GAMMA Remote Sensing and Consulting GPRI-II-1 Deformations scanner User Manual
GAMMA Remote Sensing and Consulting AG Deformations scanner
User Manual

GAMMA Portable Radar Interferometer II (GPRI-II)
User Manual
14. Jan. 2011
GAMMA Remote Sensing AG
Worbstrasse 225
CH-3073 Guemligen
Switzerland
www.gamma-rs.ch
Copyright 2011, GAMMA Remote Sensing AG. All rights reserved. This document contains
proprietary information that is protected by copyright. No part of this document may be reproduced,
transmitted, transcribed, stored in a retrieval system, or translated into any language in any form by any
means without the written express of GAMMA Remote Sensing AG.
The authors and GAMMA Remote Sensing AG have used their best efforts in preparing this manual.
However, the author and GAMMA Remote Sensing AG make no warranties of any kind, expressed or
implied, with regard to the informational content, documentation, or files contained in this manual, and
shall not be liable for technical or editorial errors or omissions contained herein. In no event shall the
author or publisher be responsible or liable for any incidental or consequential damages resulting from
the furnishing, performance, or use of this material.
TRADEMARKS Products mentioned herein may be trademarks/or registered trademarks of their
respective owners.
Table of Contents
1. Read First...............................................................................................................................................4
1.1 EMC Notice.....................................................................................................................................4
1.2 Safety Guidelines............................................................................................................................4
1.3 Operating Safety..............................................................................................................................4
2. Introduction............................................................................................................................................5
3. Quick Introduction.................................................................................................................................6
3.1 Instrument Setup..............................................................................................................................6
3.1.1 Leica heavy-duty tripod...........................................................................................................6
3.1.2 Motor with leveler and tower..................................................................................................7
3.1.3 RF Unit....................................................................................................................................9
3.1.4 Antenna..................................................................................................................................10
3.1.5 Instrument Controller and Power Unit..................................................................................10
3.2 Operating the Instrument...............................................................................................................11
3.2.1 Operating the instrument through SSH..................................................................................11
3.2.2 Operating the instrument through HTTPS ............................................................................13
4. Instrument Description.........................................................................................................................15
4.1 Instrument Components / Package List.........................................................................................15
4.2 Instrument Hardware.....................................................................................................................16
4.2.1 GPRI-II Electronics...............................................................................................................17
Chirp Generator.........................................................................................................................18
4.2.2 Antenna..................................................................................................................................19
4.2.3 Mechanics..............................................................................................................................20
GPRI-II Antenna Tower.............................................................................................................20
Tripod and Positioner and Tribrach Leveler..............................................................................20
Azimuthal Scanner.....................................................................................................................22
RF Electronics Enclosure ..........................................................................................................22
Controller and Power Unit.........................................................................................................23
4.3 Instrument Software......................................................................................................................24
5. User Interface.......................................................................................................................................25
5.1 Local Access..................................................................................................................................25
5.2 Graphical User Interface...............................................................................................................25
5.3 Terminal Access.............................................................................................................................25
5.4 Software Reference.......................................................................................................................25
5.5 File Formats...................................................................................................................................29
5.5.1 Measurement Profiles............................................................................................................29
5.5.2 Raw data................................................................................................................................29
5.5.3 SLC (single look complex) data............................................................................................30
6. Instrument Specifications.....................................................................................................................32
7. References............................................................................................................................................33
8. Appendix A..........................................................................................................................................34
1. Read First
1.1 EMC Notice
This device complies with Part 15 of the FCC Rules and with RSS-210 of Industry Canada.
Operation is subject to the following two conditions:
1. this device may not cause harmful interference, and
2. this device must accept any interference received, including interference that may cause
undesired operation.
Changes or modifications made to this equipment not expressly approved by (GAMMA Remote
Sensing AG) may void the FCC authorization to operate this equipment.
This equipment complies with FCC radiation exposure limits set forth for an uncontrolled environment.
This equipment should be installed and operated with minimum distance of 500 cm between the
radiator (antenna in view direction) and your body. For proper radar imaging, no obstacle must be
between the antennas and the target area during image acquisition at all (shadow effects).
This transmitter must not be co-located or operating in conjunction with any other antenna or
transmitter.
1.2 Safety Guidelines
Follow these guidelines to ensure general safety:
•Keep the working area clear during installation and instrument operation.
•Wear safety glasses if you are working under any conditions that might be hazardous to your
eyes.
•Do not perform any action that creates a potential hazard to people or makes the equipment
unsafe.
•Disconnect all power by turning off the power and unplugging the power cord before installing
or removing a chassis or working near power supplies
•Do not work alone if potentially hazardous conditions exist.
•Never assume that power is disconnected from a circuit; always check the circuit.
•There are no user serviceable parts in the RF Assembly or the Instrument Controller Box.
The Instrument Controller Box must not be opened with the power cable attached!
1.3 Operating Safety
•Electrical equipment generates heat. Ambient air temperature may not be adequate to cool
equipment to acceptable operating temperatures without additional measures.
•Ensure that the RF assembly and Instrument Controller cover is secure. The design allows
cooling air to circulate effectively.
2. Introduction
First of all, thanks for buying this fascinating piece of hardware and software and we hope you can
conduct many interesting and trouble free measurements. If you have feedback please do not hesitate to
contact us (gamma@gamma-rs.ch or directly one of the staff). Feedback from our users is a strong
element of our hardware and software evolution.
The GPRI-II is the second generation instrument of the Gamma Portable Radar Interferometer GPRI
[1,2]. The GPRI-1 was developed as a proof of concept and later used on numerous scientific and
commercial campaigns. The new second generation instrument GPRI-II has improved performance and
is hardened for field measurements.
This manual shall help the user to setup and use the instrument but also provides background
information on the instrument. Section 2 gives a quick access on the instrument. I gives setup
instructions and the basic commands needed to operate the instrument. Section 3 gives more detailed
information on the instrument. Section 4 gives insight in the communication interfaces. Section 5
summarizes the instrument specifications and Section 6 a list of references and literature. Finally in the
Appendix A in Section 7 a template for a measurement protocol is provided. While everything can be
controlled digitally, nevertheless we recommend to keep a handwritten logbook.
The EC and FCC instrument certification status can be checked with us. As indicated in the quote it is
the users responsibility to make sure that you have permission to use the instrument at your site. It
might be that a transmission permission is necessary. If you need technical support to get such a license
please contact us and we try to provide you the requested information.
The GPRI development at Gamma was initiated based on the perceived benefits of in-situ measurement
of deformation using differential radar interferometry. Our extensive experience with satellite
differential interferometry has demonstrated successful application of this technique for measuring
deformation due landslides, pumping of oil and water, mining, glaciers, and tectonic motion.
However, when the deformation between repeat observations exceeds wavelength/4 the usefulness and
interpretation of the data rapidly become difficult. A ground-based instrument can be rapidly deployed
and obtain data with both high spatial and temporal resolutions that are particularly well suited to
measuring rapid deformation.
Unlike orbital SAR systems, in-situ measurement permit flexibility in the selection of the observation
geometry. The geometry can be selected to give maximum sensitivity to deformation along the line of
sight. Observations from multiple aspect angles can be combined to resolve the deformation into
components along different look vectors.
Path delay variation due to tropospheric water vapor is the most significant cause of error in
deformation using differential interferometry. A stationary instrument has the ability to acquire
multiple observations for mitigation of path delay variations. Note that ground measurements have a
shorter path length through the atmosphere than orbital observations also leading to reduced error from
this source.
Multiple observations acquired over short time intervals have the advantage that decorrelation is
minimized by the shorter time intervals. Successive measurements can be processed to track non-linear
deformation within the scene.
3. Quick Introduction
3.1 Instrument Setup
The instrument setup needs to be stable (consider also wind!) and reproducible (if repeat measurements
from a given position are foreseen). The standard setup of the GPRI-2 is on the supplied heavy duty
Leica tripod. However it can also be mounted on permanent pier or other structure. In any case there
must be sufficient room for the instrument to rotate (about 2.5 meters) be made sure that the instrument
to avoid damage of the instrument.
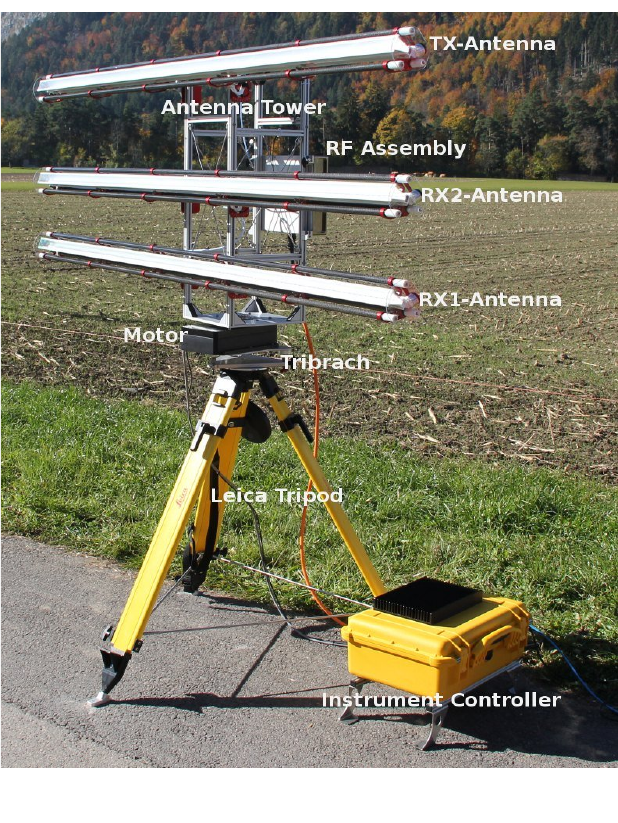
Figure 1: GPRI-II fully assembled. Instrument is aligned at 0
deg. azimuth position.
3.1.1 Leica heavy-duty tripod
Installation of the tripod is the first step in setting up the GPRI2. The tripod legs should be initially
fully retracted. Take the tripod out of the canvas transport bag and take out the 3 stainless steel rods.
1. Install the stainless steel support rods to the tripod to maintain the legs at a fixed 30 degree
angle. These rods fit into the attachments at the bottom of each leg. The end of the rod is shaped

to fit into the slots on the attachment points. A small locking arm on each attachment point must
be rotated to permit insertion of the rod. Once the rod is attached, rotate the arm back over the
rod ends and it will lock into place.
2. The tripod legs are numbered 1,2, and 3 with label. Make sure that you note the location of each
leg so that when you return to the site, the orientation of the tripod is identical. One leg of the
tripod should remain fully retracted and this should not change. In sloping terrain, this leg
should be the leg with the highest elevation. The zero degree look direction of the radar is in the
direction of leg 1.
3. Using the bubble level on top of the tripod, extend the other 2 feet of the tripod until the tripod
top surface is horizontal. Remember to keep one leg of the tripod fully retracted and only
extend the other 2 legs.
4. Screw the feet through the hole in the tip to the ground using anchor screws (6mm anchors).
5. Measure and note the extension of the legs for future repositioning.
Figure 2: Fixature of rods to have tripod
legs at fix distance.
Figure 3: Tripod foot with
special tip that allows
screwing to the ground.
Figure 4: Tripod leg extent
documentation.
Figure 5: Interface Plate of the Leica
Tripod with level and 5/8" screw.
3.1.2 Motor with leveler and tower
1. Mount the rotary positioner and leveling assembly on the tripod using the black 5/8” screw
interface of the tripod. The positioner has labels with the numbers 1 and 3. Position this edge of
the positioner +leveler between tripod legs 1 and 3. Rotate the positioner and leveler assembly
such that the edge of the positioner plate is parallel with the tripod stainless-steel rod between

legs 1 and 3.
2. Make the antenna tower interface perfectly flat using the tribrach level adjustment screws and
the large NOTE the screw on side 1 is fixed and should never be change to not loose the
absolute height reference. The large bubble level on the positioner should be used to determine
if the tower mounting plate is level. Be sure to look down from directly above the level to make
sure the bubble is centered.
3. Power on the laser plummet using the battery pack. If this is the first measurement, mark the
position of the laser on the ground for future repositioning. This point is precisely on the
rotation axis of the tower. If you are returning to the site, adjust the positioner and leveler so
that the laser beam hits the previously marked rotation center
4. Remove the 4 socket socket screws on the tower mounting plate, and mount the tower on the
plate. There is an alignment pin on the plate that makes sure that there is only one way to
position the tower. Screw the tower to the mounting plate. When you remove the tower, be sure
to screw the 4 screws back on to the plate for future use and storage.
5. Define the antenna elevation angle and set all six antenna holders accordingly. The antenna
illuminates about 60 degrees in elevation, Set the elevation angle so that the beam the center of
the area of interest. If there are areas that are significantly farther away, adjust the beam to be
centered on this area.
Figure 6: Side view of the Tripod - leveler -
positioner - Antenna Tower setup. The leveler is
adjust by rotating the red knobs. The black
screw is to fix the knob setting. At the bottom of
the motor, the connector for the laser battery is
indicated.
Figure 7: Top view of the positioner. The 4 socket
screws need to be removed before mounting the
antenna tower.
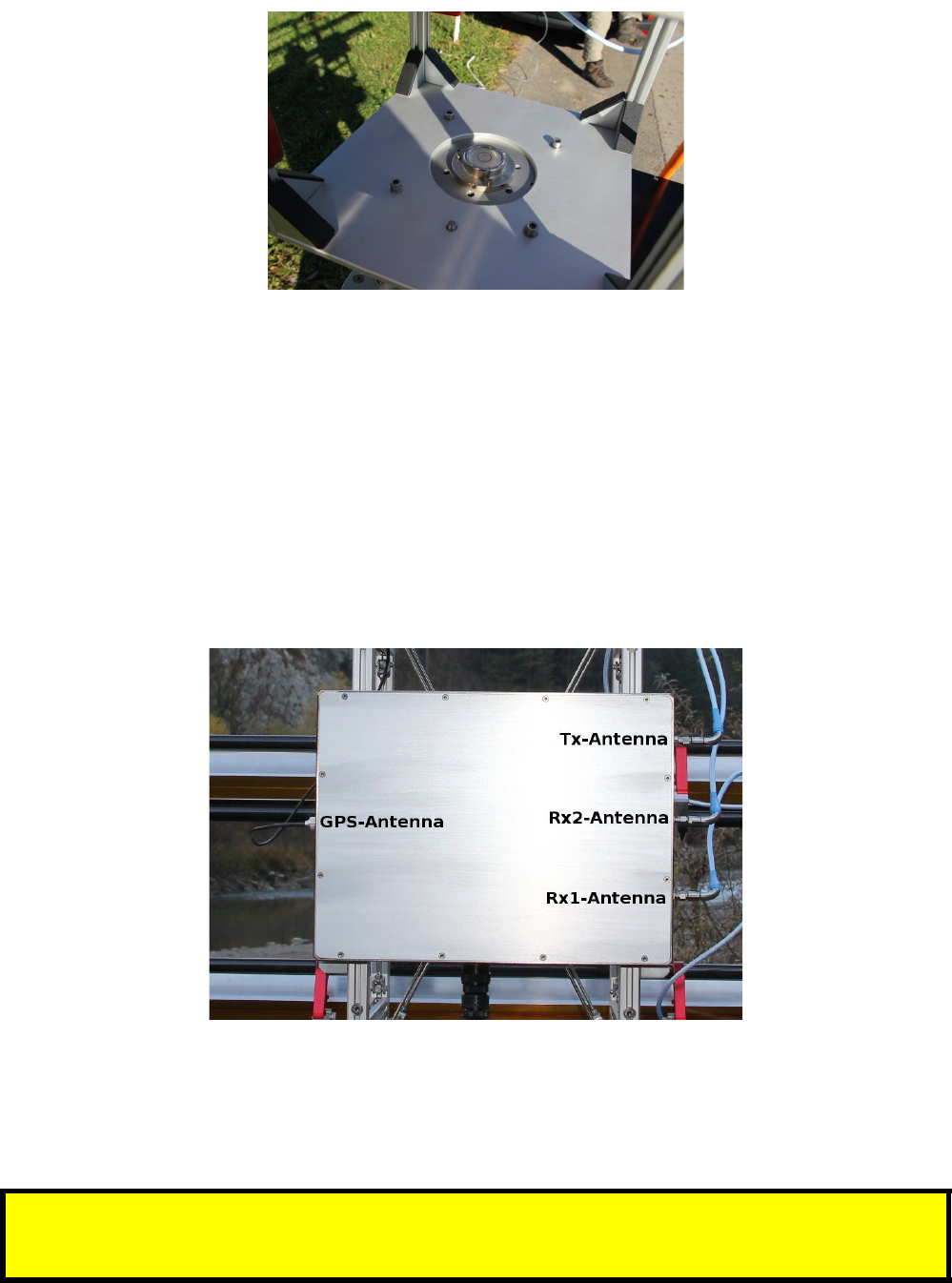
Figure 8: Bottom of Antenna Tower mounted
on the motor. Visible is the level, the 4
hexagon socket screws and the knob
enforcing the defined tower orientation.
3.1.3 RF Unit
1. Mount the RF Unit on backside of the Antenna Tower. Use the 2 screws on the back to secure
the RF unit
2. Plugin the GPS Antenna cable to the BNC connector. The GPS receiver is located on the
rotation axis of the tower.
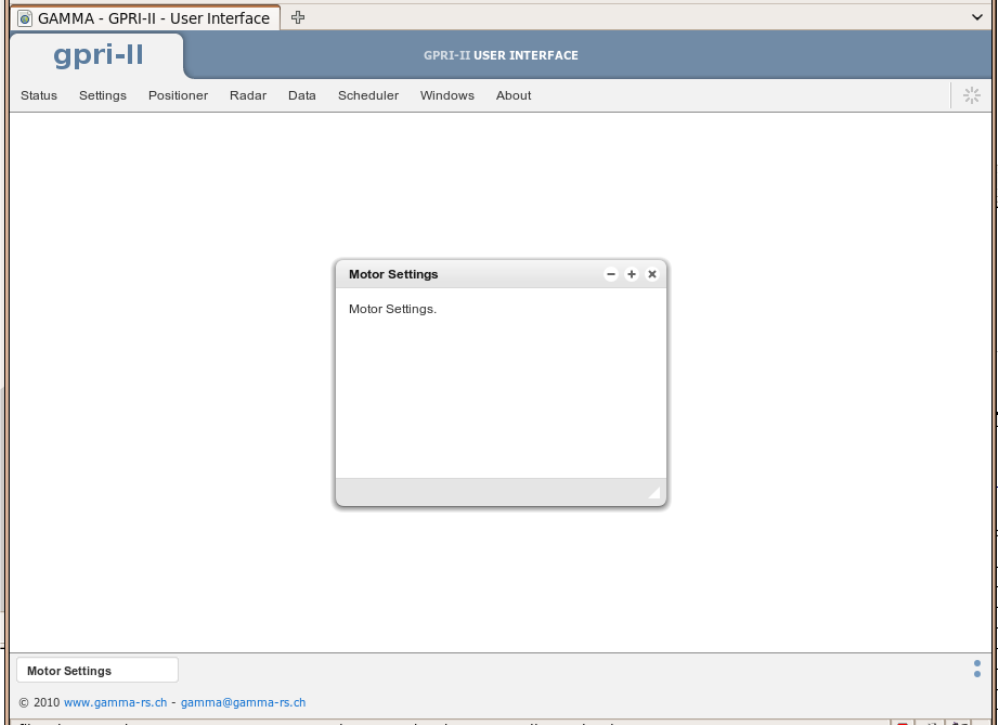
Figure 9: RF Assembly mounted at the back of the
Antenna Tower. On the left side the GPS Antenna
mounted on top of the Antenna Tower is plugged, on the
right side the Antenna cables, at the bottom the cable to
the Instrument Controller and Power Unit.
There are no user serviceable parts in the RF Assembly or the Instrument Controller
Box. The Instrument Controller Box must not be opened with the power cable
attached!

3.1.4 Antenna
1. Take each antenna out of the tube by loosening the 2 thumb screws. NOTE it is important that
you push them out with the antenna cable plug in front to avoid damaging the antenna cable.
2. Mount the antennas one by one on the corresponding antenna holders. Make sure you use a fix
order for the antennas (TX, RX1, RX2) to avoid phase effects due to slightly different antenna
characteristics. It is recommended that you note the serial numbers of each antenna and if it is
the top (TX), center (RX1), or bottom (RX2) of the tower. Each antenna has a slightly different
pattern and phase and so it is strongly recommended to use the same antennas for TX, RX1, and
RX2 for each measurement.
3. Plugin the 3 antennas to the appropriate port on the side of the RF assembly. The antenna cables
have quick-connect SMA connectors. It is very important that these be pushed on gently and
without being tilted relative to the connector axis or else they will be damaged. Inspect the
connector before each use to make sure all the connector gold springs are not damaged or bent.
!! Never detach the antenna holders as you might loose the alignment precision of the antennas. These
have been precisely positioned on the tower to insure that the antennas are parallel
Figure 10: Closeup of the Antenna holder and
Elevation Angle setting.
3.1.5 Instrument Controller and Power Unit
1. Place the Pelican case close to the tripod at a dry and convenient place. The feet can be screwed
to the ground if necessary.
2. Make sure the Instrument Controller is switched off.
3. Connect the Instrument Controller with the RF Unit (orange cable).
4. Connect the Instrument Controller with the motor (2 cables).
5. Connect the Instrument Controller to the network. The controller decides depending on the
traffic which net configuration will be selected.

6. Switch Instrument Controller on.
There are no user serviceable parts in the RF Assembly or the Instrument Controller
Box. The Instrument Controller Box must not be opened with the power cable
attached!
Figure 11: Instrument Controller and Power
Unit in Pelican case. Connectors uper line
from left to right: WLAN (not connected),
Ethernet, RF Unit, Power. Lower line from left
to right: Instrument Power Switch, USB,
Motor Control, Motor Power.
3.2 Operating the Instrument
Communication with the instrument in the field is through TCP/IP. The easiest solution is to connect
the instrument to an Ethernet Switch with attached laptop. In principle its also possible to use a crossed
Ethernet cable but this has some disadvantages. In the lab it is also possible to connect screen and
keyboard after opening the Pelican case.
The GPRI2 supports two communication layers, SSH (Secure Shell) and HTTPS (Secure Web). Its
good policy to have also a logbook for the instrument and take pictures for documentation. A list of
items to record is given in Appendix A.
3.2.1 Operating the instrument through SSH
To control the instrument through SSH a SSH client software is necessary. Preferred is to access from a
linux system that also allows to export the window environment of the instrument. Though its also
possible to access the instrument purely through the shell using e.g. Putty. In the following we assume a
Linux system accessing the instrument but the commands are the same for a pure shell connection.
Program parameters are provided for easier reading but needs to be adjusted to the individual case.
1. Login to instrument:
ssh -X -l gpri2 192.168.1.72
2. Check available disk space for data. The data are stored in their own disk partition called /data:
df /data
3. Initiate home run of the positioner (check first visually that the instrument can move freely and
the cables have enough room!):
home_run.py
4. The instrument is now looking at 0 degrees instrument azimuth angle. Angles increase
clockwise.
5. Determine the start and stop angles for the scan by moving the antenna around. Be aware that
about 3 degrees are needed on both sides of the scan for rapid motion of 10 degrees/sec,
otherwise motion is at .5 deg/sec
move_abs.py -30
6. Define the measurement parameters and setup the corresponding measurement profile. The
profile contains information on the transmitter chirp, angular scan, speed, and receiver
attenuation.
cp gpri_2ms.prf 20101115.prf
gedit 20101115.prf
7. Run receive only to avoid interference with potential other band users.
gpri2_capture.py -e eth1 -f 0.0 -M -P -S 1 -s -k 1.0 -v -p ro.prf -o 20101115_ro.raw
Then process the data using
rasSLC 20101115_ro.raw 3126 1 0 4 100 .5 .5 0
eog 20101115_ro.raw.ras
8. Run a first scan:
gpri2_capture.py -e eth1 -f 0.0 -M -P -S 1 -s -k 1.0 -v -p 20101115.prf -o
20101115_l.raw
9. Check signal levels by either processing the image (see below) or using the range plot
visualisation of the raw data:
gpri2_plot.py -s 100 20101115.prf 20101115_l.raw
10. Convert the raw data to SLC, be aware that SLC data is little endian! slc1 stands for the upper
and slc2 for the lower receive antenna:
gpri2_proc.py 20101115l.raw 20101115l.raw_par 20101115_1u.slc 20101115_1l.slc -z 80 -R
2400
11. Visualize the complex data:
dismph 20101115_ll.slc 2401 1 6000 &
12. Visualize the detected image:
multi_look 20101115_1_1.slc 20101115_1_1.slc.par 20101115_1_1.mli 20101115_1l.mli.par 1 4
raspwr 20101115_1_1.mli 3201 1 0 11 .15 .5
13. Process interferogramm from upper and lower antenna:
create_offset 20101115_5l.slc.par 20101115_5_2.slc.par 20101115_5_1_2.off
SLC_intf 20101115_5l.slc 20101115_5_2.slc 20101115_5l.slc.par 20101115_5_2.slc.par
20101115_5_1_2.off 20101115_5_1_2.int 1 4 0 - 0 0
dismph_pwr 20101115_5_1_2.int 20101115_5l.mli 3201 1 1 0 .3 .5
14. Process interferogram from repeat measurements:
create_offset 20101115_5l.slc.par 20101115_6l.slc.par 20101115_5l_ 20101115_6l.off
SLC_intf 20101115_5l.slc 20101115_6l.slc 20101115_5l.slc.par 20101115_6l.slc.par
20101115_5l_20101115_6l.off 20101115_6_6_1_1.int 1 4 0 - 0 0
dismph_pwr 20101115_5l_20101115_6l.int 20101115_5l.mli 3201 1 1 0 .3 .5
15. Copy data with secure copy to your local disk:
scp source server:path
16. or plug an external usb disk and mount it. To find out the device id of the disk (most likely
/dev/sdb1:
dmesg | tail -n 50
and look out for lines such as
[1295858.275037] sd 16:0:0:0: [sdb] Assuming drive cache: write through
[1295858.275046] sdb: sdb1
Mount the device on /mnt with
sudo mount /dev/sdb1 /mnt
The data can now be copied to and from /mnt. Make sure you unmount the device at the end
sudo umount /mnt
17. Measurements can be scheduled in cron. Edit the cron table with
cron -e
And add a new task. Check the cron manpage for the syntax.
18. Always do a positioner home-run before you switch off the instrument:
home_run.py
19. and shut down the Instrument Controller
shutdown -P now
3.2.2 Operating the instrument through HTTPS
The Instrument Controller provides a web based user interface. I can be accessed through secure http
(https) and needs authentication. ### under development ###
4. Instrument Description
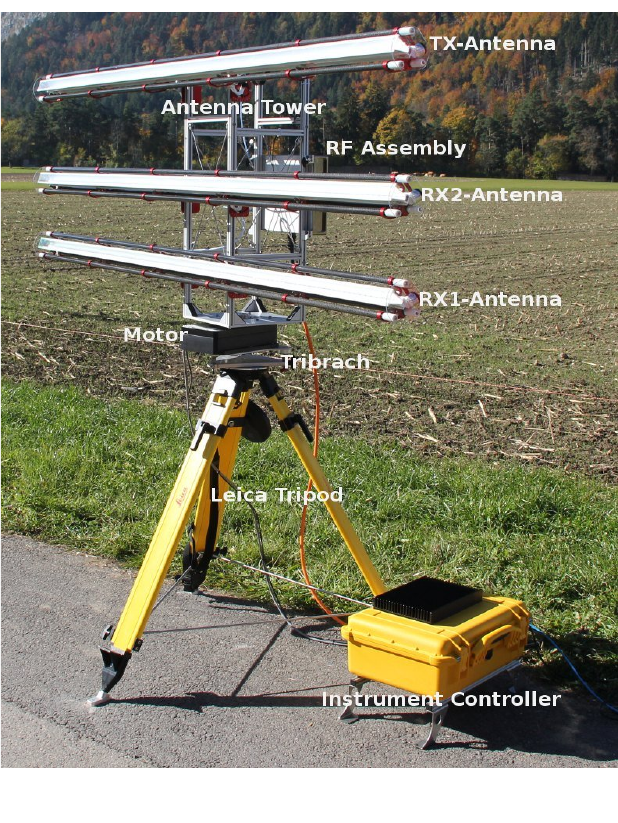
Figure 12: GPRI-II fully assembled. Instrument is aligned at 0
deg. azimuth position.
4.1 Instrument Components / Package List
The instrument consists of the following components:
–3 Fan-Beam Antennas (in 3 orange plastic tubes, Figure 13)
–1 RF Assembly (Aluminum case)
–1 Instrument Computer (yellow Pelican case)
–1 Power Cord (black)
–1 Instrument Cord (orange)
–1 Antenna tower with attached GPS antenna
–1 Leica tripod with 3 aluminum rods (orange bag)

–1 Positioner with tribach leveler
–1 Laser Plummet Battery Pack
Additional items necessary for field work
–Power generator with spare fuel
–Network Switch and 2 Ethernet cables
–Laptop computer
–Backup disk
–Drill and screws, washers, anchors to fix the tripod to the ground (6mm screws should be fine)
–socket screw key (socket screw key) 5mm
Figure 13: Antenna in the plastic tube containers.
The antenna needs to be pushed out with the
antenna side with the SMA connector in front.
4.2 Instrument Hardware
The GPRI-II instrument benefits from the experience of the GPRI-1 in the mechanical and electronic
design.
The GPRI-II has the following enhancements with respect to the GPRI-1:
1. Improved tower support based on the industry standard Leica mount system with a custom
designed tribrach for leveling and repositioning.
2. Azimuth scanner based on Newmark RMS-5S (IP67) rotary stage. Continuous scanning with a
single sweep acquisition 10 deg/sec.
3. Slotted-waveguide antennas 2.06m long, beam 0.4 azimuth beam. 37.5 deg. elevation pattern
4. DDS controlled chirp generator design with improved phase noise and negligible spurs (AD-
9910)
5. Self-contained Linux-based computer for scheduling, data acquisition, processing, and display.
Linux OS (Ubuntu 10.04 LTS) with web and scheduling services and supports the security
required for autonomous operation.
6. ETTUS USRP2 Software Defined Radio (SDR) dual-channel 14-bit streaming Analog to
Digital Converters (ADC).
7. Improved cabling with a single cable from the RF enclosure to the Peli-Case containing the
instrument controller, power-supply, and SDR.
8. Power input of 110-240 VAC and +24VDC. Weather sealed enclosures (IP65) with cooling via
heat-sinks and internal fan. Operation over temperature range -20 to +40C.
4.2.1 GPRI-II Electronics
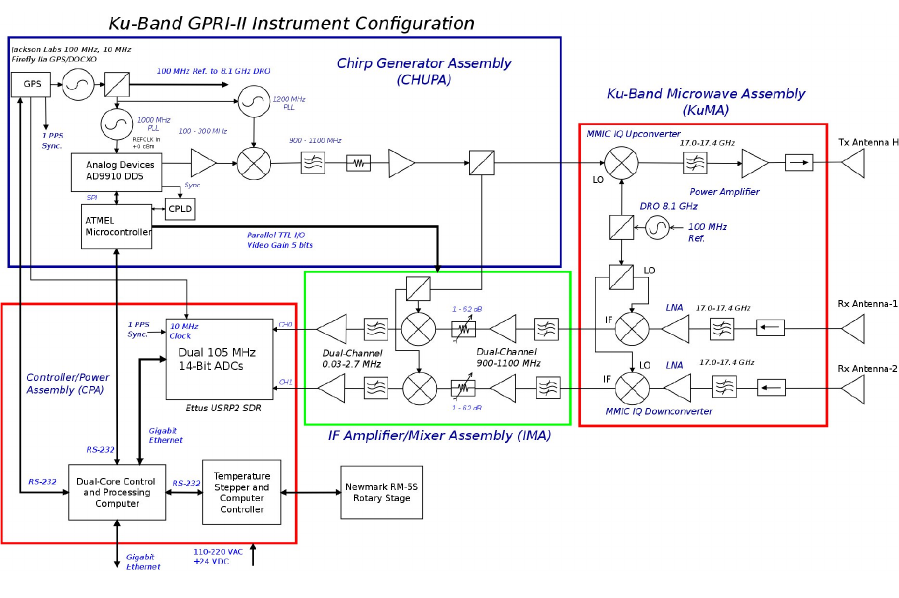
Figure 14: GPRI-II System Level Design
The high-level block design of the proposed GPRI-II is shown in Figure 14. The main elements in the
electronics are the Chirp Generator Assembly (CHUPA), IF Amplifier/Mixer Assembly (IMA), Ku-
Band Microwave Assembly (KuMA), and the Computer and Power Assembly (CPA). We retain the
dual receive channel design of the GPRI-1 to support recording interferograms with a spatial baseline
defined by the antenna separation on the tower. The GPRI acquires data with a few milliseconds
minimizing the effects of temporal decorrelation.
The use of a built-in computer permits autonomous operation and recording of data with the need for
an external lap-top. Data acquisition speed is increased substantially because data acquired during
continuous rotation of the motor avoiding stop/start motion and the associated mechanical settling time.
The computer, power-supply, ADC and stepper motor controller are all within the controller/power
assembly enclosure. Temperature and power regulation are steered by a micro-controller on the TSCC
(Temperature, Stepper, Computer Controller) board. It is responsible for ensuring that the temperature
within the enclosure is within operational limits.
Chirp Generator
The chirp generator module generates a linear FM pulse over the 900-1100 MHz frequency range. The
most critical component in the chirp generator is the Direct Digital Synthesizer (Analog Devices
AD9910). This DDS has substantially better phase noise characteristics relative to the AD9858 used in
the GPRI-1 instrument. This is due primarily to the 14-bit ADC (the AD9858 uses a 10-bit ADC). The
linear ramp generator in the DDS can be set to produce a continuous series of pulses.
The system reference signal is provided by a GPS disciplined 100 MHz crystal oscillator (Jackson
Firefly-II). The DDS 1 GHz clock signal is generated using a Phase-Locked Loop (PLL) oscillator that
uses the 100 MHz system clock as reference. All GPRI-II timing and reference signals are derived from
the 100 MHz reference oscillator such that the radar is fully synchronous.
Programming of the DDS is via a 3-wire serial protocol. An small micro-controller handles this
protocol and communicates with the Instrument Computer over an RS-232 serial line. The DDS
produces a chirp in the frequency range 100 to 300 MHz. This chirp is first heterodyned to the
frequency range 900 to 1100 MHz. The first local oscillator (LO) is a 1200 MHz Phase-Locked Loop
operating above the desired 900-1100 MHz sideband.
The microwave LO is a phase-locked Dielectric Resonator Oscillator (DRO) operating at 8.1 GHz. The
output chirp spanning 17.1 to 17.3 GHz is then filtered, then amplified and then feed to the antenna. An
isolator in the output path provides a constant load for the input and output RF amplifiers. In the
receiver, the signals from the 2 receiver antennas are amplified, filtered, and mixed down to 900-1100
MHz using the DRO LO signal. We use an MMIC active mixer with integral LO amplifier (Hittite
HMC570LC5) for this function.
The IF signal is then further amplified and mixed with the original transmitted chirp (FM-CW). A
portion of the chirp signal spanning 900 to 1100 MHz is amplified and used to demodulate the
receivedsignal. Digitally programmable attenuators are used to set the receiver gain. The second mixer
is a high-level MMIC active mixer with integral LO amplifier (Hittite HMC686LP4). The baseband
demodulated signals lie in the range 0.30 to 2.5 MHz. The frequency of the demodulated signals is
proportional to distance from the radar.
These two baseband channels are amplified and digitized at 6.25 MHz by 14-bit analog-to-digital
converters (ADC). These ADCs are in the front-end of the ETTUS USRP-2 Software Defined Radio
(SDR) that streams data samples over raw Ethernet to the system instrument computer.
One of the significant advantages of the GPRI-II design is the ability to change the output operating
frequency by changing the LO frequency. Another important feature is the use of gain modules with
constant gain over the passband in the IF module.
The microwave electronics use MMIC modules on co-planar-waveguide boards rather than
connectorized modules as in the GPRI-1. This major advantages including
1. Elimination of connectors and cabling, leading to reduction in losses, less connectors and
shorter transmission lines
2. Approximately 3 times less power consumption leading to substantially less heat generation
3. Lower cost, typical MMIC components cost a fraction of the connectorized component but
require a custom microwave coplanar waveguide circuit board, and custom enclosure.
4. Simpler mechanical construction, parts are integrated on the circuit board. Reduced size and
mass, elimination of heat-sinks.
5. Better performance, amplifier efficiency is about 2.5 times better than connectorized versions.
Better noise figure due to lower loses.
Microwave components from Hittite are the basis of the GPRI-II up- and down converters. The
HMC710LC5 is an IQ frequency up-converter and the HMC570LC5 is the matching receiver IQ down-
converter. These chips contain a 2 local oscillator (LO) amplifiers, a X2 frequency multiplier, a 90
degree splitter, 2 balanced mixers, and an RF amplifier packed within a 5x5 mm square package. The
up-converter is used to heterodyne the 0.9 to 1.1 GHz chirp to 17.1 to 17.3 GHz. The down-converter is
used in the receiver to amplify and translate the receiver input signal down to 0.9 to 1.1 GHz. The
transmit signal for the up-converter is then filtered and amplified using a HMC498LC4 amplifier chip
that can produce up to 150 mW of output power. The receiver has a low-noise amplifier input
(HMC516LC5) with a noise figure of 2.2 dB followed by a bandpass filter. The up and down-
converters utilize IQ mixers that have the advantage of suppressing noise from the image spectrum of
the input signal. The local oscillator for both the up- and down-converters is a dielectric resonator
oscillator operating at 8.1 GHz and phase locked to the 100 MHz reference signal.
The RF electronics assembly is connected to the Computer/Power enclosure using a single multi-
conductor cable with 19-pin MIL-C26582 connectors. These connectors are weather resistant (IP-65)
and rugged. All signals are relatively low frequency (< = 10 MHz). The receiver uses output buffer
amplifiers with the capability to drive capacitive loads such as a coaxial line. The receiver output goes
directly to the input of the ADCs in the CPA enclosure.
4.2.2 Antenna
The GPRI-II antenna is an end-fed slotted-waveguide antenna. The azimuth antenna sidelobes remain
constant over the entire operational bandwidth from 17.1 to 17.3 GHz at an acceptable level (-15 dB).
The predicted antenna pattern shown in Figure 15, illustrate how the antenna squints approximately a
total of 1 degree when sweep from 17.1 to 17.3 GHz. This squint effect can be compensated in the data
processing as long as the scene remains coherent for the time period of the observations that cover the
scene. Assuming that data are oversampled in azimuth (< 0.1 degree spacing) the data can be readily
interpolated as a function of frequency to create a data set that is equivalent to an antenna with a fixed
beam in one direction. What is important is that the scene remains coherent during all observations that
cover a specific direction.
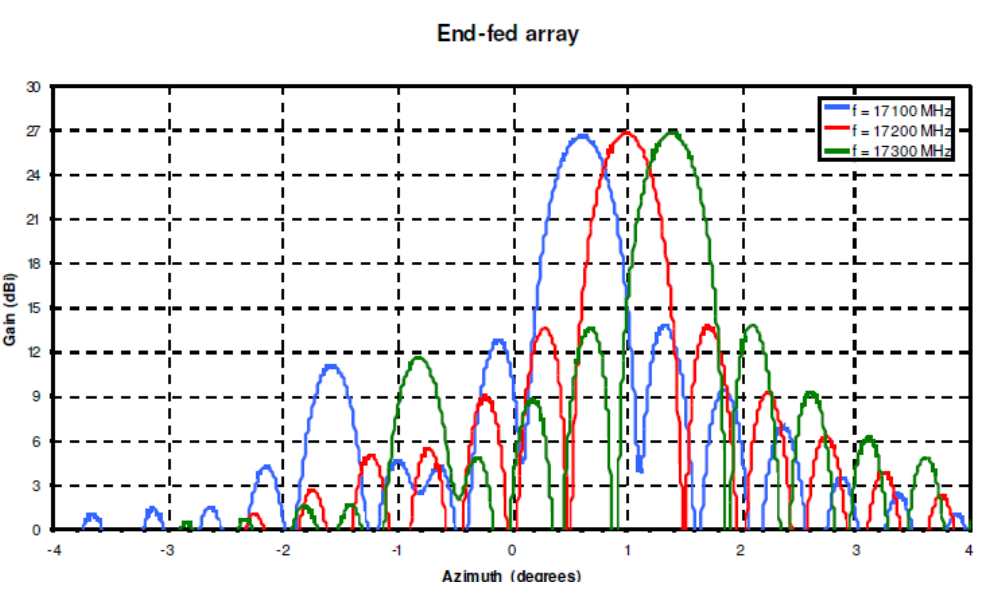
Figure 15: End-fed Array performance for GPRI-II antenna
The new antenna is designed with an aluminum flare that determines the elevation beamwidth of 37.5
deg. There is a thin plastic sheet over the flare opening to seal the antenna against moisture. The
GPRI-II antennas and support is designed to fit in a 125 mm PVC shipping tube.
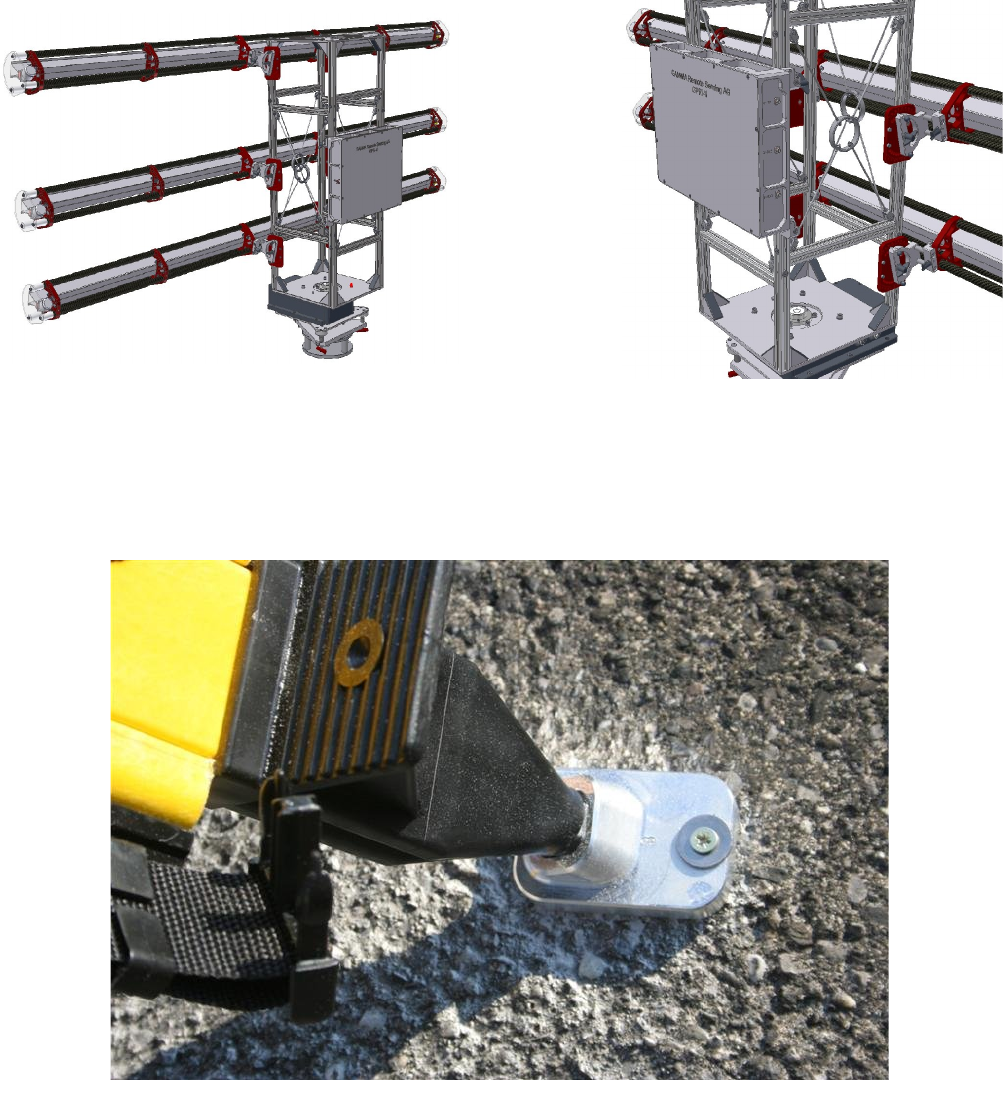
The antennas are supported on a carbon-fiber truss structure as shown in Figure 16. The carbon tubes
are be symmetrically positioned about the waveguide so there is access from -45 degrees to +45
degrees in elevation.
4.2.3 Mechanics
GPRI-II Antenna Tower
The antenna support tower has a height of 80 cm and a square cross-section of 28 x 28 cm and is
constructed using ITEM aluminum extrusion. The tower is further stiffened on each face through the
use of stainless-steel rods under tension connected to a central stainless-steel ring as shown in Figure
10. These cross-struts stiffen the tower to reduce torsional deformation.
Tripod and Positioner and Tribrach Leveler
The tripod supporting the scanner and antenna tower is a Heavy-Duty Leica tripod. It comes with a 5/8”
threaded screw that is standard and is adjustable to permit repeatable positionig. A small bubble level
embedded in the tripod mounting plate is used to ensure that the tripod itself is level within a few tenths
of a degree. The tripod can be leveled approximately by moving out the legs. The feet of the tripod
have been modified so that there is an aluminum bracket that can be fixed to the ground using a screw
in an anchors (Figure 17). This arrangement permits accurate repositioning of the GPRI-II for later
data acquisitions. A small laser on the tribrach rotational axis can be used to see the rotation axis as
projected on the ground. Additional metal struts have been added at the tripod base to improve the
rigidity and to permit precise repositioning of the tripod on preexisting anchors.
Figure 16: GPRI-II Tower with RF electronics.
A rugged custom tribrach supports the tower and is used to adjust the axis of rotation to be vertical. The
tribrach incorporates a small laser for centering the tower axis of rotation about a benchmark. In
addition a heavy-duty adapter is provided to mount the tribrach on geodetic monuments or other
structures (Figure 18).
Figure 17: Tripod mounting adapter for screw anchor mounting.
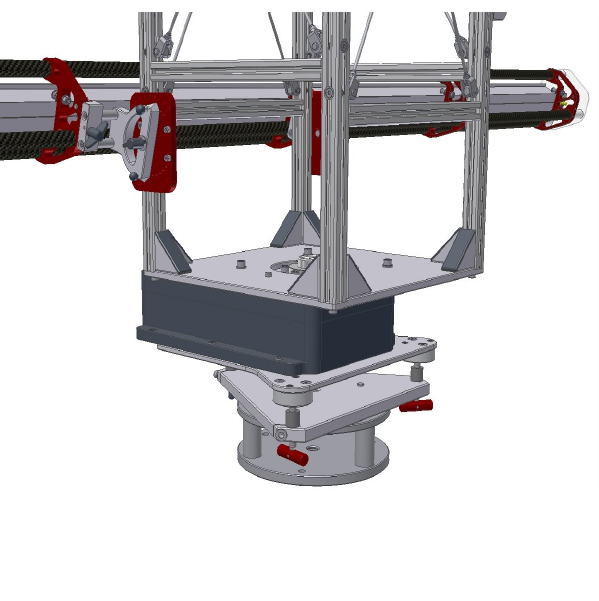
Figure 18: Tribrach with azimuthal scanner and tower.
Adapter for fixed mounting is shown attached to the tribrach.
Red knobs adjust the tilt of the tribrach motor mounting
plate.
Azimuthal Scanner
Te GPRI-II uses the Newmark RMS-5S stepper motor drive as tested with the GPRI-1. This positioner
has a repeatability of 5 arc-sec, and a resolution of 0.36 arc-seconds. The maximum load for the RMS-
5S is 36.4 kg and it has a mass of 5 kg. The TSCC micro-controller and stepper driver support smooth
ramp-up and ramp-down of the rotational velocity to permit stable rotation without vibration. Nominal
rotational scan velocity is in the range of 5 to 10 deg./sec.
RF Electronics Enclosure
The radar RF electronics are mounted in an aluminum enclosure made of single aluminum slab 56mm
thick with a 6 mm thick central plate dividing the enclosure into two 22mm deep cavities. (see Figure
19). A gasket for the top and bottom plates makes the RF enclosure waterproof. The top and bottom
covers are 3 mm thick aluminum. A single 19-pin MIL C26582 connector is used for signals and power.
The microwave connectors are side mounted to facilitate connection of the RF cables. A single +24 volt
DC power line delivers power to the RF assembly. Voltages required by the RF assmbly are produced
on an internal power supply board called the DISTRI. Low-noise on-board linear voltage regulators
generate the voltages required by the chirp generator and up-converter assembly (CHUPA), IF
amplifier assembly (IMA), and Ku-Band Microwave assembly (KuMA). All power lines are adequately
bypassed and filtered to reduce interference.
RF and IF components are mounted on both the front and back plate of the RF electronics enclosure.
Thermally controlled fans in the enclosure circulate air to promote cooling and thermal stability.
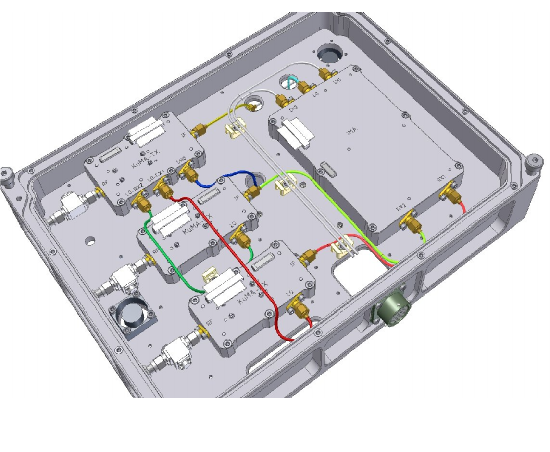
Figure 19: RF Electronics Assembly Interior showing
KuMA-TX and KuMA-RX modules along with the IMA.
The microwave up- and down converters and IMA are located on one side and the GPS receiver,
CHUPA and DISTRI on the opposite side of the enclosure.
Controller and Power Unit
The control and power unit (Figure 20) contains the power supplies that convert 100-240 VAC or 18-32
V DC to the voltages required by the radar. The power input connector can either have AC or DC input
power. An internal switch can be used to select the input power source. LED lights indicate that power
is available and that the computer communication has been established. Output connectors are provided
for the RF electronics and the azimuthal scanner. Additional ports for Ethernet and USB interfaces are
also available.
The instrument controller and power unit contains a 2.8 GHz Intel Core 2 Duo Processor T9600 on a
Kontron KTGM45 mini-ITX form-factor CPU board with 4 GB RAM and 500 GB SATA disk. An
ATMEL micro-controller switches the PC, GPS, and RF assembly power, and monitors temperatures
drives the stepper motor controller. The micro-controller is integrated on a single board along with the
power supplies for the Linux computer, azimuthal scanner, internal fans, and USRP2 SDR. Input to
the power supply is 100-240 VAC, or +18 to +32 VDC.
Two internal fans circulate the air inside the Pelican case and transfer heat to 2 external heat sinks, one
on the under-side of the Pelican case and the top cover. The internal fan speed is be regulated to
provide some control of the internal temperature. A goal for temperature regulation is that the internal
temperature is in the range of 0-45 C. The heat transfer out of the case to be about 4-5 W/deg. Given the
maximum electronics thermal load, the interior temperature of the case is 15-20 deg C higher than the
external temperature.

Figure 20: Computer+Power Assembly
4.3 Instrument Software
The instrument has different levels of software. The instrument controller is running Ubuntu Linux
10.0.4 (Long Term Stable) as Operating System. On top of that run different system services such as
openssh and lighttpd and tools that are provided through the Ubuntu software repository. Additional
instrument specific software is provided through the GAMMA gpri2 software repository. It covers the
GPRI-II instrument software, and the GPRI-II data postprocessing software. Not included is the
standard GAMMA software packages for InSAR data analysis.
5. User Interface
The GPRI-II instrument can be accessed through TCP/IP over the Ethernet connection provided at the
Instrument Controller, or by opening the Pelican case a computer display and keyboard/mouse can be
connected. The latter allows access in case the IP address of the instrument is unknown or any other
communication problem occurs.
5.1 Local Access
To have local access on the Instrument Controller the Pelican case needs to be opened and a computer
screen (VGA) and a Keyboard and Mouse (USB) can be attached. After booting up the instrument the
Ubuntu login screen shows up. The user to login as is gpri2. After loging in the standard gnome user
interface is shown. It allows full access on system settings, in particular also the network settings.
5.2 Graphical User Interface
The graphical user interface can be accessed with any recent (Javascript enabled) web browser by
requesting https://192.168.1.73/ (the IP needs to reflect your setting). After logging in as user gpri2,
you have access on system status information, instrument settings etc. The graphical user interface
gives you only access on the most important instrument functions. For full system access use the
terminal access or the local access.
5.3 Terminal Access
The instrument terminal can be accessed through secure shell (ssh). The export of the X11 windows is
supported. You can initiate this feature by logging in with the option -X (ssh -X
gpri2@192.168.1.73). The terminal access gives you full access on the system.
5.4 Software Reference
chupa_status.py
chupa_test.py
*** set DDS chirp parameters and transmit ***
Usage: chupa_test.py <f_start> <f_end> <steps>'
f_start chirp minimum (range 100e6 to 300e6)
f_end chirp maximum frequency (range 100e6 to 300e6)
steps number of frequency steps (3125, 6250, 12500, 25000)
gpri2_capture.py
*** GPRI-II data acquisition program v1.2 4-Nov-2010 ***
Usage: gpri2_capture.py: [options] [output_filename]
Options:
-h, --help show this help message and exit
-e INTERFACE, --interface=INTERFACE
use specified Ethernet interface [default=eth0]
-m MAC_ADDR, --mac-addr=MAC_ADDR
use USRP2 at specified MAC address [default=None]
-f FREQ, --freq=FREQ set frequency to FREQ
-d DECIM, --decim=DECIM
set fgpa decimation rate to DECIM [default=16]
-g GAIN, --gain=GAIN set USRP2 gain in dB (default is midpoint)
-K SCALE, --scale=SCALE
set rx input scaling of usrp2, scale_iq (default is
1024)
-S SHIFT, --shift=SHIFT
set rx output shifting of usrp2, shift_iq (default is
0). Allowed values 0, 1, 2 and 3
--lo-offset=LO_OFFSET
set daughterboard LO offset to OFFSET [default=hw
default]
--rx-bufsize=RX_BUFSIZE
set rx buffer size to RX_BUFSIZE [default=0]
-N NSAMPLES, --nsamples=NSAMPLES
number of samples to capture [default=+inf]
-T CAPTURE_DURATION, --capture-duration=CAPTURE_DURATION
number of seconds to capture [default=+inf]
-o OUTPUT_FILENAME, --output-filename=OUTPUT_FILENAME
output filename for captured samples [default=None]
-s, --output-shorts output interleaved shorts instead of complex floats
-M, --lock-masterclock-to-SMA
lock usrp2 100 Mhz master clock to external 10 Mhz
reference clock on SMA input
-P, --sync-to-first-1PPS
reset the usrp2 samplecounter on the first PPS
received on the PPS SMA input
-j RX_START_TIMESTAMP, --rx-start-timestamp=RX_START_TIMESTAMP
set start_at time of first RX packet in usrp2 100 Mhz
clockpulses (long) [default=-1 start immediately]
-k RX_START_TIME_SECONDS, --rx-start-time-seconds=RX_START_TIME_SECONDS
set start_at time of first RX packet in seconds
(float) [default=-1.0 start immediately]
-C EXTERNAL_PROGRAM, --external-program=EXTERNAL_PROGRAM
give a programname to start this as external program
just before streaming starts (string) [default=None do
not start an external program]
-v, --verbose verbose output
-p GPRI_PROFILE, --gpri-profile=GPRI_PROFILE
GPRI-II acquisition profile [default=None]
gpri2_capture_step.py
*** GPRI-II data acquisition program v1.0 20100928 ***
Usage: gpri2_capture_step.py: [options] [output_filename]
Options:
-h, --help show this help message and exit
-e INTERFACE, --interface=INTERFACE
use specified Ethernet interface [default=eth0]
-m MAC_ADDR, --mac-addr=MAC_ADDR
use USRP2 at specified MAC address [default=None]
-f FREQ, --freq=FREQ set frequency to FREQ
-d DECIM, --decim=DECIM
set fgpa decimation rate to DECIM [default=16]
-g GAIN, --gain=GAIN set USRP2 gain in dB (default is midpoint)
-K SCALE, --scale=SCALE
set rx input scaling of usrp2, scale_iq (default is
1024)
-S SHIFT, --shift=SHIFT
set rx output shifting of usrp2, shift_iq (default is
0). Allowed values 0, 1, 2 and 3
--lo-offset=LO_OFFSET
set daughterboard LO offset to OFFSET [default=hw
default]
--rx-bufsize=RX_BUFSIZE
set rx buffer size to RX_BUFSIZE [default=0]
-N NSAMPLES, --nsamples=NSAMPLES
number of samples to capture [default=+inf]
-T CAPTURE_DURATION, --capture-duration=CAPTURE_DURATION
number of seconds to capture [default=+inf]
-o OUTPUT_FILENAME, --output-filename=OUTPUT_FILENAME
output filename for captured samples [default=None]
-s, --output-shorts output interleaved shorts instead of complex floats
-M, --lock-masterclock-to-SMA
lock usrp2 100 Mhz master clock to external 10 Mhz
reference clock on SMA input
-P, --sync-to-first-1PPS
reset the usrp2 samplecounter on the first PPS
received on the PPS SMA input
-j RX_START_TIMESTAMP, --rx-start-timestamp=RX_START_TIMESTAMP
set start_at time of first RX packet in usrp2 100 Mhz
clockpulses (long) [default=-1 start immediately]
-k RX_START_TIME_SECONDS, --rx-start-time-seconds=RX_START_TIME_SECONDS
set start_at time of first RX packet in seconds
(float) [default=-1.0 start immediately]
-C EXTERNAL_PROGRAM, --external-program=EXTERNAL_PROGRAM
give a programname to start this as external program
just before streaming starts (string) [default=None do
not start an external program]
-v, --verbose verbose output
-p GPRI_PROFILE, --gpri-profile=GPRI_PROFILE
GPRI-II acquisition profile [default=None]
gpri2_plot.py
Usage: gpri2_plot.py: [options] profile raw_data
Takes a GPRI2 echo data and displays the two channels and the FFT. The script
plots a certain block of data at a time, specified on the command line as -B
or --block. This value defaults to 1000. The start position in the file can be
set by specifying -s or --start and defaults to 0 (the start of the file). By
default, the system assumes a sample rate of 1, so in time, each sample is
plotted versus the sample number. To set a true time and frequency axis, set
the sample rate (-R or --sample-rate) to the sample rate used when capturing
the samples.
Options:
-h, --help show this help message and exit
-d DATA_TYPE, --data-type=DATA_TYPE
Specify the data type (float32, int16 [default=int16]
-B BLOCK, --block=BLOCK
Specify the record size in samples [default=1000]
-o OFFSET, --offset=OFFSET
Specify offset to starting record in the file
[default=0]
-R SAMPLE_RATE, --sample-rate=SAMPLE_RATE
Set the sampler rate of the data [default=6250000.0]
-z ZERO, --zero=ZERO number of samples to set to 0 at the start of the
echo: [default=0]
-s STRIDE, --stride=STRIDE
spacing between successive display records:
[default=1]
gpri2_proc.py
Usage: gpri2_proc.py: raw_data raw_par slc1 slc2 options
Takes a GPRI2 echo data and process to SLCs for channel-1 and channel-2
Options:
--help show this help message and exit
--data-type=DATA_TYPE
Specify the data type (float32, int16 [default=int16]
-z ZERO, --zero=ZERO number of samples to set to 0 at the start of the
echo: [default=0]
-d DEC, --decim=DEC decimation factor [default=1]
-R RMAX, --rmax=RMAX maximum slant range (meters), default is 0.9 of the
aliasing slant range
-h HEADING, --heading=HEADING
heading of radar boresight clockwise from North (deg.)
-k KIND, --kind=KIND Specify kind of interpolation mode (none','linear',
'nearest', 'zero', 'slinear', 'quardratic',
'cubic')[default=none]:
gpri2_profile_proc.py
Usage: gpri2_profile_proc.py: profile raw_data slc1 slc2 options
Takes a GPRI2 echo data and process to SLCs for channel-1 and channel-2
Options:
-h, --help show this help message and exit
-d DATA_TYPE, --data-type=DATA_TYPE
Specify the data type (float32, int16
[default=float32]
-z ZERO, --zero=ZERO number of samples to set to 0 at the start of the
echo: [default=0]
gps_off.py
*** Place GPRI2 into standby mode, turn off USPR2 and DISTRI ***
TSCC Software version: SW V1.00
TSCC Voltages: ['U1 23.7']
TSCC Temperature: ['T1 36.6']
RTC get time: RTC 2010-11-12 22:59:15
GPS off: OK
home_run.py
move_abs.py
*** Move antenna positioner to an absolute angle
Usage: move_abs.py <angle> [rate]
angle relative angle (deg.)
rate rotational velocity (deg/s 0.5 --> 10., default: 10.)
move_rel.py
Usage: move_rel.py <angle> [rate]
angle relative angle (deg.)
rate rotational velocity (deg/s 0.5 --> 10., default: 10.)
tscc_powerup.py
tscc_standby.py
tscc_status.py
tscc_test.py
tx_off.py
tx_on.py
5.5 File Formats
Meta data and measurement data are kept separate. The meta data is stored in text files in a “keyword :
value” format. The data itself is stored as plain binary without headers.
5.5.1 Measurement Profiles
The measurement profile dataset, contains the instrument and observation geometry parameters used
for a given observation. The format is self describing, an example is shown below:
RF_center_freq: 1.720000e+10
IMA_atten_dB: 38
CHP_freq_min: 100.0e6
CHP_freq_max: 300.0e6
CHP_num_samp: 12500
STP_antenna_start: 90
STP_antenna_end: 180.0
STP_gear_ratio: 72
STP_rotation_speed: 10.0
TX_power: on
ADC_capture_time: 0.0
ADC_sample_rate: 6.25000e+06
antenna_elevation: 10
5.5.2 Raw data
The raw data is stored in a binary file of integers in little endian format. The meta data is stored in the
raw_par text file:
time_start: 2010-11-05 10:57:06.025627
geographic_coordinates: 46.6809900000, 7.6398266667, 0.0000
RF_center_freq: 1.72000000000e+10
RF_freq_min: 1.71000578460e+10
RF_freq_max: 1.72999421541e+10
RF_chirp_rate: 9.99425537884e+10
CHP_num_samp: 12500
IMA_atten_dB: 38
ADC_capture_time: 9.50679
ADC_sample_rate: 6.25000e+06
STP_antenna_start: 90.00000
STP_antenna_end: 180.00000
STP_rotation_speed: 10.00000
STP_gear_ratio: 72
antenna_elevation: 10.00000
CHP_temperature: 23.500
TSC_temperature: 28.400
5.5.3 SLC (single look complex) data
The detected radar data is store in the SLF file with accompanying slc_par. The data type is indicated in
the slc_par text file. In general the data is in big endian format to be compliant with the standard byte
order in the GAMMA Software. The slc file format is compatible with the GAMMA Software:
Gamma Interferometric SAR Processor (ISP) - Image Parameter File
title: 2010-11-05 10:57:06.025627 CH1 upper
sensor: GPRI 2.0
date: 2010 11 05
start_time: 39426.500665 s
center_time: 39430.776007 s
end_time: 39435.051349 s
azimuth_line_time: 1.008147e-01 s
line_header_size: 0
range_samples: 2667
azimuth_lines: 856
range_looks: 1
azimuth_looks: 1
image_format: FCOMPLEX
image_geometry: SLANT_RANGE
range_scale_factor: 1.0
azimuth_scale_factor: 1.0
center_latitude: 0.00000000 degrees
center_longitude: 0.00000000 degrees
heading: 0.000000 degrees
range_pixel_spacing: 0.749912 m
azimuth_pixel_spacing: 0.000000 m
near_range_slc: 0.000000 m
center_range_slc: 1000.000000 m
far_range_slc: 2000.000000 m
first_slant_range_polynomial: 0.0 0.0 0.0 0.0 0.0 0.0
center_slant_range_polynomial: 0.0 0.0 0.0 0.0 0.0 0.0
last_slant_range_polynomial: 0.0 0.0 0.0 0.0 0.0 0.0
incidence_angle: 0.0 degrees
azimuth_deskew: OFF
azimuth_angle: 0.0 degrees
radar_frequency: 1.720000e+10 Hz
adc_sampling_rate: 1.998851e+08 Hz
chirp_bandwidth: 1.998843e+08 Hz
prf: 9.919192 Hz
azimuth_proc_bandwidth: 0.0 Hz
doppler_polynomial: 0.0 0.0 0.0 0.0
doppler_poly_dot: 0.0 0.0 0.0 0.0
doppler_poly_ddot: 0.0 0.0 0.0 0.0
receiver_gain: 22.000 dB
calibration_gain: 0.000 dB
sar_to_earth_center: 0.0000 m
earth_radius_below_sensor: 0.0000 m
earth_semi_major_axis: 6378137.0000 m
earth_semi_minor_axis: 6356752.3141 m
number_of_state_vectors: 0
GPRI_az_start_angle: 93.33750 degrees
GPRI_az_angle_step: 0.10081 degrees
GPRI_ant_elev_angle: 10.00000 degrees
GPRI_ref_north: 46.68099000
GPRI_ref_east: 7.63982667
GPRI_ref_alt: 0.0000 m
GPRI_scan_heading: 0.00000 degrees
GPRI_tx_coord: 0.2218 0.0000 -0.3694 m m m
GPRI_rx1_coord: 0.2218 0.0000 -0.0194 m m m
GPRI_rx2_coord: 0.2218 0.0000 0.2306 m m m
GPRI_tower_roll: 0.00000 degrees
GPRI_tower_pitch: 0.00000 degrees
GPRI_phase_offset: 0.00000 radians
6. Instrument Specifications
The GPRI-II instrument specifications are as follows:
Frequency Range 17.1 to 17.3 GHz
Antenna Pattern 0.5 deg 3 dB azimuth beamwidth
35 deg. 3 dB beamwidth Elevation
Peak sidelobes: -10 dB sidelobes (1-way)
Radar type FM-CW, linear FM chirps between 0.2 and 16
milliseconds
Radar operational range 50 m → 6 km
System Clock 100 MHz low phase-noise temperature-controlled
crystal oscillator TXCO (Jackson Firefly II)
Transmit Power at the antenna <100 mW (+20 dBm)
Chirp Bandwidth 200 MHz maximum (programmable)
Range resolution 0.9 meters with 200 MHz chirp and Kaiser
window
Azimuth resolution 8m @ 1 km, proportional to slant range
Analog to Digital conversion 14-bits, dual channel, 6.25 MHz sample clock
Estimated Power Consumption Max: 65 W, 110 – 220VAC , or 24 VDC
Computer type and OS Kontron KTGM45/mITX Computer, Intel T9600
Dual-Core CPU, 4 GB RAM, Linux OS.
Azimuth Scan time 20 sec for a 120 deg sweep
Radar Mass Tower ~4 kg, RF electronics ~4 kg, scanner 10 kg,
Controller/Power ~14 kg, Antennas ~1.5 kg each.
Radar Dimensions Tower: 80x28x28 cm
RF assembly: ~ 30x26x6cm
Controller/Power: ~52x42x30cm
Antennas: 210x12.5x12.5 cm
7. References
[1] Werner C., T. Strozzi, A. Wiesmann, and U. Wegmüller, "GAMMA’s Portable Radar
Interferometer”, Procs. IAG – FIG Symposium Lisbon, Portugal, 12 – 15 May 2008.
[2] Wiesmann A., C. Werner, T. Strozzi, and U. Wegmüller, "Measuring deformation and topography
with a portable Radar interferometer”, Procs. IAG – FIG Symposium Lisbon, Portugal, 12 – 15
May 2008.
8. Appendix A
Measurement Protocol
Campaign Name
Customer
Site Name and Coordinates
Date
Weather
Antenna elevation
Tripod legs etc.
GPS Position
Power Source
Chirp
Gain
Start Azimuth
Stop Azimuth
Start Time / End Time
Dataset Names
Pictures
Remarks