Mechanical Instructions
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 22
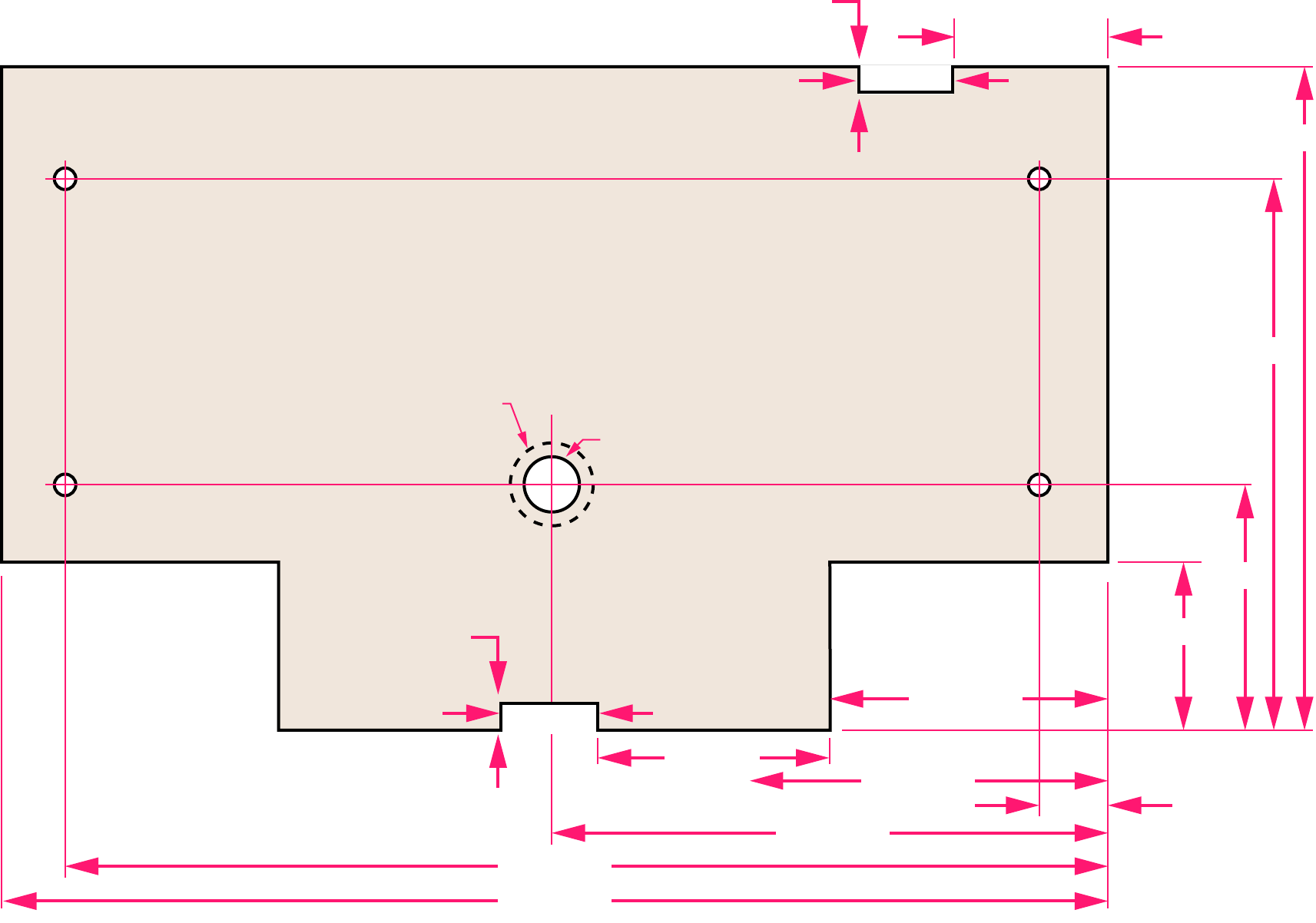
0.5000 inch dia
“SPRING HOLE”
(SPRING HOLE is also used to
access the robot’s power switch)
† Drill with #25 bit (0.1495 inch dia)
†
†
†
†
0.6214
9.4270
10.0000
3.2186
2.5000 TYP
1.5000
2.2175
4.9861
6.0000
(Top View; Rear Edge of Board)
Board = any 0.1250 to 0.5000 inch thick material of strength similar to plexiglass
All dimensions are in inches ±0.0001
2016 © International Aerial Robotics Competition
5.0000
ROBOT TOP PLATE
Half of the target robots will have the top plate painted with Krylon
"Gloss Emerald Green #52016” (RGB = 22, 86, 16) and the other half
Krylon “Gloss Banner Red #52108” (RGB = 176, 22, 4).
Obstacle robots top plates will be white.
0.40000
0.40000
“TOP TOUCH”
SWITCH NOTCH
Arduino POWER
SWITCH NOTCH
1.33300
2.00000
1.00000
2.50000
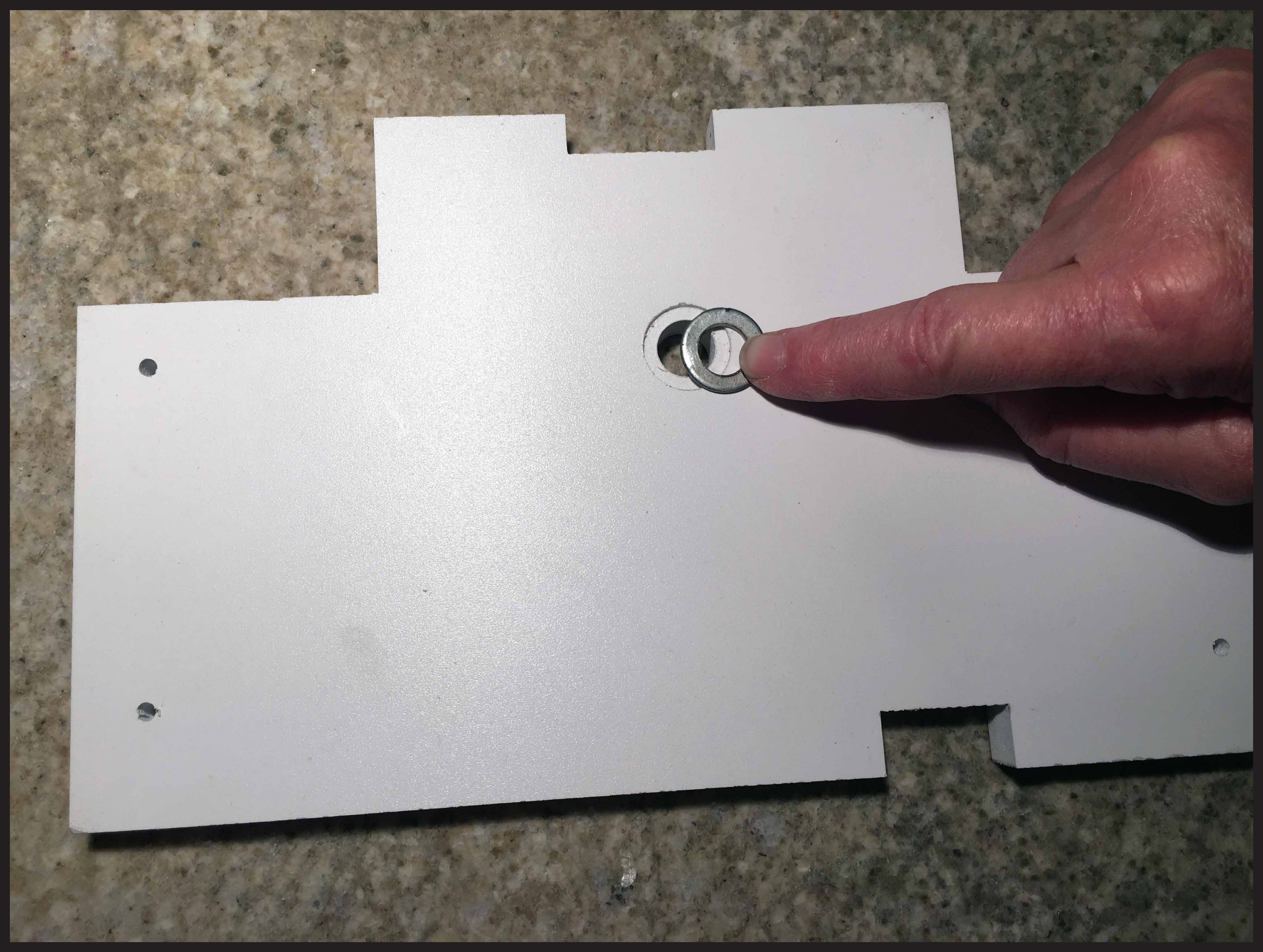
Counter sink hole to a depth of 0.0600 inches
on the bottom side of the board.
Glue a 3/4 inch dia washer with
a 7/16 inch center hole into the
countersunk area as a spring stop.
0.7500 in dia
Spring stop
Amazon.com top plate components with links:
Generic 100pcs 18mm Nylon M4 Threaded Hex Male-Female Standoff
Spacer.
https://www.amazon.com/gp/product/B01913MSJW/
ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1
Generic 100PCS Metric M4 Black Nylon Hex Nut, Hexagonal.
https://www.amazon.com/gp/product/B0129DFFPK/
ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1
Nylon 6/6 Pan Head Machine Screw, Black, #2 Phillips Drive, M4-0.7
Thread Size, 20 mm Length, Fully Threaded, USA Made (Pack of 100)
https://www.amazon.com/gp/product/B00F339IPM/
ref=oh_aui_detailpage_o02_s00?ie=UTF8&psc=1
Spring for top plate:
D. R. Templeman Company part number CFA-1050-0005-M
compression spring.
D. R. Templeman Company, 1 Northwest Dr., Plainville, CT 06062
sales@drtempleman.com www.drtempleman.com
TARGET ROBOT CONSTRUCTION STEPS:
1. Cut out top plate based on engineering drawing (see).
2. Mill a 0.75-inch indentation on the bottom of the plate as shown in Figure 1.
3. This is exactly the diameter and depth/thickness of a U.S. penny (0.060"). Get or machine
a 0.060" washer with an outside diameter of 0.75" and an inside diameter hole of 7/16".
FIGURE 1
TARGET ROBOT CONSTRUCTION STEPS (continued):
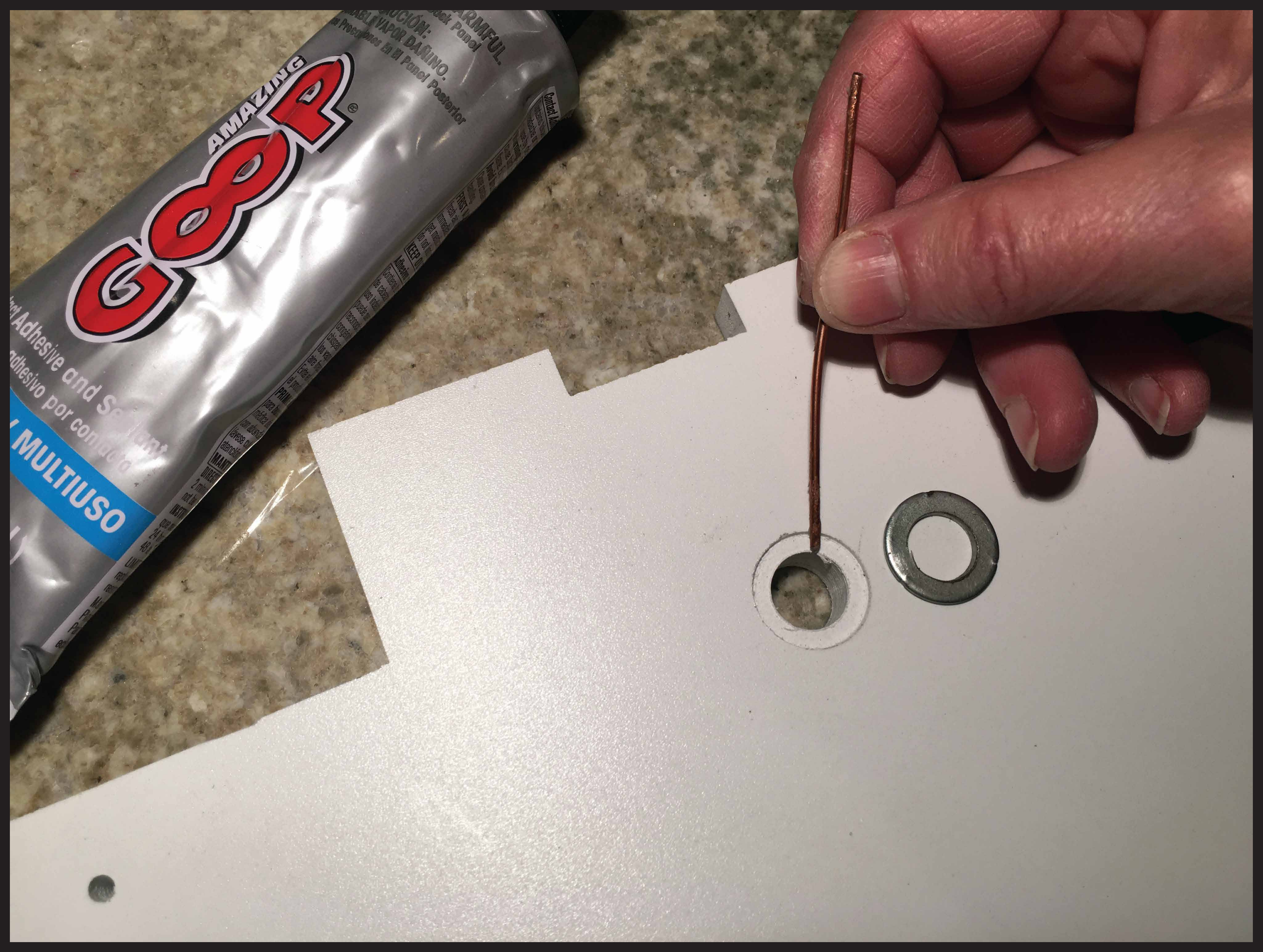
4. Using an RTV adhesive or a product like “GOOP”, glue the washer from Step 3 into the
indentation on the bottom of the top plate.
FIGURE 2

TARGET ROBOT CONSTRUCTION STEPS (continued):
5. Flip the plate over to expose the top surface as shown, and paint either RED or GREEN
using the recommended paint colors. Let dry and proceed to Step 6.
FIGURE 3
TARGET ROBOT CONSTRUCTION STEPS (continued):
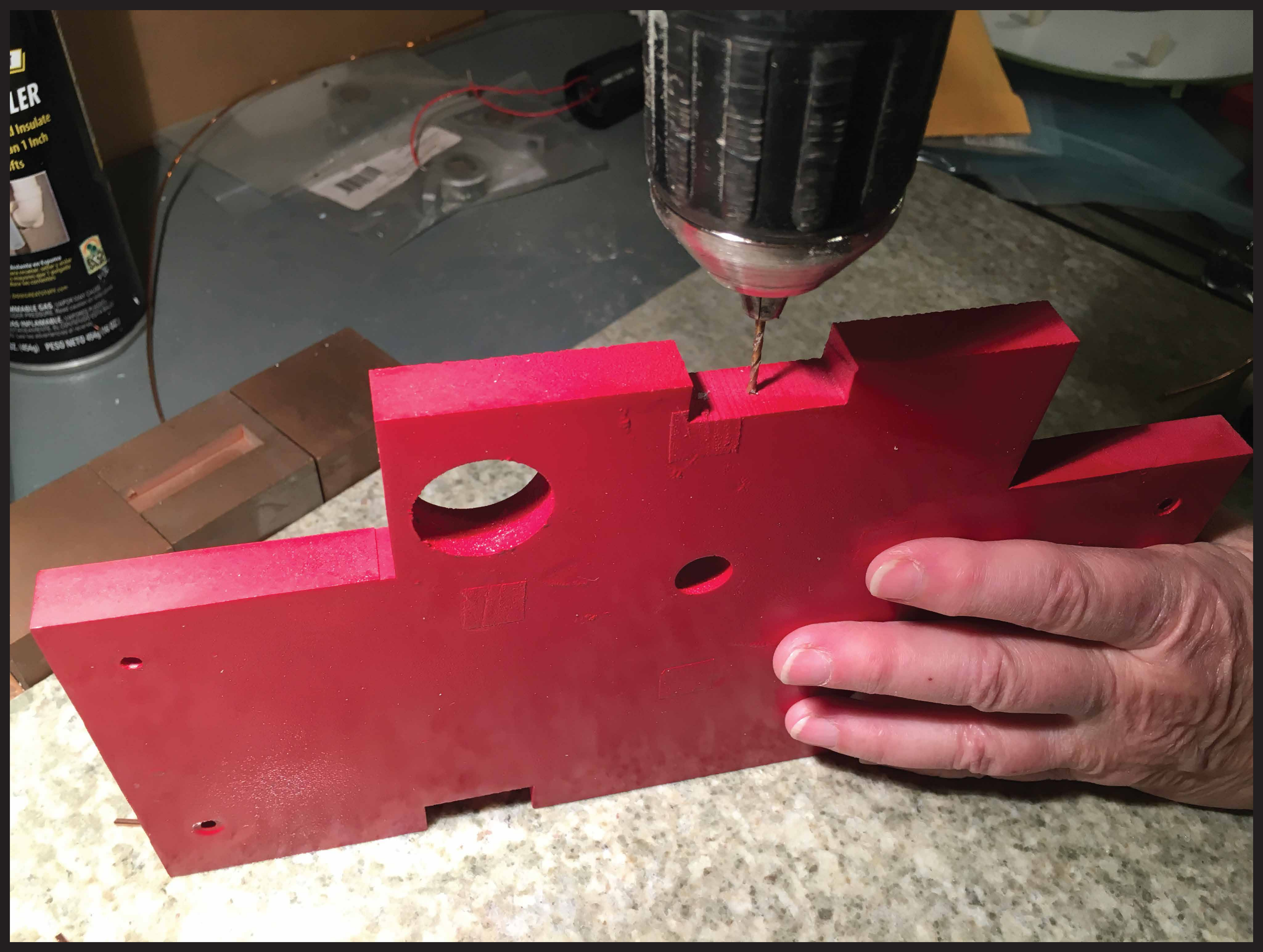
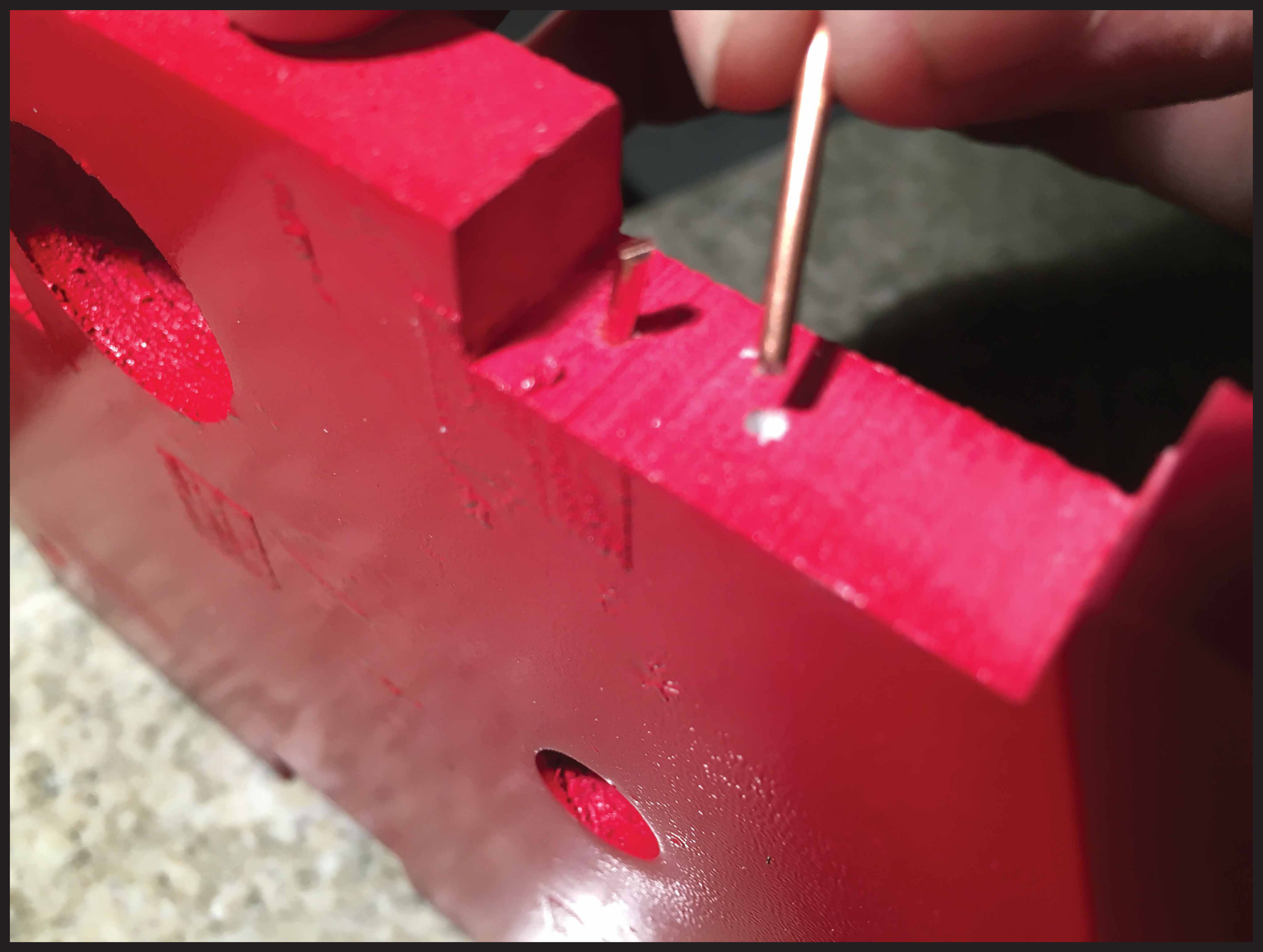
6. Drill holes to accommodate #12 AWG bare copper wire to a depth of approximately 1/4".
These holes will hold pins that position the micro switch of Figure 7 in place with the
top of the switch even with the upper surface of the top plate. The micro switch has
two holes which can be used as guides for drilling.
FIGURE 4
TARGET ROBOT CONSTRUCTION STEPS (continued):
7. Place #12 AWG bare copper wire pins in the drilled holes.
The micro switch will be registered in place with these pins. Once the micro switch has
been placed, the pins can be cut off flush with the surface of the micro switch.
FIGURE 5

TARGET ROBOT CONSTRUCTION STEPS (continued):
9. Place glue along the area of the top plate that intersects the micro switch and then
slide the micro switch into place over the registration pins as shown in Figure 7.
FIGURE 6
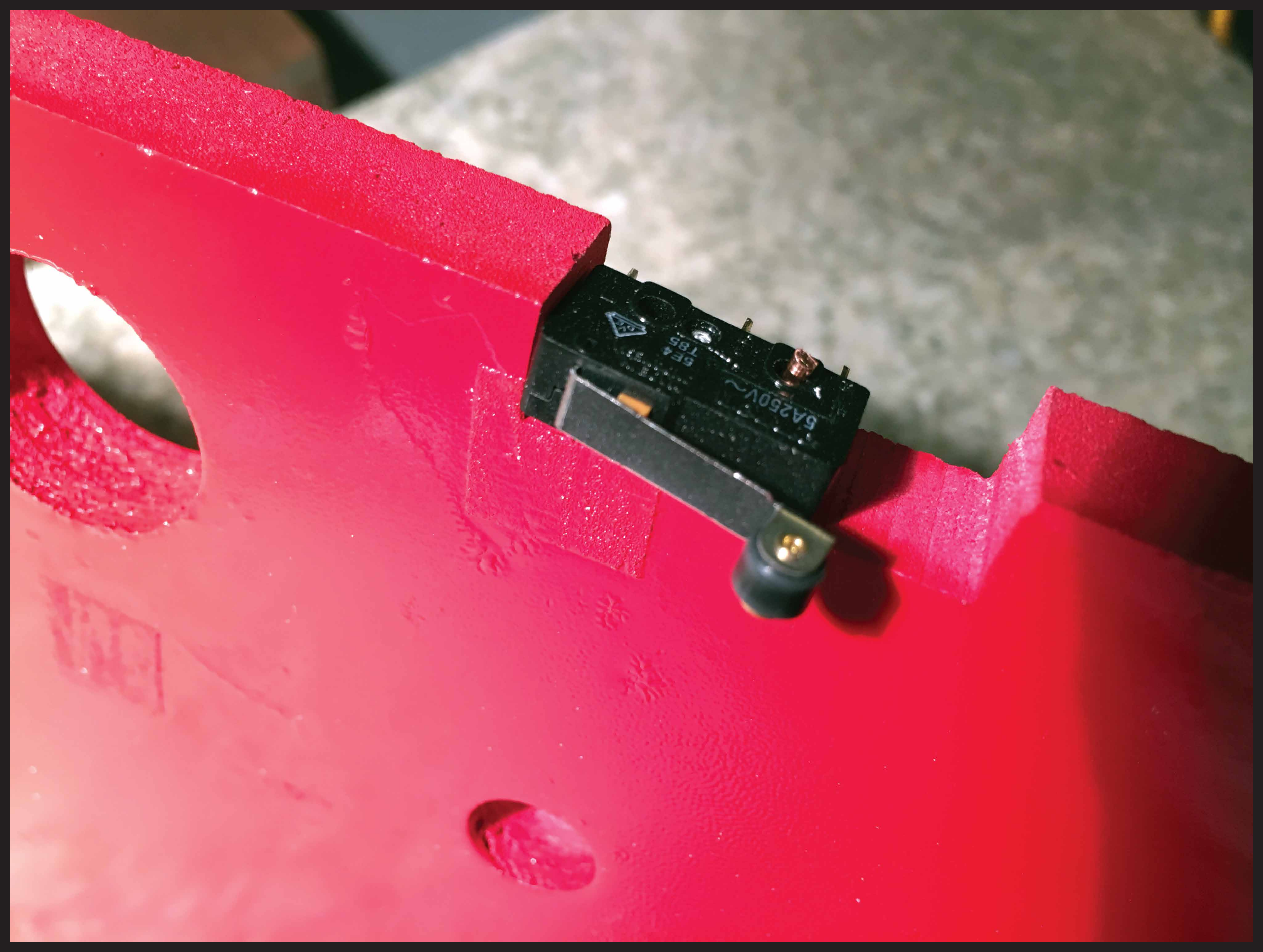
TARGET ROBOT CONSTRUCTION STEPS (continued):
10. Be sure that the top of the micro switch plastic case is flush with the top surface of the
top plate, and that the micro switch is biased to the left with the roller wheel at the end
of the lever arm near the center of the notch in the top plate.
FIGURE 7

TARGET ROBOT CONSTRUCTION STEPS (continued):
10. Next, glue the power switch into the rear edge of the top plate. Orient the switch to be
OFF in the left postion and ON when pushed to the right.
FIGURE 8

TARGET ROBOT CONSTRUCTION STEPS (continued):
11. The orientation of the two switches relative to the upper side of the top plate is as shown.
FIGURE 9
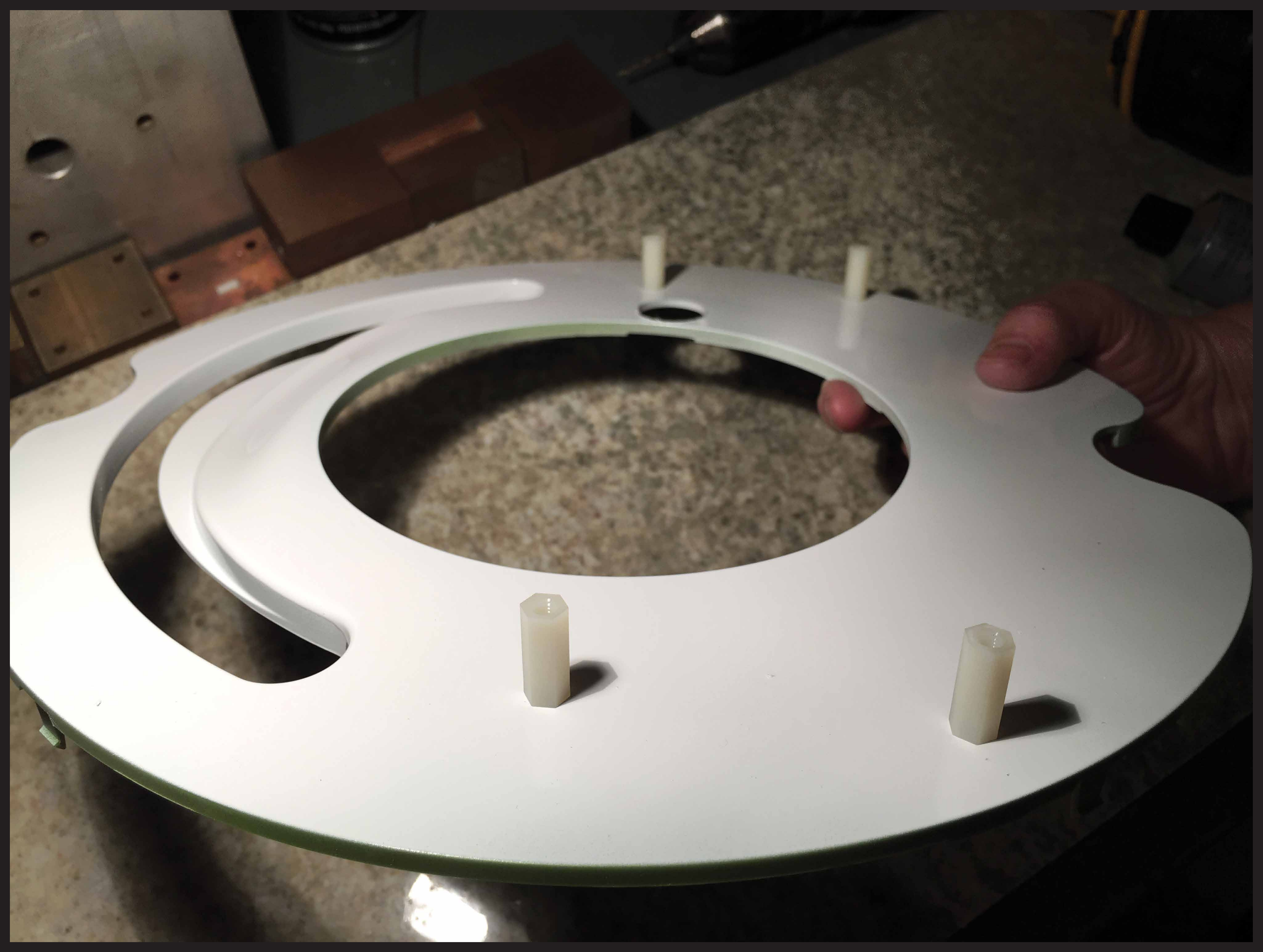
TARGET ROBOT CONSTRUCTION STEPS (continued):
12. After spray painting the Create 2 white (avoiding sensors or by keeping them covered
with tape) take the top cover and install the four stand-offs as shown. These raise the
top plate above the Create 2 top cover by about one inch to allow wires to pass beneath
and to allow room to push the ON/OFF switch on top of the robot. Note that the stand-
off hole locations are marked on the top cover plate. Also, the hole for the communica-
tions cable between the Arduino computer and the Create 2 must be drilled out (see this
hole at 12-O’clock near one of the stand-offs in Figure 10).
FIGURE 10

TARGET ROBOT CONSTRUCTION STEPS (continued):
13. Attach the top plate to the Create 2 top cover with four screws into the four stand-offs
as shown. Be sure to orient the top plate with its micro switch edge toward the front
of the Create 2’s top cover.
FIGURE 11
TARGET ROBOT CONSTRUCTION STEPS (continued):
14. Insert the D.R. Templeman Company compression spring (Type CFA-1050-0005-M) into
the hole with the glued-in washer to block the spring from pushing all the way through
the hole.
FIGURE 12

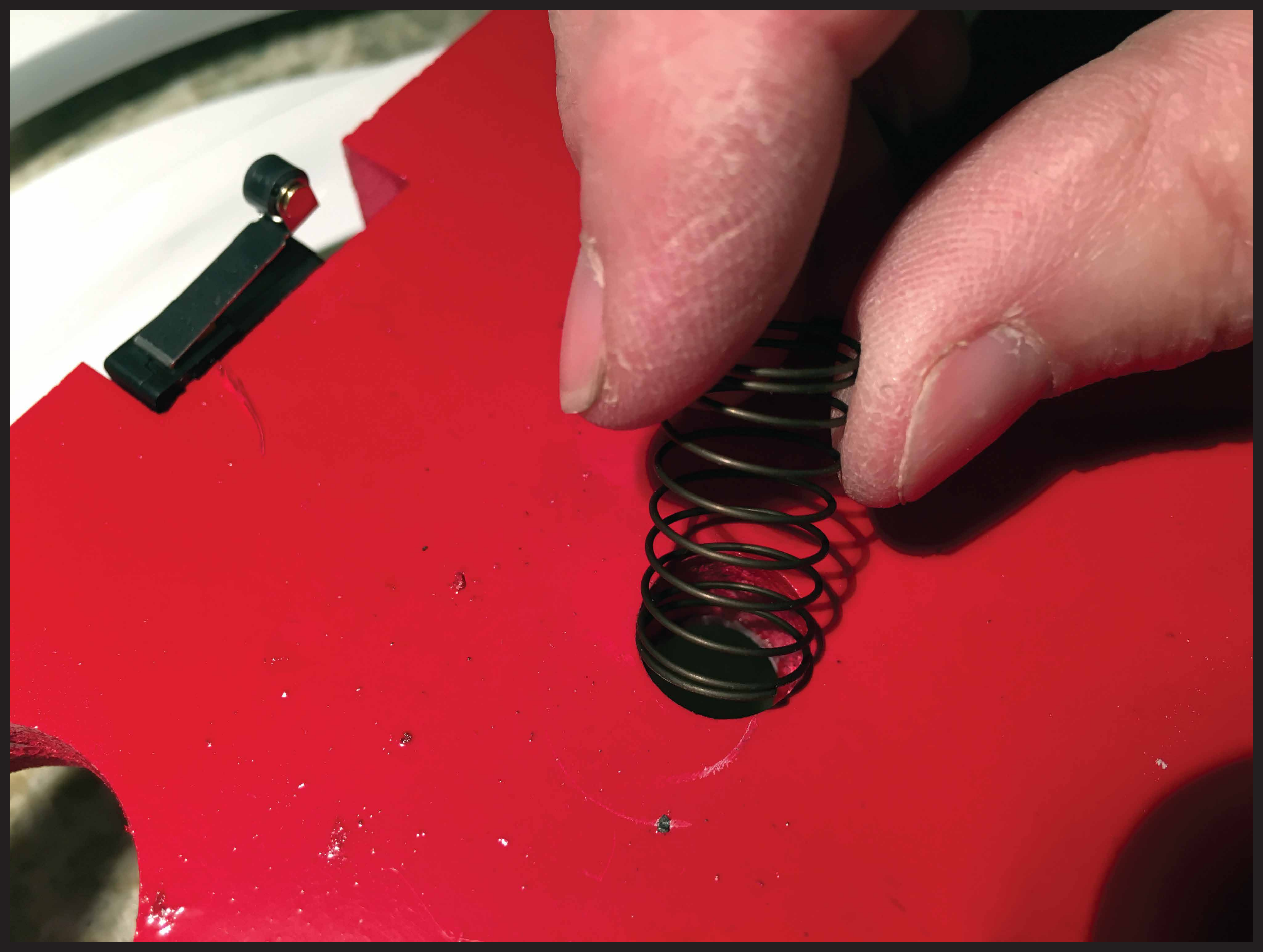
TARGET ROBOT CONSTRUCTION STEPS (continued):
15. This is how the D.R. Templeman Company compression spring (Type CFA-1050-0005-M)
should look when in place. You are now ready to create the top pressure switch paddle.
FIGURE 13
TARGET ROBOT CONSTRUCTION STEPS (continued):
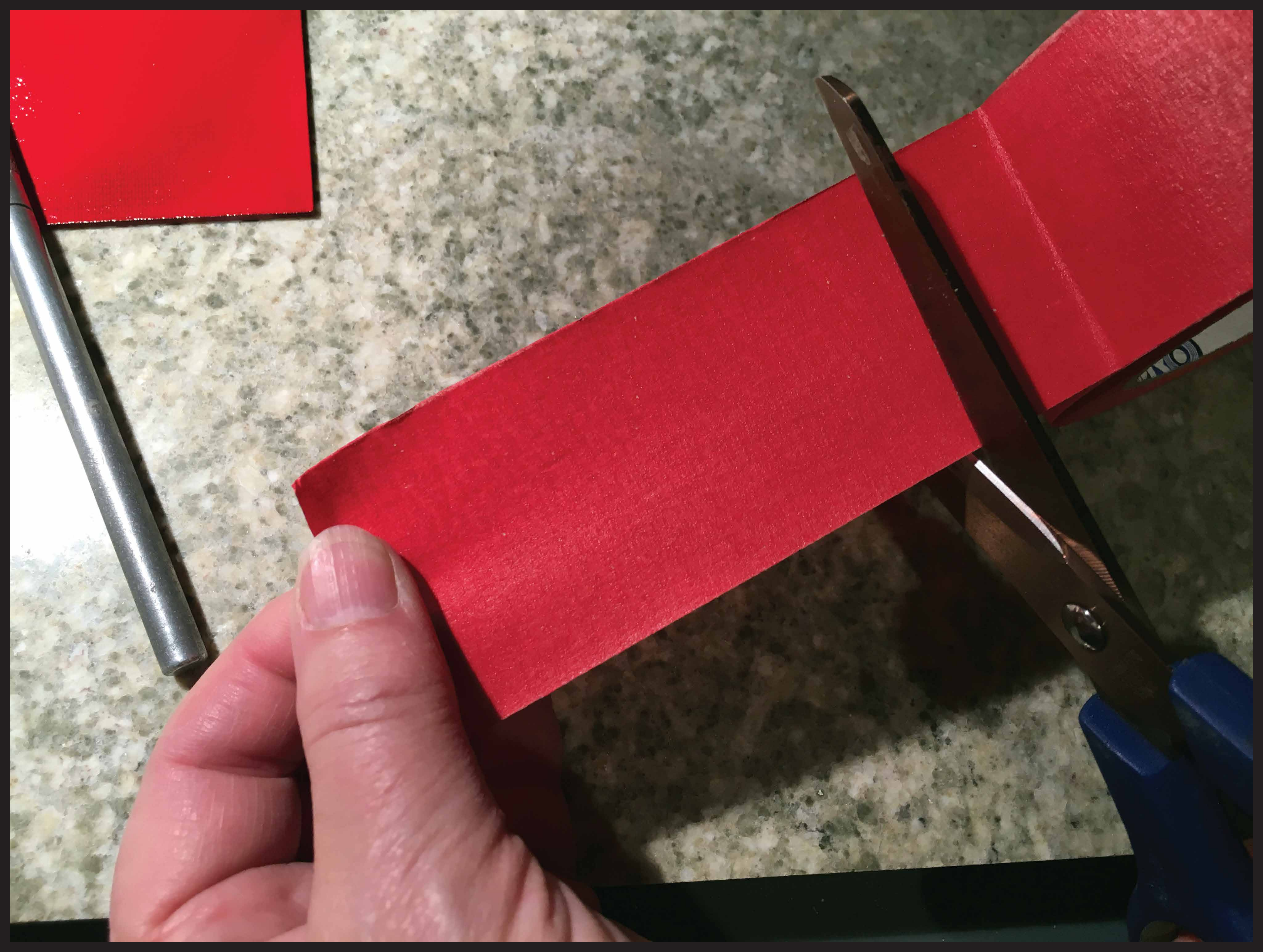
16. The top pressure switch paddle is hinged to the top plate with red tape. Use a tape that
is at least 2 inches wide.
FIGURE 14

TARGET ROBOT CONSTRUCTION STEPS (continued):
17. The 4"x 4" top pressure switch paddle should have one inch of the red hinge tape on
the paddle, and one inch to attach to the top plate.
FIGURE 15

TARGET ROBOT CONSTRUCTION STEPS (continued):
18. The 4"x 4" top pressure switch paddle can be made of any stiff thin material similar to
a tile sample such as the one shown in Figure 16. This tile sample is 4"x 4" and can be
obtained for free at some building supply stores. The paddle should be painted RED or
GREEN to match the top plate prior to taping it into place.
FIGURE 16
TARGET ROBOT CONSTRUCTION STEPS (continued):
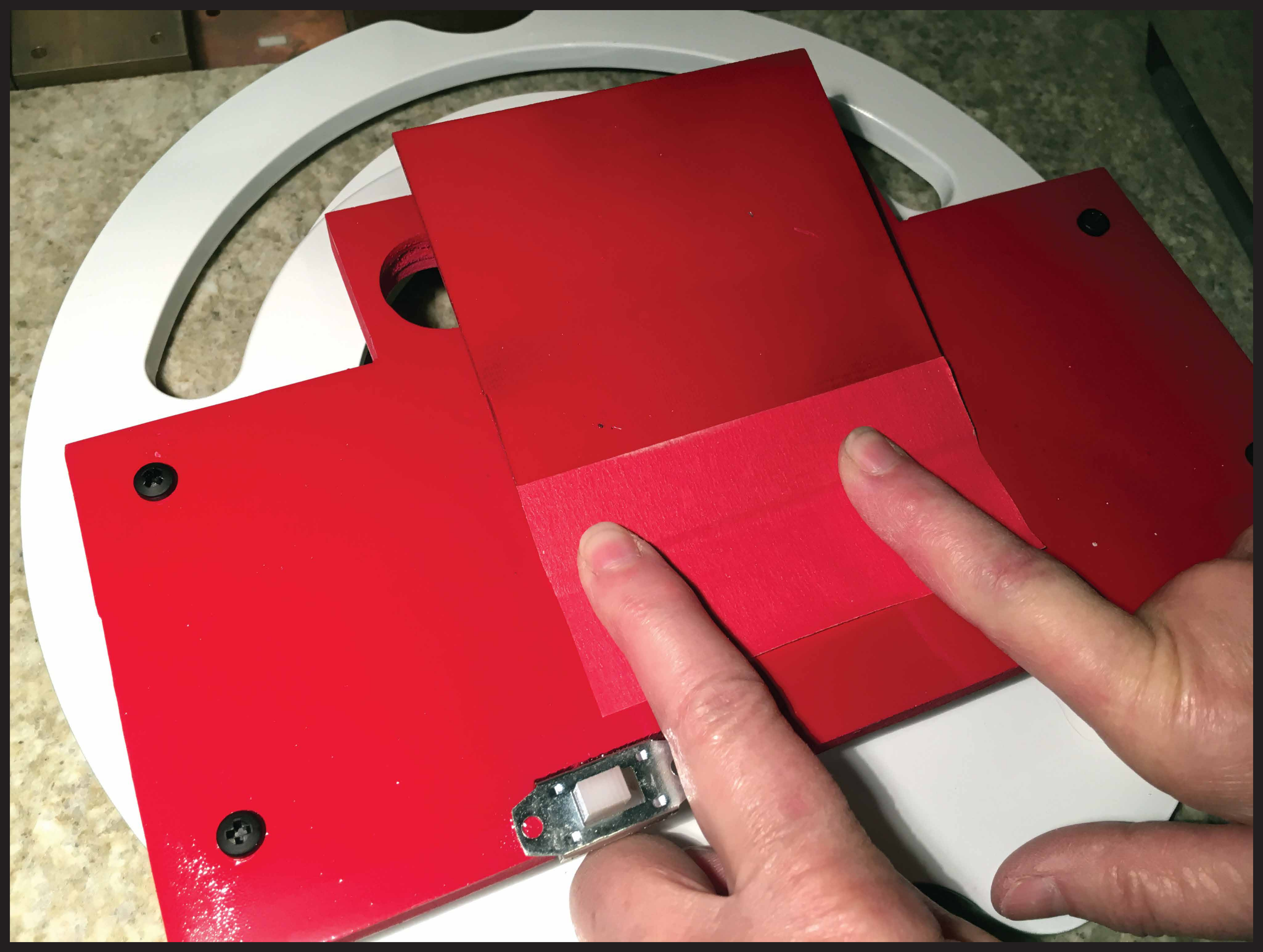
19. Apply the 4"x 4" top pressure switch paddle to the top plate as shown. The forward edge
should match the forward edge of the top plate. The spring will hold the paddle elevated
above the micro switch lever arm. When depressed from above, the paddle will activate
the micro switch.
FIGURE 17
TARGET ROBOT CONSTRUCTION STEPS (continued):
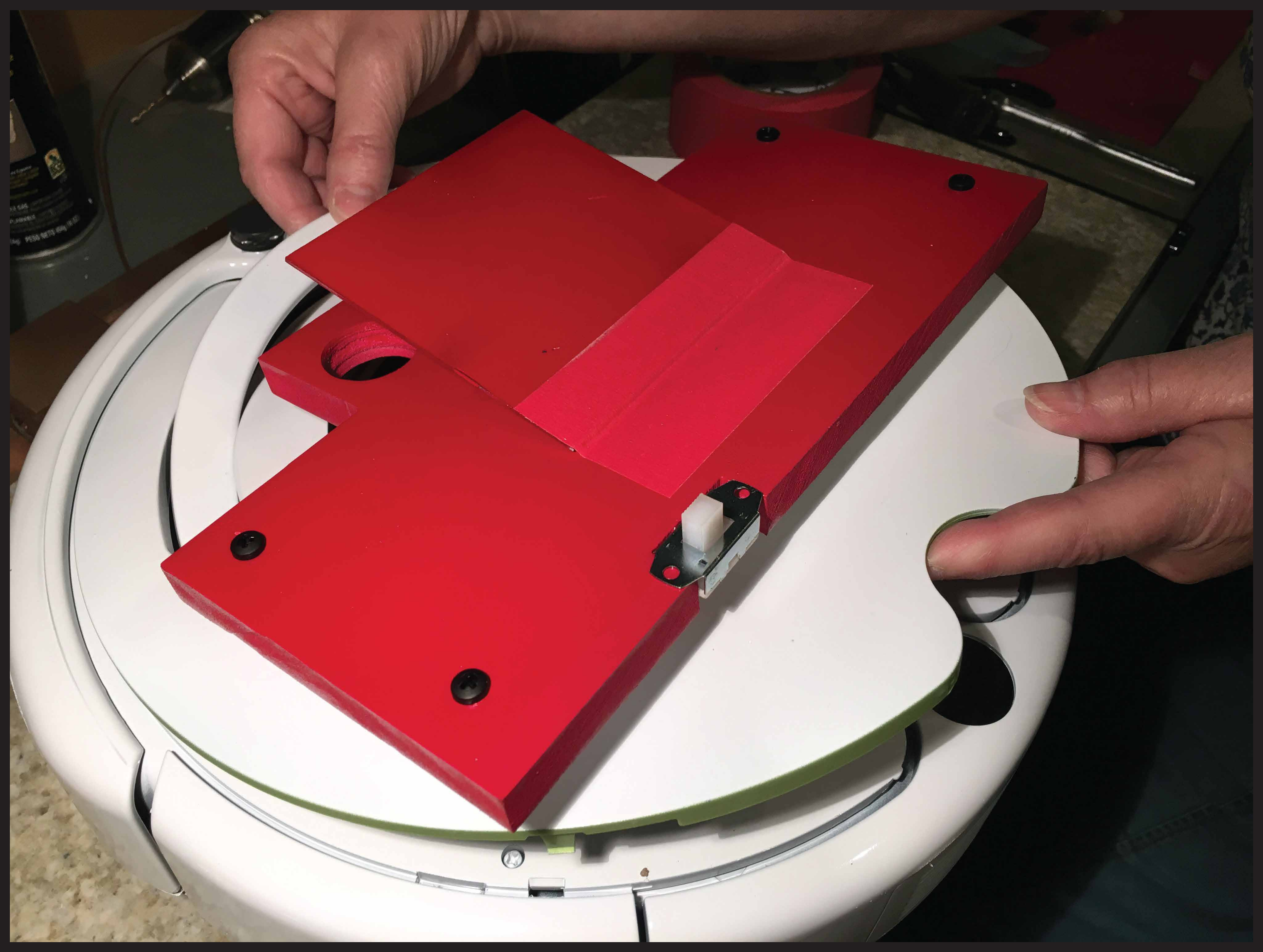
20. Install the top plate assembly onto the Create 2. Be sure the raise the Create 2 carrying
handle as you slide the assembly into place. Note that the entire Create 2 (except for its
top buttons which are covered by the top plate) has been painted white. The Create 2
IR sensors have been masked with tape to preserve their ability to function at a later
date.
FIGURE 18

TARGET ROBOT CONSTRUCTION STEPS (continued):
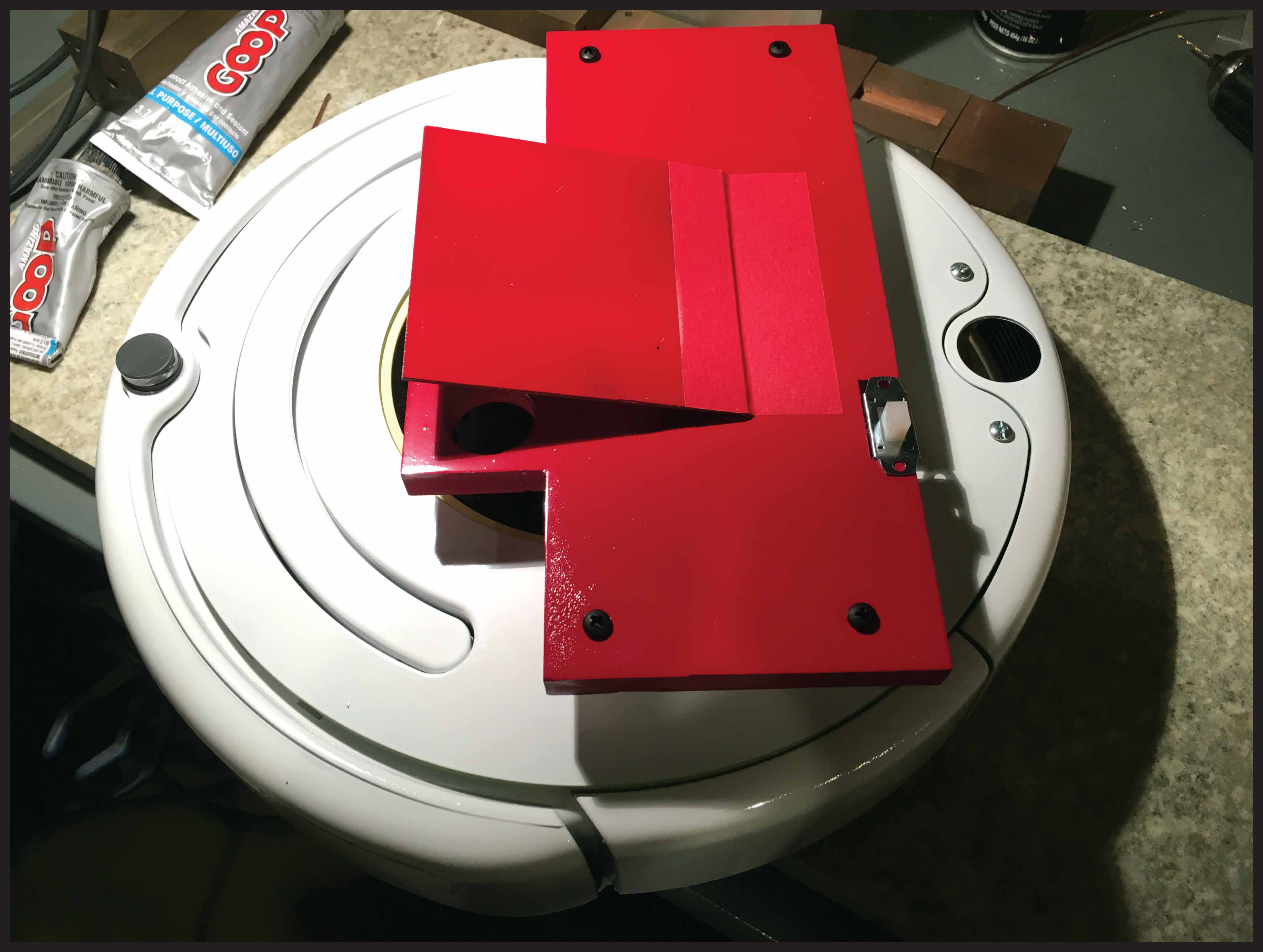
21. Install 3/4" self-tapping sheetmetal screws in the locations shown to secure the Arduino
electronics compartment. Note that the fan assembly and the drawer attachment button
should have already been removed. This makes room for the add-on electronics and
also provides a hole through which the communication and power cables pass.
FIGURE 19
TARGET ROBOT CONSTRUCTION STEPS (continued):
22. The final target robot should look like this in either RED (shown) or GREEN. The Create 2
robot bodies are painted white. The obstacle robots use the original Create top plate
(described elsewhere at this site), but attached using the same system of four stand-offs
as the target robots.
FIGURE 20
