G Lufft Mess Und Regeltechnik Gmbh IPS149 2.4 GHz Radar Sensor User Manual Annex No 5
G. Lufft Mess-Und Regeltechnik Gmbh 2.4 GHz Radar Sensor Annex No 5
UserManual.wiki
>
G Lufft Mess Und Regeltechnik Gmbh
>
IPS149 User Manual
Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

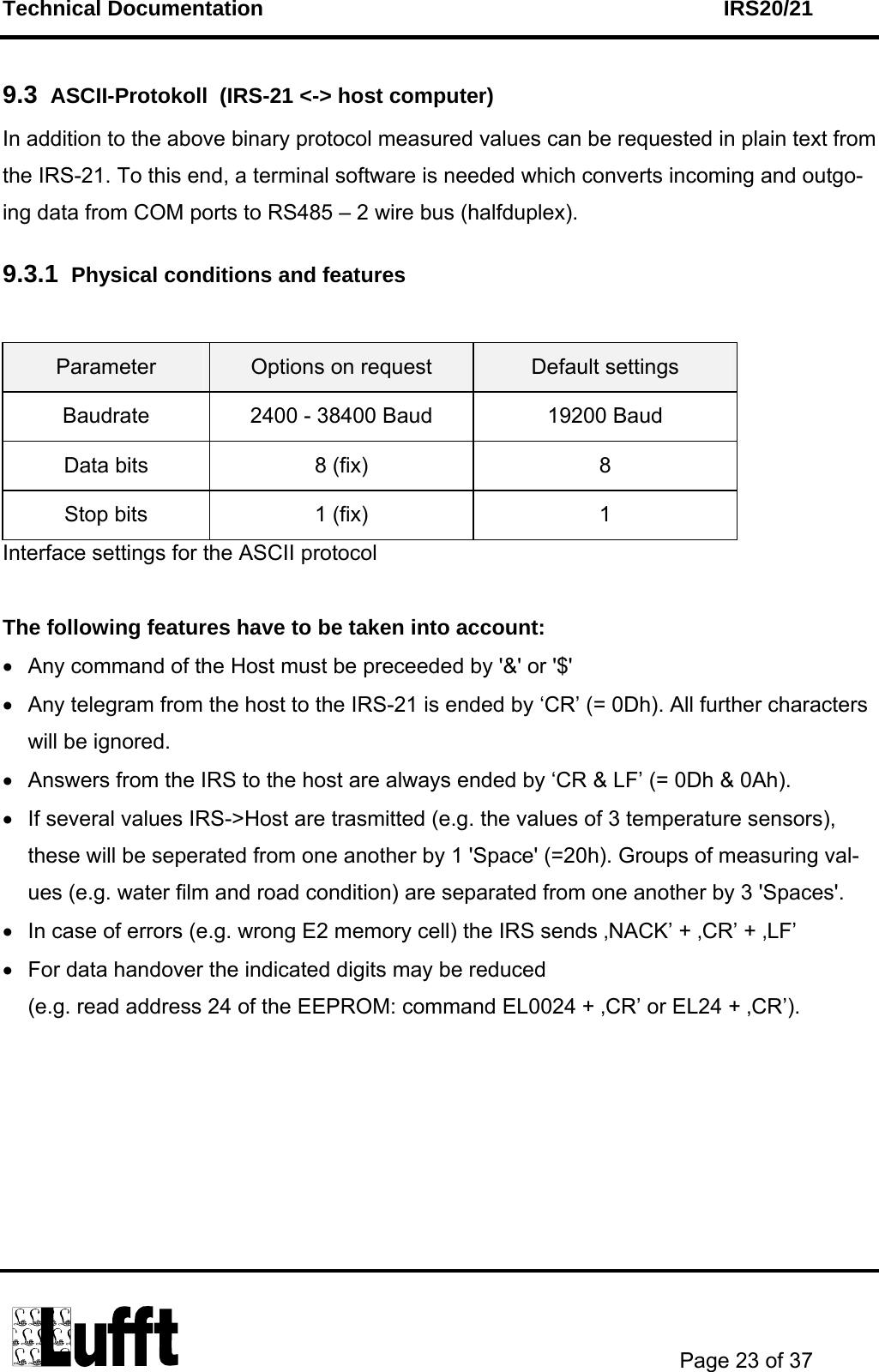
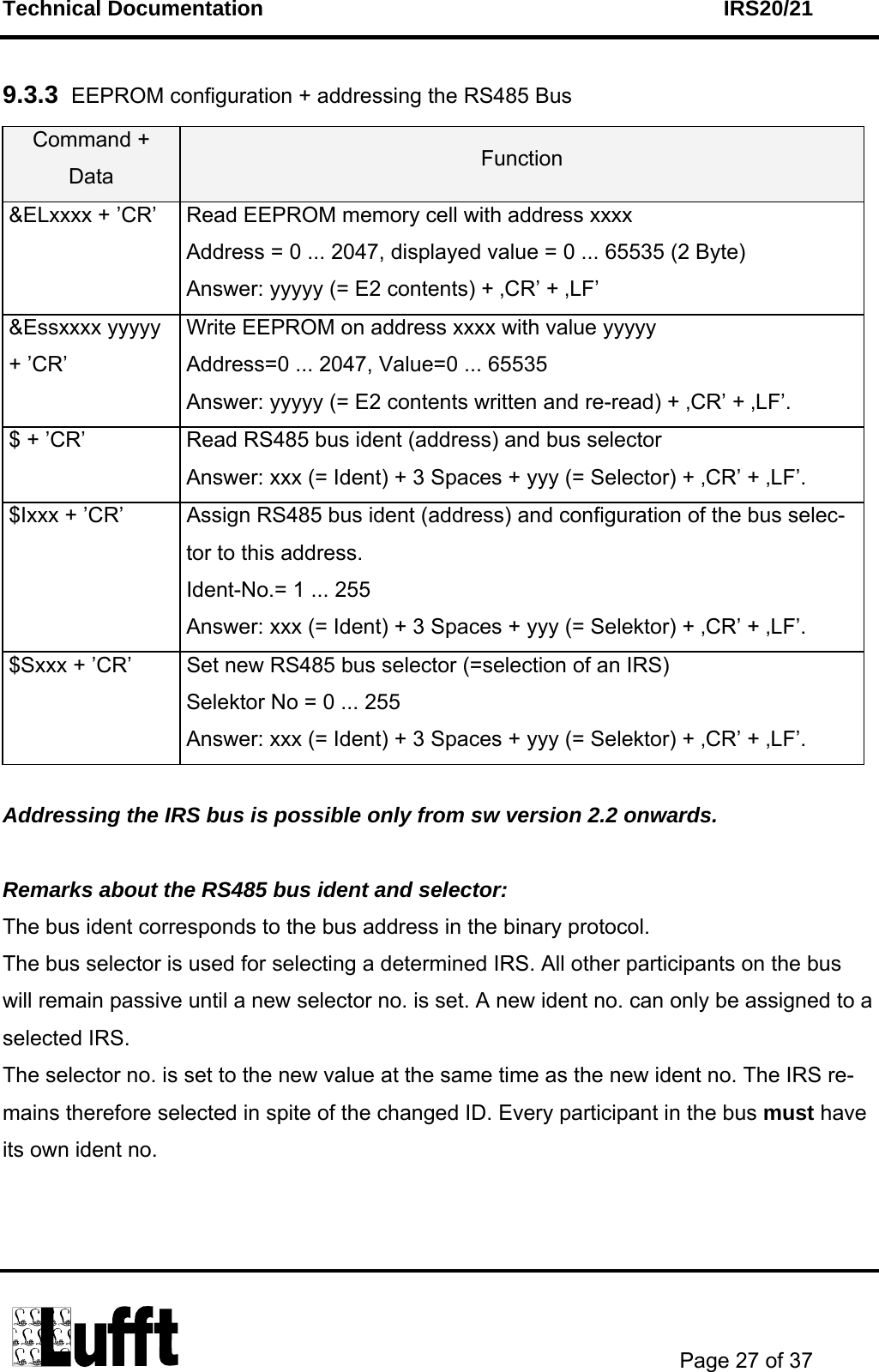
![Technical Documentation IRS20/21 Page 9 of 37 The same conditions apply when the sensor is read out directly via the RS485 interface. When using the level transducer (8410.KON2) the following aspects must be taken into ac-count in the control software of the host computer (PC): • The modem control line 'DTR' (Pin 4 of a 9 pin RS232 cable) switches the IRS power supply 'on' (H level [approx. +10 V]) or 'off' (L level [approx. -10 V]), respectively. The current state can be seen on a red LED on the circuit board of the level transducer. • The modem control line 'RTS' (Pin 7 of a 9 pin RS232 cable) controls the data direction (halfduplex) from the host computer to the IRS (L level [approx. -10V]) or from the IRS to the host computer (H level [approx. +10V]), respectively. • The IRS is always the slave. That means, the communication is always initiated by the host program. • Before starting the communication, the IRS power supply has to be switched on for about 2 seconds, so that the sensor can carry out measurements. Commands which the host system sends too early will be ignored by the IRS. • Immediately after transmitting the command telegram, the host computer must switch the data direction of the level transducer to 'IRS to host' by using the 'RTS' control line. • The level transducer will instantaneously return all characters sent by the host (echo). These should be ignored by the control software. • The IRS will wait about 100ms before answering. • After reception of the IRS answer the data direction should be switched back to 'host to IRS' and the power supply for the road sensor should be deactivated. The protocols for data transmission can be found from chapter 9 onward.](https://usermanual.wiki/G-Lufft-Mess-Und-Regeltechnik-Gmbh/IPS149/User-Guide-744811-Page-10.png)
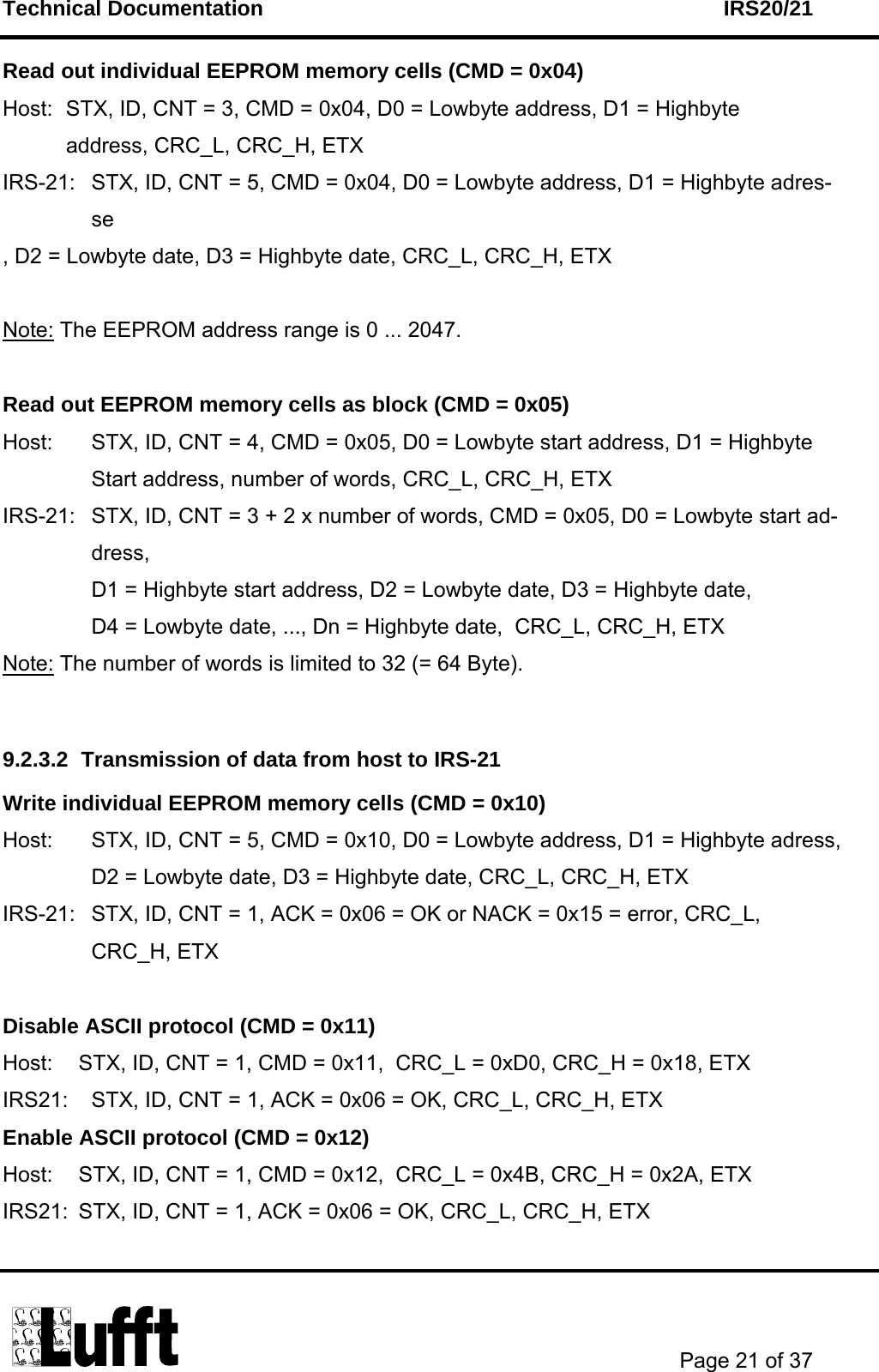
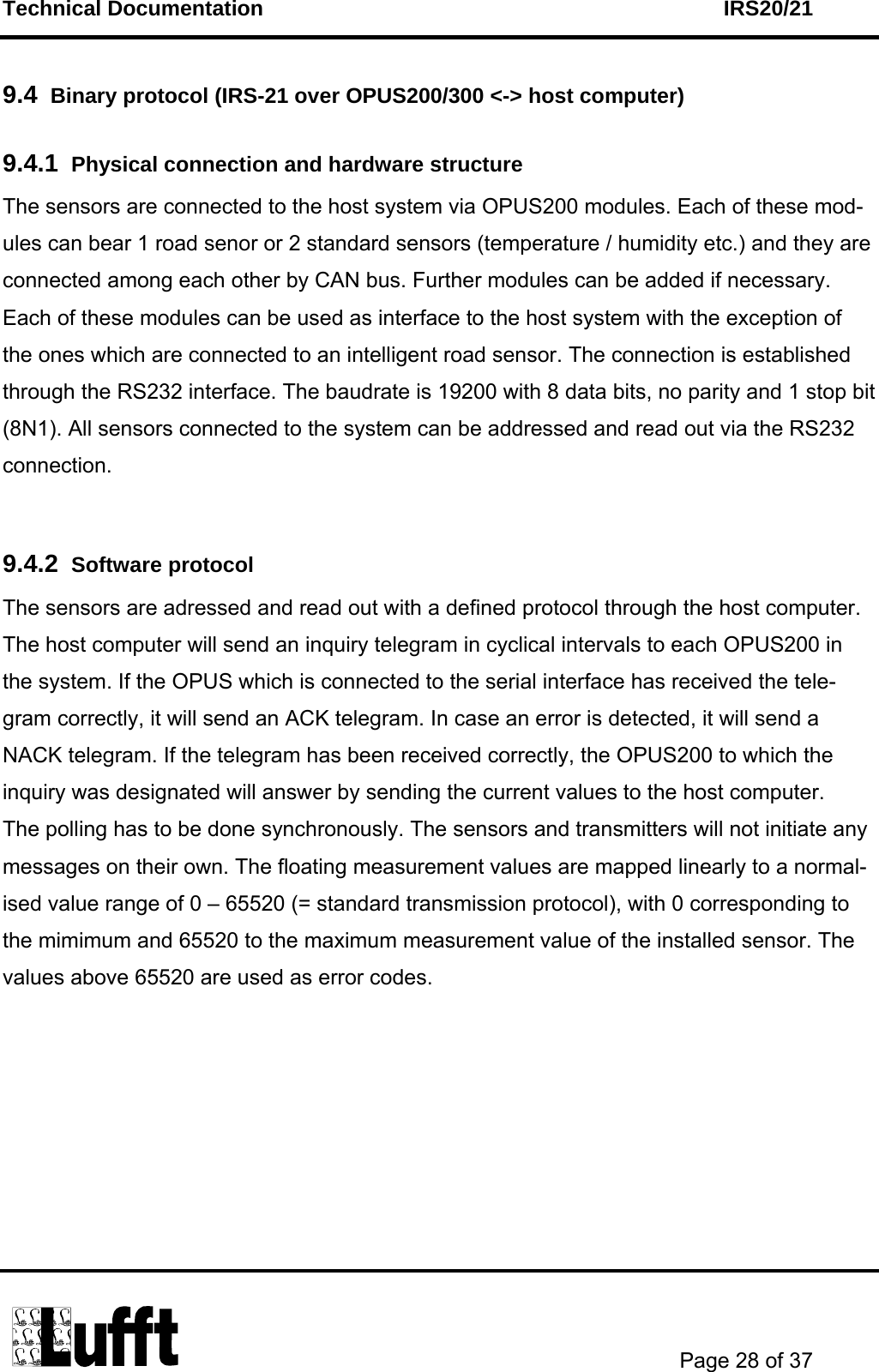
![Technical Documentation IRS20/21 Page 22 of 37 RESET - IRS-21 (CMD = 0x1F) Host: STX, ID, CNT = 1, CMD = 0x1F, CRC_L = 0xAE, CRC_H = 0xF1, ETX IRS-21: STX, ID, CNT = 1, ACK = 0x06 = OK, CRC_L, CRC_H, ETX Note: After transmitting 'OK' the sensor is re-set. 9.2.3.3 IRS-21 answer in case of receiving wrong data from the host IRS-21: STX, ID, CNT = 1, NACK = 0x15 = Not Acknowledged (Data were not accepted), CRC_L, CRC_H, ETX 9.2.4 Defining the identification 2 scenarios are possible: • Establishing a new bus line • Connecting an additional sensor to an existing bus line The default identification [short ID] (=0) should have been changed previously. By using ID=0 all sensors in a bus line are contacted. Important! It is important to make sure that the new sensor has a different ID from the sensors which are already in the line. As discussed above the new ID should be >0. The possible range is 0…250. The command for transferring the new identification is basically the same as the one for writing EEPROM cells: Host: STX, ID, CNT = 5, CMD = 0x10, D0 = 0x05, D1 = 0x00, D2 = new ID, D3 = 0x00, CRC_L, CRC_H, ETX IRS-21: STX, ID, CNT = 1, ACK = 0x06 = OK or NACK = 0x15 = error, CRC_L, CRC_H, ETX In order to have the sensor accept the new ID it has to be re-started with the reset com-mand (with the old identification still) or by switching it off and on again.](https://usermanual.wiki/G-Lufft-Mess-Und-Regeltechnik-Gmbh/IPS149/User-Guide-744811-Page-23.png)
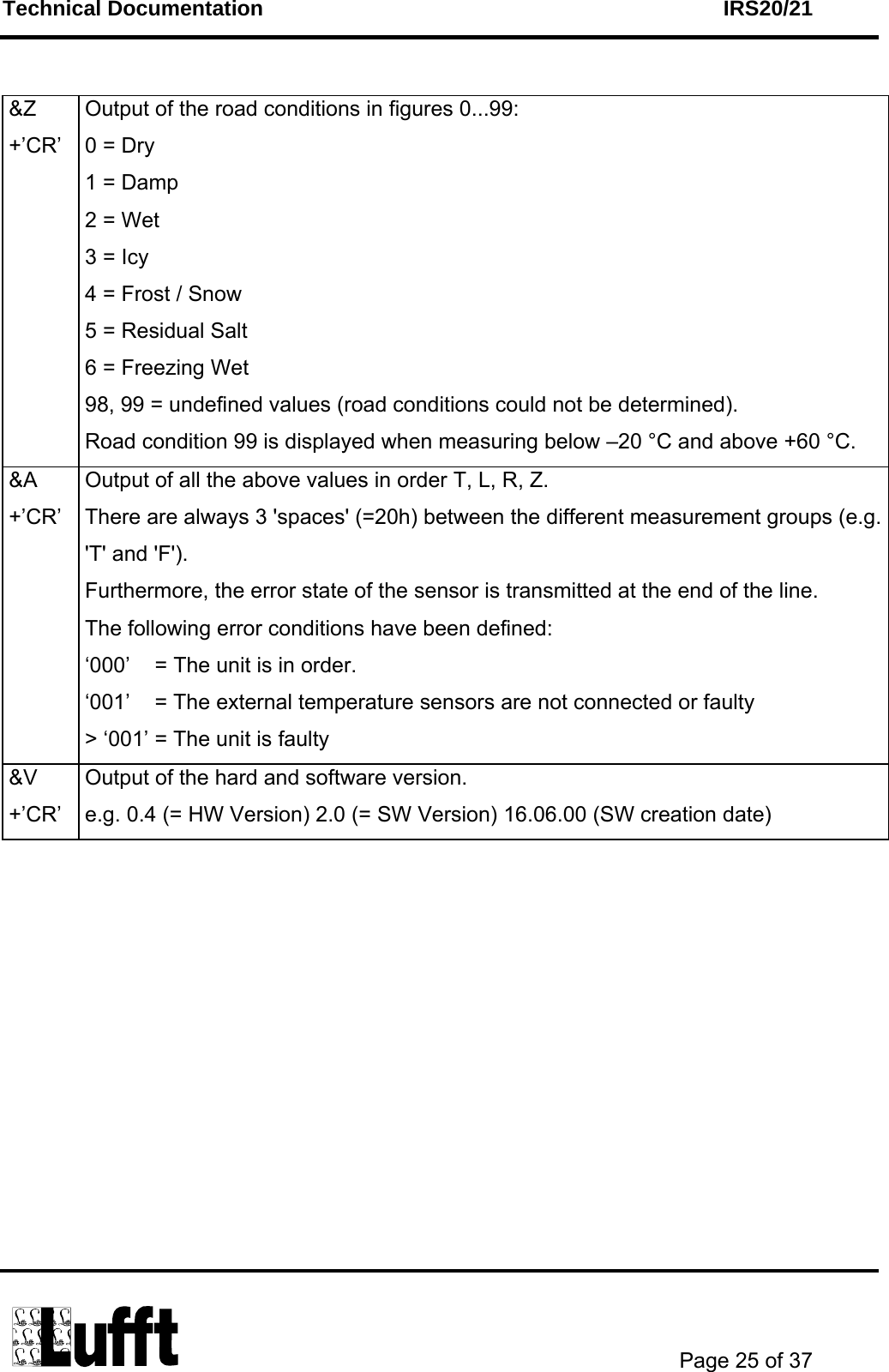
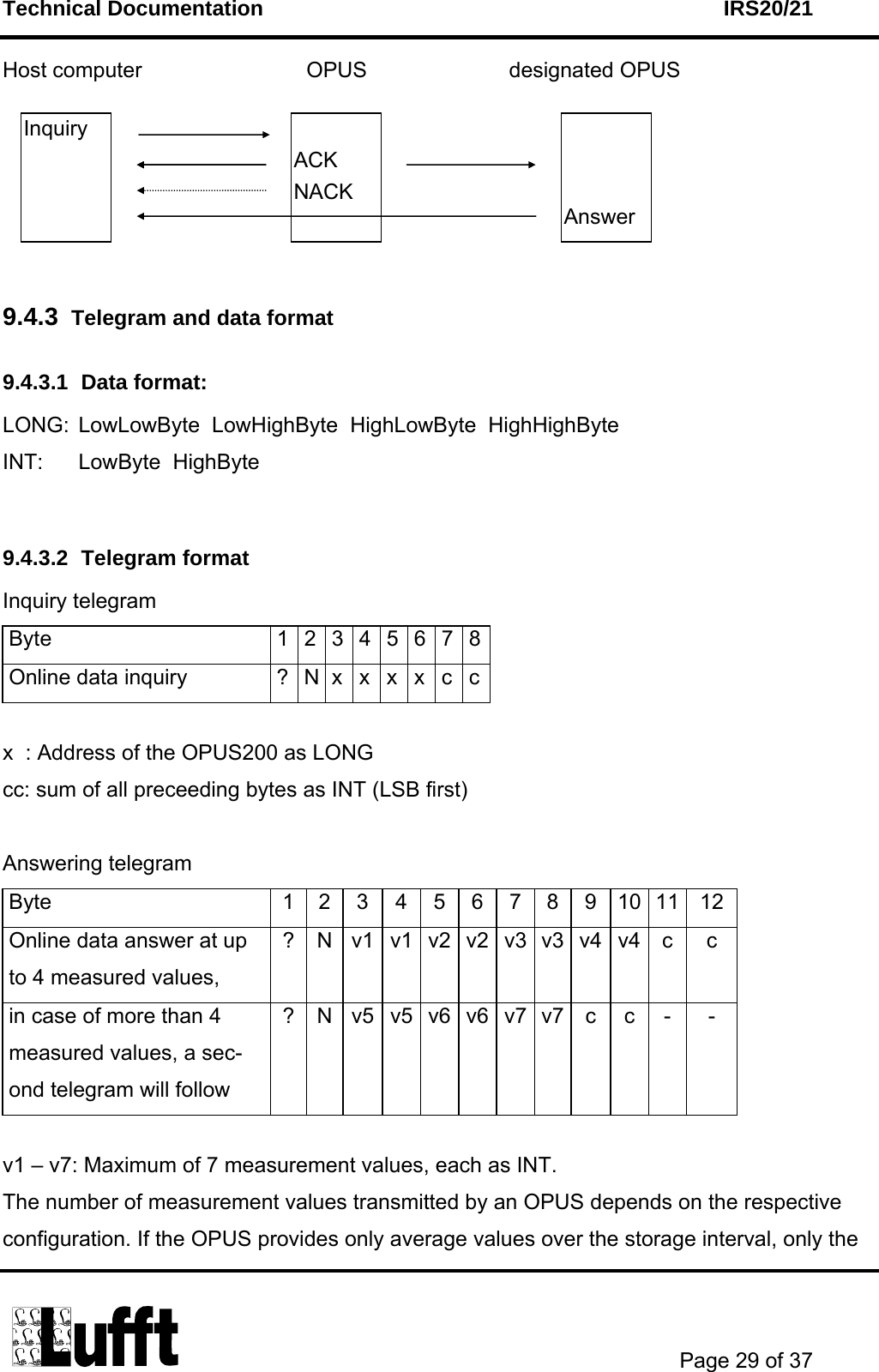

![Technical Documentation IRS20/21 Page 36 of 37 // XOR in the x16 value crc_buff ^= x16; // shift input for next iteration input = input >> 1; } return(crc_buff); } // ******************* MAIN ************************************ void main(void) { // example: CRC for 8 Bytes unsigned char values[8] = {0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37}; // initialise startvalue 0000h unsigned short crc = 0x0000; // calculation for(int n = 0; n < 8; n++) { crc = calc_crc(crc, values[n]); } // output printf("\ndata: 30h, 31h, 32h, 33h, 34h, 35h, 36h, 37h"); printf("\nCRC: %04Xh\n", crc); } Output: data: 30h, 31h, 32h, 33h, 34h, 35h, 36h, 37h CRC: 84CFh 10 Compliance Statement](https://usermanual.wiki/G-Lufft-Mess-Und-Regeltechnik-Gmbh/IPS149/User-Guide-744811-Page-37.png)