E200z4 Power Architecture ™ Core Reference ManuaL
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 866 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- e200z4 Power Architecture™ Core Reference Manual
- Contents
- Figures
- Tables
- About This Book
- Chapter 1 e200z4 Core Complex Overview
- Chapter 2 Register Model
- Figure 2-1. e200z446n3 Supervisor Mode Programmer’s Model SPRs
- Figure 2-2. e200z446n3 User-Mode Programmer’s Model SPRs
- 2.1 Power ISA Embedded Category Registers
- 2.2 e200-Specific Special Purpose Registers
- 2.3 e200-Specific Device Control Registers
- 2.4 Special Purpose Register Descriptions
- 2.4.1 Machine State Register (MSR)
- 2.4.2 Processor ID Register (PIR)
- 2.4.3 Processor Version Register (PVR)
- 2.4.4 System Version Register (SVR)
- 2.4.5 Integer Exception Register (XER)
- 2.4.6 Exception Syndrome Register
- 2.4.7 Machine Check Syndrome Register (MCSR)
- 2.4.8 Timer Control Register (TCR)
- 2.4.9 Timer Status Register (TSR)
- 2.4.10 Debug Registers
- 2.4.11 Hardware Implementation Dependent Register 0 (HID0)
- 2.4.12 Hardware Implementation Dependent Register 1 (HID1)
- 2.4.13 Branch Unit Control and Status Register (BUCSR)
- 2.4.14 L1 Cache Control and Status Registers (L1CSR0, L1CSR1)
- 2.4.15 L1 Cache Configuration Registers (L1CFG0, L1CFG1)
- 2.4.16 L1 Cache Flush and Invalidate Register (L1FINV1)
- 2.4.17 MMU Control and Status Register (MMUCSR0)
- 2.4.18 MMU Configuration Register (MMUCFG)
- 2.4.19 TLB Configuration Registers (TLB0CFG, TLB1CFG)
- 2.5 SPR Register Access
- 2.6 Reset Settings
- Chapter 3 Instruction Model
- 3.1 Unsupported Instructions and Instruction Forms
- 3.2 Optionally Supported Instructions and Instruction Forms
- 3.3 Implementation Specific Instructions
- 3.4 Power ISA Instruction Extensions
- 3.5 Memory Access Alignment Support
- 3.6 Memory Synchronization and Reservation Instructions
- 3.7 Branch Prediction
- 3.8 Interruption of Instructions by Interrupt Requests
- 3.9 New e200z4 Categories
- 3.10 ISEL Instruction
- 3.11 Enhanced Debug
- 3.12 Machine Check
- 3.13 WAIT Instruction
- 3.14 Enhanced Reservations
- 3.15 Volatile Context Save/Restore
- 3.16 Unimplemented SPRs and Read-Only SPRs
- 3.17 Invalid Forms of Instructions
- 3.18 Instruction Summary
- Chapter 4 Instruction Pipeline and Execution Timing
- 4.1 Overview of Operation
- 4.2 Core Subsystems
- 4.3 Execution Units
- 4.4 Instruction Pipeline
- Table 4-2. Pipeline Stages
- Figure 4-2. Pipeline Diagram
- 4.4.1 Description of Pipeline Stages
- 4.4.2 Instruction Prefetch Buffers and Branch Target Buffer
- 4.4.3 Single-Cycle Instruction Pipeline Operation
- 4.4.4 Basic Load and Store Instruction Pipeline Operation
- 4.4.5 Change-of-Flow Instruction Pipeline Operation
- Figure 4-7. Basic Pipe Line Flow, Branch Instructions (BTB Miss, Correct Prediction, Branch Taken)
- Figure 4-8. Basic Pipe Line Flow, Branch Instructions (BTB Hit, Correct Prediction, Branch Taken)
- Figure 4-9. Basic Pipe Line Flow, Branch Instruction (BTB Hit, Predict Taken, Incorrect Prediction)
- Figure 4-10. Basic Pipe Line Flow, Branch Instructions (BTB Miss, Predict Taken, Incorrect Prediction, Instruction Buffer Empty)
- 4.4.6 Basic Multi-Cycle Instruction Pipeline Operation
- 4.4.7 Additional Examples of Instruction Pipeline Operation for Load and Store
- 4.4.8 Move To/From SPR Instruction Pipeline Operation
- 4.5 Control Hazards
- 4.6 Instruction Serialization
- 4.7 Interrupt Recognition and Exception Processing
- 4.8 Concurrent Instruction Execution
- 4.9 Instruction Timings
- 4.10 Operand Placement On Performance
- Chapter 5 Interrupts and Exceptions
- 5.1 Interrupts
- 5.2 Exception Syndrome Register
- 5.3 Machine State Register
- 5.4 Machine Check Syndrome Register (MCSR)
- 5.5 Interrupt Vector Prefix Registers (IVPR)
- 5.6 Interrupt Vector Offset Registers (IVORxx)
- 5.7 Interrupt Definitions
- 5.7.1 Critical Input Interrupt (IVOR0)
- 5.7.2 Machine Check Interrupt (IVOR1)
- 5.7.3 Data Storage Interrupt (IVOR2)
- 5.7.4 Instruction Storage Interrupt (IVOR3)
- 5.7.5 External Input Interrupt (IVOR4)
- 5.7.6 Alignment Interrupt (IVOR5)
- 5.7.7 Program Interrupt (IVOR6)
- 5.7.8 Floating-Point Unavailable Interrupt (IVOR7)
- 5.7.9 System Call Interrupt (IVOR8)
- 5.7.10 Auxiliary Processor Unavailable Interrupt (IVOR9)
- 5.7.11 Decrementer Interrupt (IVOR10)
- 5.7.12 Fixed-Interval Timer Interrupt (IVOR11)
- 5.7.13 Watchdog Timer Interrupt (IVOR12)
- 5.7.14 Data TLB Error Interrupt (IVOR13)
- 5.7.15 Instruction TLB Error Interrupt (IVOR14)
- 5.7.16 Debug Interrupt (IVOR15)
- 5.7.17 System Reset Interrupt
- 5.7.18 SPE Unavailable Interrupt (IVOR32)
- 5.7.19 EFP Floating-point Data Interrupt (IVOR33)
- 5.7.20 EFP Floating-point Round Interrupt (IVOR34)
- 5.8 Exception Recognition and Priorities
- 5.9 Interrupt Processing
- 5.10 Process Switching
- Chapter 6 Embedded Floating-Point Unit, Version 2
- 6.1 Nomenclature and Conventions
- 6.2 EFPU Programming Model
- 6.3 Embedded Floating-Point Unit Operations
- 6.4 Embedded Floating-point Results Summary
- Table 6-2. Floating-point Results Summary-Add, Sub, Mul, Div
- Table 6-3. Floating-point Results Summary-madd, msub, nmadd, nmsub
- Table 6-4. Floating-Point Results Summary-sqrt
- Table 6-5. Floating-Point Results Summary-Min, Max
- Table 6-6. Floating-point Results Summary-Convert to unsigned
- Table 6-7. Floating-point Results Summary-Convert to signed
- Table 6-8. Floating-point Results Summary-Convert from unsigned
- Table 6-9. Floating-point Results Summary-Convert from signed
- Table 6-10. Floating-point Results Summary-fabs, fnabs, fneg
- Table 6-11. Floating-point Results Summary-Convert from half-precision
- Table 6-12. Floating-point Results Summary-Convert to half-precision
- 6.5 EFPU Instruction Timing
- 6.6 Instruction Forms and Opcodes
- Chapter 7 Signal Processing Extension Unit
- 7.1 Nomenclature and Conventions
- 7.2 SPE Programming Model
- 7.3 Integer SPE Simple Instructions
- Table 7-2. Integer SPE Simple Instructions
- Table 7-3. Data Samples and Sizes
- Figure 7-2. High Order Element Merging with evmergehi
- Figure 7-3. High Order Element Merging with evmergehilo
- Figure 7-4. Low Order Element Merging evmergelo
- Figure 7-5. Low Order Element Merging evmergelohi
- Figure 7-6. evsel
- Figure 7-7. Splat for evsplatfi
- Figure 7-8. Sign Extend in evsplati
- 7.4 Integer SPE Multiply, Multiply-Accumulate, and Operation to Accumulator Instructions (Complex Integer Instructions)
- Table 7-4. Mnemonic Extensions for Multiply-Accumulate Instructions
- 7.4.1 Multiply Half-Word Instructions
- Figure 7-9. evmhegsmfaa
- Figure 7-10. evmhegsmfan
- Figure 7-11. evmhegsmiaa
- Figure 7-12. evmhegsmian
- Figure 7-13. evmhegumiaa
- Figure 7-14. evmhegumian
- Figure 7-15. evmhesmf
- Figure 7-16. evmhesmfa
- Figure 7-17. evmhesmfaaw
- Figure 7-18. evmhesmfanw
- Figure 7-19. evmhesmi
- Figure 7-20. evmhesmia
- Figure 7-21. evmhesmiaaw
- Figure 7-22. evmhesmianw
- Figure 7-23. evmhessf
- Figure 7-24. evmhessfa
- Figure 7-25. evmhessfaaw
- Figure 7-26. evmhessfanw
- Figure 7-27. Even Form of Vector half word Multiply (evmhessiaaw)
- Figure 7-28. evmhessianw
- Figure 7-29. evmheumi-Even Multiply of Two Unsigned Modulo Integer Elements
- Figure 7-30. evmheumia
- Figure 7-31. evmheumiaaw
- Figure 7-32. evmheumianw
- Figure 7-33. evmheusiaaw
- Figure 7-34. evmheusianw
- Figure 7-35. evmhogsmfaa
- Figure 7-36. evmhogsmfan
- Figure 7-37. evmhogsmiaa
- Figure 7-38. evmhogsmian
- Figure 7-39. evmhogumiaa
- Figure 7-40. evmhogumian
- Figure 7-41. evmhosmf
- Figure 7-42. evmhosmfa
- Figure 7-43. evmhosmfaaw
- Figure 7-44. evmhosmfanw
- Figure 7-45. evmhosmi
- Figure 7-46. evmhosmia
- Figure 7-47. evmhosmiaaw
- Figure 7-48. evmhosmianw
- Figure 7-49. evmhossf
- Figure 7-50. evmhossfa
- Figure 7-51. evmhossfaaw
- Figure 7-52. evmhossfanw
- Figure 7-53. evmhossiaaw
- Figure 7-54. evmhossianw
- Figure 7-55. evmhoumi
- Figure 7-56. evmhoumia
- Figure 7-57. evmhoumiaaw
- Figure 7-58. evmhoumianw
- Figure 7-59. evmhousiaaw
- Figure 7-60. evmhousianw
- 7.4.2 Multiply Words Instructions
- Table 7-5. Multiply Words Instructions
- Figure 7-61. evmwhsmf
- Figure 7-62. evmwhsmfa
- Figure 7-63. evmwhsmi
- Figure 7-64. evmwhsmia
- Figure 7-65. evmwhssf
- Figure 7-66. evmwhssfa
- Figure 7-67. evmwhumi
- Figure 7-68. evmwhumia
- Figure 7-69. evmwlsmiaaw
- Figure 7-70. evmwlsmianw
- Figure 7-71. evmwlssiaaw
- Figure 7-72. evmwlssianw
- Figure 7-73. evmwlumi
- Figure 7-74. evmwlumia
- Figure 7-75. evmwlumiaaw
- Figure 7-76. evmwlumianw
- Figure 7-77. evmwlusiaaw
- Figure 7-78. evmwlusianw
- Figure 7-79. evmwsmf
- Figure 7-80. evmwsmfa
- Figure 7-81. evmwsmfaa
- Figure 7-82. evmwsmfan
- Figure 7-83. evmwsmi
- Figure 7-84. evmwsmia
- Figure 7-85. evmwsmiaa
- Figure 7-86. evmwsmian
- Figure 7-87. evmwssf
- Figure 7-88. evmwssfa
- Figure 7-89. evmwssfaa
- Figure 7-90. evmwssfan
- Figure 7-91. evmwumi
- Figure 7-92. evmwumia
- Figure 7-93. evmwumiaa
- Figure 7-94. evmwumian
- 7.4.3 Add/Subtract Word to Accumulator Instructions
- 7.4.4 Initializing and Reading the Accumulator
- 7.5 SPE Vector Load/Store Instructions
- Table 7-6. SPE Vector Load/Store Instructions
- Figure 7-104. evldd Results in Big- and Little-Endian Modes
- Figure 7-105. evlddx Results in Big- and Little-Endian Modes
- Figure 7-106. evldw Results in Big- and Little-Endian Modes
- Figure 7-107. evldwx Results in Big- and Little-Endian Modes
- Figure 7-108. evldh Results in Big- and Little-Endian Modes
- Figure 7-109. evldhx Results in Big- and Little-Endian Modes
- Figure 7-110. evlwhe Results in Big- and Little-Endian Modes
- Figure 7-111. evlwhex Results in Big- and Little-Endian Modes
- Figure 7-112. evlwhou Results in Big- and Little-Endian Modes
- Figure 7-113. evlwhoux Results in Big- and Little-Endian Modes
- Figure 7-114. evlwhos Results in Big- and Little-Endian Modes
- Figure 7-115. evlwhosx Results in Big- and Little-Endian Modes
- Figure 7-116. evlwwsplat Results in Big- and Little-Endian Modes
- Figure 7-117. evlwwsplatx Results in Big- and Little-Endian Modes
- Figure 7-118. evlwhsplat Results in Big- and Little-Endian Modes
- Figure 7-119. evlwhsplatx Results in Big- and Little-Endian Modes
- Figure 7-120. evlhhesplat Results in Big- and Little-Endian Modes
- Figure 7-121. evlhhesplatx Results in Big- and Little-Endian Modes
- Figure 7-122. evlhhousplat Results in Big- and Little-Endian Modes
- Figure 7-123. evlhhousplatx Results in Big- and Little-Endian Modes
- Figure 7-124. evlhhossplat Results in Big- and Little-Endian Modes
- Figure 7-125. evlhhossplatx Results in Big- and Little-Endian Modes
- Figure 7-126. evstdd Results in Big- and Little-Endian Modes
- Figure 7-127. evstddx Results in Big- and Little-Endian Modes
- Figure 7-128. evstdw Results in Big- and Little-Endian Modes
- Figure 7-129. evstdwx Results in Big- and Little-Endian Modes
- Figure 7-130. evstdh Results in Big- and Little-Endian Modes
- Figure 7-131. evstdhx Results in Big- and Little-Endian Modes
- Figure 7-132. evstwwe Results in Big- and Little-Endian Modes
- Figure 7-133. evstwwex Results in Big- and Little-Endian Modes
- Figure 7-134. evstwwo Results in Big- and Little-Endian Modes
- Figure 7-135. evstwwox Results in Big- and Little-Endian Modes
- Figure 7-136. evstwhe Results in Big- and Little-Endian Modes
- Figure 7-137. evstwhex Results in Big- and Little-Endian Modes
- Figure 7-138. evstwho Results in Big- and Little-Endian Modes
- Figure 7-139. evstwhox Results in Big- and Little-Endian Modes
- 7.6 SPE Instruction Timing
- 7.7 Instruction Forms and Opcodes
- Chapter 8 Power Management
- 8.1 Active State
- 8.2 Waiting State
- 8.3 Halted State
- 8.4 Stopped State
- 8.5 Power Management Pins
- 8.6 Power Management Control Bits
- 8.7 Software Considerations for Power Management using Wait Instructions
- 8.8 Software Considerations for Power Management using Doze, Nap or Sleep
- 8.9 Debug Considerations for Power Management
- Chapter 9 L1 Cache
- 9.1 Overview
- 9.2 4 Kbyte ICache Organization
- 9.3 Cache Lookup
- 9.4 Cache Control
- 9.5 Cache Organization Control
- 9.6 Cache Operation
- 9.7 Cache Parity and EDC Protection
- 9.8 Cache Management Instructions
- 9.9 Touch Instructions
- 9.10 Cache Line Locking/Unlocking
- 9.11 Cache Instructions and Exceptions
- 9.12 Self-Modifying Code Requirements
- 9.13 Page Table Control Bits
- 9.14 Effect of Hardware Debug on Cache Operation
- 9.15 Cache Memory Access For Debug/Error Handling
- 9.16 Hardware Debug (Cache) Control Register 0
- Chapter 10 Memory Management Unit
- 10.1 Overview
- 10.2 Effective to Real Address Translation
- 10.3 Translation Lookaside Buffer
- 10.4 Configuration Information
- 10.5 Software Interface and TLB Instructions
- 10.6 TLB Operations
- 10.7 MMU Control Registers
- 10.7.1 DEAR Register
- 10.7.2 MMU Control and Status Register 0 (MMUCSR0)
- 10.7.3 MMU Assist Registers (MAS)
- Figure 10-9. MMU Assist Register 0 (MAS0)
- Table 10-9. MAS0 -MMU Read/Write and Replacement Control
- Figure 10-10. MMU Assist Register 1 (MAS1)
- Table 10-10. MAS1-Descriptor Context and Configuration Control
- Figure 10-11. MMU Assist Register 2 (MAS2)
- Table 10-11. MAS2-EPN and Page Attributes
- Figure 10-12. MMU Assist Register 3 (MAS3)
- Table 10-12. MAS3-RPN and Access Control
- Figure 10-13. MMU Assist Register 4 (MAS4)
- Table 10-13. MAS4-Hardware Replacement Assist Configuration Register
- Figure 10-14. MMU Assist Register 6 (MAS6)
- Table 10-14. MAS6-TLB Search Context Register 0
- 10.7.4 MAS Registers Summary
- 10.7.5 MAS Register Updates
- 10.8 TLB Coherency Control
- 10.9 Core Interface Operation for MMU Control Instructions
- 10.10 Effect of Hardware Debug on MMU Operation
- 10.11 External Translation Alterations for Real-time Systems
- Chapter 11 Debug Support
- 11.1 Overview
- 11.2 Software Debug Events and Exceptions
- 11.2.1 Instruction Address Compare Event
- 11.2.2 Data Address Compare Event
- 11.2.3 Linked Instruction Address and Data Address Compare Event
- 11.2.4 Trap Debug Event
- 11.2.5 Branch Taken Debug Event
- 11.2.6 Instruction Complete Debug Event
- 11.2.7 Interrupt Taken Debug Event
- 11.2.8 Critical Interrupt Taken Debug Event
- 11.2.9 Return Debug Event
- 11.2.10 Critical Return Debug Event
- 11.2.11 Debug Counter Debug Event
- 11.2.12 External Debug Event
- 11.2.13 Unconditional Debug Event
- 11.3 Debug Registers
- 11.3.1 Debug Address and Value Registers
- 11.3.2 Debug Counter Register (DBCNT)
- 11.3.3 Debug Control and Status Registers
- 11.3.3.1 Debug Control Register 0 (DBCR0)
- 11.3.3.2 Debug Control Register 1 (DBCR1)
- 11.3.3.3 Debug Control Register 2 (DBCR2)
- 11.3.3.4 Debug Control Register 3 (DBCR3)
- 11.3.3.5 Debug Control Register 4 (DBCR4)
- 11.3.3.6 Debug Control Register 5 (DBCR5)
- 11.3.3.7 Debug Control Register 6 (DBCR6)
- 11.3.3.8 Debug Status Register (DBSR)
- 11.3.4 Debug External Resource Control Register (DBERC0)
- 11.3.5 Debug Event Select Register (DEVENT)
- 11.3.6 Debug Data Acquisition Message Register (DDAM)
- 11.4 External Debug Support
- 11.4.1 External Debug Registers
- 11.4.2 OnCE Introduction
- 11.4.3 JTAG/OnCE Pins
- 11.4.4 OnCE Internal Interface Signals
- 11.4.5 OnCE Interface Signals
- 11.4.6 e200 OnCE Controller and Serial Interface
- 11.4.7 Access to Debug Resources
- 11.4.8 Methods of Entering Debug Mode
- 11.4.9 CPU Status and Control Scan Chain Register (CPUSCR)
- 11.4.10 Instruction Address FIFO Buffer (PC FIFO)
- 11.4.11 Reserved Registers (Reserved)
- 11.5 Watchpoint Support
- 11.6 MMU and Cache Operation During Debug
- 11.7 Cache Array Access During Debug
- 11.8 Basic Steps for Enabling, Using, and Exiting External Debug Mode
- 11.9 Parallel Signature Unit
- 11.9.1 Parallel Signature Control Register (PSCR)
- 11.9.2 Parallel Signature Status Register (PSSR)
- 11.9.3 Parallel Signature High Register (PSHR)
- 11.9.4 Parallel Signature Low Register (PSLR)
- 11.9.5 Parallel Signature Counter Register (PSCTR)
- 11.9.6 Parallel Signature Update High Register (PSUHR)
- 11.9.7 Parallel Signature Update Low Register (PSULR)
- Chapter 12 Nexus 3+ Module
- 12.1 Introduction
- 12.2 Enabling Nexus 3+ Operation
- 12.3 TCODEs Supported
- 12.4 Nexus 3+ Programmer’s Model
- Table 12-8. Nexus 3+ Register Map
- 12.4.1 Client Select Control (CSC)-reference only
- 12.4.2 Port Configuration Register (PCR)-reference only
- 12.4.3 Nexus Development Control Register 1 (DC1)
- 12.4.4 Nexus Development Control Registers 2 and 3 (DC2, DC3)
- 12.4.5 Nexus Development Control Register 4 (DC4)
- 12.4.6 Development Status Register (DS)
- 12.4.7 Watchpoint Trigger Registers (WT, PTSTC, PTETC, DTSTC, DTETC)
- Figure 12-9. Watchpoint Trigger (WT) Register
- Table 12-16. Watchpoint Trigger Register Fields
- Figure 12-10. Program Trace Start Trigger Control (PTSTC) Register
- Table 12-17. Program Trace Start Trigger Control Register Fields
- Figure 12-11. Program Trace End Trigger Control (PTETC) Register
- Table 12-18. Program Trace End Trigger Control Register Fields
- Figure 12-12. Data Trace Start Trigger Control (DTSTC) Register
- Table 12-19. Data Trace Start Trigger Control Register Fields
- Figure 12-13. Data Trace End Trigger Control (DTETC) Register
- Table 12-20. Data Trace End Trigger Control Register Fields
- 12.4.8 Nexus Watchpoint Mask Register (WMSK)
- 12.4.9 Nexus Overrun Control Register (OVCR)
- 12.4.10 Data Trace Control Register (DTC)
- 12.4.11 Data Trace Start Address Registers (DTSA1-4)
- 12.4.12 Data Trace End Address Registers (DTEA1-4)
- 12.4.13 Read/Write Access Control/Status (RWCS)
- 12.4.14 Read/Write Access Data (RWD)
- 12.4.15 Read/Write Access Address (RWA)
- 12.5 Nexus 3+ Register Access via JTAG/OnCE
- 12.6 Nexus Message Fields
- 12.7 Nexus Message Queues
- 12.7.1 Message Queue Overrun
- 12.7.2 CPU Stall
- 12.7.3 Message Suppression
- 12.7.4 Nexus Message Priority
- 12.7.5 Data Acquisition Message Priority Loss Response
- 12.7.6 Ownership Trace Message Priority Loss Response
- 12.7.7 Program Trace Message Priority Loss Response
- 12.7.8 Data Trace Message Priority Loss Response
- 12.8 Debug Status Messages
- 12.9 Error Messages
- 12.10 Ownership Trace
- 12.11 Program Trace
- 12.11.1 Branch Trace Messaging Types
- 12.11.2 BTM Message Formats
- 12.11.3 Program Trace Message Fields
- 12.11.4 Resource Full Messages
- 12.11.5 Program Correlation Messages
- Figure 12-36. Program Correlation Message Formats
- 12.11.5.1 Program Correlation Message Generation for TLB Update with New Address Translation
- 12.11.5.2 Program Correlation Message Generation for TLB Invalidate (tlbivax) Operations
- 12.11.5.3 Program Correlation Message Generation for PID Updates or MSR[IS] Updates
- 12.11.6 Program Trace Overflow Error Messages
- 12.11.7 Program Trace Synchronization Messages
- 12.11.8 Enabling Program Trace
- 12.11.9 Program Trace Timing Diagrams (2 MDO/1 MSEO configuration)
- 12.12 Data Trace
- 12.13 Data Acquisition Messaging
- 12.14 Watchpoint Trace Messaging
- 12.15 Nexus 3+ Read/Write Access to Memory-Mapped Resources
- 12.16 Nexus 3+ Pin Interface
- 12.17 Rules for Output Messages
- 12.18 Auxiliary Port Arbitration
- 12.19 Examples
- Table 12-43. Indirect Branch Message Example (2 MDO/1 MSEO)
- Table 12-44. Indirect Branch Message Example (8 MDO/2 MSEO)
- Table 12-45. Direct Branch Message Example (2 MDO / 1 MSEO)
- Table 12-46. Direct Branch Message Example (8 MDO / 2 MSEO)
- Table 12-47. Data Write Message Example (8 MDO / 1 MSEO)
- Table 12-48. Data Write Message Example (8 MDO / 2 MSEO)
- 12.20 Electrical Characteristics
- 12.21 IEEE 1149.1 (JTAG) RD/WR Sequences
- Chapter 13 External Core Complex Interfaces
- 13.1 Overview
- 13.2 Signal Index
- 13.3 Signal Descriptions
- 13.3.1 e200 Processor Clock (m_clk)
- 13.3.2 Reset-Related Signals
- 13.3.3 Address and Data Buses
- 13.3.4 Transfer Attribute Signals
- 13.3.4.1 Transfer Type (p_d_htrans[1:0], p_i_htrans[1:0])
- 13.3.4.2 Write (p_d_hwrite, p_i_hwrite)
- 13.3.4.3 Transfer Size (p_d_hsize[1:0], p_i_hsize[1:0])
- 13.3.4.4 Burst Type (p_d_hburst[2:0], p_i_hburst[2:0])
- 13.3.4.5 Protection Control (p_d_hprot[5:0], p_i_hprot[5:0])
- 13.3.4.6 Cache Way Replacement (p_i_wayrep[0:1])
- 13.3.5 Byte Lane Specification
- 13.3.6 Transfer Control Signals
- 13.3.7 AHB Clock Enable Signals
- 13.3.8 Master ID Configuration Signals
- 13.3.9 Interrupt Signals
- 13.3.9.1 External Input Interrupt Request (p_extint_b)
- 13.3.9.2 Critical Input Interrupt Request (p_critint_b)
- 13.3.9.3 Non-Maskable Input Interrupt Request (p_nmi_b)
- 13.3.9.4 Interrupt Pending (p_ipend)
- 13.3.9.5 Autovector (p_avec_b)
- 13.3.9.6 Interrupt Vector Offset (p_voffset[0:15])
- 13.3.9.7 Interrupt Vector Acknowledge (p_iack)
- 13.3.9.8 Machine Check (p_mcp_b)
- 13.3.10 Lockstep Enable Signal (p_lkstep_en)
- 13.3.11 Cache Error Cross-signaling Signals
- 13.3.11.1 Cache Tag Error Out (p_cache_tagerr_out)
- 13.3.11.2 Cache Data Error Out (p_cache_dataerr_out)
- 13.3.11.3 Cache Error Address Out (p_cerraddr_out[0:31])
- 13.3.11.4 Cache Error Way(s) Out (p_cerrway_out[0:3])
- 13.3.11.5 Cache Tag Error In (p_cache_tagerr_in)
- 13.3.11.6 Cache Data Error In (p_cache_dataerr_in)
- 13.3.11.7 Cache Error Way(s) In (p_cerrway_in[0:3])
- 13.3.12 External Translation Alteration Signals
- 13.3.13 Timer Facility Signals
- 13.3.14 Processor Reservation Signals
- 13.3.15 Miscellaneous Processor Signals
- 13.3.16 Processor State Signals
- 13.3.16.1 Processor Mode (p_mode[0:3])
- 13.3.16.2 Processor Execution Pipeline Status (p_pstat_pipe0[0:5], p_pstat_pipe1[0:5])
- 13.3.16.3 Branch Prediction Status (p_brstat[0:1])
- 13.3.16.4 Processor Exception Enable MSR values (p_msr_EE, p_msr_CE, p_msr_DE, p_msr_ME)
- 13.3.16.5 Processor Return from Interrupt (p_rfi, p_rfci, p_rfdi, p_rfmci)
- 13.3.16.6 Processor Machine Check (p_mcp_out)
- 13.3.17 Power Management Control Signals
- 13.3.18 Debug Event Input Signals
- 13.3.19 Debug Event Output Signals (p_devnt_out[0:7])
- 13.3.20 Debug/Emulation (Nexus 1/ OnCE) Support Signals
- 13.3.21 Debug Lockstep Cross-signaling Signals
- 13.3.21.1 Debug Request EDM In (p_dbgrq_edm_in)
- 13.3.21.2 Debug Request EDM Out (p_dbgrq_edm_out)
- 13.3.21.3 Debug Go Request In (p_dbg_go_in)
- 13.3.21.4 Debug Go Request Out (p_dbg_go_out)
- 13.3.21.5 Debug Nexus 3 Update_DR state In (p_nex3_updtdr_in)
- 13.3.21.6 Debug Nexus 3 Update_DR state Out (p_nex3_updtdr_out)
- 13.3.22 Development Support (Nexus 3) Signals
- 13.3.23 JTAG Support Signals-Primary Interface
- 13.3.24 JTAG Support Signals-Support for External Registers
- 13.3.25 JTAG ID Signals
- 13.4 Timing Diagrams
- 13.4.1 AHB Clock Enable and the Internal HCLK
- 13.4.2 Processor Instruction/Data Transfers
- 13.4.3 Cache Error Cross-Signaling Operation
- 13.4.3.1 Cross-Signaling with Machine Check Operation Selected
- 13.4.3.2 Cross-Signaling with Auto-Invalidation Operation Selected
- Figure 13-27. Cross-Signaling Invalidation Output Operation-Data Error
- Figure 13-28. Cross-Signaling Invalidation Output Operation-Tag Error, Miss
- Figure 13-29. Cross-signaling Invalidation Output Operation-Tag Error, Hit
- Figure 13-30. Cross-Signaling Invalidation Output Operation-Tag Error, Locked lnv
- Figure 13-31. Cross-Signaling Invalidation Input Operation-Data Error
- Figure 13-32. Cross-Signaling Invalidation Input Operation-Tag Error, Miss
- Figure 13-33. Cross-Signaling Invalidation Input Operation-Tag Error, Hit
- Figure 13-34. Cross-signaling Invalidation Input Operation-Tag Error, Locked lnv
- 13.4.4 Debug Lockstep Cross-signaling Operation
- 13.4.5 Power Management
- 13.4.6 Interrupt Interface
- 13.4.7 Time Base Interface
- 13.4.8 JTAG Test Interface
- Appendix A Register Summary
- Figure A-1. e200z446n3 Supervisor Mode Programmer’s Model SPRs
- Figure A-2. e200z4463 User Mode Programmer’s Model SPRs
- Figure A-3. Machine State Register (MSR)
- Figure A-4. Processor ID Register (PIR)
- Figure A-5. Processor Version Register (PVR)
- Figure A-6. System Version Register (SVR)
- Figure A-7. Integer Exception Register (XER)
- Figure A-8. Exception Syndrome Register (ESR)
- Figure A-9. Machine Check Syndrome Register (MCSR)
- Figure A-10. Timer Control Register (TCR)
- Figure A-11. Timer Status Register (TSR)
- Figure A-12. Hardware Implementation Dependent Register 0 (HID0)
- Figure A-13. Hardware Implementation Dependent Register 1 (HID1)
- Figure A-14. Branch Unit Control and Status Register (BUCSR)
- Figure A-15. e200 Interrupt Vector Offset Register (IVOR)
- Figure A-16. DBCNT Register
- Figure A-17. DBCR0 Register
- Figure A-18. DBCR1 Register
- Figure A-19. DBCR2 Register
- Figure A-20. DBCR3 Register
- Figure A-21. DBCR4 Register
- Figure A-22. DBCR5 Register
- Figure A-23. DBCR6 Register
- Figure A-24. DBSR Register
- Figure A-25. DBERC0 Register
- Figure A-26. OnCE Status Register
- Figure A-27. OnCE Command Register
- Figure A-28. OnCE Control Register
- Figure A-29. CPU Scan Chain Register (CPUSCR)
- Figure A-30. Control State Register (CTL)
- Figure A-31. SPE Status and Control Register (SPEFSCR)
- Figure A-32. L1 Cache Control and Status Register 0 (L1CSR0)
- Figure A-33. L1 Cache Control and Status Register 1 (L1CSR1)
- Figure A-34. L1 Cache Configuration Register 0 (L1CFG0)
- Figure A-35. L1 Cache Configuration Register 1 (L1CFG1)
- Figure A-36. L1 Flush/Invalidate Register (L1FINV1)
- Figure A-37. MMU Configuration Register (MMUCFG)
- Figure A-38. TLB Configuration Register (TLB0CFG, TLB1CFG)
- Figure A-39. MMU Control and Status Register 0 (MMUCSR0)
- Figure A-40. MMU Assist Registers Summary
- Figure A-41. Parallel Signature Control Register (PSCR)
- Figure A-42. Parallel Signature Status Register (PSSR)
- Figure A-43. Parallel Signature High Register (PSHR)
- Figure A-44. Parallel Signature Low Register (PSLR)
- Figure A-45. Parallel Signature Counter Register (PSCTR)
- Figure A-46. Parallel Signature Update High Register (PSUHR)
- Figure A-47. Parallel Signature Update Low Register (PSULR)
- Appendix B Revision History

e200z4 Power Architecture™
Core Reference Manual
Supports
e200z446n3
e200z4RM
Rev. 0
10/2009

Freescale and the Freescale logo are trademarks or registered trademarks
of Freescale Semiconductor, Inc. in the U.S. and other countries. All other
product or service names are the property of their respective owners. The
Power Architecture and Power.org word marks and the Power and
Power.org logos and related marks are trademarks and service marks
licensed by Power.org. IEEE 1149.1, 754, and ISTO-Nexus 5001-2008 are
trademarks or registered trademarks of the Institute of Electrical and
Electronics Engineers, Inc. (IEEE). This product is not endorsed or
approved by the IEEE.
© Freescale Semiconductor, Inc., 2009. All rights reserved.
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductor products. There are no express or
implied copyright licenses granted hereunder to design or fabricate any integrated
circuits or integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to
any products herein. Freescale Semiconductor makes no warranty, representation or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application or use of
any product or circuit, and specifically disclaims any and all liability, including without
limitation consequential or incidental damages. “Typical” parameters which may be
provided in Freescale Semiconductor data sheets and/or specifications can and do
vary in different applications and actual performance may vary over time. All operating
parameters, including “Typicals” must be validated for each customer application by
customer’s technical experts. Freescale Semiconductor does not convey any license
under its patent rights nor the rights of others. Freescale Semiconductor products are
not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support or sustain life,
or for any other application in which the failure of the Freescale Semiconductor product
could create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended or
unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all
claims, costs, damages, and expenses, and reasonable attorney fees arising out of,
directly or indirectly, any claim of personal injury or death associated with such
unintended or unauthorized use, even if such claim alleges that Freescale
Semiconductor was negligent regarding the design or manufacture of the part.
Document Number: e200z4RM
Rev. 0, 10/2009
How to Reach Us:
Home Page:
www.freescale.com
Web Support:
http://www.freescale.com/support
USA/Europe or Locations Not Listed:
Freescale Semiconductor, Inc.
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or
+1-480-768-2130
www.freescale.com/support
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
www.freescale.com/support
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku
Tokyo 153-0064
Japan
0120 191014 or
+81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor China Ltd.
Exchange Building 23F
No. 118 Jianguo Road
Chaoyang District
Beijing 100022
China
+86 010 5879 8000
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor
Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
+1-800 441-2447 or
+1-303-675-2140
Fax: +1-303-675-2150
LDCForFreescaleSemiconductor
@hibbertgroup.com

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor iii
Contents
Paragraph
Number Title Page
Number
Co nt ents
Chapter 1
e200z4 Core Complex Overview
1.1 Overview.......................................................................................................................... 1-1
1.2 Features............................................................................................................................ 1-3
1.2.1 Execution Unit Features............................................................................................... 1-3
1.2.1.1 Instruction Unit Features ......................................................................................... 1-4
1.2.1.2 Integer Unit Features ............................................................................................... 1-4
1.2.1.3 Load/Store Unit Features......................................................................................... 1-4
1.2.2 L1 Cache Features ....................................................................................................... 1-4
1.2.3 Memory Management Unit Features ........................................................................... 1-5
1.2.4 System Bus (Core Complex Interface) Features.......................................................... 1-5
1.2.5 Nexus 3+ Features ....................................................................................................... 1-6
1.3 Programming Model........................................................................................................ 1-6
1.3.1 Register Set.................................................................................................................. 1-7
1.3.2 Instruction Set.............................................................................................................. 1-9
1.3.3 Interrupts and Exception Handling............................................................................ 1-10
1.4 Microarchitecture Summary .......................................................................................... 1-12
Chapter 2
Register Model
2.1 Power ISA Embedded Category Registers ...................................................................... 2-3
2.1.1 User-level Registers..................................................................................................... 2-3
2.1.2 Supervisor-level Registers ........................................................................................... 2-4
2.2 e200-Specific Special Purpose Registers......................................................................... 2-6
2.2.1 User-Level Registers.................................................................................................... 2-7
2.2.2 Supervisor-Level Registers.......................................................................................... 2-7
2.3 e200-Specific Device Control Registers.......................................................................... 2-9
2.4 Special Purpose Register Descriptions ............................................................................ 2-9
2.4.1 Machine State Register (MSR).................................................................................... 2-9
2.4.2 Processor ID Register (PIR) ...................................................................................... 2-11
2.4.3 Processor Version Register (PVR)............................................................................. 2-12
2.4.4 System Version Register (SVR)................................................................................. 2-12
2.4.5 Integer Exception Register (XER)............................................................................. 2-13
2.4.6 Exception Syndrome Register ................................................................................... 2-14
2.4.6.1 Power ISA VLE Mode Instruction Syndrome....................................................... 2-16
2.4.6.2 Misaligned Instruction Fetch Syndrome................................................................ 2-16
2.4.7 Machine Check Syndrome Register (MCSR)............................................................ 2-17
2.4.8 Timer Control Register (TCR)................................................................................... 2-19

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
iv Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
2.4.9 Timer Status Register (TSR)...................................................................................... 2-21
2.4.10 Debug Registers......................................................................................................... 2-22
2.4.11 Hardware Implementation Dependent Register 0 (HID0)......................................... 2-22
2.4.12 Hardware Implementation Dependent Register 1 (HID1).........................................2-24
2.4.13 Branch Unit Control and Status Register (BUCSR).................................................. 2-25
2.4.14 L1 Cache Control and Status Registers (L1CSR0, L1CSR1).................................... 2-26
2.4.15 L1 Cache Configuration Registers (L1CFG0, L1CFG1)........................................... 2-27
2.4.16 L1 Cache Flush and Invalidate Register (L1FINV1)................................................. 2-27
2.4.17 MMU Control and Status Register (MMUCSR0) ..................................................... 2-27
2.4.18 MMU Configuration Register (MMUCFG) .............................................................. 2-27
2.4.19 TLB Configuration Registers (TLB0CFG, TLB1CFG)............................................. 2-27
2.5 SPR Register Access...................................................................................................... 2-27
2.5.1 Invalid SPR References ............................................................................................. 2-27
2.5.2 Synchronization Requirements for SPRs................................................................... 2-28
2.5.3 Special Purpose Register Summary........................................................................... 2-29
2.6 Reset Settings................................................................................................................. 2-33
Chapter 3
Instruction Model
3.1 Unsupported Instructions and Instruction Forms............................................................. 3-1
3.2 Optionally Supported Instructions and Instruction Forms............................................... 3-2
3.3 Implementation Specific Instructions .............................................................................. 3-2
3.4 Power ISA Instruction Extensions................................................................................... 3-3
3.5 Memory Access Alignment Support................................................................................ 3-3
3.6 Memory Synchronization and Reservation Instructions.................................................. 3-3
3.7 Branch Prediction ............................................................................................................3-4
3.8 Interruption of Instructions by Interrupt Requests........................................................... 3-5
3.9 New e200z4 Categories ................................................................................................... 3-5
3.10 ISEL Instruction............................................................................................................... 3-6
3.11 Enhanced Debug ..............................................................................................................3-6
3.11.1 Debug Notify Halt Instructions.................................................................................... 3-8
3.12 Machine Check .............................................................................................................. 3-10
3.13 WAIT Instruction ........................................................................................................... 3-12
3.14 Enhanced Reservations.................................................................................................. 3-13
3.15 Volatile Context Save/Restore ....................................................................................... 3-16
3.16 Unimplemented SPRs and Read-Only SPRs ................................................................. 3-23
3.17 Invalid Forms of Instructions......................................................................................... 3-24
3.17.1 Load and Store with Update Instructions .................................................................. 3-24
3.17.2 Load Multiple Word (lmw, e_lmw) Instruction......................................................... 3-24
3.17.3 Branch Conditional To Count Register Instructions.................................................. 3-24

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor v
Contents
Paragraph
Number Title Page
Number
3.17.4 Instructions With Reserved Fields Non-Zero ............................................................ 3-24
3.18 Instruction Summary...................................................................................................... 3-25
3.18.1 Instruction Index Sorted by Mnemonic ..................................................................... 3-25
3.18.2 Instruction Index Sorted by Opcode.......................................................................... 3-34
Chapter 4
Instruction Pipeline and Execution Timing
4.1 Overview of Operation .................................................................................................... 4-1
4.2 Core Subsystems..............................................................................................................4-3
4.2.1 Control Unit ................................................................................................................. 4-3
4.2.2 Instruction Unit............................................................................................................ 4-3
4.2.3 Branch Unit.................................................................................................................. 4-3
4.2.4 Instruction Decode Unit............................................................................................... 4-3
4.2.5 Exception Handling ..................................................................................................... 4-3
4.3 Execution Units................................................................................................................ 4-4
4.3.1 Integer Execution Units ............................................................................................... 4-4
4.3.2 Load/Store Unit............................................................................................................4-4
4.3.3 Embedded Floating-point Execution Units.................................................................. 4-4
4.4 Instruction Pipeline.......................................................................................................... 4-4
4.4.1 Description of Pipeline Stages..................................................................................... 4-6
4.4.2 Instruction Prefetch Buffers and Branch Target Buffer...............................................4-6
4.4.3 Single-Cycle Instruction Pipeline Operation ............................................................... 4-8
4.4.4 Basic Load and Store Instruction Pipeline Operation.................................................. 4-9
4.4.5 Change-of-Flow Instruction Pipeline Operation.......................................................... 4-9
4.4.6 Basic Multi-Cycle Instruction Pipeline Operation..................................................... 4-11
4.4.7 Additional Examples of Instruction Pipeline Operation for Load and Store............. 4-13
4.4.8 Move To/From SPR Instruction Pipeline Operation.................................................. 4-14
4.5 Control Hazards ............................................................................................................. 4-16
4.6 Instruction Serialization................................................................................................. 4-16
4.6.1 Completion Serialization ........................................................................................... 4-17
4.6.2 Dispatch Serialization................................................................................................ 4-17
4.6.3 Refetch Serialization.................................................................................................. 4-17
4.7 Interrupt Recognition and Exception Processing...........................................................4-18
4.8 Concurrent Instruction Execution.................................................................................. 4-20
4.9 Instruction Timings........................................................................................................ 4-20
4.10 Operand Placement On Performance............................................................................. 4-26
Chapter 5
Interrupts and Exceptions

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
vi Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
5.1 Interrupts.......................................................................................................................... 5-2
5.1.1 Interrupt Classes ..........................................................................................................5-2
5.1.2 Interrupt Types............................................................................................................. 5-2
5.2 Exception Syndrome Register ......................................................................................... 5-5
5.3 Machine State Register .................................................................................................... 5-7
5.4 Machine Check Syndrome Register (MCSR).................................................................. 5-9
5.5 Interrupt Vector Prefix Registers (IVPR)....................................................................... 5-12
5.6 Interrupt Vector Offset Registers (IVORxx).................................................................. 5-12
5.7 Interrupt Definitions ...................................................................................................... 5-13
5.7.1 Critical Input Interrupt (IVOR0)................................................................................ 5-13
5.7.2 Machine Check Interrupt (IVOR1)............................................................................ 5-14
5.7.2.1 Machine Check Causes.......................................................................................... 5-15
5.7.2.1.1 Error Report Machine Check Exceptions.......................................................... 5-15
5.7.2.1.2 Non-Maskable Interrupt Machine Check Exceptions ....................................... 5-16
5.7.2.1.3 Asynchronous Machine Check Exceptions ....................................................... 5-17
5.7.2.2 Machine Check Interrupt Actions.......................................................................... 5-19
5.7.2.3 Checkstop State ..................................................................................................... 5-21
5.7.3 Data Storage Interrupt (IVOR2) ................................................................................ 5-21
5.7.4 Instruction Storage Interrupt (IVOR3) ...................................................................... 5-21
5.7.5 External Input Interrupt (IVOR4).............................................................................. 5-22
5.7.6 Alignment Interrupt (IVOR5).................................................................................... 5-23
5.7.7 Program Interrupt (IVOR6) ....................................................................................... 5-24
5.7.8 Floating-Point Unavailable Interrupt (IVOR7).......................................................... 5-25
5.7.9 System Call Interrupt (IVOR8).................................................................................. 5-26
5.7.10 Auxiliary Processor Unavailable Interrupt (IVOR9)................................................. 5-26
5.7.11 Decrementer Interrupt (IVOR10) .............................................................................. 5-26
5.7.12 Fixed-Interval Timer Interrupt (IVOR11).................................................................. 5-27
5.7.13 Watchdog Timer Interrupt (IVOR12) ........................................................................ 5-28
5.7.14 Data TLB Error Interrupt (IVOR13) ......................................................................... 5-28
5.7.15 Instruction TLB Error Interrupt (IVOR14)................................................................ 5-29
5.7.16 Debug Interrupt (IVOR15) ........................................................................................ 5-30
5.7.17 System Reset Interrupt............................................................................................... 5-33
5.7.18 SPE Unavailable Interrupt (IVOR32)........................................................................ 5-34
5.7.19 EFP Floating-point Data Interrupt (IVOR33)............................................................ 5-35
5.7.20 EFP Floating-point Round Interrupt (IVOR34)......................................................... 5-35
5.8 Exception Recognition and Priorities ............................................................................ 5-36
5.8.1 Exception Priorities.................................................................................................... 5-37
5.9 Interrupt Processing ....................................................................................................... 5-40
5.9.1 Enabling and Disabling Exceptions........................................................................... 5-41
5.9.2 Returning from an Interrupt Handler......................................................................... 5-42
5.10 Process Switching.......................................................................................................... 5-43

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor vii
Contents
Paragraph
Number Title Page
Number
Chapter 6
Embedded Floating-Point Unit, Version 2
6.1 Nomenclature and Conventions....................................................................................... 6-1
6.2 EFPU Programming Model ............................................................................................. 6-1
6.2.1 Signal Processing Extension/Embedded Floating-Point Status and Control Register
(SPEFSCR) .............................................................................................................. 6-1
6.2.2 GPRs and Power ISA Instructions............................................................................... 6-5
6.2.3 SPE/EFPU Available Bit in MSR................................................................................ 6-5
6.2.4 Embedded Floating-point Exception Bit in ESR......................................................... 6-5
6.2.5 EFPU Exceptions......................................................................................................... 6-5
6.2.5.1 EFP Unavailable Exception..................................................................................... 6-6
6.2.5.2 Embedded Floating-point Data Exception............................................................... 6-6
6.2.5.3 Embedded Floating-Point Round Exception ........................................................... 6-6
6.2.6 Exception Priorities...................................................................................................... 6-7
6.3 Embedded Floating-Point Unit Operations...................................................................... 6-7
6.3.1 Floating-Point Data Formats........................................................................................ 6-7
6.3.1.1 Single-Precision Floating-point Format .................................................................. 6-8
6.3.1.2 Half-Precision Floating-point Format...................................................................... 6-9
6.3.2 Conformity to IEEE Std. 754 Standard...................................................................... 6-10
6.3.3 Floating-Point Exceptions.......................................................................................... 6-11
6.3.4 Embedded Scalar Single-Precision Floating-Point Instructions................................ 6-11
6.3.5 EFPU Vector Single-precision Embedded Floating-Point Instructions..................... 6-47
6.4 Embedded Floating-point Results Summary ................................................................. 6-95
6.5 EFPU Instruction Timing............................................................................................. 6-110
6.5.1 EFPU Single-Precision Vector Floating-Point Instruction Timing...........................6-111
6.5.2 EFPU Single-Precision Scalar Floating-Point Instruction Timing .......................... 6-112
6.6 Instruction Forms and Opcodes ................................................................................... 6-114
6.6.1 Opcodes for EFPU Vector Floating-Point Instructions............................................ 6-114
6.6.2 Opcodes for EFPU Scalar Single-precision Floating-Point Instructions................. 6-116
Chapter 7
Signal Processing Extension Unit
7.1 Nomenclature and Conventions....................................................................................... 7-1
7.2 SPE Programming Model ................................................................................................ 7-1
7.2.1 SPE Status and Control Register (SPEFSCR) ............................................................. 7-1
7.2.2 Accumulator................................................................................................................. 7-3
7.2.2.1 Context Switch......................................................................................................... 7-4
7.2.3 GPRs and Power ISA Embedded Category Instructions.............................................7-4
7.2.4 SPE Available Bit in MSR........................................................................................... 7-4

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
viii Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
7.2.5 SPE Exception Bit in ESR........................................................................................... 7-4
7.2.6 SPE Exceptions............................................................................................................ 7-4
7.2.6.1 SPE Unavailable Exception..................................................................................... 7-5
7.2.6.2 SPE Vector Alignment Exception............................................................................ 7-5
7.2.7 Exception Priorities...................................................................................................... 7-5
7.3 Integer SPE Simple Instructions...................................................................................... 7-6
7.4 Integer SPE Multiply, Multiply-Accumulate, and Operation to Accumulator Instructions
(Complex Integer Instructions).................................................................................. 7-48
7.4.1 Multiply Half-Word Instructions ............................................................................... 7-49
7.4.2 Multiply Words Instructions .................................................................................... 7-113
7.4.3 Add/Subtract Word to Accumulator Instructions .................................................... 7-154
7.4.4 Initializing and Reading the Accumulator............................................................... 7-163
7.5 SPE Vector Load/Store Instructions............................................................................. 7-163
7.6 SPE Instruction Timing................................................................................................ 7-200
7.6.1 SPE Integer Simple Instructions Timing ................................................................. 7-200
7.6.2 SPE Load and Store Instruction Timing .................................................................. 7-202
7.6.3 SPE Complex Integer Instruction Timing................................................................ 7-203
7.7 Instruction Forms and Opcodes ................................................................................... 7-206
7.7.1 SPE Vector Integer Simple Instructions................................................................... 7-207
7.7.2 Opcodes for SPE Load and Store Instructions......................................................... 7-208
7.7.3 Opcodes for SPE Complex Integer Instructions...................................................... 7-210
Chapter 8
Power Management
8.1 Active State...................................................................................................................... 8-1
8.2 Waiting State .................................................................................................................... 8-1
8.3 Halted State...................................................................................................................... 8-1
8.4 Stopped State.................................................................................................................... 8-2
8.5 Power Management Pins ................................................................................................. 8-3
8.6 Power Management Control Bits..................................................................................... 8-3
8.7 Software Considerations for Power Management using Wait Instructions ..................... 8-3
8.8 Software Considerations for Power Management using Doze, Nap or Sleep ................. 8-4
8.9 Debug Considerations for Power Management............................................................... 8-4
Chapter 9
L1 Cache
9.1 Overview.......................................................................................................................... 9-1
9.2 4 Kbyte ICache Organization........................................................................................... 9-2
9.3 Cache Lookup.................................................................................................................. 9-3

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor ix
Contents
Paragraph
Number Title Page
Number
9.4 Cache Control .................................................................................................................. 9-5
9.4.1 L1 Cache Control and Status Register 0 (L1CSR0) .................................................... 9-6
9.4.2 L1 Cache Control and Status Register 1 (L1CSR1) .................................................... 9-6
9.4.3 L1 Cache Configuration Register 0 (L1CFG0) ........................................................... 9-8
9.4.4 L1 Cache Configuration Register 1 (L1CFG1) ........................................................... 9-9
9.5 Cache Organization Control .......................................................................................... 9-10
9.6 Cache Operation ............................................................................................................ 9-10
9.6.1 Cache Enable/Disable................................................................................................ 9-10
9.6.2 Cache Fills ................................................................................................................. 9-11
9.6.3 Cache Line Replacement ........................................................................................... 9-11
9.6.4 Cache-Inhibited Accesses.......................................................................................... 9-11
9.6.5 Cache Invalidation ..................................................................................................... 9-12
9.6.6 Cache Invalidate by Set and Way .............................................................................. 9-12
9.6.6.1 L1FINV1................................................................................................................ 9-12
9.7 Cache Parity and EDC Protection.................................................................................. 9-13
9.7.1 Cache Error Action Control....................................................................................... 9-14
9.7.1.1 L1CSR1[ICEA] = 00, Machine Check Generation on Error................................. 9-14
9.7.1.2 L1CSR1[ICEA] = 01, Correction/Auto-Invalidation on Error.............................. 9-14
9.7.2 Parity/EDC Error Handling for Cache Control Operations and Instructions ............ 9-15
9.7.2.1 L1FINV1 operations.............................................................................................. 9-15
9.7.2.2 Cache Touch Instructions (icbt)............................................................................. 9-15
9.7.2.3 icbi Instructions ..................................................................................................... 9-15
9.7.2.4 Cache Locking Instructions (icbtls, icblc)............................................................. 9-16
9.7.3 Cache Inhibited Accesses and Parity/EDC Errors..................................................... 9-16
9.7.4 EDC Checkbit/Syndrome Coding Scheme Generation ............................................. 9-16
9.7.5 Cache Error Injection................................................................................................. 9-18
9.7.6 Cache Error Cross-Signaling ..................................................................................... 9-18
9.8 Cache Management Instructions.................................................................................... 9-18
9.9 Touch Instructions.......................................................................................................... 9-19
9.10 Cache Line Locking/Unlocking..................................................................................... 9-19
9.10.1 Overview.................................................................................................................... 9-19
9.10.2 icbtls—Instruction Cache Block Touch and Lock Set............................................... 9-21
9.10.3 icblc—Instruction Cache Block Lock Clear.............................................................. 9-22
9.10.4 Effects of Other Cache Instructions on Locked Lines............................................... 9-22
9.10.5 Flash Clearing of Lock Bits....................................................................................... 9-23
9.11 Cache Instructions and Exceptions ................................................................................ 9-23
9.11.1 Exception Conditions for Cache Instructions ............................................................ 9-23
9.11.2 Transfer Type Encodings for Cache Management Instructions................................. 9-24
9.12 Self-Modifying Code Requirements.............................................................................. 9-25
9.13 Page Table Control Bits ................................................................................................. 9-25
9.13.1 Cache-Inhibited Accesses.......................................................................................... 9-25

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xFreescale Semiconductor
Contents
Paragraph
Number Title Page
Number
9.14 Effect of Hardware Debug on Cache Operation............................................................ 9-26
9.15 Cache Memory Access For Debug/Error Handling....................................................... 9-26
9.15.1 Cache Memory Access By Means Of Software ........................................................ 9-26
9.15.2 Cache Memory Access Through JTAG/OnCE Port .................................................. 9-27
9.15.3 Cache Debug Access Control Register (CDACNTL) ............................................... 9-28
9.15.3.1 Cache Debug Access Data Register (CDADATA)................................................ 9-29
9.16 Hardware Debug (Cache) Control Register 0................................................................ 9-30
Chapter 10
Memory Management Unit
10.1 Overview........................................................................................................................ 10-1
10.2 Effective to Real Address Translation ........................................................................... 10-1
10.2.1 Effective Addresses ................................................................................................... 10-1
10.2.2 Address Spaces .......................................................................................................... 10-2
10.2.3 Process ID.................................................................................................................. 10-2
10.2.4 Translation Flow........................................................................................................ 10-2
10.2.5 Permissions ................................................................................................................ 10-4
10.3 Translation Lookaside Buffer ........................................................................................ 10-5
10.4 Configuration Information............................................................................................. 10-6
10.4.1 MMU Configuration Register (MMUCFG) .............................................................. 10-6
10.4.2 TLB0 Configuration Register (TLB0CFG)............................................................... 10-7
10.4.3 TLB1 Configuration Register (TLB1CFG)............................................................... 10-8
10.5 Software Interface and TLB Instructions....................................................................... 10-9
10.5.1 TLB Read Entry Instruction (tlbre) ......................................................................... 10-10
10.5.2 TLB Write Entry Instruction (tlbwe) ....................................................................... 10-10
10.5.3 TLB Search Instruction (tlbsx) ................................................................................ 10-11
10.5.4 TLB Invalidate (tlbivax) Instruction........................................................................ 10-11
10.5.5 TLB Synchronize Instruction (tlbsync) ................................................................... 10-12
10.6 TLB Operations ........................................................................................................... 10-12
10.6.1 Translation Reload................................................................................................... 10-13
10.6.2 Reading the TLB...................................................................................................... 10-13
10.6.3 Writing the TLB....................................................................................................... 10-13
10.6.4 Searching the TLB................................................................................................... 10-13
10.6.5 TLB Miss Exception Update ................................................................................... 10-14
10.6.6 IPROT Invalidation Protection................................................................................ 10-14
10.6.7 TLB Load on Reset.................................................................................................. 10-14
10.6.8 The G Bit ................................................................................................................. 10-15
10.7 MMU Control Registers .............................................................................................. 10-15
10.7.1 DEAR Register ........................................................................................................ 10-15
10.7.2 MMU Control and Status Register 0 (MMUCSR0)................................................ 10-16

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xi
Contents
Paragraph
Number Title Page
Number
10.7.3 MMU Assist Registers (MAS) ................................................................................ 10-16
10.7.4 MAS Registers Summary ........................................................................................ 10-22
10.7.5 MAS Register Updates ............................................................................................ 10-22
10.8 TLB Coherency Control .............................................................................................. 10-23
10.9 Core Interface Operation for MMU Control Instructions............................................ 10-23
10.9.1 Transfer Type Encodings for MMU Control Instructions ....................................... 10-24
10.10 Effect of Hardware Debug on MMU Operation.......................................................... 10-24
10.11 External Translation Alterations for Real-time Systems ............................................. 10-25
Chapter 11
Debug Support
11.1 Overview........................................................................................................................ 11-1
11.1.1 Software Debug Facilities.......................................................................................... 11-1
11.1.1.1 Power ISA Embedded Category Compatibility..................................................... 11-2
11.1.2 Additional Debug Facilities....................................................................................... 11-2
11.1.3 Hardware Debug Facilities ........................................................................................ 11-2
11.1.4 Sharing Debug Resources by Software/Hardware..................................................... 11-3
11.1.4.1 Simultaneous Hardware and Software Debug Event Handing.............................. 11-3
11.2 Software Debug Events and Exceptions........................................................................ 11-4
11.2.1 Instruction Address Compare Event.......................................................................... 11-6
11.2.2 Data Address Compare Event.................................................................................... 11-6
11.2.2.1 Data Address Compare Event Status Updates....................................................... 11-7
11.2.3 Linked Instruction Address and Data Address Compare Event .............................. 11-15
11.2.4 Trap Debug Event.................................................................................................... 11-16
11.2.5 Branch Taken Debug Event ..................................................................................... 11-16
11.2.6 Instruction Complete Debug Event.......................................................................... 11-16
11.2.7 Interrupt Taken Debug Event................................................................................... 11-17
11.2.8 Critical Interrupt Taken Debug Event...................................................................... 11-17
11.2.9 Return Debug Event................................................................................................. 11-17
11.2.10 Critical Return Debug Event.................................................................................... 11-18
11.2.11 Debug Counter Debug Event................................................................................... 11-18
11.2.12 External Debug Event.............................................................................................. 11-18
11.2.13 Unconditional Debug Event..................................................................................... 11-18
11.3 Debug Registers........................................................................................................... 11-19
11.3.1 Debug Address and Value Registers........................................................................ 11-19
11.3.2 Debug Counter Register (DBCNT) ......................................................................... 11-20
11.3.3 Debug Control and Status Registers ........................................................................ 11-20
11.3.3.1 Debug Control Register 0 (DBCR0).................................................................... 11-21
11.3.3.2 Debug Control Register 1 (DBCR1).................................................................... 11-24
11.3.3.3 Debug Control Register 2 (DBCR2).................................................................... 11-26

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xii Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
11.3.3.4 Debug Control Register 3 (DBCR3).................................................................... 11-29
11.3.3.5 Debug Control Register 4 (DBCR4).................................................................... 11-34
11.3.3.6 Debug Control Register 5 (DBCR5).................................................................... 11-35
11.3.3.7 Debug Control Register 6 (DBCR6).................................................................... 11-37
11.3.3.8 Debug Status Register (DBSR) ........................................................................... 11-39
11.3.4 Debug External Resource Control Register (DBERC0).......................................... 11-41
11.3.5 Debug Event Select Register (DEVENT)................................................................ 11-48
11.3.6 Debug Data Acquisition Message Register (DDAM) ............................................. 11-49
11.4 External Debug Support............................................................................................... 11-49
11.4.1 External Debug Registers ........................................................................................ 11-50
11.4.1.1 External Debug Control Register 0 (EDBCR0)................................................... 11-50
11.4.1.2 External Debug Status Register 0 (EDBSR0)...................................................... 11-51
11.4.2 OnCE Introduction................................................................................................... 11-53
11.4.3 JTAG/OnCE Pins..................................................................................................... 11-56
11.4.4 OnCE Internal Interface Signals.............................................................................. 11-57
11.4.5 OnCE Interface Signals ........................................................................................... 11-57
11.4.5.1 OnCE Enable (jd_en_once)................................................................................. 11-57
11.4.5.2 OnCE Debug Request/Event (jd_de_b, jd_de_en).............................................. 11-58
11.4.5.3 e200 OnCE Debug Output (jd_debug_b) ............................................................ 11-58
11.4.5.4 e200 CPU Clock On Input (jd_mclk_on) ............................................................ 11-58
11.4.5.5 Watchpoint Events (jd_watchpt[0:21])................................................................ 11-59
11.4.6 e200 OnCE Controller and Serial Interface............................................................. 11-59
11.4.6.1 e200 OnCE Status Register ................................................................................. 11-59
11.4.6.2 e200 OnCE Command Register (OCMD)........................................................... 11-60
11.4.6.3 e200 OnCE Control Register (OCR)................................................................... 11-64
11.4.7 Access to Debug Resources..................................................................................... 11-66
11.4.8 Methods of Entering Debug Mode .......................................................................... 11-68
11.4.8.1 External Debug Request During Reset................................................................ 11-68
11.4.8.2 Debug Request During Reset............................................................................... 11-69
11.4.8.3 Debug Request During Normal Activity ............................................................. 11-69
11.4.8.4 Debug Request During Waiting, Halted, or Stopped State.................................. 11-69
11.4.8.5 Software Request During Normal Activity ......................................................... 11-70
11.4.8.6 Debug Notify Halt Instructions ........................................................................... 11-70
11.4.9 CPU Status and Control Scan Chain Register (CPUSCR) ...................................... 11-70
11.4.9.1 Instruction Register (IR)...................................................................................... 11-71
11.4.9.2 Control State Register (CTL)............................................................................... 11-72
11.4.9.3 Program Counter Register (PC)........................................................................... 11-75
11.4.9.4 Write-Back Bus Register (WBBR[low], WBBR[high])...................................... 11-75
11.4.9.5 Machine State Register (MSR)............................................................................ 11-76
11.4.9.6 Exiting Debug Mode and Interrupt Blocking...................................................... 11-76
11.4.10 Instruction Address FIFO Buffer (PC FIFO)........................................................... 11-76

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xiii
Contents
Paragraph
Number Title Page
Number
11.4.10.1 PC FIFO............................................................................................................... 11-76
11.4.11 Reserved Registers (Reserved) ................................................................................ 11-78
11.5 Watchpoint Support ..................................................................................................... 11-78
11.6 MMU and Cache Operation During Debug................................................................. 11-80
11.7 Cache Array Access During Debug............................................................................. 11-81
11.8 Basic Steps for Enabling, Using, and Exiting External Debug Mode ......................... 11-81
11.9 Parallel Signature Unit................................................................................................. 11-83
11.9.1 Parallel Signature Control Register (PSCR)............................................................ 11-84
11.9.2 Parallel Signature Status Register (PSSR)............................................................... 11-84
11.9.3 Parallel Signature High Register (PSHR)................................................................ 11-85
11.9.4 Parallel Signature Low Register (PSLR)................................................................. 11-85
11.9.5 Parallel Signature Counter Register (PSCTR)......................................................... 11-86
11.9.6 Parallel Signature Update High Register (PSUHR) ................................................ 11-86
11.9.7 Parallel Signature Update Low Register (PSULR).................................................. 11-86
Chapter 12 Nexus 3+ Module
12.1 Introduction.................................................................................................................... 12-1
12.1.1 Terms and Definitions................................................................................................ 12-1
12.1.2 Feature List ................................................................................................................ 12-2
12.1.3 Functional Block Diagram......................................................................................... 12-4
12.2 Enabling Nexus 3+ Operation........................................................................................ 12-4
12.3 TCODEs Supported ....................................................................................................... 12-5
12.4 Nexus 3+ Programmer’s Model................................................................................... 12-10
12.4.1 Client Select Control (CSC)—reference only ......................................................... 12-12
12.4.2 Port Configuration Register (PCR)—reference only............................................... 12-12
12.4.3 Nexus Development Control Register 1 (DC1)....................................................... 12-13
12.4.4 Nexus Development Control Registers 2 and 3 (DC2, DC3).................................. 12-15
12.4.5 Nexus Development Control Register 4 (DC4)....................................................... 12-18
12.4.6 Development Status Register (DS) .......................................................................... 12-19
12.4.7 Watchpoint Trigger Registers (WT, PTSTC, PTETC, DTSTC, DTETC) ............... 12-20
12.4.8 Nexus Watchpoint Mask Register (WMSK)............................................................ 12-25
12.4.9 Nexus Overrun Control Register (OVCR)............................................................... 12-26
12.4.10 Data Trace Control Register (DTC)......................................................................... 12-27
12.4.11 Data Trace Start Address Registers (DTSA1–4) ..................................................... 12-28
12.4.12 Data Trace End Address Registers (DTEA1–4)...................................................... 12-29
12.4.13 Read/Write Access Control/Status (RWCS)............................................................ 12-31
12.4.14 Read/Write Access Data (RWD) ............................................................................. 12-32
12.4.15 Read/Write Access Address (RWA) ........................................................................ 12-34
12.5 Nexus 3+ Register Access via JTAG/OnCE................................................................ 12-34
12.6 Nexus Message Fields ................................................................................................. 12-34

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xiv Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
12.6.1 TCODE Field........................................................................................................... 12-35
12.6.2 Source ID Field (SRC)............................................................................................. 12-35
12.6.3 Relative Address Field (U-ADDR).......................................................................... 12-35
12.6.4 Full Address Field (F-ADDR) ................................................................................. 12-36
12.6.5 Address Space Indication Field (MAP)................................................................... 12-36
12.7 Nexus Message Queues ............................................................................................... 12-37
12.7.1 Message Queue Overrun.......................................................................................... 12-37
12.7.2 CPU Stall ................................................................................................................. 12-37
12.7.3 Message Suppression............................................................................................... 12-37
12.7.4 Nexus Message Priority........................................................................................... 12-38
12.7.5 Data Acquisition Message Priority Loss Response ................................................. 12-39
12.7.6 Ownership Trace Message Priority Loss Response................................................. 12-39
12.7.7 Program Trace Message Priority Loss Response..................................................... 12-39
12.7.8 Data Trace Message Priority Loss Response........................................................... 12-39
12.8 Debug Status Messages................................................................................................ 12-39
12.9 Error Messages ............................................................................................................ 12-40
12.10 Ownership Trace .......................................................................................................... 12-40
12.10.1 Overview.................................................................................................................. 12-40
12.10.2 Ownership Trace Messaging (OTM) ....................................................................... 12-40
12.11 Program Trace.............................................................................................................. 12-41
12.11.1 Branch Trace Messaging Types ............................................................................... 12-41
12.11.1.1 e200 Indirect Branch Message Instructions......................................................... 12-42
12.11.1.2 e200 Direct Branch Message Instructions ........................................................... 12-43
12.11.1.3 BTM Using Branch History Messages................................................................ 12-43
12.11.1.4 BTM Using Traditional Program Trace Messages .............................................. 12-43
12.11.2 BTM Message Formats............................................................................................ 12-43
12.11.2.1 Indirect Branch Messages (History) .................................................................... 12-44
12.11.2.2 Indirect Branch Messages (Traditional) .............................................................. 12-44
12.11.2.3 Direct Branch Messages (Traditional)................................................................. 12-44
12.11.3 Program Trace Message Fields................................................................................ 12-44
12.11.3.1 Sequential Instruction Count Field (ICNT) ......................................................... 12-45
12.11.3.2 Branch/Predicate Instruction History (HIST)...................................................... 12-45
12.11.3.3 Execution Mode Indication.................................................................................. 12-46
12.11.4 Resource Full Messages........................................................................................... 12-46
12.11.5 Program Correlation Messages................................................................................ 12-47
12.11.5.1 Program Correlation Message Generation for TLB Update with New Address
Translation ....................................................................................................... 12-50
12.11.5.2 Program Correlation Message Generation for TLB Invalidate
(tlbivax) Operations......................................................................................... 12-50
12.11.5.3 Program Correlation Message Generation for PID Updates
or MSR[IS] Updates ........................................................................................ 12-50

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xv
Contents
Paragraph
Number Title Page
Number
12.11.6 Program Trace Overflow Error Messages ............................................................... 12-50
12.11.7 Program Trace Synchronization Messages.............................................................. 12-51
12.11.8 Enabling Program Trace .......................................................................................... 12-53
12.11.9 Program Trace Timing Diagrams (2 MDO/1 MSEO configuration)....................... 12-53
12.12 Data Trace.................................................................................................................... 12-54
12.12.1 Data Trace Messaging (DTM)................................................................................. 12-54
12.12.2 DTM Message Formats ........................................................................................... 12-55
12.12.2.1 Data Write Messages ........................................................................................... 12-55
12.12.2.2 Data Read Messages............................................................................................ 12-55
12.12.2.3 Data Trace Synchronization Messages................................................................ 12-56
12.12.3 DTM Operation........................................................................................................ 12-57
12.12.3.1 Data Trace Windowing........................................................................................ 12-57
12.12.3.2 Data Access/Instruction Access Data Tracing..................................................... 12-57
12.12.3.3 e200 Bus Cycle Special Cases............................................................................. 12-58
12.12.4 Data Trace Timing Diagrams(8 MDO/2 MSEO configuration).............................. 12-59
12.13 Data Acquisition Messaging........................................................................................ 12-59
12.13.1 Data Acquisition ID Tag Field................................................................................. 12-59
12.13.2 Data Acquisition Data Field .................................................................................... 12-60
12.13.3 Data Acquisition Trace Event.................................................................................. 12-60
12.14 Watchpoint Trace Messaging....................................................................................... 12-60
12.14.1 Watchpoint Timing Diagram (2 MDO/1 MSEO configuration).............................. 12-62
12.15 Nexus 3+ Read/Write Access to Memory-Mapped Resources.................................... 12-62
12.15.1 Single Write Access................................................................................................. 12-62
12.15.2 Block Write Access.................................................................................................. 12-63
12.15.3 Single Read Access.................................................................................................. 12-64
12.15.4 Block Read Access .................................................................................................. 12-64
12.15.5 Error Handling ......................................................................................................... 12-65
12.16 Nexus 3+ Pin Interface ................................................................................................ 12-66
12.16.1 Pins Implemented .................................................................................................... 12-66
12.16.2 Pin Protocol.............................................................................................................. 12-68
12.17 Rules for Output Messages .......................................................................................... 12-71
12.18 Auxiliary Port Arbitration............................................................................................ 12-71
12.19 Examples...................................................................................................................... 12-71
12.20 Electrical Characteristics ............................................................................................. 12-74
12.21 IEEE 1149.1 (JTAG) RD/WR Sequences.................................................................... 12-74
12.21.1 JTAG Sequence for Accessing Internal Nexus Registers........................................ 12-75
12.21.2 JTAG Sequence for Read Access of Memory-Mapped Resources ......................... 12-75
12.21.3 JTAG Sequence for Write Access of Memory-Mapped Resources......................... 12-76
Chapter 13 External Core Complex Interfaces

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xvi Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
13.1 Overview........................................................................................................................ 13-1
13.2 Signal Index ................................................................................................................... 13-2
13.3 Signal Descriptions........................................................................................................ 13-8
13.3.1 e200 Processor Clock (m_clk)................................................................................... 13-8
13.3.2 Reset-Related Signals ................................................................................................ 13-9
13.3.2.1 Power-On Reset (m_por)....................................................................................... 13-9
13.3.2.2 Reset (p_reset_b) ................................................................................................... 13-9
13.3.2.3 Watchdog Reset Status (p_wrs[0:1]) ..................................................................... 13-9
13.3.2.4 Debug Reset Control (p_dbrstc[0:1]) .................................................................. 13-10
13.3.2.5 Reset Base (p_rstbase[0:29]) ............................................................................... 13-10
13.3.2.6 Reset Endian Mode (p_rst_endmode) ................................................................. 13-10
13.3.2.7 Reset VLE Mode (p_rst_vlemode)...................................................................... 13-10
13.3.2.8 JTAG/OnCE Reset (j_trst_b)............................................................................... 13-10
13.3.3 Address and Data Buses .......................................................................................... 13-10
13.3.3.1 Address Bus (p_d_haddr[31:0], p_i_haddr[31:0]) .............................................. 13-11
13.3.3.2 Read Data Bus (p_d_hrdata[63:0], p_i_hrdata[63:0])......................................... 13-11
13.3.3.3 Write Data Bus (p_d_hwdata[63:0]).................................................................... 13-11
13.3.4 Transfer Attribute Signals........................................................................................ 13-12
13.3.4.1 Transfer Type (p_d_htrans[1:0], p_i_htrans[1:0]) ............................................... 13-12
13.3.4.2 Write (p_d_hwrite, p_i_hwrite) ........................................................................... 13-12
13.3.4.3 Transfer Size (p_d_hsize[1:0], p_i_hsize[1:0]) ................................................... 13-12
13.3.4.4 Burst Type (p_d_hburst[2:0], p_i_hburst[2:0]) ................................................... 13-13
13.3.4.5 Protection Control (p_d_hprot[5:0], p_i_hprot[5:0]) .......................................... 13-14
13.3.4.6 Cache Way Replacement (p_i_wayrep[0:1])....................................................... 13-15
13.3.5 Byte Lane Specification........................................................................................... 13-15
13.3.5.1 Unaligned Access (p_d_hunalign, p_i_hunalign)................................................ 13-16
13.3.5.2 Byte Strobes (p_d_hbstrb[7:0], p_i_hbstrb[7:0])................................................. 13-16
13.3.6 Transfer Control Signals.......................................................................................... 13-22
13.3.6.1 Transfer Ready (p_d_hready, p_i_hready) .......................................................... 13-22
13.3.6.2 Transfer Response (p_d_hresp[2:0], p_i_hresp[1:0]).......................................... 13-22
13.3.7 AHB Clock Enable Signals...................................................................................... 13-23
13.3.7.1 Instruction AHB Clock Enable (p_i_ahb_clken)................................................. 13-23
13.3.7.2 Data AHB Clock Enable (p_d_ahb_clken).......................................................... 13-24
13.3.8 Master ID Configuration Signals............................................................................. 13-24
13.3.8.1 CPU Master ID (p_masterid[3:0])....................................................................... 13-24
13.3.8.2 Nexus Master ID (nex_masterid[3:0])................................................................. 13-24
13.3.9 Interrupt Signals....................................................................................................... 13-24
13.3.9.1 External Input Interrupt Request (p_extint_b)..................................................... 13-25
13.3.9.2 Critical Input Interrupt Request (p_critint_b)...................................................... 13-25
13.3.9.3 Non-Maskable Input Interrupt Request (p_nmi_b) ............................................. 13-25
13.3.9.4 Interrupt Pending (p_ipend)................................................................................. 13-25

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xvii
Contents
Paragraph
Number Title Page
Number
13.3.9.5 Autovector (p_avec_b) ........................................................................................ 13-25
13.3.9.6 Interrupt Vector Offset (p_voffset[0:15]) ............................................................ 13-26
13.3.9.7 Interrupt Vector Acknowledge (p_iack) .............................................................. 13-26
13.3.9.8 Machine Check (p_mcp_b).................................................................................. 13-26
13.3.10 Lockstep Enable Signal (p_lkstep_en) .................................................................... 13-26
13.3.11 Cache Error Cross-signaling Signals ....................................................................... 13-27
13.3.11.1 Cache Tag Error Out (p_cache_tagerr_out)......................................................... 13-27
13.3.11.2 Cache Data Error Out (p_cache_dataerr_out) ..................................................... 13-27
13.3.11.3 Cache Error Address Out (p_cerraddr_out[0:31])............................................... 13-27
13.3.11.4 Cache Error Way(s) Out (p_cerrway_out[0:3])................................................... 13-27
13.3.11.5 Cache Tag Error In (p_cache_tagerr_in) ............................................................. 13-28
13.3.11.6 Cache Data Error In (p_cache_dataerr_in).......................................................... 13-28
13.3.11.7 Cache Error Way(s) In (p_cerrway_in[0:3])........................................................ 13-28
13.3.12 External Translation Alteration Signals................................................................... 13-28
13.3.12.1 External PID Enable (p_extpid_en)..................................................................... 13-28
13.3.12.2 External PID In (p_extpid[6:7])........................................................................... 13-29
13.3.13 Timer Facility Signals.............................................................................................. 13-29
13.3.13.1 Timer Disable (p_tbdisable) ................................................................................ 13-29
13.3.13.2 Timer External Clock (p_tbclk)........................................................................... 13-29
13.3.13.3 Timer Interrupt Status (p_tbint)........................................................................... 13-29
13.3.14 Processor Reservation Signals................................................................................. 13-29
13.3.14.1 CPU Reservation Status (p_rsrv)......................................................................... 13-29
13.3.14.2 CPU Reservation Clear (p_rsrv_clr).................................................................... 13-30
13.3.15 Miscellaneous Processor Signals............................................................................. 13-30
13.3.16 Processor State Signals ............................................................................................ 13-31
13.3.16.1 Processor Mode (p_mode[0:3]) ........................................................................... 13-31
13.3.16.2 Processor Execution Pipeline Status (p_pstat_pipe0[0:5], p_pstat_pipe1[0:5]).. 13-31
13.3.16.3 Branch Prediction Status (p_brstat[0:1]) ............................................................. 13-33
13.3.16.4 Processor Exception Enable MSR values (p_msr_EE, p_msr_CE, p_msr_DE,
p_msr_ME)...................................................................................................... 13-33
13.3.16.5 Processor Return from Interrupt (p_rfi, p_rfci, p_rfdi, p_rfmci)......................... 13-33
13.3.16.6 Processor Machine Check (p_mcp_out).............................................................. 13-33
13.3.17 Power Management Control Signals ....................................................................... 13-34
13.3.17.1 Low-Power Mode signals (p_doze, p_nap, p_sleep)........................................... 13-34
13.3.17.2 Wakeup (p_wakeup) ............................................................................................ 13-34
13.3.18 Debug Event Input Signals ...................................................................................... 13-35
13.3.18.1 Unconditional Debug Event (p_ude)................................................................... 13-35
13.3.18.2 External Debug Event 1 (p_devt1) ...................................................................... 13-35
13.3.18.3 External Debug Event 2 (p_devt2) ...................................................................... 13-35
13.3.19 Debug Event Output Signals (p_devnt_out[0:7]).................................................... 13-35
13.3.20 Debug/Emulation (Nexus 1/ OnCE) Support Signals.............................................. 13-36

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xviii Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number
13.3.20.1 OnCE Enable (jd_en_once)................................................................................. 13-36
13.3.20.2 Debug Session (jd_debug_b)............................................................................... 13-36
13.3.20.3 Debug Request (jd_de_b) .................................................................................... 13-37
13.3.20.4 DE_b Active High Output Enable (jd_de_en)..................................................... 13-37
13.3.20.5 Processor Clock On (jd_mclk_on)....................................................................... 13-37
13.3.20.6 Watchpoint Events (jd_watchpt[0:21])................................................................ 13-37
13.3.21 Debug Lockstep Cross-signaling Signals ................................................................ 13-37
13.3.21.1 Debug Request EDM In (p_dbgrq_edm_in)........................................................ 13-37
13.3.21.2 Debug Request EDM Out (p_dbgrq_edm_out)................................................... 13-38
13.3.21.3 Debug Go Request In (p_dbg_go_in).................................................................. 13-38
13.3.21.4 Debug Go Request Out (p_dbg_go_out) ............................................................. 13-38
13.3.21.5 Debug Nexus 3 Update_DR state In (p_nex3_updtdr_in)................................... 13-38
13.3.21.6 Debug Nexus 3 Update_DR state Out (p_nex3_updtdr_out).............................. 13-38
13.3.22 Development Support (Nexus 3) Signals................................................................. 13-39
13.3.23 JTAG Support Signals—Primary Interface ............................................................. 13-39
13.3.24 JTAG Support Signals—Support for External Registers......................................... 13-40
13.3.25 JTAG ID Signals...................................................................................................... 13-43
13.3.25.1 JTAG ID Sequence (j_id_sequence[0:1])............................................................ 13-44
13.3.25.2 JTAG ID Sequence (j_id_sequence[2:9])............................................................ 13-44
13.3.25.3 JTAG ID Version (j_id_version[0:3]).................................................................. 13-44
13.4 Timing Diagrams ......................................................................................................... 13-45
13.4.1 AHB Clock Enable and the Internal HCLK ............................................................ 13-45
13.4.2 Processor Instruction/Data Transfers....................................................................... 13-46
13.4.2.1 Basic Read Transfer Cycles................................................................................. 13-47
13.4.2.1.1 Clock 1 (C1) .................................................................................................... 13-48
13.4.2.1.2 Clock 2 (C2) .................................................................................................... 13-48
13.4.2.1.3 Clock 3 (C3) .................................................................................................... 13-48
13.4.2.1.4 Clock 4 (C4) .................................................................................................... 13-48
13.4.2.2 Read Transfer with Wait State ............................................................................. 13-48
13.4.2.3 Basic Write Transfer Cycles ................................................................................ 13-50
13.4.2.3.1 Clock 1 (C1) .................................................................................................... 13-50
13.4.2.3.2 Clock 2 (C2) .................................................................................................... 13-50
13.4.2.3.3 Clock 3 (C3) .................................................................................................... 13-51
13.4.2.3.4 Clock 4 (C4) .................................................................................................... 13-51
13.4.2.4 Write Transfer with Wait States........................................................................... 13-52
13.4.2.5 Read and Write Transfers .................................................................................... 13-53
13.4.2.6 Misaligned Accesses............................................................................................ 13-57
13.4.2.7 Burst Accesses..................................................................................................... 13-59
13.4.2.8 Error Termination Operation ............................................................................... 13-63
13.4.3 Cache Error Cross-Signaling Operation .................................................................. 13-67
13.4.3.1 Cross-Signaling with Machine Check Operation Selected.................................. 13-68

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xix
Contents
Paragraph
Number Title Page
Number
13.4.3.2 Cross-Signaling with Auto-Invalidation Operation Selected .............................. 13-69
13.4.4 Debug Lockstep Cross-signaling Operation............................................................ 13-77
13.4.4.1 Debug Entry Cross-Signaling.............................................................................. 13-78
13.4.4.2 Debug Exit Cross-Signaling ................................................................................ 13-81
13.4.4.3 Update_DR State Cross-Signaling ...................................................................... 13-84
13.4.5 Power Management ................................................................................................. 13-86
13.4.6 Interrupt Interface .................................................................................................... 13-86
13.4.7 Time Base Interface ................................................................................................. 13-90
13.4.8 JTAG Test Interface ................................................................................................. 13-90
Appendix A
Register Summary
Appendix B
Revision History

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xx Freescale Semiconductor
Contents
Paragraph
Number Title Page
Number

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxi
Figures
Figure
Number Title Page
Number
Figures
1-1 e200z446n3 Block Diagram.................................................................................................... 1-2
1-2 e200z446n3 Supervisor Mode Programmer’s Model ............................................................. 1-8
1-3 e200z446n3 User Mode Programmer’s Model SPRs ............................................................. 1-9
2-1 e200z446n3 Supervisor Mode Programmer’s Model SPRs.................................................... 2-2
2-2 e200z446n3 User-Mode Programmer’s Model SPRs............................................................. 2-3
2-3 Machine State Register (MSR) ............................................................................................... 2-9
2-4 Processor ID Register (PIR)..................................................................................................2-11
2-5 Processor Version Register (PVR) ........................................................................................ 2-12
2-6 System Version Register (SVR)............................................................................................ 2-12
2-7 Integer Exception Register (XER)........................................................................................ 2-13
2-8 Exception Syndrome Register (ESR).................................................................................... 2-14
2-9 Machine Check Syndrome Register (MCSR)....................................................................... 2-17
2-10 Timer Control Register (TCR).............................................................................................. 2-19
2-11 Timer Status Register (TSR).................................................................................................2-21
2-12 Hardware Implementation Dependent Register 0 (HID0) .................................................... 2-22
2-13 Hardware Implementation Dependent Register 1 (HID1) .................................................... 2-24
2-14 Branch Unit Control and Status Register (BUCSR) ............................................................. 2-25
4-1 e200z4 Block Diagram............................................................................................................ 4-2
4-2 Pipeline Diagram..................................................................................................................... 4-5
4-3 e200z4 Instruction Prefetch Buffers........................................................................................ 4-7
4-4 e200z4 Branch Target Buffer..................................................................................................4-8
4-5 Basic Pipe Line Flow, Single Cycle Instructions.................................................................... 4-8
4-6 Basic Pipe Line Flow, Load/Store Instructions....................................................................... 4-9
4-7 Basic Pipe Line Flow, Branch Instructions (BTB Miss, Correct Prediction, Branch Taken). 4-9
4-8 Basic Pipe Line Flow, Branch Instructions (BTB Hit, Correct Prediction, Branch Taken).. 4-10
4-9 Basic Pipe Line Flow, Branch Instruction (BTB Hit, Predict Taken, Incorrect Prediction). 4-10
4-10 Basic Pipe Line Flow, Branch Instructions
(BTB Miss, Predict Taken, Incorrect Prediction, Instruction Buffer Empty) .................. 4-11
4-11 Basic Pipe Line Flow, Multiply Class Instructions............................................................... 4-12
4-12 Pipe Line Flow, Multiply with Data Dependent Load Instruction........................................ 4-12
4-13 Basic Pipe Line Flow, long instruction ................................................................................. 4-13
4-14 Pipe Line Flow, Load/Store Instructions with Base Register Update...................................4-13
4-15 Pipelined Store Instruction with Store Data Dependency..................................................... 4-14
4-16 mtspr, mfspr Instruction Execution, Debug and SPE SPRs.................................................. 4-15
4-17 mtmsr, wrtee[i] Instruction Execution .................................................................................. 4-15
4-18 Cache/DCR, MMU mtspr, mfspr and MMU Management Instruction Execution............... 4-16
4-19 Interrupt Recognition and Handler Instruction Execution.................................................... 4-18
4-20 Interrupt Recognition and Handler Instruction Execution—Load/Store in Progress ........... 4-19
4-21 Interrupt Recognition and Handler Instruction Execution—Multi-Cycle Instruction Abort 4-20
5-1 Exception Syndrome Register (ESR)...................................................................................... 5-5
5-2 Machine State Register (MSR) ............................................................................................... 5-7

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxii Freescale Semiconductor
Figures
Figure
Number Title Page
Number
5-3 Machine Check Syndrome Register (MCSR)......................................................................... 5-9
5-4 e200 Interrupt Vector Prefix Register (IVPR)....................................................................... 5-12
5-5 e200 Interrupt Vector Offset Register (IVOR)...................................................................... 5-12
6-1 SPE/EFPU Status and Control Register (SPEFSCR).............................................................. 6-2
6-2 Single Precision Data Format .................................................................................................6-8
6-3 Single Precision Data Format .................................................................................................6-9
7-1 SPE Status and Control Register (SPEFSCR) ........................................................................ 7-2
7-2 High Order Element Merging with evmergehi .................................................................... 7-25
7-3 High Order Element Merging with evmergehilo ................................................................. 7-26
7-4 Low Order Element Merging evmergelo ............................................................................. 7-27
7-5 Low Order Element Merging evmergelohi.......................................................................... 7-28
7-6 evsel ...................................................................................................................................... 7-37
7-7 Splat for evsplatfi .................................................................................................................. 7-40
7-8 Sign Extend in evsplati......................................................................................................... 7-41
7-9 evmhegsmfaa ........................................................................................................................ 7-50
7-10 evmhegsmfan ........................................................................................................................ 7-51
7-11 evmhegsmiaa......................................................................................................................... 7-52
7-12 evmhegsmian ........................................................................................................................ 7-53
7-13 evmhegumiaa ........................................................................................................................ 7-54
7-14 evmhegumian........................................................................................................................ 7-55
7-15 evmhesmf.............................................................................................................................. 7-56
7-16 evmhesmfa ............................................................................................................................ 7-57
7-17 evmhesmfaaw ...................................................................................................................... 7-58
7-18 evmhesmfanw ...................................................................................................................... 7-59
7-19 evmhesmi .............................................................................................................................. 7-60
7-20 evmhesmia ............................................................................................................................ 7-61
7-21 evmhesmiaaw....................................................................................................................... 7-62
7-22 evmhesmianw ...................................................................................................................... 7-63
7-23 evmhessf................................................................................................................................ 7-64
7-24 evmhessfa.............................................................................................................................. 7-65
7-25 evmhessfaaw ........................................................................................................................ 7-67
7-26 evmhessfanw......................................................................................................................... 7-69
7-27 Even Form of Vector half word Multiply (evmhessiaaw).................................................... 7-71
7-28 evmhessianw ........................................................................................................................ 7-73
7-29 evmheumi—Even Multiply of Two Unsigned Modulo Integer Elements............................ 7-74
7-30 evmheumia............................................................................................................................ 7-75
7-31 evmheumiaaw...................................................................................................................... 7-76
7-32 evmheumianw...................................................................................................................... 7-77
7-33 evmheusiaaw........................................................................................................................ 7-79
7-34 evmheusianw........................................................................................................................ 7-81
7-35 evmhogsmfaa ........................................................................................................................ 7-82

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxiii
Figures
Figure
Number Title Page
Number
7-36 evmhogsmfan........................................................................................................................ 7-83
7-37 evmhogsmiaa ........................................................................................................................ 7-84
7-38 evmhogsmian ........................................................................................................................ 7-85
7-39 evmhogumiaa........................................................................................................................ 7-86
7-40 evmhogumian........................................................................................................................ 7-87
7-41 evmhosmf.............................................................................................................................. 7-88
7-42 evmhosmfa ............................................................................................................................ 7-89
7-43 evmhosmfaaw ...................................................................................................................... 7-90
7-44 evmhosmfanw...................................................................................................................... 7-91
7-45 evmhosmi.............................................................................................................................. 7-92
7-46 evmhosmia ............................................................................................................................ 7-93
7-47 evmhosmiaaw ...................................................................................................................... 7-94
7-48 evmhosmianw ...................................................................................................................... 7-95
7-49 evmhossf ............................................................................................................................... 7-96
7-50 evmhossfa.............................................................................................................................. 7-97
7-51 evmhossfaaw........................................................................................................................ 7-99
7-52 evmhossfanw....................................................................................................................... 7-101
7-53 evmhossiaaw ...................................................................................................................... 7-103
7-54 evmhossianw...................................................................................................................... 7-105
7-55 evmhoumi............................................................................................................................ 7-106
7-56 evmhoumia.......................................................................................................................... 7-107
7-57 evmhoumiaaw.................................................................................................................... 7-108
7-58 evmhoumianw.................................................................................................................... 7-109
7-59 evmhousiaaw.......................................................................................................................7-111
7-60 evmhousianw ..................................................................................................................... 7-113
7-61 evmwhsmf........................................................................................................................... 7-115
7-62 evmwhsmfa ......................................................................................................................... 7-116
7-63 evmwhsmi ........................................................................................................................... 7-117
7-64 evmwhsmia ......................................................................................................................... 7-118
7-65 evmwhssf ............................................................................................................................ 7-119
7-66 evmwhssfa........................................................................................................................... 7-120
7-67 evmwhumi........................................................................................................................... 7-121
7-68 evmwhumia......................................................................................................................... 7-122
7-69 evmwlsmiaaw...................................................................................................................... 7-123
7-70 evmwlsmianw ..................................................................................................................... 7-124
7-71 evmwlssiaaw ....................................................................................................................... 7-126
7-72 evmwlssianw....................................................................................................................... 7-128
7-73 evmwlumi............................................................................................................................ 7-129
7-74 evmwlumia.......................................................................................................................... 7-130
7-75 evmwlumiaaw ..................................................................................................................... 7-131
7-76 evmwlumianw..................................................................................................................... 7-132

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxiv Freescale Semiconductor
Figures
Figure
Number Title Page
Number
7-77 evmwlusiaaw....................................................................................................................... 7-134
7-78 evmwlusianw ...................................................................................................................... 7-136
7-79 evmwsmf............................................................................................................................. 7-137
7-80 evmwsmfa ........................................................................................................................... 7-138
7-81 evmwsmfaa ......................................................................................................................... 7-139
7-82 evmwsmfan ......................................................................................................................... 7-140
7-83 evmwsmi ............................................................................................................................. 7-141
7-84 evmwsmia ........................................................................................................................... 7-142
7-85 evmwsmiaa.......................................................................................................................... 7-143
7-86 evmwsmian ......................................................................................................................... 7-144
7-87 evmwssf .............................................................................................................................. 7-145
7-88 evmwssfa............................................................................................................................. 7-146
7-89 evmwssfaa........................................................................................................................... 7-148
7-90 evmwssfan........................................................................................................................... 7-150
7-91 evmwumi............................................................................................................................. 7-151
7-92 evmwumia........................................................................................................................... 7-152
7-93 evmwumiaa ......................................................................................................................... 7-153
7-94 evmwumian......................................................................................................................... 7-154
7-95 evaddsmiaaw....................................................................................................................... 7-155
7-96 evaddssiaaw ........................................................................................................................ 7-156
7-97 evaddumiaaw ...................................................................................................................... 7-157
7-98 evaddusiaaw........................................................................................................................ 7-158
7-99 evsubfsmiaaw...................................................................................................................... 7-159
7-100 evsubfssiaaw ....................................................................................................................... 7-160
7-101 evsubfumiaaw ..................................................................................................................... 7-161
7-102 evsubfusiaaw....................................................................................................................... 7-162
7-103 Move Register to Accumulator (evmra) ............................................................................. 7-163
7-104 evldd Results in Big- and Little-Endian Modes.................................................................. 7-165
7-105 evlddx Results in Big- and Little-Endian Modes................................................................ 7-166
7-106 evldw Results in Big- and Little-Endian Modes................................................................. 7-167
7-107 evldwx Results in Big- and Little-Endian Modes............................................................... 7-168
7-108 evldh Results in Big- and Little-Endian Modes.................................................................. 7-169
7-109 evldhx Results in Big- and Little-Endian Modes................................................................ 7-170
7-110 evlwhe Results in Big- and Little-Endian Modes ............................................................... 7-171
7-111 evlwhex Results in Big- and Little-Endian Modes ............................................................. 7-172
7-112 evlwhou Results in Big- and Little-Endian Modes............................................................. 7-173
7-113 evlwhoux Results in Big- and Little-Endian Modes........................................................... 7-174
7-114 evlwhos Results in Big- and Little-Endian Modes ............................................................. 7-175
7-115 evlwhosx Results in Big- and Little-Endian Modes ........................................................... 7-176
7-116 evlwwsplat Results in Big- and Little-Endian Modes ........................................................ 7-177
7-117 evlwwsplatx Results in Big- and Little-Endian Modes ...................................................... 7-178

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxv
Figures
Figure
Number Title Page
Number
7-118 evlwhsplat Results in Big- and Little-Endian Modes ......................................................... 7-179
7-119 evlwhsplatx Results in Big- and Little-Endian Modes ....................................................... 7-180
7-120 evlhhesplat Results in Big- and Little-Endian Modes ........................................................ 7-181
7-121 evlhhesplatx Results in Big- and Little-Endian Modes ...................................................... 7-182
7-122 evlhhousplat Results in Big- and Little-Endian Modes ...................................................... 7-183
7-123 evlhhousplatx Results in Big- and Little-Endian Modes .................................................... 7-184
7-124 evlhhossplat Results in Big- and Little-Endian Modes....................................................... 7-185
7-125 evlhhossplatx Results in Big- and Little-Endian Modes..................................................... 7-186
7-126 evstdd Results in Big- and Little-Endian Modes ................................................................ 7-187
7-127 evstddx Results in Big- and Little-Endian Modes .............................................................. 7-188
7-128 evstdw Results in Big- and Little-Endian Modes ............................................................... 7-189
7-129 evstdwx Results in Big- and Little-Endian Modes ............................................................. 7-190
7-130 evstdh Results in Big- and Little-Endian Modes ................................................................ 7-191
7-131 evstdhx Results in Big- and Little-Endian Modes .............................................................. 7-192
7-132 evstwwe Results in Big- and Little-Endian Modes............................................................. 7-193
7-133 evstwwex Results in Big- and Little-Endian Modes........................................................... 7-194
7-134 evstwwo Results in Big- and Little-Endian Modes ............................................................ 7-195
7-135 evstwwox Results in Big- and Little-Endian Modes .......................................................... 7-196
7-136 evstwhe Results in Big- and Little-Endian Modes.............................................................. 7-197
7-137 evstwhex Results in Big- and Little-Endian Modes............................................................ 7-198
7-138 evstwho Results in Big- and Little-Endian Modes ............................................................. 7-199
7-139 evstwhox Results in Big- and Little-Endian Modes ........................................................... 7-200
8-1 Power Management State Diagram......................................................................................... 8-2
9-1 e200z446n3 ICache Block Diagram ....................................................................................... 9-2
9-2 Cache Organization and Line Format ..................................................................................... 9-3
9-3 ICache Lookup Flow............................................................................................................... 9-5
9-4 L1 Cache Control and Status Register 0 (L1CSR0)................................................................ 9-6
9-5 L1 Cache Control and Status Register 1 (L1CSR1)................................................................ 9-6
9-6 L1 Cache Configuration Register 0 (L1CFG0)....................................................................... 9-9
9-7 L1 Cache Configuration Register 1 (L1CFG1)....................................................................... 9-9
9-8 L1 Flush/Invalidate Register 1 (L1FINV1) .......................................................................... 9-13
9-9 CDACNTL Register .............................................................................................................9-28
9-10 CDADATA Register.............................................................................................................. 9-29
9-11 Hardware Debug Control Register 0 (HDBCR0) ................................................................. 9-30
10-1 Virtual Address and TLB-Entry Compare Process ............................................................... 10-3
10-2 Effective to Real Address Translation Flow ......................................................................... 10-4
10-3 Granting of Access Permission ............................................................................................. 10-5
10-4 MMU Configuration Register (MMUCFG) ......................................................................... 10-6
10-5 TLB0 Configuration Register (TLB0CFG) .......................................................................... 10-7
10-6 TLB1 Configuration Register (TLB1CFG) .......................................................................... 10-8
10-7 DEAR.................................................................................................................................. 10-15

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxvi Freescale Semiconductor
Figures
Figure
Number Title Page
Number
10-8 MMU Control and Status Register 0 (MMUCSR0) ........................................................... 10-16
10-9 MMU Assist Register 0 (MAS0) ........................................................................................ 10-16
10-10 MMU Assist Register 1 (MAS1) ........................................................................................ 10-17
10-11 MMU Assist Register 2 (MAS2) ........................................................................................ 10-19
10-12 MMU Assist Register 3 (MAS3) ........................................................................................ 10-20
10-13 MMU Assist Register 4 (MAS4) ........................................................................................ 10-20
10-14 MMU Assist Register 6 (MAS6) ........................................................................................ 10-21
10-15 MMU Assist Registers Summary ....................................................................................... 10-22
10-16 External Translation Alteration TLB Entry Compare Process............................................ 10-26
11-1 Debug Resources................................................................................................................... 11-4
11-2 DVC1, DVC2 Registers...................................................................................................... 11-20
11-3 DBCNT Register................................................................................................................. 11-20
11-4 DBCR0 Register ................................................................................................................. 11-21
11-5 DBCR1 Register ................................................................................................................. 11-24
11-6 DBCR2 Register ................................................................................................................. 11-26
11-7 DBCR3 Register ................................................................................................................. 11-30
11-8 DBCR4 Register ................................................................................................................. 11-34
11-9 DBCR5 Register ................................................................................................................. 11-35
11-10 DBCR6 Register ................................................................................................................. 11-37
11-11 DBSR Register.................................................................................................................... 11-39
11-12 DBERC0 Register............................................................................................................... 11-42
11-13 DEVENT Register .............................................................................................................. 11-48
11-14 DDAM Register .................................................................................................................. 11-49
11-15 EDBCR0 Register............................................................................................................... 11-51
11-16 EDBSR0 Register ............................................................................................................... 11-52
11-17 OnCE TAP Controller and Registers .................................................................................. 11-54
11-18 OnCE TAP Controller and Registers (16-State FSM) ........................................................ 11-55
11-19 e200 OnCE Controller and Serial Interface ........................................................................ 11-59
11-20 OnCE Status Register.......................................................................................................... 11-60
11-21 OnCE Command Register................................................................................................... 11-61
11-22 OnCE Control Register ....................................................................................................... 11-64
11-23 CPU Scan Chain Register (CPUSCR) ................................................................................ 11-71
11-24 Control State Register (CTL).............................................................................................. 11-72
11-25 OnCE PC FIFO ................................................................................................................... 11-77
11-26 Parallel Signature Control Register (PSCR) ....................................................................... 11-84
11-27 Parallel Signature Status Register (PSSR).......................................................................... 11-84
11-28 Parallel Signature High Register (PSHR) ........................................................................... 11-85
11-29 Parallel Signature Low Register (PSLR) ............................................................................ 11-85
11-30 Parallel Signature Counter Register (PSCTR).................................................................... 11-86
11-31 Parallel Signature Update High Register (PSUHR)............................................................ 11-86
11-32 Parallel Signature Update Low Register (PSULR)............................................................. 11-86

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxvii
Figures
Figure
Number Title Page
Number
12-1 Nexus 3+ Functional Block Diagram.................................................................................... 12-4
12-2 Client Select Control Register............................................................................................. 12-12
12-3 Port Configuration Register ................................................................................................ 12-13
12-4 Development Control Register 1......................................................................................... 12-14
12-5 Development Control Register 2......................................................................................... 12-15
12-6 Development Control Register 3......................................................................................... 12-17
12-7 Development Control Register 4......................................................................................... 12-19
12-8 Development Status Register .............................................................................................. 12-19
12-9 Watchpoint Trigger (WT) Register ..................................................................................... 12-21
12-10 Program Trace Start Trigger Control (PTSTC) Register..................................................... 12-22
12-11 Program Trace End Trigger Control (PTETC) Register ..................................................... 12-22
12-12 Data Trace Start Trigger Control (DTSTC) Register.......................................................... 12-23
12-13 Data Trace End Trigger Control (DTETC) Register........................................................... 12-24
12-14 Watchpoint Mask Register .................................................................................................. 12-25
12-15 Nexus Overrun Control Register......................................................................................... 12-26
12-16 Data Trace Control Register................................................................................................ 12-27
12-17 Data Trace Start Address 1 Register ................................................................................... 12-28
12-18 Data Trace Start Address 2 Register ................................................................................... 12-29
12-19 Data Trace Start Address 3 Register ................................................................................... 12-29
12-20 Data Trace Start Address 4 Register ................................................................................... 12-29
12-21 Data Trace End Address 1 Register .................................................................................... 12-29
12-22 Data Trace End Address 2 Register .................................................................................... 12-30
12-23 Data Trace End Address 3 Register .................................................................................... 12-30
12-24 Data Trace End Address 4 Register .................................................................................... 12-30
12-25 Read/Write Access Control/Status Register........................................................................ 12-31
12-26 Read/Write Access Data Register ....................................................................................... 12-32
12-27 Read/Write Access Address Register.................................................................................. 12-34
12-28 Relative Address Generation and Recreation ..................................................................... 12-36
12-29 Debug Status Message Format............................................................................................ 12-40
12-30 Error Message Format......................................................................................................... 12-40
12-31 Ownership Trace Message Format...................................................................................... 12-41
12-32 Indirect Branch Message (History) Format ........................................................................ 12-44
12-33 Indirect Branch Message Format ........................................................................................ 12-44
12-34 Direct Branch Message Format........................................................................................... 12-44
12-35 Resource Full Message Format........................................................................................... 12-47
12-36 Program Correlation Message Formats............................................................................... 12-49
12-37 Direct/Indirect Branch with Sync Message Format............................................................ 12-51
12-38 Indirect Branch History w/ Sync. Message Format ............................................................ 12-52
12-39 Program Trace—Indirect Branch Message (Traditional).................................................... 12-53
12-40 Program Trace—Indirect Branch Message (History) ......................................................... 12-53
12-41 Program Trace—Direct Branch (Traditional) and Error Messages .................................... 12-54

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxviii Freescale Semiconductor
Figures
Figure
Number Title Page
Number
12-42 Program Trace - Indirect Branch w/ Sync. Message........................................................... 12-54
12-43 Data Write Message Format................................................................................................ 12-55
12-44 Data Read Message Format ................................................................................................ 12-55
12-45 Data Write/Read with Synchronization Message Format................................................... 12-56
12-46 Data Trace—Data Write Message....................................................................................... 12-59
12-47 Data Trace—Data Read with Sync Message ...................................................................... 12-59
12-48 Data Acquisition Message Format...................................................................................... 12-60
12-49 Watchpoint Message Format............................................................................................... 12-61
12-50 Watchpoint Message and Watchpoint Error Message......................................................... 12-62
12-51 Error Message Format......................................................................................................... 12-65
12-52 Single Pin MSEO Transfers................................................................................................ 12-69
12-53 Dual Pin MSEO Transfers .................................................................................................. 12-70
13-1 e200 Signal Groups............................................................................................................... 13-4
13-2 Example External JTAG Register Design........................................................................... 13-43
13-3 AHB Clock Enable Operation—1....................................................................................... 13-45
13-4 AHB Clock Enable Operation—2....................................................................................... 13-45
13-5 AHB Clock Enable Operation—3....................................................................................... 13-46
13-6 Basic Read Transfers........................................................................................................... 13-47
13-7 Read Transfer with Wait-State ............................................................................................ 13-49
13-8 Basic Write Transfers.......................................................................................................... 13-50
13-9 Write Transfer with Wait-State ........................................................................................... 13-52
13-10 Single Cycle Read and Write Transfers .............................................................................. 13-53
13-11 Single Cycle Read and Write Transfers—2 ........................................................................ 13-54
13-12 Multi-Cycle Read and Write Transfers ............................................................................... 13-55
13-13 Multi-Cycle Read and Write Transfers—2 ......................................................................... 13-56
13-14 Misaligned Read Transfer ................................................................................................... 13-57
13-15 Misaligned Write Transfer .................................................................................................. 13-58
13-16 Misaligned Write, Single Cycle Read Transfer................................................................... 13-59
13-17 Burst Read Transfer ............................................................................................................ 13-60
13-18 Burst Read with Wait-State Transfer................................................................................... 13-61
13-19 Burst Write Transfer............................................................................................................ 13-62
13-20 Burst Write with Wait-State Transfer.................................................................................. 13-63
13-21 Read and Write Transfers, Instr. Read Error Termination................................................... 13-64
13-22 Data Read Error Termination.............................................................................................. 13-65
13-23 Misaligned Write Error Termination, Burst Substituted ..................................................... 13-66
13-24 Burst Read Error Termination, Burst Write Substituted ..................................................... 13-67
13-25 Cross-Signaling Exception Output Operation..................................................................... 13-68
13-26 Cross-Signaling Exception Input Operation ....................................................................... 13-69
13-27 Cross-Signaling Invalidation Output Operation—Data Error ............................................ 13-70
13-28 Cross-Signaling Invalidation Output Operation—Tag Error, Miss .................................... 13-71
13-29 Cross-signaling Invalidation Output Operation—Tag Error, Hit........................................ 13-72

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxix
Figures
Figure
Number Title Page
Number
13-30 Cross-Signaling Invalidation Output Operation—Tag Error, Locked lnv .......................... 13-73
13-31 Cross-Signaling Invalidation Input Operation—Data Error ............................................... 13-74
13-32 Cross-Signaling Invalidation Input Operation—Tag Error, Miss ....................................... 13-75
13-33 Cross-Signaling Invalidation Input Operation—Tag Error, Hit.......................................... 13-76
13-34 Cross-signaling Invalidation Input Operation—Tag Error, Locked lnv ............................. 13-77
13-35 Debug Entry Cross-Signaling Interface, Non-Lockstep Mode........................................... 13-78
13-36 Debug Entry Cross-Signaling Interface, Lockstep Mode ................................................... 13-79
13-37 Debug Entry Cross-Signaling Interface, Lockstep Mode (2) ............................................. 13-80
13-38 Debug Exit Cross-Signaling Interface, Non-Lockstep mode.............................................. 13-81
13-39 Debug Exit Cross-Signaling Interface, Lockstep Mode ..................................................... 13-82
13-40 Debug Exit Cross-Signaling Interface, Lockstep mode (2) ................................................ 13-83
13-41 Debug Update_DR State Cross-Signaling Interface, Lockstep mode ................................ 13-84
13-42 Debug Update_DR State Cross-Signaling Interface, Lockstep Mode (2) .......................... 13-85
13-43 Wakeup Control Signal (p_wakeup) ................................................................................... 13-86
13-44 Interrupt Interface Input Signals ......................................................................................... 13-86
13-45 Interrupt Pending operation ................................................................................................ 13-87
13-46 Interrupt acknowledge operation ........................................................................................ 13-88
13-47 Interrupt Acknowledge Operation—2 ................................................................................ 13-89
13-48 Time Base Input Timing...................................................................................................... 13-90
13-49 Test Clock Input Timing ..................................................................................................... 13-90
13-50 j_trst_b Timing.................................................................................................................... 13-90
13-51 Test Access Port Timing ..................................................................................................... 13-91

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxx Freescale Semiconductor
Figures
Figure
Number Title Page
Number

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxxi
Tables
Table
Number Title Page
Number
Ta bl e s
1-1 Interrupt Registers................................................................................................................. 1-10
1-2 Exceptions and Conditions....................................................................................................1-11
2-1 MSR Field Descriptions.......................................................................................................... 2-9
2-2 PIR Field Descriptions.......................................................................................................... 2-11
2-3 PVR Field Descriptions ........................................................................................................ 2-12
2-4 SVR Field Descriptions ........................................................................................................ 2-13
2-5 XER Field Descriptions ........................................................................................................ 2-13
2-6 ESR Field Descriptions......................................................................................................... 2-14
2-7 Machine Check Syndrome Register (MCSR)....................................................................... 2-17
2-8 Timer Control Register Field Descriptions ........................................................................... 2-20
2-9 Timer Status Register Field Descriptions.............................................................................. 2-21
2-10 Hardware Implementation Dependent Register 0................................................................. 2-22
2-11 Hardware Implementation Dependent Register 1................................................................. 2-25
2-12 Branch Unit Control and Status Register.............................................................................. 2-26
2-13 System Response to Invalid SPR Reference......................................................................... 2-28
2-14 Additional synchronization requirements for SPRs.............................................................. 2-28
2-15 Special Purpose Registers ..................................................................................................... 2-29
2-16 Reset Settings for e200 Resources........................................................................................ 2-33
3-1 List of Unsupported Instructions.............................................................................................3-1
3-2 List of Optionally Supported Instructions............................................................................... 3-2
3-3 Implementation-specific Instruction Summary....................................................................... 3-2
3-4 Volatile Context Save/Restore Instruction Set...................................................................... 3-16
3-5 Instructions Sorted by Mnemonic......................................................................................... 3-25
3-6 Instructions Sorted by Opcode.............................................................................................. 3-34
4-1 Concurrent Instruction Issue Capabilities............................................................................... 4-2
4-2 Pipeline Stages ........................................................................................................................ 4-5
4-3 Instruction Class Cycle Counts............................................................................................. 4-21
4-4 Instruction Timing by Mnemonic ......................................................................................... 4-22
4-5 Performance Effects of Storage Operand Placement............................................................ 4-26
5-1 Interrupt Types ........................................................................................................................ 5-2
5-2 Interrupt Classifications .......................................................................................................... 5-3
5-3 Exceptions and Conditions...................................................................................................... 5-4
5-4 ESR Bit Settings...................................................................................................................... 5-6
5-5 MSR Bit Settings .................................................................................................................... 5-7
5-6 Machine Check Syndrome Register (MCSR)....................................................................... 5-10
5-7 IVPR Register Fields ............................................................................................................ 5-12
5-8 IVOR Register Fields............................................................................................................ 5-13
5-9 Critical Input Interrupt—Register Settings........................................................................... 5-13
5-10 Error Report Machine Check Exceptions ............................................................................. 5-16
5-11 Asynchronous Machine Check Exceptions........................................................................... 5-17
5-12 Asynchronous Machine Check MCAR update Priority........................................................ 5-19

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxxii Freescale Semiconductor
Tables
Table
Number Title Page
Number
5-13 Machine Check Interrupt—Register Settings ....................................................................... 5-20
5-14 Data Storage Interrupt—Register Settings............................................................................ 5-21
5-15 ISI Exceptions and Conditions.............................................................................................. 5-22
5-16 Instruction Storage Interrupt—Register Settings.................................................................. 5-22
5-17 External Input Interrupt—Register Settings ......................................................................... 5-23
5-18 Alignment Interrupt—Register Settings ............................................................................... 5-23
5-19 Program Interrupt—Register Settings................................................................................... 5-25
5-20 Floating-Point Unavailable Interrupt—Register Settings..................................................... 5-25
5-21 System Call Interrupt—Register Settings ............................................................................. 5-26
5-22 Decrementer Interrupt—Register Settings............................................................................ 5-27
5-23 Fixed-Interval Timer Interrupt—Register Settings............................................................... 5-27
5-24 Watchdog Timer Interrupt—Register Settings...................................................................... 5-28
5-25 Data TLB Error Interrupt—Register Settings....................................................................... 5-29
5-26 Instruction TLB Error Interrupt—Register Settings ............................................................. 5-29
5-27 Debug Interrupt—Register Settings...................................................................................... 5-32
5-28 TSR Watchdog Timer Reset Status....................................................................................... 5-33
5-29 DBSR Most Recent Reset..................................................................................................... 5-34
5-30 System Reset Interrupt—Register Settings........................................................................... 5-34
5-31 SPE Unavailable Interrupt—Register Settings ..................................................................... 5-34
5-32 SPE Floating-point Data Interrupt—Register Settings .........................................................5-35
5-33 SPE Floating-point Round Interrupt—Register Settings...................................................... 5-35
5-34 e200 Exception Priorities...................................................................................................... 5-37
5-35 MSR Setting Due to Interrupt ............................................................................................... 5-41
6-1 SPE /EFPU Status and Control Register................................................................................. 6-2
6-2 Floating-point Results Summary—Add, Sub, Mul, Div....................................................... 6-95
6-3 Floating-point Results Summary—madd, msub, nmadd, nmsub ......................................... 6-99
6-4 Floating-Point Results Summary—sqrt .............................................................................. 6-103
6-5 Floating-Point Results Summary—Min, Max .................................................................... 6-104
6-6 Floating–point Results Summary—Convert to unsigned ................................................... 6-108
6-7 Floating-point Results Summary—Convert to signed........................................................ 6-109
6-8 Floating-point Results Summary—Convert from unsigned ............................................... 6-109
6-9 Floating-point Results Summary—Convert from signed ................................................... 6-109
6-10 Floating-point Results Summary—fabs, fnabs, fneg.......................................................... 6-109
6-11 Floating-point Results Summary—Convert from half-precision........................................ 6-110
6-12 Floating-point Results Summary—Convert to half-precision ............................................ 6-110
6-13 EFPU Vector Floating-Point Instruction Timing .................................................................6-111
6-14 EFPU Scalar Floating-Point Instruction Timing................................................................. 6-112
6-15 Opcode Space Division.......................................................................................................6-114
6-16 Embedded Vector Floating-Point Instruction Opcodes....................................................... 6-114
6-17 Embedded Scalar Single-Precision Floating-Point Instruction Opcodes............................ 6-116
7-1 SPE Status and Control Register............................................................................................. 7-2

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxxiii
Tables
Table
Number Title Page
Number
7-2 Integer SPE Simple Instructions ............................................................................................. 7-6
7-3 Data Samples and Sizes .......................................................................................................... 7-7
7-4 Mnemonic Extensions for Multiply-Accumulate Instructions.............................................. 7-48
7-5 Multiply Words Instructions ............................................................................................... 7-113
7-6 SPE Vector Load/Store Instructions.................................................................................... 7-163
7-7 Timing for Integer Simple Instructions............................................................................... 7-200
7-8 SPE Load and Store Instruction Timing ............................................................................. 7-202
7-9 SPE Complex Integer Instruction Timing........................................................................... 7-203
7-10 Opcode Space Division....................................................................................................... 7-206
7-11 Opcodes for Integer Simple Instructions ............................................................................ 7-207
7-12 SPE Load and Store Instruction Opcodes ........................................................................... 7-208
7-13 Opcodes for Complex Integer Instructions, Sorted by Mnemonic ..................................... 7-210
7-14 Opcodes for Complex Integer Instructions, Sorted by Opcode .......................................... 7-213
8-1 Power Management Pins......................................................................................................... 8-3
9-1 L1CSR0 Field Descriptions ....................................................................................................9-6
9-2 L1CSR1 Field Descriptions ....................................................................................................9-7
9-3 L1CFG1 Field Descriptions....................................................................................................9-9
9-4 L1FINV1 Field Descriptions ................................................................................................ 9-13
9-5 Tag Checkbit Generation....................................................................................................... 9-17
9-6 Data Checkbit Generation.....................................................................................................9-17
9-7 Special Case Handling .......................................................................................................... 9-23
9-8 Transfer Type Encoding........................................................................................................ 9-24
9-9 Cache Debug Access Control Register Definition............................................................... 9-28
9-10 Cache Debug Access Data Register Bit Definitions............................................................. 9-29
9-11 HDBCR0 Field Descriptions ................................................................................................ 9-30
10-1 Page Size and EPN Field Comparison.................................................................................. 10-3
10-2 TLB Entry Bit Definitions ................................................................................................... 10-5
10-3 MMUCFG Field Descriptions .............................................................................................. 10-7
10-4 TLB0CFG Field Descriptions............................................................................................... 10-8
10-5 TLB1CFG Field Descriptions............................................................................................... 10-9
10-6 tlbivax EA Bit Definitions .................................................................................................. 10-11
10-7 TLB Entry 0 Values After Reset ......................................................................................... 10-14
10-8 MMUCSR0 - MMU Control and Status Register 0............................................................ 10-16
10-9 MAS0 —MMU Read/Write and Replacement Control...................................................... 10-17
10-10 MAS1—Descriptor Context and Configuration Control.................................................... 10-17
10-11 MAS2—EPN and Page Attributes...................................................................................... 10-19
10-12 MAS3—RPN and Access Control...................................................................................... 10-20
10-13 MAS4—Hardware Replacement Assist Configuration Register........................................ 10-20
10-14 MAS6—TLB Search Context Register 0............................................................................ 10-21
10-15 MMU Assist Register Field Updates .................................................................................. 10-22
10-16 Transfer Type Encoding...................................................................................................... 10-24

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxxiv Freescale Semiconductor
Tables
Table
Number Title Page
Number
11-1 DAC events and Resultant Updates...................................................................................... 11-8
11-2 DAC Events and Resultant Updates, Dual-Issue Case 1 .....................................................11-11
11-3 DAC Events and Resultant Updates, Dual-Issue Case 2 .................................................... 11-12
11-4 DAC events and Resultant Updates, Dual-issue case 3...................................................... 11-14
11-5 DAC Events and Resultant Updates, Dual-Issue Case 4 .................................................... 11-15
11-6 DBCR0 Bit Definitions....................................................................................................... 11-21
11-7 DBCR1 Bit Definitions....................................................................................................... 11-24
11-8 DBCR2 Bit Definitions....................................................................................................... 11-26
11-9 DBCR3 Bit Definitions....................................................................................................... 11-31
11-10 DBCR4 Bit Definitions....................................................................................................... 11-34
11-11 DBCR5 Bit Definitions....................................................................................................... 11-36
11-12 DBCR6 Bit Definitions....................................................................................................... 11-37
11-13 DBSR Bit Definitions ......................................................................................................... 11-40
11-14 DBERC0 Bit Definitions .................................................................................................... 11-42
11-15 DBERC0 Resource Control ................................................................................................ 11-44
11-16 DEVENT Bit Definitions.................................................................................................... 11-48
11-17 DDAM Bit Definitions........................................................................................................ 11-49
11-18 EDBCR0 Bit Definitions .................................................................................................... 11-51
11-19 EDBSR0 Bit Definitions..................................................................................................... 11-52
11-20 JTAG/OnCE Primary Interface Signals .............................................................................. 11-56
11-21 OnCE Status Register Bit Definitions................................................................................. 11-60
11-22 OnCE Command Register Bit Definitions.......................................................................... 11-61
11-23 e200 OnCE Register Addressing ........................................................................................ 11-62
11-24 OnCE Control Register Bit Definitions .............................................................................. 11-64
11-25 OnCE Register Access Requirements................................................................................. 11-67
11-26 CTL Emulation Firmware Modifications ........................................................................... 11-72
11-27 Watchpoint Output Signal Assignments ............................................................................. 11-79
11-28 PSCR Field Descriptions .................................................................................................... 11-84
11-29 PSSR Field Descriptions..................................................................................................... 11-85
12-1 Terms and Definitions........................................................................................................... 12-1
12-2 Supported TCODEs .............................................................................................................. 12-5
12-3 Error Code Encoding (TCODE = 8) ..................................................................................... 12-9
12-4 Error Type Encoding (TCODE = 8)...................................................................................... 12-9
12-5 RCODE values (TCODE = 27)............................................................................................. 12-9
12-6 Event Code Encoding (TCODE = 33) ................................................................................ 12-10
12-7 Data Trace Size Encodings (TCODE = 5,6,13,14) ............................................................. 12-10
12-8 Nexus 3+ Register Map....................................................................................................... 12-11
12-9 Client Select Control Register Fields.................................................................................. 12-12
12-10 Port Configuration Register Fields ..................................................................................... 12-13
12-11 Development Control Register 1 Fields.............................................................................. 12-14
12-12 Development Control Register 2 Fields.............................................................................. 12-16

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor xxxv
Tables
Table
Number Title Page
Number
12-13 Development Control Register 3 Fields.............................................................................. 12-18
12-14 Development Control Register 4 Fields.............................................................................. 12-19
12-15 Development Status Register Fields ................................................................................... 12-20
12-16 Watchpoint Trigger Register Fields .................................................................................... 12-21
12-17 Program Trace Start Trigger Control Register Fields ......................................................... 12-22
12-18 Program Trace End Trigger Control Register Fields .......................................................... 12-23
12-19 Data Trace Start Trigger Control Register Fields ............................................................... 12-24
12-20 Data Trace End Trigger Control Register Fields................................................................. 12-25
12-21 Watchpoint Mask Register Fields ....................................................................................... 12-26
12-22 Nexus Overrun Control Register Fields.............................................................................. 12-27
12-23 Data Trace Control Register Fields..................................................................................... 12-28
12-24 Data Trace—Address Range Options ................................................................................. 12-30
12-25 Read/Write Access Control/Status Register Fields............................................................. 12-31
12-26 Read/Write Access Status Bit Encoding ............................................................................. 12-32
12-27 RWD Data Placement For Transfers................................................................................... 12-32
12-28 RWD Byte Lane Mapping................................................................................................... 12-33
12-29 Message Type Priority and Message Dropped Responses.................................................. 12-38
12-30 Indirect Branch Message Sources ....................................................................................... 12-42
12-31 Direct Branch Message Sources ......................................................................................... 12-43
12-32 Branch/Predicate History Events ........................................................................................ 12-45
12-33 RCODE Encoding............................................................................................................... 12-47
12-34 Program Trace Exception Summary ................................................................................... 12-52
12-35 Data Trace Exception Summary ......................................................................................... 12-57
12-36 e200 Bus Cycle Cases......................................................................................................... 12-58
12-37 Watchpoint Source Encoding.............................................................................................. 12-61
12-38 JTAG Pins for Nexus 3+ ..................................................................................................... 12-66
12-39 Nexus 3+ Auxiliary Pins ..................................................................................................... 12-66
12-40 Nexus Port Arbitration Signals ........................................................................................... 12-67
12-41 MSEO Pin(s) Protocol ........................................................................................................ 12-68
12-42 MDO Request Encodings.................................................................................................... 12-71
12-43 Indirect Branch Message Example (2 MDO/1 MSEO) ...................................................... 12-72
12-44 Indirect Branch Message Example (8 MDO/2 MSEO) ...................................................... 12-72
12-45 Direct Branch Message Example (2 MDO / 1 MSEO)....................................................... 12-73
12-46 Direct Branch Message Example (8 MDO / 2 MSEO)....................................................... 12-73
12-47 Data Write Message Example (8 MDO / 1 MSEO)............................................................ 12-74
12-48 Data Write Message Example (8 MDO / 2 MSEO)............................................................ 12-74
12-49 Accessing Internal Nexus 3+ Registers through JTAG/OnCE ........................................... 12-75
12-50 Accessing Memory-Mapped Resources (Reads) ................................................................ 12-75
12-51 Accessing Memory-Mapped Resources (Writes) ............................................................... 12-76
13-1 Interface Signal Definitions .................................................................................................. 13-4
13-2 p_hrdata[63:0] Byte Address Mappings ............................................................................. 13-11

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
xxxvi Freescale Semiconductor
Tables
Table
Number Title Page
Number
13-3 p_d_hwdata[63:0] Byte Address Mappings........................................................................ 13-11
13-4 p_[d,i]_htrans[1:0] Transfer Type Encoding....................................................................... 13-12
13-5 p_[d,i]_hsize[1:0] Transfer Size Encoding ......................................................................... 13-13
13-6 p_[d,i]_hburst[2:0] Burst Type Encoding ........................................................................... 13-13
13-7 p_d_hprot[5:0] Protection Control Encoding ..................................................................... 13-14
13-8 p_i_hprot[5:0] Protection Control Encoding ...................................................................... 13-14
13-9 Mapping of Access attributes to p_d_hprot[4:2] Protection Control.................................. 13-15
13-10 p_[d,i]_hbstrb[7:0] to Byte Address Mappings .................................................................. 13-16
13-11 Byte Strobe Assertion for Transfers.................................................................................... 13-16
13-12 Big and Little Endian Memory Storage ............................................................................. 13-18
13-13 p_i_hresp[1:0] Transfer Response Encoding...................................................................... 13-22
13-14 p_d_hresp[2:0] Transfer Response Encoding ..................................................................... 13-22
13-15 Processor Mode Encoding .................................................................................................. 13-31
13-16 Processor Execution PIpeline Status Encoding................................................................... 13-32
13-17 Branch Prediction Status Encoding..................................................................................... 13-33
13-18 e200 Debug / Emulation Support Signals........................................................................... 13-36
13-19 e200 Development Support (Nexus 3) Signals................................................................... 13-39
13-20 JTAG Primary Interface Signals ......................................................................................... 13-39
13-21 JTAG Signals Used to Support External Registers............................................................. 13-40
13-22 JTAG General Purpose Register Select Decoding.............................................................. 13-42
13-23 JTAG Register ID Fields..................................................................................................... 13-43
13-24 JTAG ID Register Inputs..................................................................................................... 13-44

e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor xxxvii
About This Book
The primary objective of this manual is to describe the functionality of the e200z4 embedded
microprocessor core for software and hardware developers. This book is intended as a companion to the
EREF: A Programmer's Reference Manual for Freescale Embedded Processors (hereafter referred to as
the EREF).
Users of prior implementations of the e200 core family, such as the e200z6, may notice new terminology
employed throughout this manual. In 2004, most of Freescale’s Embedded Implementation Standards
(EIS) were contributed to help launch Power.org whose mission was to develop, enable and promote
technology originally conceived as the PowerPC architecture. References to “PowerPC” are replaced with
“Power ISA (Instruction Set Architecture) embedded category.” The term “Auxilliary Processing Unit
(APU)” is used to describe a collection of functionality within the EIS. These APUs were either absorbed
into various parts of the new Power ISA or retained their identity and became known as individual, and
sometimes optional, “categories” or “subcategories” of the Power ISA.
This document includes three levels of architectural and implementation definition, as follows:
• Power ISA embedded category—defines a set of user-level instructions and registers that are a part
of the Power ISA.
• e200 implementation details—In some cases, the Power ISA definition provides a general
framework, leaving specific details up to the implementation. Some of these details are common
to all members of the e200 core family and may be indicated as such.
• e200z4 implementation details—The next level of architectural specificity describes those features
that are shared across the cores in the e200z4 subfamily but that may be in the other members of
the e200 product line.
• e200z4xx implementation details—The e200z4 subfamily will eventually include one or more
specific cores with unique combinations of functionality. Each processor core in the e200z4
product line, such as the e200z450n3 for example, typically defines instructions, registers, register
fields, and other aspects that are more detailed than the architectural layers described above. When
features are implemented differently between the varieties of e200z4 cores, they are specifically
noted as such.
Information in this book is subject to change without notice, as described in the disclaimers on the title
page of this book. As with any technical documentation, it is the readers’ responsibility to be sure they are
using the most recent version of the documentation.
Audience
It is assumed that the reader understands operating systems, microprocessor system design, and the basic
principles of RISC processing.
e200z4 Power Architecture™ Core Reference Manual, Rev. A
xxxviii Freescale Semiconductor
Organization
Following is a summary and a brief description of the major parts of this reference manual:
•Chapter 1, “e200z4 Core Complex Overview,” provides a general description of e200z4
functionality.
•Chapter 2, “Register Model,” is useful for software engineers who need to understand the
programming model for the three programming environments and the functionality of each
register.
•Chapter 3, “Instruction Model,” provides an overview of the addressing modes and a description
of the instructions. Instructions are organized by function.
•Chapter 4, “Instruction Pipeline and Execution Timing,” describes how instructions are fetched,
decoded, issued, executed, and completed, and how instruction results are presented to the
processor and memory system. Tables are provided that indicate latency and throughput for each
of the instructions supported by the e200z4.
•Chapter 5, “Interrupts and Exceptions,” describes how the e200z4 implements the interrupt model
as it is defined by the Power ISA embedded category architecture.
•Chapter 6, “Embedded Floating-Point Unit, Version 2,” describes the instruction set architecture
of the Embedded Floating-point (EFPU) implemented on the e200z4. This unit implements scalar
and vector single-precision floating-point instructions to accelerate signal processing and other
algorithms. The e200z446n3 implements version 2 of the Embedded Floating-Point Unit (EFPU2).
•Chapter 7, “Signal Processing Extension Unit,” describes the instruction set architecture of the
SPE and implements instructions to accelerate signal processing and other algorithms.
•Chapter 8, “Power Management,” describes the power management facilities as they are defined
by the Power ISA embedded category architecture and implemented in the e200z4 core.
•Chapter 9, “L1 Cache,” This chapter describes the organization of the on-chip L1 Caches, cache
control instructions, and various cache operations.
•Chapter 10, “Memory Management Unit,” provides specific hardware and software details
regarding the e200z4 MMU implementation.
•Chapter 11, “Debug Support,” describes the internal debug facilities as they are implemented in the
e200z4 core.
•Chapter 12, “Nexus 3+ Module,” describes the Nexus 3+ module, which provides real-time
development capabilities for e200z4 processors in compliance with the proposed IEEE-ISTO
Nexus 5001-2008™ standard.
•Chapter 13, “External Core Complex Interfaces,” describes those aspects of the CCB that are
configurable or that provide status information through the programming interface. It provides a
glossary of signals mentioned throughout the book to offer a clearer understanding of how the core
is integrated as part of a larger device.
•Appendix A, “Register Summary,” contains the register diagrams for the manual.
•Appendix B, “Revision History,” contains a revision history for this manual.

e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor xxxix
Suggested Reading
This section lists additional reading that provides background for the information in this manual as well as
general information about the architecture.
General Information
The following documentation provides useful information about Power Architecture™ technology and
computer architecture in general:
• Power ISA™ Version 2.06, by Power.org™, 2009, available at the Power.org website.
• PowerPC Architecture Book, by Brad Frey, IBM, 2005, available at the IBM website.
•Computer Architecture: A Quantitative Approach, Fourth Edition, by John L. Hennessy and David
A. Patterson, Morgan Kaufmann Publishers, 2006.
•Computer Organization and Design: The Hardware/Software Interface, Third Edition, by David
A. Patterson and John L. Hennessy, Morgan Kaufmann Publishers, 2007.
Freescale documentation is available from the sources listed on the back cover of this manual; the
document order numbers are included in parentheses for ease in ordering:
•EREF: A Programmer's Reference Manual for Freescale Embedded Processors (EREFRM).
Describes the programming, memory management, cache, and interrupt models defined by the
Power ISA™ for embedded environment processors.
•Power ISA™. The latest version of the Power instruction set architecture can be downloaded from
the website www.power.org.
• Category-specific programming environments manuals. These books describe the three major
extensions to the Power ISA embedded environment of the Power ISA. These include the
following:
—AltiVec™ Technology Programming Environments Manual (ALTIVECPEM)
—Signal Processing Engine (SPE) Programming Environments Manual: A Supplement to the
EREF (SPEPEM)
—Variable-Length Encoding (VLE) Programming Environments Manual: A Supplement to the
EREF (VLEPEM)
• Core reference manuals—These books describe the features and behavior of individual
microprocessor cores and provide specific information about how functionality described in the
EREF is implemented by a particular core. They also describe implementation-specific features
and microarchitectural details, such as instruction timing and cache hardware details, that lie
outside the architecture specification.
• Integrated device reference manuals—These manuals describe the features and behavior of
integrated devices that implement and utilize a Power ISA processor core.
• Addenda/errata to reference manuals—When processors have follow-on parts, often an addendum
is provided that describes the additional features and functionality changes. These addenda are
intended for use with the corresponding reference manuals.
• Hardware specifications—Hardware specifications provide specific data regarding bus timing,
signal behavior, and AC, DC, and thermal characteristics, as well as other design considerations.
e200z4 Power Architecture™ Core Reference Manual, Rev. A
xl Freescale Semiconductor
• Technical summaries—Each device has a technical summary that provides an overview of its
features. This document is roughly the equivalent to the overview (Chapter 1) of an
implementation’s reference manual.
• Application notes—These short documents address specific design issues useful to programmers
and engineers working with Freescale processors.
Additional literature is published as new processors become available. For a current list of documentation,
refer to http://www.freescale.com.
Acronyms and Abbreviations
Table i contains acronyms and abbreviations that are used in this document. Note that the meanings for
some acronyms (such as XER) are historical, and the words for which an acronym stands may not be
intuitively obvious.
Table i. Acronyms and Abbreviated Terms
Term Meaning
CR Condition register
CTR Count register
DCR Data control register
DTLB Data translation lookaside buffer
EA Effective address
ECC Error checking and correction
FPR Floating-point register
GPR General-purpose register
IEEE Institute of Electrical and Electronics Engineers
LR Link register
LRU Least recently used
LSB Least-significant byte
lsb Least-significant bit
MMU Memory management unit
MSB Most-significant byte
msb Most-significant bit
MSR Machine state register
NaN Not a number
No-op No operation
OnCE On-chip emulation logic
PTE Page table entry
PVR Processor version register
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor xli
Terminology Conventions
Table ii lists certain terms used in this manual that differ from the architecture terminology conventions.
RISC Reduced instruction set computing
RTL Register transfer language
SIMM Signed immediate value
SPR Special-purpose register
SRR0 Machine status save/restore register 0
SRR1 Machine status save/restore register 1
TB Time base facility
TBL Time base lower register
TBU Time base upper register
TLB Translation lookaside buffer
UIMM Unsigned immediate value
UISA User instruction set architecture
VA Virtual address
VLE Variable-length encoding
XER Register used for indicating conditions such as carries and overflows for integer operations
Table ii. Terminology Conventions
The Architecture Specification This Manual
Extended mnemonics Simplified mnemonics
Fixed-point unit (FXU) Integer unit (IU)
Privileged mode (or privileged state) Supervisor-level privilege
Problem mode (or problem state) User-level privilege
Real address Physical address
Relocation Translation
Storage (locations) Memory
Storage (the act of) Access
Store in Write back
Store through Write through
Table i. Acronyms and Abbreviated Terms (continued)
Term Meaning
e200z4 Power Architecture™ Core Reference Manual, Rev. A
xlii Freescale Semiconductor
Table iii describes instruction field notation conventions used in this manual.
Table iii. Instruction Field Conventions
The Architecture Specification Equivalent to:
BA, BB, BT crbA, crbB, crbD (respectively)
BF, BFA crfD, crfS (respectively)
Dd
DS ds
/, //, /// 0...0 (shaded)
RA, RB, RT, RS rA, rB, rD, rS (respectively)
SI SIMM
UIMM
UI UIMM

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-1
Chapter 1
e200z4 Core Complex Overview
This chapter provides an overview of the e200z4 microprocessor core built on Power Architecture™
technology for embedded processors. It includes the following:
• An overview of the core, including the block diagram (Figure 1-1)
• A summary of the feature set for this core (see Section 1.2, “Features”)
— A description of the execution units (see Section 1.2.1, “Execution Unit Features”)
— A description of the memory management architecture (see Section 1.2.3, “Memory
Management Unit Features”)
— High-level details of the core memory and coherency model (see Section 1.2.4, “System Bus
(Core Complex Interface) Features”)
— High-level details of the Nexus 3+ features (see Section 1.2.5, “Nexus 3+ Features”)
• A summary of the programming model for this core (see Section 1.3, “Programming Model”)
— An overview of the register set (see Section 1.3.1, “Register Set”)
— An overview of the instruction set (see Section 1.3.2, “Instruction Set”)
— An overview of interrupts and exception handling (see Section 1.3.3, “Interrupts and Exception
Handling”)
• A summary of instruction pipeline and flow (see Section 1.4, “Microarchitecture Summary”)
1.1 Overview
The e200z4 processor family is a set of CPU cores that implement low-cost versions of Power Architecture
technology. The e200z4 core is a dual-issue, 32-bit design with 64-bit general-purpose registers (GPRs).
The e200z446n3 integrates an e200z4 CPU core, a memory management unit (MMU), a 4-Kbyte
instruction cache, and a Nexus Class 3+ real-time debug unit. Separate instruction and data AHB 2.v6
system interfaces are provided.
The e200z4 is compliant with the PowerPC™ instruction set architecture (ISA). It does not support Power
ISA floating-point instructions in hardware, but traps them so they can be emulated by software.
Instructions of the embedded floating-point category are provided to support real-time single-precision
embedded numerics operations using the general-purpose registers.
Instructions of the signal processing extension (SPE) category are provided to support real-time SIMD
fixed-point and single-precision embedded numerics operations using the general-purpose registers. All
arithmetic instructions that execute in the core operate on data in the general-purpose registers (GPRs).
The GPRs have been extended to 64-bits in order to support vector instructions defined by the SPE
category. These instructions operate on a vector pair of 16-bit or 32-bit data types and deliver vector and
scalar results.
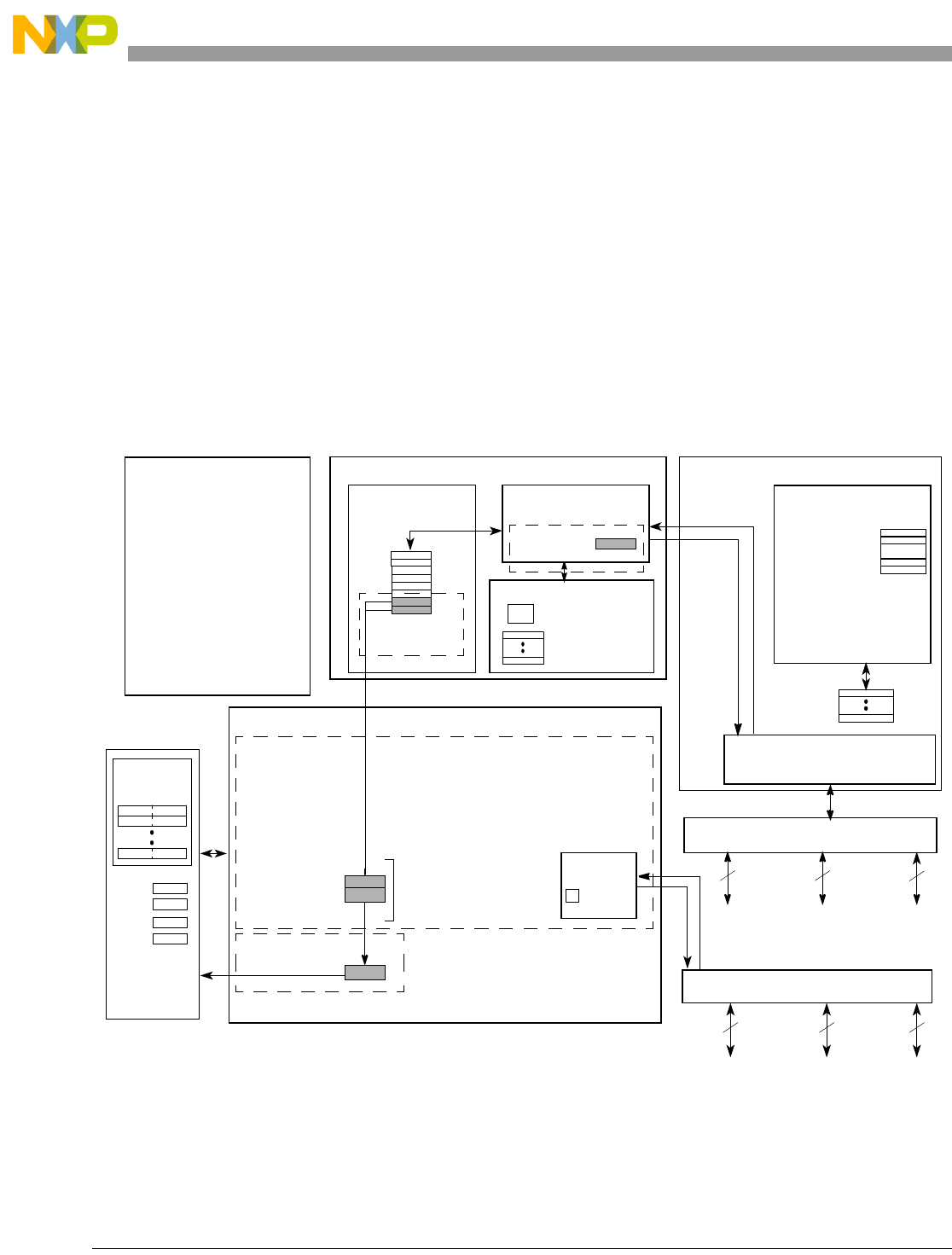
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-2 Freescale Semiconductor
In addition to the base Power ISA embedded category instruction set, the core also implements the
variable-length encoding category (VLE), which provides improved code density. See the EREF and
supplementary VLE Programming Environments Manual (VLEPEM) for more information about the VLE
extension.
The processor integrates a pair of integer execution units, a branch control unit, instruction fetch unit and
load/store unit, and a multi-ported register file capable of sustaining six read and three write operations per
clock cycle. Most integer instructions execute in a single clock cycle. Branch target prefetching is
performed by the branch unit to allow single-cycle branches in many cases.
Throughout the remainder of this document, the core is referred to as the “e200z4” when speaking of
e200z4-specific implementations, the “e200z4xx” when speaking of a specific variety of e200z4 core, or
“e200” when referring to the whole e200 family.
Figure 1-1 shows the block diagram for the device.
Figure 1-1. e200z446n3 Block Diagram
Instruction Bus Interface Unit
Software-Managed
Instruction Memory Unit
MAS
Registers
32 GPRs
(64-Bit)
XER
CR
1-, 4-, 16-, 64-,
256-Kbyte, 1-, 4-, 16-,
64-, 256-Mbyte, 1-,
4-Gbyte page sizes
Execution Units
Additional
Load/Store
Write-Back Stage
Two/Four
Instructions
32 64
N
Address Data Control
Additional Features
• OnCe/Nexus 1/Nexus 3
control logic
• Dual AHB 2.v6 buses
• SPE (SIMD)
• Embedded scalar/
vector floating-point
• Power management
• Time base/decrementer
counter
+
L1 Unified MMU
Unit
CTR
LR
Two-Instruction, In-Order Dispatch
Two-Instruction, In-Order Write-Back
•
•
•
16-Entry
Fully Associative
TLB
EA Calc
Two-stage,
single-path
execute pipeline
with overlapped
execution and
Fetch Unit
Branch Processing Unit
Instruction/Control Unit
Instruction Buffer
(8/16 Instructions)
Decode
8-Entry Branch
Stage
+EA Calc
One-Stage
Fetch
Program Counter
Target Buffer
Data Bus Interface Unit
Execute Stage
feed forwarding
32 64 N
Address Data Control
SPRs
2- or 4-Way Set-Associative
4-Kbyte Instruction Cache
Executes all e200z446n3 instructions (including
Power ISA base, SPE, and VLE categories) as
described in Chapter 3, “Instruction Model.” As
many as two instructions can execute
simultaneously, as described in Chapter 4,
“Instruction Pipeline and Execution Timing.”

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-3
1.2 Features
Key features of the e200z446n3 are summarized as follows:
• Dual-issue, 32-bit Power ISA-compliant core
• Implementation of the VLE category for reduced code footprint
• In-order execution and retirement
• Precise exception handling
• Branch processing unit (BPU)
— Dedicated branch address calculation adder
— Branch target prefetching using an 8-entry branch target buffer (BTB)
• Supports independent instruction and data accesses to different memory subsystems, such as
SRAM and flash memory by means of independent instruction and data bus interface units.
• Load/store unit
• 64-bit general-purpose register file
• Dual advanced high-performance (AHB) 2.v6 64-bit system buses
• Memory management unit (MMU) with 16-entry fully associative TLB and multiple page-size
support
• 4 Kbyte, 2/4-way set-associative instruction cache
• Signal processing extension unit, version 1.1 supporting SIMD fixed-point operations using the
64-bit general-purpose register file.
• Embedded floating-point (FPU) unit, version 2 supporting scalar and vector SIMD
single-precision floating-point operations using the 64-bit general-purpose register file.
• Nexus Class 3+ real-time development unit
• Power management
— Low power design—extensive clock gating
— Power saving modes: doze, nap, sleep, wait
— Dynamic power management of execution units, cache, and MMU
• Testability
— Synthesizeable, MuxD scan design
— ABIST/MBIST for arrays
— Built-in parallel signature unit
See the following sections for more details about specific units.
1.2.1 Execution Unit Features
The following subsections describes the execution units’ main features.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-4 Freescale Semiconductor
1.2.1.1 Instruction Unit Features
The instruction unit features the following:
• 64-bit path to cache supports fetching of two 32-bit Power ISA instructions or four 16-bit VLE
instructions per clock cycle.
• Instruction buffer holds up to eight 32-bit Power ISA instructions or sixteen 16-bit VLE
instructions.
• Dedicated program counter (PC) incrementer supports instruction prefetches.
• Branch unit with dedicated branch address adder and branch target buffer supports single-cycle
execution of successfully predicted branches.
1.2.1.2 Integer Unit Features
The integer units feature support for single-cycle execution of most integer instructions, as follows:
• 32-bit AU for arithmetic and comparison operations
• 32-bit LU for logical operations
• 32-bit priority encoder for count-leading-zeros function
• 32-bit single-cycle barrel shifter for static shifts and rotates
• 32-bit mask unit for data masking and insertion
• Divider logic for signed and unsigned divide in ≤14 clock cycles with minimized execution timing
(integer unit 1 only)
• Pipelined 32 × 32 hardware multiplier array supports 32 × 32→32 multiply with 2 clock latency,
1 clock throughput
1.2.1.3 Load/Store Unit Features
The load/store unit supports load, store, and load multiple/store multiple instructions by means of the
following:
• 32-bit effective address adder for data memory address calculations
• Pipelined operation supports throughput of one load or store operation per cycle
• Dedicated 64-bit interface to memory supports saving and restoring of up to two registers per cycle
for load multiple and store multiple word instructions
• Fully pipelined
• Two-cycle load latency
• Big- and little-endian support
• Misaligned access support
1.2.2 L1 Cache Features
The L1 cache features the following:
• 4 Kbyte, 2- or 4-way configurable set-associative instruction cache
• 64-bit data, 32-bit address bus plus attributes and control

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-5
• 32-byte line size
• Cache line locking
• Way allocation
• Tag and data parity or multi-bit EDC protection with correction/auto-invalidation capability
• Virtually indexed, physically tagged
• Pseudo round-robin replacement algorithm
• Line-fill buffer
• Hit under fill
• Supports tag and data parity
• Supports tag and data double error detection
• Correction/auto-invalidation capability
1.2.3 Memory Management Unit Features
The memory management unit features the following:
• Virtual memory support
• 32-bit virtual and physical addresses
• 8-bit process identifier
• 16-entry fully associative TLB
• Hardware assist for TLB miss exceptions
• Per-entry multiple page size support from 1 Kbyte to 4 Gbyte
• Entry flush protection
• Software managed by tlbre, tlbwe, tlbsx, tlbsync, and tlbivax instructions
• Freescale EIS MMU architecture compliant
• Support for external control of entry matching for a subset of TID values to support non-intrusive
runtime mapping modifications
1.2.4 System Bus (Core Complex Interface) Features
The core complex interface features the following:
• Independent instruction and data buses
• Advanced microcontroller bus architecture (AMBA) AHB 2.v6 protocol
• 32-bit address bus, 64-bit data bus, plus attributes and control
• Separate unidirectional 64-bit read and write data buses
• Support for HCLK running at a slower rate than CPU clock

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-6 Freescale Semiconductor
1.2.5 Nexus 3+ Features
The Nexus 3+ module provides real-time development capabilities for e200z4 processors in compliance
with the IEEE-ISTO 5001-2008™ standard. The ‘3+’ suffix indicates that some Nexus Class 4 features
are available. A portion of the pin interface (the JTAG port) is also shared with the OnCE/Nexus 1 unit.
The following features are implemented:
• Program trace by means of branch trace messaging.
— Branch trace messaging displays program flow discontinuities (direct and indirect branches,
exceptions, etc.), allowing the development tool to interpolate what transpires between the
discontinuities. Thus, static code may be traced.
• Data trace by means of data write messaging and data read messaging.
— Provides the capability for the development tool to trace reads and/or writes to selected internal
memory resources.
• Ownership trace by means of ownership trace messaging (OTM).
— OTM facilitates ownership trace by providing visibility of which process ID or operating
system task is activated.An ownership trace message is transmitted when a new process/task is
activated, allowing the development tool to trace ownership flow.
— Allows enhanced download/upload capabilities.
• Data acquisition messaging
— Allows code to be instrumented to export customized information to the Nexus auxiliary output
port.
• Watchpoint messaging by means of the auxiliary interface
• Watchpoint trigger enable of program and/or data trace messaging
• Run-time access to the processor memory map by means of the JTAG port
• Auxiliary interface for higher data input/output
— Configurable (min/max) message data out pins (nex_mdo[n:0])
— One or two message start/end out pins (nex_mseo_b[1:0])
— One read/write ready pin (nex_rdy_b) pin
— One watchpoint event pin (nex_evto_b)
— Three additional watchpoint event output pins (nex_wevt[2:0]) for SoC use
— One event-in pin (nex_evti_b)
— One MCKO (Message Clock Out) pin
All features are controllable and configurable by means of the JTAG port.
1.3 Programming Model
This section describes the register model, instruction model, and the interrupt model as they are defined
by the Power ISA, Freescale EIS, and the e200z446n3 implementation.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-7
1.3.1 Register Set
Figure 1-2 and Figure 1-3 show the complete e200z446n3 register set, including the sets of the registers
that are accessible in supervisor mode and the set of registers that are accessible in user mode. The number
to the right of the special-purpose registers (SPRs) is the decimal number used in the instruction syntax to
access the register. For example, the integer exception register (XER) is SPR 1.
Figure 1-2 shows the registers that can be accessed by supervisor-level software. User-level software can
access only those registers listed in Figure 1-3.
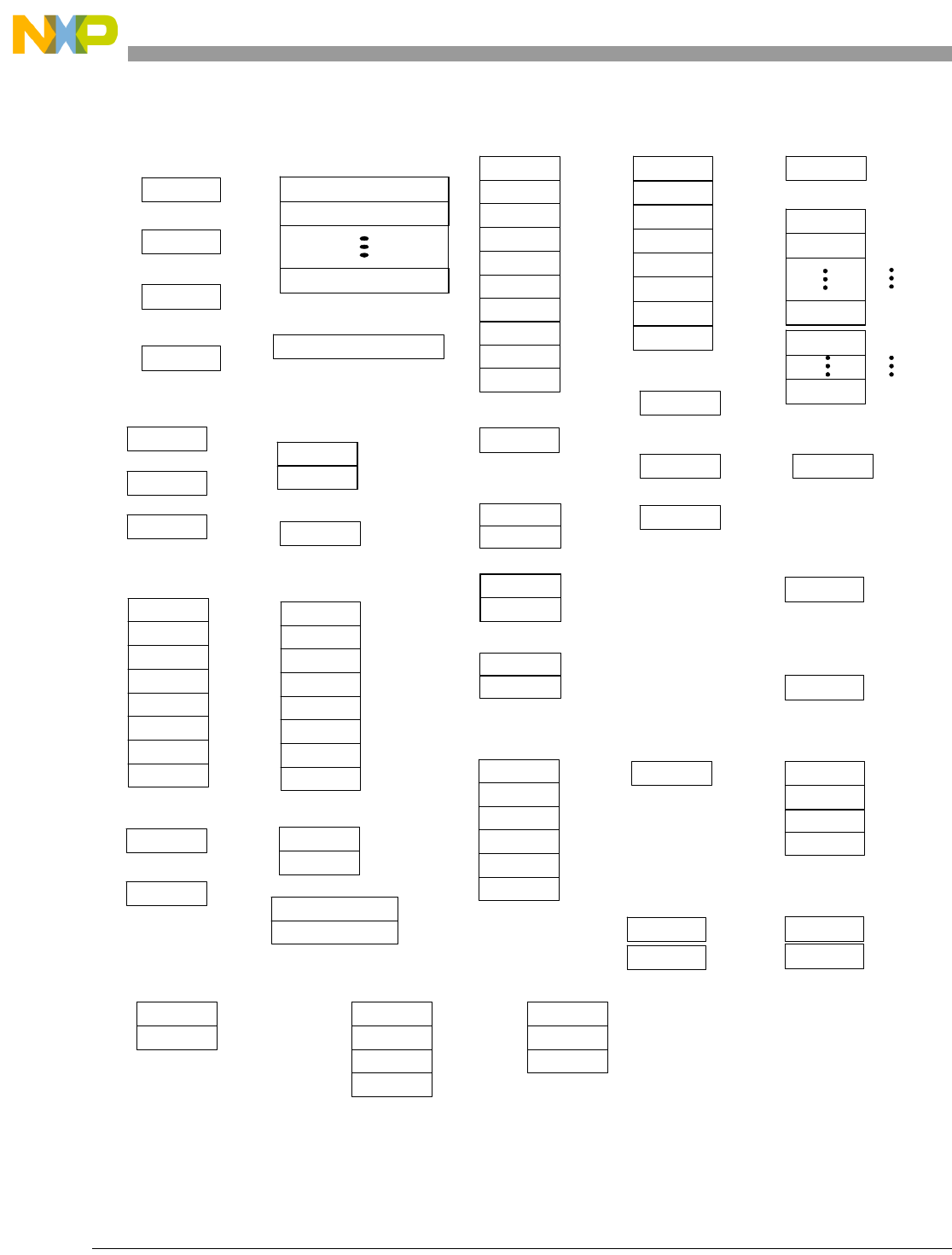
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-8 Freescale Semiconductor
Figure 1-2. e200z446n3 Supervisor Mode Programmer’s Model
ESR SPR 62
Exception Syndrome
Data Exception Address
SPR General
Exception Handling/Control Registers
Save and Restore
MMU Assist1
Memory Management Registers
Machine State
MSR
PVR
Processor Control Registers
Decrementer
Timers
Time Base (write only)
MAS0
MAS1
MAS2
MAS3
MAS4
MAS6
SPR 624
SPR 625
SPR 626
SPR 627
SPR 628
SPR 630
SPRG0
SPRG1
SPRG2
SPRG3
SPRG4
SPRG5
SPRG6
SPRG7
SPRG8
SPRG9
SPR 272
SPR 273
SPR 274
SPR 275
SPR 276
SPR 277
SPR 278
SPR 279
SPR 604
SPR 605
DEAR SPR 61
SPR 26
SPR 27
SPR 58
SPR 59
SPR 574
SPR 575
SPR 570
SPR 571
TBL SPR 284
TBU SPR 285
DEC SPR 22
Process ID
PID0 SPR 48
Processor ID
PIR SPR 286 DECAR SPR 54
IVOR0
IVOR1
IVOR15
SPR 400
SPR 401
SPR 415
Interrupt Vector Prefix
IVPR SPR 63
Interrupt Vector Offset
Control and Status
TCR SPR 340
TSR SPR 336
SPR 528
SPR 530
IVOR322
IVOR342
Processor Version
Control & Configuration
SPR 1012
SPR 1015
SPR 688
SPR 689
Hardware Implementation
Dependent1
HID0
HID1
SPR 1008
SPR 1009
MMUCSR0
MMUCFG
TLB0CFG
TLB1CFG
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link Register
LR
Condition Register
CR GPR0
GPR1
GPR31
SPR 1
XER
XER
General Registers
SPR 256
User SPR
USPRG0
SP E Status and Control
SPR 512SPEFSCR
SPE Register
SPR 287
System Version2
SVR SPR 1023
Machine Check
Syndrome Register
MCSR SPR 572
BTB Control1
SPR 1013
BUCSR
BTB Register
SRR0
SRR1
CSRR0
CSRR1
DSRR02
DSRR12
MCSRR02
MCSRR12
Machine Check
Address Register
MCAR SPR 573
Accumulator
ACC
Cache Control1
SPR 1011
L1CSR1
Cache Registers
SPR 515
Cache Configuration
(Read-only)
L1CFG0
SPR 959
L1FINV1
SPR 516
L1CFG1
IAC1
IAC2
IAC3
IAC4
IAC5
IAC6
IAC7
IAC8
Debug Registers2
Debug Control
DBCR0
DBCR1
DBCR2
DBCR31
DBCR41
DBCR51
DBCR61
DBERC01
SPR 308
SPR 309
SPR 310
SPR 561
SPR 563
SPR 564
SPR 603
SPR 569
Instruction Address Compare
SPR 312
SPR 313
SPR 314
SPR 315
SPR 565
SPR 566
SPR 567
SPR 568
Data Address Compare
DAC1
DAC2
SPR 316
SPR 317
Debug Status
DBSR SPR 304
Debug Counter1
DBCNT SPR 562 Data Value Compare (64-bit)
DV C1
DV C2
SPR 318
SPR 319
1 - These e200-specific registers may not be supported by other processors built on Power Architecture technology
2 - Optional registers defined by the Power ISA embedded architecture
3 - Read-only registers
Cache Access Registers
CDACNTL
CDADATA
DCR 351
DCR 350
PSU Registers
PSCR
PSSR
PSHR
PSLR
DCR 272
DCR 273
DCR 274
DCR 275
Device Control Registers (DCRs)1
PSCTR
PSUHR
PSULR
DCR 276
DCR 277
DCR 278
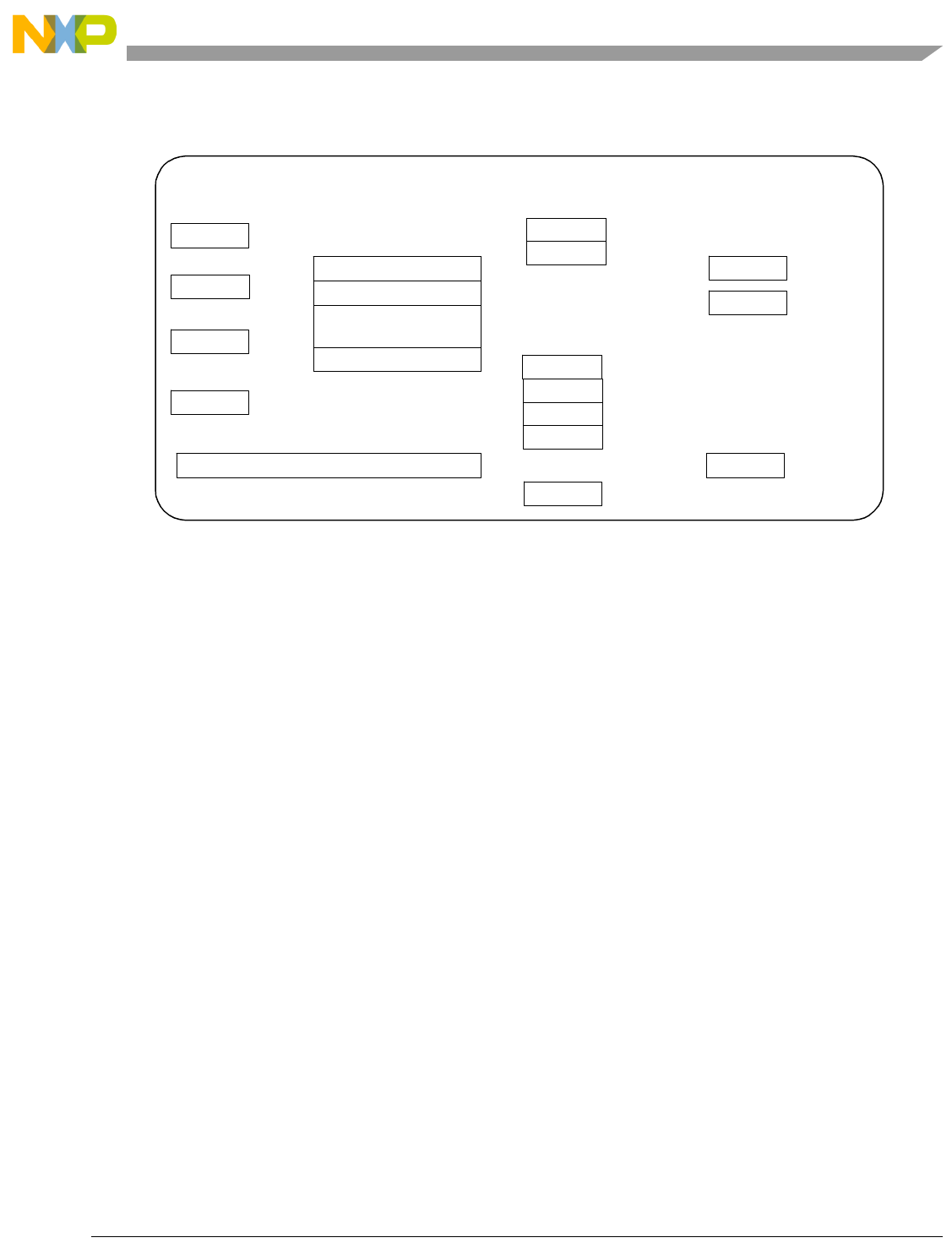
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-9
Figure 1-3 shows the user-mode special-purpose registers.
Figure 1-3. e200z446n3 User Mode Programmer’s Model SPRs
The GPRs are accessed through instruction operands. Access to other registers can be explicit, by using
instructions for that purpose such as the Move to Special-Purpose Register (mtspr) and Move from
Special-Purpose Register (mfspr) instructions. Access to other registers can also be implicit, as part of the
execution of an instruction. Some registers are accessed both explicitly and implicitly.
1.3.2 Instruction Set
The e200z4 supports the Power ISA instruction set for 32-bit embedded implementations. This is
composed primarily of the user-level instructions defined by the user instruction set architecture (UISA).
The e200z4 does not include the Power ISA floating-point, load string, or store string instructions.
The e200z446n3 core implements the following architectural extensions:
• The VLE category
• The integer select category (ISEL)
• Enhanced debug and the debug notify halt instruction categories
• The machine check category
• The WAIT category
• The volatile context save/restore category
• The embedded floating-point unit, version 2
• The signal processing extension unit, version 1.1
• The cache line locking category
• The enhanced reservations category
Timers (Read only)
Time Base
SPR 515
Cache Configuration
L1CFG0
TBL SPR 268
TBU SPR 269
Cache Register
(Read-only)
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link
LR
Condition Register
CR
SPR 1
XER
XER
General Registers
SPR General (Read-only)
Control Registers
SPRG4
SPRG5
SPRG6
SPRG7
SPR 260
SPR 261
SPR 262
SPR 263
SPR 256
User SPR
USPRG0
SPE Status and
Control Register
SPR 512
SPEFSCR
Category Registers
GPR0
GPR1
•
•
GPR31
Accumulator
ACC
SPR 516
L1CFG1
•
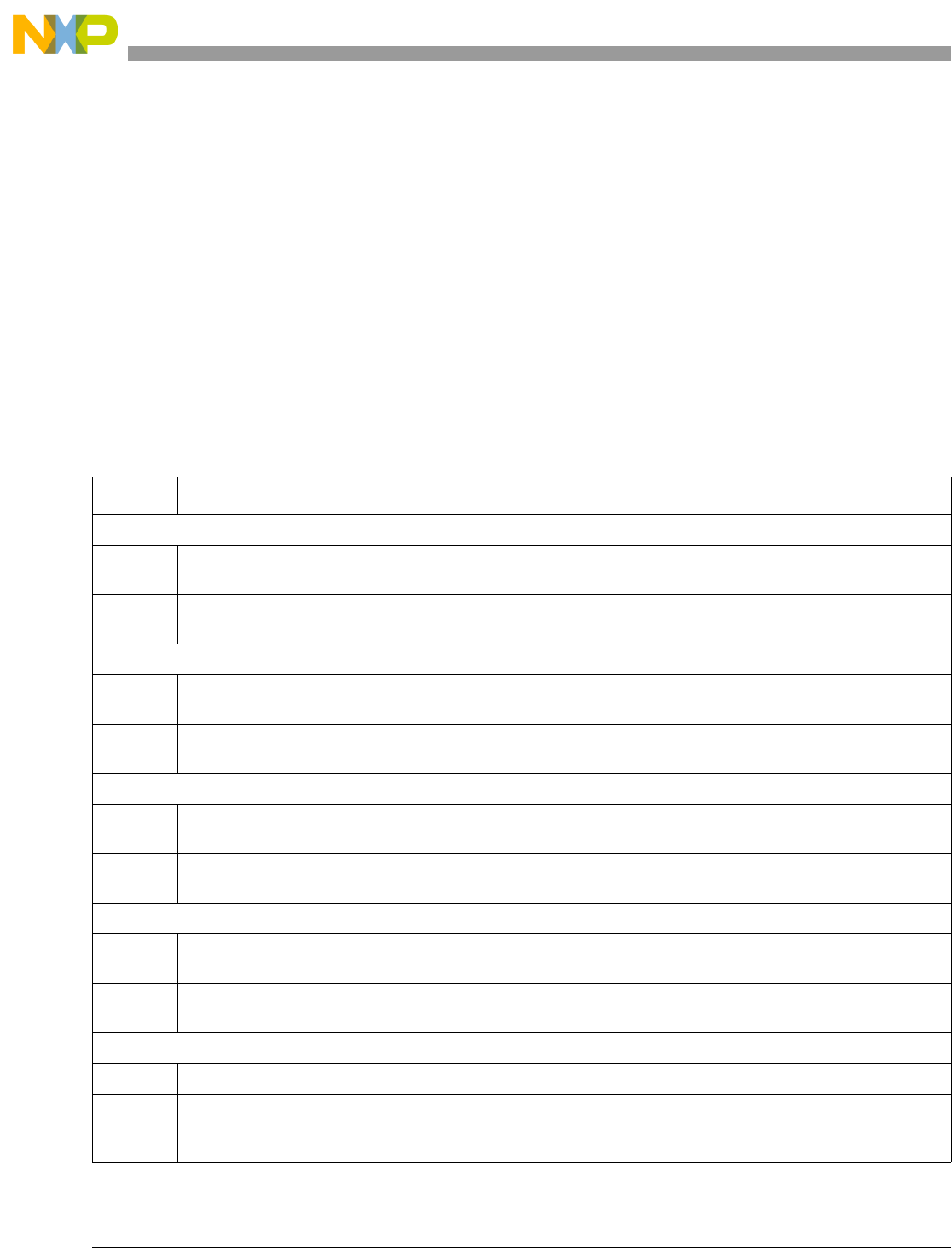
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-10 Freescale Semiconductor
1.3.3 Interrupts and Exception Handling
The e200z4 core supports an extended exception handling model with nested interrupt capability and
extensive interrupt vector programmability. In general, interrupt processing begins with an exception that
occurs due to external conditions, errors, or program execution problems. When an exception occurs, the
processor checks whether interrupt processing is enabled for that particular exception. If enabled, the
interrupt causes the state of the processor to be saved in the appropriate registers and begins execution of
the handler located at the associated vector address for that particular exception.
Once the handler is executing, the implementation may need to check bits in the exception syndrome
register (ESR), the machine check syndrome register (MCSR), or the signal processing and embedded
floating-point status and control register (SPEFSCR) to verify the specific cause of the exception and take
appropriate action.
The core complex supports the interrupts described in Table 1-1.
Table 1-1. Interrupt Registers
Register Description
Noncritical Interrupt Registers
SRR0 Save/restore register 0—On noncritical interrupts, stores either the address of the instruction causing the exception
or the address of the instruction that executes after the rfi instruction.
SRR1 Save/restore register 1—Saves machine state on noncritical interrupts and restores machine state after an rfi
instruction is executed.
Critical Interrupt Registers
CSRR0 Critical save/restore register 0—On critical interrupts, stores either the address of the instruction causing the
exception or the address of the instruction that executes after the rfci instruction.
CSRR1 Critical save/restore register 1—Saves machine state on critical interrupts and restores machine state after an rfci
instruction is executed.
Debug Interrupt Registers
DSRR0 Debug save/restore register 0—On debug interrupts, stores either the address of the instruction causing the
exception or the address of the instruction that executes after the rfdi instruction.
DSRR1 Debug save/restore register 1—Saves machine state on debug interrupts and restores machine state after an rfdi
instruction is executed.
Machine Check Interrupts
MCSRR0 Machine check save/restore register 0—On machine check interrupts, stores either the address of the instruction
causing the exception or the address of the instruction that executes after the rfmci instruction.
MCSRR1 Machine check save/restore register 1—Saves machine state on machine check interrupts and restores those
values when an rfmci instruction is executed
Syndrome Registers
MCSR Machine check syndrome register—Saves machine check syndrome information on machine check interrupts.
ESR Exception syndrome register—Provides a syndrome to differentiate among the different kinds of exceptions that
generate the same interrupt type. Upon generation of a specific exception type, the associated bits are set and all
other bits are cleared.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-11
Each interrupt has an associated interrupt vector address, obtained by concatenating IVPR[32–47] with the
address index in the associated IVOR (that is, IVPR[32–47] || IVORn[48–59] || 0b0000). The resulting
address is that of the instruction to be executed when that interrupt occurs. IVPR and IVOR values are
indeterminate on reset and must be initialized by the system software using mtspr.
Table 1-2 lists IVOR registers implemented on the e200z446n3 and the associated interrupts.
SPE Interrupt Registers
SPEFSCR Signal processing and embedded floating-point status and control register—Provides interrupt control and status
as well as various condition bits associated with the operations performed by the SPE. See Table 1-2 for a list of
the associated IVORs.
Other Interrupt Registers
DEAR Data exception address register—Contains the address that was referenced by a load, store, or cache
management instruction that caused an alignment, data TLB miss, or data storage interrupt.
IVPR
IVORs
Together, IVPR[32–47] || IVOR
n
[48–59] || 0b0000 define the address of an interrupt-processing routine. See
Table 1-2 and Chapter 5, “Interrupts and Exceptions,” for more information.
MSR Machine state register—Defines the state of the processor. When an interrupt occurs, it is updated to preclude
unrecoverable interrupts from occurring during the initial portion of the interrupt handler
Table 1-2. Exceptions and Conditions
IVOR
n
Interrupt Type IVOR
n
Interrupt Type
None1
1Vector to [
p_rstbase[0:29]
] || 0xFFC.
System reset (not an interrupt) 9 AP unavailable (not used by this core)
02
2Autovectored external and critical input interrupts use this IVOR. Vectored interrupts supply an interrupt vector offset
directly.
Critical input 10 Decrementer
1 Machine check 11 Fixed-interval timer
Machine check (non-maskable interrupt) 12 Watchdog timer
2 Data storage 13 Data TLB error
3 Instruction storage 14 Instruction TLB error
42External input 15 Debug
5 Alignment 16–31 Reserved
6 Program 32 SPE unavailable
7 Floating-point unavailable 33 SPE data exception
8 System call 34 SPE round exception
Table 1-1. Interrupt Registers (Continued)
Register Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-12 Freescale Semiconductor
1.4 Microarchitecture Summary
The e200z4 processor utilizes a five-stage pipeline for instruction execution. These stages operate in an
overlapped fashion, allowing single clock-cycle instruction execution for most instructions. The stages are
as follows:
1. Instruction fetch
2. Instruction decode/register file read/effective address calculation
3. Execute 0/memory access 0
4. Execute 1/memory access 1
5. Register write-back
The integer execution units consist of a 32-bit arithmetic unit, a logic unit, a 32-bit barrel shifter, a
mask-insertion unit, a condition register manipulation unit, a count-leading-zeros unit, a 32 ×32 hardware
multiplier array, and result feed-forward hardware. Integer unit 1 also supports hardware division.
Most arithmetic and logical operations are executed in a single cycle with the exception of multiply, which
is implemented with a 2-cycle pipelined hardware array, and the divide instructions. A count-leading-zeros
unit operates in a single clock cycle.
The instruction unit contains a program counter incrementer and dedicated branch address adder to
minimize delays during change-of-flow operations. Sequential prefetching is performed to ensure a supply
of instructions into the execution pipeline. Branch target prefetching using the BTB is performed to
accelerate taken branches. Prefetched instructions are placed into an 8-entry instruction buffer, with each
entry capable of holding a single 32-bit instruction or a pair of 16-bit instructions.
Branch target addresses are calculated in parallel with branch instruction decode. Conditional branches
that are not taken execute in a single clock cycle. Branches with successful BTB target prefetching have
an effective execution time of one clock cycle if correctly predicted. All other taken branches have an
execution time of two clock cycles.
Memory load and store operations are provided for byte, half-word, word (32-bit), and double-word data
with automatic zero or sign extension of byte and half-word load data as well as optional byte reversal of
data. These instructions can be pipelined to allow effective single-cycle throughput. Load and store
multiple word instructions allow low-overhead context save and restore operations. The load/store unit
contains a dedicated effective address adder to allow effective address generation to be optimized. There
is a single load-to-use bubble for load instructions.
The condition register unit supports the condition register (CR) and condition register operations defined
by the architecture. The condition register consists of eight 4-bit fields that reflect the results of certain
operations, such as move, integer and floating-point compare, arithmetic, and logical instructions. It also
provides a mechanism for testing and branching.
Vectored and autovectored interrupts are supported by the CPU. Vectored interrupt support is provided to
allow multiple interrupt sources to have unique interrupt handlers invoked with no software overhead.
The SPE or SPE2 category supports vector instructions operating on 8-, 16-, and 32-bit fixed-point data
types, as well as 32-bit IEEE Std. 754™ single-precision floating-point formats. It supports
single-precision floating-point operations in a pipelined fashion.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 1-13
The 64-bit general-purpose register file is used for source and destination operands, and there is a unified
storage model for single-precision floating-point data types of 32-bits and the normal integer type. Low
latency fixed-point and floating-point add, subtract, multiply, multiply-add, multiply-sub, divide,
compare, and conversion operations are provided. Most operations can be pipelined.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
1-14 Freescale Semiconductor

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-1
Chapter 2
Register Model
This section describes the registers implemented in the e200z4 core. It includes an overview of registers
defined by the Power ISA embedded category architecture and highlights differences in how these
registers are implemented in the e200z4 core. This section also provides a detailed description of
e200-specific registers. Full descriptions of the architecture-defined register set are provided in the EREF.
The architecture defines register-to-register operations for all computational instructions. Source data for
these instructions are accessed from the on-chip registers or are provided as immediate values embedded
in the opcode. The three-register instruction format allows specification of a target register distinct from
the two source registers, thus preserving the original data for use by other instructions. Data is transferred
between memory and registers with explicit load and store instructions only.
The e200z446n3 extends the general-purpose registers to 64-bits for supporting SPE operations. Power
ISA embedded category instructions operate on the lower 32 bits of the GPRs only, and the upper 32 bits
are unaffected by these instructions. SPE vector instructions operate on the entire 64-bit register. The SPE
defines load and store instructions for transferring 64-bit values to/from memory.
The following figures show the complete e200 register set including the sets of the registers that are
accessible while in supervisor mode, and the set of registers that are accessible while in user mode. The
number to the right of the special-purpose registers (SPRs) is the decimal number used in the instruction
syntax to access the register. For example, the integer exception register (XER) is SPR 1.
NOTE
The e200z4 is a 32-bit implementation of the Power ISA embedded
category. In this document, register bits are sometimes numbered from bit 0
(most significant bit) to 31 (least significant bit), rather than the Book E
numbering scheme of 32–63; thus register bit numbers for some registers in
Book E are 32 higher.
Where appropriate, the Book E defined bit numbers are shown in
parentheses.
Figure 2-1 shows the supervisor-mode special-purpose registers.
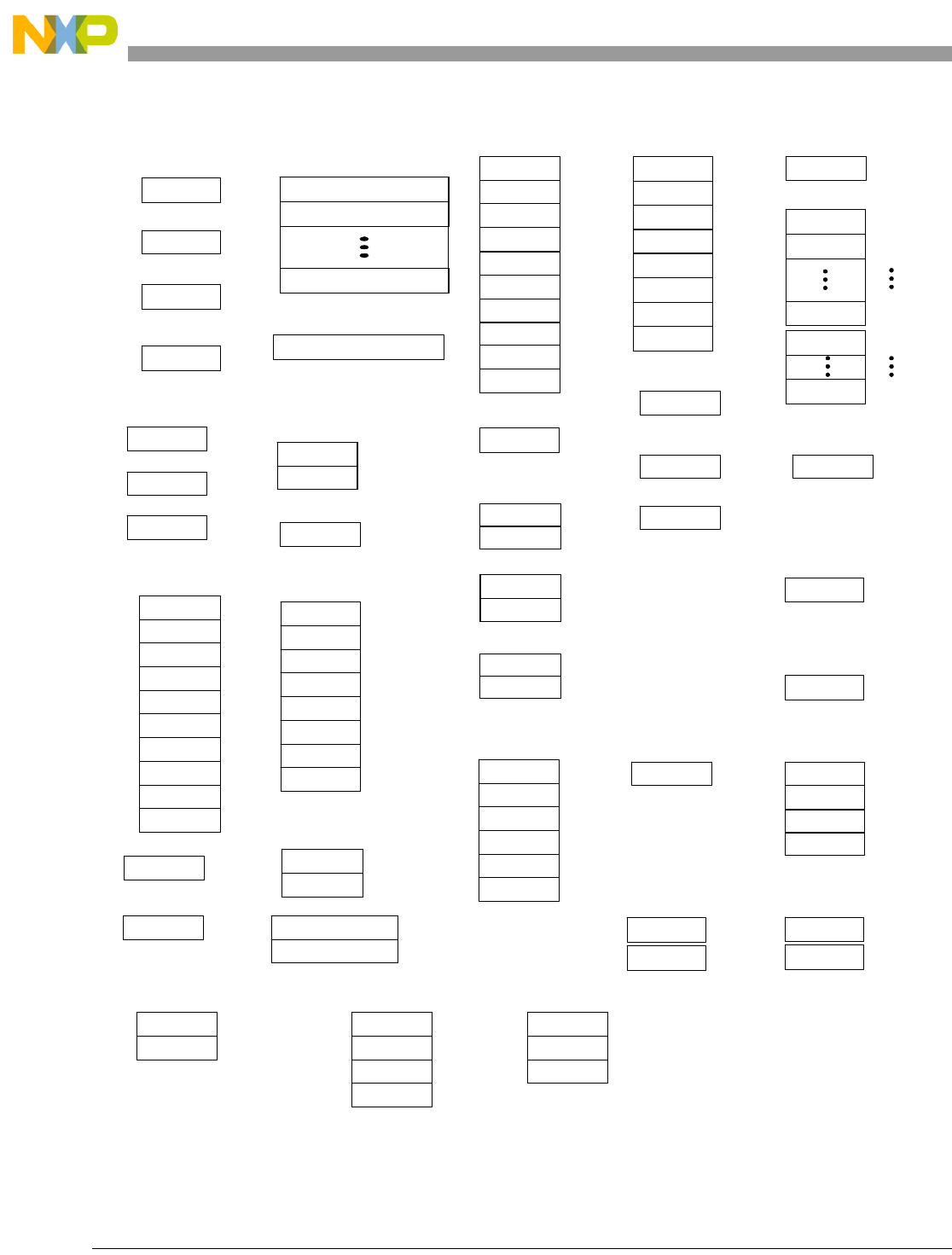
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-2 Freescale Semiconductor
Figure 2-1. e200z446n3 Supervisor Mode Programmer’s Model SPRs
ESR SPR 62
Exception Syndrome
Data Exception Address
SPR General
Exception Handling/Control Registers
Save and Restore
MMU Assist1
Memory Management Registers
Machine State
MSR
PVR
Processor Control Registers
Decrementer
Timers
Time Base (write only)
MAS0
MAS1
MAS2
MAS3
MAS4
MAS6
SPR 624
SPR 625
SPR 626
SPR 627
SPR 628
SPR 630
SPRG0
SPRG1
SPRG2
SPRG3
SPRG4
SPRG5
SPRG6
SPRG7
SPRG8
SPRG9
SPR 272
SPR 273
SPR 274
SPR 275
SPR 276
SPR 277
SPR 278
SPR 279
SPR 604
SPR 605
DEAR SPR 61
SPR 26
SPR 27
SPR 58
SPR 59
SPR 574
SPR 575
SPR 570
SPR 571
TBL SPR 284
TBU SPR 285
DEC SPR 22
Process ID
PID0 SPR 48
Processor ID
PIR SPR 286 DECAR SPR 54
IVOR0
IVOR1
IVOR15
SPR 400
SPR 401
SPR 415
Interrupt Vector Prefix
IVPR SPR 63
Interrupt Vector Offset
Control and Status
TCR SPR 340
TSR SPR 336
SPR 528
SPR 530
IVOR322
IVOR342
Processor Version
Control & Configuration
SPR 1012
SPR 1015
SPR 688
SPR 689
Hardware Implementation
Dependent1
HID0
HID1
SPR 1008
SPR 1009
MMUCSR0
MMUCFG
TLB0CFG
TLB1CFG
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link Register
LR
Condition Register
CR GPR0
GPR1
GPR31
SPR 1
XER
XER
General Registers
SPR 256
User SPR
USPRG0
SPE Status and Control
SPR 512SPEFSCR
SPE Register
SPR 287
System Version2
SVR SPR 1023
Machine Check
Syndrome Register
MCSR SPR 572
BTB Control1
SPR 1013
BUCSR
BTB Register
SRR0
SRR1
CSRR0
CSRR1
DSRR02
DSRR12
MCSRR02
MCSRR12
Machine Check
Address Register
MCAR SPR 573
Accumulator
ACC
Cache Control1
SPR 1011
L1CSR1
Cache Registers
SPR 515
Cache Configuration
(Read-only)
L1CFG0
SPR 959
L1FINV1
SPR 516
L1CFG1
IAC1
IAC2
IAC3
IAC4
IAC5
IAC6
IAC7
IAC8
Debug Registers2
Instruction Address Compare
SPR 312
SPR 313
SPR 314
SPR 315
SPR 565
SPR 566
SPR 567
SPR 568
Data Address Compare
DAC1
DAC2
SPR 316
SPR 317
Debug Status
DBSR SPR 304
Debug Counter1
DBCNT SPR 562
Data Value Compare (64-bit)
DV C1
DV C2
SPR 318
SPR 319
1 - These e200-specific registers may not be supported by other processors built on Power Architecture technology
2 - Optional registers defined by the Power ISA embedded architecture
3 - Read-only registers
Cache Access Registers
CDACNTL
CDADATA
DCR 351
DCR 350
PSU Registers
PSCR
PSSR
PSHR
PSLR
DCR 272
DCR 273
DCR 274
DCR 275
Device Control Registers (DCRs)1
PSCTR
PSUHR
PSULR
DCR 276
DCR 277
DCR 278
Debug Control
DBCR0
DBCR1
DBCR2
DBCR31
DBCR41
DBCR51
DBCR61
DBERC01
DEVENT1
DDAM1
SPR 308
SPR 309
SPR 310
SPR 561
SPR 563
SPR 564
SPR 603
SPR 569
SPR 975
SPR 576
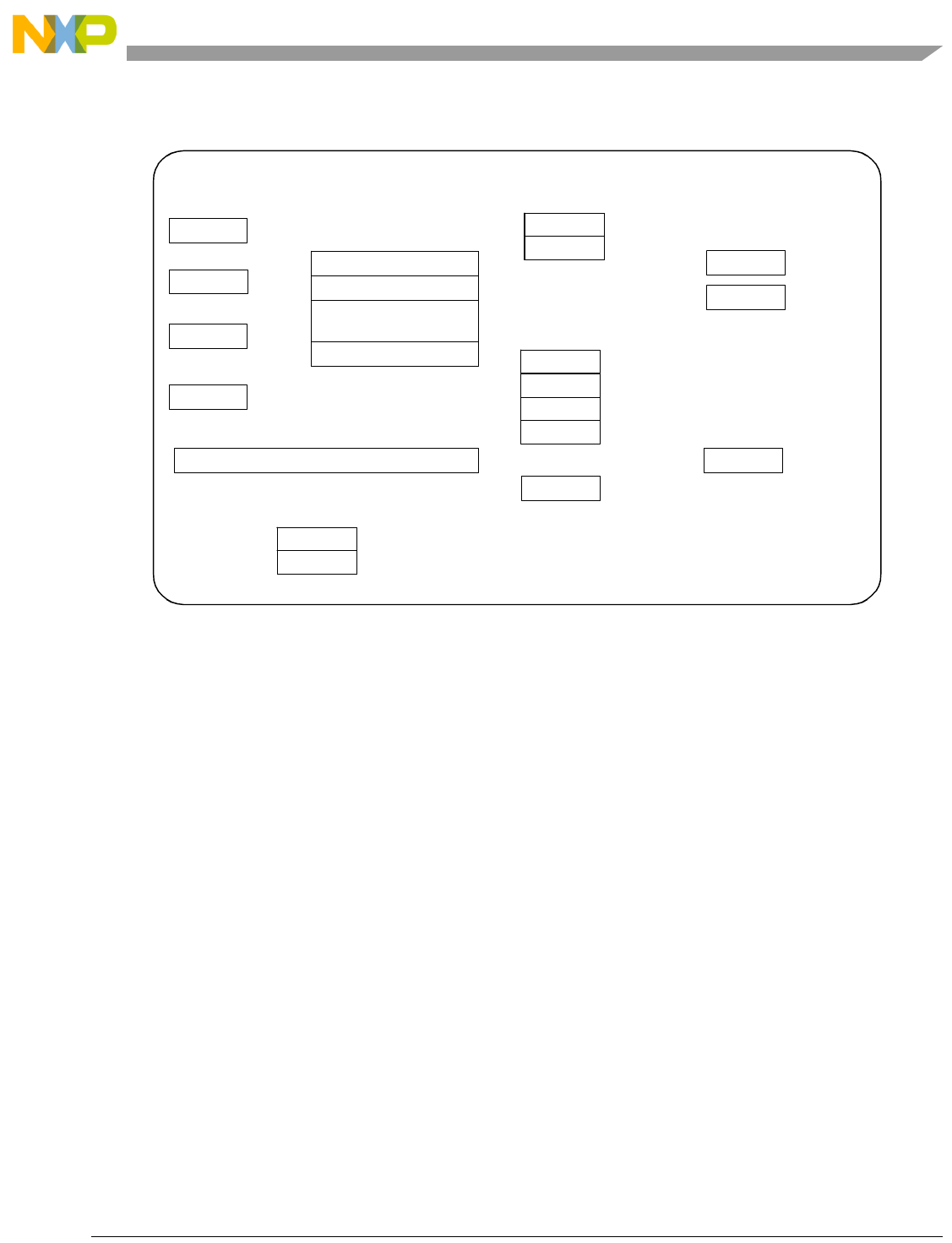
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-3
Figure 2-2 shows the user-mode special-purpose registers.
Figure 2-2. e200z446n3 User-Mode Programmer’s Model SPRs
General-purpose registers (GPRs) are accessed through instruction operands. Access to other registers can
be explicit—by using instructions for that purpose such as Move to Special Purpose Register (mtspr) and
Move from Special Purpose Register (mfspr) instructions—or implicit, as part of the execution of an
instruction. Some registers are accessed both explicitly and implicitly.
2.1 Power ISA Embedded Category Registers
The core supports most of the registers defined by Power ISA embedded category architecture. Notable
exceptions are the floating-point registers FPR0–FPR31 and FPSCR. The e200z4 does not support the
Power ISA floating-point architecture in hardware. The general-purpose registers have been extended to
64-bits. e200-specific registers are described in Section 2.2, “e200-Specific Special Purpose Registers,”
and the Power ISA embedded registers are described in the following sections. For complete descriptions,
see the EREF.
2.1.1 User-level Registers
The user-level registers can be accessed by all software with either user- or supervisor-privileges. They
include the following:
• General-purpose registers (GPRs).
— The thirty-two 64-bit GPRs (GPR0–GPR31) serve as data source or destination registers for
integer instructions and provide data for generating addresses. Power ISA embedded category
Timers (Read only)
Time Base
SPR 515
Cache Configuration
L1CFG0
TBL SPR 268
TBU SPR 269
Cache Register
(Read-only)
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link
LR
Condition Register
CR
SPR 1
XER
XER
General Registers
SPR General (Read-only)
Control Registers
SPRG4
SPRG5
SPRG6
SPRG7
SPR 260
SPR 261
SPR 262
SPR 263
SPR 256
User SPR
USPRG0
SPE Status and
Control Register
SPR 512
SPEFSCR
Category Registers
GPR0
GPR1
•
•
GPR31
Accumulator
ACC
SPR 516
L1CFG1
•
Debug
DEVENT SPR 975
DDAM SPR 576

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-4 Freescale Semiconductor
instructions affect only the lower 32 bits of the GPRs. SPE and EFP instructions are provided
that operate on the entire 64-bit register.
• Condition register (CR).
— The 32-bit CR consists of eight 4-bit fields, CR0–CR7, that reflect results of certain arithmetic
operations and provide a mechanism for testing and branching. See “Condition Register (CR),”
in Chapter 3, “Branch and Condition Register Operations of the EREF.
The remaining user-level registers are SPRs. Note that the Power ISA embedded category architecture
provides the mtspr and mfspr instructions for accessing SPRs.
• Integer exception register (XER).
— The XER indicates overflow and carries for integer operations. See “XER Register (XER),” in
Chapter 4, “Integer Operations” of the EREF for more information.
• Link register (LR).
— The LR provides the branch target address for the branch [conditional] to link register
instructions (bclr, bclrl, se_blr, se_blrl). It holds the address of the instruction that follows a
branch and link instruction, typically used for linking to subroutines. See “Link Register (LR)”,
in Chapter 3, “Branch and Condition Register Operations” of the EREF.
• Count register (CTR).
— The CTR holds a loop count that can be decremented during execution of appropriately coded
branch instructions. The CTR also provides the branch target address for the branch
[conditional] to count register instructions (bcctr, bcctrl, se_bctr, se_bctrl). See “Count
Register (CTR)”, in Chapter 3, “Branch and Condition Register Operations” of the EREF.
• Time base upper (TBU) and time base lower (TBL)
— The time base facility (TB) consists of two 32-bit registers. These two registers are accessible
in a read-only fashion to user-level software. See “Time Base”, in Chapter 8, “Timer Facilities”
of the EREF.
• SPRG4—SPRG7
— The Power ISA embedded category architecture defines software-use special purpose registers
(SPRGs). SPRG4 through SPRG7 are accessible in a read-only fashion by user-level software.
e200 does not allow user mode access to the SPRG3 register (defined as implementation
dependent by Power ISA).
•USPRG0
— The Power ISA embedded category architecture defines user software-use special purpose
register USPRG0, which is accessible in a read-write fashion by user-level software.
2.1.2 Supervisor-level Registers
Supervisor-level software has access to additional control and status registers used for configuration,
exception handling, and other operating system functions in addition to the registers accessible in
user-mode. The Power ISA embedded category architecture defines the following supervisor-level
registers:
• Processor Control registers

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-5
— Machine state register (MSR)
The MSR defines the state of the processor. The MSR can be modified by the move to machine
state register instruction (mtmsr), system call instructions (sc, se_sc), and return from
exception instructions (rfi, rfci, rfdi, rfmci, se_rfi, se_rfci, se_rfdi, se_rfmci). It can be read
by the move from machine state register instruction (mfmsr) . When an interrupt occurs, the
contents of the MSR are saved to one of the machine state save/restore registers: SRR1,
CSRR1, DSRR1, MCSRR1.
— Processor version register (PVR)
This register is a read-only register that identifies the version (model) and revision level of the
processor.
— Processor Identification Register (PIR)
This read/write register is provided to distinguish the processor from other processors in the
system.
• Storage Control register
— Process ID Register (PID, also referred to as PID0).
This register is provided to indicate the current process or task identifier. It is used by the MMU
as an extension to the effective address, and by external Nexus 2/3 modules for ownership trace
message generation. The Power ISA allows multiple PIDs; the e200z4 implements only one.
• Interrupt Registers
— Data exception address register (DEAR)
After most Data Storage Interrupts (DSI), or on an Alignment Interrupt or Data TLB Miss
Interrupt, the DEAR is set to the effective address (EA) generated by the faulting instruction.
— SPRG0–SPRG7, USPRG0
The SPRG0–SPRG7 and USPRG0 registers are provided for operating system use. The e200
does not allow user-mode access to the SPRG3 register (defined as implementation dependent
by Power ISA embedded category architecture).
— Exception syndrome register (ESR)
The ESR register provides a syndrome to differentiate between the different kinds of
exceptions which can generate the same interrupt.
— Interrupt vector prefix register (IVPR) and the interrupt vector offset registers
(IVOR0-IVOR15, IVOR32-IVOR34)
These registers together provide the address of the interrupt handler for different classes of
interrupts.
— Save/restore register 0 (SRR0)
The SRR0 register is used to save machine state on a non-critical interrupt. It contains the
address of the instruction at which execution resumes when an rfi or se_rfi instruction is
executed at the end of a non-critical class interrupt handler routine.
— Critical save/restore register 0 (CSRR0)
The CSRR0 register is used to save machine state on a critical interrupt. It contains the address
of the instruction at which execution resumes when an rfci or se_rfci instruction is executed at
the end of a critical class interrupt handler routine.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-6 Freescale Semiconductor
— Save/restore register 1 (SRR1)
The SRR1 register is used to save machine state from the MSR on non-critical interrupts and
to restore machine state when an rfi or se_rfi executes.
— Critical save/restore register 1 (CSRR1)
The CSRR1 register is used to save machine state from the MSR on critical interrupts and to
restore machine state when rfci or se_rfci executes.
• Debug facility registers
— Debug control registers (DBCR0–DBCR2)
These registers provide control for enabling and configuring debug events.
— Debug status register (DBSR)
This register contains debug event status.
— Instruction address compare registers (IAC1–IAC4)
These registers contain addresses and/or masks which are used to specify instruction address
compare debug events.
— Data address compare registers (DAC1–2)
These registers contain addresses and/or masks which are used to specify data address compare
debug events.
— Data value compare registers (DVC1–2)
These registers contain data values which are used to specify data value compare debug events.
• Timer Registers
—Time base (TB)
The TB is a 64-bit structure provided for maintaining the time of day and operating interval
timers. The TB consists of two 32-bit registers: TBU and TBL. The time base registers can be
written to only by supervisor-level software, but can be read by both user and supervisor-level
software.
— Decrementer register (DEC)
This register is a 32-bit decrementing counter that provides a mechanism for causing a
decrementer exception after a programmable delay.
— Decrementer auto-reload (DECAR)
This register is provided to support the auto-reload feature of the decrementer.
— Timer control register (TCR)
This register controls decrementer, fixed-interval timer, and watchdog timer options.
— Timer status register (TSR)
This register contains status on timer events and the most recent watchdog timer-initiated
processor reset.
2.2 e200-Specific Special Purpose Registers
The Power ISA embedded category architecture allows implementation-specific special purpose registers.
Those incorporated in the e200 core are as explained in the following sections.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-7
2.2.1 User-Level Registers
The user-level registers can be accessed by all software with either user or supervisor privileges. They
include the following:
• Signal processing extension/embedded floating-point status and control register (SPEFSCR).
The SPEFSCR contains all fixed-point and floating-point exception signal bits, exception
summary bits, exception enable bits, and rounding control bits needed for compliance with the
IEEE Std. 754 standard. See “SPE Status and Control Register (SPEFSCR),” in Chapter 7, “Signal
Processing Extension Unit.”
• The L1 cache configuration registers (L1CFG0, L1CGF1)
These read-only registers allows software to query the configuration of the L1 cache structure.
2.2.2 Supervisor-Level Registers
In addition to the Power ISA embedded category registers described above, the following supervisor-level
registers are defined in the e200:
• Configuration Registers
— Hardware implementation-dependent register 0 (HID0)
This register controls various processor and system functions.
— Hardware implementation-dependent register 1 (HID1)
This register controls various processor and system functions.
• Exception handling and control registers
— Machine check save/restore register 0 (MCSRR0)
The MCSRR0 register is used to save machine state on a machine check interrupt, and contains
the address of the instruction at which execution resumes when an rfmci or se_rfmci
instruction is executed.
— Machine Check save/restore register 1 (MCSRR1)
The MCSRR1 register is used to save machine state from the MSR on machine check
interrupts, and to restore machine state when an rfmci or se_rfmci instruction is executed.
— Machine check syndrome register (MCSR)
This register provides a syndrome to differentiate between the different kinds of conditions
which can generate a machine check.
— Machine check address register (MCAR)
This register provides an address associated with certain machine checks.
— Debug save/restore register 0 (DSRR0)
When enabled, the DSRR0 register is used to save the address of the instruction at which
execution continues when an rfdi or se_rfdi instruction executes at the end of a debug interrupt
handler routine.
— Debug save/restore register 1 (DSRR1)
When enabled, the DSRR1 register is used to save machine status on debug interrupts and to
restore machine status when an rfdi or se_rfdi instruction executes.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-8 Freescale Semiconductor
—SPRG8, SPRG9
The SPRG8 and SPRG9 registers are provided for operating system use for the machine check
and Debug APUs.
• Debug Facility Registers
— Instruction address compare registers (IAC5–IAC8)
These registers contain addresses and/or masks which are used to specify instruction address
compare debug events.
— Debug control register 3–6 (DBCR3, DBCR4, DBCR5, DBCR6)
These registers provides control for debug functions not described in Power ISA embedded
category architecture.
— Debug external resource control register 0 (DBERC0)
This register provides control for debug functions not described in PowerPC Book E
architecture.
— Debug counter register (DBCNT)
This register provides counter capability for debug functions.
— Branch unit control and status register (BUCSR)
This register controls operation of the BTB
• Cache Registers
— L1 cache configuration registers (L1CFG0, L1CFG1)
These are read-only registers that allow software to query the configuration of the L1 Cache.
— L1 cache control and status registers (L1CSR0, L1CSR1)
These registers control operations of the L1 Cache, such as cache enabling, cache invalidation,
and cache locking.
— L1 cache flush and invalidate register (L1FINV1)
This register controls software flushing and invalidation of the L1 Caches.
• Memory management unit registers
— MMU configuration register (MMUCFG)
This is a read-only register that allows software to query the configuration of the MMU.
— MMU assist (MAS0-MAS4, MAS6) registers
These registers provide the interface to the e200 core from the Memory Management Unit.
— MMU control and status register (MMUCSR0)
This register controls invalidation of the MMU.
— TLB configuration registers (TLB0CFG, TLB1CFG)
These are read-only registers that allow software to query the configuration of the TLBs.
— System version register (SVR)
This register is a read-only register that identifies the version (model) and revision level of the
system that includes the e200 processor.
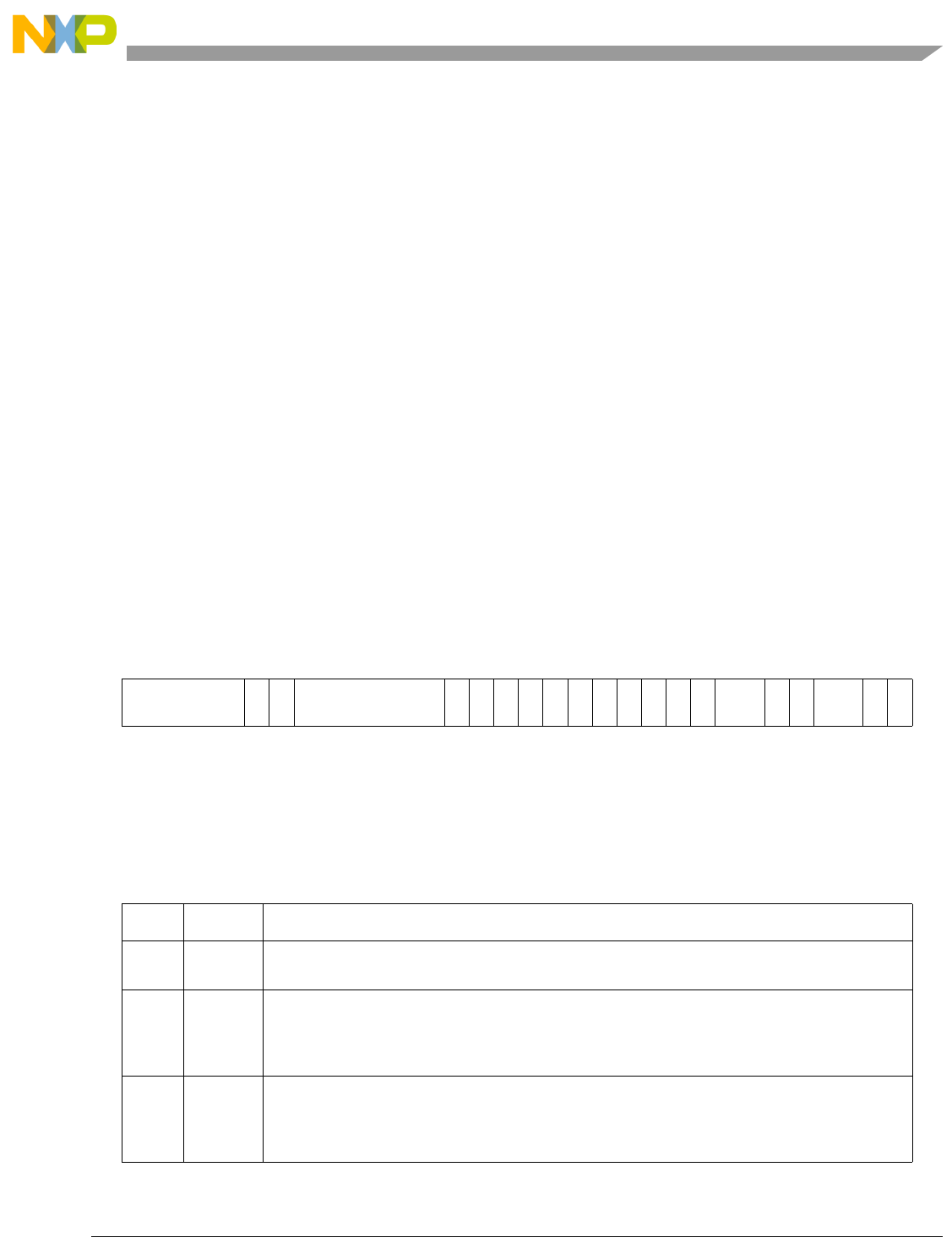
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-9
Note that it is not guaranteed that the implementation of e200 core-specific registers is consistent among
the Power ISA embedded category processors, although other processors may implement similar or
identical registers.
All e200 SPR definitions are compliant with the Freescale EIS definitions.
2.3 e200-Specific Device Control Registers
In addition to the SPRs described above, implementations may also choose to implement one or more
device control registers (DCRs). The core implements a set of device control registers to perform a parallel
signature capability in the parallel signature unit (PSU). These registers are described in Section 11.9,
“Parallel Signature Unit.”
2.4 Special Purpose Register Descriptions
The following sections provide a register figure and accompanying field descriptions table for each of the
SPRs in the core.
2.4.1 Machine State Register (MSR)
The machine state register defines the state of the processor. Chapter 5, “Interrupts and Exceptions,” of
this document describes how interrupts affect the MSR, and the EREF contains a complete description.
Figure 2-3 shows the e200 MSR.
Table 2-1 defines the MSR bits.
0
UCLE
SPE
0
WE
CE
0
EE
PR
FP
ME
FE0
0
DE
FE1
0
IS
DS
0
RI
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Read/ Write; Reset - 0x0
Figure 2-3. Machine State Register (MSR)
Table 2-1. MSR Field Descriptions
Bit(s) Name Description
0–4
(32–36)
—Reserved
1
5
(37)
UCLE User Cache Lock Enable
0 Execution of the cache locking instructions in user mode (MSRPR=1) disabled; DSI exception
taken instead, and ILK or DLK set in ESR.
1 Execution of the cache lock instructions in user mode enabled.
6
(38)
SPE SPE Available
0 Execution of SPE APU vector instructions is disabled; SPE Unavailable exception taken
instead, and SPE bit is set in ESR.
1 Execution of SPE APU vector instructions is enabled.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-10 Freescale Semiconductor
7–12
(39–44) —Reserved
1
13
(45)
WE Wait State (Power management) enable.
0 Power management is disabled.
1 Power management is enabled. The processor can enter a power-saving mode when
additional conditions are present. The mode chosen is determined by the DOZE, NAP, and
SLEEP bits in the HID0 register, described in Section 2.4.11, “Hardware Implementation
Dependent Register 0 (HID0).”
14
(46) CE Critical Interrupt Enable
0 Critical Input and Watchdog Timer interrupts are disabled.
1 Critical Input and Watchdog Timer interrupts are enabled.
15
(47)
—Preserved
1
16
(48)
EE External Interrupt Enable
0 External Input, Decrementer, and Fixed-Interval Timer interrupts are disabled.
1 External Input, Decrementer, and Fixed-Interval Timer interrupts are enabled.
17
(49)
PR Problem State
0 The processor is in supervisor mode, can execute any instruction, and can access any
resource (e.g. GPRs, SPRs, MSR, etc.).
1 The processor is in user mode, cannot execute any privileged instruction, and cannot access
any privileged resource.
18
(50)
FP Floating-Point Available
0 Floating point unit is unavailable. The processor cannot execute floating-point instructions,
including floating-point loads, stores, and moves. (A FP Unavailable interrupt will be generated
on attempted execution of floating point instructions).
1 Floating Point unit is available. The processor can execute floating-point instructions.
Note: For the e200, the floating point unit is not supported in hardware, and an unimplemented
operation exception will be generated for attempted execution of Power ISA embedded
category floating point instructions when FP is set.
19
(51)
ME Machine Check Enable
0 Asynchronous Machine Check interrupts are disabled.
1 Asynchronous Machine Check interrupts are enabled.
20
(52)
FE0 Floating-point exception mode 0 (not used by the e200)
21
(53) —Reserved
1
22
(54)
DE Debug Interrupt Enable
0 Debug interrupts are disabled.
1 Debug interrupts are enabled.
23
(55)
FE1 Floating-point exception mode 1 (not used by the e200)
24
(56)
—Reserved
1
25
(57)
—Preserved
1
Table 2-1. MSR Field Descriptions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-11
2.4.2 Processor ID Register (PIR)
The processor ID for the CPU core is contained in the processor ID register (PIR). The contents of the PIR
register are a reflection of hardware input signals to the core following reset. This register may be written
by software to modify the default reset value.
The PIR fields are defined in Table 2-2.
26
(58) IS Instruction Address Space
0 The processor directs all instruction fetches to address space 0 (TS=0 in the relevant TLB
entry).
1 The processor directs all instruction fetches to address space 1 (TS=1 in the relevant TLB
entry).
27
(59)
DS Data Address Space
0 The processor directs all data storage accesses to address space 0 (TS=0 in the relevant TLB
entry).
1 The processor directs all data storage accesses to address space 1 (TS=1 in the relevant TLB
entry).
28–29
(60–61)
—Reserved
1
30
(62)
RI Recoverable Interrupt
This bit is provided for software use to detect nested exception conditions. This bit is cleared by
hardware when a Machine Check interrupt is taken.
31
(63)
—Preserved
1
1 These bits are not implemented, will be read as zero, and writes are ignored.
ID
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 286; Read/Write; Reset: - bits 24:31 updated to reflect the values on p_cpuid[0–7], bits 0–23 reset to 0
Figure 2-4. Processor ID Register (PIR)
Table 2-2. PIR Field Descriptions
Bits Name Description
0–23 ID These bits are reset to 0. These bits are writable by software.
24–31 These bit are reset to the values provided on the p_cpuid[0–7] input signals. These bits are
writable by software.
Table 2-1. MSR Field Descriptions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-12 Freescale Semiconductor
2.4.3 Processor Version Register (PVR)
The processor version register (PVR) contains the processor version number for the CPU core.
This register contains fields to specify a particular implementation of an e200 family member as well as
allocating fields to be used by a particular business unit at their discretion. This register is read-only.
Interface signals p_pvrin[16–31] provide the contents of a portion of this register.
Table 2-3 shows the PVR field descriptions.
2.4.4 System Version Register (SVR)
The system version register (SVR) contains system version information for an e200-based SoC.
100000010101 Version MBG
Reserved Minor Rev Major Rev MBG ID
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 287; Read-only
Figure 2-5. Processor Version Register (PVR)
Table 2-3. PVR Field Descriptions
Bits Name Description
0–3 Manuf. ID These bits identify the Manufacturer ID. Freescale is 4`b1000.
4–5 — These bits are reserved (00)
6–11 Type These bits identify the processor type. e200z4 is 6`b010101.
12–15 Version These bits identify the version of the processor and inclusion of optional elements. For the
e200z446n3, these are tied to 4`b0101.
16–19 MBG Use These bits are allocated for use by Freescale Business Groups to distinguish different system
variants, and are provided by the p_pvrin[16–19] input signals.
20–23 Minor
Rev These bits distinguish between implementations of the version, and are provided by the
p_pvrin[20–23] input signals.
24–27 Major
Rev
These bits distinguish between implementations of the version, and are provided by the
p_pvrin[24–27] input signals.
28–31 MBG ID These bits identify the Freescale Business Group responsible for a particular mask set, and are
provided by the p_pvrin[28–31] input signals.
MBG value of 4`b0000 is reserved.
System Version
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1023; Read-only
Figure 2-6. System Version Register (SVR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-13
This register is used to specify a particular implementation of an e200-based system by a particular
business unit at their discretion. This register is read-only.
Table 2-4 shows the SVR field descriptions.
2.4.5 Integer Exception Register (XER)
The EREF contains a complete description of the integer exception register (XER).
The XER bit assignments are shown in Figure 2-7.
The XER fields are defined in Table 2-5.
Table 2-4. SVR Field Descriptions
Bits Name Description
0–31 Version These bits are allocated for use by Freescale Business Groups to distinguish different system
variants, and are provided by the p_sysvers[0–31] input signals
SO
OV
CA
0
Bytecnt
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1; Read/Write; Reset - 0x0
Figure 2-7. Integer Exception Register (XER)
Table 2-5. XER Field Descriptions
Bits Name Description
0
(32)
SO Summary Overflow (per the Power ISA embedded category)
1
(33)
OV Overflow (per the Power ISA embedded category)
2
(34)
CA Carry (per the Power ISA embedded category)
3–24
(35–56) —Reserved1
1These bits are not implemented, will be read as zero, and writes are ignored.
25–31
(57–63)
Bytecnt2
2These bits are implemented to support emulation of the string instructions.
Preserved for lswi, lswx, stswi, stswx string instructions
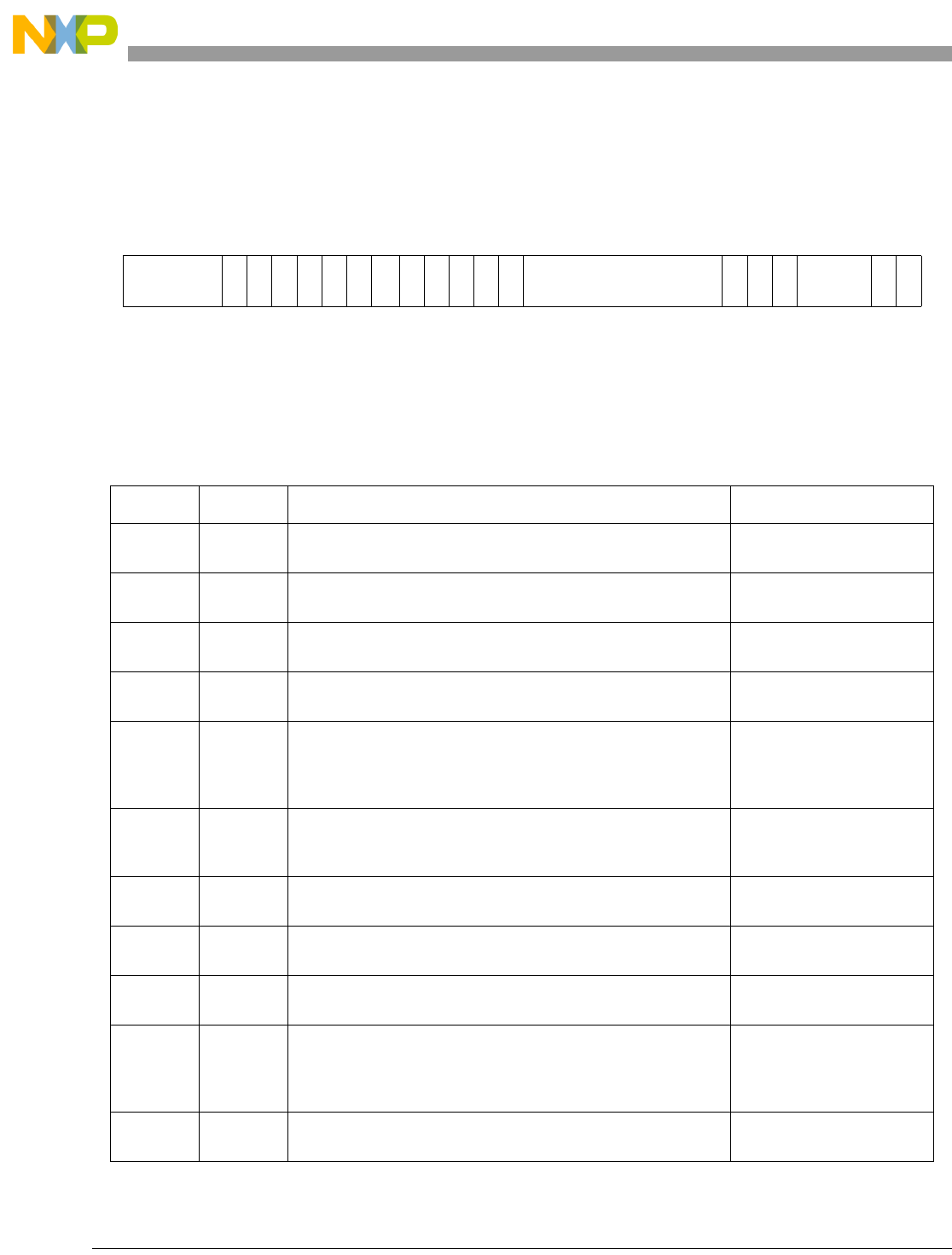
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-14 Freescale Semiconductor
2.4.6 Exception Syndrome Register
The exception syndrome register (ESR) provides a syndrome to differentiate between exceptions that can
generate the same interrupt type. The EREF contains a complete description of the ESR. The e200 adds
some implementation specific bits to this register, as seen in Figure 2-8.
The ESR fields are defined in Table 2-6.
0
PIL
PPR
PTR
FP
ST
0
DLK
ILK
AP
PUO
BO
PIE
0
SPE
0
VLEMI
0
MIF
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 62; Read/Write; Reset - 0x0
Figure 2-8. Exception Syndrome Register (ESR)
Table 2-6. ESR Field Descriptions
Bit(s) Name Description Associated Interrupt Type
0–3
(32–35)
— Allocated1—
4
(36)
PIL Illegal Instruction exception Program
5
(37)
PPR Privileged Instruction exception Program
6
(38)
PTR Trap exception Program
7
(39)
FP Floating-point operation Alignment
Data Storage
Data TLB
Program
8
(40)
ST Store operation Alignment
Data Storage
Data TLB
9
(41)
—Reserved
2—
10
(42)
DLK Data Cache Locking3Data Storage
11
(43) ILK Instruction Cache Locking Data Storage
12
(44)
AP Auxiliary Processor operation
(Currently unused in the e200)
Alignment
Data Storage
Data TLB
Program
13
(45)
PUO Unimplemented Operation exception Program
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-15
14
(46) BO Byte Ordering exception
Mismatched Instruction Storage exception Data Storage
Instruction Storage
15
(47)
PIE Program Imprecise exception
(Reserved)
Currently unused in the e200
Table 2-6. ESR Field Descriptions (Continued)
Bit(s) Name Description Associated Interrupt Type

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-16 Freescale Semiconductor
2.4.6.1 Power ISA VLE Mode Instruction Syndrome
The ESR[VLEMI] bit is provided to indicate that an interrupt was caused by a Power ISA VLE instruction.
This syndrome bit is set on an exception associated with execution or attempted execution of a Power ISA
VLE instruction. This bit is updated for the interrupt types indicated in Table 2-6.
2.4.6.2 Misaligned Instruction Fetch Syndrome
The ESR[MIF] bit is provided to indicate that an Instruction Storage Interrupt was caused by an attempt
to fetch an instruction from a Power ISA page that was not aligned on a word boundary. The fetch may
have been caused by execution of a branch class instruction from a VLE page to a non-VLE page, a branch
to LR instruction with LR[62] = 1, a branch to CTR instruction with CTR[62] = 1, execution of an rfi or
16–23
(48–55) —Reserved
2—
24
(56)
SPE SPE Operation SPE Unavailable
SPE Floating-point Data
Exception
SPE Floating-point Round
Exception
Alignment
Data Storage
Data TLB
25
(57)
— Allocated1—
26
(58)
VLEMI VLE Mode Instruction SPE Unavailable
SPE Floating-point Data
Exception
SPE Floating-point Round
Exception
Data Storage
Data TLB
Instruction Storage
Alignment
Program
System Call
27:29
(59–61)
— Allocated1—
30
(62)
MIF Misaligned Instruction Fetch Instruction Storage
Instruction TLB
31
(63)
— Allocated1—
1These bits are not implemented and should be written with zero for future compatibility.
2These bits are not implemented, and should be written with zero for future compatibility.
3This bit is implemented, but not set by hardware
Table 2-6. ESR Field Descriptions (Continued)
Bit(s) Name Description Associated Interrupt Type
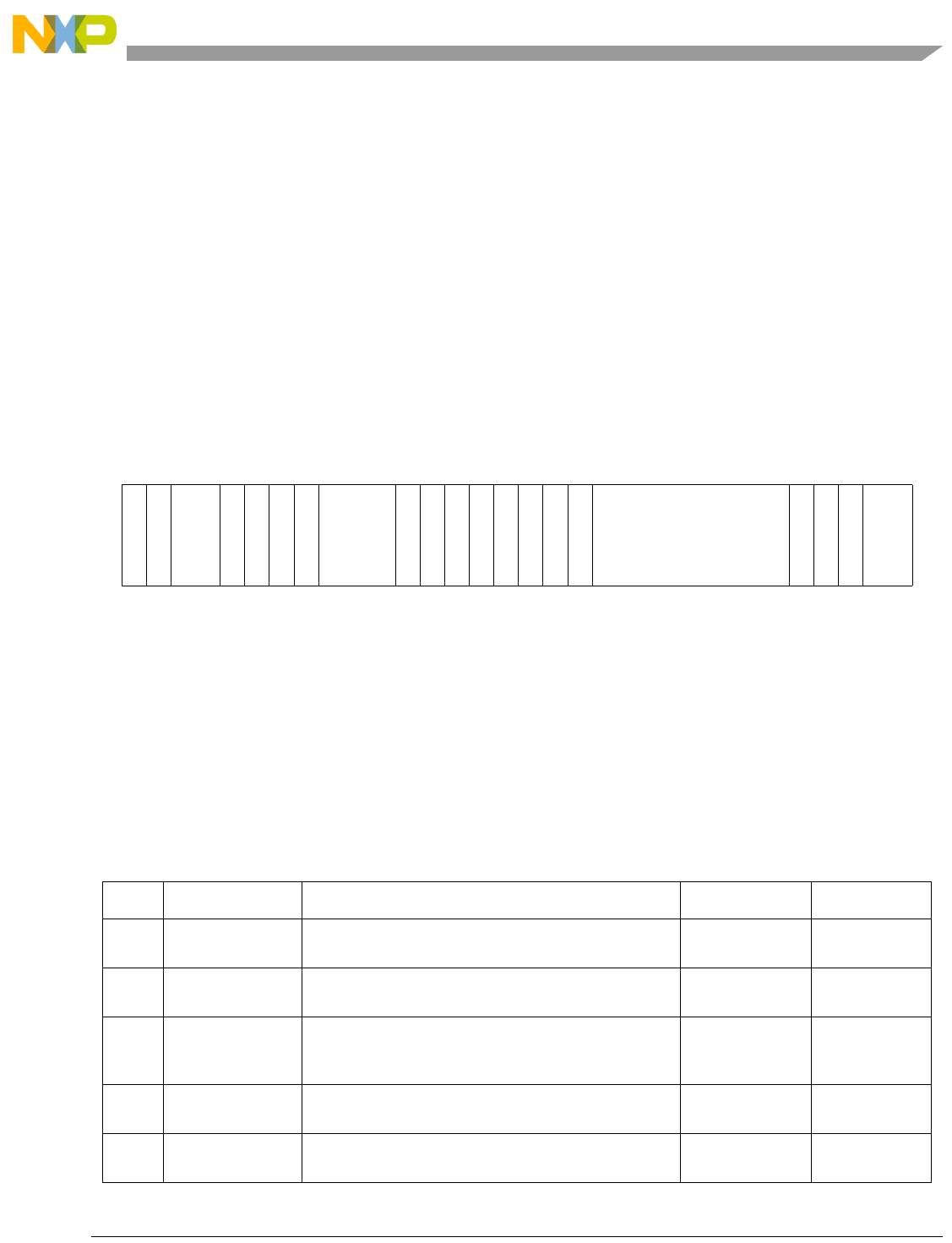
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-17
se_rfi instruction with SRR0[62] = 1, execution of an rfci or se_rfci instruction with CSRR0[62] = 1,
execution of an rfdi or se_rfdi instruction with DSRR0[62] = 1, or execution of an rfmci or se_rfmci
instruction with MCSRR0[62] = 1, where the destination address corresponds to an instruction page that
is not marked as a Power ISA VLE page.
The ESR[MIF] bit is also used to indicate that an instruction TLB interrupt was caused by a TLB miss on
the second half of a misaligned 32-bit Power ISA VLE instruction. For this case, SRR0 points to the first
half of the instruction, which resides on the previous page from the miss at page offset 0xFFE. The ITLB
handler may need to realize that the miss corresponds to the next page, although MMU MAS2 contents
will correctly reflect the page corresponding to the miss.
2.4.7 Machine Check Syndrome Register (MCSR)
When the core complex takes a machine check interrupt, it updates the machine check syndrome register
(MCSR) to differentiate between machine check conditions. The MCSR is shown in Figure 2-9.
Table 2-7 describes MCSR fields. The MCSR indicates the source of a machine check condition. When an
“Async Mchk” or “Error Report” syndrome bit in the MCSR is set, the core complex asserts p_mcp_out
for system information. Note that the bits in the MCSR are implemented as “write 1 to clear.” Therefore,
software must write ones into those bit positions it wishes to clear, typically by writing back what was
originally read. See Section 5.7.2, “Machine Check Interrupt (IVOR1) for more details of the MCSR
settings.
MCP
IC_DPERR
0
EXCP_ERR
IC_TPERR
0
IC_LKERR
0
NMI
MAV
MEA
0
IF
LD
ST
G
0
BUS_IRERR
BUS_DRERR
BUS_WRERR
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 572; Read/Clear; Reset - 0x0
Figure 2-9. Machine Check Syndrome Register (MCSR)
Table 2-7. Machine Check Syndrome Register (MCSR)
Bit Name Description Exception Type1Recoverable
0
(32)
MCP Machine check input pin Async Mchk Maybe
1
(33)
IC_DPERR Instruction Cache data array parity error Async Mchk Precise
2–3
(34–35
)
— Reserved, should be cleared. — —
4
(36)
EXCP_ERR ISI, ITLB, or Bus Error on first instruction fetch for an
exception handler
Async Mchk Precise
5
(37)
IC_TPERR Instruction Cache Tag parity error Async Mchk Precise

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-18 Freescale Semiconductor
6
(38) — Reserved, should be cleared. — —
7
(39)
IC_LKERR Instruction Cache Lock error
Indicates a cache control operation or invalidation
operation invalidated one or more locked lines in the
Icache
Status —
8–10
(40–42
)
— Reserved, should be cleared. — —
11
(43) NMI NMI input pin NMI —
12
(44)
MAV MCAR Address Valid
Indicates that the address contained in the MCAR was
updated by hardware to correspond to the first detected
Async Mchk error condition
Status —
13
(45)
MEA MCAR holds Effective Address
If MAV=1,MEA=1 indicates that the MCAR contains an
effective address and MEA=0 indicates that the MCAR
contains a physical address
Status —
14
(46)
— Reserved, should be cleared. — —
15
(47)
IF Instruction Fetch Error Report
An error occurred during the attempt to fetch an
instruction. MCSRR0 contains the instruction address.
Error Report Precise
16
(48)
LD Load type instruction Error Report
An error occurred during the attempt to execute the load
type instruction located at the address stored in
MCSRR0.
Error Report Precise
17
(49) ST Store type instruction Error Report
An error occurred during the attempt to execute the
store type instruction located at the address stored in
MCSRR0.
Error Report Precise
18
(50)
G Guarded Load or Store instruction Error Report
An error occurred during the attempt to execute the load
or store type instruction located at the address stored in
MCSRR0 and the guarded access encountered an
error on the external bus.
Error Report Precise
19–26
(51–58
)
— Reserved, should be cleared. — —
27
(59)
BUS_IRERR Read bus error on Instruction fetch or linefill Async Mchk Precise if data
used
28
(60)
BUS_DRERR Read bus error on data load Async Mchk Precise
Table 2-7. Machine Check Syndrome Register (MCSR) (Continued)
Bit Name Description Exception Type1Recoverable
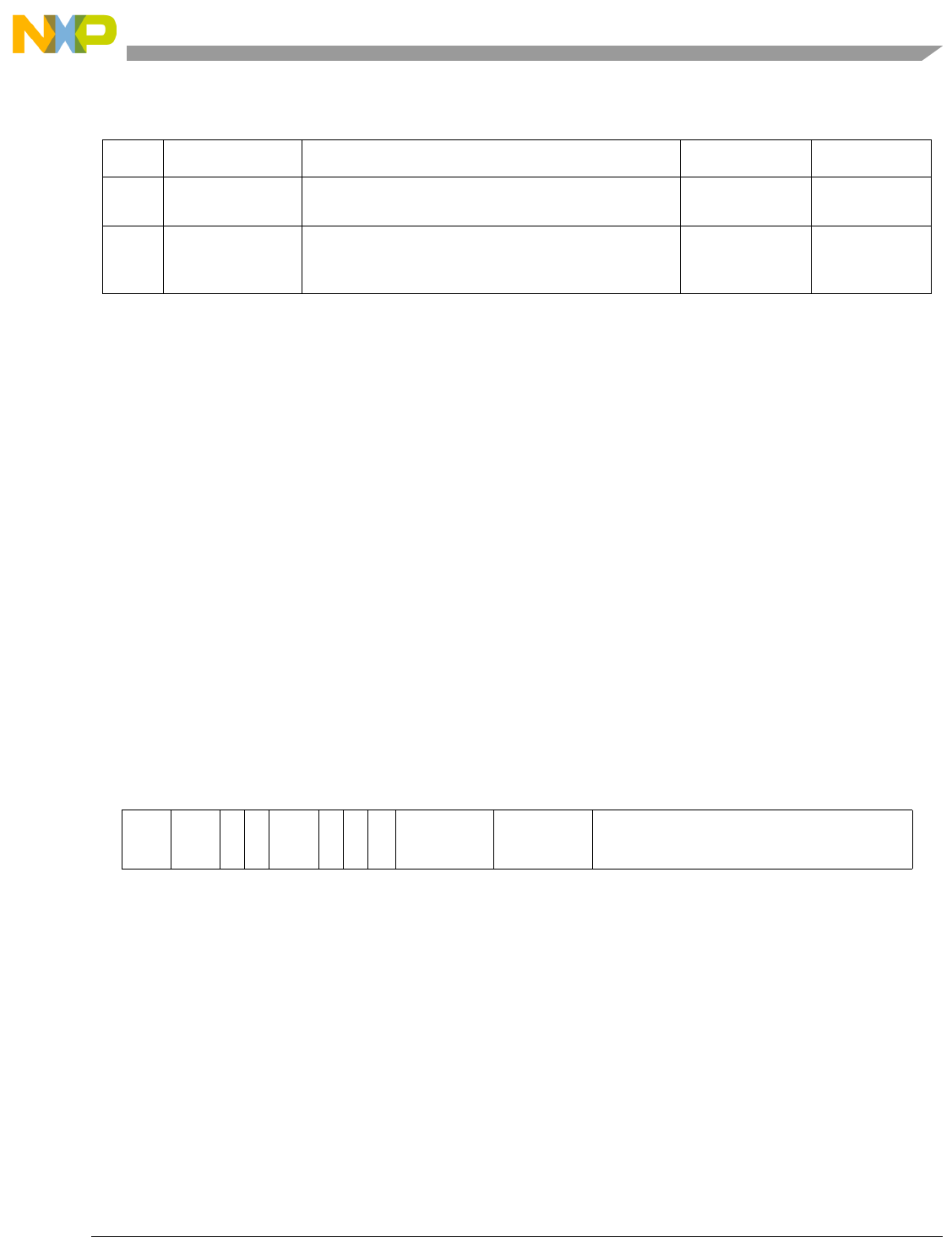
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-19
2.4.8 Timer Control Register (TCR)
The timer control register (TCR) provides control information for the CPU timer facilities. The EREF
contains a complete description of the TCR. The TCR[WRC] field functions are defined to be
implementation-dependent and are described below. In addition, the e200 core implements two fields not
specified in the Power ISA, TCR[WPEXT] and TCR[FPEXT].
The TCR is shown in Figure 2-10.
29
(61) BUS_WRERR Write bus error on store Async Mchk Unlikely
30–31
(62–63
)
— Reserved, should be cleared. — —
1The Exception Type indicates the exception type associated with a given syndrome bit
- “Error Report” indicates that this bit is only set for error report exceptions which cause machine check interrupts. These
bits are only updated when the machine check interrupt is actually taken. Error report exceptions are not gated by MSRME.
These are synchronous exceptions. These bits will remain set until cleared by software writing a “1” to the bit position(s) to
be cleared.
- “Status” indicates that this bit is provides additional status information regarding the logging of an asynchronous machine
check exception. These bits will remain set until cleared by software writing a “1” to the bit position(s) to be cleared.
- “NMI” indicates that this bit is only set for the non-maskable interrupt type exception which causes a machine check
interrupt. This bit is only updated when the machine check interrupt is actually taken. NMI exceptions are not gated by
MSRME. This is an asynchronous exception. This bit will remain set until cleared by software writing a “1” to the bit position.
- “Async Mchk” indicates that this bit is set for an asynchronous machine check exception. These bits are set immediately
upon detection of the error. Once any “Async Mchk” bit is set in the MCSR, a machine check interrupt will occur if
MSRME=1. If MSRME=0, the machine check exception will remain pending. These bits will remain set until cleared by
software writing a “1” to the bit position(s) to be cleared.
WP
WRC
WIE
DIE
FP
FIE
ARE
0
WPEXT
FPEXT
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 340; Read/Write; Reset - 0x0
Figure 2-10. Timer Control Register (TCR)
Table 2-7. Machine Check Syndrome Register (MCSR) (Continued)
Bit Name Description Exception Type1Recoverable
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-20 Freescale Semiconductor
The TCR fields are defined in Table 2-8.
Table 2-8. Timer Control Register Field Descriptions
Bits Name Description
0–1
(32–33)
WP Watchdog Timer Period
When concatenated with WPEXT, specifies one of 64 bit locations of the time base used to signal
a watchdog timer exception on a transition from 0 to 1.
TCRwpext[0–3],TCRwp[0–1] == 6’b000000 selects TBU[0]
TCRwpext[0–3],TCRwp[0–1] == 6’b111111 selects TBL[31]
2–3
(34–35)
WRC Watchdog Timer Reset Control
00 No Watchdog Timer reset will occur
01 Assert watchdog reset status output 1 (p_wrs[1]) on second time-out of Watchdog Timer
10 Assert watchdog reset status output 0 (p_wrs[0]) on second time-out of Watchdog Timer
11 Assert watchdog reset status outputs 0 and 1 (p_wrs[0], p_wrs[1]) on second time-out of
Watchdog Timer
TCRWRC resets to 0b00. This field may be set by software, but cannot be cleared by software
(except by a software-induced reset). Once written to a non-zero value, this field may no longer
be altered by software.
4
(36)
WIE Watchdog Timer Interrupt Enable
5
(37)
DIE Decrementer Interrupt Enable
6–7
(38–39) FP Fixed-Interval Timer Period
When concatenated with FPEXT, specifies one of 64 bit locations of the time base used to signal
a fixed-interval timer exception on a transition from 0 to 1.
TCRfpext[0–3],TCRfp[0–1] == 6’b000000 selects TBU[0]
TCRfpext[0–3],TCRfp[0–1] == 6’b111111 selects TBL[31]
8
(40)
FIE Fixed-Interval Timer Interrupt Enable
9
(41)
ARE Auto-Reload Enable
10
(42)
—Reserved
1
1These bits are not implemented and should be written with zero for future compatibility.
11–14
(43–46) WPEXT Watchdog Timer Period Extension (see above description for WP)
These bits get prepended to the TCRWP bits to allow selection of the one of the 64 Time Base
bits used to signal a Watchdog Timer exception.
tb0:63 ← TBU0:31 || TBL0:31
wp ← TCRWPEXT || TCRWP
tb_wp_bit ← tbwp
15–18
(47–50)
FPEXT Fixed-Interval Timer Period Extension (see above description for FP)
These bits get prepended to the TCRFP bits to allow selection of the one of the 64 Time Base bits
used to signal a Fixed-Interval Timer exception.
tb0:63 ← TBU0:31 || TBL0:31
fp ← TCRFPEXT || TCRFP
tb_fp_bit ← tbfp
19–31
(51–63)
—Reserved
1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-21
2.4.9 Timer Status Register (TSR)
The timer status register (TSR) provides status information for the CPU timer facilities. A complete
description of the TSR is in the EREF. TSR[WRS] is defined to be implementation-dependent and is
described below.
The TSR is shown in Figure 2-11.
The TSR fields are defined in Table 2-9.
NOTE
The timer status register can be read using mfspr RT,TSR. The Timer
Status Register cannot be directly written to. Instead, bits in the timer status
register corresponding to 1 bits in GPR[RS] can be cleared using mtspr
TSR,RS.
ENW
WIS
WRS
DIS
FIS
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 336; Read/Clear; Reset - 0x0
Figure 2-11. Timer Status Register (TSR)
Table 2-9. Timer Status Register Field Descriptions
Bits Name Description
0
(32)
ENW Enable Next Watchdog
1
(33) WIS Watchdog timer interrupt status
2–3
(34–35)
WRS Watchdog timer reset status
00 No second time-out of Watchdog Timer has occurred
01 Assertion of watchdog reset status output 1 (p_wrs[1]) on second time-out of Watchdog
Timer has occurred
10 Assertion of watchdog reset status output 0 (p_wrs[0]) on second time-out of Watchdog
Timer has occurred
11 Assertion of watchdog reset status outputs 0 and 1 (p_wrs[0], p_wrs[1]) on second time-out
of Watchdog Timer has occurred
4
(36)
DIS Decrementer interrupt status
5
(37)
FIS Fixed-Interval Timer interrupt status
6–31
(38–63)
—Reserved
1
1These bits are not implemented and should be written with zero for future compatibility.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-22 Freescale Semiconductor
2.4.10 Debug Registers
The debug facility registers are described in Chapter 11, “Debug Support.”
2.4.11 Hardware Implementation Dependent Register 0 (HID0)
The HID0 register is an e200 implementation-dependent register used for various configuration and
control functions, as shown in Figure 2-12.
The HID0 fields are defined in Table 2-10.
EMCP
0
DOZE
NAP
SLEEP
0
ICR
NHR
0
TBEN
SEL_TBCLK
DCLREE
DCLRCE
CICLRDE
MCCLRDE
DAPUEN
0
NOPTI
012345678910111213141516171819202122232425262728293031
SPR - 1008; Read/Write; Reset - 0x0
Figure 2-12. Hardware Implementation Dependent Register 0 (HID0)
Table 2-10. Hardware Implementation Dependent Register 0
Bits Name Description
0
[32]
EMCP Enable machine check pin (p_mcp_b)
0 p_mcp_b pin is disabled.
1p_mcp_b pin is enabled. Asserting p_mcp_b causes a machine check interrupt to be
reported.
The primary purpose of this bit is to mask out further machine check exceptions caused by
assertion of p_mcp_b.
1–7
[33–39]
— Reserved1
8
[40]
DOZE Configure for Doze power management mode
0 Doze mode is disabled
1 Doze mode is enabled
Doze mode is invoked by setting MSRWE while this bit is set.
9
[41]
NAP Configure for Nap power management mode
0 Nap mode is disabled
1 Nap mode is enabled
Nap mode is invoked by setting MSRWE while this bit is set.
10
[42]
SLEEP Configure for Sleep power management mode
0 Sleep mode is disabled
1 Sleep mode is enabled
Sleep mode is invoked by setting MSRWE while this bit is set.
Only one of DOZE, NAP, or SLEEP should be set for proper operation.
11–13
[43–45] — Reserved1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-23
14
[46] ICR Interrupt Inputs Clear Reservation
0 External Input, Critical Input, and Non-Maskable Interrupts do not affect reservation status
1 External Input, Critical Input, and Non-Maskable Interrupts clear an outstanding
reservation
15
[47]
NHR Not hardware reset
0 indicates to a reset exception handler that a reset occurred if software had previously set
this bit
1 indicates to a reset exception handler that no reset occurred if software had previously set
this bit
Provided for software use—set anytime by software, cleared by reset.
16
[48]
— Reserved1
17
[49]
TBEN TimeBase Enable
0 TimeBase is disabled
1 TimeBase is enabled
18
[50]
SEL_TBCLK Select TimeBase Clock
0 TimeBase is based on processor clock
1 TimeBase is based on p_tbclk input
This bit controls the clock source for the TimeBase. Altering this bit must be done while the
time base is disabled to preclude glitching of the counter. Timer interrupts should be disabled
prior to alteration, and the TBL and TBU registers re-initialized following a change of
TimeBase clock source.
19
[51]
DCLREE Debug Interrupt Clears MSREE
0 MSREEunaffected by Debug Interrupt
1 MSREE cleared by Debug Interrupt
This bit controls whether Debug interrupts force External Input interrupts to be disabled, or
whether they remain unaffected.
20
[52]
DCLRCE Debug Interrupt Clears MSRCE
0 MSRCE unaffected by Debug Interrupt
1 MSRCE cleared by Debug Interrupt
This bit controls whether Debug interrupts force Critical interrupts to be disabled, or whether
they remain unaffected.
21
[53] CICLRDE Critical Interrupt Clears MSRDE
0 MSRDE unaffected by Critical class interrupt
1 MSRDE cleared by Critical class interrupt
This bit controls whether certain Critical interrupts (Critical Input, Watchdog Timer) force
Debug interrupts to be disabled, or whether they remain unaffected. Machine Check interrupts
have a separate control bit.
Note: If Critical Interrupt Debug events are enabled (DBCR0CIRPT set, which should only be
done when the Debug functionality is enabled), and MSRDE is set at the time of a
(Critical Input, Watchdog Timer) Critical interrupt, a debug event will be generated after
the Critical Interrupt Handler has been fetched, and the Debug handler will be executed
first. In this case, DSRR0DE will have been cleared, such that after returning from the
debug handler, the Critical interrupt handler will not be run with MSRDE enabled.
Table 2-10. Hardware Implementation Dependent Register 0 (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-24 Freescale Semiconductor
2.4.12 Hardware Implementation Dependent Register 1 (HID1)
The HID1 register is used for bus configuration and system control. HID1 is shown in Figure 2-13.
22
[54] MCCLRDE Machine Check Interrupt Clears MSRDE
0 MSRDE unaffected by Machine Check interrupt
1 MSRDE cleared by Machine Check interrupt
This bit controls whether machine check interrupts force debug interrupts to be disabled, or
whether they remain unaffected.
23
[55]
DAPUEN Debug APU enable
0 Debug APU disabled
1 Debug APU enabled
This bit controls whether the Debug APU is enabled. When enabled, Debug interrupts use the
DSRR0/DSRR1 registers for saving state, and the rfdi instruction is available for returning
from a debug interrupt.
When disabled, Debug Interrupts use the critical interrupt resources CSRR0/CSRR1 for
saving state, the rfci instruction is used for returning from a debug interrupt, and the rfdi
instruction is treated as an illegal instruction.
When disabled, the settings of the DCLREE, DCLRCE, CICLRDE, and MCCLRDE bits are
ignored and are assumed to be ‘1’s
Read and write access to DSRR0/DSRR1 by means of the mfspr and mtspr instructions is
not affected by this bit.
24
[56]
— Reserved1
25–30
[58–62]
— Reserved1
31
[63] NOPTI No-op Touch Instructions
0 icbt instruction operates normally
1 icbt instruction is no-oped
This bit only affects the icbt instruction.
1These bits are not implemented and should be written with zero for future compatibility.
0
SYSCTL
AT S
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1009; Read/Write; Reset - 0x0
Figure 2-13. Hardware Implementation Dependent Register 1 (HID1)
Table 2-10. Hardware Implementation Dependent Register 0 (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-25
The HID1 fields are defined in Table 2-11.
2.4.13 Branch Unit Control and Status Register (BUCSR)
The BUCSR register is used for general control and status of the branch target buffer (BTB), as shown in
Figure 2-14.
Bits Name Description
0–15
[32–47]
—Reserved
1
1These bits are not implemented and should be written with zero for future compatibility.
16–23
[48–56]
SYSCTL System Control
These bits are reflected on the outputs of the p_hid1_sysctl[0–7] output signals for use in
controlling the system. They may need external synchronization.
24
[56]
ATS Atomic status (read-only)
Indicates state of the reservation bit in the load/store unit. See Section 3.6, “Memory
Synchronization and Reservation Instructions for more detail.
25–31
[57–63] —Reserved
1
Table 2-11. Hardware Implementation Dependent Register 1
0
BBFI
0
BALLOC
0
BPRED
BPEN
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1013; Read/Write; Reset - 0x0
Figure 2-14. Branch Unit Control and Status Register (BUCSR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-26 Freescale Semiconductor
The BUCSR fields are defined in Table 2-12.
2.4.14 L1 Cache Control and Status Registers (L1CSR0, L1CSR1)
The L1CSR0 and L1CSR1 registers are used for general control and status of the L1 cache. A description
of the L1CSR0 and L1CSR1 registers can be found in Chapter 9, “L1 Cache.”
Bits Name Description
0–21
[32–53]
— Reserved1
1These bits are not implemented and should be written with zero for future compatibility.
22
[54]
BBFI Branch target buffer flash invalidate.
When written to a ‘1’, BBFI flash clears the valid bit of all entries in the branch buffer; clearing
occurs regardless of the value of the enable bit (BPEN). Note: BBFI is always read as 0.
23–25
[55–57]
— Reserved1
26–27
[58–59]
BALLOC Branch Target Buffer Allocation Control
00 Branch Target Buffer allocation for all branches is enabled.
01 Branch Target Buffer allocation is disabled for backward branches.
10 Branch Target Buffer allocation is disabled for forward branches.
11 Branch Target Buffer allocation is disabled for both branch directions.
This field controls BTB allocation for branch acceleration when BPEN = 1. Note that BTB hits are
not affected by the settings of this field. Note that for branches with “AA’ = ‘1’, the MSB of the
displacement field is still used to indicate forward/backward, even though the branch is absolute.
28
[60] — Reserved1
29–30
[61–62]
BPRED Branch Prediction Control (Static)
00 Branch predicted taken on BTB miss for all branches.
01 Branch predicted taken on BTB miss only for forward branches.
10 Branch predicted taken on BTB miss only for backward branches.
11 Branch predicted not taken on BTB miss for both branch directions.
This field controls operation of static prediction mechanism on a BTB miss. Unless disabled,
fetching of the predicted target location will be performed for branch acceleration. BPRED
operates independently of BPEN, and with a BPEN setting of 0, will be used to perform static
prediction of all unresolved branches.
Note that BTB hits are not affected by the settings of this field. Note that for certain applications,
setting BPRED to a non-default value may result in improved performance.
31
[63]
BPEN Branch target buffer prediction enable.
0 Branch target buffer prediction disabled
1 Branch target buffer prediction enabled (enables BTB to predict branches)
When the BPEN bit is cleared, no hits will be generated from the BTB, and no new entries will be
allocated. Entries are not automatically invalidated when BPEN is cleared; the BBFI bit controls
entry invalidation. BPEN operates independently of BPRED, and will be used even with a BPRED
setting of 00.
Table 2-12. Branch Unit Control and Status Register

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-27
2.4.15 L1 Cache Configuration Registers (L1CFG0, L1CFG1)
The L1CFG0 and L1CGF1 registers provide configuration information for the L1 caches supplied with
this version of the e200 CPU core. A description of the L1CFG0 and L1CGF1 registers can be found in
Chapter 9, “L1 Cache.”
2.4.16 L1 Cache Flush and Invalidate Register (L1FINV1)
The L1FINV0 and L1FINV1 registers provide software-based flush and invalidation control for the L1
instruction cache supplied with this version of the e200 CPU core. A description of the L1FINV1 register
can be found in Chapter 9, “L1 Cache.”
2.4.17 MMU Control and Status Register (MMUCSR0)
The MMUCSR0 register is used for general control of the MMU. A description of the MMUCSR register
can be found in Chapter 10, “Memory Management Unit.”
2.4.18 MMU Configuration Register (MMUCFG)
The MMUCFG register provides configuration information for the MMU supplied with this version of the
e200 CPU core. A description of the MMUCFG register can be found in Chapter 10, “Memory
Management Unit.”
2.4.19 TLB Configuration Registers (TLB0CFG, TLB1CFG)
The TLB0CFG and TLB1CFG registers provide configuration information for the MMU TLBs supplied
with this version of the e200 CPU core. A description of these registers can be found in Chapter 10,
“Memory Management Unit.”
2.5 SPR Register Access
SPRs are accessed with the mfspr and mtspr instructions. The following sections outline additional access
requirements.”
2.5.1 Invalid SPR References
System behavior when an invalid SPR is referenced depends on the apparent privilege level of the register.
The register privilege level is determined by bit 5 in the SPR address. If the invalid SPR is accessible in
user mode, then an illegal exception is generated. If the invalid SPR is accessible only in supervisor mode
and the CPU core is in supervisor mode (MSR[PR] = 0), then an illegal exception is generated. If the
invalid SPR address is accessible only in supervisor mode and the CPU is not in supervisor mode
(MSR[PR] = 1), then a privilege exception is generated.
Note that writes to read-only SPRs and reads of write-only SPRs are treated as invalid SPR references.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-28 Freescale Semiconductor
Table 2-13 lists the system response to an invalid SPR.
2.5.2 Synchronization Requirements for SPRs
With the exception of the following registers, there are no synchronization requirements for accessing
SPRs beyond those stated in the Power ISA embedded category. The EREF contains a complete
description of synchronization requirements.
Software requirements for synchronization before or after accessing these registers are shown in
Table 2-14. The notation CSI in the table refers to a Context Synchronizing instruction which include sc,
isync, rfi, rfci, and rfdi.
Table 2-13. System Response to Invalid SPR Reference
SPR address bit 5 Mode MSRPR Response
0 — — Illegal exception
1 Supervisor 0 Illegal exception
1 User 1 Privilege exception
Table 2-14. Additional synchronization requirements for SPRs
Context Altering Event or Instruction Required
Before Required
After Notes
mtmsr[UCLE] none CSI
mtmsr[SPE] none CSI
mfspr
DBCNT Debug Counter register msync none 1
DBSR Debug Status register msync none
HID0 Hardware implementation dependent reg 0 none none
HID1 Hardware implementation dependent reg 1 msync none
L1CSR0,
L1CSR1
L1 cache control and status registers 0,1 msync none
L1FINV1 L1 cache flush and invalidate control register 1 msync none
MMUCSR MMU control and status register 0 CSI none
mtspr
BUCSR Branch Unit Control and Status Register none CSI
DBCNT Debug Counter register none CSI 1
DBCR0 Debug Control Register 0 none CSI
DBCR1 Debug Control Register 1 none CSI
DBCR2 Debug Control Register 2 none CSI
DBCR3 Debug control register 3 none CSI
DBCR4 Debug control register 4 none CSI

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-29
2.5.3 Special Purpose Register Summary
Power ISA embedded category and implementation-specific SPRs for the e200 core are listed in
Table 2-15. All registers are 32-bits in size. Register bits are numbered from bit 0 to bit 31 (most significant
to least significant). Shaded entries represent optional registers. An SPR register may be read or written
with the mfspr and mtspr instructions. In the instruction syntax, compilers should recognize the
mnemonic name given in the table below.
DBCR5 Debug control register 5 none CSI
DBCR6 Debug control register 6 none CSI
DBSR Debug Status Register msync none
HID0 Hardware implementation dependent reg 0 CSI isync
HID1 Hardware implementation dependent reg 1 msync,
isync
CSI
L1CSR0 L1 cache control and status register 0 msync,
isync
CSI
L1CSR1 L1 cache control and status registers 1 none CSI
L1FINV1 L1 cache flush and invalidate control register 1 msync CSI
MASx MMU MAS registers none CSI
MMUCSR MMU control and status register 0 CSI CSI
PID PID0 register none CSI
SPEFSCR SPEFSCR register none CSI2
Notes:
1. not required if counter is not currently enabled
2. not required for status bit clearing, required for altering exception enable or rounding mode bits
Table 2-15. Special Purpose Registers
Mnemonic Name SPR
Number Access Privileged e200
Specific
BUCSR Branch Unit Control and Status Register 1013 R/W Yes Yes
CSRR0 Critical Save/Restore Register 0 58 R/W Yes No
CSRR1 Critical Save/Restore Register 1 59 R/W Yes No
CTR Count Register 9 R/W No No
DAC1 Data Address Compare 1 316 R/W Yes No
DAC2 Data Address Compare 2 317 R/W Yes No
DBCNT Debug Counter register 562 R/W Yes Yes
Table 2-14. Additional synchronization requirements for SPRs (Continued)
Context Altering Event or Instruction Required
Before Required
After Notes
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-30 Freescale Semiconductor
DBCR0 Debug Control Register 0 308 R/W Yes No
DBCR1 Debug Control Register 1 309 R/W Yes No
DBCR2 Debug Control Register 2 310 R/W Yes No
DBCR3 Debug control register 3 561 R/W Yes Yes
DBCR4 Debug control register 4 563 R/W Yes Yes
DBCR5 Debug control register 5 564 R/W Yes Yes
DBCR6 Debug control register 5 603 R/W Yes Yes
DBERC0 Debug external resource control register 0 569 Read-only Yes Yes
DBSR Debug Status Register 304 Read/Clear1Ye s N o
DDAM Debug Data Acquisition Messaging register 576 R/W No Yes
DEAR Data Exception Address Register 61 R/W Yes No
DEC Decrementer 22 R/W Yes No
DECAR Decrementer Auto-Reload 54 R/W Yes No
DEVENT Debug Event register 975 R/W No Yes
DSRR0 Debug save/restore register 0 574 R/W Yes Yes
DSRR1 Debug save/restore register 1 575 R/W Yes Yes
DVC1 Data Value Compare 1 318 R/W Yes No
DVC2 Data Value Compare 2 319 R/W Yes No
ESR Exception Syndrome Register 62 R/W Yes No
HID0 Hardware implementation dependent reg 0 1008 R/W Yes Yes
HID1 Hardware implementation dependent reg 1 1009 R/W Yes Yes
IAC1 Instruction Address Compare 1 312 R/W Yes No
IAC2 Instruction Address Compare 2 313 R/W Yes No
IAC3 Instruction Address Compare 3 314 R/W Yes No
IAC4 Instruction Address Compare 4 315 R/W Yes No
IAC5 Instruction Address Compare 5 565 R/W Yes Yes
IAC6 Instruction Address Compare 6 566 R/W Yes Yes
IAC7 Instruction Address Compare 7 567 R/W Yes Yes
IAC8 Instruction Address Compare 8 568 R/W Yes Yes
IVOR0 Interrupt Vector Offset Register 0 400 R/W Yes No
IVOR1 Interrupt Vector Offset Register 1 401 R/W Yes No
IVOR2 Interrupt Vector Offset Register 2 402 R/W Yes No
Table 2-15. Special Purpose Registers (Continued)
Mnemonic Name SPR
Number Access Privileged e200
Specific
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-31
IVOR3 Interrupt Vector Offset Register 3 403 R/W Yes No
IVOR4 Interrupt Vector Offset Register 4 404 R/W Yes No
IVOR5 Interrupt Vector Offset Register 5 405 R/W Yes No
IVOR6 Interrupt Vector Offset Register 6 406 R/W Yes No
IVOR7 Interrupt Vector Offset Register 7 407 R/W Yes No
IVOR8 Interrupt Vector Offset Register 8 408 R/W Yes No
IVOR9 Interrupt Vector Offset Register 9 409 R/W Yes No
IVOR10 Interrupt Vector Offset Register 10 410 R/W Yes No
IVOR11 Interrupt Vector Offset Register 11 411 R/W Yes No
IVOR12 Interrupt Vector Offset Register 12 412 R/W Yes No
IVOR13 Interrupt Vector Offset Register 13 413 R/W Yes No
IVOR14 Interrupt Vector Offset Register 14 414 R/W Yes No
IVOR15 Interrupt Vector Offset Register 15 415 R/W Yes No
IVOR32 Interrupt vector offset register 32 528 R/W Yes Yes
IVOR33 Interrupt vector offset register 33 529 R/W Yes Yes
IVOR34 Interrupt vector offset register 34 530 R/W Yes Yes
IVPR Interrupt Vector Prefix Register 63 R/W Yes No
LR Link Register 8 R/W No No
L1CFG0 L1 cache config register 0 515 Read-only No Yes
L1CFG1 L1 cache config register 1 516 Read-only No Yes
L1CSR0 L1 cache control and status register 0 1010 R/W Yes Yes
L1CSR1 L1 cache control and status register 1 1011 R/W Yes Yes
L1FINV1 L1 cache flush and invalidate control register 0 959 R/W Yes Yes
MAS0 MMU assist register 0 624 R/W Yes Yes
MAS1 MMU assist register 1 625 R/W Yes Yes
MAS2 MMU assist register 2 626 R/W Yes Yes
MAS3 MMU assist register 3 627 R/W Yes Yes
MAS4 MMU assist register 4 628 R/W Yes Yes
MAS6 MMU assist register 6 630 R/W Yes Yes
MCAR Machine Check Address Register 573 R/W Yes Yes
MCSR Machine Check Syndrome Register 572 R/Clear2Ye s Ye s
MCSRR0 Machine Check Save/Restore Register 0 570 R/W Yes Yes
Table 2-15. Special Purpose Registers (Continued)
Mnemonic Name SPR
Number Access Privileged e200
Specific
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-32 Freescale Semiconductor
MCSRR1 Machine Check Save/Restore Register 1 571 R/W Yes Yes
MMUCFG MMU configuration register 1015 Read-only Yes Yes
MMUCSR MMU control and status register 0 1012 R/W Yes Yes
PID0 Process ID Register 48 R/W Yes No
PIR Processor ID Register 286 R/W Yes No
PVR Processor Version Register 287 Read-only Yes No
SPEFSCR SPE APU status and control register 512 R/W No No
SPRG0 SPR General 0 272 R/W Yes No
SPRG1 SPR General 1 273 R/W Yes No
SPRG2 SPR General 2 274 R/W Yes No
SPRG3 SPR General 3 275 R/W Yes No
SPRG4 SPR General 4 260 Read-only No No
276 R/W Yes No
SPRG5 SPR General 5 261 Read-only No No
277 R/W Yes No
SPRG6 SPR General 6 262 Read-only No No
278 R/W Yes No
SPRG7 SPR General 7 263 Read-only No No
279 R/W Yes No
SPRG8 SPR General 8 604 R/W Yes Yes
SPRG9 SPR General 9 605 R/W Yes Yes
SRR0 Save/Restore Register 0 26 R/W Yes No
SRR1 Save/Restore Register 1 27 R/W Yes No
SVR System Version Register 1023 Read-only Yes Yes
TBL Time Base Lower 268 Read-only No No
284 Write-only Yes No
TBU Time Base Upper 269 Read-only No No
285 Write-only Yes No
TCR Timer Control Register 340 R/W Yes No
TLB0CFG TLB0 configuration register 688 Read-only Yes Yes
TLB1CFG TLB1 configuration register 689 Read-only Yes Yes
TSR Timer Status Register 336 Read/Clear3Ye s N o
Table 2-15. Special Purpose Registers (Continued)
Mnemonic Name SPR
Number Access Privileged e200
Specific
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-33
2.6 Reset Settings
Table 2-16 shows the state of the Power ISA architected registers and other optional resources immediately
following a system reset.
USPRG0 User SPR General 0 256 R/W No No
XER Integer Exception Register 1 R/W No No
Notes:
1The Debug Status Register can be read using
mfspr RT,DBSR
. The Debug Status Register cannot be directly
written to. Instead, bits in the Debug Status Register corresponding to ‘1’ bits in GPR(RS) can be cleared using
mtspr DBSR,RS
.
2The Machine Check Syndrome Register can be read using
mfspr RT,MCSR
. The Machine Check Syndrome
Register cannot be directly written to. Instead, bits in the Machine Check Syndrome Register corresponding to ‘1’
bits in GPR(RS) can be cleared using
mtspr MCSR,RS
.
3The Timer Status Register can be read using
mfspr RT,TSR
. The Timer Status Register cannot be directly written
to. Instead, bits in the Timer Status Register corresponding to ‘1’ bits in GPR(RS) can be cleared using
mtspr
TSR,RS
.
Table 2-16. Reset Settings for e200 Resources
Resource system reset setting
Program Counter p_rstbase[0–29] || 2’b00
GPRs Unaffected1
CR Unaffected1
BUCSR 0x0000_0000
CSRR0 Unaffected1
CSRR1 Unaffected1
CTR Unaffected1
DAC1 0x0000_00002
DAC2 0x0000_00002
DBCNT Unaffected1
DBCR0 0x0000_00002
DBCR1 0x0000_00002
DBCR2 0x0000_00002
DBCR3 0x0000_00002
DBCR4 0x0000_00002
DBCR5 0x0000_00002
DBCR6 0x0000_00002
Table 2-15. Special Purpose Registers (Continued)
Mnemonic Name SPR
Number Access Privileged e200
Specific
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-34 Freescale Semiconductor
DBSR 0x1000_00002
DDAM 0x0000_00002
DEAR Unaffected1
DEC Unaffected1
DECAR Unaffected1
DEVENT 0x0000_0002
DSRR0 Unaffected1
DSRR1 Unaffected1
DVC1 Unaffected1
DVC2 Unaffected1
ESR 0x0000_0000
HID0 0x0000_0000
HID1 0x0000_0000
IAC1 0x0000_00002
IAC2 0x0000_00002
IAC3 0x0000_00002
IAC4 0x0000_00002
IAC5 0x0000_00002
IAC6 0x0000_00002
IAC7 0x0000_00002
IAC8 0x0000_00002
IVOR0 Unaffected1
IVOR1 Unaffected1
IVOR2 Unaffected1
IVOR3 Unaffected1
IVOR4 Unaffected1
IVOR5 Unaffected1
IVOR6 Unaffected1
IVOR7 Unaffected1
IVOR8 Unaffected1
IVOR9 Unaffected1
IVOR10 Unaffected1
IVOR11 Unaffected1
Table 2-16. Reset Settings for e200 Resources (Continued)
Resource system reset setting
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 2-35
IVOR12 Unaffected1
IVOR13 Unaffected1
IVOR14 Unaffected1
IVOR15 Unaffected1
IVPR Unaffected1
LR Unaffected1
L1CFG0, L1CFG13—
L1CSR0, 1 0x0000_0000
L1FINV1 0x0000_0000
MAS0 Unaffected1
MAS1 Unaffected1
MAS2 Unaffected1
MAS3 Unaffected1
MAS4 Unaffected1
MAS6 Unaffected1
MCAR Unaffected1
MCSR 0x0000_0000
MCSRR0 Unaffected1
MCSRR1 Unaffected1
MMUCFG3—
MSR 0x0000_0000
PID0 0x0000_0000
PIR 0x0000_00 || p_cpuid[0–7]
PVR3—
SPEFSCR 0x0000_0000
SPRG0 Unaffected1
SPRG1 Unaffected1
SPRG2 Unaffected1
SPRG3 Unaffected1
SPRG4 Unaffected1
SPRG5 Unaffected1
SPRG6 Unaffected1
SPRG7 Unaffected1
Table 2-16. Reset Settings for e200 Resources (Continued)
Resource system reset setting
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
2-36 Freescale Semiconductor
SPRG8 Unaffected1
SPRG9 Unaffected1
SRR0 Unaffected1
SRR1 Unaffected1
SVR3—
TBL Unaffected1
TBU Unaffected1
TCR 0x0000_0000
TSR 0x0000_0000
TLB0CFG3—
TLB1CFG3—
USPRG0 Unaffected1
XER 0x0000_0000
1Undefined on m_por assertion, unchanged on p_reset_b assertion
2 Reset by processor reset p_reset_b if DBCR0[EDM]=0, as well as
unconditionally by m_por.
3Read-only registers
Table 2-16. Reset Settings for e200 Resources (Continued)
Resource system reset setting
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-1
Chapter 3
Instruction Model
This chapter provides additional information about Power Architecture technology as it relates specifically
to the e200z4.
The e200z4 is a 32-bit implementation of Power Architecture technology as defined in the Power ISA.
This architecture specification includes a recognition that different processor implementations may require
clarifications, extensions, or deviations from the architectural descriptions.
3.1 Unsupported Instructions and Instruction Forms
Because the e200z4 is a 32-bit Power ISA embedded core, all of the instructions defined for 64-bit
implementations of the Power ISA architecture are illegal on the e200. See the EREF for more information
on 64-bit instructions. The e200 takes an illegal instruction exception type program interrupt upon
encountering a 64-bit Power ISA instruction.
The e200z4 core does not support the instructions listed in Table 3-1. An unimplemented instruction or
FP-unavailable exception is generated if the processor attempts to execute one of these instructions.
Table 3-1. List of Unsupported Instructions
Type/Name Mnemonics
String Instructions lswi, lswx,
stswi, stswx
Floating Point
Instructions fxxxx, lfxxx,
sfxxxx, mcrfs,
mffs, mtfxxx
Device control register
and Move from APID mfapidi, mfdcrx,
mtdcrx
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-2 Freescale Semiconductor
3.2 Optionally Supported Instructions and Instruction Forms
e200 cores optionally support the instructions listed in Table 3-2 if a cache and/or TLB is present. An
instruction exception may be generated if the processor attempts to execute one of these instructions and
the related functional block is not present. The specific instruction may also be treated as a no-op.
3.3 Implementation Specific Instructions
Several instructions defined in the Power ISA are implementation specific. Table 3-3 summarizes the e200
implementation-specific instructions.
Table 3-2. List of Optionally Supported Instructions
Type / Name Mnemonics Unit
Cache Management
Instructions1
1These instructions are not supported and are treated as
no-ops, with the exception of dcbz which results in an
Alignment Interrupt, and dcbi, which is treated as a
privileged no-op.
dcba, dcbf,
dcbi, dcbt,
dcbtst, dcbst,
dcbz
Data Cache
Cache Management
Instructions2
2These instructions are supported by e200z446n3
icbi, icbt Instruction
Cache
Cache Locking
Instructions3
3These instructions are not supported and are treated as
no-ops.
dcbtls,
dcbtstls,
dcblc
Data Cache
Cache Locking
Instructions2icbtls, icblc Instruction
Cache
TLB Management
Instructions2tlbivax, tlbre,
tlbsx, tlbsync,
tlbwe
TLB
DCR Management 2mfdcr, mtdcr DCR
Table 3-3. Implementation-specific Instruction Summary
Mnemonic Implementation Details
mfapidi Unimplemented instructions
mfdcrx
mtdcrx
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-3
3.4 Power ISA Instruction Extensions
This section describes the various extensions to the architecture to support the VLE functionality.
•rfci, rfdi, rfi, rfmci—No longer mask bit 62 of CSRR0, DSRR0, or SRR0 respectively. The
destination address is [D,C, MC]SRR0[32:62] || 0b0.
•bclr, bclrl, bcctr, bcctrl—No longer mask bit 62 of the LR or CTR respectively. The destination
address is [LR,CTR][32:62] || 0b0.
3.5 Memory Access Alignment Support
The e200 core provides hardware support for unaligned memory accesses. However, there is a
performance degradation for accesses which cross a 64-bit (8 byte) boundary; the throughput of the
load/store unit is degraded to 1 misaligned load every 2 cycles. Stores which are misaligned across a 64-bit
(8 byte) boundary can be translated at a rate of 2 cycles per store. Frequent use of unaligned memory
accesses is discouraged because of the impact on performance.
NOTE
Accesses which cross a translation boundary may be restarted. A misaligned
access which crosses a page boundary is restarted in its entirety in the event
of a TLB miss of the second portion of the access. This may result in the first
portion being accessed twice.
Accesses that cross a translation boundary where the endianness changes
cause a byte ordering DSI exception.
3.6 Memory Synchronization and Reservation Instructions
The msync instruction provides a synchronization function and a memory barrier function. This
instruction waits for all preceding instructions and data memory accesses to complete before the msync
instruction completes. Subsequent instructions in the instruction stream are not initiated until after the
msync instruction completes to ensure these functions have been performed.
On the e200 core, the mbar instruction with MO = 0, 1, or 2 behaves similarly to the msync instruction,
but only waits for previous data memory accesses rather than all previous instructions to complete before
completing. The mbar instruction may be preferred for most memory synchronization operations, since it
stbcx., sthcx., stwcx. Address match with prior
lbarx, lharx, or lwarx not
required for store to be
performed
mfdcr, mtdcr1Optionally supported
instructions
1The e200 CPU takes an illegal instruction exception
for unsupported DCR values
Table 3-3. Implementation-specific Instruction Summary
Mnemonic Implementation Details

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-4 Freescale Semiconductor
does not stall instruction execution if no load or store operations remain in the execution pipeline, unlike
the msync instruction. The mbar instruction with the MO field not equal to 0, 1, or 2 is treated as illegal
by the e200 core.
The e200 core implements the lwarx and stwcx. instructions as described in the Power ISA embedded
category, as well as the lharx, lbarx, sthcx., and stbcx. instructions defined by the Freescale EIS enhanced
reservation instruction set. If the EA is not a multiple of the access size for these instructions, an alignment
interrupt is invoked. The e200 allows reservation instructions to access a page that is marked as
write-through required or cache-inhibited, and no data storage interrupt is invoked.
As allowed by the Power ISA embedded category, the e200 core does not require that for a reservation
store-type instruction to succeed, the EA of the store-type instruction must be to the same reservation
granule as the EA of a preceding reservation load-type instruction. Reservation granularity is
implementation-dependent. The e200 core does not define a reservation granule explicitly; reservation
granularity is defined by external logic. When no external logic is provided, the e200 core performs no
address comparison checking, thus the effective implementation granularity is null.
The e200 core implements an internal status flag (HID1[ATS]) representing reservation status. This flag
is set when a load-type reservation instruction is executed and completes without error, and it remains set
until it is cleared by one of the following mechanisms:
• Execution of a store-type reservation instruction is completed without error.
• The e200 core p_rsrv_clr input signal is asserted.
• The reservation is invalidated when an external input, critical input, or non-maskable interrupt is
signaled and the HID0[ICR] bit is set.
When the e200 core decodes a store-type reservation instruction, it checks the value of the local reservation
flag (HID1[ATS]). If the status indicates that no reservation is active, then the store-type reservation
instruction is treated as a nop. No exceptions will be taken, and no access is performed, thus no data
breakpoint will occur, regardless of matching the data breakpoint attributes.
The e200 core provides the input signal p_xfail_b, which is sampled at termination of a st[b,h,w]cx. store
transfer to allow an external agent or mechanism to indicate that the st[b,h,w]cx. instruction has failed to
update memory, even though a reservation existed for the store at the time it was issued. This is not
considered an error, and will cause the condition codes for the st[b,h,w]cx. instruction to be written as if
a reservation did not exist for the st[b,h,w]cx. instruction. In addition, any outstanding reservation will be
cleared.
The p_rsrv_clr input signal is not intended for normal use in managing reservations. It is provided for
specialized system applications. The normal bus protocol is used to manage reservations using external
reservation logic in systems with multiple coherent bus masters, using the transfer type and transfer
response signals. In single coherent master systems, no external logic is required, and the internal
reservation flag is sufficient to support multi-tasking applications.
3.7 Branch Prediction
The e200z4 instruction fetching mechanism uses a branch target buffer (BTB) that holds branch target
addresses combined with a 2-bit saturating up-down counter scheme for branch prediction. Branch paths

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-5
are predicted by either the branch target buffer (BTB hit) or a selectable static prediction algorithm (BTB
miss) and subsequently checked to see if the prediction was correct. This enables operation beyond a
conditional branch without waiting for the branch to be decoded and resolved.
The instruction fetch unit predicts the direction of the branch as follows:
• Predict taken for any backward branch whose fetch address hits in the BTB and is predicted taken
by the counter or misses in the BTB and static prediction control in BUCSR for backward branches
indicates “predict taken.” Otherwise predict not-taken.
• Predict taken for any forward branch whose fetch address hits in the BTB and is predicted taken
by the counter or misses in the BTB and static prediction control in BUCSR for forward branches
indicates “predict taken.” Otherwise predict not-taken.
3.8 Interruption of Instructions by Interrupt Requests
In general, the core samples pending non-maskable interrupts, external input, and critical input interrupt
requests at instruction boundaries. However, in order to reduce interrupt latency, long running instructions
may be interrupted prior to completion. Instructions in this class include divides (divw[uo][.], efsdiv,
evfsdiv, evdivw[su]), floating square root (efssqrt, evfssqrt), load multiple word (lmw, e_lmw), and store
multiple word (stmw, e_stmw). In addition, the e_lmvgprw, e_stmvgprw, e_lmvsprw, and e_stmvsprw
Volatile Context Save/Restore instructions may also be interrupted prior to completion. When interrupted
prior to completion, the value saved in SRR0/CSRR0/MCSRR0 will be the address of the interrupted
instruction. The instruction will be restarted from the beginning after returning to it from the interrupt
handler.
3.9 New e200z4 Categories
The e200z4 core implements the following Freescale EIS categories that extend the Power ISA:
• The ISEL category, which is described in Section 3.10, “ISEL Instruction.”
• The Enhanced Debug category and the Debug Notify Halt Instruction, which are described in
Section 3.11, “Enhanced Debug.”
• The Machine Check category ,which is described in Section 3.12, “Machine Check.”
• The WAIT category, which is described in Section 3.13, “WAIT Instruction.”
• The Volatile Context Save/Restore category, which is described in Section 3.15, “Volatile Context
Save/Restore.”
• The Embedded Floating-Point category version 2, described along with supporting instructions in
Chapter 6, “Embedded Floating-Point Unit, Version 2.”
• The Signal Processing Extension (SPE) category version 1.1, described along with supporting
instructions in Chapter 7, “Signal Processing Extension Unit.”
• The Cache Line-Locking category, which is described in Section 9.10, “Cache Line
Locking/Unlocking.”
• The Enhanced Reservations category, which is described in Section 3.14, “Enhanced
Reservations.”

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-6 Freescale Semiconductor
3.10 ISEL Instruction
The isel instruction provides a way to select one of two registers and place the result in a destination
register under the control of a predicate value supplied by a bit in the condition register. This instruction
can be used to eliminate branches in software and in many cases improve performance. This instruction
can also increase program execution time determinism by eliminating the need to predict the target and
direction of the branches replaced by the integer select function. The instruction form and definition is as
follows:
isel isel
Integer Select
isel RT, RA, RB, crb
if RA=0 then a ← 320 else a ← GPR(RA)
c = CRcrb
if c then GPR(RT) ← a
else GPR(RT) ← GPR(RB)
For isel, if the bit of the CR specified by (crb) is set, the contents of RA|0 are copied into RT. If the bit of
the CR specified by (crb) is clear, the contents of RB are copied into RT.
Other registers altered:
• None
3.11 Enhanced Debug
The e200z4 implements the Power ISA embedded debug architecture to support the capability to handle
the debug interrupt as an additional interrupt level. To support this interrupt level, a new ‘return from
debug interrupt’ (rfdi, se_rfdi) instruction is defined as part of the debug instruction set, along with a new
pair of save/restore registers, DSRR0, and DSRR1.
When the debug capability is enabled (HID0[DAPUEN] = 1), the rfdi or se_rfdi instruction provides a
means to return from a debug interrupt. See Section 2.4.11, “Hardware Implementation Dependent
Register 0 (HID0)” for more information about enabling the debug functionality.
The instruction form and definition is as follows.
31 RT RA RB crb 0 1 1 1 1 0
0 56 10111516202125263031
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-7
rfdi rfdi
Return From Debug Interrupt
rfdi
MSR ←DSRR1
PC ←DSRR00:30 || 10
The rfdi instruction is used to return from a debug interrupt, or as a means of simultaneously establishing
a new context and synchronizing on that new context.
The contents of debug save/restore register 1 are placed into the machine state register. If the new machine
state register value does not enable any pending exceptions, then the next instruction is fetched, under
control of the new machine state register value from the address DSRR0[0–30]|| 1’b0. If the new machine
state register value enables one or more pending exceptions, the interrupt associated with the highest
priority pending exception is generated; in this case the value placed into save/restore register 0 or critical
save/restore register 0 by the interrupt processing mechanism is the address of the instruction that would
have been executed next had the interrupt not occurred (that is, the address in debug save/restore register
0 at the time of the execution of the rfdi).
Execution of this instruction is privileged and context synchronizing.
Special registers altered:
•MSR
When the debug functionality is disabled (HID0[DAPUEN] = 0), this instruction is treated as an illegal
instruction.
se_rfdi se_rfdi
Return From Debug Interrupt
se_rfdi
MSR ←DSRR1
PC ←DSRR032:62 || 0b0
The rfdi or se_rfdi instruction is used either to return from a debug interrupt or as a means of
simultaneously establishing a new context and synchronizing on that new context.
19 / / / 0 0 0 0 1 0 0 1 1 1 0
0 5 6 2021 3031
00000000000001010
015
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-8 Freescale Semiconductor
The contents of debug save/restore register 1 are placed into the machine state register. If the new machine
state register value does not enable any pending exceptions, then the next instruction is fetched, under
control of the new machine state register value from the address DSRR0[32–62]|| 0b0. If the new machine
state register value enables one or more pending exceptions, the interrupt associated with the highest
priority pending exception is generated; in this case the value placed into save/restore register 0 or critical
save/restore register 0 by the interrupt processing mechanism is the address of the instruction that would
have been executed next had the interrupt not occurred (that is, the address in debug save/restore register
0 at the time of the execution of the rfdi or se_rfdi).
Execution of this instruction is privileged and context synchronizing.
Special registers altered:
•MSR
When the debug functionality is disabled (HID0[DAPUEN] = 0), this instruction is treated as an illegal
instruction.
3.11.1 Debug Notify Halt Instructions
The dnh, e_dnh, and se_dnh instructions provide a bridge between the execution of instructions on the
core in a non-halted mode and an external debug facility. dnh, e_dnh, and se_dnh allows software to
transition the core from a running state to a debug halted state if enabled by an external debugger. dnh
provides the external debugger with bits reserved in the instruction itself to pass additional information.
When the e200z4 CPU enters a debug halted state due to a dnh, e_dnh, or se_dnh instruction, the
instruction is stored in the CPUSCR[IR] portion and the CPUSCR[PC] value points to the instruction.
Prior to exiting the debug halted state, the external debugger should update the CPUSCR to point past the
dnh, e_dnh, or se_dnh instruction.
Note that the dnh instruction is only available in the Power ISA embedded category instruction pages, and
the e_dnh and se_dnh instructions are only available in VLE instruction pages.
dnh dnh
Debugger Notify Halt
dnh dui, duis
if EDBCR[DNH_EN] = 1 then
implementation dependent register ¨ dui
halt processor
else
illegal instruction exception
0 56 1011 1516 2021 3031
010011 dui duis 0011000110 /
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-9
Execution of the dnh instruction causes the processor to halt if the external debug facility has enabled such
action by previously setting the EDBCR[DNH_EN] bit. If the processor is halted, the contents of the dui
field are provided to the external debug facility to identify the reason for the halt.
If EDBCR[DNH_EN] has not been previously set by the external debug facility, executing the dnh
instruction produces an illegal instruction exception.
The duis field is provided to pass additional information about the halt, but requires that actions be
performed by the external debug facility to access the dnh instruction to read the contents of the field.
The dnh instruction is not privileged, and executes the same regardless of the state of MSR[PR].
Whether the processor is in IDM or EDM mode has no effect on the execution of the dnh instruction.
Other registers altered:
• None
NOTE
After the dnh instruction has executed, the instruction itself can be read
back by the Illegal Instruction Interrupt handler or the external debug
facility if the contents of the dui and duis field are of interest. If the
processor entered the Illegal Instruction Interrupt handler, software can use
SRR0 to obtain the address of the dnh instruction which caused the handler
to be invoked. If the processor is halted in debug mode, the external debug
facility can access the CPUSCR register to obtain the dnh instruction which
caused the processor to halt.
e_dnh e_dnh
Debugger Notify Halt
e_dnh dui, duis
if EDBCR[DNH_EN] = 1 then
implementation dependent register ¨ dui
halt processor
else
illegal instruction exception
Execution of the e_dnh instruction causes the processor to halt if the external debug facility has enabled
such action by previously setting the EDBCR[DNH_EN] bit. If the processor is halted, the contents of the
dui field are provided to the external debug facility to identify the reason for the halt.
If EDBCR[DNH_EN] has not been previously set by the external debug facility, executing the e_dnh
instruction produces an illegal instruction exception.
0 56 1011 1516 2021 3031
011111 dui duis 0001100001 /
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-10 Freescale Semiconductor
The duis field is provided to pass additional information about the halt, but requires that actions be
performed by the external debug facility to access the e_dnh instruction to read the contents of the field.
The e_dnh instruction is not privileged; it executes the same regardless of the state of MSR[PR].
Whether the processor is in IDM or EDM mode has no effect on the execution of the e_dnh instruction.
Other registers altered:
• None
se_dnh se_dnh
Debugger Notify Halt
se_dnh
if EDBCRDNH_EN = 1 then
halt processor
else
illegal instruction exception
Execution of the se_dnh instruction causes the processor to halt if the external debug facility has enabled
such action by previously setting the EDBCR[DNH_EN] bit.
If EDBCR[DNH_EN] has not been previously set by the external debug facility, executing the se_dnh
instruction produces an illegal instruction exception.
The se_dnh instruction is not privileged; it executes the same regardless of the state of MSR[PR].
Whether the processor is in IDM or EDM mode has no effect on the execution of the se_dnh instruction.
Other registers altered:
• None
3.12 Machine Check
The e200z4 implements the Power ISA embedded category machine check functionality to support the
capability to handle the machine check interrupt as an additional interrupt level. To support this interrupt
level, a new “return from machine check interrupt” (rfmci, se_rfmci) instruction is defined as part of the
machine check instruction set, along with a new pair of save/restore registers, MCSRR0, and MCSRR1, a
machine check syndrome register MCSR, and a machine check address register MCAR.
00000000000001111
015
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-11
The rfmci and se_rfmci instructions provide a means to return from a machine check interrupt. The
instruction form and definitions is as follows:
rfmci rfmci
Return From Machine Check Interrupt
rfmci
MSR ←MCSRR1
PC ←MCSRR00:30 || 10
The rfmci instruction is used either to return from a machine check interrupt or as a means of
simultaneously establishing a new context and synchronizing on that new context.
The contents of machine check save/restore register 1 are place into the machine state register. If the new
machine state register value does not enable any pending exceptions, then the next instruction is fetched,
under control of the new machine state register value from the address MCSRR0[0–30]|| 1’b0. If the new
machine state register value enables one or more pending exceptions, the interrupt associated with the
highest priority pending exception is generated; in this case the value placed into the appropriate
save/restore register 0 by the interrupt processing mechanism is the address of the instruction that would
have been executed next had the interrupt not occurred (i.e. the address in machine check save/restore
register 0 at the time of the execution of the rfmci).
Execution of this instruction is privileged and context synchronizing.
Special registers altered:
•MSR
NOTE
This instruction is only available in 32-bit Power ISA embedded category
instruction pages, it is not available in VLE instruction pages.
se_rfmci se_rfmci
Return From Machine Check Interrupt
se_rfmci
MSR ←MCSRR1
PC ←MCSRR00:30 || 10
19 / / / 0 0 0 0 1 0 0 1 1 0 0
0 5 6 2021 3031
0000000000001011
015
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-12 Freescale Semiconductor
The se_rfmci instruction is used to return from a machine check interrupt, or as a means of simultaneously
establishing a new context and synchronizing on that new context.
The contents of machine check save/restore register 1 are placed into the machine state register. If the new
machine state register value does not enable any pending exceptions, the next instruction is fetched under
control of the new machine state register value from the address MCSRR0[0–30]|| 1’b0. If the new
Machine State Register value enables one or more pending exceptions, the interrupt associated with the
highest priority pending exception is generated; in this case the value placed into the appropriate
Save/Restore Register 0 by the interrupt processing mechanism is the address of the instruction that would
have been executed next had the interrupt not occurred (that is, the address in Machine Check Save/Restore
Register 0 at the time of the execution of the se_rfmci).
Execution of this instruction is privileged and context synchronizing.
Special Registers Altered:
•MSR
NOTE
This instruction is only available in VLE instruction pages, it is not available
in 32-bit Power ISA embedded category instruction pages.
3.13 WAIT Instruction
The wait instruction allows software to cease all synchronous activity, waiting for an asynchronous
interrupt or debug interrupt to occur. The instruction can be used to cease processor activity in both user
and supervisor modes. Asynchronous interrupts which will cause the waiting state to be exited if enabled
are critical input, external input, machine check pin (p_mcp_b). Non-maskable interrupts (p_nmi_b) will
also cause the waiting state to be exited.
wait wait
Wait for Interrupt
wait
The wait instruction provides an ordering function for the effects of all instructions executed by the
processor executing the wait instruction and stops synchronous processor activity. Executing a wait
instruction ensures that all instructions have completed before the wait instruction completes, causes
processor instruction fetching to cease, and ensures that no subsequent instructions are initiated until an
asynchronous interrupt or a debug interrupt occurs.
Once the wait instruction has completed, the program counter will point to the next sequential instruction.
The saved value in xSRR0 when the processor re-initiates activity will point to the instruction following
the wait instruction.
0 56 101115162021 31
011111 /// 0 000111110/
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-13
Execution of a wait instruction places the CPU in the waiting state and is indicated by assertion of the
p_waiting output signal. The signal will be negated after leaving the waiting state.
Software must ensure that interrupts responsible for exiting the waiting state are enabled before executing
a wait instruction.
Architecture Note: The wait instruction can be used in verification test cases to signal the end of a test
case. The encoding for the instruction is the same in both big- and little-endian modes.
3.14 Enhanced Reservations
The e200 implements the Freescale EIS enhanced reservations functionality, which extends the load and
reserve and store conditional instructions to support byte and half word data types. These instructions
operate in the same manner as the lwarx and stwcx. instructions, except for the size of the access.
Load Byte And Reserve Indexed
lbarx RT,RA,RB (X-mode)
if RA=0 then a ← 640 else a ← GPR(RA)
if X-mode then EA ← 320 || (a + GPR(RB))32:63
RESERVE ← 1
RESERVE_ADDR ← real_addr(EA)
GPR(RT) ← 560 || MEM(EA,1)
Let the effective address (EA) be calculated as follows:
For lbarx, let EA be 32 0s concatenated with bits 32:63 of the sum of the contents of GPR[RA], or 64 0s
if RA = 0, and the contents of GPR[RB].
The byte in storage addressed by EA is loaded into GPR[RT]56:63. GPR[RT]0:55 are set to 0.
This instruction creates a reservation for use by a store byte conditional instruction. An address computed
from the EA is associated with the reservation and replaces any address previously associated with the
reservation.
Special registers altered:
None
011111 RT RA RB 0000110100/
0 6 11 16 21 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-14 Freescale Semiconductor
Load Half Word And Reserve Indexed
lharx RT,RA,RB (X-mode)
if RA=0 then a ← 640 else a ← GPR(RA)
EA ← 320 || (a + GPR(RB))32:63
RESERVE ← 1
RESERVE_ADDR ← real_addr(EA)
GPR(RT) ← 480 || MEM(EA,2)
Let the effective address (EA) be calculated as follows:
For lharx, let EA be 32 zeros concatenated with bits 32–63 of the sum of the contents of GPR[RA], or 64
zeros if RA = 0 and the contents of GPR[RB].
The half word in storage addressed by EA is loaded into GPR[RT]48:63. GPR[RT]0:47 are set to 0.
This instruction creates a reservation for use by a Store Half Word Conditional instruction. An address
computed from the EA is associated with the reservation and replaces any address previously associated
with the reservation.
EA must be a multiple of two. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers altered:
None
Store Byte Conditional Indexed
stbcx. RS,RA,RB (X-mode)
if RA=0 then a ← 640 else a ← GPR(RA)
EA ← 320 || (a + GPR(RB))32:63
if RESERVE then
if RESERVE_ADDR = real_addr(EA) then
MEM(EA,1) ← GPR(RS)56:63
CR0 ← 0b00 || 0b1 || XERSO
else
u ← undefined 1-bit value
if u then MEM(EA,1) ← GPR(RS)56:63
CR0 ← 0b00 || u || XERSO
RESERVE ← 0
else
CR0 ← 0b00 || 0b0 || XERSO
011111 RT RA RB 0001110100/
0 6 11 16 21 31
011111 RS RA RB 10101101101
0 6 11 16 21 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-15
Let the effective address (EA) be calculated as follows:
For stbcx., let EA be 32 zeros concatenated with bits 32–63 of the sum of the contents of GPR[RA], or 64
zeros if RA = 0 and the contents of GPR[RB].
If a reservation exists and the storage address specified by the stbcx. is the same as that specified by the
lbarx instruction that established the reservation, the contents of bits 56–63 of GPR[RS] are stored into
the byte in storage addressed by EA and the reservation is cleared.
If a reservation exists but the storage address specified by the stbcx. is not the same as that specified by
the load and reserve instruction that established the reservation, the reservation is cleared, and it is
undefined whether the instruction completes without altering storage.
If a reservation does not exist, the instruction completes without altering storage.
CR Field 0 is set to reflect whether the store operation was performed, as follows.
CR0[LT GT EQ SO] = 0b00 || store_performed || XER[SO]
Special registers altered:
CR0
Store Half Word Conditional Indexed
sthcx. RS,RA,RB (X-mode)
if RA=0 then a ← 640 else a ← GPR(RA)
EA ← 320 || (a + GPR(RB))32:63
if RESERVE then
if RESERVE_ADDR = real_addr(EA) then
MEM(EA,2) ← GPR(RS)48:63
CR0 ← 0b00 || 0b1 || XERSO
else
u ← undefined 1-bit value
if u then MEM(EA,2) ← GPR(RS)48:63
CR0 ← 0b00 || u || XERSO
RESERVE ← 0
else
CR0 ← 0b00 || 0b0 || XERSO
Let the effective address (EA) be calculated as follows:
For sthcx., let EA be 32 zeros concatenated with bits 32–63 of the sum of the contents of GPR[RA], or 64
zeros if RA = 0 and the contents of GPR[RB].
If a reservation exists and the storage address specified by the sthcx. is the same as that specified by the
lharx instruction that established the reservation, the contents of bits 48–63 of GPR[RS] are stored into
the half word in storage addressed by EA and the reservation is cleared.
011111 RS RA RB 10110101101
0 6 11 16 21 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-16 Freescale Semiconductor
If a reservation exists but the storage address specified by the sthcx. is not the same as that specified by
the load and reserve instruction that established the reservation, the reservation is cleared, and it is
undefined whether the instruction completes without altering storage.
If a reservation does not exist, the instruction completes without altering storage.
CR Field 0 is set to reflect whether the store operation was performed, as follows.
CR0[LT GT EQ SO] = 0b00 || store_performed || XER[SO]
EA must be a multiple of two. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers altered:
CR0
3.15 Volatile Context Save/Restore
The e200 implements the Power ISA embedded category volatile context save/restore instruction set to
support the capability to quickly save and restore volatile register context on entry into an interrupt handler.
To support this functionality, a new set of instructions has been defined as part of the volatile context
save/restore instruction set, as shown in Table 3-4.
These instructions are available in VLE instruction pages to perform a multiple register load or store to a
word aligned memory address.
Load Multiple Volatile GPR Word
e_lmvgprw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
Table 3-4. Volatile Context Save/Restore Instruction Set
Instruction Definition
e_lmvgprw, e_stmvgprw Load/Store Multiple Volatile GPRS (r0, r3:r12)
e_lmvsprw, e_stmvsprw Load/Store Multiple Volatile SPRS (CR, LR, CTR, and XER)
e_lmvsrrw, e_stmvsrrw Load/Store Multiple Volatile SRRS (SRR0, SRR1)
e_lmvcsrrw, e_stmvcsrrw Load/Store Multiple Volatile CSRRS (CSRR0, CSRR1)
e_lmvdsrrw, e_stmvdsrrw Load/Store Multiple Volatile DSRRS (DSRR0, DSRR1)
e_lmvmcsrrw, e_stmvmcsrrw Load/Store Multiple Volatile MCSRRS (MCSRR0, MCSRR1)
00011000000 RA 0 0010000 D8
0 6 11 16 24 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-17
GPR(r0)32:63 ← MEM(EA,4)
EA ← (EA+4)
r ← 3
do while r ≤ 12
GPR(r)32:63 ← MEM(EA,4)
EA ← (EA+4)
r ← r + 1
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers GPR[R0] and GPR[R3] through GPR[12] are loaded from n consecutive words in
storage starting at address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
Store Multiple Volatile GPR Word
e_stmvgprw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← GPR(r0)32:63
EA ← (EA+4)
r ← 3
do while r ≤ 12
MEM(EA,4) ← GPR(r)32:63
r ← r + 1
EA ← (EA+4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers GPR[R0] and GPR[R3] through GPR[12] are stored in n consecutive words in
storage starting at address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
00011000000 RA 0 0010001 D8
0 6 11 16 24 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-18 Freescale Semiconductor
Load Multiple Volatile SPR Word
e_lmvsprw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
CR32:63 ← MEM(EA,4)
EA ← (EA+4)
LR32:63 ← MEM(EA,4)
EA ← (EA+4)
CTR32:63 ← MEM(EA,4)
EA ← (EA+4)
XER32:63 ← MEM(EA,4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers CR, LR, CTR, and XER are loaded from n consecutive words in storage starting at
address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
CR, LR, CTR, XER
Store Multiple Volatile SPR Word
e_stmvsprw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← CR32:63
EA ← (EA+4)
MEM(EA,4) ← LR32:63
EA ← (EA+4)
MEM(EA,4) ← CTR32:63
00011000001 RA 0 0010000 D8
0 6 11 16 24 31
00011000001 RA 0 0010001 D8
0 6 11 16 24 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-19
EA ← (EA+4)
MEM(EA,4) ← XER32:63
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA=0 and the sign-extended
value of the D8 instruction field.
Bits 32–63 of registers CR, LR, CTR, and XER are stored in n consecutive words in storage starting at
address EA.
EA must be a multiple of 4. If it is not, either an Alignment interrupt is invoked or the results are boundedly
undefined.
Special registers affected:
None
Load Multiple Volatile SRR Word
e_lmvsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
SRR032:63 ← MEM(EA,4)
EA ← (EA+4)
SRR132:63 ← MEM(EA,4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers SRR0 and SRR1 are loaded from consecutive words in storage starting at address
EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
SRR0, SRR1
Store Multiple Volatile SRR Word
e_stmvsrrw D8(RA) (D8-mode)
00011000100 RA 0 0010000 D8
0 6 11 16 24 31
00011000100 RA 0 0010001 D8
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-20 Freescale Semiconductor
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← SRR032:63
EA ← (EA+4)
MEM(EA,4) ← SRR132:63
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers SRR0 and SRR1 are stored in consecutive words in storage starting at address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
Load Multiple Volatile CSRR Word
e_lmvcsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
CSRR032:63 ← MEM(EA,4)
EA ← (EA+4)
CSRR132:63 ← MEM(EA,4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers CSRR0 and CSRR1 are loaded from consecutive words in storage starting at
address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
CSRR0, CSRR1
0 6 11 16 24 31
00011000101 RA 0 0010000 D8
0 6 11 16 24 31

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-21
Store Multiple Volatile CSRR Word
e_stmvcsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← CSRR032:63
EA ← (EA+4)
MEM(EA,4) ← CSRR132:63
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers CSRR0 and CSRR1 are stored in consecutive words in storage starting at address
EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
Load Multiple Volatile DSRR Word
e_lmvdsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
DSRR032:63 ← MEM(EA,4)
EA ← (EA+4)
DSRR132:63 ← MEM(EA,4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers DSRR0 and DSRR1 are loaded from consecutive words in storage starting at
address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
DSRR0, DSRR1
00011000101 RA 0 0 0 1 0 0 0 1 D8
0 6 11 16 24 31
00011000110 RA 0 0010000 D8
0 6 11 16 24 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-22 Freescale Semiconductor
Store Multiple Volatile DSRR Word
e_stmvdsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← DSRR032:63
EA ← (EA+4)
MEM(EA,4) ← DSRR132:63
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers DSRR0 and DSRR1 are stored in consecutive words in storage starting at address
EA.
EA must be a multiple of four. If it is not, either an Alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
Load Multiple Volatile MCSRR Word
e_lmvmcsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MCSRR032:63 ← MEM(EA,4)
EA ← (EA+4)
MCSRR132:63 ← MEM(EA,4)
Let the effective address (EA) be the sum of the contents of GPR[RA], or 0 if RA = 0 and the
sign-extended value of the D8 instruction field.
Bits 32–63 of registers MCSRR0 and MCSRR1 are loaded from consecutive words in storage starting at
address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
00011000110 RA 0 0010001 D8
0 6 11 16 24 31
00011000111 RA 0 0010000 D8
0 6 11 16 24 31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-23
Special registers affected:
MCSRR0, MCSRR1
Store Multiple Volatile MCSRR Word
e_stmvmcsrrw D8(RA) (D8-mode)
if RA=0 then EA ← EXTS(D8)
else EA ← (GPR(RA)+EXTS(D8))
MEM(EA,4) ← MCSRR032:63
EA ← (EA+4)
MEM(EA,4) ← MCSRR132:63
Let the effective address (EA) be the sum of the contents of GPR(RA), or 0 if RA=0, and the sign-extended
value of the D8 instruction field.
Bits 32–63 of registers MCSRR0 and MCSRR1 are stored in consecutive words in storage starting at
address EA.
EA must be a multiple of four. If it is not, either an alignment interrupt is invoked or the results are
boundedly undefined.
Special registers affected:
None
3.16 Unimplemented SPRs and Read-Only SPRs
The e200 fully decodes the SPR field of the mfspr and mtspr instructions. If the SPR specified is undefined
and not privileged, an illegal instruction exception is generated. If the SPR specified is undefined and
privileged and the CPU is in user mode (MSRPR = 1), a privileged instruction exception is generated. If
the SPR specified is undefined and privileged and the CPU is in supervisor mode (MSRPR = 0), an illegal
instruction exception is generated.
For the mtspr instruction, if the SPR specified is read-only and not privileged, an illegal instruction
exception is generated. If the SPR specified is read-only and privileged and the CPU is in user mode
(MSR[PR] = 1), a privileged instruction exception is generated. If the SPR specified is read-only and
privileged and the CPU is in supervisor mode (MSR[PR] = 0), an illegal instruction exception is generated.
00011000111 RA 0 0010001 D8
0 6 11 16 24 31

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-24 Freescale Semiconductor
3.17 Invalid Forms of Instructions
This section discusses the following invalid forms of instructions:
•Section 3.17.1, “Load and Store with Update Instructions”
•Section 3.17.2, “Load Multiple Word (lmw, e_lmw) Instruction”
•Section 3.17.3, “Branch Conditional To Count Register Instructions”
•Section 3.17.4, “Instructions With Reserved Fields Non-Zero”
3.17.1 Load and Store with Update Instructions
Power ISA defines the case when a load with update instruction specifies the same register in the RT and
RA field of the instruction as an invalid format. For this invalid case, the e200 core will perform the
instruction and update the register with the load data. In addition, if RA = 0 for any load or store with
update instruction, the e200 core will update RA (GPR0).
3.17.2 Load Multiple Word (lmw, e_lmw) Instruction
The Power ISA embedded category defines as invalid any form of the lmw or e_lmw instruction in which
RA is in the range of registers to be loaded, including the case in which RA = 0. On the e200, invalid forms
of the lmw or e_lmw instruction are executed as follows:
• Case 1—RA is in the range of RT, RA!=0.
In this case, address generation for individual loads to register targets is done using the
architectural value of RA that existed when beginning execution of this lmw or e_lmw instruction.
RA is overwritten with a value fetched from memory as if it had not been the base register. Note
that if the instruction is interrupted and restarted, the base address may be different if RA has been
overwritten.
• Case 2—RA = 0 and RT = 0.
In this case, address generation for all loads to register targets RT = 0 to RT = 31 is done
substituting the value of 0 for the RA operand.
3.17.3 Branch Conditional To Count Register Instructions
The Power ISA embedded category defines as invalid any bcctr or bcctrl instruction that specifies the
decrement and test CTR (BO[2] = 0) option. For these invalid forms of instructions, the core executes the
instruction by decrementing the CTR and branch to the location specified by the pre-decremented CTR
value if all CR and CTR conditions are met as specified by the other BO field settings.
3.17.4 Instructions With Reserved Fields Non-Zero
The Power ISA embedded category defines certain bit fields in various instructions as reserved and
specifies that these fields be set to zero. Per the Power ISA embedded category recommendation, the e200
ignores the value of the reserved field (bit 31) in X-form integer load and store instructions. The e200
ignores the value of the reserved z bits in the BO field of branch instructions. For all other instructions, the
e200 generates an illegal instruction exception if a reserved field is non-zero.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-25
3.18 Instruction Summary
Table 3-5 and Table 3-6 list all 32-bit instructions in the Power ISA embedded category, as well as certain
e200-specific instructions, sorted by mnemonic. Format, opcode, mnemonic, instruction name, and page
number in the EREF are included in the table. For e200-specific instructions, page number is not shown.
Instructions not listed here, but which are part of the Power ISA embedded category will either signal an
illegal unimplemented or FP unavailable exception. Implementation-dependent instructions are noted with
a footnote. Instructions which are optionally supported (when an optional function is added to the base
core) are shown with shaded entries.
Note that specific areas of functionality are not included in the table below:
• Cache maintenance instructions
•SPE
•VLE
•WAIT
• Enhanced reservation functionality
• Volatile context save/restore functionality
3.18.1 Instruction Index Sorted by Mnemonic
Table 3-5 shows the instructions sorted by mnemonic.
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
X 011111 01000 01010 0 add Add 223
X 011111 01000 01010 1 add. Add & record CR 223
X 011111 00000 01010 0 addc Add Carrying 224
X 011111 00000 01010 1 addc. Add Carrying & record CR 224
X 011111 10000 01010 0 addco Add Carrying & record OV 224
X 011111 10000 01010 1 addco. Add Carrying & record OV & CR 224
X 011111 00100 01010 0 adde Add Extended with CA 225
X 011111 00100 01010 1 adde. Add Extended with CA & record CR 225
X 011111 10100 01010 0 addeo Add Extended with CA & record OV 225
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-26 Freescale Semiconductor
X 011111 10100 01010 1 addeo. Add Extended with CA & record OV & CR 225
D 001110 ----- ----- - addi Add Immediate 226
D 001100 ----- ----- - addic Add Immediate Carrying 227
D 001101 ----- ----- - addic. Add Immediate Carrying & record CR 227
D 001111 ----- ----- - addis Add Immediate Shifted 226
X 011111 00111 01010 0 addme Add to Minus One Extended with CA 228
X 011111 00111 01010 1 addme. Add to Minus One Extended with CA & record CR 228
X 011111 10111 01010 0 addmeo Add to Minus One Extended with CA & record OV 228
X 011111 10111 01010 1 addmeo. Add to Minus One Extended with CA & record OV & CR 228
X 011111 11000 01010 0 addo Add & record OV 223
X 011111 11000 01010 1 addo. Add & record OV & CR 223
X 011111 00110 01010 0 addze Add to Zero Extended with CA 229
X 011111 00110 01010 1 addze. Add to Zero Extended with CA & record CR 229
X 011111 10110 01010 0 addzeo Add to Zero Extended with CA & record OV 229
X 011111 10110 01010 1 addzeo. Add to Zero Extended with CA & record OV & CR 229
X 011111 00000 11100 0 and AND 230
X 011111 00000 11100 1 and. AND & record CR 230
X 011111 00001 11100 0 andc AND with Complement 230
X 011111 00001 11100 1 andc. AND with Complement & record CR 230
D 011100 ----- ----- - andi. AND Immediate & record CR 230
D 011101 ----- ----- - andis. AND Immediate Shifted & record CR 230
I 010010 ----- ----0 0 b Branch 231
I 010010 ----- ----1 0 ba Branch Absolute 231
B 010000 ----- ----0 0 bc Branch Conditional 232
B 010000 ----- ----1 0 bca Branch Conditional Absolute 232
XL 010011 10000 10000 0 bcctr Branch Conditional to Count Register 233
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-27
XL 010011 10000 10000 1 bcctrl Branch Conditional to Count Register & Link 233
B 010000 ----- ----0 1 bcl Branch Conditional & Link 232
B 010000 ----- ----1 1 bcla Branch Conditional & Link Absolute 232
XL 010011 00000 10000 0 bclr Branch Conditional to Link Register 234
XL 010011 00000 10000 1 bclrl Branch Conditional to Link Register & Link 234
I 010010 ----- ----0 1 bl Branch & Link 231
I 010010 ----- ----1 1 bla Branch & Link Absolute 231
X 011111 00000 00000 / cmp Compare 235
D 001011 ----- ----- - cmpi Compare Immediate 235
X 011111 00001 00000 / cmpl Compare Logical 236
D 001010 ----- ----- - cmpli Compare Logical Immediate 236
X 011111 00000 11010 0 cntlzw Count Leading Zeros Word 237
X 011111 00000 11010 1 cntlzw. Count Leading Zeros Word & record CR 237
XL 010011 01000 00001 / crand Condition Register AND 238
XL 010011 00100 00001 / crandc Condition Register AND with Complement 238
XL 010011 01001 00001 / creqv Condition Register Equivalent 238
XL 010011 00111 00001 / crnand Condition Register NAND 239
XL 010011 00001 00001 / crnor Condition Register NOR 239
XL 010011 01110 00001 / cror Condition Register OR 239
XL 010011 01101 00001 / crorc Condition Register OR with Complement 240
XL 010011 00110 00001 / crxor Condition Register XOR 240
X 011111 10111 10110 / dcba Data Cache Block Allocate 241
X 011111 00010 10110 / dcbf Data Cache Block Flush 242
X 011111 01110 10110 / dcbi Data Cache Block Invalidate 243
X 011111 01100 00110 / dcblc1Data Cache Block Lock Clear ----
X 011111 00001 10110 / dcbst Data Cache Block Store 245
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-28 Freescale Semiconductor
X 011111 01000 10110 / dcbt Data Cache Block Touch 246
X 011111 00101 00110 / dcbtls1Data Cache Block Touch and Lock Set ----
X 011111 00111 10110 / dcbtst Data Cache Block Touch for Store 247
X 011111 00100 00110 / dcbtstls1Data Cache Block Touch for Store and Lock Set ----
X 011111 11111 10110 / dcbz Data Cache Block set to Zero 248
X 011111 01111 01011 0 divw Divide Word 251
X 011111 01111 01011 1 divw. Divide Word & record CR 251
X 011111 11111 01011 0 divwo Divide Word & record OV 251
X 011111 11111 01011 1 divwo. Divide Word & record OV & CR 251
X 011111 01110 01011 0 divwu Divide Word Unsigned 252
X 011111 01110 01011 1 divwu. Divide Word Unsigned & record CR 252
X 011111 11110 01011 0 divwuo Divide Word Unsigned & record OV 252
X 011111 11110 01011 1 divwuo. Divide Word Unsigned & record OV & CR 252
X 011111 01000 11100 0 eqv Equivalent 253
X 011111 01000 11100 1 eqv. Equivalent & record CR 253
X 011111 11101 11010 0 extsb Extend Sign Byte 254
X 011111 11101 11010 1 extsb. Extend Sign Byte & record CR 254
X 011111 11100 11010 0 extsh Extend Sign Half Word 254
X 011111 11100 11010 1 extsh. Extend Sign Half Word and record CR 254
X 011111 11110 10110 / icbi Instruction Cache Block Invalidate 280
X 011111 00111 00110 / icblc1Instruction Cache Block Lock Clear ----
X 011111 00000 10110 / icbt Instruction Cache Block Touch 281
X 011111 01111 00110 / icbtls1Instruction Cache Block Touch and Lock Set ----
?? 011111 ----- 01111 / isel2Integer Select ----
XL 010011 00100 10110 / isync Instruction Synchronize 282
D 100010 ----- ----- - lbz Load Byte & Zero 283
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-29
D 100011 ----- ----- - lbzu Load Byte & Zero with Update 283
X 011111 00011 10111 / lbzux Load Byte & Zero with Update Indexed 283
X 011111 00010 10111 / lbzx Load Byte & Zero Indexed 283
D 101010 ----- ----- - lha Load Half Word Algebraic 288
D 101011 ----- ----- - lhau Load Half Word Algebraic with Update 288
X 011111 01011 10111 / lhaux Load Half Word Algebraic with Update Indexed 288
X 011111 01010 10111 / lhax Load Half Word Algebraic Indexed 288
X 011111 11000 10110 / lhbrx Load Half Word Byte-Reverse Indexed 289
D 101000 ----- ----- - lhz Load Half Word and Zero 290
D 101001 ----- ----- - lhzu Load Half Word & Zero with Update 290
X 011111 01001 10111 / lhzux Load Half Word & Zero with Update Indexed 290
X 011111 01000 10111 / lhzx Load Half Word & Zero Indexed 290
D 101110 ----- ----- - lmw Load Multiple Word 291
X 011111 00000 10100 / lwarx3Load Word & Reserve Indexed 294
X 011111 10000 10110 / lwbrx Load Word Byte-Reverse Indexed 296
D 100000 ----- ----- - lwz Load Word & Zero 297
D 100001 ----- ----- - lwzu Load Word & Zero with Update 297
X 011111 00001 10111 / lwzux Load Word & Zero with Update Indexed 297
X 011111 00000 10111 / lwzx Load Word & Zero Indexed 297
X 011111 11010 10110 / mbar3Memory Barrier 298
XL 010011 00000 00000 / mcrf Move Condition Register Field 299
X 011111 10000 00000 / mcrxr Move to Condition Register from XER 300
X 011111 00000 10011 / mfcr Move From Condition Register 301
XFX 011111 01010 00011 / mfdcr Move From Device Control Register 302
X 011111 00010 10011 / mfmsr Move From Machine State Register 303
XFX 011111 01010 10011 / mfspr Move From Special Purpose Register 304
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-30 Freescale Semiconductor
X 011111 10010 10110 / msync3Memory Synchronize 305
XFX 011111 00100 10000 / mtcrf Move To Condition Register Fields 306
XFX 011111 01110 00011 / mtdcr Move To Device Control Register 307
X 011111 00100 10010 / mtmsr Move To Machine State Register 311
XFX 011111 01110 10011 / mtspr Move To Special Purpose Register 312
X 011111 /0010 01011 0 mulhw Multiply High Word 314
X 011111 /0010 01011 1 mulhw. Multiply High Word & record CR 314
X 011111 /0000 01011 0 mulhwu Multiply High Word Unsigned 314
X 011111 /0000 01011 1 mulhwu. Multiply High Word Unsigned & record CR 314
D 000111 ----- ----- - mulli Multiply Low Immediate 315
X 011111 00111 01011 0 mullw Multiply Low Word 316
X 011111 00111 01011 1 mullw. Multiply Low Word & record CR 316
X 011111 10111 01011 0 mullwo Multiply Low Word & record OV 316
X 011111 10111 01011 1 mullwo. Multiply Low Word & record OV & CR 316
X 011111 01110 11100 0 nand NAND 317
X 011111 01110 11100 1 nand. NAND & record CR 317
X 011111 00011 01000 0 neg Negate 318
X 011111 00011 01000 1 neg. Negate & record CR 318
X 011111 10011 01000 0 nego Negate & record OV 318
X 011111 10011 01000 1 nego. Negate & record OV & record CR 318
X 011111 00011 11100 0 nor NOR 319
X 011111 00011 11100 1 nor. NOR & record CR 319
X 011111 01101 11100 0 or OR 320
X 011111 01101 11100 1 or. OR & record CR 320
X 011111 01100 11100 0 orc OR with Complement 320
X 011111 01100 11100 1 orc. OR with Complement & record CR 320
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-31
D 011000 ----- ----- - ori OR Immediate 320
D 011001 ----- ----- - oris OR Immediate Shifted 320
XL 010011 00001 10011 / rfci Return From Critical Interrupt 321
XL 010011 00001 00111 / rfdi4Return From Debug Interrupt ----
XL 010011 00001 10010 / rfi Return From Interrupt 322
XL 010011 00001 00110 / rfmci5Return From Machine Check Interrupt ----
M 010100 ----- ----- 0 rlwimi Rotate Left Word Immediate then Mask Insert 327
M 010100 ----- ----- 1 rlwimi. Rotate Left Word Immediate then Mask Insert & record CR 327
M 010101 ----- ----- 0 rlwinm Rotate Left Word Immediate then AND with Mask 328
M 010101 ----- ----- 1 rlwinm. Rotate Left Word Immediate then AND with Mask & record CR 328
M 010111 ----- ----- 0 rlwnm Rotate Left Word then AND with Mask 328
M 010111 ----- ----- 1 rlwnm. Rotate Left Word then AND with Mask & record CR 328
SC 010001 ///// ////1 / sc System Call 330
X 011111 00000 11000 0 slw Shift Left Word 332
X 011111 00000 11000 1 slw. Shift Left Word & record CR 332
X 011111 11000 11000 0 sraw Shift Right Algebraic Word 334
X 011111 11000 11000 1 sraw. Shift Right Algebraic Word & record CR 334
X 011111 11001 11000 0 srawi Shift Right Algebraic Word Immediate 334
X 011111 11001 11000 1 srawi. Shift Right Algebraic Word Immediate & record CR 334
X 011111 10000 11000 0 srw Shift Right Word 336
X 011111 10000 11000 1 srw. Shift Right Word & record CR 336
D 100110 ----- ----- - stb Store Byte 337
D 100111 ----- ----- - stbu Store Byte with Update 337
X 011111 00111 10111 / stbux Store Byte with Update Indexed 337
X 011111 00110 10111 / stbx Store Byte Indexed 337
D 101100 ----- ----- - sth Store Half Word 343
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-32 Freescale Semiconductor
X 011111 11100 10110 / sthbrx Store Half Word Byte-Reverse Indexed 344
D 101101 ----- ----- - sthu Store Half Word with Update 343
X 011111 01101 10111 / sthux Store Half Word with Update Indexed 343
X 011111 01100 10111 / sthx Store Half Word Indexed 343
D 101111 ----- ----- - stmw Store Multiple Word 345
D 100100 ----- ----- - stw Store Word 347
X 011111 10100 10110 / stwbrx Store Word Byte-Reverse Indexed 348
X 011111 00100 10110 1 stwcx.3Store Word Conditional Indexed & record CR 349
D 100101 ----- ----- - stwu Store Word with Update 347
X 011111 00101 10111 / stwux Store Word with Update Indexed 347
X 011111 00100 10111 / stwx Store Word Indexed 347
X 011111 00001 01000 0 subf Subtract From 351
X 011111 00001 01000 1 subf. Subtract From & record CR 351
X 011111 00000 01000 0 subfc Subtract From Carrying 352
X 011111 00000 01000 1 subfc. Subtract From Carrying & record CR 352
X 011111 10000 01000 0 subfco Subtract From Carrying & record OV 352
X 011111 10000 01000 1 subfco. Subtract From Carrying & record OV & CR 352
X 011111 00100 01000 0 subfe Subtract From Extended with CA 353
X 011111 00100 01000 1 subfe. Subtract From Extended with CA & record CR 353
X 011111 10100 01000 0 subfeo Subtract From Extended with CA & record OV 353
X 011111 10100 01000 1 subfeo. Subtract From Extended with CA & record OV & CR 353
D 001000 ----- ----- - subfic Subtract From Immediate Carrying 354
X 011111 00111 01000 0 subfme Subtract From Minus One Extended with CA 355
X 011111 00111 01000 1 subfme. Subtract From Minus One Extended with CA & record CR 355
X 011111 10111 01000 0 subfmeo Subtract From Minus One Extended with CA & record OV 355
X 011111 10111 01000 1 subfmeo. Subtract From Minus One Extended with CA & record OV & CR 355
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-33
X 011111 10001 01000 0 subfo Subtract From & record OV 351
X 011111 10001 01000 1 subfo. Subtract From & record OV & CR 351
X 011111 00110 01000 0 subfze Subtract From Zero Extended with CA 356
X 011111 00110 01000 1 subfze. Subtract From Zero Extended with CA & record CR 356
X 011111 10110 01000 0 subfzeo Subtract From Zero Extended with CA & record OV 356
X 011111 10110 01000 1 subfzeo. Subtract From Zero Extended with CA & record OV & CR 356
X 011111 11000 10010 / tlbivax TLB Invalidate Virtual Address Indexed 358
X 011111 11101 10010 / tlbre TLB Read Entry 359
X 011111 11100 10010 ? tlbsx TLB Search Indexed 360
X 011111 10001 10110 / tlbsync TLB Synchronize 361
X 011111 11110 10010 / tlbwe TLB Write Entry 362
X 011111 00000 00100 / tw Trap Word 363
D 000011 ----- ----- - twi Trap Word Immediate 363
X 011111 00100 00011 / wrtee Write External Enable 364
X 011111 00101 00011 / wrteei Write External Enable Immediate 364
X 011111 01001 11100 0 xor XOR 365
X 011111 01001 11100 1 xor. XOR & record CR 365
D 011010 ----- ----- - xori XOR Immediate 365
D 011011 ----- ----- - xoris XOR Immediate Shifted 365
1Motorola Book E cache locking APU, refer to Section 9.10, “Cache Line Locking/Unlocking” on page 9-19
2Motorola Book E isel APU, refer to Section 3.10, “ISEL Instruction” on page 3-6
3See Section 3.6, “Memory Synchronization and Reservation Instructions” on page 3-3
4See Section 3.11, “Enhanced Debug” on page 3-6
5See Section 3.12, “Machine Check” on page 3-10
Table 3-5. Instructions Sorted by Mnemonic
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-34 Freescale Semiconductor
3.18.2 Instruction Index Sorted by Opcode
Table 3-6 lists instructions sorted by opcode.
Table 3-6. Instructions Sorted by Opcode
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
D 000011 ----- ----- - twi Trap Word Immediate 363
D 000111 ----- ----- - mulli Multiply Low Immediate 315
D 001000 ----- ----- - subfic Subtract From Immediate Carrying 354
D 001010 ----- ----- - cmpli Compare Logical Immediate 236
D 001011 ----- ----- - cmpi Compare Immediate 235
D 001100 ----- ----- - addic Add Immediate Carrying 227
D 001101 ----- ----- - addic. Add Immediate Carrying & record CR 227
D 001110 ----- ----- - addi Add Immediate 226
D 001111 ----- ----- - addis Add Immediate Shifted 226
B 010000 ----- ----0 0 bc Branch Conditional 232
B 010000 ----- ----0 1 bcl Branch Conditional & Link 232
B 010000 ----- ----1 0 bca Branch Conditional Absolute 232
B 010000 ----- ----1 1 bcla Branch Conditional & Link Absolute 232
SC 010001 ///// ////1 / sc System Call 330
I 010010 ----- ----0 0 b Branch 231
I 010010 ----- ----0 1 bl Branch & Link 231
I 010010 ----- ----1 0 ba Branch Absolute 231
I 010010 ----- ----1 1 bla Branch & Link Absolute 231
XL 010011 00000 00000 / mcrf Move Condition Register Field 299
XL 010011 00000 10000 0 bclr Branch Conditional to Link Register 234
XL 010011 00000 10000 1 bclrl Branch Conditional to Link Register & Link 234
XL 010011 00001 00001 / crnor Condition Register NOR 239
XL 010011 00001 00110 / rfmci Return From Machine Check Interrupt ----
XL 010011 00001 00111 / rfdi Return From Debug Interrupt ----
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-35
XL 010011 00001 10010 / rfi Return From Interrupt 322
XL 010011 00001 10011 / rfci Return From Critical Interrupt 321
XL 010011 00100 00001 / crandc Condition Register AND with Complement 238
XL 010011 00100 10110 / isync Instruction Synchronize 282
XL 010011 00110 00001 / crxor Condition Register XOR 240
XL 010011 00111 00001 / crnand Condition Register NAND 239
XL 010011 01000 00001 / crand Condition Register AND 238
XL 010011 01001 00001 / creqv Condition Register Equivalent 238
XL 010011 01101 00001 / crorc Condition Register OR with Complement 240
XL 010011 01110 00001 / cror Condition Register OR 239
XL 010011 10000 10000 0 bcctr Branch Conditional to Count Register 233
XL 010011 10000 10000 1 bcctrl Branch Conditional to Count Register & Link 233
M 010100 ----- ----- 0 rlwimi Rotate Left Word Immediate then Mask Insert 327
M 010100 ----- ----- 1 rlwimi. Rotate Left Word Immediate then Mask Insert & record CR 327
M 010101 ----- ----- 0 rlwinm Rotate Left Word Immediate then AND with Mask 328
M 010101 ----- ----- 1 rlwinm. Rotate Left Word Immediate then AND with Mask & record CR 328
M 010111 ----- ----- 0 rlwnm Rotate Left Word then AND with Mask 328
M 010111 ----- ----- 1 rlwnm. Rotate Left Word then AND with Mask & record CR 328
D 011000 ----- ----- - ori OR Immediate 320
D 011001 ----- ----- - oris OR Immediate Shifted 320
D 011010 ----- ----- - xori XOR Immediate 365
D 011011 ----- ----- - xoris XOR Immediate Shifted 365
D 011100 ----- ----- - andi. AND Immediate & record CR 230
D 011101 ----- ----- - andis. AND Immediate Shifted & record CR 230
?? 011111 ----- 01111 / isel Integer Select ----
X 011111 00000 00000 / cmp Compare 235
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-36 Freescale Semiconductor
X 011111 00000 00100 / tw Trap Word 363
X 011111 00000 01000 0 subfc Subtract From Carrying 352
X 011111 00000 01000 1 subfc. Subtract From Carrying & record CR 352
X 011111 00000 01010 0 addc Add Carrying 224
X 011111 00000 01010 1 addc. Add Carrying & record CR 224
X 011111 /0000 01011 0 mulhwu Multiply High Word Unsigned 314
X 011111 /0000 01011 1 mulhwu. Multiply High Word Unsigned & record CR 314
X 011111 00000 10011 / mfcr Move From Condition Register 301
X 011111 00000 10100 / lwarx Load Word & Reserve Indexed 294
X 011111 00000 10110 / icbt Instruction Cache Block Touch 281
X 011111 00000 10111 / lwzx Load Word & Zero Indexed 297
X 011111 00000 11000 0 slw Shift Left Word 332
X 011111 00000 11000 1 slw. Shift Left Word & record CR 332
X 011111 00000 11010 0 cntlzw Count Leading Zeros Word 237
X 011111 00000 11010 1 cntlzw. Count Leading Zeros Word & record CR 237
X 011111 00000 11100 0 and AND 230
X 011111 00000 11100 1 and. AND & record CR 230
X 011111 00001 00000 / cmpl Compare Logical 236
X 011111 00001 01000 0 subf Subtract From 351
X 011111 00001 01000 1 subf. Subtract From & record CR 351
X 011111 00001 10110 / dcbst Data Cache Block Store 245
X 011111 00001 10111 / lwzux Load Word & Zero with Update Indexed 297
X 011111 00001 11100 0 andc AND with Complement 230
X 011111 00001 11100 1 andc. AND with Complement & record CR 230
X 011111 /0010 01011 0 mulhw Multiply High Word 314
X 011111 /0010 01011 1 mulhw. Multiply High Word & record CR 314
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-37
X 011111 00010 10011 / mfmsr Move From Machine State Register 303
X 011111 00010 10110 / dcbf Data Cache Block Flush 242
X 011111 00010 10111 / lbzx Load Byte & Zero Indexed 283
X 011111 00011 01000 0 neg Negate 318
X 011111 00011 01000 1 neg. Negate & record CR 318
X 011111 00011 10111 / lbzux Load Byte & Zero with Update Indexed 283
X 011111 00011 11100 0 nor NOR 319
X 011111 00011 11100 1 nor. NOR & record CR 319
X 011111 00100 00011 / wrtee Write External Enable 364
X 011111 00100 00110 / dcbtstls1Data Cache Block Touch for Store and Lock Set ----
X 011111 00100 01000 0 subfe Subtract From Extended with CA 353
X 011111 00100 01000 1 subfe. Subtract From Extended with CA & record CR 353
X 011111 00100 01010 0 adde Add Extended with CA 225
X 011111 00100 01010 1 adde. Add Extended with CA & record CR 225
XFX 011111 00100 10000 / mtcrf Move To Condition Register Fields 306
X 011111 00100 10010 / mtmsr Move To Machine State Register 311
X 011111 00100 10110 1 stwcx. Store Word Conditional Indexed & record CR 349
X 011111 00100 10111 / stwx Store Word Indexed 347
X 011111 00101 00011 / wrteei Write External Enable Immediate 364
X 011111 00101 00110 / dcbtls1Data Cache Block Touch and Lock Set ----
X 011111 00101 10111 / stwux Store Word with Update Indexed 347
X 011111 00110 01000 0 subfze Subtract From Zero Extended with CA 356
X 011111 00110 01000 1 subfze. Subtract From Zero Extended with CA & record CR 356
X 011111 00110 01010 0 addze Add to Zero Extended with CA 229
X 011111 00110 01010 1 addze. Add to Zero Extended with CA & record CR 229
X 011111 00110 10111 / stbx Store Byte Indexed 337
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-38 Freescale Semiconductor
X 011111 00111 00110 / icblc1Instruction Cache Block Lock Clear ----
X 011111 00111 01000 0 subfme Subtract From Minus One Extended with CA 355
X 011111 00111 01000 1 subfme. Subtract From Minus One Extended with CA & record CR 355
X 011111 00111 01010 0 addme Add to Minus One Extended with CA 228
X 011111 00111 01010 1 addme. Add to Minus One Extended with CA & record CR 228
X 011111 00111 01011 0 mullw Multiply Low Word 316
X 011111 00111 01011 1 mullw. Multiply Low Word & record CR 316
X 011111 00111 10110 / dcbtst Data Cache Block Touch for Store 247
X 011111 00111 10111 / stbux Store Byte with Update Indexed 337
X 011111 01000 01010 0 add Add 223
X 011111 01000 01010 1 add. Add & record CR 223
X 011111 01000 10110 / dcbt Data Cache Block Touch 246
X 011111 01000 10111 / lhzx Load Half Word & Zero Indexed 290
X 011111 01000 11100 0 eqv Equivalent 253
X 011111 01000 11100 1 eqv. Equivalent & record CR 253
X 011111 01001 10111 / lhzux Load Half Word & Zero with Update Indexed 290
X 011111 01001 11100 0 xor XOR 365
X 011111 01001 11100 1 xor. XOR & record CR 365
XFX 011111 01010 00011 / mfdcr Move From Device Control Register 302
XFX 011111 01010 10011 / mfspr Move From Special Purpose Register 304
X 011111 01010 10111 / lhax Load Half Word Algebraic Indexed 288
X 011111 01011 10111 / lhaux Load Half Word Algebraic with Update Indexed 288
X 011111 01100 00110 / dcblc1Data Cache Block Lock Clear ----
X 011111 01100 10111 / sthx Store Half Word Indexed 343
X 011111 01100 11100 0 orc OR with Complement 320
X 011111 01100 11100 1 orc. OR with Complement & record CR 320
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-39
X 011111 01101 10111 / sthux Store Half Word with Update Indexed 343
X 011111 01101 11100 0 or OR 320
X 011111 01101 11100 1 or. OR & record CR 320
XFX 011111 01110 00011 / mtdcr Move To Device Control Register 307
X 011111 01110 01011 0 divwu Divide Word Unsigned 252
X 011111 01110 01011 1 divwu. Divide Word Unsigned & record CR 252
XFX 011111 01110 10011 / mtspr Move To Special Purpose Register 312
X 011111 01110 10110 / dcbi Data Cache Block Invalidate 243
X 011111 01110 11100 0 nand NAND 317
X 011111 01110 11100 1 nand. NAND & record CR 317
X 011111 01111 00110 / icbtls1Instruction Cache Block Touch and Lock Set ----
X 011111 01111 01011 0 divw Divide Word 251
X 011111 01111 01011 1 divw. Divide Word & record CR 251
X 011111 10000 00000 / mcrxr Move to Condition Register from XER 300
X 011111 10000 01000 0 subfco Subtract From Carrying & record OV 352
X 011111 10000 01000 1 subfco. Subtract From Carrying & record OV & CR 352
X 011111 10000 01010 0 addco Add Carrying & record OV 224
X 011111 10000 01010 1 addco. Add Carrying & record OV & CR 224
X 011111 10000 10110 / lwbrx Load Word Byte-Reverse Indexed 296
X 011111 10000 11000 0 srw Shift Right Word 336
X 011111 10000 11000 1 srw. Shift Right Word & record CR 336
X 011111 10001 01000 0 subfo Subtract From & record OV 351
X 011111 10001 01000 1 subfo. Subtract From & record OV & CR 351
X 011111 10001 10110 / tlbsync TLB Synchronize 361
X 011111 10010 10110 / msync Memory Synchronize 305
X 011111 10011 01000 0 nego Negate & record OV 318
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-40 Freescale Semiconductor
X 011111 10011 01000 1 nego. Negate & record OV & record CR 318
X 011111 10100 01000 0 subfeo Subtract From Extended with CA & record OV 353
X 011111 10100 01000 1 subfeo. Subtract From Extended with CA & record OV & CR 353
X 011111 10100 01010 0 addeo Add Extended with CA & record OV 225
X 011111 10100 01010 1 addeo. Add Extended with CA & record OV & CR 225
X 011111 10100 10110 / stwbrx Store Word Byte-Reverse Indexed 348
X 011111 10110 01000 0 subfzeo Subtract From Zero Extended with CA & record OV 356
X 011111 10110 01000 1 subfzeo. Subtract From Zero Extended with CA & record OV & CR 356
X 011111 10110 01010 0 addzeo Add to Zero Extended with CA & record OV 229
X 011111 10110 01010 1 addzeo. Add to Zero Extended with CA & record OV & CR 229
X 011111 10111 01000 0 subfmeo Subtract From Minus One Extended with CA & record OV 355
X 011111 10111 01000 1 subfmeo. Subtract From Minus One Extended with CA & record OV & CR 355
X 011111 10111 01010 0 addmeo Add to Minus One Extended with CA & record OV 228
X 011111 10111 01010 1 addmeo. Add to Minus One Extended with CA & record OV & CR 228
X 011111 10111 01011 0 mullwo Multiply Low Word & record OV 316
X 011111 10111 01011 1 mullwo. Multiply Low Word & record OV & CR 316
X 011111 10111 10110 / dcba Data Cache Block Allocate 241
X 011111 11000 01010 0 addo Add & record OV 223
X 011111 11000 01010 1 addo. Add & record OV & CR 223
X 011111 11000 10010 / tlbivax TLB Invalidate Virtual Address Indexed 358
X 011111 11000 10110 / lhbrx Load Half Word Byte-Reverse Indexed 289
X 011111 11000 11000 0 sraw Shift Right Algebraic Word 334
X 011111 11000 11000 1 sraw. Shift Right Algebraic Word & record CR 334
X 011111 11001 11000 0 srawi Shift Right Algebraic Word Immediate 334
X 011111 11001 11000 1 srawi. Shift Right Algebraic Word Immediate & record CR 334
X 011111 11010 10110 / mbar Memory Barrier 298
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 3-41
X 011111 11100 10010 ? tlbsx TLB Search Indexed 360
X 011111 11100 10110 / sthbrx Store Half Word Byte-Reverse Indexed 344
X 011111 11100 11010 0 extsh Extend Sign Half Word 254
X 011111 11100 11010 1 extsh. Extend Sign Half Word & record CR 254
X 011111 11101 10010 / tlbre TLB Read Entry 359
X 011111 11101 11010 0 extsb Extend Sign Byte 254
X 011111 11101 11010 1 extsb. Extend Sign Byte & record CR 254
X 011111 11110 01011 0 divwuo Divide Word Unsigned & record OV 252
X 011111 11110 01011 1 divwuo. Divide Word Unsigned & record OV & CR 252
X 011111 11110 10010 / tlbwe TLB Write Entry 362
X 011111 11110 10110 / icbi Instruction Cache Block Invalidate 280
X 011111 11111 01011 0 divwo Divide Word & record OV 251
X 011111 11111 01011 1 divwo. Divide Word & record OV & CR 251
X 011111 11111 10110 / dcbz Data Cache Block set to Zero 248
D 100000 ----- ----- - lwz Load Word & Zero 297
D 100001 ----- ----- - lwzu Load Word & Zero with Update 297
D 100010 ----- ----- - lbz Load Byte & Zero 283
D 100011 ----- ----- - lbzu Load Byte & Zero with Update 283
D 100100 ----- ----- - stw Store Word 347
D 100101 ----- ----- - stwu Store Word with Update 347
D 100110 ----- ----- - stb Store Byte 337
D 100111 ----- ----- - stbu Store Byte with Update 337
D 101000 ----- ----- - lhz Load Half Word & Zero 290
D 101001 ----- ----- - lhzu Load Half Word & Zero with Update 290
D 101010 ----- ----- - lha Load Half Word Algebraic 288
D 101011 ----- ----- - lhau Load Half Word Algebraic with Update 288
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
3-42 Freescale Semiconductor
D 101100 ----- ----- - sth Store Half Word 343
D 101101 ----- ----- - sthu Store Half Word with Update 343
D 101110 ----- ----- - lmw Load Multiple Word 291
D 101111 ----- ----- - stmw Store Multiple Word 345
1Freescale Power ISA cache locking category, refer to Section 9.10, “Cache Line Locking/Unlocking.”
Table 3-6. Instructions Sorted by Opcode (Continued)
Format
Opcode
Mnemonic Instruction
BooK E 0.99 Page
Primary
(Inst0:5)Extended
(Inst21:31)
Legend:
-Don’t care, usually part of an operand field
/Reserved bit, invalid instruction form if encoded as 1
?Allocated for implementation-dependent use. See User’ Manual for the implementation

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-1
Chapter 4
Instruction Pipeline and Execution Timing
This section describes the e200z4 instruction pipeline and instruction timing information. The core is
partitioned into the following subsystems:
• Instruction unit
• Control unit
• Branch unit
• Instruction decode unit
• Exception handling unit
• Execution units
• Core interface
4.1 Overview of Operation
A block diagram of the e200z446n3 core is shown in Figure 4-1. The instruction fetch unit prefetches
instructions from memory into the instruction buffers. The decode unit decodes each instruction and
generates information needed by the branch unit and the execution units. Prefetched instructions are
written into the instruction buffers.
The instruction issue unit attempts to issue a pair of instructions each cycle to the execution units. Source
operands for each of the instructions are provided from the GPRs or from the operand feed-forward muxes.
Data or resource hazards may create stall conditions that cause instruction issue to be stalled for one or
more cycles until the hazard is eliminated.
The execution units write the result of a finished instruction onto the proper result bus and into the
destination registers. The writeback logic retires an instruction when the instruction has finished
execution. Up to three results can be simultaneously written, depending on the size of the result.
Two execution units are provided to allow dual issue of most instructions. Only a single load/store unit is
provided. Only a single integer divide unit is provided, thus a pair of divide instructions cannot issue
simultaneously. In addition, the divide unit is blocking.
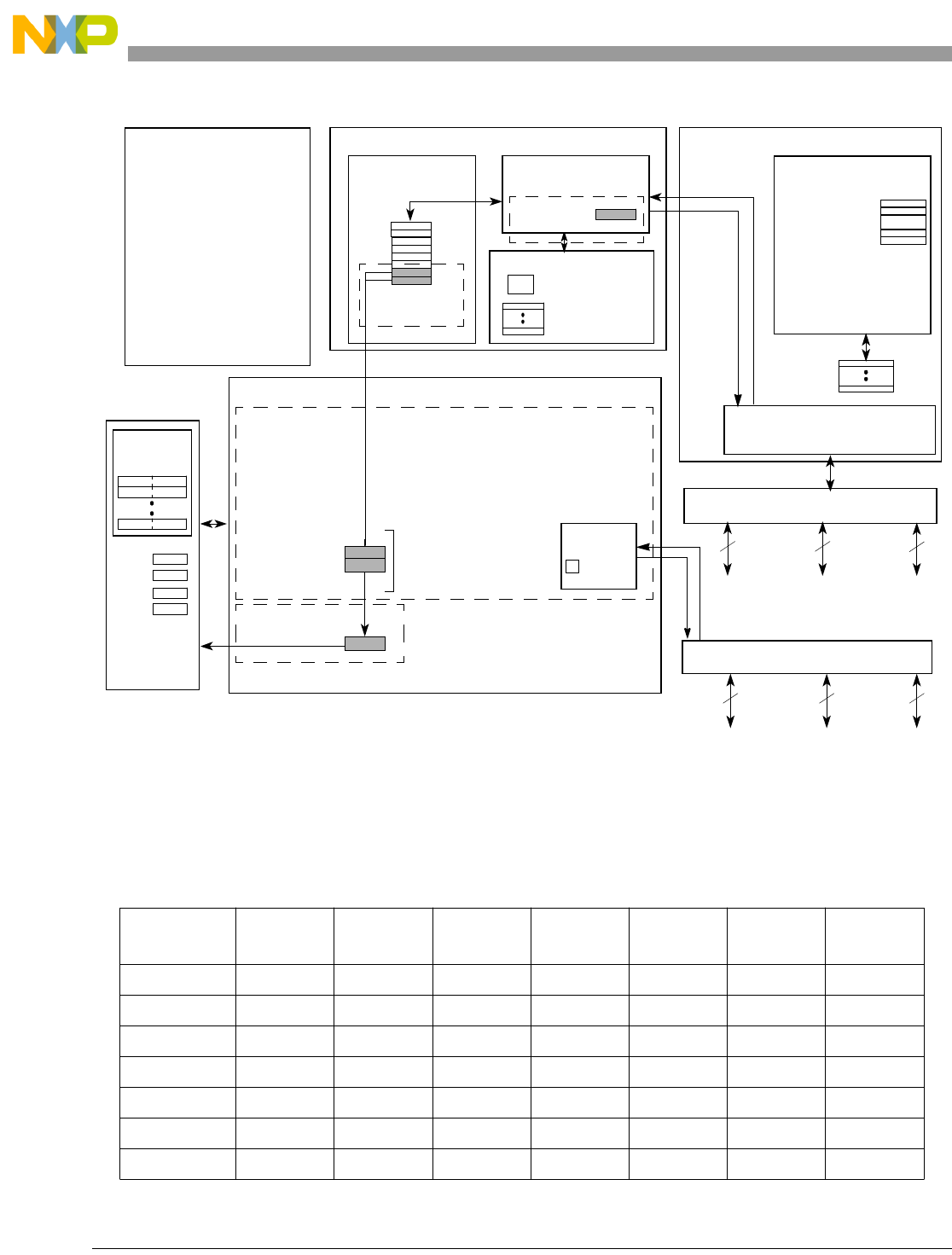
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-2 Freescale Semiconductor
Figure 4-1. e200z4 Block Diagram
Table 4-1 shows the e200z446n3 concurrent instruction issue capabilities. Note that data dependencies
between instructions generally preclude dual issue. In particular, read after write dependencies are handled
by stalling the issue pipeline as required to ensure the proper execution ordering.
Table 4-1. Concurrent Instruction Issue Capabilities
Class Of
Instruction Branch Load/Store Scalar
Integer Scalar Float Vector
Integer Vector Float Special
Branch —44444—
Load/store 4 — 4 4 4 4 —
Scalar Integer 4 4 4144
24—
Scalar Float 4 4 4 4 4 — —
Vector Integer 4 4 4244
34—
Vector Float 4 4 4 — 4 — —
Special ———————
Instruction Bus Interface Unit
Software-Managed
Instruction Memory Unit
MAS
Registers
32 GPRs
(64-Bit)
XER
CR
1-, 4-, 16-, 64-,
256-Kbyte, 1-, 4-, 16-,
64-, 256-Mbyte, 1-,
4-Gbyte page sizes
Execution Units
Additional
Load/Store
Write-Back Stage
Two/Four
Instructions
32 64
N
Address Data Control
Additional Features
• OnCe/Nexus 1/Nexus 3
control logic
• Dual AHB 2.v6 buses
• SPE (SIMD)
• Embedded scalar/
vector floating-point
• Power management
• Time base/decrementer
counter
+
L1 Unified MMU
Unit
CTR
LR
Two-Instruction, In-Order Dispatch
Two-Instruction, In-Order Write-Back
•
•
•
16-Entry
Fully Associative
TLB
EA Calc
Two-stage,
single-path
execute pipeline
with overlapped
execution and
Fetch Unit
Branch Processing Unit
Instruction/Control Unit
Instruction Buffer
(8/16 Instructions)
Decode
8-Entry Branch
Stage
+EA Calc
One-Stage
Fetch
Program Counter
Target Buffer
Data Bus Interface Unit
Execute Stage
feed forwarding
32 64 N
Address Data Control
SPRs
2- or 4-Way Set-Associative
4-Kbyte Instruction Cache
Executes all e200z446n3 instructions (including
Power ISA base, SPE, and VLE categories) as
described in Chapter 3, “Instruction Model.” As
many as two instructions can execute
simultaneously, as described in Chapter 4,
“Instruction Pipeline and Execution Timing.”

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-3
4.2 Core Subsystems
This section provides a brief overview of the core subsystems.
4.2.1 Control Unit
The control unit coordinates the instruction fetch unit, branch unit, instruction decode unit, instruction
issue unit, completion unit and exception handling logic.
4.2.2 Instruction Unit
The instruction unit controls the flow of instructions from the cache to the instruction buffers and decode
unit. Eight instruction prefetch buffers allow the instruction unit to fetch instructions ahead of actual
execution and serve to decouple memory and the execution pipeline.
4.2.3 Branch Unit
The branch unit executes branch instructions, predicts conditional branches, and provides branch target
addresses for instruction fetches. It contains an 8-entry branch target buffer to accelerate execution of
branch instructions.
4.2.4 Instruction Decode Unit
The decode unit includes the instruction buffers. A pair of instructions can be decoded each clock cycle.
The major functions of the decode logic are:
• Opcode decoding to determine the instruction class and resource requirements for each instruction
being decoded.
• Source and destination register dependency checking.
• Execution unit assignment.
• Determine any decode serializations, and inhibit subsequent instruction decoding.
The decode unit operates in a single processor clock cycle.
4.2.5 Exception Handling
The exception handling unit includes logic to handle exceptions, interrupts, and traps.
1Excludes divide class instructions occurring in both issue slots
2Excludes vector MAC/multiply class instructions occurring with scalar multiply, or divide class instructions occurring in
both issue slots
3Excludes vector MAC/multiply class instructions occurring in both issue slots, or divide class instructions occurring in
both issue slots

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-4 Freescale Semiconductor
4.3 Execution Units
The core data execution units consist of the integer units, SPE floating-point units, and the load/store unit.
Included in the execution units section are the 32 general-purpose registers (GPRs). Instructions with data
dependencies begin execution when all such dependencies are resolved.
4.3.1 Integer Execution Units
Each integer execution unit is used to process arithmetic and logical instructions. Adds, subtracts,
compares, count leading zeros, shifts and rotates execute in a single cycle.
Multiply instructions have a latency of 2 cycles with a maximum throughput of 1 per cycle.
Divide instructions have a variable latency (4–14 cycles) depending upon the operand data. The worst case
integer divide will take 14 cycles. While the divide is running, the rest of the pipeline is unavailable for
additional instructions (blocking divide).
4.3.2 Load/Store Unit
The load/store unit executes instructions that move data between the GPRs and the memory subsystem.
Loads, when free of data dependencies, execute with a maximum throughput of one per cycle and have a
two cycle latency. Stores also execute with a maximum throughput of one per cycle and two cycle latency.
Store data can be fed-forward from an immediately preceding load with no stall.
4.3.3 Embedded Floating-point Execution Units
The embedded floating-point execution units are used to process EFPU floating-point arithmetic
instructions. Adds, subtracts, compares, multiply, and multiply-accumulate pipelines have a latency of 2
cycles with a maximum throughput of 1 per cycle. SPE floating-point divide instructions have a latency
of 13 cycles. While the divide is running, the rest of the pipeline is unavailable for additional instructions
(blocking divide).
4.4 Instruction Pipeline
The processor pipeline consists of stages for instruction fetch, instruction decode, register read,
execution, and result writeback. Certain stages involve multiple clock cycles of execution. The processor
also contains an instruction prefetch buffer to allow buffering of instructions prior to the decode stage.
Instructions proceed from this buffer to the instruction decode stage by entering the instruction decode
register.
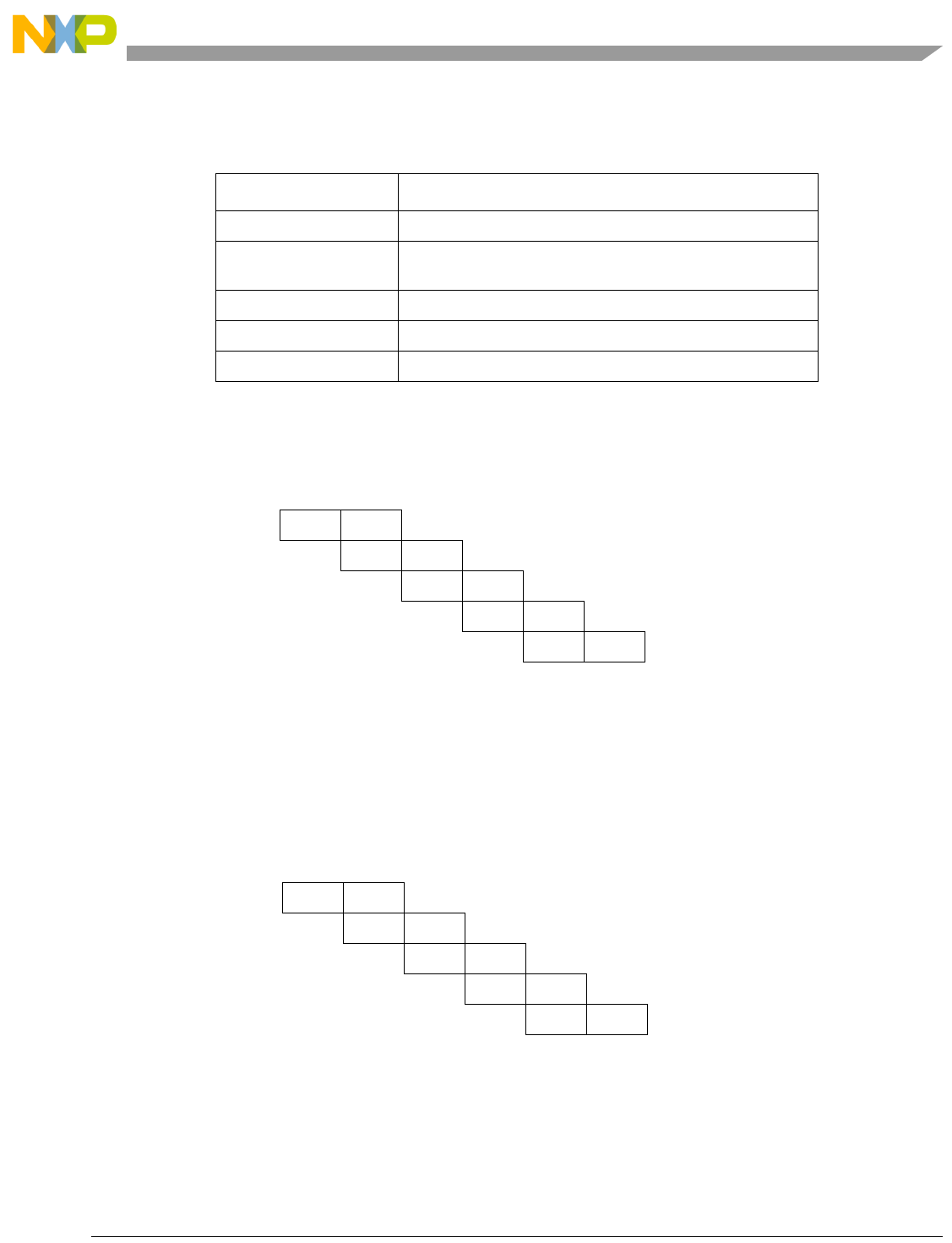
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-5
Table 4-2 explains the five pipeline stages.
Figure 4-2 shows the pipeline diagram.
Figure 4-2. Pipeline Diagram
Table 4-2. Pipeline Stages
STAGE Description
IFETCH Instruction Fetch From Memory
DECODE/RF READ/FF/
MEM EA
Instruction Decode/Register Read/Operand Forwarding/
Memory Effective Address Generation
EXECUTE0/MEM0 Instruction Execution stage 0/Memory Access stage 0
EXECUTE1/MEM1 Instruction Execution stage 1/Memory Access stage 1
WB Write Back to Registers
IFetch
Decode1/ Reg read/ FFwd
Execute0 I0,I1 I2,I3
Simple Instructions
I0,I1 I2,I3
Feedforward
I0,I1 I2,I3
I0,I1 I2,I3
I0,I1 I2,I3
Writeback
IFetch
Decode1/ Reg read / EA calc
Memory0 L0 L1
Load Instructions
L0 L1
Memory1
L0 L1
L0,L1 L1,I2
L0,L1 I2,I3
Writeback

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-6 Freescale Semiconductor
4.4.1 Description of Pipeline Stages
The IFetch pipeline stage retrieves instructions from the memory system and determines where the next
instruction fetch is performed. Up to two 32-bit instructions or four 16-bit instructions are sent from
memory to the instruction buffers each cycle.
The decode pipeline stage decodes instructions, reads operands from the register file, and performs
dependency checking.
Execution occurs in one or both of the execute pipeline stages in each execution unit (perhaps over
multiple cycles). Execution of most load/store instructions is pipelined. The load/store unit has three
pipeline stages: effective address calculation (EA Calc), initial memory access (MEM0), and final memory
access, data format, and forward (MEM1).
Simple integer instructions complete execution in the Execute 0 stage of the pipeline. Multiply instructions
require both the Execute 0 and Execute 1 stages but may be pipelined as well. Most condition-setting
instructions complete in the Execute 0 stage of the pipeline, thus conditional branches dependent on a
condition-setting instruction may be resolved by an instruction in this stage.
Result feed-forward hardware forwards the result of one instruction into the source operand(s) of a
following instruction so that the execution of data-dependent instructions does not wait until the
completion of the result write-back. Feed forward hardware is supplied to allow bypassing of completed
instructions from both execute stages into the first execution stage for a subsequent data-dependent
instruction.
4.4.2 Instruction Prefetch Buffers and Branch Target Buffer
The e200z4 contains an eight-entry instruction prefetch buffer, which supplies instructions into the
instruction register (IR) for decoding. Each slot in the prefetch buffer is 32 bits wide, capable of holding a
single 32-bit instruction or a pair of 16-bit instructions.
Instruction prefetches request a 64-bit double word, and the prefetch buffer is filled with a pair of
instructions at a time, except for the case of a change of flow fetch where the target is to the second (odd)
word. In that case only a 32-bit prefetch is performed to load the instruction prefetch buffer. This 32-bit
fetch may be immediately followed by a 64-bit prefetch to fill slots 0 and 1 in the event that the branch is
resolved to be taken.
In normal sequential execution, instructions are loaded into the IR from prefetch buffer slots 0 and 1. As
a pair of slots are emptied, they are refilled. Whenever a pair of slots is empty, a 64-bit prefetch is initiated,
which fills the earliest empty slot pairs beginning with slot 0.
If the instruction prefetch buffer empties, instruction issue stalls, and the buffer is refilled. The first
returned instruction is forwarded directly to the IR. Open cycles on the memory bus are utilized to keep
the buffer full when possible.
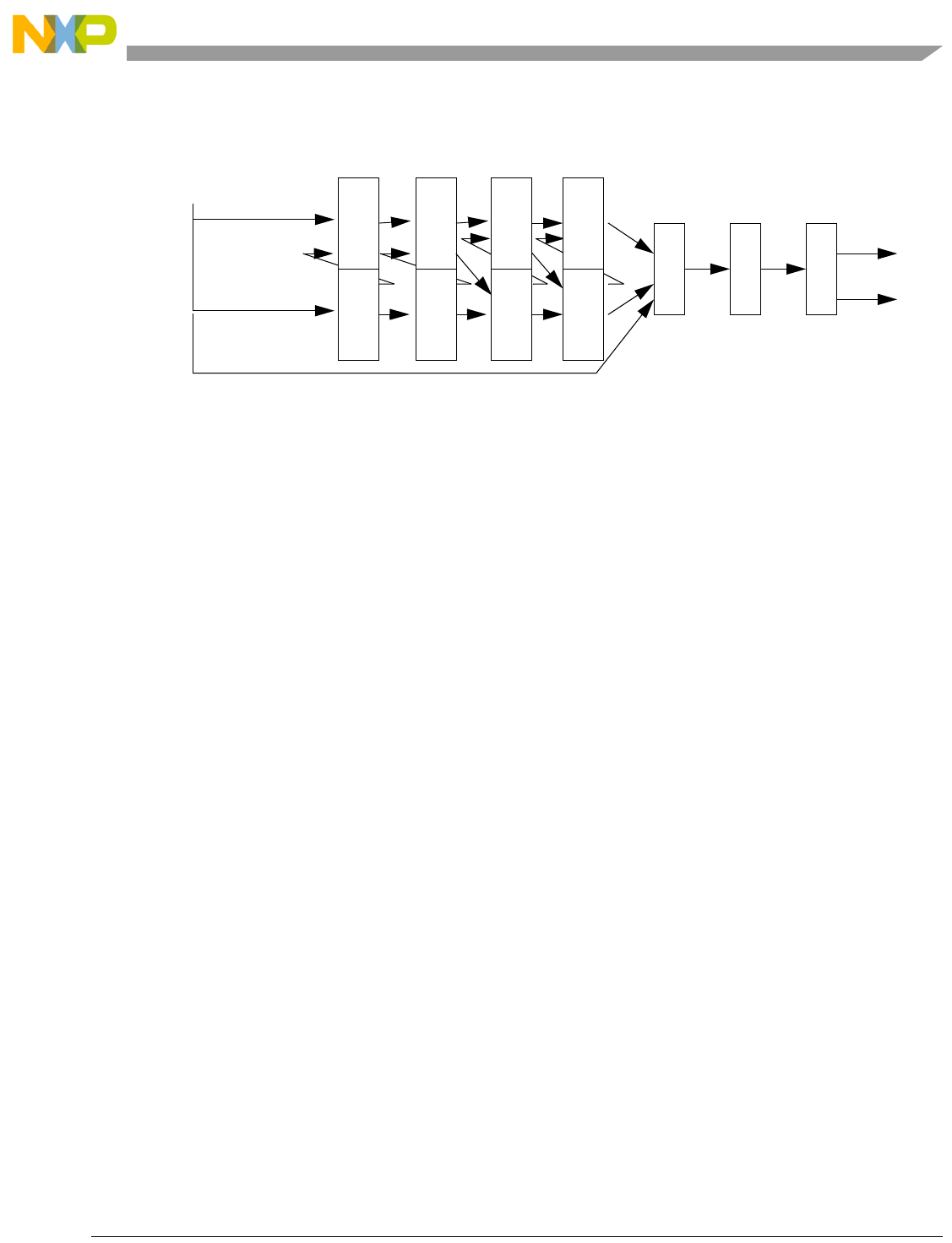
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-7
Figure 4-3 shows the instruction prefetch buffers.
Figure 4-3. e200z4 Instruction Prefetch Buffers
To resolve branch instructions and improve the accuracy of branch predictions, the e200z4 implements a
dynamic branch prediction mechanism using an 8-entry branch target buffer (BTB).
An entry is allocated in the BTB whenever a branch resolves as taken and the BTB is enabled. Entries in
the BTB are allocated on taken branches using a FIFO replacement algorithm.
Each BTB entry holds the branch target address and a 2-bit branch history counter whose value is
incremented or decremented on a BTB hit depending on whether the branch was taken. The counter can
assume four different values: strongly taken, weakly taken, weakly not taken, and strongly not taken. On
initial allocation of an entry to the BTB for a taken branch, the counter is initialized to the weakly-taken
state.
A branch will be predicted as taken on a hit in the BTB with a counter value of strongly or weakly taken.
In this case the target address contained in the BTB is used to redirect the instruction fetch stream to the
target of the branch prior to the branch reaching the instruction decode stage. In the case of a BTB miss,
static prediction is used to predict the outcome of the branch. In the case of a mispredicted branch, the
instruction fetch stream will return to the proper instruction stream after the branch has been resolved.
When a branch is predicted taken and the branch is later resolved (in the branch execute stage), the value
of the appropriate BTB counter is updated. If a branch whose counter indicates weakly taken is resolved
as taken, the counter increments so that the prediction becomes strongly taken. If the branch resolves as
not taken, the prediction changes to weakly not-taken. The counter saturates in the strongly taken states
when the prediction is correct.
The e200z4 does not implement the static branch prediction that is defined by the Power ISA embedded
category architecture. The BO prediction bit in branch encodings is ignored.
Dynamic branch prediction is enabled by setting BUCSR[BPEN]. Allocation of branch target buffer
entries may be controlled using the BUCSR[BALLOC] field to control whether forward or backward
branches (or both) are candidates for entry into the BTB, and thus for branch prediction. Once a branch is
in the BTB, BUCSR[ALLOC] has no further effect on that branch entry. Clearing BUCSR[BPEN]
disables dynamic branch prediction, in which case the e200z4 reverts to a static prediction mechanism
using the BUCSR[BPRED] field to control whether forward or backward branches (or both) are predicted
taken or not taken.
SLOT0 SLOT1
SLOT2
DECODE
SLOT3
.
.
MUX
IR
DATA 0:63
SLOT4 SLOT5
SLOT6 SLOT7
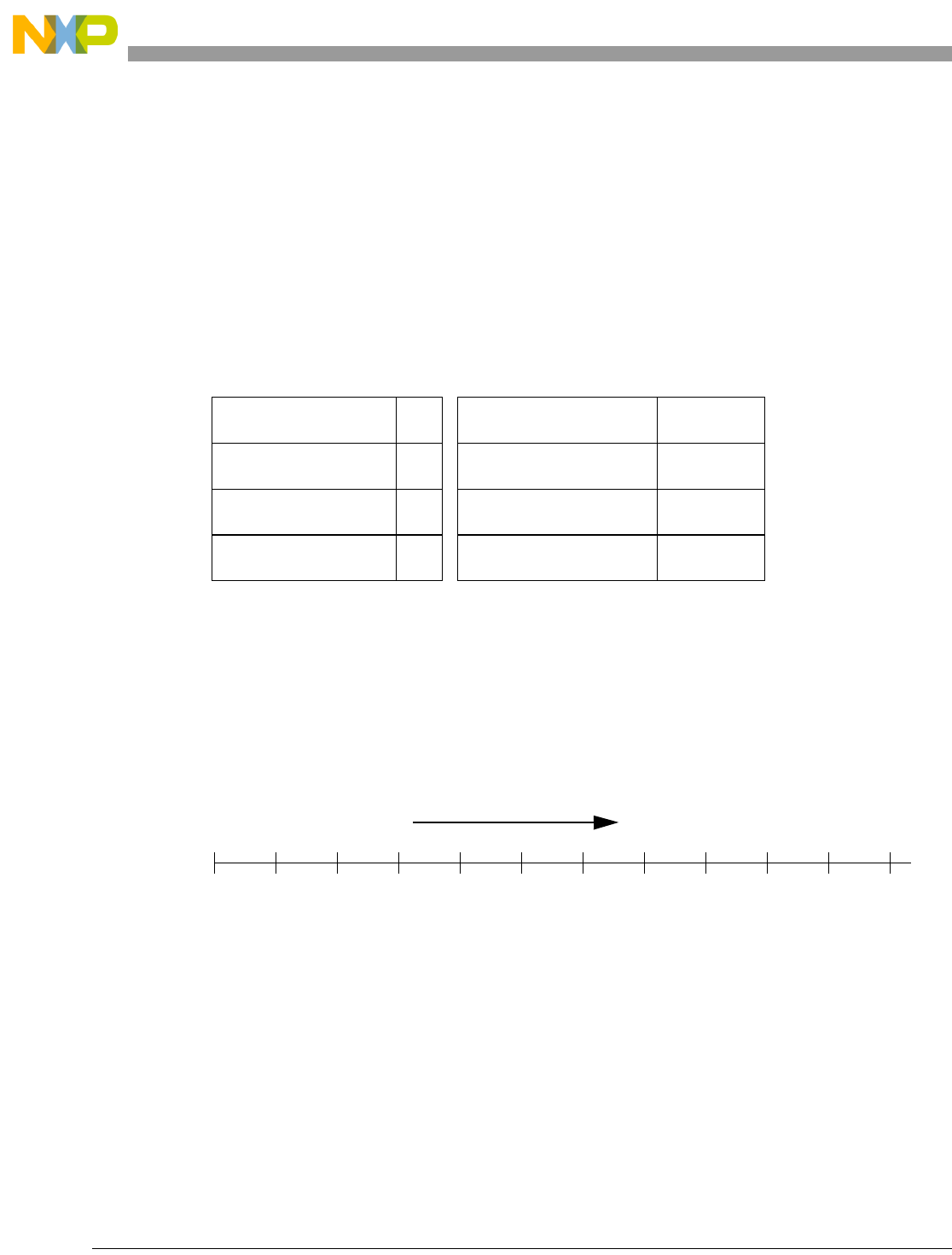
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-8 Freescale Semiconductor
The BTB uses virtual addresses for performing tag comparisons. On allocation of a BTB entry, the
effective address of a taken branch, along with the current Instruction Space (as indicated by MSR[IS]) is
loaded into the entry and the counter value is set to weakly taken. The current PID value is not maintained
as part of the tag information.
The e200z4 does support automatic flushing of the BTB when the current PID value is updated by a mtcr
PID0 instruction. Software is otherwise responsible for maintaining coherency in the BTB when a change
in effective to real (virtual to physical) address mapping is changed. This is supported by the
BUCSR[BBFI] control bit.
Figure 4-4 shows the branch target buffer.
Figure 4-4. e200z4 Branch Target Buffer
4.4.3 Single-Cycle Instruction Pipeline Operation
Sequences of single-cycle execution instructions follow the flow in Figure 4-5. Instructions are issued and
completed in program order. Most arithmetic and logical instructions fall into this category. Instructions
may feed-forward results of execution at the end of the E0 or FF stage.
Figure 4-5. Basic Pipe Line Flow, Single Cycle Instructions
TAG DATA
branch addr[0:30] target address[0:30]IS counter entry 7
IS = Instruction Space
... ...
... ... ...
branch addr[0:30] target address[0:30]
IS counter entry 1
branch addr[0:30] target address[0:30]
IS counter entry 0
1st, 2ndInst.
Time Slot
3rd, 4th Inst.
IF DEC E0 FF
IF DEC
WB
E0 FF WB
5th, 6th Inst. IF DEC E0 FF WB
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-9
4.4.4 Basic Load and Store Instruction Pipeline Operation
For load and store instructions, the effective address is calculated in the EA Calc stage, and memory is
accessed in the MEM0–MEM1 stages. Data selection and alignment is performed in MEM1, and the result
is available at the end of MEM1 for the following instruction. If the instruction has a data dependency on
the result of a load, there is a single stall cycle. Data will be fed-forward from the preceding load at the end
of the MEM1 stage.
Figure 4-6 shows the basic pipe line flow for the load/store instructions.
Figure 4-6. Basic Pipe Line Flow, Load/Store Instructions
4.4.5 Change-of-Flow Instruction Pipeline Operation
Simple change of flow instructions require 2 clock cycles to refill the pipeline with the target instruction
for taken branches and branch and link instructions with no BTB hit and correct branch prediction.
Figure 4-7 shows the basic pipe line flow for the change of flow instructions.
Figure 4-7. Basic Pipe Line Flow, Branch Instructions (BTB Miss, Correct Prediction, Branch Taken)
This 2 cycle timing may be reduced for branch type instructions by performing the target fetch
speculatively while the branch instruction is still being fetched into the instruction buffer if the branch
1st LD Inst.
Time Slot
2nd LD Inst.
IF DEC/ M0 M1
IF DEC/
WB
M0 M1 WB
3rd single cycle Inst. IF DEC stall E0 FF
EA
EA
(data dependent) WB
BR Inst.
Time Slot
Target Inst.
IF DEC (E0) (E1)
TF DEC
WB
E0 E1 WB
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-10 Freescale Semiconductor
target address can be obtained from the BTB. The resulting branch timing is reduced to a single clock when
the target fetch is initiated early enough and the branch is correctly predicted.
Figure 4-8 shows the basic pipe line flow for the reduced timing.
Figure 4-8. Basic Pipe Line Flow, Branch Instructions (BTB Hit, Correct Prediction, Branch Taken)
For certain cases where the branch is incorrectly predicted, 3 cycles are required for the not-taken branch,
which must correct the misprediction outcome. Figure 4-9 shows one example.
Figure 4-9. Basic Pipe Line Flow, Branch Instruction (BTB Hit, Predict Taken, Incorrect Prediction)
BR Inst.
Time Slot
Target Inst.
IF DEC (E0) (E1)
TF DEC
WB
E0 E1 WB
(BTB hit)
BR Inst.
Time Slot
Target Inst.
IF DEC (E0) (E1)
TF DEC
WB
abort -- --
(BTB hit)
Next seq. Inst. IF DEC E0 E1 WB
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-11
For certain other cases where the branch is incorrectly predicted as taken, a stall cycle is required to correct
the misprediction outcome and begin refilling the instruction buffer. Figure 4-10 shows one example.
Figure 4-10. Basic Pipe Line Flow, Branch Instructions
(BTB Miss, Predict Taken, Incorrect Prediction, Instruction Buffer Empty)
4.4.6 Basic Multi-Cycle Instruction Pipeline Operation
Most multi-cycle instructions may be pipelined so that the effective execution time is smaller than the
overall number of clock cycles spent in execution. The restrictions to this execution overlap are that no
data dependencies between the instructions are present and that instructions must complete and write back
results in order. A single cycle instruction which follows a multi-cycle instruction must wait for
completion of the multi-cycle instruction prior to its write-back in order to meet the in-order requirement.
Result feed-forward paths are provided so that execution may continue prior to result write-back.
BR Inst.
Time Slot
Next Inst.
IF DEC (E0) (E1)
IF DEC
WB
E0 E1 WB
(BTB miss)
Target Inst.
Next Seq Inst. IF DEC E0 E1 WB
TF abort -- --
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-12 Freescale Semiconductor
Figure 4-11 shows the basic pipe line flow for multi-cycle instruction.
Figure 4-11. Basic Pipe Line Flow, Multiply Class Instructions
Since load and store instructions calculate the effective address in the DEC stage, any dependency on a
previous instruction for EA calculation may stall the load or store in DEC until the result is available.
Figure 4-12 shows the infrequent case of a load instruction dependent on a multiply instruction.
Figure 4-12. Pipe Line Flow, Multiply with Data Dependent Load Instruction
1st Mul
Time Slot
2nd Inst.
IF DEC E0 E1
IF DEC
WB
E0 FF WB
3rd Inst. IF DEC E0 FF WB
(data dependent
Inst.
single cycle.
single-cycle)
1st Mul
Time Slot
2nd Inst.
IF DEC E0 E1
IF DEC
WB
E0 FF WB
3rd Inst. IF DEC DEC FF WB
(data dependent
Inst.
single cycle
load) (stall)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-13
The divide and load and store multiple instructions require multiple cycles in the execute stage as shown
in Figure 4-13.
Figure 4-13. Basic Pipe Line Flow, long instruction
4.4.7 Additional Examples of Instruction Pipeline Operation for Load and
Store
Figure 4-14 shows an example of pipelining a data-dependent add instruction following a load with update
instruction. While the first load begins accessing memory in the M0 stage, the next load with update can
be calculating a new effective address in the EA Calc stage. Following the EA Calc, the updated base
register value can be fed-forward to subsequent instructions, even during the MEM0 or MEM1 stage. The
add in this example will not stall, even though a data dependency exists on the updated base register of
the load with update.
Figure 4-14. Pipe Line Flow, Load/Store Instructions with Base Register Update
long inst.
Time Slot
next inst.
IF DEC
IF
E0
DEC
E1
—
....
—
....
—
....
—
....
—
....
—
Elast
—
WB
E0 FF WB
(single cycle)
1st LD Inst.
Time Slot
2nd LD Inst.
IF DEC/ M0 M1
IF DEC/
WB
M0 M1 WB
3rd single cycle Inst. IF DEC E0 FF WB
EA
EA
(data dependent
on EA calc)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-14 Freescale Semiconductor
Figure 4-15 shows an example of pipelining a data-dependent store instruction following a load
instruction. The store in this example will stall, due to the store data dependency existing on the load data
of the load instruction.
Figure 4-15. Pipelined Store Instruction with Store Data Dependency
4.4.8 Move To/From SPR Instruction Pipeline Operation
Many mtspr and mfspr instructions are treated like single cycle instructions in the pipeline and do not
cause stalls. The following SPRs are exceptions and do cause stalls:
•MSR
• Debug SPRs
• The SPE unit
• Cache/MMU SPRs
Figure 4-16–Figure 4-18 show examples of mtspr and mfspr instruction timing.
1st LD Inst.
Time Slot
2nd LD Inst.
IF DEC/ M0 M1
IF DEC/
WB
M0 M1 WB
3rd Inst. IF DEC DEC/ M0 M1
EA
EA
(data dependent WB
store data) (stall) EA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-15
Figure 4-16 applies to the debug SPRs and SPEFSCR. These instructions do not begin execution until all
previous instructions have finished their execute stage(s). In addition, execution of subsequent instructions
is stalled until the mfspr and mtspr instructions complete.
Figure 4-16. mtspr, mfspr Instruction Execution, Debug and SPE SPRs
Figure 4-17 applies to the mtmsr instruction and the wrtee and wrteei instructions. Execution of
subsequent instructions is stalled until the cycle after these instructions write-back.
Figure 4-17. mtmsr, wrtee[i] Instruction Execution
Access to cache and MMU SPRs are stalled until all outstanding bus accesses have completed on both
interfaces and the Cache and MMU are idle (p_[d,i]_cmbusy negated) to allow an access window where
no translations or cache cycles are required. Other situations such as a cache linefill may cause the cache
to be busy even when the processor interface is idle (p_[d,i]_tbusy[0]_b is negated). In these cases
execution stalls until the cache and MMU are idle as signaled by negation of p_[d,i]_cmbusy. Processor
access requests will be held off during execution of a Cache/MMU SPR instruction. A subsequent access
request may be generated the cycle following the last execute stage (i.e. during the WB cycle). This same
Prev Inst.
Time Slot
mtspr, mfspr
IF DEC/ E0 E1
IF DEC
WB
stall E0 E1
Next Inst. IF DEC stall stall stall
EA
Debug, SPE WB
E0 E1 WB
(stall)
(stall)
Prev Inst.
Time Slot
mtmsr, wrtee,
IF DEC/ E0 E1
IF DEC
WB
E0 E1 WB
Next Inst. IF DEC stall stall E0
EA
wrteei Inst.
E1 WB
(stall)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-16 Freescale Semiconductor
protocol applies to cache and MMU management instructions (e.g. icbi, tlbre, tlbwe, etc.) as well as the
DCRs.
Figure 4-18 shows an example where an outstanding bus access causes mtspr/mfspr execution to be
delayed until the bus becomes idle.
Figure 4-18. Cache/DCR, MMU mtspr, mfspr and MMU Management Instruction Execution
4.5 Control Hazards
Internal control hazards exist in the e200z4 that can cause certain instruction sequences to incur one or
more stall cycles. One such hazard is an mfspr instruction preceded by a mtspr instruction. This causes
issue stalls until the mtspr completes.
4.6 Instruction Serialization
There are three types of serialization required by the core:
• Completion
• Dispatch (Decode/Issue)
• Refetch
S3
Time Slot
mtspr, mfspr
DEC E0IF .... E1last
prev
WB
Next Instruction
Instruction
p_[i,d]_treq_b
p_[i,d]_tbusy[0]_b
p_[i,d]_ta_b
p_rd_spr,
p_wr_spr
p_[i,d]_cmbusy
DEC stallIF stall E0
WB
E1 WB
DEC stallIF stall stall E0 E1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-17
4.6.1 Completion Serialization
A completion serialized instruction is held for execution until all prior instructions have completed. The
instruction will then execute once it is next to complete in program order. Results from these instructions
will not be available for or forwarded to subsequent instructions until the instruction completes.
Instructions which are completion serialized are:
• Instructions that access or modify system control or status registers, such as mcrxr, mtmsr, wrtee,
wrteei, mtspr, mfspr (except to CTR/LR)
• Instructions that manage caches and TLBs
• Instructions defined by the architecture as context or execution synchronizing, such as isync,
se_isync, msync, rfi, rfci, rfdi, rfmci, se_rfi, se_rfci, se_rfdi, se_rfmci, sc, se_sc.
• wait
4.6.2 Dispatch Serialization
Some instructions are dispatch serialized by the core. An instruction that is dispatch serialized prevents the
next instruction from decoding until all instructions, up to and including the dispatch serialized instruction,
complete. Instructions that are dispatch serialized are isync, se_isync, msync, rfi, rfci, rfdi, rfmci, se_rfi,
se_rfci, se_rfdi, se_rfmci, sc, se_sc.
The mbar instruction is “pseudo-dispatch” serialized; it prevents the next instruction from decoding until
all previous load and store class instructions have completed.
4.6.3 Refetch Serialization
Refetch serialized instructions inhibit dispatching of subsequent instructions and force a pipeline refill to
refetch subsequent instructions after completion. These include:
• The context synchronizing instructions isync, se_isync.
• The rfi, rfci, rfdi, rfmci, se_rfi, se_rfci, se_rfdi, se_rfmci, sc, se_sc instructions.
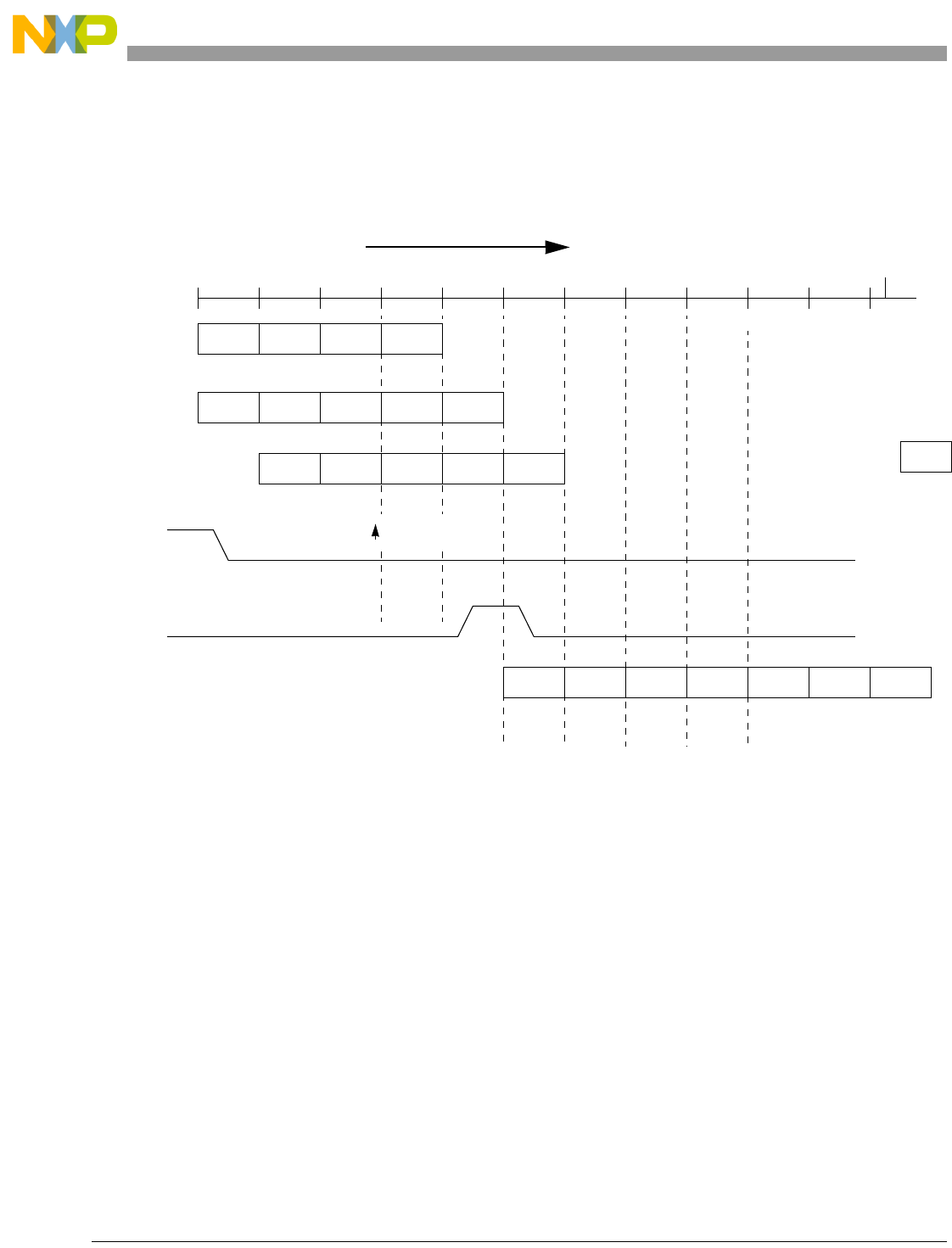
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-18 Freescale Semiconductor
4.7 Interrupt Recognition and Exception Processing
Figure 4-19 shows timing for interrupt recognition and exception processing overhead. This example
shows best-case response timing when an interrupt is received and processed during execution of a
sequence of single-cycle instructions. The handler is present in the cache and proceeds with no bubbles.
Figure 4-19. Interrupt Recognition and Handler Instruction Execution
Figure 4-20 shows timing for interrupt recognition and exception processing overhead. This example
shows best-case response timing when an interrupt is received and processed during execution of a load
S3
Time Slot
DEC E1 WBE0
Single cycle
WB
Instructions
IF Abort --DEC --
p_extint_b final sample point
p_iack
IF E0 E1DEC WB WB
1st Instruction of handler
12345678910
IF Stall StallStall Stall
11
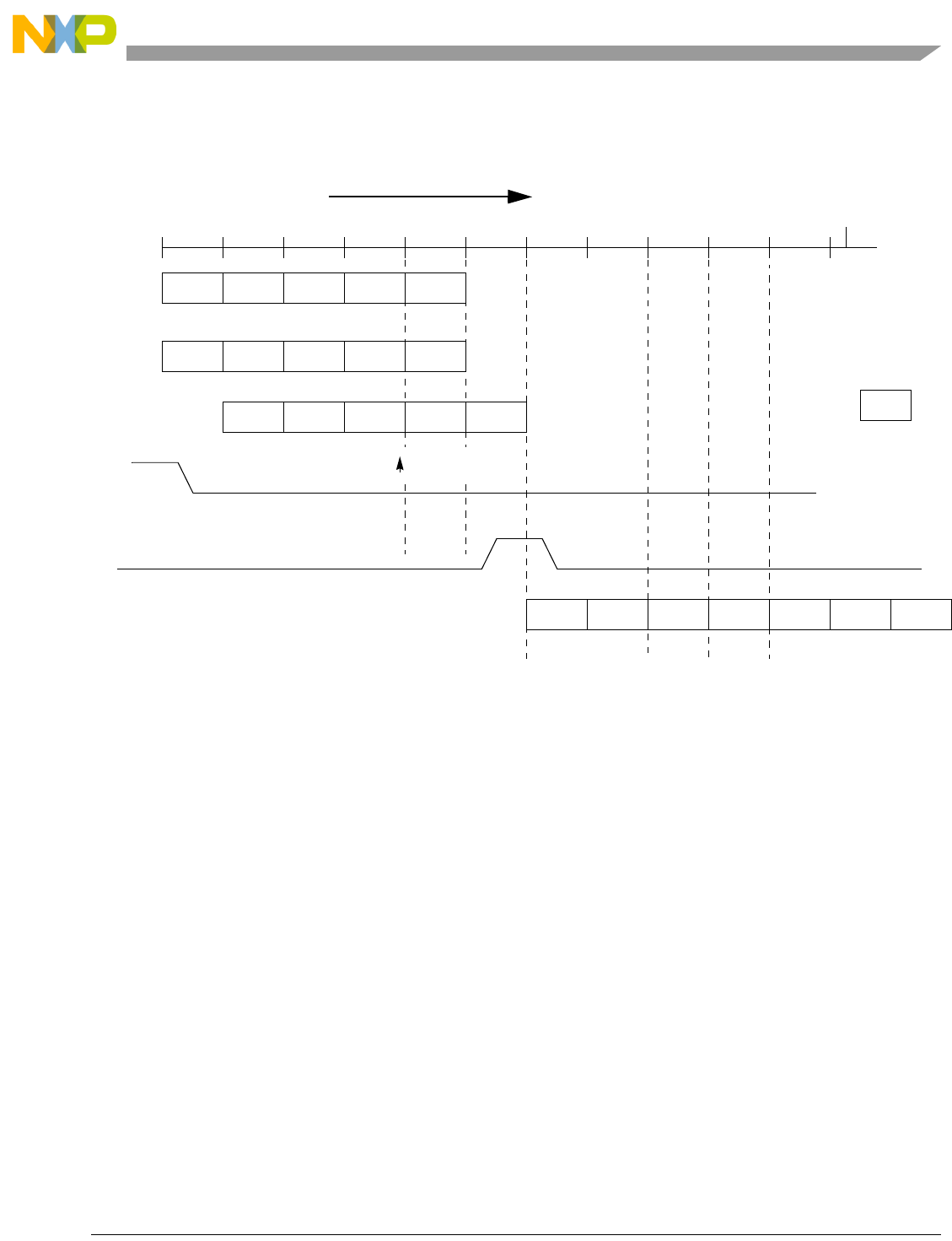
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-19
or store instruction. The fetch for the handler is delayed until completion of any outstanding load or store,
regardless of the number of wait-states.
Figure 4-20. Interrupt Recognition and Handler Instruction Execution—Load/Store in Progress
S3
Time Slot
M0 wait M1wait
Load/Store
WB
Instruction
DEC Abort --E0 --
p_extint_b
final sample point
p_iack
IF E0 E1DEC WB EX2 WB
1st Instruction of handler
12345678910
DEC -- --Abort --
11
WB
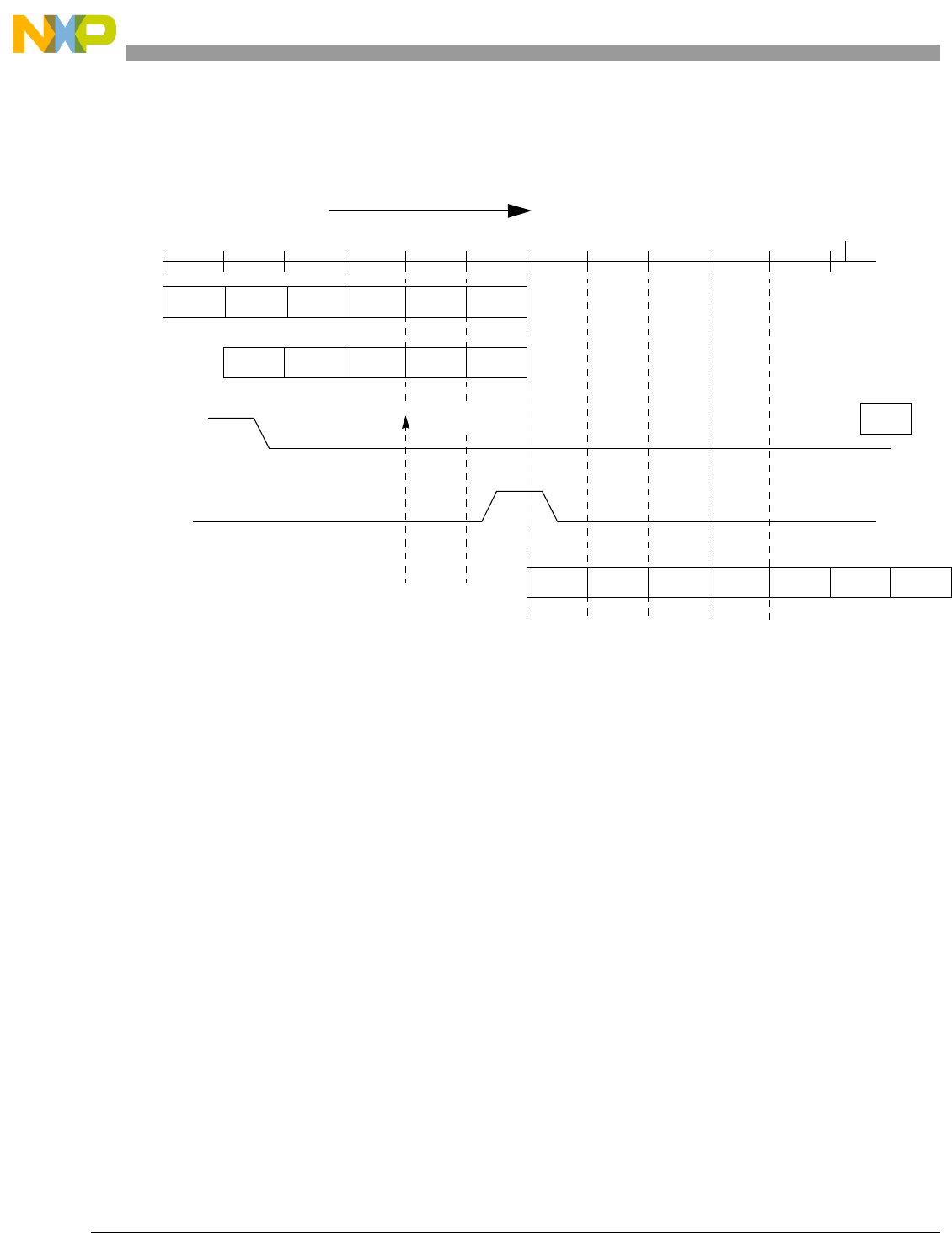
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-20 Freescale Semiconductor
Figure 4-21 shows timing for interrupt recognition and exception processing overhead. This example
shows best-case response timing when an interrupt is received and processed during execution of a
multicycle interruptible instructions. The handler is present in the cache and proceeds with no bubbles.
Figure 4-21. Interrupt Recognition and Handler Instruction Execution—Multi-Cycle Instruction Abort
4.8 Concurrent Instruction Execution
The core effectively has several execution units:
• Branch unit
• Dual scalar integer units
• Dual vector integer units
• Dual scalar embedded floating-point units/single vector embedded floating-point unit
• Load/store unit
These executions units are pipelined and support overlapped execution of instructions. In certain cases, the
branch unit predicts branches and supplies a speculative instruction stream to the instruction buffer unit.
The following instruction timing section accurately indicates the number of cycles an instruction executes
in the appropriate unit, however, determining the elapsed time or cycles to execute a sequence of
instructions is beyond the scope of this document.
4.9 Instruction Timings
Table 4-3 shows instruction timing in number of processor clock cycles for various instruction classes.
Pipelined instructions are shown with cycles of total latency and throughput cycles. Divide instructions are
not pipelined and block other instructions from executing during divide execution. Timing for SPE
S3
Time Slot
Next Instruction
DEC E1 AbortE0
-- --
Multi-cycle
WB
Interruptible
DEC Abort --stall --
12345678910
S3
p_extint_b
final sample point
p_iack
IF E0 E1DEC WB EX2 WB
1st Instruction of handler
Instruction
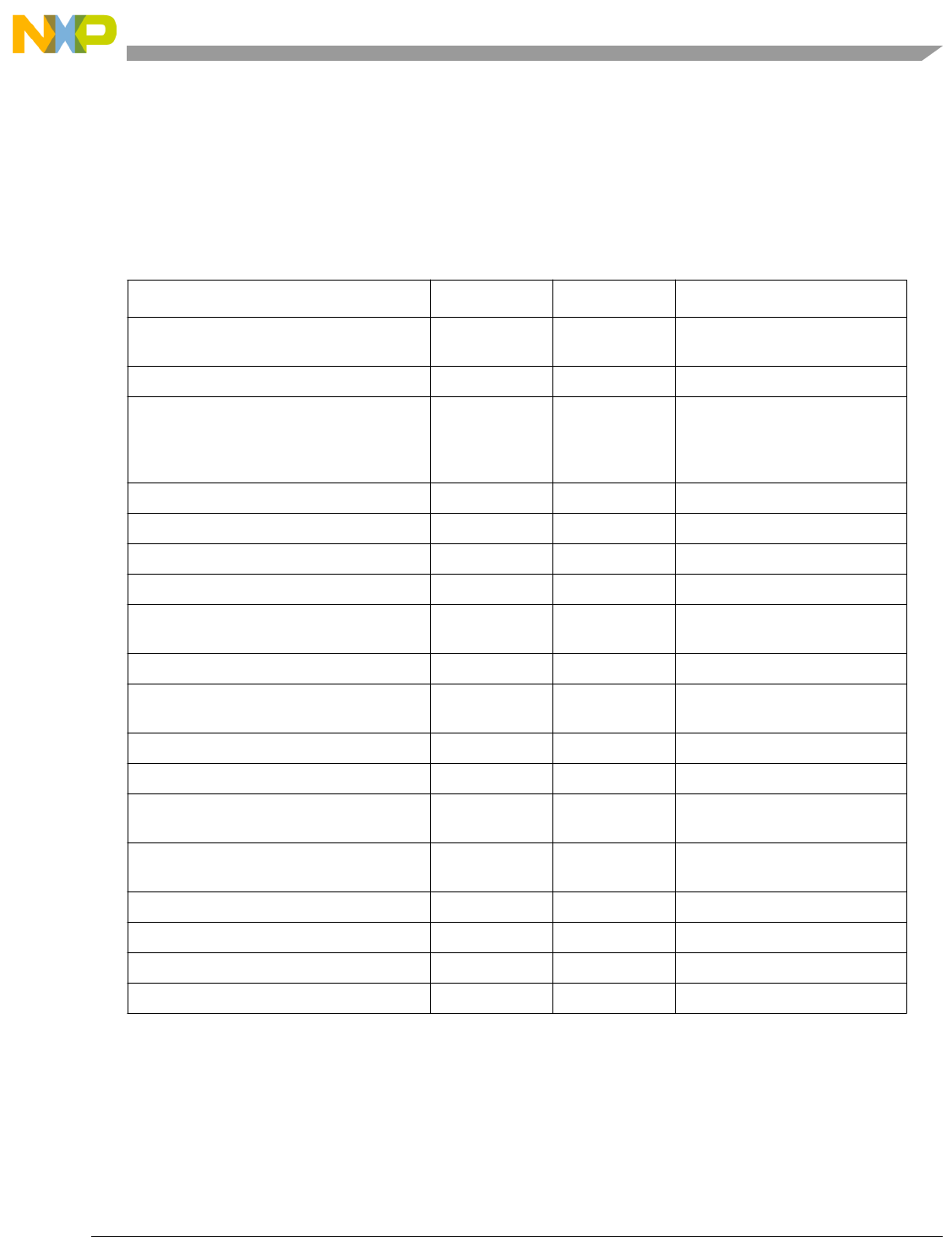
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-21
instructions is detailed in Section 7.6, “SPE Instruction Timing.” Timing for EFPU2 instructions is
detailed in Section 6.5, “EFPU Instruction Timing.”
Load/store multiple instruction cycles are represented as a fixed number of cycles plus a variable number
of cycles where ‘n’ is the number of words accessed by the instruction. In addition, cycle times marked
with a ‘&’ require a variable number of additional cycles due to serialization.
Table 4-3. Instruction Class Cycle Counts
Class of Instructions Latency Throughput Special Notes
integer: add, sub, shift, rotate, logical,
cntlzw
11—
integer: compare 1 1 —
Branch 3/2/1 3/2/1 Correct branch lookahead allows
single cycle execution
worst-case mispredicted branch
is 3 cycles
multiply 2 1 —
divide 4–14 4–14 data dependent timing
CR logical 1 1 —
loads (non-multiple) 2 1 —
load multiple 2 + n ÷2 (max) 1 + n ÷2 (max) Actual timing depends on n and
address alignment.
stores (non-multiple) 2 1 —
store multiple 2 + n ÷2 (max) 1 + n ÷2 (max) Actual timing depends on n and
address alignment.
mtmsr, wrtee, wrteei 3& 3 —
mcrf 11—
mfspr, mtspr 4& 4& applies to Debug SPRs, optional
unit SPRS
mfspr, mfmsr 1 1 applies to internal, non Debug
SPRs
mfcr, mtcr 11—
rfi, rfci, rfdi, rfmci 3——
sc 4——
tw, twi 4 — Trap taken timing
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-22 Freescale Semiconductor
Detailed timing for each instruction mnemonic along with serialization requirements is shown in
Table 4-4.
Table 4-4. Instruction Timing by Mnemonic
Mnemonic Latency Serialization
add[o][.] 1none
addc[o][.] 1none
adde[o][.] 1none
addi 1none
addic[.] 1none
addis 1none
addme[o][.] 1none
addze[o][.] 1none
and[.] 1none
andc[.] 1none
andi. 1none
andis. 1none
b[l][a] 3/2/1 none
bc[l][a] 3/2/1 none
bcctr[l] 3/2 none
bclr[l] 3/2 none
cmp 1none
cmpi 1none
cmpl 1none
cmpli 1none
cntlzw[.] 1none
crand 1none
crandc 1none
creqv 1none
crnand 1none
crnor 1none
cror 1none
crorc 1none
crxor 1none
divw[o][.] 4-141none
divwu[o][.] 4-141none
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-23
eqv[.] 1none
extsb[.] 1none
extsh[.] 1none
isel 1none
isync 32refetch
lbarx 2none
lbz 23none
lbzu 23none
lbzux 23none
lbzx 23none
lha 23none
lharx 23none
lhau 23none
lhaux 23none
lhax 23none
lhbrx 23none
lhz 23none
lhzu 23none
lhzux 23none
lhzx 23none
lmw 2 +(n/2) none
lwarx 23none
lwbrx 23none
lwz 23none
lwzu 23none
lwzux 23none
lwzx 23none
mbar 12pseudo-
dispatch
mcrf 1none
mcrxr 1 completion
mfcr 1none
mfmsr 1none
Table 4-4. Instruction Timing by Mnemonic (Continued)
Mnemonic Latency Serialization
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-24 Freescale Semiconductor
mfspr (except
DEBUG) 1none
mfspr
(DEBUG)
42completion
msync 12completion
mtcrf 2none
mtmsr 32completion
mtspr
(DEBUG)
42completion
mtspr (except
DEBUG, msr,
hid0/1)
1none
mulhw[.] 2none
mulhwu[.] 2none
mulli 2none
mullw[o][.] 2none
nand[.] 1none
neg[o][.] 1none
nop (ori
r0,r0,0) 1none
nor[.] 1none
or[.] 1none
orc[.] 1none
ori 1none
oris 1none
rfci 3 refetch
rfdi 3 refetch
rfi 3 refetch
rfmci 3 refetch
rlwimi[.] 1none
rlwinm[.] 1none
rlwnm[.] 1none
sc 4 refetch
slw[.] 1none
sraw[.] 1none
Table 4-4. Instruction Timing by Mnemonic (Continued)
Mnemonic Latency Serialization
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 4-25
srawi[.] 1none
srw[.] 1none
stb 23none
stbcx. 2none
stbu 23none
stbux 23none
stbx 23none
sth 23none
sthbrx 23none
sthcx. 23none
sthu 23none
sthux 23none
sthx 23none
stmw 2 + (n ÷2) none
stw 23none
stwbrx 23none
stwcx. 23none
stwu 23none
stwux 23none
stwx 23none
subf[o][.] 1none
subfc[o][.] 1none
subfe[o][.] 1none
subfic 1none
subfme[o][.] 1none
subfze[o][.] 1none
tw 4none
twi 4none
wrtee 3 completion
wrteei 3 completion
xor[.] 1none
xori 1none
xoris 1none
Table 4-4. Instruction Timing by Mnemonic (Continued)
Mnemonic Latency Serialization
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
4-26 Freescale Semiconductor
4.10 Operand Placement On Performance
The placement (location and alignment) of operands in memory affects the relative performance of
memory accesses, in some cases significantly. Table 4-5 indicates the effects for the e200z4 core.
In Table 4-5, optimal means that one effective address (EA) calculation occurs during the memory
operation. Good means that multiple EA calculations occur during the memory operation that may cause
additional bus activities with multiple bus transfers. Poor means that an alignment interrupt is generated
by the storage operation.
Note:
Optimal: One EA calculation occurs.
Good: Multiple EA calculations occur that may cause additional bus activities with multiple bus transfers.
Poor: Alignment interrupt occurs.
1With early-out capability, timing is data dependent
2Plus additional synchronization time
3Aligned
Table 4-5. Performance Effects of Storage Operand Placement
Operand Boundary Crossing*
Size Byte
Align.
None — Protection
Boundary
4 Byte 4
<4
Optimal
Good
—--
Good
2 Byte 2
<2
Optimal
Good
—--
Good
1 Byte 1 Optimal — --
lmw, stmw 4
<4
Good
Poor
— Good
Poor
string N/A — — —

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-1
Chapter 5
Interrupts and Exceptions
The Power ISA embedded category architecture defines the mechanisms by which the e200 core
implements interrupts and exceptions. The document uses the word ‘interrupt’ to mean the action in which
the processor saves its old context and begins execution at a predetermined interrupt handler address.
Exceptions are referred to as events that, when enabled, cause the processor to take an interrupt. This
section uses the same terminology.
The Power ISA embedded category architecture exception mechanism allows the processor to change to
supervisor state as a result of unusual conditions arising either in the execution of instructions or from
external signals, bus errors, or various internal conditions. When interrupts occur, information about the
state of the processor is saved to machine state save/restore registers (SRR0/SRR1, CSRR0/CSRR1,
DSRR0/DSRR1, or MCSRR0/MCSRR1) and the processor begins execution at an address (interrupt
vector) determined by the interrupt vector prefix register (IVPR) and one of the interrupt vector offset
registers (IVOR). The processing of instructions within the interrupt handler begins in supervisor mode.
Multiple exception conditions can map to a single interrupt vector and may be distinguished by examining
registers associated with the interrupt. The exception syndrome register (ESR) is updated with information
specific to the exception type when an interrupt occurs.
To prevent loss of state information, interrupt handlers must save the information stored in the machine
state save/restore registers, soon after the interrupt has been taken. Four sets of these registers are
implemented: SRR0 and SRR1 for non-critical interrupts, CSRR0 and CSRR1 for critical interrupts,
DSRR0 and DSRR1 for debug interrupts (when the debug functionality is enabled), and MCSRR0 and
MCSRR1 for machine check interrupts. Hardware supports the nesting of critical interrupts within
non-critical interrupts, machine check interrupts within both critical and non-critical interrupts, and debug
interrupts within both critical, non-critical, and machine check interrupts. It is up to the interrupt handler
to save necessary state information if interrupts of a given class are re-enabled within the handler.
The following terms are used to describe the stages of exception processing:
Recognition Exception recognition occurs when a condition that can cause an exception is
identified by the processor. This is also referred to as an exception event.
Taken An interrupt is described as taken when control of instruction execution is passed
to the interrupt handler; that is, the context is saved, the instruction at the
appropriate vector offset is fetched, and the interrupt handler routine begins.
Handling Interrupt handling is performed by the software linked to the appropriate vector
offset. Interrupt handling begins in supervisor mode.
Returning from an interrupt is performed by executing an rfi, rfci, rfdi, or rfmci instruction (or se_rfi,
se_rfci, se_rfdi, or se_rfmci VLE instruction) to restore state information from the respective machine
state save/restore register pair.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-2 Freescale Semiconductor
5.1 Interrupts
This section discusses interrupt classes and types.
5.1.1 Interrupt Classes
All interrupts may be categorized as asynchronous/synchronous and critical/noncritical.
• Asynchronous interrupts (such as machine check, critical input, and external interrupts) are caused
by events that are independent of instruction execution. For asynchronous interrupts, the address
reported in a save/restore register is the address of the instruction that would have executed next
had the asynchronous interrupt not occurred.
• Synchronous interrupts are those that are caused directly by the execution or attempted execution
of instructions. Synchronous inputs are further divided into precise and imprecise types.
— Synchronous precise interrupts are those that precisely indicate the address of the instruction
causing the exception that generated the interrupt or, in some cases, the address of the
immediately following instruction. The interrupt type and status bits allow determination of
which of the two instructions has been addressed in the appropriate save/restore register.
— Synchronous imprecise interrupts are those that may indicate the address of the instruction
causing the exception that generated the interrupt or some instruction after the instruction
causing the interrupt. If the interrupt was caused by either the context synchronizing
mechanism or the execution synchronizing mechanism, the address in the appropriate
save/restore register is the address of the interrupt-forcing instruction. If the interrupt was not
caused by either of those mechanisms, the address in the save/restore register is the last
instruction to start execution and may not have completed. No instruction following the
instruction in the save/restore register has executed.
5.1.2 Interrupt Types
The e200z4 core processes all interrupts as either debug, machine check, critical, or noncritical types.
Separate control and status register sets are provided for each type of interrupt. Table 5-1 describes the
interrupt types.
Table 5-1. Interrupt Types
Category Description Programming Resources
Noncritical
interrupts
First-level interrupts that let the processor change program flow
to handle conditions generated by external signals, errors, or
unusual conditions arising from program execution or from
programmable timer-related events. These interrupts are largely
identical to those defined by the OEA.
SRR0/SRR1 SPRs and rfi instruction.
Asynchronous noncritical interrupts can be
masked by the external interrupt enable bit,
MSR[EE].
Critical
interrupts Critical input, watchdog timer, and debug interrupts. These
interrupts can be taken during a noncritical interrupt or during
regular program flow. The critical input and watchdog timer
interrupts are treated as critical interrupts. If the debug interrupt
is not enabled, it is also treated as a critical interrupt.
Critical save and restore SPRs (CSRR0/CSRR1)
and rfci. Critical input and watchdog timer critical
interrupts can be masked by the critical enable
bit, MSR[CE]. Debug events can be masked by
the debug enable bit MSR[DE].
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-3
Because save/restore register pairs are serially reusable, care must be taken to preserve program state that
may be lost when an unordered interrupt is taken.
As specified by the Power ISA embedded category architecture, interrupts can be either precise or
imprecise, synchronous or asynchronous, and critical or non-critical. A precise interrupt architecturally
guarantees that no instruction beyond the instruction causing the exception has (visibly) executed.
Asynchronous exceptions are caused by events external to the processor’s instruction execution;
synchronous exceptions are directly caused by instructions or an event somehow synchronous to the
program flow, such as a context switch. Critical interrupts are provided with a separate save/restore register
pair (CSRR0/CSRR1) to allow certain critical exceptions to be handled within a non-critical interrupt
handler. Machine check interrupts are also provided with a separate save/restore register pair
(MCSRR0/MCSRR1) to allow machine check exceptions to be handled within a non-critical or critical
interrupt handler.
The types of interrupts handled are shown in Table 5-2. Refer to the interrupt chapter in the EREF for exact
details of each interrupt type.
Machine
check
interrupt
Provides a separate set of resources for the machine check
interrupt. See Section 5.7.2, “Machine Check Interrupt (IVOR1).” Machine check save and restore SPRs
(MCSRR0/MCSRR1) and rfmci. Maskable with
the machine check enable bit, MSR[ME].
Includes the machine check syndrome register
(MCSR).
Debug
interrupt
Provides a separate set of resources for the debug interrupt. See
Section 5.7.16, “Debug Interrupt (IVOR15).”
Debug save and restore SPRs (DSRR0/DSRR1)
and rfdi. Can be masked by the machine check
enable bit, MSR[DE]. Includes the debug
syndrome register (DBSR).
Table 5-2. Interrupt Classifications
Interrupt Types Synchronous/Asynchronous Precise/Imprecise Critical/Non-critical/
Debug/Machine
Check
System Reset Asynchronous, non-maskable Imprecise —
Machine Check — — Machine Check
Non-Maskable Input Interrupt Asynchronous, non-maskable Imprecise Machine Check
Critical Input Interrupt
Watchdog Timer Interrupt
Asynchronous, maskable Imprecise Critical
External Input Interrupt
Fixed-Interval Timer Interrupt
Decrementer Interrupt
Asynchronous, maskable Imprecise Non-critical
Instruction-based Debug Interrupts Synchronous Precise Critical/Debug
Table 5-1. Interrupt Types
Category Description Programming Resources
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-4 Freescale Semiconductor
These classifications are discussed in greater detail in Section 5.7, “Interrupt Definitions.” Interrupts
implemented in the e200 and the exception conditions that cause them are listed in Table 5-3.
Debug Interrupt (UDE)
Debug Imprecise Interrupt
Asynchronous Imprecise Critical/Debug
Data Storage/Alignment/TLB
Interrupts
Instruction Storage/TLB Interrupts
Synchronous Precise Non-critical
Table 5-3. Exceptions and Conditions
Interrupt Type Interrupt Vector
Offset
Register Causing Conditions
System reset none,
vector to
[p_rstbase[0:29]] ||
2’b00
Reset by assertion of p_reset_b.
Critical Input IVOR 01 p_critint_b is asserted and MSRCE =1.
Machine check IVOR 1 • p_mcp_b transitions from negated to asserted
• ISI, ITLB Error on first instruction fetch for an exception handler
• Parity Error signaled on cache access
• External bus error
Machine check
(NMI) IVOR 1 p_nmi_b transitions from negated to asserted.
Data Storage IVOR 2 • Access control.
• Byte ordering due to misaligned access across page boundary to pages
with mismatched E bits
• Cache locking exception
Instruction Storage IVOR 3 • Access control.
• Byte ordering due to misaligned instruction across page boundary to
pages with mismatched VLE bits, or access to page with VLE set, and E
indicating little-endian.
• Misaligned Instruction fetch due to a change of flow to an odd half-word
instruction boundary on a Power ISA (non-VLE) instruction page
External Input IVOR 41 p_extint_b is asserted and MSREE=1.
Alignment IVOR 5 • lmw, stmw not word aligned
• lwarx or stwcx. not word aligned, lharx or sthcx. not half-word aligned
• dcbz with disabled cache, or to W or I storage
• SPE ld and st instructions not properly aligned
Program IVOR 6 Illegal, Privileged, Trap, FP enabled, AP enabled, Unimplemented
Operation.
Floating-point
unavailable
IVOR 7 MSRFP = 0 and attempt to execute a Book E floating point operation
Table 5-2. Interrupt Classifications (Continued)
Interrupt Types Synchronous/Asynchronous Precise/Imprecise Critical/Non-critical/
Debug/Machine
Check
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-5
5.2 Exception Syndrome Register
The exception syndrome register (ESR) provides a syndrome to differentiate between exceptions that can
generate the same interrupt type. The e200 adds some implementation specific bits to this register, as seen
in Figure 5-1.
System call IVOR 8 Execution of the System Call (sc, se_sc) instruction
AP unavailable IVOR 9
Decrementer IVOR 10 As specified in the
EREF
Fixed Interval Timer IVOR 11 As specified in the
EREF
Watchdog Timer IVOR 12 As specified in the
EREF
Data TLB Error IVOR 13 Data translation lookup did not match a valid entry in the TLB
Instruction TLB
Error
IVOR 14 Instruction translation lookup did not match a valid entry in the TLB
Debug IVOR 15 Trap, instruction address compare, data address compare, instruction
complete, branch taken, return from interrupt, interrupt taken, debug
counter, external debug event, unconditional debug event
Reserved IVOR 16–31 —
SPE Unavailable
Exception
IVOR 32 See Section 7.2.6.1, “SPE Unavailable Exception
EFP Data Exception IVOR 33 See Section 6.2.5.2, “Embedded Floating-point Data Exception
EFP Round
Exception IVOR 34 See Section 6.2.5.3, “Embedded Floating-Point Round Exception
1Autovectored external and critical input interrupts use this IVOR. Vectored interrupts supply an interrupt vector offset
directly.
0
PIL
PPR
PTR
FP
ST
0
DLK
ILK
AP
PUO
BO
PIE
0
SPE
0
VLEMI
0
MIF
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 62; Read/Write; Reset - 0x0
Figure 5-1. Exception Syndrome Register (ESR)
Table 5-3. Exceptions and Conditions (Continued)
Interrupt Type Interrupt Vector
Offset
Register Causing Conditions
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-6 Freescale Semiconductor
The ESR bits are defined in Table 5-4.
Table 5-4. ESR Bit Settings
Bit(s) Name Description Associated Interrupt Type
0–3
(32–35)
— Allocated1—
4
(36)
PIL Illegal Instruction exception Program
5
(37) PPR Privileged Instruction exception Program
6
(38)
PTR Trap exception Program
7
(39)
FP Floating-point operation Alignment (not on the e200)
Data Storage (not on the e200)
Data TLB (not on the e200)
Program
8
(40)
ST Store operation Alignment
Data Storage
Data TLB
9
(41)
— Reserved2—
10
(42)
DLK Data Cache Locking3Data Storage
11
(43)
ILK Instruction Cache Locking Data Storage
12
(44)
AP Auxiliary Processor operation
(Not used by the e200)
Alignment (not on the e200)
Data Storage (not on the e200)
Data TLB (not on the e200)
Program (not on the e200)
13
(45) PUO Unimplemented Operation exception Program
14
(46)
BO Byte Ordering exception
Mismatched Instruction Storage exception
Data Storage
Instruction Storage
15
(47)
PIE Program Imprecise exception
(Reserved)
Currently unused by the e200
16–23
(48–55)
— Reserved2—
24
(56)
SPE SPE APU Operation SPE Unavailable
SPE Floating-point Data
Exception
SPE Floating-point Round
Exception
Alignment
Data Storage
Data TLB
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-7
5.3 Machine State Register
The machine state register defines the state of the processor. It is shown in Figure 5-2.
The MSR bits are defined in Table 5-5.
25
(57) — Allocated1—
26
(58)
VLEMI VLE Mode Instruction SPE Unavailable
SPE Floating-point Data
Exception
SPE Floating-point Round
Exception
Data Storage
Data TLB
Instruction Storage
Alignment
Program
System Call
27–29
(59–61)
— Allocated1—
30
(62) MIF Misaligned Instruction Fetch Instruction Storage
Instruction TLB
31
(63)
— Allocated1—
1These bits are not implemented and should be written with zero for future compatibility.
2These bits are not implemented, and should be written with zero for future compatibility.
3This bit is implemented, but not set by hardware
0
UCLE
SPE
0
WE
CE
0
EE
PR
FP
ME
FE0
0
DE
FE1
0
IS
DS
0
RI
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Read/ Write; Reset - 0x0
Figure 5-2. Machine State Register (MSR)
Table 5-5. MSR Bit Settings
Bit(s) Name Description
0–4
(32–36) —Reserved
1
5
(37)
UCLE User Cache Lock Enable
0 Execution of the cache locking instructions in user mode (MSRPR=1) disabled; DSI
exception taken instead, and ILK or DLK set in ESR.
1 Execution of the cache lock instructions in user mode enabled.
Table 5-4. ESR Bit Settings (Continued)
Bit(s) Name Description Associated Interrupt Type
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-8 Freescale Semiconductor
6
(38) SPE SPE Available
0 Execution of SPE and EFP APU vector instructions is disabled; SPE Unavailable exception
taken instead, and SPE bit is set in ESR.
1 Execution of SPE and EFP APU vector instructions is enabled.
7–12
(39–44)
—Reserved
1
13
(45)
WE Wait State (Power management) enable. This bit is defined as optional in the Power ISA
embedded category architecture.
0 Power management is disabled.
1 Power management is enabled. The processor can enter a power-saving mode when
additional conditions are present. The mode chosen is determined by the DOZE, NAP, and
SLEEP bits in the HID0 register, described in Section 2.4.11, “Hardware Implementation
Dependent Register 0 (HID0).”
14
(46)
CE Critical Interrupt Enable
0 Critical Input and Watchdog Timer interrupts are disabled.
1 Critical Input and Watchdog Timer interrupts are enabled.
15
(47) —Reserved
1
16
(48)
EE External Interrupt Enable
0 External Input, Decrementer, and Fixed-Interval Timer interrupts are disabled.
1 External Input, Decrementer, and Fixed-Interval Timer interrupts are enabled.
17
(49)
PR Problem State
0 The processor is in supervisor mode, can execute any instruction, and can access any
resource (e.g. GPRs, SPRs, MSR, etc.).
1 The processor is in user mode, cannot execute any privileged instruction, and cannot
access any privileged resource.
18
(50) FP Floating-Point Available
0 Floating-point unit is unavailable. The processor cannot execute floating-point instructions,
including floating-point loads, stores, and moves. (An FP Unavailable interrupt will be
generated on attempted execution of floating point instructions).
1 Floating-point unit is available. The processor can execute floating-point instructions. (Note
that for e200, the floating point unit is not supported, and an Unimplemented Operation
exception will be generated for attempted execution of floating-point instructions when FP
is set).
19
(51)
ME Machine Check Enable
0 Asynchronous Machine Check interrupts are disabled.
1 Asynchronous Machine Check interrupts are enabled.
20
(52)
FE0 Floating-point exception mode 0 (not used by the e200)
21
(53)
—Reserved
1
22
(54)
DE Debug Interrupt Enable
0 Debug interrupts are disabled.
1 Debug interrupts are enabled.
23
(55)
FE1 Floating-point exception mode 1 (not used by the e200)
Table 5-5. MSR Bit Settings (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-9
5.4 Machine Check Syndrome Register (MCSR)
When the processor takes a machine check interrupt, it updates the machine check syndrome register
(MCSR) to differentiate between machine check conditions. The MCSR is shown in Figure 5-3.
Table 5-6 describes MCSR fields. The MCSR indicates the source of a machine check condition. When an
“Async Mchk” or “Error Report” syndrome bit in the MCSR is set, the core complex asserts p_mcp_out
for system information.
All bits in the MCSR are implemented as “write ‘1’ to clear”. Software in the machine check handler is
expected to clear the MCSR bits it has sampled prior to re-enabling MSRME to avoid a redundant machine
24
(56) —Reserved
1
25
(57)
—Reserved
1
26
(58)
IS Instruction Address Space
0 The processor directs all instruction fetches to address space 0 (TS=0 in the relevant TLB
entry).
1 The processor directs all instruction fetches to address space 1 (TS=1 in the relevant TLB
entry).
27
(59) DS Data Address Space
0 The processor directs all data storage accesses to address space 0 (TS=0 in the relevant
TLB entry).
1 The processor directs all data storage accesses to address space 1 (TS=1 in the relevant
TLB entry).
28–29
(60–61)
—Reserved
1
30
(62)
RI Recoverable Interrupt
This bit is provided for software use to detect nested exception conditions. This bit is cleared
by hardware when a Machine Check interrupt is taken
31
(63)
—Reserved
1
1 These bits are not implemented, will be read as zero, and writes are ignored.
MCP
IC_DPERR
0
EXCP_ERR
IC_TPERR
0
IC_LKERR
0
NMI
MAV
MEA
0
IF
LD
ST
G
0
BUS_IRERR
BUS_DRERR
BUS_WRERR
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 572; Read/Clear; Reset - 0x0
Figure 5-3. Machine Check Syndrome Register (MCSR)
Table 5-5. MSR Bit Settings (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-10 Freescale Semiconductor
check exception and to prepare for updated status bit information on the next machine check interrupt.
Hardware will not clear a bit in the MCSR other than at reset. Software will typically sample MCSR early
in the machine check handler, and will use the sampled value to clear those bits which were set at the time
of sampling. Note that additional bits may become set during the handler after sampling if an asynchronous
event occurs. By writing back only the originally sampled bits, another machine check can be generated
to process the new conditions after the original handler re-enables MSRME either explicitly, or by restoring
the MSR from MSRR1 at the return.
Note that any set bit in the MCSR other than status-type bits will cause a subsequent machine check
interrupt once MSRME=1.
Table 5-6. Machine Check Syndrome Register (MCSR)
Bit Name Description Exception
Type1Recoverable
0
(32) MCP Machine check input pin Async Mchk Maybe
1
(33)
IC_DPERR Instruction Cache data array parity error Async Mchk Precise
2–3
(34–35)
— Reserved, should be cleared. — —
4
(36)
EXCP_ERR ISI, ITLB, or Bus Error on first instruction fetch for an
exception handler
Async Mchk Precise
5
(37)
IC_TPERR Instruction Cache Tag parity error Async Mchk Precise
6
(38)
— Reserved, should be cleared. —
7
(39)
IC_LKERR Instruction Cache Lock error
Indicates a cache control operation or invalidation
operation invalidated one or more locked lines in the
Icache
Status —
8–10
(40–42)
— Reserved, should be cleared. —
11
(43)
NMI NMI input pin NMI —
12
(44)
MAV MCAR Address Valid
Indicates that the address contained in the MCAR was
updated by hardware to correspond to the first detected
Async Mchk error condition
Status —
13
(45)
MEA MCAR holds Effective Address
If MAV=1,MEA=1 indicates that the MCAR contains an
effective address and MEA=0 indicates that the MCAR
contains a physical address
Status —
14
(46)
— Reserved, should be cleared. —
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-11
15
(47)
IF Instruction Fetch Error Report
An error occurred during the attempt to fetch an
instruction. This could be due to a parity error, or an
external bus error. MCSRR0 contains the instruction
address.
Error
Report
Precise
16
(48)
LD Load type instruction Error Report
An error occurred during the attempt to execute the load
type instruction located at the address stored in
MCSRR0.
Error
Report
Precise
17
(49)
ST Store type instruction Error Report
An error occurred during the attempt to execute the
store type instruction located at the address stored in
MCSRR0.
Error
Report
Precise
18
(50)
G Guarded Load or Store instruction Error Report
An error occurred during the attempt to execute the load
or store type instruction located at the address stored in
MCSRR0 and the guarded access encountered an
error on the external bus.
Error
Report
Precise
19–26
(51–58)
— Reserved, should be cleared. —
27
(59)
BUS_IRERR Read bus error on Instruction fetch or linefill Async Mchk Precise if data
used
28
(60)
BUS_DRERR Read bus error on data load Async Mchk Precise if data
used
29
(61)
BUS_WRERR Write bus error on store Async Mchk Unlikely
30–31
(62–63) — Reserved, should be cleared. —
1The Exception Type indicates the exception type associated with a given syndrome bit
“Error Report” indicates that this bit is only set for error report exceptions which cause machine check interrupts. These
bits are only updated when the machine check interrupt is actually taken. Error report exceptions are not gated by
MSR[ME]. These are synchronous exceptions. These bits will remain set until cleared by software writing a “1” to the
bit position(s) to be cleared.
“Status” indicates that this bit is provides additional status information regarding the logging of an asynchronous
machine check exception. These bits will remain set until cleared by software writing a “1” to the bit position(s) to be
cleared.
“NMI” indicates that this bit is only set for the non-maskable interrupt type exception which causes a machine check
interrupt. This bit is only updated when the machine check interrupt is actually taken. NMI exceptions are not gated by
MSRME. This is an asynchronous exception. This bit will remain set until cleared by software writing a “1” to the bit
position.
“Async Mchk” indicates that this bit is set for an asynchronous machine check exception. These bits are set immediately
upon detection of the error. Once any “Async Mchk” bit is set in the MCSR, a machine check interrupt will occur if
MSR[ME] = 1. If MSR[ME] = 0, the machine check exception will remain pending. These bits will remain set until
cleared by software writing a “1” to the bit position(s) to be cleared.
Table 5-6. Machine Check Syndrome Register (MCSR) (Continued)
Bit Name Description Exception
Type1Recoverable
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-12 Freescale Semiconductor
5.5 Interrupt Vector Prefix Registers (IVPR)
The interrupt vector prefix register (IVPR) is used during interrupt processing for determining the starting
address of a software handler used to handle an interrupt. The value contained in the vector offset field of
the IVOR selected for a particular interrupt type is concatenated with the value held in the interrupt vector
prefix register to form an instruction address from which execution is to begin. The format of IVPR is
shown in Figure 5-4.
The IVPR fields are defined in Table 5-7.
5.6 Interrupt Vector Offset Registers (IVORxx)
The interrupt vector offset registers are used during interrupt processing for determining the starting
address of a software handler used to handle an interrupt. The value contained in the vector offset field of
the IVOR selected for a particular interrupt type is concatenated with the value held in the IVPR to form
an instruction address from which execution is to begin.
The format of an e200 IVOR is shown in Figure 5-5.
Vector Base 0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR 63; Read/Write
Figure 5-4. e200 Interrupt Vector Prefix Register (IVPR)
Table 5-7. IVPR Register Fields
Bit(s) Name Description
0–15
(32–47)
Vec Base Vector Base
This field is used to define the base location of the vector table, aligned to a 64Kbyte boundary.
This field provides the high-order 16 bits of the location of all interrupt handlers. The contents of
the IVORxx register appropriate for the type of exception being processed are concatenated with
the IVPR Vector Base to form the address of the handler in memory.
16–31
(48–63) —Reserved
1
1 These bits are not implemented, will be read as zero, and writes are ignored.
0 Vector Offset 0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR 400–415, 528–530; Read/Write
Figure 5-5. e200 Interrupt Vector Offset Register (IVOR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-13
The IVOR fields are defined in Table 5-8.
5.7 Interrupt Definitions
This section discusses IVOR0–IVOR32.
5.7.1 Critical Input Interrupt (IVOR0)
A critical input exception is signalled to the processor by the assertion of the critical interrupt pin
(p_critint_b). When the e200 detects the exception and the exception is enabled by MSR[CE], it takes the
critical input interrupt. The p_critint_b input is a level-sensitive signal expected to remain asserted until
the the processor acknowledges the interrupt. If p_critint_b is negated early, recognition of the interrupt
request is not guaranteed. After the e200 begins execution of the critical interrupt handler, the system can
safely negate p_critint_b.
A critical input interrupt may be delayed by other higher priority exceptions or if MSR[CE] is cleared
when the exception occurs.
Table 5-9 lists register settings when a critical input interrupt is taken.
Table 5-8. IVOR Register Fields
Bit(s) Name Description
0–15
(32–47)
—Reserved
1
1 These bits are not implemented, will be read as zero, and writes are ignored.
16–27
(48–59)
Vector
Offset
Vector Offset
This field is used to provide a quadword index from the base address provided by the IVPR to
locate an interrupt handler.
28–31
(60–63)
—Reserved
1
Table 5-9. Critical Input Interrupt—Register Settings
Register Setting Description
CSRR0 Set to the effective address of the instruction that the processor would have attempted to execute next
if no exception conditions were present.
CSRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE0
WE0
CE0
EE0
PR0
FP0
ME—
FE00
DE—/01
FE10
IS 0
DS0
RI —
ESR Unchanged
MCSR Unchanged
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-14 Freescale Semiconductor
When the debug instructions set is enabled, the MSR[DE] bit is not automatically cleared by a critical input
interrupt, but can be configured to be cleared via the HID0 register (HID0[CICLRDE]). Refer to
Section 2.4.11, “Hardware Implementation Dependent Register 0 (HID0).”
IVOR0 is the vector offset register used by autovectored critical input interrupts to determine the interrupt
handler location. The e200 also provides the capability to directly vector critical input interrupts to
multiple handlers by allowing a critical input interrupt request to be accompanied by a vector offset. The
p_voffset[0:11] input signals are used in place of the value in IVOR0 to form the interrupt vector when a
critical input interrupt request is not autovectored (p_avec_b negated when p_critint_b asserted).
5.7.2 Machine Check Interrupt (IVOR1)
The e200z446n3 implements the machine check exception as defined in the Freescale EIS machine check
instruction set except for automatic clearing of the MSR[DE] bit (see later paragraph). This behavior is
different from the definition in the Power ISA embedded category architecture. The e200 initiates a
machine check interrupt if any of the machine check sources listed in Table 5-3 is detected.
As defined in Freescale EIS machine check instruction set, a machine check interrupt is taken for error
report and NMI-type machine check conditions even if MSR[ME] is cleared, without the processor
generating an internal checkstop condition. Processing of asynchronous type machine check sources (the
sources reflected in the MCSR “async mchk” syndrome bits) is gated by MSR[ME].
The Freescale EIS machine check instruction set defines a separate set of save/restore registers
(MCSRR0/1), a machine check syndrome register (MCSR) to record the source(s) of machine checks, and
a machine check address register (MCAR) to hold an address associated with a machine check for certain
classes of machine checks. Return from machine check instructions (rfmci, se_rfmci) are also provided
to support returns using MCSRR0/1.
The MSR[RI] status bit is provided for software use in determining if multiple nested machine check
exceptions have occurred. Software may interrogate the MCSRR1[RI] bit to determine if a machine check
occurred during the initial portion of a machine check handler prior to handler code which sets MSR[RI]
to ‘1’ to indicate that the handler can now tolerate another machine check condition without losing state
necessary for recovery.
The MSR[DE] bit is not automatically cleared by a machine check exception, but can be configured to be
cleared or left unchanged by the HID0 register (HID0[MCCLRDE]). Refer to Section 2.4.11, “Hardware
Implementation Dependent Register 0 (HID0).”
DEAR Unchanged
Vector IVPR0–15 || IVOR016–27 || 4b0000 (autovectored)
IVPR0–15 || p_voffset[0–11] || 4b0000 (non-autovectored)
1DE is cleared when the Debug APU is disabled. Clearing of DE is optionally supported by control in HID0 when the
Debug APU is enabled.
Table 5-9. Critical Input Interrupt—Register Settings (Continued)

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-15
5.7.2.1 Machine Check Causes
Machine check causes are divided into different types:
• Error report machine check conditions
• Non-maskable interrupt (NMI) machine check exceptions
• Asynchronous machine check exceptions
This division is intended to facilitate machine check handling in uniprocessor, multiprocessor, and
multithreaded systems. Although the initial implementation of the e200z4 does not implement
multithreading, future versions are expected to, and the machine check model will remain compatible. In
addition, the model is equally applicable to a single-threaded design.
5.7.2.1.1 Error Report Machine Check Exceptions
Error report machine check exceptions are directly associated with the current instruction execution
stream, and are presented to the interrupt mechanism in a manner analogous to an instruction storage or
data storage interrupt. Since the execution stream cannot continue execution without suffering from
corruption of architectural state, these exceptions are not masked by MSR[ME]. Error report machine
check exceptions are not necessarily recoverable if they occur during the initial portion of a machine check
handler. The MSR[RI] and MCSRR1[RI] bits are provided to assist software in determining recoverability.
For error report machine check exceptions, the MCSR is updated only when the machine check interrupt
is actually taken. The MCAR is not updated for error report machine check exceptions.
Error report machine check exceptions encountered by program execution can be flushed if an older
exception exists or if an asynchronous interrupt or machine check is taken before the instruction that
encountered the error becomes the oldest instruction in the machine. In this case the corresponding MCSR
bit is not set due to the flushed exception condition (although the corresponding bit may have already been
set by a previous instruction’s exception). Note that an asynchronous machine check condition may occur
for the same error condition prior to the error report machine check, and the error report machine check
may be discarded.
Depending on the type of error, the MCSR IF, LD, G, or ST bits are set by hardware to reflect the error
being reported. Software is responsible for clearing these syndrome bits by writing a ‘1’ to the bits to be
cleared. Hardware will not clear an error report bit once it is set.
• MCSR[IF] is set if the error occurred during an instruction fetch
• MCSR[LD] is set if the error occurred for a load instruction. If the error occurred for a guarded
load and the error source was from the external bus, MCSR[G] will also be set.
• MCSR[ST] is set if the error occurred in the MMU (DTLB Error or DSI) for a store type
instruction, if an external termination error was received on a cache-inhibited guarded store or on
a store conditional instruction. If an external termination error occurred on a cache-inhibited
guarded store, or on a guarded store conditional, MCSR[G] is also set.
Note that most (if not all) error report machine check exceptions are accompanied by an associated
asynchronous machine check exception on a single-threaded e200z446n3, although this may not generally
be the case for a multithreaded version.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-16 Freescale Semiconductor
Table 5-10 lists the error report machine check exceptions.
5.7.2.1.2 Non-Maskable Interrupt Machine Check Exceptions
Non-maskable interrupt exceptions are reported by means of the p_nmi_b input pin, which is transition
sensitive. NMI exceptions are not gated by MSR[ME], thus they are not necessarily recoverable if an NMI
exception occurs during the initial part of a machine check exception handler. The MSR[RI] and
MCSRR1[RI] bits are provide to assist software in determining recoverability.
Table 5-10. Error Report Machine Check Exceptions
Synchronous Machine
Check Source Error Type MCSR Updates Precise1
1MCSRR0 will point to the instruction associated with the machine check condition
Instruction Fetch (Icache tag array parity error or data array
parity error) & L1CSR1ICEA=’00’
IF yes
Icache uncorrectable tag array parity error
L1CSR1ICEA=’01’ & and locked line was
invalidated
yes
External termination error yes
Load instruction External termination error on load LD, [G]2
2G will be set if the load was a guarded load.
yes
Load and reserve instruction External termination error on load LD, [G]2yes
Store instruction External termination error on unbuffered
store3
3Store may be unbuffered if the store buffer is disabled
ST, [G]5yes
External termination error on CI+G store4
4Only reported if the store was a cache-inhibited guarded store
ST, G yes
Store conditional instruction External termination error on store
conditional
ST, [G]5
5Only reported if the store was a guarded store.
yes
icblc instruction Icache tag array parity error & at least one
line locked & L1CSR1ICEA=‘00’
IF yes
Icache tag array uncorrectable parity error &
L1CSR1ICEA=‘01’ & locked line was
invalidated
yes
icbtls instruction Icache tag array parity error &
L1CSR1ICEA=‘00’
IF yes
Icache tag array uncorrectable parity error &
L1CSR1ICEA=‘01’ & locked line was
invalidated
yes
External termination error on linefill IF yes
Exception Vectoring ISI, ITLB, or Bus Error on first instruction
fetch for an exception handler
IF yes
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-17
For NMI machine check exceptions, MCSR[NMI] is updated (set) only when the machine check interrupt
is actually taken. Hardware does not clear the MCSR[NMI] syndrome bit. Software is responsible for
clearing this syndrome bit by writing a ‘1’ to the bits to be cleared. Hardware will not clear an NMI bit
once it is set.
The MCAR is not updated for NMI machine check exceptions.
5.7.2.1.3 Asynchronous Machine Check Exceptions
The remainder of machine check exceptions are classified as asynchronous machine check exceptions, as
they are reported directly by the subsystem or resource that detected the condition. For many cases, the
asynchronous condition will be reported simultaneously with a corresponding error report condition.
These conditions are reported by immediately setting the corresponding MCSR “async mchk” syndrome
bit, regardless of the state of MSR[ME]. Interrupts due to asynchronous machine check exceptions are
gated by MSR[ME]. If MSR[ME] = 0 at the time an asynchronous machine check bit is set, the interrupt
is postponed until MSR[ME] is later set to ‘1,’ although a machine check interrupt may occur at the time
of the event due to an error report exception. Asynchronous events are cumulative; hardware does not clear
an asynchronous machine check syndrome bit. Software is responsible for clearing these syndrome bits by
writing a ‘1’ to the bit or bits to be cleared. Hardware will not clear an asynchronous machine check bit
once it is set.
If MCSR[MAV] is cleared at the time an asynchronous machine check exception occurs that has a
corresponding address (either an effective or real address) to log in the MCAR, then the MCAR and the
MCSR[MEA] bit are updated and the MCSR[MAV] bit is set. If MCSR[MAV] was previously set, the
MCAR and the MCSR[MEA] bit are not affected.
Table 5-11 details all asynchronous machine check sources.
Table 5-11. Asynchronous Machine Check Exceptions
Asynchronous
Machine Check
Source
Transaction
Source Error Type MCSR Update1MCAR
Update2
External n/a Machine Check Input Pin3MCP none
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-18 Freescale Semiconductor
Table 5-12 details the priority of asynchronous machine check updates to the MCAR when multiple
simultaneous asynchronous machine check conditions occur. Note that because a higher priority condition
can occur after a lower priority condition occurs but before the machine check interrupt handler reads the
Instruction Cache Instruction Fetch Tag array parity error and
L1CSR1[ICEA] = 00
MAV IC_TPERR RA
Icache hit, data array
parity error and
L1CSR1[ICEA] = 00
IC_DPERR RA
L1CSR1[ICEA] = 01 and
Auto-invalidation of locked
line due to uncorrectable
tag parity error
IC_TPERR,
IC_LKERR
RA
icblc Tag array parity error and
L1CSR1[ICEA] = 00 and
at least one line locked
IC_TPERR RA
icbtls Tag array parity error and
L1CSR1[ICEA] = 00
IC_TPERR RA
icblc
icbtls
L1CSR1[ICEA] = 01 and
Auto-invalidation of locked
line due to uncorrectable
tag parity error
IC_TPERR,
IC_LKERR
RA
BIU store Bus error on write MAV BUS_WRERR RA
load Bus error MAV BUS_DRERR RA
icbtls
CI or cache disabled
Ifetch
Bus error on linefill
Bus error on CI Ifetch
Bus error on cache
disabled Ifetch
MAV BUS_IRERR RA
instruction fetch or
icbtls
Bus error on locked line
error recovery refill
MAV BUS_IRERR,
IC_LKERR
RA
Exception
Vectoring
first instruction fetch
for an exception
handler
ISI or Bus Error on first
instruction fetch for an
exception handler
MAV EXCP_ERR RA
first instruction fetch
for an exception
handler
ITLB Error on first
instruction fetch for an
exception handler
MAV EXCP_ERR EA
1The MCSR update column indicates which bits in the MCSR will be updated when the exception is logged.
2The MCAR update column indicates whether or not the error will provide either a real address (RA), effective
address (EA), or no address (none) which is associated with the error.
3The machine check input pin is used by the platform logic to indicate machine check type errors which are detected
by the platform. Software must query error logging information within the platform logic to determine the specific
error condition and source.
Table 5-11. Asynchronous Machine Check Exceptions (Continued)
Asynchronous
Machine Check
Source
Transaction
Source Error Type MCSR Update1MCAR
Update2
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-19
MCSR and MCAR, the interrupt handler may not necessarily see the higher priority MCAR value, even
though multiple MCSR bits are set.
5.7.2.2 Machine Check Interrupt Actions
Machine check interrupts for “error report” conditions and NMI are enabled and taken regardless of the
state of MSR[ME]. Machine check interrupts due to an “async mchk” syndrome bit being set in MCSR
Table 5-12. Asynchronous Machine Check MCAR update Priority
Priority
(0 = highest)
Asynchronous
Machine Check
Source
Transaction
Source Error Type (MCSR Update)
0 Exception
Vectoring
first instruction fetch
for an exception
handler
ISI or Bus Error on first
instruction fetch for an
exception handler
EXCP_ERR
first instruction fetch
for an exception
handler
ITLB Error on first
instruction fetch for an
exception handler
EXCP_ERR
1 BIU store Bus error on write BUS_WRERR
2 Instruction Cache icblc
icbtls
instruction fetch
Uncorrectable tag array
parity error &
L1CSR1ICEA=01 & locked
line invalidated
IC_TPERR,
IC_LKERR
3 BIU instruction fetch Bus error on refill of locked
line with data parity error
& L1CSR1ICEA=01
BUS_IRERR,
IC_LKERR
Instruction Cache icbtls Tag array parity error &
L1CSR1ICEA=00
IC_TPERR
4 icblc Tag array parity error &
L1CSR1ICEA=00 & at
least one line is locked
IC_TPERR
5 BIU load Bus error on load BUS_DRERR
6BIUicbtls
CI or cache disabled
Ifetch
Bus error on linefill
Bus error on CI Ifetch
Bus error on cache
disabled Ifetch
BUS_IRERR
7 Instruction Cache Instruction Fetch Tag array parity error &
L1CSR1ICEA=00 IC_TPERR
8 Instruction Cache Data array parity error &
L1CSR1ICEA=00
IC_DPERR
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-20 Freescale Semiconductor
are only taken when MSR[ME] = 1. When a machine check interrupt is taken, registers are updated as
shown in Table 5-13.
The machine check syndrome register is provided to identify the source(s) of a machine check, and in
conjunction with MCSRR1[RI], may be used to identify recoverable events.
The MSR[RI] status bit is provided for software use in determining if multiple nested machine check
exceptions have occurred. Software may interrogate the MCSRR1[RI] bit to determine whether a machine
check occurred during the initial portion of a machine check handler prior to handler code, which sets
MSR[RI] to ‘1’ to indicate that the handler can now tolerate another machine check condition without
losing state necessary for recovery. The interrupt handler should set MSR[RI] as soon as possible after
saving off working registers and MCSRR0,1 to avoid loss of state if another machine check condition were
to occur.
The machine check input pin p_mcp_b can be masked by HID0[EMCP].
The non-maskable interrupt machine check input pin p_nmi_b is never masked.
Precise external termination errors occur when a load or cache-inhibited or guarded store is terminated by
assertion of p_tea_b (external bus ERROR termination response); these result in both an “error report” and
an “async mchk” machine check exception.
Some machine check exceptions are unrecoverable in the sense that execution cannot resume in the
context that existed before the interrupt; however, system software can use the machine check interrupt
handler to try to identify and recover from the machine check condition.
Table 5-13. Machine Check Interrupt—Register Settings
Register Setting Description
MCSRR0 On a best-effort basis the e200 sets this to the address of some instruction that was executing or about
to be executing when the machine check condition occurred.
MCSRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE0
WE0
CE0
EE0
PR0
FP0
ME0
FE00
DE0/—1
1DE is cleared when the debug functionality is disabled. Clearing of DE is optionally supported by control in HID0
when the debug functionality is enabled.
FE10
IS 0
DS0
RI 0
ESR Unchanged
MCSR Updated to reflect the source(s) of a machine check. Hardware only sets appropriate bits, no previously
set bits are cleared by hardware.
MCAR See Table 5- 12
Vector IVPR0–15 || IVOR116–27 || 4b0000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-21
5.7.2.3 Checkstop State
Machine checks no longer result in a checkstop, and there is no checkstop state implemented on e200z4
cores.
5.7.3 Data Storage Interrupt (IVOR2)
A data storage interrupt (DSI) may occur if no higher priority exception exists and one of the following
exception conditions exists:
• Read or write access control
• Byte ordering
• Cache locking
Access control is defined as in the Power ISA embedded category architecture. A byte ordering exception
condition occurs for any misaligned access across a page boundary to pages with mismatched E bits. Cache
locking exception conditions occur for any attempt to execute a icbtls or icblc in user mode with
MSR[UCLE] = 0.
Table 5-14 lists register settings when a DSI is taken.
5.7.4 Instruction Storage Interrupt (IVOR3)
An instruction storage interrupt (ISI) occurs when no higher priority exception exists and an execute
access control exception occurs. This interrupt is implemented as defined by the PowerISA embedded
category architecture, with the addition of misaligned instruction fetch exceptions and the extension of the
byte ordering exception status to also cover mismatched instruction storage exceptions.
Table 5-14. Data Storage Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting load/store instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE0
WE0
CE—
EE0
PR0
FP0
ME—
FE00
DE—
FE10
IS 0
DS0
RI —
ESR Access:
Byte ordering:
Cache locking:
[ST], [SPE], [VLEMI]. All other bits cleared.
[ST], [SPE], [VLEMI], BO. All other bits cleared.
(DLK, ILK), [VLEMI], [ST]. All other bits cleared.
MCSR Unchanged
DEAR For Access and Byte ordering exceptions, set to the effective address of a byte within the page whose
access caused the violation. Undefined on Cache locking exceptions
Vector IVPR0–15 || IVOR216–27 || 4b0000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-22 Freescale Semiconductor
Exception extensions implemented in the e200 for PowerPC VLE involve extending the definition of the
instruction storage interrupt to include byte ordering exceptions for instruction accesses, and misaligned
instruction fetch exceptions, and corresponding updates to the ESR.
Table 5-15 shows ISI exceptions and conditions.
Table 5-16 lists register settings when an ISI is taken.
5.7.5 External Input Interrupt (IVOR4)
An External Input exception is signalled to the processor by the assertion of the external interrupt pin
(p_extint_b). The p_extint_b input is a level-sensitive signal expected to remain asserted until the e200
acknowledges the external interrupt. If p_extint_b is negated early, recognition of the interrupt request is
not guaranteed. When the e200 detects the exception, if the exception is enabled by MSR[EE], the e200
takes the external input interrupt.
An external input interrupt may be delayed by other higher priority exceptions or if MSR[EE] is cleared
when the exception occurs.
Table 5-15. ISI Exceptions and Conditions
Interrupt Type Interrupt Vector
Offset
Register Causing Conditions
Instruction Storage IVOR 3 • Access control.
• Byte ordering due to misaligned instruction across page boundary to
pages with mismatched VLE bits, or access to page with VLE set, and E
indicating little-endian.
• Misaligned Instruction fetch due to a change of flow to an odd half word
instruction boundary on a Power ISA (non-VLE) instruction page
Table 5-16. Instruction Storage Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE0
WE0
CE—
EE0
PR0
FP0
ME—
FE00
DE—
FE10
IS 0
DS0
RI —
ESR [BO, MIF, VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR316–27 || 4b0000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-23
Table 5-17 lists register settings when an external input interrupt is taken.
IVOR4 is the vector offset register used by autovectored external input interrupts to determine the interrupt
handler location. The e200 also provides the capability to directly vector external input interrupts to
multiple handlers by allowing an external input interrupt request to be accompanied by a vector offset. The
p_voffset[0:11] input signals are used in place of the value in IVOR4 when a external input interrupt
request is not autovectored (p_avec_b negated when p_extint_b asserted).
5.7.6 Alignment Interrupt (IVOR5)
The core implements the alignment interrupt as defined by the Power ISA. An alignment exception is
generated when any of the following occurs:
• The operand of lmw or stmw not word aligned.
• The operand of lwarx or stwcx. not word aligned.
• The operand of lharx or sthcx. not half word aligned.
• Execution of a dcbz instruction is attempted.
• Execution of an SPE load or store instruction which is not properly aligned.
Table 5-18 lists register settings when an alignment interrupt is taken.
Table 5-17. External Input Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the instruction that the processor would have attempted to execute next
if no exception conditions were present.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE0
WE0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR Unchanged
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR416–27 || 4b0000
IVPR0–15 || p_voffset[0:11] || 4b0000 (non-autovectored)
Table 5-18. Alignment Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting load/store instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-24 Freescale Semiconductor
5.7.7 Program Interrupt (IVOR6)
The core implements the program interrupt as defined by the Power ISA. A program interrupt occurs when
no higher priority exception exists and one or more of the following exception conditions defined in the
Power ISA occur:
• Illegal Instruction
• Privileged Instruction
•Trap
• Unimplemented Operation
The core invokes an illegal instruction program exception on attempted execution of the following
instructions:
• Instruction from the illegal instruction class
•mtspr and mfspr instructions with an undefined SPR specified
•mtdcr and mfdcr instructions with an undefined DCR specified
The core invokes a privileged instruction program exception on attempted execution of the following
instructions when MSR[PR] = 1 (user mode):
• A privileged instruction
•mtspr and mfspr instructions which specify a SPRN value with SPRN[5] = 1 (even if the SPR is
undefined).
The core invokes an trap exception on execution of the tw and twi instructions if the trap conditions are
met and the exception is not also enabled as a debug interrupt.
The core invokes an unimplemented operation program exception on attempted execution of the
instructions lswi, lswx, stswi, stswx, mfapidi, mfdcrx, mtdcrx, or on any Power ISA floating point
instruction when MSR[FP] = 1. All other defined or allocated instructions that are not implemented by the
core cause an illegal instruction program exception.
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR [ST], [SPE], [VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Set to the effective address of a byte of the load or store whose access caused the violation.
Vector IVPR0–15 || IVOR516–27 || 4b0000
Table 5-18. Alignment Interrupt—Register Settings (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-25
Table 5-19 lists register settings when a program interrupt is taken.
5.7.8 Floating-Point Unavailable Interrupt (IVOR7)
The floating-point unavailable exception is implemented as defined in the Power ISA. A floating-point
unavailable interrupt occurs when no higher priority exception exists, an attempt is made to execute a
floating-point instruction (including floating-point load, store, or move instructions), and the
floating-point available bit in the MSR is disabled (MSR[FP] = 0).
Table 5-20 lists register settings when a floating-point unavailable interrupt is taken.
Table 5-19. Program Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR Illegal:
Privileged:
Trap:
Unimplemented:
PIL, [VLEMI]. All other bits cleared.
PPR, [VLEMI]. All other bits cleared.
PTR, [VLEMI]. All other bits cleared.
PUO, [FP], [VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR616–27 || 4b0000
Table 5-20. Floating-Point Unavailable Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR Unchanged
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR716–27 || 4b0000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-26 Freescale Semiconductor
5.7.9 System Call Interrupt (IVOR8)
A system call interrupt occurs when a system call (sc, se_sc) instruction is executed and no higher priority
exception exists.
Exception extensions implemented in e200 for PowerPC VLE include modification of the system call
interrupt definition to include updating the ESR.
Table 5-21 lists register settings when a system call interrupt is taken.
5.7.10 Auxiliary Processor Unavailable Interrupt (IVOR9)
An auxiliary processor unavailable exception is defined by the Power ISA to occur when an attempt is
made to execute an APU instruction which is implemented but configured as unavailable, and no higher
priority exception condition exists.
The e200 does not utilize this interrupt.
5.7.11 Decrementer Interrupt (IVOR10)
The e200 implements the decrementer exception as described in the EREF. A decrementer interrupt occurs
when no higher priority exception exists, a decrementer exception condition exists (TSR[DIS] = 1), and
the interrupt is enabled (both TCR[DIE] and MSR[EE] = 1).
The timer status register (TSR) holds the decrementer interrupt bit set by the timer facility when an
exception is detected. Software must clear this bit in the interrupt handler to avoid repeated decrementer
interrupts.
Table 5-21. System Call Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the instruction
following
the sc instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR [VLEMI] All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR816–27 || 4b0000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-27
Table 5-22 lists register settings when a decrementer interrupt is taken.
5.7.12 Fixed-Interval Timer Interrupt (IVOR11)
The e200 implements the fixed-interval timer (FIT) exception as described in the EREF. The triggering of
the exception is caused by selected bits in the time base register changing from 0 to 1.
A fixed-interval timer interrupt occurs when no higher priority exception exists, a FIT exception exists
(TSR[FIS] = 1), and the interrupt is enabled (both TCR[FIE] and MSR[EE] = 1).
The timer status register (TSR) holds the FIT interrupt bit set by the timer facility when an exception is
detected. Software must clear this bit in the interrupt handler to avoid repeated FIT interrupts.
Table 5-23 lists register settings when a FIT interrupt is taken.
Table 5-22. Decrementer Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the instruction that the processor would have attempted to execute next
if no exception conditions were present.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR Unchanged
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR1016–27 || 4b0000
Table 5-23. Fixed-Interval Timer Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the instruction that the processor would have attempted to execute next
if no exception conditions were present.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR Unchanged
MCSR Unchanged
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-28 Freescale Semiconductor
5.7.13 Watchdog Timer Interrupt (IVOR12)
The e200 implements the watchdog timer (WDT) exception as described in the EREF. The triggering of
the exception is caused by the first enabled watchdog time-out.
A watchdog timer interrupt occurs when no higher priority exception exists, a watchdog timer exception
exists (TSR[WIS] = 1), and the interrupt is enabled (both TCR[WIE] and MSR[CE] = 1).
The timer status register (TSR) holds the watchdog interrupt bit set by the timer facility when an exception
is detected. Software must clear this bit in the interrupt handler to avoid repeated watchdog interrupts.
Table 5-24 lists register settings when a watchdog timer interrupt is taken.
The MSR[DE] bit is not automatically cleared by a Watchdog Timer interrupt, but can be configured to be
cleared via the HID0 register (HID0[CICLRDE]). Refer to Section 2.4.11, “Hardware Implementation
Dependent Register 0 (HID0).”
5.7.14 Data TLB Error Interrupt (IVOR13)
A Data TLB error interrupt occurs when no higher priority exception exists and a Data TLB error
exception exists due to a data translation lookup miss in the TLB.
DEAR Unchanged
Vector IVPR0–15 || IVOR1116–27 || 4b0000
Table 5-24. Watchdog Timer Interrupt—Register Settings
Register Setting Description
CSRR0 Set to the effective address of the instruction that the processor would have attempted to execute next
if no exception conditions were present.
CSRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE0
EE 0
PR 0
FP 0
ME —
FE 00
DE 0/—1
1DE is cleared when the debug functionality is disabled. Clearing of DE is optionally supported by control in HID0
when the debug functionality is enabled.
FE 10
IS 0
DS 0
RI —
ESR Unchanged
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR1216–27 || 4b0000
Table 5-23. Fixed-Interval Timer Interrupt—Register Settings (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-29
Table 5-25 lists register settings when a DTLB interrupt is taken.
5.7.15 Instruction TLB Error Interrupt (IVOR14)
An instruction TLB error interrupt occurs when no higher priority exception exists and an instruction TLB
error exception exists due to an instruction translation lookup miss in the TLB.
Exception extensions implemented in the e200 for PowerPC VLE involve extending the definition of the
instruction TLB error interrupt to include updating the ESR.
Table 5-26 lists register settings when an ITLB interrupt is taken.
Table 5-25. Data TLB Error Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting load/store instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE1 0
IS 0
DS 0
RI —
ESR [ST], [SPE], [VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Set to the effective address of a byte of the load or store whose access caused the violation.
Vector IVPR0–15 || IVOR1316–27 || 4b0000
Table 5-26. Instruction TLB Error Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR [MIF] All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR1416–27 || 4b0000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-30 Freescale Semiconductor
5.7.16 Debug Interrupt (IVOR15)
The e200 implements the debug interrupt as defined in the Power ISA embedded category architecture
with the following changes:
• When the debug functionality is enabled, debug is no longer a critical interrupt, but uses DSRR0
and DSRR1 for saving machine state on context switch
• A return from debug interrupt instruction (rfdi or se_rfdi) is implemented to support the new
machine state registers
• A critical interrupt taken debug event is defined to allow critical interrupts to generate a debug
event
• A critical return debug event is defined to allow debug events to be generated for rfci and se_rfci
instructions
There are multiple sources that can signal a debug exception. A debug interrupt occurs when no higher
priority exception exists, a debug exception exists in the debug status Register, and debug interrupts are
enabled (both DBCR0[IDM] = 1 (internal debug mode) and MSR[DE] = 1). Enabling debug events and
other debug modes are discussed further in Chapter 11, “Debug Support.” With the debug functionality
enabled (see Section 2.4.11, “Hardware Implementation Dependent Register 0 (HID0)”), the debug
interrupt has its own set of machine state save/restore registers (DSRR0, DSRR1) to allow debugging of
both critical and non-critical interrupt handlers. In addition, the capability is provided to allow interrupts
to be handled while in a debug software handler. External and critical interrupts are not automatically
disabled when a debug interrupt occurs but can be configured to be cleared by the HID0 register
(HID0[DCLREE, DCLRCE]). Refer to Section 2.4.11, “Hardware Implementation Dependent Register 0
(HID0).”
When the debug functionality is disabled, debug interrupts use the CSRR0 and CSRR1 registers to save
machine state.
The following list describes the debug exception types. For additional details, refer to Section 11.2,
“Software Debug Events and Exceptions.”
• Instruction Address Compare (IAC)
This exception occurs when there is an instruction address match as defined by the debug control
registers and Instruction Address Compare events are enabled. This could either be a direct
instruction address match or a selected set of instruction addresses. IAC has the highest interrupt
priority of all instruction-based interrupts, even if the instruction itself may have encountered an
Instruction TLB error or Instruction Storage exception.
• Branch Taken (BRT)
This exception is signalled when a branch instruction is considered taken by the branch unit and
branch taken events are enabled. The debug interrupt is taken when no higher priority exception is
pending.
• Data Address Compare (DAC)
This exception is signalled when there is a data access address match as defined by the debug
control registers and data address compare events are enabled. This could either be a direct data

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-31
address match or a selected set of data addresses, or a combination of data address and data value
matching. The debug interrupt is taken when no higher priority exception is pending.
• IAC linked with DAC exceptions
This results in a DAC exception only if one or more IAC conditions are also met. See Chapter 11,
“Debug Support for more details.
•Trap (TRAP)
This exception occurs when a program trap exception is generated while trap events are enabled.
If MSR[DE] is set, the debug exception has higher priority than the program exception in this case,
and will be taken instead of a trap type program interrupt. The debug interrupt is taken when no
higher priority exception is pending. If MSR[DE] is cleared when a trap debug exception occurs,
a trap exception type program interrupt occurs instead.
• Return (RET)
This exception occurs when executing an rfi or se_rfi instruction and return debug events are
enabled. Return debug exceptions are not generated for rfci or se_rfci instructions. If
MSR[DE] = 1 at the time of the execution of the rfi or se_rfi, a debug interrupt occurs provided
there exists no higher priority exception that is enabled to cause an interrupt. CSRR0 (debug
functionality disabled) or DSRR0 (debug functionality enabled) will be set to the address of the rfi
or se_rfi instruction. If MSR[DE] = 0 at the time of the execution of the rfi or se_rfi, a debug
interrupt does not occur immediately, but the event is recorded by setting the DBSR[RET] and
DBSR[IDE] status bits.
• Critical Return (CRET)
This exception occurs when executing an rfci or se_rfci instruction and critical return debug events
are enabled. Critical return debug exceptions are only generated for rfci or se_rfci instructions. If
MSR[DE] = 1 at the time of the execution of the rfci or se_rfci, a debug interrupt will occur
provided there exists no higher priority exception which is enabled to cause an interrupt. CSRR0
(debug functionality disabled) or DSRR0 (debug functionality enabled) is set to the address of the
rfci or se_rfci instruction. If MSR[DE] = 0 at the time of the execution of the rfci or se_rfci, a
debug interrupt does not occur immediately, but the event is recorded by setting the DBSR[CRET]
and DBSR[IDE] status bits. Note that critical return debug events should not normally be enabled
unless the debug functionality is enabled to avoid corrupting CSRR0/1.
• Instruction Complete (ICMP)
This exception is signalled following execution and completion of an instruction while this event
is enabled.
•mtmsr or mtdbcr0 causing both MSR[DE] and DBCR0[IDM] to end up set
This enables precise debug mode, which may cause an imprecise (delayed) debug exception to be
generated due to an earlier recorded event in the debug status register.
• Interrupt Taken (IRPT)
This exception occurs when a non-critical interrupt context switch is detected. It is imprecise and
unordered with respect to the program flow. Note that an IRPT Debug interrupt will only occur
when detecting a non-critical interrupt on e200. The value saved in CSRR0/DSRR0 will be the
address of the non-critical interrupt handler.
• Critical Interrupt Taken (CIRPT)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-32 Freescale Semiconductor
This exception occurs when a critical interrupt context switch is detected. This exception is
imprecise and unordered with respect to the program flow. Note that a CIRPT Debug interrupt will
only occur when detecting a critical interrupt on e200. The value saved in CSRR0/DSRR0 will be
the address of the critical interrupt handler. Note that Critical Interrupt Taken debug events should
not normally be enabled unless the Debug APU is enabled to avoid corruption of CSRR0/1.
• Unconditional Debug Event (UDE)
This exception occurs when the unconditional debug event pin (p_ude) transitions to the asserted
state.
• Debug Counter Debug
These exceptions occur when enabled, and one of the debug counters decrements to zero.
• External Debug
These exceptions occur when enabled and one of the external debug event pins (p_devt1, p_devt2)
transitions to the asserted state.
The debug status register (DBSR) provides a syndrome to differentiate between debug exceptions that can
generate the same interrupt. For more details see Chapter 11, “Debug Support.”
Table 5-27 lists register settings when a debug interrupt is taken.
Table 5-27. Debug Interrupt—Register Settings
Register Setting Description
CSRR0/
DSRR01Set to the effective address of the excepting instruction for IAC, BRT, RET, CRET, and TRAP.
Set to the effective address of the next instruction to be executed
following
the excepting instruction for DAC
and ICMP.
For a UDE, IRPT, CIRPT, DCNT, or DEVT type exception, set to the effective address of the instruction that
the processor would have attempted to execute next if no exception conditions were present.
CSRR1/
DSRR1
Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —/02
EE —/02
PR 0
FP 0
ME —
FE 00
DE 0
FE 10
IS 0
DS 0
RI —
DBSR3Unconditional Debug Event
Instr. Complete Debug Event
Branch Taken Debug Event
Interrupt Taken Debug Event
Critical Interrupt Taken Debug Event
Trap Instruction Debug Event
Instruction Address Compare
Data Address Compare
Return Debug Event
Critical Return Debug Event
Debug Counter Event
External Debug Event
and optionally, an Imprecise Debug
Event flag
UDE
ICMP
BRT
IRPT
CIRPT
TRAP
{IAC1, IAC2, IAC3, IAC4}
{DAC1R, DAC1W, DAC2R, DAC2W}
RET
CRET
{DCNT1, DCNT2}
{DEVT1, DEVT2}
{IDE}
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-33
5.7.17 System Reset Interrupt
The e200 implements the system reset interrupt as defined in the Power ISA embedded category
architecture. The system reset exception is a non-maskable, asynchronous exception signalled to the
processor through the assertion of system-defined signals.
A system reset may be initiated by either asserting the p_reset_b input signal or during power-on reset by
asserting m_por. The m_por signal must be asserted during power up and must remain asserted for a period
that allows internal logic to be reset. The p_reset_b signal must also remain asserted for a period that
allows internal logic to be reset. This period is specified in the hardware specifications. If m_por or
p_reset_b are asserted for less than the required interval, the results are not predictable.
When a reset request occurs, the processor branches to the system reset exception vector (value on
p_rstbase[0:29] concatenated with 2’b00) without attempting to reach a recoverable state. If reset occurs
during normal operation, all operations cease and the machine state is lost. CPU internal state after a reset
is defined in Section 2.6, “Reset Settings.”
Reset may also be initiated by watchdog timer or debug reset control. Watchdog timer and debug reset
control provide the capability to assert the p_wrs[0:1] and p_dbrstc[0:1] signals. External logic may factor
this into the p_reset_b input signal to cause an e200 reset to occur.
Table 5-28 shows the TSR register bits associated with watchdog timer reset status. Note that these bits
will be cleared when a processor reset occurs; thus if the p_wrs[0:1] outputs are factored into p_reset_b,
they will only be seen in the “00” state by software.
Table 5-29 shows the DBSR register bits associated with reset status.
ESR Unchanged
MCSR Unchanged
DEAR Unchanged
Vector IVPR0:15 || IVOR1516–27 || 4b0000
1Assumes that the Debug interrupt is precise
2Conditional based on control bits in HID0
3Note that multiple DBSR bits may be set
Table 5-28. TSR Watchdog Timer Reset Status
Bit(s) Name Function
2–3
(34–35)
WRS 00 No action performed by Watchdog Timer
01 Watchdog Timer second time-out caused p_wrs[1] to be asserted
10 Watchdog Timer second time-out caused p_wrs[0] to be asserted
11 Watchdog Timer second time-out caused p_wrs[0] and p_wrs[1] to be asserted
Table 5-27. Debug Interrupt—Register Settings (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-34 Freescale Semiconductor
Table 5-30 lists register settings when a system reset interrupt is taken.
5.7.18 SPE Unavailable Interrupt (IVOR32)
The SPE unavailable exception is taken if MSR[SPE] is cleared and execution of an SPE instruction other
than the scalar floating-point instructions (efsxxx) or brinc is attempted, or execution of a EFPU evfsxx
instruction is attempted. When the SPE APU Unavailable exception occurs, the processor suppresses
execution of the instruction causing the exception. Table 5-31 lists register settings when a SPE
unavailable interrupt is taken.
Table 5-29. DBSR Most Recent Reset
Bit(s) Name Function
2–3
(34–35)
MRR 00 No reset occurred since these bits were last cleared by software
01 A reset occurred since these bits were last cleared by software
10 Reserved
11 Reserved
Table 5-30. System Reset Interrupt—Register Settings
Register Setting Description
CSRR0 Undefined.
CSRR1 Undefined.
MSR UCLE 0
SPE 0
WE 0
CE 0
EE 0
PR 0
FP 0
ME 0
FE 00
DE 0
FE 10
IS 0
DS 0
RI 0
ESR Cleared
DEAR Undefined
Vector [p_rstbase[0:29]] || 2’b00
Table 5-31. SPE Unavailable Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting SPE or EFP instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR SPE, [VLEMI]. All other bits cleared.
MCSR Unchanged
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-35
5.7.19 EFP Floating-point Data Interrupt (IVOR33)
The EFP floating-point data interrupt is taken if no higher priority exception exists and an EFP
floating-point data exception is generated. When a floating-point data exception occurs, the processor
suppresses execution of the instruction causing the exception.
Table 5-32 lists register settings when an SPE floating-point data interrupt is taken.
5.7.20 EFP Floating-point Round Interrupt (IVOR34)
The EFP floating-point round interrupt is taken when an EFP floating-point instruction generates an
inexact result and inexact exceptions are enabled.
Table 5-33 lists register settings when an EFP Floating-point Round interrupt is taken.
DEAR Unchanged
Vector IVPR0–15 || IVOR3216–27 || 4b0000
Table 5-32. SPE Floating-point Data Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the excepting EFP instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
ESR SPE, [VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR3316–27 || 4b0000
Table 5-33. SPE Floating-point Round Interrupt—Register Settings
Register Setting Description
SRR0 Set to the effective address of the instruction following the excepting EFP instruction.
SRR1 Set to the contents of the MSR at the time of the interrupt
MSR UCLE 0
SPE 0
WE 0
CE —
EE 0
PR 0
FP 0
ME —
FE 00
DE —
FE 10
IS 0
DS 0
RI —
Table 5-31. SPE Unavailable Interrupt—Register Settings (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-36 Freescale Semiconductor
5.8 Exception Recognition and Priorities
The following list of exception categories describes how the e200 handles exceptions up to the point of
signaling the appropriate interrupt to occur. Instruction completion is defined as updating all architectural
registers associated with that instruction as necessary and then removing the instruction from the pipeline.
• Interrupts caused by asynchronous events (exceptions). These exceptions are further distinguished
by whether they are maskable and recoverable.
— Asynchronous, non-maskable, non-recoverable:
– System reset by assertion of p_reset_b
Has highest priority and is taken immediately regardless of other pending exceptions or
recoverability. (Includes watchdog timer reset control and debug reset control)
— Asynchronous, non-maskable, possibly non-recoverable:
– Non-maskable interrupt by assertion of p_nmi_b
Has priority over any other pending exception except system reset conditions.
Recoverability is dependent on whether MCSRR0/1 are holding essential state info and are
overwritten when the NMI occurs.
— Asynchronous, maskable/non-maskable, recoverable/non-recoverable:
– Machine check interrupt
Has priority over any other pending exception except system reset conditions.
Recoverability is dependent on the source of the exception.
— Asynchronous, maskable, recoverable:
– External Input, Fixed-Interval Timer, Decrementer, Critical Input, Unconditional Debug,
External Debug Event, Debug Counter Event, and Watchdog Timer interrupts
Before handling this type of exception, the processor needs to reach a recoverable state. A
maskable recoverable exception will remain pending until taken or cancelled by software.
• Synchronous, non instruction-based interrupts. The only exception is this category is the Interrupt
Taken debug exception, recognized by an interrupt taken event. It is not considered
instruction-based but is synchronous with respect to the program flow.
— Synchronous, maskable, recoverable:
– Interrupt Taken debug event.
The machine will be in a recoverable state due to the state of the machine at the context
switch triggering this event.
• Instruction-based interrupts. These interrupts are further organized by the point in instruction
processing in which they generate an exception.
ESR SPE, [VLEMI]. All other bits cleared.
MCSR Unchanged
DEAR Unchanged
Vector IVPR0–15 || IVOR3416–27 || 4b0000
Table 5-33. SPE Floating-point Round Interrupt—Register Settings (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-37
— Instruction Fetch:
– Instruction Storage, Instruction TLB, and Instruction Address Compare debug exceptions.
Once these types of exceptions are detected, the excepting instruction is tagged. When the
excepting instruction is next to begin execution and a recoverable state has been reached,
the interrupt is taken. If an event prior to the excepting instruction causes a redirection of
execution, the instruction fetch exception is discarded (but may be encountered again).
— Instruction Dispatch/Execution:
– Program, System Call, Data Storage, Alignment, Floating-point Unavailable, SPE
Unavailable, Data TLB, EFP Floating-point Data, EFP Floating-point Round, Debug (Trap,
Branch Taken, Ret) interrupts.
These types of exceptions are determined during decode or execution of an instruction. The
exception remains pending until all instructions before the exception causing instruction in
program order complete. The interrupt is then taken without completing the
exception-causing instruction. If completing previous instructions causes an exception, that
exception takes priority over the pending instruction dispatch/execution exception, which is
discarded (but may be encountered again when instruction processing resumes).
— Post-Instruction Execution
– Debug (Data Address Compare, Instruction Complete) interrupt.
These Debug exceptions are generated following execution and completion of an instruction
while the event is enabled. If executing the instruction produces conditions for another type
of exception with higher priority, that exception is taken and the post-instruction exception
is discarded for the instruction (but may be encountered again when instruction processing
resumes)
5.8.1 Exception Priorities
Exceptions are prioritized as described in Table 5-34. Some exceptions may be masked or imprecise which
will affect their priority. Non-maskable exceptions, such as reset and machine check, may occur at any
time and are not delayed even if an interrupt is being serviced; thus state information for any interrupt may
be lost. Reset and certain machine checks are non-recoverable.
Table 5-34. e200 Exception Priorities
Priority Exception Cause IVOR
Asynchronous Exceptions
0System reset Assertion of p_reset_b, Watchdog Timer Reset Control, or Debug
Reset Control none
1
Machine check
Assertion of p_mcp_b, assertion of p_nmi_b, Cache Parity errors,
exception on fetch of first instruction of an interrupt handler, external
bus errors
1
2— —
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-38 Freescale Semiconductor
31Debug:
1.UDE
2.DEVT1
3.DEVT2
4.DCNT1
5.DCNT2
6.IDE
1. Assertion of p_ude (Unconditional Debug Event)
2. Assertion of p_devt1 and event enabled (External Debug
Event 1)
3. Assertion of p_devt2 and event enabled (External Debug
Event 2)
4. Debug Counter 1 exception
5. Debug Counter 2 exception
6. Imprecise Debug Event (event imprecise due to previous
higher priority interrupt
15
41Critical Input Assertion of p_critint_b 0
51Watchdog Timer Watchdog Timer first enabled time-out 12
61External Input Assertion of p_extint_b 4
71Fixed-Interval Timer Posting of a FIT exception in TSR due to programmer-specified bit
transition in the Time Base register
11
81Decrementer Posting of a Decrementer exception in TSR due to
programmer-specified Decrementer condition 10
9— —
Instruction Fetch Exceptions
10 Debug:
IAC (unlinked)
Instruction address compare match for enabled IAC debug event
and DBCR0IDM asserted
15
11 ITLB Error Instruction translation lookup miss in the TLB 14
12
Instruction Storage
1. Access control.
2. Byte ordering due to misaligned instruction across page
boundary to pages with mismatched VLE bits, or access to
page with VLE set, and E indicating little-endian.
3. Misaligned Instruction fetch due to a change of flow to an odd
half-word instruction boundary on a Power ISA (non-VLE)
instruction page, due to value in LR, CTR, or xSRR0
3
Instruction Dispatch/Execution Interrupts
13 Program:
Illegal Attempted execution of an illegal instruction.
6
14 Program:
Privileged Attempted execution of a privileged instruction in user-mode
6
15 Floating-point
Unavailable
Any floating-point unavailable exception condition. 7
SPE Unavailable Any SPE unavailable exception condition. 32
16 Program:
Unimplemented Attempted execution of an unimplemented instruction.
6
Table 5-34. e200 Exception Priorities (Continued)
Priority Exception Cause IVOR
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-39
17 Debug:
1.BRT
2.Trap
3.RET
4.CRET
1. Attempted execution of a taken branch instruction
2. Condition specified in tw or twi instruction met.
3. Attempted execution of a rfi instruction.
4. Attempted execution of an rfci instruction.
Note: Exceptions requires corresponding debug event enabled,
MSR[DE] = 1, and DBCR0[IDM] = 1.
15
18 Program:
Trap Condition specified in tw or twi instruction met and not trap
debug.
6
System Call Execution of the System Call (sc, se_sc) instruction. 8
EFP Floating-point
Data
Denormalized, NaN, or Infinity data detected as input or output, or
underflow, overflow, divide by zero, or invalid operation in the EFP
APU.
33
EFP Round Inexact Result 34
19 Alignment lmw, stmw, lwarx, or stwcx. not word aligned.
lharx, or sthcx. not half word aligned.
dcbz
5
20 Debug:
Debug with
concurrent DTLB or
DSI exception:
1.DAC/IAC
linked2
2.DAC unlinked2
Debug with concurrent DTLB or DSI exception. DBSR[IDE] also
set.
1. Data Address Compare linked with Instruction Address
Compare
2. Data Address Compare unlinked
Note: Exceptions requires corresponding debug event enabled,
MSR[DE] = 1, and DBCR0[IDM] = 1. In this case, the Debug
exception is considered imprecise, and DBSR[IDE] will be set.
Saved PC will point to the load or store instruction causing the
DAC event.
15
21 Data TLB Error Data translation lookup miss in the TLB. 13
22
Data Storage
1. Access control.
2. Byte ordering due to misaligned access across page boundary
to pages with mismatched E bits.
3. Cache locking due to attempt to execute a icbtls or icblc in
user mode with MSR[UCLE] = 0.
2
24 Debug:
1.IRPT
2.CIRPT
1. Interrupt taken (non-critical)
2. Critical Interrupt taken (critical only)
Note: Exceptions requires corresponding debug event enabled,
MSR[DE] = 1, and DBCR0[IDM] = 1.
15
Table 5-34. e200 Exception Priorities (Continued)
Priority Exception Cause IVOR
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-40 Freescale Semiconductor
5.9 Interrupt Processing
When an interrupt is taken, the processor uses SRR0/SRR1 for non-critical interrupts, CSRR0/CSRR1 for
critical interrupts, MCSRR0/MCSRR1 for machine check interrupts, and either CSRR0/CSRR1 or
DSRR0/DSRR1 for debug interrupts to save the contents of the MSR and to assist in identifying where
instruction execution should resume after the interrupt is handled.
When an interrupt occurs, one of SRR0/CSRR0/DSRR0/MCSRR0 is set to the address of the instruction
that caused the exception, or to the following instruction if appropriate:
• SRR1 is used to save machine state (selected MSR bits) on non-critical interrupts and to restore
those values when an rfi instruction is executed.
• CSRR1 is used to save machine status (selected MSR bits) on critical interrupts and to restore those
values when an rfci instruction is executed.
• DSRR1 is used to save machine status (selected MSR bits) on debug interrupts when the debug
functionality is enabled and to restore those values when an rfdi instruction is executed.
• MCSRR1 is used to save machine status (selected MSR bits) on machine check interrupts and to
restore those values when an rfmci instruction is executed.
The exception syndrome register is loaded with information specific to the exception type. Some interrupt
types can only be caused by a single exception type, and thus do not use an ESR setting to indicate the
interrupt cause.
Post-Instruction Execution Exceptions
25 Debug:
1.DAC/IAC
linked2
2.DAC unlinked2
1. Data Address Compare linked with Instruction Address
Compare
2. Data Address Compare unlinked
Notes: Exceptions requires corresponding debug event enabled,
MSR[DE] = 1, and DBCR0[IDM] = 1. Saved PC will point to the
instruction following the load or store instruction causing the DAC
event.
15
26 Debug:
1.ICMP 1. Completion of an instruction.
Note: Exceptions requires corresponding debug event enabled,
MSR[DE] = 1, and DBCR0[IDM] = 1.
15
1These exceptions are sampled at instruction boundaries, thus may actually occur after exceptions which are due
to a currently executing instruction. If one of these exceptions occurs during execution of an instruction in the
pipeline, it is not processed until the pipeline has been flushed, and the exception associated with the excepting
instruction may occur first.
2When no data storage interrupt or data TLB error occurs, the e200 implements the data address compare debug
exceptions as post-instruction exceptions which differs from the Power ISA definition. When a TEA (either a DTLB
error or DSI or machine check (external TEA)) occurs in conjunction with an enabled DAC or linked DAC/IAC on
a load or store class instruction, or a Debug Counter event based on a counted DAC, the debug interrupt takes
priority, and the saved PC value points to the load or store class instruction, rather than to the next instruction.
Table 5-34. e200 Exception Priorities (Continued)
Priority Exception Cause IVOR
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-41
The machine state register is updated to preclude unrecoverable interrupts from occurring during the initial
portion of the interrupt handler. Specific settings are described in Table 5-35.
For alignment, data storage, or data TLB miss interrupts, the data exception address register (DEAR) is
loaded with the address which caused the interrupt to occur.
For machine check interrupts, the machine check syndrome register is loaded with information specific to
the exception type. For certain machine checks, the MCAR is loaded with an address corresponding to the
machine check.
Instruction fetch and execution resumes, using the new MSR value, at a location specific to the exception
type. The location is determined by the interrupt vector prefix register and an interrupt vector offset
register specific for each type of interrupt (see Table 5-3).
Table 5-35 shows the MSR settings for different interrupt categories.
5.9.1 Enabling and Disabling Exceptions
When a condition exists that may cause an exception to be generated, it must be determined whether the
exception is enabled for that condition.
• System reset exceptions cannot be masked.
Table 5-35. MSR Setting Due to Interrupt
Bit(s) MSR
Definition Reset
Setting Non-Critical
Interrupt Critical
Interrupt Debug Interrupt Machine Check
Interrupt
5 (37) UCLE 0 0 0 0 0
6 (38) SPE 0 0 0 0 0
13 (45) WE 0 0 0 0 0
14 (46) CE 0 — 0 —/01
1Conditionally cleared based on control bits in HID0
0
16 (48) EE 0 0 0 —/010
17 (49) PR 0 0 0 0 0
18 (50) FP 0 0 0 0 0
19 (51) ME 0 — — — 0
20 (52) FE0 0 0 0 0 0
22 (54) DE 0 — —/010—/0
1
23 (55) FE1 0 0 0 0 0
26 (58) IS 0 0 0 0 0
27 (59) DS 0 0 0 0 0
30 (62) RI 0 — — — 0
Reserved and preserved bits are unimplemented and read as 0.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-42 Freescale Semiconductor
• Machine check exceptions cannot be masked from sources other than the machine check pin, and
certain other async machine check status settings. Assertion of p_mcp_b is only recognized if the
machine check pin enable bit (HID0[EMCP]) is set. Certain machine check exceptions can be
enabled and disabled through bits in the HID0 register.
• Asynchronous, maskable non-critical exceptions (such as the external input and decrementer) are
enabled by setting MSR[EE]. When MSR[EE] = 0, recognition of these exception conditions is
delayed. MSR[EE] is cleared automatically when a non-critical or critical interrupt is taken to mask
further recognition of conditions causing those exceptions.
• Asynchronous, maskable critical exceptions (such as critical input and watchdog timer) are
enabled by setting MSR[CE]. When MSR[CE] = 0, recognition of these exception conditions is
delayed. MSR[CE] is cleared automatically when a critical interrupt is taken to mask further
recognition of conditions causing those exceptions.
• Synchronous and asynchronous debug exceptions are enabled by setting MSR[DE]. When
MSR[DE] = 0, recognition of these exception conditions is masked. MSR[DE] is cleared
automatically when a debug interrupt is taken to mask further recognition of conditions causing
those exceptions. See Chapter 11, “Debug Support,” for more details on individual control of
debug exceptions.
• The floating point unavailable exception can be prevented by setting MSR[FP] (although an
unimplemented instruction exception will be generated by the e200 instead).
5.9.2 Returning from an Interrupt Handler
The return from interrupt (rfi, se_rfi), return from critical interrupt (rfci, se_rfci), return from debug
interrupt (rfdi, se_rfdi), and return from machine check interrupt (rfmci, se_rfmci) instructions perform
context synchronization by allowing previously issued instructions to complete before returning to the
interrupted process. In general, execution of return from interrupt type instructions ensures the following:
• All previous instructions have completed to a point where they can no longer cause an exception.
This includes post-execute type exceptions.
• Previous instructions complete execution in the context (privilege and protection) under which
they were issued.
• The rfi and se_rfi instructions copy SRR1 bits back into the MSR.
• The rfci and se_rfci instructions copy CSRR1 bits back into the MSR.
• The rfdi and se_rfdi instructions copy DSRR1 bits back into the MSR.
• The rfmci and se_rfmci instructions copy MCSRR1 bits back into the MSR.
• Instructions fetched after this instruction execute in the context established by this instruction.
• Program execution resumes at the instruction indicated by SRR0 for rfi and se_rfi, CSRR0 for rfci
and se_rfci, MCCSRR0 for rfmci and se_rfmci, and DSRR0 for rfdi and se_rfdi.
Note that the return instructions rfi and se_rfi may be subject to a return type debug exception, and that
the return from critical interrupt instructions rfci and se_rfci may be subject to a critical return type debug
exception. For a complete description of context synchronization, refer to the EREF.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 5-43
5.10 Process Switching
The following instructions are useful for restoring proper context during process switching:
• The msync instruction orders the effects of data memory instruction execution. All instructions
previously initiated appear to have completed before the msync instruction completes, and no
subsequent instructions appear to be initiated until the msync instruction completes.
• The isync instruction waits for all previous instructions to complete and then discards any fetched
instructions, causing subsequent instructions to be fetched (or refetched) from memory and to
execute in the context (privilege, translation, and protection) established by the previous
instructions.
• The stwcx. instructions clears any outstanding reservations, ensuring that a load and reserve
instruction in an old process is not paired with a store conditional instruction in a new one.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
5-44 Freescale Semiconductor

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-1
Chapter 6
Embedded Floating-Point Unit, Version 2
This chapter describes the instruction set architecture of the embedded floating-point unit, version 2
implemented on the e200z4. This unit implements scalar and vector single-precision floating-point
instructions to accelerate signal processing and other algorithms. In comparison to version 1.1 of the EFPU
architecture, version 2 of the architecture implements additional operations such as minimum, maximum,
and square root, as well as an extensive set of vector operations with permuted operands and mixed
add/sub, sum, and differences. For the remainder of this chapter, the term EFPU implies version 2 of the
architecture unless otherwise noted.
6.1 Nomenclature and Conventions
Several conventions regarding nomenclature are used in this chapter:
• Bits 0 to 31 of a 64-bit register are referenced as field 0, upper half, or high-order element of the
register. Bits 32–63 are referred to as field 1, lower half, or lower-order element of the register.
Each half is an element of a GPR.
• Mnemonics for EFPU instructions begin with the letters ‘evfs’ (embedded vector floating single)
or ‘efs’ (embedded (scalar) floating single).
6.2 EFPU Programming Model
The e200z4 core provides a register file with thirty-two 64-bit registers. The Power ISA embedded
category 32-bit instructions operate on the lower (least significant) 32 bits of the 64-bit register. EFPU
instructions are defined that view the 64-bit register as being composed of a vector of two 32-bit elements,
or a single scalar 32-bit element. Vector floating-point instructions operate on a vector of two 32-bit
single-precision floating-point numbers resident in the 64-bit GPRs. Scalar floating-point instructions
operate on the lower half of GPRs. These single-precision floating-point instructions do not have a
separate register file; there is a single shared register file for all instructions.
There are no record forms of EFPU instructions. EFPU compare instructions store the result of the
comparison into the condition register (CR). The meaning of the CR bits is now overloaded for the vector
operations. Floating-point compare instructions treat NaNs, Infinity, and Denorm as normalized numbers
for the comparison calculation when default results are provided.
6.2.1 Signal Processing Extension/Embedded Floating-Point Status and
Control Register (SPEFSCR)
Status and control for embedded floating-point uses the SPEFSCR register. This register is also
used by the SPE. Status and control bits are shared for vector floating-point operations,
single-precision floating-point operations, and SPE vector operations. The SPEFSCR register is
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-2 Freescale Semiconductor
implemented as special purpose register (SPR) number 512 and is read and written by the mfspr and
mtspr instructions. The SPEFSCR is shown in Figure 6-1.
The SPEFSCR bits are defined in Table 6-1.
SOVH
OVH
FGH
FXH
FINVH
FDBZH
FUNFH
FOVFH
0
FINXS
FINVS
FDBZS
FUNFS
FOVFS
MODE
SOV
OV
FG
FX
FINV
FDBZ
FUNF
FOVF
0
FINXE
FINVE
FDBZE
FUNFE
FOVFE
FRMC
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 512; Read/Write; Reset - 0x0
Figure 6-1. SPE/EFPU Status and Control Register (SPEFSCR)
Table 6-1. SPE /EFPU Status and Control Register
Bits Name Description
0
(32) SOVH Summary Integer Overflow High
Defined by SPE.
1
(33)
OVH Integer Overflow High
Defined by SPE.
2
(34)
FGH Embedded Floating-point Guard bit High
FGH is supplied for use by the Floating-point Round exception handler. FGH is zeroed if a
Floating-point Data Exception occurs for the high element(s). FGH corresponds to the high
element result. FGH is cleared by a scalar floating point instruction.
3
(35)
FXH Embedded Floating-point Sticky bit High
FXH is supplied for use by the Floating-point Round exception handler. FXH is zeroed if a
Floating-point Data Exception occurs for the high element(s). FXH corresponds to the high
element result. FXH is cleared by a scalar floating point instruction.
4
(36)
FINVH Embedded Floating-point Invalid Operation / Input error High
In mode 0, the FINVH bit is set to 1 if the A or B high element operand of a floating-point
instruction is Infinity, NaN, or Denorm, or if the operation is a divide and the high element
dividend and divisor are both 0.
In mode 1, the FINVH bit is set on an IEEE 754 invalid operation (IEEE 754-1985 sec7.1)
in the high element.
FINVHH is cleared by a scalar floating point instruction.
5
(37)
FDBZH Embedded Floating-point Divide by Zero High
The FDBZH bit is set to 1 when a floating-point divide instruction executed with a high
element divisor of 0, and the high element dividend is a finite non-zero number. FDBZH is
cleared by a scalar floating point instruction.
6
(38)
FUNFH Embedded Floating-point Underflow High
The FUNFH bit is set to 1 when the execution of a floating-point instruction results in an
underflow in the high element. FUNFH is cleared by a scalar floating point instruction.
7
(39) FOVFH Embedded Floating-point Overflow High
The FOVFH bit is set to 1 when the execution of a floating-point instruction results in an
overflow in the high element. FOVFH is cleared by a scalar floating point instruction.
8:9
(40:41)
— Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-3
10
(42) FINXS Embedded Floating-point Inexact Sticky Flag
The FINXS bit is set to 1 whenever the execution of a floating-point instruction delivers an
inexact result for either the low or high element and no Floating-point Data exception is
taken for either element, or if the result of a Floating-point instruction results in overflow
(FOVF=1 or FOVFH=1), but Floating-point Overflow exceptions are disabled (FOVFE=0),
or if the result of a Floating-point instruction results in underflow (FUNF=1 or FUNFH=1),
but Floating-point Underflow exceptions are disabled (FUNFE=0), and no Floating-point
Data exception occurs. The FINXS bit remains set until it is cleared by a mtspr instruction
specifying the SPEFSCR register.
11
(43)
FINVS Embedded Floating-point Invalid Operation Sticky Flag
The FINVS bit is set to a 1 when a floating-point instruction sets the FINVH or FINV bit to 1.
The FINVS bit remains set until it is cleared by a mtspr instruction specifying the SPEFSCR
register.
12
(44)
FDBZS Embedded Floating-point Divide by Zero Sticky Flag
The FDBZS bit is set to 1 when a floating-point divide instruction sets the FDBZH or FDBZ
bit to 1. The FDBZS bit remains set until it is cleared by a mtspr instruction specifying the
SPEFSCR register.
13
(45)
FUNFS Embedded Floating-point Underflow Sticky Flag
The FUNFS bit is set to 1 when a floating-point instruction sets the FUNFH or FUNF bit to
1. The FUNFS bit remains set until it is cleared by a mtspr instruction specifying the
SPEFSCR register.
14
(46)
FOVFS Embedded Floating-point Overflow Sticky Flag
The FOVFS bit is set to 1 when a floating-point instruction sets the FOVFH or FOVF bit to
1. The FOVFS bit remains set until it is cleared by a mtspr instruction specifying the
SPEFSCR register.
15
(47)
MODE Embedded Floating-point Operating Mode
0 Default hardware results operating mode
1 IEEE754 hardware results operating mode (not supported by Zen)
This bit controls the operating mode of the EFPU.
The e200 supports only mode 0.
Software should read the value of this bit after writing it to determine if the implementation
supports the selected mode. Implementations return the value written if the selected mode
is a supported mode, otherwise the value read will indicate the hardware supported mode.
16
(48)
SOV Summary integer overflow
Defined by SPE.
17
(49)
OV Integer overflow
Defined by SPE.
18
(50)
FG Embedded Floating-point Guard bit
FG is supplied for use by the Floating-point Round exception handler. FG is zeroed if a
Floating-point Data Exception occurs for the low element(s). FG corresponds to the low
element result.
19
(51)
FX Embedded Floating-point Sticky bit
FX is supplied for use by the Floating-point Round exception handler.FX is zeroed if a
Floating-point Data Exception occurs for the low element(s). FX corresponds to the low
element result.
Table 6-1. SPE /EFPU Status and Control Register (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-4 Freescale Semiconductor
20
(52) FINV Embedded Floating-point Invalid Operation/Input error
In mode 0, the FINV bit is set to 1 if the A or B low element operand of a floating-point
instruction is Infinity, NaN, or Denorm, or if the operation is a divide and the low element
dividend and divisor are both 0.
In mode 1, the FINV bit is set on an IEEE754 invalid operation (IEEE754-1985 sec7.1) in
the low element.
21
(53)
FDBZ Embedded Floating-point Divide by Zero
The FDBZ bit is set to 1 when a floating-point divide instruction executed with a low element
divisor of 0, and the low element dividend is a finite non-zero number.
22
(54)
FUNF Embedded Floating-point Underflow
The FUNF bit is set to 1 when the execution of a floating-point instruction results in an
underflow in the low element.
23
(55)
FOVF Embedded Floating-point Overflow
The FOVF bit is set to 1 when the execution of a floating-point instruction results in an
overflow in the low element.
24
(56)
— Reserved
25
(57) FINXE Embedded Floating-point Inexact Exception Enable
0 Exception disabled
1 Exception enabled
If the exception is enabled, a Floating-point Round exception is taken if for both elements,
the result of a Floating-point instruction does not result in overflow or underflow, and the
result for either element is inexact (FG | FX = 1, or FGH | FXH =1), or if the result of a
Floating-point instruction does result in overflow (FOVF=1 or FOVFH=1) for either element,
but Floating-point Overflow exceptions are disabled (FOVFE=0), or if the result of a
Floating-point instruction results in underflow (FUNF=1 or FUNFH=1), but Floating-point
Underflow exceptions are disabled (FUNFE=0), and no Floating-point Data exception
occurs.
26
(58)
FINVE Embedded Floating-point Invalid Operation / Input Error Exception Enable
0 Exception disabled
1 Exception enabled
If the exception is enabled, a Floating-point Data exception is taken if the FINV or FINVH
bit is set by a floating-point instruction.
27
(59)
FDBZE Embedded Floating-point Divide by Zero Exception Enable
0 Exception disabled
1 Exception enabled
If the exception is enabled, a Floating-point Data exception is taken if the FDBZ or FDBZH
bit is set by a floating-point instruction.
28
(60)
FUNFE Embedded Floating-point Underflow Exception Enable
0 Exception disabled
1 Exception enabled
If the exception is enabled, a Floating-point Data exception is taken if the FUNF or FUNFH
bit is set by a floating-point instruction.
Table 6-1. SPE /EFPU Status and Control Register (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-5
6.2.2 GPRs and Power ISA Instructions
The e200z4 core implements the 32-bit forms of the Power ISA embedded category instructions. All 32-bit
Power ISA instructions operate upon the lower half of the 64-bit GPR. These instructions do not affect the
upper half of a GPR.
6.2.3 SPE/EFPU Available Bit in MSR
MSR[SPE] is defined as the SPE/EFPU available bit. If this bit is clear and software attempts to execute
any of the EFPU vector instructions (evfsxxx) that affect the upper 32-bits of a GPR, the EFPU unavailable
exception is taken. If this bit is set, software can execute any of the EFPU instructions.
6.2.4 Embedded Floating-point Exception Bit in ESR
ESR[SPE] is defined as the SPE/EFPU exception bit. This bit is set whenever the processor takes an
exception related to the execution of the SPE APU instructions. This bit is also set whenever the processor
takes an interrupt related to the execution of the embedded floating-point instructions. (Note that the same
bit is used for SPE APU exceptions. Thus, SPE and embedded floating-point interrupts are
indistinguishable in the ESR).
6.2.5 EFPU Exceptions
The architecture defines the following embedded floating-point category exceptions:
• SPE/EFP Unavailable exception
• EFP Floating-point Data exception
• EFP Floating-point Round exception
Three interrupt vector offset registers (IVORs)—IVOR32, IVOR33, and IVOR34—are used by the
exception model. The SPR number for IVOR32 is 528, for IVOR33 it is 529, and for IVOR34 it is 530.
These registers are privileged.
29
(61) FOVFE Embedded Floating-point Overflow Exception Enable
0 Exception disabled
1 Exception enabled
If the exception is enabled, a Floating-point Data exception is taken if the FOVF or FOVFH
bit is set by a floating-point instruction.
30:31
(62:63)
FRMC Embedded Floating-point Rounding Mode Control
00 Round to Nearest
01 Round toward Zero
10 Round toward +Infinity
11 Round toward -Infinity
Table 6-1. SPE /EFPU Status and Control Register (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-6 Freescale Semiconductor
6.2.5.1 EFP Unavailable Exception
The EFP Unavailable exception is taken if MSR[SPE] is cleared and execution of an EFPU vector
instruction (evfsxxx) is attempted. When the EFP unavailable exception occurs, the processor suppresses
execution of the instruction causing the exception. The SRR0, SRR1, MSR, and ESR registers are
modified as follows:
• SRR0 is set to the effective address of the instruction causing the exception.
• SRR1 is set to the contents of the MSR at the time of the exception.
• MSR[CE, ME, DE] are unchanged. All other bits are cleared.
• The ESR[SPE ]bit is set. All other ESR bits are cleared.
Instruction execution resumes at address IVPR[0:15]||IVOR32[16:27]||0b0000.
6.2.5.2 Embedded Floating-point Data Exception
The embedded floating-point data exception vector is used for enabled floating-point invalid
operation/input error, underflow, overflow, and divide by zero exceptions (collectively called
floating-point data exceptions). When one of these enabled floating-point exceptions occurs, the processor
suppresses execution of the instruction causing the exception. The SRR0, SRR1, MSR, ESR and
SPEFSCR registers are modified as follows:
• SRR0 is set to the effective address of the instruction causing the exception.
• SRR1 is set to the contents of the MSR at the time of the exception.
• MSR bits CE, ME, and DE are unchanged. All other bits are cleared.
• The ESR[SPE] bit is set. All other ESR bits are cleared.
• One or more SPEFSCR status bits are set to indicate the type of exception. The affected bits are
FINVH, FINV, FDBZH, FDBZ, FOVFH, FOVF, FUNFH, and FUNF.
SPEFSCR[FG, FGH, FX, FXH] are cleared
Instruction execution resumes at address IVPR[0:15]||IVOR33[16:27]||0b0000.
6.2.5.3 Embedded Floating-Point Round Exception
The embedded floating-point round exception occurs if the SPEFSCR[FINXE] bit is set, no floating-point
data exception is taken, and either the unrounded result of an operation is not exact, an overflow occurs
and overflow exceptions are disabled (FOVF or FOVFH set with FOVFE cleared), or an underflow occurs
and underflow exceptions are disabled (FUNF set with FUNFE cleared). The embedded floating-point
round exception will not occur if an enabled embedded floating-point data exception occurs.
When the embedded floating-point round exception occurs, the unrounded (truncated) result of an inexact
high or low element is placed in the target register. If only a single element is inexact, the other exact
element will be updated with the correctly rounded result. The FG and FX bits corresponding to the other
exact element will both be ‘0’.
The bits FG and FX are provided so that an exception handler can round the result as it desires. FG (called
the ‘guard’ bit) is the value of the bit immediately to the right of the lsb of the destination format mantissa
from the infinitely precise intermediate calculation before rounding. FX (called the ‘sticky’ bit) is the value

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-7
of the ‘or’ of all the bits to the right of the guard bit (FG) of the destination format mantissa from the
infinitely precise intermediate calculation before rounding.
The SRR0, SRR1, MSR, ESR and SPEFSCR registers are modified as follows:
• SRR0 is set to the effective address of the instruction following the instruction causing the
exception.
• SRR1 is set to the contents of the MSR at the time of the exception.
• MSR bits CE, ME and DE are unchanged. All other bits are cleared.
• The ESR[SPE] bit is set. All other ESR bits are cleared.
• SPEFSCR[FGH, FG, FXH, FX] are set appropriately. SPEFSCR[FINXS] will be set.
Instruction execution resumes at address IVPR[0:15]||IVOR34[16:27]||0b0000.
6.2.6 Exception Priorities
The following list shows the priority order in which exceptions are taken:
1. EFP unavailable
2. EFP floating-point data
3. EFP floating-point round
An embedded floating-point data exception is taken if either element generates an embedded
floating-point data exception. An embedded floating-point round exception is taken if either element
generates an embedded floating-point round exception and neither element generates an embedded
floating-point data exception.
6.3 Embedded Floating-Point Unit Operations
The e200z4 implements floating-point instructions that operate upon the contents of a 64-bit register that
is a vector of two single-precision floating-point elements. The floating-point unit shares the same register
file as the integer unit. There is no separate floating-point register file. Floating-point instructions are also
provided to perform scalar single precision floating-point operations on the low elements of registers,
without affecting the high-order portion. The PowerPC ISA floating-point instructions are not
implemented in the e200z4.
The Freescale EIS architecture definition for embedded floating-point defines two operating modes: a
real-time, default results oriented mode (mode 0) and a true IEEE Std. 754 standard results operating mode
(mode 1). Implementations of the embedded floating-point unit may choose to implement one or both of
these modes. The e200z4 hardware implements mode 0. Operation that conforms to IEEE Std. 754
standard is still available in mode 0 with assistance of a software envelope.
6.3.1 Floating-Point Data Formats
The EFPU supports single precision scalar and vector floating-point data operations and conversions. In
addition, conversions between single-precision floating-point and the half-precision floating-point storage
format are supported. These formats are described in the following subsections.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-8 Freescale Semiconductor
6.3.1.1 Single-Precision Floating-point Format
Each single-precision floating-point data element is 32 bits wide with one sign bit (s), 8 bits of biased
exponent (e) and 23 bits of fraction (f).
In the IEEE 754 specification, single-precision floating point values are represented in a format consisting
of three explicit fields (sign field, biased exponent field, and fraction field) and an implicit hidden bit, as
shown in Figure 6-2.
Figure 6-2. Single Precision Data Format
For normalized numbers, the biased exponent value ‘e’ lies in the range of 1 to 254 and corresponds to an
actual exponent value E in the range –126 to +127. The hidden bit is a ‘1,’ and the value of the number is
interpreted as:
where E is the unbiased exponent and 1.fraction is the significand consisting of a leading ‘1’ (the hidden
bit) and a fractional part (fraction field). With this format, the maximum positive normalized number
(pmax) is represented by the encoding 0x7F7F_FFFF, which is approximately 3.4E+38 ( ), and the
minimum positive normalized value (pmin) is represented by the encoding 0x0080_0000, which is
approximately 1.2E-38 ( ).
Two specific values of the biased exponent, 0 and 255, are reserved for encoding special values of
.
Zeros of both positive and negative sign are represented by a biased exponent value e of zero and a fraction
f which is zero.
Infinities of both positive and negative sign are represented by a biased exponent value of 255 and a
fraction which is zero.
Denormalized numbers of both positive and negative sign are represented by a biased exponent value e of
0 and a fraction f which is non-zero. For these numbers, the hidden bit is defined by the IEEE Std. 754
standard to be ‘0.’ This number type is not directly supported in hardware. Instead, either a software
exception handler is invoked, or a default value is defined, depending on the operating mode.
Not a Numbers (NaNs) are represented by a biased exponent value e of 255 and a fraction f which is
non-zero.
fraction
0
exp
318
Hidden Bit
S
S—sign bit; 0—positive; 1—negative
exp—biased exponent field (excess 127 notation)
fraction—fractional portion of number
19
1–()
S2E
×1.fraction()×
2128
2126–
0±∞NaN and Denorm,,±,
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-9
Defining pmax to be the most positive normalized value (farthest from zero), pmin the smallest positive
normalized value (closest to zero), nmax the most negative normalized value (farthest from zero) and nmin
the smallest normalized negative value (closest to zero), an overflow is said to have occurred if the
numerically correct result of an instruction is such that r>pmax or r<nmax. An underflow is said to have
occurred if the numerically correct result of an instruction is such that 0<r<pmin or nmin<r<0. In this case,
r may be denormalized or smaller than the smallest denormalized number. If e=255 and f!= 0, then the
value is a NaN. If e=0 and f=0, then the value is a signed 0.
The EFPU hardware will not produce +Inf, –Inf, NaN, or a denormalized number. If the results of an
instruction overflow and floating-point overflow exceptions are disabled (SPEFSCR[FOVFE] bit is
cleared), then pmax or nmax is generated as the result of that instruction depending upon the sign of the
result. If the results of an instruction underflow and floating-point underflow exceptions are disabled
(SPEFSCR[FUNFE] bit is cleared), then +0 or –0 is generated as the result of that instruction based upon
the sign of the result.
6.3.1.2 Half-Precision Floating-point Format
Half-precision floating-point storage format is supported by the EFPU with conversion operations to and
from single-precision floating-point format. No computational operations are defined for half-precision
format numbers.
Each half-precision floating-point data element is 16 bits wide with one sign bit (s), 5 bits of biased
exponent (e) and 10 bits of fraction (f).
In the IEEE 754r proposal, half-precision floating point values are represented in a format consisting of
three explicit fields (sign field, biased exponent field, and fraction field) and an implicit hidden bit, as
shown in Figure 6-3.
Figure 6-3. Single Precision Data Format
For normalized numbers, the biased exponent value ‘e’ lies in the range of 1 to 30 corresponding to an
actual exponent value E in the range –14 to +15, the hidden bit is a ‘1’ (for normalized numbers), and the
value of the number is interpreted as:
where E is the unbiased exponent and 1.fraction is the significand consisting of a leading ‘1’ (the hidden
bit) and a fractional part (fraction field). With this format, the maximum positive normalized number
fraction
0
exp
155
Hidden Bit
S
S—sign bit; 0—positive; 1—negative
exp—biased exponent field (excess 15 notation)
fraction—fractional portion of number
16
1–()
S2E
×1.fraction()×

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-10 Freescale Semiconductor
(pmaxhp) is represented by the encoding 0x7BFF, which is 65504, and the minimum positive normalized
value (pminhp) is represented by the encoding 0x0400, which is approximately 6.1E-5 ( ).
Two specific values of the biased exponent, 0 and 31, are reserved for encoding special values of
.
Zeros of both positive and negative sign are represented by a biased exponent value e of zero and a fraction
f which is zero.
Infinities of both positive and negative sign are represented by a biased exponent value of 31 and a fraction
which is zero.
Denormalized numbers of both positive and negative sign are represented by a biased exponent value e of
0 and a fraction f which is non-zero. For these numbers, the hidden bit is defined to be ‘0’.
Not a Numbers (NaNs) are represented by a biased exponent value e of 31 and a fraction f which is
non-zero.
Defining pmaxhp to be the most positive normalized value (farthest from zero), pminhp the smallest
positive normalized value (closest to zero), nmaxhp the most negative normalized value (farthest from
zero) and nminhp the smallest normalized negative value (closest to zero), an overflow is said to have
occurred if the numerically correct result of a conversion is such that r>pmaxhp or r<nmaxhp. An underflow
is said to have occurred if the numerically correct result of a conversion is such that 0<r<pminhp or
nminhp<r<0. In this case, r may be denormalized, or may be smaller than the smallest denormalized
number. If e=31 and f!= 0, then the value is a NaN. If e=0 and f=0, then the value is a signed 0.
The EFPU hardware will not produce +Inf, –Inf, NaN, or a Denormalized number. If the result of a
conversion to half-precision format overflows and floating-point overflow exceptions are disabled
(SPEFSCR[FOVFE] bit is cleared), then pmaxhp or nmaxhp is generated as the result of that instruction
depending upon the sign of the result. If the result of conversion to half-precision format underflows and
Floating-point Underflow exceptions are disabled (SPEFSCR[FUNFE] bit is cleared), then +0 or –0 is
generated as the result of that instruction based upon the sign of the result. Conversions from half-precision
format to single-precision format are always exact, unless the source operand is a NaN, Inf, or Denorm. In
such cases, if floating-point invalid input exceptions are disabled (SPEFSCR[FINVE] bit is cleared), the
conversion results in a properly signed max norm or zero default result.
6.3.2 Conformity to IEEE Std. 754 Standard
The Freescale EIS architecture specifies that the EFPU implements a single-precision floating-point
system as defined in ANSI/IEEE Standard 754-1985 but may rely on software support in order to conform
fully with the standard. Thus, whenever an input operand of the floating-point instruction has data values
that are +Infinity, –Infinity, Denormalized, NaN, or when the result of an operation produces an overflow
or an underflow, an exception may be taken and the exception handler is responsible for delivering
behavior that conforms to IEEE Std. 754 standard if desired.
When floating-point invalid input exceptions are disabled (SPEFSCR[FINVE] is cleared), default results
are provided by the hardware when an Infinity, Denormalized, or NaN input is received, or for the
operation 0/0. When floating-point underflow exceptions are disabled (SPEFSCR[FUNFE] is cleared) and
the result of a floating-point operation underflows, a signed zero result is produced. The inexact exception
214–
0±∞NaN and Denorm,,±,

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-11
is also signaled for this condition. When floating-point overflow exceptions are disabled
(SPEFSCR[FOVFE] is cleared) and the result of a floating-point operation overflows, a pmax or nmax
result is produced. The inexact exception is also signaled for this condition. An exception enable flag
(SPEFSCR[FINXE]) is also provided for generating an exception when an inexact result is produced, to
allow a software handler to conform to IEEE Std. 754 standard. A divide by zero exception enable flag
(SPEFSCR[FDBZE]) is also provided for generating an exception when a divide by zero operation is
attempted to allow a software handler to conform to IEEE Std. 754 standard. All of these exceptions may
be disabled, and the hardware will then deliver an appropriate default result.
Overflow and underflow conditions are determined after rounding on e200 implementations.
6.3.3 Floating-Point Exceptions
See Section 6.2.5, “EFPU Exceptions.”
6.3.4 Embedded Scalar Single-Precision Floating-Point Instructions
The instruction descriptions in this section use the following conventions:
sa the sign of operand A
ea the biased exponent value of operand A
sb the sign of operand B
eb the biased exponent value of operand B
ei an intermediate exponent value
r result value

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-12 Freescale Semiconductor
efsabs efsabs
Floating-Point Single-Precision Absolute Value
efsabs rD,rA
RD[32:63] = 0b0 || RA[33:63]
Description:
The sign bit of the low element of RA is set to 0 and the result is placed into the low element of RD.
Exceptions:
• If the low element of RA is Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set and FG and
FX are cleared. FGH and FXH are cleared as well. I
• If floating-point invalid input exceptions are enabled, an exception is taken and the destination
register is not updated.
0 56 101115162021 31
000100 RD RA 0000001011000100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-13
efsadd efsadd
Floating-Point Single-Precision Add
efsadd rD,rA,rB
RD[32:63] = RA[32:63] +sp RB[32:63]
Description:
The low element of RA is added to the low element of RB and the result is stored in the low element of
RD. If RA is NaN or infinity, the result is either pmax (sa==0), or nmax (sa==1). If RB is NaN or infinity, the
result is either pmax (sb==0), or nmax (sb==1). If an overflow occurs, pmax or nmax (as appropriate) is stored
in RD. If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If any of the following exceptions are taken, the destination register is not updated.
• If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken.
• If an overflow occurs, the SPEFSCR[FOVF] bit is set. If an underflow occurs, the
SPEFSCR[FUNF] bit is set. If either underflow or overflow exceptions are enabled and the
corresponding bit is set, an exception is taken.
The destination register is updated with the truncated result, the FG and FX bits are properly updated to
allow rounding to be performed in the exception handler, and the FGH and FXH bits are cleared in the
following cases.
• If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are
disabled and no other exception is taken, the SPEFSCR[FINXS] bit will be set.
• If the floating-point inexact exception is enabled, an exception is taken using the floating-point
round exception vector.
FGH, FXH, FG and FX will be cleared if an overflow, underflow, or invalid operation/input error is
signaled, regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011000000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-14 Freescale Semiconductor
efscfh efscfh
Convert Floating-Point Single-Precision from Half-Precision
efscfh rD,rB
FP16format f;
FP32format result;
f ¨ rB48:63
if (fexp = 0) & (ffrac = 0)) then
result ¨ fsign || 310 // signed zero value
else if Isa16NaNorInfinity(f) then
SPEFSCRFINV ¨ 1
result ¨ fsign || 0b11111110 || 231 // max value
else if Isa16Denorm(f) then
SPEFSCRFINV ¨ 1
result ¨ fsign || 310
else
resultsign ¨ fsign
resultexp ¨ fexp - 15 + 127
resultfrac ¨ ffrac || 130
rD32:63 = result
The half-precision FP number in the low half of the low element in RB is converted to a single-precision
floating-point value, and the result is placed into the low element of RD. The rounding mode is not used
because this conversion is always exact.
Exceptions:
SPEFSCR[FINV] is set if the source element of rB is Infinity, Denorm, or NaN. If SPEFSCR[FINVE] is
set, an interrupt is taken, the destination register is not updated, and the FGH, FXH, FG, and FX bits are
cleared.
0 56 101115162021 31
000100 RD 00100 RB 01011010001
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-15
efscfsf efscfsf
Convert Floating-Point Single-Precision from Signed Fraction
efscfsf rD,rB
Description:
bl = RB[32:63]
RD[32:63] = CnvtSF32ToFP32(bl)
The signed fractional low element in RB is converted to a single-precision floating-point value using the
current rounding mode, and the result is placed into the low element of RD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010011

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-16 Freescale Semiconductor
efscfsi efscfsi
Convert Floating-Point Single-Precision from Signed Integer
efscfsi rD,rB
Description:
bl = RB32:63
RD32:63 = CnvtSI32ToFP32(bl)
The signed integer low element in RB is converted to a single-precision floating-point value using the
current rounding mode and the result is placed into the low element of RD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010001
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-17
efscfuf efscfuf
Convert Floating-Point Single-Precision from Unsigned Fraction
efscfuf rD,rB
Description:
bl = RB[32:63]
RD[32:63] = CnvtUF32ToFP32(bl)
The unsigned fractional low element in RB is converted to a single-precision floating-point value using
the current rounding mode and the result is placed into the low element of RD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010010

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-18 Freescale Semiconductor
efscfui efscfui
Convert Floating-Point Single-Precision from Unsigned Integer
efscfui rD,rB
Description:
bl = RB[32:63]
RD[32:63] = CnvtUI32ToFP32(bl)
The unsigned integer low element in RB is converted to a single-precision floating-point value using the
current rounding mode, and the result is placed into the low element of RD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-19
efscmpgt efscmpgt
Floating-Point Single-Precision Compare Greater Than
efscmpgt crfD,rA,rB
Description:
al = RA[32:63]
bl = RB[32:63]
if (al > bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
The low element of RA is compared against the low element of RB. If RA is greater than RB, the bit in
the crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
• If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set and the
FGH FXH, FG and FX bits are cleared.
• If floating-point invalid input exceptions are enabled, an exception is taken and the condition
register is not updated.
Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized numbers,
using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011001100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-20 Freescale Semiconductor
efscmpeq efscmpeq
Floating-Point Single-Precision Compare Equal
efscmpeq crfD,rA,rB
Description:
al = RA32:63
bl = RB32:63
if (al == bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
The low element of RA is compared against the low element of RB. If RA is equal to RB, the bit in the
crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
• If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set, and the
FGH FXH, FG and FX bits are cleared.
• If floating-point invalid input exceptions are enabled then an exception is taken, and the condition
register is not updated.
Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized numbers,
using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011001110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-21
efscmplt efscmplt
Floating-Point Single-Precision Compare Less Than
efscmplt crfD,rA,rB
Description:
al = RA[32:63]
bl = RB[32:6]3
if (al < bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
The low element of RA is compared against the low element of RB. If RA is less than RB, the bit in the
crfD is set. Otherwise it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
• If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set, and the
FGH, FXH, FG, and FX bits are cleared.
• If floating-point invalid input exceptions are enabled, an exception is taken and the condition
register is not updated.
Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized numbers,
using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011001101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-22 Freescale Semiconductor
efscth efscth
Convert Floating-Point Single-Precision to Half-Precision
efscth rD,rB
FP32format f;
FP16format result;
f ¨ rB[32:63]
if (fexp = 0) & (ffrac = 0)) then
result ¨ fsign || 150 // signed zero value
else if Isa32NaNorInfinity(f) then
SPEFSCRFINV ¨ 1
result ¨ fsign || 0b11110 || 101 // max value
else if Isa32Denorm(f) then
SPEFSCRFINV ¨ 1
result ¨ fsign || 150
else
unbias ¨ fexp - 127
if unbias > 15 then
result ¨ fsign || 0b11110 || 101 // max value
SPEFSCRFOVF ¨ 1
else if unbias < -14 && (result would not round up to bmin) then
result ¨ fsign || 150 // like-signed zero value
SPEFSCRFUNF ¨ 1
else
resultsign ¨ fsign
resultexp ¨ unbias + 15
resultfrac ¨ ffrac[0:9]
guard ¨ ffrac[10]
sticky ¨ (ffrac[11:22] ¼ 0)
result ¨ Round16(result, LOWER, guard, sticky)
SPEFSCRFG ¨ guard
SPEFSCRFX ¨ sticky
if guard | sticky then
SPEFSCRFINXS ¨ 1
rD[32:63] = 160 || result
The single-precision FP number in the low element in RB is converted to a half-precision floating-point
value using the current rounding mode. The result is then prepended with 16 zeros and placed into the low
element of RD.
Exceptions:
If any of the following interrupts are taken, the destination register is not updated:
• If the source element of rB is Infinity, Denorm, or NaN, SPEFSCR[FINV] is set. If
SPEFSCR[FINV] is set, an interrupt is taken, the destination register is not updated, and the FGH,
FXH, FG, and FX bits are cleared.
• If an overflow occurs, SPEFSC[RFOVF] is set.
• If an underflow occurs, SPEFSCR[FUNF] is set.
0 56 101115162021 31
000100 RD 00100 RB 01011010101
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-23
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an interrupt
is taken.
In the following cases, the destination register is updated with the truncated result, the FG and FX bits are
properly updated to allow rounding to be performed in the interrupt handler, and the FGH and FXH bits
are cleared.
• If the result of this instruction is inexact and no other interrupt is taken, SPEFSCR[FINXS] is set.
• If an overflow occurs but overflow exceptions are disabled and no other interrupt is taken,
SPEFSCR[FINXS] is set.
If the floating-point inexact exception is enabled, an interrupt is taken using the floating-point round
interrupt vector.
FGH, FXH, FG, and FX are cleared if an overflow, underflow, or invalid operation/input error is signaled,
regardless of enabled exceptions.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-24 Freescale Semiconductor
efsctsf efsctsf
Convert Floating-Point Single-Precision to Signed Fraction
efsctsf rD,rB
Description:
bl = RB32:63
if (bl == Denorm) then
RD32:63 = 0
else if ((bl == +0) || (bl == –0)) // zero cases
RD32:63 = 0
else if (ebl < 127) then
RD32:63 = CnvtFP32ToSF32Sat(bl)
else if ((ebl == 127) && (sbl == 1) && (fbl==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (bl == NAN) then RD32:63 = 0
else // Overflow
if (sbl == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
The single-precision floating-point low element in RB is converted to a signed fraction using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit fraction. NaNs are
converted as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or Na, or if an overflow occurs, the SPEFSCR[FINV] bit is set
and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is taken and the
destination register is not updated.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010111
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-25
efsctsi efsctsi
Convert Floating-Point Single-Precision to Signed Integer
efsctsi rD,rB
Description:
bl = RB32:63
if (bl == Denorm) then
RD32:63 = 0
else if (ebl < 158) then
RD32:63 = CnvtFP32ToSI32Sat(al)
else if ((ebl == 158) && (sbl == 1) && (fbl==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (bl == NAN) then RD32:63 = 0
else // Overflow
if (sbl == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
The single-precision floating-point low element in RB is converted to a signed integer using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit integer. NaNs are converted
as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or NaN, or if an overflow occurs, then the SPEFSCR[FINV]
bit is set, and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is
taken, the destination register is not updated, and no other status bits are set.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-26 Freescale Semiconductor
efsctsiz efsctsiz
Convert Floating-Point Single-Precision to Signed Integer with Round toward Zero
efsctsiz rD,rB
Description:
bl = RB32:63
if (bl == Denorm) then
RD32:63 = 0
else if (ebl < 158) then
RD32:63 = CnvtFP32ToSI32Sat(bl)
else if ((ebl == 158) && (sbl == 1) && (fbl==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (bl == NAN) then RD32:63 = 0
else // Overflow
if (sbl == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
The single-precision floating-point low element in RB is converted to a signed integer using the rounding
mode Round toward Zero and the result is saturated if it cannot be represented in a 32-bit integer. NaNs
are converted as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or NaN, or if an overflow occurs, then the SPEFSCR[FINV]
bit is set, and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is
taken, the destination register is not updated, and no other status bits are set.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011011010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-27
efsctuf efsctuf
Convert Floating-Point Single-Precision to Unsigned Fraction
efsctuf rD,rB
Description:
bl = RB32:63
if (bl == Denorm) then // force denorm to zero
RD32:63 = 0
else if ((bl == +0) || (bl == -0)) // zero cases
RD32:63 = 0
else if (sbl == 1) // Negative
RD32:63 = 0
else if (ebl < 127)
RD32:63 = CnvtFP32ToUF32Sat(bl)
else if (bl == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
The single-precision floating-point low element in RB is converted to an unsigned fraction using the
current rounding mode and the result is saturated if it cannot be represented in a 32-bit unsigned fraction.
NaNs are converted as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or NaN, or if an overflow occurs, then the SPEFSCR[FINV]
bit is set, and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is
taken and the destination register is not updated.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010110

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-28 Freescale Semiconductor
efsctui efsctui
Convert Floating-Point Single-Precision to Unsigned Integer
efsctui rD,rB
Description:
bl = RB32:63
if (bl == Denorm) then // force denorm to zero
RD32:63 = 0
else if ((bl == +0) || (bl == -0)) // zero cases
RD32:63 = 0
else if (sbl == 1) // Negative
RD32:63 = 0
else if (ebl <= 158)
RD32:63 = CnvtFP32ToUI32Sat(bl)
else if (bl == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
The single-precision floating-point low element in RB is converted to an unsigned integer using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit integer. NaNs are converted
as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or NaN, or if an overflow occurs, then the SPEFSCR[FINV]
bit is set, and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is
taken and the destination register is not updated.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011010100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-29
efsctuiz efsctuiz
Convert Floating-Point Single-Precision to Unsigned Integer with Round toward Zero
efsctui rD,rB
bl = RB32:63
if (bl == Denorm) then // force denorm to zero
RD32:63 = 0
else if ((bl == +0) || (bl == -0)) // zero cases
RD32:63 = 0
else if (sbl == 1) // Negative
RD32:63 = 0
else if (ebl <= 158)
RD32:63 = CnvtFP32ToUI32Sat(bl)
else if (bl == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
Description:
The single-precision floating-point low element in RB is converted to an unsigned integer using the
rounding mode Round toward Zero and the result is saturated if it cannot be represented in a 32-bit integer.
NaNs are converted as though they were zero.
Exceptions:
If the contents of RB are Infinity, Denorm, or NaN, or if an overflow occurs, then the SPEFSCR[FINV]
bit is set, and the FGH, FXH, FG, and FX bits are cleared. If SPEFSCR[FINVE] is set, an exception is
taken and the destination register is not updated.
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversion is not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result, the FG and FX
bits are properly updated to allow rounding to be performed in the exception handler, and the FGH and
FXH bits are cleared.
0 56 101115162021 31
000100 RD 00000 RB 01011011000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-30 Freescale Semiconductor
efsdiv efsdiv
Floating-Point Single-Precision Divide
efsdiv rD,rA,rB
RD32:63 = RA32:63 ÷sp RB32:63
Description:
The low element of RA is divided by the low element of RB and the result is stored in the low element of
RD.
• If RB is a NaN or infinity, the result is a properly signed zero.
• If RB is a denormalized number or a zero, or if RA is either NaN or infinity, the result is either
pmax (sa==sb), or nmax (sa!=sb).
• If an overflow occurs, then pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, or if both RA and RB are ±0, the
SPEFSCR[FINV] bit is set. If SPEFSCR[FINVE] is set, an exception is taken and the destination register
is not updated. Otherwise:
• If the content of RB is ±0 and the content of RA is a finite normalized non-zero number, the
SPEFSCR[FDBZ] bit is set.
• If floating-point divide by zero exceptions are enabled, an exception is taken.
• If an overflow occurs, then the SPEFSCRFOVF bit is set.
• If an underflow occurs, then the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If any of these exceptions are taken, the destination register is not updated.
In the following cases, the destination register is updated with the truncated result, the FG and FX bits are
properly updated to allow rounding to be performed in the exception handler, and the FGH and FXH bits
are cleared.
• If the result of this instruction is inexact the SPEFSCR[FINXS] bit will be set
• If an overflow occurs but overflow exceptions are disabled and no other exception is taken, the
SPEFSCR[FINXS] bit will be set.
If the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector.
0 56 101115162021 31
000100 RD RA RB 01011001001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-31
FGH, FXH, FG and FX will be cleared if an overflow, underflow, divide by zero, or invalid operation/input
error is signaled, regardless of enabled exceptions.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-32 Freescale Semiconductor
efsmadd efsmadd
Floating-Point Single-Precision Multiply-Add
efsmadd rD,rA,rB
RD32:63 = ((RA32:63 Xfp RB32:63) +sp RD32:63)
Description:
The low element of rA is multiplied by the low element of rB, the intermediate product is added to the
low element of rD, and the result is stored in the low element of rD. If RA or RB are either zero or
denormalized, the intermediate product is a properly signed zero.
Otherwise, the following occurs:
• If RA or RB are either NaN or infinity and the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), this value is used for the result and stored into RD. Otherwise, the intermediate product is
added to the corresponding element of RD.
• If RD is NaN or infinity, the result is either pmax (sd==0) or nmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. Otherwise,
• If an overflow occurs, the SPEFSCR[FOVF] bit is set.
• If an underflow occurs, the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If any of these exceptions are taken, the destination register is not updated.
In the following cases, the destination register is updated with the truncated result, the FG and FX bits are
properly updated to allow rounding to be performed in the exception handler, and the FGH and FXH bits
are cleared.
• If the result of this instruction is inexact, the SPEFSCR[FINXS] bit is set.
• If an overflow occurs on the add, but overflow exceptions are disabled and no other exception is
taken, the SPEFSCR[FINXS] bit is set.
If the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector.
0 56 101115162021 31
000100 RD RA RB 01011000010

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-33
FGH, FXH, FG, and FX are cleared if an overflow, underflow, or invalid operation/input error is signaled,
regardless of enabled exceptions.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-34 Freescale Semiconductor
efsmax efsmax
Floating-Point Single-Precision Maximum
efsmax rD,rA,rB
al ← rA32:63
bl ← rB32:63
if (al < bl) then temp ← bl
else temp ← al
if (isnan(al) & ~(isnan(bl))) then temp ← bl
if (isnan(bl) & ~(isnan(al))) then temp ← al
rD32:63 ← temp
Description:
The low element of rA is compared against the low element of rB. The larger element is selected and
placed into the low element of rD. The maximum of +0 and –0 is +0.
Exceptions:
If the contents of rA or rB are Infinity, Denorm, or NaN, SPEFSC[RFINV] is set, and the FGH, FXH, FG
and FX bits are cleared. If SPEFSCR[FINVE] is set, an interrupt is taken and the destination register is not
updated. Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized
numbers, using their values of ‘e’ and ‘f’ directly. If one of the elements is a NaN and the other is not, the
non-NaN element is selected rather than the comparison result. If the selected element is denorm, the result
is a same signed zero. If the selected element is +NaN or +infinity, the corresponding result is pmax. If the
selected element is –NaN or –infinity, the corresponding result is nmax.
0 5689101115162021 31
000100 RD RA RB 0 1010110000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-35
efsmin efsmin
Floating-Point Single-Precision Minimum
efsmin rD,rA,rB
al ← rA32:63
bl ← rB32:63
if (al < bl) then temp ← al
else temp ← bl
if (isnan(al) & ~(isnan(bl))) then temp ← bl
if (isnan(bl) & ~(isnan(al))) then temp ← al
rD32:63 ← temp
Description:
The low element of rA is compared against the low element of rB. The smaller element is selected and
placed into the low element of rD. The minimum of +0 and –0 is –0.
Exceptions:
If the contents of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV] is set, and the FGH, FXH, FG,
and FX bits are cleared. If SPEFSCR[FINVE] is set, an interrupt is taken and the destination register is not
updated. Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized
numbers, using their values of ‘e’ and ‘f’ directly. If one of the elements is a NaN and the other is not, the
non-NaN element is selected rather than the comparison result. If the selected element is denorm, the result
is a same signed zero. If the selected element is +NaN or +infinity, the corresponding result is pmax.
Otherwise, if the selected element is –NaN or –infinity, the corresponding result is nmax.
0 5689101115162021 31
000100 RD RA RB 0 1010110001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-36 Freescale Semiconductor
efsmsub efsmsub
Floating-Point Single-Precision Multiply-Subtract
efsmsub rD,rA,rB
RD32:63 = ((RA32:63 Xfp RB32:63) -sp RD32:63)
Description:
The low element of rA is multiplied by the low element of rB, the low element of rD is subtracted from
the intermediate product, and the result is stored in the low element of rD. If RA or RB are either zero or
denormalized, the intermediate product is a properly signed zero. Otherwise, if RA or RB are either NaN
or infinity, the intermediate product is either pmax (sa==sb), or nmax (sa!=sb), and this value is used for the
result and stored into RD. Otherwise, the low element of rD is subtracted from the intermediate product.
If RD is NaN or infinity, the result is either nmax (sd==0), or pmax (sd==1). Otherwise, if an overflow occurs,
then pmax or nmax (as appropriate) is stored in RD. If an underflow occurs, then +0 (for rounding modes
RN, RZ, RP) or –0 (for rounding mode RM) is stored in RD.
Exceptions:
• If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken, and the destination register is not updated.
Otherwise,
• If an overflow occurs, the SPEFSCR[FOVF] bit is set.
• If an underflow occurs, the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If any of these exceptions are taken, the destination register is not updated.
If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are disabled, and
no other exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception
is enabled, an exception is taken using the floating-point round exception vector. In this case, the
destination register is updated with the truncated result, the FG and FX bits are properly updated to allow
rounding to be performed in the exception handler, and the FGH and FXH bits are cleared.
FGH, FXH, FG, and FX are cleared if an overflow, underflow, or invalid operation/input error is signaled,
regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011000011
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-37
efsmul efsmul
Floating-Point Single-Precision Multiply
efsmul rD,rA,rB
RD32:63 = RA32:63 Xsp RB32:63
Description:
The low element of RA is multiplied by the low element of RB and the result is stored in the low element
of RD.
• If RA or RB are either zero or denormalized, the result is a properly signed zero.
• If RA or RB are either NaN or infinity, the result is either pmax (sa==sb), or nmax (sa!=sb).
• If an overflow occurs, then pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, then +0 or –0 (as appropriate) is stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. Otherwise, the
following occurs:
• If an overflow occurs, the SPEFSCR[FOVF] bit is set.
• If an underflow occurs, the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If any of these exceptions are taken, the destination register is not updated.
If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are disabled, and
no other exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception
is enabled, an exception is taken using the floating-point round exception vector. In this case, the
destination register is updated with the truncated result, the FG and FX bits are properly updated to allow
rounding to be performed in the exception handler, and the FGH and FXH bits are cleared.
FGH, FXH, FG, and FX are cleared if an overflow, underflow, or invalid operation/input error is signaled,
regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011001000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-38 Freescale Semiconductor
efsnabs efsnabs
Floating-Point Single-Precision Negative Absolute Value
efsnabs rD,rA
RD32:63 = 0b1 || RA33:63
Description:
The sign bit of the low element of RA is set to 1, and the result is placed into the low element of RD.
Exceptions:
If the low element of RA is Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set and FG and FX are
cleared. FGH and FXH are cleared as well. If floating-point invalid input exceptions are enabled, an
exception is taken and the destination register is not updated.
0 56 101115162021 31
000100 RD RA 0000001011000101
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-39
efsneg efsneg
Floating-Point Single-Precision Negate
efsneg rD,rA
RD32:63 = ¬RA32 || RA33:63
Description:
The sign bit of the low element of RA is complemented and the result is placed into the low element of RD.
Exceptions:
If the low element of RA is Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set and FG and FX are
cleared. FGH and FXH are cleared as well. If floating-point invalid input exceptions are enabled, an
exception is taken and the destination register is not updated.
0 56 101115162021 31
000100 RD RA 0000001011000110

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-40 Freescale Semiconductor
efsnmadd efsnmadd
Floating-Point Single-Precision Negative Multiply-Add
efsnmadd rD,rA,rB
RD32:63 = -((RA32:63 Xfp RB32:63) +sp RD32:63)
Description:
The low element of rA is multiplied by the low element of rB, the intermediate product is added to the
low element of rD, and the negated result is stored in the low element of rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), and this value is used for the result and stored into RD. Otherwise, the intermediate product
is added to the corresponding element of RD, and the final result is negated.
• If RD is NaN or infinity, the result is either nmax (sd==0) or pmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, –0 (for rounding modes RN, RZ, RP) or +0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. Otherwise, the
following occurs:
• If an overflow occurs, the SPEFSCR[FOVF] bit is set.
• If an underflow occurs, the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If any of these exceptions are taken, the destination register is not updated.
If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are disabled and
no other exception is taken, the SPEFSCR[FINXS] bit is set. If the floating-point inexact exception is
enabled, an exception is taken using the floating-point round exception vector. In this case, the destination
register is updated with the truncated result, the FG and FX bits are properly updated to allow rounding to
be performed in the exception handler, and the FGH and FXH bits are cleared.
FGH, FXH, FG and FX will be cleared if an overflow, underflow, or invalid operation/input error is
signaled, regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011001010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-41
efsnmsub efsnmsub
Floating-Point Single-Precision Negative Multiply-Subtract
efsnmsub rD,rA,rB
RD32:63 = -((RA32:63 Xfp RB32:63) -sp RD32:63)
Description:
The low element of element of rA is multiplied by the low element of rB, the low element of rD is
subtracted from the intermediate product, and the negated result is stored in the low element of rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), and this value is negated to obtain the result and is stored into RD. Otherwise, the low
element of rD is subtracted from the intermediate product, and the final result is negated.
• If RD is NaN or infinity, the final result is either pmax (sd==0) or nmax (sd==1).
• If an overflow occurs, then pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, then –0 (for rounding modes RN, RZ, RP) or +0 (for rounding mode RM)
is stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated.
If any of the following exceptions are taken, the destination register is not updated.
• If an overflow occurs, the SPEFSCR[FOVF] bit is set.
• If an underflow occurs, the SPEFSCR[FUNF] bit is set.
• If either underflow or overflow exceptions are enabled and the corresponding bit is set, an
exception is taken.
If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are disabled, and
no other exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception
is enabled, an exception is taken using the floating-point round exception vector. In this case, the
destination register is updated with the truncated result, the FG and FX bits are properly updated to allow
rounding to be performed in the exception handler, and the FGH and FXH bits are cleared.
FGH, FXH, FG and FX will be cleared if an overflow, underflow, or invalid operation/input error is
signaled, regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011001011

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-42 Freescale Semiconductor
efssqrt efssqrt
Floating-Point Single-Precision Square Root
efssqrt rD,rA
rD32:63 ← SQRT(rA32:63)
The square root of the low element of rA is calculated, and the results are stored in the low element of rD.
• If the low element of rA is zero or denorm, the result is a same signed zero.
• If the low element of rA is +NaN or +infinity, the corresponding result is pmax.
• If the low element of rA is non-zero and has a negative sign, including –NaN or –infinity, the
corresponding result is –0.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the low element of rD.
Exceptions:
If the low element of rA is non-zero and has a negative sign, or is Infinity, Denorm, or NaN,
SPEFSCR[FINV] is set and SPEFSCR[FGH,FXH,FG,FX] are cleared. If SPEFSCR[FINVE] is set, an
interrupt is taken and the destination register is not updated. Otherwise, if an underflow occurs,
SPEFSCR[FUNF] is set. If underflow exceptions are enabled and a corresponding status bit is set, an
interrupt is taken. If any of these interrupts are taken, the destination register is not updated.
If the result element of this instruction is inexact, or underflows but underflow exceptions are disabled and
no other interrupt is taken, SPEFSCR[FINXS] is set. If the floating-point inexact exception is enabled, an
interrupt is taken using the floating-point round interrupt vector. In this case, the destination register is
updated with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be
performed in the interrupt handler, and the FGH and FXH bits are cleared.
FG, FX, FGH, and FXH are cleared if an underflow or an invalid operation/input error is signaled for the
low element, regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA 000000 1011000111
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-43
efssub efssub
Floating-Point Single-Precision Subtract
efssub rD,rA,rB
RD32:63 = RA32:63 -sp RB32:63
Description:
The low element of RB is subtracted from the low element of RA and the result is stored in the low element
of RD.
• If RA is NaN or infinity, the result is either pmax (sa==0), or nmax (sa==1).
• If RB is NaN or infinity, the result is either nmax (sb==0), or pmax (sb==1).
• If an overflow occurs, then pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, then +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM)
is stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV] bit is set. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. If an underflow
occurs, the SPEFSCR[FUNF] bit is set. If either underflow or overflow exceptions are enabled and the
corresponding bit is set, an exception is taken. If any of these exceptions are taken, the destination register
is not updated.
If the result of this instruction is inexact or if an overflow occurs but overflow exceptions are disabled, and
no other exception is taken, the SPEFSCR[FINXS] bit is set. If the floating-point inexact exception is
enabled, an exception is taken using the floating-point round exception vector. In this case, the destination
register is updated with the truncated result, the FG and FX bits are properly updated to allow rounding to
be performed in the exception handler, and the FGH and FXH bits are cleared.
FGH, FXH, FG and FX will be cleared if an overflow, underflow, or invalid operation/input error is
signaled, regardless of enabled exceptions.
0 56 101115162021 31
000100 RD RA RB 01011000001
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-44 Freescale Semiconductor
efststeq efststeq
Floating-Point Single-Precision Test Equal
efststeq crfD,rA,rB
al = RA32:63
bl = RB32:63
if (al == bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
Description:
The low element of RA is compared against the low element of RB. If RA is equal to RB, the bit in the
crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison proceeds
after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’
directly.
Exceptions:
No exceptions are generated during the execution of efststeq instruction. If strict conformity to the
IEEE Std. 754 standard is required, the program should use the efscmpeq instruction.
NOTE:
In an implementation, the execution of efststeq is likely to be faster than the
execution of efscmpeq instruction.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011011110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-45
efststgt efststgt
Floating-Point Single-Precision Test Greater Than
efststgt crfD,rA,rB
al = RA32:63
bl = RB32:63
if (al > bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
Description:
The low element of RA is compared against the low element of RB. If RA is greater than RB, the bit in
the crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison
proceeds after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and
‘f’ directly.
Exception:
No exceptions are generated during the execution of efststgt instruction. If strict conformity to IEEE Std.
754 standard is required, the program should use the efscmpgt instruction.
NOTE:
In an implementation, the execution of efststgt is likely to be faster than the
execution of efscmpgt instruction.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011011100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-46 Freescale Semiconductor
efststlt efststlt
Floating-Point Single-Precision Test Less Than
efststlt crfD,rA,rB
al = RA32:63
bl = RB32:63
if (al < bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = undefined || cl || undefined || undefined
Description:
The low element of RA is compared against the low element of RB. If RA is less than RB, the bit in the
crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison proceeds
after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’
directly.
Exceptions:
No exceptions are generated during the execution of efststlt instruction. If strict conformity to IEEE
Std. 754 standard is required, the program should use the efscmplt instruction.
NOTE:
In an implementation, the execution of efststlt is likely to be faster than the
execution of efscmplt instruction.
0 5689101115162021 31
000100 crfD 0 0 RA RB 01011011101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-47
6.3.5 EFPU Vector Single-precision Embedded Floating-Point
Instructions
The instruction descriptions in this section use the following conventions:
sa the sign of operand A,
ea the biased exponent value of operand A,
sb the sign of operand B,
b the biased exponent value of operand B,
ei an intermediate exponent value,
r a result value.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-48 Freescale Semiconductor
evfsabs evfsabs
Vector Floating-Point Single-Precision Absolute Value
evfsabs rD,rA
RD0:31 = 0b0 || RA1:31
RD32:63 = 0b0 || RA33:63
Description:
The sign bit of each element in RA is set to 0 and the results are placed into RD.
Exceptions:
If the contents of either element of RA are Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH] bits
are set appropriately, and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately. If
floating-point invalid input exceptions are enabled, an exception is taken and the destination register is not
updated.
0 56 101115162021 31
4 RD RA 0000001010000100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-49
evfsadd evfsadd
Vector Floating-Point Single-Precision Add
evfsadd rD,rA,rB
RD0:31 = RA0:31 +sp RB0:31
RD32:63 = RA32:63 +sp RB32:63
Description:
Each single-precision floating-point element of RA is added to the corresponding element of RB and the
results are stored in RD.
• If RA is NaN or infinity, the result is either pmax (sa==0) or nmax (sa==1).
• If RB is NaN or infinity, the result is either pmax (sb==0) or nmax (sb==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH]
bits are set appropriately, and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. Otherwise, if
an overflow occurs, the SPEFSCR[FOVF, FOVFH] bits are set appropriately, or if an underflow occurs,
the SPEFSCR[FUNF, FUNFH] bits are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken,
the destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other exception is taken, or underflows but underflow exceptions are disabled, and no other
exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception is enabled,
an exception is taken using the floating-point round exception vector. In this case, the destination register
is updated with the truncated results. The FG and FX bits are properly updated to allow rounding to be
performed in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010000000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-50 Freescale Semiconductor
evfsaddsub evfsaddsub
Vector Floating-Point Single-Precision Add / Subtract
evfsaddsub rD,rA,rB
rD0:31 ← rA0:31 +sp rB0:31
rD32:63 ← rA32:63 -sp rB32:63
Description:
The high order single-precision floating-point element of rA is added to the corresponding element of rB,
the low order single-precision floating-point element of rB is subtracted from the corresponding element
of rA and the results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax (sa==0) or nmax
(sa==1).
• If an element of rB is NaN or infinity, the corresponding result is either pmax (sb==0) or nmax
(sb==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately and SPEFSCR[FGH,FXH,FG,FX] are cleared appropriately. If SPEFSCR[FINVE] is set,
an interrupt is taken and the destination register is not updated.
If an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow occurs,
SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are enabled
and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
If either result element of this instruction is inexact, overflows but overflow exceptions are disabled and
no other interrupt is taken, or underflows but underflow exceptions are disabled and no other interrupt is
taken, SPEFSCR[FINXS,FINXSH] is set. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 01010100010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-51
evfsaddsubx evfsaddsubx
Vector Floating-Point Single-Precision Add/Subtract Exchanged
evfsaddsubx rD,rA,rB
rD0:31 ← rA32:63 +sp rB0:31
rD32:63 ← rA0:31 -sp rB32:63
Description:
The high-order single-precision floating-point element of rB is added to the low-order element of rA, the
low-order single-precision floating-point element of rB is subtracted from the high-order element of rA,
and the results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax (sa==0) or nmax
(sa==1).
• If an element of rB is NaN or infinity, the corresponding result is either pmax (sb==0) or nmax
(sb==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS, FINXSH] is set if either result element of this instruction is inexact, overflows but
overflow exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions
are disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-52 Freescale Semiconductor
evfsaddx evfsaddx
Vector Floating-Point Single-Precision Add Exchanged
evfsaddx rD,rA,rB
rD0:31 ← rA32:63 +sp rB0:31
rD32:63 ← rA0:31 +sp rB32:63
Description:
The high-order single-precision floating-point element of rB is added to the low-order element of rA, the
low-order single-precision floating-point element of rB is added to the high-order element of rA, and the
results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax or nmax (as
appropriate).
• If an element of rB is NaN or infinity, the corresponding result is either pmax or nmax (as
appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS, FINXSH] is set if either result element of this instruction is inexact, overflows but
overflow exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions
are disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-53
evfscfh evfscfh
Vector Convert Floating-Point Single-Precision from Half-Precision
evfscfh rD,rB
FP16format f;
FP32format result;
fh ← rB24:31
fl ← rB48:63
if (fhexp = 0) & (fhfrac = 0)) then
resulth ← fhsign || 310 // signed zero value
else if Isa16NaNorInfinity(fh) then
SPEFSCRFINVH ← 1
resulth ← fhsign || 0b11111110 || 231 // max value
else if Isa16Denorm(fh) then
SPEFSCRFINVH ← 1
resulth ← fhsign || 310
else
resulthsign ← fhsign
resulthexp ← fhexp - 15 + 127
resulthfrac ← fhfrac || 130
if (flexp = 0) & (flfrac = 0)) then
resultl ← flsign || 310 // signed zero value
else if Isa16NaNorInfinity(fl) then
SPEFSCRFINV ← 1
resultl ← flsign || 0b11111110 || 231 // max value
else if Isa16Denorm(fl) then
SPEFSCRFINV ← 1
resultl ← flsign || 310
else
resultlsign ← flsign
resultlexp ← flexp - 15 + 127
resultlfrac ← flfrac || 130
rD0:31 = resulth; rD32:63 = resultl
Description:
The half-precision FP number in each element in RB is converted to a single-precision floating-point value
and the result is placed into the corresponding element of RD. The rounding mode is not used since this
conversion is always exact.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH] bits are set
appropriately and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared. If SPEFSCR[FINVE] is set, an
exception is taken, the destination register is not updated, and no other status bits are set.
0 56 101115162021 31
000100 RD 00100 RB 01010010001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-54 Freescale Semiconductor
evfscfsf evfscfsf
Vector Convert Floating-Point Single-Precision from Signed Fraction
evfscfsf rD,rB
RD0:31 = CnvtSF32ToFP32(RB0:31)
RD32:63 = CnvtSF32ToFP32(RB32:63)
Description:
Each signed fractional element of rB is converted to a single-precision floating-point value using the
current rounding mode and the results are placed into the corresponding elements of rD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversions are not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result(s). The FGH,
FXH, FG, and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010011
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-55
evfscfsi evfscfsi
Vector Convert Floating-Point Single-Precision from Signed Integer
evfscfsi rD,rB
RD0:31 = CnvtSI32ToFP32(RB0:31)
RD32:63 = CnvtSI32ToFP32(RB32:63)
Description:
Each signed integer element of rB is converted to the nearest single-precision floating-point value using
the current rounding mode and the results are placed into the corresponding element of rD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversions are not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result(s). The FGH,
FXH, FG, and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-56 Freescale Semiconductor
evfscfuf evfscfuf
Vector Convert Floating-Point Single-Precision from Unsigned Fraction
evfscfuf rD,rB
RD0:31 = CnvtUF32ToFP32(RB0:31)
RD32:63 = CnvtUF32ToFP32(RB32:63)
Description:
Each unsigned fractional element of rB is converted to a single-precision floating-point value using the
current rounding mode and the results are placed into the corresponding elements of rD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversions are not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result(s). The FGH,
FXH, FG, and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-57
evfscfui evfscfui
Vector Convert Floating-Point Single-Precision from Unsigned Integer
evfscfui rD,rB
RD0:31 = CnvtUI32ToFP32(RB0:31)
RD32:63 = CnvtUI32ToFP32(RB32:63)
Description:
Each unsigned integer element of rB is converted to the nearest single-precision floating-point value using
the current rounding mode and the results are placed into the corresponding elements of rD.
Exceptions:
This instruction can signal an inexact status and set SPEFSCR[FINXS] if the conversions are not exact. If
the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result(s). The FGH,
FXH, FG, and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-58 Freescale Semiconductor
evfscmpeq evfscmpeq
Vector Floating-Point Single-Precision Compare Equal
evfscmpeq crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah == bh) then ch = 1
else ch = 0
if (al == bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Description:
Each element of rA is compared against the corresponding element of rB. If rA equals RB, the crfD bit
is set, otherwise it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH]
bits are set appropriately, and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately. If
floating-point invalid input exceptions are enabled, an exception is taken and the condition register is not
updated. Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized
numbers, using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010001110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-59
evfscmpgt evfscmpgt
Vector Floating-Point Single-Precision Compare Greater Than
evfscmpgt crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah > bh) then ch = 1
else ch = 0
if (al > bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Description:
Each element of rA is compared against the corresponding element of rB. If rA is greater than rB, the bit
in the crfD is set, otherwise it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH]
bits are set appropriately and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately. If
floating-point invalid input exceptions are enabled, an exception is taken and the condition register is not
updated. Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as normalized
numbers, using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010001100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-60 Freescale Semiconductor
evfscmplt evfscmplt
Vector Floating-Point Single-Precision Compare Less Than
evfscmplt crfD,rA,rB
Description:
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah < bh) then ch = 1
else ch = 0
if (al < bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Each element of rA is compared against the corresponding element of rB. If rA is less than rB, the bit in
the crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0).
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, the SPEFSCR[FINV, FINVH]
bits are set appropriately, and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately. If
floating-point invalid input exceptions are enabled then an exception is taken, and the condition register is
not updated. Otherwise, the comparison proceeds after treating NaNs, Infinities, and Denorms as
normalized numbers, using their values of ‘e’ and ‘f’ directly.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010001101
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-61
evfscth evfscth
Vector Convert Floating-Point Single-Precision to Half-Precision
evfscth rD,rB
FP32format fh, fl;
FP16format resulth, resultl;
fh ← rB0:31; fl ← rB32:63
if (fhexp = 0) & (fhfrac = 0)) then
resulth ← fhsign || 150 // signed zero value
else if Isa32NaNorInfinity(fh) then
SPEFSCRFINVH ← 1
result ← fhsign || 0b11110 || 101 // max value
else if Isa32Denorm(fh) then
SPEFSCRFINVH ← 1
resulth ← fsign || 150
else
unbias ← fhexp - 127
if unbias > 15 then
resulth ← fhsign || 0b11110 || 101 // max value
SPEFSCRFOVFH ← 1
else if unbias < -14 && (result would not round up to bmin) then
resulth ← fhsign || 150 // like-signed zero value
SPEFSCRFUNFH ← 1
else
resulthsign ← fhsign; resulthexp ← unbias + 15; resulthfrac ← fhfrac[0:9]
guard ← fhfrac[10]; sticky ← (fhfrac[11:22] ≠ 0)
resulth ← Round16(resulth, LOWER, guard, sticky)
SPEFSCRFGH ← guard; SPEFSCRFXH ← sticky
if guard | sticky then SPEFSCRFINXS ← 1
if (flexp = 0) & (flfrac = 0)) then
resultl ← flsign || 150 // signed zero value
else if Isa32NaNorInfinity(fl) then
SPEFSCRFINV ← 1
resultl ← flsign || 0b11110 || 101 // max value
else if Isa32Denorm(fl) then
SPEFSCRFINV ← 1
resultl ← flsign || 150
else
unbias ← flexp - 127
if unbias > 15 then
resultl ← flsign || 0b11110 || 101 // max value
SPEFSCRFOVF ← 1
else if unbias < -14 && (result would not round up to bmin) then
resultl ← flsign || 150 // like-signed zero value
SPEFSCRFUNF ← 1
else
resultlsign ← flsign; resultlexp ← unbias + 15; resultlfrac ← flfrac[0:9]
guard ← flfrac[10]; sticky ← (flfrac[11:22] ≠ 0)
resultl ← Round16(resultl, LOWER, guard, sticky)
SPEFSCRFG ← guard; SPEFSCRFX ← sticky
if guard | sticky then SPEFSCRFINXS ← 1
0 56 101115162021 31
000100 RD 00100 RB 01010010101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-62 Freescale Semiconductor
rD0:31 = 160 || resulth; rD32:63 = 160 || resultl
Description:
The single-precision FP number in each element in RB is converted to a half-precision floating-point value
using the current rounding mode. The result is then prepended with 16 zeros and placed into the
corresponding element of RD.
Exceptions:
If the contents of either element of rB is Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are set
appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is set,
an interrupt is taken and the destination register is not updated.
If an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow occurs,
SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are enabled
and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS, FINXSH] is set if either result element of this instruction is inexact, overflows but
overflow exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions
are disabled,and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FGH, FXH, FG, and FX bits are properly updated to allow rounding to be
performed in the interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-63
evfsctsf evfsctsf
Vector Convert Floating-Point Single-Precision to Signed Fraction
evfsctsf rD,rB
ah = RB0:31
if (ah == Denorm) then
RD0:31 = 0
else if ((al == +0) || (al == -0)) // zero cases
RD0:31 = 0
else if (eah < 127) then
RD0:31 = CnvtFP32ToSF32Sat(ah)
else if ((eah == 127) && (sah == 1) && (fah==0)) then
RD0:31 = 0x80000000 // max negative, no overflow
else if (ah == NAN) then RD0:31 = 0
else // Overflow
if (sah == 0) then // Positive
RD0:31 = 0x7FFFFFFF
else
RD0:31 = 0x80000000
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if ((al == +0) || (al == -0)) // zero cases
RD32:63 = 0
else if (eal < 127) then
RD32:63 = CnvtFP32ToSF32Sat(al)
else if ((eal == 127) && (sal == 1) && (fal==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (al == NAN) then RD32:63 = 0
else // Overflow
if (sal == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
Description:
Each single-precision floating-point element in RB is converted to a signed fraction using the current
rounding mode; the result is saturated if it cannot be represented in a 32-bit signed fraction. NaNs are
converted as though they were zero.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, or if an overflow occurs, the SPEFSCR[FINV,
FINVH] bits are set appropriately and the SPEFSCR[FGH, FXH, FG, FX] bits are cleared appropriately.
If SPEFSCR[FINVE] is set, an exception is taken, the destination register is not updated, and no other
status bits are set.
0 56 101115162021 31
4 RD 00000 RB 01010010111

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-64 Freescale Semiconductor
If either result element of this instruction is inexact and no other exception is taken, the SPEFSCR[FINXS]
bit will be set. If the floating-point inexact exception is enabled, an exception is taken using the
floating-point round exception vector. In this case, the destination register is updated with the truncated
result. The FGH, FXH, FG, and FX bits are properly updated to allow rounding to be performed in the
exception handler.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-65
evfsctsi evfsctsi
Vector Convert Floating-Point Single-Precision to Signed Integer
evfsctsi rD,rB
ah = RB0:31
if (ah == Denorm) then
RD0:31 = 0
else if (eah < 158) then
RD0:31 = CnvtFP32ToSI32Sat(ah)
else if ((eah == 158) && (sah == 1) && (fah==0)) then
RD0:31 = 0x80000000 // max negative, no overflow
else if (ah == NAN) then RD0:31 = 0
else // Overflow
if (sah == 0) then // Positive
RD0:31 = 0x7FFFFFFF
else
RD0:31 = 0x80000000
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if (eal < 158) then
RD32:63 = CnvtFP32ToSI32Sat(al)
else if ((eal == 158) && (sal == 1) && (fal==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (al == NAN) then RD32:63 = 0
else // Overflow
if (sal == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
Description:
Each single-precision floating-point element in RB is converted to a signed integer using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit integer. NaNs are converted
as though they were zero.
Exceptions:
If the contents of either element of RB are Infinity, Denorm, or NaN, or if an overflow occurs on
conversion, then the SPEFSCR[FINV, FINVH] bits are set appropriately, and the SPEFSCR[FGH, FXH,
FG, FX] bits are cleared appropriately. If SPEFSCR[FINVE] is set, an exception is taken, the destination
register is not updated, and no other status bits are set.
If either result element of this instruction is inexact and no other exception is taken, the SPEFSCR[FINXS]
bit will be set. If the floating-point inexact exception is enabled, an exception is taken using the
floating-point round exception vector. In this case, the destination register is updated with the truncated
0 56 101115162021 31
4 RD 00000 RB 01010010101
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-66 Freescale Semiconductor
result. The FGH, FXH, FG, and FX bits are properly updated to allow rounding to be performed in the
exception handler.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-67
evfsctsiz evfsctsiz
Vector Convert Floating-Point Single-Precision to Signed Integer with Round toward Zero
evfsctsiz rD,rB
ah = RB0:31
if (ah == Denorm) then
RD0:31 = 0
else if (eah < 158) then
RD0:31 = CnvtFP32ToSI32Sat(ah)
else if ((eah == 158) && (sah == 1) && (fah==0)) then
RD0:31 = 0x80000000 // max negative, no overflow
else if (ah == NAN) then RD0:31 = 0
else // Overflow
if (sah == 0) then // Positive
RD0:31 = 0x7FFFFFFF
else
RD0:31 = 0x80000000
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if (eal < 158) then
RD32:63 = CnvtFP32ToSI32Sat(al)
else if ((eal == 158) && (sal == 1) && (fal==0)) then
RD32:63 = 0x80000000 // max negative, no overflow
else if (al == NAN) then RD32:63 = 0
else // Overflow
if (sal == 0) then // Positive
RD32:63 = 0x7FFFFFFF
else
RD32:63 = 0x80000000
Description:
Each single-precision floating-point element in RB is converted to a signed integer using the rounding
mode Round toward Zero and the result is saturated if it cannot be represented in a 32-bit integer. NaNs
are converted as though they were zero.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, or if an overflow occurs, SPEFSCR[FINV, FINVH]
are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE]
is set, an exception is taken, the destination register is not updated, and no other status bits are set.
If either result element of this instruction is inexact and no other exception is taken, SPEFSCR[FINXS] is
set. If the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result. The FGH, FXH,
FG and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010011010

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-68 Freescale Semiconductor
evfsctuf evfsctuf
Vector Convert Floating-Point Single-Precision to Unsigned Fraction
evfsctuf rD,rB
ah = RB0:31
if (ah == Denorm) then // force denorm to zero
RD0:31 = 0
else if ((ah == +0) || (ah == -0)) // zero cases
RD0:31 = 0
else if (sah == 1) // Negative
RD0:31 = 0
else if (eah < 127)
RD0:31 = CnvtFP32ToUF32Sat(ah)
else if (ah == NAN) then RD0:31 = 0
else // Overflow
RD0:31 = 0xFFFFFFFF
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if ((al == +0) || (al == -0)) // zero cases
RD32:63 = 0
else if (sal == 1) // Negative
RD32:63 = 0
else if (eal < 127)
RD32:63 = CnvtFP32ToUF32Sat(al)
else if (al == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
Description:
Each single-precision floating-point element in RB is converted to an unsigned fraction using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit fraction. NaNs are
converted as though they were zero.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, or if an overflow occurs, SPEFSCR[FINV, FINVH]
are set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE]
is set, an exception is taken, the destination register is not updated, and no other status bits are set.
If either result element of this instruction is inexact and no other exception is taken, SPEFSCR[FINXS] is
set. If the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result. The FGH, FXH,
FG and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-69
evfsctui evfsctui
Vector Convert Floating-Point Single-Precision to Unsigned Integer
evfsctui rD,rB
ah = RB0:31
if (ah == Denorm) then // force denorm to zero
RD0:31 = 0
else if ((ah == +0) || (ah == -0)) // zero cases
RD0:31 = 0
else if (sah == 1) // Negative
RD0:31 = 0
else if (eah <= 158)
RD0:31 = CnvtFP32ToUI32Sat(ah)
else if (ah == NAN) then RD0:31 = 0
else // Overflow
RD0:31 = 0xFFFFFFFF
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if ((al == +0) || (al == -0)) // zero cases
RD32:63 = 0
else if (sal == 1) // Negative
RD32:63 = 0
else if (eal <= 158)
RD32:63 = CnvtFP32ToUI32Sat(al)
else if (al == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
Description:
Each single-precision floating-point element in RB is converted to an unsigned integer using the current
rounding mode and the result is saturated if it cannot be represented in a 32-bit integer. NaNs are converted
as though they were zero.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, or if an overflow occurs, SPEFSCR[FINV, FINVH]
are set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE]
is set, an exception is taken, the destination register is not updated, and no other status bits are set.
If either result element of this instruction is inexact and no other exception is taken, SPEFSCR[FINXS]
bit will be set. If the floating-point inexact exception is enabled, an exception is taken using the
floating-point round exception vector. In this case, the destination register is updated with the truncated
result. The FGH, FXH, FG and FX bits are properly updated to allow rounding to be performed in the
exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010010100

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-70 Freescale Semiconductor
evfsctuiz evfsctuiz
Vector Convert Floating-Point Single-Precision to Unsigned Integer with Round toward Zero
evfsctui rD,rB
Description:
ah = RB0:31
if (ah == Denorm) then // force denorm to zero
RD0:31 = 0
else if ((ah == +0) || (ah == -0)) // zero cases
RD0:31 = 0
else if (sah == 1) // Negative
RD0:31 = 0
else if (eah <= 158)
RD0:31 = CnvtFP32ToUI32Sat(ah)
else if (ah == NAN) then RD0:31 = 0
else // Overflow
RD0:31 = 0xFFFFFFFF
al = RB32:63
if (al == Denorm) then
RD32:63 = 0
else if ((al == +0) || (al == -0)) // zero cases
RD32:63 = 0
else if (sal == 1) // Negative
RD32:63 = 0
else if (eal <= 158)
RD32:63 = CnvtFP32ToUI32Sat(al)
else if (al == NAN) then RD32:63 = 0
else // Overflow
RD32:63 = 0xFFFFFFFF
Each single-precision floating-point element in RB is converted to an unsigned integer using the rounding
mode Round toward Zero, and the result is saturated if it cannot be represented in a 32-bit integer. NaNs
are converted as though they were zero.
Exceptions:
If either element of RB is Infinity, Denorm, or NaN, or if an overflow occurs, SPEFSCR[FINV, FINVH]
are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE]
is set, an exception is taken, the destination register is not updated, and no other status bits are set.
If either result element of this instruction is inexact and no other exception is taken, SPEFSCR[FINXS] is
set. If the floating-point inexact exception is enabled, an exception is taken using the floating-point round
exception vector. In this case, the destination register is updated with the truncated result. The FGH, FXH,
FG, and FX bits are properly updated to allow rounding to be performed in the exception handler.
0 56 101115162021 31
4 RD 00000 RB 01010011000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-71
evfsdiff evfsdiff
Vector Floating-Point Single-Precision Differences
evfsdiff rD,rA,rB
rD0:31 ← rA0:31 -sp rA32:63
rD32:63 ← rB0:31 -sp rB32:63
The low-order single-precision floating-point element of rA is subtracted from the high-order element of
rA, the low-order single-precision floating-point element of rB is subtracted from the high-order element
of rB, and the results are stored in rD. If the high-order element of rA or rB is NaN or infinity, the
corresponding result is either pmax or nmax (as appropriate). Otherwise, if the low order element of rA or
rB is NaN or infinity, the corresponding result is either pmax or nmax (as appropriate). Otherwise, if an
overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD. If an
underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is stored in the
corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other interrupt is taken, or underflows but underflow exceptions are disabled, and no other interrupt
is taken, SPEFSCR[FINXS, FINXSH] is set. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010100101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-72 Freescale Semiconductor
evfsdiffsum evfsdiffsum
Vector Floating-Point Single-Precision Difference / Sum
evfsdiffsum rD,rA,rB
rD0:31 ← rA0:31 -sp rA32:63
rD32:63 ← rB0:31 +sp rB32:63
The low-order single-precision floating-point element of rA is subtracted from the high-order element of
rA, the low-order single-precision floating-point element of rB is added to the high-order element of rB,
and the results are stored in rD.
• If the high-order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If the low order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCRFINV,FINVH are set
appropriately, and SPEFSCRFGH,FXH,FG,FX are cleared appropriately. If SPEFSCRFINVE is set, an
interrupt is taken and the destination register is not updated. Otherwise, if an overflow occurs,
SPEFSCRFOVF,FOVFH are set appropriately, or if an underflow occurs, SPEFSCRFUNF,FUNFH are set
appropriately. If either underflow or overflow exceptions are enabled and a corresponding status bit is set,
an interrupt is taken. If any of these interrupts are taken, the destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other interrupt is taken, or underflows but underflow exceptions are disabled, and no other interrupt
is taken, SPEFSCRFINXS,FINXSH is set. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010100111
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-73
evfsdiv evfsdiv
Vector Floating-Point Single-Precision Divide
evfsdiv rD,rA,rB
RD0:31 = RA0:31 ÷sp RB0:31
RD32:63 = RA32:63 ÷sp RB32:63
Description:
Each single-precision floating-point element of rA is divided by the corresponding element of rB and the
result is stored in rD.
• If RB is a NaN or infinity, the result is a properly signed zero.
• If RB is a denormalized number or a zero or if RA is either NaN or infinity, the result is either pmax
(sa==sb) or nmax (sa!=sb).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in RD.
Exceptions:
If the contents of RA or RB are Infinity, Denorm, or NaN, or if both RA and RB are ±0, SPEFSCR[FINV,
FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated.
If the content of RB is ±0 and the content of RA is a finite normalized non-zero number, the
SPEFSCR[FDBZ, FDBZH] are set appropriately. If floating-point divide by zero exceptions are enabled,
an exception is then taken. If an overflow occurs, then SPEFSCR[FOVF, FOVFH] are set appropriately,
If an underflow occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow
exceptions are enabled and a corresponding bit is set, an exception is taken. If any of these exceptions are
taken, the destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other exception is taken, or underflows but underflow exceptions are disabled, and no other
exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception is enabled,
an exception is taken using the floating-point round exception vector. In this case, the destination register
is updated with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be
performed in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010001001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-74 Freescale Semiconductor
evfsmadd evfsmadd
Vector Floating-Point Single-Precision Multiply-Add
evfsmadd rD,rA,rB
RD0:31 = ((RA0:31 Xfp RB0:31) +sp RD0:31)
RD32:63 = ((RA32:63 Xfp RB32:63) +sp RD32:63)
Description:
Each single-precision floating-point element of rA is multiplied with the corresponding element of rB, the
intermediate product is added to the corresponding element of rD, and the result is stored in rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb), or nmax
(sa!=sb), and this value is used for the result and stored into RD. Otherwise, the intermediate product
is added to the corresponding element of RD.
• If RD is NaN or infinity, the result is either pmax (sd==0), or nmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA, RB, or RD are Infinity, Denorm, or NaN, SPEFSCR[FINV,
FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated. Otherwise, if
an overflow occurs, then the SPEFSCR[FOVF, FOVFH] bits are set appropriately, or if an underflow
occurs, then the SPEFSCR[FUNF, FUNFH] bits are set appropriately. If either underflow or overflow
exceptions are enabled and a corresponding status bit is set, an exception is taken. If any of these
exceptions are taken, the destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other exception is taken, or underflows but underflow exceptions are
disabled and no other exception is taken. If the floating-point inexact exception is enabled, an exception
is taken using the floating-point round exception vector. In this case, the destination register is updated
with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed
in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010000010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-75
evfsmax evfsmax
Vector Floating-Point Single-Precision Maximum
evfsmax rD,rA,rB
ah ← rA0:31
bh ← rB0:31
if (ah < bh) then temph ← bh
else temph ← ah
if (isnan(ah) & ~(isnan(bh))) then temph ← bh
if (isnan(bh) & ~(isnan(ah))) then temph ← ah
rD0:31 ← temph
al ← rA32:63
bl ← rB32:63
if (al < bl) then templ ← bl
else templ ← al
if (isnan(al) & ~(isnan(bl))) then templ ← bl
if (isnan(bl) & ~(isnan(al))) then templ ← al
rD32:63 ← templ
Description:
Each single-precision floating-point element of rA is compared against the corresponding elements of rB.
The larger element is selected and placed into the corresponding element of rD. The maximum of +0 and
–0 is +0.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken, and the destination register is not updated. Otherwise, the comparison proceeds
after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’
directly.
• If one of the elements is a NaN and the other is not, the non-NaN element is selected rather than
the comparison result.
• If the selected element is denorm, the result is a same signed zero.
• If the selected element is +NaN or +infinity, the corresponding result is pmax.
• If the selected element is -NaN or -infinity, the corresponding result is nmax.
0 56 101115162021 31
000100 RD RA RB 0 1010100000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-76 Freescale Semiconductor
evfsmin evfsmin
Vector Floating-Point Single-Precision Minimum
evfsmin rD,rA,rB
ah ← rA0:31
bh ← rB0:31
if (ah < bh) then temph ← ah
else temph ← bh
if (isnan(ah) & ~(isnan(bh))) then temph ← bh
if (isnan(bh) & ~(isnan(ah))) then temph ← ah
rD0:31 ← temph
al ← rA32:63
bl ← rB32:63
if (al < bl) then templ ← al
else templ ← bl
if (isnan(al) & ~(isnan(bl))) then templ ← bl
if (isnan(bl) & ~(isnan(al))) then templ ← al
rD32:63 ← templ
Each single-precision floating-point element of rA is compared against the corresponding elements of rB.
The smaller element is selected and placed into the corresponding element of rD. The minimum of +0 and
–0 is –0.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated. Otherwise, the comparison proceeds
after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’
directly.
• If one of the elements is a NaN and the other is not, the non-NaN element is selected rather than
the comparison result.
• If the selected element is denorm, the result is a same signed zero.
• If the selected element is +NaN or +infinity, the corresponding result is pmax.
• If the selected element is –NaN or –infinity, the corresponding result is nmax.
0 56 101115162021 31
000100 RD RA RB 0 1010100001
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-77
evfsmsub evfsmsub
Vector Floating-Point Single-Precision Multiply-Subtract
evfsmsub rD,rA,rB
RD0:31 = ((RA0:31 Xfp RB0:31) -sp RD0:31)
RD32:63 = ((RA32:63 Xfp RB32:63) -sp RD32:63)
Description:
Each single-precision floating-point element of rA is multiplied with the corresponding element of rB, the
corresponding element of rD is subtracted from the intermediate product, and the result is stored in rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), and this value is used for the result and stored into RD. Otherwise, the corresponding
element of rD is subtracted from the intermediate product.
• If RD is NaN or infinity, the result is either nmax (sd==0) or pmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA, RB, or RD are Infinity, Denorm, or NaN,
SPEFSCR[FINV, FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared
appropriately. If SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated.
If an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow occurs,
SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are enabled
and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other exception is taken, or underflows but underflow exceptions are
disabled and no other exception is taken. If the floating-point inexact exception is enabled, an exception
is taken using the floating-point round exception vector. In this case, the destination register is updated
with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed
in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010000011

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-78 Freescale Semiconductor
evfsmul evfsmul
Vector Floating-Point Single-Precision Multiply
evfsmul rD,rA,rB
RD0:31 = RA0:31 Xsp RB0:31
RD32:63 = RA32:63 Xsp RB32:63
Description:
Each single-precision floating-point element of rA is multiplied with the corresponding element of rB and
the result is stored in rD.
• If RA or RB are either zero or denormalized, the result is a properly signed zero.
• If RA or RB are either NaN or infinity, the result is either pmax (sa==sb), or nmax (sa!=sb).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in RD.
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an exception is taken and the destination register is not updated.
Otherwise, if an overflow occurs, then SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken,
the destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other exception is taken, or underflows but underflow exceptions are disabled, and no other
exception is taken, the SPEFSCR[FINXS] bit will be set. If the floating-point inexact exception is enabled,
an exception is taken using the floating-point round exception vector. In this case, the destination register
is updated with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be
performed in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010001000
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-79
evfsmule evfsmule
Vector Floating-Point Single-Precision Multiply By Even Element
evfsmule rD,rA,rB
rD0:31 ← rA0:31 ×sp rB0:31
rD32:63 ← rA0:31 ×sp rB32:63
Description:
The single-precision floating-point elements of rB are multiplied by the even (high-order) element of rA,
and the results are stored in rD.
• If an element of rB or the even element of rA is either zero denormalized, the corresponding result
is a properly signed zero.
• If an element of rB or the even element of rA is either NaN or infinity, the corresponding result is
either pmax (asign==bsign), or nmax (asign!=bsign).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rB or the even element of rA is Infinity, Denorm, or NaN,
SPEFSCR[FINV, FINVH] are set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared
appropriately. If SPEFSCR[FINVE] is set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions are
disabled, and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101110

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-80 Freescale Semiconductor
evfsmulo evfsmulo
Vector Floating-Point Single-Precision Multiply By Odd Element
evfsmulo rD,rA,rB
rD0:31 ← rA32:63 ×sp rB0:31
rD32:63 ← rA32:63 ×sp rB32:63
Description:
The single-precision floating-point elements of rB are multiplied by the odd (low-order) element of rA,
and the results are stored in rD.
• If an element of rB or the odd element of rA is either zero or denormalized, the corresponding result
is a properly signed zero.
• If an element of rB or the odd element of rA is either NaN or infinity, the corresponding result is
either pmax (asign==bsign) or nmax (asign!=bsign).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rB or the odd element of rA is Infinity, Denorm, or NaN,
SPEFSCR[FINV, FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared
appropriately. If SPEFSCR[FINVE] is set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, or overflows but overflow
exceptions are disabled, and no other interrupt is taken, or underflows but underflow exceptions are
disabled, and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101111
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-81
evfsmulx evfsmulx
Vector Floating-Point Single-Precision Multiply Exchanged
evfsmulx rD,rA,rB
rD0:31 ← rA32:63 ×sp rB0:31
rD32:63 ← rA0:31 ×sp rB32:63
Description:
The high-order single-precision floating-point element of rB is multiplied by the low-order element of rA,
the low-order single-precision floating-point element of rB is multiplied by the high-order element of rA,
and the results are stored in rD.
• If an element of rA or rB is either zero or denormalized, the corresponding result is a properly
signed zero.
• If an element of rA or rB are either NaN or infinity, the corresponding result is either pmax
(asign==bsign), or nmax (asign!=bsign).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 or –0 (as appropriate) is stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
If an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow occurs,
SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are enabled
and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions are
disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101100

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-82 Freescale Semiconductor
evfsnabs evfsnabs
Vector Floating-Point Single-Precision Negative Absolute Value
evfsnabs rD,rA
RD0:31 = 0b1 || RA1:31
RD32:63 = 0b1 || RA33:63
Description:
The sign bit of each element in RA is set to 1 and the results are placed into RD.
Exceptions:
If the contents of either element of RA are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are set
appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If floating-point invalid input
exceptions are enabled, an exception is taken and the destination register is not updated.
0 56 101115162021 31
4 RD RA 0000001010000101
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-83
evfsneg evfsneg
Vector Floating-Point Single-Precision Negate
evfsneg rD,rA
RD0:31 = ¬RA0 || RA1:31
RD32:63 = ¬RA32 || RA33:63
Description:
The sign bit of each element in RA is complemented and the results are placed into RD.
Exceptions:
If the contents of either element of RA are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are set
appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If floating-point invalid input
exceptions are enabled, an exception is taken and the destination register is not updated.
0 56 101115162021 31
4 RD RA 0000001010000110

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-84 Freescale Semiconductor
evfsnmadd evfsnmadd
Vector Floating-Point Single-Precision Negative Multiply-Add
evfsnmadd rD,rA,rB
RD0:31 = -((RA0:31 Xfp RB0:31) +sp RD0:31)
RD32:63 = -((RA32:63 Xfp RB32:63) +sp RD32:63)
Each single-precision floating-point element of rA is multiplied with the corresponding element of rB, the
intermediate product is added to the corresponding element of rD, and the negated result is stored in rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), and this value is used for the result and stored into RD. Otherwise, the intermediate product
is added to the corresponding element of RD, and the final result is negated.
• If RD is NaN or infinity, the result is either nmax (sd==0), or pmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, –0 (for rounding modes RN, RZ, RP) or +0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA, RB, or RD are Infinity, Denorm, or NaN, SPEFSCR[FINV,
FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If
SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken,
the destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other exception is taken, or underflows but underflow exceptions are
disabled and no other exception is taken. If the floating-point inexact exception is enabled, an exception
is taken using the floating-point round exception vector. In this case, the destination register is updated
with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed
in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010001010
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-85
evfsnmsub evfsnmsub
Vector Floating-Point Single-Precision Negative Multiply-Subtract
evfsnmsub rD,rA,rB
RD0:31 = -((RA0:31 Xfp RB0:31) -sp RD0:31)
RD32:63 = -((RA32:63 Xfp RB32:63)-sp RD32:63)
Description:
Each single-precision floating-point element of rA is multiplied with the corresponding element of rB, the
corresponding element of rD is subtracted from the intermediate product, and the negated result is stored
in rD.
• If RA or RB are either zero or denormalized, the intermediate product is a properly signed zero.
• If RA or RB are either NaN or infinity, the intermediate product is either pmax (sa==sb) or nmax
(sa!=sb), and this value is negated to obtain the result and is stored into RD. Otherwise, the
corresponding element of rD is subtracted from the intermediate product, and the final result is
negated.
• If RD is NaN or infinity, the final result is either pmax (sd==0) or nmax (sd==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, –0 (for rounding modes RN, RZ, RP) or +0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA, RB, or RD are Infinity, Denorm, or NaN,
SPEFSCR[FINV, FINVH] bits are set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared
appropriately. If SPEFSCR[FINVE] is set, an exception is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken,
the destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other exception is taken, or underflows but underflow exceptions are
disabled and no other exception is taken. If the floating-point inexact exception is enabled, an exception
is taken using the floating-point round exception vector. In this case, the destination register is updated
with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed
in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010001011

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-86 Freescale Semiconductor
evfssqrt evfssqrt
Vector Floating-Point Single-Precision Square Root
evfssqrt rD,rA
rD0:31 ← SQRT(rA0:31)
rD32:63 ← SQRT(rA32:63)
Description:
The square root of each single-precision floating-point element of rA is calculated, and the results are
stored in rD.
• If an element of rA is zero or denorm, the result is a same signed zero.
• If an element of rA is +NaN or +infinity, the corresponding result is pmax.
• If an element of rA is non-zero and has a negative sign, including -NaN or -infinity, the
corresponding result is –0.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA are non-zero and have a negative sign, or are Infinity, Denorm, or
NaN, SPEFSCR[FINV, FINVH] are set appropriately and SPEFSCR[FGH, FXH, FG, FX] are cleared
appropriately. If SPEFSCR[FINVE] is set, an interrupt is taken and the destination register is not updated.
Otherwise, if an underflow occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If underflow
exceptions are enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts
are taken, the destination register is not updated.
SPEFSCR[FINXS, FINXSH] is set if either result element of this instruction is inexact or underflows but
underflow exceptions are disabled and no other interrupt is taken. If the floating-point inexact exception
is enabled, an interrupt is taken using the floating-point round interrupt vector. In this case, the destination
register is updated with the truncated result(s). The FG and FX bits are properly updated to allow rounding
to be performed in the interrupt handler.
FG and FX (FGH and FXH) are cleared if an underflow interrupt is taken, or if an invalid operation/input
error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA 000000 1010000111
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-87
evfssub evfssub
Vector Floating-Point Single-Precision Subtract
evfssub rD,rA,rB
RD0:31 = RA0:31 -sp RB0:31
RD32:63 = RA32:63 -sp RB32:63
Description:
Each single-precision floating-point element of RB is subtracted from the corresponding element of RA
and the results are stored in RD.
• If RA is NaN or infinity, the result is either pmax (sa==0), or nmax (sa==1).
• If RB is NaN or infinity, the result is either nmax (sb==0), or pmax (sb==1).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in RD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in RD.
Exceptions:
If the contents of either element of RA or RB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCRpFGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an exception is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an exception is taken. If any of these exceptions are taken,
the destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other exception is taken, or underflows but underflow exceptions are
disabled and no other exception is taken. If the floating-point inexact exception is enabled, an exception
is taken using the floating-point round exception vector. In this case, the destination register is updated
with the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed
in the exception handler.
FG and FX (FGH and FXH) will be cleared if an overflow or underflow exception is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
4 RD RA RB 01010000001

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-88 Freescale Semiconductor
evfssubadd evfssubadd
Vector Floating-Point Single-Precision Subtract/Add
evfssubadd rD,rA,rB
rD0:31 ← rA0:31 -sp rB0:31
rD32:63 ← rA32:63 +sp rB32:63
Description:
The high-order single-precision floating-point element of rB is subtracted from the corresponding element
of rA, the low-order single-precision floating-point element of rB is subtracted from the corresponding
element of rA, and the results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax or nmax (as
appropriate).
• If an element of rB is NaN or infinity, the corresponding result is either nmax or pmax (as
appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions are
disabled, and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010100011
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-89
evfssubaddx evfssubaddx
Vector Floating-Point Single-Precision Subtract / Add Exchanged
evfssubaddx rD,rA,rB
rD0:31 ← rA32:63-sp rB0:31
rD32:63 ← rA0:31 +sp rB32:63
Description:
The high-order single-precision floating-point element of rB is subtracted from the low-order element of
rA, the low-order single-precision floating-point element of rB is added to the high-order from the
corresponding element of rA, and the results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax or nmax (as
appropriate).
• If an element of rB is NaN or infinity, the corresponding result is either nmax or pmax (as
appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions are
disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101011

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-90 Freescale Semiconductor
evfssubx evfssubx
Vector Floating-Point Single-Precision Subtract Exchanged
evfssubx rD,rA,rB
rD0:31 ← rA32:63-sp rB0:31
rD32:63 ← rA0:31 -sp rB32:63
The high-order single-precision floating-point element of rB is subtracted from the low-order element of
rA, the low-order single-precision floating-point element of rB is subtracted from the high-order from the
corresponding element of rA, and the results are stored in rD.
• If an element of rA is NaN or infinity, the corresponding result is either pmax or nmax (as
appropriate).
• If an element of rB is NaN or infinity, the corresponding result is either nmax or pmax (as
appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS] is set if either result element of this instruction is inexact, overflows but overflow
exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions are
disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt is
taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010101001
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-91
evfssum evfssum
Vector Floating-Point Single-Precision Sums
evfssum rD,rA,rB
rD0:31 ← rA0:31 +sp rA32:63
rD32:63 ← rB0:31 +sp rB32:63
The high-order single-precision floating-point element of rA is added to the low-order element of rA, the
high-order single-precision floating-point element of rB is added to the low-order element of rB, and the
results are stored in rD.
• If the high-order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If the low order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSCR[FOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
If either result element of this instruction is inexact, or overflows but overflow exceptions are disabled,
and no other interrupt is taken, or underflows but underflow exceptions are disabled, and no other interrupt
is taken, SPEFSCR[FINXS, FINXSH] is set. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010100100

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-92 Freescale Semiconductor
evfssumdiff evfssumdiff
Vector Floating-Point Single-Precision Sum / Difference
evfssumdiff rD,rA,rB
rD0:31 ← rA0:31 +sp rA32:63
rD32:63 ← rB0:31 -sp rB32:63
The high-order single-precision floating-point element of rA is added to the low-order element of rA, the
low-order single-precision floating-point element of rB is subtracted from the high-order element of rB,
and the results are stored in rD.
• If the high-order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If the low order element of rA or rB is NaN or infinity, the corresponding result is either pmax or
nmax (as appropriate).
• If an overflow occurs, pmax or nmax (as appropriate) is stored in the corresponding element of rD.
• If an underflow occurs, +0 (for rounding modes RN, RZ, RP) or –0 (for rounding mode RM) is
stored in the corresponding element of rD.
Exceptions:
If the contents of either element of rA or rB are Infinity, Denorm, or NaN, SPEFSCR[FINV, FINVH] are
set appropriately, and SPEFSCR[FGH, FXH, FG, FX] are cleared appropriately. If SPEFSCR[FINVE] is
set, an interrupt is taken and the destination register is not updated.
Otherwise, if an overflow occurs, SPEFSC[RFOVF, FOVFH] are set appropriately. If an underflow
occurs, SPEFSCR[FUNF, FUNFH] are set appropriately. If either underflow or overflow exceptions are
enabled and a corresponding status bit is set, an interrupt is taken. If any of these interrupts are taken, the
destination register is not updated.
SPEFSCR[FINXS, FINXSH] is set if either result element of this instruction is inexact, overflows but
overflow exceptions are disabled and no other interrupt is taken, or underflows but underflow exceptions
are disabled and no other interrupt is taken. If the floating-point inexact exception is enabled, an interrupt
is taken using the floating-point round interrupt vector. In this case, the destination register is updated with
the truncated result(s). The FG and FX bits are properly updated to allow rounding to be performed in the
interrupt handler.
FG and FX (FGH and FXH) are cleared if an overflow or underflow interrupt is taken, or if an invalid
operation/input error is signaled for the low (high) element (regardless of FINVE).
0 56 101115162021 31
000100 RD RA RB 0 1010100110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-93
evfststeq evfststeq
Vector Floating-Point Single-Precision Test Equal
evfststeq crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah == bh) then ch = 1
else ch = 0
if (al == bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Description:
Each element of rA is compared against the corresponding element of rB. If rA equals RB, the bit in crfD
is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison proceeds after
treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’ directly.
Exceptions:
No exceptions are taken during the execution of evfststeq. If strict conformity to IEEE Std. 754 standard
is required, the program should use evfscmpeq.
NOTE
In an implementation, the execution of evfststeq is likely to be faster than
the execution of evfscmpeq.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010011110
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-94 Freescale Semiconductor
evfststgt evfststgt
Vector Floating-Point Single-Precision Test Greater Than
evfststgt crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah > bh) then ch = 1
else ch = 0
if (al > bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Description:
Each element of rA is compared against the corresponding element of rB. If rA is greater than rB, the bit
in crfD is set. Otherwise it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison
proceeds after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and
‘f’ directly.
Exceptions:
No exceptions are taken during the execution of evfststgt. If strict conformity to IEEE Std. 754 standard
is required, the program should use evfscmpgt.
NOTE
In an implementation, the execution of evfststgt is likely to be faster than
the execution of evfscmpgt.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010011100
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-95
evfststlt evfststlt
Vector Floating-Point Single-Precision Test Less Than
evfststlt crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah < bh) then ch = 1
else ch = 0
if (al < bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
Description:
Each element of rA is compared with the corresponding element of rB. If rA is less than rB, the bit in the
crfD is set. Otherwise, it is cleared. Comparison ignores the sign of 0 (+0 = –0). The comparison proceeds
after treating NaNs, Infinities, and Denorms as normalized numbers, using their values of ‘e’ and ‘f’
directly.
Exceptions:
No exceptions are taken during the execution of evfststlt. If strict conformity to IEEE Std. 754 standard is
required, the program should use evfscmplt.
NOTE
In an implementation, the execution of evfststlt is likely to be faster than the
execution of evfscmplt.
6.4 Embedded Floating-point Results Summary
The following table summarizes the results of floating-point operations on various combinations of input
operands. Flag settings are performed on appropriate element flags.
0 5689101115162021 31
4 crfD 0 0 RA RB 01010011101
Table 6-2. Floating-point Results Summary—Add, Sub, Mul, Div
Operand A Operand B Result F INV FOVF FUNF FDBZ F INX
Add
amax 1 0 0 0 0
NaN amax 10000
Denorm amax 1 0 0 0 0
Zero amax 1 0 0 0 0
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-96 Freescale Semiconductor
Norm amax 1 0 0 0 0
NaN amax 10000
NaN NaN amax 1 0 0 0 0
NaN Denorm amax 1 0 0 0 0
NaN Zero amax 10000
NaN Norm amax 10000
Denorm bmax 1 0 0 0 0
Denorm NaN bmax 1 0 0 0 0
Denorm Denorm Zero110000
Denorm Zero Zero110000
Denorm Norm operand_b 1 0 0 0 0
Zero bmax 1 0 0 0 0
Zero NaN bmax 10000
Zero Denorm Zero110000
Zero Zero Zero100000
Zero Norm operand_b 0 0 0 0 0
Norm bmax 1 0 0 0 0
Norm NaN bmax 1 0 0 0 0
Norm Denorm operand_a 1 0 0 0 0
Norm Zero operand_a 0 0 0 0 0
Norm Norm _Calc_ 0 * * 0 *
Subtract
amax 1 0 0 0 0
NaN amax 10000
Denorm amax 1 0 0 0 0
Zero amax 1 0 0 0 0
Norm amax 1 0 0 0 0
NaN amax 10000
NaN NaN amax 1 0 0 0 0
NaN Denorm amax 1 0 0 0 0
NaN Zero amax 10000
NaN Norm amax 10000
Table 6-2. Floating-point Results Summary—Add, Sub, Mul, Div (Continued)
Operand A Operand B Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-97
Denorm –bmax 1 0 0 0 0
Denorm NaN –bmax 1 0 0 0 0
Denorm Denorm Zero210000
Denorm Zero Zero210000
Denorm Norm –operand_b 1 0 0 0 0
Zero –bmax 1 0 0 0 0
Zero NaN –bmax 1 0 0 0 0
Zero Denorm Zero210000
Zero Zero Zero200000
Zero Norm –operand_b 0 0 0 0 0
Norm –bmax 1 0 0 0 0
Norm NaN –bmax 1 0 0 0 0
Norm Denorm operand_a 1 0 0 0 0
Norm Zero operand_a 0 0 0 0 0
Norm Norm _Calc_ 0 * * 0 *
Multiply3
max 10000
NaN max 10000
Denorm Zero 1 0 0 0 0
Zero Zero 1 0 0 0 0
Norm max 10000
NaN max 10000
NaN NaN max 10000
NaN Denorm Zero 1 0 0 0 0
NaN Zero Zero 1 0 0 0 0
NaN Norm max 1 0 0 0 0
Denorm Zero 1 0 0 0 0
Denorm NaN Zero 1 0 0 0 0
Denorm Denorm Zero 1 0 0 0 0
Denorm Zero Zero 1 0 0 0 0
Denorm Norm Zero 1 0 0 0 0
Zero Zero 1 0 0 0 0
Table 6-2. Floating-point Results Summary—Add, Sub, Mul, Div (Continued)
Operand A Operand B Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-98 Freescale Semiconductor
Zero NaN Zero 10000
Zero Denorm Zero 1 0 0 0 0
Zero Zero Zero 0 0 0 0 0
Zero Norm Zero 0 0 0 0 0
Norm max 10000
Norm NaN max 1 0 0 0 0
Norm Denorm Zero 1 0 0 0 0
Norm Zero Zero 0 0 0 0 0
Norm Norm _Calc_ 0 * * 0 *
Divide3
Zero 10000
NaN Zero 10000
Denorm max 1 0 0 0 0
Zero max 10000
Norm max 10000
NaN Zero 10000
NaN NaN Zero 10000
NaN Denorm max 1 0 0 0 0
NaN Zero max 1 0 0 0 0
NaN Norm max 1 0 0 0 0
Denorm Zero 1 0 0 0 0
Denorm NaN Zero 1 0 0 0 0
Denorm Denorm max 1 0 0 0 0
Denorm Zero max 1 0 0 0 0
Denorm Norm Zero 1 0 0 0 0
Zero Zero 1 0 0 0 0
Zero NaN Zero 10000
Zero Denorm max 1 0 0 0 0
Zero Zero max 1 0 0 0 0
Zero Norm Zero 0 0 0 0 0
Norm Zero 10000
Norm NaN Zero 1 0 0 0 0
Table 6-2. Floating-point Results Summary—Add, Sub, Mul, Div (Continued)
Operand A Operand B Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-99
Norm Denorm max 1 0 0 0 0
Norm Zero max 00010
Norm Norm _Calc_ 0 * * 0 *
Notes: the following definitions apply
1 Sign of result is positive when sign_a and sign_b are different for all rounding modes except round to minus
infinity, where it is negative.
2 Sign of result is positive when sign_a and sign_b are the same for all rounding modes except round to minus
infinity, where it is negative.
3 Sign of result is always (sign_a XOR sign_b)
* Updated according to results of calculation
_Calc_ result is updated with the results of calculation
max—max normalized number with sign of (sign_a XOR sign_b)
amax—max normalized number with sign of sign_a
bmax—max normalized number with sign of sign_b
nmax—max negative normalized number
pmax—max positive normalized number
Table 6-3. Floating-point Results Summary—madd, msub, nmadd, nmsub
Operand A Operand B Operand D Result F INV FOVF FUNF FDBZ F INX
madd
, NaN , NaN, Norm , NaN, denorm,
zero, Norm
abmax 10000
, NaN denorm, zero , NaN dmax 1 0 0 0 0
, NaN denorm, zero denorm, zero zero110000
, NaN denorm, zero Norm operand_d 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
, NaN dmax 10000
denorm , NaN, denorm,
zero, Norm
denorm, zero zero110000
denorm , NaN, denorm,
zero, Norm
Norm operand_d 1 0 0 0 0
zero , NaN, denorm, , NaN dmax 1 0 0 0 0
zero , NaN, denorm denorm, zero zero110000
zero , NaN, denorm Norm operand_d 1 0 0 0 0
zero zero, Norm , NaN dmax 1 0 0 0 0
zero zero, Norm denorm zero110000
zero zero, Norm zero zero100000
zero zero, Norm Norm operand_d 0 0 0 0 0
Table 6-2. Floating-point Results Summary—Add, Sub, Mul, Div (Continued)
Operand A Operand B Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-100 Freescale Semiconductor
norm , NaN , NaN, denorm,
zero, Norm abmax 10000
norm denorm , NaN dmax 1 0 0 0 0
norm denorm denorm, zero zero110000
norm denorm norm operand_d 1 0 0 0 0
norm zero , NaN dmax 1 0 0 0 0
norm zero denorm zero110000
norm zero zero zero100000
norm zero norm operand_d 0 0 0 0 0
norm norm , NaN dmax 1 0 0 0 0
norm norm denorm ab_Calc 1 * * 0 *
norm norm zero ab_Calc 0 * * 0 *
norm norm norm _Calc_ 0 * * 0 *
nmadd
, NaN , NaN, Norm , NaN, denorm,
zero, Norm
-abmax 1 0 0 0 0
, NaN denorm, zero , NaN -dmax 1 0 0 0 0
, NaN denorm, zero denorm, zero zero310000
, NaN denorm, zero Norm -operand_d 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
, NaN -dmax 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
denorm, zero zero310000
denorm , NaN, denorm,
zero, Norm
Norm -operand_d 1 0 0 0 0
zero , NaN, denorm, , NaN -dmax 1 0 0 0 0
zero , NaN, denorm denorm, zero zero310000
zero , NaN, denorm Norm -operand_d 1 0 0 0 0
zero zero, Norm , NaN -dmax 1 0 0 0 0
zero zero, Norm denorm zero310000
zero zero, Norm zero zero300000
zero zero, Norm Norm -operand_d 0 0 0 0 0
norm , NaN , NaN, denorm,
zero, Norm -abmax 1 0 0 0 0
norm denorm , NaN -dmax 1 0 0 0 0
Table 6-3. Floating-point Results Summary—madd, msub, nmadd, nmsub (Continued)
Operand A Operand B Operand D Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-101
norm denorm denorm, zero zero310000
norm denorm norm -operand_d 1 0 0 0 0
norm zero , NaN -dmax 1 0 0 0 0
norm zero denorm zero310000
norm zero zero zero300000
norm zero norm -operand_d 0 0 0 0 0
norm norm , NaN -dmax 1 0 0 0 0
norm norm denorm -ab_Calc 1 * * 0 *
norm norm zero -ab_Calc 0 * * 0 *
norm norm norm -(_Calc_) 0 * * 0 *
msub
, NaN , NaN, Norm , NaN, denorm,
zero, Norm
abmax 10000
, NaN denorm, zero , NaN -dmax 1 0 0 0 0
, NaN denorm, zero denorm, zero zero210000
, NaN denorm, zero Norm -operand_d 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
, NaN -dmax 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
denorm, zero zero210000
denorm , NaN, denorm,
zero, Norm
Norm -operand_d 1 0 0 0 0
zero , NaN, denorm, , NaN -dmax 1 0 0 0 0
zero , NaN, denorm denorm, zero zero210000
zero , NaN, denorm Norm -operand_d 1 0 0 0 0
zero zero, Norm , NaN -dmax 1 0 0 0 0
zero zero, Norm denorm zero210000
zero zero, Norm zero zero200000
zero zero, Norm Norm -operand_d 0 0 0 0 0
norm , NaN , NaN, denorm,
zero, Norm
abmax 10000
norm denorm , NaN -dmax 1 0 0 0 0
norm denorm denorm, zero zero210000
norm denorm norm -operand_d 1 0 0 0 0
Table 6-3. Floating-point Results Summary—madd, msub, nmadd, nmsub (Continued)
Operand A Operand B Operand D Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-102 Freescale Semiconductor
norm zero , NaN -dmax 1 0 0 0 0
norm zero denorm zero210000
norm zero zero zero200000
norm zero norm -operand_d 0 0 0 0 0
norm norm , NaN -dmax 1 0 0 0 0
norm norm denorm ab_Calc 1 * * 0 *
norm norm zero ab_Calc 0 * * 0 *
norm norm norm _Calc_ 0 * * 0 *
nmsub
, NaN , NaN, Norm , NaN, denorm,
zero, Norm
-abmax 1 0 0 0 0
, NaN denorm, zero , NaN dmax 1 0 0 0 0
, NaN denorm, zero denorm, zero zero410000
, NaN denorm, zero Norm operand_d 1 0 0 0 0
denorm , NaN, denorm,
zero, Norm
, NaN dmax 10000
denorm , NaN, denorm,
zero, Norm
denorm, zero zero410000
denorm , NaN, denorm,
zero, Norm
Norm operand_d 1 0 0 0 0
zero , NaN, denorm, , NaN dmax 1 0 0 0 0
zero , NaN, denorm denorm, zero zero410000
zero , NaN, denorm Norm operand_d 1 0 0 0 0
zero zero, Norm , NaN dmax 1 0 0 0 0
zero zero, Norm denorm zero410000
zero zero, Norm zero zero400000
zero zero, Norm Norm -operand_d 0 0 0 0 0
norm , NaN , NaN, denorm,
zero, Norm
-abmax 1 0 0 0 0
norm denorm , NaN dmax 1 0 0 0 0
norm denorm denorm, zero zero410000
norm denorm norm operand_d 1 0 0 0 0
norm zero , NaN dmax 1 0 0 0 0
norm zero denorm zero410000
Table 6-3. Floating-point Results Summary—madd, msub, nmadd, nmsub (Continued)
Operand A Operand B Operand D Result F INV FOVF FUNF FDBZ F INX
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-103
norm zero zero zero400000
norm zero norm operand_d 0 0 0 0 0
norm norm , NaN dmax 1 0 0 0 0
norm norm denorm -ab_Calc 1 * * 0 *
norm norm zero -ab_Calc 0 * * 0 *
norm norm norm -(_Calc_) 0 * * 0 *
Notes: the following definitions apply
1 Sign of result is positive when (sign_a XOR sign_b) and sign_d are different for all rounding modes except round to
minus infinity, where it is negative.
2 Sign of result is positive when (sign_a XOR sign_b) and sign_d are the same for all rounding modes except round
to minus infinity, where it is negative.
3Sign of result is negative when (sign_a XOR sign_b) and sign_d are different for all rounding modes except round to
minus infinity, where it is positive.
4 Sign of result is negative when (sign_a XOR sign_b) and sign_d are the same for all rounding modes except round
to minus infinity, where it is positive.
* Updated according to results of calculation
ab_Calc—result is updated with the results of intermediate product calculation, rounded
_Calc_—result is updated with the results of calculation, rounded
abmax—max normalized number with sign of (sign_a XOR sign_b)
dmax—max normalized number with sign of sign_d
nmax—max negative normalized number
pmax—max positive normalized number
Table 6-4. Floating-Point Results Summary—sqrt
Operand A Result F INV FOVF FUNF FDBZ FINX
+∞pmax 1 0 0 0 0
–∞–0 10000
+NaN pmax 1 0 0 0 0
–NaN –0 1 0 0 0 0
+denorm +zero 1 0 0 0 0
–denorm –zero 1 0 0 0 0
+zero +zero 00000
–zero –zero 0 0 0 0 0
+norm _Calc_ 0 0 0 0 *
–norm –0 1 0 0 0 0
Table 6-3. Floating-point Results Summary—madd, msub, nmadd, nmsub (Continued)
Operand A Operand B Operand D Result F INV FOVF FUNF FDBZ F INX
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-104 Freescale Semiconductor
Table 6-5. Floating-Point Results Summary—Min, Max
Operand A Operand B Result FINV FOVF FUNF FDBZ FINX
Max
+∞ +∞ pmax 1 0 0 0 0
+∞ −∞ pmax 1 0 0 0 0
+∞ +NaN pmax 1 0 0 0 0
+∞ –NaN pmax 1 0 0 0 0
+∞ denorm pmax 1 0 0 0 0
+∞ zero pmax 1 0 0 0 0
+∞ Norm pmax 1 0 0 0 0
−∞ +∞ pmax 1 0 0 0 0
−∞ −∞ nmax 1 0 0 0 0
−∞ +NaN nmax 1 0 0 0 0
−∞ –NaN nmax 1 0 0 0 0
−∞ denorm bzero 1 0 0 0 0
−∞ zero bzero 1 0 0 0 0
−∞ Norm operand_b 1 0 0 0 0
+NaN +∞ pmax 1 0 0 0 0
+NaN −∞ nmax 1 0 0 0 0
+NaN +NaN pmax 1 0 0 0 0
+NaN –NaN pmax 1 0 0 0 0
+NaN denorm bzero 1 0 0 0 0
+NaN zero bzero 1 0 0 0 0
+NaN Norm operand_b 1 0 0 0 0
–NaN +∞ pmax 1 0 0 0 0
–NaN −∞ nmax 1 0 0 0 0
–NaN +NaN pmax 1 0 0 0 0
–NaN –NaN nmax 1 0 0 0 0
–NaN denorm bzero 1 0 0 0 0
–NaN zero bzero 1 0 0 0 0
–NaN Norm operand_b 1 0 0 0 0
+denorm +∞ pmax 1 0 0 0 0
+denorm −∞ azero 1 0 0 0 0
+denorm +NaN azero 1 0 0 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-105
+denorm –NaN azero 1 0 0 0 0
+denorm denorm azero 1 0 0 0 0
+denorm zero azero 1 0 0 0 0
+denorm +Norm operand_b 1 0 0 0 0
+denorm –Norm azero 1 0 0 0 0
–denorm +∞ pmax 1 0 0 0 0
–denorm −∞ azero 1 0 0 0 0
–denorm +NaN azero 1 0 0 0 0
–denorm –NaN azero 1 0 0 0 0
–denorm denorm bzero 1 0 0 0 0
–denorm zero bzero 1 0 0 0 0
–denorm +Norm operand_b 1 0 0 0 0
–denorm –Norm azero 1 0 0 0 0
+zero +∞ pmax 1 0 0 0 0
+zero −∞ azero 1 0 0 0 0
+zero +NaN azero 10000
+zero –NaN azero 10000
+zero denorm azero 1 0 0 0 0
+zerozeroazero00000
+zero +Norm operand_b 0 0 0 0 0
+zero –Norm azero 0 0 0 0 0
–zero +∞ pmax 1 0 0 0 0
–zero −∞ azero 1 0 0 0 0
–zero +NaN azero 1 0 0 0 0
–zero –NaN azero 1 0 0 0 0
–zero denorm bzero 1 0 0 0 0
–zero zero bzero 0 0 0 0 0
–zero +Norm operand_b 0 0 0 0 0
–zero –Norm azero 0 0 0 0 0
+Norm +∞ pmax 1 0 0 0 0
+Norm −∞ operand_a 1 0 0 0 0
+Norm +NaN operand_a 1 0 0 0 0
+Norm –NaN operand_a 1 0 0 0 0
Table 6-5. Floating-Point Results Summary—Min, Max (Continued)
Operand A Operand B Result FINV FOVF FUNF FDBZ FINX
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-106 Freescale Semiconductor
+Norm denorm operand_a 1 0 0 0 0
+Norm zero operand_a 0 0 0 0 0
+Norm Norm _Calc_ 0 0 0 0 0
–Norm +∞ pmax 1 0 0 0 0
–Norm −∞ operand_a 1 0 0 0 0
–Norm +NaN operand_a 1 0 0 0 0
–Norm –NaN operand_a 1 0 0 0 0
–Norm denorm bzero 1 0 0 0 0
–Norm zero bzero 0 0 0 0 0
–Norm Norm _Calc_ 0 0 0 0 0
Min
+∞ +∞ pmax 1 0 0 0 0
+∞ −∞ nmax 1 0 0 0 0
+∞ +NaN pmax 1 0 0 0 0
+∞ –NaN pmax 1 0 0 0 0
+∞ denorm bzero 1 0 0 0 0
+∞ zero bzero 1 0 0 0 0
+∞ Norm operand_b 1 0 0 0 0
−∞ +∞ nmax 1 0 0 0 0
−∞ −∞ nmax 1 0 0 0 0
−∞ +NaN nmax 1 0 0 0 0
−∞ –NaN nmax 1 0 0 0 0
−∞ denorm nmax 1 0 0 0 0
−∞ zero nmax 1 0 0 0 0
−∞ Norm nmax 1 0 0 0 0
+NaN +∞ pmax 1 0 0 0 0
+NaN −∞ nmax 1 0 0 0 0
+NaN +NaN pmax 1 0 0 0 0
+NaN –NaN nmax 1 0 0 0 0
+NaN denorm bzero 1 0 0 0 0
+NaN zero bzero 1 0 0 0 0
+NaN Norm operand_b 1 0 0 0 0
Table 6-5. Floating-Point Results Summary—Min, Max (Continued)
Operand A Operand B Result FINV FOVF FUNF FDBZ FINX
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-107
–NaN +∞ pmax 1 0 0 0 0
–NaN −∞ nmax 1 0 0 0 0
–NaN +NaN nmax 1 0 0 0 0
–NaN –NaN nmax 1 0 0 0 0
–NaN denorm bzero 1 0 0 0 0
–NaN zero bzero 1 0 0 0 0
–NaN Norm operand_b 1 0 0 0 0
+denorm +∞ azero 1 0 0 0 0
+denorm −∞ nmax 1 0 0 0 0
+denorm +NaN azero 1 0 0 0 0
+denorm –NaN azero 1 0 0 0 0
+denorm denorm bzero 1 0 0 0 0
+denorm zero bzero 1 0 0 0 0
+denorm +Norm azero 1 0 0 0 0
+denorm –Norm operand_b 1 0 0 0 0
–denorm +∞ azero 1 0 0 0 0
–denorm −∞ nmax 1 0 0 0 0
–denorm +NaN azero 1 0 0 0 0
–denorm –NaN azero 1 0 0 0 0
–denorm denorm azero 1 0 0 0 0
–denorm zero azero 1 0 0 0 0
–denorm +Norm azero 1 0 0 0 0
–denorm –Norm operand_b 1 0 0 0 0
+zero +∞ azero 1 0 0 0 0
+zero −∞ nmax 1 0 0 0 0
+zero +NaN azero 10000
+zero –NaN azero 10000
+zero denorm bzero 1 0 0 0 0
+zerozerobzero00000
+zero +Norm azero 0 0 0 0 0
+zero –Norm operand_b 0 0 0 0 0
–zero +∞ azero 1 0 0 0 0
–zero −∞ nmax 1 0 0 0 0
Table 6-5. Floating-Point Results Summary—Min, Max (Continued)
Operand A Operand B Result FINV FOVF FUNF FDBZ FINX
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-108 Freescale Semiconductor
–zero +NaN azero 1 0 0 0 0
–zero –NaN azero 1 0 0 0 0
–zero denorm azero 1 0 0 0 0
–zero zero azero 0 0 0 0 0
–zero +Norm azero 0 0 0 0 0
–zero –Norm operand_b 0 0 0 0 0
+Norm +∞ operand_a 1 0 0 0 0
+Norm −∞ nmax 1 0 0 0 0
+Norm +NaN operand_a 1 0 0 0 0
+Norm –NaN operand_a 1 0 0 0 0
+Norm denorm bzero 1 0 0 0 0
+Norm zero bzero 00000
+Norm Norm _Calc_ 0 0 0 0 0
–Norm +∞ operand_a 1 0 0 0 0
–Norm −∞ nmax 1 0 0 0 0
–Norm +NaN operand_a 1 0 0 0 0
–Norm –NaN operand_a 1 0 0 0 0
–Norm denorm operand_a 1 0 0 0 0
–Norm zero operand_a 0 0 0 0 0
–Norm Norm _Calc_ 0 0 0 0 0
Table 6-6. Floating–point Results Summary—Convert to unsigned
Operand
Binteger result
efsctui[z] fractional result
efsctuf F INV FOVF FUNF FDBZ F INX
+ 0xFFFF_FFFF 0xFFFF_FFFF 1 0 0 0 0
– zero zero 10000
+NaN zero zero 10000
–NaN zero zero 1 0 0 0 0
denorm zero zero 1 0 0 0 0
zero zero zero 0 0 0 0 0
+norm _Calc_ _Calc_ * 0 0 0 *
–norm zero zero 0 0 0 0 0
Table 6-5. Floating-Point Results Summary—Min, Max (Continued)
Operand A Operand B Result FINV FOVF FUNF FDBZ FINX
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-109
Table 6-7. Floating-point Results Summary—Convert to signed
Operand
Binteger result
efsctsi[z] fractional result
efsctsf F INV FOVF FUNF FDBZ F INX
+ 0x7FFF_FFFF 0x7FFF_FFFF 1 0 0 0 0
– 0x8000_0000 0x8000_0000 1 0 0 0 0
+NaN zero zero 10000
–NaN zero zero 1 0 0 0 0
denorm zero zero 1 0 0 0 0
zero zero zero 0 0 0 0 0
+norm _Calc_ _Calc_ * 0 0 0 *
–norm _Calc_ _Calc_ * 0 0 0 *
Table 6-8. Floating-point Results Summary—Convert from unsigned
Operand
Binteger source
efscfui fractional source
efscfuf F INV FOVF FUNF FDBZ F INX
zero zero zero 0 0 0 0 0
norm _Calc_ _Calc_ 0 0 0 0 *
Table 6-9. Floating-point Results Summary—Convert from signed
Operand
Binteger source
efscfsi fractional source
efscfsf F INV FOVF FUNF FDBZ F INX
zero zero zero 0 0 0 0 0
norm _Calc_ _Calc_ 0 0 0 0 *
Table 6-10. Floating-point Results Summary—fabs, fnabs, fneg
Operand
Afabs fnabs fneg F INV FOVF FUNF FDBZ F INX
+ – –A 10000
NaN Sign bit cleared Sign bit set –A 1 0 0 0 0
denorm Sign bit cleared Sign bit set –A 1 0 0 0 0
zero zero zero zero 0 0 0 0 0
norm norm norm norm 0 0 0 0 0
∞
∞
∞
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-110 Freescale Semiconductor
6.5 EFPU Instruction Timing
Instruction timing in number of processor clock cycles for EFPU instructions is shown in Table 6-13 and
Table 6-14. Pipelined instructions are shown with cycles of total latency and throughput cycles. Divide
instructions are not pipelined and block other instructions from executing during divide execution.
Instruction pipelining in the CPU is affected by the possibility of a floating-point instruction generating an
exception. A load or store class instruction that follows an EFPU instruction stalls until it can be ensured
that no previous instruction can generate a floating-point exception. This determination is based on which
floating-point exception enable bits are set (FINVE, FOVFE, FUNFE, FDBZE, and FINXE) and at what
point in the FPU pipeline an exception can be guaranteed to not occur. Invalid input operands are detected
in the first stage of the pipeline, while underflow, overflow, and inexactness are determined later in the
pipeline. The best overall performance occurs when either floating-point exceptions are disabled or when
load and store class instructions are scheduled such that previous floating-point instructions have already
resolved the possibility of exceptional results.
Table 6-11. Floating-point Results Summary—Convert from half-precision
Operand
Be[v]fscfh F INV FOVF FUNF FDBZ F INX
bmax 1 0 0 0 0
NaN bmax 10000
denorm bzero 1 0 0 0 0
zero bzero 0 0 0 0 0
+norm _Calc_ 0 0 0 0 *
–norm _Calc_ 0 0 0 0 *
Table 6-12. Floating-point Results Summary—Convert to half-precision
Operand
Be[v]fscth F INV FOVF FUNF FDBZ F INX
bmaxhp 10000
NaN bmaxhp 10000
denorm bzero 1 0 0 0 0
zero bzero 0 0 0 0 0
+norm _Calc_ 0 * * 0 *
–norm _Calc_ 0 * * 0 *
∞
∞
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-111
6.5.1 EFPU Single-Precision Vector Floating-Point Instruction Timing
Instruction timing for EFPU vector floating-point instructions is shown in Table 6-13. The table is sorted
by opcode.
Table 6-13. EFPU Vector Floating-Point Instruction Timing
Instruction Latency Throughput Comments
evfsabs 21
evfsadd 21
evfsaddx 21
evfsaddsub 21
evfsaddsubx 21
evfscfh 21
evfscfsf 21
evfscfsi 21
evfscfuf 21
evfscfui 21
evfscmpeq 21
evfscmpgt 21
evfscmplt 21
evfscth 21
evfsctsf 21
evfsctsi 21
evfsctsiz 21
evfsctuf 21
evfsctui 21
evfsctuiz 21
evfsdiff 21
evfsdiffsum 21
evfsdiv 13 13 blocking, no overlap
with next inst.
evfsmax 21
evfsmin 21
evfsmadd 21
1dest also used as
source
evfsmsub 21
1dest also used as
source
evfsmul 21
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-112 Freescale Semiconductor
6.5.2 EFPU Single-Precision Scalar Floating-Point Instruction Timing
Instruction timing for EFPU scalar floating-point instructions is shown in Table 6-14. The table is sorted
by opcode.
evfsmule 21
evfsmulo 21
evfsmulx 21
evfsnabs 21
evfsneg 21
evfsnmadd 21
1dest also used as
source
evfsnmsub 21
1dest also used as
source
evfssqrt 11 11 blocking, no overlap
with next inst.
evfssub 21
evfssubx 21
evfssubadd 21
evfssubaddx 21
evfssum 21
evfssumdiff 21
evfststeq 21
evfststgt 21
evfststlt 21
1Destination register is also a source register, so for full throughput,
back-to-back operations must use a different dest reg.
Table 6-14. EFPU Scalar Floating-Point Instruction Timing
Instruction Latency Throughput Comments
efsabs 21
efsadd 21
efscfh 21
efscfsf 21
efscfsi 21
efscfuf 21
Table 6-13. EFPU Vector Floating-Point Instruction Timing (Continued)
Instruction Latency Throughput Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-113
efscfui 21
efscmpeq 21
efscmpgt 21
efscmplt 21
efscth 21
efsctsf 21
efsctsi 21
efsctsiz 21
efsctuf 21
efsctui 21
efsctuiz 21
efsdiv 13 13 blocking, no execution
overlap with next
instruction
efsmadd 21
1dest also used as
source
efsmsub 21
1dest also used as
source
efsmax 21
efsmin 21
efsmul 21
efsnabs 21
efsneg 21
efsnmadd 21
1dest also used as
source
efsnmsub 21
1dest also used as
source
efssqrt 11 11 blocking, no overlap
with next inst.
efssub 21
efststeq 21
efststgt 21
efststlt 21
1Destination register is also a source register, so for full throughput,
back-to-back operations must use a different dest reg.
Table 6-14. EFPU Scalar Floating-Point Instruction Timing (Continued)
Instruction Latency Throughput Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-114 Freescale Semiconductor
6.6 Instruction Forms and Opcodes
Table 6-15 gives the division of the opcode space for the EFPU instructions.
6.6.1 Opcodes for EFPU Vector Floating-Point Instructions
Table 6-16 shows the embedded vector floating-point instruction opcodes.
Table 6-15. Opcode Space Division
Opcode Bits Instruction Class
0–5 21–28
4 0101 00xx Embedded vector floating-point instructions
4 0101 010x Embedded vector floating-point instructions
4 0101 0110 Embedded scalar floating-point single-precision instructions
4 0101 0111 Reserved (Embedded scalar floating-point double-precision instructions)1
1Attempted execution of a defined EFP double-precision instruction will result in an Unimplemented
instruction exception if MSRSPE =1, or an EFPU Unavailable exception if MSRSPE=0
4 0101 10xx Embedded scalar floating-point single-precision instructions
4 0101 11xx Reserved (Embedded scalar floating-point double-precision instructions)1
Table 6-16. Embedded Vector Floating-Point Instruction Opcodes
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–24 25–31
evfsadd 4 rD rA rB 0101 0000000 —
evfssub 4 rD rA rB 0101 0000001 rA – rB
evfsmadd 4 rD rA rB 0101 0000010 —
evfsmsub 4 rD rA rB 0101 0000011 —
evfsabs 4 rD rA 00000 0101 0000100 —
evfsnabs 4 rD rA 00000 0101 0000101 —
evfsneg 4 rD rA 00000 0101 0000110 —
evfssqrt 4 rD rA 00000 0101 0000111 —
evfsmul 4 rD rA rB 0101 0001000 —
evfsdiv 4 rD rA rB 0101 0001001 —
evfsnmadd 4 rD rA rB 0101 0001010 —
evfsnmsub 4 rD rA rB 0101 0001011 —
evfscmpgt 4 crfD 00 rA rB 0101 0001100 —
evfscmplt 4 crfD 00 rA rB 0101 0001101 —
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-115
evfscmpeq 4 crfD 00 rA rB 0101 0001110 —
4 0101 0001111 —
evfscfui 4 rD 00000 rB 0101 0010000 —
evfscfsi 4 rD 00000 rB 0101 0010001 —
evfscfh 4 rD 00100 rB 0101 0010001 —
evfscfuf 4 rD 00000 rB 0101 0010010 —
evfscfsf 4 rD 00000 rB 0101 0010011 —
evfsctui 4 rD 00000 rB 0101 0010100 —
evfsctsi 4 rD 00000 rB 0101 0010101 —
evfscth 4 rD 00100 rB 0101 0010101 —
evfsctuf 4 rD 00000 rB 0101 0010110 —
evfsctsf 4 rD 00000 rB 0101 0010111 —
evfsctuiz 4 rD 00000 rB 0101 0011000 —
4 0101 0011001 —
evfsctsiz 4 rD 00000 rB 0101 0011010 —
4 0101 0011011 —
evfststgt 4 crfD 00 rA rB 0101 0011100 —
evfststlt 4 crfD 00 rA rB 0101 0011101 —
evfststeq 4 crfD 00 rA rB 0101 0011110 —
4 0101 0011111 —
evfsmax 4 rD rA rB 0101 0100000 —
evfsmin 4 rD rA rB 0101 0100001 —
evfsaddsub 4 rD rA rB 0101 0100010 —
evfssubadd 4 rD rA rB 0101 0100011 rA – rB; rA + rB
evfssum 4 rD rA rB 0101 0100100 —
evfsdiff 4 rD rA rB 0101 0100101 —
evfssumdiff 4 rD rA rB 0101 0100110 —
evfsdiffsum 4 rD rA rB 0101 0100111 —
evfsaddx 4 rD rA rB 0101 0101000 —
evfssubx 4 rD rA rB 0101 0101001 —
evfsaddsubx 4 rD rA rB 0101 0101010 —
Table 6-16. Embedded Vector Floating-Point Instruction Opcodes (Continued)
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–24 25–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-116 Freescale Semiconductor
6.6.2 Opcodes for EFPU Scalar Single-precision Floating-Point
Instructions
Table 6-17 shows the embedded scalar single-precision floating-point instruction opcodes.
evfssubaddx 4 rD rA rB 0101 0101011 rA – rB; rA + rB
evfsmulx 4 rD rA rB 0101 0101100 —
4 rD rA rB 0101 0101101 —
evfsmule 4 rD rA rB 0101 0101110 —
evfsmulo 4 rD rA rB 0101 0101111 —
Table 6-17. Embedded Scalar Single-Precision Floating-Point Instruction Opcodes
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–24 25–31
efsmax 4 rD rA rB 0101 0110000 —
efsmin 4 rD rA rB 0101 0110001 —
efsadd 4 rD rA rB 0101 1000000 —
efssub 4 rD rA rB 0101 1000001 rA – rB
efsmadd 4 rD rA rB 0101 1000010 —
efsmsub 4 rD rA rB 0101 1000011 —
efsabs 4 rD rA 00000 0101 1000100 —
efsnabs 4 rD rA 00000 0101 1000101 —
efsneg 4 rD rA 00000 0101 1000110 —
efssqrt 4 rD rA 00000 0101 1000111 —
efsmul 4 rD rA rB 0101 1001000 —
efsdiv 4 rD rA rB 0101 1001001 —
efsnmadd 4 rD rA rB 0101 1001010 —
efsnmsub 4 rD rA rB 0101 1001011 —
efscmpgt 4 crfD 00 rA rB 0101 1001100 —
efscmplt 4 crfD 00 rA rB 0101 1001101 —
efscmpeq 4 crfD 00 rA rB 0101 1001110 —
Table 6-16. Embedded Vector Floating-Point Instruction Opcodes (Continued)
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–24 25–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 6-117
efscfd 4 rD 00000 rB 0101 1001111 optional, not
implemented
efscfui 4 rD 00000 rB 0101 1010000 —
efscfsi 4 rD 00000 rB 0101 1010001 —
efscfh 4 rD 00100 rB 0101 1010001 —
efscfuf 4 rD 00000 rB 0101 1010010 —
efscfsf 4 rD 00000 rB 0101 1010011 —
efsctui 4 rD 00000 rB 0101 1010100 —
efsctsi 4 rD 00000 rB 0101 1010101 —
efscth 4 rD 00100 rB 0101 1010101 —
efsctuf 4 rD 00000 rB 0101 1010110 —
efsctsf 4 rD 00000 rB 0101 1010111 —
efsctuiz 4 rD 00000 rB 0101 1011000 —
4 0101 1011001 —
efsctsiz 4 rD 00000 rB 0101 1011010 —
4 0101 1011011 —
efststgt 4 crfD 00 rA rB 0101 1011100 —
efststlt 4 crfD 00 rA rB 0101 1011101 —
efststeq 4 crfD 00 rA rB 0101 1011110 —
4 0101 1011111 —
Table 6-17. Embedded Scalar Single-Precision Floating-Point Instruction Opcodes (Continued)
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–24 25–31

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
6-118 Freescale Semiconductor

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-1
Chapter 7
Signal Processing Extension Unit
This chapter describes the instruction set architecture of the signal processing extension unit (SPE),
version 1.1. This unit implements instructions to accelerate signal processing and other algorithms.
7.1 Nomenclature and Conventions
Several conventions regarding nomenclature are used in this chapter:
• Due to historical precedent, the terms SPE and SIMD are used interchangeably
• Bits 0 to 31 of a 64-bit register are referenced as field 0, upper half, or high-order element of the
register. Bits 32–63 are referred to as field 1, lower half, or lower-order element of the register.
Each half is an element of a GPR.
• Mnemonics for SPE instructions generally begin with the letters ‘ev’ (vector).
7.2 SPE Programming Model
The e200z446n3 core provides a register file with thirty-two 64-bit registers. Power ISA embedded
category instructions operate on the lower (least significant) 32 bits of the 64-bit register. New SPE
instructions are defined that view the 64-bit register as being composed of a vector of two 32-bit elements,
and some of the instructions also read or write 16-bit elements. These new instructions can also be used to
perform scalar operations by ignoring the results of the upper 32-bit half of the register file. Some
instructions are defined that produce a 64-bit scalar result. Vector fixed-point instructions operate on a
vector of two 32-bit or four 16-bit fixed-point numbers resident in the 64-bit GPRs. The SPE and Power
ISA embedded category instructions issue from a single instruction stream.
There are no record forms of SPE instructions. Vector compare instructions store the result of the
comparison into the condition register (CR). The meaning of the CR bits are now overloaded for the vector
operations. Vector compare instructions specify a CR field, two source registers, and the type of compare:
greater than, less than, or equal. Two bits in the CR field are written with the result of the vector compare,
one for each element. The remaining two bits reflect the ‘and’ing and ‘or’ing of the vector compare results.
A partially visible accumulator register is architected for the SPE integer and fractional multiply
accumulate forms of instructions. Its usage is described in Section 7.2.2, “Accumulator.”
7.2.1 SPE Status and Control Register (SPEFSCR)
The e200z446n3 core implements the SPEFSCR register for status reporting and control of SPE
instructions. This register is also used by the embedded floating-point unit. Status and control bits
are shared for floating-point operations and SPE operations. The SPEFSCR register is implemented
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-2 Freescale Semiconductor
as special purpose register (SPR) number 512 and is read and written by the mfspr and mtspr instructions.
The SPEFSCR is shown in Figure 7-1.
The SPEFSCR bits are defined in Table 7-1.
SOVH
OVH
FGH
FXH
FINVH
FDBZH
FUNFH
FOVFH
0
FINXS
FINVS
FDBZS
FUNFS
FOVFS
MODE
SOV
OV
FG
FX
FINV
FDBZ
FUNF
FOVF
0
FINXE
FINVE
FDBZE
FUNFE
FOVFE
FRMC
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 512; Read/Write; Reset - 0x0
Figure 7-1. SPE Status and Control Register (SPEFSCR)
Table 7-1. SPE Status and Control Register
Bits Name Description
0
(32) SOVH Summary Integer Overflow High
The SOVH bit is set to 1 whenever an instruction sets OVH. The SOVH bit remains set until
it is cleared by a mtspr instruction specifying the SPEFSCR register.
1
(33)
OVH Integer Overflow High
The OVH bit is set to 1 whenever an integer or fractional SPE instruction signals an overflow
in the upper half of the result.
2
(34)
FGH Embedded Floating-Point Guard Bit High
Defined by Embedded Floating-Point Units.
3
(35)
FXH Embedded Floating-Point Inexact Bit High
Defined by Embedded Floating-Point Units.
4
(36)
FINVH Embedded Floating-Point Invalid Operation/Input eError High
Defined by Embedded Floating-Point Units.
5
(37) FDBZH Embedded Floating-Point Divide by Zero High
Defined by Embedded Floating-Point Units.
6
(38)
FUNFH Embedded Floating-Point Underflow High
Defined by Embedded Floating-Point Units.
7
(39)
FOVFH Embedded Floating-Point Overflow High
Defined by Embedded Floating-Point Units.
8:9
(40:41)
— Reserved
10
(42)
FINXS Embedded Floating-Point Inexact Sticky Flag
Defined by Embedded Floating-Point Units.
11
(43)
FINVS Embedded Floating-Point Invalid Operation Sticky Flag
Defined by Embedded Floating-Point Units.
12
(44) FDBZS Embedded Floating-Point Divide by Zero Sticky Flag
Defined by Embedded Floating-Point Units.
13
(45)
FUNFS Embedded Floating-Point Underflow Sticky Flag
Defined by Embedded Floating-Point Units.
14
(46)
FOVFS Embedded Floating-Point Overflow Sticky Flag
Defined by Embedded Floating-Point Units.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-3
7.2.2 Accumulator
The z446n3 core has a 64-bit architectural accumulator register that holds the results of the SPE multiply
accumulate (MAC) fixed-point instructions. The accumulator allows back-to-back execution of dependent
fixed-point MAC instructions, something that is found in inner loops of DSP code such as filters. The
accumulator is partially visible to the programmer in that its results do not have to be explicitly read to use
them. Instead, they are always copied into a 64-bit destination GPR specified as part of the instruction. The
15
(47) MODE Embedded Floating-Point Operating Mode
Defined by Embedded Floating-Point Units.
16
(48)
SOV Summary Integer Overflow
The SOV bit is set to 1 whenever an instruction sets OV. The SOV bit remains set until it is
cleared by a mtspr instruction specifying the SPEFSCR register.
17
(49)
OV Integer Overflow
The OV bit is set to 1 whenever an integer or fractional SPE instruction signals an overflow
in the low element result.
18
(50)
FG Embedded Floating-Point Guard bit (low/scalar)
Defined by Embedded Floating-Point Units.
19
(51) FX Embedded Floating-Point Inexact bit (low/scalar)
Defined by Embedded Floating-Point Units.
20
(52)
FINV Embedded Floating-Point Invalid Operation/Input Error (low/scalar)
Defined by Embedded Floating-Point Units.
21
(53)
FDBZ Embedded Floating-Point Divide by Zero (low/scalar)
Defined by Embedded Floating-Point Units.
22
(54)
FUNF Embedded Floating-Point Underflow (low/scalar)
Defined by Embedded Floating-Point Units.
23
(55)
FOVF Embedded Floating-Point Overflow (low/scalar)
Defined by Embedded Floating-Point Units.
24
(56)
— Reserved
25
(57)
FINXE Embedded Floating-Point Round (Inexact) Exception Enable
Defined by Embedded Floating-Point Units.
26
(58) FINVE Embedded Floating-Point Invalid Operation/Input Error Exception Enable
Defined by Embedded Floating-Point Units.
27
(59)
FDBZE Embedded Floating-Point Divide by Zero Exception Enable
Defined by Embedded Floating-Point Units.
28
(60)
FUNFE Embedded Floating-Point Underflow Exception Enable
Defined by Embedded Floating-Point Units.
29
(61)
FOVFE Embedded Floating-Point Overflow Exception Enable
Defined by Embedded Floating-Point Units.
30:31
(62:63)
FRMC Embedded Floating-Point Rounding Mode Control
Defined by Embedded Floating-Point Units.
Table 7-1. SPE Status and Control Register (Continued)
Bits Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-4 Freescale Semiconductor
accumulator, however, has to be explicitly cleared when starting a new MAC loop. Based upon the type
of instruction, an accumulator can hold either a single 64-bit value or a vector of two 32-bit elements.
An example of a MAC instruction is evmhossfaaw rD,rA,rB. In this instruction, the least significant 16
bits of rA and rB are multiplied for both elements of the vector (see Figure 7-51); the result is shifted left
one bit and added to the accumulator; and the result is possibly saturated to 32 bits in case of overflow.
The final result is placed both in the accumulator and also in rD. Thus the result of this instruction can be
used by accessing rD.
To read the accumulator contents into a register, a multiply-accumulate instruction where one of its
operands is a zero should be used, as the following sequence shows:
evxor RD, RD, RD // Zero the contents of RD, not necessary if
// a zero is available in some register.
evmwumiaa RD, RD, RD // Multiply 0 with 0, add the 0 result to
// accumulator and store back the value in acc and RD
To initialize the accumulator, the evmra instruction is used.
7.2.2.1 Context Switch
When a context switch occurs, the OS process must explicitly save the accumulator as part of the context
of the swapped-out task and then explicitly load the accumulator from the context of the new task that is
being swapped in. When the old task is restarted, its accumulator must be restored before restarting the
task.
7.2.3 GPRs and Power ISA Embedded Category Instructions
The z446n3 core implements the 32-bit forms of the Power ISA embedded category instructions. All 32-bit
Power ISA embedded category instructions operate upon the lower half of the 64-bit GPR. These
instructions do not affect the upper half of a GPR.
7.2.4 SPE Available Bit in MSR
MSR[SPE] is defined as the SPE available bit. If this bit is clear and software attempts to execute any of
the SPE instructions other than the s brincinstruction (which does not affect the upper 32-bits of a GPR),
the SPE Unavailable exception is taken. If this bit is set, software can execute any of the SPE instructions.
7.2.5 SPE Exception Bit in ESR
ESR[SPE] is defined as the SPE exception bit. This bit is set whenever the processor takes an exception
related to the execution of the SPE instructions.
7.2.6 SPE Exceptions
The architecture defines the following SPE exceptions:
• SPE Unavailable exception
• SPE Vector Alignment exception

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-5
Interrupt vector offset registers (IVOR) IVOR32 (SPE/Embedded Floating Point Unavailable Interrupt)
and IVOR5 (Alignment Interrupt), are used by the interrupt model. The SPR number for IVOR32 is 528,
IVOR5 is defined by the Power ISA. These registers are privileged.
7.2.6.1 SPE Unavailable Exception
The SPE Unavailable exception is taken if MSR[SPE] is cleared and execution of an SPE instruction other
than the brinc instruction is attempted. When the SPE Unavailable exception occurs, the processor
suppresses execution of the instruction causing the exception. The SRR0, SRR1, MSR, and ESR registers
are modified as follows:
• SRR0 is set to the effective address of the instruction causing the exception.
• SRR1 is set to the contents of the MSR at the time of the exception.
• MSR[CE,ME,DE] are unchanged. All other bits are cleared.
• The ESR[SPE] bit is set. All other ESR bits are cleared.
Instruction execution resumes at address IVPR0:15||IVOR3216:27||0b0000.
7.2.6.2 SPE Vector Alignment Exception
The SPE Vector Alignment exception is taken if the effective address of any of the following instructions
is not aligned to a 32-bit boundary: evldd, evlddx, evldw, evldwx, evldh, evldhx, evstdd, evstddx,
evstdw, evstdwx, evstdh, and evstdhx. When an SPE Vector Alignment exception occurs, the processor
suppresses the execution of the instruction causing the alignment exception and takes an alignment
interrupt.
SRR0, SRR1, MSR, ESR, and DEAR are modified as follows:
• SRR0 is set to the effective address of the instruction causing the alignment exception.
• SRR1 is set to the contents of the MSR at the time of the exception.
• MSR[CE,ME,DE] are unchanged. All other bits are cleared.
• ESR[SPE] (bit 24) is set. ESR[ST] is set only if the instruction causing the exception is a store and
is cleared for a load. All other bits are cleared.
• DEAR is updated with the effective address of a byte of the load or store.
Instruction execution resumes at address IVPR0:15||IVOR516:27||0b0000.
7.2.7 Exception Priorities
The following list shows the priority order in which exceptions are taken:
1. SPE Unavailable exception
2. SPE Vector Alignment exception
An SPE Vector Alignment exception will be taken if an SPE double-word vector load or store access is
attempted with an address which is not 32-bit aligned.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-6 Freescale Semiconductor
7.3 Integer SPE Simple Instructions
This section explains the following integer SPE simple instructions:
Table 7-2. Integer SPE Simple Instructions
Bit Reversed Increment (brinc) Vector Divide Word Unsigned (evdivwu)
Vector Absolute Value (evabs) Vector Equivalent (eveqv)
Vector Add Immediate Word (evaddiw) Vector Extend Sign Byte (evextsb)
Vector Add Word (evaddw)Vector Extend Sign Half Word (evextsh)
Vector AND (evand) Vector Merge High (evmergehi)
Vector AND with Complement (evandc) Vector Merge High/Low (evmergehilo)
Vector Compare Equal (evcmpeq)Vector Merge Low (evmergelo)
Vector Compare Greater Than Signed (evcmpgts) Vector Merge Low/High (evmergelohi)
Vector Compare Greater Than Unsigned (evcmpgts) Vector NAND (evnand)
Vector Compare Less Than Signed (evcmplts) Vector Negate (evneg)
Vector Compare Less Than Unsigned (evcmpltu) Vector NOR (evnor)
Vector Count Leading Sign Bits Word (evcntlsw) Vector OR (evor)
Vector Count Leading Zeros Word (evcntlzw) Vector OR with Complement (evorc)
Vector Divide Word Signed (evdivws)Vector Rotate Left Word (evrlw)
Vector Rotate Left Word Immediate (evrlwi) Vector Shift Right Word Immediate Signed (evsrwis)
Vector Round Word (evrndw) Vector Shift Right Word Immediate Unsigned (evsrwiu)
Vector Select (evsel) Vector Shift Right Word Signed (evsrws)
Vector Shift Left Word (evslw) Vector Shift Right Word Unsigned (evsrwu)
Vector Shift Left Word Immediate (evslwi) Vector Subtract from Word (evsubfw)
Vector Splat Fractional Immediate (evsplatfi) Vector Subtract Immediate from Word (evsubifw)
Vector Splat Immediate (evsplati) Vector XOR (evxor)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-7
brinc brinc
Bit Reversed Increment
brinc rD,rA,rB
n = 16 // Implementation dependent value
mask = rB64-n:63 // Least sig. n bits of 32-bit reg
a = rA64-n:63
d = bitreverse(1 + bitreverse(a | (¬ mask)))
rD32:63 = rA32:63-n || (d & mask) // || is concatenation
The brinc instruction provides a way for software to access FFT data in a bit-reversed manner. rA contains
the index into a buffer that contains data on which FFT is to be performed. rB contains a mask that allows
the index to be updated with bit-reversed addressing. Typically this instruction precedes a load with index
instruction, for example,
brinc r2, r3, r4
lhax r8, r5, r2
rB contains a bit-mask that is based upon the number of points in an FFT. To access a buffer containing n
byte sized data that is to be accessed with bit-reversed addressing, the mask has log2n ‘1’s in the lsb
positions and ‘0’s in the remaining most significant position. If however, the data size is a multiple of a
half word or a word, the mask is constructed so that the ‘1’s are shifted left by log2 (size of the data) and
‘0’s are placed in the lsb positions. Table 7-3 shows example values of masks for different data sizes and
number of data.
Note: An implementation can restrict the number of bits specified in a mask. In the z446n3
implementation, the number of bits is 16 which allows the user to perform bit-reversed address
computations for 65536 byte sized samples.
0 56 101115162021 31
4 rD RA RB 0 1 0 0 0 0 0 1 1 1 1
Table 7-3. Data Samples and Sizes
Number of Data Samples Data size
Byte Half Word Word Double Word
8 000...00000111 000...00001110 000...000011100 000...0000111000
16 000...00001111 000...00011110 000...000111100 000...0001111000
32 000...00011111 000...00111110 000...001111100 000...0011111000
64 000...00111111 000...01111110 000...011111100 000...0111111000

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-8 Freescale Semiconductor
evabs evabs
Vector Absolute Value
evabs rD,rA
RD0:31 = ABS(RA0:31)
RD32:63 = ABS(RA32:63)
The absolute value of each element of rA is placed into the corresponding element of rD. Absolute value
of 0x8000_0000 (most negative number) returns 0x8000_0000. No overflow is detected
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-9
evaddiw evaddiw
Vector Add Immediate Word
evaddiw rD,rB,UIMM
RD0:31 = RB0:31 + EXTZ(UIMM)// Modulo sum
RD32:63 = RB32:63 + EXTZ(UIMM)// Modulo sum
The 5-bit UIMM value is zero-extended and added to each element of rB. The results are placed into the
corresponding elements of rD.
0 56 101115162021 31
4 RD UIMM RB 0 1 0 0 0 0 0 0 0 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-10 Freescale Semiconductor
evaddw evaddw
Vector Add Word
evaddw rD,rA,rB
RD0:31 = RA0:31 + RB0:31 // Modulo sum
RD32:63 = RA32:63 + RB32:63 // Modulo sum
Adds each element of rA to the corresponding element of rB and places the results into the corresponding
elements of rD. The sum is a modulo sum.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 0 0 0 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-11
evand evand
Vector AND
evand rD,rA,rB
RD0:31 = RA0:31 & RB0:31 // Bitwise AND
RD32:63 = RA32:63 & RB32:63// Bitwise AND
Performs a bitwise AND of each element of rA and rB and places the results into the corresponding
elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 0 0 0 1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-12 Freescale Semiconductor
evandc evandc
Vector AND with Complement
evandc rD,rA,rB
RD0:31 = RA0:31 & (¬RB0:31) // Bitwise ANDC
RD32:63 = RA32:63 & (¬RB32:63) // Bitwise ANDC
Performs a bitwise AND of each element of rA and complement of rB and places the results into the
corresponding elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 0 0 1 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-13
evcmpeq evcmpeq
Vector Compare Equal
evcmpeq crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah == bh) then ch = 1
else ch = 0
if (al == bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
The msb in crfD is set if the high-order element of rA is equal to the high-order element of rB and cleared
otherwise. The next most significant bit in crfD is set if the lower order element of rA is equal to the lower
order element of rB and cleared otherwise. The last two bits of crfD are set to the OR and AND of the
result of the compare of the high and low elements.
0 5689101115162021 31
4 crfD 0 0 RA RB 0 1 0 0 0 1 1 0 1 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-14 Freescale Semiconductor
evcmpgts evcmpgts
Vector Compare Greater Than Signed
evcmpgts crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah > bh) then ch = 1
else ch = 0
if (al > bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
The msb in crfD is set if the high-order element of rA is greater than the high-order element of rB and
cleared otherwise. The next most significant bit in crfD is set if the lower order element of rA is greater
than the lower order element of rB, and cleared otherwise. The last two bits of crfD are set to the OR and
AND of the result of the compare of the high and low elements.
0 5689101115162021 31
4 crfD 0 0 RA RB 0 1 0 0 0 1 1 0 0 0 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-15
evcmpgtu evcmpgtu
Vector Compare Greater Than Unsigned
evcmpgtu crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah >U bh) then ch = 1
else ch = 0
if (al >U bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
The msb in crfD is set if the high-order element of rA is greater than the high-order element of rB, and
cleared otherwise. The next most significant bit in crfD is set if the lower order element of rA is greater
than the lower order element of rB, and cleared otherwise. The last two bits of crfD are set to the OR and
AND of the result of the compare of the high and low elements.
0 5689101115162021 31
4 crfD 0 0 RA RB 0 1 0 0 0 1 1 0 0 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-16 Freescale Semiconductor
evcmplts evcmplts
Vector Compare Less Than Signed
evcmplts crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah < bh) then ch = 1
else ch = 0
if (al < bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
The msb in crfD is set if the high-order element of rA is less than the high-order element of rB and cleared
otherwise. The next most significant bit in crfD is set if the lower order element of rA is less than the lower
order element of rB and cleared otherwise. The last two bits of crfD are set to the OR and AND of the
result of the compare of the high and low elements.
0 5689101115162021 31
4 crfD 0 0 RA RB 0 1 0 0 0 1 1 0 0 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-17
evcmpltu evcmpltu
Vector Compare Less Than Unsigned
evcmpltu crfD,rA,rB
ah = RA0:31
al = RA32:63
bh = RB0:31
bl = RB32:63
if (ah <U bh) then ch = 1
else ch = 0
if (al <U bl) then cl = 1
else cl = 0
CR4*crfD:4*crfD+3 = ch || cl || (ch | cl) || (ch & cl)
The msb in crfD is set if the high-order element of rA is less than the high-order element of rB and cleared
otherwise. The next most significant bit in crfD is set if the lower order element of rA is less than the lower
order element of rB and cleared otherwise. The last two bits of crfD are set to the OR and AND of the
result of the compare of the high and low elements.
0 5689101115162021 31
4 crfD 0 0 RA RB 0 1 0 0 0 1 1 0 0 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-18 Freescale Semiconductor
evcntlsw evcntlsw
Vector Count Leading Sign Bits Word
evcntlsw rD,rA
Counts the leading number of sign bits in each element of rA and places the counts into corresponding
elements of rD.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 1 1 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-19
evcntlzw evcntlzw
Vector Count Leading Zeros Word
evcntlzw rD,rA
Counts the leading number of zeros in each element of rA and places the counts into corresponding
elements of rD.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 1 0 1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-20 Freescale Semiconductor
evdivws evdivws
Vector Divide Word Signed
evdivws rD,rA,rB
dividendh = RA0:31
dividendl = RA32:63
divisorh = RB0:31
divisorl = RB32:63
RD0:31 = dividendh ÷ divisorh
RD32:63 = dividendl ÷ divisorl
Implementation Details:
ovh = 0
ovl = 0
if ((dividendh<0) && (divisorh==0)) then
RD0:31 = 0x80000000
ovh = 1
else if ((dividendh>=0) && (divisorh==0)) then
RD0:31 = 0x7FFFFFFF
ovh = 1
else if ((dividendh==0x80000000) && (divisorh==-1)) then
RD0:31 = 0x7FFFFFFF
ovh = 1
if ((dividendl<0) && (divisorl==0)) then
RD32:63 = 0x80000000
ovl = 1
else if ((dividendl>=0) && (divisorl==0)) then
RD32:63 = 0x7FFFFFFF
ovl = 1
else if ((dividendl==0x80000000) && (divisorl==-1)) then
RD32:63 = 0x7FFFFFFF
ovl = 1
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
The two dividends are the two elements of the contents of rA. The two divisors are the two elements of
the contents of rB. Two 32-bit quotients are formed as a result of the division on each of the upper and
lower elements and the quotients are placed into rD. The remainders are not supplied as a result of this
operation. Both the operands and quotients are interpreted as signed integers. If an overflow occurs (see
the PowerPC ISA divw instruction for the cases), the corresponding SPEFSCR bits are set. Otherwise,
they are cleared. In case of overflow, a saturated value is delivered into the destination register.
0 56 101115162021 31
4 RD RA RB 1 0 0 1 1 0 0 0 1 1 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-21
evdivwu evdivwu
Vector Divide Word Unsigned
evdivwu rD,rA,rB
dividendh = RA0:31
dividendl = RA32:63
divisorh = RB0:31
divisorl = RB32:63
RD0:31 = dividendh ÷ divisorh
RD32:63 = dividendl ÷ divisorl
Implementation Details:
ovh = 0
ovl = 0
if (divisorh == 0) then
RD0:31 = 0xFFFFFFFF
ovh = 1
if (divisorl == 0) then
RD32:63 = 0xFFFFFFFF
ovl = 1
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
The two dividends are the two elements of the contents of rA. The two divisors are the two elements of
the contents of rB. Two 32-bit quotients are formed as a result of the division on each of the upper and
lower elements and the quotients are placed into rD. The remainders are not supplied as a result of this
operation. Both the operands and quotients are interpreted as unsigned integers. If an overflow occurs (see
the PowerPC ISA divuw instruction for the cases), the corresponding SPEFSCR bits are set. Otherwise,
they are cleared. In case of overflow, a saturated value is delivered into the destination register.
0 56 101115162021 31
4 RD RA RB 1 0 0 1 1 0 0 0 1 1 1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-22 Freescale Semiconductor
eveqv eveqv
Vector Equivalent
eveqv rD,rA,rB
RD0:31 = RA0:31 ≡ RB0:31 // Bitwise XNOR
RD32:63 = RA32:63 ≡ RB32:63 // Bitwise XNOR
Performs a bitwise XNOR of each element of rA and rB and places the results into the corresponding
elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 1 0 0 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-23
evextsb evextsb
Vector Extend Sign Byte
evextsb rD,rA
RD0:31 = EXTS(RA24:31)
RD32:63 = EXTS(RA56:63)
Extends the sign of the low-order byte in each of the elements in rA and places the results into rD.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 0 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-24 Freescale Semiconductor
evextsh evextsh
Vector Extend Sign Half Word
evextsh rD,rA
RD0:31 = EXTS(RA16:31)
RD32:63 = EXTS(RA48:63)
Extends the sign of the half words in each of the elements in rA and places the results into rD.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 0 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-25
evmergehi evmergehi
Vector Merge High
evmergehi rD,rA,rB
RD0:31 = RA0:31
RD32:63 = RB0:31
The high-order elements of rA and rB are merged and placed into rD as shown in Figure 7-2.
Figure 7-2. High Order Element Merging with evmergehi
Note: A vector splat high can be performed by specifying the same register in rA and rB.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 1 1 0 0
0313263
RA
RB
RD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-26 Freescale Semiconductor
evmergehilo evmergehilo
Vector Merge High/Low
evmergehilo rD,rA,rB
RD0:31 = RA0:31
RD32:63 = RB32:63
The high-order element of rA and the low-order element of rB are merged and placed into rD as shown
in Figure 7-3.
Figure 7-3. High Order Element Merging with evmergehilo
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 1 1 1 0
0313263
RA
RB
RD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-27
evmergelo evmergelo
Vector Merge Low
evmergelo rD,rA,rB
RD0:31 = RA32:63
RD32:63 = RB32:63
The low-order elements of rA and rB are merged and placed in rD as shown in Figure 7-4.
Figure 7-4. Low Order Element Merging evmergelo
Note: A vector splat low can be performed by specifying the same register in rA and rB.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 1 1 0 1
0313263
RA
RB
RD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-28 Freescale Semiconductor
evmergelohi evmergelohi
Vector Merge Low/High
evmergelohi rD,rA,rB
RD0:31 = RA32:63
RD32:63 = RB0:31
The low-order element of rA and the high-order element of rB are merged and placed into rD as shown
in Figure 7-5.
Figure 7-5. Low Order Element Merging evmergelohi
Note: A vector swap can be performed by specifying the same register in rA and rB.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 1 1 1 1
0313263
RA
RB
RD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-29
evnand evnand
Vector NAND
evnand rD,rA,rB
RD0:31 = ¬(RA0:31 & RB0:31)// Bitwise NAND
RD32:63 = ¬(RA32:63 & RB32:63) // Bitwise NAND
Performs a bitwise NAND of each element of rA and rB and places the results into the corresponding
elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 1 1 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-30 Freescale Semiconductor
evneg evneg
Vector Negate
evneg rD,rA
RD0:31 = NEG(RA0:31)
RD32:63 = NEG(RA32:63)
The negative value of each element of rA is placed in rD. The negative value of 0x8000_0000 (most
negative number) returns 0x8000_0000. No overflow is detected.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 0 0 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-31
evnor evnor
Vector NOR
evnor rD,rA,rB
RD0:31 = ¬(RA0:31 | RB0:31) // Bitwise NOR
RD32:63 = ¬(RA32:63 | RB32:63) // Bitwise NOR
Performs a bitwise NOR of each element of rA and rB and places the result into the corresponding element
of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 1 0 0 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-32 Freescale Semiconductor
evor evor
Vector OR
evor rD,rA,rB
RD0:31 = RA0:31 | RB0:31 //Bitwise OR
RD32:63 = RA32:63 | RB32:63 // Bitwise OR
Performs a bitwise OR of each element of rA and rB and places the results into the corresponding elements
of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 0 1 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-33
evorc evorc
Vector OR with Complement
evorc rD,rA,rB
RD0:31 = RA0:31 | (¬RB0:31) // Bitwise ORC
RD32:63 = RA32:63 | (¬RB32:63) // Bitwise ORC
Performs a bitwise OR of each element of rA and complement of rB and places the results in the
corresponding elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 1 0 1 1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-34 Freescale Semiconductor
evrlw evrlw
Vector Rotate Left Word
evrlw rD,rA,rB
nh = RB27:31
nl = RB59:63
RD0:31 = ROTL(RA0:31, nh)
RD32:63 = ROTL(RA32:63, nl)
Rotates left each of the elements of rA by amounts specified in rB and places the results into rD. The rotate
amounts are specified by 5 bit fields in rB. Separate rotate values for each element of rA are specified in
bit positions rB27:31 and rB59:63.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 1 0 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-35
evrlwi evrlwi
Vector Rotate Left Word Immediate
evrlwi rD,rA,UIMM
n = UIMM
RD0:31 = ROTL(RA0:31, n)
RD32:63 = ROTL(RA32:63, n)
Rotates left both elements of rA by an amount specified by the 5-bit UIMM immediate value and places
the results into rD.
0 56 101115162021 31
4 RD RA UIMM 0 1 0 0 0 1 0 1 0 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-36 Freescale Semiconductor
evrndw evrndw
Vector Round Word
evrndw rD,rA
RD0:31 = (RA0:31+0x00008000) & 0xFFFF0000 // Modulo sum
RD32:63 = (RA32:63+0x00008000) & 0xFFFF0000 // Modulo sum
Rounds the 32-bit elements of rA into 16 bits and places the results into rD. The resulting 16 bits of each
element are placed in the most significant 16 bits of each element of rD, zeroing out the low order 16 bits
of each element.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 0 1 0 0 0 0 0 1 1 0 0
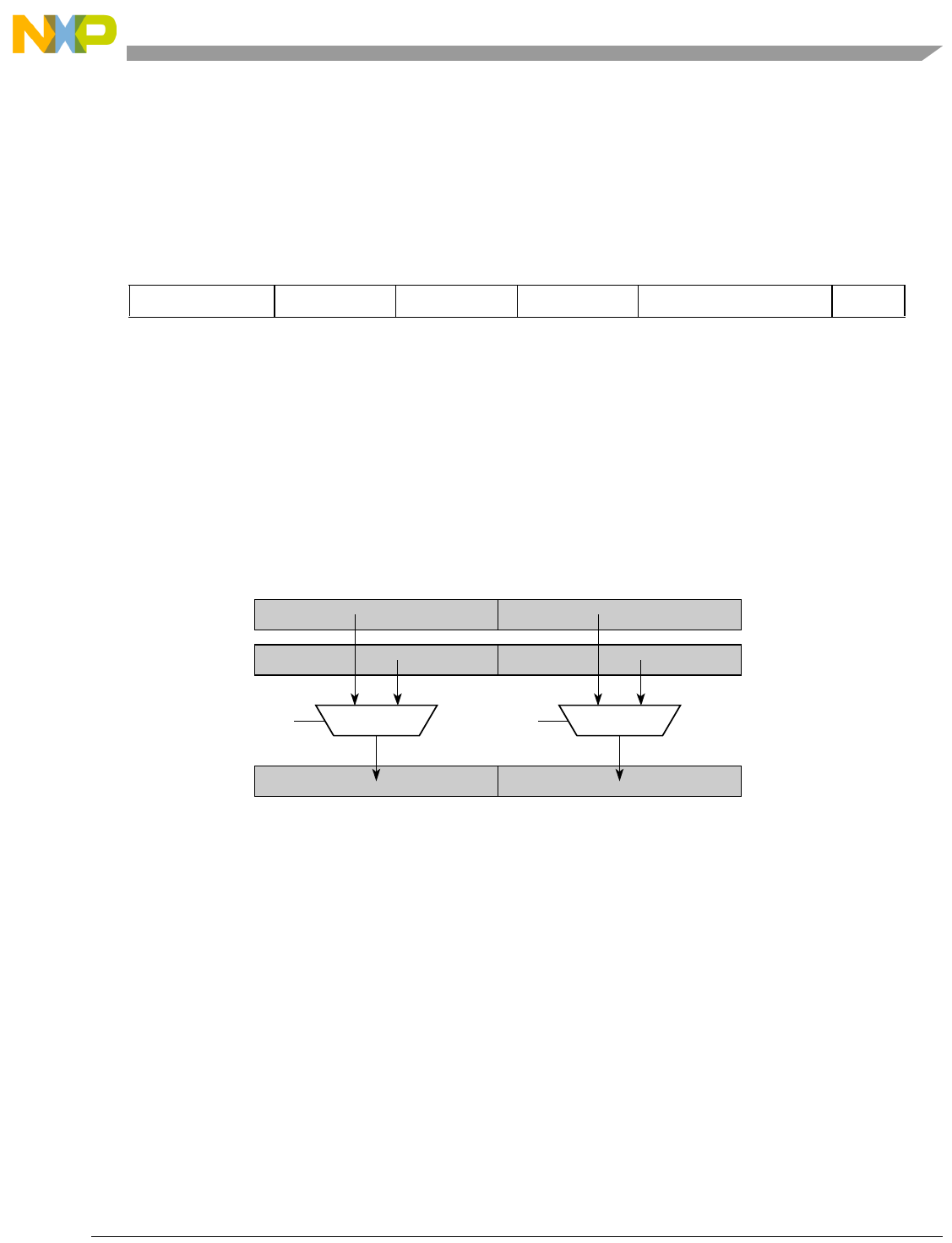
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-37
evsel evsel
Vector Select
evsel rD,rA,rB,crfS
ch = CRcrfS*4
cl = CRcrfS*4+1
if (ch == 1) then RD0:31 = RA0:31
else RD0:31 = RB0:31
if (cl == 1) then RD32:63 = RA32:63
else RD32:63 = RB32:63
If the msb if the crfS field of CR is set, the high-order element of rA is placed in the high-order element
of rD; otherwise, the high-order element of rB is placed into the higher order element of rD. If the next
most significant bit in the crfS field of CR is set, the low-order element of rA is placed in the low-order
element of rD. Otherwise, the low-order element of rB is placed into the lower order element of rD. This
is shown in Figure 7-6.
Figure 7-6. evsel
0 56 101115162021 31
4 RD RA RB 0 1 0 0 1 1 1 1 crfS
0313263
RA
RB
RD
clch 1 0 01

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-38 Freescale Semiconductor
evslw evslw
Vector Shift Left Word
evslw rD,rA,rB
nh = RB26:31
nl = RB58:63
RD0:31 = SL(RA0:31, nh)
RD32:63 = SL(RA32:63, nl)
Shifts left each element of rA by amounts specified in rB and places the results into rD. The separate shift
amounts for each element are specified by 6-bit fields in rB in bit positions 26:31 and 58:63. Shift amounts
from 32 to 63 give a zero result.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 0 1 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-39
evslwi evslwi
Vector Shift Left Word Immediate
evslwi rD,rA,UIMM
n = UIMM
RD0:31 = SL(RA0:31, n)
RD32:63 = SL(RA32:63, n)
Shifts left each element of rA by the 5-bit UIMM value and places the results into rD.
0 56 101115162021 31
4 RD RA UIMM 0 1 0 0 0 1 0 0 1 1 0
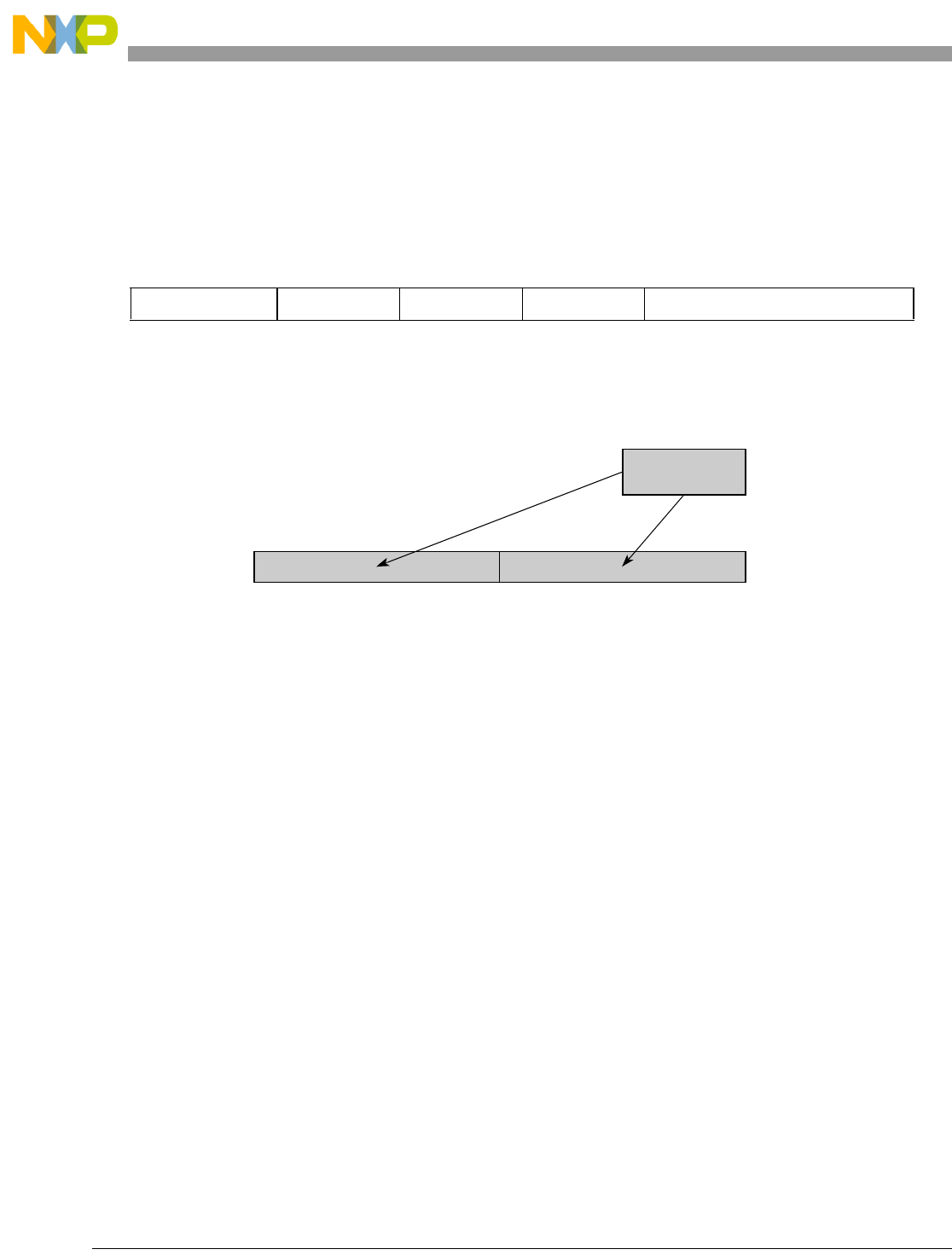
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-40 Freescale Semiconductor
evsplatfi evsplatfi
Vector Splat Fractional Immediate
evsplatfi rD,SIMM
RD0:31 = SIMM || 270
RD32:63 = SIMM || 270
The 5-bit SIMM value is padded with trailing zeros and placed into both elements of rD as shown in
Figure 7-7. The SIMM value is placed in bit positions rD0:4 and rD32:36.
Figure 7-7. Splat for evsplatfi
0 56 101115162021 31
4 RD SIMM 0 0 0 0 0 0 1 0 0 0 1 0 1 0 1 1
SIMM
RD
0313263
SABCD
SABCD000...........000000 SABCD000...........000000
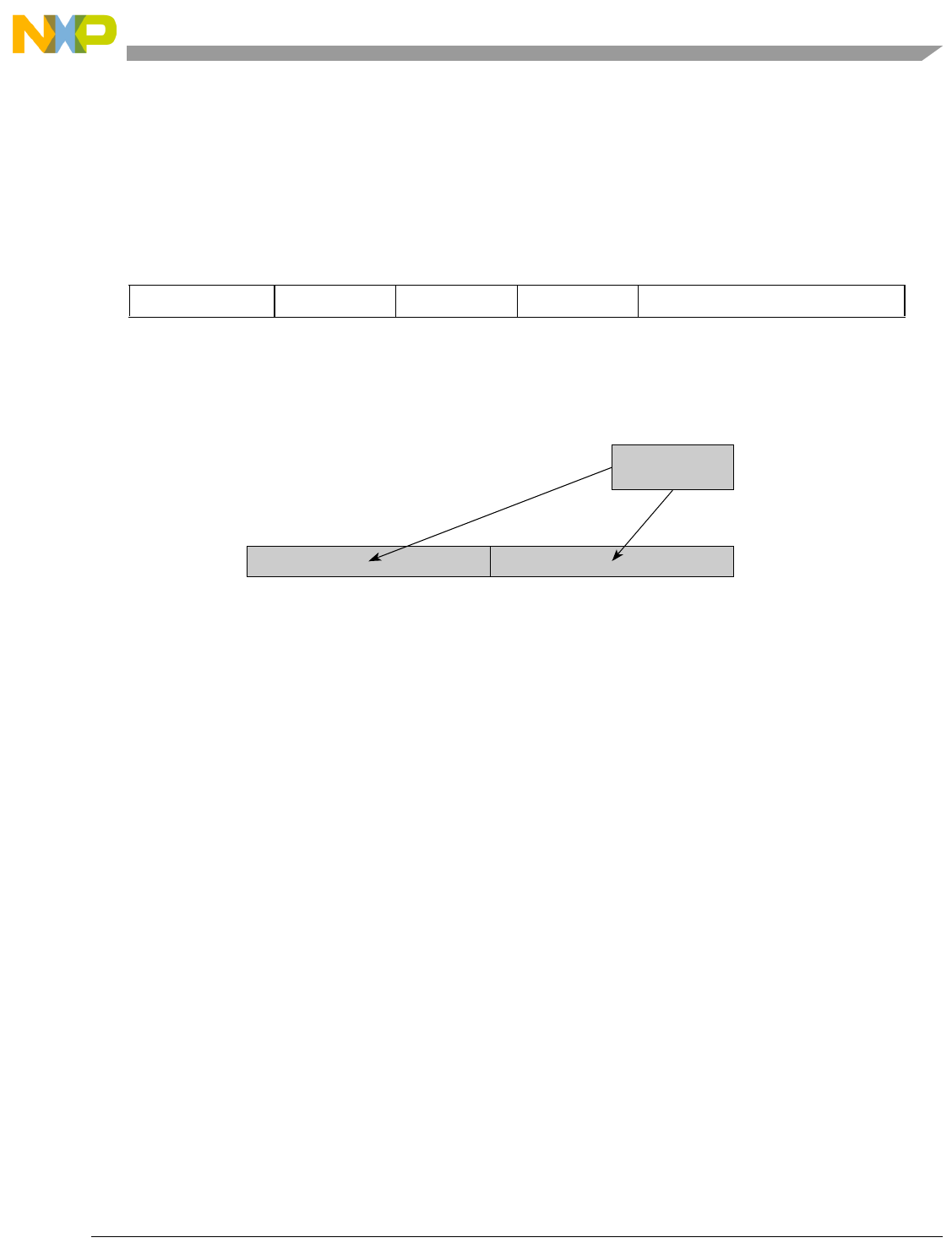
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-41
evsplati evsplati
Vector Splat Immediate
evsplati rD,SIMM
RD0:31 = EXTS(SIMM)
RD32:63 = EXTS(SIMM)
The 5-bit SIMM immediate value is sign extended and placed into both elements of rD as shown in
Figure 7-8.
Figure 7-8. Sign Extend in evsplati
0 56 101115162021 31
4 RD SIMM 0 0 0 0 0 0 1 0 0 0 1 0 1 0 0 1
SIMM
RD
0313263
SABCD
SSS......................SABCDSSS......................SABCD

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-42 Freescale Semiconductor
evsrwis evsrwis
Vector Shift Right Word Immediate Signed
evsrwis rD,rA,UIMM
n = UIMM
RD0:31 = EXTS(RA0:31-n)
RD32:63 = EXTS(RA32:63-n)
Shifts right arithmetically each element of rA by the 5-bit UIMM value and places the results into rD. The
sign bit of each source element in rA is extended right into the most significant bit positions of each result
element.
0 56 101115162021 31
4 RD RA UIMM 0 1 0 0 0 1 0 0 0 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-43
evsrwiu evsrwiu
Vector Shift Right Word Immediate Unsigned
evsrwiu rD,rA,UIMM
n = UIMM
RD0:31 = EXTZ(RA0:31-n)
RD32:63 = EXTZ(RA32:63-n)
Shifts right logically each element of rA by the 5-bit UIMM value and places the results into rD. ‘0’ bits
are shifted in to the most significant bit positions of each result element.
0 56 101115162021 31
4 RD RA UIMM 0 1 0 0 0 1 0 0 0 1 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-44 Freescale Semiconductor
evsrws evsrws
Vector Shift Right Word Signed
evsrws rD,rA,rB
nh = RB26:31
nl = RB58:63
RD0:31 = EXTS(RA0:31-nh)
RD32:63 = EXTS(RA32:63-nl)
Shifts right arithmetically each element of rA by an amount specified in rB and places the results into rD.
Separate shift amounts for each element are specified by 6-bit fields in rB that lie in bit positions 26–31
and 58–63. The sign bit of each source element in rA is extended right into the most significant bit
positions of each result element.
Shift amounts from 32 to 63 give a result of 32 sign bits.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 0 0 0 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-45
evsrwu evsrwu
Vector Shift Right Word Unsigned
evsrwu rD,rA,rB
nh = RB26:31
nl = RB58:63
RD0:31 = EXTZ(RA0:31-nh)
RD32:63 = EXTZ(RA32:63-nl)
Shifts right logically each element of rA by amounts specified in rB and places the results into rD.
Separate shift amounts for each element are specified by 6-bit fields in rB that lie in bit positions 26–31
and 58–63. Zero bits are shifted in to the most significant bit positions.
Shift amounts from 32 to 63 give a zero result.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 1 0 0 0 0 0

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-46 Freescale Semiconductor
evsubfw evsubfw
Vector Subtract from Word
evsubfw rD,rA,rB
RD0:31 = RB0:31 - RA0:31 // Modulo sum
RD32:63 = RB32:63 - RA32:63 // Modulo sum
Each element of rA is subtracted from the corresponding element of rB and the results are placed into the
corresponding elements of rD.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 0 0 1 0 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-47
evsubifw evsubifw
Vector Subtract Immediate from Word
evsubifw rD,UIMM,rB
RD0:31 = RB0:31 - EXTZ(UIMM) // Modulo sum
RD32:63 = RB32:63 - EXTZ(UIMM)// Modulo sum
The 5-bit UIMM value is zero-extended and subtracted from each element of rB. The results are placed
into the corresponding elements of rD. Note that the same value is subtracted from each element.
0 56 101115162021 31
4 RD UIMM RB 0 1 0 0 0 0 0 0 1 1 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-48 Freescale Semiconductor
evxor evxor
Vector XOR
evxor rD,rA,rB
RD0:31 = RA0:31 ⊕ RB0:31 // Bitwise XOR
RD32:63 = RA32:63 ⊕ RB32:63// Bitwise XOR
Performs a bitwise exclusive-OR of each element of rA and rB and places the results into the
corresponding elements of rD.
7.4 Integer SPE Multiply, Multiply-Accumulate, and Operation to
Accumulator Instructions (Complex Integer Instructions)
A number of forms of multiply and multiply-accumulate operations are supported in the SPE, as are add
and subtract to accumulator operations. The SPE supports signed and unsigned forms as well as optional
fractional forms. For all of these instructions, the fractional form does not apply to unsigned forms because
integer and fractional forms are identical for unsigned operands.
Table 7-4 defines mnemonic extensions for these instructions.
0 56 101115162021 31
4 RD RA RB 0 1 0 0 0 0 1 0 1 1 0
Table 7-4. Mnemonic Extensions for Multiply-Accumulate Instructions
extension meaning comments
multiply form
he half word even 16 × 16→32
heg half word even guarded 16 × 16→32, 64-bit final accum result
ho half word odd 16 × 16→32
hog half word odd guarded 16 × 16→32, 64-bit final accum result
wword 32×32→64
wh word high 32 × 32→32 high order 32-bits of product
wl word low 32 × 32→32 low order 32-bits of product
data type
smf signed modulo fractional (wrap, no saturate)
smi signed modulo integer (wrap, no saturate)
ssf signed saturate fractional —
ssi signed saturate integer —
umi unsigned modulo integer (wrap, no saturate)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-49
7.4.1 Multiply Half-Word Instructions
The following instructions perform 16 × 16 multiplies with optional saturation from the odd or even half
of elements, with and without accumulates, using signed or unsigned integer or fractional operands.
usi unsigned saturate integer —
accumulate options
a update accumulator update accumulator (no add)
aa add to accumulator add result to accumulator (64-bit sum)
aaw add to accumulator (words) add word results to accumulator words
(pair of 32-bit sums)
an add negated add negated result to accumulator (64-bit sum)
anw add negated to accumulator
(words)
add negated word results to accumulator words (pair
of 32-bit sums)
Table 7-4. Mnemonic Extensions for Multiply-Accumulate Instructions (Continued)
extension meaning comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-50 Freescale Semiconductor
evmhegsmfaa evmhegsmfaa
Multiply Half Words, Even, Guarded, Signed, Modulo, Fractional, and Accumulate
evmhegsmfaa rD,rA,rB (O=0, F=1, S=1)
prod0:31 = rA32:47 * rB32:47
temp10:63 = EXTS(prod0:31 || 0)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered signed fractional half-word element in rA is multiplied by the corresponding
signed fractional half-word element in rB. The 32-bit intermediate product is sign-extended to 64 bits and
then shifted left by one bit and added to the contents of the 64-bit accumulator to form a 65-bit intermediate
sum. The lower 64 bits of the intermediate sum are placed back into the accumulator and also written into
rD.
NOTE
This is a modulo sum. There is no check for overflow and no saturation is
performed. An overflow from the 64-bit sum, if one occurs, is not recorded
into SPEFSCR.
Figure 7-9. evmhegsmfaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 0 1 1
47 480313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-51
evmhegsmfan evmhegsmfan
Multiply Half Words, Even, Guarded, Signed, Modulo, Fractional, and Accumulate Negative
evmhegsmfan rD,rA,rB (O=0, F=1, S=1)
prod0:31 = rA32:47 * rB32:47
temp10:63 = EXTS(prod0:31 || 0)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered signed fractional half word element in rA is multiplied by the corresponding
signed fractional half word element in rB. The 32-bit intermediate product is sign-extended to 64 bits and
then shifted left by one bit and subtracted from the contents of the 64-bit accumulator to form a 65-bit
intermediate difference. The lower 64 bits of the intermediate difference is placed back into the
accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-10. evmhegsmfan
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 0 1 1
47 480313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-52 Freescale Semiconductor
evmhegsmiaa evmhegsmiaa
Multiply Half Words, Even, Guarded, Signed, Modulo, Integer, and Accumulate
evmhegsmiaa rD,rA,rB (O=0, F=0, S=1)
prod0:31 = rA32:47 *si rB32:47
temp10:63 = EXTS(prod0:31)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The intermediate product is sign-extended to 64 bits and added to the
contents of the 64-bit accumulator to form a 65-bit intermediate sum. The lower 64 bits of the intermediate
sum is placed back into the accumulator and also written into rD.
NOTE
This is a modulo sum. There is no check for overflow and no saturation is
performed. An overflow from the 64-bit sum, if one occurs, is not recorded
into SPEFSCR.
Figure 7-11. evmhegsmiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 0 0 1
47 48
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
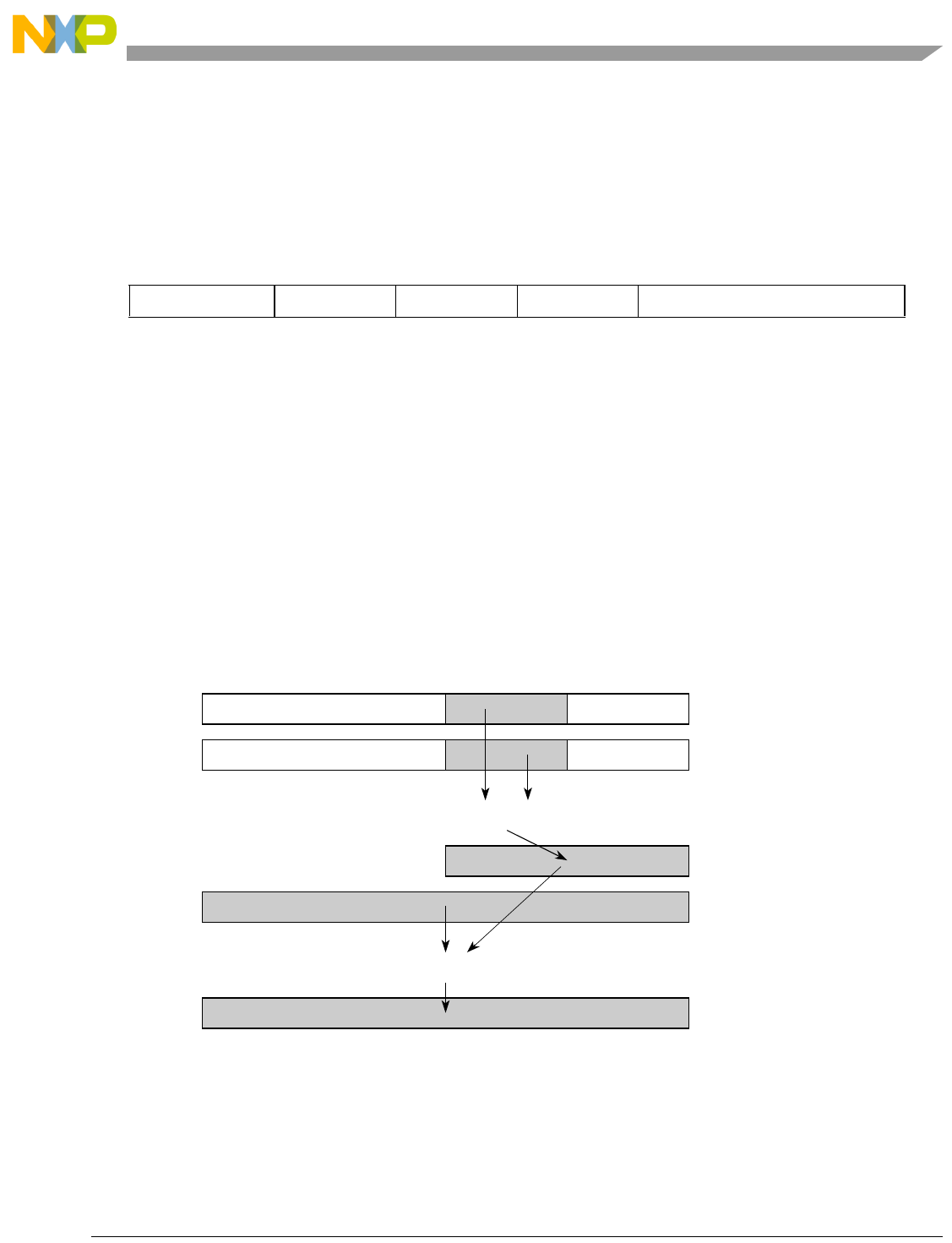
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-53
evmhegsmian evmhegsmian
Multiply Half Words, Even, Guarded, Signed, Modulo, Integer, and Accumulate Negative
evmhegsmian rD,rA,rB (O=0, F=0, S=1)
prod0:31 = rA32:47 *si rB32:47
temp10:63 = EXTS(prod0:31)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The intermediate product is sign-extended to 64 bits and subtracted from
the contents of the 64-bit accumulator to form a 65-bit intermediate difference. The lower 64 bits of the
intermediate difference is placed back into the accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-12. evmhegsmian
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 0 0 1
47 48
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
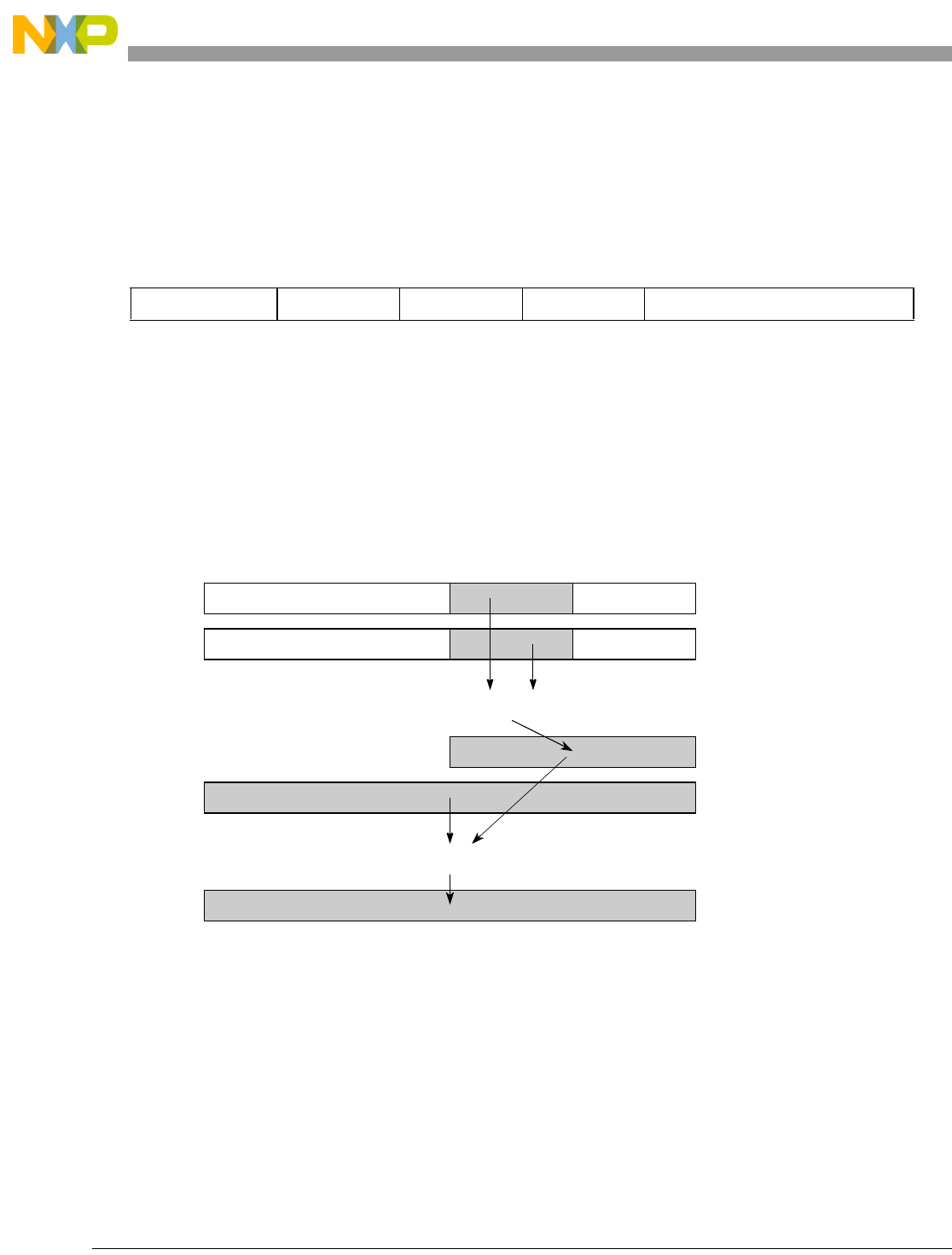
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-54 Freescale Semiconductor
evmhegumiaa evmhegumiaa
Multiply Half Words, Even, Guarded, Unsigned, Modulo, Integer, and Accumulate
evmhegumiaa rD,rA,rB (O=0, F=0, S=0)
prod0:31 = rA32:47 *ui rB32:47
temp10:63 = EXTZ(prod0:31)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The intermediate product is sign-extended to 64 bits and added
to the contents of the 64-bit accumulator to form a 65-bit intermediate sum. The lower 64 bits of the
intermediate sum is placed back into the accumulator and also written into rD.
Figure 7-13. evmhegumiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 0 0 0
47 480313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
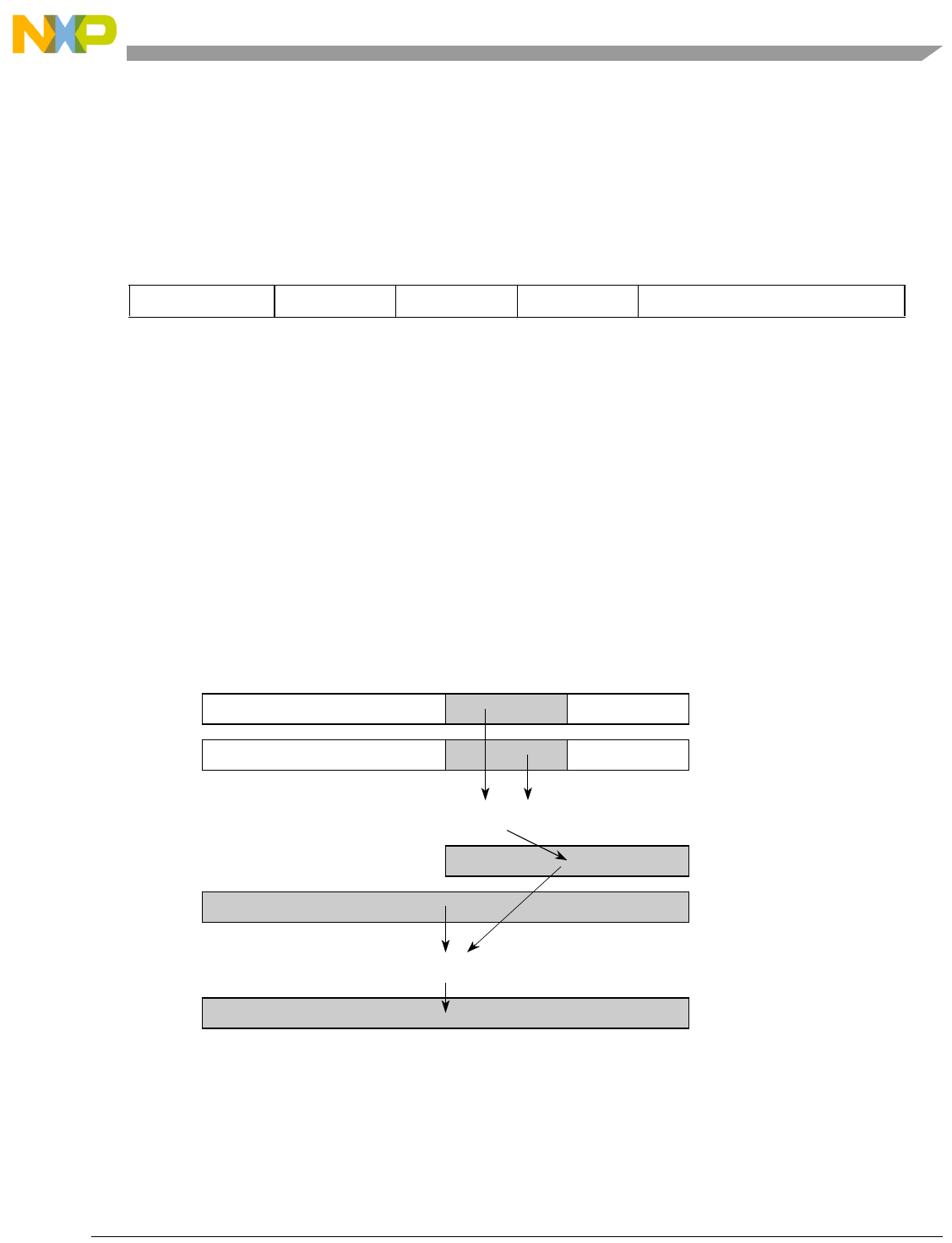
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-55
evmhegumian evmhegumian
Multiply Half Words, Even, Guarded, Unsigned, Modulo, Integer, and Accumulate Negative
evmhegumian rD,rA,rB (O=0, F=0, S=0)
prod0:31 = rA32:47 *ui rB32:47
temp10:63 = EXTZ(prod0:31)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low even-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB. The intermediate product is sign-extended to 64 bits and
subtracted from the contents of the 64-bit accumulator to form a 65-bit intermediate difference. The lower
64 bits of the intermediate difference is placed back into the accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-14. evmhegumian
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 0 0 0
47 48
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
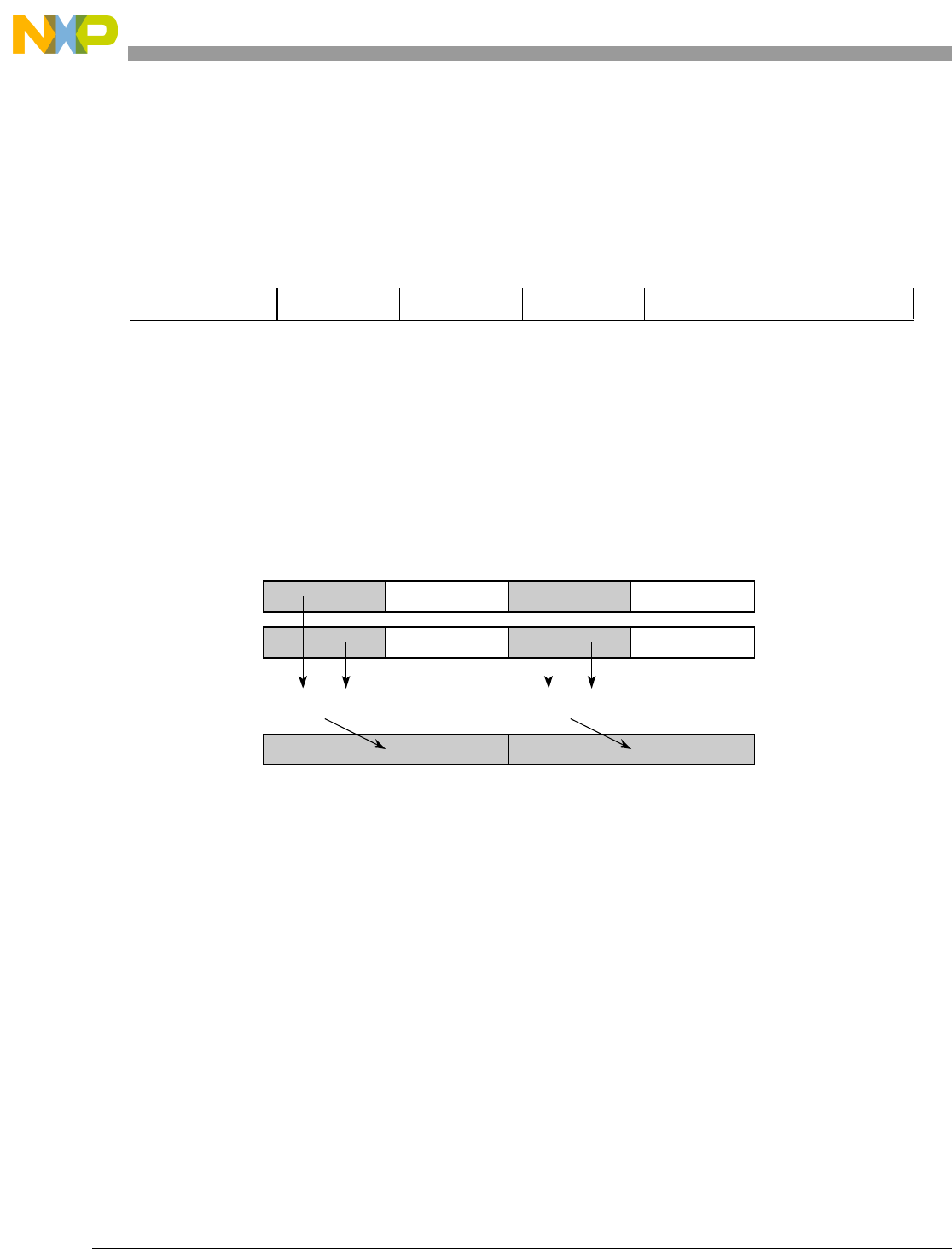
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-56 Freescale Semiconductor
evmhesmf evmhesmf
Vector Multiply Half Words, Even, Signed, Modulo, Fractional
evmhesmf rD,rA,rB (M=1, O=0, F=1, S=1, A=0)
prod0:31 = rA0:15 * rB0:15
prod32:63 = rA32:47 * rB32:47
temp10:32 = prod0:31 || 0
temp20:32 = prod32:63 || 0
rD0:31 = temp11:32
rD32:63 = temp21:32
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left by one bit to
remove the redundant sign bit and then placed into the two word elements of rD.
Figure 7-15. evmhesmf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 0 1 1
15 16 47 480313263
rA
rB
rD
XX
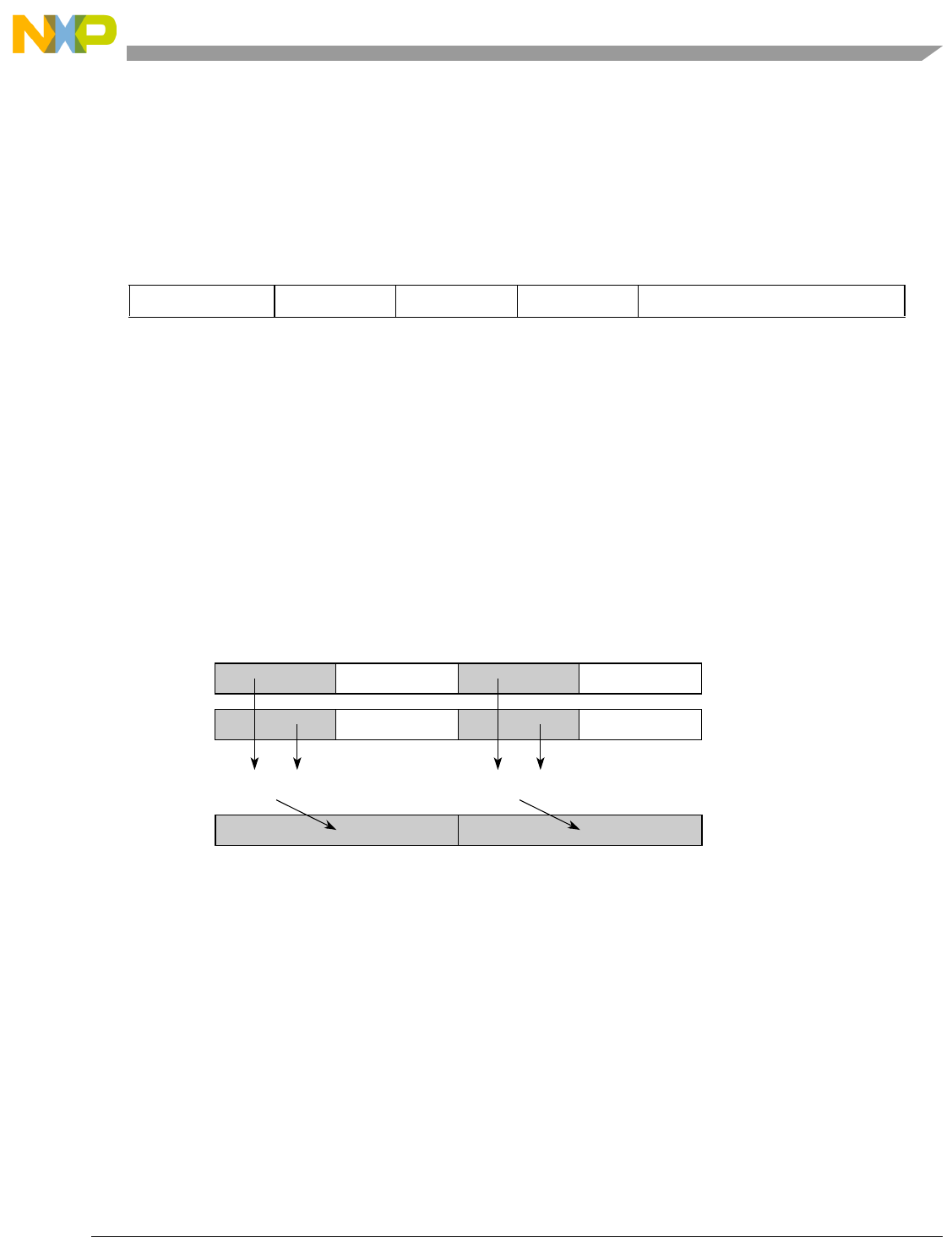
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-57
evmhesmfa evmhesmfa
Vector Multiply Half Words, Even, Signed, Modulo, Fractional, to Accumulator
evmhesmfa rD,rA,rB (M=1, O=0, F=1, S=1, A=1)
prod0:31 = rA0:15 * rB0:15
prod32:63 = rA32:47 * rB32:47
temp10:32 = prod0:31 || 0
temp20:32 = prod32:63 || 0
rD0:31 = temp11:32
rD32:63 = temp21:32
ACC0:63 = rD0:63
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left by one bit to
remove the redundant sign bit and then placed into the two word elements of rD. The result in rD is also
placed in the accumulator.
Other registers altered: ACC
Figure 7-16. evmhesmfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 0 1 1
15 16 47 48
0313263
rA
rB
Accumulator & rD
XX
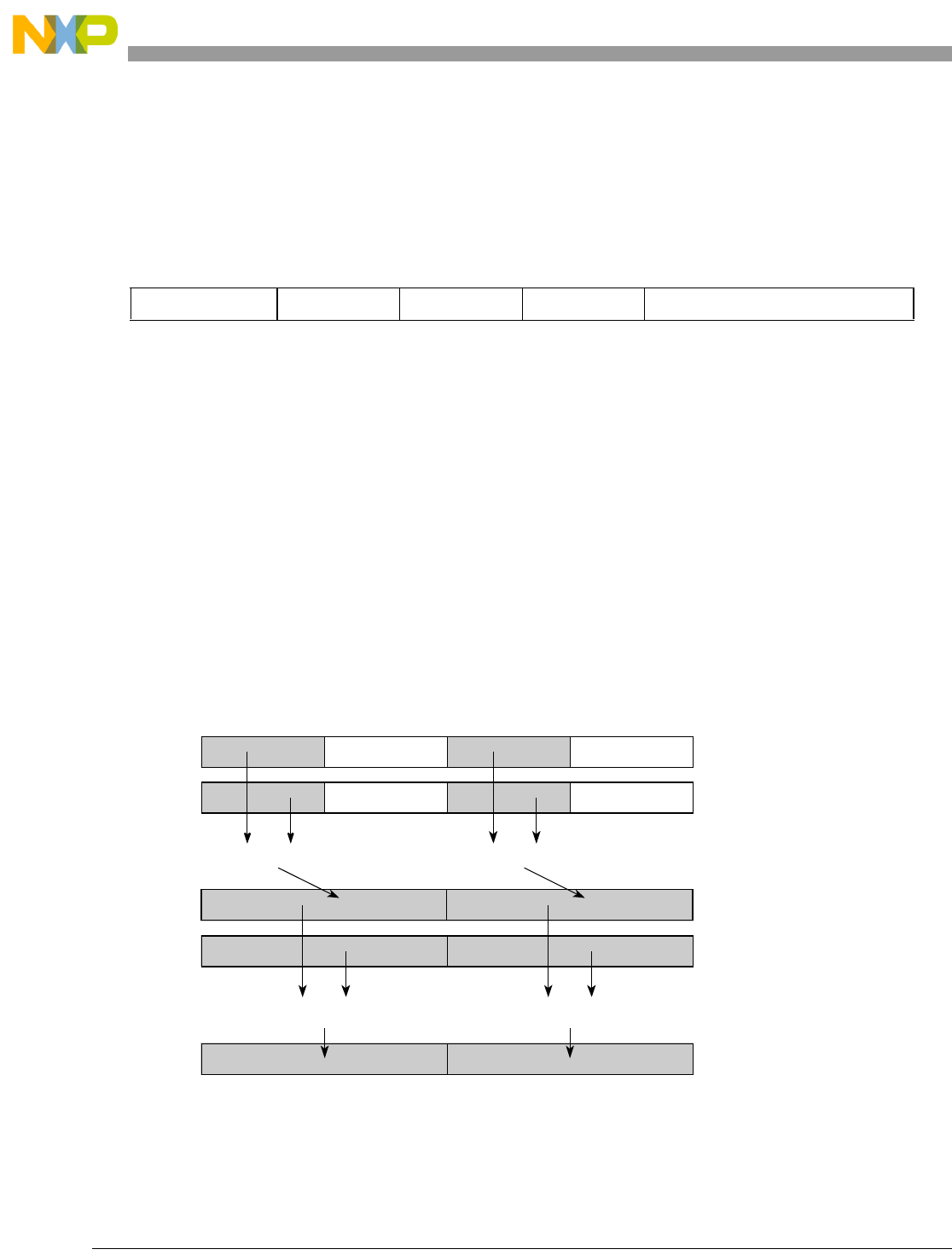
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-58 Freescale Semiconductor
evmhesmfaaw evmhesmfaaw
Vector Multiply Half Words, Even, Signed, Modulo, Fractional and Accumulate into Words
evmhesmfaaw rD,rA,rB (M=1, O=0, F=1, S=1)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
temp30:32 = ACC0:31 + temp11:32
temp40:32 = ACC32:63 + temp21:32
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered signed fractional half word element in rA is multiplied by the corresponding
signed fractional half word element in rB.
2. The intermediate 32-bit product is shifted left by one bit to remove the redundant sign bit.
3. It is added to the contents of the accumulator word to form a 33-bit intermediate sum.
4. The low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-17. evmhesmfaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 0 1 1
15 16 47 480313263
Intermediate product
Accumulator
rB
XX
+ +
Accumulator & rD
rA
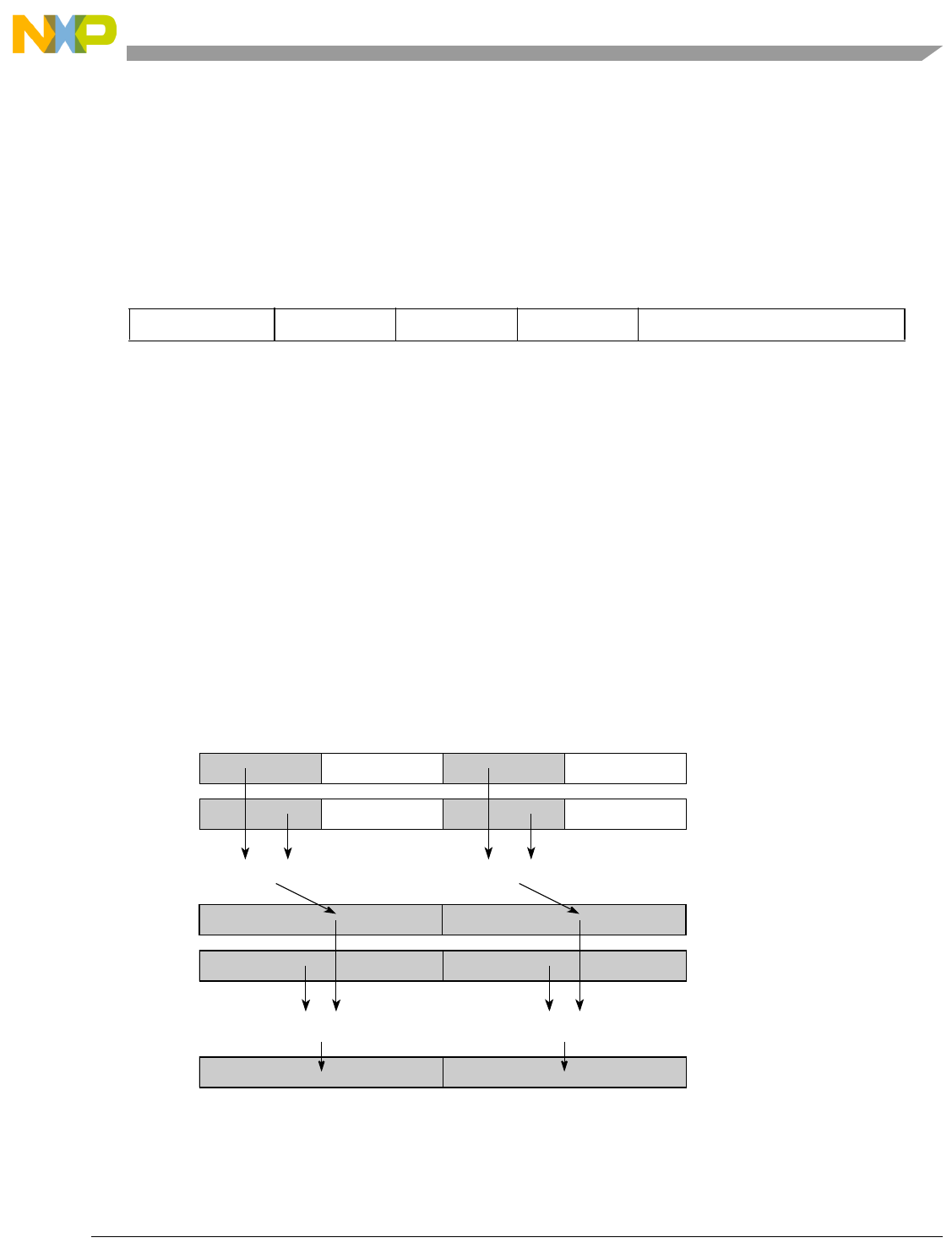
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-59
evmhesmfanw evmhesmfanw
Vector Multiply Half Words, Even, Signed, Modulo, Fractional and Accumulate Negative into
Words
evmhesmfanw rD,rA,rB (M=1, O=0, F=1, S=1)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
temp30:32 = ACC0:31 - temp11:32
temp40:32 = ACC32:63 - temp21:32
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered signed fractional half word element in rA is multiplied by the corresponding
signed fractional half word element in rB.
2. The intermediate 32-bit product is shifted left by one bit to remove the redundant sign bit.
3. It is subtracted from the contents of the accumulator word to form a 33-bit intermediate difference.
4. The low 32 bits of the intermediate difference are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-18. evmhesmfanw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 0 1 1
Intermediate product
Accumulator
- -
Accumulator & rD
15 16 47 480313263
rB
XX
rA
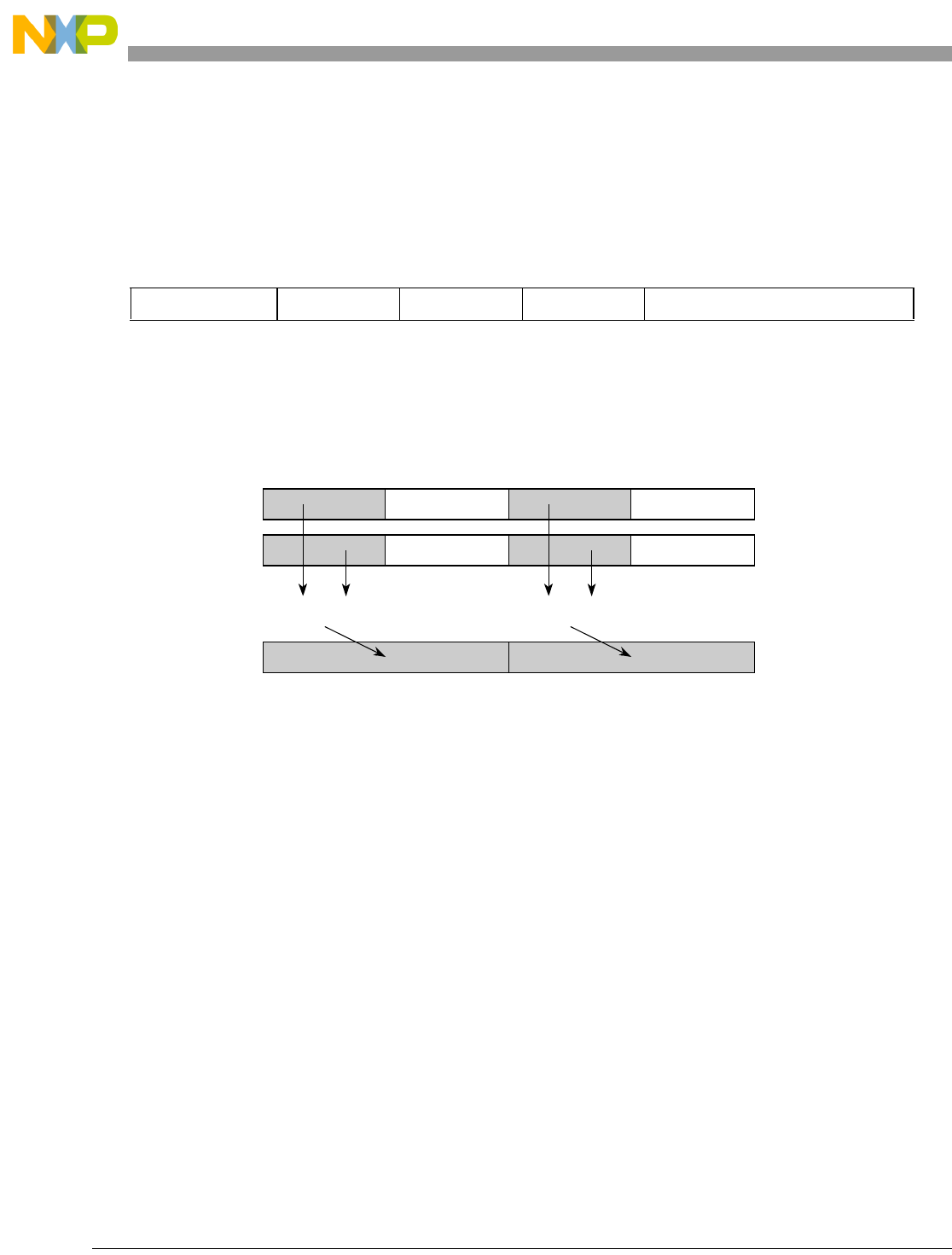
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-60 Freescale Semiconductor
evmhesmi evmhesmi
Vector Multiply Half Words, Even, Signed, Modulo, Integer
evmhesmi rD,rA,rB (M=1, O=0, F=0, S=1, A=0)
rD0:31 = rA0:15 *si rB0:15
rD32:63 = rA32:47 *si rB32:47
Each even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The two 32-bit signed integer products are placed into the two word
elements of rD.
Figure 7-19. evmhesmi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 0 0 1
15 16 47 480313263
rA
rB
rD
XX
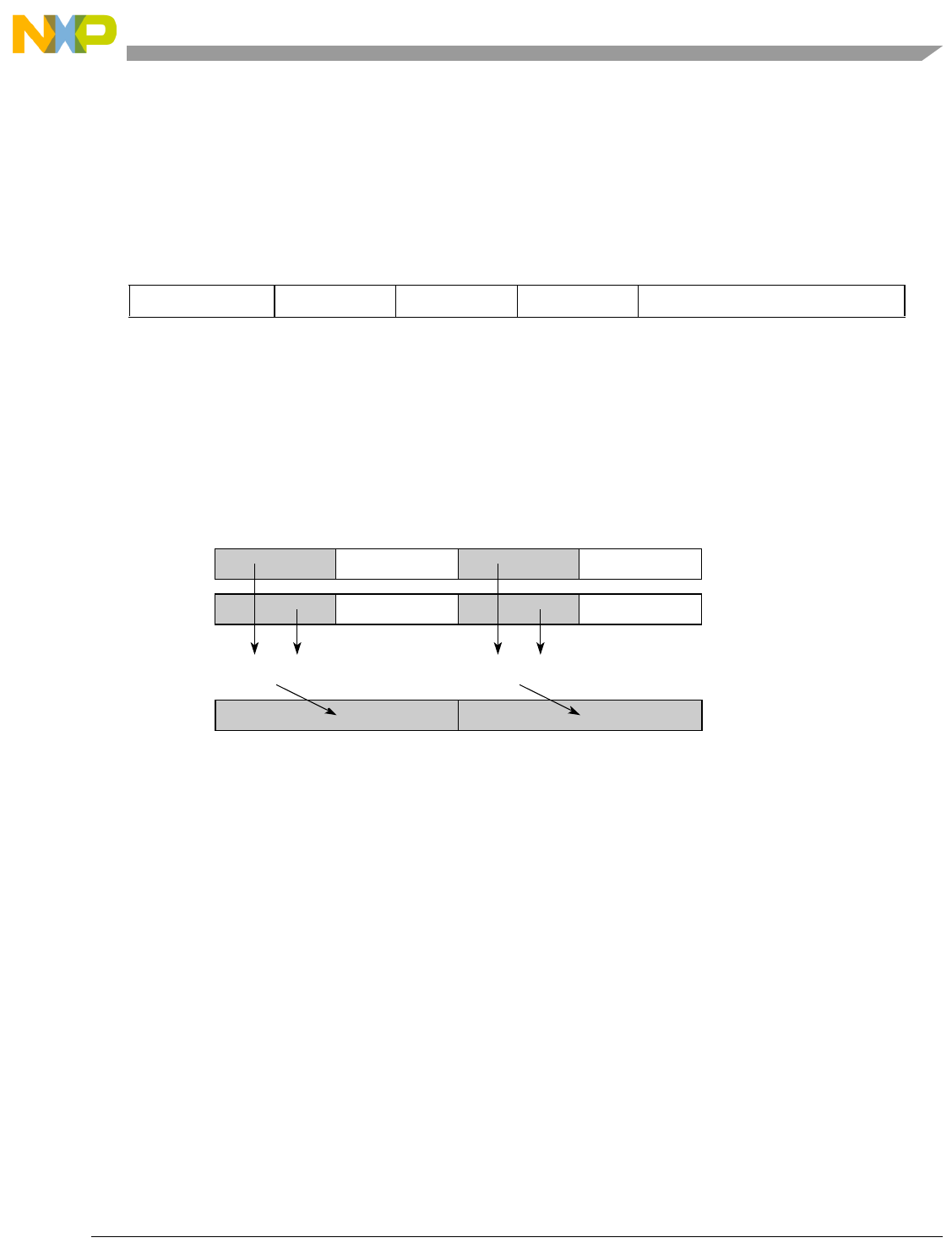
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-61
evmhesmia evmhesmia
Vector Multiply Half Words, Even, Signed, Modulo, Integer, to Accumulator
evmhesmia rD,rA,rB (M=1, O=0, F=0, S=1, A=1)
rD0:31 = rA0:15 *si rB0:15
rD32:63 = rA32:47 *si rB32:47
ACC0:63 = rD0:63
Each even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The two 32-bit signed integer products are placed into the two word
elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-20. evmhesmia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 0 0 1
15 16 47 480313263
rA
rB
Accumulator & rD
XX
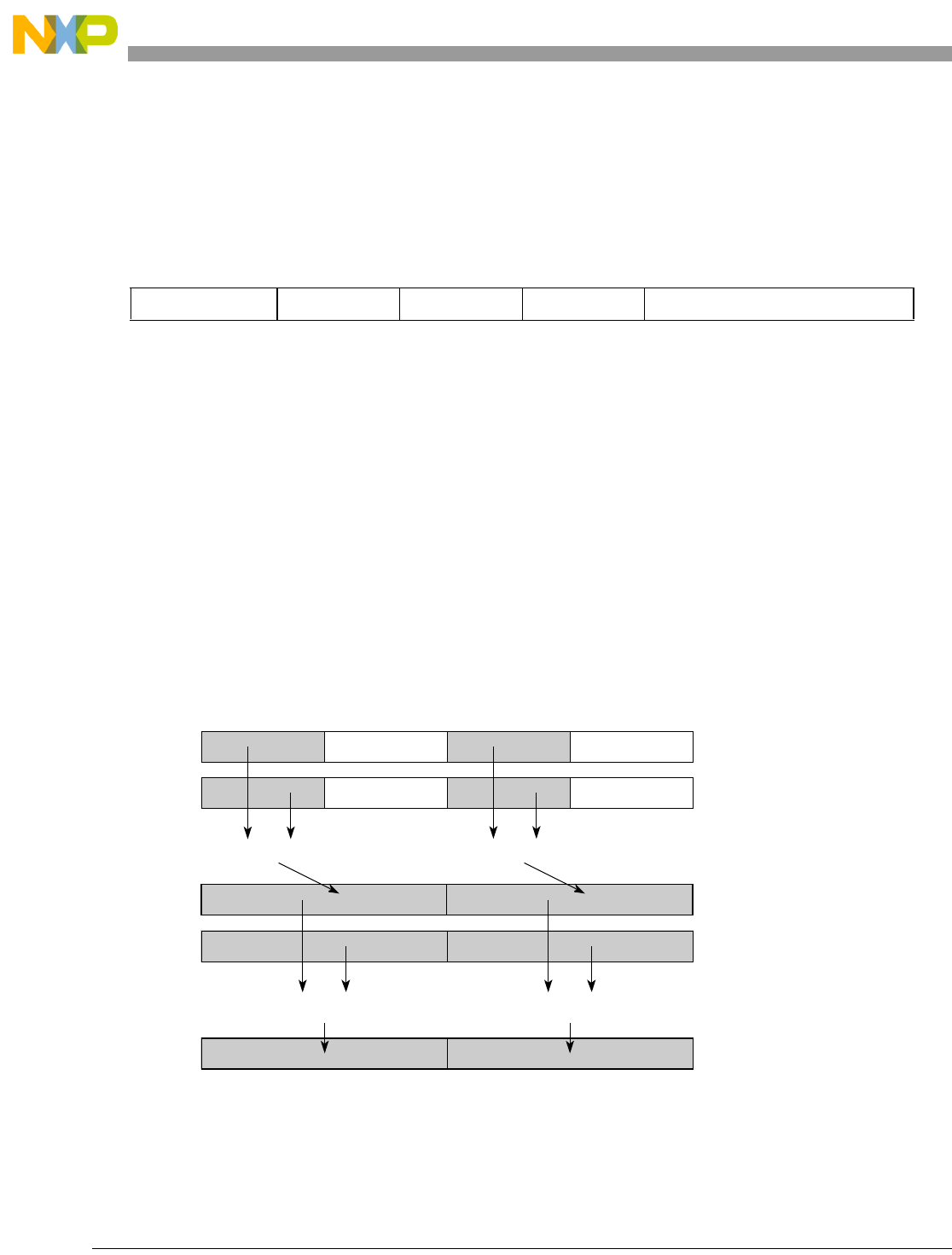
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-62 Freescale Semiconductor
evmhesmiaaw evmhesmiaaw
Vector Multiply Half Words, Even, Signed, Modulo, Integer and Accumulate into Words
evmhesmiaaw rD,rA,rB (M=1, O=0, F=0, S=1)
temp10:31 = rA0:15 *si rB0:15
temp20:31 = rA32:47 *si rB32:47
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered signed integer half word element in rA is multiplied by the corresponding
signed integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum.
3. The low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-21. evmhesmiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 0 0 1
Intermediate product
Accumulator
+ +
Accumulator & rD
15 16 47 480313263
rB
X X
rA
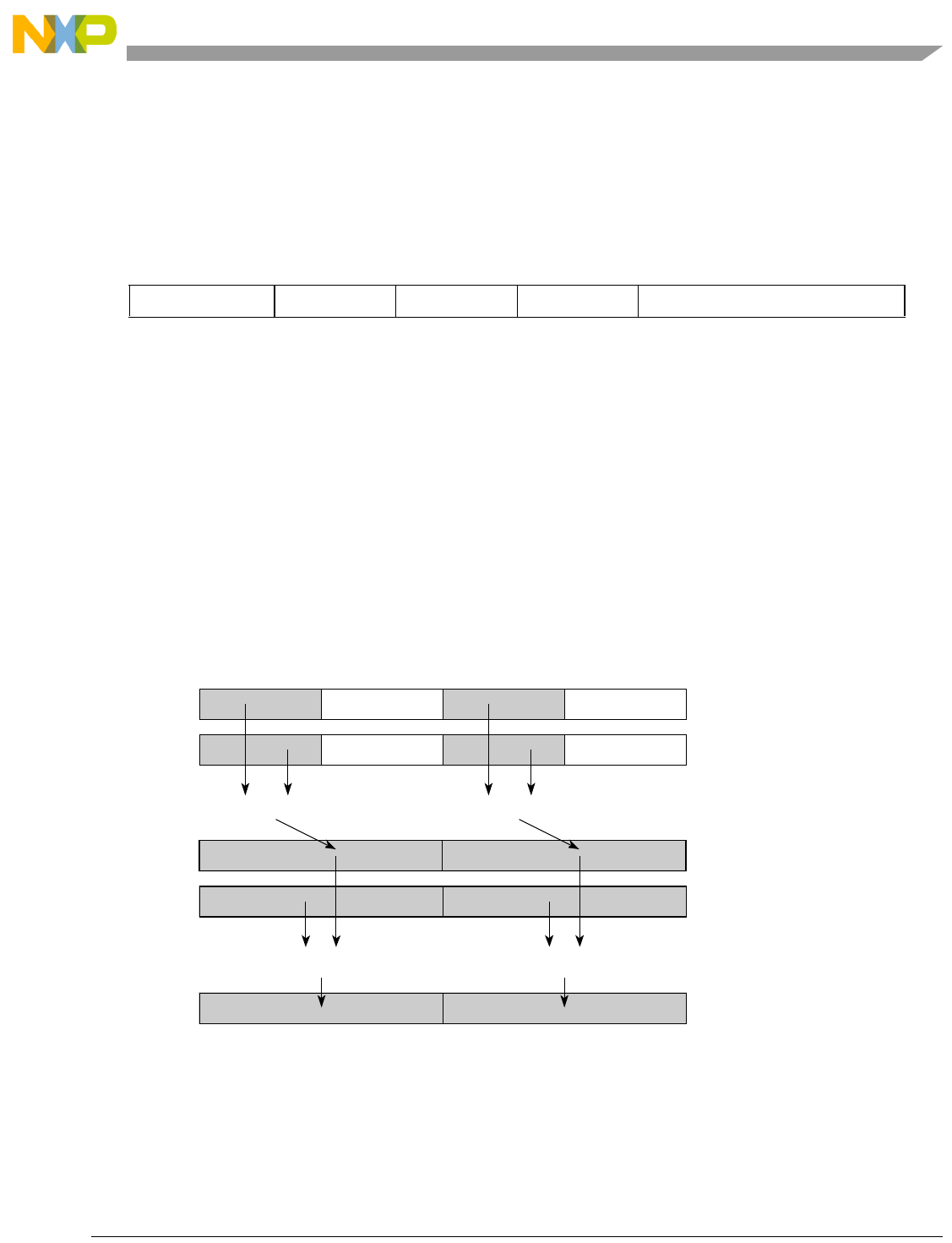
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-63
evmhesmianw evmhesmianw
Vector Multiply Half Words, Even, Signed, Modulo, Integer and Accumulate Negative into Words
evmhesmianw rD,rA,rB (M=1, O=0, F=0, S=1)
temp10:31 = rA0:15 *si rB0:15
temp20:31 = rA32:47 *si rB32:47
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
Each even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB.
The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a 33-bit
intermediate difference. The low 32 bits of the intermediate difference are placed into the accumulator
word and the corresponding rD word.
Other registers altered: ACC
Figure 7-22. evmhesmianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 0 0 1
Intermediate product
Accumulator
- -
Accumulator & rD
15 16 47 480313263
rB
XX
rA
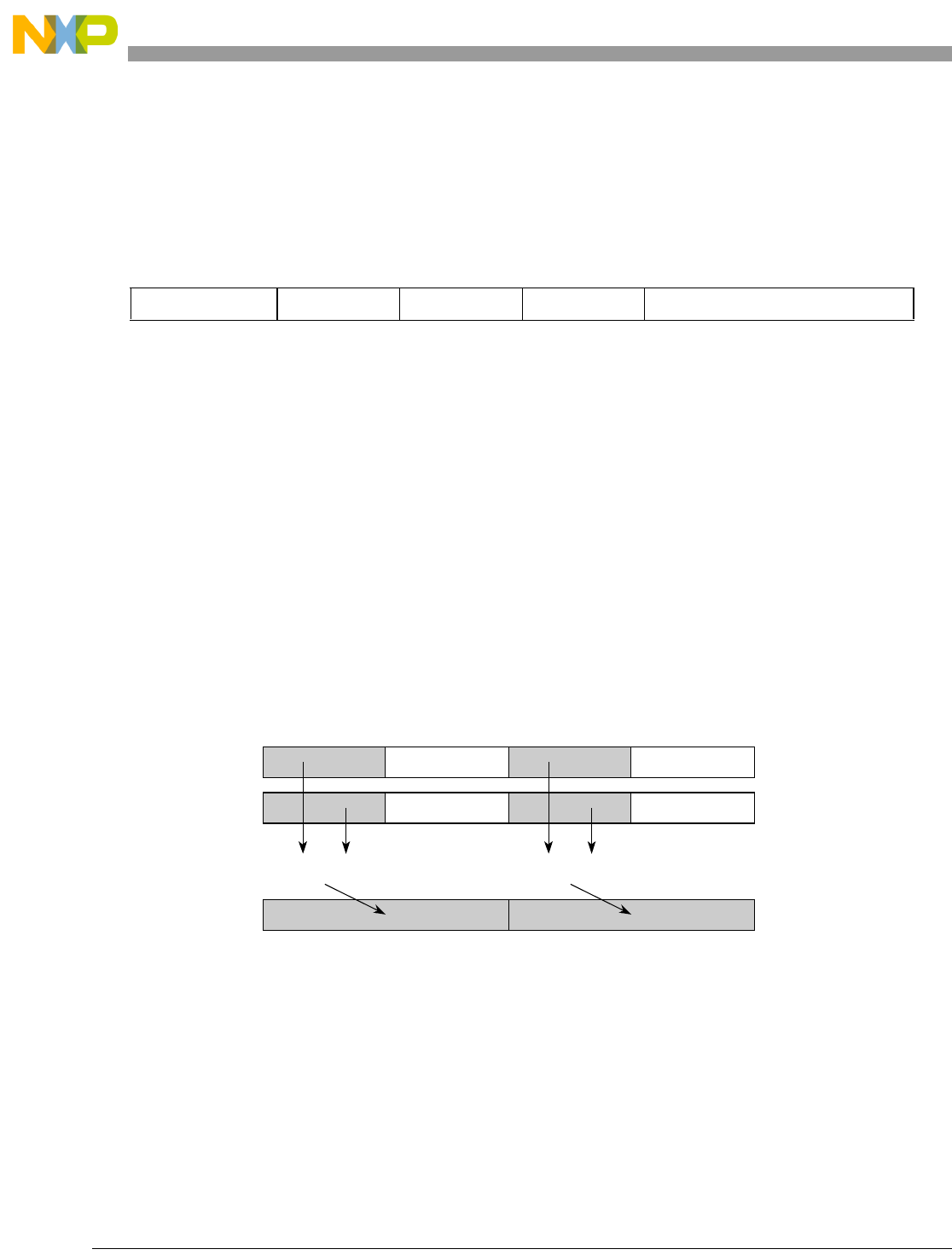
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-64 Freescale Semiconductor
evmhessf evmhessf
Vector Multiply Half Words, Even, Signed, Saturate, Fractional
evmhessf rD,rA,rB (M=0, O=0, F=1, S=1, A=0)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit and then placed into the two word elements of rD. If the inputs are –1.0
and –1.0 the result is saturated to the most positive signed fraction (0x7FFF_FFFF). If saturation occurs,
the appropriate overflow and summary overflow bits are recorded in SPEFSCR.
Other registers altered: SPEFSCR
Figure 7-23. evmhessf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 0 0 1 1
15 16 47 480313263
rA
rB
rD
XX
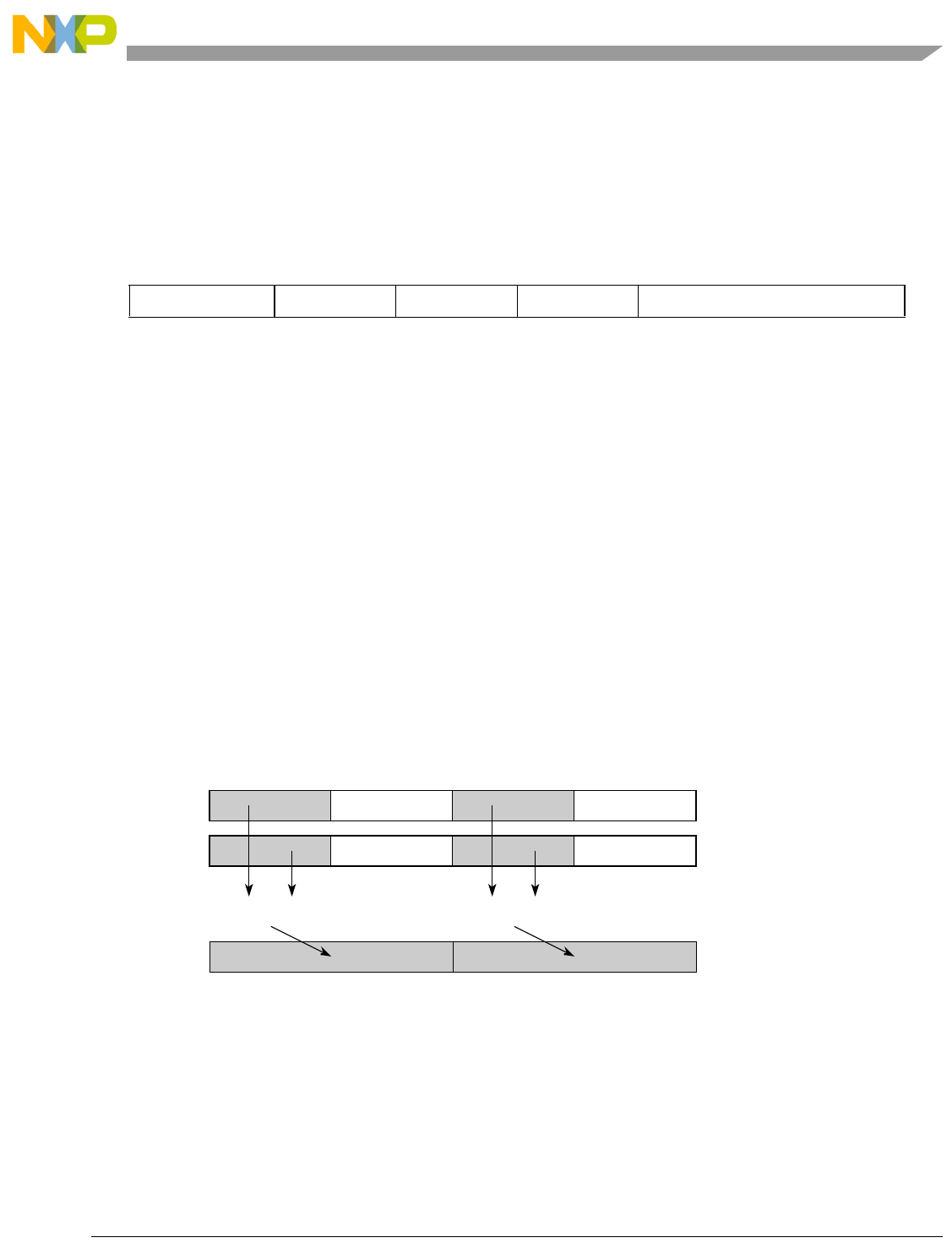
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-65
evmhessfa evmhessfa
Vector Multiply Half Words, Even, Signed, Saturate, Fractional to Accumulator
evmhessfa rD,rA,rB (M=0, O=0, F=1, S=1, A=1)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
ACC0:63 = rD0:63
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit and then placed into the two word elements of rD. If the inputs are –1.0
and –1.0 the result is saturated to the most positive signed fraction (0x7FFF_FFFF). The result in rD is
also placed in the accumulator. If saturation occurs, the appropriate overflow and summary overflow bits
are recorded in SPEFSCR.
Other registers altered: SPEFSCR, ACC
Figure 7-24. evmhessfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 0 0 1 1
15 16 47 480313263
rA
rB
Accumulator & rD
XX

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-66 Freescale Semiconductor
evmhessfaaw evmhessfaaw
Vector Multiply Half Words, Even, Signed, Saturate, Fractional, and Accumulate into Words
evmhessfaaw rD,rA,rB (M=0, O=0, F=1, S=1)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
temp30:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
temp40:31 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
temp50:32 = {ACC0,ACC0:31} + {temp30,temp30:31}
temp60:32 = {ACC32,ACC32:63} + {temp40,temp40:31}
ovh = temp50 ⊕ temp51
ovl = temp60 ⊕ temp61
rD0:31 = SATURATE_ACC(ovh, temp50, 0x80000000, 0x7FFFFFFF, temp51:32)
rD32:63 = SATURATE_ACC(ovl, temp60, 0x80000000, 0x7FFFFFFF, temp61:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = movh | ovh
SPEFSCROV = movl | ovl
SPEFSCRSOVH = SPEFSCRSOVH | movh | ovh
SPEFSCRSOV = SPEFSCRSOV | movl | ovl
For each word element in the accumulator the following operations are performed in the order shown:
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit. If the inputs are –1.0 and –1.0 the intermediate result is saturated to the
most positive signed fraction (0x7FFF_FFFF).
The intermediate 32-bit product is added to the contents of the accumulator word to form an intermediate
sum. If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF if positive
overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and the corresponding
rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
If there is an overflow from either the multiply or the addition, the overflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 0 1 1
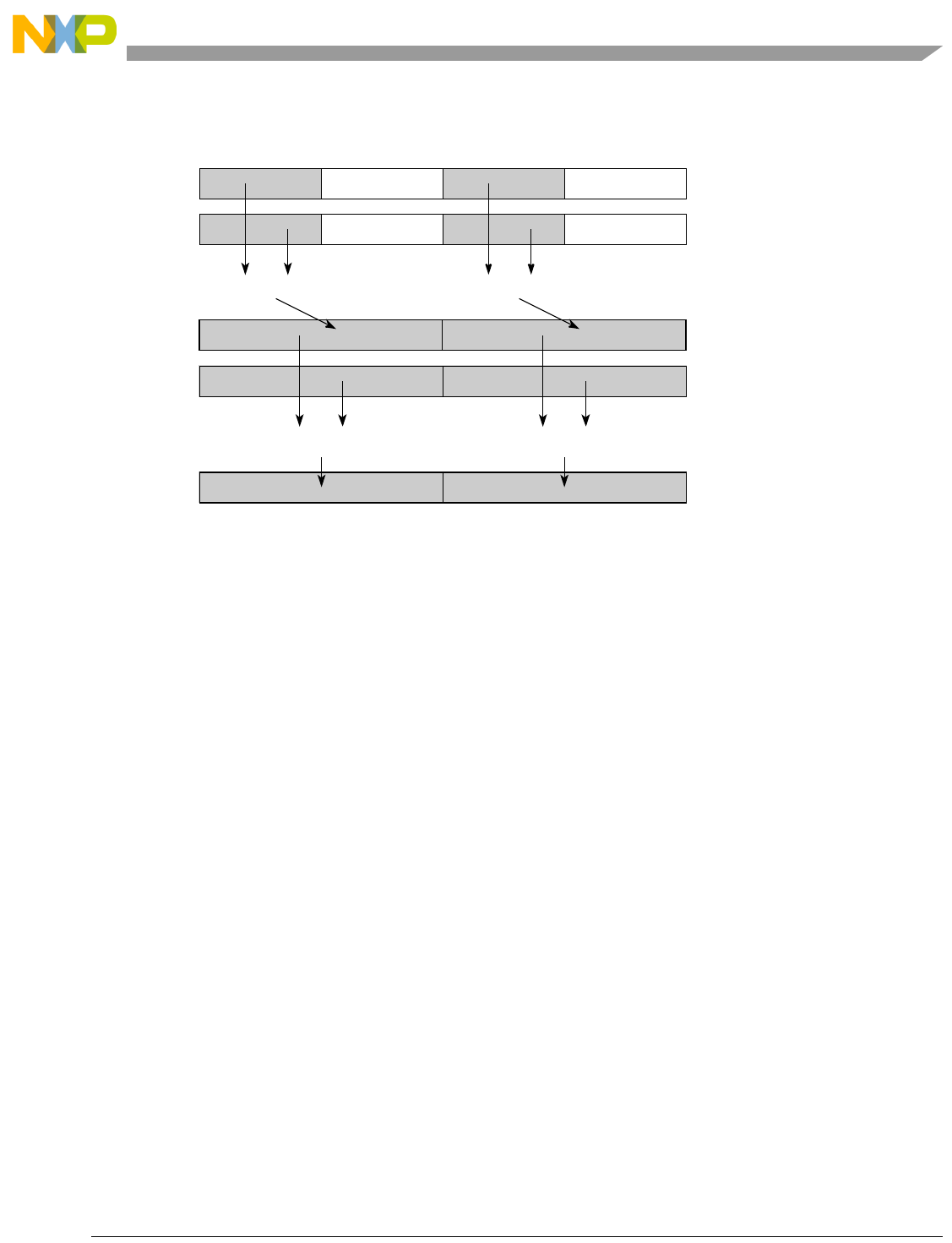
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-67
Other registers altered: SPEFSCR, ACC
Figure 7-25. evmhessfaaw
Intermediate product
Accumulator
+ +
Accumulator & rD
15 16 47 480313263
rB
X X
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-68 Freescale Semiconductor
evmhessfanw evmhessfanw
Vector Multiply Half Words, Even, Signed, Saturate, Fractional, and Accumulate Negative into
Words
evmhessfanw rD,rA,rB (M=0, O=0, F=1, S=1)
temp10:32 = (rA0:15 * rB0:15) || 0
temp20:32 = (rA32:47 * rB32:47) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
temp30:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
temp40:31 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
temp50:32 = {ACC0,ACC0:31} - {temp30,temp30:31}
temp60:32 = {ACC32,ACC32:63} - {temp40,temp40:31}
ovh = temp50 ⊕ temp51
ovl = temp60 ⊕ temp61
rD0:31 = SATURATE_ACC(ovh, temp50, 0x80000000, 0x7FFFFFFF, temp51:32)
rD32:63 = SATURATE_ACC(ovl, temp60, 0x80000000, 0x7FFFFFFF, temp61:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = movh | ovh
SPEFSCROV = movl | ovl
SPEFSCRSOVH = SPEFSCRSOVH | movh | ovh
SPEFSCRSOV = SPEFSCRSOV | movl | ovl
For each word element in the accumulator the following operations are performed in the order shown:
Each even-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit. If the inputs are –1.0 and –1.0 the intermediate result is saturated to the
most positive signed fraction (0x7FFF_FFFF).
The intermediate 32-bit product is subtracted from the contents of the accumulator word to form an
intermediate sum. If the intermediate difference has overflowed, the appropriate saturation value
(0x7FFF_FFFF if positive overflow or 0x8000_0000 if negative overflow) is placed into the accumulator
word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are placed
into the accumulator word and the corresponding rD word.
If there is an overflow from either the multiply or the addition, the overflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
Other registers altered: SPEFSCR, ACC
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 0 1 1
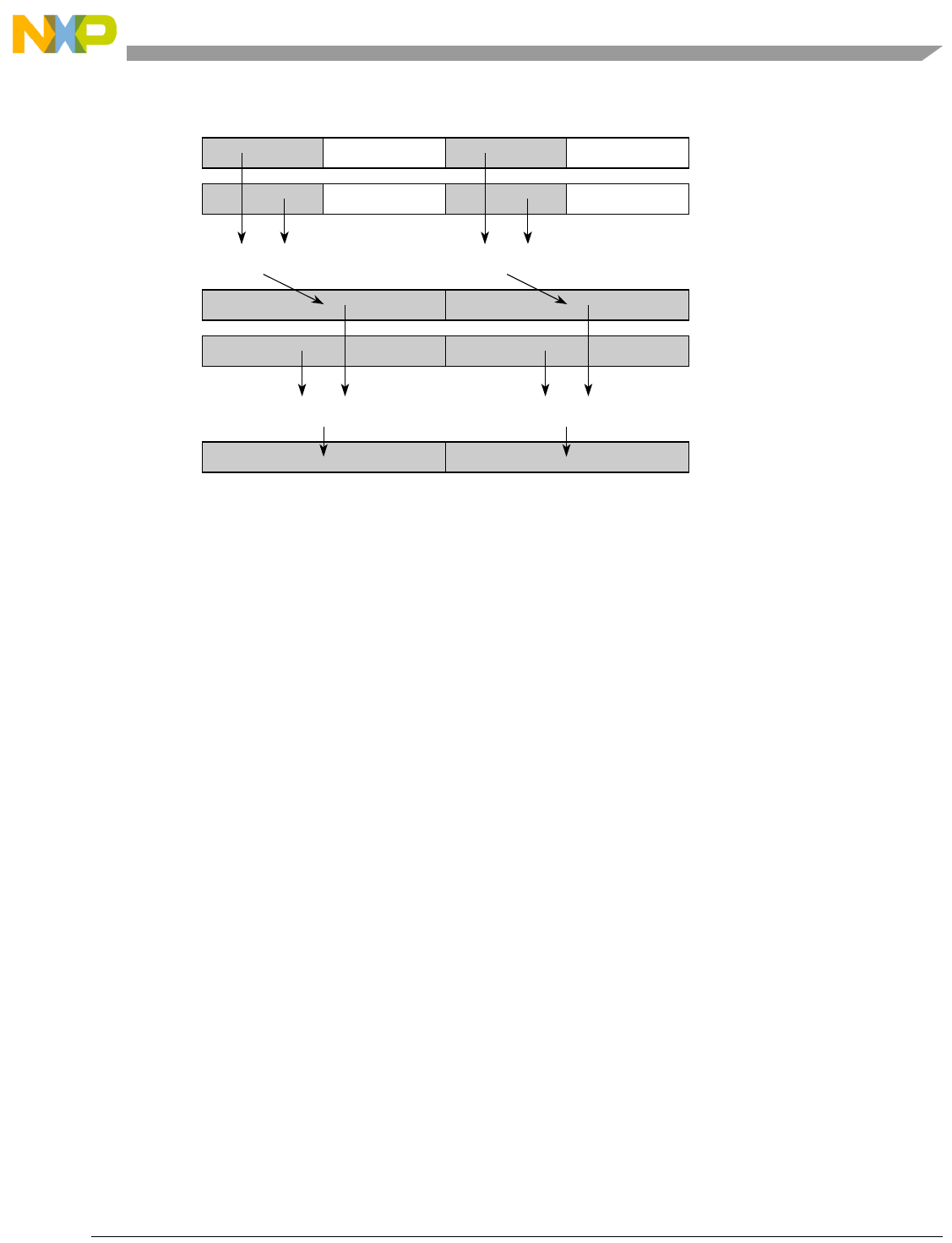
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-69
Figure 7-26. evmhessfanw
15 16 47 480313263
Intermediate product
Accumulator
rB
XX
––
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-70 Freescale Semiconductor
evmhessiaaw evmhessiaaw
Vector Multiply Half Words, Even, Signed, Saturate, Integer, and Accumulate into Words
evmhessiaaw rD,rA,rB (M=0, O=0, F=0, S=1)
temp10:31 = rA0:15 *si rB0:15
temp20:31 = rA32:47 *si rB32:47
temp30:32 = {ACC0,ACC0:31} + {temp10,temp10:31}
temp40:32 = {ACC32,ACC32:63} + {temp20,temp20:31}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
Each even-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB.
The intermediate 32-bit product is added to the contents of the accumulator word to form an intermediate
sum. If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF if positive
overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and the corresponding
rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR overflow
and summary overflow bits.
Other registers altered: SPEFSCR, ACC
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 0 0 1
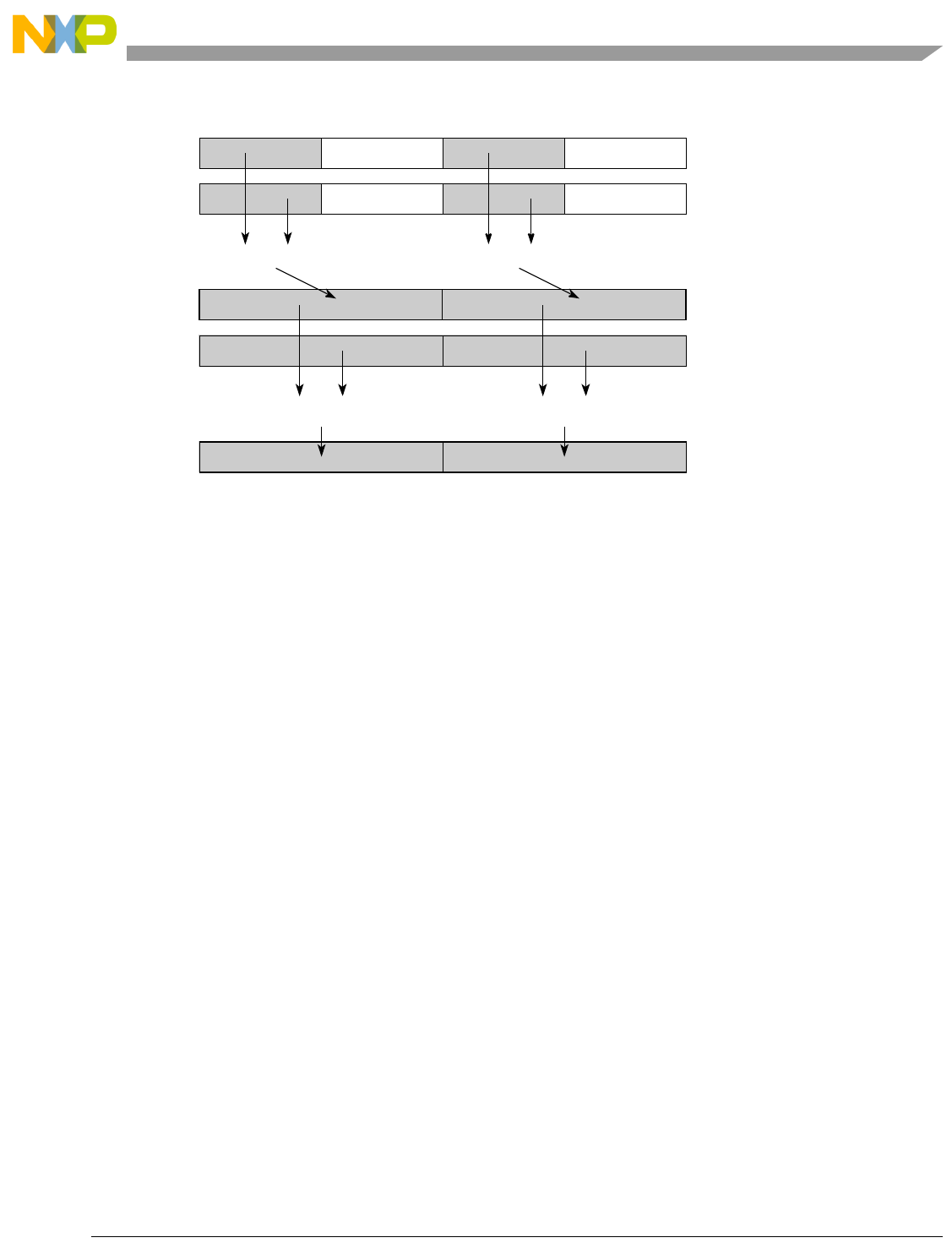
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-71
Figure 7-27. Even Form of Vector half word Multiply (evmhessiaaw)
Intermediate product
Accumulator
+ +
Accumulator & rD
15 16 47 480313263
rB
X X
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-72 Freescale Semiconductor
evmhessianw evmhessianw
Vector Multiply Half Words, Even, Signed, Saturate, Integer and Accumulate Negative into Words
evmhessianw rD,rA,rB (M=0, O=0, F=0, S=1)
temp10:31 = rA0:15 *si rB0:15
temp20:31 = rA32:47 *si rB32:47
temp30:32 = {ACC0,ACC0:31} - {temp10,temp10:31}
temp40:32 = {ACC32,ACC32:63} - {temp20,temp20:31}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator, the following operations are performed in the order shown:
1. Each even-numbered signed integer half word element in rA is multiplied by the corresponding
signed integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form
an 33-bit intermediate difference.
3. If the intermediate difference has overflowed, the appropriate saturation value (0x7FFF_FFFF if
positive overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are placed
into the accumulator word and the corresponding rD word.
4. If there is an overflow from the subtraction, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 0 0 1
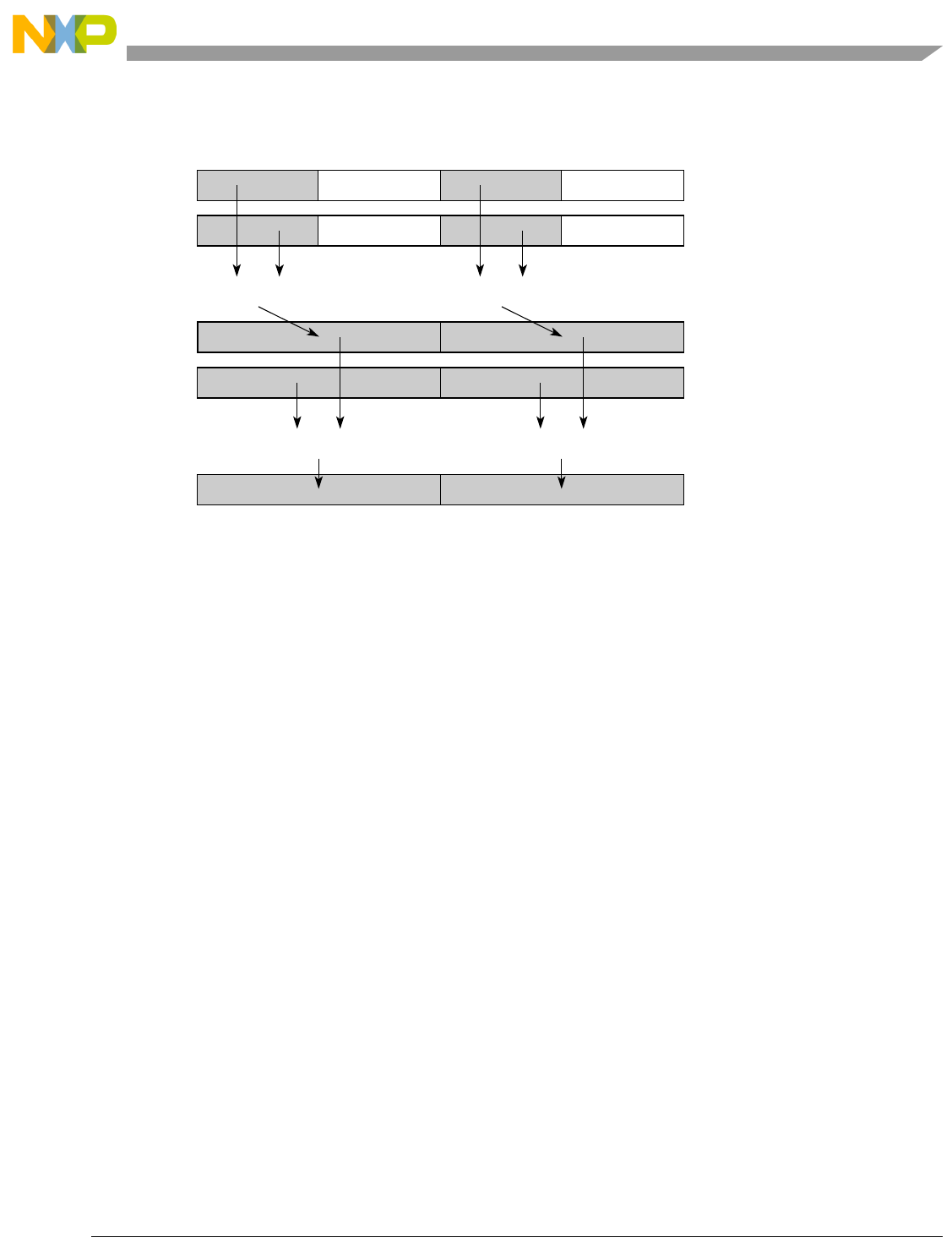
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-73
Other registers altered: SPEFSCR, ACC
Figure 7-28. evmhessianw
15 16 47 480313263
Intermediate product
Accumulator
rB
XX
––
Accumulator & rD
rA
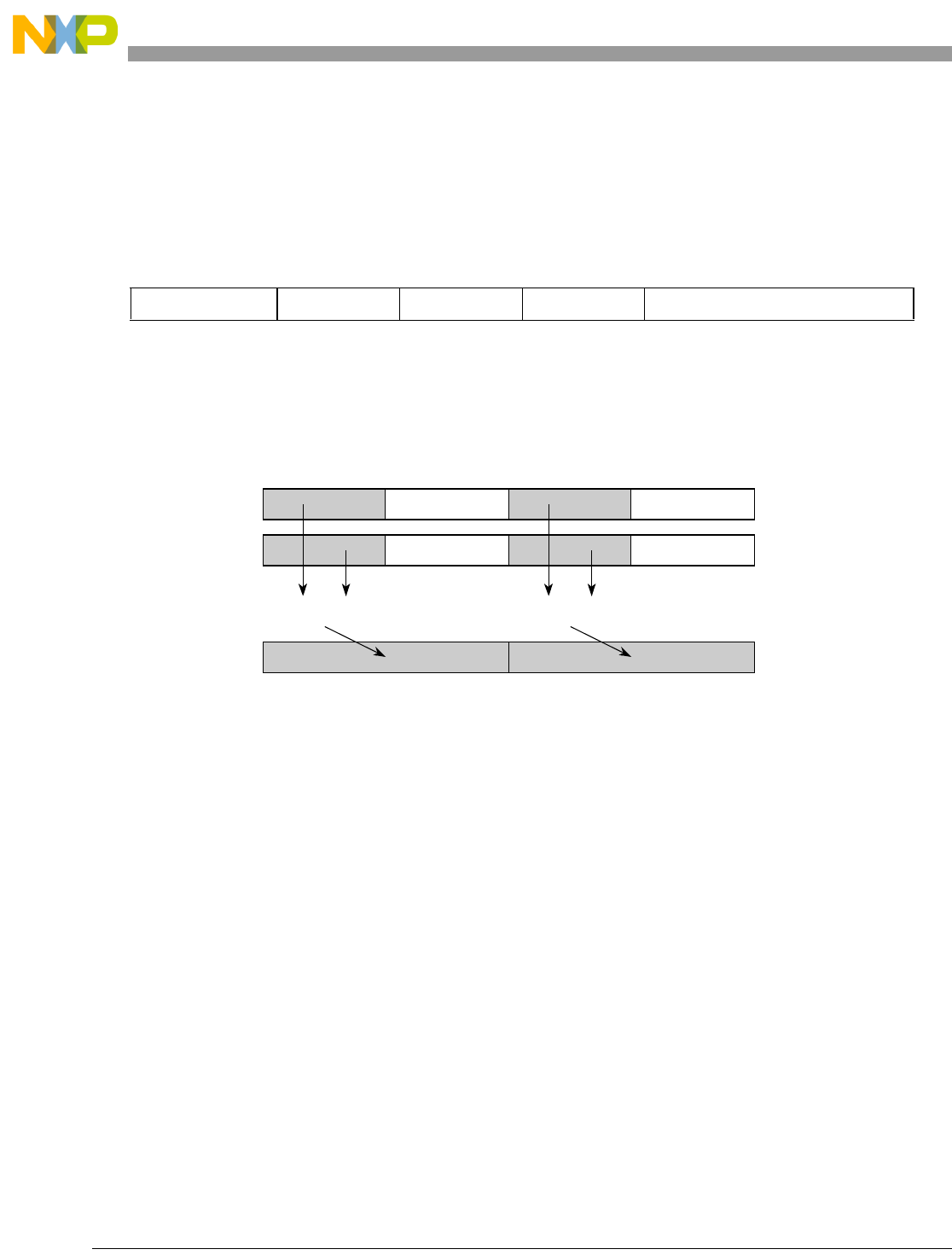
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-74 Freescale Semiconductor
evmheumi evmheumi
Vector Multiply Half Words, Even, Unsigned, Modulo, Integer
evmheumi rD,rA,rB (M=1, O=0, F=0, S=0, A=0)
rD0:31 = rA0:15 *ui rB0:15
rD32:63 = rA32:47 *ui rB32:47
Each even-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The two 32-bit unsigned integer products are placed into the
two word elements of rD.
Figure 7-29. evmheumi—Even Multiply of Two Unsigned Modulo Integer Elements
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 0 0 0
15 16 47 480313263
rA
rB
rD
XX
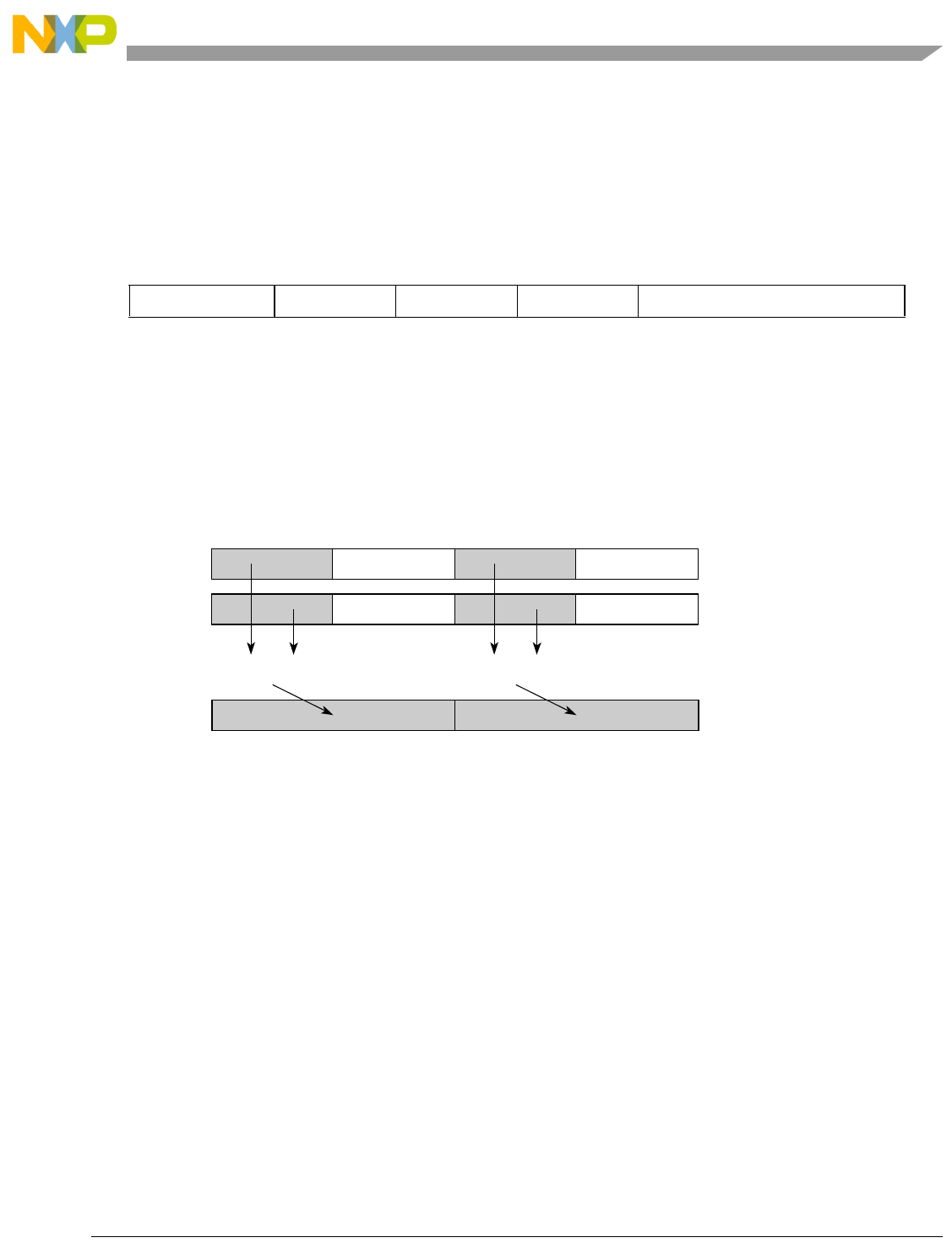
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-75
evmheumia evmheumia
Vector Multiply Half Words, Even, Unsigned, Modulo, Integer, to Accumulator
evmheumia rD,rA,rB (M=1, O=0, F=0, S=0, A=1)
rD0:31 = rA0:15 *ui rB0:15
rD32:63 = rA32:47 *ui rB32:47
ACC0:63 = rD0:63
Each even-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The two 32-bit unsigned integer products are placed into the
two word elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-30. evmheumia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 0 0 0
15 16 47 480313263
rA
rB
Accumulator & rD
XX
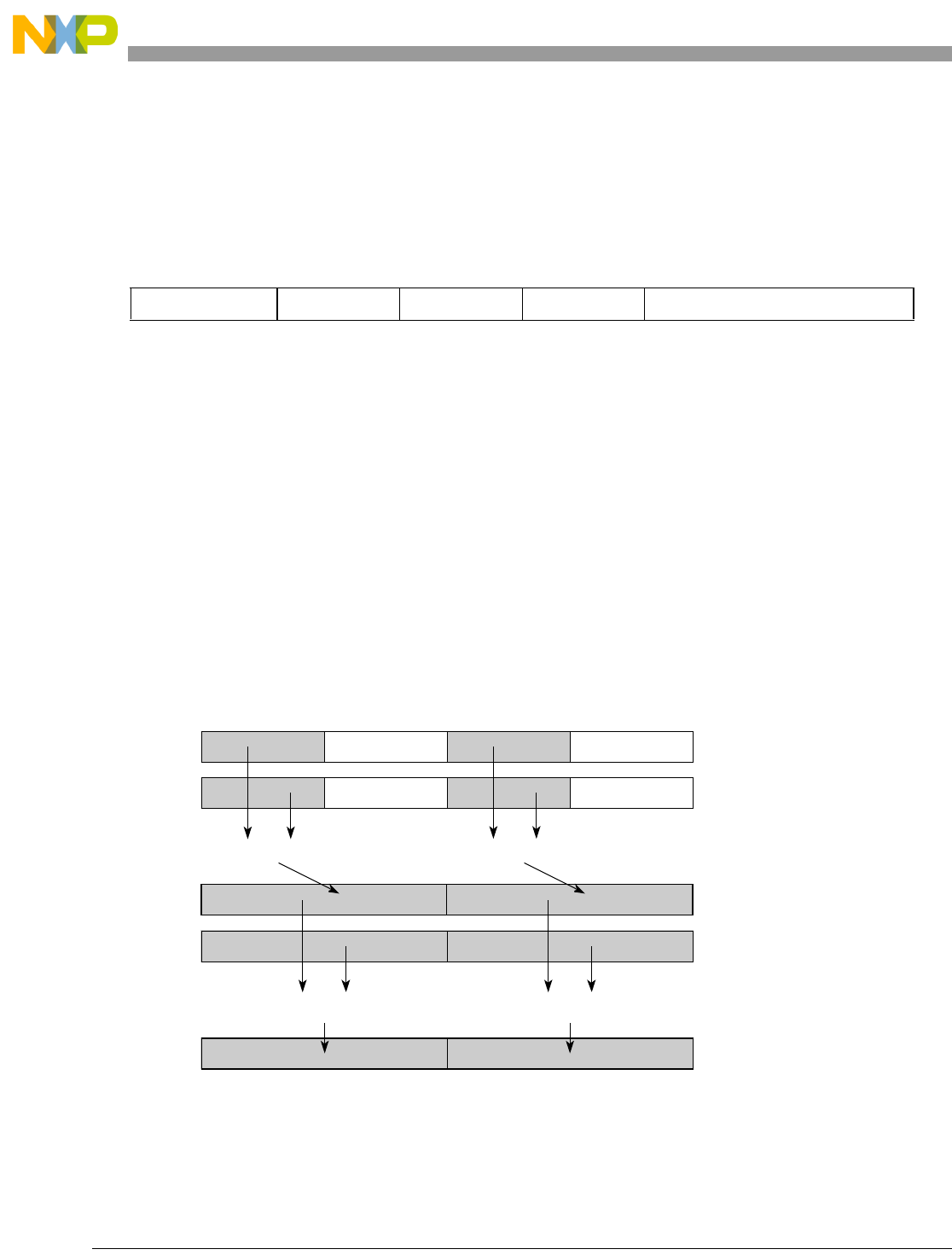
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-76 Freescale Semiconductor
evmheumiaaw evmheumiaaw
Vector Multiply Half Words, Even, Unsigned, Modulo, Integer and Accumulate into Words
evmheumiaaw rD,rA,rB (M=1, O=0, F=0, S=0)
temp10:31 = rA0:15 *ui rB0:15
temp20:31 = rA32:47 *ui rB32:47
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum.
3. The low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-31. evmheumiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 0 0 0
Intermediate product
Accumulator
+ +
Accumulator & rD
15 16 47 480313263
rB
X X
rA
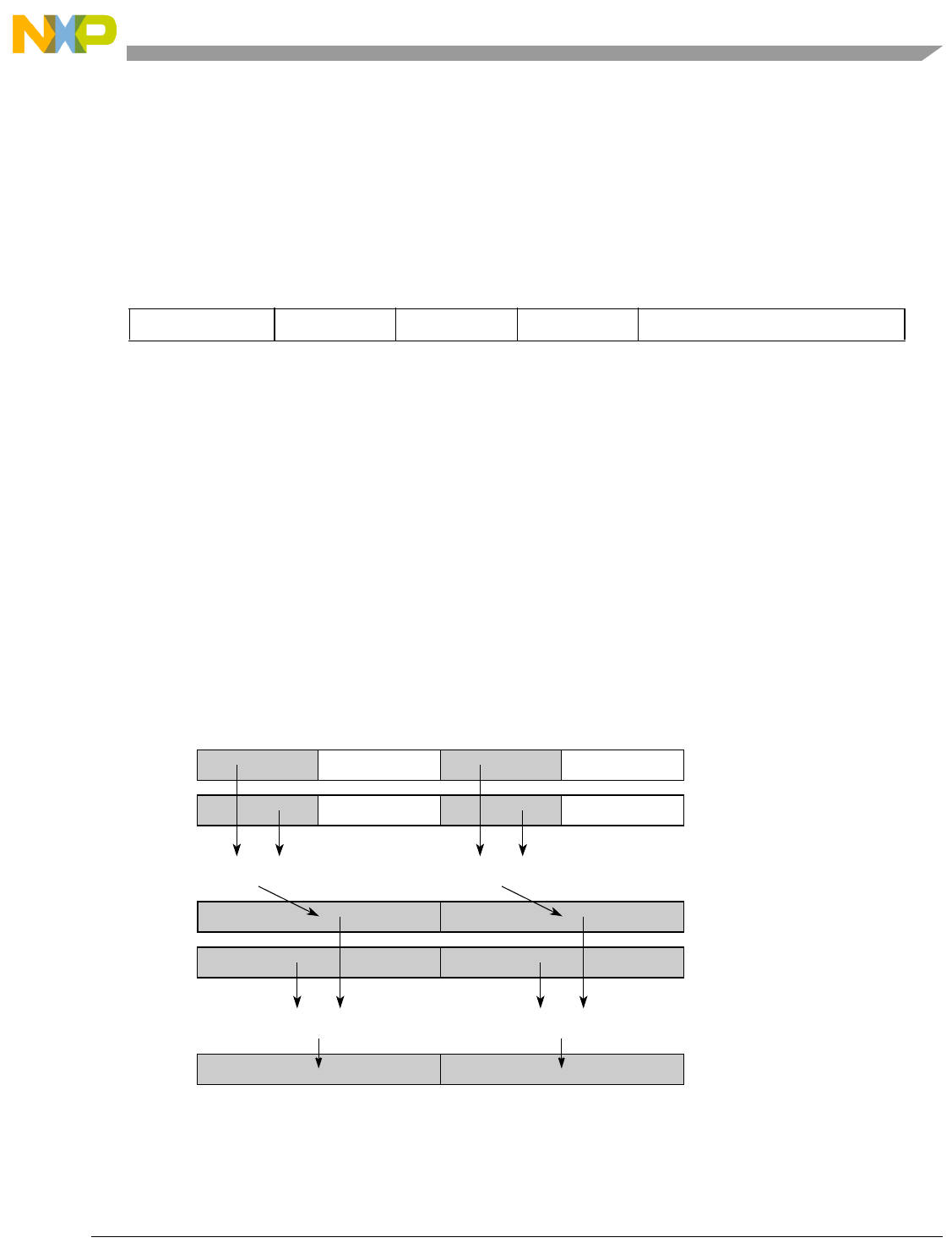
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-77
evmheumianw evmheumianw
Vector Multiply Half Words, Even, Unsigned, Modulo, Integer and Accumulate Negative into
Words
evmheumianw rD,rA,rB (M=1, O=0, F=0, S=0)
temp10:31 = rA0:15 *ui rB0:15
temp20:31 = rA32:47 *ui rB32:47
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a
33-bit intermediate difference.
3. The low 32 bits of the intermediate difference are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-32. evmheumianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 0 0 0
15 16 47 480313263
Intermediate product
Accumulator
rB
XX
––
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-78 Freescale Semiconductor
evmheusiaaw evmheusiaaw
Vector Multiply Half Words, Even, Unsigned, Saturate, Integer and Accumulate into Words
evmheusiaaw rD,rA,rB (M=0, O=0, F=0, S=0)
temp10:31 = rA0:15 *ui rB0:15
temp20:31 = rA32:47 *ui rB32:47
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0xFFFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0xFFFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum.
3. If the intermediate sum has overflowed, the saturation value 0xFFFF_FFFF is placed into the
accumulator word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate
sum are placed into the accumulator word and the corresponding rD word.
4. If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 0 0 0
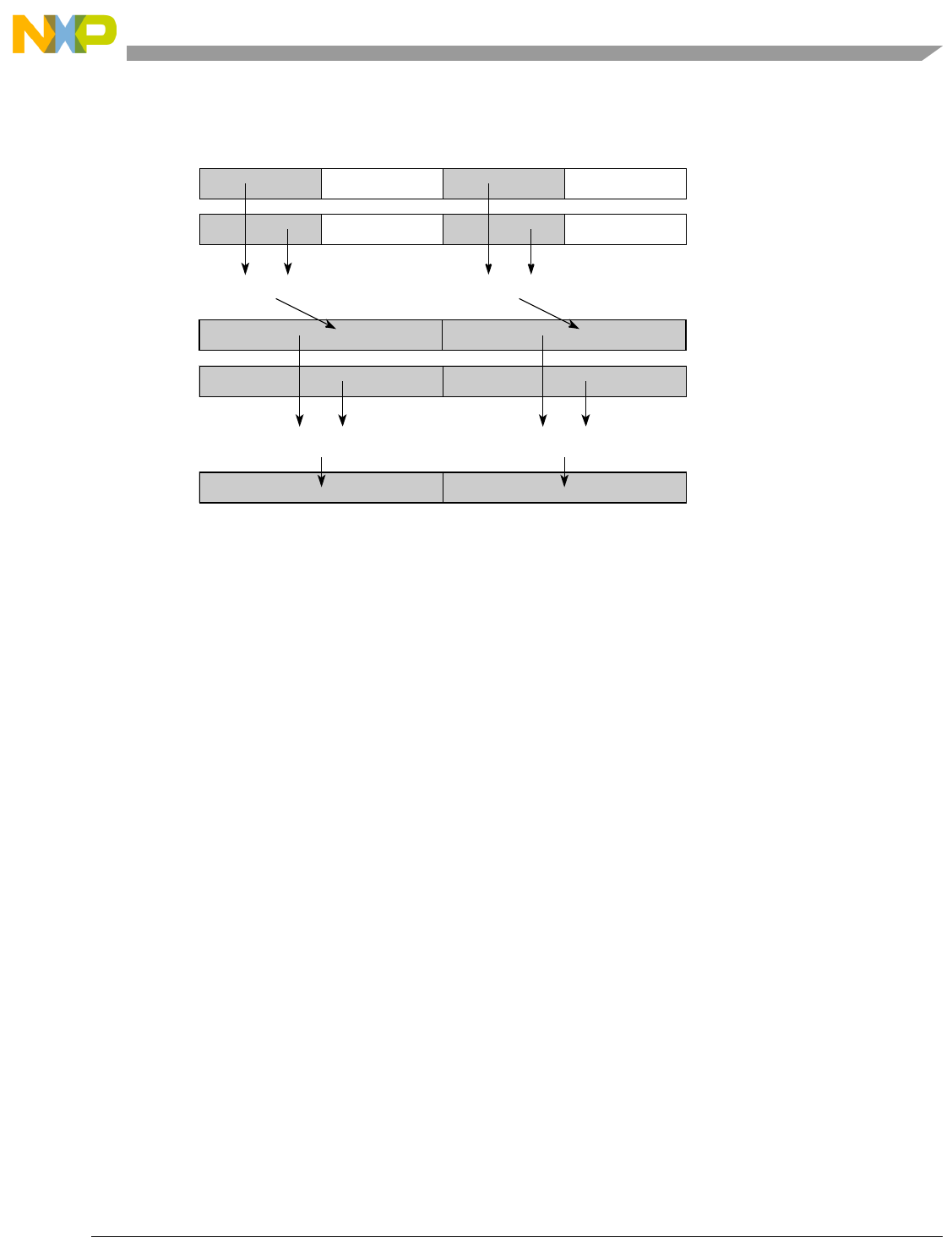
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-79
Other registers altered: SPEFSCR, ACC
Figure 7-33. evmheusiaaw
Intermediate product
Accumulator
+ +
Accumulator & rD
15 16 47 480313263
rB
X X
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-80 Freescale Semiconductor
evmheusianw evmheusianw
Vector Multiply Half Words, Even, Unsigned, Saturate, Integer, and Accumulate Negative into
Words
evmheusianw rD,rA,rB (M=0, O=0, F=0, S=0)
temp10:31 = rA0:15 *ui rB0:15
temp20:31 = rA32:47 *ui rB32:47
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0x00000000, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0x00000000, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each even-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a
33-bit intermediate difference.
3. If the intermediate difference has underflowed (is negative), the saturation value 0x0000_0000 is
placed into the accumulator word and the corresponding rD word. Otherwise, the low 32 bits of
the intermediate difference are placed into the accumulator word and the corresponding rD word.
4. If there is an underflow from the subtraction, the underflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 0 0 0
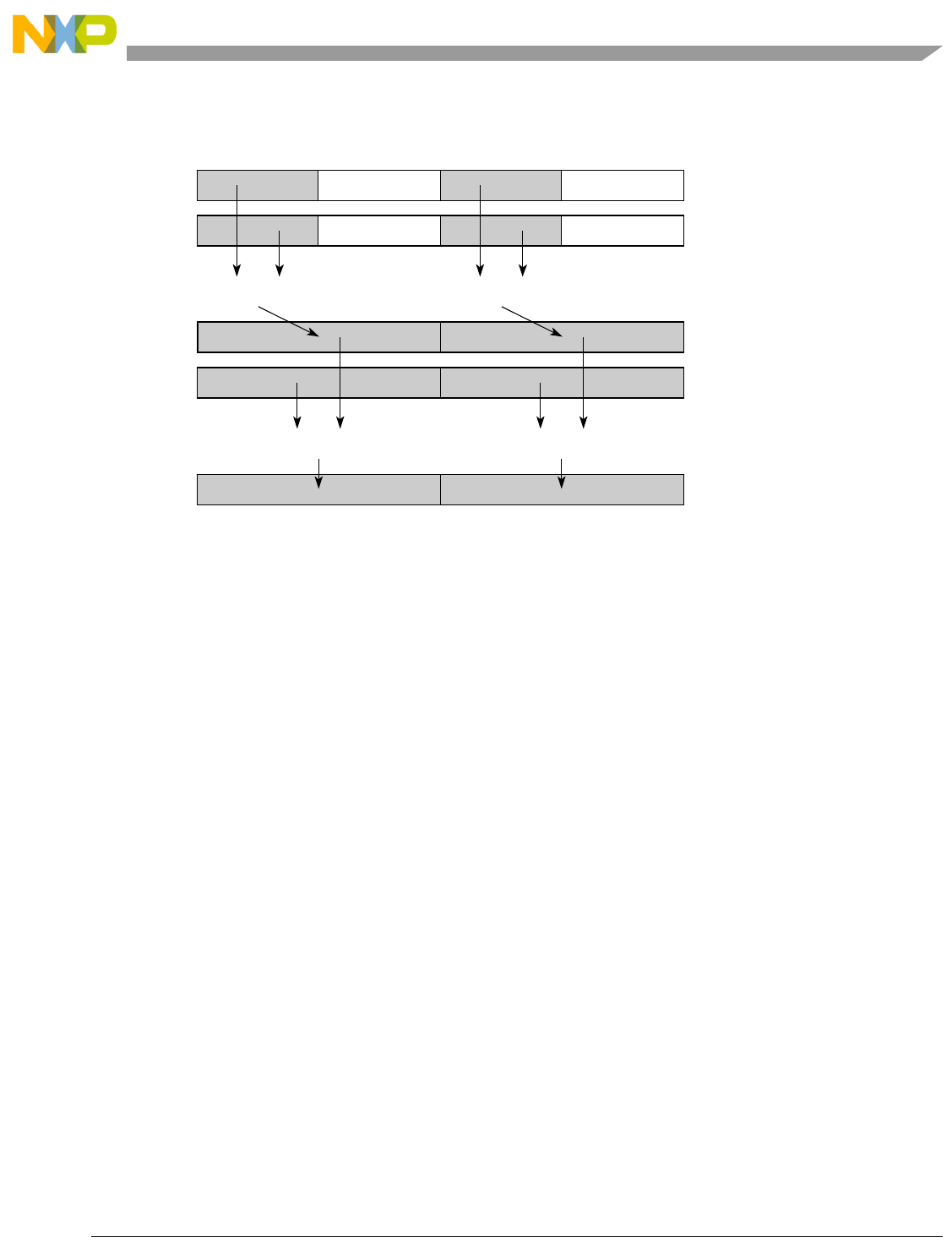
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-81
Other registers altered: SPEFSCR, ACC
Figure 7-34. evmheusianw
15 16 47 480313263
Intermediate product
Accumulator
rB
XX
––
Accumulator & rD
rA
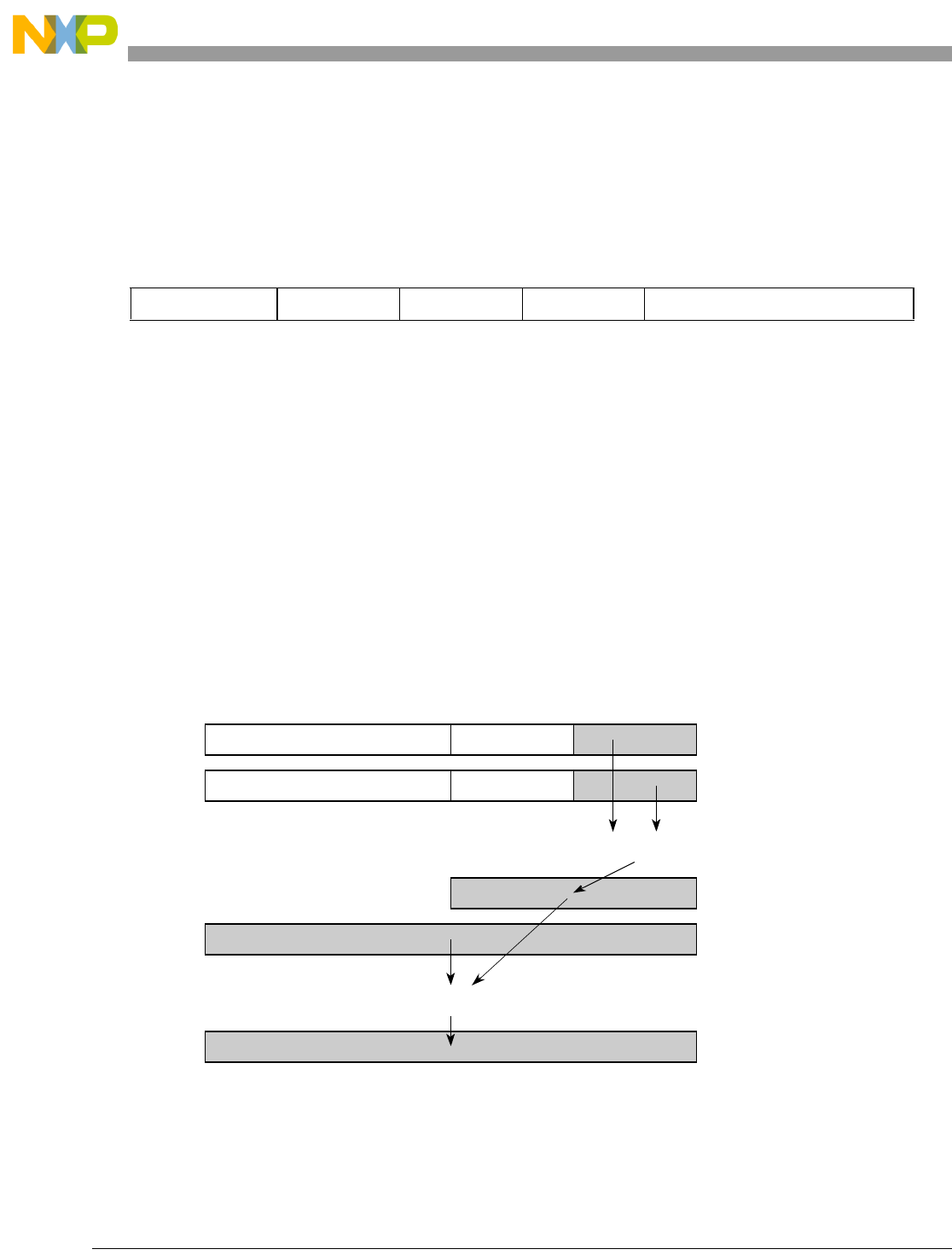
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-82 Freescale Semiconductor
evmhogsmfaa evmhogsmfaa
Multiply Half Words, Odd, Guarded, Signed, Modulo, Fractional and Accumulate
evmhogsmfaa rD,rA,rB (O=1, F=1, S=1)
prod0:31 = rA48:63 * rB48:63
temp10:63 = EXTS(prod0:31 || 0)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered signed fractional half-word element in rA is multiplied by the corresponding
signed fractional half-word element in rB. The 32-bit intermediate product is sign-extended to 64 bits.
Then it is shifted left by one bit and added to the contents of the 64-bit accumulator to form a 65-bit
intermediate sum. The lower 64 bits of the intermediate sum is placed back into the accumulator and also
written into rD.
NOTE
This is a modulo sum. There is no check for overflow and no saturation is
performed. An overflow from the 64-bit sum, if one occurs, is not recorded
into SPEFSCR.
Figure 7-35. evmhogsmfaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 1 1 1
47 480313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-83
evmhogsmfan evmhogsmfan
Multiply Half Words, Odd, Guarded, Signed, Modulo, Fractional and Accumulate Negative
evmhogsmfan rD,rA,rB (O=1, F=1, S=1)
prod0:31 = rA48:63 * rB48:63
temp10:63 = EXTS(prod0:31 || 0)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered signed fractional half-word element in rA is multiplied by the corresponding
signed fractional half-word element in rB. The 32-bit intermediate product is sign-extended to 64 bits.
Then it is shifted left by one bit and subtracted from the contents of the 64-bit accumulator to form a 65-bit
intermediate difference. The lower 64 bits of the intermediate difference is placed back into the
accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-36. evmhogsmfan
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 1 1 1
47 480313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-84 Freescale Semiconductor
evmhogsmiaa evmhogsmiaa
Multiply Half Words, Odd, Guarded, Signed, Modulo, Integer, and Accumulate
evmhogsmiaa rD,rA,rB (O=1, F=0, S=1)
prod0:31 = rA48:63 *si rB48:63
temp10:63 = EXTS(prod0:31)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The intermediate product is sign-extended to 64 bits and added to the
contents of the 64-bit accumulator to form a 65-bit intermediate sum. The lower 64 bits of the intermediate
sum is placed back into the accumulator and also written into rD.
NOTE
This is a modulo sum. There is no check for overflow and no saturation is
performed. An overflow from the 64-bit sum, if one occurs, is not recorded
into SPEFSCR.
Figure 7-37. evmhogsmiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 1 0 1
47 48
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & RD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-85
evmhogsmian evmhogsmian
Multiply Half Words, Odd, Guarded, Signed, Modulo, Integer, and Accumulate Negative
evmhogsmian rD,rA,rB (O=1, F=0, S=1)
prod0:31 = rA48:63 *si rB48:63
temp10:63 = EXTS(prod0:31)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered signed integer half-word element in rA is multiplied by the corresponding signed
integer half-word element in rB. The intermediate product is sign-extended to 64 bits and subtracted from
the contents of the 64-bit accumulator to form a 65-bit intermediate difference. The lower 64 bits of the
intermediate difference is placed back into the accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-38. evmhogsmian
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 1 0 1
47 48
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-86 Freescale Semiconductor
evmhogumiaa evmhogumiaa
Multiply Half Words, Odd, Guarded, Unsigned, Modulo, Integer, and Accumulate
evmhogumiaa rD,rA,rB (O=1, F=0, S=0)
prod0:31 = rA48:63 *ui rB48:63
temp10:63 = EXTZ(prod0:31)
temp20:64 = ACC0:63 + temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The intermediate product is sign-extended to 64 bits and added
to the contents of the 64-bit accumulator to form a 65-bit intermediate sum. The lower 64 bits of the
intermediate sum is placed back into the accumulator and also written into rD.
NOTE
This is a modulo sum. There is no check for overflow and no saturation is
performed. An overflow from the 64-bit sum, if one occurs, is not recorded
into SPEFSCR.
Figure 7-39. evmhogumiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 1 0 1 1 0 0
47 48
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
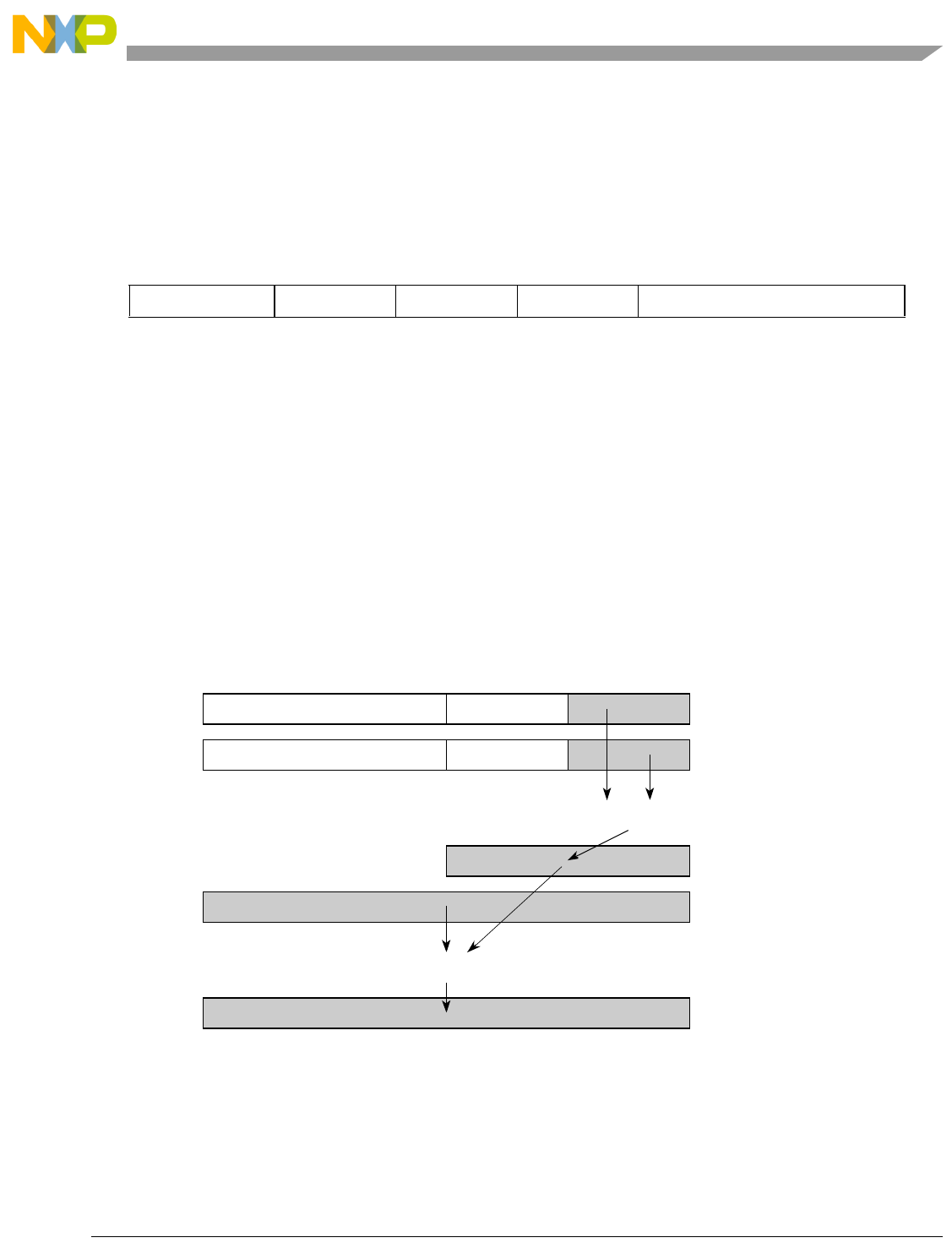
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-87
evmhogumian evmhogumian
Multiply Half Words, Odd, Guarded, Unsigned, Modulo, Integer, and Accumulate Negative
evmhogumian rD,rA,rB (O=1, F=0, S=0)
prod0:31 = rA48:63 *ui rB48:63
temp10:63 = EXTZ(prod0:31)
temp20:64 = ACC0:63 - temp10:63
rD0:63 = ACC0:63 = temp21:64
The low odd-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The intermediate product is sign-extended to 64 bits and
subtracted from the contents of the 64-bit accumulator to form a 65-bit intermediate difference. The lower
64 bits of the intermediate difference is placed back into the accumulator and also written into rD.
NOTE
This is a modulo difference. There is no check for overflow and no
saturation is performed. An overflow from the 64-bit difference, if one
occurs, is not recorded into SPEFSCR.
Figure 7-40. evmhogumian
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 1 0 1 1 0 0
47 48
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
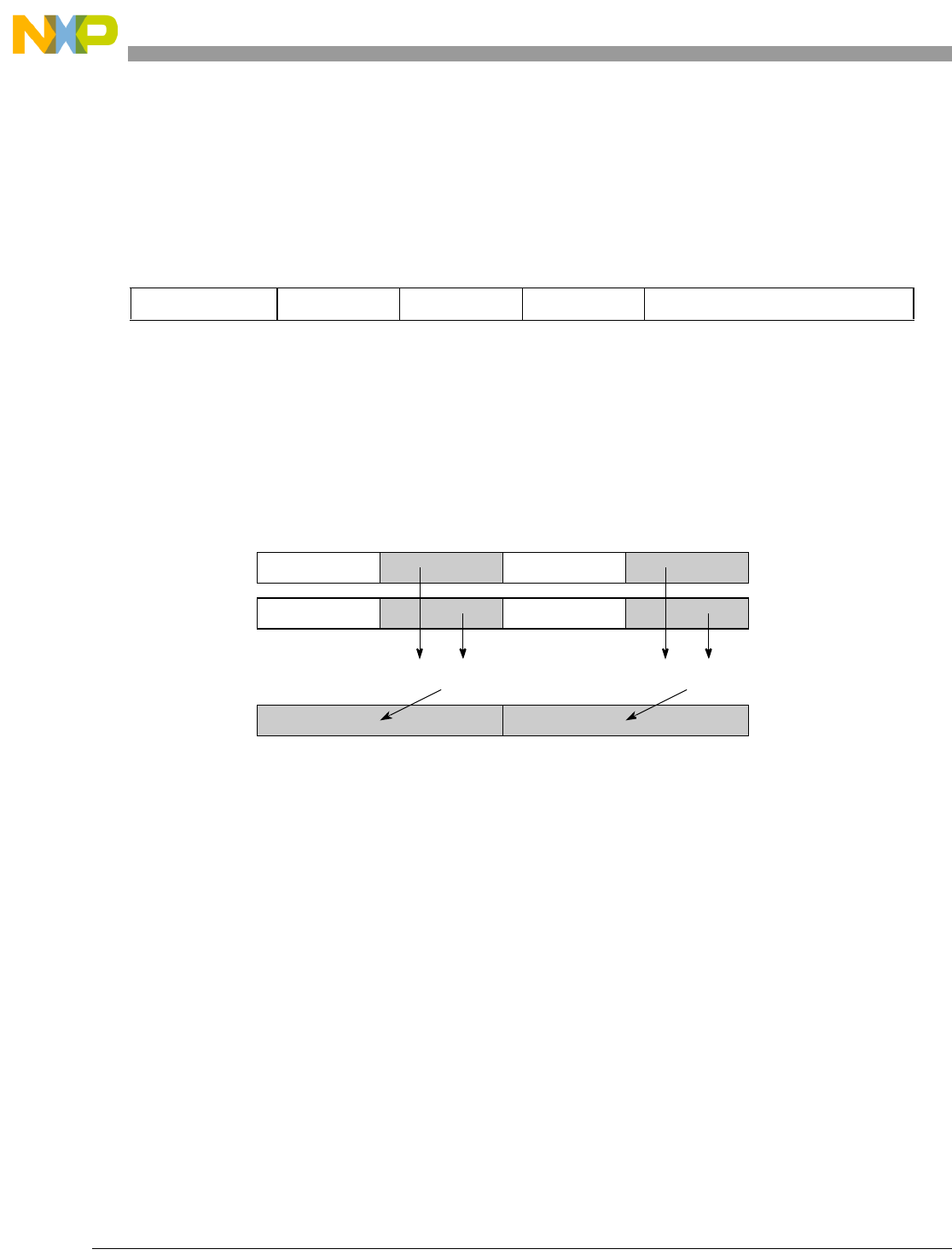
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-88 Freescale Semiconductor
evmhosmf evmhosmf
Vector Multiply Half Words, Odd, Signed, Modulo, Fractional
evmhosmf rD,rA,rB (M=1, O=1, F=1, S=1, A=0)
temp10:32 = rA16:31 * rB16:31
temp20:32 = rA48:63 * rB48:63
rD0:31 = temp11:32
rD32:63 = temp21:32
Each odd-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are placed into the two word
elements of rD.
Figure 7-41. evmhosmf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 1 1 1
15 16 47 480313263
rA
rB
rD
X X
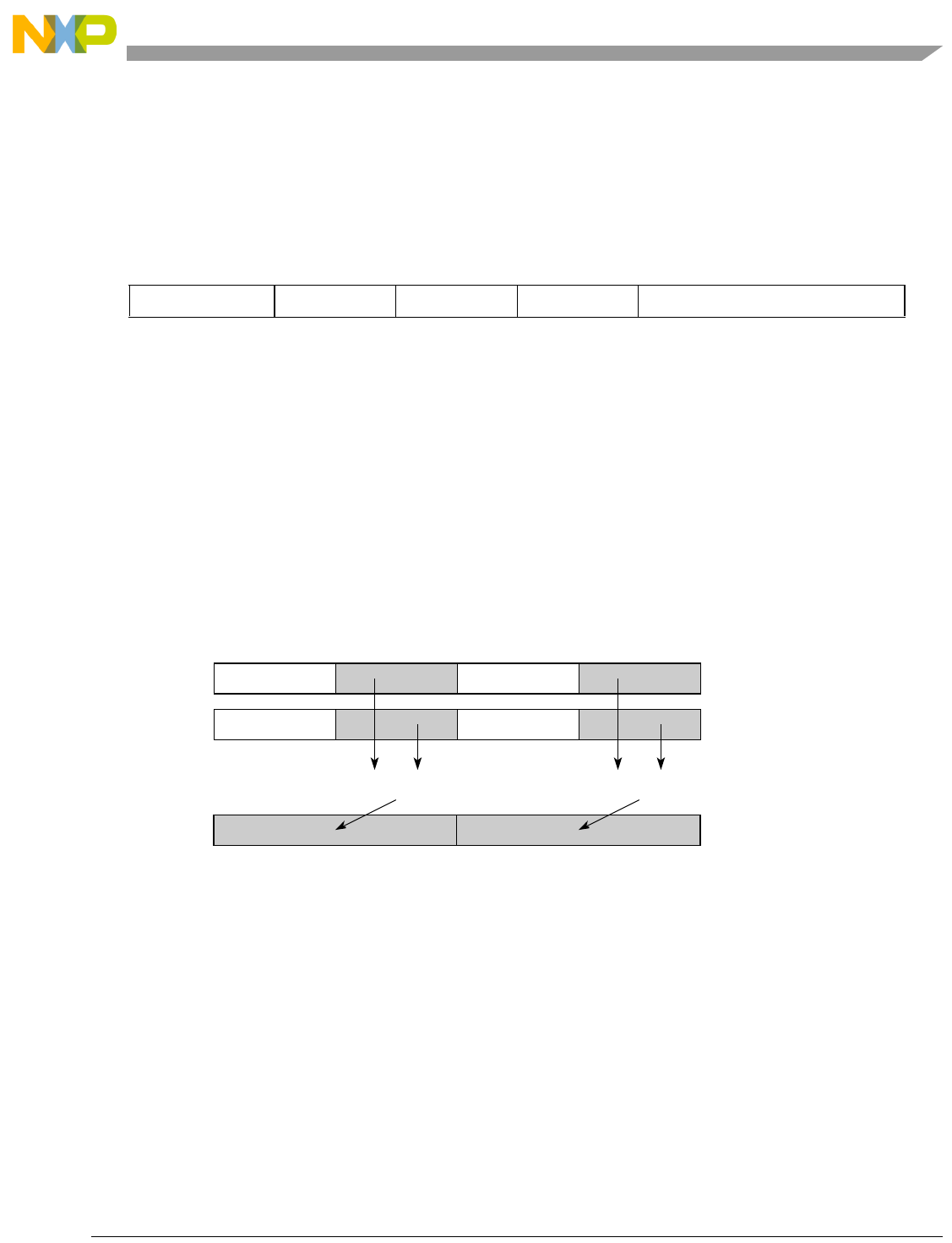
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-89
evmhosmfa evmhosmfa
Vector Multiply Half Words, Odd, Signed, Modulo, Fractional, to Accumulator
evmhosmfa rD,rA,rB (M=1, O=1, F=1, S=1, A=1)
prod0:31 = rA16:31 * rB16:31
prod32:63 = rA48:63 * rB48:63
temp10:32 = prod0:31 || 0
temp20:32 = prod32:63 || 0
rD0:31 = temp11:32
rD32:63 = temp21:32
ACC0:63 = rD0:63
Each odd-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left by one bit to
remove the redundant sign bit and then placed into the two word elements of rD. The result in rD is also
placed in the accumulator.
Other registers altered: ACC
Figure 7-42. evmhosmfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 1 1 1
15 16 47 48
0313263
rA
rB
Accumulator & rD
X X
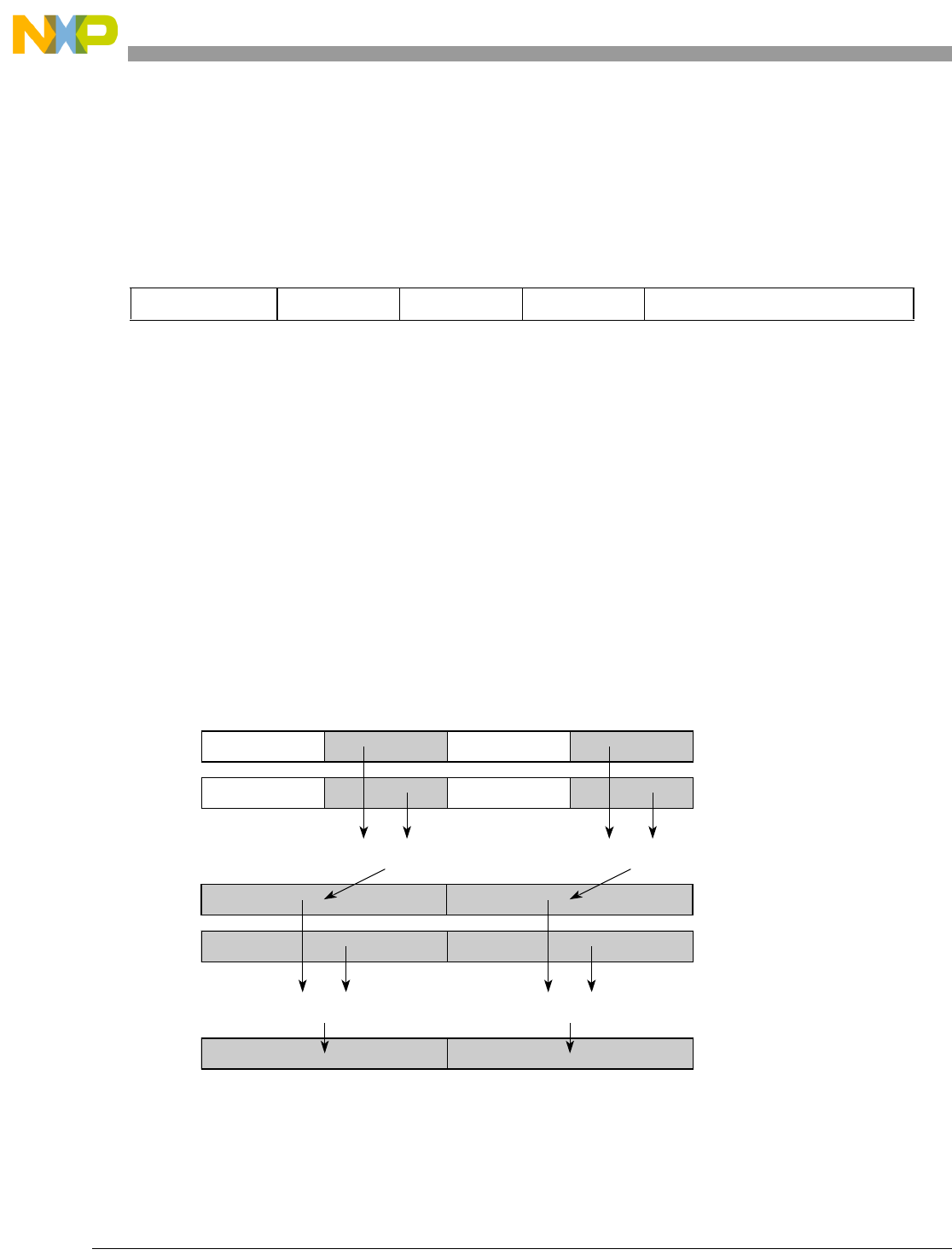
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-90 Freescale Semiconductor
evmhosmfaaw evmhosmfaaw
Vector Multiply Half Words, Odd, Signed, Modulo, Fractional, and Accumulate into Words
evmhosmfaaw rD,rA,rB (M=1, O=1, F=1, S=1)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
temp30:32 = ACC0:31 + temp11:32
temp40:32 = ACC32:63 + temp21:32
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed fractional half word element in rA is multiplied by the corresponding
signed fractional half word element in rB.
2. The intermediate 32-bit product is shifted left by one bit to remove the redundant sign bit and then
added to the contents of the accumulator word to form a 33-bit intermediate sum.
3. The low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-43. evmhosmfaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 1 1 1
15 16 47 48
0313263
Intermediate product
Accumulator
RB
X X
+ +
Accumulator & RD
RA
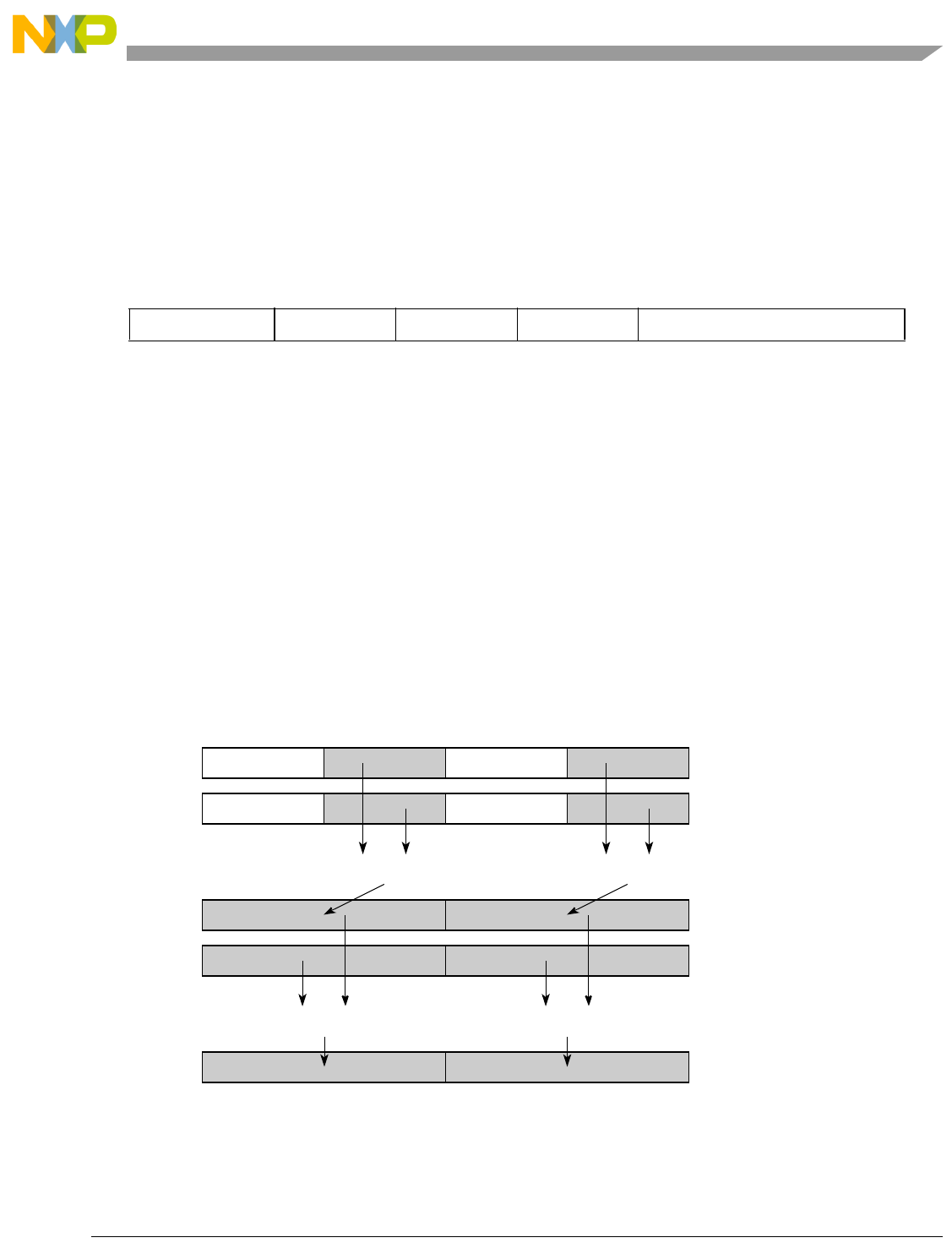
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-91
evmhosmfanw evmhosmfanw
Vector Multiply Half Words, Odd, Signed, Modulo, Fractional, and Accumulate Negative into
Words
evmhosmfanw rD,rA,rB (M=1, O=1, F=1, S=1)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
temp30:32 = ACC0:31 - temp11:32
temp40:32 = ACC32:63 - temp21:32
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed fractional half word element in rA is multiplied by the corresponding
signed fractional half word element in rB.
2. The intermediate 32-bit product is shifted left by one bit to remove the redundant sign bit and then
subtracted from the contents of the accumulator word to form a 33-bit intermediate difference.
3. The low 32 bits of the intermediate difference are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-44. evmhosmfanw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 1 1 1
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA
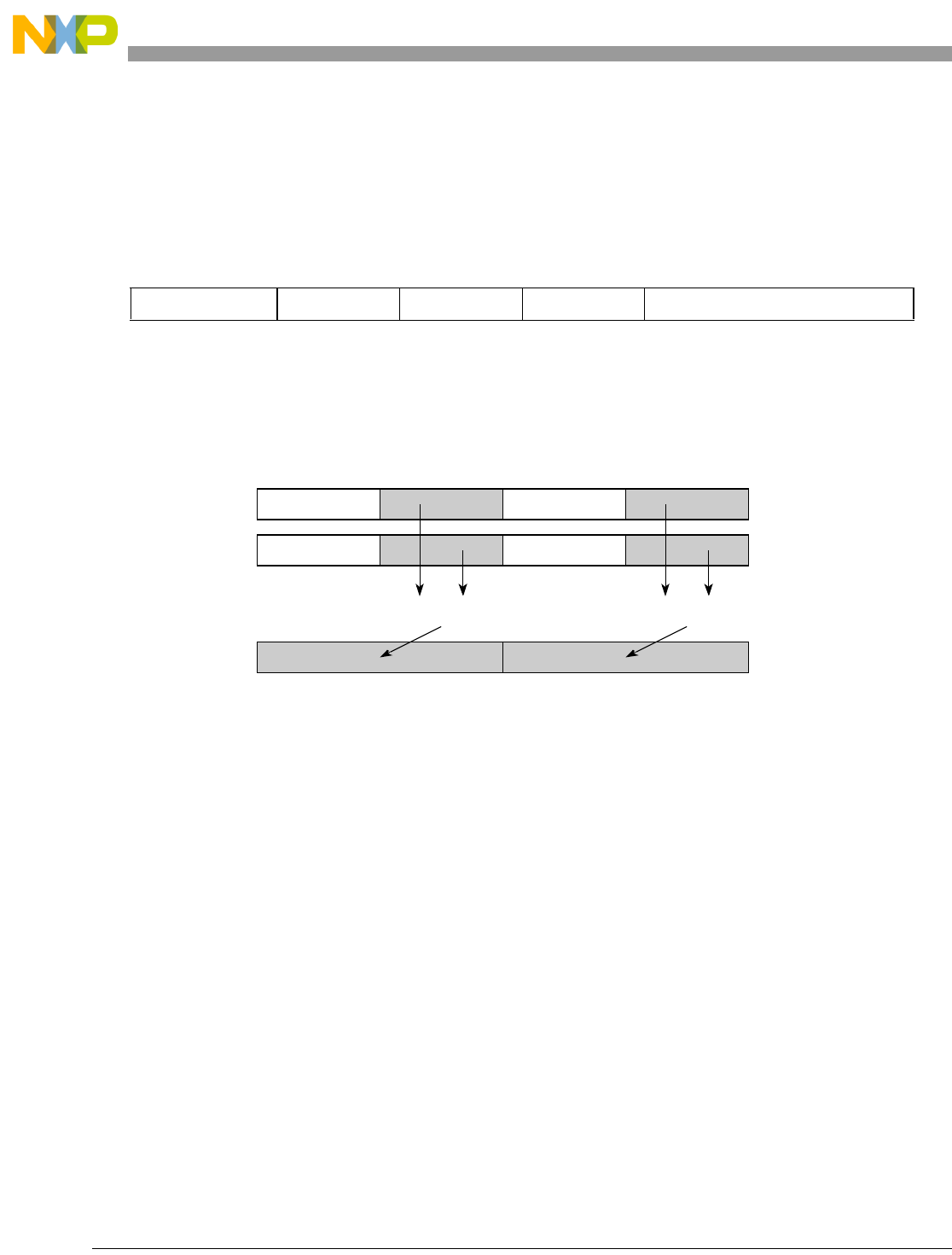
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-92 Freescale Semiconductor
evmhosmi evmhosmi
Vector Multiply Half Words, Odd, Signed, Modulo, Integer
evmhosmi rD,rA,rB (M=1, O=1, F=0, S=1, A=0)
rD0:31 = rA16:31 *si rB16:31
rD32:63 = rA48:63 *si rB48:63
Each odd-numbered signed integer half word element in rA is multiplied by the corresponding signed
integer half word element in rB. The two 32-bit signed integer products are placed into the two word
elements of rD.
Figure 7-45. evmhosmi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 1 0 1
15 16 47 480313263
rA
rB
rD
X X
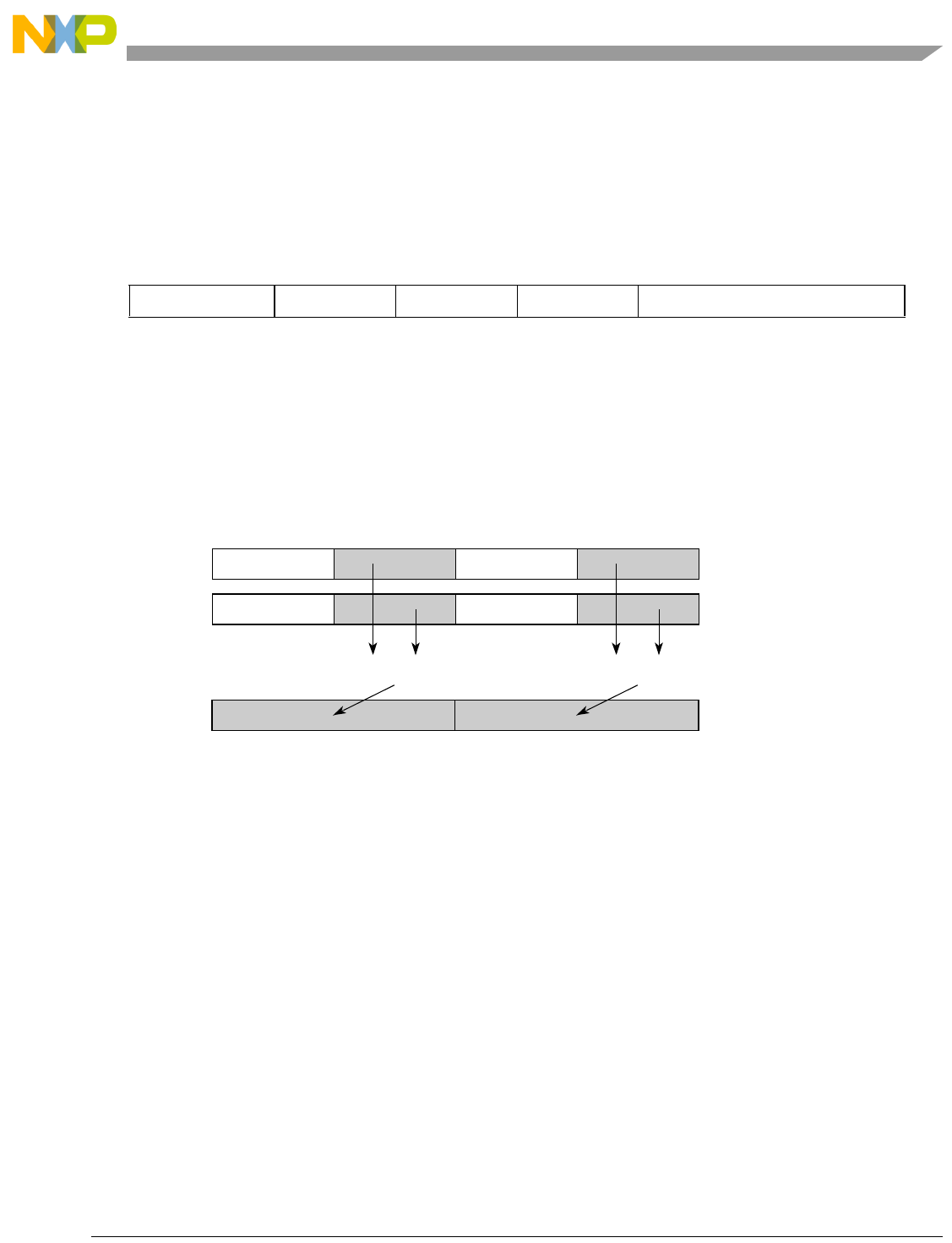
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-93
evmhosmia evmhosmia
Vector Multiply Half Words, Odd, Signed, Modulo, Integer to Accumulator
evmhosmia rD,rA,rB (M=1, O=1, F=0, S=1, A=1)
rD0:31 = rA16:31 *si rB16:31
rD32:63 = rA48:63 *si rB48:63
ACC0:63 = rD0:63
Each odd-numbered signed integer half word element in rA is multiplied by the corresponding signed
integer half word element in rB. The two 32-bit signed integer products are placed into the two word
elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-46. evmhosmia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 1 0 1
15 16 47 480313263
rA
rB
Accumulator & rD
X X
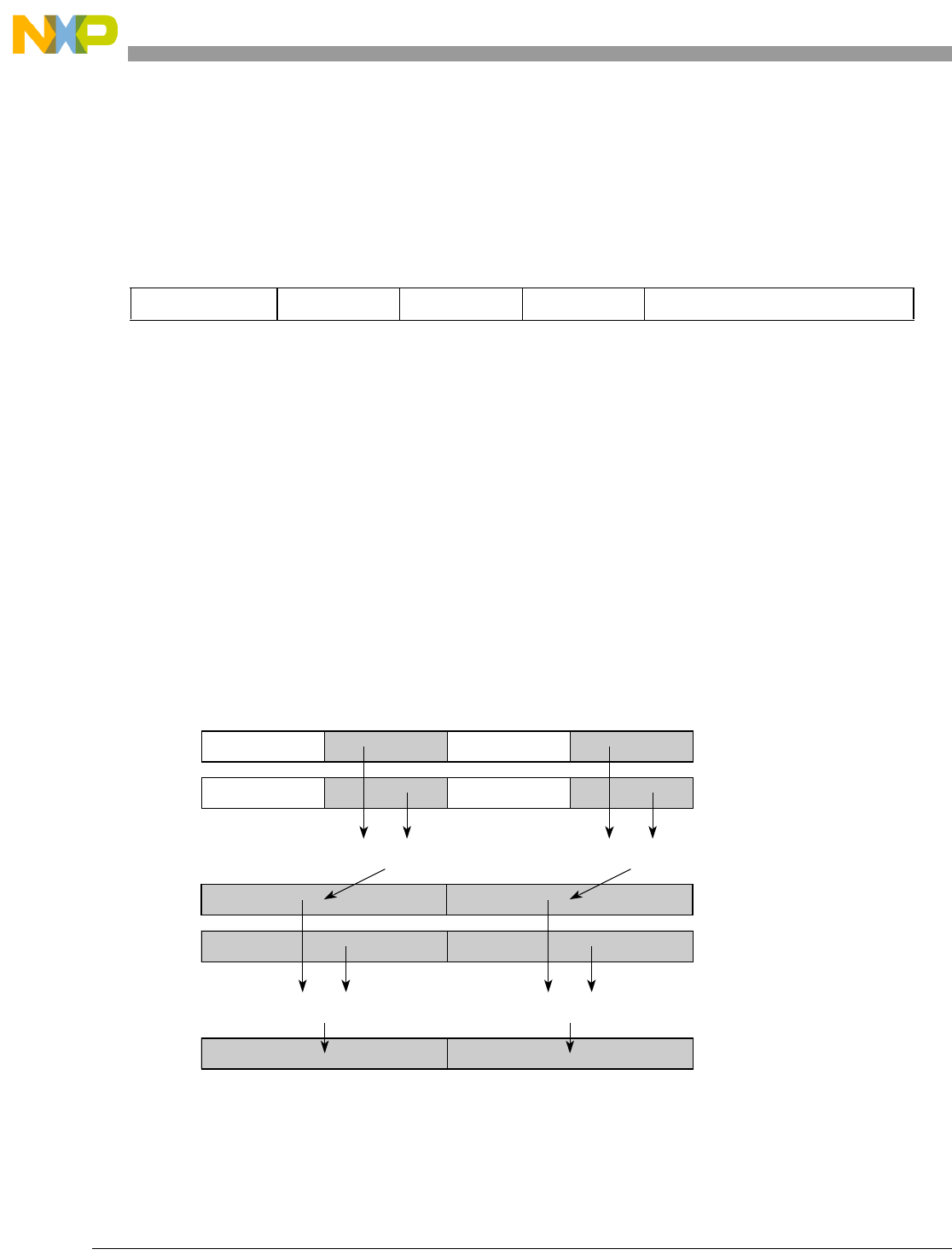
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-94 Freescale Semiconductor
evmhosmiaaw evmhosmiaaw
Vector Multiply Half Words, Odd, Signed, Modulo, Integer, and Accumulate into Words
evmhosmiaaw rD,rA,rB (M=1, O=1, F=0, S=1)
temp10:31 = rA16:31 *si rB16:31
temp20:31 = rA48:63 *si rB48:63
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed integer half word element in rA is multiplied by the corresponding
signed integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum.
3. The low 32 bits of the intermediate sum are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-47. evmhosmiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 1 0 1
15 16 47 48
0313263
Intermediate product
Accumulator
rB
X X
+ +
Accumulator & rD
rA
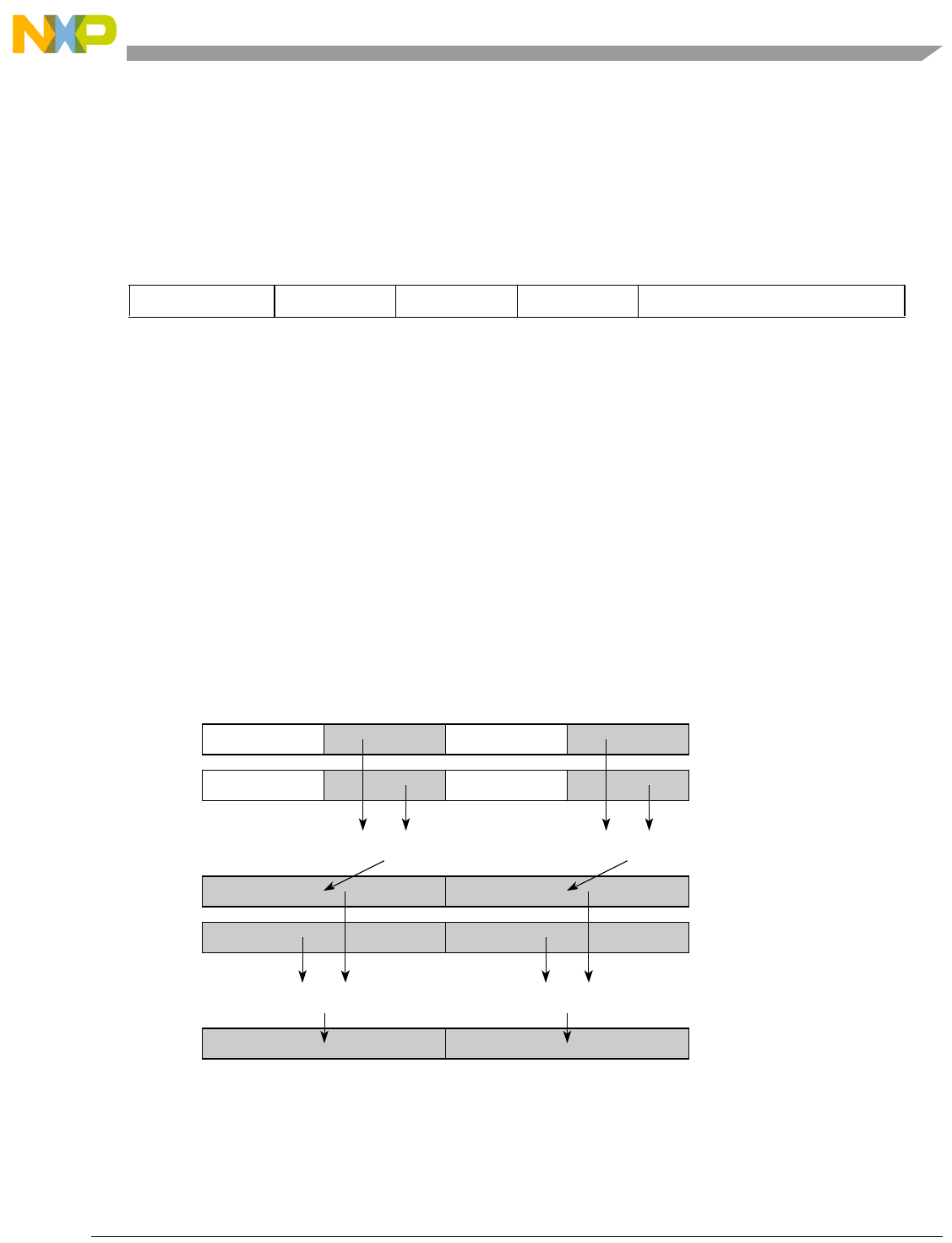
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-95
evmhosmianw evmhosmianw
Vector Multiply Half Words, Odd, Signed, Modulo, Integer, and Accumulate Negative into Words
evmhosmianw rD,rA,rB (M=1, O=1, F=0, S=1)
temp10:31 = rA16:31 *si rB16:31
temp20:31 = rA48:63 *si rB48:63
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed integer half word element in rA is multiplied by the corresponding
signed integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a
33-bit intermediate difference.
3. The low 32 bits of the intermediate difference are placed into the accumulator word and the
corresponding rD word.
Other registers altered: ACC
Figure 7-48. evmhosmianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 1 0 1
15 16 47 48
0313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA
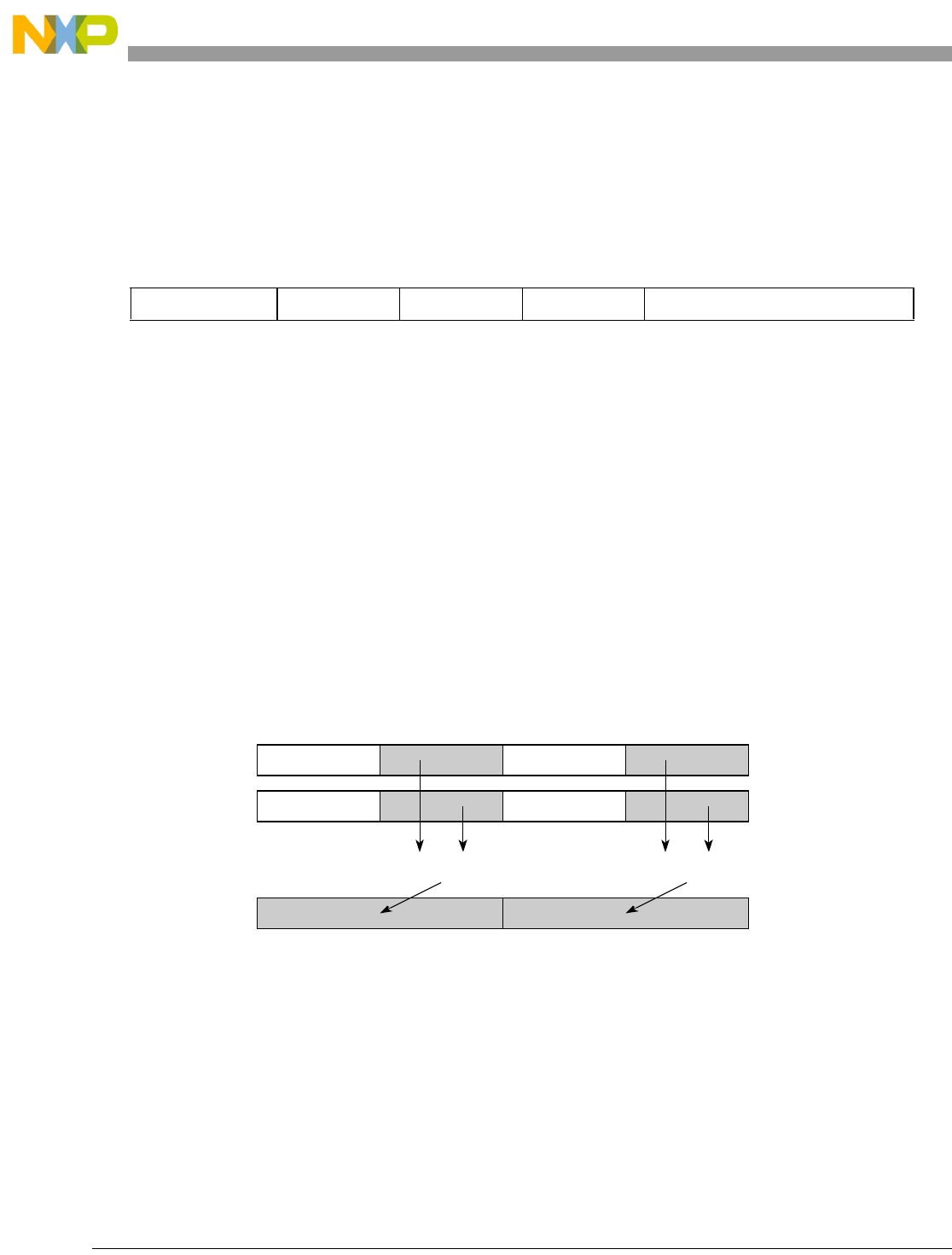
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-96 Freescale Semiconductor
evmhossf evmhossf
Vector Multiply Half Words, Odd, Signed, Saturate, Fractional
evmhossf rD,rA,rB (M=0, O=1, F=1, S=1, A=0)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each odd-numbered signed fractional half word element in rA is multiplied by the corresponding signed
fractional half word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit and then placed into the two word elements of rD. If the inputs are –1.0
and –1.0 the result is saturated to the most positive signed fraction (0x7FFF_FFFF). If saturation occurs,
the overflow and summary overflow bits are recorded.
Other registers altered: SPEFSCR
Figure 7-49. evmhossf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 0 1 1 1
15 16 47 480313263
rA
rB
rD
X X
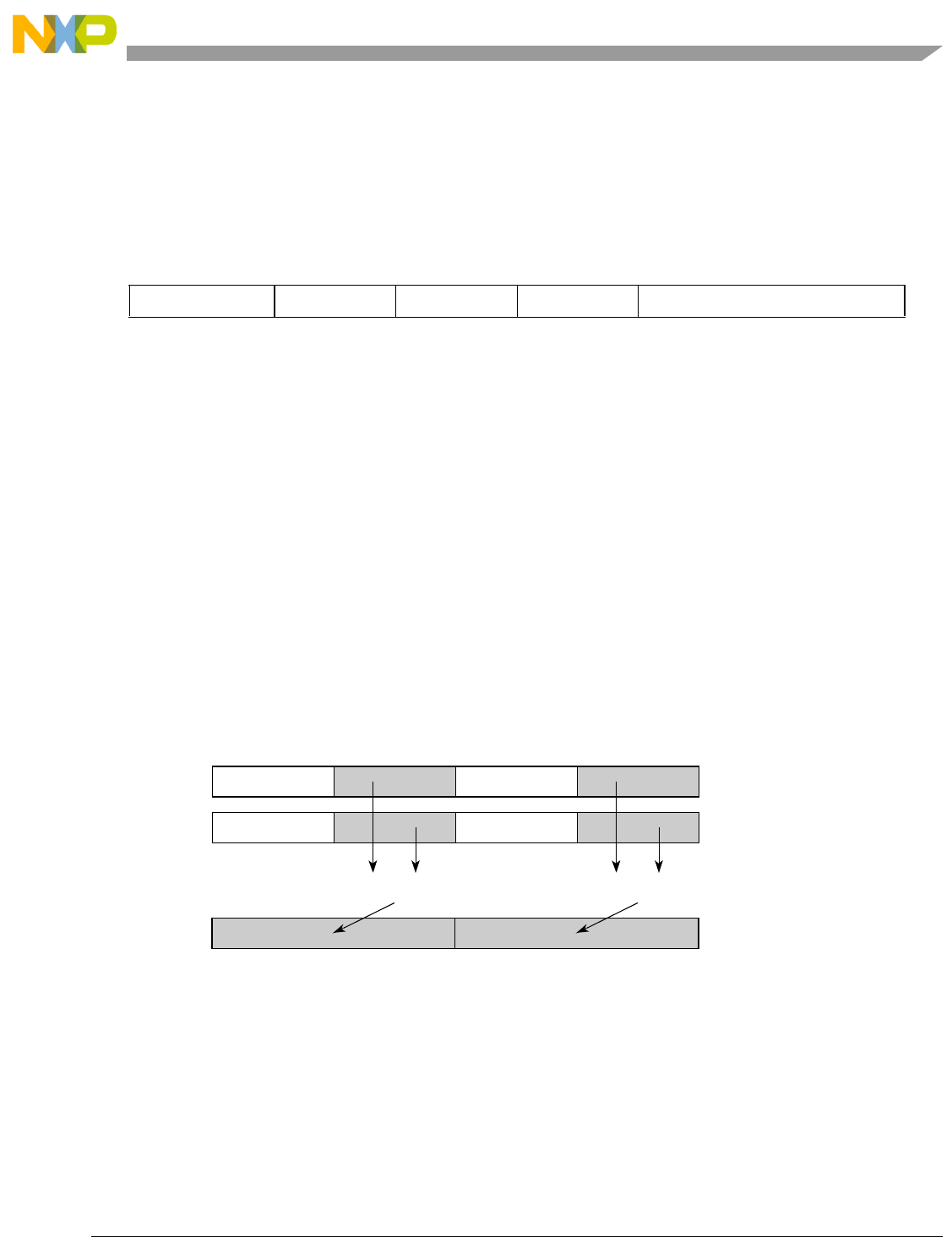
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-97
evmhossfa evmhossfa
Vector Multiply Half Words, Odd, Signed, Saturate, Fractional to Accumulator
evmhossfa rD,rA,rB (M=0, O=1, F=1, S=1, A=1)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
ACC0:63 = rD0:63
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each odd-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit and then placed into the two word elements of rD. If the inputs are –1.0
and –1.0 the result is saturated to the most positive signed fraction (0x7FFF_FFFF). If saturation occurs,
the overflow and summary overflow bits are recorded. The result in rD is also placed in the accumulator.
Other registers altered: SPEFSCR, ACC
Figure 7-50. evmhossfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 0 1 1 1
15 16 47 480313263
rA
rB
Accumulator & rD
X X

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-98 Freescale Semiconductor
evmhossfaaw evmhossfaaw
Vector Multiply Half Words, Odd, Signed, Saturate, Fractional, and Accumulate into Words
evmhossfaaw rD,rA,rB (M=0, O=1, F=1, S=1)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
temp30:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
temp40:31 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
temp50:32 = {ACC0,ACC0:31} + {temp30,temp30:31}
temp60:32 = {ACC32,ACC32:63} + {temp40,temp40:31}
ovh = temp50 ⊕ temp51
ovl = temp60 ⊕ temp61
rD0:31 = SATURATE_ACC(ovh, temp50, 0x80000000, 0x7FFFFFFF, temp51:32)
rD32:63 = SATURATE_ACC(ovl, temp60, 0x80000000, 0x7FFFFFFF, temp61:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = movh | ovh
SPEFSCROV = movl | ovl
SPEFSCRSOVH = SPEFSCRSOVH | movh | ovh
SPEFSCRSOV = SPEFSCRSOV | movl | ovl
Each odd-numbered signed fractional half-word element in rA is multiplied by the corresponding signed
fractional half-word element in rB. The two 32-bit signed fractional products are shifted left one bit to
eliminate the redundant sign bit. If the inputs are –1.0 and –1.0 the intermediate result is saturated to the
most positive signed fraction (0x7FFF_FFFF). The intermediate 32-bit products are added to the
respective accumulator word to form an intermediate sum. If the intermediate sum has overflowed, the
appropriate saturation value (0x7FFF_FFFF if positive overflow or 0x8000_0000 if negative overflow) is
placed into the accumulator word and the corresponding rD word. Otherwise, the low 32 bits of the
intermediate sum are placed into the accumulator word and the corresponding rD word.
If there is an overflow from either the multiply or the addition, the overflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 1 1 1
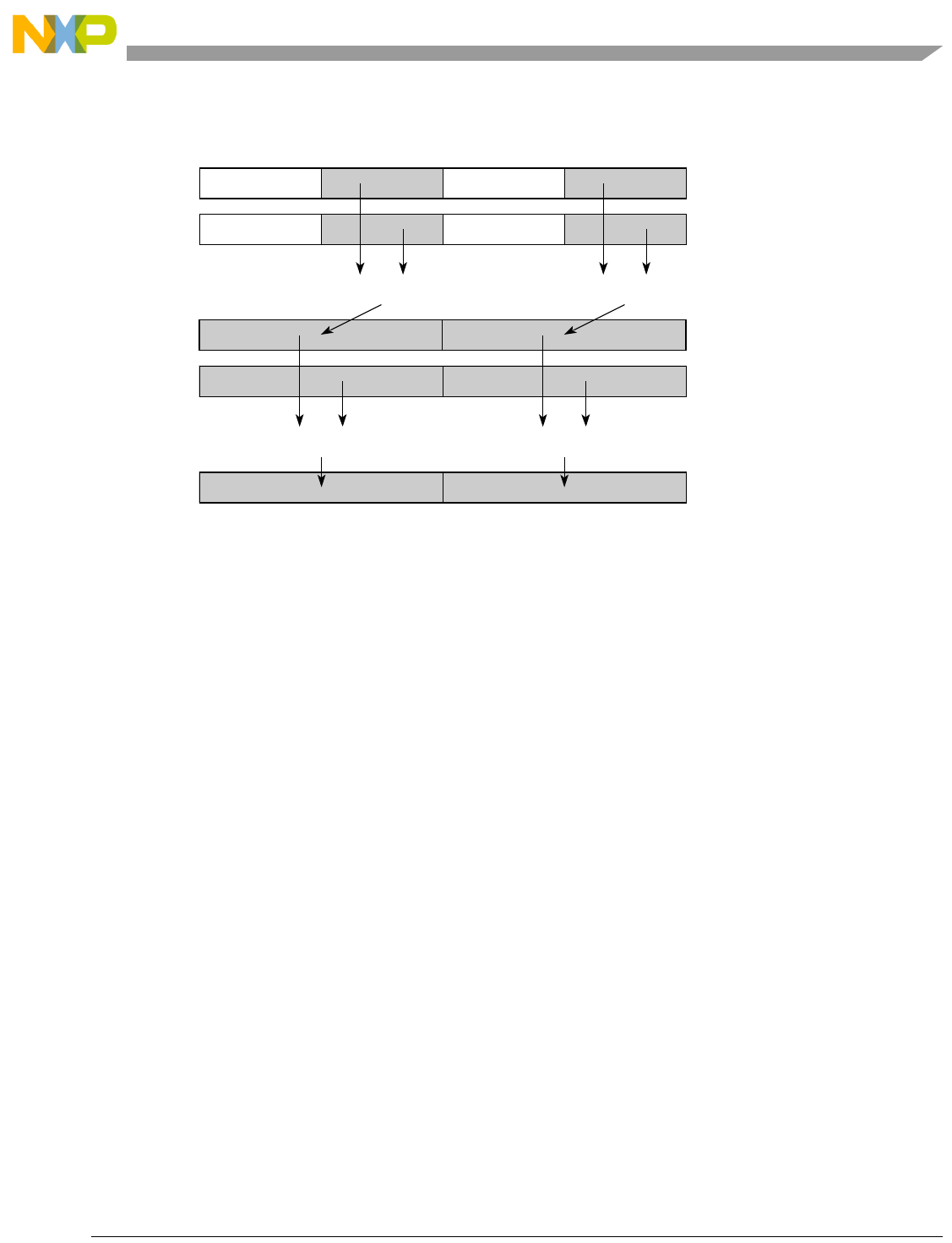
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-99
Other registers altered: SPEFSCR, ACC
Figure 7-51. evmhossfaaw
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
+ +
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-100 Freescale Semiconductor
evmhossfanw evmhossfanw
Vector Multiply Half Words, Odd, Signed, Saturate, Fractional, and Accumulate Negative into
Words
evmhossfanw rD,rA,rB (M=0, O=1, F=1, S=1)
temp10:32 = (rA16:31 * rB16:31) || 0
temp20:32 = (rA48:63 * rB48:63) || 0
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
temp30:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
temp40:31 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
temp50:32 = {ACC0,ACC0:31} - {temp30,temp30:31}
temp60:32 = {ACC32,ACC32:63} - {temp40,temp40:31}
ovh = temp50 ⊕ temp51
ovl = temp60 ⊕ temp61
rD0:31 = SATURATE_ACC(ovh, temp50, 0x80000000, 0x7FFFFFFF, temp51:32)
rD32:63 = SATURATE_ACC(ovl, temp60, 0x80000000, 0x7FFFFFFF, temp61:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = movh | ovh
SPEFSCROV = movl | ovl
SPEFSCRSOVH = SPEFSCRSOVH | movh | ovh
SPEFSCRSOV = SPEFSCRSOV | movl | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed fractional half-word element in rA is multiplied by the corresponding
signed fractional half-word element in rB. The two 32-bit signed fractional products are shifted left
one bit to eliminate the redundant sign bit. If the inputs are –1.0 and –1.0 the intermediate result is
saturated to the most positive signed fraction (0x7FFF_FFFF).
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form
an intermediate difference.
3. If the intermediate difference has overflowed, the appropriate saturation value (0x7FFF_FFFF if
positive overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are placed
into the accumulator word and the corresponding rD word.
4. If there is an overflow from either the multiply or the subtraction, the overflow information is
recorded in the SPEFSCR overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 1 1 1
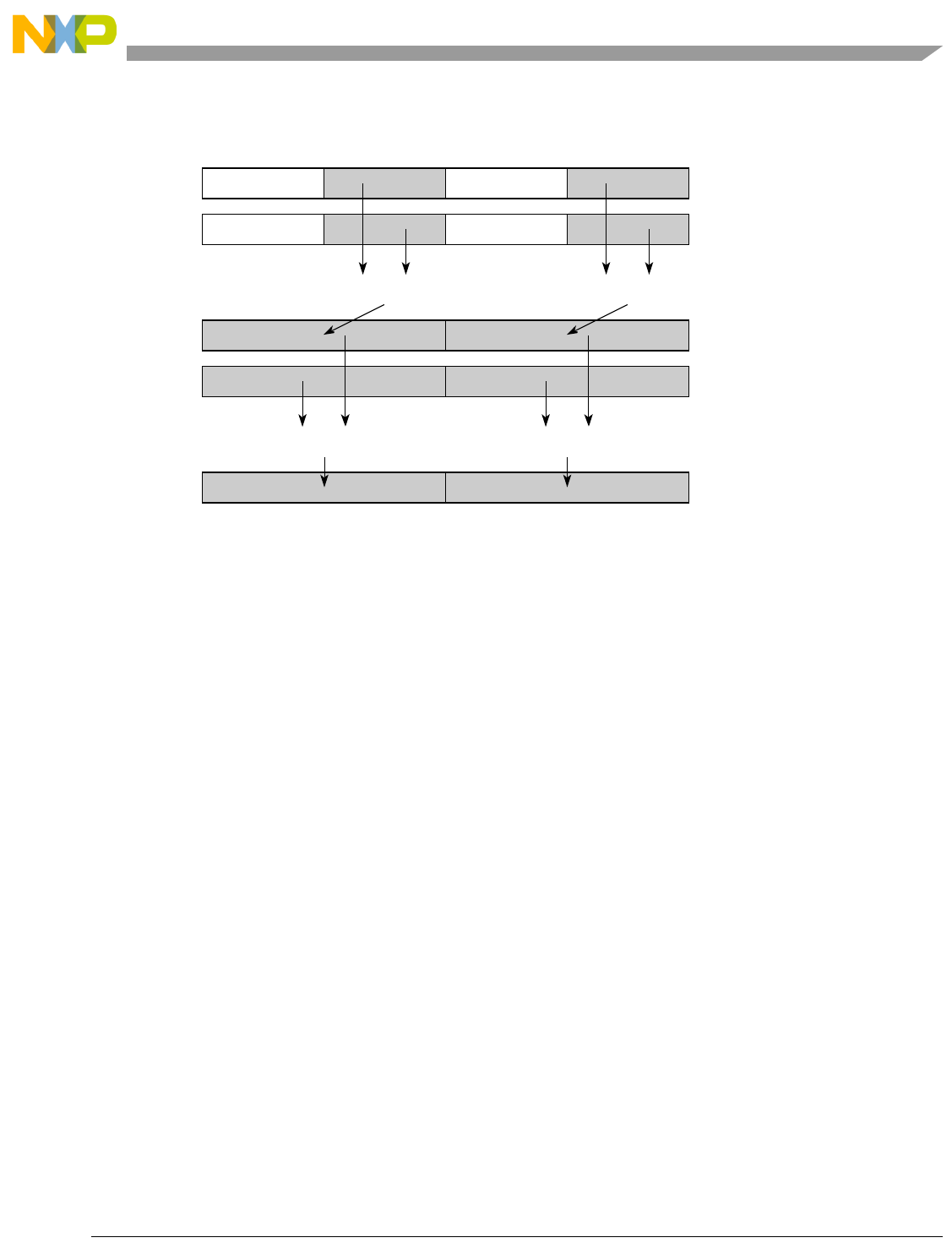
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-101
Other registers altered: SPEFSCR, ACC
Figure 7-52. evmhossfanw
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-102 Freescale Semiconductor
evmhossiaaw evmhossiaaw
Vector Multiply Half Words, Odd, Signed, Saturate, Integer, and Accumulate into Words
evmhossiaaw rD,rA,rB (M=0, O=1, F=0, S=1)
temp10:31 = rA16:31 *si rB16:31
temp20:31 = rA48:63 *si rB48:63
temp30:32 = {ACC0,ACC0:31} + {temp10,temp10:31}
temp40:32 = {ACC32,ACC32:63} + {temp20,temp20:31}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed integer half word element in rA is multiplied by the corresponding
signed integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form an
intermediate sum.
3. If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF if positive
overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and the
corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the
accumulator word and the corresponding rD word.
4. If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 1 0 1
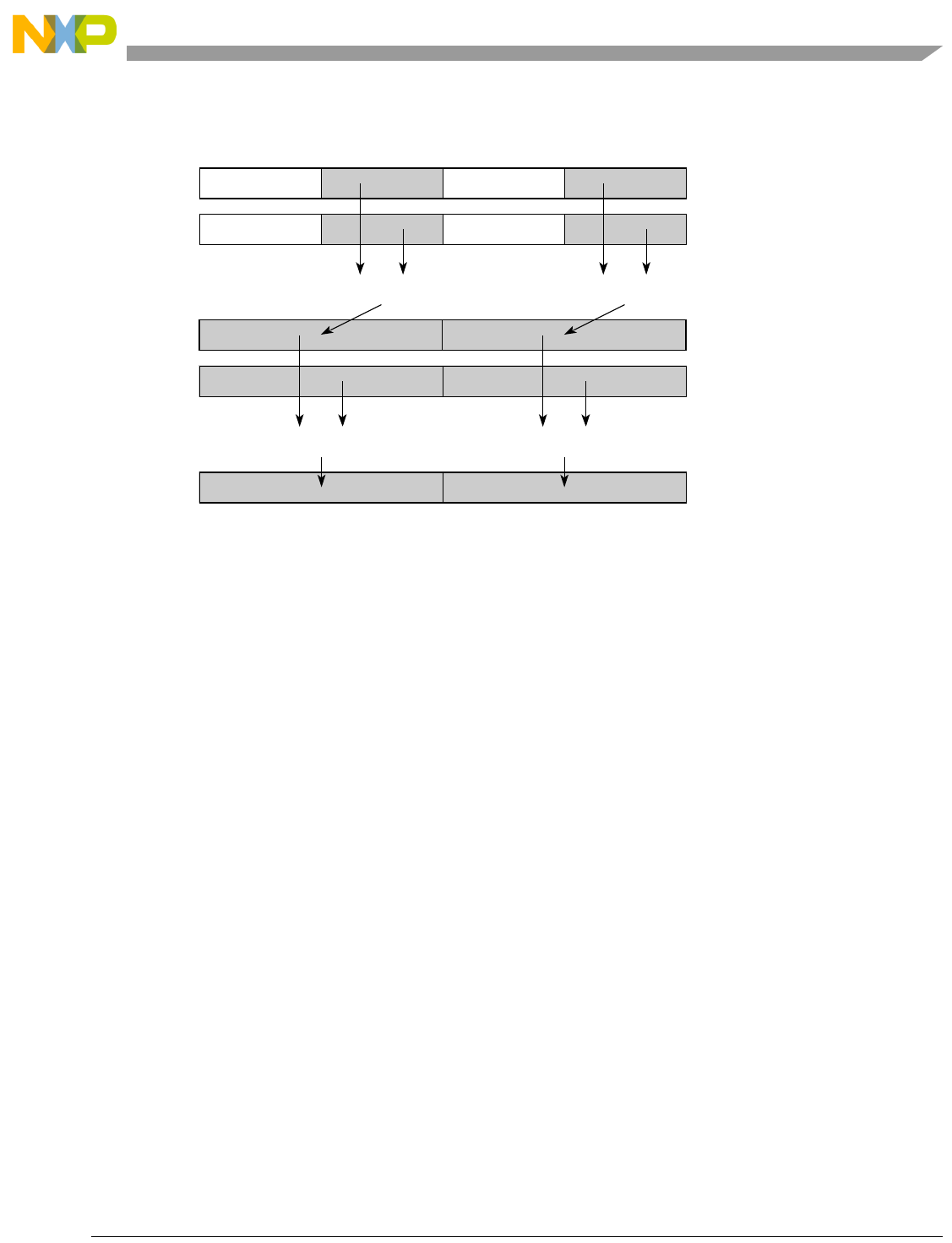
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-103
Other registers altered: SPEFSCR, ACC
Figure 7-53. evmhossiaaw
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
+ +
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-104 Freescale Semiconductor
evmhossianw evmhossianw
Vector Multiply Half Words, Odd, Signed, Saturate, Integer and Accumulate Negative into Words
evmhossianw rD,rA,rB (M=0, O=1, F=0, S=1)
temp10:31 = rA16:31 *si rB16:31
temp20:31 = rA48:63 *si rB48:63
temp30:32 = {ACC0,ACC0:31} - {temp10,temp10:31}
temp40:32 = {ACC32,ACC32:63} - {temp20,temp20:31}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered signed integer half-word element in rA is multiplied by the corresponding
signed integer half-word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form
an intermediate difference.
3. If the intermediate difference has overflowed, the appropriate saturation value (0x7FFF_FFFF if
positive overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are placed
into the accumulator word and the corresponding rD word.
4. If there is an overflow from the subtraction, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 1 0 1
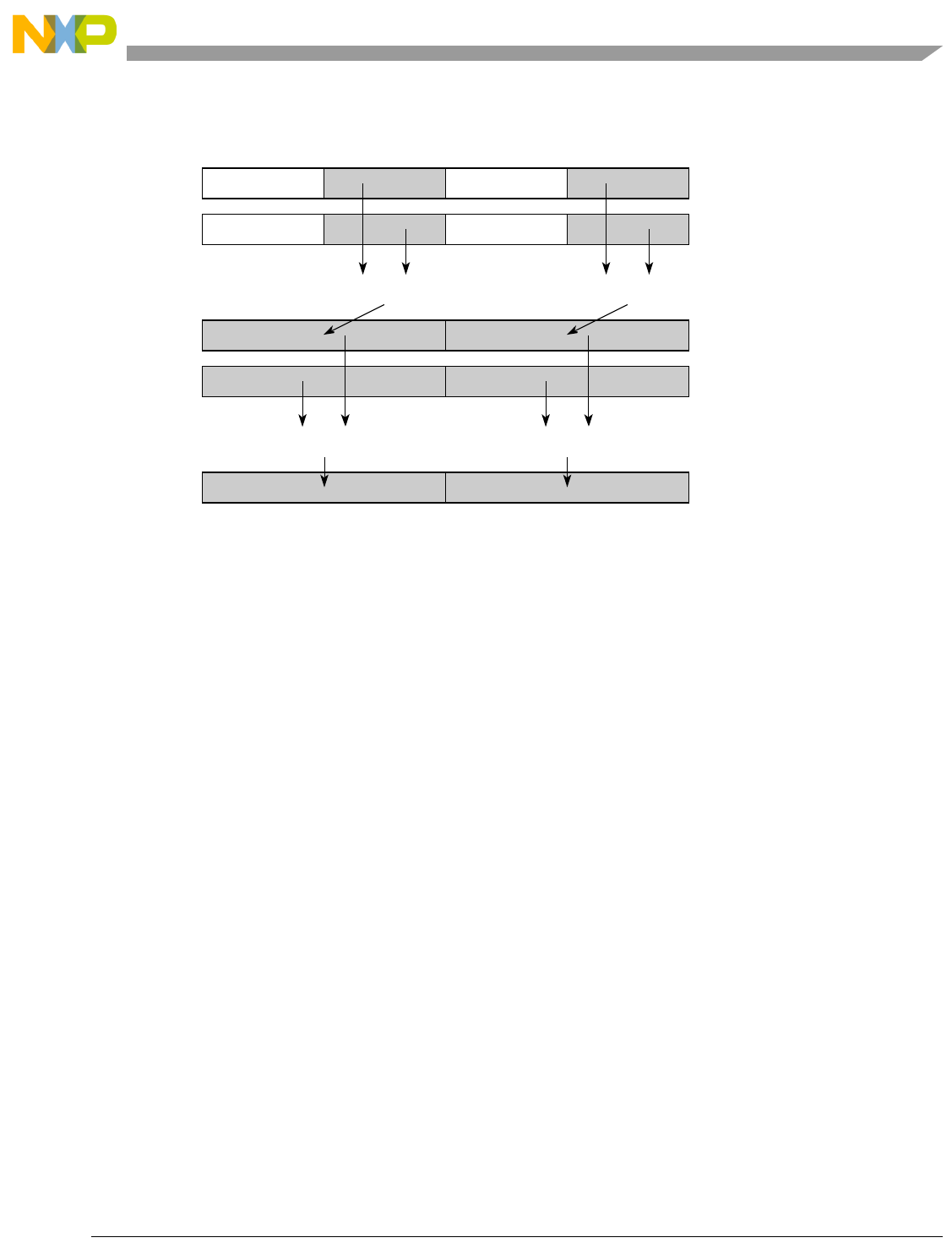
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-105
Other registers altered: SPEFSCR, ACC
Figure 7-54. evmhossianw
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA
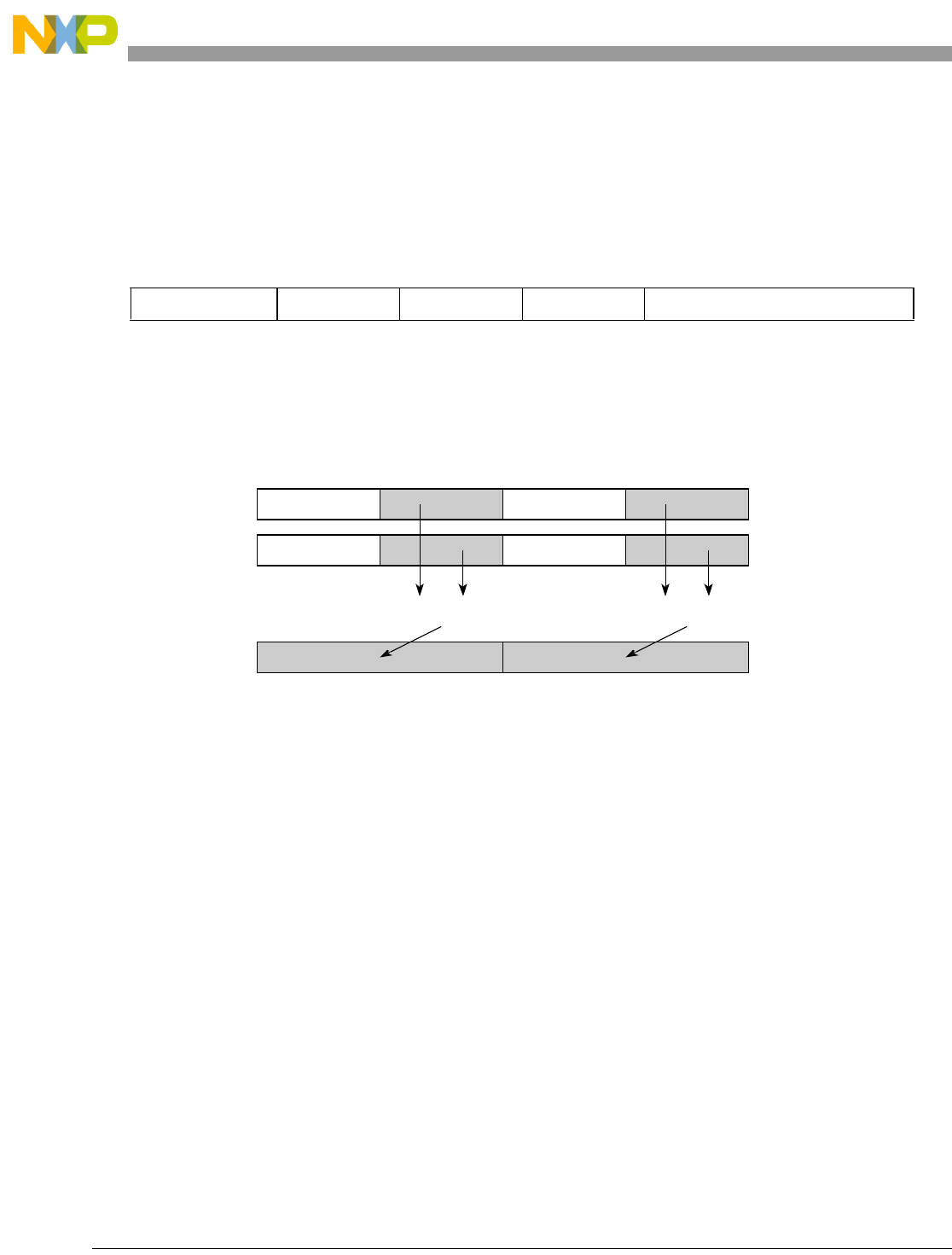
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-106 Freescale Semiconductor
evmhoumi evmhoumi
Vector Multiply Half Words, Odd, Unsigned, Modulo, Integer
evmhoumi rD,rA,rB (M=1, O=1, F=0, S=0, A=0)
rD0:31 = rA16:31 *ui rB16:31
rD32:63 = rA48:63 *ui rB48:63
Each odd-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half word element in rB. The two 32-bit unsigned integer products are placed into the
two word elements of rD.
Figure 7-55. evmhoumi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 0 0 1 1 0 0
15 16 47 480313263
rA
rB
rD
X X
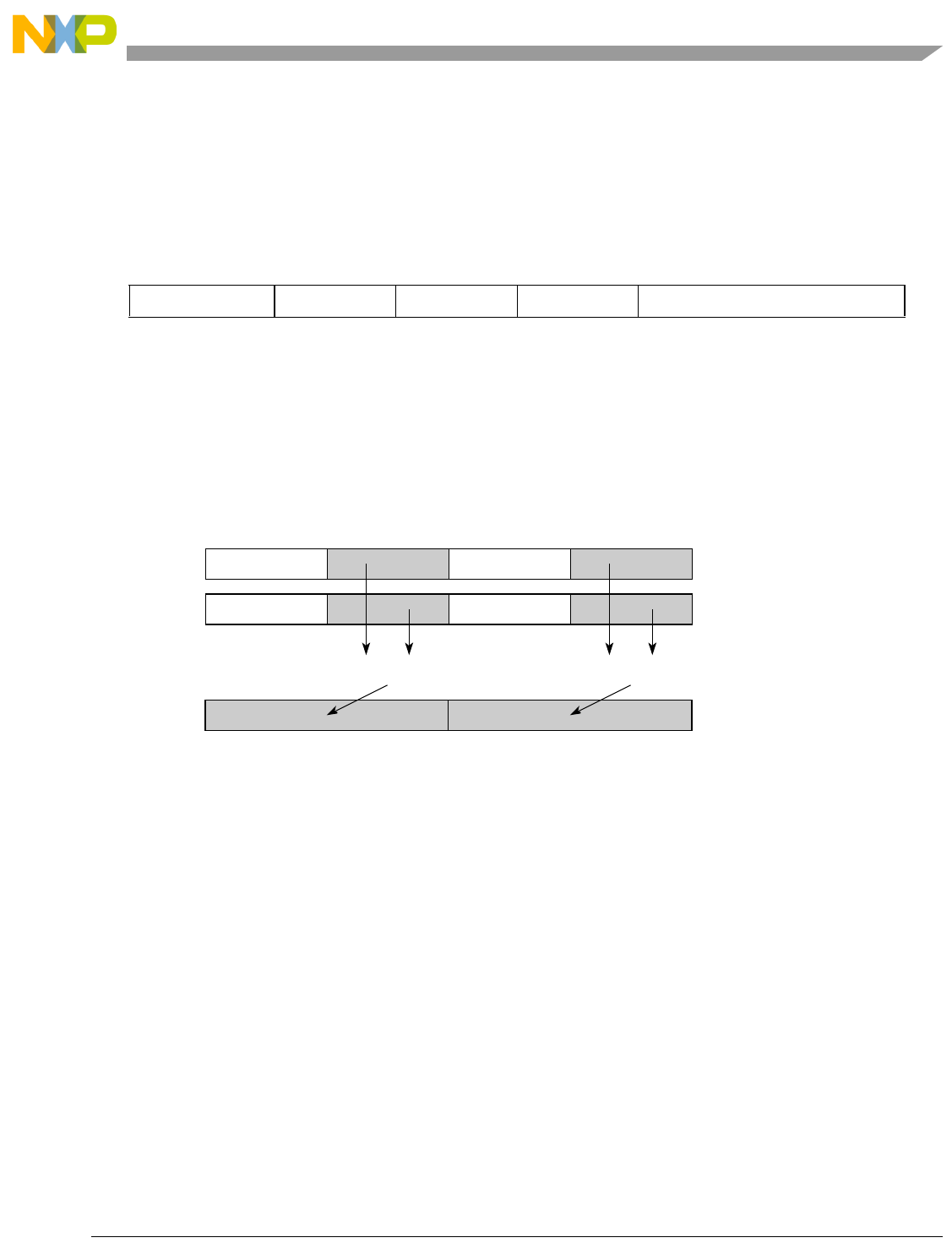
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-107
evmhoumia evmhoumia
Vector Multiply Half Words, Odd, Unsigned, Modulo, Integer, to Accumulator
evmhoumia rD,rA,rB (M=1, O=1, F=0, S=0, A=1)
rD0:31 = rA16:31 *ui rB16:31
rD32:63 = rA48:63 *ui rB48:63
ACC0:63 = rD0:63
Each odd-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB. The two 32-bit unsigned integer products are placed into the
two word elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-56. evmhoumia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 0 1 0 1 1 0 0
15 16 47 480313263
rA
rB
Accumulator & rD
X X
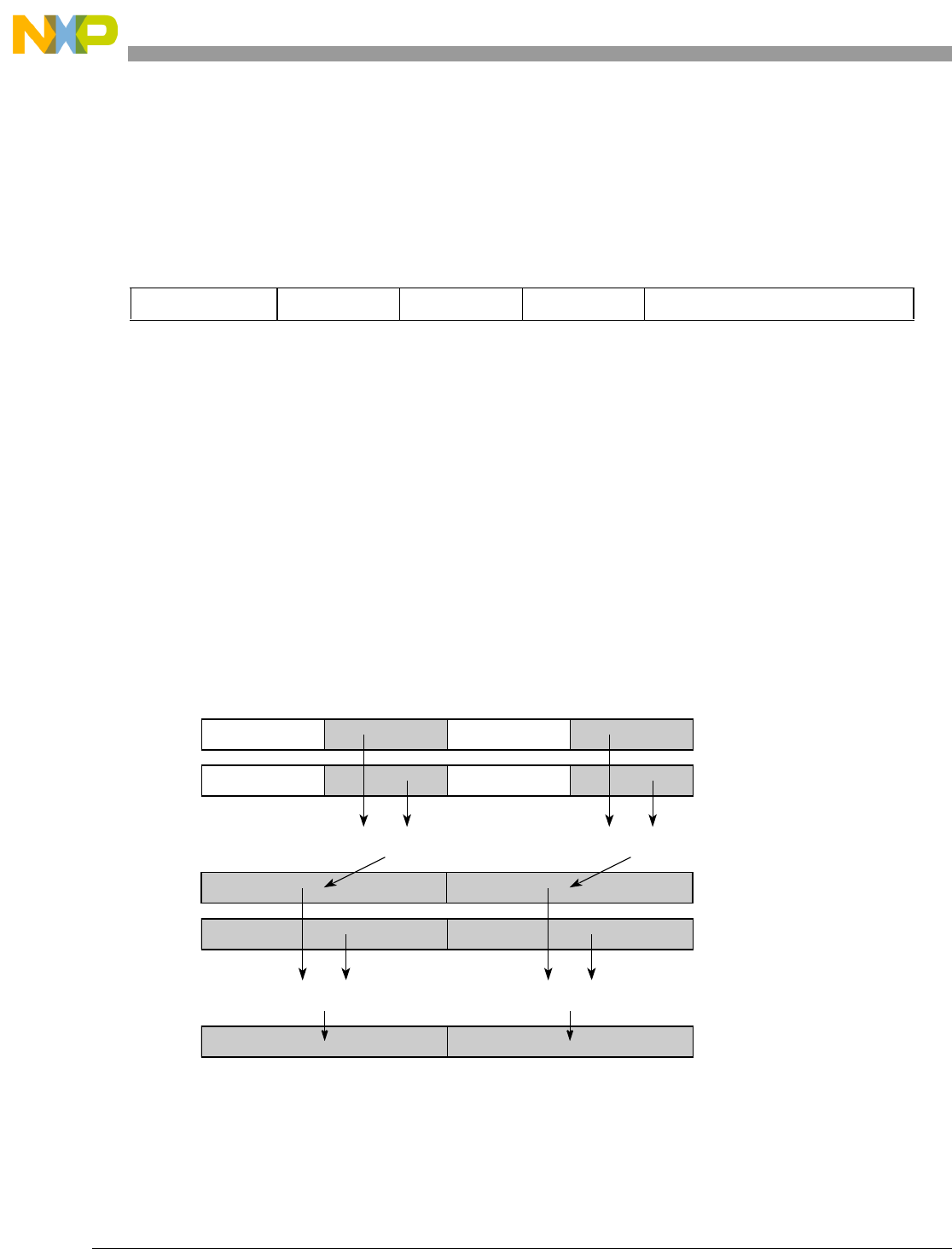
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-108 Freescale Semiconductor
evmhoumiaaw evmhoumiaaw
Vector Multiply Half Words, Odd, Unsigned, Modulo, Integer and Accumulate into Words
evmhoumiaaw rD,rA,rB (M=1, O=1, F=0, S=0)
temp10:31 = rA16:31 *ui rB16:31
temp20:31 = rA48:63 *ui rB48:63
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered unsigned integer half-word element in rA is multiplied by the corresponding
unsigned integer half-word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum. The low 32 bits of the intermediate sum are placed into the accumulator word
and the corresponding rD word.
Other registers altered: ACC
Figure 7-57. evmhoumiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 1 1 0 0
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
+ +
Accumulator & rD
rA
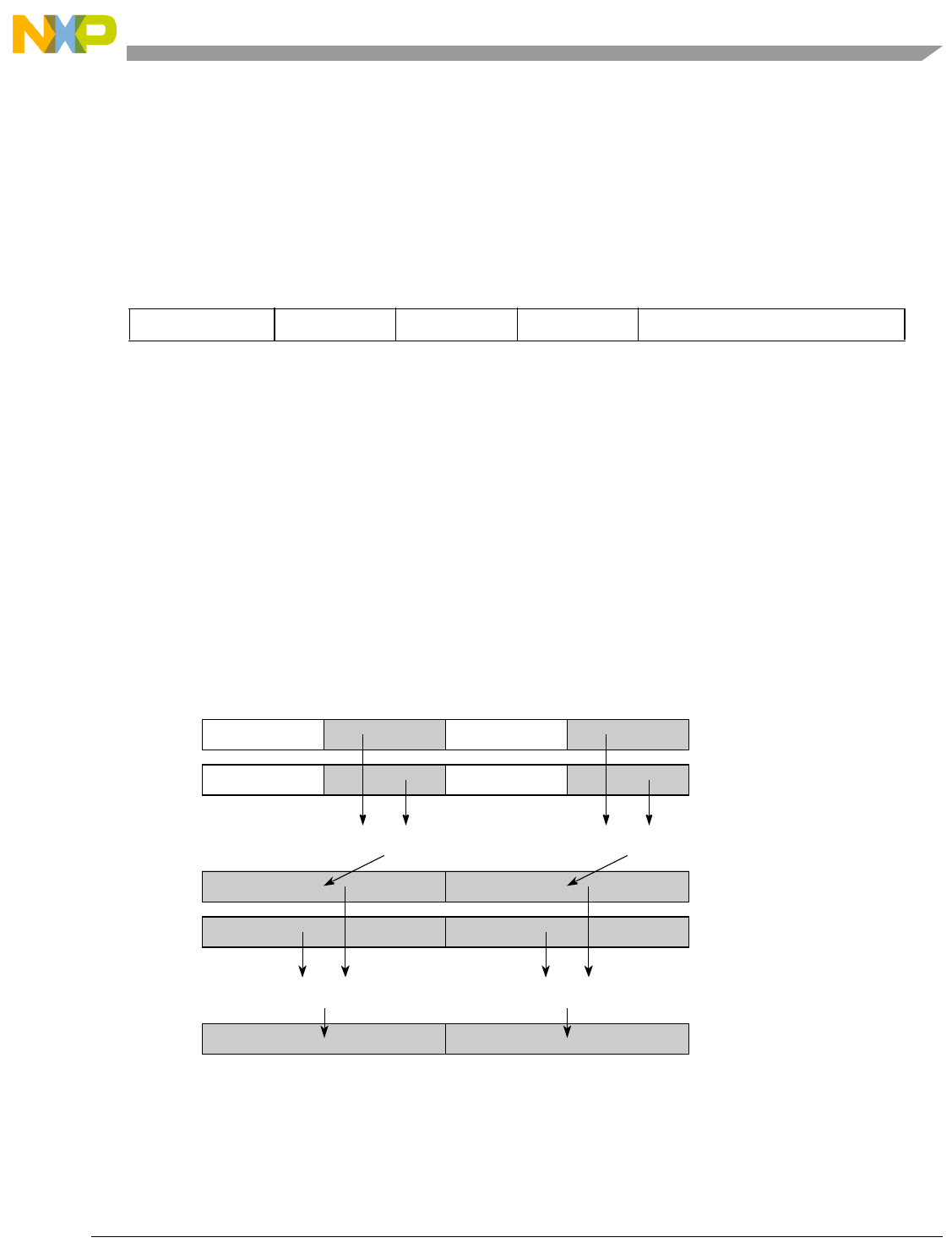
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-109
evmhoumianw evmhoumianw
Vector Multiply Half Words, Odd, Unsigned, Modulo, Integer, and Accumulate Negative into
Words
evmhoumianw rD,rA,rB (M=1, O=1, F=0, S=0)
temp10:31 = rA16:31 *ui rB16:31
temp20:31 = rA48:63 *ui rB48:63
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ACC0:31 = rD0:31 = temp31:32
ACC32:63 = rD32:63 = temp41:32
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a
33-bit intermediate difference. The low 32 bits of the intermediate difference are placed into the
accumulator word and the corresponding rD word.
Other registers altered: ACC
Figure 7-58. evmhoumianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 1 1 0 0
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-110 Freescale Semiconductor
evmhousiaaw evmhousiaaw
Vector Multiply Half Words, Odd, Unsigned, Saturate, Integer and Accumulate into Words
evmhousiaaw rD,rA,rB (M=0, O=1, F=0, S=0)
temp10:31 = rA16:31 *ui rB16:31
temp20:31 = rA48:63 *ui rB48:63
temp30:32 = ACC0:31 + temp10:31
temp40:32 = ACC32:63 + temp20:31
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0xFFFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0xFFFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is added to the contents of the accumulator word to form a 33-bit
intermediate sum.
3. If the intermediate sum has overflowed, 0xFFFF_FFFF is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the
accumulator word and the corresponding rD word.
4. If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
Other registers altered: SPEFSCR, ACC
0 56 101115162021 31
4 RD RA RB 1 0 1 0 0 0 0 0 1 0 0
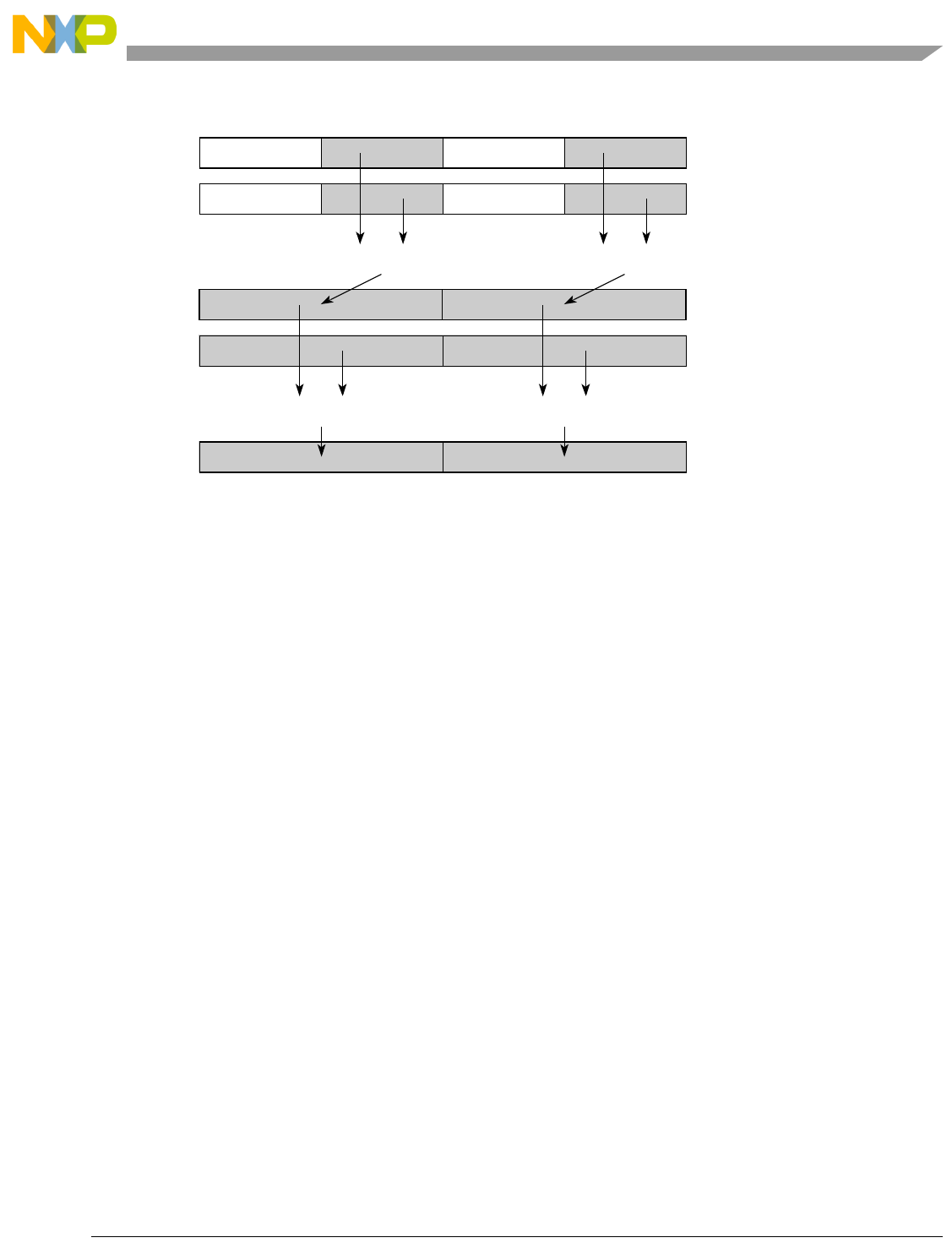
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-111
Figure 7-59. evmhousiaaw
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
+ +
Accumulator & rD
rA

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-112 Freescale Semiconductor
evmhousianw evmhousianw
Vector Multiply Half Words, Odd, Unsigned, Saturate, Integer and Accumulate Negative into
Words
evmhousianw rD,rA,rB (M=0, O=1, F=0, S=0)
temp10:31 = rA16:31 *ui rB16:31
temp20:31 = rA48:63 *ui rB48:63
temp30:32 = ACC0:31 - temp10:31
temp40:32 = ACC32:63 - temp20:31
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0x00000000, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0x00000000, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each odd-numbered unsigned integer half word element in rA is multiplied by the corresponding
unsigned integer half word element in rB.
2. The intermediate 32-bit product is subtracted from the contents of the accumulator word to form a
33-bit intermediate difference.
3. If the intermediate difference has underflowed (is negative), 0x0000_0000 is placed into the
accumulator word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate
difference are placed into the accumulator word and the corresponding rD word.
4. If there is an underflow from either subtraction, the underflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 0 0 0 0 1 0 0
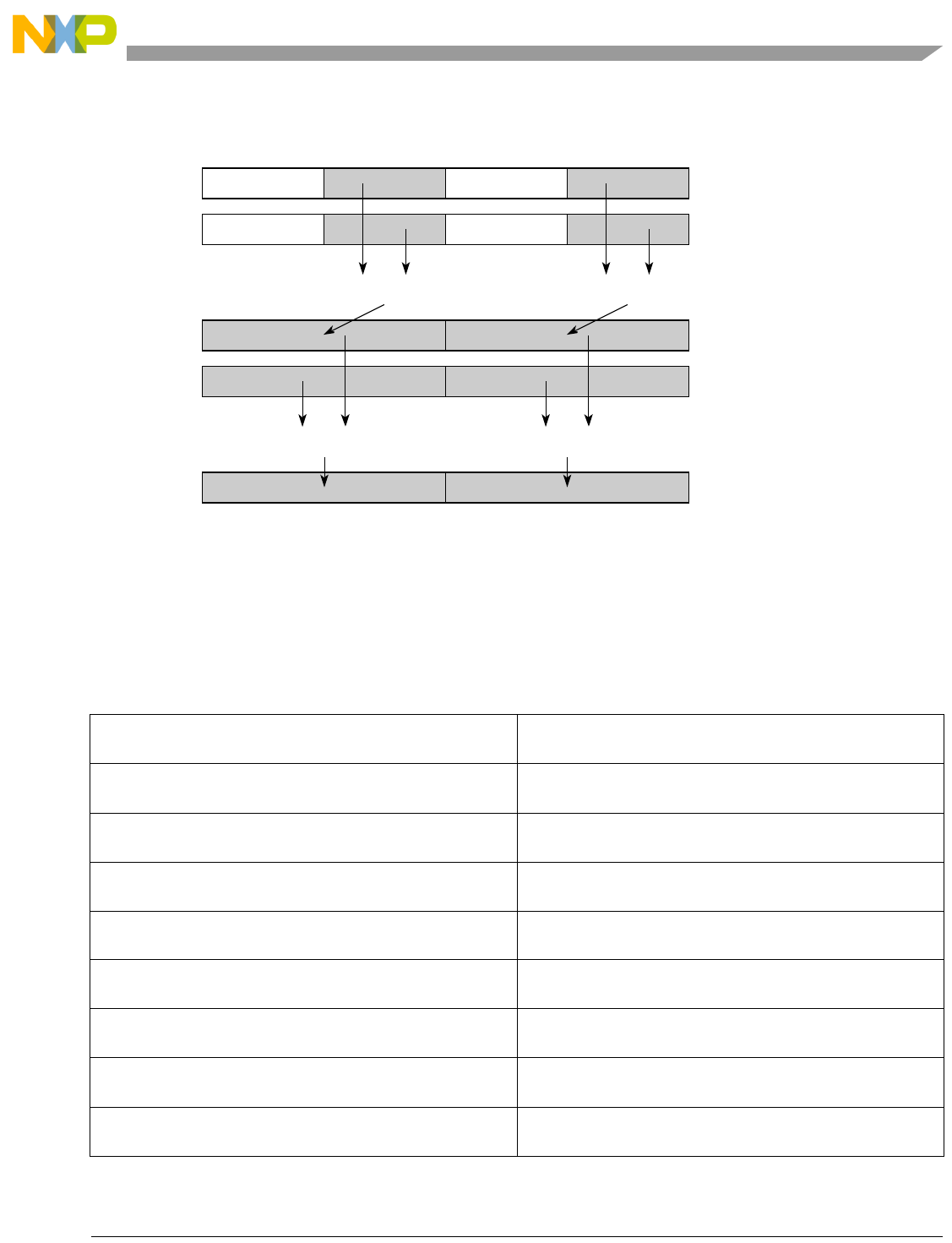
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-113
Other registers altered: SPEFSCR, ACC
Figure 7-60. evmhousianw
7.4.2 Multiply Words Instructions
The following instructions perform 32 × 32 multiplies with optional saturation, returning either the higher
or lower portion of the product, with and without accumulates, using signed or unsigned integer or
fractional operands.
Table 7-5. Multiply Words Instructions
Vector Multiply Word High Signed, Modulo, Fractional
(evmwhsmf)
Vector Multiply Word Low Signed, Saturate, Integer and
Accumulate in Words (evmwlssiaaw)
Vector Multiply Word High Signed, Modulo, Fractional, to
Accumulator (evmwhsmfa) Vector Multiply Word Low Signed, Saturate, Integer and
Accumulate Negative in Words (evmwlssianw)
Vector Multiply Word High Signed, Modulo, Integer
(evmwhsmi) Vector Multiply Word Low Unsigned, Modulo, Integer
(evmwlumi)
Vector Multiply Word High Signed, Modulo, Integer to
Accumulator (evmwhsmia) Vector Multiply Word Low Unsigned, Modulo, Integer, to
Accumulator (evmwlumia)
Vector Multiply Word High Signed, Saturate, Fractional, to
Accumulator (evmwhssfa) Vector Multiply Word Low Unsigned, Modulo, Integer and
Accumulate in Words (evmwlumiaaw)
Vector Multiply Word High Unsigned, Modulo, Integer
(evmwhumi) Vector Multiply Word Low Unsigned, Modulo, Integer, and
Accumulate Negative in Words (evmwlumianw)
Vector Multiply Word High Unsigned, Modulo, Integer, to
Accumulator (evmwhumia) Vector Multiply Word Low Unsigned, Saturate, Integer, and
Accumulate in Words (evmwlusiaaw)
Vector Multiply Word Low Signed, Modulo, Integer and
Accumulate in Words (evmwlsmiaaw) Vector Multiply Word Low Unsigned, Saturate, Integer and
Accumulate Negative in Words (evmwlusianw)
Vector Multiply Word Low Signed, Modulo, Integer, and
Accumulate Negative in Words (evmwlsmianw) Vector Multiply Word Signed, Modulo, Fractional (evmwsmf)
15 16 47 480313263
Intermediate product
Accumulator
rB
X X
– –
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-114 Freescale Semiconductor
Vector Multiply Word Signed, Modulo, Fractional, to
Accumulator (evmwsmfa) Vector Multiply Word Unsigned, Modulo, Integer, to
Accumulator (evmwumia)
Vector Multiply Word Signed, Modulo, Fractional, and
Accumulate (evmwsmfaa) Vector Multiply Word Unsigned, Modulo, Integer and
Accumulate (evmwumiaa)
Vector Multiply Word Signed, Modulo, Fractional and
Accumulate Negative (evmwsmfan) Vector Multiply Word Unsigned, Modulo, Integer and
Accumulate Negative (evmwumian)
Vector Multiply Word Signed, Modulo, Integer (evmwsmi) Vector Add Signed, Modulo, Integer to Accumulator Word
(evaddsmiaaw)
Vector Multiply Word Signed, Modulo, Integer, to Accumulator
(evmwsmia) Vector Add Signed, Saturate, Integer to Accumulator Word
(evaddssiaaw)
Vector Multiply Word Signed, Modulo, Integer, and Accumulate
(evmwsmiaa) Vector Add Unsigned, Modulo, Integer to Accumulator Word
(evaddumiaaw)
Vector Multiply Word Signed, Modulo, Integer and Accumulate
Negative (evmwsmian)
Vector Add Unsigned, Saturate, Integer to Accumulator Word
(evaddusiaaw)
Vector Multiply Word Signed, Saturate, Fractional (evmwssf) Vector Subtract Signed, Modulo, Integer to Accumulator Word
(evsubfsmiaaw)
Vector Multiply Word Signed, Saturate, Fractional, to
Accumulator (evmwssfa) Vector Subtract Signed, Saturate, Integer to Accumulator Word
(evsubfssiaaw)
Vector Multiply Word Signed, Saturate, Fractional, and
Accumulate (evmwssfaa) Vector Subtract Unsigned, Modulo, Integer to Accumulator
Word (evsubfumiaaw)
Vector Multiply Word Signed, Saturate, Fractional and
Accumulate Negative (evmwssfan) Vector Subtract Unsigned, Saturate, Integer to Accumulator
Word (evsubfusiaaw)
Vector Multiply Word Unsigned, Modulo, Integer (evmwumi) —
Table 7-5. Multiply Words Instructions (Continued)
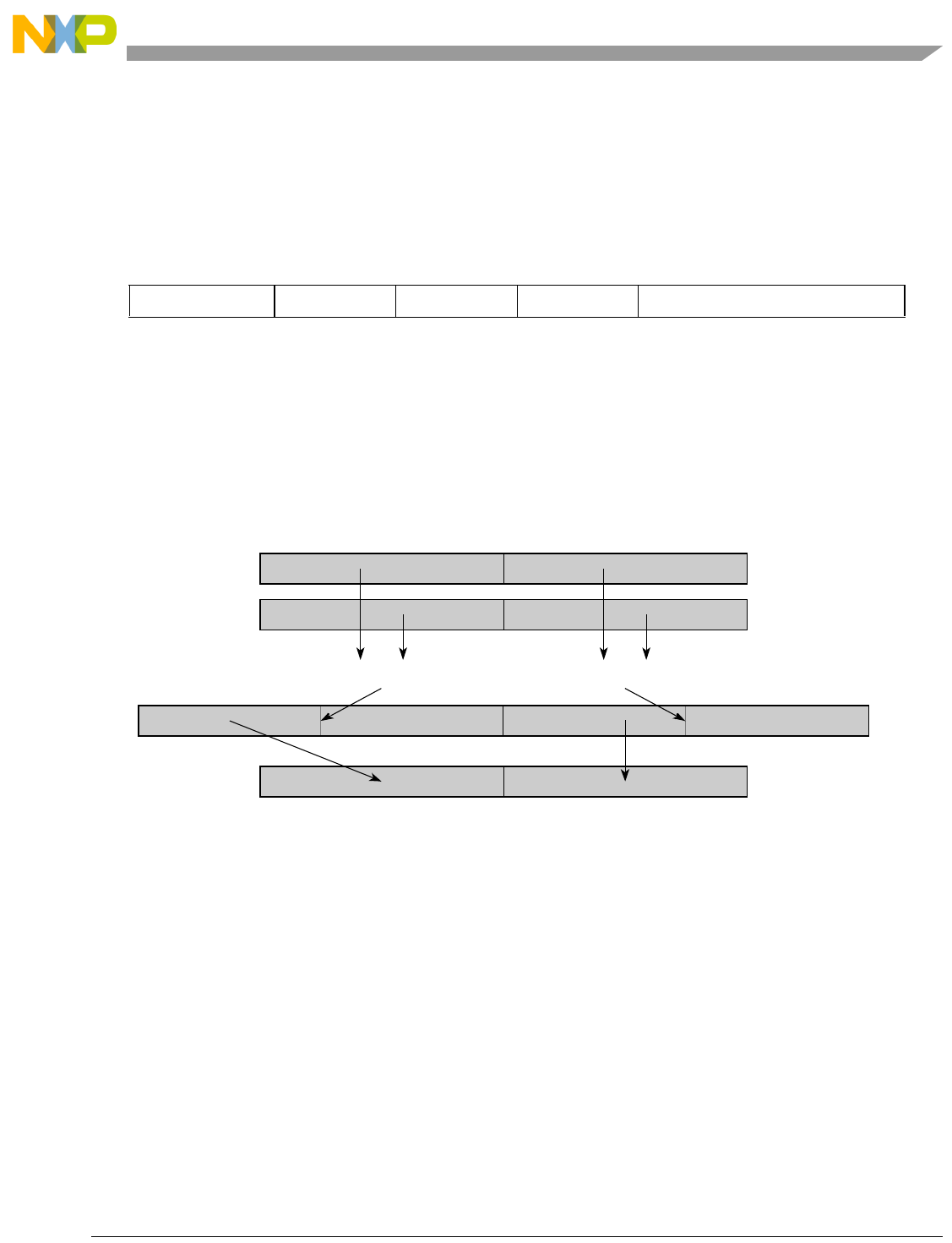
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-115
evmwhsmf evmwhsmf
Vector Multiply Word High Signed, Modulo, Fractional
evmwhsmf rD,rA,rB (M=1, F=1, S=1,A=0)
temp10:63 = rA0:31 * rB0:31
temp20:63 = rA32:63 * rB32:63
rD0:31 = temp11:32
rD32:63 = temp21:32
Each signed fractional word element in rA is multiplied by the corresponding signed fractional word
element in rB. Bits 1–32 of the two 64-bit signed fractional products (eliminating the redundant sign bit)
are placed into the two word elements of rD.
Figure 7-61. evmwhsmf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 0 1 1 1 1
0313263
Intermediate product
rB
X
rD
rA
X
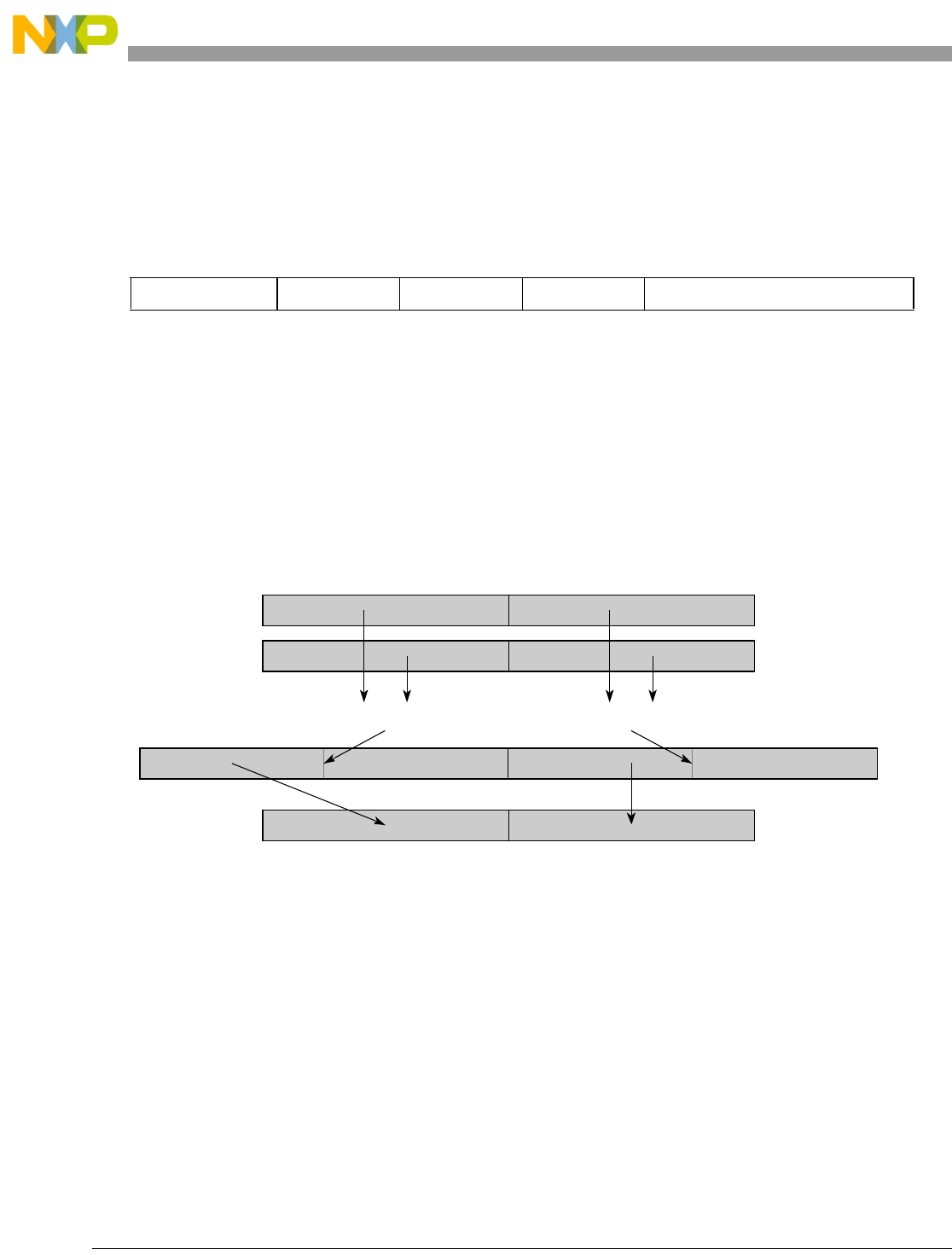
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-116 Freescale Semiconductor
evmwhsmfa evmwhsmfa
Vector Multiply Word High Signed, Modulo, Fractional, to Accumulator
evmwhsmfa rD,rA,rB (M=1, F=1, S=1,A=1)
temp10:64 = rA0:31 * rB0:31
temp20:64 = rA32:63 * rB32:63
rD0:31 = temp11:32
rD32:63 = temp21:32
ACC0:63 = rD0:63
Each signed fractional word element in rA is multiplied by the corresponding signed fractional word
element in rB. Bits 1–32 of the two 64-bit signed fractional products (eliminating the redundant sign bit)
are placed into the two word elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-62. evmwhsmfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 0 1 1 1 1
0313263
Intermediate product
rB
X
Accumulator & rD
rA
X
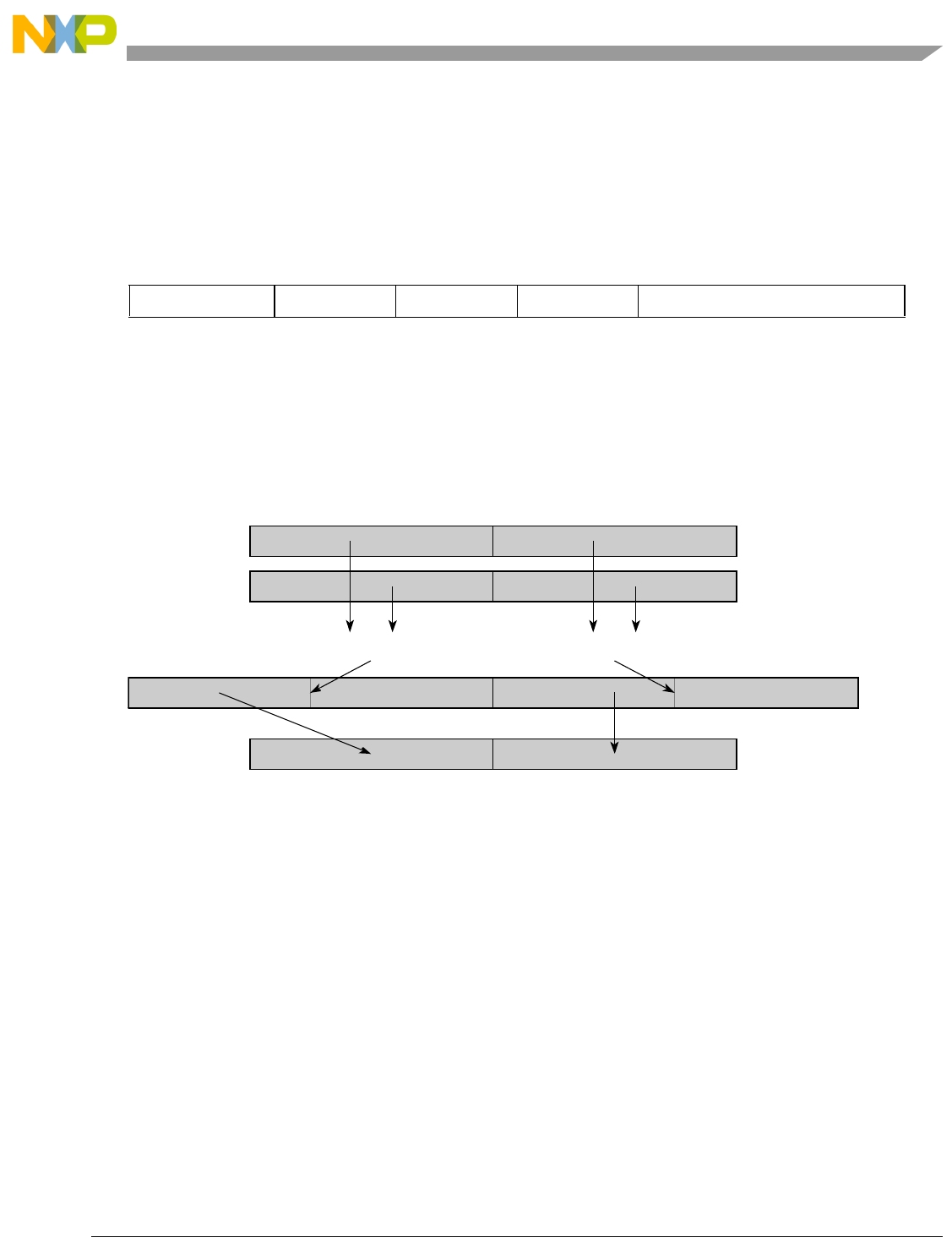
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-117
evmwhsmi evmwhsmi
Vector Multiply Word High Signed, Modulo, Integer
evmwhsmi rD,rA,rB (M=1, F=0, S=1,A=0)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
rD0:31 = temp10:31
rD32:63 = temp20:31
Each signed integer word element in rA is multiplied by the corresponding signed integer word element
in rB. The upper 32-bits of the two 64-bit signed integer products are placed into the two word elements
of rD.
Figure 7-63. evmwhsmi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 0 1 1 0 1
0313263
Intermediate product
rB
X
rD
rA
X
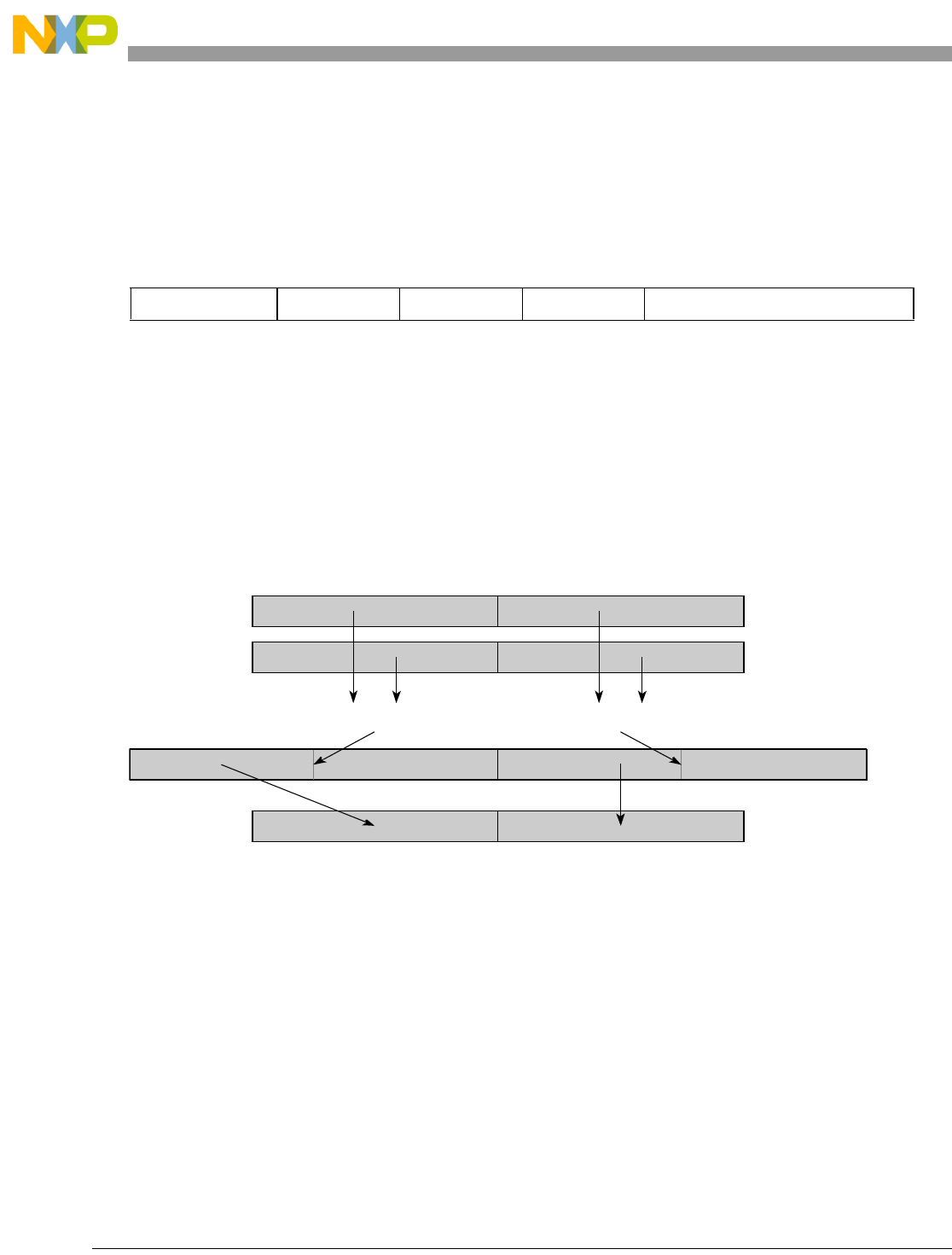
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-118 Freescale Semiconductor
evmwhsmia evmwhsmia
Vector Multiply Word High Signed, Modulo, Integer to Accumulator
evmwhsmia rD,rA,rB (M=1, F=0, S=1,A=1)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
rD0:31 = temp10:31
rD32:63 = temp20:31
ACC0:63 = rD0:63
Each signed integer word element in rA is multiplied by the corresponding signed integer word element
in rB. The upper 32-bits of the two 64-bit signed integer products are placed into the two word elements
of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-64. evmwhsmia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 0 1 1 0 1
0313263
Intermediate product
rB
X
Accumulator & rD
rA
X
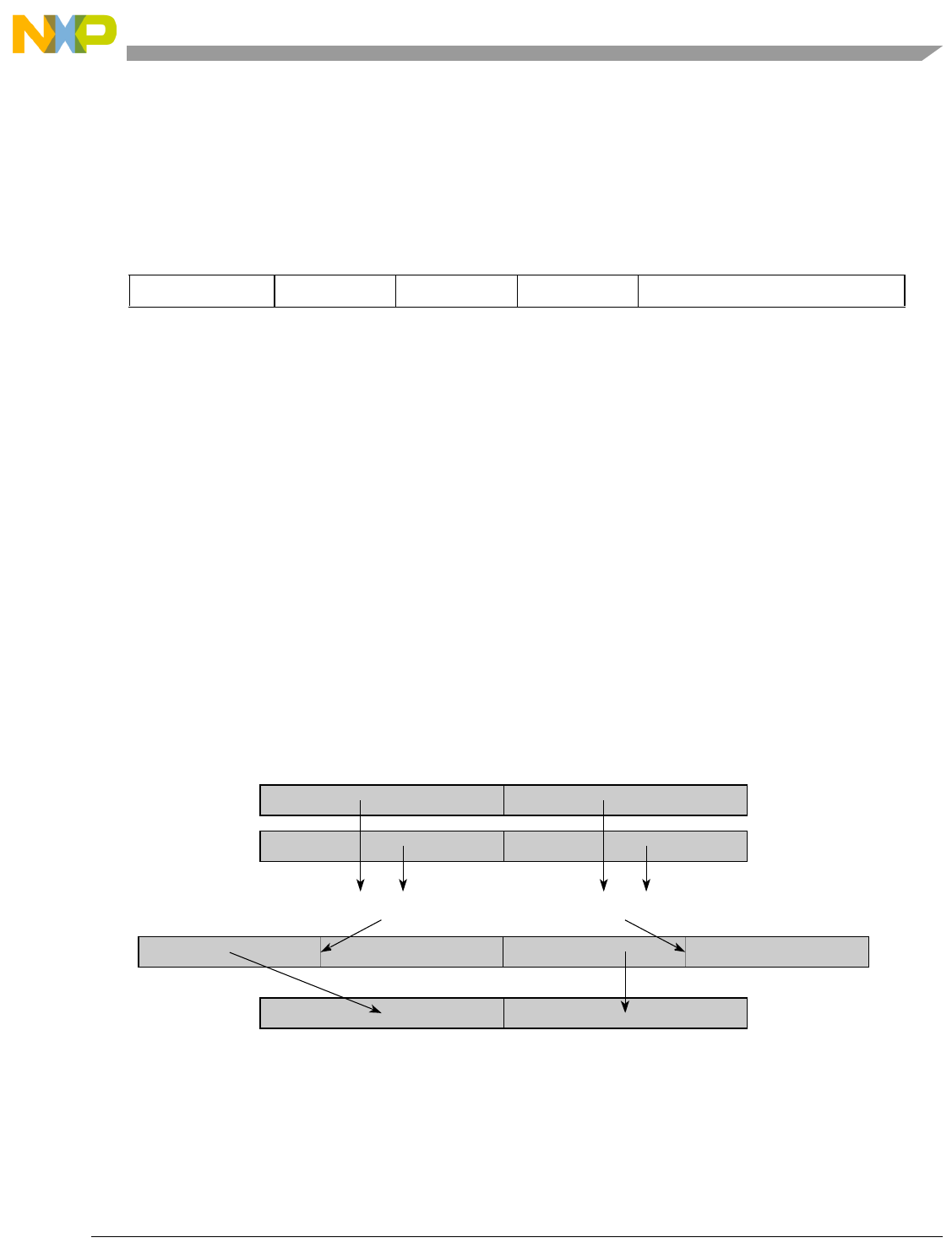
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-119
evmwhssf evmwhssf
Vector Multiply Word High Signed, Saturate, Fractional
evmwhssf rD,rA,rB (M=0, F=1, S=1,A=0)
temp10:63 = rA0:31 * rB0:31
temp20:63 = rA32:63 * rB32:63
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each signed fractional word element in rA is multiplied by the corresponding signed fractional word
element in rB. Bits1:32 of the two 64-bit signed fractional products (eliminating the redundant sign bit) are
placed into the two word elements of rD. If the inputs are -1.0 and -1.0 the result is saturated to the most
positive signed fraction (0x7FFFFFFF). If saturation occurs the overflow and summary overflow bits are
recorded.
Other registers altered: SPEFSCR
Figure 7-65. evmwhssf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 0 0 1 1 1
0313263
Intermediate product
rB
X
rD
rA
X
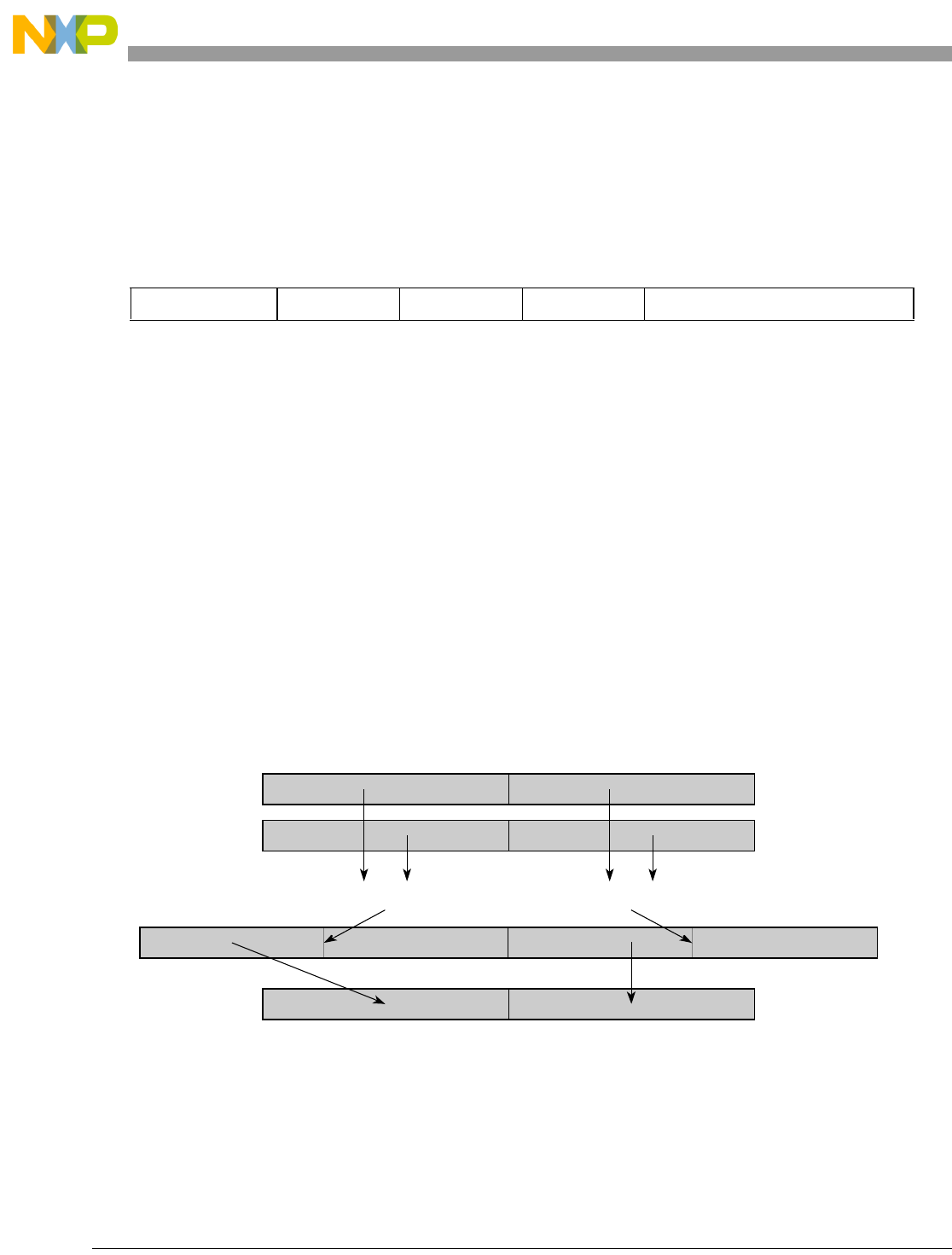
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-120 Freescale Semiconductor
evmwhssfa evmwhssfa
Vector Multiply Word High Signed, Saturate, Fractional, to Accumulator
evmwhssfa rD,rA,rB (M=0, F=1, S=1,A=1)
temp10:63 = rA0:31 * rB0:31
temp20:63 = rA32:63 * rB32:63
movh = temp10 ⊕ temp11
movl = temp20 ⊕ temp21
rD0:31 = SATURATE(movh, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE(movl, 0x7FFFFFFF, temp21:32)
ACC0:63 = rD0:63
SPEFSCROVH = movh
SPEFSCROV = movl
SPEFSCRSOVH = SPEFSCRSOVH | movh
SPEFSCRSOV = SPEFSCRSOV | movl
Each signed fractional word element in rA is multiplied by the corresponding signed fractional word
element in rB. Bits 1–32 of the two 64-bit signed fractional products (eliminating the redundant sign bit)
are placed into the two word elements of rD. If the inputs are –1.0 and –1.0 the result is saturated to the
most positive signed fraction (0x7FFF_FFFF). If saturation occurs, the overflow and summary overflow
bits are recorded. The result in rD is also placed in the accumulator.
Other registers altered: SPEFSCR, ACC
Figure 7-66. evmwhssfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 0 0 1 1 1
0313263
Intermediate product
rB
X
Accumulator & rD
rA
X
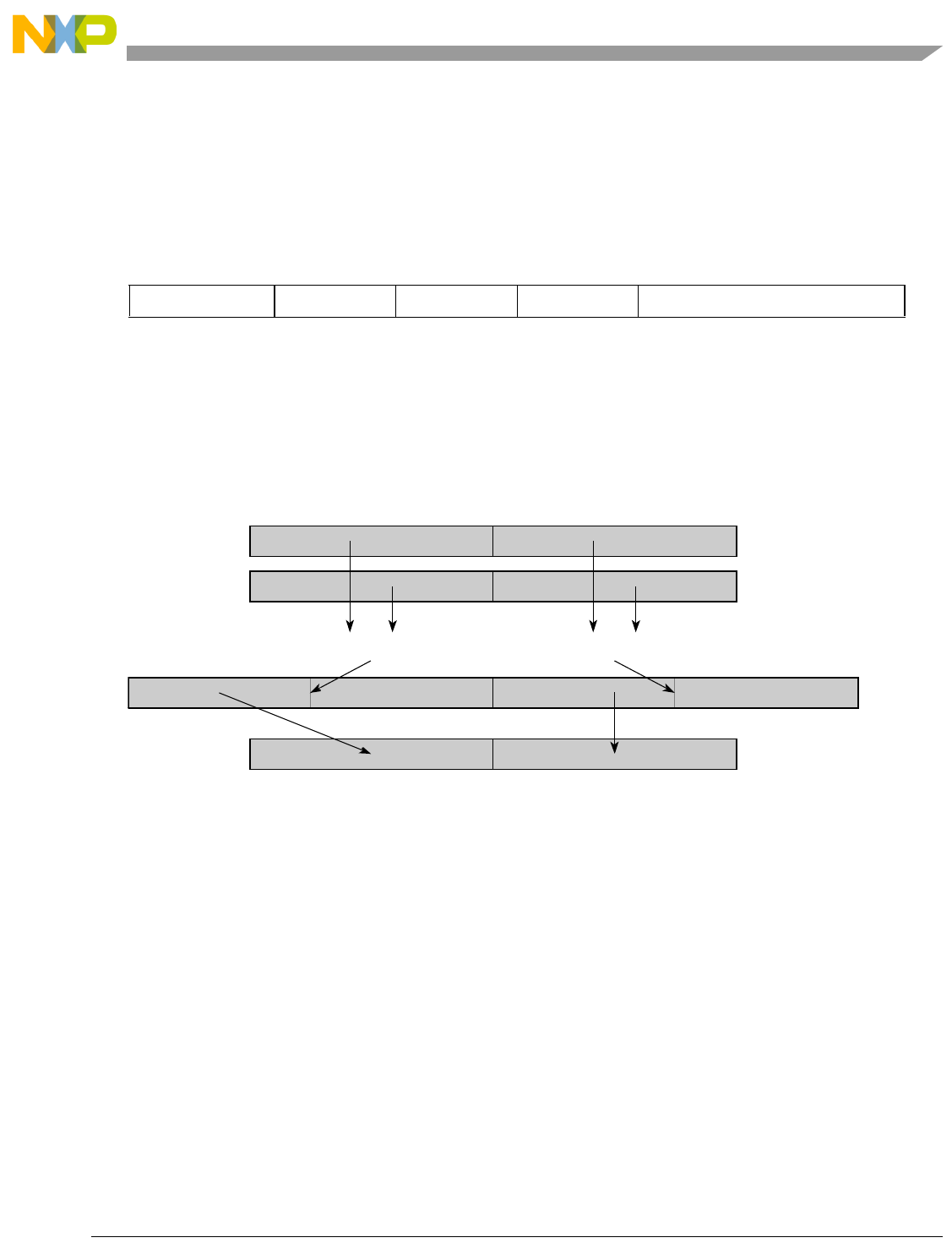
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-121
evmwhumi evmwhumi
Vector Multiply Word High Unsigned, Modulo, Integer
evmwhumi rD,rA,rB (M=1, F=0, S=0,A=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = temp10:31
rD32:63 = temp20:31
Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer word
element in rB. The upper 32-bits of the two 64-bit unsigned integer products are placed into the two word
elements of rD.
Figure 7-67. evmwhumi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 0 1 1 0 0
0313263
Intermediate product
rB
X
rD
rA
X
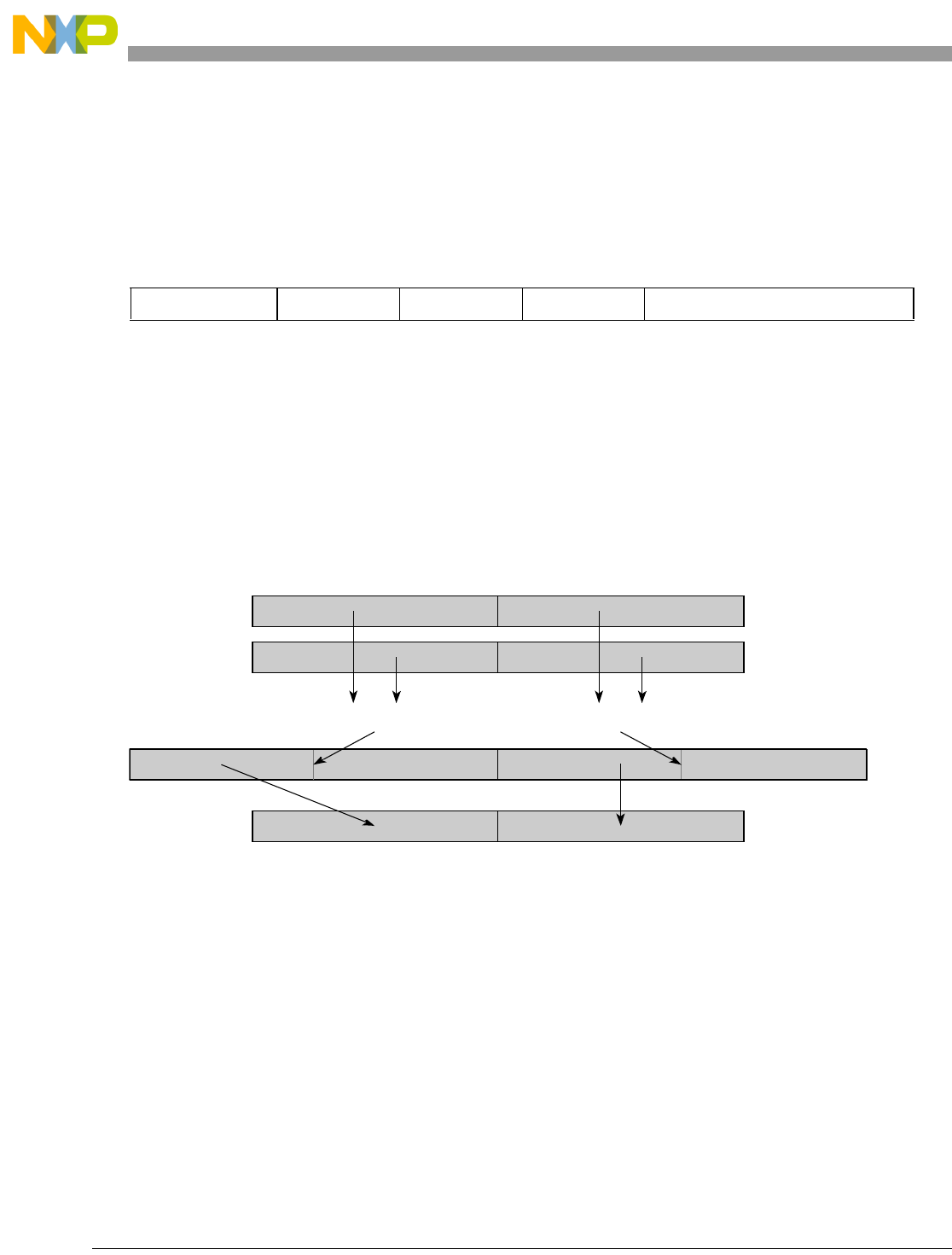
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-122 Freescale Semiconductor
evmwhumia evmwhumia
Vector Multiply Word High Unsigned, Modulo, Integer, to Accumulator
evmwhumia rD,rA,rB (M=1, F=0, S=0,A=1)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = temp10:31
rD32:63 = temp20:31
ACC0:63 = rD0:63
Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer word
element in rB. The upper 32-bits of the two 64-bit unsigned integer products are placed into the two word
elements of rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-68. evmwhumia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 0 1 1 0 0
0313263
Intermediate product
rB
X
Accumulator & rD
rA
X
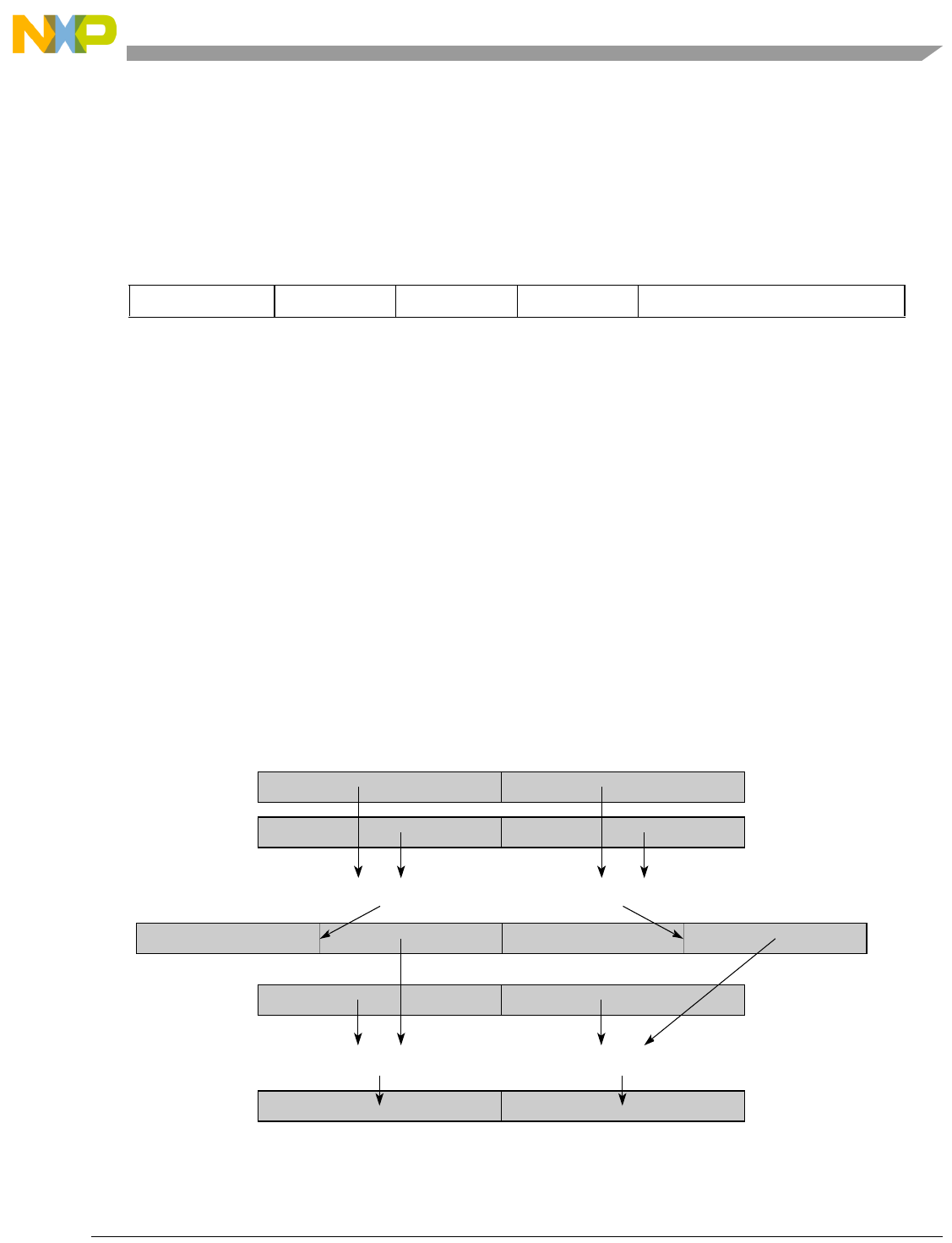
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-123
evmwlsmiaaw evmwlsmiaaw
Vector Multiply Word Low Signed, Modulo, Integer and Accumulate in Words
evmwlsmiaaw rD,rA,rB (M=1, F=0, S=1)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
rD0:31 = ACC0:31 + temp132:63
rD32:63 = ACC32:63 + temp232:63
ACC0:63 = rD0:63
For each word element in the accumulator the following operations are performed in the order shown:
1. Each signed integer word element in rA is multiplied by the corresponding signed integer word
element in rB.
2. The low 32 bits of the 64-bit intermediate product are added to the contents of the accumulator
word and placed into the corresponding rD word.
3. The result in rD is also placed in the accumulator.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
Other registers altered: ACC
Figure 7-69. evmwlsmiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 0 1 0 0 1
0313263
Intermediate product
rB
X
Accumulator
rA
X
++
Accumulator & rD
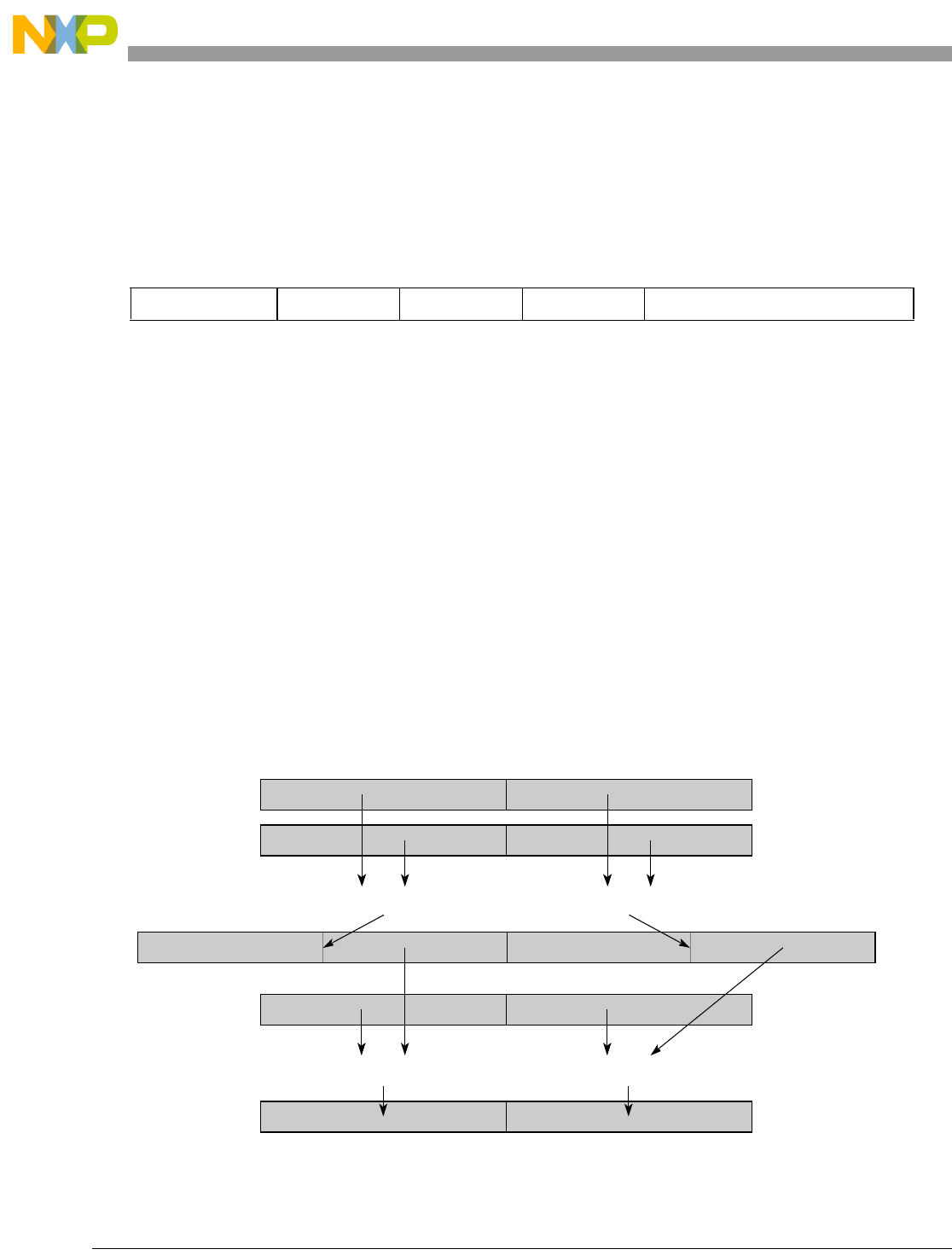
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-124 Freescale Semiconductor
evmwlsmianw evmwlsmianw
Vector Multiply Word Low Signed, Modulo, Integer, and Accumulate Negative in Words
evmwlsmianw rD,rA,rB (M=1, F=0, S=1)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
rD0:31 = ACC0:31 - temp132:63
rD32:63 = ACC32:63 - temp232:63
ACC0:63 = rD0:63
For each word element in the accumulator the following operations are performed in the order shown:
1. Each signed integer word element in rA is multiplied by the corresponding signed integer word
element in rB.
2. The low 32 bits of the 64-bit intermediate product are subtracted from the contents of the
accumulator word and placed into the corresponding rD word.
3. The result in rD is also placed in the accumulator.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
Other registers altered: ACC
Figure 7-70. evmwlsmianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 0 1 0 0 1
0313263
Intermediate product
rB
X
Accumulator
rA
X
––
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-125
evmwlssiaaw evmwlssiaaw
Vector Multiply Word Low Signed, Saturate, Integer and Accumulate in Words
evmwlssiaaw rD,rA,rB (M=0, F=0, S=1)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
temp30:32 = {ACC0,ACC0:31} + {temp132,temp132:63}
temp40:32 = {ACC32,ACC32:63} + {temp232,temp232:63}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each signed integer word element in rA is multiplied by the corresponding signed integer word
element in rB.
2. The low 32 bits of the 64-bit intermediate product are added to the contents of the accumulator
word to form an intermediate sum.
3. If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF if positive
overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and the
corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the
accumulator word and the corresponding rD word.
4. If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 0 0 0 0 1
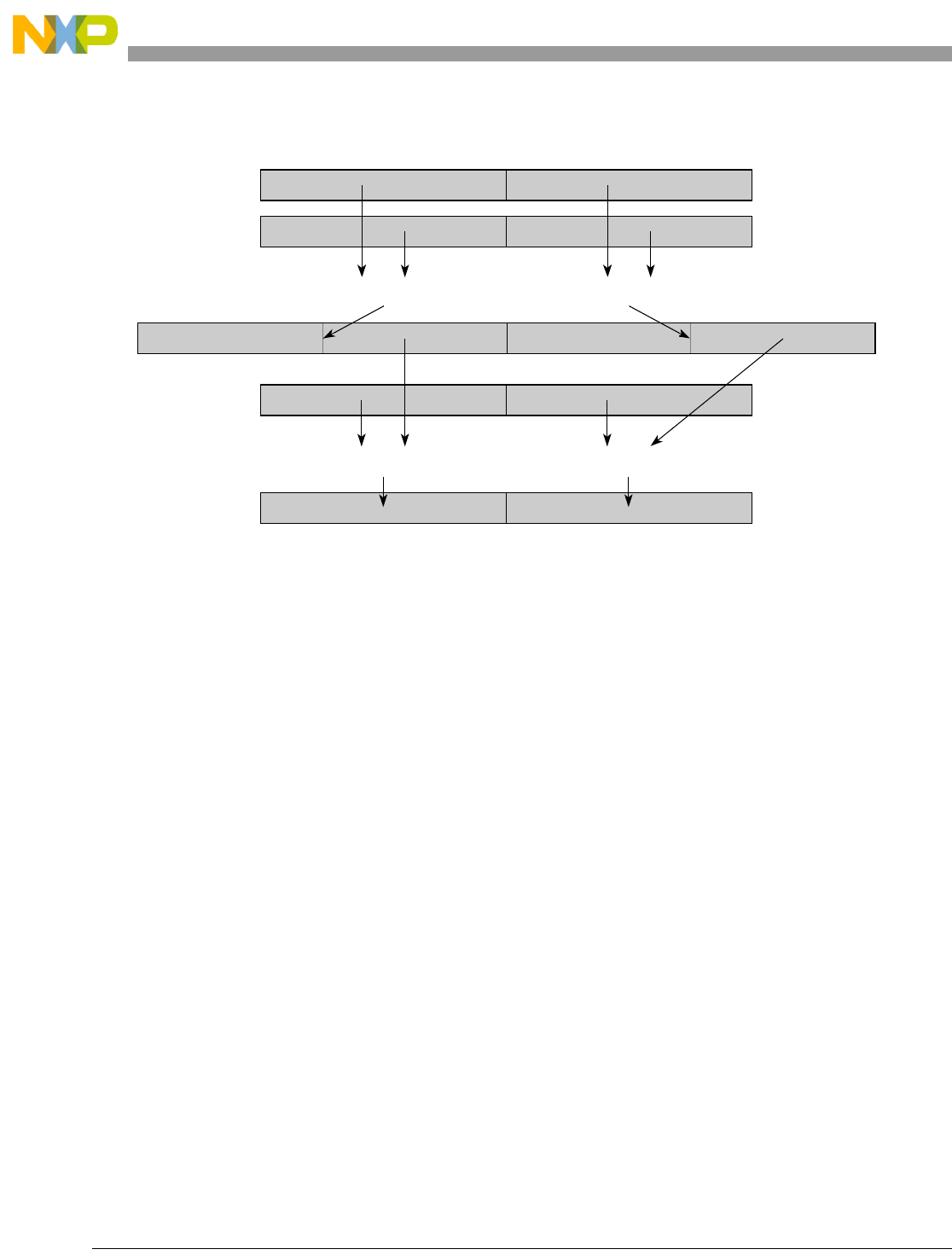
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-126 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-71. evmwlssiaaw
0313263
Intermediate product
rB
X
Accumulator
rA
X
++
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-127
evmwlssianw evmwlssianw
Vector Multiply Word Low Signed, Saturate, Integer and Accumulate Negative in Words
evmwlssianw rD,rA,rB (M=0, F=0, S=1)
temp10:63 = rA0:31 *si rB0:31
temp20:63 = rA32:63 *si rB32:63
temp30:32 = {ACC0,ACC0:31} - {temp132,temp132:63}
temp40:32 = {ACC32,ACC32:63} - {temp232,temp232:63}
ovh = temp30 ⊕ temp31
ovl = temp40 ⊕ temp41
rD0:31 = SATURATE_ACC(ovh, temp30, 0x80000000, 0x7FFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, temp40, 0x80000000, 0x7FFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each signed integer word element in rA is multiplied by the corresponding signed integer word
element in rB.
2. The low 32 bits of the 64-bit intermediate product are subtracted from the contents of the
accumulator word to form an intermediate difference.
3. If the intermediate difference has overflowed, the appropriate saturation value (0x7FFFFFFF if
positive overflow or 0x80000000 if negative overflow) is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are placed
into the accumulator word and the corresponding rD word.
4. If there is an overflow from the difference, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 0 0 0 0 1
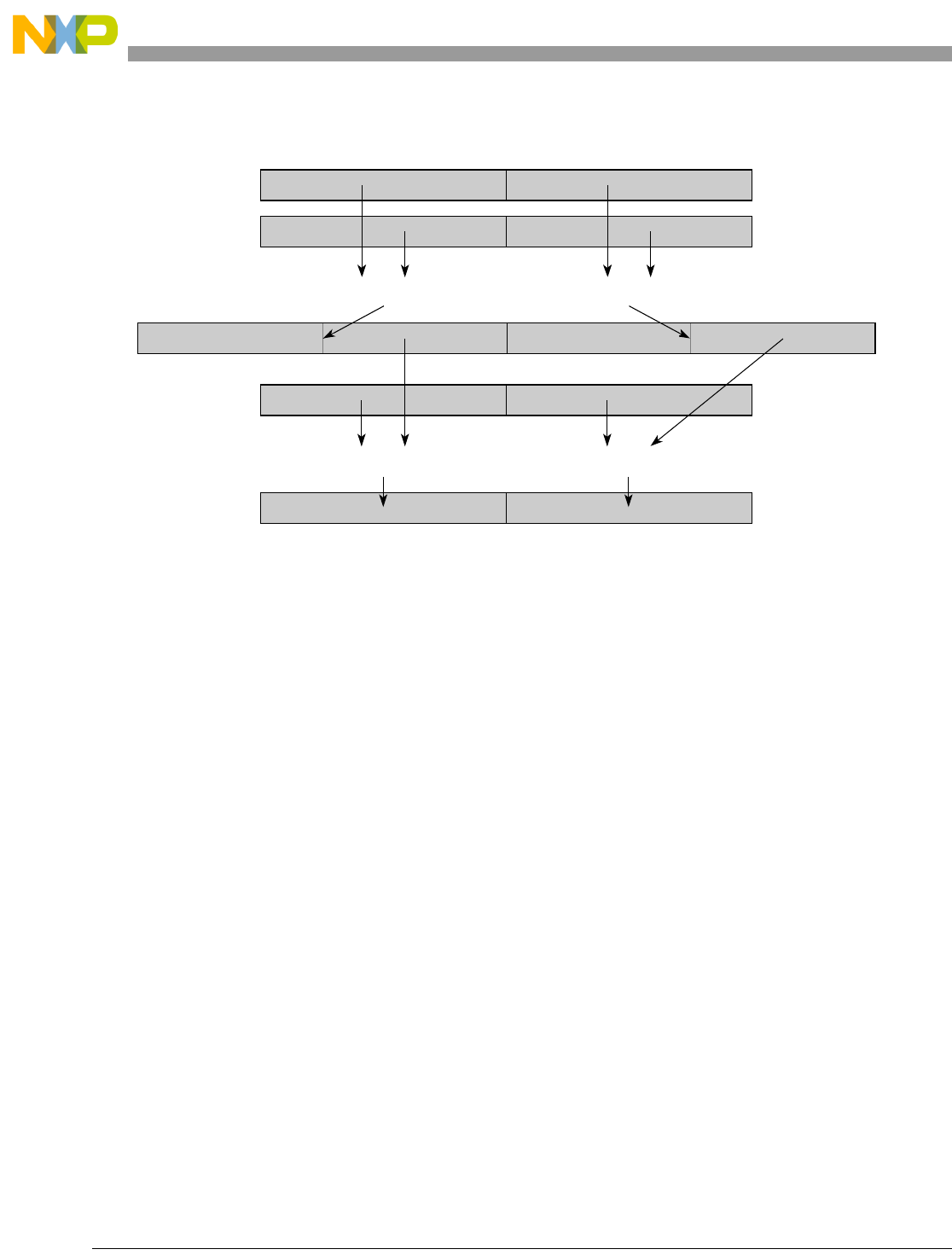
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-128 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-72. evmwlssianw
0313263
Intermediate product
rB
X
Accumulator
rA
X
––
Accumulator & rD
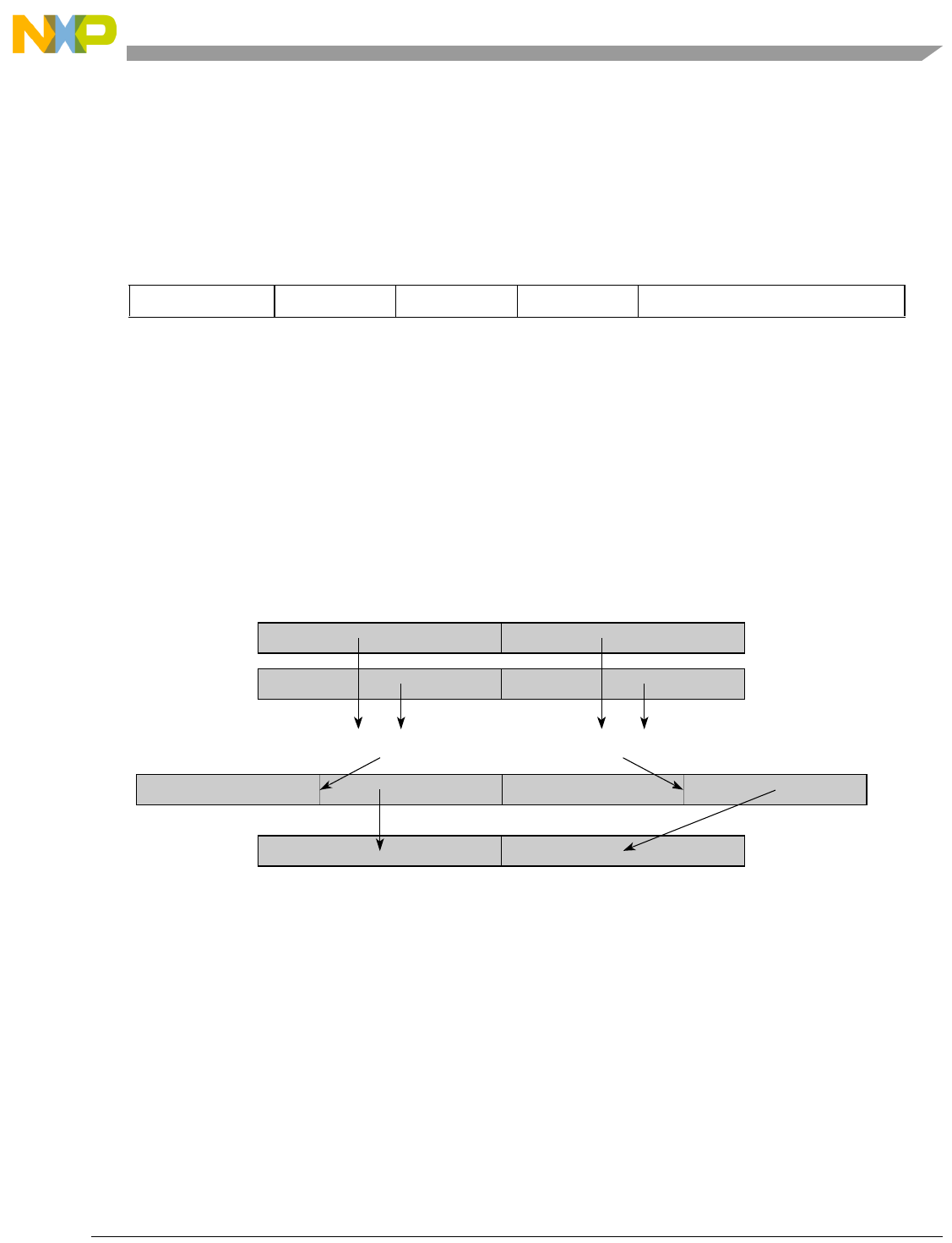
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-129
evmwlumi evmwlumi
Vector Multiply Word Low Unsigned, Modulo, Integer
evmwlumi rD,rA,rB (M=1, F=0, S=0,A=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = temp132:63
rD32:63 = temp232:63
Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer word
element in rB. The lower 32-bits of the two 64-bit unsigned integer products are placed into the two word
elements of rD.
NOTE
The low-order 32 bits of the product are independent of whether the word
elements in rA and rB are treated as signed or unsigned 32-bit integers.
Figure 7-73. evmwlumi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 0 1 0 0 0
0313263
Intermediate product
rB
X
rD
rA
X
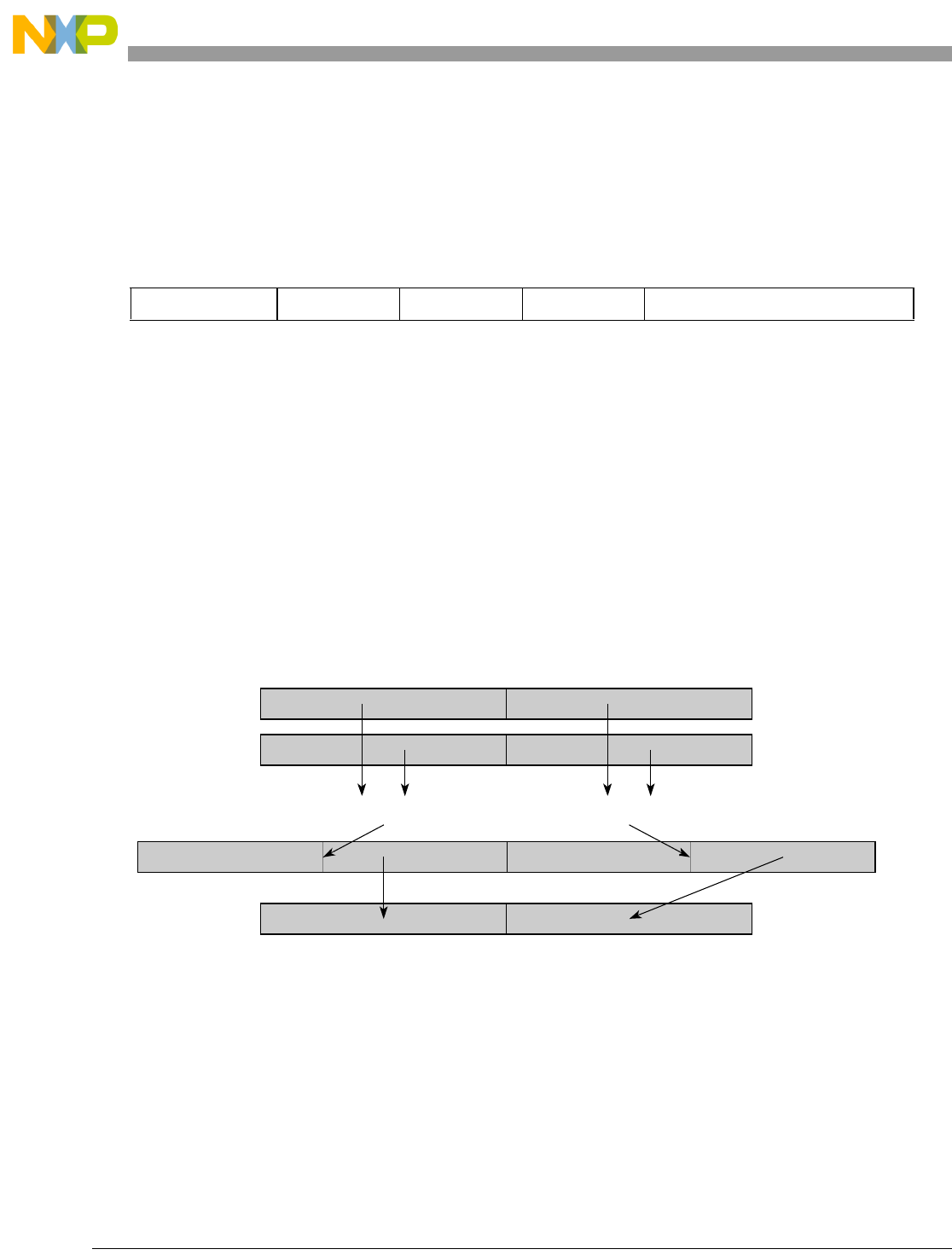
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-130 Freescale Semiconductor
evmwlumia evmwlumia
Vector Multiply Word Low Unsigned, Modulo, Integer, to Accumulator
evmwlumia rD,rA,rB (M=1, F=0, S=0,A=1)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = temp132:63
rD32:63 = temp232:63
ACC0:63 = rD0:63
Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer word
element in rB. The lower 32-bits of the two 64-bit unsigned integer products are placed into the two word
elements of rD. The result in rD is also placed in the accumulator.
NOTE
The low-order 32bits of the product are independent of whether the word
elements in rA and rB are treated as signed or unsigned 32-bit integers.
Other registers altered: ACC
Figure 7-74. evmwlumia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 0 1 0 0 0
0313263
Intermediate product
RB
X
Accumulator & rD
RA
X
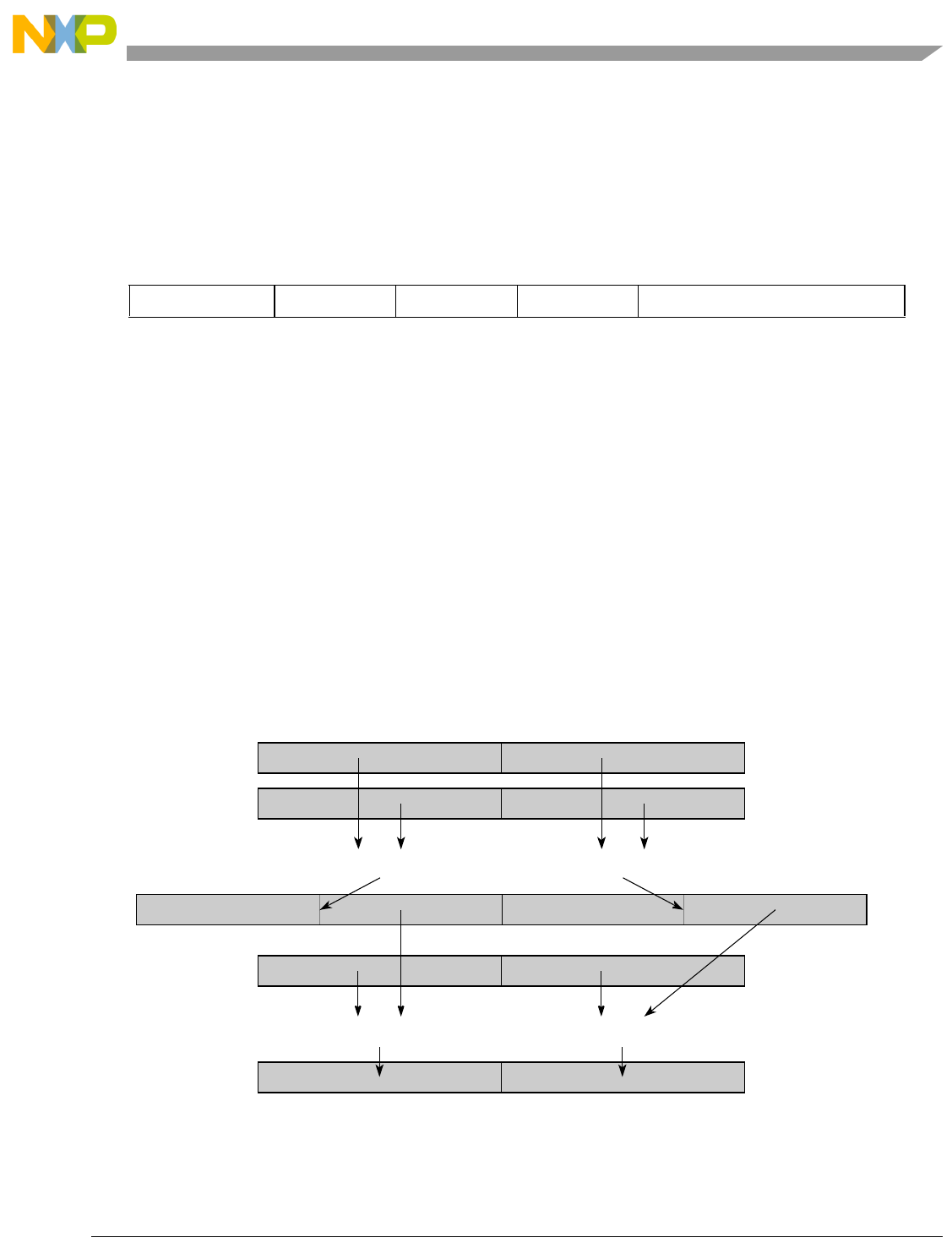
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-131
evmwlumiaaw evmwlumiaaw
Vector Multiply Word Low Unsigned, Modulo, Integer and Accumulate in Words
evmwlumiaaw rD,rA,rB (M=1, F=0, S=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = ACC0:31 + temp132:63
rD32:63 = ACC32:63 + temp232:63
ACC0:63 = rD0:63
For each word element in the accumulator the following operations are performed in the order shown:
1. Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer
word element in rB.
2. The low 32 bits of the 64-bit intermediate product are added to the contents of the accumulator
word and placed into the corresponding rD word. The result in rD is also placed in the accumulator.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
Other registers altered: ACC
Figure 7-75. evmwlumiaaw
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 0 1 0 0 0
0313263
Intermediate product
rB
X
Accumulator
rA
X
++
Accumulator & rD
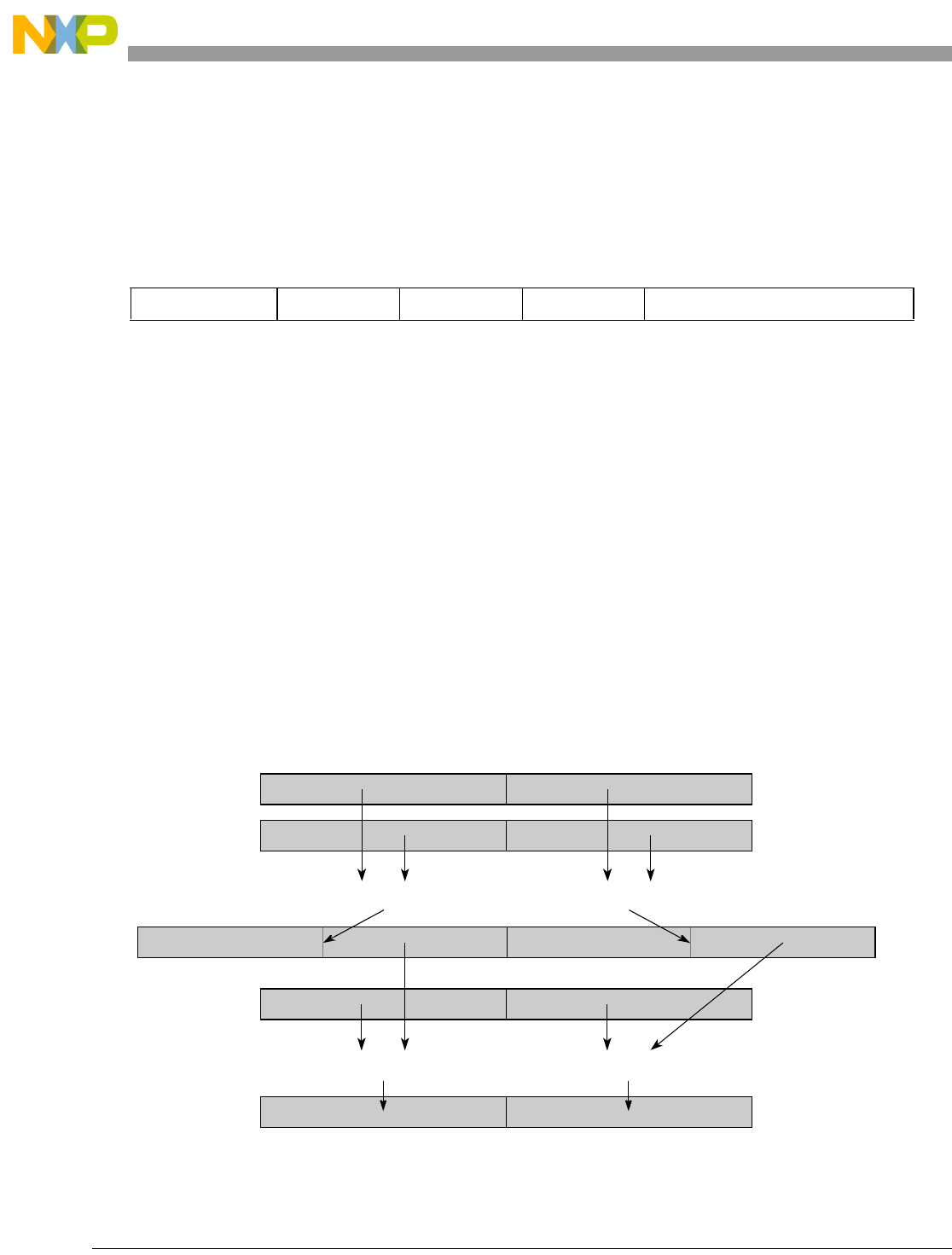
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-132 Freescale Semiconductor
evmwlumianw evmwlumianw
Vector Multiply Word Low Unsigned, Modulo, Integer, and Accumulate Negative in Words
evmwlumianw rD,rA,rB (M=1, F=0, S=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
rD0:31 = ACC0:31 - temp132:63
rD32:63 = ACC32:63 - temp232:63
ACC0:63 = rD0:63
For each word element in the accumulator the following operations are performed in the order shown:
1. Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer
word element in rB.
2. The low 32 bits of the 64-bit intermediate product are subtracted from the contents of the
accumulator word and placed into the corresponding rD word. The result in rD is also placed in
the accumulator.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
Other registers altered: ACC
Figure 7-76. evmwlumianw
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 0 1 0 0 0
0313263
Intermediate product
rB
X
Accumulator
rA
X
––
Accumulator &rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-133
evmwlusiaaw evmwlusiaaw
Vector Multiply Word Low Unsigned, Saturate, Integer, and Accumulate in Words
evmwlusiaaw rD,rA,rB (M=0, F=0, S=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
temp30:32 = ACC0:31 + temp132:63
temp40:32 = ACC32:63 + temp232:63
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0xFFFFFFFF, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0xFFFFFFFF, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer
word element in rB.
2. The low 32 bits of the 64-bit intermediate product are added to the contents of the accumulator
word to form a 33-bit intermediate sum.
3. If the intermediate sum has overflowed, 0xFFFF_FFFF is placed into the accumulator word and
the corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the
accumulator word and the corresponding rD word.
4. If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 0 0 0 0 0
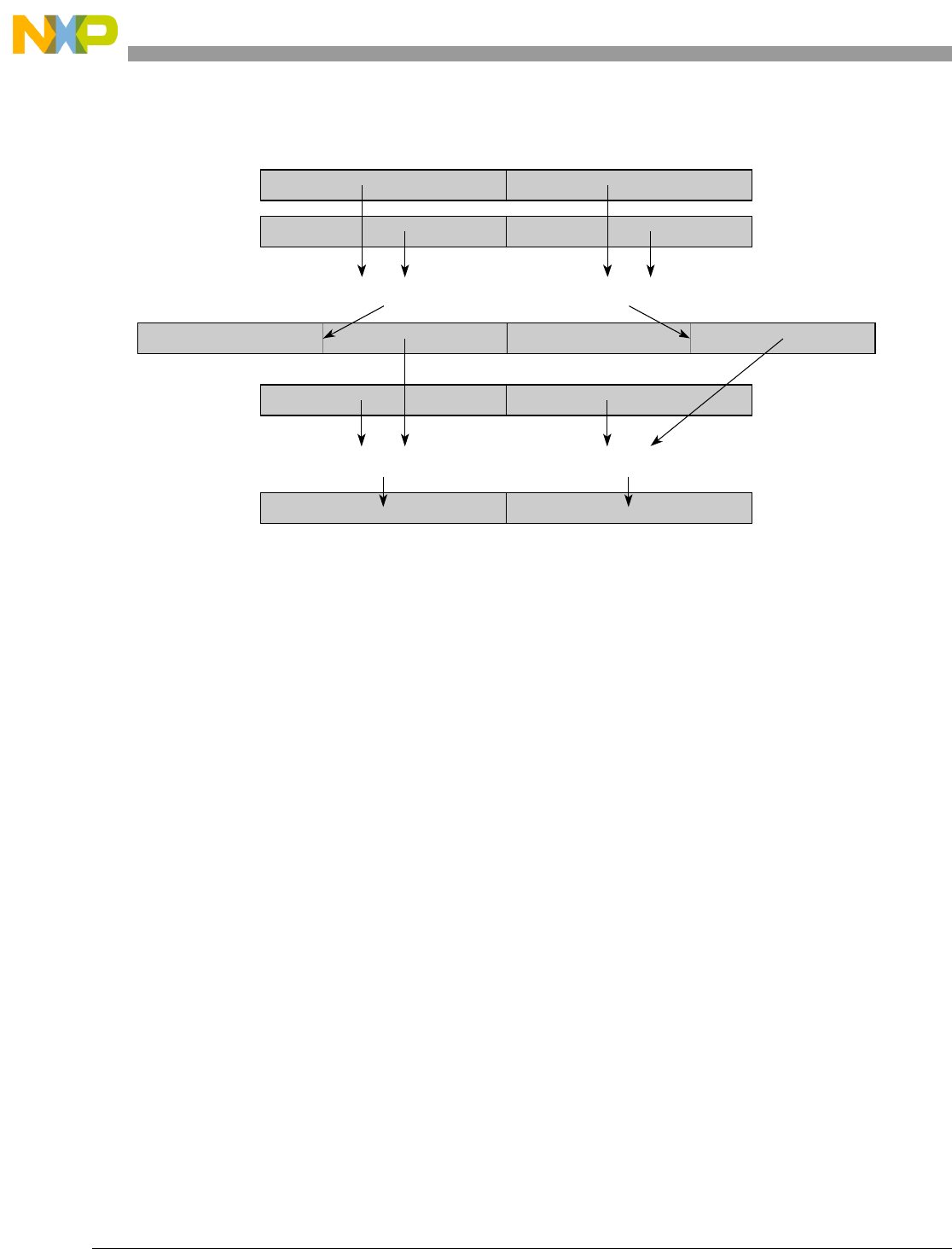
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-134 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-77. evmwlusiaaw
0313263
Intermediate product
rB
X
Accumulator
rA
X
++
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-135
evmwlusianw evmwlusianw
Vector Multiply Word Low Unsigned, Saturate, Integer and Accumulate Negative in Words
evmwlusianw rD,rA,rB (M=0, F=0, S=0)
temp10:63 = rA0:31 *ui rB0:31
temp20:63 = rA32:63 *ui rB32:63
temp30:32 = ACC0:31 - temp132:63
temp40:32 = ACC32:63 - temp232:63
ovh = temp30
ovl = temp40
rD0:31 = SATURATE_ACC(ovh, 0x00000000, temp31:32)
rD32:63 = SATURATE_ACC(ovl, 0x00000000, temp41:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
For each word element in the accumulator the following operations are performed in the order shown:
1. Each unsigned integer word element in rA is multiplied by the corresponding unsigned integer
word element in rB.
2. The low 32 bits of the 64-bit intermediate product are subtracted from the contents of the
accumulator word to form a 33-bit intermediate difference.
3. If the intermediate difference has underflowed, 0x00000000 is placed into the accumulator word
and the corresponding rD word. Otherwise, the low 32 bits of the intermediate difference are
placed into the accumulator word and the corresponding rD word.
4. If there is an underflow from the difference, the underflow information is recorded in the
SPEFSCR overflow and summary overflow bits.
NOTE
This instruction produces a valid result only if the intermediate product can
be represented in the lower 32 bits.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 0 0 0 0 0
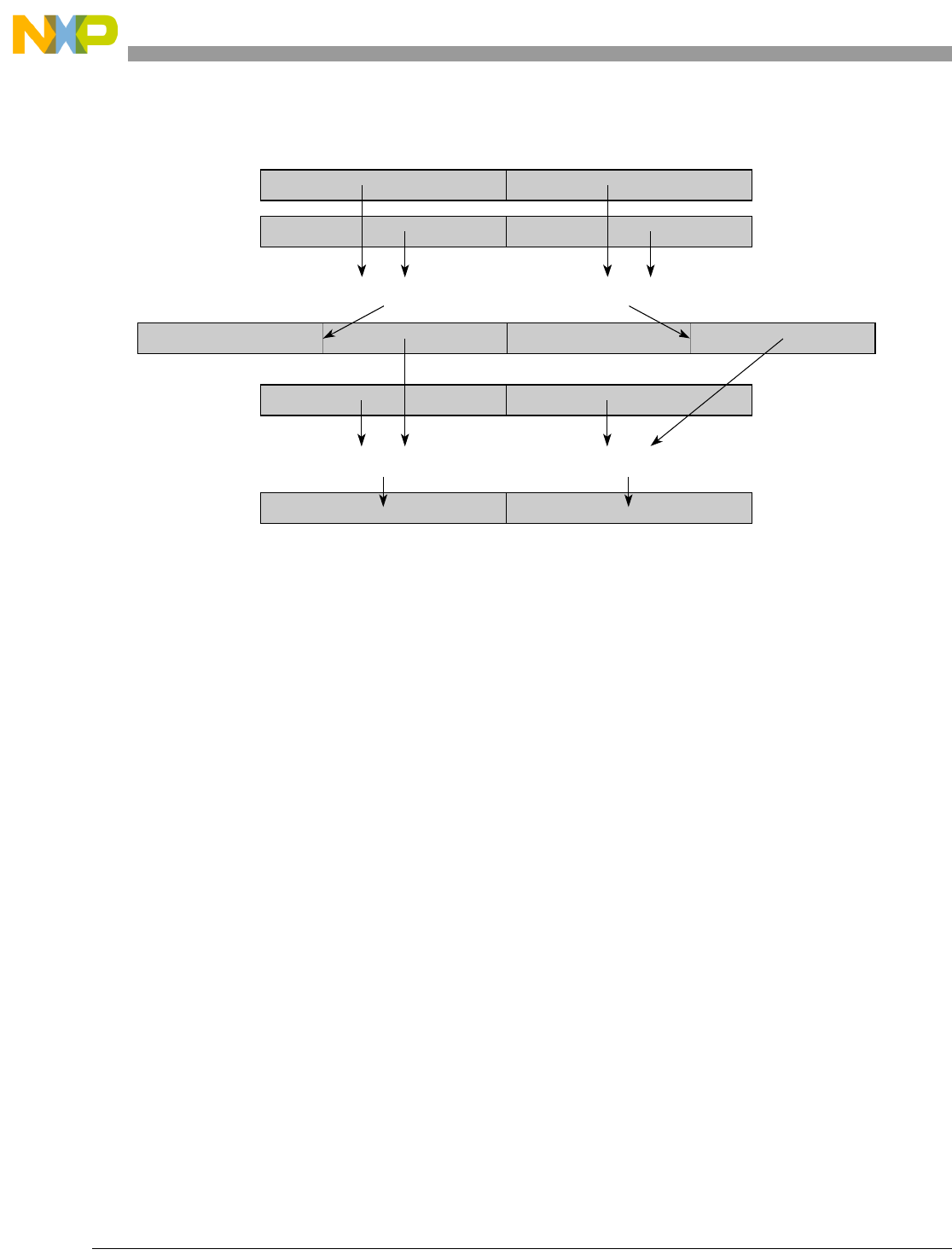
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-136 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-78. evmwlusianw
0313263
Intermediate product
rB
X
Accumulator
rA
X
––
Accumulator &rD
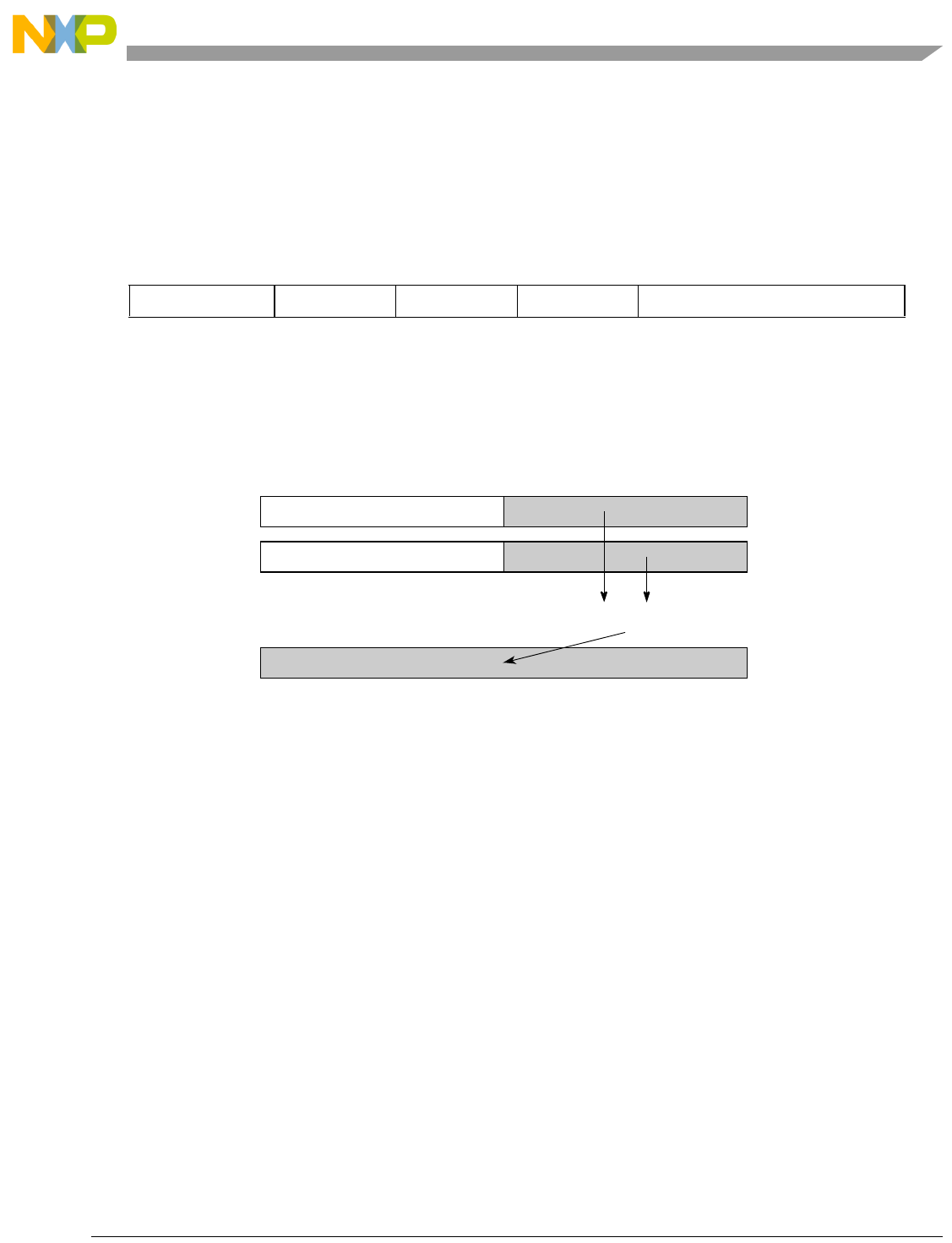
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-137
evmwsmf evmwsmf
Vector Multiply Word Signed, Modulo, Fractional
evmwsmf rD,rA,rB (M=1, F=1, S=1, A=0)
temp10:64 = (rA32:63 * rB32:63) || 0
rD0:63 = temp11:64
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. Bits 1–63 of the 64-bit signed fractional product are padded on the right with a ‘0’.
This result is placed in rD.
Figure 7-79. evmwsmf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 1 1 0 1 1
0313263
rD
rB
X
rA
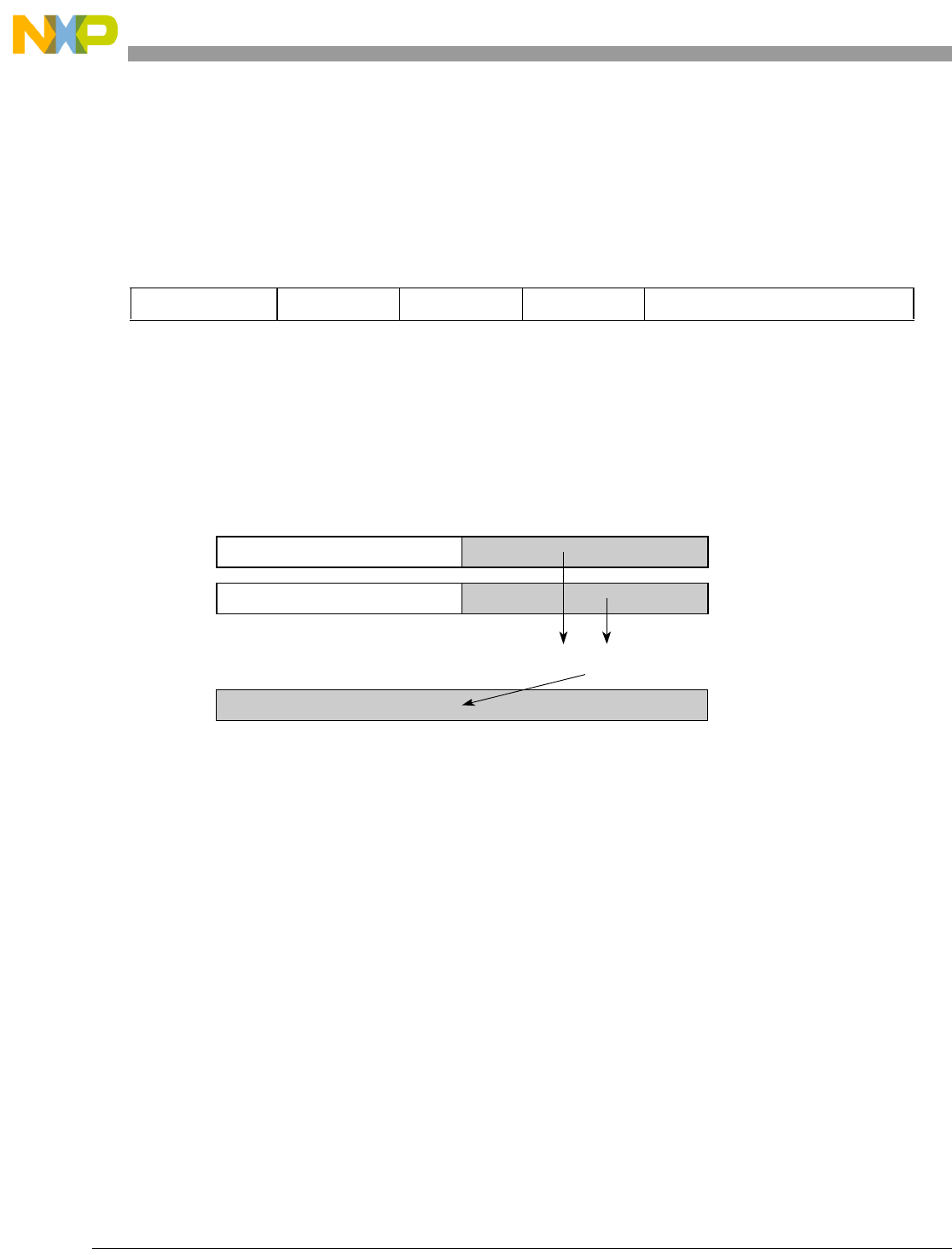
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-138 Freescale Semiconductor
evmwsmfa evmwsmfa
Vector Multiply Word Signed, Modulo, Fractional, to Accumulator
evmwsmfa rD,rA,rB (M=1, F=1, S=1, A=1)
temp10:64 = (rA32:63 * rB32:63) || 0
ACC0:63 = rD0:63 = temp11:64
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. Bits 1–63 of the 64-bit signed fractional product are padded on the right with a ‘0’.
This result is placed in rD. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-80. evmwsmfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 1 1 0 1 1
0313263
Accumulator & rD
rB
X
rA
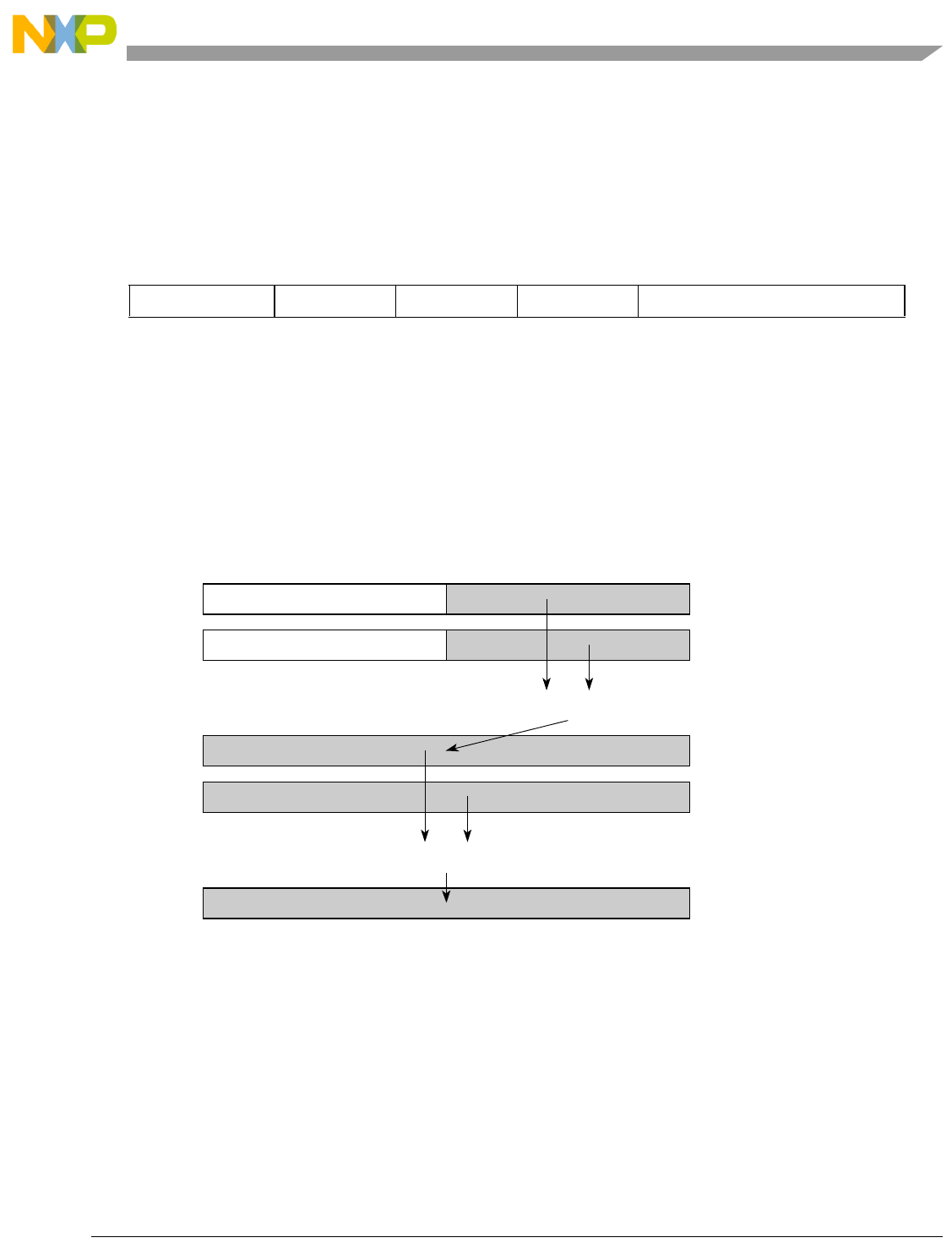
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-139
evmwsmfaa evmwsmfaa
Vector Multiply Word Signed, Modulo, Fractional, and Accumulate
evmwsmfaa rD,rA,rB (M=1, F=1, S=1)
temp10:64 = (rA32:63 * rB32:63) || 0
temp20:64 = ACC0:63 + temp11:64
ACC0:63 = rD0:63 = temp21:64
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. Bits 1–63 of the 64-bit signed fractional product are padded on the right with a ‘0’,
and this result is added to the contents of the 64-bit accumulator to form a 65-bit intermediate sum. The
lower 64 bits of the intermediate sum are placed back into the accumulator and also written into rD.
Other registers altered: ACC
Figure 7-81. evmwsmfaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 1 1 0 1 1
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-140 Freescale Semiconductor
evmwsmfan evmwsmfan
Vector Multiply Word Signed, Modulo, Fractional and Accumulate Negative
evmwsmfan rD,rA,rB (M=1, F=1, S=1)
temp10:64 = (rA32:63 * rB32:63) || 0
temp20:64 = ACC0:63 - temp11:64
ACC0:63 = rD0:63 = temp21:64
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. Bits 1–63 of the 64-bit signed fractional product are padded on the right with a ‘0’.
This result is subtracted from the contents of the 64-bit accumulator to form a 65-bit intermediate
difference. The lower 64 bits of the intermediate difference is placed back into the accumulator and also
written into rD.
Other registers altered: ACC
Figure 7-82. evmwsmfan
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 1 1 0 1 1
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-141
evmwsmi evmwsmi
Vector Multiply Word Signed, Modulo, Integer
evmwsmi rD,rA,rB (M=1, F=0, S=1, A=0)
temp0:63 = rA32:63 *si rB32:63
ACC0:63 = rD0:63 = temp0:63
The low signed integer word element in rA is multiplied by the corresponding low signed integer word
element in rB. The 64-bit signed integer product is placed in rD.
Figure 7-83. evmwsmi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 1 1 0 0 1
0313263
RD
rB
X
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-142 Freescale Semiconductor
evmwsmia evmwsmia
Vector Multiply Word Signed, Modulo, Integer, to Accumulator
evmwsmia rD,rA,rB (M=1, F=0, S=1, A=1)
temp0:63 = rA32:63 *si rB32:63
ACC0:63 = rD0:63 = temp0:63
The low signed integer word element in rA is multiplied by the corresponding low signed integer word
element in rB. The 64-bit signed integer product is placed in rD. The result in rD is also placed in the
accumulator.
Other registers altered: ACC
Figure 7-84. evmwsmia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 1 1 0 0 1
0313263
Accumulator & rD
rB
X
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-143
evmwsmiaa evmwsmiaa
Vector Multiply Word Signed, Modulo, Integer, and Accumulate
evmwsmiaa rD,rA,rB (M=1, F=0, S=1)
temp10:63 = rA32:63 *si rB32:63
temp20:64 = ACC0:63 + temp10:63
ACC0:63 = rD0:63 = temp21:64
The low signed integer word element in rA is multiplied by the corresponding low signed integer word
element in rB. The intermediate product is added to the contents of the 64-bit accumulator to form a 65-bit
intermediate sum. The lower 64 bits of the intermediate sum is placed back into the accumulator and also
written into rD.
Other registers altered: ACC
Figure 7-85. evmwsmiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 1 1 0 0 1
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-144 Freescale Semiconductor
evmwsmian evmwsmian
Vector Multiply Word Signed, Modulo, Integer and Accumulate Negative
evmwsmian rD,rA,rB (M=1, F=0, S=1)
temp10:63 = rA32:63 *si rB32:63
temp20:64 = ACC0:63 - temp10:63
ACC0:63 = rD0:63 = temp21:64
The low signed integer word element in rA is multiplied by the corresponding low signed integer word
element in rB. The intermediate product is subtracted from the contents of the 64-bit accumulator to form
a 65-bit intermediate difference. The lower 64 bits of the intermediate difference is placed back into the
accumulator and also written into rD.
Other registers altered: ACC
Figure 7-86. evmwsmian
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 1 1 0 0 1
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-145
evmwssf evmwssf
Vector Multiply Word Signed, Saturate, Fractional
evmwssf rD,rA,rB (M=0, F=1, S=1, A=0)
temp0:64 = (rA32:63 * rB32:63) || 0
movl = temp0 ⊕ temp1
rD0:63 = SATURATE(movh, 0x7FFFFFFFFFFFFFFF, temp1:64)
SPEFSCROVH = 0
SPEFSCROV = movl
SPEFSCRSOV = SPEFSCRSOV | movl
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. The 64-bit signed fractional product is placed in rD. If the inputs are –1.0 and –1.0
the result is saturated to the most positive signed fraction (0x7FFF_FFFF_FFFF_FFFF). If saturation
occurs, the overflow and summary overflow bits are recorded.
Other registers altered: SPEFSCR
Figure 7-87. evmwssf
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 1 0 0 1 1
0313263
rD
rB
X
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-146 Freescale Semiconductor
evmwssfa evmwssfa
Vector Multiply Word Signed, Saturate, Fractional, to Accumulator
evmwssfa rD,rA,rB (M=0, F=1, S=1, A=1)
temp0:64 = (rA32:63 * rB32:63) || 0
movl = temp0 ⊕ temp1
ACC0:63 = rD0:63 = SATURATE(movh, 0x7FFFFFFFFFFFFFFF, temp1:64)
SPEFSCROVH = 0
SPEFSCROV = movl
SPEFSCRSOV = SPEFSCRSOV | movl
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. The 64-bit signed fractional product is placed in rD. If the inputs are –1.0 and –1.0,
the result is saturated to the most positive signed fraction (0x7FFF_FFFF_FFFF_FFFF). If saturation
occurs the overflow and summary overflow bits are recorded. The result in rD is also placed in the
accumulator.
Other registers altered: SPEFSCR, ACC
Figure 7-88. evmwssfa
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 1 0 0 1 1
0313263
Accumulator & rD
rB
X
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-147
evmwssfaa evmwssfaa
Vector Multiply Word Signed, Saturate, Fractional, and Accumulate
evmwssfaa rD,rA,rB (M=0, F=1, S=1)
temp10:64 = (rA32:63 * rB32:63) || 0
mov = temp10 ⊕ temp11
temp20:63 = SATURATE(mov, 0x7FFFFFFFFFFFFFFF, temp11:64)
temp30:64 = {ACC0,ACC0:63} + {temp20,temp20:63}
ov = temp30 ⊕ temp31
rD0:63 = SATURATE_ACC(ov, temp30, 0x8000000000000000, 0x7FFFFFFFFFFFFFFF, temp31:64)
ACC0:63 = rD0:63
SPEFSCROV = mov | ov
SPEFSCROVH = 0
SPEFSCRSOV = SPEFSCRSOV | mov | ov
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. If the inputs are –1.0 and –1.0, the product is saturated to the most positive signed
fraction (0x7FFF_FFFF_FFFF_FFFF). The 64-bit intermediate product is shifted left by one bit (to
eliminate the redundant sign bit) and padded on the right with a ‘0’, and this value is then added to the
contents of the 64-bit accumulator to form an intermediate sum.
If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF_FFFF_FFFF if
positive overflow or 0x8000_0000_0000_0000 if negative overflow) is placed into the accumulator word
and the corresponding rD word. Otherwise, the low 64 bits of the intermediate sum are placed into the
accumulator word and the corresponding rD word. The overflow and summary overflow bits are recorded
to indicate occurrence of saturation on either the multiply or the addition.
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 1 0 0 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-148 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-89. evmwssfaa
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-149
evmwssfan evmwssfan
Vector Multiply Word Signed, Saturate, Fractional and Accumulate Negative
evmwssfan rD,rA,rB (M=0, F=1, S=1)
temp10:64 = (rA32:63 * rB32:63) || 0
mov = temp10 ⊕ temp11
temp20:63 = SATURATE(mov, 0x7FFFFFFFFFFFFFFF, temp11:64)
temp30:64 = {ACC0,ACC0:63} - {temp20,temp20:63}
ov = temp30 ⊕ temp31
rD0:63 = SATURATE_ACC(ov, temp30, 0x8000000000000000, 0x7FFFFFFFFFFFFFFF, temp31:64)
ACC0:63 = rD0:63
SPEFSCROV = mov | ov
SPEFSCROVH = 0
SPEFSCRSOV = SPEFSCRSOV | mov | ov
The low signed fractional word element in rA is multiplied by the corresponding low signed fractional
word element in rB. If the inputs are –1.0 and –1.0 the product is saturated to the most positive signed
fraction (0x7FFF_FFFF_FFFF_FFFF). The 64-bit intermediate product is shifted left by one bit (to
eliminate the redundant sign bit) and padded on the right with a ‘0’, and this value is then subtracted from
the contents of the 64-bit accumulator to form an intermediate sum. If the intermediate difference has
overflowed, the appropriate saturation value (0x7FFF_FFFF_FFFF_FFFF if positive overflow or
0x8000_0000_0000_0000 if negative overflow) is placed into the accumulator word and the
corresponding rD word. Otherwise, the low 64 bits of the intermediate difference are placed into the
accumulator word and the corresponding rD word. The overflow and summary overflow bits are recorded
to indicate occurrence of saturation either the multiply or the subtraction.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 1 0 0 1 1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-150 Freescale Semiconductor
Other registers altered: SPEFSCR, ACC
Figure 7-90. evmwssfan
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & rD
rA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-151
evmwumi evmwumi
Vector Multiply Word Unsigned, Modulo, Integer
evmwumi rD,rA,rB (M=1, F=0, S=0, A=0)
temp0:63 = rA32:63 *ui rB32:63
ACC0:63 = rD0:63 = temp0:63
The low unsigned integer word element in rA is multiplied by the corresponding low unsigned integer
word element in rB. The 64-bit unsigned integer product is placed in rD.
Figure 7-91. evmwumi
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 0 1 1 0 0 0
0313263
RD
rB
X
rA
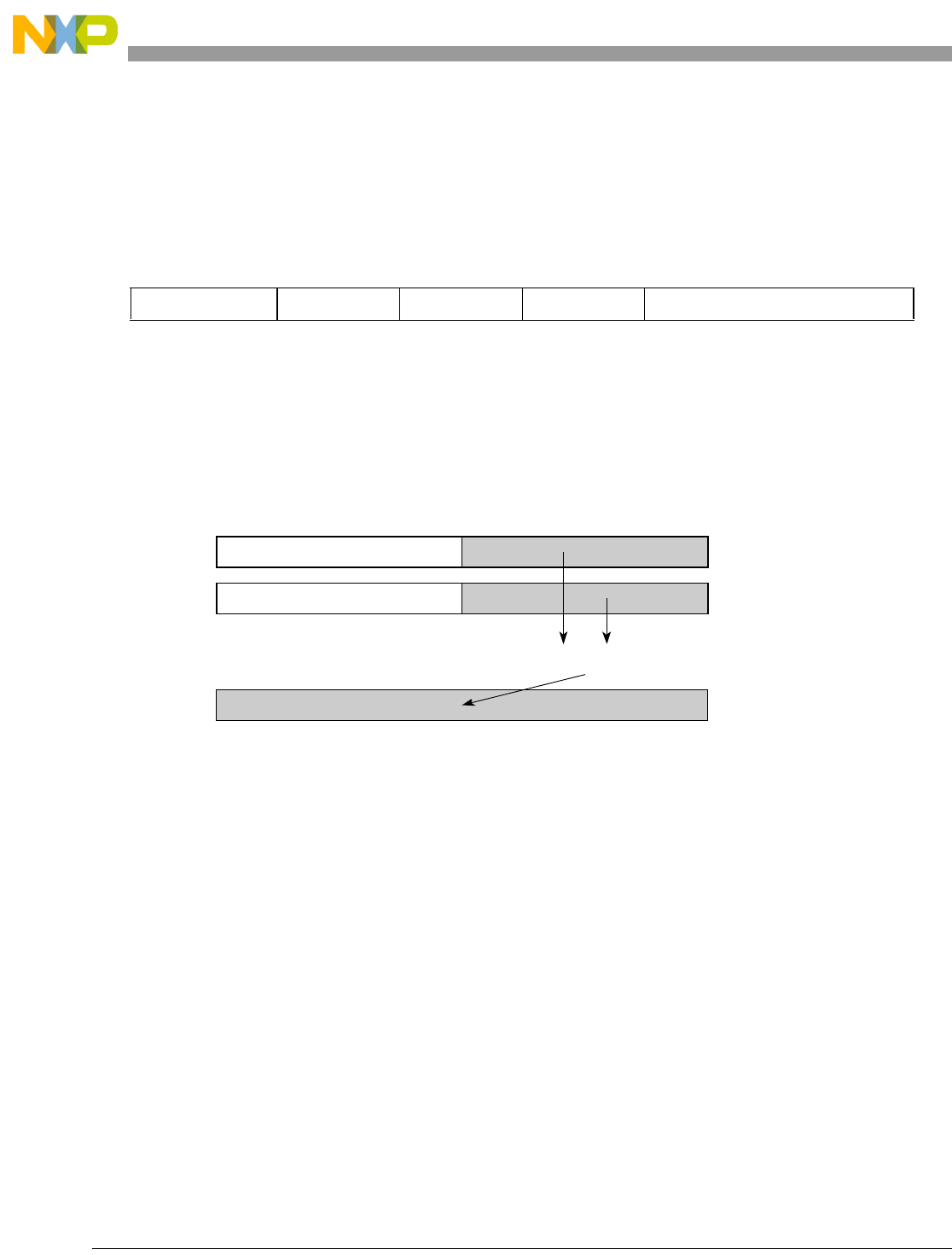
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-152 Freescale Semiconductor
evmwumia evmwumia
Vector Multiply Word Unsigned, Modulo, Integer, to Accumulator
evmwumia rD,rA,rB (M=1, F=0, S=0, A=1)
temp0:63 = rA32:63 *ui rB32:63
ACC0:63 = rD0:63 = temp0:63
The low unsigned integer word element in rA is multiplied by the corresponding low unsigned integer
word element in rB. The 64-bit unsigned integer product is placed in rD. The result in rD is also placed
in the accumulator.
Other registers altered: ACC
Figure 7-92. evmwumia
0 56 101115162021 31
4 RD RA RB 1 0 0 0 1 1 1 1 0 0 0
0313263
Accumulator & rD
rB
X
rA
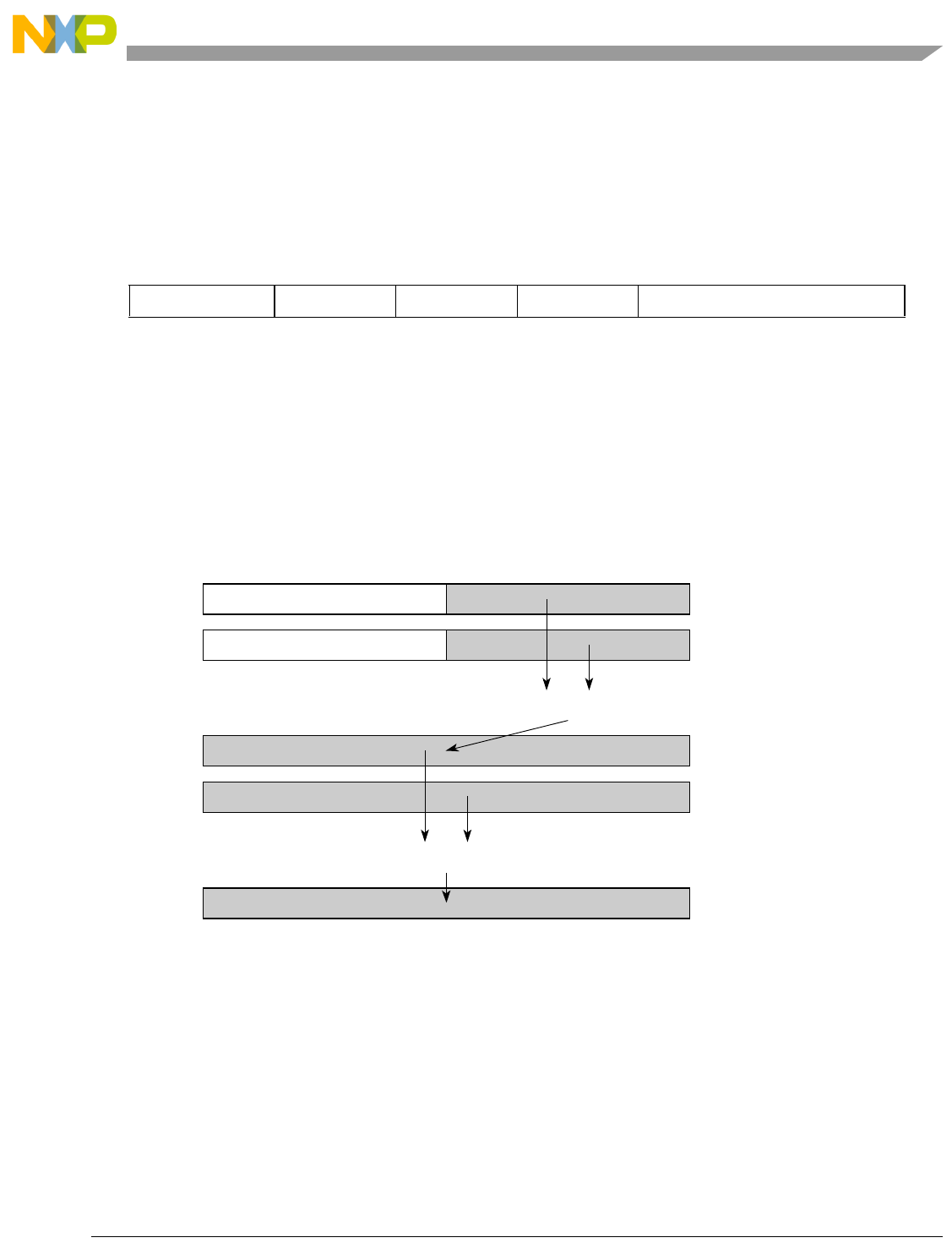
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-153
evmwumiaa evmwumiaa
Vector Multiply Word Unsigned, Modulo, Integer and Accumulate
evmwumiaa rD,rA,rB (M=1, F=0, S=0)
temp10:63 = rA32:63 *ui rB32:63
temp20:64 = ACC0:63 + temp10:63
ACC0:63 = rD0:63 = temp21:64
The low unsigned integer word element in rA is multiplied by the corresponding low unsigned integer
word element in rB. The intermediate product is added to the contents of the 64-bit accumulator to form
a 65-bit intermediate sum. The lower 64 bits of the intermediate sum is placed back into the accumulator
and also written into rD.
Other registers altered: ACC
Figure 7-93. evmwumiaa
0 56 101115162021 31
4 RD RA RB 1 0 1 0 1 0 1 1 0 0 0
0313263
Intermediate product
Accumulator
rB
X
+
Accumulator & rD
rA
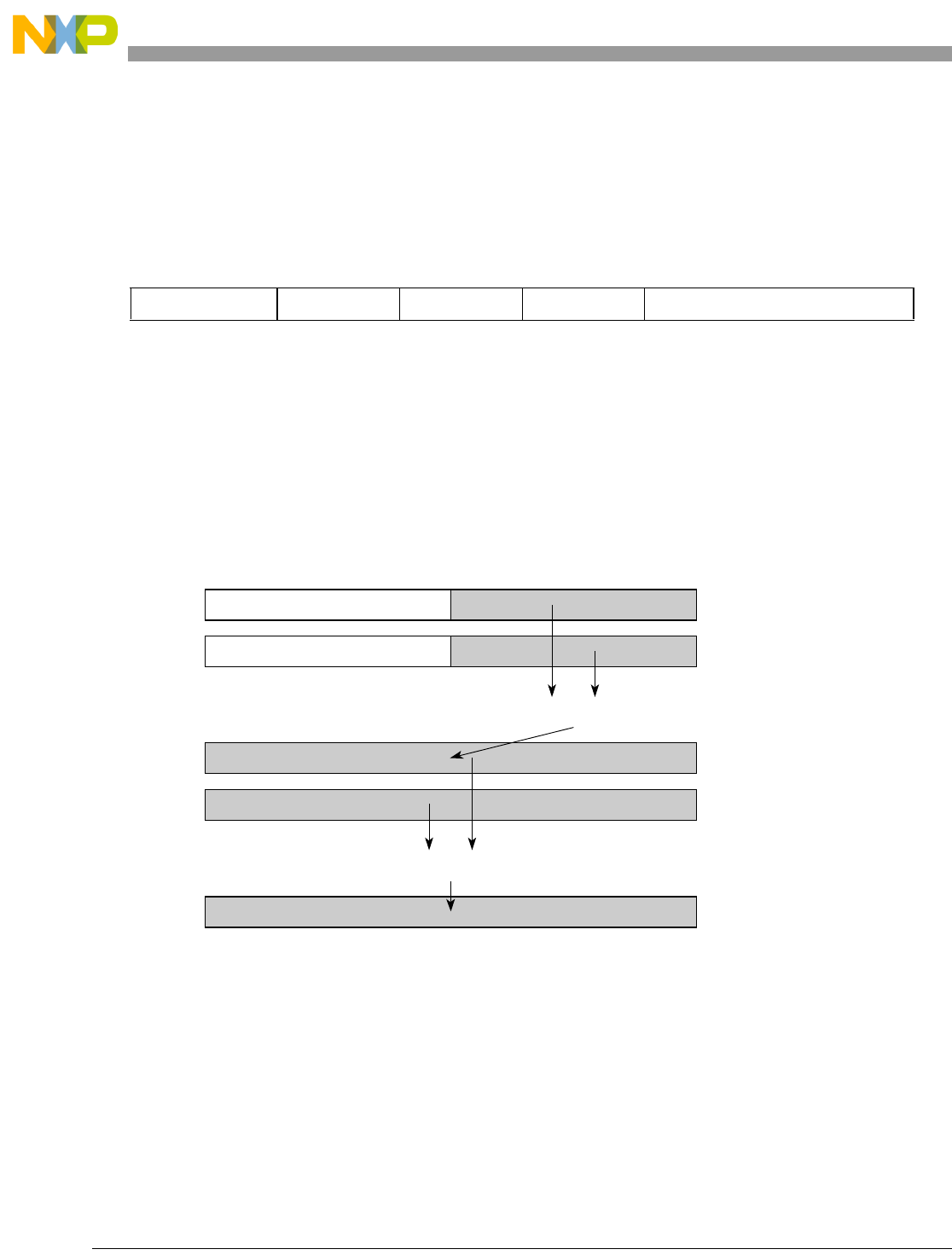
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-154 Freescale Semiconductor
evmwumian evmwumian
Vector Multiply Word Unsigned, Modulo, Integer and Accumulate Negative
evmwumian rD,rA,rB (M=1, F=0, S=0)
temp10:63 = rA32:63 *ui rB32:63
temp20:64 = ACC0:63 - temp10:63
ACC0:63 = rD0:63 = temp21:64
The low unsigned integer word element in rA is multiplied by the corresponding low unsigned integer
word element in rB. The intermediate product is subtracted from the contents of the 64-bit accumulator to
form a 65-bit intermediate difference. The lower 64 bits of the intermediate difference is placed back into
the accumulator and also written into rD.
Other registers altered: ACC
Figure 7-94. evmwumian
7.4.3 Add/Subtract Word to Accumulator Instructions
The following instructions perform addition and subtraction, with and without accumulates, using signed
or unsigned integer or fractional operands, with optional saturation.
0 56 101115162021 31
4 RD RA RB 1 0 1 1 1 0 1 1 0 0 0
0313263
Intermediate product
Accumulator
rB
X
–
Accumulator & RD
rA
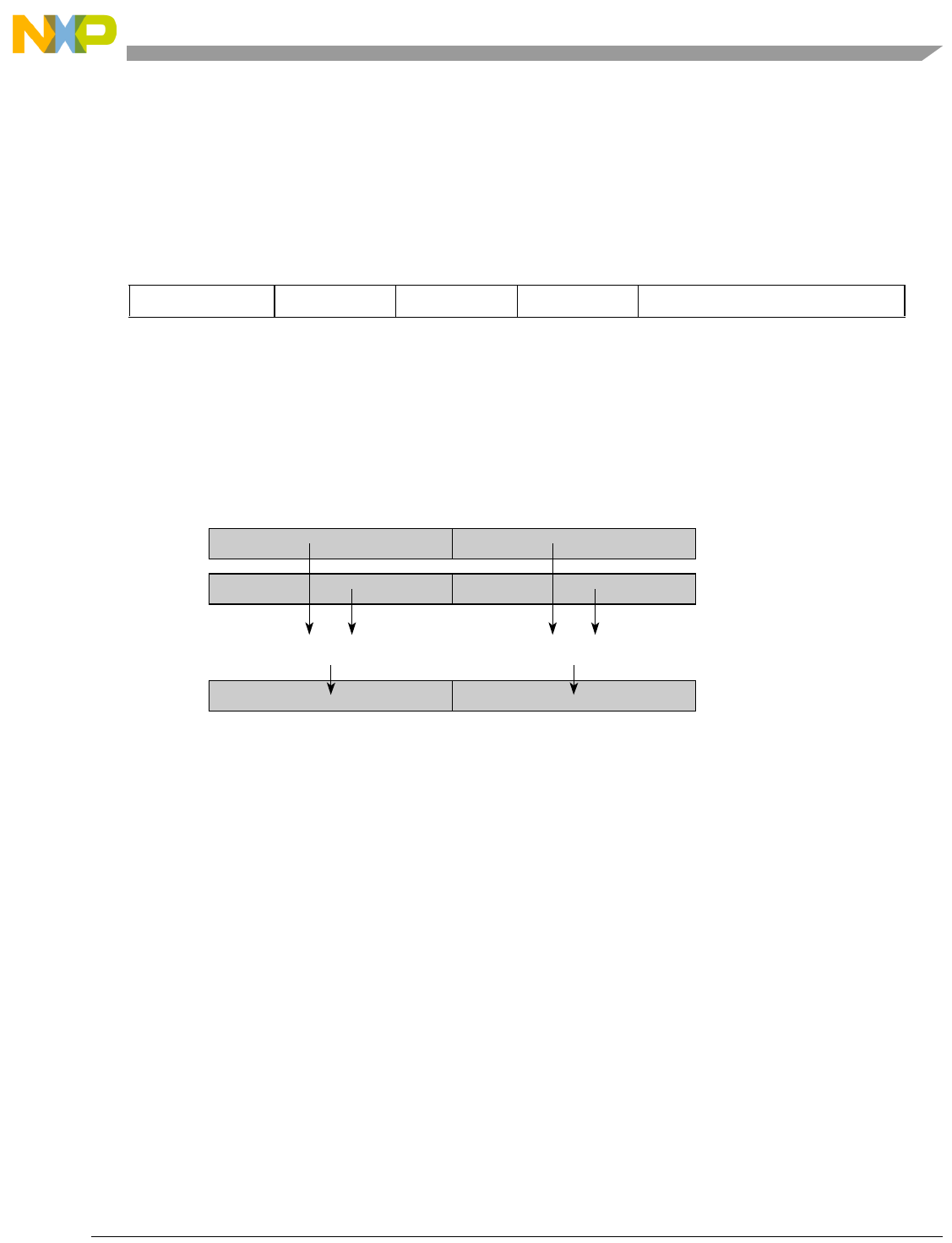
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-155
evaddsmiaaw evaddsmiaaw
Vector Add Signed, Modulo, Integer to Accumulator Word
evaddsmiaaw rD,rA (M=1, S=1)
rD0:31 = ACC0:31 + rA0:31
rD32:63 = ACC32:63 + rA32:63
ACC0:63 = rD0:63
Each word element in rA is added to the corresponding word element in the accumulator and placed into
the corresponding rD word. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-95. evaddsmiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 1 0 0 1
0313263
rA
Accumulator
+ +
Accumulator & rD
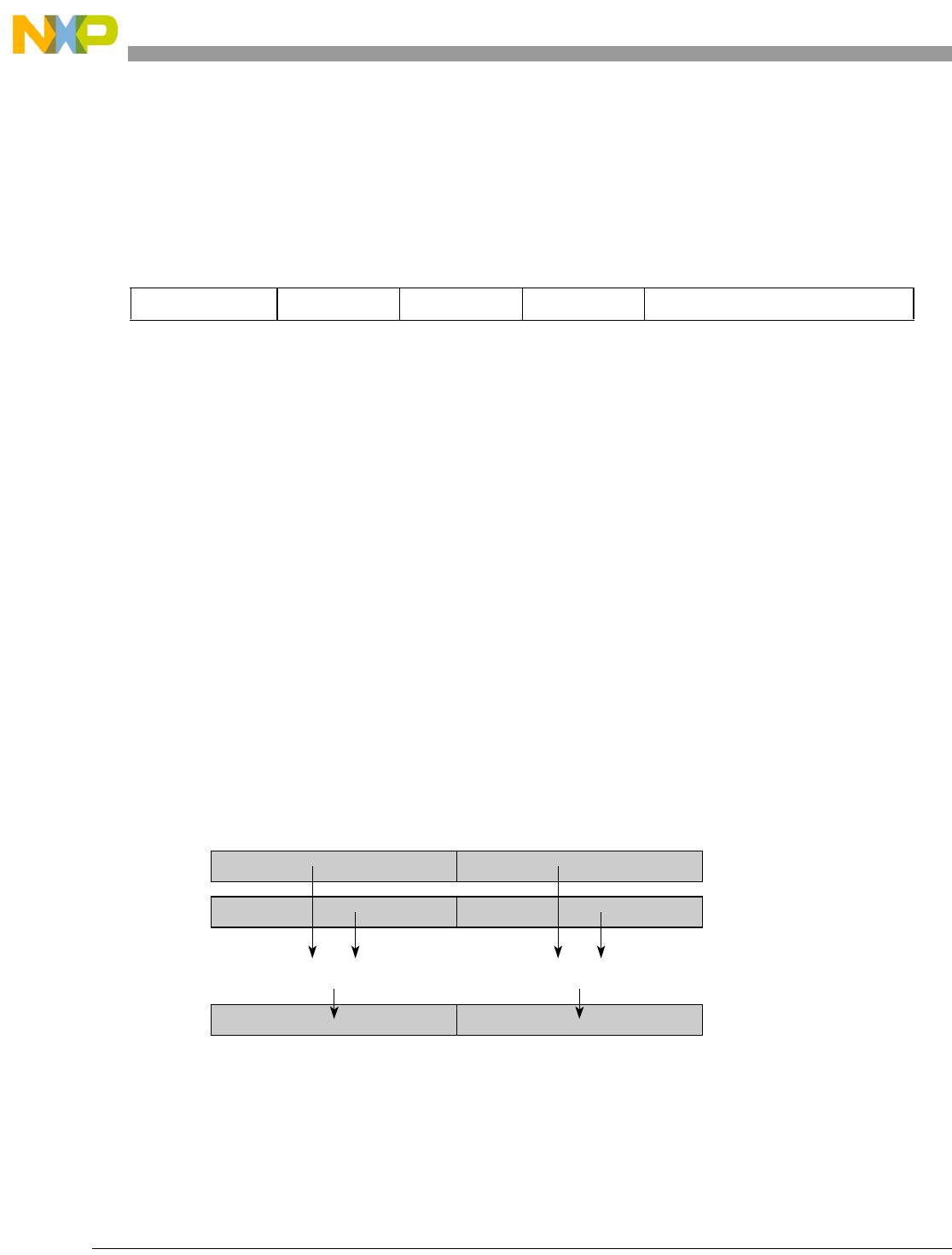
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-156 Freescale Semiconductor
evaddssiaaw evaddssiaaw
Vector Add Signed, Saturate, Integer to Accumulator Word
evaddssiaaw rD,rA (M=0, S=1)
temp10:32 = EXTS(ACC0:31) + EXTS(rA0:31)
temp20:32 = EXTS(ACC32:63) + EXTS(rA32:63)
ovh = temp10 ⊕ temp11
ovl = temp20 ⊕ temp21
rD0:31 = SATURATE_ACC(ovh, temp10, 0x80000000, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE_ACC(ovl, temp20, 0x80000000, 0x7FFFFFFF, temp21:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
Each word element in rA is added to the corresponding word element in the accumulator to form 33-bit
intermediate sum. If the intermediate sum has overflowed, the appropriate saturation value (0x7FFF_FFFF
if positive overflow or 0x8000_0000 if negative overflow) is placed into the accumulator word and the
corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into the accumulator
word and the corresponding rD word.
If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR overflow
and summary overflow bits.
Other registers altered: SPEFSCR, ACC
Figure 7-96. evaddssiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 0 0 0 1
0313263
rA
Accumulator
+ +
Accumulator & rD
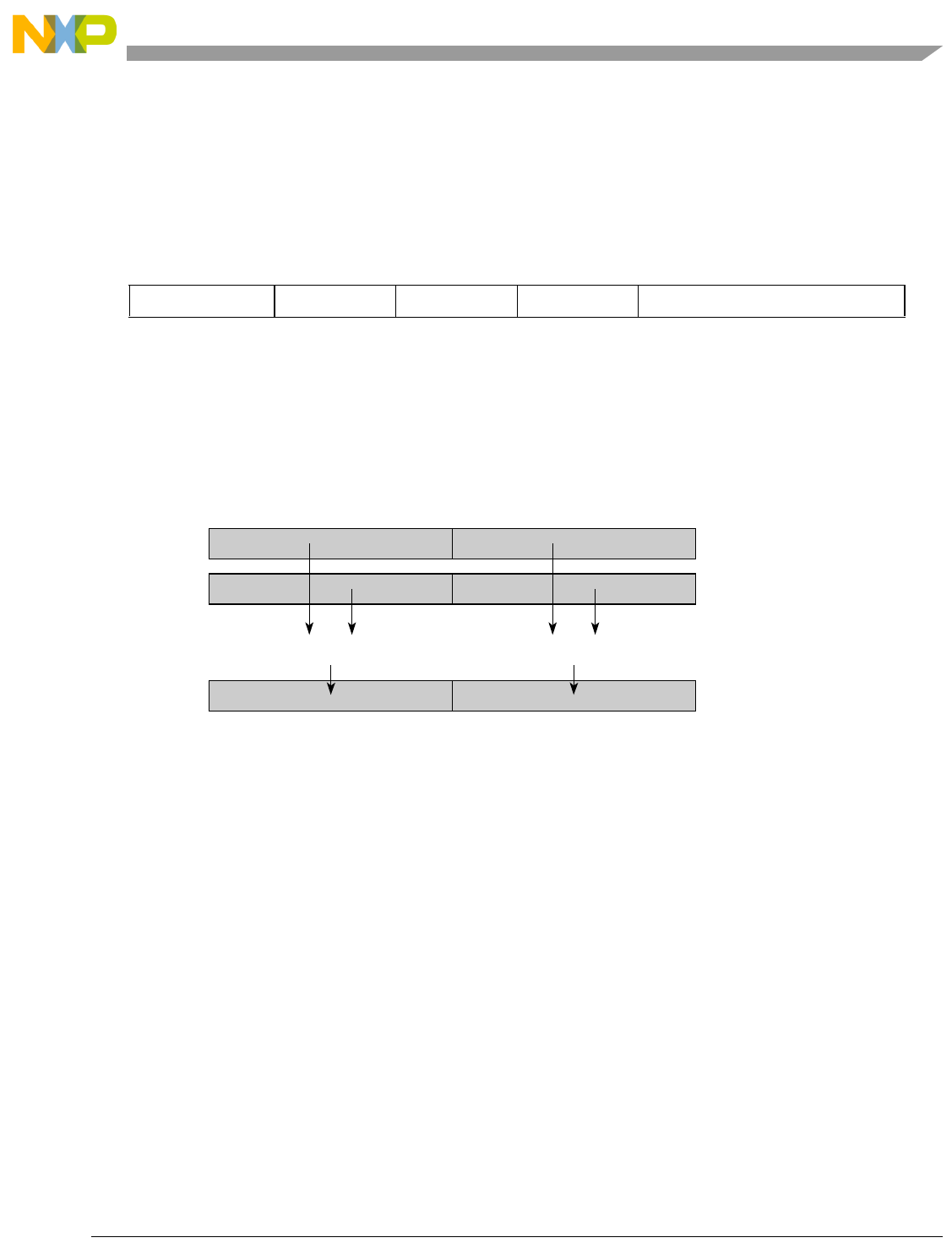
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-157
evaddumiaaw evaddumiaaw
Vector Add Unsigned, Modulo, Integer to Accumulator Word
evaddumiaaw rD,rA (M=1, S=0)
rD0:31 = ACC0:31 + rA0:31
rD32:63 = ACC32:63 + rA32:63
ACC0:63 = rD0:63
Each word element in rA is added to the corresponding word element in the accumulator and placed into
the corresponding rD word. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-97. evaddumiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 1 0 0 0
0313263
rA
Accumulator
+ +
Accumulator & rD
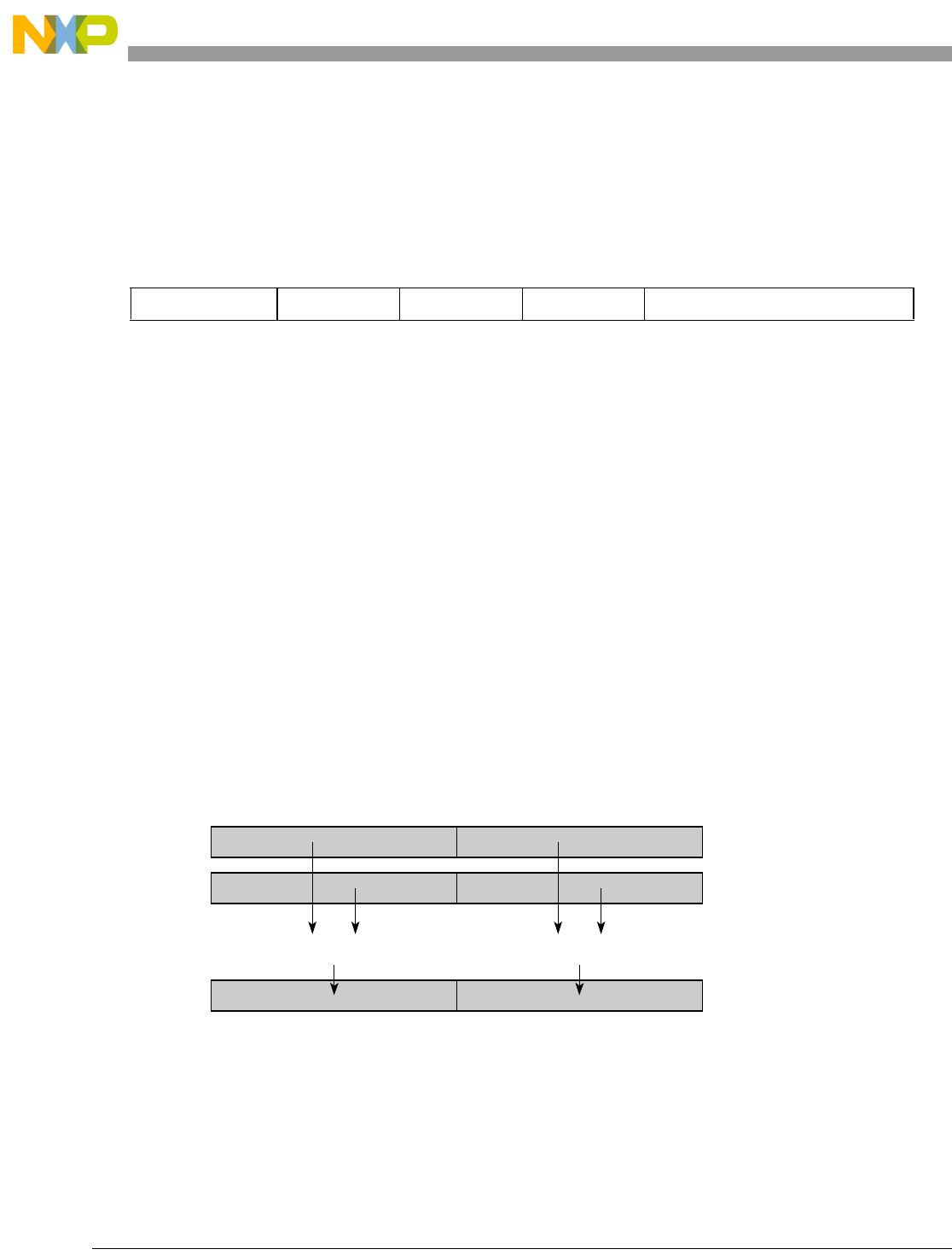
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-158 Freescale Semiconductor
evaddusiaaw evaddusiaaw
Vector Add Unsigned, Saturate, Integer to Accumulator Word
evaddusiaaw rD,rA (M=0, S=0)
temp10:32 = EXTZ(ACC0:31) + EXTZ(rA0:31)
temp20:32 = EXTZ(ACC32:63) + EXTZ(rA32:63)
ovh = temp10
ovl = temp20
rD0:31 = SATURATE(ovh, 0xFFFFFFFF, temp11:32)
rD32:63 = SATURATE(ovl, 0xFFFFFFFF, temp21:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
Each word element in rA is added to the corresponding word element in the accumulator to form 33-bit
intermediate sum. If the intermediate sum has overflowed, 0xFFFF_FFFF is placed into the accumulator
word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate sum are placed into
the accumulator word and the corresponding rD word.
If there is an overflow from the addition, the overflow information is recorded in the SPEFSCR overflow
and summary overflow bits.
Other registers altered: SPEFSCR, ACC
Figure 7-98. evaddusiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 0 0 0 0
0313263
rA
Accumulator
+ +
Accumulator & rD
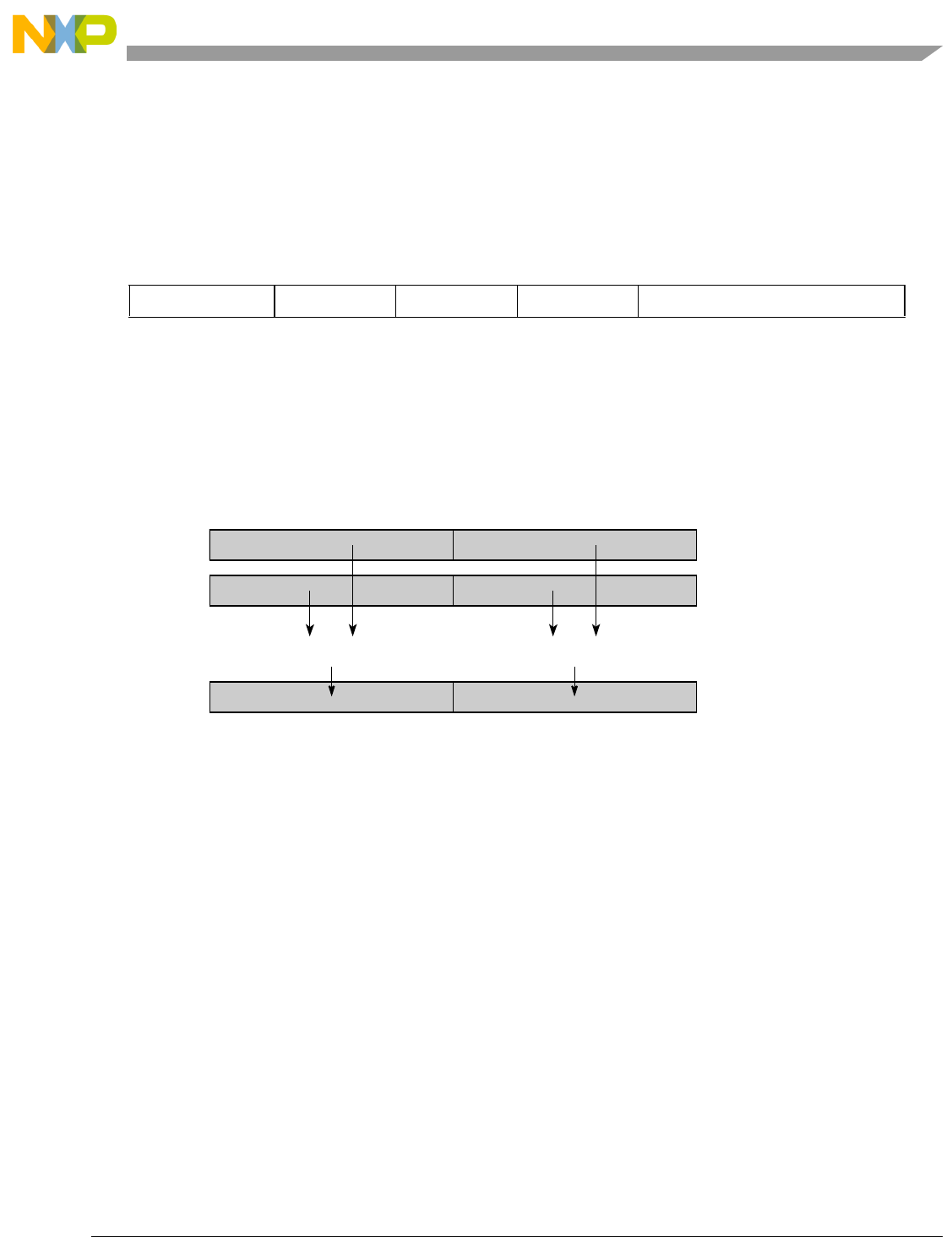
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-159
evsubfsmiaaw evsubfsmiaaw
Vector Subtract Signed, Modulo, Integer to Accumulator Word
evsubfsmiaaw rD,rA (M=1, S=1)
rD0:31 = ACC0:31 - rA0:31
rD32:63 = ACC32:63 - rA32:63
ACC0:63 = rD0:63
Each word element in rA is subtracted from the corresponding word element in the accumulator and
placed into the corresponding rD word. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-99. evsubfsmiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 1 0 1 1
0313263
rA
Accumulator
– –
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-160 Freescale Semiconductor
evsubfssiaaw evsubfssiaaw
Vector Subtract Signed, Saturate, Integer to Accumulator Word
evsubfssiaaw rD,rA (M=0, S=1)
temp10:32 = EXTS(ACC0:31) - EXTS(rA0:31)
temp20:32 = EXTS(ACC32:63) - EXTS(rA32:63)
ovh = temp10 ⊕ temp11
ovl = temp20 ⊕ temp21
rD0:31 = SATURATE_ACC(ovh, temp10, 0x80000000, 0x7FFFFFFF, temp11:32)
rD32:63 = SATURATE_ACC(ovl, temp20, 0x80000000, 0x7FFFFFFF, temp21:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
Each word element in rA is subtracted from the corresponding word element in the accumulator to form
33-bit intermediate difference. If the intermediate difference has overflowed, the appropriate saturation
value (0x7FFF_FFFF if positive overflow or 0x8000_0000 if negative overflow) is placed into the
accumulator word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate
difference are placed into the accumulator word and the corresponding rD word.
If there is an overflow from the subtraction, the overflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
Other registers altered: SPEFSCR, ACC
Figure 7-100. evsubfssiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 0 0 1 1
0313263
rA
Accumulator
– –
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-161
evsubfumiaaw evsubfumiaaw
Vector Subtract Unsigned, Modulo, Integer to Accumulator Word
evsubfumiaaw rD,rA (M=1, S=0)
rD0:31 = ACC0:31 - rA0:31
rD32:63 = ACC32:63 - rA32:63
ACC0:63 = rD0:63
Each word element in rA is subtracted from the corresponding word element in the accumulator and
placed into the corresponding rD word. The result in rD is also placed in the accumulator.
Other registers altered: ACC
Figure 7-101. evsubfumiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 1 0 1 0
0313263
rA
Accumulator
– –
Accumulator & rD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-162 Freescale Semiconductor
evsubfusiaaw evsubfusiaaw
Vector Subtract Unsigned, Saturate, Integer to Accumulator Word
evsubfusiaaw rD,rA (M=0, S=0)
temp10:32 = EXTZ(ACC0:31) - EXTZ(rA0:31)
temp20:32 = EXTZ(ACC32:63) - EXTZ(rA32:63)
ovh = temp10
ovl = temp20
rD0:31 = SATURATE(ovh, 0x00000000, temp11:32)
rD32:63 = SATURATE(ovl, 0x00000000, temp21:32)
ACC0:31 = rD0:31
ACC32:63 = rD32:63
SPEFSCROVH = ovh
SPEFSCROV = ovl
SPEFSCRSOVH = SPEFSCRSOVH | ovh
SPEFSCRSOV = SPEFSCRSOV | ovl
Each word element in rA is subtracted from the corresponding word element in the accumulator to form
33-bit intermediate difference. If the intermediate difference has underflowed, 0x0000_0000 is placed into
the accumulator word and the corresponding rD word. Otherwise, the low 32 bits of the intermediate
difference are placed into the accumulator word and the corresponding rD word.
If there is an underflow from the subtraction, the underflow information is recorded in the SPEFSCR
overflow and summary overflow bits.
Other registers altered: SPEFSCR, ACC
Figure 7-102. evsubfusiaaw
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 0 0 1 0
0313263
RA
Accumulator
– –
Accumulator & RD
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-163
7.4.4 Initializing and Reading the Accumulator
To read the accumulator contents into a register, a multiply-accumulate instruction where one of its
operands is a zero should be used, as the following sequence shows:
evxor RD, RD, RD // Zero the contents of RD, not necessary if
// a zero is available in some register.
evmwumiaa RD, RD, RD // Multiply 0 with 0, add the 0 result to
// accumulator and store back the value in acc and RD
To initialize the accumulator, the evmra instruction is used, as shown in Figure 7-103.
evmra rD,rA
Figure 7-103. Move Register to Accumulator (evmra)
RD0:63 = acc0:63 = RA0:63
The contents of rA are written into the accumulator and copied into rD. This is the method for initializing
the accumulator.
7.5 SPE Vector Load/Store Instructions
SPE Vector load and store instructions are provided with a variety of options. The mnemonics are formed
as follows:
ev{l,st}<X><Y>[Z]x
• X specifies the size of the load
• Y specifies the size of data packed into the value being loaded. Thus evldhx specified a load that
brings in a double-word composed of four half words.
• Z specifies the operation to be performed such as unpack or splat.
All load and store instructions are specified as indexed forms. A specification of a 0 in the rA field of the
instruction results in the non-indexed form of the instruction. For all loads and stores, only the lower 32
bits of registers rA and rB are used and the effective address is 32 bits.
Power ISA embedded category load instructions are implemented such that the upper half of all registers
are left unchanged for a load.
Table 7-6 lists the SPE vector load/store instructions discussed in this section.
0 56 101115162021 31
4 RD RA 0 0 0 0 0 1 0 0 1 1 0 0 0 1 0 0
Table 7-6. SPE Vector Load/Store Instructions
Vector Load Double into Double (evldd) Vector Load Double into Half Words (evldh)
Vector Load Double into Double Indexed (evlddx) Vector Load Double into Half Words Indexed (evldhx)
Vector Load Double into Words (evldw) Vector Load Word into Half Words Even (evlwhe)
Vector Load Double into Words Indexed (evldwx) Vector Load Word into Half Words Even Indexed (evlwhex)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-164 Freescale Semiconductor
Vector Load Word into Half Words Odd Unsigned
(Zero-Extended) (evlwhou) Vector Store Double of Double (evstdd)
Vector Load Word into Half Words Odd Unsigned Indexed
(Zero-Extended) (evlwhoux) Vector Store Double of Double Indexed (evstddx)
Vector Load Word into Half Words Odd Signed (With Sign
Extension) (evlwhos) Vector Store Double of Two Words (evstdw)
Vector Load Word into Half Words Odd Signed Indexed (With
Sign Extension) (evlwhosx) Vector Store Double of Two Words Indexed (evstdwx)
Vector Load Word into Word and Splat (evlwhosx) Vector Store Double of Four Half Words (evstdh)
Vector Load Word into Word and Splat Indexed (evlwwsplatx) Vector Store Double of Four Half Words Indexed (evstdhx)
Vector Load Word into Half Words and Splat (evlwhsplat) Vector Store Word of Word from Even (evstwwe)
Vector Load Word into Half Words and Splat Indexed
(evlwhsplatx) Vector Store Word of Word from Even Indexed (evstwwex)
Vector Load Half Word into Half Word Even and Splat
(evlhhesplat) Vector Store Word of Word from Odd (evstwwo)
Vector Load Half Word into Half Word Even and Splat Indexed
(evlhhesplatx) Vector Store Word of Word from Odd Indexed (evstwwox)
Vector Load Half Word into Half Word Odd Unsigned and Splat
(evlhhesplatx)Vector Store Word of Two Half Words from Even (evstwhe)
Vector Load Half Word into Half Word Odd Unsigned and Splat
Indexed (evlhhousplatx) Vector Store Word of Two Half Words from Even Indexed
(evstwhex)
Vector Load Half Word into Half Word Odd Signed and Splat
(evlhhossplat) Vector Store Word of Two Half Words from Odd (evstwho)
Vector Load Half Word into Half Word Odd Signed and Splat
Indexed (evlhhossplatx) Vector Store Word of Two Half Words from Odd Indexed
(evstwhox)
Table 7-6. SPE Vector Load/Store Instructions (Continued)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-165
evldd evldd
Vector Load Double into Double
evldd rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
RD = MEM(EA,8)
Figure 7-104 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-104. evldd Results in Big- and Little-Endian Modes
NOTE
If the EA of evldd is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 0 0 0 0 0 1
cde f h
01234567
ab g
cde f hab g
fedc ahg b
Memory
GPR in big endian
GPR in little endian
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-166 Freescale Semiconductor
evlddx evlddx
Vector Load Double into Double Indexed
evlddx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD = MEM(EA,8)
Figure 7-105 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-105. evlddx Results in Big- and Little-Endian Modes
NOTE
If the EA of evlddx is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 0 0 0 0
cde f h
01234567
ab g
cde f hab g
fedc ahg b
Memory
GPR in big endian
GPR in little endian
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-167
evldw evldw
Vector Load Double into Words
evldw rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
RD0:31 = MEM(EA,4)
RD32:63 = MEM(EA+4,4)
Figure 7-106 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-106. evldw Results in Big- and Little-Endian Modes
NOTE
If the EA of evldw is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 0 0 0 0 1 1
cde f h
01234567
ab g
cde f hab g
bahg edc f
Memory
GPR in big endian
GPR in little endian
Byte addr
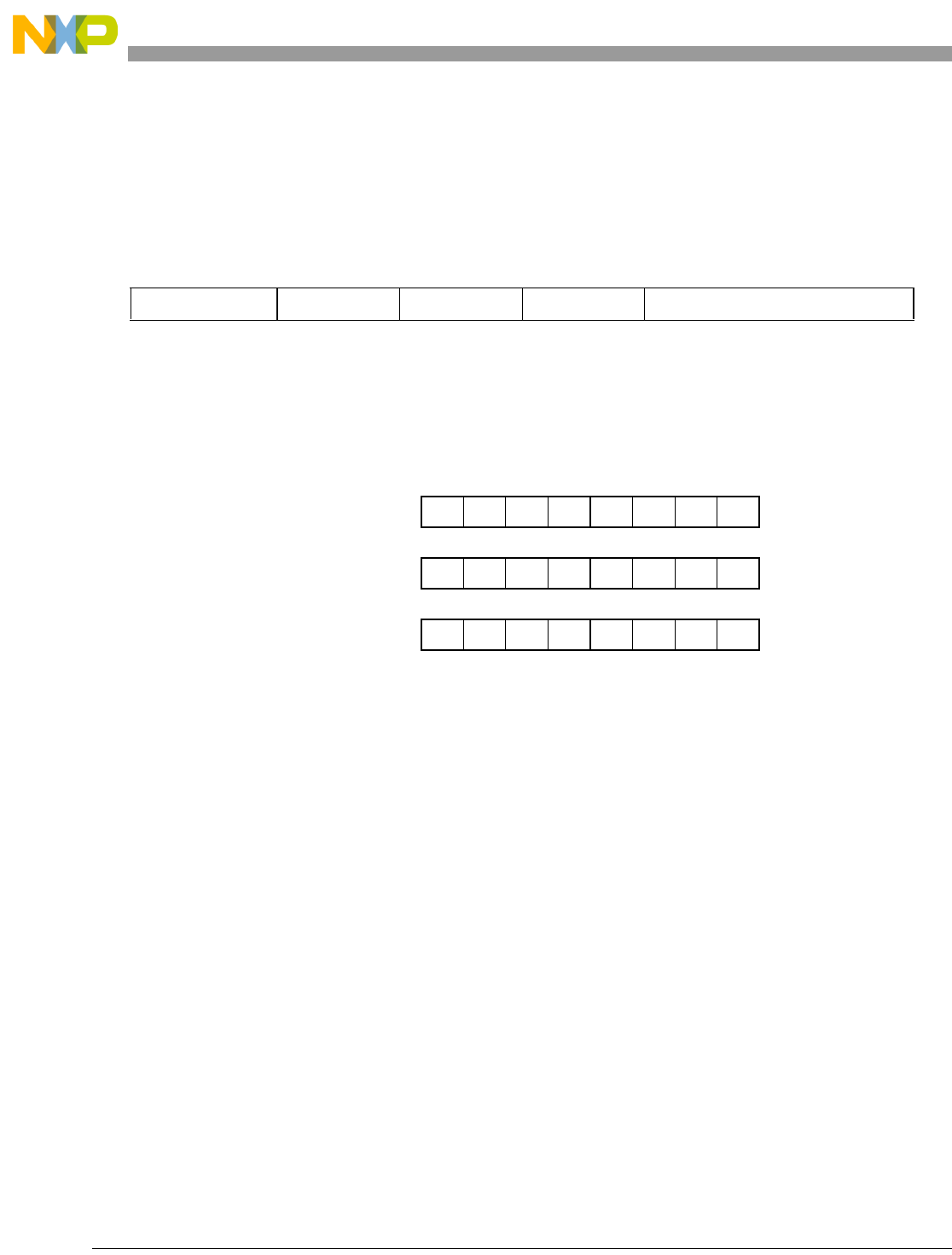
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-168 Freescale Semiconductor
evldwx evldwx
Vector Load Double into Words Indexed
evldwx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:31 = MEM(EA,4)
RD32:63 = MEM(EA+4,4)
Figure 7-107 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-107. evldwx Results in Big- and Little-Endian Modes
NOTE
If the EA of evldwx is not word aligned, an Alignment interrupt is
generated.
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 0 0 1 0
cde f h
01234567
ab g
cde f hab g
bahg edc f
Memory
GPR in big endian
GPR in little endian
Byte addr
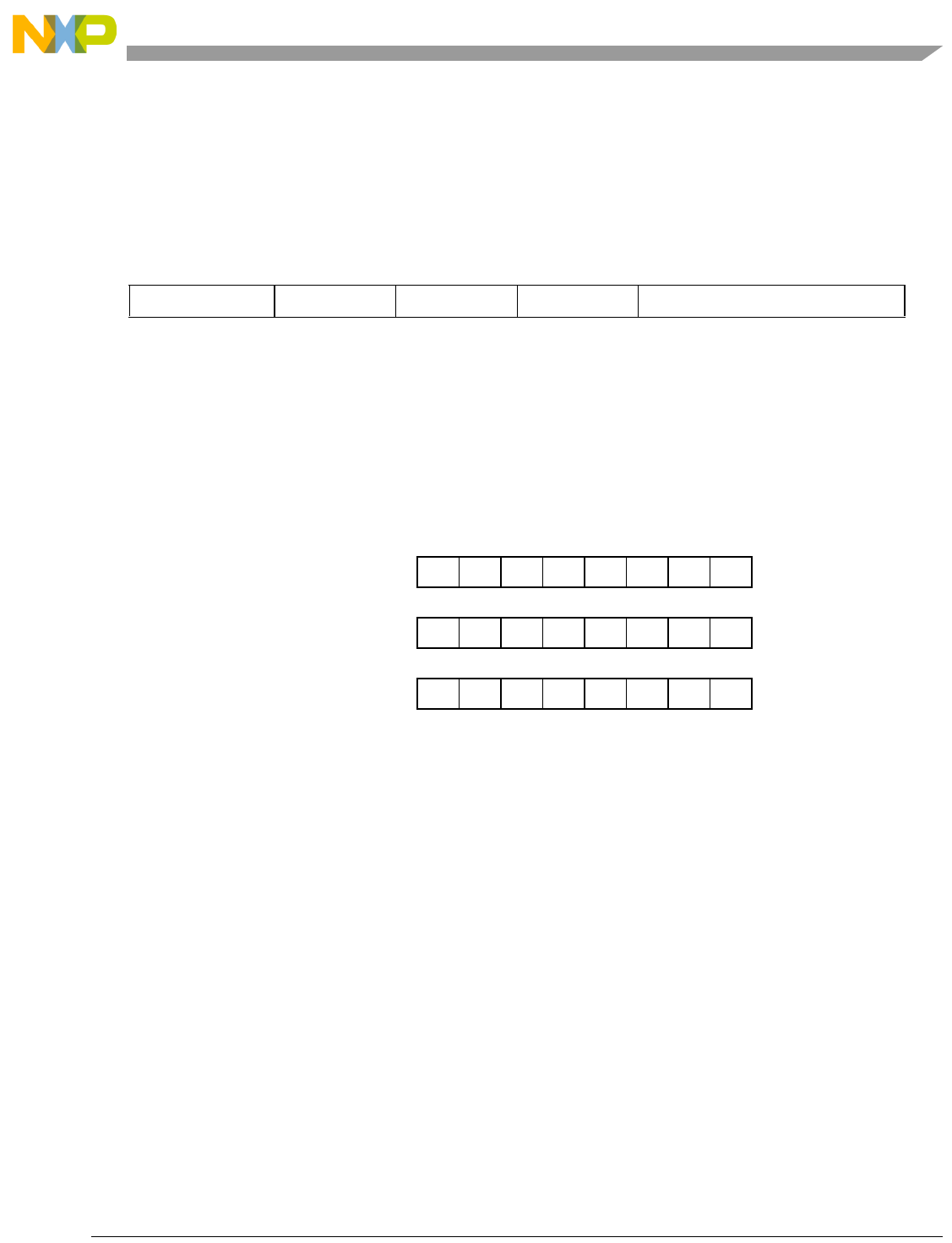
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-169
evldh evldh
Vector Load Double into Half Words
evldh rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
RD0:15 = MEM(EA,2)
RD16:31 = MEM(EA+2,2)
RD32:47 = MEM(EA+4,2)
RD48:63 = MEM(EA+6,2)
Figure 7-108 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-108. evldh Results in Big- and Little-Endian Modes
NOTE
If the EA of evldh is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 0 0 0 1 0 1
cde f h
01234567
ab g
cde f hab g
dcfe gba h
Memory
GPR in big endian
GPR in little endian
Byte addr
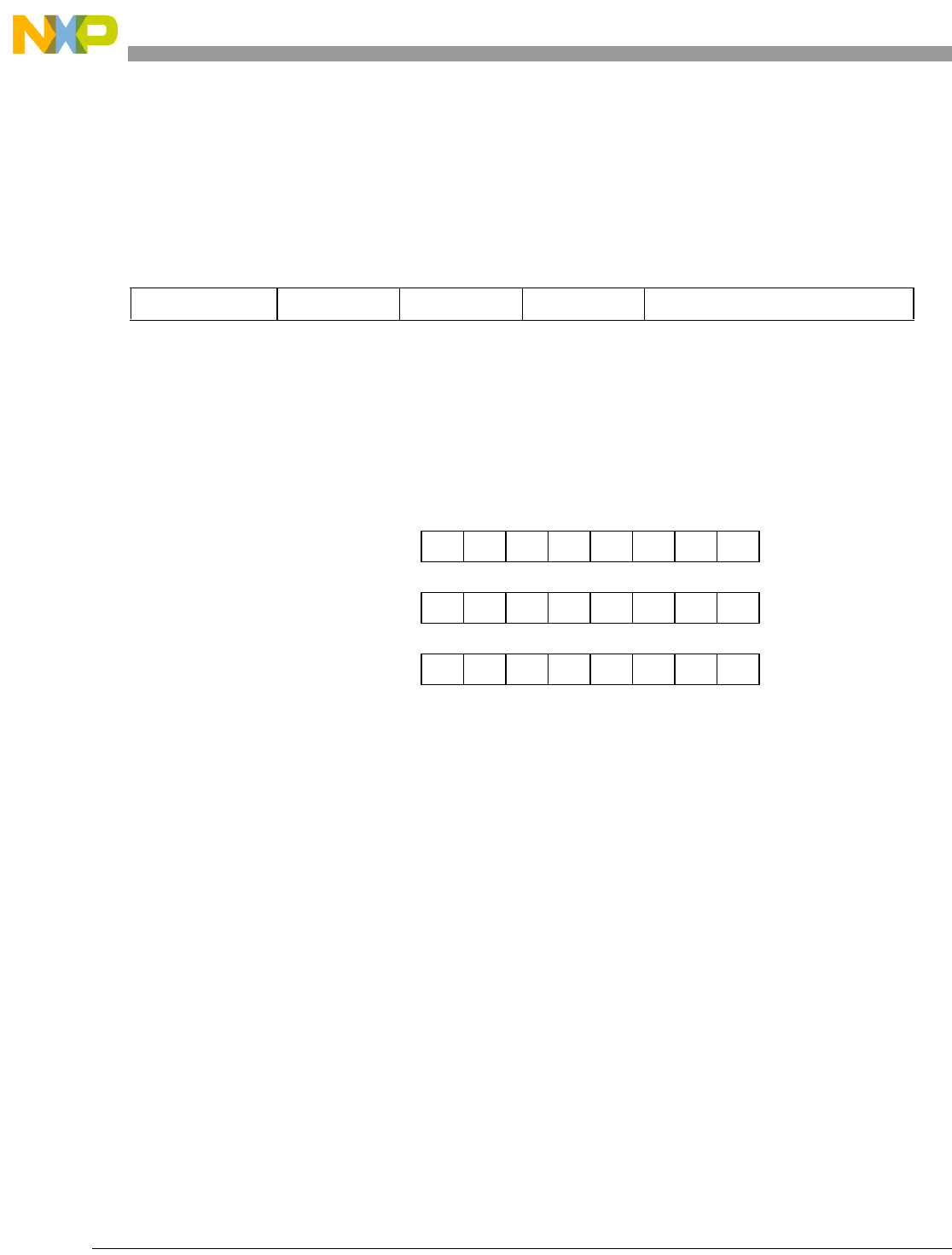
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-170 Freescale Semiconductor
evldhx evldhx
Vector Load Double into Half Words Indexed
evldhx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = MEM(EA,2)
RD16:31 = MEM(EA+2,2)
RD32:47 = MEM(EA+4,2)
RD48:63 = MEM(EA+6,2)
Figure 7-109 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-109. evldhx Results in Big- and Little-Endian Modes
NOTE
If the EA of evldhx is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 0 1 0 0
cde f h
01234567
ab g
cde f hab g
dcfe gba h
Memory
GPR in big endian
GPR in little endian
Byte addr
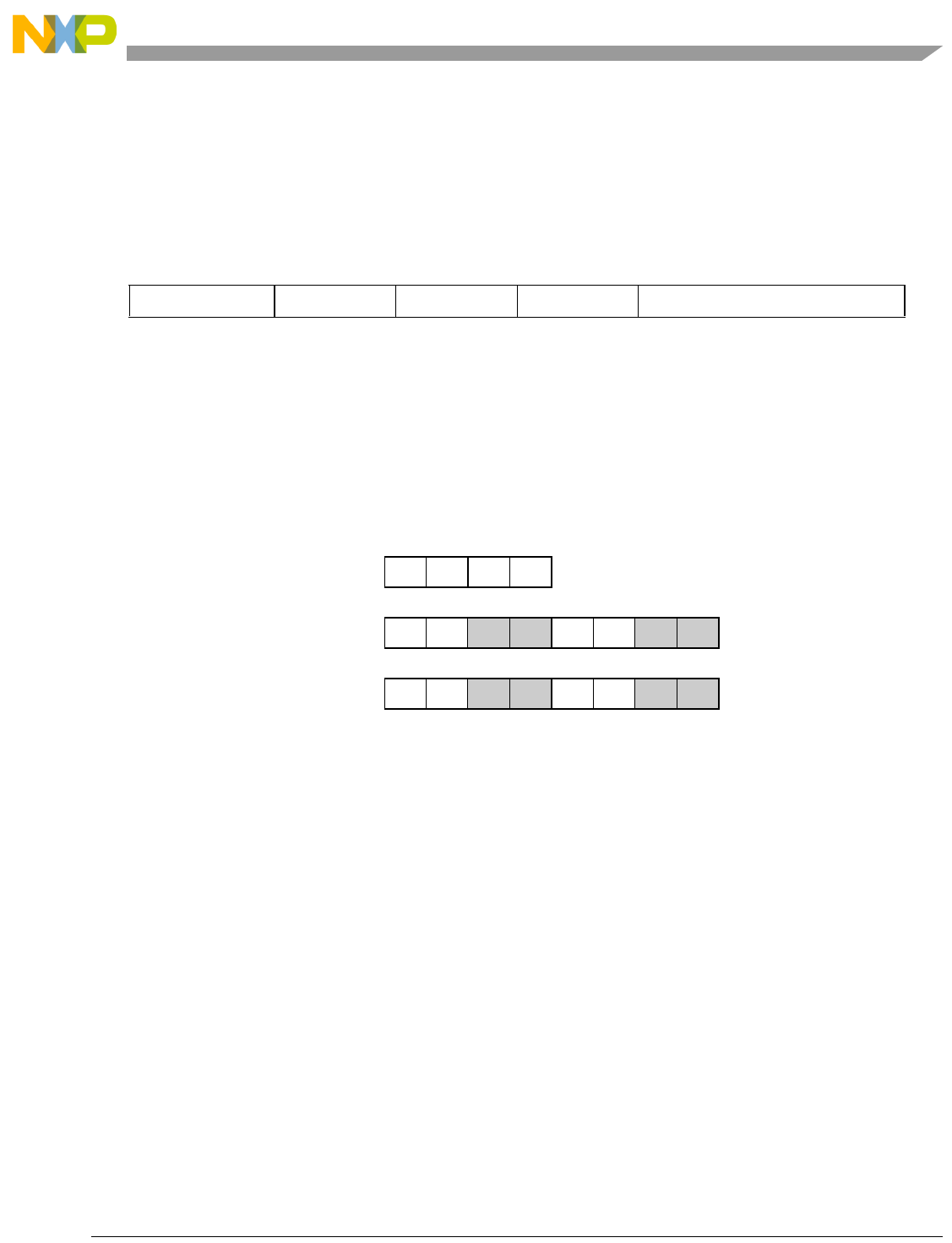
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-171
evlwhe evlwhe
Vector Load Word into Half Words Even
evlwhe rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
RD0:15 = MEM(EA,2)
RD16:31 = 0x0000
RD32:47 = MEM(EA+2,2)
RD48:63 = 0x0000
Figure 7-110 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-110. evlwhe Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 0 1 0 0 0 1
cd
0123
ab
ZZc d Zab Z
ZZdc Zba Z
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-172 Freescale Semiconductor
evlwhex evlwhex
Vector Load Word into Half Words Even Indexed
evlwhex rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = MEM(EA,2)
RD16:31 = 0x0000
RD32:47 = MEM(EA+2,2)
RD48:63 = 0x0000
Figure 7-111 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-111. evlwhex Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 1 0 0 0 0
cd
0123
ab
ZZc d Zab Z
ZZdc Zba Z
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-173
evlwhou evlwhou
Vector Load Word into Half Words Odd Unsigned (Zero-Extended)
evlwhou rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
RD0:15 = 0x0000
RD16:31 = MEM(EA,2)
RD32:47 = 0x0000
RD48:63 = MEM(EA+2,2)
Figure 7-112 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-112. evlwhou Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 0 1 0 1 0 1
cd
0123
ab
abZZ dZZ c
baZZ cZZ d
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-174 Freescale Semiconductor
evlwhoux evlwhoux
Vector Load Word into Half Words Odd Unsigned Indexed (Zero-Extended)
evlwhoux rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = 0x0000
RD16:31 = MEM(EA,2)
RD32:47 = 0x0000
RD48:63 = MEM(EA+2,2)
Figure 7-113 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-113. evlwhoux Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 1 0 1 0 0
cd
0123
ab
abZZ dZZ c
baZZ cZZ d
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-175
evlwhos evlwhos
Vector Load Word into Half Words Odd Signed (With Sign Extension)
evlwhos rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
RD0:31 = EXTS(MEM(EA,2))
RD32:63 = EXTS(MEM(EA+2,2))
Figure 7-114 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-114. evlwhos Results in Big- and Little-Endian Modes
In the big-endian memory, the msb of a and c are sign-extended. In the little-endian memory, the msb of b
and d are sign-extended.
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 0 1 0 1 1 1
cd
0123
ab
abSS dSS c
baSS cSS d
Memory
GPR in big endian
GPR in little endian
Byte addr
S = sign
S = sign
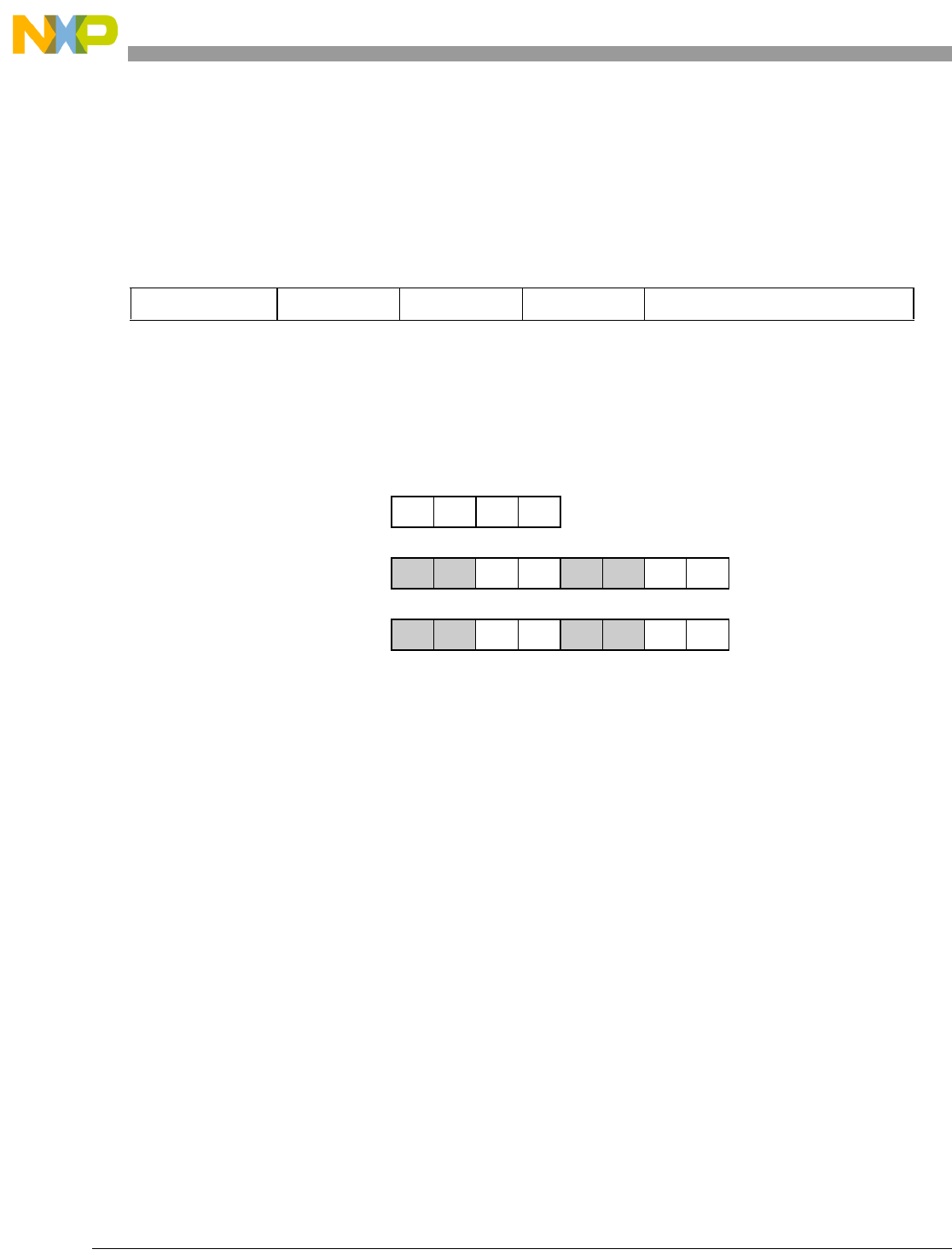
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-176 Freescale Semiconductor
evlwhosx evlwhosx
Vector Load Word into Half Words Odd Signed Indexed (With Sign Extension)
evlwhosx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:31 = EXTS(MEM(EA,2))
RD32:63 = EXTS(MEM(EA+2,2))
Figure 7-115 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-115. evlwhosx Results in Big- and Little-Endian Modes
In the big-endian memory, the msbs of a and c are sign-extended. In the little-endian memory, the msbs of
b and d are sign-extended.
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 1 0 1 1 0
cd
0123
ab
abSS dSS c
baSS cSS d
Memory
GPR in big endian
GPR in little endian
Byte addr
S = sign
S = sign
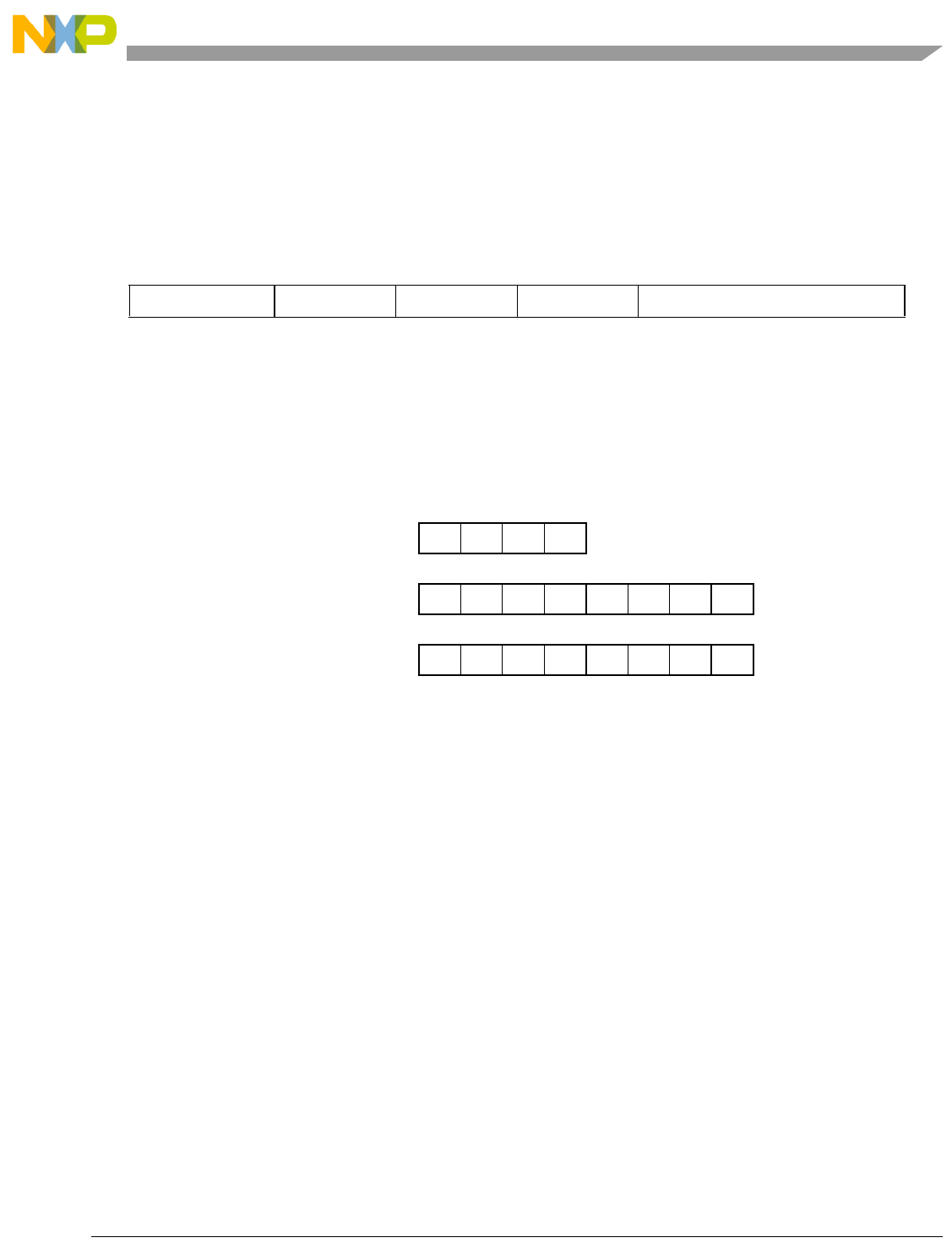
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-177
evlwwsplat evlwwsplat
Vector Load Word into Word and Splat
evlwwsplat rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
RD0:31 = MEM(EA,4)
RD32:63 = MEM(EA,4)
Figure 7-116 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-116. evlwwsplat Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 0 1 1 0 0 1
cd
0123
ab
cdab dab c
badc adc b
Memory
GPR in big endian
GPR in little endian
Byte addr
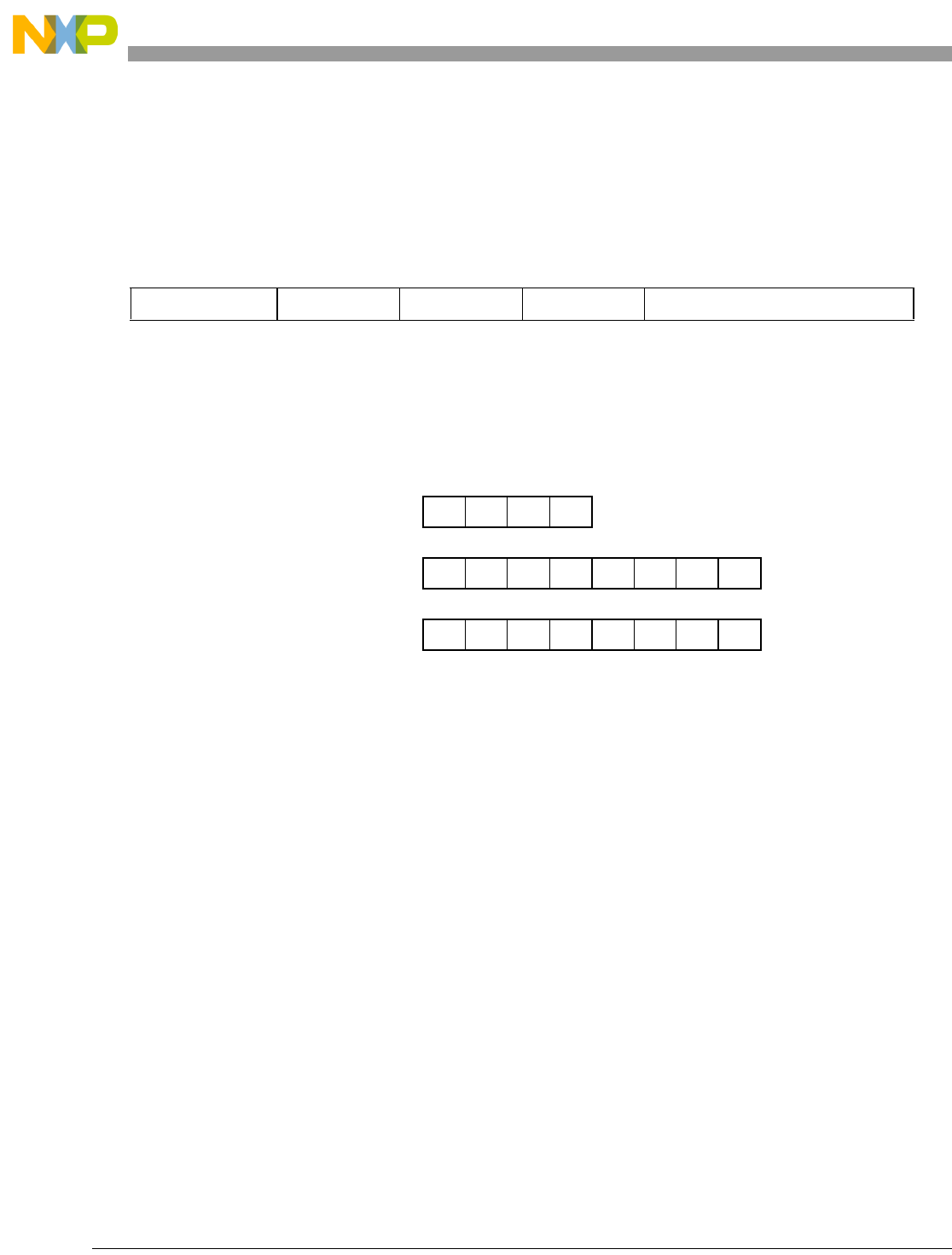
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-178 Freescale Semiconductor
evlwwsplatx evlwwsplatx
Vector Load Word into Word and Splat Indexed
evlwwsplatx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:31 = MEM(EA,4)
RD32:63 = MEM(EA,4)
Figure 7-117 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-117. evlwwsplatx Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 1 1 0 0 0
cd
0123
ab
cdab dab c
badc adc b
Memory
GPR in big endian
GPR in little endian
Byte addr
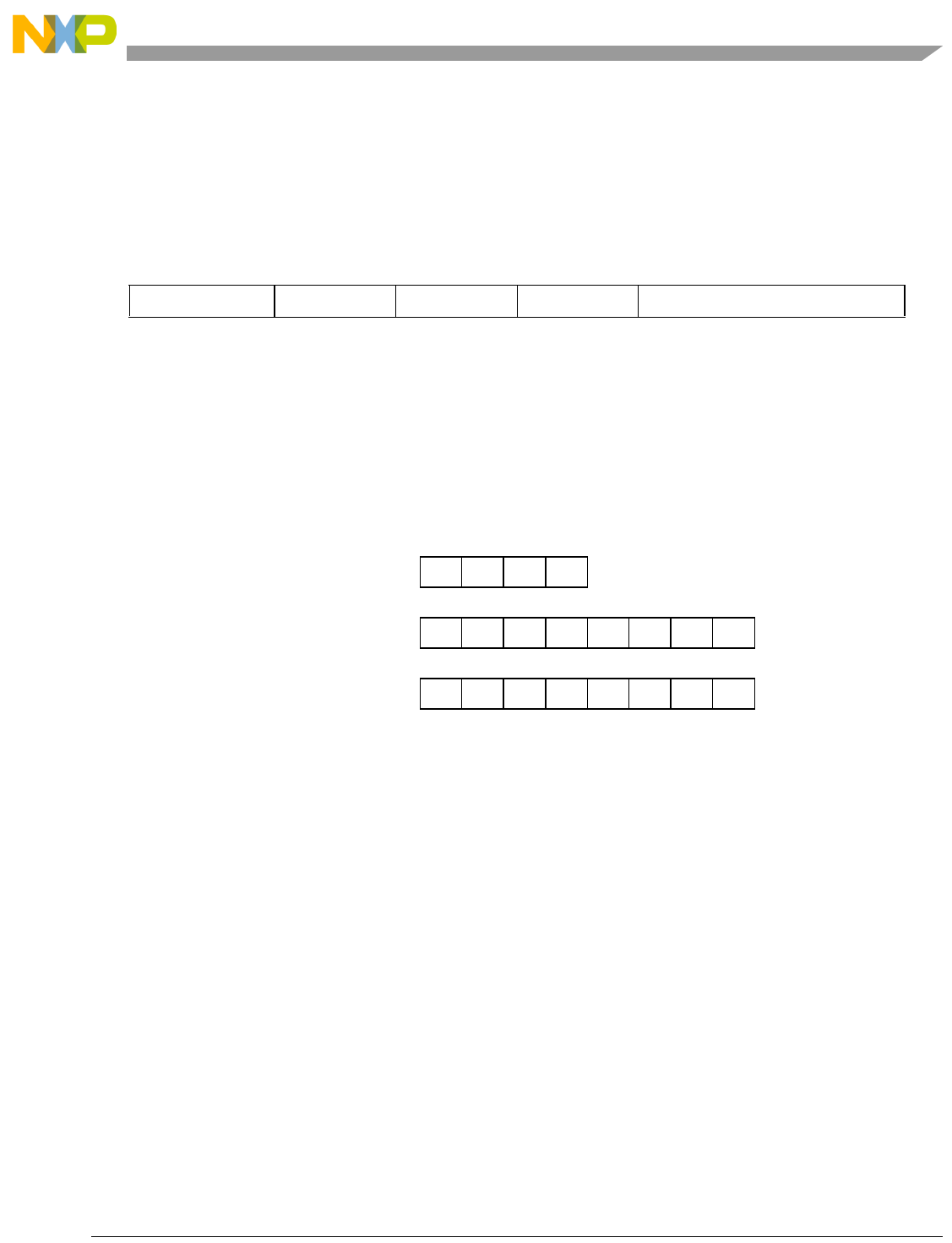
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-179
evlwhsplat evlwhsplat
Vector Load Word into Half Words and Splat
evlwhsplat rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
RD0:15 = MEM(EA,2)
RD16:31 = MEM(EA,2)
RD32:47 = MEM(EA+2,2)
RD48:63 = MEM(EA+2,2)
Figure 7-118 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-118. evlwhsplat Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 0 1 1 1 0 1
cd
0123
ab
abcd dab c
badc cba d
Memory
GPR in big endian
GPR in little endian
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-180 Freescale Semiconductor
evlwhsplatx evlwhsplatx
Vector Load Word into Half Words and Splat Indexed
evlwhsplatx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = MEM(EA,2)
RD16:31 = MEM(EA,2)
RD32:47 = MEM(EA+2,2)
RD48:63 = MEM(EA+2,2)
Figure 7-119 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-119. evlwhsplatx Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 1 1 1 0 0
cd
0123
ab
abcd dab c
badc cba d
Memory
GPR in big endian
GPR in little endian
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-181
evlhhesplat evlhhesplat
Vector Load Half Word into Half Word Even and Splat
evlhhesplat rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*2)
RD0:15 = MEM(EA,2)
RD16:31 = 0x0000
RD32:47 = MEM(EA,2)
RD48:63 = 0x0000
Figure 7-120 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-120. evlhhesplat Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<1
0 1 1 0 0 0 0 1 0 0 1
01
ab
ZZa b Zab Z
ZZba Zba Z
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-182 Freescale Semiconductor
evlhhesplatx evlhhesplatx
Vector Load Half Word into Half Word Even and Splat Indexed
evlhhesplatx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = MEM(EA,2)
RD16:31 = 0x0000
RD32:47 = MEM(EA,2)
RD48:63 = 0x0000
Figure 7-121 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-121. evlhhesplatx Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 1 0 0 0
01
ab
ZZa b Zab Z
ZZba Zba Z
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-183
evlhhousplat evlhhousplat
Vector Load Half Word into Half Word Odd Unsigned and Splat
evlhhousplat rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*2)
RD0:15 = 0x0000
RD16:31 = MEM(EA,2)
RD32:47 = 0x0000
RD48:63 = MEM(EA,2)
Figure 7-122 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-122. evlhhousplat Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<1
0 1 1 0 0 0 0 1 1 0 1
01
ab
abZZ bZZ a
baZZ aZZ b
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-184 Freescale Semiconductor
evlhhousplatx evlhhousplatx
Vector Load Half Word into Half Word Odd Unsigned and Splat Indexed
evlhhousplatx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:15 = 0x0000
RD16:31 = MEM(EA,2)
RD32:47 = 0x0000
RD48:63 = MEM(EA,2)
Figure 7-123 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-123. evlhhousplatx Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 1 1 0 0
01
ab
abZZ bZZ a
baZZ aZZ b
Memory
GPR in big endian
GPR in little endian
Byte addr
Z = zero
Z = zero
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-185
evlhhossplat evlhhossplat
Vector Load Half Word into Half Word Odd Signed and Splat
evlhhossplat rD,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*2)
RD0:31 = EXTS(MEM(EA,2))
RD32:63 = EXTS(MEM(EA,2))
Figure 7-124 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-124. evlhhossplat Results in Big- and Little-Endian Modes
In big-endian memory, the msb of a is sign-extended. In the little-endian memory, the msb of b is
sign-extended.
0 56 101115162021 31
4RDRAUIMM
1
1d = UIMM<<1
0 1 1 0 0 0 0 1 1 1 1
01
ab
abSS bSS a
baSS aSS b
Memory
GPR in big endian
GPR in little endian
Byte addr
S = sign
S = sign
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-186 Freescale Semiconductor
evlhhossplatx evlhhossplatx
Vector Load Half Word into Half Word Odd Signed and Splat Indexed
evlhhossplatx rD,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
RD0:31 = EXTS(MEM(EA,2))
RD32:63 = EXTS(MEM(EA,2))
Figure 7-125 shows how bytes are loaded into rD as determined by the endian mode.
Figure 7-125. evlhhossplatx Results in Big- and Little-Endian Modes
In big-endian memory, the msb of a is sign-extended. In the little-endian memory, the msb of b is
sign-extended.
0 56 101115162021 31
4 RD RA RB 0 1 1 0 0 0 0 1 1 1 0
01
ab
abSS bSS a
baSS aSS b
Memory
GPR in big endian
GPR in little endian
Byte addr
S = sign
S = sign
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-187
evstdd evstdd
Vector Store Double of Double
evstdd rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
MEM(EA,8) = RS0:63
Figure 7-126 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-126. evstdd Results in Big- and Little-Endian Modes
NOTE
If the EA of evstdd is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 1 0 0 0 0 1
cde f hab g
01234567
cde f hab g
fedc ahg b
GPR
Memory in big endian
Memory in little endian
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-188 Freescale Semiconductor
evstddx evstddx
Vector Store Double of Double Indexed
evstddx rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,8) = RS0:63
Figure 7-127 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-127. evstddx Results in Big- and Little-Endian Modes
NOTE
If the EA of evstddx is not word aligned, an Alignment interrupt is
generated.
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 0 0 0 0 0
cde f hab g
fedc ahg b
Memory in big endian
Memory in little endian
cde f hab g
01234567
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-189
evstdw evstdw
Vector Store Double of Two Words
evstdw rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
MEM(EA,4) = RS0:31
MEM(EA+4,4) = RS32:63
Figure 7-128 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-128. evstdw Results in Big- and Little-Endian Modes
NOTE
If the EA of evstdw is not word aligned, an Alignment interrupt is
generated.
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 1 0 0 0 1 1
cde f hab g
bahg edc f
Memory in big endian
Memory in little endian
cde f hab g
01234567
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-190 Freescale Semiconductor
evstdwx evstdwx
Vector Store Double of Two Words Indexed
evstdwx rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,4) = RS0:31
MEM(EA+4,4) = RS32:63
Figure 7-129 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-129. evstdwx Results in Big- and Little-Endian Modes
NOTE
If the EA of evstdwx is not word aligned, an Alignment interrupt is
generated.
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 0 0 0 1 0
cde f hab g
bahg edc f
Memory in big endian
Memory in little endian
cde f hab g
01234567
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-191
evstdh evstdh
Vector Store Double of Four Half Words
evstdh rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*8)
MEM(EA,2) = RS0:15
MEM(EA+2,2) = RS16:31
MEM(EA+4,2) = RS32:47
MEM(EA+6,2) = RS48:63
Figure 7-130 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-130. evstdh Results in Big- and Little-Endian Modes
NOTE
If the EA of evstdh is not word aligned, an Alignment interrupt is generated.
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<3
0 1 1 0 0 1 0 0 1 0 1
cde f hab g
dc fe gba h
Memory in big endian
Memory in little endian
cde f hab g
01234567
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-192 Freescale Semiconductor
evstdhx evstdhx
Vector Store Double of Four Half Words Indexed
evstdhx rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,2) = RS0:15
MEM(EA+2,2) = RS16:31
MEM(EA+4,2) = RS32:47
MEM(EA+6,2) = RS48:63
Figure 7-131 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-131. evstdhx Results in Big- and Little-Endian Modes
NOTE
If the EA of evstdhx is not word aligned, an Alignment interrupt is
generated.
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 0 0 1 0 0
cde f hab g
dc fe gba h
Memory in big endian
Memory in little endian
cde f hab g
01234567
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-193
evstwwe evstwwe
Vector Store Word of Word from Even
evstwwe rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
MEM(EA,4) = RS0:31
Figure 7-132 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-132. evstwwe Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 1 1 1 0 0 1
cdab
badc
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-194 Freescale Semiconductor
evstwwex evstwwex
Vector Store Word of Word from Even Indexed
evstwwex rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,4) = RS0:31
Figure 7-133 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-133. evstwwex Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 1 1 0 0 0
cdab
badc
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-195
evstwwo evstwwo
Vector Store Word of Word from Odd
evstwwo rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
MEM(EA,4) = rS32:63
Figure 7-134 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-134. evstwwo Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 1 1 1 1 0 1
ghef
fehg
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-196 Freescale Semiconductor
evstwwox evstwwox
Vector Store Word of Word from Odd Indexed
evstwwox rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,4) = rS32:63
Figure 7-135 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-135. evstwwox Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 1 1 1 0 0
ghef
fehg
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-197
evstwhe evstwhe
Vector Store Word of Two Half Words from Even
evstwhe rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
MEM(EA,2) = RS0:15
MEM(EA+2,2) = RS32:47
Figure 7-136 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-136. evstwhe Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 1 1 0 0 0 1
efab
feba
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-198 Freescale Semiconductor
evstwhex evstwhex
Vector Store Word of Two Half Words from Even Indexed
evstwhex rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,2) = RS0:15
MEM(EA+2,2) = RS32:47
Figure 7-137 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-137. evstwhex Results in Big- and Little-Endian Modes
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 1 0 0 0 0
efab
feba
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-199
evstwho evstwho
Vector Store Word of Two Half Words from Odd
evstwho rS,d(rA)
if (rA == 0) then b = 0
else b = (rA)
EA = b + EXTZ(UIMM*4)
MEM(EA,2) = RS16:31
MEM(EA+2,2) = RS48:63
Figure 7-138 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-138. evstwho Results in Big- and Little-Endian Modes
0 56 101115162021 31
4RSRAUIMM
1
1d = UIMM<<2
0 1 1 0 0 1 1 0 1 0 1
ghcd
hgdc
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-200 Freescale Semiconductor
evstwhox evstwhox
Vector Store Word of Two Half Words from Odd Indexed
evstwhox rS,rA,rB
if (rA == 0) then b = 0
else b = (rA)
EA = b + (rB)
MEM(EA,2) = RS16:31
MEM(EA+2,2) = RS48:63
Figure 7-139 shows how bytes are stored in memory as determined by the endian mode.
Figure 7-139. evstwhox Results in Big- and Little-Endian Modes
7.6 SPE Instruction Timing
Table 7-7, Table 7-8, and Table 7-9 show SPE instruction timing in number of processor clock cycles.
Pipelined instructions are shown with cycles of total latency and throughput cycles. Divide instructions are
not pipelined and block other instructions from executing during divide execution.
7.6.1 SPE Integer Simple Instructions Timing
Table 7-7 shows instruction timing for SPE integer simple instructions sorted by opcode. These
instructions are issued as a pair of operations.
0 56 101115162021 31
4 RS RA RB 0 1 1 0 0 1 1 0 1 0 0
Table 7-7. Timing for Integer Simple Instructions
Instruction Latency Throughput Comments
brinc 11 —
evabs 11 —
evaddiw 11 —
evaddw 11 —
evand 11 —
ghcd
hgdc
Memory in big endian
Memory in little endian
cde f hab g
0123
GPR
Byte addr
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-201
evandc 11 —
evcmpeq 11 —
evcmpgts 11 —
evcmpgtu 11 —
evcmplts 11 —
evcmpltu 11 —
evcntlsw 11 —
evcntlzw 11 —
eveqv 11 —
evextsb 11 —
evextsh 11 —
evmergehi 11 —
evmergehilo 11 —
evmergelo 11 —
evmergelohi 11 —
evnand 11 —
evneg 11 —
evnor 11 —
evor 11 —
evorc 11 —
evrlw 11 —
evrlwi 11 —
evrndw 11 —
evsel 11 —
evslw 11 —
evslwi 11 —
evsplatfi 11 —
evsplati 11 —
evsrwis 11 —
evsrwiu 11 —
evsrws 11 —
evsrwu 11 —
evsubfw 11 —
Table 7-7. Timing for Integer Simple Instructions (Continued)
Instruction Latency Throughput Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-202 Freescale Semiconductor
7.6.2 SPE Load and Store Instruction Timing
Table 7-7 shows instruction timing for SPE load and store instructions sorted by opcode. Actual timing
depends on alignment; the table indicates timing for aligned operands.
evsubifw 11 —
evxor 11 —
Table 7-8. SPE Load and Store Instruction Timing
Instruction Latency Throughput Comments
evldd 21 —
evlddx 21 —
evldh 21 —
evldhx 21 —
evldw 21 —
evldwx 21 —
evlhhesplat 21 —
evlhhesplatx 21 —
evlhhossplat 21 —
evlhhossplatx 21 —
evlhhousplat 21 —
evlhhousplatx 21 —
evlwhe 21 —
evlwhex 21 —
evlwhos 21 —
evlwhosx 21 —
evlwhou 21 —
evlwhoux 21 —
evlwhsplat 21 —
evlwhsplatx 21 —
evlwwsplat 21 —
evlwwsplatx 21 —
evstdd 21 —
evstddx 21 —
Table 7-7. Timing for Integer Simple Instructions (Continued)
Instruction Latency Throughput Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-203
7.6.3 SPE Complex Integer Instruction Timing
Table 7-9 shows instruction timing for SPE complex integer instructions sorted by opcode. For the divide
instructions, the number of stall cycles is (latency) for following instructions.
evstdh 21 —
evstdhx 21 —
evstdw 21 —
evstdwx 21 —
evstwhe 21 —
evstwhex 21 —
evstwho 21 —
evstwhox 21 —
evstwwe 21 —
evstwwex 21 —
evstwwo 21 —
evstwwox 21 —
Table 7-9. SPE Complex Integer Instruction Timing
Instruction Latency Through
put Comments
evaddsmiaaw 11 —
evaddssiaaw 11 —
evaddumiaaw 11 —
evaddusiaaw 11 —
evdivws 12–32112–321—
evdivwu 12–32112–321—
evmhegsmfaa 21 —
evmhegsmfan 21 —
evmhegsmiaa 21 —
evmhegsmian 21 —
evmhegumiaa 21 —
evmhegumian 21 —
evmhesmf 21 —
evmhesmfa 21 —
Table 7-8. SPE Load and Store Instruction Timing (Continued)
Instruction Latency Throughput Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-204 Freescale Semiconductor
evmhesmfaaw 21 —
evmhesmfanw 21 —
evmhesmi 21 —
evmhesmia 21 —
evmhesmiaaw 21 —
evmhesmianw 21 —
evmhessf 21 —
evmhessfa 21 —
evmhessfaaw 21 —
evmhessfanw 21 —
evmhessiaaw 21 —
evmhessianw 21 —
evmheumi 21 —
evmheumia 21 —
evmheumiaaw 21 —
evmheumianw 21 —
evmheusiaaw 21 —
evmheusianw 21 —
evmhogsmfaa 21 —
evmhogsmfan 21 —
evmhogsmiaa 21 —
evmhogsmian 21 —
evmhogumiaa 21 —
evmhogumian 21 —
evmhosmf 21 —
evmhosmfa 21 —
evmhosmfaaw 21 —
evmhosmfanw 21 —
evmhosmi 21 —
evmhosmia 21 —
evmhosmiaaw 21 —
evmhosmianw 21 —
Table 7-9. SPE Complex Integer Instruction Timing (Continued)
Instruction Latency Through
put Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-205
evmhossf 21 —
evmhossfa 21 —
evmhossfaaw 21 —
evmhossfanw 21 —
evmhossiaaw 21 —
evmhossianw 21 —
evmhoumi 21 —
evmhoumia 21 —
evmhoumiaaw 21 —
evmhoumianw 21 —
evmhousiaaw 21 —
evmhousianw 21 —
evmra 21 —
evmwhsmf 21 —
evmwhsmfa 21 —
evmwhsmi 21 —
evmwhsmia 21 —
evmwhssf 21 —
evmwhssfa 21 —
evmwhumi 21 —
evmwhumia 21 —
evmwlsmiaaw 21 —
evmwlsmianw 21 —
evmwlssiaaw 21 —
evmwlssianw 21 —
evmwlumi 21 —
evmwlumia 21 —
evmwlumiaaw 21 —
evmwlumianw 21 —
evmwlusiaaw 21 —
evmwlusianw 21 —
evmwsmf 21 —
Table 7-9. SPE Complex Integer Instruction Timing (Continued)
Instruction Latency Through
put Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-206 Freescale Semiconductor
7.7 Instruction Forms and Opcodes
Table 7-10 provides the division of the opcode space for the new SPE instructions.
evmwsmfa 21 —
evmwsmfaa 21 —
evmwsmfan 21 —
evmwsmi 21 —
evmwsmia 21 —
evmwsmiaa 21 —
evmwsmian 21 —
evmwssf 21 —
evmwssfa 21 —
evmwssfaa 21 —
evmwssfan 21 —
evmwumi 21 —
evmwumia 21 —
evmwumiaa 21 —
evmwumian 21 —
evsubfsmiaaw 11 —
evsubfssiaaw 11 —
evsubfumiaaw 11 —
evsubfusiaaw 11 —
1Timing is data dependent
Table 7-10. Opcode Space Division
Opcode Bits Instruction Class
0–5 21–25
4 0100* SPE APU integer simple instructions
4 01010 EFPU floating-point instructions
4 01011 Embedded floating-point APU instructions
4 01100 SPE APU load/store instructions
4 01101 SPE APU reserved for future use
Table 7-9. SPE Complex Integer Instruction Timing (Continued)
Instruction Latency Through
put Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-207
7.7.1 SPE Vector Integer Simple Instructions
For instructions that have signed and unsigned forms, bit 31 is 1 for the signed form and 0 for the unsigned
form. For instructions that have immediate forms, bit 30 is 1 for immediate forms. All instructions have
the destination register specified in the bits 6–10, which differs from PowerPC ISA/Book E where some
instructions have the destination in bits 11–15.
4 0111* SPE APU reserved for future use
4 10*** SPE APU integer complex instructions
4 11*** SPE APU integer complex instructions: reserved for future use
Table 7-11. Opcodes for Integer Simple Instructions
Instruction Opcode Comments
0–5 6–10 11–15 16–20 21–31
brinc 4 rD RA rB 010 0000 1111 —
evabs 4 RD RA 00000 010 0000 1000 —
evaddiw 4 RD UIMM RB 010 0000 0010 —
evaddw 4 RD RA RB 010 0000 0000 —
evand 4 RD RA RB 010 0001 0001 RD = RA & RB
evandc 4 RD RA RB 010 0001 0010 RD = RA & (~RB)
evcmpeq 4 crfD 00 RA RB 010 0011 0100 —
evcmpgts 4 crfD 00 RA RB 010 0011 0001 —
evcmpgtu 4 crfD 00 RA RB 010 0011 0000 —
evcmplts 4 crfD 00 RA RB 010 0011 0011 —
evcmpltu 4 crfD 00 RA RB 010 0011 0010 —
evcntlsw 4 RD RA 00000 010 0000 1110 —
evcntlzw 4 RD RA 00000 010 0000 1101 —
eveqv 4 RD RA RB 010 0001 1001 RD = ~(RA XOR RB)
evextsb 4 RD RA 00000 010 0000 1010 —
evextsh 4 RD RA 00000 010 0000 1011 —
evmergehi 4 RD RA RB 010 0010 1100 —
evmergehilo 4 RD RA RB 010 0010 1110 —
evmergelo 4 RD RA RB 010 0010 1101 —
Table 7-10. Opcode Space Division (Continued)
Opcode Bits Instruction Class
0–5 21–25
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-208 Freescale Semiconductor
7.7.2 Opcodes for SPE Load and Store Instructions
Load instructions have a ‘0’ in bit 26 whereas all stores have a ‘1’ in bit 26. Bits 27 and 28 indicate the
size of the data access to memory. Bit 31 indicates whether the index is immediate or the contents of a
register. All store instructions have the source of the data register specified in bits 6–10 (RS).
evmergelohi 4 RD RA RB 010 0010 1111 —
evnand 4 RD RA RB 010 0001 1110 RD = ~(RA & RB)
evneg 4 RD RA 00000 010 0000 1001 —
evnor 4 RD RA RB 010 0001 1000 RD = ~(RA | RB)
evor 4 RD RA RB 010 0001 0111 RD = RA | RB
evorc 4 RD RA RB 010 0001 1011 RD = RA | (~RB)
evrlw 4 RD RA RB 010 0010 1000 —
evrlwi 4 RD RA UIMM 010 0010 1010 —
evrndw 4 RD RA 00000 010 0000 1100 —
evsel 4 RD RA RB 010 0111 1crfS crfS is a 3-bit field
evslw 4 RD RA RB 010 0010 0100 —
evslwi 4 RD RA UIMM 010 0010 0110 —
evsplatfi 4 RD SIMM 00000 010 0010 1011 —
evsplati 4 RD SIMM 00000 010 0010 1001 —
evsrwis 4 RD RA UIMM 010 0010 0011 —
evsrwiu 4 RD RA UIMM 010 0010 0010 —
evsrws 4 RD RA RB 010 0010 0001 —
evsrwu 4 RD RA RB 010 0010 0000 —
evsubfw 4 RD RA RB 010 0000 0100 —
evsubifw 4 RD UIMM RB 010 0000 0110 —
evxor 4 RD RA RB 010 0001 0110 RD = RA XOR RB
Table 7-12. SPE Load and Store Instruction Opcodes
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–31
evldd 4 RD RA UIMM 011 0000 0001 —
evlddx 4 RD RA RB 011 0000 0000 —
Table 7-11. Opcodes for Integer Simple Instructions (Continued)
Instruction Opcode Comments
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-209
evldh 4 RD RA UIMM 011 0000 0101 —
evldhx 4 RD RA RB 011 0000 0100 —
evldw 4 RD RA UIMM 011 0000 0011 —
evldwx 4 RD RA RB 011 0000 0010 —
evlhhesplat 4 RD RA UIMM 011 0000 1001 —
evlhhesplatx 4 RD RA RB 011 0000 1000 —
evlhhossplat 4 RD RA UIMM 011 0000 1111 —
evlhhossplatx 4 RD RA RB 011 0000 1110 —
evlhhousplat 4 RD RA UIMM 011 0000 1101 —
evlhhousplatx 4 RD RA RB 011 0000 1100 —
evlwhe 4 RD RA UIMM 011 0001 0001 —
evlwhex 4 RD RA RB 011 0001 0000 —
evlwhos 4 RD RA UIMM 011 0001 0111 —
evlwhosx 4 RD RA RB 011 0001 0110 —
evlwhou 4 RD RA UIMM 011 0001 0101 —
evlwhoux 4 RD RA RB 011 0001 0100 —
evlwhsplat 4 RD RA UIMM 011 0001 1101 —
evlwhsplatx 4 RD RA RB 011 0001 1100 —
evlwwsplat 4 RD RA UIMM 011 0001 1001 —
evlwwsplatx 4 RD RA RB 011 0001 1000 —
evstdd 4 RS RA UIMM 011 0010 0001 —
evstddx 4 RS RA RB 011 0010 0000 —
evstdh 4 RS RA UIMM 011 0010 0101 —
evstdhx 4 RS RA RB 011 0010 0100 —
evstdw 4 RS RA UIMM 011 0010 0011 —
evstdwx 4 RS RA RB 011 0010 0010 —
evstwhe 4 RS RA UIMM 011 0011 0001 —
evstwhex 4 RS RA RB 011 0011 0000 —
evstwho 4 RS RA UIMM 011 0011 0101 —
evstwhox 4 RS RA RB 011 0011 0100 —
evstwwe 4 RS RA UIMM 011 0011 1001 —
Table 7-12. SPE Load and Store Instruction Opcodes (Continued)
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-210 Freescale Semiconductor
7.7.3 Opcodes for SPE Complex Integer Instructions
Figure 7-13 shows the opcodes for SPE complex integer instructions, sorted by mnemonic.
evstwwex 4 RS RA RB 011 0011 1000 —
evstwwo 4 RS RA UIMM 011 0011 1101 —
evstwwox 4 RS RA RB 011 0011 1100 —
Table 7-13. Opcodes for Complex Integer Instructions, Sorted by Mnemonic
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
evaddsmiaaw 4 RD RA 00000 100 1100 1001
evaddssiaaw 4 RD RA 00000 100 1100 0001
evaddumiaaw 4 RD RA 00000 100 1100 1000
evaddusiaaw 4 RD RA 00000 100 1100 0000
evdivws 4 RD RA RB 100 1100 0110
evdivwu 4 RD RA RB 100 1100 0111
evmhegsmfaa 4 RD RA RB 101 0010 1011
evmhegsmfan 4 RD RA RB 101 1010 1011
evmhegsmiaa 4 RD RA RB 101 0010 1001
evmhegsmian 4 RD RA RB 101 1010 1001
evmhegumiaa 4 RD RA RB 101 0010 1000
evmhegumian 4 RD RA RB 101 1010 1000
evmhesmf 4 RD RA RB 100 0000 1011
evmhesmfa 4 RD RA RB 100 0010 1011
evmhesmfaaw 4 RD RA RB 101 0000 1011
evmhesmfanw 4 RD RA RB 101 1000 1011
evmhesmi 4 RD RA RB 100 0000 1001
evmhesmia 4 RD RA RB 100 0010 1001
evmhesmiaaw 4 RD RA RB 101 0000 1001
evmhesmianw 4 RD RA RB 101 1000 1001
evmhessf 4 RD RA RB 100 0000 0011
evmhessfa 4 RD RA RB 100 0010 0011
Table 7-12. SPE Load and Store Instruction Opcodes (Continued)
Instruction Opcode Bits Comments
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-211
evmhessfaaw 4 RD RA RB 101 0000 0011
evmhessfanw 4 RD RA RB 101 1000 0011
evmhessiaaw 4 RD RA RB 101 0000 0001
evmhessianw 4 RD RA RB 101 1000 0001
evmheumi 4 RD RA RB 100 0000 1000
evmheumia 4 RD RA RB 100 0010 1000
evmheumiaaw 4 RD RA RB 101 0000 1000
evmheumianw 4 RD RA RB 101 1000 1000
evmheusiaaw 4 RD RA RB 101 0000 0000
evmheusianw 4 RD RA RB 101 1000 0000
evmhogsmfaa 4 RD RA RB 101 0010 1111
evmhogsmfan 4 RD RA RB 101 1010 1111
evmhogsmiaa 4 RD RA RB 101 0010 1101
evmhogsmian 4 RD RA RB 101 1010 1101
evmhogumiaa 4 RD RA RB 101 0010 1100
evmhogumian 4 RD RA RB 101 1010 1100
evmhosmf 4 RD RA RB 100 0000 1111
evmhosmfa 4 RD RA RB 100 0010 1111
evmhosmfaaw 4 RD RA RB 101 0000 1111
evmhosmfanw 4 RD RA RB 101 1000 1111
evmhosmi 4 RD RA RB 100 0000 1101
evmhosmia 4 RD RA RB 100 0010 1101
evmhosmiaaw 4 RD RA RB 101 0000 1101
evmhosmianw 4 RD RA RB 101 1000 1101
evmhossf 4 RD RA RB 100 0000 0111
evmhossfa 4 RD RA RB 100 0010 0111
evmhossfaaw 4 RD RA RB 101 0000 0111
evmhossfanw 4 RD RA RB 101 1000 0111
evmhossiaaw 4 RD RA RB 101 0000 0101
evmhossianw 4 RD RA RB 101 1000 0101
evmhoumi 4 RD RA RB 100 0000 1100
Table 7-13. Opcodes for Complex Integer Instructions, Sorted by Mnemonic (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-212 Freescale Semiconductor
evmhoumia 4 RD RA RB 100 0010 1100
evmhoumiaaw 4 RD RA RB 101 0000 1100
evmhoumianw 4 RD RA RB 101 1000 1100
evmhousiaaw 4 RD RA RB 101 0000 0100
evmhousianw 4 RD RA RB 101 1000 0100
evmra 4 RD RA 00000 100 1100 0100
evmwhsmf 4 RD RA RB 100 0100 1111
evmwhsmfa 4 RD RA RB 100 0110 1111
evmwhsmi 4 RD RA RB 100 0100 1101
evmwhsmia 4 RD RA RB 100 0110 1101
evmwhssf 4 RD RA RB 100 0100 0111
evmwhssfa 4 RD RA RB 100 0110 0111
evmwhumi 4 RD RA RB 100 0100 1100
evmwhumia 4 RD RA RB 100 0110 1100
evmwlsmiaaw 4 RD RA RB 101 0100 1001
evmwlsmianw 4 RD RA RB 101 1100 1001
evmwlssiaaw 4 RD RA RB 101 0100 0001
evmwlssianw 4 RD RA RB 101 1100 0001
evmwlumi 4 RD RA RB 100 0100 1000
evmwlumia 4 RD RA RB 100 0110 1000
evmwlumiaaw 4 RD RA RB 101 0100 1000
evmwlumianw 4 RD RA RB 101 1100 1000
evmwlusiaaw 4 RD RA RB 101 0100 0000
evmwlusianw 4 RD RA RB 101 1100 0000
evmwsmf 4 RD RA RB 100 0101 1011
evmwsmfa 4 RD RA RB 100 0111 1011
evmwsmfaa 4 RD RA RB 101 0101 1011
evmwsmfan 4 RD RA RB 101 1101 1011
evmwsmi 4 RD RA RB 100 0101 1001
evmwsmia 4 RD RA RB 100 0111 1001
evmwsmiaa 4 RD RA RB 101 0101 1001
Table 7-13. Opcodes for Complex Integer Instructions, Sorted by Mnemonic (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-213
Figure 7-14 shows the opcodes for SPE complex integer instructions, sorted by opcode.
evmwsmian 4 RD RA RB 101 1101 1001
evmwssf 4 RD RA RB 100 0101 0011
evmwssfa 4 RD RA RB 100 0111 0011
evmwssfaa 4 RD RA RB 101 0101 0011
evmwssfan 4 RD RA RB 101 1101 0011
evmwumi 4 RD RA RB 100 0101 1000
evmwumia 4 RD RA RB 100 0111 1000
evmwumiaa 4 RD RA RB 101 0101 1000
evmwumian 4 RD RA RB 101 1101 1000
evsubfsmiaaw 4 RD RA 00000 100 1100 1011
evsubfssiaaw 4 RD RA 00000 100 1100 0011
evsubfumiaaw 4 RD RA 00000 100 1100 1010
evsubfusiaaw 4 RD RA 00000 100 1100 0010
Table 7-14. Opcodes for Complex Integer Instructions, Sorted by Opcode
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
evmhessf 4 RD RA RB 100 0000 0011
evmhossf 4 RD RA RB 100 0000 0111
evmheumi 4 RD RA RB 100 0000 1000
evmhesmi 4 RD RA RB 100 0000 1001
evmhesmf 4 RD RA RB 100 0000 1011
evmhoumi 4 RD RA RB 100 0000 1100
evmhosmi 4 RD RA RB 100 0000 1101
evmhosmf 4 RD RA RB 100 0000 1111
evmhessfa 4 RD RA RB 100 0010 0011
evmhossfa 4 RD RA RB 100 0010 0111
evmheumia 4 RD RA RB 100 0010 1000
evmhesmia 4 RD RA RB 100 0010 1001
evmhesmfa 4 RD RA RB 100 0010 1011
Table 7-13. Opcodes for Complex Integer Instructions, Sorted by Mnemonic (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-214 Freescale Semiconductor
evmhoumia 4 RD RA RB 100 0010 1100
evmhosmia 4 RD RA RB 100 0010 1101
evmhosmfa 4 RD RA RB 100 0010 1111
evmwhssf 4 RD RA RB 100 0100 0111
evmwlumi 4 RD RA RB 100 0100 1000
evmwhumi 4 RD RA RB 100 0100 1100
evmwhsmi 4 RD RA RB 100 0100 1101
evmwhsmf 4 RD RA RB 100 0100 1111
evmwssf 4 RD RA RB 100 0101 0011
evmwumi 4 RD RA RB 100 0101 1000
evmwsmi 4 RD RA RB 100 0101 1001
evmwsmf 4 RD RA RB 100 0101 1011
evmwhssfa 4 RD RA RB 100 0110 0111
evmwlumia 4 RD RA RB 100 0110 1000
evmwhumia 4 RD RA RB 100 0110 1100
evmwhsmia 4 RD RA RB 100 0110 1101
evmwhsmfa 4 RD RA RB 100 0110 1111
evmwssfa 4 RD RA RB 100 0111 0011
evmwumia 4 RD RA RB 100 0111 1000
evmwsmia 4 RD RA RB 100 0111 1001
evmwsmfa 4 RD RA RB 100 0111 1011
evaddusiaaw 4 RD RA 00000 100 1100 0000
evaddssiaaw 4 RD RA 00000 100 1100 0001
evsubfusiaaw 4 RD RA 00000 100 1100 0010
evsubfssiaaw 4 RD RA 00000 100 1100 0011
evmra 4 RD RA 00000 100 1100 0100
evdivws 4 RD RA RB 100 1100 0110
evdivwu 4 RD RA RB 100 1100 0111
evaddumiaaw 4 RD RA 00000 100 1100 1000
evaddsmiaaw 4 RD RA 00000 100 1100 1001
evsubfumiaaw 4 RD RA 00000 100 1100 1010
Table 7-14. Opcodes for Complex Integer Instructions, Sorted by Opcode (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 7-215
evsubfsmiaaw 4 RD RA 00000 100 1100 1011
evmheusiaaw 4 RD RA RB 101 0000 0000
evmhessiaaw 4 RD RA RB 101 0000 0001
evmhessfaaw 4 RD RA RB 101 0000 0011
evmhousiaaw 4 RD RA RB 101 0000 0100
evmhossiaaw 4 RD RA RB 101 0000 0101
evmhossfaaw 4 RD RA RB 101 0000 0111
evmheumiaaw 4 RD RA RB 101 0000 1000
evmhesmiaaw 4 RD RA RB 101 0000 1001
evmhesmfaaw 4 RD RA RB 101 0000 1011
evmhoumiaaw 4 RD RA RB 101 0000 1100
evmhosmiaaw 4 RD RA RB 101 0000 1101
evmhosmfaaw 4 RD RA RB 101 0000 1111
evmhegumiaa 4 RD RA RB 101 0010 1000
evmhegsmiaa 4 RD RA RB 101 0010 1001
evmhegsmfaa 4 RD RA RB 101 0010 1011
evmhogumiaa 4 RD RA RB 101 0010 1100
evmhogsmiaa 4 RD RA RB 101 0010 1101
evmhogsmfaa 4 RD RA RB 101 0010 1111
evmwlusiaaw 4 RD RA RB 101 0100 0000
evmwlssiaaw 4 RD RA RB 101 0100 0001
evmwlumiaaw 4 RD RA RB 101 0100 1000
evmwlsmiaaw 4 RD RA RB 101 0100 1001
evmwssfaa 4 RD RA RB 101 0101 0011
evmwumiaa 4 RD RA RB 101 0101 1000
evmwsmiaa 4 RD RA RB 101 0101 1001
evmwsmfaa 4 RD RA RB 101 0101 1011
evmheusianw 4 RD RA RB 101 1000 0000
evmhessianw 4 RD RA RB 101 1000 0001
evmhessfanw 4 RD RA RB 101 1000 0011
evmhousianw 4 RD RA RB 101 1000 0100
Table 7-14. Opcodes for Complex Integer Instructions, Sorted by Opcode (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
7-216 Freescale Semiconductor
evmhossianw 4 RD RA RB 101 1000 0101
evmhossfanw 4 RD RA RB 101 1000 0111
evmheumianw 4 RD RA RB 101 1000 1000
evmhesmianw 4 RD RA RB 101 1000 1001
evmhesmfanw 4 RD RA RB 101 1000 1011
evmhoumianw 4 RD RA RB 101 1000 1100
evmhosmianw 4 RD RA RB 101 1000 1101
evmhosmfanw 4 RD RA RB 101 1000 1111
evmhegumian 4 RD RA RB 101 1010 1000
evmhegsmian 4 RD RA RB 101 1010 1001
evmhegsmfan 4 RD RA RB 101 1010 1011
evmhogumian 4 RD RA RB 101 1010 1100
evmhogsmian 4 RD RA RB 101 1010 1101
evmhogsmfan 4 RD RA RB 101 1010 1111
evmwlusianw 4 RD RA RB 101 1100 0000
evmwlssianw 4 RD RA RB 101 1100 0001
evmwlumianw 4 RD RA RB 101 1100 1000
evmwlsmianw 4 RD RA RB 101 1100 1001
evmwssfan 4 RD RA RB 101 1101 0011
evmwumian 4 RD RA RB 101 1101 1000
evmwsmian 4 RD RA RB 101 1101 1001
evmwsmfan 4 RD RA RB 101 1101 1011
Table 7-14. Opcodes for Complex Integer Instructions, Sorted by Opcode (Continued)
Instruction Opcode Bits
0–5 6–10 11–15 16–20 21–31

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 8-1
Chapter 8
Power Management
Power management is supported by e200 cores to minimize overall system power consumption. The
e200z4 core provides the ability to initiate power management from external sources as well as through
software techniques. The power states on the e200 core are described below.
8.1 Active State
The active state is the default state for the e200 core in which all of its internal units are operating at full
processor clock speed. In this state, the e200 core still provides dynamic power management in which
individual internal functional units may stop clocking automatically whenever they are idle.
8.2 Waiting State
The e200 core enters the waiting state as a result of executing a wait instruction. Following entry into the
waiting state, instruction execution and bus activity is suspended. Most internal clocks are gated off in this
state. The e200 core asserts p_waiting to indicate it is in the waiting state. Prior to entering the waiting
state, all outstanding instructions and bus transactions will be completed. The m_clk input should remain
running while in the waiting state to allow for interrupt sampling, and to allow further transitions into the
Halted or Stopped state if requested and to keep the Time Base operational if it is using m_clk as the clock
source.
In the waiting state, the core is waiting for a valid unmasked pending interrupt request. Once a pending
interrupt request is received, the core will exit the waiting state and begin interrupt processing. The return
program counter value will point to the next instruction after the wait instruction. The interrupt can be an
external input interrupt, various critical interrupts, a debug interrupt (based on ICMP), a non-maskable
interrupt, or a machine check interrupt (p_mcp_b assertion, etc.). Once the interrupt processing begins,
the core will not return to the waiting state until another wait instruction is executed.
The waiting state can be temporarily exited and returned to if a request is made to enter hardware debug
mode (various mechanisms), the halted state, or the stopped state. After exiting one of these states, the
processor will return to the waiting state. While temporarily exited, the p_waiting output will negate, and
will be re-asserted once the CPU returns to the waiting state.
8.3 Halted State
Instruction execution and bus activity is suspended in the halted state. Most internal clocks are gated off
in this state. The e200 core asserts p_halted to indicate it is in the halted state. Prior to entering the halted
state, all outstanding bus transactions will be completed, and the cache’s store and push buffers will be
flushed. The m_clk input should remain running while in the Halted state to allow further transitions into
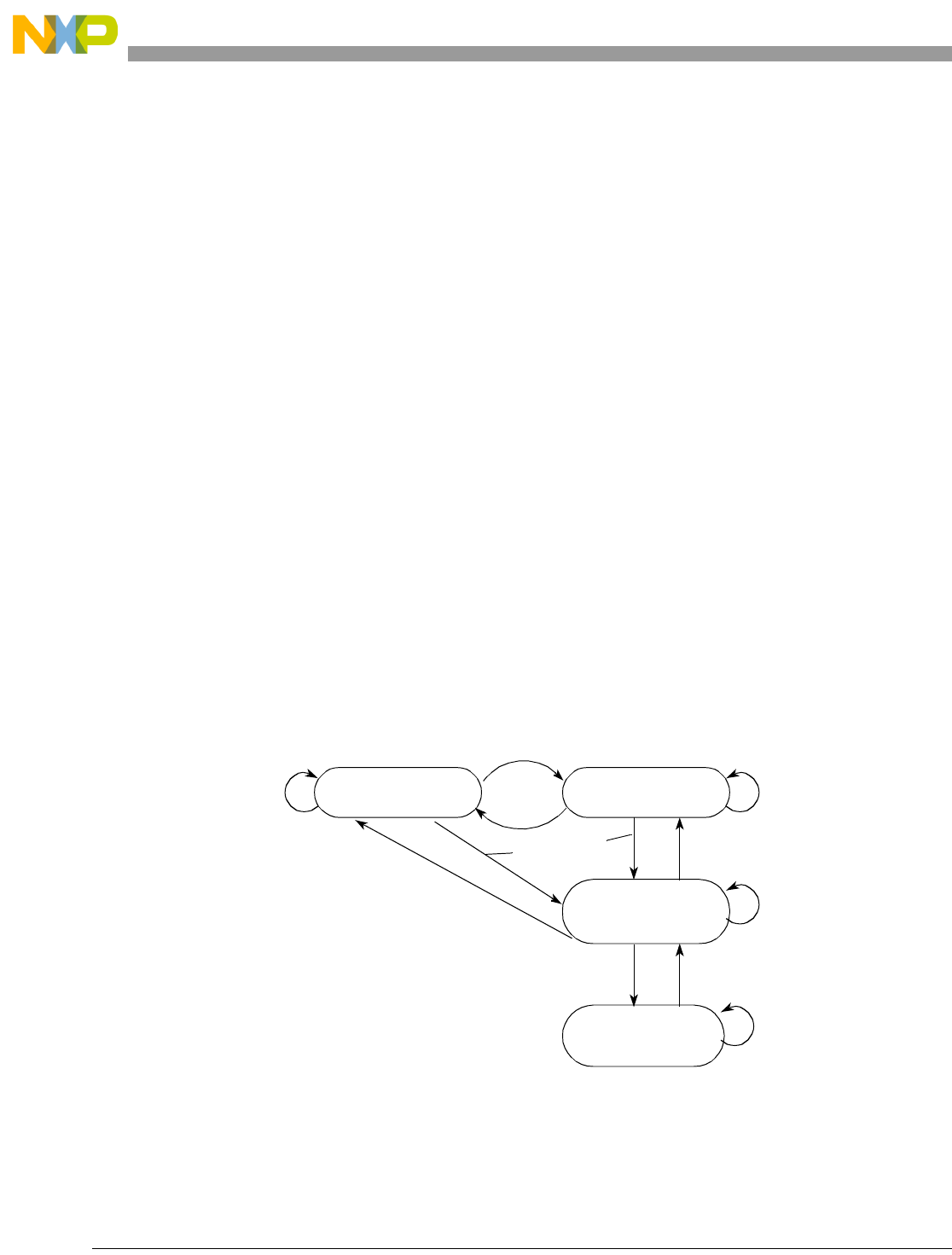
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
8-2 Freescale Semiconductor
the Stopped state if requested and to keep the Time Base operational if it is using m_clk as the clock
source.
8.4 Stopped State
The stopped state is characterized as having all internal functional units of the e200 core stopped except
the Time Base unit and the clock control state machine logic. The internal m_clk may be kept running to
keep the Time Base active and to allow quick recovery to the full on state. Clocks are not running to
functional units in this state except for the Time Base. The stopped state is reached after transitioning
through the halted state with the p_stop input asserted. The p_stopped output signal will be asserted once
the stopped state is reached.
While in the stopped state, further power savings may be achieved by disabling the Time Base by asserting
p_tbdisable, or by stopping the m_clk input. This is done externally by the system after the e200 core is
safely in the Stopped state and has asserted the p_stopped output signal. To exit from the stopped state,
the system must first restart the m_clk input.
Since the Time Base unit is off during the Stopped state if it is using m_clk as the clock source and m_clk
is stopped, or if the Time Base clocking is disabled by the assertion of p_tbdisable, system software must
usually have to access an external time base source after returning to the full on state in order to re-initialize
the Time Base unit. In addition, it will not be possible to use a Time Base related interrupt source to exit
low-power states.
The e200 also provides the capability of clocking the Time Base from an independent (but externally
synchronized) clock source which would allow the Time Base to be maintained during the Stopped state,
and would allow a Time Base related interrupt to be generated to indicate an exit condition from the
Stopped state.
Figure 8-1. Power Management State Diagram
Halted
Stopped
~p_stop & p_halt
p_stop
~p_halt & ~ p_stop & p_halt | p_stop
~p_stopp_stop
Active ~p_halt & ~ p_stop
(p_stopped asserted)
(p_halted asserted)
Waiting~p_halt & ~ p_stop
& ~ipend
ipend
exec wait
~prev_waited
~p_halt & ~ p_stop &
prev_waited
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 8-3
8.5 Power Management Pins
Table 8-1 shows how the power management pins are connected to the processor states.
8.6 Power Management Control Bits
The following bits are used by software to generate a request to enter a power-saving state and to choose
the state to be entered:
MSR[WE] The WE bit is used to qualify assertion of the p_doze, p_nap, and p_sleep output
pins to the system logic. When MSR[WE] is negated, these pins are negated.
When MSRWE is set, these pins reflect the state of their respective control bits in
the HID0 register.
HID0[DOZE] The interpretation of the doze mode bit is done by the external system logic. Doze
mode on the e200 core is intended to be the halted state with the clocks running.
HID0[NAP] The interpretation of the nap mode bit is done by the external system logic. Nap
mode on the e200 core may be used for a powerdown state with the Time Base
enabled.
HID0[SLEEP] The interpretation of the sleep mode bit is done by the external system logic. Sleep
mode on the e200 core may be used for a powerdown state with the Time Base
disabled.
8.7 Software Considerations for Power Management using Wait
Instructions
Executing a wait instruction causes the e200 core to complete instruction fetch and execution activity and
await an interrupt. The p_waiting output is asserted once the waiting state is entered. External system
hardware may interpret the state of this signal and activate the p_halt and/or p_stop inputs to cause the
Table 8-1. Power Management Pins
Pin Name Pin Definition
p_waiting Output pin asserted when the e200 core is in the waiting state
p_halt Input pin is asserted by system logic to request the core to go into the halted state. Negating this pin causes
the e200 core to transition back into the active or waiting state if p_stop is also negated.
p_halted Output pin asserted when the e200 core is in the halted state
p_stop Input pin is asserted by system logic to request that the e200 core go into the stopped state. Negating this pin
causes the e200 core to transition back into the halted state from the stopped state.
p_stopped Output pin asserted when the e200 core is in the stopped state.
p_tbdisable Input pin is asserted by system logic when clocking of the Time Base should be disabled.
p_tbint Output pin is asserted when an internal Time Base interrupt request is signalled.
p_doze/p_nap/
p_sleep Output pins that reflects the state of HID0[DOZE], HID0[NAP], and HID0[SLEEP] respectively. These pins are
qualified with MSR[WE] = 1. Interpretation of these signals is done by the system logic.
p_wakeup Output pin asserted when an interrupt is pending or other condition which requires the clock to be running

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
8-4 Freescale Semiconductor
e200 core to enter a quiescent state in which clocks may be disabled for low power operation.
Alternatively, system hardware may utilize some other clock control mechanism while the processor is in
the Waiting state and p_wakeup remains negated.
8.8 Software Considerations for Power Management using Doze,
Nap or Sleep
Setting MSR[WE] generates a request to enter a power saving state. The power saving state (doze, nap, or
sleep) must be previously determined by setting the appropriate HID0 bit. Setting MSR[WE] has no direct
effect on instruction execution, but it simply reflected on p_doze, p_nap, and p_sleep depending on the
setting of HID0[DOZE], HID0[NAP], and HID0[SLEEP] respectively. Note that the e200 core is not
affected by assertion of these pins directly. External system hardware may interpret the state of these
signals and activate the p_halt and/or p_stop inputs to cause the e200 core to enter a quiescent state in
which clocks may be disabled for low power operation.
To ensure a clean transition into and out of a power saving mode, the following program sequence is
recommended:
sync
mtmsr (WE)
isync
loop: br loop (optionally use a wait instruction)
An interrupt is typically used to exit a power saving state. The p_wakeup output is used to indicate to the
system logic that an interrupt (or a debug request) has become pending. System logic uses this output to
re-enable the clocks and exit a low power state. The interrupt handler is responsible for determining how
to exit the low power loop if one is used. Wait instructions will be exited automatically. The vectored
interrupt capability provided by the core may be useful in assisting the determination if an external
hardware interrupt is used to perform the wake-up.
8.9 Debug Considerations for Power Management
When a debug request is presented to the e200 core while in either the waiting, halted or stopped state, the
p_wakeup signal is asserted. When m_clk is provided to the CPU, it temporarily exits the waiting, halted
or stopped state and enters debug mode regardless of the assertion of p_halt or p_stop. The p_waiting,
p_halted, and p_stopped outputs are negated for the duration of the time the CPU remains in a debug
session (jd_debug_b asserted). When the debug session is exited, the CPU resamples the p_halt and p_stop
inputs and re-enters the halted or stopped state as appropriate. If the CPU was previously waiting and no
interrupt was received while in the debug session, it re-enters the waiting state and re-asserts p_waiting.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-1
Chapter 9
L1 Cache
This chapter describes the organization of the on-chip L1 instruction cache (ICache), cache control
instructions, and various cache operations. It describes the interaction among the cache, the instruction
unit, and the memory subsystem. This chapter also describes the replacement algorithm used for the L1
ICache.
9.1 Overview
The e200z4 processor supports a 4 Kbyte, 2 or 4-way set-associative, instruction cache (ICache) with a
32-byte line size. The ICache improves system performance by providing low-latency data to the
instruction pipeline, which decouples processor performance from system memory performance. The
ICache is virtually indexed and physically tagged.
Instruction addresses from the processor to the ICache are virtual addresses used to index the cache array.
The MMU provides the virtual to physical translation for use in performing the cache tag compare. If the
physical address matches a valid cache tag entry, the access hits in the cache. If the access does not match
a valid cache tag entry (misses in the cache), the cache performs a line-fill transfer on the system bus.
The L1 ICache incorporates the following features:
• 4 Kbyte, 2- or 4-way configurable set-associative instruction cache
• 64-bit data, 32-bit address bus plus attributes and control
• 32-byte line size
• Cache line locking
• Way allocation
• Tag and data parity or multi-bit EDC protection with correction/auto-invalidation capability
• Virtually indexed, physically tagged
• Pseudo round-robin replacement algorithm
• Line-fill buffer
• Hit under fill
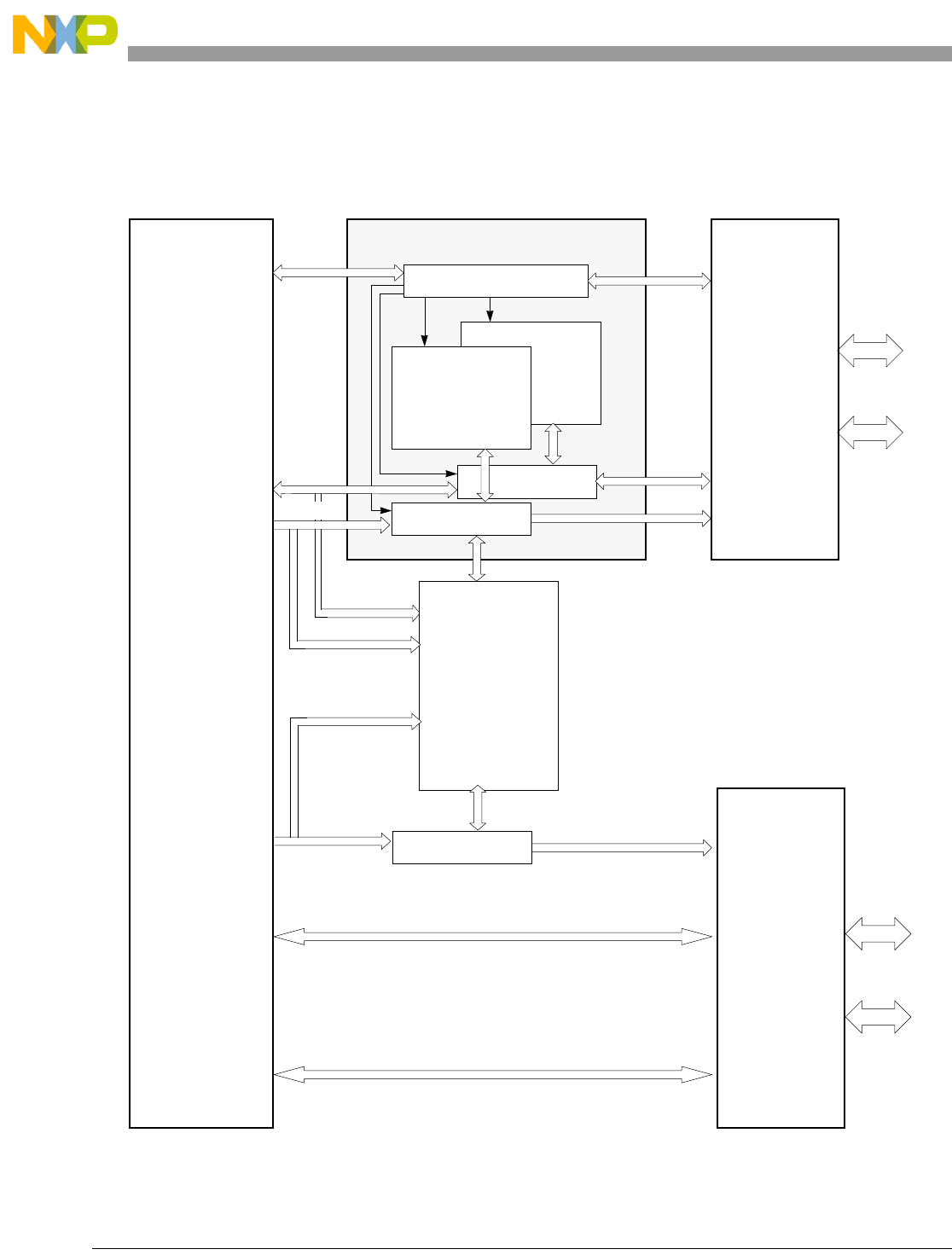
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-2 Freescale Semiconductor
9.2 4 Kbyte ICache Organization
The e200z446n3 4 Kbyte cache is organized as either two ways of 64 sets or four ways of 32 sets with each
line containing 32 bytes (four double words) of storage. Figure 9-1 shows the block diagram.
Figure 9-1. e200z446n3 ICache Block Diagram
Address/
Bus
Interface
Module
Control
Cache
Control Logic
Tag Array
Data Array
Data Path
Processor
Core
Address Path
Control
Data
Address
System
Bus
Data
Control
Data
Memory
Management
Unit
Address
Module
Interface
Bus
Control
Address Path Address
Bus
System
Data
Control
Data
Address
Data
Interface
Icache
Interface
(Inst)
(Data)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-3
Figure 9-2 illustrates the cache organization along with the cache line format.
Figure 9-2. Cache Organization and Line Format
Virtual address bits A[21–26] (A[22–26] when organized as 4-way) provide an index to select a set. Ways
are selected according to the rules of set association.
Each line consists of a physical address tag, status bits, and four double words of data. Address bits
A[27–29] select the word within the line.
9.3 Cache Lookup
Once enabled, the ICache is searched for a tag match on instruction accesses from the CPU. If a match is
found, the cached data is forwarded to the instruction fetch unit.
When a miss occurs, if there is a TLB hit and the I bit of the hitting TLB entry is clear, the translated
physical address is used to fetch a four double-word cache line beginning with the requested double word
WAY 0 WAY 1
LINE
•
•
•
•
•
•
VLTAG
TAG - 22 bit Physical Address Tag
L - Lock bit
CACHE LINE FORMAT
Doubleword3
Doubleword2Doubleword1Doubleword0
SET 0
SET 1
SET 62
SET 63
•
•
•
V - Valid bit
WAY 0WAY 1WAY 2WAY 4
LINE
•
•
•
•
•
•
•
•
•
•
•
•
SET 0
SET 1
SET 30
SET 31
•
•
•
CACHE ORGANIZED AS 2-WAY (L1CSR1ICORG=0)
CACHE ORGANIZED AS 4-WAY (L1CSR1ICORG=1)

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-4 Freescale Semiconductor
(critical double word first). The line is fetched into a line-fill buffer and the critical double word is
forwarded to the CPU.
During a cache line fill, double words received from the bus are placed into the cache line-fill buffer, and
may be forwarded (streamed) to the CPU if such a read request is pending. Accesses from the CPU
following delivery of the critical double word may be satisfied from the cache (hit under fill, non-blocking)
or from the line-fill buffer if the requested information has been already received.
When a cache linefill occurs, the line-fill buffer contents holding the previous linefill are placed into the
cache array in one cycle.
The ICache always fills an entire line, thereby providing validity on a line-by-line basis. A cache line is
always in either a valid or invalid state. Valid lines have their V bit set, indicating the line contains valid
data consistent with memory. Invalid lines have their V bit clear, causing the cache line to be ignored
during lookups. In addition, a cache line may be locked (L bit set), indicating the line is not available for
replacement.
The ICache should be explicitly invalidated after a hardware reset; reset does not invalidate the cache lines.
Following initial power-up, the ICache contents will be undefined. The L and V bits may be set on some
lines, necessitating the invalidation of the cache by software before being enabled.
To determine if the address is already allocated in the cache, use the following procedure
1. Use the cache set index, virtual address bits A[21:26] (A[22:26] for the 4-way configuration) to
select one cache set. A set is defined as the grouping of lines (one from each way) corresponding
to the same index in the cache array.
2. Use the higher order physical address bits A[0:20] (A[0:21] for the 4-way configuration) as a tag
reference or to update the cache line tag field.
3. Compare the tags from the selected cache set with the tag reference. If any one of the tags matches
the tag reference and the tag status is valid, a cache hit has occurred.
4. Use virtual address bits A[27:28] to select one of the four double words in each line. A cache hit
indicates that the selected double word in that cache line contains valid data.
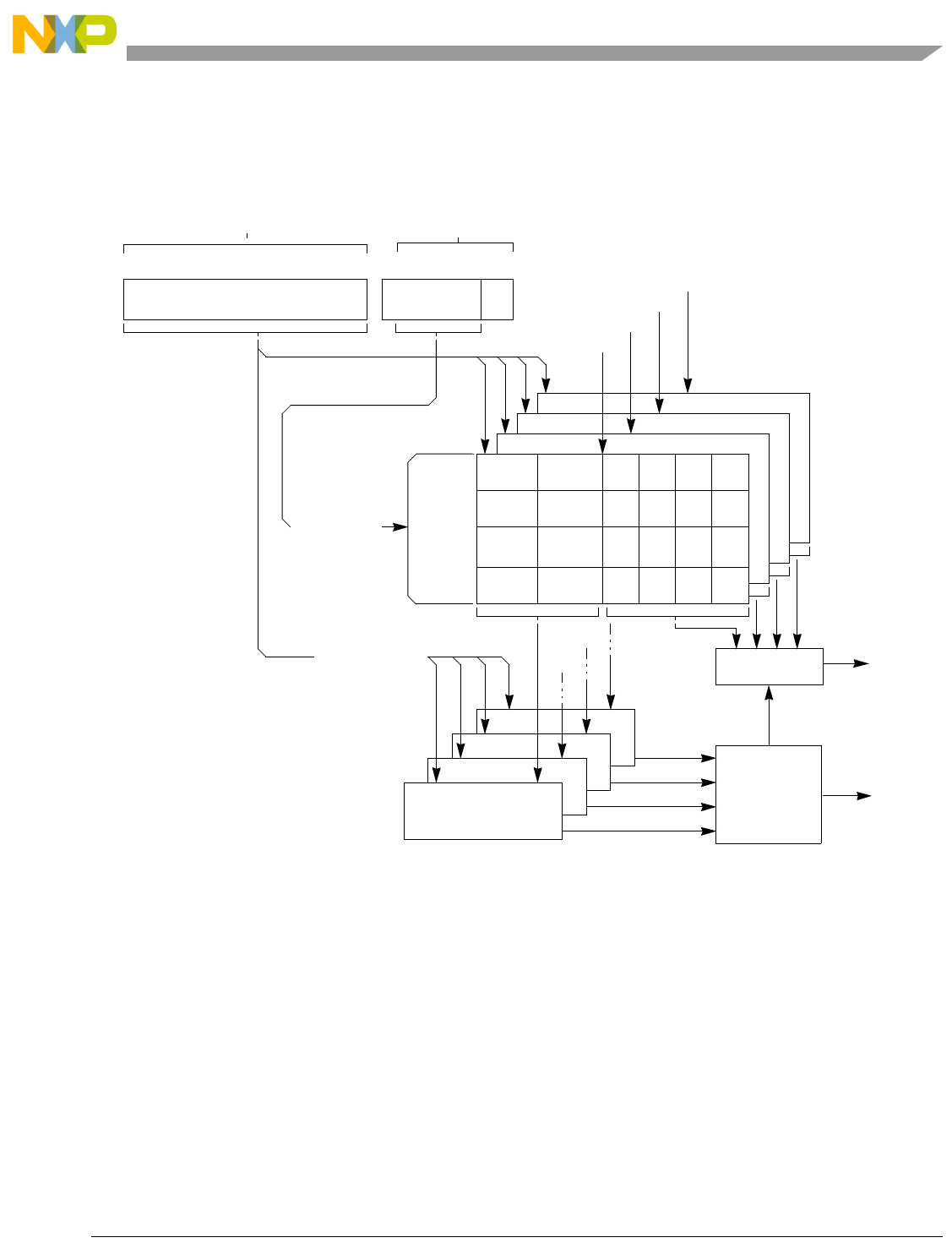
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-5
Figure 9-3 illustrates the general flow of ICache operation.
Figure 9-3. ICache Lookup Flow
9.4 Cache Control
Control of the cache is provided by bits in the L1 cache control and status registers (L1CSR0, L1CSR1).
Control bits are provided to enable/disable the cache and to invalidate it of all entries. In addition,
availability of each way of the caches may be selectively controlled for use. This way control provides
cache way locking capability, as well as controlling way availability on a cache line replacement. Ways
0–3 may be selectively disabled for instruction miss replacements by using the WID control bits in
L1CSR0.
31272621(22)20(21)0
INDEX
TAG DATA / TAG REFERENCE
MUX
COMPARATOR 0
1
(2)
(3)
LOGICAL OR
(HIT 3)
(HIT 2)
HIT 1
HIT 0
HIT
SELECT
SET 0
SET 1
SET N-1
•
•
•
TAG
REFERENCE
A[0:20(21)]
WAY 0
WAY 1
(WAY 2 CORG=1
(WAY 3) CORG=1
INSTRUCTION
STATUS DW0 DW1 DW2 DW3
TAG STATUS DW0 DW1 DW2 DW3
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
VIRTUAL ADDRESS
SET
SELECT
A[21(22):26])
TAG
PHYSICAL ADDRESS
•
•
•
•
•
••
•
•
•
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-6 Freescale Semiconductor
9.4.1 L1 Cache Control and Status Register 0 (L1CSR0)
The L1 cache control and status register 0 (L1CSR0) is a 32-bit register used for general control of a data
cache (not present in the e200z4) as well as providing general control over disabling ways in I and D
caches. The L1CSR0 register is accessed using a mfspr or mtspr instruction. The SPR number for
L1CSR0 is 1010 in decimal. The L1CSR0 register is shown in Figure 9-4.
The L1CSR0 bits are described in Table 9-1.
9.4.2 L1 Cache Control and Status Register 1 (L1CSR1)
The L1 cache control and status register 1 (L1CSR1) is a 32-bit register used for general control of the
instruction cache. The L1CSR1 register is accessed using a mfspr or mtspr instruction. The SPR number
for L1CSR0 is 1011 in decimal. The L1CSR1 register is shown in Figure 9-5.
WID
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1010; Read/Write; Reset - 0x0
Figure 9-4. L1 Cache Control and Status Register 0 (L1CSR0)
Table 9-1. L1CSR0 Field Descriptions
Bits Name Description
0–3 WID Way Instruction Disable.
0 The corresponding way in the instruction cache is available for replacement by
instruction miss line fills.
1 The corresponding way instruction cache is not available for replacement by
instruction miss line fills.
Bit 0 corresponds to way 0.
Bit 1 corresponds to way 1.
Bit 2 corresponds to way 2.
Bit 3 corresponds to way 3.
The WID bits may be used for locking ways of the instruction cache, and also are
used in determining the replacement policy of the instruction cache.
4–31 — Reserved1
1These bits are not implemented and should be written with zero for future compatibility.
0
ICECE
ICEI
0
ICEDT
0
ICUL
ICLO
ICLFC
ICLOA
ICEA
ICORG
0
ICABT
ICINV
ICE
012345678910111213141516171819202122232425262728293031
SPR - 1011; Read/Write; Reset - 0x0
Figure 9-5. L1 Cache Control and Status Register 1 (L1CSR1)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-7
The L1CSR1 bits are described in Table 9-2.
Table 9-2. L1CSR1 Field Descriptions
Bits Name Description
0–14 — Reserved1
15 ICECE Instruction Cache Error Checking Enable
0 Error Checking is disabled
1 Error Checking is enabled
16 ICEI Instruction Cache Error Injection Enable
0 Cache Error Injection is disabled
1 When ICEDT=00, parity errors will be purposefully injected into every byte
subsequently written into the cache. The parity bit of each 8-bit data element
written will be inverted on cache linefills. When ICEDT=01, a double-bit error will
be injected into each double word written into the cache by inverting the two
uppermost parity check bits (p_chk[0:1]).
ICEI will cause injection of errors regardless of the setting of ICECE, although
reporting of errors will be masked when ICECE=0.
17 — Reserved1
18:19 ICEDT Instruction Cache Error Detection Type
00 Parity Error Detection is selected
01 EDC Error Detection is selected
1x Reserved
20 — Reserved1
21 ICUL Instruction Cache Unable to Lock
Indicates a lock set instruction was not effective in locking a cache line. This bit is set
by hardware on an “unable to lock” condition (other than lock overflows), and will
remain set until cleared by software writing 0 to this bit location.
22 ICLO Instruction Cache Lock Overflow
Indicates a lock overflow (overlocking) condition occurred. This bit is set by hardware
on an “overlocking” condition, and will remain set until cleared by software writing 0
to this bit location.
23 ICLFC Instruction Cache Lock Bits Flash Clear
When written to a ‘1’, a cache lock bits flash clear operation is initiated by hardware.
Once complete, this bit is reset to ‘0’. Writing a ‘1’ while a flash clear operation is in
progress will result in an undefined operation. Writing a ‘0’ to this bit while a flash
clear operation is in progress will be ignored. Cache Lock Bits Flash Clear operations
require approximately cycles to complete. Clearing occurs regardless of the enable
(ICE) value.
24 ICLOA Instruction Cache Lock Overflow Allocate
Set by software to allow a lock request to replace a locked line when a lock overflow
situation exists.
0 Indicates a lock overflow condition will not replace an existing locked line with the
requested line
1 Indicates a lock overflow condition will replace an existing locked line with the
requested line
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-8 Freescale Semiconductor
9.4.3 L1 Cache Configuration Register 0 (L1CFG0)
The L1 cache configuration register 0 (L1CFG0) is a 32-bit read-only register. L1CFG0 provides
information about the configuration of the e200z4 L1 cache design. Since no data cache is present on the
e200z4, and the bus architecture is harvard, this register reads as all zeros in fields other than the CARCH
25:26 ICEA Instruction Cache Error Action
00 Error Detection causes Machine Check exception.
01 Error Detection causes Correction/Auto-invalidation. No machine check is
generated unless a locked line is invalidated. In EDC mode, correction is
performed for single-bit tag and lock errors, and lines with multi-bit tag or lock
errors are invalidated. In parity mode, tag or lock errors will result in invalidation
of lines. For both modes, correction is performed for single or multi-bit data errors
by reloading of the line.
1x Reserved
27 ICORG Cache Organization
0 The cache is organized as 64 sets and 2 ways
1 The cache is organized as 32 sets and 4 ways
28 — Reserved1
29 ICABT Instruction Cache Operation Aborted
Indicates a Cache Invalidate or a Cache Lock Bits Flash Clear operation was aborted
prior to completion. This bit is set by hardware on an aborted condition, and will
remain set until cleared by software writing 0 to this bit location.
30 ICINV
(ICFI)
Instruction Cache Invalidate
0 No cache invalidate
1 Cache invalidation operation
When written to a ‘1’, a cache invalidation operation is initiated by hardware. Once
complete, this bit is reset to ‘0’. Writing a ‘1’ while an invalidation operation is in
progress will result in an undefined operation. Writing a ‘0’ to this bit while an
invalidation operation is in progress will be ignored. Cache invalidation operations
require approximately cycles to complete. Invalidation occurs regardless of the
enable (ICE) value.
During cache invalidations, the parity check bits are written with a value dependent
on the ICEDT selection. ICEDT should be written with the desired value for
subsequent cache operation when ICINV is set to ‘1’ for proper operation of the
cache.
31 ICE Instruction Cache Enable
0 Cache is disabled
1 Cache is enabled
When disabled, cache lookups are not performed for instruction accesses.
Other L1CSR0 cache control operations are still available.
1These bits are not implemented and should be written with zero for future compatibility.
Table 9-2. L1CSR1 Field Descriptions (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-9
field, which indicates ICache-only. The contents of the L1CFG0 register can be read using a mfspr
instruction. The SPR number for L1CFG0 is 515 in decimal. The L1CFG0 register is shown in Figure 9-6.
9.4.4 L1 Cache Configuration Register 1 (L1CFG1)
The L1 Cache Configuration Register 1 (L1CFG1) is a 32-bit read-only register. L1CFG1 provides
information about the configuration of the L1 instruction cache design. The contents of the L1CFG1
register can be read using a mfspr instruction. The SPR number for L1CFG1 is 516 in decimal. The
L1CFG1 register is shown in Figure 9-7.
The L1CFG1 bits are described in Table 9-3.
CARCH
CWPA
CFAHA
DCFISWA
0
DCBSIZE
DCREPL
DCLA
DCPA
DCNWAY
DCSIZE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
10 0 0 0 0 0 00 00 0 0 00000000 00000000000
SPR - 515; Read-only; 0x80000000
Figure 9-6. L1 Cache Configuration Register 0 (L1CFG0)
0
ICFISWA
0
ICBSIZE
ICREPL
ICLA
ICECA
ICNWAY
ICSIZE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
0000 1 0 0 00 10 1 1 00000001 (2way)/
00000011 (4 way)
00000000100 (4 Kbyte)
SPR - 516; Read-only
Figure 9-7. L1 Cache Configuration Register 1 (L1CFG1)
Table 9-3. L1CFG1 Field Descriptions
Bits Name Description
0–3 — Reserved—read as zeros
4 ICFISWA Instruction Cache Flush/Invalidate by Set and Way Available
1 The instruction cache supports invalidation by Set and Way via the L1FINV1 spr
5–6 — Reserved—read as zeros
7–8 ICBSIZE Instruction Cache Block Size
00 The instruction cache implements a block size of 32 bytes
9–10 ICREPL Instruction Cache Replacement Policy
10 The instruction cache implements a pseudo-round-robin replacement policy
11 ICLA Instruction Cache Locking APU Available
1 The instruction cache implements the line locking functionality
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-10 Freescale Semiconductor
9.5 Cache Organization Control
The cache may be configured by software to structure the cache into the following two organizations:
• A 2-way, 64 set organization
• A 4-way, 32 set organization
The control is provided via the L1CSR1[ICORG] control bit. The default organization following reset is
2-way, 64 sets.
NOTE
Software must disable and invalidate the cache prior to altering the cache
organization and re-enabling the cache to prevent unexpected behavior.
When organized as 2-way, less power may be consumed, since a maximum of 2 ways will be enabled on
each cache access, but performance may be affected due to the reduced associativity.
The cache configuration is reflected in the content of L1CFG1, and will be representative of the current
cache organization based on L1CSR1[ICORG].
9.6 Cache Operation
This section explains the cache operation.
9.6.1 Cache Enable/Disable
The ICache is enabled or disabled by using the L1CSR1[ICE] cache enable bit. The cache enable bit is
cleared by power-on reset or normal reset, disabling the ICache.
When the ICache is disabled, the cache tag status bits are ignored, and the cache is not accessed for
instruction fetches. All instruction fetch accesses are propagated to the system bus as single-beat
(non-burst) transactions.
Note that the state of the cache inhibited access attribute (the I bit) is independent of the state of
L1CSR1[ICE]. Disabling the ICache does not affect the translation logic in the memory management unit.
Translation attributes are still used when generating attribute information on the system bus.
12 ICECA Instruction Cache Error Checking Available
1 The instruction cache implements error checking
13–20 ICNWAY Instruction Cache Number of Ways
0x01 The instruction cache is 2-way set-associative (when configured by
L1CSR1[ICORG] = 0)
0x03 The instruction cache is 4-way set-associative (when configured by
L1CSR1[ICORG] = 1)
21–31 ICSIZE Instruction Cache Size
0x004 The size of the instruction cache is 4 Kbytes
Table 9-3. L1CFG1 Field Descriptions (Continued)
Bits Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-11
Altering the ICE bit must be preceded by an isync and msync to prevent the cache from being disabled or
enabled in the middle of a data or instruction access. In addition, the cache may need to be globally
invalidated before it is disabled to prevent coherency problems when it is re-enabled.
All cache operations are affected by disabling the cache. Cache management instructions (except for
mtspr L1FINV1 and mtspr L1CSR{0,1}) do not affect a cache when it is disabled.
9.6.2 Cache Fills
Cache line fills are requested when a cacheable instruction miss occurs. The cache line fill is performed
critical double word first on the bus, using a burst access. The critical double word is forwarded to the
instruction unit before being written to the cache, thus minimizing stalls due to fill delays. Cache line fills
load a four double word line-fill buffer, and updates to the cache array are performed in a single cycle when
the next cache line fill is initiated. Subsequent instruction accesses may hit in the line-fill buffer and data
supplied from the buffer to the CPU.
Data may be streamed to the instruction fetch unit as it arrives from the bus if a corresponding request is
pending. In addition, the cache supports hit under fill, allowing subsequent instruction accesses to be
satisfied by cache hits while the remainder of the line fill completes. This non-blocking capability
improves performance by hiding a portion of the line-fill latency when data already in the cache or line-fill
buffer is subsequently requested by the CPU.
Cache fill operations are performed as wrapping bursts on the system bus. If an error response is received
on any element of the burst, the burst is terminated and the cache line marked invalid.
9.6.3 Cache Line Replacement
On an ICache miss, the cache controller uses a pseudo-round-robin replacement algorithm to determine
which cache line is selected to be replaced. There is a single replacement counter for the cache. The
replacement algorithm acts as follows: On a miss, if the replacement pointer is pointing to a way that is
not enabled for replacement (the selected line or way is locked), it is incremented until an available way
is selected (if any). After a cache line is successfully filled without error, the replacement pointer
increments to point to the next cache way. If no way is available for the replacement, the access is treated
as a single beat access and no cache line fill occurs.
The replacement counter is initialized to point to way 0 on a reset or on a respective cache invalidate all
operation. The replacement counter may also be set to a specific value by a L1FINV1 command.
9.6.4 Cache-Inhibited Accesses
When the cache-inhibited attribute is indicated by translation and on the cache lookup any line has a tag
parity/EDC error, or if a cache miss occurs, the access is performed as single beat transactions on the
system bus and the cache is ignored. Cache inhibited status is ignored on all cache hits that do not incur a
parity/EDC error. If a cache hit occurs to a line with a data error on the requested double word, the hit is
ignored and treated as a miss and a single beat access is performed. The cache remains unchanged and no
cache parity/EDC error is reported.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-12 Freescale Semiconductor
9.6.5 Cache Invalidation
The e200z4 supports full invalidation of the ICache under software control. The ICache may be invalidated
through the L1CSR1[ICINV] cache invalidate control bit. This function is available even when the ICache
is disabled.
Reset does not invalidate the ICache automatically. Software must use the ICINV control for invalidation
after a reset. Proper use of this bit is to determine that it is clear and then to set it with a pair of mfspr
mtspr operations. A 0-to-1 transition on {D,I}CINV causes a flash invalidation to be initiated which lasts
for multiple CPU cycles. Once set, the ICINV bit is cleared by hardware after the operation is complete.
It remains set during the invalidation interval and may be tested by software to determine when the
operation has completed. An mtspr operation to L1CSR1 that attempts to change the state of ICINV
during invalidation does not affect the state of that bit.
To properly generate the tag parity/check bits during the invalidation process, the error detection type
control located in the L1CSR1[ICEDT] field should be configured properly at the time the invalidation
operation is initiated. A subsequent change to the error detection type control requires an invalidation to
avoid improper interpretation of previously stored tag parity/check bits.
During the process of performing the invalidation, the ICache does not respond to accesses and remains
busy. Interrupts may still be recognized and processed, potentially aborting the invalidation operation.
When this occurs, the L1CSR1[ABT] bit is set to indicate unsuccessful completion of the operation.
Software should read the L1CSR1 register to determine that the operation has completed
(L1CSR1[ICINV] bit cleared) and then check the status of the L1CSR1[ABT] bit to determine completion
status.
NOTE
Note that while most implementations of the e200z4 stall further instruction
execution during this invalidation interval, it is not guaranteed across all
implementations. Thus software should be written using these guidelines.
Individual cache lines may be invalidated using icbi instruction. This instruction requires the cache to be
enabled in order to operate normally.
9.6.6 Cache Invalidate by Set and Way
The e200z4 supports cache invalidation under software control. The ICache may be invalidated by index
and way through a mtspr l1finv1 instruction.
9.6.6.1 L1FINV1
The L1 flush and invalidate control register (L1FINV1) is a 32-bit SPR used to select a cache set and way
to be invalidated. No tag match is required. This function is available even when the ICache is disabled.
For invalidation operations, a tag parity error or EDC error will not prevent the line from being invalidated,
and no error is reported.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-13
The SPR number for L1FINV1 is 959 in decimal. The L1FINV1 register is shown in Figure 9-8.
The L1FINV1 bits are described in Table 9-4.
9.7 Cache Parity and EDC Protection
Cache parity is supported for both the tag and data arrays of the ICache. Six parity check bits are provided
for each tag entry, and eight parity check bits are provided for each double word in the data arrays of the
ICache. These bits can be used for either standard parity checking (single-bit error detection) or for
multi-bit error detection (EDC—DED, double error detection). When utilizing EDC protection, many
multi-bit errors are also detected. Parity or EDC checking is controlled by the L1CSR1[ICECE] and
L1CSR1[ICEDT] control fields.
Data parity or EDC errors are ignored for cache misses because the parity is updated for the new line-fill
data being stored.
Parity or EDC errors are not signaled when cache error checking is disabled (L1CSR1[ICECE] = 0).
Signaling of a parity error or EDC error may optionally cause a machine check exception to occur and one
or more syndrome bits to be set in the machine check syndrome register. If correction/auto-invalidation on
error is enabled (L1CSR1[ICEA] = 01), this occurs only when a line that was locked is invalidated due to
0
CWAY
0
CSET
0
CCMD
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 959; Read/Write; Reset - 0x0
Figure 9-8. L1 Flush/Invalidate Register 1 (L1FINV1)
Table 9-4. L1FINV1 Field Descriptions
Bits Name Description
0–5 — Reserved1 for way extension
1These bits are not implemented and should be written with zero for future compatibility.
6–7 CWAY Cache Way
Specifies the cache way to be selected. When configured for 2 ways, values greater
than 1 result in undefined command operations.
8–20 — Reserved1 for set extension
21–26 CSET Cache Set
Specifies the cache set to be selected. When configured for 4 ways, values greater than
31 result in undefined command operations.
27–29 — Reserved1 for set/command extension
30–31 CCMD Cache Command
00 The data contained in this entry is invalidated
01 Reserved
10 Reserved
11 Reset way replacement pointer to the way indicated by CWAY

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-14 Freescale Semiconductor
an uncorrectable tag parity or EDC error. If machine check generation on error is enabled
(L1CSR1[ICEA] = 00), machine checks are generated when a parity/EDC error is signaled.
Refer to Section 5.7.2, “Machine Check Interrupt (IVOR1),” and to Section 2.4.7, “Machine Check
Syndrome Register (MCSR),” for a description of machine check conditions.
9.7.1 Cache Error Action Control
The L1CSR1[ICEA] control field allows for selection of several policies to apply when errors are detected
during a cache lookup. They are further described in the following subsections.
9.7.1.1 L1CSR1[ICEA] = 00, Machine Check Generation on Error
Selection of the machine check generation on error policy allows all errors to be processed by software.
Any parity or EDC error that could result in incorrect operation causes a machine check condition. To be
recoverable, the machine check handler must not incur another parity or EDC error during the initial
portion of the machine check handler. Parity/EDC errors do not generate a machine check exception for
cache-inhibited accesses.
If machine check generation on error is enabled (L1CSR1[CEA] = 00) and a parity or EDC error is
detected on any portion of the accessed tags for a cacheable access, a machine check is reported, regardless
of whether a cache hit or miss occurs. A machine check is also reported if a cache hit occurs and a parity
or EDC error is detected on any portion of the accessed double word of data for an instruction access. For
cache inhibited accesses, no errors are reported. If a parity/EDC error occurs on a cache lookup, the cache
is ignored, a single-beat bus access is performed, and no parity/EDC error is generated.
9.7.1.2 L1CSR1[ICEA] = 01, Correction/Auto-Invalidation on Error
The correction/auto-invalidation on error policy attempts to cause most parity and EDC errors to be
transparently handled by correcting lines with single-bit tag errors, invalidating lines with uncorrectable
tag errors or with data errors, and causing cache refills to reload correct data from memory, without
generation of exceptions. Exceptions are only generated when invalidations could cause a change in
correct behavior, such as changing the locked status of a line. Parity or EDC errors do not generate machine
check exceptions for cache-inhibited accesses. If a parity/EDC error occurs on a cache-inhibited access, a
single-beat bus access is performed, the cache is ignored, and no parity/EDC error is generated.
When using EDC protection for the cache tags (L1CSR1[ICEDT] = 01), single-bit tag errors are corrected
by the cache hardware during a correction/auto-invalidation cycle. For cacheable accesses, lines with
multi-bit errors are invalidated on cache lookups. When operating with only parity protection for the cache
tags (L1CSR1[ICEDT] = 00), cache entries with detectable tag errors are invalidated rather than corrected
by the cache hardware during a correction/auto-invalidation cycle.
Note that due to the relative storage capacities, the data arrays have a higher probability of incurring an
error than the tag arrays. Therefore, most errors are transparently corrected, even if they are double-bit or
multi-bit errors.
If correction/auto-invalidation on error is enabled (L1CSR1[ICEA] = 01) and an error is detected on any
portion of the accessed tags for a cacheable access, a correction/auto-invalidation cycle is inserted,

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-15
regardless of whether a cache hit or miss occurs. During this cycle, any tag entry with a single-bit tag error
is corrected if possible (correction is not possible during operation with only parity protection for the tags),
and rewritten to correct the stored error. Tag entries with uncorrectable errors are invalidated. If a locked
line is invalidated, a machine check occurs, no replacement occurs, and the locked status remains set for
the invalidated line(s) to assist software in determining the location of the error(s).
Following the correction/auto-invalidation cycle, a re-lookup is performed for the access. If a cache hit
occurs on a way without a tag parity or EDC error and a parity or EDC error is detected on any portion of
the accessed double word of data, a miss is forced. The same line is refilled from system memory, retaining
the existing lock status. The replacement pointer for the cache is not updated in these circumstances. If a
cache hit occurs on a way without a tag parity or EDC error and no parity or EDC error is detected on any
portion of the accessed double word of data, data parity or EDC errors on all other lines are ignored. No
invalidations occur.
For all cases of invalidations, if any locked line was invalidated, a machine check occurs, even though
correction/auto-invalidation is selected. Invalidation is not blocked for locked lines on cacheable accesses.
The lock bit remains unmodified by the invalidation operation to allow potential software recovery.
If a refill of a locked line due to a data parity error encounters an external bus error during the line fill, a
machine check is generated; the line is invalidated; and the lock bit remains set.
9.7.2 Parity/EDC Error Handling for Cache Control Operations and
Instructions
Parity/EDC errors are not signaled when the L1CSR1[ICECE] cache error checking enable bit is cleared.
The following sections describe error handling for cache control operations and cache control instructions
when set.
9.7.2.1 L1FINV1 operations
For invalidation operations by the L1FINV1 control register, tag parity or EDC errors result in the
specified line being invalidated. No error is reported, regardless of the setting of L1CSR1[ICEA]. Data
parity or EDC errors are ignored. Parity or EDC errors on all other ways not specified by the CWAY value
for the L1FINV1 are ignored, regardless of the settings of L1CSR1[ICEA].
9.7.2.2 Cache Touch Instructions (icbt)
Parity/EDC errors are not signaled on a lookup for an icbt instruction. For those instructions, a parity or
EDC error results in a nop and no error is reported, regardless of error checking being enabled. No
invalidations will occur.
9.7.2.3 icbi Instructions
For icbi instructions, on a hit to any line without a tag parity/EDC error or on a hit to an unlocked line with
a tag parity/EDC error, the line(s) is invalidated, regardless of the setting of L1CSR1[ICEA]. No machine
check is generated. If L1CSR1[ICEA] = ‘01’ and any line has a tag parity/EDC error, a
correction/invalidation cycle is inserted to correct tags with single-bit errors and to invalidate unlocked

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-16 Freescale Semiconductor
lines with multi-bit errors. Locked lines with uncorrectable tag errors that miss are unaffected. No machine
check is generated.
If a hit occurs to a line with a tag parity/EDC error that is locked (after a correction for
L1CSR1[ICEA] = ‘01’), the line is left unaffected. No machine check is generated, regardless of the
setting of L1CSR1[ICEA].
Otherwise, if a miss occurs, all parity/EDC errors are ignored; the lines are left unaffected; and no machine
check is generated, regardless of the setting of L1CSR1[ICEA].
All data parity or EDC errors are ignored regardless of L1CSR1[ICEA].
9.7.2.4 Cache Locking Instructions (icbtls, icblc)
For icbtls and icblc instructions, on a hit to any line without a tag parity or EDC error, the lock bits are set
or cleared appropriately and data parity or EDC errors are ignored. When L1CSR1[ICEA] = ‘00’, tag
parity/EDC errors on other lines are ignored. When L1CSR1[ICEA] = ‘01’, uncorrectable tag parity or
EDC errors on other lines also causes unlocked lines to be invalidated, regardless of hit or miss. No
machine check is generated regardless of the setting of L1CSR1[ICEA].
For cacheable icbtls instructions that hit only to a line with a tag parity or EDC error or that miss in all
ways, a machine check is generated if L1CSR1[ICEA] = ‘00’ and any line has a tag parity/EDC error. If
L1CSR1[ICEA] = ‘01’, lines with an uncorrectable tag parity/EDC error are invalidated. If a line that was
locked was invalidated, a machine check is generated.
For cacheable icblc instructions that hit only to a line with a tag parity or EDC error or that miss in all
ways, a machine check is generated if L1CSR1[ICEA] = ‘00’ and any line with a tag parity/EDC error is
locked. If L1CSR1[ICEA] = ‘01’, lines with an uncorrectable tag parity/EDC error are invalidated. If a
line that was locked or had a lock parity error was invalidated, a machine check is generated.
9.7.3 Cache Inhibited Accesses and Parity/EDC Errors
For non-cacheable access misses, no cache parity/EDC exceptions are signaled. When operating with
correction/auto-invalidation disabled, tag parity/EDC errors on any line cause misses for cache-inhibited
accesses and no machine check is generated. When correction/auto-invalidation mode is enabled, a
correction/auto-invalidation cycle is run to correct/auto-invalidate tag errors if no line is locked, and
invalidations are performed for uncorrectable tag errors. If a cache-inhibited instruction fetch access hit
occurs to a line with no tag parity/EDC error and the requested double word of data has no parity/EDC
error, the access is treated as a cache hit and the CI status is ignored. Otherwise, if the requested double
word of data has a parity/EDC error, the access is treated as a cache-inhibited cache miss and the cache
data is ignored. No machine check is generated in this case. If a cache hit occurs to a line with an
uncorrectable tag error, the hit is ignored, the access is performed as a cache-inhibited cache miss, and the
cache data is ignored. No machine check is generated in this case.
9.7.4 EDC Checkbit/Syndrome Coding Scheme Generation
When operating with EDC enabled (L1CSR1[ICEDT] =01), double bit error detection codes are used to
protect both the tag and data portions of a cache line. Each tag entry utilizes six check bits to cover the
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-17
tag + valid bit, and each double word of data in the data arrays utilizes eight check bits. These same bits
are used for parity coding when the L1CSR1[ICEDT] control field selects parity mode. The specific
coding schemes are shown in the following figures.
Table 9-5 shows the checkbit coding for each tag entry. A ‘*’ in the table indicates the bit is XORed to
form the final checkbit value.
Table 9-6 shows the checkbit coding for each double word data entry. A ‘*’ in the table indicates the bit is
XORed to form the final checkbit value.
Table 9-5. Tag Checkbit Generation
Checkbit
p_tchk[0–5]
Tag Bit
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 V
0 ****** *** ** *
1 ** ** **** ** **
2 ** *** ***** * *
3 * * ******* ****
4 ****** * * *****
5 * ** ** * ** * *** *
Table 9-6. Data Checkbit Generation
Checkbit
p_dchk
[0–7]
Data Bit
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
0****************
1 *** ******** * *****
2 *** *** ******** * **
3 * ** *** *** ********
4 * * ** *** ***
5* * * * ** ***
6***** * ***
7 ******** *
Checkbit Data Bit
32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63
0 * * ** *** ***
1* * * * ** ***
2***** * ***
3 ******** *
4****************
5 *** ******** * *****
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-18 Freescale Semiconductor
9.7.5 Cache Error Injection
Cache error injection provides a way to test error recovery by intentionally injecting parity errors into the
instruction cache as follows:
• If L1CSR1[ICEI] is set and the L1CSR1[ICEDT] = 00, any instruction cache line fill to the
instruction cache data has all of the associated parity bits inverted in the instruction cache data
array for each double word loaded.
• If L1CSR1[ICEI] is set and L1CSR1[ICEDT] = 01, any instruction cache line fill to the instruction
cache data has the associated two most significant parity check bits inverted in the instruction
cache data array for each double word loaded.
Cache parity error injection is not performed for cache debug write accesses because parity bit values
written can be directly controlled (See Section 9.15.3, “Cache Debug Access Control Register
(CDACNTL)”).
In order to clear the parity errors, a cache invalidation or an invalidation of the lines that could have had
an injected parity error may be performed. Line invalidation may be performed by an icbi instruction or
an L1FINV1 invalidation operation.
9.7.6 Cache Error Cross-Signaling
Cache error cross-signaling provides a way to support multiple cores running in lock-step when one of the
CPUs encounters a parity/EDC error. Refer to Section 13.4.3, “Cache Error Cross-Signaling Operation”
and Section 13.3.11, “Cache Error Cross-signaling Signals” for more details of operation.
9.8 Cache Management Instructions
This section describes the implementation of the cache management instructions in the e200z4 core. See
the EREF for complete descriptions.
•icbi—Instruction Cache Block Invalidate
If the cache line containing the byte addressed by the EA associated with this instruction is present
in the instruction cache, it is invalidated, regardless of lock status. If an instruction cache line fill
is in progress and the line-fill data corresponds to the EA associated with an icbi, the instruction
cache is not updated with line-fill data.
•icbt—Instruction Cache Block Touch
If HID0NOPTI is set, this instruction is treated as a no-op.
•dcba—Data Cache Block Allocate
6 *** *** ******** * **
7 * ** *** *** ********
Table 9-6. Data Checkbit Generation (Continued)
Checkbit
p_dchk
[0–7]
Data Bit
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-19
This instruction is treated as a no-op.
•dcbf—Data Cache Block Flush
This instruction is treated as a no-op.
•dcbi—Data Cache Block Invalidate
This instruction is privileged and treated as a no-op in supervisor mode.
•dcbst—Data Cache Block Store
This instruction is treated as a no-op.
•dcbt—Data Cache Block Touch
This instruction is treated as a no-op.
•dcbtst—Data Cache Block Touch
This instruction is treated as a no-op.
•dcbz—Data Cache Block Set to Zero
This instruction causes an Alignment exception.
9.9 Touch Instructions
Due to the limitations of using icbt instructions, a program that uses these instructions improperly may
actually see a degradation in performance from their use. To avoid this, the e200z4 provides the
HID0[NOPTI] control bit to cause these instructions to be treated as no-ops
9.10 Cache Line Locking/Unlocking
This section describes the cache line locking and unlocking functionality.
9.10.1 Overview
The e200z4 supports the Freescale EIS cache line locking category, which defines user-mode instructions
that perform cache locking/unlocking. Three of the instructions are for data cache locking control (dcblc,
dcbtls, dcbtstls), and two instructions are for instruction cache locking control (icblc, icbtls).
The dcbtls, dcbtstls, and dcblc lock instructions are treated as no-op instructions by the e200z4.
The icbtls and icblc instructions require either execute (X) or read (R) permission when translated by the
TLB. Exceptions are taken using data TLB errors (DTLB) or data storage interrupts (DSI), not ITLB or
ISI.
The user-mode cache lock enable MSR[UCLE] bit may be used to restrict user-mode cache line locking.
If MSR[UCLE] is clear, any cache lock instruction executed in user-mode takes a cache-locking DSI
exception (unless no-op) and sets ESR[ILK]. If MSR[UCLE] is set, cache-locking instructions can be
executed in user-mode and do not take a DSI for cache-locking. However, they may still cause a DSI for
access violations or cause machine checks for parity or external termination errors.
There are cases when attempting to set a lock fails even when no DSI or DTLB exceptions occur. These
are as follows:
• Target address is marked cache-inhibited and a cache miss occurs.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-20 Freescale Semiconductor
• Cache is disabled or all ways of the cache are disabled for replacement.
• Cache target indicated by the CT field (bits 6–10) of the instruction is not 0.
In these cases, the lock set instruction is treated as a no-op, and L1CSR1[CUL], the cache unable to lock
bit, is set.
For icbtls, an attempt is made to lock the corresponding cache line assuming no exception conditions occur
(DSI or DTLB error). If a miss occurs, and all of the available ways (ways enabled for a particular access
type) are already locked in a given cache set, an attempt to lock another line in the same set results in an
overlocking situation. In this case, L1CSR1[CLO], the cache overlock bit, is set to indicate that an
overlocking situation occurred. This does not cause an exception condition. The new line is conditionally
placed in the cache, displacing a previously locked line depending on the setting of the appropriate
L1CSR1[CLOA] bit.
The cache unable to lock conditions have priority over the cache overlock condition.
If multiple no-op or exception conditions arise on a cache lock instruction, the results are determined by
the order of precedence described in Table 9-7.
It is possible to lock all ways of a given cache set. If an attempt is made to perform a non-locking line fill
for a new address in the same cache set, the new line is not put into the cache. It is satisfied on the bus
using a single beat transfer instead of normal burst transfers.
Cache line locking interacts with the ability to control replacement of lines in certain cache ways by the
L1CSR0 WID control bits. If an icbtls cache line locking instruction is allowed to execute and finds a
matching line already present in the cache, the line’s lock bit is set regardless of the settings of the WID
field. In this case, no replacement is made. However, for cache misses that occur while executing a cache
line lock set instruction, the only candidate lines available for locking are those that correspond to ways of
the cache that have not been disabled by WID. Thus, an overlocking condition may result even though
fewer than four lines with the same index are locked.
The cache-locking DSI handler must decide whether or not to lock a given cache line based upon available
cache resources. If the locking instruction is a set lock instruction, and if the handler decides to lock the
line, it should do the following:
1. Add the line address to its list of locked lines.
2. Execute the appropriate set lock instruction to lock the cache line.
3. Modify save/restore register 0 to point to the instruction immediately after the locking instruction
that caused the DSI.
4. Execute an rfi.
If the locking instruction is a clear lock instruction, and if the handler decides to unlock the line, it should
do the following:
1. Remove the line address from its list of locked lines.
2. Execute the appropriate clear lock instruction to unlock the cache line.
3. Modify save/restore register 0 to point to the instruction immediately after the locking instruction
that caused the DSI.
4. Execute an rfi.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-21
9.10.2 icbtls—Instruction Cache Block Touch and Lock Set
icbtls icbtls
Instruction Cache Block Touch and Lock Set
icbtls CT, RA, RB (E=0) Form X
Description:
if RA=0 then a ← 640 else a ← GPR(RA)
EA <- 320 || (a + GPR(RB))32:63
PrefetchInstructionCacheBlockLockSet(CT, EA)
If CT = 0, the cache line corresponding to EA is loaded and locked into the level 1 instruction cache.
If CT = 0 and the line already exists in the instruction cache, icbtls locks the line without refetching it from
external memory.
Exceptions:
If the MSR[UCLE] (user-mode cache lock enable) bit is set, icbtls may be performed while in user mode
(MSR[PR] = 1). If the MSR[UCLE] bit is clear, an attempt to perform these instructions in user mode
causes an instruction cache locking error DSI unless the CT field or other conditions otherwise cause the
instruction to be treated as a no-op.
The e200z4 only supports CT = 0. If CT is some value other than 0, the icbtls is treated as a no-op and the
L1CSR1[ICUL] bit is set, indicating an unable-to-lock condition occurred. No other exceptions are
reported. If the instruction cache is disabled, the icbtls is treated as a no-op and the L1CSR1[ICUL] bit is
set, indicating an unable-to-lock condition occurred. No other exceptions are reported.
The icbtls instruction requires either execute or read (X or R) permissions with respect to translation and
causes a DSI interrupt for access violations. It also causes a data TLB error interrupt if the target address
cannot be translated.
If the block corresponding to EA is cache-inhibited and an instruction cache miss occurs, the instruction
is treated as a no-op, no DSI is taken due to the cache-inhibited status, and L1CSR1[ICUL] is set,
indicating an unable-to-lock condition occurred.
Other registers altered:
• L1CSR1 (see below)
When icbtls is performed to an index and a way cannot be locked, the L1CSR1[ICUL] bit is set, indicating
an unable-to-lock condition occurred. This also occurs whenever icbtls must be treated as a no-op.
When icbtls is performed to an index in the instruction cache that already has all the ways locked, this is
referred to as an overlocking situation. There is no exception generated by an overlocking situation.
Instead the L1CSR1[ICLO] bit is set, indicating an over-lock condition occurred. A line is allocated and
locked in the cache depending on the setting of the L1CSR1[ICLOA] control bit. If system software wants
31 CT RA RB 0 1 1 1 1 0 0 1 1 0 0
056101115162021 3031
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-22 Freescale Semiconductor
to precisely determine if an overlock condition has happened, it must perform the following code
sequence:
icbtls
msync
mfspr (L1CSR1)
(check L1CSR1ICUL bit for cache index unable-to-lock condition)
(check L1CSR1ICLO bit for cache index over-lock condition)
9.10.3 icblc—Instruction Cache Block Lock Clear
icblc icblc
Instruction Cache Block Lock Clear
icblc CT, RA, RB (E = 0) Form X
Description:
if RA=0 then a ← 640 else a ← GPR(RA)
EA <- 320 || (a + GPR(RB))32:63
InstCacheClearLockBit(CT, EA)
If CT = 0, and the line is present in the instruction cache, the lock bit for that line is cleared, making that
line eligible for replacement.
Exceptions:
If MSR[UCLE] (user-mode cache lock enable) is set, icblc may be performed while in user mode
(MSR[PR] = 1). If the MSR[UCLE] bit is clear, an attempt to perform these instructions in user mode
causes an instruction cache locking error DSI unless the CT field or other conditions otherwise cause the
instruction to be treated as a no-op.
The e200z4 only supports CT = 0. If CT is some value other than 0, the icblc is treated as a no-op. No other
exceptions are reported. If the instruction cache is disabled, the icblc is treated as a no-op. No other
exceptions are reported.
The icblc instruction requires either execute or read (X or R) permissions with respect to translation. It
causes a DSI interrupt for access violations and a Data TLB error interrupt for the target addresses that
cannot be translated.
9.10.4 Effects of Other Cache Instructions on Locked Lines
icbt has no effect on the state of a cache line's lock bit.
icbi invalidates and unlocks a cache line in the L1 ICache.
31 CT RA RB 0 0 1 1 1 0 0 1 1 0 0
056101115162021 3031
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-23
9.10.5 Flash Clearing of Lock Bits
The e200z4 supports flash clearing of cache lock bits under software control by using the ICFCL (cache
flash clear locks) control bit in the L1CSR1 register.
Lock bits are not cleared automatically upon power-up (m_por) or normal reset (p_reset_b). Software must
use the ICLFC control bit to clear the lock bits after a reset. Proper use of this bit is to determine that it is
clear and then set it with a pair of mfspr mtspr operations. A 0-to-1 transition on ICLFC causes a flash
clearing of the lock bits to be initiated, which lasts for multiple CPU cycles. Once set, the ICLFC bit is
cleared by hardware after the operation is complete. It remains set during the clearing interval and may be
tested by software to determine when the operation has completed. An mtspr operation to L1CSR1 that
attempts to change the state of L1CSR1[ICLFC] during invalidation does not affect the state of that bit.
During the process of performing the flash clearing, the cache does not respond to accesses and remains
busy. Interrupts may still be recognized and processed, potentially aborting the flash clearing operation.
When this occurs, L1CSR1[ABT] is set to indicate unsuccessful completion of the operation. Software
should read the L1CSR1 register to determine that the operation has completed (L1CSR1[ICLFC]
cleared), and then check the status of L1CSR1[ABT] to determine completion status.
NOTE
Note that while most implementations of the e200z4 will stall further
instruction execution during this flash clearing interval, it is not guaranteed
across all implementations. Thus, software should be written using these
guidelines.
9.11 Cache Instructions and Exceptions
All cache management instructions (except icbt) can generate DSI exceptions due to permission violations
or TLB miss exceptions if the effective address cannot be translated.
The cache locking instructions icblc and icbtls generate DSI exceptions if the MSR[UCLE] bit is clear and
the locking instruction is executed in user mode (MSR[PR] = 1). Instruction cache locking instructions
that result in a DSI exception for this reason set the ESR[ILK] bit (documented as DLK1 in the EREF).
9.11.1 Exception Conditions for Cache Instructions
If multiple no-op or exception conditions arise on a cache instruction, the results are determined by the
order of precedence described in Table 9-7.
Table 9-7. Special Case Handling
Operation CT!=0 Cache
Disabled TLB Miss User &
UCLE = 0 Protection
Violation
Cache
Parity
Error
CI and
Miss in
Cache
All
Available
Ways
Locked
External
Terminatio
n
Error
icbt NOP NOP NOP — NOP NOP NOP NOP NOP
icbtls
icblc
ICUL
NOP
ICUL
NOP
DTLB
DTLB
ILK
ILK
DSI
DSI
MC
MC
ICUL
—
ICLO
—
MC
—
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-24 Freescale Semiconductor
9.11.2 Transfer Type Encodings for Cache Management Instructions
Transfer type encodings are used to indicate to the cache whether a normal access, atomic access, cache
management control access, or MMU management control access is being requested. These attribute
signals are driven with addresses when an access is requested.
Table 9-8 shows the definitions of the p_d_ttype[0:5] encodings.
icbi — NOP DTLB — DSI — — — —
Note: Priority decreases from left to right
Cache operations that do not set or clear locks ignore the value of the CT field
“dash” indicates executes normally
“NOP” indicates treated as a no-op
DSI = data storage interrupt; DTLB = data TLB interrupt
ICUL = no-op, and set L1CSR1[CUL]
ICLO = no-op, and set L1CSR1[CLO]
ILK = data storage interrupt (DSI) and set ESR[ILK]
MC = Machine Check and update MCAR
Table 9-8. Transfer Type Encoding
p_d_ttype[0:4] Transfer Type Instruction
00000 Normal normal loads/stores
00001 Atomic lbarx, lharx, lwarx, stbcx., sthcx., and
stwcx.
00010 Reserved for Flush Data Block Reserved for dcbst
00011 Reserved for Flush and Invalidate Data
Block
Reserved for dcbf
00100 Reserved for Allocate and Zero Data Block Reserved for dcbz
00101 Reserved for Invalidate Data Block Reserved for dcbi
00110 Invalidate Instruction Block icbi
00111 Multiple Word Load/Store lmw, stmw
01000 TLB Invalidate tlbivax
01001 TLB Search tlbsx
01010 TLB Read entry tlbre
01011 TLB Write entry tlbwe
01100 Touch for Instruction icbt
01101 Lock Clear for Instruction icblc
Table 9-7. Special Case Handling
Operation CT!=0 Cache
Disabled TLB Miss User &
UCLE = 0 Protection
Violation
Cache
Parity
Error
CI and
Miss in
Cache
All
Available
Ways
Locked
External
Terminatio
n
Error
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-25
9.12 Self-Modifying Code Requirements
The following sequence of instructions synchronizes the instruction stream.
1. dcbf
2. icbi
3. msync
4. isync
This sequence ensures that the operation is correct for Power ISA embedded category processors that
implement separate instruction and data caches, as well as for multiprocessor cache-coherent systems.
9.13 Page Table Control Bits
The Power ISA embedded category architecture allows certain memory characteristics to be set on a page
and block basis. These characteristics include write through (using the W-bit), cacheability (using the
I-bit), coherency (using the M-bit), guarded memory (using the G-bit), and endianness (using the E-bit).
Incorrect use of these bits may create situations where coherency paradoxes are observed by the processor.
In particular, this can happen when the state of these bits are changed without appropriate precautions
being taken (that is, flushing the pages that correspond to the changed bits from the cache), or when the
address translations of aliased real addresses specify different values for any of the WIMGE bits.
Generally, certain mixing of WIMG settings is allowed by the Power ISA; however, others may present
cache coherence paradoxes and are considered programming errors.
9.13.1 Cache-Inhibited Accesses
When the cache-inhibited attribute is indicated by translation (WIMGE = b’x1xxx’) and a cache miss
occurs, all accesses are performed as single beat transactions on the system bus with a size indicator
corresponding to the size of the instruction fetch operation. Cache inhibited status is ignored on all cache
hits.
01110 Touch for Instruction and Lock Set icbtls
01111 Reserved for Lock Clear for Data Reserved for dcblc
10000 Reserved for Touch for Data Reserved for dcbt
10001 Reserved for Touch for Data Store Reserved for dcbtst
10010 Reserved for Touch for Data and Lock Set Reserved for dcbtls
10011 Reserved for Touch for Data Store and Lock
Set Reserved for dcbtstls
Table 9-8. Transfer Type Encoding
p_d_ttype[0:4] Transfer Type Instruction

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-26 Freescale Semiconductor
9.14 Effect of Hardware Debug on Cache Operation
Hardware debug facilities utilize normal CPU instructions to access register and memory contents during
a debug session. During hardware debug, the MMU page attributes are controllable by the debug firmware
by means of the OnCE control register (OCR) settings. Refer to Section 11.4.6.3, “e200 OnCE Control
Register (OCR).”
9.15 Cache Memory Access For Debug/Error Handling
The cache memory provides resources needed to do foreground accesses by means of mtdcr instructions
executed by the processor or background accesses by means of the JTAG/OnCE port to read and write the
cache SRAM arrays. Accesses are supported by a pair of device control registers (DCRs), which are also
mapped into OnCE-accessible registers. These resources are intended for use by special debug tools or by
debug and specialized error recovery exception software, not by general application code.
Access to the cache memory SRAM arrays using mtdcr instructions may be performed by
supervisor-level software after appropriate synchronization has been performed with msync, isync
instruction pairs. Access to the cache memory SRAM arrays using the JTAG port is conditional on the
CPU being in debug mode. The CPU must be placed in debug state prior to initiation of a read or write
access by OnCE.
This facility allows access only to the SRAM arrays used for cache tag and data storage. This function is
available even when the cache is disabled. The cache line-fill buffer, push buffer, store buffer, and late
write buffer are all outside of the SRAM arrays and are not accessible. However, before a debug memory
access request is serviced, the push and store buffers are written to external memory and the late write and
line-fill buffers are written to the cache arrays.
9.15.1 Cache Memory Access By Means Of Software
Cache debug access control and data information are accessed by executing mfdcr and mtdcr instructions
to the cache debug access control and data registers, CDACNTL and CDADATA (see Table 9-9 and
Table 9-10). Accesses are performed one word (32 bits) at a time.
For a cache write access, software must first write the CDADATA register with the desired tag or data
values. The second step is to write the CDACNTL register with desired tag or data location, full parity
information (for data writes only), and assert the R/W and GO bits in CDACNTL.
For a cache read access, software must first access and write the CDACNTL register with the desired tag
or data location, and assert the R/W and GO bits in CDACNTL. The second step is to read the CDADATA
register for the tag or data and read the CDACNTL register for full parity information (data reads only).
Note that writing a 64-bit value for data requires two passes, one for the even word (A29 = 0) and one for
the odd word (A29 = 1). Each 32-bit write updates all parity/check bits, so in general, if only a single 32-bit
write is performed, it should be preceded by a read of the data that is not being modified to properly
compute or store all 8 parity/EDC check bits when the modified 32-bit data is written. Tag writes are
accomplished in a single pass.
Completion of any operation can be determined by reading the CDACNTL register. Operations are
indicated as complete when CDACNTL[30–31] = 00. Software should poll the CDACNTL register to

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-27
determine when an access has been completed prior to assuming validity of any other information in the
CDACNTL or CDADATA registers.
Note that no parity errors are generated as a result of mtdcr/mfdcr instructions involving the CDACNTL
or CDADATA registers.
To ensure proper cache write operation, the following program sequence is recommended:
msync
isync
mtdcr cdadata, rS1 // set up write data
mtdcr cdacntl, rS2 // write control to initiate write
msync
isync
loop: mfdcr rN, cdacntl // check for done
andi. rT, rN, #3
bne loop
.
.
To ensure proper cache read operation, the following program sequence is recommended:
msync
isync
mtdcr cdacntl, rS2 // write control to initiate read
msync
isync
loop: mfdcr rN, cdacntl // check for done
andi. rT, rN, #3
bne loop
mfdcr rT, cdadata // return data
.
.
9.15.2 Cache Memory Access Through JTAG/OnCE Port
Cache debug access control and data information are serially accessed through the OnCE controller and
access the Cache Debug Access control and data registers CDACNTL and CDADATA (see Table 9-9 and
Table 9-10). Accesses are performed one word (32 bits) at a time.
For a Cache write access, the user must first write the CDADATA register with the desired tag or data
values. The second step is to write the CDACNTL register with desired tag or data location, parity
information (for data writes only), and assert the R/W and GO bits in CDACNTL.
For a cache read access, the user must first access and write the CDACNTL register with desired tag or
data location, and assert the R/W and GO bits in CDACNTL. The second step is to access and read the
CDADATA register for the tag or data and read the CDACNTL register for parity (data reads only).
Completion of any operation can be determined by reading the CDACNTL register. Operations are
indicated as complete when CDACNTL[30–31] = 00. Debug firmware should poll the CDACNTL register
to determine when an access has been completed prior to assuming the validity of any other information
in the CDACNTL or CDADATA registers.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-28 Freescale Semiconductor
9.15.3 Cache Debug Access Control Register (CDACNTL)
The cache debug access control register (CDACNTL) contains location information (T/D, CWAY, CSET,
and WORD), and control (R/W and GO) needed to access the cache tag or data SRAM arrays. Also
included here are the data SRAM parity bit values that must be supplied by the user for write accesses and
which will be supplied by the cache for read accesses of the data SRAM arrays.
The CDACNTL register is shown in Figure 9-9.
Table 9-9 provides bit definitions for the cache debug access control register.
T/D
0
CWAY
0
CSET
WORD
PARITY
0
CACHE
R/W
GO
012345678910111213141516171819202122232425262728293031
DCR - 351; Read/Write; Reset - 0x0
Figure 9-9. CDACNTL Register
Table 9-9. Cache Debug Access Control Register Definition
Bit(s) Name Description
0 T/D Tag/Data:
0 Data array selected
1 Tag array selected
1—Reserved
1
2–3 CWAY Cache Way
Specifies the cache way to be selected. When configured for 2 ways, values greater than 1 result
in undefined command operations.
4–6 — Reserved1
7–12 CSET Cache Set:
Specifies the cache set to be selected. When configured for 4 ways, values greater than 31 result
in undefined command operations.
13–15 WORD Word (Data array access only)
Specifies one of eight words of selected set
16–23 PARITY/EDC
CHECK BITS
Parity check bits2
Parity Mode (L1CSR1[ICEDT] = 00):
Data array: Byte parity bits. One bit per data byte. bit 16: Parity for byte 0, bit 17: Parity for byte
1.... bit 23: Parity for byte 7.
Tag Array: parity check bits for tag. Bit 16 corresponds to parity of tag[0–11]. Bit 17 corresponds
to parity of tag[12–21]+V. Bits 18–23 reserved.
EDC Mode (L1CSR1[ICEDT] = 01):
Data Array: parity check bits for data. Bits 16–23 correspond to p_dchk[0–7] (See Table 9-6).
Tag Array: parity check bits for tag. Bits 16–21 correspond to p_tchk[0–5] (See Tabl e 9-5).
Bits 22–23 reserved.
24–27 — Reserved1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 9-29
9.15.3.1 Cache Debug Access Data Register (CDADATA)
The cache debug access data register (CDADATA) contains the SRAM data for a debug access. The same
register is used for tag and data SRAM read and write operations.
The CDADATA register is shown in Figure 9-10.
Table 9-10 provides bit definitions for the cache debug access data register.
28 CACHE Cache Select
Specifies the cache to be selected
0 Selects the data cache or unified cache for the operation. (No-operation on e200z4)
1 Selects the instruction cache for the operation.
Note: This bit should be written with a ‘1’ by software to access the ICache. This bit is provided for
compatibility with other e200 processors.
29 R/W Read/Write:
0 Selects write operation. Write the data in the CDADATA register to the location specified by this
CDACNTL register.
1 Selects read operation. Read the cache memory location specified by this CDACNTL register
and store the resulting data in the CDADATA register and if the access is to the data array, store
the parity bits in this CDACNTL register.
30–31 GO GO command bits
00 Inactive or complete (no action taken) hardware sets GO = 00 when an operation is complete
01 Read or write cache memory location specified by this CDACNTL register.
1x Reserved
1These bits are not implemented and should be written zero for future compatibility.
2Cache parity checkers assume odd parity when using parity protection. EDC coding is used otherwise.
TAG or DATA
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 350; Read/Write; Reset - Undefined/Unaffected
Figure 9-10. CDADATA Register
Table 9-10. Cache Debug Access Data Register Bit Definitions
Bit(s) Name Description
0–31 TAG TAG Array Access Data
0–21 Tag compare bits
22 Reserved
23 Valid bit
24 Lock bit
27–31 Reserved, write as zero
DATA DATA Array Access Data (Bytes 0–3 of the selected word)
0–7 Byte 0
8–15 Byte 1
16–23Byte 2
24–31Byte 3
Table 9-9. Cache Debug Access Control Register Definition (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
9-30 Freescale Semiconductor
9.16 Hardware Debug (Cache) Control Register 0
Hardware debug control register 0 is used to disable certain cache features for hardware debug purposes.
This register is not intended for normal user use. The HDBCR0 register is accessed using an mfspr or
mtspr instruction. The SPR number for HDBCR0 is 976 in decimal.
The HDBCR0 register is shown in Figure 9-11.
The HDBCR0 bits are described in Table 9-11.
0
ISTRM
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 976; Read/Write; Reset - 0x0; Supervisor-only
Figure 9-11. Hardware Debug Control Register 0 (HDBCR0)
Table 9-11. HDBCR0 Field Descriptions
Bits Name Description
0–30 — Reserved1
1These bits are not implemented and should be written with zero for future compatibility.
31 ISTRM Disable Instruction Cache Streaming
0 ICache streaming is enabled
1 ICache streaming is disabled

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-1
Chapter 10
Memory Management Unit
10.1 Overview
The memory management unit is a 32-bit Power ISA embedded category-compliant implementation, with
the following feature set:
• Virtual memory support
• 32-bit virtual and physical addresses
• 8-bit process identifier
• 16-entry fully associative TLB
• Hardware assist for TLB miss exceptions
• Per-entry multiple page size support from 1 Kbyte to 4 Gbyte
• Entry flush protection
• Software managed by tlbre, tlbwe, tlbsx, tlbsync, and tlbivax instructions
• Freescale EIS MMU architecture compliant
• Support for external control of entry matching for a subset of TID values to support non-intrusive
runtime mapping modifications
10.2 Effective to Real Address Translation
This section discusses the following topics:
• Section 10.2.1, “Effective Addresses”
•Section 10.2.2, “Address Spaces”
•Section 10.2.3, “Process ID”
•Section 10.2.4, “Translation Flow”
•Section 10.2.5, “Permissions”
10.2.1 Effective Addresses
Instruction accesses are generated by sequential instruction fetches or due to a change in program flow
(branches and interrupts). Data accesses are generated by load, store, and cache management instructions.
The e200 instruction fetch, branch, and load/store units generate 32-bit effective addresses. The MMU
translates this effective address to a 32-bit real address which is then used for memory accesses.
The Power ISA embedded category architecture divides the effective (virtual) and real (physical) address
space into pages. The page represents the granularity of effective address translation, permission control,

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-2 Freescale Semiconductor
and memory/cache attributes. The e200z4 MMU supports twenty-three page sizes (1 Kbyte, 2 Kbyte,
4 Kbyte, 8 Kbyte, 16 Kbyte, 32 Kbyte, 64 Kbyte, 128 Kbyte, 256 Kbyte, 512 Kbyte, 1 Mbyte, 2 Mbyte,
4 Mbyte, 8 Mbyte, 16 Mbyte, 32 Mbyte, 64 Mbyte, 128 Mbyte, 256 Mbyte, 512 Mbyte, 1 Gbyte, 2 Gbyte,
4 Gbyte). In order for an effective to real address translation to exist, a valid entry for the page containing
the effective address must be in a translation lookaside buffer (TLB). Addresses for which no TLB entry
exists (a TLB miss) cause instruction or data TLB errors.
10.2.2 Address Spaces
Instruction accesses are generated by sequential instruction fetches or are due to a change in program flow
(branches and interrupts). Data accesses are generated by load, store, and cache management instructions.
The Power ISA embedded category architecture defines two effective address spaces for instruction
accesses and two effective address spaces for data accesses. The current effective address space for
instruction or data accesses is determined by the value of MSR[IS] and MSR[DS], respectively. The
address space indicator (the value of either MSR[IS] or MSR[DS], as appropriate) is used in addition to
the effective address generated by the processor for translation into a physical address by the TLB
mechanism. Because MSR[IS] and MSR[DS] are both cleared when an interrupt occurs, an address space
value of 0b0 can be used to denote interrupt-related address spaces (or possibly all system software address
spaces). An address space value of 0b1 can be used to denote non interrupt-related address spaces(or
possibly all user address spaces).
The address space associated with an instruction or data access is included as part of the virtual address in
the translation process (AS). The p_tc[1] interface signal indicates the appropriate address space.
10.2.3 Process ID
The Power ISA embedded category architecture defines that a process ID (PID) value is associated with
each effective address (instruction or data) generated by the processor. At the Book E level, a single PID
register is defined as a 32-bit register, and it maintains the value of the PID for the current process. This
PID value is included as part of the virtual address in the translation process (PID0).
For the e200z4 MMU, the PID is 8 bits in length. The most significant 24 bits are unimplemented and read
as ‘0’. The p_pid0[0:7] interface signals indicate the current process ID.
10.2.4 Translation Flow
The effective address, concatenated with the address space value of the corresponding MSR bit (MSR[IS]
or MSR[DS]), is compared to the appropriate number of bits of the EPN field (depending on the page size)
and the TS field of TLB entries. If the contents of the effective address plus the address space bit matches
the EPN field and TS bit of the TLB entry, that TLB entry is a candidate for a possible translation match.
In addition to a match in the EPN field and TS, a matching TLB entry must either match the current process
ID of the access (in PID0) or have a TID value of ‘0’, indicating the entry is globally shared among all
processes.
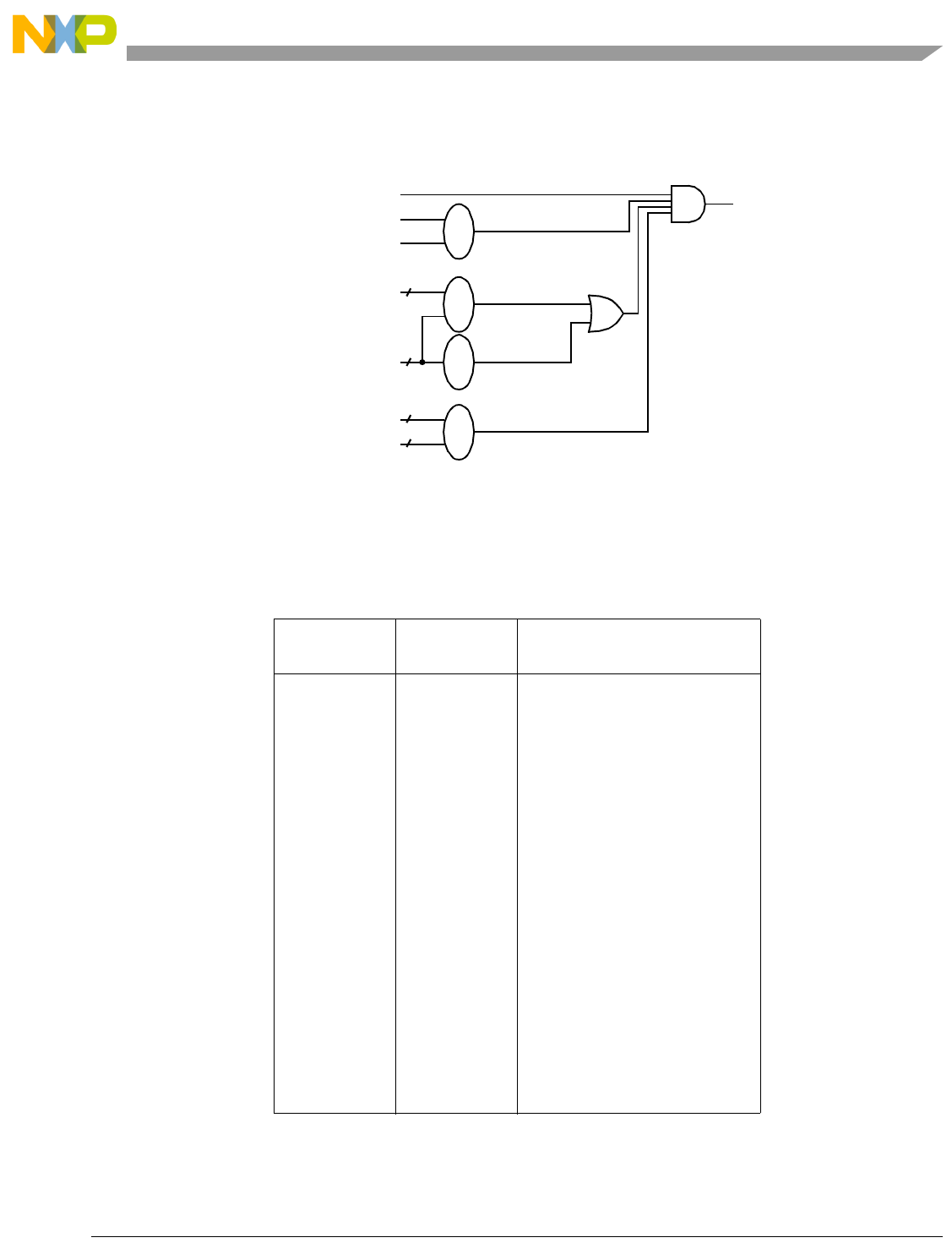
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-3
Figure 10-1 shows the translation match logic for the effective address plus its attributes, collectively
called the virtual address, and how it is compared to the corresponding fields in the TLB entries.
Figure 10-1. Virtual Address and TLB-Entry Compare Process
The page size defined for a TLB entry determines how many bits of the effective address are compared to
the corresponding EPN field in the TLB entry, as shown in Table 10-1. On a TLB hit, the corresponding
bits of the real page number (RPN) field are used to form the real address.
Table 10-1. Page Size and EPN Field Comparison
SIZE Field Page Size
(2SIZEKbytes) EA to EPN Comparison
0b00000
0b00001
0b00010
0b00011
0b00100
0b00101
0b00110
0b00111
0b01000
0b01001
0b01010
0b01011
0b01100
0b01101
0b01110
0b01111
0b10000
0b10001
0b10010
0b10011
0b10100
0b10101
0b10110
1 Kbyte
2 Kbyte
4 Kbyte
8 Kbyte
16 Kbyte
32 Kbyte
64 Kbyte
128 Kbyte
256 Kbyte
512 Kbyte
1 Mbyte
2 Mbyte
4 Mbyte
8 Mbyte
16 Mbyte
32 Mbyte
64 Mbyte
128 Mbyte
256 Mbyte
512 Mbyte
1Gbyte
2 Gbyte
4Gbyte
EA[0:21] =? EPN[0:21]
EA[0:20] =? EPN[0:20]
EA[0:19] =? EPN[0:19]
EA[0:18] =? EPN[0:18]
EA[0:17] =? EPN[0:17]
EA[0:16] =? EPN[0:16]
EA[0:15] =? EPN[0:15]
EA[0:14] =? EPN[0:14]
EA[0:13] =? EPN[0:13]
EA[0:12] =? EPN[0:12]
EA[0:11] =? EPN[0:11]
EA[0:10] =? EPN[0:10]
EA[0:9] =? EPN[0:9]
EA[0:8] =? EPN[0:8]
EA[0:7] =? EPN[0:7]
EA[0:6] =? EPN[0:6]
EA[0:5] =? EPN[0:5]
EA[0:4] =? EPN[0:4]
EA[0:3] =? EPN[0:3]
EA[0:2] =? EPN[0:2]
EA[0:1] =? EPN[0:1]
EA[0] =? EPN[0]
(none)
TLB entry Hit
=0?
private page
shared page
=?
=?
TLB_entry[V]
TLB_entry[TS]
AS (from MSR[IS] or MSR[DS])
Process ID
TLB_entry[TID]
TLB_entry[EPN]
EA page number bits
=?
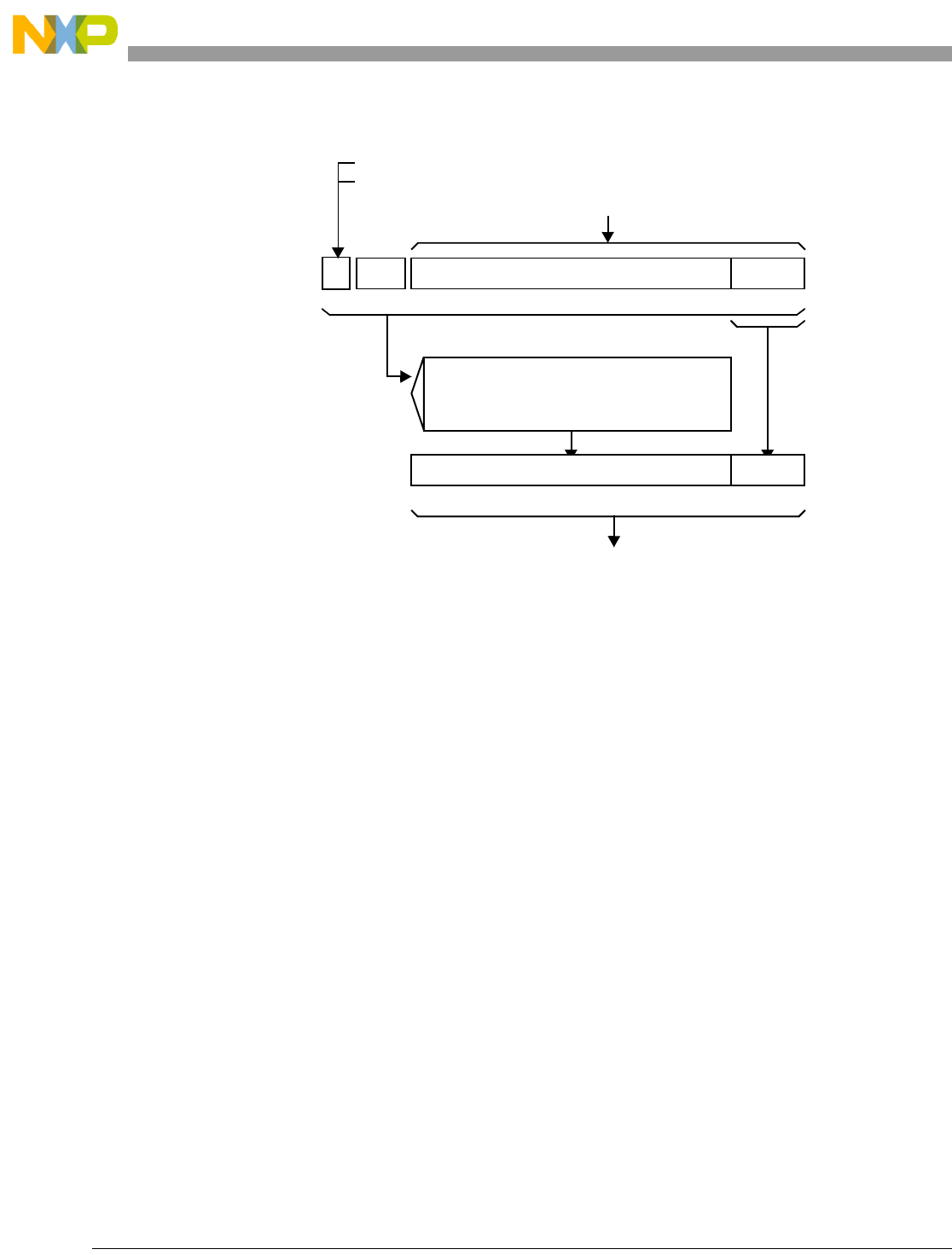
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-4 Freescale Semiconductor
On a TLB hit, the generation of the physical address occurs as shown in Figure 10-2.
Figure 10-2. Effective to Real Address Translation Flow
10.2.5 Permissions
An operating system may restrict access to virtual pages by selectively granting permissions for user-mode
read, write, and execute and supervisor-mode read, write, and execute on a per page basis. These
permissions can be set up for a particular system—for example, program code might be execute-only and
data structures may be mapped as read/write/no-execute—and can also be changed by the operating
system based on application requests and operating system policies.
The UX, SX, UW, SW, UR, and SR access control bits are provided to support selective permissions
(access control):
• SR—Supervisor read permission. Allows loads and load-type cache management instructions to
access the page while in supervisor mode (MSR[PR=0]).
• SW—Supervisor write permission. Allows stores and store-type cache management instructions to
access the page while in supervisor mode (MSR[PR=0]).
• SX—Supervisor execute permission. Allows instruction fetches to access the page and instructions
to be executed from the page while in supervisor mode (MSR[PR=0]).
• UR—User read permission. Allows loads and load-type cache management instructions to access
the page while in user mode (MSR[PR=1]).
• UW—User write permission. Allows stores and store-type cache management instructions to
access the page while in user mode (MSR[PR=1]).
32-bit Effective Address
32-bit Real Address
Virtual Address
NOTE: n = 32–log2(page size)
n<= 22
n=22 for 1Kbyte page size.
PID Effective Page Address Offset
0n31
TLB
multiple-entry
MSR[IS] for instruction fetch
AS
MSR[DS] for data access
RPN field of matching entry
n–1
Real Page Number Offset
0n31n–1
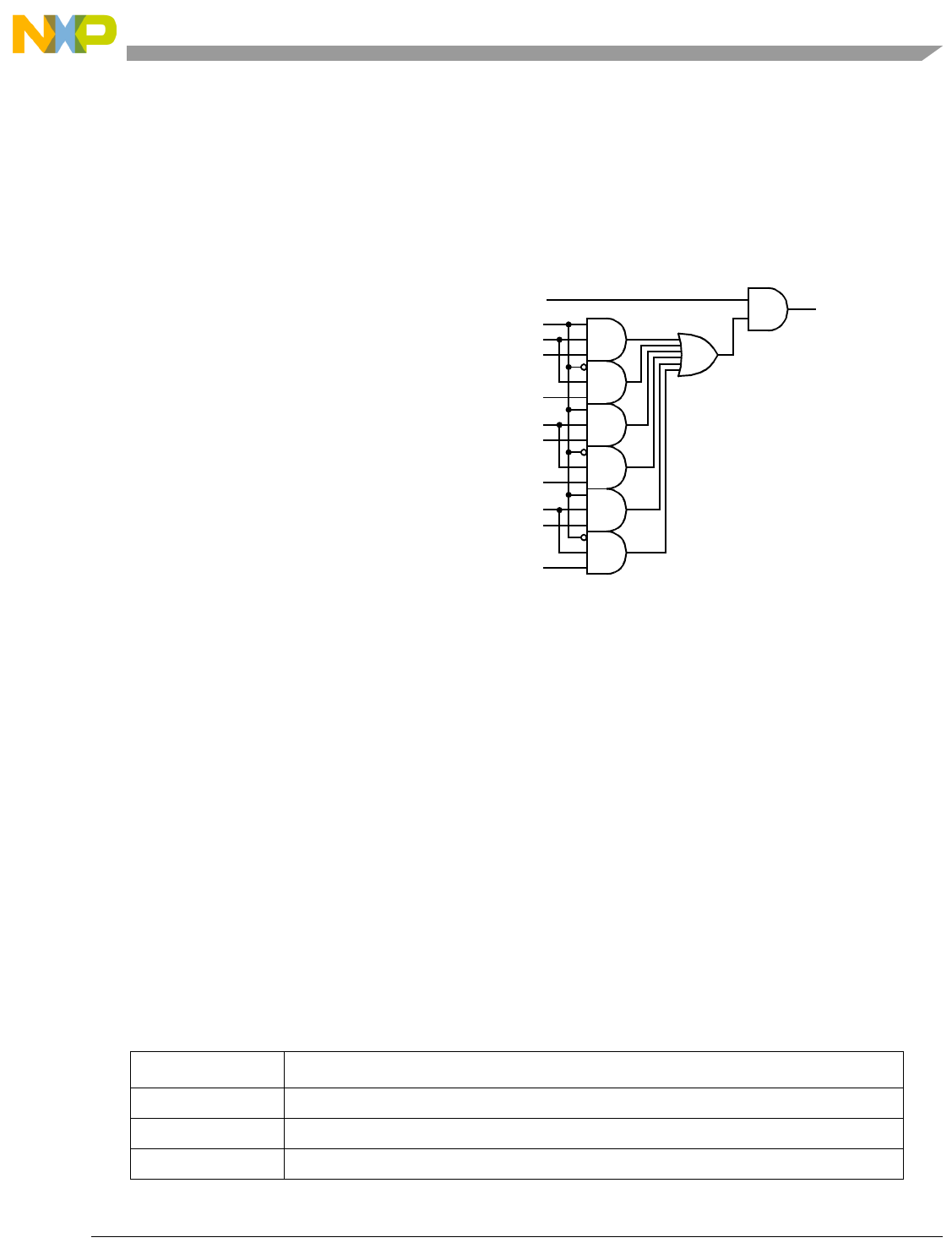
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-5
• UX—User execute permission. Allows instruction fetches to access the page and instructions to be
executed from the page while in user mode (MSR[PR=1]).
If the translation match was successful, the permission bits are checked, as shown in Figure 10-3. If the
access is not allowed by the access permission mechanism, the processor generates an instruction or data
storage interrupt (ISI or DSI). The current privilege level of an access is signaled to the MMU with the
CPU’s p_tc[0] output signal.
Figure 10-3. Granting of Access Permission
10.3 Translation Lookaside Buffer
The Freescale EIS architecture defines support for zero or more TLBs in an implementation, each with its
own characteristics, and provides configuration information for software to query the existence and
structure of the TLB(s) through a set of special purpose registers: MMUCFG, TLB0CFG, TLB1CFG, and
so on. By convention, TLB0 is used for a set associative TLB with fixed page sizes; TLB1 is used for a
fully associative TLB with variable page sizes; and TLB2 is arbitrarily defined by an implementation. The
e200z4 MMU supports a TLB that is fully associative and supports variable page sizes; thus it corresponds
to TLB1.
TLB1 consists of a 16-entry, fully associative CAM array with support for 23 page sizes. To perform a
lookup, the CAM is searched in parallel for a matching TLB entry. The contents of this TLB entry are then
concatenated with the page offset of the original effective address. The result constitutes the real (physical)
address of the access.
A hit to multiple TLB entries is considered to be a programming error. If this occurs, the TLB generates
an invalid address but an exception will not be reported.
Table 10-2. TLB Entry Bit Definitions
Field Comments
V Valid bit for entry
TS Translation address space (compared against AS bit)
TID[0–7] Translation ID (compared against PID0 or ‘0’)
access granted
instruction fetch
MSR[PR]
TLB_entry[UX]
TLB_entry[SX]
load-class data access
TLB_entry[UR]
TLB_entry[SR]
store-class data access
TLB_entry[UW]
TLB_entry[SW]
TLB match (see Figure 10-1)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-6 Freescale Semiconductor
10.4 Configuration Information
Information about the configuration for a given MMU implementation is available to system software by
reading the contents of the MMU configuration SPRs. These SPRs describe the architectural version of
the MMU, the number of TLB arrays, and the characteristics of each TLB array.
10.4.1 MMU Configuration Register (MMUCFG)
The MMU Configuration Register (MMUCFG) is a 32-bit read-only register. The SPR number for
MMUCFG is 1015 in decimal. MMUCFG provides information about the configuration of the e200z4
MMU design.
The MMUCFG register is shown in Figure 10-4.
EPN[0–21] Effective page number (compared against effective address)
RPN[0–21] Real page number (translated address)
SIZE[0–4] Page size (see Table 10- 1)
SX, SW, SR Supervisor execute, write, and read permission bits
UX, UW, UR User execute, write, and read permission bits
WIMGE Translation attributes (write-through required, cache-inhibited, memory coherence required,
guarded, endian)
U0–U3 User bits—Used only by software
IPROT Invalidation protect
VLE VLE page indicator
0
RASIZE
0
NPIDS
PIDSIZE
0
NTLBS
MAVN
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1015; Read-Only
Figure 10-4. MMU Configuration Register (MMUCFG)
Table 10-2. TLB Entry Bit Definitions
Field Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-7
The MMUCFG bits are described in Table 10-3.
10.4.2 TLB0 Configuration Register (TLB0CFG)
The TLB0 configuration register (TLB0CFG) is a 32-bit read-only register. The SPR number for
TLB0CFG is 688 in decimal. TLB0CFG provides information about the configuration of TLB0. Because
the e200z4 MMU design does not implement TLB0, this register reads as all ‘0’. It is supplied to allow
software to query it in a fashion compatible with other Freescale EIS designs.
The TLB0CFG register is shown in Figure 10-5.
Table 10-3. MMUCFG Field Descriptions
Bits Name Function
0–7
[32–39]
— Reserved1
1 These bits are not implemented and will be read as zero.
8–14
[40–46]
RASIZE Number of Bits of Real Address supported
0100000- This version of the MMU implements 32 real address bits
15–16
[47–48] — Reserved1
17–20
[49–52]
NPIDS Number of PID Registers
0001 This version of the MMU implements one PID register (PID0)
21–25
[53–57]
PIDSIZE PID Register Size
00111 PID registers contain 8 bits in this version of the MMU
26–27
[58–59]
— Reserved1
28–29
[60–61]
NTLBS Number of TLBs
01 This version of the MMU implements two TLB structures: a null TLB0 and a
fully-associative TLB for TLB1
30–31
[62–63] MAVN MMU Architecture Version Number
00 This version of the MMU implements Version 1.0 of the Freescale EIS MMU
Architecture
ASSOC
MINSIZE
MAXSIZE
IPROT
AVAIL
P2PSA
0
NENTRY
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 688; Read-Only
Figure 10-5. TLB0 Configuration Register (TLB0CFG)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-8 Freescale Semiconductor
The TLB0CFG bits are described in Table 10-4.
10.4.3 TLB1 Configuration Register (TLB1CFG)
The TLB1 configuration register (TLB1CFG) is a 32-bit read-only register. The SPR number for
TLB1CFG is 689 in decimal. TLB1CFG provides information about the configuration of TLB1 in the
e200z4 MMU.
The TLB1CFG register is shown in Figure 10-6.
Table 10-4. TLB0CFG Field Descriptions
Bits Name Function
0–7
[32–39]
ASSOC Associativity
0
8–11
[40–43]
MINSIZE Minimum Page Size
0
12–15
[44–47] MAXSIZE Maximum Page Size
0
16
[48]
IPROT Invalidate Protect Capability
0 Not present in TLB0
17
[49]
AVAIL Page Size Availability
0 No variable page sizes available
18
[50]
P2PSA Power-of-2 Page Size Availability
0 No odd powers of 2 page sizes are supported
19
[51]
— Reserved1
1 These bits are not implemented and will be read as zero.
20–31
[52–63]
NENTRY Number of Entries
0 TLB0 contains 0 entries
ASSOC
MINSIZE
MAXSIZE
IPROT
AVAIL
P2PSA
0
NENTRY
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 689; Read-Only
Figure 10-6. TLB1 Configuration Register (TLB1CFG)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-9
The TLB1CFG bits are described in Table 10-5.
10.5 Software Interface and TLB Instructions
The TLB is accessed indirectly through several MMU assist (MAS) registers. Software can write and read
the MMU assist registers with mtspr and mfspr instructions. These registers contain information related
to reading and writing a given entry within the TLB. Data is read from the TLB into the MAS registers
with a tlbre (TLB read entry) instruction. Data is written to the TLB from the MAS registers with a tlbwe
(TLB write entry) instruction.
Certain fields of the MAS registers are also written by hardware when an instruction TLB error or data
TLB error interrupt occurs.
On a TLB error interrupt, the MAS registers are written by hardware with the proper EA, default attributes
(TID, WIMGE, permissions), and TLB selection information, and an entry in the TLB to replace. Software
manages this entry selection information by updating a replacement entry value during TLB miss
handling. Software must provide the correct RPN and permission information in one of the MAS registers
before executing a tlbwe instruction.
On taking a DSI or ISI interrupt, software should update the search PID (SPID) and search address space
(SAS) fields in the MAS registers using PID0 and the appropriate MSR[IS] or MSR[DS] values that were
used when the DSI or ISI exception was recognized. During the interrupt handler, software can issue a
TLB search instruction (tlbsx), which uses the SPID field along with the SAS field to determine which
entry is related to the DSI or ISI exception. Note that by the time the search occurs, it is possible that the
Table 10-5. TLB1CFG Field Descriptions
Bits Name Function
0–7
[32–39]
ASSOC Associativity
0x10 Indicates that TLB1 associativity is 16
8–11
[40–43]
MINSIZE Minimum Page Size
0x0 Smallest page size is 1 Kbyte
12–15
[44–47] MAXSIZE Maximum Page Size
0xB Largest page size is 4 Gbytes
16
[48]
IPROT Invalidate Protect Capability
1 Invalidate Protect Capability is supported in TLB1
17
[49]
AVAIL Page Size Availability
1 All page sizes between MINSIZE and MAXSIZE are supported
18
[50]
P2PSA Power-of-2 Page Size Availability
1 All odd powers of 2 page sizes between MINSIZE and MAXSIZE are supported
(2 Kbytes, 8 Kbytes, 32 Kbytes, etc.)
19
[51]
— Reserved1
1 These bits are not implemented and will be read as zero.
20–31
[52–63] NENTRY Number of Entries
0x10 TLB1 contains 16 entries
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-10 Freescale Semiconductor
relevant entry no longer exists in the TLB if a TLB invalidate or replacement removes the entry between
the time the exception is recognized and when the tlbsx is executed.
The tlbre, tlbwe, tlbsx, tlbivax, and tlbsync instructions are privileged.
10.5.1 TLB Read Entry Instruction (tlbre)
The TLB read entry instruction causes the content of a single TLB entry to be placed in the MMU assist
registers. The entry is specified by the TLBSEL and ESEL fields of the MAS0 register. The entry contents
are placed in the MAS1, MAS2, and MAS3 registers. See Table 10-15 for details on how MAS register
fields are updated.
tlbre tlbre
tlb read entry
tlb_entry_id = MAS0(TLBSEL, ESEL)
result = MMU(tlb_entry_id)
MAS1, MAS2, MAS3 = result
10.5.2 TLB Write Entry Instruction (tlbwe)
The TLB write entry instruction causes the contents of certain fields within the MMU assist registers
MAS1, MAS2, and MAS3 to be written into a single TLB entry in the MMU. The entry written is specified
by the TLBSEL and ESEL fields of the MAS0 register.
tlbwe tlbwe
tlb write entry
tlb_entry_id = MAS0(TLBSEL, ESEL)
MMU(tlb_entry_id) = MAS1, MAS2, MAS3
31 0 1 1 1 0 1 1 0 0 1 0 0
0 5 6 2021 3031
31 0 1 1 1 1 0 1 0 0 1 0 0
0 5 6 2021 3031
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-11
10.5.3 TLB Search Instruction (tlbsx)
The TLB search instruction updates the MMU assist registers conditionally based on success or failure of
a lookup of the TLB. The lookup is controlled by an effective address provided by GPR[RB] as specified
in the instruction encoding, as well as by the SAS and SPID search fields in MAS6. The values placed into
MAS0, MAS1, MAS2, and MAS3 differ depending on a successful or unsuccessful search. See
Table 10-15 for details on how MAS register fields are updated.
tlbsx tlbsx
TLB Search Indexed
tlbsx RA,RB Form X
if RA!=0 then EA = GPR(RA) + GPR(RB)
else EA = GPR(RB)
ProcessIDs = MAS6(SPID), 8’b00000000
AS = MAS6(SAS)
VA = AS || ProcessIDs || EA
if Valid_TLB_matching_entry_exists(VA)
then result = see Table 10-15, column labelled “tlbsx hit”
else result = see Table 10-15, column labelled “tlbsx miss”
MAS0, MAS1, MAS2, MAS3 = result
10.5.4 TLB Invalidate (tlbivax) Instruction
The TLB invalidate operation is performed whenever a TLB invalidate virtual address indexed (tlbivax)
instruction is executed. This instruction invalidates TLB entries that correspond to the virtual address
calculated by this instruction. The address is detailed in Table 10-6. No other information except for that
shown in Table 10-6 is used for the invalidation (entry AS and TID values are don’t-cared).
Additional information about the targeted TLB entries is encoded in two of the lower bits of the effective
address calculated by the tlbivax instruction. Bit 28 of the tlbivax effective address is the TLBSEL field.
This bit should be set to ‘1’ to ensure TLB1 is targeted by the invalidate. Bit 29 of the tlbivax effective
address is the INV_ALL field. If this bit is set, it indicates that the invalidate operation needs to completely
invalidate all entries of TLB1 that are not marked as invalidation protected (IPROT bit of entry set to ‘1’).
The bits of EA used to perform the tlbivax invalidation of TLB1 are bits 0–21.
t
31 0 RA RB 1 1 1 0 0 1 0 0 1 0 0
0 5 6 10 11 1516 2021 3031
Table 10-6. tlbivax EA Bit Definitions
Bits Field
0–21 EA[0–21]
22–27 Reserved1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-12 Freescale Semiconductor
tlbivax tlbivax
TLB Invalidate Virtual Address Indexed
tlbivax RA,RB Form X
if RA!=0 then EA = GPR(RA) + GPR(RB)
else EA = GPR(RB)
VA = EA
if (Valid_TLB_matching_entry_exists(VA) or INV_ALL) and Entry_IPROT_not_set
then Invalidate entry
10.5.5 TLB Synchronize Instruction (tlbsync)
The TLB synchronize instruction is treated as a privileged no-op.
tlbsync tlbsync
TLB Synchronize
tlbsync
10.6 TLB Operations
This section discusses the following operations
•Section 10.6.1, “Translation Reload”
28 TLBSEL(1 = TLB1) Should be set to ‘1’
for future compatibility.
29 INV_ALL
30–31 Reserved1
1These bits should be zero for future compatibility. They
are ignored.
31 0 RA RB 1 1 0 0 0 1 0 0 1 0 0
0 5 6 10 11 1516 2021 3031
31 0 1 0 0 0 1 1 0 1 1 0 0
0 5 6 10 11 1516 2021 3031
Table 10-6. tlbivax EA Bit Definitions
Bits Field

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-13
•Section 10.6.2, “Reading the TLB”
•Section 10.6.3, “Writing the TLB”
•Section 10.6.4, “Searching the TLB”
•Section 10.6.5, “TLB Miss Exception Update”
•Section 10.6.6, “IPROT Invalidation Protection”
•Section 10.6.7, “TLB Load on Reset”
•Section 10.6.8, “The G Bit”
10.6.1 Translation Reload
The TLB reload function is performed in software with some hardware assist. This hardware assist consists
of the following:
• Five 32-bit MMU assist registers (MAS0-4,MAS6) for support of the tlbre, tlbwe, and tlbsx TLB
management instructions.
• Loading of MAS0–2 based upon defaults in MAS4 for TLB miss exceptions. This automatically
generates most of the TLB entry.
• Loading of the data exception address register (DEAR) with the effective address of the load, store,
or cache management instruction that caused an Alignment, Data TLB Miss, or Data Storage
Interrupt.
• The tlbwe instruction. When tlbwe is executed, the new TLB entry contained in MAS0–MAS2 is
written into the TLB.
10.6.2 Reading the TLB
The TLB array can be read by first writing the necessary information into MAS0 using mtspr and then
executing the tlbre instruction. To read an entry from the TLB, the TLBSEL field in MAS0 must be set to
‘01’ and the ESEL bits in MAS0 must be set to point to the desired entry. After executing the tlbre
instruction, MAS1–MAS3 must be updated with the data from the selected TLB entry.
10.6.3 Writing the TLB
The TLB1 array can be written by first writing the necessary information into MAS0–MAS3 using mtspr
and then executing the tlbwe instruction. To write an entry into the TLB, the TLBSEL field in MAS0 must
be set to ‘01’ and the ESEL bits in MAS0 must be set to point to the desired entry. When the tlbwe
instruction is executed, the TLB entry information stored in MAS1–MAS3 will be written into the selected
TLB entry.
10.6.4 Searching the TLB
The TLB can be searched using the tlbsx instruction by first writing the necessary information into MAS6.
The tlbsx instruction searches using EPN[0–21] from the GPR selected by the instruction, SAS (search
AS bit) in MAS6, and SPID in MAS6. If the search is successful, the given TLB entry information is
loaded into MAS0–MAS3. The valid bit in MAS1 is used as the success flag. If the search is successful,
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-14 Freescale Semiconductor
the valid bit in MAS1 is set; if unsuccessful, it is cleared. The tlbsx instruction is useful for finding the
TLB entry that caused a DSI or ISI exception.
10.6.5 TLB Miss Exception Update
When a TLB miss exception occurs, MAS0–MAS3 are updated with the defaults specified in MAS4 and
the AS and EPN[0–21] of the access that caused the exception. In addition, the ESEL bits are updated with
the replacement entry value.
This sets up all the TLB entry data necessary for a TLB write except for the RPN[0–21], the U0–U3 user
bits, and the UX/SX/UW/SW/UR/SR permission bits, all of which are stored in MAS3. Thus, if the
defaults stored in MAS4 are applicable to the TLB entry to be loaded, the TLB miss exception handler
only has to update MAS3 by mtspr before executing tlbwe. If the defaults are not applicable to the TLB
entry being loaded, the TLB miss exception handler has to update MAS0–MAS2 before performing the
TLB write.
10.6.6 IPROT Invalidation Protection
The IPROT bit is used to protect TLB entries from invalidation. TLB entries with IPROT set are not
invalidated by a tlbivax instruction (even when INV_ALL is indicated), nor by the MMUCSR0[TLB1_FI]
control function. The IPROT bit is used to protect interrupt vectors/handlers, since the instruction fetch of
those vectors must be guaranteed to never take a TLB miss exception.
10.6.7 TLB Load on Reset
During reset, all TLB entries except entry 0 are invalidated. TLB entry 0 is loaded with the values in the
following table:
Table 10-7. TLB Entry 0 Values After Reset
Field Reset Value Comments
VALID 1 Entry is valid
TS 0 Address space 0
TID[0–7] 0x00 TID value for shared (global) page
EPN[0–21] value of
p_rstbase[0:21]
Page address present on p_rstbase[0:29].
See Section 13.3.2.5, “Reset Base (p_rstbase[0:29])”
RPN[0–21] value of
p_rstbase[0:21]
Page address present on p_rstbase[0:29].
See Section 13.3.2.5, “Reset Base (p_rstbase[0:29])”
SIZE[0–4] 00010 4 Kbyte page size
SX/SW/SR 111 Full supervisor-mode access allowed
UX/UW/UR 111 Full user-mode access allowed
WIMG 0100 Cache inhibited, non-coherent
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-15
10.6.8 The G Bit
The G bit provides protection from bus accesses that can be cancelled due to an exception on a prior
uncompleted instruction.
If G = 1 (guarded), these types of accesses must stall until the exception status of the instruction(s) in
progress is known. If G = 0 (unguarded), then these accesses may be issued to the bus regardless of the
completion status of other instructions. Because the e200z4 does not make requests to the bus for load or
store instructions until it is known that prior instructions will complete without exceptions, proper
operation will always occur to guarded storage.
10.7 MMU Control Registers
This section discusses the following registers:
•Section 10.7.1, “DEAR Register”
•Section 10.7.2, “MMU Control and Status Register 0 (MMUCSR0)”
•Section 10.7.3, “MMU Assist Registers (MAS)”
•Section 10.7.4, “MAS Registers Summary”
•Section 10.7.5, “MAS Register Updates”
10.7.1 DEAR Register
The data exception address register (DEAR) is loaded with the effective address of the data access that
results in an alignment, data TLB miss, or DSI exception. The DEAR can be read or written using the
mfspr and mtspr instructions.
The DEAR register is shown in Figure 10-7.
E value of
p_rst_endmode
Value present on
p_rst_endmode
.
See Section 13.3.2.6, “Reset Endian Mode
(p_rst_endmode)”
U0–U3 0000 User bits
IPROT 1 Page is protected from invalidation
VLE the value of
p_rst_vlemode
Value present on
p_rst_vlemode
. See Section 13.3.2.7,
“Reset VLE Mode (p_rst_vlemode).”
Effective Page Address
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 61; Read/ Write; Reset - Unaffected
Figure 10-7. DEAR
Table 10-7. TLB Entry 0 Values After Reset (Continued)
Field Reset Value Comments
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-16 Freescale Semiconductor
10.7.2 MMU Control and Status Register 0 (MMUCSR0)
The MMU control and status register 0 (MMUCSR0) is a 32-bit register. The SPR number for MMUCSR0
is 1012 in decimal. MMUCSR0 controls the state of the MMU. The MMUCSR0 register is shown in
Figure 10-8.
The MMUCSR0 bits are described in Table 10-8.
10.7.3 MMU Assist Registers (MAS)
The e200z4 uses six special purpose registers (MAS0, MAS1, MAS2, MAS3, MAS4, and MAS6) to
facilitate reading, writing, and searching the TLBs. The MAS registers can be read or written using the
mfspr and mtspr instructions. The e200z4 does not implement the MAS5 register, present in other
Freescale EIS designs, because the tlbsx instruction only searches based on a single SPID value.
The MAS0 register is shown in Figure 10-9.
0
TLB1_FI
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 1012; Read/ Write; Reset - 0x0
Figure 10-8. MMU Control and Status Register 0 (MMUCSR0)
Table 10-8. MMUCSR0 - MMU Control and Status Register 0
Bits Name Description
0–29
[32–61]
— Reserved1
1 These bits are not implemented; they are read as zero, and writes are ignored.
30
[62]
TLB1_FI TLB1 flash invalidate
0 No flash invalidate
1 TLB1 invalidation operation
When written to a ‘1’, a TLB1 invalidation operation is initiated by hardware. Once
complete, this bit is reset to ‘0’. Writing a ‘1’ while an invalidation operation is in progress
results in an undefined operation. Writing a ‘0’ to this bit while an invalidation operation
is in progress will be ignored. TLB1 invalidation operations require 3 cycles to complete.
31
[63]
— Reserved1
0
TLBSEL (01)
0
ESEL
0
NV
Figure 10-9. MMU Assist Register 0 (MAS0)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-17
The MAS0 fields are defined in Table 10-9.
The MAS1 register is shown in Figure 10-10.
The MAS1 fields are defined in Table 10-10.
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 624; Read/ Write; Reset - Unaffected
Table 10-9. MAS0 —MMU Read/Write and Replacement Control
Bit Name Comments, or Function when Set
0–1
[32–33] — Reserved1
1 These bits are not implemented; they are read as zero, and writes are ignored.
2–3
[34–35]
TLBSEL Selects TLB for access: 00 = TLB0, 01 = TLB
(Ignored by the e200, should be written to 01 for future compatibility)
4–11
[36–43]
— Reserved1
12–15
[44–47]
ESEL Entry select for TLB.
16–27
[48–59]
— Reserved1
28–31
[60–63]
NV Next replacement victim for TLB1 (software managed) Software updates
this field; it is copied to the ESEL field on a TLB Error (see Table 10-15).
VALID
IPROT
0
TID
0
TS
TSIZ
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 625; Read/ Write; Reset - Unaffected
Figure 10-10. MMU Assist Register 1 (MAS1)
Table 10-10. MAS1—Descriptor Context and Configuration Control
Bit Name Comments, or Function when Set
0
[32]
VALID TLB Entry Valid
0 This TLB entry is invalid
1 This TLB entry is valid
1
[33]
IPROT Invalidation Protect
0 Entry is not protected from invalidation
1 Entry is protected from invalidation as described in Section 10.6.6,
“IPROT Invalidation Protection.”
Protects TLB entry from invalidation by tlbivax (TLB1 only), or flash
invalidates through MMUSCR0[TLB1_FI].
Figure 10-9. MMU Assist Register 0 (MAS0)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-18 Freescale Semiconductor
2–7
[34–39] — Reserved1
8–15
[40–47]
TID Translation ID bits
This field is compared with the current process IDs of the effective
address to be translated. A TID value of 0 defines an entry as global and
matches with all process IDs.
16–18
[48–50]
— Reserved1
19
[51]
TS Translation address space
This bit is compared with the IS or DS fields of the MSR (depending on
the type of access) to determine if this TLB entry may be used for
translation.
20–24
[52–56]
TSIZE Entry’s page size
Supported page sizes are:
0b00000 1 Kbyte
0b00001 2 Kbytes
0b00010 4 Kbytes
0b00011 8 Kbytes
0b00100 16 Kbytes
0b00101 32 Kbytes
0b00110 64 Kbytes
0b00111 128 Kbytes
0b01000 256 Kbytes
0b01001 512 Kbytes
0b01010 1 Mbyte
0b01011 2 Mbytes
0b01100 4 Mbytes
0b01101 8 Mbytes
0b01110 16 Mbytes
0b01111 32 Mbytes
0b10000 64 Mbytes
0b10001 128 Mbytes
0b10010 256 Mbytes
0b10011 512 Mbytes
0b10100 1 Gbyte
0b10101 2 Gbytes
0b10110 4 Gbytes
All other values are undefined
25–31
[57–63]
— Reserved1
1 These bits are not implemented; they are read as zero, and writes are ignored.
Table 10-10. MAS1—Descriptor Context and Configuration Control (Continued)
Bit Name Comments, or Function when Set
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-19
The MAS2 register is shown in Figure 10-11.
The MAS2 fields are defined in Table 10-11.
EPN
0
V
L
E
WIMGE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 626; Read/ Write; Reset - Unaffected
Figure 10-11. MMU Assist Register 2 (MAS2)
Table 10-11. MAS2—EPN and Page Attributes
Bit Name Comments, or Function when Set
0–21
[32–53]
EPN Effective page number [0–21]
22–25
[54–57]
— Reserved1
1 These bits are not implemented; they are read as zero, and writes are ignored.
26
[58]
VLE Power ISA VLE
0 This page is a standard Power ISA page
1 This page is a Power ISA VLE page
This bit will always read as zero and writes will be ignored if
p_vle_present
is negated.
27
[59]
W Write Through Required
0 This page is considered write-back with respect to the caches in the
system
1 All stores performed to this page are written through to main memory
28
[60]
I Cache Inhibited
0 This page is considered cacheable
1 This page is considered cache-inhibited
29
[61]
M Memory Coherence Required
0 Memory Coherence is not required
1 Memory Coherence is required
30
[62]
G Guarded
0 Access to this page are not guarded, and can be performed before it
is known if they are required by the sequential execution model
1 All loads and stores to this page are performed without speculation
(that is, they are known to be required)
The e200z4 uses the guarded attribute as described in Section 9.13,
“Page Table Control Bits” for more information.
31
[63]
E Endianness
0 The page is accessed in big-endian byte order.
1 The page is accessed in true little-endian byte order.
Determines endianness for the corresponding page. Refer to
Section 12.2.4, “Byte Lane Specification,” for more information
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-20 Freescale Semiconductor
The MAS3 register is shown in Figure 10-12.
The MAS3 fields are defined in Table 10-12.
The MAS4 register is shown in Figure 10-13.
The MAS4 fields are defined in Table 10-13.
RPN U
0
U
1
U
2
U
3
U
X
S
X
U
W
S
W
U
R
S
R
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 627; Read/ Write; Reset - Unaffected
Figure 10-12. MMU Assist Register 3 (MAS3)
Table 10-12. MAS3—RPN and Access Control
Bit Name Comments, or Function when Set
0–21
[32–53] RPN Real page number [0–21]
Only bits that correspond to a page number are valid. Bits that represent
offsets within a page are ignored and should be zero.
22–25
[54–57]
U0–U3 User bits [0–3] for use by system software
26–31
[58–63]
PERMIS Permission bits (UX, SX, UW, SW, UR, SR)
0
TLBSELD (01)
0
TIDSELD
0
TSIZED
0
VLED
WD
ID
MD
GD
ED
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 628; Read/ Write; Reset - Unaffected
Figure 10-13. MMU Assist Register 4 (MAS4)
Table 10-13. MAS4—Hardware Replacement Assist Configuration Register
Bit Name Comments, or Function when Set
0–1
[32–33]
— Reserved1
2–3
[34–35]
TLBSELD Default TLB selected
00 TLB0
01 TLB1
4–13
[36–45]
— Reserved1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-21
The MAS6 register is shown in Figure 10-14.
The MAS6 fields are defined in Table 10-14.
14–15
[46–47] TIDSELD Default PID# to load TID from
00 PID0
01 Reserved, do not use
10 Reserved, do not use
11 TIDZ (8’h00)) (Use all zeros, the globally shared value)
16–19
[48–51]
— Reserved1
20–24
[52–56]
TSIZED Default TSIZE value
25
[57] — Reserved1
26
[58]
VLED Default VLE value
27–31
[59–63]
DWIMGE Default WIMGE values
1 These bits are not implemented; they are read as zero, and writes are ignored.
0 SPID 0
SAS
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 630; Read/ Write; Reset - Unaffected
Figure 10-14. MMU Assist Register 6 (MAS6)
Table 10-14. MAS6—TLB Search Context Register 0
Bit Name Comments, or Function when Set
0–7
[32–39]
— Reserved1
1 These bits are not implemented; they are read as zero, and writes are ignored.
8–15
[40–47]
SPID PID value for searches
16–30
[48–62]
— Reserved1
31
[63]
SAS AS value for searches
Table 10-13. MAS4—Hardware Replacement Assist Configuration Register (Continued)
Bit Name Comments, or Function when Set
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-22 Freescale Semiconductor
10.7.4 MAS Registers Summary
The MAS registers are summarized in Figure 10-15.
10.7.5 MAS Register Updates
Table 10-15 details the updates to each MAS register field for each update type.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
M
A
S
0
0
TLBSEL (01)
0
ESEL
0
NV
M
A
S
1
V
A
L
I
D
I
P
R
O
T
0TID0T
S TSIZ 0
M
A
S
2
EPN 0 V
L
E
WIMGE
M
A
S
3
RPN U
0
U
1
U
2
U
3
U
X
S
X
U
W
S
W
U
R
S
R
M
A
S
4
0 T
L
B
S
E
L
D
0T
I
D
S
E
L
D
0TSIZED0V
L
E
D
W
D
I
D
M
D
G
D
E
D
M
A
S
6
0 SPID 0 S
A
S
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Figure 10-15. MMU Assist Registers Summary
Table 10-15. MMU Assist Register Field Updates
Bit/Field MAS
affected Instr/Data TLB
Error tlbsx hit tlbsx miss tlbre tlbwe ISI/DSI
TLBSEL 0 TLBSELD ‘Hitting TLB’ TLBSELD NC NC NC
ESEL 0 NV matched entry NV NC NC NC
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-23
10.8 TLB Coherency Control
The e200 core provides the ability to invalidate a TLB entry as described in the Power ISA embedded
category architecture. The tlbivax instruction invalidates local TLB entries only. No broadcast is
performed as no hardware-based coherency support is provided.
The tlbivax instruction invalidates by effective address only. This means that only the TLB entry’s EPN
bits are used to determine if the TLB entry should be invalidated. It is therefore possible for a single
tlbivax instruction to invalidate multiple TLB entries because the AS and TID fields of the entries are
ignored.
10.9 Core Interface Operation for MMU Control Instructions
MMU control instructions utilize the normal CPU interface to perform MMU control instructions. The
address bus is driven with the effective address value calculated by the instruction (if any), the access is
treated as a supervisor data word-size write, and the transfer type encodings are used to distinguish these
NV 0 NC NC NC NC NC NC
VALID 1 1 1 0 V(array) NC NC
IPROT 1 0 Matched IPROT
if TLB1 hit, else
0
0 IPROT(array) if
TBL1, else 0
NC NC
TID[0:7] 1 TIDSELD
(pid0,TIDZ)
TID(array) SPID TID(array) NC NC
TS 1 MSR(IS/DS) SAS SAS TS(array) NC NC
TSIZE[0:4] 1 TSIZED TSIZE(array) TSIZED TSIZE(array) NC NC
EPN[0:21] 2 I/D EPN EPN(array) tlbsx EPN EPN(Array) NC NC
VWIMGE 2 Default values VWIMGE(array) Default values VWIMGE(array) NC NC
RPN[0:21] 3 Zeroed RPN(Array) Zeroed RPN(Array) NC NC
ACCESS
(PERMISS +
U0:U3)
3 Zeroed Access(Array) Zeroed Access(Array) NC NC
TLBSELD 4 NC NC NC NC NC NC
TIDSELD[0:1] 4 NC NC NC NC NC NC
TSIZED[0:4] 4 NC NC NC NC NC NC
Default
VWIMGE
4NC NC NC NC NCNC
SPID 6 PID0 NC NC NC NC NC
SAS 6 MSR(IS/DS) NC NC NC NC NC
Table 10-15. MMU Assist Register Field Updates (Continued)
Bit/Field MAS
affected Instr/Data TLB
Error tlbsx hit tlbsx miss tlbre tlbwe ISI/DSI
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-24 Freescale Semiconductor
operations from other load and store operations. These transfers do not cause debug data address compare
matches to occur regardless of the effective address that is driven.
10.9.1 Transfer Type Encodings for MMU Control Instructions
Transfer type encodings are used to indicate whether a normal access, atomic access, cache management
control access, or MMU management control access is being requested. These attribute signals are driven
with addresses when an access is requested. Table 10-16 shows the definitions of the p_d_ttype[0:4]
encodings.
10.10 Effect of Hardware Debug on MMU Operation
Hardware debug facilities utilize normal CPU instructions to access register and memory contents during
a debug session. If desired during a debug session, the debug firmware may disable the translation process
Table 10-16. Transfer Type Encoding
p_d_ttype[0:4] Transfer Type Instruction
00000 Normal Normal loads/stores
00001 Atomic lbarx, lharx, lwarx, stbcx., sthcx., and
stwcx.
00010 Reserved for Flush Data Block Reserved for dcbst
00011 Reserved for Flush and Invalidate Data
Block
Reserved for dcbf
00100 Reserved for Allocate and Zero Data Block Reserved for dcbz
00101 Reserved for Invalidate Data Block Reserved for dcbi
00110 Invalidate Instruction Block icbi
00111 multiple word load/store lmw, stmw
01000 TLB Invalidate tlbivax
01001 TLB Search tlbsx
01010 TLB Read entry tlbre
01011 TLB Write entry tlbwe
01100 Touch for Instruction icbt
01101 Lock Clear for Instruction icblc
01110 Touch for Instruction and Lock Set icbtls
01111 Reserved for Lock Clear for Data Reserved for dcblc
10000 Reserved for Touch for Data Reserved for dcbt
10001 Reserved for Touch for Data Store Reserved for dcbtst
10010 Reserved for Touch for Data and Lock Set Reserved for dcbtls
10011 Reserved for Touch for Data Store and Lock
Set
Reserved for dcbtstls

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 10-25
and substitute default values for the access protection (UX, UR, UW, SX, SR, SW) bits as well as the
values obtained from the OnCE control register for page attribute (VLE, W, I, M, G, E) bits that are
normally provided by a matching TLB entry. In addition, no address translation is performed. Instead, a
1:1 mapping of effective to real addresses is performed.
When disabled during the debug session, no TLB miss or TLB access protection related DSI conditions
will occur. If the debugger desires to use the normal translation process, the MMU may be left enabled in
the OnCE OCR, and normal translation (including the possibility of a TLB Miss or DSI) will remain in
effect. Refer to Section 11.4.6.3, “e200 OnCE Control Register (OCR) for more detail on controlling
MMU operation during debug sessions.
10.11 External Translation Alterations for Real-time Systems
In order to support real-time systems in which dynamic mapping of calibration or other data types is
needed, the MMU provides special capabilities on a subset of TLB entries. These capabilities allow
external hardware to dynamically select one of multiple mappings to one or more physical pages by the
same logical address. This capability provides an inexpensive way of dynamically overlaying selected
RAM pages on top of read-only memory during runtime. The particular physical page to which a given
logical page maps can be dynamically altered by means of the p_extpid[6:7] inputs. This capability is
provided for TLB1 entries 0–15 for a restricted subset of PID values.
Enabling of the dynamic mapping capability is controlled by the p_extpid_en control input. This input is
sampled with the rising edge of the clock, and when asserted, allows for use of the dynamic remapping
capability.
When one or more of TLB1 entries 0–15 is programmed with a TID value of 8‘b1111xxxx, special
entry-specific logic is enabled for the entry. This logic causes the sampled values of the p_extpid[6:7]
inputs to be used in place of PID0[6–7] for the purposes of comparison of this entry with the current PID0
register contents to determine an entry hit condition.
In addition, for those TLB entries 0–15 that are programmed with a TID value of 8‘b1111xx11, the
comparison of TID[6–7] to PID0[6–7] for a match is always forced true. This means that the hit condition
for these entries is independent of the sampled values of the p_extpid[6:7] inputs.
TLB entries 0–15 that are programmed with a TID value of 8‘b1111nm00 match a PID0 value of
8‘b1111nmxx when p_extpid[6:7] inputs are 00. Those programmed with a TID value of 8‘b1111nm01
match a PID0 value of 8‘b1111nmxx when p_extpid[6:7] inputs are 01, and those programmed with a TID
value of 8‘b1111nm10 will match a PID0 value of 8‘b1111nmxx when p_extpid[6:7] inputs are 10. TLB
entries 0–15 programmed with a TID value of 8‘b1111nm11 match a PID0 value of 8‘b1111nmxx
regardless of the sampled values of the p_extpid[6:7] inputs.
This logic allows application software of this type to set up to three independent mappings for a set of
calibration pages, and for external hardware to select between one of the three based on the driven values
of the p_extpid[6:7] inputs. The other pages are mapped with a common set of entries with stored TID
values of 1111xx11, which will match for all sets of calibration page selections. This specialized software
must use PID values in the range of 111100xx to 111111xx.
Software is responsible for coordinating the modification to the p_extpid[6:7] inputs to ensure they only
change when there is no possibility of an error induced by simultaneous use.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
10-26 Freescale Semiconductor
Figure 10-16 shows the equivalent logical operation of the capability.
Figure 10-16. External Translation Alteration TLB Entry Compare Process
TLB entry Hit
=0?
private page
shared page
=?
=?
TLB_entry[V]
TLB_entry[TS]
AS (from MSR[IS] or MSR[DS])
Process ID[0:5]
TLB_entry[TID]
TLB_entry[EPN]
EA page number bits
0
1
modified_PID[6:7]
TLB_entry
p_extpid6:7
TLB_entry[TID6:7]
mask_TID6:7_cmp
TLB_entry[TID0:7] =?
force compare true
for PID/TID 6:7
[TID0:3]
p_extpid_en
Process ID[6:7]

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-1
Chapter 11
Debug Support
This chapter describes the debug features of the e200z446n3 core.
11.1 Overview
Internal debug support in the e200z446n3 core allows for software and hardware debug by providing
debug functions, such as instruction and data breakpoints and program trace modes. A set of software
accessible debug registers and interrupt mechanisms are provided for software based debugging. These
facilities are also available to a hardware based debugger that communicates using a modified
IEEE 1149.1™ test access port (TAP) controller and pin interface. When hardware debug is enabled, the
debug facilities controlled by hardware are protected from software modification.
Software debug facilities are defined as part of the Power ISA. The e200z446n3 supports a subset of these
defined facilities. In addition to the facilities defined in the Power ISA, the core provides additional
flexibility and functionality in the form of debug event counters, linked instruction and data breakpoints,
and sequential debug event detection. These features are also available to a hardware-based debugger.
The core also provides support for run-time integrity checking by a parallel signature unit, which is capable
of monitoring the CPU data read and data write AHB buses, and accumulating a pair of 32-bit MISR
signatures of the data values transferred over these buses.
11.1.1 Software Debug Facilities
The e200z446n3 provides debug facilities to enable hardware and software debug functions, such as
instruction and data breakpoints and program single stepping. The debug facilities consist of a set of debug
control registers (DBCR0–6, DBERC0), a set of address compare registers (IAC1–8, DAC1, and DAC2),
a set of data value compare registers (DVC1, DVC2), a configurable debug counter, a debug status register
(DBSR) for enabling and recording various kinds of debug events, and a special debug interrupt type built
into the interrupt mechanism (see Section 5.7.16, “Debug Interrupt (IVOR15)”). The debug facilities also
provide a mechanism for software-controlled processor reset and for controlling the operation of the timers
in a debug environment.
Software debug facilities are enabled by setting the internal debug mode bit in debug control register 0
(DBCR0[IDM]). When internal debug mode is enabled, debug events can occur, and can be enabled to
record exceptions in the debug status register (DBSR). If enabled by MSR[DE], these recorded exceptions
cause debug interrupts to occur. When DBCR0[IDM] is cleared (and DBCR0[EDM] is cleared as well),
no debug events occur, and no status flags are set in DBSR unless already set. In addition, when
DBCR0[IDM] is cleared (or is overridden by DBCR0[EDM] being set and DBERC0 indicating no
resource is “owned” by software) no debug interrupts occur, regardless of the contents of DBSR. A

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-2 Freescale Semiconductor
software debug interrupt handler may access all system resources and perform necessary functions
appropriate for system debug.
11.1.1.1 Power ISA Embedded Category Compatibility
The e200z446n3 core implements a subset of the the Power ISA embedded category internal debug
features. The following restrictions on functionality are present:
• Instruction address compares do not support compare on physical (real) addresses.
• Data address compares do not support compare on physical (real) addresses.
11.1.2 Additional Debug Facilities
In addition to the debug category defined in the Power ISA, the e200z446n3 provides the capability to link
instruction and data breakpoints, a configurable debug event counter to allow debug exception generation
capability, and a sequential breakpoint control mechanism.
The core also defines two new debug events (CIRPT, CRET) for debugging around critical interrupts.
In addition, the e200z446n3 implements the debug instruction set. When enabled, this allows debug
interrupts to utilize a dedicated set of save/restore registers (DSRR0, DSRR1) for saving state information
when a debug interrupt occurs and for restoring this state information at the end of a debug interrupt
handler by means of the rfdi or se_rfdi instruction.
The e200 also provides the capability for sharing resources between hardware and software debuggers. See
Section 11.1.4, “Sharing Debug Resources by Software/Hardware.”
11.1.3 Hardware Debug Facilities
The e200z446n3 core contains facilities that allow for external test and debugging. A modified
IEEE 1149.1 control interface is used to communicate with the core resources. This interface is
implemented through a standard IEEE 1149.1 TAP (test access port) controller.
By using public instructions, the external debugger can freeze or halt the core, read and write internal state
and debug facilities, single-step instructions, and resume normal execution.
Hardware debug is enabled by setting the external debug mode enable bit in debug control register 0
(DBCR0[EDM]), which is also aliased to EDBCR0[EDM]. Setting DBCR0[EDM] overrides the internal
debug mode enable bit DBCR0[IDM] unless resources are provided back to software by the settings in
DBERC0. When the hardware debug facility is enabled, software is blocked from modifying the
“hardware-owned” debug facilities. In addition, since resources are “owned” by the hardware debugger,
inconsistent values may be present if software attempts to read “hardware-owned” debug-related
resources.
When hardware debug is enabled by setting [E]DBCR0[EDM] = 1, the control registers and resources
described in Section 11.3, “Debug Registers,” are reserved for use by the external debugger. The same
events described in Section 11.2, “Software Debug Events and Exceptions,” are also used for external
debugging, but exceptions are not generated to running software. Hardware-owned debug events enabled
in the respective DBCR0–6 registers are recorded in the EDBSR0 register (not the DBSR) regardless of

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-3
MSR[DE], and no debug interrupts are generated unless the resource is granted back to software by
DBERC0 settings. Instead, the CPU enters debug mode when an enabled event causes a EDBSR0 bit to
become set. DBCR0[EDM], EDBSR0, and DBERC0 may only be written through the OnCE port.
Access to most debug resources (registers) requires that the CPU clock (m_clk) be running in order to
perform write accesses from the external hardware debugger.
11.1.4 Sharing Debug Resources by Software/Hardware
Debug resources may be shared by a hardware debugger and software debug based on the settings of debug
control register DBERC0. When DBCR0[EDM] is set, DBERC0 settings determine which debug
resources are allocated to software and which resources remain under exclusive hardware control.
Software-owned resources that set DBSR bits when DBCR0[IDM] = 1 cause a debug interrupt to occur
when enabled with MSR[DE]. Hardware-owned resources that set EDBSR0 bits when
[E]DBCR0[EDM] = 1 cause an entry into debug mode. DBERC0 is read-only by software. When resource
sharing is enabled (DBCR0[EDM] = 1 and DBERC0[IDM] = 1), only software-owned resources may be
modified by software. Hardware always has full access to all registers and all register fields through the
OnCE register access mechanism. It is up to the debug firmware to properly implement modifications to
these registers with read-modify-write operations to implement any control sharing with software.
Hardware-owned resources set status bits in the EDBSR0 register instead of in DBSR. Settings in
DBERC0 should be considered by the debug firmware in order to preserve software settings of control and
status registers as appropriate when hardware modifications to the debug registers is performed.
11.1.4.1 Simultaneous Hardware and Software Debug Event Handing
Since it is possible for a hardware-owned resource to produce a debug event at the same time as a
software-owned resource produces a different debug event, a priority ordering mechanism is implemented
to guarantee that the hardware event is handled as soon as possible while recognition of the software event
is preserved. Initially, the CPU gives the highest priority to the software event in order to reach a
recoverable boundary. It then gives highest priority to the hardware event in order to enter debug mode as
near as possible to the point of event occurrence. This is implemented by allowing software exception
handling to begin internal to the CPU and to reach the point where the current program counter and MSR
values have been saved into DSRR0/1, and the new PC pointing to the debug interrupt handler, along with
the new MSR updates. At this point, hardware priority takes over, and the CPU enters debug mode.
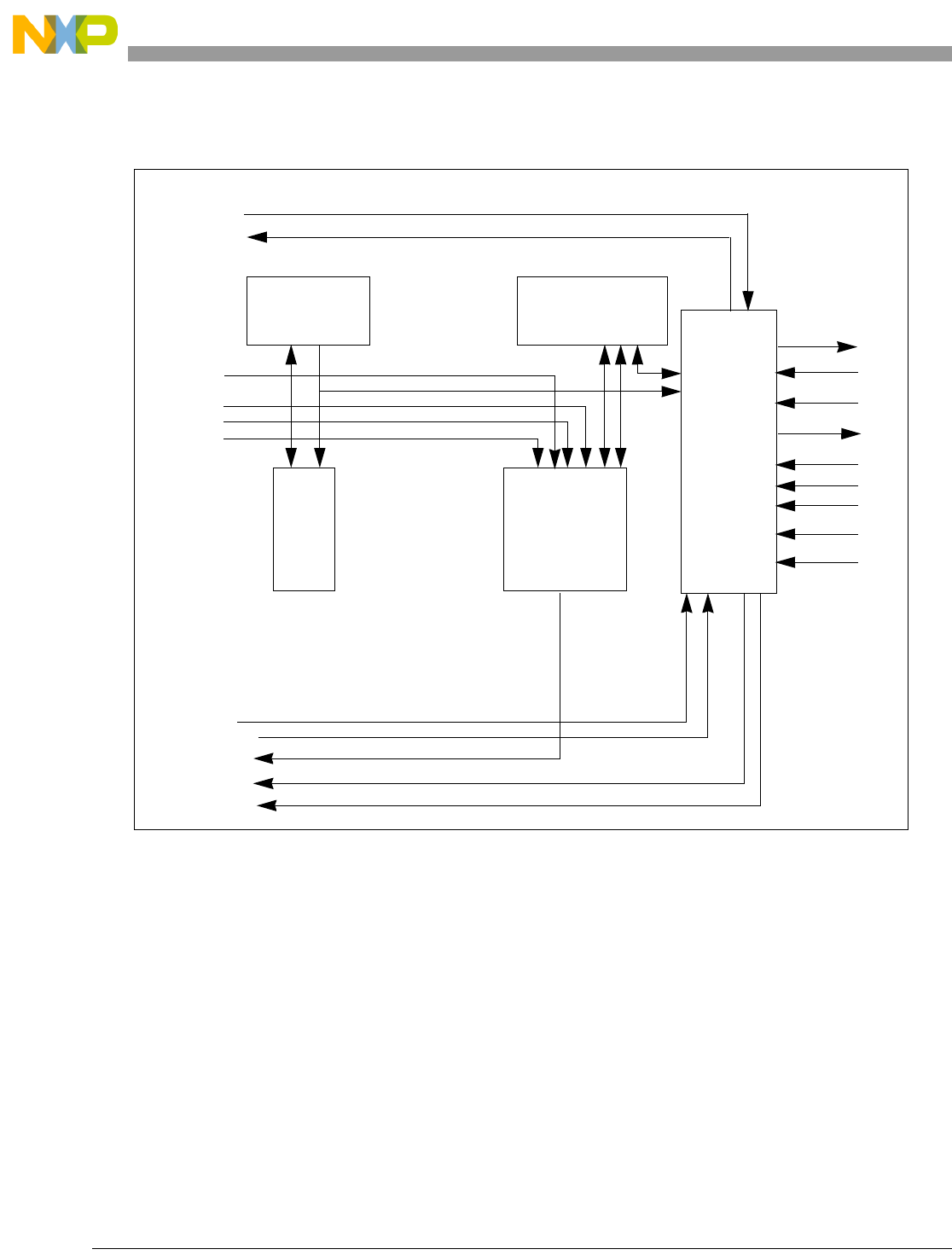
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-4 Freescale Semiconductor
Figure 11-1 shows the e200z446n3 debug resources.
Figure 11-1. Debug Resources
11.2 Software Debug Events and Exceptions
Software debug events and exceptions are available when internal debug mode is enabled
(DBCR0[IDM] = 1) and not overridden by external debug mode. DBCR0[EDM] must either be cleared or
corresponding resources must be allocated to software debug by the settings in DBERC0. When enabled,
debug events cause debug exceptions to be recorded in the debug status register. Specific event types are
enabled by the debug control registers (DBCR0–6). The unconditional debug event (UDE) is an exception
to this rule; it is always enabled. Once a debug status register (DBSR) bit is set by a debug resource that
is owned by software (other than MRR and CNT1TRG), a debug interrupt is generated if debug interrupts
are enabled by MSR[DE]. The debug interrupt handler is responsible for ensuring that multiple repeated
debug interrupts do not occur by clearing the DBSR as appropriate.
PSTAT#
ATTR#
ADDR# ..
.
j_tdo, j_tdo_en
j_tdi
j_tclk
Breakpoint and
Trace Logic
OnCE
Controller
and
Serial
Interface
Debug
Registers
and
Comparators
PC
FIFO
Pipeline
Information
j_tms
dbg_dbgrq
cpu_dbgack
jd_watchpt[0:n]
#-internal signals
to/from CPU only
p_devt[1,2]
j_trst_b
jd_de_en
jd_debug_b
DATA#
jd_en_once
jd_de_b
jd_mclk_on
p_ude

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-5
Certain debug events are not allowed to occur when MSR[DE] = 0 and DBCR0[IDM] = 1. In such
situations, no debug exception occurs and thus no DBSR bit is set. Other debug events may cause debug
exceptions and set DBSR bits regardless of the state of MSR[DE]. A debug interrupt will be delayed until
MSR[DE] is later set to ‘1’.
When a debug status register bit is set while MSR[DE] = 0, an imprecise debug event flag (DBSR[IDE])
is also set to indicate that an exception bit in the debug status register was set while debug interrupts were
disabled. Debug interrupt handler software can use this bit to determine whether the address recorded in
debug save/restore register 0 is an address associated with the instruction causing the debug exception or
the address of the instruction that enabled a delayed debug interrupt by setting the MSR[DE] bit. An
mtmsr or mtdbcr0 that causes both MSR[DE] and DBCR0[IDM] to become set, enabling precise debug
mode, may cause an imprecise (delayed) debug exception to be generated due to an earlier recorded event
in the debug status register.
There are eight types of debug events defined by the Power ISA:
• Instruction Address Compare debug events
• Data Address Compare debug events
• Trap debug events
• Branch Taken debug events
• Instruction Complete debug events
• Interrupt Taken debug events
• Return debug events
• Unconditional debug events
These events are described in detail in the EREF.
In addition, e200z446n3 defines additional debug events:
• The debug counter debug events DCNT1 and DCNT2, which are described in Section 11.2.11,
“Debug Counter Debug Event.”
• The external debug events DEVT1 and DEVT2, which are described in Section 11.2.12, “External
Debug Event.”
• The critical interrupt taken debug event CIRPT, which is described in Section 11.2.8, “Critical
Interrupt Taken Debug Event.”
• The critical return debug event CRET, which is described in Section 11.2.10, “Critical Return
Debug Event.”
The e200z446n3 debug configuration supports most of these event types. However, instruction address
compare and data address compare real address mode is not supported.
A brief description of each of the event types follows. In these descriptions, DSRR0 and DSRR1 are used,
assuming that the debug instruction set is enabled. If it is disabled, use CSRR0 and CSRR1 respectively.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-6 Freescale Semiconductor
11.2.1 Instruction Address Compare Event
Instruction address compare debug events occur when enabled and execution is attempted of an instruction
at an address that meets the criteria specified in the DBCR0, DBCR1, DBCR5, DBCR6, and IAC1–8
Registers. Instruction address compares may specify user/supervisor mode and instruction space
(MSR[IS]), along with an effective address, masked effective address, or range of effective addresses for
comparison (range compares are not supported for IAC5–8). This event can occur and be recorded in
DBSR regardless of the setting of MSR[DE]. IAC events do not occur when an instruction would not have
normally begun execution due to a higher priority exception at an instruction boundary.
IAC compares perform a 31-bit compare for VLE instruction pages, and 30-bit compares for Power ISA
instruction pages. Each half word fetched by the instruction fetch unit is marked with a set of bits
indicating whether an instruction address compare occurred on that half word. Debug exceptions occur if
enabled and a 16-bit instruction, or the first half word of a 32-bit instruction, is tagged with an IAC hit.
For instruction fetches that miss in the TLB, Power ISA pages are assumed, and a 30-bit compare is
performed.
11.2.2 Data Address Compare Event
When the debug instruction set is enabled, data address compare debug events occur when execution of a
load or store class instruction results in a data access meeting the criteria specified in the DBCR0, DBCR2,
DBCR4, DAC1, DAC2, DVC1, and DVC2 registers. Data address compares may specify user/supervisor
mode and data space (MSR[DS]), along with an effective address, masked effective address, or range of
effective addresses for comparison. This event can occur and be recorded in DBSR regardless of the setting
of MSR[DE]. Two address compare values (DAC1, DAC2) are provided.
NOTES
In contrast to the the Power ISA definition, data address compare events on
the e200z446n3 do not prevent the load or store class instruction from
completing. If a load or store class instruction completes successfully
without a data TLB or data storage interrupt, data address compare
exceptions are reported at the completion of the instruction. If the exception
results in a precise debug interrupt, the address value saved in DSRR0 (or
CSRR0 if the debug instruction set is disabled) is the address of the
instruction following the load or store class instruction. For DVC DAC
events, the exception can be imprecisely reported even further past the load
or store class instruction generating the event (without necessarily affecting
DBSR[IDE]) and the saved address value can point to a subsequent
instruction past the next instruction. This occurrence is indicated in the
DBSR[DAC_OFST] field.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-7
If a load or store class instruction does not complete successfully due to a
data TLB or data storage exception, and a data address compare debug
exception also occurs or causes a debug counter event to occur, the result is
an imprecise debug interrupt. The address value saved in DSRR0 (or
CSRR0 if the debug instruction setis disabled) is the address of the load or
store class instruction, and the DBSR[IDE] bit is set. In addition to
occurring when DBCR0[IDM] = 1, this circumstance can also occur when
DBCR0[EDM] = 1.
DAC events are not recorded or counted if a lmw or stmw instruction is
interrupted prior to completion by a critical input or external input interrupt.
DAC events are not signaled on the second portion of a misaligned load or
store that is broken up into two separate accesses.
DAC events are not signaled on the tlbre, tlbwe, tlbsx, or tlbivax
instructions.
DAC[1,2] events are not signaled if DVC[1,2]M is non-zero and a DSI or
DTLB exception occurs on the load or store, since the load or store access
is not performed. For a lmw or stmw transfer however, if a DVC
successfully occurs on a transfer and a later transfer encounters a DSI or
DTLB exception, the DAC event will be reported, since a successful data
value compare took place.
11.2.2.1 Data Address Compare Event Status Updates
Data address compare debug events with data value compares can be reported ambiguously in several
circumstances involving issuing a sequence of load or store class instructions. Due to the CPU pipeline
and the delay in performing the data value compare following completion of the access, if the first load or
store class instruction generates a DVC DAC, a second and possibly third load or store class instruction
may also generate a DAC or DVC DAC event, or a DTLB or DSI exception with or without a simultaneous
DAC event.
Also, since non-load/store instructions may be dual-issued in combination with a load/store instruction,
the actual number of additional instructions that are completed following a recognized DVC DAC on a
load/store instruction may vary from 0 to 5. This value will be reported in the DBSR[DAC_OFST] field
when the DVC DAC status is recorded.
Table 11-1 outlines the settings of the DBSR, DSRR0 saved value, and potential updating of the ESR and
MMU MASx registers for various exception cases on sequences of load/store class instructions. Not all
exception combinations are covered in the table, such as IAC, ITLB, ISI, or alignment exceptions on
subsequent instructions. In general these exceptions cause further instruction issue to be halted, execution
of the excepting instruction to be aborted, and reporting of these exceptions to be masked. The saved
DSRR0 value points to this excepting instruction, and the exception(s) may be regenerated after returning
from the debug interrupt handler and attempting to re-execute the instruction pointed to by DSRR0. In
addition, in the examples in Table 11-1, the DAC_OFST and DSRR0 values assume no dual issue occurs.
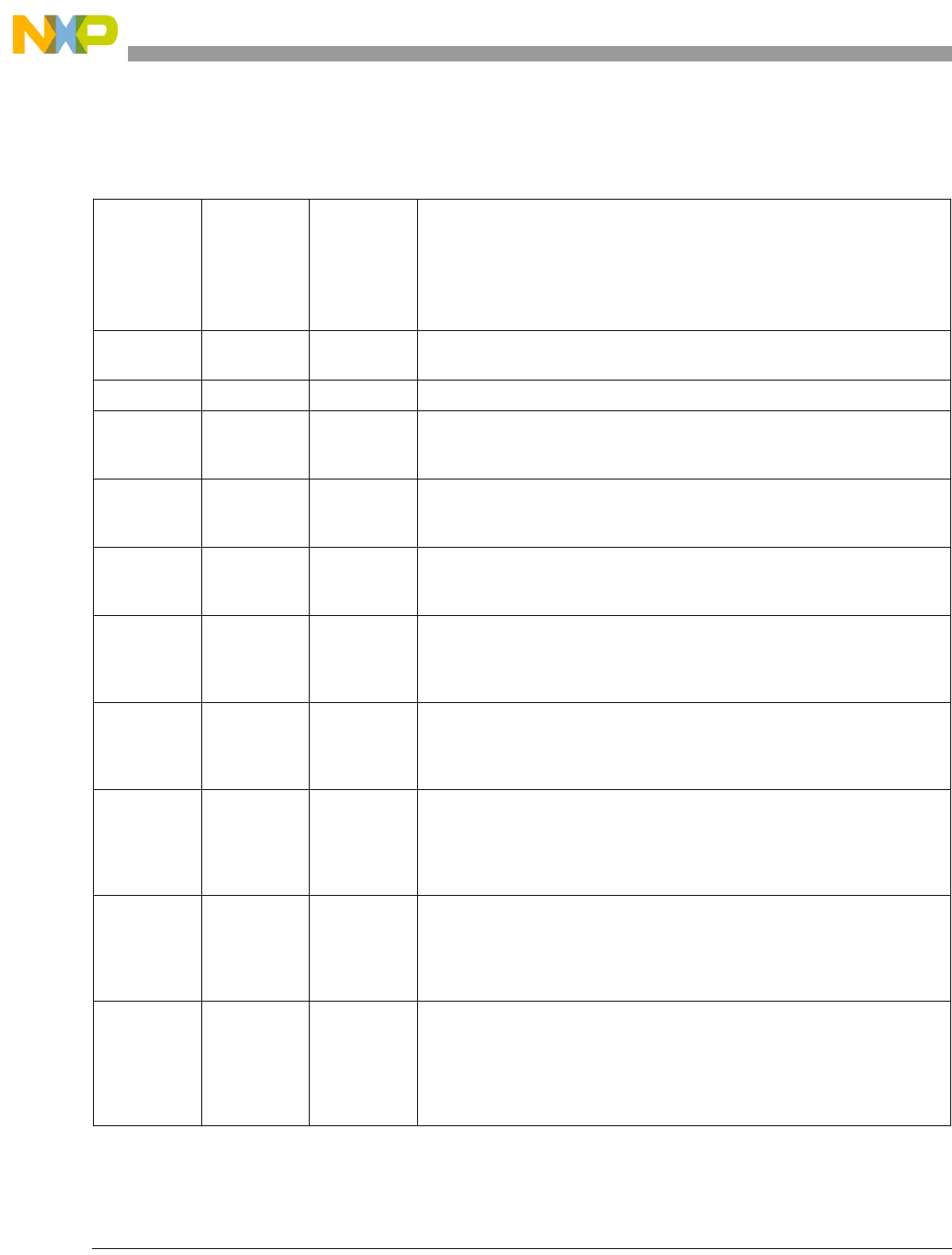
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-8 Freescale Semiconductor
If dual-issue occurs with the first, second, or third column, then the DAC_OFST and DSRR0 values will
point beyond the values shown.
Table 11-1. DAC events and Resultant Updates
1st
load/store
class
instruction
2nd
instruction
(load/store
class unless
otherwise
specified)
3rd
instruction
(load/store
class unless
otherwise
specified)
Result
DTLB Error,
no DAC
— — Take DTLB exception, no DBSR update, update MASx registers for 1st
load/store class instruction. Update ESR.
DSI, no DAC — — Take DSI exception, no DBSR update, no MASx register update. Update ESR.
DTLB Error,
with DACx
— — Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST not
set. No MASx register update for 1st load/store class instruction. DSRR0
points to 1st load/store class instruction. No ESR update.
DSI, with
DACx
— — Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST not
set. DSRR0 points to 1st load/store class instruction. No MASx register
update. No ESR update.
DACx — — Take Debug exception, DBSR update setting DACx, DAC_OFST not set.
DSRR0 points to 2nd load/store class instruction. No MASx register update.
No ESR update.
DVC DACx No
exceptions,
any
instruction
No
exceptions,
Non-ldst
instruction
Take Debug exception, DBSR update setting DACx, DAC_OFST set to
3’b001. DSRR0 points to 3rd instruction. No MASx register update. No ESR
update.
DVC DACx No exceptions No
exceptions,
Ldst
instruction
Take Debug exception, DBSR update setting DACx, DAC_OFST set to
3’b010. DSRR0 points to instruction after 3rd instruction. No MASx register
update. No ESR update.
DVC DACx DTLB Error,
no DAC
— Take Debug exception, DBSR update setting DACx, DAC_OFST not set.
DSRR0 points to 2nd load/store class instruction. no MASx register update. No
ESR update. No debug counter updates for 2nd ld/st instruction.
Note: in this case the 2nd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
DVC DACx DSI, no DAC — Take Debug exception, DBSR update setting DACx, DAC_OFST not set.
DSRR0 points to 2nd load/store class instruction. No MASx register update.
No ESR update. No debug counter updates for 2nd ld/st instruction.
Note: In this case the 2nd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
DVC DACx DTLB Error,
with DACy
— Take Debug exception, DBSR update setting DACx. DAC_OFST not set.
DSRR0 points to 2nd load/store class instruction. No MASx register update.
No ESR update. No debug counter update occurs for the 2nd ld/st.
Note: In this case the 2nd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
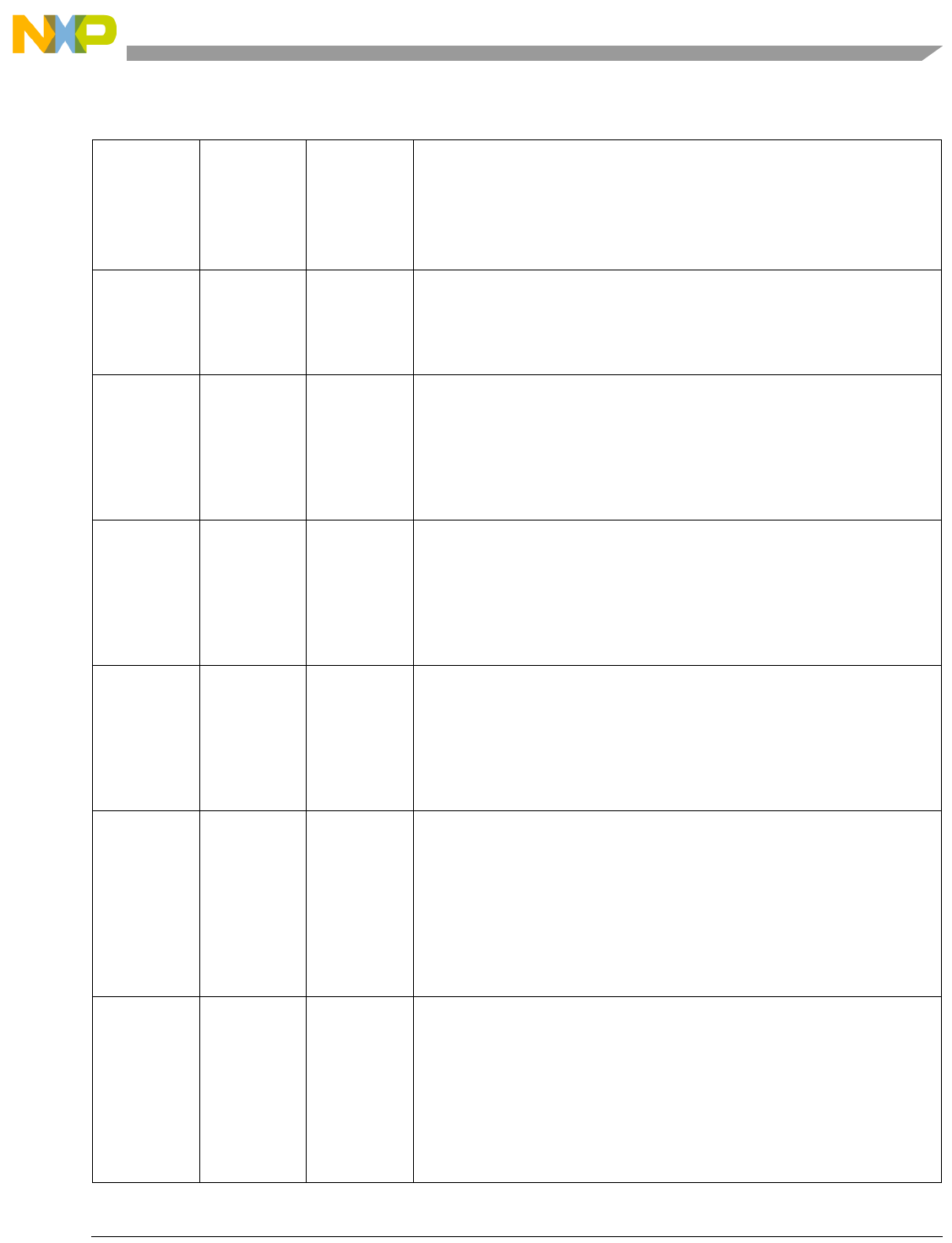
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-9
DVC DACx DSI, with
DACy
— Take Debug exception, DBSR update setting DACx. DAC_OFST not set.
DSRR0 points to 2nd load/store class instruction. No MASx register update.
No ESR update. No debug counter update occurs for the 2nd ld/st.
Note: In this case the 2nd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
DVC DACx DACy — Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b001. DSRR0 points to 3rd instruction. Debug counter update occurs for the
2nd ld/st as appropriate.
Note: In this case debug counter updates can occur for the 2nd ld/st even
though the 1st ld/st has a DVC DAC exception1.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
DVC DACx DVC DACy,
Normal Ldst
Non-Ldst
instruction
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b001. DSRR0 points to the 3rd instruction. Debug counter update occurs for
the 2nd ld/st as appropriate.
Note: In this case debug counter updates occur for the 2nd ld/st even though
the 1st ld/st has a DVC DAC exception1.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
DVC DACx DVC DACy,
Normal Ldst
Ldst
instruction,
no exception
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b010. DSRR0 points to instruction after the 3rd load/store class instruction.
Debug counter update occurs for the 2nd and 3rd ld/st as appropriate.
Note: In this case debug counter updates occur for the 2nd and 3rd ld/st even
though the 1st ld/st has a DVC DAC exception2.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
DVC DACx DVC DACy,
Normal Ldst
DSI Error, with
or without
DAC
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b001. No ESR update. DSRR0 points to 3rd instruction. Debug counter
update occurs for the 2nd ld/st as appropriate.
Note: In this case debug counter updates occur for the 2nd ld/st even though
the 1st ld/st has a DVC DAC exception1.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
Note: In this case the 3rd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
DVC DACx DVC DACy,
Normal Ldst DTLB, with or
without DAC Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b001. No ESR update. No MASx register updates. DSRR0 points to 3rd
instruction. Debug counter update occurs for the 2nd ld/st as appropriate.
Note: In this case debug counter updates occur for the 2nd ld/st even though
the 1st ld/st has a DVC DAC exception1.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
Note: In this case the 3rd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
Table 11-1. DAC events and Resultant Updates (Continued)
1st
load/store
class
instruction
2nd
instruction
(load/store
class unless
otherwise
specified)
3rd
instruction
(load/store
class unless
otherwise
specified)
Result
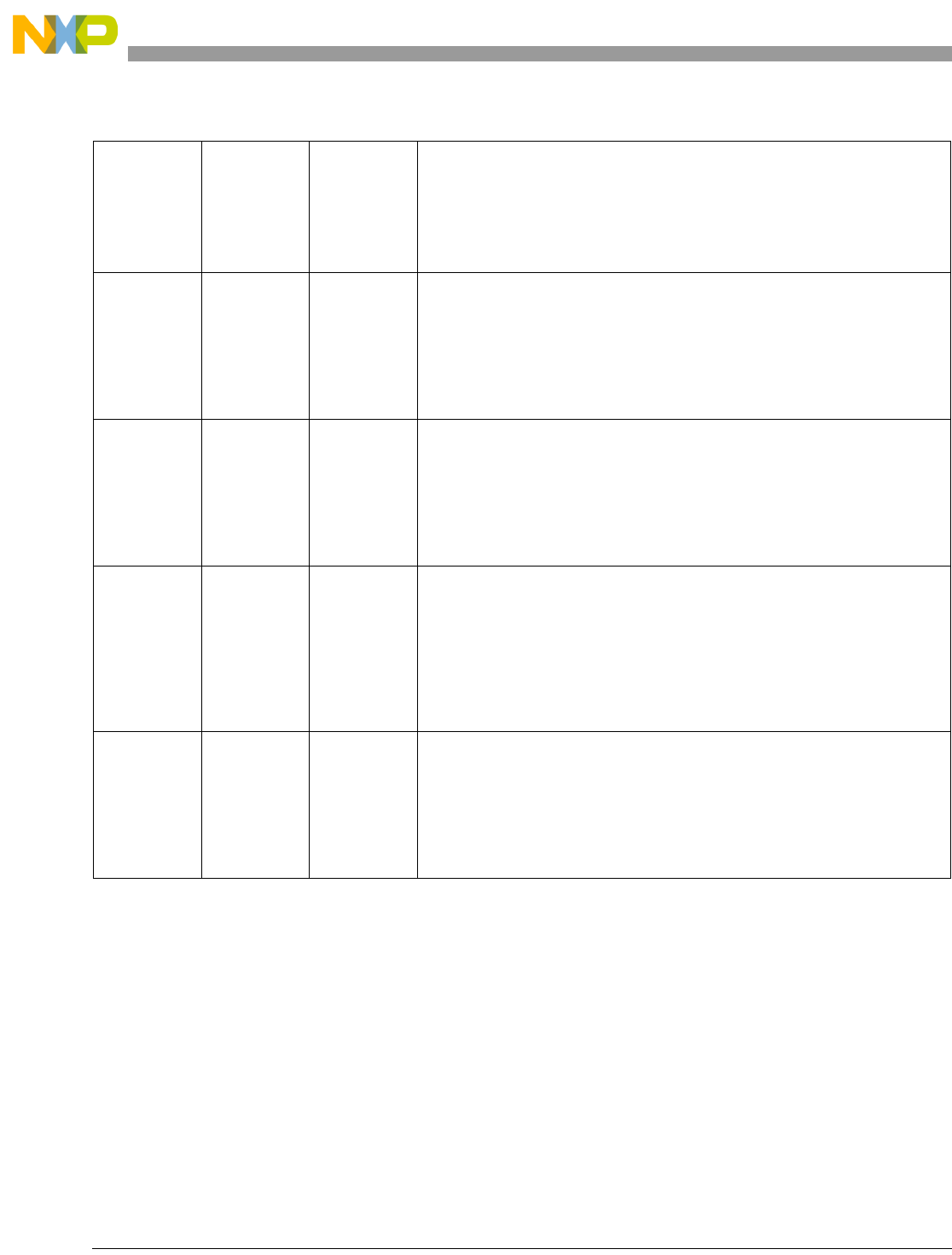
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-10 Freescale Semiconductor
Table 11-2–Table 11-5 show some example updates for specific code sequences of dual issuing of
load/store class instructions with non-load/store class instructions and the results of DAC and DVC events
on selected ones of the load/store instructions.
DVC DACx DVC DACy,
Normal Ldst
DACy, or DVC
DACy
Normal Ldst
or multiple
word Ldst
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b010. DSRR0 points to instruction after the 3rd load/store class instruction.
Debug counter update occurs for the 2nd and 3rd ld/st as appropriate.
Note: In this case debug counter updates occur for the 2nd and 3rd ld/st even
though the 1st ld/st has a DVC DAC exception2.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
DVC DACx DVC DACy,
Ldst multiple
(lmw, stmw)
Any
instruction
including ld/st
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b001. DSRR0 points to the 3rd instruction. Debug counter update occurs for
the 2nd ld/st multiple as appropriate.
Note: In this case debug counter updates occur for the 2nd ld/st multiple even
though the 1st ld/st has a DVC DAC exception1.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
DVC DACx Any
instruction
(no exception)
DSI, with or
without DAC,
Normal Ldst
or multiple
word Ldst
Take Debug exception, DBSR update setting DACx. DAC_OFST set to
3’b001. DSRR0 points to the 3rd instruction. No MASx register update. No
ESR update. No debug counter update occurs for the 3rd instruction. Debug
counter update occurs for the 2nd instruction as appropriate.
Note: In this case debug counter updates occur for the 2nd instruction even
though the 1st ld/st has a DVC DAC exception1.
Note: In this case the 3rd ld/st exception is masked. This behavior is
implementation dependent and may differ on other CPUs.
DVC DACx Any
instruction
(no exception)
DACy, or DVC
DACy
Normal Ldst
or multiple
word Ldst
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to
3’b010. DSRR0 points to instruction after the 3rd class instruction. Debug
counter update occurs for the 2nd and 3rd instruction as appropriate.
Note: In this case debug counter updates occur for the 2nd and 3rd
instructions even though the 1st ld/st has a DVC DAC exception2.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may
be indistinguishable from the “no DACy” case.
1The 2nd instruction may cause DAC, ICMP or IAC events to be counted.
2The 2nd and 3rd instructions may cause DAC, ICMP or IAC events to be counted.
Table 11-1. DAC events and Resultant Updates (Continued)
1st
load/store
class
instruction
2nd
instruction
(load/store
class unless
otherwise
specified)
3rd
instruction
(load/store
class unless
otherwise
specified)
Result
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-11
Table 11-2 shows the DAC events and resultant updates for dual-issue case 1.
Table 11-2. DAC Events and Resultant Updates, Dual-Issue Case 1
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) load/store and (4) alu, (5) load/store and (6) alu
Instruction (1):
DTLB Error, no DAC
Take DTLB exception, no DBSR update, update MASx registers for 1st load/store
instruction. Update ESR.
Instruction (1):
DSI, no DAC
Take DSI exception, no DBSR update, no MASx register update. Update ESR.
Instruction (1):
DTLB Error, with DACx
Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST set to 3’b000.
DSRR0 points to instruction (1). No MASx register update. No ESR update.
Instruction (1):
DSI, with DACx
Instruction (1):
DACx
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b000. DSRR0
points to instruction (2). No MASx register update. No ESR update.
Instruction (1):
DVC DACx
No other exceptions
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b100. DSRR0
points to instruction (6). No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)-(5) as appropriate. No debug counter or event
updates for instruction (6)
Instruction (1):
DVC DACx
Instruction (3):
DTLB Error, with or without DAC
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b001. DSRR0
points to instruction (3). no MASx register update. No ESR update. Debug counter
update occurs for instructions (1)-(2) as appropriate. No debug counter or event
updates for instructions (3)–(6).
Note: In this case the 2nd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (3):
DSI, with or without DAC
Instruction (1):
DVC DACx
Instruction (3):
DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b010.
DSRR0 points to instruction (4). Debug counter update occurs for instructions (1)–(3)
as appropriate. No debug counter or event updates for instructions (4)–(6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b100. DSRR0
points to instruction (6). No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(5) as appropriate. No debug counter or event
updates for instruction (6).
Note: In this case debug counter updates can occur for instructions (2)-(5) even though
the 1st ld/st has a DVC DAC exception.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-12 Freescale Semiconductor
Table 11-3 shows the DAC events and resultant updates for dual-issue case 2.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (5):
DSI, with or without DAC
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b010.
No ESR update. DSRR0 points to instruction (4). Debug counter update occurs for
instructions (1)–(3) as appropriate. No debug counter or event updates for instructions
(4)–(6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Note: In this case the 3rd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (5):
DTLB Error, with or without DAC
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (5):
DACy or DVC DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b100.
No ESR update. DSRR0 points to instruction (6). Debug counter update occurs for
instructions (1)–(5) as appropriate.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Table 11-3. DAC Events and Resultant Updates, Dual-Issue Case 2
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) load/store and (4) alu, (5) alu and (6) load/store
Instruction (1):
DTLB Error, no DAC
Take DTLB exception, no DBSR update, update MASx registers for 1st load/store
instruction. Update ESR.
Instruction (1):
DSI, no DAC
Take DSI exception, no DBSR update, no MASx register update. Update ESR.
Instruction (1):
DTLB Error, with DACx Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST set to 3’b000.
DSRR0 points to instruction (1). No MASx register update. No ESR update.
Instruction (1):
DSI, with DACx
Instruction (1):
DACx
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b000. DSRR0
points to instruction (2). No MASx register update. No ESR update.
Instruction (1):
DVC DACx
No other exceptions
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b101. DSRR0
points to instruction after instruction (6). No MASx register update. No ESR
update.Debug counter update occurs for instructions (1)–(6) as appropriate.
Table 11-2. DAC Events and Resultant Updates, Dual-Issue Case 1 (Continued)
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) load/store and (4) alu, (5) load/store and (6) alu
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-13
Instruction (1):
DVC DACx
Instruction (3):
DTLB Error, with or without DAC
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b001. DSRR0
points to instruction (3). No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(2) as appropriate. No debug counter or event
updates for instructions (3)–(6).
Note: In this case the 2nd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (3):
DSI, with or without DAC
Instruction (1):
DVC DACx
Instruction (3):
DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b010.
DSRR0 points to instruction (4). Debug counter update occurs for instructions (1)–(3) as
appropriate. No debug counter or event updates for instructions (4)–(6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b101. DSRR0
points to instruction (7). No MASx register update. No ESR update.Debug counter
update occurs for instructions (1)–(6) as appropriate.
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (6):
DSI, with or without DAC
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b010.
No ESR update. DSRR0 points to instruction (4). Debug counter update occurs for
instructions (1)–(3) as appropriate. No debug counter or event updates for instruction
(4).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Note: In this case the 3rd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (6):
DTLB Error, with or without DAC
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Instruction (6):
DACy or DVC DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b101.
No ESR update. DSRR0 points to instruction (7). Debug counter update occurs for
instructions (1)–(6) as appropriate. No debug counter or event updates for instruction
(7).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Table 11-3. DAC Events and Resultant Updates, Dual-Issue Case 2 (Continued)
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) load/store and (4) alu, (5) alu and (6) load/store
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-14 Freescale Semiconductor
Table 11-4 shows the DAC events and resultant updates, dual-issue case 3.
Table 11-4. DAC events and Resultant Updates, Dual-issue case 3
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) alu and (4) alu, (5) load/store and (6) alu
Instruction (1):
DTLB Error, no DAC
Take DTLB exception, no DBSR update, update MASx registers for 1st load/store
instruction. Update ESR.
Instruction (1):
DSI, no DAC
Take DSI exception, no DBSR update, no MASx register update. Update ESR.
Instruction (1):
DTLB Error, with DACx
Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST set to 3’b000.
DSRR0 points to instruction (1). No MASx register update. No ESR update.
Instruction (1):
DSI, with DACx
Instruction (1):
DACx
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b000. DSRR0
points to instruction (2). No MASx register update. No ESR update.
Instruction (1):
DVC DACx
No other exceptions
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b100. DSRR0
points to instruction (6). No MASx register update. No ESR update.Debug counter
update occurs for instructions (1)–(5) as appropriate. No debug counter or event
updates for instruction (6).
Instruction (1):
DVC DACx
Instruction (5):
DTLB Error, with or without DAC
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b011. DSRR0
points to instruction (5). no MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(4) as appropriate. No debug counter or event
updates for instructions (5)–(6).
Note: In this case the 2nd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (5):
DSI, with or without DAC
Instruction (1):
DVC DACx
Instruction (5):
DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b100.
DSRR0 points to instruction (6). Debug counter update occurs for instructions (1)–(5) as
appropriate. No debug counter or event updates for instruction (6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Instruction (1):
DVC DACx
Instruction (5):
DVC DACy
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b100. DSRR0
points to instruction (6). No MASx register update. No ESR update.Debug counter
update occurs for instructions (1)–(5) as appropriate. No debug counter or event
updates for instruction (6)
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-15
Table 11-5 shows the DAC events and resultant updates for dual-issue case 4.
11.2.3 Linked Instruction Address and Data Address Compare Event
Data address compare debug events may be linked with an instruction address compare event by setting
the DAC1LNK and/or DAC2LNK control bits in DBCR2 to further refine when a data address compare
debug event is generated. DAC1 may be linked with IAC1, and DAC2 (when not used as a mask or range
bounds register) may be linked with IAC3. When linked, a DAC1 (or DAC2) debug event occurs when
the same instruction that generates the DAC1 (or DAC2) ‘hit’ also generates an IAC1 (or IAC3) ‘hit’.
Table 11-5. DAC Events and Resultant Updates, Dual-Issue Case 4
Event(s) Result
Instruction Sequence:
The following pairs dual-issue: (1) load/store and (2) alu, (3) load/store and (4) alu, (5) alu and (6) alu
Instruction (1):
DTLB Error, no DAC
Take DTLB exception, no DBSR update, update MASx registers for 1st load/store
instruction. Update ESR.
Instruction (1):
DSI, no DAC
Take DSI exception, no DBSR update, no MASx register update. Update ESR.
Instruction (1):
DTLB Error, with DACx
Take Debug exception, DBSR update setting DACx and IDE, DAC_OFST set to 3’b000.
DSRR0 points to instruction (1). No MASx register update. No ESR update.
Instruction (1):
DSI, with DACx
Instruction (1):
DACx
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b000. DSRR0
points to instruction (2). No MASx register update. No ESR update.
Instruction (1):
DVC DACx
No other exceptions
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b011. DSRR0
points to instruction (5). No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(4) as appropriate. No debug counter or event
updates for instructions (5)–(6)
Instruction (1):
DVC DACx
Instruction (3):
DTLB Error, with or without DAC
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b001. DSRR0
points to instruction (3).No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(2) as appropriate. No debug counter or event
updates for instructions (3)–(6).
Note: In this case the 2nd ld/st exception is masked. This behavior is implementation
dependent and may differ on other CPUs.
Instruction (1):
DVC DACx
Instruction (3):
DSI, with or without DAC
Instruction (1):
DVC DACx
Instruction (3):
DACy
Take Debug exception, DBSR update setting DACx, DACy. DAC_OFST set to 3’b010.
DSRR0 points to instruction (4). Debug counter update occurs for instructions (1)–(3) as
appropriate. No debug counter or event updates for instructions (4)–(6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
Instruction (1):
DVC DACx
Instruction (3):
DVC DACy
Take Debug exception, DBSR update setting DACx, DAC_OFST set to 3’b011. DSRR0
points to instruction (5). No MASx register update. No ESR update. Debug counter
update occurs for instructions (1)–(4) as appropriate. No debug counter or event
updates for instructions (5)–(6).
Note: In this case if x==y, then the resultant state of DBSR and DSRR0 may be
indistinguishable from the “no DACy” case.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-16 Freescale Semiconductor
When linked, the IAC1 (or IAC3) event is not recorded in the debug status register, regardless of whether
a corresponding DAC1 (or DAC2) event occurs or the IAC1 (or IAC3) event enable is set.
A linked data address compare debug event occurs when the debug instruction set is enabled, execution of
a load or store class instruction results in a data access with an address that meets the criteria specified in
the DBCR0, DBCR2, DBCR4, DAC1, DAC2, DVC1, and DVC2 registers, and the instruction meets the
criteria for generating an instruction address compare event. This event can occur and be recorded in
DBSR regardless of the setting of MSR[DE]. The normal DAC1 and DAC2 status bits in the DBSR are
used for recording these events. The IAC1 and IAC3 status bits are not set if the corresponding instruction
address compare register is linked.
Linking is enabled using control bits in DBCR2. If data address compare debug events are used to control
or modify operation of the debug counter, linking is also available, even though DBCR0 may not have
enabled IAC or DAC events. Also, instruction address compare events which are linked may still affect
the debug counter (if enabled to), thus may be used to either trigger a counter, or be counted, in contrast to
being blocked from affecting the DBSR.
NOTE
Linked DAC events are not recorded or counted if a load multiple word or
store multiple word type instruction is interrupted prior to completion by a
critical input or external input interrupt.
11.2.4 Trap Debug Event
A trap debug event (TRAP) occurs if trap debug events are enabled (DBCR0[TRAP] = 1), a trap
instruction (tw, twi) is executed, and the conditions specified by the instruction for the trap are met. This
event can occur and be recorded in DBSR regardless of the setting of MSR[DE]. When a trap debug event
occurs, the DBSR[TRAP] bit is set to 1 to record the debug exception.
11.2.5 Branch Taken Debug Event
A branch taken debug event (BRT) occurs if branch taken debug events are enabled (DBCR0[BRT] = 1),
execution is attempted of a branch instruction that will be taken (either an unconditional branch or a
conditional branch whose branch condition is true), and MSR[DE] = 1 or DBCR0[EDM] = 1. Branch
taken debug events are not recognized if MSR[DE] = 0 and DBCR0[EDM] = 0 at the time of execution of
the branch instruction and thus DBSR[IDE] can not be set by a branch taken debug event. When a branch
taken debug event is recognized, the DBSR[BRT] bit is set to 1 to record the debug exception, and the
address of the branch instruction is recorded in DSRR0.
11.2.6 Instruction Complete Debug Event
An instruction complete debug event (ICMP) occurs if instruction complete debug events are enabled
(DBCR0[ICMP] = 1), execution of any instruction is completed, and MSR[DE] = 1 or DBCR0[EDM] = 1.
If execution of an instruction is suppressed because the instruction causes a different exception that is
enabled to generate an interrupt, then the attempted execution of that instruction does not cause an
instruction complete debug event. The sc instruction does not fall into the category of an instruction whose
execution is suppressed, since the instruction actually executes and then generates a system call interrupt.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-17
In this case, the instruction complete debug exception is also set. When an instruction complete debug
event is recognized, DBSR[ICMP] is set to 1 to record the debug exception and the address of the next
instruction to be executed is recorded in DSRR0.
Instruction complete debug events are not recognized if MSR[DE] = 0 and DBCR0[EDM] = 0 at the time
of execution of the instruction, thus DBSR[IDE] is not generally set by an ICMP debug event.
One circumstance may cause the DBSR[ICMP] and DBSR[IDE] bits to be set. This occurs when a EFPU
round exception occurs. Since the instruction is by definition completed (SRR0 points to the following
instruction), this interrupt takes higher priority than the debug interrupt so as not to be lost, and
DBSR[IDE] is set to indicate the imprecise recognition of a debug interrupt. In this case, the debug
interrupt will be taken with SRR0 pointing to the instruction following the instruction that generated the
EFPU round exception, and DSRR0 will point to the round exception handler. In addition to occurring
when DBCR0[IDM] = 1, this circumstance can also occur when DBCR0[EDM] = 1.
NOTE
Instruction complete debug events are not generated by the execution of an
instruction that sets MSR[DE] to 1 while DBCR0[ICMP] = 1, nor by the
execution of an instruction that sets DBCR0[ICMP] to 1 while
MSR[DE] = 1 or DBCR0[EDM] = 1.
11.2.7 Interrupt Taken Debug Event
An interrupt taken debug event (IRPT) occurs if interrupt taken debug events are enabled
(DBCR0[IRPT] = 1) and a non-critical interrupt occurs. Only non-critical class interrupts cause an
interrupt taken debug event. This event can occur and be recorded in DBSR regardless of the setting of
MSR[DE]. When an interrupt taken debug event occurs, the DBSR[IRPT] bit is set to 1 to record the debug
exception. The value saved in DSRR0 will be the address of the non-critical interrupt handler.
11.2.8 Critical Interrupt Taken Debug Event
A critical interrupt taken debug event (CIRPT) occurs if critical interrupt taken debug events are enabled
(DBCR0[CIRPT] = 1) and a critical interrupt (other than a debug interrupt when the debug instruction set
is disabled) occurs. Only critical class interrupts cause a Critical Interrupt Taken debug event. This event
can occur and be recorded in DBSR regardless of the setting of MSR[DE]. When a critical interrupt taken
debug event occurs, the DBSR[CIRPT] bit is set to 1 to record the debug exception. The value saved in
DSRR0 is the address of the critical interrupt handler. Note that this debug event should not normally be
enabled unless the debug instruction set is also enabled to avoid corruption of CSRR0/1.
11.2.9 Return Debug Event
A return debug event (RET) occurs if return debug events are enabled (DBCR0[RET] = 1) and an attempt
is made to execute an rfi or se_rfi instruction. This event can occur and be recorded in DBSR regardless
of the setting of MSR[DE]. When a return debug event occurs, the DBSR[RET] bit is set to 1 to record the
debug exception.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-18 Freescale Semiconductor
If MSR[DE] = 0 and DBCR0[EDM] = 0 at the time of the execution of the rfi or se_rfi (before the MSR
is updated by the rfi or se_rfi), then DBSR[IDE] is also set to 1 to record the imprecise debug event.
If MSR[DE] = 1 at the time of the execution of the rfi or se_rfi, a debug interrupt occurs provided no
higher priority exception is enabled to cause an interrupt. The debug save/restore register 0 is set to the
address of the rfi or se_rfi instruction.
11.2.10 Critical Return Debug Event
A critical return debug event (CRET) occurs if critical return debug events are enabled
(DBCR0[CRET] = 1) and an attempt is made to execute an rfci or se_rfci instruction. This event can occur
and be recorded in DBSR regardless of the setting of MSR[DE]. When a critical return debug event occurs,
the DBSR[CRET] bit is set to 1 to record the debug exception.
If MSR[DE] = 0 and DBCR0[EDM] = 0 at the time of the execution of the rfci or se_rfci (before the MSR
is updated by the rfci or se_rfci), then DBSR[IDE] is also set to 1 to record the imprecise debug event.
If MSR[DE] = 1 at the time of the execution of the rfci or se_rfci, a debug interrupt will occur provided
there exists no higher priority exception which is enabled to cause an interrupt. The debug save/restore
register 0 will be set to the address of the rfci or se_rfci instruction. Note that this debug event should not
normally be enabled unless the debug instruction set is also enabled to avoid corruption of CSRR0/1.
11.2.11 Debug Counter Debug Event
A debug counter debug event (DCNT1, DCNT2) occurs if debug counter debug events are enabled
(DBCR0[DCNT1] = 1 or DBCR0[DCNT2] = 1), a debug counter is enabled, and a counter decrements to
zero. This event can occur and be recorded in DBSR regardless of the setting of MSR[DE]. When a debug
counter debug event occurs, DBSR[DCNT{1,2}] is set to ‘1’ to record the debug exception.
11.2.12 External Debug Event
An external debug event (DEVT1, DEVT2) occurs if external debug events are enabled
(DBCR0[DEVT1] = 1 or DBCR0[DEVT2] = 1), and the respective p_devt1 or p_devt2 input signal
transitions to the asserted state. This event can occur and be recorded in DBSR regardless of the setting of
MSR[DE]. When an external debug event occurs, DBSR[DEVT{1,2}] is set to ‘1’ to record the debug
exception.
11.2.13 Unconditional Debug Event
An unconditional debug event (UDE) occurs when the unconditional debug event (p_ude) input transitions
to the asserted state, and either DBCR0[IDM] = 1 or DBCR0[EDM] = 1. The unconditional debug event
is the only debug event that does not have a corresponding enable bit for the event in DBCR0. This event
can occur and be recorded in DBSR regardless of the setting of MSR[DE]. When an unconditional debug
event occurs, DBSR[UDE] is set to ‘1’ to record the debug exception.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-19
11.3 Debug Registers
This section describes debug-related registers that are software accessible. These registers are intended for
use by special debug tools and debug software, not by general application code.
Access to these registers (other than DBSR) by software is conditioned by the external debug mode control
bit (DBCR0[EDM]/EDBCR0[EDM]) and the settings of debug control register DBERC0, which can be
set by the hardware debug port. If DBCR0[EDM] is set and if the bit in DBERC0 corresponding to the
resource is cleared, software is prevented from modifying debug register values other than in DBSR, since
the resource is not “owned” by software. Software always has ownership of DBSR. The execution of an
mtspr instruction targeting a debug register or register field not owned by software does not cause
modifications to occur, and no exception is signaled. In addition, since the external debugger hardware
may be manipulating debug register values, the state of these registers or register fields not owned by
software is not guaranteed to be consistent if accessed (read) by software with an mfspr instruction, other
than DBCR0[EDM] itself and the DBERC0 register. Hardware always has full access to all registers and
all register fields through the OnCE register access mechanism, and it is up to the debug firmware to
properly implement modifications to these registers with read-modify-write operations to implement any
control sharing with software. Settings in DBERC0 should be considered by the debug firmware in order
to preserve software settings of control registers as appropriate when hardware modifications to the debug
registers is performed.
11.3.1 Debug Address and Value Registers
Instruction address compare registers IAC1–8 are used to hold instruction addresses for address
comparison purposes. In addition, IAC2 and IAC4 hold mask information for IAC1 and IAC3
respectively, and IAC6 and IAC8 hold mask information for IAC5 and IAC7 respectively, when Address
Bit Match compare modes are selected. Note that when performing instruction address compares, the low
order two address bits of the instruction address and the corresponding IAC register are ignored for
Power ISA instruction pages, and the low order bit of the instruction address and the corresponding IAC
register is ignored for VLE instruction pages.
Data address compare registers DAC1 and DAC2 are used to hold data access addresses for address
comparison purposes. In addition, DAC2 holds mask information for DAC1 when Address Bit Match
compare mode is selected.
Data value compare registers DVC1 and DVC2 are used to hold data values for data comparison purposes.
DVC1 and DVC2 are 64-bit registers. Data value comparisons are used to qualify data address compare
debug events. DVC1 is associated with DAC1, and DVC2 is associated with DAC2. The most significant
byte of the DVC1(2) register (labeled B0 in Figure 11-2) corresponds to the byte data value transferred
to/from memory byte offset 0, 8, ..., and the least significant byte of the register (labeled B7 in Figure 11-2)
corresponds to byte offset 7, F, ... . When enabled for performing data value comparisons, each enabled
byte in DVC1(2) is compared with the memory value transferred on the corresponding active byte lane of
the data memory interface to determine if a match occurs. Inactive byte lanes do not participate in the
comparison, they are implicitly masked.
Table 13-12 shows active byte lanes for data transfers. Software must also program the DVC1(2) register
byte positions based on the endian mode and alignment of the access. Misaligned accesses are not fully

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-20 Freescale Semiconductor
supported because the data address and data value comparisons are only performed on the initial access in
the case of a misaligned access; thus, accesses that cross a 64-bit boundary cannot be fully matched. For
address and size combinations which involve two transfers, only the initial transfer is used for data address
and value matching. DVC1 and DVC2 may be read or written using mtspr and mfspr instructions. All
64-bits of the GPR will be accessed, regardless of the value of the MSR[SPE] bit.
11.3.2 Debug Counter Register (DBCNT)
The debug counter register (DBCNT) contains two 16-bit counters (CNT1 and CNT2) that can be
configured to operate independently or concatenated into a single 32-bit counter. Each counter can be
configured to count down (decrement) when one or more count-enabled events occur. The counters
operate regardless of whether counters are enabled to generate debug exceptions. When a count value
reaches zero, a debug count event is signaled, and a debug event can be generated (if enabled). Upon
reaching zero, the counter(s) are frozen. A debug counter signals an event on the transition from a value
of one to a final value of zero. Loading a value of zero into the counter prevents the counter from counting.
The debug counter is configured by the contents of debug control register 3. The DBCNT register is shown
in Figure 11-3.
Refer to Section 11.3.3.4, “Debug Control Register 3 (DBCR3),” for more information about updates to
the DBCNT register. Certain caveats exist on how the DBCNT and DBCR3 register are modified when
one or more counters are enabled.
11.3.3 Debug Control and Status Registers
Debug control registers (DBCR0–6 and DBERC0) are used to enable debug events, reset the processor,
control timer operation during debug events, and set the debug mode of the processor. The debug status
register (DBSR) records debug exceptions while internal debug mode is enabled.
e200z446n3 requires that a context synchronizing instruction follow an mtspr DBCR0–6 or DBSR to
ensure that any alterations enabling/disabling debug events are effective. The context synchronizing
B0 B1 B2 B3
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
B4 B5 B6 B7
32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63
SPR - 318 (DVC1), 319 (DVC2); Read/Write; Reset - Unaffected
Figure 11-2. DVC1, DVC2 Registers
CNT1 CNT2
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 562; Read/Write; Reset - Unaffected
Figure 11-3. DBCNT Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-21
instruction may or may not be affected by the alteration. Typically, an isync instruction is used to create a
synchronization boundary beyond which it can be guaranteed that the newly written control values are in
effect.
For watchpoint generation and counter operation, configuration settings contained in DBCR1–5 are used,
even though the corresponding event(s) may be disabled (by DBCR0) from setting DBSR flags.
11.3.3.1 Debug Control Register 0 (DBCR0)
Debug control register 0 is used to enable debug modes and controls which debug events are allowed to
set DBSR or EDBSR0 flags. The e200z446n3 adds some implementation specific bits to this register, as
seen in Figure 11-4.
Table 11-6 provides bit definitions for debug control register 0.
EDM
IDM
RST
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4
DAC1
DAC2
RET
IAC5
IAC6
IAC7
IAC8
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
0
FT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 308; Read/Write; Reset1 - 0x0
1DBCR0EDM is affected by j_trst_b or m_por assertion, and remains reset while in the Test_Logic_Reset state, but is
not affected by p_reset_b. All other bits are reset by processor reset p_reset_b if DBCR0EDM=0, as well as
unconditionally by m_por. If DBCR0EDM=1, DBERC0 masks off hardware-owned resources (other than RST) from
reset by p_reset_b, and only software-owned resources indicated by DBERC0 and the DBCR0RST field will be reset
by p_reset_b. The DBCR0RST field will always be reset by p_reset_b regardless of the value of DBCR0EDM.
Figure 11-4. DBCR0 Register
Table 11-6. DBCR0 Bit Definitions
Bit(s) Name Description
0 EDM External Debug Mode. This bit is read-only by software.
0 External debug mode disabled. Internal debug events not mapped into external debug events.
1 External debug mode enabled. Hardware-owned events will not cause the CPU to vector to interrupt
code. Software is not permitted to write to debug registers {DBCRx, DBCNT, IAC1-8, DAC1-2} unless
permitted by settings in DBERC0. Hardware-owned events will set status bits in EDBSR0.
Note: When external debug mode is enabled, hardware-owned resources in debug registers are not
affected by processor reset
p_reset_b
. This allows the debugger to set up hardware debug events
which remain active across a processor reset.
Programming Notes:
It is recommended that debug status bits in the debug status registers be cleared before disabling external
debug mode to avoid any internal imprecise debug interrupts.
Software may use this bit to determine if external debug has control over the debug registers.
The hardware debugger must set the EDM bit to ‘1’ before other bits in this register (and other debug
registers) may be altered. On the initial setting of this bit to ‘1’, all other bits are unchanged. This bit is only
writable through the OnCE port.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-22 Freescale Semiconductor
1 IDM Internal Debug Mode
0 Debug exceptions are disabled. Debug events do not affect DBSR.
1 Debug exceptions are enabled. Enabled debug events owned by software will update the DBSR. If
MSRDE=1, the occurrence of a debug event, or the recording of an earlier debug event in the Debug
Status Register when MSRDE was cleared, will cause a Debug interrupt.
2–3 RST Reset Control
00 No function
01
p_dbrstc[1]
pin asserted by Debug Reset Control. Allows external device to initiate processor or system
reset
10
p_dbrstc[0]
pin asserted by Debug Reset Control. Allows external device to initiate processor or system
reset.
11 Reserved
4 ICMP Instruction Complete Debug Event Enable
0 ICMP debug events are disabled
1 ICMP debug events are enabled
5 BRT Branch Taken Debug Event Enable
0 BRT debug events are disabled
1 BRT debug events are enabled
6 IRPT Interrupt Taken Debug Event Enable
0 IRPT debug events are disabled
1 IRPT debug events are enabled
7 TRAP Trap Taken Debug Event Enable
0 TRAP debug events are disabled
1 TRAP debug events are enabled
8 IAC1 Instruction Address Compare 1 Debug Event Enable
0 IAC1 debug events are disabled
1 IAC1 debug events are enabled
9 IAC2 Instruction Address Compare 2 Debug Event Enable
0 IAC2 debug events are disabled
1 IAC2 debug events are enabled
10 IAC3 Instruction Address Compare 3 Debug Event Enable
0 IAC3 debug events are disabled
1 IAC3 debug events are enabled
11 IAC4 Instruction Address Compare 4 Debug Event Enable
0 IAC4 debug events are disabled
1 IAC4 debug events are enabled
12–13 DAC1 Data Address Compare 1 Debug Event Enable
00 DAC1 debug events are disabled
01 DAC1 debug events are enabled only for store-type data storage accesses
10 DAC1 debug events are enabled only for load-type data storage accesses
11 DAC1 debug events are enabled for load-type or store-type data storage accesses
14–15 DAC2 Data Address Compare 2 Debug Event Enable
00 DAC2 debug events are disabled
01 DAC2 debug events are enabled only for store-type data storage accesses
10 DAC2 debug events are enabled only for load-type data storage accesses
11 DAC2 debug events are enabled for load-type or store-type data storage accesses
Table 11-6. DBCR0 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-23
16 RET Return Debug Event Enable
0 RET debug events are disabled
1 RET debug events are enabled
17 IAC5 Instruction Address Compare 5 Debug Event Enable
0 IAC5 debug events are disabled
1 IAC5 debug events are enabled
18 IAC6 Instruction Address Compare 6 Debug Event Enable
0 IAC6 debug events are disabled
1 IAC6 debug events are enabled
19 IAC7 Instruction Address Compare 7 Debug Event Enable
0 IAC7 debug events are disabled
1 IAC7 debug events are enabled
20 IAC8 Instruction Address Compare 8 Debug Event Enable
0 IAC8 debug events are disabled
1 IAC8 debug events are enabled
21 DEVT1 External Debug Event 1 Enable
0 DEVT1 debug events are disabled
1 DEVT1 debug events are enabled
22 DEVT2 External Debug Event 2 Enable
0 DEVT2 debug events are disabled
1 DEVT2 debug events are enabled
23 DCNT1 Debug Counter 1 Debug Event Enable
0 Counter 1 debug events are disabled
1 Counter 1 debug events are enabled
24 DCNT2 Debug Counter 2 Debug Event Enable
0 Counter 2 debug events are disabled
1 Counter 2 debug events are enabled
25 CIRPT Critical Interrupt Taken Debug Event Enable
0 CIRPT debug events are disabled
1 CIRPT debug events are enabled
26 CRET Critical Return Debug Event Enable
0 CRET debug events are disabled
1 CRET debug events are enabled
27–30 — Reserved
31 FT Freeze Timers on Debug Event
0 TimeBase Timers are unaffected by set DBSR/EDBSR0 bits
1 Disable clocking of TimeBase timers if any DBSR bit is set (any EDBSR0 bit set if DBCR0FT owned by
hardware) except MRR or CNT1TRG
Table 11-6. DBCR0 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-24 Freescale Semiconductor
11.3.3.2 Debug Control Register 1 (DBCR1)
Debug control register 1 is used to configure the instruction address compare operation. The DBCR1
register is shown in Figure 11-5.
Table 11-7 provides bit definitions for the debug control register 1.
IAC1US
IAC1ER
IAC2US
IAC2ER
IAC12M
0
IAC3US
IAC3ER
IAC4US
IAC4ER
IAC34M
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 309; Read/Write; Reset1 - 0x0
1 Reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If DBCR0EDM=1,
DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned resources
indicated by DBERC0 will be reset by p_reset_b.
Figure 11-5. DBCR1 Register
Table 11-7. DBCR1 Bit Definitions
Bit(s) Name Description
0–1 IAC1US Instruction Address Compare 1 User/Supervisor Mode
00 IAC1 debug events not affected by MSR[PR]
01 Reserved
10 IAC1 debug events can only occur if MSR[PR]=0 (Supervisor mode)
11 IAC1 debug events can only occur if MSR[PR]=1. (User mode)
2–3 IAC1ER Instruction Address Compare 1 Effective/Real Mode
00 IAC1 debug events are based on effective address
01 Unimplemented in the e200 (Power ISA real address compare), no match can occur
10 IAC1 debug events are based on effective address and can only occur if MSR[IS]=0
11 IAC1 debug events are based on effective address and can only occur if MSR[IS]=1
4–5 IAC2US Instruction Address Compare 2 User/Supervisor Mode
00 IAC2 debug events not affected by MSR[PR]
01 Reserved
10 IAC2 debug events can only occur if MSR[PR]=0 (Supervisor mode)
11 IAC2 debug events can only occur if MSR[PR]=1. (User mode)
6–7 IAC2ER Instruction Address Compare 2 Effective/Real Mode
00 IAC2 debug events are based on effective address
01 Unimplemented in e200 (Power ISA real address compare), no match can occur
10 IAC2 debug events are based on effective address and can only occur if MSR[IS]=0
11 IAC2 debug events are based on effective address and can only occur if MSR[IS]=1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-25
8–9 IAC12M Instruction Address Compare 1/2 Mode
00 Exact address compare. IAC1 debug events can only occur if the address of the instruction
fetch is equal to the value specified in IAC1. IAC2 debug events can only occur if the address
of the instruction fetch is equal to the value specified in IAC2.
01 Address bit match. IAC1 debug events can occur only if the address of the instruction fetch,
ANDed with the contents of IAC2 are equal to the contents of IAC1, also ANDed with the
contents of IAC2. IAC2 debug events do not occur. IAC1US and IAC1ER settings are used.
10 Inclusive address range compare. IAC1 debug events can occur only if the address of the
instruction fetch is greater than or equal to the value specified in IAC1 and less than the value
specified in IAC2. IAC2 debug events do not occur. IAC1US and IAC1ER settings are used.
11 Exclusive address range compare. IAC1 debug events can occur only if the address of the
instruction fetch is less than the value specified in IAC1 or is greater than or equal to the value
specified in IAC2. IAC2 debug events do not occur. IAC1US and IAC1ER settings are used.
10–15 — Reserved
16–17 IAC3US Instruction Address Compare 3 User/Supervisor Mode
00 IAC3 debug events not affected by MSR[PR]
01 Reserved
10 IAC3 debug events can only occur if MSR[PR]=0 (Supervisor mode)
11 IAC3 debug events can only occur if MSR[PR]=1 (User mode)
18–19 IAC3ER Instruction Address Compare 3 Effective/Real Mode
00 IAC3 debug events are based on effective address
01 Unimplemented in e200 (Power ISA real address compare), no match can occur
10 IAC3 debug events are based on effective address and can only occur if MSR[IS]=0
11 IAC3 debug events are based on effective address and can only occur if MSR[IS]=1
20–21 IAC4US Instruction Address Compare 4 User/Supervisor Mode
00 IAC4 debug events not affected by MSR[PR]
01 Reserved
10 IAC4 debug events can only occur if MSR[PR]=0 (Supervisor mode).
11 IAC4 debug events can only occur if MSR[PR]=1. (User mode)
22–23 IAC4ER Instruction Address Compare 4 Effective/Real Mode
00 IAC4 debug events are based on effective address
01 Unimplemented in e200 (Power ISA real address compare), no match can occur
10 IAC4 debug events are based on effective address and can only occur if MSR[IS]=0
11 IAC4 debug events are based on effective address and can only occur if MSR[IS]=1
24–25 IAC34M Instruction Address Compare 3/4 Mode
00 Exact address compare. IAC3 debug events can only occur if the address of the instruction
fetch is equal to the value specified in IAC3. IAC4 debug events can only occur if the address
of the instruction fetch is equal to the value specified in IAC4.
01 Address bit match. IAC3 debug events can occur only if the address of the instruction fetch,
ANDed with the contents of IAC4 are equal to the contents of IAC3, also ANDed with the
contents of IAC4. IAC4 debug events do not occur. IAC3US and IAC3ER settings are used.
10 Inclusive address range compare. IAC3 debug events can occur only if the address of the
instruction fetch is greater than or equal to the value specified in IAC3 and less than the value
specified in IAC4. IAC4 debug events do not occur. IAC3US and IAC3ER settings are used.
11 Exclusive address range compare. IAC3 debug events can occur only if the address of the
instruction fetch is less than the value specified in IAC3 or is greater than or equal to the value
specified in IAC4. IAC4 debug events do not occur. IAC3US and IAC3ER settings are used.
26–31 — Reserved
Table 11-7. DBCR1 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-26 Freescale Semiconductor
11.3.3.3 Debug Control Register 2 (DBCR2)
Debug control register 2 is used to configure Data Address Compare and Data Value Compare operation.
The DBCR2 register is shown in Figure 11-6.
Table 11-8 provides bit definitions for debug control register 2.
DAC1US
DAC1ER
DAC2US
DAC2ER
DAC12M
DAC1LNK
DAC2LNK
DVC1M
DVC2M
DVC1BE DVC2BE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 310; Read/Write; Reset1 - 0x0
1 Reset by processor reset
p_reset_b
if DBCR0EDM=0, as well as unconditionally by
m_por
. If DBCR0[EDM] = 1,
DBERC0 masks off hardware-owned resources from reset by
p_reset_b
and only software-owned resources
indicated by DBERC0 will be reset by
p_reset_b
.
Figure 11-6. DBCR2 Register
Table 11-8. DBCR2 Bit Definitions
Bit(s) Name Description
0–1 DAC1US Data Address Compare 1 User/Supervisor Mode
00 DAC1 debug events not affected by MSR[PR]
01 Reserved
10 DAC1 debug events can only occur if MSR[PR]=0 (Supervisor mode)
11 DAC1 debug events can only occur if MSR[PR]=1. (User mode)
2–3 DAC1ER Data Address Compare 1 Effective/Real Mode
00 DAC1 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 DAC1 debug events are based on effective address and can only occur if MSRDS=0
11 DAC1 debug events are based on effective address and can only occur if MSRDS=1
4–5 DAC2US Data Address Compare 2 User/Supervisor Mode.
00 DAC2 debug events not affected by MSR[PR]
01 Reserved
10 DAC2 debug events can only occur if MSR[PR]=0 (Supervisor mode)
11 DAC2 debug events can only occur if MSR[PR]=1. (User mode)
6–7 DAC2ER Data Address Compare 2 Effective/Real Mode
00 DAC2 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 DAC2 debug events are based on effective address and can only occur if MSRDS=0
11 DAC2 debug events are based on effective address and can only occur if MSRDS=1
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-27
8–9 DAC12M Data Address Compare 1/2 Mode
00 Exact address compare. DAC1 debug events can only occur if the address of the data
access is equal to the value specified in DAC1. DAC2 debug events can only occur if the
address of the data access is equal to the value specified in DAC2.
01 Address bit match. DAC1 debug events can occur only if the address of the data access
ANDed with the contents of DAC2, are equal to the contents of DAC1 also ANDed with the
contents of DAC2. DAC2 debug events do not occur. DAC1US and DAC1ER settings are
used.
10 Inclusive address range compare. DAC1 debug events can occur only if the address of the
data access is greater than or equal to the value specified in DAC1 and less than the value
specified in DAC2. DAC2 debug events do not occur. DAC1US and DAC1ER settings are
used.
11 Exclusive address range compare. DAC1 debug events can occur only if the address of the
data access is less than the value specified in DAC1 or is greater than or equal to the value
specified in DAC2. DAC2 debug events do not occur. DAC1US and DAC1ER settings are
used.
10 DAC1LNK Data Address Compare 1 Linked
0No effect
1 DAC1 debug events are linked to IAC1 debug events. IAC1 debug events do not affect
DBSR
When linked to IAC1, DAC1 debug events are conditioned based on whether the instruction
also generated an IAC1 debug event
11 DAC2LNK Data Address Compare 2 Linked
0No effect
1 DAC 2 debug events are linked to IAC3 debug events. IAC3 debug events do not affect
DBSR
When linked to IAC3, DAC2 debug events are conditioned based on whether the instruction
also generated an IAC3 debug event. DAC2 can only be linked if DAC12M specifies
Exact
Address Compare
since DAC2 debug events are not generated in the other compare modes.
12–13 DVC1M Data Value Compare 1 Mode
When DBCR4[DVC1C]=0–
00 DAC1 debug events not affected by data value compares.
01 DAC1 debug events can only occur when all bytes specified in the DVC1BE field match the
corresponding data byte values for active byte lanes of the memory access.
10 DAC1 debug events can only occur when any byte specified in the DVC1BE field matches
the corresponding data byte value for active byte lanes of the memory access.
11 DAC1 debug events can only occur when all bytes specified in the DVC1BE field within at
least one of the half words of the data value of the memory access matches the
corresponding DVC1 value.
Note: Inactive byte lanes of the memory access are automatically masked.
When DBCR4[DVC1C]=1–
00 Reserved
01 DAC1 debug events can only occur when any byte specified in the DVC1BE field does not
match the corresponding data byte value for active byte lanes of the memory access. If all
active bytes match, then no event will be generated.
10 DAC1 debug events can only occur when all bytes specified in the DVC1BE field do not
match the corresponding data byte values for active byte lanes of the memory access. If any
active byte match occurs, no event will be generated.
11 Reserved
Note: Inactive byte lanes of the memory access are automatically masked.
Table 11-8. DBCR2 Bit Definitions (Continued)
Bit(s) Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-28 Freescale Semiconductor
14–15 DVC2M Data Value Compare 2 Mode
When DBCR4[DVC2C]=0–
00 DAC2 debug events not affected by data value compares.
01 DAC2 debug events can only occur when all bytes specified in the DVC2BE field match the
corresponding data byte values for active byte lanes of the memory access.
10 DAC2 debug events can only occur when any byte specified in the DVC2BE field matches
the corresponding data byte value for active byte lanes of the memory access.
11 DAC2 debug events can only occur when all bytes specified in the DVC2BE field within at
least one of the half words of the data value of the memory access matches the
corresponding DVC2 value.
Note: Inactive byte lanes of the memory access are automatically masked.
When DBCR4[DVC2C]=1–
00 Reserved
01 DAC2 debug events can only occur when any byte specified in the DVC2BE field does not
match the corresponding data byte value for active byte lanes of the memory access. If all
active bytes match, then no event will be generated.
10 DAC2 debug events can only occur when all bytes specified in the DVC2BE field do not
match the corresponding data byte values for active byte lanes of the memory access. If any
active byte match occurs, no event will be generated.
11 Reserved
Note: Inactive byte lanes of the memory access are automatically masked.
16–23 DVC1BE Data Value Compare 1 Byte Enables
Specifies which bytes in the aligned double-word value associated with the memory access are
compared to the corresponding bytes in DVC1. Inactive byte lanes of a memory access smaller
than 64-bits are automatically masked by hardware. If all bits in the DVC1BE field are clear,
then a match will occur regardless of the data. Misaligned accesses which cross a double-word
boundary are not fully supported.
1xxxxxxx Byte lane 0 is enabled for comparison with the value in bits 0–7 of DVC1.
x1xxxxxx Byte lane 1 is enabled for comparison with the value in bits 8–15 of DVC1.
xx1xxxxx Byte lane 2 is enabled for comparison with the value in bits 16–23 of DVC1.
xxx1xxxx Byte lane 3 is enabled for comparison with the value in bits 24–31 of DVC1.
xxxx1xxx Byte lane 4 is enabled for comparison with the value in bits 32–39 of DVC1.
xxxxx1xx Byte lane 5 is enabled for comparison with the value in bits 40–47 of DVC1.
xxxxxx1x Byte lane 6 is enabled for comparison with the value in bits 48–55 of DVC1.
xxxxxxx1 Byte lane 7 is enabled for comparison with the value in bits 56–63 of DVC1.
24–31 DVC2BE Data Value Compare2 Byte Enables
Specifies which bytes in the aligned double-word value associated with the memory access are
compared to the corresponding bytes in DVC2. Inactive byte lanes of a memory access smaller
than 64-bits are automatically masked by hardware. If all bits in the DVC1BE field are clear,
then a match will occur regardless of the data. Misaligned accesses which cross a double-word
boundary are not fully supported.
1xxxxxxx Byte lane 0 is enabled for comparison with the value in bits 0–7 of DVC2.
x1xxxxxx Byte lane 1 is enabled for comparison with the value in bits 8–15 of DVC2.
xx1xxxxx Byte lane 2 is enabled for comparison with the value in bits 16–23 of DVC2.
xxx1xxxx Byte lane 3 is enabled for comparison with the value in bits 24–31 of DVC2.
xxxx1xxx Byte lane 4 is enabled for comparison with the value in bits 32–39 of DVC2.
xxxxx1xx Byte lane 5 is enabled for comparison with the value in bits 40–47 of DVC2.
xxxxxx1x Byte lane 6 is enabled for comparison with the value in bits 48–55 of DVC2.
xxxxxxx1 Byte lane 7 is enabled for comparison with the value in bits 56–63 of DVC2.
Table 11-8. DBCR2 Bit Definitions (Continued)
Bit(s) Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-29
11.3.3.4 Debug Control Register 3 (DBCR3)
Debug control register 3 is used to enable and configure the debug counter and debug counter events. For
counter operation, the specific debug events which cause counters to decrement are specified in DBCR3.
Note that the corresponding events do not need to be (and probably should not be) enabled in DBCR0.
The IAC1–IAC4 and DAC1–DAC2 control fields in DBCR0 are ignored for counter operations, and the
control fields in DBCR3 determine when counting is enabled. DBCR1 and DBCR2 control fields are also
used to determine the configuration of IAC1–4 and DAC1–2 operation for counting, even though
corresponding events may be disabled by DBCR0. Multiple count-enabled events that occur during
execution of an instruction typically cause only a single decrement of a counter. As an example, if more
than one IAC or DAC register hits and is enabled for counting, only a single count occurs per counter.
During lmw and stmw instructions, multiple DACx hits could occur. If the instruction is not interrupted
prior to completion, a single decrement of a counter occurs. Note that if the counters are operating
independently, both may count for the same instruction.
The debug counter register (DBCNT) is configured by DBCR3[CONFIG] to operate either as separate
16-bit Counter 1 and Counter 2, or as a combined 32-bit counter (using control bits in DBCR3 for Counter
1). Counters are enabled whenever any of their respective count enable event control bits are set to ‘1’ and
either DBCR0[IDM] or DBCR0[EDM] is set to 1. Counters are frozen during a hardware “debug session”
(see Section 11.4.2, “OnCE Introduction”). Counter 1 may be configured to count down on a number of
different debug events. Counter 2 is also configurable to count down on instruction complete, instruction
or data address compare events, and external events.
Special capability is provided for Counter 1 to be triggered to begin counting down by a subset of events
(IAC1, IAC3, DAC1R, DAC1W, DEVT1, DEVT2, and Counter 2). When one or more of the Counter 1
trigger bits is set (IAC1T1, IAC3T1, DAC1RT1, DAC1WT1, DEVT1T1, DEVT2T1, CNT2T1), Counter
1 is frozen until at least one of the triggering events occurs. It is then enabled to begin operation.
Depending on the trigger source, if it is enabled for counting, the trigger event may be counted. Triggering
status for Counter 1 is provided in the debug status register or external debug status register 0. Triggering
mode is enabled by a mtspr DBCR3, which sets one or more of the trigger enable bits and also enables
Counter 1. Once set, the trigger can be re-armed by clearing the DBSR[CNT1TRG] or
EDBSR0[CNT1TRG] status bit.
Most combinations of enables do not make sense and should be avoided. As an example, if DBCR3[ICMP]
is set for Counter 1, no other count enable should be set for Counter 1. Conversely, multiple instruction
address compare count enables are allowed to be set and may be useful.
Due to instruction pipelining issues and other constraints, most combinations of events are not supported
for event counting. Only the following combinations are intended to be used, and other combinations are
not supported:
• Any combination of IAC[1–4]
• Any combination of DAC[1–2] including linking
• Any combination of DEVT[1–2]
• Any combination of IRPT, RET
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-30 Freescale Semiconductor
Limited support is provided for the following combinations:
• Any combination of IAC[1–4] with DAC[1–2] (linked or unlinked). Note that these combinations
may be reported in an imprecise fashion, with DBSR[IDE] set in such cases.
Due to pipelining and detection of IAC events early in the pipeline and DAC events late in the pipeline,
no guarantee is made on the exact instruction boundary that a debug exception will be generated when IAC
and DAC events are combined for counting. This also applies to the case where Counter 1 is being
triggered by Counter 2, and a combination of IAC and DAC events are being enabled for the counters,
even if only one of these types is enabled for a particular counter. In general, when an IAC event logically
follows closely behind a DAC event (within several instructions), it cannot be recognized immediately
since the DAC event has not necessarily been generated in the pipeline at the time the IAC is seen, and
thus the counter may not decrement to zero for the IAC event until after the instruction with the IAC (and
perhaps several additional instructions) has proceeded down the execution pipeline. The instruction
boundary where the debug exception is actually generated in this case will typically follow the IAC by up
to several instructions.
Note that the counters will operate regardless of whether counters are enabled to generate debug
exceptions.
If Counter 2 is being used to trigger Counter 1, Counter 2 events should not normally be enabled in
DBCR0, and will not be blocked.
NOTE
Multiple IAC or DAC events will not be counted during a lmw or stmw
instruction, and no count will occur if either is interrupted by a critical input
or external input interrupt prior to completion.
DBCR3 is a e200z446n3 implementation specific register and is shown in Figure 11-7.
DEVT1C1
DEVT2C1
ICMPC1
IAC1C1
IAC2C1
IAC3C1
IAC4C1
DAC1RC1
DAC1WC1
DAC2RC1
DAC2WC1
IRPTC1
RETC1
DEVT1C2
DEVT2C2
ICMPC2
IAC1C2
IAC2C2
IAC3C2
IAC4C2
DAC1RC2
DAC1WC2
DAC2RC2
DAC2WC2
DEVT1T1
DEVT2T1
IAC1T1
IAC3T1
DAC1RT1
DAC1WT1
CNT2T1
CONFIG
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 561; Read/Write; Reset1 - 0x0
1 Reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If DBCR0EDM=1,
DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned resources
indicated by DBERC0 will be reset by p_reset_b.
Figure 11-7. DBCR3 Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-31
Table 11-9 provides bit definitions for the debug control register 3.
Table 11-9. DBCR3 Bit Definitions
Bit(s) Name Description
0 DEVT1C1 External Debug Event 1 Count 1 Enable
0 Counting DEVT1 debug events by Counter 1 is disabled
1 Counting DEVT1 debug events by Counter 1 is enabled
1 DEVT2C1 External Debug Event 2 Count 1 Enable
0 Counting DEVT2 debug events by Counter 1 is disabled
1 Counting DEVT2 debug events by Counter 1 is enabled
2 ICMPC1 Instruction Complete Debug Event Count 1 Enable
0 Counting ICMP debug events by Counter 1 is disabled
1 Counting ICMP debug events by Counter 1 is enabled
Note that ICMP events are masked by MSR[DE]=0 when operating in Internal Debug Mode
3 IAC1C1 Instruction Address Compare 1 Debug Event Count 1 Enable
0 Counting IAC1 debug events by Counter 1 is disabled
1 Counting IAC1 debug events by Counter 1 is enabled
4 IAC2C1 Instruction Address Compare2 Debug Event Count 1 Enable
0 Counting IAC2 debug events by Counter 1 is disabled
1 Counting IAC2 debug events by Counter 1 is enabled
5 IAC3C1 Instruction Address Compare 3 Debug Event Count 1 Enable
0 Counting IAC3 debug events by Counter 1 is disabled
1 Counting IAC3 debug events by Counter 1 is enabled
6 IAC4C1 Instruction Address Compare 4 Debug Event Count 1 Enable
0 Counting IAC4 debug events by Counter 1 is disabled
1 Counting IAC4 debug events by Counter 1 is enabled
7 DAC1RC1 Data Address Compare 1 Read Debug Event Count 1 Enable1
0 Counting DAC1R debug events by Counter 1 is disabled
1 Counting DAC1R debug events by Counter 1 is enabled
8 DAC1WC1 Data Address Compare 1 Write Debug Event Count 1 Enable1
0 Counting DAC1W debug events by Counter 1 is disabled
1 Counting DAC1W debug events by Counter 1 is enabled
9 DAC2RC1 Data Address Compare 2 Read Debug Event Count 1 Enable1
0 Counting DAC2R debug events by Counter 1 is disabled
1 Counting DAC2R debug events by Counter 1 is enabled
10 DAC2WC1 Data Address Compare 2 Write Debug Event Count 1 Enable1
0 Counting DAC2W debug events by Counter 1 is disabled
1 Counting DAC2W debug events by Counter 1 is enabled
11 IRPTC1 Interrupt Taken Debug Event Count 1 Enable
0 Counting IRPT debug events by Counter 1 is disabled
1 Counting IRPT debug events by Counter 1 is enabled
12 RETC1 Return Debug Event Count 1 Enable
0 Counting RET debug events by Counter 1 is disabled
1 Counting RET debug events by Counter 1 is enabled
13 DEVT1C2 External Debug Event 1 Count 2 Enable
0 Counting DEVT1 debug events by Counter 2 is disabled
1 Counting DEVT1 debug events by Counter 2 is enabled
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-32 Freescale Semiconductor
14 DEVT2C2 External Debug Event 2 Count 2 Enable
0 Counting DEVT2 debug events by Counter 2 is disabled
1 Counting DEVT2 debug events by Counter 2 is enabled
15 ICMPC2 Instruction Complete Debug Event Count 2 Enable
0 Counting ICMP debug events by Counter 2 is disabled
1 Counting ICMP debug events by Counter 2 is enabled
Note that ICMP events are masked by MSR[DE]=0 when operating in Internal Debug Mode
16 IAC1C2 Instruction Address Compare 1 Debug Event Count 2 Enable
0 Counting IAC1 debug events by Counter 2 is disabled
1 Counting IAC1 debug events by Counter 2 is enabled
17 IAC2C2 Instruction Address Compare2 Debug Event Count 2 Enable
0 Counting IAC2 debug events by Counter 2 is disabled
1 Counting IAC2 debug events by Counter 2 is enabled
18 IAC3C2 Instruction Address Compare 3 Debug Event Count 2 Enable
0 Counting IAC3 debug events by Counter 2 is disabled
1 Counting IAC3 debug events by Counter 2 is enabled
19 IAC4C2 Instruction Address Compare 4 Debug Event Count 2 Enable
0 Counting IAC4 debug events by Counter 2 is disabled
1 Counting IAC4 debug events by Counter 2 is enabled
20 DAC1RC2 Data Address Compare 1 Read Debug Event Count 2 Enable1
0 Counting DAC1R debug events by Counter 2 is disabled
1 Counting DAC1R debug events by Counter 2 is enabled
21 DAC1WC2 Data Address Compare 1 Write Debug Event Count 2 Enable1
0 Counting DAC1W debug events by Counter 2 is disabled
1 Counting DAC1W debug events by Counter 2 is enabled
22 DAC2RC2 Data Address Compare 2 Read Debug Event Count 2 Enable1
0 Counting DAC2R debug events by Counter 2 is disabled
1 Counting DAC2R debug events by Counter 2 is enabled
23 DAC2WC2 Data Address Compare 2 Write Debug Event Count 2 Enable1
0 Counting DAC2W debug events by Counter 2 is disabled
1 Counting DAC2W debug events by Counter 2 is enabled
24 DEVT1T1 External Debug Event 1 Trigger Counter 1 Enable
0 No effect
1 A DEVT1 debug event will trigger Counter 1 operation
25 DEVT2T1 External Debug Event 2 Trigger Counter 1 Enable
0 No effect
1 A DEVT2 debug event will trigger Counter 1 operation
26 IAC1T1 Instruction Address Compare 1 Trigger Counter 1 Enable
0 No effect
1 An IAC1 debug event will trigger Counter 1 operation
27 IAC3T1 Instruction Address Compare 3 Trigger Counter 1 Enable
0 No effect
1 An IAC3 debug event will trigger Counter 1 operation
Table 11-9. DBCR3 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-33
NOTE
Updates to the DBCR0, DBSR, DBCR3, and DBCNT registers should be
performed carefully if the counters are currently enabled for counting
events. For these cases, it is possible that the instruction that updates the
counters or control over the counters will cause one or more counter events
to occur (DCNT1, DCNT2, CNT1TRG), even if the result of the instruction
is to modify the counter value or control value to a state where counter
events would not be expected to occur. This is due to the pipelined nature of
the counter and control operation.
For example, if a counter was enabled to count ICMP events, MSR[DE] = 1,
and the value of the counter is 1 prior to execution of a mtspr instruction
that is loading the counter with a different value, a counter event will be
generated following completion of the mtspr, even though the counter ends
up being loaded with a new value. At the end of the mtspr instruction, a
debug event is posted, but the counter value is that of the newly written
count value. In addition, no decrement of the new counter value is
performed at the completion of a mtspr instruction that modifies a counter,
regardless of whether a debug event is generated based on the old counter
value.
As another example, if a counter was enabled to count ICMP events,
MSR[DE] = 1, and the value of the counter is 1 prior to execution of a mtspr
instruction that is loading DBCR3 with a different value, a counter event
may be generated following completion of the mtspr, even though DBCR3
28 DAC1RT1 Data Address Compare 1 Read Trigger Counter 1 Enable
0 No effect
1 A DAC1R debug event will trigger Counter 1 operation
29 DAC1WT1 Data Address Compare 1 Write Trigger Counter 1 Enable
0 No effect
1 A DAC1W debug event will trigger Counter 1 operation
30 CNT2T1 Debug Counter 2 Trigger Counter 1 Enable
0 No effect
1 Counter 2 decrementing to a value of ‘0’ will trigger Counter 1 operation
31 CONFIG Debug Counter Configuration
0 Counter 1 and Counter 2 are independent counters
1 Counter 1 and Counter 2 are concatenated into a single 32-bit counter. The event count
control bits for Counter 1 are used and the event count control bits for Counter 2 are ignored.
1If the DACx field in DBCR0 is set to restrict events to only reads or only writes, only those events will be counted if
enabled in DBCR3. In general, DAC events should be disabled in DBCR0.
Table 11-9. DBCR3 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-34 Freescale Semiconductor
ends up being loaded with a new value that is disabling the particular event
from being counted. At the end of the mtspr instruction, a debug event is
posted, but the DBCR3 value reflects the newly established control, which
may indicate that the particular event is not to cause a counter update.
To avoid this, it is recommended that the DBCNT and DBCR3 values be
modified only when no possibility of a counter related debug event on the
mtspr instruction is possible. Modifying DBCR0 to affect counter event
enabling/disabling may have similar issues, as may modifying the
DBSR[CNT1TRG] bit.
11.3.3.5 Debug Control Register 4 (DBCR4)
Debug control register 4 is used to extend data address and value compare matching functionality. DBCR4
is shown in Figure 11-8.
Table 11-10 provides bit definitions for debug control register 4.
0
DVC1C
0
DVC2C
0
DAC1XM
DAC2XM
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 563; Read/Write; Reset1 - 0x0
1DBCR4 is reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If
DBCR0EDM=1, DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned
resources indicated by DBERC0 will be reset by p_reset_b.
Figure 11-8. DBCR4 Register
Table 11-10. DBCR4 Bit Definitions
Bit(s) Name Description
0—Reserved
1 DVC1C Data Value Compare 1 Control
0 Normal DVC1 operation.
1 Inverted polarity DVC1 operation
DVC1C controls whether DVC1 data value comparisons utilize the normal Power ISA operation,
or an alternate “inverted compare” operation. In inverted polarity mode, data value compares
perform a not-equal comparison. See details in the DBCR2 register definition
2—Reserved
3 DVC2C Data Value Compare 2 Control
0 Normal DVC2 operation.
1 Inverted polarity DVC2 operation
DVC2C controls whether DVC2 data value comparisons utilize the normal Power ISA operation,
or an alternate “inverted compare” operation. In inverted polarity mode, data value compares
perform a not-equal comparison. See details in the DBCR2 register definition
4–15 — Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-35
11.3.3.6 Debug Control Register 5 (DBCR5)
Debug control register 5 is used to configure instruction address compare operation for IAC5–8. The
DBCR5 register is shown in Figure 11-9.
16–19 DAC1XM Data Address Compare 1 Extended Mask Control
0000 No additional masking when DBCR2[DAC12M] = 00
0001–1100 Exact Match Bit Mask. Number of low order bits masked in DAC1 when comparing
the storage address with the value in DAC1 for exact address compare
(DBCR2[DAC12M] = 00). Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
DAC1XM allows for binary power of 2 address range compares for DAC1 without requiring the
use of DAC2.
20–23 DAC2XM Data Address Compare 2 Extended Mask Control
0000 No additional masking when DBCR2[DAC12M] = 00
0001–1100 Exact Match Bit Mask. Number of low order bits masked in DAC2 when comparing
the storage address with the value in DAC2 for exact address compare
(DBCR2[DAC12M] = 00). Ranges up to 4 Kbytes are supported.
1101–1111 Reserved
DAC2XM allows for binary power of 2 address range compares for DAC2 without requiring the
use of DAC1.
24–31 — Reserved
IAC5US
IAC5ER
IAC6US
IAC6ER
IAC56M
0
IAC7US
IAC7ER
IAC8US
IAC8ER
IAC78M
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 564; Read/Write; Reset1 - 0x0
1 Reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If DBCR0EDM=1,
DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned resources
indicated by DBERC0 will be reset by p_reset_b.
Figure 11-9. DBCR5 Register
Table 11-10. DBCR4 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-36 Freescale Semiconductor
Table 11-7 provides bit definitions for debug control register 5.
Table 11-11. DBCR5 Bit Definitions
Bit(s) Name Description
0–1 IAC5US Instruction Address Compare 5 User/Supervisor Mode
00 IAC5 debug events not affected by MSRPR
01 Reserved
10 IAC5 debug events can only occur if MSRPR=0 (Supervisor mode)
11 IAC5 debug events can only occur if MSRPR=1. (User mode)
2–3 IAC5ER Instruction Address Compare 5 Effective/Real Mode
00 IAC5 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 IAC5 debug events are based on effective address and can only occur if MSRIS=0
11 IAC5 debug events are based on effective address and can only occur if MSRIS=1
4–5 IAC6US Instruction Address Compare 6 User/Supervisor Mode
00 IAC6 debug events not affected by MSRPR
01 Reserved
10 IAC6 debug events can only occur if MSRPR=0 (Supervisor mode)
11 IAC6 debug events can only occur if MSRPR=1. (User mode)
6–7 IAC6ER Instruction Address Compare 6 Effective/Real Mode
00 IAC6 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 IAC6 debug events are based on effective address and can only occur if MSRIS=0
11 IAC6 debug events are based on effective address and can only occur if MSRIS=1
8–9 IAC56M Instruction Address Compare 5/6 Mode
00 Exact address compare. IAC5 debug events can only occur if the address of the instruction
fetch is equal to the value specified in IAC5. IAC6 debug events can only occur if the address
of the instruction fetch is equal to the value specified in IAC6.
01 Address bit match. IAC5 debug events can occur only if the address of the instruction fetch,
ANDed with the contents of IAC6 are equal to the contents of IAC5, also ANDed with the
contents of IAC6. IAC6 debug events do not occur. IAC5US and IAC5ER settings are used.
10 Reserved.
11 Reserved.
10–15 — Reserved
16–17 IAC7US Instruction Address Compare 7 User/Supervisor Mode
00 IAC7 debug events not affected by MSRPR
01 Reserved
10 IAC7 debug events can only occur if MSRPR=0 (Supervisor mode)
11 IAC7 debug events can only occur if MSRPR=1 (User mode)
18–19 IAC7ER Instruction Address Compare 7 Effective/Real Mode
00 IAC7 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 IAC7 debug events are based on effective address and can only occur if MSRIS=0
11 IAC7 debug events are based on effective address and can only occur if MSRIS=1
20–21 IAC8US Instruction Address Compare 8 User/Supervisor Mode
00 IAC8 debug events not affected by MSRPR
01 Reserved
10 IAC8 debug events can only occur if MSRPR=0 (Supervisor mode).
11 IAC8 debug events can only occur if MSRPR=1. (User mode)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-37
11.3.3.7 Debug Control Register 6 (DBCR6)
Debug control register 6 is used to extend instruction address compare matching functionality. DBCR6 is
shown in Figure 11-10.
Table 11-12 provides bit definitions for Debug Control Register 6.
22–23 IAC8ER Instruction Address Compare 8 Effective/Real Mode
00 IAC8 debug events are based on effective address
01 Unimplemented in e200 (Book E real address compare), no match can occur
10 IAC8 debug events are based on effective address and can only occur if MSRIS=0
11 IAC8 debug events are based on effective address and can only occur if MSRIS=1
24–25 IAC78M Instruction Address Compare 7/8 Mode
00 Exact address compare. IAC7 debug events can only occur if the address of the instruction
fetch is equal to the value specified in IAC7. IAC8 debug events can only occur if the address
of the instruction fetch is equal to the value specified in IAC8.
01 Address bit match. IAC7 debug events can occur only if the address of the instruction fetch,
ANDed with the contents of IAC8 are equal to the contents of IAC7, also ANDed with the
contents of IAC8. IAC8 debug events do not occur. IAC7US and IAC7ER settings are used.
10 Reserved
11 Reserved
26–31 — Reserved
IAC1XM
IAC2XM
IAC3XM
IAC4XM
IAC5XM
IAC6XM
IAC7XM
IAC8XM
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 603; Read/Write; Reset1 - 0x0
1DBCR6 is reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If
DBCR0EDM=1, DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned
resources indicated by DBERC0 will be reset by p_reset_b.
Figure 11-10. DBCR6 Register
Table 11-12. DBCR6 Bit Definitions
Bit(s) Name Description
0–3 IAC1XM Instruction Address Compare 1 Extended Mask Control
0000 No additional masking when DBCR1[IAC12M] = 00
0001–1100 Exact Match Bit Mask. Number of low order bits masked in IAC1 when comparing
the storage address with the value in IAC1 for exact address compare (DBCR1[IAC12M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 Reserved
IAC1XM allows for binary power of 2 address range compares for IAC1 without requiring the use
of IAC2.
Table 11-11. DBCR5 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-38 Freescale Semiconductor
4–7 IAC2XM Instruction Address Compare 2 Extended Mask Control
0000 No additional masking when DBCR1[IAC12M] = 00
0001–1100 = Exact Match Bit Mask. Number of low order bits masked in IAC2 when comparing
the storage address with the value in IAC2 for exact address compare (DBCR1[IAC12M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
IAC2XM allows for binary power of 2 address range compares for IAC2 without requiring the use
of IAC1.
8–11 IAC3XM Instruction Address Compare 3 Extended Mask Control
0000–No additional masking when DBCR1[IAC34M] = 00
0001–1100 = Exact Match Bit Mask. Number of low order bits masked in IAC3 when comparing
the storage address with the value in IAC3 for exact address compare (DBCR1[IAC34M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
IAC3XM allows for binary power of 2 address range compares for IAC1 without requiring the use
of IAC2.
12–15 IAC4XM Instruction Address Compare 4 Extended Mask Control
0000–No additional masking when DBCR1[IAC34M] = 00
0001–1100 = Exact Match Bit Mask. Number of low order bits masked in IAC4 when comparing
the storage address with the value in IAC4 for exact address compare (DBCR1[IAC34M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
IAC4XM allows for binary power of 2 address range compares for IAC4 without requiring the use
of IAC3.
16–19 IAC5XM Instruction Address Compare 5 Extended Mask Control
0000–No additional masking when DBCR5[IAC56M] = 00
0001–1100 = Exact Match Bit Mask. Number of low order bits masked in IAC5 when comparing
the storage address with the value in IAC5 for exact address compare (DBCR5[IAC56M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
IAC5XM allows for binary power of 2 address range compares for IAC5 without requiring the use
of IAC6.
20–23 IAC6XM Instruction Address Compare 6 Extended Mask Control
0000–No additional masking when DBCR5[IAC56M] = 00
0001–1100 = Exact Match Bit Mask. Number of low order bits masked in IAC6 when comparing
the storage address with the value in IAC6 for exact address compare (DBCR5[IAC56M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 = Reserved
IAC6XM allows for binary power of 2 address range compares for IAC6 without requiring the use
of IAC5.
24–27 IAC7XM Instruction Address Compare 7 Extended Mask Control
0000 - No additional masking when DBCR5[IAC78M] = 00
0001 - 1100 = Exact Match Bit Mask. Number of low order bits masked in IAC7 when comparing
the storage address with the value in IAC7 for exact address compare (DBCR5[IAC78M] = 00).
Ranges up to 4 Kbytes are supported.
1101 - 1111 = Reserved
IAC7XM allows for binary power of 2 address range compares for IAC7 without requiring the use
of IAC8.
Table 11-12. DBCR6 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-39
11.3.3.8 Debug Status Register (DBSR)
The debug status register (DBSR) contains status on debug events and the most recent processor reset. The
debug status register is set by hardware and read and cleared by software. Bits in the debug status register
can be cleared using mtspr DBSR,RS. Clearing is done by writing to the debug status register with a 1 in
any bit position that is to be cleared and a 0 in all other bit positions. The write data to the debug status
register is not direct data, but a mask. A ‘1’ causes the bit to be cleared, and a ‘0’ has no effect. Debug
status bits are set by debug events only while internal debug mode is enabled (DBCR0[IDM] = 1). When
debug interrupts are enabled (MSR[DE] = 1 DBCR0[IDM] = 1 and DBCR0[EDM] = 0, or MSR[DE] = 1,
DBCR0[IDM] = 1 and DBCR0[EDM] = 1 and software is allocated resource(s) by DBERC0), a set bit in
DBSR other than MRR, VLES, or CNT1TRG causes a debug interrupt to be generated. The debug
interrupt handler is responsible for clearing DBSR bits prior to returning to normal execution. The Power
ISA VLE unit adds the DBSR[VLES] status bit to indicate debug events occurring due to a Power ISA
VLE instruction. When resource sharing is enabled, (DBCR0[EDM] = 1 and DBERC0[IDM] = 1), only
software-owned resources may be modified by software, and status bits associated with hardware-owned
resources are not set by hardware in DBSR.
The DBSR register is shown in Figure 11-11.
28–31 IAC8XM Instruction Address Compare 8 Extended Mask Control
0000 No additional masking when DBCR5[IAC78M] = 00
0001–1100 Exact Match Bit Mask. Number of low order bits masked in IAC8 when comparing
the storage address with the value in IAC8 for exact address compare (DBCR5[IAC78M] = 00).
Ranges up to 4 Kbytes are supported.
1101–1111 Reserved
IAC8XM allows for binary power of 2 address range compares for IAC8 without requiring the use
of IAC7.
IDE
UDE
MRR
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4-8
DAC1R
DAC1W
DAC2R
DAC2W
RET
0
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
VLES
DAC_OFST
CNT1TRG
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 304; Read/Write; Reset1 - 0x1000_0000
1 Reset by processor reset p_reset_b if DBCR0EDM=0, as well as unconditionally by m_por. If DBCR0EDM=1,
DBERC0 masks off hardware-owned resources from reset by p_reset_b and only software-owned resources
indicated by DBERC0 will be reset by p_reset_b. DBSRMRR is always updated by p_reset_b however.
Figure 11-11. DBSR Register
Table 11-12. DBCR6 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-40 Freescale Semiconductor
Table 11-13 provides bit definitions for the debug status register.
Table 11-13. DBSR Bit Definitions
Bit(s) Name Description
0 IDE Imprecise Debug Event
Set to 1 if MSR[DE] = 0 and DBCR0[IDM] = 1 and a debug event causes its respective Debug
Status Register bit to be set to 1. It may also be set to ‘1’ if an imprecise debug event occurs due
to a DAC event on a load or store which is terminated with error, or if an ICMP event occurs in
conjunction with a EFPU FP round exception.
1 UDE Unconditional Debug Event
Set to 1 if an unconditional debug event occurred.
2–3 MRR Most Recent Reset.
00 No reset occurred since these bits were last cleared by software
01 A hard reset occurred since these bits were last cleared by software
10 Reserved
11 Reserved
4 ICMP Instruction Complete Debug Event
Set to 1 if an Instruction Complete debug event occurred.
5 BRT Branch Taken Debug Event
Set to 1 if an Branch Taken debug event occurred.
6 IRPT Interrupt Taken Debug Event
Set to 1 if an Interrupt Taken debug event occurred.
7 TRAP Trap Taken Debug Event
Set to 1 if a Trap Taken debug event occurred.
8 IAC1 Instruction Address Compare 1 Debug Event
Set to 1 if an IAC1 debug event occurred.
9 IAC2 Instruction Address Compare 2 Debug Event
Set to 1 if an IAC2 debug event occurred.
10 IAC3 Instruction Address Compare 3 Debug Event
Set to 1 if an IAC3 debug event occurred.
11 IAC4-8 Instruction Address Compare 4–8 Debug Event
Set to 1 if an IAC4, IAC5, IAC6, IAC7, or IAC8 debug event occurred.
12 DAC1R Data Address Compare 1 Read Debug Event
Set to 1 if a read-type DAC1 debug event occurred while DBCR0[DAC1] = 0b10 or
DBCR0[DAC1] = 0b11
13 DAC1W Data Address Compare 1 Write Debug Event
Set to 1 if a write-type DAC1 debug event occurred while DBCR0[DAC1] = 0b01 or
DBCR0[DAC1] = 0b11
14 DAC2R Data Address Compare 2 Read Debug Event
Set to 1 if a read-type DAC2 debug event occurred while DBCR0[DAC2] = 0b10 or
DBCR0[DAC2] = 0b11
15 DAC2W Data Address Compare 2 Write Debug Event
Set to 1 if a write-type DAC2 debug event occurred while DBCR0[DAC2] = 0b01 or
DBCR0[DAC2] = 0b11
16 RET Return Debug Event
Set to 1 if a Return debug event occurred
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-41
11.3.4 Debug External Resource Control Register (DBERC0)
The debug external resource control register (DBERC0) controls resource allocation when DBCR0[EDM]
is set to ‘1’. DBERC0 provides a mechanism for the hardware debugger to share certain debug resources
with software. Individual resources are allocated based on the settings of DBERC0 when
DBCR0[EDM] = 1. DBERC0 settings are ignored when DBCR0[EDM] = 0.
Hardware-owned resources that generate debug events update EDBSR0 instead of DBSR and cause entry
into debug mode. However, software-owned resources that generate debug events if DBCR0[IDM] = 1
update DBSR, causing debug interrupts to occur if MSR[DE] = 1. DBERC0 is controlled by the OnCE
port hardware and is read-only to software.
The DBSR status register is always owned by software. Debug status bits in DBSR are set by
software-owned debug events only while internal debug mode is enabled. When debug interrupts are
enabled (MSRDE] = 1 DBCR0[IDM] = 1 and DBCR0[EDM] = 0, or MSRDE] = 1, DBCR0[IDM] = 1
and DBCR0[EDM] = 1 and software is allocated resource(s) by DBERC0), a set bit in DBSR by an event
that is software-owned (other than MRR or VLES) causes a debug interrupt to be generated.
Debug status bits in EDBSR0 are set by hardware-owned debug events only while external debug mode
is enabled (DBCR0[EDM] = 1).
17–20 — Reserved
21 DEVT1 External Debug Event 1 Debug Event
Set to 1 if a DEVT1 debug event occurred
22 DEVT2 External Debug Event 2 Debug Event
Set to 1 if a DEVT2 debug event occurred
23 DCNT1 Debug Counter 1 Debug Event
Set to 1 if a DCNT1 debug event occurred
24 DCNT2 Debug Counter 2 Debug Event
Set to 1 if a DCNT2 debug event occurred
25 CIRPT Critical Interrupt Taken Debug Event
Set to 1 if a Critical Interrupt Taken debug event occurred.
26 CRET Critical Return Debug Event
Set to 1 if a Critical Return debug event occurred
27 VLES VLE Status
Set to 1 if an ICMP, BRT, TRAP, RET, CRET, IAC, or DAC debug event occurred on a Power
ISA VLE Instruction. Undefined for IRPT, CIRPT, DEVT[1,2], DCNT[1,2], and UDE events
28–30 DAC_OFST Data Address Compare Offset
Indicates offset-1 of saved DSRR0 value from the address of the load or store instruction which
took a DAC Debug exception, unless a simultaneous DTLB or DSI error occurs, in which case
this field is set to 3‘b000 and DBSR[IDE] is set to 1. Normally set to 3‘b000 by a non-DVC DAC.
A DVC DAC may set this field to any value.
31 CNT1TRG Counter 1 Triggered
Set to 1 if Debug Counter 1 is triggered by a trigger event.
Table 11-13. DBSR Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-42 Freescale Semiconductor
If DBCR0[EDM] = 1, DBSR status bits corresponding to hardware-owned debug events are masked from
being set by hardware.
Software-owned resources may be modified by software, but only the corresponding control bits in
DBCR0–6 are affected by execution of a mtspr, thus only a portion of these registers may be affected,
depending on the allocation settings in DBERC0. The debug interrupt handler is still responsible for
clearing DBSR bits for software-owned resources prior to returning to normal execution. Hardware always
has full access to all registers and register fields through the OnCE register access mechanism, and it is up
to the debug firmware to properly implement modifications to these registers with read-modify-write
operations to implement any control sharing with software. Settings in DBERC0 should be considered by
the debug firmware in order to preserve software settings of control and status registers as appropriate
when hardware modifications to the debug registers is performed.
The DBERC0 register is shown in Figure 11-12.
Table 11-13 provides bit definitions for the debug external resource control register. Note that DBERC0
controls are disabled when DBCR0[EDM] = 0.
0
IDM
RST
UDE
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4
DAC1
0
DAC2
0
RET
IAC5
IAC6
IAC7
IAC8
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
BKPT
DQM
0
FT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 569; Read-only by Software; Reset - Unaffected by p_reset_b, cleared by m_por or while in the test-logic-reset
OnCE controller state
Figure 11-12. DBERC0 Register
Table 11-14. DBERC0 Bit Definitions
Bit(s) Name Description
0—Reserved
1 IDM Internal Debug Mode control
0 Internal Debug mode may not be enabled by software. DBCR0IDM is owned exclusively by hardware.
mtspr DBCR0-6 or DBCNT is always ignored. No resource sharing occurs, regardless of the
settings of other fields in DBERC0. Hardware exclusively owns all resources.
1 Internal Debug mode may be enabled by software. DBCR0IDM is owned by software. DBCR0IDM is
software readable/writable.
When DBERC0IDM=1, software writes to hardware-owned bits in DBCR0-6 and DBCNT via mtspr are
ignored.
2 RST Reset Field Control
0 DBCR0RST owned exclusively by hardware debug. No mtspr access by software to DBCR0RST field.
1 DBCR0RST accessible by software debug. DBCR0RST is software readable/writable.
3 UDE Unconditional Debug Event
0 Event owned by hardware debug.
1 Event owned by software debug.
4 ICMP Instruction Complete Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0ICMP field.
1 Event owned by software debug. DBCR0ICMP is software readable/writable.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-43
5 BRT Branch Taken Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0BRT field.
1 Event owned by software debug. DBCR0BRT is software readable/writable.
6 IRPT Interrupt Taken Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0IRPT field.
1 Event owned by software debug. DBCR0IRPT is software readable/writable.
7 TRAP Trap Taken Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0TRAP field.
1 Event owned by software debug. DBCR0TRAP is software readable/writable.
8 IAC1 Instruction Address Compare 1 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC1 control and status fields.
1 Event owned by software debug. IAC1 control fields are software readable/writable.
9 IAC2 Instruction Address Compare 2 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC2 control and status fields.
1 Event owned by software debug. IAC2 control fields are software readable/writable.
10 IAC3 Instruction Address Compare 3 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC3 control and status fields.
1 Event owned by software debug. IAC3 control fields are software readable/writable.
11 IAC4 Instruction Address Compare 4 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC4 control and status fields.
1 Event owned by software debug. IAC4 control fields are software readable/writable.
12 DAC1 Data Address Compare 1 Debug Event
0 Event owned by hardware debug. No mtspr access by software to DAC1 control and status fields.
1 Event owned by software debug. DAC1 control fields are software readable/writable.
13 — Reserved
14 DAC2 Data Address Compare 2 Debug Event
0 Event owned by hardware debug. No mtspr access by software to DAC2 control and status fields.
1 Event owned by software debug. DAC2 control fields are software readable/writable.
15 — Reserved
16 RET Return Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0RET field.
1 Event owned by software debug. DBCR0RET is software readable/writable.
17 IAC5 Instruction Address Compare 5 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC5 control and status fields.
1 Event owned by software debug. IAC5 control fields are software readable/writable.
18 IAC6 Instruction Address Compare 6 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC6 control and status fields.
1 Event owned by software debug. IAC6 control fields are software readable/writable.
19 IAC7 Instruction Address Compare 7 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC7 control and status fields.
1 Event owned by software debug. IAC7 control fields are software readable/writable.
20 IAC8 Instruction Address Compare 8 Debug Event
0 Event owned by hardware debug. No mtspr access by software to IAC8 control and status fields.
1 Event owned by software debug. IAC8 control fields are software readable/writable.
Table 11-14. DBERC0 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-44 Freescale Semiconductor
Table 11-15 shows which resources are controlled by DBERC0 settings.
21 DEVT1 External Debug Event Input 1 Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0DEVT1 field.
1 Event owned by software debug. DBCR0DEVT1 is software readable/writable.
22 DEVT2 External Debug Event Input 2 Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0DEVT2 field.
1 Event owned by software debug. DBCR0DEVT2 is software readable/writable.
23 DCNT1 Debug Counter 1 Debug Event
0 Event owned by hardware debug. No mtspr access by software to Counter1 control and status
fields.
1 Event owned by software debug. Counter1 control and status fields are software readable/writable.
24 DCNT2 Debug Counter 2 Debug Event
0 Event owned by hardware debug.No mtspr access by software to Counter2 control and status fields.
1 Event owned by software debug. Counter2 control and status fields are software readable/writable.
25 CIRPT Critical Interrupt Taken Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0CIRPT field.
1 Event owned by software debug. DBCR0CIRPT is software readable/writable.
26 CRET Critical Return Debug Event
0 Event owned by hardware debug. No mtspr access by software to DBCR0CRET field.
1 Event owned by software debug. DBCR0CRET is software readable/writable.
27 BKPT Breakpoint Instruction Debug Control
0 Breakpoint owned by hardware debug. Execution of a bkpt instruction (all 0’s opcode) results in entry
into debug mode.
1 Breakpoint owned by software debug. Execution of a bkpt instruction (all 0’s opcode) results in illegal
instruction exception.
28 DQM Data Acquisition Messaging Registers
0 DEVENTDQTAG and DDAM register are exclusively owned by hardware debug. No mtspr access by
software to DEVENTDQTAG field or DDAM register. Attempted access by software is ignored.
1 DEVENTDQTAG and DDAM register are owned by software. Software has read/write access to
DEVENTDQTAG field and DDAM register.
29–30 — Reserved
31 FT Freeze Timer Debug Control
0 DBCR0FT owned by hardware debug. No access by software.
1 DBCR0FT owned by software debug. DBCR0FT is software readable/writable.
Table 11-15. DBERC0 Resource Control
DBCR0EDM
DBERC0IDM
DBERC0RST
DBERC0UDE
DBERC0ICMP
DBERC0BRT
DBERC0IRPT
DBERC0TRAP
DBERC0IAC1
DBERC0IAC2
DBERC0IAC3
DBERC0IAC4
DBERC0IAC5
DBERC0IAC6
DBERC0IAC7
DBERC0IAC8
DBERC0DAC1
DBERC0DAC2
DBERC0RET
DBERC0DEVT1
DBERC0DEVT2
DBERC0DCNT1
DBERC0DCNT2
DBERC0CIRPT
DBERC0CRET
DBERC0BKPT
DBERC0DQM
DBERC0FT
Software Accessible
via mtspr,
affected by p_reset_b
0 ——————————————————————————— All debug registers
1 1 —————————————————————————— DBCR0
IDM
Table 11-14. DBERC0 Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-45
1 1 1 ————————————————————————— DBCR0
RST
1 1 — 1 ———————————————————————— DBCR0
UDE
1 1 —— 1 ——————————————————————— DBCR0
ICMP
1 1 ——— 1 —————————————————————— DBCR0
BRT
1 1 ———— 1 ————————————————————— DBCR0
IRPT
1 1 ————— 1 ———————————————————— DBCR0
TRAP
1 1 —————— 1 ——————————————————— IAC1,
DBCR0IAC1,
DBCR1IAC1US,IAC1E
R,
DBCR6IAC1XM
1 1 ——————— 1 —————————————————— IAC2,
DBCR0IAC2,
DBCR1IAC2US,IAC2E
R,
DBCR6IAC2XM
1 1 —————— 1 1 —————————————————— DBCR1
IAC12M
1 1 ———————— 1 ————————————————— IAC3,
DBCR0IAC3,
DBCR1IAC3US,IAC3E
R,
DBCR6IAC3XM
1 1 ————————— 1 ———————————————— IAC4,
DBCR0IAC4,
DBCR1IAC4US,IAC4E
R,
DBCR6IAC4XM
1 1 ———————— 1 1 ———————————————— DBCR1
IAC34M
1 1 —————————— 1 ——————————————— IAC5,
DBCR0IAC5,
DBCR5IAC5US,IAC5E
R,
DBCR6IAC5XM
1 1 ——————————— 1 —————————————— IAC6,
DBCR0IAC6,
DBCR5IAC6US,IAC6E
R,
DBCR6IAC6XM
1 1 —————————— 1 1 —————————————— DBCR5
IAC56M
Table 11-15. DBERC0 Resource Control (Continued)
DBCR0EDM
DBERC0IDM
DBERC0RST
DBERC0UDE
DBERC0ICMP
DBERC0BRT
DBERC0IRPT
DBERC0TRAP
DBERC0IAC1
DBERC0IAC2
DBERC0IAC3
DBERC0IAC4
DBERC0IAC5
DBERC0IAC6
DBERC0IAC7
DBERC0IAC8
DBERC0DAC1
DBERC0DAC2
DBERC0RET
DBERC0DEVT1
DBERC0DEVT2
DBERC0DCNT1
DBERC0DCNT2
DBERC0CIRPT
DBERC0CRET
DBERC0BKPT
DBERC0DQM
DBERC0FT
Software Accessible
via mtspr,
affected by p_reset_b
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-46 Freescale Semiconductor
1 1 ———————————— 1 ————————————— IAC7,
DBCR0IAC7,
DBCR5IAC7US,IAC7E
R,
DBCR6IAC7XM
1 1 ————————————— 1 ———————————— IAC8,
DBCR0IAC8,
DBCR5IAC8US,IAC8E
R,
DBCR6IAC8XM,
1 1 ———————————— 1 1 ———————————— DBCR5
IAC78M
1 1 —————————————— 1 ——————————— DAC1, DVC1
DBCR0DAC1,
DBCR2DAC1US,DAC1
ER,
DBCR2DVC1M,DVC1B
E
DBCR4DVC1C,DAC1X
M
1 1 ——————————————— 1 —————————— DAC2, DVC2
DBCR0DAC2,
DBCR2DAC2US,DAC2
ER,
DBCR2DVC2M,DVC2B
E
DBCR4DVC2C,DAC2X
M
1 1 —————————————— 1 1 —————————— DBCR2
DAC12M
1 1 —————— 1 ——————— 1 ——————————— DBCR2
DAC1LNK
1 1 ———————— 1 —————— 1 —————————— DBCR2
DAC2LNK
1 1 ———————————————— 1 ————————— DBCR0
RET
1 1 ————————————————— 1 ———————— DBCR0
DEVT1
1 1 —————————————————— 1 ——————— DBCR0
DEVT2
Table 11-15. DBERC0 Resource Control (Continued)
DBCR0EDM
DBERC0IDM
DBERC0RST
DBERC0UDE
DBERC0ICMP
DBERC0BRT
DBERC0IRPT
DBERC0TRAP
DBERC0IAC1
DBERC0IAC2
DBERC0IAC3
DBERC0IAC4
DBERC0IAC5
DBERC0IAC6
DBERC0IAC7
DBERC0IAC8
DBERC0DAC1
DBERC0DAC2
DBERC0RET
DBERC0DEVT1
DBERC0DEVT2
DBERC0DCNT1
DBERC0DCNT2
DBERC0CIRPT
DBERC0CRET
DBERC0BKPT
DBERC0DQM
DBERC0FT
Software Accessible
via mtspr,
affected by p_reset_b
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-47
DBERC0 also controls which bits or fields in DBCR0–6 are reset by assertion of p_reset_b when
DBCR0[EDM] = 1. Only software-owned bits or fields as shown in Table 11-15 are affected in this case,
except that DBCR0[RST] and DBSR[MRR] are updated by assertion of p_reset_b regardless of the value
of DBCR0[EDM] or DBERC0.
1 1 ——————————————————— 1 —————— DBCR0
DCNT1,
DBCR3[DEVT1C1,
DEVT2C1, ICMPC1,
IAC1C1, IAC2C1,
IAC3C1, IAC4C1,
DAC1RC1, DAC1WC1,
DAC2RC1, DAC2WC1,
IRPTC1, RETC1,
DEVT1T1, DEVT2T1,
IAC1T1, IAC3T1,
DAC1RT1, DAC1WT1,
CNT2T1]1,
DBCNTCNT1
1 1 ———————————————————— 1 ————— DBCR0
DCNT2,
DBCR3[DEVT1C2,
DEVT2C2, ICMPC2,
IAC1C2, IAC2C2,
IAC3C2, IAC4C2,
DAC1RC2, DAC1WC2,
DAC2RC2, DAC2WC2]2,
DBCNTCNT2
1 1 ——————————————————— 1 1 ————— DBCR3
CONFIG
1 1 ————————————————————— 1 ———— DBCR0
CIRPT
1 1 —————————————————————— 1 ——— DBCR0
CRET
1 1 ——————————————————————— 1 ——
1—
3———————————————————————— 1 — DEVENTDQTAG,
DDAM
1 1 ————————————————————————— 1 DBCR0
FT
1Note that software is given write access to all counter 1 control events and triggers regardless of whether software owns these
events. It is considered a programming error to enable counter or trigger events in DBCR3 which are not “owned” by software, and
operational results of the counter(s) are undefined if programmed.
2Note that software is given write access to all counter 2 control events regardless of whether software owns these events. It is
considered a programming error to enable counter events in DBCR3 which are not “owned” by software, and operational results of
the counter(s) are undefined if programmed.
3Note: IDM not required to be set to enable software access.
Table 11-15. DBERC0 Resource Control (Continued)
DBCR0EDM
DBERC0IDM
DBERC0RST
DBERC0UDE
DBERC0ICMP
DBERC0BRT
DBERC0IRPT
DBERC0TRAP
DBERC0IAC1
DBERC0IAC2
DBERC0IAC3
DBERC0IAC4
DBERC0IAC5
DBERC0IAC6
DBERC0IAC7
DBERC0IAC8
DBERC0DAC1
DBERC0DAC2
DBERC0RET
DBERC0DEVT1
DBERC0DEVT2
DBERC0DCNT1
DBERC0DCNT2
DBERC0CIRPT
DBERC0CRET
DBERC0BKPT
DBERC0DQM
DBERC0FT
Software Accessible
via mtspr,
affected by p_reset_b
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-48 Freescale Semiconductor
11.3.5 Debug Event Select Register (DEVENT)
The debug event select register allows instrumented software to internally generate signals when an mtspr
instruction is executed and this register is accessed. The values written to this register determine which of
the p_devnt_out[0:7] processor output signals are asserted upon access. Writing a ‘1’ to any of these bit
positions causes a one-clock pulse to be generated on the corresponding output. For p_devnt_out[0:3], a
corresponding jd_watchpt[x] output is asserted as well to indicate a watchpoint has occurred. These
signals may be used for internal core debug resources as well as for SoC level cross-triggering. See the
SoC User’s Manual for more information on SoC use cases.
The DEVENT[DEVNT] register field value is undefined on a read; it may or may not remain set to the last
value written. Since it is unconditionally shared by hardware debug and software, software should not rely
on any value remaining.
The upper 8-bits of the DEVENT register also provide the DQTAG used to identify channels within Data
Acquisition Messages. See Section 12.13.1, “Data Acquisition ID Tag Field,” for more detail on the
DQTAG.
The DEVENT register is shown in Figure 11-13.
Table 11-16 provides bit definitions for the debug event register.
DQTAG 0 DEVNT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 975; Reset1 - 0x0
1 Reset by processor reset p_reset_b if DBCR0[EDM] = 0, as well as unconditionally by m_por. If
DBCR0[EDM] = 1, DBERC0 masks off hardware-owned resources from reset by p_reset_b and only
software-owned resources indicated by DBERC0 will be reset by p_reset_b. Note that DEVNT field is shared by
hardware and software but is always reset by p_reset_b.
Figure 11-13. DEVENT Register
Table 11-16. DEVENT Bit Definitions
Bit(s) Name Description
0–7 DQTAG Data Acquisition Message IDTAG channel identifier (supplied to Nexus 3)
8–23 — Reserved, should be cleared.
24–31 DEVNT Debug Event Signals
00000000 No signal is asserted
xxxxxxx1
p_devnt_out[0]
and
jd_watchpt[12]
are asserted for one clock
xxxxxx1x
p_devnt_out[1]
and
jd_watchpt[13
] are asserted for one clock
xxxxx1xx
p_devnt_out[2]
and
jd_watchpt[20]
are asserted for one clock
xxxx1xxx
p_devnt_out[3]
and
jd_watchpt[21]
are asserted for one clock
xxx1xxxx
p_devnt_out[4]
is asserted for one clock
xx1xxxxx
p_devnt_out[5]
is asserted for one clock
x1xxxxxx
p_devnt_out[6]
is asserted for one clock
1xxxxxxx
p_devnt_out[7]
is asserted for one clock
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-49
11.3.6 Debug Data Acquisition Message Register (DDAM)
The debug data acquisition message register allows instrumented software to generate real-time data
acquisition messages (as defined by Nexus 3+) by means of an mtspr instruction to this register. See
Section 12.13, “Data Acquisition Messaging,” for details.
The DDAM register is shown in Figure 11-14.
Table 11-17 provides bit definitions for the debug data acquisition message register.
11.4 External Debug Support
External debug support is supplied through the OnCE controller serial interface, which allows access to
internal CPU registers and other system state while the CPU is halted in debug mode. All debug resources
including DBCR0–6, DBSR, IAC1–8, DAC1–2, DVC1–2, and DBCNT are accessible through the serial
OnCE interface in external debug mode. Setting the EDBCR0[EDM]/DBCR0[EDM] through the OnCE
interface enables external debug mode and, unless otherwise permitted by the settings in DBERC0,
disables software updates to the debug control registers. When [E]DBCR0[EDM] is set, debug events
enabled to set respective status bits also cause the CPU to enter debug mode as opposed to generating
debug interrupts, unless the specific events are allocated to software by the settings in DBERC0. In debug
mode, the CPU is halted at a recoverable boundary; an external debug control module may control CPU
operation through the OnCE.
Note that the descriptions of events in the subsections of Section 11.2, “Software Debug Events and
Exceptions,” refer to setting DBSR status bits; however, when resources are owned by hardware, the
events for those resources set the respective status bits in EDBSR0 instead of DBSR.
DDAM
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
SPR - 576; Reset1 - 0x0
1 Reset by processor reset
p_reset_b
if DBCR0[EDM] = 0, as well as unconditionally by
m_por
. If DBCR0[EDM] = 1,
DBERC0 masks off hardware-owned resources from reset by
p_reset_b
and only software-owned resources
indicated by DBERC0 will be reset by
p_reset_b
.
Figure 11-14. DDAM Register
Table 11-17. DDAM Bit Definitions
Bit(s) Name Description
0–31 DDAM Value to be transmitted in a Data Acquisition Message (DQM) (supplied to Nexus 3 with strobe)

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-50 Freescale Semiconductor
NOTES
On the initial setting of [E]DBCR0[EDM] to ‘1’, other bits in DBCR0 will
remain unchanged. After [E]DBCR0[EDM] has been set, all debug register
resources may be subsequently controlled through the OnCE interface. The
CPU should be placed into debug mode via the OCRDR control bit prior to
writing EDM to ‘1’. This gives the debugger the opportunity to cleanly write
to the DBCRx registers and the DBSR to clear out any residual state /
control information which could cause unintended operation.
It is intended for the CPU to remain in external debug mode
(DBCR0[EDM] = 1) in order to single step or perform other debug mode
entry/reentry by the OCRDR, either by performing go+noexit commands or
by assertion of the jd_de_b signal.
DBCR0[EDM] operation is blocked if OnCE operation is disabled
(jd_en_once negated) regardless of whether it is set or cleared. This means
that if DBCR0EDM was previously set, and then jd_en_once is negated
(this should not occur), entry into debug mode is blocked; all events are
blocked; and watchpoints are blocked.
Due to clock domain design, the CPU clock (m_clk) must be active to perform writes to debug registers
other than the OnCE command register (OCMD), the OnCE control register (OCR), external debug control
register 0 (EDBCR0), external debug status register 0 (EDBSR0) or DBCR0[EDM]. Register read data is
synchronized back to the j_tclk clock domain. The OnCE control register provides the capability to signal
the system level clock controller that the CPU clock should be activated if not already active.
Updates to the DBCRx, DBSR, and DBCNT registers by the OnCE interface should be performed with
the CPU in debug mode to guarantee proper operation. Due to the various points in the CPU pipeline where
control is sampled and event handshaking is performed, it is possible that modifications to these registers
while the CPU is running may result in early or late entry into debug mode and may have incorrect status
posted in the DBSR register.
If resource sharing is enabled by DBERC0, updates to the DBERC0, DBCRx, DBCNT, and DBSR
registers must be performed with the CPU in debug mode because simultaneous updates of register
portions could otherwise be attempted, which is not guaranteed to occur properly. The results of such an
attempt are undefined.
11.4.1 External Debug Registers
The external debug registers are used for controlling several debug aspects of the core and reporting status
while e200z446n3 is in external debug mode.
11.4.1.1 External Debug Control Register 0 (EDBCR0)
EDBCR0 is a control register accessible to an external debugger through the OnCE/JTAG port. An
external development tool can write to this register in order to enable external debug mode or to enable
debugger notify halt instructions (dnh, se_dnh).
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-51
EDBCR0 is not accessible by software, However, the state of EDBCR0[EDM] is reflected as a read-only
bit in DBCR0[EDM] to software. There is only one physical EDM bit implemented; it is reflected in both
the DBCR0 and EDBCR0 registers, and may be written and read using either register by the hardware
debugger. For future compatibility, EDBCR0 updates are preferred.
EDBCR0 is shown in Figure 11-15.
Table 11-18 provides bit definitions for external debug control register 0.
11.4.1.2 External Debug Status Register 0 (EDBSR0)
The external debug status register 0 (EDBSR0) contains the status on debug events owned by hardware.
The external debug status register 0 is set by the hardware, and read and cleared by OnCE access by the
debugger. Clearing is done by writing to the external debug status register through the OnCE port, with a
‘1’ in any bit position that is to be cleared and ‘0’ in all other bit positions. The write data to EDBSR0 is
not direct data, but a mask. A ‘1’ causes the bit to be cleared, and a ‘0’ has no effect.
EDM
DNH_EN
DTF
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Reset1 - 0x0
1EDBCR0 is affected (reset) by
j_trst_b
or
m_por
assertion, and remains reset while in the Test_Logic_Reset state,
but is not affected by
p_reset_b
.
Figure 11-15. EDBCR0 Register
Table 11-18. EDBCR0 Bit Definitions
Bit(s) Name Description
0 EDM External Debug Mode. This bit is also reflected in DBCR0
0 External debug mode disabled. Internal debug events not mapped into external debug events.
1 External debug mode enabled. Hardware-owned events will not cause the CPU to vector to interrupt
code. Software is not permitted to write to debug registers {DBCRx, DBCNT, IAC1-8, DAC1-2,
DVC1-2} unless permitted by settings in DBERC0.
When external debug mode is enabled, hardware-owned resources in debug registers are not affected
by processor reset
p_reset_b
. This allows the debugger to set up hardware debug events which remain
active across a processor reset.
1 DNH_EN dnh Instruction Enable
0 Execution of dnh and se_dnh instructions cause illegal instruction exceptions to occur.
1 Execution of dnh and se_dnh instructions cause entry into debug mode and a debug halt occurs,
regardless of the value of EDM.
2–3 DFT Debug Freeze Timers Control
00 Timebase, Watchdog timer, and Decrementer are not clocked during a debug session
01 Timebase and Watchdog timer are not clocked during a debug session. Decrementer is unaffected
10 Decrementer is not clocked during a debug session. Timebase and Watchdog timers are unaffected
11 No timer freeze during a debug session
4–31 --- Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-52 Freescale Semiconductor
The EDBSR0 register is shown in Figure 11-16.
Table 11-19 provides bit definitions for external debug status register 0.
IDE
UDE
DNH
0
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4-8
DAC1R
DAC1W
DAC2R
DAC2W
RET
0
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
VLES
DAC_OFST
CNT1TRG
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Read/Write; Reset1 - 0x0000_0000
1Reset by
j_trst_b
or
m_por
assertion, and remains reset while in the Test_Logic_Reset state or while
EDBCR0[EDM] = 0.
Figure 11-16. EDBSR0 Register
Table 11-19. EDBSR0 Bit Definitions
Bit(s) Name Description
0 IDE Imprecise Debug Event
Set to 1 if DBCR0[EDM] = 1 and an imprecise debug event occurs for a hardware-owned DAC event
due to a load or store which is terminated with error, or if a hardware-owned ICMP event occurs in
conjunction with a SPE FP round exception.
1 UDE Unconditional Debug Event
Set to 1 if a hardware-owned Unconditional debug event occurred.
2 DNH Debugger Notify Halt Event
Set to 1 if a debugger notify halt instruction was executed and caused a debug halt.
3—Reserved
4 ICMP Instruction Complete Debug Event
Set to 1 if a hardware-owned Instruction Complete debug event occurred.
5 BRT Branch Taken Debug Event
Set to 1 if a hardware-owned Branch Taken debug event occurred.
6 IRPT Interrupt Taken Debug Event
Set to 1 if a hardware-owned Interrupt Taken debug event occurred.
7 TRAP Trap Taken Debug Event
Set to 1 if a hardware-owned Trap Taken debug event occurred.
8 IAC1 Instruction Address Compare 1 Debug Event
Set to 1 if a hardware-owned IAC1 debug event occurred.
9 IAC2 Instruction Address Compare 2 Debug Event
Set to 1 if a hardware-owned IAC2 debug event occurred.
10 IAC3 Instruction Address Compare 3 Debug Event
Set to 1 if a hardware-owned IAC3 debug event occurred.
11 IAC4-8 Instruction Address Compare 4–8 Debug Event
Set to 1 if a hardware-owned IAC4, IAC5, IAC6, IAC7, or IAC8 debug event occurred.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-53
11.4.2 OnCE Introduction
The e200z446n3 on-chip emulation circuitry (OnCE™/Nexus Class 1 interface) provides a means of
interacting with the e200 core and integrated system so that a user may examine registers, memory, or
on-chip peripherals facilitating hardware/software development. OnCE operation is controlled by an
12 DAC1R Data Address Compare 1 Read Debug Event
Set to 1 if a hardware-owned read-type [DAC1] debug event occurred while DBCR0[DAC1] = 0b10 or
DBCR0[DAC1] = 0b11
13 DAC1W Data Address Compare 1 Write Debug Event
Set to 1 if a hardware-owned write-type [DAC1] debug event occurred while DBCR0[DAC1] = 0b01
or DBCR0[DAC1] = 0b11
14 DAC2R Data Address Compare 2 Read Debug Event
Set to 1 if a hardware-owned read-type [DAC2] debug event occurred while DBCR0[[DAC2]] = 0b10
or DBCR0[DAC2] = 0b11
15 DAC2W Data Address Compare 2 Write Debug Event
Set to 1 if a hardware-owned write-type [DAC2] debug event occurred while DBCR0[DAC2] = 0b01
or DBCR0[DAC2] = 0b11
16 RET Return Debug Event
Set to 1 if a hardware-owned Return debug event occurred
17–20 — Reserved
21 DEVT1 External Debug Event 1 Debug Event
Set to 1 if a hardware-owned DEVT1 debug event occurred
22 DEVT2 External Debug Event 2 Debug Event
Set to 1 if a hardware-owned DEVT2 debug event occurred
23 DCNT1 Debug Counter 1 Debug Event
Set to 1 if a hardware-owned DCNT1 debug event occurred
24 DCNT2 Debug Counter 2 Debug Event
Set to 1 if a hardware-owned DCNT2 debug event occurred
25 CIRPT Critical Interrupt Taken Debug Event
Set to 1 if a hardware-owned Critical Interrupt Taken debug event occurred.
26 CRET Critical Return Debug Event
Set to 1 if a hardware-owned Critical Return debug event occurred
27 VLES VLE Status
Set to 1 if a hardware-owned ICMP, BRT, TRAP, RET, CRET, IAC, or DAC debug event occurred on
a Power ISA VLE Instruction. Undefined for IRPT, CIRPT, DEVT[1,2], DCNT[1,2], and UDE events
28–30 DAC_OFST Data Address Compare Offset
Indicates offset-1 of saved DSRR0 value from the address of the load or store instruction which took
a hardware-owned DAC Debug exception, unless a simultaneous DTLB or DSI error occurs, in which
case this field is set to 3‘b000 and EDBSR0[IDE] is set to 1. Normally set to 3‘b000 by a non-DVC
DAC. A DVC DAC may set this field to any value.
31 CNT1TRG Counter 1 Triggered
Set to 1 if hardware-owned Debug Counter 1 is triggered by a trigger event.
Table 11-19. EDBSR0 Bit Definitions (Continued)
Bit(s) Name Description
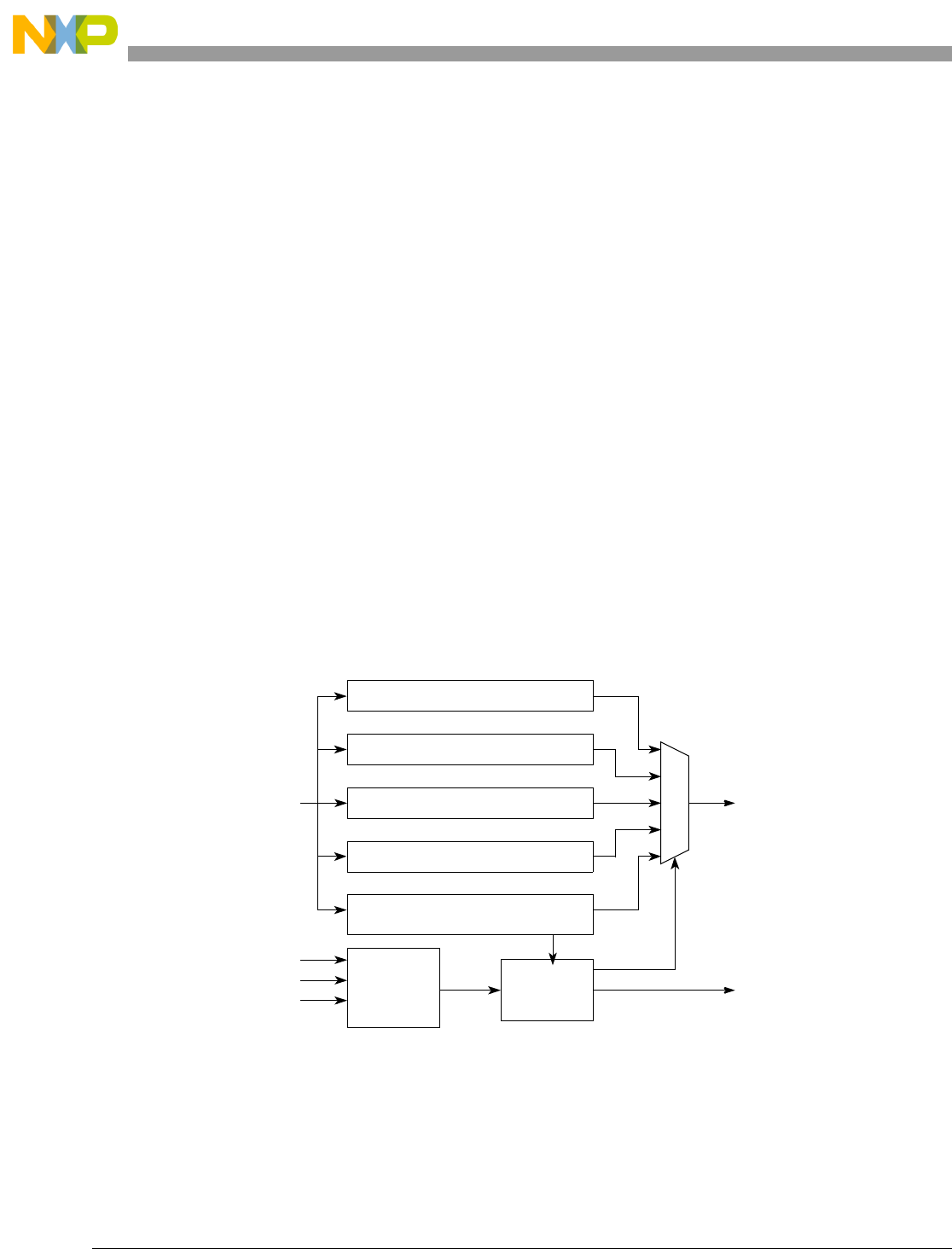
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-54 Freescale Semiconductor
industry standard IEEE 1149.1 TAP controller. By using public instructions, the external hardware
debugger can freeze or halt the CPU, read and write internal state, and resume normal execution. The core
does not contain IEEE 1149.1 standard boundary cells on its interface as it is a building block for further
integration. It does not support the JTAG related boundary scan instruction functionality, although JTAG
public instructions may be decoded and signaled to external logic.
The OnCE logic provides for Nexus Class 1 static debug capability (utilizing the same set of resources
available to software while in internal debug mode), and is present in all e200-based designs. The OnCE
module also provides support for directly integrating a Nexus class 2 or class 3 real-time debug unit with
the e200 core for development of real-time systems where traditional static debug is insufficient. The
partitioning between a OnCE module and a connected Nexus module to provide real-time debug allows
for capability and cost trade-offs to be made.
The e200z446n3 core is designed to be a fully integratable module. The OnCE TAP controller and
associated enabling logic are designed to allow concatenation with an existing JTAG controller if present
in the system. Thus, the e200z446n3 can be easily integrated with existing JTAG designs or as a
stand-alone controller.
In order to enable full OnCE operation, the jd_enable_once input signal must be asserted. In some system
integrations, this is automatic, since the input will be tied asserted. Other integrations may require the
execution of the Enable OnCE command via the TAP and appropriate entry of serial data. Exact
requirements will be documented by the integrated product specification. The jd_enable_once input signal
should not change state during a debug session or undefined activity may occur.
Figure 11-17 shows the TAP controller state model and the TAP registers implemented by the OnCE logic.
Figure 11-17. OnCE TAP Controller and Registers
OnCE mapped Debug registers
Auxiliary data registers
External Data registers
Bypass register
TAP instruction register
TAP
controller
j_trst_b
j_tclk
j_tms TDO
mux logic
j_tdi j_tdo
j_tdo_en
(OnCE OCMD)
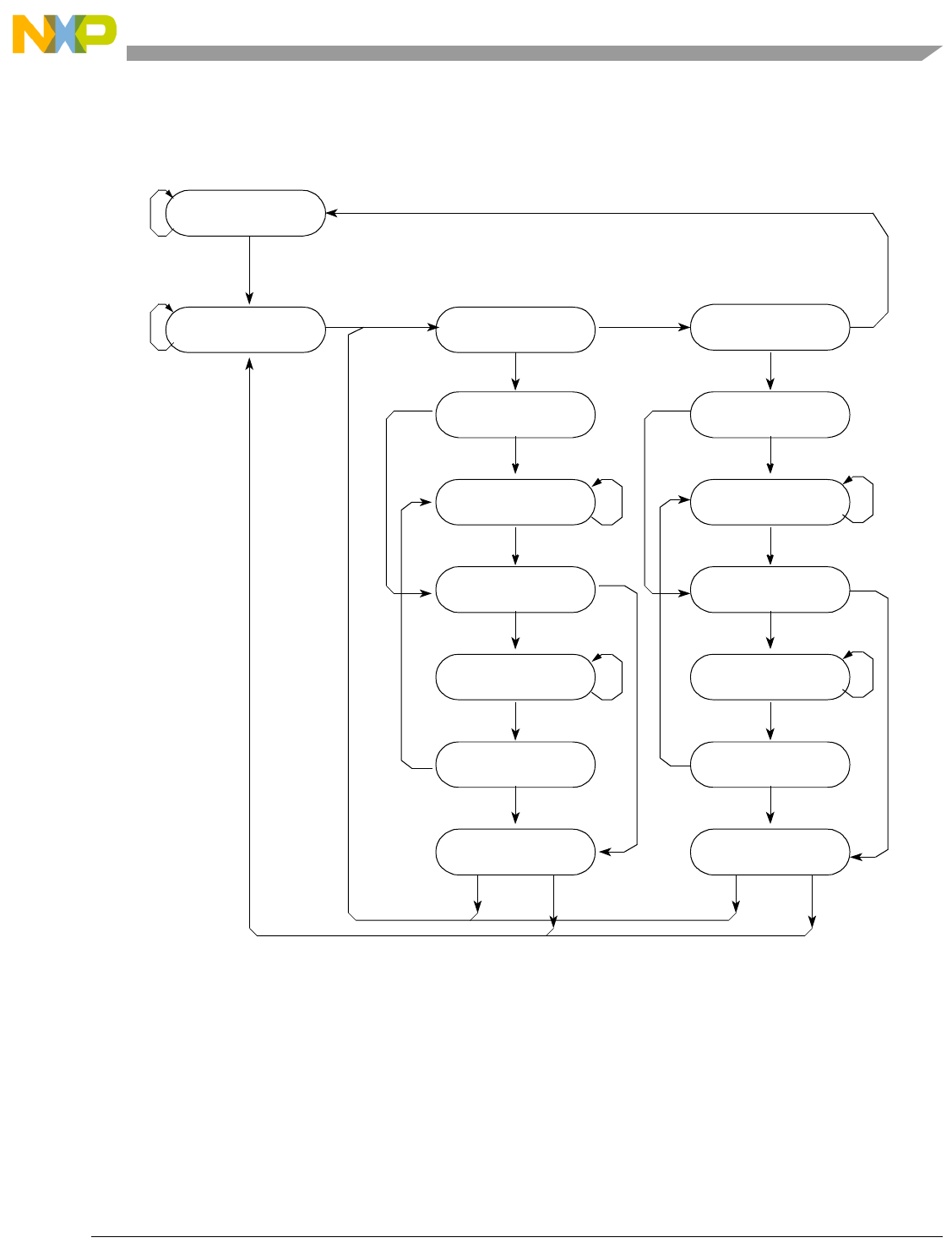
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-55
Figure 11-18 shows the OnCE controller implemented as a 16-state FSM, with a one-to-one
correspondence to the states defined for the JTAG TAP controller.
Figure 11-18. OnCE TAP Controller and Registers (16-State FSM)
Access to processor registers and the contents of memory locations happens through the following
sequence:
1. Enable external debug mode (setting DBCR0[EDM] to ‘1’).
2. Place the processor into debug mode.
3. Scan instructions and data into and out of the CPU Scan Chain (CPUSCR).
Capture - DR
Shift - DR
Exit1 - DR
Pause - DR
Exit2 - DR
Update - DR
Select - IR
Scan
Capture - IR
Shift - IR
Exit1 - IR
Pause - IR
Exit2 - IR
Update - IR
Select DR-
Scan
Run - Test/
Idle
Test-Logic-
Reset
1
0
1
11
1
1
1
1
1
1
1
1
1
1
1
1
00
00
00
00
00
0
0
0
0
0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-56 Freescale Semiconductor
4. Access required data by CPU execution of scanned instructions. Memory locations may be read by
scanning a load instruction into the e200 core (which references the desired memory location),
executing the load instruction, and then scanning out the result of the load. Other resources are
accessed in a similar manner.
A debug session begins with the CPU’s initial entry into debug mode from normal, waiting, stopped, or
halted states (all indicated by the OnCE Status Register (OSR) as discussed in Section 11.4.6.1, “e200
OnCE Status Register,”) by assertion of one or more debug requests. The jd_debug_b output signal
indicates that a debug session is in progress, and the OSR indicates the CPU is in the debug state.
Instructions may then be single-stepped by scanning new values into the CPUSCR and performing a OnCE
go+noexit command (See Section 11.4.6.2, “e200 OnCE Command Register (OCMD)”). The CPU then
temporarily exits the debug state—but not the debug session—to execute the instruction It next returns to
the debug state, again indicated by the OSR. The debug session remains in force until the final OnCE
go+exit command is executed, at which time the CPU returns to its previous state unless a new debug
request is pending. A scan into the CPUSCR is required prior to executing each go+exit or go+noexit
OnCE command.
11.4.3 JTAG/OnCE Pins
The JTAG/OnCE pin interface is used to transfer OnCE instructions and data to the OnCE control block.
Depending on the particular resource being accessed, the CPU may need to be placed in debug mode. For
resources outside of the CPU block but contained in the OnCE block, the processor is not disturbed and
may continue execution. If a processor resource is required, an internal debug request (dbg_dbgrq) may
be asserted to the CPU by the OnCE controller. This causes the CPU to finish the instruction being
executed, save the instruction pipeline information, enter debug mode, and wait for further commands.
Asserting dbg_dbgrq causes the chip to exit the low power mode enabled by the setting of MSR[WE], as
well as temporarily exiting the waiting, stopped, or halted power management states.
Table 11-20 details the primary JTAG/OnCE interface signals.
A full description of JTAG pins is provided in Section 13.3.23, “JTAG Support Signals—Primary
Interface.”
Table 11-20. JTAG/OnCE Primary Interface Signals
Signal Name Type Description
j_trst_b I JTAG test reset
j_tclk I JTAG test clock
j_tms I JTAG test mode select
j_tdi I JTAG test data input
j_tdo O Test data out to master controller or pad
j_tdo_en1
1
j_tdo_en
is asserted when the TAP controller is in the shift_DR or shift_IR
state.
O Enables TDO output buffer

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-57
11.4.4 OnCE Internal Interface Signals
The following list describes the e200z446n3 OnCE interface signals to other internal blocks associated
with the OnCE controller.
• CPU Debug Request (dbg_dbgrq)
— Asserted by the OnCE control logic to request that the CPU enters the debug state.
— May be asserted for a number of different conditions
— Causes the CPU to finish the instruction being executed, save the instruction pipeline
information, enter the debug mode, and wait for further commands.
• CPU Debug Acknowledge (cpu_dbgack)
— Asserted by the CPU upon entering the debug state.
— Used as part of the handshake mechanism between the OnCE control logic and the rest of the
CPU. The CPU core may enter debug mode either through a software or hardware event.
• CPU Address, Attributes
— Used by a Nexus class 2-4 debug unit with information for real-time address trace information.
•CPU Data
— Used to supply a Nexus class 2-4 debug unit with information for real-time data trace
capability.
11.4.5 OnCE Interface Signals
The following paragraphs describe additional OnCE interface signals to other external blocks such as a
Nexus Controller and external blocks which may need information pertaining to debug operation.
11.4.5.1 OnCE Enable (jd_en_once)
The OnCE enable signal jd_en_once is used to enable the OnCE controller to allow certain instructions
and operations to be executed. Assertion of this signal enables the full OnCE command set, as well as the
operation of control signals and OnCE Control register functions.
When this signal is disabled, only the Bypass, ID, and Enable_OnCE commands are executed by the OnCE
unit. All other commands default to a “Bypass” command. The OnCE status register is not visible when
OnCE operation is disabled. In addition, OnCE control register functions are disabled, as is the operation
of the jd_de_b input. Secure systems may choose to leave the jd_en_once signal negated until a security
check has been performed. Other systems should tie this signal asserted to enable full OnCE operation.
The j_en_once_regsel output signal is provided to assist external logic performing security checks. Refer
to Section •, “Enable Once Register Select (j_en_once_regsel),” for a description of the j_en_once_regsel
output signal.
The jd_en_once input must only change state during the Test-Logic-Reset, Run-Test/Idle, or Update_DR
TAP states. A new value takes affect after one additional j_tclk cycle of synchronization. In addition,
jd_enable_once must not change state during a debug session, or undefined activity may occur.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-58 Freescale Semiconductor
11.4.5.2 OnCE Debug Request/Event (jd_de_b, jd_de_en)
If implemented at the SoC level, a system level bidirectional open drain debug event pin DE_b (not part
of the e200z4 interface) provides a fast means of entering debug mode from an external command
controller (when input) as well as a fast means of acknowledging to an external command controller (when
output) that debug mode has been entered.
The assertion of this pin by a command controller causes the CPU core to finish the instruction being
executed, save the instruction pipeline information, enter debug mode, and wait for commands to be
entered. If DE_b was used to enter the debug mode then DE_b must be negated after the OnCE controller
responds with an acknowledge and before sending the first OnCE command. The assertion of this pin by
the CPU core acknowledges that it has entered the debug mode and is waiting for commands to be entered.
To support operation of this system pin, the OnCE logic supplies the jd_de_en output and samples the
jd_de_b input when OnCE is enabled (jd_en_once asserted). Assertion of jd_de_b causes the OnCE logic
to place the CPU into debug mode. Once debug mode has been entered, the jd_de_en output is asserted for
three j_tclk periods to signal an acknowledge. jd_de_en can be used to enable the open-drain pulldown of
the system level DE_b pin.
For systems which do not implement a system level bidirectional open drain debug event pin DE_b, the
jd_de_en and jd_de_b signals may still be used to handshake debug entry.
11.4.5.3 e200 OnCE Debug Output (jd_debug_b)
The e200 OnCE debug output, jd_debug_b, is used to indicate to on-chip resources that a debug session is
in progress. Peripherals and other units may use this signal to modify normal operation for the duration of
a debug session. This may involve the CPU executing a sequence of instructions that are not part of the
normal instruction stream that the CPU executes in other modes solely for the purpose of visibility/system
control. This signal is asserted the first time the CPU enters the debug state and remains asserted until the
CPU is released by a write to the OnCE command register with the GO and EX bits set, and a register
specified as either “No Register Selected” or the CPUSCR. This signal remains asserted even though the
CPU may enter and exit the debug state for each instruction executed under control of the e200 OnCE
controller. See Section 11.4.6.2, “e200 OnCE Command Register (OCMD),” for more information about
the function of the GO and EX bits.
This signal is not normally used by the CPU.
11.4.5.4 e200 CPU Clock On Input (jd_mclk_on)
The e200 CPU clock on input, jd_mclk_on, is used to indicate that the CPU’s m_clk input is active. This
input signal is expected to be driven by system logic external to the e200 core. It is synchronized to the
j_tclk (scan clock) clock domain and presented as a status flag on the j_tdo output during the Shift_IR state.
External firmware may use this signal to ensure that proper scan sequences will occur to access debug
resources in the m_clk clock domain.
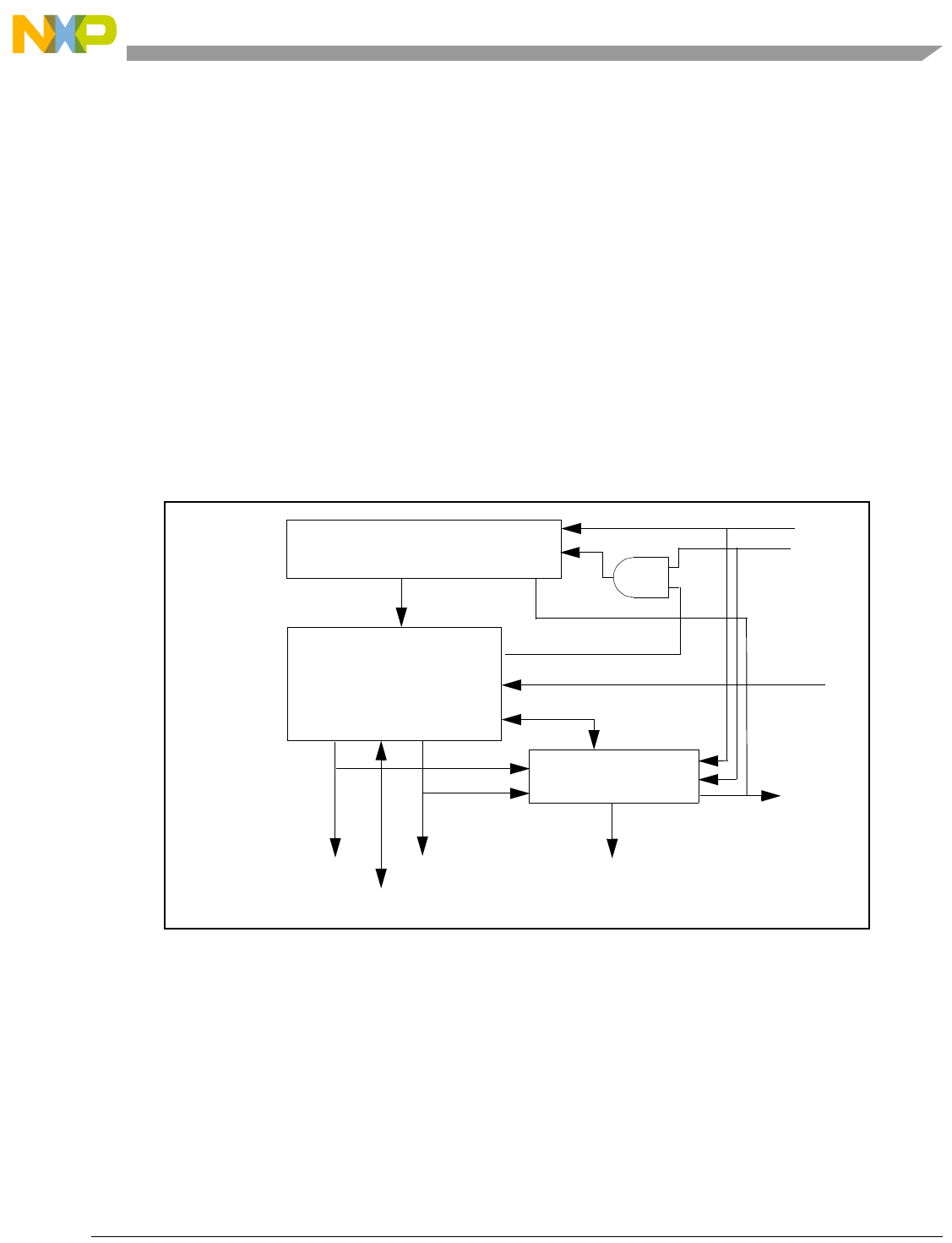
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-59
11.4.5.5 Watchpoint Events (jd_watchpt[0:21])
The jd_watchpt[0:21] signals may be asserted by the OnCE control logic to signal that a watchpoint
condition has occurred. Watchpoints do not affect the CPU. They are provided to allow external visibility
only. Watchpoint events are conditioned by the settings in the DBCR0, DBCR1, and DBCR2 registers, as
well as by the DEVENT control register settings.
11.4.6 e200 OnCE Controller and Serial Interface
The OnCE controller contains the OnCE command register, the OnCE decoder, and the status/control
register. In operation, the OnCE command register acts as the IR for the e200 TAP controller, and all other
OnCE resources are treated as data registers (DR) by the TAP controller. The command register is loaded
during the Update-IR state by serially shifting in commands during the TAP controller Shift-IR state. The
command register selects a resource to be accessed as a data register (DR) during the TAP controller
Capture-DR, Shift-DR and Update-DR states.
Figure 11-19 is a block diagram of the OnCE controller and serial interface.
Figure 11-19. e200 OnCE Controller and Serial Interface
11.4.6.1 e200 OnCE Status Register
Status information regarding the state of the CPU is latched into the OnCE status register when the OnCE
controller state machine enters the Capture-IR state. When OnCE operation is enabled, this information is
provided on the j_tdo output in serial fashion when the Shift_IR state is entered following a Capture-IR.
Information is shifted out least significant bit first.
OnCE COMMAND REGISTER
TDI
TCLK
STATUS AND CONTROL
REGISTERS TDO
MODE SELECT
OnCE DECODER
REG WRITE
REG READ
.
.
.
.
CPU CONTROL/STATUS
UPDATE
.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-60 Freescale Semiconductor
Figure 11-20 shows the OnCE status register.
Table 11-21 provides bit definitions for the OnCE status register.
11.4.6.2 e200 OnCE Command Register (OCMD)
The OnCE command register (OCMD) is a 10-bit shift register that receives its serial data from the TDI
pin and serves as the instruction register (IR). It holds the 10-bit commands to be used as input for the e200
OnCE decoder. The OCMD is updated when the TAP controller enters the Update-IR state. It contains
fields for controlling access to a resource, as well as controlling single-step operation and exit from OnCE
mode.
MCLK ERR 0 RESET HALT STOP DEBUG WAIT 0 1
0123456789
Figure 11-20. OnCE Status Register
Table 11-21. OnCE Status Register Bit Definitions
Bit(s) Name Description
0 MCLK MCLK
m_clk
Status Bit
0 Inactive state
1 Active state
This status bit reflects the logic level on the
jd_mclk_on
input signal after capture by
j_tclk
.
1 ERR ERROR
This bit is used to indicate that an error condition occurred during attempted execution of the last
single-stepped instruction (GO+NoExit with CPUSCR or No Register Selected in OCMD), and that the
instruction may not have been properly executed. This could occur if an Interrupt (all classes including
External, Critical, machine check, Storage, Alignment, Program, TLB, etc.) occurred while attempting to
perform the instruction single step. In this case, the CPUSCR will contain information related to the first
instruction of the Interrupt handler, and no portion of the handler will have been executed.
2 — Reserved, set to 0
3 RESET RESET Mode
This bit reflects the inverted logic level on the CPU
p_reset_b
input after capture by
j_tclk
.
4 HALT HALT Mode
This bit reflects the logic level on the CPU
p_halted
output after capture by
j_tclk
.
5 STOP STOP Mode
This bit reflects the logic level on the CPU
p_stopped
output after capture by
j_tclk
.
6 DEBUG Debug Mode
This bit is asserted once the CPU is in debug mode. It is negated once the CPU exits debug mode (even
during a debug session)
7 WAIT Waiting Mode
This bit reflects the logic level on the CPU
p_waiting
output after capture by
j_tclk
.
8 0 Reserved, set to 0 for IEEE 1149.1 conformity
9 1 Reserved, set to 1 for IEEE 1149.1 conformity
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-61
Although the OCMD is updated during the Update-IR TAP controller state, the corresponding resource is
accessed in the DR scan sequence of the TAP controller. As such, the Update-DR state must be transitioned
through in order for an access to occur. In addition, the Update-DR state must also be transitioned through
in order for the single-step and/or exit functionality to be performed, even though the command appears
to have no data resource requirement associated with it.
The OnCE command register is shown in Figure 11-21.
Table 11-22 provides bit definitions for the OnCE command register.
R/W GO EX RS[0:6]
0123456789
Reset - 10’b1000000010 on assertion of
j_trst_b
or
m_por
, or while in the Test_Logic_Reset state
Figure 11-21. OnCE Command Register
Table 11-22. OnCE Command Register Bit Definitions
Bit(s) Name Description
0 R/W Read/Write Command Bit
The R/W bit specifies the direction of data transfer. The table below describes the options defined by
the R/W bit.
0 Write the data associated with the command into the register specified by RS[0–6]
1 Read the data contained in the register specified by RS[0–6]
Note: The R/W bit generally ignored for read-only or write-only registers, although the PC FIFO pointer
is only guaranteed to be update when R/W=1. In addition, it is ignored for all bypass operations.
When performing writes, most registers are sampled in the Capture-DR state into a 32-bit shift
register, and subsequently shifted out on
j_tdo
during the first 32 clocks of Shift-DR.
1GOGo
Go Command Bit
0 Inactive (no action taken)
1 Execute instruction in IR
If the GO bit is set, the chip will execute the instruction which resides in the IR register in the CPUSCR.
To execute the instruction, the processor leaves the debug mode, executes the instruction, and if the
EX bit is cleared, returns to the debug mode immediately after executing the instruction. The processor
goes on to normal operation if the EX bit is set, and no other debug request source is asserted. The
GO command is executed only if the operation is a read/write to CPUSCR or a read/write to “No
Register Selected”. Otherwise the GO bit is ignored.The processor will leave the debug mode after the
TAP controller Update-DR state is entered.
On a GO+NoExit operation, returning to debug mode is treated as a debug event, thus exceptions such
as machine checks and interrupts may take priority and prevent execution of the intended instruction.
Debug firmware should mask these exceptions as appropriate. The OSRERR bit indicates such an
occurrence.
Note: Asynchronous interrupts are blocked on a GO+Exit operation until the first instruction to be
executed begins execution. See Section 11.4.9.6, “Exiting Debug Mode and Interrupt Blocking.”
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-62 Freescale Semiconductor
Table 11-23 shows the e200 OnCE register addresses.
2 EX Exit Command Bit
0 Remain in debug mode
1 Leave debug mode
If the EX bit is set, the processor will leave the debug mode and resume normal operation until another
debug request is generated. The Exit command is executed only if the Go command is issued, and the
operation is a read/write to CPUSCR or a read/write to “No Register Selected.” Otherwise the EX bit is
ignored.
The processor will leave the debug mode after the TAP controller Update-DR state is entered.
Note: If the DR bit in the OnCE control register is set or remains set, or if a bit in EDBSR0 is set and
DBCR0EDM=1 (external debug mode is enabled), or if another debug request source is
asserted, then the processor may return to the debug mode without execution of an instruction,
even though the EX bit was set.
Note: Asynchronous interrupts are blocked on a GO+Exit operation until the first instruction to be
executed begins execution. See Section 11.4.9.6, “Exiting Debug Mode and Interrupt Blocking.”
3–9 RS Register Select
The Register Select bits define which register is source (destination) for the read (write) operation.
Table 11-23 indicates the e200 OnCE register addresses. Attempted writes to read-only registers are
ignored.
Table 11-23. e200 OnCE Register Addressing
RS[0–6] Register Selected
000 0000 Reserved
000 0001 Reserved
000 0010 JTAG ID (read–only)
000 0011–000 1111 Reserved
001 0000 CPU Scan Register (CPUSCR)
001 0001 No Register Selected (Bypass)
001 0010 OnCE Control Register (OCR)
001 0011 Reserved
001 0100–001 1111 Reserved
010 0000 Instruction Address Compare 1 (IAC1)
010 0001 Instruction Address Compare 2 (IAC2)
010 0010 Instruction Address Compare 3 (IAC3)
010 0011 Instruction Address Compare 4 (IAC4)
010 0100 Data Address Compare 1 (DAC1)
010 0101 Data Address Compare 2 (DAC2)
010 0110 Data Value Compare 1 (DVC1)
010 0111 Data Value Compare 2 (DVC2)
010 1000 Instruction Address Compare 5 (IAC5)
Table 11-22. OnCE Command Register Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-63
The OnCE decoder receives the 10-bit command from the OCMD and status signals from the processor as
input. It generates all strobes required for reading and writing the selected OnCE registers.
010 1001 Instruction Address Compare 6 (IAC6)
010 1010 Instruction Address Compare 7 (IAC7)
010 1011 Instruction Address Compare 8 (IAC8)
010 1100 Debug Counter Register (DBCNT)
010 1101 Debug PCFIFO (PCFIFO)
010 1110 External Debug Control Register 0 (EDBCR0)
010 1111 External Debug Status Register 0 (EDBSR0)
011 0000 Debug Status Register (DBSR)
011 0001 Debug Control Register 0 (DBCR0)
011 0010 Debug Control Register 1 (DBCR1)
011 0011 Debug Control Register 2 (DBCR2)
011 0100 Debug Control Register 3 (DBCR3)
011 0101 Debug Control Register 4 (DBCR4)
011 0110 Debug Control Register 5 (DBCR5)
011 0111 Debug Control Register 6 (DBCR6)
011 1000–011 1100 Reserved (do not access)
011 1101 Debug Data Acquisition Message Register (DDAM)
011 1110 Debug Event Control (DEVENT)
011 1111 Debug External Resource Control (DBERC0)
100 0000–110 1110 Reserved (do not access)
110 1111 Shared Nexus Control Register Select
111 0000–111 1001 General Purpose register selects [0–9] (
j_gp_regsel[0:9]
)
111 1010 Cache Debug Access Control Register (CDACNTL)(See Section 9.15, “Cache Memory
Access For Debug / Error Handling)
111 1011 Cache Debug Access Data Register (CDADATA)(See Section 9.15, “Cache Memory Access
For Debug / Error Handling)
111 1100 Nexus2/3–Access
111 1101 LSRL Select (see Test Specification)
111 1110 Enable_OnCE1
111 1111 Bypass
1Causes assertion of the
j_en_once_regsel
output. Refer to Section 13.2.22.15, “Enable Once Register Select
(j_en_once_regsel)”
Table 11-23. e200 OnCE Register Addressing
RS[0–6] Register Selected
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-64 Freescale Semiconductor
Single stepping of instructions is performed by placing the CPU in debug mode, scanning in appropriate
information into the CPUSCR, and setting the Go bit (with the EX bit cleared) with the RS field indicating
either the CPUSCR or No Register Selected. After executing a single instruction, the CPUre-enters debug
mode and awaits further commands. During single-stepping, exception conditions may occur if not
properly masked by debug firmware (interrupts, machine checks, bus error conditions, and so on) and may
prevent the desired instruction from being successfully executed. OSR[ERR] is set to indicate this
condition. In these cases, values in the CPUSCR will correspond to the first instruction of the exception
handler.
Additionally, [E]DBCR0[EDM] is forced to ‘1’ internally while single-stepping to prevent debug events
from generating debug interrupts. Also, during a debug session, the DBSR and the DBCNT registers are
frozen from updates due to debug events regardless of [E]DBCR0[EDM]. They may still be modified
during a debug session by a single-stepped mtspr instruction or by OnCE access if [E]DBCR0[EDM] is
set.
11.4.6.3 e200 OnCE Control Register (OCR)
The e200 OnCE control register is a 32-bit register used to force the e200 core into debug mode and to
enable/disable sections of the e200 OnCE control logic. It also provides control over the MMU during a
debug session (see Section 11.6, “MMU and Cache Operation During Debug”). The control bits are
read/write. These bits are only effective while OnCE is enabled (jd_en_once asserted).
Figure 11-22 shows the OCR.
Table 11-24 provides bit definitions for the OnCE Control Register.
0
I_DMDIS
0
I_DVLE
I_DI
I_DM
0
I_DE
D_DMDIS
0
D_DW
D_DI
D_DM
D_DG
D_DE
0
WKUP
FDB
DR
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Reset - 0xo000_0000 on m_por, j_trst_b, or entering Test_logic_Reset state
Figure 11-22. OnCE Control Register
Table 11-24. OnCE Control Register Bit Definitions
Bit(s) Name Description
0–7 — Reserved
8I_DMDIS
Instruction Side Debug MMU Disable Control Bit (I_DMDIS)
0 MMU not disabled for debug sessions
1 MMU disabled for debug sessions
This bit may be used to control whether the MMU is enabled normally, or whether the MMU is disabled
during a debug session for Instruction Accesses. When enabled, the MMU functions normally. When
disabled, for Instruction Accesses, no address translation is performed (1:1 address mapping), and the
TLB VLE, I,M, and E bits are taken from the OCR bits I_VLE, I_DI, I_DM, and I_DE bits. The W and G
bits are assumed ‘0’. The SX and UX access permission control bits are set to‘1’ to allow full access.
When disabled, no TLB miss or TLB exceptions are generated for Instruction accesses. External
access errors can still occur.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-65
9–10 — Reserved
11 I_DVLE
Instruction Side Debug TLB ‘VLE’ Attribute Bit (I_DVLE)
This bit is used to provide the ‘VLE’ attribute bit to be used when the MMU is disabled during a debug
session.
12 I_DI Instruction Side Debug TLB ‘I’ Attribute Bit (I_DI)
This bit is used to provide the ‘I’ attribute bit to be used for Instruction accesses when the MMU is
disabled for Instruction accesses during a debug session.
13 I_DM
Instruction Side Debug TLB ‘M’ Attribute Bit (I_DM)
This bit is used to provide the ‘M’ attribute bit to be used for Instruction accesses when the MMU is
disabled for Instruction accesses during a debug session.
14 — Reserved
15 I_DE
Instruction Side Debug TLB ‘E’ Attribute Bit (I_DE)
This bit is used to provide the ‘E’ attribute bit to be used for Instruction accesses when the MMU is
disabled for Instruction accesses during a debug session.
16 D_DMDIS
Data Side Debug MMU Disable Control Bit (D_DMDIS)
0 MMU not disabled for debug sessions
1 MMU disabled for debug sessions
This bit may be used to control whether the MMU is enabled normally, or whether the MMU is disabled
during a debug session for Data Accesses. When enabled, the MMU functions normally. When
disabled, for Data Accesses, no address translation is performed (1:1 address mapping), and the TLB
WIMGE bits are taken from the OCR bits D_DW, D_DI, D_DM, D_DG, and D_DE bits. The SR, SW,
UR, and UW access permission control bits are set to‘1’ to allow full access. When disabled, no TLB
miss or TLB exceptions are generated for Data accesses. External access errors can still occur.
17–18 — Reserved
19 D_DW
Data Side Debug TLB ‘W’ Attribute Bit (D_DW)
This bit is used to provide the ‘W’ attribute bit to be used for Data accesses when the MMU is disabled
for Data accesses during a debug session.
20 D_DI
Data Side Debug TLB ‘I’ Attribute Bit (D_DI)
This bit is used to provide the ‘I’ attribute bit to be used for Data accesses when the MMU is disabled
for Data accesses during a debug session.
21 D_DM
Data Side Debug TLB ‘M’ Attribute Bit (D_DM)
This bit is used to provide the ‘M’ attribute bit to be used for Data accesses when the MMU is disabled
for Data accesses during a debug session.
22 D_DG
Data Side Debug TLB ‘G’ Attribute Bit (D_DG)
This bit is used to provide the ‘G’ attribute bit to be used for Data accesses when the MMU is disabled
for Data accesses during a debug session.
23 D_DE
Data Side Debug TLB ‘E’ Attribute Bit (D_DE)
This bit is used to provide the ‘E’ attribute bit to be used for Data accesses when the MMU is disabled
for Data accesses during a debug session.
24–28 — Reserved
29 WKUP
Wakeup Request Bit (WKUP)
This control bit may be used to force the Zen
p_wakeup
output signal to be asserted. This control
function may be used by debug firmware to request that the chip-level clock controller restore the
m_clk
input to normal operation regardless of whether the CPU is in a low power state to ensure that debug
resources may be properly accessed by external hardware through scan sequences.
Table 11-24. OnCE Control Register Bit Definitions (Continued)
Bit(s) Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-66 Freescale Semiconductor
11.4.7 Access to Debug Resources
Resources contained in the e200 OnCE module that do not require the e200 processor core to be halted for
access may be accessed while the core is running without interfering with processor execution. Accesses
to other resources such as the CPUSCR require that the core be placed in debug mode to avoid
synchronization hazards. Debug firmware may ensure that it is safe to access these resources by
determining the state of the core prior to access. Note that a scan operation to update the CPUSCR is
required prior to exiting debug mode once debug mode has been entered.
Some cases of write accesses other than accesses to the OnCE command and control registers, or the EDM
bit of DBCR0, require the e200 m_clk to be running for proper operation. The OnCE control register
provides a means of signaling this need to a system level clock control module.
In addition, since the CPU may cause multiple bits of certain registers to change state, reads of certain
registers while the CPU is running (DBSR, DBCNT, and so on) may not have consistent bit settings unless
read twice with the same value indicated. In order to guarantee that the contents are consistent, the CPU
should be placed into debug mode or multiple reads should be performed until consistent values have been
obtained on consecutive reads.
30 FDB
Force Breakpoint Debug Mode Bit (FDB)
This control bit is used to determine whether the processor is operating in breakpoint debug enable
mode or not. The processor may be placed in breakpoint debug enable mode by setting this bit. In
breakpoint debug enable mode, execution of the ‘
bkpt
’ pseudo- instruction will cause the processor to
enter debug mode, as if the
jd_de_b
input had been asserted.
This bit is qualified with DBCR0[EDM], which must be set for FDB to take effect.
Note that this bit has no effect on dnh or se_dnh instruction operation.
31 DR
CPU Debug Request Control Bit
This control bit is used to unconditionally request the CPU to enter the Debug Mode. The CPU will
indicate that Debug Mode has been entered via the data scanned out in the shift-IR state.
0 No Debug Mode request
1 Unconditional Debug Mode request
When the DR bit is set the processor will enter Debug mode at the next instruction boundary.
Table 11-24. OnCE Control Register Bit Definitions (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-67
Table 11-25 provides a list of access requirements for OnCE registers.
Table 11-25. OnCE Register Access Requirements
Register
Name
Access Requirements
Notes
Requires
jd_en_once
to be
asserted
Requires
DBCR0
[EDM] = 1
Requires
m_clk
active
for Write
Access
Requires
CPU to be
halted
for Read
Access
Requires
CPU to be
halted
for Write
Access
Enable_OnCE N N N N — —
Bypass N NNNN—
CPUSCR Y Y Y Y Y —
DAC1 Y YYN*
1—
DAC2 Y YYN*
1—
DBCNT Y Y Y N2*1—
DBCR0 Y Y Y N *1*DBCR0[EDM] access only requires
jd_en_once
asserted
DBCR1–6 Y Y Y N *1—
DEVENT Y Y Y N *1—
DBERC0 Y N Y N *1—
DBSR Y Y Y N2*1—
EDBCR0 Y N N N N *DBCR0[EDM] access only requires
jd_en_once
asserted
EDBSR0 Y Y N N N —
IAC1–8 Y Y Y N *1—
JTAG ID N N — N — Read only
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-68 Freescale Semiconductor
11.4.8 Methods of Entering Debug Mode
The OnCE status register indicates that the CPU has entered the debug mode by means of the debug status
bit. The following sections describe how debug mode is entered assuming the OnCE circuitry has been
enabled. In the e200, OnCE operation is enabled by the assertion of the jd_en_once input (see
Section 11.4.5.1, “OnCE Enable (jd_en_once)”).
11.4.8.1 External Debug Request During Reset
Holding the jd_de_b signal asserted during the assertion of p_reset_b, and continuing to hold it asserted
following the negation of p_reset_b causes the e200 core to enter debug mode. After receiving an
acknowledge by the OnCE status register debug bit, the external command controller negates the jd_de_b
signal before sending the first command. Note that in this case the e200 core does not execute an
OCR Y NNNN—
OSR YN—N—
Read-only, accessed by scanning
out IR while
jd_en_once
is asserted
PC FIFO
YNYNN
Updates frozen while OCMD holds
PCFIFO register encoding.
Note: No updates occur to the
PCFIFO while the OnCE state
machine is in the
Test_Logic_Reset state
Cache Debug
Access Control
(CDACNTL)
YNYYY
CPU must be in debug mode with
clocks running
Cache Debug
Access Data
(CDADATA)
YNYYY
CPU must be in debug mode with
clocks running
Nexus2/3-Access Y N N N N —
External GPRs Y N N N N —
LSRL Select YN???
System Test logic implementation
determines LSRL functionality
1Writes to these registers while the CPU is running may have unpredictable results due to the pipelined nature of
operation, and the fact that updates are not synchronized to a particular clock, instruction, or bus cycle boundary,
therefore it is strongly recommended to ensure the processor is first placed into debug mode before updates to these
registers are performed.
2Reads of these registers while the CPU is running may not give data that is self-consistent due to synchronization across
clock domains.
Table 11-25. OnCE Register Access Requirements (Continued)
Register
Name
Access Requirements
Notes
Requires
jd_en_once
to be
asserted
Requires
DBCR0
[EDM] = 1
Requires
m_clk
active
for Write
Access
Requires
CPU to be
halted
for Read
Access
Requires
CPU to be
halted
for Write
Access

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-69
instruction before entering debug mode, although the first instruction to be executed may be fetched prior
to entering debug mode.
In this case, all values in the debug scan chain are undefined, and the external debug control module is
responsible for proper initialization of the chain before debug mode is exited. In particular, the exception
processing associated with reset may not be performed when the debug mode is exited. Thus, the debug
controller must initialize the PC, MSR, and IR to the image that the processor would have obtained in
performing reset exception processing, or the debug controller must cause the appropriate reset to be
re-asserted.
11.4.8.2 Debug Request During Reset
Asserting a debug request by setting the DR bit in the OCR during the assertion of p_reset_b causes the
chip to enter debug mode. In this case, the chip may fetch the first instruction of the reset exception
handler, but does not execute an instruction before entering debug mode. In this case, all values in the
debug scan chain are undefined, and the external debug control module is responsible for proper
initialization of the chain before debug mode is exited. In particular, the exception processing associated
with reset may not be performed when the debug mode is exited. Thus, the debug controller must initialize
the PC, MSR, and IR to the image that the processor would have obtained in performing reset exception
processing, or the debug controller must cause the appropriate reset to be re-asserted.
11.4.8.3 Debug Request During Normal Activity
Asserting a debug request by setting the DR bit in the OCR during normal chip activity causes the chip to
finish the execution of the current instruction and then enter the debug mode. Note that in this case the chip
completes the execution of the current instruction and stops after the newly fetched instruction enters the
CPU instruction register. This process is the same for any newly fetched instruction including instructions
fetched by the interrupt processing, or those that will be aborted by the interrupt processing.
11.4.8.4 Debug Request During Waiting, Halted, or Stopped State
Asserting a debug request by setting the DR bit in the OCR when the chip is in the waiting state (p_waiting
asserted), halted state (p_halted asserted) or stopped state (p_stopped asserted) causes the CPU to exit the
state and enter the debug mode once the CPU clock m_clk has been restored. Note that in this case, the
CPU negates the p_waiting, p_halted and p_stopped outputs. Once the debug session has ended, the CPU
returns to its prior state.
To signal the chip-level clock generator to re-enable m_clk, the p_wakeup output is asserted whenever the
debug block asserts a debug request to the CPU due to either OCRDR being set or jd_de_b assertion. It
remains set from then until the debug session ends (jd_debug_b goes from asserted to negated). In
addition, the status of the jd_mclk_on input (after synchronization to the j_tclk clock domain) may be
sampled along with other status bits from the j_tdo output during the Shift_IR TAP controller state. This
status may be used if necessary by external debug firmware to ensure proper scan sequences occur to
registers in the m_clk clock domain.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-70 Freescale Semiconductor
11.4.8.5 Software Request During Normal Activity
Upon executing a ‘bkpt’ pseudo-instruction (for e200, defined to be an all zeros instruction opcode) when
the OCR register’s (FDB) bit is set (debug mode enable control bit is true) and DBCR0[EDM] = 1, the
CPU enters debug mode after the instruction following the ‘bkpt’ pseudo-instruction has entered the
instruction register.
11.4.8.6 Debug Notify Halt Instructions
The dnh, e_dnh, and se_dnh instructions allow software to transition the core from a running state to a
debug halted state if enabled by EDBCR0[DNH_EN]. They also provide the external debugger with bits
reserved in the instruction itself to pass additional information. Entry into debug mode is not conditioned
on EDBCR0[EDM], allowing for debug of software debug handlers as well as other software. For the
e200z4, when the CPU enters a debug halted state due to a dnh, e_dnh, or se_dnh instruction, the
instruction is stored in the CPUSCR[IR] portion, and the CPUSCR[PC] value points to the instruction. The
external debugger should update the CPUSCR prior to exiting the debug halted state to point past the dnh,
e_dnh, or se_dnh instruction.
11.4.9 CPU Status and Control Scan Chain Register (CPUSCR)
A number of on-chip registers store the CPU pipeline status and are configured in a single-scan chain for
access by the e200 OnCE controller. The CPUSCR register contains these processor resources, which are
used to restore the pipeline and resume normal chip activity upon return from the debug mode, as well as
a mechanism for the emulator software to access processor and memory contents.
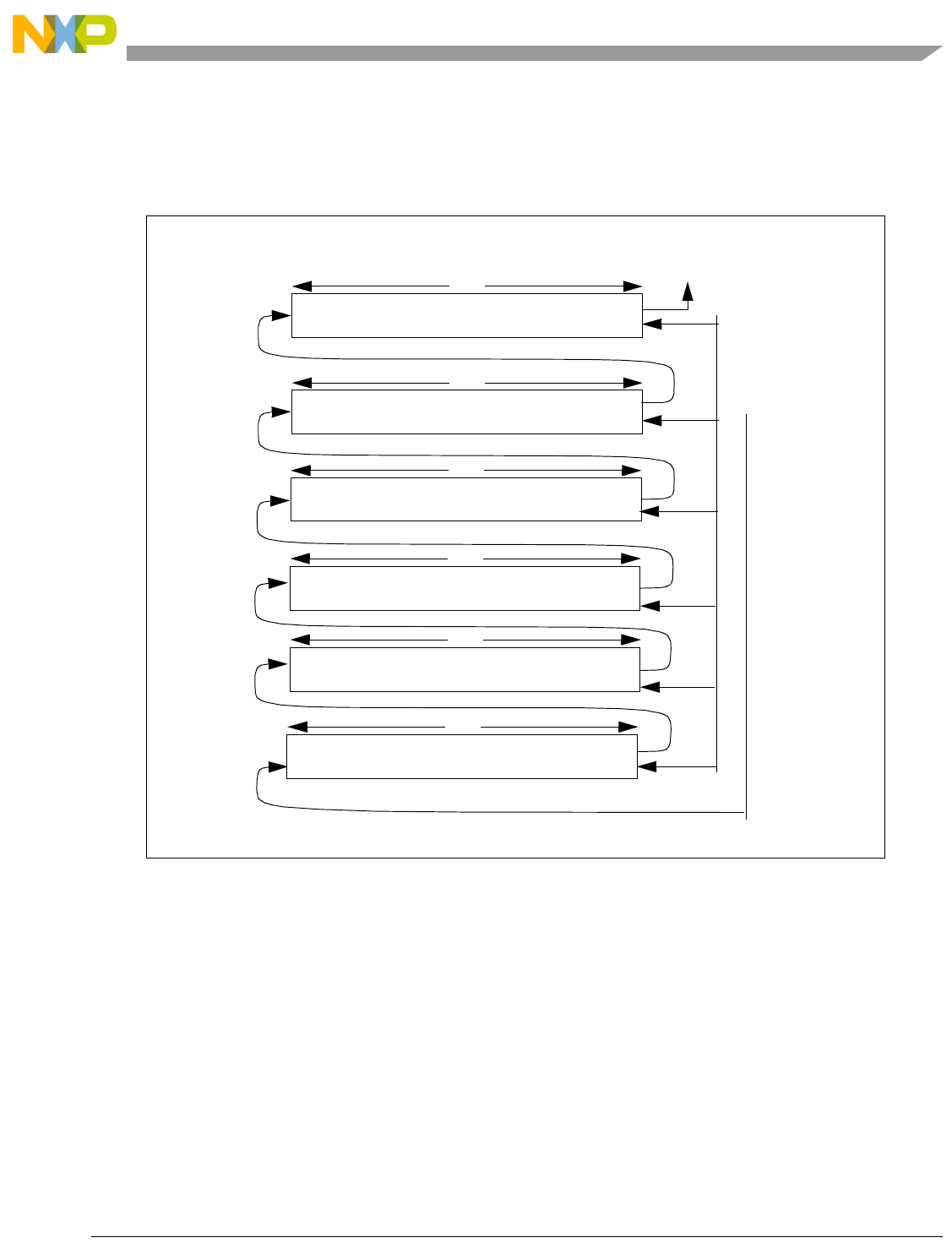
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-71
Figure 11-23 shows the block diagram of the pipeline information registers contained in the CPUSCR.
Once debug mode has been entered, it is required to scan in and update this register prior to exiting debug
mode.
Figure 11-23. CPU Scan Chain Register (CPUSCR)
11.4.9.1 Instruction Register (IR)
The instruction register (IR) provides a mechanism for controlling the debug session by serving as a means
for forcing in selected instructions, and then causing them to be executed in a controlled manner by the
debug control block. When the scan-out of this chain begins, this register contains the opcode of the next
instruction to be executed upon entering debug mode. This value should be saved for later restoration if
continuation of the normal instruction stream is desired.
On scan-in, this register is filled with an instruction opcode selected by debug control software in
preparation for exiting debug mode. By selecting appropriate instructions and controlling the execution of
those instructions, the results of execution may be used to examine or change memory locations and
processor registers. The debug control module external to the processor core controls execution by
TDO
TDI
TCK
MSR
WBBRhigh
32
32
031
031
PC
32
031
IR
32
031
CTL
32
031
WBBRlow
32
031
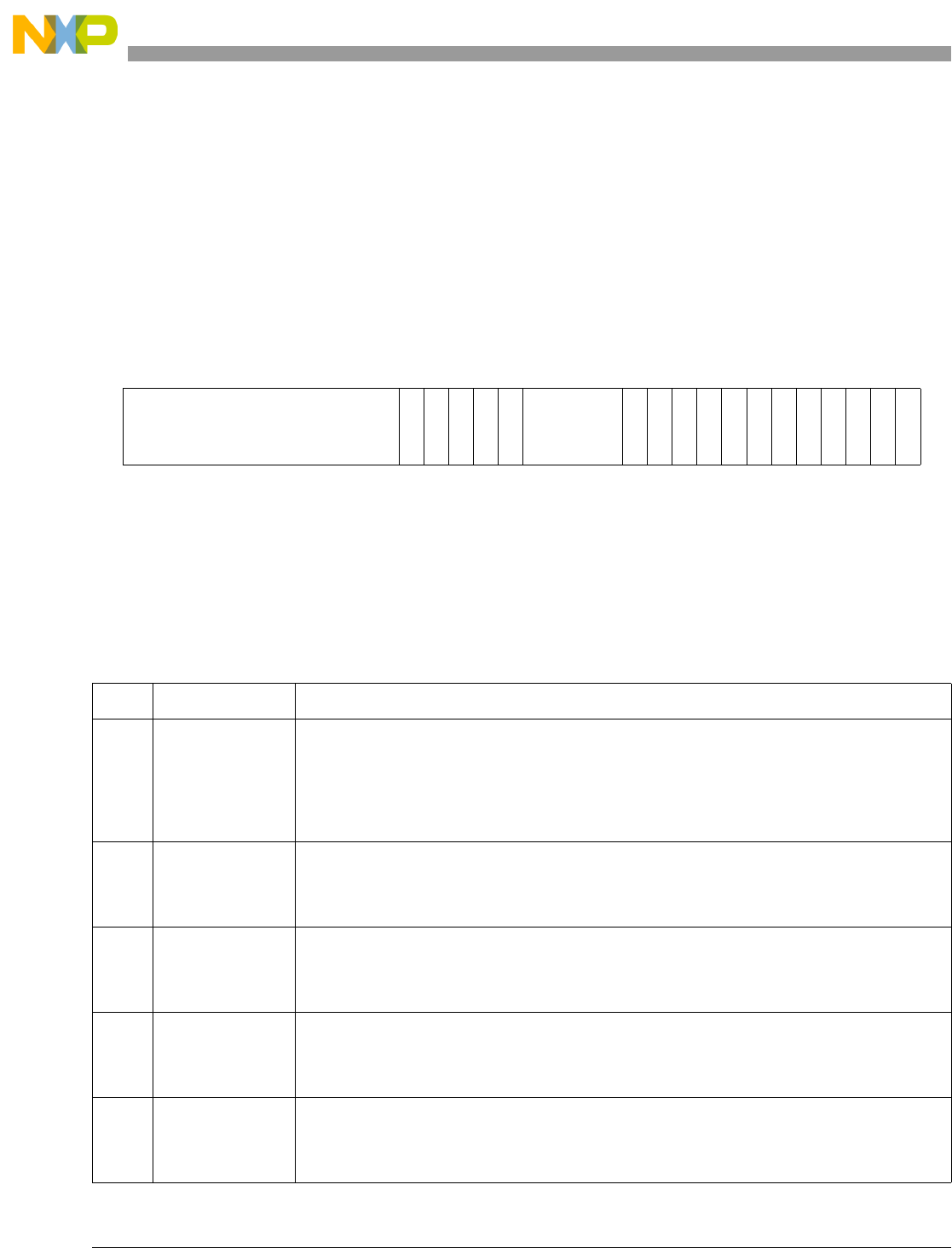
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-72 Freescale Semiconductor
providing a single-step capability. Once the debug session is complete and normal processing is to be
resumed, this register may be loaded with the value originally scanned out.
11.4.9.2 Control State Register (CTL)
The control state register (CTL) is a 32-bit register that stores the value of certain internal CPU state
variables before the debug mode is entered. This register is affected by the operations performed during
the debug session and should normally be restored by the external command controller when returning to
normal mode.
Figure 11-24 shows the control state register.
In addition to saved internal state variables, two of the bits are used by emulation firmware to control the
debug process. In certain circumstances, emulation firmware must modify the content of this register as
well as the PC and IR values in the CPUSCR before exiting debug mode. These cases are described in
Table 11-26.
*
IRSTAT13
IRSTAT12
IRSTAT11
IRSTAT10
WAITING
PCOFST
PCINV
FFRA
IRSTAT0
IRSTAT1
IRSTAT2
IRSTAT3
IRSTAT4
IRSTAT5
IRSTAT6
IRSTAT7
IRSTAT8
IRSTAT9
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure 11-24. Control State Register (CTL)
Table 11-26. CTL Emulation Firmware Modifications
Bit(s) Name Description
0–10 * Internal State Bits
These control bits represent internal processor state and should be restored to their original
value after a debug session is completed, i.e when a e200 OnCE command is issued with the
GO and EX bits set and not ignored. When performing instruction execution during a debug
session (see Section 11.4.5.3, “e200 OnCE Debug Output (jd_debug_b)”) which is not part of
the normal program execution flow, these bits should be set to a 0.
11 IRStat10 IR Status Bit 10
This control bit indicates an Instruction Address Compare 5 event status for the IR.
0 No Instruction Address Compare 5 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 5 event occurred on the fetch of this instruction.
12 IRStat11 IR Status Bit 11
This control bit indicates an Instruction Address Compare 6 event status for the IR.
0 No Instruction Address Compare 6 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 6 event occurred on the fetch of this instruction.
13 IRStat12 IR Status Bit 12
This control bit indicates an Instruction Address Compare 7 event status for the IR.
0 No Instruction Address Compare 7 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 7 event occurred on the fetch of this instruction.
14 IRStat13 IR Status Bit 13
This control bit indicates an Instruction Address Compare 8 event status for the IR.
0 No Instruction Address Compare 8 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 8 event occurred on the fetch of this instruction.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-73
15 WAITING WAITING State Status
This bit indicates whether the CPU was in the waiting state prior to entering debug mode. If set,
the CPU was in the waiting state. Upon exiting a debug session, the value of this bit in the
restored CPUSCR will determine whether the CPU re-enters the waiting state on a go+exit.
0 CPU was not in the waiting state when debug mode was entered
1 CPU was in the waiting state when debug mode was entered
16 PCOFST PC Offset Field
This field indicates whether the value in the PC portion of the CPUSCR must be adjusted prior
to exiting debug mode. Due to the pipelined nature of the CPU, the PC value must be backed-up
by emulation software in certain circumstances. The PCOFST field specifies the value to be
subtracted from the original value of the PC. This adjusted PC value should be restored into the
PC portion of the CPUSCR just prior to exiting debug mode with a go+exit. In the event the
PCOFST is non-zero, the IR should be loaded with a nop instruction instead of the original IR
value, other wise the original value of IR should be restored. (But see PCINV which overrides
this field)
0000 No correction required.
0001 Subtract 0x04 from PC.
0010 Subtract 0x08 from PC.
0011 Subtract 0x0C from PC.
0100 Subtract 0x10 from PC.
0101 Subtract 0x14 from PC.
All other encodings are reserved
20 PCINV PC and IR Invalid Status Bit
This status bit indicates that the values in the IR and PC portions of the CPUSCR are invalid.
Exiting debug mode with the saved values in the PC and IR will have unpredictable results.
Debug firmware should initialize the PC and IR values in the CPUSCR with desired values prior
to exiting debug mode if this bit was set when debug mode was initially entered.
0 No error condition exists.
1 Error condition exists. PC and IR are corrupted.
21 FFRA Feed Forward RA Operand Bit
This control bit causes the content of the WBBR to be used as the RA operand value (RS for
logical, mtspr, mtdcr, cntlzw, and shift operations, RX for VLE se_ instructions, RT for
e_{logical_op}2i type instructions, RB for evaddiw, evsubifw, and the value to use as the PC for
calculating the LR update value for branch with link type instructions) of the first instruction to be
executed following an update of the CPUSCR. This allows the debug firmware to update
processor registers — initialize the WBBR with the desired value, set the FFRA bit, and execute
a ori Rx,Rx,0 instruction to the desired register.
0 No action.
1 Content of WBBR used as operand value
22 IRStat0 IR Status Bit 0
This control bit indicates a TEA status for the IR.
0 No TEA occurred on the fetch of this instruction.
1 TEA occurred on the fetch of this instruction.
23 IRStat1 IR Status Bit 1
This control bit indicates a TLB Miss status for the IR.
0 No TLB Miss occurred on the fetch of this instruction.
1 TLB Miss occurred on the fetch of this instruction.
Table 11-26. CTL Emulation Firmware Modifications (Continued)
Bit(s) Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-74 Freescale Semiconductor
Emulation firmware should modify the content of the CTL, PC, and IR values in the CPUSCR during the
execution of debug related instructions as well as just prior to exiting debug with a go+exit command.
During the debug session, the CTL register should be written with the FFRA bit set as appropriate, all other
bits set to ‘0’, and the IR set to the value of the desired instruction to be executed. IRStat8 is used to
determine the type of instruction present in the IR.
24 IRStat2 IR Status Bit 2
This control bit indicates an Instruction Address Compare 1 event status for the IR.
0 No Instruction Address Compare 1 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 1 event occurred on the fetch of this instruction.
25 IRStat3 IR Status Bit 3
This control bit indicates an Instruction Address Compare 2 event status for the IR.
0 No Instruction Address Compare 2 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 2 event occurred on the fetch of this instruction.
26 IRStat4 IR Status Bit 4
This control bit indicates an Instruction Address Compare 3 event status for the IR.
0 No Instruction Address Compare 3 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 3 event occurred on the fetch of this instruction.
27 IRStat5 IR Status Bit 5
This control bit indicates an Instruction Address Compare 4 event status for the IR.
0 No Instruction Address Compare 4 event occurred on the fetch of this instruction.
1 An Instruction Address Compare 4 event occurred on the fetch of this instruction.
28 IRStat6 IR Status Bit 6
This control bit indicates a Parity Error status for the IR.
0 No Parity Error occurred on the fetch of this instruction.
1 Parity Error occurred on the fetch of this instruction.
29 IRStat7 IR Status Bit 7
This control bit indicates a Precise External Termination Error status for the IR, or a 2nd half TLB
Miss for the instruction in the IR.
0 0 = No Precise External Termination Error occurred on the fetch of this instruction.
1 If IRStat1 = ‘0’, a Precise External Termination Error occurred on the fetch of this instruction.
If IRStat1 = ‘1’, a TLB Miss occurred on the 2nd half of this instruction.
30 IRStat8 IR Status Bit 8
This control bit indicates the Power ISA VLE status for the IR.
0 IR contains a Power ISA instruction.
1 IR contains a Power ISA VLE instruction, aligned in the Most Significant Portion of IR if 16-bit.
31 IRStat9 IR Status Bit 9
This control bit indicates the Power ISA VLE Byte-ordering Error status for the IR, or a Power ISA
misaligned instruction fetch, depending on the state of IRStat8.
0 IR contains an instruction without a byte-ordering error and no Misaligned Instruction Fetch
Exception has occurred (no MIF).
1 If IRStat8 = ‘0’, A Power ISA Misaligned Instruction Fetch Exception has occurred while filling
the IR.
If IRStat8 = ‘1’, IR contains an instruction with a byte-ordering error due to mismatched VLE
page attributes, or due to E indicating little-endian for a VLE page.
Table 11-26. CTL Emulation Firmware Modifications (Continued)
Bit(s) Name Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-75
Just prior to exiting debug mode with a go+exit, the PCINV status bit that was originally present when
debug mode was first entered should be tested as follows.
• If set, the PC and IR should be initialized for performing whatever recovery sequence is
appropriate for a faulted exception vector fetch.
• If cleared, the PCOFST bits should be examined to determine whether the PC value must be
adjusted.
Due to the pipelined nature of the CPU, the PC value must be backed-up by emulation software in certain
circumstances. The PCOFST field specifies the value to be subtracted from the original value of the PC.
This adjusted PC value should be restored in to the PC portion of the CPUSCR just prior to exiting debug
mode with a go+exit. In the event the PCOFST is non-zero, the IR should be loaded with a no-op
instruction (such as ori r0,r0,0) instead of the original IR value. Otherwise the original value of IR should
be restored.
Note that when a correction is made to the PC value, it generally points to the last completed instruction.
However, that instruction is not re-executed; the no-op instruction is executed instead, and instruction fetch
and execution resumes at location PC+4. IRStat8 is used determine the type of instruction present in the
IR and should be cleared in this case. Note that debug events that may occur on the no-op (ICMP) are
generated (and optionally counted) if enabled.
For the CTL register, the internal state bits should be restored to their original value. The IRStatus bits
should be set to zeros if the PC was adjusted. If no PC adjustment was performed, emulation firmware
should determine whether IRStat2-5 should be set to ‘0’ to avoid re-entry into debug mode for an
instruction breakpoint request. Upon exiting debug mode with go+exit, if one of these bits is set, debug
mode is re-entered prior to any further instruction execution.
11.4.9.3 Program Counter Register (PC)
The PC is a 32-bit register that stores the value of the program counter that was present when the chip
entered the debug mode. It is affected by the operations performed during the debug mode and must be
restored by the external command controller when the CPU returns to normal mode. PC normally points
to the instruction contained in the IR portion of CPUSCR. If debug firmware wishes to redirect program
flow to an arbitrary location, the PC and IR should be initialized to correspond to the first instruction to be
executed upon resumption of normal processing. Alternatively, the IR may be set to a no-op and the PC
set to point to the location prior to the location at which it is desired to redirect flow to. On exiting debug
mode, the no-op is executed and instruction fetch and execution resume at PC+4.
11.4.9.4 Write-Back Bus Register (WBBR[low], WBBR[high])
WBBR is used as a means of passing operand information between the CPU and the external command
controller. Whenever the external command controller needs to read the contents of a register or memory
location, it forces the chip to execute an instruction that brings that information to WBBR. WBBR[low]
holds the 32-bit result of most instructions including load data returned for a load or load with update
instruction. For SPE/EFPU instructions that generate 64-bit results, WBBR[low] holds the low-order 32
bits of the result. WBBR[high] holds the updated effective address calculated by a load with update
instruction. For SPE/EFPU instructions that generate 64-bit results, WBBR[high] holds the high-order 32
bits of the result. It is undefined for other instructions.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-76 Freescale Semiconductor
For example, to read the lower 32 bits of processor register r1, an ori r1,r1,0 instruction is executed, and
the result value of the instruction is latched into WBBR[low]. The contents of WBBR[low] can then be
delivered serially to the external command controller. To update a processor resource, this register is
initialized with a data value to be written and an ori instruction that uses this value as a substitute data
value is executed. The control state register FFRA bit forces the value of WBBR[low] to be substituted for
the normal RS source value of the ori instruction, thus allowing updates to processor registers to be
performed (refer to Section 11.4.9.2, “Control State Register (CTL)” for more detail on CTL[FFRA]).
WBBR[low] and WBBR[high] are generally undefined on instructions that do not write back a result. Due
to control issues, they are not defined on lmw or branch instructions.
To read and write the entire 64 bits of a GPR, both WBBR[low] and WBBR[high] are used. For reads, an
evslwi rn,rn,0 may be used. For writes, the same instruction may be used, but CTL[FFRA] must be set as
well. Note that MSR[SPE] must be set in order for these operations to be performed properly.
11.4.9.5 Machine State Register (MSR)
The MSR is a 32-bit register that defines the state of the machine. Whenever the external command
controller needs to save or modify the state of the machine, this register is used. This register is affected
by the operations performed during the debug mode and must be restored by the external command
controller when returning to normal mode.
11.4.9.6 Exiting Debug Mode and Interrupt Blocking
When exiting debug mode with a Go+Exit, asynchronous interrupts are blocked until the first instruction
to be executed begins execution. This includes external and critical input, NMI, machine check, timer,
decrementer, and watchdog interrupts. Asynchronous debug interrupts are not blocked however; the CPU
re-enters debug mode without executing an instruction following Go+Exit, although it may fetch an
instruction and discard it. Exceptions due to an illegal instruction or error flags set within the CPUSCR
CTL register are not blocked because they apply to the instruction in the CPUSCR IR.
11.4.10 Instruction Address FIFO Buffer (PC FIFO)
To assist debugging and keep track of program flow, a First-In-First-Out (FIFO) buffer stores the addresses
of the last eight instruction change of flow destinations that were fetched. These include exception
vectoring to an exception handler and returns, as well as pipeline refills due to execution of the isync
instruction.
11.4.10.1 PC FIFO
The PC FIFO stores the addresses of the last eight instruction change of flow addresses that were actually
taken. The FIFO is implemented as a circular buffer containing eight 32-bit registers and one 3-bit counter.
All the registers have the same address, but any access to the FIFO address causes the counter to increment,
making it point to the next FIFO register. The registers are serially available to the external command
controller through the common FIFO address.
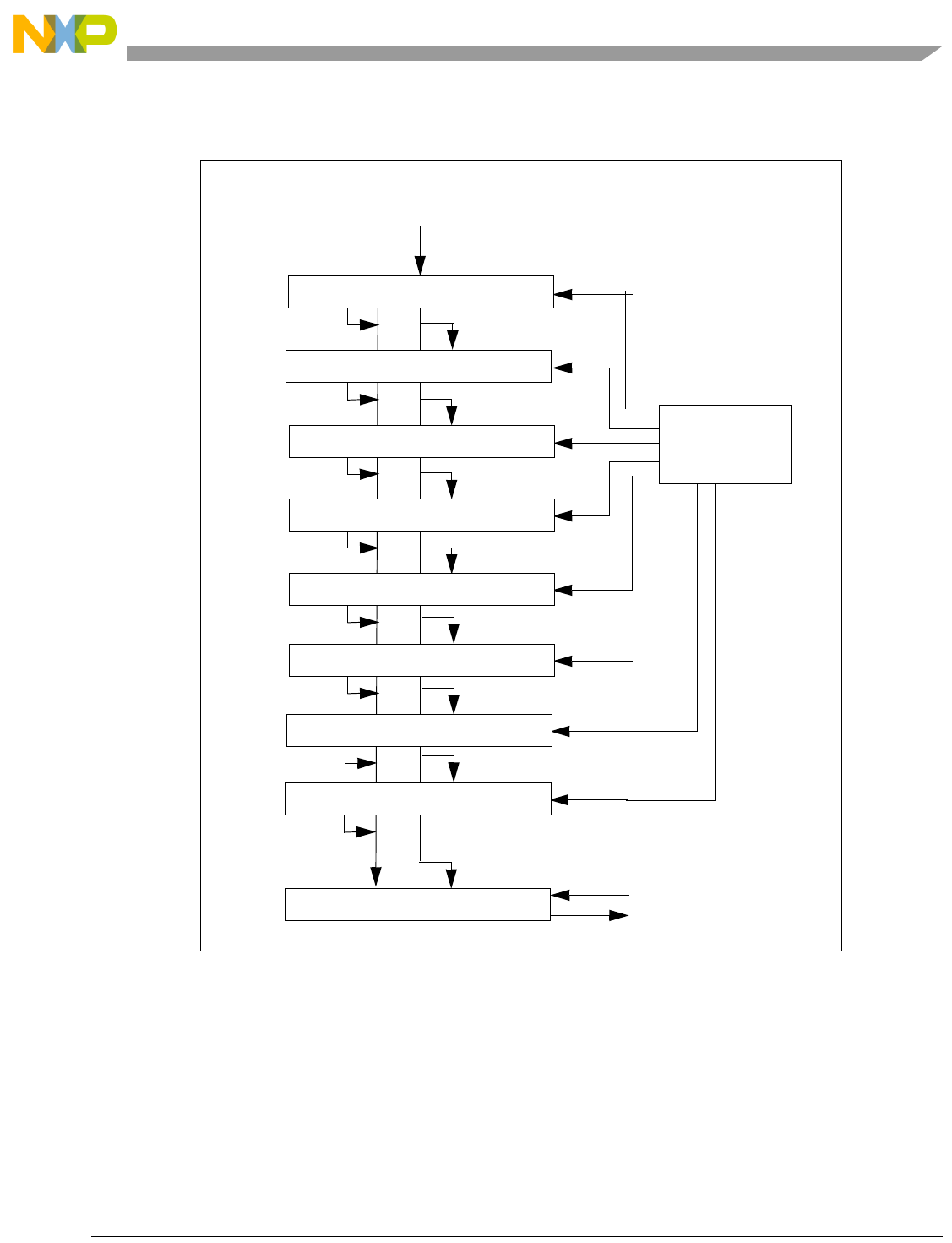
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-77
Figure 11-25 shows the block diagram of the PC FIFO.
Figure 11-25. OnCE PC FIFO
The FIFO is not affected by the operations performed during a debug session except for the FIFO pointer
increment when accessing the FIFO. When entering debug mode, the FIFO counter points to the FIFO
register containing the address of the oldest of the eight change of flow prefetches. When the OCMD RS
field is loaded with the value corresponding to the PC FIFO (010 1101), the current pointer value is
captured into a temporary register. This temporary value (not the actual FIFO counter) is incremented as
FIFO reads or writes are performed. The first FIFO read obtains the oldest address, and the following FIFO
PC FIFO REGISTER 0
TDO
TCK
PC FIFO REGISTER 1
PC FIFO REGISTER 2
PC FIFO REGISTER 3
PC FIFO REGISTER 4
INSTRUCTION FETCH ADDRESS
CIRCULAR
BUFFER
POINTER
PC FIFO SHIFT REGISTER
PC FIFO REGISTER 5
PC FIFO REGISTER 6
PC FIFO REGISTER 7

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-78 Freescale Semiconductor
reads returns the other addresses from the oldest to the newest (the order of execution). Writes operate
similarly.
Updates to the FIFO by change of flows are frozen whenever the OCMD register contains a command
whose RS[0–6] field points to the PC FIFO (010 1101). This allows firmware to access the contents of the
PC FIFO without placing the CPU into debug mode. After completing all accesses to the PC FIFO, another
OCMD value that does not select the PC FIFO should be entered to allow the PC FIFO to resume updating.
To ensure FIFO coherence, a complete set of eight accesses of the FIFO should be performed because each
access increments the temporary FIFO pointer, thus making it point to the next location. After eight
accesses, the pointer points to the same location it pointed to before starting the access procedure. The
temporary counter value captures the actual counter each time the OCMD RS field transitions to the value
corresponding to the PC FIFO (010 1101).
The FIFO pointer is reset to entry 0 when either j_trst_b or m_por are asserted.
11.4.11 Reserved Registers (Reserved)
The reserved registers are used to control various test control logic. These registers are not intended for
customer use. To preclude device and/or system damage, these registers should not be accessed.
11.5 Watchpoint Support
The e200 supports the generation and signalling of watchpoints when operating in internal debug mode
(DBCR0[IDM] = 1) or in external debug mode (DBCR0EDM = 1). Watchpoints are indicated with a
dedicated set of interface signals. The jd_watchpoint[0:21] output signals are used to indicate that a
watchpoint has occurred. Certain watchpoints (DEVNT-based) are not qualified with DBCR0[EDM] or
DBCR0[IDM].
Each debug address compare function (IAC1–8, DAC1–2) and debug counter event (DCNT1–2), as well
as other event types, are capable of triggering a watchpoint output. The DBCRx control fields are used to
configure watchpoints, regardless of whether events are enabled in DBCR0. Watchpoints may occur
whenever an associated event would have been posted in the debug status register if enabled. No explicit
enable bits are provided for watchpoints; they are always enabled by definition.
During a debug session, events (other than DEVT1 and DEVT2) with a corresponding DBSR bit are
blocked from asserting a watchpoint. The DEVNT-based watchpoints are not blocked during a debug
session. If not desired, for address-based events the base address values for these events may be
programmed to an unused system address. MSR[DE] has no effect on watchpoint generation.
External logic may monitor the assertion of these signals for debugging purposes. Watchpoints are
signaled in the clock cycle following the occurrence of the actual event. The Nexus3 module also monitors
assertion of these signals for various development control purposes.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-79
Table 11-27 shows the watchpoint output signal assignments.
Table 11-27. Watchpoint Output Signal Assignments
Signal Name Type Description
jd_watchpt[0] IAC1 Instruction Address Compare 1 Watchpoint
Asserted whenever an IAC1 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[1] IAC2 Instruction Address Compare 2 Watchpoint
Asserted whenever an IAC2 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[2] IAC3 Instruction Address Compare 3 Watchpoint
Asserted whenever an IAC3 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[3] IAC4 Instruction Address Compare 4 Watchpoint
Asserted whenever an IAC4 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[4] DAC11Data Address Compare 1 Watchpoint
Asserted whenever a DAC1 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[5] DAC21Data Address Compare 2 Watchpoint
Asserted whenever a DAC2 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[6] DCNT1 Debug Counter 1 Watchpoint
Asserted whenever Debug Counter 1 decrements to zero
regardless of being enabled to set DBSR status
jd_watchpt[7] DCNT2 Debug Counter 2 Watchpoint
Asserted whenever Debug Counter 2 decrements to zero
regardless of being enabled to set DBSR status
jd_watchpt[8] IAC5 Instruction Address Compare 5 Watchpoint
Asserted whenever an IAC5 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[9] IAC6 Instruction Address Compare 6 Watchpoint
Asserted whenever an IAC6 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[10] DEVT1 Debug Event Input 1 Watchpoint
Asserted whenever a DEVT1 debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[11] DEVT2 Debug Event Input 2 Watchpoint
Asserted whenever a DEVT2 debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[12] DEVNT0 Debug Event Output 0 Watchpoint
Asserted whenever a ‘1’ is written to the bit of the DEVNT field
of the DEVENT debug register corresponding to jd_watchpt[12]
jd_watchpt[13] DEVNT1 Debug Event Output 1 Watchpoint
Asserted whenever a ‘1’ is written to the bit of the DEVNT field
of the DEVENT debug register corresponding to jd_watchpt[13]

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-80 Freescale Semiconductor
11.6 MMU and Cache Operation During Debug
Normal operation of the MMU may be modified during a debug session by the OnCE control register
(OCR). A debug session begins when the CPU initially enters debug mode, and ends when a OnCE
command with GO+EXIT is executed, releasing the CPU for normal operation. If desired during a debug
session, the debug firmware may disable the translation process and substitute default values for the access
protection bits (UX, UR, UW, SX, SR, SW) and values obtained from the OnCE control register for page
attribute bits (VLE, W, I, M, G, E) normally provided by a matching TLB entry. In addition, no address
translation is performed. Instead, a 1:1 mapping of effective to real addresses is performed.
When disabled during a debug session, no TLB miss or TLB-related storage interrupt conditions occur. If
the debugger desires to use the normal translation process, the MMU may be left enabled in the OnCE
OCR, and normal translation (including the possibility of a TLB Miss or storage interrupt) remains in
effect.
The OCR control bits are used when debug mode is entered. Refer to the bit definitions in the OCR
(Section 11.4.6.3, “e200 OnCE Control Register (OCR),” for more detail. When the MMU is disabled for
jd_watchpt[14] IAC7 Instruction Address Compare 7 Watchpoint
Asserted whenever an IAC7 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[15] IAC8 Instruction Address Compare 8 Watchpoint
Asserted whenever an IAC8 compare occurs regardless of
being enabled to set DBSR status
jd_watchpt[16] IRPT Interrupt Watchpoint
Asserted whenever an IRPT debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[17] RET Return Watchpoint
Asserted whenever a RET debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[18] CIRPT Critical Interrupt Watchpoint
Asserted whenever a CIRPT debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[19] CRET Critical Return Watchpoint
Asserted whenever a CRET debug event occurs regardless of
being enabled to set DBSR status
jd_watchpt[20] DEVNT2 Debug Event Output 2 Watchpoint
Asserted whenever a ‘1’ is written to the bit of the DEVNT field
of the DEVENT debug register corresponding to jd_watchpt[20]
jd_watchpt[21] DEVNT3 Debug Event Output 3 Watchpoint
Asserted whenever a ‘1’ is written to the bit of the DEVNT field
of the DEVENT debug register corresponding to jd_watchpt[21]
1If the corresponding event is completely disabled in DBCR0, either load-type or store-type data
accesses are allowed to generate watchpoints. Otherwise watchpoints are generated only for the
enabled conditions.
Table 11-27. Watchpoint Output Signal Assignments
Signal Name Type Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-81
instruction accesses (OCR[I_DMDIS]) or for data accesses (OCR[D_DMDIS]), substituted page attribute
bits control operation on respective accesses initiated during debug. No address translation is performed.
Instead, a 1:1 mapping between effective and real addresses is performed for respective accesses.
11.7 Cache Array Access During Debug
The cache arrays may be read and written during debug mode by the CDACNTL and CDADATA debug
registers. This functionality is described in detail in Section 9.15, “Cache Memory Access For
Debug/Error Handling.”
11.8 Basic Steps for Enabling, Using, and Exiting External Debug
Mode
The following steps show one possible scenario for a debugger wishing to use the external debug facilities.
This simplified flow is intended to illustrate basic operations, but does not cover all potential methods in
depth.
To enable external debug mode and initialize debug registers:
1. The debugger should ensure that the jd_en_once control signal is asserted in order to enable OnCE
operation
2. Select the OCR and write a value to it in which OCR[DR], OCR[WKUP], are set to ‘1’. The tap
controller must step through the proper states as outlined earlier. This step places the CPU in a
debug state in which it is halted and awaiting single-step commands or a release to normal mode
3. Scan out the value of the OSR to determine that the CPU clock is running and the CPU has entered
the Debug state. This can be done in conjunction with a read of the CPUSCR. The OSR is shifted
out during the Shift_IR state. The CPUSCR is shifted out during the Shift_DR state. The debugger
should save the scanned-out value of CPUSCR for later restoration.
4. Select the DBCR0 register and update it with the DBCR0[EDM] bit set
5. Clear the DBSR status bits
6. Write appropriate values to the DBCRx, IAC, DAC, and DBCNT registers. Note that the initial
write to DBCR0 only affects the EDM bit, so the remaining portion of the register must now be
initialized, keeping the EDM bit set.
At this point, the system is ready to commence debug operations. Depending on the desired operation,
different steps must occur.
• Optionally, set OCR[I_DMDIS] and/or OCR[D_DMDIS] to ensure that no TLB misses occur
while performing the debug operations
• Optionally, ensure that the values entered into the MSR portion of the CPUSCR during the
following steps cause interrupt to be disabled (clearing MSR[EE] and MSR[CE]). This ensures that
external interrupt sources do not cause single-step errors.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-82 Freescale Semiconductor
To single-step the CPU:
1. Debugger scans in either a new or a previously saved value of the CPUSCR (with appropriate
modification of the PC and IR as described in Section 11.4.9.2, “Control State Register (CTL)”)
with a Go+Noexit OnCE command value.
2. The debugger scans out the OSR with “no-register selected”, Go cleared, and determines that the
PCU has re-entered the debug state and that no ERR condition occurred.
To return the CPU to normal operation (without disabling external debug mode):
1. The OCR[I_DMDIS, D_DMDIS], OCR[DR], control bits should be cleared, leaving the
OCR[WKUP] bit set.
2. The debugger restores the CPUSCR with a previously saved value of the CPUSCR (with
appropriate modification of the PC and IR as described in Section 11.4.9.2, “Control State Register
(CTL)”) with a Go+Exit OnCE Command value.
3. OCR[WKUP] may then be cleared.
To exit external debug mode:
1. The debugger should place the CPU in the debug state by the OCR[DR] with OCR[WKUP]
asserted, scanning out and saving the CPUSCR.
2. The debugger should write the DBCRx registers as needed, likely clearing every enable except
DBCR0[EDM].
3. The debugger should write the DBSR to a cleared state.
4. The debugger should re-write the DBCR0 with all bits including EDM cleared.
5. The debugger should clear OCR[DR].
6. The debugger restores the CPUSCR with the previously saved value of the CPUSCR (with
appropriate modification of the PC and IR as described in Section 11.4.9.2, “Control State Register
(CTL)”) with a Go+Exit OnCE Command value.
7. OCR[WKUP] may then be cleared.
NOTE
These steps are examples. They are not an exact template for debugger
operation.
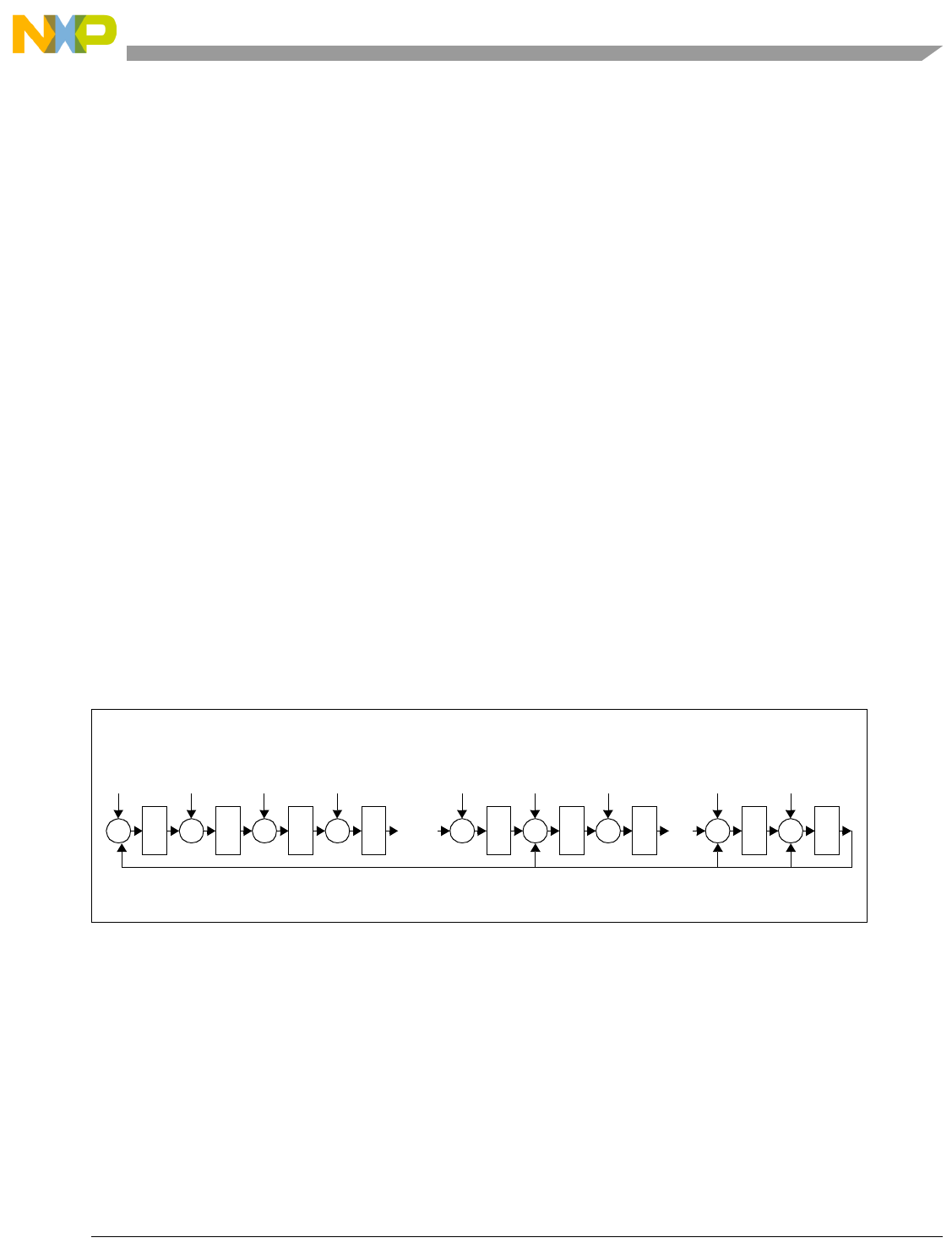
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-83
11.9 Parallel Signature Unit
To support applications requiring system integrity checking during operation, the e200 core provides a
parallel signature unit, which is capable of monitoring the CPU data read and data write AHB buses, and
accumulating a pair of 32-bit MISR signatures of the data values transferred over these buses.
The primitive polynomial used is P(X) = 1 + X10 +X
30 +X
31 +X
32. Values are accumulated based on an
initially programmed seed value and qualified based on active byte lanes of the data read and data write
buses (p_d_hrdata[63:0], p_d_hwdata[63:0]) as indicated by the p_d_hbstrb[7:0] signals. Inactive byte
lanes use a value of all zeros as input data to the MISRs. Refer to Table 13-12 for active byte lane
information. If a transfer error occurs on any accumulated read data, the returned read data is ignored; a
value of all zeros is used instead; and the error is logged. Errors occurring on data writes are not logged
because the data driven by the CPU is valid.
The unit may be independently enabled for read cycles and write cycles, allowing for flexible usage.
Software may also control accumulation of software provided values by a pair of update registers. In
addition, a counter is provided for software use to monitor the number of beats of data that have been
compressed.
Updates are performed when the parallel signature registers are initialized, when a qualified bus cycle is
terminated, when a software update is performed via a high or low update register, and when the parallel
signature high or low registers are written with an mtdcr instruction.
NOTE
Updates due to qualified bus transfers are suppressed for the duration of a
debug session.
The parallel signature unit consists of seven registers as described below. Access to these registers is
privileged. No user-mode access is allowed.
NOTE
Proper access of the PSU registers requires that the mfdcr instruction which
reads a PSU register be preceded by either an mbar or an msync instruction.
To ensure that the effects of an mtdcr instruction to one of the PSU registers
has taken effect, the mtdcr should be followed by a context synchronizing
instruction (sc, isync, rfi, rfci, rfdi).
+d q +d q +d q +d q
+d q +d q +d q
... ...
D31 (D63) D30 (D62) D29 (D61) D28 (D60) D1 (D33) D0 (D32)
D21 (D53)
+d q
D20 (D52)
+d q
D22 (D54)
Data Bus (p_d_hrdata, p_d_hwdata)
PSHR, (PSLR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-84 Freescale Semiconductor
11.9.1 Parallel Signature Control Register (PSCR)
The parallel signature control register (PSCR) controls the operation of the parallel signature unit.
Table 11-28 shows the PSCR field descriptions.
11.9.2 Parallel Signature Status Register (PSSR)
The parallel signature status register (PSSR) provides status relative to operation of the parallel signature
unit.
0
CNTEN
0
RDEN
WREN
INIT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 272; Read/Write; Reset - 0x0
Figure 11-26. Parallel Signature Control Register (PSCR)
Table 11-28. PSCR Field Descriptions
Bits Name Description
0–25 — These bits are reserved
26 CNTEN Counter Enable
0 Counter is disabled.
1 Counter is enabled. Counter is incremented on every accumulated transfer, or on a mtdcr
psulr,Rn instruction.
27–28 — These bits are reserved
29 RDEN Read Enable
0 Processor data read cycles are ignored.
1 Processor data reads cycles are accumulated. For inactive byte lanes, zeros are used for the
data values.
30 WREN Write Enable
0 Processor write cycles are ignored.
1 Processor write cycles are accumulated. For inactive byte lanes, zeros are used for the data
values.
31 INIT This bit may be written with a ‘1’ to set the values in the PSHR, PSLR, and PSCTR registers to
all ‘0’s (0x00000000). This bit always reads as ‘0’.
0
TERR
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 273; Read/Write; Reset -Unaffected
Figure 11-27. Parallel Signature Status Register (PSSR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 11-85
Table 11-28 shows the PSSR field descriptions.
11.9.3 Parallel Signature High Register (PSHR)
The parallel signature high register (PSHR) provides signature information for the high word (bits 63–32)
of the AHB data read and data write buses. It may be written by an mtdcr pshr, Rs instruction (DCR
register 274) to initialize a seed value prior to enabling signature accumulation. The PSCR[INIT] control
bit may also be used to clear the PSHR. This register is unaffected by system reset; thus, it should be
initialized by software prior to performing parallel signature operations.
11.9.4 Parallel Signature Low Register (PSLR)
The parallel signature low register (PSLR) provides signature information for the low word (bits 31–0) of
the AHB data read and data write buses. It may be written via a mtdcr pslr, Rs instruction (DCR register
275) to initialize a seed value prior to enabling signature accumulation. The PSCR[INIT] control bit may
also be used to clear the PSLR. This register is unaffected by system reset; thus, it should be initialized by
software prior to performing parallel signature operations.
Table 11-29. PSSR Field Descriptions
Bits Name Description
0–30 — These bits are reserved
31 TERR Transfer Error Status
0 No transfer error has occurred on accumulated read data since this bit was last cleared by
software.
1 A transfer error has occurred on accumulated read data since this bit was last cleared by
software.
This bit indicates whether a transfer error has occurred on accumulated read data, and that the
read data values returned were ignored and zeros are used instead. This bit is not cleared by
hardware; only a software write of ‘1’ to this bit will cause it to be cleared.
High Signature
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 274; Read/Write; Reset -Unaffected
Figure 11-28. Parallel Signature High Register (PSHR)
Low Signature
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 275; Read/Write; Reset -Unaffected
Figure 11-29. Parallel Signature Low Register (PSLR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
11-86 Freescale Semiconductor
11.9.5 Parallel Signature Counter Register (PSCTR)
The parallel signature counter register (PSCTR) provides count information for signature accumulation.
The counter is incremented on every accumulated transfer or on an mtdcr psulr, Rn instruction. It may be
written by an mtdcr psctr, Rs instruction (DCR register 276) to initialize a value prior to enabling
signature accumulation. The PSCR[INIT] control bit may also be used to clear the PSCTR. This register
is unaffected by system reset; thus, it should be initialized by software prior to performing parallel
signature operations.
11.9.6 Parallel Signature Update High Register (PSUHR)
The parallel signature update high register (PSUHR) provides a means for updating the high signature
value by software. It may be written by a mtdcr psuhr, Rs instruction (DCR register 277) to cause
signature accumulation to occur in the parallel signature high register (PSHR) using the data value written.
This register is write-only; attempted reads return a value of all zeros. Writing to this register does not
cause the PSCTR to increment.
11.9.7 Parallel Signature Update Low Register (PSULR)
The parallel signature update low register (PSULR) provides a means for updating the low signature value
by software. It may be written by an mtdcr psulr, Rs instruction (DCR register 278) to cause signature
accumulation to occur in the parallel signature low register (PSLR) using the data value written. This
register is write-only; attempted reads return a value of all zeros. Writing to this register also causes the
PSCTR to increment.
Counter
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 276; Read/Write; Reset -Unaffected
Figure 11-30. Parallel Signature Counter Register (PSCTR)
High Signature Update Data
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 277; Write-only; Reset -Unaffected
Figure 11-31. Parallel Signature Update High Register (PSUHR)
Low Signature Update Data
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 278; Write-only; Reset -Unaffected
Figure 11-32. Parallel Signature Update Low Register (PSULR)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-1
Chapter 12 Nexus 3+ Module
This chapter defines the auxiliary pin functions, transfer protocols and standard development features of a
Class 3 device in compliance with the proposed IEEE-ISTO Nexus 5001-2008™ standard. The
development features supported are Program Trace, Data Trace, Watchpoint Messaging, Ownership Trace,
Data Acquisition Messaging, and Read/Write Access through the JTAG interface. The Nexus 3+ module
also supports two Class 4 features: Watchpoint Triggering and Processor Overrun Control.
12.1 Introduction
The Nexus 3+ module provides real-time development capabilities for e200 processors in compliance with
the proposed IEEE-ISTO Nexus 5001-2008 standard. This module provides development support
capabilities without requiring the use of address and data pins for internal visibility.
A portion of the pin interface (the JTAG port) is also shared with the OnCE/Nexus 1 unit. The IEEE-ISTO
5001-2008 standard defines an extensible auxiliary port that is used in conjunction with the JTAG port in
e200z4 processors.
The Nexus modules are coupled to the CPU core and monitor a variety of signals including addresses, data,
control signals, status signals, and so forth. Some SoC designs may use a single shared Nexus module with
the capability of selectively monitoring more than one CPU. Control over this selection of the source if
information is provided by a SoC-level shared Nexus control module, which is accessed through JTAG by
the Nexus 1 shared Nexus control register. Specifics of this module are provided in a separate document.
The CPU provides an interface signal to communicate the selection of this register.
12.1.1 Terms and Definitions
Table 12-1 contains a set of terms and definitions associated with the Nexus 3+ module.
Table 12-1. Terms and Definitions
Term Description
IEEE-ISTO 5001 Consortium and standard for real-time embedded system design. World wide Web
documentation at http://www.nexus5001.org
Auxiliary Port Refers to Nexus auxiliary port. Used as auxiliary port to the IEEE 1149.1 JTAG interface.
Branch Trace Messaging
(BTM)
Visibility of addresses for taken branches and exceptions, and the number of sequential
instructions executed between each taken branch.
Data Read Message (DRM) External visibility of data reads to memory-mapped resources.
Data Write Message (DWM) External visibility of data writes to memory-mapped resources.
Data Trace Messaging (DTM) External visibility of how data flows through the embedded system. This may include DRM
and/or DWM.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-2 Freescale Semiconductor
12.1.2 Feature List
The Nexus 3+ module conforms to Class 3 of the IEEE-ISTO 5001-2008 standard, with additional Class
4 features available. The following features are implemented:
• Program Trace through Branch Trace Messaging (BTM).
— Branch trace messaging displays program flow discontinuities (direct and indirect branches,
exceptions, and so on), allowing the development tool to interpolate what transpires between
the discontinuities. Thus static code may be traced.
• Data Trace through Data Write Messaging (DWM) and Data Read Messaging (DRM).
— This provides the capability for the development tool to trace reads and/or writes to selected
internal memory resources.
• Ownership Trace through Ownership Trace Messaging (OTM).
— OTM facilitates ownership trace by providing visibility of which process ID or operating
system task is activated. An Ownership Trace Message is transmitted when a new process/task
is activated, allowing the development tool to trace ownership flow.
• Run-time access to embedded processor memory map through the JTAG port, which allows
enhanced download/upload capabilities.
Data Acquisition Messaging
(DQM) Data Acquisition Messaging (DQM) allows code to be instrumented to export customized
information to the Nexus Auxiliary Output Port.
JTAG Compliant Device complying to IEEE 1149.1 JTAG standard
JTAG IR and DR Sequence JTAG Instruction Register (IR) scan to load an opcode value for selecting a development
register. The JTAG IR corresponds to the OnCE command register (OCMD). The selected
development register is then accessed by an JTAG Data Register (DR) scan.
Nexus1 The e200 (OnCE) debug module. This module integrated with each e200 processor provides all
static (core halted) debug functionality. This module conforms to Class1 of the IEEE-ISTO
5001-2008 standard.
Ownership Trace
Message (OTM)
Visibility of process/function that is currently executing.
Public Messages Messages on the auxiliary pins for accomplishing common visibility and controllability
requirements
SoC “System-on-a-Chip”. SoC signifies all of the modules on a single die. This generally includes
one or more processors with associated peripherals, interfaces & memory modules.
Standard The phrase “according to the standard” is used to indicate according to the IEEE-ISTO 5001
standard.
Transfer Code (TCODE) Message header that identifies the number and/or size of packets to be transferred, and how to
interpret each of the packets.
Watchpoint A Data or Instruction Breakpoint or other debug event which does not cause the processor to
halt. Instead, a pin is used to signal that the condition occurred. A Watchpoint Message may
also be generated.
Table 12-1. Terms and Definitions (Continued)
Term Description

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-3
• Watchpoint Messaging through the auxiliary pins
• Watchpoint Trigger enable of Program and/or Data Trace Messaging
• Data Acquisition Messaging (DQM) allows code to be instrumented to export customized
information to the Nexus Auxiliary Output Port
• Address Translation Messaging through program correlation messages displays updates to the
TLB for use by the debugger in correlating virtual and physical address information
• Auxiliary interface for higher data input/output
— Configurable (min/max) Message Data Out pins (nex_mdo[n:0])
— One (1) or two (2) Message Start/End Out pins (nex_mseo_b[1:0])
— One (1) Read/Write Ready pin (nex_rdy_b) pin
— One (1) Watchpoint Event output pin (nex_evto_b)
— Three (3) additional Watchpoint Event output pins (nex_wevt[2:0]) for SoC use
— One (1) Event In pin (nex_evti_b)
— One (1) MCKO (Message Clock Out) pin
• Registers for Program Trace, Data Trace, Ownership Trace and Watchpoint Trigger.
• All features controllable and configurable via the JTAG port
NOTE
For multi-Nexus implementations, the configuration of the Message Data
Out pins is controlled by the port control register (at the SoC level). For
single Nexus implementations, this configuration is controlled by
development control register 1 (DC1) within the Nexus 3+ module.
In either implementation, both full port mode (maximum number of MDO
pins) or reduced port mode (minimum number of MDO pins) are supported.
This setting should not be changed while the system is running.
The configuration of the Message Start/End Out pins (1 or 2) is determined
at the SOC integration level. This option will be hard-wired based on SOC
bandwidth requirements.
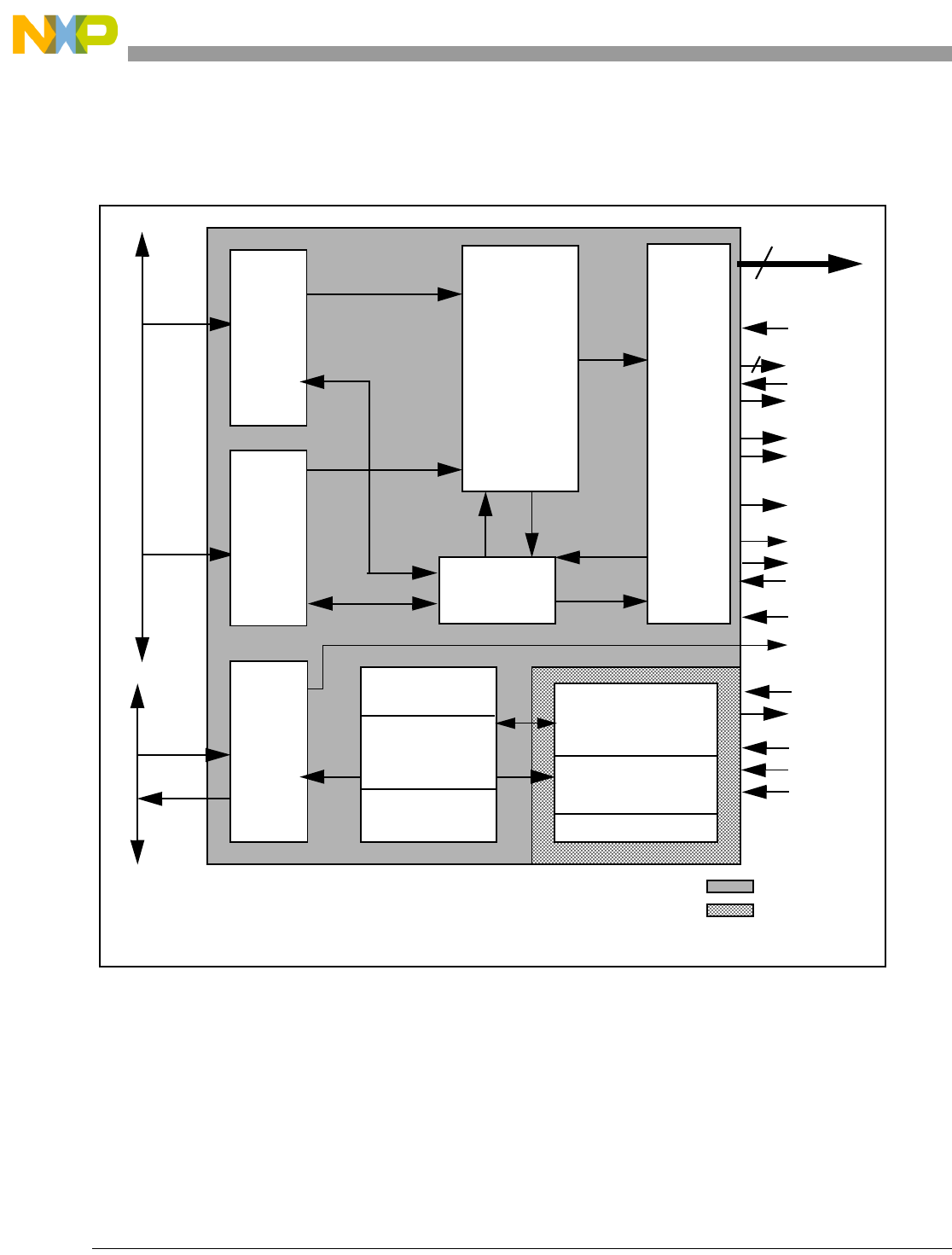
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-4 Freescale Semiconductor
12.1.3 Functional Block Diagram
Figure 12-1 shows the Nexus 3+ functional block diagram.
Figure 12-1. Nexus 3+ Functional Block Diagram
12.2 Enabling Nexus 3+ Operation
The Nexus module is enabled by loading a single instruction (NEXUS3-ACCESS) into the JTAG
instruction register (IR) (OnCE OCMD register). For the Nexus 3+ module, the OCMD value is
0b0001111100. Once enabled, the module will be ready to accept control input by the JTAG/OnCE pins.
Enabling the Nexus 3+ module automatically enables the generation of debug status messages.
nex_mseo0_b
nex_mcko
e200 Virtual Bus
AHB System Bus
Nexus3 Block
Nexus1 Block (w/in e200 CPU)
I/O Logic
OnCE Debug
breakpoint /
Watchpoint
control
DMA (Read/Write)
Instruction SnoopData Snoop
nex_mdo(N:0)
j_tdo
j_tdi
j_tms
j_tclk
j_trst_b
nex_evto_b
nex_rdy_b
nex_evti_b
DMA registers
control/status
registers
Registers
Message
Queues
Memory
Control
nex_mseo1_b
N+1
nex_aux_req(1:0)
npc_aux_grant
2
Note:
The “nex_aux_req[1:0]”, “npc_aux_grant” & “nex_aux_busy” signals are used for inter-module
nex_aux_busy
communication in a multi-Nexus environment. They are not pins on the SoC.
ext_multi_nex_sel
nex_ext_src_id[3:0]
nex_wevto[2:0]
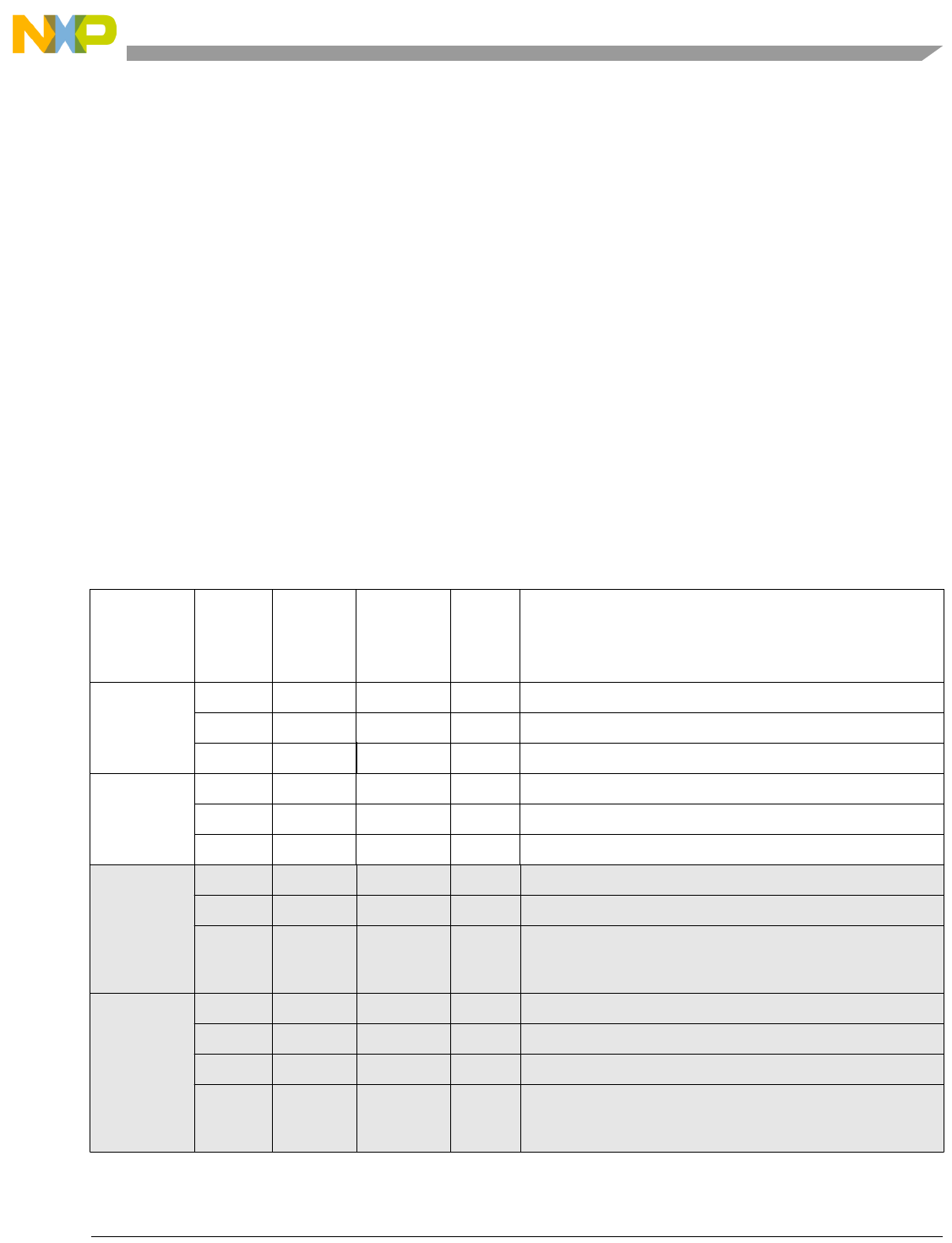
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-5
The Nexus module is disabled when the JTAG state machine reaches the Test-Logic-Reset state. This state
can be reached by the assertion of the j_trst_b pin or by cycling through the state machine using the j_tms
pin. The Nexus module is also be disabled if a Power-on-Reset (POR) event occurs. If the Nexus 3+
module is disabled, no trace output is provided, and the module disables (drive inactive) auxiliary port
output pins (nex_mdo[n:0], nex_mseo[1:0], nex_mcko). Nexus registers are not be available for reads or
writes.
NOTE
Please refer to the “Nexus 3 Integration Guide” for details on IEEE-ISTO
5001 compliance with regard to output pins and multiple Nexus module
configurations.
12.3 TCODEs Supported
The Nexus 3+ pins allow for flexible transfer operations through Public Messages. A TCODE defines the
transfer format, the number and/or size of the packets to be transferred, and the purpose of each packet.
The IEEE-ISTO 5001-2008 standard defines a set of public messages and allocates additional TCODEs
for vendor-specific features outside the scope of the public messages. The Nexus 3+ block supports the
TCODEs shown in Table 12-2.
Table 12-2. Supported TCODEs
Message
Name
Minimum
Field
Size
(bits)
Maximum
Field Size
(bits) Field Name Field
Type Field Description
Debug Status 6 6 TCODE fixed TCODE number = 0
4 4 SRC fixed source processor identifier
8 8 STATUS fixed Debug Status Register (DS[31:24])
Ownership
Tra ce
Message
6 6 TCODE fixed TCODE number = 2
4 4 SRC fixed source processor identifier
1 12 PROCESS variable Task/Process ID tag
Program
Tra ce
Direct Branch
Message
6 6 TCODE fixed TCODE number = 3
4 4 SRC fixed source processor identifier
1 8ICNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
Program
Tra ce
Indirect
Branch
Message
6 6 TCODE fixed TCODE number = 4
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (IS) indicator
1 8 ICNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
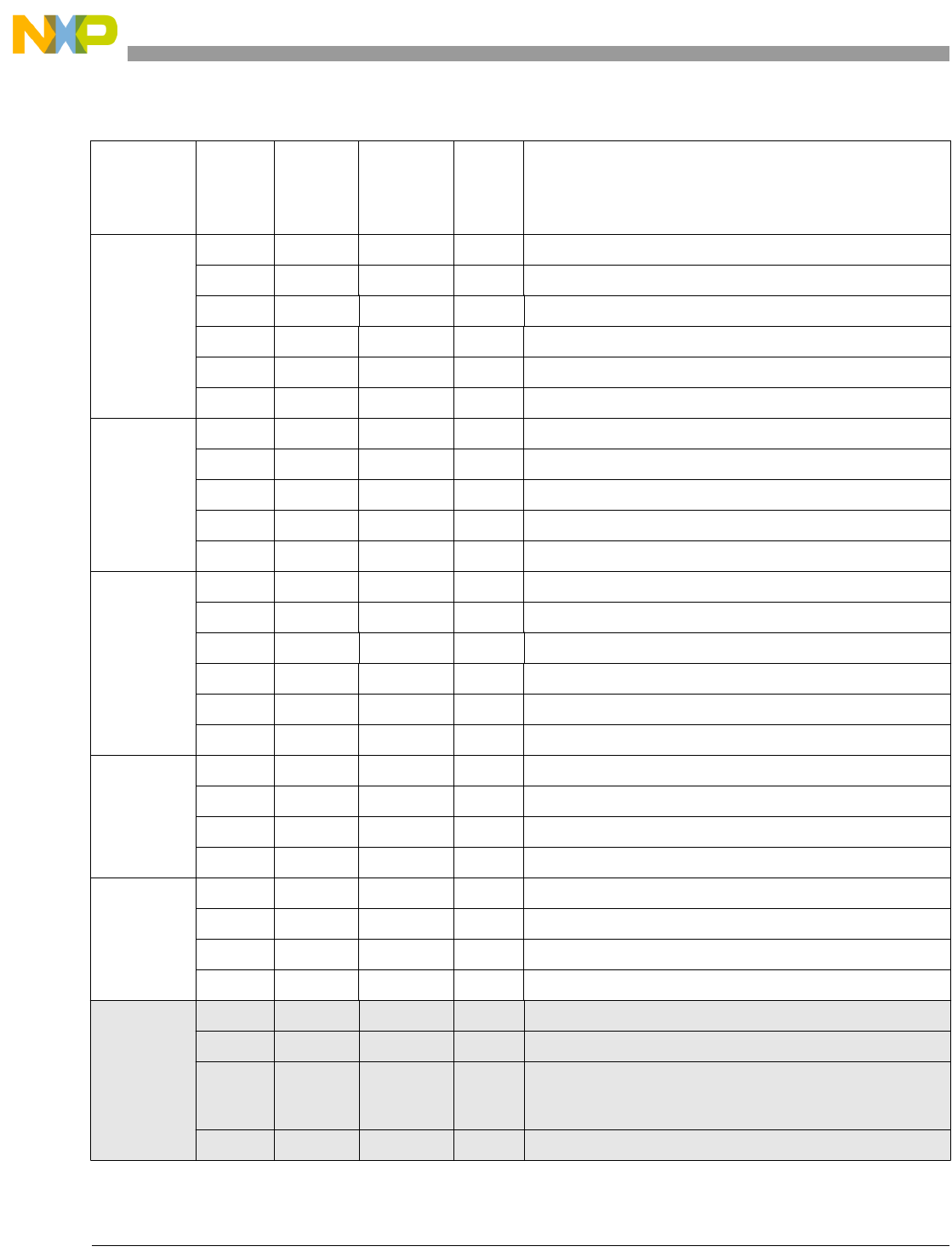
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-6 Freescale Semiconductor
Data Trace
Data Write
Message
6 6 TCODE fixed TCODE number = 5
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (DS) indicator
4 4 DSZ fixed Data size (Refer to Table 12-7)
1 32 U-ADDR variable Unique portion of the data write address
1 64 DATA variable Data write value(s) (see Data Trace section for details)
Data Trace
Data Read
Message
6 6 TCODE fixed TCODE number = 6
4 4 SRC fixed source processor identifier
3 3 DSZ fixed data size (Refer to Table 12-7)
1 32 U-ADDR variable unique portion of the data read address
1 64 DATA variable data read value(s) (see Data Trace section for details)
Data Trace -
Data Read
Message
6 6 TCODE fixed TCODE number = 6
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (DS) indicator
4 4 DSZ fixed data size (Refer to Table 12-7)
1 32 U-ADDR variable unique portion of the data read address
1 64 DATA variable data read value(s) (see Data Trace section for details)
Data
Acquisition
Message
6 6 TCODE fixed TCODE number = 7
4 4 SRC fixed source processor identifier
8 8 DQTAG fixed identification tag taken from DEVENTDQTAG register field
1 32 DQDATA variable exported data taken from DDAM register
Error
Message
6 6 TCODE fixed TCODE number = 8
4 4 SRC fixed source processor identifier
4 4 ETYPE fixed error type
8 8 EVCODE fixed error code
Program
Tra ce
Direct Branch
Message w/
Sync
6 6 TCODE fixed TCODE number = 11
4 4 SRC fixed source processor identifier
1 8 ICNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
132 F-ADDR variable full target address (leading zeros truncated)
Table 12-2. Supported TCODEs (Continued)
Message
Name
Minimum
Field
Size
(bits)
Maximum
Field Size
(bits) Field Name Field
Type Field Description
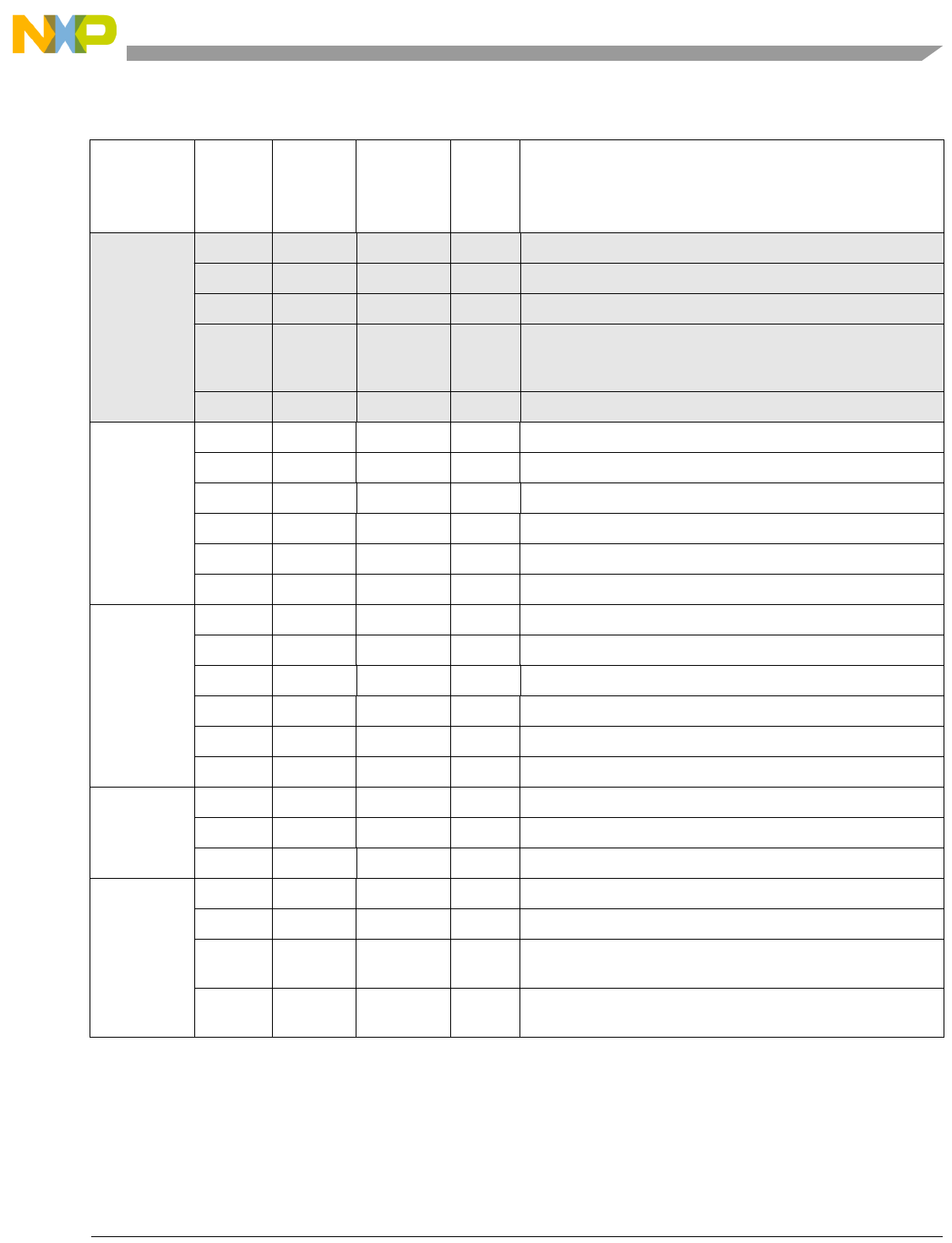
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-7
Program
Tra ce
Indirect
Branch
Message w/
Sync
6 6 TCODE fixed TCODE number = 12
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (IS) indicator
1 8 ICNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
132 F-ADDR variable full target address (leading zeros truncated)
Data Trace
Data Write
Message
w/ Sync
6 6 TCODE fixed TCODE number = 13
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (DS) indicator
4 4 DSZ fixed data size (Refer to Table 12-7)
1 32 F-ADDR variable full access address (leading zeros truncated)
1 64 DATA variable data write value(s) (see Data Trace section for details)
Data Trace
Data Read
Message
w/ Sync
6 6 TCODE fixed TCODE number = 14
4 4 SRC fixed source processor identifier
1 1 MAP fixed Address Space (DS) indicator
4 4 DSZ fixed data size (Refer to Table 12-7)
1 32 F-ADDR variable full access address (leading zeros truncated)
1 64 DATA variable data read value(s) (see Data Trace section for details)
Watchpoint
Message
6 6 TCODE fixed TCODE number = 15
4 4 SRC fixed source processor identifier
132
WPHIT variable Field indicating watchpoint source(s) (leading zeros truncated)
Resource Full
Message
6 6 TCODE fixed TCODE number = 27
4 4 SRC fixed source processor identifier
4 4 RCODE fixed resource code (Refer to Table 12 -5 ) indicates which resource
is the cause of this message
1 32 RDATA variable branch/predicate instruction history (see Section
Section 12.11.4, “Resource Full Messages”)
Table 12-2. Supported TCODEs (Continued)
Message
Name
Minimum
Field
Size
(bits)
Maximum
Field Size
(bits) Field Name Field
Type Field Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-8 Freescale Semiconductor
Program
Trace
Indirect
Branch
History
Message
66 TCODE fixed TCODE number = 28 (see Note below)
44SRCfixed source processor identifier
1 1 MAP fixed Address Space (IS) indicator
18 I-CNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
132 U-ADDR variable unique part of target address for taken branches/exceptions
132 HIST variable branch/predicate instruction history (see Section 12.11.1,
“Branch Trace Messaging Types”)
Program
Trace
Indirect
Branch
History
Message with
Sync
66 TCODE fixed TCODE number = 29 (see Note below)
44SRCfixed source processor identifier
1 1 MAP fixed Address Space (IS) indicator
18 I-CNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
132 F-ADDR variable full target address (leading zero (0) truncated)
132 HIST variable branch/predicate instruction history (see Section 12.11.1,
“Branch Trace Messaging Types”)
Program
Tra ce
Program
Correlation
Message
66 TCODE fixed TCODE number = 33
44SRCfixed source processor identifier
44 EVCODE fixed event correlated with program flow (Refer to Table 12-6)
22 CDF fixed # fields of information in CDATA.
01 one field (CDATA1),
10 two fields (CDATA1 + CDATA2),
11 three fields (CDATA1 + CDATA2 + CDATA3)
18 I-CNT variable # sequential instructions completed since last predicate
instruction, transmitted instruction count, or taken change of
flow
132 CDATA1 variable correlation data field 1 [branch/predicate instruction history or
TLB info part1] (see Section 12.11.5, “Program Correlation
Messages”)
032 CDATA2 variable correlation data field 2- PID/IS info or TLB info (F-ADDR_V for
virtual address or tlbivax EA) (see Section 12.11.5, “Program
Correlation Messages”)
032 CDATA3 variable correlation data field 3 - TLB info -ADDR_P for physical
address (see Section 12.11.5, “Program Correlation
Messages”)
Table 12-2. Supported TCODEs (Continued)
Message
Name
Minimum
Field
Size
(bits)
Maximum
Field Size
(bits) Field Name Field
Type Field Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-9
NOTE
Program Trace can be implemented using either branch history/predicate
instruction messages or traditional direct/indirect branch messages. The
user can select between the two types of program trace. The advantages for
each are discussed in Section 12.11.1, “Branch Trace Messaging Types.” If
the branch history method is selected, the shaded TCODES above will not
be messaged out.
Table 12-3 shows the error code encodings used when reporting an error via the Nexus 3+ error message.
Table 12-3 shows the error type encodings used when reporting an error through the Nexus 3+ error
message.
Table 12-5 shows the encodings used for resource codes for certain messages.
Table 12-3. Error Code Encoding (TCODE = 8)
Error Code Description
xxxxxxx1 Watchpoint Trace Message(s) Lost
xxxxxx1x Data Trace Message(s) Lost
xxxxx1xx Program Trace Message(s) Lost
xxxx1xxx Ownership Trace Message(s) Lost
xxx1xxxx Status Message(s) Lost (Debug Status messages, etc.)
xx1xxxxx Data Acquisition Message(s) Lost
x1xxxxxx Reserved
1xxxxxxx Reserved
Table 12-4. Error Type Encoding (TCODE = 8)
Error Type Description
0000 Message Queue Overrun caused one or more messages to be lost
0001 Contention with higher priority messages caused one or more messages to be lost
0010 Reserved
0011 Read/write access error
0100 Reserved
0101 Invalid access opcode (Nexus Register unimplemented)
0110–1111 Reserved
Table 12-5. RCODE values (TCODE = 27)
Resource Code Description
0000 Program Trace Instruction counter reached 255 and was reset.
0001 Program Trace, Branch/Predicate Instruction History full. This type of packet is
terminated by a stop bit set to 1 after the last history bit.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-10 Freescale Semiconductor
Table 12-6 shows the event code encodings used for certain messages.
Table 12-7 shows the data trace size encodings used for certain messages.
12.4 Nexus 3+ Programmer’s Model
This section describes the Nexus 3+ programmers model. Nexus 3+ registers are accessed using the
JTAG/OnCE port in compliance with IEEE 1149.1. See Section 12.5, “Nexus 3+ Register Access via
JTAG/OnCE,” for details on Nexus 3+ register access.
Table 12-6. Event Code Encoding (TCODE = 33)
Event Code Description
0000 Entry into Debug Mode
0001 Entry into Low Power Mode (CPU only)
0010–0011 Reserved for future functionality
0100 Disabling Program Trace
0101 New process ID value is established in PID0 by mtspr PID0, or new value for MSRIS
is established by an mtmsr instruction
0110–1001 Reserved for future functionality
1010 Branch and link occurrence (direct branch function call)1
1Only used for Program Trace—History Mode
1011 New Address Translation established in the TLB by tlbwe
1100 Address Translation entries invalidated in the TLB by tlbivax
1101 Reserved for future functionality
1110 End of Power ISA tracing (trace disable or entry into a VLE page from a non-VLE
page)
1111 End of VLE tracing (trace disabled or entry into a non-VLE page from a VLE page)
Table 12-7. Data Trace Size Encodings (TCODE = 5,6,13,14)
DTM Size Encoding Transfer Size
0000 0—no data
0001 Byte
0010 Half word (2 bytes)
0011 Reserved
0100 Word (4 bytes)
0100–0111 Reserved
1000 Double word (8 bytes)
1001–1111 Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-11
NOTE
Nexus 3+ registers and output signals are numbered using bit 0 as the least
significant bit. This bit ordering is consistent with the ordering defined by
the IEEE-ISTO 5001-2008 standard.
Table 12-8 details the register map for the Nexus 3+ module.
Table 12-8. Nexus 3+ Register Map
Nexus Register Nexus
Access
Opcode
Read/
Write Read
Address Write
Address
Client Select Control (CSC)10x1 R0x02 —
Port Configuration Register (PCR)1PCR_INDEX2R/W — —
Development Control 1 (DC1) 0x2 R/W 0x04 0x05
Development Control 2 (DC2) 0x3 R/W 0x06 0x07
Development Control 3 (DC3) 0x4 R/W 0x08 0x09
Development Control 4 (DC4) 0x5 R/W 0x0A 0x0B
Read/Write Access Control/Status (RWCS) 0x7 R/W 0x0E 0x0F
Read/Write Access Address (RWA) 0x9 R/W 0x12 0x13
Read/Write Access Data (RWD) 0xA R/W 0x14 0x15
Watchpoint Trigger (WT) 0xB R/W 0x16 0x17
Data Trace Control (DTC) 0xD R/W 0x1A 0x1B
Data Trace Start Address 1 (DTSA1) 0xE R/W 0x1C 0x1D
Data Trace Start Address 2 (DTSA2) 0xF R/W 0x1E 0x1F
Data Trace Start Address 3 (DTSA3) 0x10 R/W 0x20 0x21
Data Trace Start Address 4 (DTSA4) 0x11 R/W 0x22 0x23
Data Trace End Address 1 (DTEA1) 0x12 R/W 0x24 0x25
Data Trace End Address 2 (DTEA2) 0x13 R/W 0x26 0x27
Data Trace End Address 3 (DTEA3) 0x14 R/W 0x28 0x29
Data Trace End Address 4 (DTEA4) 0x15 R/W 0x2A 0x2B
Reserved 0x16 -> 0x2F — 0x28->0x5E 0x29->5F
Development Status (DS) 0x30 R 0x60 —
Reserved 0x31 R/W 0x62 0x63
Overrun Control (OVCR) 0x32 R/W 0x64 0x65
Watchpoint Mask (WMSK) 0x33 R/W 0x66 0x67
Reserved 0x34 — 0x68 0x69
Program Trace Start Trigger Control (PTSTC) 0x35 R/W 0x6A 0x6B
Program Trace End Trigger Control (PTETC) 0x36 R/W 0x6C 0x6D
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-12 Freescale Semiconductor
12.4.1 Client Select Control (CSC)—reference only
The CSC register determines which Nexus client is under development. This register is present at the
top-level SOC Nexus 3+ controller to select one of multiple on-chip Nexus 3+ units.
Figure 12-2 shows the client select control register.
Table 12-9 shows the CSC fields.
12.4.2 Port Configuration Register (PCR)—reference only
The port configuration register (PCR) controls the basic port functions for all Nexus modules in a
multi-Nexus environment. This includes clock control and auxiliary port width. All bits in this register are
writable only once after system reset.
Data Trace Start Trigger Control (DTSTC) 0x37 R/W 0x6E 0x6F
Data Trace End Trigger Control (DTETC) 0x38 R/W 0x70 0x71
Reserved 0x39 -> 0x3F — 0x72->0x7E 0x73->7F
1The CSC and PCR registers are shown in this table as part of the Nexus programmer’s model. They are only
present at the top level SoC Nexus controller in a multi-Nexus implementation, not in the Nexus 3+ module.
The SoC’s CSC Register is readable through Nexus, but the PCR is shown for reference only here.
2 The “PCR_INDEX” is a parameter determined by the SoC. Refer to the “the e200 Nexus 3 Integration Guide”
for more information on how this parameter is implemented for each Nexus module.
Reserved CS
76543210
Nexus Reg# - 0x1;
Read-only; Reset - 0x0
Figure 12-2. Client Select Control Register
Table 12-9. Client Select Control Register Fields
CSC[7–4] RES Reserved for future Nexus Clients (read as 0)
CSC[3–0] CSC Client Select Control
0xX Nexus client (SoC level)
Table 12-8. Nexus 3+ Register Map (Continued)
Nexus Register Nexus
Access
Opcode
Read/
Write Read
Address Write
Address
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-13
Figure 12-3 shows the port configuration register.
Figure 12-3. Port Configuration Register
Table 12-10 shows the PCR fields.
NOTE
The CSC and PCR registers exist in a separate module at the SoC level in a
multi-Nexus environment. If the e200 Nexus 3+ module is the only Nexus
module, these registers are not implemented. Instead, the e200 Nexus 3+
defined development control register 1 (DC1) is used to control the
SoC-level Nexus port functionality.
12.4.3 Nexus Development Control Register 1 (DC1)
Nexus development control register 1 is used to control basic development features of the Nexus 3+
module.
OPC
0
MCK_EN
MCK_DIV
0
313029282726252423222120191817161514131211109876543210
Nexus Reg# - PCR_INDEX; Read/Write; Reset - 0x0
Table 12-10. Port Configuration Register Fields
Bits Name Description
31 OPC Output Port Mode Control (SoC Level)
0 Reduced Port Mode configuration (min# nex_mdo[n:0] pins defined by
SOC)
1 Full Port Mode configuration (max# nex_mdo[n:0] pins defined by SOC)
30 — Reserved for future functionality
29 MCK_EN MCKO Clock Enable (SoC Level)
0nex_mcko is disabled
1nex_mcko is enabled
28–26 MCK_DIV MCKO Clock Divide Ratio (see note below) (SoC Level)
000 nex_mcko is 1x processor clock freq.
001 nex_mcko is 1/2x processor clock freq.
010 Reserved (default to 1/2x processor clock freq.)
011 nex_mcko is 1/4x processor clock freq.
100–110 Reserved (default to 1/2x processor clock freq.)
111 nex_mcko is 1/8x processor clock freq.
25–0 — Reserved for future functionality
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-14 Freescale Semiconductor
Development control register 1 is shown in Figure 12-4.
Development control register 1’s fields are described in Table 12-11.
OPC
MCK_DIV
0
PTM
0
POTD
TSEN
EOC
EIC
0
TM
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x2; Read/Write; Reset - 0x0
Figure 12-4. Development Control Register 1
Table 12-11. Development Control Register 1 Fields
Bits Name Description
31 OPC Output Port Mode Control
0 Reduced Port Mode configuration (min# nex_mdo[n:0] pins defined
1 Full Port Mode configuration (max# nex_mdo[n:0] pins defined
30–29 MCK_DIV MCKO Clock Divide Ratio (see note below)
00 nex_mcko is 1x processor clock frequency
01 nex_mcko is 1/2x processor clock frequency
10 nex_mcko is 1/4x processor clock frequency
11 nex_mcko is 1/8x processor clock frequency
28–15 — Reserved for future functionality
27 PTM Program Trace Method
0 Program Trace uses traditional Branch Messages
1 Program Trace uses Branch History Messages
26–15 — Reserved for future functionality
14 POTD Periodic Ownership Trace Disable
0 Periodic Ownership Trace message events are enabled
1 Periodic Ownership Trace message events are disabled
13–12 TSEN Timestamp Enable(not implemented, write to 00)
00 Timestamp is disabled
11–10 EOC EVTO Control
00 nex_evto_b upon occurrence of Watchpoints (configured in DC2 and DC3)
01 nex_evto_b upon entry into Debug Mode
1x Reserved
9–8 EIC EVTI Control
00 nex_evti_b is used for synchronization (Program Trace/Data Trace)
01 nex_evti_b is used for Debug request
1X Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-15
NOTE
The output port mode control bit (OPC) and MCKO clock divide ratio bits
(MCK_DIV) must be modified only during system reset or debug mode to
insure correct output port and output clock functionality. It is also
recommended that all other bits of the DC1 only be modified in one of those
two modes.
12.4.4 Nexus Development Control Registers 2 and 3 (DC2, DC3)
Nexus development control registers 2 and 3 are used to control output signaling on the Nexus 3+ module.
A table of watchpoints can be found in Table 11-27.
Figure 12-5 shows development control register 2.
7–6 — Reserved for future functionality
5–0 TM Trace Mode1
000000 All Trace Disabled
XXXXX1 Ownership Trace enabled
XXXX1X Data Trace enabled
XXX1XX Program Trace enabled
XX1XXX Watchpoint Trace enabled
X1XXXX Reserved
1XXXXX Data Acquisition Trace enabled
1This field may be updated by hardware in response to watchpoint triggering. Writes to this field take precedence over
hardware updates in the event of a collision. Refer to Section 12.4.7, “Watchpoint Trigger Registers (WT, PTSTC, PTETC,
DTSTC, DTETC),” for more information on watchpoint triggering.
0 WEVTO[2]C WEVTO[1]C WEVTO[0]C EWC
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x3; Read/Write; Reset - 0x0
Figure 12-5. Development Control Register 2
Table 12-11. Development Control Register 1 Fields (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-16 Freescale Semiconductor
Table 12-12 describes development control register 2’s fields.
Table 12-12. Development Control Register 2 Fields
Bits Name Description
31–28 — Reserved
27–24 WEVTO[2]C Watchpoint Event Out 2 Configuration
0000 No Watchpoints #0-14 trigger nex_wevto[2]
0001 Watchpoint #0 triggers nex_wevto[2]
0010 Watchpoint #1 triggers nex_wevto[2]
0011 Watchpoint #2 triggers nex_wevto[2]
0100 Watchpoint #3 triggers nex_wevto[2]
0101 Watchpoint #4 triggers nex_wevto[2]
0110 Watchpoint #5 triggers nex_wevto[2]
0111 Watchpoint #6 triggers nex_wevto[2]
1000 Watchpoint #7 triggers nex_wevto[2]
1001 Watchpoint #8 triggers nex_wevto[2]
1010 Watchpoint #9 triggers nex_wevto[2]
1011 Watchpoint #10 triggers nex_wevto[2]
1100 Watchpoint #11 triggers nex_wevto[2]
1101 Watchpoint #12 triggers nex_wevto[2]
1110 Watchpoint #13 triggers nex_wevto[2]
1111 Watchpoint #14 triggers nex_wevto[2]
23–20 WEVTO[1]C Watchpoint Event Out 1 Configuration
0000 No Watchpoints 0–14 trigger nex_wevto[1]
0001 Watchpoint #0 triggers nex_wevto[1]
0010 Watchpoint #1 triggers nex_wevto[1]
0011 Watchpoint #2 triggers nex_wevto[1]
0100 Watchpoint #3 triggers nex_wevto[1]
0101 Watchpoint #4 triggers nex_wevto[1]
0110 Watchpoint #5 triggers nex_wevto[1]
0111 Watchpoint #6 triggers nex_wevto[1]
1000 Watchpoint #7 triggers nex_wevto[1]
1001 Watchpoint #8 triggers nex_wevto[1]
1010 Watchpoint #9 triggers nex_wevto[1]
1011 Watchpoint #10 triggers nex_wevto[1]
1100 Watchpoint #11 triggers nex_wevto[1]
1101 Watchpoint #12 triggers nex_wevto[1]
1110 Watchpoint #13 triggers nex_wevto[1]
1111 Watchpoint #14 triggers nex_wevto[1]
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-17
Figure 12-5 shows the development control register 3.
19–16 WEVTO[0]C Watchpoint Event Out 0 Configuration
0000 No Watchpoints 0–14 trigger nex_wevto[0]
0001 Watchpoint #0 triggers nex_wevto[0]
0010 Watchpoint #1 triggers nex_wevto[0]
0011 Watchpoint #2 triggers nex_wevto[0]
0100 Watchpoint #3 triggers nex_wevto[0]
0101 Watchpoint #4 triggers nex_wevto[0]
0110 Watchpoint #5 triggers nex_wevto[0]
0111 Watchpoint #6 triggers nex_wevto[0]
1000 Watchpoint #7 triggers nex_wevto[0]
1001 Watchpoint #8 triggers nex_wevto[0]
1010 Watchpoint #9 triggers nex_wevto[0]
1011 Watchpoint #10 triggers nex_wevto[0]
1100 Watchpoint #11 triggers nex_wevto[0]
1101 Watchpoint #12 triggers nex_wevto[0]
1110 Watchpoint #13 triggers nex_wevto[0]
1111 Watchpoint #14 triggers nex_wevto[0]
15–0 EWC EVTO Watchpoint Configuration1
0000000000000000 No Watchpoints 0–15 trigger nex_evto_b
XXXXXXXXXXXXXXX1Watchpoint #0 triggers nex_evto_b
XXXXXXXXXXXXXX1XWatchpoint #1 triggers nex_evto_b
XXXXXXXXXXXXX1XXWatchpoint #2 triggers nex_evto_b
XXXXXXXXXXXX1XXXWatchpoint #3 triggers nex_evto_b
XXXXXXXXXXX1XXXXWatchpoint #4 triggers nex_evto_b
XXXXXXXXXX1XXXXXWatchpoint #5 triggers nex_evto_b
XXXXXXXXX1XXXXXXWatchpoint #6 triggers nex_evto_b
XXXXXXXX1XXXXXXXWatchpoint #7 triggers nex_evto_b
XXXXXXX1XXXXXXXXWatchpoint #8 triggers nex_evto_b
XXXXXX1XXXXXXXXXWatchpoint #9 triggers nex_evto_b
XXXXX1XXXXXXXXXXWatchpoint #10 triggers nex_evto_b
XXXX1XXXXXXXXXXXWatchpoint #11 triggers nex_evto_b
XXX1XXXXXXXXXXXXWatchpoint #12 triggers nex_evto_b
XX1XXXXXXXXXXXXXWatchpoint #13 triggers nex_evto_b
X1XXXXXXXXXXXXXXWatchpoint #14 triggers nex_evto_b
1XXXXXXXXXXXXXXXWatchpoint #15 triggers nex_evto_b
1The EOC bits in DC1 must be programmed to trigger EVTO on Watchpoint occurrence for the EWC bits to have any effect.
0 WEVTO[2]C WEVTO[1]C WEVTO[0]C 0 EWC
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x4; Read/Write; Reset - 0x0
Figure 12-6. Development Control Register 3
Table 12-12. Development Control Register 2 Fields (Continued)
Bits Name Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-18 Freescale Semiconductor
Table 12-12 shows the development control register 3’s fields.
12.4.5 Nexus Development Control Register 4 (DC4)
Nexus development control register 4 is used to control masking of events that initiate program correlation
messages on the Nexus 3+ module.
Table 12-13. Development Control Register 3 Fields
Bits Name Description
31–28 — Reserved
27–24 WEVTO[2]C Watchpoint Event Out 2 Configuration
0000 No Watchpoints 15–21 trigger nex_wevto[2]
0001 Watchpoint #15 triggers nex_wevto[2]
0010 Watchpoint #16 triggers nex_wevto[2]
0011 Watchpoint #17 triggers nex_wevto[2]
0100 Watchpoint #18 triggers nex_wevto[2]
0101 Watchpoint #19 triggers nex_wevto[2]
0110 Watchpoint #20 triggers nex_wevto[2]
0111 Watchpoint #21 triggers nex_wevto[2]
1000–1111 Reserved
23–20 WEVTO[1]C Watchpoint Event Out 1 Configuration
0000 No Watchpoints 15–21 trigger nex_wevto[1]
0001 Watchpoint #15 triggers nex_wevto[1]
0010 Watchpoint #16 triggers nex_wevto[1]
0011 Watchpoint #17 triggers nex_wevto[1]
0100 Watchpoint #18 triggers nex_wevto[1]
0101 Watchpoint #19 triggers nex_wevto[1]
0110 Watchpoint #20 triggers nex_wevto[1]
0111 Watchpoint #21 triggers nex_wevto[1]
1000–1111 Reserved
19–16 WEVTO[0]C Watchpoint Event Out 0 Configuration
0000 No Watchpoints 15–21 trigger nex_wevto[0]
0001 Watchpoint #15 triggers nex_wevto[0]
0010 Watchpoint #16 triggers nex_wevto[0]
0011 Watchpoint #17 triggers nex_wevto[0]
0100 Watchpoint #18 triggers nex_wevto[0]
0101 Watchpoint #19 triggers nex_wevto[0]
0110 Watchpoint #20 triggers nex_wevto[0]
0111 Watchpoint #21 triggers nex_wevto[0]
1000–1111 Reserved
15–6 — Reserved for watchpoint expansion
5–0 EWC EVTO Watchpoint Configuration1
000000 No Watchpoints 16–21 trigger nex_evto_b
XXXXX1 Watchpoint #16 triggers nex_evto_b
XXXX1X Watchpoint #17 triggers nex_evto_b
XXX1XX Watchpoint #18 triggers nex_evto_b
XX1XXX Watchpoint #19 triggers nex_evto_b
X1XXXX Watchpoint #20 triggers nex_evto_b
1XXXXX Watchpoint #21 triggers nex_evto_b
1The EOC bits in DC1 must be programmed to trigger EVTO on Watchpoint occurrence for the EWC bits to have any effect.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-19
Figure 12-7 shows the development control register 4.
Table 12-14 shows the development control register 4’s fields.
12.4.6 Development Status Register (DS)
The Development Status Register is used to report system debug status. When debug mode is entered or
exited, or an SoC- or e200-defined low power mode is entered (see note below), a debug status message
is transmitted with DS[31–24]. The external tool can read this register at any time.
Figure 12-8 shows the development status register.
0 EVCDM
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x5; Read/Write; Reset - 0x0
Figure 12-7. Development Control Register 4
Table 12-14. Development Control Register 4 Fields
Bits Name Description
31–16 — Reserved
15–0 EVCDM Event Code (EVCODE) Mask1
0000000000000000No EVCODEs masked for Program Correlation Messages
XXXXXXXXXXXXXXX1EVCODE #0 is masked for Program Correlation Messages
XXXXXXXXXXXXXX1XEVCODE #1 is masked for Program Correlation Messages
XXXXXXXXXXXXX1XXEVCODE #2 is masked for Program Correlation Messages
XXXXXXXXXXXX1XXXEVCODE #3 is masked for Program Correlation Messages
XXXXXXXXXXX1XXXXEVCODE #4 is masked for Program Correlation Messages
XXXXXXXXXX1XXXXXEVCODE #5 is masked for Program Correlation Messages
XXXXXXXXX1XXXXXXEVCODE #6 is masked for Program Correlation Messages
XXXXXXXX1XXXXXXXEVCODE #7 is masked for Program Correlation Messages
XXXXXXX1XXXXXXXXEVCODE #8 is masked for Program Correlation Messages
XXXXXX1XXXXXXXXXEVCODE #9 is masked for Program Correlation Messages
XXXXX1XXXXXXXXXXEVCODE #10 is masked for Program Correlation Messages
XXX1XXXXXXXXXXXEVCODE #11 is masked for Program Correlation Messages
XXX1XXXXXXXXXXXXEVCODE #12 is masked for Program Correlation Messages
XX1XXXXXXXXXXXXXEVCODE #13 is masked for Program Correlation Messages
X1XXXXXXXXXXXXXXEVCODE #14 is masked for Program Correlation Messages
1XXXXXXXXXXXXXXXEVCODE #15 is masked for Program Correlation Messages
1Refer to Table 12-6 for implemented EVCODEs
DBG
LPS
LPC
0
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x30; Read-only; Reset - 0x0
Figure 12-8. Development Status Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-20 Freescale Semiconductor
Table 12-15 shows the development status register’s fields.
12.4.7 Watchpoint Trigger Registers (WT, PTSTC, PTETC, DTSTC, DTETC)
The watchpoint trigger registers allows the watchpoints defined within the e200 Nexus1 logic to trigger
actions. These watchpoints can control program and/or data trace enable and disable. The control bits can
be used to produce a related “window” for triggering trace messages. The watchpoint trigger register (WT)
is used to control triggering by a single selected watchpoint. The program trace start trigger control
(PTSTC), program trace end trigger control (PTETC), data trace start trigger control (DTSTC), and data
trace end trigger control (DTETC) are used for extended trigger controls for the respective function. If
multiple watchpoints are desired for triggering, or a watchpoint beyond watchpoint 13 is required, then
one or more of the extended watchpoint trigger registers may be used. A field encoding of 4’b1111 in one
of the WT register fields enables the corresponding extended trigger register. For all other WT field
encodings, the corresponding extended trigger register is disabled and the contents are ignored.
When a start trigger is detected, the designated trace features become enabled and the corresponding
enable bits of the DC1 register are set. Whenever a stop trigger is detected, the designated trace features
become disabled and the corresponding enable bits of the DC1 register are cleared. If the same trigger
condition is used for both start and stop triggering, the designated trace features toggle between being
enabled and disabled at each occurrence of the trigger condition. Similarly, if start and stop triggers for a
trace feature occur simultaneously, the designated trace feature toggles between enabled and disabled
depending on the enable state at the time of the trigger events. For example, if tracing is enabled but start
and stop triggers occur simultaneously, tracing will be disabled. Direct writes of the DC1 register take
precedence over any trace feature enable state that is derived from watchpoint triggering. A table of
watchpoints can be found in Table 11-27.
Table 12-15. Development Status Register Fields
Bits Name Description
31 DBG e200 CPU Debug Mode Status
0 CPU not in Debug mode
1 CPU in Debug mode (jd_debug_b signal asserted)
30–28 LPS e200 System Low Power Mode Status
000 Normal (Run) mode
XX1 DOZE mode (p_doze signal asserted)
X1X NAP mode (p_nap signal asserted)
1XX SLEEP mode (p_sleep signal asserted)
27–26 LPC e200 CPU Low Power Mode Status
00 Normal (Run) mode
01 CPU in Halted state (p_halted signal asserted)
10 CPU in Stopped state (p_stopped signal asserted)
11 CPU in Waiting state (p_waiting signal asserted)
25–0 — Reserved for future functionality (read as 0)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-21
Figure 12-9 shows the watchpoint trigger register.
Table 12-16 details the watchpoint trigger register fields.
PTS PTE DTS DTE 0
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0xB; Read/Write; Reset - 0x0
Figure 12-9. Watchpoint Trigger (WT) Register
Table 12-16. Watchpoint Trigger Register Fields
Bits Name Description
31–28 PTS Program Trace Start Control
0000 Trigger disabled
0001 Use Watchpoint #0
0010 Use Watchpoint #1
.
.
1110 Use Watchpoint #13
1111 Use control settings in the PTSTC register
27–24 PTE Program Trace End Control
0000 Trigger disabled
0001 Use Watchpoint #0
0010 Use Watchpoint #1
.
.
1110 Use Watchpoint #13
1111 Use control settings in the PTETC register
23–20 DTS Data Trace Start Control
0000 Trigger disabled
0001 Use Watchpoint #0
0010 Use Watchpoint #1
.
.
1110 Use Watchpoint #13
1111 Use control settings in the DTSTC register
19–16 DTE Data Trace End Control
0000 Trigger disabled
0001 Use Watchpoint #0
0010 Use Watchpoint #1
.
.
1110 Use Watchpoint #13
1111 Use control settings in the DTETC register
15–0 — Reserved for future functionality (read as 0)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-22 Freescale Semiconductor
The PTSTC register, shown in Figure 12-10, is used for extended program trace start trigger control.
Table 12-17 details the PTSTC register fields.
The PTETC register, shown in Figure 12-11, is used for extended program trace end trigger control.
0PTST
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x35; Read/Write; Reset - 0x0
Figure 12-10. Program Trace Start Trigger Control (PTSTC) Register
Table 12-17. Program Trace Start Trigger Control Register Fields
Bits Name Description
31–22 — Reserved for future functionality (read as 0)
21–0 PTST Program Trace Start Trigger Control
0000000000000000000000Trigger disabled
XXXXXXXXXXXXXXXXXXXXX1Use Watchpoint #0
XXXXXXXXXXXXXXXXXXXX1XUse Watchpoint #1
XXXXXXXXXXXXXXXXXXX1XXUse Watchpoint #2
XXXXXXXXXXXXXXXXXX1XXXUse Watchpoint #3
XXXXXXXXXXXXXXXXX1XXXXUse Watchpoint #4
XXXXXXXXXXXXXXXX1XXXXXUse Watchpoint #5
XXXXXXXXXXXXXXX1XXXXXXUse Watchpoint #6
XXXXXXXXXXXXXX1XXXXXXXUse Watchpoint #7
XXXXXXXXXXXXX1XXXXXXXXUse Watchpoint #8
XXXXXXXXXXXX1XXXXXXXXXUse Watchpoint #9
XXXXXXXXXXX1XXXXXXXXXXUse Watchpoint #10
XXXXXXXXXX1XXXXXXXXXXXUse Watchpoint #11
XXXXXXXXX1XXXXXXXXXXXXUse Watchpoint #12
XXXXXXXX1XXXXXXXXXXXXXUse Watchpoint #13
XXXXXXX1XXXXXXXXXXXXXXUse Watchpoint #14
XXXXXX1XXXXXXXXXXXXXXXUse Watchpoint #15
XXXXX1XXXXXXXXXXXXXXXXUse Watchpoint #16
XXXX1XXXXXXXXXXXXXXXXXUse Watchpoint #17
XXX1XXXXXXXXXXXXXXXXXXUse Watchpoint #18
XX1XXXXXXXXXXXXXXXXXXXUse Watchpoint #19
X1XXXXXXXXXXXXXXXXXXXXUse Watchpoint #20
1XXXXXXXXXXXXXXXXXXXXXUse Watchpoint #21
0PTET
313029282726252423222120191817161514131211109876543210
Nexus Reg#0x36; Read/Write; Reset - 0x0
Figure 12-11. Program Trace End Trigger Control (PTETC) Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-23
Table 12-18 details the PTETC register fields.
The DTSTC register, shown in Figure 12-12, is used for extended data trace start trigger control.
Table 12-18. Program Trace End Trigger Control Register Fields
Bits Name Description
31–22 — Reserved for future functionality (read as 0)
21–0 PTET Program Trace End Trigger Control
0000000000000000000000 Trigger disabled
XXXXXXXXXXXXXXXXXXXXX1Use Watchpoint #0
XXXXXXXXXXXXXXXXXXXX1XUse Watchpoint #1
XXXXXXXXXXXXXXXXXXX1XXUse Watchpoint #2
XXXXXXXXXXXXXXXXXX1XXXUse Watchpoint #3
XXXXXXXXXXXXXXXXX1XXXXUse Watchpoint #4
XXXXXXXXXXXXXXXX1XXXXXUse Watchpoint #5
XXXXXXXXXXXXXXX1XXXXXXUse Watchpoint #6
XXXXXXXXXXXXXX1XXXXXXXUse Watchpoint #7
XXXXXXXXXXXXX1XXXXXXXXUse Watchpoint #8
XXXXXXXXXXXX1XXXXXXXXXUse Watchpoint #9
XXXXXXXXXXX1XXXXXXXXXXUse Watchpoint #10
XXXXXXXXXX1XXXXXXXXXXXUse Watchpoint #11
XXXXXXXXX1XXXXXXXXXXXXUse Watchpoint #12
XXXXXXXX1XXXXXXXXXXXXXUse Watchpoint #13
XXXXXXX1XXXXXXXXXXXXXXUse Watchpoint #14
XXXXXX1XXXXXXXXXXXXXXXUse Watchpoint #15
XXXXX1XXXXXXXXXXXXXXXXUse Watchpoint #16
XXXX1XXXXXXXXXXXXXXXXXUse Watchpoint #17
XXX1XXXXXXXXXXXXXXXXXXUse Watchpoint #18
XX1XXXXXXXXXXXXXXXXXXXUse Watchpoint #19
X1XXXXXXXXXXXXXXXXXXXXUse Watchpoint #20
1XXXXXXXXXXXXXXXXXXXXXUse Watchpoint #21
0DTST
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x37; Read/Write; Reset - 0x0
Figure 12-12. Data Trace Start Trigger Control (DTSTC) Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-24 Freescale Semiconductor
Table 12-17 details the DTSTC register fields.
The DTETC register, shown in Figure 12-13, is used for extended data trace end trigger control.
Table 12-19. Data Trace Start Trigger Control Register Fields
Bits Name Description
31–22 — Reserved for future functionality (read as 0)
21–0 DTST Data Trace Start Trigger Control
0000000000000000000000 Trigger disabled
XXXXXXXXXXXXXXXXXXXXX1Use Watchpoint #0
XXXXXXXXXXXXXXXXXXXX1XUse Watchpoint #1
XXXXXXXXXXXXXXXXXXX1XXUse Watchpoint #2
XXXXXXXXXXXXXXXXXX1XXXUse Watchpoint #3
XXXXXXXXXXXXXXXXX1XXXXUse Watchpoint #4
XXXXXXXXXXXXXXXX1XXXXXUse Watchpoint #5
XXXXXXXXXXXXXXX1XXXXXXUse Watchpoint #6
XXXXXXXXXXXXXX1XXXXXXXUse Watchpoint #7
XXXXXXXXXXXXX1XXXXXXXXUse Watchpoint #8
XXXXXXXXXXXX1XXXXXXXXXUse Watchpoint #9
XXXXXXXXXXX1XXXXXXXXXXUse Watchpoint #10
XXXXXXXXXX1XXXXXXXXXXXUse Watchpoint #11
XXXXXXXXX1XXXXXXXXXXXXUse Watchpoint #12
XXXXXXXX1XXXXXXXXXXXXXUse Watchpoint #13
XXXXXXX1XXXXXXXXXXXXXXUse Watchpoint #14
XXXXXX1XXXXXXXXXXXXXXXUse Watchpoint #15
XXXXX1XXXXXXXXXXXXXXXXUse Watchpoint #16
XXXX1XXXXXXXXXXXXXXXXXUse Watchpoint #17
XXX1XXXXXXXXXXXXXXXXXXUse Watchpoint #18
XX1XXXXXXXXXXXXXXXXXXXUse Watchpoint #19
X1XXXXXXXXXXXXXXXXXXXXUse Watchpoint #20
1XXXXXXXXXXXXXXXXXXXXXUse Watchpoint #21
0DTET
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 038; Read/Write; Reset - 0x0
Figure 12-13. Data Trace End Trigger Control (DTETC) Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-25
Table 12-18 details the DTETC register fields.
12.4.8 Nexus Watchpoint Mask Register (WMSK)
The Nexus watchpoint mask register, shown in Figure 12-14, controls which watchpoint events are
enabled to produce watchpoint trace messages. DC1[TM] must also be programmed to generate
watchpoint trace messages.
Table 12-20. Data Trace End Trigger Control Register Fields
Bits Name Description
31–22 — Reserved for future functionality (read as 0)
21–0 DTET Data Trace End Trigger Control
0000000000000000000000 Trigger disabled
XXXXXXXXXXXXXXXXXXXXX1Use Watchpoint #0
XXXXXXXXXXXXXXXXXXXX1XUse Watchpoint #1
XXXXXXXXXXXXXXXXXXX1XXUse Watchpoint #2
XXXXXXXXXXXXXXXXXX1XXXUse Watchpoint #3
XXXXXXXXXXXXXXXXX1XXXXUse Watchpoint #4
XXXXXXXXXXXXXXXX1XXXXXUse Watchpoint #5
XXXXXXXXXXXXXXX1XXXXXXUse Watchpoint #6
XXXXXXXXXXXXXX1XXXXXXXUse Watchpoint #7
XXXXXXXXXXXXX1XXXXXXXXUse Watchpoint #8
XXXXXXXXXXXX1XXXXXXXXXUse Watchpoint #9
XXXXXXXXXXX1XXXXXXXXXXUse Watchpoint #10
XXXXXXXXXX1XXXXXXXXXXXUse Watchpoint #11
XXXXXXXXX1XXXXXXXXXXXXUse Watchpoint #12
XXXXXXXX1XXXXXXXXXXXXXUse Watchpoint #13
XXXXXXX1XXXXXXXXXXXXXXUse Watchpoint #14
XXXXXX1XXXXXXXXXXXXXXXUse Watchpoint #15
XXXXX1XXXXXXXXXXXXXXXXUse Watchpoint #16
XXXX1XXXXXXXXXXXXXXXXXUse Watchpoint #17
XXX1XXXXXXXXXXXXXXXXXXUse Watchpoint #18
XX1XXXXXXXXXXXXXXXXXXXUse Watchpoint #19
X1XXXXXXXXXXXXXXXXXXXXUse Watchpoint #20
1XXXXXXXXXXXXXXXXXXXXXUse Watchpoint #21
0WEM
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x33; Read/Write; Reset - 0x0
Figure 12-14. Watchpoint Mask Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-26 Freescale Semiconductor
Table 12-16 details the Watchpoint Trigger register fields.
12.4.9 Nexus Overrun Control Register (OVCR)
The Nexus overrun control register, shown in Figure 12-15, controls Nexus behavior as the internal
message queues fill up. Response options include suppressing selected message types or stalling processor
instruction execution.
Table 12-21. Watchpoint Mask Register Fields
Bits Name Description
31–22 — Reserved for future functionality (read as 0)
21–0 WEM Watchpoint Enable for Messaging
0000000000000000000000 No Watchpoints enabled for Watchpoint Trace Messaging
XXXXXXXXXXXXXXXXXXXXX1Watchpoint #0 enabled for WTM
XXXXXXXXXXXXXXXXXXXX1XWatchpoint #1 enabled for WTM
XXXXXXXXXXXXXXXXXXX1XXWatchpoint #2 enabled for WTM
XXXXXXXXXXXXXXXXXX1XXXWatchpoint #3 enabled for WTM
XXXXXXXXXXXXXXXXX1XXXXWatchpoint #4 enabled for WTM
XXXXXXXXXXXXXXXX1XXXXXWatchpoint #5 enabled for WTM
XXXXXXXXXXXXXXX1XXXXXXWatchpoint #6 enabled for WTM
XXXXXXXXXXXXXX1XXXXXXXWatchpoint #7 enabled for WTM
XXXXXXXXXXXXX1XXXXXXXXWatchpoint #8 enabled for WTM
XXXXXXXXXXXX1XXXXXXXXXWatchpoint #9 enabled for WTM
XXXXXXXXXXX1XXXXXXXXXXWatchpoint #10 enabled for WTM
XXXXXXXXXX1XXXXXXXXXXXWatchpoint #11 enabled for WTM
XXXXXXXXX1XXXXXXXXXXXXWatchpoint #12 enabled for WTM
XXXXXXXX1XXXXXXXXXXXXXWatchpoint #13 enabled for WTM
XXXXXXX1XXXXXXXXXXXXXXWatchpoint #14 enabled for WTM
XXXXXX1XXXXXXXXXXXXXXXWatchpoint #15 enabled for WTM
XXXXX1XXXXXXXXXXXXXXXXWatchpoint #16 enabled for WTM
XXXX1XXXXXXXXXXXXXXXXXWatchpoint #17 enabled for WTM
XXX1XXXXXXXXXXXXXXXXXXWatchpoint #18 enabled for WTM
XX1XXXXXXXXXXXXXXXXXXXWatchpoint #19 enabled for WTM
X1XXXXXXXXXXXXXXXXXXXXWatchpoint #20 enabled for WTM
1XXXXXXXXXXXXXXXXXXXXXWatchpoint #21 enabled for WTM
0
SPTHOLD
0
SPEN
0
STTHOLD
0
STEN
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x32; Read/Write; Reset - 0x0
Figure 12-15. Nexus Overrun Control Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-27
Table 12-16 shows the Nexus overrun control register fields.
12.4.10 Data Trace Control Register (DTC)
The data trace control registercontrols whether DTM Messages are restricted to reads, writes, or both for
a user-programmable address range. There are four data trace channels controlled by the DTC for the
Nexus 3+ module. Channels can be programmed to trace data accesses or instruction accesses, but not
independently.
Figure 12-16 shows the data trace control register.
Figure 12-16. Data Trace Control Register
Table 12-22. Nexus Overrun Control Register Fields
Bits Name Description
31–30 — Reserved, should be cleared
29–28 SPTHOLD Suppression Threshold
00 Suppression threshold is when message queues are 1/4 full
01 Suppression threshold is when message queues are 1/2 full
10 Suppression threshold is when message queues are 3/4 full
11 Reserved
27–22 — Reserved, should be cleared
21–16 SPEN Suppression Enable
000000 Suppression is disabled
xxxxx1 Ownership Trace message suppression is enabled
xxxx1x Data Trace message suppression is enabled
xxx1xx Program Trace message suppression is enabled
xx1xxx Watchpoint Trace message suppression is enabled
x1xxxx Reserved
1xxxxx Data Acquisition message suppression is enabled
15–14 — Reserved, should be cleared
13–12 STTHOLD Stall Threshold
00 Stall threshold is when message queues are 1/4 full
01 Stall threshold is when message queues are 1/2 full
10 Stall threshold is when message queues are 3/4 full
11 Reserved
11–1 — Reserved, should be cleared
0 STEN Stall Enable
0 Stalling is disabled
1 Stalling is enabled
RWT1
RWT2
RWT3
RWT4
0
RC1
RC2
RC3
RC4
DI
0
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0xD; Read/Write; Reset - 0x0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-28 Freescale Semiconductor
Table 12-23 details the data trace control register fields.
12.4.11 Data Trace Start Address Registers (DTSA1–4)
Figure 12-17–Figure 12-20 show the data trace start address registers, which define the start addresses for
each trace channel.
Table 12-23. Data Trace Control Register Fields
Bits Name Description
31–30 RWT1 Read/Write Trace 1
00 No trace enabled
X1 Enable Data Read Trace
1X Enable Data Write Trace
29–28 RWT2 Read/Write Trace 2
00 No trace enabled
X1 Enable Data Read Trace
1X Enable Data Write Trace
27–26 RWT3 Read/Write Trace 3
00 No trace enabled
X1 Enable Data Read Trace
1X Enable Data Write Trace
25–24 RWT4 Read/Write Trace 4
00 No trace enabled
X1 Enable Data Read Trace
1X Enable Data Write Trace
23–8 — Reserved for future functionality (read as 0)
7 RC1 Range Control 1
0 Condition trace on address within range
1 Condition trace on address outside of range
6 RC2 Range Control 2
0 Condition trace on address within range
1 Condition trace on address outside of range
5 RC3 Range Control 3
0 Condition trace on address within range
1 Condition trace on address outside of range
4 RC4 Range Control 4
0 Condition trace on address within range
1 Condition trace on address outside of range
3 DI Data Access/Instruction Access Trace
0 Condition trace on data accesses
1 Condition trace on instruction accesses
2–0 — Reserved for future functionality (read as 0)
Data Trace Start Address
Figure 12-17. Data Trace Start Address 1 Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-29
.
..
12.4.12 Data Trace End Address Registers (DTEA1–4)
Figure 12-20–Figure 12-24 show the data trace end address registers, which define the end addresses for
each trace channel.
313029282726252423222120191817161514131211109876543210
Nexus Reg#0xE; Read/Write; Reset - 0x0
Data Trace Start Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0xF; Read/Write; Reset - 0x0
Figure 12-18. Data Trace Start Address 2 Register
Data Trace Start Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x10; Read/Write; Reset - 0x0
Figure 12-19. Data Trace Start Address 3 Register
Data Trace Start Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x11; Read/Write; Reset - 0x0
Figure 12-20. Data Trace Start Address 4 Register
Data Trace End Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x12; Read/Write; Reset - 0x0
Figure 12-21. Data Trace End Address 1 Register
Figure 12-17. Data Trace Start Address 1 Register
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-30 Freescale Semiconductor
.
.
.
Table 12-24 illustrates the range that is selected for data trace for various cases of DTSA being less than,
greater than, or equal to DTEA.
NOTE
DTSA must be less than DTEA in order to guarantee correct Data
Write/Read Traces. Data Trace ranges are inclusive of the DTSA and DTEA
addresses for Range Control settings indicating “within range”, and are
exclusive of the DTSA and DTEA addresses for Range Control settings
indicating “outside of range”.
Data Trace End Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x13; Read/Write; Reset - 0x0
Figure 12-22. Data Trace End Address 2 Register
Data Trace End Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x14; Read/Write; Reset - 0x0
Figure 12-23. Data Trace End Address 3 Register
Data Trace End Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x15; Read/Write; Reset - 0x0
Figure 12-24. Data Trace End Address 4 Register
Table 12-24. Data Trace—Address Range Options
Programmed Values Range Control Bit Value Range Selected
DTSA < DTEA 0 DTSA -> <- DTEA
DTSA < DTEA 1 <- DTSA DTEA ->
DTSA > DTEA N/A Invalid Range - no trace
DTSA = DTEA N/A Invalid Range - no trace
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-31
12.4.13 Read/Write Access Control/Status (RWCS)
The read write access control/status register provides control for read/write access. Read/write access
provides DMA-like access to memory-mapped resources on the AHB system bus either while the
processor is halted or during runtime. The RWCS register also provides read/write access status
information per Table 12-26.
Figure 12-25 shows the read/write access control/status register.
Table 12-25 shows the RWCS fields.
AC
RW
SZ
MAP
PR
0
CNT
ERR
DV
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x7; Read/Write1; Reset - 0x0
1ERR and DV are read-only
Figure 12-25. Read/Write Access Control/Status Register
Table 12-25. Read/Write Access Control/Status Register Fields
Bits Name Description
RWCS[31] AC Access Control
0 End access
1 Start access
RWCS[30] RW Read/Write Select
0 Read access
1 Write access
RWCS[29–27] SZ Word Size
000 8-bit (byte)
001 16-bit (half-word)
010 32-bit (word)
011 64-bit (double word, requires two passes through RWD)
100–111 Reserved (default to word)
RWCS[26–24] MAP MAP Select
000 Primary memory map
001–111 Reserved
RWCS[23–22] PR1Read/Write Access Priority
00 Reserved (default to highest access priority)
01 Reserved (default to highest access priority)
10 Reserved (default to highest access priority)
11 Highest access priority
RWCS[21–16] — Reserved for future functionality
RWCS[15–2] CNT Access Control Count
hhhh Number of accesses of word size SZ
RWCS[1] ERR2Read/Write Access Error (see Table 12-26)
RWCS[0] DV 2Read/Write Access Data Valid (see Table 12-26)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-32 Freescale Semiconductor
Table 12-26 shows the read/write access status bit encoding.
12.4.14 Read/Write Access Data (RWD)
The read/write access data register (RWD) provides the data to/from system bus memory-mapped
locations when initiating a read or a write access.
Figure 12-26 shows the read/write access data register.
Read/write accesses to the AHB require that the debug firmware properly retrieve/place the data in the
RWD. Table 12-27 shows the proper placement of data into the RWD. Note that double-word transfers
require two passes through RWD.
1The priority functionality is not currently implemented
2ERR and DV are read-only
Table 12-26. Read/Write Access Status Bit Encoding
Read Action Write Action ERR DV
Read Access has not completed Write Access completed without error 0 0
Read Access error has occurred Write Access error has occurred 1 0
Read Access completed without error Write Access has not completed 0 1
Not Allowed Not allowed 1 1
Read/Write Data
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0xA; Read/Write; Reset - 0x0
Figure 12-26. Read/Write Access Data Register
Table 12-27. RWD Data Placement For Transfers
Transfer Size
and byte offset RWA(2–0) RWCS[SZ] vRWD
31–24 23–16 15–87–0
Byte x x x 0 0 0 — — — X
Half x x 0 0 0 1 — — X X
Word x 0 0 0 1 0 X X X X
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-33
Table 12-28 shows the mapping of RWD bytes to byte lanes of the AHB read and write data buses.
Double word
first RWD pass (low
order data)
second RWD pass
(high order data)
0 0 0 0 1 1
X
X
X
X
X
X
X
X
Table Notes:
“X” indicates byte lanes with valid data
“—” indicates byte lanes which will contain unused data.
Table 12-28. RWD Byte Lane Mapping
Transfer Size
and byte offset RWA(2–0) RWD
31–24 23–16 15–87–0
Byte at 000 0 0 0 — — — AHB[7–0]
Byte at 001 0 0 1 — — — AHB[15–8]
Byte at 010 0 1 0 — — — AHB[23–16]
Byte at 011 0 1 1 — — — AHB[31–24]
Byte at 100 1 0 0 — — — AHB[39–32]
Byte at 101 1 0 1 — — — AHB[47–40]
Byte at 110 1 1 0 — — — AHB[55–48]
Byte at 111 1 1 1 — — — AHB[63–56]
Half at 000 0 0 0 — — AHB[15–8] AHB[7–0]
Half at 010 0 1 0 — — AHB[31–24] AHB[23–16]
Half at 100 1 0 0 — — AHB[47–40] AHB[39–32]
Half at 110 1 1 0 — — AHB[63–56] AHB[55–48]
Word at 000 0 0 0 AHB[31–24] AHB[23–16] AHB[15–8] AHB[7–0]
Word at 100 1 0 0 AHB[63–56] AHB[55–48] AHB[47–40] AHB[39–32]
Double word at 000
first RWD pass
second RWD pass
0 0 0
AHB[31–24]
AHB[63–56]
AHB[23–16]
AHB[55–48]
AHB[15–8]
AHB[47–40]
AHB[7–0]
AHB[39–32]
Table Notes–
“—” indicat es byte lanes which will contain unused dat a.
Table 12-27. RWD Data Placement For Transfers (Continued)
Transfer Size
and byte offset RWA(2–0) RWCS[SZ] vRWD
31–24 23–16 15–87–0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-34 Freescale Semiconductor
12.4.15 Read/Write Access Address (RWA)
The read/write access address register, shown in Figure 12-27, provides the system bus address to be
accessed when initiating a read or a write access.
12.5 Nexus 3+ Register Access via JTAG/OnCE
Access to Nexus 3+ register resources is enabled by loading a single instruction (“NEXUS3-ACCESS”)
into the JTAG instruction register (IR) (OnCE OCMD register). For the Nexus 3+ block, the OCMD value
is 0b0001111100.
Once the “NEXUS3-ACCESS” instruction has been loaded, the JTAG/OnCE port allows tool/target
communications with all Nexus 3+ registers according to the register map in Table 12-8.
Reading/writing of a Nexus 3+ register then requires two passes through the data-scan (DR) path of the
JTAG state machine (see Section 12.21, “IEEE 1149.1 (JTAG) RD/WR Sequences”).
1. The first pass through the DR selects the Nexus 3+ register to be accessed by providing an index
(see Table 12-8), and the direction (read/write). This is achieved by loading an 8-bit value into the
JTAG Data Register (DR). This register has the following format:
2. The second pass through the DR then shifts the data in or out of the JTAG port, LSB first.
— During a read access, data is latched from the selected Nexus register when the JTAG state
machine passes through the “Capture-DR” state.
— During a write access, data is latched into the selected Nexus register when the JTAG state
machine passes through the “Update-DR” state.
12.6 Nexus Message Fields
Nexus messages are comprised of fields. Each field contains a distinct piece of information within a
message, and each message contains multiple fields. Messages are transferred in packets over the auxiliary
output protocol. A packet is a collection of fields. A packet may contain any number of fixed length fields
Read/Write Address
313029282726252423222120191817161514131211109876543210
Nexus Reg# - 0x9; Read/Write; Reset - 0x0
Figure 12-27. Read/Write Access Address Register
Nexus Register Index: Selected from values in Table 12-8
Read/Write (R/W): 0 Read
1Write
R/WNexus Register Index
(1 bit) (7bits)
RESET Value: 0x00

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-35
but at most one variable length field. The variable length field must be the last field in a packet. The
following subsections describe a subset of the message field types.
12.6.1 TCODE Field
The TCODE field is a 6-bit fixed length field that identifies the type of message and its format. The field
encodings are assigned by IEEE-ISTO 5001.
12.6.2 Source ID Field (SRC)
Each Nexus module in a device is identified by a unique client source identification number. The number
assigned to each Nexus module is determined by the SoC integrator and is provided on the
nex3_ext_src_id[0:3] input signals. Multi-threaded processors may assign additional source ID
information to indicate which thread a message is associated with. The e200z446n3 Nexus 3+ module
implements a 4-bit fixed length Source ID field consisting of a Client Source ID.
12.6.3 Relative Address Field (U-ADDR)
The non-sync forms of the program and data trace messages include addresses that are relative to the
address transmitted in the previous program or data trace message respectively. The relative address format
conforms to the IEEE-ISTO 5001 standard and is designed to reduce the number of bits transmitted for
address fields.
The relative address is generated by XORing the new address with the previous and then using only the
results up to the most significant ‘1’. To recreate the original address, the relative address is XORed with
the previously decoded address.
The relative address of a program trace message is calculated with respect to the previous program trace
message, regardless of any address information that may have been sent in any other trace messages in the
interim between the two program trace messages.
The relative address of a data trace message is calculated with respect to the previous data trace message,
regardless of any address information that may have been sent in any other trace messages in the interim
between the two data trace messages.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-36 Freescale Semiconductor
Figure 12-28 shows the relative address generation and recreation.
Previous Address (A1) =0x0003FC01, New Address (A2) = 0x0003F365
Figure 12-28. Relative Address Generation and Recreation
12.6.4 Full Address Field (F-ADDR)
Program trace synchronization messages provide the full address associated with the trace event (leading
zeroes may be truncated) with the intent of providing a reference point for development tools to operate
from when reconstructing relative addresses. Synchronization messages are generated at significant mode
switches and are also generated periodically to ensure that development tools are guaranteed to have a
reference address given a sufficiently large sample of trace messages.
12.6.5 Address Space Indication Field (MAP)
Data trace messages and indirect-type program trace messages provide the address space status (DS or IS
value) in the address space (MAP) field. For data trace, the MAP field indicates the DS space (MSR[DS]
value) used for the data access. For program trace, the MAP field is used to indicate the future space used
for instruction execution (new value of MSR[IS]). A change in instruction address space only occurs on
reset, on an exception, or by an mtmsr, rfi, rfci, rfdi, or rfmci instruction. A potential change in address
space by an exception or by an rfi, rfci, rfdi, or rfmci instruction causes a program trace indirect branch
message to be generated indicating the new address space (IS) value, along with ICNT and HIST
information for instructions executed up to the change (including the rfi, rfci, rfdi, or rfmci). A change in
address space by an mtmsr instruction causes a program correlation message to be generated indicating
the new address space (IS) value, along with ICNT and HIST information for instructions executed prior
to the change (including the mtmsr).
Message Generation:
A1 = 0000 0000 0000 0011 1111 1100 0000 0001
A2 = 0000 0000 0000 0011 1111 0011 0110 0101
A1 ⊕ A2 = 0000 0000 0000 0000 0000 1111 0110 0100
Address Message (M1) = 1111 0110 0100
Address Re-creation:
A1 ⊕ M1 = A2
A1 = 0000 0000 0000 0011 1111 1100 0000 0001
M1 = 0000 0000 0000 0000 0000 1111 0110 0100
A2 = 0000 0000 0000 0011 1111 0011 0110 0101

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-37
12.7 Nexus Message Queues
The Nexus 3+ module implements internal message queues capable of storing up to three messages per
cycle into a small initial queue which then fills a larger queue at up to two messages per cycle. Messages
that enter the queues are transmitted in the order in which they are received.
If more than three messages attempt to enter the queue in the same cycle, the highest priority messages are
stored and the remaining message(s) are dropped due to a collision. Collision events are expected to be
rare.
The overrun control register (OVCR) controls the Nexus behavior as the message queue fills. The Nexus
block may be programmed to:
• Allow the queue to overflow, drain the contents, queue an overrun error message and resume
tracing.
• Stall the processor when the queue utilization reaches the selected threshold.
• Suppress selected message types when the queue utilization reaches the selected threshold.
12.7.1 Message Queue Overrun
In this mode, the message queue stops accepting messages when an overrun condition is detected. The
contents of the queues are allowed to drain until empty. Incoming messages are discarded until the queue
is emptied. Once empty, an overrun error message is enqueued which contains information about the types
of messages that were discarded due to the overrun condition.
12.7.2 CPU Stall
In this mode, processor instruction issue is stalled when the queue utilization reaches the selected
threshold. The processor is stalled long enough drop one threshold level below the level which triggered
the stall. For example, if stalling the processor is triggered at 1/4 full, the stall stays in effect until the queue
utilization drops to empty. There may be significant skid from the time that the stall request is made until
the processor is able to stop completing instructions. This skid should be taken into consideration when
programming the threshold. Refer to Section 12.4.9, “Nexus Overrun Control Register (OVCR),” for
complete programming options.
12.7.3 Message Suppression
In this mode, the message queue disables selected message types when the queue utilization reaches the
selected threshold. This allows lower bandwidth tracing to continue, possibly avoiding an overrun
condition. If an overrun condition occurs despite this message suppression, the queue responds according
to the behavior described in Section 12.7.1, “Message Queue Overrun.” Once triggered, message
suppression remains in effect until queue utilization drops to the threshold below the selected trigger
suppression level.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-38 Freescale Semiconductor
12.7.4 Nexus Message Priority
Nexus messages may be lost due to contention with other message types under the following
circumstances:
• More than three messages are generated in the same cycle
Up to three message requests can be queued into the message buffer in a given cycle. If more than three
message requests exist in a given cycle, the three highest priority message classes are queued into the
message buffer. The remaining messages that did not successfully queue into the message buffer in that
cycle generate subsequent responses as detailed in Table 12-29.
The CPU is capable of completing two instructions per cycle. If multiple trace messages need to be queued
at the same time, they will be queued with the following priority: Instruction 0 (oldest instruction) (WPM
→DQM → PCM[PIDMSG] →OTM → BTM → DTM)→ Instruction1 (newer instruction) (WPM →
DQM → OTM → BTM → DTM). Up to three messages may be simultaneously queued. Note that for the
cycle following a dropped PTM, non-periodic OTM, or DQM message, only two other messages may be
queued in addition to the dropped error message.
Watchpoint messages from instructions that complete at the same time or events that occur during the same
cycle are combined.
Table 12-29 lists the various message types and their relative priority from highest to lowest.
Table 12-29. Message Type Priority and Message Dropped Responses
Message Type Message Priority Message Dropped
Response
Error Error 0 (highest) N/A1
WP
(Watchpoint Trace)
WPM
(Watchpoint Message) 1N/A1
DQ
(Data Acquisition)
DQM
(Data Acquisition Message) 2DQM Error Message
Program Trace
(PID MSG)
PCMPID or mtmsr IS update
(Program Correlation Message) 2OTM Error Message
OT
(Ownership) OTMPID update
(Ownership Trace Message) 2OTM Error Message2
Program Trace BTM
(Branch Trace Message) 2BTM Error Message,
Sync upgrade next BTM
RFM
(Resource Full for Instruction counter or history
buffer)
3
BTM Error Message
Sync upgrade next BTM
DS
(Debug Status Message) 4Sync upgrade next BTM
PCM
(Program Correlation Message) 5BTM Error Message
Sync upgrade next BTM
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-39
12.7.5 Data Acquisition Message Priority Loss Response
If a data acquisition message (DQM) loses arbitration due to contention with higher priority messages, an
error message is generated to indicate that a DQM has been lost due to contention.
12.7.6 Ownership Trace Message Priority Loss Response
If software updates to the Process ID state cause an ownership trace message (OTM) to lose arbitration
due to contention with higher priority messages—other than a program correlation message with
EVCODE = 0101 (PID or MSR[IS] update)—an error message is generated to indicate that an OTM has
been lost due to contention. If the pending OTM is a periodic update, the event is dropped without
generating an error message.
12.7.7 Program Trace Message Priority Loss Response
If a program trace message (PTM) loses arbitration due to contention with higher priority messages, and
the discarded PTM is a program correlation message, a resource full message for instruction count/history
buffer, or a Branch Trace message, then an error message is generated to indicate that branch trace
information has been lost, and the next branch trace message is upgraded to a sync-type message.
If the discarded PTM is a program correlation message with PID information (EVCODE = 0101), the error
message will indicate a dropped OTM and a dropped program trace (error code = xxxx11xx).
12.7.8 Data Trace Message Priority Loss Response
If a data trace message (DTM) loses arbitration due to contention with higher priority messages, the DTM
event is discarded and the next DTM is upgraded to a sync-type message.
12.8 Debug Status Messages
Debug status messages report low-power mode and debug status. Debug status messages are enabled when
Nexus 3+ is enabled. Entering/exiting Debug Mode as well as entering, exiting, or changing low-power
DT
(Data Trace)
DTM
(Data Trace Message) 6Sync upgrade next DTM
OT
(Ownership)
OTMPeriodic update
(Ownership Trace Message)
7
(lowest)
none
1Error and Watchpoint messages are not dropped due to collisions, due to their priority.
2Message will always be dropped if program trace is enabled, and program correlation messages for PID0 /mtmsr IS
messages are not masked (Event Code = 0101). No error message is sent for this case since the PID value is
contained in the higher priority message.
Table 12-29. Message Type Priority and Message Dropped Responses
Message Type Message Priority Message Dropped
Response
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-40 Freescale Semiconductor
mode(s) trigger a debug status message, indicating the value of the most significant byte in the
development status register. Debug status information is sent out in the format shown in Figure 12-29:
Figure 12-29. Debug Status Message Format
12.9 Error Messages
Error messages are enabled whenever the debug logic is enabled. There are two conditions that produce
an error message, each receiving a separate error type designation:
• A message is discarded due to contention with other (higher priority) message types. These errors
have an error type value of 1.
• The message queue overruns. After the queue is drained, an error message is enqueued with an
error code that indicates what types of messages were discarded during the interim. These errors
will have an error type value of 0.
NOTE
The OVCR register can be used in order to alleviate potential overrun
situations.
Error information is messaged out as shown in Figure 12-30 (also see Table 12-3 and Table 12-4).
Figure 12-30. Error Message Format
12.10 Ownership Trace
This section details the ownership trace features of the Nexus 3+ module.
12.10.1 Overview
Ownership trace provides a macroscopic view when debugging software written in a high level or
object-oriented language. It offers the highest level of abstraction for tracking operating system software
execution. This is especially useful when the developer is not interested in debugging at lower levels.
12.10.2 Ownership Trace Messaging (OTM)
Ownership trace information is messaged by the auxiliary port using an ownership trace message (OTM).
The e200 processors contain a Power ISA defined “Process ID” register within the CPU. It is updated by
TCODE (000000)DS[31:24]
(8 bits) (6 bits)
Src. Proc.
(4 bits)
Fixed length = 18 bits
Error Code Src. Proc.
(4 bits)
TCODE (001000)
(6 bits)
Fixed length = 20 bits
(6 bits)
Error Type
(4 bits)

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-41
the operating system software to provide task/process ID information. The contents of this register are
replicated on the pins of the processor and connected to Nexus. The process ID register value can be
accessed using the mfspr/mtspr instructions.
NOTE
The CPU includes a process ID register (PID0); thus, the Nexus UBA
functionality is not implemented.
There are two conditions that cause an ownership trace message when ownership trace is enabled:
• When new information is updated in the PID0 register by the e200 processor, the data is latched
within Nexus and messaged out by the auxiliary port, allowing development tools to trace
ownership flow. However, if program trace is enabled and program correlation messages for
PID0/mtmsr IS messages are not masked (Event Code = 0101), an OTM is not generated for an
update to the PID0 register, since the program correlation message will provide this PID0 update
information.
• Periodically, at least once every 256 messages, the most recent state of the PID0 register is
messaged out. The resulting ownership trace message indicates in the PID index subfield that PID0
status is being reported and the most recent value of the PID0 register is conveyed in the Process
ID value subfield. These periodic ownership trace message events can be disabled by setting
DC1[POTD].
Ownership trace information is messaged out as shown in Figure 12-31.
Figure 12-31. Ownership Trace Message Format
12.11 Program Trace
This section details the program trace mechanism supported by Nexus 3+ for the e200 processor. Program
trace is implemented through branch trace messaging (BTM) as per the IEEE-ISTO 5001-2008 standard
definition. Branch trace messaging for e200 processors is accomplished by snooping the e200 virtual
address bus (between the CPU and MMU), attribute signals, and CPU Status (p_mode[0:3],
p_pstat_pipe{0,1}[0:5]).
12.11.1 Branch Trace Messaging Types
Traditional branch trace messaging facilitates program trace by providing the following types of
information:
• Messaging for taken direct branches includes how many sequential instructions were executed since
the last taken branch or exception, including the taken direct branch. Branch instructions are
included in the count of sequential instructions.
PID Index
Process ID Src. Proc.
(4 bits)
TCODE (000010)
(6 bits)
Variable length = 15–22 bits
(1–8 bits) (4 bits)
(0000)
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-42 Freescale Semiconductor
• Messaging for taken indirect branches and exceptions includes how many sequential instructions
were executed since the last taken branch or exception and the unique portion of the branch target
address or exception vector address. Branch instructions are included in the count of sequential
instructions. For taken indirect branches that trigger generation of a message, the branch is also
included in the count. Messaging for taken indirect branches and exceptions also include the newly
established value of MSR[IS] in the MAP field if the indirect branch message is due to an exception
or rfi, rfci, rfdi, or rfmci class instruction. For all other indirect branches, the MAP field will reflect
the current value of msr[is].
Branch history messaging facilitates program trace by providing the following information.
• Messaging for taken indirect branches and exceptions includes:
— How many sequential instructions (I-CNT) were executed since the last predicate instruction,
taken/not taken direct branch, taken/not-taken indirect branch, or exception
— The unique portion of the branch target address or exception vector address
— A branch/predicate instruction history field.
Each bit in the history field represents a direct branch or predicated instruction where a value of one
indicates taken and a value of zero indicates not taken. Certain instructions (evsel) generate a pair of
predicate bits which are both reported as consecutive bits in the history field. Not-taken indirect branches
generate a history bit with a value of zero. Instructions that generate history bits are not included in
instruction counts. For taken indirect branches which trigger generation of this message type, the branch
is included in the count, but not in the history field. Messaging for taken indirect branches and exceptions
also include the newly established value of the MSR[IS] bit in the MAP field if the indirect branch message
is due to an exception or rfi, rfci, rfdi, or rfmci class instruction. For all other indirect branches, the MAP
field reflect the current value of MSR[IS].
12.11.1.1 e200 Indirect Branch Message Instructions
Table 12-30 shows the types of instructions and events that cause indirect branch messages or branch
history messages to be encoded.
Table 12-30. Indirect Branch Message Sources
Source of Indirect Branch Message Instructions/Detail
Taken branch relative to a register value bcctr, bcctrl, bclr, bclrl, se_bctr, se_bctrl,
se_blr, se_blrl
System Call/Trap exceptions taken sc, se_sc, tw, twi
Return from interrupts/exceptions rfi, rfci, rfdi, se_rfi, se_rfci, se_rfdi
Exit from reset with Program Trace Enabled Indirect branch with Sync, target address is
initial instruction, count=1

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-43
12.11.1.2 e200 Direct Branch Message Instructions
Table 12-31 shows the types of instructions that cause direct branch messages or toggle a bit in the
instruction history buffer to be messaged out in a resource full message or branch history message.
12.11.1.3 BTM Using Branch History Messages
Traditional BTM messaging can accurately track the number of sequential instructions between branches,
but cannot accurately indicate which instructions were conditionally executed and which were not.
Branch history messaging solves this problem by providing a predicated instruction history field in each
indirect branch message. Each bit in the history represents a predicated instruction or direct branch, or a
not-taken indirect branch. A value of one indicates the conditional instruction was executed or the direct
branch was taken. A value of zero indicates the conditional instruction was not executed or the branch was
not taken. Certain instructions (evsel) generate a pair of predicate bits which are both reported as
consecutive bits in the history field.
Branch history messages solve predicated instruction tracking and save bandwidth since only indirect
branches cause messages to be queued.
12.11.1.4 BTM Using Traditional Program Trace Messages
Based on the PTM bit in the DC1 register, program tracing can utilize either branch history messages
(PTM = 1) or traditional direct/indirect branch messages (PTM = 0).
Branch history saves bandwidth and keeps consistency between methods of program trace, yet may lose
temporal order between BTM messages and other types of messages. Since direct branches are not
messaged, but are instead included in the history field of the indirect branch history message, other types
of messages may enter the FIFO between branch history messages. The development tool cannot
determine the ordering of “events” that occurred with respect to direct branches simply by the order in
which messages are sent out.
Traditional BTM messages maintain their temporal ordering because each event that can cause a message
to be queued enters the FIFO in the order it occurred and is messaged out maintaining that order.
12.11.2 BTM Message Formats
The Nexus 3+ block supports three types of traditional BTM messages: direct, indirect, and
synchronization messages. It supports two types of branch history BTM messages: indirect branch history
and indirect branch history with synchronization messages.
Table 12-31. Direct Branch Message Sources
Source of Direct Branch Message Instructions
Taken direct branch instructions
Instruction Synchronize b, ba, bl, bla, bc, bca, bcl, bcla, se_b. se_bc, se_bl, e_b, e_bc,
e_bl, e_bcl, isync, se_isync
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-44 Freescale Semiconductor
12.11.2.1 Indirect Branch Messages (History)
Indirect branches include all taken branches whose destination is determined at run time, interrupts, and
exceptions. If DC1[PTM] is set, indirect branch information is messaged out in the following format:
Figure 12-32. Indirect Branch Message (History) Format
12.11.2.2 Indirect Branch Messages (Traditional)
If DC1[PTM] is cleared, indirect branch information is messaged out in the following format:
Figure 12-33. Indirect Branch Message Format
12.11.2.3 Direct Branch Messages (Traditional)
Direct branches (conditional or unconditional) are all taken branches whose destination is fixed in the
instruction opcode. Direct branch information is messaged out in the following format:
Figure 12-34. Direct Branch Message Format
NOTE
When DC1[PTM] is set, direct branch messages are not transmitted. Instead, each
direct branch, not-taken indirect branch, or predicated instruction is recorded in the
history buffer.
12.11.3 Program Trace Message Fields
The following subsections describe specific fields used for program trace messages.
TCODE (011100)
(6 bits)
(1-8 bits) (4 bits)
Max length = 83 bits; Min length = 14 bits
Source
Proc.
Sequence Count
(1 bit)
Inst
Space
Relative Address
(1-32 bits)
(1-32 bits)
Branch History
TCODE (000100)
(6 bits)
(1-8 bits) (4 bits)
Max length = 51 bits; Min length = 13 bits
Source
Proc.
Sequence Count
(1 bit)
Inst
Space
Relative Address
(1-32 bits)
TCODE (000011)
Sequence Count
(6 bits) (1-8 bits)
Src. Proc.
(4 bits)
Max length = 18 bits; Min length = 11bits

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-45
12.11.3.1 Sequential Instruction Count Field (ICNT)
Most of the program trace messages include an instruction count field. For traditional branch messages,
ICNT represents the number of sequential instructions including non-taken branches since the last
direct/indirect branch messages. Branch instructions that trigger message generation are included in the
ICNT.
For branch history messages, ICNT represents the number of instructions executed since the last
taken/non-taken direct branch, predicate instruction, last taken/not-taken indirect branch, or exception.
Branch instructions that trigger message generation are included in the ICNT. Instructions that generate
history bits are not included in the ICNT.
The sequential instruction counter overflows after its value reaches 255 and is reset to 0. In addition, the
next BTM message (corresponding to the 256th or later instruction) is converted to a synchronization type
message.
The instruction counter is reset every time the instruction count is transmitted in a message or whenever
there is a branch/predicate history event, as well as on exiting from debug mode.
12.11.3.2 Branch/Predicate Instruction History (HIST)
If DC1[PTM] is set, BTM messaging uses the branch history format. The branch history (HIST) field in
these messages provides a history of branch execution used for reconstructing the program flow. The
branch/predicate history buffer stores information about branch and predicate instruction execution. The
buffer is implemented as a left-shifting register. The buffer is preloaded with a one, which acts as a stop
bit (the most significant 1 in the history field is a termination bit for the field). The pre-loaded bit itself is
not part of the history, but is transmitted with the packet.
A value of one is shifted into the history buffer for each taken direct branch (program counter relative
branch) or predicate instruction whose condition evaluates to true. A value of zero is shifted into the
history buffer for each not-taken branch (including indirect branch instructions) or predicate instruction
whose condition evaluates to false. For the evsel instruction, two bits are shifted in, corresponding to the
low element (shifted in first) and the high element (shifted in second) conditions.
This history buffer information is transmitted as part of an indirect branch with history message, as part of
a program correlation message, or as part of a resource full message if the history buffer becomes full. The
history buffer is reset every time the history information is transmitted in a message, as well as on exiting
from debug mode.
Table 12-32 shows the branch/predicate history events.
Table 12-32. Branch/Predicate History Events
Branch/Predicate History Event History
Bit(s) Relevant Instructions
Not taken register indirect branches 0 bcctr, bcctrl, bclr, bclrl
Not taken direct branches 0 b, ba, bc, bca, bla, bcla, bl, bcl
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-46 Freescale Semiconductor
12.11.3.3 Execution Mode Indication
In order for a development tool to properly interpret instruction count and history information, it must be
aware of the execution mode context of that information. VLE instructions are interpreted differently from
non-VLE instructions.
Program trace messages provide the execution mode status in the least significant bit of the reconstructed
address field. A value of ‘0’ indicates that preceding instruction count and history information should be
interpreted in a non-VLE context. A value of ‘1’ indicates that the preceding instruction count and history
information should be interpreted in a VLE context. Note that when a branch results in an execution mode
switch, the program trace message resulting from that branch will indicate the previous execution state.
The new state will not be signaled until the next program trace message.
In some cases, a Program Correlation Message is generated to indicate execution mode status. Refer to
Section 12.11.5, “Program Correlation Messages,” for more information on these cases.
12.11.4 Resource Full Messages
The resource full message is used in conjunction with branch trace and branch history messages. The
resource full message is generated when either the internal branch/predicate history buffer is full or if the
BTM instruction sequence counter (I-CNT) overflows. If synchronization is needed at the time the
message is generated, the synchronization is delayed until the next branch trace message that is not a
resource full message.
For history buffer overflow, the resource full message transmits a resource code (RCODE) of 0b0001 and
the current contents of the history buffer, including the stop bit, are transmitted in the resource data
(RDATA) field. This history information can be concatenated by the development tool with the
branch/predicate history information from subsequent messages to obtain the complete branch/predicate
history between indirect changes of flow.
For instruction counter overflow, the resource full message transmits an RCODE of 0b0000 and a value
of 0xFF is transmitted in the RDATA field. This indicates that 255 sequential instructions have been
executed since the last change of flow or, if program trace is in history mode, since the last instruction
which recorded history information.
Taken direct branches 1 b, ba, bc, bca, bla, bcla, bl, bcl1
evsel instruction 00,01,10,
or 11
evsel
1If the EVCODE for direct branch function calls is not masked in DC4, taken bl and bcl
instructions generate program correlation messages and are not logged in the history
buffer.
Table 12-32. Branch/Predicate History Events
Branch/Predicate History Event History
Bit(s) Relevant Instructions
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-47
Figure 12-35 shows the resource full message format.
Figure 12-35. Resource Full Message Format
Table 12-33 shows the RCODE encodings and RDATA information used for resource full messages.
12.11.5 Program Correlation Messages
Program correlation messages (PCMs) are used to correlate events to the program flow that may or may
not be associated with the instruction stream. The following events result in a PCM when program trace
is enabled:
• When the CPU enters debug mode
— The instruction count and history information provided by the PCM can be used to determine
the last sequence of instructions executed prior to debug mode entry.
• When the CPU first enters a low power mode in which instructions are no longer executed
— The instruction count and history information provided by the PCM can be used to determine
the last sequence of instructions executed prior to low power mode entry.
• Whenever program trace is disabled by any means
— The instruction count and history information provided by the PCM can be used to determine
the last sequence of instructions executed prior to disabling program trace. A second PCM is
generated on this event if there has been an execution mode switch into or out of a sequence of
VLE instructions. This VLE state information allows the development tool to interpret any
preceding instruction count or history information in the proper context.
• When a “Branch and Link” instruction executes (direct branch function call—bl/bcl/bla/bcla-type
instructions)
• Whenever the CPU crosses a page boundary that results in an execution mode switch into or out
of a sequence of VLE instructions
— The PCM effectively breaks up any running instruction count and history information between
the two modes of operation so that the instruction count and history information can be
processed by the development tool in the proper context.
Table 12-33. RCODE Encoding
RCODE Description RDATA field
0000 Program Trace Instruction counter reached
255 and was reset.
0xFF
0001 Program Trace, Branch / Predicate
Instruction History full.
Branch HIstory.
This type of packet is terminated by a stop
bit set to 1 after the last history bit.
TCODE (011011)RCODE
(6 bits)
(4 bits)
Src. Proc.
(4 bits)
Max length = 46 bits; Min length = 15 bits
(1-32 bits)
RDATA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-48 Freescale Semiconductor
• When using program trace in history mode and a direct branch results in an execution mode switch
into or out of a sequence of VLE instructions
— The PCM effectively breaks up any running history information between the two modes of
operation so that the history information can be processed by the development tool in the
proper context.
• When a new address translation is established in the TLB by an tlbwe instruction.
• When address translation(s) are invalidated in the TLB by an tlbivax instruction.
• When a new instruction address space setting (IS) is established in the MSR by an mtmsr
instruction.
• When an update to the process ID register (PID0) is made by an mtspr PID0.
Refer to Table 12-6 for the event codes that are supported in this implementation. Event code masking is
available by the EVCDM field of the DC4 register to allow for control over generation of program
correlation messages for each event type.
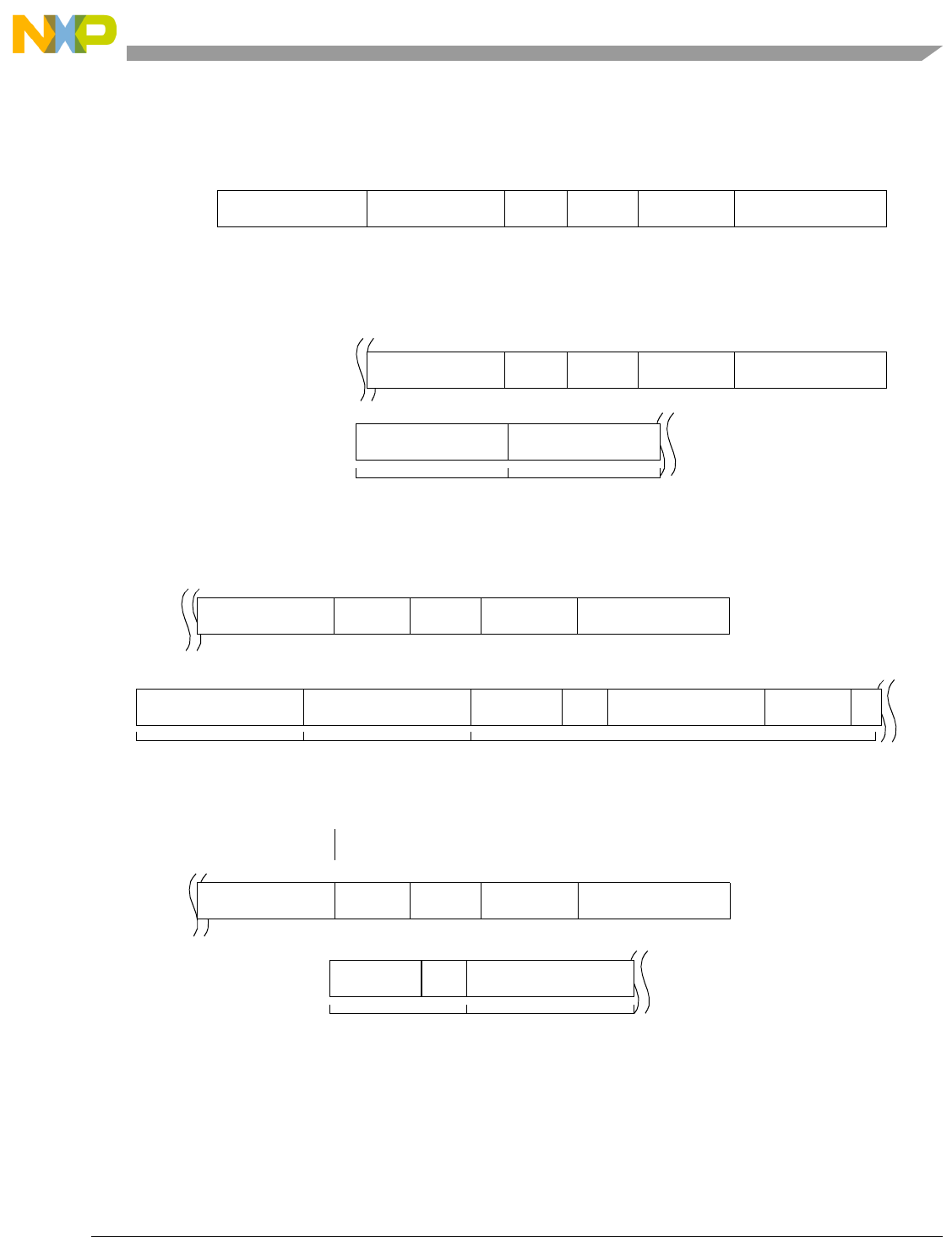
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-49
Program correlation is messaged out as shown in Figure 12-36:
Figure 12-36. Program Correlation Message Formats
TCODE (100001)EVCODE
(6 bits)
(4 bits)
Src. Proc.
(4 bits)
Max length = 56 bits; Min length = 18 bits
(1-32 bits)
Branch History CDF*
(2 bits)
Sequence Count
(1-8 bits)
* - CDF=01,
EVCODE = Any but 0101, 1100
TCODE (100001)EVCODE
(6 bits)
(4 bits)
Src. Proc.
(4 bits)
Max length = 88 bits; Min length = 19 bits
(1-32 bits)
Branch History
CDF*
(2 bits)
Sequence Count
(1-8 bits)
* - CDF=10,
**- EVCODE = 1100
(1-32 bits)
tlbivax EA
(CDATA 1)(CDATA 2)
TCODE (100001)
EVCODE
(6 bits)
(4 bits)
Src. Proc.
(4 bits)
Max length = 98 bits; Min length = 28 bits
CDF*
(2 bits)
Page Size (TSIZE)
TID
(5 bits)
(1-8 bits)
TS
(1 bit)
Virtual F-ADDR
(1-32 bits)
Physical F-ADDR
(1-32 bits)
* - CDF=11
**- EVCODE=1011
(CDATA 3) (CDATA 2) (CDATA1)
Sequence Count
(1-8 bits)
(0 for this case)
IPROT
(1 bit)
V
(1 bit)
TCODE (100001)
EVCODE
(6 bits)
(4 bits)
Src. Proc.
(4 bits)
Max length = 65 bits; Min length = 20 bits
CDF*
(2 bits)
PID
(1-8 bits)
IS
(1 bit)
Branch History
(1-32 bits)
* - CDF=10
**- EVCODE=0101
(CDATA 1)(CDATA 2)
Sequence Count
(1-8 bits)

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-50 Freescale Semiconductor
12.11.5.1 Program Correlation Message Generation for TLB Update with New
Address Translation
When a new address translation is established in the TLB, a program correlation message is generated
containing the information regarding the new TLB entry using EVCODE = 1011. A PCM with current
history and instruction count is also generated using EVCODE = 1011 (unless collapsed with a different
EVCODE) and sent just prior to sending the PCM containing the newly established address translation.
The messages are provided so that the address translation information can be processed by the
development tool in the proper program flow.
12.11.5.2 Program Correlation Message Generation for TLB Invalidate (tlbivax)
Operations
When a tlbivax is executed to invalidate one or more entries in the TLB, a program correlation message
is generated containing the information regarding the tlbivax EA used for invalidation using
EVCODE = 1100. The current history and instruction count (which includes the tlbivax instruction) is
also included in the message. The messages are provided so that the address translation information can
be processed by the development tool in the proper program flow.
12.11.5.3 Program Correlation Message Generation for PID Updates or MSR[IS]
Updates
When a (potentially) new value is established in the PID by an mtspr PID0, a program correlation message
is generated containing the information regarding the new PID0 value. This PCM also contains the current
history and instruction count, and the current value of MSR[IS]. The message is provided so that address
translation information can be processed by the development tool in the proper program flow. The mtspr
PID0 is included in the instruction count information. Note that ownership trace messages (other than the
periodic OTM) are redundant with the information provided and may be disabled to avoid unnecessary
message bandwidth or collisions.
When a new value is established in MSR[IS] by an mtmsr instruction, a program correlation message is
generated containing the information regarding the new MSR[IS] value. This PCM also contains the
current history and instruction count, and the current value of PID0. The message is provided so that
address translation information can be processed by the development tool in the proper program flow. The
mtmsr instruction is included in the instruction count information.
12.11.6 Program Trace Overflow Error Messages
An error message occurs when a new message cannot be queued due to the message queue being full. The
FIFO will discard incoming messages until it has completely emptied the queue. Once emptied, an error
message is queued. The error encoding indicates which type(s) of messages attempted to be queued while
the FIFO was being emptied.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-51
12.11.7 Program Trace Synchronization Messages
By default, program trace messages perform XOR compression on the branch target address to produce
the address field for the message. This compression is consistent with the specification in IEEE-ISTO
5001.
Under some conditions an uncompressed address is sent to provide development tools with a baseline
reference address. A program trace direct/indirect branch with sync message is messaged by the auxiliary
port (provided program trace is enabled) for the following conditions (see Table 12-34):
• Initial program trace message upon the first direct/indirect branch after exit from system reset or
whenever program trace is enabled.
• Upon direct/indirect branch after returning from a CPU low power state.
• Upon direct/indirect branch after returning from debug mode.
• Upon direct/indirect branch after occurrence of queue overrun (can be caused by any trace
message), provided program trace is enabled.
• Upon direct/indirect branch after the periodic program trace counter has expired indicating 255
without-sync program trace messages have occurred since the last with-sync message occurred.
• Upon direct/indirect branch after assertion of the Event In (nex_evti_b) pin if the EIC bits within
the DC1 register have enabled this feature.
• Upon direct/indirect branch after the sequential instruction counter has expired indicating 255
instructions have occurred since the last change of flow.
• Upon direct/indirect branch after a BTM message was lost due to a collision while attempting to
enter the message queue.
• Upon the first direct/indirect branch message after an execution mode switch into or out of a
sequence of VLE instructions.
Note that the ICNT and history information for the first message is not meaningful for some of these cases
because the temporary masking of program trace may result in ambiguous values. Subsequent with-sync
messages do not have this issue.
The format for program trace direct/indirect branch with sync messages is as shown in Figure 12-37.
Figure 12-37. Direct/Indirect Branch with Sync Message Format
The format for program trace indirect branch history with sync messages is as as shown in Figure 12-38.
TCODE (001011 or 001100)
(6 bits)
(1-8 bits)
Full Target Address
(1-32 bits) (4 bits)
Max length = 51 bits; Min length = 13 bits
Source
Proc.
Sequence Count
(1 bit)
Inst
Space
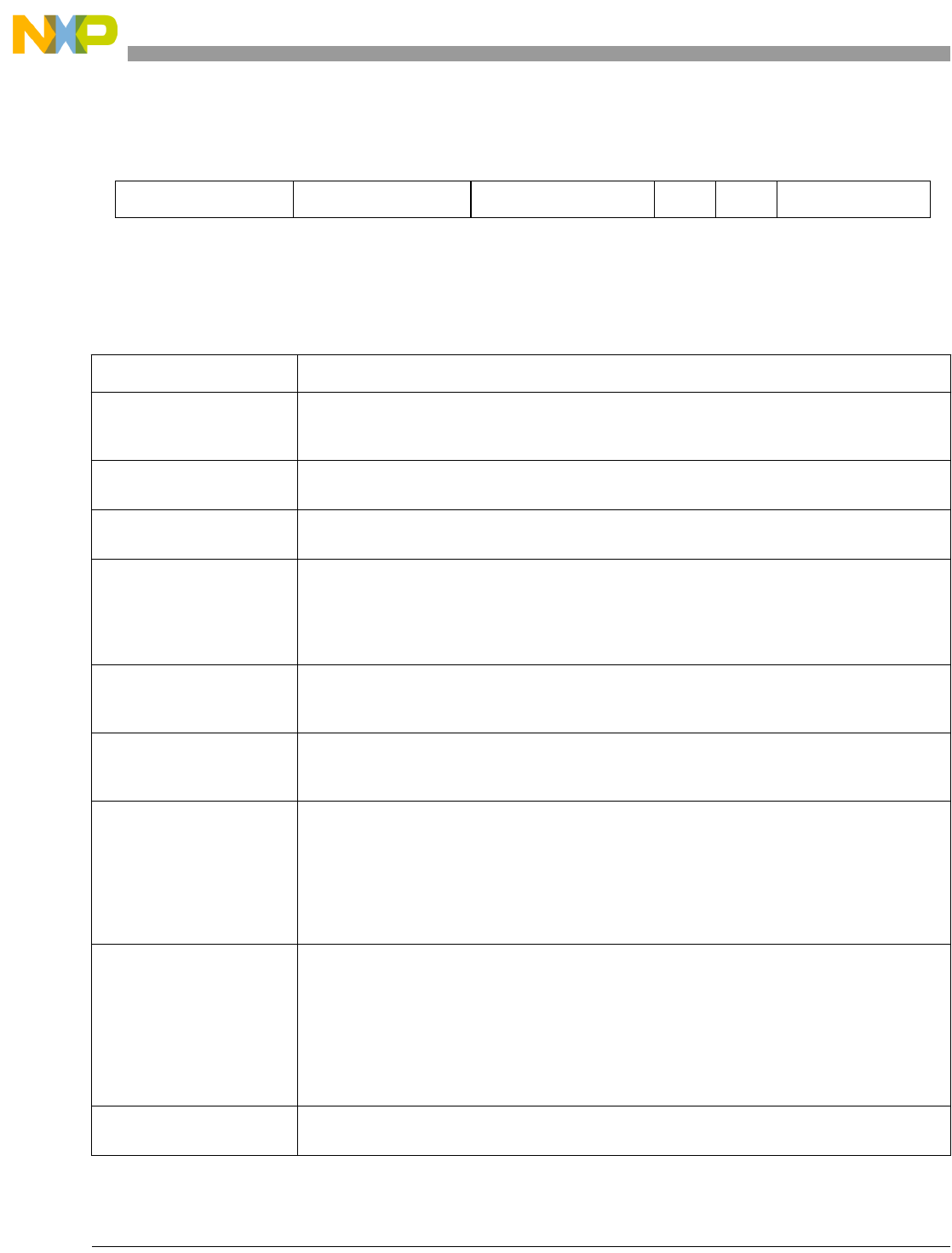
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-52 Freescale Semiconductor
Figure 12-38. Indirect Branch History w/ Sync. Message Format
Exception conditions that result in program trace synchronization are summarized in Table 12-34.
Table 12-34. Program Trace Exception Summary
Exception Condition Exception Handling
System Reset Negation At the negation of JTAG reset (j_trst_b), queue pointers, counters, state machines, and registers
within the Nexus 3+ module are reset. Upon exiting system reset, if Program Trace is already
enabled, a Program Trace Message is sent as an Indirect Branch w/ Sync. Message.
Program Trace Enabled The first Program Trace Message (after Program Trace has been enabled) is a synchronization
message.
Exit from Low Power/Debug Upon exit from a Low Power mode or Debug mode the next direct/indirect branch will be
converted to a Direct/Indirect Branch with Sync. Message.
Queue Overrun An Error Message occurs when a new message cannot be queued due to the message queue
being full. The FIFO will discard messages until it has completely emptied the queue. Once
emptied, an Error Message will be queued. The error encoding will indicate which type(s) of
messages attempted to be queued while the FIFO was being emptied. The next BTM message
in the queue will be a Direct/Indirect Branch w/ Sync. Message.
Periodic Program Trace
Sync. A forced synchronization occurs periodically after 255 non-sync Program Trace Messages have
been queued. A Direct/Indirect Branch w/ Sync. Message is queued. The periodic program trace
message counter then resets.
Event In If the Nexus module is enabled, a nex_evti_b assertion initiates a Direct/Indirect Branch w/
Sync. Message upon the next direct/indirect branch (if Program Trace is enabled and the EIC bits
of the DC1 Register have enabled this feature).
Sequential Instruction Count
Overflow
After the sequential instruction counter reaches its maximum count (up to 255 sequential
instructions may be executed), a forced synchronization occurs. The sequential counter then
resets. A Program Trace Direct/Indirect Branch w/ Sync.Message is queued upon execution of
the next branch. A Resource Full Message is Queued on the overflow event.
If a branch instruction is the 255th instruction to occur, and causes a Program Trace message to
be queued, then no Resource Full Message is queued, and the w/Sync message will be queued
for the
next
Program Trace Direct/Indirect Branch Message.
Collision Priority All Messages have the following priority: Instruction 0 (WPM -> DQM -> OTM -> BTM -> DTM)->
Instruction1 (WPM -> DQM -> OTM -> BTM -> DTM), where instruction0 is the oldest instruction.
A BTM Message from Instruction1 which attempts to enter the queue at the same time as three
higher priority messages from either instruction will be lost. An Error Message will be sent
indicating the BTM was lost. The following direct/indirect branch will queue a Direct/Indirect
Branch w/ Sync. Message. The count value within this message will reflect the number of
sequential instructions executed after the last successful BTM Message was generated. This
count will include the branch which did not generate a message due to the collision.
Execution Mode Switch Whenever the CPU switches execution mode into or out of a sequence of VLE instructions, the
next branch trace message will be a Direct/Indirect Branch w/ Sync Message.
Sequence
(1-8 bits)
Full Target Address
(1-32 bits)
Max length = 83 bits; Min length = 14 bits
(1-32 bits)
Branch History Count TCODE (011101)
(6 bits) (4 bits)
Source
Proc.
(1 bit)
Inst
Space
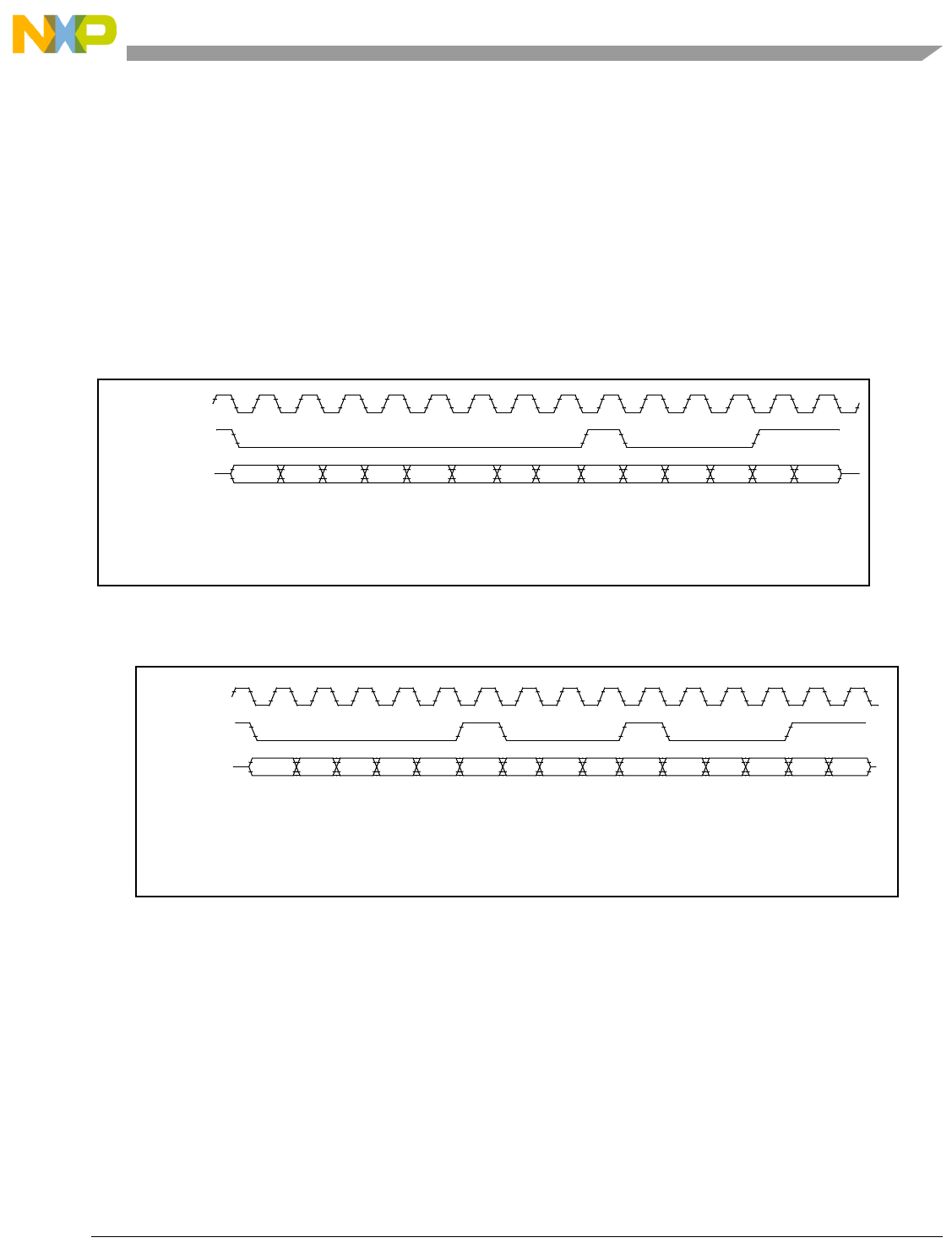
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-53
12.11.8 Enabling Program Trace
Program Trace Messaging can be enabled in one of two ways:
• Setting the TM field of the DC1 register to enable program trace
• Using the PTS field of the WT register to enable program trace on watchpoint hits (e200
watchpoints are configured within the CPU)
12.11.9 Program Trace Timing Diagrams (2 MDO/1 MSEO configuration)
Figure 12-39–Figure 12-42 shows the program trace timing diagrams.
Figure 12-39. Program Trace—Indirect Branch Message (Traditional)
Figure 12-40. Program Trace—Indirect Branch Message (History)
00 01 00 00 00 10 00 00 10 01 01 10 10
TCODE = 4
source processor = 0000, IS=1
# of sequential instructions = 128
relative address = 8'ha5
00
MCKO
MSEO_B
MDO[1:0]
00 11 01 00 00 01 01 01 10 10 01 01 10
TCODE = 28
source processor = 0000, IS=1
# of sequential instructions = 0
relative address = 8'ha5
branch history = 8'b10100101 (w/ stop)
10 00
MCKO
MSEO_B
MDO[1:0]
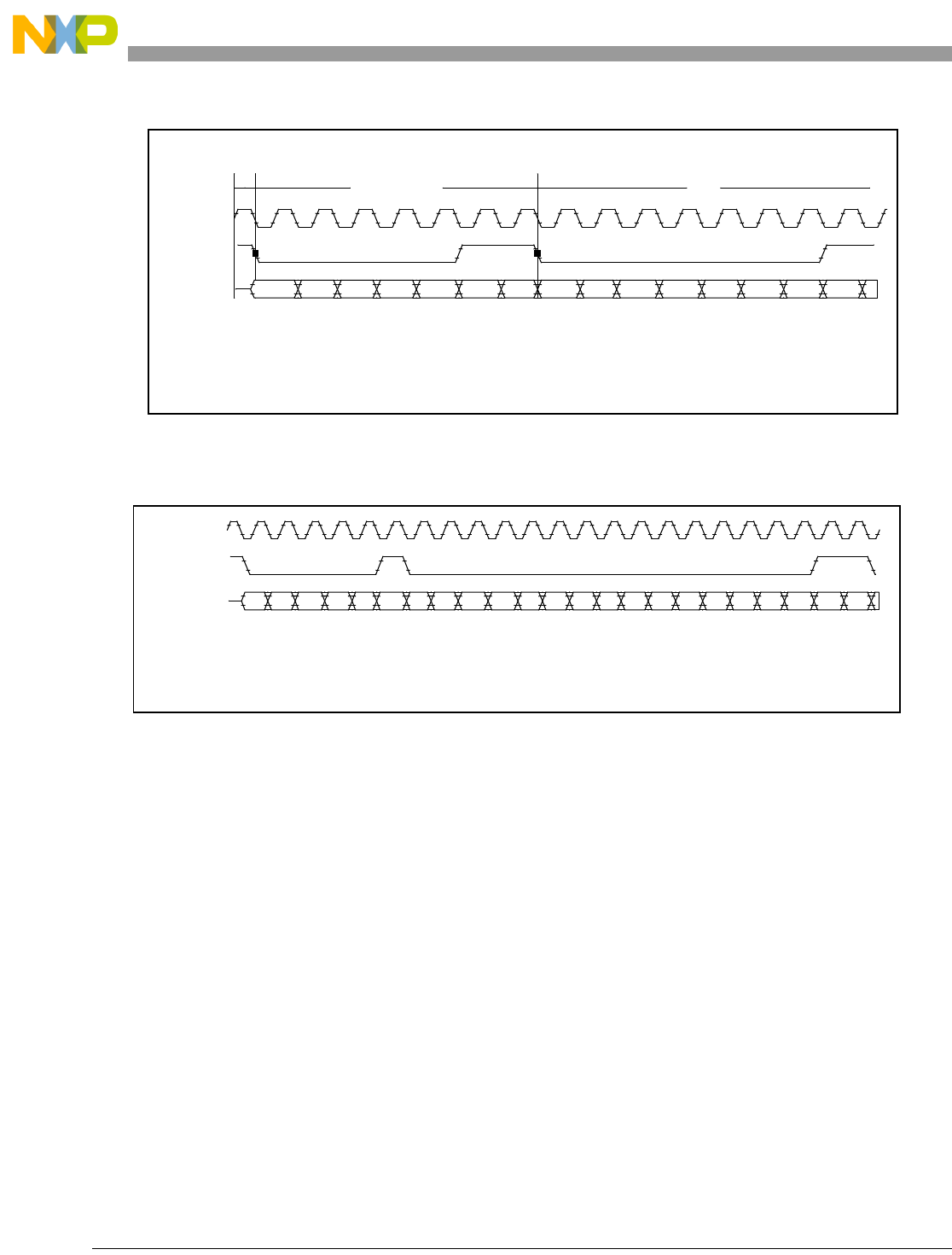
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-54 Freescale Semiconductor
Figure 12-41. Program Trace—Direct Branch (Traditional) and Error Messages
Figure 12-42. Program Trace - Indirect Branch w/ Sync. Message
12.12 Data Trace
This section deals with the data trace mechanism supported by the Nexus 3+ module. Data trace is
implemented by data write messaging (DWM) and data read messaging (DRM), as per the IEEE-ISTO
5001-2008 standard.
12.12.1 Data Trace Messaging (DTM)
Data trace messaging for the e200 is accomplished by snooping the e200 address and internal data buses
and storing the information for qualifying accesses (based on enabled features and matching target
addresses). The Nexus 3+ module traces all data access that meet the selected range and attributes.
NOTE
Data trace is only performed on the e200 internal data bus. This allows for
data visibility for e200 processors which incorporate a data cache. Only
e200 CPU initiated accesses will be traced. No DMA accesses to the AHB
system bus will be traced.
Direct Branch Error
11 00 00 00 00 11 00 00 10 00 00 00 01
DBM:
TCODE = 3
source processor = 0000
# of sequential instructions = 3
Error:
TCODE = 8
source processor = 0000
error code = 1 (queue overrun - BTM only)
00 00
MCKO
MSEO_B
MDO[1:0]
00 11 00 00 00 11 10 11 00 11 10 10 11
TCODE = 12
source processor = 0000, IS = 1,
# of sequential instructions = 1
full target address = 32'hdeadface
11 01 11 10 10 10 11 01 11 00
MCKO
MSEO_B
MDO[1:0]
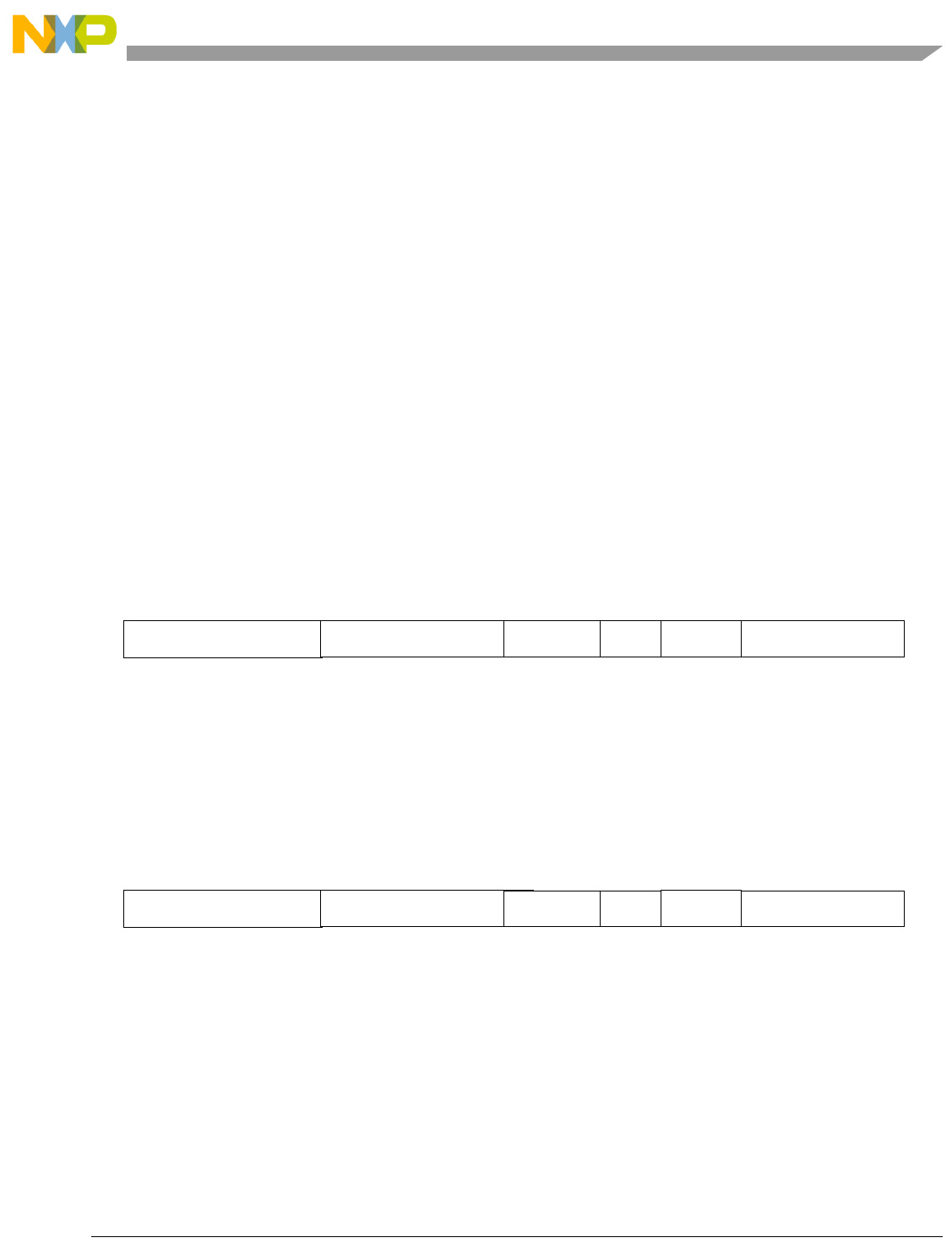
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-55
Data Trace Messaging can be enabled in one of two ways.
• Setting the TM field of the DC1 register to enable data trace.
• Using the DTS field of the WT register to enable data trace on watchpoint hits (e200 watchpoints
are configured within the Nexus 1 module).
12.12.2 DTM Message Formats
The Nexus 3+ block supports the following five types of DTM messages:
• Data Write
• Data Read
• Data Write Synchronization
• Data Read Synchronization
• Error Messages
12.12.2.1 Data Write Messages
The data write message contains the data write value and the address of the write access, relative to the
previous data trace message. Data write message information is messaged out as shown in Figure 12-43.
Figure 12-43. Data Write Message Format
12.12.2.2 Data Read Messages
The data read message contains the data read value and the address of the read access, relative to the
previous data trace message. Data read message information is messaged out as shown in Figure 12-44.
Figure 12-44. Data Read Message Format
NOTE
e200 based CPUs are capable of generating two reads or writes per clock
cycle in cases where multiple registers are accessed with a single instruction
(lmw/stmw). These will have a double word pair size encoding
(p_tsiz = 0b000). In these cases, the Nexus 3+ module sends one data trace
message with the two 32-bit data values as one combined 64-bit value for
each message.
Data Value(s)*
(1–64 bits) (6 bits)
TCODE (000101)
(1–32 bits)
Src. Proc
(4 bits)
Relative Address
Max length = 111 bits; Min length = 17 bits
Data Size
(4 bits) (1 bit)
Data
Space
Data Value(s)*
(1–64 bits) (6 bits)
TCODE (000110)
(1–32 bits)
Src. Proc
(4 bits)
Relative Address
Max length = 111 bits; Min length = 17 bits
Data Size
(4 bits) (1 bit)
Data
Space
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-56 Freescale Semiconductor
For e200-based CPUs, the double word encoding (p_tsiz = 0b000) may also
indicate a double word access and will be sent out as a single data trace
Message with a single 64-bit data value.
The debug/development tool needs to distinguish the two cases based on the
family of e200 processor.
12.12.2.3 Data Trace Synchronization Messages
A data trace write/read with synchronization message is messaged by the auxiliary port (provided data
trace is enabled) for the following conditions (see Table 12-35):
• Initial Data Trace Message after exit from system reset or whenever data trace is enabled.
• Upon returning from a CPU low-power state.
• Upon returning from debug mode.
• After occurrence of queue overrun (can be caused by any trace message), provided data trace is
enabled.
• After the periodic data trace counter has expired indicating 255 without-sync data trace messages
have occurred since the last with-sync message occurred.
• Upon assertion of the Event In (nex_evti_b) pin, the first data trace message will be a
synchronization message if the EIC bits of the DC1 Register have enabled this feature.
• Upon data trace write/read after the previous DTM message was lost due to an attempted access to
a secure memory location (for SOCs with security).
• Upon data trace write/read after the previous DTM message was lost due to a collision entering the
FIFO between the DTM Message and any two of the following: watchpoint message, ownership
trace message, or program trace message.
Data trace synchronization messages provide the full address (without leading zeros) and insure that
development tools fully synchronize with data trace regularly. Synchronization messages provide a
reference address for subsequent DTMs, in which only the unique portion of the data trace address is
transmitted. The format for data trace write/read with synchronization messages is shown in Figure 12-45.
Figure 12-45. Data Write/Read with Synchronization Message Format
Exception conditions that result in data trace Synchronization are summarized in Table 12-35.
Data Value
(1-64 bits) (1-32 bits)
Full Address
Max length = 111 bits; Min length = 17 bits
Data Size
(4 bits)
TCODE (
001101 or 001110
)
(6 bits)
(4 bits)
Source
Proc.
(1 bit)
Data
Space
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-57
12.12.3 DTM Operation
The following sections explain DTM operation.
12.12.3.1 Data Trace Windowing
Data write/read messages are enabled by the RWT field in the data trace control register (DTC) for each
DTM channel. Data trace windowing is achieved by the address range defined by the DTEA and DTSA
registers and by the RC field in the DTC register. All e200 initiated read/write accesses that fall inside or
outside these address ranges, as programmed, are candidates to be traced.
12.12.3.2 Data Access/Instruction Access Data Tracing
The Nexus 3+ module is capable of tracing either instruction access data or data access data and can be
configured for either type of data trace by setting the DI1 field within the data trace control register. This
setting applies to all DTM channels.
Table 12-35. Data Trace Exception Summary
Exception Condition Exception Handling
System Reset Negation At the negation of JTAG reset (j_trst_b), queue pointers, counters, state machines, and registers
within the Nexus 3+ module are reset. If Data Trace is enabled, the first Data Trace Message is
a Data Write/Read w/ Sync. Message.
Data Trace Enabled The first Data Trace Message (after Data Trace has been enabled) is a synchronization message.
Exit from Low Power/Debug Upon exit from a Low Power mode or Debug mode the next Data Trace Message will be converted
to a Data Write/Read with Sync. Message.
Queue Overrun An Error Message occurs when a new message cannot be queued due to the message queue
being full. The FIFO will discard messages until it has completely emptied the queue. Once
emptied, an Error Message will be queued. The error encoding will indicate which type(s) of
messages attempted to be queued while the FIFO was being emptied. The next DTM message
in the queue will be a Data Write/Read w/ Sync. Message.
Periodic Data Trace Sync. A forced synchronization occurs periodically after 255 Data Trace Messages have been queued.
A Data Write/Read w/ Sync. Message is queued. The periodic data trace message counter then
resets.
Event In If the Nexus module is enabled, a nex_evti_b assertion initiates a Data Trace Write/Read w/
Sync. Message upon the next data write/read (if Data Trace is enabled and the EIC bits of the DC1
Register have enabled this feature).
Attempted Access to Secure
Memory
For SOC’s which implement security, any attempted read or write to secure memory locations will
temporarily disable Data Trace & cause the corresponding DTM to be lost. A subsequent
read/write will queue a Data Trace Read/Write w/ Sync. Message.
Collision Priority All Messages have the following priority: Instruction 0 (WPM → DQM → OTM → BTM → DTM)→
Instruction1 (WPM → DQM → PCM[PIDMSG] →OTM → BTM → DTM), where instruction0 is the
oldest instruction. A DTM Message that attempts to enter the queue at the same time as three
other higher priority messages will be lost. A subsequent read/write queues a data trace
read/write w/ sync. message.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-58 Freescale Semiconductor
12.12.3.3 e200 Bus Cycle Special Cases
Table 12-36 shows the e200 bus cycle special cases.
NOTE
For misaligned accesses (crossing 64-bit boundary), the access is broken
into two accesses by the CPU. If either access is within the data trace range,
a single DTM is sent with a size encoding indicating the size of the original
access (such as word), and the address indicating the original misaligned
accesses.
Table 12-36. e200 Bus Cycle Cases
Special Case Action
e200 bus cycle aborted Cycle ignored
e200 bus cycle with data error (TEA)1
1Buffering of stores in the CPU store buffer may generate a DTM prior to the actual memory access, regardless of an error
termination condition from memory.
Data Trace Message discarded
e200 bus cycle completed without error1Cycle captured & transmitted
e200 (AHB) bus cycle initiated by Nexus3 Cycle ignored
e200 bus cycle is an instruction fetch Cycle selectively ignored based on DTCDI setting
e200 bus cycle accesses misaligned data (across 64-bit
boundary)
both 1st & 2nd transactions within data trace range
1st and 2nd cycle captured and a single DTM is transmitted (see
Note)
e200 bus cycle accesses misaligned data (across 64-bit
boundary)
1st transaction within data trace range; 2nd transaction out of
data trace range
1st and 2nd cycle captured and a single DTM is transmitted (see
Note)
e200 bus cycle accesses misaligned data (across 64-bit
boundary)
1st transaction within data trace range; 2nd transaction
(regardless of within range or not) receives a bus error
Data Trace Message discarded
e200 bus cycle accesses misaligned data (across 64-bit
boundary)
1st transaction out of data trace range; 2nd transaction within
data trace range
1st & 2nd cycle captured & a single DTM is transmitted (see
Note)
e200 bus cycle accesses misaligned data (across 64-bit
boundary)
1st transaction out of data trace range; 2nd transaction within
range, receives a bus error
Data Trace Message discarded
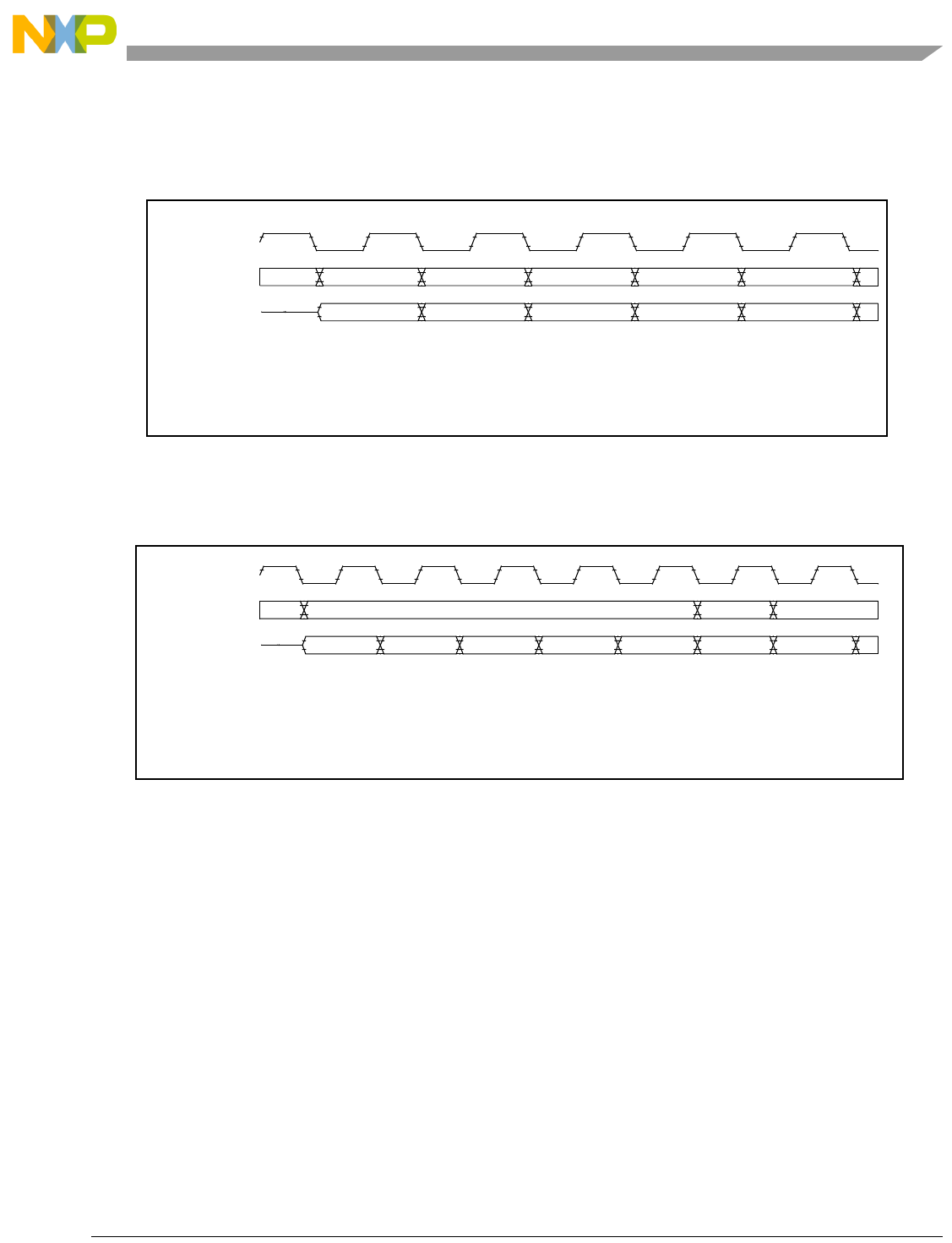
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-59
12.12.4 Data Trace Timing Diagrams(8 MDO/2 MSEO configuration)
Figure 12-46 shows the data write message timing diagram.
Figure 12-46. Data Trace—Data Write Message
Figure 12-47 shows the data read with synchornization message timing diagram.
Figure 12-47. Data Trace—Data Read with Sync Message
12.13 Data Acquisition Messaging
This section details the data acquisition mechanisms supported by the e200z446n3 Nexus 3+ module. Data
Acquisition trace is implemented using data acquisition trace messages in accordance with IEEE-ISTO
5001 definitions. The control mechanism to export the data is different from the recommendations of the
standard, however.
Data acquisition trace provides a convenient and flexible mechanism for the debugger to observe the
architectural state of the machine through software instrumentation.
12.13.1 Data Acquisition ID Tag Field
The DQTAG tag field (DQTAG) is an 8-bit value specifying control or attribute information for the data
included in the data acquisition message. DQTAG is sampled from DEVENT[DQTAG] when a write to
1001010000000101 000101010 11101111
11 00 00 01 00
TCODE = 5
source processor = 0000, DS = 1
data size = 0010 (half word)
relative address = 8'ha5
write data = 16'hbeef
11
10111110
MCKO
MSEO_B[1:0]
MDO[7:0]
0000100000001110 01100111 01000101
11 00
TCODE = 14,
source processor = 0000, DS=0
data size = 0001 (byte)
full access address = 32'h01468ace
write data = 8'h5c
10100011
01
00000000
11
01011100
MCKO
MSEO_B[1:0]
MDO[7:0]
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-60 Freescale Semiconductor
DDAM is performed by mtspr operations. The usage of the DQTAG is left to the discretion of the
development tool to be used in whatever manner is deemed appropriate for the application.
12.13.2 Data Acquisition Data Field
The data acquisition data field (DQDATA) is the data captured from the DDAM write operation by mtspr
operations. Leading zeros are omitted from the message.
12.13.3 Data Acquisition Trace Event
For DQM, a dedicated SPR has been allocated (DDAM). It is expected that the general use case is to
instrument the software and use mtspr operations to generate data acquisition messages.
There is no explicit error response for failed accesses as a result of contention between an internal and
external debugger. Software may be blocked or given ownership of DDAM and the DQTAG field of the
DEVENT register by control in DBERC0 while in external debug mode. Hardware always has access to
these registers. Refer to Section 11.3.4, “Debug External Resource Control Register (DBERC0),” for more
detail on DBERC0.
Reads from the data acquisition channel do not generate a data acquisition event and return zeroes for the
read data.
Figure 12-48 shows the data acquisition message format.
.
Figure 12-48. Data Acquisition Message Format
12.14 Watchpoint Trace Messaging
Enabling watchpoint messaging is done by setting the watchpoint trace enable bit in the DC1 register.
Setting the individual watchpoint sources is supported through the e200 Nexus 1 module. The e200
Nexus 1 module is capable of setting multiple types of watchpoints. Please refer to the debug chapter for
details on watchpoint initialization.
When watchpoints occur due to one or more asserted watchpoint event signals and watchpoint trace
messaging is enabled, a watchpoint trace message is sent to the message queue to be messaged out. This
message includes the watchpoint number indicating which watchpoint(s) caused the message. If more than
one enabled watchpoint occurs in a single cycle, only one watchpoint trace message is generated and
multiple bits of the watchpoint hit field are set. The settings of WMSK[WEM] control which watchpoints
are enabled to generate watchpoint trace messages.
The occurrence of any of the e200 defined watchpoints can also be programmed to assert the Event Out
(nex_evto_b) pin for one (1) period of the output clock (nex_mcko) based on settings in the DC2 and DC3
registers. See Table 12-39 for details on nex_evto_b.
TCODE (011011)DQTAG
(6 bits)
(8 bits)
Src. Proc.
(4 bits)
Max length = 50 bits; Min length = 19 bits
(1-32 bits)
DQDATA
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-61
Watchpoint information is messaged out as shown in Figure 12-49.
Figure 12-49. Watchpoint Message Format.
Table 12-37 shows the watchpoint source encoding. The Watchpoint Source message field contains a ‘1’
for each asserted watchpoint. Leading zeros are truncated.
Table 12-37. Watchpoint Source Encoding
Watchpoint Source (1-22 bits) Watchpoint Description
XXXXXXXXXXXXXXXXXXXXX1Watchpoint #0 enabled for WTM
XXXXXXXXXXXXXXXXXXXX1XWatchpoint #1 (I enabled for WTM
XXXXXXXXXXXXXXXXXXX1XXWatchpoint #2 enabled for WTM
XXXXXXXXXXXXXXXXXX1XXXWatchpoint #3 enabled for WTM
XXXXXXXXXXXXXXXXX1XXXXWatchpoint #4 enabled for WTM
XXXXXXXXXXXXXXXX1XXXXXWatchpoint #5 enabled for WTM
XXXXXXXXXXXXXXX1XXXXXXWatchpoint #6 enabled for WTM
XXXXXXXXXXXXXX1XXXXXXXWatchpoint #7 enabled for WTM
XXXXXXXXXXXXX1XXXXXXXXWatchpoint #8 enabled for WTM
XXXXXXXXXXXX1XXXXXXXXXWatchpoint #9 enabled for WTM
XXXXXXXXXXX1XXXXXXXXXXWatchpoint #10 enabled for WTM
XXXXXXXXXX1XXXXXXXXXXXWatchpoint #11 enabled for WTM
XXXXXXXXX1XXXXXXXXXXXXWatchpoint #12 enabled for WTM
XXXXXXXX1XXXXXXXXXXXXXWatchpoint #13 enabled for WTM
XXXXXXX1XXXXXXXXXXXXXXWatchpoint #14 enabled for WTM
XXXXXX1XXXXXXXXXXXXXXXWatchpoint #15 enabled for WTM
XXXXX1XXXXXXXXXXXXXXXXWatchpoint #16 enabled for WTM
XXXX1XXXXXXXXXXXXXXXXXWatchpoint #17 enabled for WTM
XXX1XXXXXXXXXXXXXXXXXXWatchpoint #18 enabled for WTM
XX1XXXXXXXXXXXXXXXXXXXWatchpoint #19 enabled for WTM
X1XXXXXXXXXXXXXXXXXXXXWatchpoint #20 enabled for WTM
1XXXXXXXXXXXXXXXXXXXXXWatchpoint #21 enabled for WTM
Src. Proc.
(4 bits)
TCODE (001111)
(6 bits)
Watchpoint Source
(1-22 bits)
Variable length = 11-32 bits
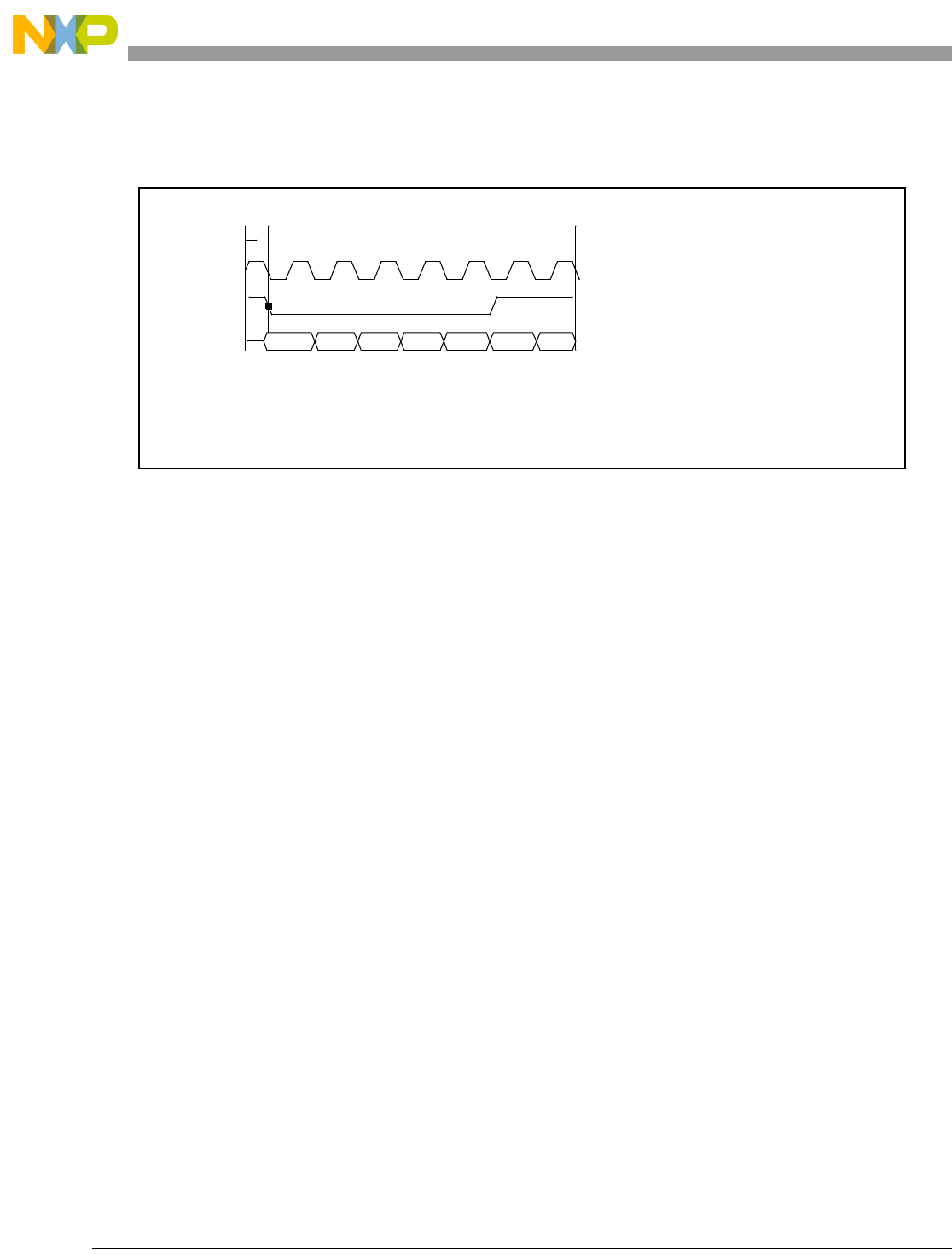
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-62 Freescale Semiconductor
12.14.1 Watchpoint Timing Diagram (2 MDO/1 MSEO configuration)
Figure 12-50 shows the watchpoint message and watchpoint error message timing diagram.
Figure 12-50. Watchpoint Message and Watchpoint Error Message
12.15 Nexus 3+ Read/Write Access to Memory-Mapped Resources
The read/write access feature allows access to memory-mapped resources by means of the JTAG/OnCE
port. The read/write mechanism supports single as well as block reads and writes to e200 AHB resources.
The Nexus 3+ module is capable of accessing resources on the e200 system bus (AHB), with multiple
configurable priority levels. Memory-mapped registers and other non-cached memory can be accessed by
the standard memory map settings.
All accesses are setup and initiated by the read/write access control/status register as well as the read/write
access address and read/write access data registers.
Using the read/write access registers, memory mapped e200 AHB resources can be accessed through
Nexus 3+. The following subsections describe the steps required to access memory-mapped resources.
NOTE
Read/write access can only access memory mapped resources when system
reset is de-asserted and clocks are running.
Misaligned accesses are not supported in the e200 Nexus 3+ module.
12.15.1 Single Write Access
This section explains the steps required for single write access.
1. Initialize the read/write access address register (RWA) through the access method outlined in
Section 12.5, “Nexus 3+ Register Access via JTAG/OnCE.” Configure as follows:
— Write Address -> 32h’xxxxxxxx (write address)
2. Initialize the read/write access control/status register (RWCS) through the access method outlined
in Section 12.5, “Nexus 3+ Register Access via JTAG/OnCE.” Configure the bits as follows:
— Access Control (AC) -> 1b’1 (to indicate start access)
Watchpoint
11 11 00 00 00 10 00
WPM:
TCODE = 15
source processor = 00
watchpoint # = 2
p_mcko
p_mseo_b
p_mdo[1:0]

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-63
— Map Select (MAP) -> 3b’000 (primary memory map)
— Access Priority (PR) -> 2b’00 (lowest priority)
— Read/Write (RW) -> 1b’1 (write access)
— Word Size (SZ) -> 3b’0xx (32-bit, 16-bit, 8-bit)
— Access Count (CNT) -> 14h’0000 or 14h’0001(single access)
NOTE
Access Count (CNT) of 14’h0000 or 14’h0001 performs a single access.
3. Initialize the read/write access data register through the access method outlined in Section 12.5,
“Nexus 3+ Register Access via JTAG/OnCE.” Configure as follows:
— Write Data -> 32h’xxxxxxxx (write data)
The Nexus block then arbitrates for the AHB system bus and transfers the data value from the data buffer
RWD register to the memory mapped address in the read/write access address register (RWA). When the
access has completed without error (ERR = 1’b0), Nexus asserts the nex_rdy_b pin (see Table 12-39 for
detail on nex_rdy_b) and clears the DV bit in the RWCS register. This indicates that the device is ready
for the next access.
NOTE
Only the nex_rdy_b pin as well as the DV and ERR bits within the RWCS
provide Read/Write Access status to the external development tool.
12.15.2 Block Write Access
This section explains the steps required for block write access.
1. Follow Steps 1, 2, and 3 outlined in Section 12.15.1, “Single Write Access,” to initialize the
registers, but use a value greater than one (14’h0001) for the CNT field in the RWCS register.
2. The Nexus block then arbitrates for the AHB system bus and transfers the first data value from the
RWD register to the memory mapped address in the RWA register. When the transfer has
completed without error (ERR=1’b0), the address from the RWA register is incremented to the next
word size (specified in the SZ field) and the number from the CNT field is decremented. Nexus
then asserts the nex_rdy_b pin, indicating that the device is ready for the next access.
3. Repeat Step 3 in Section 12.15.1, “Single Write Access until the internal CNT value is zero (0).
When this occurs, the DV bit within the RWCS is cleared to indicate the end of the block write
access.
NOTE
The actual RWA value as well as the CNT field within the RWCS are not
changed when executing a block write access. The original values can be
read by the external development tool at any time.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-64 Freescale Semiconductor
12.15.3 Single Read Access
This section explains the steps required for single read access.
1. Initialize the RWA register through the access method outlined in Section 12.5, “Nexus 3+ Register
Access via JTAG/OnCE.” Configure as follows:
— Read Address -> 32h’xxxxxxxx (read address)
2. Initialize the RWCS register through the access method outlined in Section 12.5, “Nexus 3+
Register Access via JTAG/OnCE.” Configure the bits as follows:
— Access Control (AC) -> 1b’1 (to indicate start access)
— Map Select (MAP) -> 3b’000 (primary memory map)
— Access Priority (PR) -> 2b’00 (lowest priority)
— Read/Write (RW) -> 1b’0 (read access)
— Word Size (SZ) -> 3b’0xx (32-bit, 16-bit, 8-bit)
— Access Count (CNT) -> 14h’0000 or 14h’0001(single access)
NOTE
Access Count (CNT) of 14’h0000 or 14’h0001 performs a single access.
3. The Nexus block then arbitrates for the AHB system bus and the read data is transferred from the
AHB to the RWD register. When the transfer is completed without error (ERR=1’b0), Nexus
asserts the nex_rdy_b pin (see Table 12-39 for detail on nex_rdy_b) and sets the DV bit in the
RWCS register, indicating that the device is ready for the next access.
4. The data can then be read from the read/write access data register (RWD) through the access
method outlined in Section 12.5, “Nexus 3+ Register Access via JTAG/OnCE.”
NOTE
Only the nex_rdy_b pin as well as the DV and ERR bits within the RWCS
provide read/write access status to the external development tool.
12.15.4 Block Read Access
This section explains the steps required for block read access.
1. Follow Steps 1 and 2 outlined in Section 12.15.3, “Single Read Access,” to initialize the registers,
but use a value greater than one (14’h0001) for the CNT field in the RWCS register.
2. The Nexus block then arbitrates for the AHB system bus and the read data is transferred from the
AHB to the RWD register. When the transfer has completed without error (ERR=1’b0), the address
from the RWA register is incremented to the next word size (specified in the SZ field) and the
number from the CNT field is decremented. Nexus then asserts the nex_rdy_b pin, indicating that
the device is ready for the next access.
3. The data can then be read from the read/write access data register (RWD) through the access
method outlined in Section 12.5, “Nexus 3+ Register Access via JTAG/OnCE.”
4. Repeat Steps 3 and 4 in Section 12.15.3, “Single Read Access,” until the CNT value is zero (0).
When this occurs, the DV bit within the RWCS is set to indicate the end of the block read access.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-65
NOTES
The data values must be shifted out 32-bits at a time LSB first (for example,
double word read equals two word reads from the RWD).
The actual RWA value as well as the CNT field within the RWCS are not
changed when executing a block read access. The original values can be
read by the external development tool at any time.
12.15.5 Error Handling
The Nexus 3+ module handles various error conditions as follows:
• AHB Read/Write Error
— All address and data errors that occur on read/write accesses to the e200 AHB system bus return
a transfer error encoding on the p_hresp[1:0] signals. If this occurs:
– The access is terminated without retrying (AC bit is cleared)
– The ERR bit in the RWCS register is set
– The error message is sent (TCODE = 8) indicating read/write error
• Access Termination
— If the AC bit in the RWCS Register is set to start read/write accesses and invalid values are
loaded into the RWD and/or RWA, an AHB access error may occur. This is handled as
described above.
— If a block access is in progress (all cycles not completed), and the RWCS register is written,
then the original block access is terminated at the boundary of the nearest completed access.
– If the RWCS is written with the AC bit set, the next read/write access begins and the RWD
can be written to/ read from.
– If the RWCS is written with the AC bit cleared, the Read/Write access is terminated at the
nearest completed access. This method can be used to break (early terminate) block
accesses.
• Read/Write Access Error Message
— The Read/Write Access Error Message is sent out when an AHB system bus access error (read
or write) has occurred.
— Error information is messaged out as shown in Figure 12-50.
Figure 12-51. Error Message Format
TCODE (001000)Error Code (00011)
(6 bits) (5 bits)
Src. Proc.
(4 bits)
Fixed length = 15 bits
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-66 Freescale Semiconductor
12.16 Nexus 3+ Pin Interface
The Nexus 3+ pin interface provides the function of transmitting messages from the message queues to the
external tools. It is also responsible for handshaking with the message queues.
12.16.1 Pins Implemented
The Nexus 3+ module implements an auxiliary port consisting of one nex_evti_b and one nex_mseo_b
or two nex_mseo_b[1:0]. It also implements a configurable number of nex_mdo[n:0] pins, one
nex_rdy_b pin, one nex_evto_b pin, three nex_wevto[2:0] pins, and one clock output pin (nex_mcko),
as well as additional configuration pins described in Table 12-39. The output pins are synchronized to the
Nexus 3+ output clock (nex_mcko).
All Nexus 3+ input functionality is controlled through the JTAG/OnCE port in compliance with IEEE
1149.1 (see Section 12.5, “Nexus 3+ Register Access via JTAG/OnCE,” for details). The JTAG pins are
incorporated as I/O to the e200 processor and are further described in Section 11.4.3, “JTAG/OnCE Pins.”
The auxiliary pins are used to send and receive messages and are described in Table 12-39.
Table 12-38. JTAG Pins for Nexus 3+
JTAG Pins Input/
Output Description of JTAG Pins (included in e200 Nexus 1)
j_tdo O The Test Data Output (j_tdo) pin is the serial output for test instructions and data.
j_tdo is three-stateable and is actively driven in the “Shift-IR” and “Shift-DR” controller
states. j_tdo changes on the falling edge of j_tclk.
j_tdi I The Test Data Input (j_tdi) pin receives serial test instruction and data. TDI is sampled
on the rising edge of j_tclk.
j_tms I The Test Mode Select (j_tms) input pin is used to sequence the OnCE controller state
machine. j_tms is sampled on the rising edge of j_tclk.
j_tclk I The Test Clock (j_tclk) input pin is used to synchronize the test logic, and control
register access through the JTAG/OnCE port.
j_trst_b I The Test Reset (j_trst_b) input pin is used to asynchronously initialize the
JTAG/OnCE controller.
Table 12-39. Nexus 3+ Auxiliary Pins
Auxiliary Pins Input/
Output Description of Auxiliary Pins
nex_mcko O Message Clock Out (nex_mcko) is a free running output clock to development tools
for timing of nex_mdo[n:0] & nex_mseo_b[1:0] pin functions. nex_mcko is
programmable through the DC1 Register.
nex_mdo[n:0] O Message Data Out (nex_mdo[n:0]) are output pins used for OTM, BTM, and DTM.
External latching of nex_mdo[n:0] shall occur on the rising edge of the Nexus3 clock
(nex_mcko).
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-67
The Nexus auxiliary port arbitration pins are used when the Nexus 3+ module is implemented in a
multi-Nexus SoC that shares a single auxiliary output port. The arbitration is controlled by an SoC-level
Nexus port control module (NPC). Refer to Section 12.18, “Auxiliary Port Arbitration,” for detail on
Nexus port arbitration.
Table 12-40 shows the Nexus port arbitration signals.
nex_mseo_b[1:0] O Message Start/End Out (nex_mseo_b[1:0]) are output pins which indicate when a
message on the nex_mdo[n:0] pins has started, when a variable length packet has
ended, and when the message has ended. External latching of nex_mseo_b[1:0]
shall occur on the rising edge of the Nexus3 clock (nex_mcko). One or two pin MSEO
functionality is determined at integration time per SOC implementation
nex_rdy_b O Ready (nex_rdy_b) is an output pin used to indicate to the external tool that the
Nexus block is ready for the next Read/Write Access. If Nexus3 is enabled, this signal
is asserted upon successful (without error) completion of an AHB system bus transfer
(Nexus read or write) & is held asserted until the JTAG/OnCE state machine reaches
the “Capture_DR” state. Upon exit from system reset or if Nexus3 is disabled,
nex_rdy_b remains de-asserted
nex_evto_b O Event Out (nex_evto_b) is an output which, when asserted, indicates one of two
events has occurred based on the EOC bits in the DC1 Register. nex_evto_b is held
asserted for one (1) cycle of nex_mcko:
1) one (or more) watchpoints has occurred (from Nexus1) & EOC = 2’b00
2) debug mode was entered (jd_debug_b asserted from Nexus1) & EOC = 2’b01
nex_evti_b I Event In (nex_evti_b) is an input which, when asserted, will initiate one of two events
based on the EIC bits in the DC1 Register (if the Nexus3 module is enabled at reset):
1) Program Trace & Data Trace synchronization messages (provided Program Trace
& Data Trace are enabled & EIC = 2’b00).
2) Debug request to e200 Nexus1 module (provided EIC = 2’b01 and this feature is
implemented).
nex_wevto[2–0] O Watchpoint Event Out 2–0 (nex_wevto[2:0]) are outputs which, when asserted,
indicates one or more watchpoint events has occurred based on the settings in the
DC2 and DC3 registers. nex_wevto[2:0] is held asserted for one (1) cycle of
nex_mcko.
nex_ext_src_id[0–3] I nex_ext_src_id[0:3] is used to provide the SRC field value used in each message.
These pins are tied to a predetermined value at SoC integration time
Table 12-40. Nexus Port Arbitration Signals
Nexus Port
Arbitration Pins Input/
Output Description of Arbitration Pins
nex_aux_req[1:0] O Nexus Auxiliary Request (nex_aux_req[1:0]) output signals indicate to an SoC level
Nexus arbiter a request for access to the shared Nexus auxiliary port in a multi-Nexus
implementation. The priority encodings are determined by how many messages are
currently in the message queues (see Table 12-42).
nex_aux_busy O Nexus Auxiliary Busy (nex_aux_busy) is an output signal to an SoC level Nexus
arbiter indicating that the Nexus 3+ module is currently transmitting its message after
being granted the Nexus auxiliary port.
Table 12-39. Nexus 3+ Auxiliary Pins (Continued)
Auxiliary Pins Input/
Output Description of Auxiliary Pins
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-68 Freescale Semiconductor
12.16.2 Pin Protocol
The protocol for the e200 processor transmitting messages via the auxiliary pins is accomplished with the
MSEO pin function outlined in Table 12-41. Both single and dual pin cases are shown.
nex_mseo_b[1:0] is used to signal the end of variable-length packets, and not fixed length packets.
nex_mseo_b[1:0] is sampled on the rising edge of the Nexus 3+ clock (nex_mcko).
npc_aux_grant I Nexus Auxiliary Grant (npc_aux_grant) is an input from the SoC level Nexus Port
Controller (NPC) that the auxiliary port has been granted to the Nexus 3+ module to
transmit its message.
ext_multi_nex_sel I Multi-Nexus Select (ext_multi_nex_sel) is a static signal indicating that the Nexus 3+
module is implemented within a multi-Nexus environment. If set, port control and
arbitration is controlled by the SoC level arbitration module (NPC).
Table 12-41. MSEO Pin(s) Protocol
nex_mseo_b Function Single nex_mseo_b data (serial) Dual nex_mseo_b[1:0] data
Start of message 1-1-0 11-00
End of message 0-1-1-(more 1’s) 00 (or 01)-11-(more 1’s)
End of variable length packet 0-1-0 00-01
Message transmission 0’s 00’s
Idle (no message) 1’s 11’s
Table 12-40. Nexus Port Arbitration Signals
Nexus Port
Arbitration Pins Input/
Output Description of Arbitration Pins
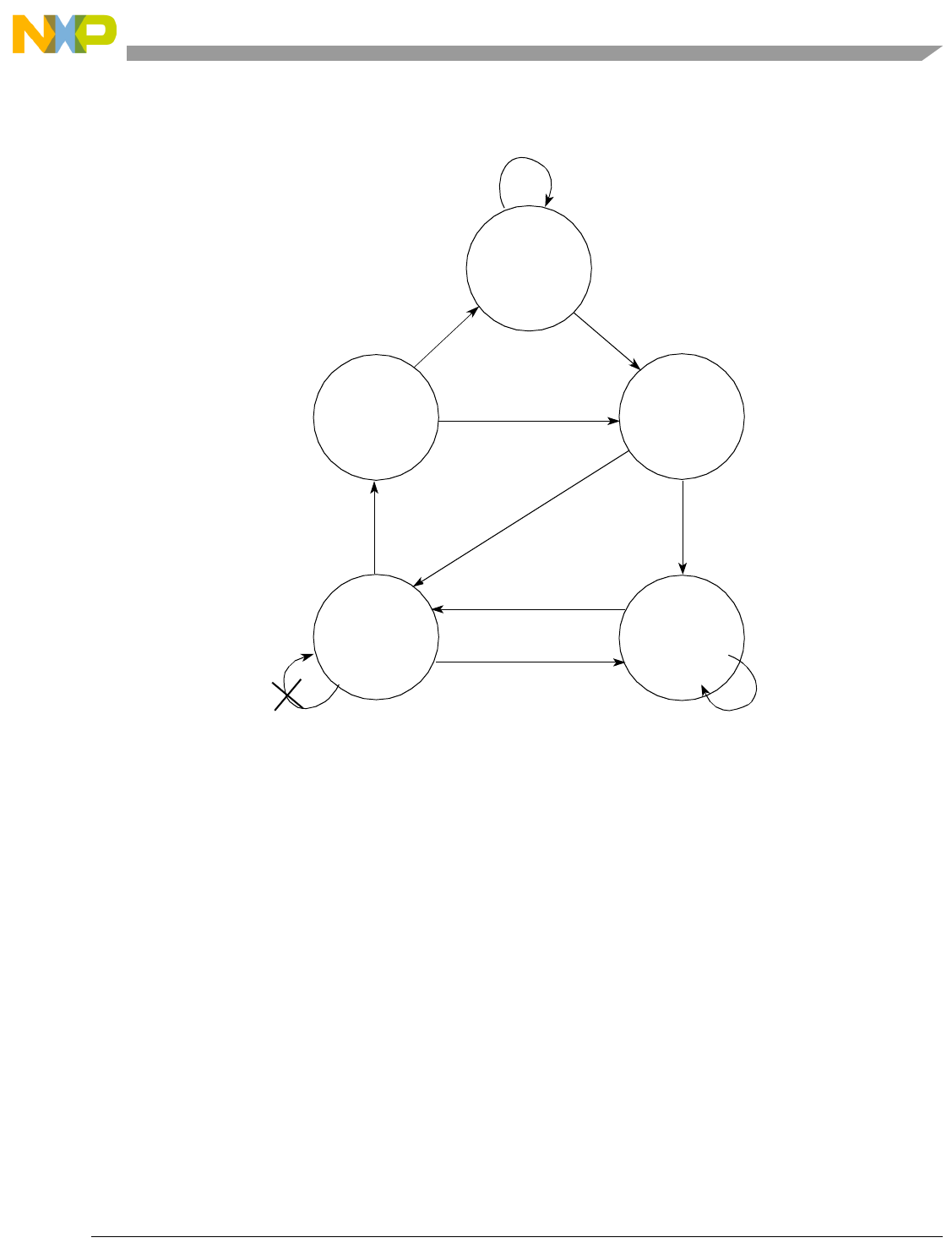
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-69
Figure 12-52 illustrates the state diagram for single pin MSEO transfers.
Figure 12-52. Single Pin MSEO Transfers
Note that the “End Message” state does not contain valid data on the nex_mdo[n:0] pins. Also, it is not
possible to have two consecutive “End Packet” messages. This implies the minimum packet size for a
variable length packet is 2× the number of nex_mdo[n:0] pins. This ensures that a false end of message
state is not entered by emitting two consecutive ones on the nex_mseo_b pin before the actual end of
message.
Idle
Start
Message
Normal
Transfer
End
Message
nex_mseo_b =1
nex_mseo_b = 1
nex_mseo_b = 0
nex_mseo_b = 0
nex_mseo_b = 1
nex_mseo_b = 1
nex_mseo_b = 0
nex_mseo_b = 0
nex_mseo_b = 0
nex_mseo_b = 1
MDO: Invalid
MDO: Invalid
Not Allowed
End
Packet
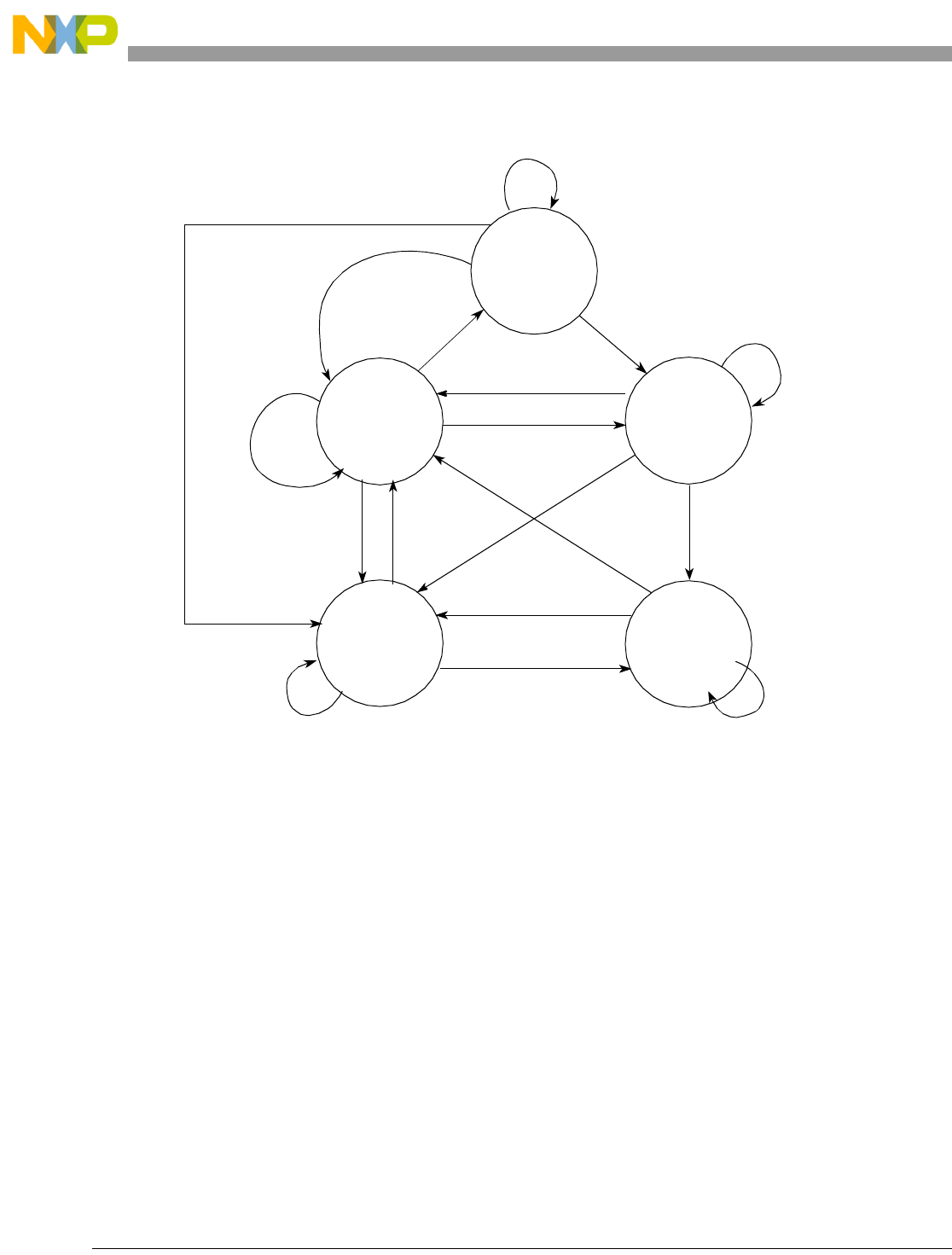
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-70 Freescale Semiconductor
Figure 12-53 illustrates the state diagram for dual pin MSEO transfers.
Figure 12-53. Dual Pin MSEO Transfers
The dual pin MSEO option is more robust that the single pin option. Termination of the current message
may immediately be followed by the start of the next message on the consecutive clocks. An extra clock
to end the message is not necessary as with the one MSEO pin option. The dual pin option also allows for
consecutive “End Packet” states. This can be an advantage when small, variable sized packets are
transferred.
NOTE
The “End Message” state may also indicate the end of a variable-length
packet as well as the end of the message when using the dual pin option.
Idle
Normal
Transfer
End
Message
nex_mseo_b[1:0] = 11
nex_mseo_b[1:0] = 11
nex_mseo_b[1:0] = 00
nex_mseo_b[1:0] = 00
nex_mseo_b[1:0] = 01
nex_mseo_b[1:0] = 01
nex_mseo_b[1:0] = 00
nex_mseo_b[1:0] = 00
nex_mseo_b[1:0] = 00
nex_mseo_b[1:0] = 11
MDO: Invalid
nex_mseo_b[1:0] = 01
End
Packet
nex_mseo_b[1:0] = 11
nex_mseo_b[1:0] = 11
nex_mseo_b[1:0] = 10
Start
Message
nex_mseo_b[1:0]=10
nex_mseo_b[1:0] = 10
nex_mseo_b[1:0]=01
nex_mseo_b[1:0] = 01
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-71
12.17 Rules for Output Messages
The e200-based Class 3 compliant embedded processors must provide messages through the auxiliary port
in a consistent manner as described below:
• A variable-sized packet within a message must end on a port boundary.
• A variable-sized packet may start within a port boundary only when following a fixed length
packet. (If two variable-sized packets end and start on the same clock, it is impossible to know
which bit is from the last packet and which bit is from the next packet.)
• Whenever a variable-length packet is sized such that it does not end on a port boundary, it is
necessary to extend and zero fill the remaining bits after the highest-order bit so that it can end on
a port boundary.
For example, if the nex_mdo[n:0] port is 2 bits wide, and the unique portion of an indirect address
TCODE is 5 bits, then the remaining 1 bit of nex_mdo[n:0] must be packed with a 0.
12.18 Auxiliary Port Arbitration
In a multi-Nexus environment, the Nexus 3+ module must arbitrate for the shared Nexus port at the SoC
level.The request scheme is implemented as a 2-bit request with various levels of priority. The priority
levels are defined in Table 12-42 below. The Nexus 3+ module receives a 1-bit grant signal
(npc_aux_grant) from the SoC level arbiter. When a grant is received, the Nexus 3+ module begins
transmitting its message following the protocol outlined in Section 12.16.2, “Pin Protocol.” The Nexus 3+
module maintains control of the port, by asserting the nex_aux_busy signal, until the MSEO state machine
reaches the “End Message” state.
12.19 Examples
The following are examples of program trace and data trace messages.
Table 12-43 illustrates an example indirect branch message with 2 MDO/1 MSEO configuration.
Table 12-44 illustrates the same example with an 8 MDO/2 MSEO configuration.
Note that T0 and S0 are the least significant bits where:
• Tx = TCODE number (fixed)
• Sx = Source processor (fixed)
• MAP = Address Space Value (IS)
• Ix = Number of instructions (variable)
Table 12-42. MDO Request Encodings
Request Level MDO Request Encoding
(nex_aux_req[1:0]) Condition of Queue
No Request 00 No message to send
Low Priority 01 Message queue less than ½ full
-- 10 Reserved
High Priority 11 Message queue ½ full or more
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-72 Freescale Semiconductor
• Ax = Unique portion of the address (variable)
Note that during clock 13, the nex_mdo[n:0] pins are ignored in the single MSEO case.
Table 12-43. Indirect Branch Message Example (2 MDO/1 MSEO)
Clock nex_mdo[1:0] nex_mseo_b State
0XX 1 Idle (or end of last message)
1T1T0 0 Start Message
2T3T2 0 Normal Transfer
3T5T4 0 Normal Transfer
4S1S0 0 Normal Transfer
5S3S2 0 Normal Transfer
6I0MAP 0 Normal Transfer
7I2I1 0 Normal Transfer
8I4I3 1 End Packet
9A1A0 0 Normal Transfer
10 A3 A2 0 Normal Transfer
11 A5 A4 0 Normal Transfer
12 A7 A6 1 End Packet
13 0 0 1 End Message
14 T1 T0 0 Start Message
Table 12-44. Indirect Branch Message Example (8 MDO/2 MSEO)
Clock nex_mdo[7:0] nex_mseo_b[1:0] State
0 XXXXXXXX 1 1 Idle (or end of last
message)
1 S1S0T5T4T3T2T1T0 0 0 Start Message
2 I4 I3 I2 I1 I0 MAP S3 S2 0 1 End Packet
3 A7A6A5A4A3A2A1A0 1 1 End Packet/End
Message
4 S1S0T5T4T3T2T1T0 0 0 Start Message
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-73
Table 12-45 and Table 12-46 illustrate examples of direct branch messages: one with 2 MDO/1 MSEO,
and one with 8 MDO/2 MSEO.
Note that T0 and I0 are the least significant bits where:
• Tx = TCODE number (fixed)
• Sx = Source processor (fixed)
• Ix = Number of Instructions (variable)
Table 12-45. Direct Branch Message Example (2 MDO / 1 MSEO)
Clock nex_mdo[1:0] nex_mseo_b State
0 X X 1 Idle (or end of last
message)
1 T1 T0 0 Start Message
2 T3 T2 0 Normal Transfer
3 T5 T4 0 Normal Transfer
4 S1 S0 0 Normal Transfer
5 S3 S2 0 Normal Transfer
6 I1 I0 1 End Packet
7 0 0 1 End Message
Table 12-46. Direct Branch Message Example (8 MDO / 2 MSEO)
Clock nex_mdo[7:0] nex_mseo_b[1:0] State
0 X X X X X X X X 1 1 Idle (or end of last
message)
1 S1S0T5T4T3T2T1T0 0 0 Start Message
2 0 0 0 0 I1 I0 S3 S2 1 1 End Packet/End
Message
3 S1S0T5T4T3T2T1T0 0 0 Start Message
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-74 Freescale Semiconductor
Table 12-47 illustrates an example Data Write Message with 8 MDO/1 MSEO configuration. Table 12-48
illustrates the same DWM with 8 MDO/2 MSEO configuration
Note that T0, A0, D0 are the least significant bits where:
• Tx = TCODE number (fixed)
• Sx = Source processor (fixed)
• MAP = Address Space Value (DS)
• Zx = Data size (fixed)
• Ax = Unique portion of the address (variable)
• Dx = Write data (variable—8, 16 or 32-bit)
12.20 Electrical Characteristics
For all electrical characteristics related to e200 and Nexus 3+ operation, please refer to the appropriate
“e200 Integration Guide.”
12.21 IEEE 1149.1 (JTAG) RD/WR Sequences
This section contains example JTAG/OnCE sequences used to access resources.
Table 12-47. Data Write Message Example (8 MDO / 1 MSEO)
Clock nex_mdo[7:0] nex_mseo_b State
0 XXXXXXXX 1 Idle (or end of last message)
1 S1S0T5T4T3T2T1T0 0 Start Message
2 A0Z3Z2Z1Z0DSS3S2 1 End Packet
3 D7D6D5D4D3D2D1D0 0 Normal Transfer
4 00000000 1 End Packet
5 00000000 1 End Message
Table 12-48. Data Write Message Example (8 MDO / 2 MSEO)
Clock nex_mdo[7:0] nex_mseo_b[1:0] State
0 X X X X X X X X 1 1 Idle (or end of last message)
1 S1S0T5T4T3T2T1T0 0 0 Start Message
2 A0Z3Z2Z1Z0DSS3S2 0 1 End Packet
3 D7D6D5D4D3D2D1D0 1 1 End Packet/End Message
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 12-75
12.21.1 JTAG Sequence for Accessing Internal Nexus Registers
Table 12-49 shows the JTAG sequence for accessing internal Nexus 3+ registers.
12.21.2 JTAG Sequence for Read Access of Memory-Mapped Resources
Table 12-50 shows the JTAG sequence for read access of memory-mapped resources.
Table 12-49. Accessing Internal Nexus 3+ Registers through JTAG/OnCE
Step # TMS Pin Description
1 1 IDLE -> SELECT-DR_SCAN
2 0 SELECT-DR_SCAN -> CAPTURE-DR (Nexus Command Register value loaded in shifter)
3 0 CAPTURE-DR -> SHIFT-DR
4 0 (7) TCK clocks issued to shift in direction (rd/wr) bit and first 6 bits of Nexus reg. addr.
5 1 SHIFT-DR -> EXIT1-DR (7th bit of Nexus reg. shifted in)
6 1 EXIT1-DR -> UPDATE-DR (Nexus shifter is transferred to Nexus Command Register)
7 1 UPDATE-DR -> SELECT-DR_SCAN
8 0 SELECT-DR_SCAN -> CAPTURE-DR (Register value is transferred to Nexus shifter)
9 0 CAPTURE-DR -> SHIFT-DR
10 0 (31) TCK clocks issued to transfer register value to TDO pin while shifting in TDI value
11 1 SHIFT-DR -> EXIT1-DR (MSB of value is shifted in/out of shifter)
12 1 EXIT1-DR -> UPDATE -DR (if access is write, shifter is transferred to register)
13 0 UPDATE-DR -> RUN-TEST/IDLE (transfer complete - Nexus controller to Reg. Select state)
Table 12-50. Accessing Memory-Mapped Resources (Reads)
Step # TCLK clocks Description
1 13 Nexus Command = write to Read/Write Access Address Register (RWA)
2 37 Write RWA (initialize starting read address—data input on TDI)
3 13 Nexus Command = write to Read/Write Control/Status Register (RWCS)
4 37 Write RWCS (initialize read access mode and CNT value - data input on TDI)
5 — Wait for falling edge of nex_rdy_b pin
6 13 Nexus Command = read Read/Write Access Data Register (RWD)
7 37 Read RWD (data output on TDO)
8 — If CNT > 0, go back to Step #5
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
12-76 Freescale Semiconductor
12.21.3 JTAG Sequence for Write Access of Memory-Mapped Resources
Table 12-50 shows the JTAG sequence for write access of memory-mapped resources.
Table 12-51. Accessing Memory-Mapped Resources (Writes)
Step # TCLK clocks Description
1 13 Nexus Command = write to Read/Write Access Control/Status Register (RWCS)
2 37 Write RWCS (initialize write access mode and CNT value - data input on TDI)
3 13 Nexus Command = write to Read/Write Address Register (RWA)
4 37 Write RWA (initialize starting write address - data input on TDI)
5 13 Nexus Command = read Read/Write Access Data Register (RWD)
6 37 Write RWD (data output on TDO)
7 -- Wait for falling edge of nex_rdy_b pin
8 -- If CNT > 0, go back to Step #5

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-1
Chapter 13 External Core Complex Interfaces
This chapter describes the external interfaces to the e200z446n3 core complex, including signal
descriptions as well as the data transfer protocols.
13.1 Overview
The external interfaces encompass control and data signals supporting instruction and data transfers,
support for interrupts, including vectored interrupt logic, reset support, power management interface
signals, debug event signals, Time Base control and status information, processor state information, Nexus
1/3/OnCE/JTAG interface signals, and a Test interface.
The memory portion of the e200 core interface is comprised of a pair of 64-bit wide standard AHB 2.v6
system buses, one for instructions and the other for data. Both interfaces operate in a pipelined fashion and
support misaligned transfers and true big- and little-endian operating modes. The data memory interface
supports read and write transfers of 8, 16, 24, 32, and 64 bits, and the instruction memory interface
supports read transfers of 16, 32, and 64 bits.
The memory interface supported by the bus interface units (BIUs) is based on the AHB 2.v6 definition.
Additional sideband signals have been added to support additional control functions.
NOTE
The AHB bit and byte ordering reflect a natural little-endian ordering, as
used by the AMBA documentation. The e200z446n3 BIU automatically
performs the necessary byte lane conversions to support big-endian
transfers. Memories and peripheral devices/interfaces should be wired
according to byte lane addresses defined in Section 13.3.5, “Byte Lane
Specification,” and Table 13-10.
Single-beat and misaligned transfers are supported for cache-inhibited read and write cycles. Burst
transfers (double word aligned) of four double words are supported for cache line-fill operations.
Misaligned accesses are supported with one or more transfers to an interface. If an access is misaligned
but contained within an aligned 64-bit double word, the core performs a single transfer. The memory
interface is responsible for delivering (reads) or accepting (writes) the data corresponding to the size and
byte enable signals aligned according to the low order three address bits. If an access is misaligned and
crosses a 64-bit boundary, the BIU performs a pair of transfers beginning at the effective address for the
first transfer, along with appropriate byte enables, and for the second transfer the address is incremented
to the next 64-bit boundary. The size and byte enable signals are driven to correspond to the number of
remaining bytes to be transferred.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-2 Freescale Semiconductor
13.2 Signal Index
This section contains an index of the e200 signals.
The following prefixes are used for e200 signal mnemonics:
mmaster clock and reset signals
pprocessor or core-related signals
jJTAG mode signals
jd JTAG and Debug mode signals
ipt Scan and test mode signals
nex Nexus signals
NOTE
The “_b” suffix denotes an active low signal. Signals without the active-low
suffix are active high.
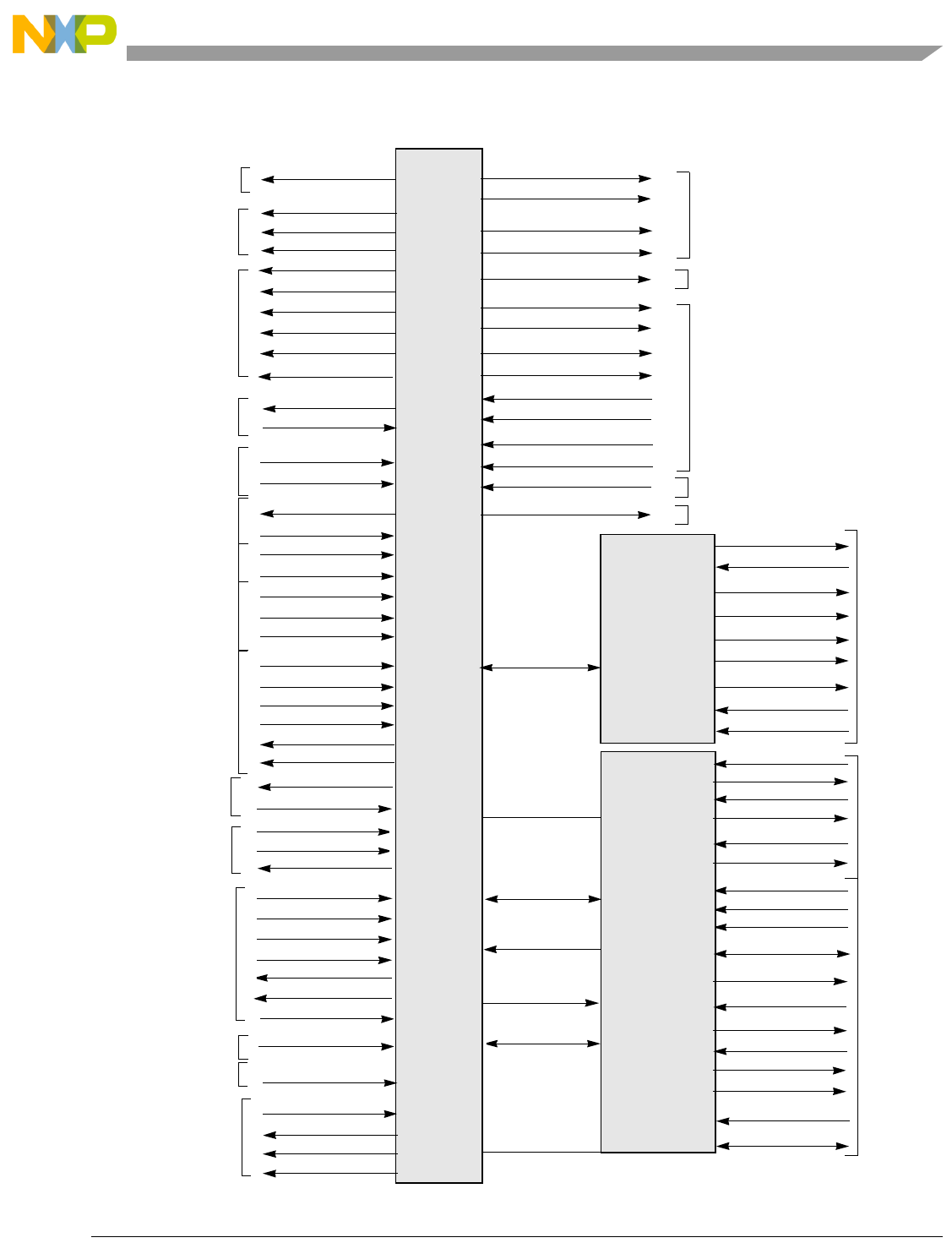
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-3
Figure 13-1 groups core bus and control signals by function.
Transfer
Transfer Control
Attributes
p_[d,i]_htrans[1:0]
p_[d,i]_hburst[2:0]
p_[d,i]_hbstrb[7:0]
Data Bus
Address Bus p_[d,i]_haddr[31:0]
* These signals are internal to the core
Notes:
e200
CPU
p_devt2
p_devt1
p_ude
p_[d,i]_hwrite
p_[d,i]_hprot[5:0]
p_[d,i]_hsize[1:0]
p_[d,i]_hunalign
Reservation
Signals
p_rsrv
p_rsrv_clr
p_tbint
p_tbclk
Time Base p_tbdisable
Signals
Debug
Support
e200 Nexus1
Module
jd_debug_b
dbg_dbgrq*
cpu_dbgack*
OnCE Control*
JTAG Interface
jd_de_b
Test Interface
jd_de_en
jd_en_once
jd_watchpt[0:21]
jd_mclk_on
j_en_once_regsel
(OnCE/Debug)
p_d_hwdata[63:0]
p_[d,i]_hrdata[63:0]
p_cpuid[0:7]
Misc. p_sysvers[0:31]
p_pvrin[16:31]
Signals
Processor
p_[d,i]_hresp[2:0]
Transfer p_[d,i]_hready
Status
Termination/
p_mcp_b
Machine Check
Interrupt
p_extint_b
p_critint_b
p_avec_b
p_voffset[0:15]
p_iack
Signals
p_ipend
Dev
Support
e200 Nexus
Module
nex_mseo_b[1:0]
nex_evti_b
nex_wevto[2:0]
nex_mcko
nex_rdy_b
nex_evto_b
Clock m_clk
p_[d,i]_hmaster[3:0]
MasterID p_masterid[3:0]
p_mcp_out
p_nmi_b
p_pstat_pipe[0,1,2][0:5]
Processor Status
p_hid1_sysctl[0:7] HID1 System Control
p_msr_{EE,ME,DE,CE},
p_rfi,p_rfci,p_rfdi,p_rfmci
p_mode[0:3], p_brstat[0:1],
p_reset_b, m_por
Reset- p_rst_vlemode
p_rst_endmode
p_rstbase[0:29]
related
Signals
p_wrs[0:1]
p_dbrstc[0:1]
p_cerraddr_out[0:31]
Cache Error Cross-Signaling
p_cache_dataerr_out
p_cerrway_out[0:3]
p_cache_tagerr_out
p_cerraddr_in[0:31]
p_cache_dataerr_in
p_cerrway_in[0:3]
p_cache_tagerr_in
p_lkstep_en Lockstep Control
nex_ext_src_id[0:3]
nex_mdo[n:0]
p_i_wayrep[0:1]
p_extpid_en
External p_extpid[6:7]
Alteration
Translation
nex_masterid[3:0]
p_halt, p_stop
Power p_halted, p_stopped, p_waiting
p_wakeup
Signals
Management
p_doze, p_nap, p_sleep
p_dbgrq_edm_out
p_dbgrq_edm_in
p_dbg_go_out
p_dbg_go_in
Debug
Lkstep
Cntl
p_devnt_out[0:7] Debug Events
p_nex3_updtdr_out
p_nex3_updtdr_in
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-4 Freescale Semiconductor
Figure 13-1. e200 Signal Groups
Table 13-1 shows e200 signal function and type, signal definition, and reset value. Signals are presented
in functional groups.
Table 13-1. Interface Signal Definitions
Signal Name Type Reset
Value Definition
Clock and Reset-related Signals
m_clk I —Global system clock
m_por I —Power-on reset
p_reset_b I —Processor reset input
p_wrs[0:1] O —Processor watchdog reset status outputs
p_dbrstc[0:1] O —Processor debug reset control outputs
p_rstbase[0:29] I —Reset exception handler base address
p_rst_endmode I —Reset endian mode select
p_rst_vlemode I —Reset VLE mode select, value to be loaded into TLB entry
0 on reset.
Memory Interface Signals
p_d_hmaster[3:0], p_i_hmaster[3:0] O —Master ID
p_d_haddr[31:0], p_i_haddr[31:0] O —Address buses
p_d_hwrite, p_i_hwrite*O 0 Write signal (always driven low for p_i_hwrite)
p_d_hprot[5:0], p_i_hprot[5:0] O —Protection Codes
p_d_htrans[1:0], p_i_htrans[1:0] O —Transfer Type
p_d_hburst[2:0], p_i_hburst[2:0] O —Burst Type
p_d_hsize[1:0], p_d_hsize[1:0] O —Transfer Size
p_d_hunalign, p_i_hunalign O — Indicates the current data access is a misaligned access.
p_d_hbstrb[7:0], p_i_hbstrb[7:0] O 0 Byte strobes
p_d_hrdata[63:0], p_i_hrdata[63:0] I —Read data buses
p_d_hwdata[63:0] O —Write data bus
p_d_hready, p_i_hready I —Transfer Ready
p_d_hresp[2:0], p_i_hresp[1:0] I —Transfer Response
p_i_wayrep[0:1] 0 —Way replacement
Indicates the cache way being replaced by a burst read
linefill.
p_d_ahb_clken, p_i_ahb_clken I —AHB Clock enable
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-5
Master ID Configuration Signals
p_masterid[3:0] I —CPU Master ID configuration
nex_masterid[3:0] I —Nexus Master ID configuration
Interrupt Interface Signals
p_extint_b I —External Input interrupt request
p_critint_b I —Critical Input interrupt request
p_nmi_b I —Non-Maskable Interrupt input request
p_avec_b I —Autovector request
Use internal interrupt vector offset
p_voffset[0:15] I —Interrupt vector offset for vectored interrupts
p_iack O 0 Interrupt Acknowledge. Indicates an interrupt is being
acknowledge.
p_ipend O 0 Interrupt Pending. Indicates an interrupt is pending
internally.
p_mcp_b I —Machine Check input request
CPU Lockstep Enable Signal
p_lkstep_en I —CPU Lockstep Enable input
Cache Error Cross-Signaling Signals
p_cerraddr_in[0:31] I —Cache error address input
p_cerrway_in[0:3] I —Cache error ways input
p_cache_tagerr_in I —Cache tag error input
p_cache_dataerr_in I —Cache data error input
p_cerraddr_out[0:31] O —Cache error address output
p_cerrway_out[0:3] O —Cache error ways output
p_cache_tagerr_out O 0 Cache error update output
p_cache_dataerr_out O 0 Cache data error output
External Translation Alteration Signals
p_extpid_en I —External PID enable input
p_extpid[6:7] I —External PID[6:7] input
Time Base Signals
p_tbint O 0 Time Base Interrupt
p_tbdisable I —Time Base Disable input
Table 13-1. Interface Signal Definitions (Continued)
Signal Name Type Reset
Value Definition
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-6 Freescale Semiconductor
p_tbclk I —Time Base Clock input
Misc. CPU Signals
p_cpuid[0:7] I —CPU ID input
p_sysvers[0:31] I —System Version inputs (for SVR)
p_pvrin[16:31] I —Inputs for PVR
p_pid0[0:7] O 0 PID0[24:31] outputs
p_pid0_updt O 0 PID0 update status
p_hid1_sysctl[0:7] O 0 HID1[16:23] outputs
CPU Reservation Signals
p_rsrv O 0 Reservation status
p_rsrv_clr I —Clear Reservation flag
CPU State Signals
p_mode[0:3] O 0 Indicates processor global status
p_pstat_pipe0[0:5], p_pstat_pipe1[0:5] O 0 Indicates processor status for each pipe
p_brstat[0:1] O 0 Indicates Branch prediction status
p_msr_EE, p_msr_DE, p_msr_CE,
p_msr_ME
O 0 Reflect the values of these MSR bits
p_rfi, p_rfci, p_rfdi, p_rfmci O 0 Reflect the execution of the corresponding instruction
p_mcp_out O 0 Indicates a machine check has occurred
p_doze O 0 Indicates low-power doze mode of operation
p_nap O 0 Indicates low-power nap mode of operation
p_sleep O 0 Indicates low-power sleep mode of operation
p_wakeup O 0 Indicates to external clock control module to enable clocks
and exit from low-power mode
p_halt I —CPU halt request
p_halted O 0 CPU halted
p_stop I —CPU stop request
p_stopped O 0 CPU stopped
p_waiting O 0 CPU waiting
CPU Debug Event Signals
p_ude I —Unconditional Debug Event
p_devt1 I —Debug Event 1 input
Table 13-1. Interface Signal Definitions (Continued)
Signal Name Type Reset
Value Definition
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-7
p_devt2 I —Debug Event 2 input
p_devnt_out[0:7] O 0 Debug Event outputs
Debug/Emulation Support Signals (Nexus 1/OnCE)
jd_en_once I —Enable full OnCE operation
jd_debug_b O 1 Indicates processor has entered debug session
jd_de_b I —Debug request
jd_de_en O 0 Active -high output enable for DE_b open-drain IO cell
jd_mclk_on I —Indicates the system clock controller is actively toggling
m_clk
jd_watchpt[0:21] O 0 Indicate watchpoint has occurred
Debug Lockstep Cross-Signaling Signals
p_dbgrq_edm_in I —Debug EDM debug request input
p_dbg_go_in I —Debug OCMD go input
p_nex3_updtdr_in I —Debug Nexus 3 synchronized update DR state in
p_dbgrq_edm_out O —Debug EDM debug request output
p_dbg_go_out O —Debug OCMD go output
p_nex3_updtdr_out O —Debug Nexus 3 synchronized update DR state out
Development Support Signals (Nexus 3)
nex_mcko O —Nexus 3 Clock Output
nex_rdy_b O —Nexus 3 Ready Output
nex_evto_b O —Nexus 3 Event-Out Output
nex_wevto[2:0] O — Nexus 3 Watchpoint Event-Out Outputs
nex_evti_b I — Nexus 3 Event-In Input
nex_mdo[n:0] O —Nexus 3 Message Data Output
nex_mseo_b[1:0] O —Nexus 3 Message Start/End Output
nex_ext_src_id[0:3] I —Nexus 3 SRC ID Input
JTAG-Related Signals
j_trst_b I —JTAG test reset from pad
j_tclk I —JTAG test clock from pad
j_tms I —JTAG test mode select from pad
j_tdi I —JTAG test data input from pad
j_tdo O 0 JTAG test data out to master controller or pad
Table 13-1. Interface Signal Definitions (Continued)
Signal Name Type Reset
Value Definition
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-8 Freescale Semiconductor
13.3 Signal Descriptions
The following subsections provide descriptions of the signals.
13.3.1 e200 Processor Clock (m_clk)
The m_clk input is the synchronous clock source for the e200 processor core.
Since the e200 is designed for static operation, m_clk can be gated off to lower power dissipation (for
example, during low-power stopped states).
j_tdo_en O 0 Enables TDO output buffer
j_tst_log_rst O 0 Indicates Test-Logic-Reset state of JTAG controller
j_capture_ir O 0 Indicates Capture_IR state of JTAG controller
j_update_ir O 0 Indicates Update_IR state of JTAG controller
j_shift_ir O 0 Indicates Shift_IR state of JTAG controller
j_capture_dr O 0 Indicates parallel test data register load state of JTAG
controller
j_shift_dr O 0 Indicates the TAP controller is in shift DR state
j_update_gp_reg O 0 Updates JTAG controller test data register
j_rti O 0 JTAG controller run-test-idle state
j_key_in I — Input for providing data to be shifted out during Shift_IR
state when jd_en_once is negated
j_en_once_regsel O 0 External Enable Once register select
j_nexus_regsel O 0 External Nexus register select
j_lsrl_regsel O 0 External LSRL register select
j_gp_regsel[0:9] O 0 General-purpose external JTAG register select
j_id_sequence[0:1] I —JTAG ID Register (2 MSBs of sequence field)
j_id_version[0:3] I —JTAG ID Register Version Field
j_serial_data I —Serial data from external JTAG registers
Test Primary Input/Output Signals
Test Control Interface1——Test Mode determination
Scan Test Interface1——Scan Configuration and Testing
Memory BIST Interface1——Memory BIST Configuration and Testing
1Please refer to the e200 Test Guide for information on the Test signals
Table 13-1. Interface Signal Definitions (Continued)
Signal Name Type Reset
Value Definition

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-9
13.3.2 Reset-Related Signals
The e200 supports several reset input signals for the CPU and JTAG/OnCE control logic: m_por,
p_reset_b, and j_trst_b. The reset domains have been partitioned such that the CPU p_reset_b signal
does not affect JTAG/OnCE logic and j_trst_b does not affect processor logic. It is possible and desirable
to access OnCE registers while the processor is running or in reset. Alternatively, it is also possible and
desirable to assert j_trst_b and clear the JTAG/OnCE logic without affecting the state of the processor.
The synchronization logic between the processor and debug module requires an assertion of either
j_trst_b or m_por during initial processor power-up reset in order to ensure proper operation. If the pin
associated with the j_trst_b input is designed with a pull-up resistor and left floating, then assertion of
m_por is required during the initial power-on processor reset. Similarly, for those systems which do not
have a power-on reset circuit and choose to tie m_por low, it is required to assert j_trst_b during processor
power-up reset. Once a power-up reset has been achieved, the two resets can be asserted independently.
The watchdog reset status output signals, p_wrs[0:1], are also provided and can be conditionally asserted
by watchdog time-outs.
The debug reset control outputs, p_dbrstc[0:1], can be asserted by debug control settings in DBCR0.
A set of input signals (p_rstbase[0:29], p_rst_endmode, p_rst_vlemode) are provided to relocate the
reset exception handler to allow for flexible placement of boot code and to select the default endian mode
and VLE mode of the CPU out of reset.
These signals are described in detail in the following subsections.
13.3.2.1 Power-On Reset (m_por)
The m_por signal is the power-on reset input for the e200 processor. This signal serves the following
purposes:
•m_por is “ORed” with the j_trst_b function. The resulting signal clears the JTAG TAP controller
and associated registers as well as the OnCE state machine. This is an asynchronous clear with a
short assertion time requirement.
•m_por is “ORed” with the p_reset_b function. The resulting signal clears certain CPU registers.
This is an asynchronous clear with a short assertion time requirement.
13.3.2.2 Reset (p_reset_b)
The p_reset_b input is the active-low reset input for the e200 processor. p_reset_b is treated as an
asynchronous input and is sampled by the clock control logic in the e200 debug module.
13.3.2.3 Watchdog Reset Status (p_wrs[0:1])
The p_wrs[0:1] outputs are active-high reset output status signals from the e200 core which reflect the
value of the TSR[WRS] status field. p_wrs[0:1] are conditionally asserted by the Watchdog Timer
(Section 2.4.8, “Timer Control Register (TCR),” and Section 2.4.9, “Timer Status Register (TSR)”).

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-10 Freescale Semiconductor
13.3.2.4 Debug Reset Control (p_dbrstc[0:1])
The p_dbrstc[0:1] outputs are active-high reset output control signals from the e200 core. They reflect the
value of the DBCR0[RST] status field and are conditionally asserted by the debug control logic
(Section 11.3.3.1, “Debug Control Register 0 (DBCR0)”).
13.3.2.5 Reset Base (p_rstbase[0:29])
The p_rstbase[0:29] inputs are provided to allow system integrators to be able to specify/relocate the base
address of the reset exception handler. These inputs are used to form the upper 30 bits of the instruction
access following negation of reset, which is used to fetch the initial instruction of the reset exception
handler. These bits should be driven to a value corresponding to the desired boot memory device in the
system. These inputs must remain stable in a window beginning two clocks prior to the negation of reset
and extending into the cycle in which the reset vector fetch is initiated. These inputs are also used by the
MMU during reset to form a default TLB entry 0 for translation of the reset vector fetch.
The initial instruction fetch occurs to the location [p_rstbase[0:29] || 2’b00].
13.3.2.6 Reset Endian Mode (p_rst_endmode)
The p_rst_endmode input is used by the MMU during reset to form the ‘E’ bit of the default TLB entry
0 for translation of the reset vector fetch. A low logic level on this signal causes the resultant entry ‘E’ bit
to set to ‘0’, indicating a big-endian page. A high logic level on this signal causes the resultant entry ‘E’
bit to set to ‘1’, indicating a little-endian page.
13.3.2.7 Reset VLE Mode (p_rst_vlemode)
The p_rst_vlemode input is used by the MMU during reset to form the ‘VLE’ bit of the default TLB entry
0 for translation of the reset vector fetch. A low logic level on this signal causes the resultant entry ‘VLE’
bit to set to ‘0’, indicating a Power ISA page. A high logic level on this signal causes the resultant entry
‘VLE’ bit to set to ‘1’, indicating a VLE page.
13.3.2.8 JTAG/OnCE Reset (j_trst_b)
The j_trst_b signal (referred to in the IEEE 1149.1 JTAG Specification as the TRST* signal) is an
asynchronous reset with a short assertion time requirement. It is “ORed” with the m_por function and the
resulting signal clears the OnCE TAP controller and associated registers as well as the OnCE state
machine.
13.3.3 Address and Data Buses
Dual instruction and data interfaces are provided by the e200z446n3. They are described together, with
appropriate differences denoted.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-11
13.3.3.1 Address Bus (p_d_haddr[31:0], p_i_haddr[31:0])
These outputs provide the address for a bus transfer. Per the AHB definition, p_[d,i]_haddr[31] is the
MSB and p_[d,i]_haddr[0] is the LSB.
13.3.3.2 Read Data Bus (p_d_hrdata[63:0], p_i_hrdata[63:0])
These inputs provide data to the e200z446n3 on read transfers. The read data bus can transfer 8, 16, 24,
32, or 64 bits of data per bus transfer. Instruction transfers do not use the 8-bit and 24-bit capability. Per
the AHB definition, p_[d,i]_hrdata[63] is the MSB and p_hrdata[0] is the LSB.
Table 13-2 shows the relationship of byte addresses to read data bus signals.
13.3.3.3 Write Data Bus (p_d_hwdata[63:0])
These outputs transfer data from the e200z446n3 on write transfers. The write data bus can transfer 8, 16,
24, 32, or 64 bits of data per bus transfer. Per the AHB definition, p_d_hwdata[63] is the MSB and
p_d_hwdata[0] is the LSB.
Figure 13-3 shows the relationship of byte addresses to write data bus signals.
Table 13-2. p_hrdata[63:0] Byte Address Mappings
Memory Byte Address Wired To p_[d,i]_hrdata Bits
000 7:0
001 15:8
010 23:16
011 31:24
100 39:32
101 47:40
110 55:48
111 63:56
Table 13-3. p_d_hwdata[63:0] Byte Address Mappings
Memory Byte Address Wired To p_d_hwdata Bits
000 7:0
001 15:8
010 23:16
011 31:24
100 39:32
101 47:40
110 55:48
111 63:56
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-12 Freescale Semiconductor
13.3.4 Transfer Attribute Signals
The following paragraphs describe the transfer attribute signals, which provide additional information
about the bus transfer cycle. Transfer attributes are driven with address at the beginning of a bus transfer.
13.3.4.1 Transfer Type (p_d_htrans[1:0], p_i_htrans[1:0])
The processor drives these signals to indicate the current transfer type. Table 13-4 shows
p_[d,i]_htrans[1:0] encoding.
If the p_[d,i]_htrans[1:0] encoding is neither IDLE or BUSY, a transfer is being requested. The
e200z446n3 does not utilize the BUSY encoding and does not present this type of transfer to a bus slave.
Slaves must terminate IDLE transfers with a zero wait-state OKAY response and ignore the (non-existent)
transfer.
13.3.4.2 Write (p_d_hwrite, p_i_hwrite)
This output signal defines the data transfer direction for the current bus cycle. A high (logic one) level
indicates a write cycle, and a low (logic zero) level indicates a read cycle. For p_i_hwrite, the signal is
internally driven low for all instruction AHB transfers.
13.3.4.3 Transfer Size (p_d_hsize[1:0], p_i_hsize[1:0])
The p_[d,i]_hsize[1:0] signals indicate the data size for a bus transfer. Table 13-5 shows the definitions of
the p_[d,i]_hsize[1:0] encodings. For misaligned transfers, the transfer size may indicate a size larger than
the requested size to ensure that all asserted byte strobes are contained within the “container” defined by
Table 13-4. p_[d,i]_htrans[1:0] Transfer Type Encoding
p_[d,i]_htrans[1] p_[d,i]_htrans[0] Access type
00IDLE
No data transfer is required
0 1 BUSY
Master is busy, burst transfer continues. (encoding not used
by the e200z4)
1 0 NONSEQ
Indicates the first transfer of a burst, or a single transfer.
Address and control signals are unrelated to the previous
transfer.
1 1 SEQ
Indicates the continuation of a burst. Address and control
signals are related to the previous transfer. Control signals
are the same, Address has been incremented by the size of
the data transferred (optionally wrapped).
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-13
p_[d,i]_hsize[1:0]. Refer to Table 13-11 and Table 13-12 for p_[d,i]_hsize[1:0] encodings used for
aligned and misaligned transfers.
13.3.4.4 Burst Type (p_d_hburst[2:0], p_i_hburst[2:0])
The p_[d,i]_hburst[2:0] signals indicate the burst type for a bus transfer. Table 13-6 shows the definitions
of the p_[d,i]_hburst[2:0] encodings.
The e200z446n3 only utilizes SINGLE and WRAP4 burst types. In addition, all WRAP4 bursts are of
double-word size aligned to double-word boundaries.
Table 13-5. p_[d,i]_hsize[1:0] Transfer Size Encoding
p_[d,i]_hsize[1:0] Transfer Size
00 Byte
01 Half Word (2 bytes)
10 Word (4 bytes)
11 Double Word (8 bytes)
Table 13-6. p_[d,i]_hburst[2:0] Burst Type Encoding
p_hburst[2:0] Burst Type
000 SINGLE
No burst, single beat only
001 INCR
• Incrementing burst of unspecified length
•Unused
010 WRAP4
4-beat wrapping burst
011 INCR4
• 4-beat incrementing burst
• Unused
100 WRAP8
• 8-beat wrapping burst
• Unused
101 INCR8
• 8-beat incrementing burst
• Unused
110 WRAP16
• 16-beat wrapping burst
• Unused
111 INCR16
• 16-beat incrementing burst
• Unused
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-14 Freescale Semiconductor
13.3.4.5 Protection Control (p_d_hprot[5:0], p_i_hprot[5:0])
The e200z446n3 drives the p_[d,i]_hprot[5:0] signals to indicate the type of access for the current bus
cycle. p_[d,i]_hprot[0] indicates instruction/data, p_[d,i]_hprot[1] indicates user/supervisor.
p_[d,i]_hprot[5] indicates whether the access is exclusive (such as for a lbarx, lharx, lwarx, stbcx.,
sthcx., or stwcx. instruction). p_[d,i]_hprot[4:2] (allocate, cacheable, bufferable) are used to indicate
particular cache attributes for the access and are driven to default values based on settings in the memory
management unit.
Table 13-7 shows the definitions of the p_d_hprot[5:0] signals.
Table 13-8 shows the definitions of the p_i_hprot[5:0] signals.
Table 13-7. p_d_hprot[5:0] Protection Control Encoding
p_hprot[5] p_hprot[4] p_hprot[3] p_hprot[2] p_hprot[1] p_hprot[0] Transfer Type
— — — — 0 1 User-mode access
— — — — 1 1 Supervisor-mode access
— 0 0 0 — 1 Cache-Inhibited
— 0 0 1 — 1 Guarded, not Cache-Inhibited
—010—1Reserved
—011—1Reserved
—100—1Reserved
—101—1Reserved
— 1 1 0 — 1 Cacheable, Writethrough
— 1 1 1 — 1 Cacheable, Writeback
0 — — — — 1 Not Exclusive
1 — — — — 1 Exclusive Access
Table 13-8. p_i_hprot[5:0] Protection Control Encoding
p_hprot[5] p_hprot[4] p_hprot[3] p_hprot[2] p_hprot[1] p_hprot[0] Transfer Type
0 — — — 0 0 User-mode access
0 — — — 1 0 Supervisor-mode access
0000—0Cache-Inhibited
0001—0Reserved
0010—0Reserved
0011—0Reserved
0100—0Reserved
0101—0Reserved
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-15
Note that all signals are provided on both I and D ports, although they will not all change state. For
example, p_d_hprot0 is always high).
The e200z446n3 maps the Power ISA embedded category storage attributes to the AHB data port hprot
signals in the manner described in Table 13-9:
13.3.4.6 Cache Way Replacement (p_i_wayrep[0:1])
The p_i_wayrep[0:1] control signals are driven valid during cache line-fills to indicate which way of the
cache is being replaced. These signals are driven valid with address and attribute timing, and remain valid
for all beats of the burst read. These signals are undefined on all other transfer types.
13.3.5 Byte Lane Specification
Read transactions transfer from 1 to 8 bytes of data on the p_[d,i]_hrdata[63:0] bus. The byte lanes
involved in the transfer are determined by the starting byte number specified by the lower address bits in
conjunction with the transfer size and byte strobes. Addressing of the byte lanes is shown big-endian (left
to right) regardless of the endian mode of the e200 core. The byte of memory corresponding to address 0
is connected to B0 (p_[d,i]_h{r,w}data[7:0]) and the byte of memory corresponding to address 7 is
connected to B7 (p_[d,i]_h{r,w}data[63:56]). The CPU internally permutes read data as required for the
endian mode of the current access. Misaligned transfers are indicated with the p_[d,i]_hunalign signal to
indicate that byte strobes do not correspond exactly to size and low-order address bits.
0110—0Cacheable
0111—0Reserved
Table 13-9. Mapping of Access attributes to p_d_hprot[4:2] Protection Control
[I] [G] [W] p_hprot[4] p_hprot[3] p_hprot[2] Transfer Type
0 0 0 1 1 1 Cacheable, Writeback
0 0 1 1 1 0 Cacheable, Writethrough
0 1 — 0 0 1 Guarded, not Cache-Inhibited
1 — — 0 0 0 Cache-Inhibited
— — — 0 0 1 Buffered Store, page marked
Guarded
— — — 1 1 0 Buffered Store and page marked
Writethrough, and non-Guarded
— — — 1 1 1 Buffered Store and page marked
copyback, and non-Guarded
Table 13-8. p_i_hprot[5:0] Protection Control Encoding
p_hprot[5] p_hprot[4] p_hprot[3] p_hprot[2] p_hprot[1] p_hprot[0] Transfer Type
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-16 Freescale Semiconductor
13.3.5.1 Unaligned Access (p_d_hunalign, p_i_hunalign)
The p_[d,i]_hunalign output signal indicates that the current access is a misaligned access. This signal is
asserted for misaligned data accesses, and for misaligned instruction accesses from VLE pages. Normal
Power ISA instruction pages are always aligned. The timing of this signal is approximately the same as
address timing. When p_[d,i]_hunalign is asserted, the p_[d,i]_hbstrb[7:0] byte strobe signals indicate
the selected bytes involved in the current portion of the misaligned access, which may not include all bytes
defined by the size and low-order address signals. Aligned transfers also assert the byte strobes, but in a
manner corresponding to size and low order address bits.
13.3.5.2 Byte Strobes (p_d_hbstrb[7:0], p_i_hbstrb[7:0])
The p_[d,i]_hbstrb[7:0] byte strobe signals indicate the selected bytes involved in the current transfer. For
a misaligned access, the current transfer may not include all bytes defined by the size and low-order
address signals. For aligned transfers, the byte strobe signals will correspond to the bytes defined by the
size and low-order address signals. Table 13-3 shows the relationship of byte addresses to the byte strobe
signals.
Table 13-11 lists all of the data transfer permutations. Note that misaligned data requests which cross a
64-bit boundary are broken up into two separate bus transactions, and the address value and the size
encoding for the first transfer is not modified. The table is arranged in a big-endian fashion, but the active
lanes are the same regardless of the endian-mode of the access. The e200z446n3 performs the proper byte
routing internally based on endianness.
Table 13-10. p_[d,i]_hbstrb[7:0] to Byte Address Mappings
Memory Byte Address Wired to p_h{R,w}data Bits Corresponding Byte Strobe Signal
000 7:0 p_[d,i]_hbstrb[0]
001 15:8 p_[d,i]_hbstrb[1]
010 23:16 p_[d,i]_hbstrb[2]
011 31:24 p_[d,i]_hbstrb[3]
100 39:32 p_[d,i]_hbstrb[4]
101 47:40 p_[d,i]_hbstrb[5]
110 55:48 p_[d,i]_hbstrb[6]
111 63:56 p_[d,i]_hbstrb[7]
Table 13-11. Byte Strobe Assertion for Transfers
Program Size
and byte offset A(2:0) HSIZE
[1:0]
Data Bus Byte Strobes HUNALIGN
B0 B1 B2 B3 B4 B5 B6 B7
Byte @000 0 0 0 0 0 X ——————— 0
Byte @001 0 0 1 0 0 — X —————— 0
Byte @010 0 1 0 0 0 —— X ————— 0
Byte @011 0 1 1 0 0 ——— X ———— 0
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-17
Byte @100 1 0 0 0 0 ———— X ——— 0
Byte @101 1 0 1 0 0 ————— X —— 0
Byte @110 1 1 0 0 0 —————— X — 0
Byte @111 1 1 1 0 0 ——————— X 0
Half @000 0 0 0 0 1 X X—————— 0
Half @001 0 0 1 1 0#— X X ————— 1
Half @010 0 1 0 0 1 —— X X———— 0
Half @011 0 1 1 1 1#——— X X ——— 1
Half @100 1 0 0 0 1 ———— X X—— 0
Half @101 1 0 1 1 0#————— X X — 1
Half @110 1 1 0 0 1 —————— X X 0
Half @111
(2 bus transfers)
1 1 1
0 0 0
0 1*
0 0
—
X
—
—
—
—
—
—
—
—
—
—
—
—
X
—
1
0
Word @000 0 0 0 1 0 XXXX———— 0
Word @001 0 0 1 1 1#—XXXX——— 1
Word @010 0 1 0 1 1#——XXXX—— 1
Word @011 0 1 1 1 1#———XXXX— 1
Word @100 1 0 0 1 0 ———— XXXX 0
Word @101
(2 bus transfers)
1 0 1
0 0 0
1 0*
0 0
—
X
—
—
—
—
—
—
—
—
X
—
X
—
X
—
1
0
Word @110
(2 bus transfers)
1 1 0
0 0 0
1 0*
0 1
—
X
—
X
—
—
—
—
—
—
—
—
X
—
X
—
1
0
Word @111
(2 bus transfers)
1 1 1
0 0 0
10*
1 0
—
X
—
X
—
X
—
—
—
—
—
—
—
—
X
—
1
1
Double Word @000 0 0 0 1 1 XXXXXXXX 0
Double Word @100
(2 bus transfers)
1 0 0
+0 0 0
1 1*
1 0
—
X
—
X
—
X
—
X
X
—
X
—
X
—
X
—
1
0
Table Notes:
“X” indicates byte lanes involved in the transfer; Other lanes will contain driven but unused data.
# These misaligned transfers drive size according to the size of the power of two aligned “container” in
which the byte strobes are asserted.
* These misaligned cases drive request size according to the size specified by the load or store instruction.
Table 13-11. Byte Strobe Assertion for Transfers
Program Size
and byte offset A(2:0) HSIZE
[1:0]
Data Bus Byte Strobes HUNALIGN
B0 B1 B2 B3 B4 B5 B6 B7
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-18 Freescale Semiconductor
Table 13-12 shows the final layout in memory for data transferred from a 64-bit GPR containing the bytes
‘A B C D E F G H’ to memory. Misaligned accesses which cross a double-word boundary are broken into
a pair of accesses by the CPU. Double-word transfers are always word or double-word aligned.
Table 13-12. Big and Little Endian Memory Storage
Program Size
and byte offset A(3:0) HSIZE
(1:0)
Even Double Word—0 0dd Double Word—1
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
Byte @0000 0 0 0 0 0 0 H — — — — — — — — — — — — — — —
Byte @0001 0 0 0 1 0 0 — H — — — — — — — — — — — — — —
Byte @0010 0 0 1 0 0 0 — — H — — — — — — — — — — — — —
Byte @0011 0 0 1 1 0 0 — — — H — — — — — — — — — — — —
Byte @0100 0 1 0 0 0 0 — — — — H — — — — — — — — — — —
Byte @0101 0 1 0 1 0 0 — — — — — H — — — — — — — — — —
Byte @0110 0 1 1 0 0 0 — — — — — — H — — — — — — — — —
Byte @0111 0 1 1 1 0 0 — — — — — — — H — — — — — — — —
Byte @1000 1 0 0 0 0 0 — — — — — — — — H — — — — — — —
Byte @1001 1 0 0 1 0 0 — — — — — — — — — H — — — — — —
Byte @1010 1 0 1 0 0 0 — — — — — — — — — — H — — — — —
Byte @1011 1 0 1 1 0 0 — — — — — — — — — — — H — — — —
Byte @1100 1 1 0 0 0 0 — — — — — — — — — — — — H — — —
Byte @1101 1 1 0 1 0 0 — — — — — — — — — — — — — H — —
Byte @1110 1 1 1 0 0 0 — — — — — — — — — — — — — — H —
Byte @1111 1 1 1 1 0 0 — — — — — — — — — — — — — — — H
B. E. Half @0000 0 0 0 0 0 1 G H — — — — — — — — — — — — — —
B. E. Half @0001 0 0 0 1 1 0#—G H —————————————
B. E. Half @0010 0 0 1 0 0 1 — — G H — — — — — — — — — — — —
B. E. Half @0011 0 0 1 1 1 1#———G H———————————
B. E. Half @0100 0 1 0 0 0 1 — — — — G H — — — — — — — — — —
B. E. Half @0101 0 1 0 1 1 0#—————G H —————————
B. E. Half @0110 0 1 1 0 0 1 — — — — — — G H — — — — — — — —
B. E. Half @0111 0 1 1 1 0 1 — — — — — — — G — — — — — — — —
1 0 0 0 0 0 ————————H ———————
B. E. Half @1000 1 0 0 0 0 1 — — — — — — — — G H — — — — — —
B. E. Half @1001 1 0 0 1 1 0#—————————G H—————
B. E. Half @1010 1 0 1 0 0 1 — — — — — — — — — — G H — — — —
B. E. Half @1011 1 0 1 1 1 1#———————————G H———
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-19
B. E. Half @1100 1 1 0 0 0 1 — — — — — — — — — — — — G H — —
B. E. Half @1101 1 1 0 1 1 0#—————————————G H —
B. E. Half @1110 1 1 1 0 0 1 — — — — — — — — — — — — — — G H
B. E. Half @1111 1 1 1 1 0 1 — — — — — — — — — — — — — — — G
0 0 0 0
(next
dword)
0 0
H———————————————
L E. Half @0000 0 0 0 0 0 1 H G ——————————————
L. E. Half @0001 0 0 0 1 1 0#—H G—————————————
L. E. Half @0010 0 0 1 0 0 1 —— H G————————————
L. E. Half @0011 0 0 1 1 1 1#———H G———————————
L. E. Half @0100 0 1 0 0 0 1 ———— H G——————————
L. E. Half @0101 0 1 0 1 1 0#—————H G—————————
L. E. Half @0110 0 1 1 0 0 1 ——————H G————————
L. E. Half @0111 0 1 1 1 0 1 ——————— H ————————
1 0 0 0 0 0 ————————G———————
L. E. Half @1000 1 0 0 0 0 1 ————————H G——————
L. E. Half @1001 1 0 0 1 1 0#————————— H G—————
L. E. Half @1010 1 0 1 0 0 1 ——————————H G————
L. E. Half @1011 1 0 1 1 1 1#——————————— H G———
L. E. Half @1100 1 1 0 0 0 1 ———————————— H G——
L. E. Half @1101 1 1 0 1 1 0#—————————————H G—
L. E. Half @1110 1 1 1 0 0 1 —————————————— H G
L. E. Half @1111 1 1 1 1 0 1 ———————————————H
+ 0 0 0 0
(next
dword)
0 0
G———————————————
B. E. Word @0000 0 0 0 0 1 0 E F G H — — — — — — — — — — — —
B. E. Word @0001 0 0 0 1 1 1#— E F G H ———————————
B. E. Word @0010 0 0 1 0 1 1#—— E F G H ——————————
B. E. Word @0011 0 0 1 1 1 1#——— E F G H —————————
B. E. Word @0100 0 1 0 0 0 1 0 — — — — E F G H — — — — — — — —
Table 13-12. Big and Little Endian Memory Storage (Continued)
Program Size
and byte offset A(3:0) HSIZE
(1:0)
Even Double Word—0 0dd Double Word—1
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-20 Freescale Semiconductor
B. E. Word @0101 0 1 0 1 1 0 — — — — — E F G — — — — — — — —
1 0 0 0 0 0 ————————H ———————
B. E. Word @0110 0 1 1 0 1 0 — — — — — — E F — — — — — — — —
1 0 0 0 0 1 ————————G H——————
B. E. Word @0111 0 1 1 1 1 0 — — — — — — — E — — — — — — — —
1 0 0 0 1 0 ————————F G H—————
B. E. Word @1000 1 0 0 0 1 0 — — — — — — — — E F G H — — — —
B. E. Word @1001 1 0 0 1 1 1#————————— E F G H ———
B. E. Word @1010 1 0 1 0 1 1#—————————— E F G H ——
B. E. Word @1011 1 0 1 1 1 1#——————————— E F G H —
B. E. Word @1100 1 1 0 0 1 0 — — — — — — — — — — — — E F G H
B. E. Word @1101 1 1 0 1 1 0 — — — — — — — — — — — — — E F G
+ 0 0 0 0
(next
dword)
0 0
H———————————————
B. E. Word @1110 1 1 1 0 1 0 — — — — — — — — — — — — — — E F
+ 0 0 0 0
(next
dword)
0 1
G H ——————————————
B. E. Word @1111 1 1 1 1 1 0 — — — — — — — — — — — — — — — E
+ 0 0 0 0
(next
dword) 1 0
F G H —————————————
L. E. Word @0000 0 0 0 0 1 0 H G F E ————————————
L. E. Word @0001 0 0 0 1 1 1#— H G F E ———————————
L. E. Word @0010 0 0 1 0 1 1#—— H G F E ——————————
L. E. Word @0011 0 0 1 1 1 1#———H G F E —————————
L. E. Word @0100 0 1 0 0 1 0 — — — — H G F E — — — — — — — —
L. E. Word @0101 0 1 0 1 1 0 — — — — — H G F — — — — — — — —
1 0 0 0 0 0 ———————— E ———————
L. E. Word @0110 0 1 1 0 1 0 — — — — — — H G — — — — — — — —
1 0 0 0 0 1 ————————F E——————
L. E. Word @0111 0 1 1 1 1 0 ——————— H ————————
1 0 0 0 1 0 ————————G F E—————
Table 13-12. Big and Little Endian Memory Storage (Continued)
Program Size
and byte offset A(3:0) HSIZE
(1:0)
Even Double Word—0 0dd Double Word—1
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-21
L. E. Word @1000 1 0 0 0 1 0 — — — — — — — — H G F E — — — —
L. E. Word @1001 1 0 0 1 1 1#————————— H G F E ———
L. E. Word @1010 1 0 1 0 1 1#——————————H G F E ——
L. E. Word @1011 1 0 1 1 1 1#——————————— H G F E —
L. E. Word @1100 1 1 0 0 1 0 — — — — — — — — — — — — H G F E
L. E. Word @1101 1 1 0 1 1 0 — — — — — — — — — — — — — H G F
+ 0 0 0 0
(next
dword)
0 0 E ———————————————
L. E. Word @1110 1 1 1 0 1 0 — — — — — — — — — — — — — — H G
+ 0 0 0 0
(next
dword)
0 1 F E ——————————————
L. E. Word @1111 1 1 1 1 1 0 ———————————————H
+ 0 0 0 0
(next
dword)
1 0 G F E —————————————
B.E. Double Word
@0000
0 0 0 0 1 1 A B C D E F G H————————
B. E. Double Word
@0100
0 1 0 0 1 1 ———— A B C D————————
1 0 0 0
(next
dword)
1 0
———————— E F G H ————
B.E. Double Word
@1000
1 0 0 0 1 1 — — — — — — — — A B C D E F G H
B. E. Double Word
@1100
1 1 0 0 1 1 ———————————— A B C D
+ 0 0 0 0
(next
dword) 1 0
E F G H ————————————
L.E. Double Word
@0000
0 0 0 0 1 1 H G F E D C B A ————————
L. E. Double Word
@0100
0 1 0 0 1 1 ———— H G F E ————————
1 0 0 0
(next
dword)
1 0
————————D C B A ————
L.E. Double Word
@1000
0 0 0 0 1 1 — — — — — — — — H G F E D C B A
Table 13-12. Big and Little Endian Memory Storage (Continued)
Program Size
and byte offset A(3:0) HSIZE
(1:0)
Even Double Word—0 0dd Double Word—1
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-22 Freescale Semiconductor
13.3.6 Transfer Control Signals
The following paragraphs describe the transfer control signals.
13.3.6.1 Transfer Ready (p_d_hready, p_i_hready)
The p_[d,i]_hready input signal indicates completion of a requested transfer operation. An external
device asserts p_[d,i]_hready to terminate the transfer. The p_[d,i]_hresp[2:0] signals indicate status of
the transfer.
13.3.6.2 Transfer Response (p_d_hresp[2:0], p_i_hresp[1:0])
The p_d_hresp[2:0] and p_i_hresp[1:0] signals indicate status of a terminating transfer on the respective
interfaces. Table 13-13 and Table 13-14 show the definitions of the p_i_hresp[1:0] and p_d_hresp[2:0]
encodings.
L. E. Double Word
@1100
1 1 0 0 1 1 ———————————— H G F E
+ 0 0 0 0
(next
dword)
1 0
D C B A ————————————
Notes:
Assumes a 64-bit GPR contains ‘A B C D E F G H’
# These misaligned transfers drive size according to the size of the power of two aligned “container” in which the byte strobes
are asserted.
Table 13-13. p_i_hresp[1:0] Transfer Response Encoding
p_i_hresp[1:0] Response Type
00 OKAY
Transfer terminated normally
01 ERROR
Transfer terminated abnormally
10 Reserved (RETRY not supported in AHB-Lite protocol)
11 Reserved (SPLIT not supported in AHB-Lite protocol)
Table 13-14. p_d_hresp[2:0] Transfer Response Encoding
p_d_hresp[2:0] Response Type
000 OKAY
Transfer terminated normally
001 ERROR
Transfer terminated abnormally
Table 13-12. Big and Little Endian Memory Storage (Continued)
Program Size
and byte offset A(3:0) HSIZE
(1:0)
Even Double Word—0 0dd Double Word—1
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-23
The ERROR and XFAIL responses are required to be two cycle responses. In this case, the ERROR or
XFAIL responses must be signaled one cycle prior to assertion of p_[d,i]_hready and must remain
unchanged during the cycle p_[d,i]_hready is asserted.
The XFAIL response is signaled to the CPU via the p_d_xfail_b internal signal. See Section 12.2.3.16,
“Store Exclusive Failure (p_d_xfail_b).”
13.3.7 AHB Clock Enable Signals
The following paragraphs describe the AHB clock enable signals. These inputs are used to qualify the
processor m_clk edges used for AHB output signal state updates and AHB input signal sampling for the
memory interfaces. This allows for system AHB interfaces that run at submultiples of the m_clk
frequency. These signals do not affect non-AHB interface signals.
13.3.7.1 Instruction AHB Clock Enable (p_i_ahb_clken)
The p_i_ahb_clken input signal is used to qualify the rising edges of m_clk on which the input signals
p_i_hready, p_i_hresp[1:0] and p_i_hrdata[63:0] are sampled. (Note that by definition,
p_i_hrdata[63:0] sampling is also qualified by the recognized assertion of p_i_hready, per the AHB
protocol). When driven low, no sampling of these signals occurs, since m_clk is gated at the sampling
logic.
The p_i_ahb_clken input signal is also used to qualify the rising edges of m_clk on which the output
signals p_i_haddr[31:0], p_i_hbstrb[7:0], p_i_hburst[1:0], p_i_hmaster[3:0], p_i_hprot[5:0],
p_i_hsize[1:0], p_i_htrans[1:0], and p_i_hunalign change state (by definition, in conjunction with the
p_i_hready input per the AHB protocol).
The p_i_ahb_clken signal should normally be driven (change state) off the falling edge of m_clk to ensure
the proper setup and hold times surrounding the m_clk high period. It must remain stable throughout the
duration of m_clk high. This signal is not internally synchronized. It should be tied high when operating
the data AHB at m_clk frequency. The integration guide defines the required setup time before m_clk rises
and hold time after m_clk falls.
010 Reserved (RETRY not supported in AHB-Lite protocol)
011 Reserved (SPLIT not supported in AHB-Lite protocol)
100 XFAIL
Exclusive store failed (stwcx. did not completed successfully)
101 Reserved
110 Reserved
111 Reserved
Table 13-14. p_d_hresp[2:0] Transfer Response Encoding (Continued)
p_d_hresp[2:0] Response Type

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-24 Freescale Semiconductor
13.3.7.2 Data AHB Clock Enable (p_d_ahb_clken)
The p_d_ahb_clken input signal is used to qualify the rising edges of m_clk on which the input signals
p_d_hready, p_d_hresp[2:0], and p_d_hrdata[63:0] are sampled. (Note that by definition,
p_d_hrdata[63:0] sampling is also qualified by the recognized assertion of p_d_hready, per the AHB
protocol). When driven low, no sampling of these signals occurs because m_clk is gated at the sampling
logic.
The p_d_ahb_clken input signal is also used to qualify the rising edges of m_clk on which the output
signals p_d_haddr[31:0], p_d_hbstrb[7:0], p_d_hburst[1:0], p_d_hmaster[3:0], p_d_hprot[5:0],
p_d_hsize[1:0], p_d_htrans[1:0], p_d_hunalign, p_d_hwdata[63:0], and p_d_hwrite change state (by
definition, in conjunction with the p_d_hready input per the AHB protocol).
The p_d_ahb_clken signal should normally be driven (change state) off the falling edge of m_clk to
ensure the proper setup and hold times surrounding the m_clk high period. It must remain stable
throughout the duration of m_clk high. This signal is not internally synchronized. It should be tied high
when operating the data AHB at m_clk frequency. The integration guide defines the required setup time
before m_clk rises and hold time after m_clk falls.
13.3.8 Master ID Configuration Signals
The following paragraphs describe the master ID configuration signals. These inputs are used to drive the
p_[d,i]_hmaster[3:0] outputs when a bus cycle is active.
13.3.8.1 CPU Master ID (p_masterid[3:0])
The p_masterid[3:0] input signals configure the master ID for the CPU. These values are driven on the
p_[d,i]_hmaster[3:0] outputs for a CPU-initiated bus cycle.
13.3.8.2 Nexus Master ID (nex_masterid[3:0])
The nex_masterid[3:0] input signals configure the master ID for the Nexus 3 unit. These values are driven
on the p_d_hmaster[3:0] outputs for a Nexus 3 initiated bus cycle.
13.3.9 Interrupt Signals
The following paragraphs describe the signals that control the interrupt functions. Interrupt request inputs
p_extint_b and p_critint_b to the core are level sensitive, not edge-triggered; thus the interrupt controller
module must keep the interrupt request as well as the appropriate p_voffset or p_avec_b inputs asserted
until the interrupt is serviced to guarantee that the CPU core recognizes the request. Once a request is
generated, there is no guarantee the CPU will not recognize the interrupt request even if the request is later
removed. Interrupt requests must be held stable to avoid spurious responses. The interrupt inputs p_nmi_b
and p_mcp_b are transition sensitive, as described in Section 13.3.9.8, “Machine Check (p_mcp_b),” and
Section 13.3.9.3, “Non-Maskable Input Interrupt Request (p_nmi_b).”

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-25
13.3.9.1 External Input Interrupt Request (p_extint_b)
This active-low signal provides the external input interrupt request to the e200 core. p_extint_b is masked
by MSR[EE]. This signal is not internally synchronized by the e200 core; thus it must meet setup and hold
time constraints relative to m_clk when the e200 core clock is running. This signal is level sensitive and
must remain asserted to be guaranteed to be recognized.
13.3.9.2 Critical Input Interrupt Request (p_critint_b)
This active-low signal provides the critical input interrupt request to the e200 core. p_critint_b is masked
by MSR[CE]. This signal is not internally synchronized by the e200 core; thus it must meet setup and hold
time constraints relative to m_clk when the e200 core clock is running. This signal is level sensitive and
must remain asserted to be guaranteed to be recognized.
13.3.9.3 Non-Maskable Input Interrupt Request (p_nmi_b)
This active-low, transition sensitive signal provides a non-maskable interrupt request to the e200 core. This
signal is not internally synchronized by the e200 core; thus it must meet setup and hold time constraints to
m_clk when the e200 core clock is running. The p_nmi_b input is sampled on two consecutive m_clk
periods to detect a transition from the negated to the asserted state. Initiation of exception processing for
the NMI is internally qualified with this transition.
Note that when the core is halted or stopped without clocks, transitions on this signal are not immediately
detected. Instead, the p_ipend and p_wakeup signals are asserted to indicate to system logic that an
interrupt is pending, so the clocks should be started and the p_halt and p_stop inputs negated so that the
interrupt may be processed.
13.3.9.4 Interrupt Pending (p_ipend)
This active-high signal indicates that an asserted p_extint_b, p_critint_b, or p_nmi_b interrupt request
input or an enabled timer facility interrupt (Watchdog, Fixed-Interval, or Decrementer) has been
recognized internally by the core and is enabled by the appropriate bit in the MSR (p_nmi_b is never
masked), and is asserted combinationally from the qualified interrupt request inputs as well as when
MCSR[NMI] is set. The p_ipend signal can be used to signal other bus masters or a bus arbiter that an
interrupt condition is pending. External power management logic can use this output to control operation
of the core and other logic or may use the p_wakeup signal similarly. Actual handling of the interrupt
request may be delayed due to higher priority exceptions; assertion of p_ipend does not mean that
exception processing for the interrupt has begun. The p_nmi_b input affects the p_ipend signal slightly
differently; the p_ipend output asserts any time the p_nmi_b input is asserted or whenever the
MCSR[NMI] syndrome bit is set.
13.3.9.5 Autovector (p_avec_b)
This active-low signal is asserted with either the p_extint_b or p_critint_b interrupt request to request use
of the internal IVOR4 or IVOR0 registers for obtaining an exception vector offset. If this signal is negated
when a p_extint_b or p_critint_b interrupt is requested, an external vector offset is taken from the
p_voffset[0:15] input signals. This signal is level sensitive and must remain asserted to be guaranteed to

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-26 Freescale Semiconductor
be recognized. This signal must be driven to a valid state during each clock cycle that either p_extint_b
or p_critint_b is asserted.
13.3.9.6 Interrupt Vector Offset (p_voffset[0:15])
These input signals provide a vector offset to be used when exception processing begins for an incoming
interrupt request. These signals are sampled along with the p_extint_b and p_critint_b interrupt request
inputs, and must be driven to a valid value when either of these signals is asserted unless the p_avec_b
signal is also asserted. If p_avec_b is asserted, these inputs are not used. The p_voffset[0:15] signals
correspond to bits 16:31 of the IVOR registers. p_voffset[0:11] are used in forming the exception handler
address, and p_voffset[12:15] are reserved and should be driven low. The p_voffset[0:15] signals are level
sensitive and must remain asserted to be guaranteed to be recognized correctly. In addition, these signals
must be asserted concurrently with the p_extint_b and p_critint_b inputs when used.
13.3.9.7 Interrupt Vector Acknowledge (p_iack)
The p_iack output signal provide an interrupt vector acknowledge indicator to allow external interrupt
controllers to be informed when a critical input or external input interrupt is being processed. The p_iack
signal is asserted after the cycle in which the p_avec_b and p_voffset[0:15] signals are sampled in
preparation for exception processing. See Figure 13-46 and Figure 13-47 for timing diagrams of operation.
13.3.9.8 Machine Check (p_mcp_b)
This active-low, transition sensitive signal provides a machine check interrupt request to the e200 core.
p_mcp_b is masked by the HID0[EMCP] bit. This signal is not internally synchronized by the e200 core;
therefore, it must meet setup and hold time constraints to m_clk when the e200 core clock is running. The
p_mcp_b input is sampled on two consecutive m_clk periods to detect a transition from the negated to the
asserted state. Note that when the core is halted or stopped without clocks, transitions on this signal are not
immediately detected, so it must be held asserted until it can be recognized with the m_clk running.
The p_mcp_b signal is sampled while the e200 core is in debug mode or is in the waiting, halted, or
stopped power management states if the m_clk is running. See Section •, “Processor Waiting (p_waiting),”
Section •, “Processor Halted (p_halted),” and Section •, “Processor Stopped (p_stopped).”
13.3.10 Lockstep Enable Signal (p_lkstep_en)
The p_lkstep_en signal enables lockstep cross-signaling operation for the cache and the Nexus1 (OnCE)
unit. When asserted, the cache and debug lockstep cross-signaling inputs are enabled. When negated, these
input signals are ignored, but the cross-signaling output signals are still driven. Refer to Section 13.4.3,
“Cache Error Cross-Signaling Operation,” and Section 13.3.21, “Debug Lockstep Cross-signaling
Signals.” Transitions on this signal must be properly coordinated by the SoC to ensure that enabling and
disabling of lockstep operation is performed at appropriate operational boundaries, otherwise undefined
behavior may result.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-27
13.3.11 Cache Error Cross-signaling Signals
The following paragraphs describe the cache error cross-signaling interface signals. Examples of operation
are provided in Section 13.4.3, “Cache Error Cross-Signaling Operation.”
13.3.11.1 Cache Tag Error Out (p_cache_tagerr_out)
The active-high p_cache_tagerr_out output signal is used to indicate a valid cache tag parity error has
occurred during this cycle. It is only signaled if a cache operation or exception is signaled by the detected
error condition. When L1CSR1[ICEA] indicates machine check generation on error, assertion of this
signal indicates a machine check is signaled for the access, or for icbi operations, indicates that a remote
invalidation of one or more cache lines should occur. When L1CSR1[ICEA] indicates auto-invalidation
on error, assertion of this signal indicates that the cache inserts an additional cycle to perform
auto-invalidation on cache ways with uncorrectable tag errors and to correct tags in ways with correctable
errors. This signal is reset to 0.
13.3.11.2 Cache Data Error Out (p_cache_dataerr_out)
The active-high p_cache_dataerr_out output signal issued to indicate a valid cache data array parity error
has occurred during this cycle. It is only signaled if a cache operation or exception is signaled by the
detected error condition. When L1CSR1[ICEA] indicates machine check generation on error, assertion of
this signal indicates a machine check will be signaled for the access. When L1CSR1[ICEA] indicates
auto-invalidation on error, assertion of this signal indicates that the cache forces a miss cycle to refill the
cache line to correct the error data. The way with the data error to be reloaded is indicated by the assertion
of one of the p_cerrway_out[0:3] signals in the following cycle. This signal is reset to 0.
13.3.11.3 Cache Error Address Out (p_cerraddr_out[0:31])
The active-high p_cerraddr_out[0:31] output signals are used to provide the physical address
corresponding to a cache error signaled by the p_cache_tagerr_out and p_cache_dataerr_out output
signals. These signals should be qualified with the assertion of p_cache_tagerr_out or
p_cache_dataerr_out in the previous cycle. The p_cerraddr_out[0:31] values are provided to allow for
proper updating of the MCAR on machine check exceptions by another cache. These signals are undefined
following reset.
13.3.11.4 Cache Error Way(s) Out (p_cerrway_out[0:3])
The active-high p_cerrway_out[0:3] output signals are used to indicate which way(s) of the cache
encountered a cache tag or data array error. These signals should be qualified with the assertion of
p_cache_tagerr_out or assertion of p_cache_dataerr_out in the previous cycle. Uncorrectable tag errors
are indicated by the assertion of one or more of the p_cerrway_out[0:3] signals in the cycle following
assertion of p_cache_tagerr_out. If only correctable tag errors are found, these signals remain negated.
When reloading of a cache way to correct a data error occurs, the way with the data error to be reloaded is
indicated by the assertion of one of the p_cerrway_out[0:3] signals in the cycle following assertion of
p_cache_dataerr_out. These signals are reset to 0.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-28 Freescale Semiconductor
13.3.11.5 Cache Tag Error In (p_cache_tagerr_in)
The active-high p_cache_tagerr_in input signal is used to indicate a cache tag parity error is being
cross-signaled from another cache during this cycle. When cross-signaling operation is enabled via
assertion of the p_lkstep_en input signal, assertion of this signal indicates the values of
p_cerraddr_in[0:31] and p_cerrway_in[0:3] in the next cycle should be used to cause a cache parity
error to be emulated for the indicated way(s) of the cache, using the index provided by
p_cerraddr_in[0:31]. Depending on the settings of L1CSR1[ICEA], either a machine check or a possible
invalidation should occur. MCAR should be updated with the value on p_cerraddr_in[0:31] if a machine
check is signaled and MAV was previously clear. Normally, the value of p_cerraddr_in[0:31] is identical
to the internal value of p_cerraddr_out[0:31], although an undetected internal error causing a loss of
synchronization between two (or more) processors operating in lockstep may cause the values to be
different. This loss of synchronization will be detected at some future time.
13.3.11.6 Cache Data Error In (p_cache_dataerr_in)
The active-high p_cache_dataerr_in input signal is used to indicate a cache data array parity error is
being cross-signaled from another cache during this cycle. When cross-signaling operation is enabled via
assertion of the p_lkstep_en input signal, assertion of this signal indicates the values of
p_cerraddr_in[0:31] and p_cerrway_in[0:3] in the next cycle should be used to cause a cache parity
error to be emulated for the indicated way(s) of the cache, using the index provided by
p_cerraddr_in[0:31]. Depending on the settings of L1CSR1, either a machine check or a refill should
occur. MCAR should be updated with the value on p_cerraddr_in[0:31] if a machine check is signaled
and MAV was previously clear. Normally, the value of p_cerraddr_in[0:31] is identical to the internal
value of p_cerraddr_out[0:31], although an undetected internal error causing a loss of synchronization
between two (or more) processors operating in lockstep may cause the values to be different. This loss of
synchronization will be detected at some future time.
13.3.11.7 Cache Error Way(s) In (p_cerrway_in[0:3])
When cross-signaling operation is enabled by the assertion of the p_lkstep_en input signal, the active-high
p_cerrway_in[0:3] input signals are used to indicate whether the corresponding ways of the cache should
emulate a cache error. These signals should be qualified with the assertion of p_cache_tagerr_in or
p_cache_dataerr_in in the previous cycle.
13.3.12 External Translation Alteration Signals
The following paragraphs describe the external translation alteration interface signals. A description of
operation is provided in Section 10.11, “External Translation Alterations for Real-time Systems.”
13.3.12.1 External PID Enable (p_extpid_en)
The active-high p_extpid_en input signal is used to enable the external translation alteration interface.
Enabling of the dynamic mapping capability is controlled by asserting the p_extpid_en control input. This
input is sampled with the rising edge of the clock, and when asserted, allows the dynamic remapping
capability to be used.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-29
13.3.12.2 External PID In (p_extpid[6:7])
The active-high p_extpid[6:7] input signals are used to provide the PID[6:7] comparison values for certain
TLB entries. These signals are qualified with the assertion of p_extpid_en.
13.3.13 Timer Facility Signals
The following sub-sections describe the processor signals associated with the time base, watchdog,
fixed-interval and decrementer facilities.
13.3.13.1 Timer Disable (p_tbdisable)
The active-high p_tbdisable input signal is used to disable the internal Time Base and Decrementer
counters. When this signal is asserted, Time Base and Decrementer updates are frozen. When this signal
is negated, Time Base and Decrementer updates are unaffected. This signal may be used to freeze the state
of the Time Base and Decrementer during low power or debug operation. This signal is not internally
synchronized by the e200 core. Therefore, it must meet setup and hold time constraints relative to m_clk
when the e200 core clock is running, as well as to p_tbclk when selected as an alternate clock source for
the Time Base.
13.3.13.2 Timer External Clock (p_tbclk)
The active-high p_tbclk input signal is used as an alternate clock source for the Time Base and
Decrementer counters. Selection of this clock is made using the HID0[SEL_TBCLK] control bit (see
Section 2.4.11, “Hardware Implementation Dependent Register 0 (HID0)”). This clock source must be
synchronous to the m_clk input, and cannot exceed 50% of the m_clk frequency. This signal must be
driven such that it changes state on the falling edge of m_clk.
13.3.13.3 Timer Interrupt Status (p_tbint)
The active-high p_tbint output signal is used to indicate that an internal timer facility unit is generating
an interrupt request (TSR[WIS]=1 and TCR[WIE]=1 and MSR[CE]=1, or
TSR[DIS]=1 and TCR[DIE]=1 and MSR[EE]=1, or TSR[FIS]=1 and TCR[FIE]=1 and MSR[CE]=1).
This signal may be used to exit low power operation or for other system purposes.
13.3.14 Processor Reservation Signals
The following subsections describe processor reservation signals associated with the lbarx, lharx, lwarx,
stbcx., sthcx., and stwcx. instructions.
13.3.14.1 CPU Reservation Status (p_rsrv)
The active-high p_rsrv output signal is used to indicate that a reservation has been established by the
execution of a load and reserve (lbarx, lharx, lwarx) instruction. This signal is set following the successful
completion of a load and reserve instruction. This signal remains set until the reservation has been cleared.
(Refer to Section 3.6, “Memory Synchronization and Reservation Instructions”). This signal is provided
as a status indicator for specialized system applications only.

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-30 Freescale Semiconductor
13.3.14.2 CPU Reservation Clear (p_rsrv_clr)
The active-high p_rsrv_clr input signal is used to clear a reservation that has been previously established.
External reservation management logic may use this signal to implement reservation management policies
which are outside of the scope of the CPU. (Refer to Section 3.6, “Memory Synchronization and
Reservation Instructions”). This signal may be asserted independently of any bus transfer.
The p_rsrv_clr input signal is not intended for normal use in managing reservations. It is provided for
specialized system applications. The normal bus protocol is used to manage reservations using external
reservation logic in systems with multiple coherent bus masters, using the transfer type and transfer
response signals. In single coherent master systems, no external logic is required and the internal
reservation flag is sufficient to support multi-tasking applications.
The p_d_xfail_b signal is provided to indicate success/failure of a stbcx., sthcx., or stwcx. instruction as
part of bus transfer termination using the XFAIL p_d_hresp[2:0] encoding. See Section 12.2.3.16, “Store
Exclusive Failure (p_d_xfail_b),” for more details about p_d_xfail_b.
13.3.15 Miscellaneous Processor Signals
The following list describes miscellaneous active-high processor signals.
• CPU ID (p_cpuid[0:7])
— Input signals used to provide an identity for a particular processor.
— Reflected in the processor ID register (Section 2.4.2, “Processor ID Register (PIR)) following
reset.
— Intended to remain in a static condition and are not internally synchronized.
• PID0 outputs (p_pid0[0:7])
— Output signals used to provide the current process ID in the process ID rRegister 0 (PID0).
— Correspond to the low order eight bits of PID0.
• PID0 Update (p_pid0_updt)
— Output signal used to indicate that the process ID register 0 (PID0) is being updated by a mtspr
instruction.
— Asserts during the clock cycle the p_pid0[0:7] outputs are changing.
• System Version (p_sysvers[0:31])
— Input signals used to provide a version number for the particular system incorporating a e200
CPU.
— Reflected in the system version register (Section 2.4.4, “System Version Register (SVR)”).
— Intended to remain in a static condition and are not internally synchronized.
• Processor Version (p_pvrin[16:31])
— Used to provide a portion of the version number for a particular e200 CPU.
— Reflected in the processor version register (Section 2.4.3, “Processor Version Register
(PVR)”).
— Intended to remain in a static condition and are not internally synchronized.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-31
• HID1 System Control (p_hid1_sysctl[0:7])
— Output signals used to provide a set of control output signals external to the CPU by means of
values written to the HID1 special purpose register.
— Outputs change state following the rising edge of m_clk, and may need synchronization
depending on actual use. See Section 2.4.12, “Hardware Implementation Dependent Register
1 (HID1).
13.3.16 Processor State Signals
The following sub-sections describe processor internal state signals.
13.3.16.1 Processor Mode (p_mode[0:3])
These signals indicate the global processor execution status. The timing is synchronous with m_clk.
Table 13-16 shows p_mode[0:3] encoding.
13.3.16.2 Processor Execution Pipeline Status (p_pstat_pipe0[0:5],
p_pstat_pipe1[0:5])
These signals indicate the internal execution pipeline status. The timing is synchronous with the m_clk,
so the indicated status may not apply to a current bus transfer. Pipe0 corresponds to the oldest instruction
Table 13-15. Processor Mode Encoding
p_mode[0:3] Internal Processor Mode
0000Execution Stalled
0 0 0 1 Execute Exception
0 0 1 0 Instruction Squashed
0 0 1 1 Normal Processing
0 1 0 0 Processor in Halted state
0 1 0 1 Processor in Stopped state
0 1 1 0 Processor in Debug mode1
1As reflected on the cpu_dbgack internal state signal
0111Reserved
1 0 0 0 Processor in Waiting state
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-32 Freescale Semiconductor
in the pipeline, pipe1 to the next to oldest instruction. Table 13-16 shows p_pstat_pipe{0,1}[0:5]
encodings.
Table 13-16. Processor Execution PIpeline Status Encoding1
1All encodings which do not appear in the table are reserved
p_pstat_pipe{0,1}[0:5] Processor PIpeline Status
0 0 0 0 s m Complete Instruction2,3
000100Complete lmw, stmw, e_lmw, e_stmw, e_lmvgprw, e_stmvgprw,
e_lmvsprw, e_stmvsprw, e_lmv[c,d,mc, ]srrw, e_stmv[c,d,mc,
]srrw
000101Complete e_lmw, or e_stmw
001000Complete isync
001011Complete se_isync
00110mComplete lbarx, lharx, lwarx, stbcx., sthcx., or stwcx.4
01000mComplete evsel with condition false for both elements
01010mComplete evsel with condition false for high element and true for low
element
01100mComplete evsel with condition true for high element and false for low
element
01110mComplete evsel with condition true for both elements
100000Complete Branch Instruction bc, bcl, bca, bcla, b, bl, ba, bla
resolved as not taken
1 0 0 0 0 1 Complete Branch Instruction e_bc, e_bcl, e_b, e_bl resolved as not
taken
100011Complete Branch Instruction se_bc, se_b, se_bl resolved as not
taken
100100Complete Branch Instruction bc, bcl, bca, bcla, b, bl, ba, bla
resolved as taken
100101Complete Branch Instruction e_bc, e_bcl, e_b, e_bl resolved as
taken
100111Complete Branch Instruction se_bc, se_b, se_bl resolved as taken
101000Complete bclr, bclrl, bcctr, bcctrl resolved as not taken
101100Complete bclr, bclrl, bcctr, bcctrl resolved as taken
101111Complete se_blr, se_blrl, se_bctr, se_bctrl (always taken)
11000mComplete isel with condition false
11010mComplete isel with condition true
1 1 1 0 x x No instruction completed
111100Complete rfi, rfci, rfdi, or rfmci
111111Complete se_rfi, se_rfci, se_rfdi, or se_rfmci
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-33
13.3.16.3 Branch Prediction Status (p_brstat[0:1])
These signals indicate the status of a branch prediction prefetch. Branch prediction prefetches are
performed for branch target buffer hits with predict taken status to accelerate branches. The timing is
synchronous with tm_clk, so the indicated status may not apply to a current bus transfer. Table 13-17
shows p_brstat[0:1] encoding.
13.3.16.4 Processor Exception Enable MSR values (p_msr_EE, p_msr_CE,
p_msr_DE, p_msr_ME)
These active-high output signals reflect the state of the corresponding MSR[EE,CE,DE,ME] bits. They
may be used by external system logic to determine the set of enabled exceptions. These signals change
state on execution of an mtmsr, rfi, rfci, rfdi, rfmci, se_rfi, se_rfci, se_rfdi, se_rfmci, wrtee, or wrteei
instruction or during exception processing where one or more bits may be cleared during the exception
processing sequence.
13.3.16.5 Processor Return from Interrupt (p_rfi, p_rfci, p_rfdi, p_rfmci)
These active-high output signals reflect the state of the processor when executing a return from interrupt
class instruction. The signals are asserted for one clock during the execution of the corresponding rfi, rfci,
rfdi, rfmci, se_rfi, se_rfci, se_rfdi, or se_rfmci instruction. They may be used by external system logic
to determine the execution state of one or more nested or un-nested interrupt exception handlers, and may
be used to provide hardware assist to external interrupt controllers, or priority elevation mechanisms. In
conjunction with the interrupt acknowledge and exception enable outputs, an external state machine may
track the entry and exit status of handlers for various classes and priorities of interrupts.
13.3.16.6 Processor Machine Check (p_mcp_out)
The active-high p_mcp_out output signal is asserted by the processor when a machine check condition
has caused an “Async Mchk” or “Error Report” type syndrome bit to be set in the machine check syndrome
register. Refer to Section 2.4.7, “Machine Check Syndrome Register (MCSR).”
2Except rfi, rfci, rfdi, rfmci, lmw, stmw, lbarx, lharx, lwarx, stbcx., sthcx., stwcx., isync, isel,
se_rfi, se_rfci, se_rfdi, se_rfmci, e_lmw, e_stmw, se_isel, and Change of Flow Instructions
3s - instruction size, 0=32-bit, 1=16-bit.
m - 0 for Power ISA page, 1 for VLE page
4m - 0 for Power ISA page, 1 for VLE page
Table 13-17. Branch Prediction Status Encoding
p_brstat[0:1] Branch Prediction Status
0 x Default (no branch predicted taken prefetch)
1 0 Branch predicted taken prefetch resolved as not taken
1 1 Branch predicted taken prefetch resolved as taken

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-34 Freescale Semiconductor
13.3.17 Power Management Control Signals
The following active-high signals are provided for power management or other control functions by
external control logic.
• Processor Waiting (p_waiting)
— Output signal used to indicate that the processor has entered the waiting state (Section 8.2,
“Waiting State”).
• Processor Halt Request (p_halt)
— Input signal used to request the processor to enter the halted state (Section 8.3, “Halted State”).
• Processor Halted (p_halted)
— Output signal used to indicate that the processor has entered the halted state (Section 8.3,
“Halted State”).
• Processor Stop Request (p_stop)
— Input signal used to request the processor to enter the stopped state (Section 8.4, “Stopped
State”).
• Processor Stopped (p_stopped)
— Output signal used to indicate that the processor has entered the stopped state (Section 8.4,
“Stopped State”).
13.3.17.1 Low-Power Mode signals (p_doze, p_nap, p_sleep)
The active-high p_doze, p_nap, and p_sleep output signals are asserted by the processor to reflect the
settings of the HID0[DOZE], HID0[NAP], and HID0[SLEEP] control bits when the MSR[WE] bit is set.
These outputs may assert for one or more clock cycles. External logic can detect the asserted edge or level
of these signals to determine which low-power mode has been requested and then place the e200 core and
peripherals in a low-power consumption state. The p_wakeup signal can be monitored to determine when
to end the low-power condition.
The e200 core can be placed in a low-power state by forcing the m_clk input to a quiescent state and
brought out of low-power state by re-enabling m_clk. The Time Base facilities may be separately enabled
or disabled using combinations of the Timer Facility control signals described in Section 13.3.13, “Timer
Facility Signals.”
13.3.17.2 Wakeup (p_wakeup)
The active-high p_wakeup output signal should be used by external logic to remove the e200 core and
system logic from a low-power state. It also is used to indicate to the system clock controller that the m_clk
input should be re-enabled for debug purposes. This signal is asynchronous to the system clock and should
be synchronized to the system clock domain to avoid hazards.
p_wakeup asserts whenever:
• A valid pending interrupt is detected by the core
• A request to enter debug mode is made by setting the DR bit in the OnCE control register (OCR)
or by the assertion of the jd_de_b or p_ude input signals

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-35
• The processor is in a debug session and the jd_debug_b output is asserted.
• A request to enable the m_clk input has been made by setting the WKUP bit in the OnCE control
register
• The p_nmi_b input is asserted or the MCSR[NMI] syndrome bit is set.
p_wakeup (or other system state) should be monitored to determine when to release the processor (and
system if applicable) from a low-power state.
13.3.18 Debug Event Input Signals
The following interface signals are provided to signal debug events to the e200 core.
13.3.18.1 Unconditional Debug Event (p_ude)
The active-high p_ude input signal is used to request an unconditional debug event. This event is
described in detail in Section 11.2.13, “Unconditional Debug Event.” This signal is not internally
synchronized by the e200 core; thus it must meet setup and hold time constraints relative to m_clk when
the e200 core clock is running. This signal is level sensitive and must be held asserted until acknowledged
by software or when external debug mode is enabled, by assertion of the jd_debug_b output for
recognition to be guaranteed.
In addition, only a transition from the negated state to the asserted state of the p_ude signal causes an event
to occur. The level on this signal is used, however, to cause assertion of the p_wakeup output.
13.3.18.2 External Debug Event 1 (p_devt1)
The active-high p_devt1 input signal is used to request an external debug event. This event is described
in detail in Section 11.2.12, “External Debug Event.” This signal is not internally synchronized by the e200
core; thus it must meet setup and hold time constraints relative to m_clk when the e200 core clock is
running. If the e200 core clock is disabled, this signal is not recognized. In addition, only a transition from
the negated state to the asserted state of the p_devt1 signal causes an event to occur. It is intended to signal
e200 related events that are generated while the CPU is active.
13.3.18.3 External Debug Event 2 (p_devt2)
The active-high p_devt2 input signal is used to request an external debug event. This event is described
in detail in Section 11.2.12, “External Debug Event.” This signal is not internally synchronized by the e200
core; thus it must meet setup and hold time constraints relative to m_clk when the e200 core clock is
running. If the e200 core clock is disabled, this signal is not recognized. In addition, only a transition from
the negated state to the asserted state of the p_devt2 signal causes an event to occur. It is intended to signal
e200 related events that are generated while the CPU is active.
13.3.19 Debug Event Output Signals (p_devnt_out[0:7])
The active-high p_devnt_out[0:7] output signals are used to provide a single-clock pulse based on the
values written to the DEVNT field of the DEVENT debug register. These outputs correspond to the low
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-36 Freescale Semiconductor
order eight bits of DEVENT. Note that p_devnt_out[0] corresponds to the low order bit, not the MSB of
the DEVNT field.
13.3.20 Debug/Emulation (Nexus 1/ OnCE) Support Signals
The following interface signals are provided to assist in implementing an on-chip emulation capability
with a controller external to the e200 core.
13.3.20.1 OnCE Enable (jd_en_once)
The OnCE enable signal jd_en_once is used to enable the OnCE controller to allow certain instructions
and operations to be executed. Assertion of this signal enables the full OnCE command set, as well as
operation of control signals and OnCE Control register functions. When this signal is disabled, only the
Bypass, ID and Enable_OnCE commands are executed by the OnCE unit; all other commands default to
a “Bypass” command. The OnCE Status register (OSR) is not visible when OnCE operation is disabled.
In addition, OnCE Control register (OCR) functions are disabled, as is the operation of the jd_de_b input.
Secure systems may choose to leave this signal negated until a security check has been performed. Other
systems should tie this signal asserted to enable full OnCE operation. The j_en_once_regsel and j_key_in
signals are provided to assist external logic performing security checks.
Refer to Section •, “Enable Once Register Select (j_en_once_regsel),” for a description of the
j_en_once_regsel output signal and to Section •, “Key Data In (j_key_in),” for a description of the
j_key_in input signal.
The jd_en_once input must only change state during the Test-Logic-Reset, Run-Test/Idle, or Update_DR
TAP states. A new value will take affect after one additional j_tclk cycle of synchronization.
13.3.20.2 Debug Session (jd_debug_b)
The jd_debug_b active-low output signal is asserted when the processor first enters into debug mode. It
remains asserted for the duration of a “debug session”.
NOTE
A debug session includes single-step operations (Go+NoExit OnCE
commands). That is, jd_debug_b remains asserted during OnCE
single-step executions.
Table 13-18. e200 Debug / Emulation Support Signals
Signal Type Description
jd_en_once I Enable full OnCE operation
jd_debug_b O Debug Session indicator
jd_de_b I Debug request
jd_de_en O DE_b active high output enable
jd_mclk_on I CPU clock is active indicator

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-37
This signal is provided to allow system resources to be aware that access is occurring for debug purposes,
thus allowing certain resource side effects to be frozen or otherwise controlled. Examples include FIFO
state change control and control of side-effects of register or memory accesses. Refer to Section 11.4.5.3,
“e200 OnCE Debug Output (jd_debug_b),” for additional information on this signal.
13.3.20.3 Debug Request (jd_de_b)
This signal is the debug mode request input. This signal is not internally synchronized by the e200 core;
thus it must meet setup and hold time constraints relative to j_tclk. To be recognized, it must be held
asserted for a minimum of two j_tclk periods, and the jd_en_once input must be in the asserted state.
jd_de_b is synchronized to m_clk in the debug module before being sent to the processor (two clocks).
This signal is normally the input from the top-level DE_b open-drain bidirectional I/O cell. Refer to
Section 11.4.5.2, “OnCE Debug Request/Event (jd_de_b, jd_de_en),” for additional information on this
signal.
13.3.20.4 DE_b Active High Output Enable (jd_de_en)
This output signal is an active-high enable for the top-level DE_b open-drain bidirectional I/O cell. This
signal is asserted for three j_tclk periods upon processor entry into debug mode. Refer to Section 11.4.5.2,
“OnCE Debug Request/Event (jd_de_b, jd_de_en),” for additional information on this signal.
13.3.20.5 Processor Clock On (jd_mclk_on)
This active-high input signal is driven by system level clock control logic to indicate that the processor’s
m_clk input is active. This signal is synchronized to j_tclk and provided as a status bit in the OnCE Status
register.
13.3.20.6 Watchpoint Events (jd_watchpt[0:21])
The jd_watchpoint[0:21] active-high output signals are used to indicate that a watchpoint has occurred.
Each debug address compare function (IAC1-8, DAC1-2) and debug counter event (DCNT1-2) is capable
of triggering a watchpoint output. Refer to Section 11.5, “Watchpoint Support,” for the signal assignments
of each watchpoint source.
13.3.21 Debug Lockstep Cross-signaling Signals
The following paragraphs describe the debug lockstep cross-signaling interface signals, which are used to
enable lockstep debug operations. Examples of operation are provided in Section 13.4.4, “Debug Lockstep
Cross-signaling Operation.”
13.3.21.1 Debug Request EDM In (p_dbgrq_edm_in)
The active-high p_dbgrq_edm_in input signal is used to indicate that a request to enter a debug halted
state has been recognized in another CPU and that debug mode may be entered when the receiving CPU
has an internally generated debug request present. The request may have occurred by means of a tclk
domain mechanism, such as the setting of OCR[DR] or assertion of the jd_de_b input, or by a set bit in

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-38 Freescale Semiconductor
the EDBSR0 register when EDBCR0[EDM] is set. This signal is assumed to be synchronized to the m_clk
clock domain and must meet setup and hold times to m_clk. The p_dbgrq_edm_in input signal is
qualified with the p_lkstep_en input, and is only used to condition debug mode entry when p_lkstep_en
is asserted. If p_lkstep_en is negated, this input signal is ignored.
13.3.21.2 Debug Request EDM Out (p_dbgrq_edm_out)
The active-high p_dbgrq_edm_out output signal is used to indicate that a request to enter a debug halted
state has occurred. The request may have occurred by means of a tclk domain mechanism, such as setting
of the OCR[DR] control bit or assertion of the jd_de_b input, or by a set bit in the EDBSR0 register when
EDBCR0[EDM] is set. This signal is synchronized to the m_clk clock domain. This signal is reset to 0.
13.3.21.3 Debug Go Request In (p_dbg_go_in)
The active-high p_dbg_go_in input signal is used to indicate that a request to exit a debug halted state has
been recognized in another CPU and that debug mode may be exited when the receiving CPU has an
internally generated “GO” request present. A request occurs by means of the tclk clock domain when the
Update_DR state is entered and the OCMD “GO” bit is set. This signal is assumed to be synchronized to
the m_clk clock domain and must meet setup and hold times to m_clk. The p_dbg_go_in input signal is
qualified with the p_lkstep_en input, and is only used to condition debug mode exit when p_lkstep_en is
asserted. If p_lkstep_en is negated, this input signal is ignored.
13.3.21.4 Debug Go Request Out (p_dbg_go_out)
The active-high p_dbg_go_out output signal is used to indicate that a request to exit a debug halted state
has occurred. A request occurs by the tclk clock domain when the Update_DR state is entered and the
OCMD “GO” bit is set. This signal is synchronized to the m_clk clock domain. This signal is reset to 0.
13.3.21.5 Debug Nexus 3 Update_DR state In (p_nex3_updtdr_in)
The active-high p_nex3_updtdr_in input signal is used to indicate that a synchronized Update_DR state
has been recognized in another CPU and that Nexus 3 register updates may occur when the receiving CPU
has an internally generated Update_DR request present. When the Update_DR state is entered in the tclk
clock domain and is synchronized to the m_clk domain, this signal is used to qualify updates to Nexus 3
control registers to assure that updates occur in synchrony in all lockstep processors. This signal is
assumed to be synchronized to the m_clk clock domain and must meet setup and hold times to m_clk. The
p_nex3_updtdr_in input signal is qualified with the p_lkstep_en input, and is only used to condition
Nexus 3 register updates via the Update_DR state when p_lkstep_en is asserted. If p_lkstep_en is
negated, this input signal is ignored.
13.3.21.6 Debug Nexus 3 Update_DR state Out (p_nex3_updtdr_out)
The active-high p_nex3_updtdr_out output signal is used to indicate that a synchronized Update_DR
state has been reached internally. When the Update_DR state is entered in the tclk clock domain and is
synchronized to the m_clk domain, this output is asserted, and remains asserted until updates due to an
Update DR state occur. This signal is synchronized to the m_clk clock domain.
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-39
13.3.22 Development Support (Nexus 3) Signals
Table 13-19 shows the interface signals provided to assist in implementing a real-time development tool
capability with a controller external to the e200 core.
13.3.23 JTAG Support Signals—Primary Interface
Table 13-20 lists the primary JTAG interface signals. These signals are usually connected directly to
device pins (except for j_tdo, which needs three-state and edge support logic). However, this may not be
the case when JTAG TAP controllers are concatenated together.
The following list describes the JTAG primary interface signals in greater detail.
• JTAG/OnCE Serial Input (j_tdi)
— Provides data and commands to the OnCE controller. Data is latched on the rising edge of the
j_tclk serial clock and shifted into the OnCE serial port least significant bit (LSB) first.
• JTAG/OnCE Serial Clock (j_tclk)
— Supplies the OnCE control block with the serial clock, which provides pulses required to shift
data and commands into and out of the OnCE serial port.
Table 13-19. e200 Development Support (Nexus 3) Signals
Signal Type Description
nex_mcko O Nexus Clock Output
nex_rdy_b O Nexus Ready Output
nex_evto_b O Nexus Event-Out Output
nex_evti_b I Nexus Event-In Input
nex_wevto[2:0] O Nexus Watchpoint Event-Out Outputs
nex_mdo[n:0] O Nexus Message Data Output
nex_mseo_b[1:0] O Nexus Message Start/End Output
nex_ext_src_id[0:3] I Nexus SRC ID Input
Table 13-20. JTAG Primary Interface Signals
Signal Name Type Description
j_trst_b I JTAG test reset
j_tclk I JTAG test clock
j_tms I JTAG test mode select
j_tdi I JTAG test data input
j_tdo O Test data out to master controller or pad
j_tdo_en1
1j_tdo_en is asserted when the TAP controller is in the shift_dr or shift_ir state.
O Enables TDO output buffer
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-40 Freescale Semiconductor
— Data is clocked into the OnCE on the rising edge and clocked out of the OnCE serial port on
the rising edge. The debug serial clock frequency must be no greater than 50% of the processor
clock frequency.
• JTAG/OnCE Serial Output (j_tdo)
— Serial data is read from the OnCE block through the j_tdo pin.
– Data is always shifted out the OnCE serial port least significant bit (LSB) first.
– When data is clocked out of the OnCE serial port, j_tdo changes on the rising edge of j_tclk.
—Always driven.
— An external system-level TDO pin can be released to high impedance and should be actively
driven in the shift-IR and shift-DR controller states.
– The j_tdo_en signal is supplied to indicate when an external TDO pin should be enabled
and is asserted during the shift-IR and shift-DR controller states.
– For IEEE Std. 1149 conformity, the system level pin should change state on the falling edge
of TCLK.
• JTAG/OnCE Test Mode Select (j_tms)
— Input used to cycle through states in the OnCE Debug Controller.
— Toggling the j_tms pin while clocking with j_tclk controls transitions through the TAP state
controller.
• JTAG/OnCE Test Reset (j_trst_b)
— Input used to externally reset the OnCE controller by placing it in the Test-Logic-Reset state.
13.3.24 JTAG Support Signals—Support for External Registers
Table 13-21 details additional signals that may be used to support external JTAG data registers using the
e200 TAP controller.
Table 13-21. JTAG Signals Used to Support External Registers
Signal Name Type Description
j_tst_log_rst O Indicates the TAP controller is in the Test-Logic-Reset state
j_rti O JTAG controller run-test/idle state
j_capture_ir O Indicates the TAP controller is in the capture IR state
j_shift_ir O Indicates the TAP controller is in shift IR state
j_update_ir O Indicates the TAP controller is in update IR state
j_capture_dr O Indicates the TAP controller is in the capture DR state
j_shift_dr O Indicates the TAP controller is in shift DR state
j_key_in I Serial data from external key logic
j_update_gp_reg O Updates JTAG controller general-purpose data register
j_gp_regsel[0:9] O General-purpose external JTAG register select
j_en_once_regsel O External Enable OnCE register select
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-41
The following list describes the JTAG signals used to support external registers in greater detail.
• Test-Logic-Reset (j_tst_log_rst)
— Indicates the TAP controller is in the Test-Logic-Reset state.
• Run-Test/Idle (j_rti)
— Indicates the TAP controller is in the Run-Test/Idle state.
• Capture IR (j_capture_ir)
— Indicates the TAP controller is in the Capture_IR state.
• Shift IR (j_shift_ir)
— Indicates the TAP controller is in the Shift_IR state.
• Update IR (j_update_ir)
— Indicates the TAP controller is in the Update_IR state.
• Capture DR (j_capture_dr)
— Indicates the TAP controller is in the Capture_DR state.
• Shift DR (j_shift_dr)
— Indicates the TAP controller is in the Shift_DR state.
• Key Data In (j_key_in)
— Receives serial data from logic to indicate a key or other value to be scanned out in the Shift_IR
state when the current value in the IR is the Enable_OnCE instruction.
— Provided to assist with implementing security logic outside of the e200z446n3, which
conditionally asserts jd_en_once.
– During the Shift_IR state, when jd_en_once is negated, this input is sampled on the rising
edge of j_tclk
– After a two clock delay the data is internally routed to j_tdo, which allows provision of a
key value through the j_tdo output following a transition from Capture_IR to Shift_IR. The
key value is provided by the j_key_in input.
• Update DR with Write (j_update_gp_reg)
— Indicates that the TAP controller is in the Update_DR state and that the R/W bit in the OnCE
Command register is low (write command).
— The j_gp_regsel[0:9] signals should be monitored to see which register, if any, needs to be
updated.
• Register Select (j_gp_regsel)
j_nexus_regsel O External Nexus register select
j_lsrl_regsel O External LSRL register select
j_serial_data I Serial data from external JTAG register(s)
Table 13-21. JTAG Signals Used to Support External Registers (Continued)
Signal Name Type Description
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-42 Freescale Semiconductor
— The outputs shown in Table 13-22 are a decode of the REGSEL[0:6] field in the once command
register (OCMD). They are used to specify which external general purpose JTAG register to
access through the e200 TAP controller.
• Enable Once Register Select (j_en_once_regsel)
— Asserted when a decode of the REGSEL[0:6] field in the OnCE Command Register (OCMD)
indicates an external Enable_OnCE register is selected (0b1111110 encoding) for access via the
e200 TAP controller.
— May be used by external security logic to assist with controlling the jd_enable_once input
signal.
– The external enable_OnCE register should be muxed onto the j_serial_data input (see
Section •, “Serial Data (j_serial_data)”).
– During the Shift_DR state, j_serial_data is supplied to the j_tdo output.
• External Nexus Register Select (j_nexus_regsel)
— Asserted when a decode of the REGSEL[0–6] field in the OCMD indicates an external Nexus
register is selected (0b1111100 encoding) for access through the e200 TAP controller.
• External LSRL Register Select (j_lsrl_regsel)
— Asserted when a decode of the REGSEL[0–6] field in the OCMD indicates an external LSRL
register is selected (0b1111101 encoding) for access through the e200 TAP controller.
• Serial Data (j_serial_data)
— Receives serial data from external JTAG registers.
— All external registers share this one serial output back to the core, therefore it must be muxed
using the j_gp_regsel[0:9], j_lsrl_regsel, and j_en_once_regsel signals. D
— Data is internally routed to j_tdo.
Figure 13-2 shows one example of how an external JTAG register set (2) can be designed using the
inputs and outputs provided and by the JTAG primary inputs themselves. The main components
are a clock generation unit, a JTAG shifter (load, shift, hold, clr), the registers (load, hold, clr), and
Table 13-22. JTAG General Purpose Register Select Decoding
Signal Name Type Description
j_gp_regsel[0] O REGSEL[0:6]=7’h70
j_gp_regsel[1] O REGSEL[0:6]=7’h71
j_gp_regsel[2] O REGSEL[0:6]=7’h72
j_gp_regsel[3] O REGSEL[0:6]=7’h73
j_gp_regsel[4] O REGSEL[0:6]=7’h74
j_gp_regsel[5] O REGSEL[0:6]=7’h75
j_gp_regsel[6] O REGSEL[0:6]=7’h76
j_gp_regsel[7] O REGSEL[0:6]=7’h77
j_gp_regsel[8] O REGSEL[0:6]=7’h78
j_gp_regsel[9] O REGSEL[0:6]=7’h79
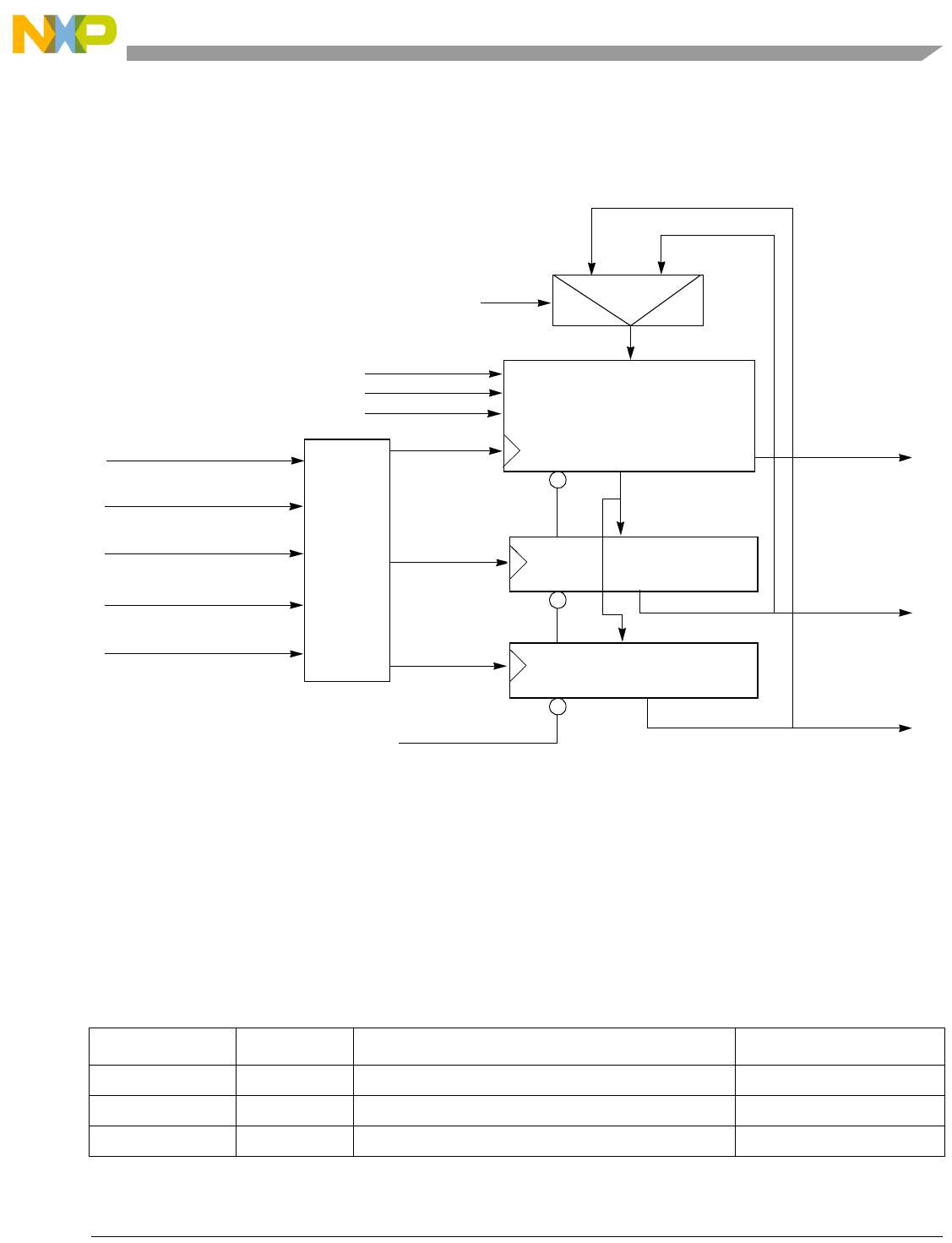
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-43
an input mux to the shifter for the serial output back to the e200 core. The shifter and the registers
may be as wide as the application warrants [0:x]. The length determines the number of states the
TAP controller is held in Shift_DR (x+1).
Figure 13-2. Example External JTAG Register Design
13.3.25 JTAG ID Signals
Table 13-23 shows the JTAG ID register unique to Freescale as specified by the IEEE 1149.1 JTAG
Specification. Note that bit 31 is the MSB of this register.
Table 13-23. JTAG Register ID Fields
Bit Field Type Description Value
[31–28] Variable Version Number Variable
[27–22] Fixed Design Center Number (ZEN) 6’b011111
[21–12] Variable Sequence Number Variable
Shifter
D
Data
Q
REG0
Q
DREG1
Q
j_gp_regsel[1:0] S
D
01
reg0_dat
reg1_dat
clk_reg02
clk_reg13
2. clk_reg0 = j_tclk & j_update_gp_reg & j_gp_regsel[0]
3. clk_reg1 = j_tclk & j_update_gp_reg & j_gp_regsel[1]
SI
SO
j_serial_data
j_tdi
clk_shfter1
1. clk_shfter = j_tclk & (j_shift_dr | j_capture_dr)
CLK
GEN
j_tclk
j_gp_regsel[1:0]
j_shift_dr
j_update_gp_reg
SHIFT
LOAD
j_capture_dr
j_shift_dr
j_capture_dr
j_trst_b
NOTES:
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-44 Freescale Semiconductor
The e200 core shifts out a 1 as the first bit on j_tdo if the Shift_DR state is entered directly from the
test-logic-reset state. This is per the JTAG specification and informs any JTAG controller that an ID
register exists on the part. The e200 JTAG ID register is accessed by writing the OCMR (OnCE Command
Register) with the value 7’h02 in the REGSEL[0–6] field.
The JTAG ID bit, manufacturer ID field, and design center number are fixed by the JTAG Consortium
and/or Freescale. The version numbers and the two most significant bits (MSBs) of the sequence number
are variable and brought out to external ports. The lower eight bits of the sequence number are variable
and strapped internally to track variations in processor deliverables.
Table 13-24 shows the inputs to the JTAG ID register that are input ports on the e200 core. These bits are
provided for a customer to track revisions of a device using the e200 core.
13.3.25.1 JTAG ID Sequence (j_id_sequence[0:1])
The j_id_sequence[0:1] inputs correspond to the two MSBs of the 10-bit sequence number in the JTAG
ID register. These inputs are normally static. They are provided for the customer for further component
variation identification.
13.3.25.2 JTAG ID Sequence (j_id_sequence[2:9])
The j_id_sequence[2:9] field is internally strapped to track variations in processor and module
deliverables. Each e200 deliverable has a unique sequence number. Additionally, each revision of these
modules can be identified by unique sequence numbers.
13.3.25.3 JTAG ID Version (j_id_version[0:3])
The j_id_version[0:3] inputs correspond to the 4-bit version number in the JTAG ID register. These inputs
are normally static. They are provided to the customer for strapping in order to facilitate easy identification
of component variants.
[11–1] Fixed Freescale Manufacturer ID 11’b00000001110
0 Fixed JTAG ID Register Identification Bit 1’b1
Table 13-24. JTAG ID Register Inputs
Signal Name Type Description
j_id_sequence[0:1] IJTAG ID register (2 MSBs of sequence field)
j_id_version[0:3] IJTAG ID register version field
Table 13-23. JTAG Register ID Fields (Continued)
Bit Field Type Description Value
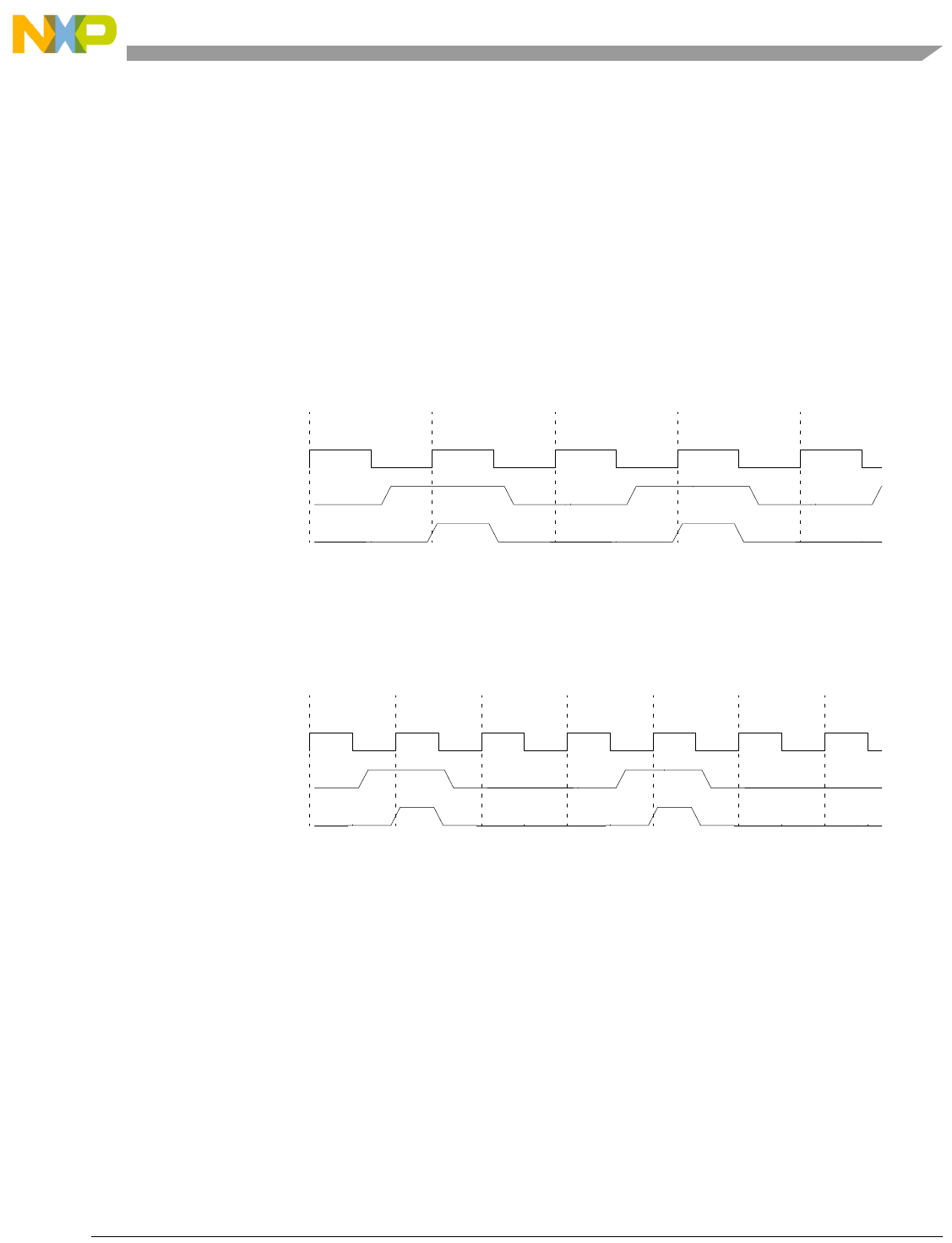
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-45
13.4 Timing Diagrams
The following subsections provide timing diagrams.
13.4.1 AHB Clock Enable and the Internal HCLK
The CPU generates an internal HCLK to control AHB signal input sampling and output transitions based
on the internal m_clk and the p_[i,d]_ahb_clken signals. The following diagrams show the relationships
of these signals and the resulting HCLK. Note that since no AHB signals are sampled or change state on
the falling edge of HCLK, the duty cycle is not an issue.
Figure 13-3 shows an example of a free-running half-speed HCLK relative to m_clk.
Figure 13-3. AHB Clock Enable Operation—1
Figure 13-4 shows an example of a free-running 1/3 speed HCLK relative to m_clk.
Figure 13-4. AHB Clock Enable Operation—2
12345
m_clk
p_[d,i]_ahb_clken
internal HCLK
1234567
m_clk
p_[i,d]_ahb_clken
internal HCLK
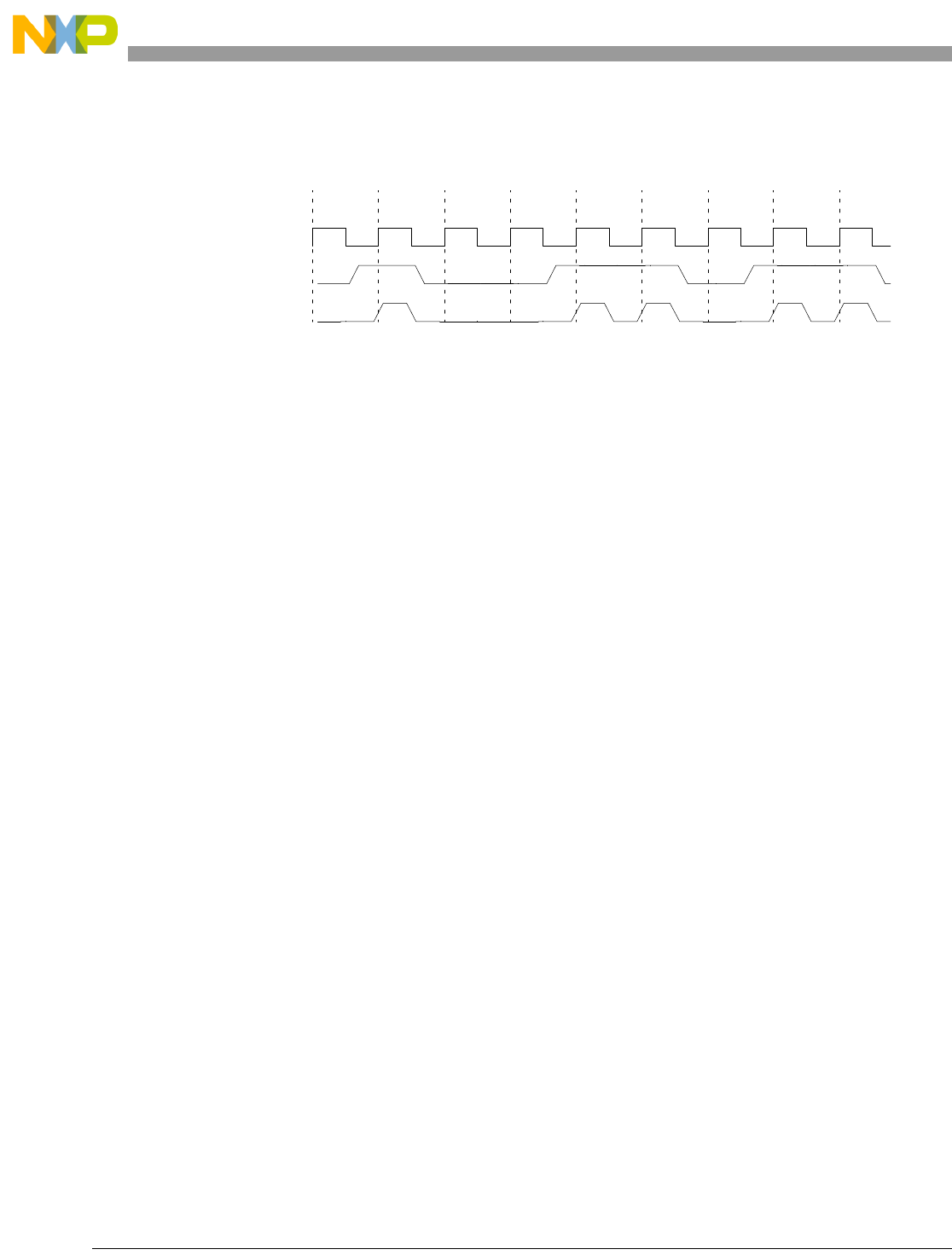
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-46 Freescale Semiconductor
Figure 13-5 shows an example of a non-periodic HCLK, used for power reduction, relative to m_clk.
Figure 13-5. AHB Clock Enable Operation—3
13.4.2 Processor Instruction/Data Transfers
Transferring data between the core and peripherals involves the address bus, data buses, and control and
attribute signals. The address and data buses are parallel, non-multiplexed buses, which support byte,
half-word, three byte, word, and double-word transfers. All bus input and output signals are sampled and
driven with respect to the rising edge of the m_clk signal. The core moves data on the bus by issuing
control signals and using a handshake protocol to ensure correct data movement.
The memory interface operates in a pipelined fashion to allow additional access time for memory and
peripherals. AHB transfers consist of an address phase that lasts only a single cycle, followed by the data
phase which may last for one or more cycles depending on the state of the p_hready signal.
Read transfers consist of a request cycle, where address and attributes are driven along with a transfer
request, and one or more memory access cycles to perform accesses and return data to the CPU for
alignment, sign or zero extension, and forwarding.
Write transfers consist of a request cycle, where address and attributes are driven along with a transfer
request, and one or more data drive cycles where write data is driven and external devices accept write data
for the access.
Access requests are generated in an overlapped fashion in order to support sustained single cycle transfers.
Up to two access requests may be in progress at any one cycle, one access outstanding and a second in the
pending request phase.
Access requests are assumed to be accepted as long as there are no accesses in progress, or if an access in
progress is terminated during the same cycle a new request is active (p_hready asserted). Once an access
has been accepted, the BIU is free to change the current request at any time, even if part of a burst transfer.
The local memory control logic is responsible for proper pipelining and latching of all interface signals to
initiate memory accesses.
The system hardware can use the p_hresp[2:0] signals to signal that the current bus cycle has an error
when a fault is detected, using the error response encoding. Error assertion requires a two cycle response.
In the first cycle of the response, the p_hresp[2:0] signals are driven to indicate error and p_hready must
be negated. During the following cycle, the error response must continue to be driven, and p_hready must
be asserted. When the core recognizes a bus error condition for an access at the end of the first cycle of the
123456789
m_clk
p_[i,d]_ahb_clken
internal HCLK
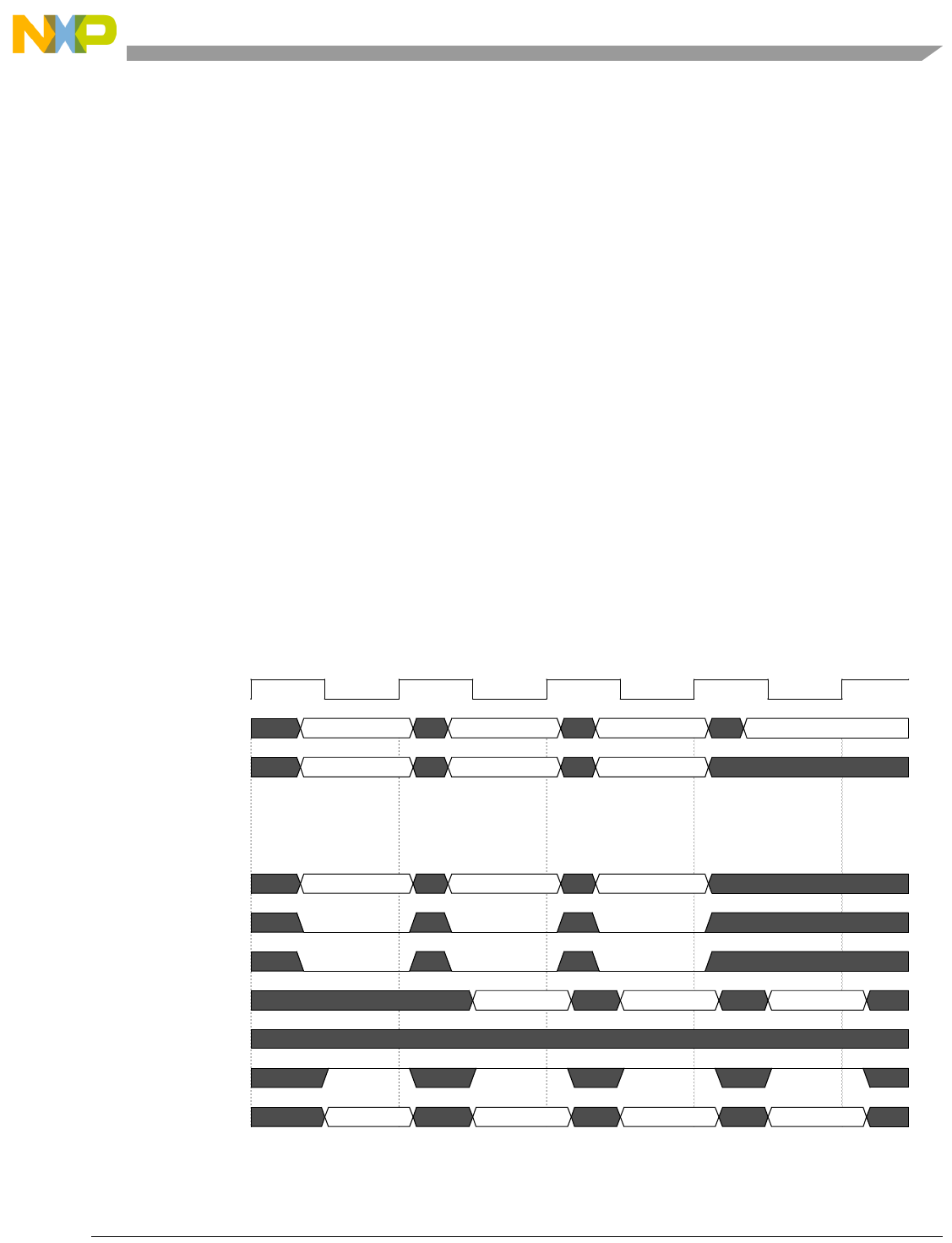
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-47
two cycle error response, a subsequent pending access request may be removed by the BIU driving the
p_htrans[2:0] signals to the IDLE state in the second cycle of the two cycle error response. Not all
pending requests are removed however.
When a bus cycle is terminated with a bus error, the core can enter storage error exception processing
immediately following the bus cycle, or it can defer processing the exception.
The instruction prefetch mechanism requests instruction words from the instruction memory unit before it
is ready to execute them. If a bus error occurs on an instruction fetch, the core does not take the exception
until it attempts to use the instruction. Should an intervening instruction cause a branch, or should a task
switch occur, the storage error exception for the unused access does not occur. A bus error termination for
any write access or read access that reference data specifically requested by the execution unit causes the
core to begin exception processing.
NOTE
In the following diagrams showing AHB operations, note that the HCLK
signal is that of the AHB bus, for example m_clk qualified by
p_[i,d]_ahb_clken
13.4.2.1 Basic Read Transfer Cycles
During a read transfer, the core receives data from a memory or peripheral device. Figure 13-6 illustrates
functional timing for basic read transfers, with clock-by-clock descriptions of the activity in the following
subsections.
Figure 13-6. Basic Read Transfers
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y data z
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-48 Freescale Semiconductor
13.4.2.1.1 Clock 1 (C1)
The first read transfer starts in clock cycle 1. During C1, the core places valid values on the address bus
and transfer attributes. The burst type (p_hburst[2:0]), protection control (p_hprot[5:0]), and transfer
type (p_htrans[1:0]) attributes identify the specific access type. The transfer size attribute (p_hsize[1:0])
indicates the size of the transfer. The byte strobes (p_hbstrb[7:0]) are driven to indicate active byte lanes.
The write (p_hwrite) signal is driven low for a read cycle.
The core asserts transfer request (p_htrans = NONSEQ) during C1 to indicate that a transfer is being
requested. Since the bus is currently idle, (0 transfers outstanding), the first read request to addrx is
considered taken at the end of C1. The default slave drives a ready/OKAY response for the current idle
cycle.
13.4.2.1.2 Clock 2 (C2)
During C2, the addrx memory access takes place using the address and attribute values that were driven
during C1 to enable reading of one or more bytes of memory. Read data from the slave device is provided
on the p_hrdata inputs. The slave device responds by asserting p_hready to indicate the cycle is
completing and drives an OKAY response.
Another read transfer request is made during C2 to addry (p_htrans = NONSEQ), and since the access to
addrx is completing, it is considered taken at the end of C2.
13.4.2.1.3 Clock 3 (C3)
During C3, the addry memory access takes place using the address and attribute values which were driven
during C2 to enable reading of one or more bytes of memory. Read data from the slave device for addry is
provided on the p_hrdata inputs. The slave device responds by asserting p_hready to indicate the cycle
is completing and drives an OKAY response.
Another read transfer request is made during C3 to addrz (p_htrans = NONSEQ), and since the access to
addry is completing, it is considered taken at the end of C3.
13.4.2.1.4 Clock 4 (C4)
During C4, the addrz memory access takes place using the address and attribute values which were driven
during C3 to enable reading of one or more bytes of memory. Read data from the slave device for addrz is
provided on the p_hrdata inputs. The slave device responds by asserting p_hready to indicate the cycle
is completing and drives an OKAY response.
The CPU has no more outstanding requests, so p_htrans indicates IDLE. The address and attribute signals
are thus undefined.
13.4.2.2 Read Transfer with Wait State
Figure 13-7 shows an example of wait state operation. Signal p_hready for the first request (addrx) is not
asserted during C2, so a wait state is inserted until p_hready is recognized (during C3).
Meanwhile, a subsequent request has been generated by the CPU for addry which is not taken in C2
because the previous transaction is still outstanding. The address and transfer attributes remain driven in
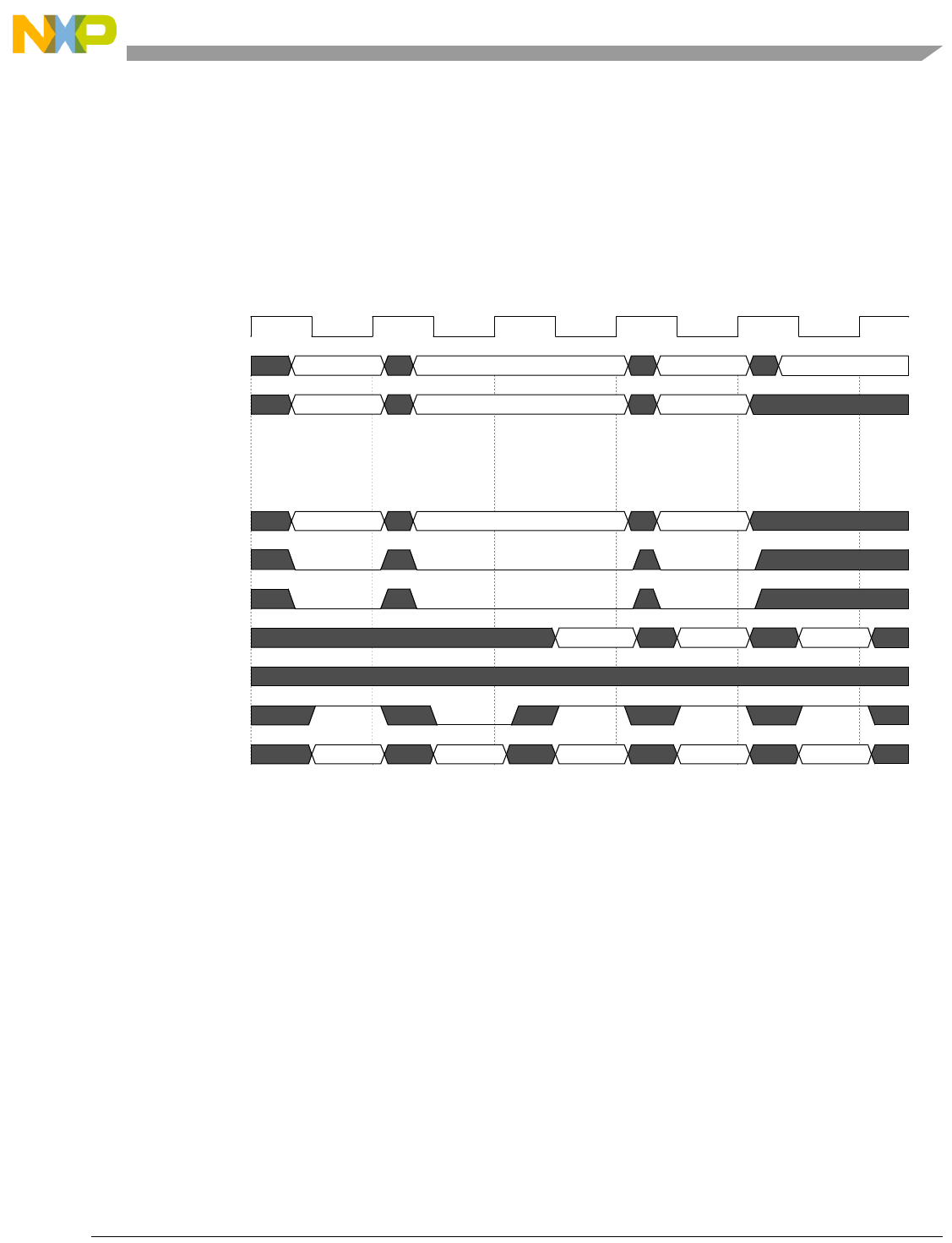
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-49
cycle C3 and are taken at the end of C3 since the previous access is completing. Data for addrx and a
ready/OKAY response is driven back by the slave device. In cycle C4, a request for addrz is made. The
request for access to addrz is taken at the end of C4, and during C5, the data and a ready/OKAY response
is provided by the slave device. In cycle C5, no further accesses are requested.
Figure 13-7 shows the read transfer with wait-state.
Figure 13-7. Read Transfer with Wait-State
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y data z
okay okay okay okay okay
Read with wait-state, single cycle reads, full pipelining
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
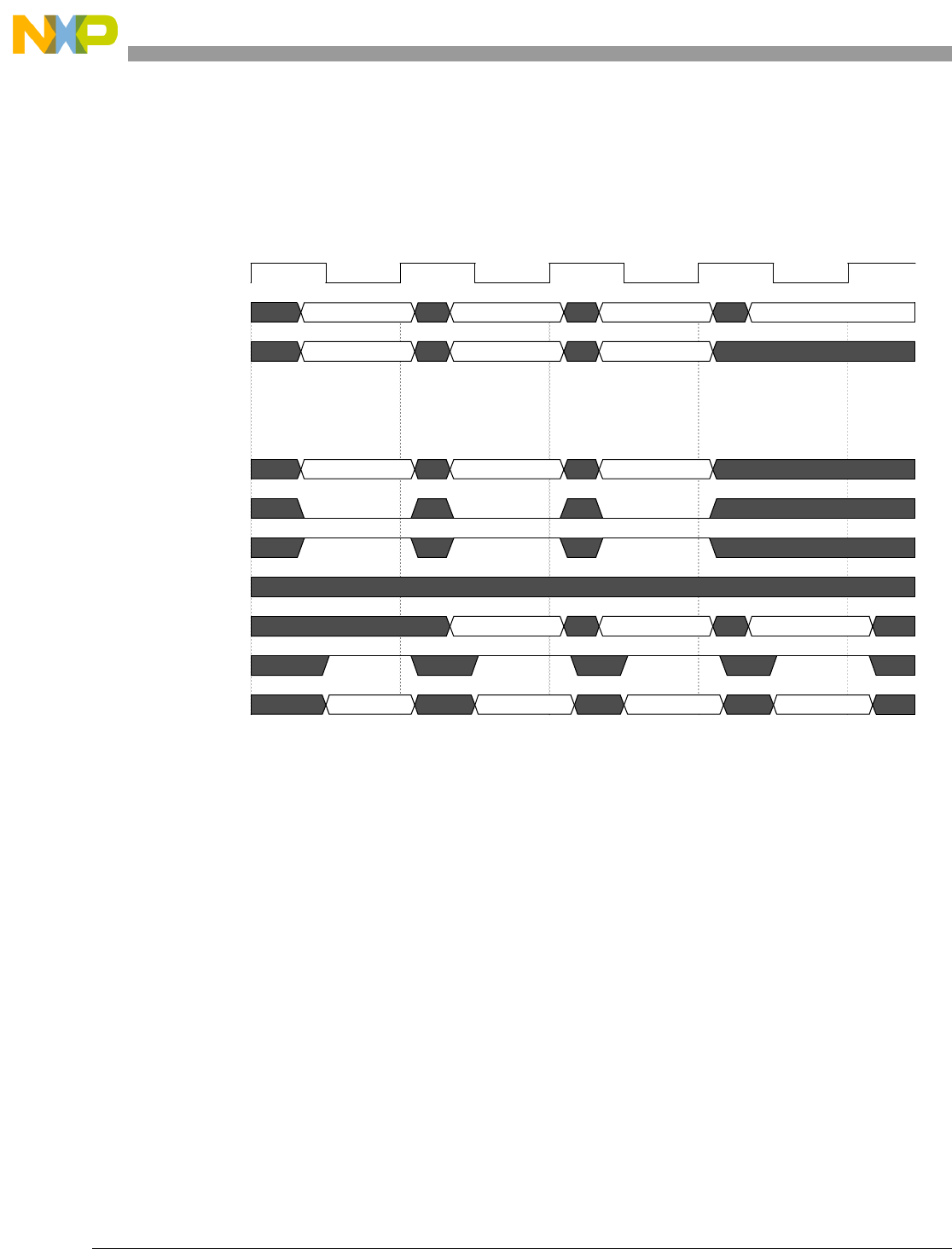
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-50 Freescale Semiconductor
13.4.2.3 Basic Write Transfer Cycles
During a write transfer, the core provides write data to a memory or peripheral device. Figure 13-8
illustrates functional timing for basic write transfers, with clock-by-clock descriptions of the activity in the
following subsections.
Figure 13-8. Basic Write Transfers
13.4.2.3.1 Clock 1 (C1)
The first write transfer starts in clock cycle 1. During C1, the core places valid values on the address bus
and transfer attributes. The burst type (p_hburst[2:0]), protection control (p_hprot[5:0]), and transfer
type (p_htrans[1:0]) attributes identify the specific access type. The transfer size attributes (p_hsize[1:0])
indicates the size of the transfer. The byte strobes (p_hbstrb[7:0]) are driven to indicate active byte lanes.
The write (p_hwrite) signal is driven high for a write cycle.
The core asserts transfer request (p_htrans= NONSEQ) during C1 to indicate that a transfer is being
requested. Since the bus is currently idle, (0 transfers outstanding), the first write request to addrx is
considered taken at the end of C1. The default slave drives a ready/OKAY response for the current idle
cycle.
13.4.2.3.2 Clock 2 (C2)
During C2, the write data for the access is driven, and the addrx memory access takes place using the
address and attribute values which were driven during C1 to enable writing of one or more bytes of
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y data z
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-51
memory. The slave device responds by asserting p_hready to indicate the cycle is completing and drives
an OKAY response.
Another write transfer request is made during C2 to addry (p_htrans = NONSEQ), and since the access to
addrx is completing, it is considered taken at the end of C2.
13.4.2.3.3 Clock 3 (C3)
During C3, write data for addry is driven, and the addry memory access takes place using the address and
attribute values that were driven during C2 to enable writing of one or more bytes of memory. The slave
device responds by asserting p_hready to indicate the cycle is completing and drives an OKAY response.
Another write transfer request is made during C3 to addrz (p_htrans = NONSEQ), and since the access to
addry is completing, it is considered taken at the end of C3.
13.4.2.3.4 Clock 4 (C4)
During C4, write data for addrz is driven, and the addrz memory access takes place using the address and
attribute values that were driven during C3 to enable writing of one or more bytes of memory. The slave
device responds by asserting p_hready to indicate the cycle is completing and drives an OKAY response.
The CPU has no more outstanding requests, so p_htrans indicates IDLE. The address and attribute signals
are thus undefined.
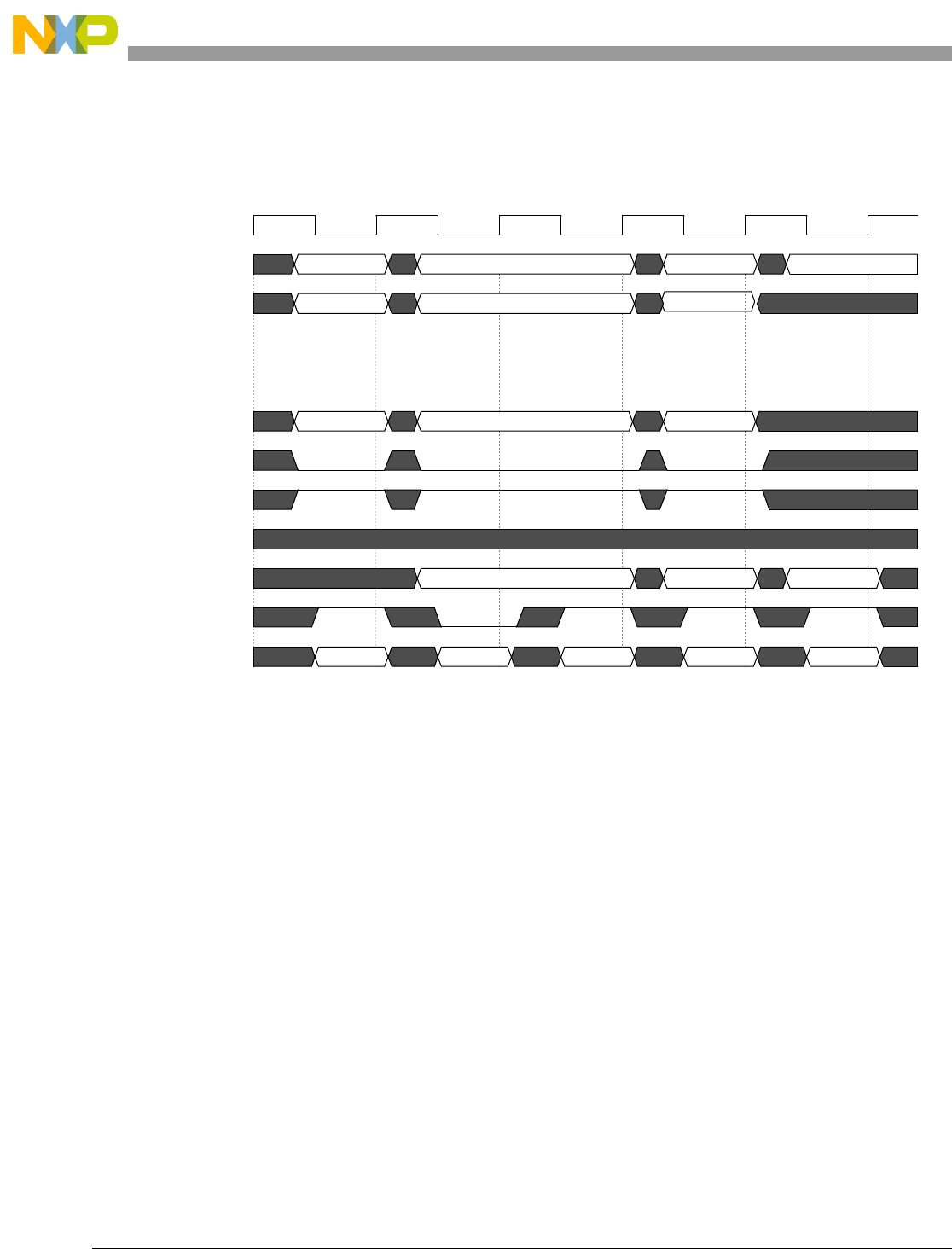
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-52 Freescale Semiconductor
13.4.2.4 Write Transfer with Wait States
Figure 13-9 shows an example of write-wait-state operation.
Figure 13-9. Write Transfer with Wait-State
Signal p_hready for the first request (addrx) is not asserted during C2, so a wait state is inserted until
p_hready is recognized (during C3).
Meanwhile, a subsequent request has been generated by the CPU for addry, which is not taken in C2
because the previous transaction is still outstanding. The address, transfer attributes, and write data remain
driven in cycle C3 and are taken at the end of C3 since a ready/OKAY response is driven back by the slave
device for the previous access. In cycle C4, a request for addrz is made. The request for access to addrz is
taken at the end of C4, and during C5, a ready/OKAY response is provided by the slave device. In cycle
C5, no further accesses are requested.
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y data z
okay okay okay okay okay
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
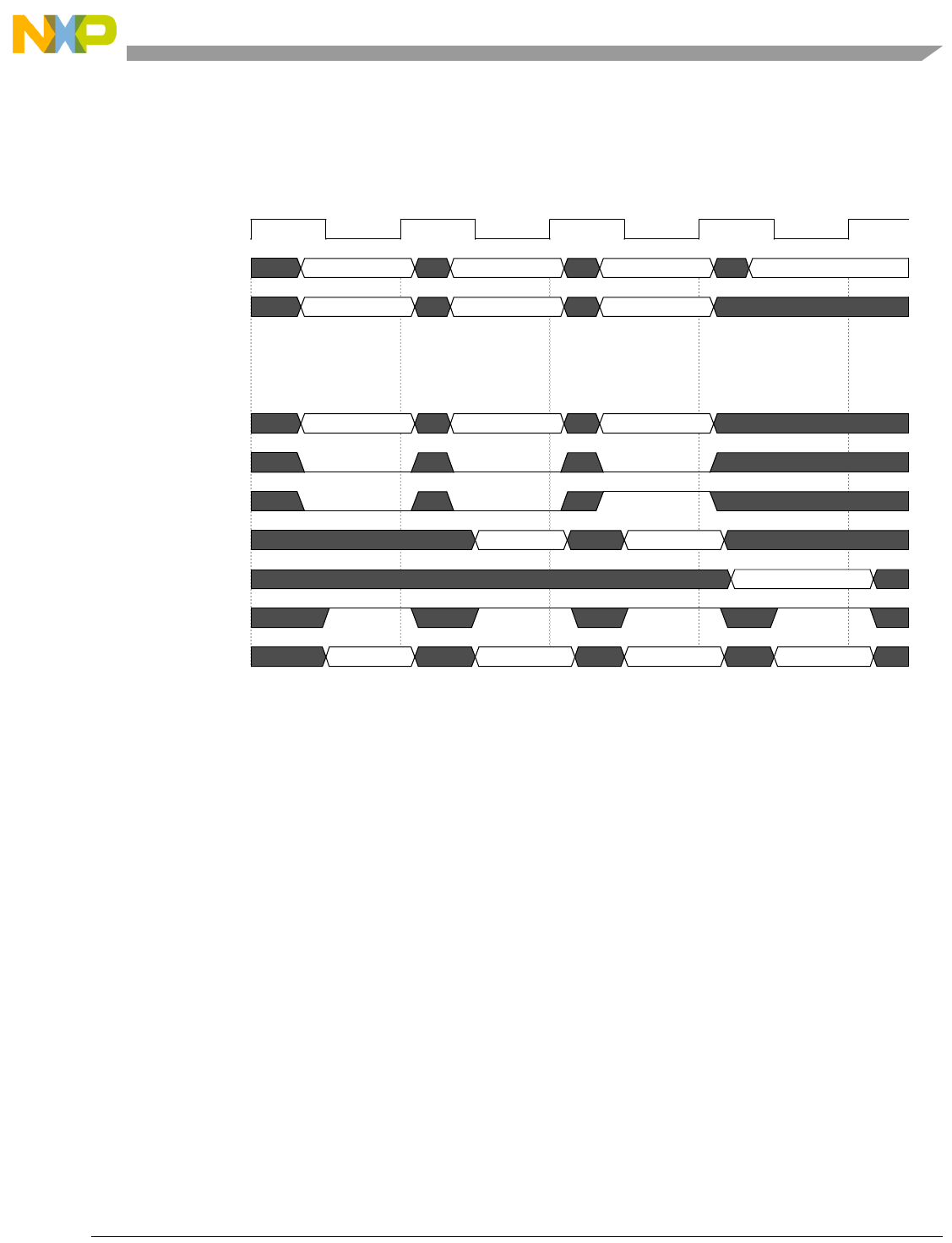
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-53
13.4.2.5 Read and Write Transfers
Figure 13-10 shows a sequence of read and write cycles.
Figure 13-10. Single Cycle Read and Write Transfers
The sequence is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle.
2. The second read request (addry) is taken at the end of C2 since a ready/OKAY response is asserted
during C2 for the first read access (addrx).
3. During C3, a request is generated for a write to addry, which is taken at the end of C3 because the
second access is terminating.
4. Data for the addrz write cycle is driven in C4, the cycle after the access is taken, and a ready/OKAY
response is signaled to complete the write cycle to addrz.
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y
data z
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
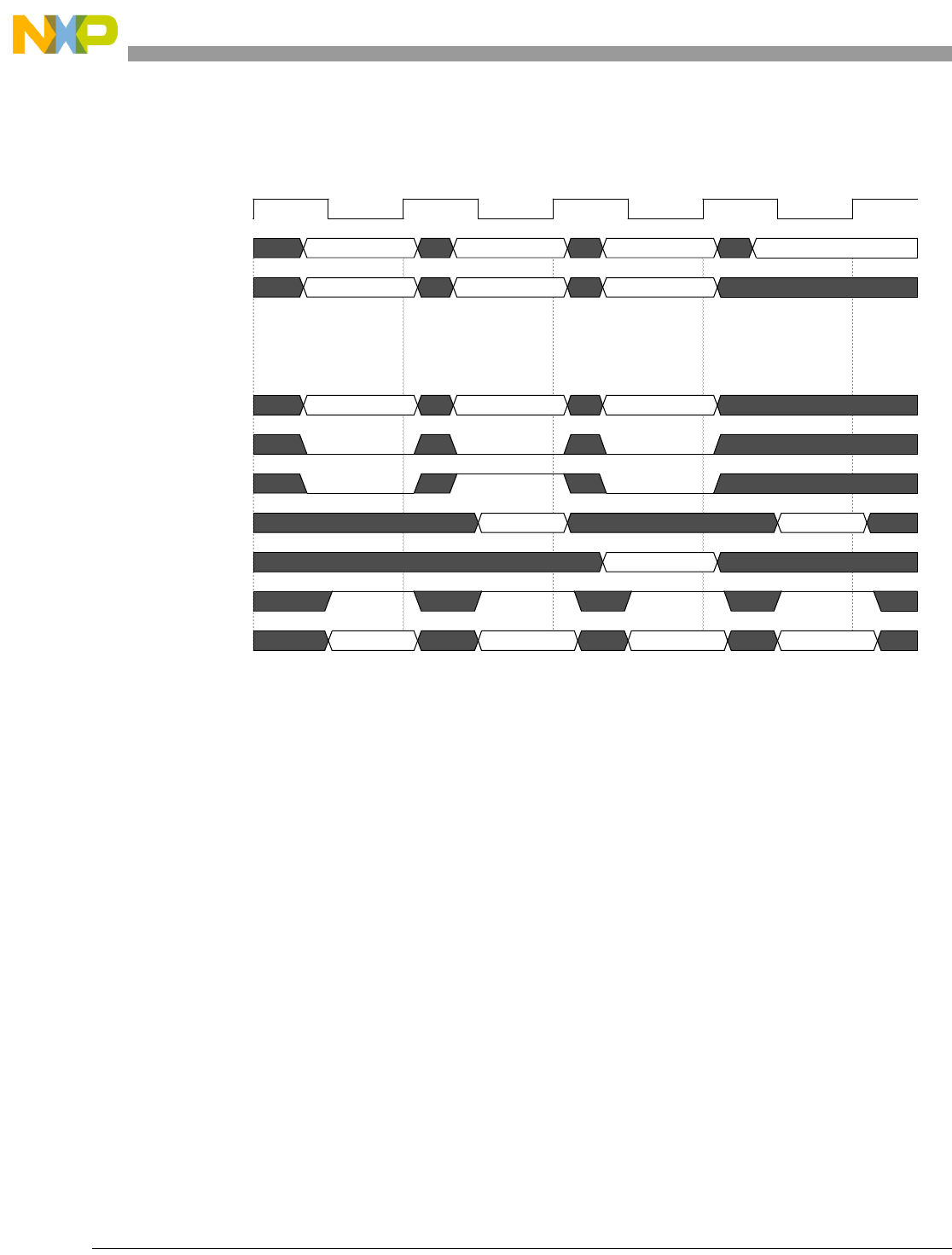
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-54 Freescale Semiconductor
Figure 13-11 shows another sequence of read and write cycles. This example shows an interleaved write
access between two reads.
Figure 13-11. Single Cycle Read and Write Transfers—2
The sequence is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle.
2. The first write request (addry) is taken at the end of C2 since the first access is terminating (addrx).
3. Data for the addry write cycle is driven in C3, the cycle after the access is taken.
4. Also during C3, a request is generated for a read to addrz, which is taken at the end of C3 since the
write access is terminating.
5. During C4, the addry write access is terminated, and no further access is requested.
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data z
data y
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
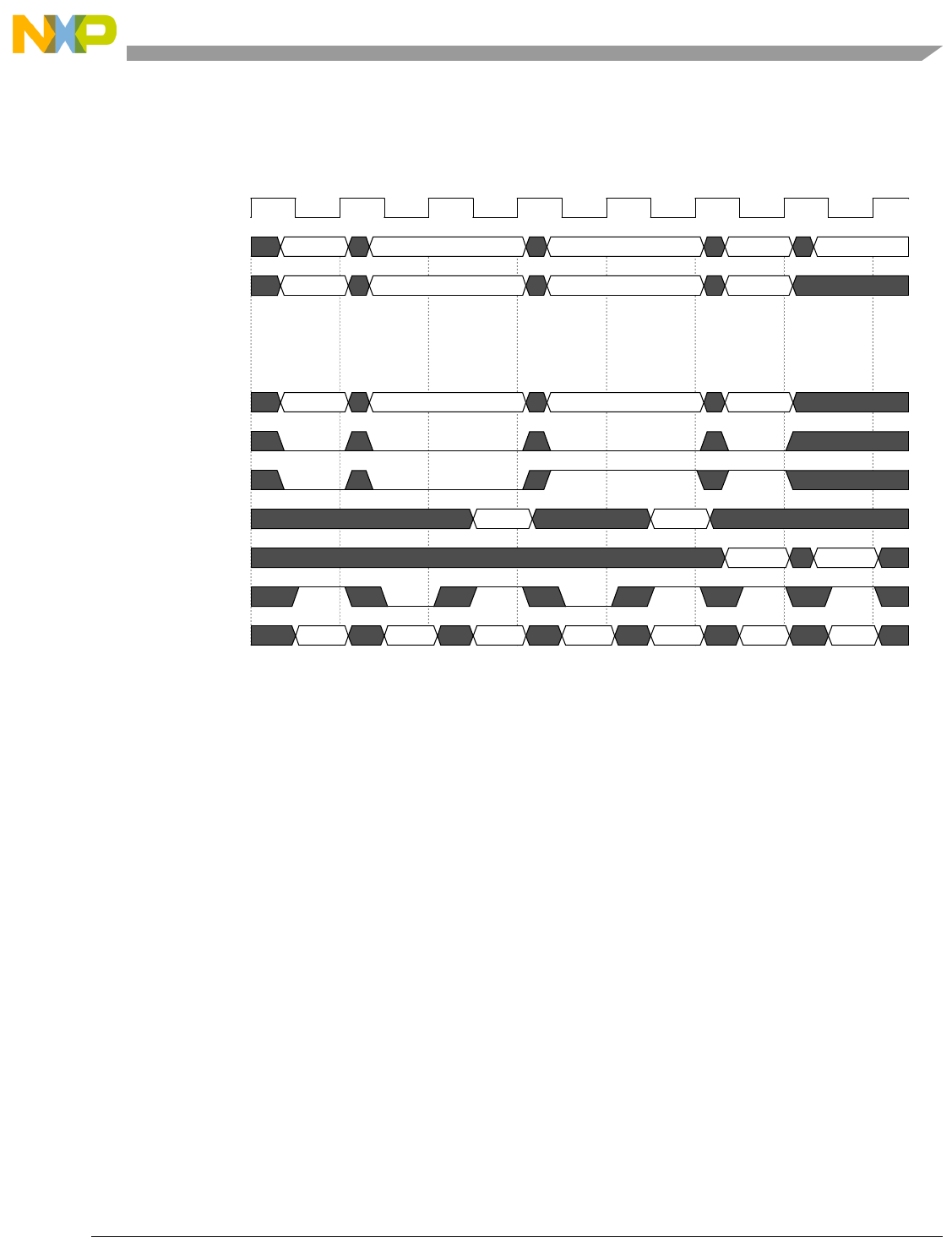
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-55
Figure 13-12 shows another sequence of read and write cycles. In this example, reads incur a single wait
state.
Figure 13-12. Multi-Cycle Read and Write Transfers
The sequence is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle.
2. The second read request (addry) is not taken at the end of cycle C2 since no ready response is
signaled and only one access can be outstanding (addrx). It is taken at the end of C3 once the first
read request has signaled a ready/OKAY response.
3. The first write request (addrz) is not taken during C4 since a ready response is not asserted during
C4 for the second read access (addry).
4. During C5, the request for a write to addrz is taken because the second access is terminating.
5. Data for the addrz write cycle is driven in C6, the cycle after the access is taken.
6. During C6, the addrz write access is terminated and the addrw write request is taken.
7. During C7, data for the addrw write access is driven, and a ready/OKAY response is asserted to
complete the write cycle to addrw.
nonseq nonseq nonseq nonseq idle
addr x addr y addr z addr w
single single single single
data x data y
data z data w
okay okay okay okay okay okay okay
12345678
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
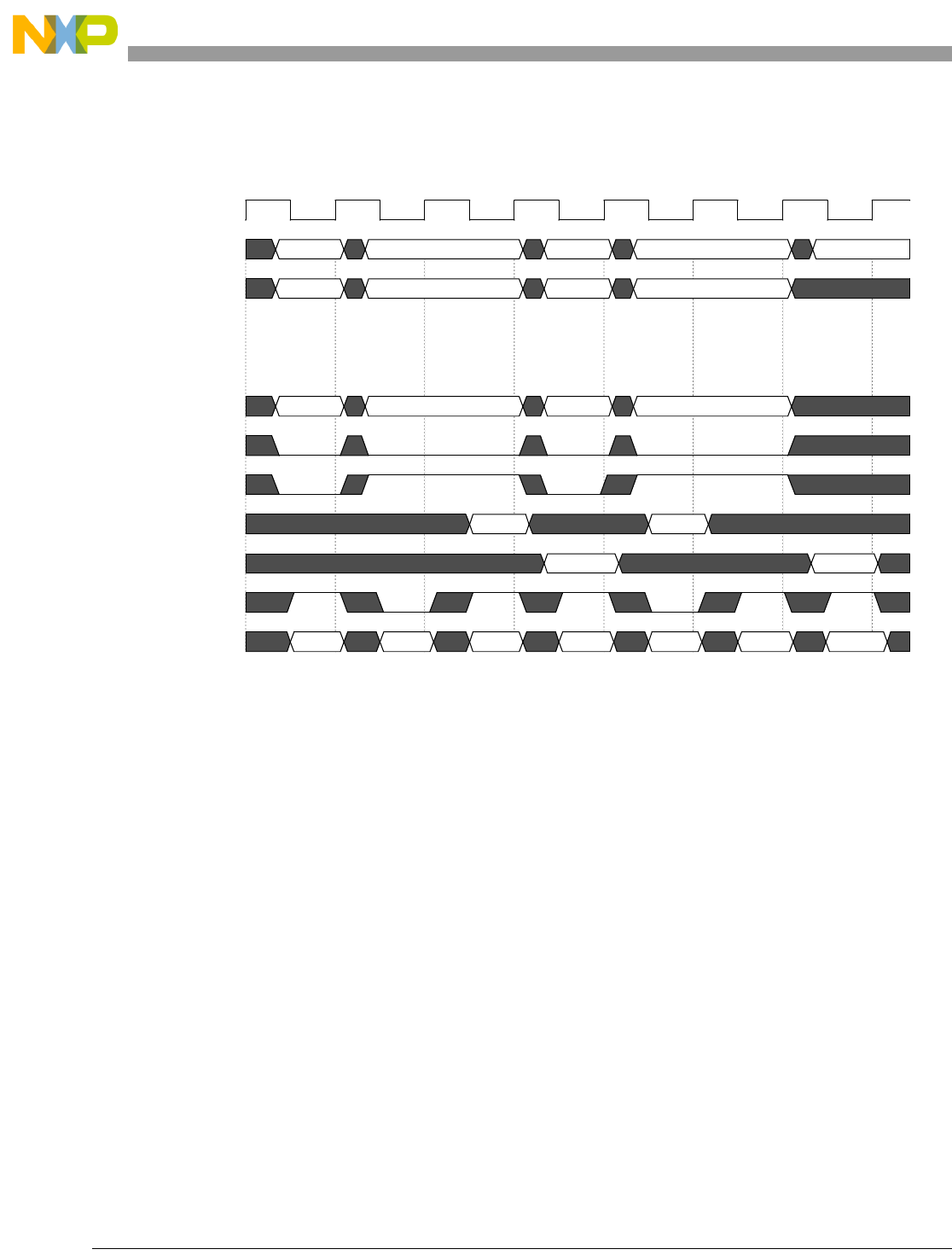
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-56 Freescale Semiconductor
Figure 13-13 shows another sequence of read and write cycles. In this example, reads incur a single wait
state.
Figure 13-13. Multi-Cycle Read and Write Transfers—2
The sequence is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle.
2. The first write request (addry) is not taken at the end of cycle C2 since no ready response is signaled
and only one access can be outstanding (addrx). It is taken at the end of C3 once the first read
request has signaled a ready/OKAY response.
3. Data for the addry write cycle is driven in C4, the cycle after the access is taken.
4. The second read request (addrz) is taken during C4 because the addry write is terminating.
5. A second write request (addrw) is not taken at the end of C5 since the second read access is not
terminating; thus it continues to drive the address and attributes into cycle C6.
6. During C6, the addrz read access is terminated and the addrw write access is taken.
7. In cycle C7, data for the addrw write access is driven.
8. During C7, a ready/OKAY response is asserted to complete the write cycle to addrw. No further
accesses are requested, so p_htrans signals IDLE.
nonseq nonseq nonseq nonseq idle
addr x addr y addr z addr w
single single single single
data x data z
data y data w
okay okay okay okay okay okay okay
12345678
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
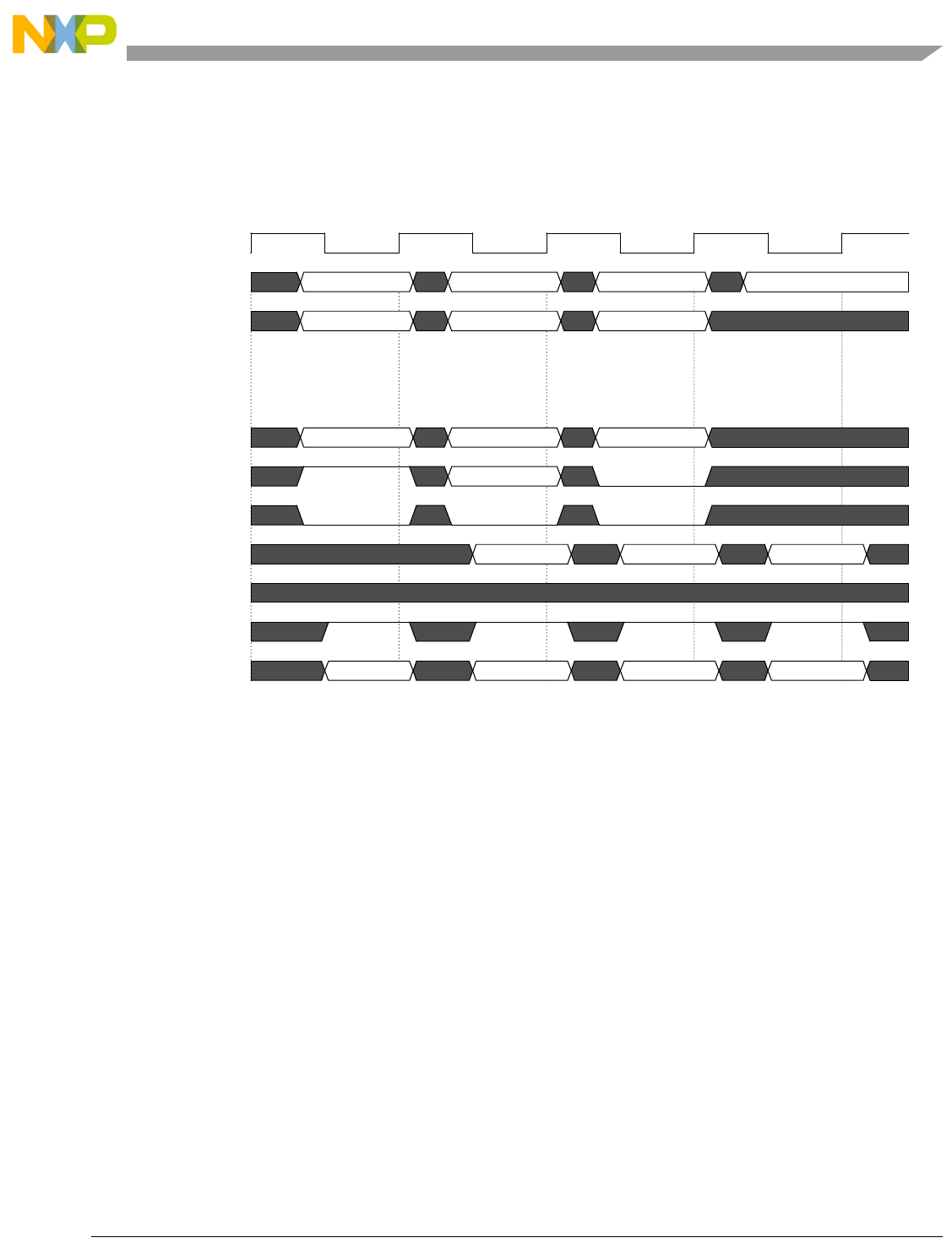
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-57
13.4.2.6 Misaligned Accesses
Figure 13-14 illustrates functional timing for a misaligned read transfer. The read to addrx is misaligned
across a 64-bit boundary.
Figure 13-14. Misaligned Read Transfer
The first portion of the misaligned read transfer starts in C1. During C1, the core places valid values on
the address bus and transfer attributes. The p_hwrite signal is driven low for a read cycle. The transfer
size attributes (p_hsize) indicate the size of the transfer. Even though the transfer is misaligned, the size
value driven corresponds to the size of the entire misaligned data item. p_hunalign is driven high to
indicate that the access is misaligned. The p_hbstrb outputs are asserted to indicate the active byte lanes
for the read, which may not correspond to size and low-order address outputs. p_htrans is driven to
NONSEQ.
During C2, the addrx memory access takes place using the address and attribute values which were driven
during C1 to enable reading of one or more bytes of memory.
The second portion of the misaligned read transfer request is made during C2 to addrx+ (which is aligned
to the next higher 64-bit boundary), and because the first portion of the misaligned access is completing,
it is taken at the end of C2. The p_htrans signals indicate NONSEQ. The size value driven is the size of
the remaining bytes of data in the misaligned read, rounded up (for the 3-byte case) to the next higher
power-of-2. The p_hbstrb signals indicate the active byte lanes. For the second portion of a misaligned
transfer, the p_hunalign signal is driven high for the 3-byte case (low for all others). The next read access
is requested in C3 and p_htrans indicates NONSEQ. p_hunalign is negated, since this access is aligned.
nonseq nonseq nonseq idle
addr x addr x+ addr y
single single single
**
data x data x+ data y
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
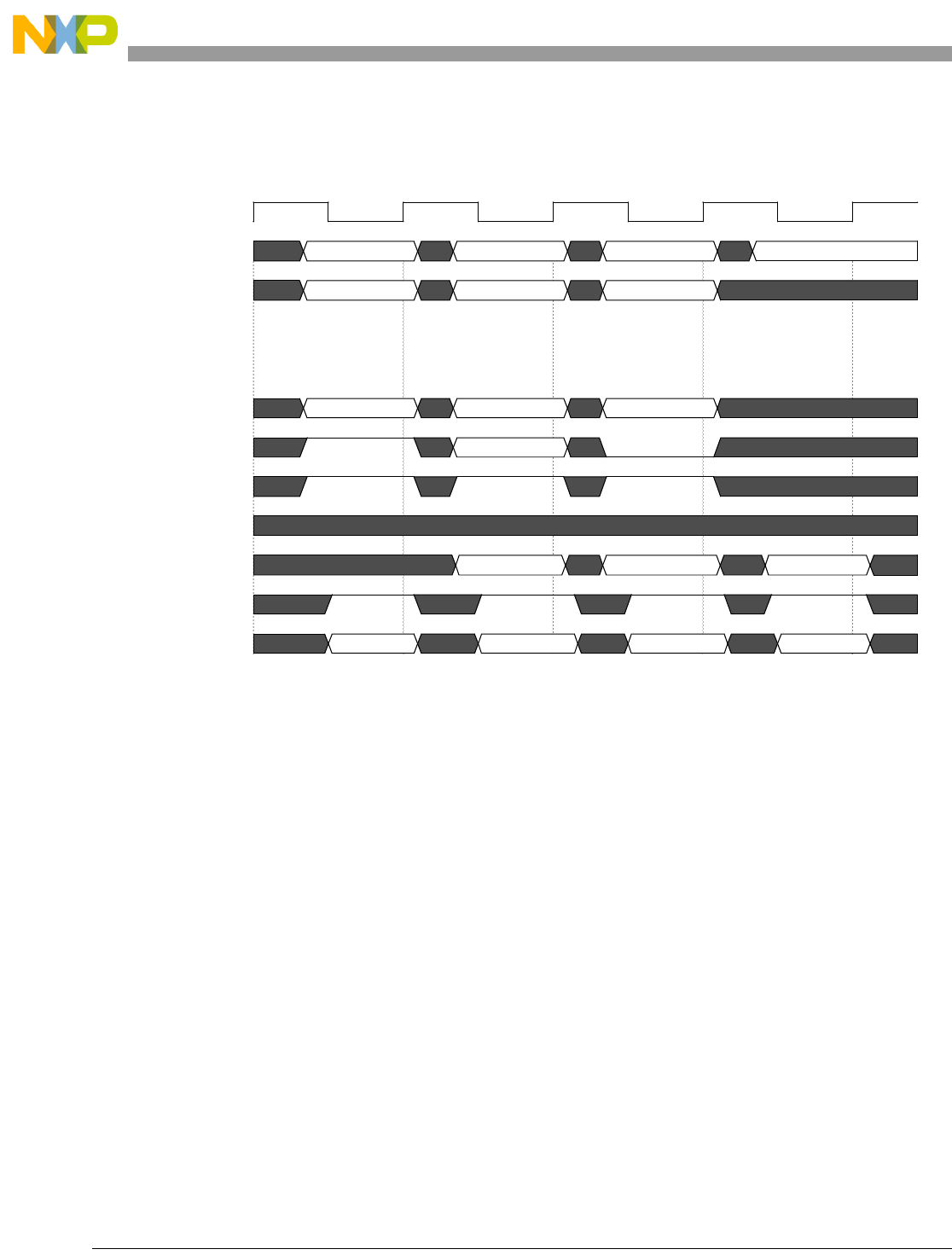
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-58 Freescale Semiconductor
Figure 13-15 illustrates functional timing for a misaligned write transfer. The write to addrx is misaligned
across a 64-bit boundary.
Figure 13-15. Misaligned Write Transfer
The first portion of the misaligned write transfer starts in C1. During C1, the core places valid values on
the address bus and transfer attributes. The p_hwrite signal is driven high for a write cycle. The transfer
size attribute (p_hsize) indicates the size of the transfer. Even though the transfer is misaligned, the size
value driven corresponds to the size of the entire misaligned data item. p_hunalign is driven high to
indicate that the access is misaligned. The p_hbstrb outputs are asserted to indicate the active byte lanes
for the write, which may not correspond to size and low-order address outputs. p_htrans is driven to
NONSEQ.
During C2, data for addrx is driven, and the addrx memory access takes place using the address and
attribute values which were driven during C1 to enable writing of one or more bytes of memory.
The second portion of the misaligned write transfer request is made during C2 to addrx+ (which is aligned
to the next higher 64-bit boundary), and since the first portion of the misaligned access is completing, it is
taken at the end of C2. The p_htrans signals indicate NONSEQ. The size value driven is the size of the
remaining bytes of data in the misaligned write, rounded up (for the 3-byte case) to the next higher
power-of-2. The p_hbstrb signals indicate the active byte lanes. For the second portion of a misaligned
transfer, the p_hunalign signal is driven high for the 3-byte case (low for all others).
The next write access is requested in C3 and p_htrans indicates NONSEQ. p_hunalign is negated,
because this access is aligned.
nonseq nonseq nonseq idle
addr x addr x+ addr y
single single single
**
data x data x+ data y
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
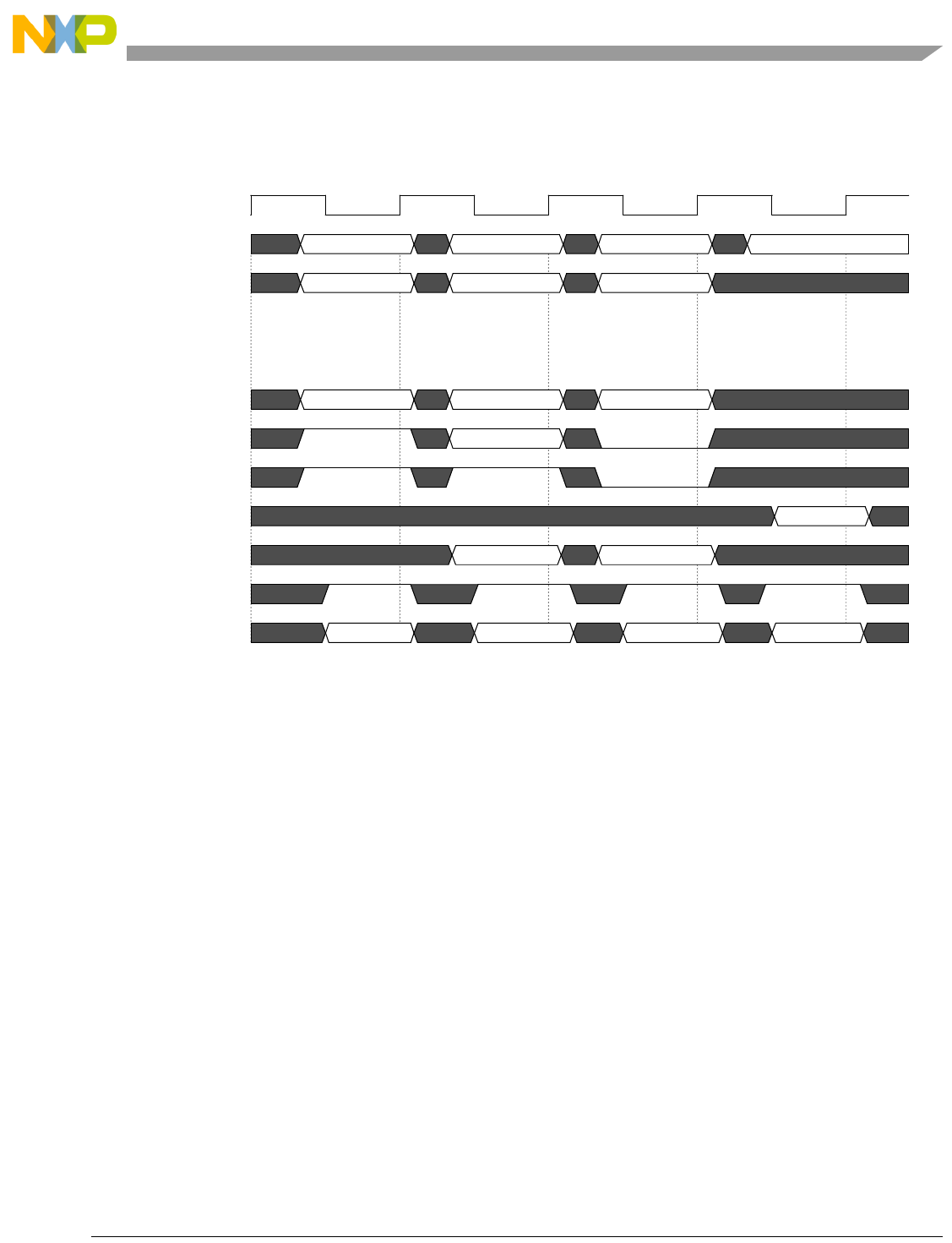
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-59
An example of a misaligned write cycle followed by an aligned read cycle is shown in Figure 13-16. It is
similar to the previous example in Figure 13-15.
Figure 13-16. Misaligned Write, Single Cycle Read Transfer
13.4.2.7 Burst Accesses
The following paragraphs describe burst read and burst write accesses on the AHB. Burst write accesses
are shown for reference only. The e200z446n3 does not generate burst write transfers.
nonseq nonseq nonseq idle
addr x addr x+ addr y
single single single
**
data y
data x data x+
okay okay okay okay
12345
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
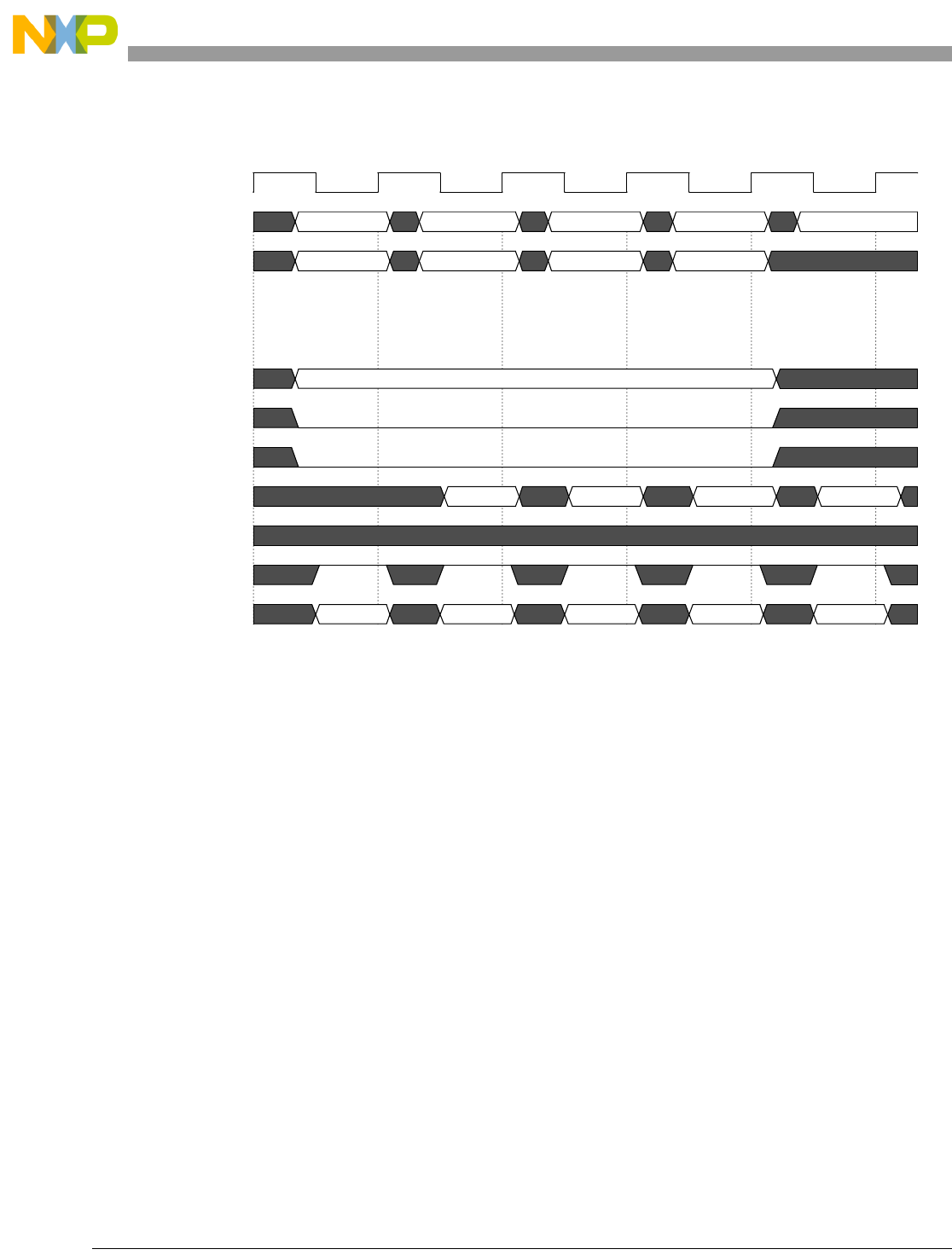
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-60 Freescale Semiconductor
Figure 13-17 illustrates functional timing for a burst read transfer.
Figure 13-17. Burst Read Transfer
The p_hburst signals indicate WRAP4 for all burst transfers. The p_hunalign signal is negated. p_hsize
indicate 64-bits, and all eight p_hbstrb signals are asserted. The burst address is aligned to a 64-bit
boundary and wraps around modulo four double words. Note that in this example the p_htrans signal
indicates IDLE after the last portion of the burst has been taken, but this is not always the case.
NOTE
Bursts may be followed immediately by any type of transfer. No idle cycle
is required.
nonseq seq seq seq idle
addr x addr x+8 addr x+16 addr x+24
wrap4
data x data x+8 data x+16 data x+24
okay okay okay okay okay
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
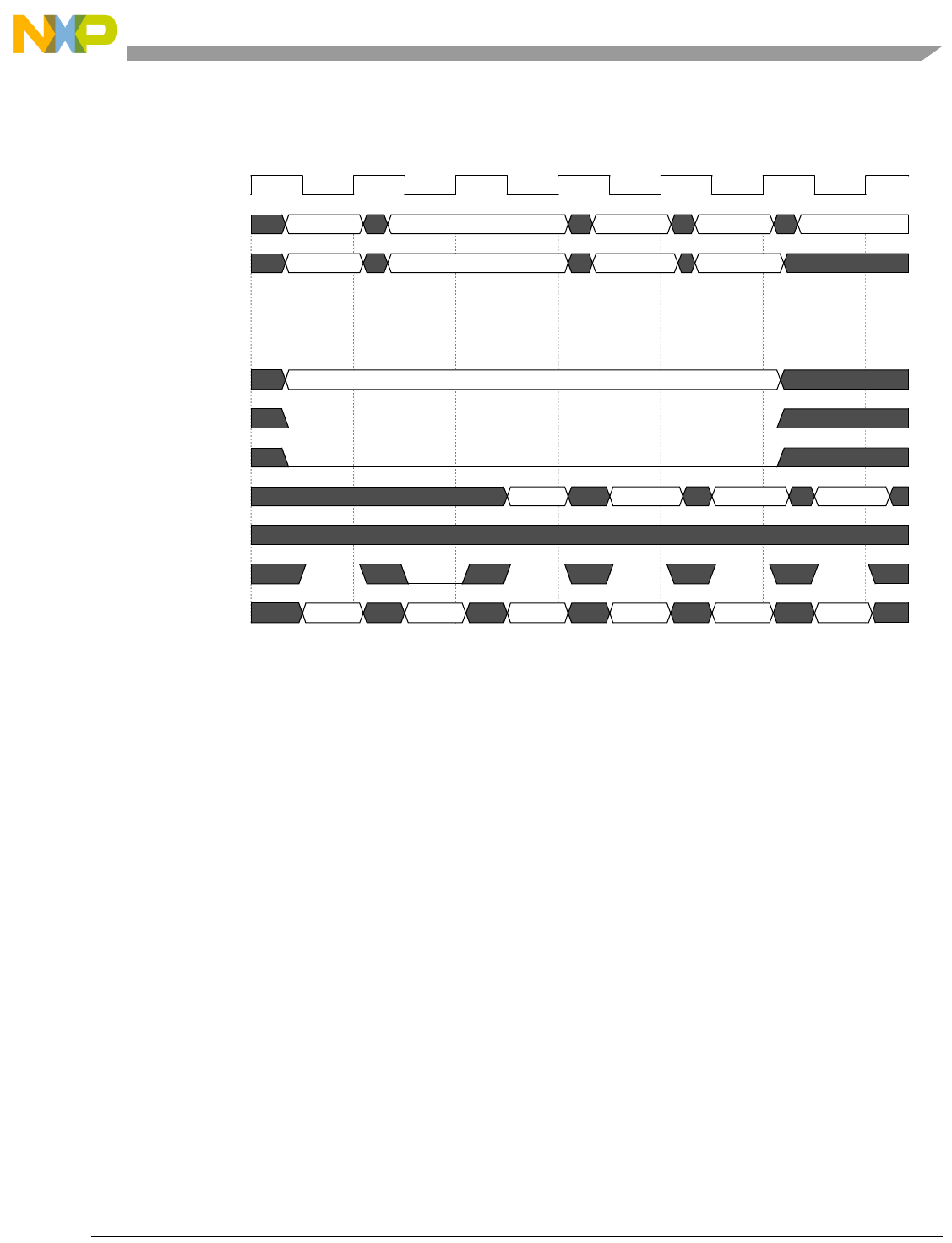
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-61
Figure 13-18 illustrates functional timing for a burst read with wait-state transfer.
Figure 13-18. Burst Read with Wait-State Transfer
The first cycle of the burst incurs a single wait-state.
nonseq seq seq seq idle
addr x addr x+8 addr x+16 addr x+24
wrap4
data x data x+8 data x+16 data x+24
okay okay okay okay okay okay
1234567
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
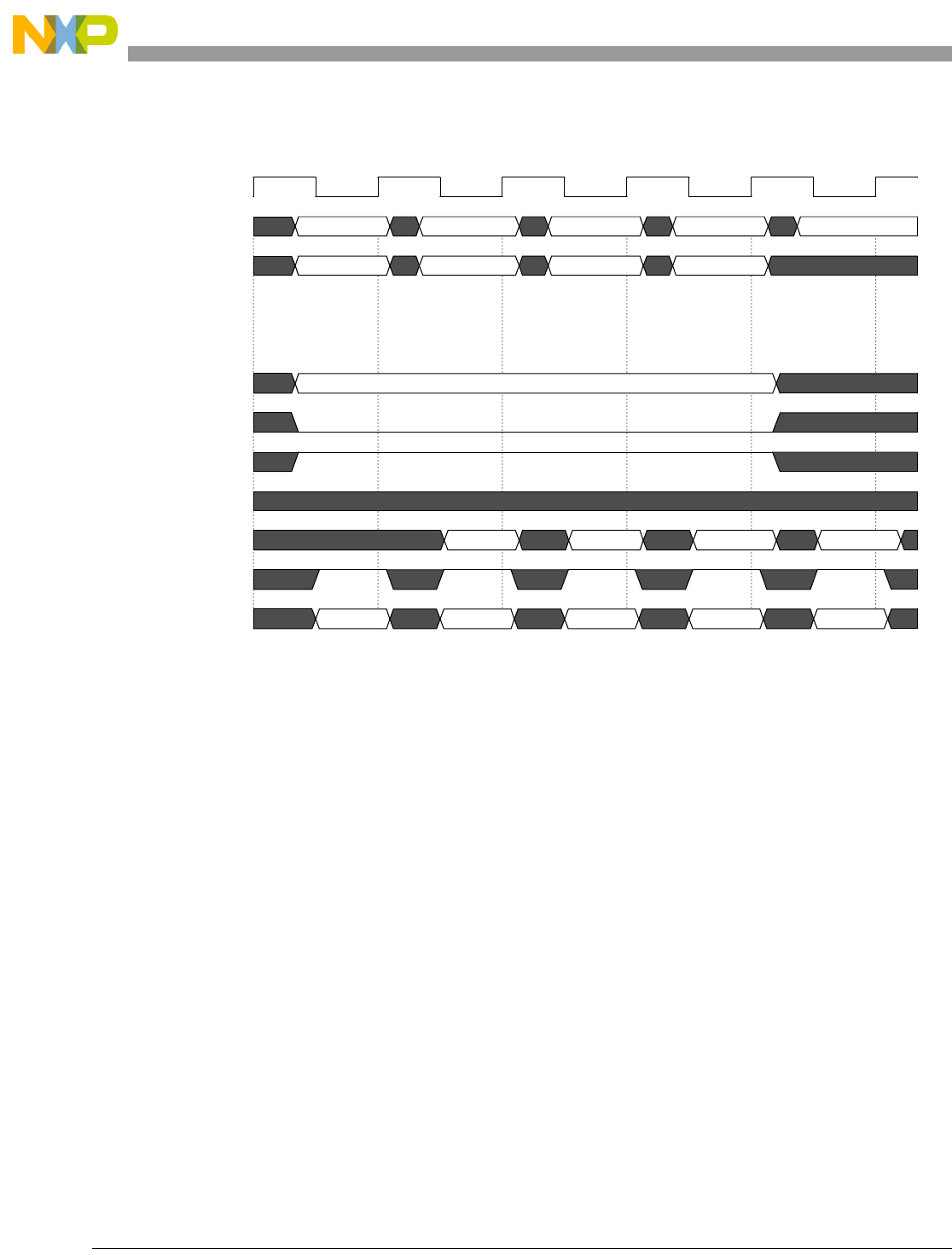
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-62 Freescale Semiconductor
Figure 13-19 illustrates functional timing for a burst write transfer.
Figure 13-19. Burst Write Transfer
nonseq seq seq seq idle
addr x addr x+8 addr x+16 addr x+24
wrap4
data x data x+8 data x+16 data x+24
okay okay okay okay okay
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
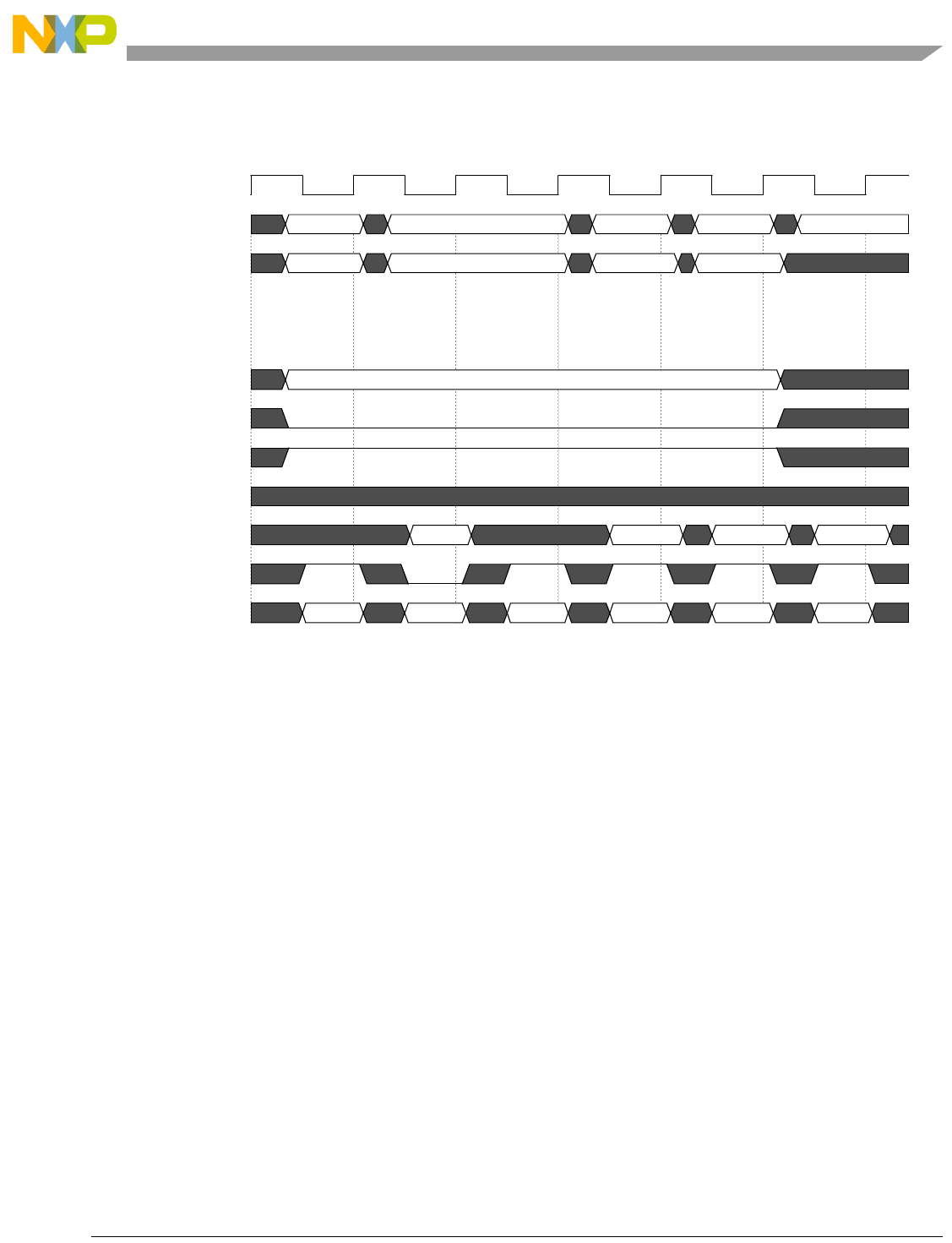
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-63
Figure 13-18 illustrates functional timing for a burst write with wait-state transfer.
Figure 13-20. Burst Write with Wait-State Transfer
The first cycle of the burst incurs a single wait-state. Data for the second beat of the burst is valid the cycle
after the second beat is taken.
13.4.2.8 Error Termination Operation
The p_hresp[2:0] inputs are used to signal an error termination for an access in progress. The ERROR
encoding is used in conjunction with the assertion of p_hready to terminate a cycle with error. Error
termination is a two-cycle termination; the first cycle consists of signaling the ERROR response on
p_hresp[2:0] while holding p_hready negated, and during the second cycle, asserting p_hready while
continuing to drive the ERROR response on p_hresp[2:0]. This two cycle termination allows the BIU to
retract a pending access if it desires to do so. p_htrans may be driven to IDLE during the second cycle of
the two-cycle error response, or may change to any other value, and a new access unrelated to the pending
access may be requested. The cycle which may have been previously pending while waiting for a response
which terminates with error may be changed. It is not required to remain unchanged when an error
response is received.
nonseq seq seq seq idle
addr x addr x+8 addr x+16 addr x+24
wrap4
data x data x+8 data x+16 data x+24
okay okay okay okay okay okay
1234567
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
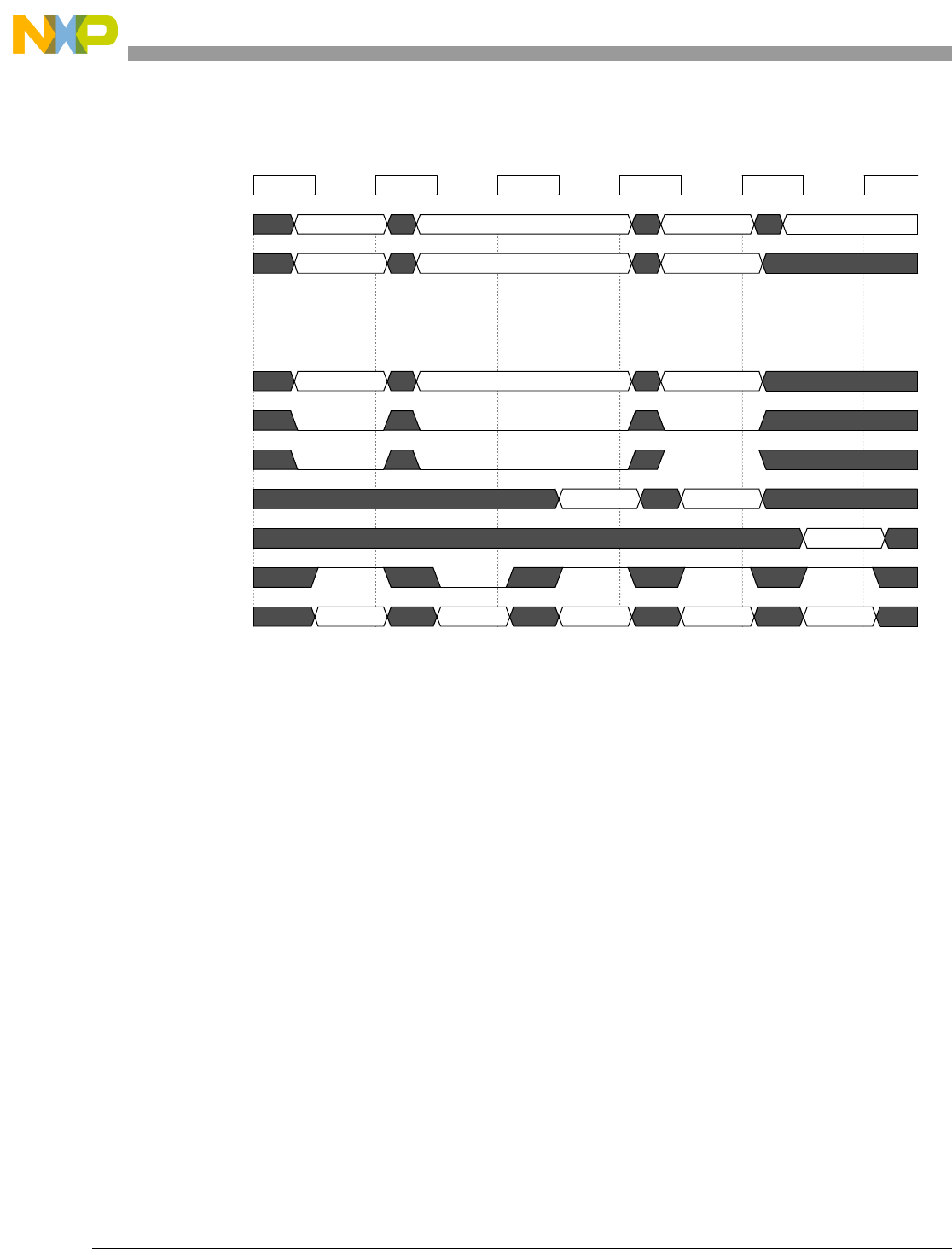
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-64 Freescale Semiconductor
Figure 13-21 shows an example of error termination.
Figure 13-21. Read and Write Transfers, Instr. Read Error Termination
The sequence of events is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle. It is an instruction
prefetch.
2. The second read request (addry) is not taken at the end of C2 since the first access is still
outstanding (no p_hready assertion). An error response is signaled by the addressed slave for
addrx by driving ERROR onto the p_hresp[2:0] inputs. This is the first cycle of the two cycle error
response protocol.
3. p_hready is asserted during C3 for the first read access (addrx) while the ERROR encoding
remains driven on p_hresp[2:0], terminating the access. The read data bus is undefined.
4. In this example of error termination, the CPU continues to request an access to addry. It is taken at
the end of C3.
5. During C4, read data is supplied for the addry read, and the access is terminated normally during
C4.
6. Also during C4, a request is generated for a write to addrz, which is taken at the end of C4 because
the second access is terminating.
7. Data for the addrz write cycle is driven in C5, the cycle after the access is taken.
8. During C5, a ready/OKAY response is signaled to complete the write cycle to addrz.
nonseq nonseq nonseq idle
addr x addr y addr z
single single single
data x data y
data z
okay error error okay okay
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
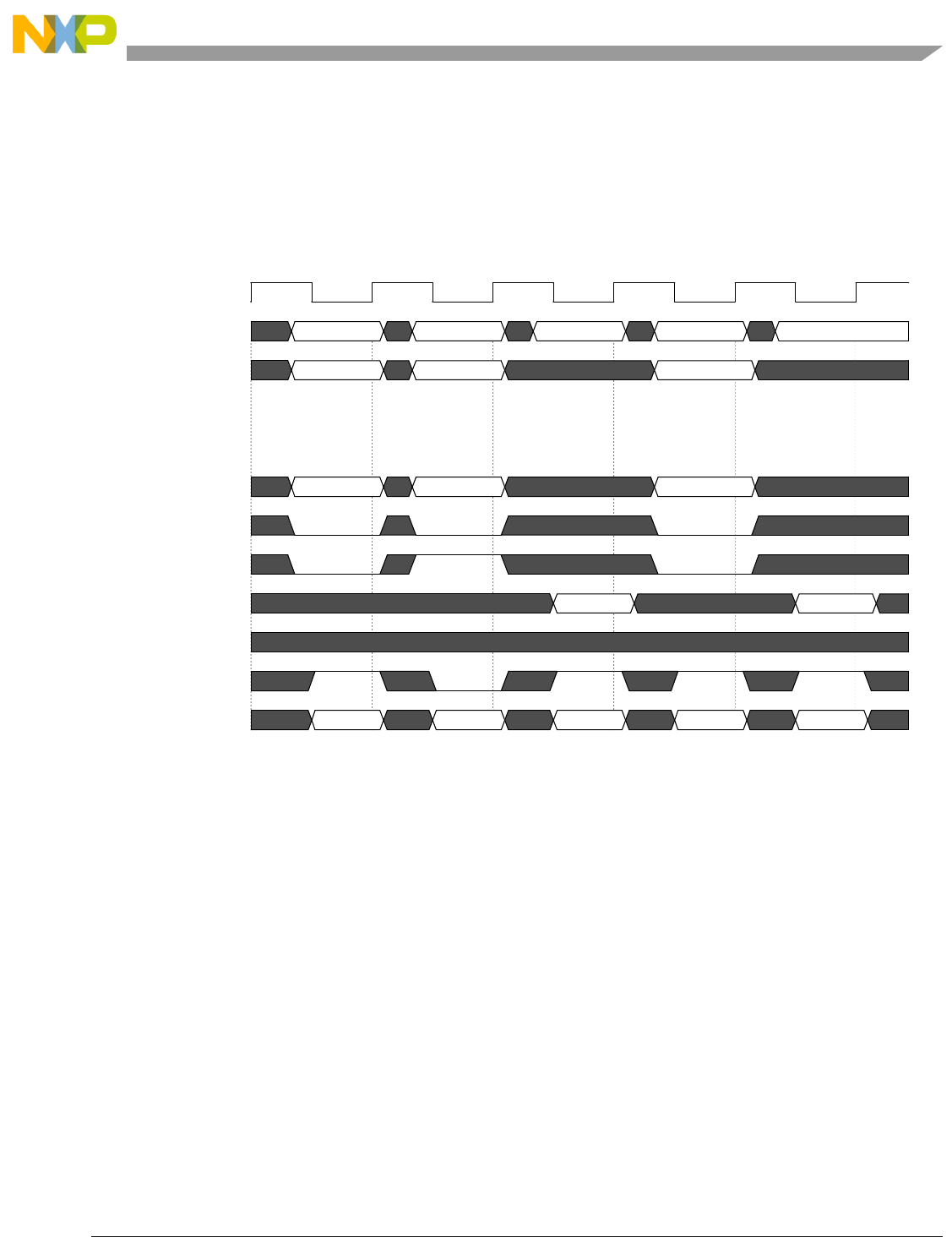
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-65
9. In this example of error termination, a subsequent access remained requested. This does not always
occur when certain types of transfers are terminated with error. The following figures outline cases
where an error termination for a given cycle causes a pending request to be aborted prior to
initiation.
Figure 13-22 shows another example of error termination.
Figure 13-22. Data Read Error Termination
The sequence is as follows:
1. The first read request (addrx) is taken at the end of cycle C1 since the bus is idle. It is a data read.
2. The second request (write to addry) is not taken at the end of C2 since the first access is still
outstanding (no p_hready assertion). An error response is signaled by the addressed slave for
addrx by driving ERROR onto the p_hresp[2:0] inputs. This is the first cycle of the two cycle error
response protocol.
3. p_hready is asserted during C3 for the first read access (addrx) while the ERROR encoding
remains driven on p_hresp[2:0], terminating the access. The read data bus is undefined.
4. In this example of error termination, the CPU retracts the requested access to addry by driving the
p_htrans signals to the IDLE state during the second cycle of the two-cycle error response.
5. A different access to addrz is requested during C4 and is taken at the end of C4. During C5, read
data is supplied for the addrz read, and the access is terminated normally.
6. In this example of error termination, a subsequent access was aborted.
nonseq nonseq idle nonseq idle
addr x addr y addr z
single single single
data x data z
okay error error okay okay
123456
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
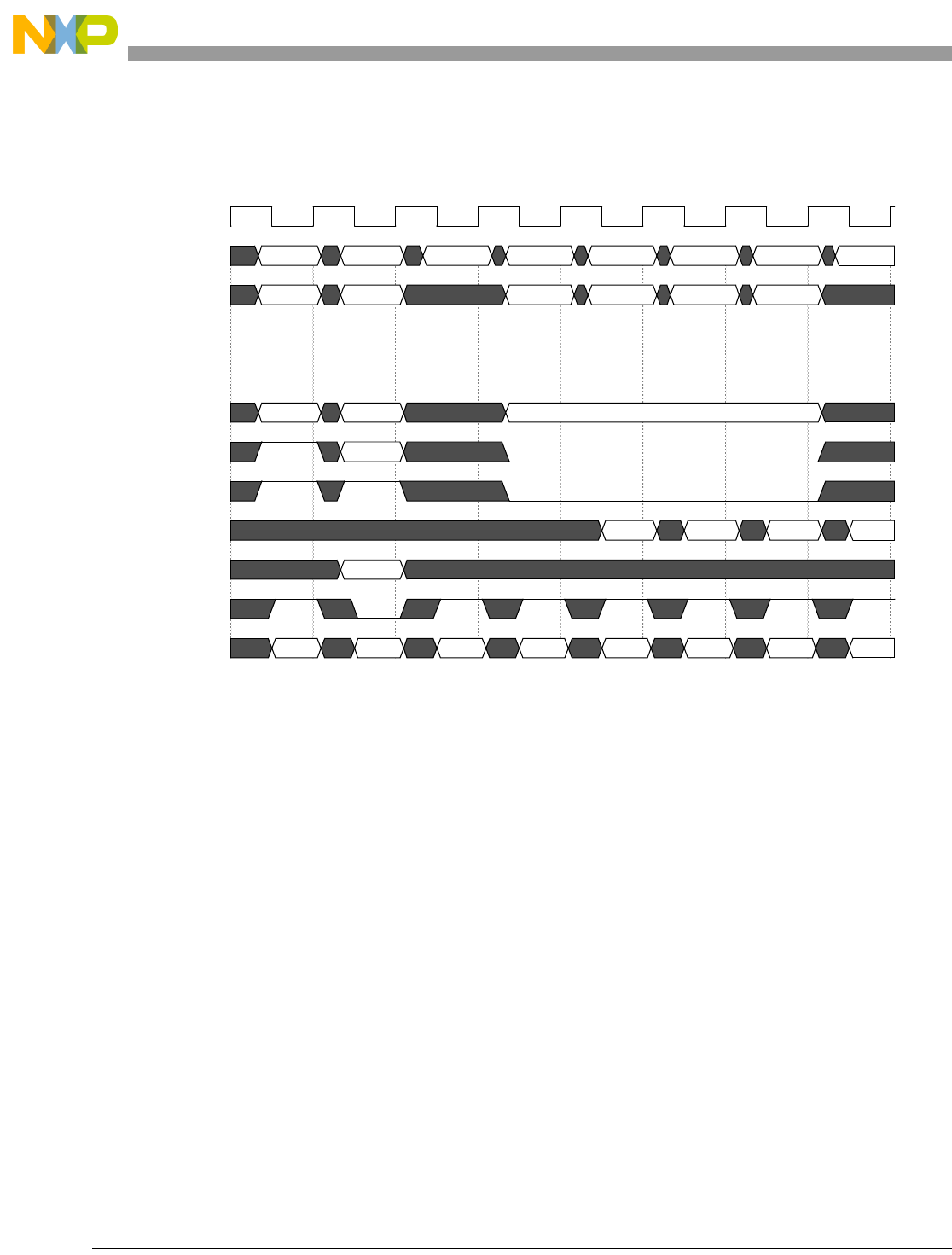
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-66 Freescale Semiconductor
Figure 13-23 shows another example of error termination, this time on the initial portion of a misaligned
write.
Figure 13-23. Misaligned Write Error Termination, Burst Substituted
The first portion of the misaligned write request is terminated with error. The second portion is aborted by
the CPU during the second cycle of the two cycle error response, and a subsequent burst read access to
addrw becomes pending instead.
nonseq nonseq idle nonseq seq seq seq idle
addr x addr x+ addr w addr w+8 addr w+16 addr w+24
single single wrap 4
**
data w w+8 w+16 w +24
data x
okay error error okay okay okay okay okay
12345678
hclk
p_htrans
_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
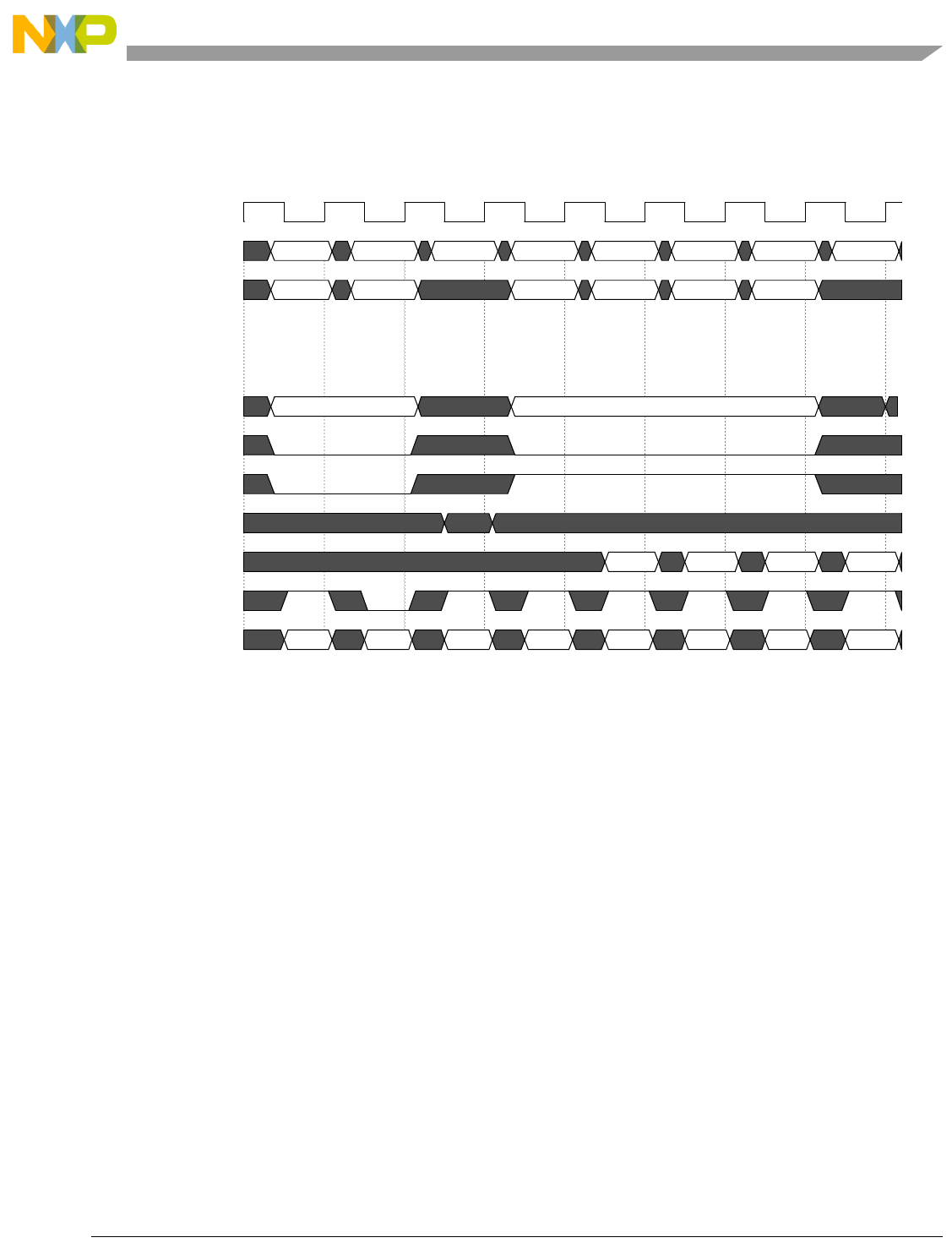
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-67
Figure 13-24 shows another example of error termination, this time on the initial portion of a burst read.
The aborted burst is followed by a burst write.
Figure 13-24. Burst Read Error Termination, Burst Write Substituted
The first portion of the burst read request is terminated with error. The second portion is aborted by the
CPU during the second cycle of the two cycle error response, and a subsequent burst write access to addry
becomes pending instead.
13.4.3 Cache Error Cross-Signaling Operation
The cache error cross-signaling interface is provided to allow for lockstep operation of two or more CPUs
in the presence of cache parity/EDC errors. The interface provides a means for signaling that one or more
errors has occurred and that other cache(s) in the lockstep operation should emulate an error condition.
During valid cache lookups, if a parity/EDC error is detected in a CPU, the error is indicated by means of
the p_cache_tagerr_out and p_cache_dataerr_out outputs, and the corresponding address and cache
way(s) incurring the error are indicated with the p_cerraddr_out[0:31] and p_cerrway_out[0:3] outputs
in the next cycle. In a dual-CPU lockstep system, these outputs are normally tied to the corresponding
p_cache_tagerr_in, p_cache_dataerr_in, p_cerraddr_in[0:31], and p_cerrway_in[0:3] inputs of the
other CPU.
Normally, due to extremely low probability, it is not expected that the two CPUs would incur an error
during the same lookup cycle. If this is an issue requiring detection, then system logic may be utilized to
detect simultaneous assertion of more than one CPU’s error output signal(s) and perform appropriate error
recovery, such as a reset operation.
nonseq seq idle nonseq seq seq seq idle
addr x addr x+8 addr y addr y+8 addr y+16 addr y+24
wrap4 wrap4
data x
data y y+8 y+16 y+24
okay error error okay okay okay okay okay
12345678
hclk
p_htrans
p_addr,p_hprot
p_hsize,
p_hbstrb, etc
p_hburst
p_hunalign
p_hwrite
p_hrdata
p_hwdata
p_hready
p_hresp
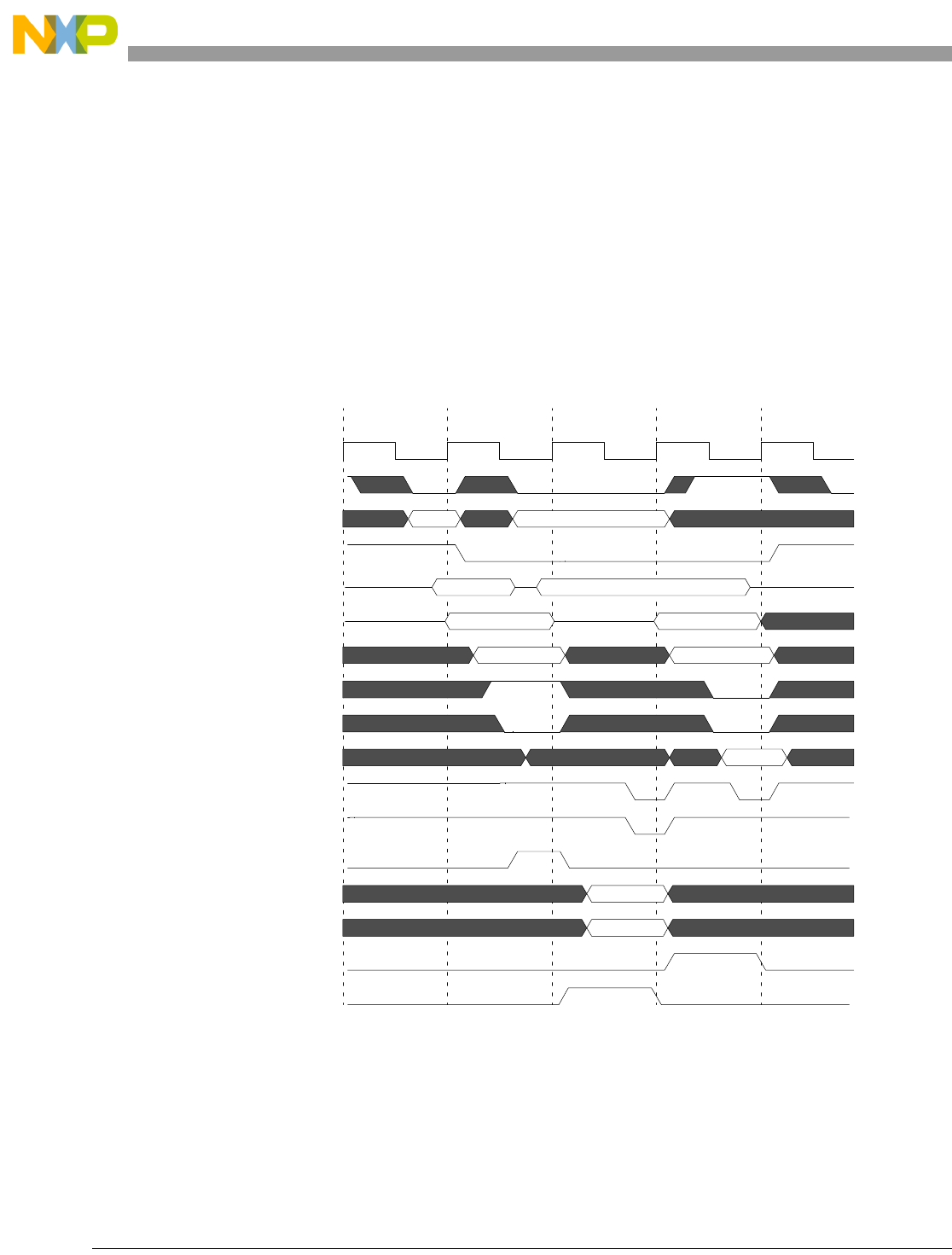
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-68 Freescale Semiconductor
Enabling of cache error cross-signaling is performed by assertion of the p_lkstep_en input signal. When
p_lkstep_en is negated, the p_cache_err_in, p_cache_tagerr_in, p_cache_dataerr_in,
p_tagerrway_in[0:3], and p_drterrway_in[0:3] inputs are ignored. In the examples which follow, is is
assumed that p_lkstep_en has been properly asserted.
13.4.3.1 Cross-Signaling with Machine Check Operation Selected
Figure 13-25 illustrates functional timing for a cross-signaling operation by a CPU encountering an
internal cache error with the error action indicating that a machine check should be generated
(L1CSR1[ICEA] = 00). A cache error is detected in cycle 2 and results in a machine check exception being
signaled.
Figure 13-25. Cross-Signaling Exception Output Operation
For cross-signaling operations during icbi invalidate operations when machine check error action is
selected (L1CSR1[ICEA] = ‘00’), the signaling of a p_cache_tagerr_out event indicates that a false hit
to one or more unlocked line occurred and the line(s) should be invalidated in the other CPU(s), regardless
of hit or miss conditions in the other CPU(s), rather than to cause a machine check condition. The ways(s)
that incurred a false hit are signaled on the p_cerrway_out[0:3] outputs. This is currently the only
addr a addr a+8 begin exception processing
idle
addr a addr a + 8
addr a addr a+8
data a data a+8
data a data a+8
phys(a)
Hit with cache_err_out, no auto-invalidate, force exception
12345
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_data_in
p_ta_b
p_tea_b
p_cache_[tag,data]err_out
p_cerraddr_out
p_cerrway_out[0:3]
ec_excp_det
update MCAR
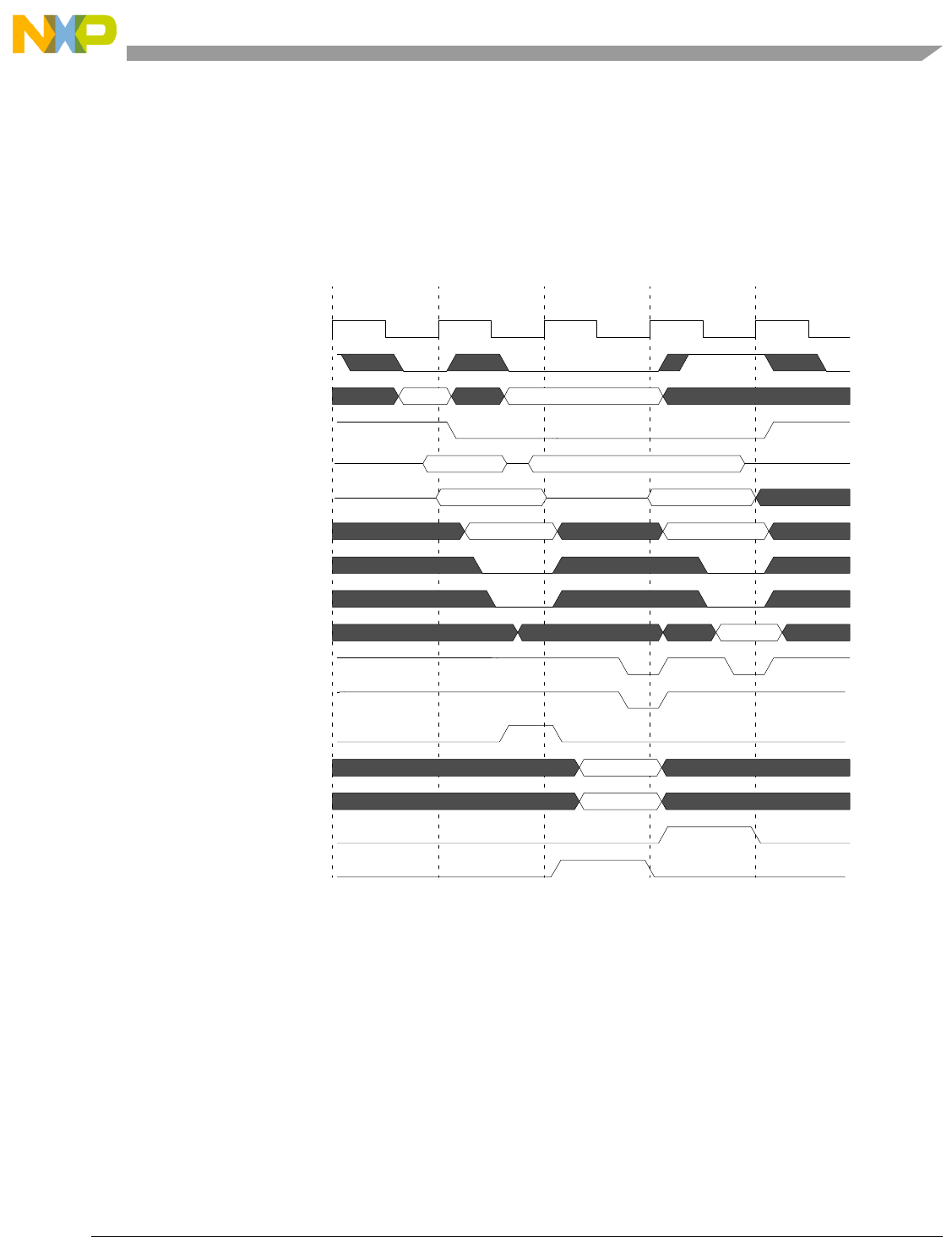
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-69
situation in which a machine check is not generated due to signaling of a p_cache_tagerr_out event when
operating with machine check error action enabled (L1CSR1[ICEA] = ‘00’).
Figure 13-26 illustrates functional timing for a cross-signaling operation by a CPU receiving a cache error
cross-signaling operation with the error action indicating a machine check should be generated. A cache
error is detected in cycle 2 by an external cache and results in a machine check exception being generated.
Figure 13-26. Cross-Signaling Exception Input Operation
13.4.3.2 Cross-Signaling with Auto-Invalidation Operation Selected
Figure 13-27 illustrates functional timing for a cross-signaling operation by a CPU which encounters an
internal cache error in the cache data array with the error action indicating that an auto-invalidation should
addr a addr a+8 begin exception processing
idle
addr a addr a + 8
addr a addr a+8
data a data a+8
data a data a+8
phys(a)
Hit with cache_err_out, no auto-invalidate, force exception
12345
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_data_in
p_ta_b
p_tea_b
p_cache_[tag,data]err_in
p_cerraddr_in
p_cerrway_in[0:3]
ec_excp_det
update MCAR
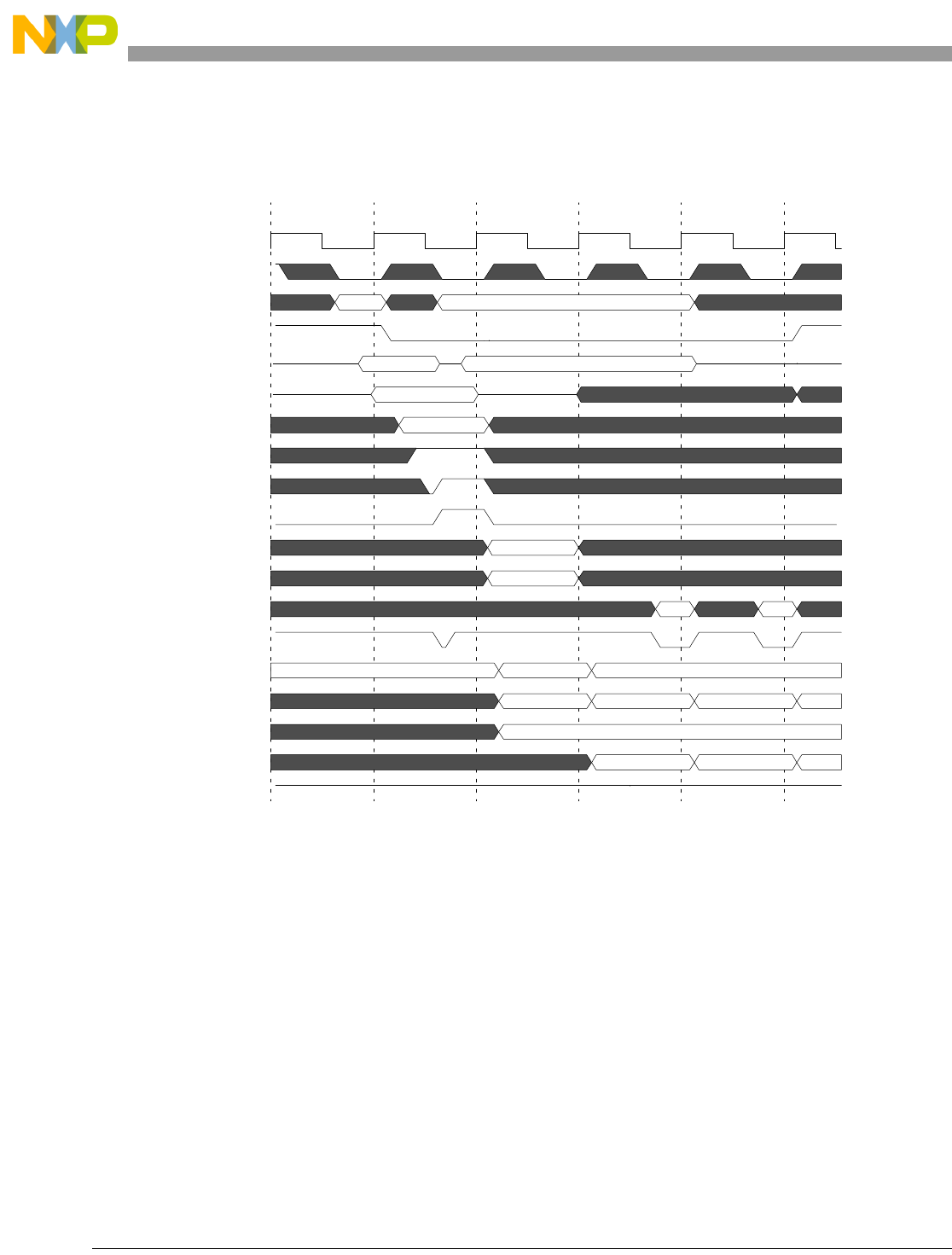
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-70 Freescale Semiconductor
be generated. A cache data array error is detected in cycle 2 and results in a cache miss being forced. The
error entry is refilled beginning in cycle 3.
Figure 13-27. Cross-Signaling Invalidation Output Operation—Data Error
Figure 13-28 illustrates functional timing for a cross-signaling operation by a CPU encountering an
internal cache error in the cache tag array with the error action indicating that an auto-invalidation should
be generated. A cache tag array error is detected in cycle 2 and results in a cache correction/invalidation
cycle being forced. In this example, way 0 has a correctable error and way 2 has an uncorrectable error and
addr a addr a + 8
idle
addr a addr a + 8
addr a addr a + 8 (stream hit)
force miss
phys(a)
data a data a+8
idle non-seq seq
addr a addr a + 8 (modulo)addr a + 16 (mod)addr a + 24 (mod)
wrap 4
addr a critical Dwordaddr a + 8, wrap addr a +16, wrap
Hit with EDC error in data array, auto-invalidate, force miss
123456
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_dataerr_out
p_cerraddr_out
p_cerrway_out[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
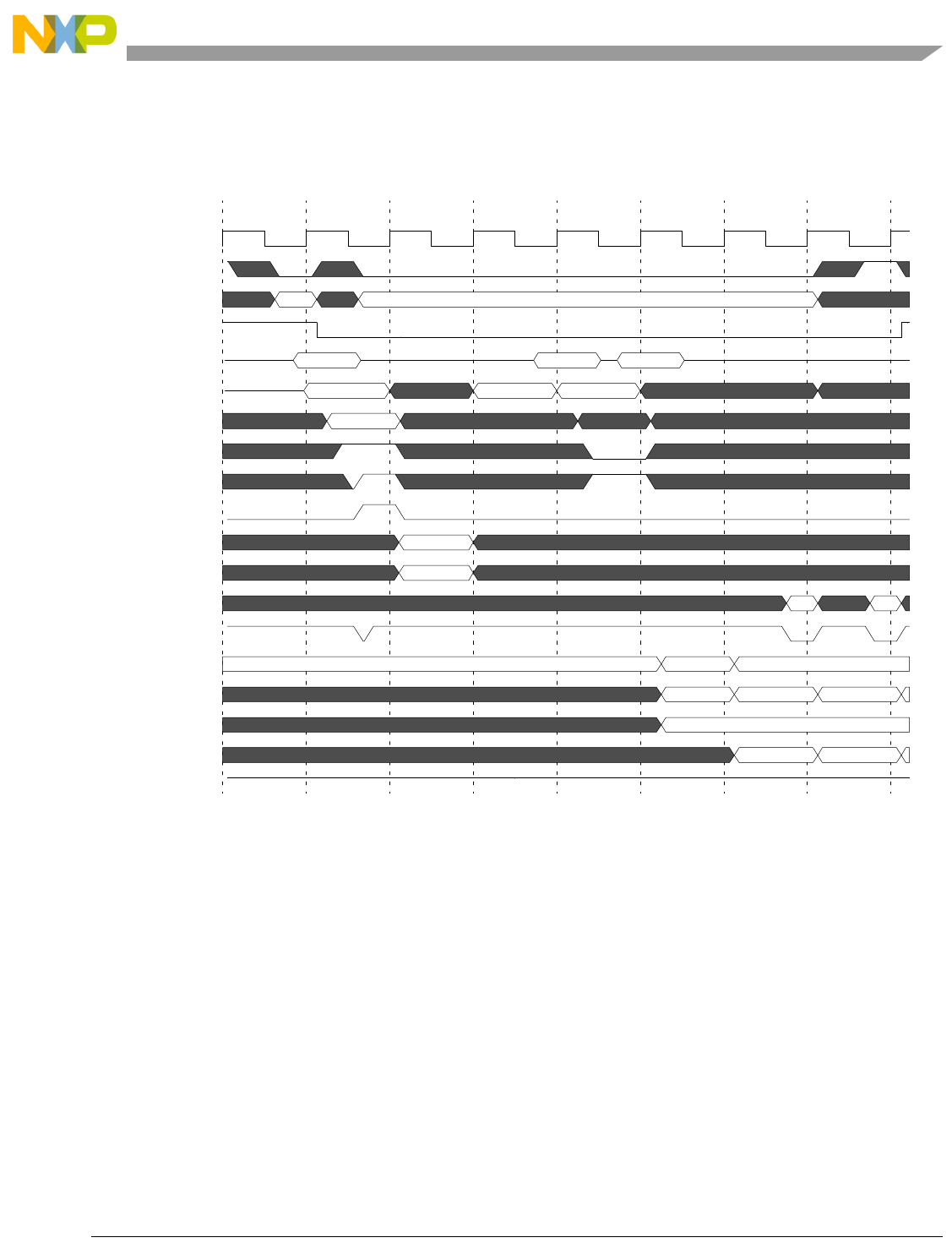
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-71
requires invalidation. The correction of way 0 and invalidation of way 2 are performed in cycle 4. The
address ‘a’ access is recycled in cycle 5 and results in a miss. The cache is refilled beginning in cycle 6.
Figure 13-28. Cross-Signaling Invalidation Output Operation—Tag Error, Miss
Figure 13-29 illustrates functional timing for a cross-signaling operation by a CPU encountering an
internal cache error in the cache tag array with the error action indicating that an auto-invalidation should
be generated. A cache tag array error is detected in cycle 2 and results in a cache correction/invalidation
addr a addr a + 8
idle
addr a addr a addr a + 8
addr a compute corr correct/inv tags recycle a addr a + 8 (stream hit)
force miss
phys(a)
0010
data a data a+8
idle non-seq seq
addr a addr a + 8 (modulo)addr a + 16 (mod)
wrap 4
addr a critical Dwordaddr a + 8, wrap
Hit with EDC error in tag array, auto-invalidate/correct, subsequent miss
12345678
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_out
p_cerraddr_out
p_cerrway_out[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
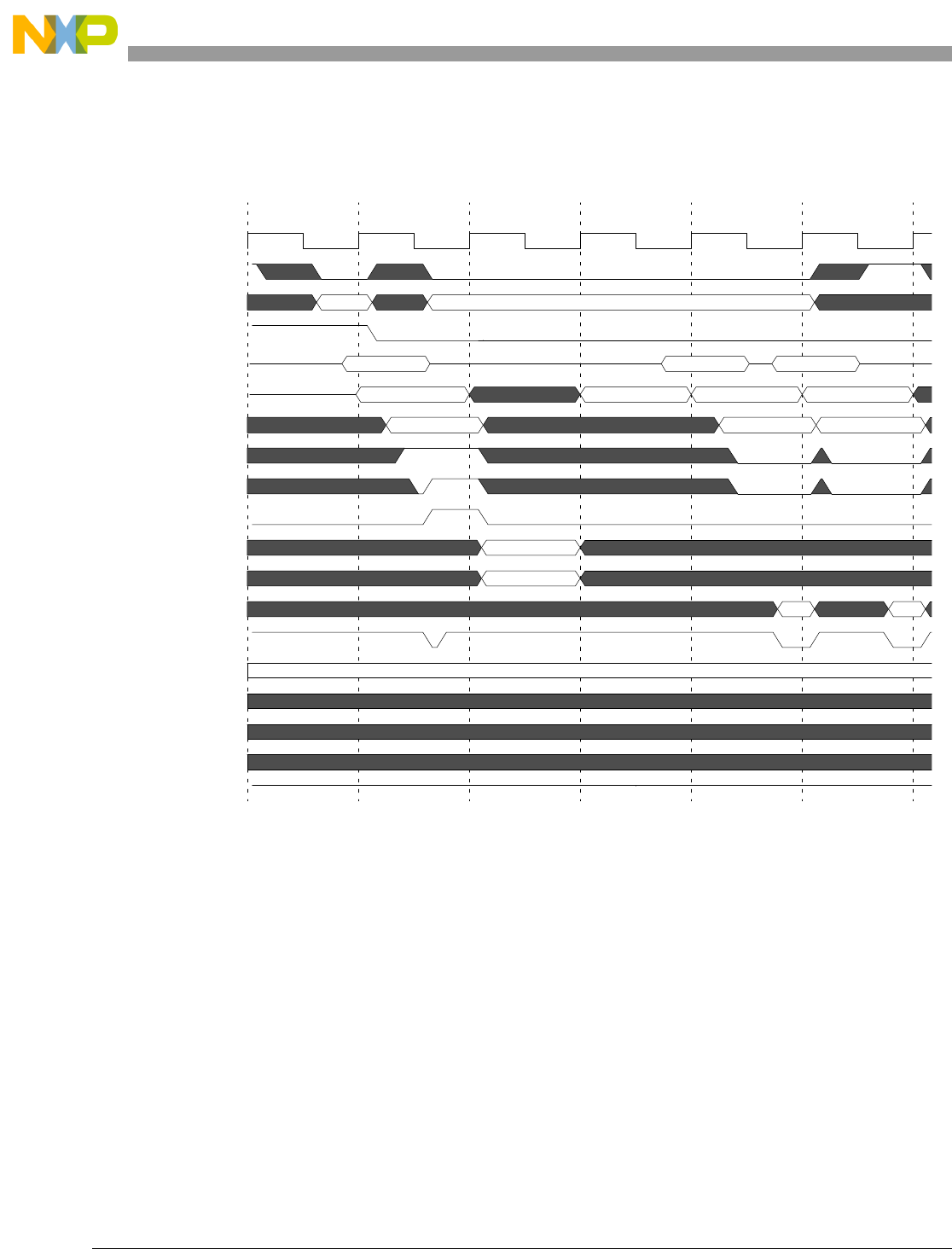
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-72 Freescale Semiconductor
cycle being forced. In this example, way 1 has a correctable error. The correction of way 1 is performed
in cycle 4. The address ‘a’ access is recycled in cycle 5 and results in a hit.
Figure 13-29. Cross-signaling Invalidation Output Operation—Tag Error, Hit
Figure 13-30 illustrates functional timing for a cross-signaling operation by a CPU which encounters an
internal cache error in the cache tag array with the error action indicating that an auto-invalidation should
be generated. A cache tag array error is detected in cycle 2 and results in a cache correction/invalidation
addr a addr a + 8
idle
addr a addr a addr a + 8
addr a compute corr correct tag recycle a addr a + 8
force miss
phys(a)
0000
data a data a
idle
Hit with EDC error in tag array, auto-invalidate/correct, subsequent hit
123456
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_out
p_cerraddr_out
p_cerrway_out[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
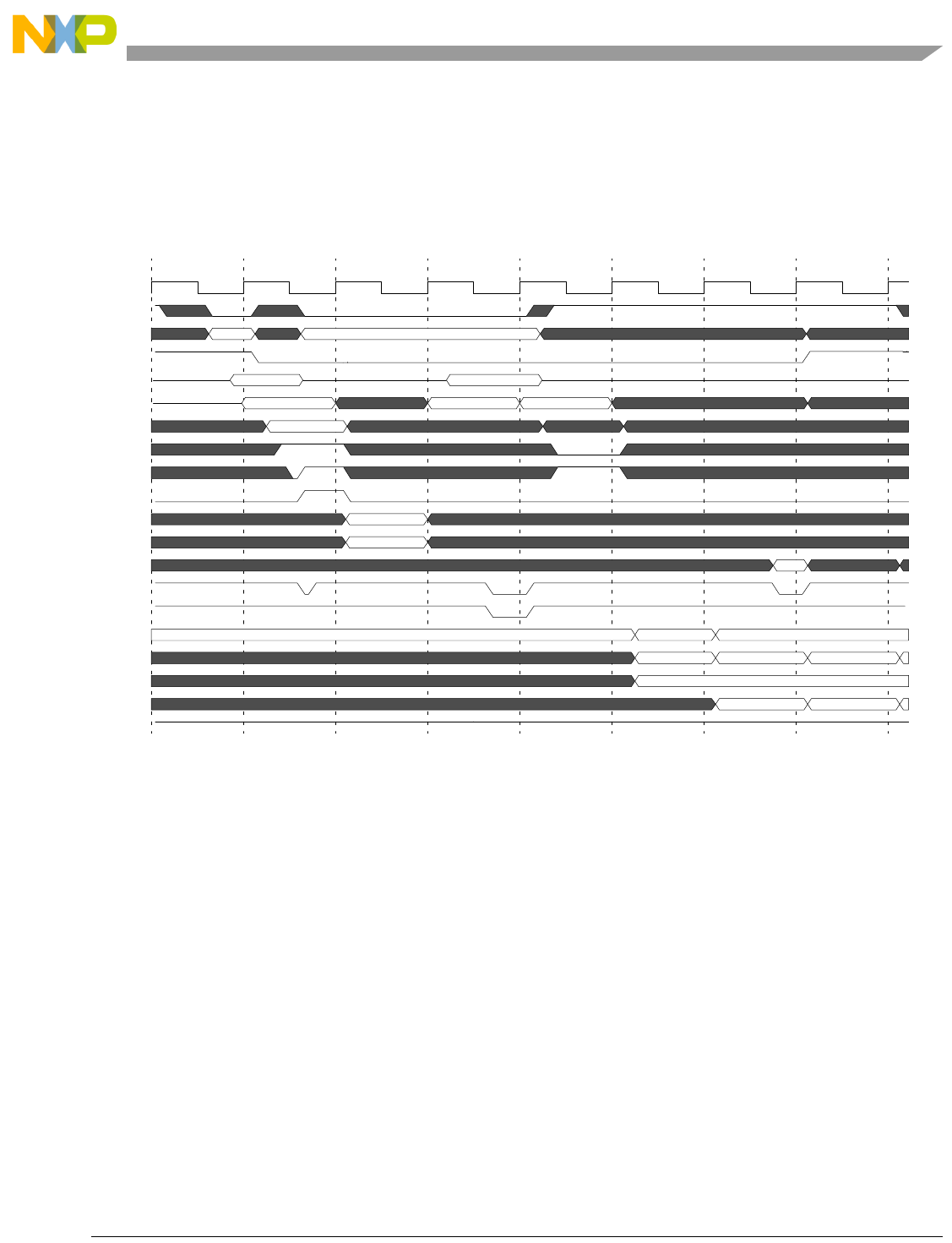
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-73
cycle being forced. In this example, way 1 has an uncorrectable error and is locked. The invalidation of
way 1 is performed in cycle 4, and a machine check is signaled.
Figure 13-30. Cross-Signaling Invalidation Output Operation—Tag Error, Locked lnv
Figure 13-31 illustrates functional timing for a cross-signaling operation by a CPU receiving a cache error
cross-signaling operation for the cache data array with the error action indicating that an auto-invalidation
addr a addr a + 8 begin excp processing
idle
addr a addr a + 8
addr a compute corr correct/inv tags addr a+8
force miss
phys(a)
0100
data a
idle non-seq seq
addr a+8 addr a +16 addr a +24
wrap 4
addr a+8 critical Dwordaddr a + 8, wrap addr a +16, wrap
Hit with EDC error in tag array, auto-invalidate/correct, locked line invalidated
12345678
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_out
p_cerraddr_out
p_cerrway_out[0:3]
p_data_in
p_ta_b
p_tea_b
h_trans
h_addr
h_burst
h_rdata
h_ready
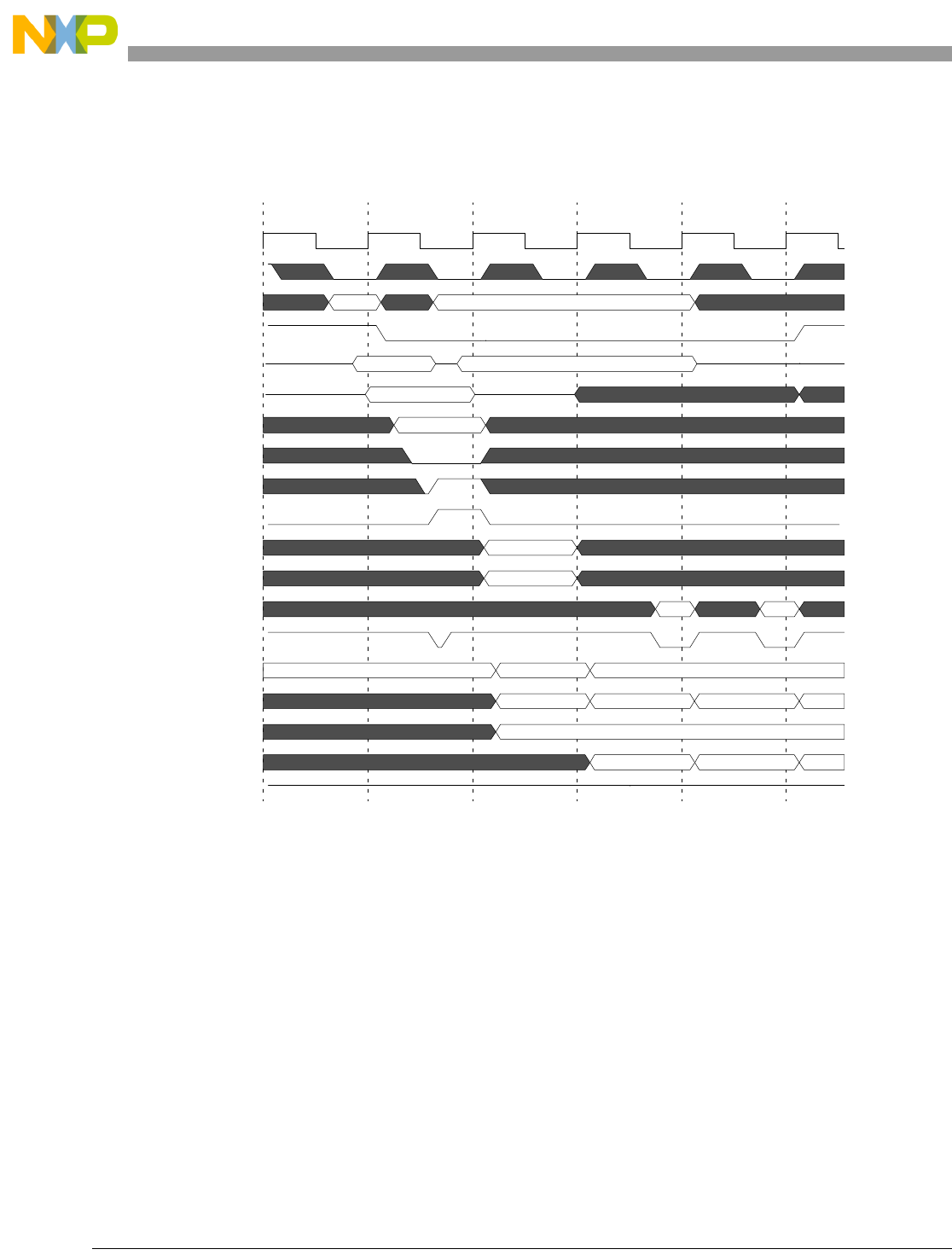
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-74 Freescale Semiconductor
should be generated. A cache data array error is detected in cycle 2 by an external cache, and results in a
cache miss being forced. The error entry is refilled beginning in cycle 3.
Figure 13-31. Cross-Signaling Invalidation Input Operation—Data Error
Figure 13-32 illustrates functional timing for a cross-signaling operation by a CPU receiving a cache error
cross-signaling operation for the cache tag array with the error action indicating that an auto-invalidation
should be generated. A cache tag array error is detected in cycle 2 by an external cache, and results in a
cache correction/invalidation cycle being forced. In this example, in the external cache, way 0 has a
correctable error, and way 2 has an uncorrectable error and requires invalidation. Only the invalidations
addr a addr a + 8
idle
addr a addr a + 8
addr a addr a + 8 (stream hit)
force miss
phys(a)
data a data a+8
idle non-seq seq
addr a addr a + 8 (modulo)addr a + 16 (mod)addr a + 24 (mod)
wrap 4
addr a critical Dwordaddr a + 8, wrap addr a +16, wrap
Hit with EDC error in data array, auto-invalidate, force miss
123456
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_dataerr_in
p_cerraddr_in
p_cerrway_in[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
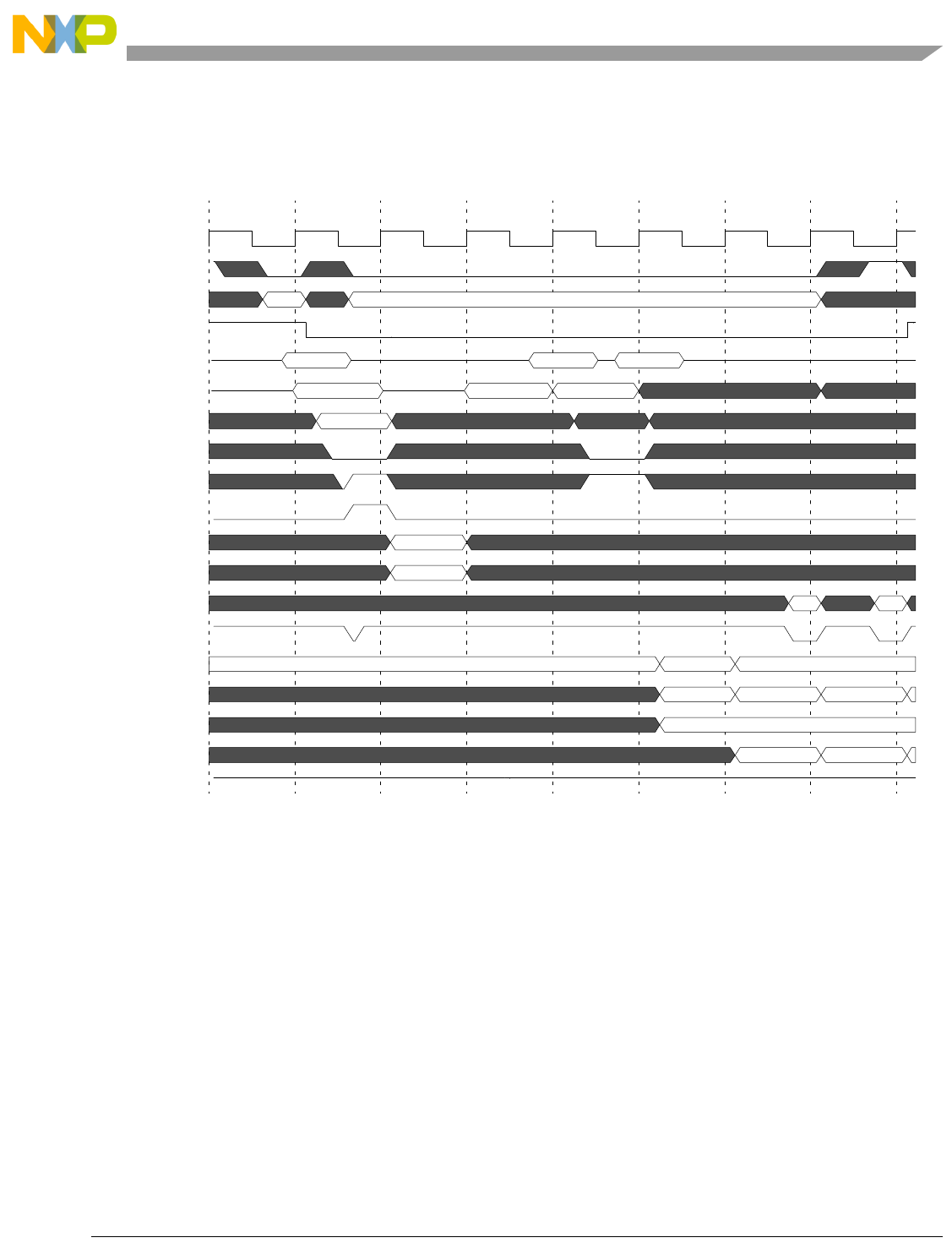
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-75
are signaled on the p_cerrway_in[0:3] inputs. The invalidation of way 2 is performed in cycle 4. The
address ‘a’ access is recycled in cycle 5 and results in a miss. The cache is refilled beginning in cycle 6.
Figure 13-32. Cross-Signaling Invalidation Input Operation—Tag Error, Miss
Figure 13-33 illustrates functional timing for a cross-signaling operation by a CPU which receives a cache
error cross-signaling operation for the cache tag array with the error action indicating that an
auto-invalidation should be generated. A cache tag array error is detected in cycle 2 by an external cache,
and results in a cache correction/invalidation cycle being forced in cycle 3. In this example, in the external
cache, way 1 has a correctable error. Only the invalidations are signaled on the p_cerrway_in[0:3] inputs.
addr a addr a + 8
idle
addr a addr a addr a + 8
addr a inv way 2 tag recycle a addr a + 8 (stream hit)
force miss
phys(a)
0010
data a data a+8
idle non-seq seq
addr a addr a + 8 (modulo)addr a + 16 (mod)
wrap 4
addr a critical Dwordaddr a + 8, wrap
Hit with EDC error in tag array, auto-invalidate/correct, subsequent miss
12345678
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_in
p_cerraddr_in
p_cerrway_in[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
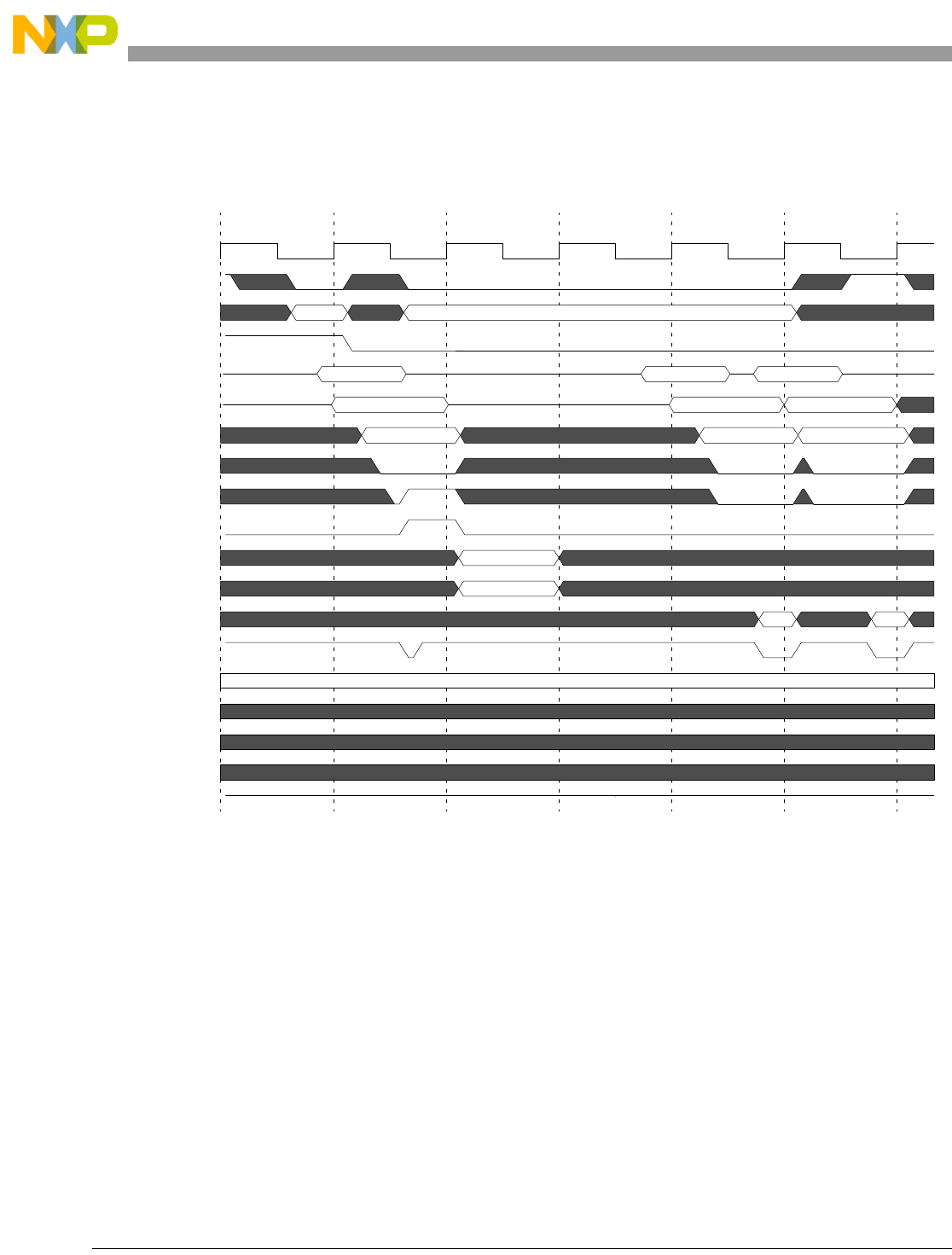
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-76 Freescale Semiconductor
Since no invalidations are required, no access is performed in cycle 4. The address ‘a’ access is recycled
in cycle 5 and results in a hit.
Figure 13-33. Cross-Signaling Invalidation Input Operation—Tag Error, Hit
Figure 13-34 illustrates functional timing for a cross-signaling operation by a CPU encountering an
internal cache error in the cache tag array with the error action indicating that an auto-invalidation should
be generated. A cache tag array error is detected in cycle 2 and results in a cache correction/invalidation
addr a addr a + 8
idle
addr a addr a addr a + 8
addr a recycle a addr a + 8
force miss
phys(a)
0000
data a data a+8
idle
Hit with EDC error in tag array, auto-invalidate/correct, subsequent hit
123456
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_in
p_cerraddr_in
p_cerrway_in[0:3]
p_data_in
p_ta_b
h_trans
h_addr
h_burst
h_rdata
h_ready
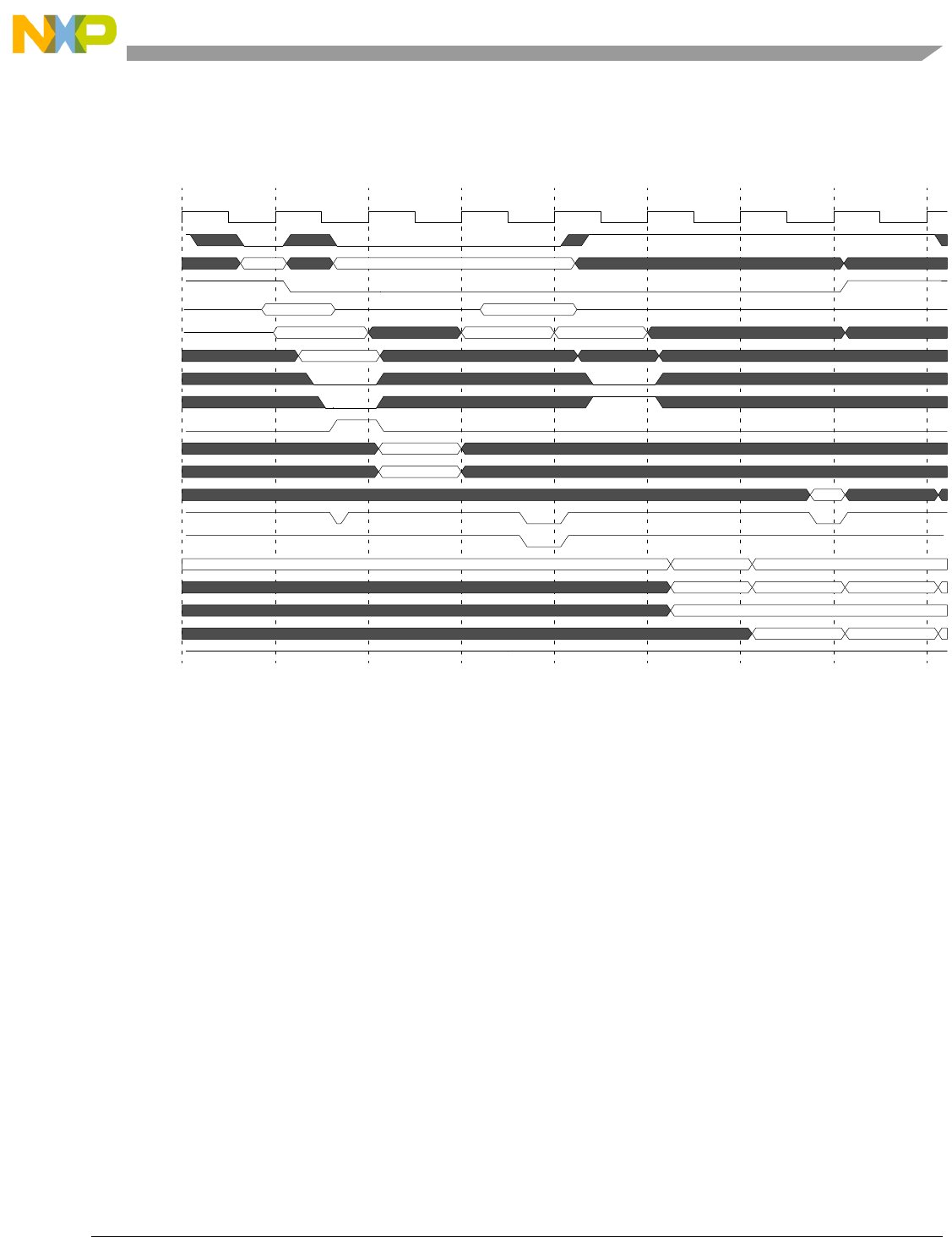
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-77
cycle being forced. In this example, way 1 has an uncorrectable error and is locked. The invalidation of
way 1 is performed in cycle 4, and a machine check is signaled.
Figure 13-34. Cross-signaling Invalidation Input Operation—Tag Error, Locked lnv
13.4.4 Debug Lockstep Cross-signaling Operation
The debug lockstep cross-signaling interface allows the lockstep operation of two or more CPUs during
external debug mode (EDM) operations in which the CPUs must maintain lockstep operation in the
presence of asynchronous debug operations causing the CPU to enter or exit a debug halted mode. The
interface provides a means for signaling that a debug request has been received, and that other CPUs in
lockstep operation should emulate the same debug-entry point. Similar signaling is provided for exiting
debug mode, either in response to a single-step operation (a go+noexit OCMD operation) or in response
to exiting debug mode back to normal operating mode (go+exit OCMD operation). Because the debug
logic associated with the OnCE JTAG controller operates asynchronously to the processor m_clk clock,
the exact edge on which a debug request generated from the OnCE tclk domain is recognized is not always
deterministic, and the same issue exists when exiting debug mode by a tclk domain generated OCMD “go”
command.
In addition, debug lockstep cross-signaling is provided to handshake updates to the Nexus 3 control
registers such that various aspects of Nexus 3 are controlled in a lockstep fashion. This is done by
providing handshaking of synchronized Update_DR TAP controller states, so that register updates due to
entering the Update_DR state are delayed until the Update_DR state has been seen by all lockstep
processors. Since the OnCE JTAG controller operates asynchronously to the processor m_clk clock, the
exact edge on which an Update_DR state generated from the OnCE tclk domain is recognized is not
addr a addr a + 8 begin excp proc
idle
addr a addr a + 8
addr a compute corr correct/inv tags addr a+8
phys(a)
0100
data a
idle non-seq seq
addr a+8 addr a +16 addr a +24
wrap 4
addr a+8 critical Dwordaddr a + 8, wrap
a
Hit with EDC error in tag array, auto-invalidate/correct, locked line invalidated
12345678
m_clk
p_i_treq_b
p_i_addr
p_tbusy_b
mmu acc
cache acc
arrays data
error_detect
cache miss
p_cache_tagerr_in
p_cerraddr_in
p_cerrway_in[0:3]
p_data_in
p_ta_b
p_tea_b
h_trans
h_addr
h_burst
h_rdata
h_ready
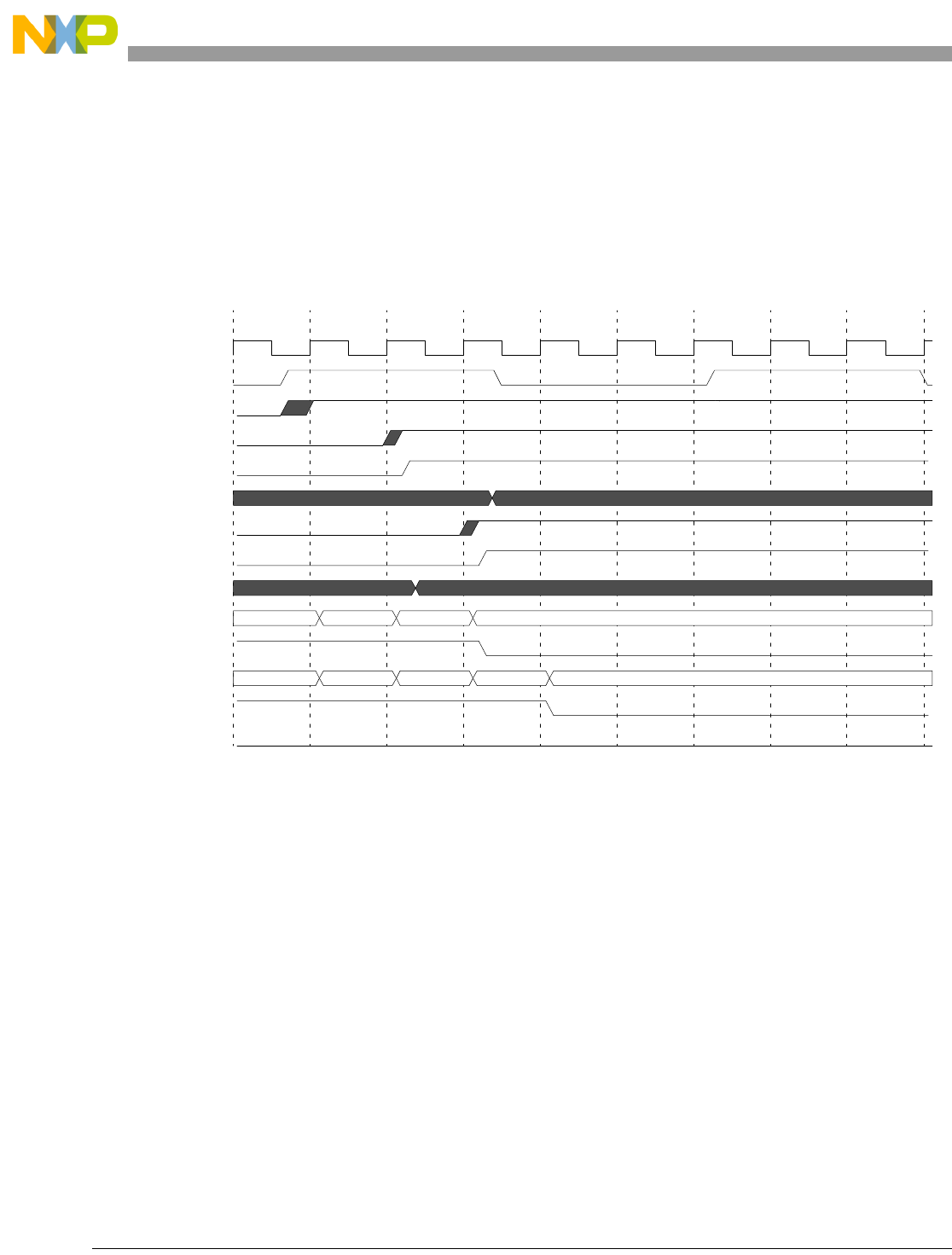
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-78 Freescale Semiconductor
always deterministic. The cross-signaling interface provides the means for ensuring lockstep updates of
register resources.
13.4.4.1 Debug Entry Cross-Signaling
Figure 13-35 illustrates functional timing for debug entry cross-signaling operation with lockstep
operation disabled.
Figure 13-35. Debug Entry Cross-Signaling Interface, Non-Lockstep Mode
In this example, entry into debug mode is requested by setting the OCRDR bit simultaneously in CPU0 and
CPU1. The OCR register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the DR bit is synchronized to the m_clk clock domain in each processor. Since the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the DR bit
to differ in the two CPUs. In the example shown in the timing diagram, the DR bit is updated at the rise of
tclk, and the synchronized version (ocr_dr_mcksync) in CPU0 is asserted in clock cycle 3. Due to
differences in synchronizer outputs, the version of this signal in CPU1 is not seen asserted until clock cycle
4. Since the lockstep control signal p_lkstep_en is not asserted for this example, the cross-signaling
interface signals cpu0_p_dbgrq_edm_in and cpu1_p_dbgrq_edm_in are ignored, and do not condition
the entry into debug mode by the CPUs. CPU0 enters debug mode in cycle 4 (cpu0_jd_debug_b asserted)
with a program counter value of 100C, while CPU1 enters debug mode in cycle 5 (cpu1_jd_debug_b
asserted) with a program counter value of 1010. The two CPUs are thus no longer in sync.
1000 1004 1008 100C
1000 1004 1008 100C 1010
Debug entry from OCR[DR], non-locked operation, CPU 0 enters debug mode first
123456789
m_clk
tclk
OCR[DR]
cpu0_ocr_dr_mcksync
cpu0_p_dbgrq_edm_out
cpu0_p_dbgrq_edm_in
cpu1_ocr_dr_mcksync
cpu1_p_dbgrq_edm_out
cpu1_p_dbgrq_edm_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
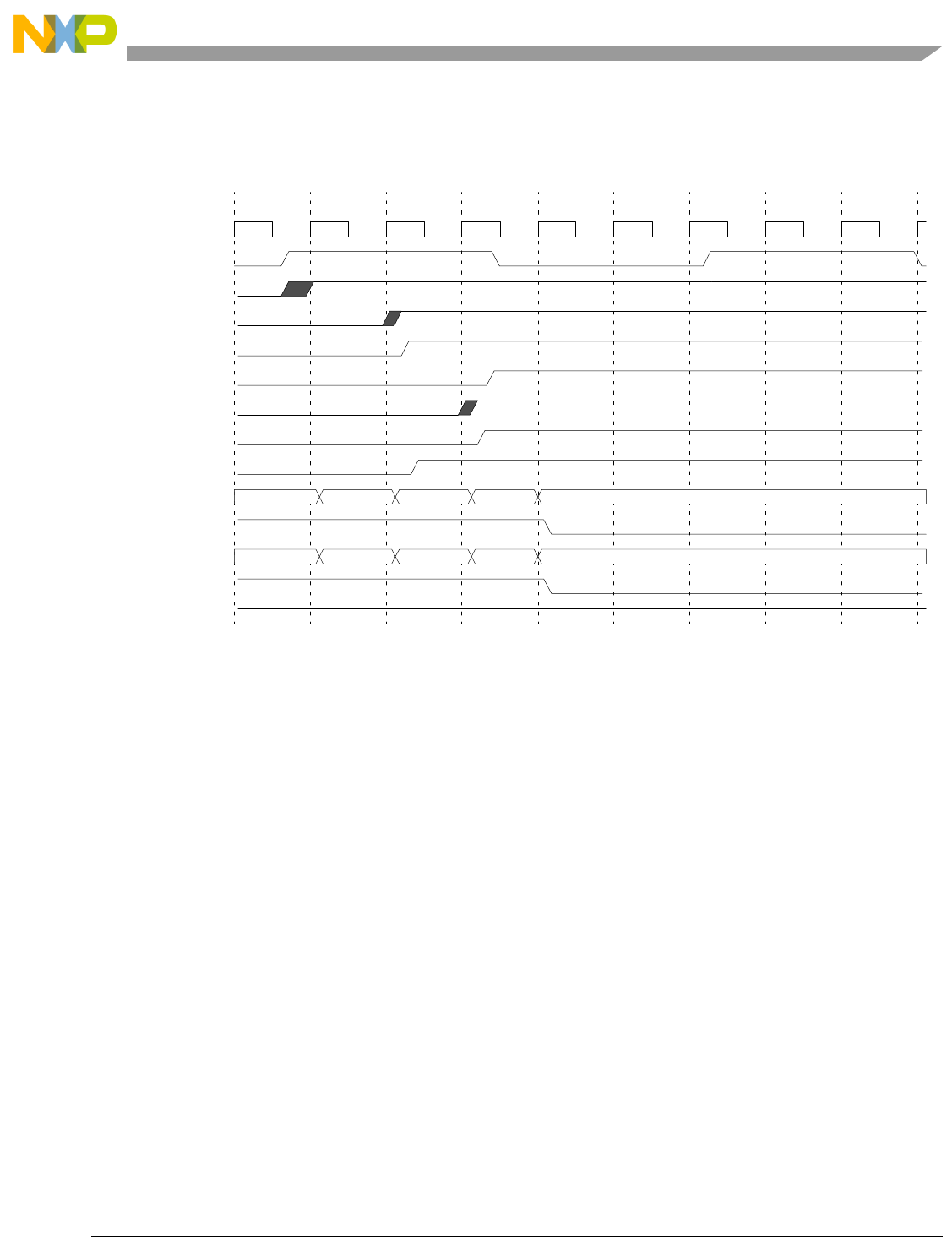
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-79
Figure 13-36 illustrates functional timing for debug entry cross-signaling operation with lockstep
operation enabled.
Figure 13-36. Debug Entry Cross-Signaling Interface, Lockstep Mode
In this example, entry into debug mode is requested by setting the OCRDR bit simultaneously in CPU0 and
CPU1. The OCR register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the DR bit is synchronized to the m_clk clock domain in each processor. Since the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the DR bit
to differ in the two CPUs. In the example in the timing diagram, the DR bit is updated at the rise of tclk,
and the synchronized version (ocr_dr_mcksync) in CPU0 is asserted in clock cycle 3. Due to differences
in synchronizer outputs, the version of this signal in CPU1 is not seen asserted until clock cycle 4. Since
the lockstep control signal p_lkstep_en is asserted for this example, the cross-signaling interface signals
cpu0_p_dbgrq_edm_in and cpu1_p_dbgrq_edm_in are used to handshake entry into debug mode, and
condition the entry into debug mode by the CPUs. Based on the internal recognition of the asserted DR bit
(cpu0_ocr_dr_mcksync) in cycle 3, CPU0 output cpu0_p_dbgrq_edm_out is asserted in cycle 3 and
drives the corresponding input signal cpu1_p_dbgrq_edm_in of CPU1 in cycle 3. Since CPU0 does not
have an asserted cpu0_p_dbgrq_edm_in signal, debug entry is delayed. Based on the internal recognition
of the asserted DR bit (cpu1_ocr_dr_mcksync) in cycle 4, CPU1 output cpu1_p_dbgrq_edm_out is
asserted in cycle 4 and drives the corresponding input signal cpu0_p_dbgrq_edm_in of CPU0 in cycle 4.
At this point, both CPUs have received the proper cross-signaling handshakes to allow synchronized entry
into debug mode. CPU0 and CPU1 both enter debug mode in cycle 5 (cpu0,1_jd_debug_b asserted) with
a program counter value of 1010. The two CPUs are thus properly in sync.
1000 1004 1008 100C 1010
1000 1004 1008 100C 1010
Debug entry from OCR[DR], Lockstep operation, CPU 0 sees OCR[DR] first, debug mode entry synchronized
123456789
m_clk
tclk
OCR[DR]
cpu0_ocr_dr_mcksync
cpu0_p_dbgrq_edm_out
cpu0_p_dbgrq_edm_in
cpu1_ocr_dr_mcksync
cpu1_p_dbgrq_edm_out
cpu1_p_dbgrq_edm_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
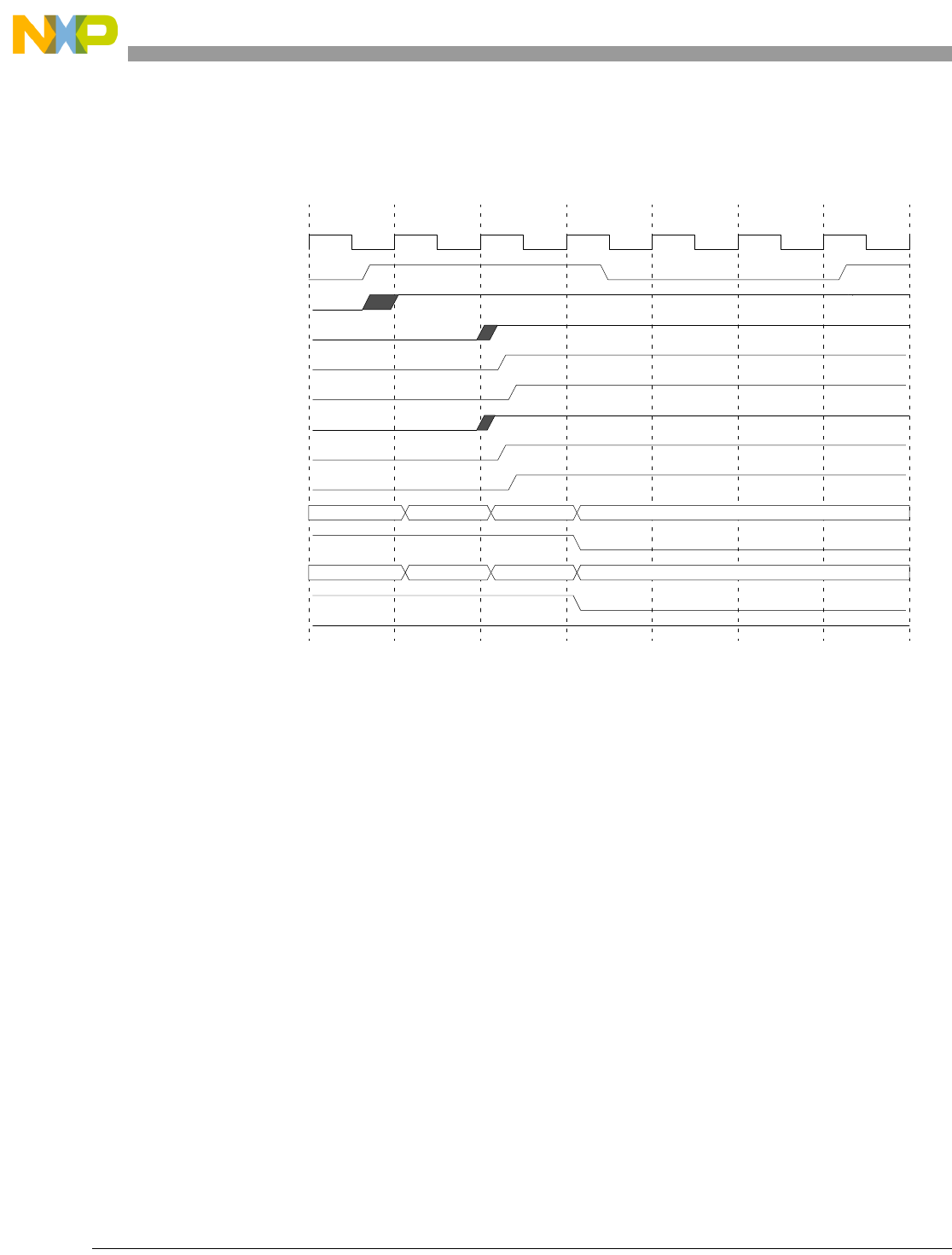
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-80 Freescale Semiconductor
Figure 13-37 illustrates functional timing for debug entry cross-signaling operation with lockstep
operation enabled.
Figure 13-37. Debug Entry Cross-Signaling Interface, Lockstep Mode (2)
In this example, entry into debug mode is requested by setting the OCRDR bit simultaneously in CPU0 and
CPU1. The OCR register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the DR bit is synchronized to the m_clk clock domain in each processor. Since the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the DR bit
to differ in the two CPUs. In the example in the timing diagram, the DR bit is updated at the rise of tclk,
and the synchronized version (ocr_dr_mcksync) in CPU0 and in CPU1 is asserted in clock cycle 3. Since
the lockstep control signal p_lkstep_en is asserted for this example, the cross-signaling interface signals
cpu0_p_dbgrq_edm_in and cpu1_p_dbgrq_edm_in are used to handshake entry into debug mode, and
condition the entry into debug mode by the CPUs. Based on the internal recognition of the asserted DR bit
(cpu0_ocr_dr_mcksync) in cycle 3, CPU0 output cpu0_p_dbgrq_edm_out is asserted in cycle 3 and
drives the corresponding input signal cpu1_p_dbgrq_edm_in of CPU1 in cycle 3. Similarly, in cycle 3,
CPU1 output cpu1_p_dbgrq_edm_out is asserted and drives the corresponding input signal
cpu0_p_dbgrq_edm_in of CPU0 in cycle 3. Since CPU0 has an asserted cpu0_p_dbgrq_edm_in signal,
debug entry is not delayed. Based on the internal recognition of the asserted DR bit
(cpu1_ocr_dr_mcksync) in cycle 3, CPU1 output cpu1_p_dbgrq_edm_out is asserted in cycle 3 and
drives the corresponding input signal cpu0_p_dbgrq_edm_in of CPU0 in cycle 3.
At this point, both CPUs have received the proper cross-signaling handshakes to allow synchronized entry
into debug mode. CPU0 and CPU1 both enter debug mode in cycle 4 (cpu0,1_jd_debug_b asserted) with
a program counter value of 100C. The two CPUs are thus properly in sync.
1000 1004 1008 100C
1000 1004 1008 100C
Debug entry from OCR[DR], Lockstep operation, CPU 0 and 1 see OCR[DR] simultaneously, debug mode entry synchronized
1234567
m_clk
tclk
OCR[DR]
cpu0_ocr_dr_mcksync
cpu0_p_dbgrq_edm_out
cpu0_p_dbgrq_edm_in
cpu1_ocr_dr_mcksync
cpu1_p_dbgrq_edm_out
cpu1_p_dbgrq_edm_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
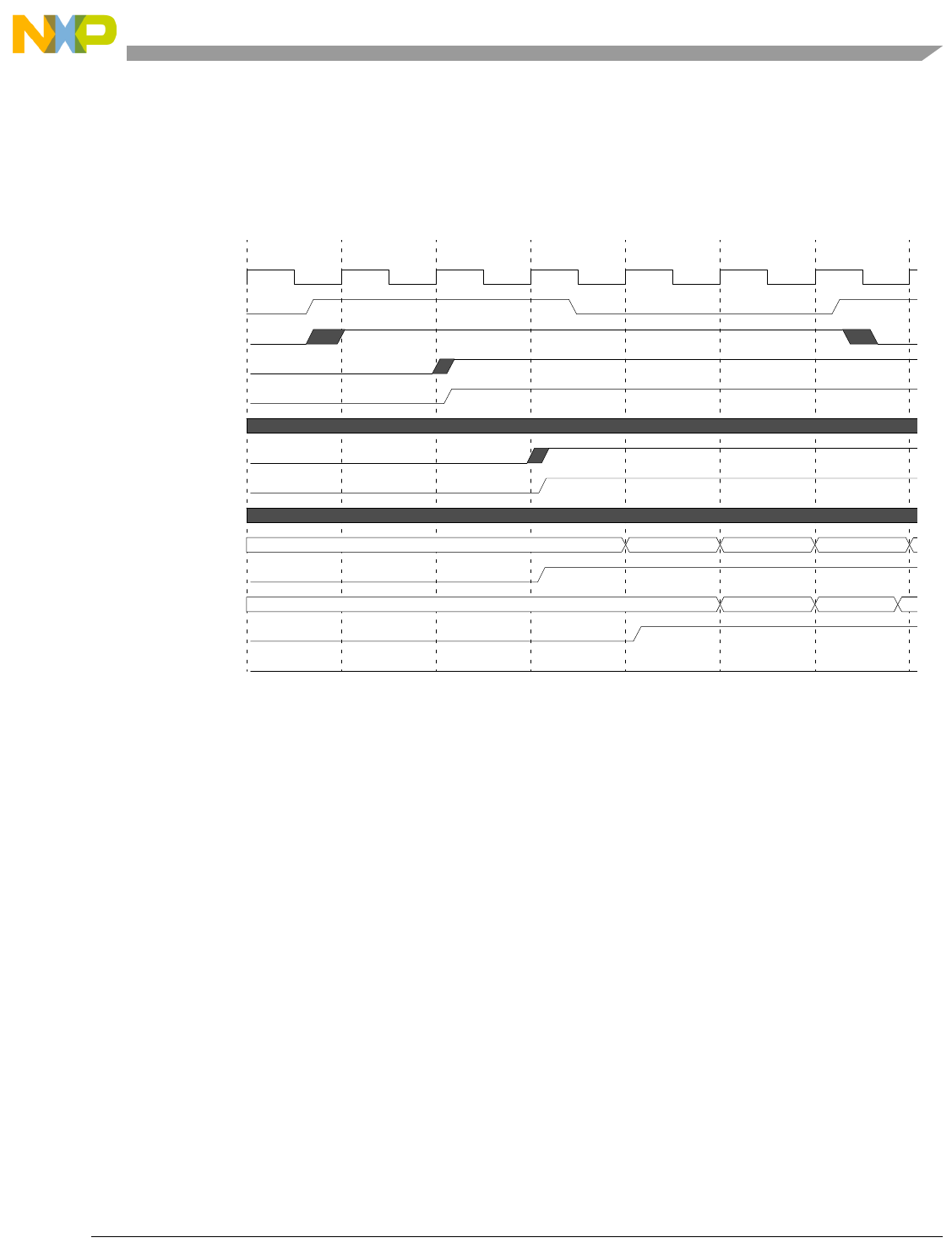
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-81
13.4.4.2 Debug Exit Cross-Signaling
Figure 13-38 illustrates functional timing for debug exit cross-signaling operation with lockstep operation
disabled.
Figure 13-38. Debug Exit Cross-Signaling Interface, Non-Lockstep mode
In this example, exit from debug mode is requested by setting OCMD[GO] simultaneously in CPU0 and
CPU1. The OCMD register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the GO bit is synchronized to the m_clk clock domain in each processor. Because the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the GO bit
to differ in the two CPUs. In this example, the GO bit is updated at the rise of tclk in cycle 1, and the
synchronized version (ocmd_go_mcksync) in CPU0 is asserted in clock cycle 3. Due to differences in
synchronizer outputs, the version of this signal in CPU1 is not seen asserted until clock cycle 4. Since the
lockstep control signal p_lkstep_en is not asserted for this example, the cross-signaling interface signals
cpu0_p_dbg_go_in and cpu1_p_dbg_go_in are ignored and do not condition the exit from debug mode
by the CPUs. CPU0 exits debug mode in cycle 4 (cpu0_jd_debug_b negated) and begins execution, while
CPU1 exits debug mode in cycle 5 (cpu1_jd_debug_b negated). The two CPUs are thus no longer in sync.
2000 2004 2008 200C
2000 2004 2008
Debug exit, non-Lockstep operation, CPU 0 sees OCMD “go” first, debug mode exit not synchronized
1234567
m_clk
tclk
OCMD - go
cpu0_ocmd_go_mcksync
cpu0_p_dbg_go_out
cpu0_p_dbg_go_in
cpu1_ocmd_go_mcksync
cpu1_p_dbg_go_out
cpu1_p_dbg_go_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
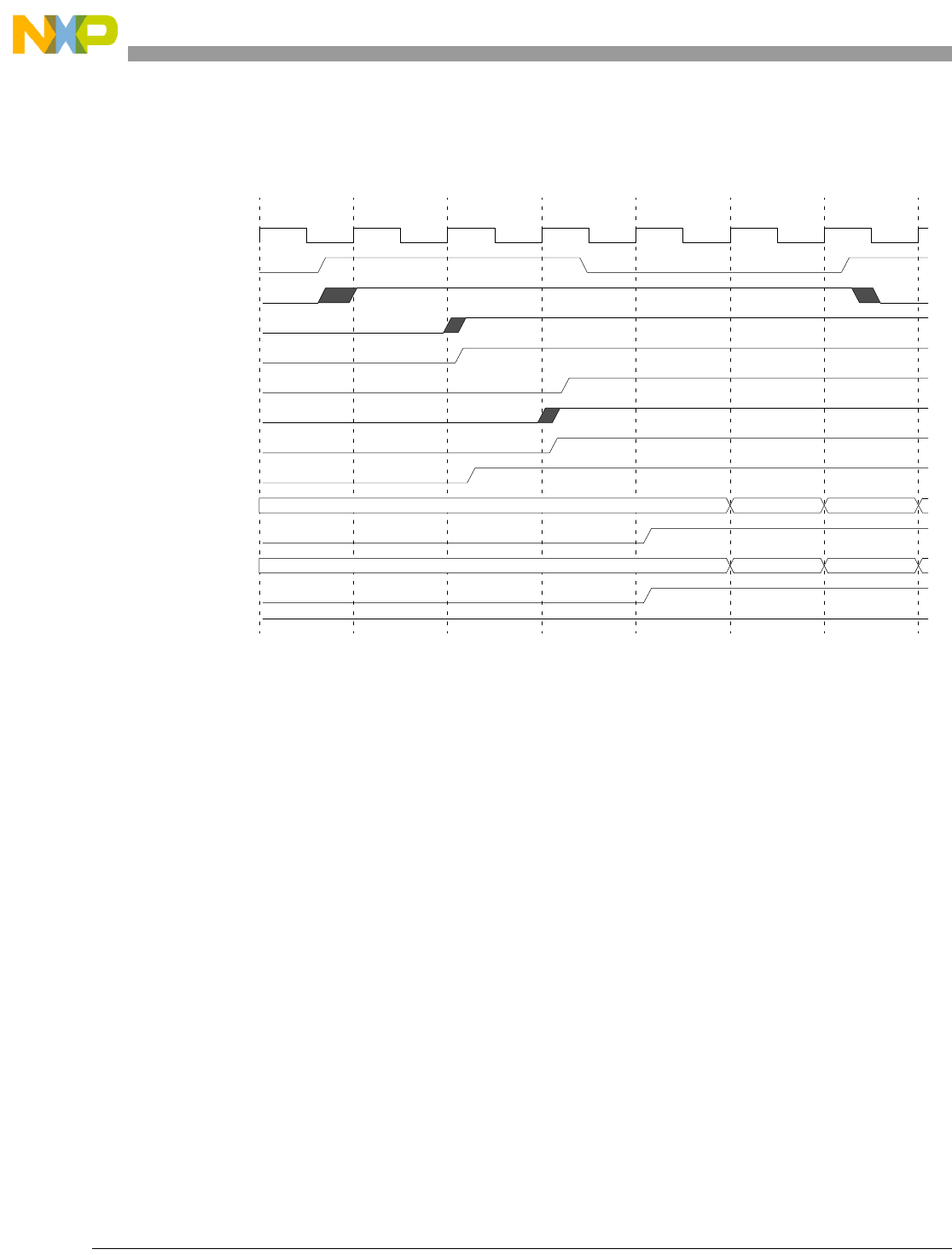
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-82 Freescale Semiconductor
Figure 13-39 illustrates functional timing for debug exit cross-signaling operation with lockstep operation
enabled.
Figure 13-39. Debug Exit Cross-Signaling Interface, Lockstep Mode
In this example, exit from debug mode is requested by setting OCMD[GO] simultaneously in CPU0 and
CPU1. The OCMD register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the GO bit is synchronized to the m_clk clock domain in each processor. Since the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the GO bit
to differ in the two CPUs. In this example, the GO bit is updated at the rise of tclk in cycle 1, and the
synchronized version (ocmd_go_mcksync) in CPU0 is asserted in clock cycle 3. Due to differences in
synchronizer outputs, the version of this signal in CPU1 is not seen asserted until clock cycle 4. Since the
lockstep control signal p_lkstep_en is asserted for this example, the cross-signaling interface signals
cpu0_p_dbg_go_in and cpu1_p_dbg_go_in are used to qualify exiting debug mode. CPU0 signals an
exit condition in cycle 3 by asserting cpu0_p_dbg_go_out which drives the cpu1_p_dbg_go_in input of
CPU1. Since CPU0’s cpu0_p_dbg_go_in input is not yet asserted, CPU0 delays exiting debug mode.
CPU1 signals an exit condition in cycle 4 by asserting cpu1_p_dbg_go_out which drives the
cpu0_p_dbg_go_in input of CPU0.
Since CPU0 and CPU1 now have their respective p_dbg_go_in input asserted, exiting from debug mode
may now proceed. CPU0 and CPU1 exit debug mode in cycle 5 (jd_debug_b negated) and being
execution. The two CPUs are thus kept in sync.
2000 2004 2008
2000 2004 2008
Debug exit, Lockstep operation, CPU 0 sees OCMD “go” first, debug mode exit synchronized
1234567
m_clk
tclk
OCMD - go
cpu0_ocmd_go_mcksync
cpu0_p_dbg_go_out
cpu0_p_dbg_go_in
cpu1_ocmd_go_mcksync
cpu1_p_dbg_go_out
cpu1_p_dbg_go_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
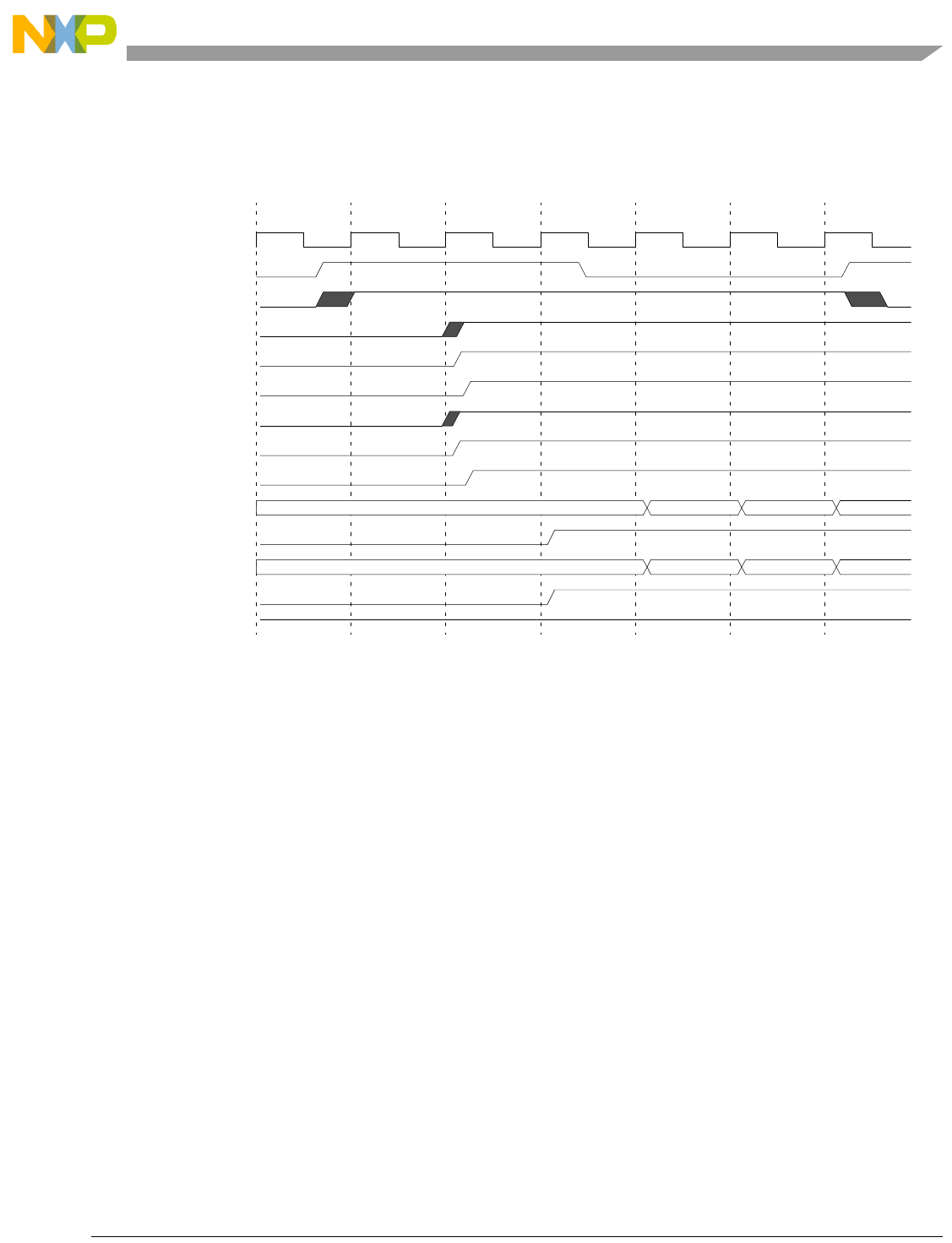
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-83
Figure 13-40 illustrates functional timing for debug exit cross-signaling operation with lockstep operation
enabled.
Figure 13-40. Debug Exit Cross-Signaling Interface, Lockstep mode (2)
In this example, exit from debug mode is requested by setting OCMD[GO] simultaneously in CPU0 and
CPU1. The OCMD register is updated in the Update_DR state by the OnCE controller, using tclk clocking,
and the value of the GO bit is synchronized to the m_clk clock domain in each processor. Since the
relationship between tclk and m_clk is not fixed, it is possible for the synchronized version of the GO bit
to differ in the two CPUs. In this example, the GO bit is updated at the rise of tclk in cycle 1, and the
synchronized version (ocmd_go_mcksync) in CPU0 and CPU1 is asserted in clock cycle 3. Since the
lockstep control signal p_lkstep_en is asserted for this example, the cross-signaling interface signals
cpu0_p_dbg_go_in and cpu1_p_dbg_go_in are used to qualify exiting debug mode. CPU0 signals an
exit condition in cycle 3 by asserting cpu0_p_dbg_go_out which drives the cpu1_p_dbg_go_in input of
CPU1. CPU1 also signals an exit condition in cycle 3 by asserting cpu1_p_dbg_go_out which drives the
cpu0_p_dbg_go_in input of CPU0.
Because CPU0 and CPU1 now have their respective p_dbg_go_in input asserted, exiting from debug
mode may now proceed. CPU0 and CPU1 exit debug mode in cycle 4 (jd_debug_b negated) and begin
execution. The two CPUs are thus kept in sync.
2000 2004 2008 200C
2000 2004 2008 200C
Debug exit, Lockstep operation, CPU 0 and CPU1 see OCMD “go” simultaneously, debug mode exit synchronized
1234567
m_clk
tclk
OCMD - go
cpu0_ocmd_go_mcksync
cpu0_p_dbg_go_out
cpu0_p_dbg_go_in
cpu1_ocmd_go_mcksync
cpu1_p_dbg_go_out
cpu1_p_dbg_go_in
cpu0_prog_counter1
cpu0_jd_debug_b
cpu1_prog_counter
cpu1_jd_debug_b
p_lkstep_en
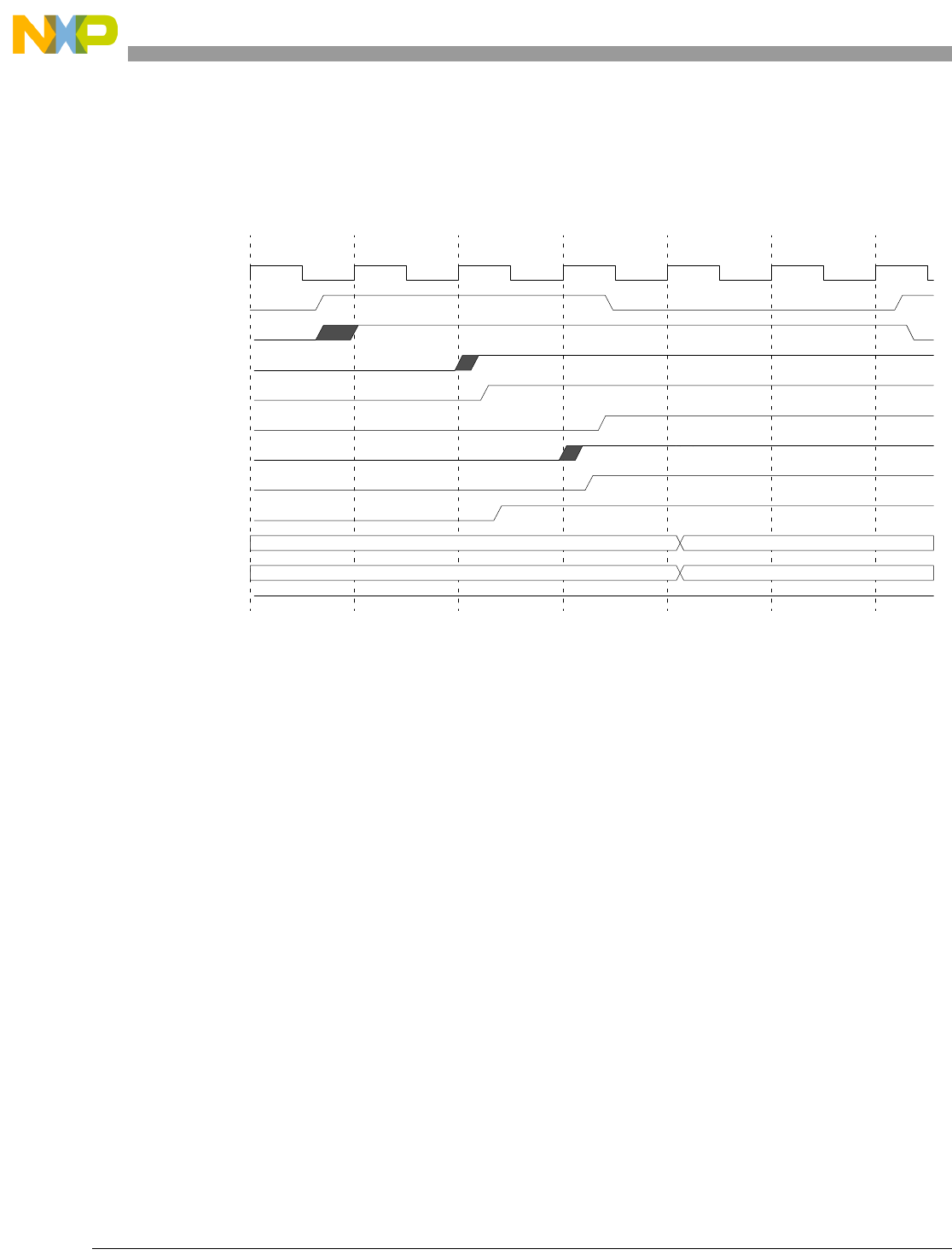
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-84 Freescale Semiconductor
13.4.4.3 Update_DR State Cross-Signaling
Figure 13-41 illustrates functional timing for Update_DR cross-signaling operation with lockstep
operation enabled.
Figure 13-41. Debug Update_DR State Cross-Signaling Interface, Lockstep mode
In this example, an update to one of the Nexus 3 registers is requested by entering the Update_DR state
simultaneously in CPU0 and CPU1 in the tclk domain. The Update_DR state is reached by the OnCE
controller, using tclk clocking, and the Update_DR state is synchronized to the m_clk clock domain in
each processor. Because the relationship between tclk and m_clk is not fixed, it is possible for the
synchronized version of the Update_DR state to differ in the two CPUs. In the example in the timing
diagram, the Update_DR state is reached at the rise of tclk, and the synchronized version in CPU0 is
asserted in clock cycle 3. Due to differences in synchronizer outputs, the version of this signal in CPU1 is
not asserted until clock cycle 4. Since the lockstep control signal p_lkstep_en is asserted for this example,
the cross-signaling interface signals, cpu0_p_nex3_updtdr_in and cpu1_p_nex3_updtdr_in, are used to
handshake actual register updates by the CPUs. Based on the internal recognition of the synchronized
version of the asserted Update_DR state in cycle 3, CPU0 output, cpu0_p_nex3_updtdr_out, is asserted
in cycle 3 and drives the corresponding input signal, cpu1_p_nex3_updtdr_in, of CPU1 in cycle 3. Since
CPU0 does not have an asserted cpu0_p_nex3_updtdr_in signal, the Nexus 3 register update is delayed.
Based upon reaching the synchronized version of the Update_DR state in cycle 4, CPU1 output,
cpu1_p_nex3_updtdr_out, is asserted in cycle 4 and drives the corresponding input signal,
cpu0_p_nex3_updtdr_in, of CPU0 in cycle 4.
At this point, both CPUs have received the proper cross-signaling handshakes to allow the Nexus 3 register
update to occur. CPU0 and CPU1 both update the Nexus 3 register in cycle 5. The two CPUs are thus
properly in sync.
Old Value New Value
Old_Value New Value
Update_DR for Nexus 3, Lockstep operation, CPU 0 sees Update_DR first, register update synchronized
1234567
m_clk
tclk
Update_DR_TAP_State
cpu0_Update_DR_mcksync
cpu0_p_nex3_updtdr_out
cpu0_p_nex3_updtdr_in
cpu1_Update_DR_mcksync
cpu1_p_nex3_updtdr_out
cpu1_p_nex3_updtdr_in
cpu0_nexus3_reg_value
cpu1_nexus3_reg_value
p_lkstep_en
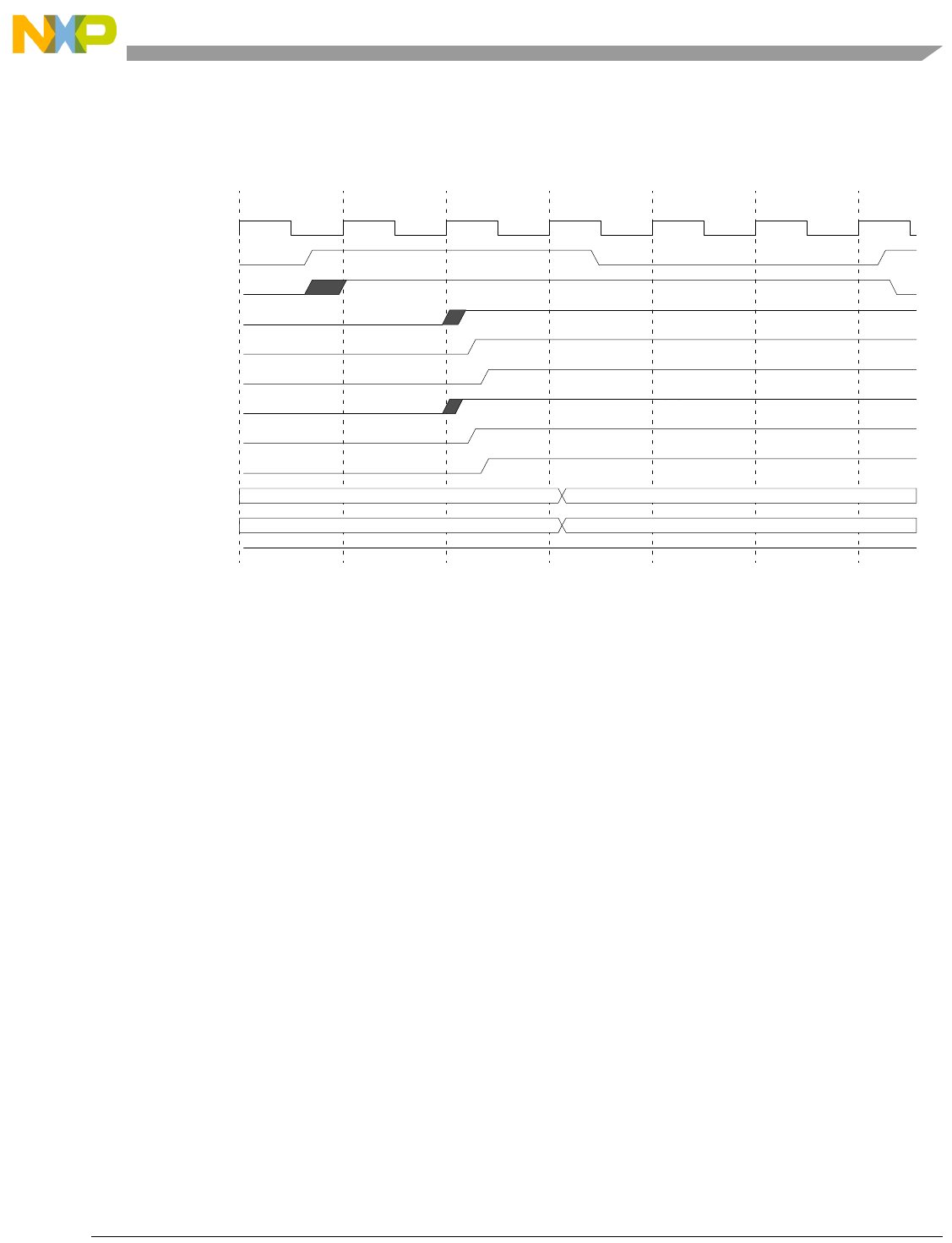
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-85
Figure 13-42 illustrates functional timing for Update_DR cross-signaling operation with lockstep
operation enabled.
Figure 13-42. Debug Update_DR State Cross-Signaling Interface, Lockstep Mode (2)
In this example, an update to one of the Nexus 3 registers is requested by entering the Update_DR state
simultaneously in CPU0 and CPU1 in the tclk domain. The Update_DR state is reached by the OnCE
controller, using tclk clocking, and the Update_DR state is synchronized to the m_clk clock domain in
each processor. Because the relationship between tclk and m_clk is not fixed, it is possible for the
synchronized version of the Update_DR state to differ in the two CPUs. In the example in the timing
diagram, the Update_DR state is reached at the rise of tclk, and the synchronized version in CPU0 is
asserted in clock cycle 3. The version of this signal in CPU1 is also asserted in clock cycle 3. Because the
lockstep control signal, p_lkstep_en, is asserted for this example, the cross-signaling interface signals,
cpu0_p_nex3_updtdr_in and cpu1_p_nex3_updtdr_in, are used to handshake actual register updates by
the CPUs. Based on the internal recognition of the synchronized version of the asserted Update_DR state
in cycle 3, CPU0 output, cpu0_p_nex3_updtdr_out, is asserted in cycle 3 and drives the corresponding
input signal, cpu1_p_nex3_updtdr_in, of CPU1 in cycle 3. Based upon reaching the synchronized
Update_DR state in cycle 3, CPU1 output, cpu1_p_nex3_updtdr_out is asserted in cycle 3 and drives the
corresponding input signal, cpu0_p_nex3_updtdr_in, of CPU0 in cycle 3. At this point, both CPUs have
received the proper cross-signaling handshakes to allow the Nexus 3 register update to occur. CPU0 and
CPU1 both update the Nexus 3 register in cycle 4. The two CPUs are thus properly in sync.
Old Value New Value
Old_Value New Value
Update_DR for Nexus 3, Lockstep operation, CPU 0,1 see simultaneous Update_DR, register update synchronized
1234567
m_clk
tclk
Update_DR_TAP_State
cpu0_Update_DR_mcksync
cpu0_p_nex3_updtdr_out
cpu0_p_nex3_updtdr_in
cpu1_Update_DR_mcksync
cpu1_p_nex3_updtdr_out
cpu1_p_nex3_updtdr_in
cpu0_nexus3_reg_value
cpu1_nexus3_reg_value
p_lkstep_en
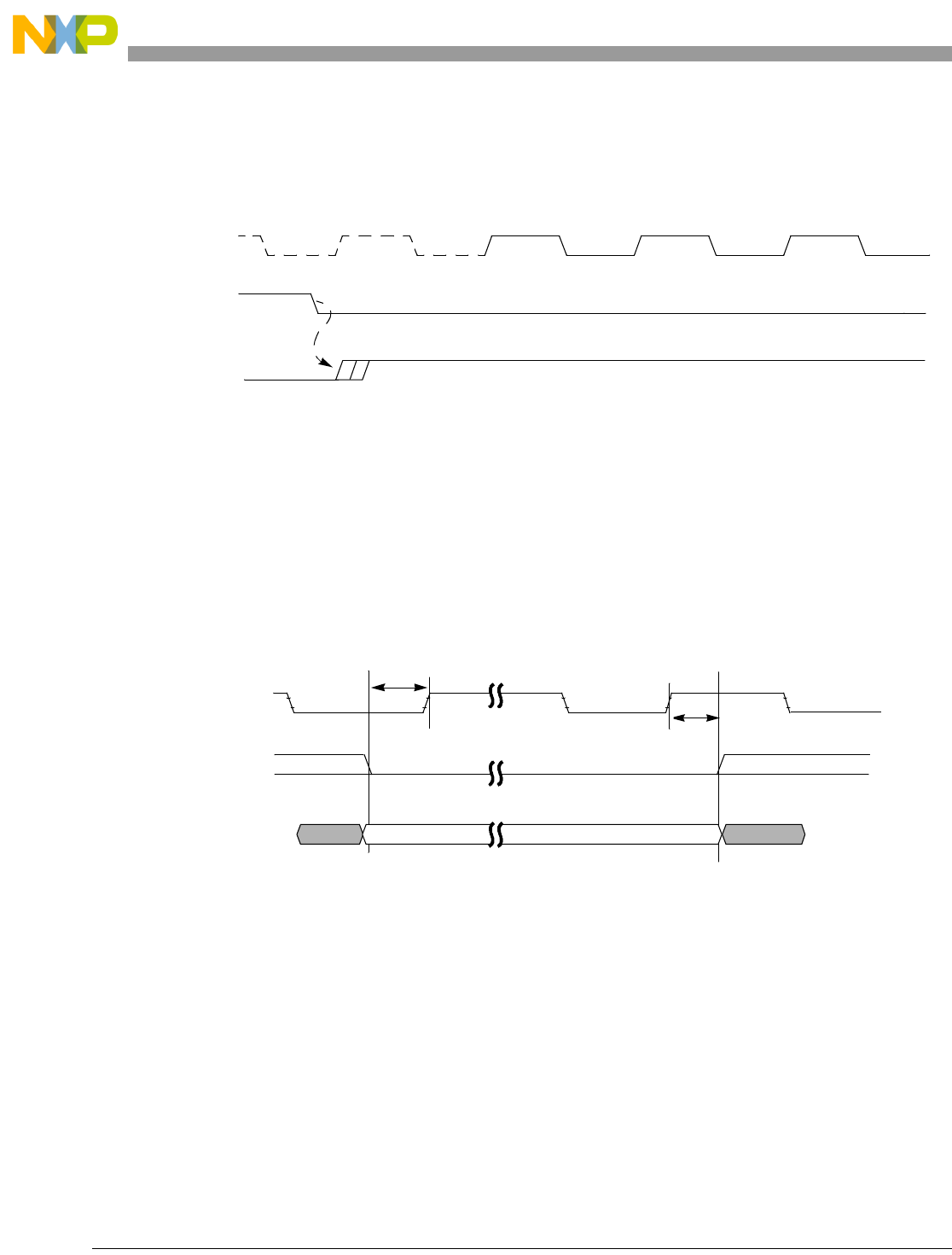
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-86 Freescale Semiconductor
13.4.5 Power Management
The following diagram shows the relationship of the wakeup control signal, p_wakeup, to the relevant
input signals.
Figure 13-43. Wakeup Control Signal (p_wakeup)
13.4.6 Interrupt Interface
Figure 13-44 shows the relationship of the interrupt input signals to the CPU clock. The p_avec_b,
p_extint_b, p_critint_b and p_voffset[0:15] inputs as well as the p_nmi_b input must meet setup and
hold timing relative to the rising edge of the m_clk. In addition, during each clock cycle in which either
of the interrupt request inputs p_extint_b or p_critint_b are asserted, p_avec_b and p_voffset[0:15] are
required to be in a valid state for the highest priority non-masked interrupt being requested.
Figure 13-44. Interrupt Interface Input Signals
m_clk
p_extint_b
p_wakeup
p_critint_b
jd_de_b,
p_ude,
OCR[WKUP]
p_extint_b
p_voffset[0:15]
p_critint_b
p_avec_b
m_clk
p_nmi_b
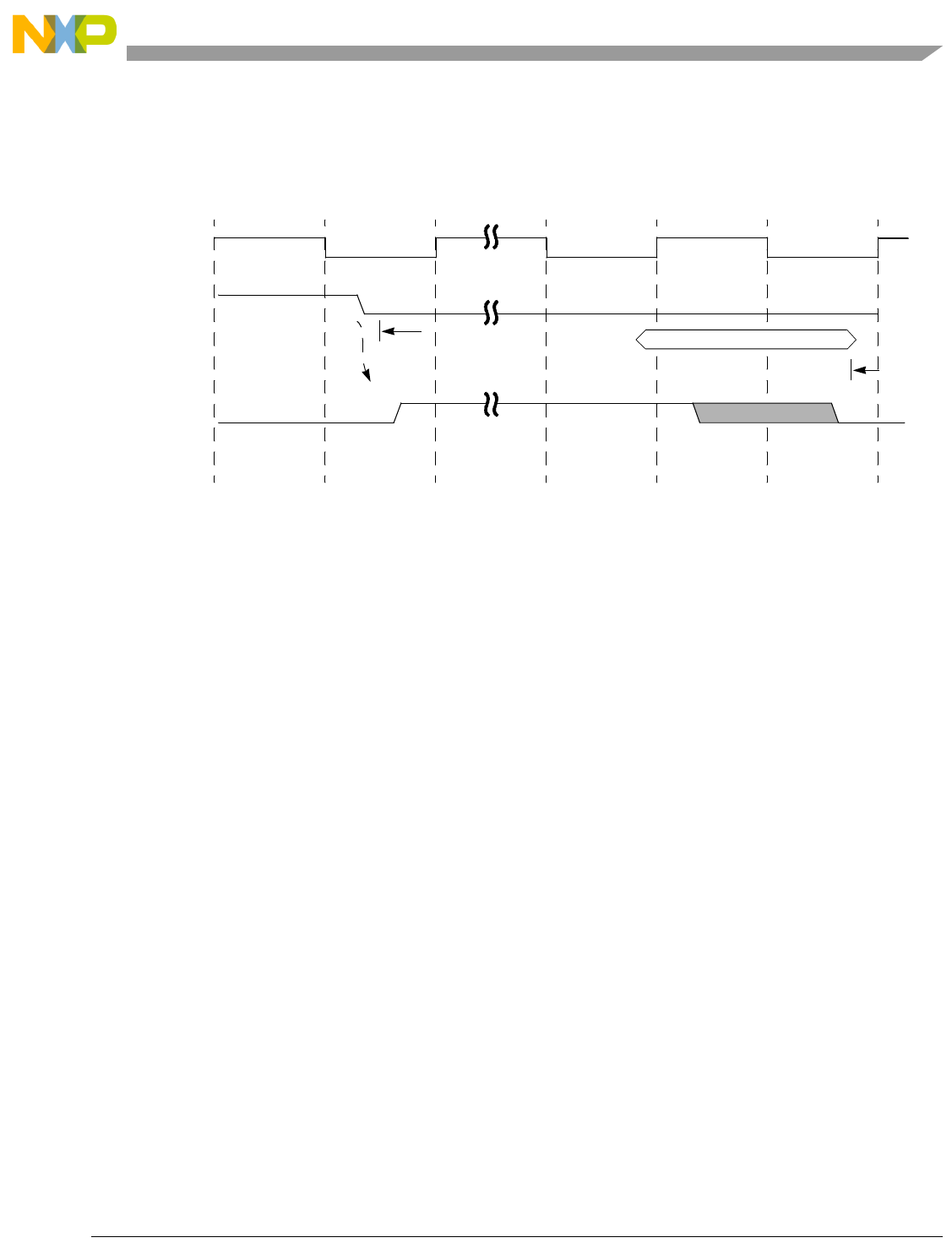
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-87
Figure 13-45 shows the relationship of the interrupt pending signal to the interrupt request inputs. Note
that p_ipend is asserted combinationally from the p_extint_b, p_critint_b, and p_nmi_b inputs, and the
MCSR[NMI] syndrome bit.
Figure 13-45. Interrupt Pending operation
m_clk
p_extint_b
p_ipend
p_critint_b
Exception vector fetch
p_nmi_b
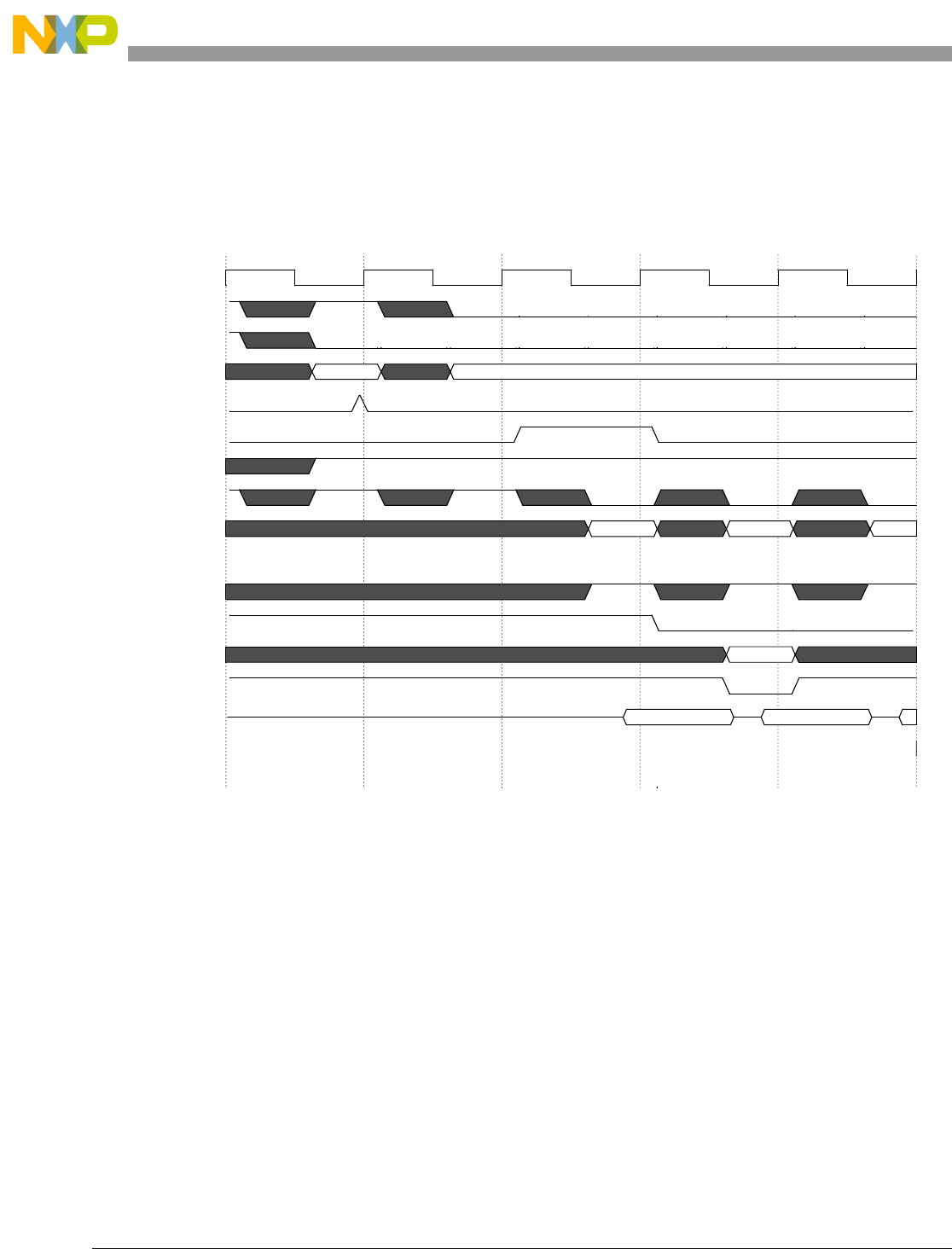
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-88 Freescale Semiconductor
Figure 13-46 shows the relationship of the interrupt acknowledge signal to the interrupt request inputs and
exception vector fetching.
Figure 13-46. Interrupt acknowledge operation
In this example, an external input interrupt is requested in cycle 1. The p_voffset[0:15] inputs are driven
with the vector offset for ‘A’, and p_avec_b is negated, indicating vectoring is desired. For this example,
the bus is idle at the time of assertion. The CPU may sample a requested interrupt as early as the cycle it
is initially requested, and does so in this example. The interrupt request and the vector offset and
autovector input are sampled at the end of cycle 1. In cycle 3, the interrupt is acknowledged by the
assertion of the p_iack output, indicating that the values present on interrupt inputs at the beginning of
cycle 2 have been internally latched and committed to for servicing. Note that the interrupt vector lines
have changed to a value of ‘B’ during cycle 2, and the p_critint_b input has been asserted by the interrupt
controller. The vector number/autovector signals must be consistent with the higher priority critical input
request, thus must change at the same time the state of the interrupt request inputs change. Because the
p_iack output asserts in cycle 3, it is indicating that the values present at the rise of cycle 2 (vector ‘A’)
have been committed to. During cycle 3, the CPU begins instruction fetching of the handler for vector ‘A’.
The new request for a subsequent critical interrupt ‘B’ was not received in time to be acted upon first. It is
acknowledged after the fetch for the external input interrupt handler has been completed and has entered
decode.
vec A vec B
A handler A + A ++
1st inst pair
int A handlr A handlr +
12345
m_clk
p_critint_b
p_extint_b
p_voffset
sample point
p_iack
p_avec_b
p_treq_b
p_addr
attributes
p_r/w
p_tbusy_b
p_data_in
p_ta_b
mem access
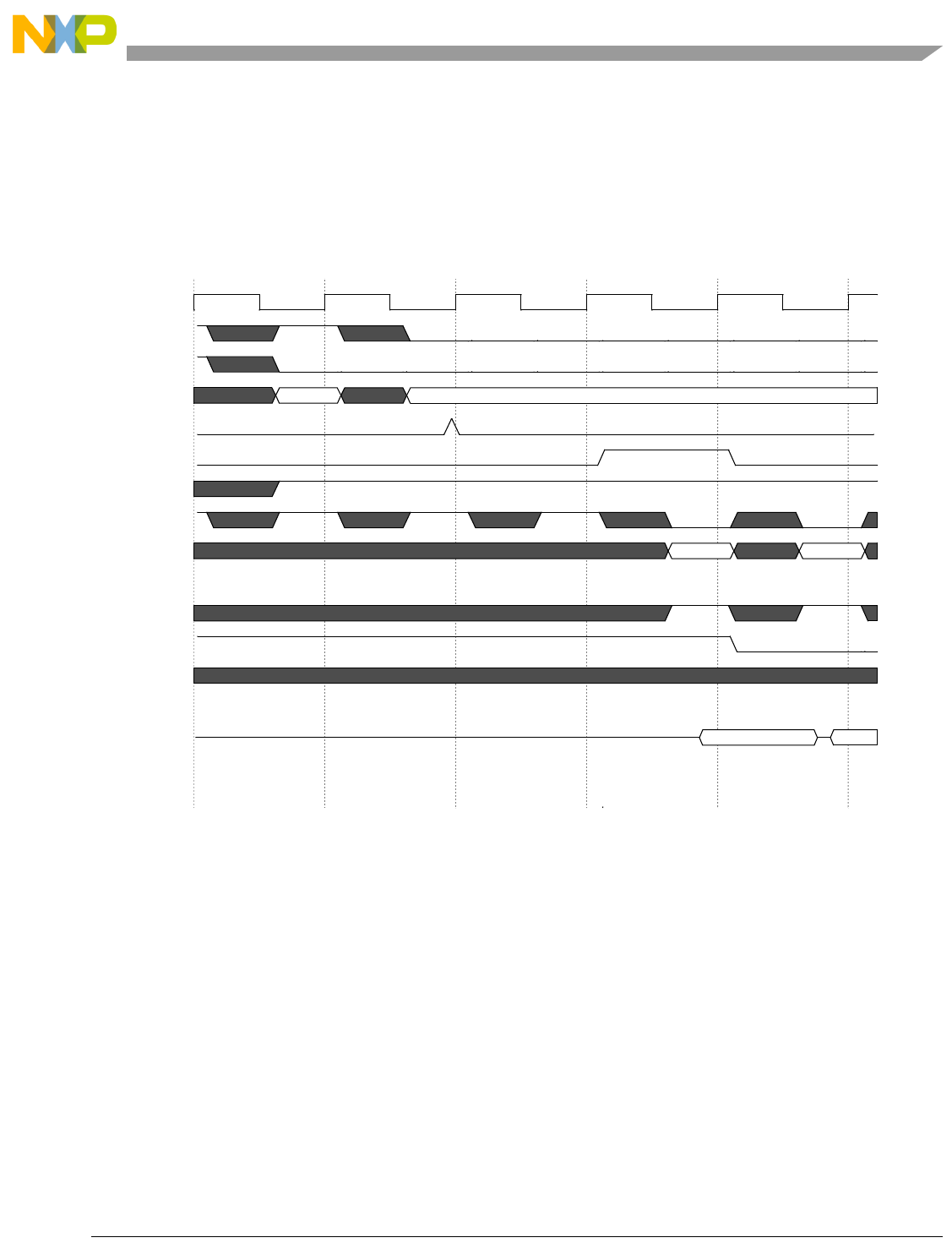
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-89
Note that the time between assertion of an interrupt request input and the acknowledgment of an interrupt
may be multiple cycles, and the interrupt inputs may change during that interval. The CPU asserts the
p_iack output to indicate the cycle to which an interrupt is committed. In the following example, since the
CPU was unable to acknowledge the external input interrupt during cycle 2 due to internal or external
execution conditions, the critical input request was sampled. This case is shown in Figure 13-47.
Figure 13-47. Interrupt Acknowledge Operation—2
vec A vec B
B handler B+
int B handlr B hand++
12345
m_clk
p_critint_b
p_extint_b
p_voffset
sample point
p_iack
p_avec_b
p_treq_b
p_addr
attributes
p_r/w
p_tbusy_b
p_data_in
mem_access
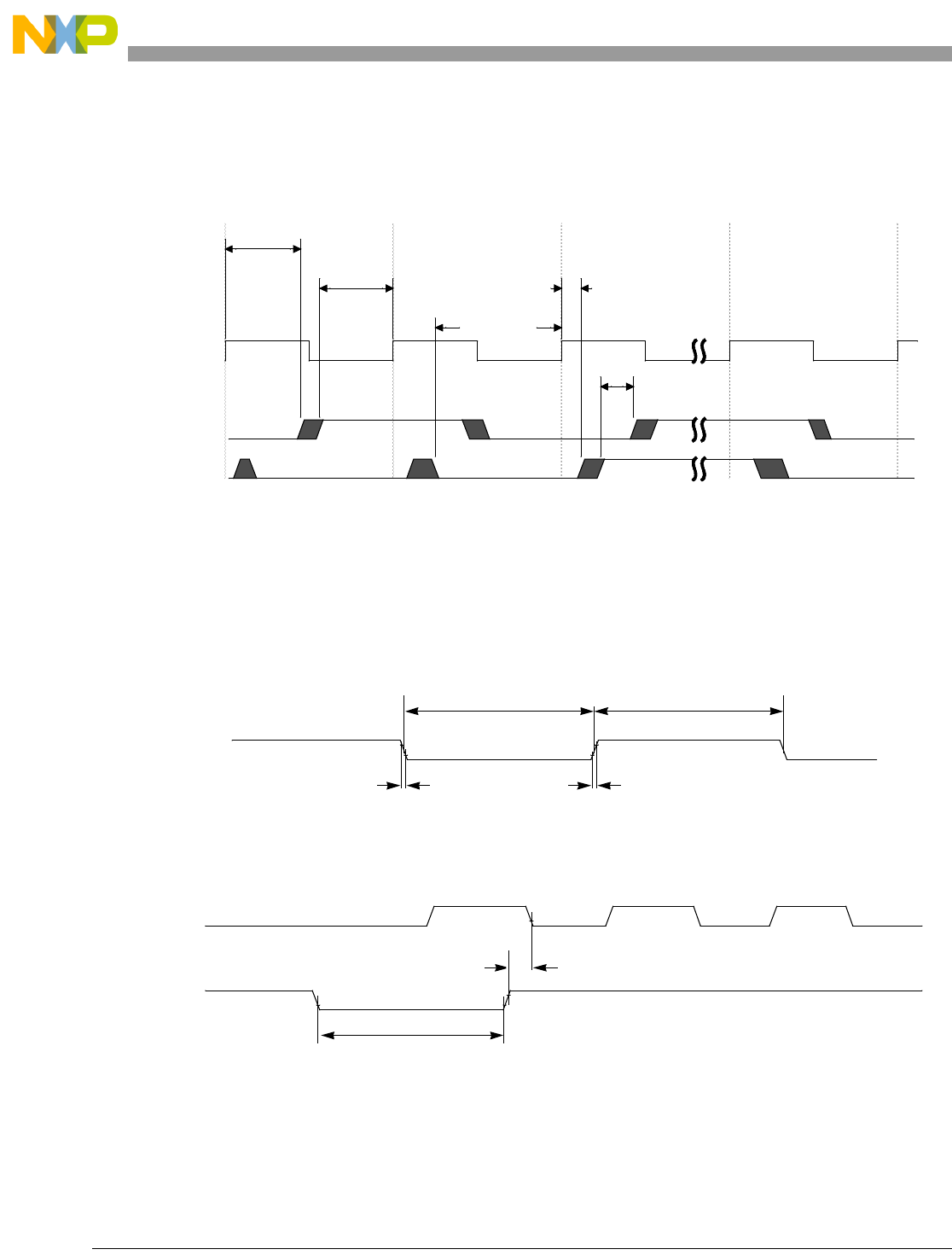
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-90 Freescale Semiconductor
13.4.7 Time Base Interface
The following figure shows the required relationships of the time base inputs. The electrical values
associated with these timings may be found in the e200 Integration Guide.
Figure 13-48. Time Base Input Timing
13.4.8 JTAG Test Interface
Figure 13-49, Figure 13-50, and Figure 13-51 show the relationships of the various JTAG related signals
to the j_tclk input. The electrical values associated with these timings may be found in the e200
Integration Guide.
Figure 13-49. Test Clock Input Timing
Figure 13-50. j_trst_b Timing
t_tbdis_su2
t_tbdis_su
t_tbdis_holdt_tbclk_su
t_tbclk_hold
m_clk
p_tbclk
p_tbdisable
j_tclk
TEST_CLK_INPUT_TIM_01
VIL
VIH
tCW tCW
tCrf tCrf
j_tclk
j_trst_b
JTRSTB_TIM_01
tTSCL
tTAT
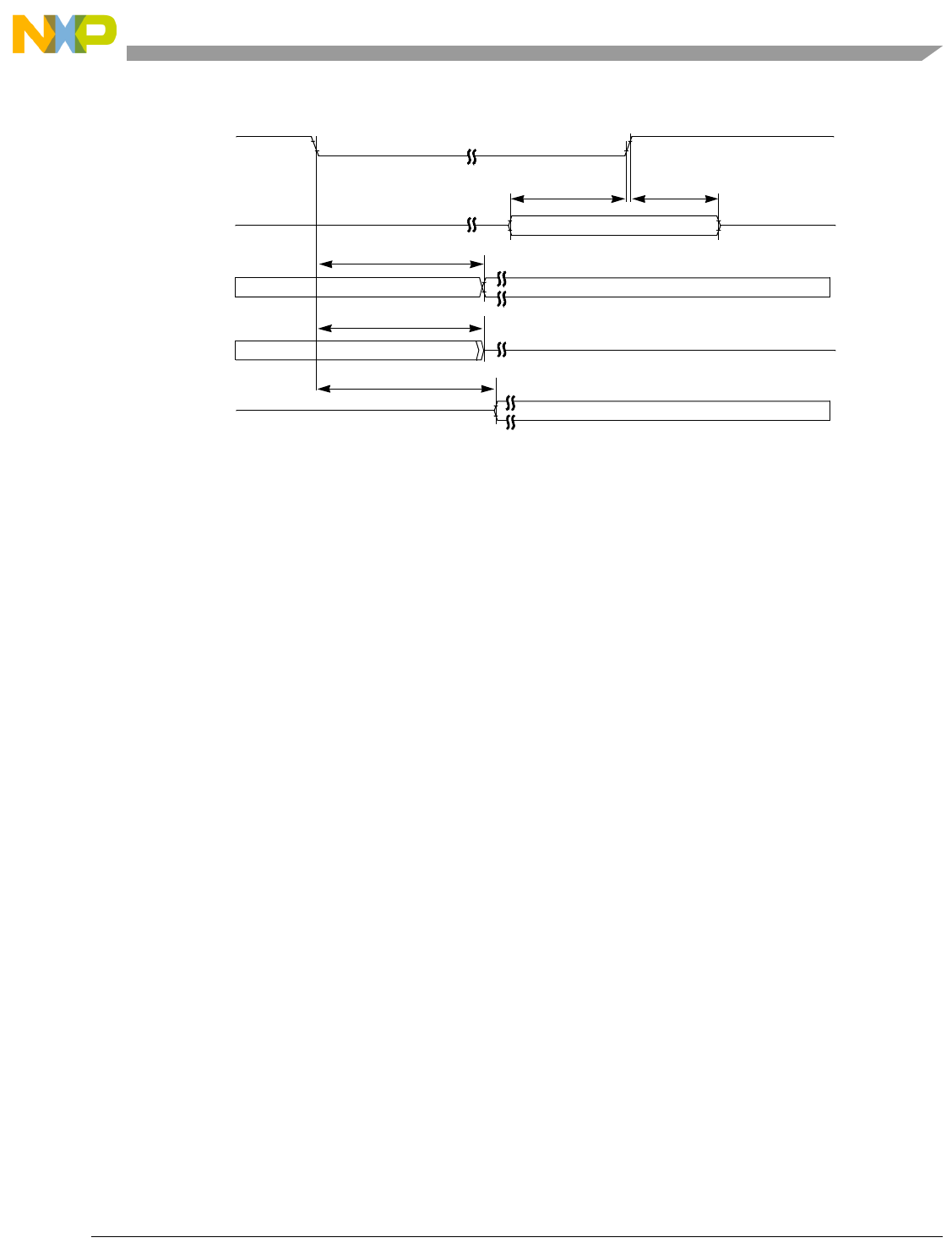
e200z4 Power Architecture™ Core Reference Manual, Rev. 0
Freescale Semiconductor 13-91
Figure 13-51. Test Access Port Timing
Input Data Valid
Output Data Valid
Output Data Valid
j_tclk
j_tdi
j_tdo
j_tdo
j_tdo
j_tms
VIL VIH
TEST_ACC_PRT_TIM_01
tDST tDHT
tCLTDV
tCLEV
tCLTDV

e200z4 Power Architecture™ Core Reference Manual, Rev. 0
13-92 Freescale Semiconductor

e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-1
Appendix A
Register Summary
As shown in the following register diagrams, most of the registers implemented are defined by the Power
ISA embedded architecture. Additional registers and fields within registers are defined by the Freescale
EIS and by the implementation.
The Power ISA embedded architecture defines some register fields in a very general way, leaving some
details as implementation specific. In some cases, this more specific functionality is defined by the
Freescale EIS; in others it is left up to the processor. This chapter identifies the level at which each features
is defined.
Figure A-1 and Figure A-2 show the e200 register set, grouped by whether they can be accessed by user-
or supervisor-level software. Unless otherwise indicated, these registers are defined by the base or
embedded category of the Power ISA architecture.
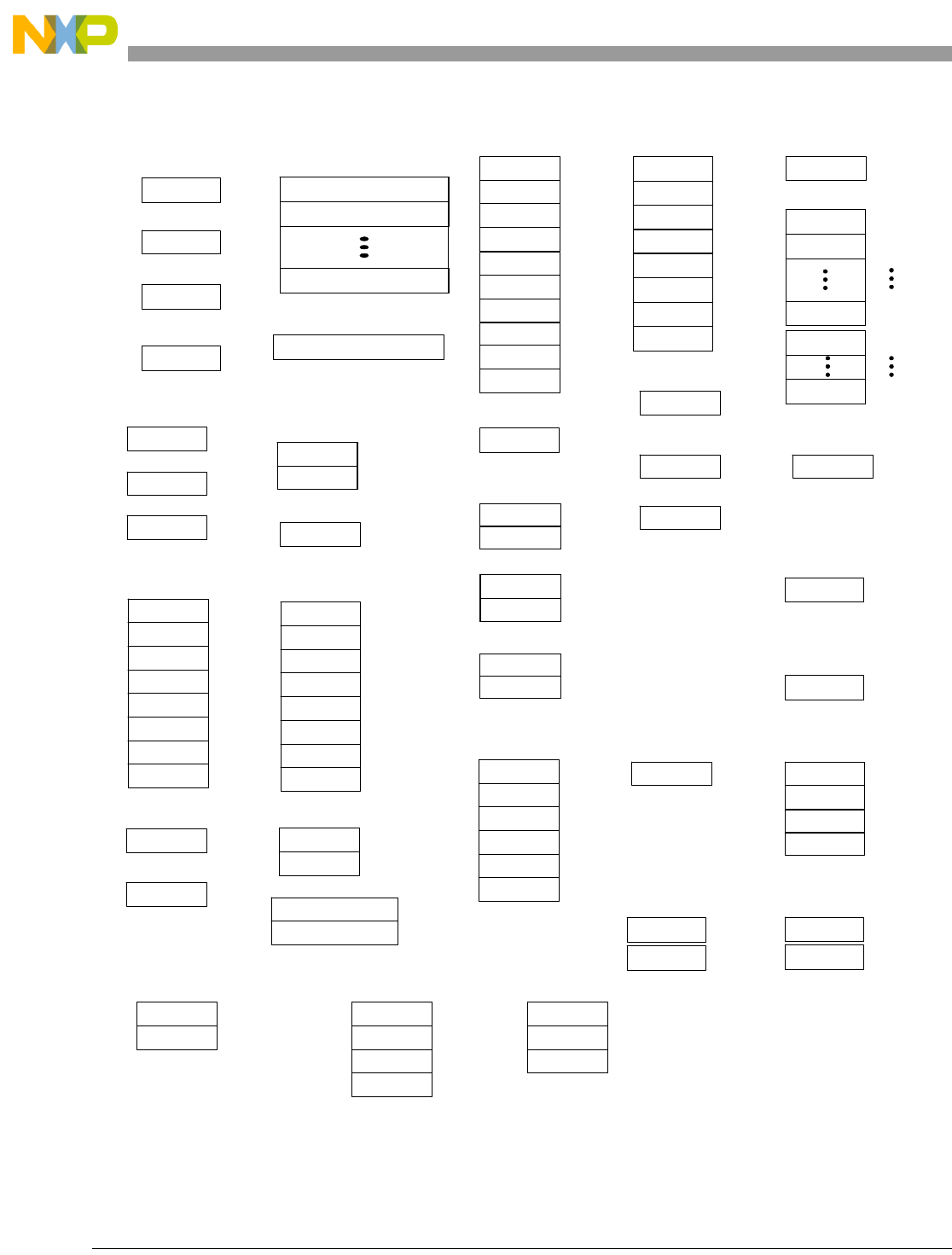
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-2 Freescale Semiconductor
Figure A-1. e200z446n3 Supervisor Mode Programmer’s Model SPRs
ESR SPR 62
Exception Syndrome
Data Exception Address
SPR General
Exception Handling/Control Registers
Save and Restore
MMU Assist1
Memory Management Registers
Machine State
MSR
PVR
Processor Control Registers
Decrementer
Timers
Time Base (write only)
MAS0
MAS1
MAS2
MAS3
MAS4
MAS6
SPR 624
SPR 625
SPR 626
SPR 627
SPR 628
SPR 630
SPRG0
SPRG1
SPRG2
SPRG3
SPRG4
SPRG5
SPRG6
SPRG7
SPRG8
SPRG9
SPR 272
SPR 273
SPR 274
SPR 275
SPR 276
SPR 277
SPR 278
SPR 279
SPR 604
SPR 605
DEAR SPR 61
SPR 26
SPR 27
SPR 58
SPR 59
SPR 574
SPR 575
SPR 570
SPR 571
TBL SPR 284
TBU SPR 285
DEC SPR 22
Process ID
PID0 SPR 48
Processor ID
PIR SPR 286 DECAR SPR 54
IVOR0
IVOR1
IVOR15
SPR 400
SPR 401
SPR 415
Interrupt Vector Prefix
IVPR SPR 63
Interrupt Vector Offset
Control and Status
TCR SPR 340
TSR SPR 336
SPR 528
SPR 530
IVOR322
IVOR342
Processor Version
Control & Configuration
SPR 1012
SPR 1015
SPR 688
SPR 689
Hardware Implementation
Dependent1
HID0
HID1
SPR 1008
SPR 1009
MMUCSR0
MMUCFG
TLB0CFG
TLB1CFG
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link Register
LR
Condition Register
CR GPR0
GPR1
GPR31
SPR 1
XER
XER
General Registers
SPR 256
User SPR
USPRG0
SPE Status and Control
SPR 512SPEFSCR
SPE Register
SPR 287
System Version2
SVR SPR 1023
Machine Check
Syndrome Register
MCSR SPR 572
BTB Control1
SPR 1013
BUCSR
BTB Register
SRR0
SRR1
CSRR0
CSRR1
DSRR02
DSRR12
MCSRR02
MCSRR12
Machine Check
Address Register
MCAR SPR 573
Accumulator
ACC
Cache Control1
SPR 1011
L1CSR1
Cache Registers
SPR 515
Cache Configuration
(Read-only)
L1CFG0
SPR 959
L1FINV1
SPR 516
L1CFG1
IAC1
IAC2
IAC3
IAC4
IAC5
IAC6
IAC7
IAC8
Debug Registers2
Debug Control
DBCR0
DBCR1
DBCR2
DBCR31
DBCR41
DBCR51
DBCR61
DBERC01
SPR 308
SPR 309
SPR 310
SPR 561
SPR 563
SPR 564
SPR 603
SPR 569
Instruction Address Compare
SPR 312
SPR 313
SPR 314
SPR 315
SPR 565
SPR 566
SPR 567
SPR 568
Data Address Compare
DAC1
DAC2
SPR 316
SPR 317
Debug Status
DBSR SPR 304
Debug Counter1
DBCNT SPR 562 Data Value Compare (64-bit)
DV C1
DV C2
SPR 318
SPR 319
1 - These e200-specific registers may not be supported by other processors built on Power Architecture technology
2 - Optional registers defined by the Power ISA embedded architecture
3 - Read-only registers
Cache Access Registers
CDACNTL
CDADATA
DCR 351
DCR 350
PSU Registers
PSCR
PSSR
PSHR
PSLR
DCR 272
DCR 273
DCR 274
DCR 275
Device Control Registers (DCRs)1
PSCTR
PSUHR
PSULR
DCR 276
DCR 277
DCR 278
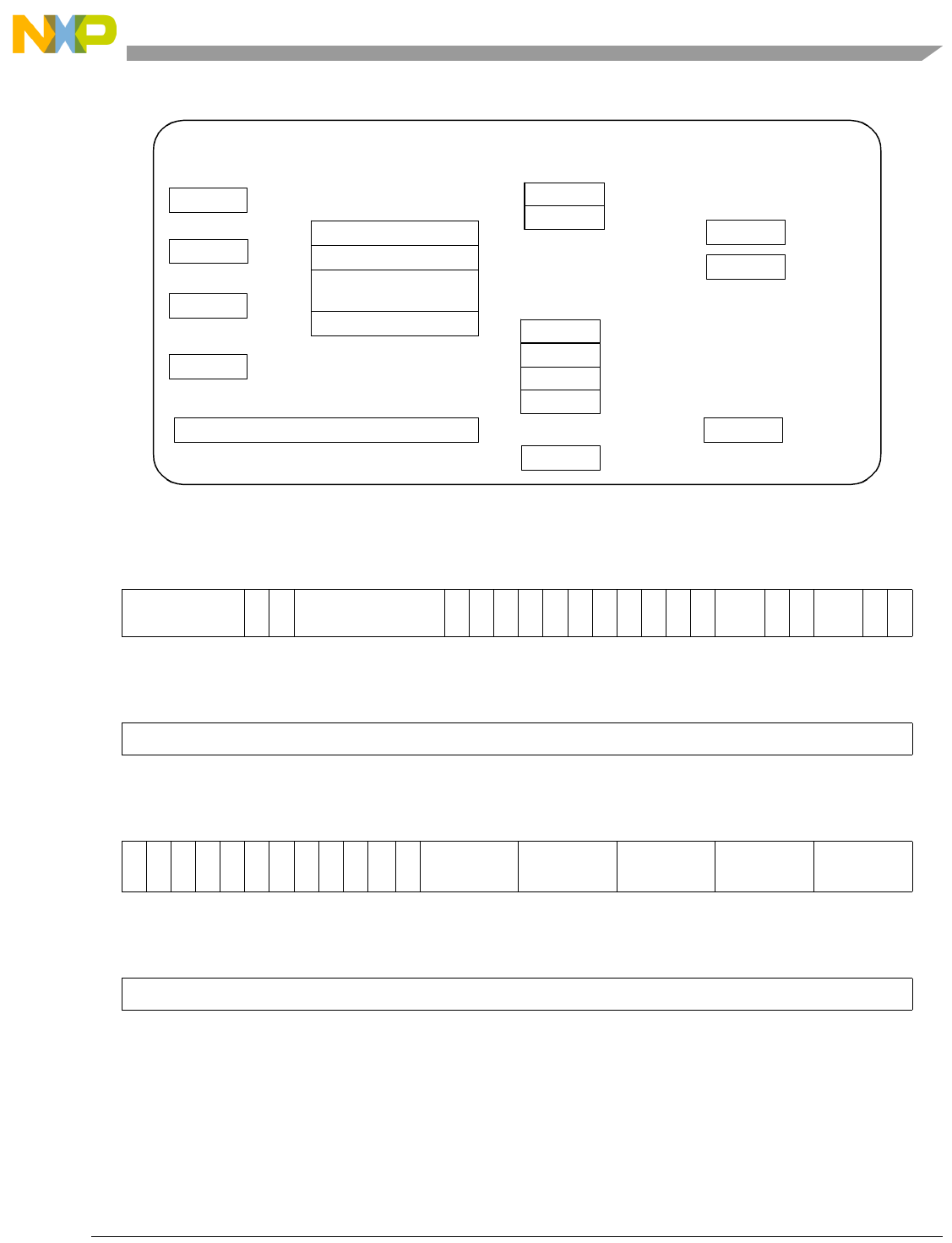
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-3
Figure A-2. e200z4463 User Mode Programmer’s Model SPRs
Figure A-3–Figure A-47 show the individual registers.
0
UCLE
SPE
0
WE
CE
0
EE
PR
FP
ME
FE0
0
DE
FE1
0
IS
DS
0
RI
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-3. Machine State Register (MSR)
ID
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-4. Processor ID Register (PIR)
100000010101 Version MBG
Reserved
Minor Rev Major Rev MBG ID
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-5. Processor Version Register (PVR)
System Version
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-6. System Version Register (SVR)
Timers (Read only)
Time Base
SPR 515
Cache Configuration
L1CFG0
TBL SPR 268
TBU SPR 269
Cache Register
(Read-only)
SPR 9
General-Purpose Registers
Count Register
CTR
SPR 8
Link
LR
Condition Register
CR
SPR 1
XER
XER
General Registers
SPR General (Read-only)
Control Registers
SPRG4
SPRG5
SPRG6
SPRG7
SPR 260
SPR 261
SPR 262
SPR 263
SPR 256
User SPR
USPRG0
SPE Status and
Control Register
SPR 512
SPEFSCR
Category Registers
GPR0
GPR1
•
•
GPR31
Accumulator
ACC
SPR 516
L1CFG1
•
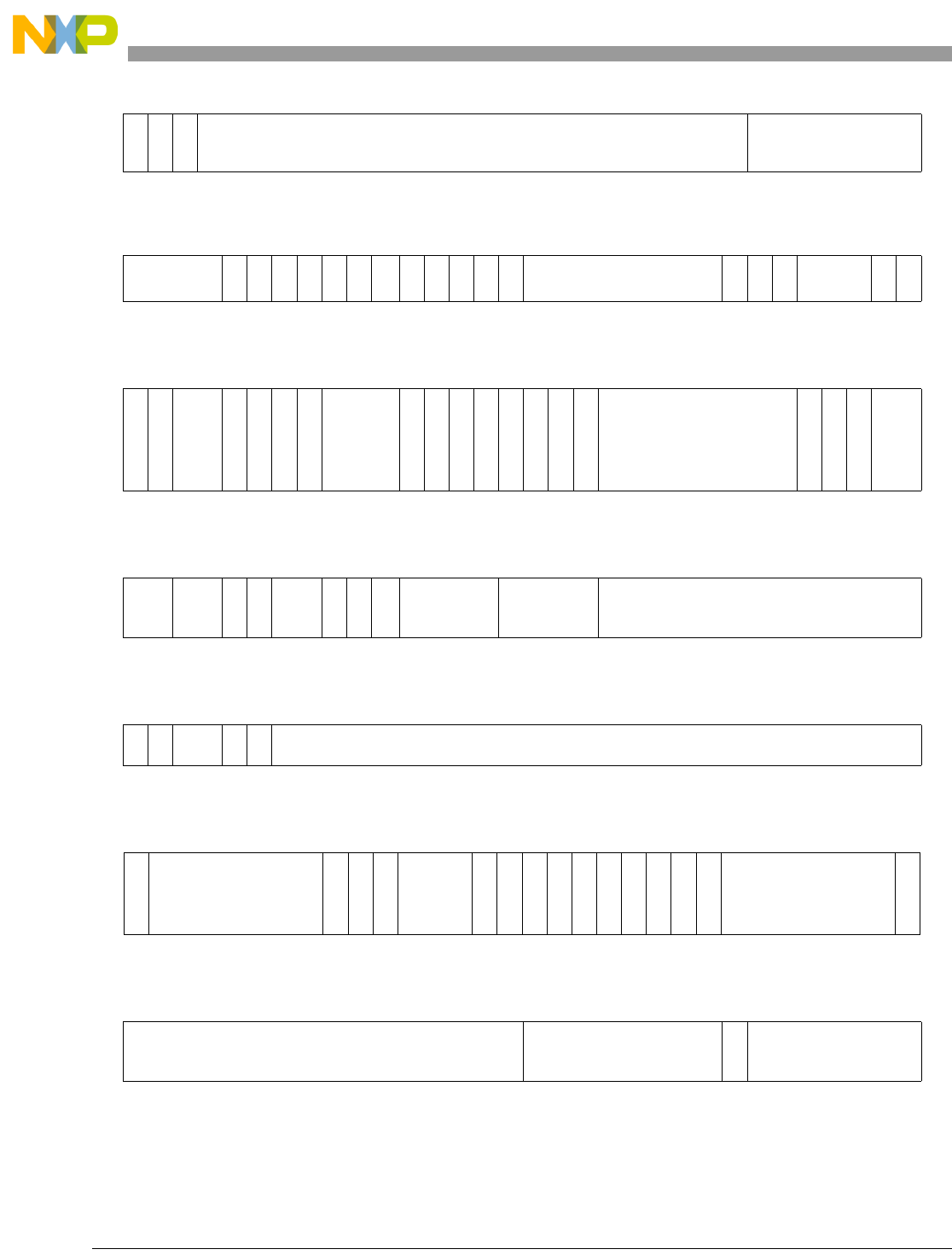
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-4 Freescale Semiconductor
SO
OV
CA
0
Bytecnt
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-7. Integer Exception Register (XER)
0
PIL
PPR
PTR
FP
ST
0
DLK
ILK
AP
PUO
BO
PIE
0
SPE
0
VLEMI
0
MIF
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-8. Exception Syndrome Register (ESR)
MCP
IC_DPERR
0
EXCP_ERR
IC_TPERR
0
IC_LKERR
0
NMI
MAV
MEA
0
IF
LD
ST
G
0
BUS_IRERR
BUS_DRERR
BUS_WRERR
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-9. Machine Check Syndrome Register (MCSR)
WP
WRC
WIE
DIE
FP
FIE
ARE
0
WPEXT
FPEXT
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-10. Timer Control Register (TCR)
ENW
WIS
WRS
DIS
FIS
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-11. Timer Status Register (TSR)
EMCP
0
DOZE
NAP
SLEEP
0
ICR
NHR
0
TBEN
SELTBCLK
DCLREE
DCLRCE
CICLRDE
MCCLRDE
DAPUEN
0
NOPTI
012345678910111213141516171819202122232425262728293031
Figure A-12. Hardware Implementation Dependent Register 0 (HID0)
0
SYSCTL
AT S
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-13. Hardware Implementation Dependent Register 1 (HID1)
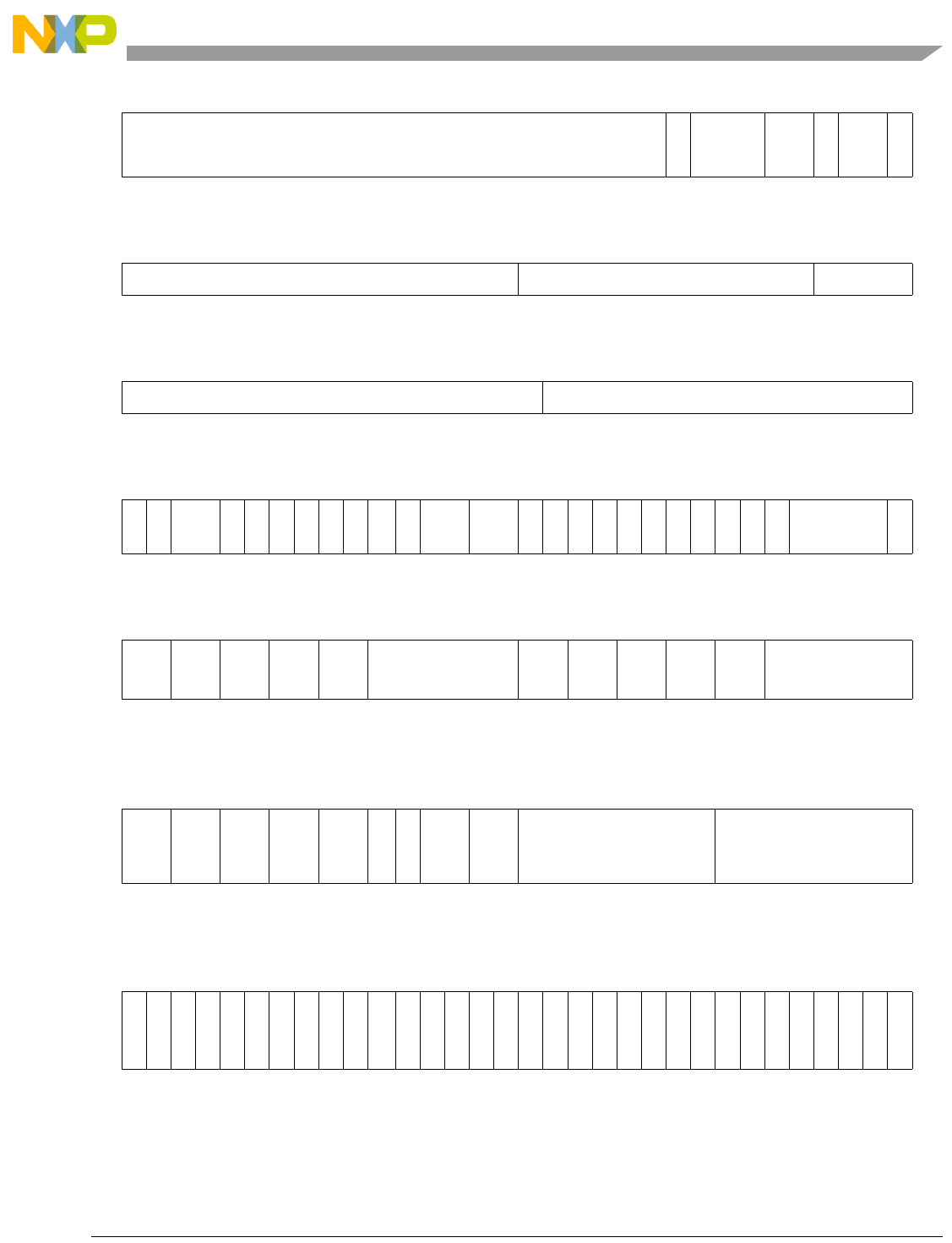
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-5
0
BBFI
0
BALLOC
0
BPRED
BPEN
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-14. Branch Unit Control and Status Register (BUCSR)
0 Vector Offset 0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-15. e200 Interrupt Vector Offset Register (IVOR)
CNT1 CNT2
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-16. DBCNT Register
EDM
IDM
RST
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4
DAC1
DAC2
RET
IAC5
IAC6
IAC7
IAC8
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
0
FT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-17. DBCR0 Register
IAC1US
IAC1ER
IAC2US
IAC2ER
IAC12M
0
IAC3US
IAC3ER
IAC4US
IAC4ER
IAC34M
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-18. DBCR1 Register
DAC1US
DAC1ER
DAC2US
DAC2ER
DAC12M
DAC1LNK
DAC2LNK
DVC1M
DVC2M
DVC1BE DVC2BE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-19. DBCR2 Register
DEVT1C1
DEVT2C1
ICMPC1
IAC1C1
IAC2C1
IAC3C1
IAC4C1
DAC1RC1
DAC1WC1
DAC2RC1
DAC2WC1
IRPTC1
RETC1
DEVT1C2
DEVT2C2
ICMPC2
IAC1C2
IAC2C2
IAC3C2
IAC4C2
DAC1RC2
DAC1WC2
DAC2RC2
DAC2WC2
DEVT1T1
DEVT2T1
IAC1T1
IAC3T1
DAC1RT1
DAC1WT1
CNT2T1
CONFIG
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-20. DBCR3 Register
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-6 Freescale Semiconductor
0
DVC1C
0
DVC2C
0
DAC1XM
DAC2XM
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-21. DBCR4 Register
IAC5US
IAC5ER
IAC6US
IAC6ER
IAC56M
0
IAC7US
IAC7ER
IAC8US
IAC8ER
IAC78M
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-22. DBCR5 Register
IAC1XM
IAC2XM
IAC3XM
IAC4XM
IAC5XM
IAC6XM
IAC7XM
IAC8XM
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-23. DBCR6 Register
IDE
UDE
MRR
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4-8
DAC1R
DAC1W
DAC2R
DAC2W
RET
0
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
VLES
DAC_OFST
CNT1TRG
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-24. DBSR Register
0
IDM
RST
UDE
ICMP
BRT
IRPT
TRAP
IAC1
IAC2
IAC3
IAC4
DAC1
0
DAC2
0
RET
IAC5
IAC6
IAC7
IAC8
DEVT1
DEVT2
DCNT1
DCNT2
CIRPT
CRET
BKPT
DQM
0
FT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-25. DBERC0 Register
MCLK ERR 0 RESET HALT STOP DEBUG WAIT 0 1
0123456789
Figure A-26. OnCE Status Register
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-7
Figure A-29. CPU Scan Chain Register (CPUSCR)
R/W GO EX RS[0:6]
0123456789
Figure A-27. OnCE Command Register
0
I_DMDIS
0
I_DVLE
I_DI
I_DM
0
I_DE
D_DMDIS
0
D_DW
D_DI
D_DM
D_DG
D_DE
0
WKUP
FDB
DR
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-28. OnCE Control Register
TDO
TDI
TCK
MSR
WBBRhigh
32
32
031
031
PC
32
031
IR
32
031
CTL
32
031
WBBRlow
32
031
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-8 Freescale Semiconductor
*
IRSTAT13
IRSTAT12
IRSTAT11
IRSTAT10
WAITING
PCOFST
PCINV
FFRA
IRSTAT0
IRSTAT1
IRSTAT2
IRSTAT3
IRSTAT4
IRSTAT5
IRSTAT6
IRSTAT7
IRSTAT8
IRSTAT9
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-30. Control State Register (CTL)
SOVH
OVH
FGH
FXH
FINVH
FDBZH
FUNFH
FOVFH
0
FINXS
FINVS
FDBZS
FUNFS
FOVFS
MODE
SOV
OV
FG
FX
FINV
FDBZ
FUNF
FOVF
0
FINXE
FINVE
FDBZE
FUNFE
FOVFE
FRMC
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-31. SPE Status and Control Register (SPEFSCR)
WID
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-32. L1 Cache Control and Status Register 0 (L1CSR0)
0
ICECE
ICEI
0
ICEDT
0
ICUL
ICLO
ICLFC
ICLOA
ICEA
ICORG
0
ICABT
ICINV
ICE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-33. L1 Cache Control and Status Register 1 (L1CSR1)
CARCH
CWPA
CFAHA
DCFISWA
0
DCBSIZE
DCREPL
DCLA
DCPA
DCNWAY
DCSIZE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-34. L1 Cache Configuration Register 0 (L1CFG0)
0
ICFISWA
0
ICBSIZE
ICREPL
ICLA
ICPA
ICNWAY
ICSIZE
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-35. L1 Cache Configuration Register 1 (L1CFG1)
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-9
0
CWAY
0
CSET
0
CCMD
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-36. L1 Flush/Invalidate Register (L1FINV1)
0
RASIZE
0
NPIDS
PIDSIZE
0
NTLBS
MAVN
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-37. MMU Configuration Register (MMUCFG)
ASSOC
MINSIZE
MAXSIZE
IPROT
AVAIL
P2PSA
0
NENTRY
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-38. TLB Configuration Register (TLB0CFG, TLB1CFG)
0
TLB1_FI
0
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
Figure A-39. MMU Control and Status Register 0 (MMUCSR0)
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-10 Freescale Semiconductor
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
M
A
S
0
0
TLBSEL (01)
0
ESEL
0
NV
M
A
S
1
V
A
L
I
D
I
P
R
O
T
0TID0T
S
TSIZ 0
M
A
S
2
EPN 0 V
L
E
WIMGE
M
A
S
3
RPN U
0
U
1
U
2
U
3
U
X
S
X
U
W
S
W
U
R
S
R
M
A
S
4
0 T
L
B
S
E
L
D
0T
I
D
S
E
L
D
0TSIZED0V
L
E
D
W
DI
DM
DG
DE
D
M
A
S
6
0 SPID 0 S
A
S
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Figure A-40. MMU Assist Registers Summary
0
CNTEN
0
RDEN
WREN
INIT
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 272; Read/Write; Reset - 0x0
Figure A-41. Parallel Signature Control Register (PSCR)
Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor A-11
0
TERR
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 273; Read/Write; Reset -Unaffected
Figure A-42. Parallel Signature Status Register (PSSR)
High Signature
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 274; Read/Write; Reset -Unaffected
Figure A-43. Parallel Signature High Register (PSHR)
Low Signature
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 275; Read/Write; Reset -Unaffected
Figure A-44. Parallel Signature Low Register (PSLR)
Counter
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 276; Read/Write; Reset -Unaffected
Figure A-45. Parallel Signature Counter Register (PSCTR)
High Signature Update Data
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 277; Write-only; Reset -Unaffected
Figure A-46. Parallel Signature Update High Register (PSUHR)
Low Signature Update Data
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031
DCR - 278; Write-only; Reset -Unaffected
Figure A-47. Parallel Signature Update Low Register (PSULR)

Register Summary
e200z4 Power Architecture™ Core Reference Manual, Rev. A
A-12 Freescale Semiconductor

e200z4 Power Architecture™ Core Reference Manual, Rev. A
Freescale Semiconductor B-1
Appendix B
Revision History
This appendix provides a list of the major differences between revisions of the e200z4 Power
Architecture™ Core Reference Manual. This is the initial version of the manual, so there are currently no
differences.

Revision History
e200z4 Power Architecture™ Core Reference Manual, Rev. A
B-2 Freescale Semiconductor
