Emerson Fisher 546 Data Sheet
2015-03-30
: Emerson Emerson-Fisher-546-Data-Sheet-681866 emerson-fisher-546-data-sheet-681866 emerson pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 8

www.Fisher.com
Fisherr 546 Electro‐Pneumatic Transducer
Fisher 546 transducers receive a direct‐current input
signal and use a torque motor, nozzle‐flapper, and
pneumatic relay to convert the signal to a proportional
pneumatic output signal. Nozzle pressure, which
operates the relay, is also piped to the torque motor
feedback bellows. This provides a comparison
between input signal and nozzle pressure and reduces
errors in nozzle pressure.
The transducer can be mounted on a pneumatic
diaphragm control valve actuator to provide accurate
operation of the valve. The integrated high‐capacity
pneumatic relay eliminates the need for additional
boosters or relays for operation of control valves.
The transducer also can be used to provide stable
operation when its output signal is transmitted to
small terminal volume chambers such as control
bellows in pneumatic valve positioners.
Features
n Vibration Resistance—High natural frequency of
torque motor moving parts results in negligible
vibration influence.
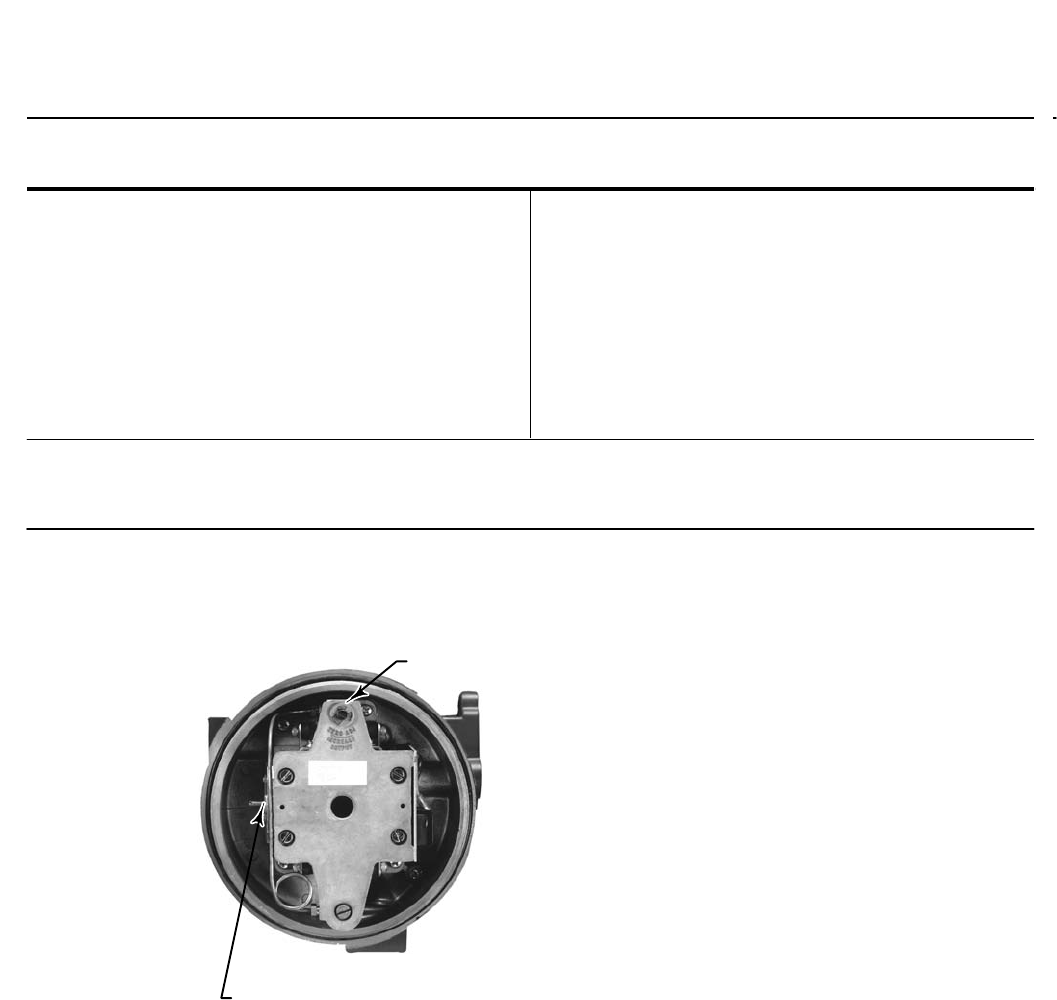
n Easy Adjustment—Screwdriver adjustments for span
and zero are conveniently located and have arrows
indicating rotation to increase settings (as shown in
figure 1).
W2115
Fisher 546 Transducer Mounted on
657 Pneumatic Diaphragm Actuator
n Field‐Reversible Action—No additional parts
required to reverse action.
n Simple Relay Removal—Integrated pneumatic relay
is mounted outside case and can be removed
without disturbing electrical or pressure
connections or impairing explosion safety.
546 Transducer
D200061X012
Product Bulletin
62.1:546
September 2012

546 Transducer
D200061X012
Product Bulletin
62.1:546
September 2012
2
Specifications
Available Configuration
Electro‐pneumatic signal transducer with
explosion‐proof case and cover
The 546 can ordered Jwith or Jwithout a Fisher
67CFR filter regulator. The 51 mm (2 inch) supply
pressure gauge mounted on the regulator may be
J0 to 30 psig or J0 to 60 psig range
Input Signals
J4 to 20 mA DC, J10 to 50 mA DC, J1 to 9 V DC,
or JTwo‐way split range using either half of one of
the standard input signal spans
Internal Resistance of Torque Motor
4 to 20 mA DC Input Signal: 176 ±10 ohms
10 to 50 mA DC Input Signal: 90 ±10 ohms
1 to 9 VDC Input Signal: 1300 ±50 ohms
(temperature compensated circuit)
Output Signals
Ranges:
J0.2 to 1.0 bar (3 to 15 psig), J0.4 to 2.0 bar
(6 to 30 psig), J 0 to 1.2 bar (0 to 18 psig) or
J0 to 2.3 bar (0 to 33 psig)
Action: Field-reversible between Jdirect and
Jreverse
Supply Pressure(1)
Recommended: 0.3 bar (5 psi) higher than upper
range limit of output signal
Maximum: 3.5 bar (50 psig)
Average Steady‐State Air Consumption(2)(3)
0.44 m3/hr (16.5 scfh) at 1.4 bar (20 psi) supply
pressure
Maximum Output Air Capacity(2)
At 1.4 bar (20 psig) Supply Pressure:
12.9 m3/hr (480 scfh)
At 2.4 bar (35 psig) Supply Pressure:
18.5 m3/hr (690 scfh)
Performance(4)
Actuator Loading Time: see figure 3
Reference Accuracy: ±0.75% of output signal span
Independent Linearity: ±0.50% of output signal span
Open Loop Gain: 26
Frequency Response: Gain is attenuated 3 dB at 20 Hz
with transducer output signal piped to a typical
instrument bellows with 305 mm (12 inch) of 1/4 inch
tubing
Electromagnetic Interference (EMI): Tested per IEC
61326‐1 (Edition 1.1). Meets emission levels for Class
A equipment (industrial locations) and Class B
equipment (domestic locations). Meets immunity
requirements for industrial locations (Table A.1 in the
IEC specification document). Immunity performance
shown in table 1.
Operative Ambient Temperature Limits(1)
-40 to 66_C (-40 to 150_F)
Electrical Classification
Hazardous Area:
CSA—Explosion-proof, Dust Ignition‐proof, Div 2
FM—Explosion‐proof, Non‐incendive
Refer to table 2 for specific approval information.
NEMA 3R, CSA Enclosure 3
NEMA 3R mounting orientation requires vent location
to be below horizontal.
Adjustments
Zero and Span Adjustments: Screwdriver adjustments
located inside case (see figure 1)
Connections
Supply Pressure: 1/4 NPT internal located on side of
case (located on filter‐regulator if a 67CFR is mounted
to transducer)
Output Pressure: 1/4 NPT internal located on side of
case
Vent: 1/4 NPT internal with screen located on relay
Electrical: 1/2 NPT internal located on bottom of case
-continued-
546 Transducer
D200061X102
Product Bulletin
62.1:546
September 2012
3
Specifications (continued)
Construction Materials
Case and Cover: Aluminum
O‐Rings: Nitrile
Flame Arrestors: Stainless steel
Supporting Bracket/Torsion Member: Stainless steel
Magnets: Alloy steel
Nozzle: Stainless steel
Feedback Bellows: Brass
Relay Body: Aluminum
Relay Restriction: Aluminum/Stainless steel
Relay Diaphragm: Nitrile
Relay Valve Plug and Seat Ring: Brass
Mounting
Mounting parts are available for Jcontrol valve
actuator mounting, Jpipestand (2 inch nominal)
mounting, or Jsurface mounting
Approximate Weight
4.1 kg (9 lb)
NOTE: Specialized instrument terms are defined in ANSI/ISA Standard 51.1 - Process Instrument Terminology.
1. The pressure/temperature limits in this document and any applicable standard or code limitation should not be exceeded.
2. Normal m3/hr-‐Normal cubic meters per hour (0_C and 1.01325 bar, absolute). Scfh‐‐Standard cubic feet per hour (60_F and 14.7 psia).
3. Average flow rate determined at 12 mA and 0.6 bar (9 psig) output.
4. Performance values are obtained using a transducer with a 4 to 20 mA DC input signal and a 0.2 to 1.0 bar (3 to 15 psig) or a 0.4 to 2.0 bar (6 to 30 psig) output signal. Ambient temperature is 24_C
(75_F). A transducer with other input or output signals may exceed these values.
Figure 1. Zero and Span Adjustments (Cover Removed)
W5391
ZERO ADJUSTMENT
SPAN ADJUSTMENT
546 Transducer
D200061X012
Product Bulletin
62.1:546
September 2012
4
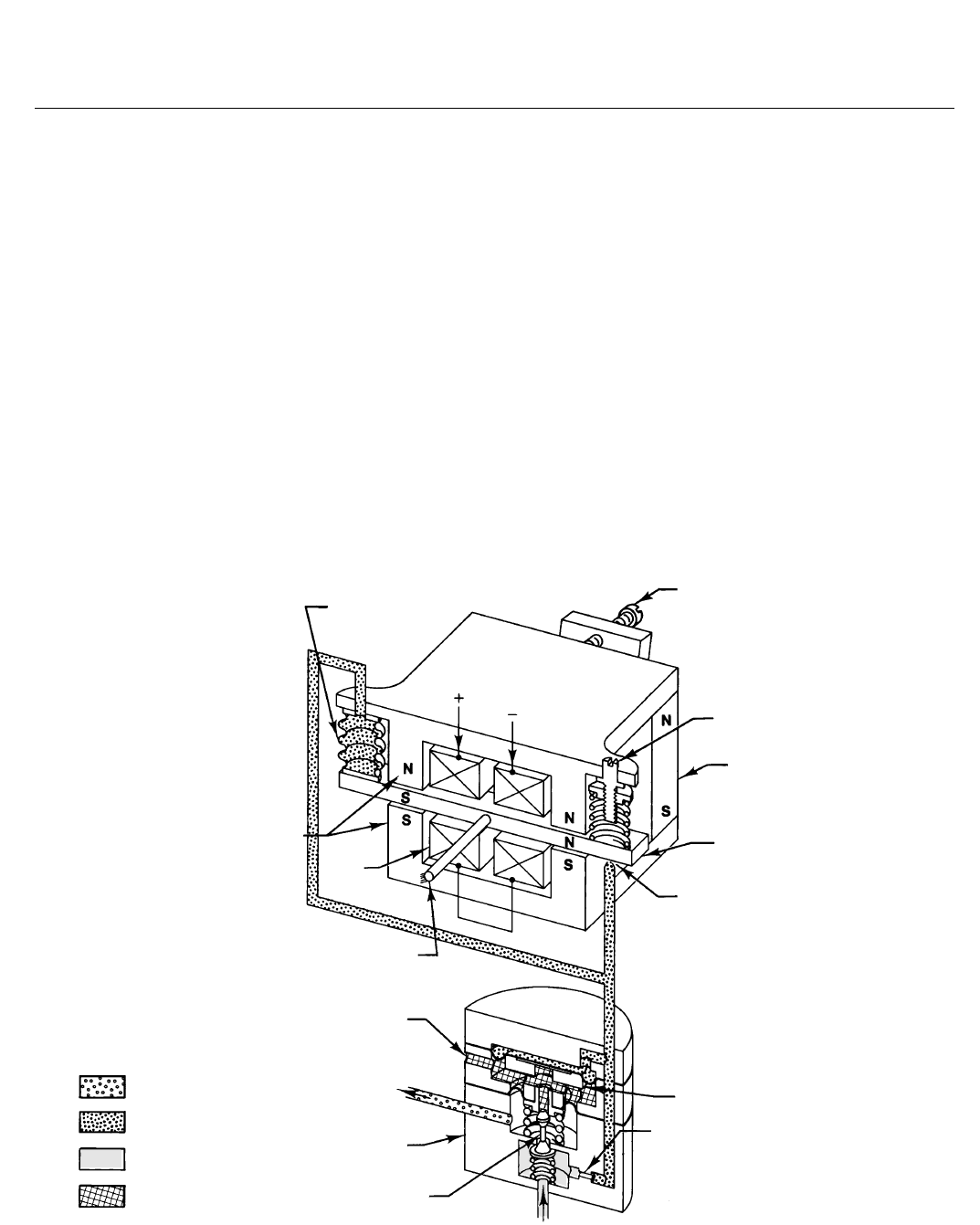
Principle of Operation
Refer to figure 2, and assume that the transducer is
direct acting. As the DC milliamp signal increases, so
does the magnetic field around the coils. This results in
an increased magnetic attraction between the
armature and the pole pieces. The armature rotates
slightly clockwise to cover the nozzle, increasing
pressure in the nozzle, the upper chamber of the relay,
and the feedback bellows. Increased nozzle pressure
and increased pressure in the upper chamber of the
relay cause the relay supply port to open, increasing
the output pressure to the actuator and the control
valve. At the same time, the increased pressure in the
feedback bellows acts to move the armature back to
the equilibrium position. In this way, the new nozzle
pressure is compared to the DC input signal by the
force balance principle.
As the DC input signal decreases, magnetic attraction
is reduced and the armature rotates slightly in the
counterclockwise direction to uncover the nozzle.
Decreased nozzle pressure and decreased pressure in
the upper chamber of the relay cause the relay exhaust
port to open and allow output pressure to bleed to
atmosphere. Pressure to the control valve is reduced
until equilibrium is attained.
Reverse‐acting transducers operate in a similar
manner except that when the DC input signal
increases, pressure to the actuator and control valve
decreases.
Figure 2. Transducer Schematic
FEEDBACK
BELLOWS
POLE PIECES
COIL
ARMATURE
TORSION ROD
EXHAUST
OUTPUT
RELAY
VALVE PLUG
SUPPLY
FIXED RESTRICTION
CENTER SPACER ASSEMBLY
EXHAUST PRESSURE
SUPPLY PRESSURE
NOZZLE PRESSURE
OUTPUT PRESSURE
NOZZLE
ARMATURE
PERMANENT MAGNET
ZERO ADJUSTMENT
SPAN ADJUSTMENT
(MAGNETIC SHUNT)
CP4285-A
A1505-3
546 Transducer
D200061X102
Product Bulletin
62.1:546
September 2012
5
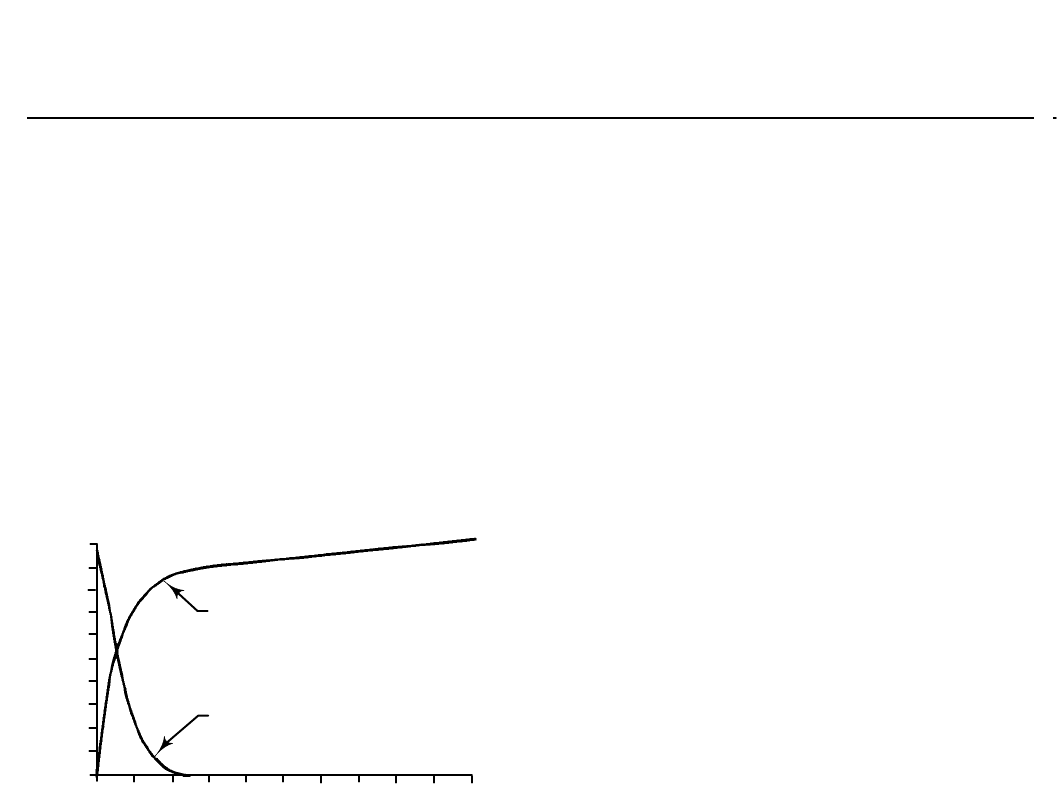
Valve Stroking Time
Figure 3 shows relative times for loading and
exhausting an actuator. Exhausting times are
nominally 25 percent of the loading times. Stroking
time depends upon the size of the actuator, travel,
relay characteristics and the magnitude and rate of
change of the input signal. If stroking time is critical,
contact your Emerson Process Management sales
office.
Figure 3. Output‐Time Relationship
LOADING
EXHAUSTING
TIME (%)
0 102030405060708090100
0
10
20
30
40
50
60
70
80
90
100
OUTPUT
(% OF 546 OUTPUT SPAN)
19A1361‐A
A3103
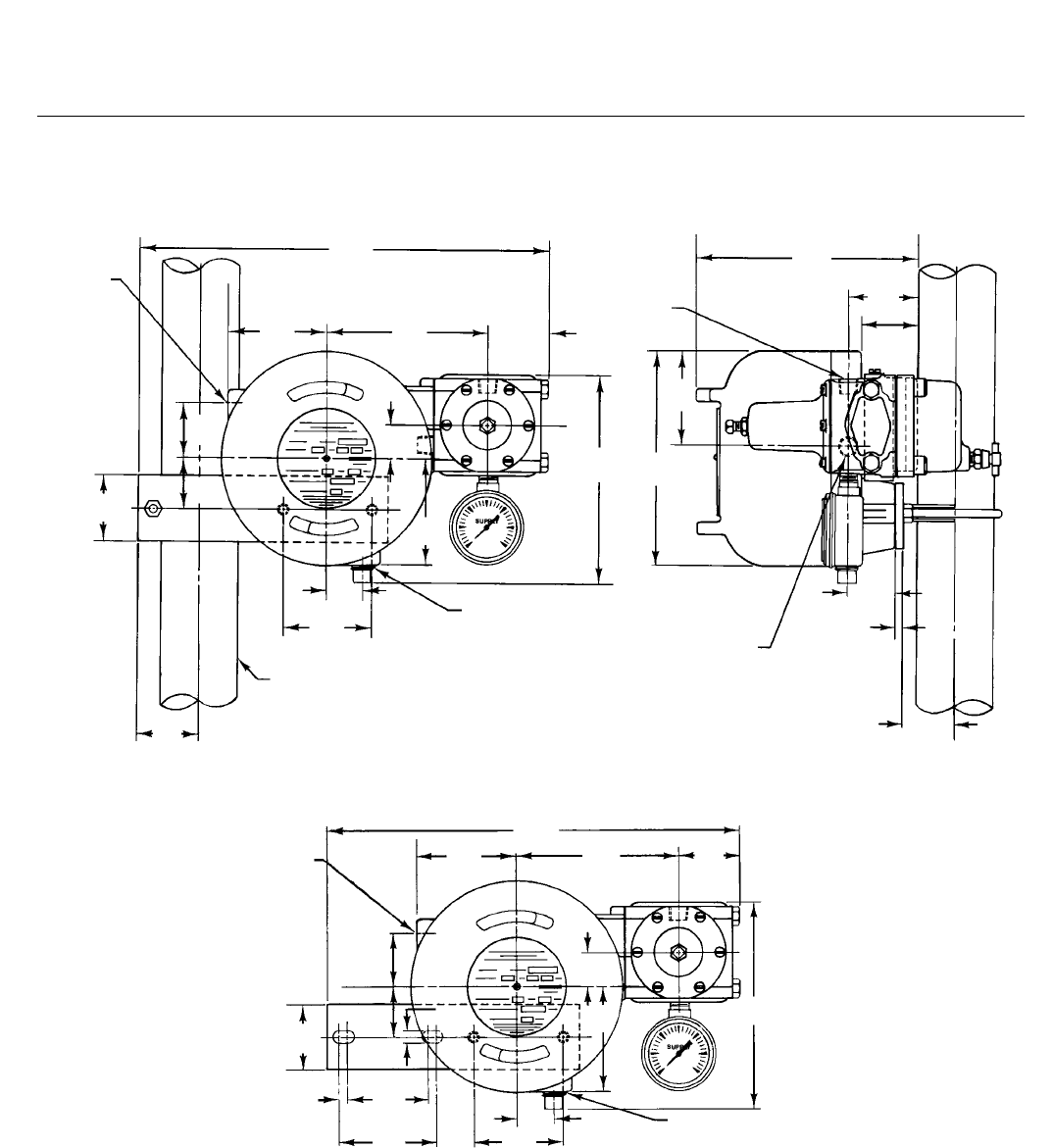
Installation
Standard positions for actuator mounting and
pipestand mounting are shown on the front cover
and figure 4, respectively. Dimensions are shown in
figure 4.
Ordering Information
To determine what ordering information is required,
refer to the Specifications table. Carefully review the
information under each specification and in the
referenced table. Specify the desired choice wherever
there is a selection to be made. Always specify the type
number as identified in the Available Configurations
specification.
For transducers that are to be used in intrinsically safe
installations, specify the rating required and the
system with which the unit will be used.
When ordering actuator mounting parts, specify the
actuator type, size, travel, and diaphragm pressure
range. For all Fisher 657 and 667 actuators except size
80, specify whether actuator yoke or actuator casing
mounting is desired (yoke mounting is only available
on size 80 actuators).
For split‐range operation, specify the portion of input
signal to be used; e.g. 4 to 12 milliamps of a standard
4 to 20 milliamp signal.
546 Transducer
D200061X012
Product Bulletin
62.1:546
September 2012
6
Figure 4. Dimensions
51
(2.00)
CP6477-E
A1248-1
ACTUATOR MOUNTING
16
(0.62)
56
(2.25)
70
(2.75) 37
(1.44)
70
(2.75)
22
(0.88)
1/2 NPT CONDUIT
CONNECTION
329
(12.94)
78
(3.06)
125
(4.94)
46
(1.81)
32
(1.25)
83
(3.25)
164
(6.44)
40
(1.56)
44
(1.75)
8.7
(0.34)
1/4 NPT OUTPUT
CONNECTION
51
(2.00)
CP7280-E
A1249-1 PIPESTAND MOUNTING
51 PIPE
(2.00)
165
(6.50)
70
(2.75)
22
(0.88) 1/2 NPT CONDUIT
CONNECTION
329
(12.94)
78
(3.06)
125
(4.94)
46
(1.81)
32
(1.25)
83
(3.25)
164
(6.44)
40
(1.56)
44
(1.75)
1/4 NPT
OUTPUT
CONNECTION
51
(2.00)
1/4 NPT SUPPLY
CONNECTION
WHEN FILTER
REGULATOR
IS FURNISHED
67
(2.62)
1/4 NPT SUPPLY
CONNECTION
WHEN FILTER
REGULATOR
IS NOT FURNISHED
171
(6.75)
52
(2.06)
43
(1.69)
37
(1.44)
40
(1.56)
6.3
(0.25)
mm
(INCH)
546 Transducer
D200061X102
Product Bulletin
62.1:546
September 2012
7
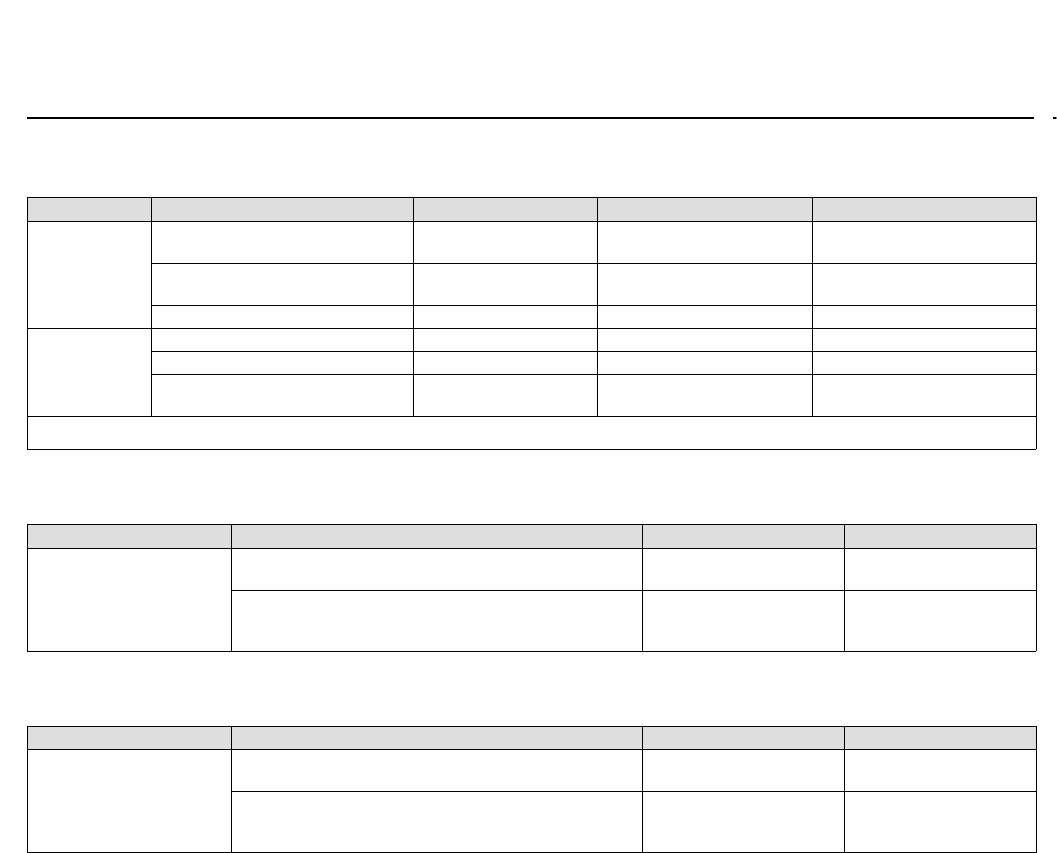
Table 1. Electromagnetic Immunity Performance
Port Phenomenon Basic Standard Test Level Performance Criteria(1)
Enclosure
Electrostatic discharge (ESD) IEC 61000‐4‐2 4 kV contact
8 kV air A
Radiated EM field IEC 61000‐4‐3 80 to 1000 MHz @ 10V/m with
1 kHz AM at 80% A
Rated power frequency magnetic field IEC 61000‐4‐8 60 A/m at 50 Hz A
I/O signal/control
Burst (fast transients) IEC 61000‐4‐4 1 kV A
Surge IEC 61000‐4‐5 1 kV (line to ground only, each) B
Conducted RF IEC 61000‐4‐6 150 kHz to 80 MHz at 3 Vrms
with 1kHz AM at 80% A
Specification limit = ±1% of span
1. A=No degradation during testing. B = Temporary degradation during testing, but is self‐recovering.
Table 2. Hazardous Area Classifications—CSA (Canada)
Certification Body Certification Obtained Temperature Code Enclosure Rating
CSA
Explosion-proof
Class I, Division 1, Group C,D T5 (Tamb = 66_C) CSA ENC 3
Class II, Division 1, Groups E,F,G
Class I, Division 2, Groups A,B,C,D
Class II, Division 2, Groups F,G
T5 CSA ENC 3
Table 3. Hazardous Area Classifications—FM (United States)
Certification Body Certification Obtained Temperature Code Enclosure Rating
FM
Explosion-proof
Class I, Division 1, Groups C,D T5 (Tamb = 60_C) NEMA 3R
Class II, Division 1, Groups E,F,G
Class I, Division 2, Groups A,B,C,D
Class II, Division 2, Groups F,G
T5 NEMA 3R

546 Transducer
D200061X012
Product Bulletin
62.1:546
September 2012
8
Emerson Process Management
Marshalltown, Iowa 50158 USA
Sorocaba, 18087 Brazil
Chatham, Kent ME4 4QZ UK
Dubai, United Arab Emirates
Singapore 128461 Singapore
www.Fisher.com
The contents of this publication are presented for informational purposes only, and while every effort has been made to ensure their accuracy, they are not
to be construed as warranties or guarantees, express or implied, regarding the products or services described herein or their use or applicability. All sales are
governed by our terms and conditions, which are available upon request. We reserve the right to modify or improve the designs or specifications of such
products at any time without notice.
E 1989, 2012 Fisher Controls International LLC. All rights reserved.
Fisher is a mark owned by one of the companies in the Emerson Process Management business unit of Emerson Electric Co. Emerson Process Management,
Emerson, and the Emerson logo are trademarks and service marks of Emerson Electric Co. All other marks are the property of their respective owners.
Neither Emerson, Emerson Process Management, nor any of their affiliated entities assumes responsibility for the selection, use or maintenance
of any product. Responsibility for proper selection, use, and maintenance of any product remains solely with the purchaser and end user.
