GAMMA Remote Sensing and Consulting GPRI-II-1 Deformations scanner User Manual
GAMMA Remote Sensing and Consulting AG Deformations scanner
UserManual.wiki
>
GAMMA Remote Sensing and Consulting
>
GPRI II 1 User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
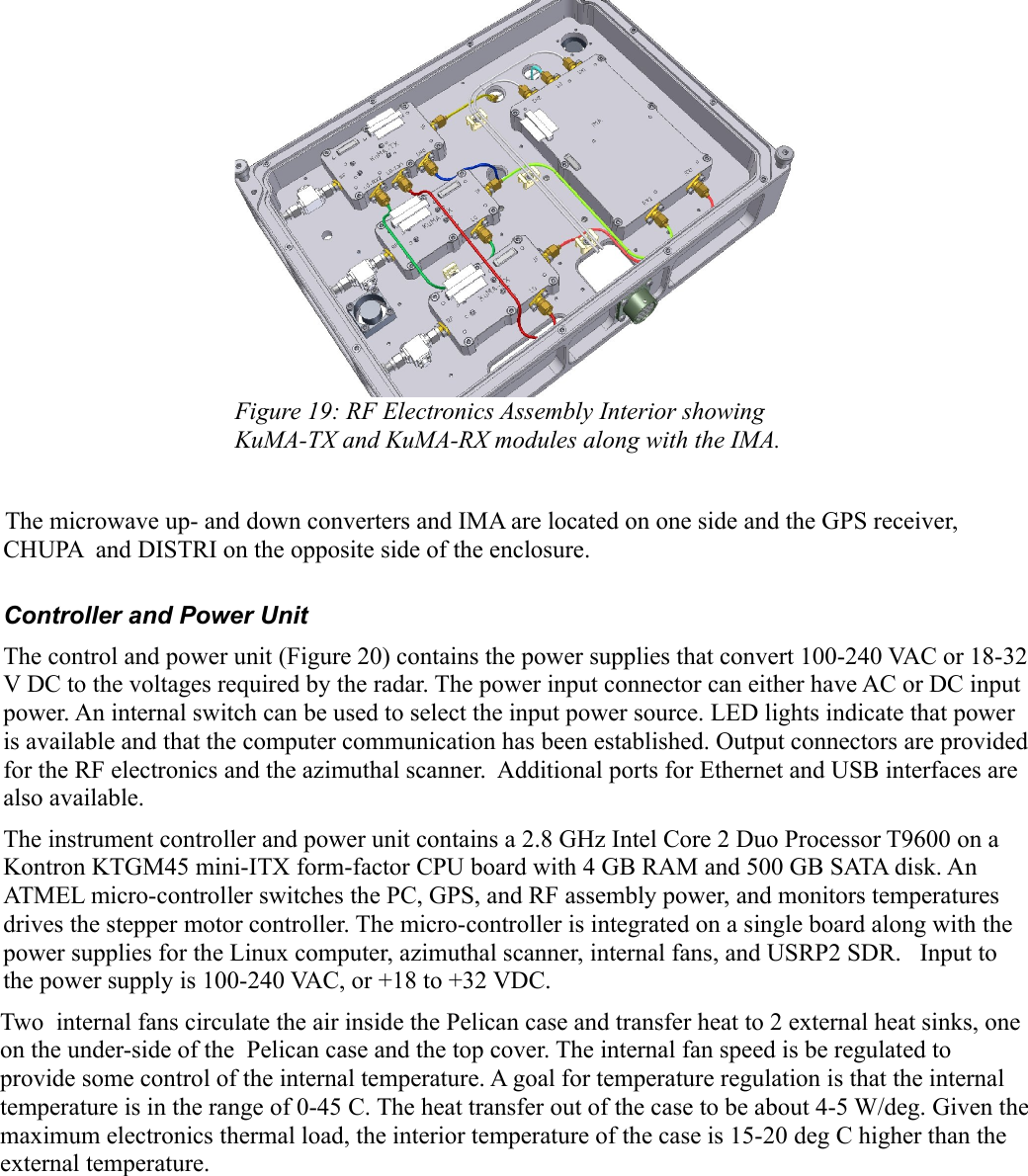
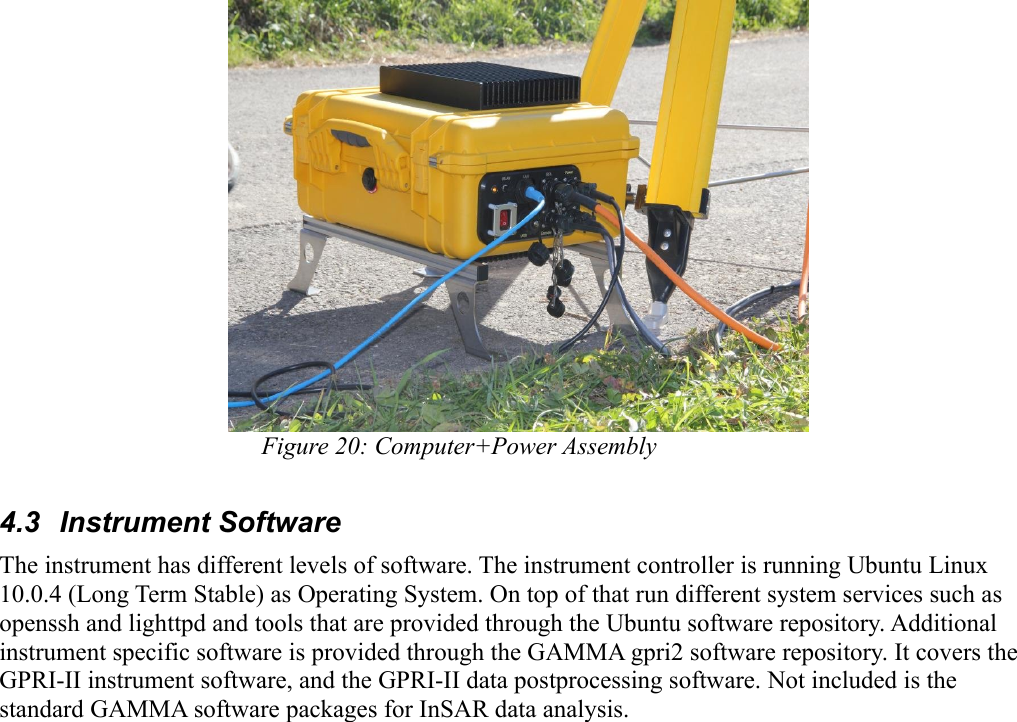
![2. IntroductionFirst of all, thanks for buying this fascinating piece of hardware and software and we hope you can conduct many interesting and trouble free measurements. If you have feedback please do not hesitate to contact us (gamma@gamma-rs.ch or directly one of the staff). Feedback from our users is a strong element of our hardware and software evolution.The GPRI-II is the second generation instrument of the Gamma Portable Radar Interferometer GPRI [1,2]. The GPRI-1 was developed as a proof of concept and later used on numerous scientific and commercial campaigns. The new second generation instrument GPRI-II has improved performance and is hardened for field measurements. This manual shall help the user to setup and use the instrument but also provides background information on the instrument. Section 2 gives a quick access on the instrument. I gives setup instructions and the basic commands needed to operate the instrument. Section 3 gives more detailed information on the instrument. Section 4 gives insight in the communication interfaces. Section 5 summarizes the instrument specifications and Section 6 a list of references and literature. Finally in the Appendix A in Section 7 a template for a measurement protocol is provided. While everything can be controlled digitally, nevertheless we recommend to keep a handwritten logbook. The EC and FCC instrument certification status can be checked with us. As indicated in the quote it is the users responsibility to make sure that you have permission to use the instrument at your site. It might be that a transmission permission is necessary. If you need technical support to get such a license please contact us and we try to provide you the requested information.The GPRI development at Gamma was initiated based on the perceived benefits of in-situ measurement of deformation using differential radar interferometry. Our extensive experience with satellite differential interferometry has demonstrated successful application of this technique for measuring deformation due landslides, pumping of oil and water, mining, glaciers, and tectonic motion. However, when the deformation between repeat observations exceeds wavelength/4 the usefulness and interpretation of the data rapidly become difficult. A ground-based instrument can be rapidly deployed and obtain data with both high spatial and temporal resolutions that are particularly well suited to measuring rapid deformation. Unlike orbital SAR systems, in-situ measurement permit flexibility in the selection of the observation geometry. The geometry can be selected to give maximum sensitivity to deformation along the line of sight. Observations from multiple aspect angles can be combined to resolve the deformation into components along different look vectors.Path delay variation due to tropospheric water vapor is the most significant cause of error in deformation using differential interferometry. A stationary instrument has the ability to acquire multiple observations for mitigation of path delay variations. Note that ground measurements have a shorter path length through the atmosphere than orbital observations also leading to reduced error from this source.Multiple observations acquired over short time intervals have the advantage that decorrelation is minimized by the shorter time intervals. Successive measurements can be processed to track non-linear deformation within the scene.](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-5.png)

![14. Process interferogram from repeat measurements:create_offset 20101115_5l.slc.par 20101115_6l.slc.par 20101115_5l_ 20101115_6l.off SLC_intf 20101115_5l.slc 20101115_6l.slc 20101115_5l.slc.par 20101115_6l.slc.par 20101115_5l_20101115_6l.off 20101115_6_6_1_1.int 1 4 0 - 0 0dismph_pwr 20101115_5l_20101115_6l.int 20101115_5l.mli 3201 1 1 0 .3 .5 15. Copy data with secure copy to your local disk: scp source server:path 16. or plug an external usb disk and mount it. To find out the device id of the disk (most likely /dev/sdb1:dmesg | tail -n 50and look out for lines such as[1295858.275037] sd 16:0:0:0: [sdb] Assuming drive cache: write through [1295858.275046] sdb: sdb1 Mount the device on /mnt withsudo mount /dev/sdb1 /mntThe data can now be copied to and from /mnt. Make sure you unmount the device at the endsudo umount /mnt17. Measurements can be scheduled in cron. Edit the cron table withcron -eAnd add a new task. Check the cron manpage for the syntax.18. Always do a positioner home-run before you switch off the instrument:home_run.py19. and shut down the Instrument Controllershutdown -P now3.2.2 Operating the instrument through HTTPS The Instrument Controller provides a web based user interface. I can be accessed through secure http (https) and needs authentication. ### under development ###](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-13.png)
![5. User InterfaceThe GPRI-II instrument can be accessed through TCP/IP over the Ethernet connection provided at the Instrument Controller, or by opening the Pelican case a computer display and keyboard/mouse can be connected. The latter allows access in case the IP address of the instrument is unknown or any other communication problem occurs.5.1 Local AccessTo have local access on the Instrument Controller the Pelican case needs to be opened and a computer screen (VGA) and a Keyboard and Mouse (USB) can be attached. After booting up the instrument the Ubuntu login screen shows up. The user to login as is gpri2. After loging in the standard gnome user interface is shown. It allows full access on system settings, in particular also the network settings.5.2 Graphical User InterfaceThe graphical user interface can be accessed with any recent (Javascript enabled) web browser by requesting https://192.168.1.73/ (the IP needs to reflect your setting). After logging in as user gpri2, you have access on system status information, instrument settings etc. The graphical user interface gives you only access on the most important instrument functions. For full system access use the terminal access or the local access.5.3 Terminal AccessThe instrument terminal can be accessed through secure shell (ssh). The export of the X11 windows is supported. You can initiate this feature by logging in with the option -X (ssh -X gpri2@192.168.1.73). The terminal access gives you full access on the system.5.4 Software Referencechupa_status.pychupa_test.py*** set DDS chirp parameters and transmit *** Usage: chupa_test.py <f_start> <f_end> <steps>' f_start chirp minimum (range 100e6 to 300e6) f_end chirp maximum frequency (range 100e6 to 300e6) steps number of frequency steps (3125, 6250, 12500, 25000) gpri2_capture.py*** GPRI-II data acquisition program v1.2 4-Nov-2010 *** Usage: gpri2_capture.py: [options] [output_filename] Options: -h, --help show this help message and exit -e INTERFACE, --interface=INTERFACE use specified Ethernet interface [default=eth0]](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-25.png)
![-m MAC_ADDR, --mac-addr=MAC_ADDR use USRP2 at specified MAC address [default=None] -f FREQ, --freq=FREQ set frequency to FREQ -d DECIM, --decim=DECIM set fgpa decimation rate to DECIM [default=16] -g GAIN, --gain=GAIN set USRP2 gain in dB (default is midpoint) -K SCALE, --scale=SCALE set rx input scaling of usrp2, scale_iq (default is 1024) -S SHIFT, --shift=SHIFT set rx output shifting of usrp2, shift_iq (default is 0). Allowed values 0, 1, 2 and 3 --lo-offset=LO_OFFSET set daughterboard LO offset to OFFSET [default=hw default] --rx-bufsize=RX_BUFSIZE set rx buffer size to RX_BUFSIZE [default=0] -N NSAMPLES, --nsamples=NSAMPLES number of samples to capture [default=+inf] -T CAPTURE_DURATION, --capture-duration=CAPTURE_DURATION number of seconds to capture [default=+inf] -o OUTPUT_FILENAME, --output-filename=OUTPUT_FILENAME output filename for captured samples [default=None] -s, --output-shorts output interleaved shorts instead of complex floats -M, --lock-masterclock-to-SMA lock usrp2 100 Mhz master clock to external 10 Mhz reference clock on SMA input -P, --sync-to-first-1PPS reset the usrp2 samplecounter on the first PPS received on the PPS SMA input -j RX_START_TIMESTAMP, --rx-start-timestamp=RX_START_TIMESTAMP set start_at time of first RX packet in usrp2 100 Mhz clockpulses (long) [default=-1 start immediately] -k RX_START_TIME_SECONDS, --rx-start-time-seconds=RX_START_TIME_SECONDS set start_at time of first RX packet in seconds (float) [default=-1.0 start immediately] -C EXTERNAL_PROGRAM, --external-program=EXTERNAL_PROGRAM give a programname to start this as external program just before streaming starts (string) [default=None do not start an external program] -v, --verbose verbose output -p GPRI_PROFILE, --gpri-profile=GPRI_PROFILE GPRI-II acquisition profile [default=None]gpri2_capture_step.py*** GPRI-II data acquisition program v1.0 20100928 *** Usage: gpri2_capture_step.py: [options] [output_filename] Options: -h, --help show this help message and exit -e INTERFACE, --interface=INTERFACE use specified Ethernet interface [default=eth0] -m MAC_ADDR, --mac-addr=MAC_ADDR use USRP2 at specified MAC address [default=None] -f FREQ, --freq=FREQ set frequency to FREQ -d DECIM, --decim=DECIM set fgpa decimation rate to DECIM [default=16] -g GAIN, --gain=GAIN set USRP2 gain in dB (default is midpoint) -K SCALE, --scale=SCALE set rx input scaling of usrp2, scale_iq (default is 1024)](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-26.png)
![-S SHIFT, --shift=SHIFT set rx output shifting of usrp2, shift_iq (default is 0). Allowed values 0, 1, 2 and 3 --lo-offset=LO_OFFSET set daughterboard LO offset to OFFSET [default=hw default] --rx-bufsize=RX_BUFSIZE set rx buffer size to RX_BUFSIZE [default=0] -N NSAMPLES, --nsamples=NSAMPLES number of samples to capture [default=+inf] -T CAPTURE_DURATION, --capture-duration=CAPTURE_DURATION number of seconds to capture [default=+inf] -o OUTPUT_FILENAME, --output-filename=OUTPUT_FILENAME output filename for captured samples [default=None] -s, --output-shorts output interleaved shorts instead of complex floats -M, --lock-masterclock-to-SMA lock usrp2 100 Mhz master clock to external 10 Mhz reference clock on SMA input -P, --sync-to-first-1PPS reset the usrp2 samplecounter on the first PPS received on the PPS SMA input -j RX_START_TIMESTAMP, --rx-start-timestamp=RX_START_TIMESTAMP set start_at time of first RX packet in usrp2 100 Mhz clockpulses (long) [default=-1 start immediately] -k RX_START_TIME_SECONDS, --rx-start-time-seconds=RX_START_TIME_SECONDS set start_at time of first RX packet in seconds (float) [default=-1.0 start immediately] -C EXTERNAL_PROGRAM, --external-program=EXTERNAL_PROGRAM give a programname to start this as external program just before streaming starts (string) [default=None do not start an external program] -v, --verbose verbose output -p GPRI_PROFILE, --gpri-profile=GPRI_PROFILE GPRI-II acquisition profile [default=None] gpri2_plot.pyUsage: gpri2_plot.py: [options] profile raw_data Takes a GPRI2 echo data and displays the two channels and the FFT. The script plots a certain block of data at a time, specified on the command line as -B or --block. This value defaults to 1000. The start position in the file can be set by specifying -s or --start and defaults to 0 (the start of the file). By default, the system assumes a sample rate of 1, so in time, each sample is plotted versus the sample number. To set a true time and frequency axis, set the sample rate (-R or --sample-rate) to the sample rate used when capturing the samples. Options: -h, --help show this help message and exit -d DATA_TYPE, --data-type=DATA_TYPE Specify the data type (float32, int16 [default=int16] -B BLOCK, --block=BLOCK Specify the record size in samples [default=1000] -o OFFSET, --offset=OFFSET Specify offset to starting record in the file [default=0] -R SAMPLE_RATE, --sample-rate=SAMPLE_RATE Set the sampler rate of the data [default=6250000.0] -z ZERO, --zero=ZERO number of samples to set to 0 at the start of the echo: [default=0]](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-27.png)
![-s STRIDE, --stride=STRIDE spacing between successive display records: [default=1] gpri2_proc.pyUsage: gpri2_proc.py: raw_data raw_par slc1 slc2 options Takes a GPRI2 echo data and process to SLCs for channel-1 and channel-2 Options: --help show this help message and exit --data-type=DATA_TYPE Specify the data type (float32, int16 [default=int16] -z ZERO, --zero=ZERO number of samples to set to 0 at the start of the echo: [default=0] -d DEC, --decim=DEC decimation factor [default=1] -R RMAX, --rmax=RMAX maximum slant range (meters), default is 0.9 of the aliasing slant range -h HEADING, --heading=HEADING heading of radar boresight clockwise from North (deg.) -k KIND, --kind=KIND Specify kind of interpolation mode (none','linear', 'nearest', 'zero', 'slinear', 'quardratic', 'cubic')[default=none]: gpri2_profile_proc.pyUsage: gpri2_profile_proc.py: profile raw_data slc1 slc2 options Takes a GPRI2 echo data and process to SLCs for channel-1 and channel-2 Options: -h, --help show this help message and exit -d DATA_TYPE, --data-type=DATA_TYPE Specify the data type (float32, int16 [default=float32] -z ZERO, --zero=ZERO number of samples to set to 0 at the start of the echo: [default=0] gps_off.py*** Place GPRI2 into standby mode, turn off USPR2 and DISTRI *** TSCC Software version: SW V1.00 TSCC Voltages: ['U1 23.7'] TSCC Temperature: ['T1 36.6'] RTC get time: RTC 2010-11-12 22:59:15 GPS off: OK home_run.pymove_abs.py*** Move antenna positioner to an absolute angle Usage: move_abs.py <angle> [rate] angle relative angle (deg.) rate rotational velocity (deg/s 0.5 --> 10., default: 10.) move_rel.py](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-28.png)
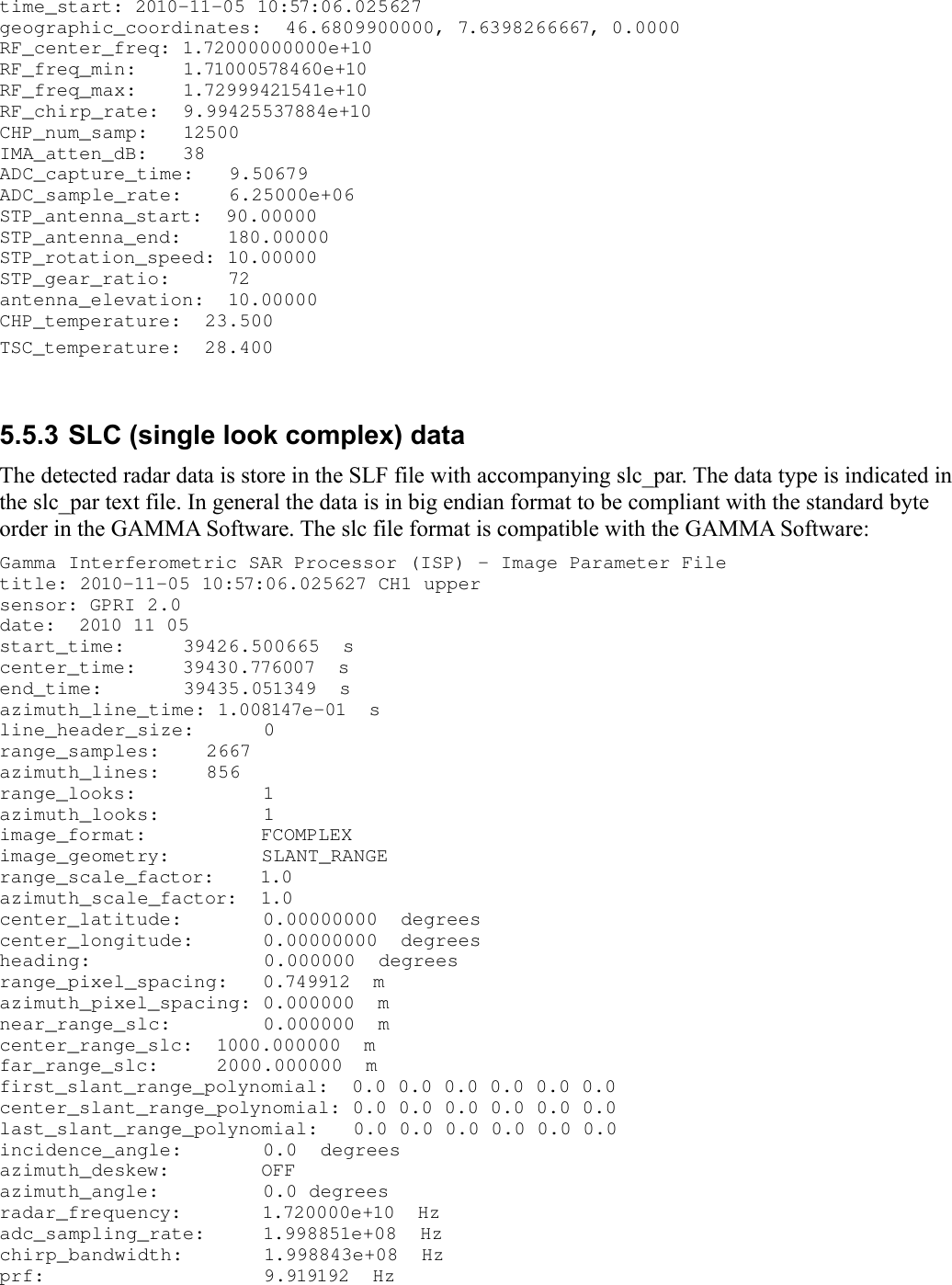
![Usage: move_rel.py <angle> [rate] angle relative angle (deg.) rate rotational velocity (deg/s 0.5 --> 10., default: 10.) tscc_powerup.pytscc_standby.pytscc_status.pytscc_test.pytx_off.pytx_on.py5.5 File FormatsMeta data and measurement data are kept separate. The meta data is stored in text files in a “keyword : value” format. The data itself is stored as plain binary without headers.5.5.1 Measurement ProfilesThe measurement profile dataset, contains the instrument and observation geometry parameters used for a given observation. The format is self describing, an example is shown below:RF_center_freq: 1.720000e+10 IMA_atten_dB: 38 CHP_freq_min: 100.0e6 CHP_freq_max: 300.0e6 CHP_num_samp: 12500 STP_antenna_start: 90 STP_antenna_end: 180.0 STP_gear_ratio: 72 STP_rotation_speed: 10.0 TX_power: on ADC_capture_time: 0.0 ADC_sample_rate: 6.25000e+06 antenna_elevation: 10 5.5.2 Raw dataThe raw data is stored in a binary file of integers in little endian format. The meta data is stored in the raw_par text file:](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-29.png)
![7. References[1] Werner C., T. Strozzi, A. Wiesmann, and U. Wegmüller, "GAMMA’s Portable Radar Interferometer”, Procs. IAG – FIG Symposium Lisbon, Portugal, 12 – 15 May 2008.[2] Wiesmann A., C. Werner, T. Strozzi, and U. Wegmüller, "Measuring deformation and topography with a portable Radar interferometer”, Procs. IAG – FIG Symposium Lisbon, Portugal, 12 – 15 May 2008.](https://usermanual.wiki/GAMMA-Remote-Sensing-and-Consulting/GPRI-II-1/User-Guide-1408795-Page-33.png)