Robo Master Development Board User Guide
RoboMaster%20Development%20Board%20User%20Guide
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 35

RoboMaster 开发板
V1.0
2018.04
用户手册
2
免责声明
感谢您购买 RoboMasterTM 开发板 A型(以下简称开发板 A型 )、RoboMaster 开发板 B型( 以
下简称开发板 B型)、RoboMaster 开发板 OLED(以下简称 OLED)。在使用之前,请仔细
阅读本声明,一旦使用,即被视为对本声明全部内容的认可和接受。请严格遵守手册、产品说
明和相关的法律法规、政策、准则安装和使用该产品。在使用产品过程中,用户承诺对自己的
行为及因此而产生的所有后果负责。因用户不当使用、安装、改装造成的任何损失,DJITM 将
不承担法律责任。
DJI 是深圳市大疆 TM 创新科技有限公司及其关联公司的商标。本文出现的产品名称、品牌等,
均为其所属公司的商标。本产品及手册为大疆创新版权所有。未经许可,不得以任何形式复制
翻印。
关于免责声明的最终解释权,归大疆创新所有。
产品使用注意事项
1. 请按照说明书正确连接线材,以免损坏接口以及开发板。
2. 使用前请检查线材有无老化、短路。老化或短路的线材不适合继续使用。
3. 请按照本文规定的工作环境(如电压、电流、温度等参数)使用,否则将会影响产品寿命
或造成永久性损坏。
4. 安装时注意做好保护,防止静电、物理损坏。
5. 请保持开发板的干净整洁,避免由于异物造成短路或性能下降。
6. 请不要用手直接接触开发板上的芯片,避免由于静电放电造成开发板损坏或性能下降。
7. 开发板上电后如发现有火花、冒烟,焦糊味或其它异常,请立即关掉电源。
3
1
23 1 2 23 1 22 21 201916 1718 16 16
2
23
23
1
26
25
24
1
2
2 1 3 4 5 6 6 6
7
8
9
10
11
12
13
14
8
15
RoboMaster 开发板 A 型
简 介
RoboMaster 开发板 A 型是一款面向机器人 DIY 的开源主控。开发板主控芯片为
STM32F427IIH6,拥有丰富的扩展接口和通信接口,板载 IMU,可配合 RoboMaster 出品的
M3508 直流无刷减速电机、UWB 模块以及妙算等产品使用,亦可配合 DJI 飞控 SDK 使用,
配件丰富。开发板具有防反接和缓启动等多重保护。经过 RoboMaster 竞赛的打磨和改进,开
发板不仅满足比赛机器人的控制需求,也非常适合用户 DIY。
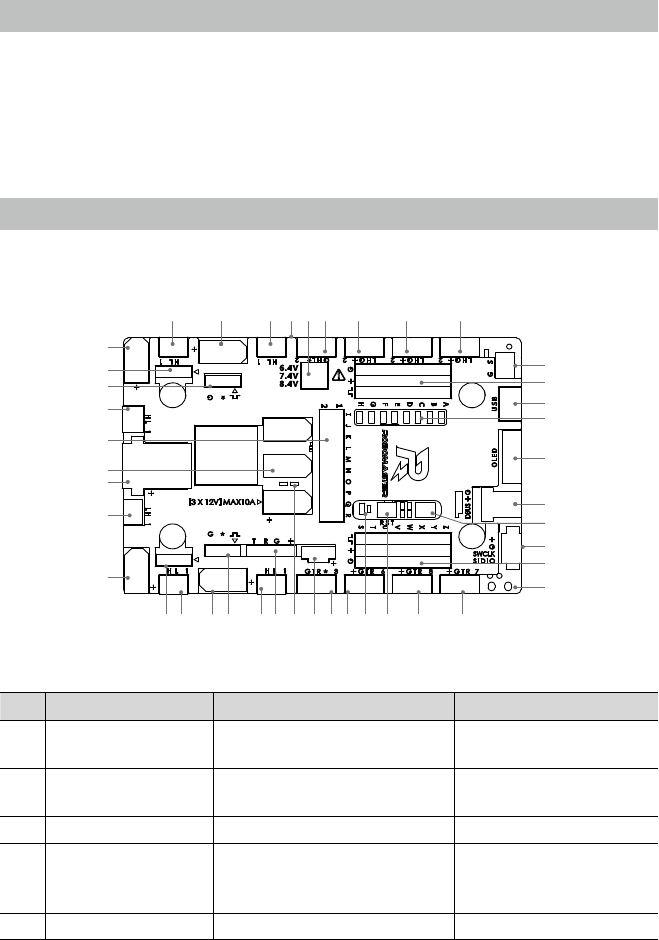
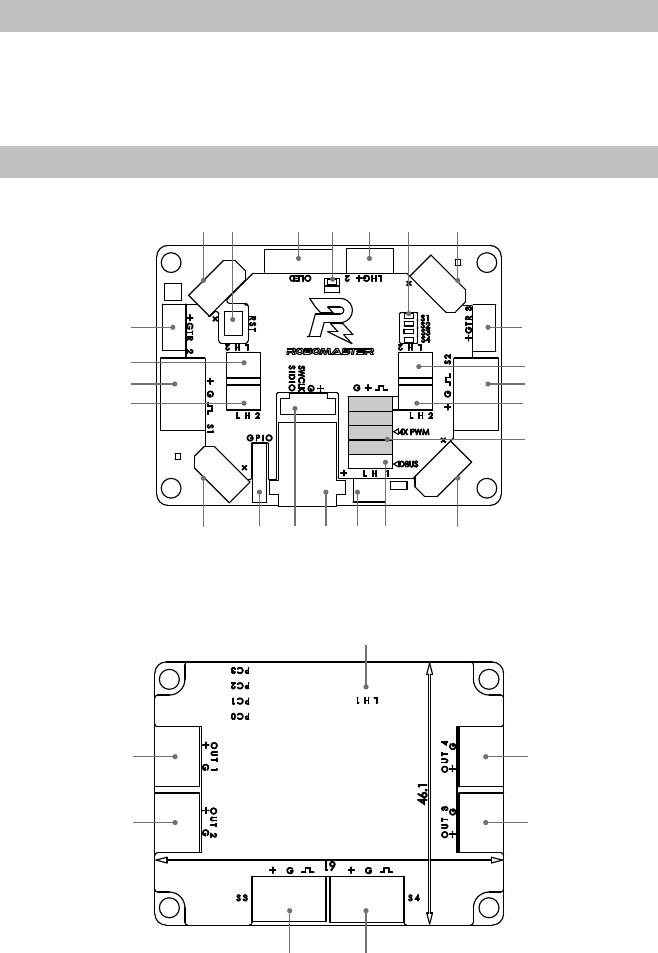
接口及外部丝印
开发板 A 型正面丝印及接口如下图所示:
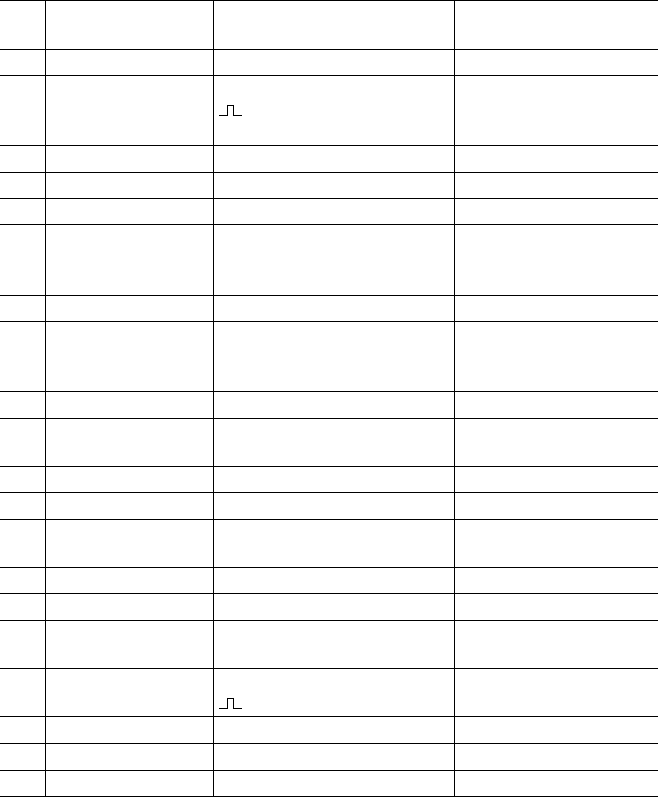
序号 名称 丝印说明 备注
1 CAN1 H:CAN-H( 高位数据线 )
L:CAN-L( 低位数据线 )
2可控电源输出接口 +:电源正极 未标注的一端为电源负极 ,此
电源可以通过程序进行控制。
3 TF 卡槽
4电压调节拨码 6.4V 7.4V 8.4V:
仅有对应位置 ON 时的电压值
此拨码用于调节 (8)PWM 的
电压,更多详细设置请见反
面丝印图。
5 SDK CAN2
4
6 CAN2 H:CAN-H( 高位数据线 )
L:CAN-L( 低位数据线 )
7同步信号 G:GND、S:同步信号
8 PWM×8
G:GND 、+:VCC
:PWM 输出,A – H S-Z:IO
对应表索引
其中 VCC 电压可以通过电压
调节拨码设置,IO 对应表见
反面丝印图。
9 USB
10 用户自定义 LED×8
11 OLED 接口
12 DBUS DBUS:DBUS 信号、+:VCC
G:GND
在连接设备时,请注意 DBUS
端子上的突出部分方向与丝
印标注一致。
13 用户自定义按键
14 SWD
+:VCC(3.3V)、G:GND、
SWCLK:SWD 时钟、SIDIO:
SWD 数据
15 3.3V 电源输出接口 3V3:VCC(3.3V)、PGND:GND
16 UART +:VCC、G:GND、T:数据发送
(Tx)、R:数据接收 (Rx)
17 复位按键
18 用户自定义 LED×2
19 SDK UART G:GND、T:数据发送 (Tx)
R:数据接收 (Rx)、*:无连接
20 5V 电源输出接口 +:VCC 未标注引脚为 GND。
21 12V 电源指示灯
22 蓝牙串口 T:数据发送 (Tx)、R:数据接收 (Rx)、
G:GND、+:VCC
23 PWM G:GND 、*:无连接
:PWM 输出、△:1号引脚
部分接口未完全标注,只标
注了 1号引脚。
24 电源输入接口 +:VCC 未标注引脚为 GND。
25 12V 电源输出接口 ×3
26 GPIO X 18 & 5V 电源 1,2,I-R:IO 对应表索引 IO 对应表见反面丝印图。
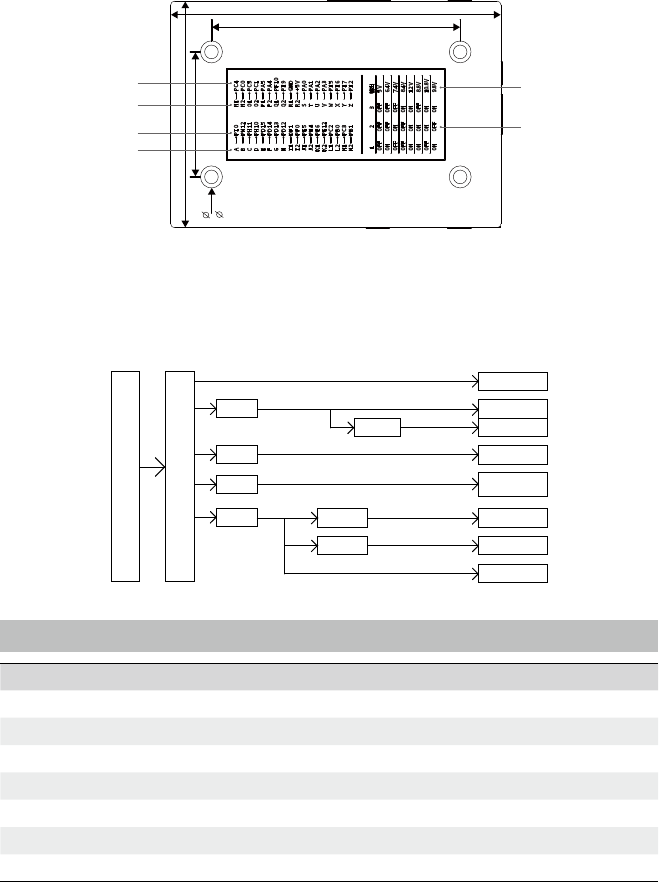
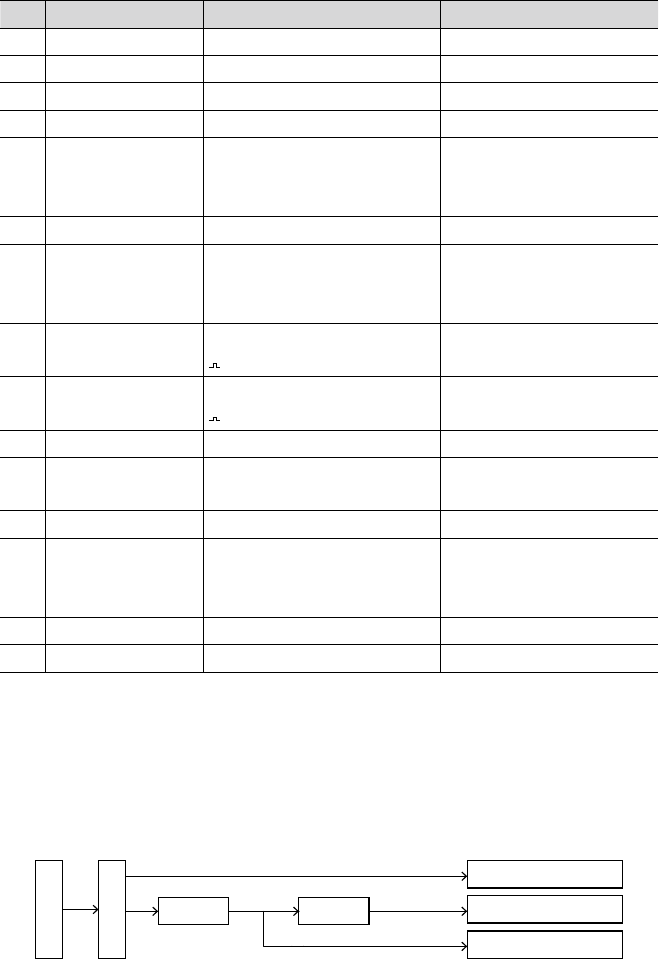
5
电源框图如下图所示:
2*8 路PWM供电
CAN通讯接口
串口通讯接口
XT30 供电
3.3 V 对外供电
电源输出
可调电源输出
D-Bus + Buzzer
3.3 V@250 mA 5 V@500 mA
IMU
MCU
LM25116 12 V@10 A
MP2233 3.3 V@3 A
TPS54540
TPS54540
MP2456GJ LP5907MFX
24 V Power output @ Max 20 A
3.3 V@250 mA
LP5907MFX
5~12 V@5 A
5 V@2 A 5 V
PowerTree
24 V电源输入
防反接& 缓启动
通讯接口电源
特征参数
项目 参数
最大电压 26 V
支持电池 4~6S LiPo
最大允许输入电流 *(持续) 20 A
电源输出接口最大单路电流 ** 10A
重量 48 g
尺寸(长宽) 85×58 mm
工作温度范围 0 ~ 55 ℃
* 室温 25℃、通风良好的实验环境下测得。
** 电源输出接口单路最大电流指每一路电源输出接口可承受的最大电流,但所有电源输出接
口的电流总和不得超过最大允许输入电流。
开发板 A 型背面丝印如下图所示:
85
58
64
32
5.50
3.50
对应单片机 IO 对应输出电压
正面丝印标注索引
电压调节拨码状态
对应单片机 IO
正面丝印标注索引
6
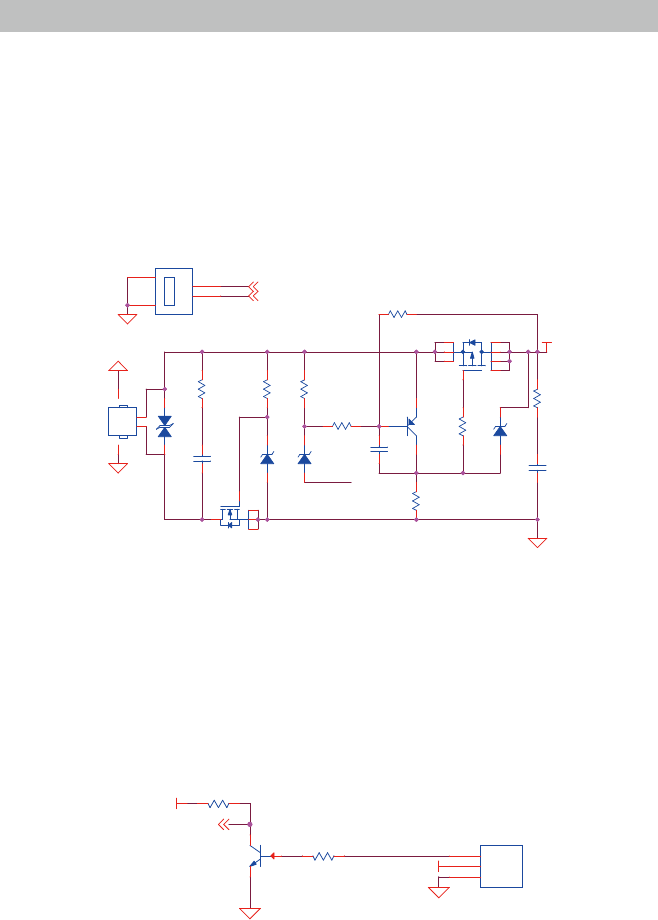
1.2 DBUS* 接口
开发板 A型配备有 1路DBUS 接口 ,下图是其接口原理图。
DBUS 是UART 信号的反相形式,因此从接插件的 3脚进入后,经过 Q14 反相之后再送入单
片机的 UART1。波特率一般设置为 100kbps。
* DBUS 为DJI 遥控器通用协议
最大输出电压
28V
左右
电流
20A
NC D14
开启过压防护
NC
BAT-
BAT-
PGND
PGND
VCC_INPUT
PGND
PGND
CAN1_L [6,8]
CAN1_H [6,8]
Q18
PMBT3906
1
23
J10
0.0
XT30PW-M
1
2
34
D17
BZX584C9V1
R87 1K
0201 1%
R171
10K
0201
1%
D13
SMAJ28CA
R82
33R0402
5%
Q1TPCA8122
1
2
3
4
8
7
6
5
R169100K
02011%
D94
28V~32V
A C
R172
1K
0201
1%
D14
BZX584C9V1
R9233R
04025%
R173
1.5M0201
1%
C19410nF
25V 0402
C19910nF
25V 0402
R170100K
02011%
J9
1.0A
11257W90-2P-S
11
22
3
3
4
4
C41
100nF
50V 0603
Q2
PSMN1R4-40YLD
1
2
3
4
5
电源和CAN输入
防反接,上电缓启动,过压保护
DBUS
VCC_5V_S
VCC_3V3_S
PGND
PGND
USART1_RX(PB7)[3]
Q14
PMBT3904-215
1
23
R174
4.7K
J43
0.0A
1
12
23
3
R89
4.7K
2.54mm 3PIN单排弯头插针(90°)
功能说明
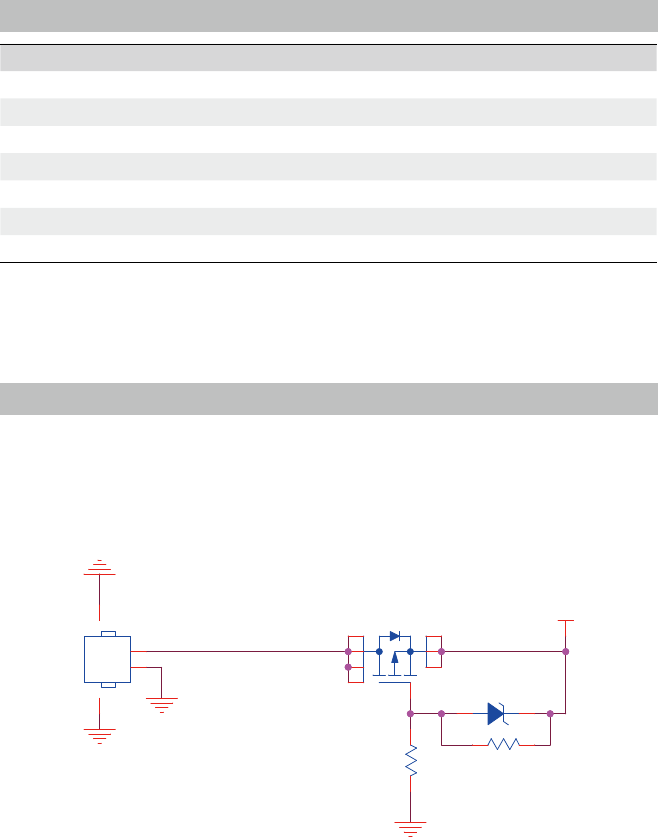
1.1 电源过压、防反接、缓启动电路
电源输入接口采用标准的 XT30 接口,电源输入首先并联 28V TVS 管,防止瞬态高电压烧坏开
发板,然后通过 PMOS Q1 和NMOS Q2 组成缓启动与防反接电路,有效防止电源接头接触瞬
间打火,造成接头损坏,并且防止电源正负极反接对开发板造成损害。其中图中 D19 为齐纳
二极管,当输入电压超过其击穿电压(30±2V)时,三极管 Q3 导通,PMOS Q1 关断,该电
路起到过压保护的作用。
7
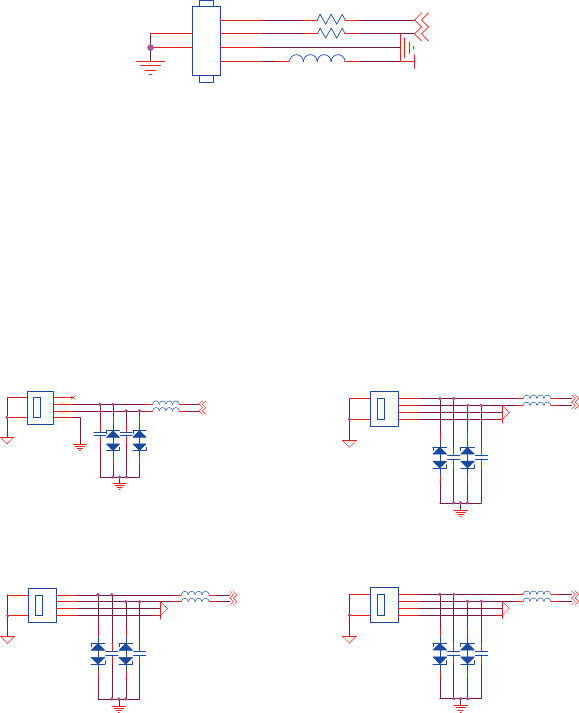
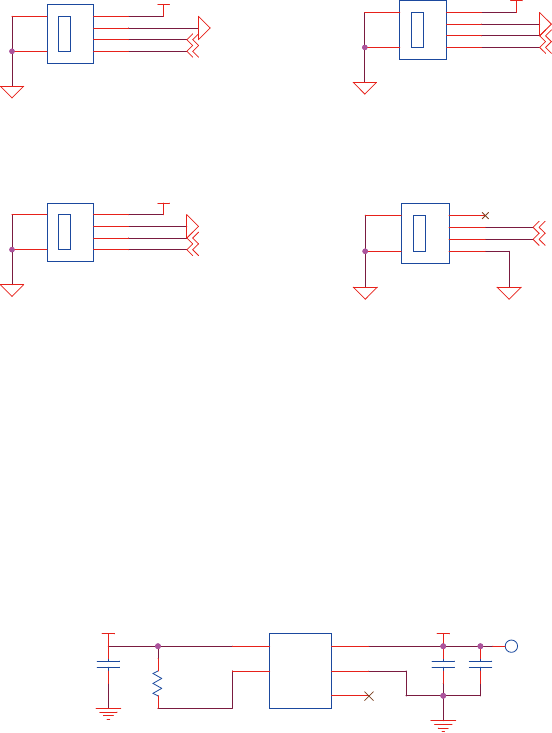
1.4 USART 接口
开发板A型配备有四路USART 接口,分别连接到USART3、USART6、USART7 和
USART8。其中 USART3 是配合 DJI ON BOARD SDK 使用,线序与其它三个串口不同,在使
用串口时请注意 TX 和RX 需要交叉连接。本接口只支持 3.3V 和5V 电平,若需与 RS485 或
RS232 接口通信,请外置电平转换芯片。
通讯接口
立式
PGND
USART3_RX(PD9) [4]
USART3_TX(PD8) [4]
J2
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
C3847pF
50V
0201
L4
0201
150mA
L3
0201
150mA
D12
A C
C3747pF50V0201
D11
A C
立式
PGND
VCC_5V_U
PGND
USART6_TX(PG14) [4]
USART6_RX(PG9) [4]
J36
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
D76
A C
D77
A C
L63
0201
150mA
L62
0201
150mA
C10447pF50V0201
C10547pF50V0201
立式
PGND
VCC_5V_U
PGND
UART8_RX(PE0) [4]
UART8_TX(PE1) [4]
J37
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L64
0201
150mA
C10847pF50V0201
L65
0201
150mA
C10947pF50V0201
D79
A C
D80
A C
立式
PGND
VCC_5V_U
PGND
UART7_RX(PE7) [4]
UART7_TX(PE8) [4]
D83
A C
J38
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L67
0201
150mA
C12347pF50V0201
L68
0201
150mA
C12447pF50V0201
D82
AC
On Board SDK
USER串口
通讯接口
立式
PGND
USART3_RX(PD9) [4]
USART3_TX(PD8) [4]
J2
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
C3847pF
50V
0201
L4
0201
150mA
L3
0201
150mA
D12
A C
C3747pF50V0201
D11
A C
立式
PGND
VCC_5V_U
PGND
USART6_TX(PG14) [4]
USART6_RX(PG9) [4]
J36
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
D76
A C
D77
AC
L63
0201
150mA
L62
0201
150mA
C10447pF50V0201
C10547pF50V0201
立式
PGND
VCC_5V_U
PGND
UART8_RX(PE0) [4]
UART8_TX(PE1) [4]
J37
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L64
0201
150mA
C10847pF50V0201
L65
0201
150mA
C10947pF50V0201
D79
A C
D80
A C
立式
PGND
VCC_5V_U
PGND
UART7_RX(PE7) [4]
UART7_TX(PE8) [4]
D83
A C
J38
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L67
0201
150mA
C12347pF50V0201
L68
0201
150mA
C12447pF50V0201
D82
AC
On Board SDK
USER串口
通讯接口
立式
PGND
USART3_RX(PD9) [4]
USART3_TX(PD8) [4]
J2
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
C3847pF
50V
0201
L4
0201
150mA
L3
0201
150mA
D12
A C
C3747pF50V0201
D11
A C
立式
PGND
VCC_5V_U
PGND
USART6_TX(PG14) [4]
USART6_RX(PG9) [4]
J36
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
D76
A C
D77
A C
L63
0201
150mA
L62
0201
150mA
C10447pF50V0201
C10547pF50V0201
立式
PGND
VCC_5V_U
PGND
UART8_RX(PE0) [4]
UART8_TX(PE1) [4]
J37
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L64
0201
150mA
C10847pF50V0201
L65
0201
150mA
C10947pF50V0201
D79
AC
D80
AC
立式
PGND
VCC_5V_U
PGND
UART7_RX(PE7) [4]
UART7_TX(PE8) [4]
D83
A C
J38
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L67
0201
150mA
C12347pF50V0201
L68
0201
150mA
C12447pF50V0201
D82
AC
On Board SDK
USER串口
通讯接口
立式
PGND
USART3_RX(PD9) [4]
USART3_TX(PD8) [4]
J2
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
C3847pF
50V
0201
L4
0201
150mA
L3
0201
150mA
D12
A C
C3747pF50V0201
D11
A C
立式
PGND
VCC_5V_U
PGND
USART6_TX(PG14) [4]
USART6_RX(PG9) [4]
J36
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
D76
A C
D77
A C
L63
0201
150mA
L62
0201
150mA
C10447pF50V0201
C10547pF50V0201
立式
PGND
VCC_5V_U
PGND
UART8_RX(PE0) [4]
UART8_TX(PE1) [4]
J37
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L64
0201
150mA
C10847pF50V0201
L65
0201
150mA
C10947pF50V0201
D79
A C
D80
A C
立式
PGND
VCC_5V_U
PGND
UART7_RX(PE7) [4]
UART7_TX(PE8) [4]
D83
A C
J38
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
L67
0201
150mA
C12347pF50V0201
L68
0201
150mA
C12447pF50V0201
D82
AC
On Board SDK
USER串口
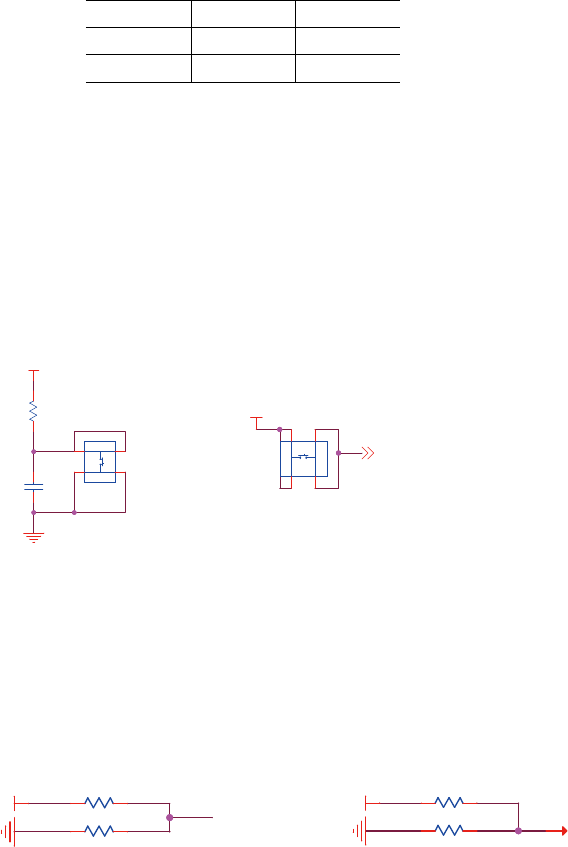
1.3 SWD 调试接口
开发板 A型配备一个 SWD 调试接口,用于单片机程序的下载和调试。SWD 调试接口位于主
控板的右侧下方。SWCLK 和SWDIO 在开发板中串联了 100Ω 的电阻,起到保护单片机的作用。
RFID
GND
VCC_3V3_S
GND
SWDIO [3]
SWCLK [3]
R4 100R 02011%
R3 100R 02011%
L1
0402
1500mA
J1
1A
1
2
3
4
5
6
卧式53261 接口,1脚在左侧
8
1.5 用户自定义 LED×2
开发板 A型配备有 2颗用户自定义 LED,分别为绿色和红色。每一个指示灯都由单片机的一
个引脚直接驱动,其配置低电平则点亮指示灯,配置高电平则指示灯熄灭。下表为指示灯的引
脚配置和参数。
用户自定义 LED
颜色 单片机引脚 点亮电流
绿色 PF14 约4mA
红色 PE11 约4mA
1.6 用户自定义 LED X 8
开发板 A型配备有 8颗绿色 LED 灯珠,对应 IO 为PG1-PG8,单颗点亮电流约 4mA。
1.7 按键
开发板 A型配备两个按键,其中黑色按键为单片机复位按键,白色按键为用户自定义按键。
其中白色按键直接连到单片机的 PB2 管脚,该按键按下为高电平。
1.8 BOOT 启动设置
开发板 A型上的 STM32 芯片上有两个管脚 BOOT0 和BOOT1,这两个管脚在芯片复位时的
电平状态决定了芯片复位后的启动方式。开发板 A型的 BOOT 管脚配置如下图。默认情况下
BOOT 管脚均被拉低,上电从 User Flash 启动。其中 R1、R2、R17 和R18 焊盘位于两个按
键中间,R1 和R17 是空贴,用户可以使用镊子将其短接,使得单片机以不同的方式启动。当
BOOT0 = 1 BOOT1 = 0 时,单片机将从 System memory 启动,进入 DFU 模式。
NRST
VCC_3V3_S
50mA
SW1
12
34
R19
10K
0201
1%
C13
1uF
6.3V
0201
VCC_3V3_S
KEY(PB2) [4]
S1
50mA
1
2
3
4
用户自定义按键
BOOT1
VCC_3V3_MCU
R2
10K 0402
5%
R1
10K 0402
5% NC
BOOT0
VCC_3V3_MCU
R18
10K 0402
5%
R17
10K 0402
5% NC
9
1.9 USB 接口
开发板 A型配备一个 USB 全速接口,该端口完全符合 USB2.0 规范的 On-The-Go 补充标准,
在主机模式下。OTG_FS 支持全速(FS,12Mbps)和低速(LS,1.5Mbps)收发器,而从机
模式下仅支持全速(FS,12Mbps)收发器。
VCC_5V_S
USB_FS_DP(PA12) [3]
USB_FS_DM(PA11) [3]
USB_FS_ID(PA10) [3]
C401uF
16V 0402
D15
PESD12VV1BL
AC
D18
PESD5V0F1BL
C
A
R38
22R0402
5%
L5INDUCTOR
0603
1.4A
J14
1.0A
VBUS 1
DM 2
DP 3
ID 4
GND 5
SHELL1 6
SHELL2 7
SHELL3 8
SHELL4 9
SHELL5 10
SHELL6 11
U2
DLP11SN900HL2
4
4
1
122
33
C39100nF
25V 0402
D19
PESD5V0F1BL
C
A
R41
22R0402
5%
D20
PESD5V0F1BL
CA
R42
22R0402
5%
USB接口
Boot mood selection pins Boot mode Aliasing
BOOT1 BOOT0
X 0 Main Flash Memory Main Flash memory is selected as
the boot space
0 1 System memory System memory is selected as the
boot space
1 1 Embedded SRAM Embedded SRAM is selected as
the boot space
3V3
BOOT0
BOOT0
NRSTNRST
GND GND
GND
3V3
BOOT1
BOOT1
GND
KEY(PB2)
VCC_3V3_S VCC_3V3_S
KEY(PB2)
10
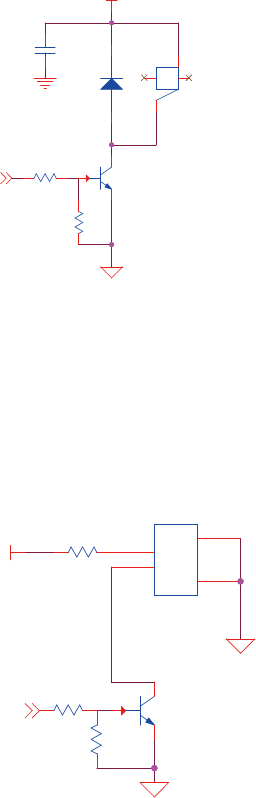
1.10 蜂鸣器
开发板 A型板载一个贴片式蜂鸣器,该蜂鸣器需要使用 PWM 驱动,额定频率 2700Hz。
1.11 5V 电源接口
开发板 A型集成一个可控的 5V 电源接口,最大电流 400mA,用户可以外接 RoboMaster 红
点激光器,也可使用线材包里提供的线材连接其他设备。
Buzzer
VCC_5V_S
PGND
TIM12_CH1(PH6)[4]
C50
10uF25V
0603
LS1
KLJ-8530A-5027
5V
A
C
B D
R48
10K
Q4
NPN-1
1A
1
23
R47 510R
0402 5%
D28
DIODE
A C
PGND
VCC_5V_U
PGND
LASER(PG13)[4]
R44
10K
Q3
NPN-1
1A
1
23
J15
1A
53398-0271
1
1
2
2
33
44
R43
510R
0402
5%
R37
0R0805
5%
5V电源接口
11
1.13 IMU 模块
开发板 A型集成一个 IMU 模块,其 IMU 由MPU6500 陀螺仪和 IST8310 地磁传感器组成。为
了解决陀螺仪温飘的问题,开发板在 MPU6500 四周增加 10 颗加热电阻,用户可以通过 PB5
加热电阻控制管脚和 MPU6500 内部的温度传感器做恒温处理,加热温度一般控制在比电路板
正常工作温度高 15~20℃为宜。10 个加热电阻工作电压为 24V,该电阻可以在 1S 内将 IMU
模块的温度从 25℃加热到 50℃。板载 IST8310 的地址为:0x0E。为减少电源噪声对 IMU 模
块的影响,板载 IMU 模块采用独立的 LDO 供电。
VCC_3V3_IMUVCC_5V_S
R168
4.7K
0402
5%
C196
100nF
25V 0402
U14
LP5907SNX-3.3/NOPB
OUT 1
GND 2
EN
3
IN
4
PAD 5
C195
4.7uF6.3V
0402
1
C197
4.7uF6.3V
0402
1.12 CAN2 通讯接口
开发板 A型为满足用户外接设备的需求,一共引出 4个CAN2 接口,其中一个(J3)线序与
另外三个(J11、J8 和J4)不相同。J3 是专门为 DJI OnboardSDK 使用的通讯接口,其余三
个接口可以接 RoboMaster UWB 定位系统以及其他 CAN 通讯的模块。
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J4
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN 接口
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J8
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN2 接口
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J11
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN2 接口
立式
PGNDPGND
CAN2_H [6,8]
CAN2_L [6,8]
J3
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J4
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN 接口
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J8
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN2 接口
立式
VCC_5V_U
PGND
PGND
CAN2_H [6,8]
CAN2_L [6,8]
J11
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
CAN2 接口
立式
PGNDPGND
CAN2_H [6,8]
CAN2_L [6,8]
J3
1.0A
11257W00-4P-S
11
22
33
44
5
5
6
6
12
泄放电阻
AUX_DA
AUX_CL
AUX_DA
AUX_CL
VCC_3V3_IMU
VCC_3V3_IMU
IMU_INT(PB8)[3]
SPI5_NSS(PF6) [4]
SPI5_SCK(PF7)[4]
SPI5_MISO(PF8) [4]
SPI5_MOSI(PF9)[4]
C51
10nF10V
0201
C52
100nF
25V
0402
L16
0201
150mA
C53
1uF16V
0402
U3
MPU6600
NC1 1
NC2 2
NC3 3
NC4 4
NC5 5
NC6 6
AUX_CL
7
VDDIO
8
AD0/SDO 9
REGOUT 10
FSYNC
11
INT
12
VDD
13
NC7 14
NC8 15
NC9 16
NC10 17
GND 18
RESV-FLOAT
19
RESV-GND
20
AUX_DA
21
CSn 22
SCL/SCLK
23
SDA/SDI
24
ePAD
25
C54
100nF25V
0402
R46
4.7K
L14
0201
150mAL13
0201
150mA
L17
0201
150mA
R49
4.7K0201
5%
L15
0201
150mA
R50
4.7K0201
5%
IIC Address :0X0E
AUX_DA
AUX_CL
VCC_3V3_IMU
VCC_3V3_IMU
INT(PE3)[4]
Set/Reset(PE2)[4]
C57
100nF
25V
0402
C56
4.7uF
10V
0603
U4
IST8310
SCL
1
AVDD
2
NC1
3
NC2
4
CAD0
5
CAD1
6
VPP
7
NC3
8
GND1 9
C1 10
GND2 11
NC 12
DVDD13
RSTN 14
DRDY15
SDA16
C55
100nF
25V0402
VCC_INPUT
PGND
Heat_PWM(PB5)[3]
R5210K
04025%
R5510K
04025%
R5910K
04025%
R61 100R
0201
1%
R5710K
04025%
R5410K
04025%
R5110K
04025%
R5810K
04025%
Q5
BSS138LT1G
0.5~1.5V
1
2 3
R5610K
04025%
R5310K
04025%
R6010K
04025%
R62
10K
0402
XXX
5%
13
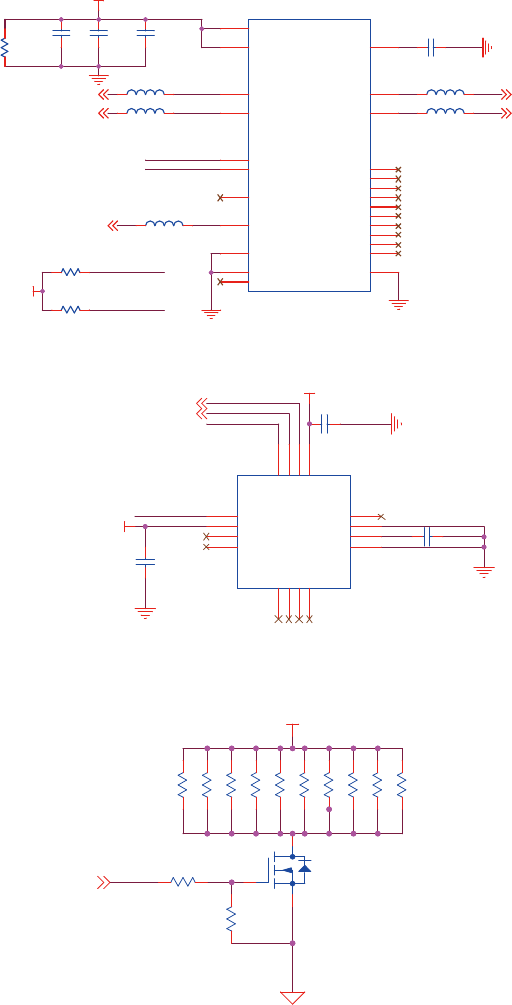
1.15 用户自定义接口
为增强开发板 A型的适用性,板载 18 个用户自定义接口,以 2.54mm 排针的形式引出,其原
理图如下图所示。
PGND
VCC_5V_U
DAC_OUT2(PA5) [3]
ADC1_IN14(PC4) [3]
ADC1_IN15(PC5) [3]
I2C2_SCL(PF1) [4]
ADC1_IN13(PC3) [3]
ADC1_IN12(PC2) [3]
SPI4_MISO(PE5) [4]
SPI4_MOSI(PE6) [4]
PF10 [4]
I2C2_SDA(PF0)[4]
SPI4_SCK(PE12)[4]
DAC_OUT1(PA4)[3]
SPI4_NSS(PE4)[4]
ADC1_IN9(PB1)[3]
ADC1_IN8(PB0)[3]
ADC1_IN10(PC0)[3]
ADC1_IN11(PC1)[3]
DAC_EXTI9(PI9)[5]
C9547pF50V0201
0201
150mA
D67
A C
C8547pF50V0201
150mA
C9147pF50V0201
0201
150mA
D65
AC
C9647pF
50V0201
150mA
D68
A C
C9047pF50V
0201
D58
AC
150mA
0201
150mA
D64
AC
C97
47pF50V0201
D69
AC
C8947pF50V0201
D63
AC
C98
47pF
50V0201
D70
A C
0201
150mA
C8847pF50V0201
0201
C9347pF50V0201
150mA
D62
AC
C9947pF50V0201
0201
150mA
C8747pF50V0201
D71
A C
150mA
150mA
D61
AC
C10047pF50V0201
D66
AC
D72
A C
C10247pF50V0201
C8647pF50V0201
150mA
D60
AC
C10147pF50V0201
J34
3A
2*10pin 180°直排针
1 2
3 4
5 6
7 8
9 10
11 12
13 14
15 16
17 18
19 20
D73
AC
150mA
L56
L58
L50
L52
L44
L46
L48
L54
L60
0201
0201
0201
0201
0201
0201
0201
0201
0201
150mA
D75
AC
D59
AC
C9447pF50V0201
0201
D74
A C
C9247pF50V0201
0201
150mA
0201
用户自定义接口
150mA
150mA
150mA
L55
L57
L49
L61
L59
L51
L53
L45
L47
1.14 TF 卡接口
开发板 A型配备一个 TF 卡接口,用户可以根据自己的需求存储一些调试数据,其原理图如下
图所示。
Micro_SD
VCC_3V3_S
PGND
PGND
PGND
SDIO_CMD(PD2)[4]
SDIO_CK(PC12)[3]
SDIO_D2(PC10)[3]
SDIO_D3(PC11)[3]
SDIO_D0(PC8)[3]
SDIO_D1(PC9)[3]
SD_EXTI(PE15)[4]
R29 22R 04020.05
R2210K
R30 22R 04020.05
R2310K
R31 22R 04020.05
R28 22R 04020.05
R2410K
R32 22R 04020.05
R2510K
J6
MicroSD 47352-1001
DAT2
1
DAT3
2
CMD
3
VSS1
6
VDD
4
CLK
5
DAT0
7
DAT1
8
CDSW
D1
GND1
G1 GND3G3
GND2
G2 GND4G4
R2610K
R27 22R 04020.05
C36
100nF
25V
0402
SD卡接口
14
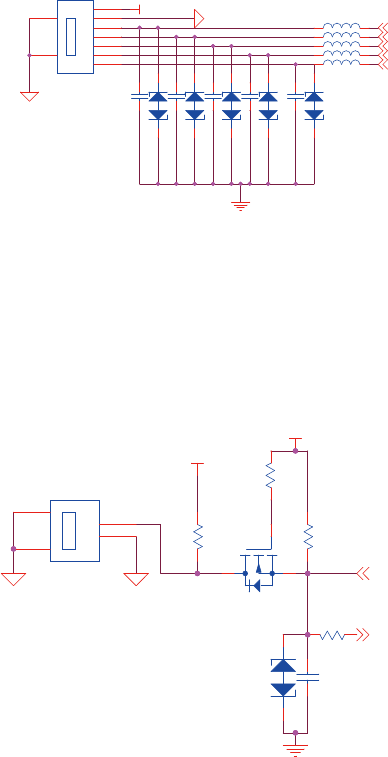
1.16 PWM 接口
开发板 A型为方便用户使用 PWM 驱动的舵机等执行器,引出 16 路PWM,并为这 16 路
PWM 提供 5A 驱动能力的电源。PWM 供电电压默认输出 5V,用户可以根据实际需求调整 3
位拨码配置不同的输出电压。PWM 原理图和电源配置表如下图所示。
串联电阻22.75 13.3 9.4
拨码序号 1 2 3 输出电压
1OFFOFF OFF 4.9875
2 ON OFF OFF 6.401126
3OFF ON OFF 7.405545
4OFFOFF ON 8.408777
5 ON ON ON 12.24
6 ON ON OFF 8.819
7OFF ON ON 10.85
8 ON OFF ON 9.82
5V@5A
环路补偿
(12~24)V->5V
0.8V
Imax =5A
fclk = 400kHz
NC
DC-DC BUCK
FB=0.8V
FB_1
FB_1
VCC_INPUT
VCC_5V_ADJ
PGND
PGND
PGNDPGND
PGND
PGND
PGND
R120
68K
0201
0.01
R119
17.8K
0402
0.01
TP_3
C122
4.7nF
50V
0402
C11722uF
25V
R124
13.3K
04021%
5AU7
BOOT 1
VIN
2
EN
3
RT/CLK
4
FB 5
COMP
6
GND 7
SW 8
EP
9
C1134.7uF
50V
0805
R167
1.2K
0402
1%
C18422uF
25V
TP_4
R116
0R 0402
XXX
0.05
C11822uF
25V
R165750R
04021%
C11622uF
25V
C110
100nF50V
0603
C1144.7uF
50V
0805
R118
100R
0201
1% C120
100pF0201
D81
SVM860VB
8A
3
1
2
C1124.7uF
50V
0805
C115
100nF
25V
0402
R121
243K
0402
0.01
R117
40.2K0402
XXX
1%
C1114.7uF
50V
0805
1 2 3
ON KE
U8
DSHP03TSGER
25mA
1
2
3 4
5
6
C119
470pF
50V
0402
C18522uF
25V
R115
309K
0402
0.01
R1668.2K
0402 1%
R12322K
0402 1%
L66
6.8uH 4.5A
C121
47pF
50V
0402
R122
7.68K
0402
1%
并排放置
PGND
VCC_5V_ADJ
TIM8_CH4(PI2)[5]
TIM8_CH3(PI7)[5]
TIM8_CH2(PI6)[5]
TIM2_CH1(PA0)[3]
TIM8_CH1(PI5)[5]
TIM2_CH2(PA1)[3]
TIM2_CH3(PA2)[3]
TIM2_CH4(PA3)[3]
J31
3A
8pin 180°直排针蓝色
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
C7947pF50V0201
R99 100R 02011%
L34
0201
150mA
D56
A C
C7847pF50V0201
R95 100R 02011%
L40
0201
150mA
D57
AC
D55
AC
L36
0201
150mA
R101 100R 02011%
D47
AC
R98 100R 02011%
L41
0201
150mA
C8247pF50V0201
C8147pF50V0201
J30
3A
8pin 180°直排针
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
L37
0201
150mA
D51
AC
R103 100R 02011%
C8047pF50V0201
L42
0201
150mA
D50
A C
R97 100R 02011%
C7547pF50V0201
J29
3A
8pin 180°直排针红色
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
R102 100R 02011%
D49
A C
L38
0201
150mA
C7447pF50V0201
R96 100R 02011%
D48
AC
L35
0201
150mA
C7647pF50V0201
8路PWM 输出
15
1.18 同步信号接口
为了同步外接模块时序,开发板 A型配备一个 5V 同步信号接口,该接口可以根据 PB14 和
PB15 的相关配置,来决定单发同步信号、接收同步信号以及收发同步信号。其电路图如下所示。
1.17 OLED 接口
为方便用户调试和显示部分参数,开发板 A型配备 OLED 接口,用户可以购买 OLED 模块使用,
详细使用方法可以参见开发板 OLED 功能说明。
卧式
VCC_3V3_S
PGND
PGND
BUTTON_AD(PA6) [3]
OLED_RST(PB10) [3]
OLED_DC(PB9) [3]
OLED_SCLK(PB3) [3]
OLED_MOSI(PA7) [3]
C4647pF50V0201
D23
AC
J17
1.0A
11257W90-7P-S
11
22
33
44
55
66
77
8
8
9
9
C4747pF50V0201
L6
0201
150mA
L9
0201
150mA
D24
AC
C4347pF50V0201
D25
AC
D21
AC
L10
0201
150mA
L7
0201
150mA
C4447pF50V0201
L8
0201
150mA
C4547pF50V0201
D22
AC
OLED&按键
PGND PGND
VCC_5V_U
VCC_3V3_S
SNYCHOR(PB14) [3]
SNYCHOR(PB15) [3]
R107
10K
0402 5%
C10647pF50V
0201
R105 22R
04020.05
R106
10K
0402 5%
R111
0R
0402
5%
Q15
BSS138LT1G
0.5~1.5V
1
23
D78
AC
J42
1.0A
11257W90-2P-S
11
22
3
3
4
4
5V 同步信号
16
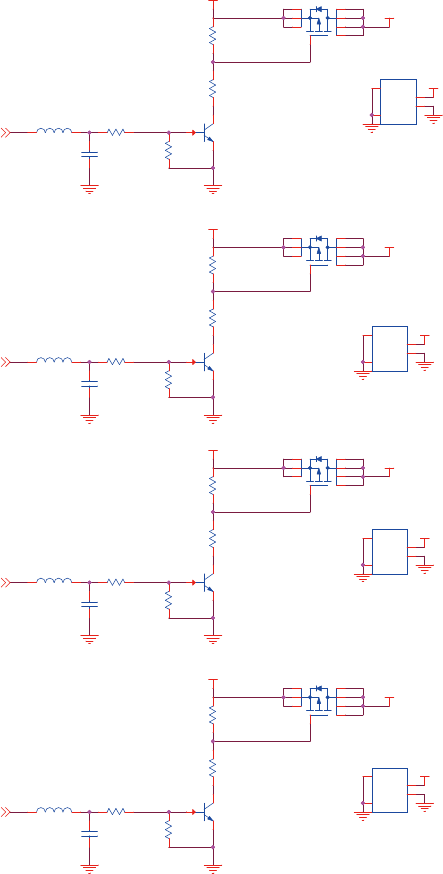
1.19 四路可控电源输出接口
开发板 A型有四个可控电源输出接口,每一个电源接口都由一个 PMOS 来控制,4路总电流
不能超过 20A,且单路电流不能超过 10A。其原理图如下图所示:
20A
走线
PGND
VCC_OUT1
VCC_OUT1
VCC_INPUT
PGND
POWER1_CTRL(PH2)[4]
C5947pF50V
Q6
TPCA8122
?2V~?3V
1
2
3
4
8
7
6
5
+
-
J20
15.0A
XT30UPB-F
C
A
D30
BZX584C9V1
R68
1K
0201
1%
L19
0201
150mA
R70
10K
0201
1%
R6610K
0402
XXX
5%
Q9
PMBT3904-215
1
2 3
R6410K
0402
XXX
5%
0201
20A
走线
VCC_OUT2
VCC_INPUT
VCC_OUT2
PGND
PGND
POWER2_CTRL(PH3)[4]
Q10
TPCA8122
?2V~?3V
1
2
3
4
8
7
6
5
Q13
PMBT3904-215
1
23
R78
10K
0201
1%
L21
0201
150mA
R76
1K
0201
1%
R7410K
0402
XXX
5%
D32
BZX584C9V1
R7210K
0402
XXX
5%
+
-
J22
15.0A
XT30UPB-F
C
A
C6047pF50V
0201
20A
走线
VCC_INPUT
VCC_OUT3
PGND
VCC_OUT3
PGND
POWER3_CTRL(PH4)[4]
R69
10K
0201
1%
+
-
J19
15.0A
XT30UPB-F
C
A
Q7
TPCA8122
?2V~?3V
1
2
3
4
8
7
6
5
L18
0201
150mA
R6510K
0402
XXX
5%
R67
1K
0201
1%
Q8
PMBT3904-215
1
23
D29
BZX584C9V1
R6310K
0402
XXX
5%
C58
47pF
50V0201
20A
走线
VCC_OUT4
VCC_INPUT
PGND
VCC_OUT4
PGND
POWER4_CTRL(PH5)[4]
R77
10K
0201
1%
D31
BZX584C9V1
Q12
PMBT3904-215
1
2 3
R7110K
0402
XXX
5%
R75
1K
0201
1%
+
-
J21
15.0A
XT30UPB-F
C
A
C6147pF50V0201
Q11
TPCA8122
?2V~?3V
1
2
3
4
8
7
6
5
L20
0201
150mA
R7310K
0402
XXX
5%

17
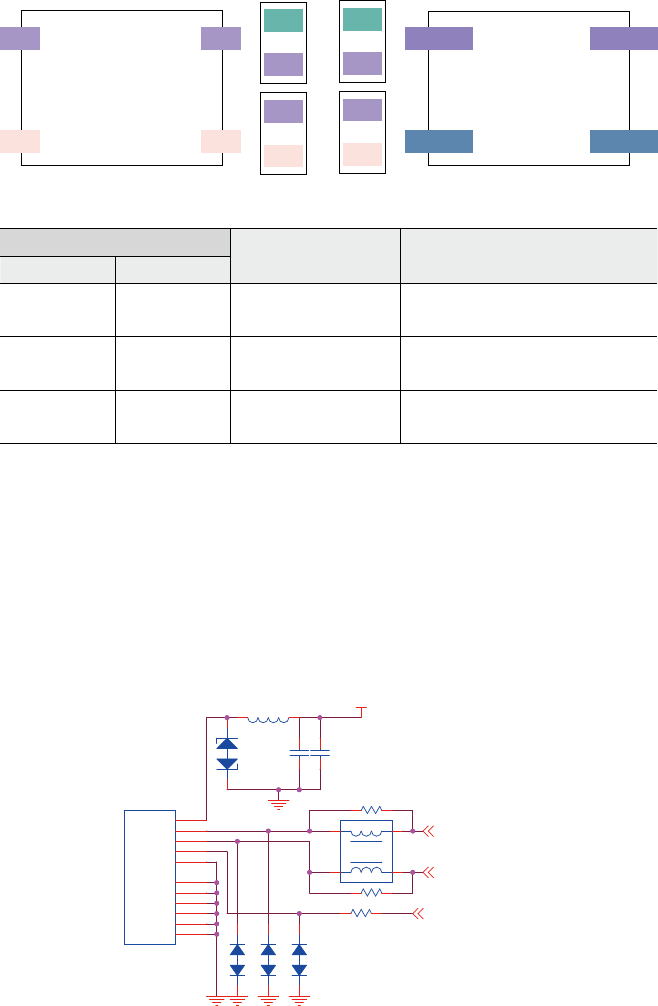
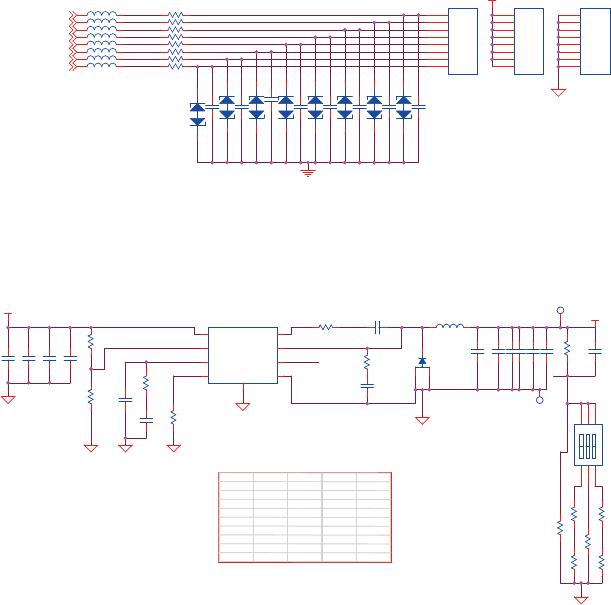
1.20 12V 电源输出接口
开发板 A型配备一个输出电压 12V,最大输出电流 10A* 的DC-DC 电源 ,当负载电流达到
10A 后,若继续加重负载,会导致电压下降甚至造成永久损坏。该电源具备过流保护功能,
保护动作电流为 22A,如果用户用来给电机供电,请注意电机如进行急加速急减速等操作时,
会导致短时的电流增大超过保护电路动作电流值,故请缓慢启动电机,以免造成电机无法正
常启动。
*室温 25℃、通风良好的实验环境下测得。
f=250KHz
Vin>12.5V
开始转换
(15~24)V->12V
VCC
VCC
PGND
PGND
PGNDPGND PGND
VCC_12V
PGND
VCC_12V
PGND
PGND
PGND
PGND
PGND
VCC_INPUT
VCC_INPUT
PGND
VCC_12V
VCC_12V PGND
PGND
D88
DIODE TVS BI-DIR
A
C
R139
0R
R142
0R
XXX
R134
4.7R 0402
1%
R143
4.7K
R129 4.7R
C13410nF
C143
3.3nF
C141
1uF
50V
0805
C19122uF
25V
LM25116MHX/NOPB
U9
VIN
1
UVLO
2
RT/SYNC
3
EN
4
RAMP
5
AGND
6
SS
7
FB
8
COMP
9
VOUT
10
DEMB 11
CS 12
CSG 13
PGND
14
LO 15
VCC 16
VCCX 17
HB 18
HO 19
SW 20
EP
21
D84
DIODE
AC
R138
10K
0402
5%
C142
100nF
50V
0603
R130
10K
0402
5%
C13922uF
25V
TP_5
R13317.8K
C130
1uF 50V
0603
C137
22uF
25V
R1370R
C147330pF
R128
100K0402
1%
R141
4mR
1206 1%
Q16
BSC067N06LS3
1.7V
5
6
7
8
4
1
2
3
C144100pF
R132511K
C132
1uF
16V
0402
R13112.4K
C193
22uF
25V
D87
DIODE
AC
TP_6
C1451uF
R1351.21K
C140
22uF
25V
R14010.7K
D85
DIODE
A
C
R136
10R
04025%
L69
10uH
13.8*12.6*6.0mm
10A
C126
4.7uF
50V
1206
C129
100nF
50V
0603
+
C125
22uF
35V
CA
+
C135
22uF
35V
CA
C133270pF
C13822uF
25V
C128
1uF
50V
0805
C131
1uF 50V
0603
C192
22uF
25V
D89
30mA
Q17
PSMN1R8-40YLC
1
2
3
4
5
D86
DIODE
A C
C127
4.7uF
50V
1206
R127
1M0201
1%
C146
470pF
C13622uF
25V
1.21 预留蓝牙模块接口
为方便用户调试,开发板 A型含有一个蓝牙接口,用户可以根据实际的需求自行使用蓝牙模块。
该接口使用 UART2,其原理图如下所示。
VCC_5V_U
PGND
USART2_RX(PD6) [4]
USART2_TX(PD5) [4]
C4947pF50V0201
C4847pF50V0201
L12
0201
150mA
D26
A C
D27
A C
J18
SIP4-2P54MM
4Pin排针
11
22
33
44
L11
0201
150mA
预留蓝牙串口
18
RoboMaster 开发板 B 型
简 介
RoboMaster 开发板 B 型专为传感器和执行部件设计,可配合 RoboMaster 开发板 A 型使用,
完成复杂机器人的开发。该开发板主控芯片为 STM32F105R8T6,接口丰富、结构紧凑,支持
电磁阀等控制。拥有四路光耦隔离保护接口,可搭配 RoboMaster OLED 模块使用。
接口及外部丝印
1
1 114 12 11 1013
12 3 4 5 6
7
5
5
88
7
5
5
9
11
1515
15
8 8
15
19
序号 名称 丝印说明 备注
1电源输出接口 +:VCC 未标注一端为 GND。
2复位按键
3 OLED 接口
4用户自定义 LED X 2
5 CAN2
H:CAN-H( 高位数据线 )
L:CAN-L( 低位数据线 )
G:GND、+:VCC
6传感器指示灯 S1-S4:对应 4个传感器指示灯
7 UART
+:VCC、G:GND
T:数据发送 (Tx)
R:数据接收 (Rx)
8传感器接口 +:VCC、G:GND、
:传感器信号
9 PWM X 4 G:GND、+:VCC
:PWM 信号
10 DBUS
11 CAN1 H:CAN-H( 高位数据线 )
L:CAN-L( 低位数据线 )
12 电源输入接口 +:VCC 未标注一端为 GND。
13 SWD
+:VCC(3.3V)、G:GND、
SWCLK:SWD 时钟、SIDIO:
SWD 数据
14 GPIO X 4
15 可控电源输出接口 +:VCC、G:GND
电源框图如下图所示:
3.3 V@250 mA
TPS54540 5 V@5 A LP5907MFX MCU
PWM&5 V POWER SUPPLY
24 V PowerOutput MAX@16 A
PowerTree
电源输出
防反接
24 V电源输入
20
特征参数
项目 参数
最大电压 26 V
支持电池 3-6S LiPo
最大工作电流 *(持续) 20 A
电源输出接口最大单路电流 ** 10A
重量 24 g
尺寸(长宽) 60*46 mm
工作温度范围 0 ~ 55 ℃
* 室温 25℃、通风良好的实验环境下测得。
** 电源输出接口单路最大电流指每一路电源输出接口可承受的最大电流,但所有电源输出接
口的电流总和不得超过最大允许输入电流。
功能说明
2.1 电源防反接电路
电源输入接口采用标准的 XT30 接口,在正极线路上串有一个 PMOS,该 MOS 可以实现防反
接的作用,其原理图如下所示。
VCC_INPUT
R68
10K
0402
5%
Q10
TPCA8122
1
2
3
4
8
7
6
5
J30
0.0
XT30PW-M
1
2
34
D20
R67
10K
0402
5%

21
2.2 DBUS 接口
开发板 B型配备有 1路DBUS 接口 ,下图是其接口原理图。
DBUS 是UART 信号的反相形式,因此从接插件的 3脚进入后,经过 Q9 反相之后再送入单片
机的 UART4。波特率一般设置为 100kbps。
DBUS
2.54mm
间距插针
VCC_3V3
VCC_5V
DBUS_RX [2]
R54
4.7K0402
5%
J9
2.54MM 3PIN
11
22
33
R45
4.7K
0402
5%
Q9
PMBT3904-215
1
23
2.3 SWD 调试接口
开发板 B型配备一个 SWD 调试接口,用于单片机程序的下载和调试。SWD 调试接口位于主
控板的右侧下方。SWCLK 和SWDIO 在开发板中串联了 100Ω 的电阻,起到保护单片机的作用。
立式式
53261
接口,
1
脚在左侧
GND
VCC_3V3
GND
SWDIO [2]
SWCLK [2]
R1 100R 02011%
J1
1A
533980471
1
2
3
45
6
L1
1500mA
R2 100R 02011%
22
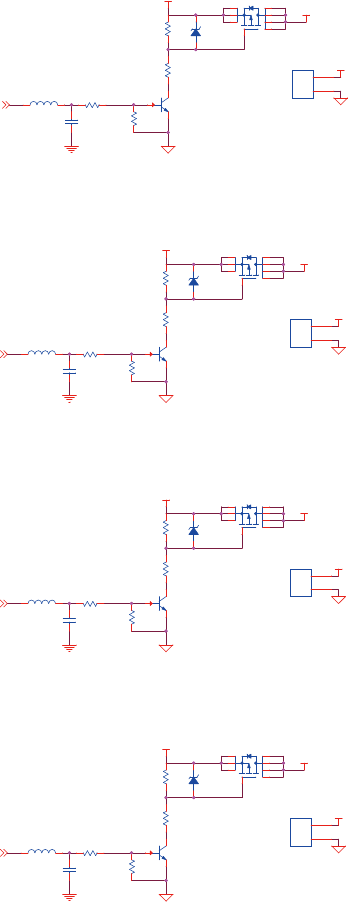
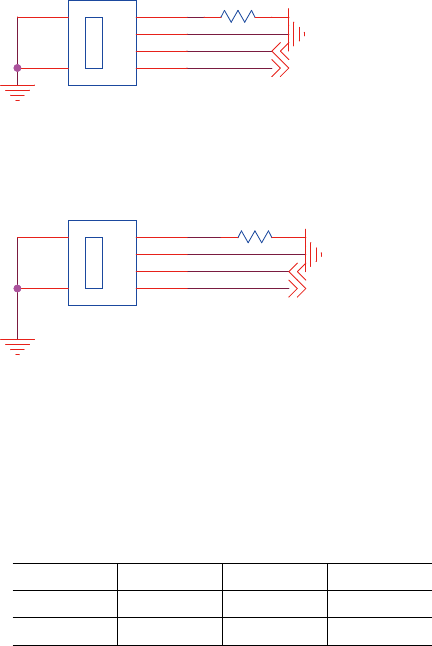
2.4 USART 接口
开发板 B型配备有两路 USART 接口,分别连接到 USART2、USART3。在使用串口时请注意
TX 和RX 的交叉连接,以免造成无法通讯。本接口只支持 3.3V 和5V 电平,若需与 RS485 或
RS232 接口通信,请外置电平转换芯片。
卧式
两路调试串口
VCC_5V
VCC_5V
USART2_RX [2]
USART2_TX [2]
USART3_RX [2]
USART3_TX [2]
R66 0R
0402 5%NC
J20
11257W90-4P-S
11257W90-4P-S
11
22
33
44
5
5
6
6
R65 0R
0402 5%NC
J16
11257W90-4P-S
11257W90-4P-S
11
22
33
44
5
5
6
6
2.5 用户自定义 LED
开发板 B型配备有 2颗LED 指示灯。每一个 LED 都由单片机的一个引脚直接驱动,其配置低
电平则点亮 LED,配置高电平则 LED 熄灭。给出了 LED 的引脚配置和参数。
LED 引脚配置
颜色 单片机引脚 IO 类型 点亮电流
绿色 PB0 5V 容忍 约 4mA
红色 PB1 5V 容忍 约 4mA
23
2.6 按键
复位按键
NRST
VCC_3V3
R5
10K
0201
1%
50mA
SW1
12
34
C5
1uF
10V
0201
2.7 BOOT 启动设置
开发板 B型上的 STM32 芯片上有两个管脚 BOOT0 和BOOT1,这两个管脚在芯片复位时的
电平状态决定了芯片复位后的启动方式。开发板 B型的 BOOT 管脚配置如下图所示。默认情
况下 BOOT 管脚均被拉低,上电从 User Flash 启动。其中 R11 和R14 是空贴器件,用户可以
使用镊子将其短接,使得单片机以不同的方式启动。
Boot mood selection pins Boot mode Aliasing
BOOT1 BOOT0
X 0 Main Flash Memory Main Flash memory is selected as
the boot space
0 1 System memory System memory is selected as the
boot space
1 1 Embedded SRAM Embedded SRAM is selected as
the boot space
BOOT1 BOOT0
0BOOT SOURCE
X1
1
User Flash
0
1System Memory
Embedded SRAM
通过短接
NC
电阻来改变
BOOT
引导方式。
BOOT1
BOOT0
VCC_3V3
VCC_3V3
R11
10K0402
5%
NC
R13 10K
04025%
R14 10K
0402 5% NC
R12 10K
04025%
24
2.7 CAN 接口
开发板 B型为满足用户外接设备的需求,引出两路 CAN,CAN1 配置为 PB8 和PB9 管脚,
CAN2 配置为 PB12 和PB13 管脚。
2.8 用户自定义接口
为增强开发板的适用性,板载 4个用户自定义接口,以 2.54mm 排针的形式引出,其原理图
如下图所示。
PC0
PC1
PC2
PC3
J33
0.0A
2.54mm 4PIN 单排直插针
1
1
2
2
3
3
4
4
2.9 PWM 接口
开发板 B型为方便用户使用 PWM 驱动的舵机等执行器,引出 4路PWM。
YC.DZ.S00743
TIM1_CH1(PA8)
2.54mm
间距插针
2.54mm
间距插针
TIM1_CH2(PA9)
2.54mm
间距插针
TIM1_CH3(PA10) TIM1_CH4(PA11)
2.54mm
间距插针
4
路
PWM
输出
VCC_5V
VCC_5V
VCC_5VVCC_5V
TIM1_CH1[2]
TIM1_CH2[2] TIM1_CH3[2] TIM1_CH4[2]
J27
2.54MM 3PIN
11
22
33
J28
2.54MM 3PIN
11
22
33
J29
2.54MM 3PIN
11
22
33
J26
2.54MM 3PIN
11
22
33

25
2.10 OLED 接口
为方便用户调试和显示部分参数,开发板 B型配备 OLED 接口,用户可以购买 OLED 模块使用,
详细使用方法可以参见开发板 OLED 功能说明。
OLED 接口
VCC_3V3
OLED_DC [2]
OLED_RST [2]
SPI1_SCK [2]
SPI1_MOSI [2]
Button_AD [2]
C2747pF50V0201
D11
A C
L19 150mA
L18 150mA
J31
1.0A
11257W90-7P-S
11
22
33
44
55
66
77
8
8
9
9
D9
A C
C2547pF50V0201
C2847pF50V0201
L20 150mA
D7
AC
D10
A C
C2647pF50V0201
L21 150mA
D8
AC
C2947pF50V0201
L22 150mA
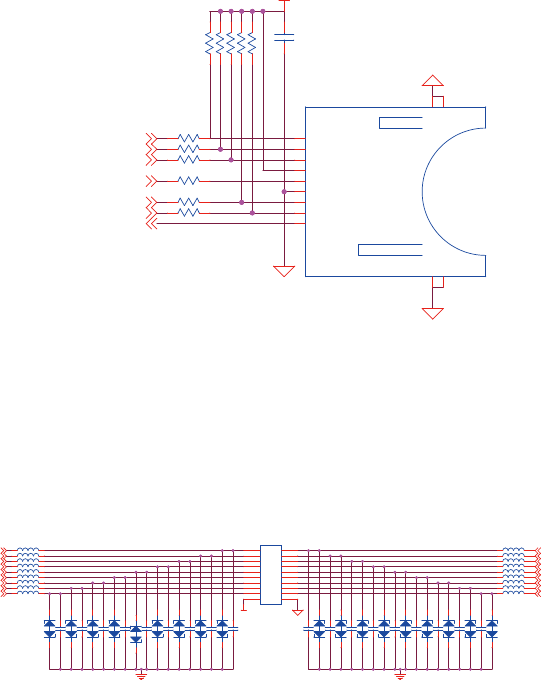
2.11 传感器接口
为满足用户需要接高压信号(大于 5V)开关量传感器的需求,本开发板集成了四路带光耦隔
离的接口,其中有两路是高电平有效,另外两路是低电平有效,用户可以根据选用的传感器自
行安装。另外也可以根据原理图修改 0ohm 电阻自行配置高低电平。其原理图如下所示。每一
路传感器接口型号为 XH2.54 插座,每个接口最大可提供 2A 电流。
默认低电平有效,实际使用可以自行配置电阻。
S_INPUT1_L
S_INPUT2_L
S_INPUT1_H
S_INPUT2_H
S_INPUT3_H
S_INPUT4_H
S_INPUT4_L
S_INPUT3_L
S_INPUT1_H
S_INPUT1_L
S_INPUT2_H
S_INPUT2_L
S_INPUT3_H
S_INPUT3_L
S_INPUT4_H
S_INPUT4_L
VCC_3V3
VCC_3V3
VCC_3V3
VCC_3V3
VCC_INPUTVCC_INPUTVCC_INPUTVCC_INPUT
VCC_INPUT
VCC_INPUT
VCC_INPUT
VCC_INPUT
S_OUT1 [2]
S_OUT2 [2]
S_OUT3 [2]
S_OUT4 [2]
J8
3.0A
11
22
33
4
4
5
5
R57 1K
04020.05
R42
0R 0603
5%
R5310K
04025%
R63
0R
0603
NC
R64
0R
0603
D18
30mA红
R52 1K
04020.05
R56
0R 0603
NC
R59
0R 0603
5%
R4710K
04025%
R39
0R 0603
NC R44
0R
0603
NC
R41
0R
06035%
D19
30mA 红
R40
0R
06035%
R46 1K
0402 0.05
D16
30mA 红R5110K
04025%
R49
0R 0603
5%
R5810K
04025%
R62
0R
06035%
NC
R60
0R 0603
NC
R55
0R 0603
5%
U4
TLP291-4
1
2
3
4
5
6
7
8 9
10
11
12
13
14
15
16
J10
3.0A
11
22
33
4
4
5
5
R61
0R
0603 5%
R48
0R 0603
NC
R43
0R
0603
NC
R50 1K
04020.05
D17
30mA 红
J7
3.0A
WAFER2.5-1X3P
11
22
33
4
4
5
5
J11
3.0A
11
22
33
4
4
5
5
四路传感器输入接口
26
2.12 四路可控电源输出接口
开发板 B型有四个电源输出接口,每一个电源接口都由一个 PMOS 来控制是否输出电源。其
原理图如下图所示。每一路可输出最大电流为 2A,插座型号为 XH2.54。
VCC_INPUT
VCC_OUT1
VCC_INPUT
VCC_OUT2
VCC_INPUT
VCC_OUT3
VCC_INPUT
VCC_OUT4
VCC_OUT1
VCC_OUT2
VCC_OUT3
VCC_OUT4
POWER1_CTRL[2]
POWER2_CTRL[2]
POWER3_CTRL[2]
POWER4_CTRL[2]
J3
3.0A
WAFER2.5-1X2P
11
22
3
3
4
4
R3510K
0402 5%
L24 150mA
Q6
PMBT3904-215
1
23
R37 1K
0402 0.05
J5
3.0A
WAFER2.5-1X2P
11
22
3
3
4
4
L26 150mA
R2110K
0402 5%
Q1
TPCA8122
1
2
3
4
8
7
6
5
C3547pF50V0201
R25 1K
0402 0.05
R3410K
0402 5%
R3010K
0402 5%
R19 1K
0402 0.05
L25 150mA
R1810K
0402 5%
J4
3.0A
WAFER2.5-1X2P
11
22
3
3
4
4
Q3
TPCA8122
1
2
3
4
8
7
6
5
R20
10K
0201
1%
R2910K
0402 5%
Q7
TPCA8122
1
2
3
4
8
7
6
5
C3047pF50V0201
R27
10K
0201
1%
R1710K
0402 5%
Q4
PMBT3904-215
1
2 3
R31 1K
0402 0.05
J6
3.0A
WAFER2.5-1X2P
11
22
3
3
4
4
L23 150mA
Q8
PMBT3904-215
1
2 3
R33
10K
0201
1%
Q2
PMBT3904-215
1
2 3
C3147pF50V0201
C3747pF50V0201
Q5
TPCA8122
1
2
3
4
8
7
6
5
R38
10K
0201
1%
R2210K
0402 5%
4路可控电源输出
27
RoboMaster 开发板 OLED
简 介
RoboMaster 开发板 OLED 专 为 RoboMaster 开发板 A 型 和RoboMaster 开发板 B 型设计。
OLED 带有一个 0.96 英寸,分辨率为 128 × 64 的 OLED 屏幕以及一个五维按键。OLED 采
用SPI 通讯的方式,其驱动芯片为 SH1106G。
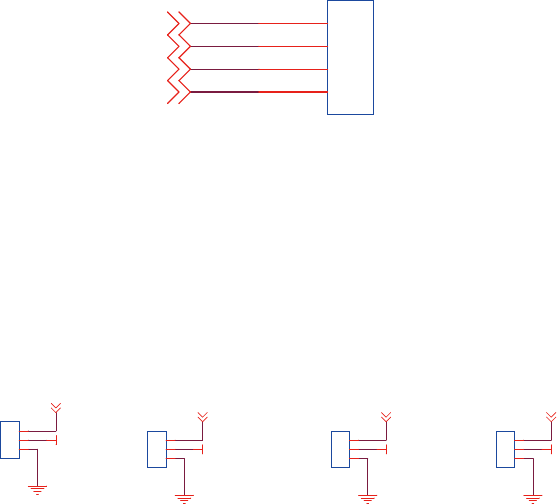
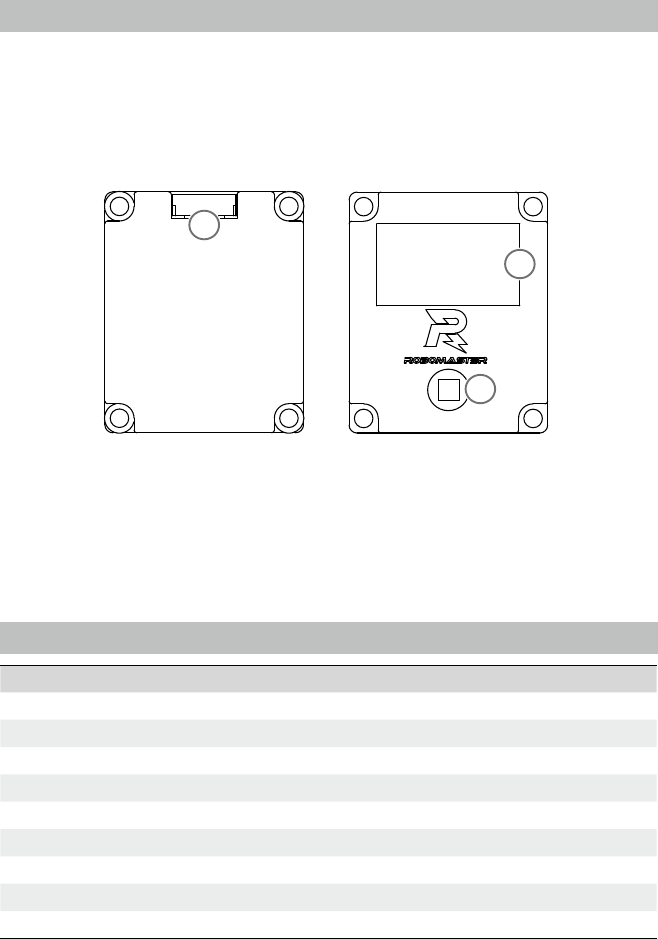
接口示意图
1
2
3
1. 7-Pin 接口,如图所示从左到右线序分别为:
BUTTON AD、SPI2 MOSI、SPI2-SCK、OLED-DC、OLED-RST、GND、VCC-3V3。
2. OLED 屏幕。
3. 五维按键安装孔:将包装内的五维按键按压至该孔进行固定。安装后,五维按键支持上、下、
左、右及中间五个方向的操作,查看五维按键说明章节了解详细信息。
特征参数
项目 参数
额定电压 3.3V
最大工作电流 * 10mA
OLED 通信接口 SPI
按键 五维键
重量 9 g
尺寸(长宽) 37×45 mm
屏幕分辨率 128×64
屏幕尺寸 0.96 英寸
工作温度范围 0 ~ 50 ℃
* 室温 25℃、通风良好的实验环境下测得。
28
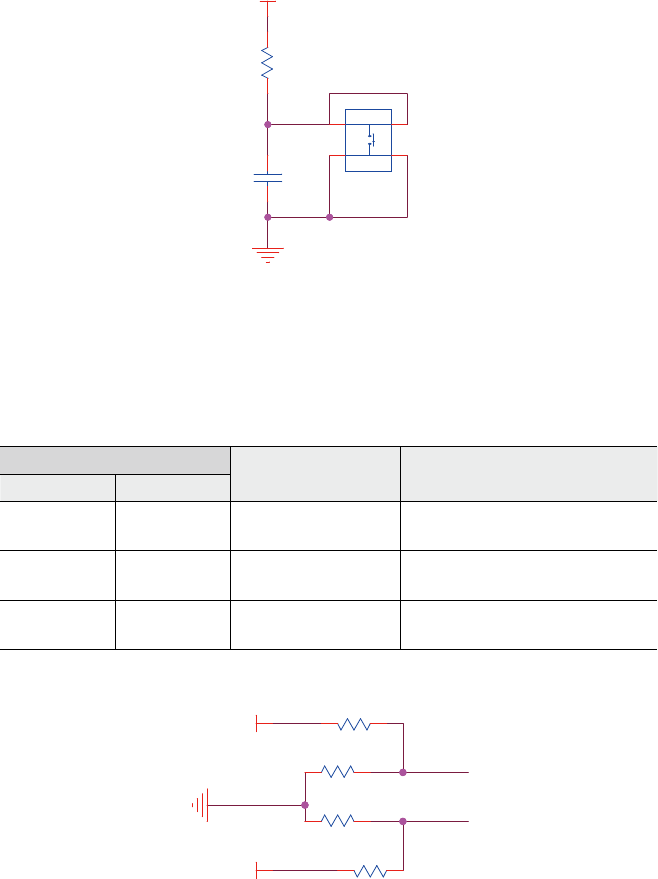
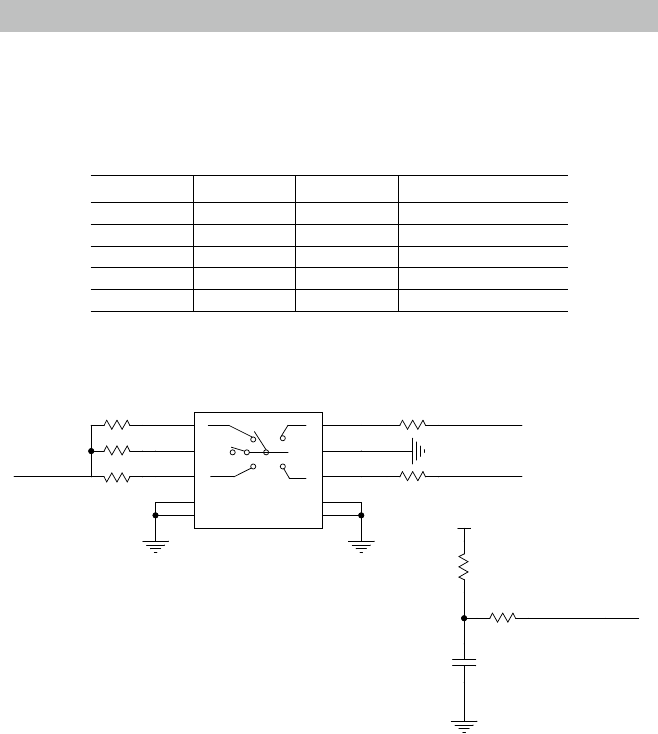
功能说明
OLED 模块采用 SPI 通讯的方式,其驱动芯片为 SH1106G。扩展 OLED 模块的通用性,该模
块集成一个五向按键,为节省信号线,五个按键共用一个管脚,采用 AD 采集键值,以分压的
方式,将五个按键五等分,其参考分压表如下表所示。
按键 阻值 电压 AD 参考值 (12bit)
中间 0 0 0
左26.1 0.683029 847.7843
右73.2 1.394688 1731.104
上150 1.98 2457.6
下402 2.642629 3280.064
100K
Button_AD
Button_AD
Button_ADButton_AD
VCC_3V3
R3 309K
0402 1%
R5 10K
0402 1%
R2
33K
0402 1%
R4
0R
0402 5%
R6
10M
0402 1%
R7 100K
0402 1%
C7
100nF
25V
0402
R8 0R
0402 5%
J3
0.0
A
1
CEN
2
C
3
B4
COM 5
D6
MT1
7MT2 8
MT3
9MT4 10
29
参考初始化代码
void InitOLED_MASTER_SH1106G(void)
{
Write_Command(0xAE); //DOT MARTIX DISPLAY OFF
Write_Command(0x32); //SET PUMP VOLTAGE 8v
Write_Command(0x40); //SET DISPLAY START LINE(40H-7FH)
Write_Command(0x81); //CONTARST CONTROL(00H-0FFH)
Write_Command(CONTRAST);
Write_Command(0xA1); //SET SEGMENT RE-MAP(0A0H-0A1H)
Write_Command(0xA4); //ENTIRE DISPLAY OFF(0A4H-0A5H)
Write_Command(0xA6); //SET NORMAL DISPLAY(0A6H-0A7H)
Write_Command(0xA8); //SET MULTIPLEX RATIO 64
Write_Command(0x3F);
Write_Command(0xAD); //SET DC/DC BOOSTER(8AH=OFF,8BH=ON)
Write_Command(0x8B);
Write_Command(0xC8); //COM SCAN COM1-COM64(0C8H,0C0H)
Write_Command(0xD3); //SET DISPLAY OFFSET(OOH-3FH)
Write_Command(0x00);
Write_Command(0xD5); //SET FRAME FREQUENCY
Write_Command(0x80);
Write_Command(0xD9); //SET PRE_CHARGE PERIOD
Write_Command(0x1F);
Write_Command(0xDA); //COM PIN CONFIGURATION(02H,12H)
Write_Command(0x12);
Write_Command(0xDB); //SET VCOM DESELECT LEVEL(35H)
Write_Command(0x40);
Write_Command(0xAF); //DSPLAY ON
}
30
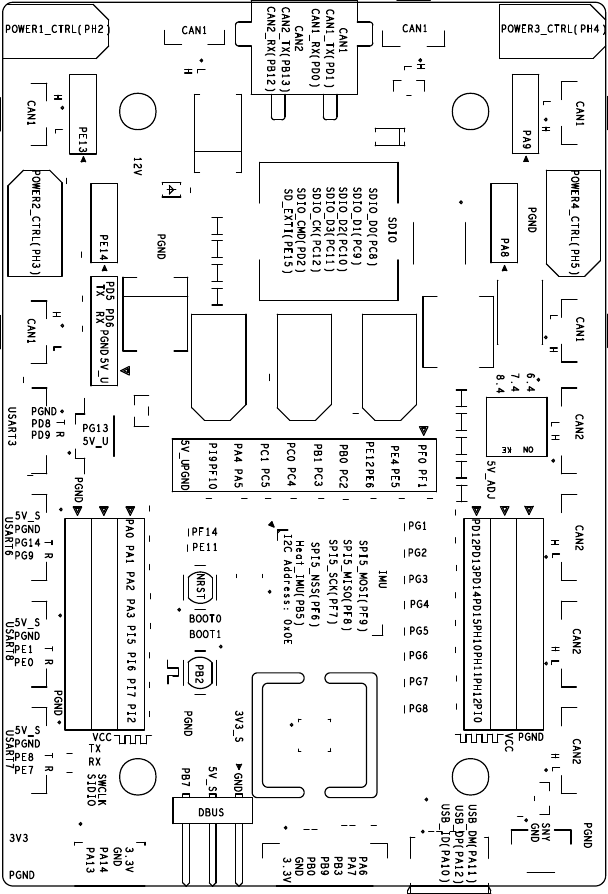
RoboMaster 开发板 A 型 丝印及引脚定义图
31
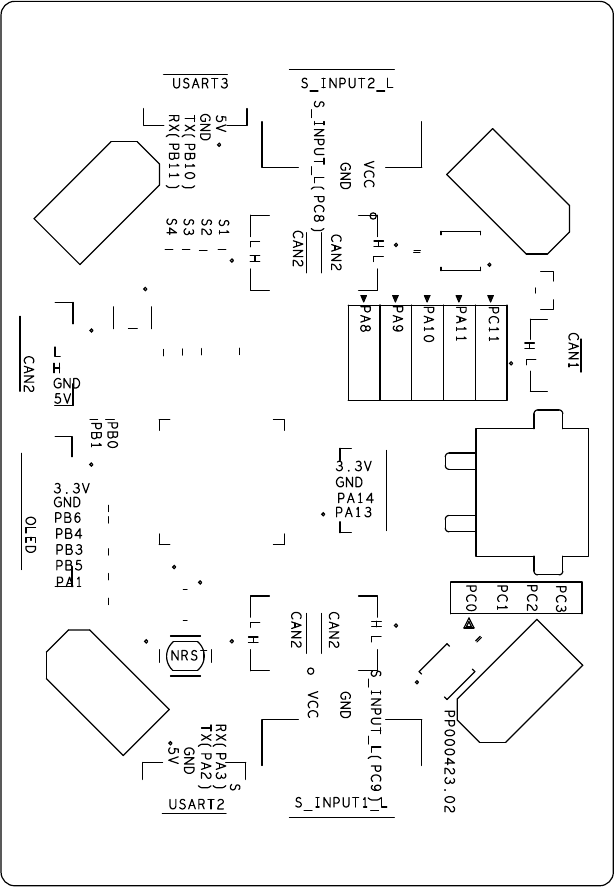
RoboMaster 开发板 B 型 丝印及引脚定义图
(正面)
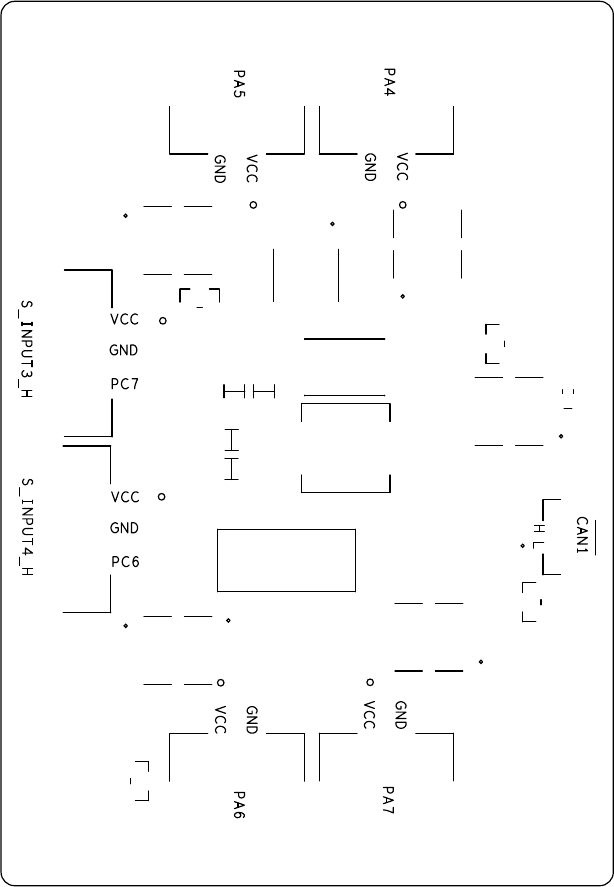
32
(背面)

Copyright © 2018 大疆创新 版权所有
WWW.ROBOMASTER.COM
