STM8S Series And STM8AF 8 Bit Microcontrollers STM8 Reference Manual
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 467 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- 1 Central processing unit (CPU)
- 2 Boot ROM
- 3 Memory and register map
- 4 Flash program memory and data EEPROM
- 4.1 Flash and EEPROM introduction
- 4.2 Flash and EEPROM glossary
- 4.3 Main Flash memory features
- 4.4 Memory organization
- 4.5 Memory protection
- 4.6 Memory programming
- 4.7 ICP (in-circuit programming) and IAP (in-application programming)
- 4.8 Flash registers
- 4.8.1 Flash control register 1 (FLASH_CR1)
- 4.8.2 Flash control register 2 (FLASH_CR2)
- 4.8.3 Flash complementary control register 2 (FLASH_NCR2)
- 4.8.4 Flash protection register (FLASH_FPR)
- 4.8.5 Flash protection register (FLASH_NFPR)
- 4.8.6 Flash program memory unprotecting key register (FLASH_PUKR)
- 4.8.7 Data EEPROM unprotection key register (FLASH_DUKR)
- 4.8.8 Flash status register (FLASH_IAPSR)
- 4.8.9 Flash register map and reset values
- 5 Single wire interface module (SWIM) and debug module (DM)
- 6 Interrupt controller (ITC)
- 7 Power supply
- 8 Reset (RST)
- 9 Clock control (CLK)
- Figure 20. Clock tree
- 9.1 Master clock sources
- 9.2 Master clock switching
- 9.3 Low-speed clock selection
- 9.4 CPU clock-divider
- 9.5 Peripheral clock-gating (PCG)
- 9.6 Clock security system (CSS)
- 9.7 Clock-out capability (CCO)
- 9.8 CLK interrupts
- 9.9 CLK register description
- 9.9.1 Internal clock register (CLK_ICKR)
- 9.9.2 External clock register (CLK_ECKR)
- 9.9.3 Clock master status register (CLK_CMSR)
- 9.9.4 Clock master switch register (CLK_SWR)
- 9.9.5 Switch control register (CLK_SWCR)
- 9.9.6 Clock divider register (CLK_CKDIVR)
- 9.9.7 Peripheral clock gating register 1 (CLK_PCKENR1)
- 9.9.8 Peripheral clock gating register 2 (CLK_PCKENR2)
- 9.9.9 Clock security system register (CLK_CSSR)
- 9.9.10 Configurable clock output register (CLK_CCOR)
- 9.9.11 HSI clock calibration trimming register (CLK_HSITRIMR)
- 9.9.12 SWIM clock control register (CLK_SWIMCCR)
- 9.10 CLK register map and reset values
- 10 Power management
- 11 General purpose I/O ports (GPIO)
- 12 Auto-wakeup (AWU)
- 13 Beeper (BEEP)
- 14 Independent watchdog (IWDG)
- 15 Window watchdog (WWDG)
- 15.1 WWDG introduction
- 15.2 WWDG main features
- 15.3 WWDG functional description
- 15.4 How to program the watchdog timeout
- 15.5 WWDG low power modes
- 15.6 Hardware watchdog option
- 15.7 Using Halt mode with the WWDG (WWDGHALT option)
- 15.8 WWDG interrupts
- 15.9 WWDG registers
- 15.10 Window watchdog register map and reset values
- 16 Timer overview
- 17 16-bit advanced control timer (TIM1)
- 17.1 TIM1 introduction
- 17.2 TIM1 main features
- 17.3 TIM1 time base unit
- 17.4 TIM1 clock/trigger controller
- Figure 43. Clock/trigger controller block diagram
- 17.4.1 Prescaler clock (CK_PSC)
- 17.4.2 Internal clock source (fMASTER)
- 17.4.3 External clock source mode 1
- 17.4.4 External clock source mode 2
- 17.4.5 Trigger synchronization
- 17.4.6 Synchronization between TIM1, TIM5 and TIM6 timers
- Figure 53. Timer chaining system implementation example
- Figure 54. Trigger/master mode selection blocks
- Figure 55. Master/slave timer example
- Figure 56. Gating timer B with OC1REF of timer A
- Figure 57. Gating timer B with the counter enable signal of timer A (CNT_EN)
- Figure 58. Triggering timer B with the UEV of timer A (TIMERA-UEV)
- Figure 59. Triggering timer B with counter enable CNT_EN of timer A
- Figure 60. Triggering Timer A and B with Timer A TI1 input
- 17.5 TIM1 capture/compare channels
- Figure 61. Capture/compare channel 1 main circuit
- Figure 62. 16-bit read sequence for the TIM1_CCRi register in capture mode
- 17.5.1 Write sequence for 16-bit TIM1_CCRi registers
- 17.5.2 Input stage
- 17.5.3 Input capture mode
- 17.5.4 Output stage
- 17.5.5 Forced output mode
- 17.5.6 Output compare mode
- 17.5.7 PWM mode
- Figure 70. Edge-aligned counting mode PWM mode 1 waveforms (ARR = 8)
- Figure 71. Center-aligned PWM waveforms (ARR = 8)
- Figure 72. Example of one-pulse mode
- Figure 73. Complementary output with deadtime insertion
- Figure 74. Deadtime waveforms with a delay greater than the negative pulse
- Figure 75. Deadtime waveforms with a delay greater than the positive pulse
- Figure 76. Six-step generation, COM example (OSSR = 1)
- 17.5.8 Using the break function
- 17.5.9 Clearing the OCiREF signal on an external event
- 17.5.10 Encoder interface mode
- 17.6 TIM1 interrupts
- 17.7 TIM1 registers
- 17.7.1 Control register 1 (TIM1_CR1)
- 17.7.2 Control register 2 (TIM1_CR2)
- 17.7.3 Slave mode control register (TIM1_SMCR)
- 17.7.4 External trigger register (TIM1_ETR)
- 17.7.5 Interrupt enable register (TIM1_IER)
- 17.7.6 Status register 1 (TIM1_SR1)
- 17.7.7 Status register 2 (TIM1_SR2)
- 17.7.8 Event generation register (TIM1_EGR)
- 17.7.9 Capture/compare mode register 1 (TIM1_CCMR1)
- 17.7.10 Capture/compare mode register 2 (TIM1_CCMR2)
- 17.7.11 Capture/compare mode register 3 (TIM1_CCMR3)
- 17.7.12 Capture/compare mode register 4 (TIM1_CCMR4)
- 17.7.13 Capture/compare enable register 1 (TIM1_CCER1)
- 17.7.14 Capture/compare enable register 2 (TIM1_CCER2)
- 17.7.15 Counter high (TIM1_CNTRH)
- 17.7.16 Counter low (TIM1_CNTRL)
- 17.7.17 Prescaler high (TIM1_PSCRH)
- 17.7.18 Prescaler low (TIM1_PSCRL)
- 17.7.19 Auto-reload register high (TIM1_ARRH)
- 17.7.20 Auto-reload register low (TIM1_ARRL)
- 17.7.21 Repetition counter register (TIM1_RCR)
- 17.7.22 Capture/compare register 1 high (TIM1_CCR1H)
- 17.7.23 Capture/compare register 1 low (TIM1_CCR1L)
- 17.7.24 Capture/compare register 2 high (TIM1_CCR2H)
- 17.7.25 Capture/compare register 2 low (TIM1_CCR2L)
- 17.7.26 Capture/compare register 3 high (TIM1_CCR3H)
- 17.7.27 Capture/compare register 3 low (TIM1_CCR3L)
- 17.7.28 Capture/compare register 4 high (TIM1_CCR4H)
- 17.7.29 Capture/compare register 4 low (TIM1_CCR4L)
- 17.7.30 Break register (TIM1_BKR)
- 17.7.31 Deadtime register (TIM1_DTR)
- 17.7.32 Output idle state register (TIM1_OISR)
- 17.7.33 TIM1 register map and reset values
- 18 16-bit general purpose timers (TIM2, TIM3, TIM5)
- 18.1 TIM2, TIM3 and TIM5 introduction
- 18.2 TIM2/TIM3 main features
- 18.3 TIM5 main features
- 18.4 TIM2/TIM3/TIM5 functional description
- 18.5 TIM2/TIM3/TIM5 interrupts
- 18.6 TIM2/TIM3/TIM5 registers
- 18.6.1 Control register 1 (TIMx_CR1)
- 18.6.2 Control register 2 (TIM5_CR2)
- 18.6.3 Slave mode control register (TIM5_SMCR)
- 18.6.4 Interrupt enable register (TIMx_IER)
- 18.6.5 Status register 1 (TIMx_SR1)
- 18.6.6 Status register 2 (TIMx_SR2)
- 18.6.7 Event generation register (TIMx_EGR)
- 18.6.8 Capture/compare mode register 1 (TIMx_CCMR1)
- 18.6.9 Capture/compare mode register 2 (TIMx_CCMR2)
- 18.6.10 Capture/compare mode register 3 (TIMx_CCMR3)
- 18.6.11 Capture/compare enable register 1 (TIMx_CCER1)
- 18.6.12 Capture/compare enable register 2 (TIMx_CCER2)
- 18.6.13 Counter high (TIMx_CNTRH)
- 18.6.14 Counter low (TIMx_CNTRL)
- 18.6.15 Prescaler register (TIMx_PSCR)
- 18.6.16 Auto-reload register high (TIMx_ARRH)
- 18.6.17 Auto-reload register low (TIMx_ARRL)
- 18.6.18 Capture/compare register 1 high (TIMx_CCR1H)
- 18.6.19 Capture/compare register 1 low (TIMx_CCR1L)
- 18.6.20 Capture/compare register 2 high (TIMx_CCR2H)
- 18.6.21 Capture/compare register 2 low (TIMx_CCR2L)
- 18.6.22 Capture/compare register 3 high (TIMx_CCR3H)
- 18.6.23 Capture/compare register 3 low (TIMx_CCR3L)
- 19 8-bit basic timer (TIM4, TIM6)
- 19.1 TIM4, TIM6 introduction
- 19.2 TIM4 main features
- 19.3 TIM6 main features
- 19.4 TIM4/TIM6 interrupts
- 19.5 TIM4/TIM6 clock selection
- 19.6 TIM4/TIM6 registers
- 19.6.1 Control register 1 (TIMx_CR1)
- 19.6.2 Control register 2 (TIM6_CR2)
- 19.6.3 Slave mode control register (TIM6_SMCR)
- 19.6.4 Interrupt enable register (TIMx_IER)
- 19.6.5 Status register 1 (TIMx_SR)
- 19.6.6 Event generation register (TIMx_EGR)
- 19.6.7 Counter (TIMx_CNTR)
- 19.6.8 Prescaler register (TIMx_PSCR)
- 19.6.9 Auto-reload register (TIMx_ARR)
- 19.6.10 TIM4/TIM6 register map and reset values
- 20 Serial peripheral interface (SPI)
- 20.1 SPI introduction
- 20.2 SPI main features
- 20.3 SPI functional description
- 20.3.1 SPI general description
- 20.3.2 Configuring the SPI in slave mode
- 20.3.3 Configuring the SPI master mode
- 20.3.4 Configuring the SPI for simplex communications
- 20.3.5 Data transmission and reception procedures
- Figure 94. TXE/RXNE/BSY behavior in full duplex mode (RXONLY = 0). Case of continuous transfers
- Figure 95. TXE/RXNE/BSY behavior in slave / full duplex mode (BDM = 0, RXONLY = 0). Case of continuous transfers
- Figure 96. TXE/BSY in master transmit-only mode (BDM = 0 and RXONLY = 0). Case of continuous transfers
- Figure 97. TXE/BSY in slave transmit-only mode (BDM = 0 and RXONLY = 0). Case of continuous transfers
- Figure 98. RXNE behavior in receive-only mode (BDM = 0 and RXONLY = 1). Case of continuous transfers
- Figure 99. TXE/BSY behavior when transmitting (BDM = 0 and RXLONY = 0). Case of discontinuous transfers
- 20.3.6 CRC calculation
- 20.3.7 Status flags
- 20.3.8 Disabling the SPI
- 20.3.9 Error flags
- 20.3.10 SPI low power modes
- 20.3.11 SPI interrupts
- 20.4 SPI registers
- 20.4.1 SPI control register 1 (SPI_CR1)
- 20.4.2 SPI control register 2 (SPI_CR2)
- 20.4.3 SPI interrupt control register (SPI_ICR)
- 20.4.4 SPI status register (SPI_SR)
- 20.4.5 SPI data register (SPI_DR)
- 20.4.6 SPI CRC polynomial register (SPI_CRCPR)
- 20.4.7 SPI Rx CRC register (SPI_RXCRCR)
- 20.4.8 SPI Tx CRC register (SPI_TXCRCR)
- 20.5 SPI register map and reset values
- 21 Inter-integrated circuit (I2C) interface
- 21.1 I2C introduction
- 21.2 I2C main features
- 21.3 I2C general description
- 21.4 I2C functional description
- 21.4.1 I2C slave mode
- 21.4.2 I2C master mode
- Figure 104. Transfer sequence diagram for master transmitter
- Figure 105. Method 1: transfer sequence diagram for master receiver
- Figure 106. Method 2: transfer sequence diagram for master receiver when N >2
- Figure 107. Method 2: transfer sequence diagram for master receiver when N=2
- Figure 108. Method 2: transfer sequence diagram for master receiver when N=1
- 21.4.3 Error conditions
- 21.4.4 SDA/SCL line control
- 21.5 I2C low power modes
- 21.6 I2C interrupts
- 21.7 I2C registers
- 21.7.1 Control register 1 (I2C_CR1)
- 21.7.2 Control register 2 (I2C_CR2)
- 21.7.3 Frequency register (I2C_FREQR)
- 21.7.4 Own address register LSB (I2C_OARL)
- 21.7.5 Own address register MSB (I2C_OARH)
- 21.7.6 Data register (I2C_DR)
- 21.7.7 Status register 1 (I2C_SR1)
- 21.7.8 Status register 2 (I2C_SR2)
- 21.7.9 Status register 3 (I2C_SR3)
- 21.7.10 Interrupt register (I2C_ITR)
- 21.7.11 Clock control register low (I2C_CCRL)
- 21.7.12 Clock control register high (I2C_CCRH)
- 21.7.13 TRISE register (I2C_TRISER)
- 21.7.14 I2C register map and reset values
- 22 Universal asynchronous receiver transmitter (UART)
- 22.1 Introduction
- 22.2 UART main features
- 22.3 UART functional description
- Figure 110. UART1 block diagram
- Figure 111. UART2 block diagram
- Figure 112. UART3 block diagram
- Figure 113. UART4 block diagram
- 22.3.1 UART character description
- 22.3.2 Transmitter
- 22.3.3 Receiver
- 22.3.4 High precision baud rate generator
- 22.3.5 Clock deviation tolerance of the UART receiver
- 22.3.6 Parity control
- 22.3.7 Multi-processor communication
- 22.3.8 LIN (local interconnection network) mode
- 22.3.9 UART synchronous communication
- 22.3.10 Single wire half duplex communication
- 22.3.11 Smartcard
- 22.3.12 IrDA SIR ENDEC block
- 22.4 LIN mode functional description
- 22.5 UART low power modes
- 22.6 UART interrupts
- 22.7 UART registers
- 22.7.1 Status register (UART_SR)
- 22.7.2 Data register (UART_DR)
- 22.7.3 Baud rate register 1 (UART_BRR1)
- 22.7.4 Baud rate register 2 (UART_BRR2)
- 22.7.5 Control register 1 (UART_CR1)
- 22.7.6 Control register 2 (UART_CR2)
- 22.7.7 Control register 3 (UART_CR3)
- 22.7.8 Control register 4 (UART_CR4)
- 22.7.9 Control register 5 (UART_CR5)
- 22.7.10 Control register 6 (UART_CR6)
- 22.7.11 Guard time register (UART_GTR)
- 22.7.12 Prescaler register (UART_PSCR)
- 22.7.13 UART register map and reset values
- 23 Controller area network (beCAN)
- 23.1 Introduction
- 23.2 beCAN main features
- 23.3 beCAN general description
- 23.4 Operating modes
- 23.5 Test modes
- 23.6 Functional description
- 23.6.1 Transmission handling
- 23.6.2 Reception handling
- 23.6.3 Identifier filtering
- Figure 148. 32-bit filter bank configuration (FSCx bits = 0b11 in CAN_FCRx register)
- Figure 149. 16-bit filter bank configuration (FSCx bits = 0b10 in CAN_FCRx register)
- Figure 150. 16/8-bit filter bank configuration (FSCx bits = 0b01 in CAN_FCRx register)
- Figure 151. 8-bit filter bank configuration (FSCx bits = 0b00 in CAN_FCRx register)
- Table 65. Example of filter numbering
- Figure 152. Filter banks configured as in the example in Table 65
- 23.6.4 Message storage
- 23.6.5 Error management
- 23.6.6 Bit timing
- 23.7 Interrupts
- 23.8 Register access protection
- 23.9 Clock system
- 23.10 beCAN low power modes
- 23.11 beCAN registers
- 23.11.1 CAN master control register (CAN_MCR)
- 23.11.2 CAN master status register (CAN_MSR)
- 23.11.3 CAN transmit status register (CAN_TSR)
- 23.11.4 CAN transmit priority register (CAN_TPR)
- 23.11.5 CAN receive FIFO register (CAN_RFR)
- 23.11.6 CAN interrupt enable register (CAN_IER)
- 23.11.7 CAN diagnostic register (CAN_DGR)
- 23.11.8 CAN page select register (CAN_PSR)
- 23.11.9 CAN error status register (CAN_ESR)
- 23.11.10 CAN error interrupt enable register (CAN_EIER)
- 23.11.11 CAN transmit error counter register (CAN_TECR)
- 23.11.12 CAN receive error counter register (CAN_RECR)
- 23.11.13 CAN bit timing register 1 (CAN_BTR1)
- 23.11.14 CAN bit timing register 2 (CAN_BTR2)
- 23.11.15 Mailbox registers
- 23.11.16 CAN filter registers
- 23.12 CAN register map
- 24 Analog/digital converter (ADC)
- 24.1 Introduction
- 24.2 ADC main features
- 24.3 ADC extended features
- 24.4 ADC pins
- 24.5 ADC functional description
- 24.6 ADC low power modes
- 24.7 ADC interrupts
- 24.8 Data alignment
- 24.9 Reading the conversion result
- 24.10 Schmitt trigger disable registers
- 24.11 ADC registers
- 24.11.1 ADC data buffer register x high (ADC_DBxRH) (x=0..7 or 0..9 )
- 24.11.2 ADC data buffer register x low (ADC_DBxRL) (x=or 0..7 or 0..9)
- 24.11.3 ADC control/status register (ADC_CSR)
- 24.11.4 ADC configuration register 1 (ADC_CR1)
- 24.11.5 ADC configuration register 2 (ADC_CR2)
- 24.11.6 ADC configuration register 3 (ADC_CR3)
- 24.11.7 ADC data register high (ADC_DRH)
- 24.11.8 ADC data register low (ADC_DRL)
- 24.11.9 ADC Schmitt trigger disable register high (ADC_TDRH)
- 24.11.10 ADC Schmitt trigger disable register low (ADC_TDRL)
- 24.11.11 ADC high threshold register high (ADC_HTRH)
- 24.11.12 ADC high threshold register low (ADC_HTRL)
- 24.11.13 ADC low threshold register high (ADC_LTRH)
- 24.11.14 ADC low threshold register low (ADC_LTRL)
- 24.11.15 ADC watchdog status register high (ADC_AWSRH)
- 24.11.16 ADC watchdog status register low (ADC_AWSRL)
- 24.11.17 ADC watchdog control register high (ADC_AWCRH)
- 24.11.18 ADC watchdog control register low (ADC_AWCRL)
- 24.12 ADC register map and reset values
- 25 Revision history

October 2017 DocID14587 Rev 14 1/467
1
RM0016
Reference manual
STM8S Series and STM8AF Series 8-bit microcontrollers
Introduction
This reference manual provides complete information for application developers on how to
use STM8S Series and STM8AF Series microcontroller memory and peripherals.
The STM8AF Series of microcontrollers is designed for automotive applications, with
different memory densities, packages and peripherals:
•The low-density STM8AF devices are the STM8AF6223/26 with 8 Kbytes of Flash
memory.
•The medium-density STM8AF devices are the STM8AF624x and STM8AF6266/68
microcontrollers with 16 to 32 Kbytes of Flash memory.
•The high-density STM8AF devices are the STM8AF52xx and STM8AF6269/8x/Ax
microcontrollers with 32 to 128 Kbytes of Flash memory.
The STM8S Series of microcontrollers is designed for general purpose applications, with
different memory densities, packages and peripherals.
•The value-line low-density STM8S devices are the STM8S001xx/STM8S003xx
microcontrollers with 8 Kbytes of Flash memory.
•The value-line medium-density STM8S devices are the STM8S005xx microcontrollers
with 32 Kbytes of Flash memory.
•The value-line high-density STM8S devices are the STM8S007xx microcontrollers with
64 Kbytes of Flash memory.
•The access-line low-density STM8S devices are the STM8S103xx and STM8S903xx
microcontrollers with 8 Kbytes of Flash memory.
•The access-line medium-density STM8S devices are the STM8S105xx microcontrollers
with 16 to 32 Kbytes of Flash memory.
•The performance-line high-density STM8S devices are the STM8S207xx and
STM8S208xx microcontrollers with 32 to 128 Kbytes of Flash memory.
Refer to the product datasheet for ordering information, pin description, mechanical and
electrical device characteristics, and for the complete list of available peripherals.
Reference documents
•For information on programming, erasing and protection of the internal Flash memory
please refer to the STM8S Series and STM8AF Series Flash programming manual
(PM0051), and to the STM8 SWIM communication protocol and debug module user
manual (UM0470).
•For information on the STM8 core, refer to STM8 CPU programming manual (PM0044).
•The bootloader user manual (UM0560) describes the usage of the integrated ROM
bootloader.
www.st.com

Contents RM0016
2/467 DocID14587 Rev 14
Contents
1 Central processing unit (CPU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.1 CPU introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.2 CPU registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.2.1 Description of CPU registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.2.2 STM8 CPU register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3 Global configuration register (CFG_GCR) . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3.1 Activation level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3.2 SWIM disable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.3.3 Description of global configuration register (CFG_GCR) . . . . . . . . . . . . 28
1.3.4 Global configuration register map and reset values . . . . . . . . . . . . . . . 28
2 Boot ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Memory and register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1 Memory layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.1 Memory map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.2 Stack handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Register description abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4 Flash program memory and data EEPROM . . . . . . . . . . . . . . . . . . . . . 34
4.1 Flash and EEPROM introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Flash and EEPROM glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3 Main Flash memory features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4 Memory organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.4.1 STM8S and STM8AF memory organization . . . . . . . . . . . . . . . . . . . . . 36
4.4.2 Memory access/ wait state configuration . . . . . . . . . . . . . . . . . . . . . . . . 40
4.4.3 User boot area (UBC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.4.4 Data EEPROM (DATA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4.5 Main program area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4.6 Option bytes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.5 Memory protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.5.1 Readout protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.5.2 Memory access security system (MASS) . . . . . . . . . . . . . . . . . . . . . . . 44

DocID14587 Rev 14 3/467
RM0016 Contents
16
4.5.3 Enabling write access to option bytes . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.6 Memory programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.6.1 Read-while-write (RWW) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.6.2 Byte programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.6.3 Word programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.6.4 Block programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.6.5 Option byte programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.7 ICP (in-circuit programming) and IAP (in-application programming) . . . . 49
4.8 Flash registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.8.1 Flash control register 1 (FLASH_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.8.2 Flash control register 2 (FLASH_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.8.3 Flash complementary control register 2 (FLASH_NCR2) . . . . . . . . . . . 53
4.8.4 Flash protection register (FLASH_FPR) . . . . . . . . . . . . . . . . . . . . . . . . 54
4.8.5 Flash protection register (FLASH_NFPR) . . . . . . . . . . . . . . . . . . . . . . . 54
4.8.6 Flash program memory unprotecting key register (FLASH_PUKR) . . . 54
4.8.7 Data EEPROM unprotection key register (FLASH_DUKR) . . . . . . . . . . 55
4.8.8 Flash status register (FLASH_IAPSR) . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.8.9 Flash register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Single wire interface module (SWIM) and debug module (DM) . . . . . 57
5.1 SWIM and DM introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 SWIM main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.3 SWIM modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6 Interrupt controller (ITC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.1 ITC introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.2 Interrupt masking and processing flow . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.2.1 Servicing pending interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2.2 Interrupt sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.3 Interrupts and low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.4 Activation level/low power mode control . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.5 Concurrent and nested interrupt management . . . . . . . . . . . . . . . . . . . . . 64
6.5.1 Concurrent interrupt management mode . . . . . . . . . . . . . . . . . . . . . . . . 64
6.5.2 Nested interrupt management mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.6 External interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.7 Interrupt instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

Contents RM0016
4/467 DocID14587 Rev 14
6.8 Interrupt mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.9 ITC and EXTI registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.9.1 CPU condition code register interrupt bits (CCR) . . . . . . . . . . . . . . . . . 68
6.9.2 Software priority register x (ITC_SPRx) . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.9.3 External interrupt control register 1 (EXTI_CR1) . . . . . . . . . . . . . . . . . . 70
6.9.4 External interrupt control register 1 (EXTI_CR2) . . . . . . . . . . . . . . . . . . 71
6.9.5 ITC and EXTI register map and reset values . . . . . . . . . . . . . . . . . . . . . 72
7 Power supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
8 Reset (RST) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
8.1 “Reset state” and “under reset” definitions . . . . . . . . . . . . . . . . . . . . . . . . 74
8.2 Reset circuit description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
8.3 Internal reset sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
8.3.1 Power-on reset (POR) and brown-out reset (BOR) . . . . . . . . . . . . . . . . 75
8.3.2 Watchdog reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
8.3.3 Software reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
8.3.4 SWIM reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
8.3.5 Illegal opcode reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
8.3.6 EMC reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
8.4 RST register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8.4.1 Reset status register (RST_SR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
8.5 RST register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9 Clock control (CLK) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9.1 Master clock sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.1.1 HSE (high-speed external) clock signal . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.1.2 HSI (high-speed internal) clock signal . . . . . . . . . . . . . . . . . . . . . . . . . . 81
9.1.3 LSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
9.2 Master clock switching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.2.1 System startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.2.2 Master clock switching procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.3 Low-speed clock selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.4 CPU clock-divider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.5 Peripheral clock-gating (PCG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
9.6 Clock security system (CSS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88

DocID14587 Rev 14 5/467
RM0016 Contents
16
9.7 Clock-out capability (CCO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.8 CLK interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.9 CLK register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9.9.1 Internal clock register (CLK_ICKR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9.9.2 External clock register (CLK_ECKR) . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
9.9.3 Clock master status register (CLK_CMSR) . . . . . . . . . . . . . . . . . . . . . . 92
9.9.4 Clock master switch register (CLK_SWR) . . . . . . . . . . . . . . . . . . . . . . . 92
9.9.5 Switch control register (CLK_SWCR) . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.9.6 Clock divider register (CLK_CKDIVR) . . . . . . . . . . . . . . . . . . . . . . . . . . 94
9.9.7 Peripheral clock gating register 1 (CLK_PCKENR1) . . . . . . . . . . . . . . . 95
9.9.8 Peripheral clock gating register 2 (CLK_PCKENR2) . . . . . . . . . . . . . . . 96
9.9.9 Clock security system register (CLK_CSSR) . . . . . . . . . . . . . . . . . . . . . 97
9.9.10 Configurable clock output register (CLK_CCOR) . . . . . . . . . . . . . . . . . 98
9.9.11 HSI clock calibration trimming register (CLK_HSITRIMR) . . . . . . . . . . . 99
9.9.12 SWIM clock control register (CLK_SWIMCCR) . . . . . . . . . . . . . . . . . . . 99
9.10 CLK register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
10 Power management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
10.1 General considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
10.1.1 Clock management for low consumption . . . . . . . . . . . . . . . . . . . . . . . 102
10.2 Low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
10.2.1 Wait mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
10.2.2 Halt mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
10.2.3 Active-halt modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
10.3 Additional analog power controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
10.3.1 Fast Flash wakeup from Halt mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
10.3.2 Very low Flash consumption in Active-halt mode . . . . . . . . . . . . . . . . . 104
11 General purpose I/O ports (GPIO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
11.2 GPIO main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
11.3 Port configuration and usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
11.3.1 Input modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
11.3.2 Output modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
11.4 Reset configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
11.5 Unused I/O pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108

Contents RM0016
6/467 DocID14587 Rev 14
11.6 Low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
11.7 Input mode details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
11.7.1 Alternate function input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
11.7.2 Interrupt capability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
11.7.3 Analog channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
11.7.4 Schmitt trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
11.7.5 Analog function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
11.8 Output mode details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
11.8.1 Alternate function output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
11.8.2 Slope control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
11.9 GPIO registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111
11.9.1 Port x output data register (Px_ODR) . . . . . . . . . . . . . . . . . . . . . . . . . 111
11.9.2 Port x pin input register (Px_IDR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
11.9.3 Port x data direction register (Px_DDR) . . . . . . . . . . . . . . . . . . . . . . . 112
11.9.4 Port x control register 1 (Px_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
11.9.5 Port x control register 2 (Px_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
11.9.6 GPIO register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 113
12 Auto-wakeup (AWU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
12.1 AWU introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
12.2 LSI clock measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
12.3 AWU functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .115
12.3.1 AWU operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
12.3.2 Time base selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
12.3.3 LSI clock frequency measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
12.4 AWU registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .118
12.4.1 Control/status register (AWU_CSR) . . . . . . . . . . . . . . . . . . . . . . . . . . 118
12.4.2 Asynchronous prescaler register (AWU_APR) . . . . . . . . . . . . . . . . . . 119
12.4.3 Timebase selection register (AWU_TBR) . . . . . . . . . . . . . . . . . . . . . . 119
12.4.4 AWU register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 120
13 Beeper (BEEP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
13.1 Beeper introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
13.2 Beeper functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
13.2.1 Beeper operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
13.2.2 Beeper calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122

DocID14587 Rev 14 7/467
RM0016 Contents
16
13.3 Beeper registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
13.3.1 Beeper control/status register (BEEP_CSR) . . . . . . . . . . . . . . . . . . . . 122
13.3.2 Beeper register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . 123
14 Independent watchdog (IWDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
14.1 IWDG introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
14.2 IWDG functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
14.3 IWDG registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
14.3.1 Key register (IWDG_KR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
14.3.2 Prescaler register (IWDG_PR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
14.3.3 Reload register (IWDG_RLR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
14.3.4 IWDG register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 127
15 Window watchdog (WWDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
15.1 WWDG introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
15.2 WWDG main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
15.3 WWDG functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
15.4 How to program the watchdog timeout . . . . . . . . . . . . . . . . . . . . . . . . . . 130
15.5 WWDG low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
15.6 Hardware watchdog option . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
15.7 Using Halt mode with the WWDG (WWDGHALT option) . . . . . . . . . . . . 132
15.8 WWDG interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
15.9 WWDG registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
15.9.1 Control register (WWDG_CR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
15.9.2 Window register (WWDG_WR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
15.10 Window watchdog register map and reset values . . . . . . . . . . . . . . . . . 133
16 Timer overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
16.1 Timer feature comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
16.2 Glossary of timer signal names . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
17 16-bit advanced control timer (TIM1) . . . . . . . . . . . . . . . . . . . . . . . . . . 138
17.1 TIM1 introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
17.2 TIM1 main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
17.3 TIM1 time base unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141

Contents RM0016
8/467 DocID14587 Rev 14
17.3.1 Reading and writing to the 16-bit counter . . . . . . . . . . . . . . . . . . . . . . 142
17.3.2 Write sequence for 16-bit TIM1_ARR register . . . . . . . . . . . . . . . . . . . 142
17.3.3 Prescaler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
17.3.4 Up-counting mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
17.3.5 Down-counting mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
17.3.6 Center-aligned mode (up/down counting) . . . . . . . . . . . . . . . . . . . . . . 147
17.3.7 Repetition down-counter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
17.4 TIM1 clock/trigger controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
17.4.1 Prescaler clock (CK_PSC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
17.4.2 Internal clock source (fMASTER) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
17.4.3 External clock source mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
17.4.4 External clock source mode 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
17.4.5 Trigger synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
17.4.6 Synchronization between TIM1, TIM5 and TIM6 timers . . . . . . . . . . . 159
17.5 TIM1 capture/compare channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
17.5.1 Write sequence for 16-bit TIM1_CCRi registers . . . . . . . . . . . . . . . . . 167
17.5.2 Input stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
17.5.3 Input capture mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
17.5.4 Output stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
17.5.5 Forced output mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
17.5.6 Output compare mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
17.5.7 PWM mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
17.5.8 Using the break function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
17.5.9 Clearing the OCiREF signal on an external event . . . . . . . . . . . . . . . . 184
17.5.10 Encoder interface mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
17.6 TIM1 interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
17.7 TIM1 registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
17.7.1 Control register 1 (TIM1_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
17.7.2 Control register 2 (TIM1_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
17.7.3 Slave mode control register (TIM1_SMCR) . . . . . . . . . . . . . . . . . . . . . 191
17.7.4 External trigger register (TIM1_ETR) . . . . . . . . . . . . . . . . . . . . . . . . . . 192
17.7.5 Interrupt enable register (TIM1_IER) . . . . . . . . . . . . . . . . . . . . . . . . . . 194
17.7.6 Status register 1 (TIM1_SR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
17.7.7 Status register 2 (TIM1_SR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
17.7.8 Event generation register (TIM1_EGR) . . . . . . . . . . . . . . . . . . . . . . . . 197
17.7.9 Capture/compare mode register 1 (TIM1_CCMR1) . . . . . . . . . . . . . . . 198
17.7.10 Capture/compare mode register 2 (TIM1_CCMR2) . . . . . . . . . . . . . . . 202

DocID14587 Rev 14 9/467
RM0016 Contents
16
17.7.11 Capture/compare mode register 3 (TIM1_CCMR3) . . . . . . . . . . . . . . . 203
17.7.12 Capture/compare mode register 4 (TIM1_CCMR4) . . . . . . . . . . . . . . . 204
17.7.13 Capture/compare enable register 1 (TIM1_CCER1) . . . . . . . . . . . . . . 205
17.7.14 Capture/compare enable register 2 (TIM1_CCER2) . . . . . . . . . . . . . . 208
17.7.15 Counter high (TIM1_CNTRH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
17.7.16 Counter low (TIM1_CNTRL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
17.7.17 Prescaler high (TIM1_PSCRH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
17.7.18 Prescaler low (TIM1_PSCRL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
17.7.19 Auto-reload register high (TIM1_ARRH) . . . . . . . . . . . . . . . . . . . . . . . 210
17.7.20 Auto-reload register low (TIM1_ARRL) . . . . . . . . . . . . . . . . . . . . . . . . 210
17.7.21 Repetition counter register (TIM1_RCR) . . . . . . . . . . . . . . . . . . . . . . . 210
17.7.22 Capture/compare register 1 high (TIM1_CCR1H) . . . . . . . . . . . . . . . . 211
17.7.23 Capture/compare register 1 low (TIM1_CCR1L) . . . . . . . . . . . . . . . . . 211
17.7.24 Capture/compare register 2 high (TIM1_CCR2H) . . . . . . . . . . . . . . . . 212
17.7.25 Capture/compare register 2 low (TIM1_CCR2L) . . . . . . . . . . . . . . . . . 212
17.7.26 Capture/compare register 3 high (TIM1_CCR3H) . . . . . . . . . . . . . . . . 213
17.7.27 Capture/compare register 3 low (TIM1_CCR3L) . . . . . . . . . . . . . . . . . 213
17.7.28 Capture/compare register 4 high (TIM1_CCR4H) . . . . . . . . . . . . . . . . 214
17.7.29 Capture/compare register 4 low (TIM1_CCR4L) . . . . . . . . . . . . . . . . . 214
17.7.30 Break register (TIM1_BKR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
17.7.31 Deadtime register (TIM1_DTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
17.7.32 Output idle state register (TIM1_OISR) . . . . . . . . . . . . . . . . . . . . . . . . 218
17.7.33 TIM1 register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 219
18 16-bit general purpose timers (TIM2, TIM3, TIM5) . . . . . . . . . . . . . . . 222
18.1 TIM2, TIM3 and TIM5 introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
18.2 TIM2/TIM3 main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
18.3 TIM5 main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
18.4 TIM2/TIM3/TIM5 functional description . . . . . . . . . . . . . . . . . . . . . . . . . 223
18.4.1 Time base unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
18.4.2 Clock/trigger controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
18.4.3 Capture/compare channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
18.5 TIM2/TIM3/TIM5 interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
18.6 TIM2/TIM3/TIM5 registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
18.6.1 Control register 1 (TIMx_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
18.6.2 Control register 2 (TIM5_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230

Contents RM0016
10/467 DocID14587 Rev 14
18.6.3 Slave mode control register (TIM5_SMCR) . . . . . . . . . . . . . . . . . . . . . 231
18.6.4 Interrupt enable register (TIMx_IER) . . . . . . . . . . . . . . . . . . . . . . . . . . 232
18.6.5 Status register 1 (TIMx_SR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
18.6.6 Status register 2 (TIMx_SR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
18.6.7 Event generation register (TIMx_EGR) . . . . . . . . . . . . . . . . . . . . . . . . 235
18.6.8 Capture/compare mode register 1 (TIMx_CCMR1) . . . . . . . . . . . . . . . 236
18.6.9 Capture/compare mode register 2 (TIMx_CCMR2) . . . . . . . . . . . . . . . 239
18.6.10 Capture/compare mode register 3 (TIMx_CCMR3) . . . . . . . . . . . . . . . 240
18.6.11 Capture/compare enable register 1 (TIMx_CCER1) . . . . . . . . . . . . . . 241
18.6.12 Capture/compare enable register 2 (TIMx_CCER2) . . . . . . . . . . . . . . 242
18.6.13 Counter high (TIMx_CNTRH) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
18.6.14 Counter low (TIMx_CNTRL) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
18.6.15 Prescaler register (TIMx_PSCR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
18.6.16 Auto-reload register high (TIMx_ARRH) . . . . . . . . . . . . . . . . . . . . . . . 244
18.6.17 Auto-reload register low (TIMx_ARRL) . . . . . . . . . . . . . . . . . . . . . . . . 245
18.6.18 Capture/compare register 1 high (TIMx_CCR1H) . . . . . . . . . . . . . . . . 245
18.6.19 Capture/compare register 1 low (TIMx_CCR1L) . . . . . . . . . . . . . . . . . 246
18.6.20 Capture/compare register 2 high (TIMx_CCR2H) . . . . . . . . . . . . . . . . 246
18.6.21 Capture/compare register 2 low (TIMx_CCR2L) . . . . . . . . . . . . . . . . . 246
18.6.22 Capture/compare register 3 high (TIMx_CCR3H) . . . . . . . . . . . . . . . . 247
18.6.23 Capture/compare register 3 low (TIMx_CCR3L) . . . . . . . . . . . . . . . . . 247
19 8-bit basic timer (TIM4, TIM6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
19.1 TIM4, TIM6 introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
19.2 TIM4 main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
19.3 TIM6 main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
19.4 TIM4/TIM6 interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
19.5 TIM4/TIM6 clock selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
19.6 TIM4/TIM6 registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
19.6.1 Control register 1 (TIMx_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
19.6.2 Control register 2 (TIM6_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
19.6.3 Slave mode control register (TIM6_SMCR) . . . . . . . . . . . . . . . . . . . . . 256
19.6.4 Interrupt enable register (TIMx_IER) . . . . . . . . . . . . . . . . . . . . . . . . . . 258
19.6.5 Status register 1 (TIMx_SR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
19.6.6 Event generation register (TIMx_EGR) . . . . . . . . . . . . . . . . . . . . . . . . 259
19.6.7 Counter (TIMx_CNTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259

DocID14587 Rev 14 11/467
RM0016 Contents
16
19.6.8 Prescaler register (TIMx_PSCR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
19.6.9 Auto-reload register (TIMx_ARR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
19.6.10 TIM4/TIM6 register map and reset values . . . . . . . . . . . . . . . . . . . . . . 260
20 Serial peripheral interface (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
20.1 SPI introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
20.2 SPI main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
20.3 SPI functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
20.3.1 SPI general description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
20.3.2 Configuring the SPI in slave mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
20.3.3 Configuring the SPI master mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
20.3.4 Configuring the SPI for simplex communications . . . . . . . . . . . . . . . . 268
20.3.5 Data transmission and reception procedures . . . . . . . . . . . . . . . . . . . 268
20.3.6 CRC calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
20.3.7 Status flags . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
20.3.8 Disabling the SPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
20.3.9 Error flags . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
20.3.10 SPI low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
20.3.11 SPI interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
20.4 SPI registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
20.4.1 SPI control register 1 (SPI_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
20.4.2 SPI control register 2 (SPI_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
20.4.3 SPI interrupt control register (SPI_ICR) . . . . . . . . . . . . . . . . . . . . . . . . 284
20.4.4 SPI status register (SPI_SR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
20.4.5 SPI data register (SPI_DR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
20.4.6 SPI CRC polynomial register (SPI_CRCPR) . . . . . . . . . . . . . . . . . . . . 286
20.4.7 SPI Rx CRC register (SPI_RXCRCR) . . . . . . . . . . . . . . . . . . . . . . . . . 286
20.4.8 SPI Tx CRC register (SPI_TXCRCR) . . . . . . . . . . . . . . . . . . . . . . . . . 287
20.5 SPI register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
21 Inter-integrated circuit (I2C) interface . . . . . . . . . . . . . . . . . . . . . . . . . 288
21.1 I2C introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
21.2 I2C main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
21.3 I2C general description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
21.4 I2C functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
21.4.1 I2C slave mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291

Contents RM0016
12/467 DocID14587 Rev 14
21.4.2 I2C master mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
21.4.3 Error conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
21.4.4 SDA/SCL line control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
21.5 I2C low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
21.6 I2C interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
21.7 I2C registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
21.7.1 Control register 1 (I2C_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
21.7.2 Control register 2 (I2C_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
21.7.3 Frequency register (I2C_FREQR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
21.7.4 Own address register LSB (I2C_OARL) . . . . . . . . . . . . . . . . . . . . . . . 308
21.7.5 Own address register MSB (I2C_OARH) . . . . . . . . . . . . . . . . . . . . . . 308
21.7.6 Data register (I2C_DR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
21.7.7 Status register 1 (I2C_SR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
21.7.8 Status register 2 (I2C_SR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
21.7.9 Status register 3 (I2C_SR3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
21.7.10 Interrupt register (I2C_ITR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
21.7.11 Clock control register low (I2C_CCRL) . . . . . . . . . . . . . . . . . . . . . . . . 315
21.7.12 Clock control register high (I2C_CCRH) . . . . . . . . . . . . . . . . . . . . . . . 316
21.7.13 TRISE register (I2C_TRISER) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318
21.7.14 I2C register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
22 Universal asynchronous receiver transmitter (UART) . . . . . . . . . . . . 320
22.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
22.2 UART main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
22.3 UART functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
22.3.1 UART character description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
22.3.2 Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
22.3.3 Receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
22.3.4 High precision baud rate generator . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
22.3.5 Clock deviation tolerance of the UART receiver . . . . . . . . . . . . . . . . . 337
22.3.6 Parity control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
22.3.7 Multi-processor communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
22.3.8 LIN (local interconnection network) mode . . . . . . . . . . . . . . . . . . . . . . 340
22.3.9 UART synchronous communication . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
22.3.10 Single wire half duplex communication . . . . . . . . . . . . . . . . . . . . . . . . 343
22.3.11 Smartcard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343

DocID14587 Rev 14 13/467
RM0016 Contents
16
22.3.12 IrDA SIR ENDEC block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
22.4 LIN mode functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
22.4.1 Master mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
22.4.2 Slave mode with automatic resynchronization disabled . . . . . . . . . . . 352
22.4.3 Slave mode with automatic resynchronization enabled . . . . . . . . . . . . 355
22.4.4 LIN mode selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
22.5 UART low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
22.6 UART interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
22.7 UART registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
22.7.1 Status register (UART_SR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
22.7.2 Data register (UART_DR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
22.7.3 Baud rate register 1 (UART_BRR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
22.7.4 Baud rate register 2 (UART_BRR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
22.7.5 Control register 1 (UART_CR1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
22.7.6 Control register 2 (UART_CR2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
22.7.7 Control register 3 (UART_CR3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
22.7.8 Control register 4 (UART_CR4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
22.7.9 Control register 5 (UART_CR5) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
22.7.10 Control register 6 (UART_CR6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
22.7.11 Guard time register (UART_GTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
22.7.12 Prescaler register (UART_PSCR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
22.7.13 UART register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 375
23 Controller area network (beCAN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
23.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
23.2 beCAN main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
23.3 beCAN general description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
23.3.1 CAN 2.0B active core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
23.3.2 Control, status and configuration registers . . . . . . . . . . . . . . . . . . . . . 379
23.3.3 Tx mailboxes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
23.3.4 Acceptance filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
23.4 Operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
23.4.1 Initialization mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
23.4.2 Normal mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
23.4.3 Sleep mode (low power) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
23.4.4 Time triggered communication mode . . . . . . . . . . . . . . . . . . . . . . . . . . 382

Contents RM0016
14/467 DocID14587 Rev 14
23.5 Test modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
23.5.1 Silent mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
23.5.2 Loop back mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
23.5.3 Loop back combined with silent mode . . . . . . . . . . . . . . . . . . . . . . . . . 384
23.6 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
23.6.1 Transmission handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
23.6.2 Reception handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
23.6.3 Identifier filtering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 388
23.6.4 Message storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
23.6.5 Error management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396
23.6.6 Bit timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
23.7 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
23.8 Register access protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
23.9 Clock system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
23.10 beCAN low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
23.11 beCAN registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401
23.11.1 CAN master control register (CAN_MCR) . . . . . . . . . . . . . . . . . . . . . . 401
23.11.2 CAN master status register (CAN_MSR) . . . . . . . . . . . . . . . . . . . . . . . 402
23.11.3 CAN transmit status register (CAN_TSR) . . . . . . . . . . . . . . . . . . . . . . 403
23.11.4 CAN transmit priority register (CAN_TPR) . . . . . . . . . . . . . . . . . . . . . 404
23.11.5 CAN receive FIFO register (CAN_RFR) . . . . . . . . . . . . . . . . . . . . . . . 406
23.11.6 CAN interrupt enable register (CAN_IER) . . . . . . . . . . . . . . . . . . . . . . 407
23.11.7 CAN diagnostic register (CAN_DGR) . . . . . . . . . . . . . . . . . . . . . . . . . 408
23.11.8 CAN page select register (CAN_PSR) . . . . . . . . . . . . . . . . . . . . . . . . 408
23.11.9 CAN error status register (CAN_ESR) . . . . . . . . . . . . . . . . . . . . . . . . . 409
23.11.10 CAN error interrupt enable register (CAN_EIER) . . . . . . . . . . . . . . . . 410
23.11.11 CAN transmit error counter register (CAN_TECR) . . . . . . . . . . . . . . . 410
23.11.12 CAN receive error counter register (CAN_RECR) . . . . . . . . . . . . . . . . 411
23.11.13 CAN bit timing register 1 (CAN_BTR1) . . . . . . . . . . . . . . . . . . . . . . . . 411
23.11.14 CAN bit timing register 2 (CAN_BTR2) . . . . . . . . . . . . . . . . . . . . . . . . 412
23.11.15 Mailbox registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413
23.11.16 CAN filter registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418
23.12 CAN register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424
23.12.1 Page mapping for CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425
24 Analog/digital converter (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428

DocID14587 Rev 14 15/467
RM0016 Contents
16
24.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428
24.2 ADC main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428
24.3 ADC extended features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428
24.4 ADC pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
24.5 ADC functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
24.5.1 ADC on-off control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
24.5.2 ADC clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
24.5.3 Channel selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432
24.5.4 Conversion modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432
24.5.5 Overrun flag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433
24.5.6 Analog watchdog . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
24.5.7 Conversion on external trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
24.5.8 Analog zooming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
24.5.9 Timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
24.6 ADC low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437
24.7 ADC interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437
24.8 Data alignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
24.9 Reading the conversion result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
24.10 Schmitt trigger disable registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 441
24.11 ADC registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 441
24.11.1 ADC data buffer register x high (ADC_DBxRH) (x=0..7 or 0..9 ) . . . . . 441
24.11.2 ADC data buffer register x low (ADC_DBxRL) (x=or 0..7 or 0..9) . . . . 442
24.11.3 ADC control/status register (ADC_CSR) . . . . . . . . . . . . . . . . . . . . . . . 443
24.11.4 ADC configuration register 1 (ADC_CR1) . . . . . . . . . . . . . . . . . . . . . . 444
24.11.5 ADC configuration register 2 (ADC_CR2) . . . . . . . . . . . . . . . . . . . . . . 445
24.11.6 ADC configuration register 3 (ADC_CR3) . . . . . . . . . . . . . . . . . . . . . . 446
24.11.7 ADC data register high (ADC_DRH) . . . . . . . . . . . . . . . . . . . . . . . . . . 447
24.11.8 ADC data register low (ADC_DRL) . . . . . . . . . . . . . . . . . . . . . . . . . . . 447
24.11.9 ADC Schmitt trigger disable register high (ADC_TDRH) . . . . . . . . . . . 448
24.11.10 ADC Schmitt trigger disable register low (ADC_TDRL) . . . . . . . . . . . . 448
24.11.11 ADC high threshold register high (ADC_HTRH) . . . . . . . . . . . . . . . . . 449
24.11.12 ADC high threshold register low (ADC_HTRL) . . . . . . . . . . . . . . . . . . 449
24.11.13 ADC low threshold register high (ADC_LTRH) . . . . . . . . . . . . . . . . . . 450
24.11.14 ADC low threshold register low (ADC_LTRL) . . . . . . . . . . . . . . . . . . . 450
24.11.15 ADC watchdog status register high (ADC_AWSRH) . . . . . . . . . . . . . . 451
24.11.16 ADC watchdog status register low (ADC_AWSRL) . . . . . . . . . . . . . . . 451

Contents RM0016
16/467 DocID14587 Rev 14
24.11.17 ADC watchdog control register high (ADC_AWCRH) . . . . . . . . . . . . . 452
24.11.18 ADC watchdog control register low (ADC_AWCRL) . . . . . . . . . . . . . . 452
24.12 ADC register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453
25 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455

DocID14587 Rev 14 17/467
RM0016 List of tables
18
List of tables
Table 1. Interrupt levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 2. CPU register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Table 3. CFG_GCR register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 4. List of abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 5. Block size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 6. Memory access versus programming method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 7. Flash register map and reset values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 8. Software priority levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 9. Interrupt enabling/disabling inside an ISR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 10. Vector address map versus software priority bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Table 11. Dedicated interrupt instruction set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Table 12. Interrupt register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Table 13. RST register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Table 14. Devices with 4 trimming bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Table 15. Devices with 3 trimming bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Table 16. CLK interrupt requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Table 17. Peripheral clock gating bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Table 18. Peripheral clock gating bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Table 19. CLK register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Table 20. Low power mode management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Table 21. I/O port configuration summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Table 22. Effect of low power modes on GPIO ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Table 23. Recommended and non-recommended configurations for analog input . . . . . . . . . . . . . 109
Table 24. GPIO register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Table 25. Time base calculation table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Table 26. AWU register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Table 27. Beeper register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Table 28. Watchdog timeout period (LSI clock frequency = 128 kHz) . . . . . . . . . . . . . . . . . . . . . . . 125
Table 29. IWDG register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Table 30. Window watchdog timing example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Table 31. Effect of low power modes on WWDG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Table 32. WWDG register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Table 33. Timer characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Table 34. Timer feature comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Table 35. Glossary of internal timer signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Table 36. Explanation of indices‘i’, ‘n’, and ‘x’ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Table 37. Counting direction versus encoder signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Table 38. Output control for complementary OCi and OCiN channels with break feature . . . . . . . . 207
Table 39. TIM1 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
Table 40. TIM2 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
Table 41. TIM3 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Table 42. TIM5 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
Table 43. TIM4 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Table 44. TIM6 register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
Table 45. SPI behavior in low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
Table 46. SPI interrupt requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
Table 47. SPI register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
Table 48. I2C interface behavior in low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303

List of tables RM0016
18/467 DocID14587 Rev 14
Table 49. I2C Interrupt requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Table 50. I2C_CCR values for SCL frequency table (fMASTER = 10 MHz or 16 MHz). . . . . . . . . . 317
Table 51. I2C register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
Table 52. UART configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
Table 53. Noise detection from sampled data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
Table 54. Baud rate programming and error calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
Table 55. UART receiver tolerance when UART_DIV[3:0] is zero . . . . . . . . . . . . . . . . . . . . . . . . . . 337
Table 56. UART receiver’s tolerance when UART_DIV[3:0] is different from zero. . . . . . . . . . . . . . 338
Table 57. Frame format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
Table 58. LIN mode selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
Table 59. UART interface behavior in low power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
Table 60. UART interrupt requests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
Table 61. UART1 register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Table 62. UART2 register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Table 63. UART3 register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376
Table 64. UART4 register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Table 65. Example of filter numbering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392
Table 66. Transmit mailbox mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
Table 67. Receive mailbox mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
Table 68. beCAN behavior in low power modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
Table 69. beCAN control and status page - register map and reset values . . . . . . . . . . . . . . . . . . . 426
Table 70. beCAN mailbox pages - register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . 426
Table 71. beCAN filter configuration page - register map and reset values . . . . . . . . . . . . . . . . . . . 427
Table 72. ADC pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
Table 73. Low power modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437
Table 74. ADC Interrupts in single and non-buffered continuous mode (ADC1 and ADC2). . . . . . . 437
Table 75. ADC interrupts in buffered continuous mode (ADC1). . . . . . . . . . . . . . . . . . . . . . . . . . . . 438
Table 76. ADC interrupts in scan mode (ADC1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 439
Table 77. ADC1 register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453
Table 78. ADC2 register map and reset values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454
Table 79. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455

DocID14587 Rev 14 19/467
RM0016 List of figures
22
List of figures
Figure 1. Programming model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 2. Stacking order. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 3. Memory map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 4. Default stack model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 5. Customized stack model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 6. Flash memory and data EEPROM organization on low density STM8S and STM8AF . . . 38
Figure 7. Flash memory and data EEPROM organization on medium density STM8S and STM8AF39
Figure 8. Flash memory and data EEPROM organization high density STM8S and STM8AF . . . . . 40
Figure 9. UBC area size definition on low density STM8S devices . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 10. UBC area size definition on medium density STM8S
and STM8AF with up to 32 Kbytes of Flash program memory . . . . . . . . . . . . . . . . . . . . . . 42
Figure 11. UBC area size definition on high density STM8S and
STM8AF with up to 128 Kbytes of Flash program memory . . . . . . . . . . . . . . . . . . . . . . . . 43
Figure 12. SWIM pin connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Figure 13. Interrupt processing flowchart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Figure 14. Priority decision process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Figure 15. Concurrent interrupt management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 16. Nested interrupt management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Figure 17. Power supply overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figure 18. Reset circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Figure 19. VDD/VDDIO voltage detection: POR/BOR threshold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Figure 20. Clock tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figure 21. HSE clock sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Figure 22. Clock switching flowchart (automatic mode example) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figure 23. Clock switching flowchart (manual mode example) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Figure 24. GPIO block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Figure 25. AWU block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Figure 26. Beep block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Figure 27. Independent watchdog (IWDG) block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Figure 28. Watchdog block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Figure 29. Approximate timeout duration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Figure 30. Window watchdog timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Figure 31. TIM1 general block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Figure 32. Time base unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Figure 33. 16-bit read sequence for the counter (TIM1_CNTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Figure 34. Counter in up-counting mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Figure 35. Counter update when ARPE = 0 (ARR not preloaded) with prescaler = 2 . . . . . . . . . . . . 144
Figure 36. Counter update event when ARPE = 1 (TIM1_ARR preloaded). . . . . . . . . . . . . . . . . . . . 144
Figure 37. Counter in down-counting mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Figure 38. Counter update when ARPE = 0 (ARR not preloaded) with prescaler = 2 . . . . . . . . . . . . 146
Figure 39. Counter update when ARPE = 1 (ARR preloaded), with prescaler = 1 . . . . . . . . . . . . . . 146
Figure 40. Counter in center-aligned mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Figure 41. Counter timing diagram, fCK_CNT = fCK_PSC, TIM1_ARR = 06h, ARPE = 1 . . . . . . . . . . . 148
Figure 42. Update rate examples depending on mode and TIM1_RCR register settings . . . . . . . . . 150
Figure 43. Clock/trigger controller block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Figure 44. Control circuit in normal mode, fCK_PSC = fMASTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Figure 45. TI2 external clock connection example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Figure 46. Control circuit in external clock mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153

List of figures RM0016
20/467 DocID14587 Rev 14
Figure 47. External trigger input block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Figure 48. Control circuit in external clock mode 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Figure 49. Control circuit in trigger mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Figure 50. Control circuit in trigger reset mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Figure 51. Control circuit in trigger gated mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Figure 52. Control circuit in external clock mode 2 + trigger mode . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Figure 53. Timer chaining system implementation example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Figure 54. Trigger/master mode selection blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Figure 55. Master/slave timer example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Figure 56. Gating timer B with OC1REF of timer A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Figure 57. Gating timer B with the counter enable signal of timer A (CNT_EN) . . . . . . . . . . . . . . . . 163
Figure 58. Triggering timer B with the UEV of timer A (TIMERA-UEV) . . . . . . . . . . . . . . . . . . . . . . . 164
Figure 59. Triggering timer B with counter enable CNT_EN of timer A . . . . . . . . . . . . . . . . . . . . . . 165
Figure 60. Triggering Timer A and B with Timer A TI1 input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Figure 61. Capture/compare channel 1 main circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Figure 62. 16-bit read sequence for the TIM1_CCRi register in capture mode . . . . . . . . . . . . . . . . . 167
Figure 63. Channel input stage block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Figure 64. Input stage of TIM 1 channel 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Figure 65. PWM input signal measurement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Figure 66. PWM input signal measurement example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Figure 67. Channel output stage block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Figure 68. Detailed output stage of channel with complementary output (channel 1) . . . . . . . . . . . . 172
Figure 69. Output compare mode, toggle on OC1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Figure 70. Edge-aligned counting mode PWM mode 1 waveforms (ARR = 8) . . . . . . . . . . . . . . . . . 175
Figure 71. Center-aligned PWM waveforms (ARR = 8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Figure 72. Example of one-pulse mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Figure 73. Complementary output with deadtime insertion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
Figure 74. Deadtime waveforms with a delay greater than the negative pulse . . . . . . . . . . . . . . . . . 179
Figure 75. Deadtime waveforms with a delay greater than the positive pulse. . . . . . . . . . . . . . . . . . 179
Figure 76. Six-step generation, COM example (OSSR = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Figure 77. Behavior of outputs in response to a break (channel without complementary output) . . . 182
Figure 78. Behavior of outputs in response to a break (TIM1 complementary outputs) . . . . . . . . . . 183
Figure 79. ETR activation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Figure 80. Example of counter operation in encoder interface mode . . . . . . . . . . . . . . . . . . . . . . . . 186
Figure 81. Example of encoder interface mode with IC1 polarity inverted. . . . . . . . . . . . . . . . . . . . . 186
Figure 82. TIM2/TIM3 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Figure 83. TIM5 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
Figure 84. Time base unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
Figure 85. Input stage block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
Figure 86. Input stage of TIM 2 channel 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
Figure 87. Output stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Figure 88. Output stage of channel 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Figure 89. TIM4 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Figure 90. TIM6 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
Figure 91. SPI block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
Figure 92. Single master/ single slave application. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
Figure 93. Data clock timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Figure 94. TXE/RXNE/BSY behavior in full duplex mode (RXONLY = 0).
Case of continuous transfers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Figure 95. TXE/RXNE/BSY behavior in slave / full duplex mode
(BDM = 0, RXONLY = 0). Case of continuous transfers. . . . . . . . . . . . . . . . . . . . . . . . . . 271
Figure 96. TXE/BSY in master transmit-only mode

DocID14587 Rev 14 21/467
RM0016 List of figures
22
(BDM = 0 and RXONLY = 0). Case of continuous transfers. . . . . . . . . . . . . . . . . . . . . . . 272
Figure 97. TXE/BSY in slave transmit-only mode (BDM = 0 and RXONLY = 0).
Case of continuous transfers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Figure 98. RXNE behavior in receive-only mode (BDM = 0 and RXONLY = 1).
Case of continuous transfers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
Figure 99. TXE/BSY behavior when transmitting (BDM = 0 and RXLONY = 0).
Case of discontinuous transfers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Figure 100. I2Cbus protocol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
Figure 101. I2C block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
Figure 102. Transfer sequence diagram for slave transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
Figure 103. Transfer sequence diagram for slave receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
Figure 104. Transfer sequence diagram for master transmitter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
Figure 105. Method 1: transfer sequence diagram for master receiver . . . . . . . . . . . . . . . . . . . . . . . . 297
Figure 106. Method 2: transfer sequence diagram for master receiver when N >2. . . . . . . . . . . . . . . 298
Figure 107. Method 2: transfer sequence diagram for master receiver when N=2 . . . . . . . . . . . . . . . 300
Figure 108. Method 2: transfer sequence diagram for master receiver when N=1 . . . . . . . . . . . . . . . 300
Figure 109. I2C interrupt mapping diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
Figure 110. UART1 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
Figure 111. UART2 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
Figure 112. UART3 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
Figure 113. UART4 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
Figure 114. Word length programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Figure 115. Configurable stop bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
Figure 116. TC/TXE behavior when transmitting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330
Figure 117. Start bit detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
Figure 118. Data sampling for noise detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334
Figure 119. How to code UART_DIV in the BRR registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
Figure 120. Mute mode using idle line detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Figure 121. Mute mode using Address mark detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
Figure 122. UART example of synchronous transmission. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
Figure 123. UART data clock timing diagram (M=0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
Figure 124. UART data clock timing diagram (M=1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
Figure 125. RX data setup/hold time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343
Figure 126. ISO 7816-3 asynchronous protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
Figure 127. Parity error detection using 1.5 stop bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
Figure 128. IrDA SIR ENDEC- block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
Figure 129. IrDA data modulation (3/16) - normal mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
Figure 130. Break detection in LIN mode (11-bit break length - LBDL bit is set). . . . . . . . . . . . . . . . . 350
Figure 131. Break detection in LIN mode vs framing error detection. . . . . . . . . . . . . . . . . . . . . . . . . . 351
Figure 132. LIN identifier field parity bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Figure 133. LIN identifier field parity check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Figure 134. LIN header reception time-out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
Figure 135. LIN synch field measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
Figure 136. UARTDIV read / write operations when LDUM = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
Figure 137. UARTDIV read / write operations when LDUM = 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
Figure 138. Bit sampling in reception mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
Figure 139. UART interrupt mapping diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362
Figure 140. CAN network topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
Figure 141. beCAN block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
Figure 142. beCAN operating modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
Figure 143. beCAN in silent mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
Figure 144. beCAN in loop back mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383

List of figures RM0016
22/467 DocID14587 Rev 14
Figure 145. beCAN in combined mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
Figure 146. Transmit mailbox states . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
Figure 147. Receive FIFO states . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
Figure 148. 32-bit filter bank configuration (FSCx bits = 0b11 in CAN_FCRx register) . . . . . . . . . . . . 390
Figure 149. 16-bit filter bank configuration (FSCx bits = 0b10 in CAN_FCRx register) . . . . . . . . . . . . 390
Figure 150. 16/8-bit filter bank configuration (FSCx bits = 0b01 in CAN_FCRx register) . . . . . . . . . . 391
Figure 151. 8-bit filter bank configuration (FSCx bits = 0b00 in CAN_FCRx register) . . . . . . . . . . . . . 391
Figure 152. Filter banks configured as in the example in Table 65 . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
Figure 153. CAN error state diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396
Figure 154. Bit timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
Figure 155. CAN frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398
Figure 156. Event flags and interrupt generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Figure 157. CAN register mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424
Figure 158. CAN page mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425
Figure 159. ADC1 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
Figure 160. ADC2 block diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 430
Figure 161. Analog watchdog guarded area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
Figure 162. Timing diagram in single mode (CONT = 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436
Figure 163. Timing diagram in continuous mode (CONT = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436
Figure 164. Right alignment of data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
Figure 165. Left alignment of data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440

DocID14587 Rev 14 23/467
RM0016 Central processing unit (CPU)
28
1 Central processing unit (CPU)
1.1 CPU introduction
The CPU has an 8-bit architecture. Six internal registers allow efficient data manipulations.
The CPU is able to execute 80 basic instructions. It features 20 addressing modes and can
address six internal registers. For the complete description of the instruction set, refer to the
STM8 microcontroller family programming manual (PM0044).
1.2 CPU registers
The six CPU registers are shown in the programming model in Figure 1. Following an
interrupt, the registers are pushed onto the stack in the order shown in Figure 2. They are
popped from stack in the reverse order. The interrupt routine must therefore handle it, if
needed, through the POP and PUSH instructions.
1.2.1 Description of CPU registers
Accumulator (A)
The accumulator is an 8-bit general purpose register used to hold operands and the results
of the arithmetic and logic calculations as well as data manipulations.
Index registers (X and Y)
These are 16-bit registers used to create effective addresses. They may also be used as a
temporary storage area for data manipulations and have an inherent use for some
instructions (multiplication/division). In most cases, the cross assembler generates a
PRECODE instruction (PRE) to indicate that the following instruction refers to the Y register.
Program counter (PC)
The program counter is a 24-bit register used to store the address of the next instruction to
be executed by the CPU. It is automatically refreshed after each processed instruction. As a
result, the STM8 core can access up to 16 Mbytes of memory.
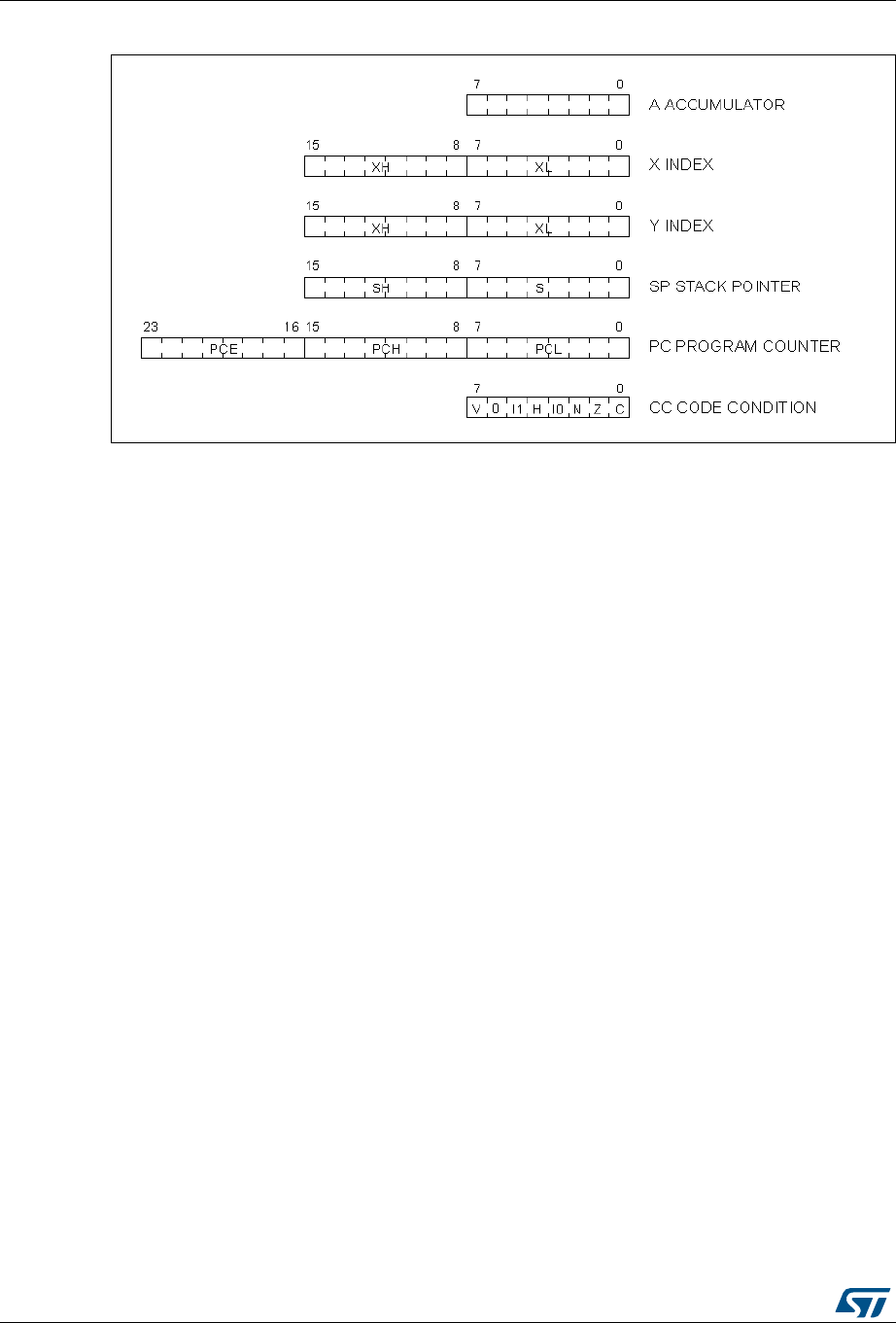
Central processing unit (CPU) RM0016
24/467 DocID14587 Rev 14
Figure 1. Programming model
Stack pointer (SP)
The stack pointer is a 16-bit register. It contains the address of the next free location of the
stack. Depending on the product, the most significant bits can be forced to a preset value.
The stack is used to save the CPU context on subroutine calls or interrupts. The user can
also directly use it through the POP and PUSH instructions.
The stack pointer can be initialized by the startup function provided with the C compiler. For
applications written in C language, the initialization is then performed according to the
address specified in the linker file for C users. If you use your own linker file or startup file,
make sure the stack pointer is initialized properly (with the address given in the datasheets).
For applications written in assembler, you can use either the startup function provided by ST
or write your own by initializing the stack pointer with the correct address.
The stack pointer is decremented after data has been pushed onto the stack and
incremented after data is popped from the stack. It is up to the application to ensure that the
lower limit is not exceeded.
A subroutine call occupies two or three locations. An interrupt occupies nine locations to
store all the internal registers (except SP). For more details refer to Figure 2.
Note: The WFI/HALT instructions save the context in advance. If an interrupt occurs while the
CPU is in one of these modes, the latency is reduced.
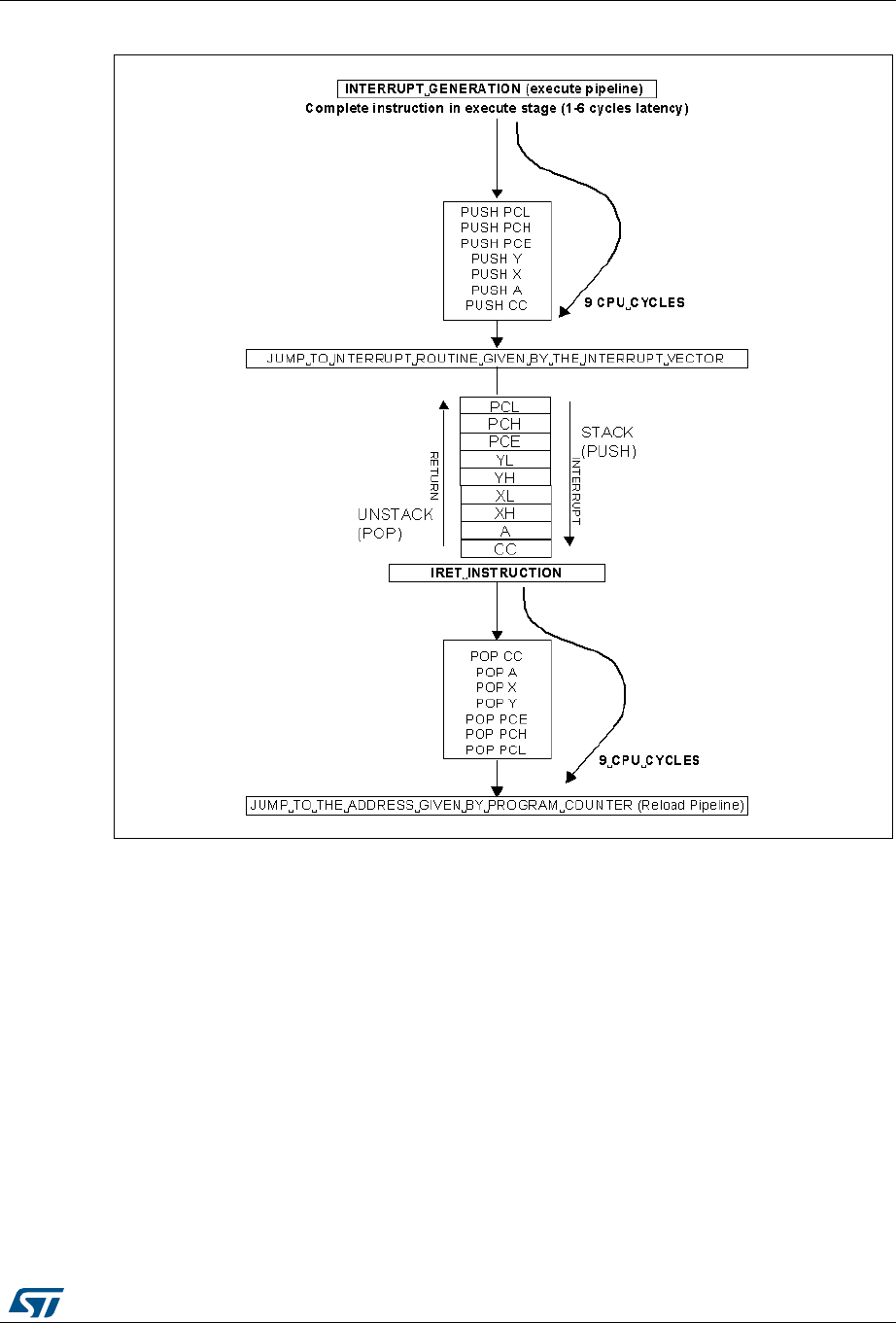
DocID14587 Rev 14 25/467
RM0016 Central processing unit (CPU)
28
Figure 2. Stacking order
Condition code register (CC)
The condition code register is an 8-bit register which indicates the result of the instruction
just executed as well as the state of the processor. The 6th bit (MSB) of this register is
reserved. These bits can be individually tested by a program and specified action taken as a
result of their state. The following paragraphs describe each bit:
•V: Overflow
When set, V indicates that an overflow occurred during the last signed arithmetic operation,
on the MSB result bit. See the INC, INCW, DEC, DECW, NEG, NEGW, ADD, ADDW, ADC,
SUB, SUBW, SBC, CP, and CPW instructions.
•I1: Interrupt mask level 1
The I1 flag works in conjunction with the I0 flag to define the current interruptability level as
shown in Table 1. These flags can be set and cleared by software through the RIM, SIM,
HALT, WFI, IRET, TRAP, and POP instructions and are automatically set by hardware when
entering an interrupt service routine.
Central processing unit (CPU) RM0016
26/467 DocID14587 Rev 14
•H: Half carry bit
The H bit is set to 1 when a carry occurs between the bits 3 and 4 of the ALU during an ADD
or ADC instruction. The H bit is useful in BCD arithmetic subroutines.
•I0: Interrupt mask level 0
See Flag I1.
•N: Negative
When set to 1, this bit indicates that the result of the last arithmetic, logical or data
manipulation is negative (i.e. the most significant bit is a logic 1).
•Z: Zero
When set to 1, this bit indicates that the result of the last arithmetic, logical or data
manipulation is zero.
•C: Carry
When set, C indicates that a carry or borrow out of the ALU occurred during the last
arithmetic operation on the MSB operation result bit. This bit is also affected during bit test,
branch, shift, rotate and load instructions. See the ADD, ADC, SUB, and SBC instructions.
In a division operation, C indicates if trouble occurred during execution (quotient overflow or
zero division). See the DIV instruction.
In bit test operations, C is the copy of the tested bit. See the BTJF and BTJT instructions.
In shift and rotate operations, the carry is updated. See the RRC, RLC, SRL, SLL, and SRA
instructions.
This bit can be set, reset or complemented by software using the SCF, RCF, and CCF
instructions.
Example: Addition
$B5 + $94 = "C" + $49 = $149
Table 1. Interrupt levels
Interruptability Priority I1 I0
Interruptable main Lowest
Highest
10
Interruptable level 1 0 1
Interruptable level 2 0 0
Non interruptable 1 1
C7 0
0 10110101
C7 0
+0 10010100
C7 0
=1 01001001
DocID14587 Rev 14 27/467
RM0016 Central processing unit (CPU)
28
1.2.2 STM8 CPU register map
The CPU registers are mapped in the STM8 address space as shown inTable 2. These
registers can only be accessed by the debug module but not by memory access instructions
executed in the core.
1.3 Global configuration register (CFG_GCR)
1.3.1 Activation level
The MCU activation level is configured by programming the AL bit in the CFG_GCR register.
For information on the use of this bit refer to Section 6.4: Activation level/low power mode
control on page 63.
1.3.2 SWIM disable
By default, after an MCU reset, the SWIM pin is configured to allow communication with an
external tool for debugging or Flash/EEPROM programming. This pin can be configured by
the application for use as a general purpose I/O. This is done by setting the SWD bit in the
CFG_GCR register.
Table 2. CPU register map
Address
offset Register name765432 1 0
0x00 A MSB----- -LSB
0x01 PCE MSB - ---- -LSB
0x02 PCH MSB----- -LSB
0x03 PCL MSB----- -LSB
0x04 XH MSB----- -LSB
0x05 XL MSB----- -LSB
0x06 YH MSB----- -LSB
0x07 YL MSB----- -LSB
0x08 SPH MSB----- -LSB
0x09 SPL MSB----- -LSB
0x0A CC V 0 I1 H I0 N Z C
Central processing unit (CPU) RM0016
28/467 DocID14587 Rev 14
1.3.3 Description of global configuration register (CFG_GCR)
Address offset: 0x00
Reset value: 0x00
1.3.4 Global configuration register map and reset values
The CFG_GCR is mapped in the STM8 address space. Refer to the corresponding
datasheets for the base address.
76543210
Reserved AL SWD
rw rw
Bits 7:2 Reserved
Bit 1 AL: Activation level
This bit is set and cleared by software. It configures main or interrupt-only activation.
0: Main activation level. An IRET instruction causes the context to be retrieved from the stack and
the main program continues after the WFI instruction.
1: Interrupt-only activation level. An IRET instruction causes the CPU to go back to WFI/Halt mode
without restoring the context.
Bit 0 SWD: SWIM disable
0: SWIM mode enabled
1: SWIM mode disabled
When SWIM mode is enabled, the SWIM pin cannot be used as general purpose I/O.
Table 3. CFG_GCR register map
Address
offset Register name765432 1 0
0x00 CFG_GCR
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
AL
0
SWD
0

DocID14587 Rev 14 29/467
RM0016 Boot ROM
29
2 Boot ROM
The internal 2 Kbyte boot ROM (available in some devices) contains the bootloader code.
Its main tasks are to download the application program to the internal Flash/EEPROM
through the SPI, CAN, or UART interface, and to program the code, data, option bytes and
interrupt vectors in internal Flash/EEPROM.
To perform bootlloading in LIN mode, a different bootloader communication protocol is
implemented on UART2/UART3 and UART1.
The boot loader starts executing after reset. Refer to the STM8 bootloader user manual
(UM0560) for more details.
Memory and register map RM0016
30/467 DocID14587 Rev 14
3 Memory and register map
For details on the memory map, I/O port hardware register map and CPU/SWIM/debug
module/interrupt controller registers, refer to the product datasheets.
3.1 Memory layout
3.1.1 Memory map
Figure 3. Memory map
The RAM upper limit, data EEPROM upper and lower limit, Option Byte upper limit,
hardware (HW) registers upper limit, and the program memory upper limit are specific to the
device configuration. Please refer to the datasheets for quantitative information.
00 000h
RAM upper limit
Data EEPROM lower limit
Data EEPROM upper limit
00 4800h
00 5000h
00 6000h
00 6800h
00 7F00h
00 8000h
00 8080h
RAM
Stack
Reserved
Data EEPROM
Reserved
Option bytes
Reserved
HW registers
Reserved
Boot ROM (optional)
Reserved
Registers for CPU, SWIM, ITC, DM
Interrupt vectors
Program EEPROM
Program memory upper limit
Option bytes upper limit
HW registers upper limit
ai18468
DocID14587 Rev 14 31/467
RM0016 Memory and register map
33
3.1.2 Stack handling
Default stack model
The stack of the STM8S and STM8AF microcontrollers is implemented in the user RAM
area. The default stack model is shown in Figure 4.
Figure 4. Default stack model
1. The stack roll-over limit is not implemented on all devices. Refer to the datasheets for detailed information.
Stack pointer initialization value
This is the default value of the stack pointer. The user must take care to initialize this pointer.
Correct loading of this pointer is usually performed by the initialization code generated by
the development tools (linker file). In the default stack model this pointer is initialized to the
RAM end address.
Stack roll-over limit
In some devices, a stack roll-over limit is implemented at a fixed address. If the stack pointer
is decreased below the stack roll-over limit, using a push operation or during context saving
for subroutines or interrupt routines, it is reset to the RAM end address. The stack pointer
does not roll over if stack pointer arithmetic is used.
Such behavior of the stack pointer is of particular importance when developing software on
a device with a different memory configuration than the target device.
ai15055v2
Default stack model
End address
Stack roll-over limit (1)
Stack pointer initialization value
Start address
RAM
Memory and register map RM0016
32/467 DocID14587 Rev 14
Customized stack model
STM8S and STM8AF stack pointer handling allows a customized stack model to be
implemented. This permits a flexible stack size without restrictions due to the stack roll-over
limit. Implementing the customized stack also benefits portability of the software on products
with different memory configurations. Figure 5 shows the customized stack model.
Figure 5. Customized stack model
1. The stack roll-over limit is not implemented on all devices.
2. The guard cells are RAM locations that have to be continuously polled by the application program to detect
whether a stack overflow has taken place.
In this stack model, the initial stack pointer must be placed beyond the stack roll-over limit.
Consequently, the growing stack never reaches the stack roll-over limit. It is clear that in this
implementation the stack size is not limited by the roll-over mechanism. Nevertheless, the
user has to define the stack position and stack size in the link file, and he has to ensure that
the stack pointer does not exceed the defined stack area (stack overflow or under-run).
The RAM locations above and below the customized stack can be regularly used as RAM to
store variables or other information.
Guard cells can be implemented at the lower end of the stack to detect if the stack pointer
exceeds the defined limit. These cells are standard RAM locations, initialized with fixed
values that the stack overwrites if an overflow occurs. The user software can regularly poll
these cells, detect the overflow condition, and put the application in a fail safe state.
During the software validation phase hardware breakpoints can be set at both limits of the
stack to validate that neither a stack overflow nor an under-run happens.
ai15056v2
Customized stack model
End address
Stack roll-over limit (1)
Stack pointer initialization value
Start address
RAM
Optional guard cells (2)
Flexible stack size
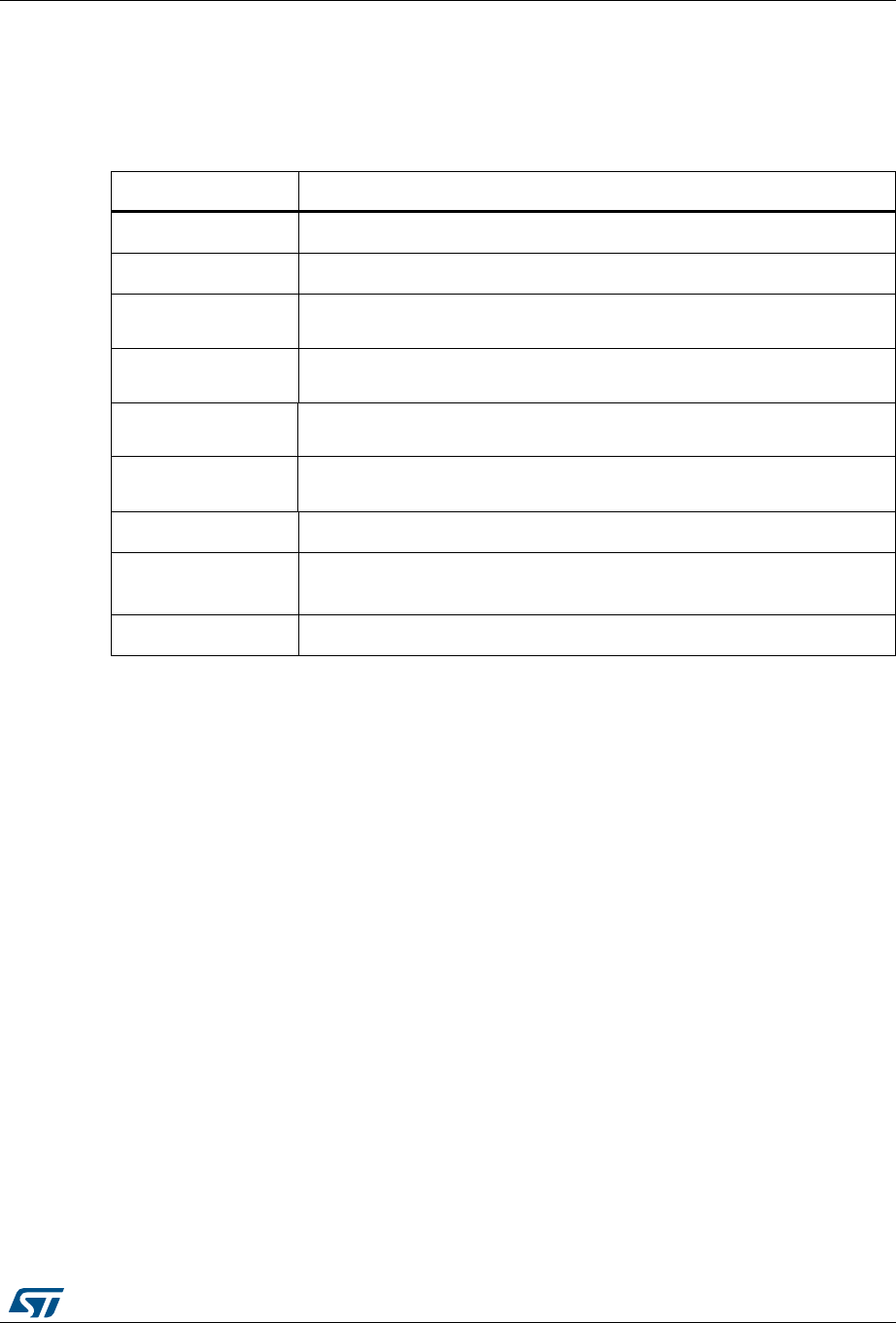
DocID14587 Rev 14 33/467
RM0016 Memory and register map
33
3.2 Register description abbreviations
In the register descriptions of each chapter in this reference manual, the following
abbreviations are used:
Table 4. List of abbreviations
Abbreviation Description
read/write (rw) Software can read and write to these bits.
read-only (r) Software can only read these bits.
write only (w) Software can only write to this bit. Reading the bit returns a meaningless
value.
read/write once (rwo) Software can only write once to this bit but can read it at any time. Only a
reset can return this bit to its reset value.
read/clear (rc_w1) Software can read and clear this bit by writing 1. Writing ‘0’ has no effect on
the bit value.
read/clear (rc_w0) Software can read and clear this bit by writing 0. Writing ‘1’ has no effect on
the bit value.
read/set (rs) Software can read and set this bit. Writing ‘0’ has no effect on the bit value.
read/clear by read
(rc_r)
Software can read this bit. Reading this bit automatically clears it to ‘0’.
Writing ‘0’ has no effect on the bit value.
Reserved (Res.) Reserved bit, must be kept at reset value.

Flash program memory and data EEPROM RM0016
34/467 DocID14587 Rev 14
4 Flash program memory and data EEPROM
4.1 Flash and EEPROM introduction
The embedded Flash program memory and data EEPROM memories are controlled by a
common set of registers. Using these registers, the application can program or erase
memory contents and set write protection, or configure specific low power modes. The
application can also program the device option bytes.
4.2 Flash and EEPROM glossary
•Block
A block is a set of bytes that can be programmed or erased in one single programming
operation. Operations that are performed at block level are faster than standard
programming and erasing. Refer to Table 5 for the details on block size.
•Page
A page is a set of blocks.
A dedicated option byte can be used to configure, by increments of one page, the size
of the user boot code.

DocID14587 Rev 14 35/467
RM0016 Flash program memory and data EEPROM
56
4.3 Main Flash memory features
•STM8S and STM8AF EEPROM is divided into two memory areas
– Up to 128 Kbytes of Flash program memory. The density differs according to the
device. Refer to Section 4.4: Memory organization for details
– Up to 2 Kbytes of data EEPROM including option bytes. Data EEPROM density
differs according to the device. Refer to Section 4.4: Memory organization for
details.
•Programming modes
– Byte programming and automatic fast byte programming (without erase operation)
– Word programming
– Block programming and fast block programming mode (without erase operation)
– Interrupt generation on end of program/erase operation and on illegal program
operation.
•Read-while-write capability (RWW). This feature is not available on all devices. Refer to
the datasheets for details
•In-application programming (IAP) and in-circuit programming (ICP) capabilities
•Protection features
– Memory readout protection (ROP)
– Program memory write protection with memory access security system (MASS
keys)
– Data memory write protection with memory access security system (MASS keys)
– Programmable write protected user boot code area (UBC).
•Memory state configurable to operating or power-down (IDDQ) in Halt and Active-halt
modes

Flash program memory and data EEPROM RM0016
36/467 DocID14587 Rev 14
4.4 Memory organization
4.4.1 STM8S and STM8AF memory organization
STM8S and STM8AF EEPROM is organized in 32-bit words (4 bytes per word).
The memory organization differs according to the devices:
•Low density STM8S and STM8AF devices
– 8 Kbytes of Flash program memory organized in 128 pages or blocks of 64 bytes
each. The Flash program memory is divided into 2 areas, the user boot code area
(UBC), which size can be configured by option byte, and the main program
memory area. The Flash program memory is mapped in the upper part of the
STM8S addressing space and includes the reset and interrupt vectors.
– Up to 640 bytes of data EEPROM (DATA) organized in pages or blocks of
64 bytes each. One block (64 bytes) contains the option bytes of which 11 are
used to configure the device hardware features. The options bytes can be
programmed in user, IAP and ICP/SWIM modes.
•Medium density STM8S devices
– From 16 to 32 Kbytes of Flash program memory organized in up to 64 pages of 4
blocks of 128 bytes each. The Flash program memory is divided into 2 areas, the
user boot code area (UBC), which size can be configured by option byte, and the
main program memory area. The Flash program memory is mapped in the upper
part of the STM8S addressing space and includes the reset and interrupt vectors.
– Up to 1 Kbyte of data EEPROM (DATA) organized in up to 2 pages of 4 blocks of
128 bytes each. One block (128 bytes) contains the option bytes of which 13 are
used to configure the device hardware features. The options bytes can be
programmed in user, IAP and ICP/SWIM modes.
•Medium density STM8AF devices
– From 16 to 32 Kbytes of Flash program memory organized in up to 64 pages of 4
blocks of 128 bytes each. The Flash program memory is divided into 2 areas, the
user boot code area (UBC), which size can be configured by option byte, and the
main program memory area. The Flash program memory is mapped in the upper
part of the STM8AF addressing space and includes the reset and interrupt
vectors.
– Up to 1 Kbyte of data EEPROM (DATA) organized in up to 2 pages of 4 blocks of
128 bytes each. One block (128 bytes) contains the option bytes of which 13 are
used to configure the device hardware features. The options bytes can be
programmed in user, IAP and ICP/SWIM modes.
•High density STM8S devices
– From 32 to 128 Kbytes of Flash program memory organized in up to 256 pages of
4 blocks of 128 bytes each. The Flash program memory is divided into 2 areas,
the user boot code area (UBC), which size can be configured by option byte, and
the main program memory area. The Flash program memory is mapped in the
upper part of the STM8S addressing space and includes the reset and interrupt
vectors.
– Up to 2 Kbytes of data EEPROM (DATA) organized in up to 4 pages of 4 blocks of
128 bytes each. The size of the DATA area is fixed for a given microcontroller. One
block (128 bytes) contains the option bytes of which 15 are used to configure the

DocID14587 Rev 14 37/467
RM0016 Flash program memory and data EEPROM
56
device hardware features. The options bytes can be programmed in user, IAP and
ICP/SWIM modes.
•High density STM8AF devices
– From 32 to 128 Kbytes of Flash program memory organized in up to 256 pages of
4 blocks of 128 bytes each. The Flash program memory is divided into 2 areas,
the user boot code area (UBC), which size can be configured by option byte, and
the main program memory area. The Flash program memory is mapped in the
upper part of the STM8AF addressing space and includes the reset and interrupt
vectors.
– Up to 2 Kbytes of data EEPROM (DATA) organized in up to 4 pages of 4 blocks of
128 bytes each. The size of the DATA area is fixed for a given microcontroller. One
block (128 bytes) contains the option bytes of which 15 are used to configure the
device hardware features. The options bytes can be programmed in user, IAP and
ICP/SWIM modes.
The page defines the granularity of the user boot code area as described in Section 4.4.3:
User boot area (UBC).
Figure 6, Figure 7, and Figure 8 show the Flash memory and data EEPROM organization
for STM8S and STM8AF devices. Refer to the STM8S and STM8AF programming manual
(PM0051) for more information.
Note: The EEPROM access time allows the device to run up to 16 MHz. For clock frequencies
above 16 MHz, Flash/data EEPROM access must be configured for 1 wait state. This is
enabled by the device option byte (refer to the option bytes section of the STM8S and
STM8AF datasheets).
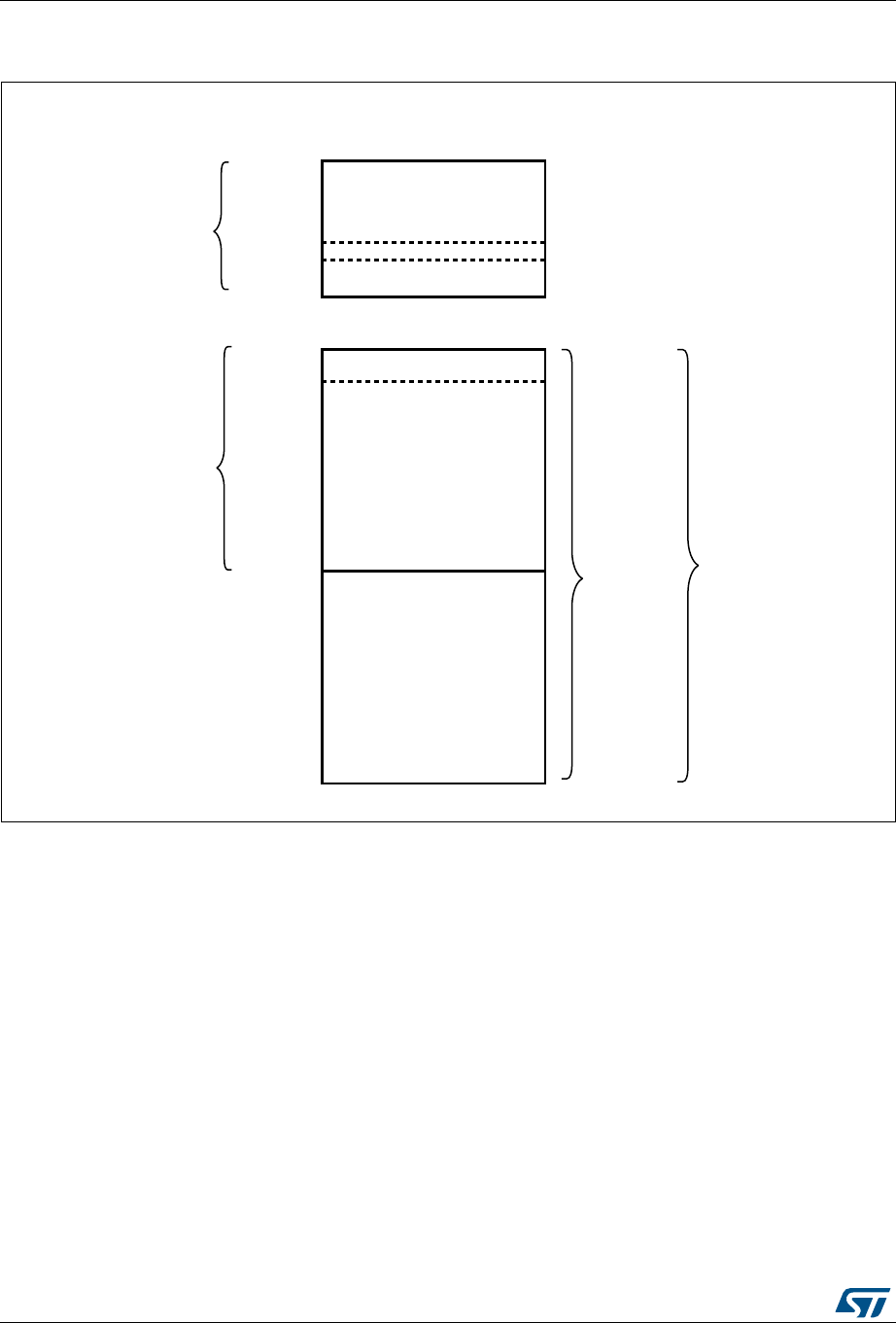
Flash program memory and data EEPROM RM0016
38/467 DocID14587 Rev 14
Figure 6. Flash memory and data EEPROM organization on low density STM8S and
STM8AF
ai15503
USER BOOT CODE (UBC)
(permanently write protected)
0x00 8000
MAIN PROGRAM
(write access possible for IAP
and using MASS mechanism)
0x00 9FFF
Programmable size
from 2 pages (1 Kbytes)
up to 8 Kbytes
(1 page steps)
DATA MEMORY
(up to 640 bytes)
8 Kbytes of
FLASH PROGRAM
MEMORY
Flash program
memory
Interrupt vectors (128 bytes)
OPTION BYTES (1 block)
0x00 483F
0x00 4000
DATA EEPROM
1 page = 1 block = 64 bytes
0x00 4800
0x00 427F
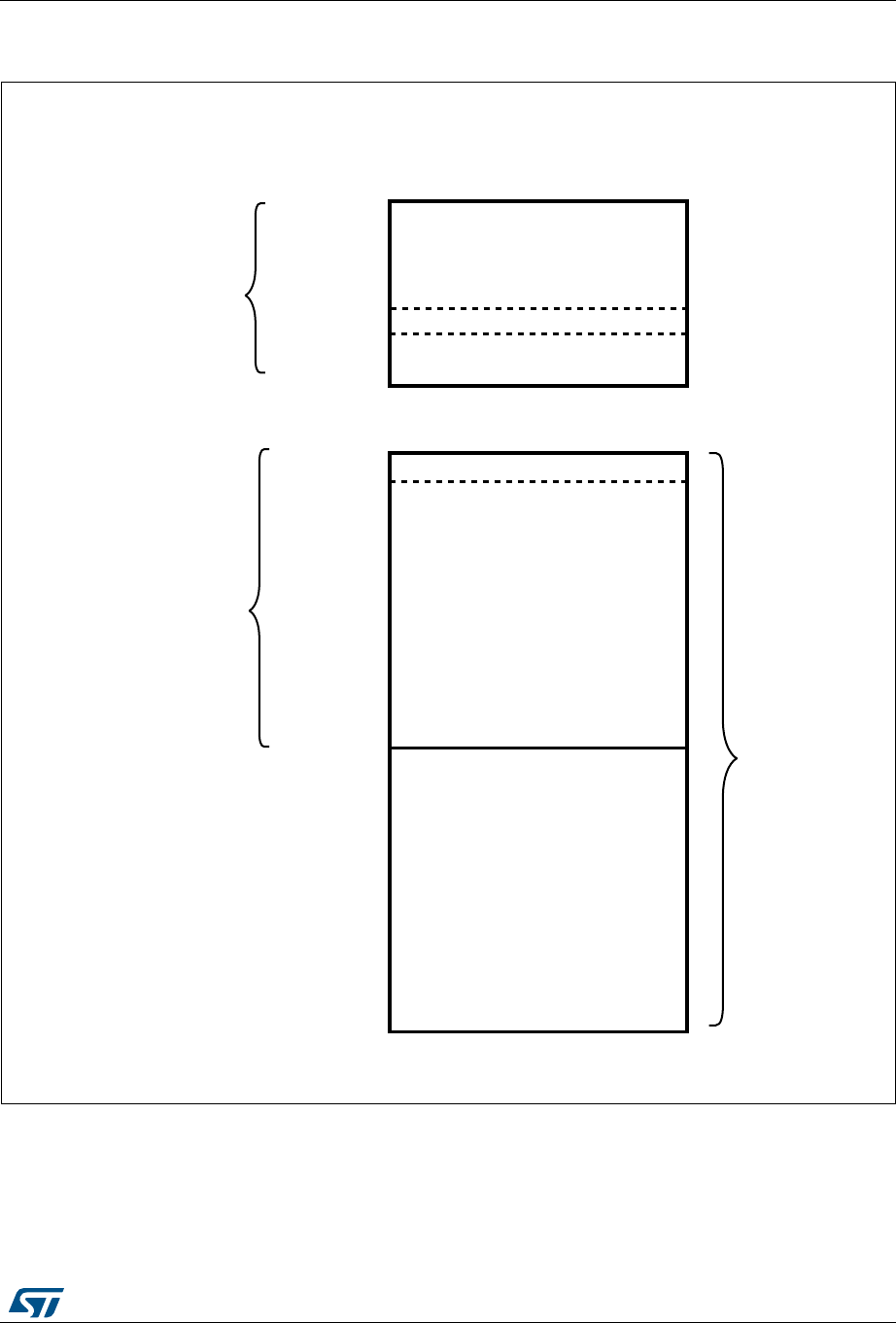
DocID14587 Rev 14 39/467
RM0016 Flash program memory and data EEPROM
56
Figure 7. Flash memory and data EEPROM organization on medium density STM8S
and STM8AF
1. The memory mapping is given for the STM8AF devices featuring 32 Kbytes of Flash program memory and
1 Kbytes of SRAM.
ai15502
USER BOOT CODE (UBC)
(permanently write protected)
00 8000h
MAIN PROGRAM
(write access possible for IAP
and using MASS mechanism)
00 FFFFh
Programmable size
from 2 pages (1 Kbyte)
up to 32 Kbytes
(1 page steps)
DATA MEMORY
(up to 1 Kbyte)
Flash program
memory
Interrupt vectors (128 bytes)
OPTION BYTES (1 block)
00 487Fh
00 4000h
DATA EEPROM
1 page = 512 bytes
1 block = 128 bytes
00 43FFh
00 4800h
Flash program memory and data EEPROM RM0016
40/467 DocID14587 Rev 14
Figure 8. Flash memory and data EEPROM organization high density STM8S and
STM8AF
4.4.2 Memory access/ wait state configuration
The Flash/ data EEPROM access time allows the device to run at up to 16 MHz without wait
states.
When using the high-speed external clock (HSE) at higher frequencies up to 24 MHz, one
wait state is necessary. In this case the device option byte should be programmed to insert
this wait state. Refer to the datasheet option byte section.
4.4.3 User boot area (UBC)
The user boot area (UBC) contains the reset and the interrupt vectors. It can be used to
store the IAP and communication routines. The UBC area has a second level of protection
to prevent unintentional erasing or modification during IAP programming. This means that it
is always write protected and the write protection cannot be unlocked using the MASS keys.
ai15501b
USER BOOT CODE (UBC)
(permanently write protected)
0x00 8000
MAIN PROGRAM
(write access possible for IAP
and using MASS mechanism)
0x02 7FFF
Programmable size
from 2 pages (1 Kbytes)
up to 64 or 128 Kbytes
(1 page steps)
DATA MEMORY
(up to 2 Kbytes)
32 to 128 Kbytes of
Flash Program
Memory
Flash program
memory
Interrupt vectors (128 bytes)
OPTION BYTES (1 block)
0x00 487F
0x00 4000
DATA EEPROM
1 page = 512 bytes
1 block = 128 bytes
0x00 47FF
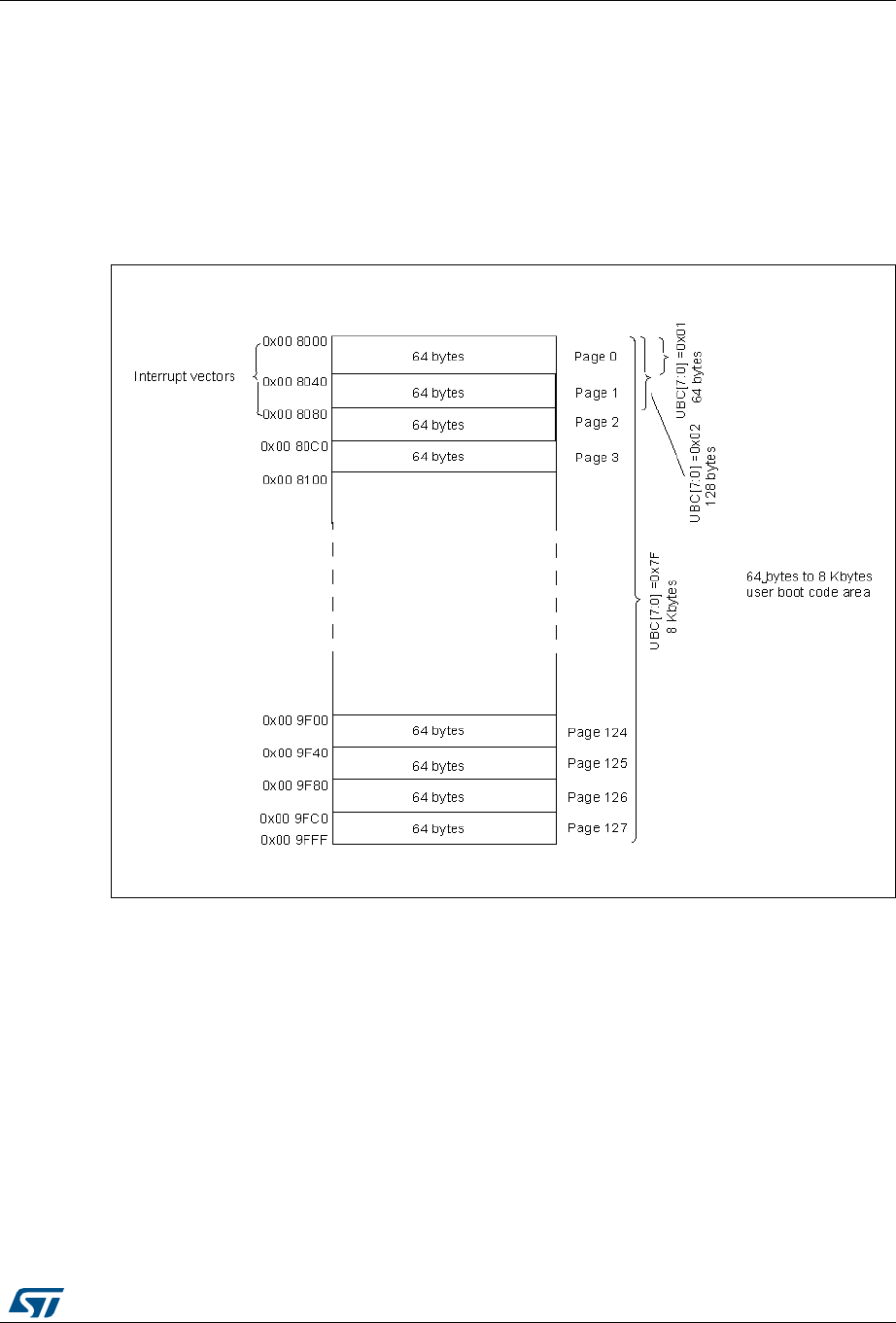
DocID14587 Rev 14 41/467
RM0016 Flash program memory and data EEPROM
56
The size of the UBC area can be obtained by reading the UBC option byte.
The size of the UBC area can be configured in ICP mode (using the SWIM interface)
through the UBC option byte. The UBC option byte specifies the number of pages allocated
for the UBC area starting from address 0x00 8000.
Refer to Figure 9, Figure 10, and Figure 11 for a description of the UBC area memory
mapping and to the option byte section in the datasheets for more details on the UBC option
byte.
Figure 9. UBC area size definition on low density STM8S devices
1. N (number of protected pages) = UBC[7:0].
2. UBC[7:0] = 0x00 means no user boot code area is defined. Refer to the datasheets for the description of
the UBC option byte.
3. The first 2 pages (128 bytes) contain the interrupt vectors.
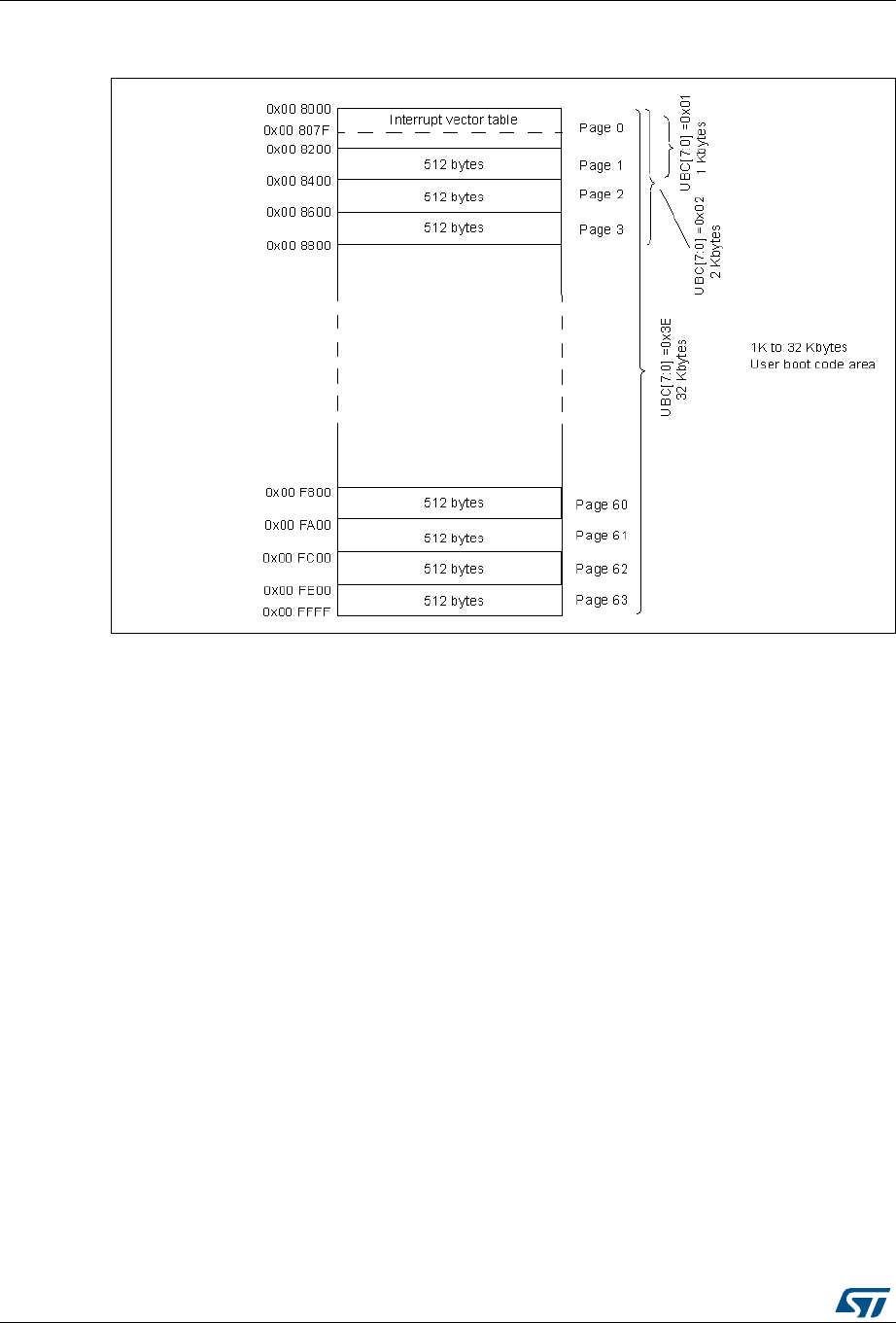
Flash program memory and data EEPROM RM0016
42/467 DocID14587 Rev 14
Figure 10. UBC area size definition on medium density STM8S
and STM8AF with up to 32 Kbytes of Flash program memory
1. N (number of protected pages) = UBC[7:0] + 2 for UBC[7:0] > 1.
2. UBC[7:0] =0x00 means no user boot code area is defined. Refer to the datasheets for the description of the
UBC option byte.
3. The first 2 pages (1 Kbytes) contain the 128 bytes of interrupt vectors (32 IT vectors).
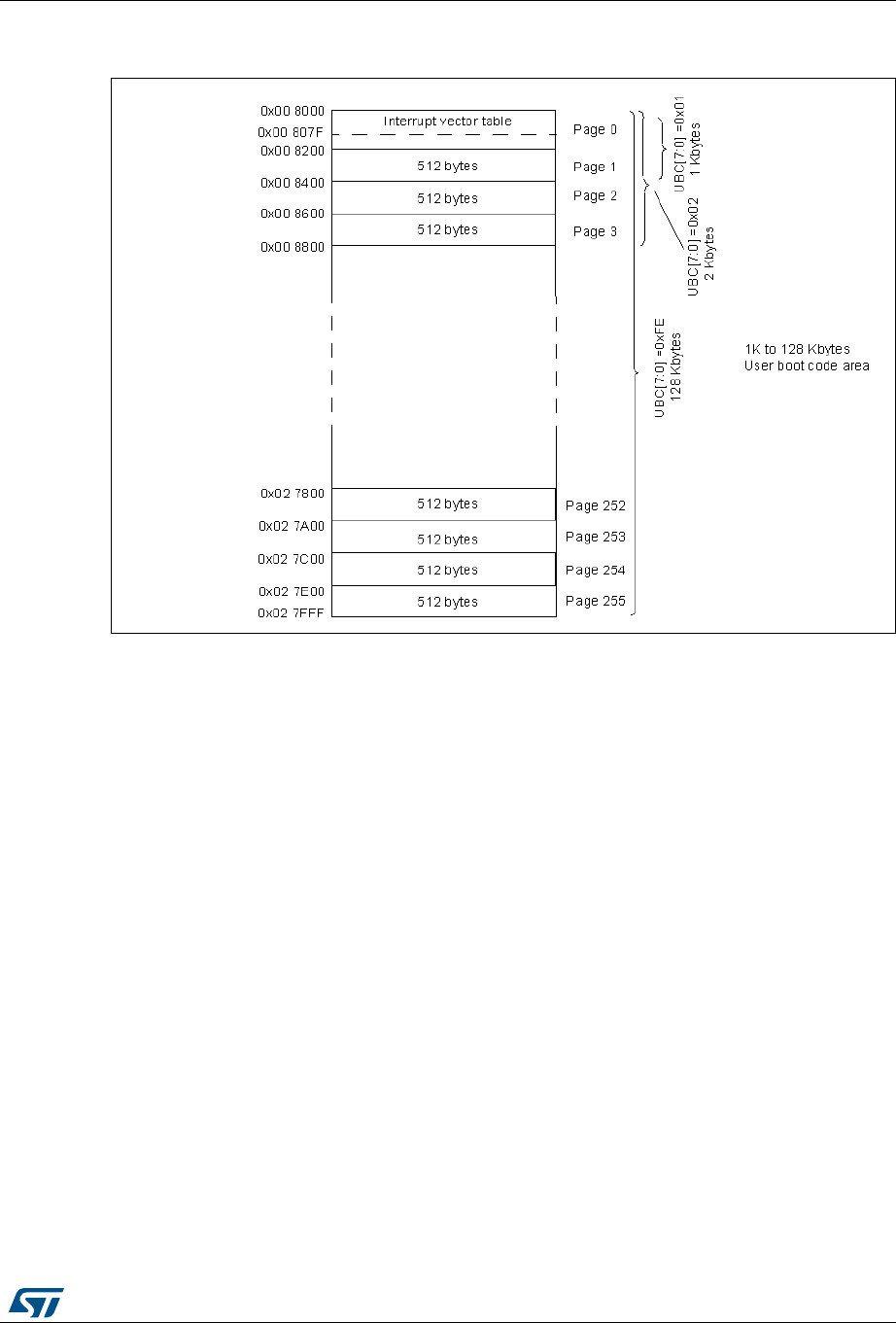
DocID14587 Rev 14 43/467
RM0016 Flash program memory and data EEPROM
56
Figure 11. UBC area size definition on high density STM8S and
STM8AF with up to 128 Kbytes of Flash program memory
1. UBC[7:0] = 0x00 means no user boot code area is defined. Refer to the datasheets for the description of
the UBC option byte.
2. The first 2 pages (1 Kbytes) contain the interrupt vectors, of which only 128 bytes (32 IT vectors) are used.
4.4.4 Data EEPROM (DATA)
The data EEPROM area can be used to store application data. By default, the DATA area is
write protected to prevent unintentional modification when the main program is updated in
IAP mode. The write protection can be unlocked only by using a specific MASS key
sequence (refer to Enabling write access to the DATA area).
Refer to Section 4.4: Memory organization for the size of the DATA area.
4.4.5 Main program area
The main program is the part of the Flash program memory which is used to store the
application code (see Figure 6, Figure 7 and Figure 8).
4.4.6 Option bytes
The option bytes are used to configure device hardware features and memory protection.
They are located in a dedicated memory array of one block.
The option bytes can be modified both in ICP/SWIM and in IAP mode, with OPT bit of the
FLASH_CR2 register set to 1 and the NOPT bit of the FLASH_NCR2 register set to 0 (see
Section 4.8.2: Flash control register 2 (FLASH_CR2) and Section 4.8.3: Flash
complementary control register 2 (FLASH_NCR2)).

Flash program memory and data EEPROM RM0016
44/467 DocID14587 Rev 14
Refer to the option byte section in the datasheet for more information on option bytes, and to
the STM8 SWIM protocol and debug module user manual (UM0470) for details on how to
program them.
4.5 Memory protection
4.5.1 Readout protection
Readout protection is selected by programming the ROP option byte to 0xAA. When
readout protection is enabled, reading or modifying the Flash program memory and DATA
area in ICP mode (using the SWIM interface) is forbidden, whatever the write protection
settings. Furthermore, on medium and high density STM8S and STM8AF, the debug
module (DM) cannot start code execution by the CPU when the readout protection is active,
and the CPU is stalled.
Even if no protection can be considered as totally unbreakable, the readout feature provides
a very high level of protection for a general purpose microcontroller.
Removing the readout protection
The readout protection can be disabled on the program memory, UBC and DATA areas, by
reprogramming the ROP option byte in ICP mode. In this case, the Flash program memory,
the DATA area and the option bytes are automatically erased and the device can be
reprogrammed.
Refer to Table 6: Memory access versus programming method for details on memory
access when readout protection is enabled or disabled.
4.5.2 Memory access security system (MASS)
After reset, the main program and DATA areas are protected against unintentional write
operations. They must be unlocked before attempting to modify their content. This unlock
mechanism is managed by the memory access security system (MASS).
The UBC area specified in the UBC option byte is always write protected (see Section 4.4.3:
User boot area (UBC)).
Once the memory has been modified, it is recommended to enable the write protection
again to protect the memory content against corruption.
Enabling write access to the main program memory
After a device reset, it is possible to disable the main program memory write protection by
writing consecutively two values called MASS keys to the FLASH_PUKR register (see
Section 4.8.6: Flash program memory unprotecting key register (FLASH_PUKR)). These
programmed keys are then compared to two hardware key values:
•First hardware key: 0b0101 0110 (0x56)
•Second hardware key: 0b1010 1110 (0xAE)
The following steps are required to disable write protection of the main program area:

DocID14587 Rev 14 45/467
RM0016 Flash program memory and data EEPROM
56
1. Write a first 8-bit key into the FLASH_PUKR register. When this register is written for
the first time after a reset, the data bus content is not latched into the register, but
compared to the first hardware key value (0x56).
2. If the key available on the data bus is incorrect, the FLASH_PUKR register remains
locked until the next reset. Any new write commands sent to this address are
discarded.
3. If the first hardware key is correct when the FLASH_PUKR register is written for the
second time, the data bus content is still not latched into the register, but compared to
the second hardware key value (0xAE).
4. If the key available on the data bus is incorrect, the write protection on program
memory remains locked until the next reset. Any new write commands sent to this
address is discarded.
5. If the second hardware key is correct, the main program memory is write unprotected
and the PUL bit of the FLASH_IAPSR is set (see Section 4.8.8: Flash status register
(FLASH_IAPSR)) register.
Before starting programming, the application must verify that PUL bit is effectively set. The
application can choose, at any time, to disable again write access to the Flash program
memory by clearing the PUL bit.
Enabling write access to the DATA area
After a device reset, it is possible to disable the DATA area write protection by writing
consecutively two values called MASS keys to the FLASH_DUKR register (see
Section 4.8.9: Flash register map and reset values). These programmed keys are then
compared to two hardware key values:
•First hardware key: 0b1010 1110 (0xAE)
•Second hardware key: 0b0101 0110 (0x56)
The following steps are required to disable write protection of the DATA area:
1. Write a first 8-bit key into the FLASH_DUKR register. When this register is written for
the first time after a reset, the data bus content is not latched into the register, but
compared to the first hardware key value (0xAE).
2. If the key available on the data bus is incorrect, the application can re-enter two MASS
keys to try unprotecting the DATA area.
3. If the first hardware key is correct, the FLASH_DUKR register is programmed with the
second key. The data bus content is still not latched into the register, but compared to
the second hardware key value (0x56).
4. If the key available on the data bus is incorrect, the data EEPROM area remains write
protected until the next reset. Any new write command sent to this address is ignored.
5. If the second hardware key is correct, the DATA area is write unprotected and the DUL
bit of the FLASH_IAPSR register is set (see Section 4.8.8: Flash status register
(FLASH_IAPSR)).
Before starting programming, the application must verify that the DATA area is not write
protected by checking that the DUL bit is effectively set. The application can choose, at any
time, to disable again write access to the DATA area by clearing the DUL bit.
4.5.3 Enabling write access to option bytes
The procedure for enabling write access to the option byte area is the same as the one used
for data EEPROM. However, the OPT bit in the Flash control register 2 (FLASH_CR2) must

Flash program memory and data EEPROM RM0016
46/467 DocID14587 Rev 14
be set, and the corresponding NOPT bit in the Flash complementary control register 2
(FLASH_NCR2) must be cleared to enable write access to the option bytes.
4.6 Memory programming
The main program memory, and the DATA area must be unlocked before attempting to
perform any program operation. The unlock mechanism depends on the memory area to be
programmed as described in Section 4.5.2: Memory access security system (MASS).
4.6.1 Read-while-write (RWW)
The RWW feature allows write operations to be performed on data EEPROM while reading
and executing the program memory. Execution time is therefore optimized. The opposite
operation is not allowed: Data memory cannot be read while writing to the program memory.
This RWW feature is always enabled and can be used at any time. Any access to Flash
control registers FLASH_CR1 and FLASH_CR2 while writing to the memory stalls the CPU,
making RWW unavailable.
Note: The RWW feature is not available on all devices. Refer to the datasheets for addition
information.
4.6.2 Byte programming
The main program memory and the DATA area can be programmed at byte level. To
program one byte, the application writes directly to the target address.
•In the main program memory:
The application stops for the duration of the byte program operation.
•In DATA area:
– Devices with RWW capability: Program execution does not stop, and the byte
program operation is performed using the read-while-write (RWW) capability in
IAP mode.
– Devices without RWW capability: The application stops for the duration of the byte
program operation.
To erase a byte, simply write 0x00 at the corresponding address.
The application can read the FLASH_IAPSR register to verify that the programming or
erasing operation has been correctly executed:
•EOP flag is set after a successful programming operation
•WR_PG_DIS is set when the software has tried to write to a protected page. In this
case, the write procedure is not performed.
As soon as one of these flags are set, a Flash interrupt is generated if it has been previously
enabled by setting the IE bit of the FLASH_CR1 register.
Automatic fast byte programming
The programming duration can vary according to the initial content of the target address. If
the word (4 bytes) containing the byte to be programmed is not empty, the whole word is
automatically erased before the program operation. On the contrary if the word is empty, no
erase operation is performed and the programming time is shorter (see tPROG in Table
“Flash program memory” in the datasheet).

DocID14587 Rev 14 47/467
RM0016 Flash program memory and data EEPROM
56
However, the programming time can be fixed by setting the FIX bit of the FLASH_CR1
register to force the program operation to systematically erase the byte whatever its content
(see Section 4.8.1: Flash control register 1 (FLASH_CR1)). The programming time is
consequently fixed and equal to the sum of the erase and write time (see tPROG in Table
“Flash program memory” in the datasheet).
Note: To write a byte fast (no erase), the whole word (4 bytes) into which it is written must be
erased beforehand. Consequently, It is not possible to do two fast writes to the same word
(without an erase before the second write): The first write will be fast but the second write to
the other byte will require an erase.
4.6.3 Word programming
A word write operation allows an entire 4-byte word to be programmed in one shot, thus
minimizing the programming time.
As for byte programming, word operation is available both for the main program memory
and data EEPROM. On some devices, the read-while-write (RWW) capability is also
available when a word programming operation is performed on the data EEPROM. Refer to
the datasheets for additional information.
•In the main program memory:
The application stops for the duration of the byte program operation.
•In DATA area
– Devices with RWW capability: Program execution does not stop, and the byte
program operation is performed using the read-while-write (RWW) capability in
IAP mode.
– Devices without RWW capability: The application stops for the duration of the byte
program operation.
To program a word, the WPRG/NWPRG bits in the FLASH_CR2 and FLASH_NCR2
registers must be previously set/cleared to enable word programming mode (see
Section 4.8.2: Flash control register 2 (FLASH_CR2) and Section 4.8.2: Flash control
register 2 (FLASH_CR2)). Then, the 4 bytes of the word to be programmed must be loaded
starting with the first address. The programming cycle starts automatically when the 4 bytes
have been written.
As for byte operation, the EOP and the WR_PG_DIS control flags of FLASH_IAPSR,
together with the Flash interrupt, can be used to determine if the operation has been
correctly completed.
4.6.4 Block programming
Block program operations are much faster than byte or word program operations. In a block
program operation, a whole block is programmed or erased in a single programming cycle.
Refer to Table 5 for details on the block size according to the devices.

Flash program memory and data EEPROM RM0016
48/467 DocID14587 Rev 14
Block operations can be performed both to the main program memory and DATA area:
•In the main program memory:
Block program operations to the main program memory have to be executed totally
from RAM.
•In the DATA area
– Devices with RWW capability: DATA block operations can be executed from the
main program memory. However, the data loading phase (see below) has to be
executed from RAM.
– Devices without RWW capability: Block program operations must be executed
totally from RAM.
There are three possible block operations:
•Block programming, also called standard block programming: The block is
automatically erased before being programmed.
•Fast block programming: No previous erase operation is performed.
•Block erase
During block programming, interrupts are masked by hardware.
Standard block programming
A standard block program operation allows a whole block to be written in one shot. The
block is automatically erase before being programmed.
To program a whole block in standard mode, the PRG/NPRG bits in the FLASH_CR2 and
FLASH_NCR2 registers must be previously set/cleared to enable standard block
programming (see Section 4.8.2: Flash control register 2 (FLASH_CR2) and Section 4.8.2:
Flash control register 2 (FLASH_CR2)). Then, the block of data to be programmed must be
loaded sequentially to the destination addresses in the main program memory or DATA
area. This causes all the bytes of data to be latched. To start programming the whole block,
all bytes of data must be written. All bytes written in a programming sequence must be in the
same block. This means that they must have the same high address: Only the six least
significant bits of the address can change. When the last byte of the target block is loaded,
the programming starts automatically. It is preceded by an automatic erase operation of the
whole block.
When programming a block in DATA area, the application can check the HVOFF bit in the
Flash status register (FLASH_IAPSR). As soon the HVOFF flag is reset the actual
programming phase starts and the application can return to main program memory.
The EOP and the WR_PG_DIS control flags of the FLASH_IAPSR together with the Flash
interrupt can be used to determine if the operation has been correctly completed.
Fast block programming
Fast block programming allows programming without first erasing the memory contents.
Fast block programming is therefore twice as fast as standard programming.
This mode is intended only for programming parts that have already been erased. It is very
useful for programming blank parts with the complete application code, as the time saving is
significant.
Fast block programming is performed by using the same sequence as standard block
programming. To enable fast block programming mode, the FPRG/NFPRG bits of the
FLASH_CR2 and FLASH_NCR2 registers must be previously set/cleared.
DocID14587 Rev 14 49/467
RM0016 Flash program memory and data EEPROM
56
The HVOFF flag can also be polled by the application which can execute other instructions
(RWW) during the actual programming phase of the DATA.
The EOP and WR_PG_DIS bits of the FLASH_IAPSR register can be checked to determine
if the fast block programming operation has been correctly completed.
Caution: The data programmed in the block are not guaranteed when the block is not blank before
the fast block program operation.
Block erasing
A block erase allows a whole block to be erased.
To erase a whole block, the ERASE/NERASE bits in the FLASH_CR2 and FLASH_NCR2
registers must be previously set/cleared to enable block erasing (see Section 4.8.2: Flash
control register 2 (FLASH_CR2) and Section 4.8.3: Flash complementary control register 2
(FLASH_NCR2)). The block is then erased by writing ‘0x00 00 00 00’ to any word inside the
block. The word start address must end with ‘0’, ‘4’, ‘8’, or ‘C’.
The EOP and the WR_PG_DIS control flags of the FLASH_IAPSR together with the Flash
interrupt can be used to determine if the operation has been correctly completed.
4.6.5 Option byte programming
Option byte programming is very similar to data EEPROM byte programming.
The application writes directly to the target address. The program does not stop and the
write operation is performed using the RWW capability.
Refer to the datasheet for details of the option byte contents.
4.7 ICP (in-circuit programming) and IAP (in-application
programming)
The in-circuit programming (ICP) method is used to update the entire content of the memory,
using the SWIM interface to load the user application into the microcontroller. ICP offers
quick and efficient design iterations and eliminates unnecessary package handling or
socketing of devices. The SWIM interface (single wire interface module) uses the SWIM pin
to connect to the programming tool.
In contrast to the ICP method, in-application programming (IAP) can use any communication
interface supported by the microcontroller (I/Os, I2C, SPI, USART...) to download the data to
be programmed in the memory. IAP allows the Flash program memory content to be
reprogrammed during application execution. Nevertheless, part of the application must have
been previously programmed in the Flash program memory using ICP.
Table 5. Block size
STM8 microcontroller family Block size
Low density STM8S and STM8AF 64 bytes
Medium density STM8S and STM8AF (up to 32 Kbytes) 128 bytes
High density STM8S and STM8AF (up to 128 Kbytes) 128 bytes
Flash program memory and data EEPROM RM0016
50/467 DocID14587 Rev 14
Refer to the STM8S and STM8AF Flash programming manual (PM0051) and STM8 SWIM
protocol and debug manual (UM0470) for more information on programming procedures.
Table 6. Memory access versus programming method(1)
Mode ROP Memory Area Access from
core
User, IAP, and bootloader
(if available)
Readout
protection
enabled
User boot code area (UBC) R/E
Main program R/W/E(2)
Data EEPROM area (DATA) R/W(3)
Option bytes R
Readout
protection
disabled
User boot code area (UBC) R/E(4)
Main program R/W/E(2)
Data EEPROM area (DATA) R/W(3)
Option bytes R/W(5)
SWIM active
(ICP mode)
Readout
protection
enabled
User boot code area (UBC) P
Main program P
Data EEPROM area (DATA) P
Option bytes P/WROP(6)
Readout
protection
disabled
User boot code area (UBC) R/E(4)
Main program R/W/E(2)
Data EEPROM area (DATA) R/W(3)
Option bytes R/W(5)
1. R/W/E = Read, write, and execute
R/E = Read and execute (write operation forbidden)
R = Read (write and execute operations forbidden)
P = The area cannot be accessed (read, execute and write operations forbidden)
P/WROP = Protected, write forbidden except for ROP option byte.
2. The Flash program memory is write protected (locked) until the correct MASS key is written in the FLASH_PUKR. It is
possible to lock the memory again by resetting the PUL bit in the FLASH_IAPSR register. If incorrect keys are provided, the
device must be reset and new keys programmed.
3. The data memory is write protected (locked) until the correct MASS key is written in the FLASH_DUKR. It is possible to lock
the memory again by resetting the DUL bit in the IAPSR register. If incorrect keys are provided, another key program
sequence can be performed without resetting the device.
4. To program the UBC area, the application must first clear the UBC option byte.
5. The option bytes are write protected (locked) until the correct MASS key is written in the FLASH_DUKR (with OPT set to 1).
It is possible to lock the memory again by resetting the DUL bit in the FLASH_IAPSR register. If incorrect keys are
provided, another key program sequence can be performed without resetting the device.
6. When ROP is removed, the whole memory is erased, including the option bytes.

DocID14587 Rev 14 51/467
RM0016 Flash program memory and data EEPROM
56
4.8 Flash registers
4.8.1 Flash control register 1 (FLASH_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
Reserved HALT AHALT IE FIX
rrwrwrwrw
Bits 7:4 Reserved
Bit 3 HALT: Power-down in Halt mode
This bit is set and cleared by software.
0: Flash in power-down mode when MCU is in Halt mode
1: Flash in operating mode when MCU is in Halt mode
Bit 2 AHALT: Power-down in Active-halt mode
This bit is set and cleared by software.
0: Flash in operating mode when MCU is in Active-halt mode
1: Flash in power-down when MCU is in Active-halt mode
Bit 1 IE: Flash Interrupt enable
This bit is set and cleared by software.
0: Interrupt disabled
1: Interrupt enabled. An interrupt is generated if the EOP or WR_PG_DIS flag in the
FLASH_IAPSR register is set.
Bit 0 FIX: Fixed Byte programming time
This bit is set and cleared by software.
0: Standard programming time of (1/2 tprog) if the memory is already erased and tprog
otherwise.
1: Programming time fixed at tprog.

Flash program memory and data EEPROM RM0016
52/467 DocID14587 Rev 14
4.8.2 Flash control register 2 (FLASH_CR2)
Address offset: 0x01
Reset value: 0x00
76543210
OPT WPRG ERASE FPRG Reserved PRG
rw rw rw rw r rw
Bit 7 OPT: Write option bytes
This bit is set and cleared by software.
0: Write access to option bytes disabled
1: Write access to option bytes enabled
Bit 6 WPRG: Word programming
This bit is set by software and cleared by hardware when the operation is completed.
0: Word program operation disabled
1: Word program operation enabled
Bit 5 ERASE(1): Block erasing
This bit is set by software and cleared by hardware when the operation is completed.
0: Block erase operation disabled
1: Block erase operation enabled
Bit 4 FPRG(1): Fast block programming
This bit is set by software and cleared by hardware when the operation is completed.
0: Fast block program operation disabled
1: Fast block program operation enabled
Bits 3:1 Reserved
Bit 0 PRG: Standard block programming
This bit is set by software and cleared by hardware when the operation is completed.
0: Standard block programming operation disabled
1: Standard block programming operation enabled (automatically first erasing)
1. The ERASE and FPRG bits are locked when the memory is busy.

DocID14587 Rev 14 53/467
RM0016 Flash program memory and data EEPROM
56
4.8.3 Flash complementary control register 2 (FLASH_NCR2)
Address offset: 0x02
Reset value: 0xFF
76543210
NOPT NWPRG NERASE NFPRG Reserved NPRG
rw rw rw rw r rw
Bit 7 NOPT: Write option bytes
This bit is set and cleared by software.
0: Write access to option bytes enabled
1: Write access to option bytes disabled
Bit 6 NWPRG: Word programming
This bit is cleared by software and set by hardware when the operation is completed.
0: Word programming enabled
1: Word programming disabled
Bit 5 NERASE: Block erase
This bit is cleared by software and set by hardware when the operation is completed.
0: Block erase enabled
1: Block erase disabled
Bit 4 NFPRG: Fast block programming
This bit is cleared by software and set by software reading the register.
0: Fast block programming enabled (no erase before programming, the programmed data
values are not guaranteed when the block is not blank (fully erased) before the operation)
1: Fast block programming disabled
Bits 3:1 Reserved.
Bit 0 NPRG: Block programming
This bit is cleared by software and set by hardware when the operation is completed.
0: Block programming enabled
1: Block programming disabled
Flash program memory and data EEPROM RM0016
54/467 DocID14587 Rev 14
4.8.4 Flash protection register (FLASH_FPR)
Address offset: 0x03
Reset value: 0x00
4.8.5 Flash protection register (FLASH_NFPR)
Address offset: 0x04
Reset value: 0xFF
4.8.6 Flash program memory unprotecting key register (FLASH_PUKR)
Address offset: 0x08
Reset value: 0x00
76543210
Reserved WPB5 WPB4 WPB3 WPB2 WPB1 WPB0
r rorororororo
Bits 7:6 Reserved.
Bits 5:0 WPB[5:0]: User boot code area protection bits
These bits show the size of the boot code area. They are loaded at startup with the content of
the UBC option byte. Refer to the datasheets for the protected pages according to the bit
values.
76543210
Reserved NWPB5 NWPB4 NWPB3 NWPB2 NWPB1 NWPB0
ro ro ro ro ro ro
Bits 7:6 Reserved.
Bits 5:0 WPB[5:0]: User boot code area protection bits
These bits show the size of the boot code area. They reflect the content of the NUBC option
byte. Refer o the datasheet for the protected pages according to the bit values.
76543210
MASS_PRG KEYS
rw
Bits 7:0 PUK [7:0]: Main program memory unlock keys
This byte is written by software (all modes). It returns 0x00 when read.
Refer to Enabling write access to the main program memory on page 44 for the description
of main program area write unprotection mechanism.
DocID14587 Rev 14 55/467
RM0016 Flash program memory and data EEPROM
56
4.8.7 Data EEPROM unprotection key register (FLASH_DUKR)
Address offset: 0x0A
Reset value: 0x00
4.8.8 Flash status register (FLASH_IAPSR)
Address offset: 0x05
Reset value: 0x40
76543210
MASS_DATA KEYS
rw
Bits 7:0 DUK[7:0]: Data EEPROM write unlock keys
This byte is written by software (all modes). It returns 0x00 when read.
Refer to Enabling write access to the DATA area on page 45 for the description of main
program area write unprotection mechanism.
76543210
Reserved HVOFF Reserved DUL EOP PUL WR_PG_DIS
res. r r rc_w0 rc_r rc_w0 rc_r
Bit 7 Reserved.
Bit 6 HVOFF: End of high voltage flag
This bit is set and cleared by hardware.
0: HV ON, start of actual programming
1: HV OFF, end of high voltage
Bits 5:4 Reserved, forced by hardware to 0.
Bit 3 DUL: Data EEPROM area unlocked flag
This bit is set by hardware and cleared by software by programming it to 0.
0: Data EEPROM area write protection enabled
1: Data EEPROM area write protection has been disabled by writing the correct MASS
keys
Flash program memory and data EEPROM RM0016
56/467 DocID14587 Rev 14
4.8.9 Flash register map and reset values
For details on the Flash register boundary addresses, refer to the general hardware register
map in the datasheets.
Bit 2 EOP: End of programming (write or erase operation) flag
This bit is set by hardware. It is cleared by software by reading the register, or when a new
write/erase operation starts.
0: No EOP event occurred
1: An EOP operation occurred. An interrupt is generated if the IE bit is set in the
FLASH_CR1 register.
Bit 1 PUL: Flash Program memory unlocked flag
This bit is set by hardware and cleared by software by programming it to 0.
0: Write protection of main Program area enabled
1: Write protection of main Program area has been disabled by writing the correct MASS
keys.
Bit 0 WR_PG_DIS: Write attempted to protected page flag
This bit is set by hardware and cleared by software by reading the register.
0: No WR_PG_DIS event occurred
1: A write attempt to a write protected page occurred. An interrupt is generated if the IE bit
is set in the FLASH_CR1 register.
Table 7. Flash register map and reset values
AddressRegister name7654 3 2 1 0
0x00 FLASH_CR1
Reset value
-
0
-
0
-
0
-
0
HALT
0
AHALT
0
IE
0
FIX
0
0x01 FLASH_CR2
Reset value
OPT
0
WPRG
0
ERASE
0
FPRG
0
-
0
-
0
-
0
PRG
0
0x02 FLASH_NCR2
Reset value
NOPT
1
NWPRG
1
NERAS
E
1
NFPRG
1
-
1
-
1
-
1
NPRG
1
0x03 FLASH_FPR
Reset value
-
0
-
0
WPB5
0
WPB4
0
WPB3
0
WPB2
0
WPB1
0
WPB0
0
0x04 FLASH_NFPR
Reset value
-
1
-
1
NWPB5
1
NWPB4
1
NWPB3
1
NWPB2
1
NWPB1
1
NWPB0
1
0x05 FLASH_IAPSR
Reset value
-
0
HVOFF
1
-
0
-
0
DUL
0
EOP
0
PUL
0
WR_PG_
DIS
0
0x06-
0x07 Reserved
0x08 FLASH_PUKR
Reset value
PUK7
0
PUK6
0
PUK5
0
PUK4
0
PUK3
0
PUK2
0
PUK1
0
PUK0
0
0x09 Reserved
0x0A FLASH_DUKR
Reset value
DUK7
0
DUNP6
0
DUK5
0
DUK4
0
DUK3
0
DUK2
0
DUK1
0
DUK0
0
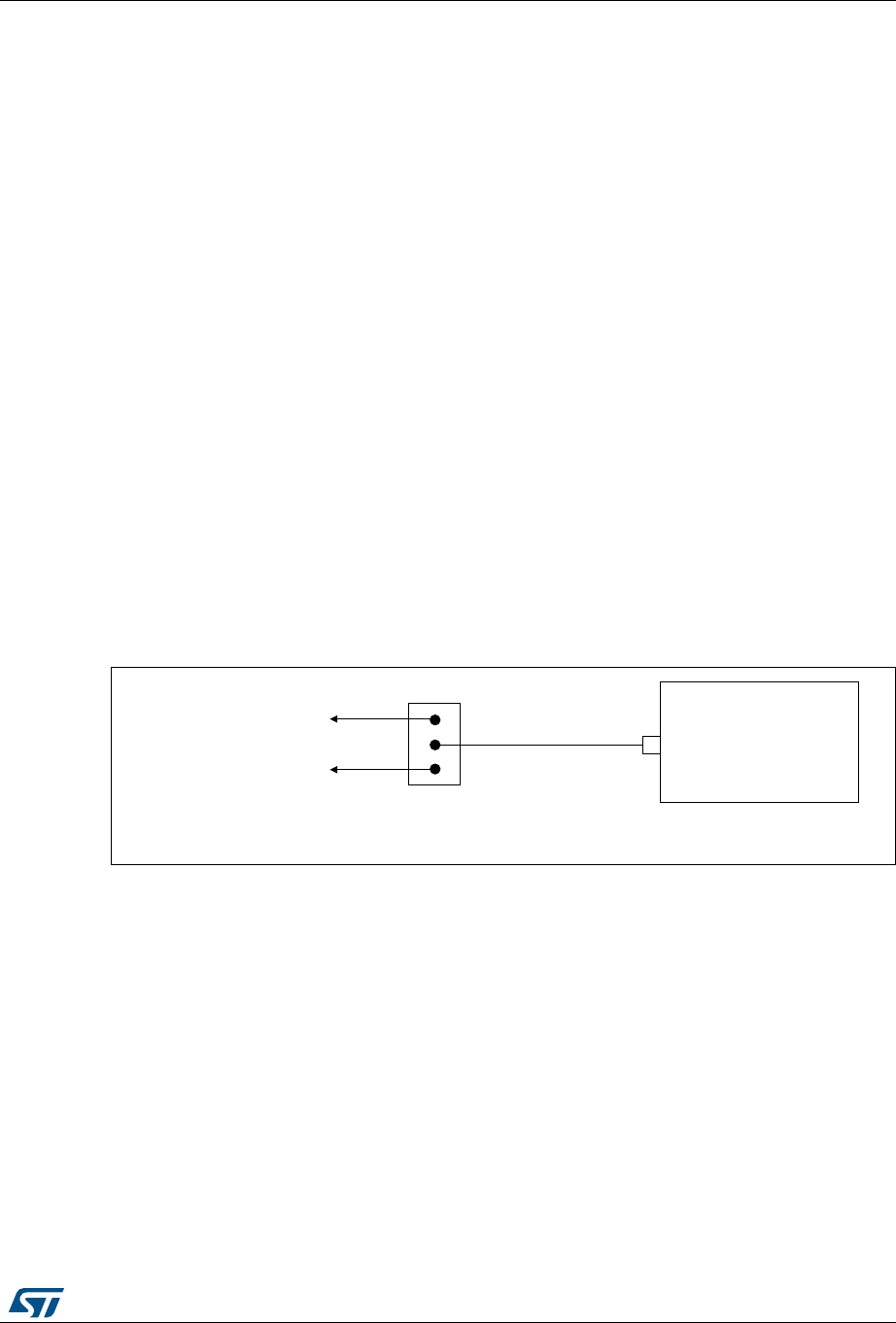
DocID14587 Rev 14 57/467
RM0016 Single wire interface module (SWIM) and debug module (DM)
58
5 Single wire interface module (SWIM) and debug
module (DM)
5.1 SWIM and DM introduction
In-circuit debugging mode or in-circuit programming mode are managed through a single
wire hardware interface featuring ultrafast memory programming. Coupled with an in-circuit
debugging module, it also offers a non-intrusive emulation mode, making the in-circuit
debugger extremely powerful, close in performance to a full-featured emulator.
5.2 SWIM main features
•Based on an asynchronous, high sink (8 mA), open-drain, bidirectional communication.
•Allows reading or writing any part of memory space.
•Access to CPU registers (A, X, Y, CC, SP). They are memory mapped for read or write
access.
•Non intrusive read/write on the fly to the RAM and peripheral registers.
•Device reset capability with status flag in the Reset status register (RST_SR).
•Clock speed selectable in the SWIM clock control register (CLK_SWIMCCR).
SWIM pin can be used as a standard I/O with some restrictions if you also want to use it for
debug. The most secure way is to provide on the PCB a strap option.
Figure 12. SWIM pin connection
5.3 SWIM modes
After a power-on reset, the SWIM is reset and enters OFF mode.
1. OFF: Default state after power-on reset. The SWIM pin cannot be used by the
application as an I/O.
2. I/O: This state is entered by software writing to the SWD bit in the Global configuration
register (CFG_GCR). In this state, the SWIM pin can be used by the application as a
standard I/O pin. In case of a reset, the SWIM goes back to OFF mode.
3. SWIM: This state is entered when a specific sequence is performed on the SWIM pin.
In this state, the SWIM pin is used by the host tool to control the STM8 with 3
commands (SRST system reset, ROTF read on the fly, WOTF write on the fly).
Note: Refer to the STM8 SWIM communication Protocol and Debug Module User Manual for a
description of the SWIM and Debug module (DM) registers.
MSv17035V1
MCU
SWIM/PA0
I/O for application
SWIM interface for tools
Jumper selection for
debug process

Single wire interface module (SWIM) and debug module (DM) RM0016
58/467 DocID14587 Rev 14
There are two important considerations to highlight for the devices where the NRST pin is
not present:
•If the SWIM pin should be used with the I/O pin functionality, it is recommended to add
a ~5 seconds delay in the firmware before changing the functionality on the pin with
SWIM functions. This action allows the user to set the device into SWIM mode after the
device power on and to be able to reprogram the device. If the pin with SWIM
functionality is set to I/O mode immediately after the device reset, the device is unable
to connect through the SWIM interface and it will be locked forever (if the NRST pin is
not available on the package). This initial delay can be removed in the final (locked)
code.
•Their program memory must contain a valid program loop. If the device's memory is
empty, the program continues into non-existing memory space and executes invalid
opcode; this causes the device to reset (reading of non-existing memory is random
content). This behavior might lead to periodic device resets and to a difficulty to
connect to the device through the SWIM interface.

DocID14587 Rev 14 59/467
RM0016 Interrupt controller (ITC)
72
6 Interrupt controller (ITC)
6.1 ITC introduction
•Management of hardware interrupts
– External interrupt capability on most I/O pins with dedicated interrupt vector and
edge sensitivity setting per port
– Peripheral interrupt capability
•Management of software interrupt (TRAP)
•Nested or concurrent interrupt management with flexible interrupt priority and level
management:
– Up to 4 software programmable nesting levels
– Up to 32 interrupt vectors fixed by hardware
– 2 non maskable events: RESET, TRAP
– 1 non-maskable top level hardware interrupt (TLI)
This interrupt management is based on:
•Bit I1 and I0 of the CPU Condition Code register (CCR)
•Software priority registers (ITC_SPRx)
•Reset vector address 0x00 8000 at the beginning of program memory. In devices with
boot ROM, the reset initialization routine is programmed in ROM by
STMicroelectronics.
•Fixed interrupt vector addresses located at the high addresses of the memory map
(0x00 8004 to 0x00 807C) sorted by hardware priority order.
6.2 Interrupt masking and processing flow
The interrupt masking is managed by bits I1 and I0 of the CCR register and by the
ITC_SPRx registers which set the software priority level of each interrupt vector (see
Table 8). The processing flow is shown in Figure 13.
When an interrupt request has to be serviced:
1. Normal processing is suspended at the end of the current instruction execution.
2. The PC, X,Y, A and CCR registers are saved onto the stack.
3. Bits I1 and I0 of CCR register are set according to the values in the ITC_SPRx registers
corresponding to the serviced interrupt vector.
4. The PC is then loaded with the interrupt vector of the interrupt to service and the first
instruction of the interrupt service routine is fetched .
The interrupt service routine should end with the IRET instruction which causes the content
of the saved registers to be recovered from the stack. As a consequence of the IRET
instruction, bits I1 and I0 are restored from the stack and the program execution resumes.
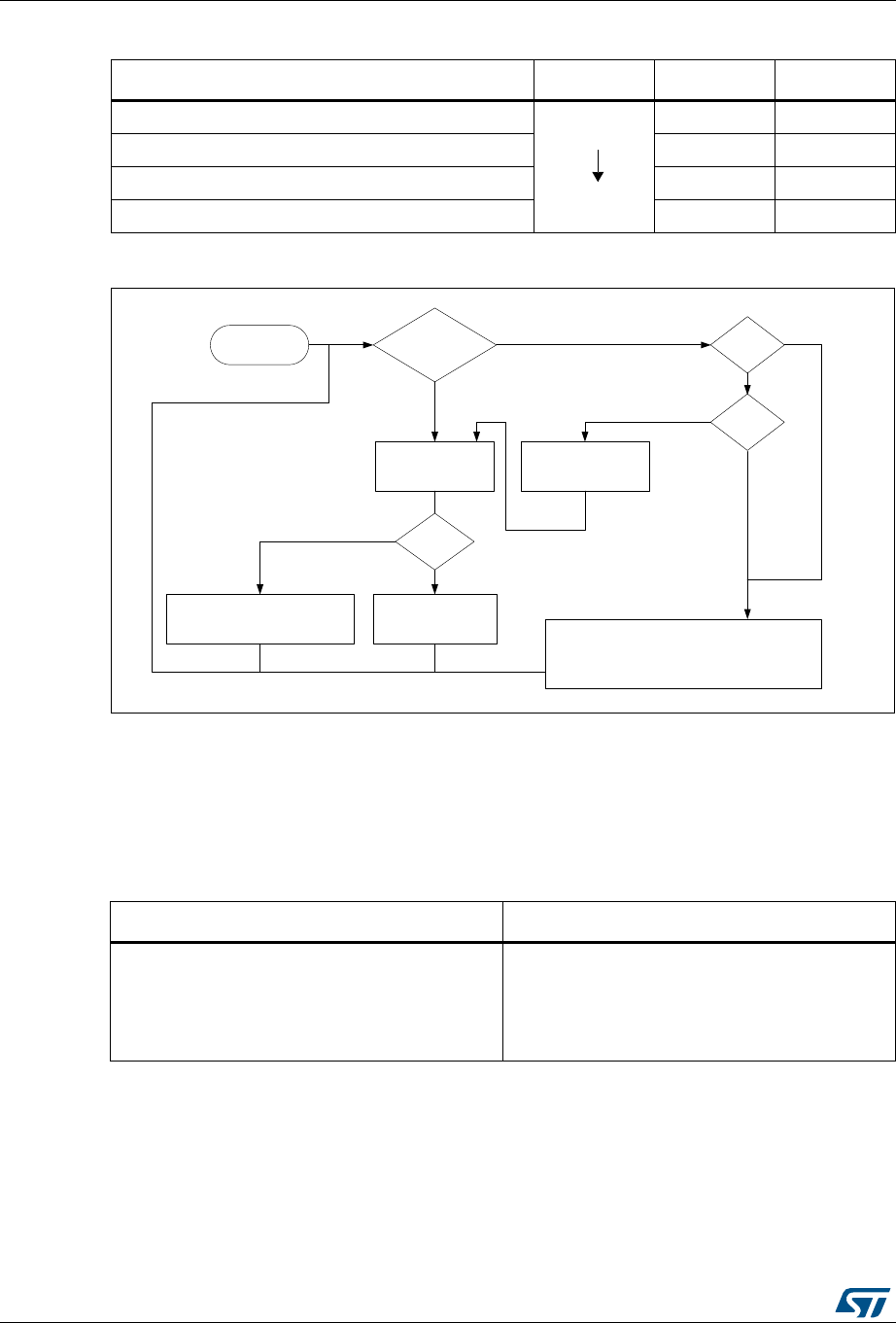
Interrupt controller (ITC) RM0016
60/467 DocID14587 Rev 14
Figure 13. Interrupt processing flowchart
Caution: If the interrupt mask bits I0 and I1 are set within an interrupt service routine (ISR) with the
instruction SIM, removal of the interrupt mask with RIM causes the software priority to be
set to level 0.
To restore the correct priority when disabling and enabling interrupts inside an ISR, follow
the procedures presented in Table 8 for disabling and enabling the interrupts.
6.2.1 Servicing pending interrupts
Several interrupts can be pending at the same time. The interrupt to be taken into account is
determined by the following two-step process:
Table 8. Software priority levels
Software priority Level I1 I0
Level 0 (main)
Low
High
10
Level 1 0 1
Level 2 0 0
Level 3 (= software priority disabled) 1 1
MSv47744V1
RESET PENDING
INTERRUPT
TRAP
TLI
I1:0
« IRET »
RESTORE PC, X, Y, A, CCR
FROM STACK
EXECUTE
INSTRUCTION STACK PC, X, Y, A, CCR
LOAD I1:0 FROM INTERRUPT SW REG.
LOAD PC FROM INTERRUPT VECTOR
FETCH NEXT
INSTRUCTION
THE INTERRUPT
STAYS PENDING
Y
N
N
Y
Y
N
Interrupt has the same or a
lower software priority
than current one
Interrupt has a higher
software priority
than current one
Table 9. Interrupt enabling/disabling inside an ISR
Disabling the interrupts Enabling the interrupts
#asm
PUSH CC
POP ISR_CC(1)
SIM
#endasm
1. ISR_CC is a variable which stores the current value of the CC register.
#asm
PUSH ISR_CC(1)
POP CC
#endasm
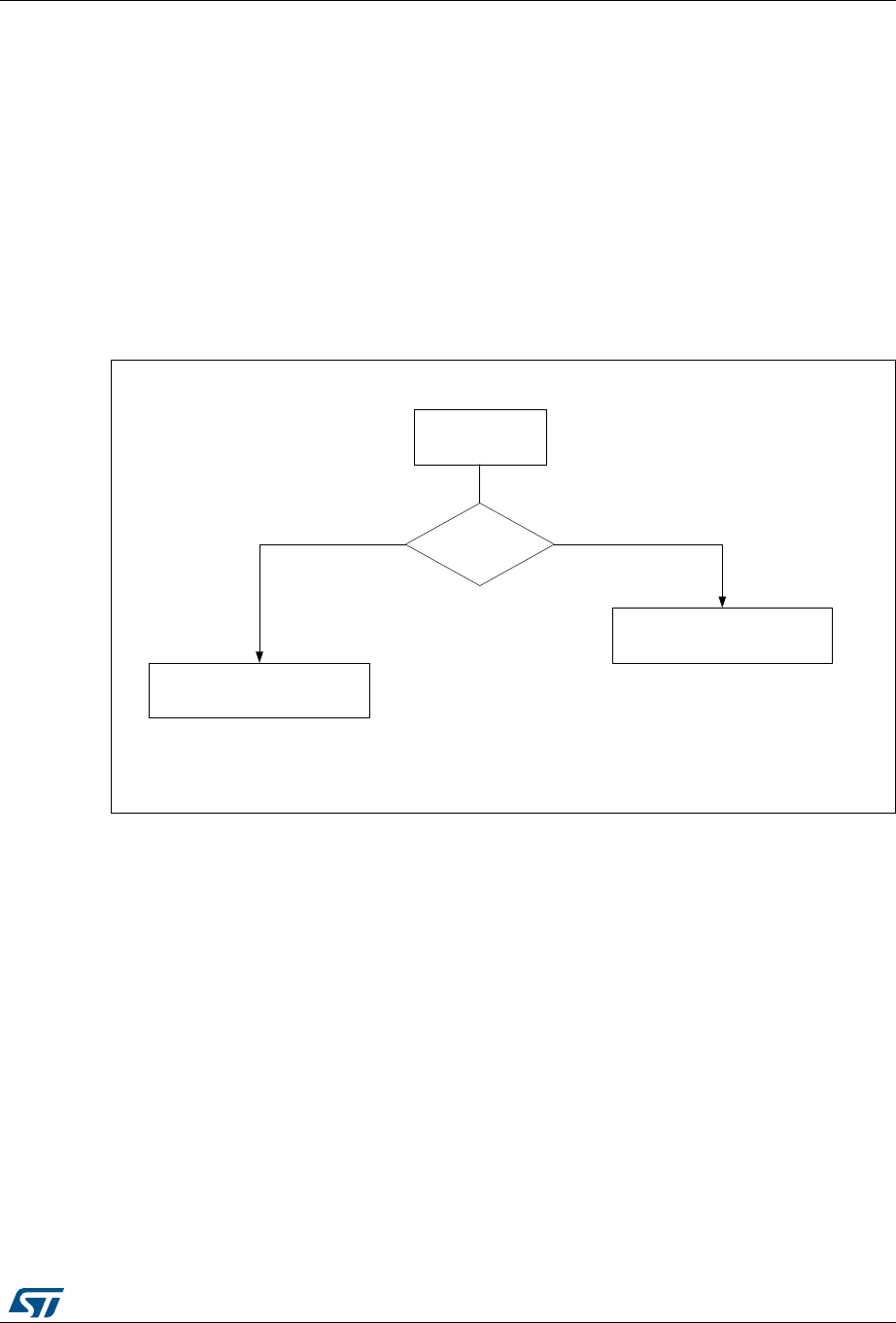
DocID14587 Rev 14 61/467
RM0016 Interrupt controller (ITC)
72
1. The highest software priority interrupt is serviced.
2. If several interrupts have the same software priority then the interrupt with the highest
hardware priority is serviced first.
When an interrupt request is not serviced immediately, it is latched and then processed
when its software priority combined with the hardware priority becomes the highest one.
Note: 1 The hardware priority is exclusive while the software one is not. This allows the previous
process to succeed with only one interrupt.
2 RESET, TLI and TRAP are considered as having the highest software priority in the decision
process.
See Figure 14 for a description of pending interrupt servicing process.
Figure 14. Priority decision process
6.2.2 Interrupt sources
Two interrupt source types are managed by the STM8 interrupt controller:
•Non-maskable interrupts: RESET, TLI and TRAP
•Maskable interrupts: external interrupts or interrupts issued by internal peripherals
Non-maskable interrupt sources
Non-maskable interrupt sources are processed regardless of the state of bits I1 and I0 of the
CCR register (see Figure 13). PC, X, Y, A and CCR registers are stacked only when a TRAP
MSv45261V1
SOFTWARE
PRIORITY
PENDING
INTERRUPTS
HIGHEST SOFTWARE
PRIORITY SERVICED
HIGHEST HARDWARE
PRIORITY SERVICED
DifferentSame
Interrupt controller (ITC) RM0016
62/467 DocID14587 Rev 14
or TLI interrupt occurs. The corresponding vector is then loaded in the PC register and bits
I1 and I0 of the CCR register are set to disable interrupts (level 3).
•TRAP (non-maskable software interrupt)
This software interrupt source is serviced when the TRAP instruction is executed. It is
serviced accordingly to the flowchart shown in Figure 13.
A TRAP interrupt does not allow the processor to exit from Halt mode.
•RESET
The RESET interrupt source has the highest STM8 software and hardware priorities.
This means that all the interrupts are disabled at the beginning of the reset routine.
They must be re-enabled by the RIM instruction (see Table 11: Dedicated interrupt
instruction set).
A RESET interrupt allows the processor to exit from Halt mode.
See RESET chapter for more details on RESET interrupt management.
•TLI (top level hardware interrupt)
This hardware interrupt occurs when a specific edge is detected on the corresponding
TLI input. It is serviced accordingly to the flowchart shown in Figure 13.
Caution: A TRAP instruction must not be used in a TLI service routine.

DocID14587 Rev 14 63/467
RM0016 Interrupt controller (ITC)
72
Maskable interrupt sources
Maskable interrupt vector sources are serviced if the corresponding interrupt is enabled and
if its own interrupt software priority in ITC_SPRx registers is higher than the one currently
being serviced (I1 and I0 in CCR register). If one of these two conditions is not met, the
interrupt is latched and remains pending.
•External interrupts
External interrupts can be used to wake up the MCU from Halt mode. The device
sensitivity to external interrupts can be selected by software through the External
Interrupt Control registers (EXTI_CRx).
When several input pins connected to the same interrupt line are selected
simultaneously, they are logically ORed.
When external level-triggered interrupts are latched, if the given level is still present at
the end of the interrupt routine, the interrupt remains activated except if it has been
inactivated in the routine.
•Peripheral interrupts
Most peripheral interrupts cause the MCU to wake up from Halt mode. See the interrupt
vector table in the datasheet.
A peripheral interrupt occurs when a specific flag is set in the peripheral status register
and the corresponding enable bit is set in the peripheral control register.
The standard sequence for clearing a peripheral interrupt performs an access to the
status register followed by a read or write to an associated register. The clearing
sequence resets the internal latch. A pending interrupt (that is an interrupt waiting to be
serviced) is therefore lost when the clear sequence is executed.
6.3 Interrupts and low power modes
All interrupts allow the processor to exit from Wait mode.
Only external and other specific interrupts allow the processor to exit from Halt and Active-
halt mode (see wakeup from halt and wakeup from Active-halt in the interrupt vector table in
the datasheet).
When several pending interrupts are present while waking up from Halt mode, the first
interrupt serviced can only be an interrupt with exit-from-Halt mode capability. It is selected
through the decision process shown in Figure 14. If the highest priority pending interrupt
cannot wake up the device from Halt mode, it will be serviced next.
If any internal or external interrupt (from a timer for example) occurs while the HALT
instruction is executing, the HALT instruction is completed but the interrupt invokes the
wakeup process immediately after the HALT instruction has finished executing. In this case
the MCU is actually waking up from Halt mode to Run mode, with the corresponding delay
of tWUH as specified in the datasheet.
6.4 Activation level/low power mode control
The MCU activation level is configured by programming the AL bit in the CFG_GCR register
(see global configuration register (CFG_GCR)).
This bit is used to control the low power modes of the MCU. In very low power applications,
the MCU spends most of the time in WFI and is woken up (through interrupts) at specific
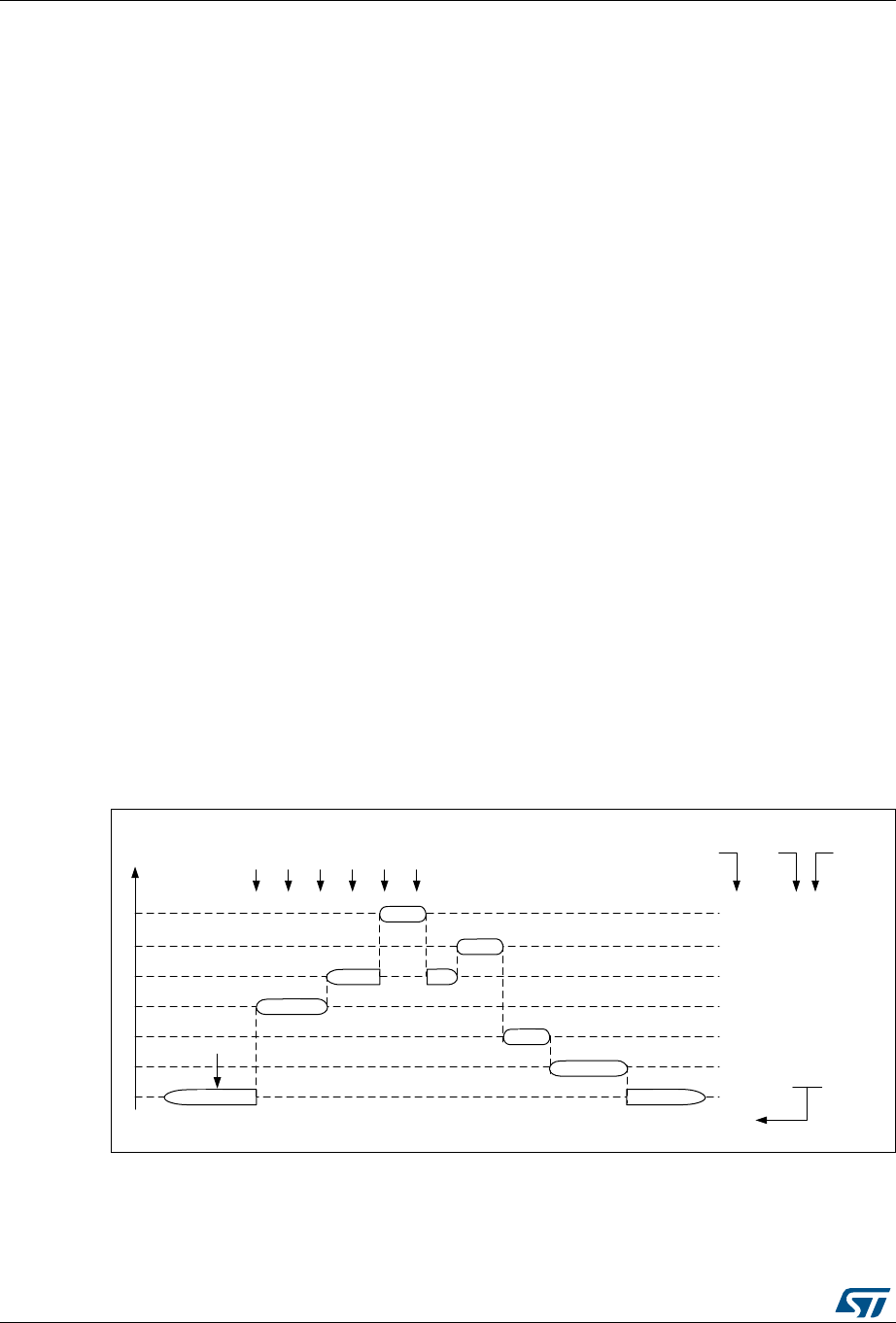
Interrupt controller (ITC) RM0016
64/467 DocID14587 Rev 14
moments in order to execute a specific task. Some of these recurring tasks are short
enough to be treated directly in an ISR (interrupt service routine), rather than going back to
the main program. To cover this case, you can set the AL bit before entering Low power
mode (by executing WFI instruction), then the interrupt routine returns directly to Low power
mode. The run time/ISR execution is reduced due to the fact that the register context is
saved only on the first interrupt.
As a consequence, all the operations can be executed in ISR in very simple applications. In
more complex ones, an interrupt routine may relaunch the main program by simply resetting
the AL bit.
For example, an application may need to be woken up by the auto-wakeup unit (AWU)
every 50 ms in order to check the status of some pins/sensors/push-buttons. Most of the
time, as these pins are not active, the MCU can return to Low power mode without running
the main program. If one of these pins is active, the ISR decides to launch the main program
by resetting the AL bit.
6.5 Concurrent and nested interrupt management
STM8 devices feature two interrupt management modes:
•Concurrent mode
•Nested mode
6.5.1 Concurrent interrupt management mode
In this mode, all interrupts are interrupt priority level 3 so that none of them can be
interrupted, except by a TLI, RESET, or TRAP.
The hardware priority is given in the following order from the lowest to the highest priority,
that is: MAIN, IT4, IT3, IT2, IT1, IT0, TRAP/TLI (same priority), and RESET.
Figure 15 shows an example of concurrent interrupt management mode.
Figure 15. Concurrent interrupt management
MSv47717V2
IT2
IT1
IT4
IT3
TRAP
IT0
Software
priority level I1 I0
311
311
311
311
311
311
3/0
1011/10
RIM
Hardware priority
Used stack = 2 x 9 bytes
TRAP
IT0
IT3
IT4
IT2
IT1
IT1
Main Main
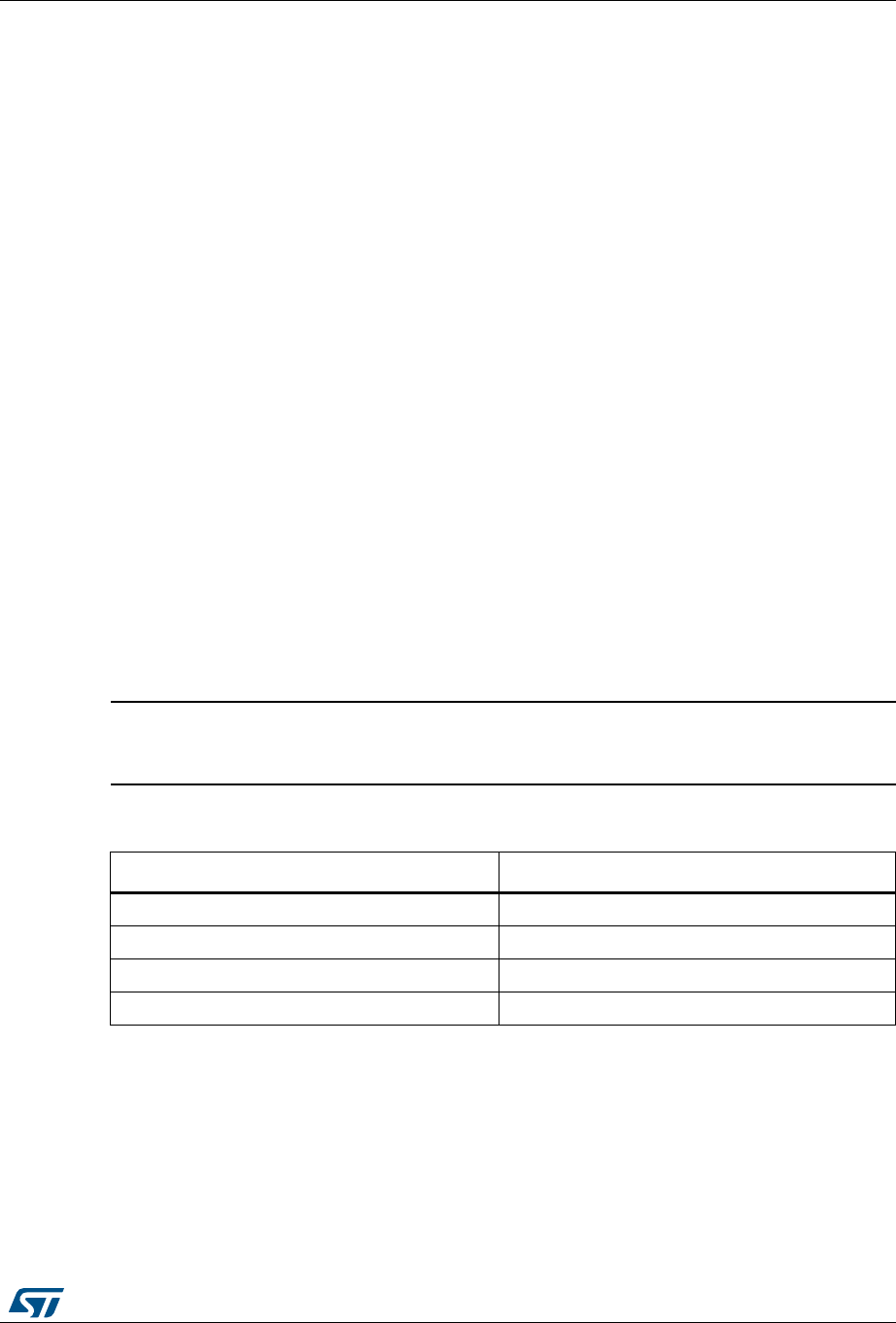
DocID14587 Rev 14 65/467
RM0016 Interrupt controller (ITC)
72
6.5.2 Nested interrupt management mode
In this mode, interrupts are allowed during interrupt routines. This mode is activated as soon
as an interrupt priority level lower than level 3 is set.
The hardware priority is given in the following order from the lowest to the highest priority,
that is: MAIN, IT4, IT3, IT2, IT1, IT0, and TRAP.
The software priority is configured for each interrupt vector by setting the corresponding
I1_x and I0_x bits of the ITC_SPRx register. I1_x and I0_x bits have the same meaning as
I1 and I0 bits of the CCR register (see Table 10).
Level 0 can not be programmed (I1_x=1, I0_x=0). In this case, the previously stored value is
kept. For example: if previous value is 0xCF, and programmed value equals 64h, the result
is 44h.
The RESET and TRAP vectors have no software priorities. When one is serviced, bits I1
and I0 of the CCR register are both set.
Caution: If bits I1_x and I0_x are modified while the interrupt x is executed, the device operates as
follows: if the interrupt x is still pending (new interrupt or flag not cleared) and the new
software priority is higher than the previous one, then the interrupt x is re-entered.
Otherwise, the software priority remains unchanged till the next interrupt request (after the
IRET of the interrupt x).
During the execution of an interrupt routine, the HALT, POPCC, RIM, SIM and WFI
instructions change the current software priority till the next IRET instruction or one of the
previously mentioned instructions is issued. See Section 6.7 for the list of dedicated
interrupt instructions.
Figure 16 shows an example of nested interrupt management mode.
Warning: A stack overflow may occur without notifying the software of
the failure.
Table 10. Vector address map versus software priority bits
Vector address ITC_SPRx bits
0x00 8008h I1_0 and I0_0 bits(1)
1. ITC_SPRx register bits corresponding to the TLI can be read and written. However they are not significant
in the interrupt process management.
0x00 800Ch I1_1 and I0_1 bits
... ...
0x00 807Ch I1_29 and I0_29 bits
Interrupt controller (ITC) RM0016
66/467 DocID14587 Rev 14
Figure 16. Nested interrupt management
6.6 External interrupts
Five interrupt vectors are dedicated to external Interrupt events:
•5 lines on Port A: PA[6:2]
•8 lines on Port B: PB[7:0]
•8 lines on Port C: PC[7:0]
•7 lines on Port D: PD[6:0]
•8 lines on Port E: PE[7:0]
PD7 is the Top Level Interrupt source (TLI), except for 20-pin packages on which the Top
Level Interrupt source (TLI) can be available on the PC3 pin using an alternate function
remapping option bit. Refer to option bytes section in the product datasheet for more details.
To generate an interrupt, the corresponding GPIO port must be configured in input mode
with interrupts enabled. Refer to the register description in the GPIO chapter for details.
The interrupt sensitivity must be configured in the external interrupt control register 1
(EXTI_CR1) and external interrupt control register 2 (EXTI_CR2) (see Section 6.9.3 and
Section 6.9.4.).
6.7 Interrupt instructions
Table 11 shows the interrupt instructions.
MSv47718V2
IT2
IT1
IT4
IT3
TRAP
IT0
Software
priority level I1 I0
311
311
200
101
311
311
3/0
11/10
RIM
Hardware priority
Used stack = 4 x 9 bytes
TRAP
IT3
IT1
Main
IT2 IT2
IT4
IT4
IT1
10
Main
IT0
Table 11. Dedicated interrupt instruction set
Instruction New description Function/example I1 H I0 N Z C
HALT Entering Halt mode - 1 - 0 - - -
IRET Interrupt routine return Pop CCR, A, X, Y, PC I1 H I0 N Z C
JRM Jump if I1:0=11 (level 3) I1:0=11 ? - - - - - -
DocID14587 Rev 14 67/467
RM0016 Interrupt controller (ITC)
72
6.8 Interrupt mapping
Refer to the corresponding device datasheet for the table of interrupt vector addresses.
JRNM Jump if I1:0<>11 I1:0<>11 ? - - - - - -
POP CC Pop CCR from the stack Memory => CCR I1 H I0 N Z C
PUSH CC Push CC on the stack CC =>Memory - - - - - -
RIM Enable interrupt (level 0 set) Load 10 in I1:0 of CCR 1 - 0 - - -
SIM Disable interrupt (level 3 set) Load 11 in I1:0 of CCR 1 - 1 - - -
TRAP Software trap Software NMI 1 - 1 - - -
WFI Wait for interrupt - 1 - 0 - - -
Table 11. Dedicated interrupt instruction set (continued)
Instruction New description Function/example I1 H I0 N Z C
Interrupt controller (ITC) RM0016
68/467 DocID14587 Rev 14
6.9 ITC and EXTI registers
6.9.1 CPU condition code register interrupt bits (CCR)
Address: refer to the general hardware register map table in the datasheet.
Reset value: 0x28
76543210
V–I1HI0NZC
rrrwrrwrrr
Bits 5, 3(1) I[1:0]: Software interrupt priority bits(2)
These two bits indicate the software priority of the current interrupt request. When an interrupt
request occurs, the software priority of the corresponding vector is loaded automatically from the
software priority registers (ITC_SPRx).
The I[1:0] bits can be also set/cleared by software using the RIM, SIM, HALT, WFI, IRET or
PUSH/POP instructions (see Figure 16: Nested interrupt management).
I1 I0 Priority Level
1 0 Level 0 (main)
Low
High
0 1 Level 1
0 0 Level 2
1 1 Level 3 (= software priority disabled*)
1. Refer to the central processing section for details on the other CCR bits.
2. TLI, TRAP and RESET events can interrupt a level-3 program.
DocID14587 Rev 14 69/467
RM0016 Interrupt controller (ITC)
72
6.9.2 Software priority register x (ITC_SPRx)
Address offset: 0x00 to 0x07
Reset value: 0xFF
76543210
ITC_SPR1 VECT3SPR[1:0] VECT2SPR[1:0] VECT1SPR[1:0] VECT0SPR[1:0]
ITC_SPR2 VECT7SPR[1:0] VECT6SPR[1:0] VECT5SPR[1:0] VECT4SPR[1:0]
ITC_SPR3 VECT11SPR[1:0] VECT10SPR[1:0] VECT9SPR[1:0] VECT8SPR[1:0]
ITC_SPR4 VECT15SPR[1:0] VECT14SPR[1:0] VECT13SPR[1:0] VECT12SPR[1:0]
ITC_SPR5 VECT19SPR[1:0] VECT18SPR[1:0] VECT17SPR[1:0] VECT16SPR[1:0]
ITC_SPR6 VECT23SPR[1:0] VECT22SPR[1:0] VECT21SPR[1:0] VECT20SPR[1:0]
ITC_SPR7 VECT27SPR[1:0] VECT26SPR[1:0] VECT25SPR[1:0] VECT24SPR[1:0]
ITC_SPR8 Reserved VECT29SPR[1:0] VECT28SPR[1:0]
rw rw rw rw rw
Bits 7:0 VECTxSPR[1:0]: Vector x software priority bits
These eight read/write registers (ITC_SPR1 to ITC_SPR8) are written by software to define the
software priority of each interrupt vector.
The list of vectors is given in Table 10: Vector address map versus software priority bits.
Refer to Section 6.9.1: CPU condition code register interrupt bits (CCR) for the values to be
programmed for each priority.
ITC_SPR1 bits 1:0 are forced to 1 by hardware (TLI)
ITC_SPR8 bits 7:4 are forced to 1 by hardware.
Note: It is forbidden to write 10 (priority level 0). If 10 is written, the previous value is kept and the
interrupt priority remains unchanged.

Interrupt controller (ITC) RM0016
70/467 DocID14587 Rev 14
6.9.3 External interrupt control register 1 (EXTI_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
PDIS[1:0] PCIS[1:0] PBIS[1:0] PAIS[1:0]
rw rw rw rw
Bits 7:6 PDIS[1:0]: Port D external interrupt sensitivity bits
These bits can only be written when I1 and I0 in the CCR register are both set to 1 (level 3). They
define the sensitivity of Port D external interrupts.
00: Falling edge and low level
01: Rising edge only
10: Falling edge only
11: Rising and falling edge
Bits 5:4 PCIS[1:0]: Port C external interrupt sensitivity bits
These bits can only be written when I1 and I0 in the CCR register are both set to 1 (level 3). They
define the sensitivity of Port C external interrupts.
00: Falling edge and low level
01: Rising edge only
10: Falling edge only
11: Rising and falling edge
Bits 3:2 PBIS[1:0]: Port B external interrupt sensitivity bits
These bits can only be written when I1 and I0 in the CCR register are both set to 1 (level 3). They
define the sensitivity of Port B external interrupts.
00: Falling edge and low level
01: Rising edge only
10: Falling edge only
11: Rising and falling edge
Bits 1:0 PAIS[1:0]: Port A external interrupt sensitivity bits
These bits can only be written when I1 and I0 in the CCR register are both set to 1 (level 3). They
define the sensitivity of Port A external interrupts.
00: Falling edge and low level
01: Rising edge only
10: Falling edge only
11: Rising and falling edge

DocID14587 Rev 14 71/467
RM0016 Interrupt controller (ITC)
72
6.9.4 External interrupt control register 1 (EXTI_CR2)
Address offset: 0x01
Reset value: 0x00
76543210
Reserved TLIS PEIS[1:0]
rrwrw
Bits 7:3 Reserved.
Bit 2 TLIS: Top level interrupt sensitivity
This bit is set and cleared by software. This bit can be written only when external interrupt is
disabled on the corresponding GPIO port (PD7 or PC3, refer to Section 6.6: External interrupts on
page 66).
0: Falling edge
1: Rising edge
Bits 1:0 PEIS[1:0]: Port E external interrupt sensitivity bits
These bits can only be written when I1 and I0 in the CCR register are both set to 1 (level 3). They
define the sensitivity of the Port E external interrupts.
00: Falling edge and low level
01: Rising edge only
10: Falling edge only
11: Rising and falling edge
Interrupt controller (ITC) RM0016
72/467 DocID14587 Rev 14
6.9.5 ITC and EXTI register map and reset values
Table 12. Interrupt register map
Add.
offset
Register
name 76543210
ITC-SPR block(1)
0x00
ITC_SPR1
Reset value
VECT3
SPR1
1
VECT3
SPR0
1
VECT2
SPR1
1
VECT2
SPR0
1
VECT1
SPR1
1
VECT1
SPR0
1
Reserved
1
Reserved
1
0x01
ITC_SPR2
Reset value
VECT7
SPR1
1
VECT7
SPR0
1
VECT6
SPR1
1
VECT6
SPR0
1
VECT5
SPR1
1
VECT5
SPR0
1
VECT4
SPR1
1
VECT4
SPR0
1
0x02
ITC_SPR3
Reset value
VECT11
SPR1
1
VECT11
SPR0
1
VECT10
SPR1
1
VECT10
SPR0
1
VECT9
SPR1
1
VECT9
SPR0
1
VECT8
SPR1
1
VECT8
SPR0
1
0x03
ITC_SPR4
Reset value
VECT15
SPR1
1
VECT15
SPR0
1
VECT14
SPR1
1
VECT14
SPR0
1
VECT13
SPR1
1
VECT13
SPR0
1
VECT12
SPR1
1
VECT12
SPR0
1
0x04
ITC_SPR5
Reset value
VECT19
SPR1
1
VECT19
SPR0
1
VECT18
SPR1
1
VECT18
SPR0
1
VECT17
SPR1
1
VECT17
SPR0
1
VECT16
SPR1
1
VECT16
SPR0
1
0x05
ITC_SPR6
Reset value
VECT23
SPR1
1
VECT23
SPR0
1
VECT22
SPR1
1
VECT22
SPR0
1
VECT21
SPR1
1
VECT21
SPR0
1
VECT20
SPR1
1
VECT20
SPR0
1
0x06
ITC_SPR7
Reset value
VECT27
SPR1
1
VECT27
SPR0
1
VECT26
SPR1
1
VECT26
SPR0
1
VECT25
SPR1
1
VECT25
SPR0
1
VECT24
SPR1
1
VECT24
SPR0
1
0x07
ITC_SPR8
Reset value
------
VECT28
SPR1
1
VECT28
SPR0
1
ITC-EXTI block(2)
0x00 EXTI_CR1
Reset value
PDIS1
0
PDIS0
0
PCIS1
0
PCIS0
0
PBIS1
0
PBIS0
0
PAIS1
0
PAIS0
0
0x01 EXTI_CR2
Reset value
-
0
-
0
-
0
-
0
-
0
TLIS
0
PEIS1
0
PEIS0
0
1. The address offsets are expressed for the ITC-SPR block base address (see CPU/SWIM/debug module/interrupt controller
registers table in the datasheet).
2. The address offsets are expressed for the ITC-EXTI block base address (see General hardware register map table in the
datasheet).
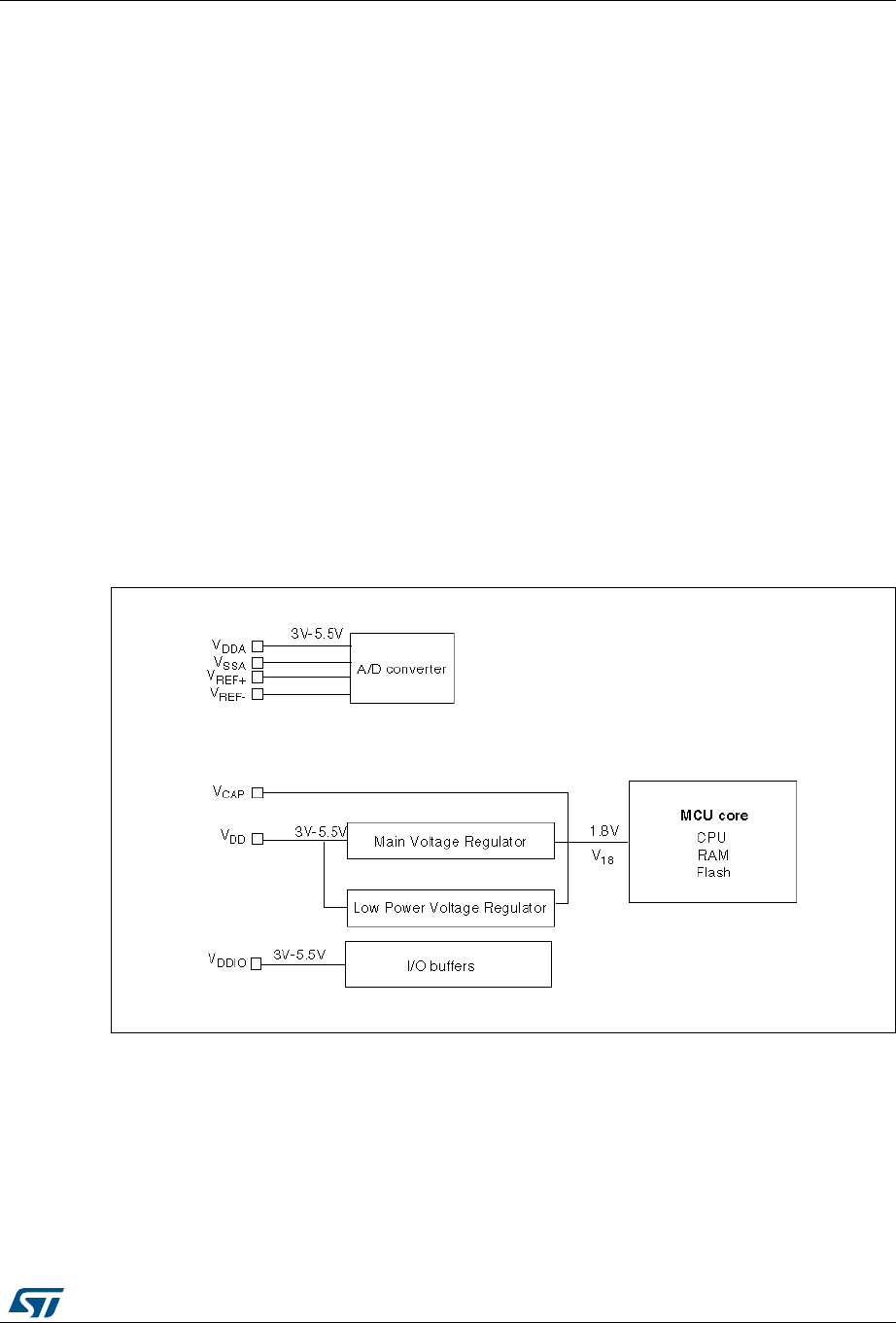
DocID14587 Rev 14 73/467
RM0016 Power supply
104
7 Power supply
The MCU has four distinct power supplies:
•VDD/VSS: Main power supply (3 V to 5.5 V)
•VDDIO/VSSIO: I/O power supply (3 V to 5.5 V)
•VDDA/VSSA: Power supply for the analog functions
•VREF+/VREF-: Reference supply for Analog Digital Converter
The VDD/VSS pins are used to supply the internal Main Voltage Regulator (MVR) and the
internal Low Power Voltage Regulator (LPVR). The 2 regulator outputs are connected and
provide the 1.8 V supply (V18) to the MCU core (CPU, Flash and RAM)
In low power modes the system automatically switches from the MVR to the LPVR in order
to reduce current consumption.
To stabilize the MVR, a capacitor must be connected to the VCAP pin (for more details refer
to the datasheet electrical characteristics section).
Depending on the package size, there are one or two pairs of dedicated pins for
VDDIO/VSSIO to supply power to the I/Os.
VDDA/VSSA and VREF+/VREF- are connected to the Analog to Digital Converter (ADC).
Figure 17. Power supply overview
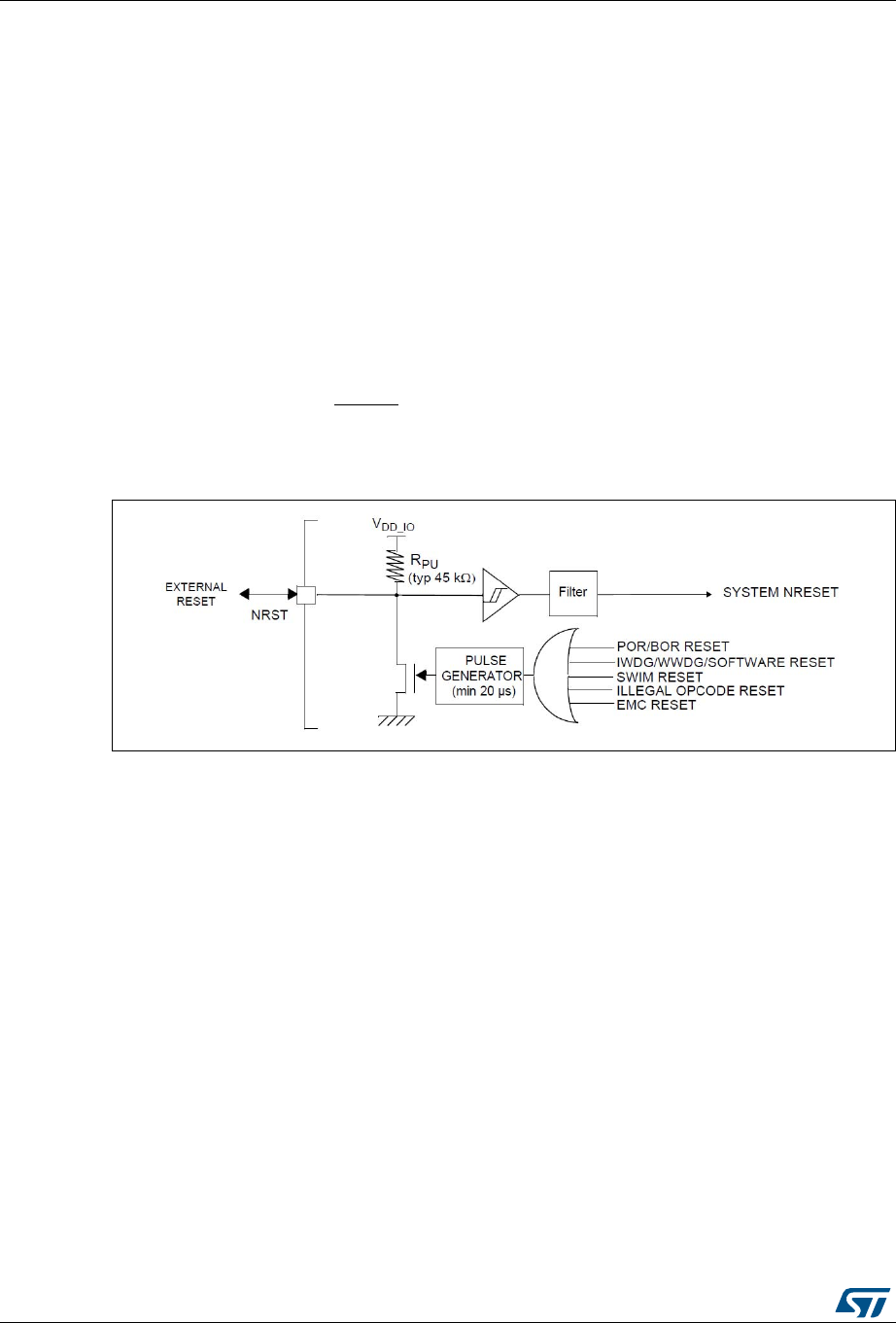
Reset (RST) RM0016
74/467 DocID14587 Rev 14
8 Reset (RST)
There are 9 reset sources:
•External reset through the NRST pin
•Power-on reset (POR)
•Brown-out Reset (BOR)
•Independent watchdog reset (IWDG)
•Window watchdog reset (WWDG)
•Software reset
•SWIM reset
•Illegal opcode reset
•EMC reset: generated if critical registers are corrupted or badly loaded
These sources act on the RESET pin and it is always kept low during the delay phase. The
RESET service routine vector is fixed at address 6000h in the memory map.
Figure 18. Reset circuit
8.1 “Reset state” and “under reset” definitions
When a reset occurs, there is a reset phase from the external pin pull-down to the internal
reset signal release. During this phase, the microcontroller sets some hardware
configurations before going to the reset vector.
At the end of this phase, most of the registers are configured with their “reset state” values.
During the reset phase, i.e. “under reset”, some pin configurations may be different from
their “reset state” configuration.
8.2 Reset circuit description
The NRST pin is both an input and an open-drain output with integrated RPU weak pull-up
resistor.
The low pulse of duration tINFP(NRST) on the NRST pin generates an external reset. The
reset detection is asynchronous and therefore the MCU can enter reset even in Halt mode.
The NRST pin also acts as an open-drain output for resetting external devices.
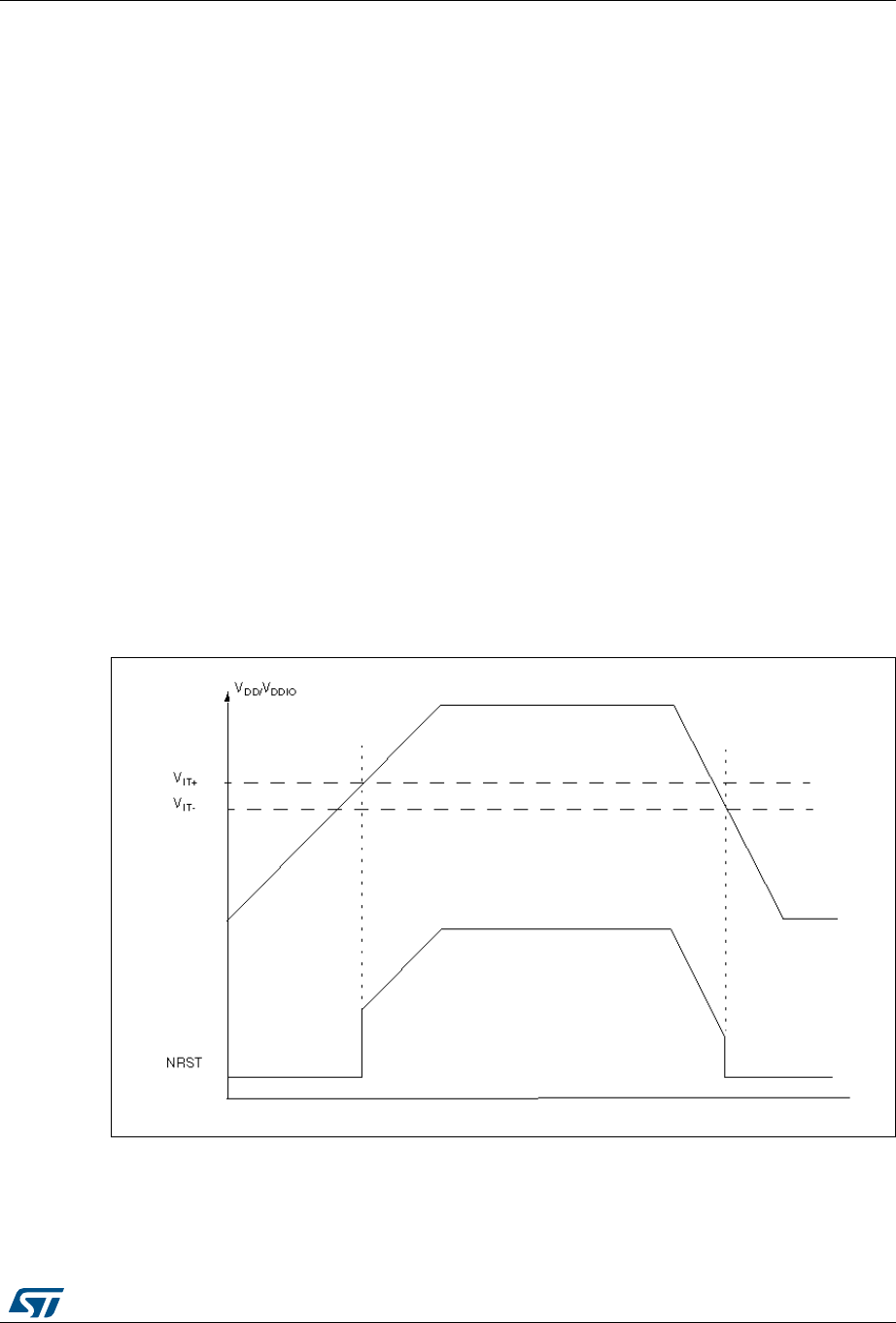
DocID14587 Rev 14 75/467
RM0016 Reset (RST)
104
An internal temporization maintains a pulse of duration tOP(NRST) whatever the internal reset
source. An additional internal weak pull-up ensures a high level on the reset pin when the
reset is not forced.
8.3 Internal reset sources
Each internal reset source is linked to a specific flag bit in the Reset status register
(RST_SR) except POR/BOR which have no flag. These flags are set respectively at reset
depending on the given reset source. So they are used to identify the last reset source.
They are cleared by software writing the logic value “1”.
8.3.1 Power-on reset (POR) and brown-out reset (BOR)
During power-on, the POR keeps the device under reset until the supply voltages (VDD and
VDDIO) reach the voltage level at which the BOR starts to function. At this point, the BOR
reset replaces the POR and the POR is automatically switched off. The BOR reset is
maintained till the supply voltage reaches the operating voltage range.
See Electrical parameters section of the datasheet for more details.
The BOR also generates a reset when the supply voltage drops below the VIT- threshold.
When this occurs, the POR is re-armed for the next power-on phase.
An hysteresis is implemented to ensure clean detection of voltage rise and fall.
The BOR always remains active even when the MCU is put into Low Power mode.
Figure 19. VDD/VDDIO voltage detection: POR/BOR threshold
8.3.2 Watchdog reset
Refer to Section 15: Window watchdog (WWDG) and Section 14: Independent watchdog
(IWDG) for details.

Reset (RST) RM0016
76/467 DocID14587 Rev 14
8.3.3 Software reset
The application software can trigger reset by clearing bit T6 in the WWDG_CR register.
Refer to Section 15: Window watchdog (WWDG).
8.3.4 SWIM reset
An external device connected to the SWIM interface can request the SWIM block to
generate an MCU reset.
8.3.5 Illegal opcode reset
In order to provide enhanced robustness to the device against unexpected behavior, a
system of illegal opcode detection is implemented. If a code to be executed does not
correspond to any opcode or prebyte value, a reset is generated. This, combined with the
Watchdog, allows recovery from an unexpected fault or interference.
Note: A valid prebyte associated with a valid opcode forming an unauthorized combination does
not generate a reset.
8.3.6 EMC reset
To protect the application against spurious write access or system hang-up, possibly caused
by electromagnetic disturbance, the most critical registers are implemented as two bitfields
that must contain complementary values. Mismatches are automatically detected by this
mechanism, triggering an EMC reset and allowing the application to cleanly recover normal
operations.
DocID14587 Rev 14 77/467
RM0016 Reset (RST)
104
8.4 RST register description
8.4.1 Reset status register (RST_SR)
Address offset: 0x00
Reset value: 0xXX
8.5 RST register map
Refer to the corresponding datasheet for the base address.
76543210
Reserved EMCF SWIMF ILLOPF IWDGF WWDGF
r rc_w1 rc_w1 rc_w1 rc_w1 rc_w1
Bits 7:5 Reserved.
Bit 4 EMCF: EMC reset flag
This bit is set by hardware and cleared by software writing “1”.
0: No EMC reset occurred
1: An EMC reset occurred (possible cause: complementary register or option byte mismatch).
Bit 3 SWIMF: SWIM reset flag
This bit is set by hardware and cleared by software writing “1”.
0: No SWIM reset occurred
1: A SWIM reset occurred
Bit 2 ILLOPF: Illegal opcode reset flag
This bit is set by hardware and cleared by software writing “1”.
0: No ILLOP reset occurred
1: An ILLOP reset occurred
Bit 1 IWDGF: Independent Watchdog reset flag
This bit is set by hardware and cleared by software writing “1”.
0: No IWDG reset occurred
1: An IWDG reset occurred
Bit 0 WWDGF: Window Watchdog reset flag
This bit is set by hardware and cleared by software writing “1”.
0: No WWDG reset occurred
1: An WWDG reset occurred
Table 13. RST register map
Address
offset Register Name765432 1 0
0x00 RST_SR
Reset value
-
x
-
x
-
x
EMCF
x
SWIMF
x
ILLOPF
x
IWDGF
x
WWDGF
x

Clock control (CLK) RM0016
78/467 DocID14587 Rev 14
9 Clock control (CLK)
The clock controller is designed to be powerful, very robust, and at the same time easy to
use. Its purpose is to allow you to obtain the best performance in your application while at
the same time get the full benefit of all the microcontroller’s power saving capabilities.
You can manage all the different clock sources independently and distribute them to the
CPU and to the various peripherals. Prescalers are available for the master and CPU
clocks.
A safe and glitch-free switch mechanism allows you to switch the master clock on the fly
from one clock source to another one.
EMC-hardened clock configuration registers
To protect the application against spurious write access or system hang-up, possibly caused
by electromagnetic disturbance, the most critical CLK registers are implemented as two
bitfields that must contain complementary values. Mismatches are automatically detected
by the CLK, triggering an EMC reset and allowing the application to cleanly recover normal
operations. See CLK register description for more details.
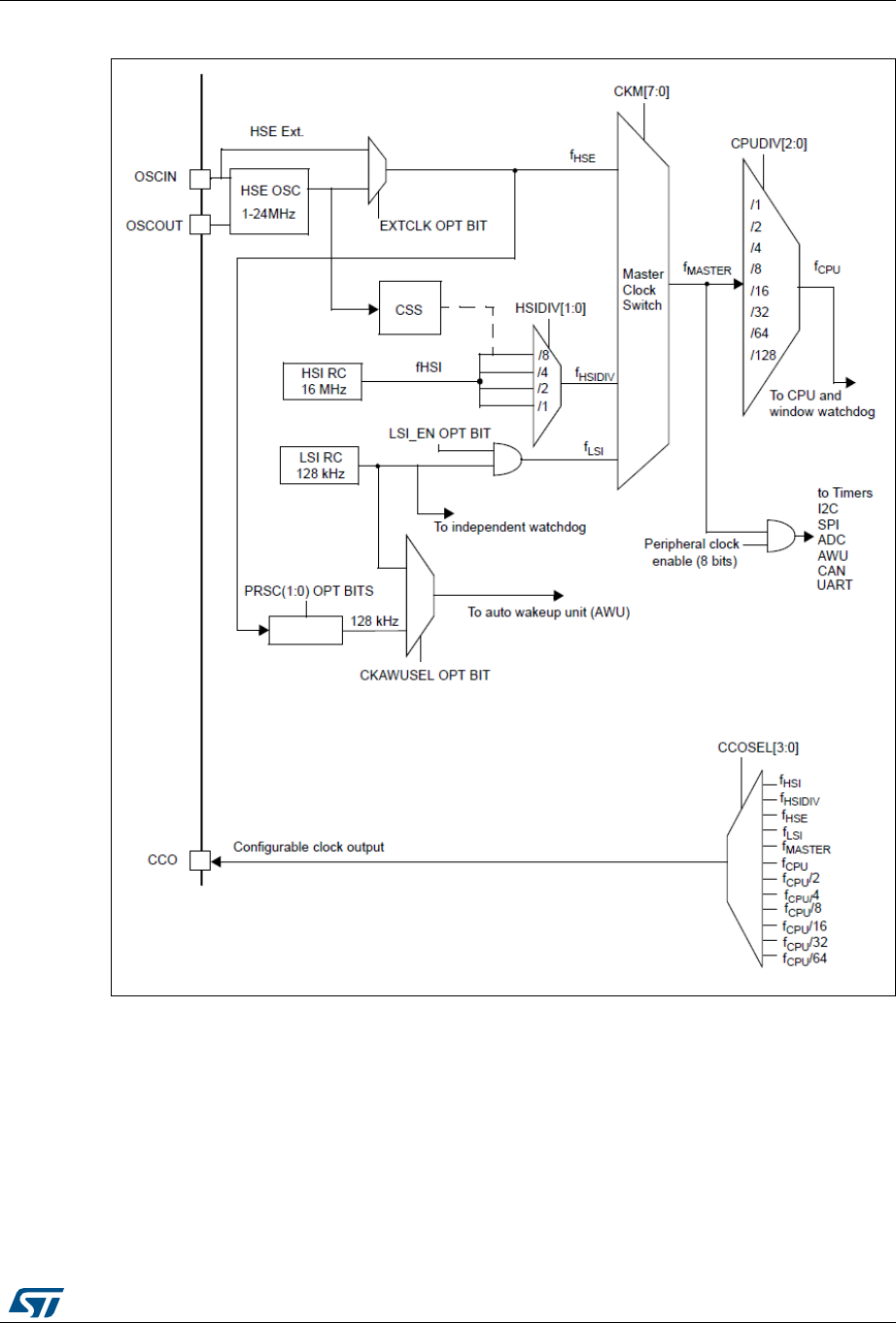
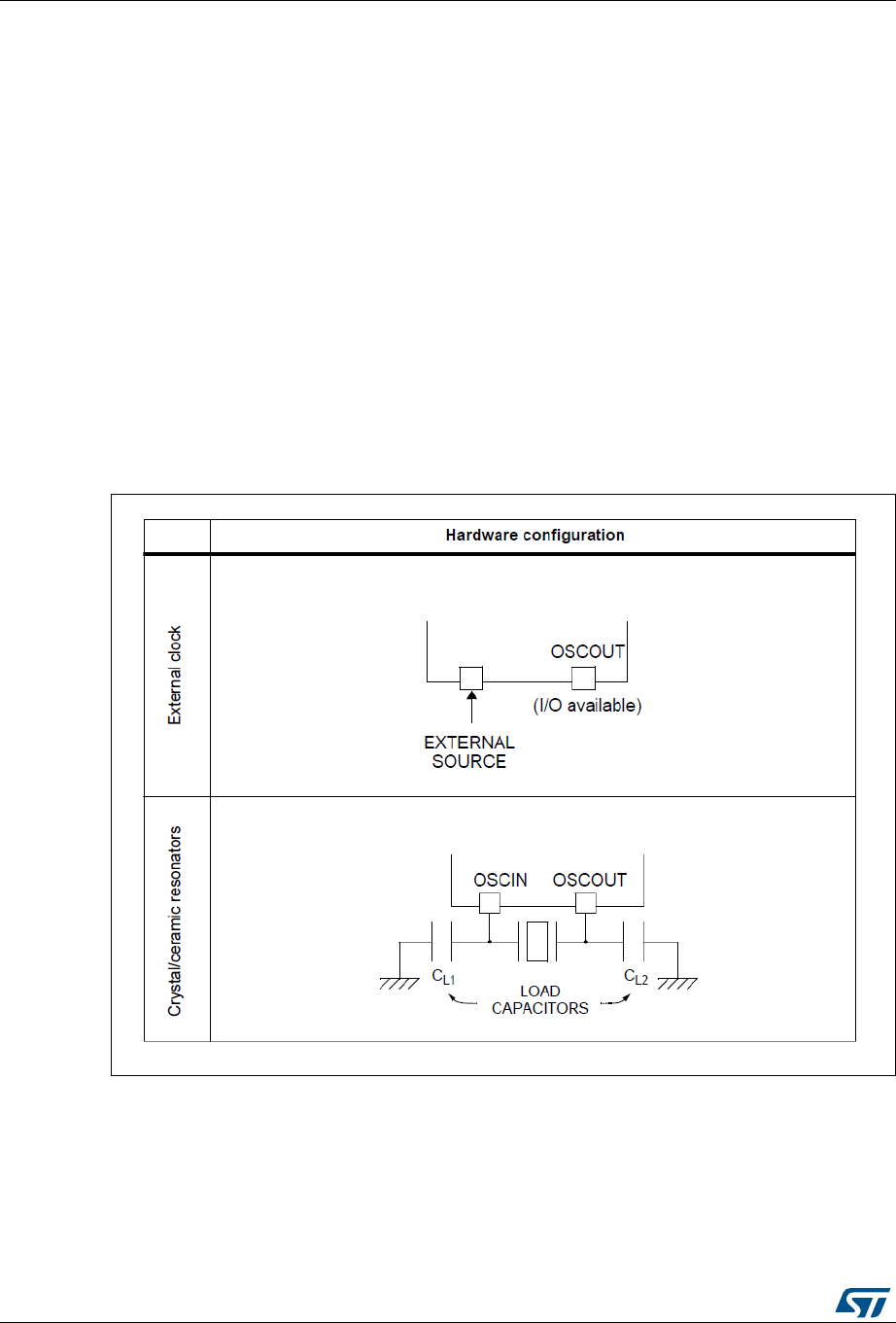
Clock control (CLK) RM0016
80/467 DocID14587 Rev 14
9.1 Master clock sources
4 different clock sources can be used to drive the master clock:
•1-24 MHz high speed external crystal oscillator (HSE)
•Up to 24 MHz high speed user-external clock (HSE user-ext)
•16 MHz high speed internal RC oscillator (HSI)
•128 kHz low speed internal RC (LSI)
Each clock source can be switched on or off independently when it is not used, to optimize
power consumption.
9.1.1 HSE (high-speed external) clock signal
The high speed external clock signal (HSE) can be generated from two possible clock
sources:
•HSE external crystal/ceramic resonator
•HSE user external clock
Figure 21. HSE clock sources
The resonator and the load capacitors have to be placed as close as possible to the
oscillator pins in order to minimize output distortion and start-up stabilization time. The
loading capacitance values must be adjusted according to the selected oscillator.

DocID14587 Rev 14 81/467
RM0016 Clock control (CLK)
104
External crystal/ceramic resonator (HSE crystal)
The 1 to 24 MHz external oscillator has the advantage of producing a very accurate rate on
the main clock with 50% duty cycle.
The associated hardware configuration is shown in Figure 21. Refer to the electrical
characteristics section for more details.
At start up the clock signal produced by the oscillator is not stable, and by default a delay of
2048 osc cycles is inserted before the clock signal is released. You can program a shorter
stabilization time in the HSECNT option byte, please refer to option bytes section in the
datasheet.
The HSERDY flag in the External clock register (CLK_ECKR) indicates if the high-speed
external oscillator is stable or not. At startup, the clock is not released until this bit is set by
hardware.
The HSE Crystal can be switched on and off using the HSEEN bit in the External clock
register (CLK_ECKR).
External source (HSE user-ext)
In this mode, an external clock source must be provided. It can have a frequency of up to
24 MHz. You select this mode by programming the EXTCLK option bit. Refer to the option
bytes section of the datasheet. The external clock signal (square, sinus or triangle) with
~50% duty cycle has to drive the OSCIN pin while the OSCOUT pin is available as standard
I/O (see Figure 20).
Note: For clock frequencies above 16 MHz, Flash /data EEPROM access must be configured for 1
wait state. This is enabled by the device option byte. Refer to the datasheet option byte
section.
9.1.2 HSI (high-speed internal) clock signal
The HSI clock signal is generated from an internal 16 MHz RC oscillator together with a
programmable divider (factor 1 to 8). This is programmed in the Clock divider register
(CLK_CKDIVR).
Note: At startup the master clock source is automatically selected as HSI RC clock output divided
by 8 (fHSI/8).
The HSI RC oscillator has the advantage of providing a 16 MHz master clock source with
50% duty cycle at low cost (no external components). It also has a faster startup time than
the HSE crystal oscillator however, even with calibration the frequency is less accurate than
an external crystal oscillator or ceramic resonator.
The HSIRDY flag in the Internal clock register (CLK_ICKR) indicates if the HSI RC is stable
or not. At startup, the HSI RC output clock is not released until this bit is set by hardware.
The HSI RC can be switched on and off using the HSIEN bit in the Internal clock register
(CLK_ICKR).
Backup source
The HSI/8 signal can also be used as a backup source (Auxiliary clock) if the HSE crystal
oscillator fails. Refer to Section 9.6: Clock security system (CSS).
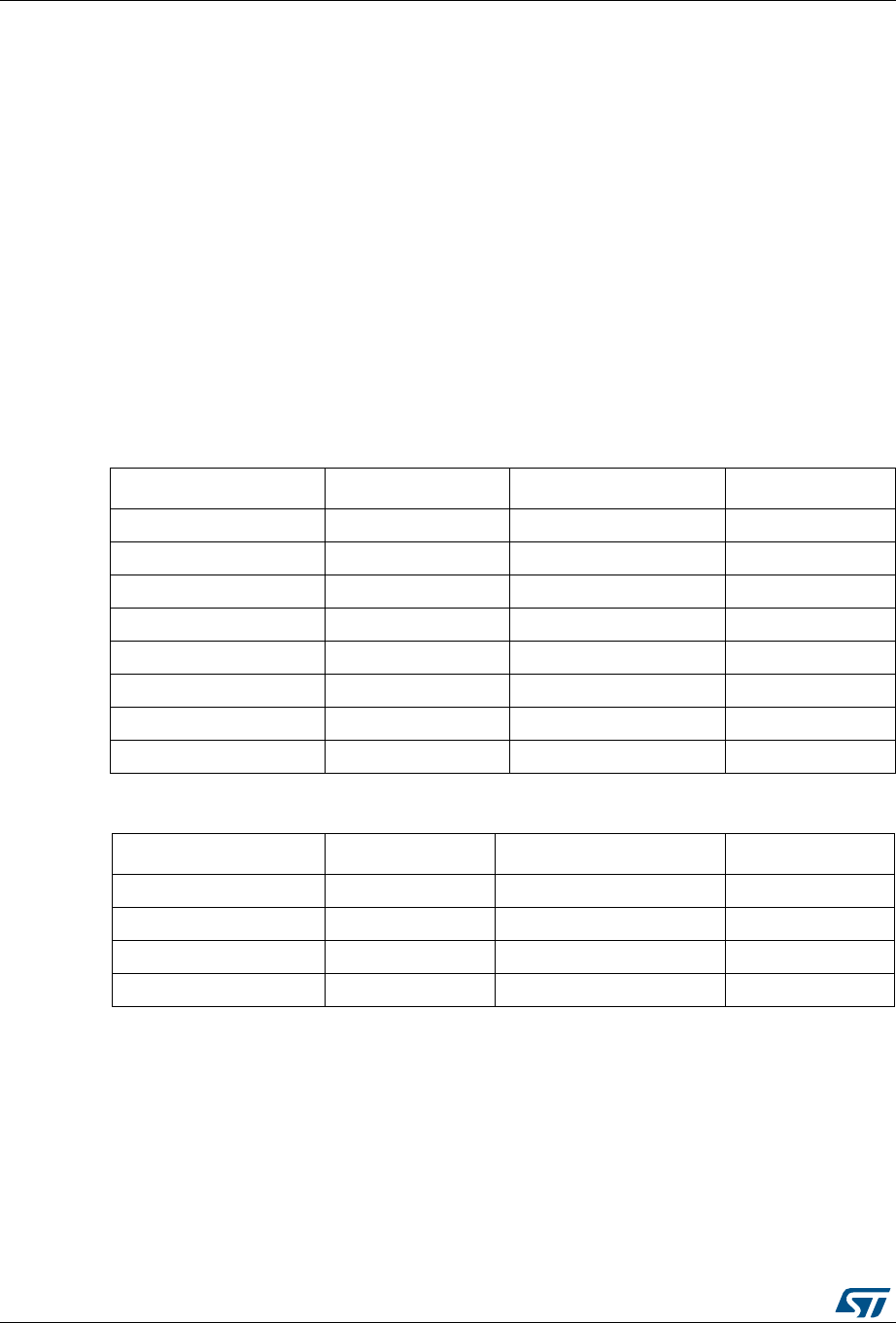
Clock control (CLK) RM0016
82/467 DocID14587 Rev 14
Fast wakeup feature
If the FHWU bit in the Internal clock register (CLK_ICKR) is set, this automatically selects
the HSI clock as master clock after MCU wakeup from Halt or Active-halt (see Low power
chapter).
Calibration
Each device is factory calibrated by ST.
After reset, the factory calibration value is automatically loaded in an internal calibration
register.
If the application is subject to voltage or temperature variations this may affect the RC
oscillator speed. You can trim the HSI frequency in the application using the HSI clock
calibration trimming register (CLK_HSITRIMR). In this register there are 3 or 4 bits providing
an additional trimming value that is added to the internal HSI calibration register value.
The width of the trimming steps with 4 bits is half the trimming step width with 3 bits.
As the trimming step width depends on the absolute frequency of the RC oscillator, a
successive approximation method needs to be applied for the trimming. This method is
described in a separate technical document.
9.1.3 LSI
The 128 kHz LSI RC acts as a low power, low cost alternative master clock source as well
as a low power clock source that can be kept running in Halt mode for the independent
watchdog (IWDG) and auto-wakeup unit (AWU).
Table 14. Devices with 4 trimming bits
Trimming bits value Trimming steps Trimming bits value Trimming steps
0111b +7 1111b -1
0110b +6 1110b -2
0101b +5 1101b -3
0100b +4 1100b -4
0011b +3 1011b -5
0010b +2 1010b -6
0001b +1 1001b -7
0000b 0 1000b -8
Table 15. Devices with 3 trimming bits
Trimming bits value Trimming steps Trimming bits value Trimming steps
011b +3 111b -1
010b +2 110b -2
001b +1 101b -3
000b 0 100b -4

DocID14587 Rev 14 83/467
RM0016 Clock control (CLK)
104
The LSI RC can be switched on and off using the LSIEN bit in the Internal clock register
(CLK_ICKR).
The LSIRDY flag in the Internal clock register (CLK_ICKR) indicates if the low-speed
internal oscillator is stable or not. At startup, the clock is not released until this bit is set by
hardware.
Calibration
Like the HSI RC, the LSI RC device is factory calibrated by ST. However, it is not possible to
perform further trimming.
Note: When using the independent watchdog with the LSI as clock source, in order to guarantee
that the CPU will never run on the same clock in case of corruption, the LSI clock cannot be
the master clock if LSI_EN option bit is reset. Refer to the option bytes section in the
datasheet.
9.2 Master clock switching
The clock switching feature provides an easy to use, fast and secure way for the application
to switch from one master clock source to another.
9.2.1 System startup
For fast system startup, after a reset the clock controller configures the master clock source
as HSI RC clock output divided by 8 (HSI/8). This is to take advantage of the short
stabilization time of the HSI oscillator. The /8 divider is to ensure safe start-up in case of
poor VDD conditions.
Once the master clock is released, the user program can switch the master clock to another
clock source.
9.2.2 Master clock switching procedures
To switch clock sources, you can proceed in one of two ways:
•Automatic switching
•Manual switching
Automatic switching
The automatic switching enables, the user to launch a clock switch with a minimum number
of instructions. The software can continue doing other operations without taking care of the
switch event exact time.
To enable automatic switching, follow the sequence below (refer to the flowchart in
Figure 22):
1. Enable the switching mechanism by setting the SWEN bit in the Switch control register
(CLK_SWCR).
2. Write the 8-bit value used to select the target clock source in the Clock master switch
register (CLK_SWR). The SWBSY bit in the CLK_SWCR register is set by hardware,
and the target source oscillator starts. The old clock source continues to drive the CPU
and peripherals.

Clock control (CLK) RM0016
84/467 DocID14587 Rev 14
As soon as the target clock source is ready (stabilized), the content of the CLK_SWR
register is copied to the Clock master status register (CLK_CMSR).
The SWBSY bit is cleared and the new clock source replaces the old one. The SWIF flag in
the CLK_SWCR is set and an interrupt is generated if the SWIEN bit is set.
Manual switching
The manual switching is not as immediate as the automatic switching but it offers to the user
a precise control of the switch event time.
To enable manual switching, follow the sequence below (refer to the flowchart in Figure 23):
1. Write the 8-bit value used to select the target clock source in the Clock master switch
register (CLK_SWR). Then the SWBSY bit is set by hardware, and the target source
oscillator starts. The old clock source continues to drive the CPU and peripherals.
2. The software has to wait until the target clock source is ready (stabilized). This is
indicated by the SWIF flag in the CLK_SWCR register and by an interrupt if the SWIEN
bit is set.
3. The final software action is to set, at the chosen time, the SWEN bit in the CLK_SWCR
register to execute the switch.
In both manual and automatic switching modes, the old master clock source will not be
powered off automatically in case it is required by other blocks (the LSI RC may be used to
drive the independent watchdog for example). The clock source can be powered off using
the bits in the Internal clock register (CLK_ICKR) and External clock register (CLK_ECKR).
If the clock switch does not work for any reason, software can reset the current switch
operation by clearing the SWBSY flag. This will restore the CLK_SWR register to its
previous content (old master clock).
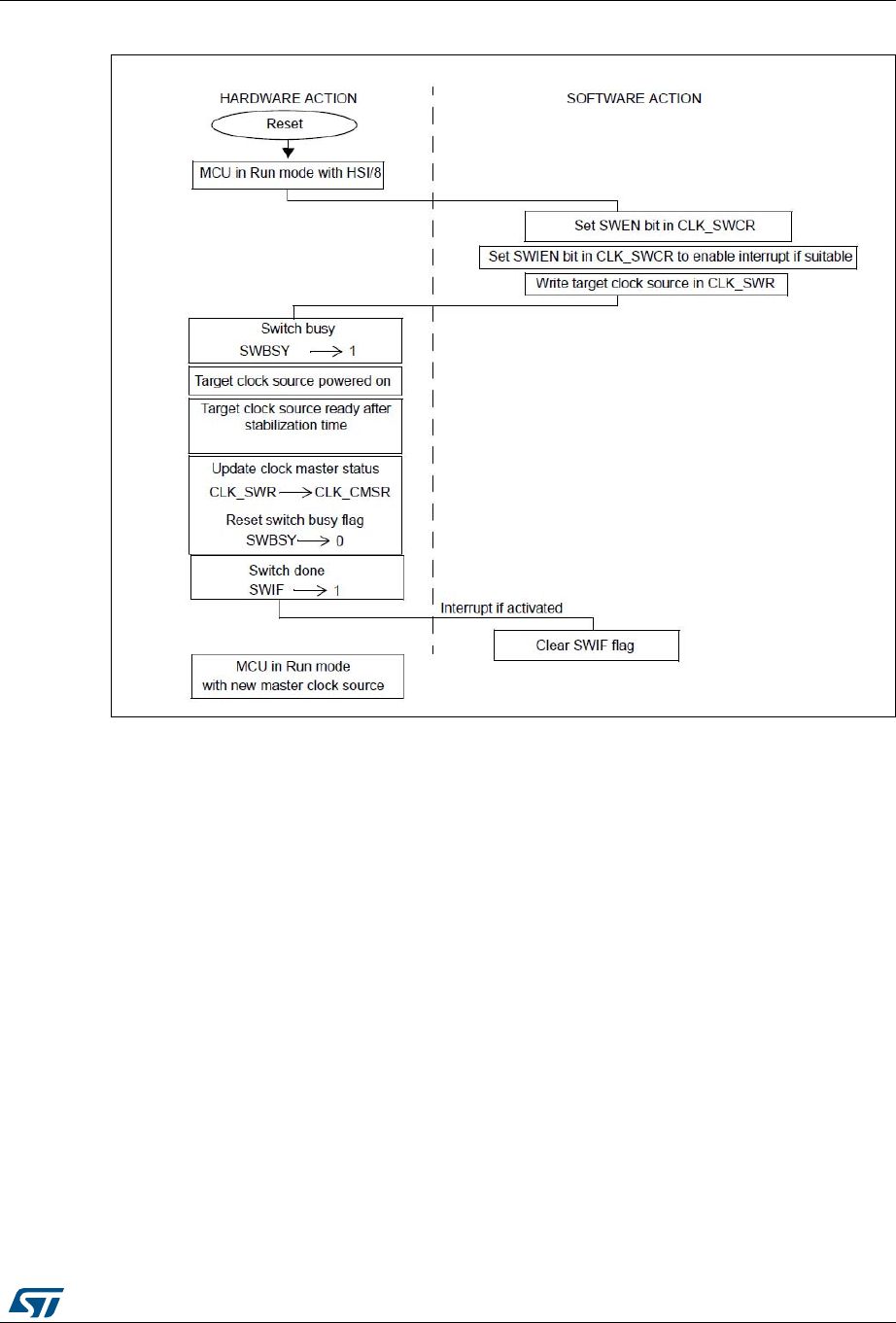
Clock control (CLK) RM0016
86/467 DocID14587 Rev 14
Figure 23. Clock switching flowchart (manual mode example)
9.3 Low-speed clock selection
The Low-speed clock source for the AWU or the independent watchdog can be LSI or HSE
divided according to the CKAWUSEL option bit. Refer to option bytes section in the
datasheet.
The division factor for HSE has to be programmed in the HSEPRSC[1:0] option bits Refer to
in the option bytes section of the datasheet. The goal is to get 128 kHz at the output of the
HSE prescaler.
9.4 CPU clock-divider
The CPU clock (fCPU) is derived from the master clock (fMASTER), divided by a factor
programmed in the CPUDIV[2:0] bits in the Clock divider register (CLK_CKDIVR). Seven
division factors (1 to 128 in steps of power of 2) can be selected (refer to Figure 20).
The fCPU signal is the clock for both the CPU and the window watchdog.

DocID14587 Rev 14 87/467
RM0016 Clock control (CLK)
104
9.5 Peripheral clock-gating (PCG)
Gating the clock to unused peripherals helps reduce power consumption. Peripheral clock
Gating (PCG) mode allows you to selectively enable or disable the fMASTER clock
connection to the following peripherals at any time in Run mode:
•ADC
•I2C
•AWU (register clock, not counter clock)
•SPI
•TIM[4:1]
•UART
•CAN (register clock, not CAN clock)
After a device reset, all peripheral clocks are enabled. You can disable the clock to any
peripheral by clearing the corresponding PCKEN bit in the Peripheral clock gating register 1
(CLK_PCKENR1) and in the Peripheral clock gating register 2 (CLK_PCKENR2). But you
have to disable properly the peripheral using the appropriate bit, before stopping the
corresponding clock.
To enable a peripheral, you must first enable the corresponding PCKEN bit in the
CLK_PCKENR registers and then set the peripheral enable bit in the peripheral’s control
registers.
The AWU counter is driven by an internal or external clock (LSI or HSE) independent from
fMASTER, so that it continues to run even if the register clock to this peripheral is switched
off.

Clock control (CLK) RM0016
88/467 DocID14587 Rev 14
9.6 Clock security system (CSS)
The Clock Security System (CSS) monitors HSE crystal clock source failures. When
fMASTER depends on HSE crystal, i.e. when HSE is selected, if the HSE clock fails due to a
broken or disconnected resonator or any other reason, the clock controller activates a stall-
safe recovery mechanism by automatically switching fMASTER to the auxiliary clock source
(HSI/8). Once selected the auxiliary clock source remains enabled until the MCU is reset.
You enable the clock security system by setting the CSSEN bit in the Clock security system
register (CLK_CSSR). For safety reason, once CSS is enabled it cannot be disabled until
the next reset.
The following conditions must be met so that the CSS can detect HSE quartz crystal
failures:
•HSE crystal on: (HSEEN = 1 in the External clock register (CLK_ECKR))
•HSE oscillator in quartz crystal configuration (EXTCLK option bit is reset)
•CSS function enabled: (CSSEN = 1 in the CLK_CSSR register)
If HSE is the current clock master when a failure is detected, the CSS performs the following
actions:
•The CSSD bit is set in the CLK_CSSR register and an interrupt is generated if the
CSSIEN bit is set.
•The Clock master status register (CLK_CMSR), Clock master switch register
(CLK_SWR) register and the HSIDIV[1:0] bits in the Clock divider register
(CLK_CKDIVR) are set to their reset values (CKM[7:0]= SWI[7:0]=E1h). HSI/8
becomes the master clock.
•The HSIEN bit in the Internal clock register (CLK_ICKR) register is set (HSI on).
•The HSEEN bit in the External clock register (CLK_ECKR) is cleared (HSE off)
•The AUX bit is set to indicate that the HSI/8 auxiliary clock source is forced.
You can clear the CSSD bit by software but the AUX bit is cleared only by reset.
To select a faster clock speed, you can modify the HSIDIV[1:0] bits in the CLK_CKDIVR
register after the CSSD bit in the CLK_CSSR register is cleared.
If HSE is not the current clock master when a failure is detected, the master clock is not
switched to the auxiliary clock and none of the above actions are performed except:
•The HSEEN bit is cleared in the CLK_ECKR register, HSE is then switched OFF
•The CSSD bit is set in the CLK_CSSR register and interrupt is generated if CSSDIE is
also set, it can be cleared by software.
If HSE is not the current clock master and the master clock switch to HSE is ongoing, the
SWBSY bit in the CLK_SWCR register must be cleared by software before clearing the
CSSD bit.
If HSE is selected by CCOSEL to be in output mode (see Clock-out capability (CCO)) when
a failure is detected, the selection is automatically changed to force HSI (HSIDIV) instead of
HSE.
DocID14587 Rev 14 89/467
RM0016 Clock control (CLK)
104
9.7 Clock-out capability (CCO)
The configurable Clock Output (CCO) capability allows you to output a clock on the external
CCO pin. You can select one of 6 clock signals as CCO clock:
•fHSE
•fHSI
•fHSIDIV
•fLSI
•fMASTER
•fCPU (with current prescaling selection)
Note: 50% duty cycle is not guaranteed on all possible prescaled values
The selection is controlled by the CCOSEL[3:0] bits in the Configurable clock output register
(CLK_CCOR).
The user has to select first the desired clock for the dedicated I/O pin (see Pin Description
chapter). This I/O must be set at 1 in the corresponding Px_CR1 register to be set as input
with pull-up or push-pull output.
The sequence to really output the chosen clock starts with CCOEN=1 in Configurable clock
output register (CLK_CCOR).
The CCOBSY is set to indicate that the configurable clock output system is operating. As
long as the CCOBSY bit is set, the CCOSEL bits are write protected.
The CCO automatically activates the target oscillator if needed. The CCORDY bit is set
when the chosen clock is ready.
To disable the clock output the user has to clear the CCOEN bit. Both CCOBSY and
CCORDY remain at 1 till the shut down is completed. The time between the clear of CCOEN
and the reset of the two flags can be relatively long, for instance in case the selected clock
output is very slow compared to fCPU.
9.8 CLK interrupts
The following interrupts can be generated by the clock controller:
•Master clock source switch event
•Clock Security System event
Both interrupts are individually maskable.
Table 16. CLK interrupt requests
Interrupt event Event
flag
Enable
control
bit
Exit
from
wait
Exit
from
Halt
CSS event CSSD CSSDIE Yes No
Master clock switch event SWIF SWIEN Yes No
Clock control (CLK) RM0016
90/467 DocID14587 Rev 14
9.9 CLK register description
9.9.1 Internal clock register (CLK_ICKR)
Address offset: 0x00
Reset value: 0x01
76543210
Reserved REGAH LSIRDY LSIEN FHW HSIRDY HSIEN
rrwrrwrwrrw
Bits 7:6 Reserved, must be kept cleared.
Bit 5 REGAH: Regulator power off in Active-halt mode
This bit is set and cleared by software. When it is set, the main voltage regulator is powered off as
soon as the MCU enters Active-halt mode, so the wakeup time is longer.
0: MVR regulator ON in Active-halt mode
1: MVR regulator OFF in Active-halt mode
Bit 4 LSIRDY: Low speed internal oscillator ready
This bit is set and cleared by hardware.
0: LSI clock not ready
1: LSI clock ready
Bit 3 LSIEN: Low speed internal RC oscillator enable
This bit is set and cleared by software. It is set by hardware whenever the LSI oscillator is required,
for example:
– When switching to the LSI clock (see CLK_SWR register)
– When LSI is selected as the active CCO source (see CLK_CCOR register)
– When BEEP is enabled (BEEPEN bit set in the BEEP_CSR register)
– When LSI measurement is enabled (MSR bit set in the AWU_CSR register)
It cannot be cleared when LSI is selected as master clock source (CLK_CMSR register), as active
CCO source or as clock source for the AWU peripheral or independent Watchdog.
0: Low-speed internal RC off
1: Low-speed internal RC on
DocID14587 Rev 14 91/467
RM0016 Clock control (CLK)
104
9.9.2 External clock register (CLK_ECKR)
Address offset: 0x01
Reset value: 0x00
Bit 2 FHWU: Fast wakeup from Halt/Active-halt modes
This bit is set and cleared by software.
0: Fast wakeup from Halt/Active-halt modes disabled
1: Fast wakeup from Halt/Active-halt modes enabled
Bit 1 HSIRDY: High speed internal oscillator ready
This bit is set and cleared by hardware.
0: HSI clock not ready
1: HSI clock ready
Bit 0 HSIEN: High speed internal RC oscillator enable
This bit is set and cleared by software. It is set by hardware whenever the HSI oscillator is required,
for example:
– When activated as safe oscillator by the CSS
– When switching to HSI clock (see CLK_SWR register)
– When HSI is selected as the active CCO source (see CLK_CCOR register)
It cannot be cleared when HSI is selected as clock master (CLK_CMSR register), as active CCO
source or if the safe oscillator (AUX) is enabled.
0: High-speed internal RC off
1: High-speed internal RC on
76543210
Reserved HSERDY HSEEN
rrrw
Bits 7:2 Reserved, must be kept cleared.
Bit 1 HSERDY: High speed external crystal oscillator ready
This bit is set and cleared by hardware.
0: HSE clock not ready
1: HSE clock ready (HSE clock is stabilized and available)
Bit 0 HSEEN: High speed external crystal oscillator enable
This bit is set and cleared by software. It can be used to switch the external crystal oscillator on or
off. It is set by hardware in the following cases:
– When switching to HSE clock (see CLK_SWR register)
– When HSE is selected as the active CCO source (see CLK_CCOR register)
It cannot be cleared when HSE is selected as clock master (indicated in CLK_CMSR register) or as
the active CCO source.
0: HSE clock off
1: HSE clock on
Clock control (CLK) RM0016
92/467 DocID14587 Rev 14
9.9.3 Clock master status register (CLK_CMSR)
Address offset:0x03
Reset value: 0xE1
9.9.4 Clock master switch register (CLK_SWR)
Address offset: 0x04
Reset value: 0xE1
76543210
CKM[7:0]
rrrrrrrr
Bits 7:0 CKM[7:0]: Clock master status bits
These bits are set and cleared by hardware. They indicate the currently selected master clock
source. An invalid value occurring in this register will automatically generate an MCU reset.
0xE1: HSI selected as master clock source (reset value)
0xD2: LSI selected as master clock source (only if LSI_EN option bit is set)
0xB4: HSE selected as master clock source
76543210
SWI[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 SWI[7:0]: Clock master selection bits
These bits are written by software to select the master clock source. Its contents are write protected
while a clock switch is ongoing (while the SWBSY bit is set). They are set to the reset value (HSI) if
the AUX bit is set in the CLK_CSSR register. If Fast Halt wakeup mode is selected (FHW bit =1 in
CLK_ICKR register) then these bits are set by hardware to E1h (HSI selected) when resuming from
Halt/Active-halt mode.
0xE1: HSI selected as master clock source (reset value)
0xD2: LSI selected as master clock source (only if LSI_EN option bit is set)
0xB4: HSE selected as master clock source

DocID14587 Rev 14 93/467
RM0016 Clock control (CLK)
104
9.9.5 Switch control register (CLK_SWCR)
Address offset: 0x05
Reset value: 0xXX
76543210
Reserved SWIF SWIEN SWEN SWBSY
r rc_w0 rw rw rw
Bits 7:4 Reserved.
Bit 3 SWIF: Clock switch interrupt flag
This bit is set by hardware and cleared by software writing 0. Its meaning depends on the status of
the SWEN bit. Refer to Figure 22 and Figure 23.
″In manual switching mode (SWEN = 0):
0: Target clock source not ready
1: Target clock source ready
″In automatic switching mode (SWEN = 1):
0: No clock switch event occurred
1: Clock switch event occurred
Bit 2 SWIEN: Clock switch interrupt enable
This bit is set and cleared by software.
0: Clock switch interrupt disabled
1: Clock switch interrupt enabled
Bit 1 SWEN: Switch start/stop
This bit is set and cleared by software. Writing a 1 to this bit enables switching the master clock to
the source defined in the CLK_SWR register.
0: Disable clock switch execution
1: Enable clock switch execution
Bit 0 SWBSY: Switch busy
This bit is set and cleared by hardware. It can be cleared by software to reset the clock switch
process.
0: No clock switch ongoing
1: Clock switch ongoing

Clock control (CLK) RM0016
94/467 DocID14587 Rev 14
9.9.6 Clock divider register (CLK_CKDIVR)
Address offset: 0x06
Reset value: 0x18
76543210
Reserved HSIDIV[1:0] CPUDIV[2:0]
r rwrwrwrwrw
Bits 7:5 Reserved, must be kept cleared.
Bits 4:3 HSIDIV[1:0]: High speed internal clock prescaler
These bits are written by software to define the HSI prescaling factor.
00: fHSI= fHSI RC output
01: fHSI= fHSI RC output/2
10: fHSI= fHSI RC output/4
11: fHSI= fHSI RC output/8
Bits 2:0 CPUDIV[2:0]: CPU clock prescaler
These bits are written by software to define the CPU clock prescaling factor.
000: fCPU=fMASTER
001: fCPU=fMASTER/2
010: fCPU=fMASTER/4
011: fCPU=fMASTER/8
100: fCPU=fMASTER/16
101: fCPU=fMASTER/32
110: fCPU=fMASTER/64
111: fCPU=fMASTER/128
DocID14587 Rev 14 95/467
RM0016 Clock control (CLK)
104
9.9.7 Peripheral clock gating register 1 (CLK_PCKENR1)
Address offset: 0x07
Reset value: 0xFF
76543210
PCKEN1[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 PCKEN1[7:0]: Peripheral clock enable
These bits are written by software to enable or disable the fMASTER clock to the corresponding
peripheral (see Table 17).
0: fMASTER to peripheral disabled
1: fMASTER to peripheral enabled
Table 17. Peripheral clock gating bits
Control bit Peripheral
PCKEN17 TIM1
PCKEN16 TIM3
PCKEN15 TIM2/TIM5 (product dependent)
PCKEN14 TIM4/ TIM6 (product dependent)
PCKEN13 UART1/2/3/4 (product dependent, see datasheet
for bit assignment table)
PCKEN12
PCKEN11 SPI
PCKEN10 I2C
Clock control (CLK) RM0016
96/467 DocID14587 Rev 14
9.9.8 Peripheral clock gating register 2 (CLK_PCKENR2)
Address offset: 0x0A
Reset value: 0xFF
76543210
PCKEN2[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 PCKEN2[7:0]: Peripheral clock enable
These bits are written by software to enable or disable the fMASTER clock to the corresponding
peripheral. See Table 17
0: fMASTER to peripheral disabled
1: fMASTER to peripheral enabled
Table 18. Peripheral clock gating bits
Control bit Peripheral
PCKEN27 CAN (product dependent, see datasheet)
PCKEN26 Reserved
PCKEN25 Reserved
PCKEN24 Reserved
PCKEN23 ADC
PCKEN22 AWU
PCKEN21 Reserved
PCKEN20 Reserved

DocID14587 Rev 14 97/467
RM0016 Clock control (CLK)
104
9.9.9 Clock security system register (CLK_CSSR)
Address offset: 0x08
Reset value: 0x00
76543210
Reserved CSSD CSSDIE AUX CSSEN
rrc_w0rwrrwo
Bits 7:4 Reserved, must be kept cleared.
Bit 3 CSSD: Clock security system detection
This bit is set by hardware and cleared by software writing 0.
0: CSS is off or no HSE crystal clock disturbance detected.
1: HSE crystal clock disturbance detected.
Bit 2 CSSDIE: Clock security system detection interrupt enable
This bit is set and cleared by software.
0: Clock security system interrupt disabled
1: Clock security system interrupt enabled
Bit 1 AUX: Auxiliary oscillator connected to master clock
This bit is set and cleared by hardware.
0: Auxiliary oscillator is off.
1: Auxiliary oscillator (HSI/8) is on and selected as current clock master source.
Bit 0 CSSEN: Clock security system enable
This bit can be read many times and be written once-only by software.
0: Clock security system off
1: Clock security system on

Clock control (CLK) RM0016
98/467 DocID14587 Rev 14
9.9.10 Configurable clock output register (CLK_CCOR)
Address offset: 0x09
Reset value: 0x00
76543210
Reserved CCOBSY CCORDY CCOSEL[3:0] CCOEN
r r r rwrwrwrwrw
Bit 7 Reserved, must be kept cleared.
Bit 6 CCOBSY: Configurable clock output busy
This bit is set and cleared by hardware. It indicates that the selected CCO clock source is being
switched-on and stabilized. While CCOBSY is set, the CCOSEL bits are write-protected. CCOBSY
remains set until the CCO clock is enabled.
0: CCO clock not busy
1: CCO clock busy
Bit 5 CCORDY: Configurable clock output ready
This bit is set and cleared by hardware. It indicates that the CCO clock is being output.
0: CCO clock not available
1: CCO clock available
Bits 4:1 CCOSEL[3:0]: Configurable clock output selection.
These bits are written by software to select the source of the output clock available on the
CLK_CCO pin. They are write-protected when CCOBSY is set.
0000: fHSIDIV
0001: fLSI
0010: fHSE
0011: Reserved
0100: fCPU
0101: fCPU/2
0110: fCPU/4
0111: fCPU/8
1000: fCPU/16
1001: fCPU/32
1010: fCPU/64
1011: fHSI
1100: fMASTER
1101: fCPU
1110: fCPU
1111: fCPU
Bit 0 CCOEN: Configurable clock output enable
This bit is set and cleared by software.
0: CCO clock output disabled
1: CCO clock output enabled
DocID14587 Rev 14 99/467
RM0016 Clock control (CLK)
104
9.9.11 HSI clock calibration trimming register (CLK_HSITRIMR)
Address offset: 0x0C
Reset value: 0x00
9.9.12 SWIM clock control register (CLK_SWIMCCR)
Address offset: 0x0D
Reset value: 0bXXXX XXX0
76543210
Reserved HSITRIM[3:0]
rrwrwrwrw
Bits 7:4 Reserved, must be kept cleared.
Bits 3:0 HSITRIM[3:0] HSI trimming value
These bits are written by software to fine tune the HSI calibration.
Note: In high density STM8S and STM8AF devices, only bits 2:0 are available.
In other devices, bits 3:0 are available to achieve a better HSI resolution. Compatibility with bits
2:0 can be selected through options bytes (refer to datasheet).
76543210
Reserved SWIMCLK
rrw
Bits 7:1 Reserved.
Bit 0 SWIMCLK SWIM clock divider
This bit is set and cleared by software.
0: SWIM clock divided by 2
1: SWIM clock not divided by 2
Clock control (CLK) RM0016
100/467 DocID14587 Rev 14
9.10 CLK register map and reset values
Table 19. CLK register map and reset values
Address
offset Register name76543210
0x00 CLK_ICKR
Reset value
-
0
-
0
REGAH
0
LSIRDY
0
LSIEN
0
FHWU
0
HSIRDY
0
HSIEN
1
0x01 CLK_ECKR
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
HSERDY
0
HSEEN
0
0x02 Reserved area (1 byte)
0x03 CLK_CMSR
Reset value
CKM7
1
CKM6
1
CKM5
1
CKM4
0
CKM3
0
CKM2
0
CKM1
0
CKM0
1
0x04 CLK_SWR
Reset value
SWI7
1
SWI6
1
SWI5
1
SWI4
0
SWI3
0
SWI2
0
SWI1
0
SWI0
1
0x05 CLK_SWCR
Reset value
-
x
-
x
-
x
-
x
SWIF
x
SWIEN
x
SWEN
x
SWBSY
x
0x06 CLK_CKDIVR
Reset value
-
0
-
0
-
0
HSIDIV1
1
HSIDIV0
1
CPUDIV2
0
CPUDIV12
0
CPUDIV0
0
0x07 CLK_PCKENR1
Reset value
PCKEN17
1
PCKEN16
1
PCKEN15
1
PCKEN14
1
PCKEN13
1
PCKEN12
1
PCKEN11
1
PCKEN10
1
0x08 CLK_CSSR
Reset value
-
0
-
0
-
0
-
0
CSSD
0
CSSDIE
0
AUX
0
CSSEN
0
0x09 CLK_CCOR
Reset value
-
0
CCOBSY
0
CCORDY
0
CCOSEL3
0
CCOSEL2
0
CCOSEL1
0
CCOSEL0
0
CCOEN
0
0x0A CLK_PCKENR2
Reset value
PCKEN27
1
PCKEN26
1
PCKEN25
1
PCKEN24
1
PCKEN23
1
PCKEN22
1
PCKEN21
1
PCKEN20
1
0x0B Reserved area (1 byte)
0x0C CLK_HSITRIMR
Reset value
-
0
-
0
-
0
-
0
-
0
HSITRIM2
0
HSITRIM1
0
HSITRIM0
0
0x0D CLK_SWIMCCR
Reset value
-
x
-
x
-
x
-
x
-
x
-
x
-
x
SWIMCLK
0

DocID14587 Rev 14 101/467
RM0016 Power management
104
10 Power management
By default, after a system or power reset, the microcontroller is in Run mode. In this mode
the CPU is clocked by fCPU and executes the program code, the system clocks are
distributed to the active peripherals and the microcontroller is drawing full power.
While in Run mode, still keeping the CPU running and executing code, the application has
several ways to reduce power consumption, such as:
•Slowing down the system clocks
•Gating the clocks to individual peripherals when they are unused
•Switching off any unused analog functions
However, when the CPU does not need to be kept running, three dedicated low power
modes can be used:
•Wait
•Active-halt (configurable for slow or fast wakeup)
•Halt (configurable for slow or fast wakeup)
You can select one of these three modes and configure them to obtain the best compromise
between lowest power consumption, fastest start-up time and available wakeup sources.
10.1 General considerations
Low power consumption features are generally very important for all types of application for
energy saving. Ultra low power features are especially important for mobile applications to
ensure long battery lifetimes. This is also crucial for environmental protection.
In a silicon chip there are two kind of consumption:
•Static power consumption which is due to analog polarization and leakages. This so
small, it is only significant in Halt and Active-halt modes (refer to Section 10.2: Low
power modes).
•Dynamic power consumption which comes from running the digital parts of the chip.
It depends on VDD, clock frequency and load capacitors.
In a microcontroller device the consumption depends on:
•VDD supply voltage
•Analog performance
•MCU size or number of digital gates (leakages and load capacitors)
•Clock frequency
•Number of active peripherals
•Available low power modes and low power levels
Device processing performance is also very important, as this allows the application to
minimize the time spent in Run mode and maximize the time in low power mode.
Using the MCU’s flexible power management features, you can obtain a range of significant
power savings while the system is running or able to resume operations quickly.
Power management RM0016
102/467 DocID14587 Rev 14
10.1.1 Clock management for low consumption
Slowing down the system clock
In Run mode, choosing the oscillator to be used as the system clock source is very
important to ensure the best compromise between performance and consumption. The
selection is done by programming the clock controller registers. Refer to the Clock control
(CLK) section.
As a further measure, fCPU can be reduced by writing to the CPUDIV[2:0] bits in the Clock
divider register (CLK_CKDIVR). This reduces the speed of the CPU and consequently the
power consumption of the MCU. The other peripherals (clocked by fMASTER) are not affected
by this setting.
To return to full speed at any time in Run mode, clear the CPUDIV[2:0] bits.
Peripheral clock gating
For additional power saving you can use peripheral clock gating (PCG). This can be done at
any time by selectively enabling or disabling the fMASTER clock connection to individual
peripherals. Refer to the Clock control (CLK) section.
These settings are effective in both Run and Wait modes.
10.2 Low power modes
The main characteristics of the four low power modes are summarized in Table 20.
Table 20. Low power mode management
Mode
(consumption
level)
Main voltage
regulator Oscillators CPU Peripherals
Wakeup trigger
event
Wait
( - ) On On Off On(1)
All internal interrupts
(including AWU) or
external interrupts,
reset
Active-halt
( - - ) On
Off
except LSI (or
HSE)
Off Only AWU(2) AWU or external(3)
interrupts, reset
Active-halt with
MVR auto power off
( - - - )
Off
(low power
regulator on)
Off
except LSI only Off Only AWU(2) AWU or external(3)
interrupts, reset
Halt
( - - - - )
Off
(low power
regulator on)
Off Off Off(2) External(3) interrupts,
reset
1. If the peripheral clock is not disabled by peripheral clock gating function.
2. If activated, BEEP or IWDG stay switched on. In this case, the LSI clock is forced to run.
3. Including communication peripheral interrupts.

DocID14587 Rev 14 103/467
RM0016 Power management
104
10.2.1 Wait mode
Wait mode is entered from Run mode by executing a WFI (wait for interrupt) instruction: this
stops the CPU but allows the other peripherals and interrupt controller to continue to run.
Therefore the consumption decreases accordingly. Wait mode can be combined with PCG
(peripheral clock gating), reduced CPU clock frequency and low mode clock source
selection (LSI, HSI) to further reduce the power consumption of the device. Refer to the
Clock control (CLK) description.
In Wait mode, all the registers and RAM contents are preserved, the previously defined
clock configuration remains unchanged (Clock master status register (CLK_CMSR)).
When an internal or external interrupt request occurs, the CPU wakes-up from Wait mode
and resumes processing.
10.2.2 Halt mode
In this mode the master clock is stopped. This means that the CPU and all the peripherals
clocked by fMASTER or by derived clocks are disabled. As a result, none of the peripherals
are clocked and the digital part of the MCU consumes almost no power.
In Halt mode, all the registers and RAM contents are preserved, by default the clock
configuration remains unchanged (Clock master status register (CLK_CMSR)).
The MCU enters Halt mode when a HALT instruction is executed. Wakeup from Halt mode
is triggered by an external interrupt, sourced by a GPIO port configured as interrupt input or
an Alternate Function pin capable of triggering a peripheral interrupt.
In this mode the MVR regulator is switched off to save power. Only the LPVR regulator (and
brown-out reset) is active.
Fast clock wakeup
The HSI RC start-up time is much faster than the HSE crystal start-up time (refer to the
Electrical Parameters in the datasheet). Therefore, to optimize the MCU wakeup time, it is
recommended to select the HSI clock as the fMASTER clock source before entering Halt
mode.
This selection can be done without clock switching using the FHWU bit in the Internal clock
register (CLK_ICKR). Refer to the Clock control (CLK) chapter.
10.2.3 Active-halt modes
Active-halt mode is similar to Halt mode except that it does not require an external interrupt
for wakeup. It uses the AWU to generate a wakeup event internally after a programmable
delay.
In Active-halt mode, the main oscillator, the CPU and almost all the peripherals are stopped.
Only the LSI RC or HSE oscillators are running to drive the AWU counters and IWD counter
if enabled.
To enter Active-halt mode, first enable the AWU as described in the AWU section. Then
execute a HALT instruction.

Power management RM0016
104/467 DocID14587 Rev 14
Main voltage regulator (MVR) auto power-off
By default the main voltage regulator is kept on Active-halt mode. Keeping it active ensures
fast wakeup from Active-halt mode. However, the current consumption of the MVR is non-
negligible.
To further reduce current consumption, the MVR regulator can be powered off automatically
when the MCU enters Active-halt mode. To configure this feature, set the REGAH bit in the
Internal clock register (CLK_ICKR) register. In this mode:
•The MCU core is powered only by the LPVR regulator (same as in Halt mode).
•Only the LSI clock source can be used, as the HSE clock current consumption is too
high for the LPVR.
The Main voltage regulator is powered on again at wakeup and it requires a longer wakeup
time (refer to the datasheet electrical characteristics section for wakeup timing and current
consumption data).
Fast clock wakeup
As described for Halt mode, in order to get the shortest wakeup time, it is recommended to
select HSI as the fMASTER clock source. The FHWU bit is also available to save switching
time.
A fast wakeup time is very important in Active-halt mode. It supplements the effect of CPU
processing performance by helping to minimize the time the MCU stays in Run mode
between two periods in low power mode, and thus reduces the overall average power
consumption.
Since the clock is not automatically switched to the original master clock, the application
must restore the clock source before entering Halt/Active-halt mode as soon as it is ready.
10.3 Additional analog power controls
10.3.1 Fast Flash wakeup from Halt mode
By default the Flash is in power-down state when the microcontroller enters Halt mode. The
current leakage is negligible, resulting in very low consumption in Halt mode. However the
Flash wakeup time is relatively slow (several µs).
If you need the application to wakeup quickly from Halt mode, set the HALT bit in
Section 4.8.1: Flash control register 1 (FLASH_CR1). This ensures that the Flash is in
Standby mode when the microcontroller enters in Halt mode. Its wakeup time is reduced to a
few ns. However, in this case the consumption is increased up to several µAs.
Refer to the electrical characteristics section of the datasheet for more details.
10.3.2 Very low Flash consumption in Active-halt mode
By default, in Active-halt mode, the Flash remains in operating mode to ensure the fastest
wakeup time, however in this case the power consumption is not optimized.
To optimize the power consumption you can set the AHALT bit in Flash control register 1
(FLASH_CR1). This will switch the Flash to power-down state when entering Active-halt
mode. The consumption decreases but the wakeup time increases up to a few µs.

DocID14587 Rev 14 105/467
RM0016 General purpose I/O ports (GPIO)
113
11 General purpose I/O ports (GPIO)
11.1 Introduction
General purpose input/output ports are used for data transfers between the chip and the
external world. An I/O port can contain up to eight pins. Each pin can be individually
programmed as a digital input or digital output. In addition, some ports may have alternate
functions like analog inputs, external interrupts, input/output for on-chip peripherals. Only
one alternate function can be mapped to a pin at a time, the alternate function mapping is
controlled by option byte. Refer to the datasheet for a description of the option bytes.
An output data register, input data register, data direction register and two configuration
registers are associated with each port. A particular port will behave as an input or output
depending on the status of the data direction register of the port.
11.2 GPIO main features
•Port bits can be configured individually
•Selectable input modes: floating input or input with pull-up
•Selectable output modes: push-pull output or pseudo-open-drain.
•Separate registers for data input and output
•External interrupts can be enabled and disabled individually
•Output slope control for reduced EMC noise
•Alternate function I/Os for on-chip peripherals
•Input Schmitt trigger can be disabled on analog inputs for reduced power consumption
•Read-modify-write possible on data output latch
•5 V-tolerant inputs
•I/O state guaranteed in voltage range 1.6 V to VDDIOmax
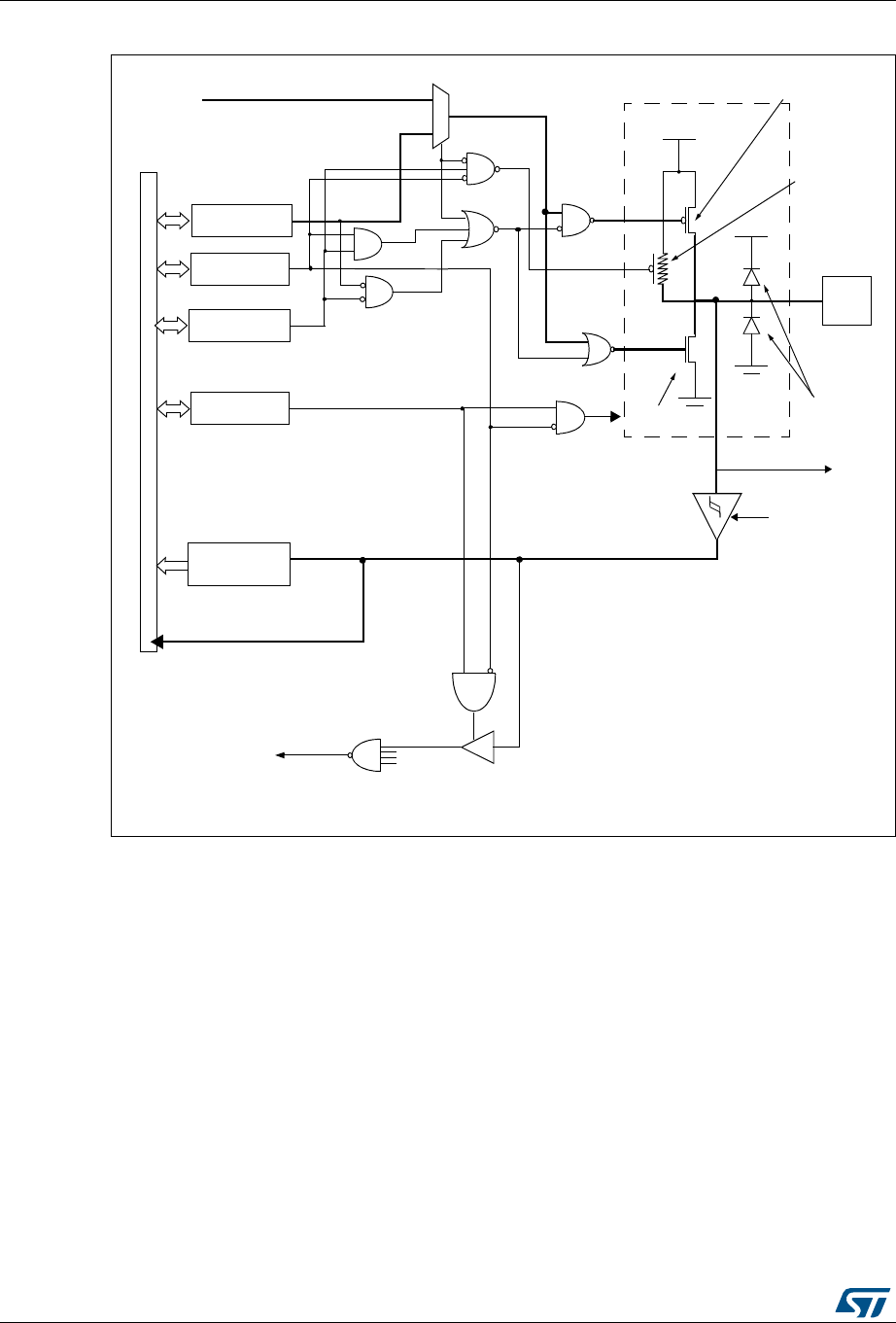
General purpose I/O ports (GPIO) RM0016
106/467 DocID14587 Rev 14
Figure 24. GPIO block diagram
Note: The output stage is disabled when the analog input is selected.
11.3 Port configuration and usage
An output data register (ODR), pin input register (IDR), data direction register (DDR) are
always associated with each port.
The control register 1 (CR1) and control register 2 (CR2) allow input/output options. An I/O
pin is programmed using the corresponding bits in the DDR, ODR, CR1 and CR2 registers.
Bit n in the registers corresponds to pin n of the Port.
The various configurations are summarized in Table 21.
ODR REGISTER
DDR REGISTER
CR1 REGISTER
PIN
V
DD
ALTERNATE
ENABLE
ALTERNATE
OUTPUT 1
0
PULL-UP
CONDITION
P-BUFFER
N-BUFFER
PULL-UP
ALTERNATE FUNCTION
INPUT TO ON-CHIP
V
DD
DIODES
FROM
OTHER
BITS
EXTERNAL
TO INTERRUPT
INTERRUPT
CR2 REGISTER
PERIPHERAL
CONTROLLER
SLOPE
CONTROL
IDR REGISTER
(Read only)
OUTPUT
INPUT
PAD
PROTECTION
On/Off
Schmitt
trigger
Analog input
ai17840
DATA BUS
DocID14587 Rev 14 107/467
RM0016 General purpose I/O ports (GPIO)
113
11.3.1 Input modes
Clearing the DDRx bit selects input mode. In this mode, reading a IDR bit returns the digital
value of the corresponding I/O pin.
Refer to Section 11.7: Input mode details on page 109 for information on analog input,
external interrupts and Schmitt trigger enable/disable.
As shown in Table 21, four different input modes can be theoretically be configured by
software: floating without interrupt, floating with interrupt, pull-up without interrupt or pull-up
with interrupt. However in practice, not all ports have external interrupt capability or pull-ups.
You should refer to the datasheet pin-out description for details on the actual hardware
capability of each port.
Table 21. I/O port configuration summary
Mode DDR
bit
CR1
bit
CR2
bit Function Pull-up P-buffer
Diodes
to VDD to VSS
Input
00 0
Floating without
interrupt Off
Off
On
On
01 0
Pull-up without
interrupt On
0 0 1 Floating with interrupt Off
0 1 1 Pull-up with interrupt On
Output
1 0 0 Open drain output
Off
Off
1 1 0 Push-pull output On
10 1
Open drain output, fast
mode Off
1 1 1 Push-pull, fast mode Off On
1x x
True open drain (on
specific pins) Not implemented
Not im-
plemented
(1)
1. The diode connected to VDD is not implemented in true open drain pads. A local protection between the
pad and VOL is implemented to protect the device against positive stress.
General purpose I/O ports (GPIO) RM0016
108/467 DocID14587 Rev 14
11.3.2 Output modes
Setting the DDRx bit selects output mode. In this mode, writing to the ODR bits applies a
digital value to the I/O through the latch. Reading IDR bit returns the digital value from the
corresponding I/O pin. Using the CR1, CR2 registers, different output modes can be
configured by software: Push-pull output, Open-drain output.
Refer to Section 11.8: Output mode details on page 110 for more information.
11.4 Reset configuration
All I/O pins are generally input floating under reset (i.e. during the reset phase) and at reset
state (i.e. after reset release). However, a few pins may have a different behavior. Refer to
the datasheet pinout description for all details.
11.5 Unused I/O pins
Unused I/O pins must not be left floating to avoid extra current consumption. They must be
put into one of the following configurations:
•connected to VDD or VSS by external pull-up or pull-down resistor and kept as input
floating (reset state),
•configured as input with internal pull-up/down resistor,
•configured as output push-pull low.
The I/O ports not present on smaller packages are automatically configured by a factory
setting (unless otherwise specified in the datasheet). As a consequence, no configuration is
required on these I/O ports. The bits corresponding to these ports in the configuration
registers Px_ODR, PxDDR, PxCR1 and PxCR2 can be written, but this will have no effect.
The value read in the corresponding bits of the PxIDR register will be '0'.
11.6 Low power modes
Note: If PA1/PA2 pins are used to connect an external oscillator, to ensure a lowest power
consumption in Halt mode, PA1 and PA2 must be configured as input pull-up.
Table 22. Effect of low power modes on GPIO ports
Mode Description
Wait No effect on I/O ports. External interrupts cause the device to exit from Wait
mode.
Halt No effect on I/O ports. External interrupts cause the device to wakeup from
Halt mode.
DocID14587 Rev 14 109/467
RM0016 General purpose I/O ports (GPIO)
113
11.7 Input mode details
11.7.1 Alternate function input
Some I/Os can be used as alternate function input. For example as the port may be used as
the input capture input to a timer. Alternate function inputs are not selected automatically,
you select them by writing to a control bit in the registers of the corresponding peripheral.
For Alternate Function input, you should select floating or pull-up input configuration in the
DDR and CR1 registers.
11.7.2 Interrupt capability
Each I/O can be configured as an input with interrupt capability by setting the CR2x bit while
the I/O is in input mode. In this configuration, a signal edge or level input on the I/O
generates an interrupt request.
Falling or rising edge sensitivity is programmed independently for each interrupt vector in
the EXTI_CR[2:1] registers.
External interrupt capability is only available if the port is configured in input mode.
Interrupt masking
Interrupts can be enabled/disabled individually by programming the corresponding bit in the
configuration register (Px_CR2). At reset state, the interrupts are disabled.
If a pin alternate function is TLI, use the Px_CR2 bit to enable/disable the TLI interrupt. The
TLI interrupt is associated to a dedicated interrupt vector.
11.7.3 Analog channels
Analog I/O channels can be selected by the ADC peripheral. The corresponding input and
output stages are then automatically disabled. As mentioned in the next section, the input
Schmitt trigger should be disabled in the ADC_TDR register when using the analog
channels.
Table 23. Recommended and non-recommended configurations for analog input
DDR CR1 CR2 ADC_TDR Configuration Comments
00 0 1 Floating Input without interrupt,
Schmitt trigger disabled
Recommended analog input
configuration
0 1 x x Input with pull-up enabled Not recommended for analog input when
analog voltage is present since these
configurations cause excess current flow
on the input pin.
Both input and output stages are
disabled on ADC selected channel.
1 0 x x Output
1 1 x x Output

General purpose I/O ports (GPIO) RM0016
110/467 DocID14587 Rev 14
11.7.4 Schmitt trigger
On all I/Os with an analog input, it is possible to disable the Schmitt trigger, even if the
corresponding ADC channel is not enabled. The two registers ADC_TDRH and ADC_TDRL
allow to disable the Schmitt trigger.
Setting one bit in these registers leads to disabling the corresponding Schmitt trigger input
buffer.
In case an I/O is used as analog input, and the corresponding ADC channel is enabled
(CH[3:0] bits in ADC_CSR register), the Schmitt trigger is disabled, whatever the status of
the corresponding bit in ADC_TDRH or ADC_TDRL registers.
11.7.5 Analog function
Selected I/Os can be used to deliver analog signal to ADC, Comparators or DAC periphery.
The GPIO pin have to be configured in the input floating configuration without interrupt
(default state) to use it for analog function. The current consumption of the IO with enabled
analog function can be reduced by disabling unused Schmitt trigger in IO input section
either by ADC_TRIGRx register in ADC interface (see Section 14.3.15: Schmitt trigger
disabling) or by switching on a corresponding analog switch in RI by setting corresponding
CHxE bit in RI_IOSRx (see Section 11.2.2: I/O groups). See the product datasheet for pins
with analog functions.
11.8 Output mode details
11.8.1 Alternate function output
Alternate function outputs provide a direct path from a peripheral to an output or to an I/O
pad, taking precedence over the port bit in the data output latch register (Px_ODR) and
forcing the Px_DDR corresponding bit to 1.
An alternate function output can be push-pull or pseudo-open drain depending on the
peripheral and Control register 1 (Px_CR1) and slope can be controlled depending on the
Control register 2 (Px_CR2) values.
Examples:
SPI output pins must be set-up as push-pull, fast slope for optimal operation.
11.8.2 Slope control
The maximum frequency that can be applied to an I/O can be controlled by software using
the CR2 bit. Low frequency operation with improved EMC behavior is selected at reset.
Higher frequency (up to 10 MHz) can be selected if needed. This feature can be applied in
either open drain or push-pull output mode on I/O ports of output type O3 or O4. Refer to the
pin description tables in the datasheets for the specific output type information for each pin.
DocID14587 Rev 14 111/467
RM0016 General purpose I/O ports (GPIO)
113
11.9 GPIO registers
The bit of each port register drives the corresponding pin of the port.
11.9.1 Port x output data register (Px_ODR)
Address offset: 0x00
Reset value: 0x00
11.9.2 Port x pin input register (Px_IDR)
Address offset: 0x01
Reset value: 0xXX
Note: Px_IDR reset value depends on the external circuitry.
76543210
ODR7 ODR6 ODR5 ODR4 ODR3 ODR2 ODR1 ODR0
rw rw rw rw rw rw rw rw
Bits 7:0 ODR[7:0]: Output data register bits
Writing to the ODR register when in output mode applies a digital value to the I/O through the latch.
Reading the ODR returns the previously latched value in the register.
In Input mode, writing in the ODR register, latches the value in the register but does not change the
pin state. The ODR register is always cleared after reset. Bit read-modify-write instructions (BSET,
BRST) can be used on the DR register to drive an individual pin without affecting the others.
76543210
IDR7 IDR6 IDR5 IDR4 IDR3 IDR2 IDR1 IDR0
rrrrrrrr
Bits 7:0 IDR[7:0]: Pin input values
The pin register can be used to read the pin value irrespective of whether port is in input or output
mode. This register is read-only.
0: Low logic level
1: High logic level
General purpose I/O ports (GPIO) RM0016
112/467 DocID14587 Rev 14
11.9.3 Port x data direction register (Px_DDR)
Address offset: 0x02
Reset value: 0x00
11.9.4 Port x control register 1 (Px_CR1)
Address offset: 0x03
Reset value: 0x00 except for PD_CR1 which reset value is 0x02.
76543210
DDR7 DDR6 DDR5 DDR4 DDR3 DDR2 DDR1 DDR0
rw rw rw rw rw rw rw rw
Bits 7:0 DDR[7:0]: Data direction bits
These bits are set and cleared by software to select input or output mode for a particular pin of a
port.
0: Input mode
1: Output mode
76543210
C17 C16 C15 C14 C13 C12 C11 C10
rw rw rw rw rw rw rw rw
Bits 7:0 C1[7:0]: Control bits
These bits are set and cleared by software. They select different functions in input mode and output
mode (see Table 21).
–In input mode (DDR = 0):
0: Floating input
1: Input with pull-up
–In output mode (DDR = 1):
0: Pseudo open drain
1: Push-pull, slope control for the output depends on the corresponding CR2 bit
Note: This bit has no effect on true open drain ports (refer to pin marked “T” in datasheet pin
description table).
DocID14587 Rev 14 113/467
RM0016 General purpose I/O ports (GPIO)
113
11.9.5 Port x control register 2 (Px_CR2)
Address offset: 0x04
Reset value: 0x00
11.9.6 GPIO register map and reset values
Each GPIO port has five registers mapped as shown in Table 24. Refer to the register map
in the corresponding datasheet for the base address for each port.
Note: At reset state, all ports are input floating. Exceptions are indicated in the pin description
table of the corresponding datasheet.
76543210
C27 C26 C25 C24 C23 C22 C21 C20
rw rw rw rw rw rw rw rw
Bits 7:0 C2[7:0]: Control bits
These bits are set and cleared by software. They select different functions in input mode and output
mode. In input mode, the CR2 bit enables the interrupt capability if available. If the I/O does not have
interrupt capability, setting the CR2 bit has no effect. In output mode, setting the bit increases the
speed of the I/O. This applies to ports with O3 and O4 output types (see pin description table).
–In input mode (DDR = 0):
0: External interrupt disabled
1: External interrupt enabled
–In output mode (DDR = 1):
0: Output speed up to 2 MHz
1: Output speed up to 10 MHz
Table 24. GPIO register map
Address
offset
Register
name 76543210
0x00 Px_ODR
Reset value
ODR7
0
ODR6
0
ODR5
0
ODR4
0
ODR3
0
ODR2
0
ODR1
0
ODR0
0
0x01 Px_IDR
Reset value
IDR7
x
IDR6
x
IDR5
x
IDR4
x
IDR3
x
IDR2
x
IDR1
x
IDR0
x
0x02 Px_DDR
Reset value
DDR7
0
DDR6
0
DDR5
0
DDR4
0
DDR3
0
DDR2
0
DDR1
0
DDR0
0
0x03 Px_CR1(1)
Reset value
C17
0
C16
0
C15
0
C14
0
C13
0
C12
0
C11
0
C10
0
0x04 Px_CR2
Reset value
C27
0
C26
0
C25
0
C24
0
C23
0
C22
0
C21
0
C20
0
1. PD_CR reset value is 0x02.
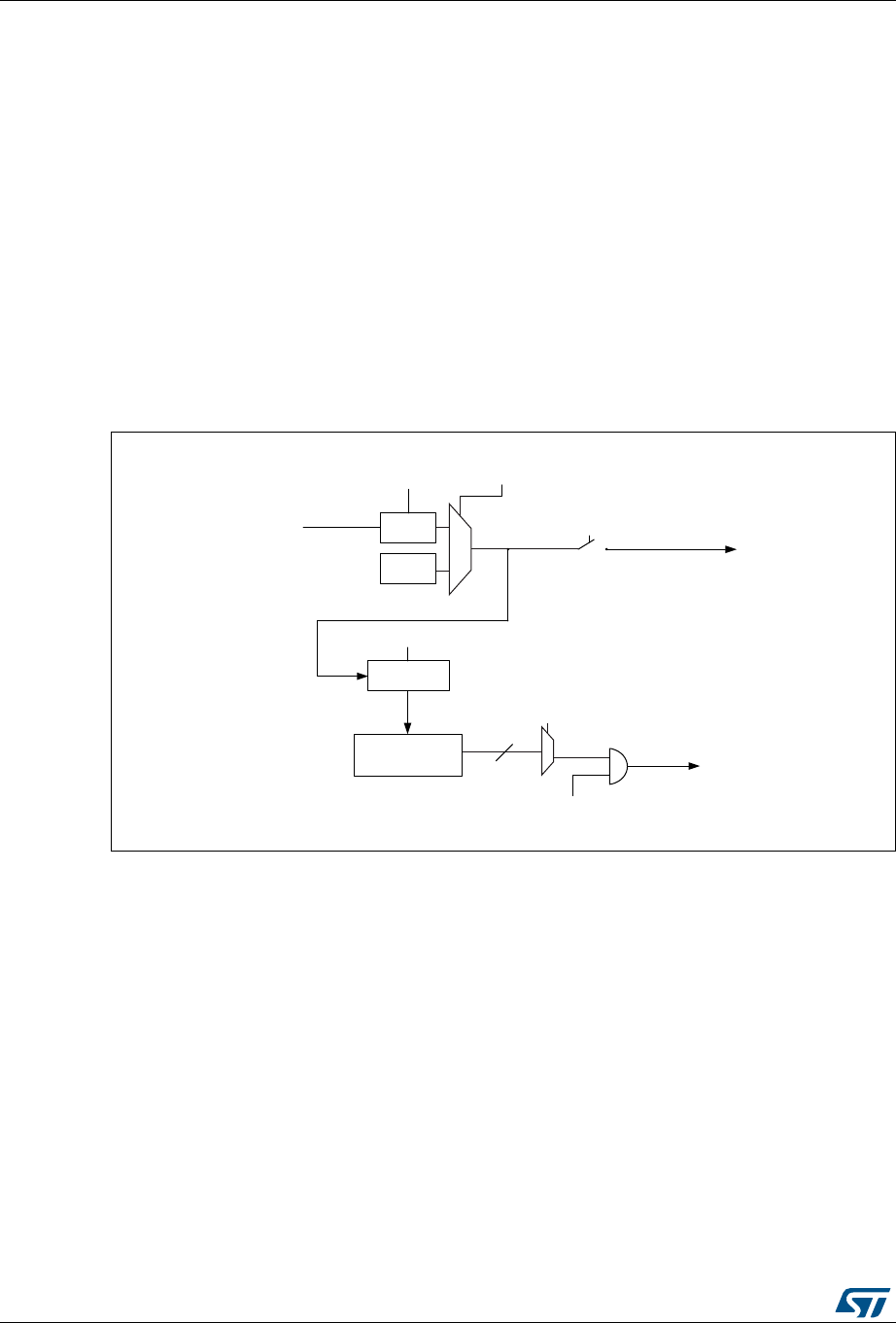
Auto-wakeup (AWU) RM0016
114/467 DocID14587 Rev 14
12 Auto-wakeup (AWU)
12.1 AWU introduction
The AWU is used to provide an internal wakeup time base that is used when the MCU goes
into Active-halt power saving mode. This time base is clocked by the low speed internal
(LSI) RC oscillator clock or the HSE crystal oscillator clock divided by a prescaler.
12.2 LSI clock measurement
To ensure the best possible accuracy when using the LSI clock, its frequency can be
measured with TIM3 or TIM1 timer input capture 1 (see datasheet for information on which
timer is connected in the specific product).
Figure 25. AWU block diagram
1. The LS clock source is selected by programming the CKAWUSEL option bit as explained in the clock
controller chapter.
MSv45269V1
6-BIT PROG
COUNTER
AWU COUNTERS
HSE clock
(1 – 24 MHz)
PRSC [1:0]
OPTION bits
CKAWUSEL
OPTION bit
~ 128 kHz LS clock
MSR
To timer input capture
(for measurement)
fLS
fLS
APR[5:0]
AWUTB [3:0]
15 time bases
AWUEN & HALT/WAIT
AWU interrupt
Prescaler
LSI RC
128 kHz

DocID14587 Rev 14 115/467
RM0016 Auto-wakeup (AWU)
123
12.3 AWU functional description
12.3.1 AWU operation
To use the AWU, perform the following steps in order:
1. Measure the LS clock frequency using the MSR bit in AWU_CSR register and TIM3 or
TIM1 input capture 1.
2. Define the appropriate prescaler value by writing to the APR [5:0] bits in the
Asynchronous prescaler register (AWU_APR).
3. Select the desired auto-wakeup delay by writing to the AWUTB[3:0] bits in the
Timebase selection register (AWU_TBR).
4. Set the AWUEN bit in the Control/status register (AWU_CSR).
5. Execute the HALT instruction. AWU counters are reloaded and start to count a new
AWU time interval.
Note: The counters only start when the MCU enters Active-halt mode after a HALT instruction
(refer to the Active-halt mode section in the power management chapter). The AWU
interrupt is then enabled at the same time.
The prescaler counter starts to count only if APR[5:0] value is different from its reset value,
0x3F.
Idle mode
If the AWU is not in use, then the AWUTB[3:0] bits the Timebase selection register
(AWU_TBR) should be loaded with 0b0000 to reduce power consumption.
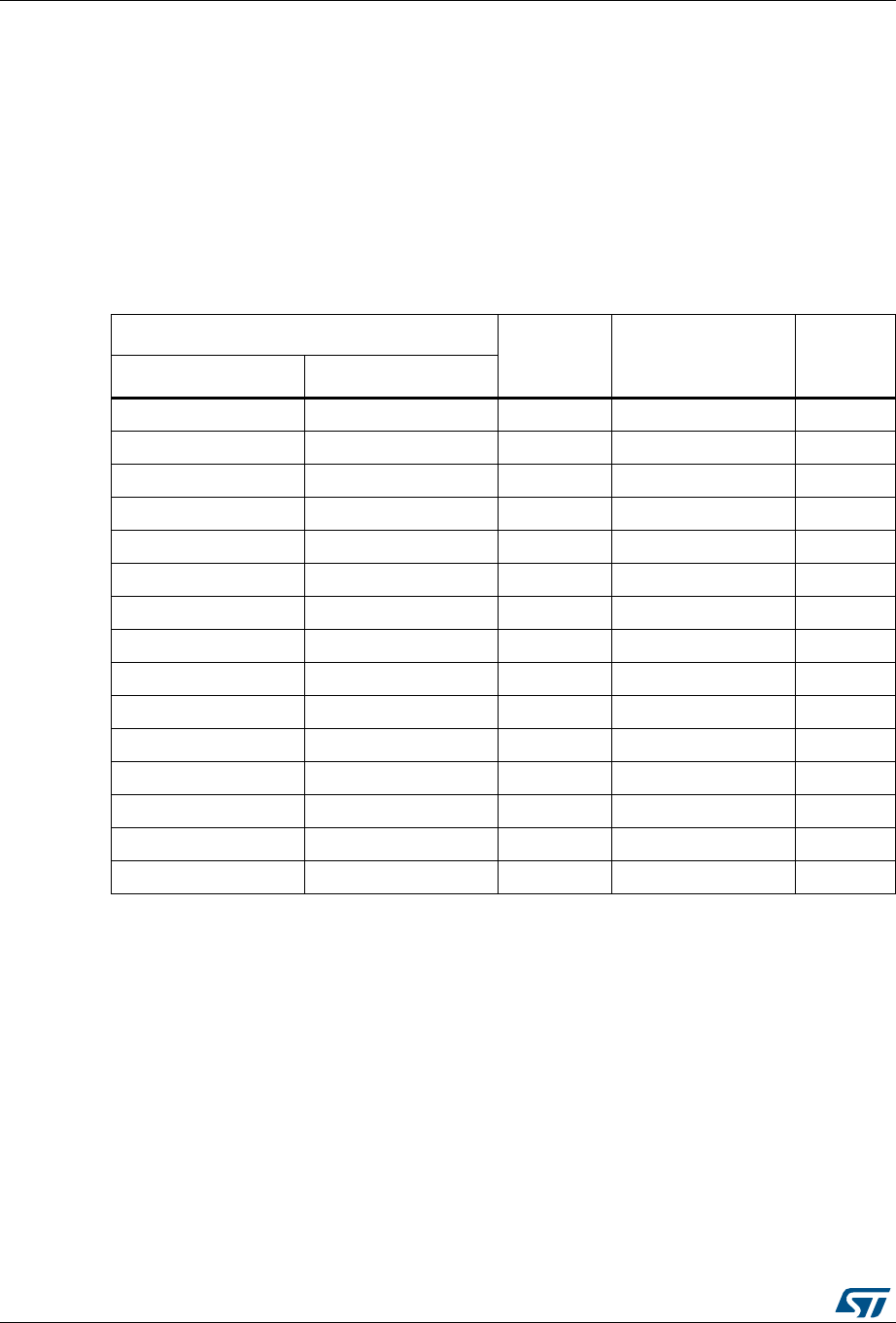
Auto-wakeup (AWU) RM0016
116/467 DocID14587 Rev 14
12.3.2 Time base selection
Please refer to the Asynchronous prescaler register (AWU_APR) and Timebase selection
register (AWU_TBR) descriptions.
The AWU time intervals depend on the values of:
•AWUTB[3:0] bits. This gives the counter output rank.
•APR[5:0] bits. This gives the prescaler division factor (APRDIV).
15 non-overlapped ranges of time intervals can be defined as follows:
In order to obtain the right values for AWUTB[3:0] and APRDIV, you have to:
•First, search the interval range corresponding to the desired time interval. This gives
the AWUTB[3:0] value.
•Then APRDIV can be chosen to obtain a time interval value as close as possible to the
desired one. This can be done using the formulas listed in the table above.
Note: If the target value is between 211x128/fLS and 211x130/fLS or between 211x320/fLS and
211x330/fLS, the value closer to the target one must be chosen.
Table 25. Time base calculation table
Interval range
AWUTB[3:0]
APRDIV formula for
time interval
calculation
APRDIV
range
fLS = f fLS = 128kHz
2/f - 64/f 0.015625 ms - 0.5 ms 0001 APRDIV/fLS 2 to 64
2x32/f - 2x2x32/f 0.5 ms - 1.0 ms 0010 2 x APRDIV/fLS 32 to 64
2x64/f - 2x2x64/f 1 ms - 2 ms 0011 22 x APRDIV/fLS 32 to 64
22x64/f - 22x128/f 2 ms - 4 ms 0100 23 x APRDIV/fLS 32 to 64
23x64/f - 23x128/f 4 ms - 8 ms 0101 24 x APRDIV/fLS 32 to 64
24x64/f - 24x128/f 8 ms - 16 ms 0110 25 x APRDIV/fLS 32 to 64
25x64/f - 25x128/f 16 ms - 32 ms 0111 26 x APRDIV/fLS 32 to 64
26x64/f - 26x128/f 32 ms - 64 ms 1000 27 x APRDIV/fLS 32 to 64
27x64/f - 27x128/f 64 ms - 128 ms 1001 28 x APRDIV/fLS 32 to 64
28x64/f - 28x128/f 128 ms - 256 ms 1010 29 x APRDIV/fLS 32 to 64
29x64/f - 29x128/f 256 ms - 512 ms 1011 210 x APRDIV/fLS 32 to 64
210x64/f - 210x128/f 512 ms - 1.024 s 1100 211 x APRDIV/fLS 32 to 64
211x64/f - 211x128/f 1.024 s - 2.048 s 1101 212 x APRDIV/fLS 32 to 64
211x130/f - 211x320/f 2.080 s - 5.120 s 1110 5 x 211 x APRDIV/fLS 26 to 64
211x330/f - 212x960/f 5.280 s - 30.720 s 1111 30 x 211 x APRDIV/fLS 11 to 64

DocID14587 Rev 14 117/467
RM0016 Auto-wakeup (AWU)
123
Example 1
•fLS = 128 kHz
•Target time interval = 6 ms
The appropriate interval range is: 4 ms - 8 ms
so the AWUTB[3:0] value is 0x5.
The APRDIV value is:
6 ms = 24 x APRDIV / fLS => APRDIV = (6*10-3 x fLS ) / 24 = 48
so the APR[5:0] value is 48 (0x30)
Example 2
•fLS = 128 kHz
•Target time interval = 3 s
The appropriate interval range is: 2.080 s - 5.120 s
So the AWUTB[3:0] value is 0xE.
The APRDIV value is:
3 s = 5 x 211 x APRDIV / fLS => APRDIV = (3 x fLS ) / 5 x 211 = 37.5
So the AWUTB[3:0] can be either 37 or 38 which gives a time base of 2.96s or 3.04s
respectively. This is not exactly 3s.
12.3.3 LSI clock frequency measurement
The frequency dispersion of the low speed internal RC (LSI) oscillator after RC factory
trimming is 128 kHz +/- 12.5% on the whole temperature range. To obtain a precise AWU
time interval or beeper output, the exact LSI frequency has to be measured.
Use the following procedure:
1. Set the MSR bit in the Control/status register (AWU_CSR) to connect the LSI clock
internally to a timer input capture.
2. Measure the frequency of the LSI clock using the Timer input capture interrupt.
3. Write the appropriate value in the APR [5:0] bits in the Asynchronous prescaler register
(AWU_APR) to adjust the AWU time interval to the desired length. The AWUTB[3:0]
bits can be modified to select different time intervals.
LSI clock frequency measurement can also be used to calibrate the beeper frequency (see
Section 13.2.2).
Auto-wakeup (AWU) RM0016
118/467 DocID14587 Rev 14
12.4 AWU registers
12.4.1 Control/status register (AWU_CSR)
Address offset: 0x00
Reset value: 0x00
76543210
Reserved AWUF AWUEN Reserved MSR
rrc_rrw r rw
Bits 7:6 Reserved
Bit 5 AWUF: Auto-wakeup flag
This bit is set by hardware when the AWU module generates an interrupt and cleared by reading the
AWU_CSR register. Writing to this bit does not change its value.
0: No AWU interrupt occurred
1: AWU interrupt occurred
Bit 4 AWUEN: Auto-wakeup enable
This bit is set and cleared by software. It enables the auto-wakeup feature. If the microcontroller enters
Active-halt or Wait mode, the AWU feature wakes up the microcontroller after a programmable time
delay.
0: AWU (Auto-wakeup) disabled
1: AWU (Auto-wakeup) enabled
Bits 3:1 Reserved
Bit 0 MSR: Measurement enable
This bit connects the fLS clock to a timer input capture. This allows the timer to be used to measure the
LS frequency (fLS).
0: Measurement disabled
1: Measurement enabled
Note: Refer to the datasheet for information on which timer input capture can be connected to the LSI
clock in the specific product).

DocID14587 Rev 14 119/467
RM0016 Auto-wakeup (AWU)
123
12.4.2 Asynchronous prescaler register (AWU_APR)
Address offset: 0x01
Reset value: 0x3F
12.4.3 Timebase selection register (AWU_TBR)
Address offset: 0x02
Reset value: 0x00
76543210
Reserved APR[5:0]
rrw
Bits 7:6 Reserved
Bits 5:0 APR[5:0]: Asynchronous prescaler divider
These bits are written by software to select the prescaler divider (APRDIV) feeding the counter clock.
0x00: APRDIV = 2 0x0E: APRDIV = 16
0x01: APRDIV = 3 0x0F: APRDIV = 17
... ...
0x06: APRDIV = 8 0x3E: APRDIV = 64
Note: This register must not be kept at its reset value (0x3F)
76543210
Reserved AWUTB[3:0]
rrw
Bits 7:4 Reserved
Bits 3:0 AWUTB[3:0]: Auto-wakeup timebase selection
These bits are written by software to define the time interval between AWU interrupts. AWU
interrupts are enabled when AWUEN = 1.
0000: No interrupt
0001: APRDIV/fLS 0010: 2xAPRDIV/fLS 0011: 22APRDIV/fLS
0100: 23APRDIV/fLS 0101: 24APRDIV/fLS 0110: 25APRDIV/fLS
0111: 26APRDIV/fLS 1000: 27APRDIV/fLS 1001: 28APRDIV/fLS
1010: 29APRDIV/fLS 1011: 210APRDIV/fLS 1100: 211APRDIV/fLS
1101: 212APRDIV/fLS 1110: 5x211APRDIV/fLS 1111: 30x211APRDIV/fLS
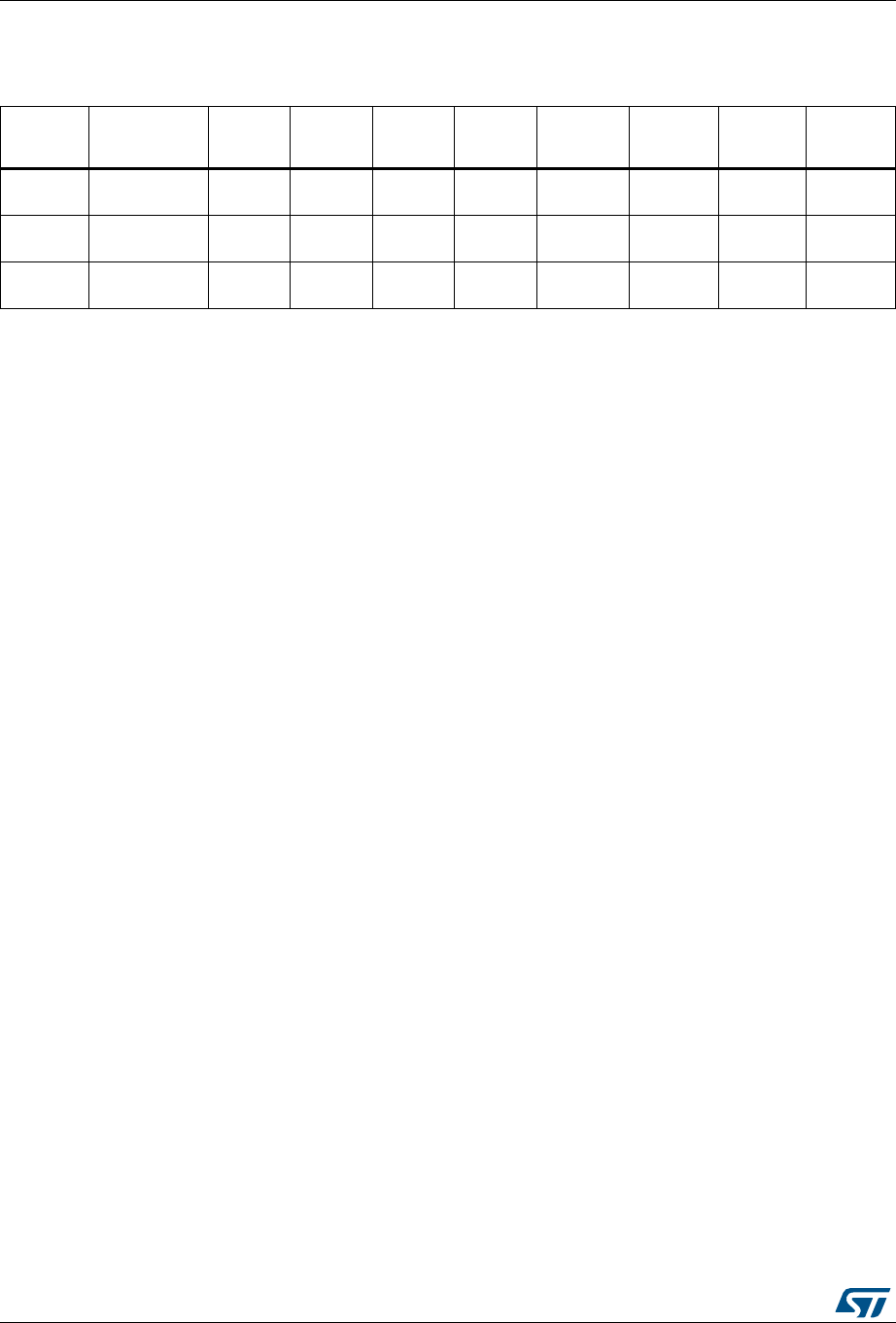
Auto-wakeup (AWU) RM0016
120/467 DocID14587 Rev 14
12.4.4 AWU register map and reset values
Table 26. AWU register map
Address
offset
Register
name 7654 3 2 1 0
0x00 AWU_CSR
Reset value
-
0
-
0
AWUF
0
AWUEN
0
-
0
-
0
-
0
MSR
0
0x01 AWU_APR
Reset value
-
0
-
0
APR5
1
APR4
1
APR3
1
APR2
1
APR1
1
APR0
1
0x02 AWU_TBR
Reset value
-
0
-
0
-
0
-
0
AWUTB3
0
AWUTB2
0
AWUTB1
0
AWUTB0
0
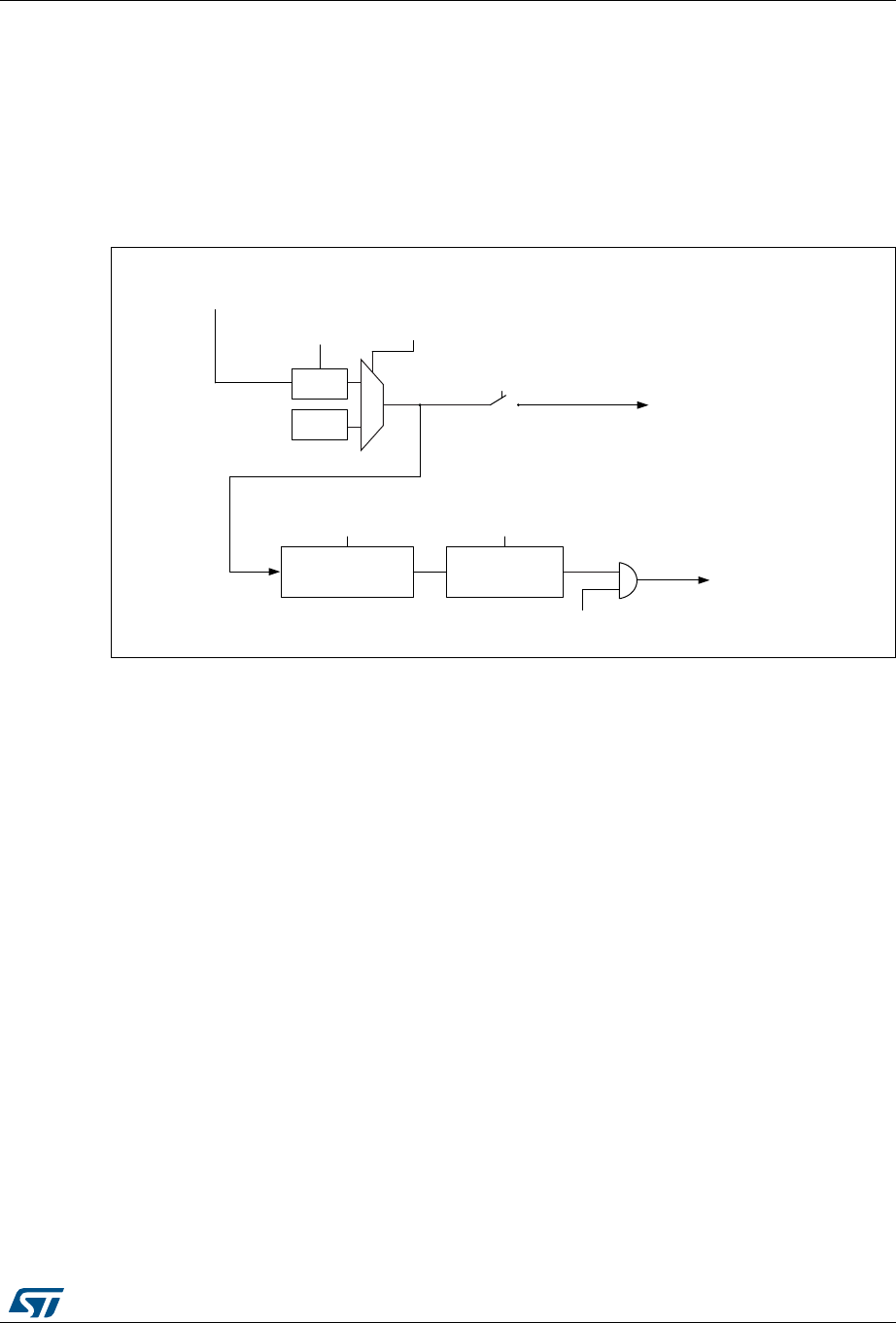
DocID14587 Rev 14 121/467
RM0016 Beeper (BEEP)
123
13 Beeper (BEEP)
13.1 Beeper introduction
This function generates a beep signal in the range of 1, 2 or 4 kHz when the LS clock is
operating at a frequency of 128 kHz.
Figure 26. Beep block diagram
13.2 Beeper functional description
13.2.1 Beeper operation
To use the beep function, perform the following steps in order:
1. Calibrate the LS clock frequency as described in Section 13.2.2: Beeper calibration to
define BEEPDIV[4:0] value.
2. Select 1 kHz, 2 kHz or 4 kHz output frequency by writing to the BEEPSEL[1:0] bits in
the Beeper control/status register (BEEP_CSR).
3. Set the BEEPEN bit in the Beeper control/status register (BEEP_CSR) to enable the
LS clock source.
Note: The prescaler counter starts to count only if BEEPDIV[4:0] value is different from its reset
value, 0x1F.
MSv45270V1
HSE clock (4 – 24 MHz)
PRSC [1:0]
OPTION bits
CKAWUSEL
OPTION bit
~ 128 kHz LS clock
MSR
To timer input capture
(for measurement)
fLS BEEPDIV[4:0] bits
BEEPEN
Prescaler
LSI RC
128 kHz
5-BIT BEEPER PROG
COUNTER
BEEPSEL[1:0] bits
3-BIT COUNTER 1 kHz, 2 kHz, 4 kHz
BEEP pin
Beeper (BEEP) RM0016
122/467 DocID14587 Rev 14
13.2.2 Beeper calibration
This procedure can be used to calibrate the LS 128 kHz clock in order to reach the standard
frequency output, 1 kHz, 2 kHz or 4 kHz.
Use the following procedure:
1. Measure the LSI clock frequency (refer to Section 12.3.3: LSI clock frequency
measurement above).
2. Calculate the BEEPDIV value as follows, where A and x are the integer and fractional
part of fLS/8 (in kHz):
BEEPDIV = A-2 when x is less than or equal to A/(1+2*A), else
BEEPDIV = A-1
3. Write the resulting BEEPDIV value in the BEEPDIV[4:0] bits in the Beeper control/status
register (BEEP_CSR).
13.3 Beeper registers
13.3.1 Beeper control/status register (BEEP_CSR)
Address offset: 0x00
Reset value: 0x1F
76543210
BEEPSEL[1:0] BEEPEN BEEPDIV[4:0]
rw rw rw
Bits 7:6 BEEPSEL[1:0]: Beep selection
These bits are set and cleared by software to select 1, 2 or 4 kHz beep output when calibration is
done.
00: fLS/(8 x BEEPDIV) kHz output
01: fLS/(4 x BEEPDIV) kHz output
1x: fLS/(2 x BEEPDIV) kHz output
Bit 5 BEEPEN: Beep enable
This bit is set and cleared by software to enable the beep feature.
0: Beep disabled
1: Beep enabled
Bits 4:0 BEEPDIV[4:0]: Beep prescaler divider
These bits are set and cleared by software to define the Beeper prescaler dividing factor BEEPDIV.
0x00: BEEPDIV = 2
0x01: BEEPDIV = 3
...
0x0E: BEEPDIV = 16
0x0F: BEEPDIV = 17
0x1E: BEEPDIV = 32
Note: This register must not be kept at its reset value (0x1F)
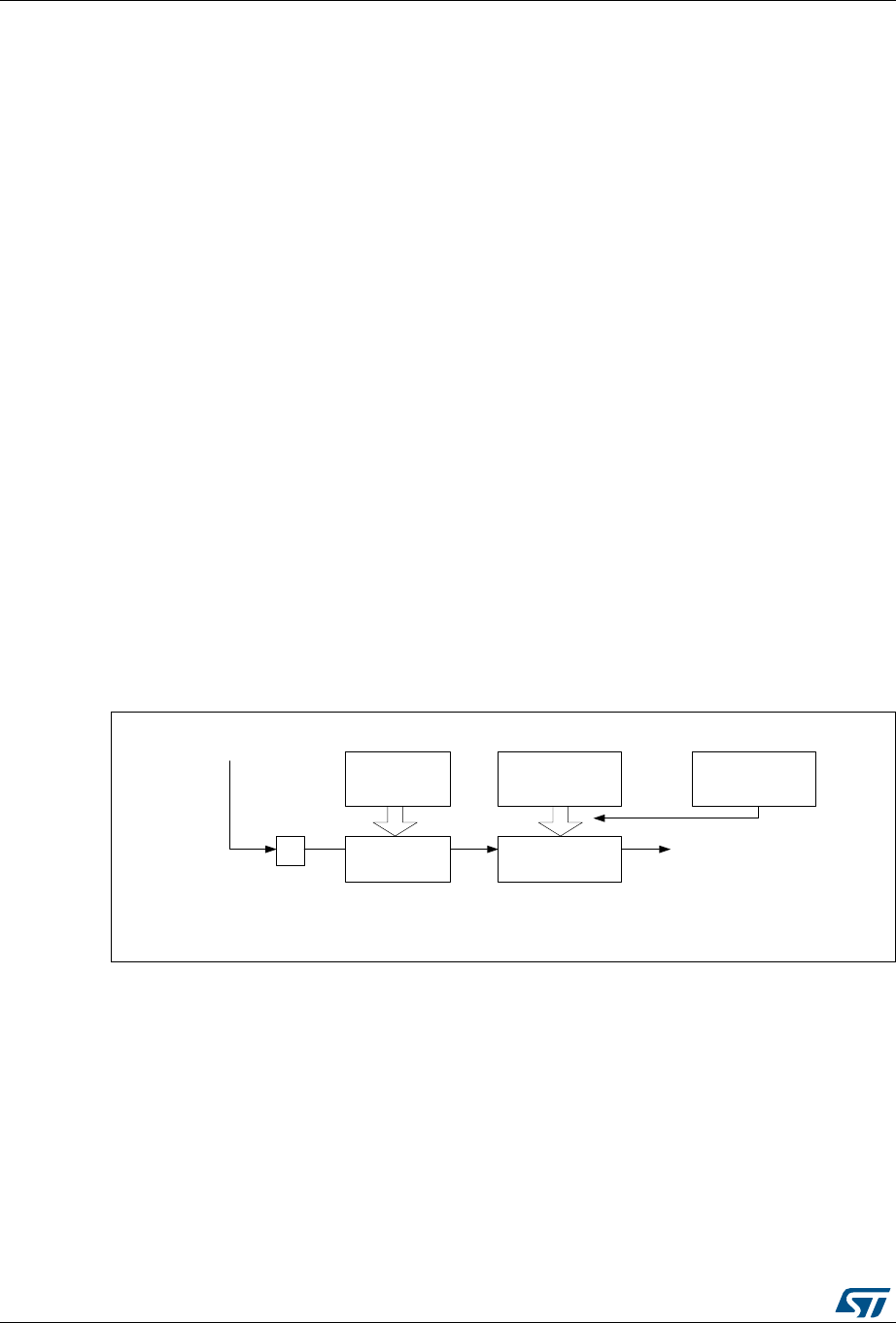
Independent watchdog (IWDG) RM0016
124/467 DocID14587 Rev 14
14 Independent watchdog (IWDG)
14.1 IWDG introduction
The independent watchdog peripheral can be used to resolve processor malfunctions due to
hardware or software failures. It is clocked by the 128 kHz LSI internal RC clock source, and
thus stays active even if the main clock fails.
14.2 IWDG functional description
Figure 27 shows the functional blocks of the independent watchdog module.
When the independent watchdog is started by writing the value 0xCC in the key register
(IWDG_KR), the counter starts counting down from the reset value of 0xFF. When it reaches
the end of count value (0x00) a reset signal is generated (IWDG RESET).
Once enabled, the independent watchdog can be configured through the IWDG_PR, and
IWDG_RLR registers. The IWDG_PR register is used to select the prescaler divider feeding
the counter clock. Whenever the KEY_REFRESH value (0xAA) is written in the IWDG_KR
register, the IWDG is refreshed by reloading the IWDG_RLR value into the counter and the
watchdog reset is prevented.
The IWDG_PR and IWDG_RLR registers are write protected. To modify them, first write the
KEY_ACCESS code (0x55) in the IWDG_KR register. The sequence can be aborted by
writing 0xAA in the IWDG_KR register to refresh it.
Refer to Section 14.3: IWDG registers for details on the IWDG registers.
Figure 27. Independent watchdog (IWDG) block diagram
Hardware watchdog feature
If the hardware watchdog feature has been enabled through the IWDG_HW option byte, the
watchdog is automatically enabled at power-on, and generates a reset unless the key
register is written by the software before the counter reaches end of count. Refer to the
option byte description in the datasheet.
MSv45271V1
128 kHz LSI clock
/2
64 kHz
7-bit
prescaler 8-bit-down-counter
WDG reset
IWDG_PR register IWDG_RLR
reload register
IWDG_KR
key register
DocID14587 Rev 14 125/467
RM0016 Independent watchdog (IWDG)
127
Timeout period
The timeout period can be configured through the IWDG_PR and IWDG_RLR registers. It
is determined by the following equation:
where:
T = Timeout period
TLSI = 1/fLSI
P = 2 (PR[2:0] + 2)
R = RLR[7:0]+1
The IWDG counter must be refreshed by software before this timeout period expires.
Otherwise, an IWDG reset will be generated after the following delay has elapsed since the
last refresh operation:
D = T + 6 x TLSI
where D= delay between the last refresh operation and the IWDG reset.
Table 28. Watchdog timeout period (LSI clock frequency = 128 kHz)
Prescaler divider PR[2:0] bits
Timeout
RL[7:0]= 0x00 RL[7:0]= 0xFF
/4 0 62.5 µs 15.90 ms
/8 1 125 µs 31.90 ms
/16 2 250 µs 63.70 ms
/32 3 500 µs 127 ms
/64 4 1.00 ms 255 ms
/128 5 2.00 ms 510 ms
/256 6 4.00 ms 1.02 s
T2T
LSI P×R××=
Independent watchdog (IWDG) RM0016
126/467 DocID14587 Rev 14
14.3 IWDG registers
14.3.1 Key register (IWDG_KR)
Address offset: 0x00
Reset value: 0xXX
14.3.2 Prescaler register (IWDG_PR)
Address offset: 0x01
Reset value: 0x00
76543210
KEY[7:0]
w
Bits 7:0 KEY[7:0]: Key value
The KEY_REFRESH value must be written by software at regular intervals, otherwise the watchdog
generates an MCU reset when the counter reaches 0.
If the IWDG is not enabled by option byte (see datasheet for option byte description), the
KEY_ENABLE value is the first value to be written in this register.
KEY_ENABLE value = 0xCC
Writing the KEY_ENABLE value starts the IWDG.
KEY_REFRESH value = 0xAA
Writing the KEY_REFRESH value refreshes the IWDG.
KEY_ACCESS value = 0x55
Writing the KEY_ACCESS value enables the access to the protected IWDG_PR and IWDG_RLR
registers (see Section 14.2).
76543210
Reserved PR[2:0]
rrw
Bits 7:3 Reserved
Bits 2:0 PR[2:0]: Prescaler divider
These bits are write access protected (see Section 14.2). They can be written by software to select the
prescaler divider feeding the counter clock.
000: divider /4
001: divider /8
010: divider /16
011: divider /32
100: divider /64
101: divider /128
110: divider /256
111: Reserved
DocID14587 Rev 14 127/467
RM0016 Independent watchdog (IWDG)
127
14.3.3 Reload register (IWDG_RLR)
Address offset: 0x02
Reset value: 0xFF
14.3.4 IWDG register map and reset values
76543210
RL[7:0]
rw
Bits 7:0 RL[7:0]: Watchdog counter reload value
These bits are write access protected (see Section 14.2). They are written by software to define the
value to be loaded in the watchdog counter each time the value 0xAA is written in the IWDG_KR
register. The watchdog counter counts down from this value. The timeout period is a function of this
value and the clock prescaler. Refer to Table 28.
Table 29. IWDG register map
Address
offset
Register
name 76543210
0x00 IWDG_KR
Reset value
KEY[7:0]
xxxxxxxx
0x01 IWDG_PR
Reset value
-
0
-
0
-
0
-
0
-
0
PR2[2:0]
000
0x02 IWDG_RLR
Reset value
RL7[7:0]
11111111

Window watchdog (WWDG) RM0016
128/467 DocID14587 Rev 14
15 Window watchdog (WWDG)
15.1 WWDG introduction
The window watchdog is used to detect the occurrence of a software fault, usually
generated by external interference or by unforeseen logical conditions, which causes the
application program to abandon its normal sequence. The watchdog circuit generates an
MCU reset on expiry of a programmed time period, unless the program refreshes the
contents of the downcounter before the T6 bit becomes cleared. An MCU reset is also
generated if the 7-bit downcounter value (in the control register) is refreshed before the
downcounter has reached the window register value. This implies that the counter must be
refreshed in a limited window.
15.2 WWDG main features
•Programmable free-running downcounter
•Conditional reset
– Reset (if watchdog activated) when the downcounter value becomes less than
0x40
– Reset (if watchdog activated) if the downcounter is reloaded outside the window
(see Figure 30)
•Hardware/software watchdog activation (selectable by option byte)
•Optional reset on HALT instruction (configurable by option byte)
15.3 WWDG functional description
If the watchdog is activated (the WDGA bit is set) and when the 7-bit downcounter (T[6:0]
bits) rolls over from 0x40 to 0x3F (T6 becomes cleared), it initiates a reset cycle pulling low
the reset pin. If the software refreshes the counter while the counter is greater than the
value stored in the window register, then a reset is generated.
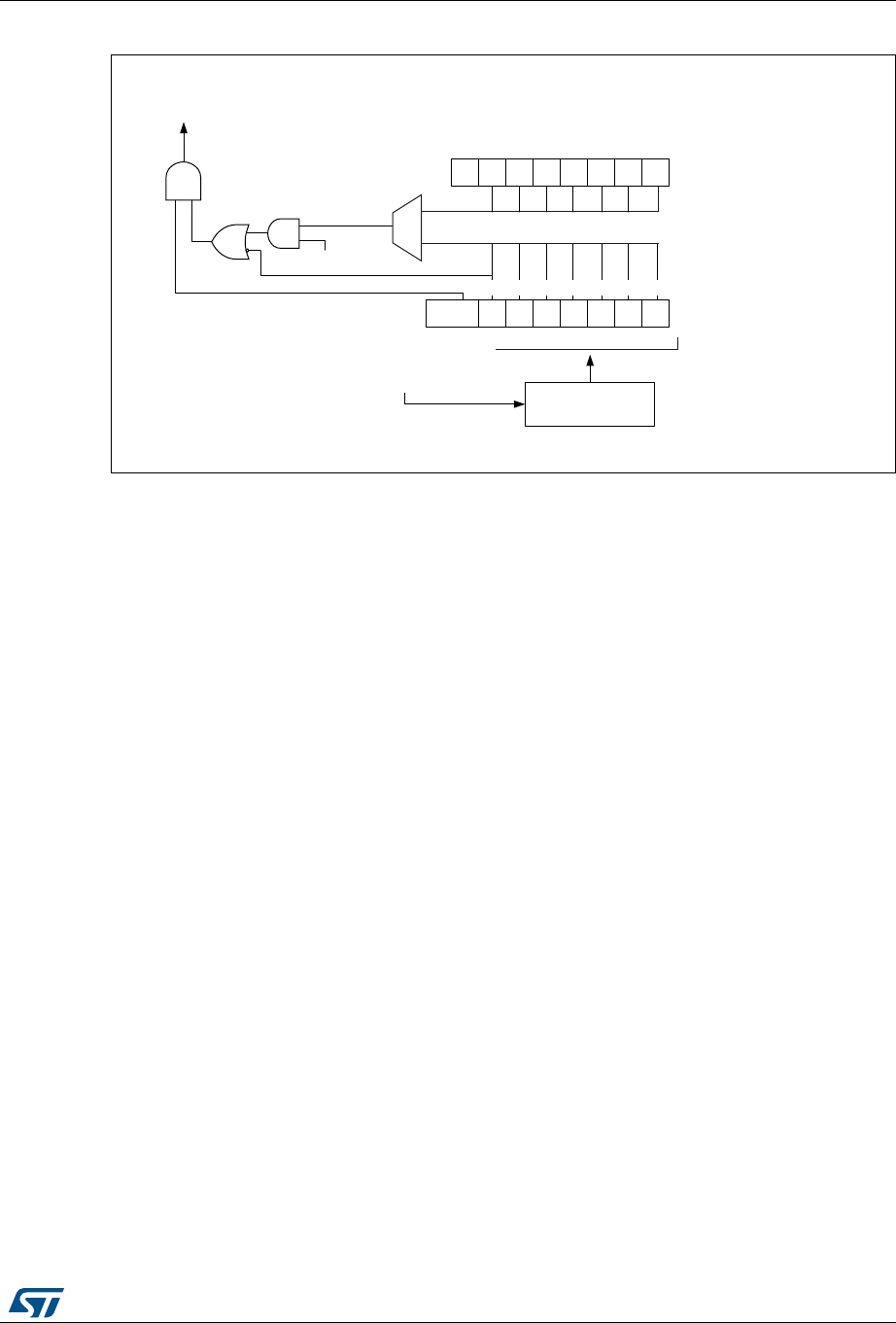
DocID14587 Rev 14 129/467
RM0016 Window watchdog (WWDG)
133
Figure 28. Watchdog block diagram
The application program must write in the WWDG_CR register at regular intervals during
normal operation to prevent an MCU reset. This operation must occur only when the counter
value is lower than the window register value. The value to be stored in the WWDG_CR
register must be between 0xFF and 0xC0 (see Figure 29):
•Enabling the watchdog:
When software watchdog is selected (by option byte), the watchdog is disabled after a
reset. It is enabled by setting the WDGA bit in the WWDG_CR register, then it cannot
be disabled again except by a reset.
When hardware watchdog is selected (by option byte), the watchdog is always active
and the WDGA bit is not used.
•Controlling the downcounter:
This downcounter is free-running: It counts down even if the watchdog is disabled.
When the watchdog is enabled, the T6 bit must be set to prevent generating an
immediate reset.
The T[5:0] bits contain the number of increments which represents the time delay
before the watchdog produces a reset (see Figure 29: Approximate timeout duration).
The timing varies between a minimum and a maximum value due to the unknown
status of the prescaler when writing to the WWDG_CR register (see Figure 30).
The window register (WWDG_WR) contains the high limit of the window: To prevent a
reset, the downcounter must be reloaded when its value is lower than the window
register value and greater than 0x3F. Figure 30 describes the window watchdog
process.
Note: The T6 bit can be used to generate a software reset (the WDGA bit is set and the T6 bit is
cleared).
•Watchdog reset on halt option
If the watchdog is activated and the watchdog reset on halt option is selected, then the
HALT instruction will generate a reset.
MSv45272V1
RESET
Comparator = 1 when
T6:0 > W6:0
CMP
Write WWDG_CR
- W6 W5 W4 W3 W2 W1 W0
WATCHDOG WINDOW REGISTER (WWDG_WR)
T6 T5 T4 T3 T2 T1 T0WDGA
WATCHDOG CONTROL REGISTER (wWDG_CR)
7-BIT DOWNCOUNTER (CNT)
WDG PRESCALER
DIV12288
fCPU
(from clock)
Window watchdog (WWDG) RM0016
130/467 DocID14587 Rev 14
15.4 How to program the watchdog timeout
The formula below can be used to calculate the WWDG timeout, tWWDG, expressed in ms:
where TCPU is the peripheral clock period expressed in ms
Warning: When writing to the WWDG_CR register, always write 1 in the
T6 bit to avoid generating an immediate reset.
Figure 29. Approximate timeout duration
tWWDG TCPU 12288×T5:0[]1+()×=
MSv45273V1
CNT value (hex.)
Watchdog timeout (ms) @ 16 MHz fCPU
7F
78
70
68
60
58
50
48
40
0.768 6.144 12.288 18.432 24.576 30.72 36.864 43.008 49.152
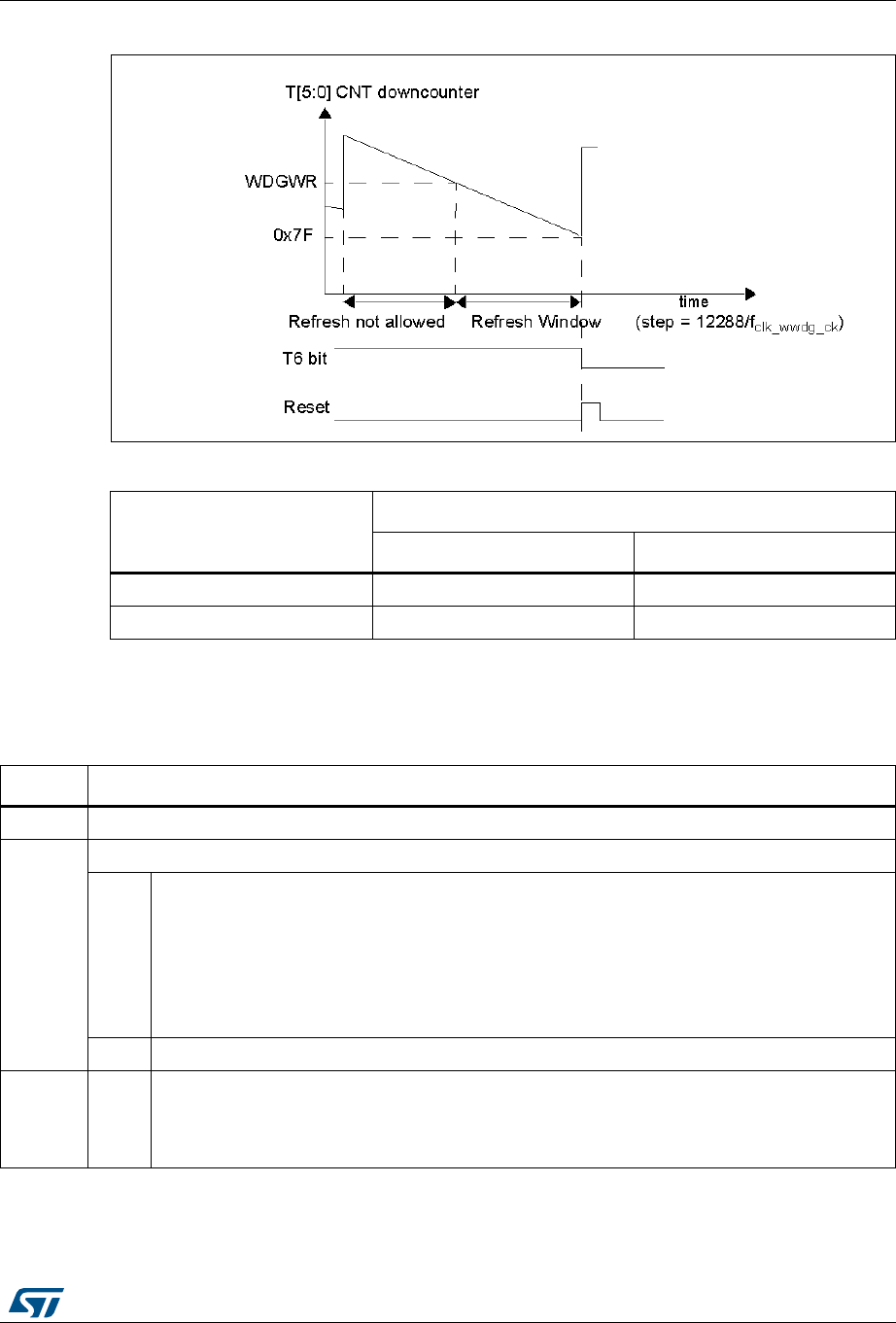
DocID14587 Rev 14 131/467
RM0016 Window watchdog (WWDG)
133
Figure 30. Window watchdog timing diagram
15.5 WWDG low power modes
Table 30. Window watchdog timing example
T[6:0]
fCPU (MHz)
216
40h 6.144 0.768
7Fh 393.216 49.152
Table 31. Effect of low power modes on WWDG
Mode Description
Wait No effect on watchdog: The downcounter continues to decrement.
Halt
WWDG_HALT in option byte
0
No watchdog reset is generated. The MCU enters Halt mode. The watchdog counter is
decremented once and then stops counting and is no longer able to generate a watchdog reset
until the MCU receives an external interrupt or a reset.
If an interrupt is received (refer to interrupt table mapping to see interrupts which can occur in
Halt mode), the watchdog restarts counting after the stabilization delay. If a reset is generated,
the watchdog is disabled (reset state) unless hardware watchdog is selected by option byte. For
application recommendations see Section 15.8 below.
1 A reset is generated instead of entering Halt mode.
Active-
halt x
No reset is generated. The MCU enters Active-halt mode. The watchdog counter is not
decremented. It stops counting. When the MCU receives an oscillator interrupt or external
interrupt, the watchdog restarts counting immediately. When the MCU receives a reset the
watchdog restarts counting after the stabilization delay.
Window watchdog (WWDG) RM0016
132/467 DocID14587 Rev 14
15.6 Hardware watchdog option
If hardware watchdog is selected by option byte, the watchdog is always active and the
WDGA bit in the WWDG_CR register is not used. Refer to the option byte description in the
datasheet.
15.7 Using Halt mode with the WWDG (WWDGHALT option)
The following recommendation applies if Halt mode is used when the watchdog is enabled.
Before executing the HALT instruction, refresh the WDG counter, to avoid an unexpected
WWDG reset immediately after waking up the microcontroller.
15.8 WWDG interrupts
None.
15.9 WWDG registers
15.9.1 Control register (WWDG_CR)
Address offset: 0x00
Reset value: 0x7F
76543210
WDGA T6 T5 T4 T3 T2 T1 T0
rs rw rw rw rw rw rw rw
Bit 7 WDGA: Activation bit(1)
This bit is set by software and only cleared by hardware after a reset. When WDGA = 1, the watchdog
can generate a reset.
0: Watchdog disabled
1: Watchdog enabled
Bits 6:0 T[6:0]: 7-bit counter (MSB to LSB)
These bits contain the value of the watchdog counter. It is decremented every 12288 fCPU cycles
(approximately). A reset is produced when it rolls over from 0x40 to 0x3F (T6 becomes cleared).
1. This bit is not used if the hardware watchdog option is enabled by option byte.
DocID14587 Rev 14 133/467
RM0016 Window watchdog (WWDG)
133
15.9.2 Window register (WWDG_WR)
Address offset: 0x01
Reset value: 0x7F
15.10 Window watchdog register map and reset values
76543210
Reserved W6 W5 W4 W3 W2 W1 W0
rw rw rw rw rw rw rw
Bit 7 Reserved
Bits 6:0 W[6:0]: 7-bit window value
These bits contain the window value to be compared to the downcounter.
Table 32. WWDG register map and reset values
Address
offset
Register
name 76543210
0x00 WWDG_CR
Reset value
WDGA
0
T6
1
T5
1
T4
1
T3
1
T2
1
T1
1
T0
1
0x01 WWDG_WR
Reset value
-
0
W6
1
W5
1
W4
1
W3
1
W2
1
W1
1
W0
1
Timer overview RM0016
134/467 DocID14587 Rev 14
16 Timer overview
The devices in the STM8S and STM8AF family may be equipped with up to three different
timer types: Advanced control (TIM1), general purpose (TIM2/TIM3/TIM5), and basic timers
(TIM4/TIM6). The timers share the same architecture, but some have additional unique
features. The common timer architecture, which includes identical register mapping and
common basic features, simplifies their use and makes it easier to design applications.
Table 33 shows the main timer characteristics.
In STM8S and STM8AF devices with TIM1, TIM5 and TIM6, the timers do not share any
resources but they can be linked together and synchronized as described in
Synchronization between TIM1, TIM5 and TIM6 timers on page 159. In STM8S and
STM8AF devices with TIM1, TIM2, TIM3 and TIM4, the timers are not linked together.
This section gives a comparison of the different timer features (Table 34), a glossary of
internal timer signal names (Table 35).
Section 17: 16-bit advanced control timer (TIM1) contains a full description of all the various
timer modes. The other timer sections (Section 18 and Section 19) are more brief and give
only specific details on each timer, its block diagram, and register description.
Table 33. Timer characteristics
Symbol Parameter Min Typ Max Unit
tw(ICAP)in Input capture pulse time 2 tMASTER
tres(TIM) Timer resolution time 1 tMASTER
ResTIM
Timer resolution with 16-bit counter 16 bit
Timer resolution with 8-bit counter 8 bit
tCOUNTER
Counter clock period when internal clock is
selected 1t
MASTER
tMAX_COUNT
Maximum possible count with 16-bit counter 65,536 tMASTER
Maximum possible count with 8-bit counter 256 tMASTER
DocID14587 Rev 14 135/467
RM0016 Timer overview
261
16.1 Timer feature comparison
Table 34. Timer feature comparison
Timer
Counter
resol-
ution
Counter
type
Prescaler
factor
Capture/
compare
chan-
nels
Comple-
mentary
outputs
Repet-
ition
counter
External
trigger
input
External
break
input
Timer
synchro-
nization/
chaining
TIM1
(advanced
control
timer)
16-bit
Up/down
Any integer
from 1 to
65536
43Yes11
With
TIM5/
TIM6
TIM2
(general
purpose
timer)
Up
Any power of
2 from 1 to
32768
3
None No 0 0 No
TIM3
(general
purpose
timer)
2
TIM4
(basic
timer)
8-bit
Any power of
2 from 1 to
128
0
TIM5
(general
purpose
timer)
16-bit
Up
Any power of
2 from 1 to
32768
3
None No
1
(shared
with
TIM1) 0Yes
TIM6
(basic
timer)
8-bit
Any power of
2 from 1 to
128
00
Timer overview RM0016
136/467 DocID14587 Rev 14
16.2 Glossary of timer signal names
Table 35. Glossary of internal timer signals
Internal signal name Description Related figures
BI Break interrupt
Figure 31: TIM1 general block diagram on
page 140
CCiI: CC1I, CC2I, CC3I, CC4I Capture/compare
interrupt
CK_CNT Counter clock Figure 35: Counter update when ARPE =
0 (ARR not preloaded) with prescaler = 2
on page 144
CK_PSC Prescaler clock
CNT_EN Counter enable
CNT_INIT Counter initialize Figure 45: TI2 external clock connection
example on page 152
ETR External trigger from
TIMx_ETR pin
Figure 47: External trigger input block
diagram on page 154
ETRF External trigger filtered
ETRP External trigger
prescaled
fMASTER
Timer peripheral clock
from clock controller
(CLK)
Figure 20: Clock tree and Figure 12:
Clock structure on page 61
ICi : IC1, IC2 Input capture Figure 64: Input stage of TIM 1 channel 1
on page 168
ICiPS: IC1PS, IC2PS Input capture prescaled
MATCH1 Compare match
Figure 54: Trigger/master mode selection
blocks on page 161 and Section 17.7.2:
Control register 2 (TIM1_CR2) on
page 190
OCi: OC1, OC2 Timer output channel Figure 68: Detailed output stage of
channel with complementary output
(channel 1) on page 172
OCiREF: OC1REF, OC2REF Output compare
reference signal
TGI Trigger interrupt Figure 43: Clock/trigger controller block
diagram on page 151
TIi : TI1, TI2 Timer input
Figure 64: Input stage of TIM 1 channel 1
on page 168
TIiF: TI1F, TI2F Timer input filtered
TI1_ED Timer input edge
detector
TIiFPn: TI1FP1, TI1FP2,
TI2FP1, TI2FP2, TI3FP3,
TI3FP4, TI4FP3, TI4FP4
Timer input filtered
prescaled
TRC Trigger capture
TRGI
Trigger input to
clock/trigger/slave
mode controller
Figure 44: Control circuit in normal mode,
fCK_PSC = fMASTER on page 152
DocID14587 Rev 14 137/467
RM0016 Timer overview
261
UEV Update event Figure 35: Counter update when ARPE =
0 (ARR not preloaded) with prescaler = 2
on page 144
UIF Update interrupt
Table 36. Explanation of indices‘i’, ‘n’, and ‘x’(1)
1. These indices are used in Section 17, Section 18, and Section 19.
i
Signal number: May be 1, 2, 3, 4 depending on the device
Bit number: May be 1, 2, 3, 4 ........ depending on the device
Register number: May be 1, 2, 3, 4 depending on the device
n Signal number (when i is already used): May be 1, 2, 3, 4 depending on the device
xTimer number: May be 1, 2, 3, 4, 5, 6 depending on the device
Don’t care (for bits)
Table 35. Glossary of internal timer signals (continued)
Internal signal name Description Related figures

16-bit advanced control timer (TIM1) RM0016
138/467 DocID14587 Rev 14
17 16-bit advanced control timer (TIM1)
This section gives a description of the full set of timer features.
17.1 TIM1 introduction
TIM1 consists of a 16-bit up-down auto-reload counter driven by a programmable prescaler.
The timer may be used for a variety of purposes, including:
•Time base generation
•Measuring the pulse lengths of input signals (input capture)
•Generating output waveforms (output compare, PWM and one-pulse mode)
•Interrupt capability on various events (capture, compare, overflow, break, trigger)
•Synchronization with TIM5/TIM6 timers or external signals (external clock, reset,
trigger and enable).
This timer is ideally suited for a wide range of control applications, including those requiring
center-aligned PWM capability with complementary outputs and deadtime insertion.
The timer clock can be sourced from internal clocks or from an external source selectable
through a configuration register.

DocID14587 Rev 14 139/467
RM0016 16-bit advanced control timer (TIM1)
261
17.2 TIM1 main features
TIM1 features include:
•16-bit up, down, up/down counter auto-reload counter
•Repetition counter to update the timer registers only after a given number of cycles of
the counter.
•16-bit programmable prescaler allowing the counter clock frequency to be divided “on
the fly” by any factor between 1 and 65536.
•Synchronization circuit to control the timer with external signals and to interconnect
several timers (timer interconnection not implemented in some devices).
•4 independent channels that can alternately be configured as:
– Input capture
– Output compare
– PWM generation (edge and center-aligned mode)
– 6-step PWM generation
– One-pulse mode output
– Complementary outputs on three channels with programmable deadtime insertion.
•Break input to put the timer output signals in reset state or in a known state.
•External trigger input pin (ETR)
•Interrupt generation on the following events:
– Update: Counter overflow/underflow, counter initialization (by software or
internal/external trigger)
– Trigger event (counter start, stop, initialization or count by internal/external trigger)
– Input capture
– Output compare
– Break input
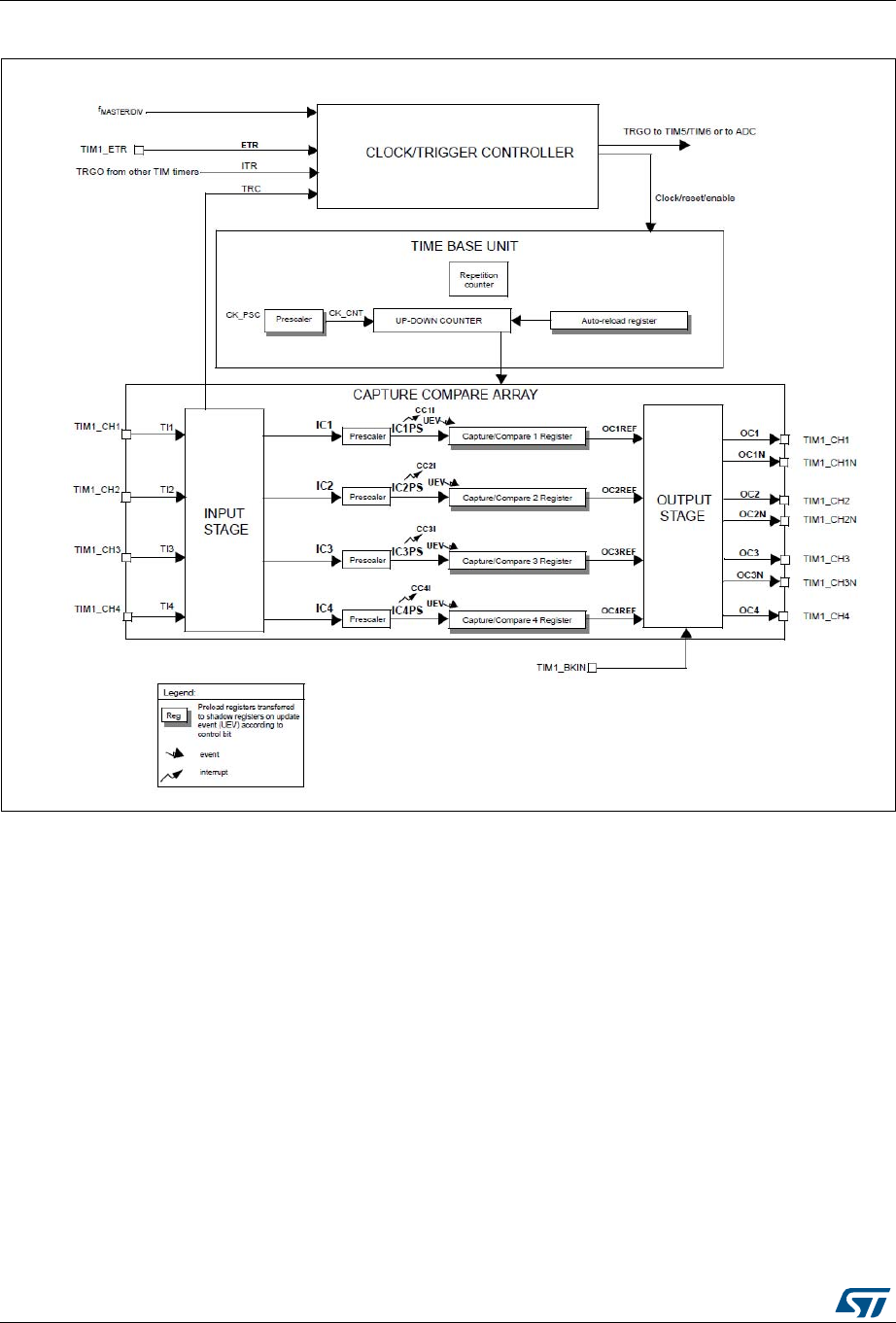
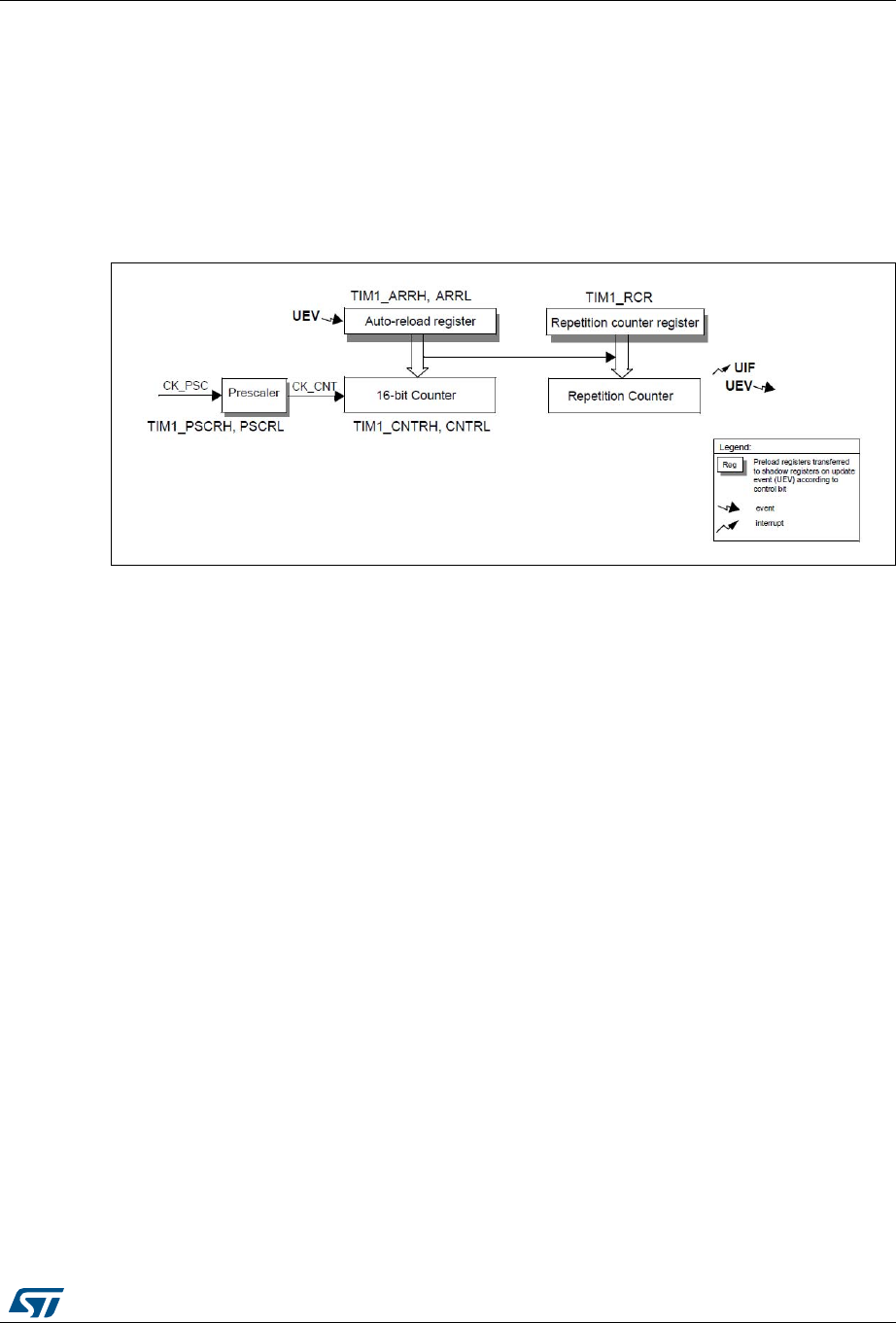
DocID14587 Rev 14 141/467
RM0016 16-bit advanced control timer (TIM1)
261
17.3 TIM1 time base unit
The timer has a time base unit that includes:
•16-bit up/down counter
•16-bit auto-reload register
•Repetition counter
•Prescaler
Figure 32. Time base unit
The 16-bit counter, the prescaler, the auto-reload register and the repetition counter register
can be written or read by software.
The auto-reload register is composed of a preload register plus a shadow register.
Writing to the auto-reload register can be done in two modes:
•Auto-reload preload enabled (ARPE bit set in the TIM1_CR1 register). In this mode,
when data is written to the auto-reload register, it is kept in the preload register and
transferred into the shadow register at the next update event (UEV).
•Auto-reload preload disabled (ARPE bit cleared in the TIM1_CR1 register). In this
mode, when data is written to the auto-reload register it is transferred into the shadow
register immediately.
An update event is generated:
•On a counter overflow or underflow
•By software, setting the UG bit in the TIM1_EGR register
•By a trigger event from the clock/trigger controller
With preload enabled (ARPE = 1), when an update event occurs: The auto-reload shadow
register is updated with the preload value (TIM1_ARR) and the buffer of the prescaler is
reloaded with the preload value (content of the TIM1_PSCR register).
The UEV can be disabled by setting the UDIS bit in the TIM1_CR1
The counter is clocked by the prescaler output CK_CNT, which is enabled only when the
counter enable bit (CEN) in TIM1_CR1 register is set.
Note: The actual counter enable signal CNT_EN is set 1 clock cycle after CEN.
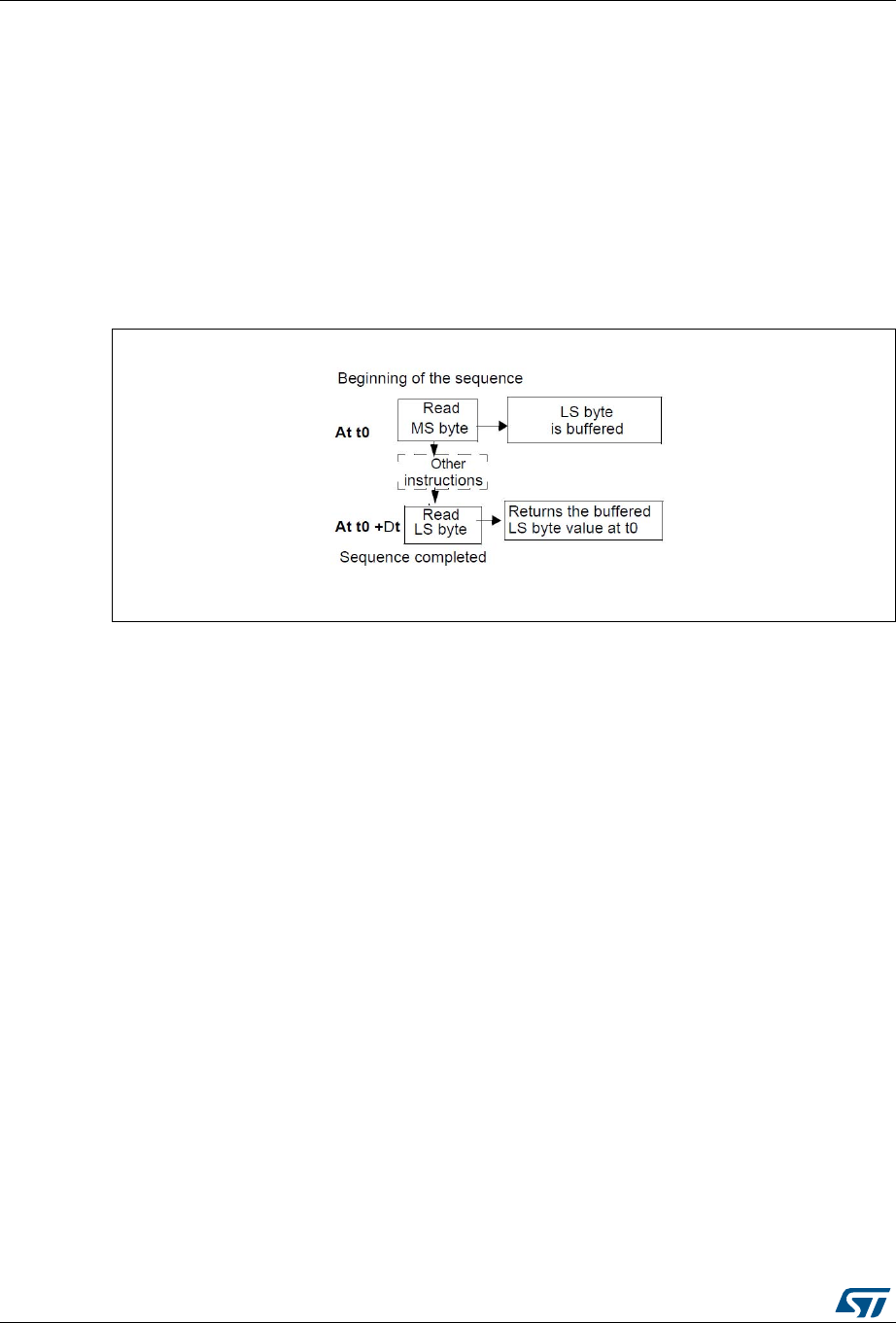
16-bit advanced control timer (TIM1) RM0016
142/467 DocID14587 Rev 14
17.3.1 Reading and writing to the 16-bit counter
There is no buffering when writing to the counter. Both TIM1_CNTRH and TIM1_CNTRL
can be written at any time, so it is suggested not to write a new value into the counter while
it is running to avoid loading an incorrect intermediate content.
An 8-bit buffer is implemented for the read. Software must read the MS byte first, after which
the LS byte value is buffered automatically (see Figure 33). This buffered value remains
unchanged until the 16-bit read sequence is completed.
Note: Do not use the LDW instruction to read the 16-bit counter. It reads the LS byte first and
returns an incorrect result.
Figure 33. 16-bit read sequence for the counter (TIM1_CNTR)
17.3.2 Write sequence for 16-bit TIM1_ARR register
16-bit values are loaded in the TIM1_ARR register through preload registers. This must be
performed by two write instructions, one for each byte. The MS byte must be written first.
The shadow register update is blocked as soon as the MS byte has been written, and stays
blocked until the LS byte has been written. Do not use the LDW instruction as this writes the
LS byte first which produces incorrect results.
17.3.3 Prescaler
The prescaler implementation is as follows:
The TIM1 prescaler is based on a 16-bit counter controlled through a 16-bit register (in
TIM1_PSCR register). It can be changed on the fly as this control register is buffered. It can
divide the counter clock frequency by any factor between 1 and 65536.
The counter clock frequency is calculated as follows:
fCK_CNT = fCK_PSC/(PSCR[15:0]+1)
The prescaler value is loaded through a preload register. The shadow register, which
contains the current value to be used, is loaded as soon as the LS byte has been written.
To update the 16-bit prescaler, load two bytes in separate write operations starting with the
MSB. Do not use the LDW instruction for this purpose as it writes the LSB first.
The new prescaler value is taken into account in the following period (after the next counter
update event).
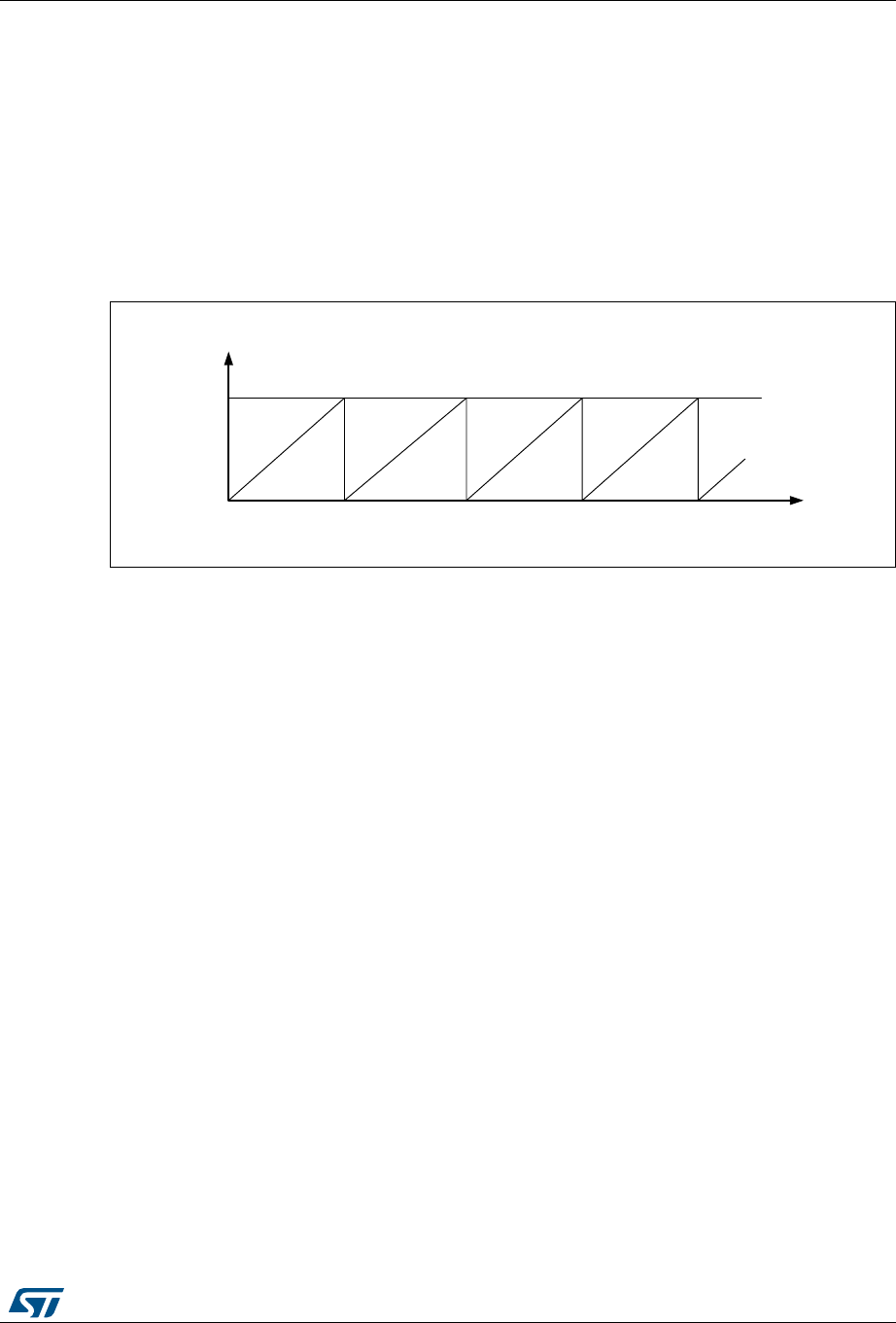
DocID14587 Rev 14 143/467
RM0016 16-bit advanced control timer (TIM1)
261
Read operations to the TIM1_PSCR registers access the preload registers, so no special
care needs to be taken to read them.
17.3.4 Up-counting mode
In up-counting mode, the counter counts from 0 to a user-defined compare value (content of
the TIM1_ARR register). It then restarts from 0 and generates a counter overflow event and
a UEV if the UDIS bit is 0 in the TIM1_CR1 register.
Figure 34 shows an example of this counting mode.
Figure 34. Counter in up-counting mode
An update event can also be generated by setting the UG bit in the TIM1_EGR register
(either by software or by using the trigger controller).
The UEV can be disabled by software by setting the UDIS bit in the TIM1_CR1 register. This
is to avoid updating the shadow registers while writing new values in the preload registers.
No UEV occurs until the UDIS bit has been written to 0. Note that the counter and the
prescaler restart counting from 0 but, the prescaler division factor does not change. In
addition, if the URS bit (update request selection) in the TIM1_CR1 register is set, setting
the UG bit generates an UEV without setting the UIF flag. Consequently, no interrupt
request is sent. This avoids generating both update and capture interrupts when clearing
the counter on the capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in
TIM1_SR1 register) is set (depending on the URS bit):
•The auto-reload shadow register is updated with the preload value (TIM1_ARR).
•The buffer of the prescaler is reloaded with the preload value (content of the
TIM1_PSCR register).
Figure 35 and Figure 36 show two examples of the counter behavior for different clock
frequencies when TIM1_ARR = 0x36.
In Figure 35, the prescaler divider is set to 2, so the counter clock (CK_CNT) frequency is at
half the frequency of the prescaler clock source (CK_PSC). The auto-reload preload is
disabled (ARPE = 0). Consequently, the shadow register is immediately changed and
counter overflow occurs when upcounting reaches 0x36. This generates a UEV.
MSv45278V1
Counter
TIMx_ARR
O
Overflow Overflow Overflow Overflow Time
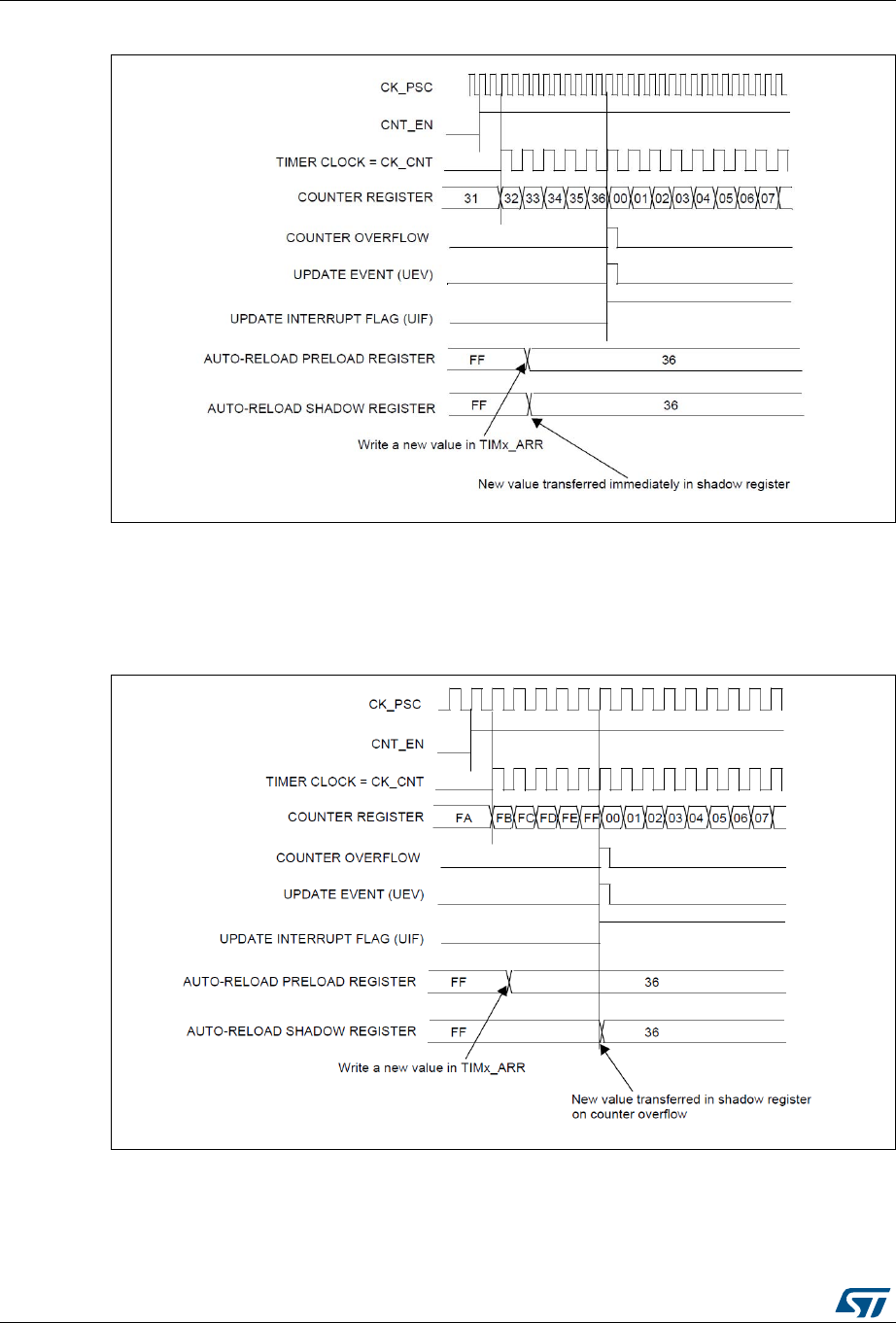
16-bit advanced control timer (TIM1) RM0016
144/467 DocID14587 Rev 14
Figure 35. Counter update when ARPE = 0 (ARR not preloaded) with prescaler = 2
In Figure 36 the prescaler divider is set to 1, so CK_CNT has the same frequency as
CK_PSC. The auto-reload preload is enabled (ARPE = 1), so the next counter overflow
occurs at 0xFF. The new auto-reload value register value of 36h is taken into account after
the overflow which generates a UEV.
Figure 36. Counter update event when ARPE = 1 (TIM1_ARR preloaded)
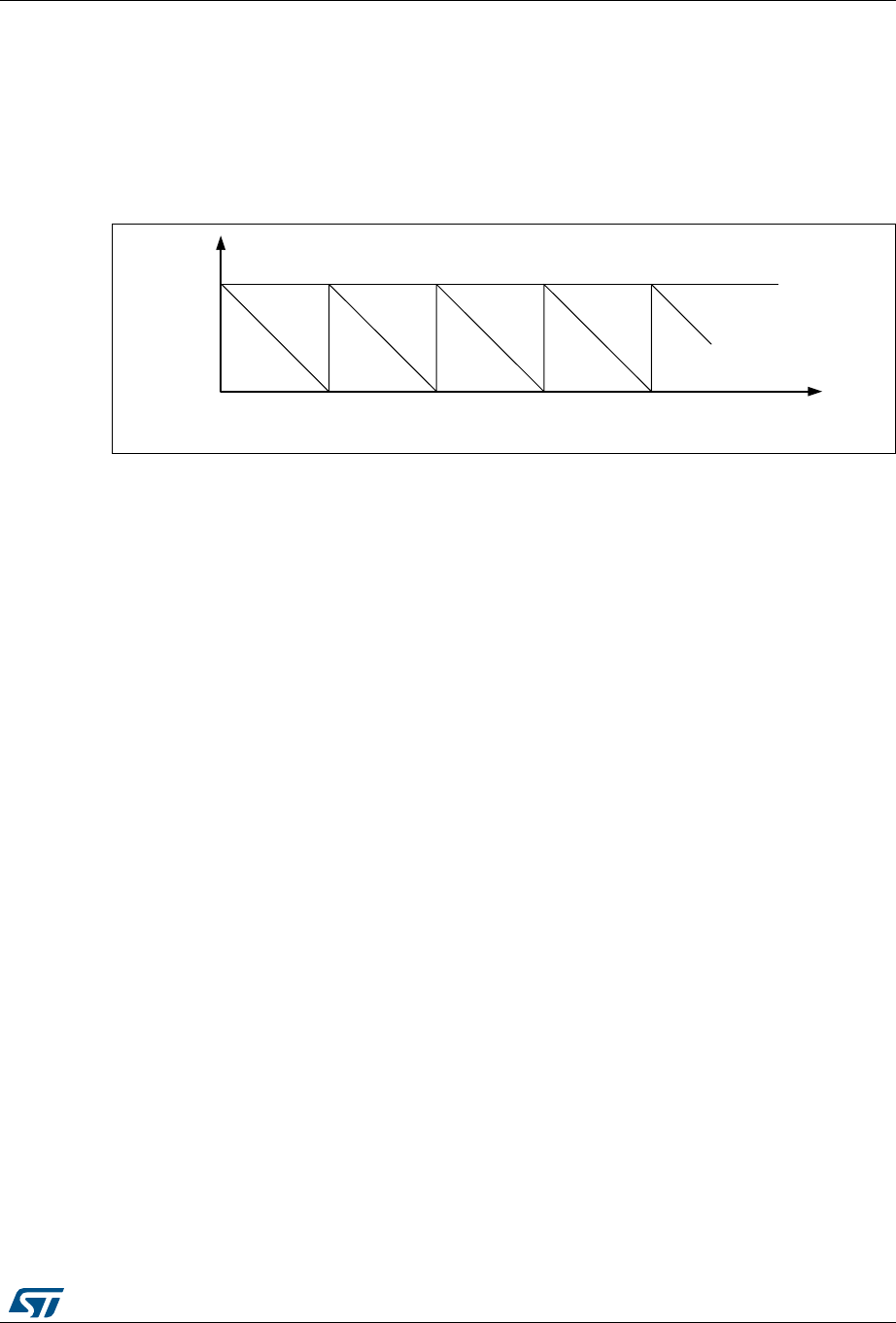
DocID14587 Rev 14 145/467
RM0016 16-bit advanced control timer (TIM1)
261
17.3.5 Down-counting mode
In down-counting mode, the counter counts from the auto-reload value (content of the
TIM1_ARR register) down to 0. It then restarts from the auto-reload value and generates a
counter underflow and a UEV, if the UDIS bit is 0 in the TIM1_CR1 register.
Figure 37 shows an example of this counting mode.
Figure 37. Counter in down-counting mode
An update event can also be generated by setting the UG bit in the TIM1_EGR register (by
software or by using the clock/trigger mode controller).
The UEV update event can be disabled by software by setting the UDIS bit in TIM1_CR1
register. This is to avoid updating the shadow registers while writing new values in the
preload registers. No update event occurs until the UDIS bit has been written to 0. However,
the counter restarts from the current auto-reload value, whereas the counter of the prescaler
restarts from 0 (without any change to the prescale rate).
In addition, if the URS bit (update request selection) in the TIM1_CR1 register is set, setting
the UG bit generates a UEV without setting the UIF flag (thus no interrupt request is sent).
This avoids generating both update and capture interrupts when clearing the counter on the
capture event.
When an update event occurs, all the registers are updated and the update flag (UIF bit in
TIM1_SR1 register) is set (depending on the URS bit):
•The buffer of the prescaler is reloaded with the preload value (content of the
TIM1_PSCR register),
•The auto-reload shadow register is updated with the preload value (content of the
TIM1_ARR register). Note that the auto-reload is updated before the counter is
reloaded, so that the next period is the expected one.
Figure 38 and Figure 39 show some examples of the counter behavior for different clock
frequencies when TIM1_ARR = 0x36.
In downcounting mode, preload is not normally used. Consequently, the new value is taken
into account in the next period (see Figure 38).
MSv45281V1
TIMx_ARR
0
Underflow Underflow Underflow Underflow Time
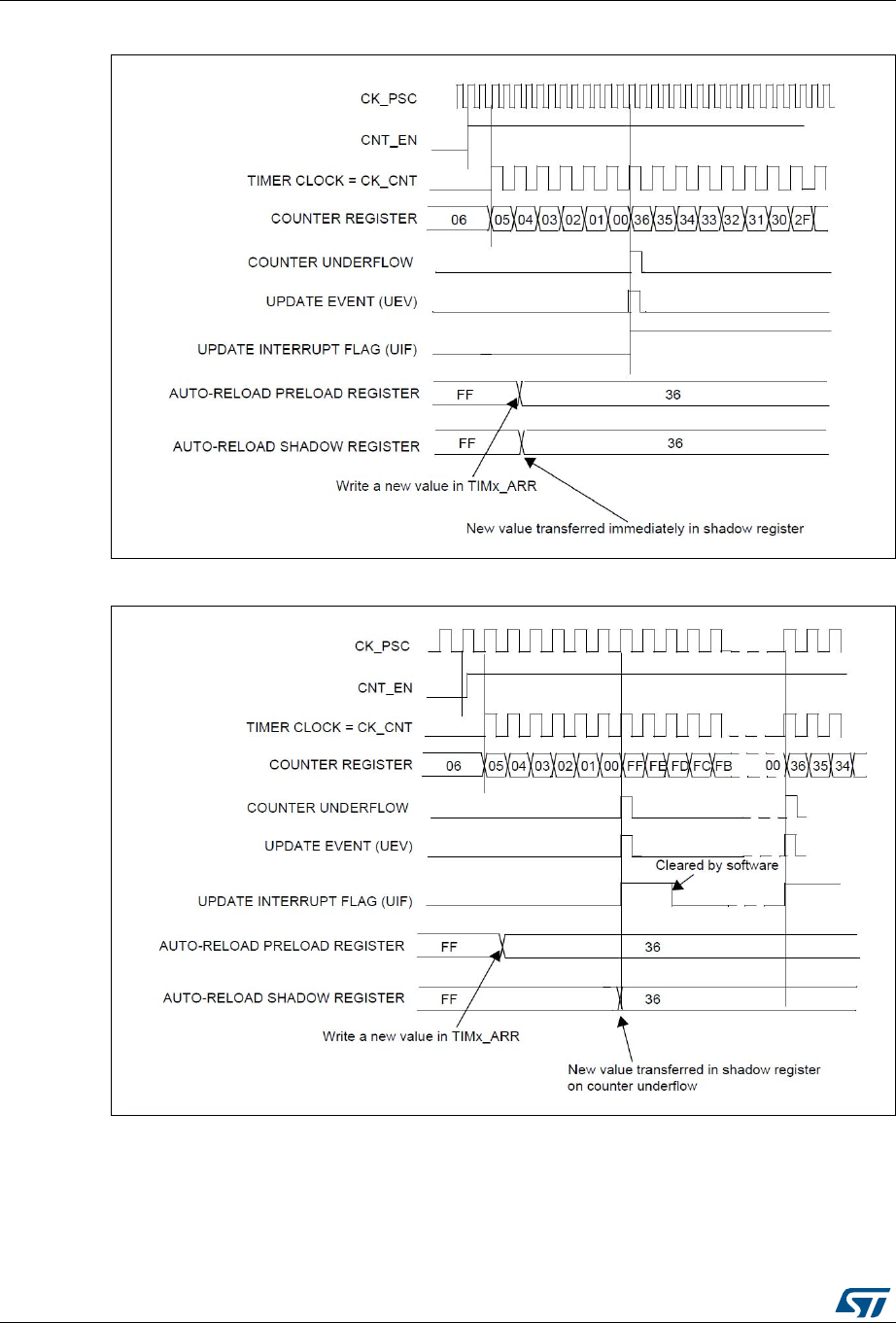
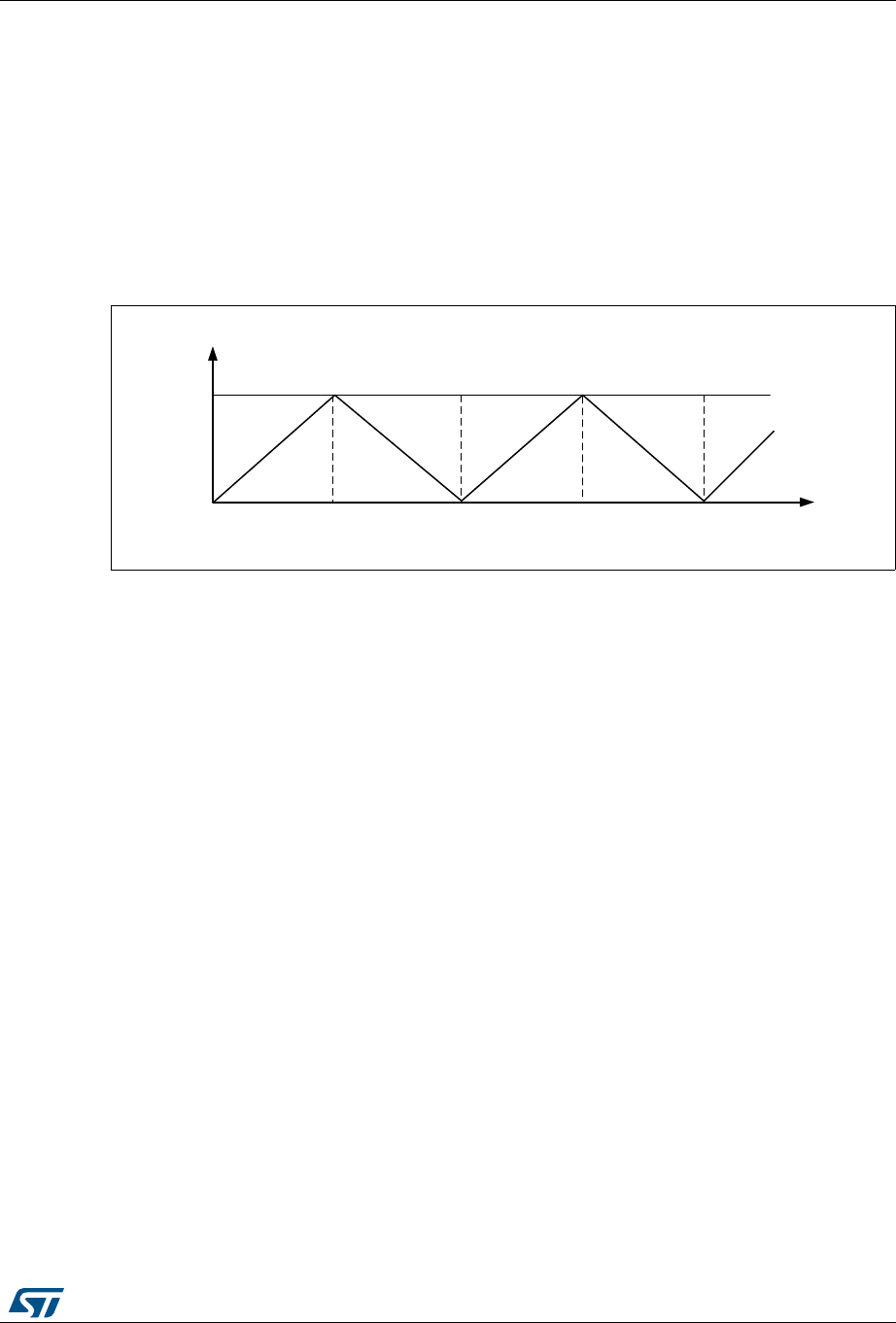
DocID14587 Rev 14 147/467
RM0016 16-bit advanced control timer (TIM1)
261
17.3.6 Center-aligned mode (up/down counting)
In center-aligned mode, the counter counts from 0 to the auto-reload value of -1 (content of
the TIM1_ARR register). This generates a counter overflow event. The counter then counts
down to 0 and generates a counter underflow event. After this, the counter restarts counting
from 0.
In this mode, the direction bit (DIR) in the TIM1_CR1 register cannot be written. It is updated
by hardware and gives the current direction of the counter.
The Figure 40 shows an example of this counting mode.
Figure 40. Counter in center-aligned mode
If the timer has a repetition counter (as in TIM1), the UEV is generated after up and down
counting and repeated for the number of times programmed in the repetition counter
register (TIM1_RCR). Otherwise, the UEV is generated at each counter overflow and at
each counter underflow.
Setting the UG bit in the TIM1_EGR register (by software or by using the clock/trigger mode
controller) also generates an update event. In this case, the counter and the prescaler
restart counting from 0.
The UEV can be disabled by software by setting the UDIS bit in the TIM1_CR1 register. This
is to avoid updating the shadow registers while writing new values in the preload registers.
In this way, no update event occurs until the UDIS bit is written to 0. However, the counter
continues counting up and down, based on the current auto-reload value. In timers with a
repetition counter, the new update rate is used because the repetition register is not double
buffered. For this reason, care must be taken when changing the update rate.
In addition, if the URS bit in the TIM1_CR1 register is set, setting the UG bit generates a
UEV without setting the UIF flag. Consequently, no interrupt request is sent. This avoids
generating both update and capture interrupts when clearing the counter on the capture
event.
When an update event occurs, all registers are updated and the update flag (the UIF bit in
the TIM1_SR1 register) is set (depending on the URS bit).
•The buffer of the prescaler is reloaded with the preload value (content of the
TIM1_PSCR register).
•The auto-reload shadow register is updated with the preload value (content of the
TIM1_ARR register). Note that if the update source is a counter overflow, the auto-
reload is updated before the counter is reloaded, so that the next period is the expected
one (the counter is loaded with the new value).
Below are some examples of the counter behavior for different clock frequencies.
MSv45279V1
Counter
TIMx_ARR
0
Overflow Underflow Overflow Underflow Time
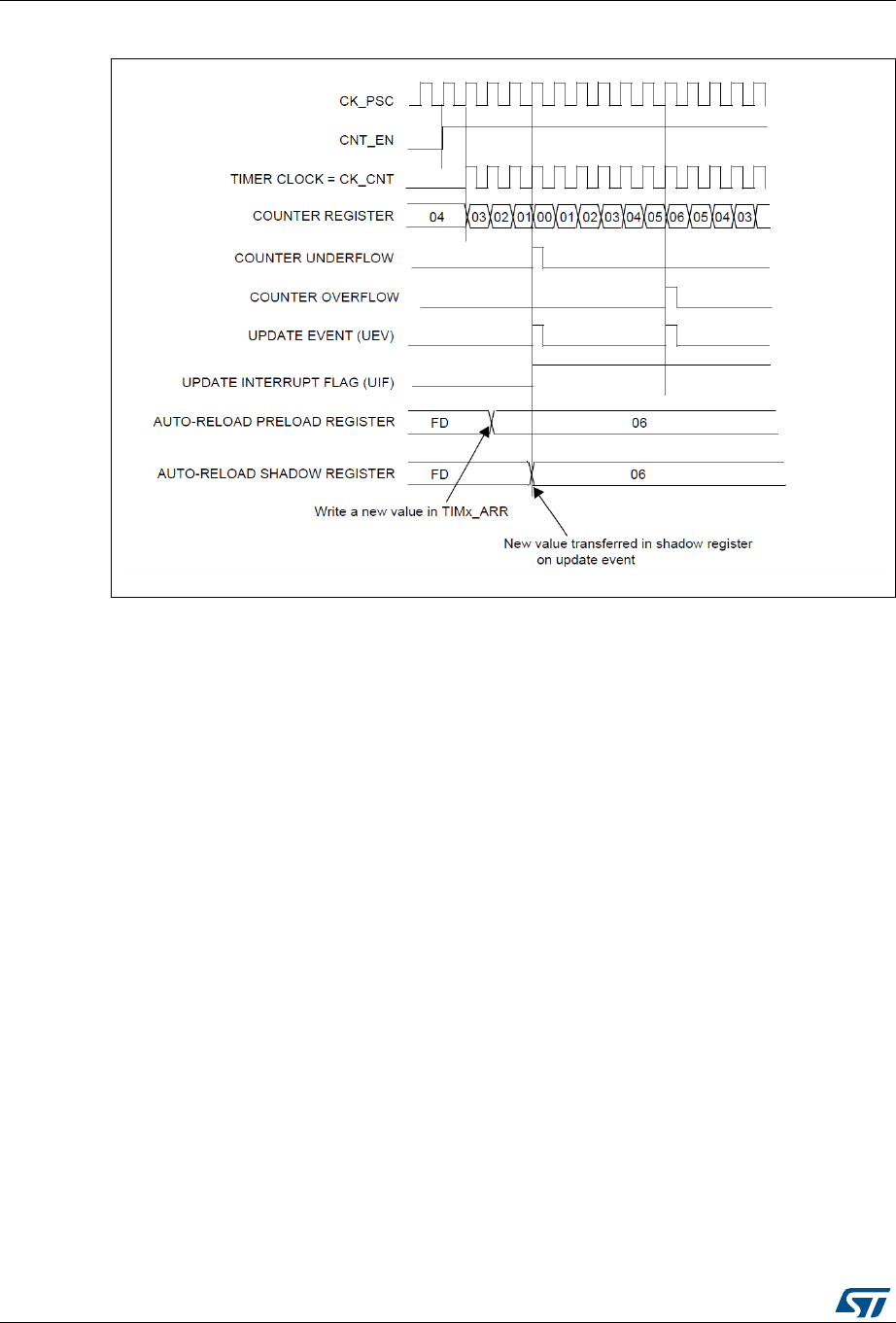
16-bit advanced control timer (TIM1) RM0016
148/467 DocID14587 Rev 14
Figure 41. Counter timing diagram, fCK_CNT = fCK_PSC, TIM1_ARR = 06h, ARPE = 1
Hints on using center-aligned mode:
•When starting in center-aligned mode, the current up-down configuration is used. It
means that the counter starts counting up or down depending on the value written in
the DIR bit in the TIM1_CR1 register. Moreover, the DIR and CMS bits must not be
changed at the same time by the software.
•Writing to the counter while running in center-aligned mode is not recommended as it
can lead to unexpected results. In particular:
– The direction is not updated if a value is written in the counter that is greater than
the auto-reload value (TIM1_CNT>TIM1_ARR). For example, if the counter is
counting up, it continues to do so.
– The direction is updated if 0 or the TIM1_ARR value are written in the counter but
no UEV is generated.
•The safest way to use center-aligned mode is to generate an update by software
(setting the UG bit in the TIM1_EGR register) just before starting the counter. Avoid
writing to the counter while it is running.

DocID14587 Rev 14 149/467
RM0016 16-bit advanced control timer (TIM1)
261
17.3.7 Repetition down-counter
Section 17.3: TIM1 time base unit describes how the UEV is generated with respect to
counter overflows/underflows. It is generated only when the repetition down-counter
reaches zero. This can be useful while generating PWM signals.
This means that data are transferred from the preload registers to the shadow registers
(TIM1_ARR auto-reload register, TIM1_PSCR prescaler register, and TIM1_CCRx
capture/compare registers in compare mode) every ‘n’ counter overflow or underflow, where
N is the value in the TIM1_RCR repetition counter register.
The repetition down-counter is decremented:
•At each counter overflow in up-counting mode
•At each counter underflow in down-counting mode
•At each counter overflow and at each counter underflow in center-aligned mode.
Although this limits the maximum number of repetitions to 128 PWM cycles, it makes it
possible to update the duty cycle twice per PWM period. When refreshing compare
registers only once per PWM period in center-aligned mode, maximum resolution is
2 x tCK_PSC due to the symmetry of the pattern.
The repetition down-counter is an auto-reload type, the repetition rate of which is
maintained as defined by the TIM1_RCR register value (refer to Figure 42). When the UEV
is generated by software (by setting the UG bit in the TIM1_EGR register) or by hardware
(through the clock/trigger controller), it occurs immediately irrespective of the value of the
repetition down-counter. The repetition down-counter is reloaded with the content of the
TIM1_RCR register.
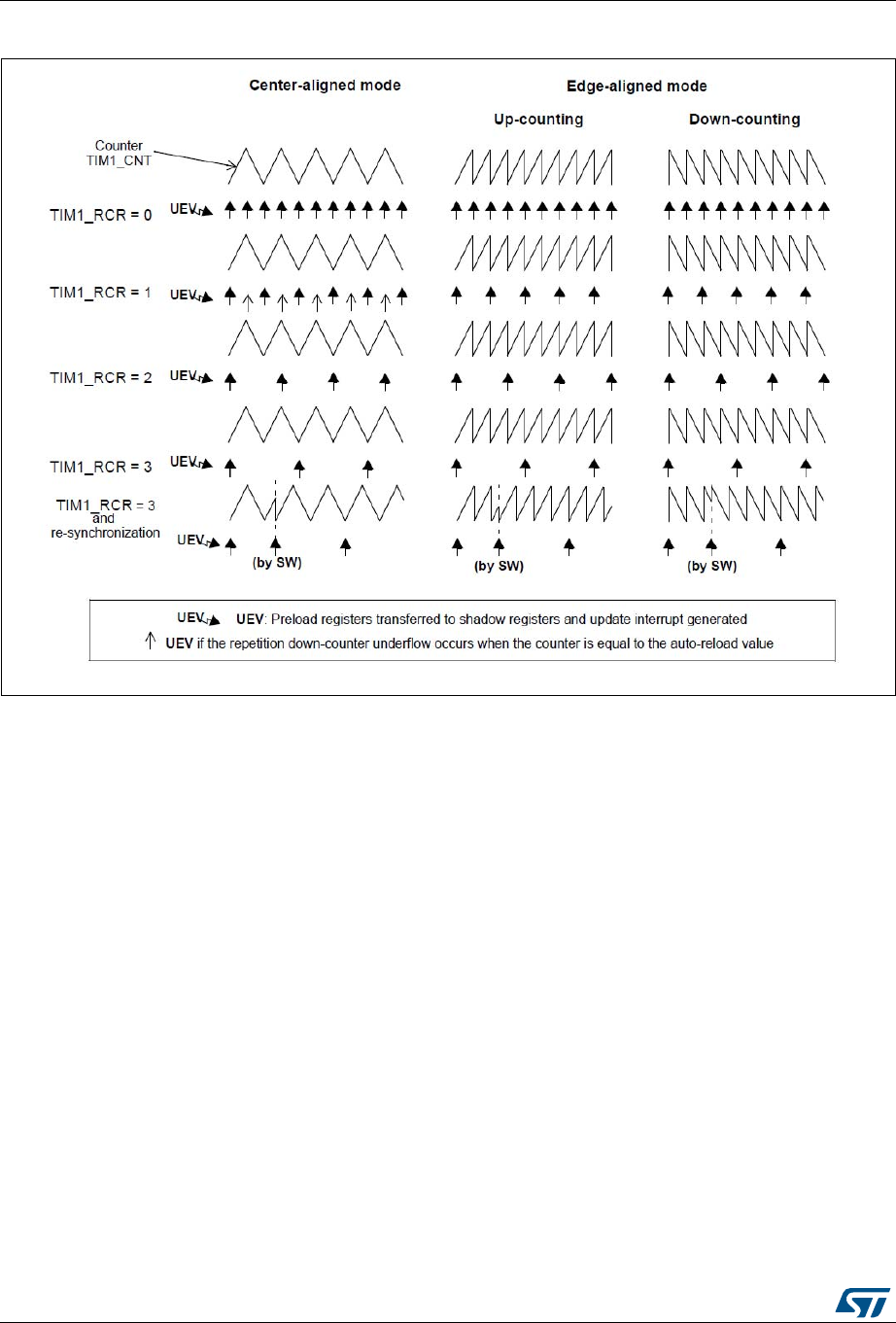
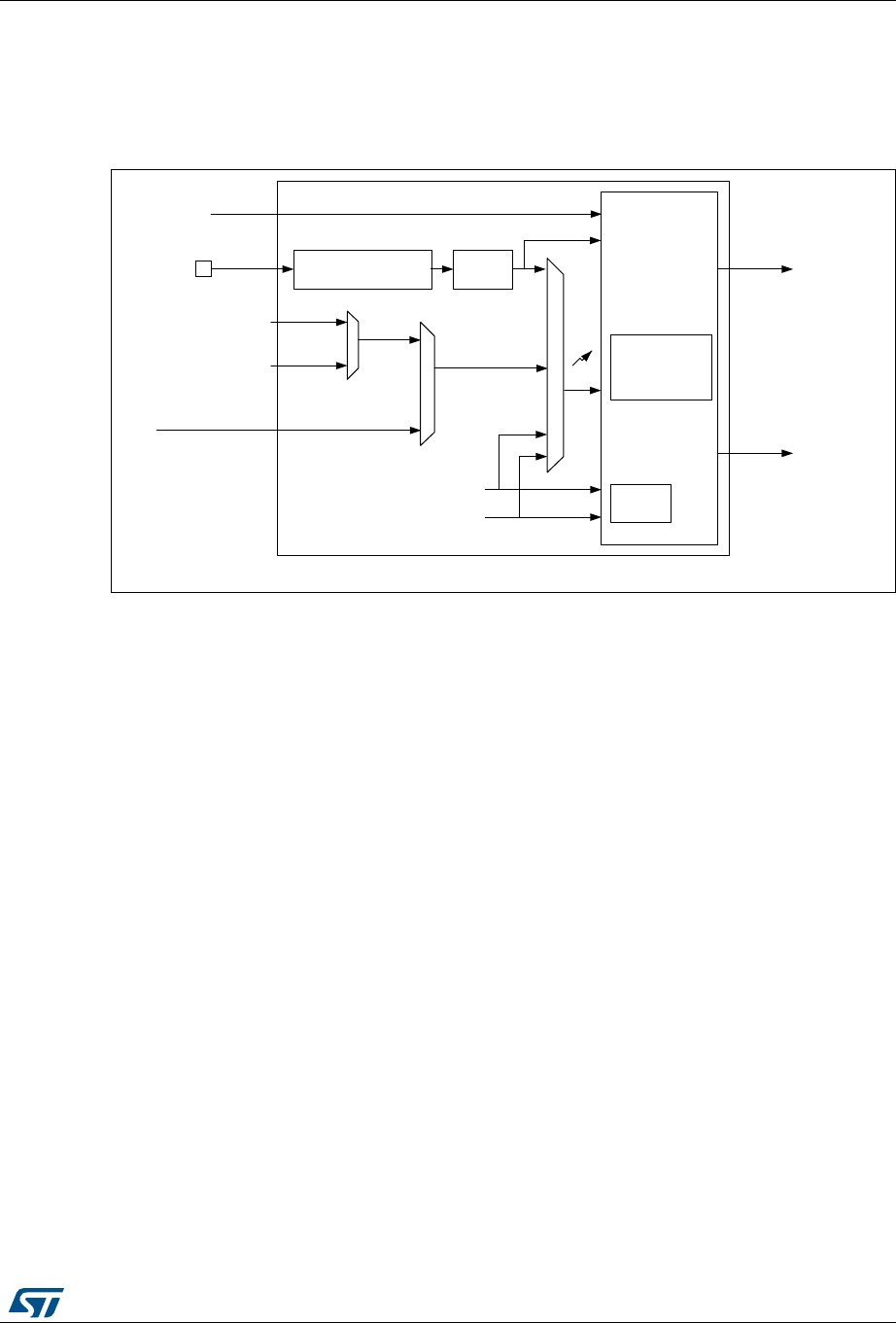
DocID14587 Rev 14 151/467
RM0016 16-bit advanced control timer (TIM1)
261
17.4 TIM1 clock/trigger controller
The clock/trigger controller allows the timer clock sources, input triggers, and output triggers
to be configured. The block diagram is shown in Figure 43.
Figure 43. Clock/trigger controller block diagram
17.4.1 Prescaler clock (CK_PSC)
The time base unit prescaler clock (CK_PSC) can be provided by the following clock
sources:
•Internal clock (fMASTER)
•External clock mode 1: External timer input (TIx)
•External clock mode 2: External trigger input (ETR)
•Internal trigger inputs (ITRi): using one timer as prescaler for another timer. Refer to
Using one timer as prescaler for another timer on page 161 for more details.
MSv45285V1
fMASTER
Trigger
Controller
TIM1_ETR ETR Polarity Selection & Edge
Detector & Prescaler Input filter
ETRF
TRGO To other
timers
TRGO from TIM6 (ITR0)
TRGO from TIM5 (ITR2)
From input stage
ETRP
ITR
TI1F_ED
From input stage
TI1FP1
TI1FP2
Encoder
Interface
TRC
TRGI
TGI
Clock / Trigger
Mode
Controller
Reset, Enable,
Up/Down, Count
CK_PSC
To Time Base Unit
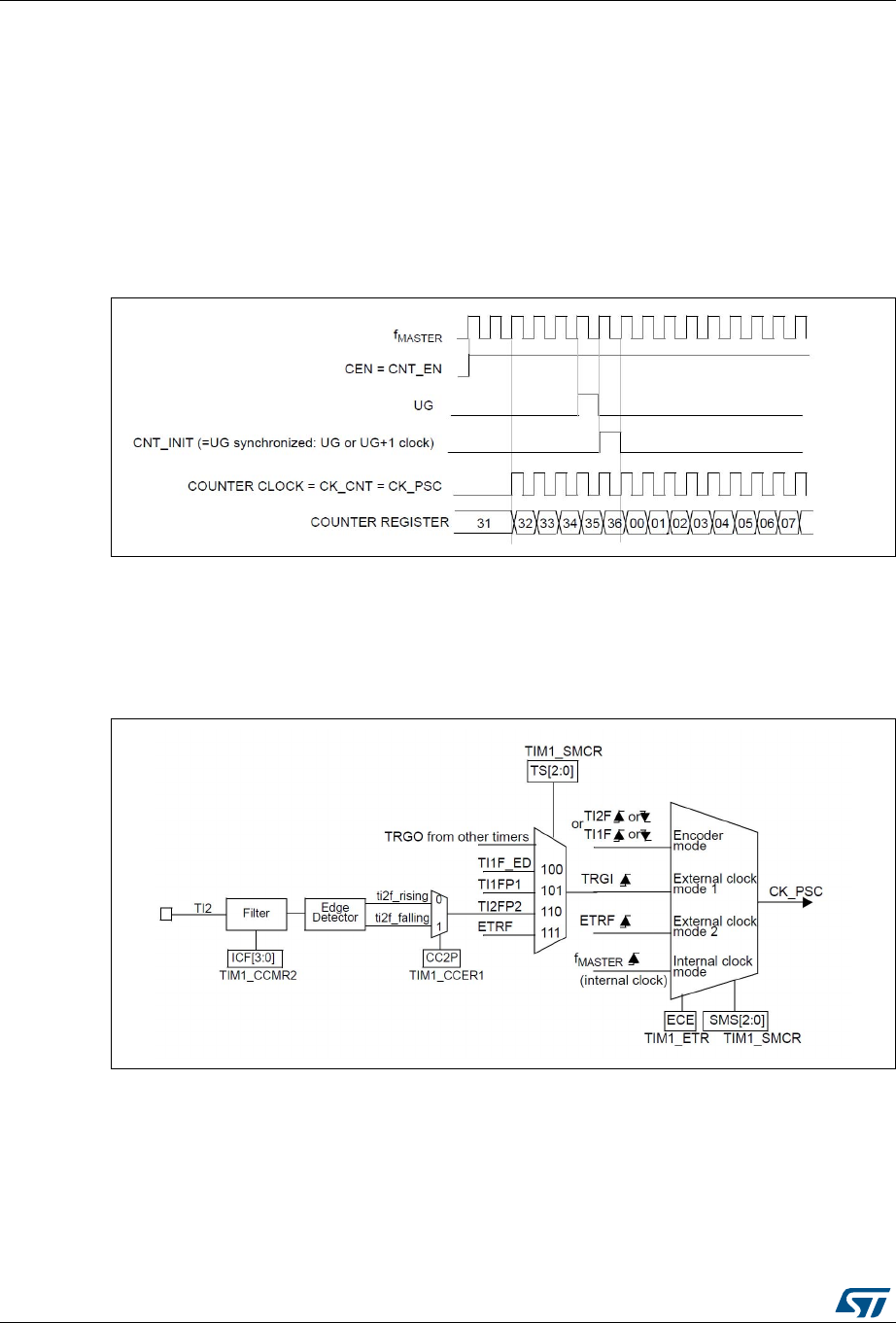
16-bit advanced control timer (TIM1) RM0016
152/467 DocID14587 Rev 14
17.4.2 Internal clock source (fMASTER)
If both the clock/trigger mode controller and the external trigger input are disabled
(SMS = 000 in TIM1_SMCR and ECE = 0 in the TIM1_ETR register), the CEN, DIR, and UG
bits behave as control bits and can be changed only by software (except UG which remains
cleared automatically). As soon as the CEN bit is written to 1, the prescaler is clocked by the
internal clock.
The figure below shows the behavior of the control circuit and the up-counter in normal
mode, without the prescaler.
Figure 44. Control circuit in normal mode, fCK_PSC = fMASTER
17.4.3 External clock source mode 1
The counter can count at each rising or falling edge on a selected timer input. This mode is
selected when SMS = 111 in the TIM1_SMCR register (see Figure 45).
Figure 45. TI2 external clock connection example
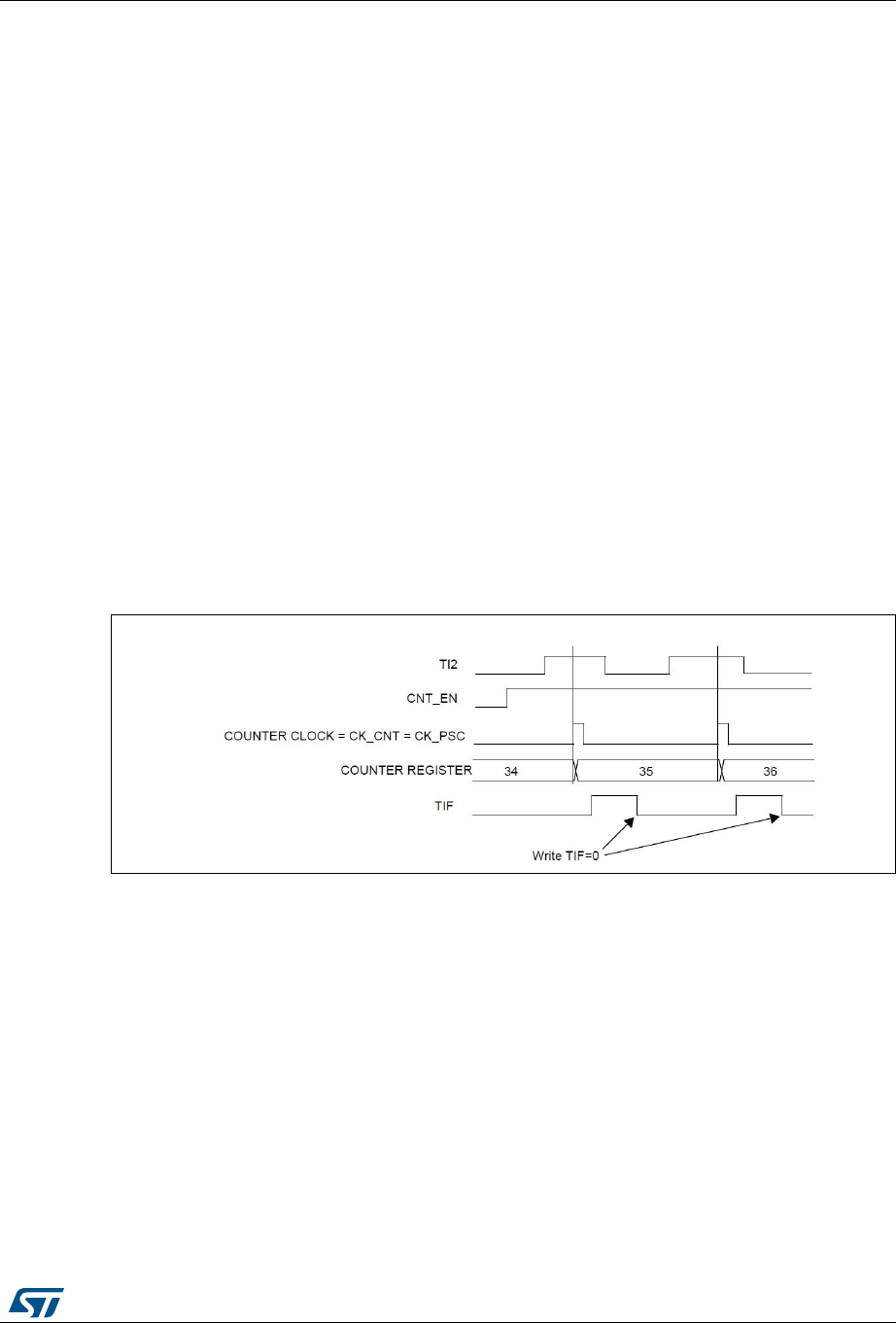
DocID14587 Rev 14 153/467
RM0016 16-bit advanced control timer (TIM1)
261
Procedure
Use the following procedure to configure the up-counter and, for example, to count in
response to a rising edge on the TI2 input:
1. Configure channel 2 to detect rising edges on the TI2 input by writing CC2S = 01 in the
TIM1_CCMR2 register.
2. Configure the input filter duration by writing the IC2F[3:0] bits in the TIM1_CCMR2
register (if no filter is needed, keep IC2F = 0000).
Note: The capture prescaler is not used for triggering, so it does not need t o be
configured. The CC2S bits do not need to be configured either as they only select the
input capture source.
3. Select rising edge polarity by writing CC2P = 0 in the TIM1_CCER1 register.
4. Configure the timer in external clock mode 1 by writing SMS = 111 in the TIM1_SMCR
register.
5. Select TI2 as the input source by writing TS = 110 in the TIM1_SMCR register.
6. Enable the counter by writing CEN = 1 in the TIM1_CR1 register.
When a rising edge occurs on TI2, the counter counts once and the trigger flag is set (TIF bit
in the TIM1_SR1 register) and an interrupt request can be sent if enabled (depending on the
TIE bit in the TIM1_IER register).
The delay between the rising edge on TI2 and the actual reset of the counter is due to the
resynchronization circuit on TI2 input.
Figure 46. Control circuit in external clock mode 1
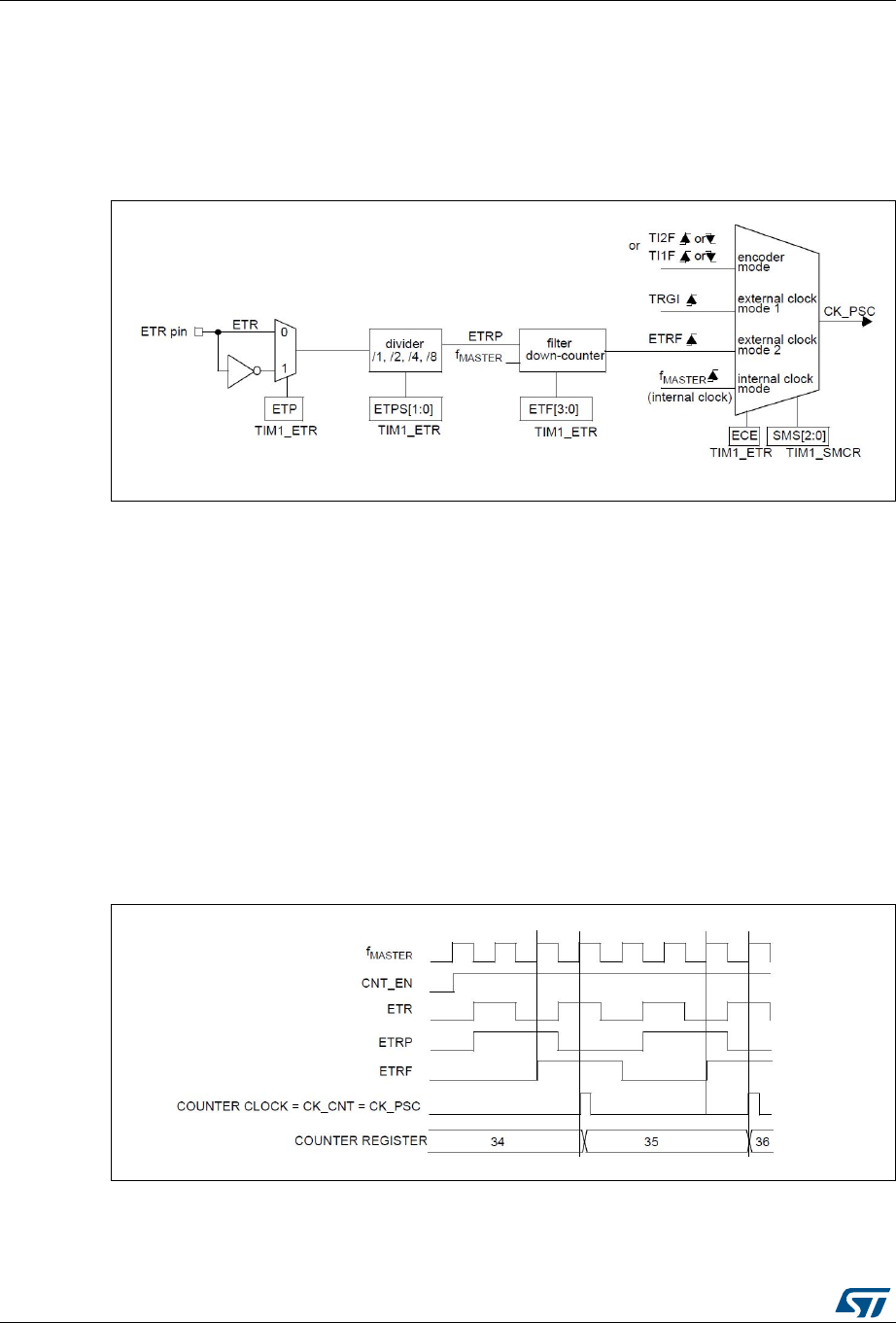
16-bit advanced control timer (TIM1) RM0016
154/467 DocID14587 Rev 14
17.4.4 External clock source mode 2
The counter can count at each rising or falling edge on the ETR. This mode is selected by
writing ECE = 1 in the TIM1_ETR register.
The Figure 47 gives an overview of the external trigger input block.
Figure 47. External trigger input block diagram
Procedure
Use the following procedure to configure the up-counter and, for example, to count once
every two rising edges on the ETR:
1. As no filter is needed in this example, write ETF[3:0] = 0000 in the TIM1_ETR register.
2. Set the prescaler by writing ETPS[1:0] = 01 in the TIM1_ETR register.
3. Select rising edge detection on the ETR pin by writing ETP = 0 in the TIM1_ETR
register.
4. Enable external clock mode 2 by writing ECE = 1 in the TIM1_ETR register.
5. Enable the counter by writing CEN = 1 in the TIM1_CR1 register.
The counter counts once every two ETR rising edges.
The delay between the rising edge on the ETR and the actual reset of the counter is due to
the resynchronization circuit on the external trigger signal (ETRP).
Figure 48. Control circuit in external clock mode 2
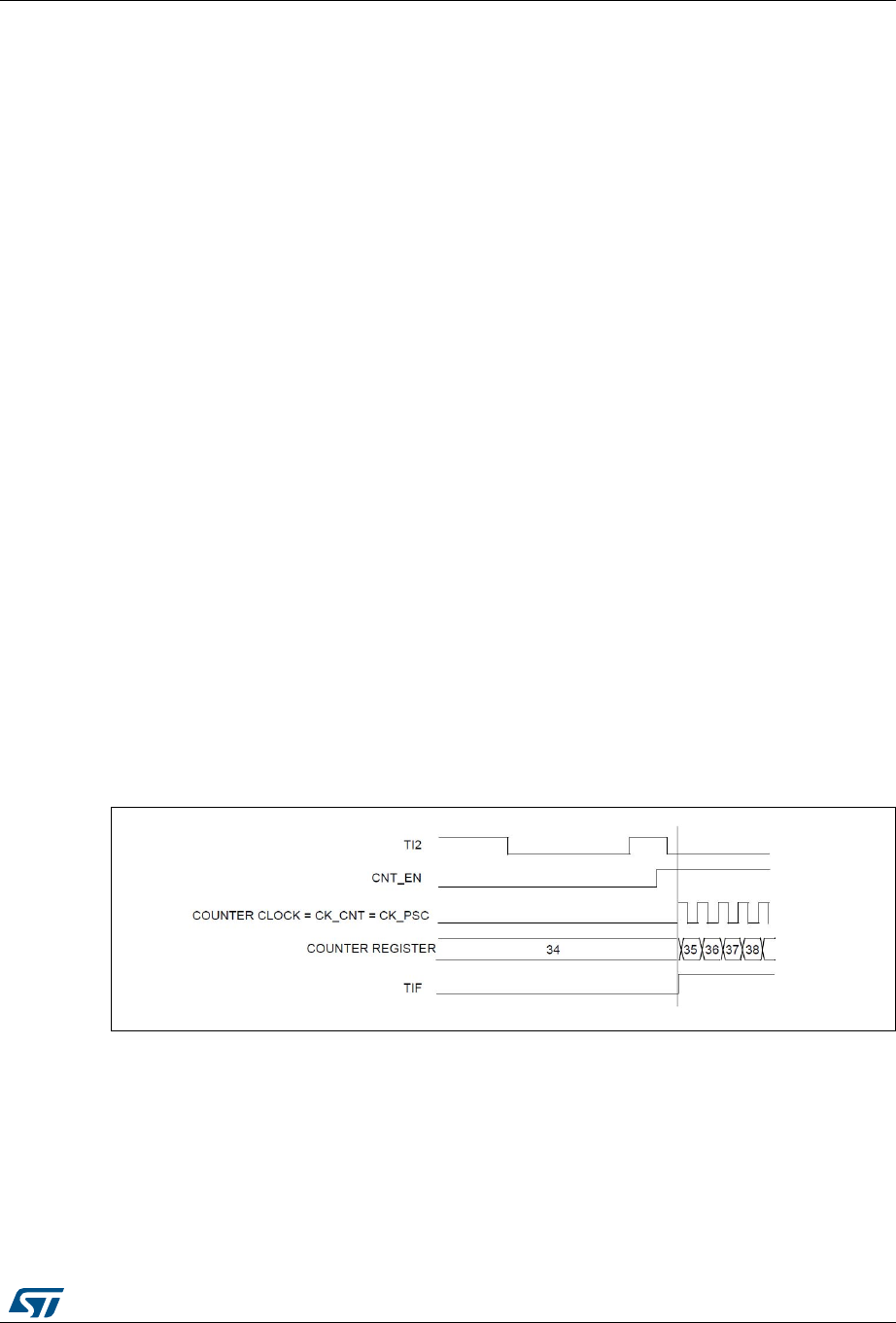
DocID14587 Rev 14 155/467
RM0016 16-bit advanced control timer (TIM1)
261
17.4.5 Trigger synchronization
There are four trigger inputs (refer to Table 35: Glossary of internal timer signals on
page 136):
•ETR
•TI1
•TI2
•TRGO from TIM5/TIM6
The TIM1 timer can be synchronized with an external trigger in three modes: Trigger
standard mode, trigger reset mode and trigger gated mode.
Trigger standard mode
The counter can start in response to an event on a selected input.
Procedure
Use the following procedure to start the up-counter in response, for example, to a rising
edge on the TI2 input:
1. Configure channel 2 to detect rising edges on TI2. As no filter is required in this
example, configure an input filter duration of 0 (IC2F = 0000). The capture prescaler is
not used for triggering and does not need to be configured. The CC2S bits select the
input capture source and do not need to be configured either. Write CC2P = 0 in the
TIM1_CCER1 register to select rising edge polarity.
2. Configure the timer in trigger mode by writing SMS = 110 in the TIM1_SMCR register.
Select TI2 as the input source by writing TS = 110 in the TIM1_SMCR register.
When a rising edge occurs on TI2, the counter starts counting on the internal clock and the
TIF flag is set.
The delay between the rising edge on TI2 and the actual reset of the counter is due to the
resynchronization circuit on TI2 input.
Figure 49. Control circuit in trigger mode
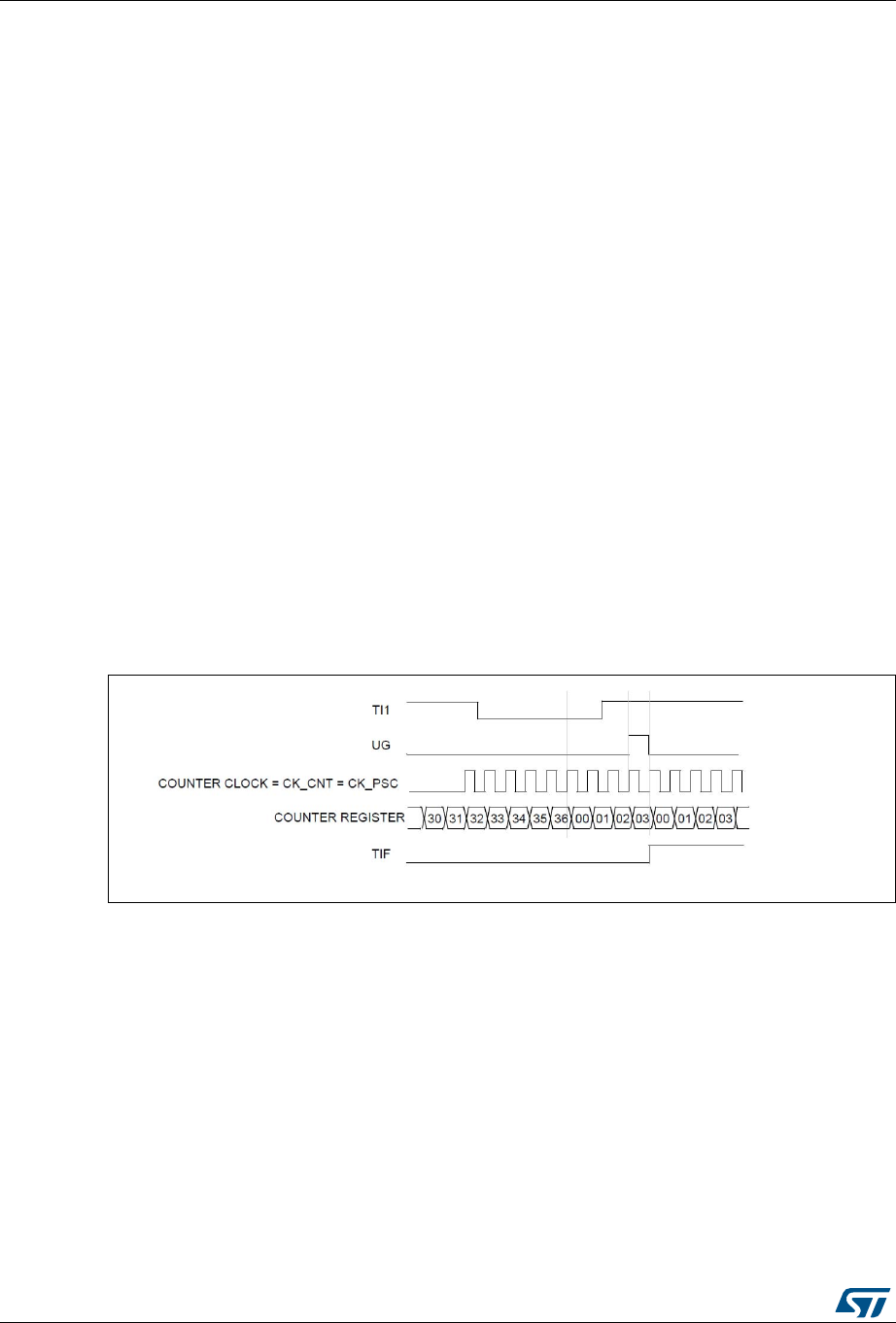
16-bit advanced control timer (TIM1) RM0016
156/467 DocID14587 Rev 14
Trigger reset mode
The counter and its prescaler can be re-initialized in response to an event on a trigger input.
Moreover, if the URS bit from the TIM1_CR1 register is low, a UEV is generated. Then all
the preloaded registers (TIM1_ARR, TIM1_CCRi) are updated.
Example
Use the following procedure to clear the up-counter in response to a rising edge on TI1
input:
1. Configure channel 1 to detect rising edges on TI1. As no filter is required in this
example, configure an input filter duration of 0 (IC2F = 0000). The capture prescaler is
not used for triggering and does not need to be configured. The CC1S bits select the
input capture source and do not need to be configured either. Write CC1P = 0 in
TIM1_CCER1 register to validate the polarity (and detect rising edges).
2. Configure the timer in reset mode by writing SMS = 100 in TIM1_SMCR register. Select
TI1 as the input source by writing TS = 101 in the TIM1_SMCR register.
3. Start the counter by writing CEN = 1 in the TIM1_CR1 register.
The counter starts counting on the internal clock and behaves normally until the TI1 rising
edge. When TI1 rises, the counter is cleared and restarts from 0. In the meantime, the
trigger flag is set (TIF bit in the TIM1_SR1 register) and an interrupt request can be sent if
enabled (depending on the TIE in the TIM1_IER register).
Figure 50 shows this behavior when the auto-reload register TIM1_ARR = 36h. The delay
between the rising edge on TI1 and the actual reset of the counter is due to the
resynchronization circuit on TI1 input.
Figure 50. Control circuit in trigger reset mode
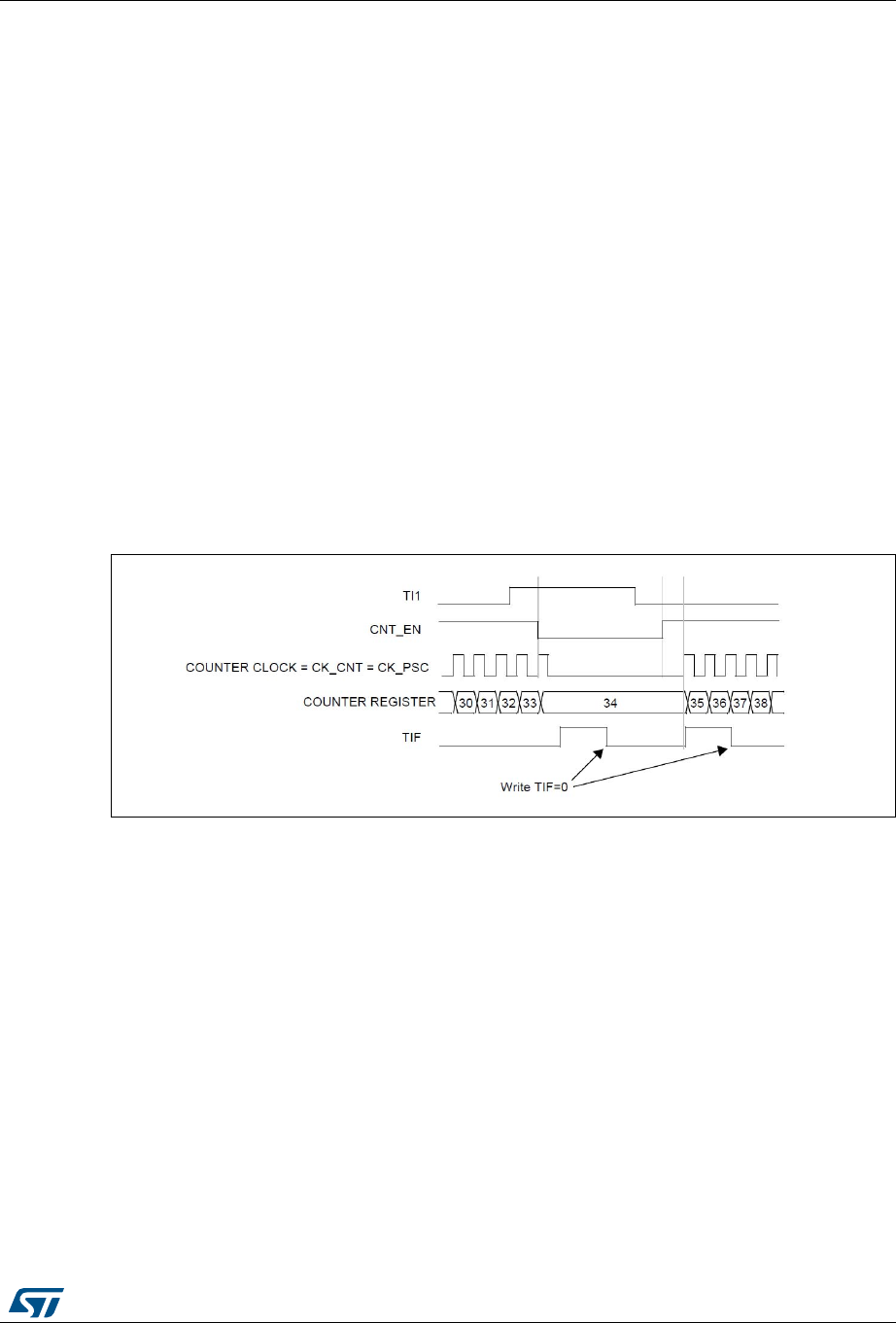
DocID14587 Rev 14 157/467
RM0016 16-bit advanced control timer (TIM1)
261
Trigger gated mode
The counter can be enabled depending on the level of a selected input.
Example
Use the following procedure to enable the up-counter when TI1 input is low:
1. Configure channel 1 to detect low levels on TI1. Configure the input filter duration (IC1F
= 0000). The capture prescaler is not used for triggering and does not need to be
configured. The CC1S bits select the input capture source and do not need to be
configured either. Write CC1P = 1 in the TIM1_CCER1 register to validate the polarity
(and detect low level).
2. Configure the timer in trigger gated mode by writing SMS = 101 in the TIM1_SMCR
register. Select TI1 as the input source by writing TS = 101 in the TIM1_SMCR register.
3. Enable the counter by writing CEN = 1 in the TIM1_CR1 register (in trigger gated
mode, the counter does not start if CEN = 0 irrespective of the trigger input level).
The counter starts counting on the internal clock as long as TI1 is low. It stops as soon as
TI1 becomes high. The TIF flag is set when the counter starts or stops.
The delay between the rising edge on TI1 and the actual reset of the counter is due to the
resynchronization circuit on TI1 input.
Figure 51. Control circuit in trigger gated mode
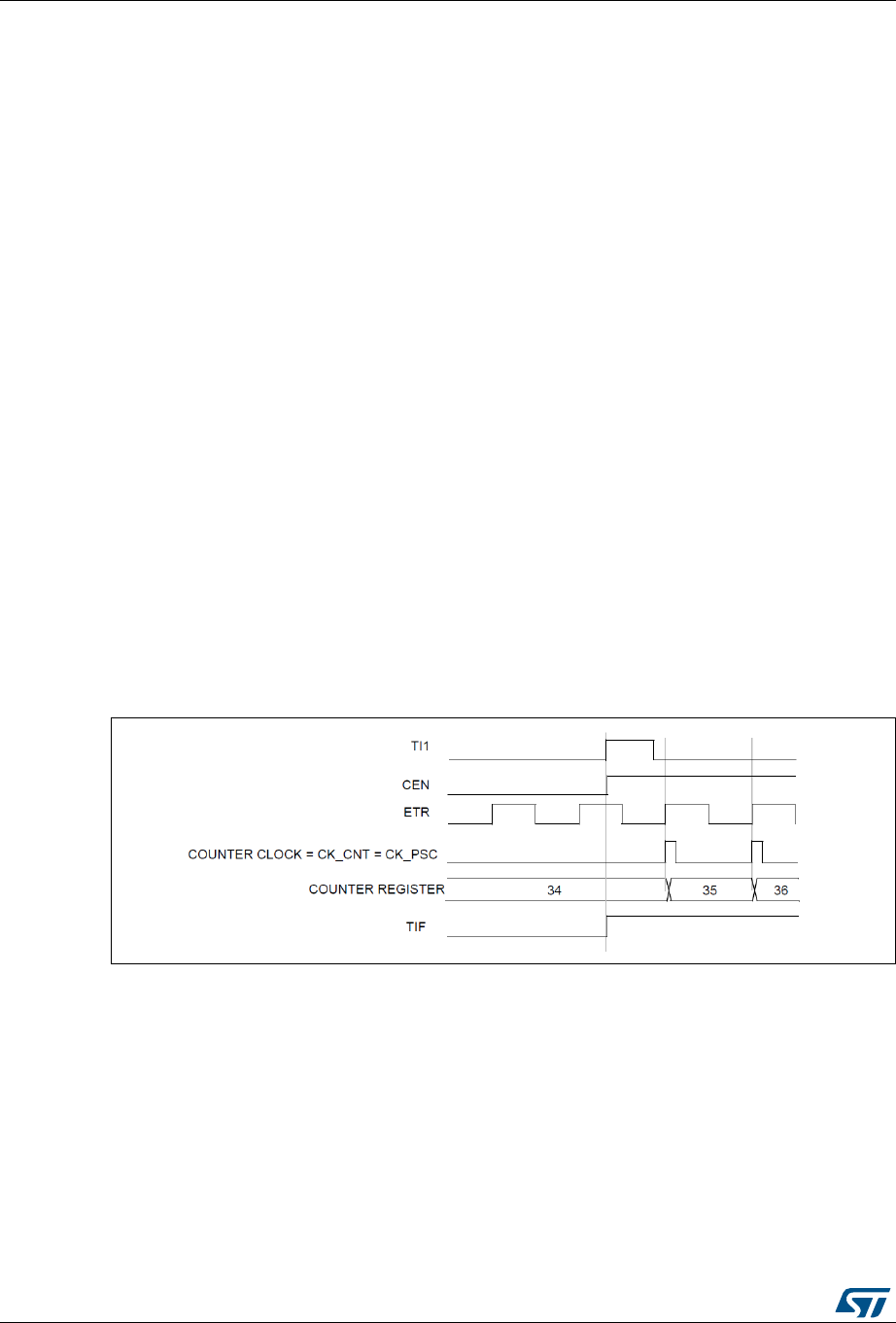
16-bit advanced control timer (TIM1) RM0016
158/467 DocID14587 Rev 14
Combining trigger modes with external clock mode 2
External clock mode 2 can be used with another trigger mode. For example, the ETR can be
used as the external clock input, and a different input can be selected as trigger input (in
trigger standard mode, trigger reset mode, or trigger gated mode). Care must be taken not
to select ETR as TRGI (through the TS bits in the TIM1_SMCR register).
Example
Use the following procedure to enable the up-counter at each rising edge on the ETR as
soon as a rising edge occurs on TI1 (standard trigger mode with external ETR clock):
1. Configure the external trigger input circuit by writing to the TIM1_ETR register. Write
ETF = 0000 (no filter needed in this example). Write ETPS = 00 to disable the
prescaler, write ETP = 0 to detect rising edges on the ETR, and write ECE = 1 to
enable external clock mode 2.
2. Configure channel 1 to detect rising edges on TI1. Configure the input filter duration
(IC1F = 0000). The capture prescaler is not used for triggering and does not need to be
configured. The CC1S bits select the input capture source and do not need to be
configured either. Write CC1P = 0 in the TIM1_CCER1 register to select rising edge
polarity.
3. Configure the timer in trigger mode by writing SMS = 110 in the TIM1_SMCR register.
Select TI1 as the input source by writing TS = 101 in the TIM1SMCR register.
A rising edge on TI1 enables the counter and sets the TIF flag. Consequently, the counter
counts on the ETR rising edges.
The delay between the rising edge on TI1 and the actual reset of the counter is due to the
resynchronization circuit on TI1 input. The delay between the rising edge on the ETR and
the actual reset of the counter is due to the resynchronization circuit on the ETRP signal.
Figure 52. Control circuit in external clock mode 2 + trigger mode

DocID14587 Rev 14 159/467
RM0016 16-bit advanced control timer (TIM1)
261
17.4.6 Synchronization between TIM1, TIM5 and TIM6 timers
On STM8AF and STM8S low-density devices, the timers are linked together internally for
timer synchronization or chaining. When one timer is configured in master mode, it can
output a trigger (TRGO) to reset, start, stop, or clock the counter of any other timer
configured in slave mode.
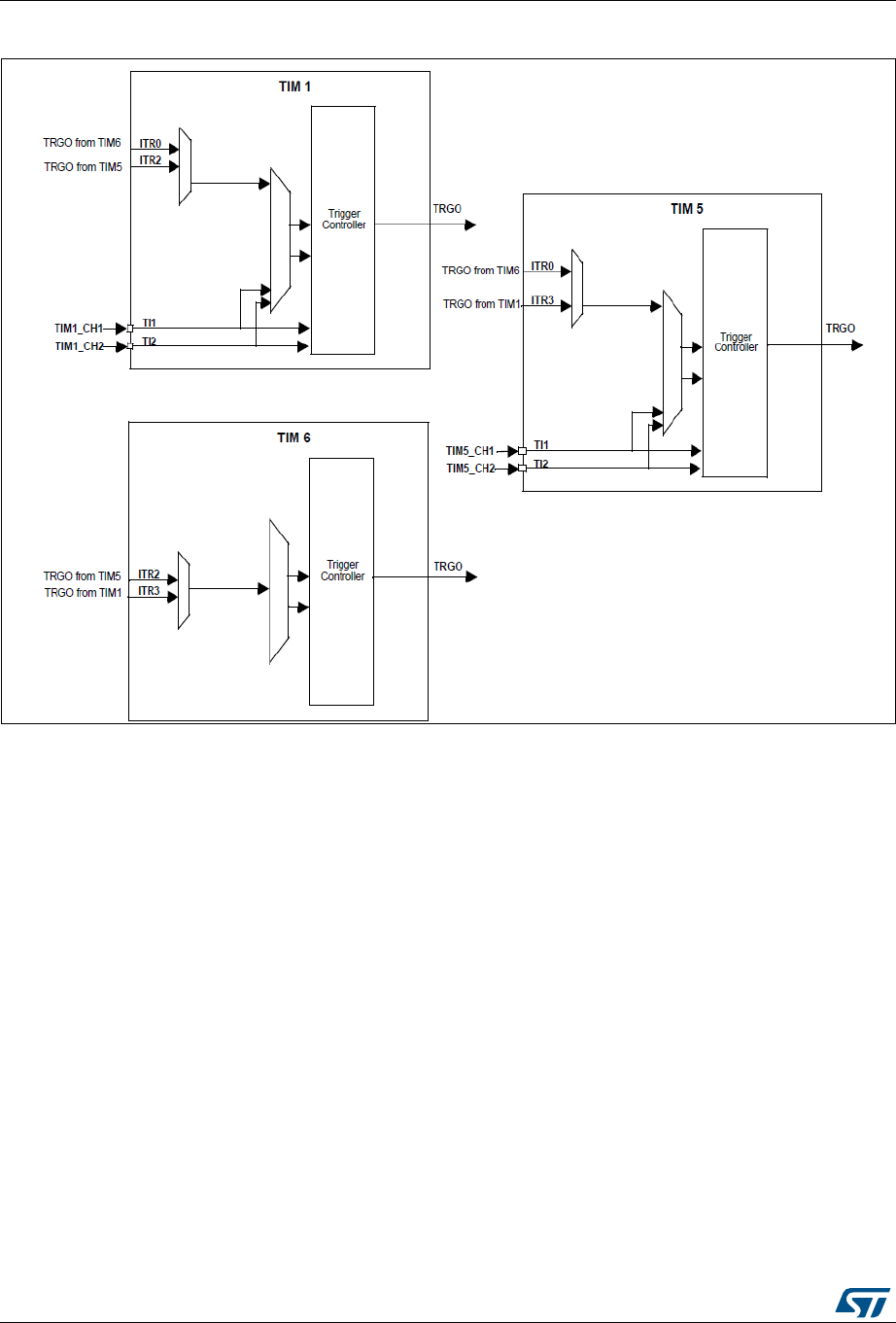
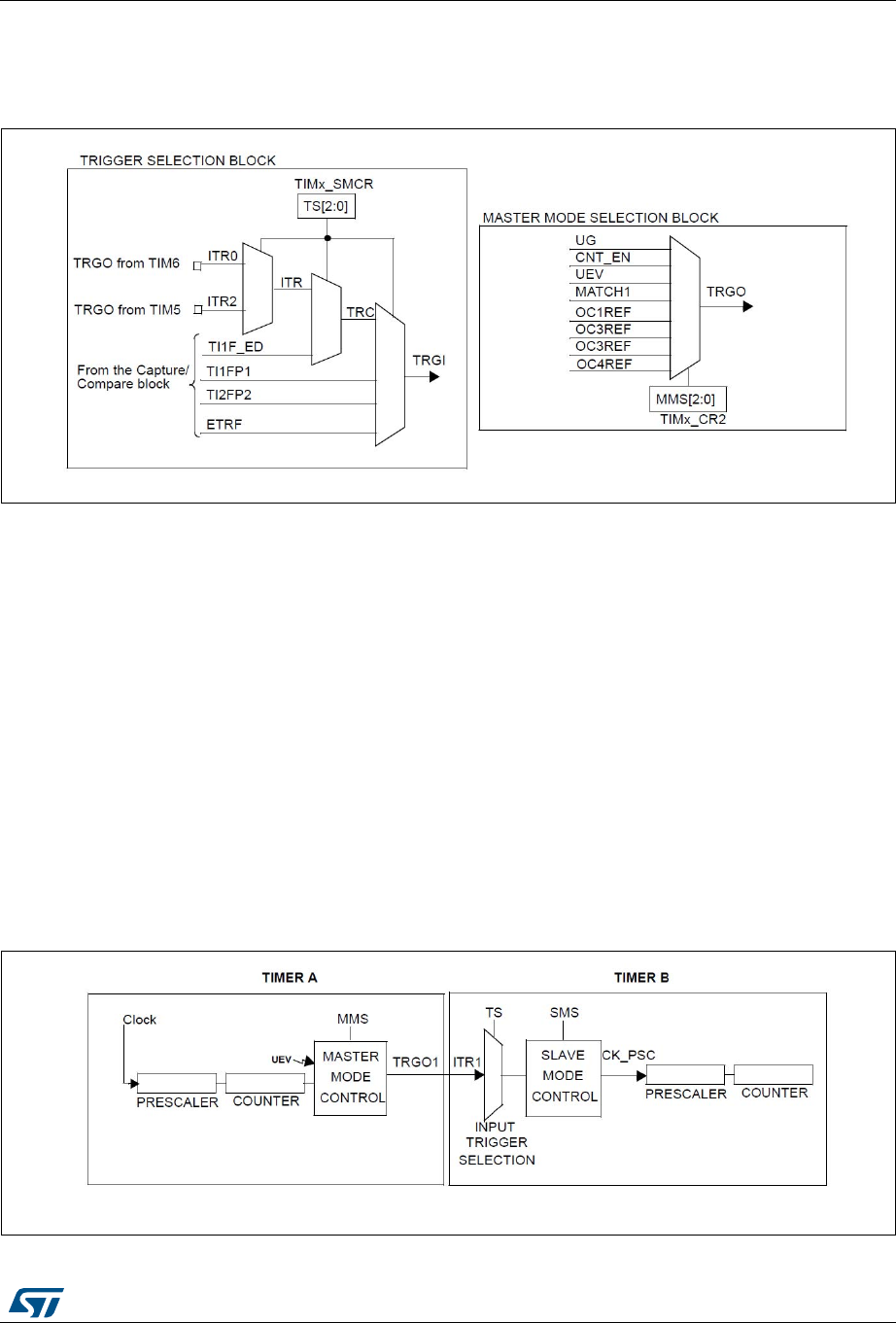
DocID14587 Rev 14 161/467
RM0016 16-bit advanced control timer (TIM1)
261
Figure 54 presents an overview of the trigger selection and the master mode selection
blocks.
Figure 54. Trigger/master mode selection blocks
Using one timer as prescaler for another timer
Refer to Figure 55 to see how timer A can be configured to act as a prescaler for timer B.
1. Configure timer A in master mode so that it outputs a periodic trigger signal on each
UEV. To configure that a rising edge is output on TRGO1 each time an update event is
generated, write MMS = 010 in the TIMx_CR2 register.
2. Connect the TRGO1 output of timer A to timer B, timer B must be configured in slave
mode using ITR1 as the internal trigger. Select this through the TS bits in the
TIMx_SMCR register (see TS[2:0] bit definitions in TIMx_SMCR register).
3. Put the clock/trigger controller in external clock mode 1, by writing SMS = 111 in the
TIMx_SMCR register. This causes timer B to be clocked by the rising edge of the
periodic timer A trigger signal (which corresponds to the timer A counter overflow).
4. Enable both timers by setting their respective CEN bits (TIMx_CR1 register).
Note: If OCi is selected on timer A as trigger output (MMS = 1xx), its rising edge is used to clock
the counter of timer B.
Figure 55. Master/slave timer example
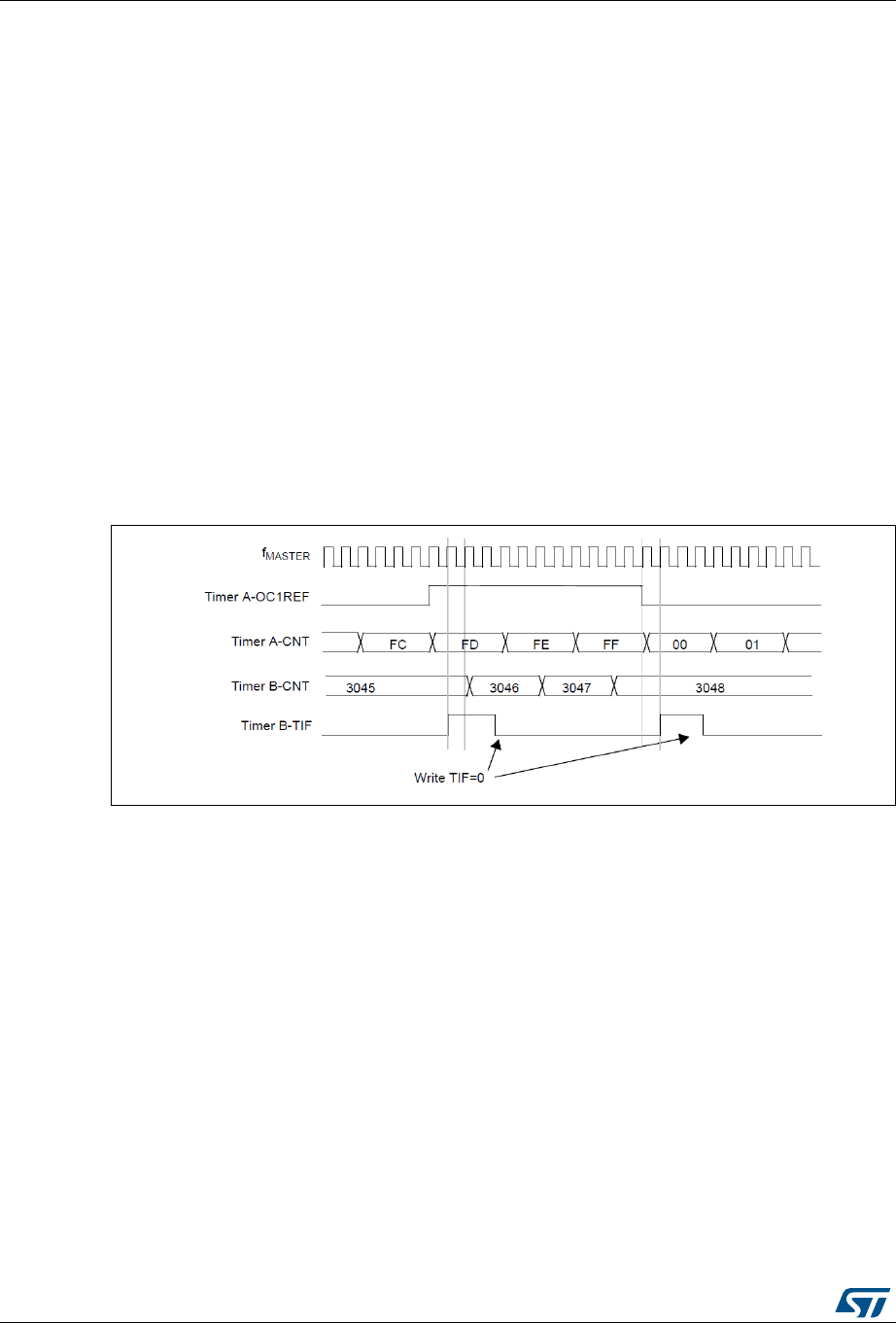
16-bit advanced control timer (TIM1) RM0016
162/467 DocID14587 Rev 14
Using one timer to enable another timer
Example 1
The enable of timer B is controlled with the output compare 1 of timer A (refer to Figure 56
for connections). Timer B counts on the divided internal clock only when OC1REF of timer A
is high. Both counter clock frequencies are divided by four by the prescaler compared to
f
MASTER
(fCK_CNT = f
MASTER
/4).
1. Configure timer A master mode to send its output compare 1 reference (OC1REF)
signal as trigger output (MMS = 100 in the TIMx_CR2 register).
2. Configure the timer A OC1REF waveform (TIMx_CCMR1 register)
3. Configure timer B to get the input trigger from timer A (see TS[2:0] bit definitions in
TIMx_SMCR register).
4. Configure timer B in trigger gated mode (SMS = 101 in TIMx_SMCR register)
5. Enable timer B by writing 1 in the CEN bit (TIMx_CR1 register)
6. Start timer A by writing 1 in the CEN bit (TIMx_CR1 register)
Note: The counter 2 clock is not synchronized with counter 1. This mode only affects the timer B
counter enable signal.
Figure 56. Gating timer B with OC1REF of timer A
In Figure 56, the timer B counter and prescaler are not initialized before being started.
Therefore, they start counting from their current value. It is possible to start from a given
value by resetting both timers before starting timer A. In this case, any value can be written
in the timer counters. The timers can easily be reset by software using the UG bit in the
TIMx_EGR registers.
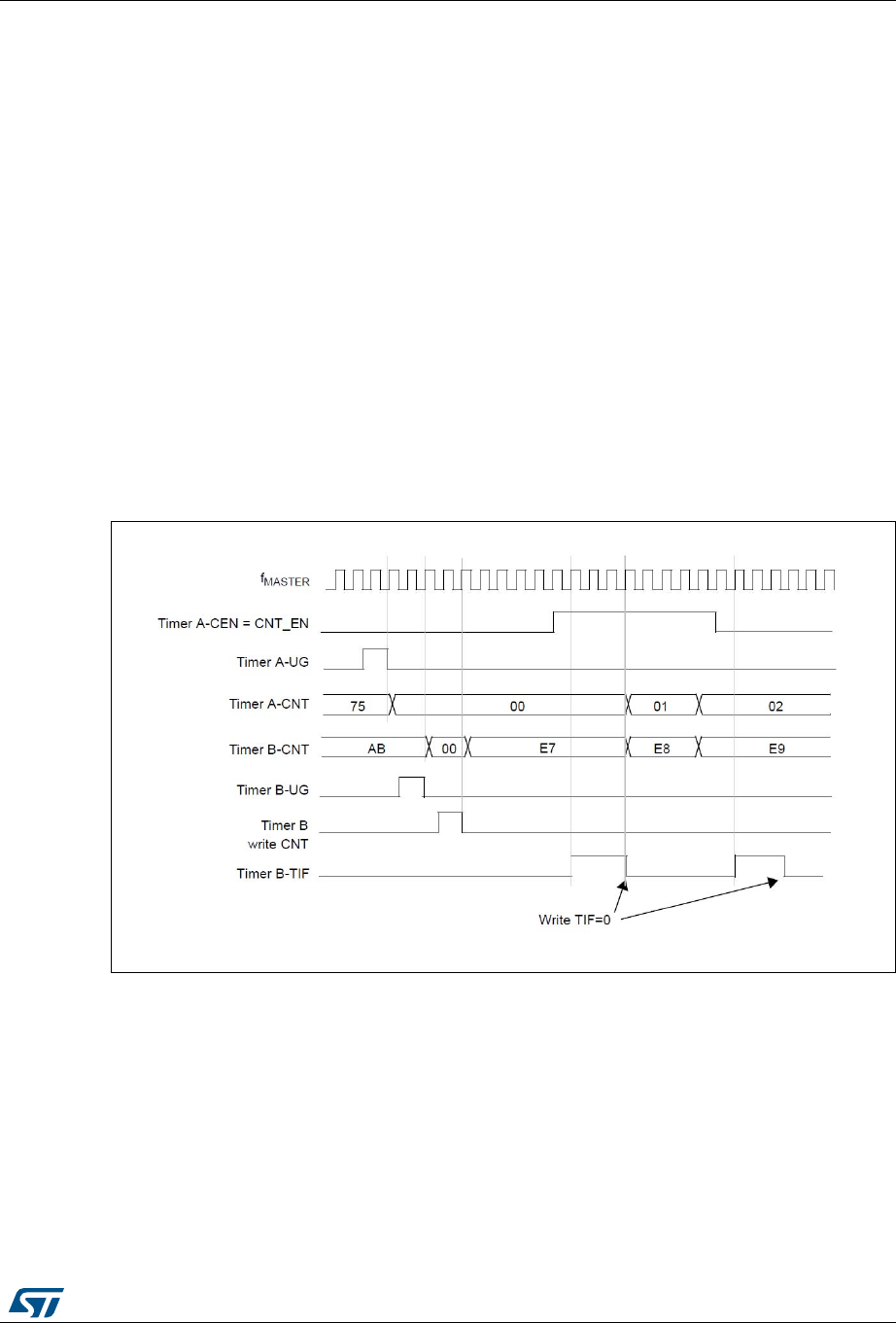
DocID14587 Rev 14 163/467
RM0016 16-bit advanced control timer (TIM1)
261
Example 2
Timer A and timer B are synchronized. Timer A is the master and starts from 0. Timer B is
the slave and starts from E7h. The prescaler ratio is the same for both timers. Timer B stops
when timer A is disabled by writing 0 to the CEN bit in the TIMx_CR1 register:
1. Configure timer A master mode to send its output compare 1 reference (OC1REF)
signal as trigger output (MMS = 100 in the TIMx_CR2 register).
2. Configure the timer A OC1REF waveform (TIMx_CCMR1 register)
3. Configure timer B to get the input trigger from timer A (see TS[2:0] bit definitions in
TIMx_SMCR register).
4. Configure timer B in trigger gated mode (SMS = 101 in TIMx_SMCR register)
5. Reset timer A by writing 1 in UG bit (TIMx_EGR register)
6. Reset timer B by writing 1 in UG bit (TIMx_EGR register)
7. Initialize timer B to 0xE7 by writing ‘E7h’ in the timer B counter (TIMx_CNTRL)
8. Enable timer B by writing 1 in the CEN bit (TIMx_CR1 register)
9. Start timer A by writing 1 in the CEN bit (TIMx_CR1 register)
10. Stop timer A by writing 0 in the CEN bit (TIMx_CR1 register)
Figure 57. Gating timer B with the counter enable signal of timer A (CNT_EN)
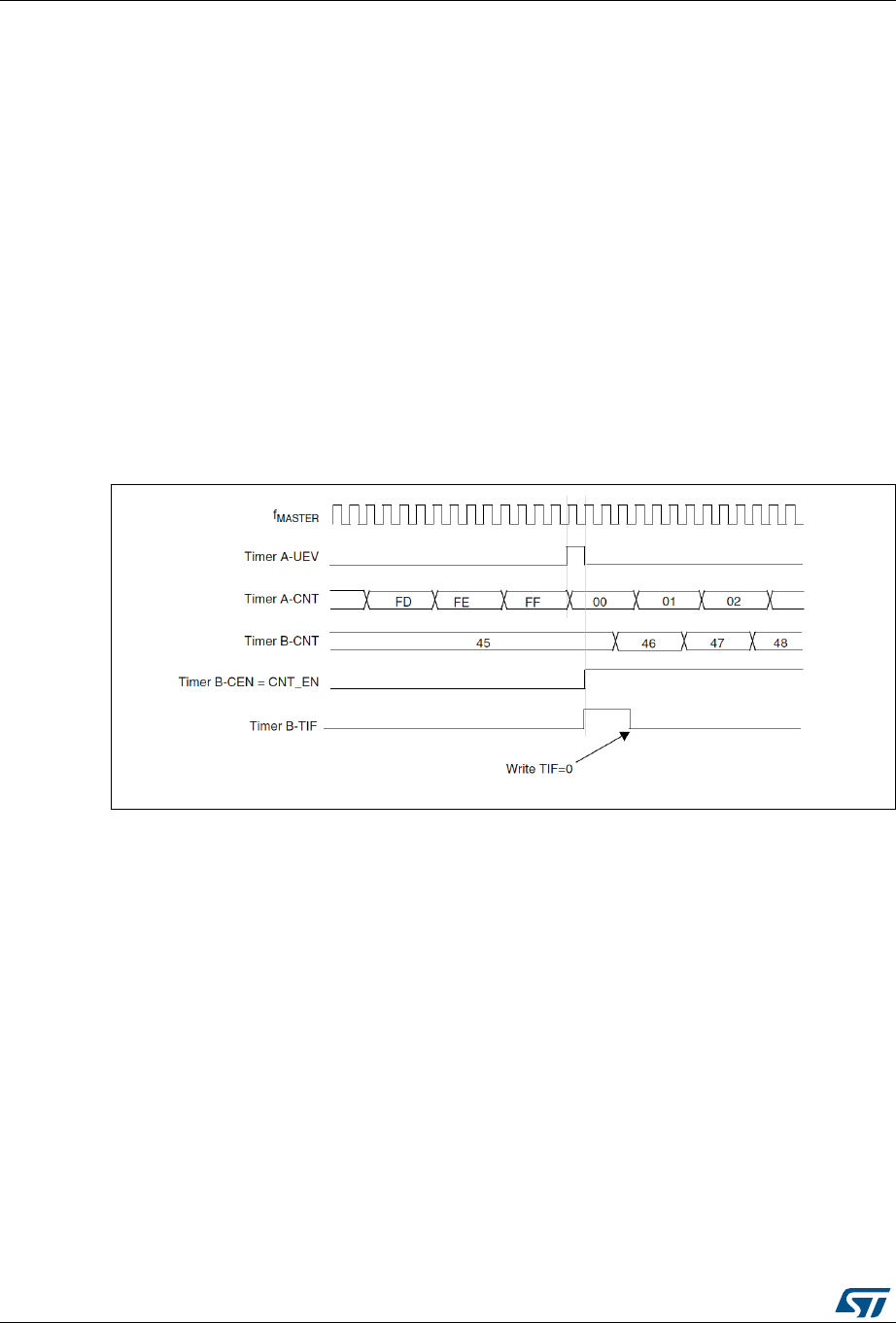
16-bit advanced control timer (TIM1) RM0016
164/467 DocID14587 Rev 14
Using one timer to start another timer
Example 1
The enable of timer B is set with the UEV of timer A (refer to Figure 55 for connections).
Timer B starts counting from its current value (which can be non-zero) on the divided
internal clock as soon as the UEV is generated by timer A. When timer B receives the
trigger signal, its CEN bit is automatically set and the counter counts until 0 is written to the
CEN bit in the TIM1_CR1 register. Both counter clock frequencies are divided by four by the
prescaler compared to fMASTER (fCK_CNT = fMASTER/4).
1. Configure timer A master mode to send its UEV as trigger output (MMS = 010 in the
TIM1_CR2 register).
2. Configure the timer A period (TIM1_ARR registers)
3. Configure timer B to get the input trigger from timer A (see TS[2:0] bit definitions in
TIM1_SMCR register).
4. Configure timer B in trigger mode (SMS = 110 in TIM1_SMCR register)
5. Start timer A by writing 1 in the CEN bit (TIM1_CR1 register)
Figure 58. Triggering timer B with the UEV of timer A (TIMERA-UEV)
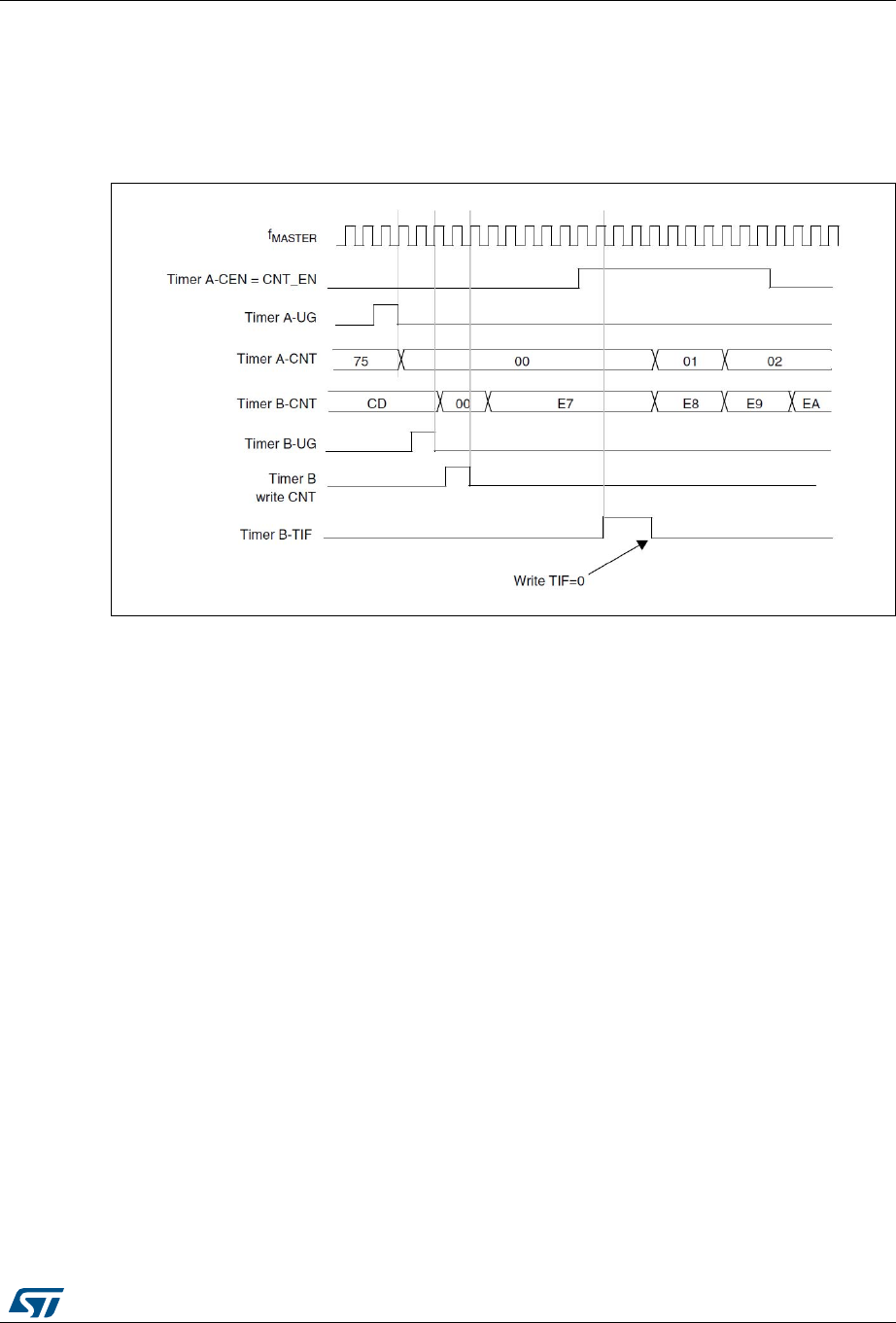
DocID14587 Rev 14 165/467
RM0016 16-bit advanced control timer (TIM1)
261
Example 2
As in the previous example, both counters can be initialized before starting to count.
Figure 59 shows the behavior, with the same configuration as in Figure 57, but, in trigger
standard mode instead of trigger gated mode (SMS = 110 in the TIM1_SMCR register).
Figure 59. Triggering timer B with counter enable CNT_EN of timer A
Starting 2 timers synchronously in response to an external trigger
Example
The enable of timer A is set when its TI1 input rises and the enable of timer B is set with the
enable of timer A (refer to Figure 55 for connections). To ensure the counters alignment,
timer A must be configured in master/slave mode (slave with respect to TI1, master with
respect to timer B).
1. Configure timer A master mode to send its enable as trigger output (MMS = 001 in the
TIMx_CR2 register).
2. Configure timer A slave mode to get the input trigger from TI1 (TS = 100 in the
TIMx_SMCR register).
3. Configure timer A in trigger mode (SMS = 110 in the TIMx_SMCR register)
4. Configure timer A in master/slave mode by writing MSM = 1 (TIMx_SMCR register)
5. Configure timer B to get the input trigger from timer A (see TS[2:0] bit definitions in
TIMx_SMCR register).
6. Configure timer B in trigger mode (SMS = 110 in the TIMx_SMCR register)
When a rising edge occurs on TI1 (timer A), both counters start counting synchronously on
the internal clock and both TIF flags are set.
Note: In this example both timers are initialized before starting (by setting their respective UG
bits). Both counters start from 0, but an offset can easily be inserted between them by
writing to any of the counter registers (TIMx_CNT). It can be seen that the master/slave
mode inserts a delay between CNT_EN and CK_PSC on timer A.
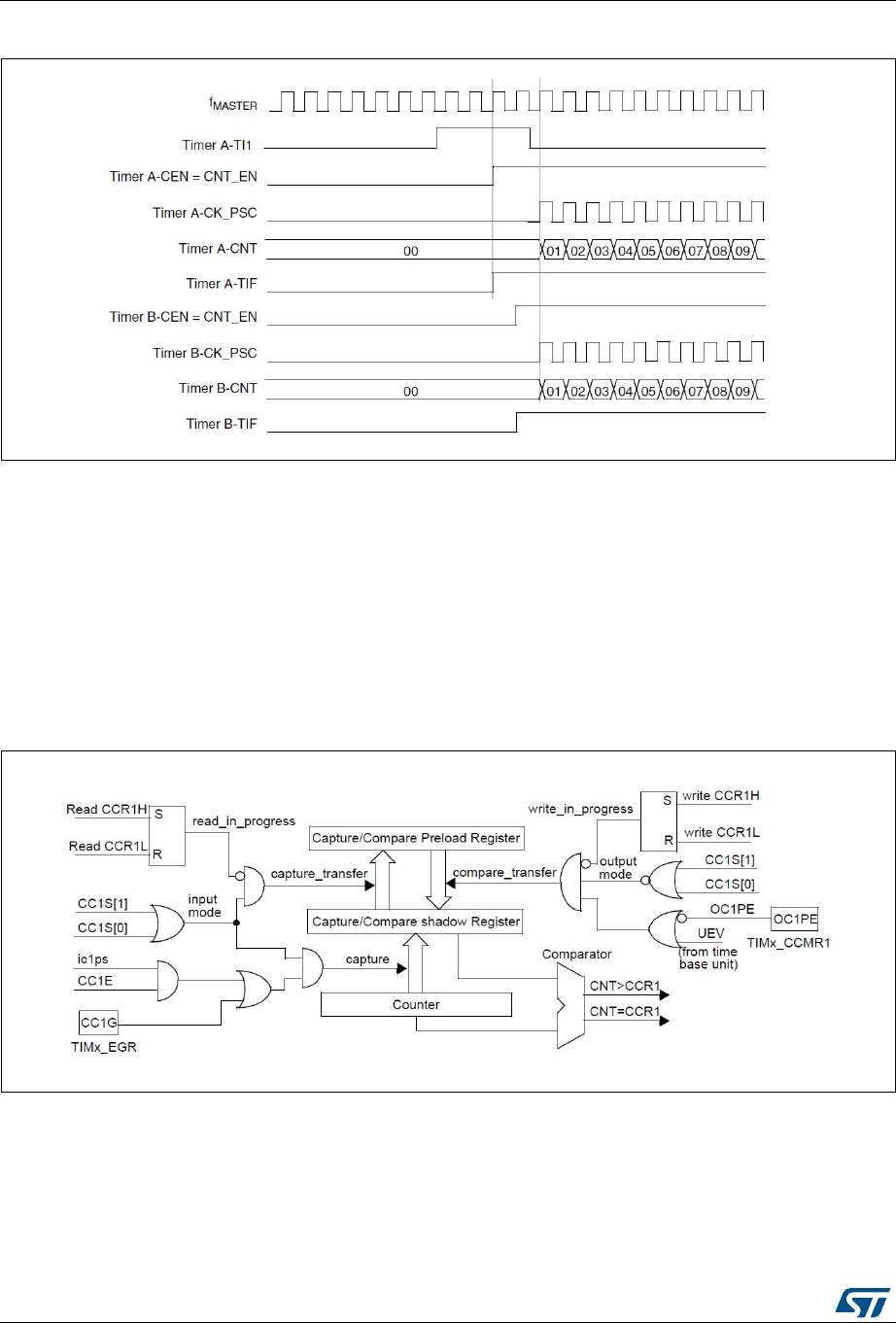
16-bit advanced control timer (TIM1) RM0016
166/467 DocID14587 Rev 14
Figure 60. Triggering Timer A and B with Timer A TI1 input
17.5 TIM1 capture/compare channels
The timer I/O pins (TIM1_CCi) can be configured either for input capture or output compare
functions. The choice is made by configuring the CCiS channel selection bits in the
capture/compare channel mode registers (TIM1_CCMRi), where i is the channel number.
Each Capture/Compare channel is built around a capture/compare register (including a
shadow register), an input stage for capture (with digital filter, multiplexing and prescaler)
and an output stage (with comparator and output control).
Figure 61. Capture/compare channel 1 main circuit
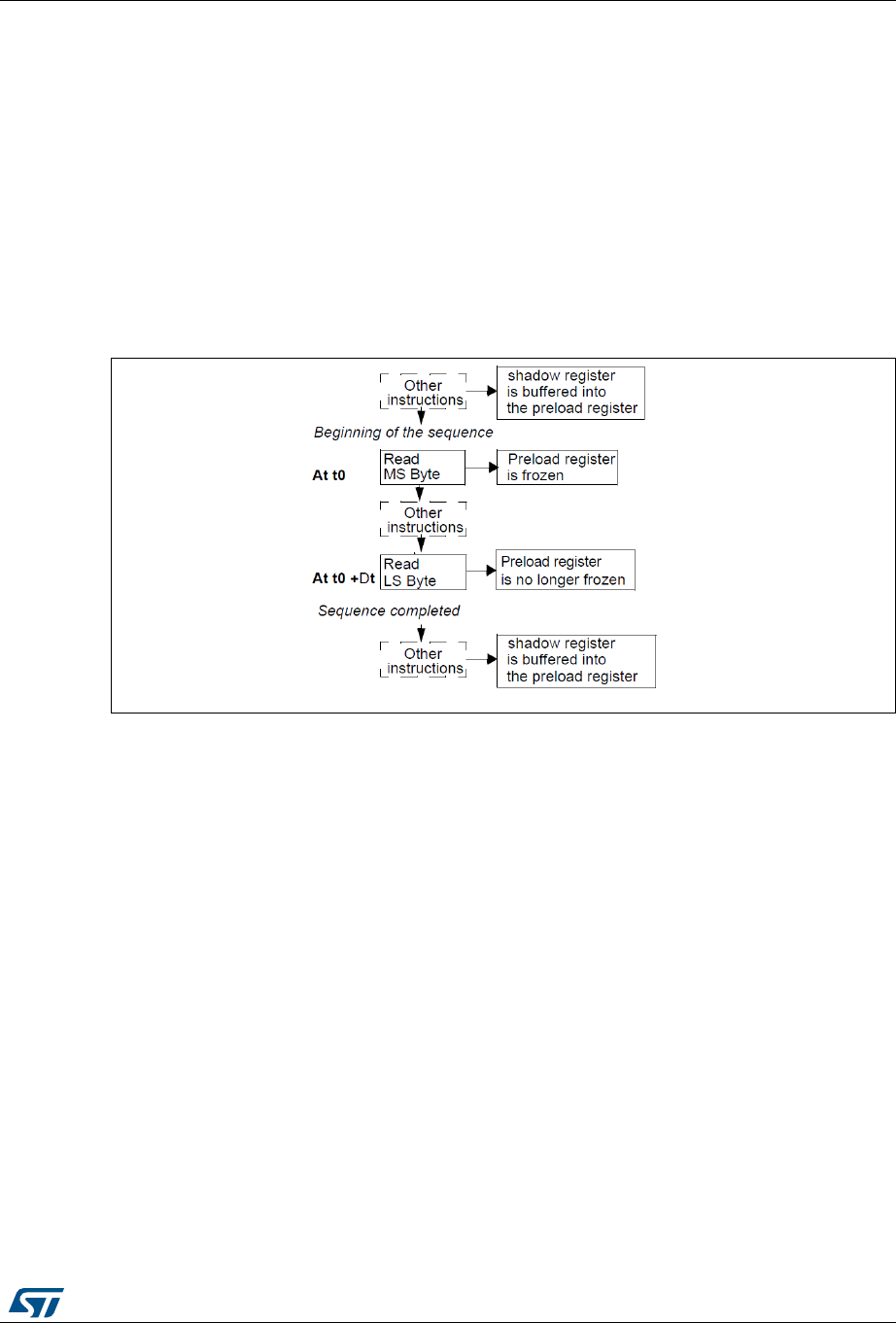
DocID14587 Rev 14 167/467
RM0016 16-bit advanced control timer (TIM1)
261
The capture/compare block is made of one preload register and one shadow register. Write
and read always access the preload register. In capture mode, captures are made in the
shadow register, which is copied into the preload register. In compare mode, the content of
the preload register is copied into the shadow register which is compared to the counter.
When the channel is configured in output mode (CCiS = 00 in the TIM1_CCMRi registers),
the TIM1_CCRi registers can be accessed without any restriction.
When the channel is configured in input mode, the sequence for reading the TIM1_CCRi
registers is the same as for the counter (see Figure 62). When a capture occurs, the content
of the counter is captured into the TIM1_CCRi shadow registers. Then this value is loaded
into the preload register, except during a read sequence, when the preload register is
frozen.
Figure 62. 16-bit read sequence for the TIM1_CCRi register in capture mode
Figure 62 shows the sequence for reading the CCRi registers in the 16-bit timers. This
buffered value remains unchanged until the 16-bit read sequence is completed.
After a complete read sequence, if only the TIM1_CCRiL registers are read, they return the
LS byte of the count value at the time of the read.
If the MS byte is read after the LS byte, it no longer corresponds to the same captured value
as the LS byte.
17.5.1 Write sequence for 16-bit TIM1_CCRi registers
16-bit values are loaded in the TIM1_CCRi registers through preload registers. This must
be performed by two write instructions, one for each byte. The MS byte must be written first.
The shadow register update is blocked as soon as the MS byte has been written, and stays
blocked until the LS byte is written. Do not use the LDW instruction, as this writes the LS
byte first, and produces incorrect results in this case.
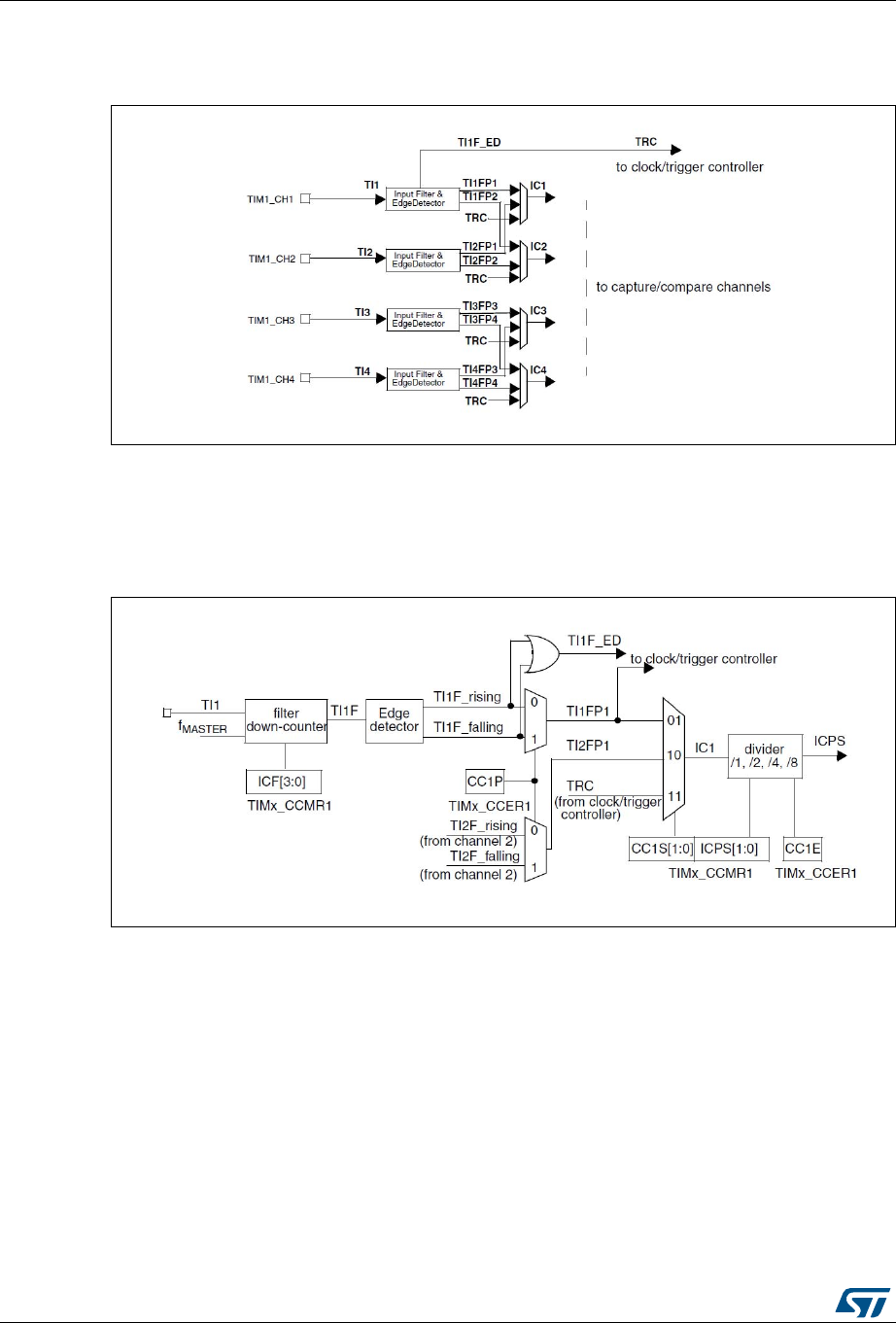
16-bit advanced control timer (TIM1) RM0016
168/467 DocID14587 Rev 14
17.5.2 Input stage
Figure 63. Channel input stage block diagram
Figure 64 shows how the input stage samples the corresponding TIi input to generate a
filtered signal TIiF. Then, an edge detector with polarity selection, generates a signal
(TIiFPn) which can be used as trigger input by the clock/trigger controller or as the capture
command. The signal is prescaled before entering the capture register (ICiPS).
Figure 64. Input stage of TIM 1 channel 1

DocID14587 Rev 14 169/467
RM0016 16-bit advanced control timer (TIM1)
261
17.5.3 Input capture mode
In input capture mode, the capture/compare registers (TIM1_CCRi) are used to latch the
value of the counter after a transition detected on the corresponding ICi signal. When a
capture occurs, the corresponding CCiIF flag (TIM1_SR1 register) is set.
An interrupt can be sent if it is enabled, by setting the CCiIE bits in the TIM1_IER register. If
a capture occurs while the CCiIF flag is already high, the over-capture flag CCiOF
(TIM1_SR2 register) is set. CCiIF can be cleared by software by writing it to 0 or by reading
the captured data stored in the TIMx_CCRiL registers. CCiOF is cleared by writing it to 0.
Procedure
The following procedure shows how to capture the counter value in TIM1_CCR1, for
example, when TI1 input rises.
1. Select the active input: For example, to link the TIM1_CCR1 register to the TI1 input,
write the CC1S bits to 01 in the TIM1_CCMR1 register. This configures the channel in
input mode and the TIM1_CCR1 register becomes read-only.
2. Program the required input filter duration for the signal to be connected to the timer.
This is done for each TIi input using the ICiF bits in the TIM1_CCMRi registers. For
example, if the input signal is unstable for up to five tMASTER cycles when it toggles, the
filter duration must be performed for longer than five clock cycles. The filter bits allow a
duration of eight cycles to be selected by writing them to 0011 in the TIMx_CCMR1
register. With this filter setting, a transition on TI1 is valid only when eight consecutive
samples with the new level have been detected (sampled at fMASTER frequency).
3. Select the edge of the active transition on the TI1 channel by writing the CC1P bit to 0
in the TIM1_CCER1 register (rising edge in this case).
4. Program the input prescaler. In this example, the capture needs to be performed at
each valid transition, so the prescaler is disabled (write the IC1PS bits to 00 in the
TIM1_CCMR1 register).
5. Enable capture from the counter into the capture register by setting the CC1E bit in the
TIM1_CCER1 register.
6. If needed, enable the related interrupt request by setting the CC1IE bit in the TIM1_IER
register.
When an input capture occurs:
•The TIM1_CCR1 register gets the value of the counter on the active transition
•The input capture flag (CC1IF) is set. The overcapture flag (CC1OF) is also set if at
least two consecutive captures occur while the flag remains uncleared.
•An interrupt is generated depending on the CC1IE bit
To handle the overcapture event (CC1OF flag), it is recommended to read the data before
the overcapture flag. This avoids missing an overcapture which could occur after reading
the flag and before reading the data.
Note: IC interrupts can be generated by software by setting the corresponding CCiG bits in the
TIM1_EGR register.
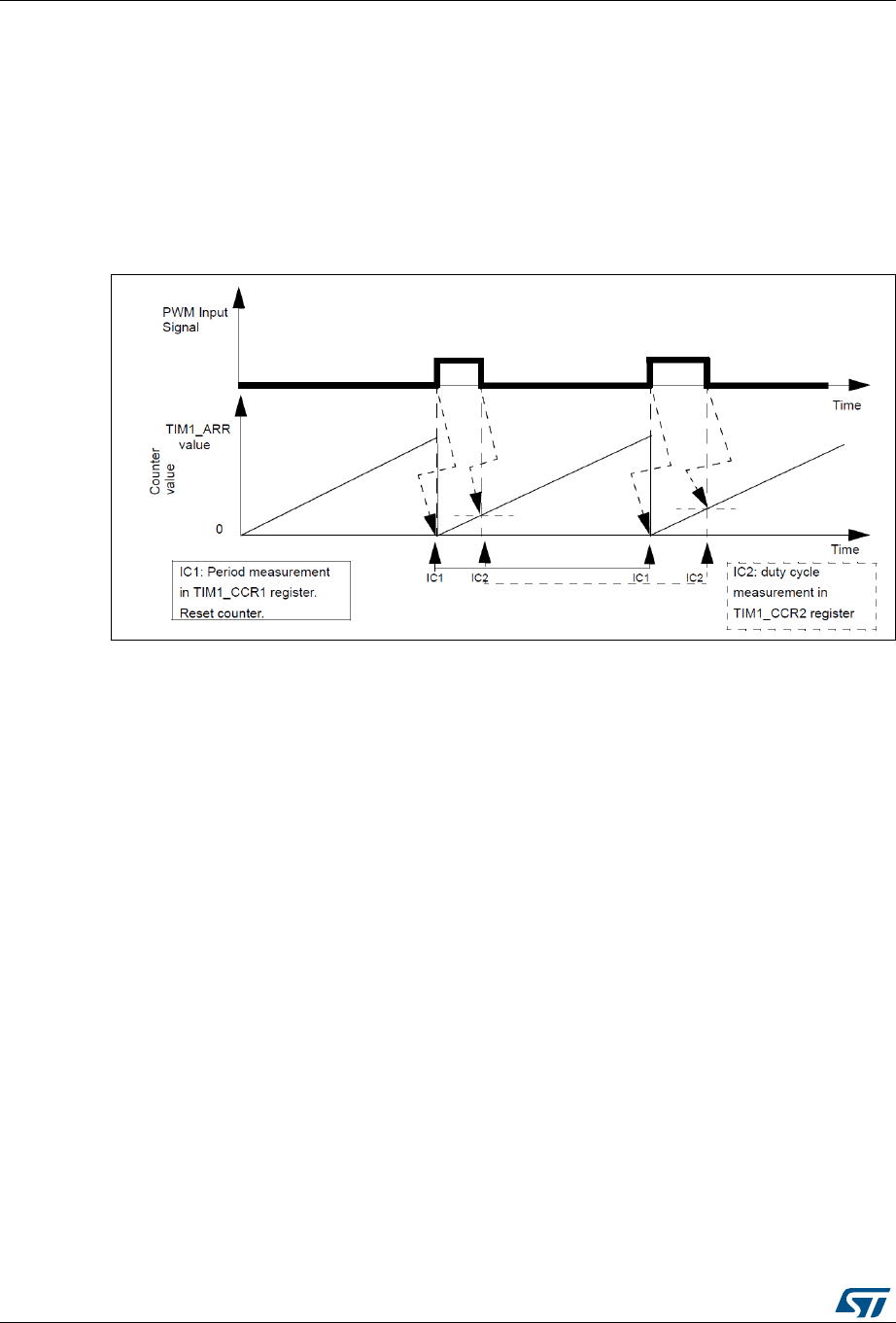
16-bit advanced control timer (TIM1) RM0016
170/467 DocID14587 Rev 14
PWM input signal measurement
This mode is a particular case of input capture mode (see Figure 65). The procedure is the
same except:
•Two ICi signals are mapped on the same TIi input
•These two ICi signals are active on edges with opposite polarity
•One of the two TIiFP signals is selected as trigger input and the clock/trigger controller
is configured in trigger reset mode.
Figure 65. PWM input signal measurement
Procedure
Depending on the fMASTER frequency and prescaler value, the period (in the TIM1_CCR1
register) can be measured and the duty cycle (in the TIM1_CCR2 register) of the PWM can
be applied on TI1 using the following procedure:
1. Select the active input capture or trigger input for TIM1_CCR1 by writing the CC1S bits
to 01 in the TIM1_CCMR1 register (TI1FP1 selected).
2. Select the active polarity for TI1FP1 (used for both capture and counter clear in
TIMx_CCR1) by writing the CC1P bit to 0 (TI1FP1 active on rising edge).
3. Select the active input for TIM1_CCR2 by writing the CC2S bits to 10 in the
TIM1_CCMR2 register (TI1FP2 selected).
4. Select the active polarity for TI1FP2 (used for capture in TIM1_CCR2) by writing the
CC2P bit to 1 (TI1FP2 active on falling edge).
5. Select the valid trigger input by writing the TS bits to 101 in the TIM1_SMCR register
(TI1FP1 selected).
6. Configure the clock/trigger controller in reset mode by writing the SMS bits to 100 in the
TIM1_SMCR register.
7. Enable the captures by writing the CC1E and CC2E bits to 1 in the TIM1_CCER1
register.
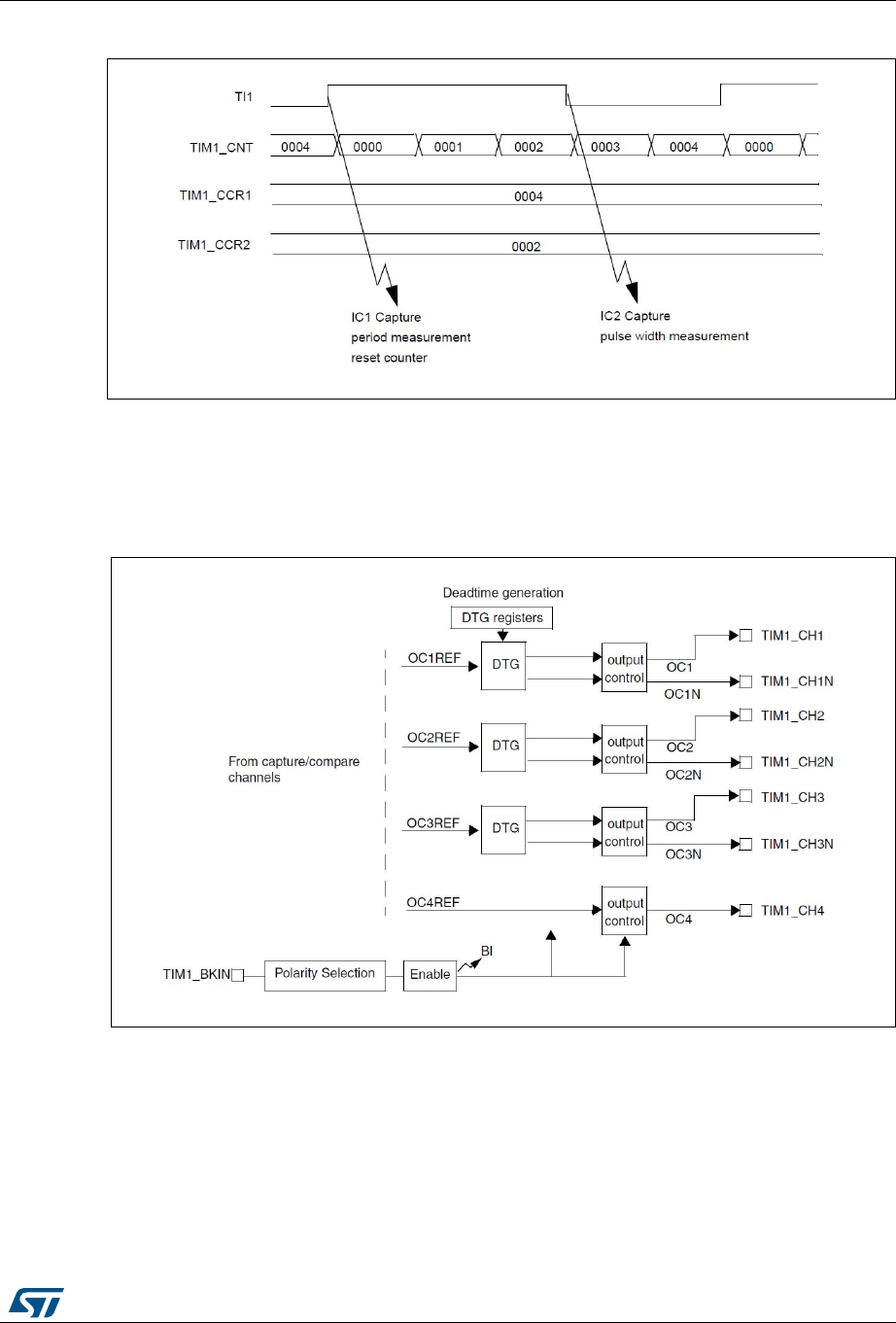
DocID14587 Rev 14 171/467
RM0016 16-bit advanced control timer (TIM1)
261
Figure 66. PWM input signal measurement example
17.5.4 Output stage
The output stage generates an intermediate waveform called OCiREF (active high) which is
then used for reference. Break functions and polarity act at the end of the chain.
Figure 67. Channel output stage block diagram
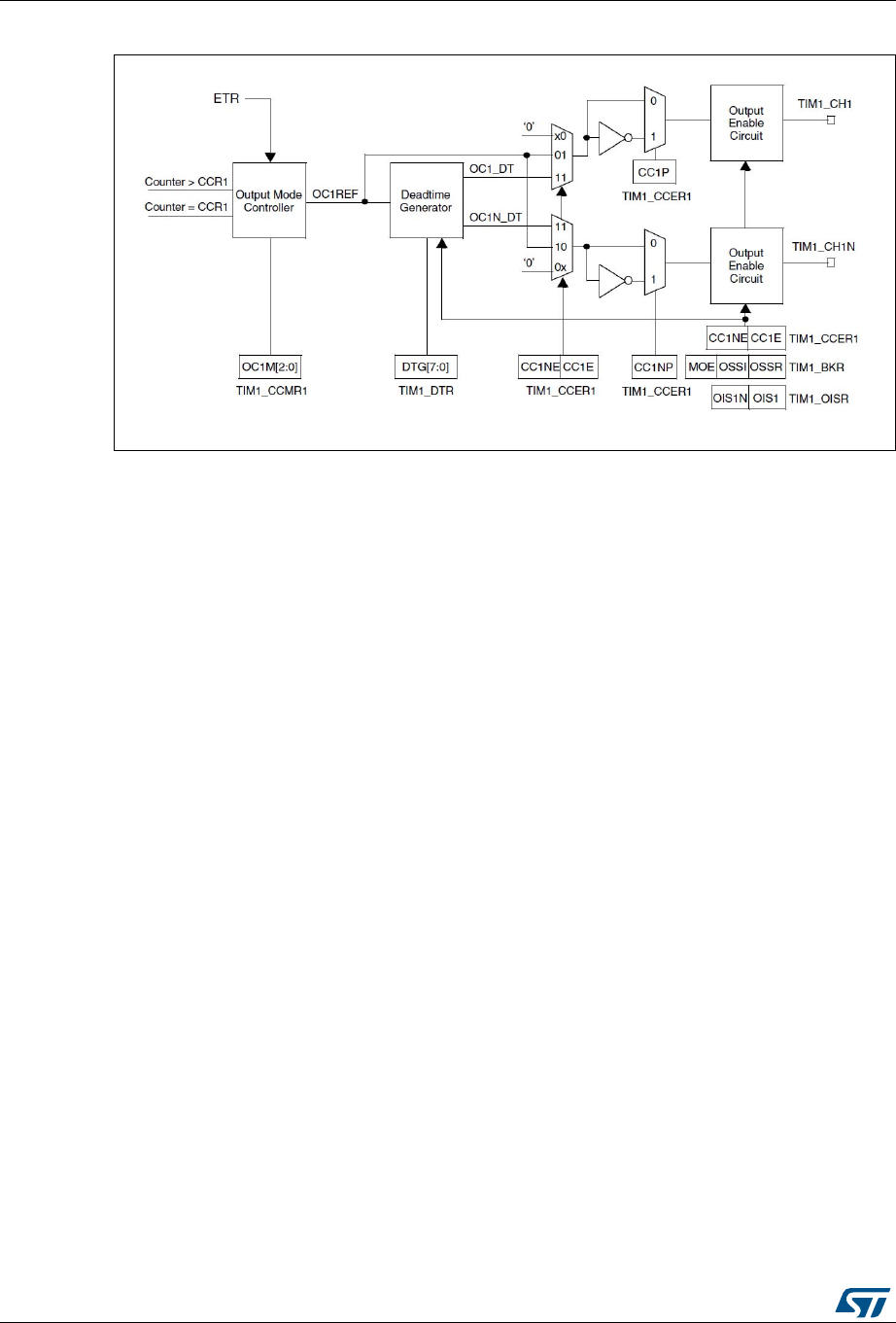
16-bit advanced control timer (TIM1) RM0016
172/467 DocID14587 Rev 14
Figure 68. Detailed output stage of channel with complementary output (channel 1)
17.5.5 Forced output mode
In output mode (CCiS bits = 00 in the TIM1_CCMRi registers), each output compare signal
can be forced to high or low level directly by software, independently of any comparison
between the output compare register and the counter.
To force an output compare signal to its active level, write 101 in the OCiM bits in the
corresponding TIM1_CCMRi registers. OCiREF is forced high (OCiREF is always active
high) and the OCi output is forced high or low depending on the CCiP polarity bits.
For example, if CCiP = 0 (OCi active high) => OCi is forced high.
The OCiREF signal can be forced low by writing the OCiM bits to 100 in the TIMx_CCMRx
registers.
Nevertheless, the comparison between the TIM1_CCRi shadow registers and the counter is
still performed and allows the flag to be set. Interrupt requests can be sent accordingly. This
is described in the output compare mode section below.
17.5.6 Output compare mode
This function is used to control an output waveform or indicate when a period of time has
elapsed.
When a match is found between the capture/compare register and the counter:
•Depending on the output compare mode, the corresponding OCi output pin:
– Keeps its level (OCiM = 000),
– Is set active (OCiM = 001),
– Is set inactive (OCiM = 010)
– Toggles (OCiM = 011)
•A flag is set in the interrupt status register (CCiIF bits in the TIM1_SR1 register).
•An interrupt is generated if the corresponding interrupt mask is set (CCiIE bits in the
TIM1_IER register).
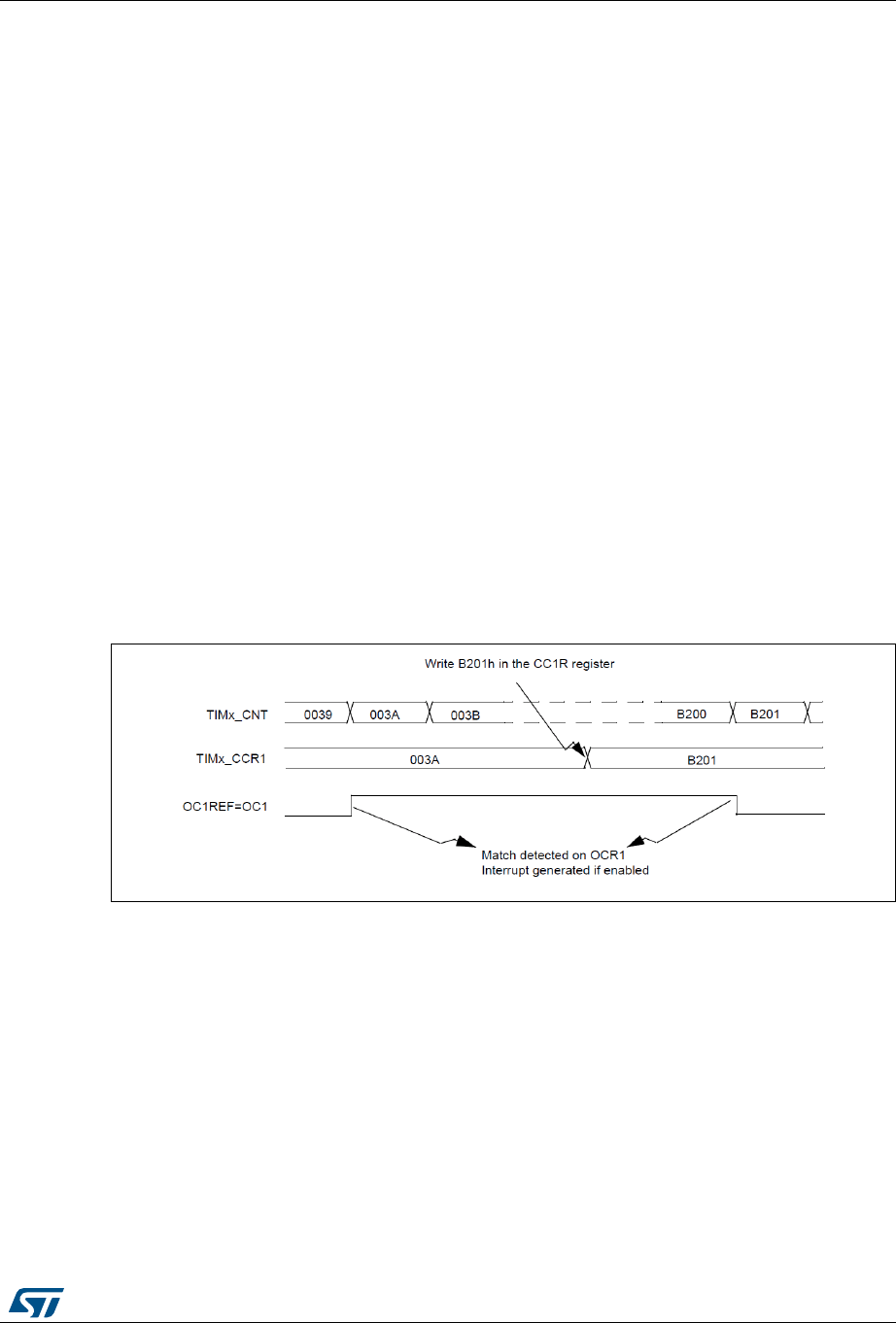
DocID14587 Rev 14 173/467
RM0016 16-bit advanced control timer (TIM1)
261
The output compare mode is defined by the OCiM bits in the TIM1_CCMRi registers. The
active or inactive level polarity is defined by the CCiP bits in the TIM1_CCERi registers.
The TIM1_CCRi registers can be programmed with or without preload registers using the
OCiPE bits in the TIM1_CCMRi registers.
In output compare mode, the UEV has no effect on the OCiREF and OCi output. The timing
resolution is one count of the counter. Output compare mode can also be used to output a
single pulse.
Procedure
1. Select the counter clock (internal, external, or prescaler).
2. Write the desired data in the TIM1_ARR and TIM1_CCRi registers.
3. Set the CCiIE bits if an interrupt request is to be generated.
4. Select the output mode as follows:
– Write OCiM = 011 to toggle the OCi output pin when CNT matches CCRi
– Write OCiPE = 0 to disable the preload register
– Write CCiP = 0 to select active high polarity
– Write CCiE = 1 to enable the output
5. Enable the counter by setting the CEN bit in the TIMx_CR1 register
The TIM1_CCRi registers can be updated at any time by software to control the output
waveform, provided that the preload registers are not enabled (OCiPE = 0). Otherwise, the
TIMx_CCRi shadow registers are updated only at the next UEV (see example in Figure 69.
Figure 69. Output compare mode, toggle on OC1

16-bit advanced control timer (TIM1) RM0016
174/467 DocID14587 Rev 14
17.5.7 PWM mode
Pulse width modulation mode allows you to generate a signal with a frequency determined
by the value of the TIM1_ARR register and a duty cycle determined by the value of the
TIM1_CCRi registers.
The PWM mode can be selected independently on each channel (one PWM per OCi output)
by writing 110 (PWM mode 1) or 111 (PWM mode 2) in the OCiM bits in the TIM1_CCMRi
registers. The corresponding preload register must be enabled by setting the OCiPE bits in
the TIM1_CCMRi registers. The auto-reload preload register (in up-counting or center-
aligned modes) may be optionally enabled by setting the ARPE bit in the TIM1_CR1
register.
As the preload registers are transferred to the shadow registers only when an UEV occurs,
all registers have to be initialized by setting the UG bit in the TIM1_EGR register before
starting the counter.
OCi polarity is software programmable using the CCiP bits in the TIM1_CCERi registers. It
can be programmed as active high or active low. The OCi output is enabled by a
combination of CCiE, MOE, OISi, OSSR and OSSI bits (TIM1_CCERi and TIM1_BKR
registers). Refer to the TIM1_CCERi register descriptions for more details.
In PWM mode (1 or 2), TIM1_CNT and TIM1_CCRi are always compared to determine
whether TIM1_CCRi ≤ TIM1_CNT or TIM1_CNT≤ TIM1_CCRi (depending on the direction
of the counter).
The timer is able to generate PWM in edge-aligned mode or center-aligned mode
depending on the CMS bits in the TIM1_CR1 register.
PWM edge-aligned mode
Up-counting configuration
Up-counting is active when the DIR bit in the TIM1_CR1 register is low.
Example
This example uses PWM mode 1. The reference PWM signal, OCiREF, is high as long as
TIM1_CNT < TIM1_CCRi. Otherwise, it becomes low. If the compare value in TIM1_CCRi is
greater than the auto-reload value (in TIM1_ARR) then OCiREF is held at 1. If the compare
value is 0, OCiREF is held at 0. Figure 70 shows some edge-aligned PWM waveforms in an
example where TIM1_ARR = 8.
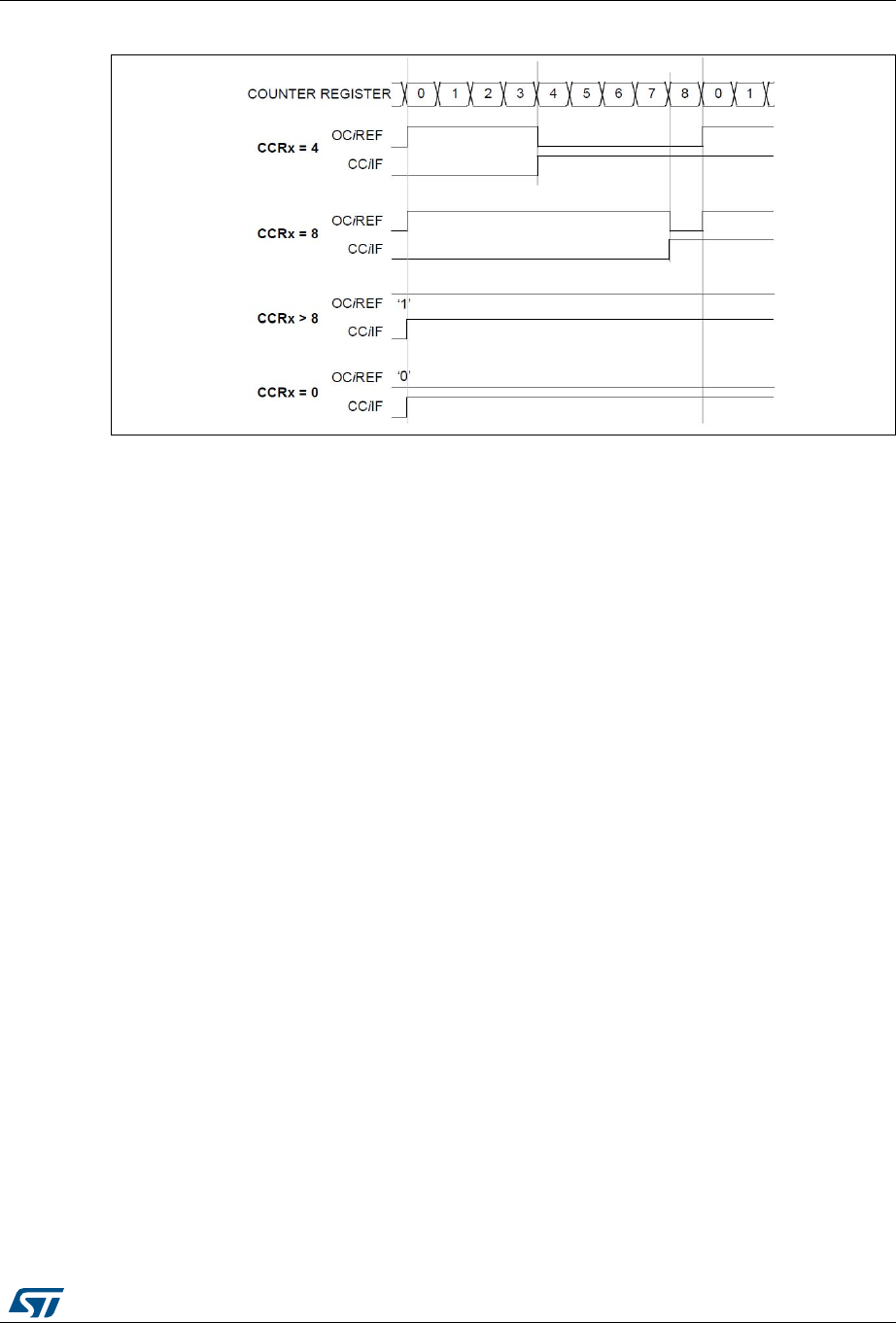
DocID14587 Rev 14 175/467
RM0016 16-bit advanced control timer (TIM1)
261
Figure 70. Edge-aligned counting mode PWM mode 1 waveforms (ARR = 8)
Down-counting configuration
Down-counting is active when the DIR bit in the TIM1_CR1 register is high. Refer to Down-
counting mode on page 145
In PWM mode 1, the reference signal OCiREF is low as long as TIM1_CNT> TIM1_CCRi.
Otherwise, it becomes high. If the compare value in the TIM1_CCRi registers is greater than
the auto-reload value in the TIM1_ARR register, OCiREF is held at 1. Zero percent PWM is
not possible in this mode.
PWM center-aligned mode
Center-aligned mode is active when the CMS bits in the TIM1_CR1 register are different
from 00 (all the remaining configurations have the same effect on the OCiREF/OCi signals).
The compare flag is set when the counter counts up, down, or up and down depending on
the CMS bits configuration. The direction bit (DIR) in the TIM1_CR1 register is updated by
hardware and is read-only in this mode (refer to Center-aligned mode (up/down counting) on
page 147).
Figure 71 shows some center-aligned PWM waveforms in an example where:
•TIM1_ARR = 8,
•PWM mode is PWM mode 1
•The flag is set (arrow symbol in Figure 71) in three different cases:
– When the counter counts down (CMS = 01)
– When the counter counts up (CMS = 10)
– When the counter counts up and down (CMS = 11)
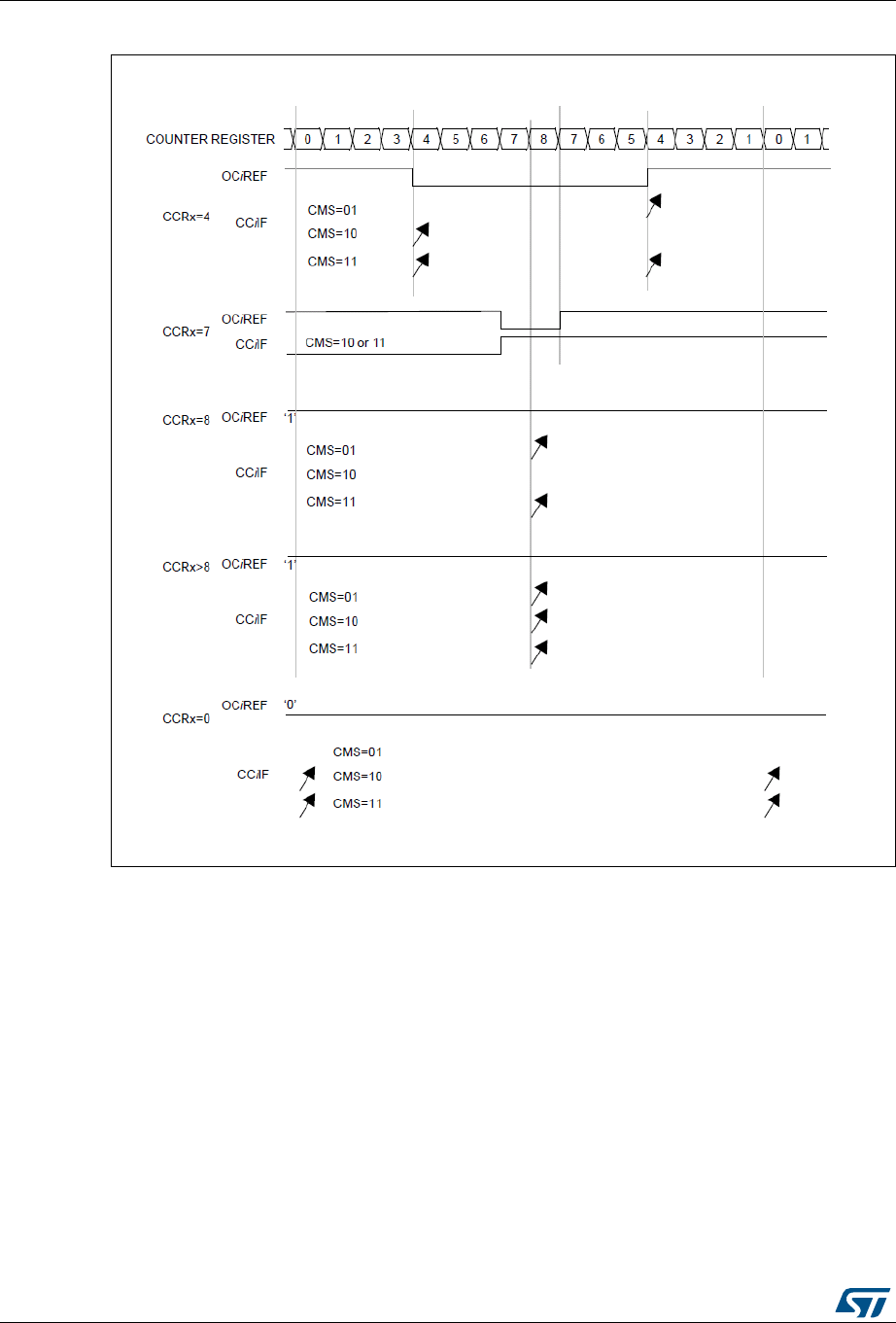
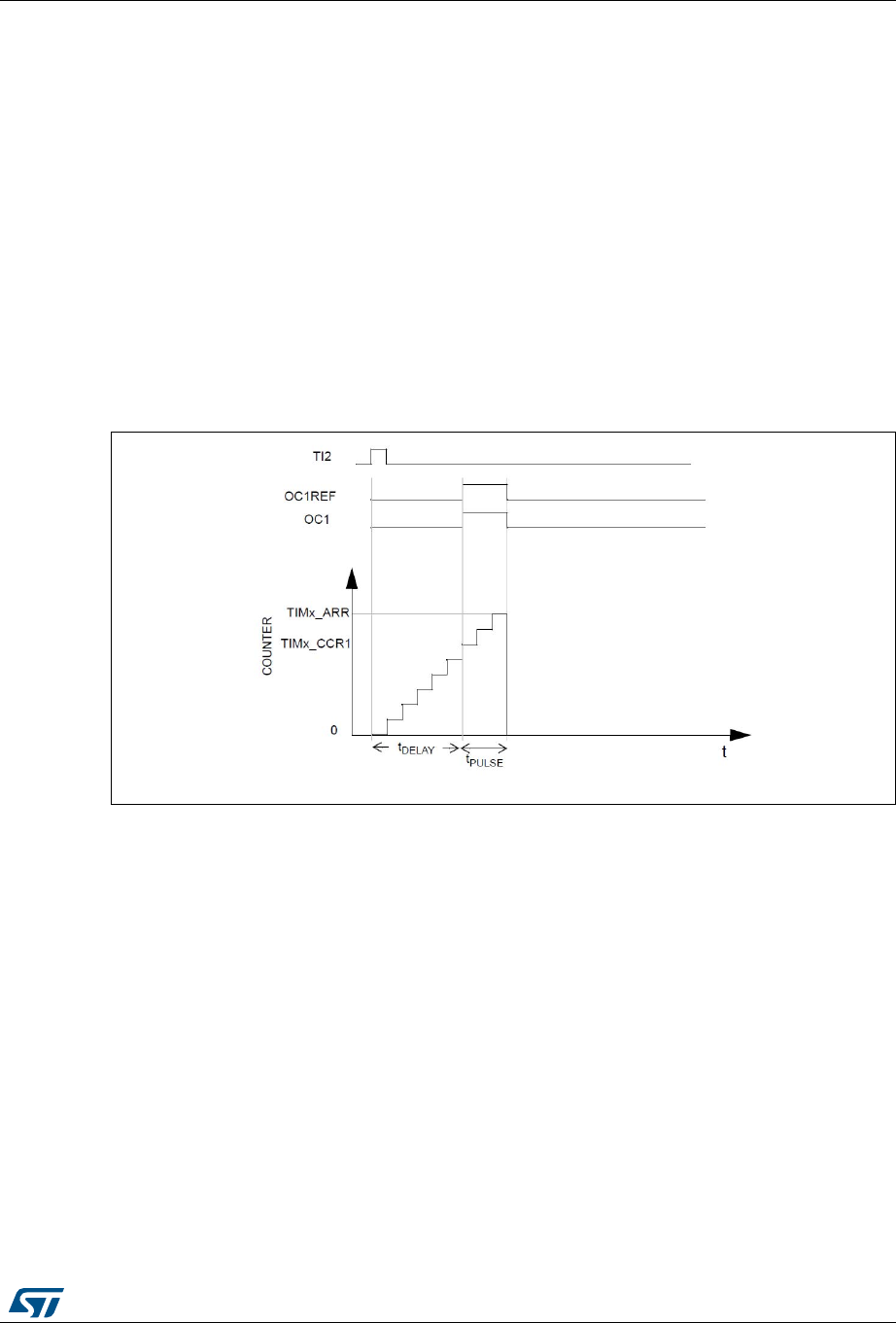
DocID14587 Rev 14 177/467
RM0016 16-bit advanced control timer (TIM1)
261
One-pulse mode
One-pulse mode (OPM) is a particular case of the previous modes. It allows the counter to
be started in response to a stimulus and to generate a pulse with a programmable length
after a programmable delay.
Starting the counter can be controlled through the clock/trigger controller. Generating the
waveform can be done in output compare mode or PWM mode. Select one-pulse mode by
setting the OPM bit in the TIM1_CR1 register. This makes the counter stop automatically at
the next UEV.
A pulse can be correctly generated only if the compare value is different from the counter
initial value. Before starting (when the timer is waiting for the trigger), the configuration must
be:
•In up-counting: CNT< CCRi ≤ ARR (in particular, 0 < CCRi),
•In down-counting: CNT> CCRi
Figure 72. Example of one-pulse mode
Example
This example shows how to generate a positive pulse on OC1 with a length of tPULSE and
after a delay of tDELAY as soon as a positive edge is detected on the TI2 input pin.
Follow the procedure below to use IC2 as trigger 1:
•Map IC2 on TI2 by writing CC2S = 01 in the TIM1_CCMR2 register
•IC2 must detect a rising edge, so write CC2P = 0 in the TIM1_CCER1 register
•Configure IC2 as trigger for the clock/trigger controller (TRGI) by writing TS = 110 in the
TIM1_SMCR register.
•IC2 is used to start the counter by writing SMS to 110 in the TIM1_SMCR register
(trigger mode).

16-bit advanced control timer (TIM1) RM0016
178/467 DocID14587 Rev 14
The OPM waveform is defined by writing the compare registers (taking into account the
clock frequency and the counter prescaler) as follows:
•The tDELAY is defined by the value written in the TIM1_CCR1 register
•The tPULSE is defined by the difference between the auto-reload value and the compare
value (TIM1_ARR - TIM1_CCR1).
•To build a waveform with a transition from 0 to 1 when a compare match occurs and a
transition from 1 to 0 when the counter reaches the auto-reload value, enable PWM
mode 2 by writing OCiM = 111 in the TIM1_CCMR1 register. Alternatively, enable the
preload registers by writing OC1PE = 1 in the TIM1_CCMR1 register and ARPE = 0 in
the TIM1_CR1 register (optional). In this case, write the compare value in the
TIM1_CCR1 register and write the auto-reload value in the TIM1_ARR register. Then,
generate an update by setting the UG bit and wait for an external trigger event on TI2.
CC1P is written to 0 in this example.
In the example outlined above, the DIR and CMS bits in the TIM1_CR1 register should be
low.
As only one pulse is required, write 1 in the OPM bit in the TIM1_CR1 register to stop the
counter at the next UEV (when the counter rolls over from the auto-reload value back to 0).
Particular case: OCi fast enable
In one-pulse mode, the edge detection on the TIi input sets the CEN bit which enables the
counter. Then, a comparison between the counter and the compare value makes the output
toggle. However, several clock cycles are needed for these operations and this affects the
the minimum delay (tDELAY min) that can be obtained.
To output a waveform with the minimum delay, set the OCiFE bits in the TIM1_CCMRi
registers. OCiREF (and OCi) are forced in response to the stimulus, without taking the
comparison into account. The new level of OCiREF (and OCi) is the same as if a compare
match had occured. The OCiFE bits acts only if the channel is configured in PWM1 or
PWM2 mode.
Complementary outputs and deadtime insertion
TIM1 can output two complementary signals per channel. It also manages the switching-off
and switching-on instants of the outputs (see Figure 31: TIM1 general block diagram on
page 140).
This time is generally known as deadtime. Deadtimes must be adjusted depending on the
characteristics of the devices connected to the outputs (example, intrinsic delays of level-
shifters, delays due to power switches).
The polarity of the outputs can be selected (main output OCi or complementary OCi N)
independently for each output. This is done by writing to the CCi P and CCi NP bits in the
TIM1_CCERi registers.
The complementary signals OCi and OCi N are activated by a combination of several
control bits: The CCi E and CCi NE bits in the TIM1_CCERi register and, if the break feature
is implemented, the MOE, OISi, OISi N, OSSI, and OSSR bits in the TIM1_BKR register.
Refer to Table 38: Output control for complementary OCi and OCiN channels with break
feature on page 207 for more details. In particular, the deadtime is activated when switching
to the IDLE state (when MOE falls to 0).
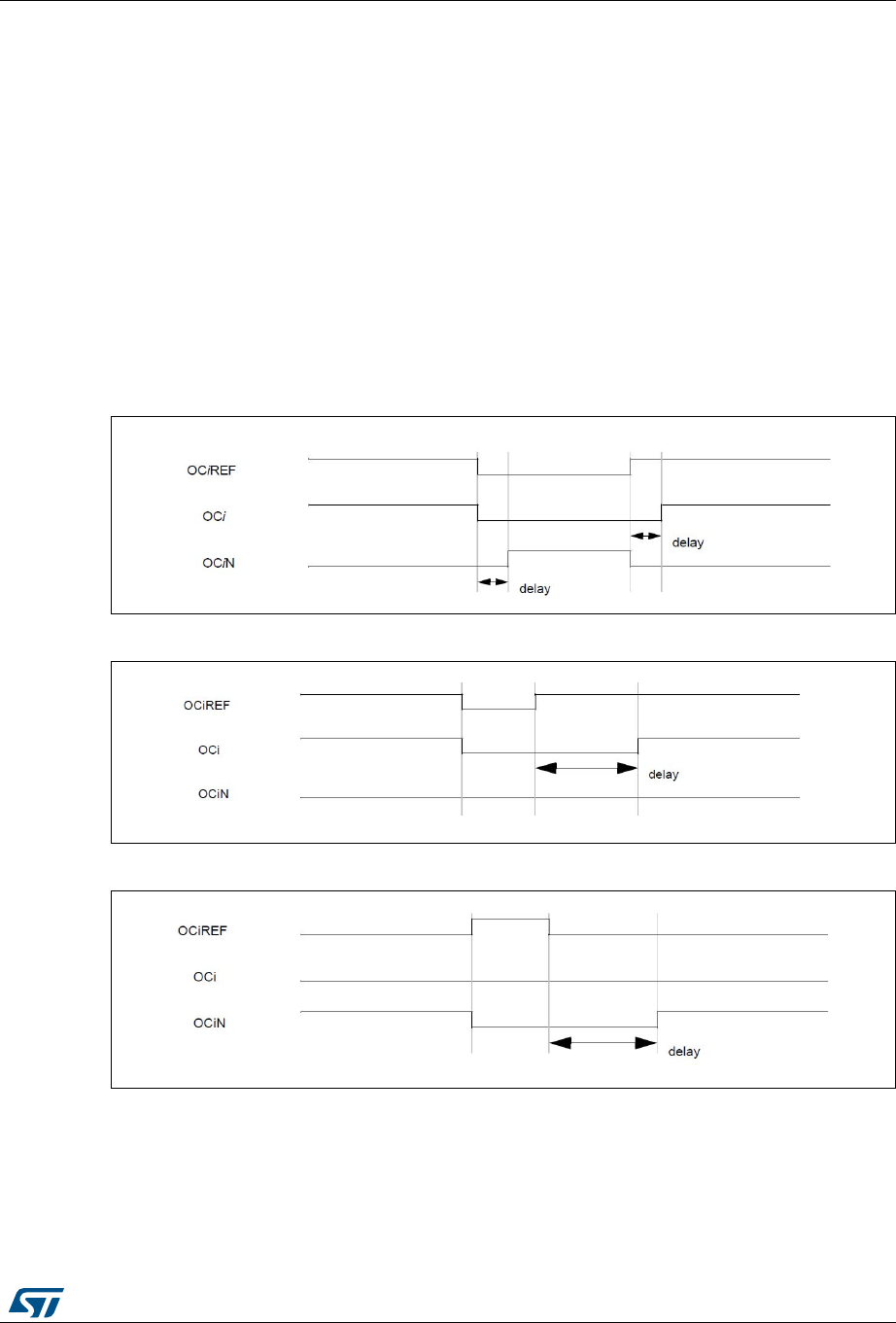
DocID14587 Rev 14 179/467
RM0016 16-bit advanced control timer (TIM1)
261
Deadtime insertion is enabled by setting the CCi E and CCi NE bits, and the MOE bit if the
break circuit is present. Each channel embeds an 8-bit deadtime generator. It generates two
outputs: OCi and OCi N from a reference waveform, OCi REF. If OCi and OCi N are active
high:
•The OCi output signal is the same as the reference signal except for the rising edge,
which is delayed relative to the reference rising edge.
•The OCi N output signal is the opposite of the reference signal except for the rising
edge, which is delayed relative to the reference falling edge.
If the delay is greater than the width of the active output (OCi or OCi N), the corresponding
pulse is not generated.
Figure 73, Figure 74, and Figure 75 show the relationships between the output signals of
the deadtime generator and the reference signal OCi REF (where CCi P = 0, CCi NP = 0,
MOE = 1, CCi E = 1, and CCi NE = 1 in these examples)
Figure 73. Complementary output with deadtime insertion
Figure 74. Deadtime waveforms with a delay greater than the negative pulse
Figure 75. Deadtime waveforms with a delay greater than the positive pulse
The deadtime delay is the same for each of the channels and is programmable with the
DTG bits in the TIM1_DTR register. Refer to Section 17.7.31: Deadtime register
(TIM1_DTR) on page 217 for delay calculation.

16-bit advanced control timer (TIM1) RM0016
180/467 DocID14587 Rev 14
Re-directing OCiREF to OCi or OCiN
In output mode (forced, output compare, or PWM), OCiREF can be re-directed to the OCi or
OCiN outputs by configuring the CCiE and CCiNE bits in the corresponding TIM1_CCERi
registers. This means bypassing the deadtime generator which allows a specific waveform
(such as PWM or static active level) to be sent on one output while the complementary
output remains at its inactive level. Alternative possibilities are to have both outputs at
inactive level or both outputs active and complementary with deadtime.
Note: When only OCiN is enabled (CCiE = 0, CCiNE = 1), it is not complemented and becomes
active as soon as OCiREF is high. For example, if CCiNP = 0 then OCiN = OCiREF. On the
other hand, when both OCi and OCiN are enabled (CCiE = CCiNE = 1), OCi becomes active
when OCiREF is high whereas OCiN is complemented and becomes active when OCiREF
is low.
Six-step PWM generation for motor control
When complementary outputs are implemented on a channel, preload bits are available on
the OCi M, CCi E and CCi NE bits. The preload bits are transferred to the active bits at the
commutation event (COM). This allows the configuration for the next step to be
programmed in advance and for configuration of all the channels to be changed at the same
time. The COM event can be generated by software by setting the COMG bit in the
TIM1_EGR register or by hardware trigger (on the rising edge of TRGI).
A flag is set when the COM event occurs (COMIF bit in the TIM1_SR register) which can
generate an interrupt (if the COMIE bit is set in the TIM1_IER register).
Figure 76 shows the behavior of the OCi and OCi N outputs when a COM event occurs, for
three different examples of programmed configurations.
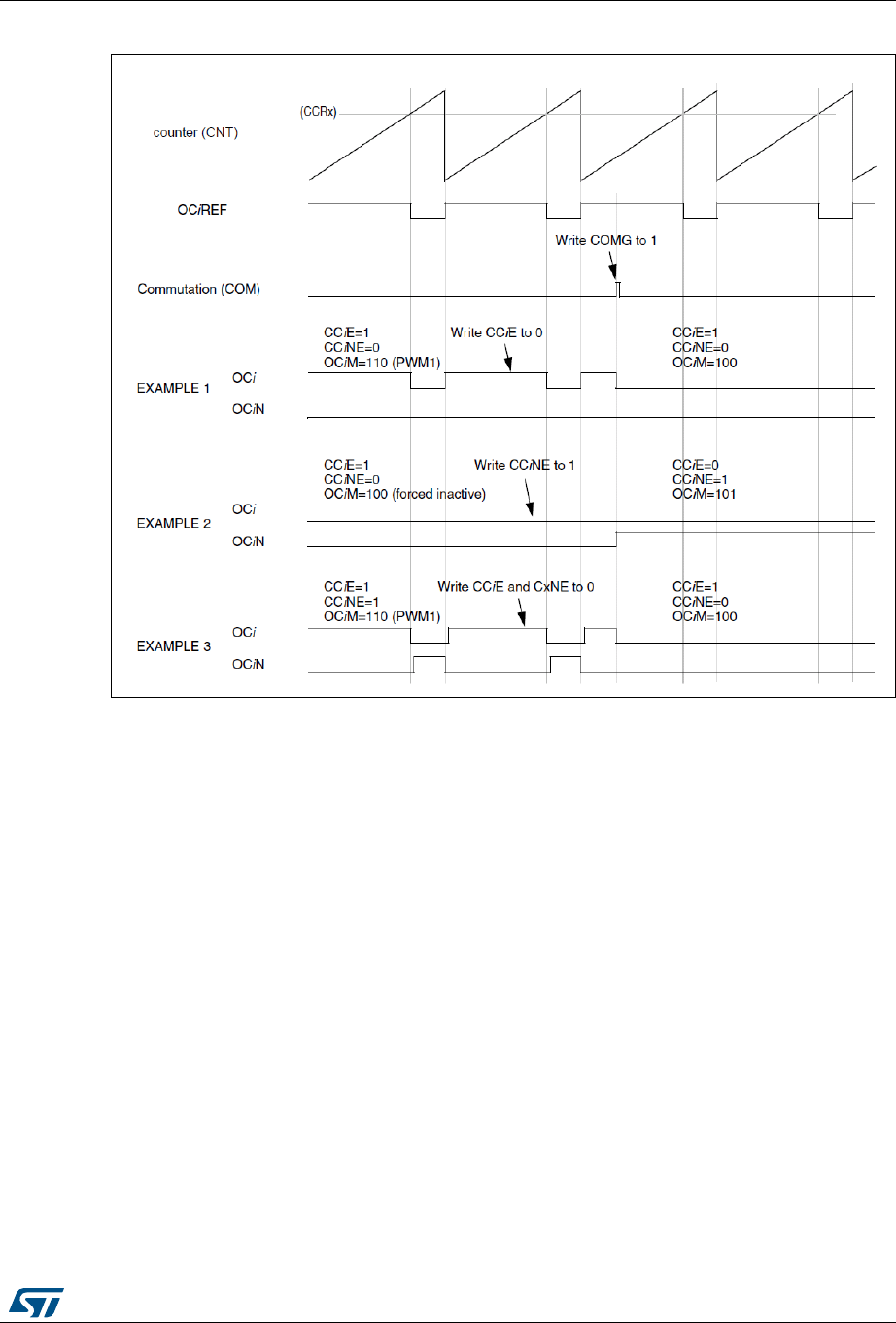
DocID14587 Rev 14 181/467
RM0016 16-bit advanced control timer (TIM1)
261
Figure 76. Six-step generation, COM example (OSSR = 1)
17.5.8 Using the break function
The break function is often used in motor control. When using the break function, the output
enable signals and inactive levels are modified according to additional control bits (MOE,
OSSR and OSSI bits in the TIM1_BKR register).
When exiting from reset, the break circuit is disabled and the MOE bit is low. The break
function is enabled by setting the BKE bit in the TIM1_BKR register. The break input polarity
can be selected by configuring the BKP bit in the same register. BKE and BKP can be
modified at the same time.
Because MOE falling edge can be asynchronous, a resynchronization circuit has been
inserted between the actual signal (acting on the outputs) and the synchronous control bit
(accessed in the TIM1_BKR register). It results in some delays between the asynchronous
and the synchronous signals. For example, if MOE is written to 1 after it has been low, a
delay (dummy instruction) must be inserted before it can be read correctly.
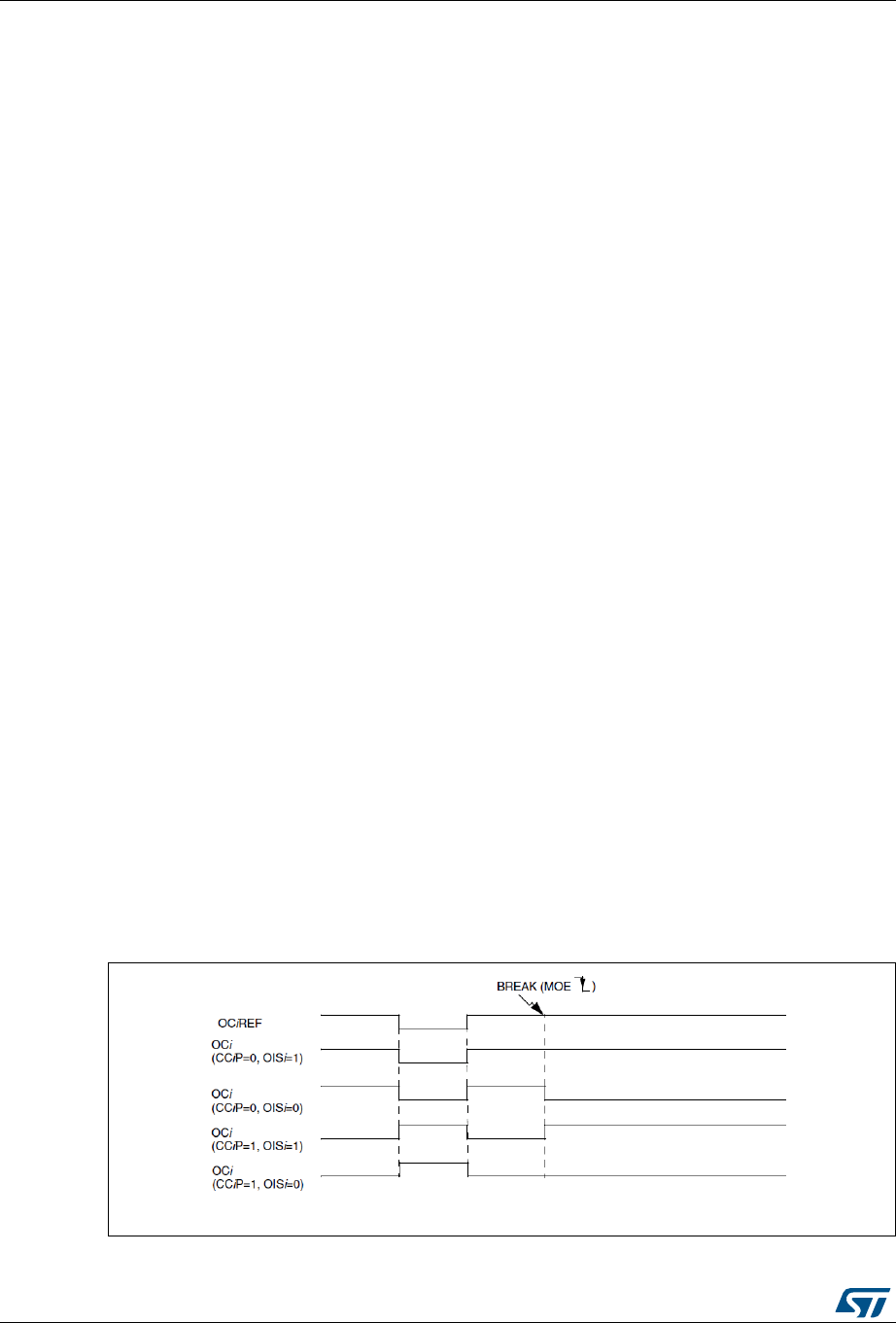
16-bit advanced control timer (TIM1) RM0016
182/467 DocID14587 Rev 14
When a break occurs (selected level on the break input):
•The MOE bit is cleared asynchronously, putting the outputs in inactive state, idle state,
or reset state (selected by the OSSI bit). This happens even if the MCU oscillator is off.
•Each output channel is driven with the level programmed in the OISi bits in the
TIM1_OISR register as soon as MOE = 0. If OSSI = 0, the timer releases the enable
output otherwise the enable output remains high.
•When complementary outputs are implemented:
– The outputs are first put in inactive state (depending on the polarity). This is done
asynchronously so that it works even if no clock is provided to the timer.
– If the timer clock is still present, the deadtime generator is reactivated to drive the
outputs with the level programmed in the OISi and OISi N bits after a deadtime.
Even in this case, OCi and OCi N cannot be driven to their active level together.
Note that because of the resynchronization on MOE, the deadtime duration is a bit
longer than usual (around two 2 ck_tim clock cycles).
•The break status flag (BIF bit in the TIM1_SR1 register) is set. An interrupt can be
generated if the BIE bit in the TIM1_IER register is set.
•If the AOE bit in the TIM1_BKR register is set, the MOE bit is automatically set again at
the next UEV. This can be used to perform a regulation. Otherwise, MOE remains low
until it is written to 1 again. In this case, it can be used for security and the break input
can be connected to an alarm from power drivers, thermal sensors, or any security
components.
Note: The break inputs act on signal level. Thus, the MOE bit cannot be set while the break input
is active (neither automatically nor by software). In the meantime, the status flag BIF cannot
be cleared.
The break can be generated by the break input (BKIN) which has a programmable polarity
and can be enabled or disabled by setting or resetting the BKE bit in the TIM1_BKR register.
In addition to the break inputs and the output management, a write protection has been
implemented inside the break circuit to safeguard the application. It allows the configuration
of several parameters (OCi polarities and state when disabled, OCiM configurations, break
enable, and polarity) to be frozen. Three levels of protection can be selected using the
LOCK bits in the TIM1_BKR register. The LOCK bits can be written only once after an MCU
reset.
Figure 77 shows an example of the behavior of the outputs in response to a break.
Figure 77. Behavior of outputs in response to a break (channel without
complementary output)
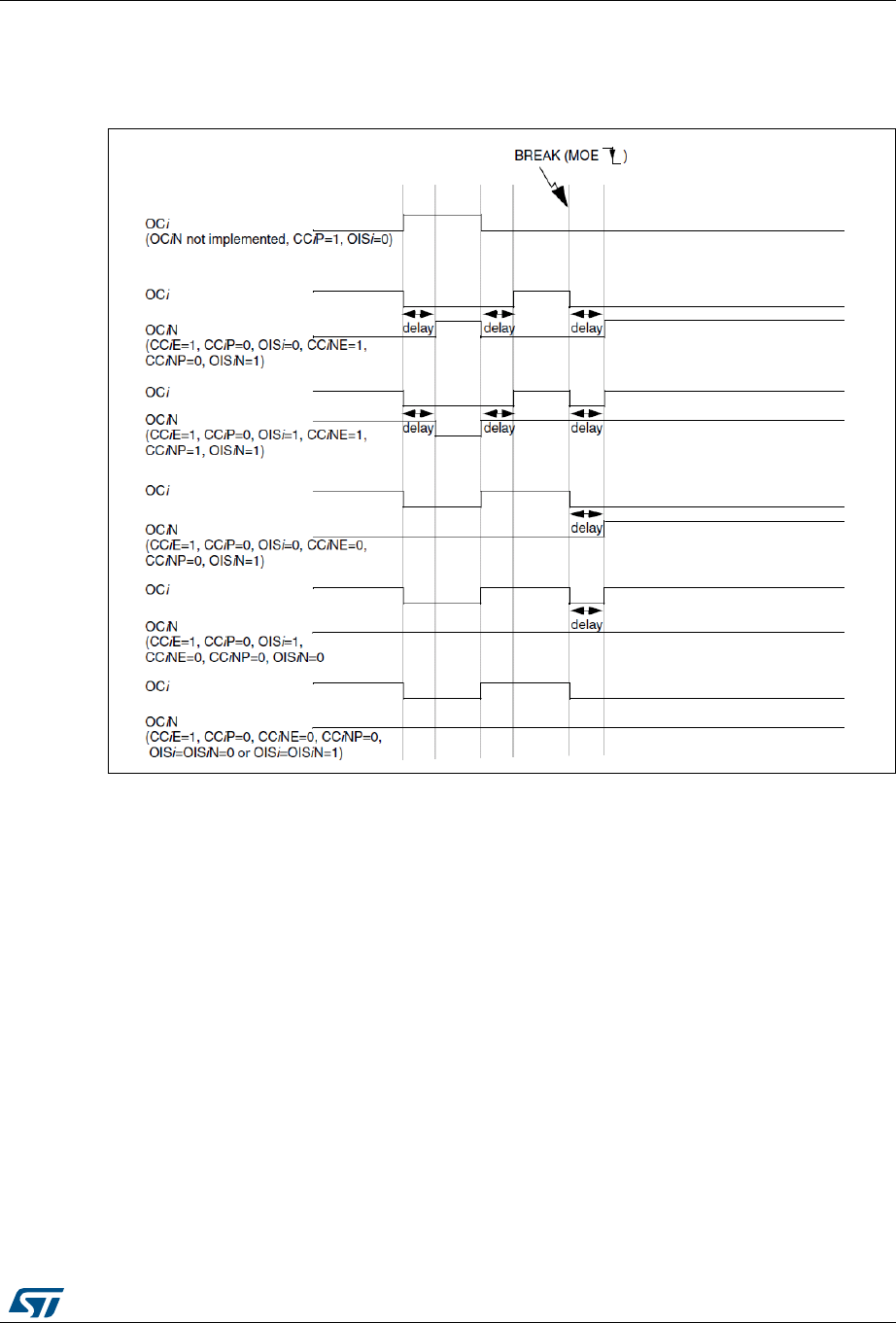
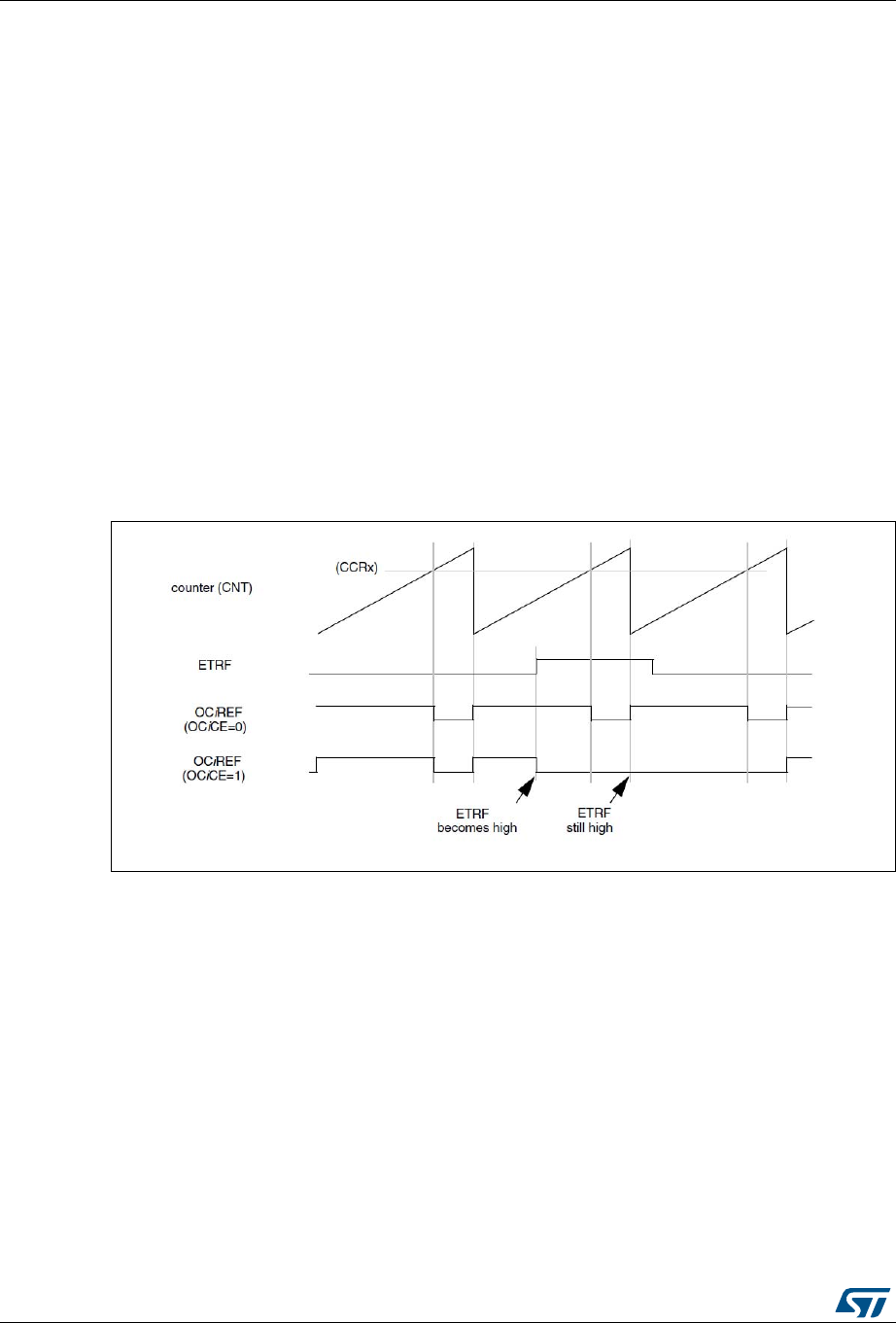
16-bit advanced control timer (TIM1) RM0016
184/467 DocID14587 Rev 14
17.5.9 Clearing the OCiREF signal on an external event
The OCiREF signal of a given channel can be cleared when a high level is detected on
ETRF (if OCiCE =1 in the TIM1_CCMRi registers, one enable bit per channel). The OCiREF
signal remains low until the next UEV occurs. This function can be used in output compare
mode and PWM mode only. It does not work in forced mode.
The OCiREF signal can be connected to the output of a comparator and be used for current
handling by configuring the external trigger as follows:
1. Switch off the external trigger prescaler by setting bits ETPS[1:0] in the TIM1_ETR
register to 00.
2. Disable external clock mode 2 by setting the ECE bit in the TIM1_ETR register to 0
3. Configure the external trigger polarity (ETP) and the external trigger filter (ETF) as
desired.
Refer to Figure 47: External trigger input block diagram.
Figure 79 shows the behavior of the OCiREF signal when the ETRF input becomes high, for
both values of the enable bits OCiCE. In this example, the timer is programmed in PWM
mode.
Figure 79. ETR activation
DocID14587 Rev 14 185/467
RM0016 16-bit advanced control timer (TIM1)
261
17.5.10 Encoder interface mode
Encoder interface mode is typically used for motor control. It can be selected by writing:
•SMS = 001 in the TIM1_SMCR register if the counter is counting on TI2 edges only
•SMS = 010 if the counter is counting on TI1 edges only
•SMS = 011 if the counter is counting on both TI1 and TI2 edges
Select the TI1 and TI2 polarity by programming the CC1P and CC2P bits in the
TIM1_CCER1 register. When needed, the input filter can also be programmed.
The two inputs TI1 and TI2 are used to interface an incremental encoder (see Table 37). If
the counter is enabled (when the CEN bit in the TIM1_CR1 register is written to 1), it is
clocked by each valid transition on TI1FP1 or TI2FP2 (see Figure 64: Input stage of TIM 1
channel 1). The transition sequences of the two inputs (TI1 and TI2) are evaluated and
generate count pulses and a direction signal. Depending on the sequence, the counter
counts up or down, and the DIR bit in the TIM1_CR1 register is modified accordingly by
hardware. The DIR bit is calculated at each transition based on inputs from either TI1 or TI2.
without this being dependent on whether the counter is counting pulses on TI1, TI2 or both.
Encoder interface mode acts as an external clock with direction selection. The counter
counts continuously between 0 and the auto-reload value in the TIM1_ARR register (0 to
ARR or ARR down to 0 depending on the direction). TIM1_ARR must be configured before
starting. The capture, compare, prescaler, and trigger output features continue to work as
normal in this mode. Encoder mode and external clock mode 2 are not compatible and must
not be selected together.
In encoder interface mode, the counter is modified automatically depending on the speed
and the direction of the incremental encoder. The content of the counter therefore always
represents the encoder's position. The count direction corresponds to the rotation direction
of the connected sensor. Table 37 summarizes the possible combinations of counting
directions and encoder signals, assuming that TI1 and TI2 do not switch at the same time.
An external incremental encoder can be connected directly to the MCU without external
interface logic. However, comparators are normally used to convert the encoder’s
differential outputs to digital signals. This greatly increases noise immunity. The third
encoder output which indicates the mechanical zero position, may be connected to an
external interrupt input and trigger a counter reset.
Table 37. Counting direction versus encoder signals
Active edge
Level on opposite
signal
(TI1FP1 for TI2,
TI2FP2 for TI1)
TI1FP1 signal TI2FP2 signal
Rising Falling Rising Falling
Counting on
TI1 only
High Down Up No count No count
Low Up Down No count No count
Counting on
TI2 only
High No count No count Up Down
Low No count No count Down Up
Counting on
both TI1 and
TI2
High Down Up Up Down
Low Up Down Down Up
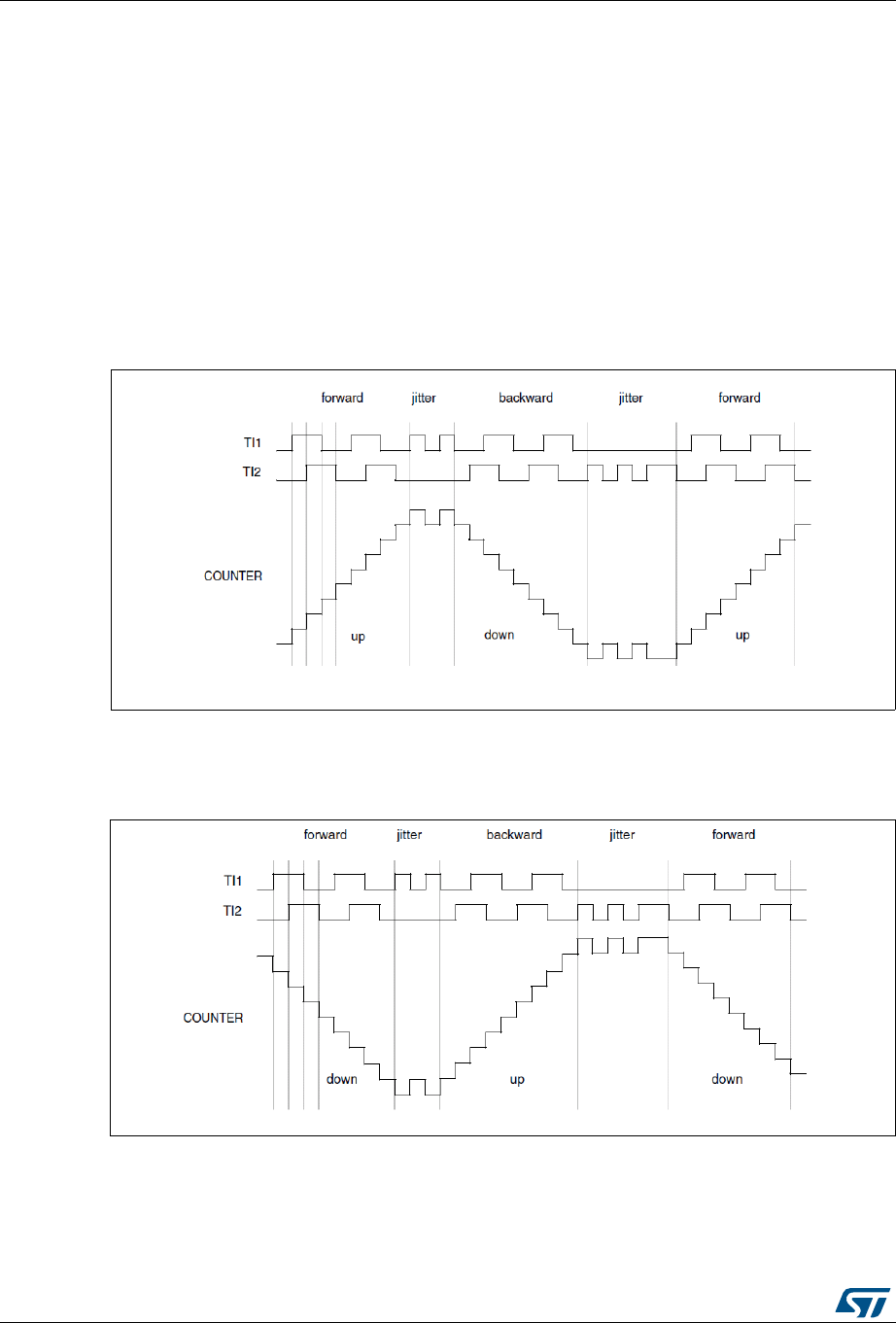
16-bit advanced control timer (TIM1) RM0016
186/467 DocID14587 Rev 14
Figure 80 gives an example of counter operation, showing count signal generation and
direction control. It also shows how input jitter is compensated where both edges are
selected. This might occur if the sensor is positioned near one of the switching points. In the
example below, configuration is as follows:
•CC1S = 01 (TIM1_CCMR1 register, IC1 mapped on TI1)
•CC2S = 01 (TIM1_CCMR2 register, IC2 mapped on TI2)
•CC1P = 0 (TIM1_CCER1 register, IC1 non-inverted, IC1=TI1)
•CC2P = 0 (TIM1_CCER2 register, IC2 non-inverted, IC2=TI2)
•SMS = 011 (TIM1_SMCR register, both inputs are active on both rising and falling
edges).
•CEN = 1 (TIM1_CR1 register, counter is enabled)
Figure 80. Example of counter operation in encoder interface mode
Figure 81 gives an example of counter behavior when IC1 polarity is inverted (same
configuration as Figure 80 except that CC1P =1).
Figure 81. Example of encoder interface mode with IC1 polarity inverted

DocID14587 Rev 14 187/467
RM0016 16-bit advanced control timer (TIM1)
261
When the timer is configured in encoder interface mode, it provides information on the
current position of the sensors. Dynamic information, such as speed, acceleration, and
slowdown, can be obtained by measuring the period between two encoder events using a
second timer configured in capture mode. The output of the encoder, which indicates the
mechanical zero, can be used for this purpose. Depending on the time between two events,
the counter can also be read at regular intervals. This can be done by latching the counter
value into a third input capture register, if one is available. In this case, the capture signal
must be periodic and can be generated by another timer.
17.6 TIM1 interrupts
TIM1 has eight interrupt request sources, mapped on 2 interrupt vectors:
•Break interrupt
•Trigger interrupt
•Commutation interrupt
•Capture/compare 4 interrupt
•Capture/compare 3 interrupt
•Capture/compare 2 interrupt
•Capture/compare 1 interrupt
•Update interrupt (example: overflow, underflow, and counter initialization)
To use the interrupt features for each interrupt channel used, set the desired interrupt
enable bits (BIE, TIE, COMIE, CCiIE, and UIE) in the TIM1_IER register to enable interrupt
requests.
The different interrupt sources can also be generated by software using the corresponding
bits in the TIM1_EGR register.
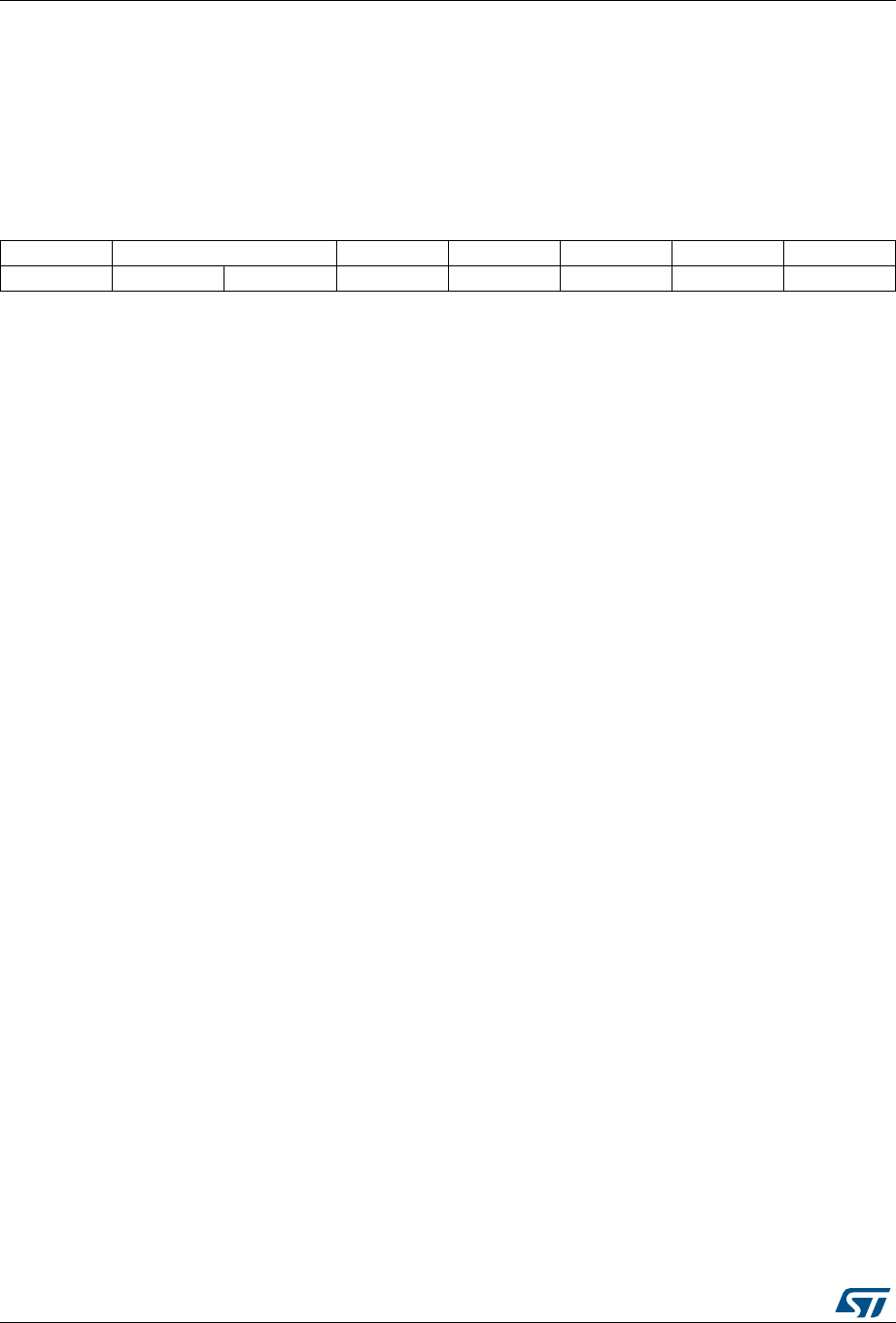
16-bit advanced control timer (TIM1) RM0016
188/467 DocID14587 Rev 14
17.7 TIM1 registers
17.7.1 Control register 1 (TIM1_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
ARPE CMS[1:0] DIR OPM URS UDIS CEN
rw rw rw rw rw rw rw rw
Bit 7 ARPE: Auto-reload preload enable
0: TIM1_ARR register is not buffered through a preload register. It can be written directly
1: TIM1_ARR register is buffered through a preload register
Bits 6:5 CMS[1:0]: Center-aligned mode selection
00: Edge-aligned mode. The counter counts up or down depending on the direction bit (DIR).
01: Center-aligned mode 1. The counter counts up and down alternately. Output compare interrupt
flags of channels configured in output (CCiS = 00 in TIM1_CCMRi registers) are set only when the
counter is counting down.
10: Center-aligned mode 2. The counter counts up and down alternately. Output compare interrupt
flags of channels configured in output (CCiS = 00 in CCMRi registers) are set only when the counter
is counting up.
11: Center-aligned mode 3. The counter counts up and down alternately. Output compare interrupt
flags of channels configured in output (CCiS = 00 in TIM1_CCMRi registers) are set both when the
counter is counting up and down.
Note: It is not allowed to switch from edge-aligned mode to center-aligned mode while the counter is
enabled (CEN = 1)
Encoder mode (SMS = 001, 010 or 011 in TIM1_SMCR register) must be disabled in center-
aligned mode.
Bit 4 DIR: Direction
0: Counter used as up-counter
1: Counter used as down-counter
Note: This bit is read-only when the timer is configured in center-aligned mode or encoder mode.
Bit 3 OPM: One-pulse mode
0: Counter is not stopped at update event
1: Counter stops counting at the next update event (clearing the CEN bit)

DocID14587 Rev 14 189/467
RM0016 16-bit advanced control timer (TIM1)
261
Bit 2 URS: Update request source
0: When enabled by the UDIS bit, the UIF bit is set and an update interrupt request is sent when one
of the following events occurs:
– Registers are updated (counter overflow/underflow)
– UG bit is set by software
– Update event is generated through the clock/trigger controller
1: When enabled by the UDIS bit, the UIF bit is set and an update interrupt request is sent only when
registers are updated (counter overflow/underflow).
Bit 1 UDIS: Update disable.
0: A UEV is generated as soon as a counter overflow occurs, a software update is generated, or a
hardware reset is generated by the clock/trigger mode controller. Buffered registers are then loaded
with their preload values.
1: A UEV is not generated and shadow registers keep their value (ARR, PSC, CCRi). The counter
and the prescaler are re-initialized if the UG bit is set or if a hardware reset is received from the
clock/trigger mode controller.
Bit 0 CEN: Counter enable
0: Counter disabled
1: Counter enabled
Note: External clock, trigger gated mode, and encoder mode can work only if the CEN bit has been
previously set by software. However, trigger mode can set the CEN bit automatically by
hardware.
16-bit advanced control timer (TIM1) RM0016
190/467 DocID14587 Rev 14
17.7.2 Control register 2 (TIM1_CR2)
Address offset: 0x01
Reset value: 0x00
76543210
Reserved MMS[2:0] Reserved COMS Reserved CCPC
rrwrwrw rw rw
Bit 7 Reserved
Bits 6:4 MMS[2:0]: Master mode selection
These bits select the information to be sent in master mode to the ADC or to the other timers for
synchronization (TRGO). The combination is as follows:
000: Reset - The UG bit from the TIM1_EGR register is used as trigger output (TRGO). If the reset is
generated by the trigger input (clock/trigger mode controller configured in reset mode), the signal on
TRGO is delayed compared to the actual reset.
001: Enable - The counter enable signal is used as trigger output (TRGO). It is used to start several
timers or the ADC to control a window in which a slave timer or the ADC is enabled. The counter
enable signal is generated by a logic OR between the CEN control bit and the trigger input when
configured in trigger gated mode. When the counter enable signal is controlled by the trigger input,
there is a delay on TRGO, except if the master/slave mode is selected (see the MSM bit description
in TIM1_SMCR register).
010: Update - The update event is selected as trigger output (TRGO)
011: Compare pulse (MATCH1) - The trigger output sends a positive pulse when the CC1IF flag is to
be set (even if it was already high), as soon as a capture or a compare match occurs (TRGO).
100: Compare - OC1REF signal is used as trigger output (TRGO)
101: Compare - OC2REF signal is used as trigger output (TRGO)
110: Compare - OC3REF signal is used as trigger output (TRGO)
111: Compare - OC4REF signal is used as trigger output (TRGO)
Bit3 Reserved, must be kept cleared.
Bit 2 COMS: Capture/compare control update selection
0: When capture/compare control bits are preloaded (CCPC = 1), they are updated by setting the
COMG bit.
1: When capture/compare control bits are preloaded (CCPC = 1), they are updated by setting the
COMG bit or when an rising edge occurs on TRGI.
Note: This bit acts only on channels with complementary outputs.
Bit 1 Reserved, forced by hardware to 0
Bit 0 CCPC: Capture/compare preloaded control
0: The CCiE, CCiNE, CCiP, and CCiNP bits in the TIM1_CCERi registers and the OCiM bit in the
TIM1_CCMRi registers are not preloaded
1: CCiE, CCiNE, CCiP, C C iNP and OCiM bits are preloaded, after having been written, they are
updated only when COMG bit is set in the TIM1_EGR register.
Note: This bit acts only on channels with complementary outputs.
DocID14587 Rev 14 191/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.3 Slave mode control register (TIM1_SMCR)
Address offset: 0x02
Reset value: 0x00
76543210
MSM TS[2:0] Reserved SMS[2:0]
rw rw rw rw r rw rw rw
Bit 7 MSM: Master/slave mode
0: No action
1: The effect of an event on the trigger input (TRGI) is delayed to allow a perfect synchronization
between TIM1 and another timer (through TRGO).
Bits 6:4 TS[2:0]: Trigger selection
This bit field selects the trigger input (TRGI) to be used to synchronize the counter.
000: Internal trigger ITR0 connected to TIM6 TRGO (*)
001: Reserved
010: Reserved
011: Internal trigger ITR3 connected to TIM5 TRGO (*)
100: TI1 edge detector (TI1F_ED)
101: Filtered timer input 1 (TI1FP1)
110: Filtered timer input 2 (TI2FP2)
111: External trigger input (ETRF)
(*): 8K low-density devices only otherwise reserved.
Note: These bits must only be changed when they are not used (e.g. when SMS = 000) to avoid
incorrect edge detections at the transition.
Bit 3 Reserved.
Bits 2:0 SMS[2:0]: Clock/trigger/slave mode selection
When external signals are selected, the active edge of the trigger signal (TRGI) is linked to the
polarity selected on the external input (see input control register and control register description).
000: Clock/trigger controller disabled - If CEN = 1, the prescaler is clocked directly by the internal
clock.
001: Encoder mode 1 - Counter counts up or down on TI2FP2 edge depending on TI1FP1 level
010: Encoder mode 2 - Counter counts up or down on TI1FP1 edge depending on TI2FP2 level
011: Encoder mode 3 - Counter counts up or down on both TI1FP1 and TI2FP2 edges depending on
the level of the other input.
100: Reset mode - Rising edge of the selected trigger signal (TRGI) re-initializes the counter and
generates an update of the registers.
101: Trigger gated mode - The counter clock is enabled when the trigger signal (TRGI) is high. The
counter stops (but is not reset) as soon as the trigger becomes low. Both start and stop of the
counter are controlled.
110: Trigger standard mode - The counter starts at a rising edge of the trigger TRGI (but, it is not
reset). Only the start of the counter is controlled.
111: External clock mode 1 - Rising edges of the selected trigger (TRGI) clock the counter
Note: Trigger gated mode must not be used if TI1F_ED is selected as the trigger input (TS = 100).
TI1F_ED outputs 1 pulse for each transition on TI1F, whereas trigger gated mode checks the
level of the trigger signal.

16-bit advanced control timer (TIM1) RM0016
192/467 DocID14587 Rev 14
17.7.4 External trigger register (TIM1_ETR)
Address offset: 0x03
Reset value: 0x00
76543210
ETP ECE ETPS[1:0] ETF[3:0]
rw rw rw rw rw rw rw rw
Bit 7 ETP: External trigger polarity
This bit selects whether ETR or ETR is used for trigger operations
0: ETR is non-inverted, active at high level or rising edge
1: ETR is inverted, active at low level or falling edge

DocID14587 Rev 14 193/467
RM0016 16-bit advanced control timer (TIM1)
261
Bit 6 ECE: External clock enable
This bit enables external clock mode 2.
0: External clock mode 2 disabled
1: External clock mode 2 enabled. The counter is clocked by any active edge on the ETRF signal.
Note: Setting the ECE bit has the same effect as selecting external clock mode 1 with TRGI
connected to ETRF (SMS = 111 and TS = 111 in the TIM1_SMCR register).
It is possible to simultaneously use external clock mode 2 with the following modes: Trigger
standard mode, trigger reset mode, and trigger gated mode. Nevertheless, TRGI must not be
connected to ETRF in these cases (TS bits must not be 111 in the TIM1_SMCR register).
If external clock mode 1 and external clock mode 2 are enabled at the same time, the external
clock input is ETRF.
Bits 5:4 ETPS: External trigger prescaler
The ETRP frequency must be, at most,1/4 of fMASTER frequency. A prescaler can be enabled to
reduce ETRP frequency. It is useful when inputting fast external clocks.
00: Prescaler off
01: ETRP frequency divided by 2
10: ETRP frequency divided by 4
11: ETRP frequency divided by 8
Bits 3:0 ETF: External trigger filter.
This bitfield defines the frequency used to sample the ETRP signal and the length of the digital filter
applied to it. The digital filter is made of an event counter in which N events are needed to validate a
transition on the output:
0000: No filter, sampling is done at fMASTER
0001: fSAMPLING=fMASTER, N = 2
0010: fSAMPLING=fMASTER, N = 4
0011: fSAMPLING=fMASTER, N = 8
0100: fSAMPLING=fMASTER/2, N = 6
0101: fSAMPLING=fMASTER/2, N = 8
0110: fSAMPLING=fMASTER/4, N = 6
0111: fSAMPLING=fMASTER/4, N = 8
1000: fSAMPLING=fMASTER/8, N = 6
1001: fSAMPLING=fMASTER/8, N = 8
1010: fSAMPLING=fMASTER/16, N = 5
1011: fSAMPLING=fMASTER/16, N = 6
1100: fSAMPLING=fMASTER/16, N = 8
1101: fSAMPLING=fMASTER/32, N = 5
1110: fSAMPLING=fMASTER/32, N = 6
1111: fSAMPLING=fMASTER/32, N = 8

16-bit advanced control timer (TIM1) RM0016
194/467 DocID14587 Rev 14
17.7.5 Interrupt enable register (TIM1_IER)
Address offset: 0x04
Reset value: 0x00
76543210
BIE TIE COMIE CC4IE CC3IE CC2IE CC1IE UIE
rw rw rw rw rw rw rw rw
Bit 7 BIE: Break interrupt enable
0: Break interrupt disabled
1: Break interrupt enabled
Bit 6 TIE: Trigger interrupt enable
0: Trigger interrupt disabled
1: Trigger interrupt enabled
Bit 5 COMIE: Commutation interrupt enable
0: Commutation interrupt disabled
1: Commutation interrupt enabled
Bit 4 CC4IE: Capture/compare 4 interrupt enable
0: CC4 interrupt disabled
1: CC4 interrupt enabled
Bit 3 CC3IE: Capture/compare 3 interrupt enable
0: CC3 interrupt disabled
1: CC3 interrupt enabled
Bit 2 CC2IE: Capture/compare 2 interrupt enable
0: CC2 interrupt disabled
1: CC2 interrupt enabled
Bit 1 CC1IE: Capture/compare 1 interrupt enable
0: CC1 interrupt disabled
1: CC1 interrupt enabled
Bit 0 UIE: Update interrupt enable
0: Update interrupt disabled
1: Update interrupt enabled

DocID14587 Rev 14 195/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.6 Status register 1 (TIM1_SR1)
Address offset: 0x05
Reset value: 0x00
76543210
BIF TIF COMIF CC4IF CC3IF CC2IF CC1IF UIF
rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0
Bit 7 BIF: Break interrupt flag
This flag is set by hardware as soon as the break input goes active. It can be cleared by software if
the break input is not active.
0: No break event has occurred
1: An active level has been detected on the break input
Bit 6 TIF: Trigger interrupt flag
This flag is set by hardware on a trigger event (the active edge is detected on a TRGI signal, both
edges are detected if trigger gated mode is selected). It is cleared by software.
0: No trigger event has occurred
1: Trigger interrupt pending
Bit 5 COMIF: Commutation interrupt flag
This flag is set by hardware on a COM (when capture/compare control bits - CCiE, CCiNE, OCiM -
have been updated). It is cleared by software.
0: No COM has occurred
1: COM interrupt pending
Bit 4 CC4IF: Capture/compare 4 interrupt flag
Refer to CC1IF description
Bit 3 CC3IF: Capture/compare 3 interrupt flag
Refer to CC1IF description
16-bit advanced control timer (TIM1) RM0016
196/467 DocID14587 Rev 14
17.7.7 Status register 2 (TIM1_SR2)
Address offset: 0x06
Reset value: 0x00
r
Bit 2 CC2IF: Capture/compare 2 interrupt flag
Refer to CC1IF description
Bit 1 CC1IF: Capture/compare 1 interrupt flag
If channel CC1 is configured as output:
This flag is set by hardware when the counter matches the compare value, with some exception in
center-aligned mode (refer to the CMS bits from TIM1_CR1 register description). It is cleared by
software.
0: No match
1: The content of the counter register TIM1_CNT matches the content of the TIM1_CCR1 register
Note: When the contents of TIMx_CCRi are greater than the contents of TIMx_ARR, the CCiIF bit
goes high on the counter overflow (in up-counting and up/down-counting modes) or underflow
(in down-counting mode)
If channel CC1 is configured as input:
This bit is set by hardware on a capture. It is cleared by software or by reading the TIM1_CCR1L
register.
0: No input capture has occurred
1: The counter value has been captured in the TIM1_CCR1 register (an edge has been detected on
IC1 which matches the selected polarity).
Bit 0 UIF: Update interrupt flag
This bit is set by hardware on an update event. It is cleared by software.
0: No update has occurred
1: Update interrupt pending. This bit is set by hardware when the registers are updated:
– At overflow or underflow if UDIS = 0 in the TIM1_CR1 register
– When CNT is re-initialized by software using the UG bit in TIM1_EGR register, if URS = 0
and UDIS = 0 in the TIM1_CR1 register.
– When CNT is re-initialized by a trigger event (refer to the TIM1_SMCR register description),
if URS = 0 and UDIS = 0 in the TIM1_CR1 register.
76543210
Reserved CC4OF CC3OF CC2OF CC1OF Reserved
r rc_w0 rc_w0 rc_w0 rc_w0 r
Bits 7:5 Reserved, must be kept cleared
Bit 4 CC4OF: Capture/compare 4 overcapture flag
Refer to CC1OF description
Bit 3 CC3OF: Capture/compare 3 overcapture flag
Refer to CC1OF description
DocID14587 Rev 14 197/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.8 Event generation register (TIM1_EGR)
Address offset: 0x07
Reset value: 0x00
Bit 2 CC2OF: Capture/compare 2 overcapture flag
Refer to CC1OF description
Bit 1 CC1OF: Capture/compare 1 overcapture flag
This flag is set by hardware only when the corresponding channel is configured in input capture
mode. It is cleared by software by writing it to 0.
0: No overcapture has been detected
1: The counter value has been captured in TIM1_CCR1 register while CC1IF flag was already set
Bit 0 Reserved, must be kept cleared.
76543210
BG TG COMG CC4G CC3G CC2G CC1G UG
wwwwwwww
Bit 7 BG: Break generation
This bit is set by software to generate an event. It is automatically cleared by hardware.
0: No action
1: A break event is generated. The MOE bit is cleared and the BIF flag is set. An interrupt is
generated if enabled by the BIE bit.
Bit 6 TG: Trigger generation
This bit is set by software to generate an event. It is automatically cleared by hardware.
0: No action
1: The TIF flag is set in TIM1_SR1 register. An interrupt is generated if enabled by the TIE bit.
Bit 5 COMG: Capture/compare control update generation
This bit can be set by software and is automatically cleared by hardware.
0: No action
1: When the CCPC bit in the TIM1_CR2 register is set, it allows the CCiE, CCiNE CCiP, C C iNP, and
OCiM bits to be updated.
Note: This bit acts only on channels that have a complementary output.
Bit 4 CC4G: Capture/compare 4 generation
Refer to CC1G description.
Bit 3 CC3G: Capture/compare 3 generation
Refer to CC1G description.

16-bit advanced control timer (TIM1) RM0016
198/467 DocID14587 Rev 14
17.7.9 Capture/compare mode register 1 (TIM1_CCMR1)
Address offset: 0x08
Reset value: 0x00
This channel can be used in input (capture mode) or in output (compare mode). The
direction of the channel is defined by configuring the CC1S bits. All the other bits of this
register have a different function in input and output mode. For a given bit, OCii describes its
function when the channel is configured in output, ICii describes its function when the
channel is configured in input. Therefore, be aware that the same bit can have a different
meaning for the input and output stage.
Bit 2 CC2G: Capture/compare 2 generation
Refer to CC1G description.
Bit 1 CC1G: Capture/compare 1 generation.
This bit is set by software to generate an event. It is automatically cleared by hardware.
0: No action
1: A capture/compare event is generated on channel 1:
If the CC1 channel is configured in output mode:
The CC1IF flag is set and the corresponding interrupt request is sent if enabled.
If the CC1 channel is configured in input mode:
The current value of the counter is captured in the TIM1_CCR1 register. The CC1IF flag is set, and
the corresponding interrupt request is sent if enabled. The CC1OF flag is set if the CC1IF flag is
already high.
Bit 0 UG: Update generation
This bit can be set by software and is automatically cleared by hardware.
0: No action
1: Re-initializes the counter and generates an update of the registers. Note that the prescaler
counter is also cleared. The counter is cleared if center-aligned mode is selected or if DIR = 0 (up-
counting). Otherwise, it takes the auto-reload value (TIM1_ARR) if DIR = 1 (down-counting).

DocID14587 Rev 14 199/467
RM0016 16-bit advanced control timer (TIM1)
261
Channel configured in output
76543210
OC1CE OC1M[2:0] OC1PE OC1FE CC1S[1:0]
rw rw rw rw rw rw rw rw
Bit 7 OC1CE: Output compare 1 clear enable
This bit is used to enable the clearing of the channel 1 output compare signal (OC1REF) by an
external event on the TIM1_ETR pin (see Section 17.5.9 on page 184).
0: OC1REF is not affected by the ETRF input signal (derived from the TIM1_ETR pin)
1: OC1REF is cleared as soon as a high level is detected on ETRF input signal (derived from the
TIM1_ETR pin).
Bits 6:4 OC1M: Output compare 1 mode
These bits define the behavior of the output reference signal, OC1REF, from which OC1 is derived.
OC1REF is active high whereas OC1 active level depends on the CC1P bit.
000: Frozen - The comparison between the output compare register TIM1_CCR1 and the counter
register TIM1_CNT has no effect on the outputs.
001: Set channel 1 to active level on match - OC1REF signal is forced high when the counter
register TIM1_CNT matches the capture/compare register 1 (TIM1_CCR1).
010: Set channel 1 to inactive level on match - OC1REF signal is forced low when the counter
register TIM1_CNT matches the capture/compare register 1 (TIM1_CCR1).
011: Toggle - OC1REF toggles when TIM1_CNT = TIM1_CCR1
100: Force inactive level - OC1REF is forced low
101: Force active level - OC1REF is forced high
110: PWM mode 1 - In up-counting, channel 1 is active as long as TIM1_CNT < TIM1_CCR1,
otherwise, the channel is inactive. In down-counting, channel 1 is inactive (OC1REF = 0) as long as
TIM1_CNT > TIM1_CCR1, otherwise, the channel is active (OC1REF = 1).
111: PWM mode 2 - In up-counting, channel 1 is inactive as long as TIM1_CNT < TIM1_CCR1,
otherwise, the channel is active. In down-counting, channel 1 is active as long as TIM1_CNT >
TIM1_CCR1, otherwise, the channel is inactive.
Note: These bits can no longer be modified while LOCK level 3 has been programmed (LOCK bits in
TIM1_BKR register) and CC1S = 00 (the channel is configured in output).
In PWM mode 1 or 2, the OCiREF level changes only when the result of the comparison
changes or when the output compare mode switches from “frozen” mode to “PWM” mode (refer
to PWM mode on page 174 for more details).
On channels that have a complementary output, this bitfield is preloaded. If the CCPC bit is set
in the TIM1_CR2 register, the OCM active bits take the new value from the preload bits only
when a COM is generated.

16-bit advanced control timer (TIM1) RM0016
200/467 DocID14587 Rev 14
Bit 3 OC1PE: Output compare 1 preload enable
0: Preload register on TIM1_CCR1 disabled. TIM1_CCR1 can be written at anytime. The new value
is taken into account immediately.
1: Preload register on TIM1_CCR1 enabled. Read/write operations access the preload register.
TIM1_CCR1 preload value is loaded in the shadow register at each UEV.
Note: These bits can no longer be modified while LOCK level 3 has been programmed (LOCK bits in
TIM1_BKR register) and CC1S = 00 (the channel is configured in output).
For correct operation, preload registers must be enabled when the timer is in PWM mode. This
is not mandatory in one-pulse mode (OPM bit set in TIM1_CR1 register).
Bit 2 OC1FE: Output compare 1 fast enable
This bit is used to accelerate the effect of an event on the trigger in input on the CC output.
0: CC1 behaves normally depending on the counter and CCR1 values, even when the trigger is on.
The minimum delay to activate CC1 output when an edge occurs on the trigger input, is 5 clock
cycles.
1: An active edge on the trigger input acts like a compare match on the CC1 output. If this happens,
OC is set to the compare level irrespective of the result of the comparison. The delay to sample the
trigger input and to activate CC1 output is reduced to 3 clock cycles. OCFE acts only if the channel
is configured in PWM1 or PWM2 mode.
Bits 1:0 CC1S[1:0]: Capture/compare 1 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1FP1
10: CC1 channel is configured as input, IC1 is mapped on TI2FP1
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode works only if an internal
trigger input is selected through the TS bit (TIM1_SMCR register).
Note: CC1S bits are writable only when the channel is off (CC1E = 0 in TIM1_CCER1).

DocID14587 Rev 14 201/467
RM0016 16-bit advanced control timer (TIM1)
261
Channel configured in input
76543210
IC1F[3:0] IC1PSC[1:0] CC1S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC1F[3:0]: Input capture 1 filter
This bitfield defines fSAMPLING, the frequency used to sample TI1 input and the length of the digital
filter applied to TI1. The digital filter is made of an event counter in which N events are needed to
validate a transition on the output:
0000: No filter, fSAMPLING= fMASTER
0001: fSAMPLING=fMASTER, N = 2
0010: fSAMPLING=fMASTER, N = 4
0011: fSAMPLING=fMASTER, N = 8
0100: fSAMPLING=fMASTER/2, N = 6
0101: fSAMPLING=fMASTER/2, N = 8
0110: fSAMPLING=fMASTER/4, N = 6
0111: fSAMPLING=fMASTER/4, N = 8
1000: fSAMPLING=fMASTER/8, N = 6
1001: fSAMPLING=fMASTER/8, N = 8
1010: fSAMPLING=fMASTER/16, N = 5
1011: fSAMPLING=fMASTER/16, N = 6
1100: fSAMPLING=fMASTER/16, N = 8
1101: fSAMPLING=fMASTER/32, N = 5
1110: fSAMPLING=fMASTER/32, N = 6
1111: fSAMPLING=fMASTER/32, N = 8
Note: Even on channels that have a complementary output, this bit field is not preloaded and does
not take into account the content of the CCPC bit (in the TIM1_CR2 register).
Bits 3:2 IC1PSC[1:0]: Input capture 1 prescaler
This bitfield defines the ratio of the prescaler acting on CC1 input (IC1). The prescaler is reset as
soon as CC1E = 0 (TIM1_CCER register).
00: No prescaler, capture is made each time an edge is detected on the capture input
01: Capture is made once every 2 events
10: Capture is made once every 4 events
11: Capture is made once every 8 events
Bits 1:0 CC1S[1:0]: Capture/compare 1 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1FP1
10: CC1 channel is configured as input, IC1 is mapped on TI2FP1
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode works only if an internal
trigger input is selected through the TS bit (TIM1_SMCR register).
Note: CC1S bits are writable only when the channel is OFF (CC1E = 0 in TIM1_CCER1).

16-bit advanced control timer (TIM1) RM0016
202/467 DocID14587 Rev 14
17.7.10 Capture/compare mode register 2 (TIM1_CCMR2)
Address offset: 0x09
Reset value: 0x00
Channel configured in output
Channel configured in input
76543210
OC2CE OC2M[2:0] OC2PE OC2FE CC2S[1:0]
rw rw rw rw rw rw rw rw
Bit 7 OC2CE: Output compare 2 clear enable
Bits 6:4 OC2M(2:0]: Output compare 2 mode
Bit 3 OC2PE: Output compare 2 preload enable
Bit 2 OC2FE: Output compare 2 fast enable
Bits 1:0 CC2S[1:0]: Capture/compare 2 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2FP2
10: CC2 channel is configured as input, IC2 is mapped on TI1FP2
11: Reserved
Note: CC2S bits are writable only when the channel is off (CC2E and CC2NE = 0 and updated in
TIM1_CCER1).
76543210
IC2F[3:0] IC2PSC[1:0] CC2S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC2F: Input capture 2 filter
Bits 3:2 IC2PSC(1:0]: Input capture 2 prescaler
Bits 1:0 CC2S[1:0]: Capture/compare 2 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2FP2
10: CC2 channel is configured as input, IC2 is mapped on TI1FP2
11: CC2 channel is configured as input, IC2 is mapped on TRC. This mode works only if an internal
trigger input is selected through the TS bit (TIM1_SMCR register).
Note: CC2S bits are writable only when the channel is off (CC2E and CC2NE = 0 and updated in
TIM1_CCER1).

DocID14587 Rev 14 203/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.11 Capture/compare mode register 3 (TIM1_CCMR3)
Address offset: 0x0A
Reset value: 0x00
Refer to the CCMR1 register description above.
Channel configured in output
Channel configured in input
76543210
OC3CE OC3M[2:0] OC3PE OC3FE CC3S[1:0]
rw rw rw rw rw rw rw rw
Bit 7 OC3CE: Output compare 3 clear enable
Bits 6:4 OC3M[2:0]: Output compare 3 mode
Bit 3 OC3PE: Output compare 3 preload enable
Bit 2 OC3FE: Output compare 3 fast enable
Bits 1:0 CC3S[1:0]: Capture/compare 3 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3FP3
10: CC3 channel is configured as input, IC3 is mapped on TI4FP3
11: Reserved
Note: CC3S bits are writable only when the channel is off (CC3E and CC3NE = 0 and updated in
TIM1_CCER2).
76543210
IC3F[3:0] IC3PSC[1:0] CC3S[1:0]
rw rw rw rw rw rw rw
Bits 7:4 IC3F: Input capture 3 filter
Bits 3:2 IC3PSC[1:0]: Input capture 3 prescaler
Bits 1:0 CC3S[1:0]: Capture/compare 3 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3FP3
10: CC3 channel is configured as input, IC3 is mapped on TI4FP3
11: Reserved
CC3S bits are writable only when the channel is off (CC3E and CC3NE = 0 and updated in
TIM1_CCER2).

16-bit advanced control timer (TIM1) RM0016
204/467 DocID14587 Rev 14
17.7.12 Capture/compare mode register 4 (TIM1_CCMR4)
Address offset: 0xB
Reset value: 0x00
Refer to the CCMR1 register description above.
Channel configured in output
Channel configured in input
76543210
OC4CE OC4M[2:0] OC4PE OC4FE CC4S[1:0]
rw rw rw rw rw rw rw rw
Bit 7 OC4CE: Output compare 4 clear enable
Bits 6:4 OC4M[2:0]: Output compare 4 mode
Bit 3 OC4PE: Output compare 4 preload enable
Bit 2 OC4FE: Output compare 4 fast enable
Bits 1:0 CC4S[1:0]: Capture/compare 4 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC4 channel is configured as output
01: CC4 channel is configured as input, IC4 is mapped on TI4FP4
10: CC4 channel is configured as input, IC4 is mapped on TI3FP4
11: Reserved
Note: CC4S bits are writable only when the channel is off (CC4E and CC4NE = 0 and updated in
TIM1_CCER2).
76543210
IC4F[3:0] IC4PSC[1:0] CC4S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC4F: Input capture 4 filter
Bits 3:2 IC4PSC[1:0]: Input capture 4 prescaler
Bits 1:0 CC4S[1:0]: Capture/compare 4 selection
This bitfield defines the direction of the channel (input/output) and the used input.
00: CC4 channel is configured as output.
01: CC4 channel is configured as input, IC4 is mapped on TI4FP4.
10: CC4 channel is configured as input, IC4 is mapped on TI3FP4.
11: Reserved
Note: CC4S bits are writable only when the channel is off (CC4E and CC4NE = 0 and updated in
TIM1_CCER2).

DocID14587 Rev 14 205/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.13 Capture/compare enable register 1 (TIM1_CCER1)
Address offset: 0x0C
Reset value: 0x00
76543210
CC2NP CC2NE CC2P CC2E CC1NP CC1NE CC1P CC1E
rw rw rw rw rw rw rw rw
Bit 7 CC2NP: Capture/compare 2 complementary output polarity
Refer to CC1NP description.
Bit 6 CC2NE: Capture/compare 2 complementary output enable
Refer to CC1NE description.
Bit 5 CC2P: Capture/compare 2 output polarity
Refer to CC1P description.
Bit 4 CC2E: Capture/compare 2 output enable
Refer to CC1E description.
Bit 3 CC1NP: Capture/compare 1 complementary output polarity
0: OC1N active high
1: OC1N active low
Note: This bit is no longer writable while LOCK level 2 or 3 have been programmed (LOCK bits in
TIM1_BKR register) and CC1S = 00 (the channel is configured in output).
On channels that have a complementary output, this bit is preloaded. If the CCPC bit is set in
the TIM1_CR2 register, the CC1NP active bit takes the new value from the preload bit only
when a COM is generated.

16-bit advanced control timer (TIM1) RM0016
206/467 DocID14587 Rev 14
Bit 2 CC1NE: Capture/compare 1 complementary output enable
0: Off - OC1N is not active. OC1N level is then a function of the MOE, OSSI, OSSR, OIS1, OIS1N
and CC1E bits.
1: On - OC1N signal is output on the corresponding output pin depending on the MOE, OSSI,
OSSR, OIS1, OIS1N and CC1E bits.
Note: On channels that have a complementary output, this bit is preloaded. If the CCPC bit is set in
the TIM1_CR2 register, the CC1NE active bit takes the new value from the preload bit when a
COM is generated.
Bit 1 CC1P: Capture/compare 1 output polarity
CC1 channel configured as output:
0: OC1 active high
1: OC1 active low
CC1 channel configured as input for trigger function (see Figure 64):
0: Trigger on a high level or rising edge of TI1F
1: Trigger on a low level or falling edge of TI1F
CC1 channel configured as input for capture function (see Figure 64):
0: Capture on a rising edge of TI1F or TI2F
1: Capture on a falling edge of TI1F or TI2F
Note: This bit is no longer writable while LOCK level 2 or 3 have been programmed (LOCK bits in
TIM1_BKR register).
On channels that have a complementary output, this bit is preloaded. If the CCPC bit is set in
the TIM1_CR2 register, the CC1P active bit takes the new value from the preload bit when a
COM is generated.
Bit 0 CC1E: Capture/compare 1 output enable
CC1 channel is configured as output:
0: Off - OC1 is not active. OC1 level is then a function of the MOE, OSSI, OSSR, OIS1, OIS1N and
CC1NE bits.
1: On - OC1 signal is output on the corresponding output pin depending on the MOE, OSSI, OSSR,
OIS1, OIS1N and CC1NE bits.
CC1 channel is configured as input:
This bit determines if a capture of the counter value can be made in the input capture/compare
register 1 (TIM1_CCR1) or not.
0: Capture disabled
1: Capture enabled
Note: On channels that have a complementary output, this bit is preloaded. If the CCPC bit is set in
the TIM1_CR2 register, the CC1E active bit takes the new value from the preload bit only when
a COM is generated.
DocID14587 Rev 14 207/467
RM0016 16-bit advanced control timer (TIM1)
261
Note: The state of the external I/O pins connected to the OCi channels depends on the OCi
channel state and the GPIO registers.
Table 38. Output control for complementary OCi and OCiN channels with break feature(1)
Control bits Output states
MOE OSSI OSSR CCiE CCiNE OCi OCiN
1x
(2)
000
Output disabled
(not driven by the timer)
Output disabled
(not driven by the timer)
001
Output disabled
(not driven by the timer)
OCiREF + polarity OCiN =
OCiREF xor CCiNP
010
OCiREF + polarity OCi =
OCiREF xor CCiP
Output disabled
(not driven by the timer)
011OCiREF + polarity + deadtime
Complementary to OCiREF
(not OCiREF) + polarity +
deadtime
100
Output disabled
(not driven by the timer)
Output disabled
(not driven by the timer)
101
Off state
(output enabled with inactive
state) OCi = CCiP
OCiREF + polarity OCiN =
OCiREF xor CCiNP
110
OCiREF + polarity OCi =
OCiREF xor CCiP
Off state
(output enabled with inactive
state) OCiN = CCiNP
1 1 1 OCiREF + polarity + deadtime
Complementary to OCiREF
(not OCiREF) + polarity +
deadtime
0
0
x(2) xx
Output disabled (not driven by the timer)
0
0
0
1Off state (output enabled with inactive state)
Asynchronously: OCi = CCiP and OCiN = CCiNP
Then if the clock is present: OCi = OISi and OCiN = OISiN after
a deadtime, assuming that OISi and OISiN do not correspond
with OCi and OCiN in active state
1
1
1
1. Never set CCiE = CCNiE = 0 when the channel is used. When the channel is not used, program CCiP = CCiNP = OISi =
OISiN = 0 otherwise.
2. Don’t care
16-bit advanced control timer (TIM1) RM0016
208/467 DocID14587 Rev 14
17.7.14 Capture/compare enable register 2 (TIM1_CCER2)
Address offset: 0x0D
Reset value: 0x00
17.7.15 Counter high (TIM1_CNTRH)
Address offset: 0x0E
Reset value: 0x00
76543210
Reserved CC4P CC4E CC3NP CC3NE CC3P CC3E
r rwrwrwrwrwrw
Bits 7:6 Reserved
Bit 5 CC4P: Capture/compare 4 output polarity
Refer to CC1P description.
Bit 4 CC4E: Capture/compare 4 output enable
Refer to CC1E description.
Bit 3 CC3NP: Capture/compare 3 complementary output polarity
Refer to CC1NP description.
Bit 2 CC3NE: Capture/compare 3 complementary output enable
Refer to CC1NE description.
Bit 1 CC3P: Capture/compare 3 output polarity
Refer to CC1P description.
Bit 0 CC3E: Capture/compare 3 output enable
Refer to CC1E description.
76543210
CNT[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CNT[15:8]: Counter value (MSB)
DocID14587 Rev 14 209/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.16 Counter low (TIM1_CNTRL)
Address offset: 0x0F
Reset value: 0x00
17.7.17 Prescaler high (TIM1_PSCRH)
Address offset: 0x10
Reset value: 0x00
17.7.18 Prescaler low (TIM1_PSCRL)
Address offset: 0x11
Reset value: 0x00
76543210
CNT[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CNT[7:0]: Counter value (LSB).
76543210
PSC[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0
PSC[15:8]: Prescaler value (MSB)
The prescaler value divides the CK_PSC clock frequency. The counter clock frequency fCK_CNT is
equal to fCK_PSC / (PSCR[15:0]+1). PSCR contain the value which is loaded in the active prescaler
register at each UEV (including when the counter is cleared through the UG bit of the TIM1_EGR
register or through the trigger controller when configured in trigger reset mode). A UEV must be
generated so that a new prescaler value can be taken into account.
76543210
PSC[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 PSC[7:0]: Prescaler value (LSB)
The prescaler value divides the CK_PSC clock frequency. The counter clock frequency fCK_CNT is
equal to fCK_PSC / (PSCR[15:0]+1). PSCR contains the value which is loaded in the active prescaler
register at each UEV (including when the counter is cleared through the UG bit of the TIM1_EGR
register or through the trigger controller when configured in trigger reset mode).
A UEV must be generated so that a new prescaler value can be taken into account.
16-bit advanced control timer (TIM1) RM0016
210/467 DocID14587 Rev 14
17.7.19 Auto-reload register high (TIM1_ARRH)
Address offset: 0x12
Reset value: 0xFF
17.7.20 Auto-reload register low (TIM1_ARRL)
Address offset: 0x13
Reset value: 0xFF
17.7.21 Repetition counter register (TIM1_RCR)
Address offset: 0x14
Reset value: 0x00
76543210
ARR[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 ARR[15:8]: Auto-reload value (MSB)
ARR is the value to be loaded in the actual auto-reload register. Refer to the Section 17.3: TIM1 time
base unit on page 141 for more details about ARR update and behavior. The counter is blocked
while the auto-reload value is null.
76543210
ARR[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 ARR[7:0]: Auto-reload value (LSB).
76543210
REP[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 REP[7:0]: Repetition counter value.
When the preload registers are enabled, these bits allow the user to set up the update rate of the
compare registers (periodic transfers from preload to shadow registers) as well as the update
interrupt generation rate if the update interrupt is enabled (UIE=1).
Each time the REP_CNT related down-counter reaches zero, a UEV is generated and it restarts
counting from the REP value. As REP_CNT is reloaded with the REP value only at the repetition
update event U_RC, any write to the TIM1_RCR register is not taken into account until the next
repetition update event.
In PWM mode (REP+1) corresponds to:
– The number of PWM periods in edge-aligned mode
– The number of half PWM periods in center-aligned mode
DocID14587 Rev 14 211/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.22 Capture/compare register 1 high (TIM1_CCR1H)
Address offset: 0x15
Reset value: 0x00
17.7.23 Capture/compare register 1 low (TIM1_CCR1L)
Address offset: 0x16
Reset value: 0x00
76543210
CCR1[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR1[15:8]: Capture/compare 1 value (MSB)
If the CC1 channel is configured as output (CC1S bits in TIM1_CCMR1 register):
The value of CCR1 is loaded permanently into the actual capture/compare 1 register if the preload
feature is enabled (OC1PE bit in TIMx_CCMR1). Otherwise, the preload value is copied in the active
capture/compare 1 register when a UEV occurs. The active capture/compare register contains the
value which is compared to the counter register, TIMx_CNT, and signalled on the OC1 output.
If the CC1 channel is configured as input (CC1S bits in TIM1_CCMR1 register):
The value of CCR1 is the counter value transferred by the last input capture 1 event (IC1). In this
case, these bits are read only.
76543210
CCR1[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR1[7:0]: Capture/compare 1 value (LSB)
16-bit advanced control timer (TIM1) RM0016
212/467 DocID14587 Rev 14
17.7.24 Capture/compare register 2 high (TIM1_CCR2H)
Address offset: 0x17
Reset value: 0x00
17.7.25 Capture/compare register 2 low (TIM1_CCR2L)
Address offset: 0x18
Reset value: 0x00
76543210
CCR2[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR2[15:8]: Capture/compare 2 value (MSB)
If the CC2 channel is configured as output (CC2S bits in TIM1_CCMR2 register):
The value of CCR2 is loaded permanently into the actual capture/compare 2 register if the preload
feature is not enabled (OC2PE bit in TIM1_CCMR2). Otherwise, the preload value is copied in the
active capture/compare 2 register when a UEV occurs.The active capture/compare register contains
the value which is compared to the counter register, TIM1_CNT, and signalled on the OC2 output.
If the CC2 channel is configured as input (CC2S bits in TIM1_CCMR2 register):
The value of CCR2 is the counter value transferred by the last input capture 2 event (IC2). In this
case, these bits are read only.
76543210
CCR2[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR2[7:0]: Capture/compare value (LSB)
DocID14587 Rev 14 213/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.26 Capture/compare register 3 high (TIM1_CCR3H)
Address offset: 0x19
Reset value: 0x00
17.7.27 Capture/compare register 3 low (TIM1_CCR3L)
Address offset: 0x1A
Reset value: 0x00
76543210
CCR3[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR3[15:8]: Capture/compare value (MSB)
If the CC3 channel is configured as output (CC3S bits in TIM1_CCMR3 register):
The value of CCR3 is loaded permanently into the actual capture/compare 3 register if the preload
feature is not enabled (OC3PE bit in TIM1_CCMR3). Otherwise, the preload value is copied in the
active capture/compare 3 register when a UEV occurs.The active capture/compare register contains
the value which is compared to the counter register, TIM1_CNT, and signalled on the OC3 output.
If the CC3 channel is configured as input (CC3S bits in TIM1_CCMR3 register):
The value of CCR3 is the counter value transferred by the last input capture 3 event (IC31).
76543210
CCR3[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR3[7:0]: Capture/compare value (LSB)
16-bit advanced control timer (TIM1) RM0016
214/467 DocID14587 Rev 14
17.7.28 Capture/compare register 4 high (TIM1_CCR4H)
Address offset: 0x1B
Reset value: 0x00
17.7.29 Capture/compare register 4 low (TIM1_CCR4L)
Address offset: 0x1C
Reset value: 0x00
76543210
CCR4[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR4[15:8]: Capture/compare value (MSB)
If the CC4 channel is configured as output (CC4S bits in TIM1_CCMR4 register):
The value of CCR4 is loaded permanently into the actual capture/compare 4 register if the preload
feature is not enabled (OC4PE bit in TIM1_CCMR4). Otherwise, the preload value is copied in the
active capture/compare 4 register when a UEV occurs.The active capture/compare register contains
the value which is compared to the counter register, TIM1_CNT, and signalled on the OC4 output.
If the CC4 channel is configured as input (CC4S bits in TIM1_CCMR4 register):
The value of CCR4 is the counter value transferred by the last input capture 4 event (IC4).
76543210
CCR4[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR4[7:0]: Capture/compare value (LSB)

DocID14587 Rev 14 215/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.30 Break register (TIM1_BKR)
Address offset: 0x1D
Reset value: 0x00
76543210
MOE AOE BKP BKE OSSR OSSI LOCK
rw rw rw rw rw rw rw rw
Bit 7 MOE: Main output enable
This bit is cleared asynchronously by hardware as soon as the break input is active. It is set by
software or automatically depending on the AOE bit. It acts only on the channels which are
configured in output.
0: OC and OCN outputs are disabled or forced to idle state
1: OC and OCN outputs are enabled if their respective enable bits are set (CCiE in TIM1_CCERi
registers).
See OC/OCN enable description for more details (Section 17.7.13 on page 205).
Bit 6 AOE: Automatic output enable
0: MOE can be set only by software
1: MOE can be set by software or automatically at the next UEV (if the break input is not active)
Note: This bit can no longer be modified while LOCK level 1 has been programmed (LOCK bits in the
TIM1_BKR register).
Bit 5 BKP: Break polarity
0: Break input BKIN is active low
1: Break input BKIN is active high
Note: This bit can no longer be modified while LOCK level 1 has been programmed (LOCK bits in the
TIM1_BKR register).
Bit 4 BKE: Break enable
0: Break input (BKIN) disabled
1: Break input (BKIN) enabled
Note: This bit can no longer be modified while LOCK level 1 has been programmed (LOCK bits in the
TIM1_BKR register).

16-bit advanced control timer (TIM1) RM0016
216/467 DocID14587 Rev 14
Note: As the bits AOE, BKP, BKE, OSSR, and OSSI can be write-locked depending on the LOCK
configuration, it is necessary to configure all of them during the first write access to the
TIM1_BKR register.
Bit 3 OSSR: Off state selection for Run mode
This bit is used when MOE = 1 on channels with a complementary output which are configured as
outputs. See OC/OCN enable description for more details (Section 17.7.13).
0: When inactive, OC/OCN outputs are disabled (OC/OCN enable output signal = 0)
1: When inactive, OC/OCN outputs are enabled with their inactive level as soon as CCiE = 1 or
CCiNE = 1, after which the OC/OCN enable output signal = 1
Note: This bit can no longer be modified while LOCK level 2 has been programmed (LOCK bits in
TIM1_BKR register).
Bit 2 OSSI: Off state selection for idle mode
This bit is used when MOE = 0 on channels configured as outputs. See OC enable description for
more details (Section 17.7.13).
0: When inactive, OCi outputs are disabled (OCi enable output signal = 0)
1: When inactive, OCi outputs are forced first with their idle level as soon as CCiE = 1 (OC enable
output signal = 1)
Note: This bit can no longer be modified while LOCK level 2 has been programmed (LOCK bits in the
TIM1_BKR register).
Bits 1:0 LOCK[1:0]: Lock configuration
These bits offer a write protection against software errors.
00: LOCK off - No bits are write protected
01: LOCK level 1 - OISi bit in TIM1_OISR register and BKE/BKP/AOE bits in TIM1_BKR register can
no longer be written.
10: LOCK level 2 - LOCK level 1 + CC polarity bits (CCiP bits in TIM1_CCERi registers, as long as
the related channel is configured in output through the CCiS bits) as well as the OSSR and OSSI
bits can no longer be written.
11: LOCK Level 3 - LOCK level 2 + CC control bits (OCiM and OCiPE bits in TIM1_CCMRi registers,
as long as the related channel is configured in output through the CCiS bits) can no longer be
written.
Note: The LOCK bits can be written only once after reset. Once the TIM1_BKR register has been
written, their content is frozen until the next reset.

DocID14587 Rev 14 217/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.31 Deadtime register (TIM1_DTR)
Address offset: 0x1E
Reset value: 0x00
76543210
DTG7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 DTG[7:0]: Deadtime generator set-up
This bitfield defines the duration of the deadtime inserted between the complementary outputs. DT
corresponds to this duration. tCK_PSC is the TIM1 clock pulse.
DTG[7:5] = 0xx => DT= DTG[7:0] x tdtg with tdtg = tCK_PSC (f1)
DTG[7:5] = 10x => DT= (64 + DTG[5:0]) x tdtg with tdtg= 2 x tCK_PSC (f2)
DTG[7:5] = 110 => DT = (32 + DTG[4:0]) x tdtg with tdtg= 8 x tCK_PSC (f3)
DTG[7:5] = 111 => DT = (32 + DTG[4:0]) x tdtg with tdtg = 16 x tCK_PSC (f4)
Example
If tCK_PSC= 125 ns (8 MHz), deadtime possible values are:
DTG[7:0] = 0 x 0 to 0 x 7F from 0 to 15875 ns in 125 ns steps (refer to f1)
DTG[7:0] = 0 x 80 to 0 x BF from 16 µs to 31750 ns in 250 ns steps (refer to f2)
DTG[7:0] = 0 x C0 to 0 x DF from 32 µs to 63 µs in 1µs steps (refer to f3)
DTG[7:0] = 0 x E0 to 0 x FF from 64 µs to 126 µs in 2 µs steps (refer to f4)
Note: This bitfield can not be modified while LOCK level 1, 2, or 3 have been programmed (LOCK bits
in the TIM1_BKR register).

16-bit advanced control timer (TIM1) RM0016
218/467 DocID14587 Rev 14
17.7.32 Output idle state register (TIM1_OISR)
Address offset: 0x1F
Reset value: 0x00
76543210
Reserved OIS4 OIS3N OIS3 OIS2N OIS2 OIS1N OIS1
r rwrwrwrwrwrwrw
Bit 7 Reserved, forced by hardware to 0
Bit 6 OIS4: Output idle state 4 (OC4 output)
Refer to OIS1 bit
Bit 5 OIS3N: Output idle state 3 (OC3N output)
Refer to OIS1N bit
Bit 4 OIS3: Output idle state 3 (OC3 output)
Refer to OIS1 bit
Bit 3 OIS2N: Output idle state 2 (OC2N output)
Refer to OIS1N bit
Bit 2 OIS2: Output idle state 2 (OC2 output)
Refer to OIS1 bit
Bit 1 OIS1N: Output idle state 1 (OC1N output).
0: OC1N = 0 after a deadtime when MOE = 0
1: OC1N = 1 after a deadtime when MOE = 0
Note: This bit can no longer be modified while LOCK level 1, 2 or 3 have been programmed (LOCK
bits in the TIM1_BKR register).
Bit 0 OIS1: Output idle state 1 (OC1 output).
0: OC1=0 (after a deadtime if OC1N is implemented) when MOE=0
1: OC1=1 (after a deadtime if OC1N is implemented) when MOE=0
Note: This bit can no longer be modified while LOCK level 1, 2 or 3 have been programmed (LOCK
bits in the TIM1_BKR register).
DocID14587 Rev 14 219/467
RM0016 16-bit advanced control timer (TIM1)
261
17.7.33 TIM1 register map and reset values
Table 39. TIM1 register map
Address
offset
Register
name 76543210
0x00 TIM1_CR1
Reset value
ARPE
0
CMS1
0
CMS0
0
DIR
0
OPM
0
URS
0
UDIS
0
CEN
0
0x01 TIM1_CR2
Reset value
-
0
MMS2
0
MMS1
0
MMS0
0
-
0
COMS
0
-
0
CCPC
0
0x02 TIM1_SMCR
Reset value
MSM
0
TS2
0
TS1
0
TS0
0
-
0
SMS2
0
SMS1
0
SMS0
0
0x03 TIM1_ETR
Reset value
ETP
0
ECE
0
ETPS1
0
ETPS0
0
EFT3
0
EFT2
0
EFT1
0
EFT0
0
0x04 TIM1_IER
Reset value
BIE
0
TIE
0
COMIE
0
CC4IE
0
CC3IE
0
CC2IE
0
CC1IE
0
UIE
0
0x05 TIM1_SR1
Reset value
BIF
0
TIF
0
COMIF
0
CC4IF
0
CC3IF
0
CC2IF
0
CC1IF
0
UIF
0
0x06 TIM1_SR2
Reset value
-
0
-
0
-
0
CC4OF
0
CC3OF
0
CC2OF
0
CC1OF
0
-
0
0x07 TIM1_EGR
Reset value
BG
0
TG
0
COMG
0
CC4G
0
CC3G
0
CC2G
0
CC1G
0
UG
0
0x08
TIM1_CCMR1
(output mode)
Reset value
OC1CE
0
OC1M2
0
OC1M1
0
OC1M0
0
OC1PE
0
OC1FE
0
CC1S1
0
CC1S0
0
TIM1_CCMR1
(input mode)
Reset value
IC1F3
0
IC1F2
0
IC1F1
0
IC1F0
0
IC1PSC
1
0
IC1PSC
0
0
CC1S1
0
CC1S0
0
0x09
TIM1_ CCMR2
(output mode)
Reset value
OC2CE
0
OC2M2
0
OC2M1
0
OC2M0
0
OC2PE
0
OC2FE
0
CC2S1
0
CC2S0
0
TIM1_CCMR2
(input mode)
Reset value
IC2F3
0
IC2F2
0
IC2F1
0
IC2F0
0
IC2PSC
1
0
IC2PSC
0
0
CC2S1
0
CC2S0
0
0x0A
TIM1_CCMR3
(output mode)
Reset value
OC3CE
0
OC3M2
0
OC3M1
0
OC3M0
0
OC3PE
0
OC3FE
0
CC3S1
0
CC3S0
0
TIM1_CCMR3
(input mode)
Reset value
IC3F3
0
IC3F2
0
IC3F1
0
IC3F0
0
IC3PSC
1
0
IC3PSC
0
0
CC3S1
0
CC3S0
0
16-bit advanced control timer (TIM1) RM0016
220/467 DocID14587 Rev 14
0x0B
TIM1_CCMR4
(output mode)
Reset value
OC4CE
0
OC4M2
0
OC4M1
0
OC4M0
0
OC4PE
0
OC4FE
0
CC4S1
0
CC4S0
0
TIM1_CCMR4
(input mode)
Reset value
IC4F3
0
IC4F2
0
IC4F1
0
IC4F0
0
IC4PSC
1
0
IC4PSC
0
0
CC4S1
0
CC4S0
0
0x0C TIM1_CCER1
Reset value
CC2NP
0
CC2NE
0
CC2P
0
CC2E
0
CC1NP
0
CC1NE
0
CC1P
0
CC1E
0
0x0D TIM1_CCER2
Reset value
-
0
-
0
CC4P
0
CC4E
0
CC3NP
0
CC3NE
0
CC3P
0
CC3E
0
0x0E TIM1_CNTRH
Reset value
CNT15
0
CNT14
0
CNT13
0
CNT12
0
CNT11
0
CNT10
0
CNT9
0
CNT8
0
0x0F TIM1_CNTRL
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x10 TIM1_PSCRH
Reset value
PSC15
0
PSC14
0
PSC13
0
PSC12
0
PSC11
0
PSC10
0
PSC9
0
PSC8
0
0x11 TIM1_PSCRL
Reset value
PSC7
0
PSC6
0
PSC5
0
PSC4
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
0x12 TIM1_ARRH
Reset value
ARR15
1
ARR14
1
ARR13
1
ARR12
1
ARR11
1
ARR10
1
ARR9
1
ARR8
1
0x13 TIM1_ARRL
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1
0x14 TIM1_RCR
Reset value
REP7
0
REP6
0
REP5
0
REP4
0
REP3
0
REP2
0
REP1
0
REP0
0
0x15 TIM1_CCR1H
Reset value
CCR115
0
CCR114
0
CCR113
0
CCR112
0
CCR111
0
CCR110
0
CCR19
0
CCR18
0
0x16 TIM1_CCR1L
Reset value
CCR17
0
CCR16
0
CCR15
0
CCR14
0
CCR13
0
CCR12
0
CCR11
0
CCR10
0
0x17 TIM1_CCR2H
Reset value
CCR215
0
CCR214
0
CCR213
0
CCR212
0
CCR211
0
CCR210
0
CCR29
0
CCR28
0
0x18 TIM1_CCR2L
Reset value
CCR27
0
CCR26
0
CCR25
0
CCR24
0
CCR23
0
CCR22
0
CCR21
0
CCR20
0
0x19 TIM1_CCR3H
Reset value
CCR315
0
CCR314
0
CCR313
0
CCR312
0
CCR311
0
CCR310
0
CCR39
0
CCR38
0
0x1A TIM1_CCR3L
Reset value
CCR37
0
CCR36
0
CCR35
0
CCR34
0
CCR33
0
CCR32
0
CCR31
0
CCR30
0
0x1B TIM1_CCR4H
Reset value
CCR415
0
CCR414
0
CCR413
0
CCR412
0
CCR411
0
CCR410
0
CCR49
0
CCR48
0
0x1C TIM1_CCR4L
Reset value
CCR47
0
CCR46
0
CCR45
0
CCR44
0
CCR43
0
CCR42
0
CCR41
0
CCR40
0
Table 39. TIM1 register map (continued)
Address
offset
Register
name 76543210
DocID14587 Rev 14 221/467
RM0016 16-bit advanced control timer (TIM1)
261
0x1D TIM1_BKR
Reset value
MOE
0
AOE
0
BKP
0
BKE
0
OSSR
0
OSSI
0
LOCK
0
LOCK
0
0x1E TIM1_DTR
Reset value
DTG7
0
DTG6
0
DTG5
0
DTG4
0
DTG3
0
DTG2
0
DTG1
0
DTG0
0
0x1F TIM1_OISR
Reset value
-
0
OIS4
0
OIS3N
0
OIS3
0
OIS2N
0
OIS2
0
OIS1N
0
OIS1
0
Table 39. TIM1 register map (continued)
Address
offset
Register
name 76543210

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
222/467 DocID14587 Rev 14
18 16-bit general purpose timers (TIM2, TIM3, TIM5)
18.1 TIM2, TIM3 and TIM5 introduction
This chapter describes TIM2, TIM3 and TIM5 which are identical timers, with the exception
that TIM2 has three channels and TIM3 has two channels. TIM5 is also described below. It
is identical to TIM2 except that it has two additional registers to support timer
synchronization and chaining.
Each timer consists of a 16-bit up-counting auto-reload counter driven by a programmable
prescaler.
It may be used for a variety of purposes, including:
•Time base generation
•Measuring the pulse lengths of input signals (input capture)
•Generating output waveforms (output compare, PWM and One-pulse mode)
•Interrupt capability on various events (capture, compare, overflow)
•Synchronization with other timers or external signals (external clock, reset, trigger and
enable) (in devices with TIM5).
The timer clock can be sourced from internal clocks.
Only the main features of the general purpose timers are given in this chapter.
Refer to the corresponding paragraphs of Section 17: 16-bit advanced control timer (TIM1)
on page 138 for more details on each feature.
18.2 TIM2/TIM3 main features
TIM2/TIM3 features include:
•16-bit up counting auto-reload counter.
•4-bit programmable prescaler allowing the counter clock frequency to be divided “on
the fly” by any power of 2 from 1 to 32768.
•3 independent channels for:
– Input capture
– Output compare
– PWM generation (edge-aligned mode)
•Interrupt request generation on the following events:
– Update: counter overflow, counter initialization (by software)
– Input capture
– Output compare
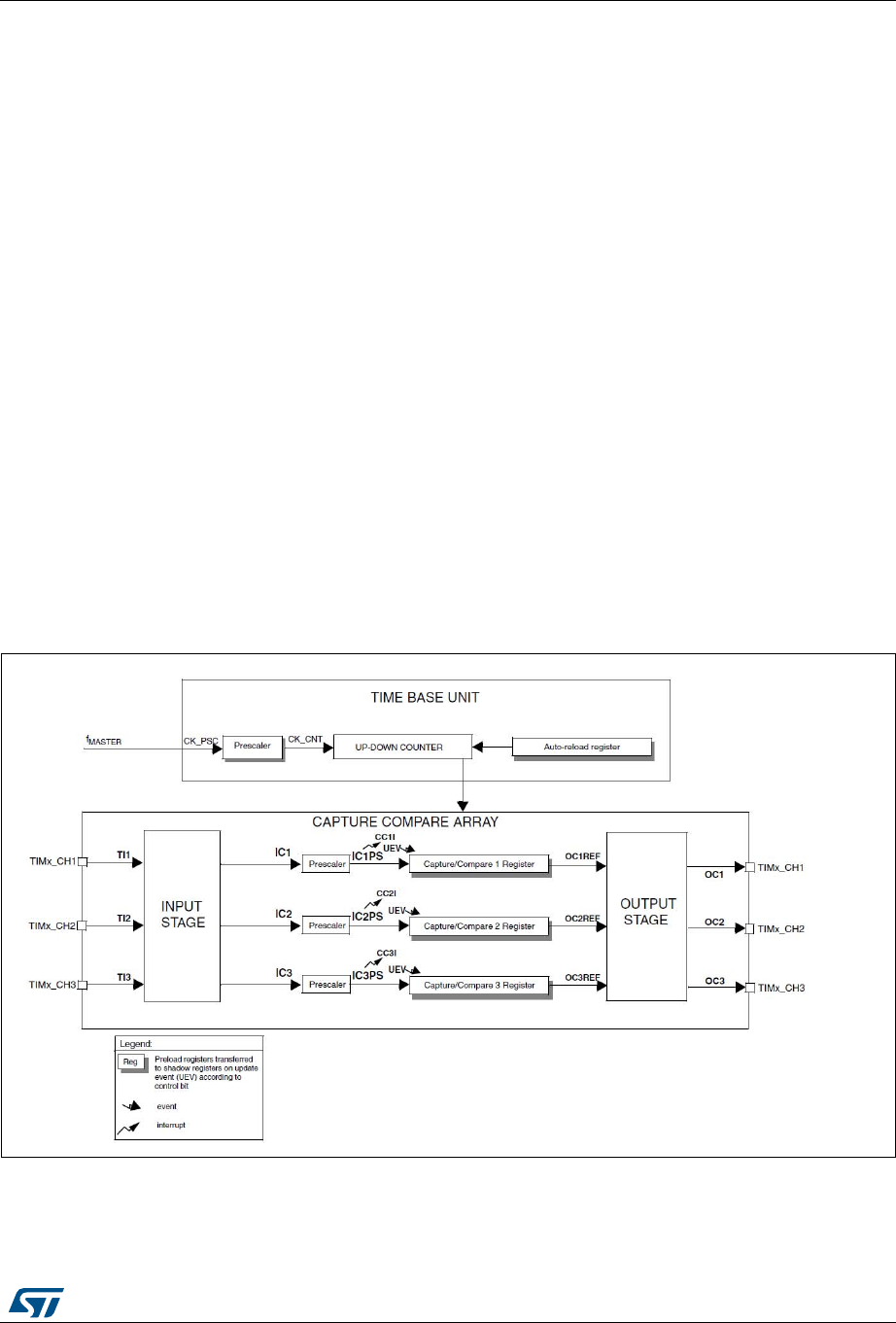
DocID14587 Rev 14 223/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.3 TIM5 main features
TIM5 features include:
•16-bit up counting auto-reload counter.
•4-bit programmable prescaler allowing the counter clock frequency to be divided “on
the fly” by any power of 2 from 1 to 32768.
•3 independent channels for:
– Input capture
– Output compare
– PWM generation (edge-aligned mode)
– One-pulse mode output
•Synchronization circuit to control the timer with external signals and to interconnect
several timers (See Section 17.4.6 on page 159)
•External trigger input TIM1_ETR (shared with TIM1)
•Interrupt generation on the following events:
– Update: counter overflow, counter initialization (by software)
– Input capture
– Output compare
18.4 TIM2/TIM3/TIM5 functional description
Figure 82. TIM2/TIM3 block diagram
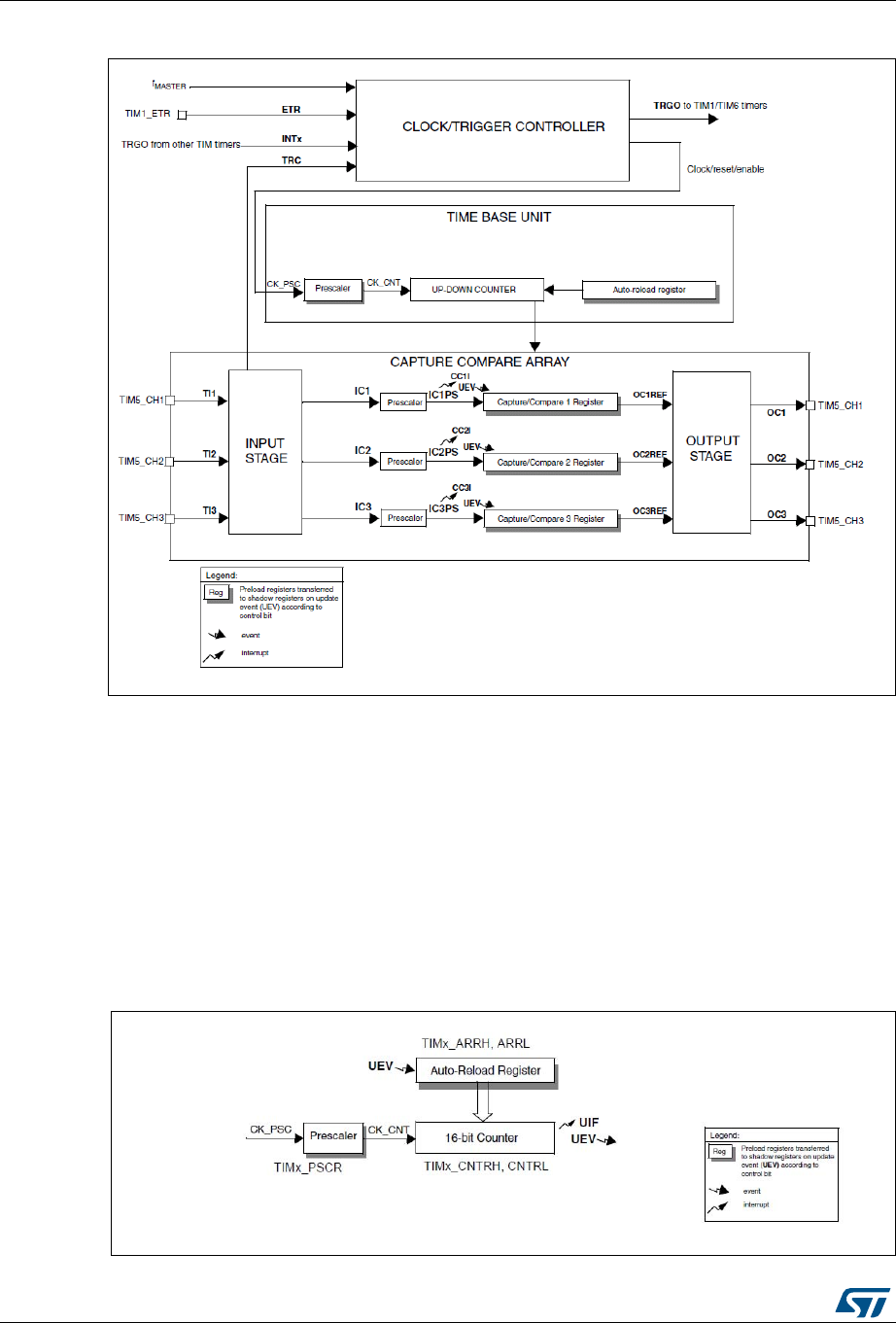
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
224/467 DocID14587 Rev 14
Figure 83. TIM5 block diagram
18.4.1 Time base unit
The timer has a time base unit that includes:
•16-bit up counter
•16-bit auto-reload register
•4-bit programmable prescaler
There is no repetition counter.
The clock source for is the internal clock (fMASTER). It is connected directly to the CK_PSC
clock that feeds the prescaler driving the counter clock CK_CNT.
Figure 84. Time base unit

DocID14587 Rev 14 225/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
For more details refer to Section 17.3: TIM1 time base unit on page 141.
Prescaler
The prescaler implementation is as follows:
•The prescaler is based on a 16-bit counter controlled through a 4-bit register (in the
TIMx_PSCR register). It can be changed on the fly as this control register is buffered. It
can divide the counter clock frequency by any power of 2 from 1 to 32768.
The counter clock frequency is calculated as follows:
fCK_CNT = fCK_PSC/2(PSCR[3:0])
The prescaler value is loaded through a preload register. The shadow register, which
contains the current value to be used is loaded as soon as the LS Byte has been written.
The new prescaler value is taken into account in the following period (after the next counter
update event).
Read operations to the TIMx_PSCR registers access the preload registers, so no special
care needs to be taken to read them.
Counter operation
Refer to Section 17.3.4: Up-counting mode on page 143.
18.4.2 Clock/trigger controller
A clock/trigger controller and the associated TIMx_CR2 and TIMx_SMCR registers are not
implemented in TIM2/TIM3, only in TIM5. Refer to Section 17.4: TIM1 clock/trigger
controller on page 151
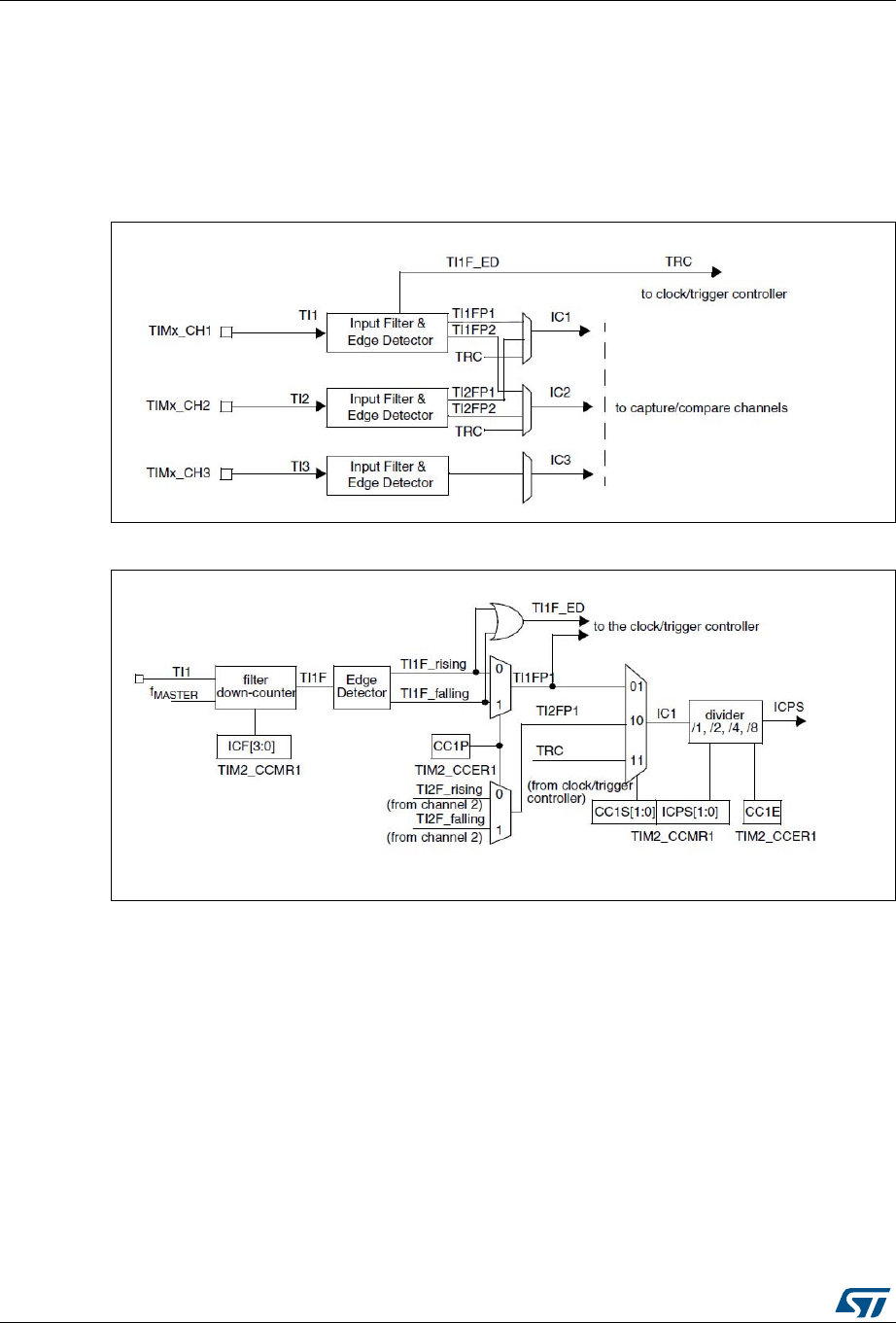
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
226/467 DocID14587 Rev 14
18.4.3 Capture/compare channels
Input stage
Refer to Section 17.5: TIM1 capture/compare channels on page 166.
There are two input channels, as shown in Figure 85: Input stage block diagram.
Figure 85. Input stage block diagram
Figure 86. Input stage of TIM 2 channel 1
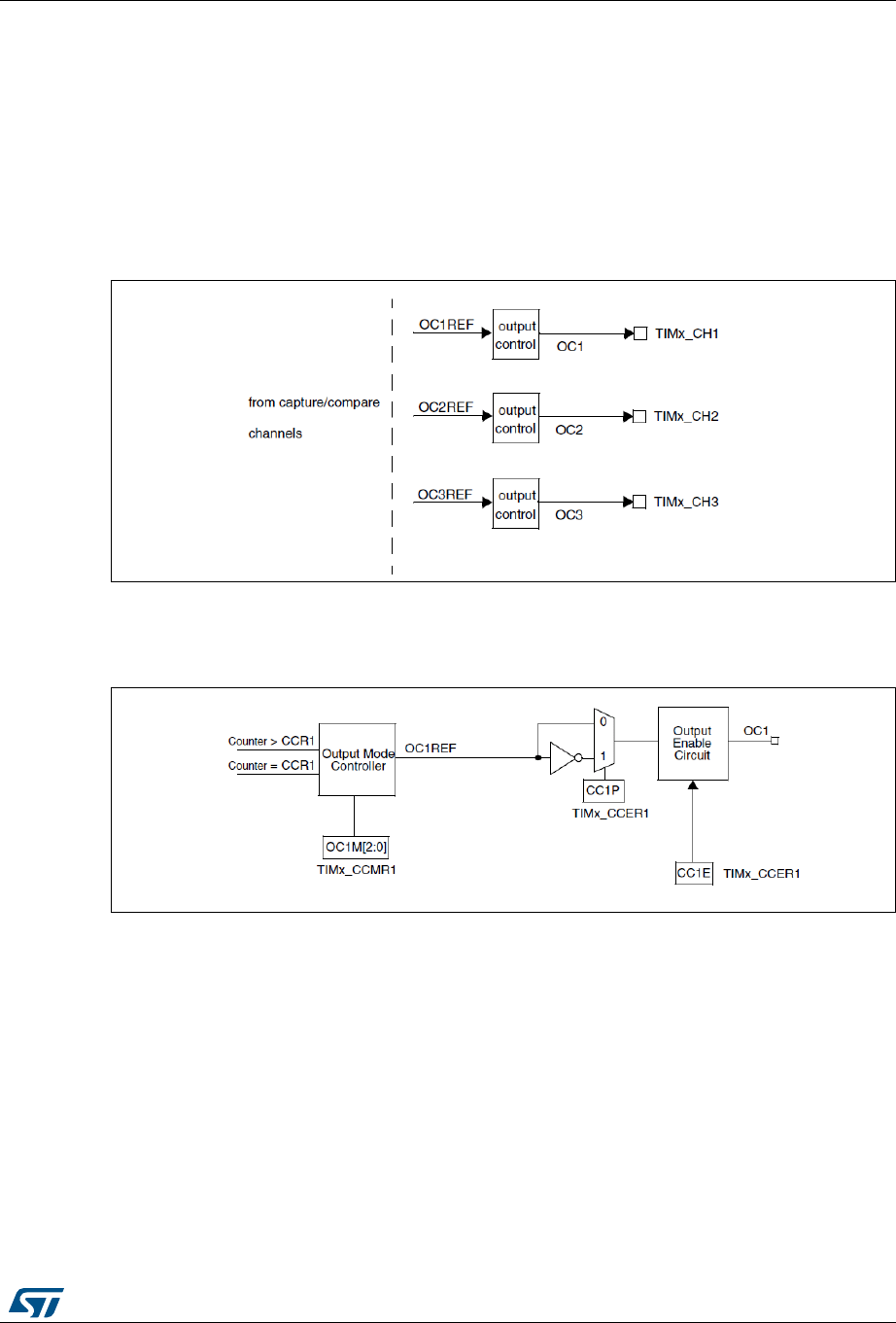
DocID14587 Rev 14 227/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
Output stage
Refer to Section 17.5.4: Output stage on page 171, Section 17.5.5: Forced output mode on
page 172, Section 17.5.7: PWM mode on page 174.
Note: As the clock/trigger controller and the associated TIMx_CR2 and TIMx_SMCR registers are
not implemented in TIM2/TIM3, the one-pulse mode (described in Section 17.5.7: PWM
mode) is not available in TIM2/TIM3.
As shown in Figure 87. TIMx outputs have no deadtime or complementary outputs.
Figure 87. Output stage
The output stage generates an intermediate waveform which is then used for reference:
OCxREF (active high). Polarity acts at the end of the chain (see Figure 88).
Figure 88. Output stage of channel 1

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
228/467 DocID14587 Rev 14
18.5 TIM2/TIM3/TIM5 interrupts
The timers have 4 interrupt request sources:
•Capture/compare 3 interrupt
•Capture/compare 2 interrupt
•Capture/compare 1 interrupt
•Update interrupt
•Trigger interrupt (TIM5 only)
To use the interrupt features, for each interrupt channel used, set the desired CC3IE and/or
CC2IE and/or CC1IE bits in the TIMx_IER register to enable interrupt requests.
The different interrupt sources can be also generated by software using the corresponding
bits in the TIMx_EGR register.
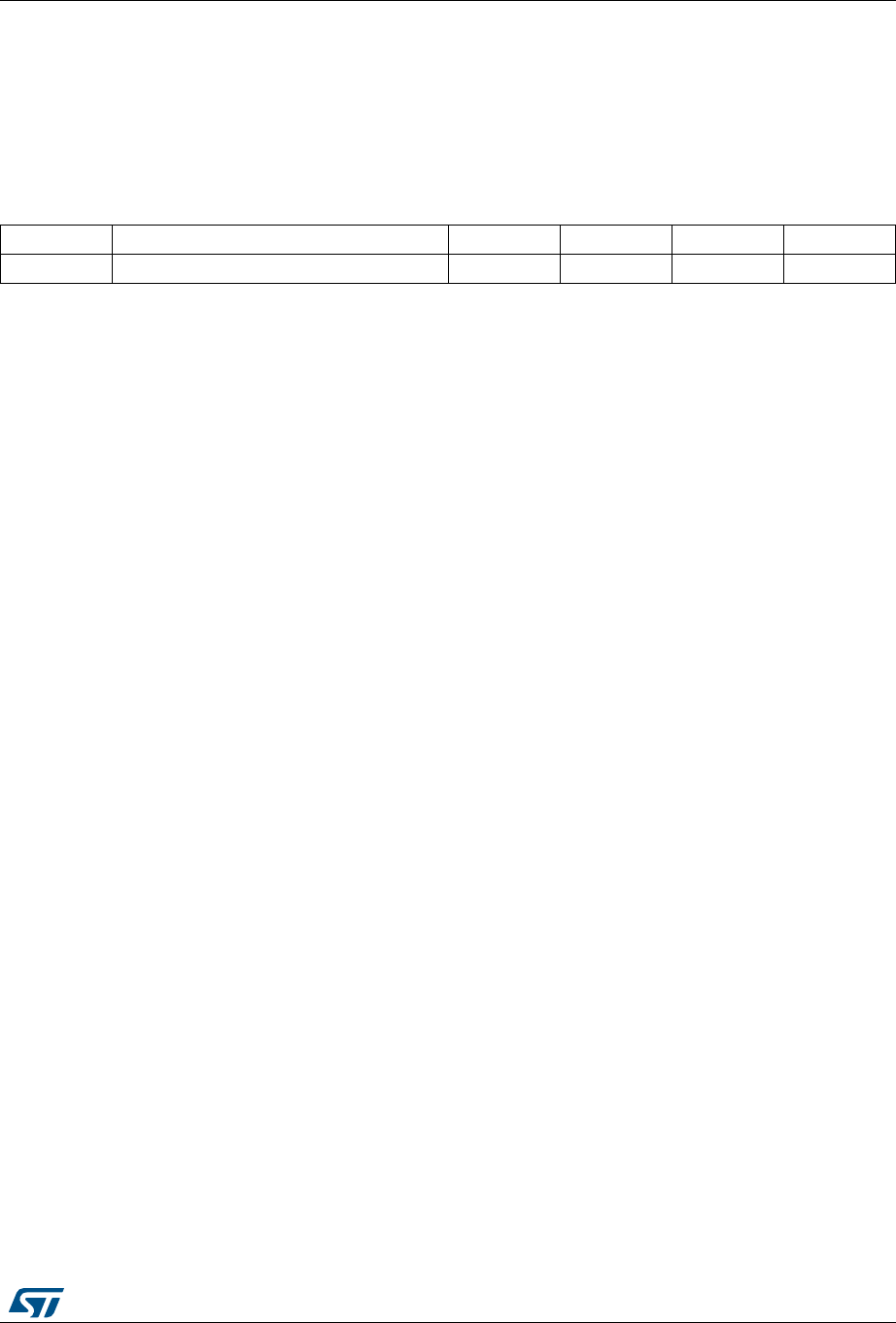
DocID14587 Rev 14 229/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6 TIM2/TIM3/TIM5 registers
18.6.1 Control register 1 (TIMx_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
ARPE Reserved OPM URS UDIS CEN
rw r rw rw rw rw
Bit 7 ARPE: Auto-reload preload enable
0: TIMx_ARR register is not buffered through a preload register. It can be written directly
1: TIMx_ARR register is buffered through a preload register
Bits 6:4 Reserved
Bit 3 OPM: One-pulse mode (1)
0: Counter is not stopped at update event
1: Counter stops counting at the next update event (clearing the CEN bit)
Bit 2 URS: Update request source
0: When enabled by the UDIS bit, the UIF bit is set and an update interrupt request is sent when one
of the following events occurs:
– Registers are updated (counter overflow/underflow)
– UG bit is set by software
– Update event is generated through the clock/trigger controller
1: When enabled by the UDIS bit, the UIF bit is set and an update interrupt request is sent only when
registers are updated (counter overflow/underflow).
Bit 1 UDIS: Update disable
0: A UEV is generated as soon as a counter overflow occurs or a software update is generated or an
hardware reset is generated by the clock/trigger mode controller. Buffered registers are then loaded
with their preload values.
1: A UEV is not generated, shadow registers keep their value (ARR, PSC, CCRi). The counter and
the prescaler are re-initialized if the UG bit is set.
Bit 0 CEN: Counter enable
0: Counter disabled
1: Counter enabled
1. One-pulse mode is not available on TIM2/TIM3 but the OPM bit can be used for other purposes (for example, to stop the
counter properly).

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
230/467 DocID14587 Rev 14
18.6.2 Control register 2 (TIM5_CR2)
Address offset: 0x01
Reset value: 0x00
Note: This register is only available in TIM5, see Table 42 on page 250.
76543210
Reserved MMS[2:0] Reserved
rrwrwrw r
Bit 7 Reserved, must be kept cleared
Bits 6:4 MMS[2:0]: Master mode selection
These bits select the information to be sent in master mode to TIM1 and TIM2for synchronization
(TRGO). The combination is as follows:
000: Reset - the UG bit from the TIM5_EGR register is used as a trigger output (TRGO). If the reset
is generated by the trigger input (clock/trigger mode controller configured in trigger reset mode), the
signal on TRGO is delayed compared to the actual reset.
001: Enable - the counter enable signal is used as a trigger output (TRGO). It is used to start several
timers at the same time or to control a window in which a slave timer is enabled. The counter enable
signal is generated by a logic OR between the CEN control bit and the trigger input when configured
in gated mode. When the counter enable signal is controlled by the trigger input, there is a delay on
TRGO, except if the master/slave mode is selected (see the MSM bit description in TIM5_SMCR
register).
010: Update - The update event is selected as a trigger output (TRGO)
011: Reserved
100: Reserved
101: Reserved
111: Reserved
Bits 3:0 Reserved, must be kept cleared

DocID14587 Rev 14 231/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.3 Slave mode control register (TIM5_SMCR)
Address offset: 0x02
Reset value: 0x00
Note: This register is only available in TIM5, see Table 42 on page 250.
76543210
MSM TS[2:0] Reserved SMS[2:0]
rw rw rw rw r rw rw rw
Bit 7 MSM Master/slave mode
0: No action
1: The effect of an event on the trigger input (TRGI) is delayed to allow a perfect synchronization
between timers (through TRGO).
Bits 6:4 TS[2:0] Trigger selection
This bit field selects the trigger input to be used to synchronize the counter.
000: Internal trigger ITR0 connected to TIM6 TRGO (*)
001: Internal trigger ITR1 connected to TIM6 TRGO (*)
010: Reserved
011: Reserved
100: Reserved
101: Reserved
110: Reserved
111: Reserved
(*) 8K low-density devices unless otherwise specified.
Note: These bits must only be changed when they are not used (e.g. when SMS = 000) to avoid
wrong edge detections at the transition.
Bit 3 Reserved.
Bits 2:0 SMS[2:0] Clock/trigger/slave mode selection
When external signals are selected, the active edge of the trigger signal (TRGI) is linked to the
polarity selected on the external input (see Input Control register and Control Register description).
000: Clock/trigger controller disabled - if CEN = 1 then the prescaler is clocked directly by the
internal clock.
001, 010 and 011: Reserved
100: Trigger reset mode - Rising edge of the selected trigger signal (TRGI) reinitializes the counter
and generates an update of the registers.
101: Gated mode - The counter clock is enabled when the trigger signal (TRGI) is high. The counter
stops (but is not reset) as soon as the trigger becomes low. Both the start and stop of the counter are
controlled.
110: Trigger mode - The counter starts at a rising edge of the trigger TRGI (but it is not reset). Only
the start of the counter is controlled.
111: External clock mode 1 - Rising edges of the selected trigger (TRGI) clock the counter

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
232/467 DocID14587 Rev 14
18.6.4 Interrupt enable register (TIMx_IER)
Address offset: 0x01 or 0x03 (TIM2), 0x01 (TIM3), 0x03 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
Reserved TIE Reserved CC3IE CC2IE CC1IE UIE
rrw r rw rw rw rw
Bits 7 Reserved
Bit 6 TIE: Trigger interrupt enable
0: Trigger interrupt disabled
1: Trigger interrupt enabled
Note: In TIM2/TIM3 this bit is reserved.
Bits 5:4 Reserved, must be kept cleared
Bit 3 CC3IE: Capture/compare 3 interrupt enable
0: CC3 interrupt disabled
1: CC3 interrupt enabled
Bit 2 CC2IE: Capture/compare 2 interrupt enable
0: CC2 interrupt disabled
1: CC2 interrupt enabled
Bit 1 CC1IE: Capture/compare 1 interrupt enable
0: CC1 interrupt disabled
1: CC1 interrupt enabled
Bit 0 UIE: Update interrupt enable
0: Update interrupt disabled
1: Update interrupt enabled

DocID14587 Rev 14 233/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.5 Status register 1 (TIMx_SR1)
Address offset: 0x02 or 0x04 (TIM2), 0x02 (TIM3), 0x04 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
Reserved TIF Reserved CC3IF CC2IF CC1IF UIF
r rc_w0 r rc_w0 rc_w0 rc_w0 rc_w0
Bit 7 Reserved
Bit 6 TIF: Trigger interrupt flag
This flag is set by hardware on a trigger event (active edge is detected on TRGI signal and both
edges are detected when gated mode is selected). It is cleared by software.
0: No trigger event has occurred
1: Trigger interrupt pending
Note: In TIM2/TIM3 this bit is reserved.
Bits 5:4 Reserved, must be kept cleared
BIt 3 CC3IF: Capture/compare 3 interrupt flag
Refer to CC1IF description.
Bit 2 CC2IF: Capture/compare 2 interrupt flag
Refer to CC1IF description.
Bit 1 CC1IF: Capture/compare 1 interrupt flag
If channel CC1 is configured as output:
This flag is set by hardware when the counter matches the compare value. It is cleared by software.
0: No match
1: The content of the counter TIMx_CNT has matched the content of the TIMx_CCR1 register
If channel CC1 is configured as input:
This bit is set by hardware on a capture. It is cleared by software or by reading the TIMx_CCR1L
register.
0: No input capture has occurred
1: The counter value has been captured in TIMx_CCR1 register (an edge has been detected on IC1
which matches the selected polarity).
Bit 0 UIF: Update interrupt flag
This bit is set by hardware on an update event. It is cleared by software.
0: No update has occurred
1: Update interrupt pending. This bit is set by hardware when the registers are updated:
– At overflow if UDIS = 0 in the TIMx_CR1 register
– When CNT is re-initialized by software using the UG bit in TIMx_EGR register, if URS = 0 and
UDIS = 0 in the TIMx_CR1 register.

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
234/467 DocID14587 Rev 14
18.6.6 Status register 2 (TIMx_SR2)
Address offset: 0x03 or 0x05 (TIM2), 0x03 (TIM3), 0x05 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
Reserved CC3OF CC2OF CC1OF Reserved
rrc_w0
rc_w0 rc_w0 r
Bits 7:4 Reserved
Bit 3 CC3OF: Capture/compare 3 overcapture flag
Refer to CC1OF description
Bit 2 CC2OF: Capture/compare 2 overcapture flag
Refer to CC1OF description
Bit 1 CC1OF: Capture/compare 1 overcapture flag
This flag is set by hardware only when the corresponding channel is configured in input capture
mode. It is cleared by software by writing it to 0.
0: No overcapture has been detected
1: The counter value has been captured in TIMx_CCR1 register while CC1IF flag was already set
Bit 0 Reserved, forced by hardware to 0

DocID14587 Rev 14 235/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.7 Event generation register (TIMx_EGR)
Address offset: 0x04 or 0x06 (TIM2), 0x04 (TIM3), 0x06 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
Reserved TG Reserved CC3G CC2G CC1G UG
r w r wwww
Bit 7 Reserved
Bit 6 TG: Trigger generation
This bit is set by software to generate an event. It is automatically cleared by hardware.
0: No action
1: The TIF flag is set in TIM5_SR1 register. An interrupt is generated if enabled by the TIE bit
Note: In TIM2/TIM3 this bit is reserved.
Bits 5:4 Reserved
Bit 3 CC3G: Capture/compare 3 generation
Refer to CC1G description
Bit 2 CC2G: Capture/compare 2 generation
Refer to CC1G description
Bit 1 CC1G: Capture/compare 1 generation
This bit is set by software to generate an even. It is automatically cleared by hardware.
0: No action
1: A capture/compare event is generated on channel 1:
– If the CC1 channel is configured in output mode. In this case, the CC1IF flag is set, and the
corresponding interrupt request is sent if enabled.
– If the CC1 channel configured in input mode. In this case, the current value of the counter is
captured in the TIMx_CCR1 register. The CC1IF flag is set, and the corresponding interrupt request
is sent if enabled. The CC1OF flag is set if the CC1IF flag is already high.
Bit 0 UG: Update generation
This bit can be set by software, it is automatically cleared by hardware.
0: No action
1: Re-initializes the counter and generates an update of the registers. Note that the prescaler
counter is also cleared.
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
236/467 DocID14587 Rev 14
18.6.8 Capture/compare mode register 1 (TIMx_CCMR1)
The channel can be used in input (capture mode) or in output (compare mode). The
direction of the channel is defined by configuring the CC1S bits. All the other bits of this
register have a different function in input and in output mode. For a given bit, OCi describes
its function when the channel is configured in output and ICi describes its function when the
channel is configured in input. Therefore, be aware that the same bit can have a different
meaning for the input stage and for the output stage.
Address offset: 0x05 or 0x07 (TIM2), 0x05 (TIM3), 0x07 (TIM5); for TIM2 address see
Section
Reset value: 0x00
Channel configured in output
76543210
Reserved OC1M[2:0] OC1PE Reserved CC1S[1:0]
rrw rw rw rw rrw rw
Bit 7 Reserved
Bits 6:4 OC1M[2:0]: Output compare 1 mode
These bits defines the behavior of the output reference signal OC1REF from which OC1 is derived.
OC1REF is active high whereas OC1 active level depends on the CC1P bit.
000: Frozen - The comparison between the output compare register TIMx_CCR1 and the counter
TIMx_CNT has no effect on the outputs
001: Set channel 1 to active level on match. OC1REF signal is forced high when the counter
TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1).
010: Set channel 1 to inactive level on match. OC1REF signal is forced low when the counter
TIMx_CNT matches the capture/compare register 1 (TIMx_CCR1).
011: Toggle - OC1REF toggles when TIMx_CNT=TIMx_CCR1
100: Force inactive level - OC1REF is forced low
101: Force active level - OC1REF is forced high
110: PWM mode 1 - In up-counting, channel 1 is active as long as TIMx_CNT< TIMx_CCR1.
Otherwise, channel 1 is inactive. In down-counting, channel 1 is inactive (OC1REF = 0) as long as
TIMx_CNT> TIMx_CCR1. Otherwise, channel 1 is active (OC1REF = 1).
111: PWM mode 2 - In up-counting, channel 1 is inactive as long as TIMx_CNT< TIMx_CCR1.
Otherwise, channel 1 is active.
Note: In PWM mode 1 or 2, the OCiREF level changes only when the result of the comparison
changes or when the output compare mode switches from “frozen” mode to “PWM” mode.
Refer to Section 17.5.7 on page 174 for more details.

DocID14587 Rev 14 237/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
Bit 3 OC1PE: Output compare 1 preload enable
0: Preload register on TIMx_CCR1 disabled. TIMx_CCR1 can be written at anytime. The new value
is taken into account immediately.
1: Preload register on TIMx_CCR1 enabled. Read/write operations access the preload register.
TIMx_CCR1 preload value is loaded in the shadow register at each update event.
Note: For correct operation, preload registers must be enabled when the timer is in PWM mode. This
is not mandatory in one-pulse mode (OPM bit set in TIMx_CR1 register).
Bit 2 Reserved
Bits 1:0 CC1S[1:0]: Capture/compare 1 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1FP1
10: CC1 channel is configured as input, IC1 is mapped on TI2FP1
11: CC1 channel is configured as input, IC1 is mapped on TRC. This mode works only if an internal
trigger input is selected through the TS bit (TIM5_SMCR register).
Note: CC1S bits are writable only when the channel is off (CC1E = 0 and is updated in
TIMx_CCER1).

16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
238/467 DocID14587 Rev 14
Channel configured in input
76543210
IC1F[3:0] IC1PSC[1:0] CC1S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC1F[3:0]: Input capture 1 filter
This bitfield defines the frequency used to sample TI1 input and the length of the digital filter applied
to TI1. The digital filter is made of an event counter in which N events are needed to validate a
transition on the output:
0000: No filter, sampling is done at fMASTER
0001: fSAMPLING= fMASTER, N = 2
0010: fSAMPLING= fMASTER, N = 4
0011: fSAMPLING= fMASTER, N = 8
0100: fSAMPLING= fMASTER/2, N = 6
0101: fSAMPLING= fMASTER/2, N = 8
0110: fSAMPLING= fMASTER/4, N = 6
0111: fSAMPLING= fMASTER/4, N = 8
1000: fSAMPLING= fMASTER/8, N = 6
1001: fSAMPLING= fMASTER/8, N = 8
1010: fSAMPLING= fMASTER/16, N = 5
1011: fSAMPLING= fMASTER/16, N = 6
1100: fSAMPLING= fMASTER/16, N = 8
1101: fSAMPLING= fMASTER/32, N = 5
1110: fSAMPLING= fMASTER/32, N = 6
1111: fSAMPLING= fMASTER/32, N = 8
Bits 3:2 IC1PSC[1:0]: Input capture 1 prescaler
This bitfield defines the ratio of the prescaler acting on CC1 input (IC1). The prescaler is reset as
soon as CC1E = 0 (TIMx_CCER register).
00: no prescaler, capture is done each time an edge is detected on the capture input
01: Capture is done once every 2 events
10: Capture is done once every 4 events
11: Capture is done once every 8 events
Note: The internal event counter is not reset when IC1PSC is changed on the fly. In this case the old
value is used until the next capture occurs. To force a new value to be taken in account
immediately, the CC1E bit can be cleared and set again.
Bits 1:0 CC1S[1:0]: Capture/compare 1 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC1 channel is configured as output
01: CC1 channel is configured as input, IC1 is mapped on TI1FP1
10: CC1 channel is configured as input, IC1 is mapped on TI2FP1
11: Reserved
Note: CC1S bits are writable only when the channel is OFF (CC1E = 0 in TIMx_CCER1 and
updated).
DocID14587 Rev 14 239/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.9 Capture/compare mode register 2 (TIMx_CCMR2)
Note: Refer to Capture/compare mode register 1 (TIMx_CCMR1) on page 236 for details on using
these bits.
Address offset: 0x06 or 0x08 (TIM2), 0x06 (TIM3), 0x08 (TIM5 ); for TIM2 address see
Section
Reset value: 0x00
Channel configured in output
76543210
Reserved OC2M[2:0] OC2PE Reserved CC2S[1:0]
rrw rw rw rw rrw
Bit 7 Reserved
Bits 6:4 OC2M[2:0]: Output compare 2 mode
Bit 3 OC2PE: Output compare 2 preload enable
Bit 2 Reserved
Bits 1:0 CC2S[1:0]: Capture/compare 2 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2FP2
10: CC2 channel is configured as input, IC2 is mapped on TI1FP2
11:CC2 channel is configured as input, IC2 is mapped on TRC. This mode works only if an internal
trigger input is selected through the TS bit (TIM5_SMCR register).
Note: CC2S bits are writable only when the channel is off (CC2E = 0 in TIMx_CCER1).
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
240/467 DocID14587 Rev 14
Channel configured in input
18.6.10 Capture/compare mode register 3 (TIMx_CCMR3)
Refer to Capture/compare mode register 1 (TIM1_CCMR1) on page 198 for details on using
these bits.
Address offset: 0x07 or 0x09 (TIM2), 0x09 (TIM5); for TIM2 address see Section
Reset value: 0x00
Channel configured in output
Note: This register is not available in TIM3.
76543210
IC2F[3:0] IC2PSC[1:0] CC2S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC2F[3:0]: Input capture 2 filter
Bits 3:2 IC2PCS[1:0]: Input capture 2 prescaler
Bits 1:0 CC2S[1:0]: Capture/compare 2 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC2 channel is configured as output
01: CC2 channel is configured as input, IC2 is mapped on TI2FP2
10: CC2 channel is configured as input, IC2 is mapped on TI1FP2
11: Reserved
Note: CC2S bits are writable only when the channel is off (CC2E = 0 in TIMx_CCER1).
76543210
Reserved OC3M[2:0] OC3PE Reserved CC3S[1:0]
r rw rw rw rw r rw rw
Bit 7 Reserved
Bits 6:4 OC3M[2:0]: Output compare 3 mode
Bit 3 OC3PE: Output compare 3 preload enable
Bit 2 Reserved
Bits 1:0 CC3S[1:0]: Capture/compare 3 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3FP3
10: Reserved
11: Reserved
Note: CC3S bits are writable only when the channel is off (CC3E = 0 in TIMx_CCER2).

DocID14587 Rev 14 241/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
Channel configured in input
Note: This register is not available in TIM3.
18.6.11 Capture/compare enable register 1 (TIMx_CCER1)
Address offset: 0x08 or 0x0A (TIM2), 0x07 (TIM3), 0x0A (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
IC3F[3:0] IC3PSC[1:0] CC3S[1:0]
rw rw rw rw rw rw rw rw
Bits 7:4 IC3F[3:0] Input capture 3 filter
Bits 3:2 IC3PSC(1:0]: Input capture 3 prescaler
Bits 1:0 CC3S[1:0]: Capture/compare 3 selection
This bitfield defines the direction of the channel (input/output) as well as the used input.
00: CC3 channel is configured as output
01: CC3 channel is configured as input, IC3 is mapped on TI3FP3
10: Reserved
11: Reserved
Note: CC3S bits are writable only when the channel is off (CC3E = 0 in TIMx_CCER2).
76543210
Reserved CC2P CC2E Reserved CC1P CC1E
r rw rw r rw rw
Bits 6:7 Reserved
Bit 5 CC2P: Capture/compare 2 output polarity
Refer to CC1P description
Bit 4 CC2E: Capture/compare 2 output enable
Refer to CC1E description.
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
242/467 DocID14587 Rev 14
18.6.12 Capture/compare enable register 2 (TIMx_CCER2)
Address offset: 0x09 or 0x0B (TIM2), 0x0B (TIM5); for TIM2 address see Section
Reset value: 0x00
Note: This register is not available in TIM3.
18.6.13 Counter high (TIMx_CNTRH)
Address offset: 0x0A or 0x0C (TIM2), 0x08 (TIM3), 0x0C (TIM5); for TIM2 address see
Section
Reset value: 0x00
Bits 2:3 Reserved
Bit 1 CC1P: Capture/compare 1 output polarity
CC1 channel configured as output:
0: OC1 active high
1: OC1 active low
CC1 channel configured as input for capture function (see Figure 64):
0: Capture is done on a rising edge of TI1F or TI2F
1: Capture is done on a falling edge of TI1F or TI2F
Bit 0 CC1E: Capture/Compare 1 output Enable.
CC1 channel configured as output:
0: Off - OC1 is not active.
1: On - OC1 signal is output on the corresponding output pin.
CC1 channel configured as input:
In this case, this bit determines if a capture of the counter value can be made in the input
capture/compare register 1 (TIMx_CCR1) or not.
0: Capture disabled
1: Capture enabled
76543210
Reserved CC3P CC3E
rrwrw
Bits 7:2 Reserved
Bit 1 CC3P: Capture/compare 3 output polarity
Refer to CC1P description.
Bit 0 CC3E: Capture/compare 3 output enable
Refer to CC1E description.
76543210
CNT[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CNT[15:8]: Counter value (MSB)

DocID14587 Rev 14 243/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.14 Counter low (TIMx_CNTRL)
Address offset: 0x0B or 0x0D (TIM2), 0x09 (TIM3), 0x0D (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
CNT[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CNT[7:0]: Counter value (LSB)
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
244/467 DocID14587 Rev 14
18.6.15 Prescaler register (TIMx_PSCR)
Address offset: 0x0C or 0x0E (TIM2), 0x0A (TIM3), 0x0E (TIM5); for TIM2 address see
Section
Reset value: 0x00
18.6.16 Auto-reload register high (TIMx_ARRH)
Address offset: 00x0D or 0x0F (TIM2), 0x0B (TIM3), 0x0F (TIM5); for TIM2 address see
Section
Reset value: 0xFF
76543210
Reserved PSC[3:0]
rrw
rw rw rw
Bits 7:3 Reserved
Bits 2:0 PSC[3:0]: Prescaler value
The prescaler value divides the CK_PSC clock frequency.
The counter clock frequency fCK_CNT is equal to fCK_PSC / 2(PSC[3:0]). PSC[7:4] are forced to 0 by
hardware.
PSCR contains the value which is loaded in the active prescaler register at each update event
(including when the counter is cleared through the UG bit of the TIMx_EGR register).
This means that a UEV must be generated so that a new prescaler value can be taken into account.
76543210
ARR[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 ARR[15:8]: Auto-reload value (MSB)
ARR is the value to be loaded in the actual auto-reload register.
Refer to the Section 17.3: TIM1 time base unit on page 141 for more details about ARR update and
behavior.
The counter is blocked while the auto-reload value is 0.
DocID14587 Rev 14 245/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.17 Auto-reload register low (TIMx_ARRL)
Address offset: 00x0E or 0x10 (TIM2), 0x0C (TIM3), 0x10 (TIM5); for TIM2 address see
Section
Reset value: 0xFF
18.6.18 Capture/compare register 1 high (TIMx_CCR1H)
Address offset: 00x0F or 0x11 (TIM2), 0x0D (TIM3), 0x11 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
ARR[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 ARR[7:0]: Auto-reload value (LSB)
76543210
CCR1[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR1[15:8]: Capture/compare 1 value (MSB)
If the CC1 channel is configured as output (CC1S bits in TIMx_CCMR1 register):
The value of CCR1 is loaded permanently into the actual capture/compare 1 register if the preload
feature is not enabled (OC1PE bit in TIMx_CCMR1). Otherwise, the preload value is copied in the
active capture/compare 1 register when a UEV occurs. The active capture/compare register
contains the value which is compared to the counter register, TIMx_CNT, and signalled on the OC1
output.
If the CC1 channel is configured as input (CC1S bits in TIMx_CCMR1 register):
The value of CCR1 is the counter value transferred by the last input capture 1 event (IC1). In this
case, these bits are read only.
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
246/467 DocID14587 Rev 14
18.6.19 Capture/compare register 1 low (TIMx_CCR1L)
Address offset: 00x10 or 0x12 (TIM2), 0x0E (TIM3), 0x12 (TIM5); for TIM2 address see
Section
Reset value: 0x00
18.6.20 Capture/compare register 2 high (TIMx_CCR2H)
Address offset: 00x11 or 0x13 (TIM2), 0x0F (TIM3), 0x13 (TIM5); for TIM2 address see
Section
Reset value: 0x00
18.6.21 Capture/compare register 2 low (TIMx_CCR2L)
Address offset: 00x12 or 0x14 (TIM2), 0x10 (TIM3), 0x14 (TIM5); for TIM2 address see
Section
Reset value: 0x00
76543210
CCR1[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR1[7:0]: Capture/compare 1 value (LSB)
76543210
CCR2[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR2[15:8]: Capture/compare 2 value (MSB)
If the CC2 channel is configured as output (CC2S bits in TIMx_CCMR2 register):
The value of CCR2 is loaded permanently into the actual capture/compare 2 register if the preload
feature is not enabled (OC2PE bit in TIMx_CCMR2). Otherwise, the preload value is copied in the
active capture/compare 2 register when a UEV occurs. The active capture/compare register
contains the value which is compared to the counter register, TIMx_CNT, and signalled on the OC2
output.
If the CC2 channel is configured as input (CC2S bits in TIMx_CCMR2 register):
The value of CCR2 is the counter value transferred by the last input capture 2 event (IC2).
76543210
CCR2[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR2[7:0]: Capture/compare value (LSB)

DocID14587 Rev 14 247/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
18.6.22 Capture/compare register 3 high (TIMx_CCR3H)
Address offset: 00x13 or 0x15 (TIM2), 0x15 (TIM5); for TIM2 address see Section
Reset value: 0x00
Note: This register is not available in TIM3.
18.6.23 Capture/compare register 3 low (TIMx_CCR3L)
Address offset: 00x14 or 0x16 (TIM2), 0x16 (TIM5); for TIM2 address see Section
Reset value: 0x00
Note: This register is not available in TIM3.
TIM2/TIM3/TIM5 register map and reset values
In some STM8S and STM8AF devices, TIM2 register locations at offset 0x01 and 0x02 are
reserved. In this case the TIM2_IER and subsequent registers in the TIM2 block are offset
by 2 more bytes. Refer to the datasheet for the product-specific register map.
76543210
CCR3[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR3[15:8]: Capture/compare value (MSB)
If the CC3 channel is configured as output (CC3S bits in TIMx_CCMR3 register):
The value of CCR3 is loaded permanently into the actual capture/compare 3 register if the preload
feature is not enabled (OC3PE bit in TIMx_CCMR3). Otherwise, the preload value is copied in the
active capture/compare 3 register when a UEV occurs. The active capture/compare register
contains the value which is compared to the counter register, TIMx_CNT, and signalled on the OC3
output.
If the CC3 channel is configured as input (CC3S bits in TIMx_CCMR3 register):
The value of CCR3 is the counter value transferred by the last input capture 3 event (IC3).
76543210
CCR3[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CCR3[7:0]: Capture/compare value (LSB)
Table 40. TIM2 register map
Address offset
(product
dependent)
Register
name 76543210
0x00 0x00 TIM2_CR1
Reset value
ARPE
0
-
0
-
0
-
0
OPM
0
URS
0
UDIS
0
CEN
0
- 0x01 Reserved
- 0x02 Reserved
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
248/467 DocID14587 Rev 14
0x01 0x03 TIM2_IER
Reset value
-
0
-
0
-
0
-
0
CC3IE
0
CC2IE
0
CC1IE
0
UIE
0
0x02 0x04 TIM2_SR1
Reset value
-
0
-
0
-
0
-
0
CC3IF
0
CC2IF
0
CC1IF
0
UIF
0
0x03 0x05 TIM2_SR2
Reset value
-
0
-
0
-
0
-
0
CC3OF
0
CC2OF
0
CC1OF
0
-
0
0x04 0x06 TIM2_EGR
Reset value
-
0
-
0
-
0
-
0
CC3G
0
CC2G
0
CC1G
0
UG
0
0x05 0x07
TIM2_CCMR
1
(output
mode)
Reset value
-
0
OC1M2
0
OC1M1
0
OC1M0
0
OC1PE
0
-
0
CC1S1
0
CC1S0
0
TIM2_CCMR
1
(input mode)
Reset value
IC1F3
0
IC1F2
0
IC1F1
0
IC1F0
0
IC1PSC
1
0
IC1PSC
0
0
CC1S1
0
CC1S0
0
0x06 0x08
TIM2_
CCMR2
(output
mode)
Reset value
-
0
OC2M2
0
OC2M1
0
OC2M0
0
OC2PE
0
-
0
CC2S1
0
CC2S0
0
TIM2_CCMR
2
(input mode)
Reset value
IC2F3
0
IC2F2
0
IC2F1
0
IC2F0
0
IC2PSC
1
0
IC2PSC
0
0
CC2S1
0
CC2S0
0
0x07 0x09
TIM2_CCMR
3
(output
mode)
Reset value
-
0
OC3M2
0
OC3M1
0
OC3M0
0
OC3PE
0
-
0
CC3S1
0
CC3S0
0
TIM2_CCMR
3
(input mode)
Reset value
IC3F3
0
IC3F2
0
IC3F1
0
IC3F0
0
IC3PSC
1
0
IC3PSC
0
0
CC3S1
0
CC3S0
0
0x08 0x0A
TIM2_CCER
1
Reset value
-
0
-
0
CC2P
0
CC2E
0
-
0
-
0
CC1P
0
CC1E
0
0x09 0x0B
TIM2_CCER
2
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
CC3P
0
CC3E
0
0x0A 0x0C
TIM2_CNTR
H
Reset value
CNT15
0
CNT14
0
CNT13
0
CNT12
0
CNT11
0
CNT10
0
CNT9
0
CNT8
0
Table 40. TIM2 register map (continued)
Address offset
(product
dependent)
Register
name 76543210
DocID14587 Rev 14 249/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
0x0B 0x0D
TIM2_CNTR
L
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x0C 0x0E TIM2_PSCR
Reset value
-
0
-
0
-
0
-
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
0x0D 0x0F TIM2_ARRH
Reset value
ARR15
1
ARR14
1
ARR13
1
ARR12
1
ARR11
1
ARR10
1
ARR9
1
ARR8
1
0x0E 0x10 TIM2_ARRL
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1
0x0F 0x11
TIM2_CCR1
H
Reset value
CCR115
0
CCR114
0
CCR113
0
CCR112
0
CCR111
0
CCR110
0
CCR19
0
CCR18
0
0x10 0x12
TIM2_CCR1
L
Reset value
CCR17
0
CCR16
0
CCR15
0
CCR14
0
CCR13
0
CCR12
0
CCR11
0
CCR10
0
0x11 0x13
TIM2_CCR2
H
Reset value
CCR215
0
CCR214
0
CCR213
0
CCR212
0
CCR211
0
CCR210
0
CCR29
0
CCR28
0
0x12 0x14
TIM2_CCR2
L
Reset value
CCR27
0
CCR26
0
CCR25
0
CCR24
0
CCR23
0
CCR22
0
CCR21
0
CCR20
0
0x13 0x15
TIM2_CCR3
H
Reset value
CCR315
0
CCR314
0
CCR313
0
CCR312
0
CCR311
0
CCR310
0
CCR39
0
CCR38
0
0x14 0x16
TIM2_CCR3
L
Reset value
CCR37
0
CCR36
0
CCR35
0
CCR34
0
CCR33
0
CCR32
0
CCR31
0
CCR30
0
Table 40. TIM2 register map (continued)
Address offset
(product
dependent)
Register
name 76543210
Table 41. TIM3 register map
Address
offset Register name76543210
0x00 TIM3_CR1
Reset value
ARPE
0
-
0
-
0
-
0
OPM
0
URS
0
UDIS
0
CEN
0
0x01 TIM3_IER
Reset value
-
00
-
0
-
0
-
0
CC2IE
0
CC1IE
0
UIE
0
0x02 TIM3_SR1
Reset value
-
00
-
0
-
0
-
0
CC2IF
0
CC1IF
0
UIF
0
0x03 TIM3_SR2
Reset value
-
0
-
0
-
0
-
0
-
0
CC2OF
0
CC1OF
0
-
0
0x04 TIM3_EGR
Reset value
-
00
-
0
-
0
-
0
CC2G
0
CC1G
0
UG
0
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
250/467 DocID14587 Rev 14
0x05
TIM3_CCMR1
(output mode)
Reset value
-
0
OC1M2
0
OC1M1
0
OC1M0
0
OC1PE
0
-
0
CC1S1
0
CC1S0
0
TIM3_CCMR1
(input mode)
Reset value
IC1F3
0
IC1F2
0
IC1F1
0
IC1F0
0
IC1PSC
1
0
IC1PSC
0
0
CC1S1
0
CC1S0
0
0x06
TIM3_ CCMR2
(output mode)
Reset value
-
0
OC2M2
0
OC2M1
0
OC2M0
0
OC2PE
0
-
0
CC2S1
0
CC2S0
0
TIM3_CCMR2
(input mode)
Reset value
IC2F3
0
IC2F2
0
IC2F1
0
IC2F0
0
IC2PSC
1
0
IC2PSC
0
0
CC2S1
0
CC2S0
0
0x07 TIM3_CCER1
Reset value
-
0
-
0
CC2P
0
CC2E
0
-
0
-
0
CC1P
0
CC1E
0
0x08 TIM3_CNTRH
Reset value
CNT15
0
CNT14
0
CNT13
0
CNT12
0
CNT11
0
CNT10
0
CNT9
0
CNT8
0
0x09 TIM3_CNTRL
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x0A TIM3_PSCR
Reset value
-
0
-
0
-
0
-
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
0x0B TIM3_ARRH
Reset value
ARR15
1
ARR14
1
ARR13
1
ARR12
1
ARR11
1
ARR10
1
ARR9
1
ARR8
1
0x0C TIM3_ARRL
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1
0x0D TIM3_CCR1H
Reset value
CCR115
0
CCR114
0
CCR113
0
CCR112
0
CCR111
0
CCR110
0
CCR19
0
CCR18
0
0x0E TIM3_CCR1L
Reset value
CCR17
0
CCR16
0
CCR15
0
CCR14
0
CCR13
0
CCR12
0
CCR11
0
CCR10
0
0x0F TIM3_CCR2H
Reset value
CCR215
0
CCR214
0
CCR213
0
CCR212
0
CCR211
0
CCR210
0
CCR29
0
CCR28
0
0x10h TIM3_CCR2L
Reset value
CCR27
0
CCR26
0
CCR25
0
CCR24
0
CCR23
0
CCR22
0
CCR21
0
CCR20
0
Table 41. TIM3 register map (continued)
Address
offset Register name76543210
Table 42. TIM5 register map
AddressRegister name76543210
0x00 TIM5_CR1
Reset value
ARPE
0
-
0
-
0
-
0
OPM
0
URS
0
UDIS
0
CEN
0
0x01 TIM5_CR2
Reset value
-
0
MMS2
0
MMS1
0
MMS0
0
-
0
COMS
0
-
0
CCPC
0
DocID14587 Rev 14 251/467
RM0016 16-bit general purpose timers (TIM2, TIM3, TIM5)
261
0x02 TIM5_SMCR
Reset value
MSM
0
TS2
0
TS1
0
TS0
0
-
0
SMS2
0
SMS1
0
SMS0
0
0x03 TIM5_IER
Reset value
-
0
TIE
0
-
0
-
0
CC3IE
0
CC2IE
0
CC1IE
0
UIE
0
0x04 TIM5_SR1
Reset value
-
0
TIF
0
-
0
-
0
CC3IF
0
CC2IF
0
CC1IF
0
UIF
0
0x05 TIM5_SR2
Reset value
-
0
-
0
-
0
-
0
CC3OF
0
CC2OF
0
CC1OF
0
-
0
0x06 TIM5_EGR
Reset value
-
0
TG
0
-
0
-
0
CC3G
0
CC2G
0
CC1G
0
UG
0
0x07
TIM5_CCMR1
(output mode)
Reset value
-
0
OC1M2
0
OC1M1
0
OC1M0
0
OC1PE
0
-
0
CC1S1
0
CC1S0
0
TIM5_CCMR1
(input mode)
Reset value
IC1F3
0
IC1F2
0
IC1F1
0
IC1F0
0
IC1PSC
1
0
IC1PSC
0
0
CC1S1
0
CC1S0
0
0x08
TIM5_ CCMR2
(output mode)
Reset value
-
0
OC2M2
0
OC2M1
0
OC2M0
0
OC2PE
0
-
0
CC2S1
0
CC2S0
0
TIM5_CCMR2
(input mode)
Reset value
IC2F3
0
IC2F2
0
IC2F1
0
IC2F0
0
IC2PSC
1
0
IC2PSC
0
0
CC2S1
0
CC2S0
0
0x09
TIM5_CCMR3
(output mode)
Reset value
-
0
OC3M2
0
OC3M1
0
OC3M0
0
OC3PE
0
-
0
CC3S1
0
CC3S0
0
TIM5_CCMR3
(input mode)
Reset value
IC3F3
0
IC3F2
0
IC3F1
0
IC3F0
0
IC3PSC
1
0
IC3PSC
0
0
CC3S1
0
CC3S0
0
0x0A TIM5_CCER1
Reset value
-
0
-
0
CC2P
0
CC2E
0
-
0
-
0
CC1P
0
CC1E
0
0x0B TIM5_CCER2
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
CC3P
0
CC3E
0
0x0C TIM5_CNTRH
Reset value
CNT15
0
CNT14
0
CNT13
0
CNT12
0
CNT11
0
CNT10
0
CNT9
0
CNT8
0
0x0D TIM5_CNTRL
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x0E TIM5_PSCR
Reset value
-
0
-
0
-
0
-
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
0x0F TIM5_ARRH
Reset value
ARR15
1
ARR14
1
ARR13
1
ARR12
1
ARR11
1
ARR10
1
ARR9
1
ARR8
1
Table 42. TIM5 register map (continued)
AddressRegister name76543210
16-bit general purpose timers (TIM2, TIM3, TIM5) RM0016
252/467 DocID14587 Rev 14
0x10 TIM5_ARRL
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1
0x11 TIM5_CCR1H
Reset value
CCR115
0
CCR114
0
CCR113
0
CCR112
0
CCR111
0
CCR110
0
CCR19
0
CCR18
0
0x12 TIM5_CCR1L
Reset value
CCR17
0
CCR16
0
CCR15
0
CCR14
0
CCR13
0
CCR12
0
CCR11
0
CCR10
0
0x13 TIM5_CCR2H
Reset value
CCR215
0
CCR214
0
CCR213
0
CCR212
0
CCR211
0
CCR210
0
CCR29
0
CCR28
0
0x14 TIM5_CCR2L
Reset value
CCR27
0
CCR26
0
CCR25
0
CCR24
0
CCR23
0
CCR22
0
CCR21
0
CCR20
0
0x15 TIM5_CCR3H
Reset value
CCR315
0
CCR314
0
CCR313
0
CCR312
0
CCR311
0
CCR310
0
CCR39
0
CCR38
0
0x16 TIM5_CCR3L
Reset value
CCR37
0
CCR36
0
CCR35
0
CCR34
0
CCR33
0
CCR32
0
CCR31
0
CCR30
0
Table 42. TIM5 register map (continued)
AddressRegister name76543210
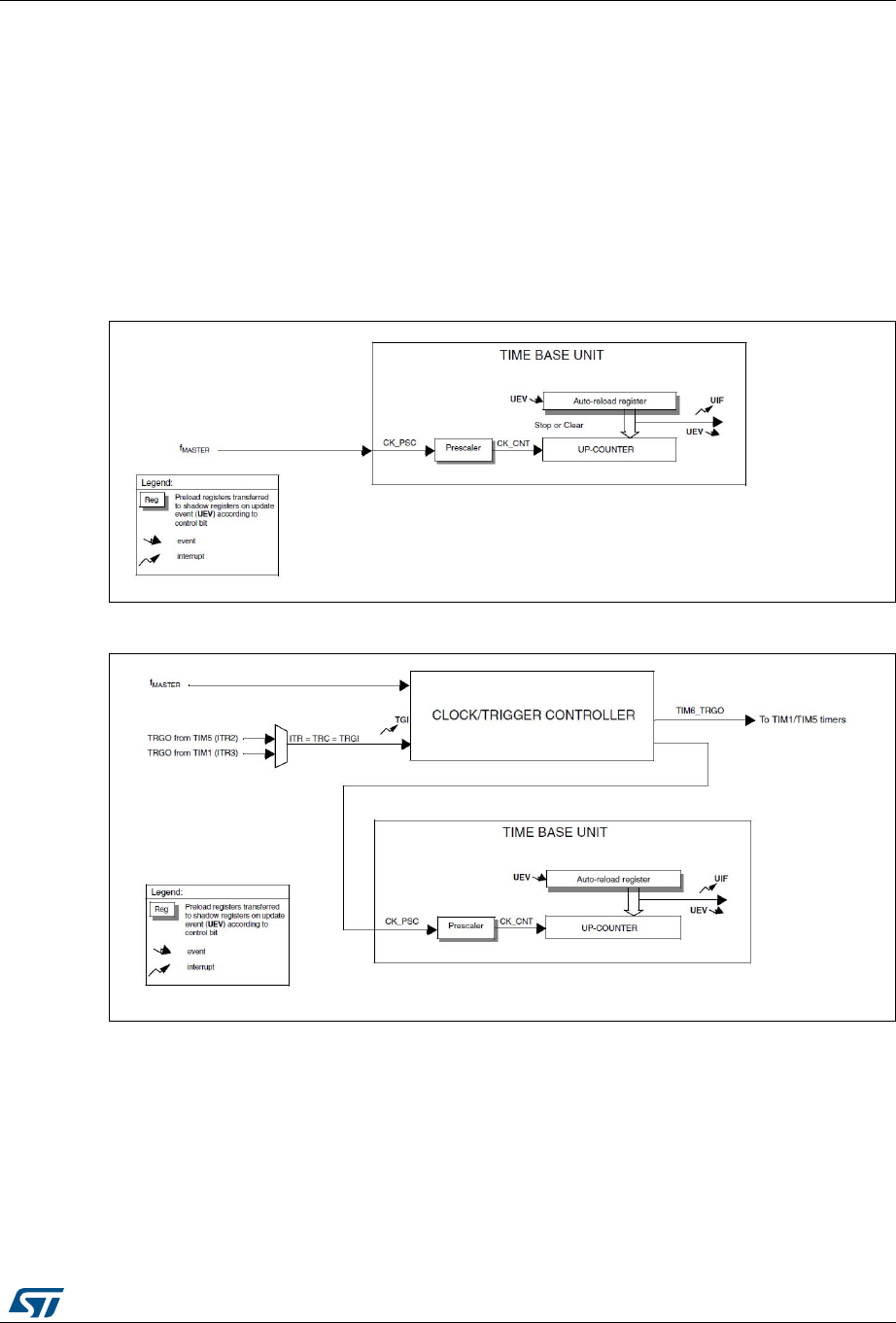
DocID14587 Rev 14 253/467
RM0016 8-bit basic timer (TIM4, TIM6)
261
19 8-bit basic timer (TIM4, TIM6)
19.1 TIM4, TIM6 introduction
The timer consists of an 8-bit auto-reload up-counter driven by a programmable prescaler. It
can be used for time base generation, with interrupt generation on timer overflow.
TIM6 is implemented with the clock/trigger controller for timer synchronization and chaining.
Refer to Section 17.3 on page 141 for the general description of the timer features.
Figure 89. TIM4 block diagram
Figure 90. TIM6 block diagram

8-bit basic timer (TIM4, TIM6) RM0016
254/467 DocID14587 Rev 14
19.2 TIM4 main features
The main features include:
•8-bit auto-reload up counter
•3-bit programmable prescaler which allows dividing (also “on the fly”) the counter clock
frequency by 1, 2, 4, 8, 16, 32, 64 and 128.
•Interrupt generation
– On counter update: Counter overflow
19.3 TIM6 main features
The main features include:
•8-bit auto-reload up counter
•3-bit programmable prescaler which allows dividing (also “on the fly”) the counter clock
frequency by 1, 2, 4, 8, 16, 32, 64 and 128.
•Synchronization circuit to control the timer with external signals and to interconnect
several timers (See Section 17.4.6 on page 159).
•Interrupt generation
– On counter update: Counter overflow
– On trigger input
19.4 TIM4/TIM6 interrupts
The timer has 2 interrupt request sources:
•Update interrupt (overflow, counter initialization)
•Trigger input (TIM6 only)
19.5 TIM4/TIM6 clock selection
The clock source for the timer is the internal clock (fMASTER). It is connected directly to the
CK_PSC clock that feeds the prescaler driving the counter clock CK_CNT.
Prescaler
The prescaler implementation is as follows:
•The prescaler is based on a 7-bit counter controlled through a 3-bit register (in the
TIMx_PSCR register). It can be changed on the fly as this control register is buffered. It
can divide the counter clock frequency by any power of 2 from 1 to 128.
The counter clock frequency is calculated as follows:
fCK_CNT = fCK_PSC/2(PSCR[2:0])
The prescaler value is loaded through a preload register. The shadow register, which
contains the current value to be used, is loaded as soon as the LS byte has been written.
Read operations to the TIMx_PSCR registers access the preload registers, so no special
care needs to be taken to read them.
DocID14587 Rev 14 255/467
RM0016 8-bit basic timer (TIM4, TIM6)
261
19.6 TIM4/TIM6 registers
19.6.1 Control register 1 (TIMx_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
ARPE Reserved OPM URS UDIS CEN
rw rrw rw rw rw
Bit 7 ARPE: Auto-reload preload enable
0: TIM4_ARR register is not buffered through a preload register. It can be written directly
1: TIM4_ARR register is buffered through a preload register
Bits 6:4 Reserved, must be kept cleared
Bit 3 OPM: One-pulse mode
0: Counter is not stopped at update event
1: Counter stops counting at the next update event (clearing the CEN bit)
Bit 2 URS: Update request source
0: When enabled, an update interrupt request is sent as soon as registers are updated (counter
overflow).
1: When enabled, an update interrupt request is sent only when the counter reaches the
overflow/underflow.
Bit 1 UDIS: Update disable
0: A UEV is generated as soon as a counter overflow occurs or a software update is generated.
Buffered registers are then loaded with their preload values.
1: A UEV is not generated, shadow registers keep their value (ARR, PSC). The counter and the
prescaler are re-initialized if the UG bit is set.
Bit 0 CEN: Counter enable
0: Counter disable
1: Counter enable

8-bit basic timer (TIM4, TIM6) RM0016
256/467 DocID14587 Rev 14
19.6.2 Control register 2 (TIM6_CR2)
Address offset: 0x01
Reset value: 0x00
Note: This register is not available in TIM4.
19.6.3 Slave mode control register (TIM6_SMCR)
Address offset: 0x02
Reset value: 0x00
Note: This register is not available in TIM4.
76543210
Reserved MMS[2:0] Reserved
rrwrwrw r
Bit 7 Reserved, must be kept cleared
Bits 6:4 MMS[2:0]: Master mode selection
These bits are used to select the information to be sent in master mode to for synchronization
(TRGO). The combination is as follows:
000: Reset - the UG bit from the TIM6_EGR register is used as a trigger output (TRGO). If the reset
is generated by the trigger input (clock/trigger mode controller configured in trigger reset mode), the
signal on the TRGO is delayed compared to the actual reset.
001: Enable - the counter enable signal is used as a trigger output (TRGO). It is used to start several
timers at the same time or to control a window in which a slave timer is enabled. The counter enable
signal is generated by a logic OR between the CEN control bit and the trigger input when configured
in gated mode. When the counter enable signal is controlled by the trigger input, there is a delay on
TRGO, except if the master/slave mode is selected (see the MSM bit description in the TIM6_SMCR
register).
010: Update - The update event is selected as trigger output (TRGO)
011: Reserved
100: Reserved
101: Reserved
111: Reserved
Bits 3:0 Reserved, must be kept cleared
76543210
MSM TS[2:0] Reserved SMS[2:0]
rw rw rw rw r rw rw rw

DocID14587 Rev 14 257/467
RM0016 8-bit basic timer (TIM4, TIM6)
261
Bit 7 MSM: Master/slave mode
0: No action
1: The effect of an event on the trigger input (TRGI) is delayed to allow a perfect synchronization
between timers (through TRGO).
Bits 6:4 TS[2:0]: Trigger selection
This bit field selects the trigger input to be used to synchronize the counter.
000: Reserved
001: Internal trigger ITR1 connected to TIM1 TRGO (*)
010: Reserved
011: Internal trigger ITR3 connected to TIM5 TRGO (*)
100: Reserved
101: Reserved
110: Reserved
111: Reserved
(*) 8K low-density devices unless otherwise specified.
Note: These bits must only be changed when they are not used (e.g. when SMS = 000) to avoid
wrong edge detections at the transition.
Bit 3 Reserved.
Bits 2:0 SMS[2:0]:Clock/trigger/slave mode selection
When external signals are selected, the active edge of the trigger signal (TRGI) is linked to the
polarity selected on the external input (see Input control register and control register description).
000: Clock/trigger controller disabled - If CEN = 1, the prescaler is clocked directly by the internal
clock.
001: Reserved
010: Reserved
011: Reserved
100: Trigger reset mode - The rising edge of the selected trigger signal (TRGI) reinitializes the
counter and generates an update of the registers.
101: Gated mode - The counter clock is enabled when the trigger signal (TRGI) is high. The counter
stops (but is not reset) as soon as the trigger becomes low. Both start and stop of the counter are
controlled.
110: Trigger mode - The counter starts at a rising edge of the trigger TRGI (but it is not reset). Only
the start of the counter is controlled.
111: External clock mode 1 - Rising edges of the selected trigger (TRGI) clock the counter.

8-bit basic timer (TIM4, TIM6) RM0016
258/467 DocID14587 Rev 14
19.6.4 Interrupt enable register (TIMx_IER)
Address offset: 0x01 or 0x03 (TIM4), 0x03 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0x00
19.6.5 Status register 1 (TIMx_SR)
Address offset: 0x02 or 0x04 (TIM4), 0x04 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0x00
76543210
Reserved TIE Reserved UIE
rrw r rw
Bit 7 Reserved, must be kept cleared
Bit 6 TIE: Trigger interrupt enable
0: Trigger Interrupt disabled
1: Trigger Interrupt enabled
Note: In TIM4 this bit is reserved.
Bits 5:1 Reserved, must be kept cleared
Bit 0 UIE: Update interrupt enable
0: Update interrupt disabled
1: Update interrupt enabled
76543210
Reserved
TIF
Reserved
UIF
rc_w0 rc_w0
Bit 7 Reserved, must be kept cleared
Bit 6 TIF: Trigger interrupt flag.
This flag is set by hardware on a trigger event (the active edge is detected on the TRGI signal,
both edges are detected if gated mode is selected). It is cleared by software.
0: No trigger event has occurred
1: Trigger interrupt pending.
Note: In TIM4 this bit is reserved.
Bits 5:1 Reserved, must be kept cleared
Bit 0 UIF: Update interrupt flag
This bit is set by hardware on an update event. It is cleared by software.
0: No update has occurred
1: Update interrupt pending. This bit is set by hardware when the registers are updated:
– At overflow if UDIS = 0 in the TIM4_CR1 register
– When CNT is re-initialized by software using the UG bit in the TIM4_EGR register, if URS = 0
and UDIS = 0 in the TIM4_CR1 register.
DocID14587 Rev 14 259/467
RM0016 8-bit basic timer (TIM4, TIM6)
261
19.6.6 Event generation register (TIMx_EGR)
Address offset: 0x03 or 0x05 (TIM4), 0x05 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0x00
19.6.7 Counter (TIMx_CNTR)
Address offset: 0x04 or 0x06 (TIM4), 0x06 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0x00
19.6.8 Prescaler register (TIMx_PSCR)
Address offset: 0x05 or 0x07 (TIM4), 0x07 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0x00
76543210
Reserved
TG
Reserved
UG
w w
Bit 7 Reserved, must be kept cleared
Bit 6 TG: Trigger generation
This bit is set by software to generate an event. It is automatically cleared by hardware.
0: No action
1: The TIF flag is set in TIM6_SR register. An interrupt is generated if enabled by the TIE bit
Note: In TIM4 this bit is reserved.
Bits 5:1 Reserved, must be kept cleared
Bit 0 UG: Update generation
This bit can be set by software, it is automatically cleared by hardware.
0: No action
1: Re-initializes the counter and generates an update of the registers. Note that the prescaler
counter is also cleared.
76543210
CNT[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 CNT[7:0]: Counter value
76543210
Reserved
PSC[2:0]
rw rw rw
8-bit basic timer (TIM4, TIM6) RM0016
260/467 DocID14587 Rev 14
19.6.9 Auto-reload register (TIMx_ARR)
Address offset: 0x06 or 0x08 (TIM4), 0x08 (TIM6); for TIM4 address see Section 19.6.10
Reset value: 0xFF
19.6.10 TIM4/TIM6 register map and reset values
In some STM8S and STM8AF devices, TIM4 register locations at offset 0x01 and 0x02 are
reserved. In this case the TIM4_IER and subsequent registers in the TIM4 block are offset
by 2 more bytes. Refer to the datasheet for the product-specific register map.
Bits 7:3 Reserved, must be kept cleared
Bits 2:0 PSC[2:0]: Prescaler value
The prescaler value divides the CK_PSC clock frequency. The counter clock frequency fCK_CNT is
equal to fCK_PSC / 2(PSC[2:0]).
PSC contains the value which is loaded into the active prescaler register at each UEV (including
when the counter is cleared through the UG bit of TIM4_EGR).
Consequently, a UEV must be generated so that a new prescaler value can be taken into account.
76543210
ARR[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 ARR[7:0]: Auto-reload value
Table 43. TIM4 register map
Address
offset
(product
dependent)
Register
name 76543210
0x00 0x00 TIM4_CR1
Reset value
ARPE
0
-
0
-
0
-
0
OPM
0
URS
0
UDIS
0
CEN
0
- 0x01 Reserved
- 0x02 Reserved
0x01 0x03 TIM4_IER
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
-
0
UIE
0
0x02 0x04 TIM4_SR
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
-
0
UIF
0
0x03 0x05 TIM4_EGR
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
-
0
UG
0
0x04 0x06 TIM4_CNTR
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x05 0x07 TIM4_PSCR
Reset value
-
0
-
0
-
0
-
0
-
0
PSC2
0
PSC1
0
PSC0
0
0x06 0x08 TIM4_ARR
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1
DocID14587 Rev 14 261/467
RM0016 8-bit basic timer (TIM4, TIM6)
261
Table 44. TIM6 register map
Address
offset Register name76543210
0x00 TIM6_CR1
Reset value
ARPE
0
-
0
-
0
-
0
OPM
0
URS
0
UDIS
0
CEN
0
0x01 TIM6_CR2
Reset value
-
0
MMS2
0
MMS1
0
MMS0
0
-
0
-
0
-
0
-
0
0x02 TIM6_SMCR
Reset value
MSM
0
TS2
0
TS1
0
TS0
0
-
0
SMS2
0
SMS1
0
SMS0
0
0x03 TIM6_IER
Reset value
-
0
TIE
0
-
0
-
0
-
0
-
0
-
0
UIE
0
0x04 TIM6_SR1
Reset value
-
0
TIF
0
-
0
-
0
-
0
-
0
-
0
UIF
0
0x05 TIM6_EGR
Reset value
-
0
TG
0
-
0
-
0
-
0
-
0
-
0
UG
0
0x06 TIM6_CNTR
Reset value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0x07 TIM6_PSCR
Reset value
-
0
-
0
-
0
-
0
-
0
PSC2
0
PSC1
0
PSC0
0
0x08 TIM6_ARR
Reset value
ARR7
1
ARR6
1
ARR5
1
ARR4
1
ARR3
1
ARR2
1
ARR1
1
ARR0
1

Serial peripheral interface (SPI) RM0016
262/467 DocID14587 Rev 14
20 Serial peripheral interface (SPI)
20.1 SPI introduction
The serial peripheral interface (SPI) allows half/ full duplex, synchronous, serial
communication with external devices. The interface can be configured as the master and in
this case it provides the communication clock (SCK) to the external slave device. The
interface is also capable of operating in multi-master configuration.
It may be used for a variety of purposes, including simplex synchronous transfers on 2 lines
with a possible bidirectional data line or reliable communication using CRC checking.
20.2 SPI main features
•Full duplex synchronous transfers (on 3 lines)
•Simplex synchronous transfers on 2 lines with or without a bidirectional data line
•Master or slave operation
•8 Master mode frequencies (fMASTER/2 max.)
•Slave mode frequency (fMASTER/2 max.)
•Faster communication - Maximum SPI speed: 10 MHz
•NSS management by hardware or software for both master and slave
•Programmable clock polarity and phase
•Programmable data order with MSB-first or LSB-first shifting
•Dedicated transmission and reception flags with interrupt capability
•SPI bus busy status flag
•Master mode fault and overrun flags with interrupt capability
•Hardware CRC feature for reliable communication:
– CRC value can be transmitted as last byte in Tx mode
– CRC error checking for last received byte
•Wakeup capability:
The MCU wakes up from Low power mode in full or half duplex transmit-only modes
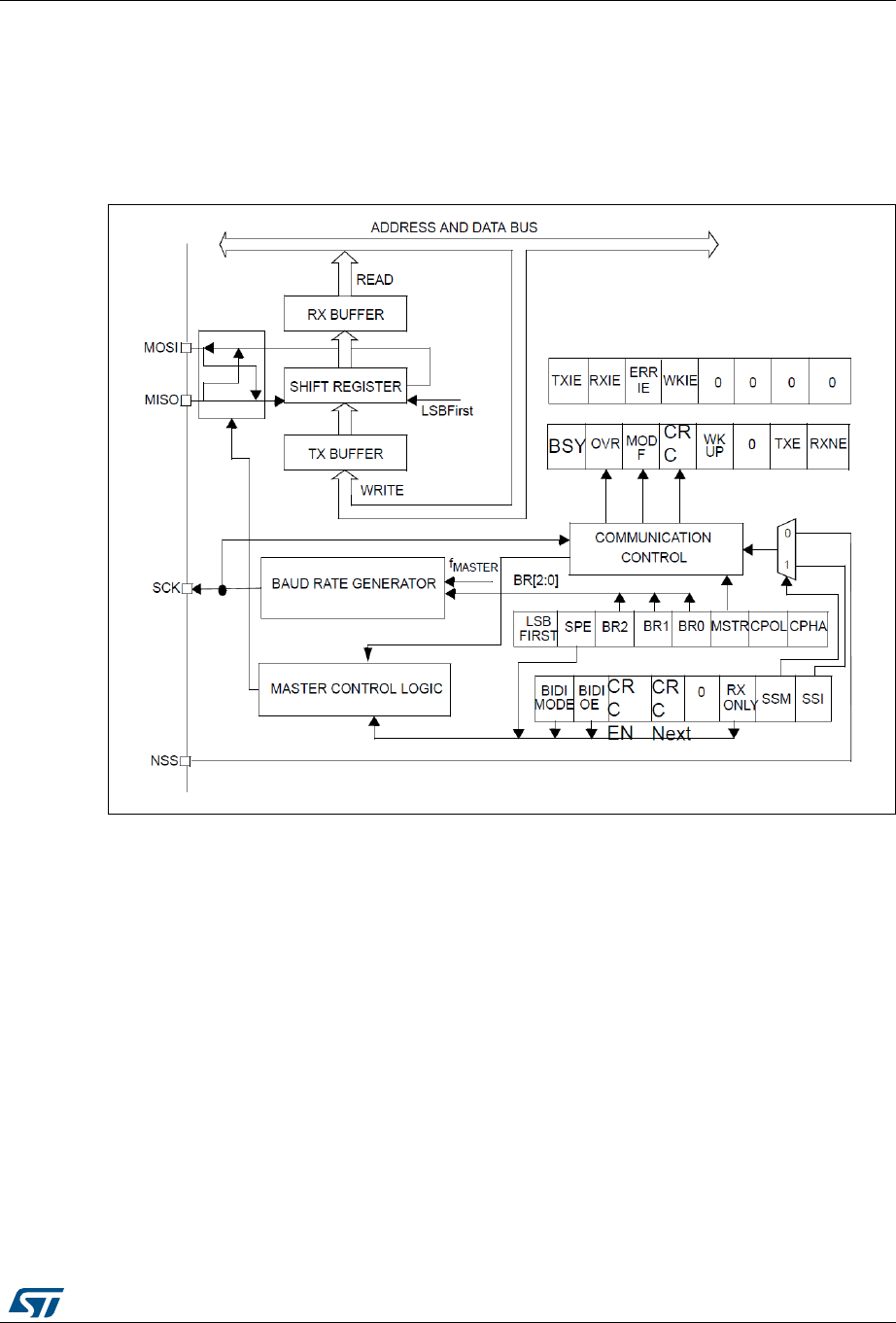
DocID14587 Rev 14 263/467
RM0016 Serial peripheral interface (SPI)
287
20.3 SPI functional description
20.3.1 SPI general description
The block diagram of the SPI is shown in Figure 91.
Figure 91. SPI block diagram
The SPI is connected to external devices through four pins:
•MISO: Master In / Slave Out data (port C7). This pin can be used to transmit data in
slave mode and receive data in master mode.
•MOSI: Master Out / Slave In data (port C6). This pin can be used to transmit data in
master mode and receive data in slave mode.
•SCK: Serial Clock output (port C5) for SPI masters and Serial Clock input for SPI
slaves.
•NSS: Slave select (port E5). This is a optional pin to select a slave device. This pin acts
as a ‘chip select’ to let the SPI master communicate with slaves individually and to
avoid contention on the data lines. Slave NSS inputs can be driven by standard I/O
ports on the master device. When configured in master mode (MSTR bit =1) and if NSS
is pulled low, the SPI enters master mode fault state: the MSTR bit is automatically
reset and the device is configured in slave mode (refer to Section 20.3.9: Error flags on
page 279).
A basic example of interconnections between a single master and a single slave is
illustrated in Figure 92.
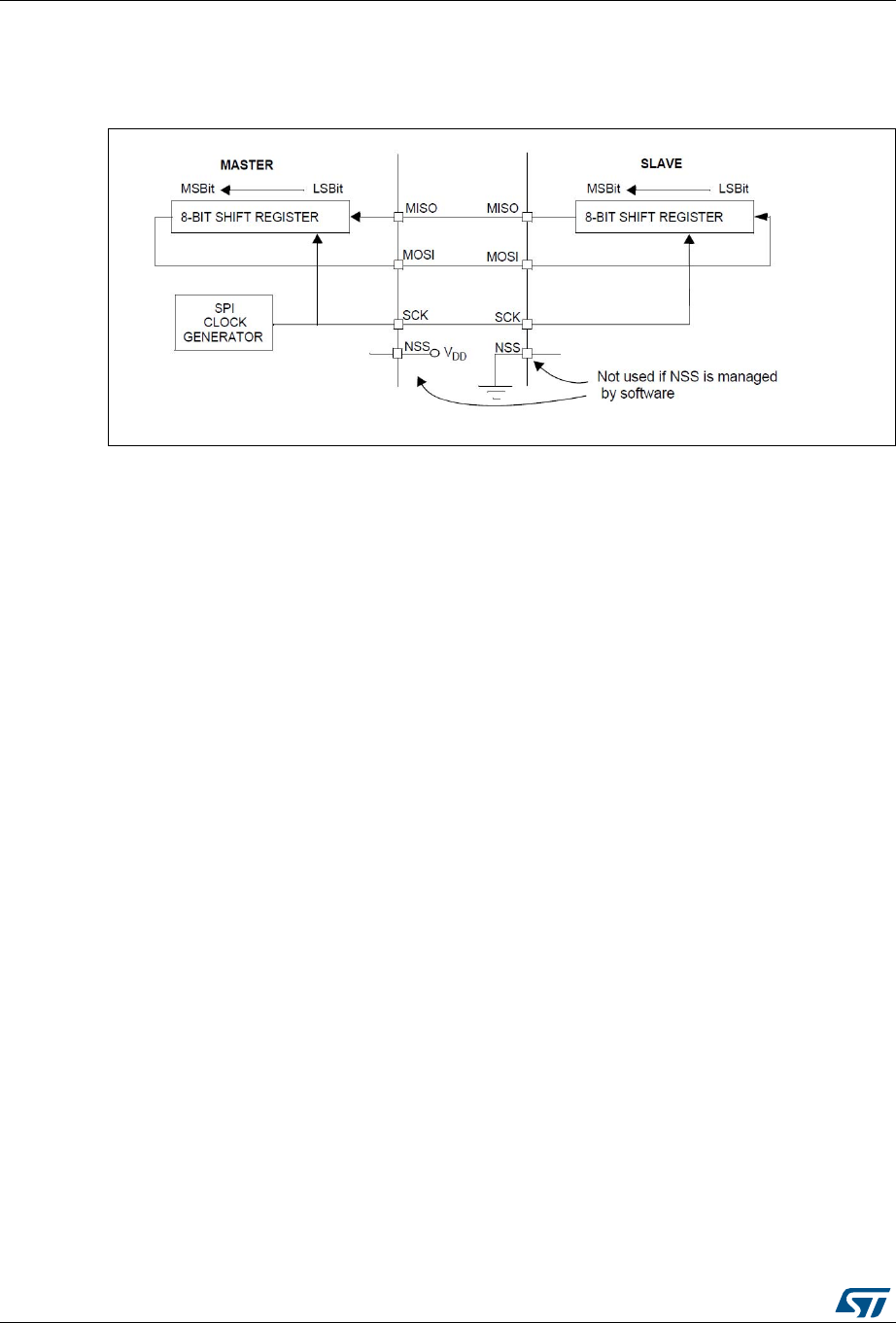
Serial peripheral interface (SPI) RM0016
264/467 DocID14587 Rev 14
Note: When using the SPI in High-speed mode, the I/Os where SPI outputs are connected should
be programmed as fast slope outputs in order to be able to reach the expected bus speed.
Figure 92. Single master/ single slave application
The MOSI pins are connected together and the MISO pins are connected together. In this
way data is transferred serially between master and slave (most significant bit first).
The communication is always initiated by the master. When the master device transmits
data to a slave device via MOSI pin, the slave device responds the MISO pin. This implies
full duplex communication with both data out and data in synchronized with the same clock
signal (which is provided by the master device via the SCK pin).
Slave select (NSS) pin management
A hardware or software slave select management configuration can be set using the
Software slave select management (SSM) bit from the SPI_CR2 register.
•Software NSS management (SSM = 1): with this configuration, slave select
information is driven internally by the Internal slave select (SSI) bit value in the
SPI_CR2 register.The external NSS pin remains free for other application uses.
•Hardware NSS management (SSM = 0): For devices set as master, this configuration
allows multimaster capability. For devices set as slave, the NSS pin works as a
classical NSS input. The slave is selected when the NSS line is in low level and is not
selected if the NSS line is in high level.
Note: When the master is communicating with SPI slaves which need to be deselected between
transmissions, the NSS pin must be configured as a GPIO.

DocID14587 Rev 14 265/467
RM0016 Serial peripheral interface (SPI)
287
Clock phase and clock polarity
Four possible timing relationships may be chosen by software, using the CPOL and CPHA
bits. The CPOL (clock polarity) bit controls the steady state value of the clock when no data
is being transferred. This bit affects both master and slave modes. If CPOL is reset, SCK pin
has a low level idle state. If CPOL is set, SCK pin has a high level idle state.
Note: Make sure the SPI pin is configured at the idle state level of the SPI in order to avoid
generating an edge on the SPI clock pin when enabling or disabling the SPI cell.
If CPHA (clock phase) bit is set, the second edge on the SCK pin (falling edge if the CPOL
bit is reset, rising edge if the CPOL bit is set) is the MSBit capture strobe. Data is latched on
the occurrence of the first clock transition. If CPHA bit is reset, the first edge on the SCK pin
(falling edge if CPOL bit is set, rising edge if CPOL bit is reset) is the MSBit capture strobe.
Data is latched on the occurrence of the second clock transition.
The combination of the CPOL clock polarity and CPHA (clock phase) bits selects the data
capture clock edge.
Figure 93 shows an SPI transfer with the four combinations of the CPHA and CPOL bits.
The diagram may be interpreted as a master or slave timing diagram where the SCK pin,
the MISO pin, the MOSI pin are directly connected between the master and the slave
device.
Note: 1 Prior to changing the CPOL/CPHA bits the SPI must be disabled by resetting the SPE bit.
2 Master and slave must be programmed with the same timing mode.
3 The idle state of SCK must correspond to the polarity selected in the SPI_CR1 register (by
pulling up SCK if CPOL=1 or pulling down SCK if CPOL=0).
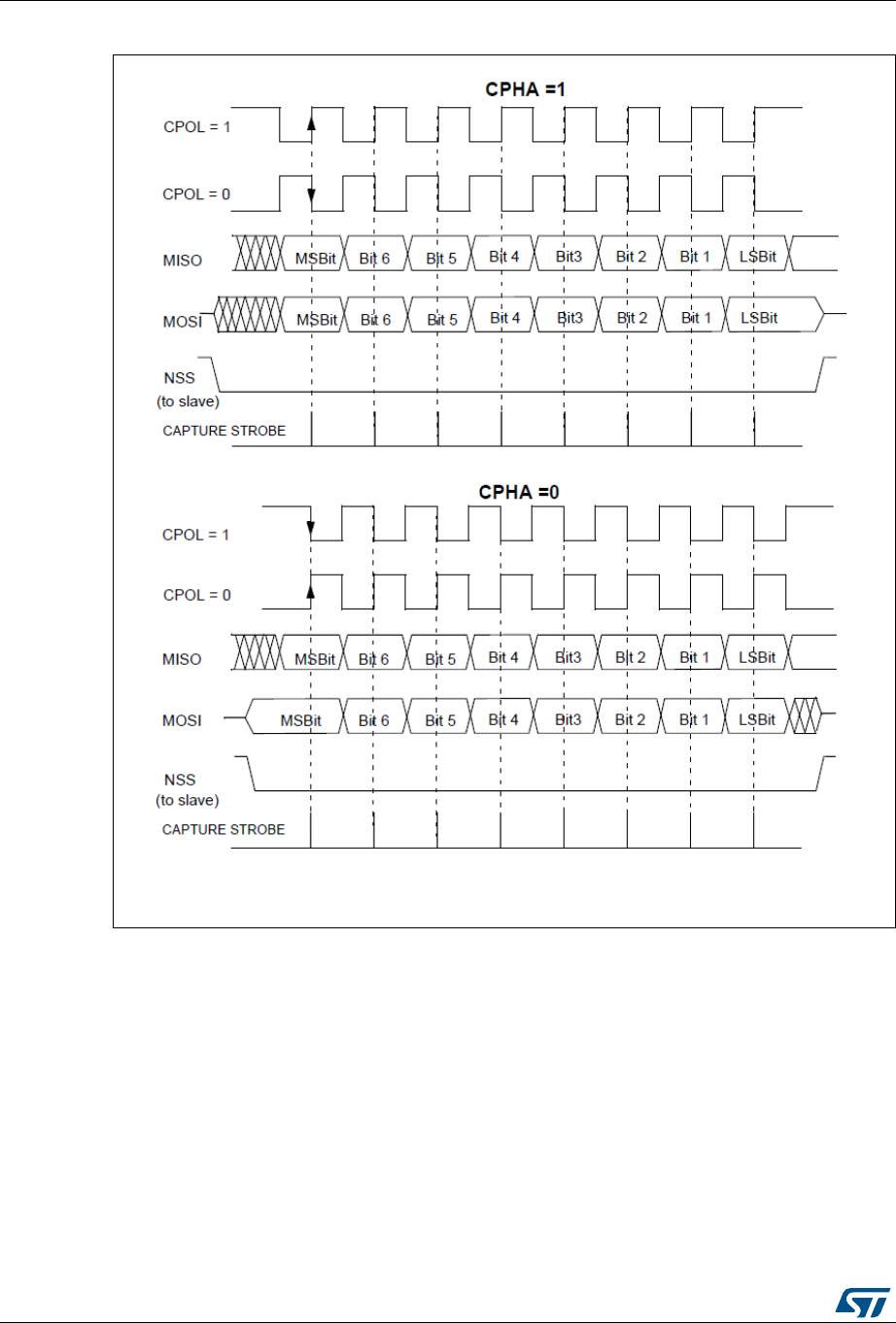
Serial peripheral interface (SPI) RM0016
266/467 DocID14587 Rev 14
Figure 93. Data clock timing diagram
1. These timings are shown with the LSBFIRST bit reset in the SPI_CR1 register.
Frame format
Data can be shifted out either MSB-first or LSB-first depending on the value of the
LSBFIRST bit in the SPI_CR1 Register.

DocID14587 Rev 14 267/467
RM0016 Serial peripheral interface (SPI)
287
20.3.2 Configuring the SPI in slave mode
In slave configuration, the serial clock is received on the SCK pin from the master device.
The value set in the BR[2:0] bits in the SPI_CR1 register, does not affect the data transfer
rate.
Follow the procedure below to configure the SPI in slave mode:
1. Select the CPOL and CPHA bits to define one of the four relationships between the
data transfer and the serial clock (see Figure 93). For correct data transfer, the CPOL
and CPHA bits must be configured in the same way in the slave device and the master
device.
2. The frame format (MSB-first or LSB-first depending on the value of the LSBFIRST bit in
the SPI_CR1 register) must be the same as the master device.
3. In Hardware mode (refer to Slave select (NSS) pin management on page 264), the
NSS pin must be connected to a low level signal during the complete data transmit
sequence. In NSS Software mode, set the SSM bit and clear the SSI bit in the
SPI_CR2 register.
4. Clear the MSTR bit and set the SPE bit to assign the pins to alternate functions.
In this configuration the MOSI pin is a data input and the MISO pin is a data output.
Note: In applications with a parallel multi-slave structure, with separate NSS signals and the slave
MISO outputs connected together, the corresponding GPIO registers must be configured
correctly. The SPI_MISO pin is controlled by the SPI peripheral only when the NSS signal is
active and the device is selected as slave. When the NSS signal is released, the pin is
driven by GPIO register settings only. To function correctly, the GPIO has to be configured in
input pull-up mode with no interrupt. This configuration is done using the GPIO_DDR,
GPIO_CR1 and GPIO_CR2 registers - see Section 11.8.1: Alternate function output.
20.3.3 Configuring the SPI master mode
In a master configuration, the serial clock is generated on the SCK pin.
Follow the procedure below to configure the SPI in master mode:
1. Select the BR[2:0] bits to define the serial clock baud rate (see SPI_CR1 register).
2. Select the CPOL and CPHA bits to define one of the four relationships between the
data transfer and the serial clock (see Figure 93).
3. Configure the LSBFIRST bit in the SPI_CR1 register to define the frame format.
4. In Hardware mode, connect the NSS pin to a high-level signal during the complete data
transmit sequence. In software mode, set the SSM and SSI bits in the SPI_CR2
register.
5. Set the MSTR and SPE bits (they remain set only if the NSS pin is connected to a high-
level signal).
In this configuration the MOSI pin is a data output and to the MISO pin is a data input.

Serial peripheral interface (SPI) RM0016
268/467 DocID14587 Rev 14
20.3.4 Configuring the SPI for simplex communications
The SPI is capable of operating in simplex mode in 2 configurations.
•1 clock and 1 bidirectional data wire
•1 clock and 1 data wire (Receive-only or Transmit-only)
1 clock and 1 bidirectional data wire
This mode is enabled by setting the BDM bit in the SPI_CR2 register. In this mode SCK is
used for the clock, and MOSI in master or MISO in slave mode is used for data
communication. The transfer direction (Input/output) is selected by the BDOE bit in the
SPI_CR2 register. When this bit is set to 1, the data line is output, otherwise it is input.
1 clock and 1 unidirectional data wire (BDM = 0)
In this mode, the application can use the SPI either in transmit-only mode or in receive-only
mode:
•Transmit-only mode is similar to full-duplex mode (BDM = 0, RXONLY = 0): the data is
transmitted to the transmit pin (MOSI in master mode or MISO in slave mode) and the
receive pin (MISO in master mode or MOSI in slave mode) can be used as general
purpose I/O. In this case, the application just needs to ignore the Rx buffer (if the data
register is read, it does not contain the received value).
•In receive-only mode, the application can disable the SPI output function by setting the
RXONLY bit in the SPI_CR2 register. In this case, it frees the transmit I/O pin (MOSI in
master mode or MISO in slave mode) so it can be used for other purposes.
To start the communication in receive-only mode, configure and enable the SPI:
•In master mode, the communication starts immediately and stops when the SPE bit is
reset and the current reception stops. There is no need to read the BSY flag in this
mode. It is always set when an SPI communication is ongoing.
•In slave mode, the SPI continues to receive as long as the NSS is pulled down (or the
SSI bit is reset in NSS software mode) and the SCK is running.
20.3.5 Data transmission and reception procedures
Rx and Tx buffer
In reception, data are received and then stored into an internal Rx buffer while In
transmission, data are first stored into an internal Tx buffer before being transmitted.
A read access of the SPI_DR register returns the Rx buffered value whereas a write access
of the SPI_DR stores the written data into the Tx buffer.
Start sequence in master mode
•In full-duplex (BDM = 0 and RXONLY = 0)
– The sequence begins when data is written into the SPI_DR register (Tx buffer).
– The data is then parallel loaded from the Tx buffer into the 8-bit shift register
during the first bit transmission and then shifted out serially to the MOSI pin.
– At the same time, the received data on MISO pin is shifted in serially to the 8-bit
shift register and then parallel loaded into the SPI_DR register (Rx Buffer).

DocID14587 Rev 14 269/467
RM0016 Serial peripheral interface (SPI)
287
•In unidirectional receive-only mode (BDM = 0 and RXONLY = 1)
– The sequence begins as soon as the bit SPE = 1
– Only the receiver is activated and the received data on MISO pin is shifted in
serially to the 8-bit shift register and then parallel loaded into the SPI_DR register
(Rx Buffer).
•In bidirectional mode, when transmitting (BDM = 1 and BDOE = 1)
– The sequence begins when a data is written into the SPI_DR register (Tx buffer).
– The data is then parallel loaded from the Tx buffer into the 8-bit shift register
during the first bit transmission and then shifted out serially to the MOSI pin.
– No data is received.
•In bidirectional mode, when receiving (BDM = 1 and BDOE = 0)
– The sequence begins as soon as SPE = 1 and BDOE = 0.
– The received data on MOSI pin is shifted in serially to the 8-bit shift register and
then parallel loaded into the SPI_DR register (Rx Buffer).
– The transmitter is not activated and no data is shifted out serially to the MOSI pin.
Start sequence in slave mode
•In full-duplex (BDM=0 and RXONLY=0)
– The sequence begins when the slave device receives the clock signal and the first
bit of the data on its MOSI pin. The remaining 7 bits are loaded into the shift
register.
– At the same time, the data is parallel loaded from the Tx buffer into the 8-bit shift
register during the first bit transmission and then shifted out serially to the MISO
pin. The software must have written the data to be sent before the SPI master
device initiates the transfer.
•In unidirectional receive-only mode (BDM = 0 and RXONLY = 1)
– The sequence begins when the slave device receives the clock signal and the first
bit of the data on its MOSI pin. The remaining 7 bits are loaded into the shift
register.
– The transmitter is not activated and no data is shifted out serially to the MISO pin.
•In bidirectional mode, when transmitting (BDM = 1 and BDOE = 1)
– The sequence begins when the slave device receives the clock signal and the first
bit of the Tx buffer is transmitted to the MISO pin.
– The data is then parallel loaded from the Tx buffer into the 8-bit shift register
during the first bit transmission and then shifted out serially to the MISO pin. The
software must have written the data to be sent before the SPI master device starts
the transfer.
– no data is received.
•In bidirectional mode, when receiving (BDM = 1 and BDOE = 0)
– The sequence starts when the slave device receives the clock signal and the first
bit of the data to its MISO pin.
– The data received on MISO pin is shifted in serially to the 8-bit shift register and
then parallel loaded into the SPI_DR register (Rx Buffer).
– The transmitter is not activated and no data is shifted out serially to the MISO pin.

Serial peripheral interface (SPI) RM0016
270/467 DocID14587 Rev 14
Handling data transmission and reception
The TXE flag (Tx buffer empty) is set when the data is transferred from the Tx buffer to the
shift register. It indicates that the internal Tx buffer is ready to be loaded with the next data.
An interrupt can be generated if TXIE bit in the SPI_ICR register is set.
Note: The software must ensure that TXE flag is set to 1 before attempting to write into the Tx
buffer. Otherwise, it will overwrite the data which was previously written in the Tx buffer.
The RXNE flag (Rx buffer not empty) is set on the last sampling clock edge, when the data
is transferred from the shift register to the Rx buffer. It indicates that a data is ready to be
read from the SPI_DR register. An interrupt can be generated if RXIE bit in the SPI_ICR
register is set. Clearing the RXNE bit is performed by reading the SPI_DR register.
In some configurations, the BSY flag can be used during the last data transfer to wait until
the completion of the transfer.
Full Duplex Transmit and receive procedure in master or slave mode
(BDM=0 and RXONLY = 0)
1. Enable the SPI by setting the SPE bit
2. Write the first data to be transmitted in the SPI_DR register (this clears the TXE flag).
3. Wait until TXE = 1 and write the second data to be transmitted. Then wait until RXNE =
1 and read the SPI_DR to get the first received data (this clears the RXNE bit). Repeat
this operation for each data to be transmitted/received until the n-1 received data.
4. Wait until RXNE = 1 and read the last received data.
5. Wait until TXE = 1 and then wait until BSY = 0 before disabling the SPI.
This procedure can also be implemented using dedicated interrupt subroutines launched at
each rising edge of RXNE or TXE flags.
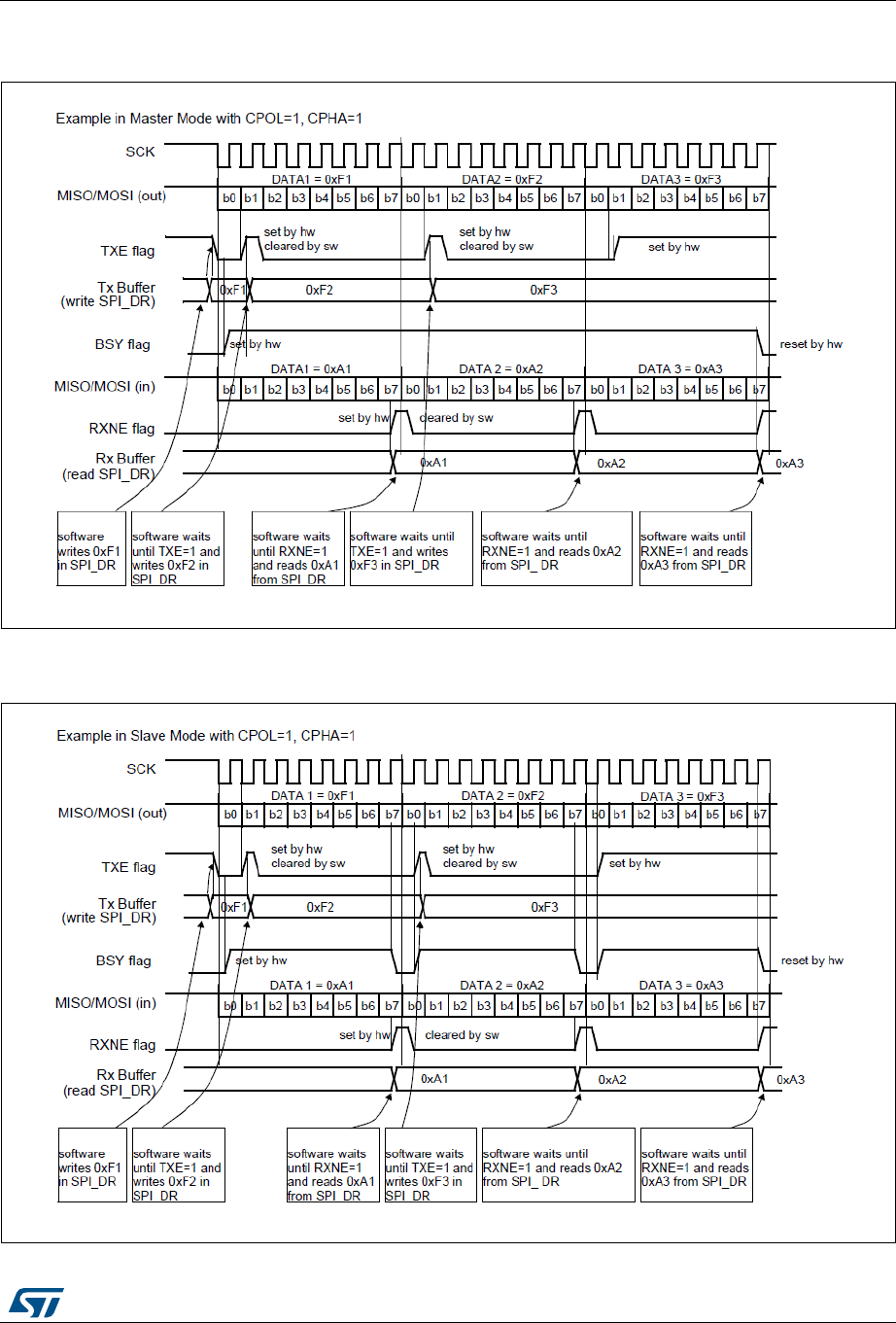
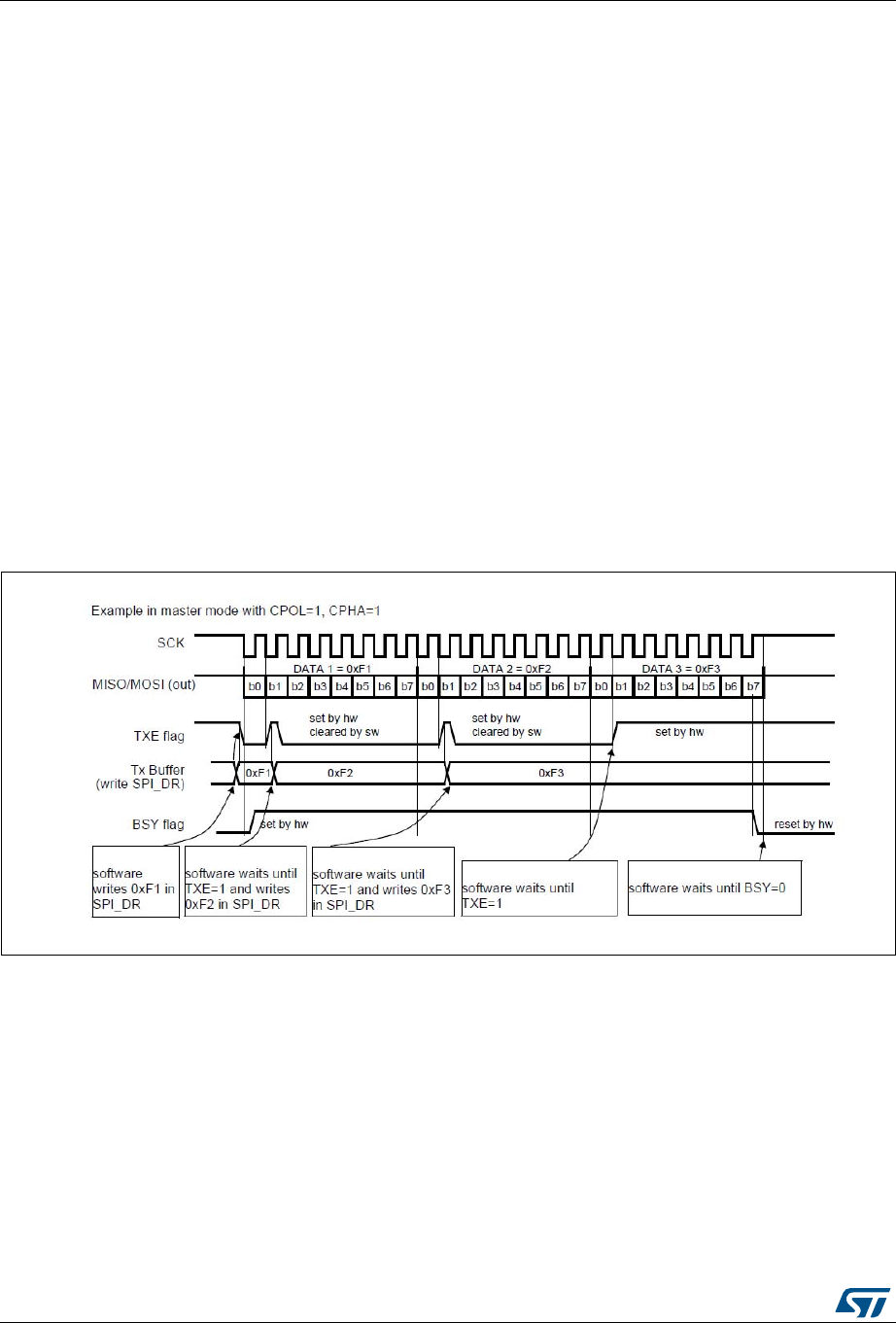
Serial peripheral interface (SPI) RM0016
272/467 DocID14587 Rev 14
Transmit-only procedure (BDM = 0 RXONLY = 0)
In this mode, the procedure can be reduced as described below and the BSY bit can be
used to wait until the effective completion of the transmission (see Figure 94 and Figure 95):
1. Enable the SPI by setting the SPE bit
2. Write the first data to send in the SPI_DR register (this clears the TXE bit).
3. Wait until TXE = 1 and write the next data to be transmitted. Repeat this step for each
data to be transmitted.
4. After writing the last data in the SPI_DR register, wait until TXE = 1 and then wait until
BSY=0 which indicates that the transmission of the last data is complete.
This procedure can be also implemented using dedicated interrupt subroutines launched at
each rising edge of TXE flag.
Note: 1 In master mode, during discontinuous communications, there is a 2 CPU clock period delay
between the write operation to SPI_DR and the BSY bit setting. As a consequence, in
transmit-only mode, it is mandatory to wait first until TXE is set and then until BSY is reset
after having written the last data.
2 After transmitting two data in transmit-only mode, the OVR flag is set in the SPI_SR register
since the received data are never read.
Figure 96. TXE/BSY in master transmit-only mode
(BDM = 0 and RXONLY = 0). Case of continuous transfers
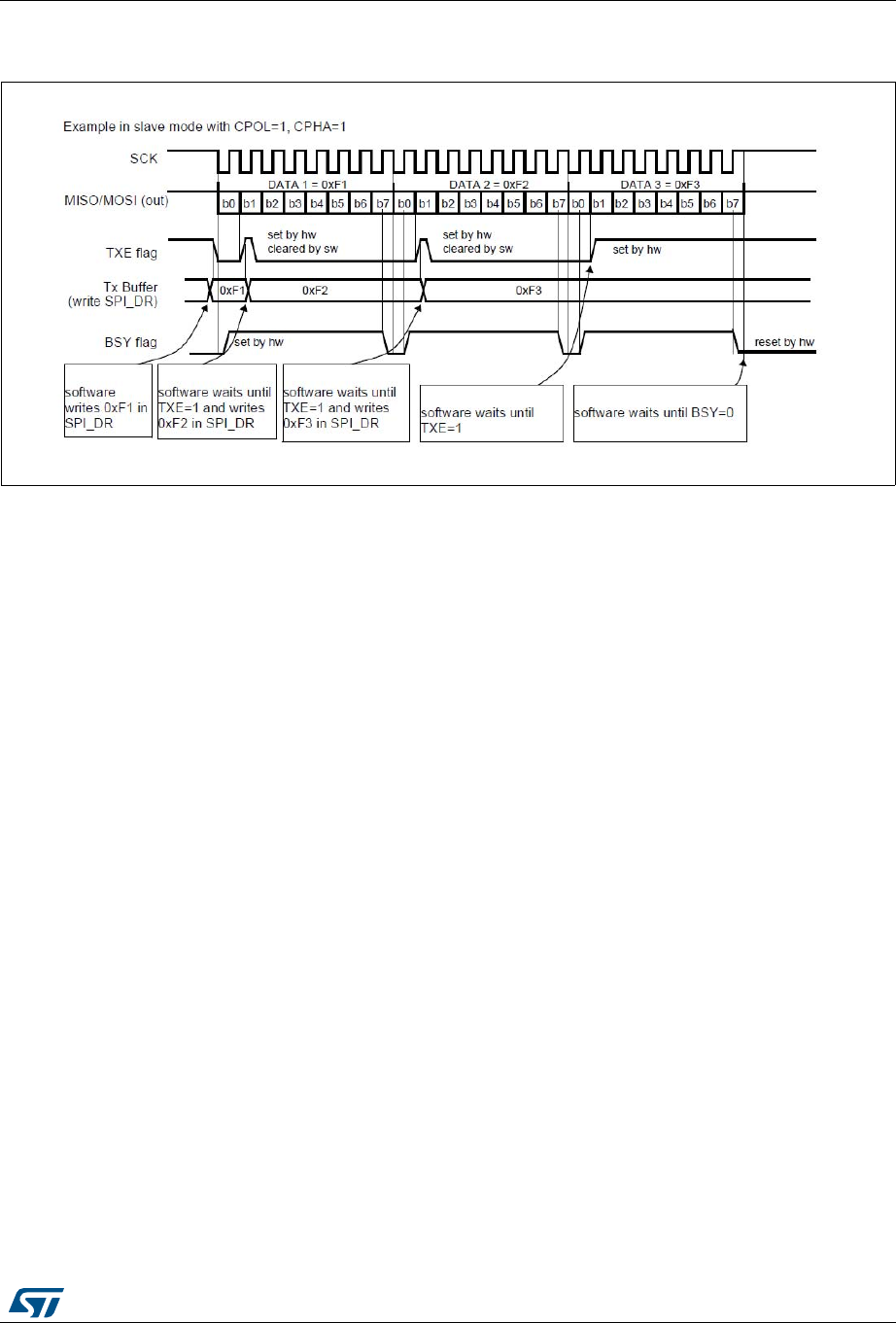
DocID14587 Rev 14 273/467
RM0016 Serial peripheral interface (SPI)
287
Figure 97. TXE/BSY in slave transmit-only mode (BDM = 0 and RXONLY = 0).
Case of continuous transfers
Bidirectional transmit procedure (BDM = 1 and BDOE = 1)
In this mode, the procedure is similar to the Transmit-only procedure except that the BDM
and BDOE bits must both be set in the SPI_CR2 register before enabling the SPI.
Unidirectional receive-only procedure (BDM = 0 and RXONLY = 1)
In this mode, the procedure can be reduced as described below (see Figure 98):
1. Set the RXONLY bit in the SPI_CR2 register
2. Enable the SPI by setting bit SPE to 1:
a) In master mode, this immediately activates the generation of the SCK clock, and
data is received serially until the SPI is disabled (SPE = 0).
b) In slave mode, data are received when the SPI master device drives NSS low and
generates the SCK clock.
3. Wait until RXNE =1 and read the SPI_DR register to get the received data (this clears
the RXNE bit). Repeat this operation for each data to be received.
This procedure can be also implemented using dedicated interrupt subroutines launched at
each rising edge of the RXNE flag.
Note: If it is required to disable the SPI after the last transfer, follow the recommendation
described in Section 20.3.8: Disabling the SPI on page 277.
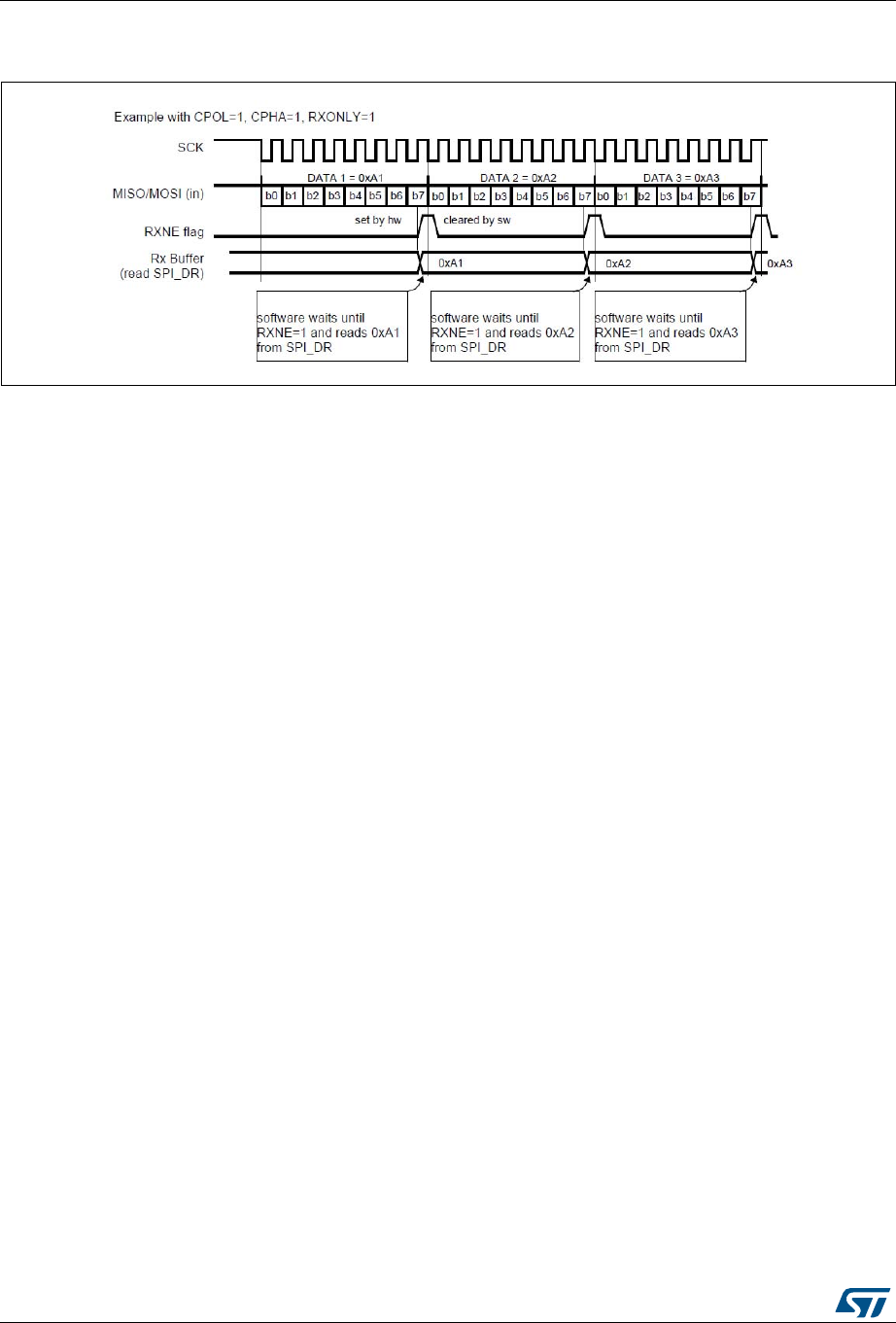
Serial peripheral interface (SPI) RM0016
274/467 DocID14587 Rev 14
Figure 98. RXNE behavior in receive-only mode (BDM = 0 and RXONLY = 1).
Case of continuous transfers
Bidirectional receive procedure (BDM = 1 and BDOE = 0)
In this mode, the procedure is similar to the Receive-only procedure except that the BDM bit
must be set and the BDOE bit must be reset in the SPI_CR2 register before enabling the
SPI.
Continuous and discontinuous transfers
When transmitting data in master mode, if the software is fast enough to detect each TXE
rising edge (or TXE interrupt) and to immediately write the SPI_DR register before the
ongoing data transfer is complete, the communication is said to be continuous. In this case,
there is no discontinuity in the generation of the SPI clock between each data and the BSY
bit will never be reset between each data transfer.
On the contrary, if the software is not fast enough, this can lead to some discontinuities in
the communication. In this case, the BSY bit is reset between each data transmission (see
Figure 99).
In master receive-only mode (BDM = 0 and RXONLY = 1) or in bidirectional receive mode
(BDM = 1 and BDOE = 0), the communication is always continuous and the BSY flag is
always read at 1.
In slave mode, the continuity of the communication is decided by the SPI master device. But
even if the communication is continuous, the BSY flag goes low between each transfer for a
minimum duration of one SPI clock cycle (see Figure 95).
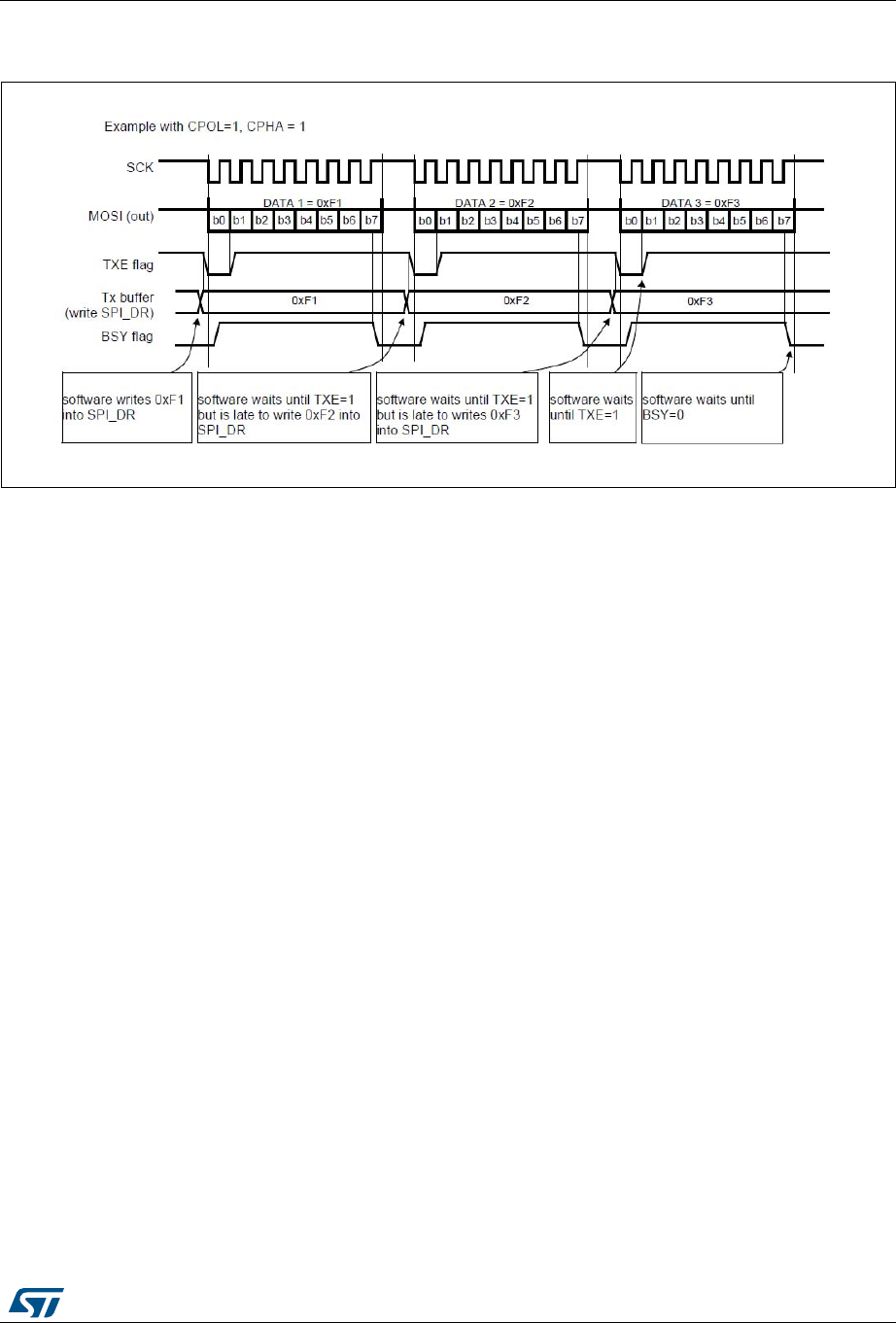
DocID14587 Rev 14 275/467
RM0016 Serial peripheral interface (SPI)
287
Figure 99. TXE/BSY behavior when transmitting (BDM = 0 and RXLONY = 0).
Case of discontinuous transfers
20.3.6 CRC calculation
A CRC calculator has been implemented for communication reliability. Separate CRC
calculators are implemented for transmitted data and received data. The CRC is calculated
using a programmable polynomial serially on each bit. The CRC is calculated on the
sampling clock edge defined by the CPHA and CPOL bits in the SPI_CR1 register.
CRC calculation is enabled by setting the CRCEN bit in the SPI_CR1 register. This action
resets the CRC registers (SPI_RXCRCR and SPI_TXCRCR). When the CRCNEXT bit in
SPI_CR2 is set, the SPI_TXCRCR value is transmitted at the end of the current byte
transmission.
If a byte is present in the Tx buffer, the CRC value is transmitted only after the transmission
of this byte. During the transmission of CRC, the CRC calculator is switched off and the
register value remains unchanged.
The CRCERR flag in the SPI_SR register is set if the value received in the shift register
during the SPI_TXCRCR value transmission does not match the SPI_RXCRCR value.

Serial peripheral interface (SPI) RM0016
276/467 DocID14587 Rev 14
SPI communication using CRC is possible through the following procedure:
•Program the CPOL, CPHA, LSBfirst, BR, SSM, SSI and MSTR values.
•Program the polynomial in the SPI_CRCPR register
•Enable the CRC calculation by setting the CRCEN bit in the SPI_CR1 register. This
also clears the SPI_RXCRCR and SPI_TXCRCR registers
•Enable the SPI by setting the SPE bit in SPI_CR1
•Start the communication and sustain the communication until all but one byte has been
transmitted or received.
•On writing the last byte to the Txbuffer, set the CRCNext bit in the SPI_CR2 register to
indicate that after transmission of the last byte, the CRC should be transmitted. The
CRC calculation will be frozen during the CRC transmission.
•After transmitting the last byte, the SPI transmits the CRC. CRCNext bit is reset. The
CRC is also received and compared against the SPI_RXCRCR value. If the value does
not match, the CRCERR flag in SPI_SR is set and an interrupt can be generated when
the ERRIE in the SPI_ICR register is set.
Note: With high bit rate frequencies, the user must take care when transmitting CRC. As the
number of used CPU cycles has to be as low as possible in the CRC transfer phase, the
calling of software functions in the CRC transmission sequence is forbidden to avoid errors
in the last data and CRC reception.
DocID14587 Rev 14 277/467
RM0016 Serial peripheral interface (SPI)
287
20.3.7 Status flags
There are three status flags to allow the application to completely monitor the state of the
SPI bus.
Tx buffer empty flag (TXE)
When set, this flag indicates that the Tx buffer is empty and that the next data to be
transmitted can be loaded into the buffer. The TXE flag is reset when writing the SPI_DR
register.
Rx buffer not empty (RXNE)
When set, this flag indicates that there is a valid received data in the Rx buffer. This flag is
reset when SPI_DR is read.
Busy flag (BSY)
This BSY flag is set and reset by hardware (writing to this flag has no effect). The BSY flag
indicates the state of the communication layer of the SPI.
When BSY is set, it indicates that the SPI is busy communicating. There is one exception in
master mode / bidirectional receive mode (MSTR=1 and BDM=1 and BDOE=0) where the
BSY flag is kept low during the reception.
The BSY flag is useful to detect the end of a transfer if the software wants to disable the SPI
and enters Halt mode (or disable the peripheral clock). This will avoid corrupting the last
transfer. For this, the procedure described below must be strictly respected.
The BSY flag is also useful to avoid write collisions in a multimaster system.
The BSY flag is set when a transfer starts with the exception of master mode / bidirectional
receive mode (MSTR = 1 and BDM = 1 and BDOE = 0).
It is reset:
•when a transfer is finished (except in master mode if the communication is continuous)
•when the SPI is disabled
•when a master mode fault occurs (MODF = 1)
When communication is not continuous, the BSY flag is low between each communication.
When communication is continuous, in master mode, the BSY flag is kept high during the
whole transfers.
When communication is continuous, in slave mode, the BSY flag goes back to low state for
one SPI clock cycle between each transfer.
Note: Do not use the BSY flag to handle each data transmission or reception. It is better to use
TXE and RXNE flags instead.
20.3.8 Disabling the SPI
When a transfer is terminated, the application can stop the communication by disabling the
SPI peripheral. This is done by resetting the SPE bit.
For some configurations, disabling the SPI and entering Halt mode while a transfer is on-
going, can cause the current transfer to be corrupted and/or it can happen that the BSY flag
becomes unreliable.

Serial peripheral interface (SPI) RM0016
278/467 DocID14587 Rev 14
To avoid any of these effects, it is recommended to respect the following procedure when
disabling the SPI:
In master or slave full duplex mode (BDM = 0, RXONLY = 0):
1. Wait until RXNE = 1 to receive the last data
2. Wait until TXE = 1
3. Then wait until BSY = 0
4. Disable the SPI (SPE = 0) and eventually enter Halt mode (or disable the peripheral
clock).
In master or slave unidirectional transmit-only mode (BDM = 0, RXONLY = 0)
or bidirectional transmit mode (BDM = 1, BDOE = 1):
After the last data is written in the SPI_DR register:
1. Wait until TXE = 1
2. Then wait until BSY = 0
3. Disable the SPI (SPE = 0) and, if desired, enter Halt mode (or disable the peripheral
clock).
In master unidirectional receive-only mode (MSTR = 1, BDM = 0, RXONLY = 1)
or bidirectional receive mode (MSTR = 1, BDM = 1, BDOE = 0):
This case must be managed in a particular way to ensure that the SPI does not initiate a
new transfer:
1. Wait for the second to last occurrence of RXNE = 1 (n-1)
2. Then wait for one SPI clock cycle (using a software loop) before disabling the SPI
(SPE = 0)
3. Then wait for the last RXNE=1 before entering Halt mode (or disabling the peripheral
clock).
Note: In master bidirectional receive mode (MSTR=1 and BDM=1 and BDOE=0), the BSY flag is
kept low during a transfer.
In slave receive-only mode (MSTR = 0, BDM = 0, RXONLY = 1) or bidirectional
receive mode (MSTR = 0, BDM = 1, BDOE = 0):
1. You can disable the SPI (write SPE = 1) whenever you want: the current transfer will
complete before being effectively disabled.
2. Then, if you want to enter Halt mode, you must first wait until BSY = 0 before entering
Halt mode (or disabling the peripheral clock).

DocID14587 Rev 14 279/467
RM0016 Serial peripheral interface (SPI)
287
20.3.9 Error flags
Master mode fault (MODF)
Master mode fault occurs when the master device has its NSS pin pulled low (in NSS
hardware mode) or SSI bit low (in NSS software mode), this automatically sets the MODF
bit. Master mode fault affects the SPI peripheral in the following ways:
•The MODF bit is set and an SPI interrupt is generated if the ERRIE bit is set.
•The SPE bit is reset. This blocks all output from the device and disables the SPI
interface.
•The MSTR bit is reset, thus forcing the device into slave mode.
Use the following software sequence to clear the MODF bit:
1. Make a read or write access to the SPI_SR register while the MODF bit is set.
2. Then write to the SPI_CR1 register.
To avoid any multiple slave conflicts in a system comprising several MCUs, the NSS pin
must be pulled high during the MODF bit clearing sequence. The SPE and MSTR bits can
be restored to their original state after this clearing sequence.
As a security, hardware does not allow you to set the SPE and MSTR bits while the MODF
bit is set.
In a slave device the MODF bit cannot be set. However, in a multi-master configuration, the
device can be in slave mode with this MODF bit set. In this case, the MODF bit indicates
that there might have been a multimaster conflict for system control. You can use an
interrupt routine to recover cleanly from this state by performing a reset or returning to a
default state.
Overrun condition
An overrun condition occurs, when the master device has sent data bytes and the slave
device has not cleared the RXNE bit resulting from the previous data byte transmitted.
When an overrun condition occurs:
•OVR bit is set and an interrupt is generated if the ERRIE bit is set.
In this case, the receiver buffer contents will not be updated with the newly received data
from the master device. A read to the SPI_DR register returns this byte. All other
subsequently transmitted bytes are lost.
Clearing the OVR bit is done by a read access to the SPI_DR register followed by a read
access to the SPI_SR register.
CRC error
This flag is used to verify the correctness of the value received when the CRCEN bit in the
SPI_CR2 register is set. The CRCERR flag in the SPI_SR register is set if the value
received in the shift register after the SPI_TXCRCR value transmission does not match the
SPI_RXCRCR value. Refer to Chapter 20.3.6: CRC calculation.
Serial peripheral interface (SPI) RM0016
280/467 DocID14587 Rev 14
20.3.10 SPI low power modes
Using the SPI to wake up the device from Halt mode
When the microcontroller is in Halt mode, the SPI is still capable of responding as a slave
provided the NSS pin is tied low or the SSI bit is reset before entering Halt mode.
When the first sampling edge of data (as defined by the CPHA bit) is detected:
•The WKUP bit is set in the SPI_SR register
•An interrupt is generated if the WKIE bit in the SPI_ICR register is set.
•This interrupt wakes up the device from Halt mode.
•Due to the time needed to restore the system clock, the SPI slave sends or receives a
few data before being able to communicate correctly. It is then mandatory to use the
following protocol:
– A specific value is written into the SPI_DR before entering Halt mode. This value
indicates to the external master that the SPI is in Halt mode
– The external master sends the same byte continuously until it receives from the
SPI slave device a new value other than the unique value indicating the SPI is in
Halt mode. This new value indicates the SPI slave has woken-up and can
correctly communicate.
Restrictions in receive-only modes
The wakeup functionality is not guaranteed in receive-only modes (BDM = 0 and
RXONLY = 1 or BDM = 1 and BDOE = 0) since the time needed to restore the system clock
can be greater than the data reception time. A loss of data in reception would then be
induced and the slave device can not indicate to the master which data has been properly
received.
20.3.11 SPI interrupts
Table 45. SPI behavior in low power modes
Mode Description
Wait No effect on SPI.
SPI interrupt events cause the device to exit from Wait mode.
Halt
SPI registers are frozen.
In Halt mode, the SPI is inactive. If the SPI is in master mode, then
communication resumes when the device is woken up by an interrupt with
“wakeup from Halt mode” capability.
If the SPI is in slave mode, then it can wake up the MCU from Halt mode after
detecting the first sampling edge of data.
Table 46. SPI interrupt requests
Interrupt event Event
flag
Enable
control
bit
Exit
from
Wait
Exit
from
Halt
Transmit buffer empty flag TXE TXIE Yes No
Receive buffer not empty flag RXNE RXIE Yes No
DocID14587 Rev 14 281/467
RM0016 Serial peripheral interface (SPI)
287
Wakeup event flag WKUP WKIE Yes Yes
Master mode fault event MODF
ERRIE
Yes No
Overrun error OVR Yes No
CRC error flag CRCERR Yes No
Table 46. SPI interrupt requests (continued)
Interrupt event Event
flag
Enable
control
bit
Exit
from
Wait
Exit
from
Halt
Serial peripheral interface (SPI) RM0016
282/467 DocID14587 Rev 14
20.4 SPI registers
20.4.1 SPI control register 1 (SPI_CR1)
Address offset: 0x00
Reset value: 0x00
76543210
LSBFIRST SPE BR [2:0] MSTR CPOL CPHA
rw rw rw rw rw rw
Bit 7 LSBFIRST: Frame format (1)
0: MSB is transmitted first
1: LSB is transmitted first
Bit 6 SPE: SPI enable (2)
0: Peripheral disabled
1: Peripheral enabled
Bits 5:3 BR[2:0]: Baud rate control
000: fMASTER/2
001: fMASTER/4
010: fMASTER/8
011: fMASTER/16
100: fMASTER/32
101: fMASTER/64
110: fMASTER/128
111: fMASTER/256
Note: These bits should not be changed when the communication is ongoing.
Bit 2 MSTR: Master selection (1)
0: Slave configuration
1: Master configuration
Bit1 CPOL: Clock polarity (1)
0: SCK to 0 when idle
1: SCK to 1 when idle
Bit 0 CPHA: Clock phase (1)
0: The first clock transition is the first data capture edge
1: The second clock transition is the first data capture edge
1. This bit should not be changed when the communication is ongoing.
2. When disabling the SPI, follow the procedure described in Section 20.3.8: Disabling the SPI on page 277

DocID14587 Rev 14 283/467
RM0016 Serial peripheral interface (SPI)
287
20.4.2 SPI control register 2 (SPI_CR2)
Address offset: 0x01
Reset value: 0x00
76543210
BDM BDOE CRCEN CRCNEXT Reserved RXOnly SSM SSI
rw rw rw rw rw rw rw rw
Bit 7 BDM: Bidirectional data mode enable
0: 2-line unidirectional data mode selected
1: 1-line bidirectional data mode selected
Bit 6 BDOE: Input/Output enable in bidirectional mode
This bit selects the direction of transfer in bidirectional mode when BDM is set to 1.
0: Input enabled (receive-only mode)
1: Output enabled (transmit-only mode)
In master mode, the MOSI pin is used and in slave mode, the MISO pin is used.
Bit 5 CRCEN: Hardware CRC calculation enable
0: CRC calculation disabled
1: CRC calculation Enabled
Note: This bit should be written only when SPI is disabled (SPE = ‘0’) for correct operation
Bit 4 CRCNEXT: Transmit CRC next
0: Next transmit value is from Tx buffer
1: Next transmit value is from Tx CRC register
Bit 3 Reserved
Bit 2 RXONLY: Receive only
0: Full duplex (Transmit and receive)
1: Output disabled (Receive only mode)
This bit combined with BDM bit selects the direction of transfer in 2 line uni-directional mode
This bit is also useful in a multi-slave system in which this particular slave is not accessed, the output
from the accessed slave is not corrupted.
Bit 1 SSM: Software slave management
0: Software slave management disabled
1: Software slave management enabled
When the SSM bit is set, the NSS pin input is replaced with the value coming from the SSI bit
Bit 0 SSI: Internal slave select
This bit has effect only when SSM bit is set. The value of this bit is forced onto the NSS pin and the I/O
value of the NSS pin is ignored.
0: Slave mode
1: Master mode

Serial peripheral interface (SPI) RM0016
284/467 DocID14587 Rev 14
20.4.3 SPI interrupt control register (SPI_ICR)
Address offset: 0x02
Reset value: 0x00
76543210
TXIE RXIE ERRIE WKIE Reserved
rw rw rw rw r
Bit 7 TXIE: Tx buffer empty interrupt enable
0: TXE interrupt masked
1: TXE interrupt not masked. This allows an interrupt request to be generated when the TXE flag is
set.
Bit 6 RXIE: RX buffer not empty interrupt enable
0: RXNE interrupt masked
1: RXNE interrupt not masked. This allows an interrupt request to be generated when the RXNE flag
is set.
Bit 5 ERRIE: Error interrupt enable
0: Error interrupt is masked
1: Error interrupt is enabled. This allows an interrupt request to be generated when an error
condition occurs (CRCERR, OVR, MODF)
Bit 4 WKIE: Wakeup interrupt enable
0: Wakeup interrupt masked
1: Wakeup interrupt enabled. This allows an interrupt request to be generated when the WKUP flag
is set.
Bits 3:0 Reserved

DocID14587 Rev 14 285/467
RM0016 Serial peripheral interface (SPI)
287
20.4.4 SPI status register (SPI_SR)
Address offset: 0x03
Reset value: 0x02
76543210
BSY OVR MODF CRCERR WKUP Reserved TXE RXNE
r rc_w0 rc_w0 rc_w0 rc_w0 r r r
Bit 7 BSY: Busy flag
0: SPI not busy
1: SPI is busy in communication
This flag is set and reset by hardware.
Note: BSY flag must be used with cautious: refer to Section 20.3.7: Status flags on page 277 and
Section 20.3.8: Disabling the SPI on page 277
Bit 6 OVR: Overrun flag
0: No Overrun occurred
1: Overrun occurred
This flag is set by hardware and reset by a software sequence.
Bit 5 MODF: Mode fault
0: No Mode fault occurred
1: Mode fault occurred
This flag is set by hardware and reset by a software sequence.
Bit 4 CRCERR: CRC error flag
0: CRC value received matches the SPI_RXCRCR value
1: CRC value received does not match the SPI_RXCRCR value
This flag is set by hardware and cleared by software writing 0.
Bit 3 WKUP: Wakeup flag
0: No wakeup event occurred
1: Wakeup event occurred
This flag is set on the first sampling edge on SCK when the STM8 is in Halt mode and the SPI is
configured as slave.
This flag is reset by software writing 0.
Bit 2 Reserved
Bit 1 TXE: Transmit buffer empty
0: Tx buffer not empty
1: Tx buffer empty
Bit 0 RXNE: Receive buffer not empty
0: Rx buffer empty
1: Rx buffer not empty
Serial peripheral interface (SPI) RM0016
286/467 DocID14587 Rev 14
20.4.5 SPI data register (SPI_DR)
Address offset: 0x04
Reset value: 0x00
20.4.6 SPI CRC polynomial register (SPI_CRCPR)
Address offset: 0x05
Reset value: 0x07
20.4.7 SPI Rx CRC register (SPI_RXCRCR)
Address offset: 0x06Reset value: 0x00
76543210
DR[7:0]
rw
Bits 7:0 DR[7:0]: Data register
Byte received or to be transmitted.
The data register is split into 2 buffers - one for writing (Transmit buffer) and another one for reading
(Receive buffer). A write to the data register will write into the Tx buffer and a read from the data
register will return the value held in the Rx buffer.
76543210
CRCPOLY[7:0]
rw
Bits 7:0 CRCPOLY[7:0]: CRC polynomial register
This register contains the polynomial for the CRC calculation.
The CRC polynomial (0x07) is the reset value of this register. You can configure an other polynomial
as required for your application.
76543210
RxCRC[7:0]
r
Bits 7:0 RXCRC[7:0]: Rx CRC Register
When CRC calculation is enabled, the RxCRC[7:0] bits contain the computed CRC value of the
subsequently received bytes. This register is reset when the CRCEN bit in SPI_CR2 register is written
to 1. The CRC is calculated serially using the polynomial programmed in the SPI_CRCPR register.
Note: A read to this register when the BSY Flag is set could return an incorrect value.
DocID14587 Rev 14 287/467
RM0016 Serial peripheral interface (SPI)
287
20.4.8 SPI Tx CRC register (SPI_TXCRCR)
Address offset: 0x07Reset value: 0x00
20.5 SPI register map and reset values
76543210
TxCRC[7:0]
r
Bits 7:0 TxCRC[7:0]: Tx CRC register
When CRC calculation is enabled, the TxCRC[7:0] bits contain the computed CRC value of the
subsequently transmitted bytes. This register is reset when the CRCEN bit of SPI_CR2 is written to 1.
The CRC is calculated serially using the polynomial programmed in the SPI_CRCPR register.
Note: A read to this register when the BSY flag is set could return a incorrect value
Table 47. SPI register map and reset values
Address
offset
Register
name 76543210
0x00 SPI_CR1
Reset value
LSB FIRST
0
SPE
0
BR2
0
BR1
0
BR0
0
MSTR
0
CPOL
0
CPHA
0
0x01 SPI_CR2
Reset value
BDM
0
BDOE
0
CRCEN
0
CRCNEXT
0
-
0
RXONLY
0
SSM
0
SSI
0
0x03 SPI_SR
Reset value
BSY
0
OVR
0
MODF
0
CRCERR
0
WKUP
0
-
0
TXE
1
RXNE
0
0x04 SPI_DR
Reset value
DR[7:0]
0
0x05 SPI_CRCPR
reset value
MSB
0
-
0
-
0
-
0
-
0
-
1
-
1
LSB
1
0x06 SPI_RXCRCR
reset value
MSB
0
-
0
-
0
-
0
-
0
-
0
-
0
LSB
0
0x07 SPI_TXCRCR
reset value
MSB
0
-
0
-
0
-
0
-
0
-
0
-
0
LSB
0

Inter-integrated circuit (I2C) interface RM0016
288/467 DocID14587 Rev 14
21 Inter-integrated circuit (I2C) interface
21.1 I2C introduction
I2C (inter-integrated circuit) bus interface serves as an interface between the
microcontroller and the serial I2C bus. It provides multi-master capability, and controls all
I2C bus-specific sequencing, protocol, arbitration and timing. It supports standard and fast
speed modes.
21.2 I2C main features
•Parallel-bus/I2C protocol converter
•Multi-master capability: the same interface can act as Master or Slave
•I2C Master features:
– Clock generation
– Start and Stop generation
•I2C Slave features:
– Programmable I2C Address detection
– Stop bit detection
•Generation and detection of 7-bit/10-bit addressing and general call
•Supports different communication speeds:
– Standard speed (up to 100 kHz),
– Fast speed (up to 400 kHz)
•Status flags:
– Transmitter/receiver mode flag
– End-of-byte transmission flag
– I2C busy flag
•Error flags:
– Arbitration lost condition for master mode
– Acknowledgement failure after address/ data transmission
– Detection of misplaced start or stop condition
– Overrun/underrun if clock stretching is disabled
•3 types of interrupts:
– 1 communication interrupt
– 1 error condition interrupt
– 1 wakeup from Halt interrupt
•Wakeup capability:
– MCU wakes up from Low power mode on address detection in slave mode.
•Optional clock stretching
DocID14587 Rev 14 289/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.3 I2C general description
In addition to receiving and transmitting data, this interface converts it from serial to parallel
format and vice versa. The interrupts are enabled or disabled by software. The interface is
connected to the I2C bus by a data pin (SDA) and by a clock pin (SCL). It can be connected
with a standard (up to 100 kHz), or fast (up to 400 kHz) I2C bus.
Mode selection
The interface can operate in one of the four following modes:
•Slave transmitter
•Slave receiver
•Master transmitter
•Master receiver
By default, it operates in slave mode. The interface automatically switches from slave to
master, after it generates a START condition and from master to slave, if an arbitration loss
or a STOP generation occurs, allowing Multi-Master capability.
Communication flow
In Master mode, the I2C interface initiates a data transfer and generates the clock signal. A
serial data transfer always begins with a start condition and ends with a stop condition. Both
start and stop conditions are generated in master mode by software.
In Slave mode, the interface is capable of recognizing its own addresses (7- or 10-bit), and
the General Call address. The General Call address detection may be enabled or disabled
by software.
Data and addresses are transferred as 8-bit bytes, MSB first. The first byte(s) following the
start condition contain the address (one in 7-bit mode, two in 10-bit mode). The address is
always transmitted in Master mode.
A 9th clock pulse follows the 8 clock cycles of a byte transfer, during which the receiver must
send an acknowledge bit to the transmitter. Refer to the following figure.
Figure 100. I2Cbus protocol
Acknowledge may be enabled or disabled by software. The I2C interface addresses (7-/10-
bit and/or general call address) can be selected by software.
The block diagram of the I2C interface is shown in Figure 101.
MSv47719V1
SDA
SCL
MSB
12 89
ACK
Stop
condition
Start
condition
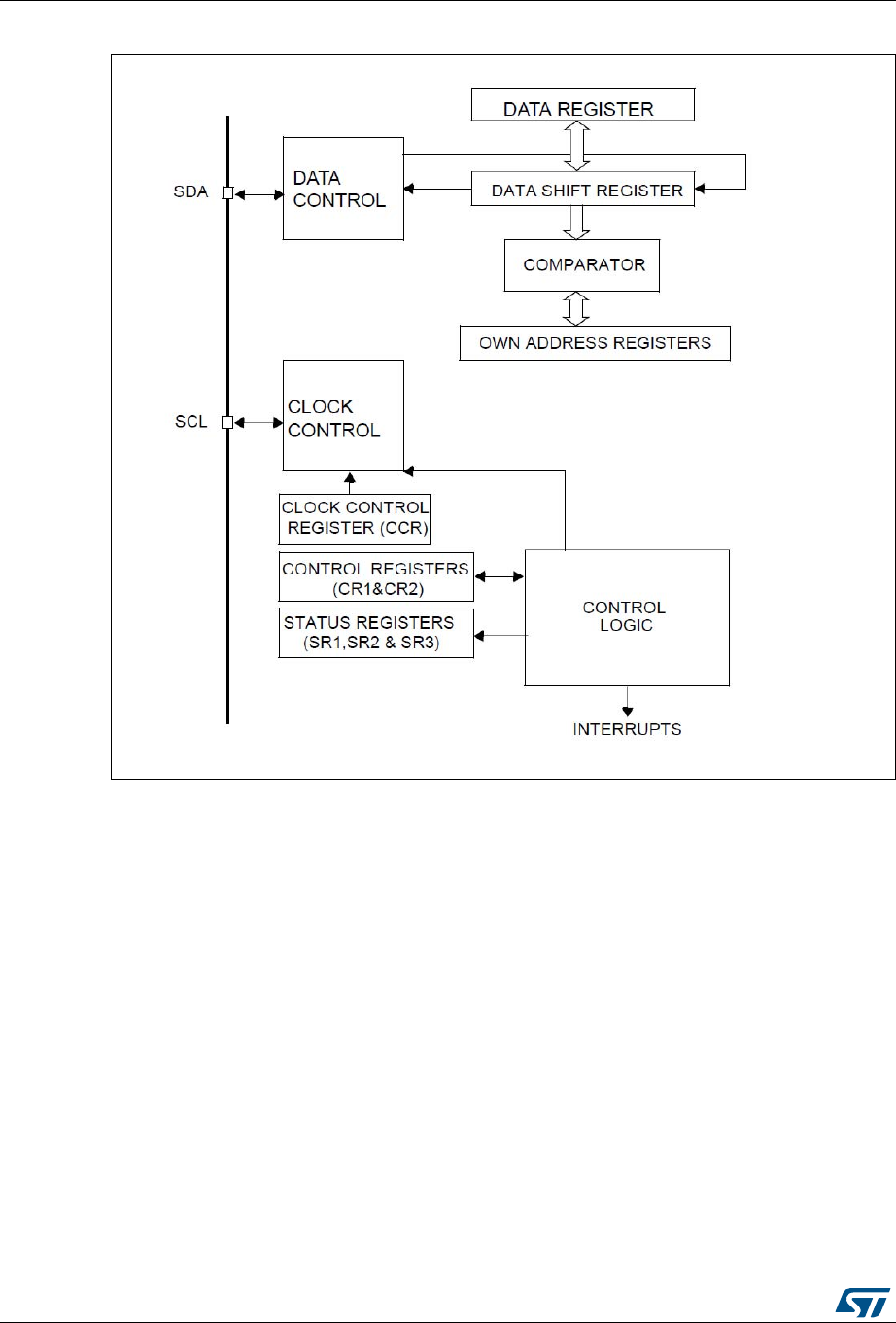

DocID14587 Rev 14 291/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.4 I2C functional description
By default the I2C interface operates in Slave mode. To switch from default Slave mode to
Master mode a Start condition generation is needed.
21.4.1 I2C slave mode
The peripheral input clock must be programmed in the I2C_FREQR register in order to
generate correct timings. The peripheral input clock frequency must be at least:
•1 MHz in Standard mode
•4 MHz in Fast mode
As soon as a start condition is detected, the address is received from the SDA line and sent
to the shift register. Then it is compared with the address of the interface (OAR1L and OAR2
if ENDUAL = 1) or the General Call address (if ENGC = 1).
Note: In 10-bit addressing mode, the comparison includes the header sequence (11110xx0),
where xx denotes the two most significant bits of the address.
Header or address not matched: the interface ignores it and waits for another Start
condition.
Header matched (10-bit mode only): the interface generates an acknowledge pulse if the
ACK bit is set and waits for the 8-bit slave address.
Address matched: the interface generates in sequence:
•An acknowledge pulse if the ACK bit is set
•The ADDR bit is set by hardware and an interrupt is generated if the ITEVTEN bit is
set.
In 10-bit mode, after receiving the address sequence the slave is always in Receiver mode.
It will enter Transmitter mode on receiving a repeated Start condition followed by the header
sequence with matching address bits and the least significant bit set (11110xx1).
The TRA bit indicates whether the slave is in Receiver or Transmitter mode.
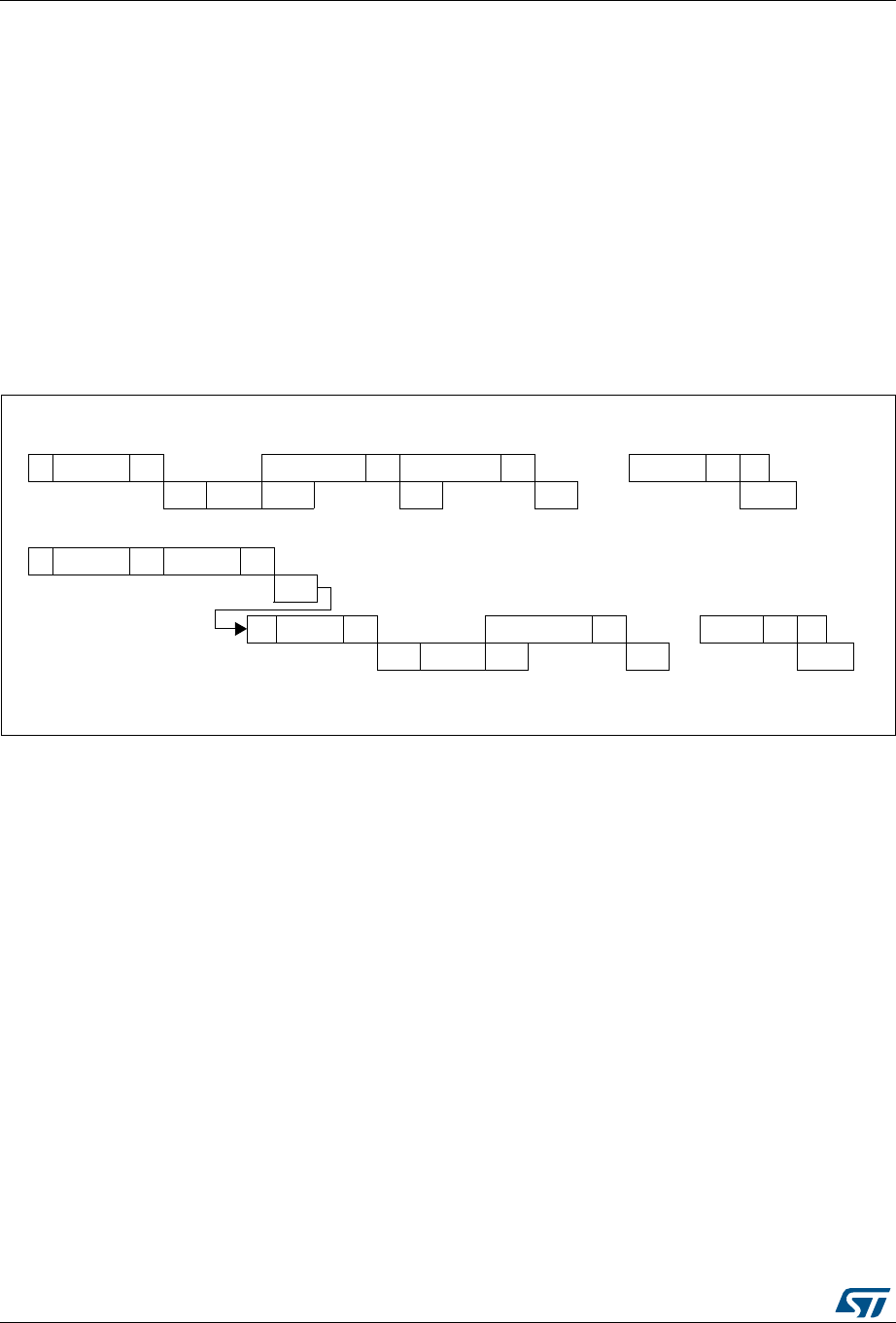
Inter-integrated circuit (I2C) interface RM0016
292/467 DocID14587 Rev 14
Slave transmitter
Following the address reception and after clearing ADDR, the slave sends bytes from the
DR register to the SDA line via the internal shift register.
The slave stretches SCL low until ADDR is cleared and DR filled with the data to be sent
(see Transfer sequencing EV1 EV3 in the following figure).
When the acknowledge pulse is received:
•The TXE bit is set by hardware with an interrupt if the ITEVTEN and the ITBUFEN bits
are set.
If TXE is set and a data was not written in the DR register before the end of the next data
transmission, the BTF bit is set and the interface waits until BTF is cleared, by reading the
SR1 register and then writing to the DR register, stretching SCL low.
Figure 102. Transfer sequence diagram for slave transmitter
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge, EVx = Event (with
interrupt if ITEVTEN=1)
EV1: ADDR =1, cleared by reading SR1 register followed by reading SR3.
EV3-1: TXE=1, shift register empty, data register empty, write Data1 in DR.
EV3: TXE=1, shift register not empty, data register empty, cleared by writing DR.
EV3-2: AF=1, AF is cleared by writing ‘0’ in AF bit of SR2 register.
2. EV1 and EV3-1 events stretch SCL low until the end of the corresponding software sequence.
3. EV3 software sequence must be performed before the end of the current byte transfer. In case EV3
software sequence can not be managed before the end of the current byte transfer, it is recommended to
use BTF instead of TXE with the drawback of slowing the communication.
Slave receiver
Following the address reception and after clearing ADDR, the slave receives bytes from the
SDA line into the DR register via the internal shift register. After each byte the interface
generates in sequence:
•An acknowledge pulse if the ACK bit is set
•The RXNE bit is set by hardware and an interrupt is generated if the ITEVTEN and
ITBUFEN bit is set.
If RXNE is set and the data in the DR register is not read before the end of the next data
reception, the BTF bit is set and the interface waits until BTF is cleared, by reading the SR1
register and then reading the DR register, stretching SCL low (see Figure 103).
7-bit slave transmitter
10-bit slave transmitter
S A ddress A Data1 .....
EV1 EV3-1 EV3
SrData1 A ....
EV1 EV3_1 EV3 EV3 EV3-2
MS37718V1
Data2AA
DataN NA P
EV3-2
EV3 EV3
S Header A Address A
EV1
Header A DataN NA P
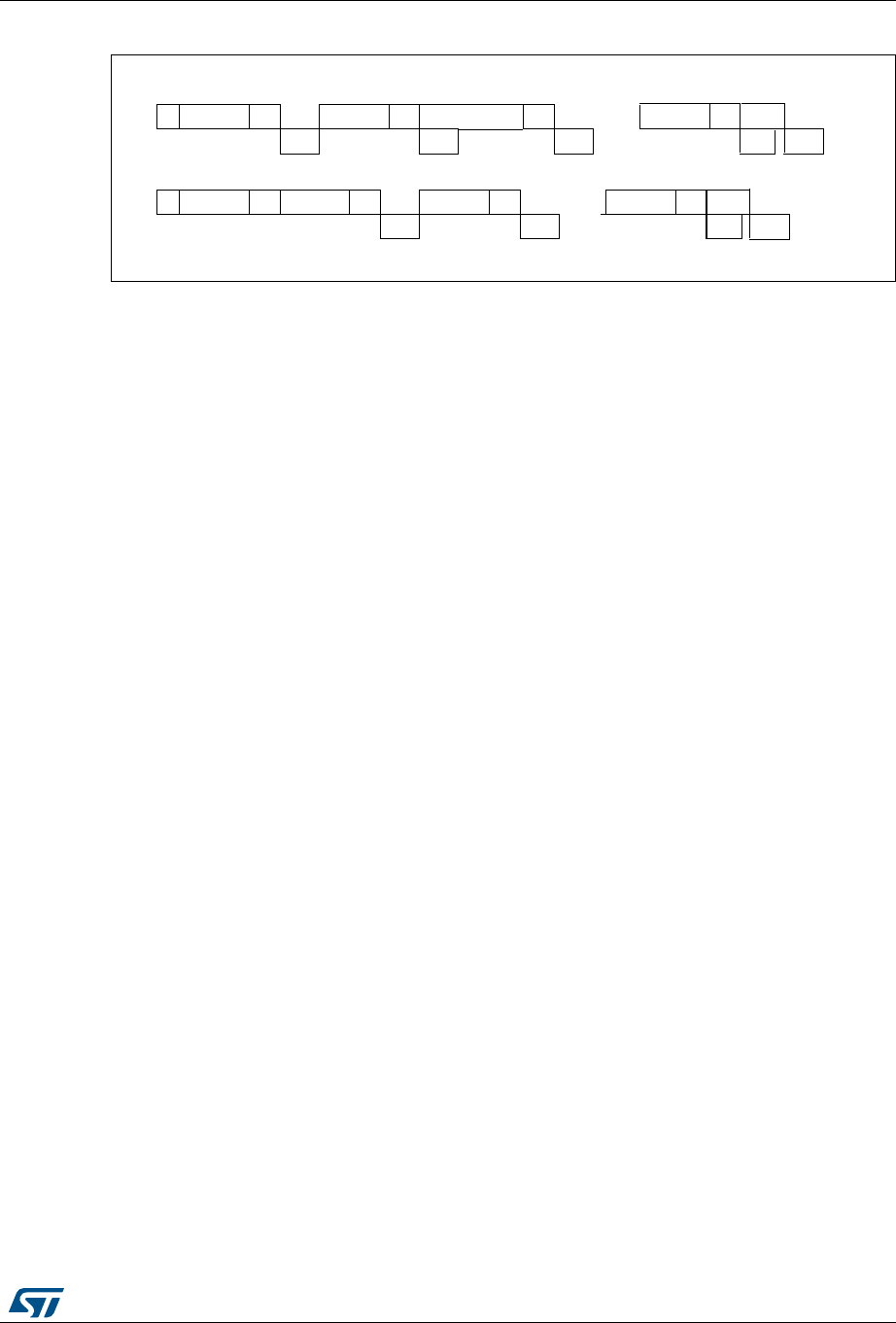
DocID14587 Rev 14 293/467
RM0016 Inter-integrated circuit (I2C) interface
319
Figure 103. Transfer sequence diagram for slave receiver
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge, EVx= Event (with
interrupt if ITEVTEN=1)
EV1: ADDR =1, cleared by reading SR1 register followed by reading SR3.
EV2: RXNE=1, cleared by reading DR register.
EV4: STOPF=1, cleared by reading SR1 register followed by writing CR2 register
2. EV1 event stretches SCL low until the end of the corresponding software sequence.
3. EV2 software sequence must be performed before the end of the current byte transfer.
4. After checking the SR1 register content, the user should perform the complete clearing sequence for each
flag found set. Thus, for the ADDR and STOPF flags, the following sequence is recommended inside the
I2C interrupt routine:
READ SR1
if (ADDR == 1) {READ SR1; READ SR3}
if (STOPF == 1) {READ SR1; WRITE CR2}
The purpose is to make sure that both ADDR and STOPF flags are cleared if both are found set.
5. See also: Note 8 on page 311.
Closing slave communication
After the last data byte is transferred, a Stop condition is generated by the master. The
interface detects this condition and sets the STOPF bit and generates an interrupt if the
ITEVTEN bit is set.
STOPF is cleared by a read of the SR1 register followed by a write to the CR2 register (see
Figure 104).
21.4.2 I2C master mode
In Master mode, the I2C interface initiates a data transfer and generates the clock signal. A
serial data transfer always begins with a Start condition and ends with a Stop condition.
Master mode is selected as soon as the Start condition is generated on the bus with a
START bit.
The following is the required sequence in master mode.
•Program the peripheral input clock in I2C_FREQR Register in order to generate correct
timings.
•Configure the clock control registers
•Configure the rise time register
•Program the I2C_CR1 register to enable the peripheral
•Set the START bit in the I2C_CR2 register to generate a Start condition
The peripheral input clock frequency must be at least:
•1 MHz in Standard mode
•4 MHz in Fast mode
7-bit slave receiver
10-bit slav e receiver
AData2 A ..... DataN A P
AA
..... DataN
MS37719V1
S Address Data1 A
EV1 EV2 EV2 EV2 EV4
EV2 EV4
AP
EV2
Data1Address
A
SHeader

Inter-integrated circuit (I2C) interface RM0016
294/467 DocID14587 Rev 14
SCL master clock generation
The CCR bits are used to generate the high and low level of the SCL clock, starting from the
generation of the rising and falling edge (respectively). As a slave may stretch the SCL line,
the peripheral checks the SCL input from the bus at the end of the time programmed in
TRISE bits after the rising edge generation.
•If the SCL line is low, it means that a slave is stretching the bus, and the high level
counter stops until the SCL line is detected high. This allows to guarantee the minimum
HIGH period of the SCL clock parameter.
•If the SCL line is high, the high level counter keeps on counting.
Indeed, the feedback loop from the SCL rising edge generation by the peripheral to the SCL
rising edge detection by the peripheral takes time even if no slave stretches the clock. This
loopback duration is linked to SCL rising time (impacting SCL VIH input detection), plus
delay due to the analog noise filter present on SCL input path, plus delay due to internal
SCL input synchronization with I2C Peripheral clock. The maximum time used by the
feedback loop is programmed in TRISE bits, so that the SCL frequency remains stable
whatever the SCL rising time.
Start condition
Setting the START bit causes the interface to generate a Start condition and to switch to
Master mode (MSL bit set) when the BUSY bit is cleared.
Note: In master mode, setting the START bit causes the interface to generate a Re-Start condition
at the end of the current byte transfer.
Once the Start condition is sent:
•The SB bit is set by hardware and an interrupt is generated if the ITEVTEN bit is set.
Then the master waits for a read of the SR1 register followed by a write in the DR register
with the Slave address ().

DocID14587 Rev 14 295/467
RM0016 Inter-integrated circuit (I2C) interface
319
Slave address transmission
Then the slave address is sent to the SDA line via the internal shift register.
•In 10-bit addressing mode, sending the header sequence causes the following event:
– The ADD10 bit is set by hardware and an interrupt is generated if the ITEVTEN bit
is set.
Then the master waits for a read of the SR1 register followed by a write in the DR
register with the second address byte (see Figure 104 & Figure 105 Transfer
sequencing EV9).
The ADDR bit is set by hardware and an interrupt is generated if the ITEVTEN bit is
set. Then the master waits for a read of the SR1 register followed by a read in the SR3
register (see Figure 104 & Figure 105 Transfer sequencing EV6).
•In 7-bit addressing mode, one address byte is sent.
As soon as the address byte is sent,
– The ADDR bit is set by hardware and an interrupt is generated if the ITEVTEN bit
is set.
Then the master waits for a read of the SR1 register followed by a read in the SR3
register (see Figure 104 & Figure 105 Transfer sequencing EV6).
The master can decide to enter Transmitter or Receiver mode depending on the LSB of
the slave address sent.
•In 7-bit addressing mode,
– To enter Transmitter mode, a master sends the slave address with LSB reset.
– To enter Receiver mode, a master sends the slave address with LSB set.
•In 10-bit addressing mode,
– To enter Transmitter mode, a master sends the header (11110xx0) and then the
slave address, (where xx denotes the two most significant bits of the address).
– To enter Receiver mode, a master sends the header (11110xx0) and then the
slave address. Then it should send a repeated Start condition followed by the
header (11110xx1), (where xx denotes the two most significant bits of the
address).
The TRA bit indicates whether the master is in Receiver or Transmitter mode.
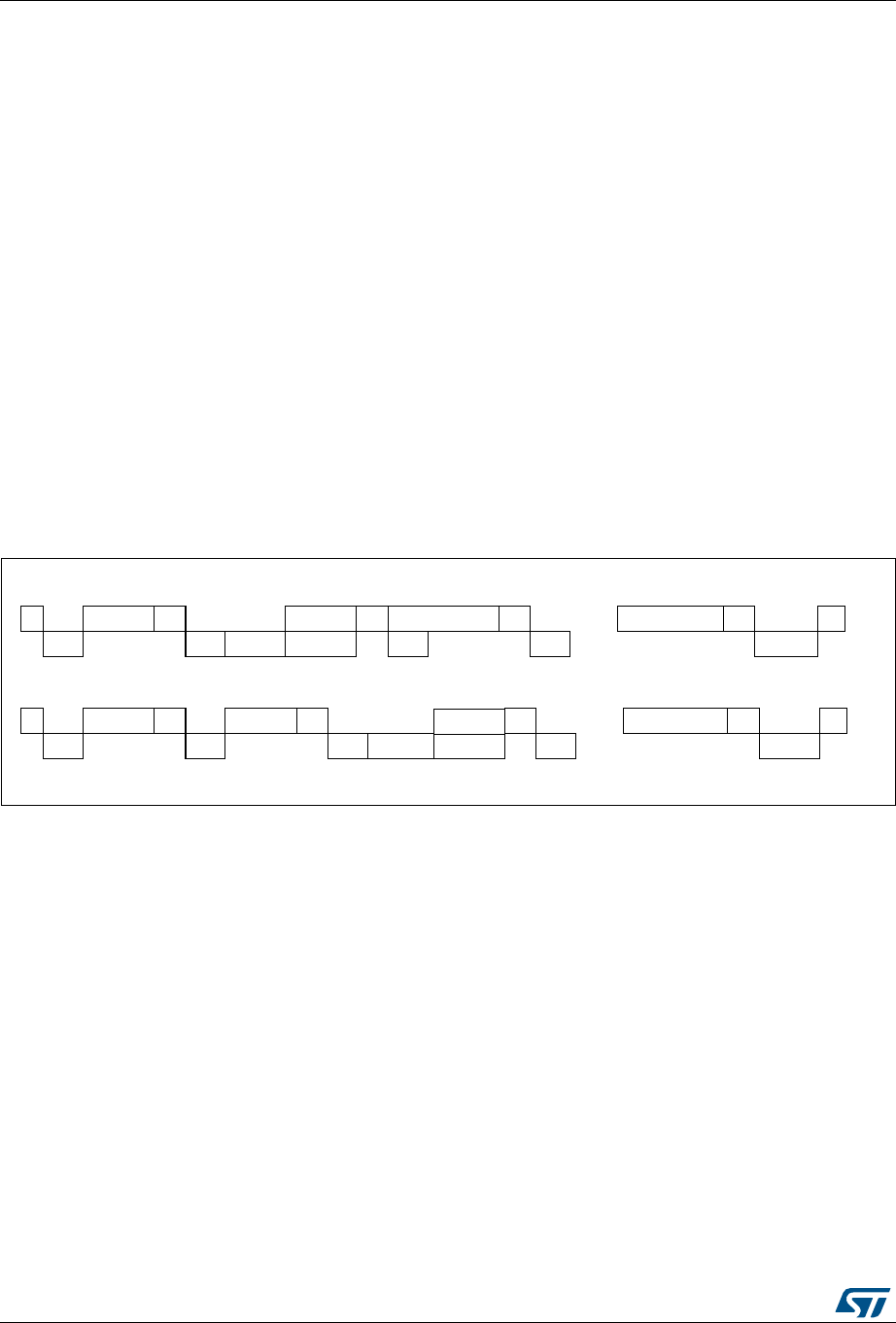
Inter-integrated circuit (I2C) interface RM0016
296/467 DocID14587 Rev 14
Master transmitter
Following the address transmission and after clearing ADDR, the master sends bytes from
the DR register to the SDA line via the internal shift register.
The master waits until the first data byte is written in the DR register, (see
Figure 104Transfer sequencing EV8_1).
When the acknowledge pulse is received:
•The TXE bit is set by hardware and an interrupt is generated if the ITEVTEN and
ITBUFEN bits are set.
If TXE is set and a data byte was not written in the DR register before the end of the next
data transmission, BTF is set and the interface waits until BTF is cleared, by reading the
SR1 register and then writing to the DR register, stretching SCL low.
Closing the communication
After writing the last byte to the DR register, the STOP bit is set by software to generate a
Stop condition (see Figure 104 Transfer sequencing EV8_2). The interface goes
automatically back to slave mode (MSL bit cleared).
Note: Stop condition should be programmed during EV8_2 event, when either TXE or BTF is set.
Figure 104. Transfer sequence diagram for master transmitter
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge,
EVx= Event (with interrupt if ITEVTEN=1)
EV5: SB=1, cleared by reading SR1 register followed by writing DR register with Address.
EV6: ADDR=1, cleared by reading SR1 register followed by reading SR3.
EV8_1: TXE=1, shift register empty, data register empty, write DR register.
EV8: TXE=1, shift register not empty, data register empty, cleared by writing DR register.
EV8_2: TXE=1, BTF = 1, Program STOP request. TXE and BTF are cleared by HW by stop condition
EV9: ADD10=1, cleared by reading SR1 register followed by writing DR register. See also:Note 8 on
page 311
2. EV8 software sequence must be performed before the end of the current byte transfer. In case EV8
software sequence can not be managed before the end of the current byte transfer, it is recommended to
use BTF instead of TXE with the drawback of slowing the communication.
7-bit master transmitter
A.....
.....
S Address AData1 Data2A DataN AP
EV5 EV6 EV8_1 EV8 EV8 EV8 EV8_2
DataN AP
EV8_2
Data1 A
EV8 EV8EV8_1EV6
S
EV5
Header A Address A
EV9
10-bit master transmitter
MS37720V1
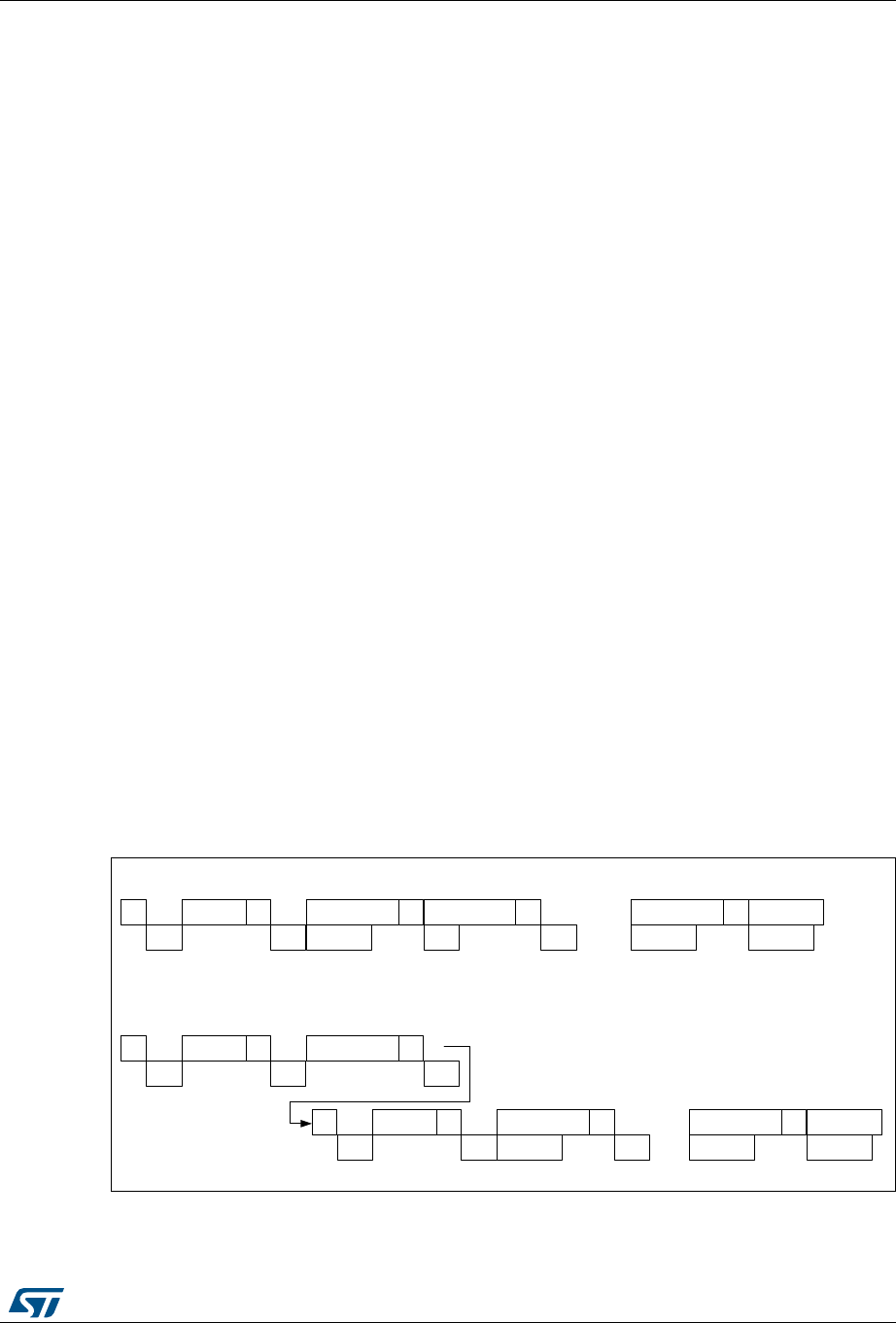
DocID14587 Rev 14 297/467
RM0016 Inter-integrated circuit (I2C) interface
319
Master receiver
Following the address transmission and after clearing ADDR, the I2C interface enters
Master Receiver mode. In this mode the interface receives bytes from the SDA line into the
DR register via the internal shift register. After each byte the interface generates in
sequence:
•An acknowledge pulse if the ACK bit is set
•The RXNE bit is set and an interrupt is generated if the ITEVTEN and ITBUFEN bits
are set ().
If the RXNE bit is set and the data in the DR register was not read before the end of the next
data reception, the BTF bit is set by hardware and the interface waits for the BTF bit to be
cleared by reading I2C_SR1 and then I2C_DR, stretching SCL low.
Closing the communication
Method 1: This method is for the case when the I2C is used with interrupts that have the
highest priority in the application.
The master sends a NACK for the last byte received from the slave. After receiving this
NACK, the slave releases the control of the SCL and SDA lines. Then the master can send
a Stop/Re-Start condition.
•In order to generate the non-acknowledge pulse after the last received data byte, the
ACK bit must be cleared just after reading the second last data byte (after second last
RXNE event).
•In order to generate the Stop/Re-Start condition, software must set the STOP/ START
bit just after reading the second last data byte (after the second last RXNE event).
•In case a single byte is to be received, the Acknowledge deactivation and the STOP
condition generation are made just after EV6 (in EV6-1 just after ADDR is cleared).
After the Stop condition generation, the interface goes automatically back to slave mode
(MSL bit cleared).
Method 1: This method is for the case when the I2C is used with interrupts that have the
highest priority in the application.
Figure 105. Method 1: transfer sequence diagram for master receiver
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge,
EVx= Event (with interrupt if ITEVTEN=1)
MSv47720V1
7-bit master receiver
10-bit master receiver
S
EV5
Address
EV6 EV6_1
AData1 AData2
EV7
A
EV7
DataN NA P
S
EV5
Header
EV9
AAddress A
EV6
S
EV5
Header
EV6 EV6_1
AData1 A
EV7
EV7_1 EV7
DataN NA P
EV7_1 EV7
1. In case of a single byte to be received, it is a NACK
(1)
r
...
...
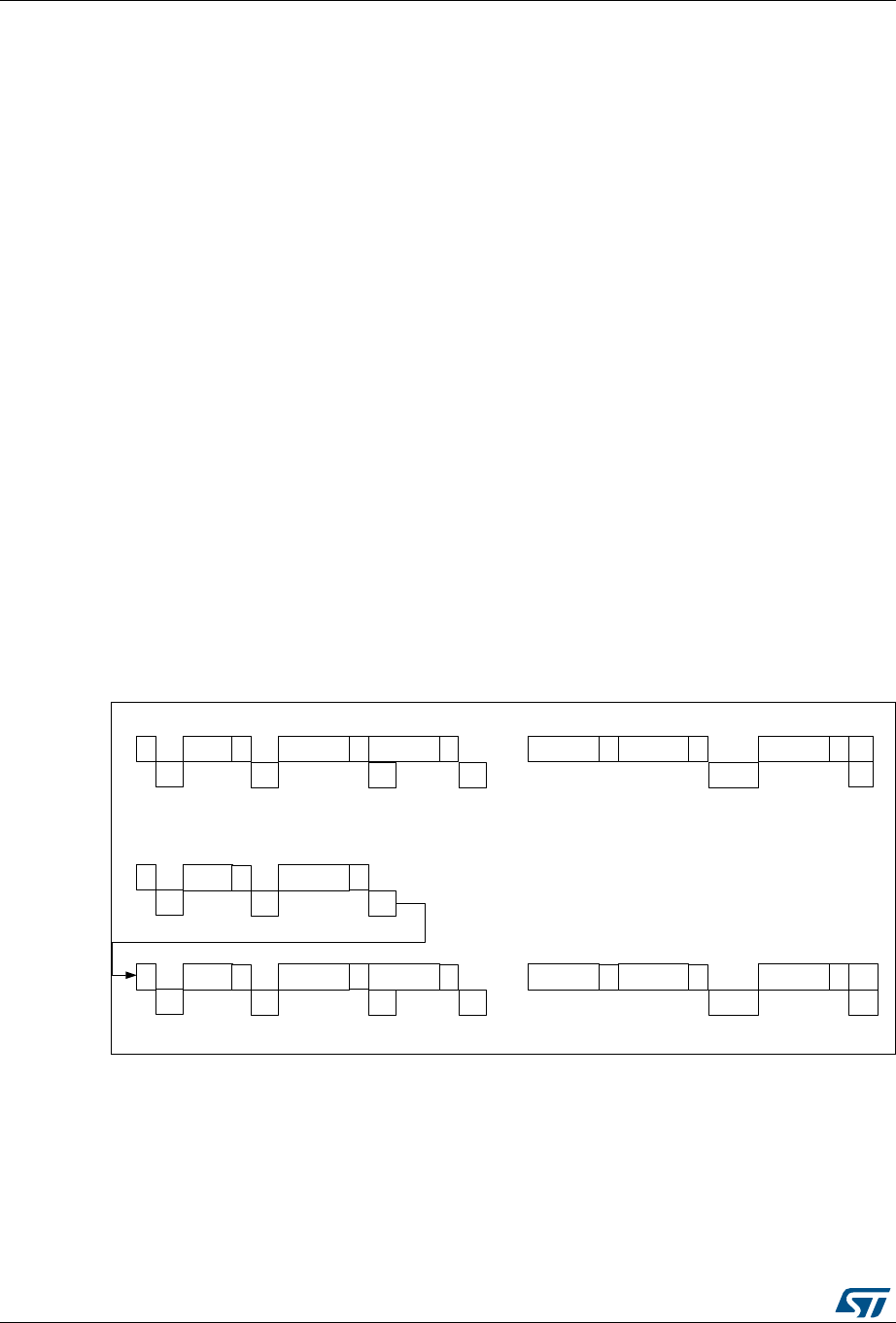
Inter-integrated circuit (I2C) interface RM0016
298/467 DocID14587 Rev 14
EV5: SB=1, cleared by reading SR1 register followed by writing DR register.
EV6: ADDR=1, cleared by reading SR1 register followed by reading SR3. In 10-bit master receiver mode,
this sequence should be followed by writing CR2 with START = 1.
EV6_1: no associated flag event, used for 1 byte reception only. Program ACK=0 and STOP=1 after
clearing ADDR.
EV7: RxNE=1, cleared by reading DR register.
EV7_1: RxNE=1, cleared by reading DR register, program ACK=0 and STOP request
EV9: ADD10=1, cleared by reading SR1 register followed by writing DR register.
2. If the DR and shift registers are full, the next data reception (I2C clock generation for slave) is performed
after the EV7 event is cleared. In this case, EV7 does not overlap with data reception.
3. If a single byte is received, it is NA.
4. EV5, EV6 and EV9 events stretch SCL low until the end of the corresponding software sequence.
5. EV7 software sequence must be completed before the end of the current byte transfer.In case EV7
software sequence can not be managed before the current byte end of transfer, it is recommended to use
BTF instead of RXNE with the drawback of slowing the communication.
6. The EV6_1 or EV7_1 software sequence must be completed before the ACK pulse of the current byte
transfer.
7. See also: Note 8 on page 311.
Method 2: This method is for the case when the I2C is used with interrupts that do not have
the highest priority in the application or when the I2C is used with polling.
With this method:
•DataN_2 is not read, so that after DataN_1, the communication is stretched (both
RxNE and BTF are set).
•Then, the ACK bit must be cleared before reading DataN-2 in DR to make sure this bit
has been cleared before the DataN Acknowledge pulse.
•After that, just after reading DataN_2, software must set the STOP/ START bit and read
DataN_1. After RxNE is set, read DataN.
This is illustrated in the following figure:
Figure 106. Method 2: transfer sequence diagram for master receiver when N >2
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge,
EVx= Event (with interrupt if ITEVTEN=1)
EV5: SB=1, cleared by reading SR1 register followed by writing the DR register.
EV6: ADDR1, cleared by reading SR1 register followed by reading SR3.
In 10-bit master receiver mode, this sequence should be followed by writing CR2 with START = 1.
EV7: RxNE=1, cleared by reading DR register.
EV7_2: BTF = 1, DataN-2 in DR and DataN-1 in shift register, program ACK = 0, Read DataN-2 in DR.
Program STOP = 1, read DataN-1.
MSv47721V1
EV7_2
S
EV5
Address
EV6
AData1 AData2
EV7 EV7
DataN-2 A
(1) ... DataN-1 A
ADataN NA P
EV7
S
EV5
Header
EV9
AAddress A
EV6
EV7_2
S
EV5
Header
EV6
AData1 AData2
EV7 EV7
DataN-2 ADataN-1 A
ADataN NA P
EV7
r...
7-bit master receiver
10-bit master receiver

DocID14587 Rev 14 299/467
RM0016 Inter-integrated circuit (I2C) interface
319
EV9: ADD10= 1, cleared by reading SR1 register followed by writing DR register.
2. EV5, EV6 and EV9 events stretch SCL low until the end of the corresponding software sequence.
3. EV7 software sequence must be completed before the end of the current byte transfer. In case EV7
software sequence can not be managed before the current byte end of transfer, it is recommended to use
BTF instead of RXNE, with the drawback of slowing the communication.
When 3 bytes remain to be read:
•RxNE = 1 => Nothing (DataN-2 not read).
•DataN-1 received
•BTF = 1 because both shift and data registers are full: DataN-2 in DR and DataN-1 in
the shift register => SCL tied low: no other data will be received on the bus.
•Clear ACK bit
•Read DataN-2 in DR => This launches the DataN reception in the shift register
•DataN received (with a NACK)
•Program START/STOP
•Read DataN-1
•RxNE = 1
•Read DataN
The procedure described above is valid for N>2. The cases where a single byte or two bytes
are to be received should be handled differently, as described below:
•Case of a single byte to be received:
– In the ADDR event, clear the ACK bit.
– Clear ADDR
– Program the STOP/START bit.
– Read the data after the RxNE flag is set.
•Case of two bytes to be received:
– Set POS and ACK
– Wait for the ADDR flag to be set
– Clear ADDR
–Clear ACK
– Wait for BTF to be set
– Program STOP
– Read DR twice
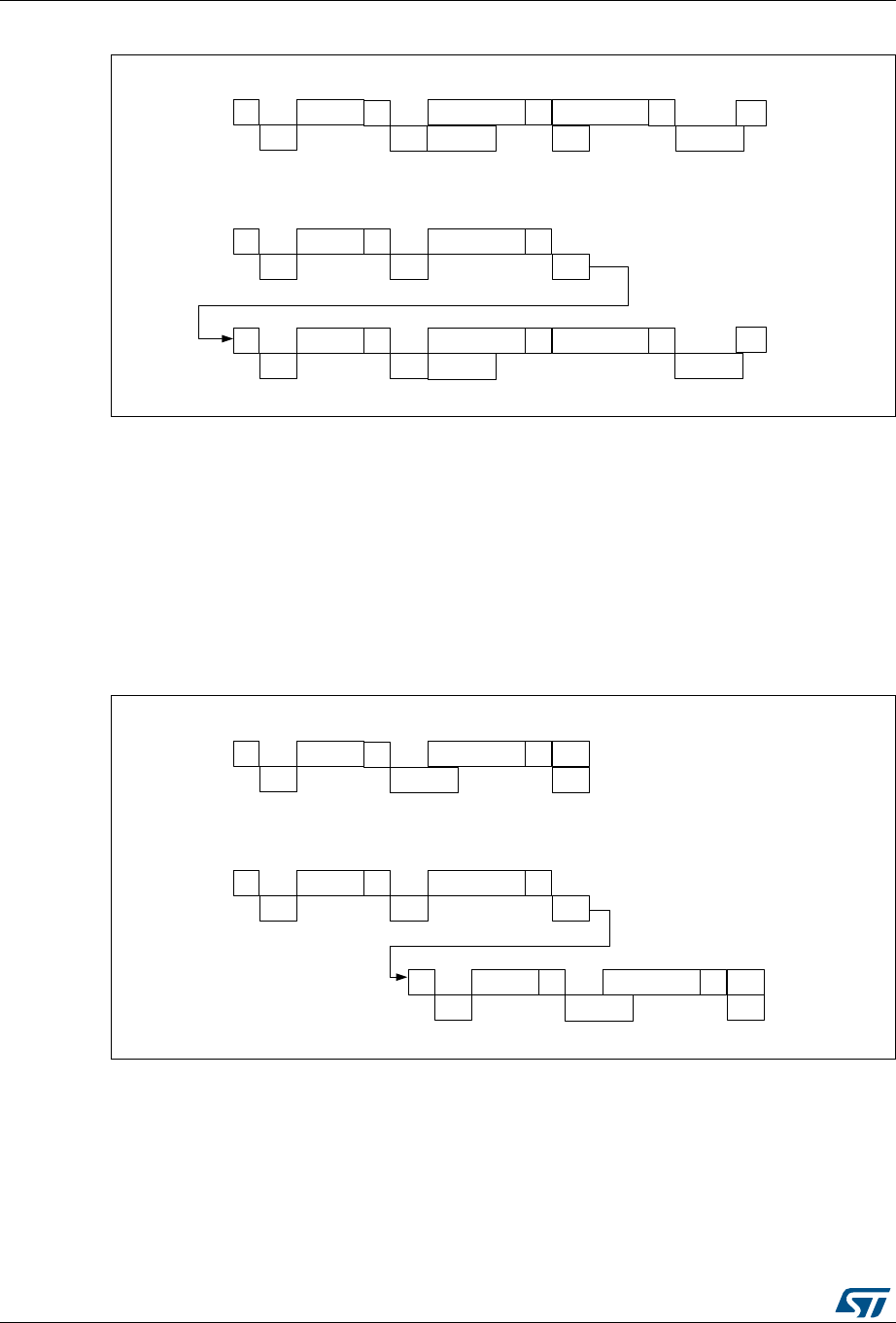
Inter-integrated circuit (I2C) interface RM0016
300/467 DocID14587 Rev 14
Figure 107. Method 2: transfer sequence diagram for master receiver when N=2
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge,
EVx= Event (with interrupt if ITEVTEN=1).
EV5: SB=1, cleared by reading SR1 register followed by writing the DR register.
EV6: ADDR1, cleared by reading SR1 register followed by reading SR3.
In 10-bit master receiver mode, this sequence should be followed by writing CR2 with START = 1.
EV6_1: No associated flag event. The acknowledge should be disabled just after EV6, that is after ADDR is
cleared
EV7_3: BTF = 1, program STOP = 1, read DR twice (Read Data1 and Data2) just after programming the
STOP.
EV9: ADD10= 1, cleared by reading SR1 register followed by writing DR register.
2. EV5, EV6 and EV9 events stretch SCL low until the end of the corresponding software sequence.
3. EV6_1 software sequence must be completed before the ACK pulse of the current byte transfer.
Figure 108. Method 2: transfer sequence diagram for master receiver when N=1
1. Legend:
S= Start, Sr = Repeated Start, P= Stop, A= Acknowledge, NA= Non-acknowledge,
EVx= Event (with interrupt if ITEVTEN=1).
EV5: SB=1, cleared by reading SR1 register followed by writing the DR register.
EV6: ADDR =1, cleared by reading SR1 resister followed by reading SR3 register.
EV6_3: ADDR = 1, program ACK = 0, clear ADDR by reading SR1 register followed by reading SR3
register, program STOP =1 just after ADDR is cleared.
EV7: RxNE =1, cleared by reading DR register.
MSv47722V1
S
EV5
Address
EV6
AData1 AData2
EV7
(1)
NA
S
EV5
Header
EV9
AAddress A
EV6
S
EV5
Header
EV6
AData1 AData2 NA
r
7-bit master receiver
10-bit master receiver
EV6_1 EV7_3
EV6_1 EV7_3
P
P
MSv47723V1
S
EV5
Address AData1 NA
EV7
S
EV5
Header
EV9
AAddress A
EV6
S
EV5
Header AData1
r
7-bit master receiver
10-bit master receiver
EV6_3
P
EV6_3
NA
EV7
P

DocID14587 Rev 14 301/467
RM0016 Inter-integrated circuit (I2C) interface
319
EV9: ADD10= 1, cleared by reading SR1 register followed by writing DR register.
2. EV5, EV6 and EV9 events stretch SCL low until the end of the corresponding software sequence.
3. EV6_3 software sequence must be completed before the ACK pulse of the current byte transfer.
21.4.3 Error conditions
The following are the error conditions which may cause communication to fail.
Bus error (BERR)
This error occurs when the I2C interface detects an external stop or a start condition during
an address or data transfer. In this case:
•The BERR bit is set and an interrupt is generated if the ITERREN bit is set
•In the case of the slave: data are discarded and the lines are released by hardware:
– In the case of a misplaced start, the slave considers it is a restart and waits for an
address or a stop condition.
– In the case of a misplaced stop, the slave reacts in the same way as for a stop
condition and the lines are released by hardware.
•In the case of the master: the lines are not released and there is no effect in the state of
the current transmission: software can decide if it wants to abort the current
transmission or not.
Acknowledge failure (AF)
This error occurs when the interface detects a non-acknowledge bit. In this case,
•The AF bit is set and an interrupt is generated if the ITERREN bit is set
•A transmitter which receives a NACK must reset the communication:
– If slave: Lines are released by hardware
– If master: A stop condition or repeated start must be generated by software
Arbitration lost (ARLO)
This error occurs when the I2C interface detects an arbitration lost condition. In this case,
•The ARLO bit is set by hardware (and an interrupt is generated if the ITERREN bit is
set).
•The I2C interface goes automatically back to slave mode (the MSL bit is cleared)
•When the I²C loses the arbitration, it is not able to acknowledge its slave address in the
same transfer, but it can acknowledge it after a repeated start from the master.
•Lines are released by hardware

Inter-integrated circuit (I2C) interface RM0016
302/467 DocID14587 Rev 14
Overrun/underrun error (OVR)
An Overrun error can occur in slave mode when clock stretching is disabled and the I2C
interface is receiving data. The interface has received a byte (RXNE = 1) and the data in DR
has not been read, before the next byte is received by the interface. In this case,
•The last received byte is lost
•In case of overrun error, software should clear the RXNE bit and the transmitter should
re-transmit the last received byte.
Underrun error can occur in slave mode when clock stretching is disabled and the I2C
interface is transmitting data. The interface has not updated the DR with the next byte
(TXE=1), before the clock comes for the next byte. In this case,
•The same byte in the DR register will be sent again
•The user should make sure that data received on the receiver side during an underrun
error is discarded and that the next bytes are written within the clock low time specified
in the I2C bus standard.
•For the first byte to be transmitted, the DR must be written after ADDR is cleared and
before the first SCL rising edge. If it is not possible, the receiver must discard the first
data.
21.4.4 SDA/SCL line control
•If clock stretching is enabled:
– Transmitter mode: If TXE = 1 and BTF = 1: the interface holds the clock line low
before transmission to wait for the microcontroller to read SR1 and then write the
byte in the Data register (both buffer and shift register are empty).
– Receiver mode: If RXNE = 1 and BTF = 1: the interface holds the clock line low
after reception to wait for the microcontroller to read SR1 and then read the byte in
the Data Register or write to CR2 (both buffer and shift register are full).
•If clock stretching is disabled in Slave mode:
– Overrun error in case of RXNE = 1 and no read of DR has been done before the
next byte is received. The last received byte is lost.
– Underrun error in case TXE = 1 and no write into DR has been done before the
next byte must be transmitted. The same byte will be sent again.
– Write Collision not managed.
DocID14587 Rev 14 303/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.5 I2C low power modes
21.6 I2C interrupts
Table 48. I2C interface behavior in low power modes(1)
1. I2C cannot operate at low power run and low power wait modes due to low PCLK frequency.
Mode Description
Wait No effect on I2C interface.
I2C interrupts cause the device to exit from Wait mode.
Halt
In slave mode: Communication is reset, except for configuration registers. Device is in
slave mode.
Wakeup from Halt interrupt is generated if ITEVTEN = 1 and address matched (including
allowed headers).
The matched address is not acknowledged in Halt mode so the master has to send it
again when the CPU is woken up to receive an acknowledge.
If NOSTRETCH = 0, SCLH will be stretched after acknowledge pulse in Halt mode until
WUFH is cleared by software;
None of the flags are set by the address which wakes up the CPU.
In master mode: Communication is frozen until the CPU is woken up. Wakeup from Halt
flag and interrupt are generated if ITEVTEN=1 and there is a HALT instruction.
Note: It is forbidden to enter Halt mode while a communication is on
going.
Table 49. I2C Interrupt requests
Interrupt event Event
flag
Enable
control
bit
Exit
from
Wait
Exit
from
Halt
Start bit sent (Master) SB
ITEVTEN
Yes
No
Address sent (Master) or Address matched
(Slave) ADDR
10-bit header sent (Master) ADD10
Stop received (Slave) STOPF
Data byte transfer finished BTF
Wakeup from Halt WUFH ITEVTEN Yes
Receive buffer not empty RXNE ITEVTEN
and
ITBUFEN
No
Transmit buffer empty TXE
Bus error BERR
ITERREN
Arbitration loss (Master) ARLO
Acknowledge failure AF
Overrun/underrun OVR
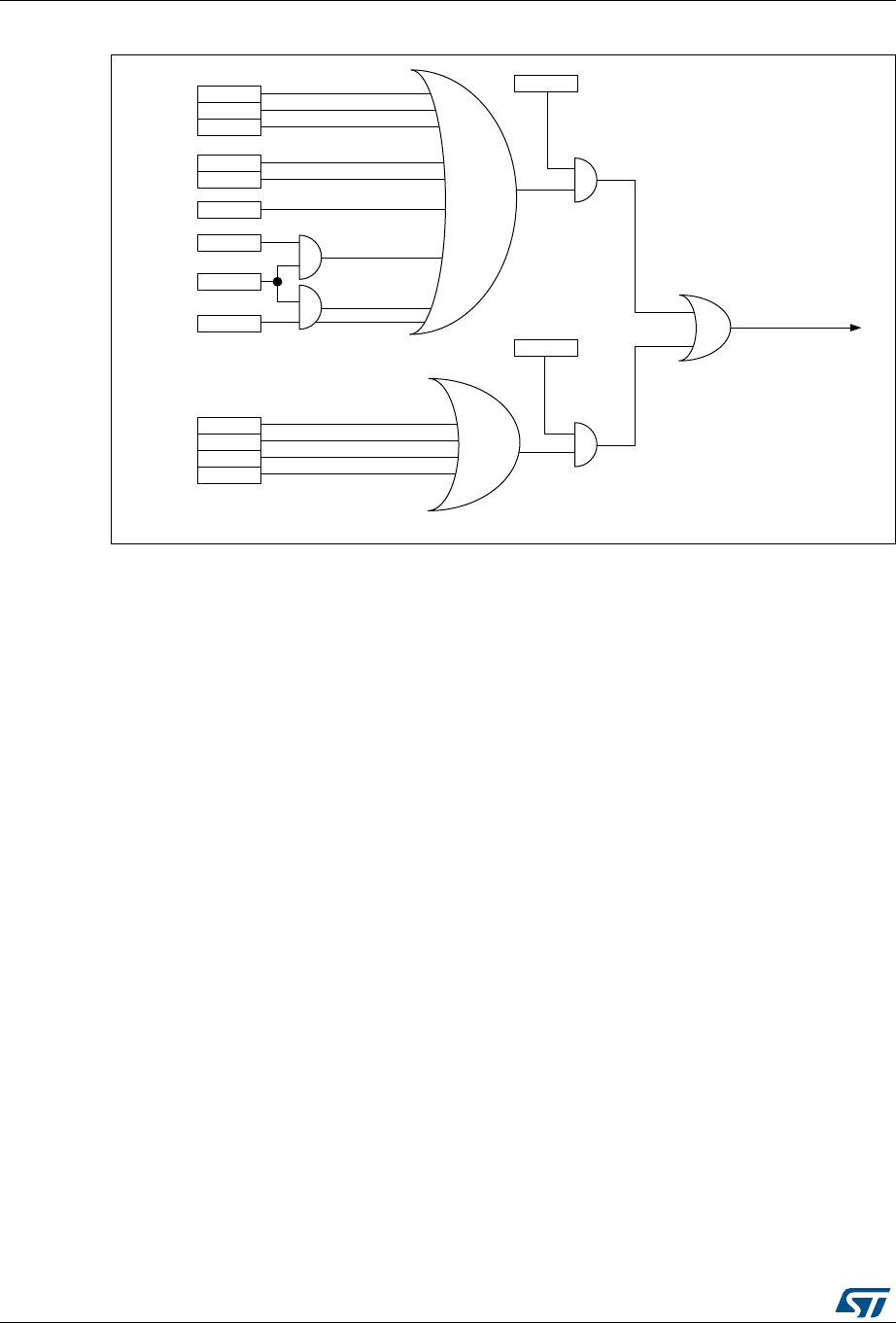
DocID14587 Rev 14 305/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.7 I2C registers
21.7.1 Control register 1 (I2C_CR1)
Address offset: 0x00
Reset value: 0x00
76 5 43210
NOSTRETCH ENGC Reserved PE
rw rw r rw
Bit 7 NOSTRETCH: Clock stretching disable (Slave mode)
This bit is used to disable clock stretching in slave mode when ADDR or BTF flag is set, until it is
reset by software.
0: Clock stretching enabled
1: Clock stretching disabled
Bit 6 ENGC: General call enable
0: General call disabled. Address 0x00 is NACKed.
1: General call enabled. Address 0x00 is ACKed.
Bits 5:1 Reserved
Bit 0 PE: Peripheral enable
0: Peripheral disable
1: Peripheral enable: the corresponding I/Os are selected as alternate functions.
Note: If this bit is reset while a communication is on going, the peripheral is disabled at the end of the
current communication, when back to IDLE state.
All bit resets due to PE=0 occur at the end of the communication.

Inter-integrated circuit (I2C) interface RM0016
306/467 DocID14587 Rev 14
21.7.2 Control register 2 (I2C_CR2)
Address offset: 0x01
Reset value: 0x00
76543210
SWRST Reserved POS ACK STOP START
rw r rw rw rw rw
Bit 7 SWRST: Software reset
When set, the I2C is at reset state. Before resetting this bit, make sure the I2C lines are released and
the bus is free.
0: I2C Peripheral not at reset state
1: I2C Peripheral at reset state
Note: This bit can be used in case the BUSY bit is set to ‘1’ when no stop condition has been
detected on the bus.
Bits 6::4 Reserved
Bit 3 POS: Acknowledge position (for data reception).
This bit is set and cleared by software and cleared by hardware when PE=0.
0: ACK bit controls the (N)ACK of the current byte being received in the shift register.
1: ACK bit controls the (N)ACK of the next byte which will be received in the shift register.
Note: The POS bit is used when the procedure for reception of 2 bytes (see Method 2: transfer
sequence diagram for master receiver when N=2) is followed. It must be configured before
data reception starts. In this case, to NACK the 2nd byte, the ACK bit must be cleared just after
ADDR is cleared.
Note:
Bit 2 ACK: Acknowledge enable
This bit is set and cleared by software and cleared by hardware when PE=0.
0: No acknowledge returned
1: Acknowledge returned after a byte is received (matched address or data)
Bit 1 STOP: Stop generation
The bit is set and cleared by software, cleared by hardware when a Stop condition is detected, set by
hardware when a timeout error is detected.
– In Master mode:
0: No Stop generation.
1: Stop generation after the current byte transfer or after the current Start condition is sent.
– In Slave mode:
0: No Stop generation.
1: Release the SCL and SDA lines after the current byte transfer.
Bit 0 START: Start generation
This bit is set and cleared by software and cleared by hardware when start is sent or PE=0.
– In Master mode:
0: No Start generation
1: Repeated start generation
– In Slave mode:
0: No Start generation
1: Start generation when the bus is free
DocID14587 Rev 14 307/467
RM0016 Inter-integrated circuit (I2C) interface
319
Note: When STOP or START is set, the user must not perform any write access to I2C_CR2
before the control bit is cleared by hardware. Otherwise, a second STOP or START request
may occur.
21.7.3 Frequency register (I2C_FREQR)
Address offset: 0x02
Reset value: 0x00
76543210
Reserved FREQ[5:0]
rrw
Bits 7:6 Reserved
Bits 5:0 FREQ[5:0] Peripheral clock frequency. (1)
The FREQ field is used by the peripheral to generate data setup and hold times compliant with the
I2C specifications. The FREQ bits must be programmed with the peripheral input clock frequency
value:
The allowed range is between 1 MHz and 24 MHz
000000: not allowed
000001: 1 MHz
000010: 2 MHz
...
011000: 24 MHz
Higher values: not allowed
1. The minimum peripheral clock frequencies for respecting the I2C bus timings are:
1 MHz for standard mode and 4 MHz for fast mode

Inter-integrated circuit (I2C) interface RM0016
308/467 DocID14587 Rev 14
21.7.4 Own address register LSB (I2C_OARL)
Address offset: 0x03
Reset value: 0x00
21.7.5 Own address register MSB (I2C_OARH)
Address offset: 0x04
Reset value: 0x00
76543210
ADD[7:1] ADD0
rw rw
Bits 7:1 ADD[7:1] Interface address
bits 7:1 of address
Bit 0 ADD[0] Interface address
7-bit addressing mode: don’t care
10-bit addressing mode: bit 0 of address
76543210
ADDMODE ADDCONF Reserved ADD[9:8] Reserved
rw rw r rw r
Bit 7 ADDMODE Addressing mode (Slave mode)
0: 7-bit slave address (10-bit address not acknowledged)
1: 10-bit slave address (7-bit address not acknowledged)
Bit 6 ADDCONF Address mode configuration
This bit must set by software (must always be written as ‘1’).
Bits 5:3 Reserved
Bits 2:1 ADD[9:8] Interface address
10-bit addressing mode: bits 9:8 of address.
Bit 0 Reserved

DocID14587 Rev 14 309/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.7.6 Data register (I2C_DR)
Address offset: 0x06
Reset value: 0x00
76543210
DR[7:0]
rw
Bits 7:0 DR[7:0]: Data register (1)(2)(3)
Byte received or to be transmitted to the bus.
– Transmitter mode: Byte transmission starts automatically when a byte is written in the DR register. A
continuous transmit stream can be maintained if the next data to be transmitted is put in DR once
the transmission is started (TXE=1)
– Receiver mode: Received byte is copied into DR (RXNE=1). A continuous transmit stream can be
maintained if DR is read before the next data is received (RXNE=1).
1. In slave mode, the address is not copied into DR.
2. Write collision is not managed (DR can be written if TXE=0).
3. If an ARLO event occurs on ACK pulse, the received byte is not copied into DR and so cannot be read.

Inter-integrated circuit (I2C) interface RM0016
310/467 DocID14587 Rev 14
21.7.7 Status register 1 (I2C_SR1)
Address offset: 0x07
Reset value: 0x00
76543210
TXE RXNE Reserved STOPF ADD10 BTF ADDR SB
rrrrrrrr
Bit 7 TXE: Data register empty (transmitters) (1)
0: Data register not empty
1: Data register empty
– Set when DR is empty in transmission. TXE is not set during address phase.
– Cleared by software writing to the DR register or by hardware after a start or a stop condition or
when PE=0.
Note: TXE cannot be cleared by writing the first data in transmission or by writing a data when the
BTF bit is set as in both cases, the DR register is still empty.
Bit 6 RXNE: Data register not empty (receivers) (2) (3)
0: Data register empty
1: Data register not empty
– Set when data register is not empty in receiver mode. RXNE is not set during address phase.
– Cleared by software reading or writing the DR register or by hardware when PE=0.
Note: RXE cannot be cleared by reading a data when the BTF bit is set as the DR register is still full
in this case.
Bit 5 Reserved
Bit 4 STOPF: Stop detection (Slave mode) (4)(5)
0: No Stop condition detected
1: Stop condition detected
– Set by hardware when a Stop condition is detected on the bus by the slave after an acknowledge (if
ACK=1).
– Cleared by software reading the SR1 register followed by a write in the CR2 register, or by hardware
when PE=0
Bit 3 ADD10: 10-bit header sent (Master mode) (6)
0: No ADD10 event occurred.
1: Master has sent first address byte (header).
– Set by hardware when the master has sent the first byte in 10-bit address mode.
– Cleared by software reading the SR1 register followed by a write in the DR register of the second
address byte, or by hardware when PE=0.

DocID14587 Rev 14 311/467
RM0016 Inter-integrated circuit (I2C) interface
319
Bit 2 BTF: Byte transfer finished (7)(8)
0: Data byte transfer not done
1: Data byte transfer succeeded
– Set by hardware when NOSTRETCH=0 and:
– In reception when a new byte is received (including ACK pulse) and DR has not been read
yet (RXNE=1).
– In transmission when a new byte should be sent and DR has not been written yet (TXE=1).
– Cleared by software reading SR1 followed by either a read or write in the DR register or by hardware
after a start or a stop condition in transmission or when PE=0.
Bit 1 ADDR: Address sent (master mode)/matched (slave mode) (8)(9)
This bit is cleared by software reading SR1 register followed reading SR3, or by hardware when PE=0.
– Address matched (Slave)
0: Address mismatched or not received.
1: Received address matched.
– Set by hardware as soon as the received slave address matched with the OAR registers
content or a general call or a SMBus is recognized. (when enabled depending on
configuration).
– Address sent (Master)
0: No end of address transmission
1: End of address transmission
– For 10-bit addressing, the bit is set after the ACK of the 2nd byte.
– For 7-bit addressing, the bit is set after the ACK of the byte.
Note: ADDR is not set after a NACK reception
Bit 0 SB: Start bit (Master mode) (8)
0: No Start condition
1: Start condition generated.
– Set when a Start condition generated.
– Cleared by software by reading the SR1 register followed by writing the DR register, or by
hardware when PE=0
1. The interrupt will be generated when DR is copied into shift register after an ACK pulse. If a NACK is received, copy is not
done and TXE is not set.
2. The interrupt will be generated when Shift register is copied into DR after an ACK pulse.
3. RXNE is not set in case of ARLO event.
4. The STOPF bit is not set after a NACK reception.
5. It is recommended to perform the complete clearing sequence (READ SR1 then WRITE CR2) after STOPF is set. Refer to
Figure 103: Transfer sequence diagram for slave receiver on page 293
6. The ADD10 bit is not set after a NACK reception.
7. The BTF bit is not set after a NACK reception, or in case of an ARLO event.
8. Due to timing constraints, when in standard mode if CCR is less than 9 (i.e. with peripheral clock below 2 MHz) with
fMASTER = fCPU and the event interrupt disabled, the following procedure must be followed:
modify the reset sequence in order to insert at least 5 cycles between each operations in the flag clearing sequence. For
example, when fMASTER = fCPU = 1 MHz, use the following sequence to poll the SB bit:
_label_wait: BTJF I2C_SR1,SB,_label_wait
NOP ;
NOP;
NOP ;
NOP
NOP
LD I2C_DR, A ; once executed, the SB bit is then cleared.
9. In slave mode, it is recommended to perform the complete clearing sequence (READ SR1 then READ SR3) after ADDR is
set. Refer to Figure 103: Transfer sequence diagram for slave receiver on page 293.

Inter-integrated circuit (I2C) interface RM0016
312/467 DocID14587 Rev 14
21.7.8 Status register 2 (I2C_SR2)
Address offset: 0x08
Reset value: 0x00
76543210
Reserved WUFH Reserved OVR AF ARLO BERR
r rc_w0 r rc_w0 rc_w0 rc_w0 rc_w0
Bits 7:6 Reserved
Bit 5 WUFH: Wakeup from Halt
0: no wakeup from Halt mode
1: 7-bit address or header match in Halt mode (slave mode) or Halt entered when in master mode.
Note: This bit is set asynchronously in slave mode (during HALT mode). It is set only if ITEVTEN = 1.
– cleared by software writing 0, or by hardware when PE=0.
Bit 4 Reserved
Bit 3 OVR: Overrun/underrun
0: No overrun/underrun
1: Overrun or underrun
– Set by hardware in slave mode when NOSTRETCH=1 and:
– In reception when a new byte is received (including ACK pulse) and the DR register has not
been read yet. New received byte is lost.
– In transmission when a new byte should be sent and the DR register has not been written
yet. The same byte is sent twice.
Cleared by software writing 0, or by hardware when PE=0.
Note: if the DR write occurs very close to the SCL rising edge, the sent data is unspecified and a hold
timing error occurs.
Bit 2 AF: Acknowledge failure.
0: No acknowledge failure
1: Acknowledge failure
– Set by hardware when no acknowledge is returned.
– Cleared by software writing 0, or by hardware when PE=0.
Bit 1 ARLO: Arbitration lost (master mode)
0: No Arbitration lost detected
1: Arbitration lost detected
Set by hardware when the interface loses the arbitration of the bus to another master.
– Cleared by software writing 0, or by hardware when PE=0.
After an ARLO event the interface switches back automatically to Slave mode (MSL=0).
Bit 0 BERR: Bus error
0: No misplaced Start or Stop condition
1: Misplaced Start or Stop condition
– Set by hardware when the interface detects a SDA rising or falling edge while SCL is high,
occurring in a non-valid position during a byte transfer.
– Cleared by software writing 0, or by hardware when PE=0.

DocID14587 Rev 14 313/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.7.9 Status register 3 (I2C_SR3)
Address offset: 0x09
Reset value: 0x00
Note: Reading I2C_SR3 after reading I2C_SR1 clears the ADDR flag, even if the ADDR flag was
set after reading I2C_SR1. Consequently, I2C_SR3 must be read only when ADDR is found
set in I2C_SR1 or when the STOPF bit is cleared.
76543210
DUALF Reserved GENCALL Reserved TRA BUSY MSL
r r rrrrr
Bit 7 DUALF: Dual flag (Slave mode)
0: Received address matched with OAR1
1: Received address matched with OAR2
– Cleared by hardware after a Stop condition or repeated Start condition, or when PE=0.
Bits 6:5 Reserved
Bit 4 GENCALL: General call header (Slave mode)
0: No general call
1: General call header received when ENGC=1
– Cleared by hardware after a Stop condition or repeated Start condition, or when PE=0.
Bit 3 Reserved
Bit 2 TRA: Transmitter/Receiver
0: Data bytes received
1: Data bytes transmitted
This bit is set depending on R/W bit of address byte, at the end of total address phase.
It is also cleared by hardware after detection of Stop condition (STOPF=1), repeated Start condition,
loss of bus arbitration (ARLO=1), or when PE=0.
Bit 1 BUSY: Bus busy
0: No communication on the bus
1: Communication ongoing on the bus
– Set by hardware on detection of SDA or SCL low
– cleared by hardware on detection of a Stop condition.
It indicates a communication in progress on the bus. This information is still updated when the
interface is disabled (PE=0).
Bit 0 MSL: Master/Slave
0: Slave mode
1: Master mode
– Set by hardware as soon as the interface is in Master mode (SB=1).
– Cleared by hardware after detecting a Stop condition on the bus or a loss of arbitration
(ARLO=1), or by hardware when PE=0.
Inter-integrated circuit (I2C) interface RM0016
314/467 DocID14587 Rev 14
21.7.10 Interrupt register (I2C_ITR)
Address offset: 0x0A
Reset value: 0x00
76543210
Reserved ITBUFEN ITEVTEN ITERREN
rrwrwrw
Bits 7:3 Reserved
Bit 2 ITBUFEN: Buffer interrupt enable
0: TXE = 1 or RXNE = 1 does not generate any interrupt.
1:TXE = 1 or RXNE = 1 generates Event interrupt.
Bit 1 ITEVTEN: Event interrupt enable
0: Event interrupt disabled
1: Event interrupt enabled
This interrupt is generated when:
– SB = 1 (Master)
– ADDR = 1 (Master/Slave)
– ADD10= 1 (Master)
– STOPF = 1 (Slave)
– BTF = 1 with no TXE or RXNE event
– TXE event to 1 if ITBUFEN = 1
– RXNE event to 1if ITBUFEN = 1
– WUFH = 1 (asynchronous interrupt to wakeup from Halt)
Bit 0 ITERREN: Error interrupt enable
0: Error interrupt disabled
1: Error interrupt enabled
– This interrupt is generated when:
– BERR = 1
–ARLO = 1
–AF = 1
–OVR = 1

DocID14587 Rev 14 315/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.7.11 Clock control register low (I2C_CCRL)
Address offset: 0x02
Reset value: 0x0B
76543210
CCR[7:0]
rw
Bits 7:0 CCR[7:0] Clock control register (Master mode)
Controls the SCLH clock in Master mode.
– Standard mode:
Period(I2C) = 2 * CCR * tMASTER
thigh = CCR * tMASTER
tlow = CCR * tMASTER
– Fast mode:
If DUTY = 0:
Period(I2C) = 3* CCR * tMASTER
thigh = CCR * tMASTER
tlow = 2 * CCR * tMASTER
If DUTY = 1: (to reach 400 kHz)
Period(I2C) = 25 * CCR * tMASTER
thigh = 9 * CCR * tMASTER
tlow = 16 * CCR * tMASTER
Note: tCK = 1/ fMASTER. fMASTER is the input clock to the peripheral configured using clock control
register.
The minimum allowed value is 04h, except in FAST DUTY mode where the minimum allowed
value is 0x01.
thigh = tr(SCL) + tw(SCLH). See device datasheet for the definitions of parameters.
tlow = tf(SCL) + tw(SCLL). See device datasheet for the definitions of parameters.
I2C communication speed, fSCL = 1/(thigh + tlow)
The real frequency may differ due to the analog noise filter input delay.

Inter-integrated circuit (I2C) interface RM0016
316/467 DocID14587 Rev 14
21.7.12 Clock control register high (I2C_CCRH)
Address offset: 0x0C
Reset value: 0x00
Note: The CCR registers must be configured only when the I²C is disabled (PE=0).
fMASTER = multiple of 10 MHz is required to generate Fast clock at 400 kHz. fMASTER
≥
1
MHz is required to generate Standard clock at 100 kHz.
76543210
F/S DUTY Reserved CCR[11:8]
rw rw r rw
Bit 7 F/S: I2C master mode selection
0: Standard mode I2C
1: Fast mode I2C
Bit 6 DUTY: Fast mode duty cycle
0: Fast mode tlow/thigh = 2
1: Fast mode tlow/thigh = 16/9 (see CCR)
Bits 5:4 Reserved
Bits 3:0 CCR[11:8]: Clock control register in Fast/Standard mode (Master mode)
Controls the SCLH clock in master mode.
– Standard mode:
Period(I2C) = 2 * CCR * tMASTER
thigh = CCR * tMASTER
tlow = CCR * tMASTER
– Fast mode:
If DUTY = 0:
Period(I2C) = 3 * CCR * tMASTER
thigh = CCR * tMASTER
tlow = 2 * CCR * tMASTER
If DUTY = 1: (to reach 400 kHz)
Period(I2C) = 25 * CCR * tMASTER
thigh = 9 * CCR * tMASTER
tlow = 16 * CCR * tMASTER
For instance: in standard mode, to generate a 100 kHz SCL frequency:
If FREQR = 08, tMASTER = 125 ns so CCR must be programmed with 0x28
(0x28 <=> 40 x 125 ns = 5000 ns.)
Note: thigh = tr(SCL) + tw(SCLH). See device datasheet for the definitions of parameters
tlow = tf(SCL) + tw(SCLL). See device datasheet for the definitions of parameters
The real frequency may differ due to the analog noise filter input delay.
DocID14587 Rev 14 317/467
RM0016 Inter-integrated circuit (I2C) interface
319
Table 50. I2C_CCR values for SCL frequency table (fMASTER = 10 MHz or 16 MHz(1))
I2C
Speed
I2C
frequency
(fSCL)
fMASTER = 10 MHz fMASTER= 16 MHz
in Hz Actual
(Hz)
% Error
(%)
I2C_CCR
(h)
Duty
cycle
bit
Actual
(Hz)
% Error
(%)
I2C_CCR
(h)
Duty cycle
bit
Fast
speed
400000 400000 0 1 1 410256.41 2.56 D 0
370000 370370.37 0.10 9 0 380952.38 2.96 E 0
350000 370370.37 5.82 9 0 355555.56 1.59 F 0
320000 333333.33 4.17 A 0 320000 0 2 1
300000 303030.30 1.01 B 0 313725.49 4.57 11 0
270000 277777.78 2.88 C 0 280701.75 3.96 13 0
250000 256410.26 2.56 D 0 253968.25 1.59 15 0
220000 222222.22 1.01 F 0 222222.22 1.01 18 0
200000 200000 0 2 1 205128.20 2.56 1A 0
170000 175438.60 3.20 13 0 172043.01 1.20 1F 0
150000 151515.15 1.01 16 0 152380.95 1.59 23 0
120000 123456.79 2.88 1B 0 121212.12 1.01 2C 0
Standard
speed
100000 100000 0 32
No impact
100000 0 50
No impact
50000 50000 0 64 50000 0 A0
30000 30120.48 0.40 A6 30075.19 0.25 10A
20000 20000 0 FA 20000 0 190
1. The following table gives the values to be written in the I2C_CCR register to obtain the required I²C SCL line frequency

Inter-integrated circuit (I2C) interface RM0016
318/467 DocID14587 Rev 14
21.7.13 TRISE register (I2C_TRISER)
Address offset: 0x0D
Reset value: 0x02
76543210
Reserved TRISE[5:0]
rrw
Bits 7:6 Reserved
Bits 5:0 TRISE[5:0] Maximum rise time in Fast/Standard mode (Master mode)
These bits should provide the maximum duration of the SCL feedback loop in master mode. The
purpose is to keep a stable SCL frequency whatever the SCL rising edge duration.
These bits must be programmed with the maximum SCL rise time given in the I2C bus specification,
incremented by 1.
For instance: in standard mode, the maximum allowed SCL rise time is 1000 ns.
If the value in the I2C_FREQR register = 08h, then tMASTER = 125 ns therefore the TRISE[5:0] bits
must be programmed with 0x09.
(1000 ns / 125 ns = 8 + 1)
The filter value can also be added to TRISE[5:0].
If the result is not an integer, TRISE[5:0] must be programmed with the integer part, in order to
respect the tHIGH parameter.
Note: TRISE[5:0] must be configured only when the I2C is disabled (PE = 0).
DocID14587 Rev 14 319/467
RM0016 Inter-integrated circuit (I2C) interface
319
21.7.14 I2C register map and reset values
Table 51. I2C register map
Address
offset
Register
name 7 6 5 43210
0x00 I2C_CR1
Reset value
NO STRETCH
0
ENGC
0
-
0
-
0
-
0
-
0
-
0
PE
0
0x01 I2C_CR2
Reset value
SWRST
0
-
0
-
0
-
0
POS
0
ACK
0
STOP
0
START
0
0x02 I2C_FREQR
Reset value
-
0
-
0
FREQ[5:0]
000000
0x03 I2C_OARL
Reset value
ADD[7:1]
0000000
ADD0
0
0x04 I2C_OARH
Reset value
ADDMODE
0
ADDCONF
0
-
0
-
0
-
0
ADD[9:8]
00
-
0
0x05 Reserved
0x06 I2C_DR
Reset value
DR[7:0]
0
0x07 I2C_SR1
Reset value
TXE
0
RXNE
0
-
0
STOPF
0
ADD10
0
BTF
0
ADDR
0
SB
0
0x08 I2C_SR2
Reset value
-
0
-
0
WUFH
0
-
0
OVR
0
AF
0
ARLO
0
BERR
0
0x09 I2C_SR3
Reset value
-
0
-
0
-
0
GENCALL
0
-
0
TRA
0
BUSY
0
MSL
0
0x0A I2C_ITR
Reset value
-
0
-
0
-
0
--
0
--
0
ITBUFEN
0
ITEVTEN
0
ITERREN
0
0x0B I2C_CCRL
Reset value
CCR[7:0]
00000000
0x0C I2C_CCRH
Reset value
FS
0
DUTY
0
-
0
-
0
CCR[11:8]
0000
0x0D I2C_TRISER
Reset value
-
0
-
0
TRISE[5:0]
000010
Universal asynchronous receiver transmitter (UART) RM0016
320/467 DocID14587 Rev 14
22 Universal asynchronous receiver transmitter (UART)
22.1 Introduction
The UARTs in the STM8S and STM8AF microcontroller families (UART1, UART2, UART3
or UART4) offer a flexible means of full-duplex data exchange with external equipment
requiring an industry standard NRZ asynchronous serial data format (UART mode). The
STM8 UARTs offer a very wide range of baud rates and can also be used for multi-
processor communication. They also support LIN (Local Interconnection Network) protocol
version 1.3, 2.0, 2.1, 2.2 and J2602.
UART1, UART2 and UART4 have extended features (see Table 52):
•LIN slave mode is supported in UART2, UART3 and UART4.
•Synchronous one-way communication, Smartcard Protocol and IrDA (Infrared Data
Association) SIR ENDEC specifications are supported in UART1, UART2 and UART4.
•Half-duplex single wire communication is supported in UART1 and UART4.
Refer to the datasheet for information on the availability of the UART configurations
(UART1, UART2, UART3 or UART4) in each microcontroller type.
Table 52. UART configurations(1)
Feature UART1 UART2 UART3 UART4
Asynchronous mode XXXX
Multiprocessor communication XXXX
Synchronous communication X X NA X
Smartcard mode X X NA X
IrDA mode X X NA X
Single-wire Half-duplex mode X NA NA X
LIN master mode XXXX
LIN slave mode NA X X X
1. X = supported; NA = not applicable.

DocID14587 Rev 14 321/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.2 UART main features
•Full duplex, asynchronous communications
•NRZ standard format (Mark/Space)
•High-precision baud rate generator system
– Common programmable transmit and receive baud rates up to fMASTER/16
•Programmable data word length (8 or 9 bits)
•Configurable stop bits
– Support for 1 or 2 stop bits
•LIN Master mode (UART1, UART2, UART3 and UART4)
– LIN break and delimiter generation
– LIN break and delimiter detection with separate flag and interrupt source for
readback checking
•LIN Slave mode (UART2, UART3 and UART4)
– Autonomous header handling and mute mode to filter responses
– Identifier parity error checking
– LIN automatic resynchronization, allowing operation with internal RC oscillator
(HSI) clock source.
– Break detection at any time, even during a byte reception
– Header errors detection:
Delimiter too short
Synch field error
Deviation error (if automatic resynchronization is enabled)
Framing error in synch field or identifier field
Header timeout
•Transmitter clock output for synchronous communication (UART1, UART2 and UART4)
•IrDA SIR Encoder Decoder (UART1, UART2 and UART4)
– Support for 3/16 bit duration for normal mode
•Smartcard Emulation Capability (UART1, UART2 and UART4)
– Smartcard interface supporting the asynchronous protocol for Smartcards as
defined in ISO 7816-3 standards
– 1.5 Stop bits for Smartcard operation
•Single wire Half Duplex Communication (UART1 and UART4)
•Separate enable bits for Transmitter and Receiver
•Transfer detection flags:
– Receive buffer full
– Transmit buffer empty
– End of Transmission flags
•Parity control
– Transmits parity bit
– Checks parity of received data byte
•4 error detection flags
– Overrun error

Universal asynchronous receiver transmitter (UART) RM0016
322/467 DocID14587 Rev 14
– Noise error
– Frame error
– Parity error
•6 interrupt sources with flags
– Transmit data register empty
– Transmission complete
– Receive data register full
– Idle line received
– Overrun error
– Framing error or noise flag
•2 interrupt vectors
– Transmitter interrupt
– Receiver interrupt when register is full
•Reduced power consumption mode
•Multi-Processor communication - enter into mute mode if address match does not
occur
•Wakeup from mute mode (by idle line detection or address mark detection)
•2 receiver wakeup modes:
– Address bit (MSB)
– Idle line
22.3 UART functional description
The interface is externally connected to another device by two or three pins (see Figure 110:
UART1 block diagram, Figure 111: UART2 block diagram and Figure 112: UART3 block
diagram). Any UART bidirectional communication requires a minimum of two pins: UART
Receive data input (UART_RX) and UART transmit data output (UART_TX):
UART_RX is the serial data input. Over-sampling techniques are used for data recovery by
discriminating between valid incoming data and noise.
UART_TX is the serial data output. When the transmitter is disabled, the output pin returns
to its I/O port configuration. When the transmitter is enabled and nothing is to be
transmitted, the pin is at high level.
Through these pins, serial data is transmitted and received in normal UART mode as frames
comprising:
•An Idle Line prior to transmission or reception
•A start bit
•A data word (8 or 9 bits) least significant bit first
•1, 1.5 and 2 Stop bits indicating that the frame is complete
•A status register (UART_SR)
•Data Register (UART_DR)
•16-bit baud rate prescaler (UART_BRR)
•Guard time Register for use in Smartcard mode
Refer to the register description for the definitions of each bit.
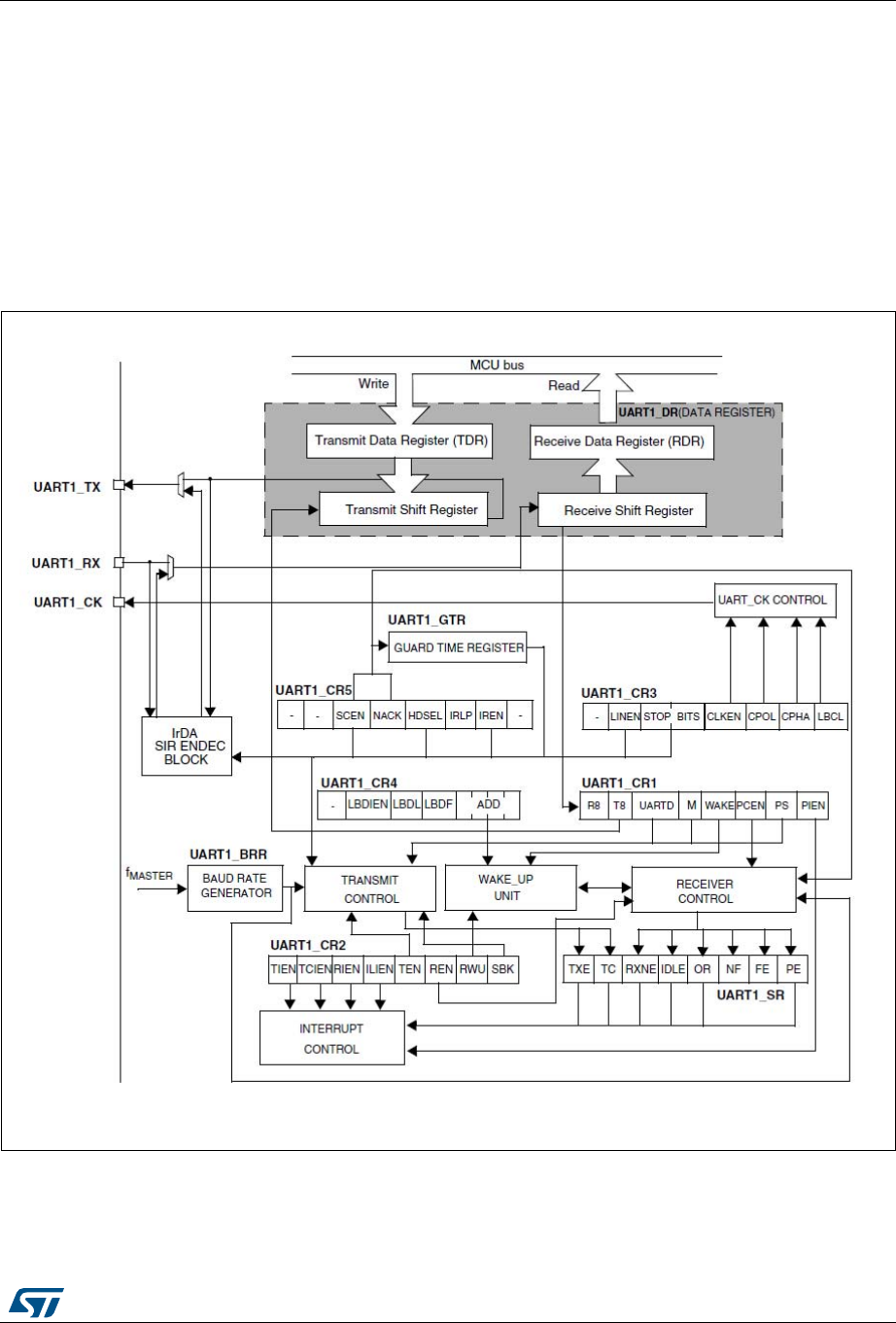
DocID14587 Rev 14 323/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
The following pin is required to interface in synchronous mode:
UART_CK: Transmitter clock output. This pin outputs the transmitter data clock for
synchronous transmission (no clock pulses on start bit and stop bit, and a software
option to send a clock pulse on the last data bit). This can be used to control
peripherals that have shift registers (e.g. LCD drivers). The clock phase and polarity
are software programmable.
The UART_RX and UART_TX pins are used in IrDA mode as follows:
UART_RX = IrDA_RDI: Receive Data Input in IrDA mode
UART_TX = IrDA_TDO: Transmit Data Output in IrDA mode
Figure 110. UART1 block diagram
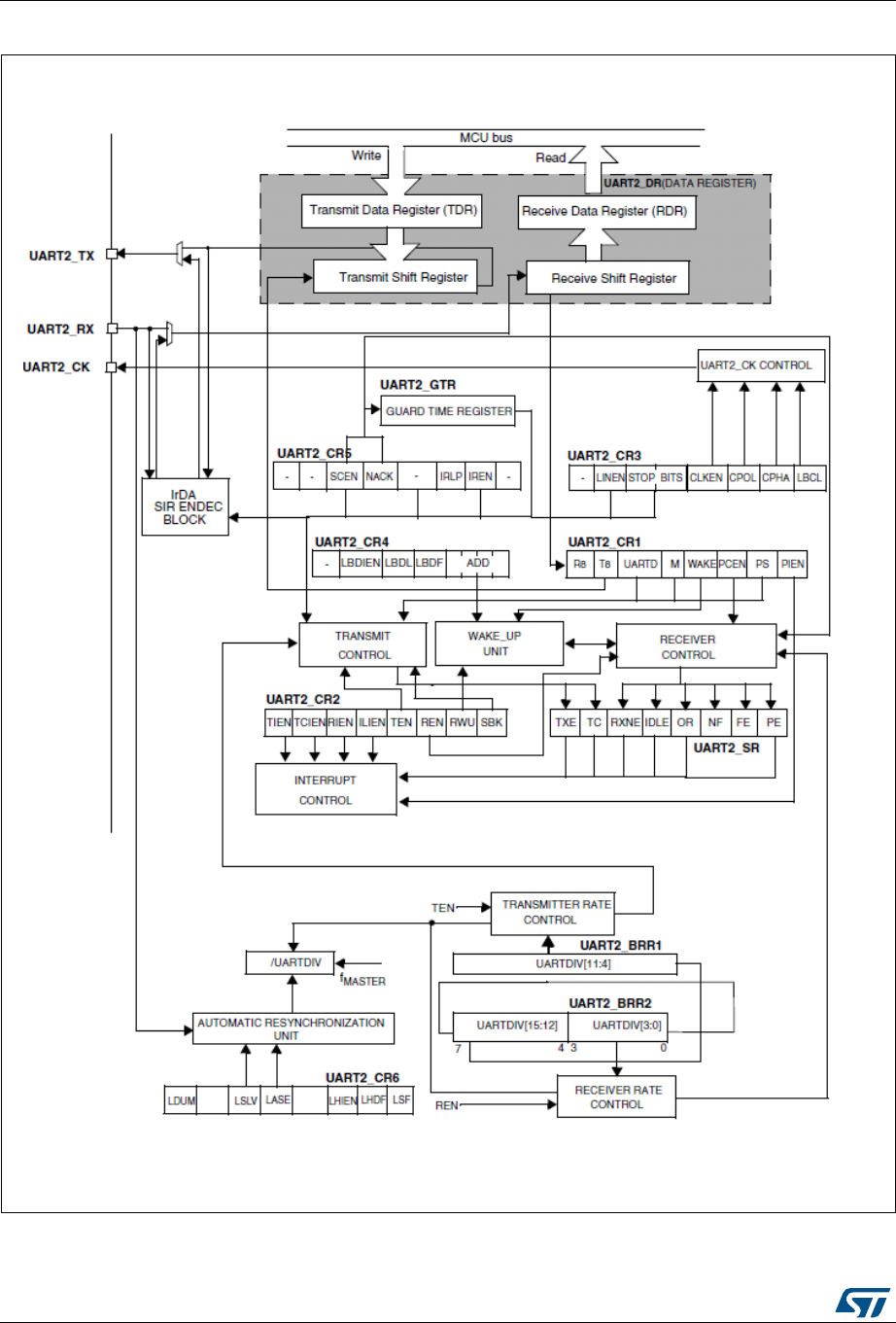
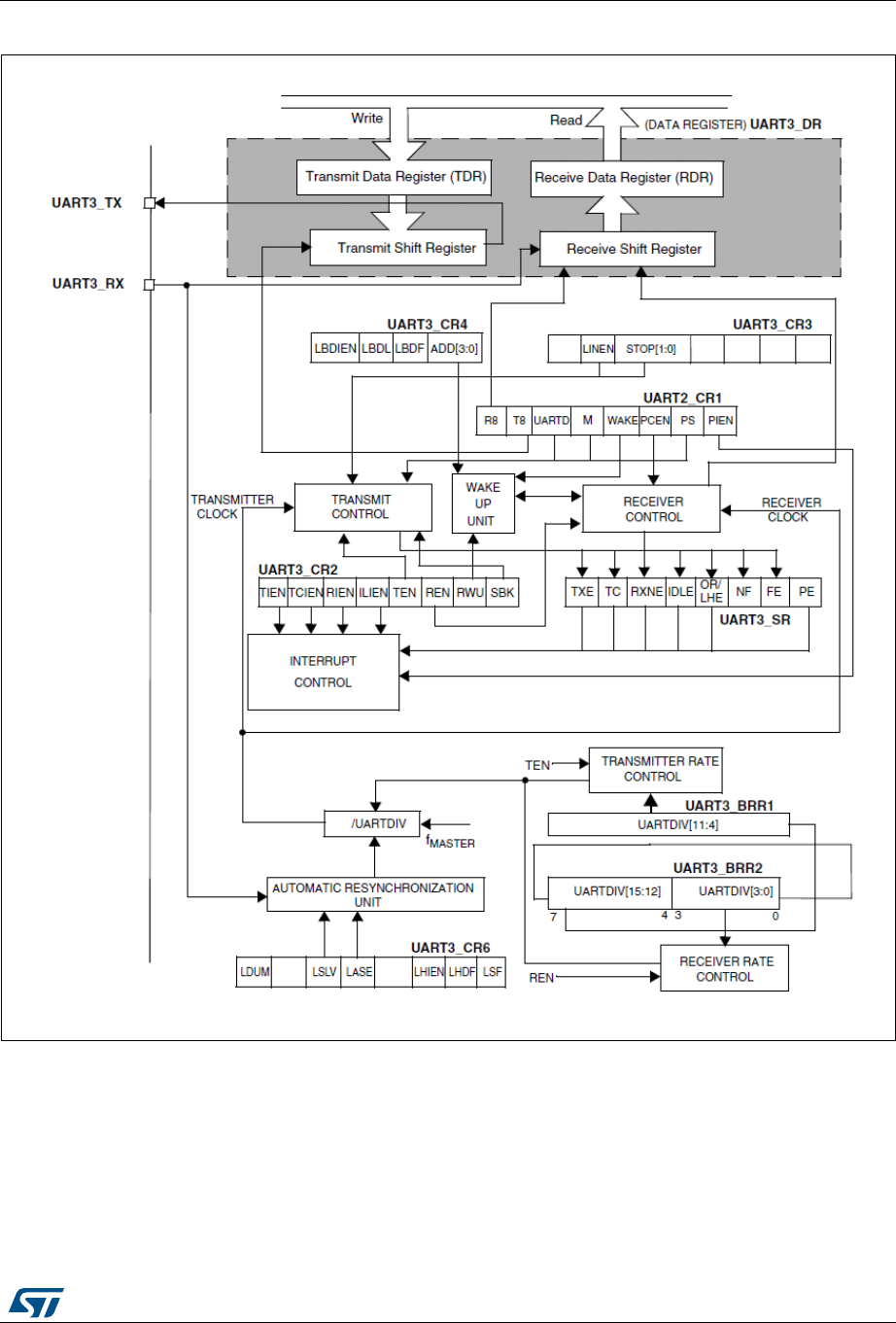
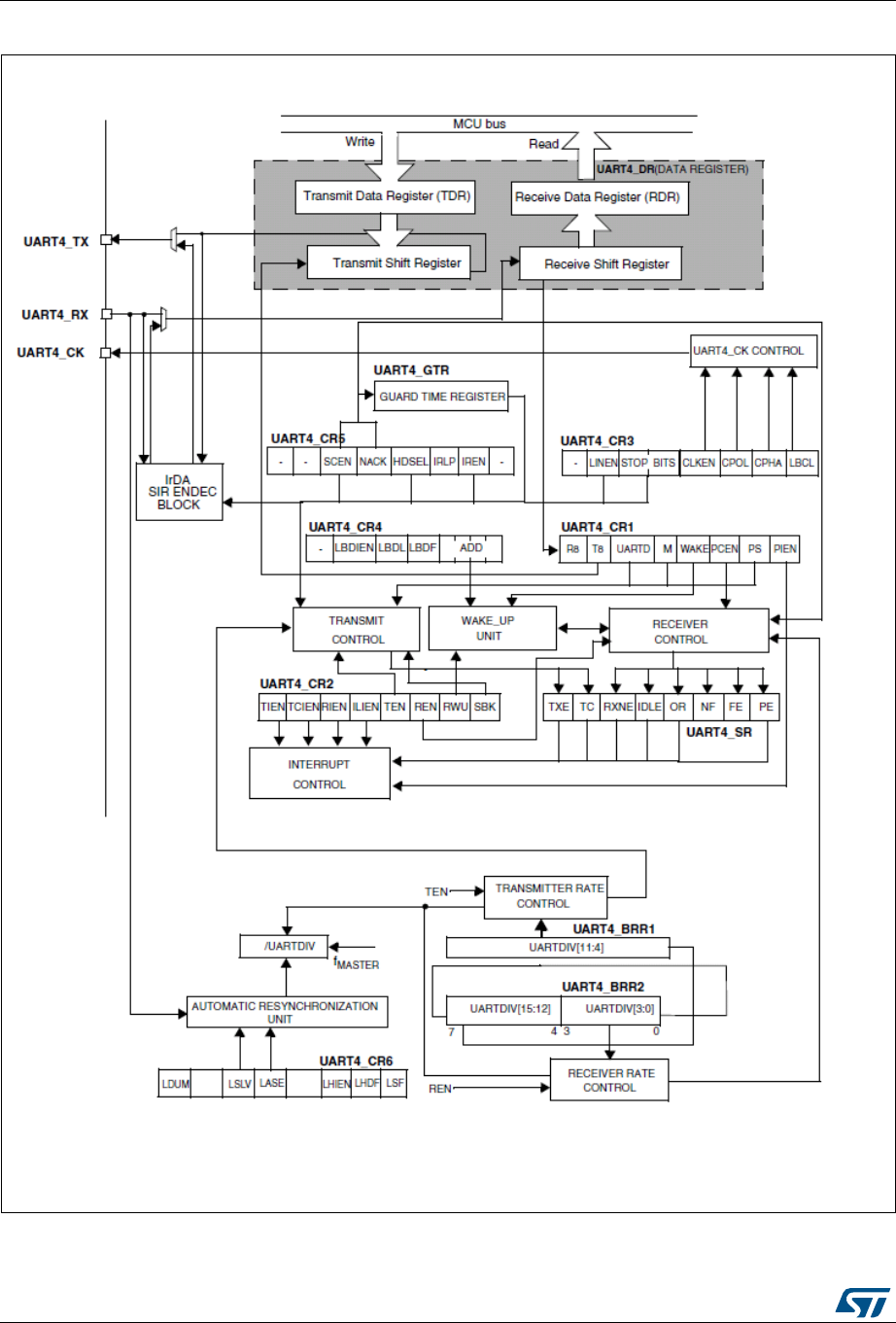
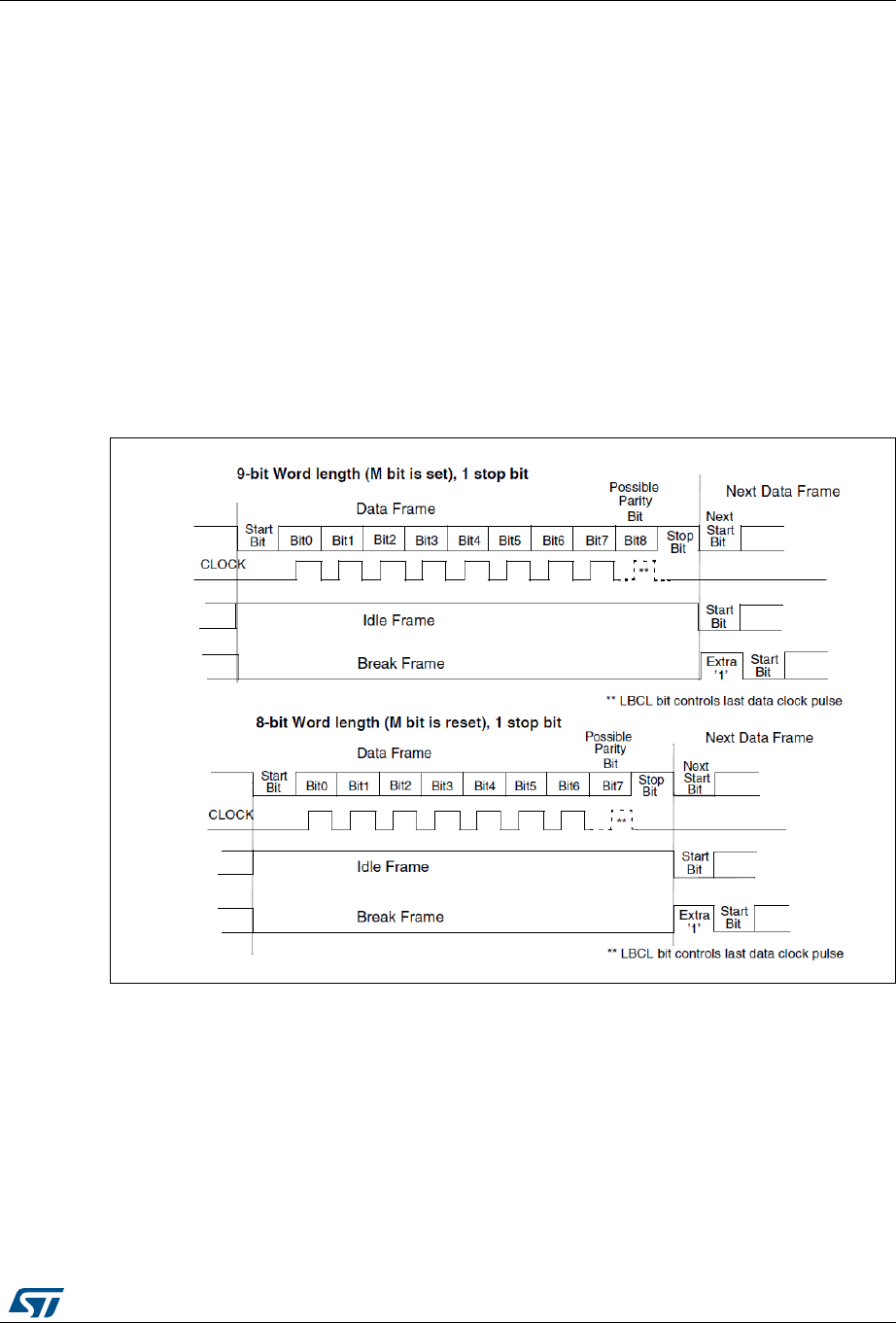
DocID14587 Rev 14 327/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.3.1 UART character description
Word length may be selected as being either 8 or 9 bits by programming the M bit in the
UART_CR1 register (see Figure 114).
The UART_TX pin is in low state during the start bit. It is in high state during the stop bit.
An Idle character is interpreted as an entire frame of “1”s (the number of “1” ‘s includes the
start bit, the number of data bits and the number of stop bits).
A Break character is interpreted on receiving “0”s for a frame period. At the end of the
break frame the transmitter inserts either 1 or 2 stop bits (logic “1” bit) to acknowledge the
start bit.
Transmission and reception are driven by a common baud rate generator, the clock for each
is generated when the enable bit is set respectively for the transmitter and receiver.
The details of each block is given below.
Figure 114. Word length programming

Universal asynchronous receiver transmitter (UART) RM0016
328/467 DocID14587 Rev 14
22.3.2 Transmitter
The transmitter can send data words of either 8 or 9 bits depending on the M bit status.
When the M bit is set, word length is 9 bits and the 9th bit (the MSB) has to be stored in the
T8 bit in the UART_CR1 register.
When the transmit enable bit (TEN) is set, the data in the transmit shift register is output on
the UART_TX pin and the corresponding clock pulses are output on the UART_CK pin.
Character transmission
During an UART transmission, data shifts out least significant bit first on the UART_TX pin.
In this mode, the UART_DR register consists of a buffer (TDR) between the internal bus and
the transmit shift register (see Figure 110).
Every character is preceded by a start bit which is a logic level low for one bit period. The
character is terminated by a configurable number of stop bits.
The following stop bits are supported by UART.
Note: 1 The TEN bit should not be reset during transmission of data.Resetting the TEN bit during
the transmission will corrupt the data on the UART_TX pin as the baud rate counters will get
frozen.The current data being transmitted will be lost.
2 An idle frame will be sent after the TEN bit is enabled.
Configurable stop bits
The number of stop bits to be transmitted with every character can be programmed in
Control register 3, bits 5,4.
•1 stop bit: This is the default value of number of stop bits.
•2 Stop bits: This is supported by normal mode UART.
•1.5 Stop bits: To be used in Smartcard mode only.
An idle frame transmission will include the stop bits.
A break transmission consists of 10 low bits followed by the configured number of stop bits
(when m = 0) and 11 low bits followed by the configured number of stop bits (when m = 1). It
is not possible to transmit long breaks (break of length greater than 10/11 low bits).
Note: In LIN mode (see Section 22.3.8 on page 340), a standard 13-bit break is always generated.
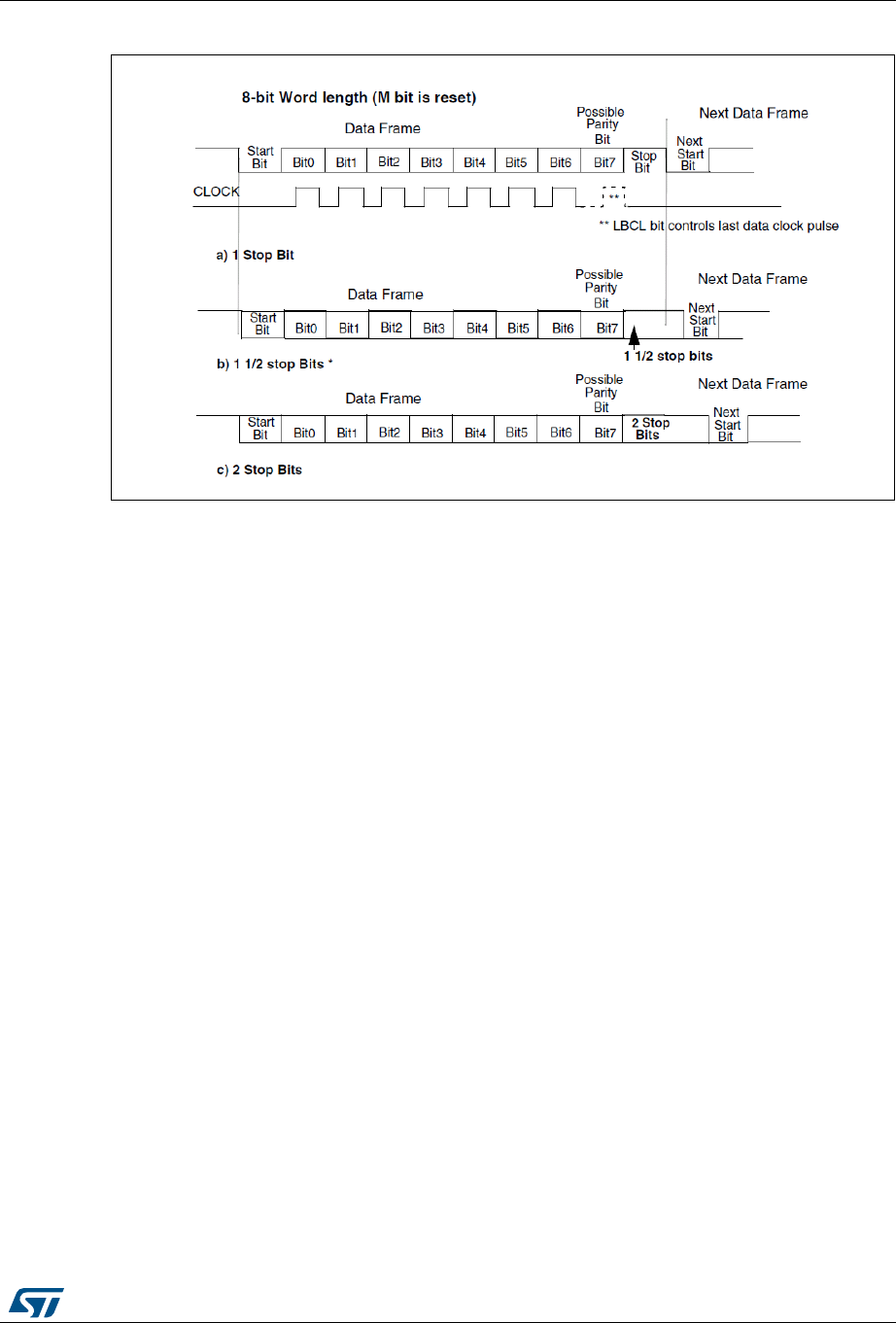
DocID14587 Rev 14 329/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Figure 115. Configurable stop bits
Procedure:
1. Program the M bit in UART_CR1 to define the word length.
2. Program the number of stop bits in UART_CR3.
3. Select the desired baud rate by programming the baud rate registers in the following
order:
a) UART_BRR2
b) UART_BRR1
4. Set the TEN bit in UART_CR2 to enable transmitter mode.
5. Write the data to send in the UART_DR register (this clears the TXE bit). Repeat this
for each data to be transmitted in case of single buffer.
6. Once the last data is written to the UART_DR register, wait until TC is set to ‘1’, which
indicates that the last data transmission is complete. This last step is required, for
instance, to avoid last data transmission corruption when disabling the UART or
entering Halt mode.
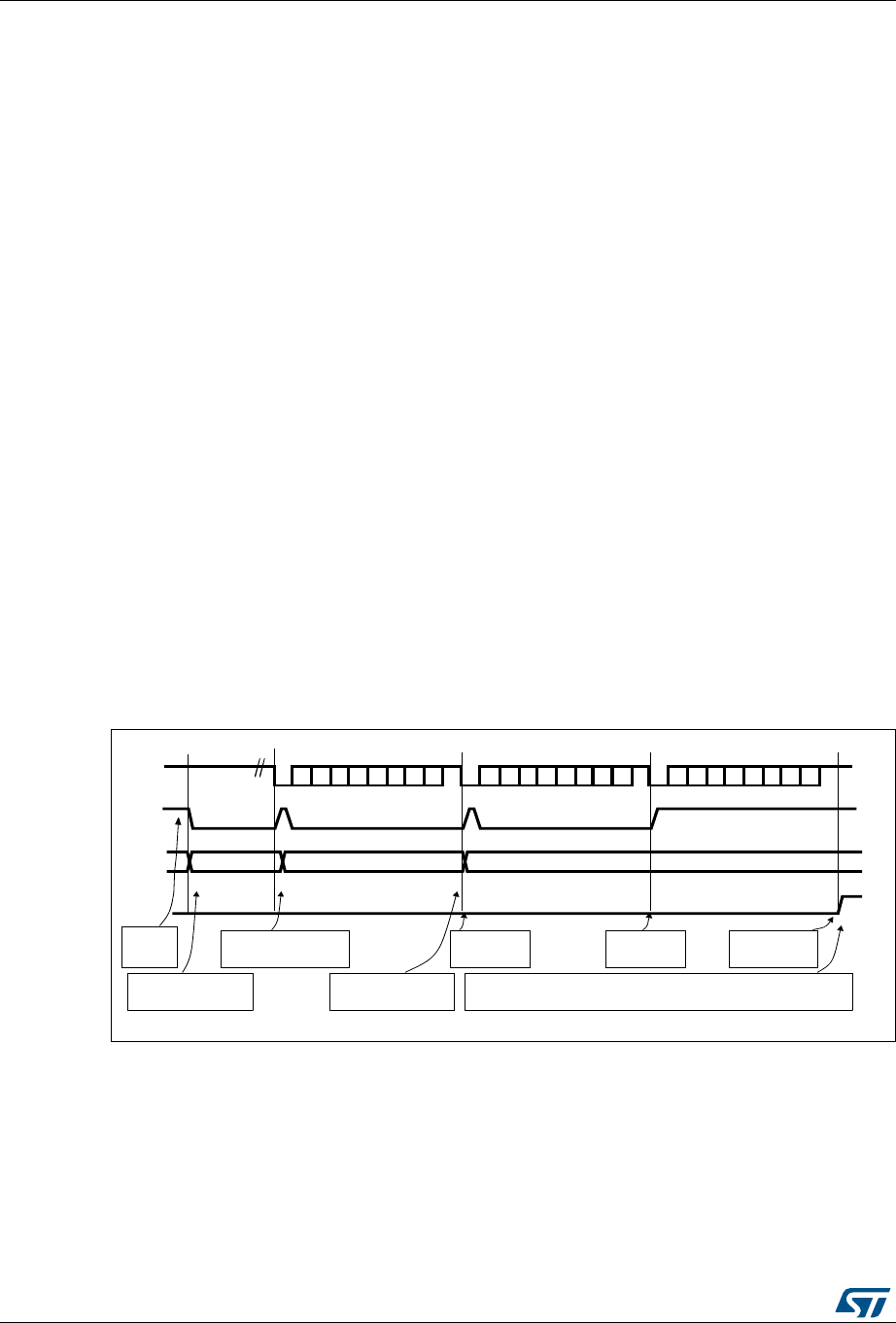
Universal asynchronous receiver transmitter (UART) RM0016
330/467 DocID14587 Rev 14
Single byte communication
Clearing the TXE bit is always performed by a write to the data register.
The TXE bit is set by hardware and it indicates:
•The data has been moved from TDR to the shift register and the data transmission has
started.
•The TDR register is empty.
•The next data can be written in the UART_DR register without overwriting the previous
data.
This flag generates an interrupt if the TIEN bit is set.
When a transmission is taking place, a write instruction to the UART_DR register stores the
data in the TDR register. The data is copied in the shift register at the end of the current
transmission.
When no transmission is taking place, a write instruction to the UART_DR register places
the data directly in the shift register, the data transmission starts, and the TXE bit is
immediately set.
If a frame transmission is complete (after the stop bit) and the TXE bit is set, the TC bit is
set. An interrupt is generated if the TCIEN is set in the UART_CR2 register. After writing the
last data in the UART_DR register, it is mandatory to wait until TC is set to ‘1’ before
entering Halt mode or disabling the UART (see Figure 116: TC/TXE behavior when
transmitting).
The following software sequence is required to clear the TC bit:
1. Read from the UART_SR register
2. Write to the UART_DR register
Figure 116. TC/TXE behavior when transmitting
1. This example assumes that several other transmissions occur after TE has been set.
Note: The TC bit can also be cleared by writing a ‘0’ to it. This clear sequence is recommended
only for multibuffer communication.
TX line
USART_DR F2
TC flag
F3
because TXE=0
software waits until TC=1
TC is set because
TXE=1
set
Idle preamble
by hardware
F1
software
enables the
USAR
T
TC is not set
because TXE=0
TXE flag
software waits until TXE=1
and writes F1 into DR
software waits until TXE=1
and writes F3 into DR
software waits until TXE=1
and writes F2 into DR
Frame 1 Frame 2 Frame 3
set by hardware
set by hardware
cleared by software
set by hardware
cleared by software
TC is not set
ai17121d
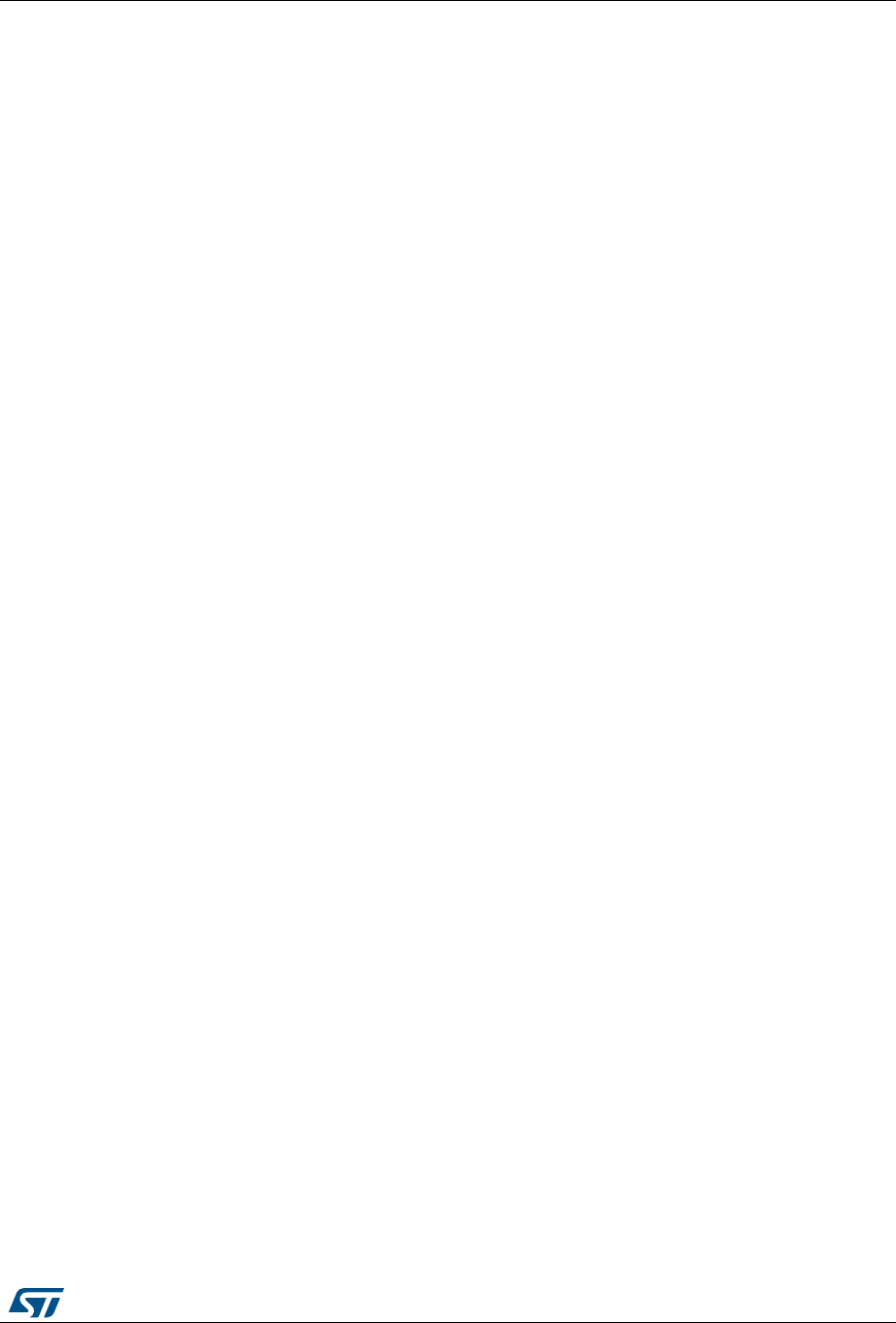
DocID14587 Rev 14 331/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Break character
Setting the SBK bit transmits a break character. The break frame length depends on the M
bit (see Figure 114).
If the SBK bit is set to ‘1’ a break character is sent on the UART_TX line after completing the
current character transmission. This bit is reset by hardware when the break character is
completed (during the stop bit of the break character).The UART inserts a logic 1 bit at the
end of the last break frame to guarantee the recognition of the start bit of the next frame.
Note: The break character is sent without taking into account the number of stop bits. If the UART
is programmed with 2 stop bits, the TX line is pulled low until the end of the first stop bit only.
Then 2 logic 1 bits are inserted before the next character.
Note: If the software resets the SBK bit before the start of break transmission, the break character
is not transmitted. For two consecutive breaks, the SBK bit should be set after the stop bit of
the previous break.
Idle character
Setting the TEN bit drives the UART to send an idle frame before the first data frame.
22.3.3 Receiver
The UART can receive data words of either 8 or 9 bits. When the M bit is set, word length is
9 bits and the MSB is stored in the R8 bit in the UART_CR1 register.
Start bit detection
In the UART, the start bit is detected when a specific sequence of samples is recognized.
This sequence is: 1 1 1 0 X 0 X 0X 0X 0 X 0X 0. The start bit detection sequence shown in
Figure 117.
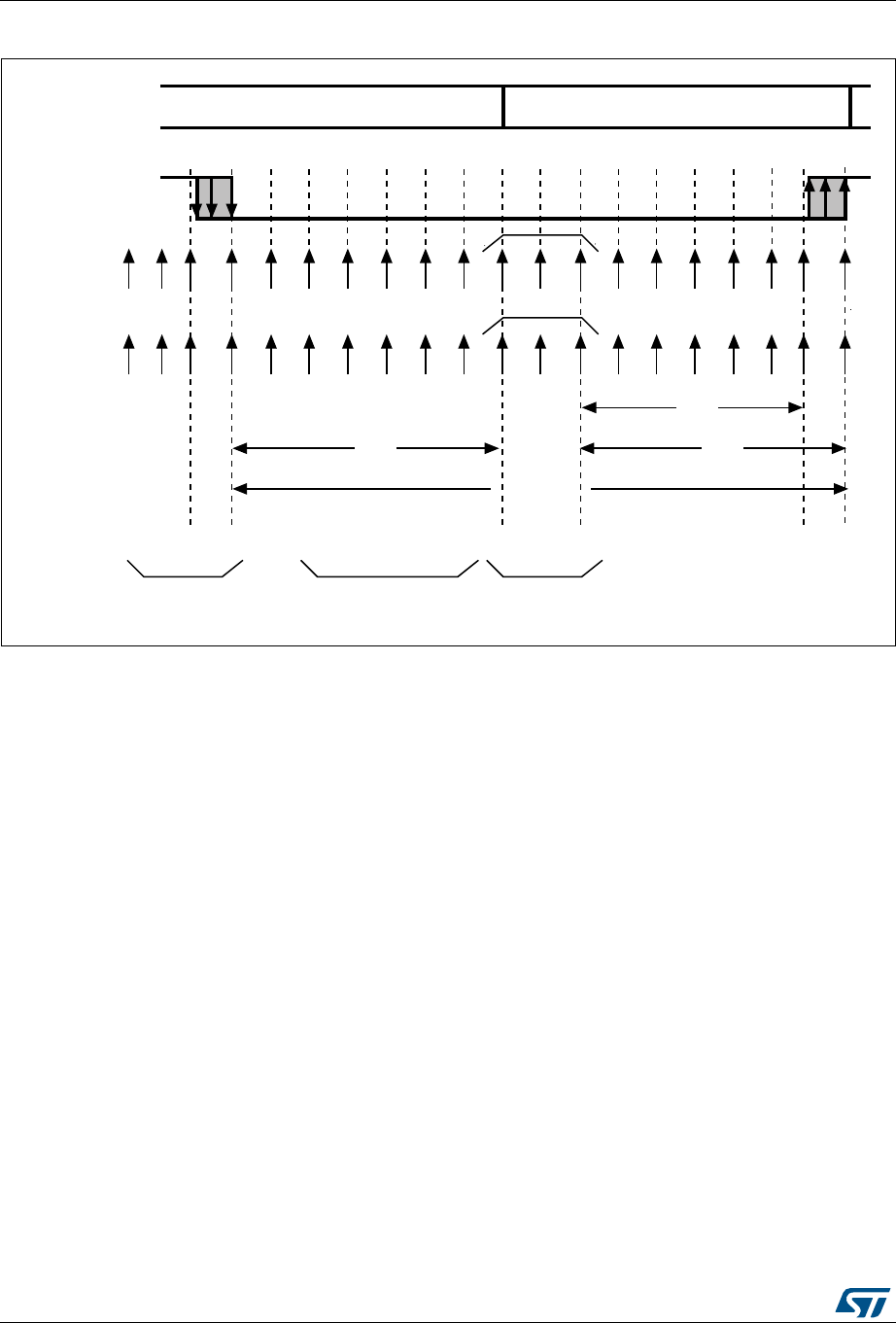
Universal asynchronous receiver transmitter (UART) RM0016
332/467 DocID14587 Rev 14
Figure 117. Start bit detection
Note: If the sequence is not complete, the start bit detection aborts and the receiver returns to the
idle state (no flag is set), where it waits for a falling edge.
If only 2 out of the 3 bits are at 0 (sampling on the 3rd, 5th and 7th bits or sampling on the 8th,
9th and 10th bits), the start bit is validated but the NF noise flag bit is set.
The start bit is confirmed if the last 3 samples are at 0 (sampling on the 8th, 9th, and 10th
bits.
Character reception
During an UART reception, data shifts in least significant bit first through the UART_RX pin.
In this mode, the UART_DR register consists of a buffer (RDR) between the internal bus
and the received shift register (see Figure 2).
Procedure:
1. Program the M bit in UART_CR1 to define the word length.
2. Program the number of stop bits in UART_CR3.
3. Select the desired baud rate by programming the baud rate registers in the following
order:
a) UART_BRR2
b) UART_BRR1
4. Set the REN bit UART_CR2. This enables the receiver which begins searching for a
start bit.
01 0 X0 X 0 00 0 XXXXXX
Falling edge
detection
11
1 2 3 4 5 6 7 8 9 10 111213141516
X X X X X X X X 9 10 111213141516
6/16
7/167/16
X
At least 2 bits
out of 3 at 0
At least 2 bits
out of 3 at 0
One-bit time
Conditions
to validate
the start bit
Real
sample
clock
Ideal
sample
clock
RX line
RX state Idle Start bit
Sampled values
ai15471b

DocID14587 Rev 14 333/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
When a character is received
•The RXNE bit is set. It indicates that the content of the shift register is transferred to the
RDR.
•An interrupt is generated if the RIEN bit is set.
•The error flags can be set if a frame error, noise or an overrun error has been detected
during reception.
•Clearing the RXNE bit is performed by a software read to the UART_DR register. The
RXNE flag can also be cleared by writing a zero to it. The RXNE bit must be cleared
before the end of the reception of the next character to avoid an overrun error.
Note: The REN bit should not be reset while receiving data. If the REN bit is disabled during
reception, the reception of the current byte will be aborted.
Break character
When a break character is received, the UART handles it as a framing error.
Idle character
When an idle frame is detected, there is the same procedure as a data received character
plus an interrupt if the ILIEN bit is set.
Overrun error
An overrun error occurs when a character is received when RXNE has not been reset. Data
can not be transferred from the shift register to the RDR register until the RXNE bit is
cleared.
When an overrun error occurs:
•The OR bit is set.
•The RDR content will not be lost. The previous data is available when a read to
UART_DR is performed.
•The shift register will be overwritten. The second data received during overrun is lost.
•An interrupt is generated if the RIEN bit is set.
•The OR bit is reset by a read to the UART_SR register followed by a UART_DR
register read operation.
Noise error
Over-sampling techniques are used for data recovery by discriminating between valid
incoming data and noise.
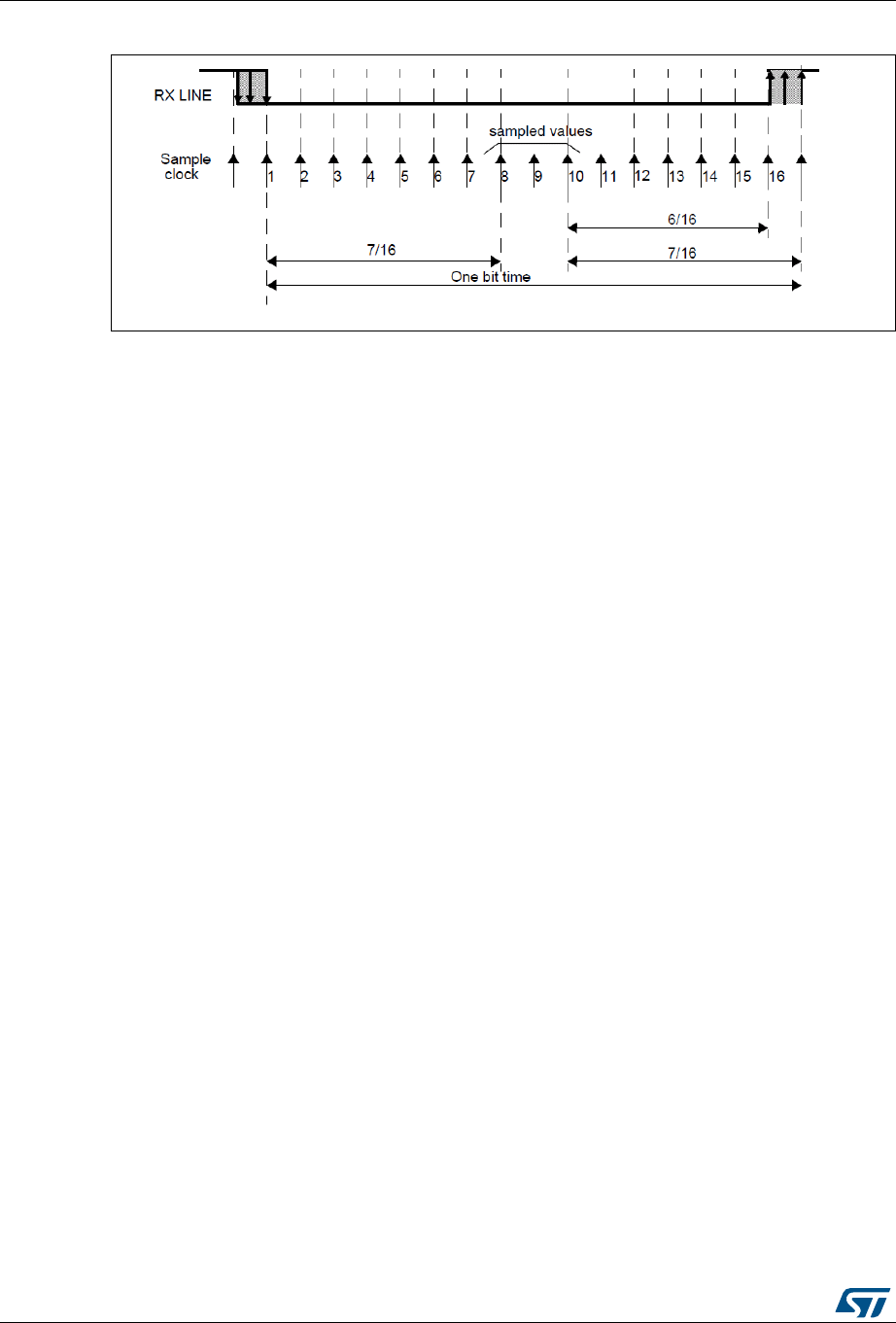
DocID14587 Rev 14 335/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
When noise is detected in a frame:
•The NF is set at the rising edge of the RXNE bit.
•The invalid data is transferred from the Shift register to the UART_DR register.
This bit rises at the same time as the RXNE bit which generates an interrupt. The NF bit is
reset by a UART_SR register read operation followed by a UART_DR register read
operation.
Framing error
A framing error is detected when:
The stop bit is not recognized on reception at the expected time, following either a de-
synchronization or excessive noise.
When the framing error is detected:
•The FE bit is set by hardware
•The invalid data is transferred from the Shift register to the UART_DR register.
•No interrupt is generated in case of single byte communication. However, this bit rises
at the same time as the RXNE bit which itself generates an interrupt.
The FE bit is reset by a UART_SR register read operation followed by a UART_DR register
read operation.
Configurable stop bits during reception:
The number of stop bits to be received can be configured through the control bits of Control
Register 3 - it can be either 1 or 2 in normal mode, 1 in IrDA mode and 1.5 in Smartcard
mode.
1. 1 Stop Bit: Sampling for 1 stop Bit is done on the 8th, 9th and 10th samples.
2. 1.5 Stop Bits (Smartcard mode only): Sampling for 1.5 stop bits is done on the
16th,17th and 18th samples. An NACK signal received from the Smartcard forces the
data signal low during the sampling, flagged as a framing error. Then, the FE flag is set
with the RXNE at the end of the 1.5 stop bit.
3. 2 Stop Bits: Sampling for 2 stop bits is done on the 8th, 9th and 10th samples of the first
stop bit.If a framing error is detected during the first stop bit the framing error flag will be
set. The second stop bit is not checked for framing error. The RXNE flag will be set at
the end of the first stop bit.
Table 53. Noise detection from sampled data
Sampled value NF status Received bit value Data validity
000 0 0 Valid
001 1 0 Not Valid
010 1 0 Not Valid
011 1 1 Not Valid
100 1 0 Not Valid
101 1 1 Not Valid
110 1 1 Not Valid
111 0 1 Valid
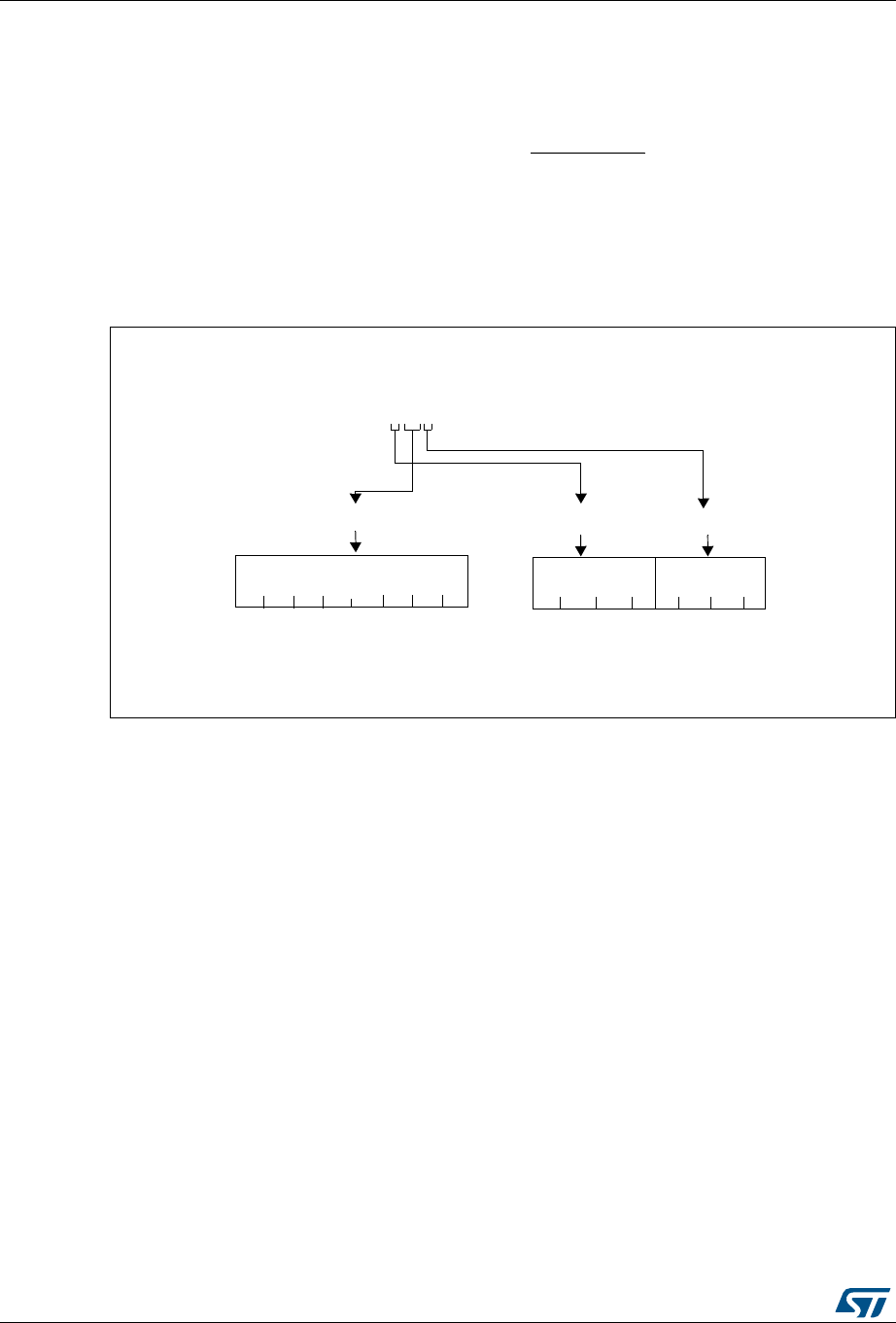
Universal asynchronous receiver transmitter (UART) RM0016
336/467 DocID14587 Rev 14
22.3.4 High precision baud rate generator
The receiver and transmitter (Rx and Tx) are both set to the same baud rate programmed by
a 16-bit divider UART_DIV according to the following formula:
The UART_DIV baud rate divider is an unsigned integer, coded in the BRR1 and BRR2
registers as shown in Figure 119.
Refer to Table 54. for typical baud rate programming examples.
Figure 119. How to code UART_DIV in the BRR registers
Note: The Baud Counters will be updated with the new value of the Baud Registers after a write to
BRR1. Hence the Baud Register value should not be changed during a transaction. The
BRR2 should be programmed before BRR1.
Note: UART_DIV must be greater than or equal to 16d.
Tx/ Rx baud rate = fMASTER
UART_DIV
7070
UART_BRR1 UART_BRR2
4 3
Example: To obtain 9600 baud with fMASTER = 10 MHz.
UART_DIV[15:12]UART_DIV[11:4] UART_DIV[3:0]
UART_DIV = 1042d = 0x0412 See Table 54.
register = 0x02
UART_DIV = 10 000 000/9600
register = 0x41
0x41 0x2
0x0
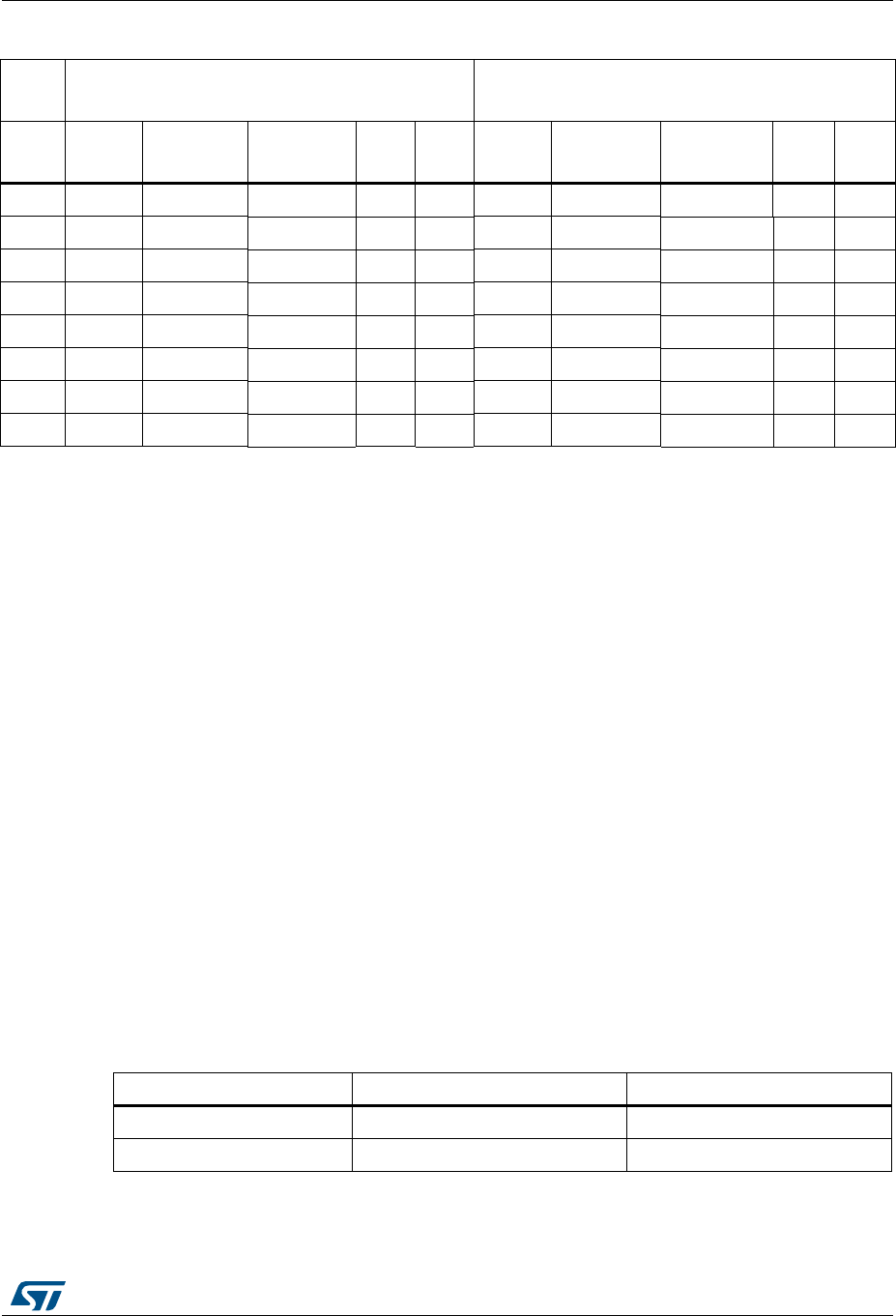
DocID14587 Rev 14 337/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Note: The lower the fMASTER frequency, the lower will be the accuracy for a particular baud
rate.The upper limit of the achievable baud rate can be fixed with this data.
22.3.5 Clock deviation tolerance of the UART receiver
The USART’s asynchronous receiver works correctly only if the total clock system deviation
is less than the USART receiver’s tolerance. The causes which contribute to the total
deviation are:
•DTRA: Deviation due to the transmitter error (which also includes the deviation of the
transmitter’s local oscillator)
•DQUANT: Error due to the baud rate quantization of the receiver
•DREC: Deviation of the receiver’s local oscillator
•DTCL: Deviation due to the transmission line (generally due to the transceivers which
can introduce an asymmetry between the low-to-high transition timing and the high-to-
low transition timing)
DTRA + DQUANT + DREC + DTCL < UART receiver’s tolerance
The UART receiver’s tolerance to properly receive data is equal to the maximum tolerated
deviation and depends on the following choices:
•10- or 11-bit character length defined by the M bit in the UART_CR1 register
•Use of fractional baud rate or not
Table 55. UART receiver tolerance when UART_DIV[3:0] is zero
Table 54. Baud rate programming and error calculation
Baud
rate fMASTER = 10 MHz fMASTER = 16 MHz
in
kbps Actual % Error (1) UART_DIV BRR1 BRR2 Actual % Error(1) UART_DIV BRR1 BRR2
2.4 2.399 −0.008% 0x1047 0x04 0x17 2.399 −0.005% 0x1A0B 0xA0 0x1B
9.6 9.596 −0.032% 0x0412 0x41 0x02 9.598 −0.020% 0x0693 0x68h 0x03
19.2 19.193 −0.032% 0x0209 0x20 0x09 19.208 −0.040% 0x0341 0x34 0x01
57.6 57.471 −0.224% 0x00AE 0x0A 0x0E 57.554 −0.080% 0x0116 0x11 0x06
115.2 114.942 −0.224% 0x0057 0x05 0x07 115.108 −0.080% 0x008B 0x08 0x0B
230.4 232.558 −0.937% 0x002B 0x02 0x0B 231.884 −0.644% 0x0045 0x04 0x05
460.8 454.545 −1.358% 0x0016 0x01 0x06 457.143 −0.794% 0x0023 0x02 0x03
921.6 NA NA NA NA NA 941.176 −2.124% 0x11 0x01 0x01
1. Error % = (Calculated - Desired) Baud Rate / Desired Baud Rate
M bit NF is an error NF is don’t care
0 3.75% 4.375%
1 3.41% 3.97%
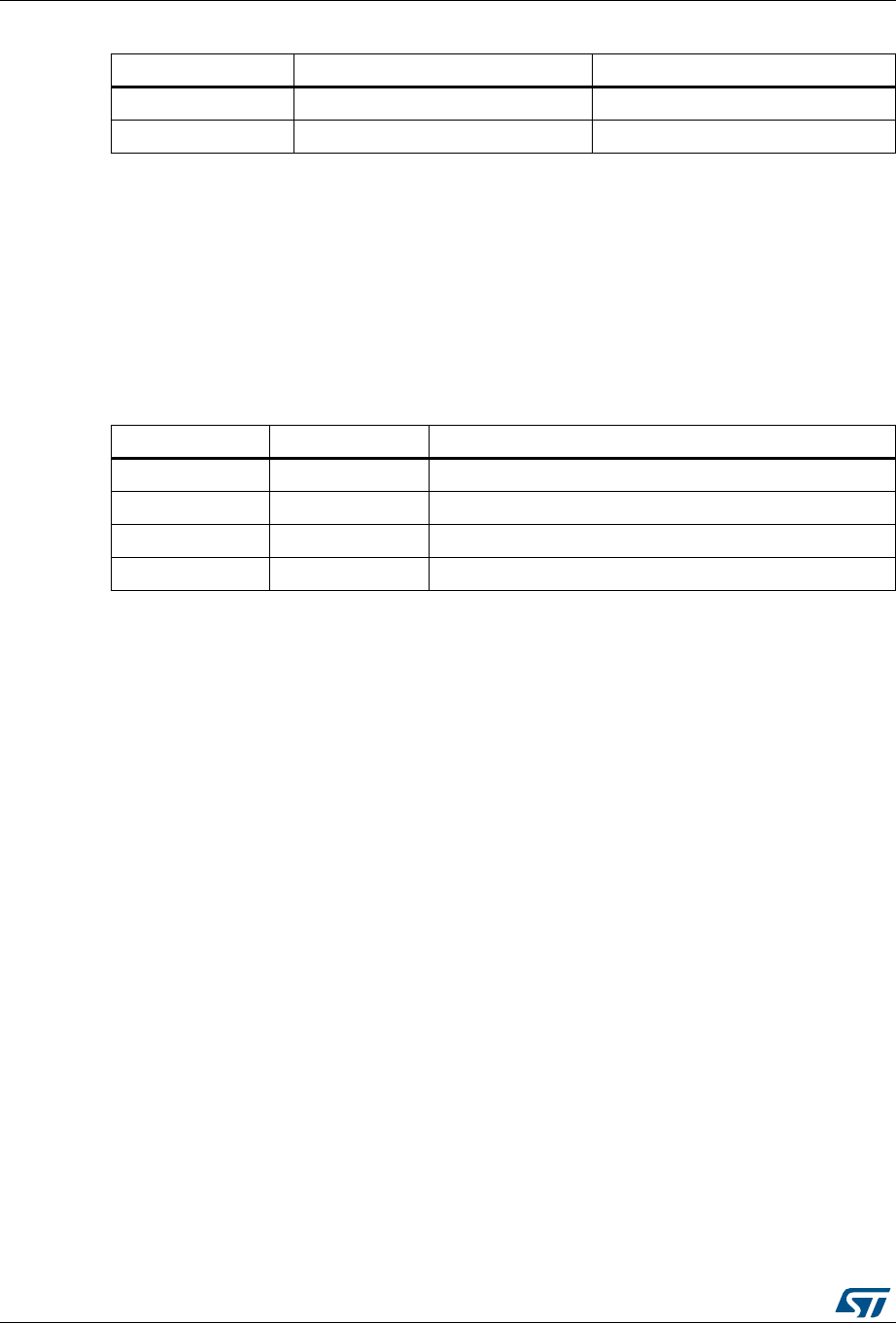
Universal asynchronous receiver transmitter (UART) RM0016
338/467 DocID14587 Rev 14
Table 56. UART receiver’s tolerance when UART_DIV[3:0] is different from zero
Note: The values specified in Table 55 and Table 56 may slightly differ in the special case when
the received frames contain some Idle frames of exactly 10-bit times when M=0 (11-bit times
when M=1).
22.3.6 Parity control
Parity control (generation of parity bit in transmission and parity checking in reception) can
be enabled by setting the PCEN bit in the UART_CR1 register. Depending on the frame
length defined by the M bit, the possible UART frame formats are as listed in Table 57.
Legends: SB: Start Bit, STB: Stop Bit, PB: Parity Bit
Note: In case of wakeup by an address mark, the MSB bit of the data is taken into account and not
the parity bit
Even parity: the parity bit is calculated to obtain an even number of “1s” inside the frame
made of the 7 or 8 LSB bits (depending on whether M is equal to 0 or 1) and the parity bit.
Ex: data=00110101; 4 bits set => parity bit will be 0 if even parity is selected (PS bit in
UART_CR1 = 0).
Odd parity: the parity bit is calculated to obtain an odd number of “1s” inside the frame
made of the 7 or 8 LSB bits (depending on whether M is equal to 0 or 1) and the parity bit.
Example: data=00110101; 4 bits set => parity bit will be 1 if odd parity is selected (PS bit in
UART_CR1 = 1).
Transmission: If the PCEN bit is set in UART_CR1 then the MSB bit of the data written in
the data register is not transmitted but is changed by the parity bit to give an even number of
‘1’s if even parity is selected (PS=0) or an odd number of ‘1’s if odd parity is selected
(PS=1).
Reception: If the parity check fails, the PE flag is set in the UART_SR register and an
interrupt is generated if the PIEN bit is set in the UART_CR1 register.
M bit NF is an error NF is don’t care
0 3.33% 3.88%
1 3.03% 3.53%
Table 57. Frame format
M bit PCEN bit UART frame
0 0 | SB | 8 bit data | STB |
0 1 | SB | 7-bit data | PB | STB |
1 0 | SB | 9-bit data | STB |
1 1 | SB | 8-bit data PB | STB |
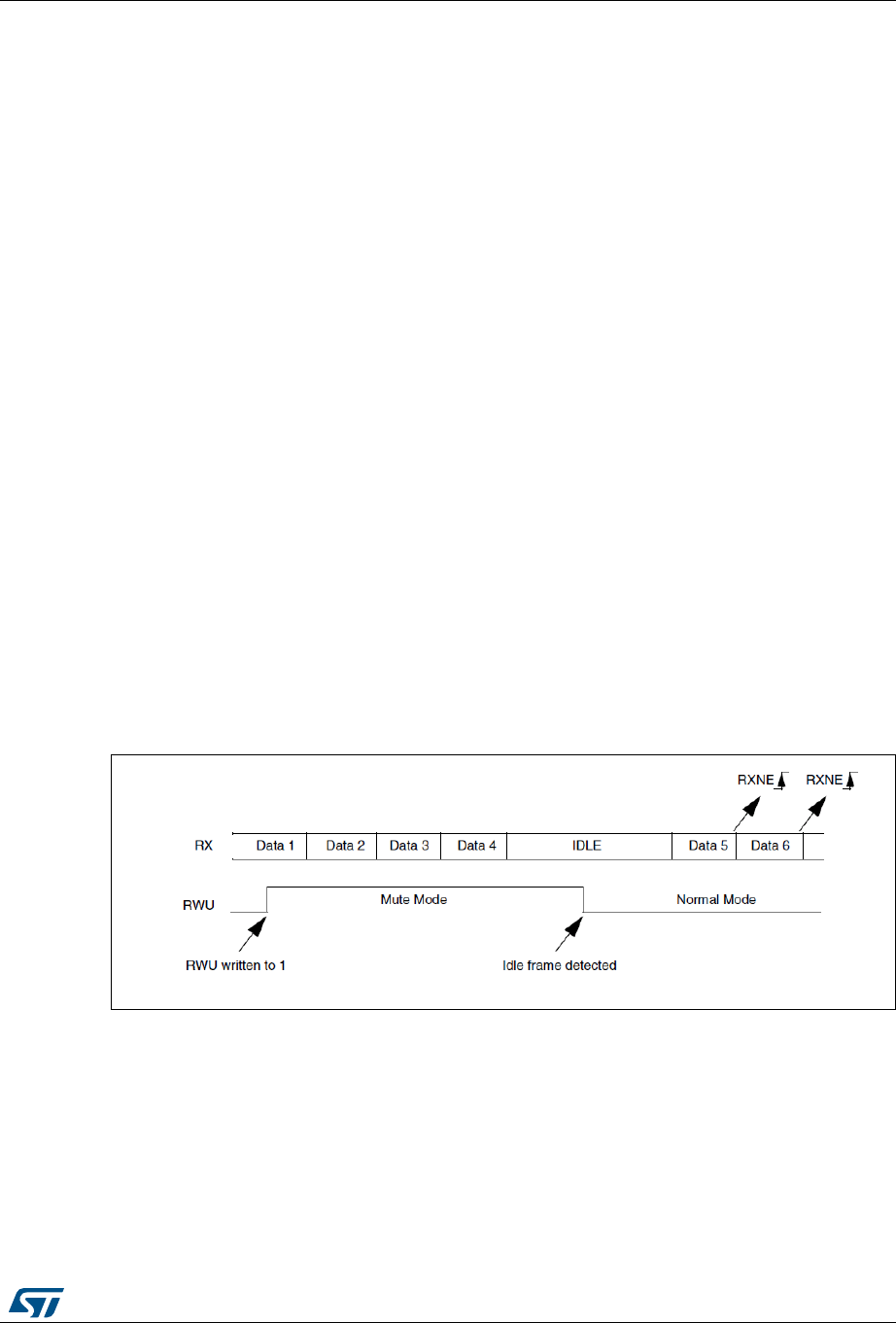
DocID14587 Rev 14 339/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.3.7 Multi-processor communication
It is possible to perform multi-processor communication with the UART (several UARTs
connected in a network). For example, one of the UARTs can be the master, its TX output is
connected to the RX input of the other UART. The others are slaves, their respective TX
outputs are logically ANDed together and connected to the RX input of the master.
In multi-processor configurations it is often desirable that only the intended message
recipient should actively receive the full message contents, thus reducing redundant UART
service overhead for all non addressed receivers.
The non addressed devices may be placed in mute mode by means of the muting function.
In mute mode:
•None of the reception status bits can be set.
•All the receive interrupts are inhibited.
•The RWU bit in UART_CR2 register is set to 1. RWU can be controlled automatically
by hardware or written by the software under certain conditions.
The UART can enter or exit from mute mode using one of two methods, depending on the
WAKE bit in the UART_CR1 register:
•Idle Line detection if the WAKE bit is reset,
•Address Mark detection if the WAKE bit is set.
Idle line detection (WAKE = 0)
The UART enters mute mode when the RWU bit is written to 1.
It wakes up when an Idle frame is detected. Then the RWU bit is cleared by hardware but
the IDLE bit is not set in the UART_SR register. RWU can also be written to 0 by software.
An example of mute mode behavior using idle line detection is given in Figure 120.
Figure 120. Mute mode using idle line detection
Address mark detection (WAKE = 1)
In this mode, bytes are recognized as addresses if their MSB is a ‘1’ else they are
considered as data. In an address byte, the address of the targeted receiver is put on the 4
LSB. This 4-bit word is compared by the receiver with its own address which is programmed
in the ADD bits in the UART_CR4 register.
The UART enters mute mode when an address character is received which does not match
its programmed address. The RXNE flag is not set for this address byte and no interrupt
request is issued as the UART would have entered mute mode.
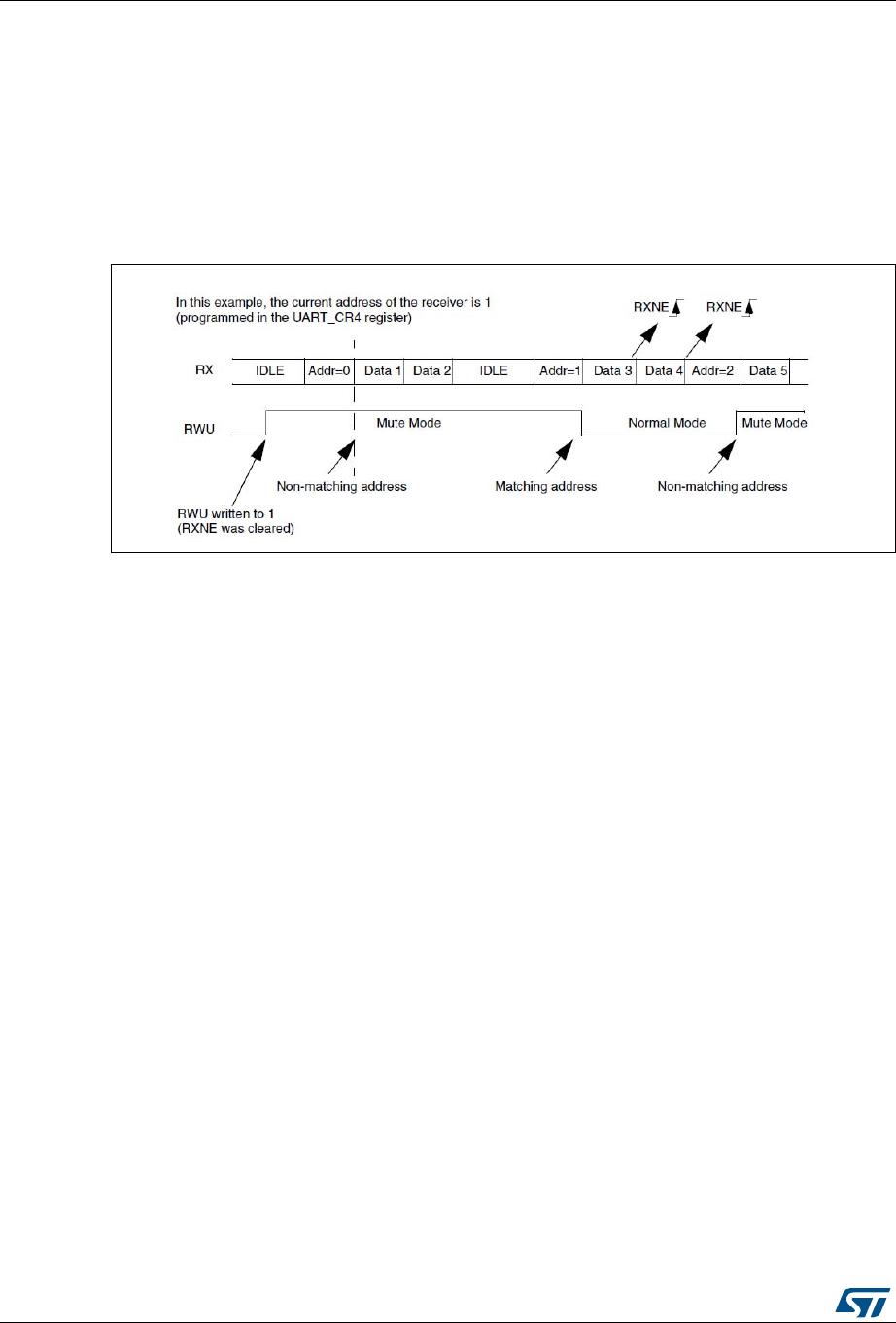
Universal asynchronous receiver transmitter (UART) RM0016
340/467 DocID14587 Rev 14
It exits from mute mode when an address character is received which matches the
programmed address. Then the RWU bit is cleared and subsequent bytes are received
normally. The RXNE bit is set for the address character since the RWU bit has been
cleared.
The RWU bit can be written to 0 or 1 when the receiver buffer contains no data (RXNE=0 in
the UART_SR register). Otherwise the write attempt is ignored.
An example of mute mode behavior using address mark detection is given in Figure 121.
Figure 121. Mute mode using Address mark detection
Note: If parity control is enabled, the parity bit remains in the MSB and the address bit is put in the
"MSB - 1" bit.
For example, with 7-bit data, address mode and parity control:
SB I 7-bit data I ADD I PB I STB
where:
SB = Start Bit
STB = Stop Bit
ADD = Address bit
PB = Parity Bit
22.3.8 LIN (local interconnection network) mode
The UART supports LIN break and delimiter generation in LIN master mode.
Refer to Section 22.4.1: Master mode on page 348 for details. LIN slave mode is supported
by the UART2, UART3 and UART4 only, not by UART1.
LIN mode is selected by setting the LINEN bit in the UART_CR3 register. In LIN mode, the
following bits must be kept cleared:
•CLKEN, STOP[1:0] in the UART_CR3 register
•SCEN, HDSEL and IREN in the UART_CR5 register
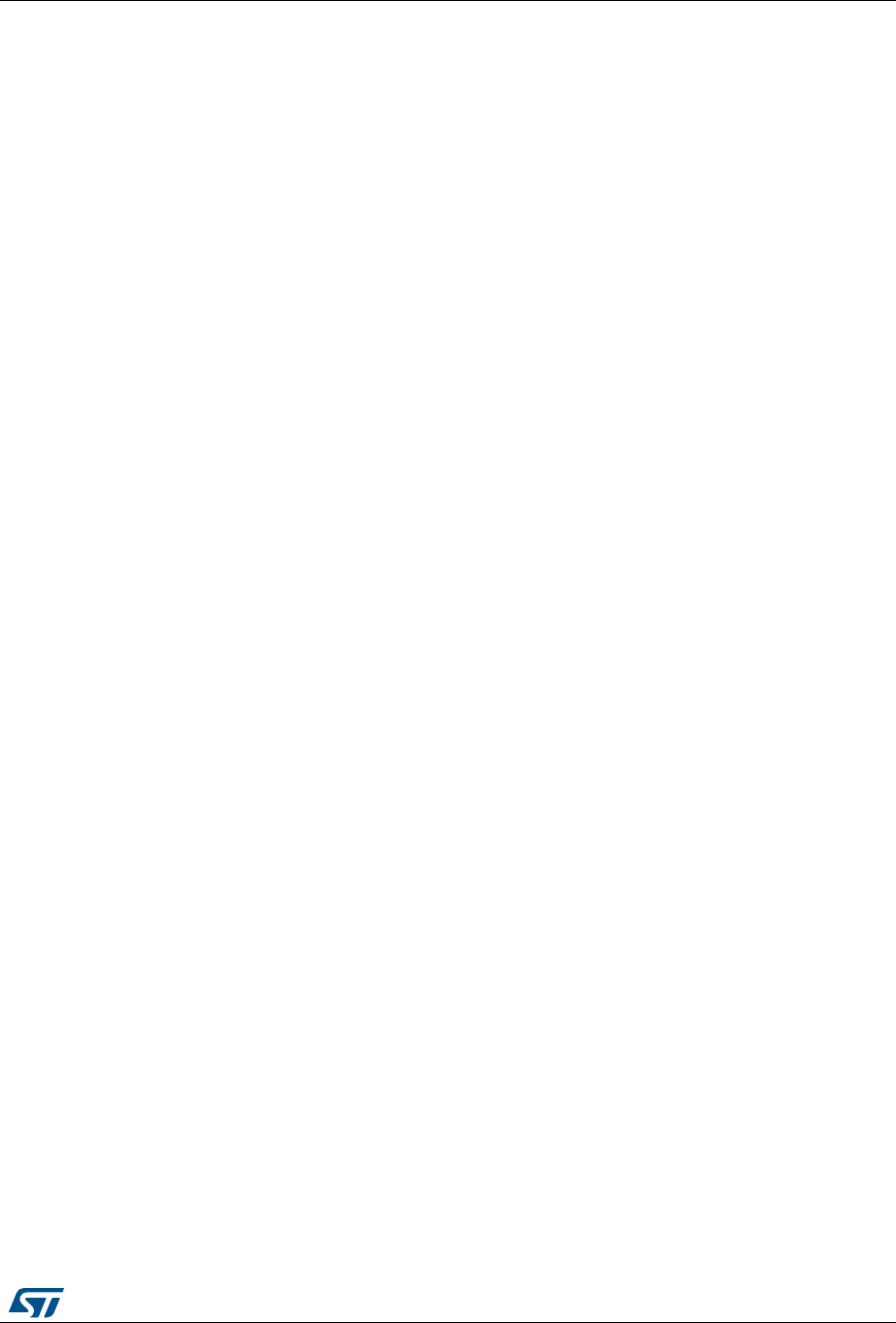
DocID14587 Rev 14 341/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.3.9 UART synchronous communication
The UART transmitter allows the user to control bidirectional synchronous serial
communications in master mode.
In synchronous mode, the following bits must be kept cleared:
•LINEN bit in the UART_CR3 register
•SCEN, HDSEL and IREN bits in the UART_CR5 register
Note: This feature is only available in UART1, UART2 and UART4.
The UART_CK pin is the output of the UART transmitter clock. No clock pulses are sent to
the UART_CK pin during start bit and stop bit. Depending on the state of the LBCL bit in the
UART_CR3 register clock pulses will or will not be generated during the last valid data bit
(address mark). The CPOL bit in the UART_CR3 register allows the user to select the clock
polarity, and the CPHA bit in the UART_CR3 register allows the user to select the phase of
the external clock (see Figure 122, Figure 123 & Figure 124).
During idle and break frames, the external CK clock is not activated.
In synchronous mode, the UART receiver works differently compared to asynchronous
mode. If RE=1, the data is sampled on SCLK (rising or falling edge, depending on CPOL
and CPHA), without any oversampling. A setup and a hold time (even if the hold time is not
relevant due to the SPI protocol) must be respected (which depends on the baud rate: 1/16
bit time for an integer baud rate).
Note: 1 The UART_CK pin works in conjunction with the TX pin. When the UART transmitter is
disabled (TEN and REN= 0), the UART_CK and UART_TX pins go into high impedance
state.
2 The LBCL, CPOL and CPHA bits in UART_CR3 have to be selected when both the
transmitter and the receiver are disabled (TEN=REN=0) to ensure that the clock pulses
function correctly. These bits should not be changed while the transmitter or the receiver is
enabled.
3 It is recommended to set TE and RE are set in the same instruction in order to minimize the
setup and the hold time of the receiver.
4 The UART supports master mode only: it cannot receive or send data related to an input
clock (SCLK is always an output).
5 The data given in this section apply only when the UART_DIV[3:0] bits in the UART_BRR2
register are kept at 0. Else the setup and hold times are not 1/16 of a bit time but 4/16 of a
bit time.
This option allows to serially control peripherals which consist of shift registers, without
losing any functions of the asynchronous communication which can still talk to other
asynchronous transmitters and receivers.
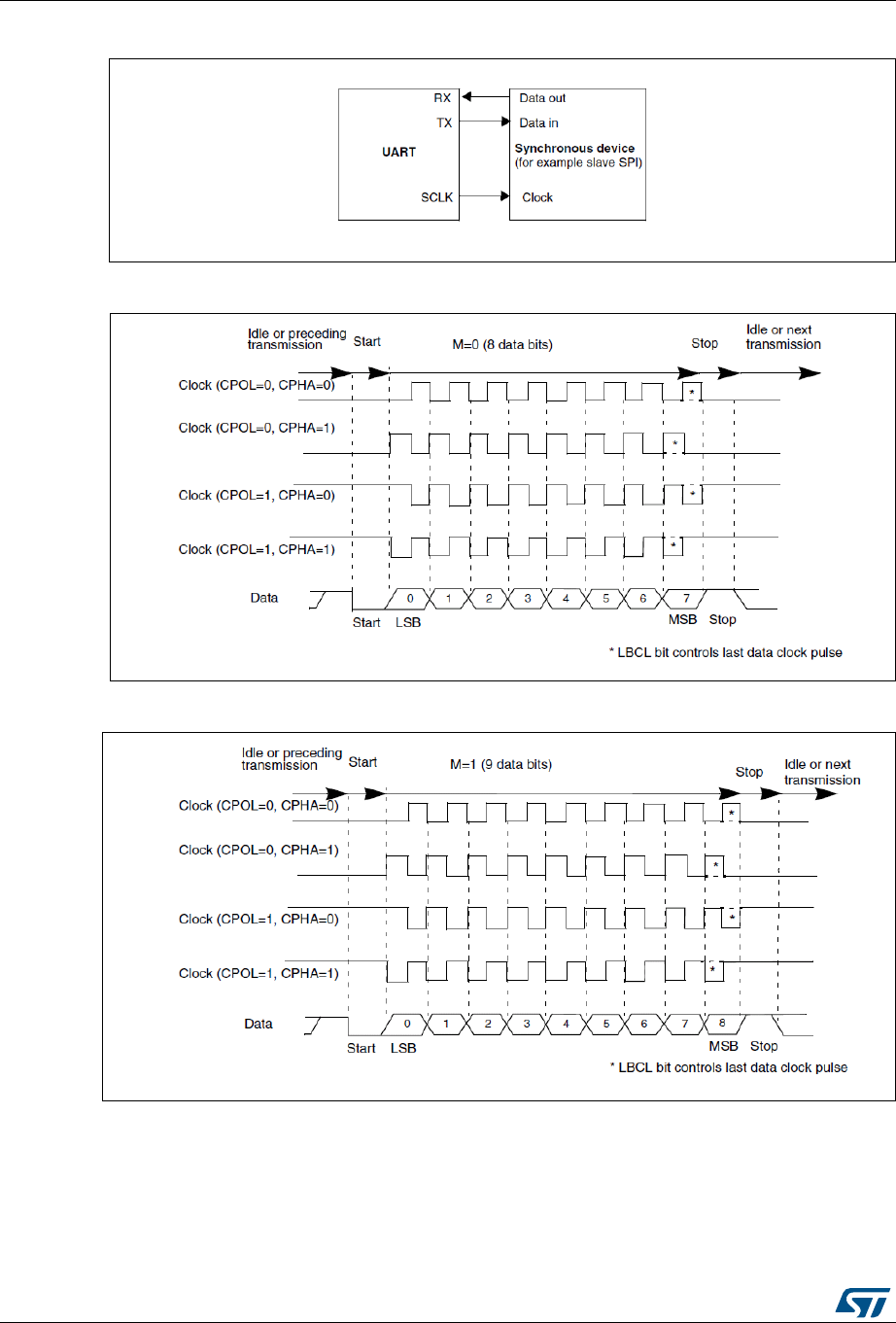
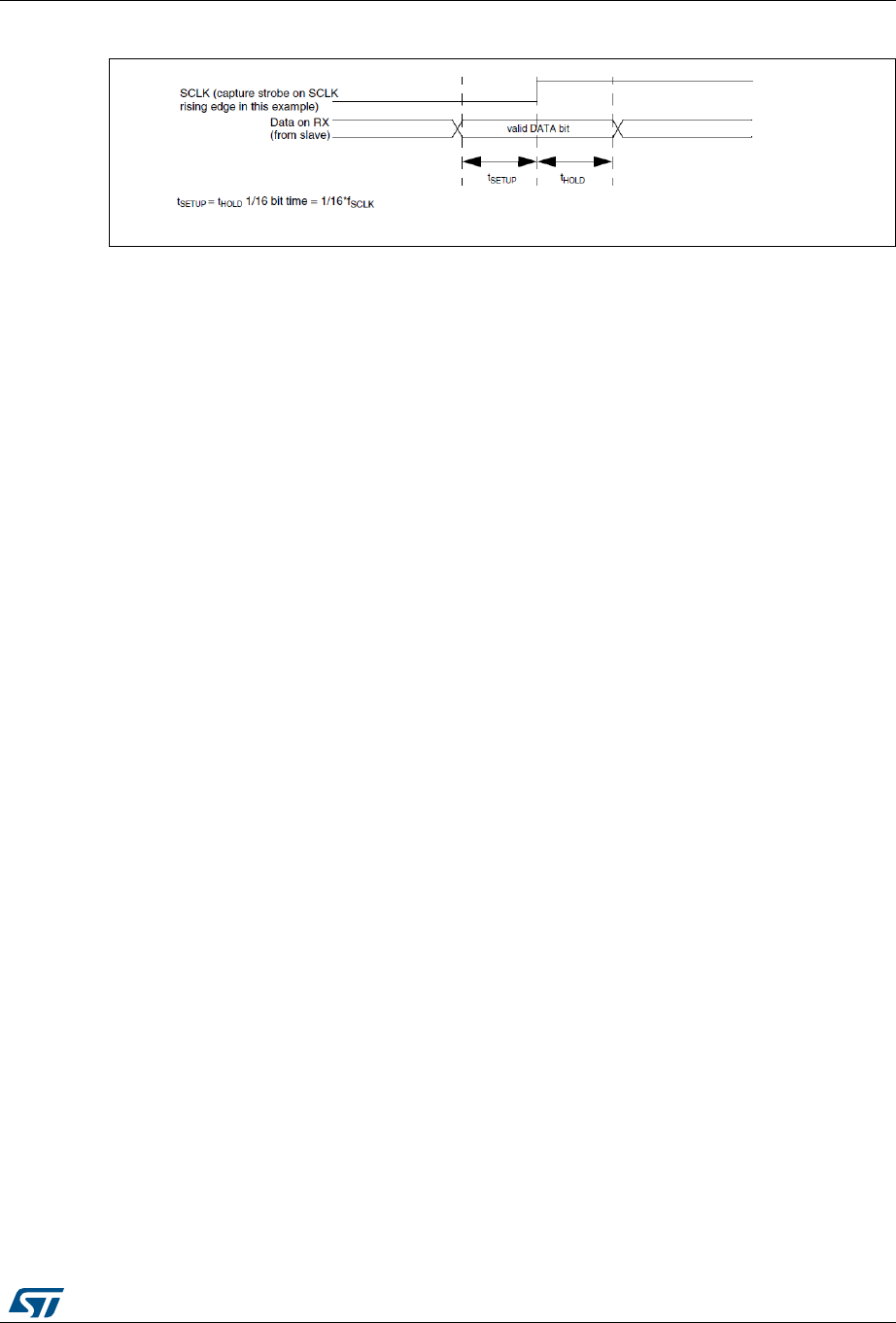
DocID14587 Rev 14 343/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Figure 125. RX data setup/hold time
Note: The function of UART_CK is different in Smartcard mode. Refer to Section 22.3.11:
Smartcard for more details.
22.3.10 Single wire half duplex communication
The UART can be configured to follow a single wire half duplex protocol. Single-wire half-
duplex mode is selected by setting the HDSEL bit in the UART_CR5 register. In this mode,
the following bits must be kept cleared:
•LINEN and CLKEN bits in the UART_CR3 register
•SCEN and IREN bits in the UART_CR5 register
Note: This feature is only available in UART1 and UART4.
As soon as HDSEL is set:
•UART_RX is no longer used
•UART_TX is always released when no data is transmitted. Thus, it acts as a standard
I/O in idle or in reception. This means that the I/O must be configured so that UART_TX
is configured as floating input (or output high open-drain) when not driven by the UART.
Apart from this, the communications are similar to what is done in normal UART mode. The
conflicts on the line must be managed by the software (by the use of a centralized arbiter, for
instance). In particular, the transmission is never blocked by hardware and continue to occur
as soon as a data is written in the data register while the TEN bit is set.
22.3.11 Smartcard
Smartcard mode is selected by setting the SCEN bit in the UART_CR5 register. In
smartcard mode, the following bits must be kept cleared:
•LINEN bit in the UART_CR3 register,
•HDSEL and IREN bits in the UART_CR5 register.
Moreover, the CKEN bit may be set in order to provide a clock to the smartcard.
Note: This feature is only available in UART1, UART2 and UART4.
The Smartcard interface is designed to support asynchronous protocol Smartcards as
defined in the ISO7816-3 standard. The UART should be configured as eight bits plus parity
and 1.5 stop bits. With Smartcard mode enabled (which can be done by setting the SCEN
bit in the UART_CR5) the UART can communication with an asynchronous Smartcard.
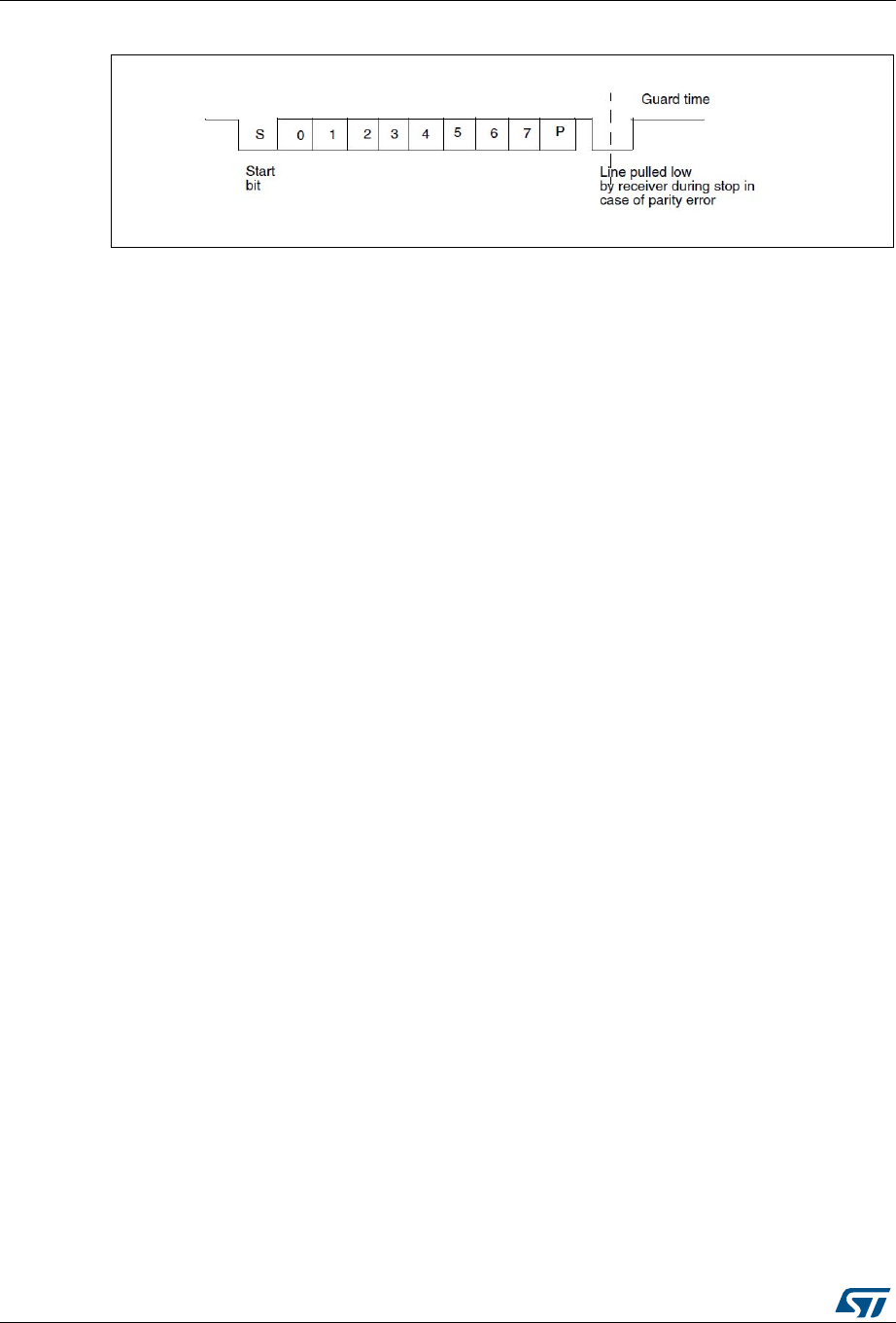
Universal asynchronous receiver transmitter (UART) RM0016
344/467 DocID14587 Rev 14
Figure 126. ISO 7816-3 asynchronous protocol
When connected to a smartcard, the UART_TX output drives a bidirectional line that is also
driven by the smartcard.
Smartcard is a single wire half duplex communication protocol.
•Transmission of data from the transmit shift register is guaranteed to be delayed by a
minimum of 1/2 baud clock. In normal operation a full transmit shift register will start
shifting on the next baud clock edge. In Smartcard mode this transmission is further
delayed by a guaranteed 1/2 baud clock.
•If a parity error is detected during reception of a frame programmed with a 1.5 stop bit
period, the transmit line is pulled low for a baud clock period after 1/2 baud clock
period. This is to indicate to the Smartcard that the data transmitted to the UART has
not been correctly received. This NACK signal (pulling transmit line low for 1 baud
clock) will cause a framing error on the transmitter side (configured with 1.5 stop bits).
The application can handle re-sending of data according to the protocol. A parity error
is ‘NACK’ed by the receiver if the NACK control bit is set, otherwise a NACK is not
transmitted.
•The TE bit must be set to enable:
– Data transmission
– Transmission of acknowledgements in case of parity error.
Software must manage the timing of data transmission to avoid conflicts on the
data line when it writes new data in the data register.
•The RE bit must be set to enable:
– Data reception (sent by the Smartcard as well as by the UART),
– Detection of acknowledgements in case of parity error.
•The assertion of the TC flag can be delayed by programming the Guard Time register.
In normal operation, TC is asserted when the transmit shift register is empty and no
further transmit requests are outstanding. In Smartcard mode an empty transmit shift
register triggers the guard time counter to count up to the programmed value in the
Guard Time register. TC is forced low during this time. When the guard time counter
reaches the programmed value TC is asserted high.
•The de-assertion of TC flag is unaffected by Smartcard mode.
•If a framing error is detected on the transmitter end (due to a NACK from the receiver),
the NACK will not be detected as a start bit by the receive block of the transmitter.
According to the ISO protocol, the duration of the received NACK can be 1 or 2 baud
clock periods.
•On the receiver side, if a parity error is detected and a NACK is transmitted the receiver
will not detect the NACK as a start bit.
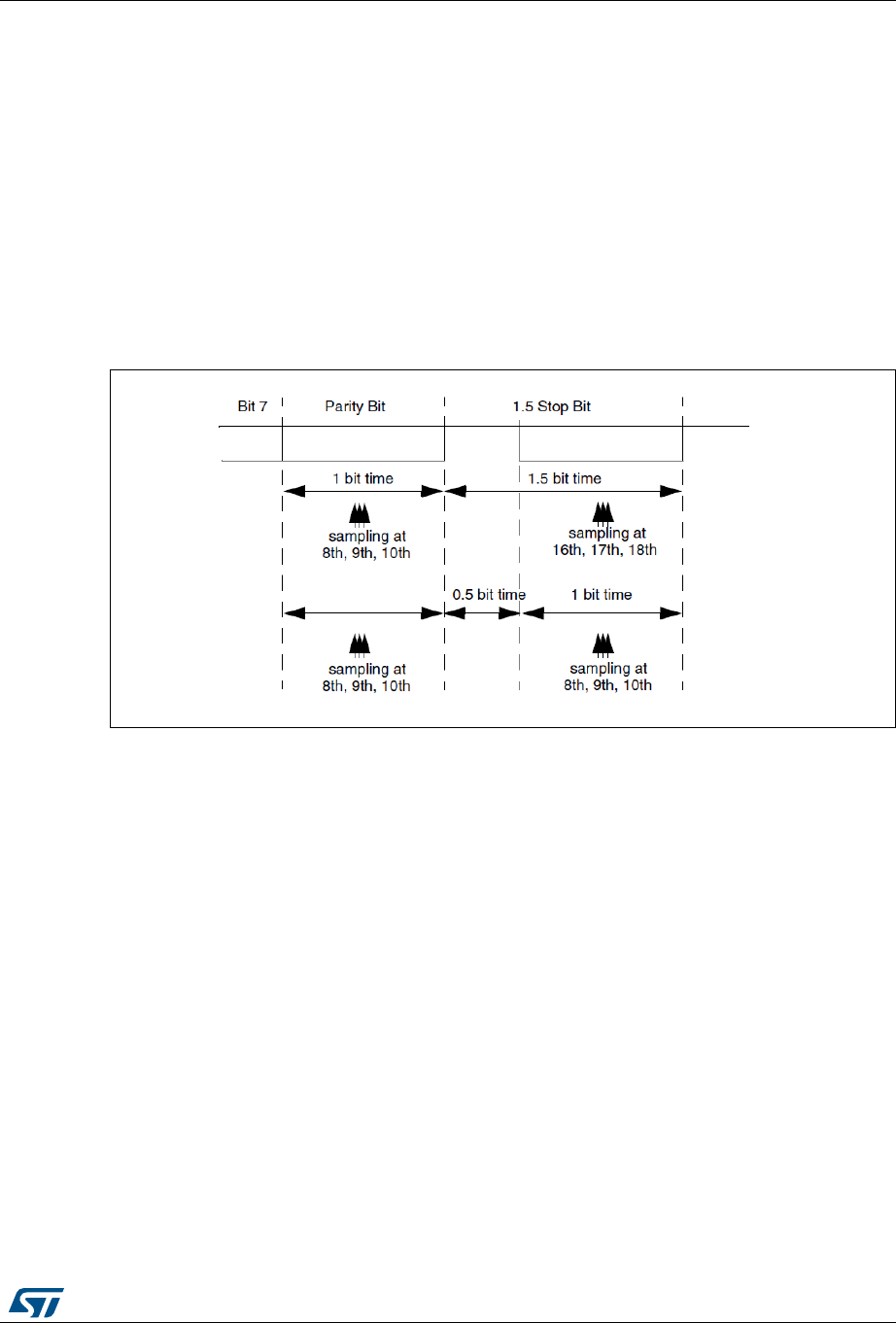
DocID14587 Rev 14 345/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
•The output enable signal for the Smartcard I/O enables driving into a bidirectional line
which is also driven by the Smartcard. This signal is active while transmitting the start
and data bits and transmitting NACK. While transmitting the stop bits this signal is
disabled, so that the UART weakly drives a ‘1’ on the bidirectional line.
Note: 1 A break character is not significant in Smartcard mode. A 00h data with a framing error will
be treated as data and not as a break.
2 No IDLE frame is transmitted when toggling the TEN bit. The IDLE frame (as defined for the
other configurations) is not defined by the ISO protocol.
Figure 127 details how the NACK signal is sampled by the UART. In this example the UART
is transmitting a data and is configured with 1.5 stop bits. The receiver part of the UART is
enabled in order to check the integrity of the data and the NACK signal.
Figure 127. Parity error detection using 1.5 stop bits
The UART can provide a clock to the smartcard through the UART_CK output. In smartcard
mode, UART_CK is not associated to the communication but is simply derived from the
internal peripheral input clock through a 5-bit prescaler. The division ratio is configured in
the prescaler register UART_PSCR. UART_CK frequency can be programmed from
fMASTER/2 to fMASTER/62, where fMASTER is the peripheral input clock.
22.3.12 IrDA SIR ENDEC block
IrDA mode is selected by setting the IREN bit in the UART_CR5 register. The STOP bits in
the UART_CR3 register must be configured to “1 stop bit”. In IrDA mode, the following bits
must be kept cleared:
•LINEN, STOP and CKEN bits in the UART_CR3 register,
•SCEN and HDSEL bits in the UART_CR5 register.
Note: This feature is only available in UART1, UART2 and UART4.
The IrDA SIR physical layer specifies use of a Return to Zero, Inverted (RZI) modulation
scheme that represents logic 0 as an infrared light pulse (see Figure 128).
The SIR Transmit encoder modulates the Non Return to Zero (NRZ) transmit bit stream
output from the UART. The output pulse stream is transmitted to an external output driver
and infrared LED. The UART supports only bit rates up to 115.2 kbps for the SIR ENDEC. In
normal mode the transmitted pulse width is specified as 3/16 of a bit period.

Universal asynchronous receiver transmitter (UART) RM0016
346/467 DocID14587 Rev 14
The SIR receive decoder demodulates the return-to-zero bit stream from the infrared
detector and outputs the received NRZ serial bit stream to UART. The decoder input is
normally HIGH (marking state) in the idle state. The transmit encoder output has the
opposite polarity to the decoder input. A start bit is detected when the decoder input is low.
•IrDA is a half duplex communication protocol. If the Transmitter is busy (i.e. the UART
is sending data to the IrDA encoder), any data on the IrDA receive line will be ignored
by the IrDA decoder and if the Receiver is busy (UART is receiving decoded data from
the UART), data on the TX from the UART to IrDA will not be encoded by IrDA. While
receiving data, transmission should be avoided as the data to be transmitted could be
corrupted.
•A ’0’ is transmitted as a high pulse and a ’1’ is transmitted as a ’0’. The width of the
pulse is specified as 3/16th of the selected bit period in normal mode (see Figure 129).
•The SIR decoder converts the IrDA compliant receive signal into a bit stream for the
UART.
•The SIR receive logic interprets a high state as a logic one and low pulses as logic
zeros.
•The transmit encoder output has the opposite polarity to the decoder input. The SIR
output is in low state when idle.
•The IrDA specification requires the acceptance of pulses greater than 1.41 us. The
acceptable pulse width is programmable. Glitch detection logic on the receiver end
filters out pulses of width less than 2 PSC periods (PSC is the prescaler value
programmed in UART_PSCR). Pulses of width less than 1 PSC period are always
rejected, but those of width greater than one and less than two periods may be
accepted or rejected, those greater than 2 periods will be accepted as a pulse. The
IrDA encoder/decoder doesn’t work when PSC=0.
•The receiver can communicate with a low-power transmitter.
•In IrDA mode, the STOP bits in the UART_CR2 register must be configured to “1 stop
bit”.
IrDA low-power mode
The IrDA can be used either in normal mode or in Low Power mode. The Low Power mode
is selected by setting the IRLP bit in UART_CR5 register.
Transmitter:
In low-power mode the pulse width is not maintained at 3/16 of the bit period. Instead, the
width of the pulse is 3 times the low-power baud rate which can be a minimum of 1.42 MHz.
Generally this value is 1.8432 MHz (1.42 MHz < PSC< 2.12 MHz). A low-power mode
programmable divisor divides the system clock to achieve this value.
Receiver:
Receiving in low-power mode is similar to receiving in normal mode. For glitch detection the
UART should discard pulses of duration shorter than 1/PSC. A valid low is accepted only if
its duration is greater than 2 periods of the IrDA low-power Baud clock (PSC value in
UART_PSCR).
Note: 1 A pulse of width less than two and greater than one PSC period(s) may or may not be
rejected.
2 The receiver set up time should be managed by software. The IrDA physical layer
specification specifies a minimum of 10 ms delay between transmission and reception (IrDA
is a half duplex protocol).
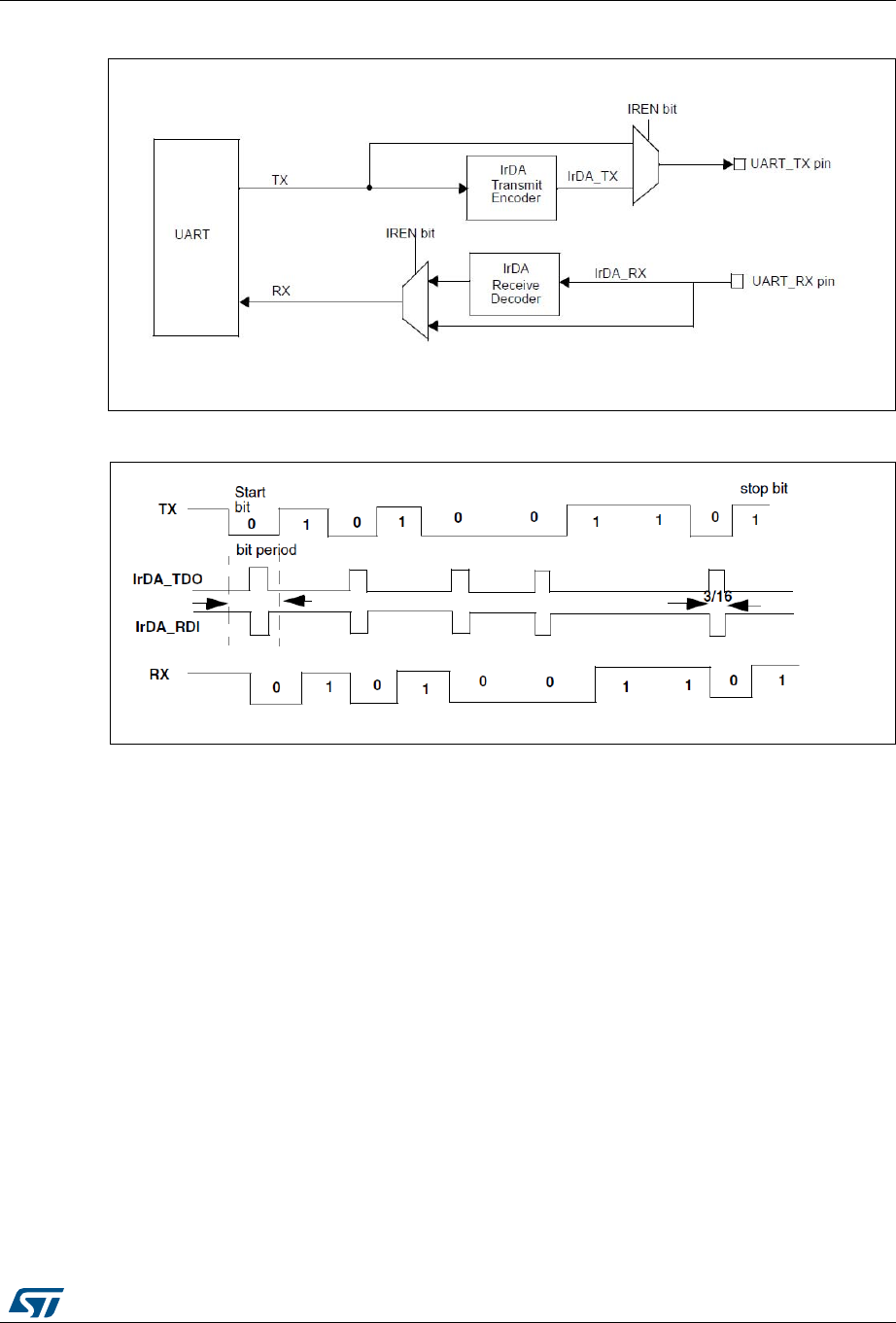

Universal asynchronous receiver transmitter (UART) RM0016
348/467 DocID14587 Rev 14
22.4 LIN mode functional description
In LIN mode, 8-bit data format with 1 stop bit is required in accordance with the LIN
standard.
To configure these settings, clear the M bit in UART_CR1 register and clear the STOP[1:0]
bits in the UART_CR3 register.
22.4.1 Master mode
UART initialization
Procedure:
1. Select the desired baudrate by programming the UART_BRR2 and UART_BRR1
registers.
2. Enable LIN mode by setting the LINEN bit in the UART_CR3 register.
3. Enable the transmitter and receiver by setting the TEN and REN bits in the UART_CR2
register.
LIN header transmission
According to the LIN protocol, any communication on the LIN bus is triggered by the Master
sending a Header, followed by the response. The Header is transmitted by the Master Task
(master node) while the data are transmitted by the Slave task of a node (master node or
one of the slave nodes).
Procedure without error monitoring:
1. Request Break + Delimiter transmission (13 dominant bits and 1 recessive bit) by
setting the SBK bit in the UART_CR2 register.
2. Request Synch Field transmission by writing 0x55 in the UART_DR register.
3. Wait for the TC flag in the UART_SR register.
4. Request Identifier Field transmission by writing the protected identifier value in the
UART_DR register.
5. Wait for the TC flag in the UART_SR register.
Procedure with error monitoring:
1. Request Break + Delimiter transmission (13 dominant bits and 1 recessive bit) by
setting the SBK bit in the UART_CR2 register;
2. Wait for the LBDF flag in the UART_CR4 register.
3. Request Synch Field transmission by writing 0x55 into UART_DR register.
4. Wait for the RXNE flag in the UART_SR register and read back the UART_DR register.
5. Request Identifier Field transmission by writing the protected identifier value in the
UART_DR register.
6. Wait for the RXNE flag in the UART_SR register and read back the UART_DR register.
The LBDF flag is set only if a valid Break + Delimiter has been received back on the
UART_RX pin.

DocID14587 Rev 14 349/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
LIN break and delimiter detection
The UART features a break detection circuit which is totally independent from the normal
UART receiver. A break can be detected whenever it occurs, during idle state or during a
frame.
When the receiver is enabled (REN=1 in UART_CR2), the circuit looks at the UART_RX
input for a start signal. The method for detecting start bits is the same when searching break
characters or data. After a start bit has been detected, the circuit samples the next bits
exactly like for the data (on the 8th, 9th and 10th samples). If 10 bits (when the LBDL = 0 in
UART_CR4) or 11 bits (when LBDL=1 in UART_CR4) are detected as ‘0’, and are followed
by a delimiter character, the LBDF flag is set in UART_CR4. If the LBDIEN bit=1, an
interrupt is generated.
If a ‘1’ is sampled before the 10 or 11 have occurred, the break detection circuit cancels the
current detection and searches for a start bit again. If LIN mode is disabled (LINEN=0), the
receiver continues working as a normal UART, without taking into account the break
detection.
If LIN mode is enabled (LINEN=1), as soon as a framing error occurs (i.e. stop bit detected
at ‘0’, which will be the case for any break frame), the receiver stops until the break
detection circuit receives either a ‘1’, if the break word was not complete, or a delimiter
character if a break has been detected.
The behavior of the break detector state machine and the break flag is shown in Figure 130:
Break detection in LIN mode (11-bit break length - LBDL bit is set) on page 350.
The LBDF flag is used in master mode, in slave mode the LHDF flag is used instead.
Examples of break frames are given on Figure 131: Break detection in LIN mode vs framing
error detection on page 351.
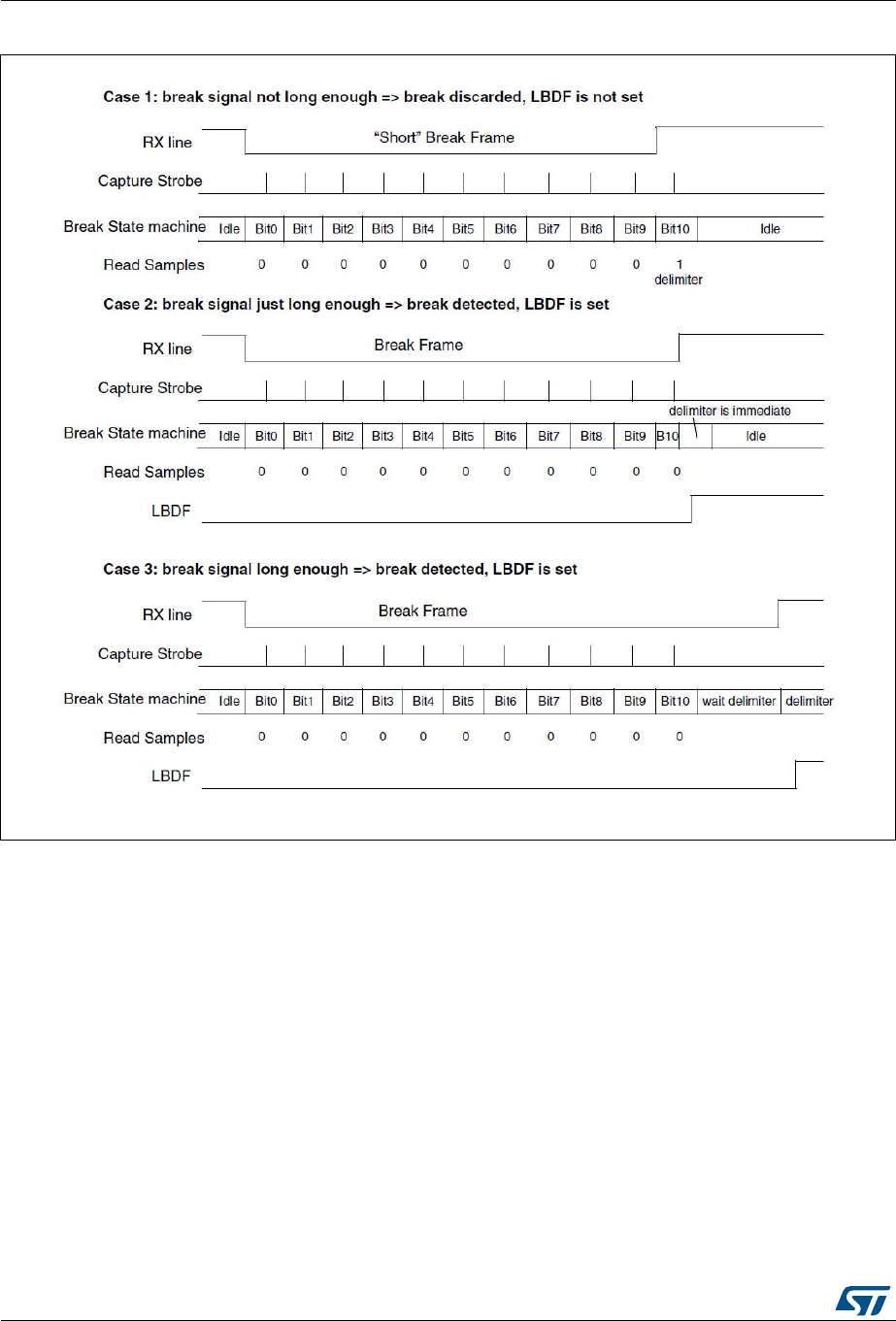
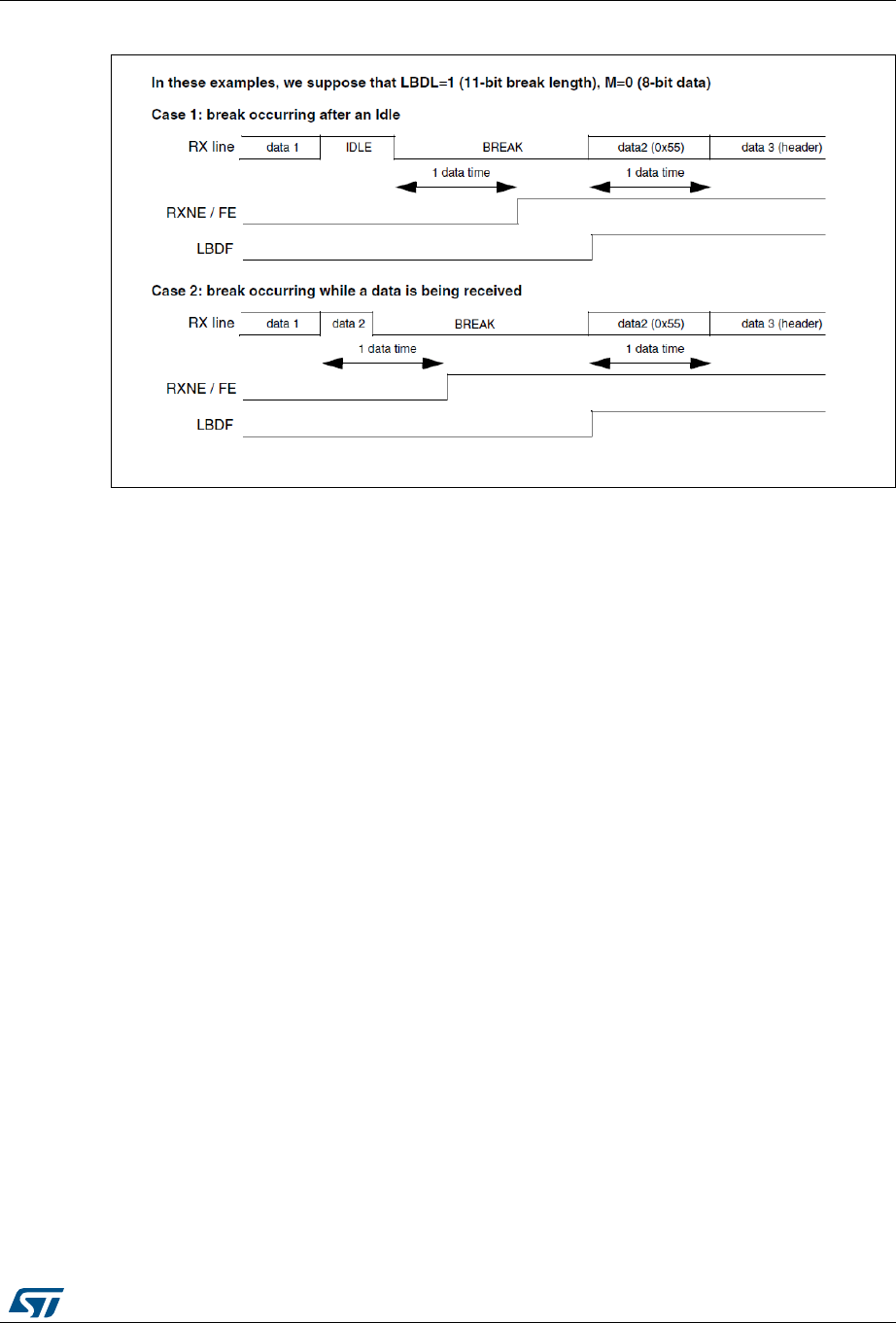
DocID14587 Rev 14 351/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Figure 131. Break detection in LIN mode vs framing error detection
Response transmission (master is the publisher of the response)
The response is composed of bytes with a standard UART format: 8-bit data, 1 stop bit, no
parity.
In order to send n data bytes, the application must repeat the following sequence n times:
1. Write data in UART_DR register
2. Wait for RXNE flag in UART_SR register
3. Check for readback value by reading the UART_DR register
Response reception (master is the subscriber of the response)
In order to receive n data bytes, the application must repeat following sequence n times:
1. Wait for the RXNE flag in the UART_SR register
2. Read the UART_DR register
Discard response (slave to slave communication)
In case of slave to slave communication and if the master does not need to check errors in
the response, the application can ignore the RXNE flag till the next frame slot. The RXNE
and OR flags should be cleared before starting the next Break transmission.
Note: Receiving back a Break will also set the RXNE and FE flags before setting the LBDF flag.
Therefore, if the RX interrupt is used, it's better to disable it (by clearing the RIEN bit in the
UART_CR2 register) before sending the Break, to avoid an additional interrupt. In case of
slave to slave communication, RIEN bit can be cleared once the header has been
transmitted.

Universal asynchronous receiver transmitter (UART) RM0016
352/467 DocID14587 Rev 14
22.4.2 Slave mode with automatic resynchronization disabled
Note: This feature is only available in UART2, UART3 and UART4.
UART initialization
Procedure:
1. Select the desired baudrate by programming UART_BRR2 and UART_BRR1 registers,
2. Enable transmitter and receiver by setting TEN and REN bits in UART_CR2 register,
3. Enable LSLV bit in UART_CR6 register,
4. Enable LIN mode by setting LINEN bit in UART_CR3 register,
LIN Header reception
According to the LIN protocol, a slave node must wait for a valid header, coming from the
master node. Then application has to take following action, depending on the header
Identifier value:
•Receive the response
•Transmit the response
•Ignore the response and wait for next header
When a LIN Header is received:
•The LHDF flag in the UART_CR6 register indicates that a LIN Header has been
detected.
•An interrupt is generated if the LHDIEN bit in the UART_CR6 register is set.
•The LIN Identifier is available in the UART_DR register.
Note: It is recommended to put UART in mute mode by setting RWU bit. This mode allows
detection of headers only and prevents the reception of any other characters.
Setting the PCEN bit in the UART_CR2 register while LIN is in slave mode enables the
Identifier parity check. The PE flag in the UART_CR6 register is set together with the LHDF
flag in the UART_CR6 register if the Identifier parity is not correct.
Response transmission (slave is the publisher of the response)
In order to send n data bytes, the application must repeat following sequence n times:
1. Write data in the UART_DR register
2. Wait for the RXNE flag in the UART_SR register
3. Check for readback value by reading the UART_DR register
Once response transmission is completed, software can set the RWU bit.
Response reception (slave is the subscriber of the response)
In order to receive n data bytes, the application must repeat following sequence n times:
1. Wait for the RXNE flag in the UART_SR register
2. Read the UART_DR register
Once response reception is completed, software can set the RWU bit.
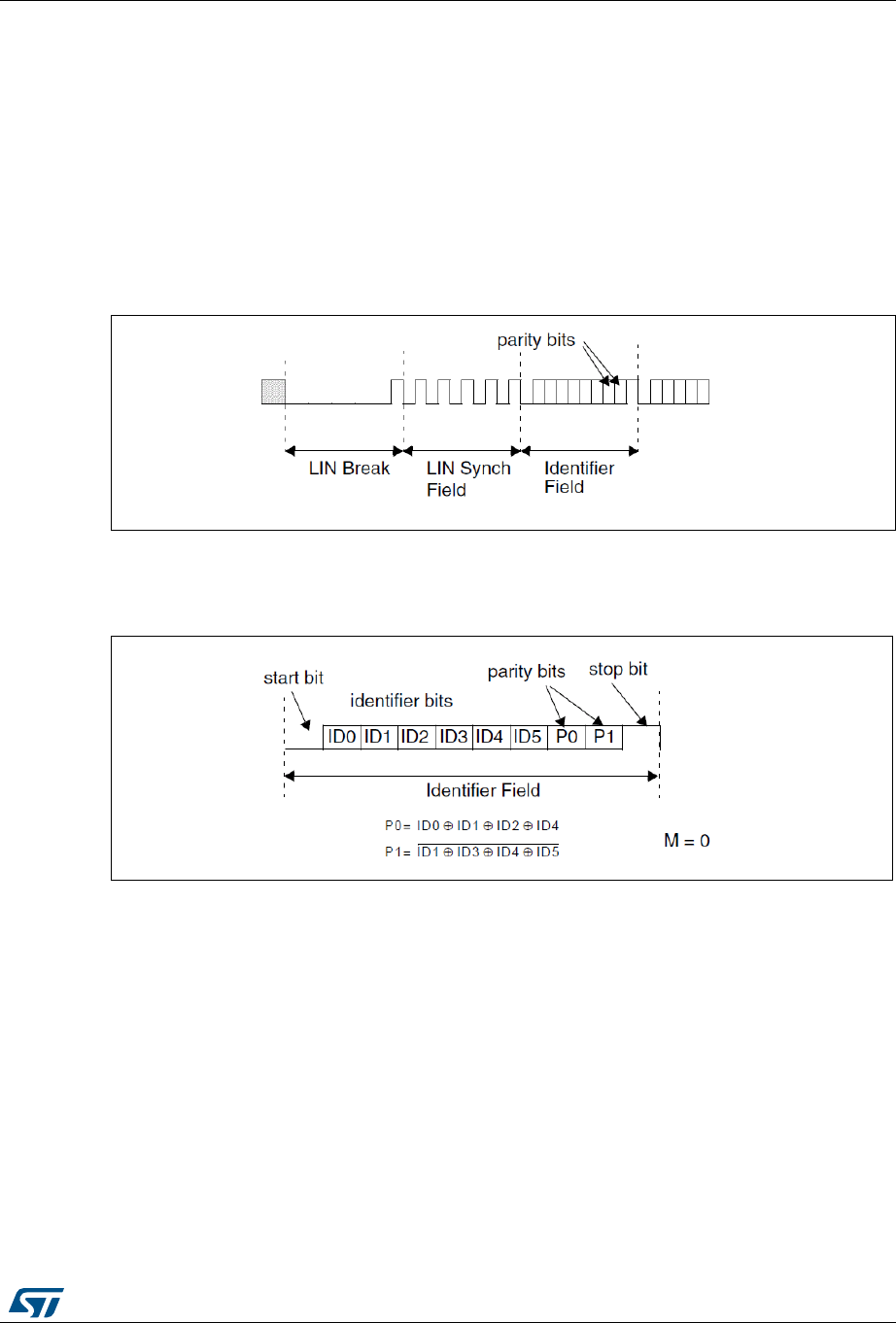
DocID14587 Rev 14 353/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Discard response
Software can set the RWU bit immediately.
LIN Slave parity
In LIN Slave mode (LINEN and LSLV bits are set) LIN parity checking can be enabled by
setting the PCEN bit. An interrupt is generated if an ID parity error occurs (PE bit rises) and
the PIEN bit is set.
In this case, the parity bits of the LIN Identifier Field are checked. The identifier character is
recognized as the third received character after a break character (included):
Figure 132. LIN identifier field parity bits
The bits involved are the two MSB positions (7th and 8th bits) of the identifier character. The
check is performed as specified by the LIN specification:
Figure 133. LIN identifier field parity check
LIN header error detection
The LIN Header Error Flag indicates that an invalid LIN Header has been detected.
When a LIN Header Error occurs:
•The LHE flag is set
•An interrupt is generated if the RIEN bit in the UART_CR2 register is set.
The LHE bit is reset by an access to the UART_SR register followed by a read of the
UART_DR register.
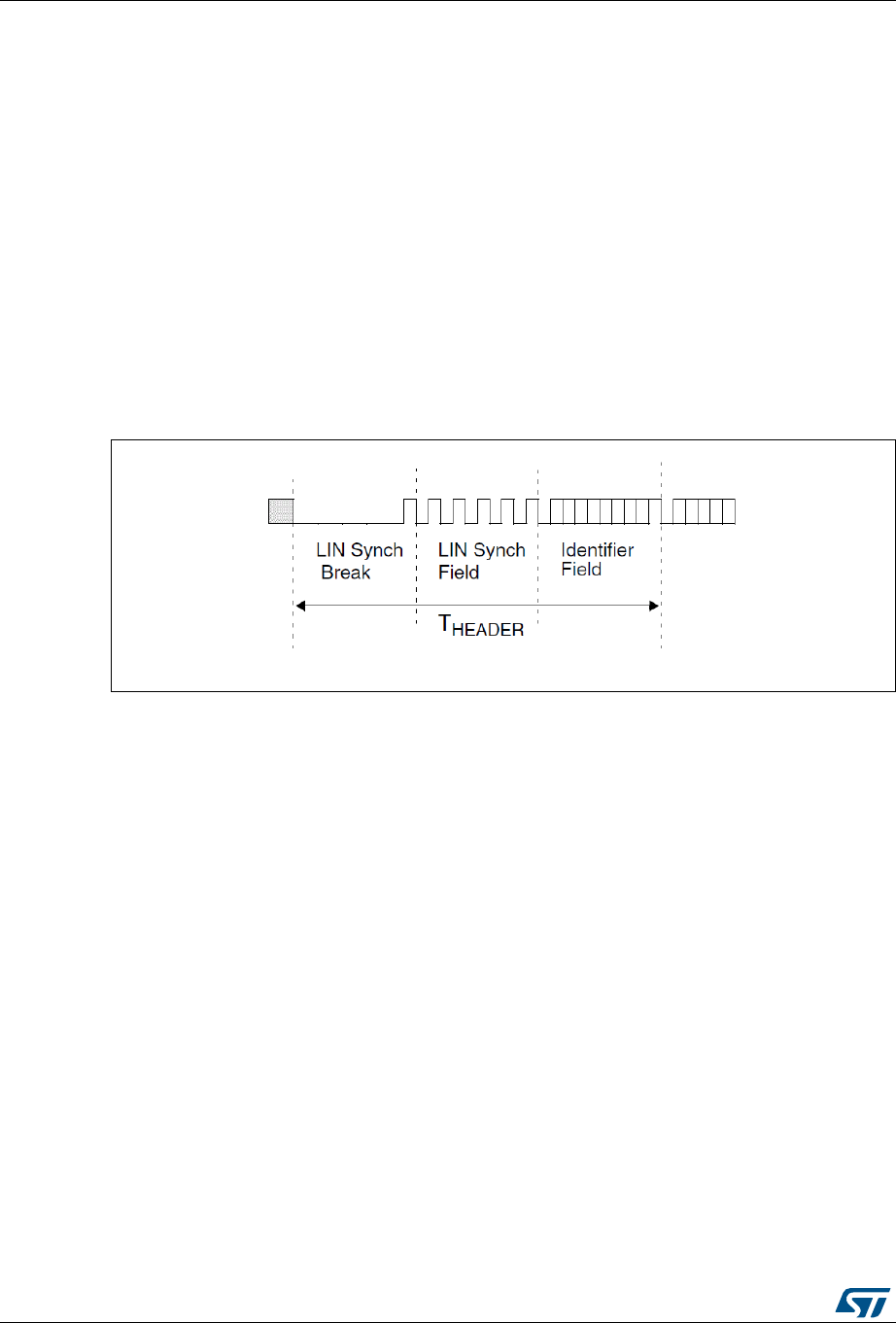
Universal asynchronous receiver transmitter (UART) RM0016
354/467 DocID14587 Rev 14
LHE is set if one of the following conditions occurs:
•Break Delimiter is too short
•Synch Field is different from 55h
•Framing error in Synch Field or Identifier Field
•A LIN header reception time-out
Note: If a LIN header error occurs, the LSF bit in the UART_CR6 register must be cleared by
software
LIN header time-out error
The UART automatically monitors the THEADER_MAX condition given by the LIN protocol.
If the entire Header (up to and including the STOP bit of the LIN Identifier Field) is not
received within the maximum time limit of 57 bit times then a LIN Header Error is signaled
and the LHE bit is set in the UART_SR register.
Figure 134. LIN header reception time-out
The time-out counter is enabled at each break detection. It is stopped in the following
conditions:
•A LIN Identifier Field has been received
•An LHE error occurred (other than a time-out error).
•A software reset of LSF bit (transition from high to low) occurred during the analysis of
the LIN Synch Field
If LHE bit is set due to this error during the LIN Synch Field (if LASE bit = 1) then the UART
goes into a blocked state (the LSF bit is set).
If LHE bit is set due to this error during Fields other than LIN Synch Field or if LASE bit is
reset then the current received Header is discarded and the UART searches for a new
Break Field.
Note on LIN Header time-out limit
According to the LIN specification, the maximum length of a LIN Header which does not
cause a time-out is equal to:
1.4 * (34 + 1) = 49 TBIT_MASTER.
TBIT_MASTER refers to the master baud rate.

DocID14587 Rev 14 355/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
When checking this time-out, the slave node is desynchronized for the reception of the LIN
Break and Synch fields. Consequently, a margin must be allowed, taking into account the
worst case: This occurs when the LIN identifier lasts exactly 10 TBIT_MASTER periods. In
this case, the LIN Break and Synch fields last 49 - 10 = 39 TBIT_MASTER periods.
Assuming the slave measures these first 39 bits with a desynchronized clock of 15.5%. This
leads to a maximum allowed Header Length of:
39 x (1/0.845) TBIT_MASTER + 10 TBIT_MASTER
= 56.15 TBIT_SLAVE
A margin is provided so that the time-out occurs when the header length is greater than 57
TBIT_SLAVE periods. If it is less than or equal to 57 TBIT_SLAVE periods, then no time-out
occurs.
Mute mode and errors
In mute mode, if an LHE error occurs during the analysis of the LIN Synch Field or if a LIN
Header Time-out occurs then the LHE bit is set but it does not wake up from mute mode. In
this case, the current header analysis is discarded. If needed, the software has to reset the
LSF bit. Then the UART searches for a new LIN header.
In mute mode, if a framing error occurs on a data (which is not a break), it is discarded and
the FE bit is not set.
Any LIN header which respects the following conditions causes a wake-up from mute mode:
•A valid LIN Break and Delimiter
•A valid LIN Synch Field (without deviation error)
•A LIN Identifier Field without framing error. Note that a LIN parity error on the LIN
Identifier Field does not prevent wake-up from mute mode.
•No LIN Header Time-out should occur during Header reception.
22.4.3 Slave mode with automatic resynchronization enabled
This mode is similar to slave mode as described in Section 22.4.2: Slave mode with
automatic resynchronization disabled, with the addition of automatic resynchronization
enabled by the LASE bit. In this mode UART adjusts the baudrate generator after each
Synch Field reception.
Note: This feature is only available at UART2, UART3 and UART4.
Automatic resynchronization
When automatic resynchronization is enabled, after each LIN Break, the time duration
between 5 falling edges on RDI is sampled on fMASTER and the result of this measurement
is stored in an internal 19-bit register called SM (not user accessible) (See Figure 135).
Then the UARTDIV value (and its associated BRR1 and BRR2 registers) are automatically
updated at the end of the fifth falling edge. During LIN Synch field measurement, the UART
state machine is stopped and no data is transferred to the data register.
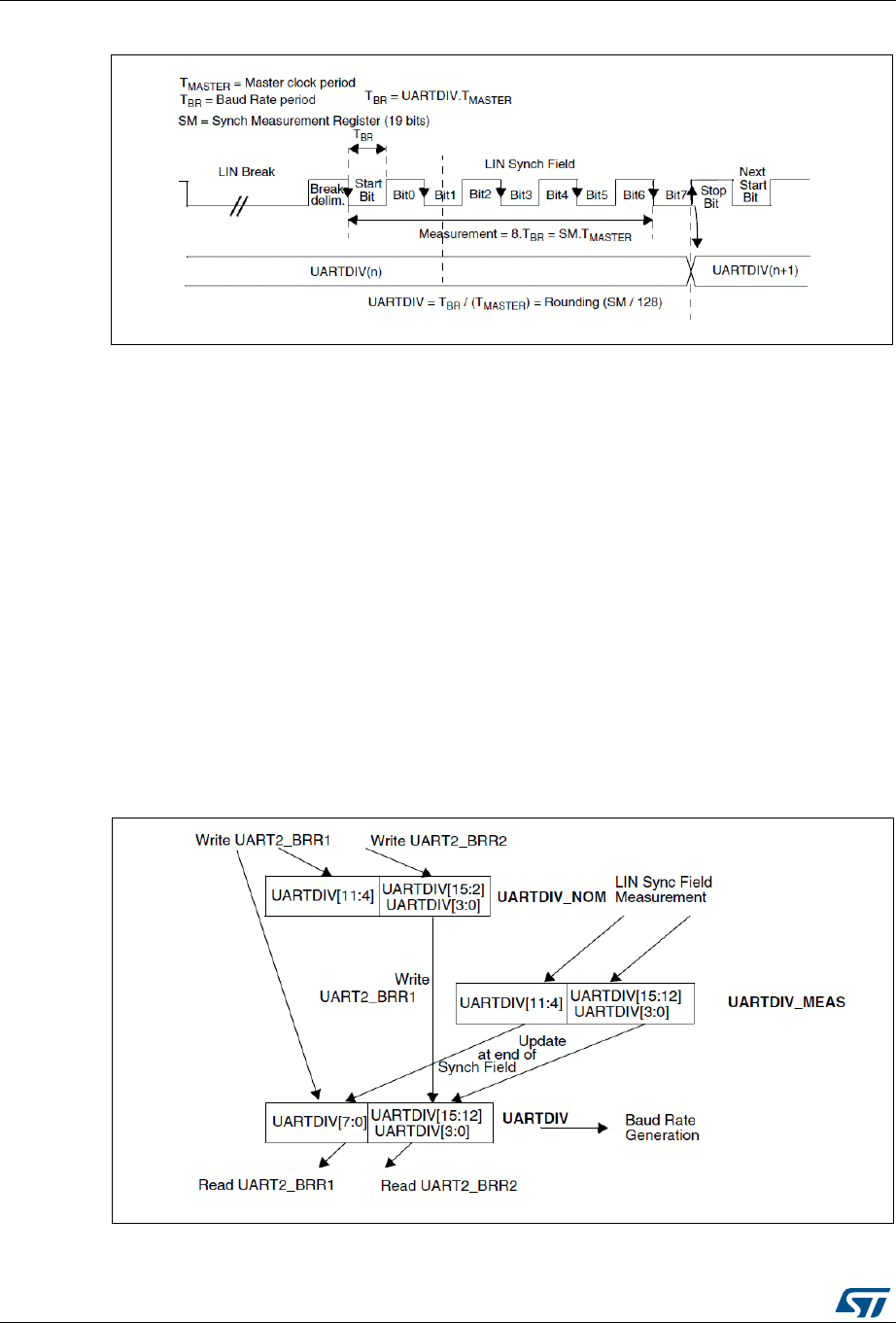
Universal asynchronous receiver transmitter (UART) RM0016
356/467 DocID14587 Rev 14
Figure 135. LIN synch field measurement
UARTDIV is an unsigned integer, coded in the BRR1 and BRR2 registers as shown in
Figure 119.
If LASE bit = 1 then UARTDIV is automatically updated at the end of each LIN Synch Field.
Three registers are used internally to manage the auto-update of the LIN divider
(UARTDIV):
•UARTDIV_NOM (nominal value written by software at UART_BRR1 and UART_BRR2
addresses)
•UARTDIV_MEAS (results of the Field Synch measurement)
•UARTDIV (used to generate the local baud rate)
The control and interactions of these registers are explained in Figure 136 and Figure 137.
They depend on the LDUM bit setting (LIN Divider Update Method)
As explained in Figure 136 and Figure 137, UARTDIV can be updated by two concurrent
actions: a transfer from UARTDIV_MEAS at the end of the LIN Sync Field and a transfer
from UARTDIV_NOM due to a software write to BRR1. If both operations occur at the same
time, the transfer from UARTDIV_NOM has priority.
Figure 136. UARTDIV read / write operations when LDUM = 0
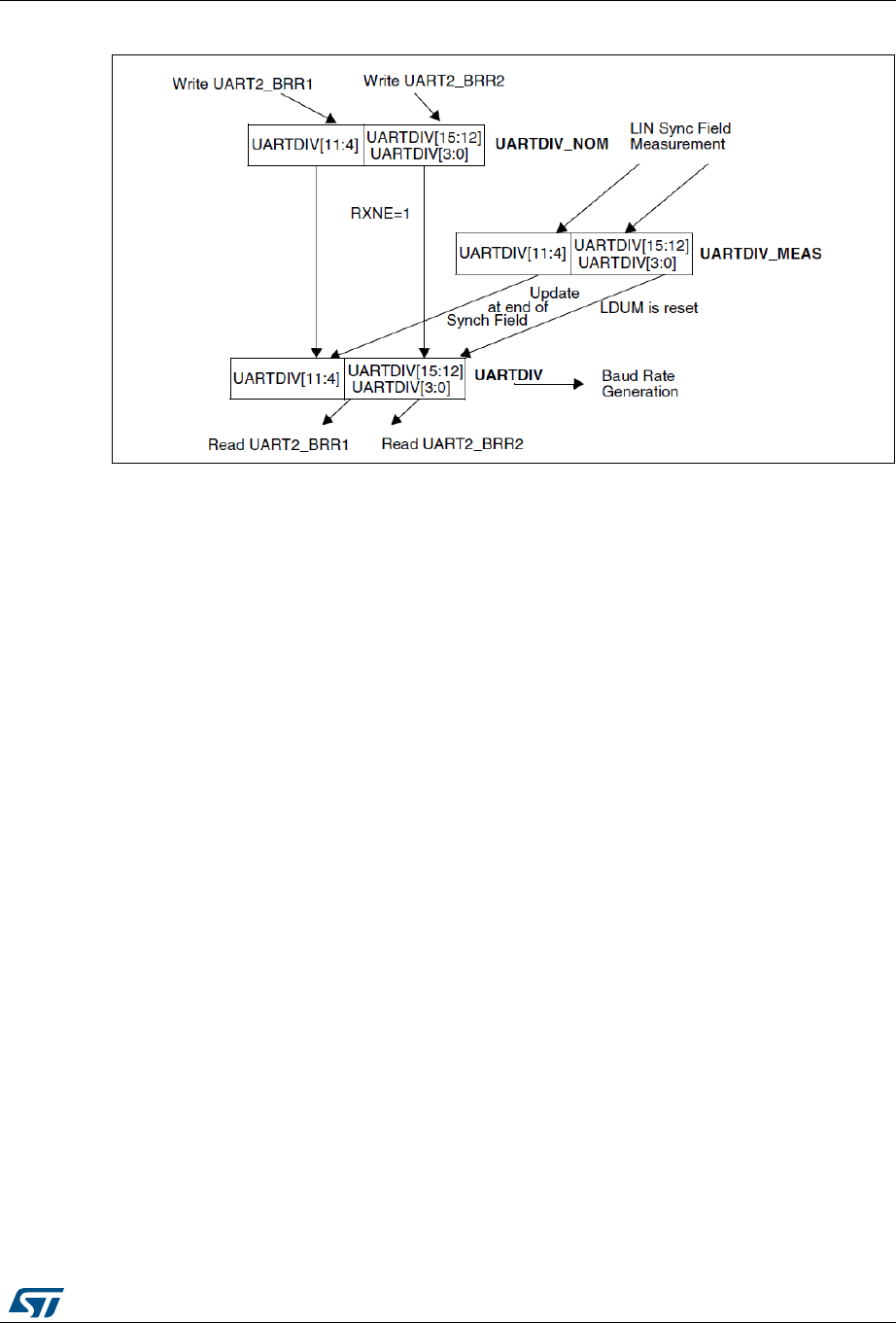
DocID14587 Rev 14 357/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Figure 137. UARTDIV read / write operations when LDUM = 1
Deviation error on the synch field
The deviation error is checked by comparing the current baud rate (relative to the slave
oscillator) with the received LIN Synch Field (relative to the master oscillator). Two checks
are performed in parallel.
The first check is based on a measurement between the first falling edge and the last falling
edge of the Synch Field.
•If D1 > 14.84% LHE is set
•If D1< 14.06% LHE is not set
•If 14.06% < D1 < 14.84% LHE can be either set or reset depending on the dephasing
between the signal on UART_RX pin and the fMASTER clock
The second check is based on a measurement of time between each falling edge of the
Synch Field
•If D2 > 18.75% LHE is set
•If D2 < 15.62% LHE is not set
•If 15.62% < D2 < 18.75% LHE can be either set or reset depending on dephasing
between the signal on UART_RX pin and the fMASTER clock
Note that the UART does not need to check if the next edge occurs slower than expected.
This is covered by the check for deviation error on the full synch byte.

Universal asynchronous receiver transmitter (UART) RM0016
358/467 DocID14587 Rev 14
Note: Deviation checking is based on the current baudrate and not on the nominal one. Therefore,
in order to guarantee correct deviation checking, the baudrate generator must reload the
nominal value before each new Break reception. This nominal value is programmed by the
application during initialization. To do this software must set the LDUM bit before checksum
reception.
If LDUM bit is set, the next character reception will automatically reload the baudrate
generator with nominal value.
You can also reload the nominal value by writing to BRR2 and BRR1. This second method
is typically used when an error occurs during response transmission or reception.
If for any reason, the LDUM bit is set when UART is receiving a new Break and a Synch
Field, this bit will be ignored and cleared. UART will adjust the baudrate generator with a
value calculated from the synch field.
LIN header error detection
LHE is set if one of the following conditions occurs:
•Break Delimiter is too short
•Deviation error on the Synch Field is outside the LIN specification which allows up to +/
-14% of period deviation between the slave and master oscillators.
•Framing error in Synch Field or Identifier Field
•A LIN header reception time-out
•An overflow during the Synch Field Measurement, which leads to an overflow of the
divider registers
LIN header time-out error
The description in the section LIN header time-out error on page 354 applies also when
automatic resynchronization is enabled.
UART clock tolerance when synchronized
When synchronization has been performed, following reception of a LIN Break, the UART
has the same clock deviation tolerance as in UART mode, which is explained below:
During reception, each bit is oversampled 16 times. The mean of the 8th, 9th and 10th
samples is considered as the bit value.
Consequently, the clock frequency should not vary more than 6/16 (37.5%) within one bit.
The sampling clock is resynchronized at each start bit, so that when receiving 10 bits (one
start bit, 1 data byte, 1 stop bit), the clock deviation should not exceed 3.75%.
DocID14587 Rev 14 359/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
UART clock tolerance when unsynchronized
When LIN slaves are unsynchronized (meaning no characters have been transmitted for a
relatively long time), the maximum tolerated deviation of the UART clock is +/-14%.
If the deviation is within this range then the LIN Break is detected properly when a new
reception occurs.
This is made possible by the fact that masters send 13 low bits for the LIN Break, which can
be interpreted as 11 low bits (13 bits -14% = 11.18) by a "fast" slave and then considered as
a LIN Break. According to the LIN specification, a LIN Break is valid when its duration is
greater than tSBRKTS = 10. This means that the LIN Break must last at least 11 low bits.
If the period desynchronization of the slave is +14% (slave too slow), the character "00h"
which represents a sequence of 9 low bits must not be interpreted as a break character (9
bits + 14% = 10.26). Consequently, a valid LIN break must last at least 11 low bits.
Clock deviation causes
The causes which contribute to the total deviation are:
•DTRA: Deviation due to transmitter error. Note: the transmitter can be either a master
or a slave (in case of a slave listening to the response of another slave).
•DMEAS: Error due to the LIN Synch measurement performed by the receiver.
•DQUANT: Error due to the baud rate quantization of the receiver.
•DREC: Deviation of the local oscillator of the receiver: This deviation can occur during
the reception of one complete LIN message assuming that the deviation has been
compensated at the beginning of the message.
•DTCL: Deviation due to the transmission line (generally due to the transceivers)
•All the deviations of the system should be added and compared to the UART clock
tolerance:
– DTRA + DMEAS+ DQUANT + DREC + DTCL < 3.75%
Error due to LIN synch measurement
The LIN Synch Field is measured over eight bit times.
This measurement is performed using a counter clocked by the CPU clock. The edge
detections are performed using the CPU clock cycle.
This leads to a precision of 2 CPU clock cycles for the measurement which lasts
8*UARTDIV clock cycles.
Consequently, this error (DMEAS) is equal to:
2 / (8*UARTDIVMIN)
UARTDIVMIN corresponds to the minimum LIN prescaler content, leading to the maximum
baud rate, taking into account the maximum deviation of +/-14%.
Error due to baud rate quantization
The baud rate can be adjusted in steps of 1 / (UARTDIV). The worst case occurs when the
"real" baud rate is in the middle of the step.
This leads to a quantization error (DQUANT) equal to 1 / (2*UARTDIVMIN).
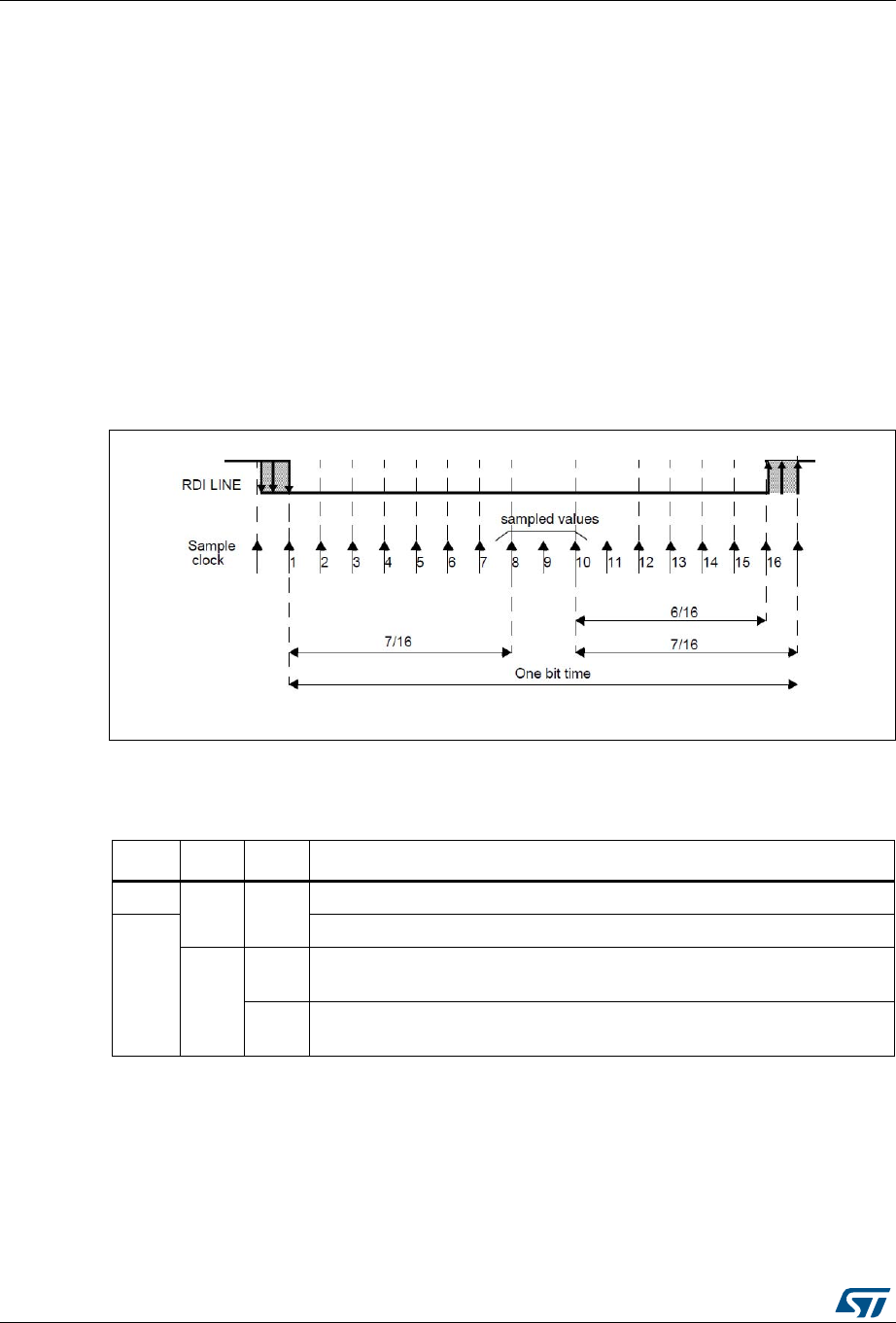
Universal asynchronous receiver transmitter (UART) RM0016
360/467 DocID14587 Rev 14
Impact of clock deviation on maximum baud rate
The choice of the nominal baud rate (UARTDIVNOM) will influence both the quantization
error (DQUANT) and the measurement error (DMEAS). The worst case occurs for
UARTDIVMIN.
Consequently, at a given CPU frequency, the maximum possible nominal baud rate
(LPRMIN) should be chosen with respect to the maximum tolerated deviation given by the
equation:
DTRA + 1 / (2*UARTDIVMIN) + DREC + DTCL < 3.75%
Example:
A nominal baud rate of 20 Kbits/s at TCPU = 125 ns (8 MHz) leads to UARTDIVNOM = 25d.
UARTDIVMIN = 25 - 0.15*25 = 21.25
DQUANT = 1 / (2*UARTDIVMIN) = 0.0015%
Figure 138. Bit sampling in reception mode
22.4.4 LIN mode selection
Table 58. LIN mode selection
LINE LSLV LASE Meaning
000 LIN mode disabled
1
LIN Master Mode
1
0LIN Slave Mode
with Automatic resynchronization disabled
1LIN Slave Mode
with Automatic resynchronization enabled
DocID14587 Rev 14 361/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.5 UART low power modes
22.6 UART interrupts
Note: 1 The UART interrupt events are connected to two interrupt vectors (see Figure 139).
a) Transmission Complete or Transmit Data Register empty interrupt.
b) Idle Line detection, Overrun error, Receive Data register full, Parity error interrupt,
and Noise Flag.
2 These events generate an interrupt if the corresponding Enable Control Bit is set and the
interrupt mask in the CC register is reset (RIM instruction).
Table 59. UART interface behavior in low power modes
Mode Description
Wait No effect on UART.
UART interrupts cause the device to exit from Wait mode.
Halt UART registers are frozen.
In Halt mode, the UART stops transmitting/receiving until Halt mode is exited.
Table 60. UART interrupt requests
Interrupt event Event
flag
Enable
control
bit
Exit
from
Wait
Exit
from
Halt
Transmit data register empty TXE TIEN Yes No
Transmission complete TC TCIEN Yes No
Received data ready to be read RXNE RIEN Yes No
Overrun error detected / LIN header error OR/LHE Yes No
Idle line detected IDLE ILIEN Yes No
Parity error PE PIEN Yes No
Break flag LBDF LBDIEN Yes No
Header Flag LHDF LHDIEN Yes No
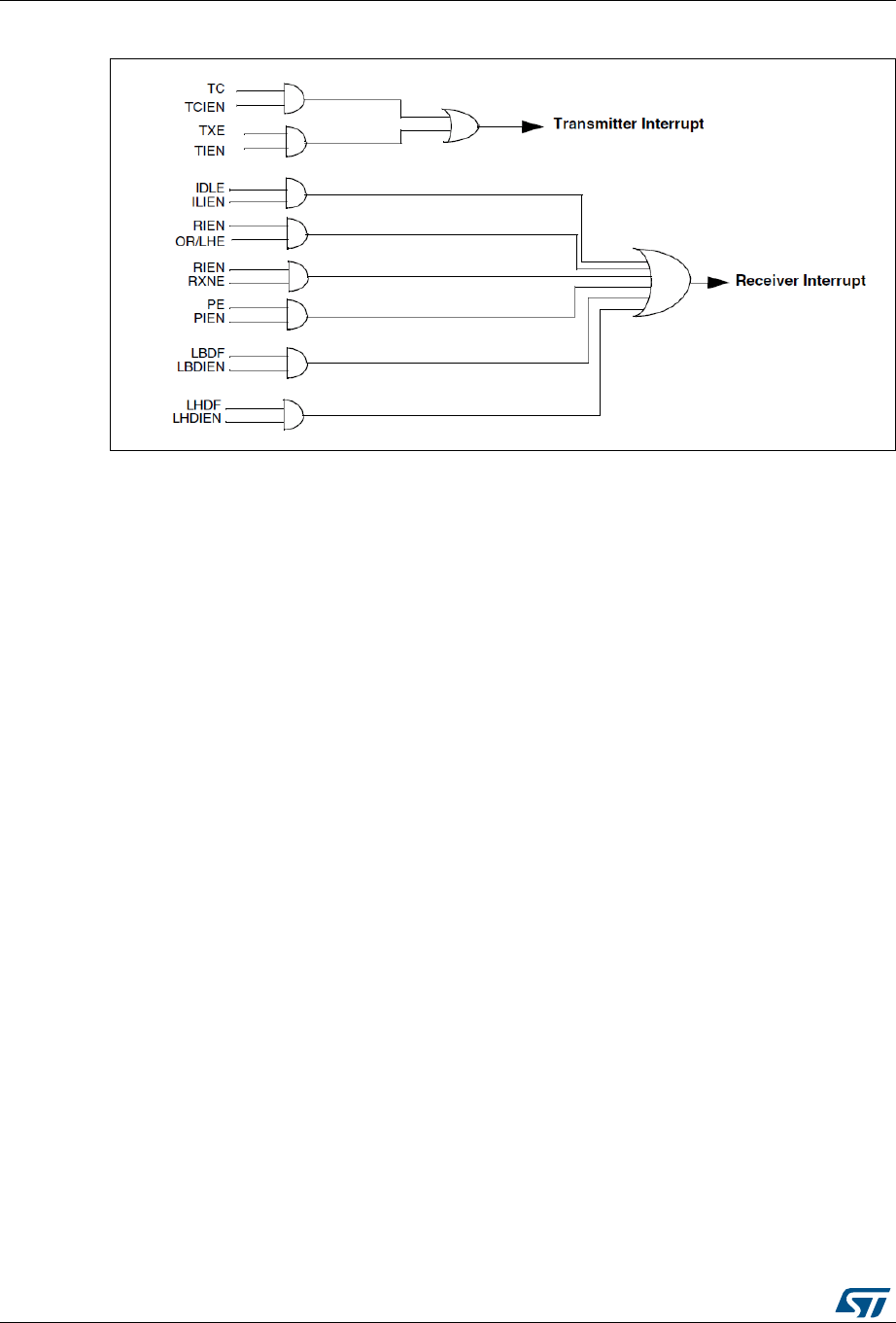
DocID14587 Rev 14 363/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7 UART registers
22.7.1 Status register (UART_SR)
Address offset: 0x00
Reset value: 0xC0
76543210
TXE TC RXNE IDLE OR/LHE NF FE PE
rrc_w0rc_w0rrrrr
Bit 7 TXE: Transmit data register empty
This bit is set by hardware when the content of the TDR register has been transferred into the shift
register. An interrupt is generated if the TIEN bit =1 in the UART_CR2 register. It is cleared by a
write to the UART_DR register.
0: Data is not transferred to the shift register
1: Data is transferred to the shift register
Bit 6 TC: Transmission complete
This bit is set by hardware if the transmission of a frame containing data is complete and TXE bit is
set. An interrupt is generated if TCIEN=1 in the UART_CR2 register. The TC bit is cleared either by
a software sequence (a read to the UART_SR register followed by a write to the UART_DR
register), or by programming the bit to ‘0’. This clear sequence is recommended only for multibuffer
communications.
0: Transmission is not complete
1: Transmission is complete
Bit 5 RXNE: Read data register not empty
This bit is set by hardware when the content of the RDR shift register has been transferred to the
UART_DR register. An interrupt is generated if RIEN=1 in the UART_CR2 register. It is cleared by a
read to the UART_DR register. In UART2 and UART3, it can also be cleared by writing 0.
0: Data is not received
1: Received data is ready to be read.
Bit 4 IDLE: IDLE line detected (1)
This bit is set by hardware when an Idle Line is detected. An interrupt is generated if the ILIEN=1 in
the UART_CR2 register. It is cleared by a software sequence (a read to the UART_SR register
followed by a read to the UART_DR register).
0: No Idle Line is detected
1: Idle Line is detected

Universal asynchronous receiver transmitter (UART) RM0016
364/467 DocID14587 Rev 14
Bit 3 OR: Overrun error(2)
This bit is set by hardware when the word currently being received in the shift register is ready to be
transferred into the RDR register while RXNE=1. An interrupt is generated if RIEN=1 in the
UART_CR2 register. It is cleared by a software sequence (a read to the UART_SR register followed
by a read to the UART_DR register).
0: No Overrun error
1: Overrun error is detected
LHE LIN Header Error (LIN slave mode)
During LIN Header reception, this bit signals three error types:
– Break delimiter too short
– Synch Field error
– Deviation error (if LASE=1)
– Identifier framing error
0: No LIN Header error
1: LIN Header error detected
Bit 2 NF: Noise flag (3)
This bit is set by hardware when noise is detected on a received frame. It is cleared by a software
sequence (a read to the UART_SR register followed by a read to the UART_DR register).
0: No noise is detected
1: Noise is detected
Bit 1 FE: Framing error (4)
This bit is set by hardware when a de-synchronization, excessive noise or a break character is
detected. It is cleared by a software sequence (a read to the UART_SR register followed by a read
to the UART_DR register).
0: No Framing error is detected
1: Framing error or break character is detected
Note: For the UART2 and UART3, in LIN slave mode (bits LINE and LSLV are set), when a framing
error is detected in the Synch or Identifier Fields , the FE bit is set. But the FE bit will not be set
when a Break reception is detected.
Bit 0 PE: Parity error
This bit is set by hardware when a parity error occurs in receiver mode. It is cleared by a software
sequence (a read to the status register followed by a read to the UART_DR data register). You have
to wait for the RXNE flag to be set before clearing it. An interrupt is generated if PIEN=1 in the
UART_CR1 register.
0: No parity error
1: Parity error (or, in LIN slave mode, identifier parity error)
1. The IDLE bit will not be set again until the RXNE bit has been set itself (i.e. a new idle line occurs)
2. When this bit is set, the RDR register content will not be lost but the shift register will be overwritten.
3. This bit does not generate interrupt as it appears at the same time as the RXNE bit which itself generates an interrupt.
4. This bit does not generate interrupt as it appears at the same time as the RXNE bit which itself generates an interrupt. If the
word currently being transferred causes both frame error and overrun error, it will be transferred and only the OR bit will be
set.
DocID14587 Rev 14 365/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.2 Data register (UART_DR)
Address offset: 0x01
Reset value: 0xXX
22.7.3 Baud rate register 1 (UART_BRR1)
The Baud Rate Registers are common to both the transmitter and the receiver. The baud
rate is programmed using two registers BRR1 and BRR2. Writing of BRR2 (if required)
should precede BRR1, since a write to BRR1 will update the baud counters.
See Figure 119: How to code UART_DIV in the BRR registers on page 336 and Table 54:
Baud rate programming and error calculation on page 337
Note: 1 The baud counters stop counting if the TEN or REN bits are disabled respectively.
Address offset: 0x02
Reset value: 0x00
76543210
DR[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 DR[7:0]: Data value
Contains the Received or Transmitted data character, depending on whether it is read from or
written to.
The Data register performs a double function (read and write) since it is composed of two registers,
one for transmission (TDR) and one for reception (RDR)
The TDR register provides the parallel interface between the internal bus and the output shift
register.
The RDR register provides the parallel interface between the input shift register and the internal bus.
76543210
UART_DIV[11:4]
rw rw rw rw - rw rw rw
Bits 7:0 UART_DIV[11:4] UART_DIV bits (1)
These 8 bits define the 2nd and 3rd nibbles of the 16-bit UART divider (UART_DIV).
1. BRR1 = 00h means UART clock is disabled.
Universal asynchronous receiver transmitter (UART) RM0016
366/467 DocID14587 Rev 14
22.7.4 Baud rate register 2 (UART_BRR2)
Address offset: 0x03
Reset value: 0x00
22.7.5 Control register 1 (UART_CR1)
Address offset: 0x04
Reset value: 0x00
76543210
UART_DIV[15:12] UART_DIV[3:0]
rw rw rw rw rw rw rw rw
Bits 7:4 UART_DIV[15:12] MSB of UART_DIV.
These 4 bits define the MSB of the UART Divider (UART_DIV)
Bits 3:0 UART_DIV[3:0]: LSB of UART_DIV.
These 4 bits define the LSB of the UART Divider (UART_DIV)
76543210
R8 T8 UARTD M WAKE PCEN PS PIEN
rw rw rw rw rw rw rw rw
Bit 7 R8: Receive Data bit 8.
This bit is used to store the 9th bit of the received word when M=1
Bit 6 T8: Transmit data bit 8.
This bit is used to store the 9th bit of the transmitted word when M=1
Bit 5 UARTD: UART Disable (for low power consumption).
When this bit is set the UART prescaler and outputs are stopped at the end of the current byte
transfer in order to reduce power consumption. This bit is set and cleared by software.
0: UART enabled
1: UART prescaler and outputs disabled
Bit 4 M: word length.
This bit determines the word length. It is set or cleared by software.
0: 1 Start bit, 8 Data bits, n Stop bit (n depending on STOP[1:0] bits in the UART_CR3 register)
1: 1 Start bit, 9 Data bits, 1 Stop bit
Note: The M bit must not be modified during a data transfer (both transmission and reception) In LIN
slave mode, the M bit and the STOP[1:0] bits in the UART_CR3 register should be kept at 0.
Bit 3 WAKE: Wakeup method.
This bit determines the UART wakeup method, it is set or cleared by software.
0: Idle Line
1: Address Mark
DocID14587 Rev 14 367/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.6 Control register 2 (UART_CR2)
Address offset: 0x05
Reset value: 0x00
Bit 2 PCEN: Parity control enable.
–UART Mode
This bit selects the hardware parity control (generation and detection). When the parity control is
enabled, the computed parity is inserted at the MSB position (9th bit if M=1; 8th bit if M=0) and parity
is checked on the received data. This bit is set and cleared by software. Once it is set, PCEN is
active after the current byte (in reception and in transmission).
0: Parity control disabled
1: Parity control enabled
– LIN slave mode
This bit enables the LIN identifier parity check while the UART is in LIN slave mode.
0: Identifier parity check disabled
1: Identifier parity check enabled
Bit 1 PS: Parity selection.
This bit selects the odd or even parity when the parity generation/detection is enabled (PCEN bit set)
in UART mode. It is set and cleared by software. The parity will be selected after the current byte.
0: Even parity
1: Odd parity
Bit 0 PIEN: Parity interrupt enable.
This bit is set and cleared by software.
0: Parity interrupt disabled
1: Parity interrupt is generated whenever PE=1 in the UART_SR register
76543210
TIEN TCIEN RIEN ILIEN TEN REN RWU SBK
rw rw rw rw rw rw rw rw
Bit 7 TIEN: Transmitter interrupt enable
This bit is set and cleared by software.
0: Interrupt is inhibited
1: An UART interrupt is generated whenever TXE=1 in the UART_SR register
Bit 6 TCIEN: Transmission complete interrupt enable
This bit is set and cleared by software.
0: Interrupt is inhibited
1: An UART interrupt is generated whenever TC=1 in the UART_SR register
Bit 5 RIEN: Receiver interrupt enable
This bit is set and cleared by software.
0: Interrupt is inhibited
1: An UART interrupt is generated whenever OR=1 or RXNE=1 in the UART_SR register
Bit 4 ILIEN: IDLE Line interrupt enable
This bit is set and cleared by software.
0: Interrupt is inhibited
1: An UART interrupt is generated whenever IDLE=1 in the UART_SR register
Universal asynchronous receiver transmitter (UART) RM0016
368/467 DocID14587 Rev 14
Bit 3 TEN: Transmitter enable (1) (2)
This bit enables the transmitter. It is set and cleared by software.
0: Transmitter is disabled
1: Transmitter is enabled
Bit 2 REN: Receiver enable
This bit enables the receiver. It is set and cleared by software.
0: Receiver is disabled
1: Receiver is enabled and begins searching for a start bit
Bit 1 RWU: Receiver wakeup
–UART mode
This bit determines if the UART is in mute mode or not. It is set and cleared by software and can be
cleared by hardware when a wakeup sequence is recognized.(3) (4)
– LIN slave mode (UART2, UART3 and UART4 only, if bits LINE and LSLV are set)
While LIN is used in slave mode, setting the RWU bit allows the detection of Headers only and
prevents the reception of any other characters. Refer to Mute mode and errors on page 355. In LIN
slave mode, when RXNE is set, the software can not set or clear the RWU bit.
0: Receiver in active mode
1: Receiver in mute mode
Bit 0 SBK: Send break
This bit set is used to send break characters. It can be set and cleared by software.It should be set
by software, and will be reset by hardware during the stop bit of break.
0: No break character is transmitted
1: Break character will be transmitted
1. During transmission, a “0” pulse on the TEN bit (“0” followed by “1”) sends a preamble (idle line) after the current word.
2. When TEN is set there is a 1 bit-time delay before the transmission starts.
3. Before selecting Mute mode (by setting the RWU bit) the UART must first receive a data byte, otherwise it cannot function
in Mute mode with wakeup by Idle line detection.
4. In Address Mark Detection wakeup configuration (WAKE bit=1) the RWU bit cannot be modified by software while the
RXNE bit is set.

DocID14587 Rev 14 369/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.7 Control register 3 (UART_CR3)
Address offset: 0x06
Reset value: 0x00
76543210
Reserved LINEN STOP[1:0] CLKEN CPOL CPHA LBCL
r rwrwrwrwrwrwrw
Bit 7 Reserved, must be kept cleared.
Bit 6 LINEN: LIN mode enable
This bit is set and cleared by software.
0: LIN mode disabled
1: LIN mode enabled
Bits 5:4 STOP: STOP bits.
These bits are used for programming the stop bits.
00: 1 Stop bit
01: Reserved
10: 2 Stop bits
11: 1.5 Stop bits
Note: For LIN slave mode, both bits should be kept cleared.
Bit 3 CLKEN: Clock enable
This bit allows the user to enable the SCLK pin.
0: SLK pin disabled
1: SLK pin enabled
Note: This bit is not available for UART3.
Bit 2 CPOL: Clock polarity (1)
This bit allows the user to select the polarity of the clock output on the SCLK pin. It works in
conjunction with the CPHA bit to produce the desired clock/data relationship
0: SCK to 0 when idle
1: SCK to 1 when idle.
Note: This bit is not available for UART3.
Bit 1 CPHA: Clock phase (1)
This bit allows the user to select the phase of the clock output on the SCLK pin. It works in
conjunction with the CPOL bit to produce the desired clock/data relationship
0: The first clock transition is the first data capture edge
1: The second clock transition is the first data capture edge
Note: This bit is not available for UART3.
Bit 0 LBCL: Last bit clock pulse.(1)(2)
This bit allows the user to select whether the clock pulse associated with the last data bit transmitted
(MSB) has to be output on the SCLK pin.
0: The clock pulse of the last data bit is not output to the SCLK pin.
1: The clock pulse of the last data bit is output to the SCLK pin.
Note: This bit is not available for UART3.
1. These 3 bits (CPOL, CPHA, LBCL) should not be written while the transmitter is enabled.
2. The last bit is the 8th or 9th data bit transmitted depending on the 8 or 9 bit format selected by the M bit in the UART_CR1
register.
Universal asynchronous receiver transmitter (UART) RM0016
370/467 DocID14587 Rev 14
22.7.8 Control register 4 (UART_CR4)
Address offset: 0x07
Reset value: 0x00
76543210
Reserved LBDIEN LBDL LBDF ADD[3:0]
r rwrwrwrwrwrwrw
Bit 7 Reserved, must be kept cleared.
Bit 6 LBDIEN: LIN Break Detection Interrupt Enable.
Break interrupt mask (break detection using break delimiter).
0: LIN break detection interrupt disabled
1: LIN break detection interrupt enabled
Bit 5 LBDL: LIN Break Detection Length.
This bit is for selection between 11 bit or 10 bit break detection.
0: 10 bit break detection
1: 11 bit break detection
Bit 4 LBDF: LIN Break Detection Flag.
LIN Break Detection Flag (Status flag)
This bit is set by hardware and cleared by software writing 0.
0: LIN Break not detected
1: LIN Break detected
An interrupt is generated when LBDF=1 if LBDIEN=1
Bits 3:0 ADD[3:0]: Address of the UART node.
This bitfield gives the address of the UART node.
This is used in multi-processor communication during mute mode, for wakeup with address mark
detection.

DocID14587 Rev 14 371/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.9 Control register 5 (UART_CR5)
Address offset: 0x08
Reset value: 0x00
76543210
Reserved SCEN NACK HDSEL IRLP IREN Reserved
rrrrwrwrwr
Bits 7:6 Reserved, must be kept cleared.
Bit 5 SCEN: Smartcard mode enable.
This bit is used for enabling Smartcard mode.
0: Smartcard Mode disabled
1: Smartcard Mode enabled
Note: This bit is not available for UART3.
Bit 4 NACK: Smartcard NACK enable
0: NACK transmission in case of parity error is disabled
1: NACK transmission during parity error is enabled.
Note: This bit is not available for UART3.
Bit 3 HDSEL: Half-Duplex Selection
Selection of Single-wire Half-duplex mode
0: Half duplex mode is not selected
1: Half duplex mode is selected
Note: This bit is not available for UART2 and UART3.
Bit 2 IRLP: IrDA Low Power
This bit is used for selected between normal and Low power IrDA mode
0: Normal mode
1: Low power mode
Note: This bit is not available for UART3.
Bit 1 IREN: IrDA mode Enable
This bit is set and cleared by software.
0: IrDA disabled
1: IrDA enabled
Note: This bit is not available for UART3.
Bit 0 Reserved, must be kept cleared.

Universal asynchronous receiver transmitter (UART) RM0016
372/467 DocID14587 Rev 14
22.7.10 Control register 6 (UART_CR6)
Address offset: 0x09
Reset value: 0x00
Note: This register is not available for UART1.
76543210
LDUM Reserved LSLV LASE Reserved LHDIEN LHDF LSF
rw r rw rw r rw rc_w0 rc_w0
Bit 7 LDUM: LIN Divider Update Method
0: LDIV is updated as soon as BRR1 is written (if no automatic resynchronization update occurs at
the same time).
1: LDIV is updated at the next received character (when RXNE=1) after a write to the BRR1 register.
LDIV is coded using the two register BRR1 and BRR2
This bit is reset by hardware once LDIV is updated with the measured baud rate at the end of the
synch field.
Bit 6 Reserved
Bit 5 LSLV: LIN Slave Enable
0: LIN Master Mode
1: LIN Slave Mode
Bit 4 LASE: LIN automatic resynchronisation enable
0: LIN automatic resynchronization disabled
1: LIN automatic resynchronization enabled
Bit 3 Reserved
Bit 2 LHDIEN: LIN Header Detection Interrupt Enable.
Header interrupt mask.
0: LIN header detection interrupt disabled
1: LIN header detection interrupt enabled
Bit 1 LHDF: LIN Header Detection Flag.
This bit is set by hardware when a LIN header is detected in LIN slave mode and cleared by
software writing 0.
0: LIN Header not detected
1: LIN Header detected (Break+Sync+Ident)
An interrupt is generated when LHDF=1 if LHDIEN=1
Bits 0 LSF: LIN Sync Field
This bit indicates that the LIN Synch Field is being analyzed. It is only used in LIN Slave mode. In
automatic resynchronization mode (LASE bit=1), when the UART is in the LIN Synch Field State it
waits or counts the falling edges on the RDI line.
It is set by hardware as soon as a LIN Break is detected and cleared by hardware when the LIN
Synch Field analysis is finished. This bit can also be cleared by software writing 0 to exit LIN Synch
State and return to idle mode.
0: The current character is not the LIN Synch Field
1: LIN Synch Field State (LIN Synch Field undergoing analysis)

DocID14587 Rev 14 373/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.11 Guard time register (UART_GTR)
Address offset: 0x09 (UART1), 0x0A (UART2 and UART4)
Reset value: 0x00
76543210
GT[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 GT[7:0]: Guard time value.
This register gives the Guard time value in terms of number of baud clocks.
This is used in Smartcard mode.The Transmission Complete flag is set after this guard time value.
Note: These bits are not available for UART3.
Universal asynchronous receiver transmitter (UART) RM0016
374/467 DocID14587 Rev 14
22.7.12 Prescaler register (UART_PSCR)
Address offset: 0x0A (UART1), 0x0B (UART2 and UART4)
Reset value: 0x00
Note: Care must be taken to program this register with correct value, when both Smartcard and
IrDA interfaces are used in the application
76543210
PSC[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 PSC[7:0]: Prescaler value.
–In IrDA Low Power mode
PSC[7:0] = IrDA Low Power Baud Rate (1)
Used for programming the prescaler for dividing the system clock to achieve the low power
frequency:
The source clock is divided by the value given in the register (8 significant bits):
0000 0000: Reserved - do not program this value
0000 0001: divides the source clock by 1
0000 0010: divides the source clock by 2
...
– In Smartcard mode
PSC[4:0]: Prescaler value. (2) (3)
Used for programming the prescaler for dividing the system clock to provide the smartcard clock.
The value given in the register (5 significant bits) is multiplied by 2 to give the division factor of the
source clock frequency:
0 0000: Reserved - do not program this value
0 0001: divides the source clock by 2
0 0010: divides the source clock by 4
0 0011: divides the source clock by 6
...
Note: These bits are not available for UART3.
1. This prescaler setting has no effect if IrDA mode is not enabled.
2. This prescaler setting has no effect if Smartcard mode is not enabled.
3. Bits [7:5] have no effect even if Smartcard mode is enabled.
DocID14587 Rev 14 375/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
22.7.13 UART register map and reset values
Table 61. UART1 register map
Address Register
name 76543210
0x00 UART1_SR
Reset Value
TXE
1
TC
1
RXNE
0
IDLE
0
OR
0
NF
0
FE
0
PE
0
0x01 UART1_DR
Reset Value
DR7
x
DR6
x
DR5
x
DR4
x
DR3
x
DR2
x
DR1
x
DR0
x
0x02 UART1_BRR1
Reset Value
UART_DIV[11:4]
00000000
0x03 UART1_BRR2
Reset Value
UART_DIV[15:12]
0000
UART_DIV[3:0]
0000
0x04 UART1_CR1
Reset Value
R8
0
T8
0
UARTD
0
M
0
WAKE
0
PCEN
0
PS
0
PIEN
0
0x05 UART1_CR2
Reset Value
TIEN
0
TCIEN
0
RIEN
0
ILIEN
0
TEN
0
REN
0
RWU
0
SBK
0
0x06 UART1_CR3
Reset Value
-
0
LINEN
0
STOP
00
CKEN
0
CPOL
0
CPHA
0
LBCL
0
0x07 UART1_CR4
Reset Value
-
0
LBDIEN
0
LBDL
0
LBDF
0
ADD[3:0]
0000
0x08 UART1_CR5
Reset Value
-
0
-
0
SCEN
0
NACK
0
HDSEL
0
IRLP
0
IREN
00
0x09 UART1_GTR
Reset Value
GT7
0
GT6
0
GT5
0
GT4
0
GT3
0
GT2
0
GT1
0
GT0
0
0x0A UART1_PSCR
Reset Value
PSC7
0
PSC6
0
PSC5
0
PSC4
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
Table 62. UART2 register map
Address Register
name 76543210
0x00 UART2_SR
Reset Value
TXE
1
TC
1
RXNE
0
IDLE
0
OR
0
NF
0
FE
0
PE
0
0x01 UART2_DR
Reset Value
DR7
x
DR6
x
DR5
x
DR4
x
DR3
x
DR2
x
DR1
x
DR0
x
0x02 UART2_BRR1
Reset Value
UART_DIV[11:4]
00000000
0x03 UART2_BRR2
Reset Value
UART_DIV[15:12]
0000
UART_DIV[3:0]
0000
0x04 UART2_CR1
Reset Value
R8
0
T8
0
UARTD
0
M
0
WAKE
0
PCEN
0
PS
0
PIEN
0
0x05 UART2_CR2
Reset Value
TIEN
0
TCIEN
0
RIEN
0
ILIEN
0
TEN
0
REN
0
RWU
0
SBK
0
0x06 UART2_CR3
Reset Value
-
0
LINEN
0
STOP
00
CKEN
0
CPOL
0
CPHA
0
LBCL
0
Universal asynchronous receiver transmitter (UART) RM0016
376/467 DocID14587 Rev 14
0x07 UART2_CR4
Reset Value
-
0
LBDIEN
0
LBDL
0
LBDF
0
ADD[3:0]
0000
0x08 UART2_CR5
Reset Value
-
0
-
0
SCEN
0
NACK
0
-
0
IRLP
0
IREN
00
0x09 UART2_CR6
Reset Value
LDUM
0
-
0
LSLV
0
LASE
0
-
0
LHDIEN
0
LHDF
0
LSF
0
0x0A UART2_GTR
Reset Value
GT7
0
GT6
0
GT5
0
GT4
0
GT3
0
GT2
0
GT1
0
GT0
0
0x0B UART2_PSCR
Reset Value
PSC7
0
PSC6
0
PSC5
0
PSC4
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0
Table 62. UART2 register map (continued)
Address Register
name 76543210
Table 63. UART3 register map
Address Register
name 76543210
0x00 UART3_SR
Reset Value
TXE
1
TC
1
RXNE
0
IDLE
0
OR
0
NF
0
FE
0
PE
0
0x01 UART3_DR
Reset Value
DR7
x
DR6
x
DR5
x
DR4
x
DR3
x
DR2
x
DR1
x
DR0
x
0x02 UART3_BRR1
Reset Value
UART_DIV[11:4]
00000000
0x03 UART3_BRR2
Reset Value
UART_DIV[15:12]
0000
UART_DIV[3:0]
0000
0x04 UART3_CR1
Reset Value
R8
0
T8
0
UARTD
0
M
0
WAKE
0
PCEN
0
PS
0
PIEN
0
0x05 UART3_CR2
Reset Value
TIEN
0
TCIEN
0
RIEN
0
ILIEN
0
TEN
0
REN
0
RWU
0
SBK
0
0x06 UART3_CR3
Reset Value
-
0
LINEN
0
STOP
00
-
0
-
0
-
0
-
0
0x07 UART3_CR4
Reset Value
-
0
LBDIEN
0
LBDL
0
LBDF
0
ADD[3:0]
0000
0x08 Reserved
0x09 UART2_CR6
Reset Value
LDUM
0
-
0
LSLV
0
LASE
0
-
0
LHDIEN
0
LHDF
0
LSF
0
DocID14587 Rev 14 377/467
RM0016 Universal asynchronous receiver transmitter (UART)
377
Table 64. UART4 register map
Address Register
name 76543210
0x00 UART4_SR
Reset Value
TXE
1
TC
1
RXNE
0
IDLE
0
OR
0
NF
0
FE
0
PE
0
0x01 UART4_DR
Reset Value
DR7
x
DR6
x
DR5
x
DR4
x
DR3
x
DR2
x
DR1
x
DR0
x
0x02 UART4_BRR1
Reset Value
UART_DIV[11:4]
00000000
0x03 UART4_BRR2
Reset Value
UART_DIV[15:12]
0000
UART_DIV[3:0]
0000
0x04 UART4_CR1
Reset Value
R8
0
T8
0
UARTD
0
M
0
WAKE
0
PCEN
0
PS
0
PIEN
0
0x05 UART4_CR2
Reset Value
TIEN
0
TCIEN
0
RIEN
0
ILIEN
0
TEN
0
REN
0
RWU
0
SBK
0
0x06 UART4_CR3
Reset Value
-
0
LINEN
0
STOP
00
CKEN
0
CPOL
0
CPHA
0
LBCL
0
0x07 UART4_CR4
Reset Value
-
0
LBDIEN
0
LBDL
0
LBDF
0
ADD[3:0]
0000
0x08 UART4_CR5
Reset Value
-
0
-
0
SCEN
0
NACK
0
HDSEL
0
IRLP
0
IREN
00
0x09 UART4_CR6
Reset Value
LDUM
0
-
0
LSLV
0
LASE
0
-
0
LHDIEN
0
LHDF
0
LSF
0
0x0A UART4_GTR
Reset Value
GT7
0
GT6
0
GT5
0
GT4
0
GT3
0
GT2
0
GT1
0
GT0
0
0x0B UART4_PSCR
Reset Value
PSC7
0
PSC6
0
PSC5
0
PSC4
0
PSC3
0
PSC2
0
PSC1
0
PSC0
0

Controller area network (beCAN) RM0016
378/467 DocID14587 Rev 14
23 Controller area network (beCAN)
23.1 Introduction
The Basic Enhanced CAN peripheral, named beCAN, interfaces the CAN network. It
supports the CAN protocol version 2.0A and B. It has been designed to manage high
number of incoming messages efficiently with a minimum CPU load. It also meets the
priority requirements for transmit messages.
For safety-critical applications the CAN controller provides all hardware functions for
supporting the CAN Time triggered Communication option.
23.2 beCAN main features
•Supports CAN protocol version 2.0 A, B Active
•Bit rates up to 1 Mbit/s
•Supports the Time Triggered Communication option
Transmission
•Three transmit mailboxes
•Configurable transmit priority
•Time Stamp on SOF transmission
Reception
•One receive FIFO with three stages
•Six scalable filter banks
•Identifier list feature
•Configurable FIFO overrun
•Time Stamp on SOF reception
Time triggered communication option
•Disable automatic retransmission mode
•16-bit free running timer
•Configurable timer resolution
•Time Stamp sent in last two data bytes
Management
•Maskable interrupts
•Software-efficient mailbox mapping at a unique address space
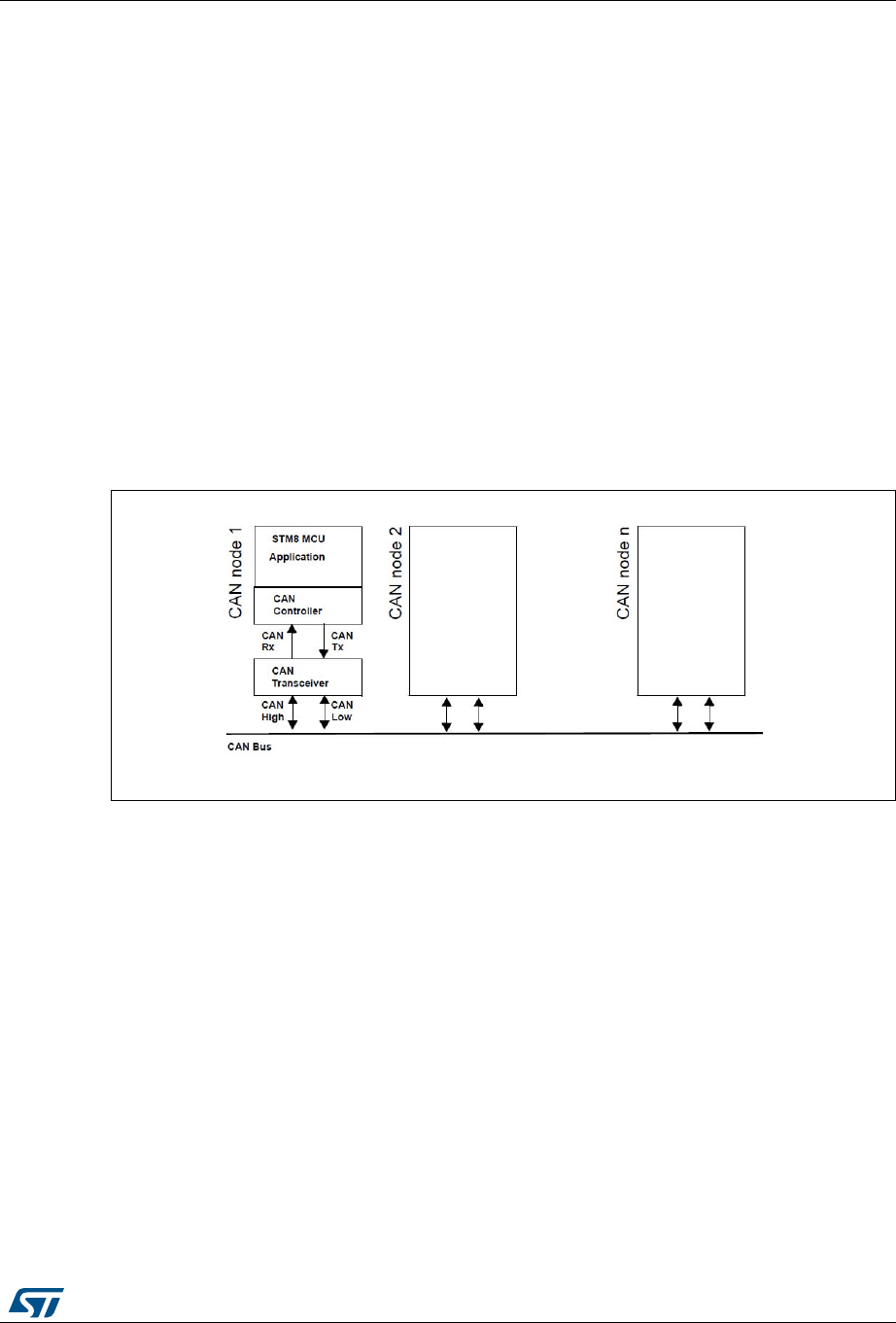
DocID14587 Rev 14 379/467
RM0016 Controller area network (beCAN)
427
23.3 beCAN general description
In today’s CAN applications, the number of nodes in a network is increasing and often
several networks are linked together via gateways. Typically the number of messages in the
system (and thus to be handled by each node) has significantly increased. In addition to the
application messages, Network Management and Diagnostic messages have been
introduced.
•An enhanced filtering mechanism is required to handle each type of message.
Furthermore, application tasks require more CPU time, therefore real-time constraints
caused by message reception have to be reduced.
•A receive FIFO scheme allows the CPU to be dedicated to application tasks for a long
time period without losing messages.
The standard HLP (Higher Layer Protocol) based on standard CAN drivers requires an
efficient interface to the CAN controller.
•All mailboxes and registers are organized in 16-byte pages mapped at the same
address and selected via a page select register.
Figure 140. CAN network topology
23.3.1 CAN 2.0B active core
The beCAN module handles the transmission and the reception of CAN messages fully
autonomously. Standard identifiers (11-bit) and extended identifiers (29-bit) are fully
supported by hardware.
23.3.2 Control, status and configuration registers
The application uses these registers to:
•Configure CAN parameters, e.g. baud rate
•Request transmissions
•Handle receptions
•Manage interrupts
•Get diagnostic information
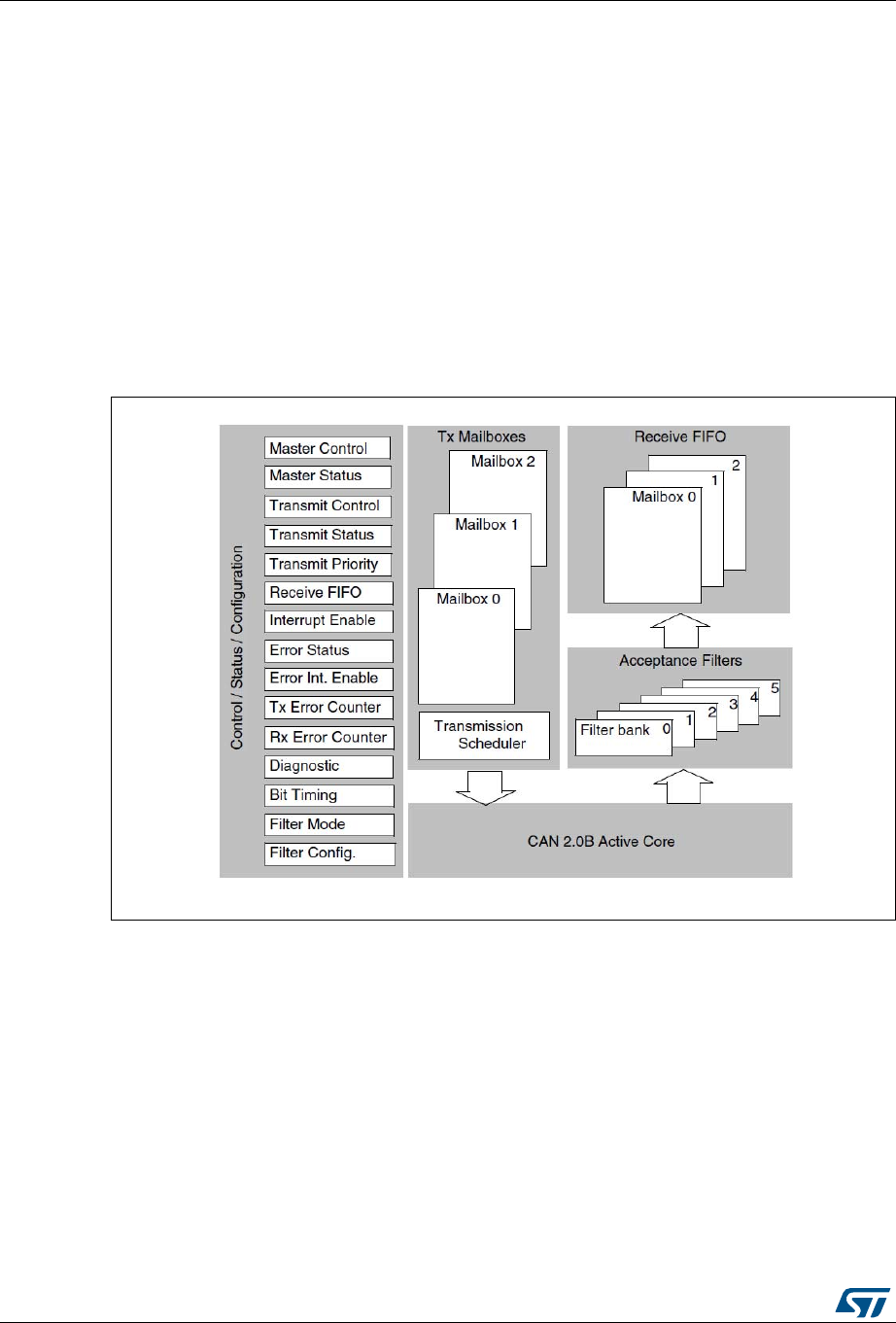
Controller area network (beCAN) RM0016
380/467 DocID14587 Rev 14
23.3.3 Tx mailboxes
Three transmit mailboxes are provided to the software for setting up messages. The
Transmission Scheduler decides which mailbox has to be transmitted first.
23.3.4 Acceptance filters
The beCAN provides six scalable/configurable identifier filter banks for selecting the
incoming messages the software needs and discarding the others.
Receive FIFO
The receive FIFO is used by the CAN controller to store the incoming messages. Three
complete messages can be stored in the FIFO. The software always accesses the next
available message at the same address. The FIFO is managed completely by hardware.
Figure 141. beCAN block diagram
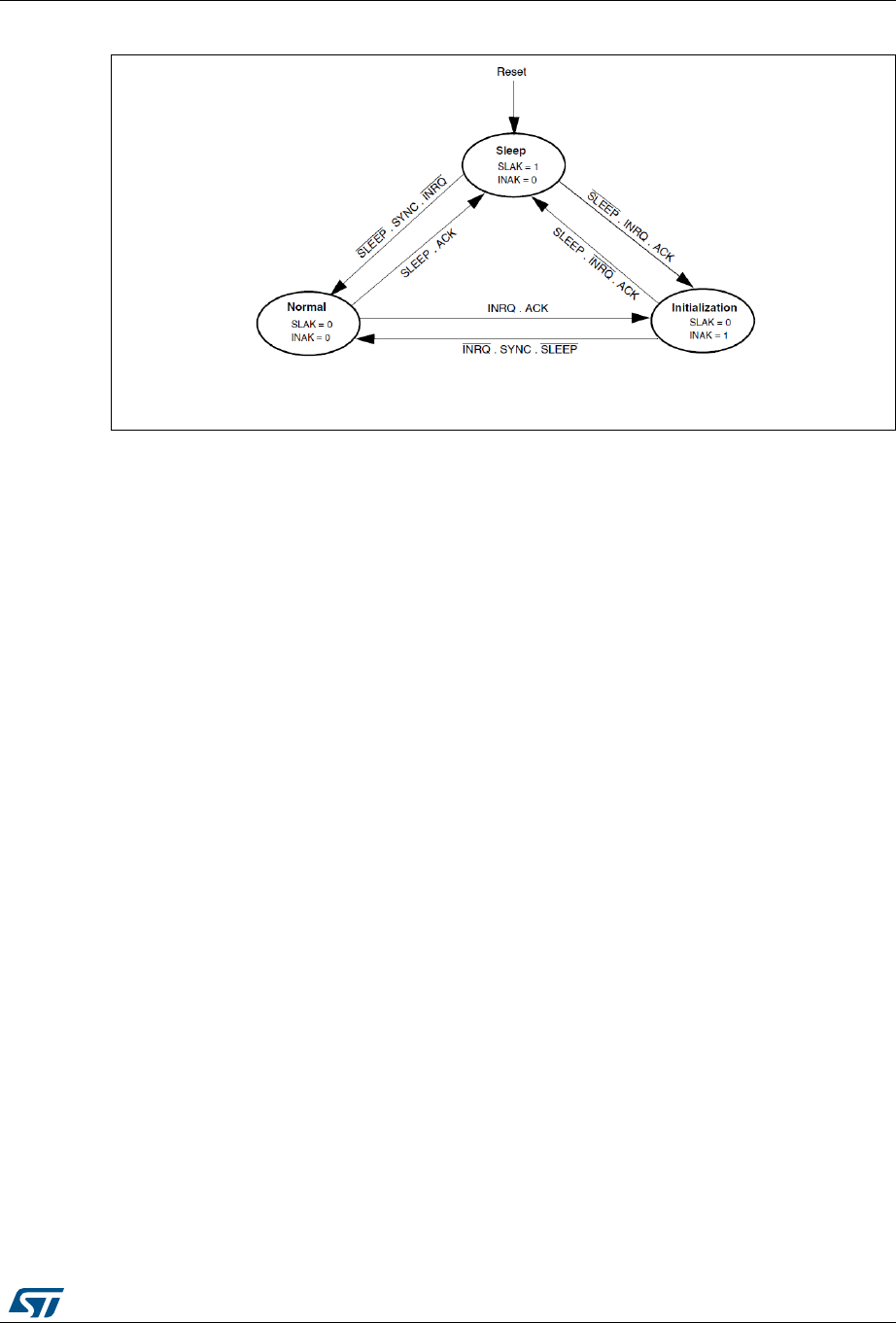
DocID14587 Rev 14 381/467
RM0016 Controller area network (beCAN)
427
Figure 142. beCAN operating modes
23.4 Operating modes
beCAN has three main operating modes: Initialization, Normal and Sleep. After a
hardware reset, beCAN is in sleep mode to reduce power consumption. The software
requests beCAN to enter Initialization or Sleep mode by setting the INRQ or SLEEP bits in
the CAN_MCR register. Once the mode has been entered, beCAN confirms it by setting the
INAK or SLAK bits in the CAN_MSR register. When neither INAK nor SLAK are set, beCAN
is in Normal mode. Before entering Normal mode beCAN always has to synchronize on
the CAN bus. To synchronize, beCAN waits until the CAN bus is idle, this means 11
consecutive recessive bits have been monitored on CANRX.
Note: The beCAN controls the PG0 port (CAN_TX pin) when the beCAN is in Normal mode,
whereas the PG0 port is controlled by the PG_ODR and PG_DDR GPIO registers while the
beCAN is in Initialization mode or in Sleep mode. Therefore the PG_ODR and PG_DDR
registers must be configured in order to maintain a recessive state on CAN_TX pin.
23.4.1 Initialization mode
The software initialization can be done while the hardware is in Initialization mode. To enter
this mode the software sets the INRQ bit in the CAN_MCR register and waits until the
hardware has confirmed the request by setting the INAK bit in the CAN_MSR register.
To leave Initialization mode, the software clears the INQR bit. beCAN has exit Initialization
mode once the INAK bit has been cleared by hardware. However the Rx line has to be in
recessive state to leave this mode.
While in Initialization mode, all message transfers to and from the CAN bus are stopped and
the status of the CAN bus output CANTX is recessive (high).
Entering Initialization Mode does not change any of the configuration registers.
To initialize the CAN Controller, software has to set up the Bit Timing registers and the filter
banks. If a filter bank is not used, it is recommended to leave it non active (leave the
corresponding FACT bit in the CAN_FCRx register cleared).

Controller area network (beCAN) RM0016
382/467 DocID14587 Rev 14
23.4.2 Normal mode
Once the initialization has been done, the software must request the hardware to enter
Normal mode, to synchronize on the CAN bus and start reception and transmission. This
request to enter Normal mode is done by clearing the INRQ bit in the CAN_MCR register.
Afterwards, the beCAN is synchronized with the data transfer on the CAN bus by waiting for
the occurrence of a sequence of 11 consecutive recessive bits (Bus Idle state) before
finishing the switch to Normal mode and being ready to take part in bus activities. The
switch completion is confirmed by hardware by clearing the INAK bit in the CAN_MSR
register.
The initialization of the filter values is independent from Initialization mode but must be done
while the filter bank is not active (corresponding FACTx bit cleared). The filter bank scale
and mode configuration must be configured in initialization mode.
23.4.3 Sleep mode (low power)
To reduce power consumption, beCAN has a low power mode called Sleep mode. This
mode is entered on software request by setting the SLEEP bit in the CAN_MCR register. In
this mode, the beCAN clock is stopped, however software can still access the beCAN
mailboxes.
Note: If software requests entry to initialization mode by setting the INRQ bit while beCAN is in
sleep mode, it must also clear the SLEEP bit.
beCAN can be woken up (exit Sleep mode) either by software clearing the SLEEP bit or on
detection of CAN bus activity.
On CAN bus activity detection, hardware automatically performs the wakeup sequence by
clearing the SLEEP bit if the AWUM bit in the CAN_MCR register is set. If the AWUM bit is
cleared, software has to clear the SLEEP bit when a wakeup interrupt occurs, in order to exit
from sleep mode.
Note: If the wakeup interrupt is enabled (WKUIE bit set in CAN_IER register) a wakeup interrupt
will be generated on detection of CAN bus activity, even if the beCAN automatically
performs the wakeup sequence.
After the SLEEP bit has been cleared, Sleep mode is exited once beCAN has synchronized
with the CAN bus, refer to Figure 142: beCAN operating modes. However the Rx line has to
be in recessive state to leave this mode. Sleep mode is exited once the SLAK bit has been
cleared by hardware.
23.4.4 Time triggered communication mode
The TTCM (Time Triggered Communication Mode in CAN_MCR) bit has to be set to enable
the Time Triggered Communication mechanism.
In this mode, the internal counter of the CAN hardware is activated and used to generate the
Time Stamp value stored in the CAN_MTSRH and CAN_MTSRL registers (for Rx and Tx
mailboxes). The internal counter is captured on the sample point of the Start Of Frame bit in
both reception and transmission.
The TGT bit (Transmit Global Time in CAN_MDLCR) enables automatic transmission of the
contents of both CAN_MTSRH and CAN_MTSRL in the two last data bytes of the message
(refer to the TTCAN specification ISO 11898-4).
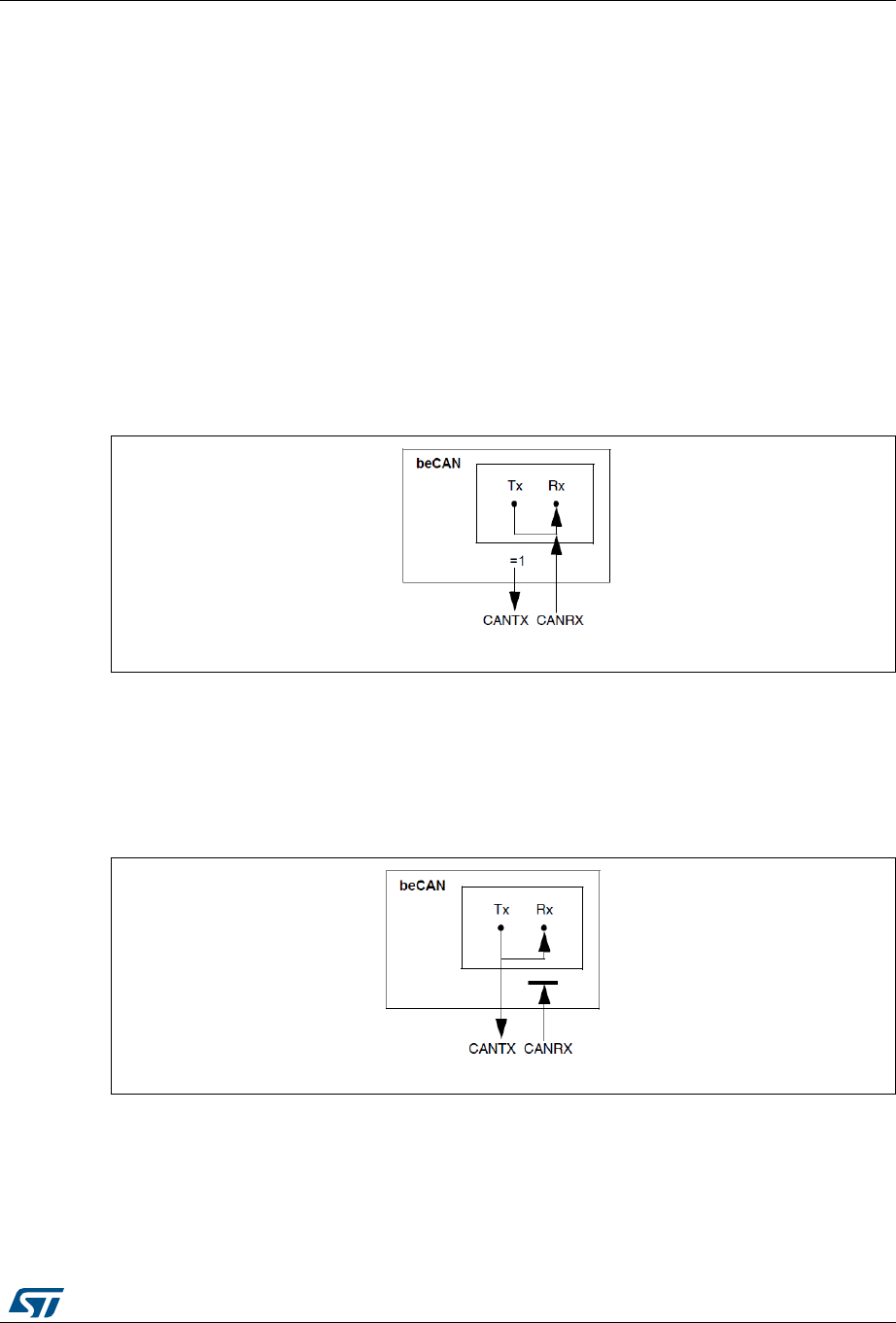
DocID14587 Rev 14 383/467
RM0016 Controller area network (beCAN)
427
23.5 Test modes
Test modes can be selected by the SILM and LBKM bits in the CAN_DGR register. These
bits must be configured while beCAN is in Initialization mode. Once a test mode has been
selected, the INRQ bit in the CAN_MCR register must be reset to enter Normal mode.
23.5.1 Silent mode
The beCAN can be put in Silent mode by setting the SILM bit in the CAN_DGR register.
In Silent mode, the beCAN is able to receive valid data frames and valid remote frames, but
it sends only recessive bits on the CAN bus and it cannot start a transmission. If the beCAN
has to send a dominant bit (ACK bit, overload flag, active error flag), the bit is rerouted
internally so that the CAN Core monitors this dominant bit, although the CAN bus may
remain in recessive state. Silent mode can be used to analyze the traffic on a CAN bus
without affecting it by the transmission of dominant bits (Acknowledge Bits, Error Frames).
Figure 143. beCAN in silent mode
23.5.2 Loop back mode
The beCAN can be set in Loop Back Mode by setting the LBKM bit in the CAN_DGR
register. In Loop Back Mode, the beCAN treats its own transmitted messages as received
messages and stores them (if they pass acceptance filtering) in the FIFO.
Figure 144. beCAN in loop back mode
This mode is provided for self-test functions. To be independent of external events, the CAN
Core ignores acknowledge errors (no dominant bit sampled in the acknowledge slot of a
data / remote frame) in Loop Back Mode. In this mode, the beCAN performs an internal
feedback from its Tx output to its Rx input. The actual value of the CANRX input pin is
disregarded by the beCAN. The transmitted messages can be monitored on the CANTX pin.
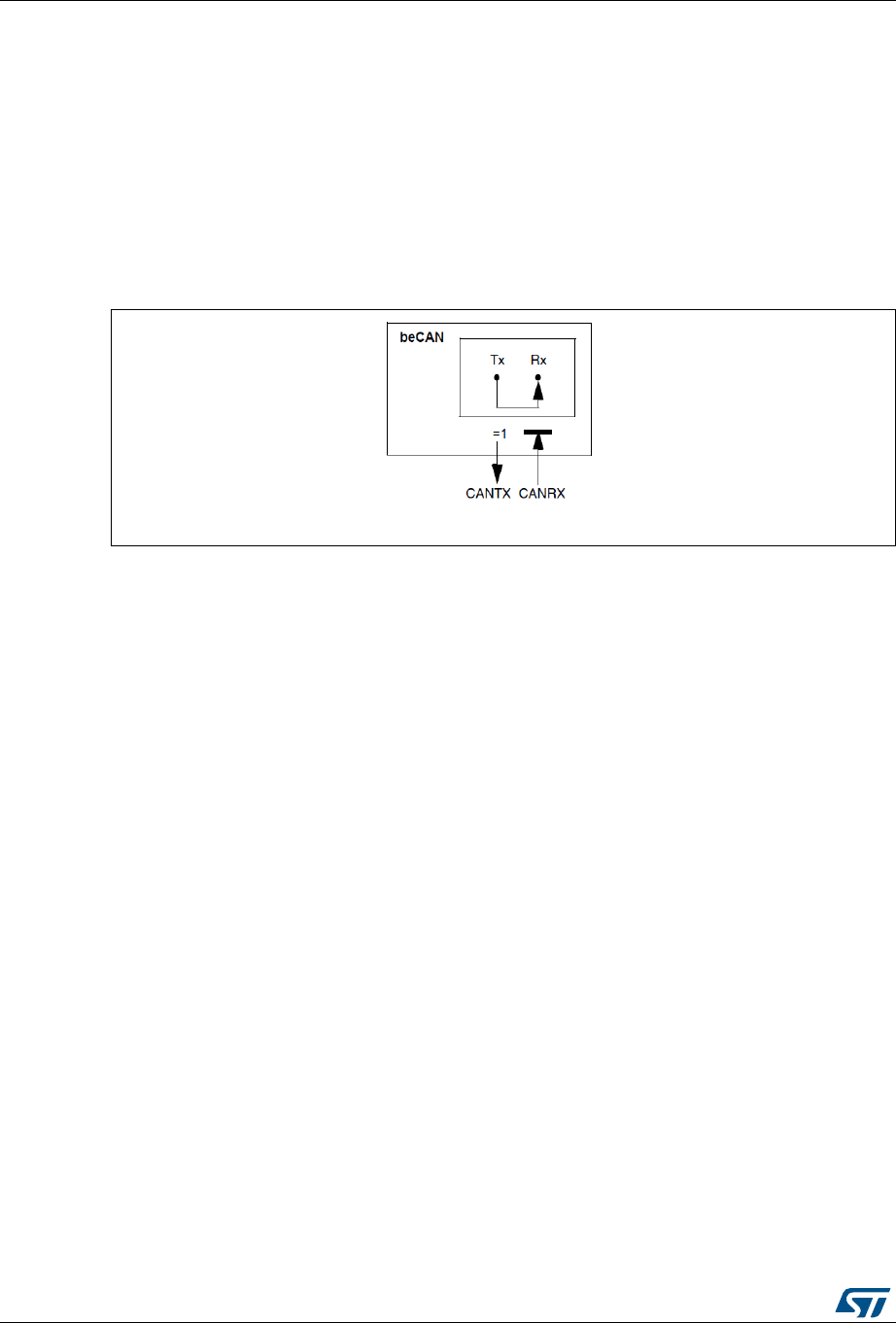
Controller area network (beCAN) RM0016
384/467 DocID14587 Rev 14
Note: As the Tx line is still active in this mode, be aware that it can disturb the communication on
the CAN bus.
23.5.3 Loop back combined with silent mode
It is also possible to combine Loop Back mode and Silent mode by setting the LBKM and
SILM bits in the CAN_DGR register. This mode can be used for a “Hot Selftest”, meaning
the beCAN can be tested like in Loop Back mode but without affecting a running CAN
system connected to the CANTX and CANRX pins. In this mode, the CANRX pin is
disconnected from the beCAN and the CANTX pin is held recessive.
Figure 145. beCAN in combined mode
23.6 Functional description
23.6.1 Transmission handling
In order to transmit a message, the application must select one empty transmit mailbox, set
up the identifier, the data length code (DLC) and the data before requesting the transmission
by setting the corresponding TXRQ bit in the CAN_MCSR register. Once the mailbox has
exited empty state, the software no longer has write access to the mailbox registers.
Immediately after the TXRQ bit has been set, the mailbox enters pending state and waits to
become the highest priority mailbox, see Transmit Priority. As soon as the mailbox has the
highest priority it will be scheduled for transmission. The transmission of the message of
the scheduled mailbox will start (enter transmit state) when the CAN bus becomes idle.
Once the mailbox has been successfully transmitted, it will become empty again. The
hardware indicates a successful transmission by setting the RQCP and TXOK bits in the
CAN_MCSR and CAN_TSR registers.
If the transmission fails, the cause is indicated by the ALST bit in the CAN_MCSR register in
case of an Arbitration Lost, and/or the TERR bit, in case of transmission error detection.
Transmit priority
By identifier:
When more than one transmit mailbox is pending, the transmission order is given by the
identifier of the message stored in the mailbox. The message with the lowest identifier value
has the highest priority according to the arbitration of the CAN protocol. If the identifier
values are equal, the lower mailbox number will be scheduled first.

DocID14587 Rev 14 385/467
RM0016 Controller area network (beCAN)
427
By transmit request order:
The transmit mailboxes can be configured as a transmit FIFO by setting the TXFP bit in the
CAN_MCR register. In this mode the priority order is given by the transmit request order.
This mode is very useful for segmented transmission.
Abort
A transmission request can be aborted by the user setting the ABRQ bit in the CAN_MCSR
register. In pending or scheduled state, the mailbox is aborted immediately. An abort
request while the mailbox is in transmit state can have two results. If the mailbox is
transmitted successfully the mailbox becomes empty with the TXOK bit set in the
CAN_MCSR and CAN_TSR registers. If the transmission fails, the mailbox becomes
scheduled, the transmission is aborted and becomes empty with TXOK cleared. In all
cases the mailbox will become empty again at least at the end of the current transmission.
Non-automatic retransmission mode
This mode has been implemented in order to fulfil the requirement of the Time Triggered
Communication option of the CAN standard. To configure the hardware in this mode the
NART bit in the CAN_MCR register must be set.
In this mode, each transmission is started only once. If the first attempt fails, due to an
arbitration loss or an error, the hardware will not automatically restart the message
transmission.
At the end of the first transmission attempt, the hardware considers the request as
completed and sets the RQCP bit in the CAN_MCSR register. The result of the transmission
is indicated in the CAN_MCSR register by the TXOK, ALST and TERR bits.
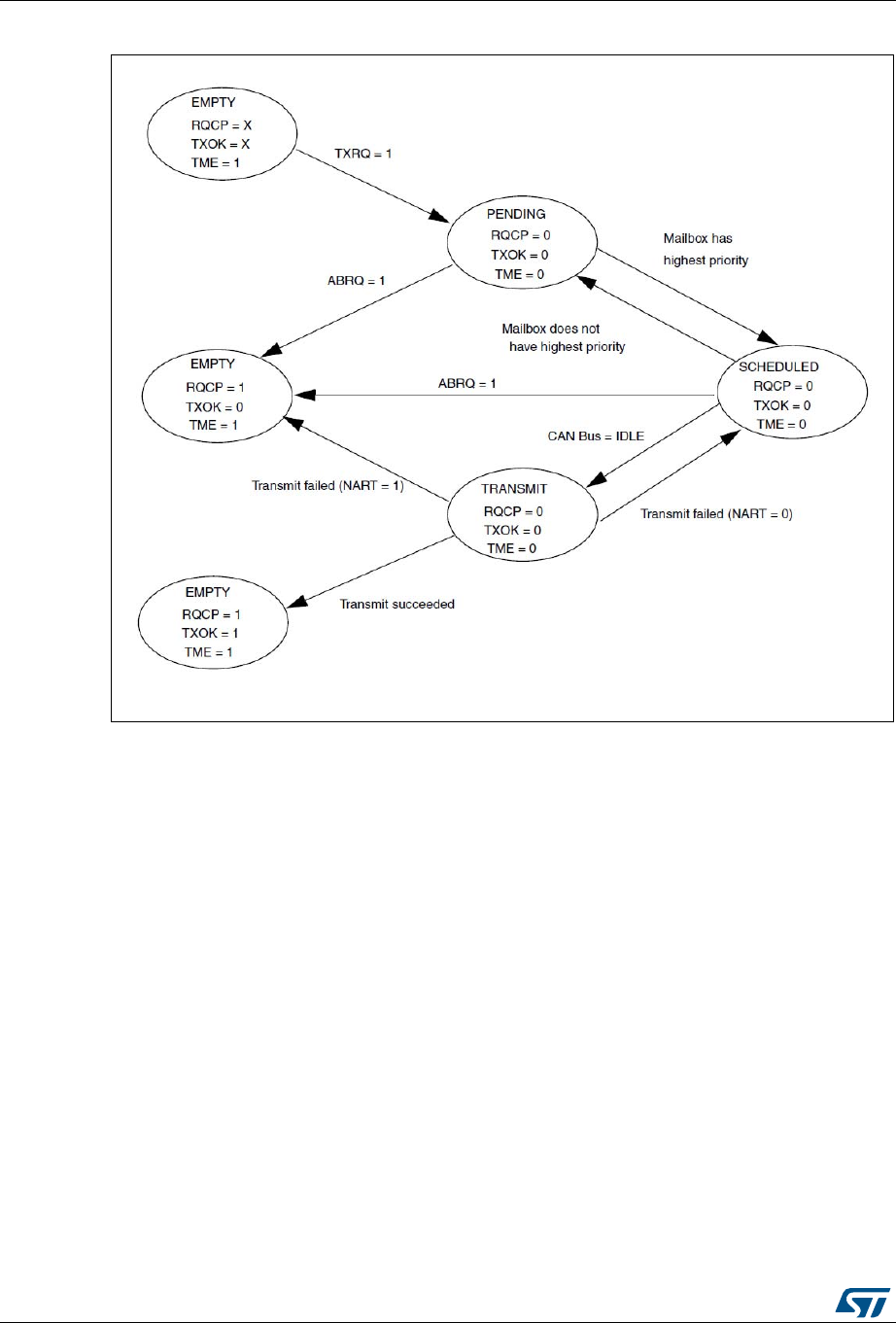
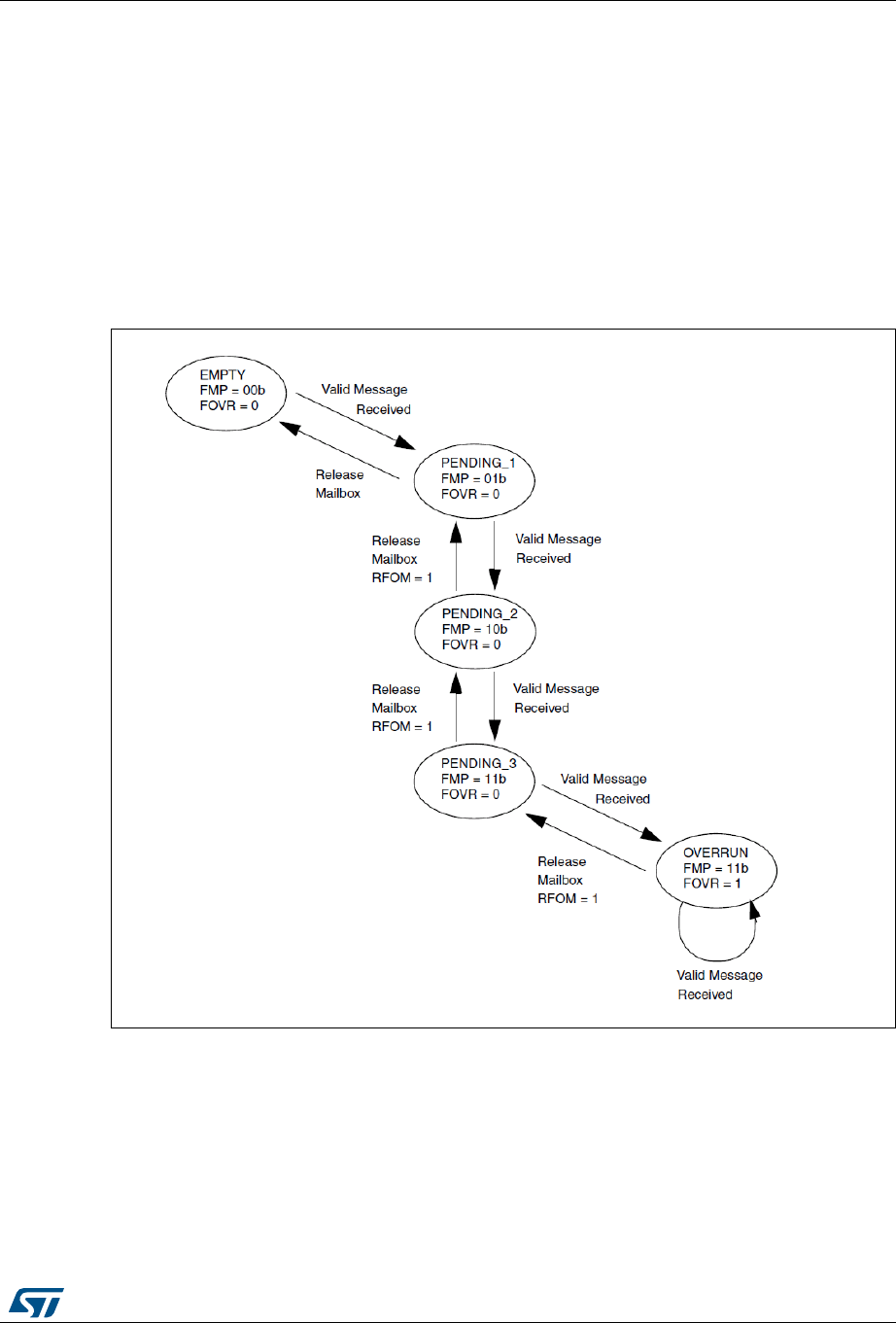
DocID14587 Rev 14 387/467
RM0016 Controller area network (beCAN)
427
23.6.2 Reception handling
For the reception of CAN messages, three mailboxes organized as a FIFO are provided. In
order to save CPU load, simplify the software and guarantee data consistency, the FIFO is
managed completely by hardware. The application accesses the messages stored in the
FIFO through the FIFO output mailbox.
Valid message
A received message is considered as valid when it has been received correctly according to
the CAN protocol (no error until the last but one bit of the EOF field) and It passed through
the identifier filtering successfully, see Section 23.6.3: Identifier filtering.
Figure 147. Receive FIFO states
FIFO management
Starting from the empty state, the first valid message received is stored in the FIFO which
becomes pending_1. The hardware signals the event setting the FMP[1:0] bits in the
CAN_RFR register to the value 0b01. The message is available in the FIFO output mailbox.
The software reads out the mailbox content and releases it by setting the RFOM bit in the
CAN_RFR register. The FIFO becomes empty again. If a new valid message has been
received in the meantime, the FIFO stays in pending_1 state and the new message is
available in the output mailbox.

Controller area network (beCAN) RM0016
388/467 DocID14587 Rev 14
If the application does not release the mailbox, the next valid message will be stored in the
FIFO which enters pending_2 state (FMP[1:0] = 0b10). The storage process is repeated for
the next valid message putting the FIFO into pending_3 state (FMP[1:0] = 0b11). At this
point, the software must release the output mailbox by setting the RFOM bit, so that a
mailbox is free to store the next valid message. Otherwise the next valid message received
will cause a loss of message.
Refer also to Section 23.6.4: Message storage.
Overrun
Once the FIFO is in pending_3 state (i.e. the three mailboxes are full) the next valid
message reception will lead to an overrun and a message will be lost. The hardware
signals the overrun condition by setting the FOVR bit in the CAN_RFR register. Which
message is lost depends on the configuration of the FIFO:
– If the FIFO lock function is disabled (RFLM bit in the CAN_MCR register cleared)
the last message stored in the FIFO will be overwritten by the new incoming
message. As a result, the last message is always available to the application.
Note: The previously received messages will stay in their positions in the FIFO, only the last one
will be overwritten.
– If the FIFO lock function is enabled (RFLM bit in the CAN_MCR register set) the
most recent message will be discarded and the software will have the three oldest
messages in the FIFO available.
Reception related interrupts
On the storage of the first message in the FIFO - FMP[1:0] bits change from 0b00 to 0b01 -
an interrupt is generated if the FMPIE bit in the CAN_IER register is set.
When the FIFO becomes full (i.e. a third message is stored) the FULL bit in the CAN_RFR
register is set and an interrupt is generated if the FFIE bit in the CAN_IER register is set.
On overrun condition, the FOVR bit is set and an interrupt is generated if the FOVIE bit in
the CAN_IER register is set.
23.6.3 Identifier filtering
In the CAN protocol the identifier of a message is not associated with the address of a node
but related to the content of the message. Consequently a transmitter broadcasts its
message to all receivers. On message reception a receiver node decides - depending on
the identifier value - whether the software needs the message or not. If the message is
needed, it is copied into the RAM. If not, the message must be discarded without
intervention by the software.
To fulfil this requirement, the beCAN Controller provides 6 configurable and scalable filter
banks (5:0) in order to receive only the messages the software needs. This hardware
filtering saves CPU resources which would be otherwise needed to perform filtering by
software. Each filter bank x consists of eight 8-bit registers, CAN_FxR[8:1].
DocID14587 Rev 14 389/467
RM0016 Controller area network (beCAN)
427
Scalable width
To optimize and adapt the filters to the application needs, each filter bank can be scaled
independently. Depending on the filter scale a filter bank provides:
– One 32-bit filter for the STDID[10:0] / EXID[28:18], IDE, EXID[17:0] and RTR bits.
– Two 16-bit filters for the STDID[10:0] / EXID[28:18], RTR and IDE bits.
– Four 8-bit filters for the STDID[10:3] / EXID[28:21] bits. The other bits are
considered as don’t care.
– One 16-bit filter and two 8-bit filters for filtering the same set of bits as the 16 and
8-bit filters described above.
Refer to Figure 148 through Figure 151.
Furthermore, the filters can be configured in mask mode or in identifier list mode.
Mask mode
In mask mode the identifier registers are associated with mask registers specifying which
bits of the identifier are handled as “must match” or as “don’t care”.
Identifier list mode
In identifier list mode, the mask registers are used as identifier registers. Thus instead of
defining an identifier and a mask, two identifiers are specified, doubling the number of single
identifiers. All bits of the incoming identifier must match the bits specified in the filter
registers.
Filter bank scale and mode configuration
The filter banks are configured by means of the corresponding CAN_FCRx register. To
configure a filter bank this must be deactivated by clearing the FACT bit in the CAN_FCRx
register. The filter scale is configured by means of the FSC[1:0] bits in the corresponding
CAN_FCRx register. The identifier list or identifier mask mode for the corresponding
Mask/Identifier registers is configured by means of the FMLx and FMHx bits in the
CAN_FMRx register. The FMLx bit defines the mode for the lower half (registers
CAN_FxR1-4), and the FMHx bit the mode for the upper half (registers CAN_FxR5-8) of
filter bank x. Refer to Figure 148 through Figure 151 for details.
Examples:
– If filter bank 1 is configured as two 16-bit filters, then the FML1 bit defines the
mode of the CAN_F1R3 and CAN_F1R4 registers and the FMH1 bit defines the
mode of the CAN_F1R7 and CAN_F1R8 registers.
– If filter bank 1 is configured as four 8-bit filters, then the FML1 bit defines the mode
of the CAN_F1R2 and CAN_F1R4 registers and the FMH1 bit defines the mode of
the CAN_F1R6 and CAN_F1R8 registers.
Controller area network (beCAN) RM0016
390/467 DocID14587 Rev 14
Note: In 32-bit configuration, the FMLx and FMHx bits must have the same value to ensure that
the four Mask/Identifier registers are in the same mode.
When a standard identifier is received (IDE bit is zero), the extended part of 32-bit or 16-bit
filters is not compared.
To filter a group of identifiers, configure the Mask/Identifier registers in mask mode.
To select single identifiers, configure the Mask/Identifier registers in identifier list mode.
Filters not used by the application should be left deactivated.
Each filter within a filter bank is numbered (called the Filter Number) from 0 to a maximum
dependent on the mode and the scale of each of the 6 filter banks.
For the filter configuration, refer to Figure 148 through Figure 151.
Figure 148. 32-bit filter bank configuration (FSCx bits = 0b11 in CAN_FCRx register)
Figure 149. 16-bit filter bank configuration (FSCx bits = 0b10 in CAN_FCRx register)
Filter registers Filter mode1
Mapping STID[10:3] /
EXID[28:21]
STID [2:0] /
EXID[20:18]
RTR
IDE
EXID
[17:15] EXID [14:7] EXID[6:0] 0 FMHx = 0
FMLx = 0
FMHx = 1
FMLx = 1
Identifier CAN_FxR1 CAN_FxR2 CAN_FxR3 CAN_FxR4 ID
n
ID n
Identifier/Mask CAN_FxR5 CAN_FxR6 CAN_FxR7 CAN_FxR8 M ID n+1
ID= Identifier
M = Mask
n = Filter number
x = Filter bank number
1 The FMHx and FMLx bits are located in the CAN_FMR1 and CAN_FMR2 registers
Filter registers Filter mode1
Mapping STID[10:3] /
EXID[28:21]
STID [2:0]
/ EXID
[20:18]
RTR
IDE
EXID
[17:15]
FMHx = 0
FMLx = 0
FMHx = 0
FMLx = 1
FMHx = 1
FMLx = 0
FMHx = 1
FMLx = 1
Identifier CAN_FxR1 CAN_FxR2 ID
n
ID nID
n
ID n
Identifier/Mask CAN_FxR3 CAN_FxR4 M ID n+1 M ID n+1
Identifier CAN_FxR5 CAN_FxR6 ID
n+1
ID
n+2
ID n+1 ID n+2
Identifier/Mask CAN_FxR7 CAN_FxR8 M M ID n+2 ID n+3
ID= Identifier
M = Mask
n = Filter number
x = Filter bank number
1 The FMHx and FMLx bits are located in the CAN_FMR1 and CAN_FMR2 registers
DocID14587 Rev 14 391/467
RM0016 Controller area network (beCAN)
427
Figure 150. 16/8-bit filter bank configuration (FSCx bits = 0b01 in CAN_FCRx register)
Figure 151. 8-bit filter bank configuration (FSCx bits = 0b00 in CAN_FCRx register)
Filter registers Filter mode1
Mapping STID[10:3] /
EXID[28:21]
STID [2:0]
/ EXID
[20:18]
RTR
IDE
EXID
[17:15]
FMHx = 0
FMLx = 0
FMHx = 0
FMLx = 1
FMHx = 1
FMLx = 0
FMHx = 1
FMLx = 1
Identifier CAN_FxR1 CAN_FxR2 ID
n
ID nID
n
ID n
Identifier/Mask CAN_FxR3 CAN_FxR4 M ID n+1 M ID n+1
Identifier CAN_FxR5 ID
n+1
ID
n+2
ID n+1 ID n+2
Identifier/Mask CAN_FxR6 M M ID n+2 ID n+3
Identifier CAN_FxR7 ID
n+2
ID
n+3
ID n+3 ID n+4
Identifier/Mask CAN_FxR8 M M ID n+4 ID n+5
ID= Identifier
M = Mask
n = Filter number
x = Filter bank number
1 The FMHx and FMLx bits are located in the CAN_FMR1 and CAN_FMR2 registers
Filter registers Filter mode1
Mapping STID[10:3] /
EXID[28:21]
FMHx = 0
FMLx = 0
FMHx = 0
FMLx = 1
FMHx = 1
FMLx = 0
FMHx = 1
FMLx = 1
Identifier CAN_FxR1 ID
n
ID nID
n
ID n
Identifier/Mask CAN_FxR2 M ID n+1 M ID n+1
Identifier CAN_FxR3 ID
n+1
ID n+2 ID
n+1
ID n+2
Identifier/Mask CAN_FxR4 M ID n+3 M ID n+3
Identifier CAN_FxR5 ID
n+2
ID
n+4
ID n+2 ID n+4
Identifier/Mask CAN_FxR6 M M ID n+3 ID n+5
Identifier CAN_FxR7 ID
n+3
ID
n+5
ID n+4 ID n+6
Identifier/Mask CAN_FxR8 M M ID n+5 ID n+7
ID= Identifier
M = Mask
n = Filter number
x = Filter bank number
1 The FMHx and FMLx bits are located in the CAN_FMR1 and CAN_FMR2 registers
Controller area network (beCAN) RM0016
392/467 DocID14587 Rev 14
Filter match index
Once a message has been received in the FIFO it is available to the application. Typically
application data are copied into RAM locations. To copy the data to the right location the
application has to identify the data by means of the identifier. To avoid this and to ease the
access to the RAM locations, the CAN controller provides a Filter Match Index.
This index is stored in the mailbox together with the message according to the filter priority
rules. Thus each received message has its associated Filter Match Index.
The Filter Match Index can be used in two ways:
– Compare the Filter Match Index with a list of expected values.
– Use the Filter Match Index as an index on an array to access the data destination
location.
For non-masked filters, the software no longer has to compare the identifier.
If the filter is masked the software reduces the comparison to the masked bits only.
Note: The index value of the filter number does not take into account the activation state of the
filter banks.
Table 65. Example of filter numbering
Filter bank
Filter number
Number FCS FMH FML FACT Configuration
0 0b11 1 1 1 Identifier list (32-bit) 0
1
1 0b11 0 0 1 Identifier mask (32-bit) 2
2 0b10 1 1 1 Identifier list (16-bit)
3
4
5
6
3 0b00 0 1 0
Deactivated
Identifier List/Identifier
mask (8-bit)
7
8
9
10
11
12
4 0b10 0 0 0 Deactivated
Identifier Mask (16-bit)
13
14
5 0b01 0 0 1 Identifier Mask (16/8-bit)
15
16
17
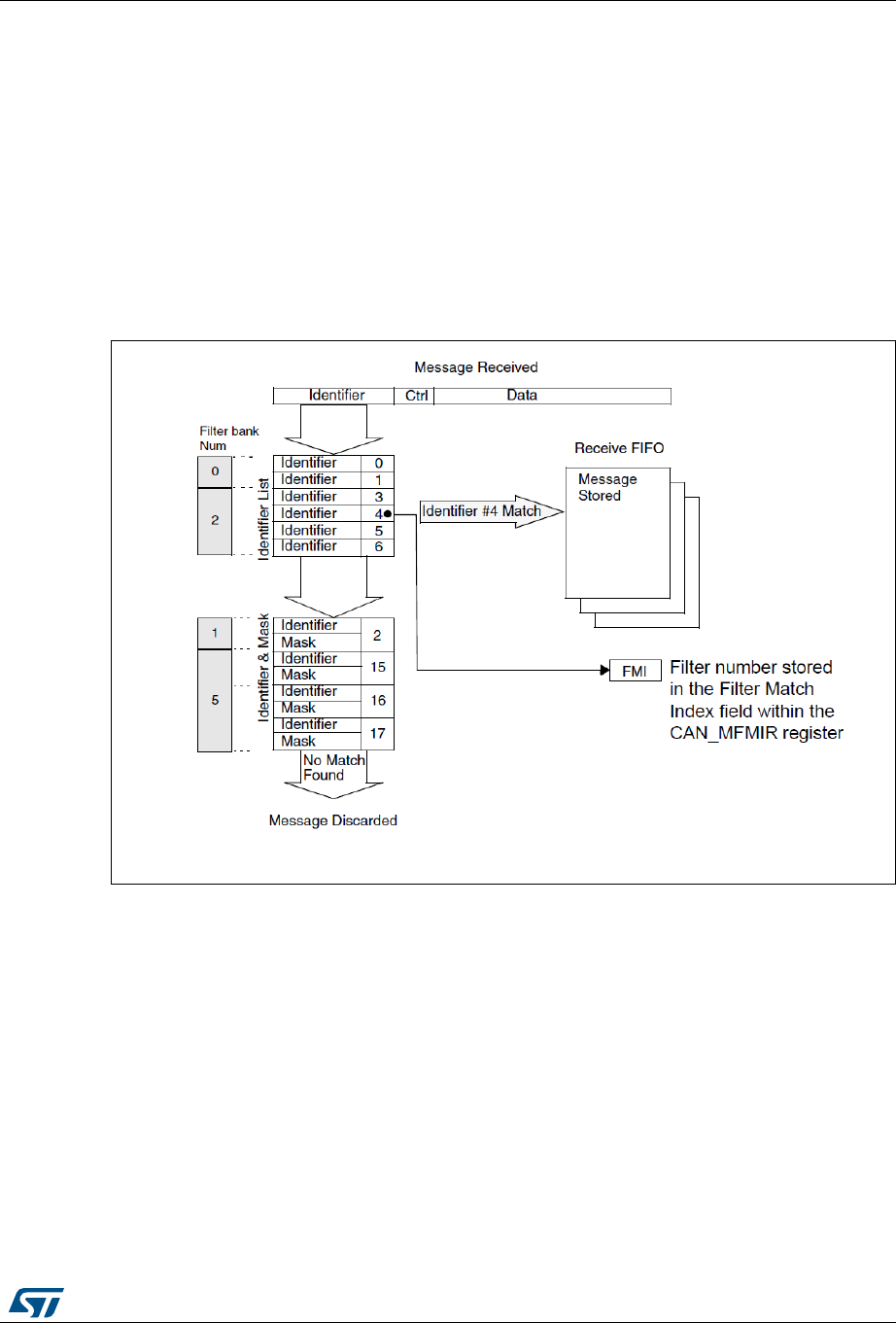
DocID14587 Rev 14 393/467
RM0016 Controller area network (beCAN)
427
Filter priority rules
Depending on the filter combination it may occur that an identifier passes successfully
through several filters. In this case the filter match value stored in the receive mailbox is
chosen according to the following rules:
– A 32-bit filter takes priority over 16-bit filter which takes itself priority over 8-bit
filter.
– For filters of equal scale, priority is given to the identifier List mode over the
identifier Mask mode.
– For filters of equal scale and mode, priority is given by the filter number (the lower
the number, the higher the priority).
Figure 152. Filter banks configured as in the example in Table 65
The example above shows the filtering principle of the beCAN. On reception of a message,
the identifier is compared first with the filters configured in identifier list mode. If there is a
match, the message is stored in the FIFO and the index of the matching filter is stored in the
Filter Match Index. As shown in the example, the identifier matches with Identifier #4 thus
the message content and FMI 4 is stored in the FIFO.
If there is no match, the incoming identifier is then compared with the filters configured in
mask mode.
If the identifier does not match any of the identifiers configured in the filters, the message is
discarded by hardware without disturbing the software.
Controller area network (beCAN) RM0016
394/467 DocID14587 Rev 14
23.6.4 Message storage
The interface between the software and the hardware for the CAN messages is
implemented by means of mailboxes. A mailbox contains all information related to a
message; identifier, data, control, status and time stamp information.
Transmit mailbox
The software sets up the message to be transmitted in an empty transmit mailbox. The
status of the transmission is indicated by hardware in the CAN_MCSR register.
Table 66. Transmit mailbox mapping
Offset to Transmit Mailbox base
address (bytes) Register name
0CAN_MCSR
1 CAN_MDLCR
2 CAN_MIDR1
3 CAN_MIDR2
4 CAN_MIDR3
5 CAN_MIDR4
6 CAN_MDAR1
7 CAN_MDAR2
8 CAN_MDAR3
9 CAN_MDAR4
10 CAN_MDAR5
11 CAN_MDAR6
12 CAN_MDAR7
13 CAN_MDAR8
14 CAN_MTSRL
15 CAN_MTSRH
DocID14587 Rev 14 395/467
RM0016 Controller area network (beCAN)
427
Receive mailbox
When a message has been received, it is available to the software in the FIFO output
mailbox. Once the software has handled the message (e.g. read it) the software must
release the FIFO output mailbox by means of the RFOM bit in the CAN_RFR register to
make the next incoming message available. The filter match index is stored in the
CAN_MFMIR register. The 16-bit time stamp value is stored in the CAN_MTSRH and
CAN_MTSRL registers.
Table 67. Receive mailbox mapping
Offset to Receive Mailbox base
address (bytes) Register name
0CAN_MFMIR
1 CAN_MDLCR
2 CAN_MIDR1
3 CAN_MIDR2
4 CAN_MIDR3
5 CAN_MIDR4
6 CAN_MDAR1
7 CAN_MDAR2
8 CAN_MDAR3
9 CAN_MDAR4
10 CAN_MDAR5
11 CAN_MDAR6
12 CAN_MDAR7
13 CAN_MDAR8
14 CAN_MTSRL
15 CAN_MTSRH
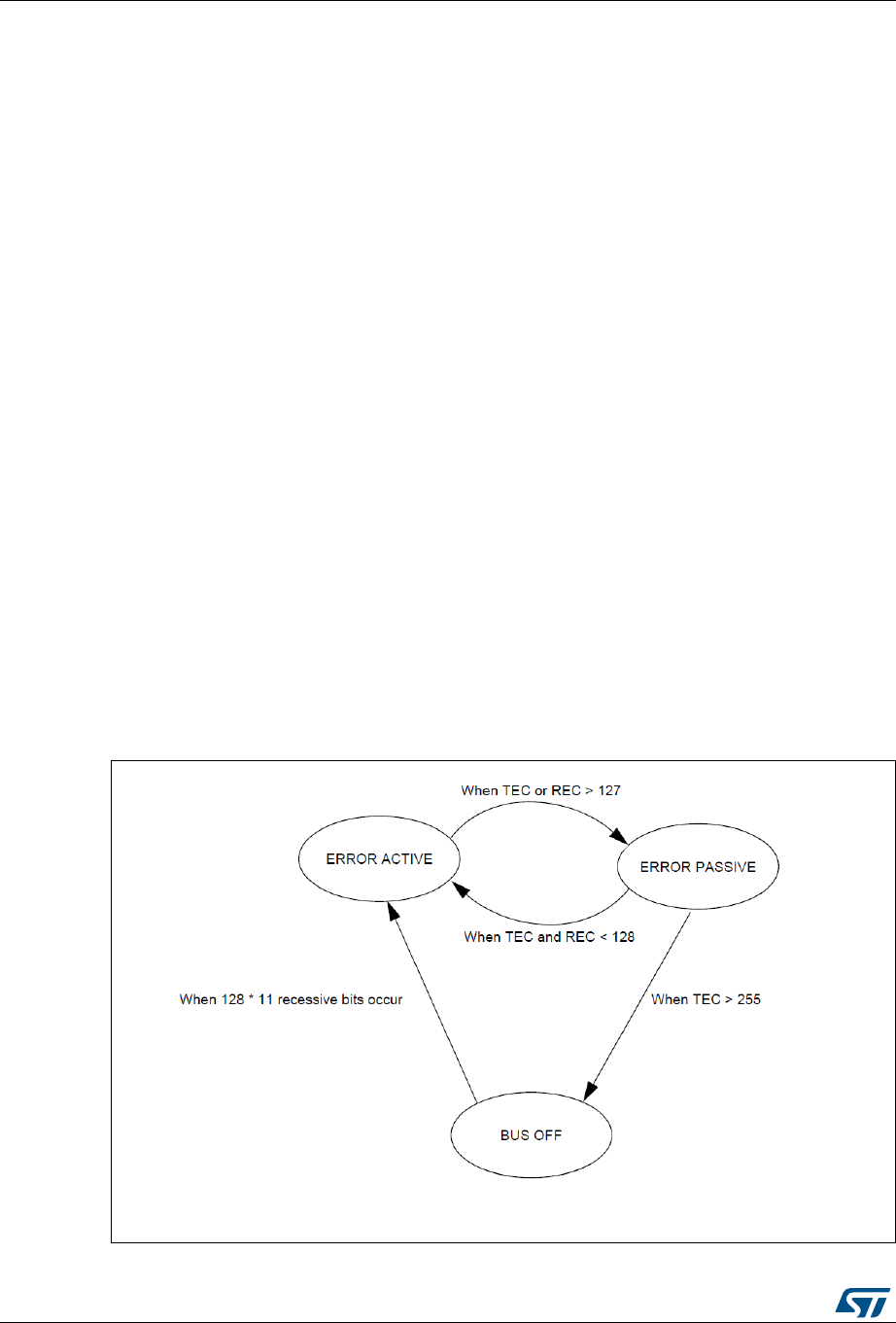
Controller area network (beCAN) RM0016
396/467 DocID14587 Rev 14
23.6.5 Error management
The error management as described in the CAN protocol is handled entirely by hardware
using a Transmit Error Counter (CAN_TECR register) and a Receive Error Counter
(CAN_RECR register), which get incremented or decremented according to the error
condition. For detailed information about TEC and REC management, please refer to the
CAN standard.
Both of them may be read by software to determine the stability of the network.
Furthermore, the CAN hardware provides detailed information on the current error status in
CAN_ESR register. By means of CAN_EIER register and ERRIE bit in CAN_IER register,
the software can configure the interrupt generation on error detection in a very flexible way.
Bus-Off recovery
The Bus-Off state is reached when TEC is greater then 255, this state is indicated by BOFF
bit in CAN_ESR register. In Bus-Off state, the beCAN is no longer able to transmit and
receive messages.
Depending on the ABOM bit in the CAN_MCR register beCAN will recover from Bus-Off
(become error active again) either automatically or on software request. But in both cases
the beCAN has to wait at least for the recovery sequence specified in the CAN standard
(128 x 11 consecutive recessive bits monitored on CANRX).
If ABOM is set, the beCAN will start the recovering sequence automatically after it has
entered Bus-Off state.
If ABOM is cleared, the software must initiate the recovering sequence by requesting
beCAN to enter initialization mode. Then beCAN starts monitoring the recovery sequence
when the beCAN is requested to leave the initialization mode.
Note: In initialization mode, beCAN does not monitor the CANRX signal, therefore it cannot
complete the recovery sequence. To recover, beCAN must be in normal mode.
Figure 153. CAN error state diagram
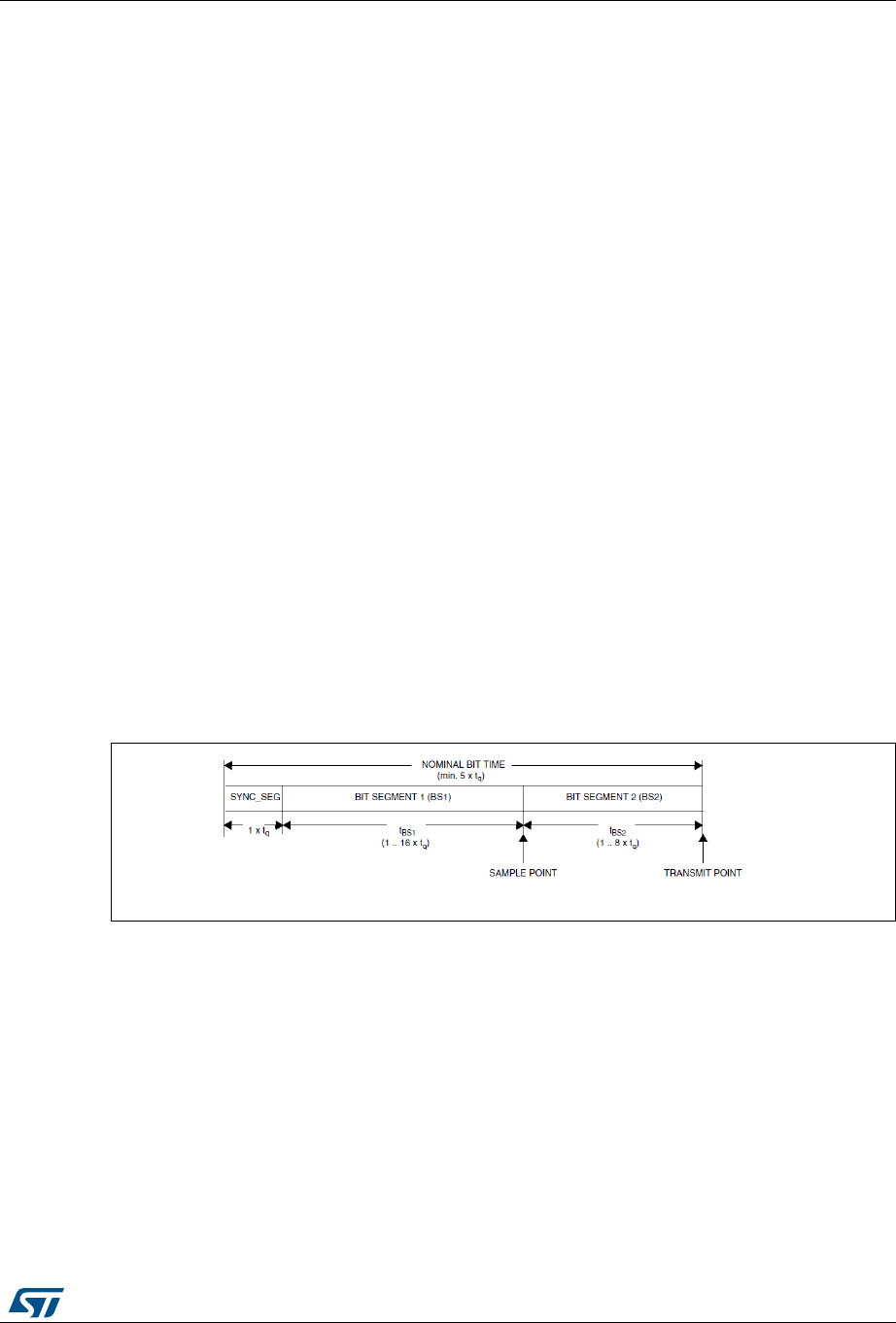
DocID14587 Rev 14 397/467
RM0016 Controller area network (beCAN)
427
23.6.6 Bit timing
The bit timing logic monitors the serial bus-line and performs sampling and adjustment of
the sample point by synchronizing on the start-bit edge and resynchronizing on the following
edges. Its operation may be explained simply by splitting nominal bit time into three
segments as follows:
–Synchronization segment (SYNC_SEG): a bit change is expected to occur
within this time segment. It has a fixed length of one time quantum (1 x tCAN).
–Bit segment 1 (BS1): defines the location of the sample point. It includes the
PROP_SEG and PHASE_SEG1 of the CAN standard. Its duration is
programmable between 1 and 16 time quanta but may be automatically
lengthened to compensate for positive phase drifts due to differences in the
frequency of the various nodes of the network.
–Bit segment 2 (BS2): defines the location of the transmit point. It represents the
PHASE_SEG2 of the CAN standard. Its duration is programmable between 1 and
8 time quanta but may also be automatically shortened to compensate for
negative phase drifts.
The resynchronization Jump Width (SJW) defines an upper bound to the amount of
lengthening or shortening of the bit segments. It is programmable between 1 and 4 time
quanta.
To guarantee the correct behavior of the CAN controller, SYNC_SEG + BS1 + BS2 must be
greater than or equal to 5 time quanta.
Note: For a detailed description of the CAN bit timing and resynchronization mechanism, please
refer to the ISO 11898 standard.
As a safeguard against programming errors, the configuration of the Bit Timing Registers
CAN_BTR1 and CAN_BTR2 is only possible while the device is in Initialization mode.
Figure 154. Bit timing
with
where tq refers to the time quantum, tsys is the system clock period (fMASTER). BRP[5:0],
BS1[3:0], and BS2[2:0] are defined in the CAN_BTR1 and CAN_BTR2 registers.
BaudRate 1
NominalBitTime
----------------------------------------------=
NominalBitTime tqtBS1 tBS2
++=
tBS1 BS1[3:0] 1+()tq
×=
tBS2 BS2[2:0] 1+()tq
×=
tqBRP[5:0] 1+()tsys
×=
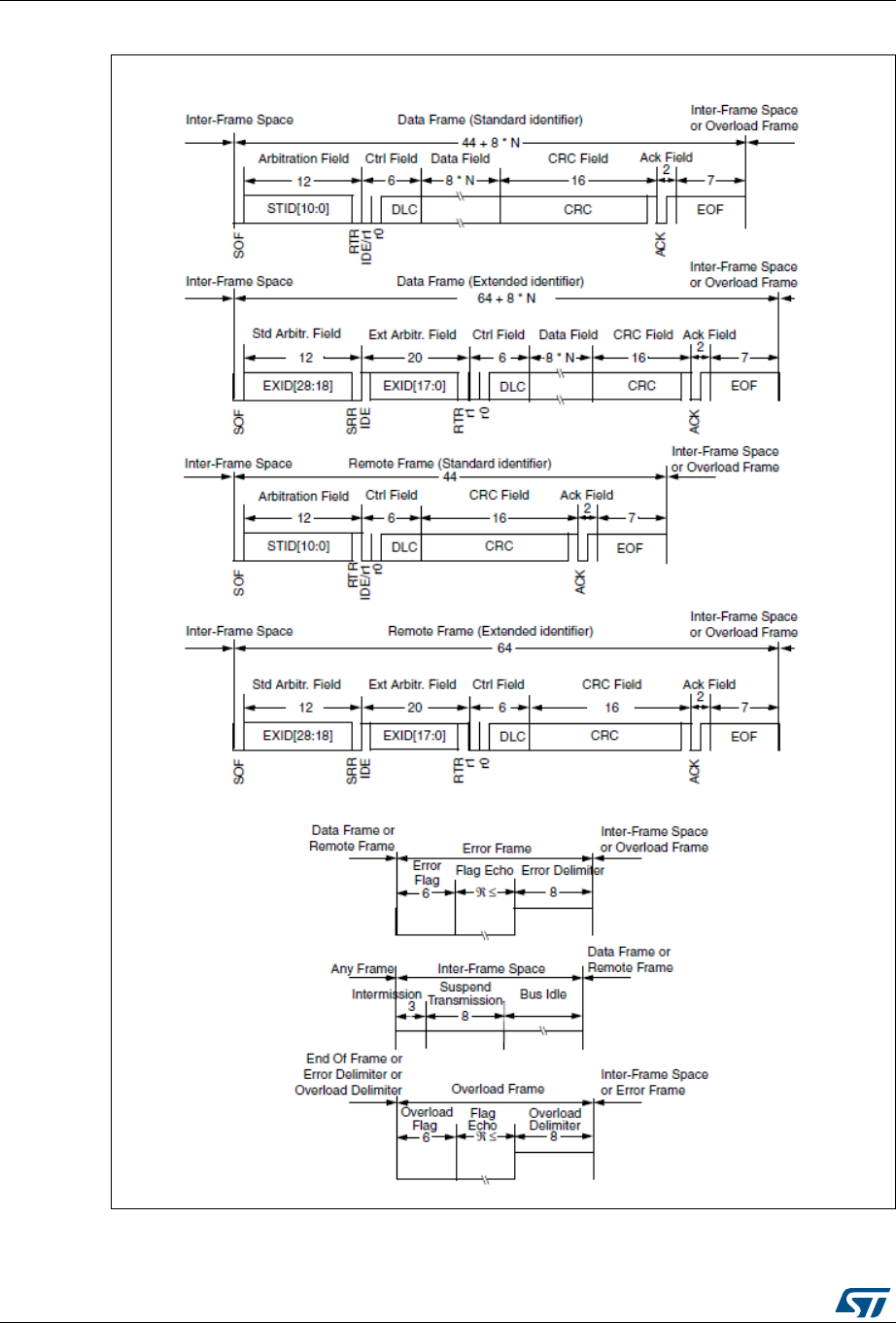
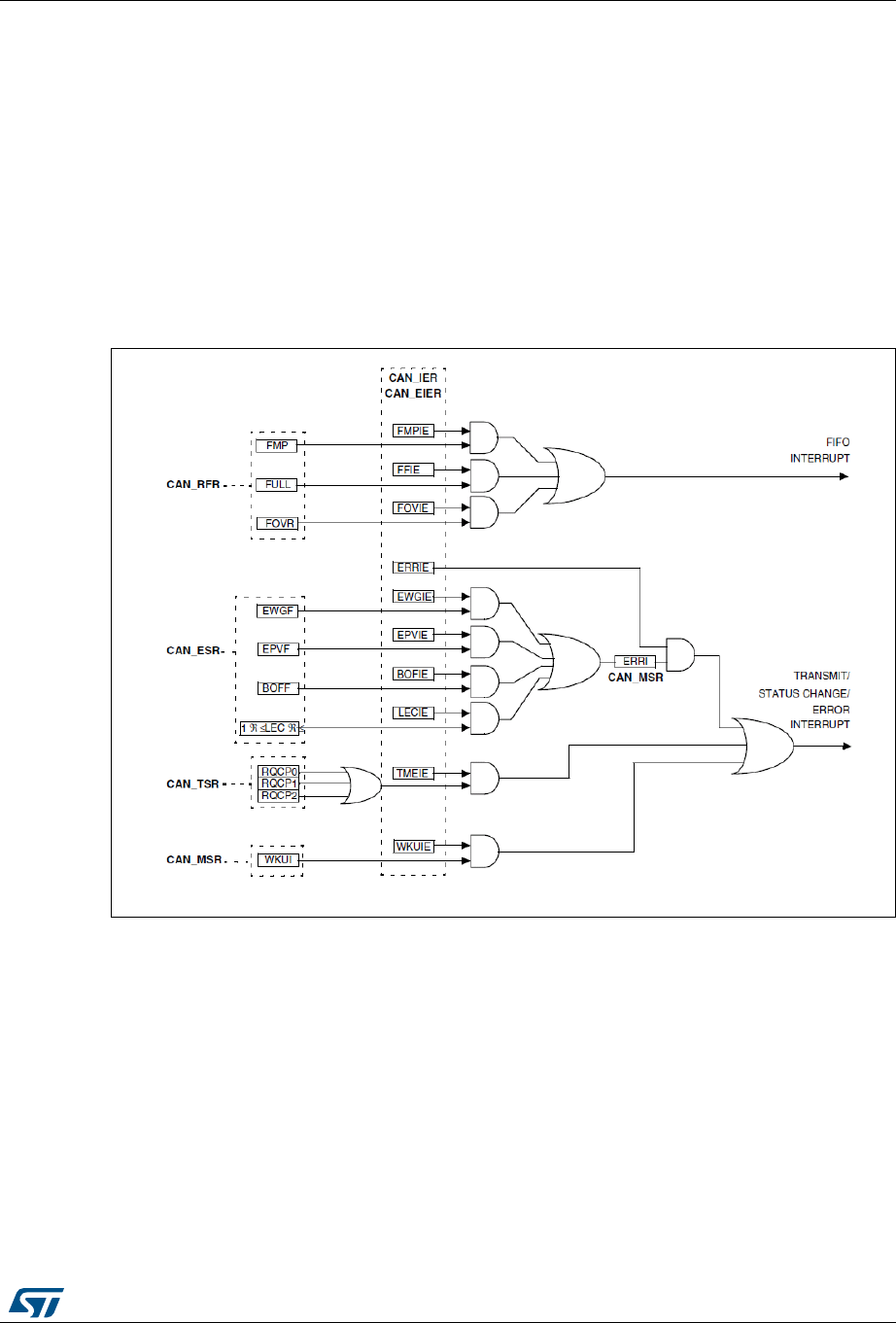
DocID14587 Rev 14 399/467
RM0016 Controller area network (beCAN)
427
SOF = Start Of Frame; ID = Identifier; RTR = Remote Transmission Request; IDE = Identifier Extension;
r0, r1 = Reserved bits; DLC = Data Length Code; CRC = Cyclic Redundancy Code;
Error flag: 6 dominant bits if node is error active else 6 recessive bits.
Suspend transmission: applies to error passive nodes only.
EOF = End of Frame
ACK = Acknowledge bit (send as recessive)
Ctrl = Control
23.7 Interrupts
Two interrupt vectors are dedicated to beCAN. Each interrupt source can be independently
enabled or disabled by means of the CAN Interrupt Enable Register (CAN_IER) and CAN
Error Interrupt Enable register (CAN_EIER).
Figure 156. Event flags and interrupt generation
•The FIFO interrupt can be generated by the following events:
– Reception of a new message, FMP bits in the CAN_RFR register incremented.
– FIFO full condition, FULL bit in the CAN_RFR register set.
– FIFO overrun condition, FOVR bit in the CAN_RFR register set.
•The transmit, error and status change interrupt can be generated by the following
events:
– Transmit mailbox 0 becomes empty, RQCP0 bit in the CAN_TSR register set.
– Transmit mailbox 1 becomes empty, RQCP1 bit in the CAN_TSR register set.
– Transmit mailbox 2 becomes empty, RQCP2 bit in the CAN_TSR register set.
– Error condition, for more details on error conditions please refer to the CAN Error
Status register (CAN_ESR).
– Wakeup condition, SOF monitored on the CAN Rx signal.
Controller area network (beCAN) RM0016
400/467 DocID14587 Rev 14
23.8 Register access protection
Erroneous access to certain configuration registers can cause the hardware to temporarily
disturb the whole CAN network. Therefore the following registers can be modified by
software only while the hardware is in initialization mode:
CAN_BTR1, CAN_BTR2, CAN_FCR1, CAN_FCR2, CAN_FMR1, CAN_FMR2 and
CAN_DGR registers.
Although the transmission of incorrect data will not cause problems at the CAN network
level, it can severely disturb the application. A transmit mailbox can be only modified by
software while it is in empty state, refer to Figure 146: Transmit mailbox states.
The filters must be deactivated before their value can be modified by software. The
modification of the filter configuration (scale or mode) can be done by software only in
initialization mode.
23.9 Clock system
The clock tolerance limit as specified in CAN protocol is 1.58 % at speeds of up to 125
Kbps. For higher baud rates, it is suggested to use a crystal oscillator.
Note: If the clock security system feature is enabled in the CLK controller (Refer to the description
of the CSSEN bit in the Clock security system register (CLK_CSSR) on page 97), there is a
way to put CAN automatically into the recessive state when a main clock failure occurs, so
that the CAN network does not get stuck by the device. However to ensure this, the PG0 I/O
pin must be configured in pull-up mode prior to using the beCAN. In this way, when a failure
occurs and the I/O alternate function is disabled, the line is pulled-up instead of floating.
23.10 beCAN low power modes
Note: If a CAN frame is received in Wait, Halt or Active-halt modes, the microcontroller will be
woken-up but the CAN frame will be lost.
Table 68. beCAN behavior in low power modes
Mode Description
Wait
No effect on beCAN, except that accesses to Tx/Rx mailboxes and filter values are not
possible (CPU clock is stopped).
beCAN interrupts cause the device to exit from WAIT mode.
Slow No effect on beCAN.
Halt/ Active-
halt
BeCAN is halted. If the beCAN has been successfully put in Sleep mode (refer to
Section 23.4.3) before executing the halt instruction, any falling edge detected on
CAN_RX pin will trigger a beCAN Rx interrupt and wake-up the device from
Halt/Active-halt mode.
DocID14587 Rev 14 401/467
RM0016 Controller area network (beCAN)
427
23.11 beCAN registers
23.11.1 CAN master control register (CAN_MCR)
Address offset: 0x00
Reset value: 0x02
76543210
TTCM ABOM AWUM NART RFLM TXFP SLEEP INRQ
rw rw rw rw rw rw rw rw
Bit 7 TTCM Time Triggered Communication Mode
0: Time Triggered Communication mode disabled.
1: Time Triggered Communication mode enabled
Note: For more information on Time Triggered Communication mode, please refer to Section 23.4.4:
Time triggered communication mode.
Bit 6 ABOM Automatic Bus-Off Management
This bit controls the behavior of the CAN hardware on leaving the Bus-Off state.
0: The Bus-Off state is exited on software request.
Refer to Section 23.6.5: Error management, Bus-Off recovery.
1: The Bus-Off state is exited automatically by hardware once 128 x 11 recessive bits have been
monitored.
Note: For detailed information on the Bus-Off state please refer to Section 23.6.5: Error
management.
Bit 5 AWUM Automatic wakeup Mode
This bit controls the behavior of the CAN hardware when a message is received in Sleep mode.
0: The sleep mode is exited on software request by clearing the SLEEP bit in the CAN_MCR
register.
1: The sleep mode is exited automatically by hardware when a CAN message is detected. In this
case, the SLEEP bit of the CAN_MCR register and the SLAK bit of the CAN_MSR register are
cleared by hardware, while the WKUI bit of the CAN_MSR register is set. If the CAN bus is active
when the Sleep automatic wakeup request occurs,it does not enter Sleep mode.
The AWUM and the SLEEP bits must be set simultaneously.
Bit 4 NART No Automatic Retransmission
0: The CAN hardware will automatically retransmit the message until it has been successfully
transmitted according to the CAN standard.
1: A message will be transmitted only once, independently of the transmission result (successful,
error or arbitration lost).
Bit 3 RFLM Receive FIFO Locked Mode
0: Receive FIFO not locked on overrun. Once a receive FIFO is full the next incoming message will
overwrite the previous one.
1: Receive FIFO locked against overrun. Once a receive FIFO is full the next incoming message will
be discarded.

Controller area network (beCAN) RM0016
402/467 DocID14587 Rev 14
23.11.2 CAN master status register (CAN_MSR)
Address offset: 0x01
Reset value: 0x02
Bit 2 TXFP Transmit FIFO Priority
This bit controls the transmission order when several mailboxes are pending at the same time.
0: Priority driven by the identifier of the message
1: Priority driven by the request order (chronologically)
Bit 1 SLEEP Sleep Mode Request
This bit must be set by software to request the CAN hardware to enter Sleep mode. If the AWUM bit
is not set, the Sleep mode is entered as soon as the current CAN activity (CAN frame transmission
or reception) has completed. If the AWUM bit is set and the CAN bus is active, the CAN does not
enter Sleep mode, the SLEEP bit is not set, and the WKUI bit of the CAN_MSR register is set.
This bit must be cleared by software to exit Sleep mode. It can be cleared by hardware when the
AWUM bit is set and a SOF bit is detected on the CAN Rx signal.
After a reset, the CAN is in Sleep mode and the SLEEP bit is set.
Bit 0 INRQ Initialization Request
The software clears this bit to switch the hardware into normal mode. Once 11 consecutive
recessive bits have been monitored on the Rx signal the CAN hardware is synchronized and ready
for transmission and reception. Hardware signals this event by clearing the INAK bit in the
CAN_MSR register.
Software sets this bit to request the CAN hardware to enter initialization mode. Once software has
set the INRQ bit, the CAN hardware waits until the current CAN activity (transmission or reception)
is completed before entering the initialization mode. Hardware signals this event by setting the INAK
bit in the CAN_MSR register.
76543210
Reserved RX TX WKUI ERRI SLAK INAK
r r r rc_w1 rc_w1 r r
Bits 7:6 Reserved.
Bit 5 RX Receive
1: The CAN hardware is currently receiver.
Bit 4 TX Transmit
1: The CAN hardware is currently transmitter.
Bit 3 WKUI Wakeup Interrupt
This bit is set by hardware to signal that a SOF bit has been detected while the CAN hardware was
in sleep mode. Setting this bit generates a status change interrupt if the WKUIE bit in the CAN_IER
register is set.
This bit is cleared by software writing 1.
DocID14587 Rev 14 403/467
RM0016 Controller area network (beCAN)
427
23.11.3 CAN transmit status register (CAN_TSR)
Address offset: 0x02
Reset value: 0x00
Bit 2 ERRI Error Interrupt
This bit is set by hardware when a bit of the CAN_ESR has been set on error detection and the
corresponding interrupt in the CAN_EIER is enabled. Setting this bit generates a status change
interrupt if the ERRIE bit in the CAN_EIER register is set.
This bit is cleared by software writing 1.
Bit 1 SLAK Sleep Acknowledge
This bit is set by hardware and indicates to the software that the CAN hardware is now in sleep
mode. This bit acknowledges the sleep mode request from the software (set SLEEP bit in
CAN_MCR register).
This bit is cleared by hardware when the CAN hardware has exited Sleep mode. Sleep mode is
exited when the SLEEP bit in the CAN_MCR register is cleared. Please refer to the AWUM bit of the
CAN_MCR register description for detailed information for clearing SLEEP bit.
Bit 0 INAK Initialization Acknowledge
This bit is set by hardware and indicates to the software that the CAN hardware is now in
initialization mode. This bit acknowledges the initialization request from the software (set INRQ bit in
CAN_MCR register).
This bit is cleared by hardware when the CAN hardware has exited initialization mode and is now
synchronized on the CAN bus. To be synchronized the hardware has to monitor a sequence of 11
consecutive recessive bits on the CAN RX signal.
76543210
Reserved TXOK2 TXOK1 TXOK0 Reserved RQCP2 RQCP1 RQCP0
r r r r r rc_w1 rc_w1 rc_w1
Bit 7 Reserved.
Bit 6 TXOK2 Transmission OK for mailbox 2
This bit is set by hardware when the transmission request on mailbox 2 has been completed
successfully. Please refer to Figure 146.
This bit is cleared by hardware when mailbox 2 is requested for transmission or when the software
clears the RQCP2 bit.
Bit 5 TXOK1 Transmission OK for mailbox 1
This bit is set by hardware when the transmission request on mailbox 1 has been completed
successfully. Please refer to Figure 146.
This bit is cleared by hardware when mailbox 1 is requested for transmission or when the software
clears the RQCP1 bit.
Bit 4 TXOK0 Transmission OK for mailbox 0
This bit is set by hardware when the transmission request on mailbox 0 has been completed
successfully. Please refer to Figure 146.
This bit is cleared by hardware when mailbox 1 is requested for transmission or when the software
clears the RQCP0 bit.
Bit 3 Reserved.
Controller area network (beCAN) RM0016
404/467 DocID14587 Rev 14
23.11.4 CAN transmit priority register (CAN_TPR)
Address offset: 0x03
Reset value: 0x0C
Bit 2 RQCP2 Request Completed for Mailbox 2
This bit is set by hardware to signal that the last request for mailbox 2 has been completed. The
request could be a transmit or an abort request.
This bit is cleared by software writing 1.
Bit 1 RQCP1 Request Completed for Mailbox 1
This bit is set by hardware to signal that the last request for mailbox 1 has been completed. The
request could be a transmit or an abort request.
This bit is cleared by software writing 1.
Bit 0 RQCP0 Request Completed for Mailbox 0
This bit is set by hardware to signal that the last request for mailbox 0 has been completed. The
request could be a transmit or an abort request.
This bit is cleared by software writing 1.
76543210
LOW2 LOW1 LOW0 TME2 TME1 TME0 CODE1 CODE0
rrrrrrrr
Bit 7 LOW2 Lowest Priority Flag for Mailbox 2
This bit is set by hardware when more than one mailbox is pending for transmission and mailbox 2
has the lowest priority.
Note: It is set to zero when only one mailbox is pending.
Bit 6 LOW1 Lowest Priority Flag for Mailbox 1
This bit is set by hardware when more than one mailbox is pending for transmission and mailbox 1
has the lowest priority.
Note: It is set to zero when only one mailbox is pending.
Bit 5 LOW0 Lowest Priority Flag for Mailbox 0
This bit is set by hardware when more than one mailbox is pending for transmission and mailbox 0
has the lowest priority.
Note: It is set to zero when only one mailbox is pending.
Bit 4 TME2 Transmit Mailbox 2 Empty
This bit is set by hardware when no transmit request is pending for mailbox 2.
Note: This bit is reserved, forced to 0 by hardware in ST7 beCAN compatibility mode (TXM2E bit = 0
in CAN_DGR register).

DocID14587 Rev 14 405/467
RM0016 Controller area network (beCAN)
427
Bit 3 TME1 Transmit Mailbox 1 Empty
This bit is set by hardware when no transmit request is pending for mailbox 1.
Bit 2 TME0 Transmit Mailbox 0 Empty
This bit is set by hardware when no transmit request is pending for mailbox 0.
Bits 1:0 CODE[1:0] Mailbox Code
When at least one transmit mailbox is free, this field contains the number of the next free transmit
mailbox.
When all transmit mailboxes are pending, this field contains the number of the transmit mailbox with
the lowest priority.
Note: CODE1 is always 0 in ST7 beCAN compatibility mode (TXM2E bit = 0 in CAN_DGR register).

Controller area network (beCAN) RM0016
406/467 DocID14587 Rev 14
23.11.5 CAN receive FIFO register (CAN_RFR)
Address offset: 0x04
Reset value: 0x00
76543210
Reserved RFOM FOVR FULL Reserved FMP[1:0]
rrsrc_w1rc_w1rrr
Bit 7:6 Reserved.
Bit 5 RFOM Release FIFO Output Mailbox
Set by software to release the output mailbox of the FIFO. The output mailbox can only be released
when at least one message is pending in the FIFO. Setting this bit when the FIFO is empty has no
effect. If more than one message is pending in the FIFO, the software has to release the output
mailbox to access the next message.
Cleared by hardware when the output mailbox has been released.
Bit 4 FOVR FIFO Overrun
This bit is set by hardware when a new message has been received and passed the filter while the
FIFO was full.
This bit is cleared by software writing ‘1’.
Bit 3 FULL FIFO Full
Set by hardware when three messages are stored in the FIFO.
This bit can be cleared by software writing ‘1’ or by releasing the FIFO by means of RFOM.
Bit 2 Reserved.
Bits 1:0 FMP[1:0] FIFO Message Pending
These bits indicate how many messages are pending in the receive FIFO.
FMP is increased each time the hardware stores a new message in to the FIFO. FMP is decreased
each time the FIFO output mailbox has been released by hardware (RFOM bit has been cleared
after prior setting by software).

DocID14587 Rev 14 407/467
RM0016 Controller area network (beCAN)
427
23.11.6 CAN interrupt enable register (CAN_IER)
Address offset: 0x05
Reset value: 0x00
76543210
WKUIE Reserved FOVIE FFIE FMPIE TMEIE
rw r rw rw rw rw
Bit 7 WKUIE Wakeup Interrupt Enable
0: No interrupt when WKUI is set.
1: Interrupt generated when WKUI bit is set.
Bit 6:4 Reserved.
Bit 3 FOVIE FIFO Overrun Interrupt Enable
0: No interrupt when FOVR bit is set.
1: Interrupt generated when FOVR bit is set.
Bit 2 FFIE FIFO Full Interrupt Enable
0: No interrupt when FULL bit is set.
1: Interrupt generated when FULL bit is set.
Bit 1 FMPIE FIFO Message Pending Interrupt Enable
0: No interrupt on FMP[1:0] bits transition from 0b00 to 0b01.
1: Interrupt generated on FMP[1:0] bits transition from 0b00 to 0b01.
Bit 0 TMEIE Transmit Mailbox Empty Interrupt Enable
0: No interrupt when RQCPx bit is set.
1: Interrupt generated when RQCPx bit is set.
Controller area network (beCAN) RM0016
408/467 DocID14587 Rev 14
23.11.7 CAN diagnostic register (CAN_DGR)
Address offset: 0x06
Reset value: 0x0C
23.11.8 CAN page select register (CAN_PSR)
Address offset: 0x07
Reset value: 0x00
76543210
Reserved TXM2E RX SAMP SILM LBKM
rrwrrrwrw
Bit 7:5 Reserved.
Bit 4 TXM2E TX Mailbox 2 enable
0: Force compatibility with ST7 beCAN (2 TX Mailboxes) - reset value
1: Enables the third TX Mailbox (Mailbox number 2)
Bit 3 RX CAN Rx Signal
Monitors the actual value of the CAN_RX Pin.
Bit 2 SAMP Last sample point
The value of the last sample point.
Bit 1 SILM Silent mode
0: Normal operation
1: Silent mode
Bit 0 LBKM Loop back mode
0: Loop back mode disabled
1: Loop back mode enabled
76543210
Reserved PS[2:0]
rrwrwrw
Bits 7:3 Reserved.
Bits 2:0 PS[2:0] Page select
This register is used to select the register page.
000: Tx Mailbox 0
001: Tx Mailbox 1
010: Acceptance Filter 0:1
011: Acceptance Filter 2:3
100: Acceptance Filter 4:5
101: Tx Mailbox 2
110: Configuration/Diagnostic
111: Receive FIFO
Refer to Figure 158 for more details.

DocID14587 Rev 14 409/467
RM0016 Controller area network (beCAN)
427
23.11.9 CAN error status register (CAN_ESR)
Address offset: See Table 71.
Reset value: 0000 0000 (00h)
76543210
Reserved LEC[2:0] Reserved BOFF EPVF EWGF
rrwrwrwrrrr
Bit 7 Reserved.
Bit 6:4 LEC[2:0] Last error code
This field holds a code which indicates the type of the last error detected on the CAN bus. If a
message has been transferred (reception or transmission) without error, this field will be cleared to
‘0’. The code 7 is unused and may be written by the CPU to check for update.
000: No Error
001: Stuff Error
010: Form Error
011: Acknowledgment Error
100: Bit recessive Error
101: Bit dominant Error
110: CRC Error
111: Set by software
Bit 3 Reserved.
Bit 2 BOFF Bus-off flag
This bit is set by hardware when it enters the bus-off state. The bus-off state is entered on
CAN_TECR overrun, TEC greater than 255, refer to Section 23.6.5 on page 396.
Bit 1 EPVF Error passive flag
This bit is set by hardware when the Error Passive limit has been reached (Receive Error Counter or
Transmit Error Counter greater than 127).
Bit 0 EWGF Error warning flag
This bit is set by hardware when the warning limit has been reached. Receive Error Counter or
Transmit Error Counter greater than 96.

Controller area network (beCAN) RM0016
410/467 DocID14587 Rev 14
23.11.10 CAN error interrupt enable register (CAN_EIER)
Address offset: See Table 71.
Reset value: 0000 0000 (00h)
23.11.11 CAN transmit error counter register (CAN_TECR)
Address offset: See Table 71.
Reset value: 0000 0000 (00h)
76543210
ERRIE Reserved LECIE Reserved BOFIE EPVIE EWGIE
rw r rw r rw rw rw
Bit 7 ERRIE Error interrupt enable
0: No interrupt is generated when an error condition is pending in the CAN_ESR (ERRI bit in
CAN_MSR is set).
1: An interrupt is generated when an error condition is pending in the CAN_ESR (ERRI bit in
CAN_MSR is set).
Refer to Figure 156 for more details.
Bit 6:5 Reserved.
Bit 4 LECIE Last error code interrupt enable
0: ERRI bit is not set when the error code in LEC[2:0] is set by hardware on error detection.
1: ERRI bit is set when the error code in LEC[2:0] is set by hardware on error detection.
Bit 3 Reserved.
Bit 2 BOFIE Bus-Off interrupt enable
0: ERRI bit is not set when BOFF is set.
1: ERRI bit is set when BOFF is set.
Bit 1 EPVIE Error passive interrupt enable
0: ERRI bit is not set when EPVF is set.
1: ERRI bit is set when EPVF is set.
Bit 0 EWGIE Error warning interrupt enable
0: ERRI bit is not set when EWGF is set.
1: ERRI bit is set when EWGF is set.
76543210
TEC[7:0]
rrrrrrrr
Bits 7:0 TEC[7:0] Transmit error counter
In case of an error during transmission, this counter is incremented by 8 depending on the error
condition as defined by the CAN standard. After every successful transmission the counter is
decremented by 1 or reset to 0 if the CAN controller exited from bus-off to error active state. When
the counter value exceeds 127, the CAN controller enters the error passive state. When the counter
value exceeds 255, the CAN controller enters the bus-off state.

DocID14587 Rev 14 411/467
RM0016 Controller area network (beCAN)
427
23.11.12 CAN receive error counter register (CAN_RECR)
Address offset: See Table 71.
Reset value: 0000 0000 (00h)
23.11.13 CAN bit timing register 1 (CAN_BTR1)
Address offset: See Table 71.
Reset value: 0100 0000 (40h)
This register can only be accessed by the software when the CAN hardware is in
initialization mode.
76543210
REC[7:0]
rrrrrrrr
Bits 7:0 REC[7:0] Receive error counter
This is the Receive Error Counter implementing part of the fault confinement mechanism of the CAN
protocol. In case of an error during reception, this counter is incremented by 1 or by 8 depending on
the error condition as defined by the CAN standard. After every successful reception the counter is
decremented by 1 or reset to 120 if its value was higher than 128. When the counter value exceeds
127, the CAN controller enters the error passive state.
76543210
SJW[1:0] BRP[5:0]
rw rw rw rw rw rw rw rw
Bits 7:6 SJW[1:0] Resynchronization jump width
These bits define the maximum number of time quanta the CAN hardware is allowed to lengthen or
shorten a bit to perform the resynchronization. Resynchronization Jump Width = (SJW+1).
Bits 5:0 BRP[5:0] Baud rate prescaler
These bits define the length of a time quantum.
tq = (BRP+1)/fMASTER

Controller area network (beCAN) RM0016
412/467 DocID14587 Rev 14
23.11.14 CAN bit timing register 2 (CAN_BTR2)
Address offset: See Table 71.
Reset value: 0x23
This register can only be accessed by the software when the CAN hardware is in
initialization mode.
76543210
Reserved BS2[2:0] BS1[3:0]
r rwrwrwrwrwrwrw
Bit 7 Reserved, must be kept cleared.
Bits 6:4 BS2[2:0] Bit Segment 2
These bits define the number of time quanta in Bit Segment 2.
Bit Segment 2 = (BS2+1)
Bits 3:0 BS1[3:0] Bit Segment 1
These bits define the number of time quanta in Bit Segment 1
Bit Segment 1 = (BS1+1)
For more information on bit timing, please refer to Section 23.6.6: Bit timing.
DocID14587 Rev 14 413/467
RM0016 Controller area network (beCAN)
427
23.11.15 Mailbox registers
This chapter describes the registers of the transmit and receive mailboxes. Refer to
Section 23.6.4: Message storage for detailed register mapping.
Transmit and receive mailboxes have the same registers except:
– CAN_MCSR register in a transmit mailbox is replaced by CAN_MFMIR register in
a receive mailbox.
– A receive mailbox is always write protected.
– A transmit mailbox is write enabled only while empty (the corresponding TME bit in
the CAN_TPR register is set).
Caution: As the mailbox registers usually have no defined reset value, the user should not rely on the
initial setup and should always fill all the configuration bits accordingly.
CAN message control/status register (CAN_MCSR)
Address offset: See Table 66. and Table 67.
Reset value: 0x00
Note: This register is implemented only in transmit mailboxes. In receive mailboxes, the
CAN_MFMIR register is mapped at this location.
76543210
Reserved TERR ALST TXOK RQCP ABRQ TXRQ
rrrrrc_w1rsrs
Bits 7:6 Reserved.
Bit 5 TERR Transmission error
This bit is updated by hardware after each transmission attempt.
0: The previous transmission was successful
1: The previous transmission failed due to an error
Bit 4 ALST Arbitration lost
This bit is updated by hardware after each transmission attempt.
0: The previous transmission was successful
1: The previous transmission failed due to an arbitration lost
Bit 3 TXOK Transmission OK
The hardware updates this bit after each transmission attempt.
0: The previous transmission failed
1: The previous transmission was successful
Note: This bit has the same value as the corresponding TXOKx bit in the CAN_TSR register.
Controller area network (beCAN) RM0016
414/467 DocID14587 Rev 14
CAN mailbox filter match index register (CAN_MFMIR)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
Note: This register is implemented only in receive mailboxes. In transmit mailboxes, the
CAN_MCSR register is mapped at this location.
Bit 2 RQCP Request completed
Set by hardware when the last request (transmit or abort) has been performed.
Cleared by software writing a “1” or by hardware on transmission request.
Note: This bit has the same value as the corresponding RQCPx bit of the CAN_TSR register.
Clearing this bit clears all the status bits (TXOK, ALST and TERR) in the CAN_MCSR register
and the corresponding RQCPx and TXOKx bits in the CAN_TSR register.
Bit 1 ABRQ Abort request for mailbox
Set by software to abort the transmission request for the corresponding mailbox.
Cleared by hardware when the mailbox becomes empty.
Setting this bit has no effect when the mailbox is not pending for transmission.
Bit 0 TXRQ Transmit mailbox request
Set by software to request the transmission for the corresponding mailbox.
Cleared by hardware when the mailbox becomes empty.
76543210
FMI[7:0]
rrrrrrrr
Bits 7:0 FMI[7:0] Filter match index
This register contains the index of the filter the message stored in the mailbox passed through. For
more details on identifier filtering please refer to Section 23.6.3: Identifier filtering - Filter Match
Index paragraph.
DocID14587 Rev 14 415/467
RM0016 Controller area network (beCAN)
427
CAN mailbox identifier register 1 (CAN_MIDR1)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
CAN mailbox identifier register 2 (CAN_MIDR2)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
76543210
Reserved IDE RTR STID[10:6] / EXID[28:24]
r rwrwrwrwrwrwrw
Bit 7 Reserved.
Bit 6 IDE Extended identifier
This bit defines the identifier type of message in the mailbox.
0: Standard identifier.
1: Extended identifier.
Bit 5 RTR Remote transmission request
0: Data frame
1: Remote frame
Bits 4:0 STID[10:6] Standard identifier
5 most significant bits of the standard part of the identifier.
or
EXID[28:24] Extended identifier
5 most significant bits of the “Base” part of extended identifier.
76543210
STID[5:0] / EXID[23:18] EXID[17:16]
rw rw rw rw rw rw rw rw
Bits 7:2 STID[5:0] Standard Identifier
6 least significant bits of the standard part of the identifier.
or
EXID[23:18] Extended Identifier
6 least significant bits of the “Base” part of extended identifier.
Bits 1:0 EXID[17:16] Extended Identifier
2 most significant bits of the “Extended” part of the extended identifier.
Controller area network (beCAN) RM0016
416/467 DocID14587 Rev 14
CAN mailbox identifier register 3 (CAN_MIDR3)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
CAN mailbox identifier register 4 (CAN_MIDR4)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
CAN mailbox data length control register (CAN_MDLCR)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
76543210
EXID[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 EXID[15:8] Extended identifier
Bit 15 to 8 of the “Extended” part of the extended identifier.
76543210
EXID[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 EXID[7:0] Extended identifier
8 least significant bits of the “Extended” part of the extended identifier.
76543210
TGT Reserved DLC[3:0]
rw r rw rw rw rw
Bit 7 TGT Transmit global time
This bit should be used only when the hardware is in the Time Trigger Communication mode, TTCM
bit in the CAN_MCR register is set. It must be cleared by user in Normal mode to transfer last two
data bytes correctly
0: CAN_MTSRH and CAN_MTSRL registers are not sent.
1: CAN_MTSRH and CAN_MTSRL registers are sent in the last two data bytes of the message.
Bits 6:4 Reserved.
Bits 3:0 DLC[3:0] Data length code
This field defines the number of data bytes in a data frame or a remote frame request.
DocID14587 Rev 14 417/467
RM0016 Controller area network (beCAN)
427
CAN mailbox data register x (CAN_MDAR) (x= 1 .. 8)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
CAN mailbox time stamp register low (CAN_MTSRL)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
CAN mailbox time stamp register high (CAN_MTSRH)
Address offset: See Table 66. and Table 67.
Reset value: 0xXX
76543210
DATA[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 DATA[7:0] Data
A data byte of the message. A message can contain from 0 to 8 data bytes.
Note: These bits are write protected when the mailbox is not in empty state.
76543210
TIME[7:0]
rrrrrrrr
Bits 7:0 TIME[7:0] Message time stamp low
This field contains the low byte of the 16-bit timer value captured at the SOF detection.
76543210
TIME[15:8]
rrrrrrrr
Bits 7:0 TIME[15:8] Message time stamp high
This field contains the high byte of the 16-bit timer value captured at the SOF detection.
Controller area network (beCAN) RM0016
418/467 DocID14587 Rev 14
23.11.16 CAN filter registers
CAN filter mode register 1 (CAN_FMR1)
Address offset: See Table 71.
Reset value: 0x00
76543210
FMH3 FML3 FMH2 FML2 FMH1 FML1 FMH0 FML0
rw rw rw rw rw rw rw rw
Bit 7 FMH3 Filter 3 mode high
Mode of the high identifier/mask registers of Filter 3.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bit 6 FML3 Filter 3 mode low
Mode of the low identifier/mask registers of Filter 3.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
Bit 5 FMH2 Filter 2 mode high
Mode of the high identifier/mask registers of Filter 2.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bit 4 FML2 Filter 2 mode low
Mode of the low identifier/mask registers of Filter 2.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
Bit 3 FMH1 Filter 1 mode high
Mode of the high identifier/mask registers of Filter 1.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bits 2 FML1 Filter 1 mode low
Mode of the low identifier/mask registers of filter 1.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
Bit 1 FMH0 Filter 0 mode high
Mode of the high identifier/mask registers of filter 0.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bit 0 FML0 Filter 0 mode low
Mode of the low identifier/mask registers of filter 0.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
DocID14587 Rev 14 419/467
RM0016 Controller area network (beCAN)
427
CAN filter mode register 2 (CAN_FMR2)
Address offset: See Table 71.
Reset value: 0x00
76543210
Reserved FMH5 FML5 FMH4 FML4
rrwrwrwrw
Bits 7:4 Reserved.
Bit 3 FMH5 Filter 5 mode high
Mode of the high identifier/mask registers of Filter 5.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bits 2 FML5 Filter 5 mode low
Mode of the low identifier/mask registers of filter 5.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
Bit 1 FMH4 Filter 4 mode high
Mode of the high identifier/mask registers of filter 4.
0: High registers are in mask mode
1: High registers are in identifier list mode
Bit 0 FML4 Filter 4 mode low
Mode of the low identifier/mask registers of filter 4.
0: Low registers are in mask mode
1: Low registers are in identifier list mode
Controller area network (beCAN) RM0016
420/467 DocID14587 Rev 14
CAN filter configuration register 1 (CAN_FCR1)
Address offset: See Table 71.
Reset value: 0x00
76543210
Reserved FSC11 FSC10 FACT1 Reserved FSC01 FSC00 FACT0
r rw rw rw r rw rw rw
Bit 7 Reserved.
Bits 6:5 FSC1[1:0] Filter scale configuration
These bits define the scale configuration of Filter 1.
Bit 4 FACT1 Filter Active
The software sets this bit to activate Filter 1. To modify the Filter 1 registers (CAN_F1Rx), the
FACT1 bit must be cleared.
0: Filter 1 is not active
1: Filter 1 is active
Bit 3 Reserved.
Bits 2:1 FSC0[1:0] Filter scale configuration
These bits define the scale configuration of Filter 0.
Bit 0 FACT0 Filter active
The software sets this bit to activate Filter 0. To modify the Filter 0 registers (CAN_F0Rx), the
FACT0 bit must be cleared.
0: Filter 0 is not active
1: Filter 0 is active
DocID14587 Rev 14 421/467
RM0016 Controller area network (beCAN)
427
CAN filter configuration register 2 (CAN_FCR2)
Address offset: See Table 71.
Reset value: 0x00
76543210
Reserved FSC31 FSC30 FACT3 Reserved FSC21 FSC20 FACT2
r rw rw rw r rw rw rw
Bit 7 Reserved.
Bits 6:5 FSC3[1:0] Filter scale configuration
These bits define the scale configuration of Filter 3.
Bit 4 FACT3 Filter active
The software sets this bit to activate Filter 3. To modify the Filter 3 registers (CAN_F3Rx) the FACT3
bit must be cleared.
0: Filter 3 is not active
1: Filter 3 is active
Bit 3 Reserved.
Bits 2:1 FSC2[1:0] Filter scale configuration
These bits define the scale configuration of Filter 2.
Bit 0 FACT2 Filter active
The software sets this bit to activate Filter 2. To modify the Filter 2 registers (CAN_F2Rx), the
FACT2 bit must be cleared.
0: Filter 2 is not active
1: Filter 2 is active
Controller area network (beCAN) RM0016
422/467 DocID14587 Rev 14
CAN filter configuration register 3 (CAN_FCR3)
Address offset: See Table 71.
Reset value: 0x00
76543210
Reserved FSC51 FSC50 FACT5 Reserved FSC41 FSC40 FACT4
r rw rw rw r rw rw rw
Bit 7 Reserved.
Bits 6:5 FSC5[1:0] Filter scale configuration
These bits define the scale configuration of Filter 5.
Bit 4 FACT5 Filter active
The software sets this bit to activate Filter 5. To modify the Filter 5 registers (CAN_F5Rx) the FACT5
bit must be cleared.
0: Filter 5 is not active
1: Filter 5 is active
Bit 3 Reserved.
Bits 2:1 FSC4[1:0] Filter scale configuration
These bits define the scale configuration of Filter 4.
Bit 0 FACT4 Filter active
The software sets this bit to activate Filter 4. To modify the Filter 4 registers (CAN_F4Rx), the
FACT4 bit must be cleared.
0: Filter 4 is not active
1: Filter 4 is active
DocID14587 Rev 14 423/467
RM0016 Controller area network (beCAN)
427
CAN filter bank i register x (CAN_FiRx) (i = 0 .. 5, x = 1 .. 8)
Address offset: See Figure 158.
Reset value: 0xXX
76543210
FB(7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 FB[7:0]: Filter bits
– Identifier
Each bit of the register specifies the level of the corresponding bit of the expected identifier.
0: Dominant bit is expected
1: Recessive bit is expected
–Mask
Each bit of the register specifies whether the bit of the associated identifier register must match with
the corresponding bit of the expected identifier or not.
0: Don’t care, the bit is not used for the comparison
1: Must match, the bit of the incoming identifier must have the same level has specified in the
corresponding identifier register of the filter.
Note: Each filter i is composed of 8 registers, CAN_FiR1..8. Depending on the scale and mode
configuration of the filter the function of each register can differ. For the filter mapping, functions
description and mask registers association, refer to Section Figure 23.6.3: Identifier filtering.
A Mask/Identifier register in mask mode has the same bit mapping as in identifier list mode.
Note: To modify these registers, the corresponding FACT bit in the CAN_FCRx register must
be cleared.
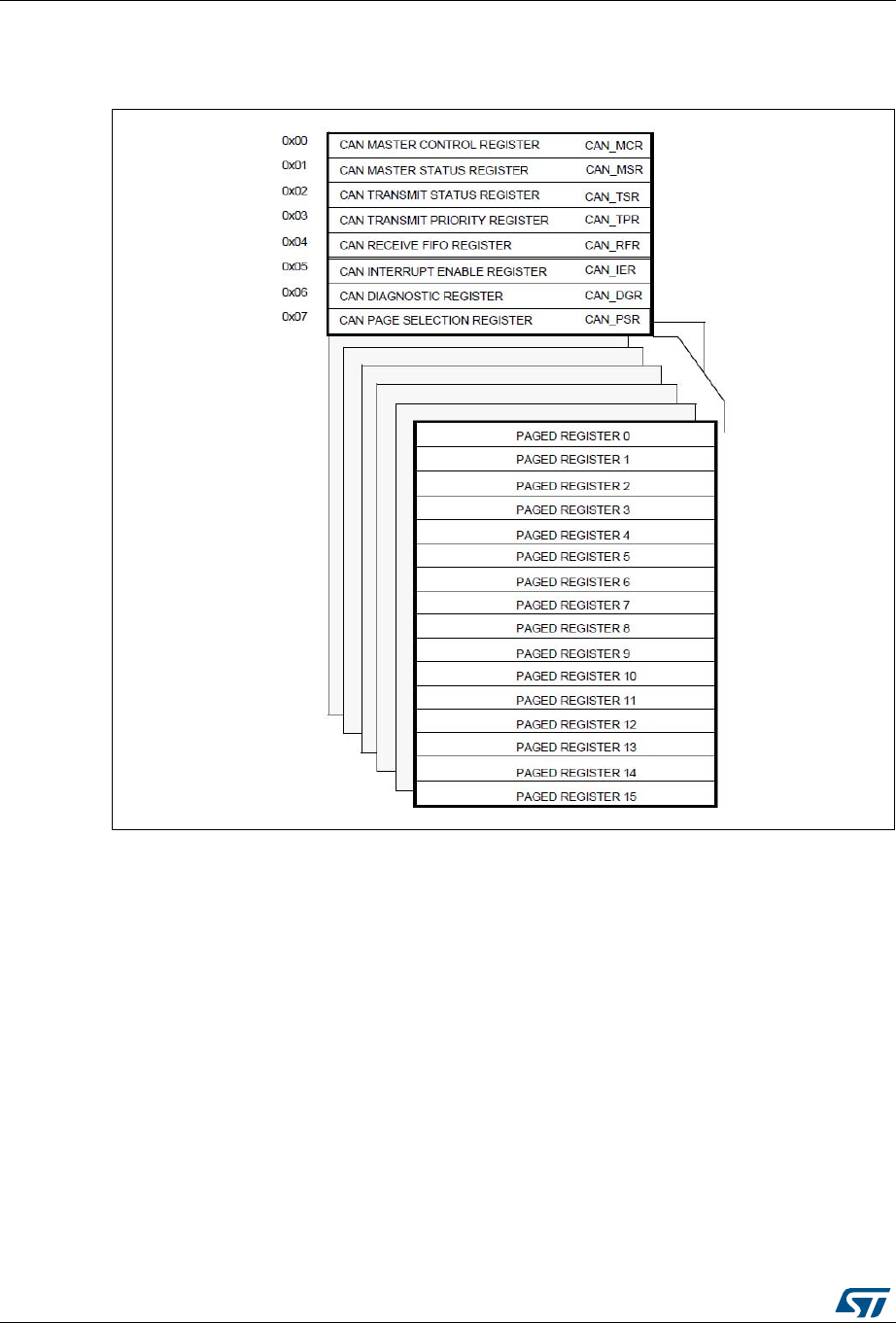
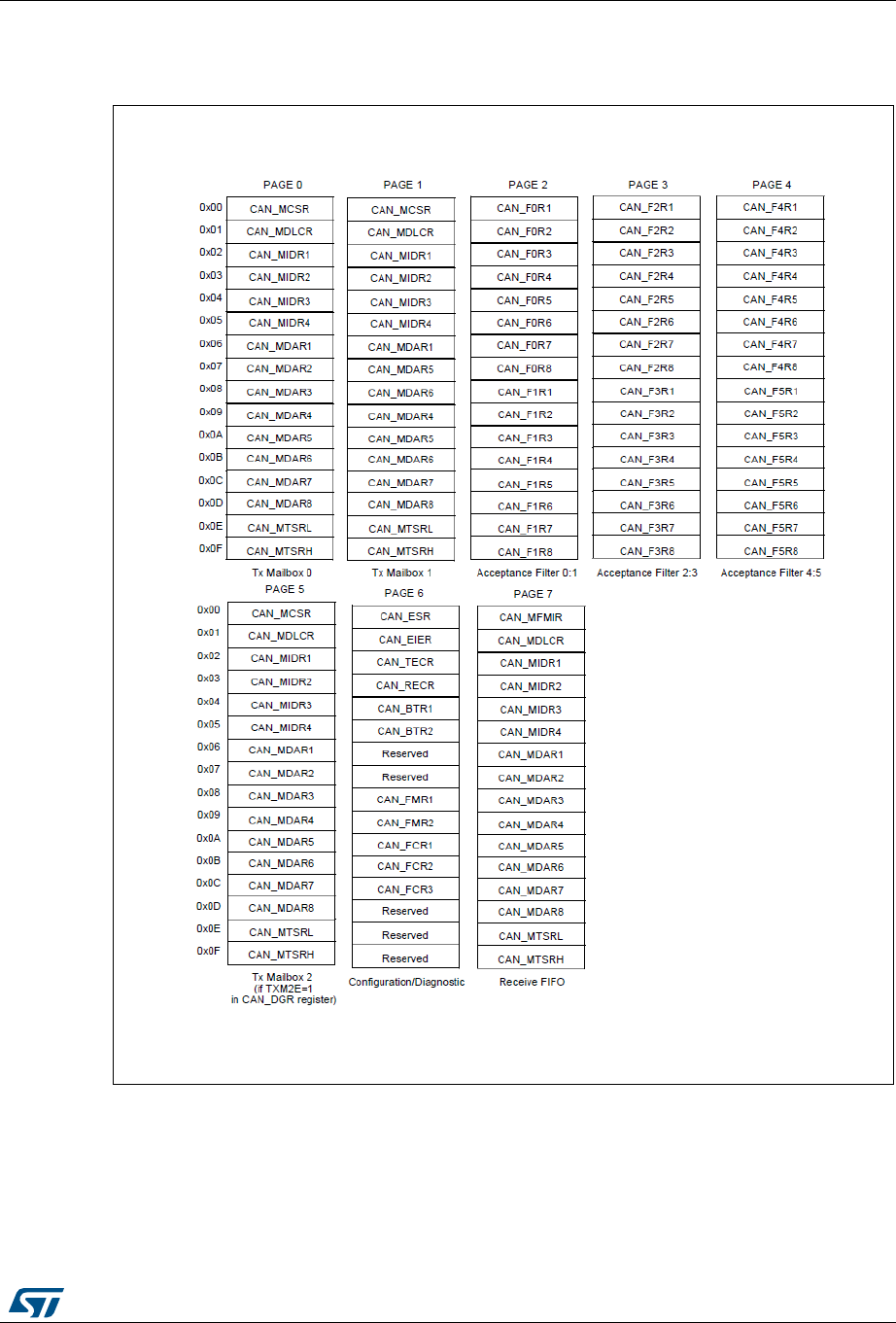
Controller area network (beCAN) RM0016
426/467 DocID14587 Rev 14
Table 69. beCAN control and status page - register map and reset values
Address
Offset Register name765 4 3210
0x00 CAN_MCR
Reset Value
TTCM
0
ABOM
0
AWUM
0
NART
0
RFLM
0
TXFP
0
SLEEP
1
INRQ
0
0x01 CAN_MSR
Reset Value 0 0
RX
0
TX
0
WKUI
0
ERRI
0
SLAK
1
INAK
0
0x02 CAN_TSR
Reset Value 0
TXOK2
0
TXOK1
0
TXOK0
00
RQCP2
0
RQCP1
0
RQCP0
0
0x03 CAN_TPR
Reset Value
LOW2
0
LOW1
0
LOW0
0
TME2
0
TME1
1
TME0
1
CODE1
0
CODE0
0
0x04 CAN_RFR
Reset Value 0 0
RFOM
0
FOVR
0
FULL
00
FMP1
0
FMP0
0
0x05 CAN_IER
Reset Value
WKUIE
000 0
FOVIE
0
FFIE
0
FMPIE
0
TMEIE
0
0x06 CAN_DGR
Reset Value 0 0 0
TXM2E
0
RX
1
SAMP
1
SILM
0
LBKM
0
0x07 CAN_PSR
Reset Value 0 0 0 0 0
PS2
0
PS1
0
PS0
0
Table 70. beCAN mailbox pages - register map and reset values
Address
Offset Register name 7 6 5 4 3 2 1 0
0x00
Receive
CAN_MFMIR
Reset Value
FMI7
x
FMI6
x
FMI5
x
FMI4
x
FMI3
x
FMI2
x
FMI1
x
FMI0
x
0x00
Transmit
CAN_MCSR
Reset Value 0 0
TERR
0
ALST
0
TXOK
0
RQCP
0
ABRQ
0
TXRQ
0
0x01 CAN_MDLCR
Reset Value
TGT
xxx x
DLC3
x
DLC2
x
DLC1
x
DLC0
x
0x02
CAN_MIDR1
Reset Value x
IDE
x
RTR
x
STID10 /
EXID28
x
STID9 /
EXID27
x
STID8 /
EXID26
x
STID7 /
EXID25
x
STID6 /
EXID24
x
0x03
CAN_MIDR2
Reset Value
STID5 /
EXID23
x
STID4 /
EXID22
x
STID3 /
EXID21
x
STID2 /
EXID20
x
STID1 /
EXID19
x
STID0 /
EXID18
x
EXID17
x
EXID16
x
0x04 CAN_MIDR3
Reset Value
EXID15
x
EXID14
x
EXID13
x
EXID12
x
EXID11
x
EXID10
x
EXID9
x
EXID8
x
0x05 CAN_MIDR4
Reset Value
EXID7
x
EXID6
x
EXID5
x
EXID4
x
EXID3
x
EXID2
x
EXID1
x
EXID0
x
0x06:0D CAN_MDAR1:8
Reset Value
MDAR7
x
MDAR6
x
MDAR5
x
MDAR4
x
MDAR3
x
MDAR2
x
MDAR1
x
MDAR0
x
0x0E CAN_MTSRL
Reset Value
TIME7
x
TIME6
x
TIME5
x
TIME4
x
TIME3
x
TIME2
x
TIME1
x
TIME0
x
0x0F CAN_MTSRH
Reset Value
TIME15
x
TIME14
x
TIME13
x
TIME12
x
TIME11
x
TIME10
x
TIME9
x
TIME8
x
DocID14587 Rev 14 427/467
RM0016 Controller area network (beCAN)
427
Table 71. beCAN filter configuration page - register map and reset values
Address
Offset Register name 7 6 5 4 3 2 1 0
0x00 CAN_ESR
Reset Value 0LEC2
0
LEC1
0
LEC0
00BOFF
0
EPVF
0
EWGF
0
0x01 CAN_EIER
Reset Value
ERRIE
000
LECIE
00BOFIE
0
EPVIE
0
EWGIE
0
0x02 CAN_TECR
Reset Value
TEC7
0
TEC6
0
TEC5
0
TEC4
0
TEC3
0
TEC2
0
TEC1
0
TEC0
0
0x03 CAN_RECR
Reset Value
REC7
0
REC6
0
REC5
0
REC4
0
REC3
0
REC2
0
REC1
0
REC0
0
0x04 CAN_BTR1
Reset Value
SJW1
0
SJW0
1
BRP5
0
BRP4
0
BRP3
0
BRP2
0
BRP1
0
BRP0
0
0x05 CAN_BTR2
Reset Value 0BS22
0
BS21
1
BS20
0
BS13
0
BS12
0
BS11
1
BS10
1
0x06 Reserved XXXXXXXX
0x07 Reserved XXXXXXXX
0x08 CAN_FMR1
Reset Value
FMH3
0
FML3
0
FMH2
0
FML2
0
FMH1
0
FML1
0
FMH0
0
FML0
0
0x09 CAN_FMR2
Reset Value 000 0
FMH5
0
FML5
0
FMH4
0
FML4
0
0x0A CAN_FCR1
Reset Value 0FSC11
0
FSC10
0
FACT1
00FSC01
0
FSC00
0
FACT0
0
0x0B CAN_FCR2
Reset Value 0FSC31
0
FSC30
0
FACT3
00FSC21
0
FSC20
0
FACT2
0
0x0C CAN_FCR3
Reset Value 0FSC51
0
FSC50
0
FACT5
00FSC41
0
FSC40
0
FACT4
0

Analog/digital converter (ADC) RM0016
428/467 DocID14587 Rev 14
24 Analog/digital converter (ADC)
24.1 Introduction
ADC1 and ADC2 are 10-bit successive approximation Analog to Digital Converters. They
have up to 16 multiplexed input channels (the exact number of channels is indicated in the
datasheet pin description). A/D Conversion of the various channels can be performed in
single, and continuous modes.
ADC1 has extended features for scan mode, buffered continuous mode and analog
watchdog. Refer to the datasheet for information about the availability of ADC1 and ADC2 in
specific product types.
24.2 ADC main features
These features are available in ADC1 and ADC2.
•10-bit resolution
•Single and continuous conversion modes
•Programmable prescaler: fMASTER divided by 2 to 18
•External trigger option using external interrupt (ADC_ETR) or timer trigger (TRGO)
•Analog zooming (in devices with VREF pins)
•Interrupt generation at End of Conversion
•Data alignment with in-built data coherency
•ADC input range: VSSA ≤ VIN ≤ VDDA
24.3 ADC extended features
These features are available in ADC1.
•Buffered continuous conversion mode(a)
•Scan mode for single and continuous conversion
•Analog watchdog with upper and lower thresholds
•Interrupt generation at analog watchdog event
The block diagrams of ADC1 and ADC2 are shown in Figure 159 and Figure 160
a. Data buffer size is product dependent (10 x 10 bits or 8 x 10 bits). Please refer to the datasheet.
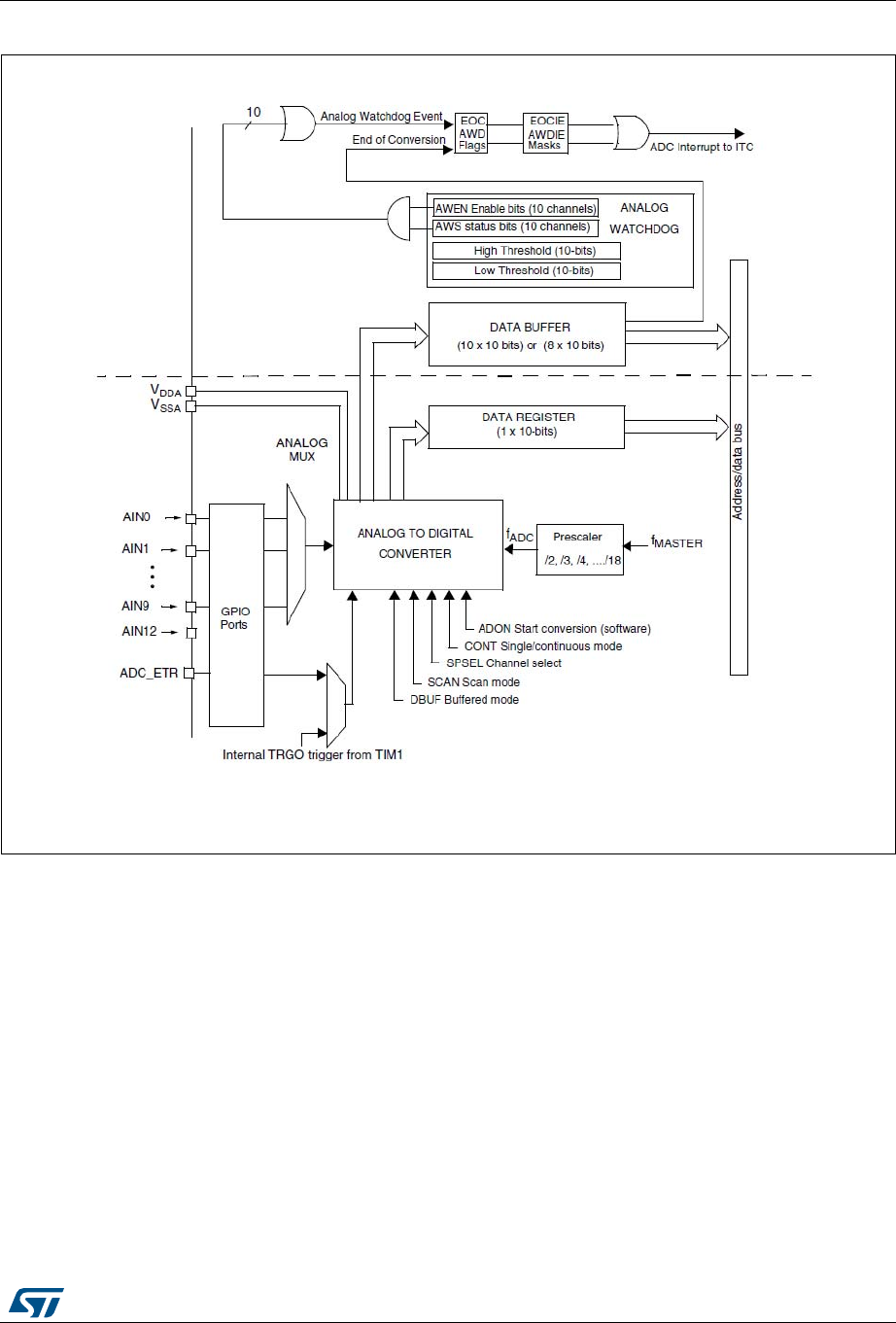
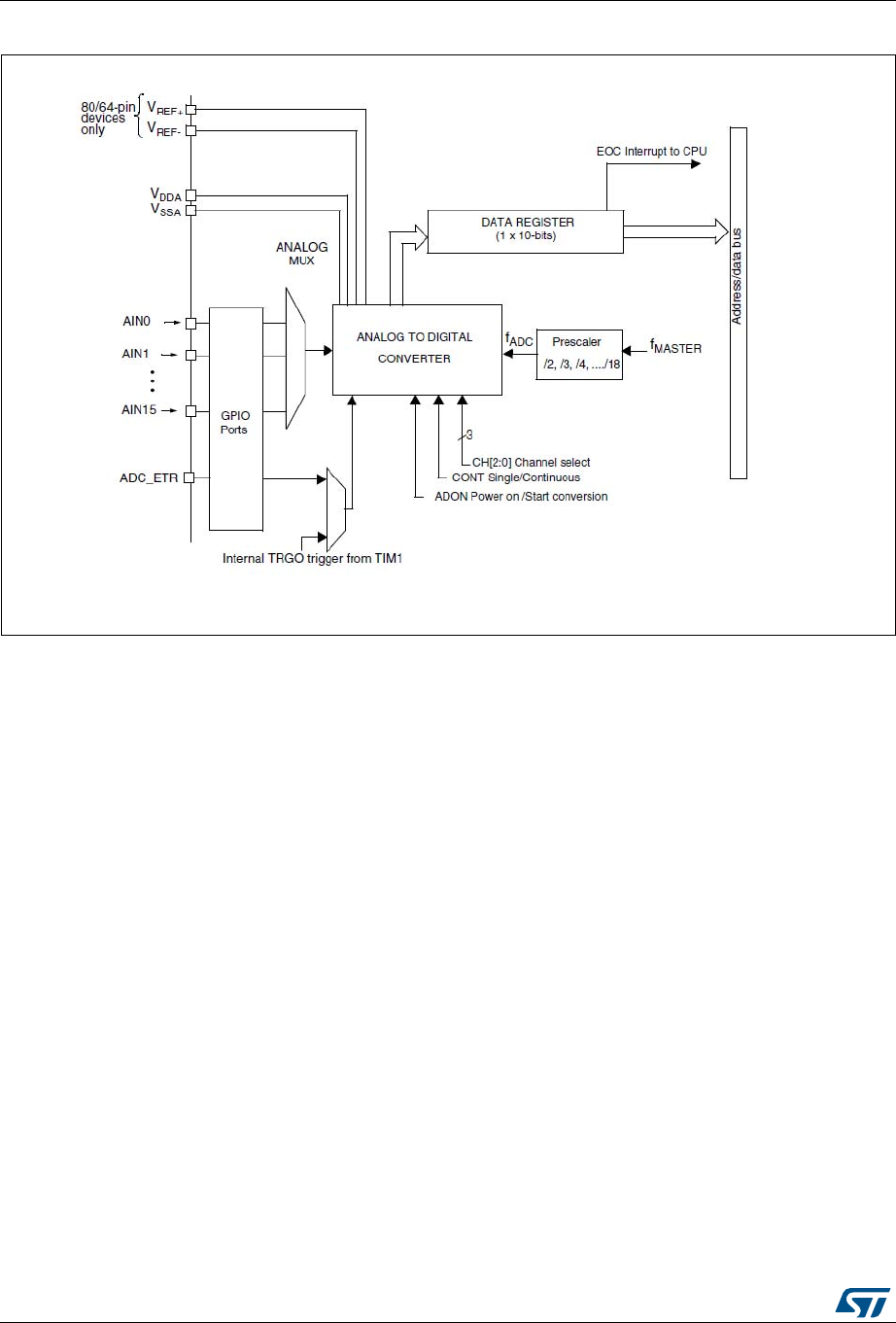
DocID14587 Rev 14 431/467
RM0016 Analog/digital converter (ADC)
454
24.4 ADC pins
24.5 ADC functional description
24.5.1 ADC on-off control
The ADC can be powered-on by setting the ADON bit in the ADC_CR1 register. When the
ADON bit is set for the first time, it wakes up the ADC from power down mode. To start
conversion, set the ADON bit in the ADC_CR1 register with a second write instruction.
At the end of conversion, the ADC remains powered on and you have to set the ADON bit
only once to start the next conversion.
If the ADC is not used for a long time, it is recommended to switch it to power down mode to
decrease power consumption. This is done by clearing the ADON bit.
When the ADC is powered on, the digital input and output stages of the selected channel
are disabled independently on the GPIO pin configuration. It is therefore recommended to
select the analog input channel before powering on the ADC (see Section 24.5.3: Channel
selection).
24.5.2 ADC clock
The clock supplied to the ADC can by a prescaled fMASTER clock. The prescaling factor of
the clock depends on the SPSEL[2:0] bits in the ADC_CR1 register.
Table 72. ADC pins
Name Signal type Remarks
VDDA
Input, Analog
supply
Analog power supply. This input is bonded to VDD in
devices that have no external VDDA pin.
VSSA
Input, Analog
supply ground
Ground for analog power supply. This input is bonded to
VSS in devices that have no external VSSA pin.
VREF-
Input, Analog
Reference negative
The lower/negative reference voltage for the ADC,
ranging from VSSA to (VSSA + 500 mV).
This input is bonded to VSSA in devices that have no
external VREF- pin (packages with 48 pins or less)
VREF+
Input, Analog
Reference positive
The higher/positive reference voltage for the ADC,
ranging from 2.75 V to VDDA. This input is bonded to VDDA
in devices that have no external VREF+ pin (packages with
48 pins or less)
AIN[15:0] Analog input signals Up to 16 analog input channels, which are converted by
the ADC one at a time.
ADC_ETR Digital input signals External trigger.

Analog/digital converter (ADC) RM0016
432/467 DocID14587 Rev 14
24.5.3 Channel selection
There are up to 16 external input channels that can be selected through CH[0:3] bits of the
ADC_CSR register. The number of external channels depends on the device (refer to the
product datasheets).
If the channel selection is changed during a conversion, the current conversion is reset and
a new start pulse is sent to the ADC.
24.5.4 Conversion modes
The ADC supports five conversion modes: single mode, continuous mode, buffered
continuous mode, single scan mode, continuous scan mode.
Note: ADC1 AIN12 channel cannot be selected in ADC scan mode or with analog watchdog.
Values converted from AIN12 are stored only in the ADC_DRH/ADC_DRL registers. Refer
to product datasheet for AIN12 availability.
Single mode
In Single conversion mode, the ADC does one conversion on the channel selected by the
CH[3:0] bits in the ADC_CSR register. This mode is started by setting the ADON bit in the
ADC_CR1 register, while the CONT bit is 0.
Once the conversion is complete, the converted data are stored in the ADC_DR register, the
EOC (End of Conversion) flag is set and an interrupt is generated if the EOCIE bit is set.
Continuous and buffered continuous modes
In continuous conversion mode, the ADC starts another conversion as soon as it finishes
one. This mode is started by setting the ADON bit in the ADC_CR1 register, while the CONT
bit is set.
•If buffering is not enabled (DBUF bit = 0 in the ADC_CR3 register), the converted data
is stored in the ADC_DR register and the EOC (End of Conversion) flag is set. An
interrupt is generated if the EOCIE bit is set. Then a new conversion starts
automatically.
•If buffering is enabled (DBUF bit =1) the data buffer is filled with the results of 8 or 10
consecutive conversions performed on a single channel. When the buffer is full, the
EOC (End of Conversion) flag is set and an interrupt is generated if the EOCIE bit is
set. Then a new set of 8 or 10 conversions starts automatically. The OVR flag is set if
one of the data buffer registers is overwritten before it has been read (see
Section 24.5.5).
To stop continuous conversion, reset the CONT bit to stop conversion or reset the ADON bit
to power off the ADC.
Single scan mode
This mode is used to convert a sequence of analog channels from AIN0 to AINn where ‘n’ is
the channel number defined by the CH[3:0] bits in the ADC_CSR register. During the scan
conversion sequence the CH[3:0] bits are updated by hardware and contain the channel
number currently being converted.
Single scan mode is started by setting the ADON bit while the SCAN bit is set and the
CONT bit is cleared.
DocID14587 Rev 14 433/467
RM0016 Analog/digital converter (ADC)
454
Note: When using scan mode, it is not possible to use channels AIN0 to AINn in output mode
because the output stage of each channel is disabled when it is selected by the ADC
multiplexer.
A single conversion is performed for each channel starting with AIN0 and the data is stored
in the data buffer registers ADC_DBxR. When the last channel (channel ‘n’) has been
converted, the EOC (End of Conversion) flag is set and an interrupt is generated if the
EOCIE bit is set.
The converted values for each channel can be read from the data buffer registers. The OVR
flag is set if one of the data buffer registers is overwritten before it has been read (see
Section 24.5.5).
Do not clear the SCAN bit while the conversion sequence is in progress. Single scan mode
can be stopped immediately by clearing the ADON bit.
To start a new SCAN conversion, clear the EOC bit and set the ADON bit in the ADC_CR1
register.
Continuous scan mode
This mode is like single scan mode except that each time the last channel has been
converted, a new scan conversion from channel 0 to channel n starts automatically. The
OVR flag is set if one of the data buffer registers is overwritten before it has been read (see
Section 24.5.5).
Continuous scan mode is started by setting the ADON bit while the SCAN and CONT bits
are set.
Do not clear the SCAN bit while scan conversion is in progress.
Continuous scan mode can be stopped immediately by clearing the ADON bit. Alternatively
if the CONT bit is cleared while conversion is ongoing, conversion stops the next time the
last channel has been converted.
Caution: In scan mode, do not use a bit manipulation instruction (BRES) to clear the EOC flag. This is
because this performs a read-modify-write on the whole ADC_CSR register, reading the
current channel number from the CH[3:0] register and writing it back, which changes the last
channel number for the scan sequence.
The correct way to clear the EOC flag in continuous scan mode is to load a byte in the
ADC_CSR register from a RAM variable, clearing the EOC flag and reloading the last
channel number for the scan sequence
24.5.5 Overrun flag
The OVR error flag is set by hardware in buffered continuous mode, single scan or
continuous scan modes. It indicates that one of the ten data buffer registers was overwritten
by a new converted value before the previous value was read. In this case, it is
recommended to start a new conversion.
Note: Setting the ADON bit automatically clears the OVR flag.
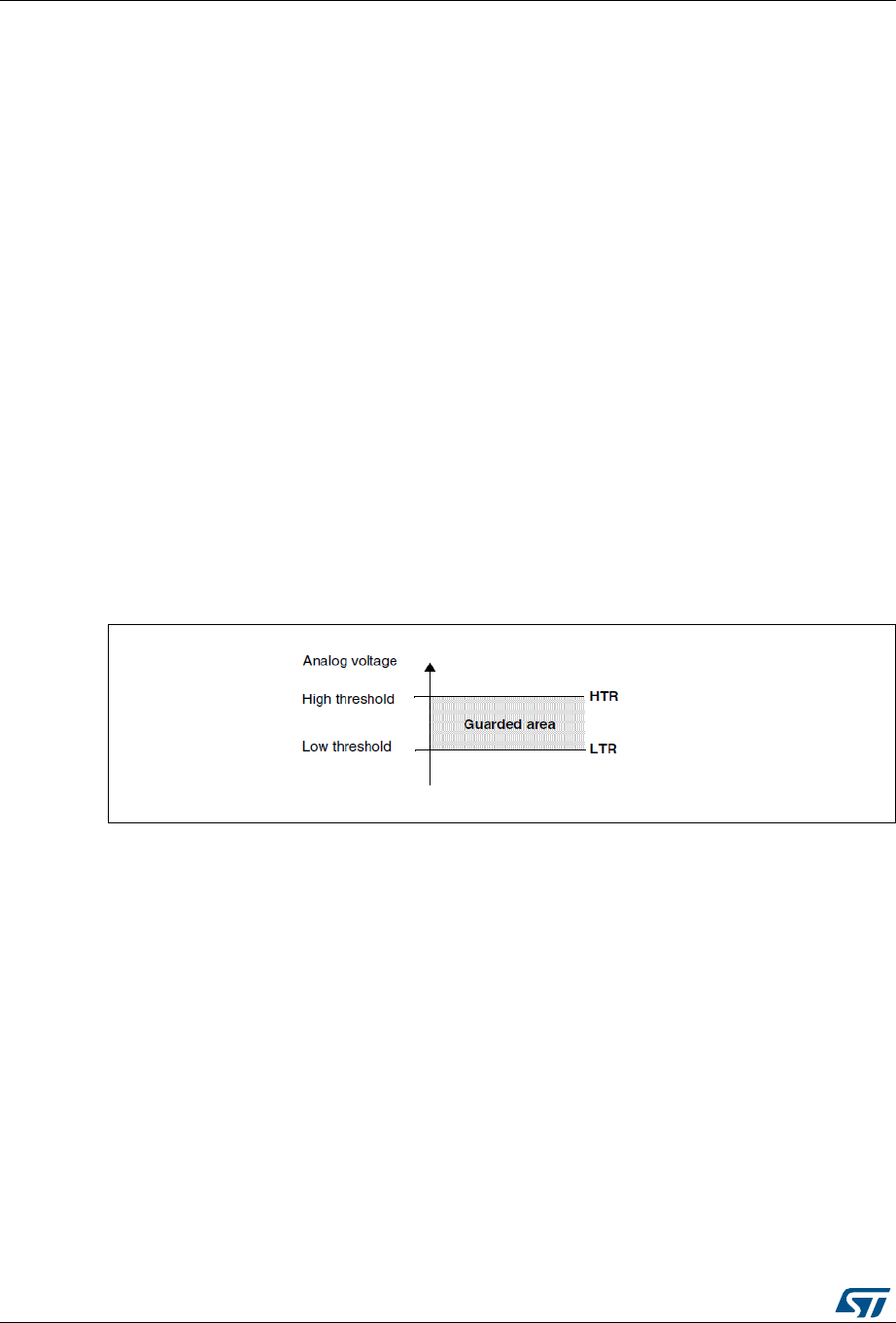
Analog/digital converter (ADC) RM0016
434/467 DocID14587 Rev 14
24.5.6 Analog watchdog
The analog watchdog is enabled by default for single conversion and non-buffered
continuous conversion modes.
The AWD analog watchdog flag is set if the analog voltage converted by the ADC is below a
low threshold or above a high threshold as shown in Figure 161. These thresholds are
programmed in the ADC_HTR and ADC_LTR 10-bit registers. An interrupt can be enabled
by setting the AWDIE bit in the ADC_CSR register.
For Scan mode, the analog watchdog can be enabled on selected channels using the
AWENx bits in the ADC_AWCRH and ADC_AWCRL registers. The watchdog status for
each channel is obtained by reading the AWSx bits in the ADC_AWSRH and ADC_AWSRL
registers. If any of the AWS flags are set, this also sets the AWD flag. Depending on the
AWDIE interrupt enable bit, an interrupt is generated at the end of the SCAN sequence. The
interrupt routine should then clear the AWS flag and the global AWD flag in the ADC_CSR
register.
For Buffered continuous mode, the analog watchdog can be enabled on selected buffers,
and is managed as described for scan mode, with the difference the buffers contain the
results of continuous conversions performed on a single channel.
Refer to Section 24.7 for more details on interrupts.
Note: To optimize analog watchdog interrupt latency in scan or buffered continuous mode, it
recommended to use the last channels in the conversion sequence.
Figure 161. Analog watchdog guarded area

DocID14587 Rev 14 435/467
RM0016 Analog/digital converter (ADC)
454
24.5.7 Conversion on external trigger
Conversion can be triggered by an rising edge event on the ADC_ETR pin or a TRGO event
from a timer. Refer to the datasheet for details on the timer trigger, as this is product depend-
ent). If the EXTTRIG control bit is set then either of the external events can be used to trigger
a conversion. The EXTSEL[1:0] bits are used to select the two possible sources of events
that can trigger conversion.
To use external trigger mode:
1. The ADC is in off state (ADON=0) and EOC bit is cleared.
2. Select trigger source (EXTSEL [1:0]).
3. Set external trigger mode EXTTRIG=1 using a BSET instruction in order not to change
other bits in the register.
4. If the trigger source is in high state, this switches on the ADC. For this reason, test if
ADC is switched off (ADON=0), then switch on ADC (ADON=1).
5. Wait for the stabilization time (tSTAB). If an external trigger occurs before tSTAB elapses,
the result will not be accurate.
6. Conversion starts when an external trigger event occurs.
Note: 1 If timer trigger mode is selected (timer event as trigger source, not external pin) it is
recommended to start the timer only when the ADC is completely set - and stop the timer
before the ADC is switched off.
2 External trigger mode must be disabled (EXTTRIG=0) before executing a HALT instruction.
24.5.8 Analog zooming
Analog zooming is supported in devices with external reference voltage pins (VREF+ and
VREF-). In analog zooming, the reference voltage is chosen to allow increased resolution in a
reduced voltage range. Refer to the datasheet for details on the allowed reference voltage
range.
24.5.9 Timing diagram
As shown in Figure 162, after ADC power on, the ADC needs a stabilization time tSTAB
(equivalent to one conversion time tCONV) before it starts converting accurately. For
subsequent conversions there is no stabilization delay and ADON needs to be set only
once. The ADC conversion time takes 14 clock cycles. After conversion the EOC flag is set
and the 10-bit ADC Data register contains the result of the conversion.
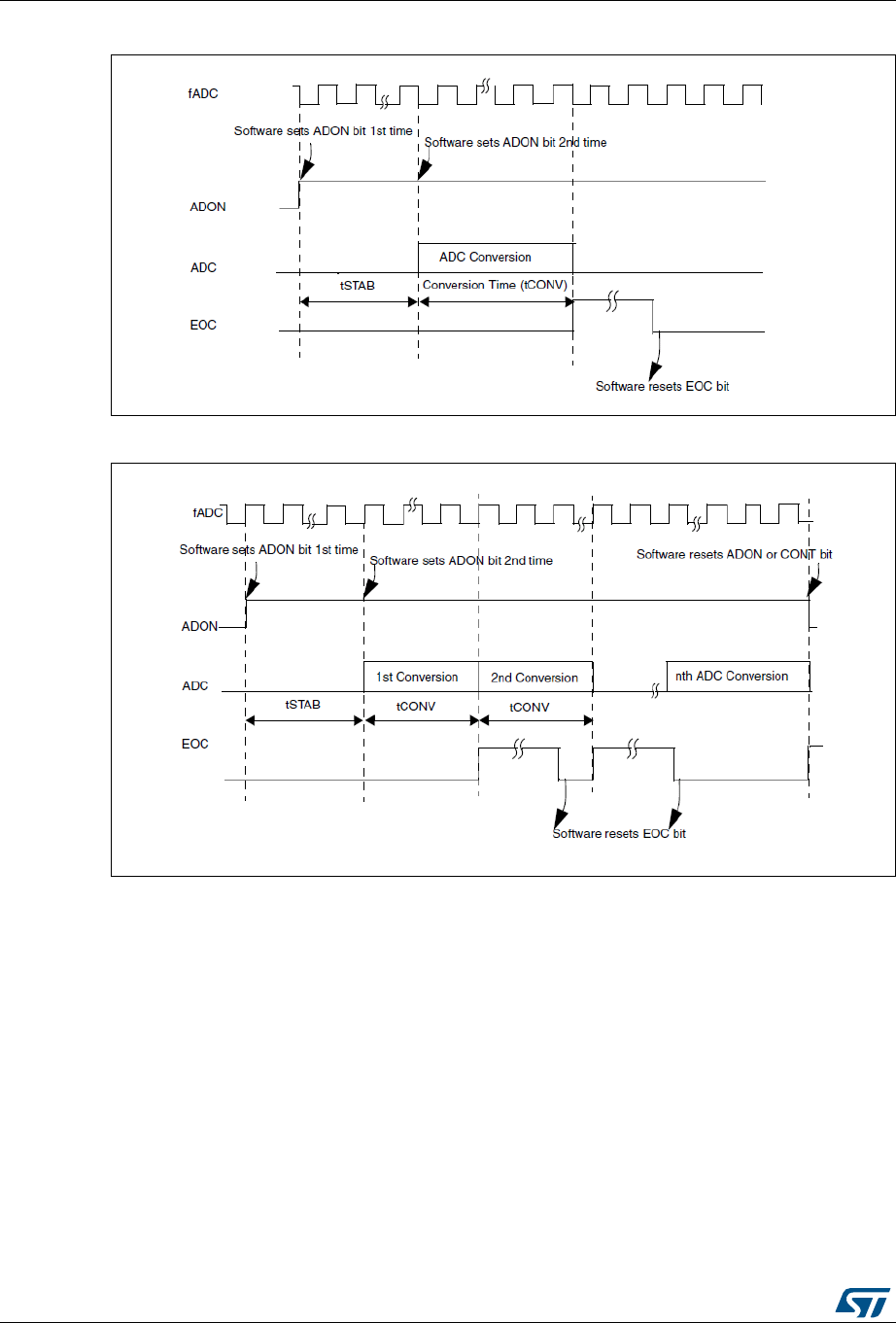
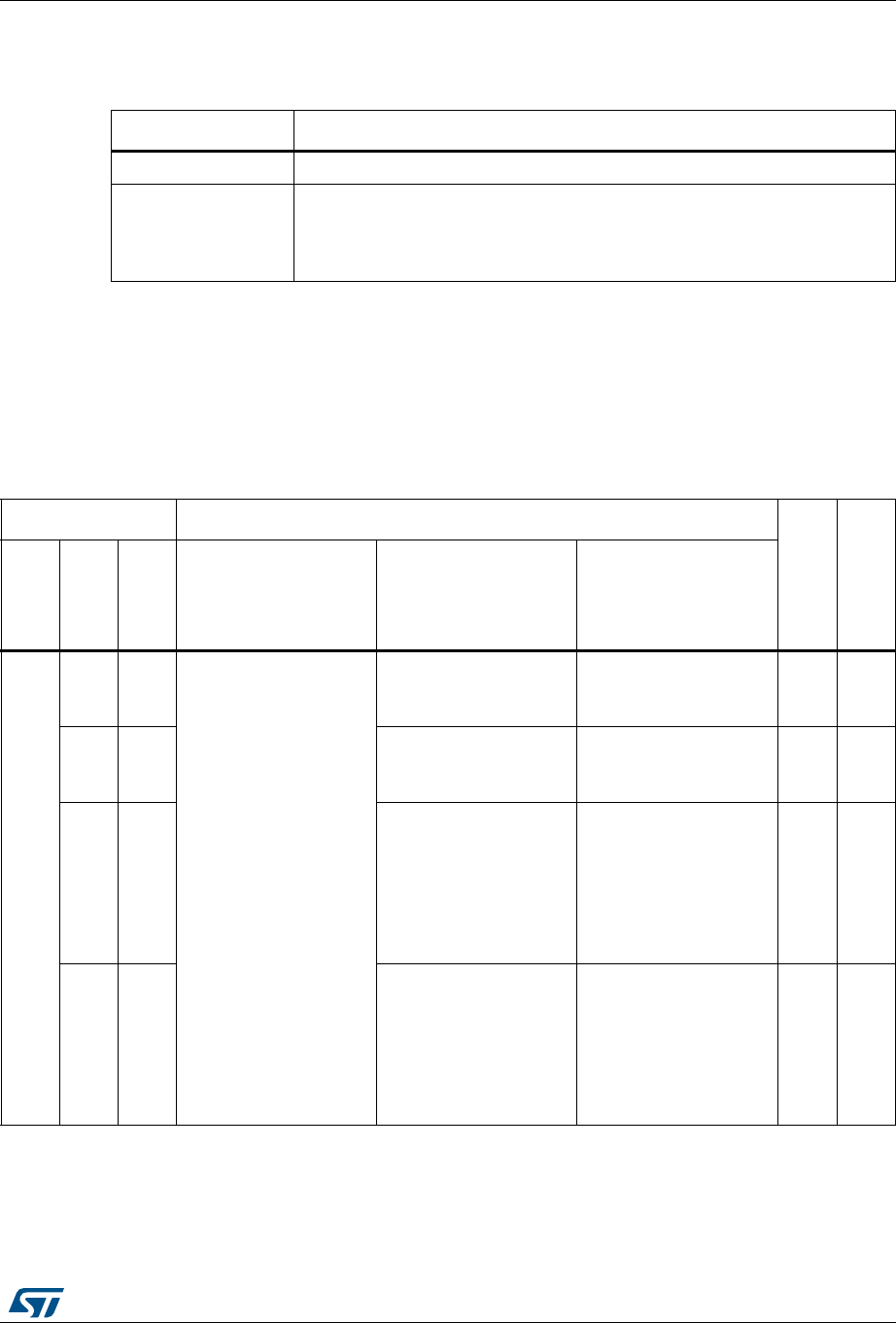
DocID14587 Rev 14 437/467
RM0016 Analog/digital converter (ADC)
454
24.6 ADC low power modes
The ADC does not have the capability to wake the device from Active-halt or Halt mode.
24.7 ADC interrupts
The ADC interrupt control bits are summarized in Table 74, Table 75 and Table 76
Table 73. Low power modes
Mode Description
Wait No effect on ADC
Halt/
Active-halt
In devices with extended features, the ADC is automatically switched off
before entering Halt/Active-halt mode. After waking up from Active-halt, the
ADON bit must be set by software to power on the ADC, and a delay of 7 µs
is needed before starting a new conversion.
Table 74. ADC Interrupts in single and non-buffered continuous mode (ADC1 and ADC2)(1)
Enable bits Status flags
Exit
from
Wait
Exit
from
Halt
AWENx
AWDIE
EOCIE
AWSx AWDG EOC
Don’t
care
0 0
Don’t care
Flag is set if the channel
crosses the
programmed thresholds.
Flag is set at the end of
each conversion. No No
0 1
Flag is set if the channel
crosses the
programmed thresholds.
Flag is set at the end of
each conversion and an
interrupt is generated.
Yes No
1 0
Flag is set if the channel
crosses the
programmed thresholds.
An interrupt is
generated but
continuous conversion
is not stopped.
Flag is set at the end of
each conversion. Yes No
1 1
Flag is set if the channel
crosses the
programmed thresholds.
An interrupt is
generated but
continuous conversion
is not stopped.
Flag is set at the end of
each conversion and an
interrupt is generated.
Yes no
1. BSIZE = Data buffer size (8 or 10 depending on the product).
Analog/digital converter (ADC) RM0016
438/467 DocID14587 Rev 14
Table 75. ADC interrupts in buffered continuous mode (ADC1)
Enable bits Status flags
Exit
from
Wait
Exit
from
Halt
AWENx
AWDIE
EOCIE
AWSx AWD EOC
0 Don’t
care 0 0
0
The flag is set at the end
of BSIZE conversions No No
0 Don’t
care 1 0
The flag is set at the end
of BSIZE conversions
and an interrupt is
generated.
Yes No
1 0 0
Flag is set if conversion
on buffer ”x” crosses the
thresholds programmed
in the ADC_HTR and
ADC_LTR registers
The flag is set at the end
of BSIZE conversions if
at least one of the
AWSx bits is set
The flag is set at the end
of BSIZE conversions
(Data Buffer Full)
No No
1 1 0
The flag is set and an
interrupt is generated at
the end of BSIZE
conversions if at least
one of the AWSx bits is
set. Continuous
conversion is not
stopped.
Yes No
1 0 1
The flag is set at the end
of BSIZE conversions if
at least one of the
AWSx bits is set
The flag is set at the end
of BSIZE conversions
and an interrupt is
generated.
Yes No
1 1 1
The flag is set
immediately as soon as
one of the AWSx bits is
set. In interrupt is
generated and
continuous conversion
is stopped.
The flag is set at the end
of BSIZE conversions
and an interrupt is
generated.
Yes No
DocID14587 Rev 14 439/467
RM0016 Analog/digital converter (ADC)
454
Table 76. ADC interrupts in scan mode (ADC1)
Control bits Status bits
Exit
from
Wait
Exit
from
Halt
AWENx
AWDIE
EOCIE
AWSx AWD EOC
0 Don’t
care 0 0 0 The flag is set at the end
of the scan sequence No No
0 Don’t
care 1 0 0
The flag is set at the end
of the scan sequence
and an interrupt is
generated.
Yes No
1 0 0
Flag is set if conversion
on channel ”x” crosses
the thresholds
programmed in the
ADC_HTR and
ADC_LTR registers
The flag is set at the end
of the scan sequence if
at least one of the
AWSx bits is set
The flag is set at the end
of the scan sequence No No
1 1 0
The flag is set and an
interrupt is generated at
the end of the SCAN
sequence if at least one
of the AWSx bits is set.
SCAN conversion is not
stopped.
The flag is set to 1 at the
end of the scan
sequence
Yes No
1 0 1
The flag is set at the end
of the scan sequence if
at least one of the
AWSx bits is set
The flag is set to 1 at the
end of the scan
sequence and an
interrupt is generated.
Yes No
1 1 1
The flag is set
immediately as soon as
one of the AWSx bits is
set. In interrupt is
generated and scan
conversion is stopped.
The flag is set at the end
of the scan sequence
and an interrupt is
generated.
Yes No
Analog/digital converter (ADC) RM0016
440/467 DocID14587 Rev 14
24.8 Data alignment
ALIGN bit in the ADC_CR2 register selects the alignment of data stored after conversion.
Data can be aligned in the following ways.
Right Alignment: 8 Least Significant bits are written in the ADC_DL register, then the
remaining Most Significant bits are written in the ADC_DH register. The Least Significant
Byte must be read first followed by the Most Significant Byte. In this case, the LDW
instruction can be used as it has the same reading order.
Figure 164. Right alignment of data
Left Alignment: 8 Most Significant bits are written in the ADC_DH register, then the
remaining Least Significant bits are written in the ADC_DL register. The Most Significant
Byte must be read first followed by the Least Significant Byte.
Figure 165. Left alignment of data
24.9 Reading the conversion result
The conversion results from ADC_DRH and ADC_DRL data registers must be read in a
specific order to guarantee data coherency. This order depends on the data alignment (refer
to Section 24.8: Data alignment).
When the ADC1DBxRH and ADC1DBxRL data buffer registers are read (ADC1 only), there
is no internal locking mechanism. Therefore, the user must check the OVR flag in the
ADC_CR3 register after having read the ADC1DBxRH and AD1CDBxRL registers. If the
OVR flag is cleared, this ensures that the values just read from the ADC1DBxRH and
AD1CDBxRL registers are consistent.
Another way to ensure data consistency (with right alignment of data) is to read
ADC1DBxRH and ADC1DBxRL with the following sequence, which must not be interrupted:
ADC_READ:
LDW X,#ADC_DB0RH
CPW X,#ADC_DB0RH
JREQ ADC_END
LDW X,#ADC_DB0RH
ADC_END:
D7
ADC_DRH
ADC_DRL
D8 D9
D6 D5 D4 D3 D2 D1 D0
D9
ADC_DRL
ADC_DRH
D0 D1
D8 D7 D6 D5 D4 D3 D2
DocID14587 Rev 14 441/467
RM0016 Analog/digital converter (ADC)
454
24.10 Schmitt trigger disable registers
The ADC_TDRH and ADC_TDRL registers are used to disable the Schmitt triggers available
in the AIN analog input pins. Disabling the Schmitt trigger lowers the power consumption in
the I/Os.
24.11 ADC registers
24.11.1 ADC data buffer register x high (ADC_DBxRH) (x=0..7 or 0..9 )
Address offset: 0x00 + 2 * channel number
Reset value: 0x00
Note: Data buffer registers are not available for ADC2. The data buffer size and base address are
device dependent and are specified in the corresponding datasheet. Note that the data
buffer registers and the other ADC registers have different base addresses.
76543210
DBH[7:0]
rrrrrrrr
Bits 7:0 DBH[7:0] Data bits high
These bits are set/reset by hardware and are read only. When the ADC is in
buffered continuous or scan mode, they contain the high part of the converted
data. The data is in right-aligned or left-aligned format depending on the ALIGN
bit.
Left Data Alignment
These bits contain the eight MSB bits of the converted data.
Right Data Alignment
These bits contain the (eight ADC data width) MSB bits of the converted data.
Remaining bits are tied to zero.
See Figure 164.

Analog/digital converter (ADC) RM0016
442/467 DocID14587 Rev 14
24.11.2 ADC data buffer register x low (ADC_DBxRL) (x=or 0..7 or 0..9)
Address offset: 0x01 + 2 * channel number
Reset value: 0x00
Note: Data buffer registers are not available for ADC2. The data buffer size and base address are
device dependent and are specified in the corresponding datasheet. Note that the data
buffer registers and the other ADC registers have different base addresses.
76543210
DBL[7:0]
rrrrrrrr
Bits 7:0 DBL[7:0] Data bits low
These bits are set/reset by hardware and are read only. When the ADC is in
buffered continuous or scan mode, they contain the low part of the A/D
conversion result, in right-aligned or left-aligned format depending on the
ALIGN bit.
Left Data Alignment
These bits contain the (eight ADC data width) LSB bits of the converted data.
Remaining bits of the register are tied to zero.
See Figure 165.
Right Data Alignment
These bits contain the eight LSB bits of the converted data.

DocID14587 Rev 14 443/467
RM0016 Analog/digital converter (ADC)
454
24.11.3 ADC control/status register (ADC_CSR)
Address offset: 0x20
Reset value: 0x00
76543210
EOC AWD EOCIE AWDIE CH[3:0]
rw rc_w0 rw rw rw rw rw rw
Bit 7 EOC: End of conversion
This bit is set by hardware at the end of conversion. It is cleared by software by writing ‘0’.
0: Conversion is not complete
1: Conversion complete
Bit 6 AWD: Analog Watchdog flag
0: No analog watchdog event
1: An analog watchdog event occurred. In buffered continuous or scan mode you can read the
ADC_AWSR register to determine the data buffer register related to the event. An interrupt request
is generated if AWDIE=1.
Note: This bit is not available for ADC2
Bit 5 EOCIE: Interrupt enable for EOC
This bit is set and cleared by software. It enables the interrupt for End of Conversion.
0: EOC interrupt disabled
1: EOC interrupt enabled. An interrupt is generated when the EOC bit is set.
Bit 4 AWDIE: Analog watchdog interrupt enable
0: AWD interrupt disabled.
1: AWD interrupt enabled
Note: This bit is not available for ADC2
Bits 3:0 CH[3:0]: Channel selection bits
These bits are set and cleared by software. They select the input channel to be converted.
0000: Channel AIN0
0001: Channel AIN1
....
1111: Channel AIN15

Analog/digital converter (ADC) RM0016
444/467 DocID14587 Rev 14
24.11.4 ADC configuration register 1 (ADC_CR1)
Address offset: 0x21
Reset value: 0x00
76543210
Reserved SPSEL[2:0] Reserved CONT ADON
r rw rw rw r rw rw
Bit 7 Reserved, always read as 0.
Bits 6:4 SPSEL[2:0]: Prescaler selection
These control bits are written by software to select the prescaler division factor.
000: fADC = fMASTER/2
001: fADC = fMASTER/3
010: fADC = fMASTER/4
011: fADC = fMASTER/6
100: fADC = fMASTER/8
101: fADC = fMASTER/10
110: fADC = fMASTER/12
111: fADC = fMASTER/18
See Section 24.5.2 on page 431.
Note: It is recommended to change the SPSEL bits when ADC is in power down. This is because
internally there can be a glitch in the clock during this change. Otherwise the user is required to
ignore the 1st converted result if the change is done when ADC is not in power down.
Bits 3:2 Reserved, always read as 0.
Bit 1 CONT: Continuous conversion
This bit is set and cleared by software. If set, conversion takes place continuously till this bit is reset
by software.
0: Single conversion mode
1: Continuous conversion mode
Bit 0 ADON: A/D Converter on/off
This bit is set and reset by software. This bit must be written to wake up the ADC from power down
mode and to trigger the start of conversion. If this bit holds a value of 0 and a 1 is written to it then it
wakes the ADC from power down mode. Conversion starts when this bit holds a value of 1 and a 1 is
written to it. As soon as the ADC is powered on, the output stage of the selected channel is disabled.
0: Disable ADC conversion/calibration and go to power down mode.
1: Enable ADC and to start conversion
Note: If any other bit in this register apart from ADON is changed at the same time, then conversion is
not triggered. This is to prevent triggering an erroneous conversion.

DocID14587 Rev 14 445/467
RM0016 Analog/digital converter (ADC)
454
24.11.5 ADC configuration register 2 (ADC_CR2)
Address offset: 0x22
Reset value: 0x00
76543210
Reserved EXTTRIG EXTSEL[1:0] ALIGN Reserved SCAN Reserved
rrwrwrwrwrrwr
Bit 7 Reserved, must be kept cleared.
Bit 6 EXTTRIG: External trigger enable
This bit is set and cleared by software. It is used to enable an external trigger to trigger a conversion.
0: Conversion on external event disabled
1: Conversion on external event enabled
Note: To avoid a spurious trigger event, use the BSET instruction to set EXTTRIG without changing
other bits in the register.
Bits 5:4 EXTSEL[1:0]: External event selection
The two bits are written by software. They select one of four types of event used to trigger the start
of ADC conversion.
00: Internal TIM1 TRGO event
01: External interrupt on ADC_ETR pin
10: Reserved
11: Reserved
Bit 3 ALIGN: Data alignment
This bit is set and cleared by software.
0: Left alignment (the eight MSB bits are written in the ADC_DRH register then the remaining LSB
bits are written in the ADC_DRL register). The reading order should be MSB first and then LSB.
1: Right alignment (eight LSB bits are written in the ADC_DRL register then the remaining MSB bits
are written in the ADC_DH register). The reading order should be LSB first and then MSB.
Note: The ALIGN bit influences the ADC_DRH/ADC_DRL register reading order and not the reading
order of the buffer registers.
Bit 2 Reserved, must be kept cleared.
Bit 1 SCAN: Scan mode enable
This bit is set and cleared by software.
0: Scan mode disabled
1: Scan mode enabled
Note: This bit is not available for ADC2
Bit 0 Reserved, must be kept cleared.

Analog/digital converter (ADC) RM0016
446/467 DocID14587 Rev 14
24.11.6 ADC configuration register 3 (ADC_CR3)
Address offset: 0x23
Reset value: 0x00
Note: This register is not available for ADC2.
76543210
DBUF OVR Reserved
rw rc_w0 r
Bit 7 DBUF: Data buffer enable
This bit is set and cleared by software. It is used together with the CONT bit enable buffered
continuous mode (DBUF=1, CONT=1). When DBUF is set, converted values are stored in the
ADC_DBxRH and ADC_DBxRL registers instead of the ADC_DRH and ADC_DRL registers.
0: Data buffer disabled
1: Data buffer enabled
Bit 6 OVR: Overrun flag
This bit is set by hardware and cleared by software.
0: No overrun
1: An overrun was detected in the data buffer registers.
Refer to Section 24.5.5 on page 433 for more details.
Bits 5:0 Reserved, must be kept cleared.

DocID14587 Rev 14 447/467
RM0016 Analog/digital converter (ADC)
454
24.11.7 ADC data register high (ADC_DRH)
Address offset: 0x24
Reset value: 0xXX
24.11.8 ADC data register low (ADC_DRL)
Address offset: 0x25
Reset value: 0xXX
76543210
DH[7:0]
rrrrrrrr
Bits 7:0 DH[7:0] Data bits high
These bits are set/reset by hardware and are read only. When the ADC is in single or non-buffered
continuous mode, they contain the high part of the converted data, in right-aligned or left-aligned
format depending on the ALIGN bit.
– Left Data Alignment
These bits contain the 8 MSB bits of the converted data. The MSB must be read first before reading
the LSB (see Section 24.9: Reading the conversion result
and Figure 165.)
– Right Data Alignment
These bits contain the (ADC data width - 8) MSB bits of the converted data. Remaining bits are tied
to zero.
See Figure 164.
76543210
DL[7:0]
rrrrrrrr
Bits 7:0 DL[7:0] Data bits low
These bits are set/reset by hardware and are read only. When the ADC is in single or non-buffered
continuous mode, they contain the low part of the A/D conversion result, in right-aligned or left-
aligned format depending on the ALIGN bit.
– Left Data Alignment
These bits contain the (ADC data width - 8) LSB bits of the converted data, remaining bits of the
register are tied to zero.
See Figure 165.
– Right Data Alignment
These bits contain the 8 LSB bits of the converted data. The LSB must be read first before reading
the MSB (see Section 24.9: Reading the conversion result
and Figure 164.)
Analog/digital converter (ADC) RM0016
448/467 DocID14587 Rev 14
24.11.9 ADC Schmitt trigger disable register high (ADC_TDRH)
Address offset: 0x26
Reset value: 0x00
24.11.10 ADC Schmitt trigger disable register low (ADC_TDRL)
Address offset: 0x27
Reset value: 0x00
76543210
TD[15:8]
rw rw rw rw rw rw rw rw
Bits 7:0 TD[15:8] Schmitt trigger disable high
These bits are set and cleared by software. When a TDx bit is set, it disables the I/O port input
Schmitt trigger of the corresponding ADC input channel x even if this channel is not being converted.
This is needed to lower the static power consumption of the I/O port.
0: Schmitt trigger enabled
1: Schmitt trigger disabled
76543210
TD[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 TD[7:0] Schmitt trigger disable low
These bits are set and cleared by software. When a TDx bit is set, it disables the I/O port input
Schmitt trigger of the corresponding ADC input channel x even if this channel is not being converted.
This is needed to lower the static power consumption of the I/O port.
0: Schmitt trigger enabled
1: Schmitt trigger disabled
DocID14587 Rev 14 449/467
RM0016 Analog/digital converter (ADC)
454
24.11.11 ADC high threshold register high (ADC_HTRH)
Address offset: 0x28
Reset value: 0xFF
Note: This register is not available for ADC2.
24.11.12 ADC high threshold register low (ADC_HTRL)
Address offset: 0x29
Reset value: 0x03
Note: This register is not available for ADC2.
76543210
HT[9:2]
rw rw rw rw rw rw rw rw
Bits 7:0 HT[9:2] Analog Watchdog High Voltage threshold MSB
These bits are set and cleared by software. They define the MSB of the high threshold (VREFH) for
the Analog Watchdog.
76543210
Reserved HT[1:0]
rrwrw
Bits 7:2 Reserved, must be kept cleared.
Bits 1:0 HT[1:0] Analog watchdog high voltage threshold LSB
These bits are set and cleared by software. They define the LSB of the high threshold (VREFH) for the
Analog Watchdog.
Analog/digital converter (ADC) RM0016
450/467 DocID14587 Rev 14
24.11.13 ADC low threshold register high (ADC_LTRH)
Address offset: 0x2A
Reset value: 0x00
Note: This register is not available for ADC2.
24.11.14 ADC low threshold register low (ADC_LTRL)
Address offset: 0x2B
Reset value: 0x00
Note: This register is not available for ADC2.
76543210
LT[9:2]
rw rw rw rw rw rw rw rw
Bits 7:0 LT[9:2] Analog watchdog low voltage threshold MSB
These bits are set and cleared by software. They define the MSB of the low Threshold (VREFL) for the
Analog Watchdog.
76543210
Reserved LT[1:0]
rrwrw
Bits 7:2 Reserved, must be kept cleared.
Bits 1:0 LT[1:0] Analog watchdog low voltage threshold LSB
These bits are set and cleared by software. They define the LSB of the low threshold (VREFL) for the
Analog Watchdog.
DocID14587 Rev 14 451/467
RM0016 Analog/digital converter (ADC)
454
24.11.15 ADC watchdog status register high (ADC_AWSRH)
Address offset: 0x2C
Reset value: 0x00
Note: This register is not available for ADC2.
24.11.16 ADC watchdog status register low (ADC_AWSRL)
Address offset: 0x2D
Reset value: 0x00
Note: This register is not available for ADC2.
76543210
Reserved AWS[9:8]
r rc_w0 rc_w0
Bits 7:2 Reserved, must be kept cleared.
Bits 1:0 AWS[9:8] Analog watchdog status flags 9:8
These bits are set by hardware and cleared by software.
– In buffered continuous mode (DBUF=1, CONT=1) AWS flags behave as described in Table
75.
– In scan mode (SCAN=1) AWS flags behave as described in Table 76.
0: No analog watchdog event in data buffer register x.
1: Analog watchdog event occurred in data buffer register x.
76543210
AWS[7:0]
rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0 rc_w0
Bits 7:0 AWS[7:0] Analog watchdog status flags 7:0
These bits are set by hardware and cleared by software.
– In buffered continuous mode (DBUF=1, CONT=1) AWS flags behave as described in Table
75.
– In scan mode (SCAN=1) AWS flags behave as described in Table 76.
0: No analog watchdog event in data buffer register x.
1: Analog watchdog event occurred in data buffer register x.
Analog/digital converter (ADC) RM0016
452/467 DocID14587 Rev 14
24.11.17 ADC watchdog control register high (ADC_AWCRH)
Address offset: 0x2E
Reset value: 0x00
Note: This register is not available for ADC2.
24.11.18 ADC watchdog control register low (ADC_AWCRL)
Address offset: 0x2F
Reset value: 0x00
Note: This register is not available for ADC2.
76543210
Reserved AWEN[9:8]
rrwrw
Bits 7:2 Reserved, must be kept cleared.
Bits 1:0 AWEN[9:8] Analog watchdog enable bits 9:8
These bits are set and cleared by software.
In buffered continuous mode (DBUF=1, CONT=1) and in scan mode (SCAN=1) the AWENx bits
enable the analog watchdog function for each of the 10 data buffer registers.
0: Analog watchdog disabled in data buffer register x.
1: Analog watchdog enabled in data buffer register x.
76543210
AWEN[7:0]
rw rw rw rw rw rw rw rw
Bits 7:0 AWEN[7:0] Analog watchdog enable bits 7:0
These bits are set and cleared by software.
In buffered continuous mode (DBUF=1, CONT=1) and in scan mode (SCAN=1) the AWENx bits
enable the analog watchdog function for each of the 10 data buffer registers.
0: Analog watchdog disabled in data buffer register x.
1: Analog watchdog enabled in data buffer register x.
DocID14587 Rev 14 453/467
RM0016 Analog/digital converter (ADC)
454
24.12 ADC register map and reset values
Table 77. ADC1 register map and reset values
Address
offset Register name 7 6 5 4 3 2 1 0
0x00 ADC1 _DB0RH
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
DATA9
0
DATA8
0
0x01 ADC1_DB0RL
Reset value
DATA7
0
DATA6
0
DATA5
0
DATA4
0
DATA3
0
DATA2
0
DATA1
0
DATA0
0
0x02 to
0x0D Reserved
0x0E ADC1 _DB7RH
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
DATA9
0
DATA8
0
0x0Fh ADC1_DB7RL
Reset value
DATA7
0
DATA6
0
DATA5
0
DATA4
0
DATA3
0
DATA2
0
DATA1
0
DATA0
0
0x10 ADC1 _DB8RH(1)
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
DATA9
0
DATA8
0
0x11 ADC1_DB8RL(1)
Reset value
DATA7
0
DATA6
0
DATA5
0
DATA4
0
DATA3
0
DATA2
0
DATA1
0
DATA0
0
0x12 ADC1 _DB9RH(1)
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
DATA9
0
DATA8
0
0x13 ADC1_DB9RL(1)
Reset value
DATA7
0
DATA6
0
DATA5
0
DATA4
0
DATA3
0
DATA2
0
DATA1
0
DATA0
0
0x14 to
0x1F Reserved
0x20 ADC1 _CSR
Reset value
EOC
0
AWD
0
EOCIE
0
AWDIE
0
CH3
0
CH2
0
CH1
0
CH0
0
0x21 ADC1_CR1
Reset value
-
0
SPSEL2
0
SPSEL1
0
SPSEL0
0
-
0
-
0
CONT
0
ADON
0
0x22 ADC1_CR2
Reset value
-
0
EXTTRIG
0
EXTSEL1
0
EXTSEL0
0
ALIGN
0
-
0
SCAN
0
-
0
0x23 ADC1_CR3
Reset value
DBUF
0
OVR
0
-
0
-
0
-
0
-
0
-
0
-
0
0x24 ADC1_DRH
Reset value
-
x
-
x
-
x
-
x
-
x
-
x
DATA9
x
DATA8
x
0x25 ADC1_DRL
Reset value
DATA7
x
DATA6
x
DATA5
x
DATA4
x
DATA3
x
DATA2
x
DATA1
x
DATA0
x
0x26 ADC1_TDRH(2)
Reset value
TD15
0
TD14
0
TD13
0
TD12
0
TD11
0
TD10
0
TD9
0
TD8
0
0x27 ADC1_TDRL
Reset value
TD7
0
TD6
0
TD5
0
TD4
0
TD3
0
TD2
0
TD1
0
TD0
0
0x28 ADC1 _HTRH
Reset value
HT9
1
HT8
1
HT7
1
HT6
1
HT5
1
HT4
1
HT3
1
HT2
1
0x29 ADC1_HTRL
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
HT1
1
HT0
1
0x2A ADC1 _LTRH
Reset value
LT9
0
LT8
0
LT7
0
LT6
0
LT5
0
LT4
0
LT3
0
LT2
0
0x2B ADC1_LTRL
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
LT1
0
LT0
0
0x2C ADC1 _AWSRH(2)
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
AWS9
0
AWS8
0
Analog/digital converter (ADC) RM0016
454/467 DocID14587 Rev 14
0x2D ADC1_AWSRL
Reset value
AWS7
0
AWS6
0
AWS5
0
AWS4
0
AWS3
0
AWS2
0
AWS1
0
AWS0
0
0x2E ADC1 _AWCRH(2)
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
AWEN9
0
AWEN8
0
0x2F ADC1_AWCRL
Reset value
AWEN7
0
AWEN6
0
AWEN5
0
AWEN4
0
AWEN3
0
AWEN2
0
AWEN1
0
AWEN0
0
1. This register is reserved in devices with buffer size 8 x 10 bits.
2. This register is reserved in devices without ADC channels 8 and 9.
Table 77. ADC1 register map and reset values (continued)
Address
offset Register name 7 6 5 4 3 2 1 0
Table 78. ADC2 register map and reset values
Address
offset Register name 7 6 5 4 3 2 1 0
0x20 ADC2 _CSR
Reset value
EOC
0
AWD
0
EOCIE
0
AWDIE
0
CH3
0
CH2
0
CH1
0
CH0
0
0x21 ADC2_CR1
Reset value
-
0
SPSEL2
0
SPSEL1
0
SPSEL0
0
-
0
-
0
CONT
0
ADON
0
0x22 ADC2_CR2
Reset value
-
0
EXTTRIG
0
EXTSEL1
0
EXTSEL0
0
ALIGN
0
-
0
-
0
-
0
0x23 ADC2_CR3
Reset value
DBUF
0
OVR
0
-
0
-
0
-
0
-
0
-
0
-
0
0x24 ADC2_DRH
Reset value
-
0
-
0
-
0
-
0
-
0
-
0
DATA9
0
DATA8
0
0x25 ADC2_DRL
Reset value
DATA7
0
DATA6
0
DATA5
0
DATA4
0
DATA3
0
DATA2
0
DATA1
0
DATA0
0
0x26 ADC2_TDRH
Reset value
TD15
0
TD14
0
TD13
0
TD12
0
TD11
0
TD10
0
TD9
0
TD8
0
0x27 ADC2_TDRL
Reset value
TD7
0
TD6
0
TD5
0
TD4
0
TD3
0
TD2
0
TD1
0
TD0
0
DocID14587 Rev 14 455/467
RM0016 Revision history
463
25 Revision history
Table 79. Document revision history
Date Revision Changes
27-May-2008 1 Initial release.
13-Aug-2008 2
Updated Section 2: Memory and register map on page 27:
introduced high, medium and low density categories; modified end
address for option bytes; updated RAM, data EEPROM and Flash
program memory densities.
Updated Figure 18: Reset circuit on page 74
Update min reset pulse from 300 to 500 ns in Section 8.2: Reset
circuit description on page 74
Updated Table 6: Memory access versus programming method on
page 50.
Reorganized Section 16 on page 134 to Section 19 on page 253
Renamed USART and LINUART to UART1, UART2 and UART3
combined in new Section 22 on page 320.
Updated CAN filter and external clock description in Section 23 on
page 378.
Renamed ADC to ADC1 and ADC2 in Section 24 on page 428
Updated Continuous scan mode on page 433
Updated Conversion on external trigger on page 435
22-Sep-2008 3
Updated Section 4: Flash program memory and data EEPROM.
Changed name of SWUAH bit to REGAH in Section 9.9.1: Internal
clock register (CLK_ICKR) on page 90.
Modified LSI frequency measurement in Section 11.1 on page 105
Modified Peripheral clock gating register 1 (CLK_PCKENR1) on
page 95
Modified Section 11.8.2: Slope control on page 110.
Added description of TIM5, TIM6 in Section 16: Timer overview,
Section 18: 16-bit general purpose timers (TIM2, TIM3, TIM5) and
Section 19: 8-bit basic timer (TIM4, TIM6).
Updated Section 24.5.6: Analog watchdog.
Revision history RM0016
456/467 DocID14587 Rev 14
15-Jan-2009 4
Removed memory and register map (information transferred to
datasheets)
Register absolute addresses replaced by offsets. (refer now to
register map in datasheet for the base addresses).
Added Note related to TLI interrupt in Section 6.2.1 on page 60.
Added TLI in Section 6.5: Concurrent and nested interrupt
management.
Updated Flash program density to 32 - 128 Kbytes for high density
STM8S devices in Section 4: Flash program memory and data
EEPROM.
Updated size of STM8S option byte area in Section 4.4: Memory
organization and Figure 6, Figure 7, and Figure 8.
Updated maximum value of UBC in Figure 11.Added information on
DATA area programming on devices with and without RWW
capability in Section 4.6.2: Byte programming and Section 4.6.4:
Block programming.
Added HVOFF in: Fast block programming, : Fast block
programming, and Section 4.8.8: Flash status register
(FLASH_IAPSR). Updated bitfield access types in Section 4.8.8:
Flash status register (FLASH_IAPSR) on page 55.
Table 6: Memory access versus programming method: removed NMI
and TRAP vectors, modified access for option bytes in ICP/SWIM
mode/ROP enabled, and UBC ROP disabled.
Updated Table 28: Watchdog timeout period (LSI clock frequency =
128 kHz) on page 125
Updated Table 29: Approximate timeout duration on page 130
Table 30: Window watchdog timing diagram on page 131
Updated Note 8 on page 311
10-Aug-2009 5
Added note to Section 4.4: Memory organization.
Added Section 4.4.2: Memory access/ wait state configuration.
Updated maximum value of UCB[7:0] in Figure 2: Page 255 is
reserved for data EEPROM.
Added note 1 below Figure 10. Added note 1 and updated note 3
below Figure 11.
Check in PUL/DUL bits made mandatory in Section 4.5.2: Memory
access security system (MASS).
Added details in Section 4.6: Memory programming on word
programming in main program and DATA.
Updated Section 4.8.8: Flash status register (FLASH_IAPSR) on
page 55.
Added note to Section 9.1.2: HSI (high-speed internal) clock signal.
Updated Table 17 (UART peripheral clock gating bit description
moved to datasheet).
Updated Table 20: Low power mode management on page 102
Updated management of hardware interrupts in Section 6.1: ITC
introduction.
Removed interrupt vector table (moved to datasheet)
Table 79. Document revision history (continued)
Date Revision Changes
DocID14587 Rev 14 457/467
RM0016 Revision history
463
10-Aug-2009 5
cont’d
Changed note in Section 6.9.2: Software priority register x
(ITC_SPRx) on page 69.
Updated AWU Section 12.3.2: Time base selection.
Removed description of timer input XOR feature (TI1S bit in
Section 17 and Section 18.
Updated trigger selection for and ETR description for TIM5 in
Section 18.
Updated MMS bits in Control register 2 (TIM5_CR2) and Control
register 2 (TIM6_CR2).
Updated TG bit of Event generation register (TIMx_EGR).
Added note on TIM2 and TIM4 register offsets inSection on page
247 and Section 19.6.10 on page 260
Section 21.4.3, Acknowledge failure (AF): Added “repeated start” to
master condition.
Modified Section 21.7.3: Frequency register (I2C_FREQR) on
page 307.
Added 6th step to UART Character transmission. Updated
UARTSingle byte communication.
Added Figure 116: TC/TXE behavior when transmitting.
Updated TC bit description in Section 22.7.1: Status register
(UART_SR).
Added Start bit detection and Section 22.3.5: Clock deviation
tolerance of the UART receiver in Section 22.3.3: Receiver.
Added a caution to Section 23.11.15: Mailbox registers.
Updated description of TGT in CAN mailbox data length control
register (CAN_MDLCR).
Changed alignment of threshold registers and added note for data
buffer base address in Section 24.11: ADC registers.
08-Dec-2009 6
Peripheral clock gating register 2 (CLK_PCKENR2): Replaced
address offset.
Table 20: Low power mode management: Updated peripheral
information for Active halt (--), Active halt with MVR auto power off (-
--), and Halt (----).
Repetition counter register (TIM1_RCR): Replaced the reset value.
Interrupt enable register (TIMx_IER): Corrected name of bit 3
(CC3IE) in register table.
Status register 1 (TIMx_SR1): Added description of bit 3 (CC3IF) to
register description table.
Figure 93: Data clock timing diagram: Removed “from master” and
“from slave” beneath MISO and MOSI respectively.
Section 20.3.5: Data transmission and reception procedures: timing
diagrams revised and description of receive-only mode expanded.
Added Section 20.3.8: Disabling the SPI
Master mode fault (MODF): SPE and MSTR bits can be returned to
their original state only after a MODF bit clearing sequence.
SPI interrupt control register (SPI_ICR): Removed notes relating to
the TXIE and RXIE bits.
Table 79. Document revision history (continued)
Date Revision Changes
Revision history RM0016
458/467 DocID14587 Rev 14
08-Dec-2009 6
cont’d
Figure 105: Method 1: transfer sequence diagram for master
receiver: Added footnote concerning the next data reception and the
EV7event.
Bus error (BERR): Updated.
Updated Figure 116: TC/TXE behavior when transmitting and
removed note concerning IDLE preamble.
Updated Section 24.9: Reading the conversion result to account for
the fact that the reading order of the ADC results from the buffer
registers has no impact on data coherency.
Section 24.11.1 and Section 24.11.2: Removed sentence about the
reading order of the MSB and LSB bits respectively.
Section 24.11.5: Added note about the ALIGN bit reading order.
Table 79. Document revision history (continued)
Date Revision Changes
DocID14587 Rev 14 459/467
RM0016 Revision history
463
31-Jan-2011 7
Merge with STM8A reference manual (RM0009).
Renamed low power modes, Halt, Active-halt, Wait, and Run in the
whole document.
Added overview of STM8S and STM8A device families on
coverpage.
Section 2: Boot ROM: added LIN mode configuration.
Section 3: Memory and register map:
– Updated Section 3.1.1: Memory map to cover both STM8A and
STM8S devices.
– Added Section 3.1.2: Stack handling.
Section 4: Flash program memory and data EEPROM
– Updated Flash program memory and SRAM size for medium
density STM8S and STM8A devices in Section 4.4.1: STM8S and
STM8AF memory organization.
– Added Note 1 below Figure 7: Flash memory and data EEPROM
organization on medium density STM8S and STM8AF.
– Added 32 Kbyte and 128 Kbyte STM8A devices and Section 4.4.2:
Memory access/ wait state configuration.
–Section 4.5.1: Readout protection: added DM mode when readout
protection is enabled, and Section : Temporarily removing the
readout protection.
– Added case of FLASH_CR1/FLASH_CR2 access during memory
write operation in Section 4.6.1: Read-while-write (RWW).
– Moved all information related to temporary memory unprotection to
dedicated application note.
Section 7: Power supply:
– Removed minimum VCAP value in Power section overview.
Section 8: Reset (RST):
– Changed EMS to EMC.
– Added Section 8.1: “Reset state” and “under reset” definitions.
– Replace numerical values by tOP(NRST) and tINFP(NRST) in
Section 8.2: Reset circuit description.
Section 9: Clock control (CLK):
– Added Table 14: Devices with 4 trimming bits and Table 15:
Devices with 3 trimming bits in Section 9.1.2: HSI (high-speed
internal) clock signal.
– Updated CLK_HSITRIMR, CLK_SWIMCCR, and CLK_SWCR
reset values.
Section 10: Power management:
– Updated Fast clock wakeup in Section 10.2.3: Active-halt modes.
Section 6: Interrupt controller (ITC):
– Added caution note concerning interrupt disabling inside an ISR in
Section 6.2: Interrupt masking and processing flow.
– Added Push CC instruction in Table 11: Dedicated interrupt
instruction set.
– Removed note 3 in Section 6.2.1: Servicing pending interrupts.
Removed case of TRAP interruption by TLI in Section 6.2.2:
Interrupt sources.
Table 79. Document revision history (continued)
Date Revision Changes
Revision history RM0016
460/467 DocID14587 Rev 14
31-Jan-2011 7
cont’d
– Removed Halt mode and HALT instruction from Section 6.4:
Activation level/low power mode control.
Section 11: General purpose I/O ports (GPIO):
– Added note Figure 24: GPIO block diagram.
– Removed warning note in Section 11.3: Port configuration and
usage.
– Updated Table 21: I/O port configuration summary.
– Updated Section 11.4: Reset configuration.
– Updated unused I/O pin status in Section 11.5: Unused I/O pins
– Added TLI masking in Section 11.7.2: Interrupt capability.
– Updated Section 11.7.3: Analog channels.
– Updated Section 11.8.2: Slope control.
– Changed reset value of Px_IDR to 0xXX in Section 11.9.2: Port x
pin input register (Px_IDR).
– Specified PD_CR1 reset value in Section 11.9.4: Port x control
register 1 (Px_CR1).
Section 12: Auto-wakeup (AWU):
– Modified Step 5 in Section 12.3.1: AWU operation.
Section 17: 16-bit advanced control timer (TIM1):
– Modified Figure 71: Center-aligned PWM waveforms (ARR = 8)
– Changed fSYSCLK to fMASTER in Figure 31: TIM1 general block
diagram.
– TIM1_TRIG renamed TIM1_ETR.
Section 20: Serial peripheral interface (SPI):
– Added note related to parallel multislave structures in
Section 20.3.2: Configuring the SPI in slave mode.
Section 21: Inter-integrated circuit (I2C) interface:
– Modified Figure 101: I2C block diagram on page 290, Figure 102:
Transfer sequence diagram for slave transmitter and Figure 103:
Transfer sequence diagram for slave receiver.
– Modified Section 21.4.2: I2C master mode.
– Modified PO bit description changed in Section 21.7.2: Control
register 2 (I2C_CR2).
– Modified note 8 in Section 21.7.7: Status register 1 (I2C_SR1),
Section 21.7.11: Clock control register low (I2C_CCRL) and
Section 21.7.12: Clock control register high (I2C_CCRH).
– Added Table 50: I2C_CCR values for SCL frequency table
(fMASTER = 10 MHz or 16 MHz).
Section 22: Universal asynchronous receiver transmitter
(UART):
– Updated LIN break and delimiter detection.
– Updated Table 54: Baud rate programming and error calculation.
– Updated interrupt source flags and slave mode features updated in
Section 22.2.
Table 79. Document revision history (continued)
Date Revision Changes
DocID14587 Rev 14 461/467
RM0016 Revision history
463
31-Jan-2011 7(continued)
Section 23: Controller area network (beCAN):
– Modified fCANEXT upper limit in Section 23.9: Clock system.
– SLEEP and AWUM bit description updated in Section 23.11.1:
CAN master control register (CAN_MCR)
– External beCAN clock source (fCANEXT) removed together with bit
CLKS of CAN_BTR2 register.
– Removed CAN register CLK_CANCCR.
Section 24: Analog/digital converter (ADC):
– Updated address offset for ADC _CSR to ADC_AWCRL.
– Added AIN12 pin and Note 1 in Figure 159: ADC1 block diagram,
and note related to AIN12 in Section 24.5.4: Conversion modes.
15-Dec-2011 8
Added value line STM8S devices on page 1
Modified Section 4.4.1: STM8S and STM8AF memory organization
on page 36
Modified Section 6.6: External interrupts on page 66
Modified TLIS bit description in Section 6.9.4: External interrupt
control register 1 (EXTI_CR2) on page 71
Modified Figure 20: Clock tree on page 79.
Modiifed HSE oscillator in quartz crystal configuration in Section 9.6:
Clock security system (CSS) on page 88
Removed one sentence in Section 11.8.1: Alternate function output
on page 110.
Modified Timeout period on page 125
Modified Figure 101: I2C block diagram on page 290 (SMBA pin
removed)
Replaced SYSCLK with fCPU in Section 15: Window watchdog
(WWDG) on page 128.
Modified Section 15.7: Using Halt mode with the WWDG
(WWDGHALT option) on page 132
Removed note 1 below Figure 101: I2C block diagram on page 290
Added one note in Section : Output stage
Added one note to OPM bit description in Section 18.6.1: Control
register 1 (TIMx_CR1)
Note added below Section 21.7.9: Status register 3 (I2C_SR3) on
page 313
Modified title of Table 55: UART receiver tolerance when
UART_DIV[3:0] is zero on page 337 and Table 56: UART receiver’s
tolerance when UART_DIV[3:0] is different from zero on page 338
Modified RWU bit description in Section 22.7.6: Control register 2
(UART_CR2) on page 367
Modified Section 23.4.2: Normal mode on page 382
Added note to FE bit description in Section 22.7.1: Status register
(UART_SR) on page 363
Modified Section 24.9: Reading the conversion result on page 440
and Section 24.11.2: ADC data buffer register x low (ADC_DBxRL)
(x=or 0..7 or 0..9) (DBL[7:0] instead of DB[7:0])
Table 79. Document revision history (continued)
Date Revision Changes
Revision history RM0016
462/467 DocID14587 Rev 14
07-May-2013 9
Added low density STM8AF devices.
Replaced all references of STM8A with STM8AF.
Updated Table 14: Devices with 4 trimming bits.
Updated Section 11.5: Unused I/O pins.
Updated Halt/ Active-halt description in Table 68: beCAN behavior in
low power modes.
Added UART4 in Section 22: Universal asynchronous receiver
transmitter (UART).
Updated Section 23.4.4: Time triggered communication mode.
19-Jun-2014 10
–Introduction: updated the description of the medium and high
density STM8AF devices.
–Section 4.4.1: STM8S and STM8AF memory organization:
updated the description of Medium density STM8AF devices.
–Section 23: Controller area network (beCAN): changed the default
reset value for CAN_MSR.
–Section 6: Interrupt controller (ITC): replaced IRS_CC with
ISR_CC in the footnote of Table 9: Interrupt enabling/disabling
inside an ISR.
–Section 11: General purpose I/O ports (GPIO): removed the
footnote (1) in Table 21: I/O port configuration summary
–Section 24: Analog/digital converter (ADC): replaced the first
sentence in Section 24.5.6: Analog watchdog, and replaced
AWDENx with AWENx in the heading of Table 74.
–Section 21: Inter-integrated circuit (I2C) interface: added the
section “SCL master clock generation”, and updated
Section 21.4.2: I2C master mode, Section 21.7.3: Frequency
register (I2C_FREQR) and Section 21.7.13: TRISE register
(I2C_TRISER).
–Section 24.5.3: Channel selection: corrected a typo on ACD_CSR.
– Updated Section 11.7.4: Schmitt trigger.
23-Mar-2015 11
Updated:
– the document title and the Introduction on the cover page,
– the very first sentence in Section 17.4.6: Synchronization between
TIM1, TIM5 and TIM6 timers,
– TS[2:0] bit definitions in Section 17.7.3: Slave mode control
register (TIM1_SMCR),
– TS[2:0] bit definitions in Section 18.6.3: Slave mode control
register (TIM5_SMCR)
– TS[2:0] bit definitions in Section 19.6.3: Slave mode control
register (TIM6_SMCR)
–Section 17.4.6: Synchronization between TIM1, TIM5 and TIM6
timers: replaced “TS = 001 in the TIMx_SMCR register” with “see
TS[2:0] bit definitions in TIMx_SMCR register.
–Section 23.4: Operating modes: added a note about PG0 port,
– the Disclaimer.
Table 79. Document revision history (continued)
Date Revision Changes
DocID14587 Rev 14 463/467
RM0016 Revision history
463
23-Sep-2015 12
Window watchdog (WWDG)
– Corrected the downcounter bit number in Figure 28: Watchdog
block diagram
Inter-integrated circuit (I2C) interface
– Removed PEC calculation and PEC register boxes in Figure 101:
I2C block diagram.
Universal asynchronous receiver transmitter (UART)
– Updated the LIN version in Section 22.1: Introduction:
Controller area network (beCAN)
– Improved the readability of Figure 148 to Figure 151.
25-Jul-2017 13
– Updated the introduction of the Section 22.4.3: Slave mode with
automatic resynchronization enabled.
– Updated Section 5.3: SWIM modes.
– All figures of the document were updated (format update, no
content update). Below figures were redrawn: Figure 13,
Figure 14, Figure 25, Figure 26, Figure 27, Figure 28, Figure 29,
Figure 34 and Figure 37.
– For the whole document, chapter titles were updated to be more
specific about their content whenever it was relevant.
04-Oct-2017 14
Updated:
–Section 6.2.2: Interrupt sources
–Figure 13: Interrupt processing flowchart
–Figure 15: Concurrent interrupt management
–Figure 16: Nested interrupt management
–Figure 100: I2Cbus protocol
–Figure 105: Method 1: transfer sequence diagram for master
receiver
–Figure 106: Method 2: transfer sequence diagram for master
receiver when N >2
–Figure 107: Method 2: transfer sequence diagram for master
receiver when N=2
–Figure 108: Method 2: transfer sequence diagram for master
receiver when N=1
Table 79. Document revision history (continued)
Date Revision Changes

Index RM0016
464/467 DocID14587 Rev 14
Index
A
ADC_AWCRH . . . . . . . . . . . . . . . . . . . . . . . .452
ADC_AWCRL . . . . . . . . . . . . . . . . . . . . . . . . .452
ADC_AWSRH . . . . . . . . . . . . . . . . . . . . . . . .451
ADC_AWSRL . . . . . . . . . . . . . . . . . . . . . . . . .451
ADC_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . .444
ADC_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . .445
ADC_CR3 . . . . . . . . . . . . . . . . . . . . . . . . . . .446
ADC_CSR . . . . . . . . . . . . . . . . . . . . . . . . . . .443
ADC_DBxRH . . . . . . . . . . . . . . . . . . . . . . . . .441
ADC_DBxRL . . . . . . . . . . . . . . . . . . . . . . . . .442
ADC_DRH . . . . . . . . . . . . . . . . . . . . . . . . . . .447
ADC_DRL . . . . . . . . . . . . . . . . . . . . . . . . . . .447
ADC_HTRH . . . . . . . . . . . . . . . . . . . . . . . . . .449
ADC_HTRL . . . . . . . . . . . . . . . . . . . . . . . . . .449
ADC_LTRH . . . . . . . . . . . . . . . . . . . . . . . . . .450
ADC_LTRL . . . . . . . . . . . . . . . . . . . . . . . . . . .450
ADC_TDRH . . . . . . . . . . . . . . . . . . . . . . . . . .448
ADC_TDRL . . . . . . . . . . . . . . . . . . . . . . . . . .448
AWU_APR . . . . . . . . . . . . . . . . . . . . . . . . . . .119
AWU_CSR1 . . . . . . . . . . . . . . . . . . . . . . . . . .118
AWU_TBR . . . . . . . . . . . . . . . . . . . . . . . . . . .119
B
BEEP_CSR . . . . . . . . . . . . . . . . . . . . . . . . . .122
C
CAN_BTR1 . . . . . . . . . . . . . . . . . . . . . . . . . .411
CAN_BTR2 . . . . . . . . . . . . . . . . . . . . . . . . . .412
CAN_DGR . . . . . . . . . . . . . . . . . . . . . . . . . . .408
CAN_ESR . . . . . . . . . . . . . . . . . . . . . . . . . . .409
CAN_FCR1 . . . . . . . . . . . . . . . . . . . . . . . . . .420
CAN_FCR2 . . . . . . . . . . . . . . . . . . . . . . . . . .421
CAN_FCR3 . . . . . . . . . . . . . . . . . . . . . . . . . .422
CAN_FiRx . . . . . . . . . . . . . . . . . . . . . . . . . . .423
CAN_FMR1 . . . . . . . . . . . . . . . . . . . . . . . . . .418
CAN_FMR2 . . . . . . . . . . . . . . . . . . . . . . . . . .419
CAN_IER . . . . . . . . . . . . . . . . . . . . . . . .407, 410
CAN_MCR . . . . . . . . . . . . . . . . . . . . . . . . . . .401
CAN_MCSR . . . . . . . . . . . . . . . . . . . . . . . . . .413
CAN_MDAR . . . . . . . . . . . . . . . . . . . . . . . . . .417
CAN_MDLCR . . . . . . . . . . . . . . . . . . . . . . . . .416
CAN_MFMIR . . . . . . . . . . . . . . . . . . . . . . . . .414
CAN_MIDR1 . . . . . . . . . . . . . . . . . . . . . . . . .415
CAN_MIDR2 . . . . . . . . . . . . . . . . . . . . . . . . .415
CAN_MIDR3 . . . . . . . . . . . . . . . . . . . . . . . . .416
CAN_MIDR4 . . . . . . . . . . . . . . . . . . . . . . . . . 416
CAN_MSR . . . . . . . . . . . . . . . . . . . . . . . . . . . 402
CAN_MTSRH . . . . . . . . . . . . . . . . . . . . . . . . 417
CAN_MTSRL . . . . . . . . . . . . . . . . . . . . . . . . . 417
CAN_PSR . . . . . . . . . . . . . . . . . . . . . . . . . . . 408
CAN_RECR . . . . . . . . . . . . . . . . . . . . . . . . . . 411
CAN_RFR . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
CAN_TECR . . . . . . . . . . . . . . . . . . . . . . . . . . 410
CAN_TPR . . . . . . . . . . . . . . . . . . . . . . . . . . . 404
CAN_TSR . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
CFG_GCR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
CLK_CCOR . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
CLK_CKDIVR . . . . . . . . . . . . . . . . . . . . . . . . . 94
CLK_CMSR . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
CLK_CSSR . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
CLK_ECKR . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
CLK_HSITRIMR . . . . . . . . . . . . . . . . . . . . . . . 99
CLK_ICKR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
CLK_PCKENR1 . . . . . . . . . . . . . . . . . . . . . . . 95
CLK_PCKENR2 . . . . . . . . . . . . . . . . . . . . . . . 96
CLK_SWCR . . . . . . . . . . . . . . . . . . . . . . . . . . 93
CLK_SWR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
E
EXTI_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
EXTI_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
F
FLASH_CR1 . . . . . . . . . . . . . . . . . . . . 51-52, 55
FLASH_NCR2 . . . . . . . . . . . . . . . . . . . . . . . . . 53
I
I2C_CCRH . . . . . . . . . . . . . . . . . . . . . . . . . . 316
I2C_CCRL . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
I2C_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
I2C_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
I2C_DR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
I2C_FREQR . . . . . . . . . . . . . . . . . . . . . . . . . 307
I2C_ITR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
I2C_OARH . . . . . . . . . . . . . . . . . . . . . . . . . . 308
I2C_OARL . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
I2C_SR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
I2C_SR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
I2C_SR3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
I2C_TRISER . . . . . . . . . . . . . . . . . . . . . . . . . 318
ITC_SPRx . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69

RM0016 Index
DocID14587 Rev 14 465/467
IWDG_KR . . . . . . . . . . . . . . . . . . . . . . . . . . .126
IWDG_PR . . . . . . . . . . . . . . . . . . . . . . . . . . .126
IWDG_RLR . . . . . . . . . . . . . . . . . . . . . . . . . .127
P
Px_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
Px_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .113
Px_DDR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
Px_IDR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111
Px_ODR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111
R
RST_SR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77
S
SPI_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . .282
SPI_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .283
SPI_CRCPR . . . . . . . . . . . . . . . . . . . . . . . . . .286
SPI_DR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .286
SPI_ICR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .284
SPI_RXCRCR . . . . . . . . . . . . . . . . . . . . . . . .286
SPI_SR . . . . . . . . . . . . . . . . . . . . . . . . . . . . .285
SPI_TXCRCR . . . . . . . . . . . . . . . . . . . . . . . .287
T
TIM1_ARRH . . . . . . . . . . . . . . . . . . . . . . . . . .210
TIM1_ARRL . . . . . . . . . . . . . . . . . . . . . . . . . .210
TIM1_BKR . . . . . . . . . . . . . . . . . . . . . . . . . . .215
TIM1_CCER1 . . . . . . . . . . . . . . . . . . . . . . . . .205
TIM1_CCER2 . . . . . . . . . . . . . . . . . . . . . . . . .208
TIM1_CCMR1 . . . . . . . . . . . . . . . . . . . . . . . .198
TIM1_CCMR2 . . . . . . . . . . . . . . . . . . . . . . . .202
TIM1_CCMR3 . . . . . . . . . . . . . . . . . . . . . . . .203
TIM1_CCMR4 . . . . . . . . . . . . . . . . . . . . . . . .204
TIM1_CCR1H . . . . . . . . . . . . . . . . . . . . . . . . .211
TIM1_CCR1L . . . . . . . . . . . . . . . . . . . . . . . . .211
TIM1_CCR2H . . . . . . . . . . . . . . . . . . . . . . . . .212
TIM1_CCR2L . . . . . . . . . . . . . . . . . . . . . . . . .212
TIM1_CCR3H . . . . . . . . . . . . . . . . . . . . . . . . .213
TIM1_CCR3L . . . . . . . . . . . . . . . . . . . . . . . . .213
TIM1_CCR4H . . . . . . . . . . . . . . . . . . . . . . . . .214
TIM1_CCR4L . . . . . . . . . . . . . . . . . . . . . . . . .214
TIM1_CNTRH . . . . . . . . . . . . . . . . . . . . . . . .208
TIM1_CNTRL . . . . . . . . . . . . . . . . . . . . . . . . .209
TIM1_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . .188
TIM1_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . .190
TIM1_DTR . . . . . . . . . . . . . . . . . . . . . . . . . . .217
TIM1_EGR . . . . . . . . . . . . . . . . . . . . . . . . . . .197
TIM1_ETR . . . . . . . . . . . . . . . . . . . . . . . . . . .192
TIM1_IER . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
TIM1_OISR . . . . . . . . . . . . . . . . . . . . . . . . . . 218
TIM1_PSCRH . . . . . . . . . . . . . . . . . . . . . . . . 209
TIM1_PSCRL . . . . . . . . . . . . . . . . . . . . . . . . 209
TIM1_RCR . . . . . . . . . . . . . . . . . . . . . . . . . . 210
TIM1_SMCR . . . . . . . . . . . . . . . . . . . . . . . . . 191
TIM1_SR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
TIM1_SR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
TIM4_ARR . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
TIM4_CNTR . . . . . . . . . . . . . . . . . . . . . . . . . 259
TIM4_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
TIM4_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
TIM4_EGR . . . . . . . . . . . . . . . . . . . . . . . . . . 259
TIM4_IER . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
TIM4_PSCR . . . . . . . . . . . . . . . . . . . . . . . . . 259
TIM4_SMCR . . . . . . . . . . . . . . . . . . . . . . . . . 256
TIM4_SR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
TIMx_ARRH . . . . . . . . . . . . . . . . . . . . . . . . . 244
TIMx_ARRL . . . . . . . . . . . . . . . . . . . . . . . . . . 245
TIMx_CCER1 . . . . . . . . . . . . . . . . . . . . . . . . 241
TIMx_CCER2 . . . . . . . . . . . . . . . . . . . . . . . . 242
TIMx_CCMR1 . . . . . . . . . . . . . . . . . . . . . . . . 236
TIMx_CCMR2 . . . . . . . . . . . . . . . . . . . . . . . . 239
TIMx_CCMR3 . . . . . . . . . . . . . . . . . . . . . . . . 240
TIMx_CCR1H . . . . . . . . . . . . . . . . . . . . . . . . 245
TIMx_CCR1L . . . . . . . . . . . . . . . . . . . . . . . . . 246
TIMx_CCR2H . . . . . . . . . . . . . . . . . . . . . . . . 246
TIMx_CCR2L . . . . . . . . . . . . . . . . . . . . . . . . . 246
TIMx_CCR3H . . . . . . . . . . . . . . . . . . . . . . . . 247
TIMx_CCR3L . . . . . . . . . . . . . . . . . . . . . . . . . 247
TIMx_CNTRH . . . . . . . . . . . . . . . . . . . . . . . . 242
TIMx_CNTRL . . . . . . . . . . . . . . . . . . . . . . . . 243
TIMx_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
TIMx_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
TIMx_EGR . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
TIMx_IER . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
TIMx_PSCR . . . . . . . . . . . . . . . . . . . . . . . . . 244
TIMx_SMCR . . . . . . . . . . . . . . . . . . . . . . . . . 231
TIMx_SR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
TIMx_SR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
U
UART_BRR1 . . . . . . . . . . . . . . . . . . . . . . . . . 365
UART_BRR2 . . . . . . . . . . . . . . . . . . . . . . . . . 366
UART_CR1 . . . . . . . . . . . . . . . . . . . . . . . . . . 366
UART_CR2 . . . . . . . . . . . . . . . . . . . . . . . . . . 367
UART_CR3 . . . . . . . . . . . . . . . . . . . . . . . . . . 369
UART_CR4 . . . . . . . . . . . . . . . . . . . . . . . . . . 370
UART_CR5 . . . . . . . . . . . . . . . . . . . . . . . . . . 371
UART_CR6 . . . . . . . . . . . . . . . . . . . . . . . . . . 372
UART_DR . . . . . . . . . . . . . . . . . . . . . . . . . . . 365


DocID14587 Rev 14 467/467
RM0016
467
IMPORTANT NOTICE – PLEASE READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and
improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on
ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of order
acknowledgement.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or
the design of Purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2017 STMicroelectronics – All rights reserved
