RG6 User Manual Tr
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 35

Orijinal
Kullanım kılavuzu
Hazırlayan: On Robot ApS
RG6

RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
1
1 Önsöz ......................................................................................................... 4
1.1 ................................................................................................. 4
1.2 ........................................................................................ 4
2 ............................................................................................................ 5
3 .................................................................................... 5
3.1 Geçerlilik ve sorumluluk ....................................................................................... 5
3.2 ..................................................................................... 5
3.3 ................................................................................. 6
3.4 ....................................................................................... 7
3.5 .................................................................................................... 8
3.6 ............................................................................................ 8
4 Mekanik arayüz .......................................................................................... 9
4.1 ............................................................................................... 9
4.2 Mekanik boyutlar ................................................................................................ 10
4.3 Yükleme kapasitesi ............................................................................................ 11
4.4 Parmaklar ........................................................................................................... 11
4.5 ................................................................................. 12
4.5.1 .................................................................................................................. 12
5 Elektriksel arayüz ..................................................................................... 13
5.1 Araç ................................................................................................. 13
5.1.1 ...................................................................................................................... 13
6 Teknik bilgiler ........................................................................................... 14
6.1 Teknik Özellikler ................................................................................................. 14
7 Tutucuyu programlama ............................................................................ 15

RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
2
7.1 ........................................................................................................... 15
7.2 .............................................................................................. 15
7.2.1 Montaj kurulumu ................................................................................................................ 15
7.2.1.1 Dirsek .......................................................................................................................................... 15
7.2.1.2 Döndürme düğmeleri ................................................................................................................ 16
7.2.1.3 TCP radyo düğmeleri ve değerler ............................................................................................. 17
7.2.1.4 TCP genişliği ............................................................................................................................... 19
7.2.1.5 RG6 çift kurulumu ...................................................................................................................... 19
7.2.2 Ayarlar ............................................................................................................................... 20
7.2.2.1 Parmak ucu sapması .................................................................................................................. 20
7.2.2.2 TCP ayarları ................................................................................................................................ 21
7.2.2.3 Tek adımı devre dışı bırakma .................................................................................................... 21
7.2.2.4 Derinlik dengeleme ayarları ...................................................................................................... 21
7.3 ...................................................................................................... 22
7.3.1 ............................................................................................................. 23
7.3.2 .............................................................................................................. 24
7.3.3 Derinlik dengeleme ............................................................................................................ 25
7.3.4 ................................................................................... 26
7.3.4.1 Herhangi bir nesne tutmadan ................................................................................................... 26
7.3.4.2 Bir nesneyi içten tutarken ......................................................................................................... 27
7.3.4.3 Bir nesneyi dıştan tutarken ....................................................................................................... 28
7.3.5 Çift Tutucu ......................................................................................................................... 29
7.4 .............................................................................................. 30
7.5 RG6 Komut fonksiyonu ...................................................................................... 31
7.6 ............................................................................ 31

RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
3
7.6.1 Tek RG6 ............................................................................................................................ 31
7.6.2 Çift RG6 ............................................................................................................................. 31
7.7 URCap sürümü .................................................................................................. 32
7.7.1 ................................................................................................................ 32
7.8 ................................................................................................... 33
8 Beyanlar ve sertifikalar ............................................................................. 34
8.1 ......................................................................... 34
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
4
1
Yeni RG6 Endüstriyel Robot Kavrayıcı için sizi kutlarız.
RG6 genel olarak alma ve yerleştirme uygulamaları için, farklı boyuttaki nesneler üzerinde çalışabilen bir
elektrikli endüstriyel robot tutucudur.
Kavrama kuvveti ve kavrama genişliği özel ihtiyaçlara göre ayarlanabilir.
1.1
Teslim edilen bileşenlerin görünümü bu kılavuzda yer alan resim ve çizimlerden farklı olabilir.
1.2
Tutucu kısmen tamamlanmış makinedir ve risk değerlendirmesi Tutucunun parçası olduğu her bir uygulama
için gereklidir. Aşağıdaki tüm güvenlik talimatlarına uyulmasını önemlidir.
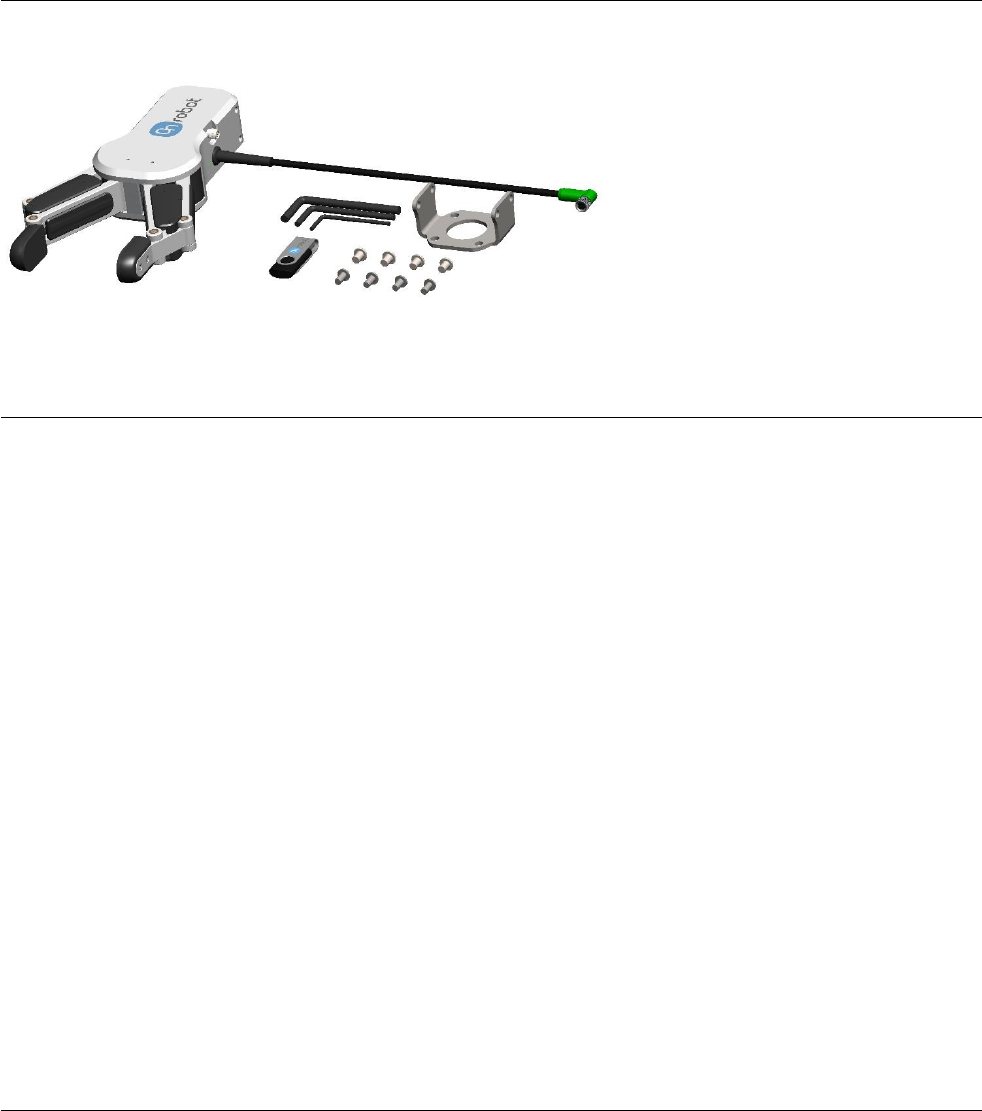
1x RG6 Endüstriyel Robot Kavrayıcı
1x RG6 Tek Dirsek
2x RG6 Parmak Ucu
1x USB Flash Sürücü
- Yazılım
- Kullanım Kılavuzu
1x Cıvata Torbası
3x Torx anahtarları

RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
5
2
RG6 genel olarak alma ve yerleştirme uygulamalarında kullanılan, nesneleri tutması için tasarlanmış bir
endüstriyel robot tutucudur. Tutucunun uzun tutucu kolları çeşitli boyutlardaki nesnelerle taşımasına,
kavrama kuvvetini ayarlama özelliği de hem narin hem de ağır nesneleri taşımasına olanak sağlar.
Standart parmaklar, birçok farklı nesne ile kullanılabilir, ancak özel parmaklar takmak da mümkündür.
Kurulum karmaşıklığı en az düzeydedir, RG6 kablo destekleyen herhangi bir robot üzerine doğrudan
bağlanabilir. Tutucunun tüm yapılandırması robot yazılımında denetlenir.
3
3.1 Geçerlilik ve sorumluluk
Bu kılavuzdaki bilgiler tam bir robotik uygulama tasarlamaya yönelik bir kılavuz değildir. Güvenlik talimatları
sadece RG6 Tutucu ile sınırlıdır ve tam bir uygulamanın güvenlik önlemlerini kapsamaz. Tam uygulama,
uygulamanın kurulu olduğu ülkenin standartlarında ve yönetmeliklerinde belirtilen güvenlik gerekliliklerine
uygun olarak tasarlanıp kurulmalıdır.
Uygulamayı entegre eden kişiler, ilgili ülkede geçerli güvenlik yasa ve yönetmeliklerinin tam olarak
uygulanmasından ve tam uygulamadaki tüm ciddi tehlikelerin bertaraf edilmesini sağlamaktan sorumludur.
Bu aşağıdakileri içermekle birlikte, bunlarla sınırlı değildir:
• Tam uygulama için bir risk değerlendirmesi yapma.
• Tam uygulamanın doğru tasarlandığını ve kurulduğunu doğrulama.
3.2
Bu kılavuzdaki güvenlik talimatları ve diğer bilgiler, tüm talimatlara uyulduğunda bile, kullanıcının zarar
görmeyeceğinin garantisi değildir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
6
3.3
TEHLİKE:
Önlenmediği takdirde yaralanmaya veya ölüme neden olabilecek çok
tehlikeli bir duruma işaret eder.
UYARI:
Önlenmediği takdirde yaralanmaya veya ekipmanda hasara neden olabilecek, tehlikeli olması
muhtemel elektriksel bir duruma işaret eder.
UYARI:
Önlenmediği takdirde yaralanmaya veya ekipmanda ciddi hasara neden olabilecek, tehlikeli
olması muhtemel bir duruma işaret eder.
DİKKAT:
Önlenmediği takdirde ekipmanda hasara neden olabilecek bir duruma işaret eder.
NOT:
İpucu ve tavsiye gibi ek bilgileri gösterir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
7
3.4
Bu bölüm genel uyarıları ve ikazları içerir.
UYARI:
1. Tutucunun düzgün biçimde monte edildiğinden emin olun.
2. Tutucunun engellere çarpmadığından emin olun.
3. Hasarlı bir Tutucuyu kesinlikle kullanmayın.
4. Çalışma veya öğretme modundayken herhangi bir uzvunuzun Tutucu parmaklarıyla ve
parmak kollarıyla temas etmediğinden ya da bunların arasında olmadığından emin olun.
5. Uygulamadaki tüm ekipmanın güvenlik talimatlarına uymaya dikkat edin.
6. Tutucuyu kesinlikle modifiye etmeyin! Herhangi bir değişiklik tehlikeli durumlara neden
olabilir.
On Robot, ÜRÜNDE HERHANGİ BİR DEĞİŞİKLİK VEYA MODİFİKASYON YAPILDIĞI TAKDİRDE
HİÇBİR SORUMLULUK KABUL ETMEZ.
7. Özel parmaklar gibi harici bir donanımı monte ederken, buradakilerle birlikte harici
kılavuzdaki güvenlik talimatlarına da uyulduğuna emin olun.
8. Tutucu bir UR robota bağlı olmadığı uygulamalarda kullanılacaksa, bağlantıların analog
giriş, dijital girişler, çıkışlar ve güç bağlantılarına benzediğinden emin olmak önemlidir.
Özel uygulamanıza uygun şekilde adapte edilmiş bir RG6 Tutucu programlama komut
dosyası kullandığınızdan emin olun. Daha fazla bilgi için lütfen tedarikçinizle irtibata geçin.
DİKKAT:
1. Tutucunun ona zarar verebilecek makinelerle kombine edilmesi veya
birlikte çalışması durumunda, tüm fonksiyonların olası tehlikeli alanın dışında ayrıca test
edilmesi önemle tavsiye edilir.
2. Tutucu geri bildirimi (G/Ç hazır sinyali) sürekli çalışmaya dayanıyorsa ve bir arıza nedeniyle
Tutucu ve/veya diğer makineler zarar görecekse, arıza meydana gelse bile doğru çalışmayı
güvenceye almak için, Tutucu geri bildirimine ek olarak harici sensörlerin de kullanılması
önemle tavsiye edilir.
On Robot, programlama hataları veya Tutucunun çalışma hatası nedeniyle Tutucunun
veya diğer ekipmanın zarar görmesinden sorumlu tutulamaz.
3. Tutucunun hasar görmesine neden olabileceği için, korozif maddeler, lehim sıçraması
veya aşındırıcı tozlar ile Tutucunun temas etmesine kesinlikle izin vermeyin.
Çalışanların veya nesnelerin Tutucunun çalışma alanında bulunmasına kesinlikle izin
vermeyin.
Ülkenizdeki güvenlik yasaları ve standartlarına uymayan bir makineye takılı bir Tutucuyu
kesinlikle çalıştırmayın.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
8
4. Kurulumu yaparken Tutucunun sıvılarla temasından kaçının. Programlama yaparken her
zaman Tutucunun iç parçalarının sıvılarla temas etmediğinden emin olun.
3.5
Tutucu endüstriyel robotlar için uç elemanı veya araç olarak tasarlanmış bir sanayi ekipmanıdır.
Farklı nesneleri alma ve yerleştirme işlemleri için tasarlanmıştır.
RG6 Tutucu, Universal Robots'un robotlarıyla kullanılmak üzere tasarlanmıştır. Elektrik bağlantılarının,
programlama ve Tutucunun kullanımıyla ilgili olarak bu kılavuzda yer alan bilgiler sadece Universal Robots'un
robotları için geçerlidir.
DİKKAT:
Bu kılavuz UR robotları dışında kullanıma dair açıklamaları içermez. Tutucunun yanlış kullanımı
Tutucuda veya bağlı olduğu ekipmanda hasara neden olabilir.
Tutucunun insanlarla birlikte veya insanlara yakın şekilde ortak çalışmaya yönelik olarak kullanılması yanızca,
özel kullanımın tutulan nesneleri de içerecek şekilde komple uygulamaya dair risk değerlendirmesine bağlı
olarak önemli bir risk taşımadığı, tehlikeli olmayan uygulamalar için mümkündür.
Kullanım amacı dışında herhangi bir şekilde kullanım veya uygulama, izin verilemez kötüye kullanım olarak
değerlendirilir.
Bu aşağıdakileri içermekle birlikte, bunlarla sınırlı değildir:
1. Patlama olasılığı olan ortamlarda kullanılması.
2. Medikal ya da hayati tehlike arz eden uygulamalarda kullanılması.
3. Bir risk değerlendirmesi yapmadan önce kullanılması.
3.6
Tutucu kısmen tamamlanmış makine olarak kabul edildiği için bir risk değerlendirmesi yapmak önemlidir.
Ayrıca uygulamada yer alan tüm makinelerin kılavuzlarında yer alan yönergelerin takip edilmesi de önemlidir.
Entegre eden kişinin risk değerlendirmesini yapmak için ISO 12100 ve ISO 10218-2’deki kılavuzlardan
yararlanması önerilir.
Aşağıda entegre eden kişinin asgari olarak dikkat etmesi gereken bazı olası tehlikeli durumlar listelenmiştir.
Belirli bir duruma bağlı olarak başka tehlikeli durumların olabileceğini unutmayın.
1. Tutucunun parmak kolları arasına uzuv sıkışması.
2. Tutulan nesnenin keskin kenarlarının ve sivri uçlarının deri kesiklerine neden olması.
3. Tutucunun yanlış montajından kaynaklanan tehlikeler.
4. Örneğin, yanlış kavrama kuvveti veya bir robota bağlı yüksek hızlanma nedeniyle nesnelerin
Tutucudan düşmesi.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
9
4
Tutucu bir güç kaybı durumunda kavrama kuvvetini koruyacağı şekilde tasarlanmıştır.
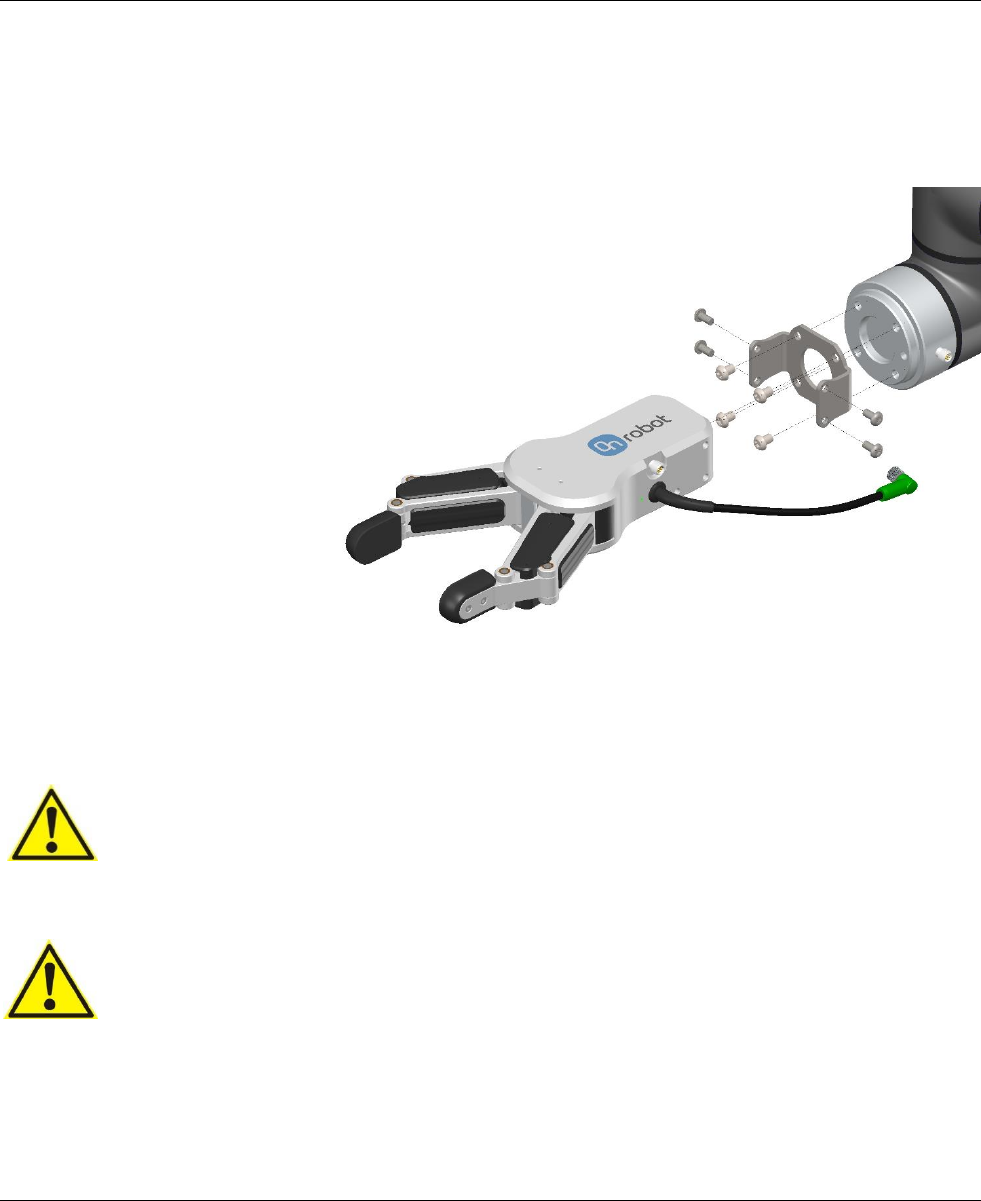
4.1
Standart Tutucu dirsek tasarımı, Tutucunun 90°’lik adımlarla, 0° ila 180° arası açılarda ayarlanabilmesine
olanak tanır
4 adet M6x8 cıvata ile Tutucu dirseğini 30 torkla monte edin.
En az 7Nm tork ile cıvataları sıkın.
4-6 adet M5x10 cıvatayı 25 tork ile sıkın
En az 2Nm tork ile cıvataları sıkın.
TEHLİKE:
Tutucunun cıvataların doğru torkla sıkılarak monte edildiğinden emin olun. Yanlış montaj
yaralanmaya neden olabilir veya Tutucuya zarar verebilir.
DİKKAT:
Tutucudaki M5 dişleri 6mm derinliğe sahiptir. Bu derinliği aşmayın.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
10
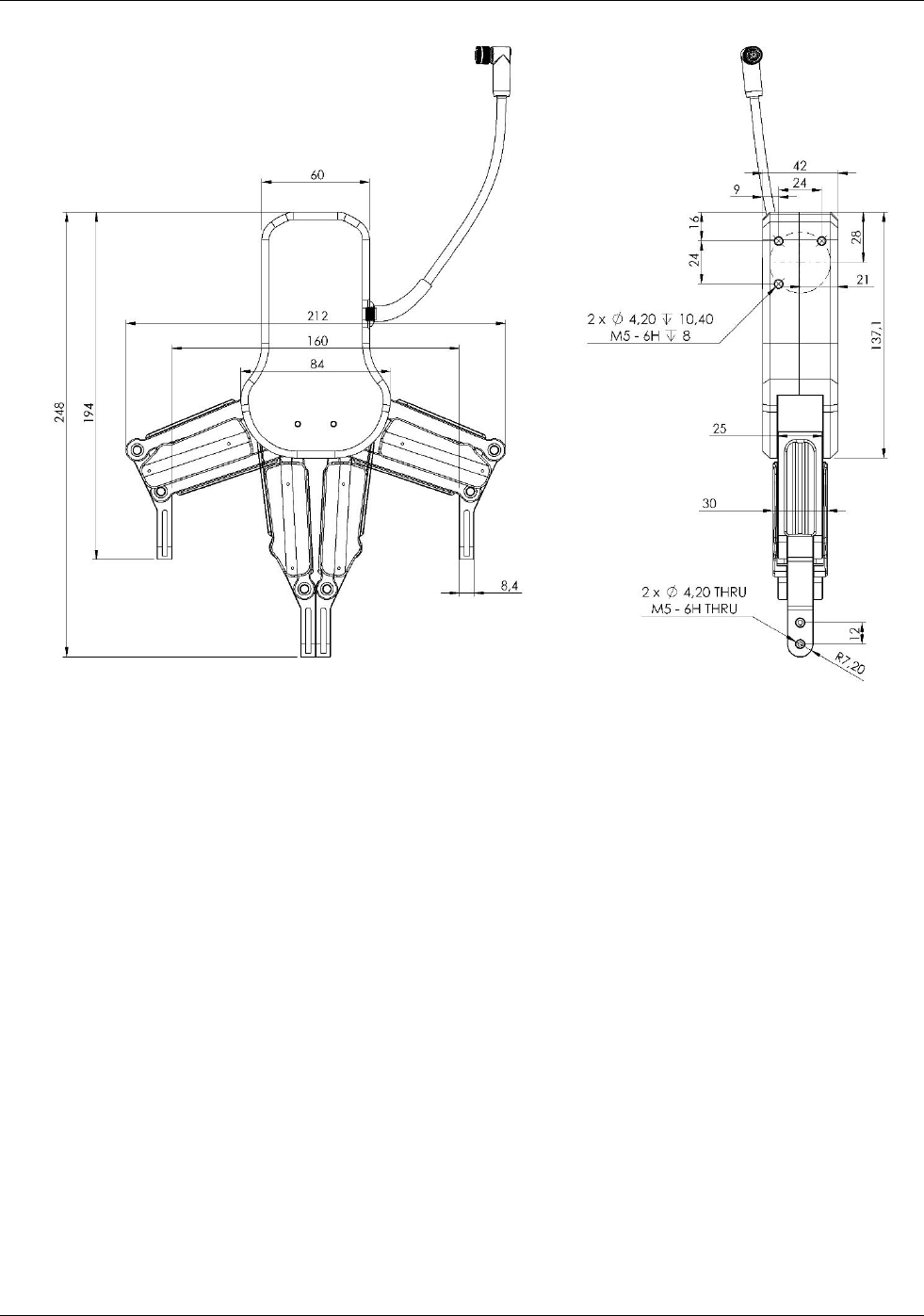
4.2 Mekanik boyutlar
Boyutlar milimetre cinsindendir (kablo yukarıdaki çizimden farklı olabilir).
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
11
Fy
Mz
My1
Mx
Mx1
Mz1
My
4.3 Yükleme kapasitesi
Bir nesneyi tutarken aşağıdaki parametrelerin bazılarının doğrudan uygulanabilir olmadığını ancak Tutucu
üzerindeki yükü hesaplamak için kullanılabileceğini aklınızda bulundurun.
Parmak uçlarındaki parametreler
gösterilen konumda hesaplanmıştır
ve parmakların konumlarına bağlı olarak
değişir.
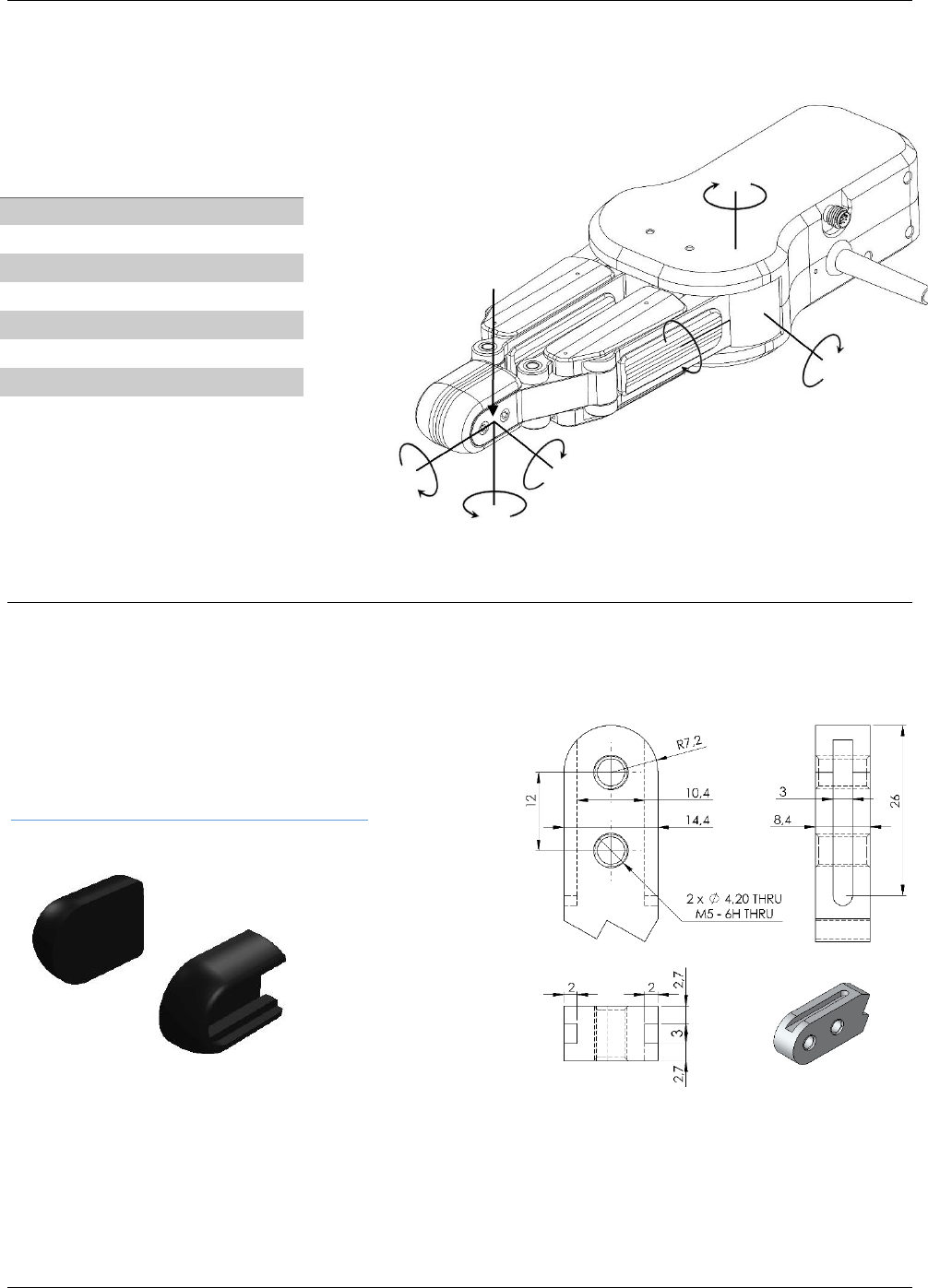
4.4 Parmaklar
Standart parmaklar birçok farklı iş için kullanılabilir.
Özel parmaklar gerekiyorsa, bunların Tutucunun parmak uçlarına uyması gerekir.
Parametre
Statik Birim
Fy
1890
[N]
Mx
38
[Nm]
My
20
[Nm]
Mz
35
[Nm]
Mx1
120
[Nm]
My1
56
[Nm]
Mz1
120
[Nm]
Standart parmaklar
Çeşitli türlerde işler için
Boyutlar milimetre cinsindendir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
12
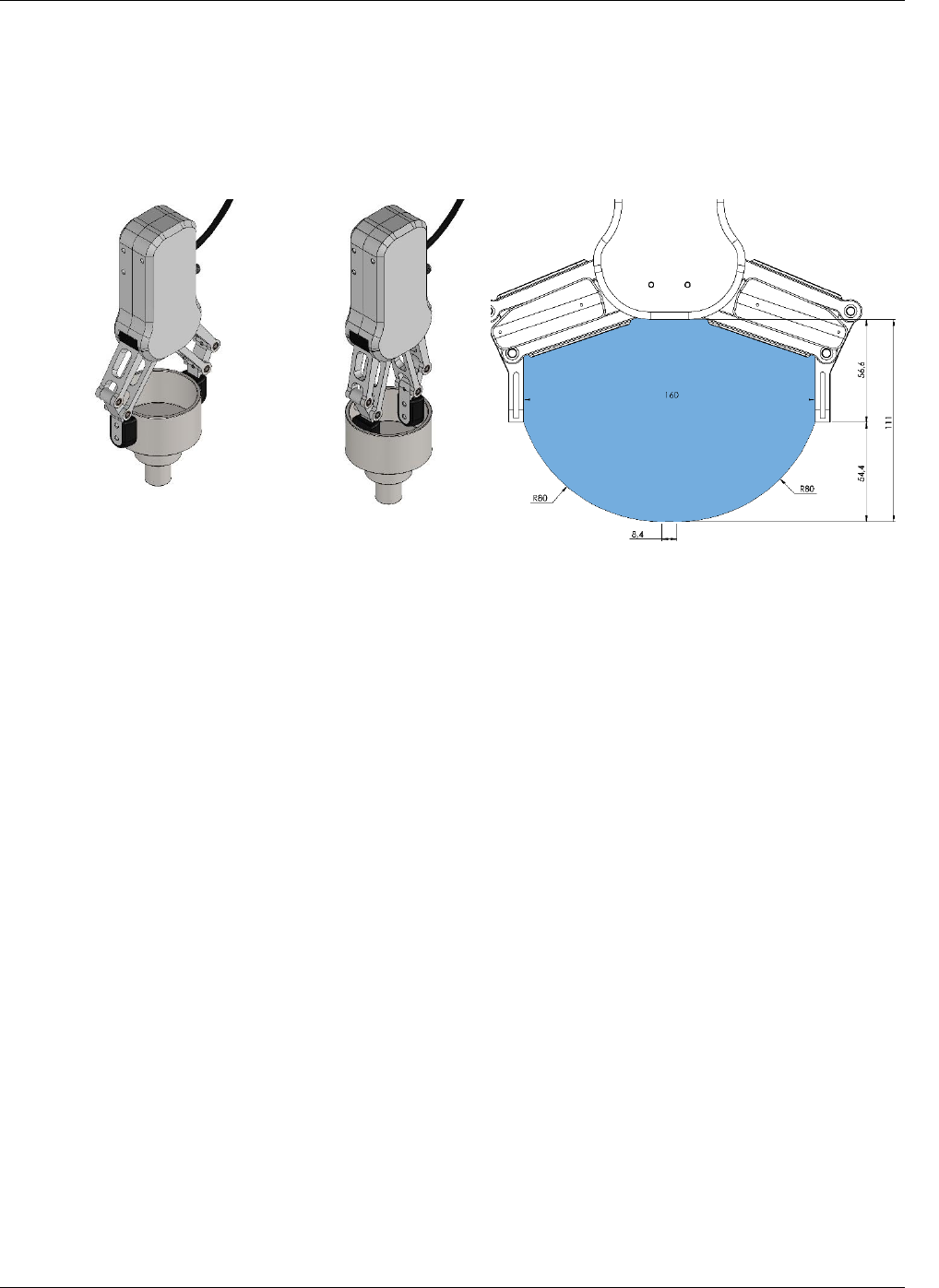
4.5
Çalışma aralığı alüminyum parmaklar arasında ölçülür. Tutucu, parmaklar döndürülerek içten veya dıştan
tutacak şekilde kullanılabilir. Tutucu ayarlarına değerleri girmeden önce sapmanın ayarlanmış olduğun emin
olun.
4.5.1
Parmak ucu kalınlığı, bağlı olan parmak ucunun referans noktasıyla RG6 alüminyum parmak ucu arasındaki
uzaklığı belirlemek için kullanılır.
Parmak uçlarını çıkarırken veya değiştirirken parmak ucu kalınlığı RG6 yapılandırmasında ayarlanmalıdır.
Daha fazla bilgi için bölüm 7.2.2’ye bakınız.
Dıştan Tutma
İçten Tutma
Döndürülmüş
parmaklar
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
13
5
Bu bölümde Tutucunun tüm elektriksel arayüzü açıklanır. Burada kullanılan “G/Ç” terimiyle Tutucudan çıkan
veya Tutucuya gelen tüm dijital ve analog kontrol sinyalleri kastedilir.
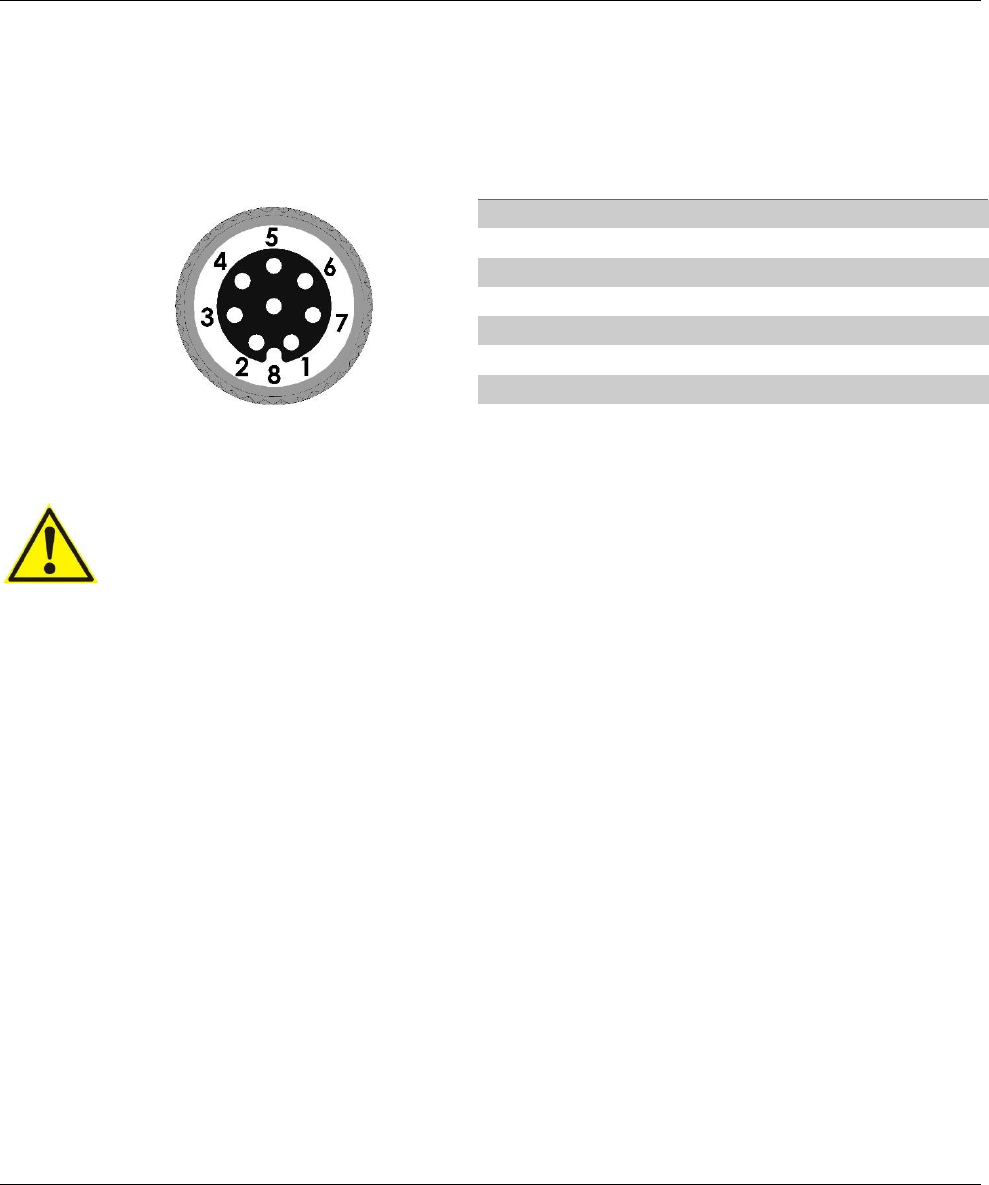
5.1
Tutucu kablosu Universal Robots'un robotlarına uyacak şekilde tasarlanmıştır. Bağlantılar aşağıda tarif edildiği
şekildedir. Tutucudaki araç bağlantısı çıkışı aşağıda tarif edilen giriş kablosu ile aynı bağlantıları paylaşır.
DİKKAT:
1. Tutucunun UR robotuna bağlı olmadığı bir uygulamada kullanıldığı durumlarda:
i. Analog giriş, dijital giriş-çıkış ve güç bağlantılarının uyumlu olduğuna emin
olun.
ii. Özel uygulamanıza uygun şekilde adapte edilmiş bir RG6 Tutucu programlama komut
dosyası kullandığınızdan emin olun.
Daha fazla bilgi için lütfen tedarikçinizle irtibata geçin.
2. Tutucuyu ıslak bir ortamda çalıştırmayın.
5.1.1
Tutucu hem 12V hem de 24V ile çalışabilir.
Lütfen aklınızda bulundurun: 12 Volt'ta, kuvvet, hız ve bu kılavuzda açıklanan fonksiyon toleranslarının
bazılarını geçerli değildir. 24 V kullanılması önerilir.
pin
tel
UR aracı
UR I/O V3
1
Beyaz
AI2
Araç analog giriş 2
2
Kahverengi
AI3
Araç analog giriş 3
3
Yeşil
DI9
Araç girişi 1
4
Sarı
DI8
Araç girişi 0
5
Gri
Güç
24V DC
6
Pembe
DO9
Araç çıkışı 1
7
Mavi
DO8
Araç çıkışı 0
8
Kırmızı
GND
0V DC
Kablo SAC-8P-PUR - 1404191
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
14
6
6.1 Teknik Özellikler
* Tutucu 12 V’de normal hızın yaklaşık olarak yarı hızında çalışır.
Teknik veriler
Min.
Tipik
Maks.
Birim
IP Sınıfı
54
Toplam hareket (ayarlanabilir)
0
-
160
[mm]
Parmak konumu ayrışması
-
0,15
-
[mm]
Tekrarlama hassasiyeti
-
0,15
0,3
[mm]
Geriye hareket boşluğu
0,4
0,7
1
[mm]
Kavrama kuvveti (ayarlanabilir)
25
-
120
[N]
Kavrama kuvveti hassasiyeti
±2
±5
±10
[N]
Çalışma gerilimi*
10
24
26
[V DC]
Enerji tüketimi
1,9
-
14,4
[B]
Maksimum Akım
25
-
600
[mA]
Çalışma ortamı sıcaklığı
5
-
50
[°C]
Depolama sıcaklığı
0
-
60
[°C]
Ürün ağırlığı
-
1
-
[kg]
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
15
7
7.1
UR sürümü 3.3 veya daha yeniyse, kurulum ve URCap eklentisini kullanamaya başlamak için Hızlı Başlangıç
kılavuzunu okuyun.
Daha düşük bir versiyon için 7.8UR uyumluluk bölümüne bakın.
7.2
7.2.1 Montaj kurulumu
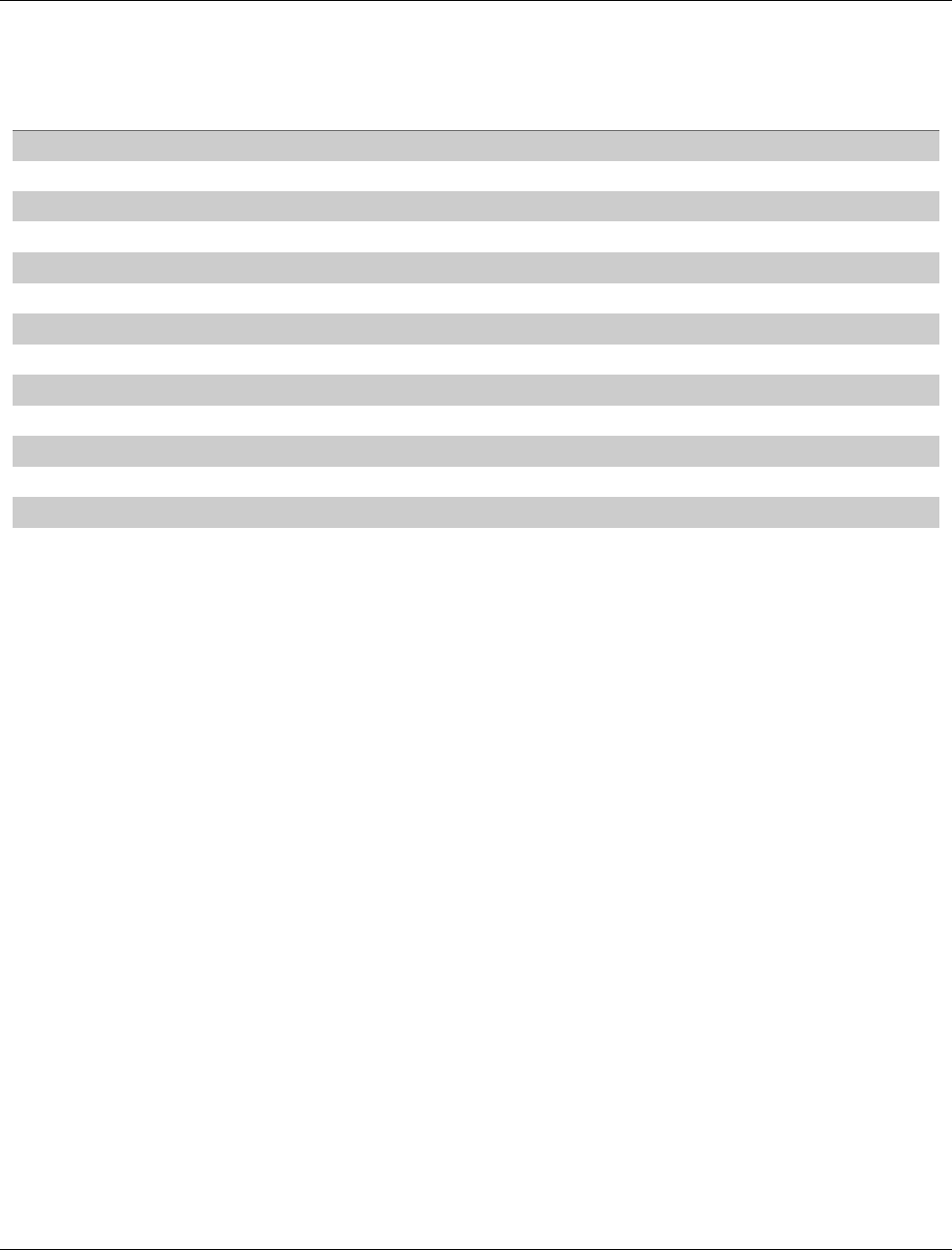
7.2.1.1 Dirsek
RG6 (ları) robota monte etmek için kullanılan dirseği seçin.
Seçenekler şunlardır: “Tek” ya da “çift”.
“Çift” dirsek, çift RG6 kurulumu için kullanılır. “Çift” dirsek ile RG6 30°’lik adımlarla döndürülebilir.
“Tek” dirsek ile RG6 90°’lik adımlarla döndürülebilir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
16
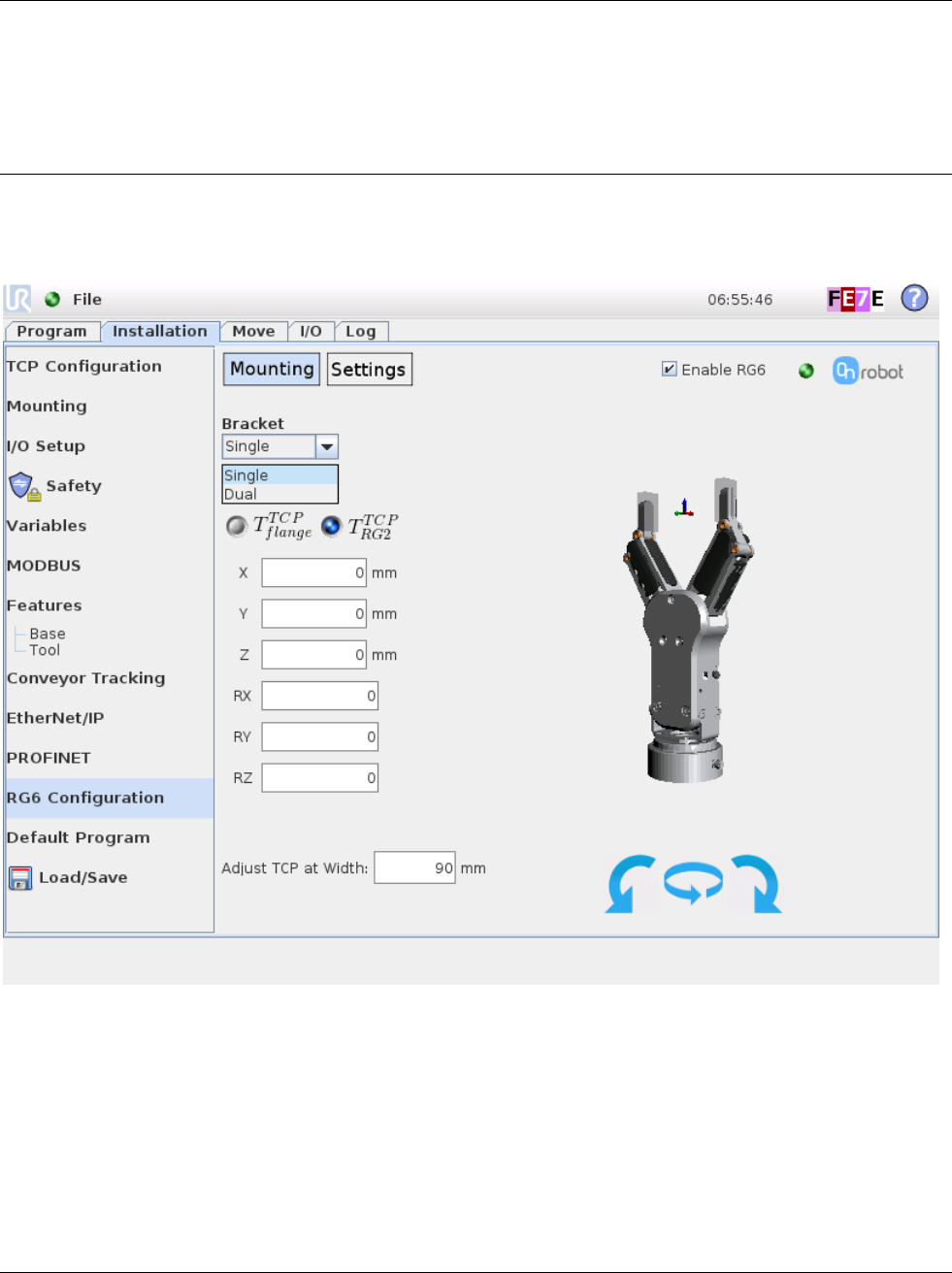
7.2.1.2
‘b’ işaretli düğme, dirseği araç flanşının z-ekseni etrafında saatin ters yönünde 90° döndürür.
‘a’ işaretli düğmeler seçilen RG6’yı (kullanılan dirseğe bağlı olarak 30°/90°) adımlarla +/- yönde döndürür.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
17
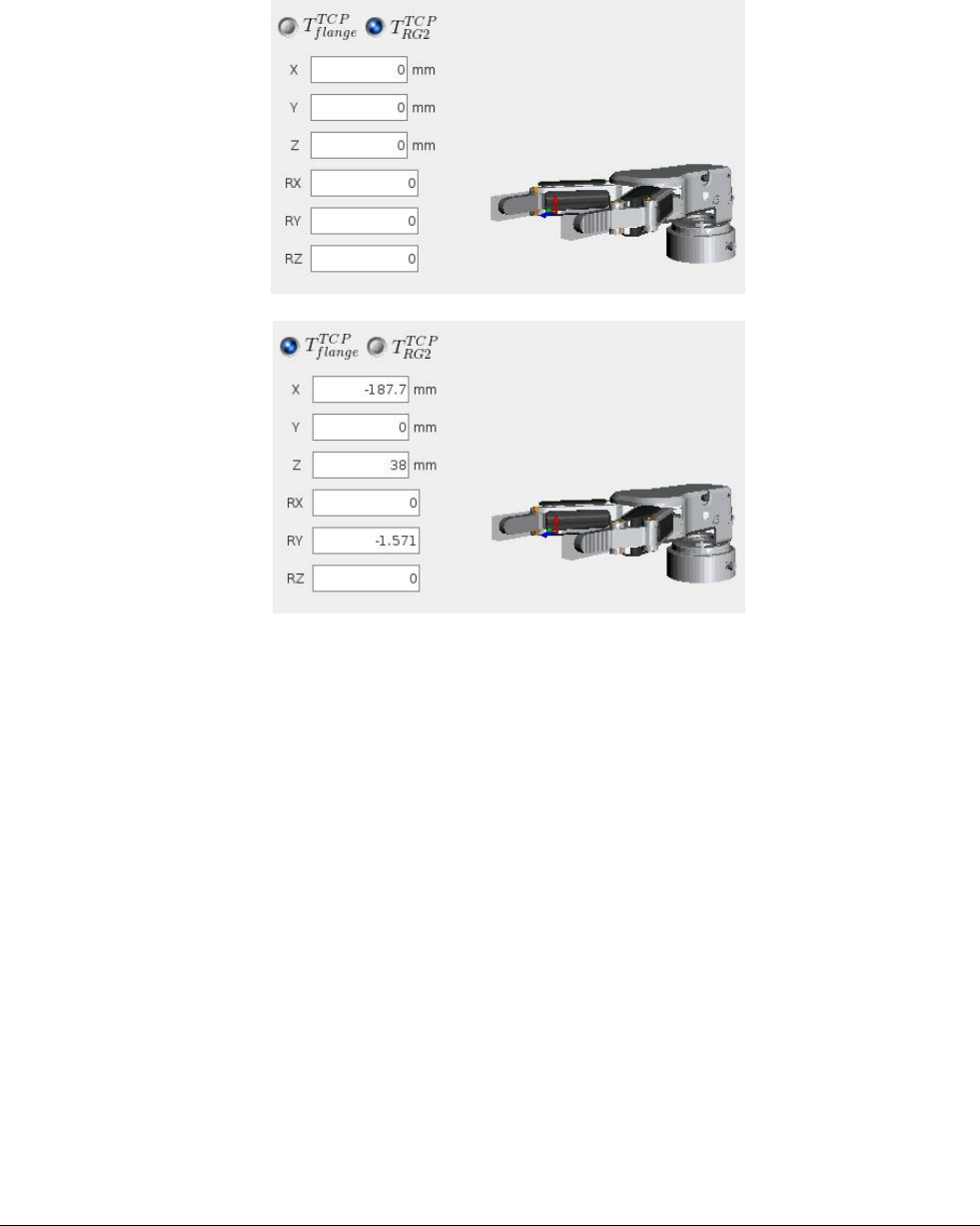
7.2.1.3
Değerler, araç flanşından asıl TCP’ye dönüşümü veya RG6’nın parmakları
arasındaki nokta ile asıl
TCP dönüşümünü temsil ettiğinde Radyo düğmeleri de değişir
. ‘nin değerleri dirseğe ve RG6’nın
dönme hareketine bağlı olduğu halde
‘nin varsayılan değerleri her zaman [0,0,0,0,0,0] olacaktır.
Yukarıdaki örnekte
ve
arasındaki farkın nasıl hesaplandığını gösterilmektedir.
[X,Y,Z,RX,RY,RZ] alanları hem giriş hem de çıkış olarak kullanılır.
seçildiğinde, Döndürme
düğmelerine basıldığında ve yeni TCP genişliği girildiğinde değerler etkilenecektir. [X, Y, Z, RX, RY, RZ,]
değerleri her zaman üzerine yazılabilir. Sıfırlama istendiğinde, TCP radyo düğmesi
değerine
ayarlanmalıdır ve [X,Y,Z,RX,RY,RZ] rotasyon vektörleri [0,0,0,0,0,0] şeklinde doldurulmalıdır.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
18
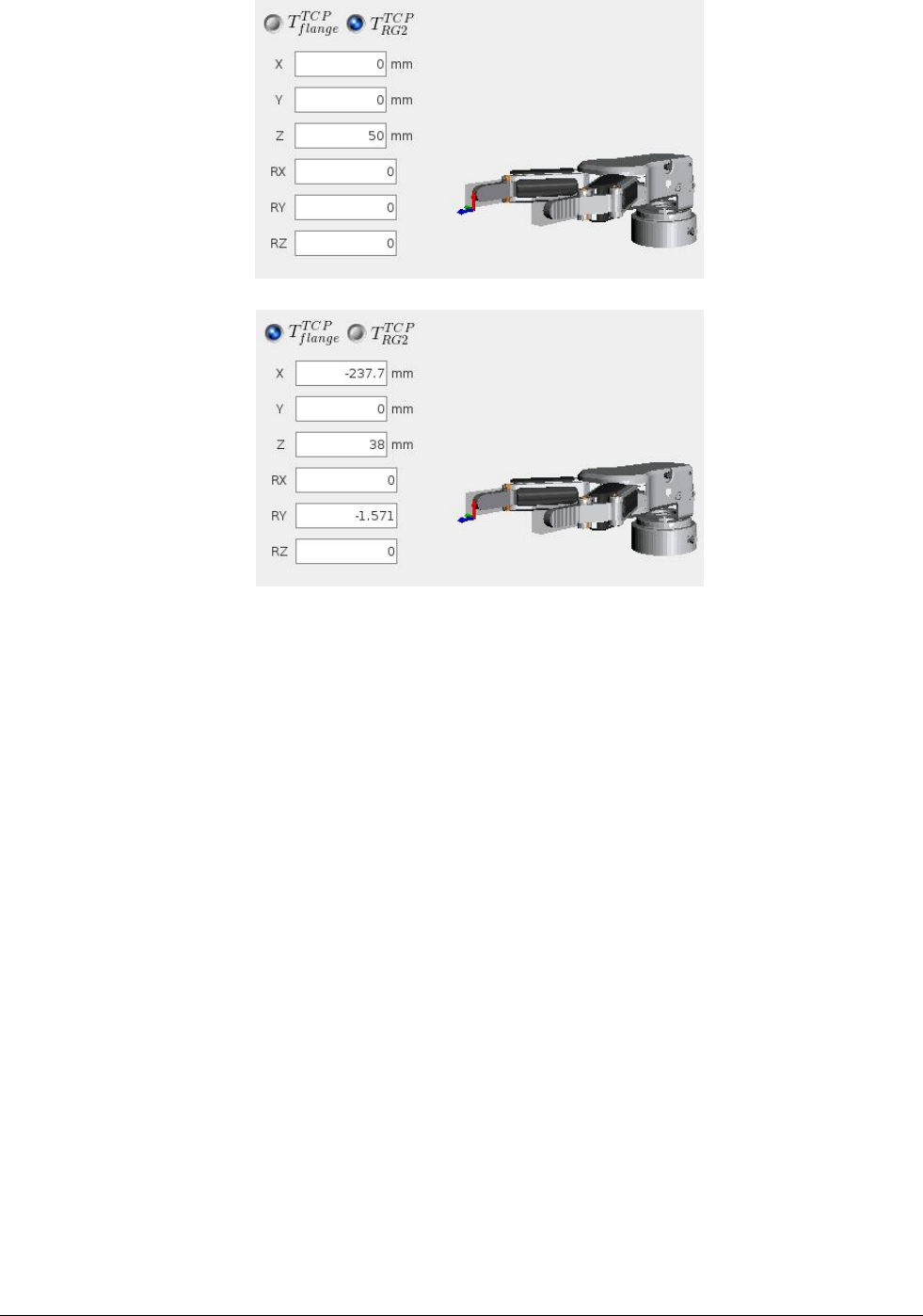
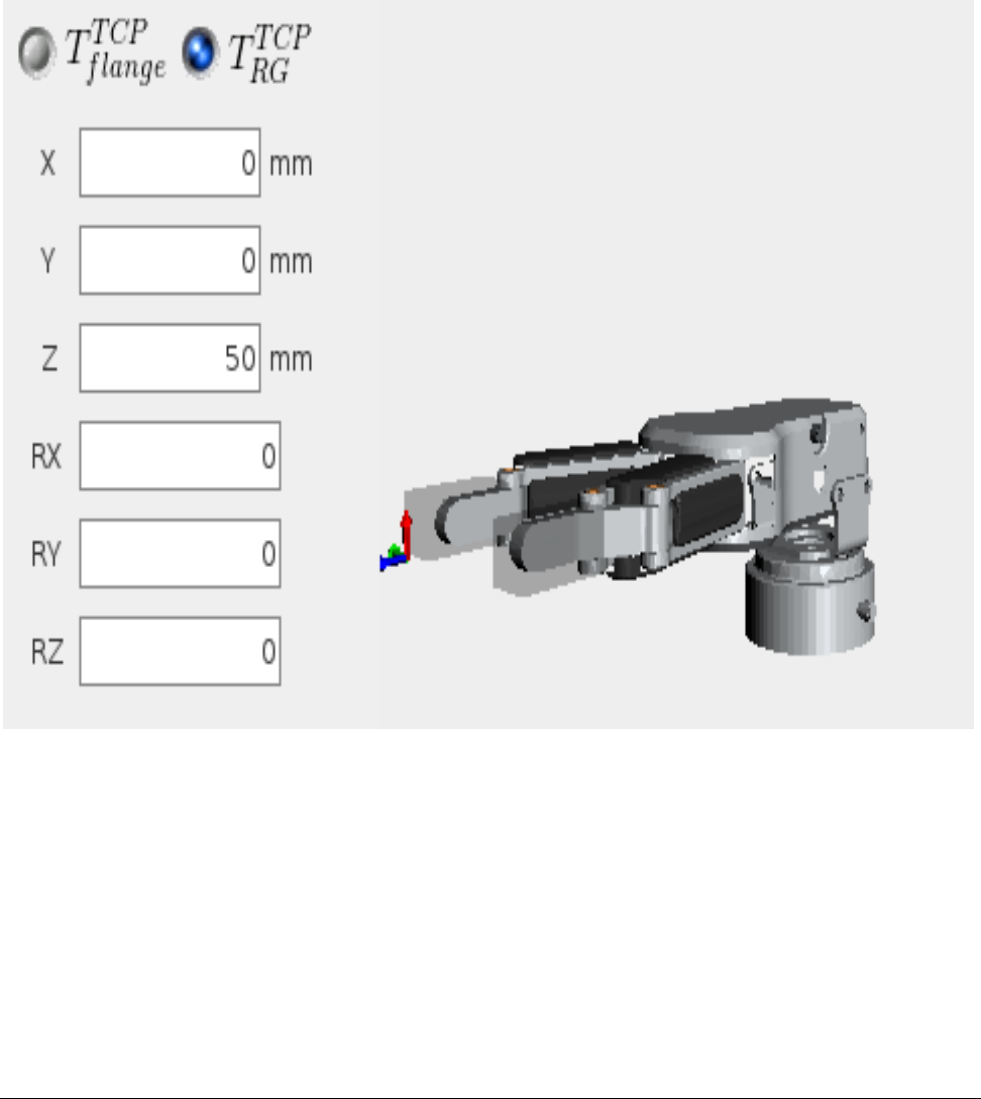
Yukarıda gösterilen örnekte, RG6’nın parmaklarının 50 mm uzatıldığında nelerin dikkate alınması gerektiği
gösterilmektedir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
19
7.2.1.4
Parmaklar arasındaki referans genişliği tanımlar. Daha yüksek bir genişlik, dirsekten parmak aralığına doğru
uzanmayı azaltırken, daha düşük bir değer bu uzanmayı artıracaktır.
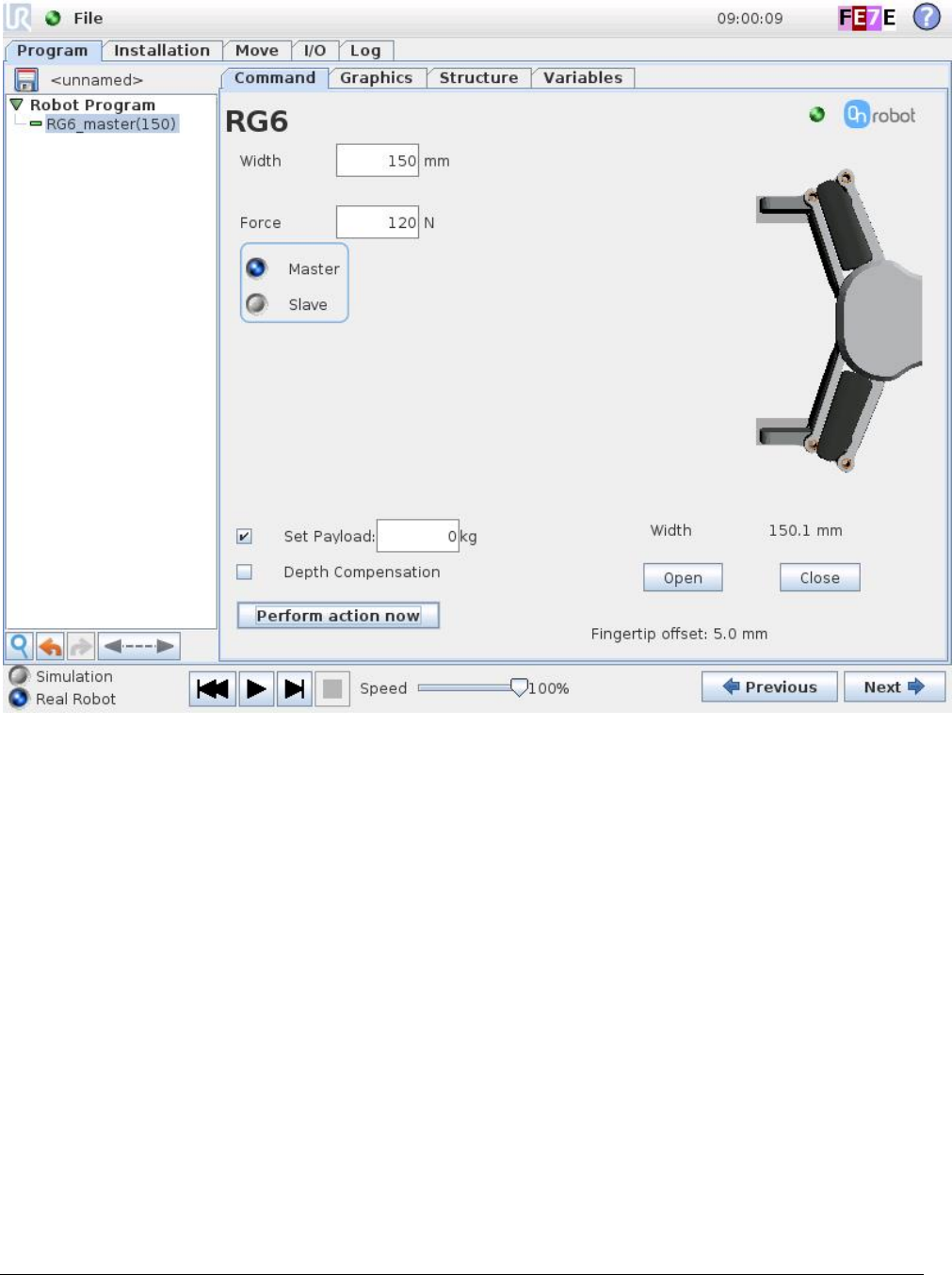
7.2.1.5 RG6 çift kurulumu
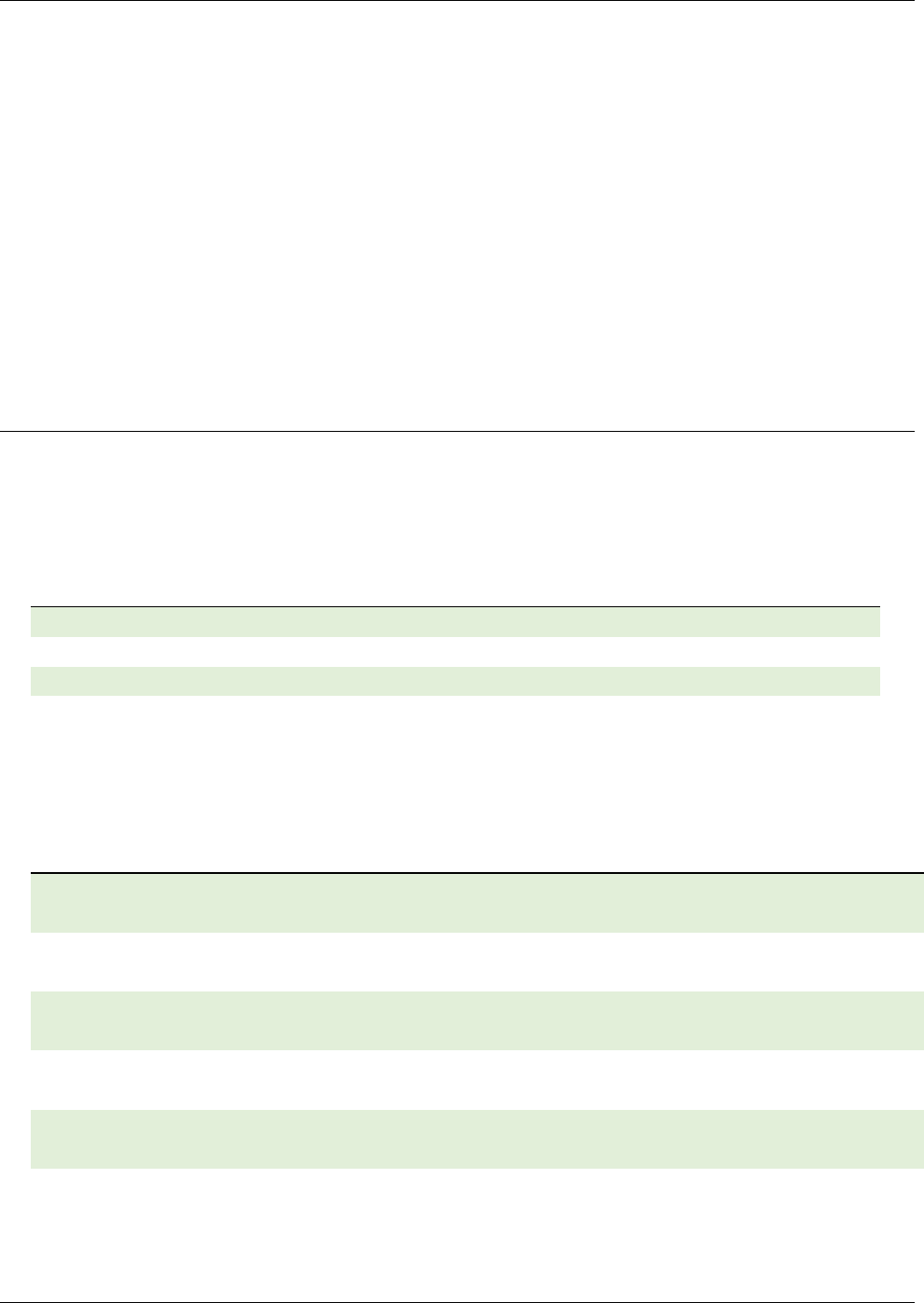
Çift dirsek seçilirse, “Master (Ana)” ve “Slave (Bağımlı)” radyo düğmeleri görünecektir. Bunlar, iki RG6
Tutucunun döndürme hareketini kontrol eder. Ana/Bağımlı radyo düğmeleri, eylemi Ana RG6 ile Bağımlı
RG6’dan hangisinin gerçekleştireceğini belirler.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
20
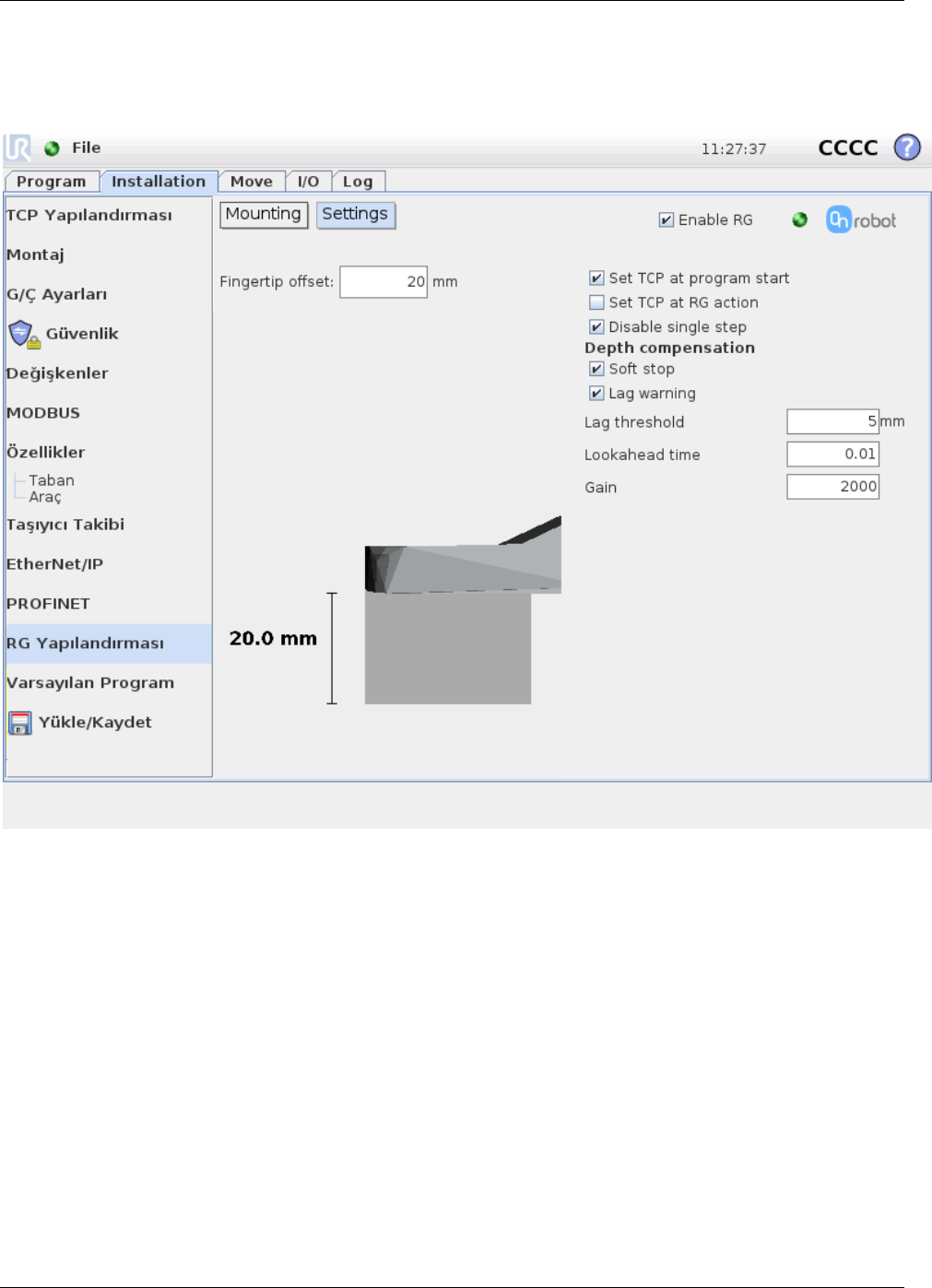
7.2.2 Ayarlar
7.2.2.1
Parmak ucu sapması, bağlanan parmak ucunun referans noktası ile RG6 alüminyum parmak ucunun içi
arasındaki uzaklığı belirtmek için kullanılır.
Yukarıdaki örnekler, URCap’ın belirli sapmaları nasıl kullandığını göstermektedir.

RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
21
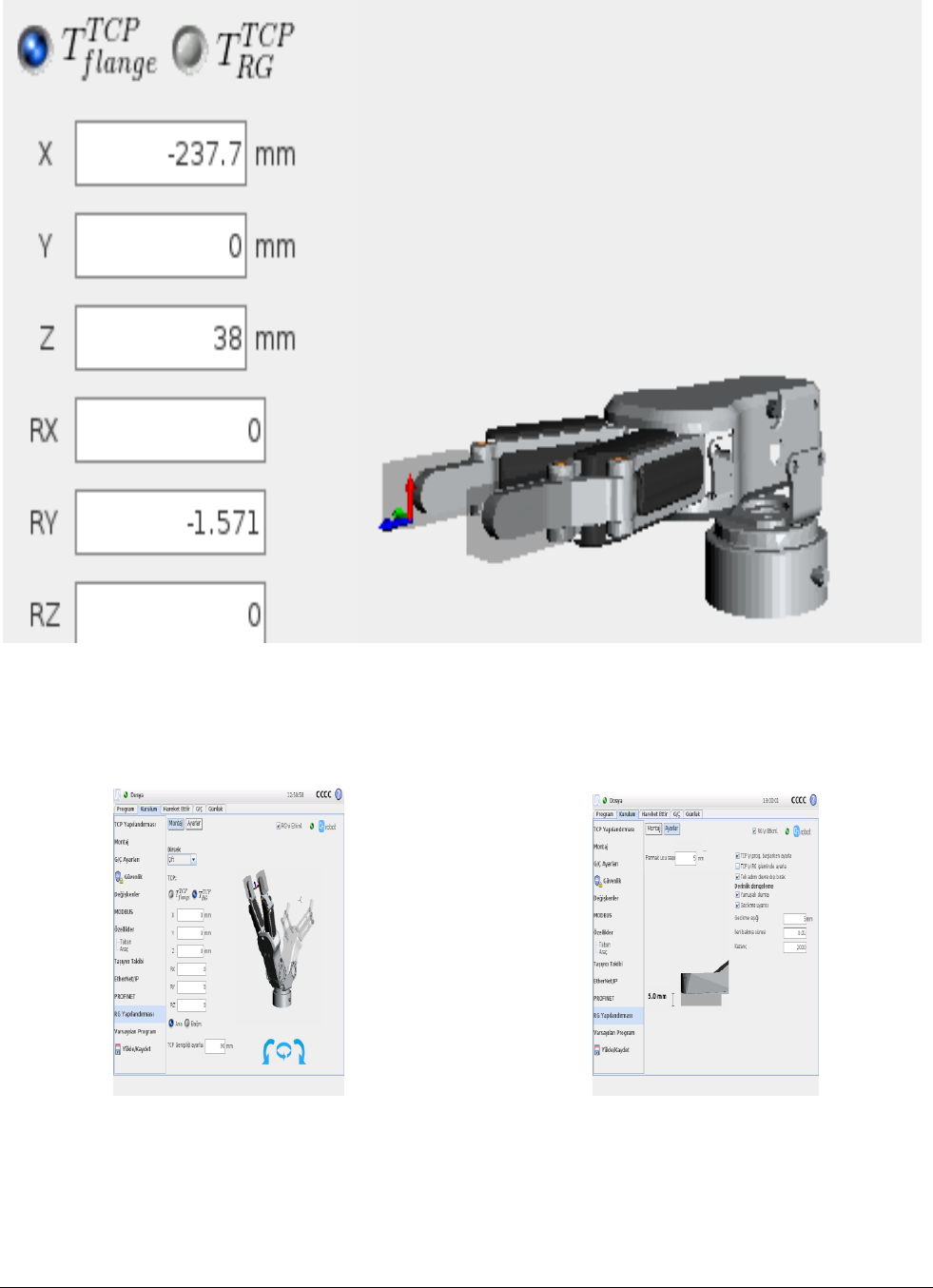
7.2.2.2
URCap eklentisini TCP [X,Y,Z,RX,RY,RZ] döndürme vektörleri değerine ayarlama seçeneği, program
başladığında ve/veya RG6 herhangi bir işlem yaptığında sağ üst köşede kullanılabilir durumdadır.
TCP elle kontrol ediliyor ve “Derinlik Dengeleme” kullanılmıyorsa her iki onay işaretinin devre dışı
bırakılması önerilir. TCP (bir program sırasında) dinamik olarak değiştiriliyor ve “Derinlik Dengeleme”
kullanılıyorsa, “TCP’yi RG6 eyleminde ayarla” değerinin etkinleştirilmesi tavsiye edilir.
7.2.2.3
“Tek adımı devre dışı bırak” seçilirse, robot programı RG6 düğümlerin sayısına bağlı olmaksızın hızlı
başlatılır; ancak bu durumda RG6 düğümlerini tek adımlamak mümkün değildir. İşaretli değilse durum
tersidir. Bu seçenek ayrıca sağ üst köşede de yer alır.
7.2.2.4 Derinlik dengel
Bütün “Derinlik Dengeleme” ayarları, RG6 düğümü Derinlik dengeleme için ayarlandığında, Derinlik
dengelemenin nasıl davranacağını kontrol etmek için kullanılır.
“Yumuşak durdurma” dengelemenin sonunda tüm eklem ivmelenmesini düşürür ve tümleşik dengeleme
hatasını en aza indirir, ancak düğüm yürütme süresini biraz azaltır.
“Gecikme uyarısı” etkinse robot hareketi RG6’yı belirtilen eşiğin üzerinde geciktirirse, robot bir uyarı verir.
Gecikmenin nedeni; düşük değerli hız kaydırıcı, düşük kazanç, yüksek ileri bakma süresi, sıkı güvenlik
ayarları, robot kinematiği, hızlı RG6 hareketleri (yüksek güç) ve tam RG6 vurusu olabilir.
“Gecikme eşiği” gecikme uyarısı etkinken uyarının devreye gireceği eşiği belirtir.
“Kazanç” derinlik dengelemede kullanılan servoj fonksiyonu için kullanılan kazancı belirtir. UR komut
kılavuzuna bakın.
“İleri bakma süresi” derinlik dengelemede kullanılan servoj fonksiyonu için kullanılan ileri bakma süresini
belirtir. UR komut kılavuzuna bakın.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
22
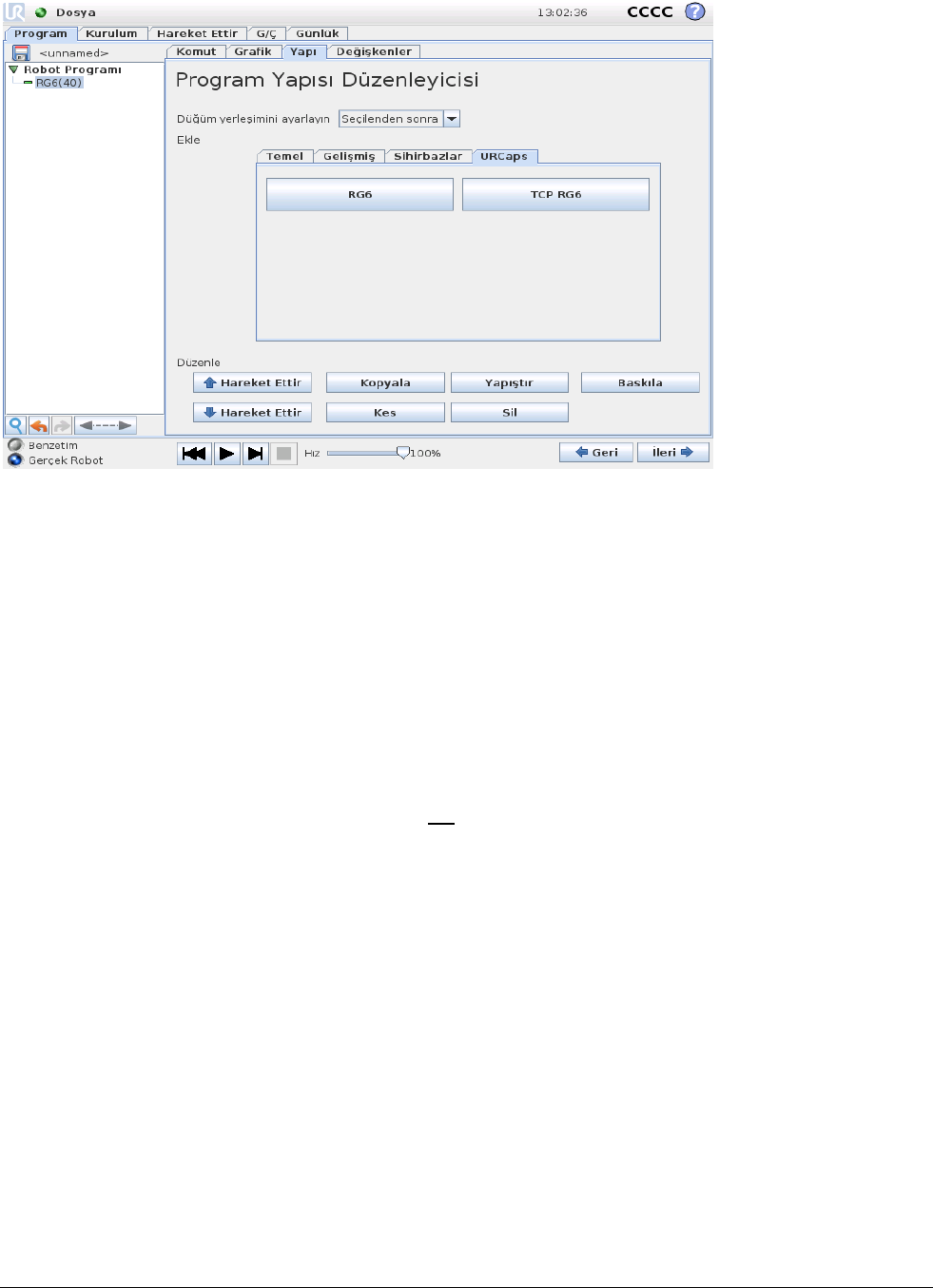
7.3
Bir RG6 düğüm eklemek için, Program sekmesinden Structure (Yapı)’yı seçin ve sonra URCaps sekmesine gidin.
Düğüm eklemek için RG6 düğmesine basın.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
23
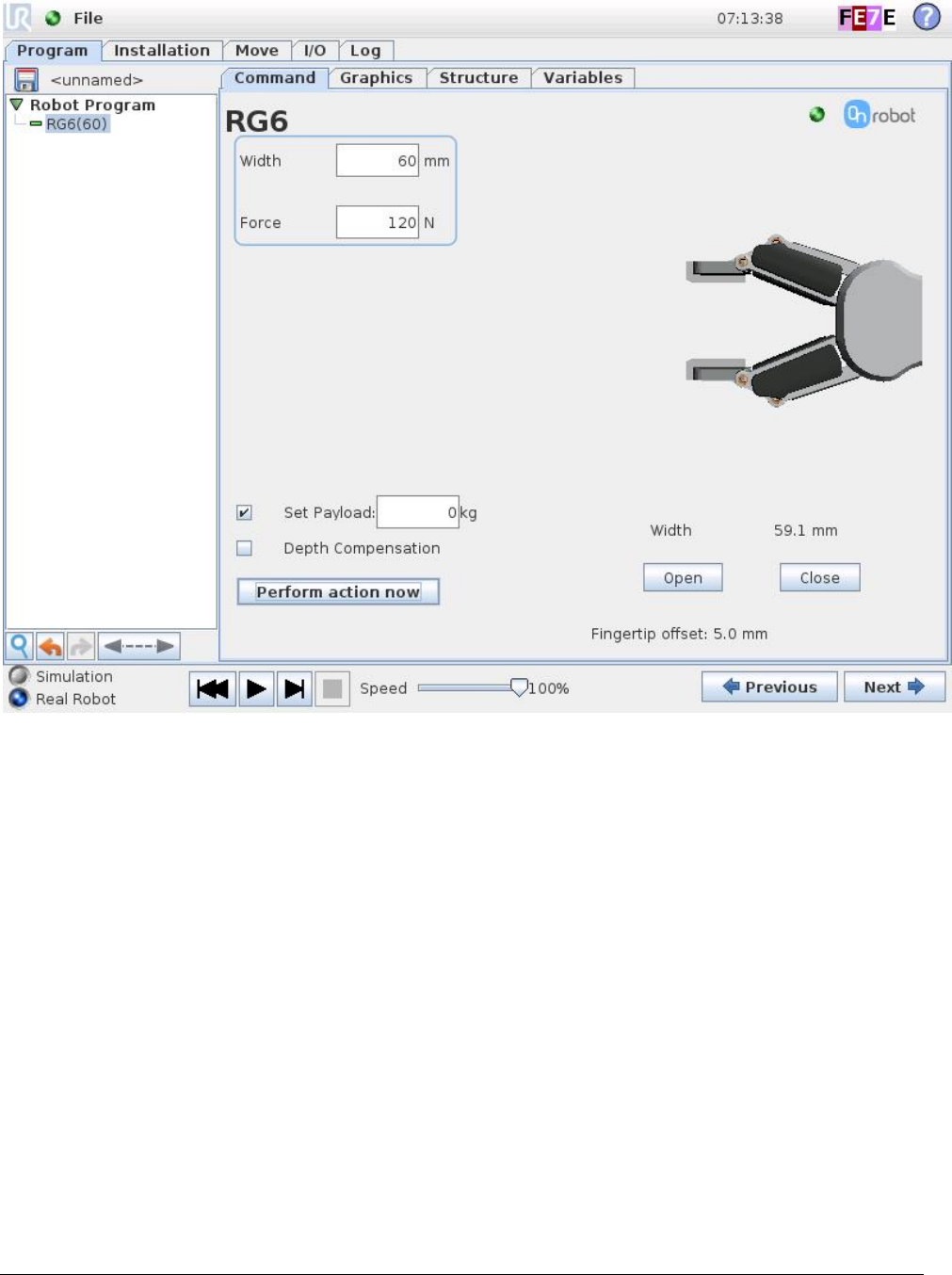
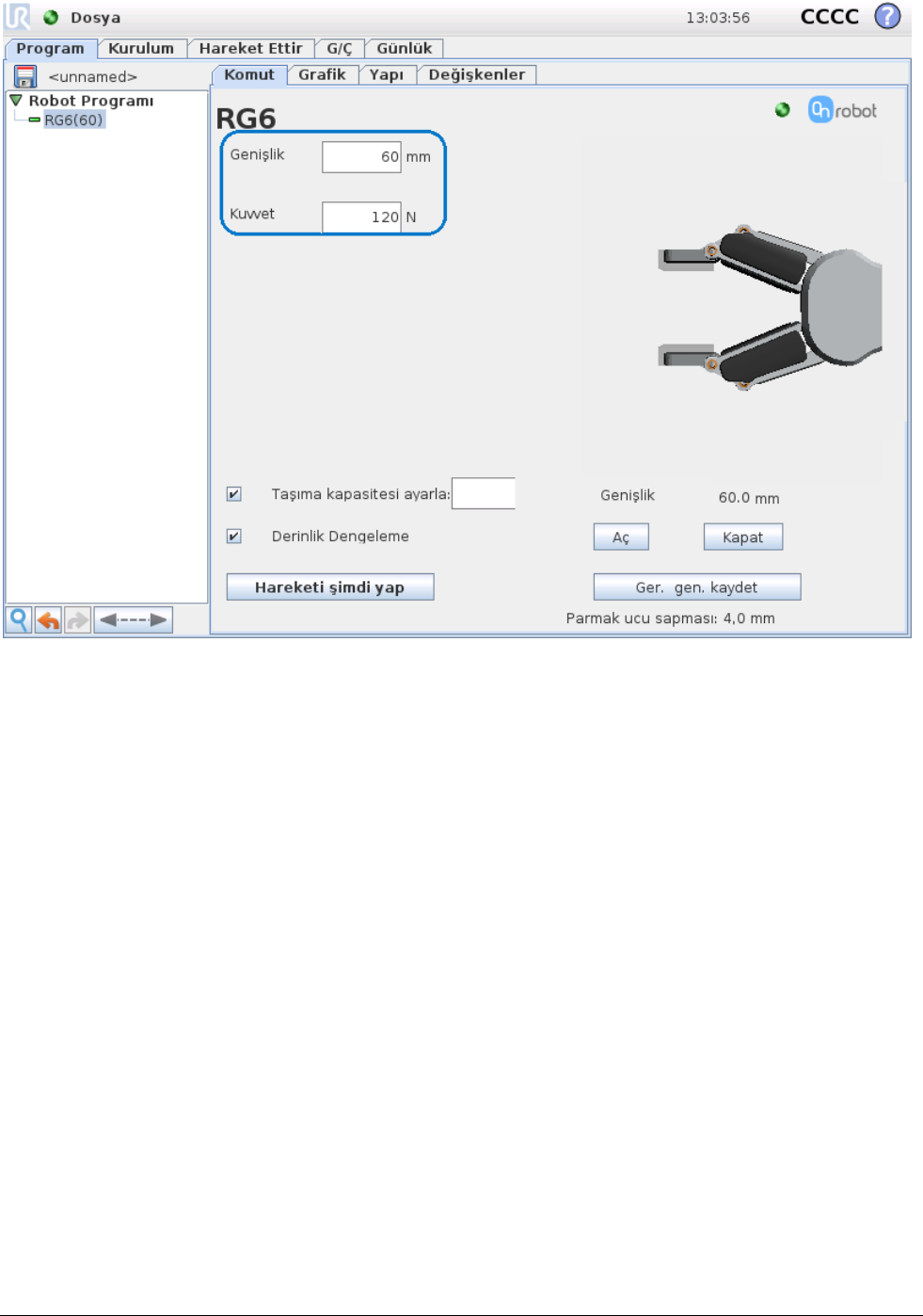
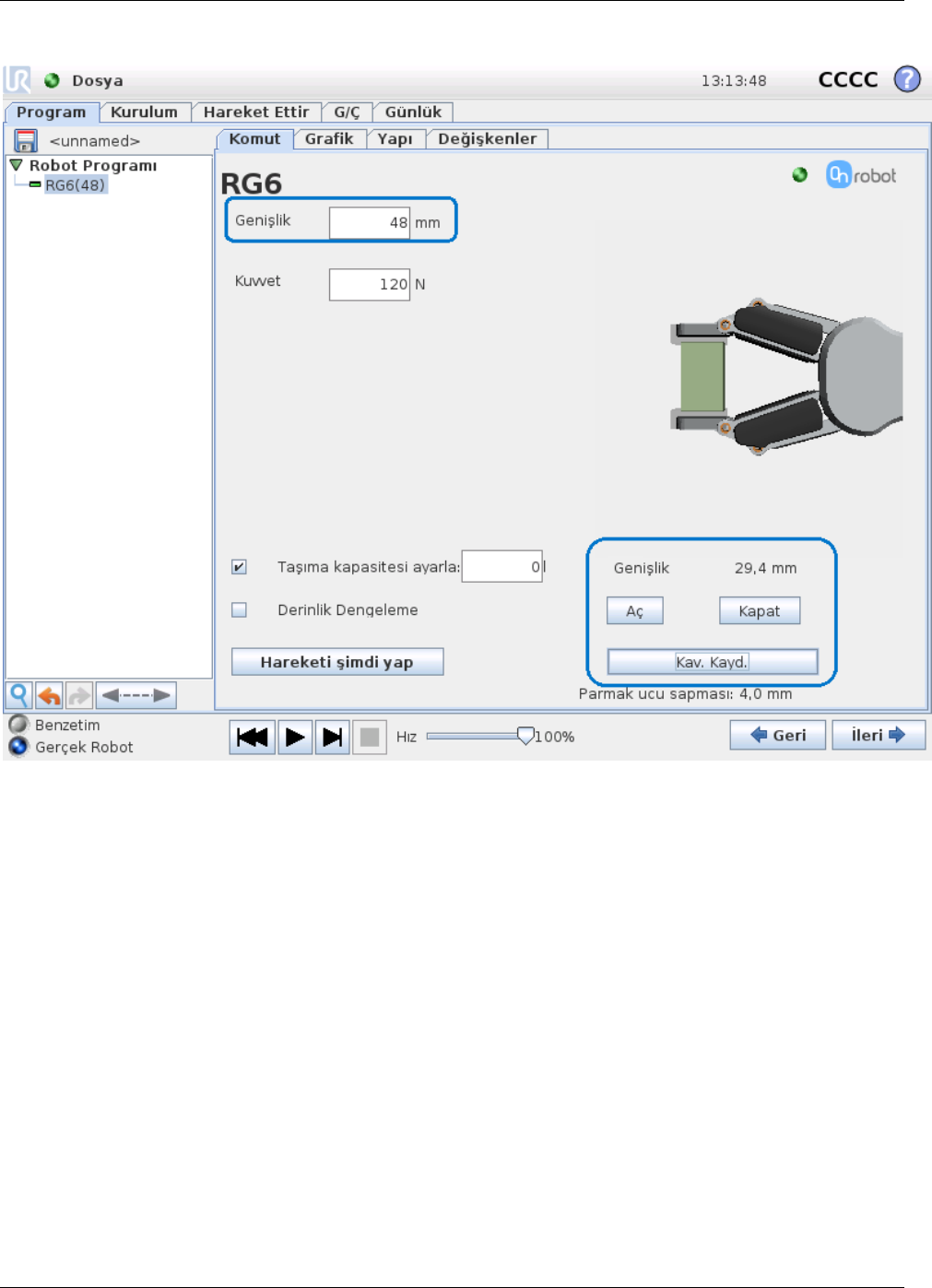
7.3.1
“Genişlik” RG6’nın ulaşmaya çalıştığı en geniş değerdir. RG6 belirtilen kuvvet elde edildiğinde hedef
genişlikten farklı olan bir genişlikte durur.
“Kuvvet” RG6’nn elde etmeye çalıştığı hedef kuvvettir. RG6, hedef genişliğe hedef kuvvetten önce ulaşırsa
hareketini durdurur ve hedef kuvvet öngörülen genişlikte elde edilmeyebilir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
24
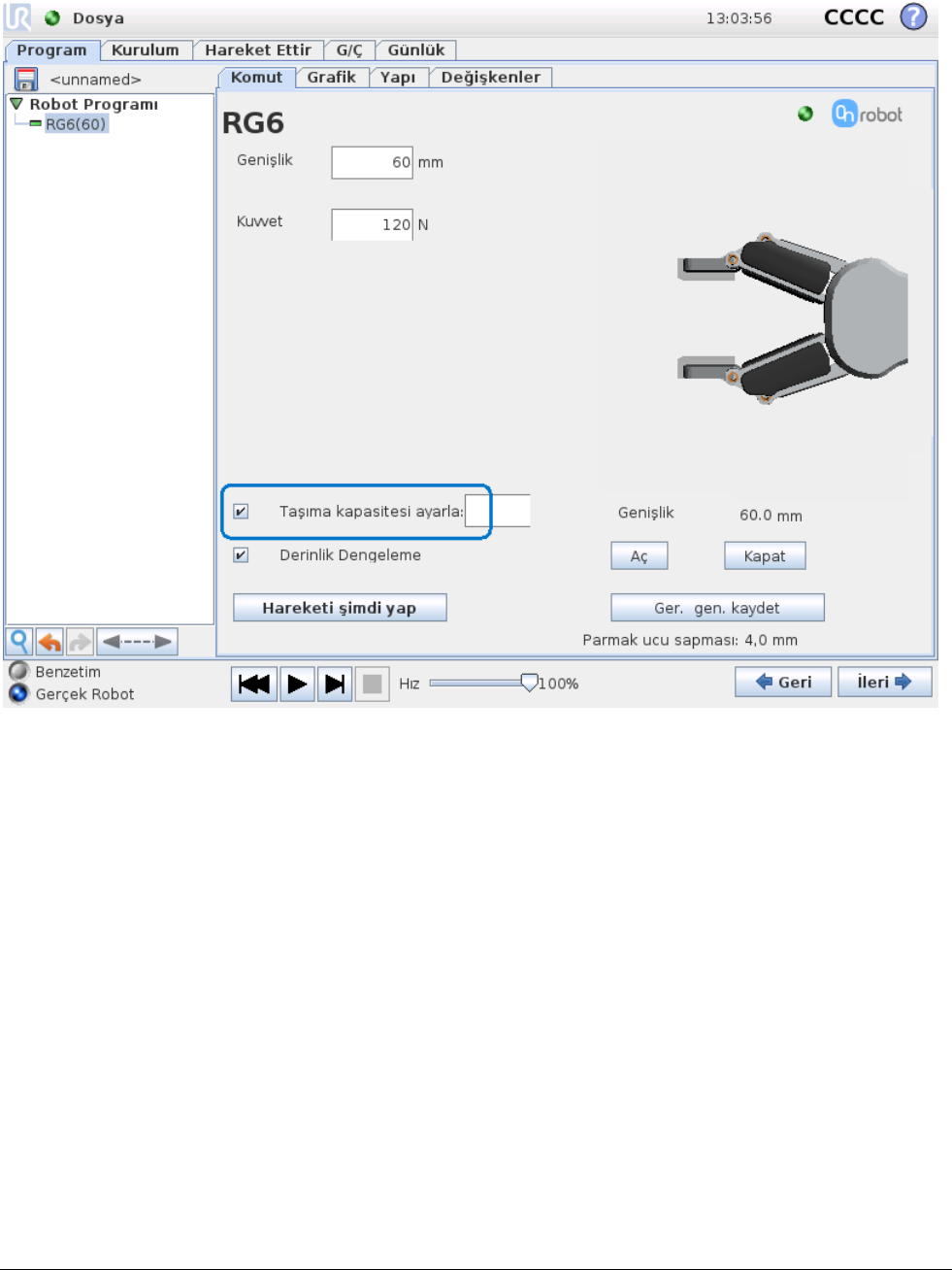
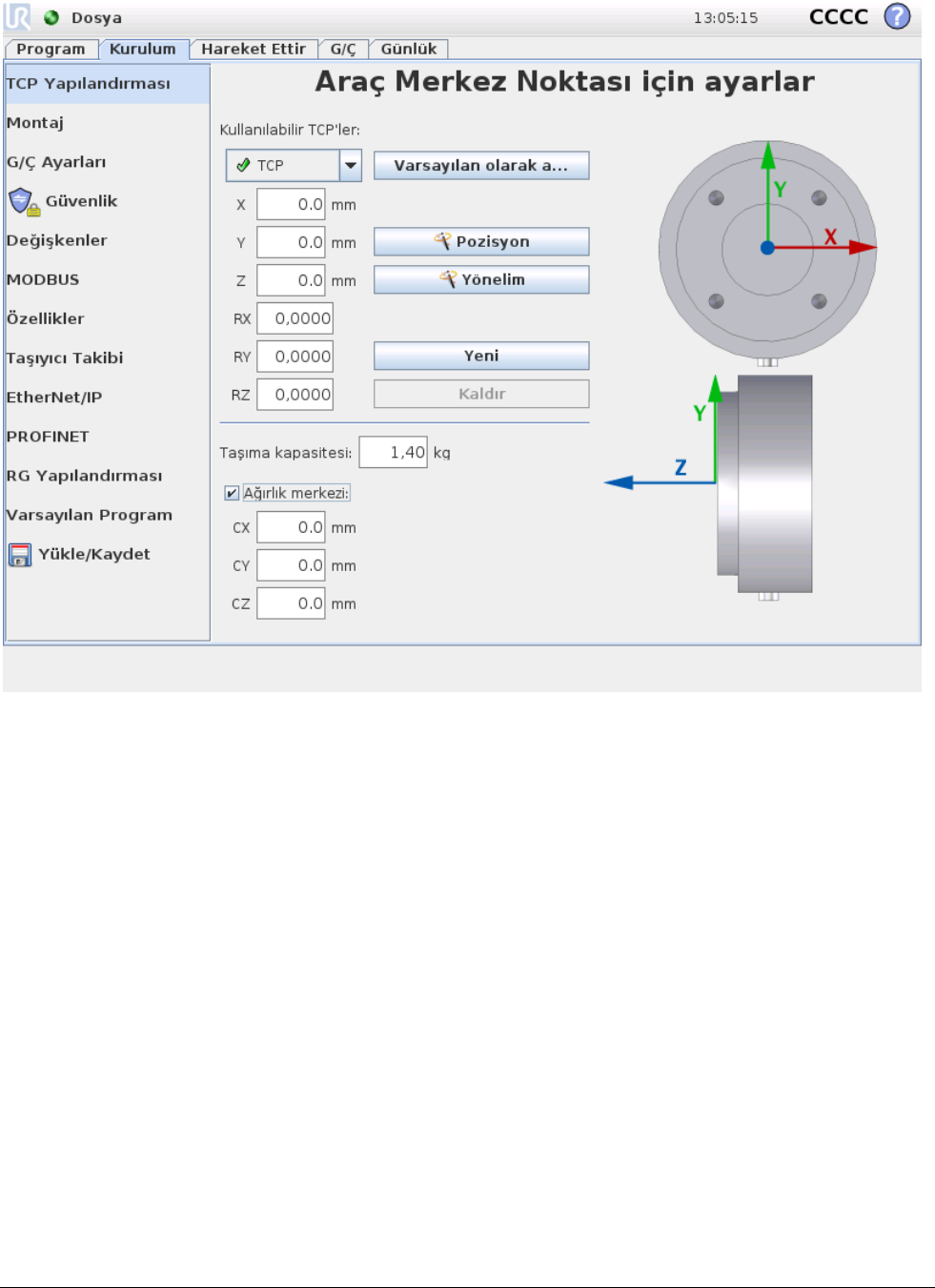
7.3.2
“Taşıma kapasitesini ayarla” hesaplaması seçildiğinde, Taşıma kapasitesi alanına nesne ağrılığı girilmelidir.
Bunun ardından URCap eklentisi toplam taşıma kapasitesi sonucunu (dirsek, RG6(‘ler) nesnenin toplamı)
hesaplar. Nesnenin kütle merkezinin TCP’de olduğu varsayılır. Nesne ağırlığı yalnızca Tutucu bir nesneyi
tuttuğunda hesaplamaya dahil edilir.
Hesaplamalarda kullanılan formül şöyledir:
n: Var olan bileşenlerin sayısı
i: Dirsek, RG6_ana, RG6_bağımlı, ana_nesne, bağımlı_nesne
m: Her bir bileşen için kütle
r: Her bir bileşen için kütle vektörünün merkezi
M: UR kontrol aygıtına gönderilen nihai kütle (taşıma kapasitesi)
R: Nihai kütle merkezi vektörü (CX=Rx, CY=Ry, CZ=Rz)
Aşağıda referans olarak da gösterilen yukarıdaki formüller TCP yapılandırma kurulumuna ilişkindir. Basit bir
anlatımla, “Taşıma kapasitesini ayarla” seçildiğinde yalnızca söz konusu nesnenin ağırlığını dikkate almak
gerekir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
25
Alttaki iki örnek; RG6 0,5 kg ağırlığında bir nesneyi tuttuğunda URCap’ın nasıl bir hesaplama yapacağını
anlatıyor.
Tek destek dirseği:
Robot taşıma yükü = 0,09 kg (dirsek) + 1,0 kg (RG6) + 0,5 kg (taşıma nesnesi) = 1,59
Çift destek dirseği:
Robot taşıma yükü = 0,18 kg (çift dirsek) + 1,0 kg (RG6 ana) + 1,0 kg (RG6 bağımlı) + 0,5 kg (taşıma nesnesi) =
2,68 kg
7.3.3 Derinlik dengeleme
“Derinlik Dengeleme” etkinleştirildiğinde robot kol, parmak kollarının dairesel hareketini eşitleyen bir
hareket yapmaya çalışır. RG6 ve robot kolu hareketi arasında küçük bir gecikme olur. Bu gecikme
kurulumda belirlenen ayarlara bağlı olur. Bkz. 7.2.2.4 Dengeleme z-ekseni boyunca yapılır, bu nedenle z-
ekseninin yönelimini etkileyecek elle yapılmış herhangi bir değişiklik dengelemeyi de etkileyecektir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
26
7.3.4
7.3.4.1 Herhangi bir nesne tutmadan
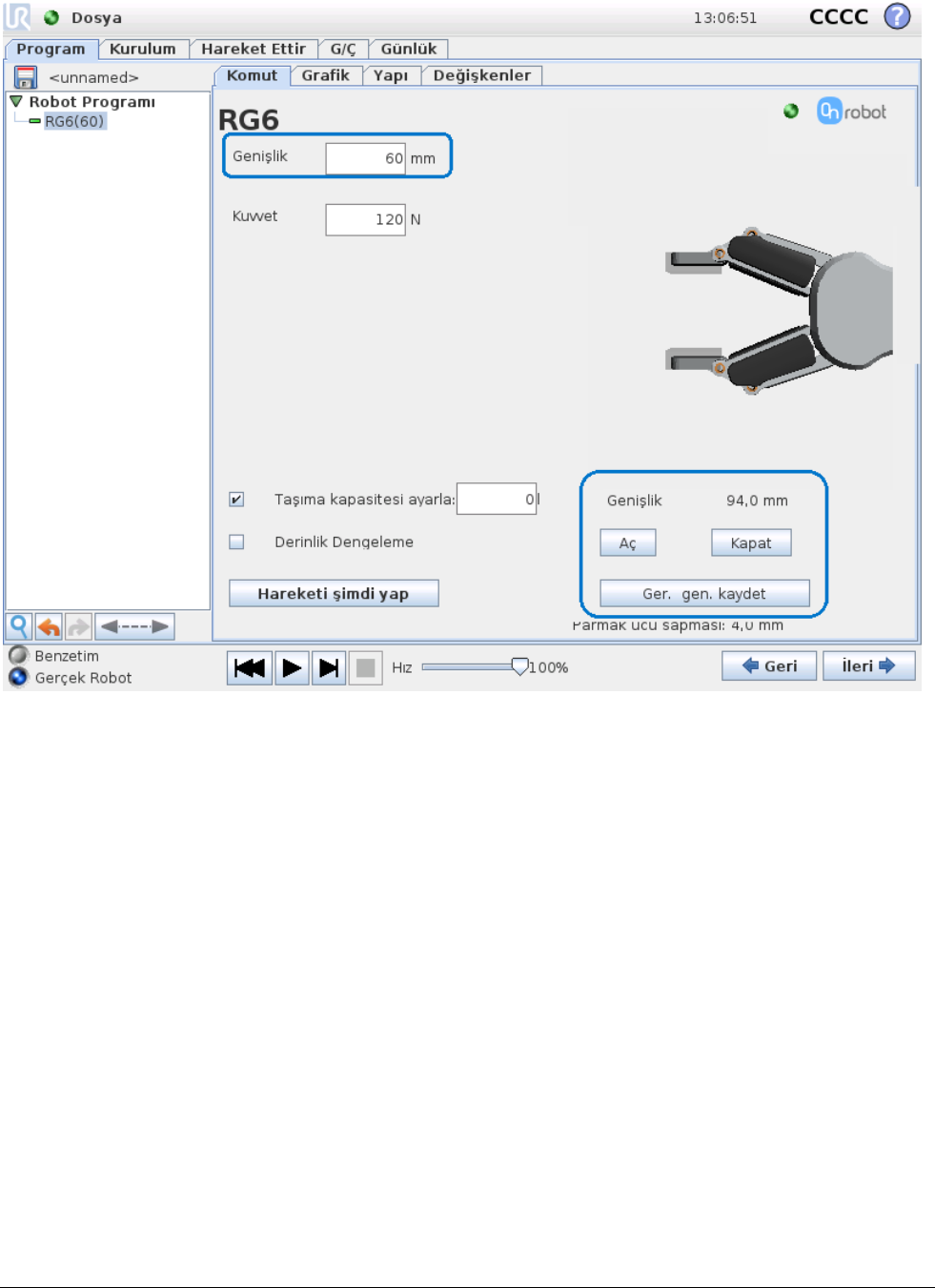
“Aç” ve “Kapat” düğmeleri, (seçilen) RG6’yı açıp kapatan “basılı tuttukça çalışan” düğmelerdir.
Yukarıdaki resimde; bir iş parçası tutulduğunda genişlik metninin nasıl bir geri bildirim verdiği ve “Gerçek
genişliği kaydet”e basıldığında güncel genişliğin düğüme nasıl ayarlandığı gösterilmektedir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
27
7.3.4.2 Bir nesneyi içten tutarken
Yukarıdaki resimde; bir nesne içten tutulduğunda genişlik metninin gerçek genişlikle ilgili nasıl bir geri
bildirim verdiği gösterilmektedir. “Kavramayı kaydet”e basıldığında güncel genişlik düğüme +3 mm olarak
ayarlanır.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
28
7.3.4.3
Yukarıdaki resimde; bir nesne dıştan tutulduğunda genişlik metninin gerçek genişlikle ilgili nasıl bir geri
bildirim verdiği gösterilmektedir. “Kavramayı kaydet”e basıldığında güncel genişlik düğüme -3 mm olarak
ayarlanır.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
29
7.3.5 Çift Tutucu
Ana/Bağımlı düğmeleri ile eylemi ana Tutucunun mu yoksa bağımlı tutucunun mu gerçekleştireceği
belirlenir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
30
7.4
RG6 TCP düğümü, robot için geçerli TCP’yi ayarlamak için eklenebilir. Görünüm ve kontroller Montaj kurulum
ekranıyla benzerdir. “TCP radyo düğmeleri ve değerler” ile “TCP genişliği” Kurulumdakilerle aynıdır. Farklı
olarak tüm kurulumu değil tek bir düğümü etkiler.
Örnek olarak lütfen bkz. 7.2.1.3 ve 0 (Çift Tutucu kuruluysa bkz 7.2.1.5 ve 7.3.5).
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
31
7.5 RG6 Komut fonksiyonu
On Robot URCap etkinleştirildiğinde, ön tanımlı bir RG6 komut fonksiyonu olacaktır:
RG6 (hedef_genişlik = 110, hedef_kuvvet = 40, yük = 0,0, yükü_ayarla = Yanlış, derinlik_dengeleme = Yanlış,
bağımlı = Yanlış)
Tüm giriş değişkenleri RG6 düğümünde kullanılanla aynıdır. Komut fonksiyonu parametreli programlama için
faydalıdır. Örneğin bir iş parçasını hızlıca bırakması için bağıl bir hareketi aşağıda belirtilen şekilde yapabilir:
RG6 (ölçüm_genişliği + 5, 40)
Bu, hedef kuvvet 40N’ye ayarlanmış şekilde Tutucuyu 5 mm açar.
Ayrıca yumuşak/uyumlu bir iş parçasının kesin bir derinlikle (2 mm) işaretlenmesi gerekiyorsa, bu aşağıda
belirtilen şekilde yapılabilir:
RG6 (hedef_genişlik=0, hedef_kuvvet=3, derinlik_dengeleme=Doğru)
RG6 (hedef_genişlik=ölçülen_genişlik-2, hedef_kuvvet=40, derinlik_dengeleme=Doğru)
7.6
7.6.1 Tek RG6
7.6.2 Çift RG6
Geri Bildirim
değişkeni
Birim
Açıklama
tutma_saptandı
Doğru/Yanlış
Tutucu bir iş parçasını saptadıysa Doğru
tutma_kaybı
Doğru/Yanlış
Tutucu bir iş parçasını düşürdüyse Doğru
ölçülen_genişlik
[mm]
Tutucunun parmakları arasındaki genişlik
Geri Bildirim değişkeni
Birim
Açıklama
ana_tutma_saptandı
Doğru/Yanlış
Ana Tutucu bir iş parçasını saptadıysa
Doğru
ana_tutma_kaybı
Doğru/Yanlış
Ana Tutucu bir iş parçasını düşürdüyse
Doğru
ana_ölçülen_genişlik
[mm]
Ana tutucunun parmakları arasındaki
genişlik
bağımlı_tutma_saptandı
Doğru/Yanlış
Bağımlı Tutucu bir iş parçasını saptadıysa
Doğru
bağımlı_tutma_kaybı
Doğru/Yanlış
Bağımlı Tutucu bir iş parçasını
düşürdüyse Doğru
bağımlı_ölçülen_değer
[mm]
Bağımlı tutucunun parmakları arasındaki
genişlik
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
32
7.7 URCap sürümü
7.7.1
Sağ üst köşedeki Onrobot logosunu basıldığında alttaki kutu görüntülenir. Bu kutudan, RG6 aygıt yazılımı
güncellenebilir ve hangi URCap sürümünün yüklü olduğu görülebilir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
33
7.8
UR sürümü 3.0 <= ve > = 3.3 ise: Robotun en yeni mevcut UR yazılımına yükseltilmesi ve bu kılavuzda yüklenen
URCap eklentisinin yüklenmesi önerilir. Robot sürümü <3.0 ise On Robot USB aygıtı bunu algılayarak gerekli
şablonlar yükleyecektir. Bu durumda, USB aygıtındaki “\ON\CLASSIC\Technical support” klasöründe bulunan
Kullanıcı Kılavuzu sürüm 1.44’e bakın.
Uyumluluğa genel bakış:
Aygıt yazılımı sürümü düşük ise URCap otomatik olarak güncellemenize rehberlik edecektir.
RG6 Kullanıcı Kılavuzu - Versiyon 1.9
Özellikler periyodik olarak gözden geçirilir ve haber verilmeksizin değiştirilebilir Telif hakları: © 2015 - 2017 On Robot ApS. Tüm hakları saklıdır
34
8
8.1
Avrupa Makine Direktifi 2006/42/EC Ek II 1.B.’ye göre
Üretici:
On Robot ApS
Hvidkærvej 3
5250 Odense SV
Danimarka
+45 53 53 57 37
Bu ürünle ilgili olarak aşağıdakileri beyan eder:
Tipi: Endüstriyel Robot Kavrayıcı
Modeli: RG6
Seri numarası başlangıcı: RG6-1020017
2006/42/EC’ye göre kısmen tamamlanmış makinedir. Bu ürün 2006/42/EC’de belirtilen tüm temel
gerekliliklere tam uyumlu hale getirilmeden işletmeye alınmamalıdır. Kapsamlı bir risk değerlendirmesi gerekli
tüm gerekliliklerin yerine getirilmesinin bir parçası olarak her uygulama için gerçekleştirilmelidir. Tüm temel
gereklilikler değerlendirilmelidir. RG6 kullanım kılavuzundaki tüm talimatlara ve açıklamalara uyulması
zorunludur.
2006/42/EC Ek-VII kısım B'ye göre derlenen Teknik dokümantasyon ulusal makamlar tarafından talep
edildiğinde sağlanabilir.
Ürün aşağıdaki yönetmeliklere uygundur ve aşağıdaki yönetmeliklere göre CE işareti almıştır:
2014/30/EU - Elektromanyetik Uygunluk Direktifi (EMC)
2011/65/EU - Bazı tehlikeli maddelerin kullanımının sınırlandırılması (RoHS)
2014/35/EU - Düşük gerilim direktifi (LVD)
Bilge Jacob Christiansen
İşletme Direktörü ve Kurucu
Odense, 18 Temmuz 2017
