Pixhawk2 Manual (中文版)x 使用说明
User Manual: Pixhawk2-使用说明 of /wp-content/uploads/2017/01
Open the PDF directly: View PDF ![]() .
.
Page Count: 17

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
自驾仪
快速上手指南
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
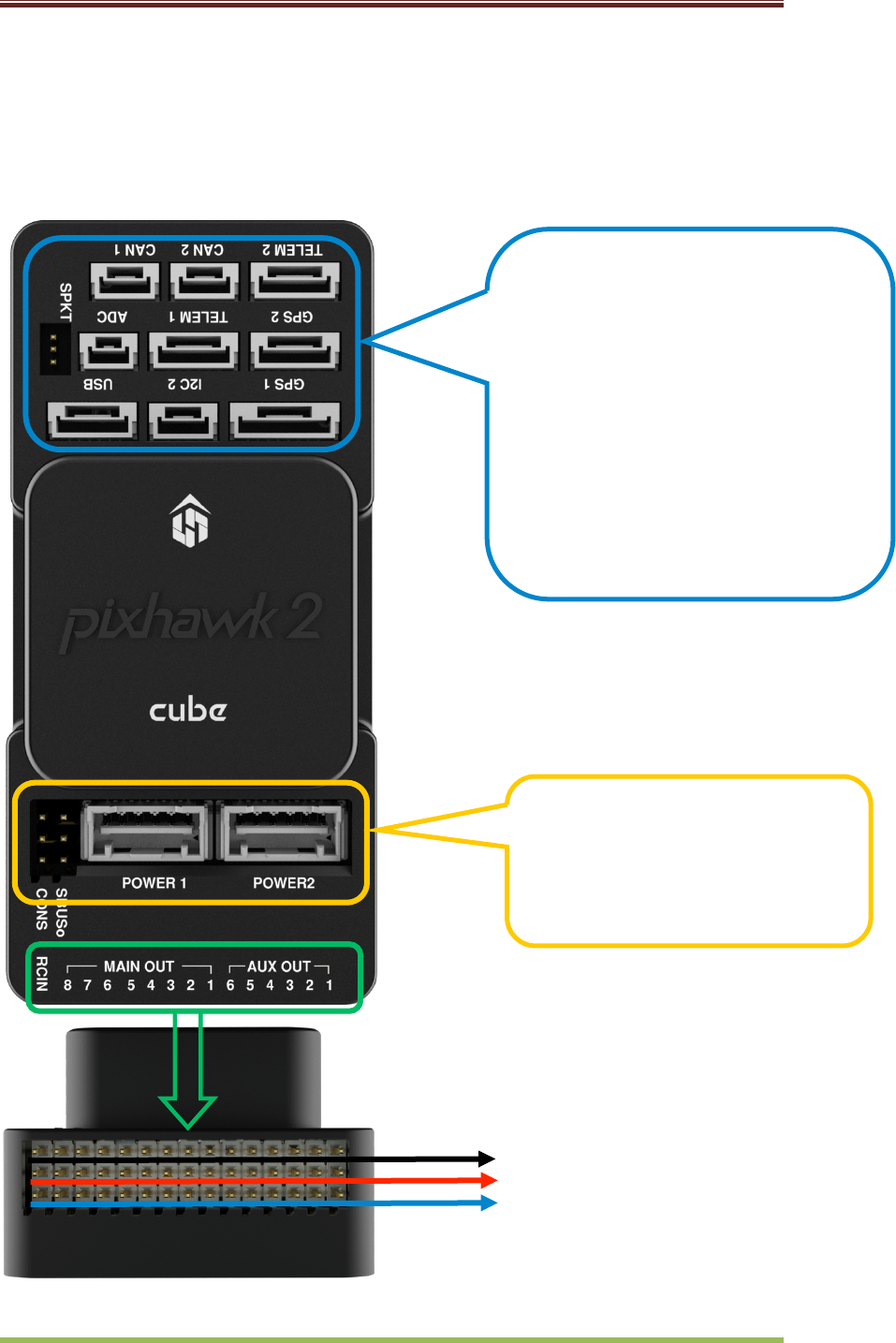
PIXHAWK2.1 概览:
端口:
•GPS1/GPS2
•TELEM1/TELEM2
•I2C 总线 2
•USB
•3.3 V 模拟数字信号转
换
•CAN 总线 1/CAN 总线
2
•光流 DSM 接收
•电源 1
•电源 2
•总线
•串口 5
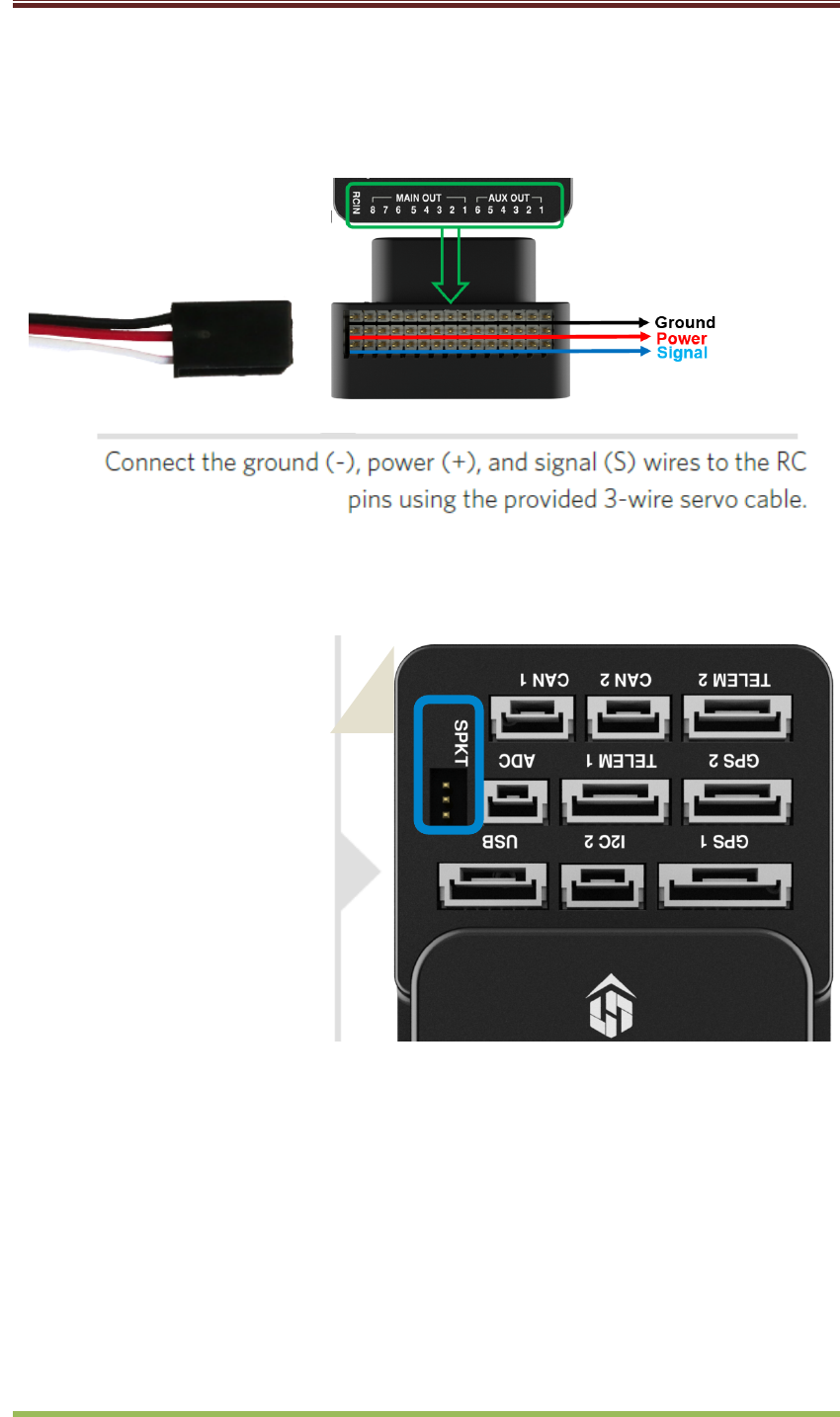
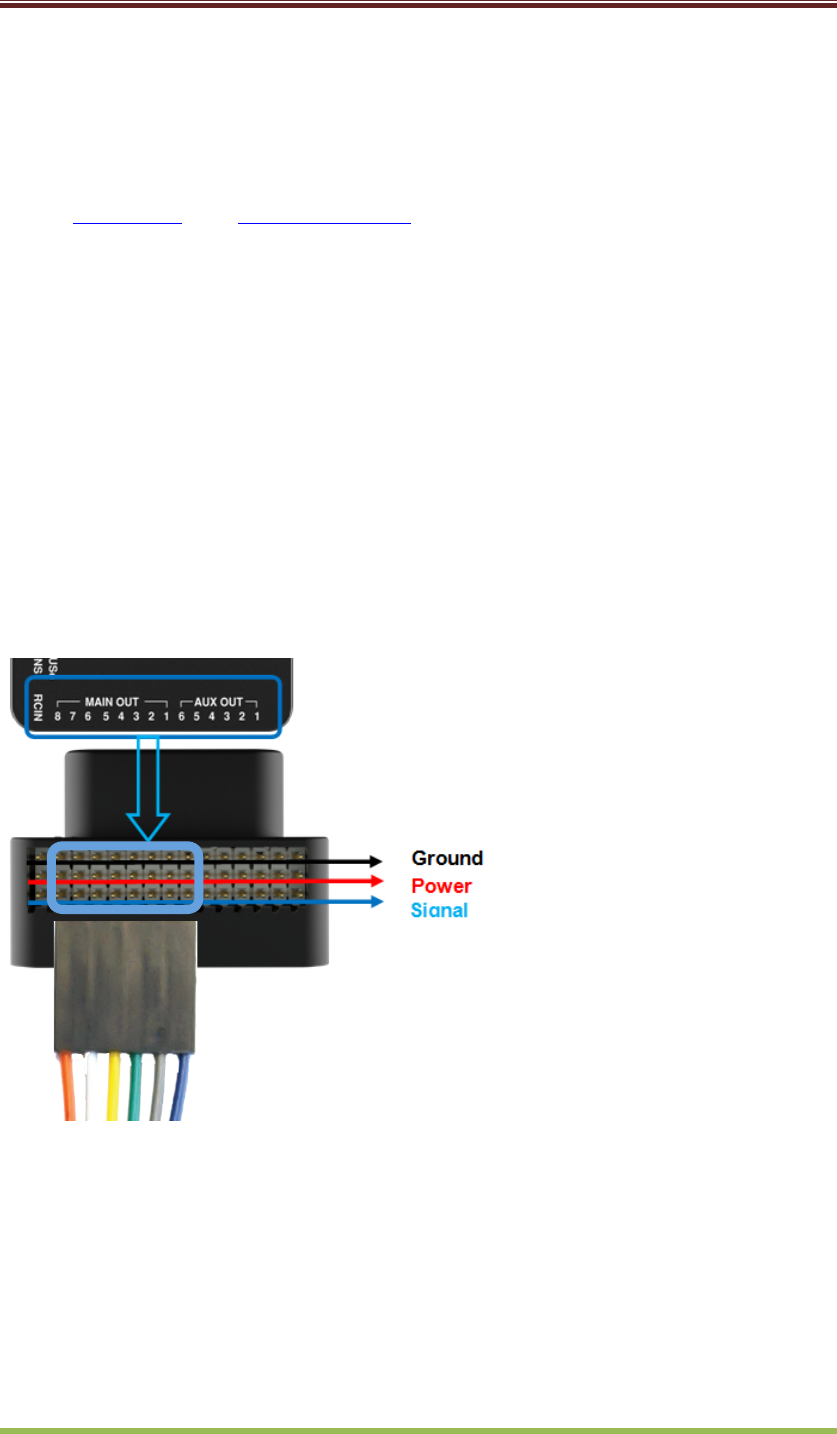
接地
电源
信号

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
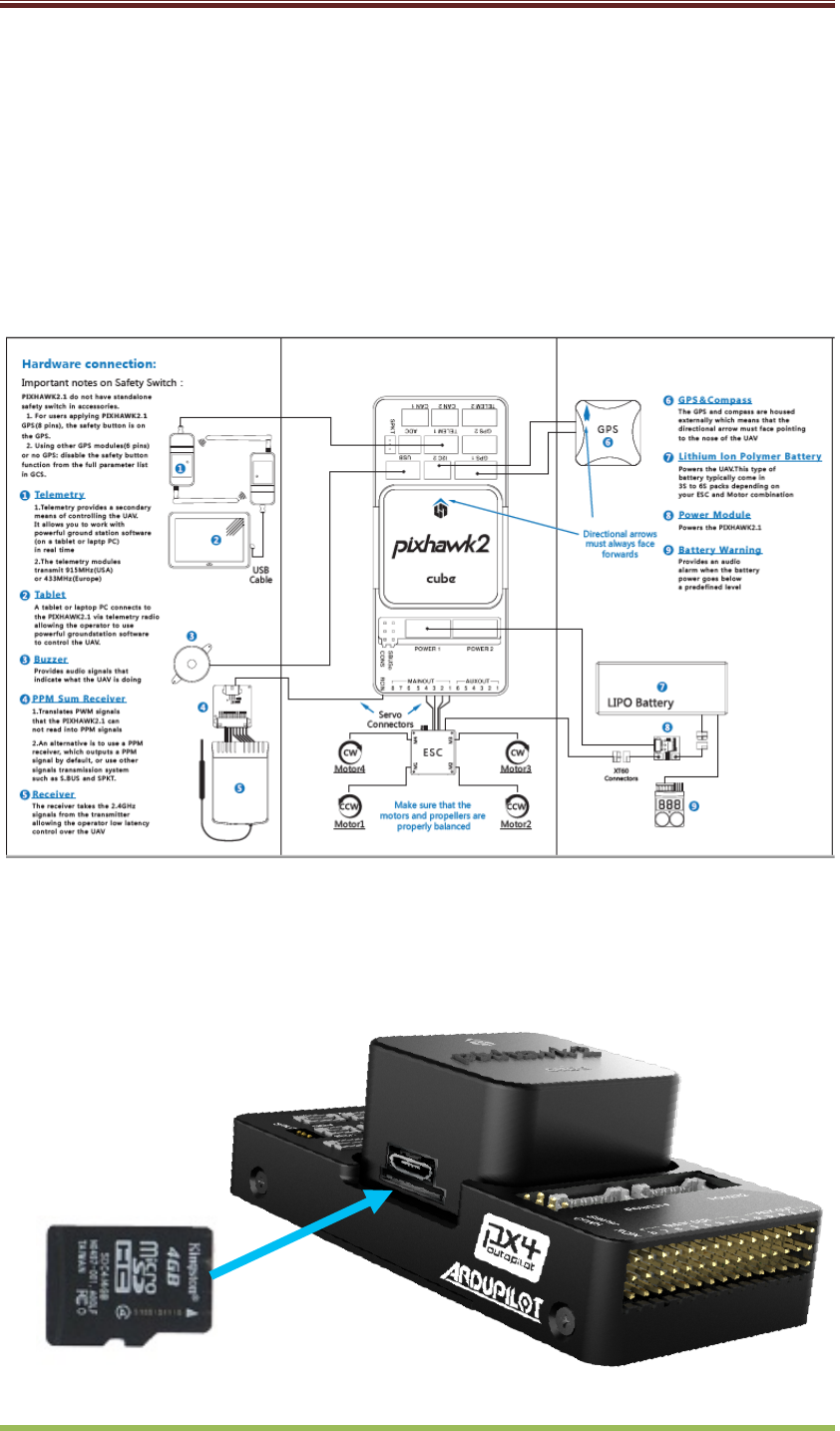
SD 卡
调试接口
Micro-USB 接
口
SD 卡

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
PIXHAWK2.1 附件:

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
开始
PIXHAWK2.1 pixhawk2.1 是最新一代的独立开源项目,目标是为学
术机构,爱好者以及专业用户提供高性价比的自驾仪硬件!
在APM 固件的帮助下, PIXHAWK2.1 可以让任何一架遥控飞机,
直升机或旋翼机成为专业的个人飞行平台。当你完整的安装好飞行
器后,你可以按照接下来的指导来安装好你的 pixhawk2.1。
安装
I. 连接
II. 下载固件
III. 调校
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
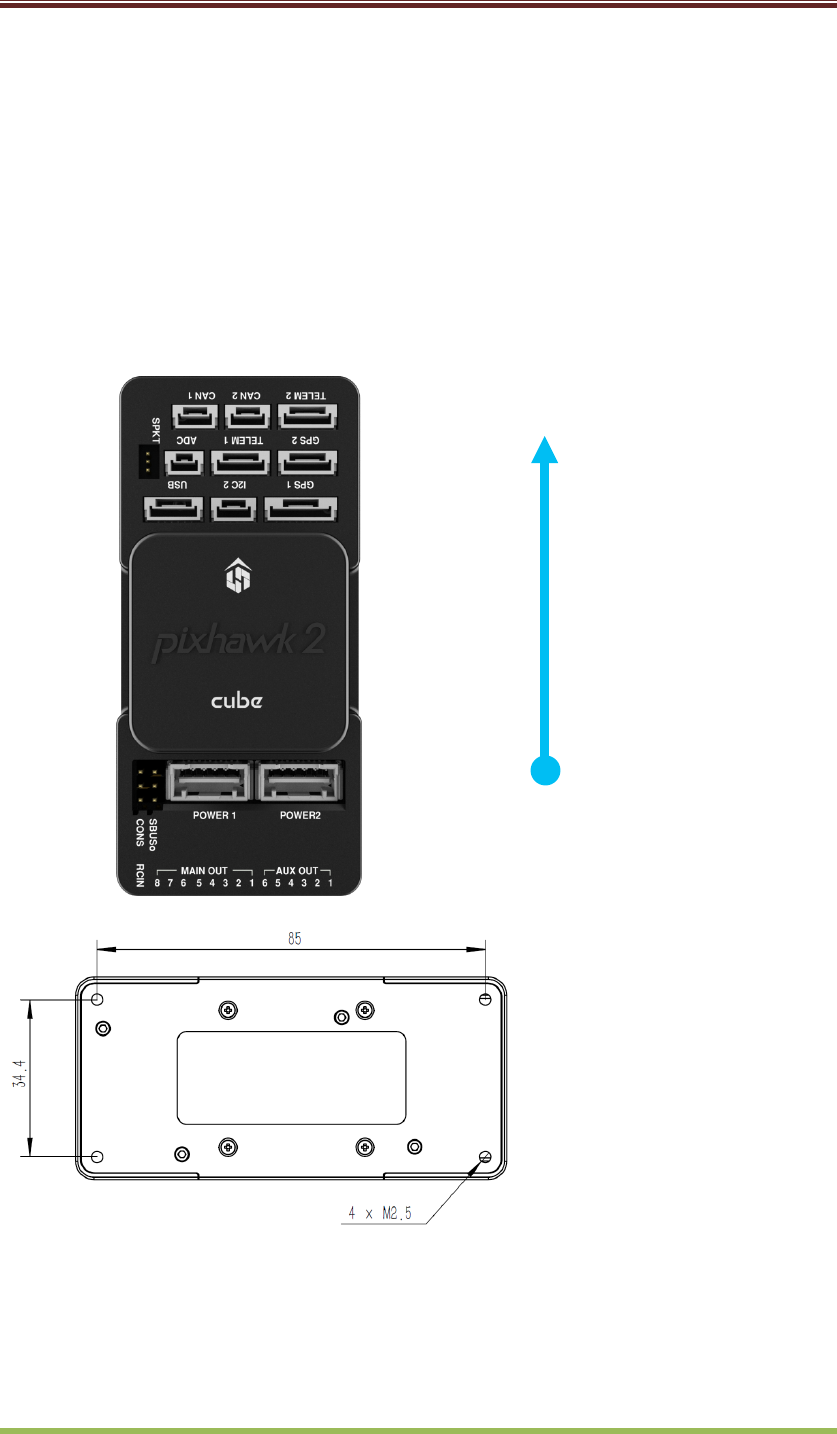
○
1 安装
使用我们提供的泡沫或者螺丝将 pixhawk2.1 尽可能的安装在飞行器
的重心上。确保自驾仪上箭头的方向和飞行器朝前的方向相同。
对于需要使用螺丝安装的用户,pixhawk2.1 的附件中含有专为
1.8mm 母板所设计的螺丝。定制的 M2.5 号螺丝螺纹长度需在
6mm 与7.55mm 之间。
飞行器前方

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
○
2连接
将SD 卡插入 PIXHAWK2.1 方块中
如果 SD 卡没有被提前插入,请将 SD 卡插入自驾仪中。
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
连接接收机
PPM RC 接收机或 Futaba SBUS 接收机
光流接收机
对于光流 DSM, DSM2,
或者 DSM-X 卫星 RC
接收机, 连接到
SPKT/DSM 端口。
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
PWM 接收机
请在 hex.aero 或 proficnc.com 购买 PPM 解码器模块连接 PWM
RC 接收机。
连接输出
旋翼
将PDB上的每一根信号分连
接对应的引脚。将每一个电机的信
号线连接对应的引脚。
Pin 1 = Motor 1 Pin 5 = Motor 5
Pin 2 = Motor 2 Pin 6 = Motor 6
Pin 3 = Motor 3 Pin 7 = Motor 7
Pin 4 = Motor 4 Pin 8 = Motor 8
固定翼
将每一个通道连接对应的引脚。
.
Pin 1 = 副翼
Pin 2 = 升降舵
Pin 3 = 油
Pin 4 = 方向舵
直升机
对于直升机,将油门和转向连接主
要的星号输出引脚。
Pin 3 = 油
Pin 4 = 转向

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
○
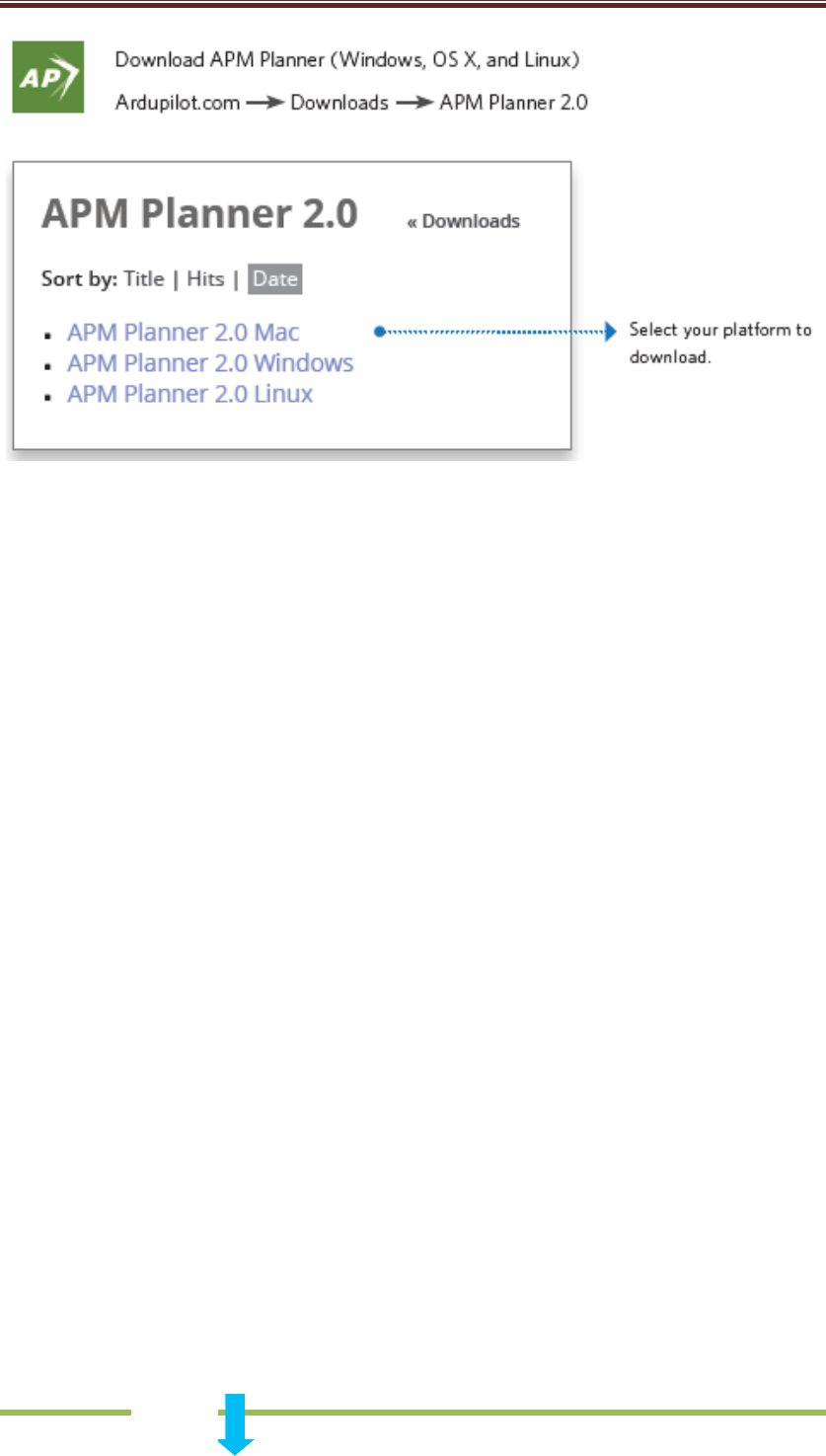
3下载固件
APM 固件是PIXHAWK2.1的核心。首先,在ardupilot.com下载好你所使用平台
(windows,OS X,Linux)的Mission Planner 。
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
安装
在选择好你的安装文件夹之后,阅读安全信息并且选择好下载。
打开文件夹并运行安装向导,跳过安全选项并安装所有推荐的驱动。
当安装完成后,打开程序并且将 PIXHAWK2.1 连接到你的电脑。
你的电脑会自动安装相应的驱动。PIXHAWK2.1 只有在 Mavlink 没
有连接上时才可以下载固件。
选择初始设置, 安装固件, 接下来选择你的载具。
○
1
"

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
连接之后,在引导下安装固件。当信息指示条显示下载完成之后,
将USB 重新插拔一次。
如果你听见了提示音,表示你的固件已经成功安装了。如果你听到
了三成连续的提示音之后,重新插拔 USB 并且按住安全按钮。重新
开始之后,当你听见连续的两声提示音之后,表示你的固件已经成
功下载。
○
2"
Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
○
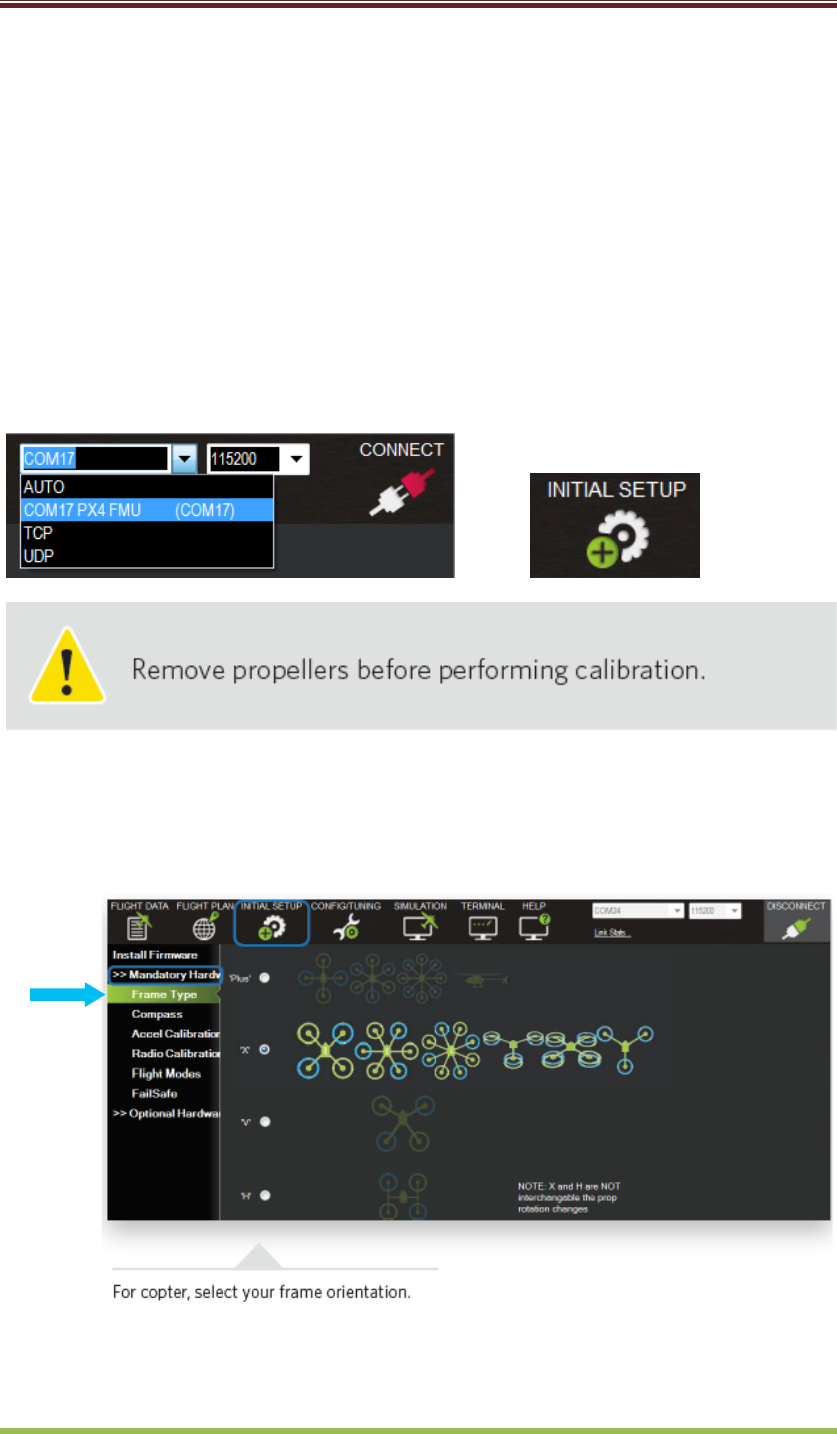
4调校
当PIXHAWK2.1 连接到你的电脑之后,在下拉菜单内选择 115200
波特率,并且点击连接图标。选择初始设置,开始调试向导。
选择飞行模式(旋翼)
调校罗盘

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
调校加速度计
选择加速度校准,选择校准,并按照提示 pixhawk2.1 的加速度计校
准。等待几秒钟后,按照提示改变飞行器的位置。
遥控器校准
选择加载罗盘选项;自动计算磁偏角;并且指定好 PIXHAWK2.1。选
择启动向导的实时校准,并按照提示操作。
选择遥控器校准来校正接收机,打开你的遥控器并选择遥控
器,将所有的摇杆推到极限的位置,在所有通道的红线校准完
成后点击完成按钮。

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
选择飞行模式
调校 ESC
请参考 http://ardupilot.org/copter/docs/esc-calibration.html
!
完成
你的飞行器已经可以起飞了!
将遥控器上的每个开关打到合适的位置,Mission Planner 会将当前位置显示为
绿色。为每个开关选择一个模式并且点击保存模式按钮。

Hex$Technology$Limited$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$hex.aero$
!
赫星(厦门)电子有限公司
!
!
注意:
PIXHAWK2.1 单独安装了标准的 GPS 安全按钮。如果你没有购买 GPS,请在 Mission
Planner 内将安全参数设置为 1。
