GLB Electronics SX150EN11C-G Synthesized Network Radio Data Systems, Model SX15 User Manual SNRDS99C
GLB Electronics Inc Synthesized Network Radio Data Systems, Model SX15 SNRDS99C
UserManual.wiki
>
GLB Electronics
>
SX150EN11C G User Manual
Synthesized Netlink Radio Data System Operating Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

![GLB Electronics, Inc. SNRDS Manual4-4GLB Synthesized Netlink Radio Data System01/04/00for it to move down a line (scrolling the screen up if necessary) when an LF is received. On some terminals the LFis assumed when a CR is received, thus reducing the number of characters that must be sent. In the latter case ifthe sender uses both CR and LF at the end of the line, lines become double spaced. In Chat mode both CR and LFare echoed to the terminal at the end of each line, even though only CR is transmitted over the radio link. If theterminal shows the message double-spaced, the LF may be suppressed using the MF command (Section 7.5.). Chatmode example: to send “Hi there.”, just type“Hi there.”<CR><LF>4.3.3. Chat Mode special charactersSpecial characters are used to edit the line and as commands. These include BACKSPACE to correct errors, andothers as follows:^B send a connect request^C initiate a disconnect^D enable receive display without transmitting^R display one frame of received data^T retype the contents of the buffer^U delete current line of input^X delete contents of bufferESC exit Chat mode \ Place any next character into the messageSuppose a line has been typed but it isn’t to be sent until the other station sends its next packet (to maintain thecontinuity of the conversation). ^D re-enables the receive display without sending the typed message; when thenext message has been received the typed message is automatically returned.A received message may be displayed during typing by using ^R. After the incoming message has been displayedthe current line may be continued. If no new characters have been typed for about 40 seconds, the controller sendswhatever is in the buffer and the receive display is enabled. This time value may be changed with the OIcommand. Time-out avoids accidentally blocking incoming information forever if LF is not used.]Once typed information has been acked by the other station, it’s automatically deleted from the buffer. Each timethis occurs a BELL character is sent to the terminal (even if more info is being typed) to indicate that the lastmessage was acked.The ESC command may be used to exit from Chat mode to Command mode at any time. Manual re-entry to Chatmode is made by typing the MS command. Normally entry to Chat mode is automatic when a connection isestablished and exit occurs when the connection is terminated (see ML command).Any of the reserved control characters may be sent, such as ESC by preceding them with the ‘\’ character. Thesequence “\”ESC places the ESC into the message instead of exiting Chat mode, as ESC by itself does. It followsthat in order to send an actual ‘\’ character it’s necessary to type “\\”. The first says “place the next character intothe buffer”, and the next character is ‘\’. See OR.If there’s any information in the buffer when Chat mode is entered, it’s displayed as if freshly typed. Whenadditional info is typed it appends to the old info, but the old info may be deleted or edited as desired, using theavailable control character controls.](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-28.png)
![SNRDS Manual GLB Electronics, IncGLB Synthesized Netlink Radio Data System 4-1701/04/00:“BS”store the message“K”delete it from transmit bufferThe message may be edited by recalling it into the transmit buffer with BR. The contents of the transmit buffermay be edited either with the “I” command or by entering Chat mode temporarily (MS). Either of these commandsis terminated with ESC.4.13. Beacon ControlBeacon mode is activated by setting a time period with the BT command (Beacon Timer), where each countrepresents about 10 seconds. At the maximum value of 255 the repeat time is about 30 minutes, but the time valuesautomatically increase with channel activity; on a busy channel it sends less frequently.Beacon mode is terminated by setting the time value to zero. The beacon stops when connected; it resumes upondisconnect. The beacon time value is also shown on the status display line as the last number.A useful function of the Beacon mode is to identify active digipeaters by having them send a periodic beaconmessage. The message may include the digipeater address. For a digipeater operating in the unattended mode,proceed as follows: connect to the digipeater, then set the destination address fields for the beacon using “BD” forthe destination and “BV” if beacons are to be sent via a digipeater path. Use BS to enter a beacon message (seesection 4.9.2. Remote commands, special cases]. For example to have the beacon addressed to “QST” connect tothe digipeater and send “BDQST 0<CR>”. Then send a timing value “BTn<CR>” (where n is the timing value).The beacon message may be examined by sending “BR<CR>”. If the other station isn’t in unattended mode theabove commands may be sent by preceding them with “AQ” (Section 4.8. Remote Commands).4.13.1. Alternate Beacon MessageFirmware can be supplied with a special message permanently programmed into the EPROM. Beacons are sentwith this message by enabling it with the BA command.4.14. Station filtering systemAn important capability is a powerful multiple-function address filtering system, henceforth referred to as the“filterlist”.Up to 10 addresses are permitted (other numbers available as a software option), each of them assigned to any (orall) of five filters. Each filter can be designated to operate in one of two modes of operation called “REJECT” and“SELECT”. Please be careful to distinguish between “filter” and “mode”. The 5th filter is used to direct the flow ofdata to either serial port.4.14.1. Filters and ModesA FILTER is one of the five processes that can apply to each address. Each filter has two MODES of operation. Inthe commands the five filters are referenced with characters as follows:CharacterFilter Function of filterMMONITOR filters the display by originating stationVVIA filters the display by digipeaterDDIGIPEAT filters stations to be digipeated](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-41.png)
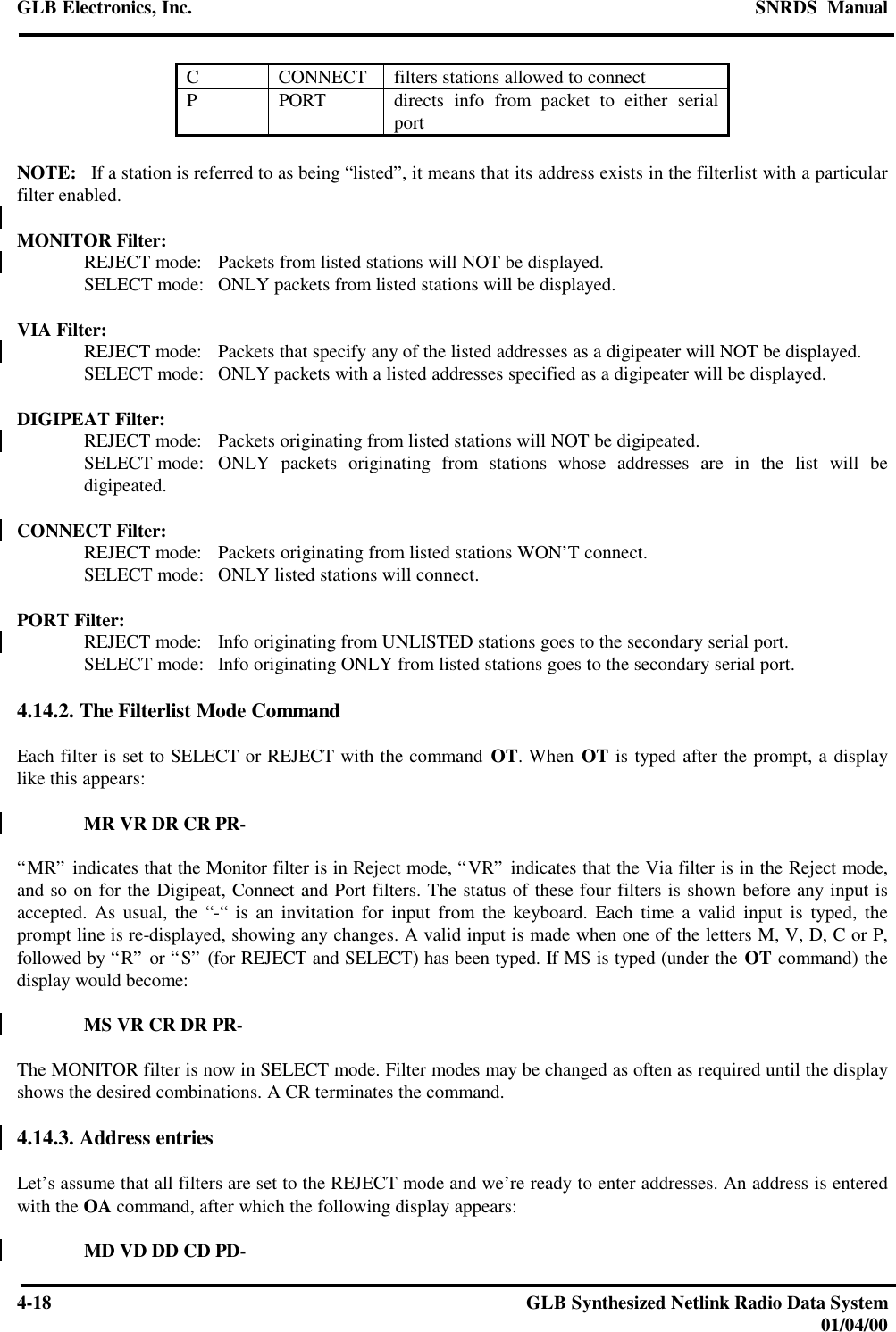
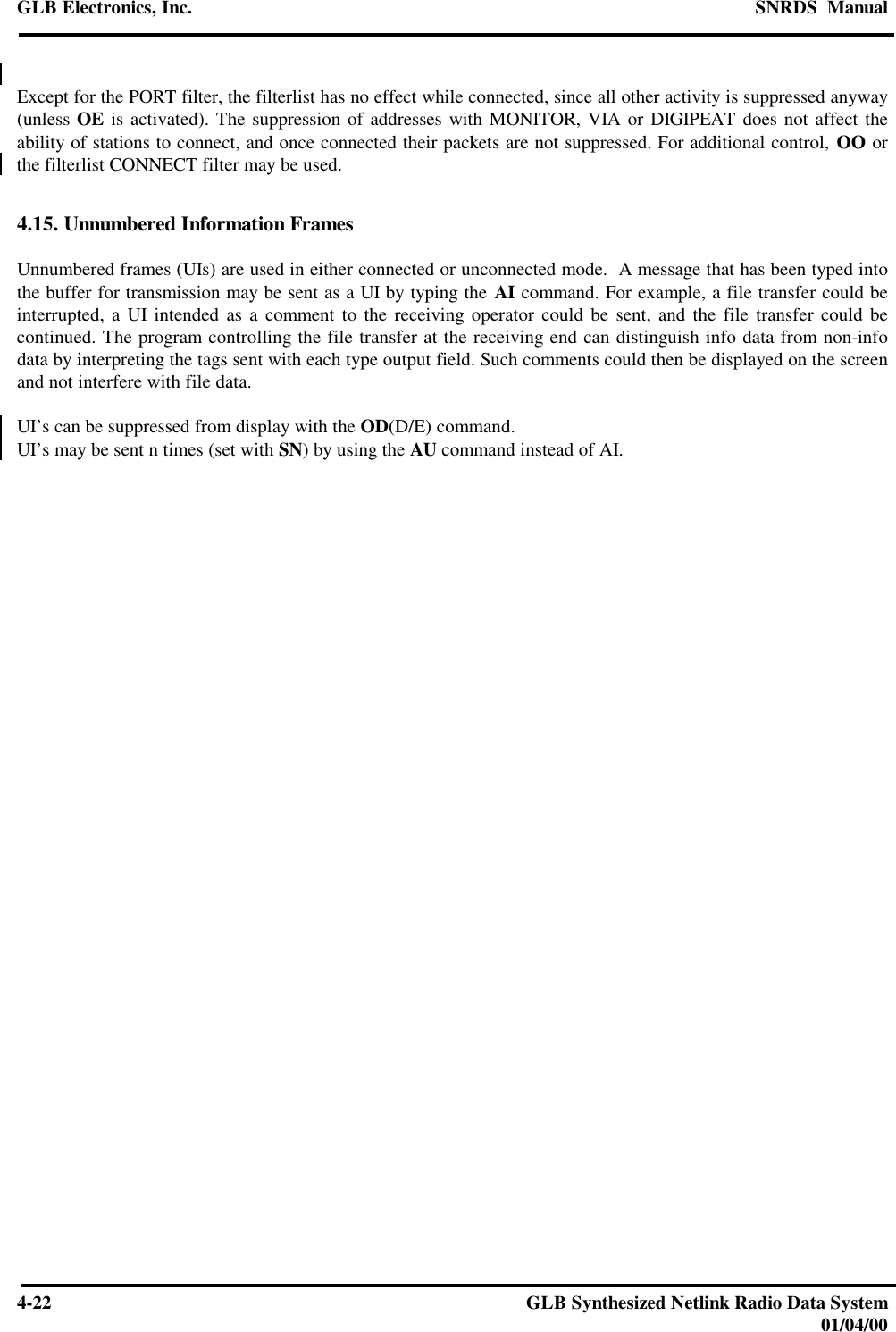
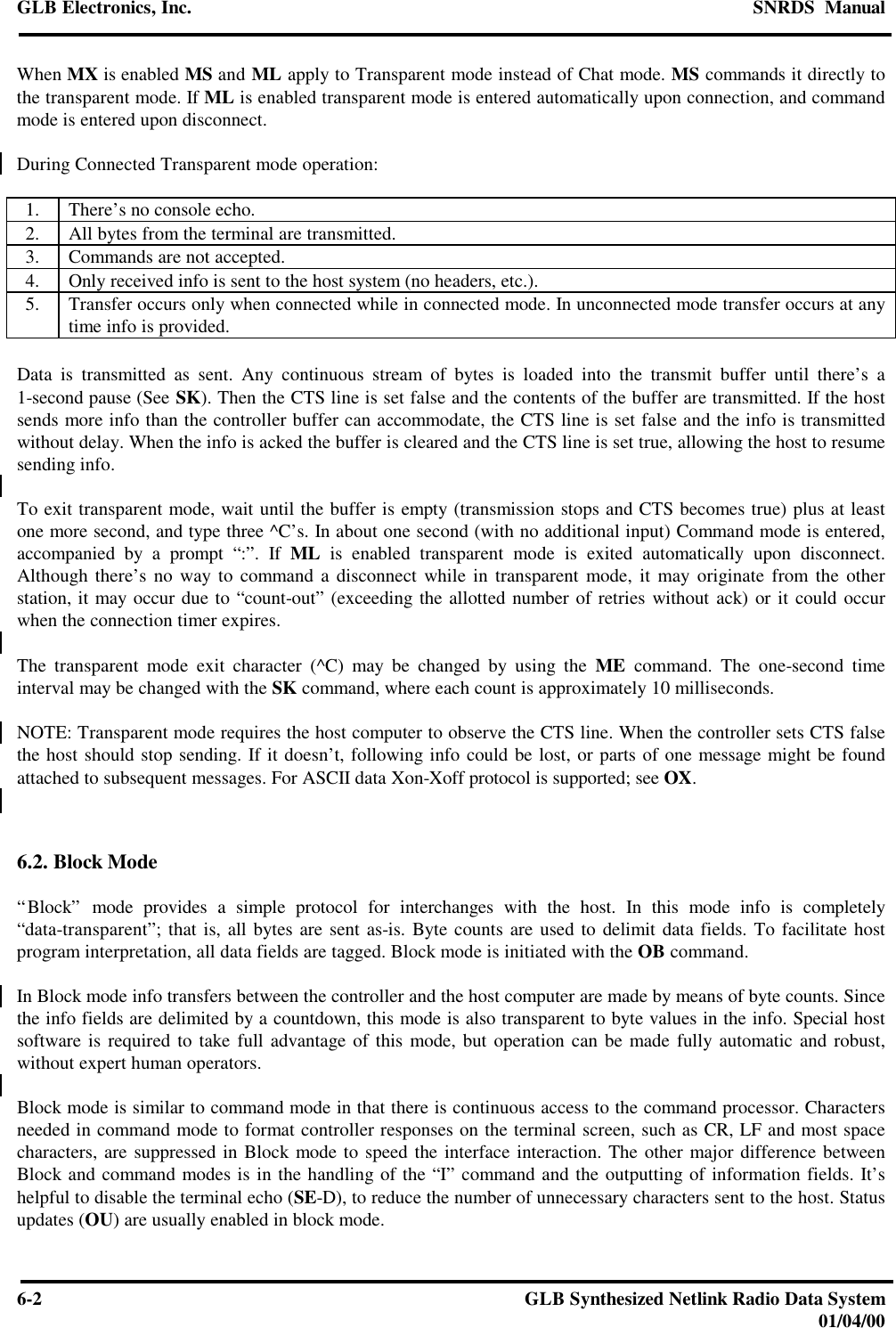

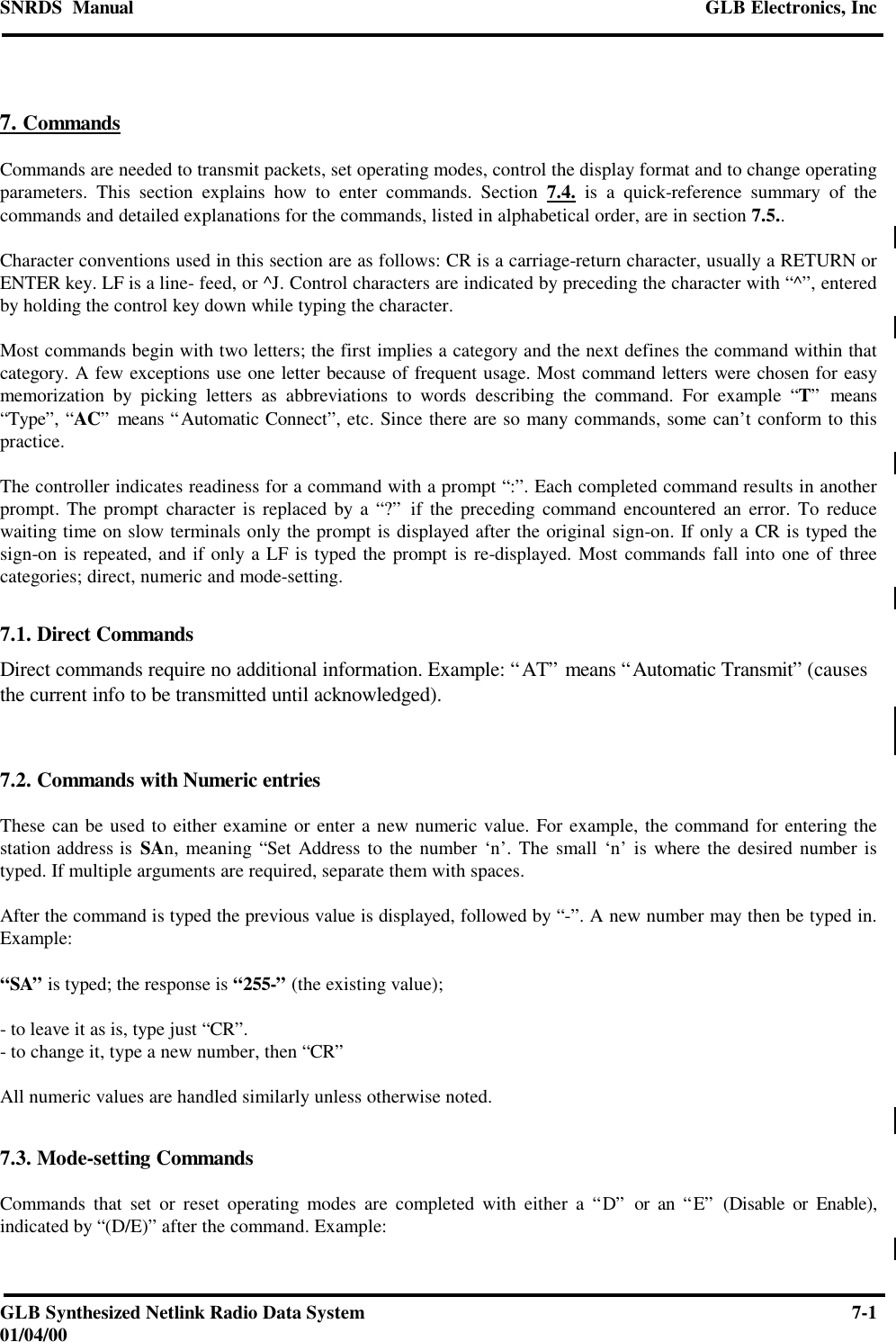
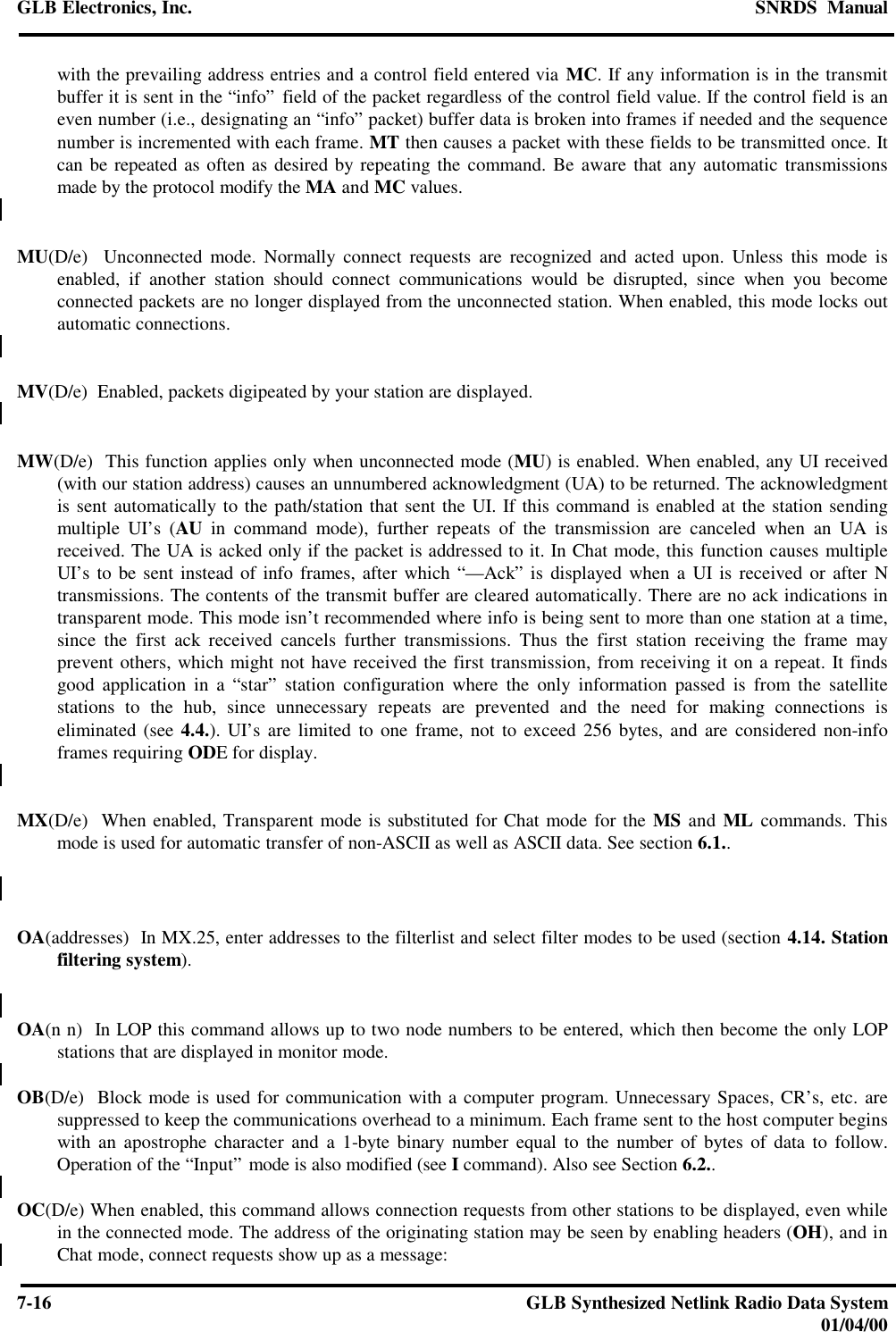
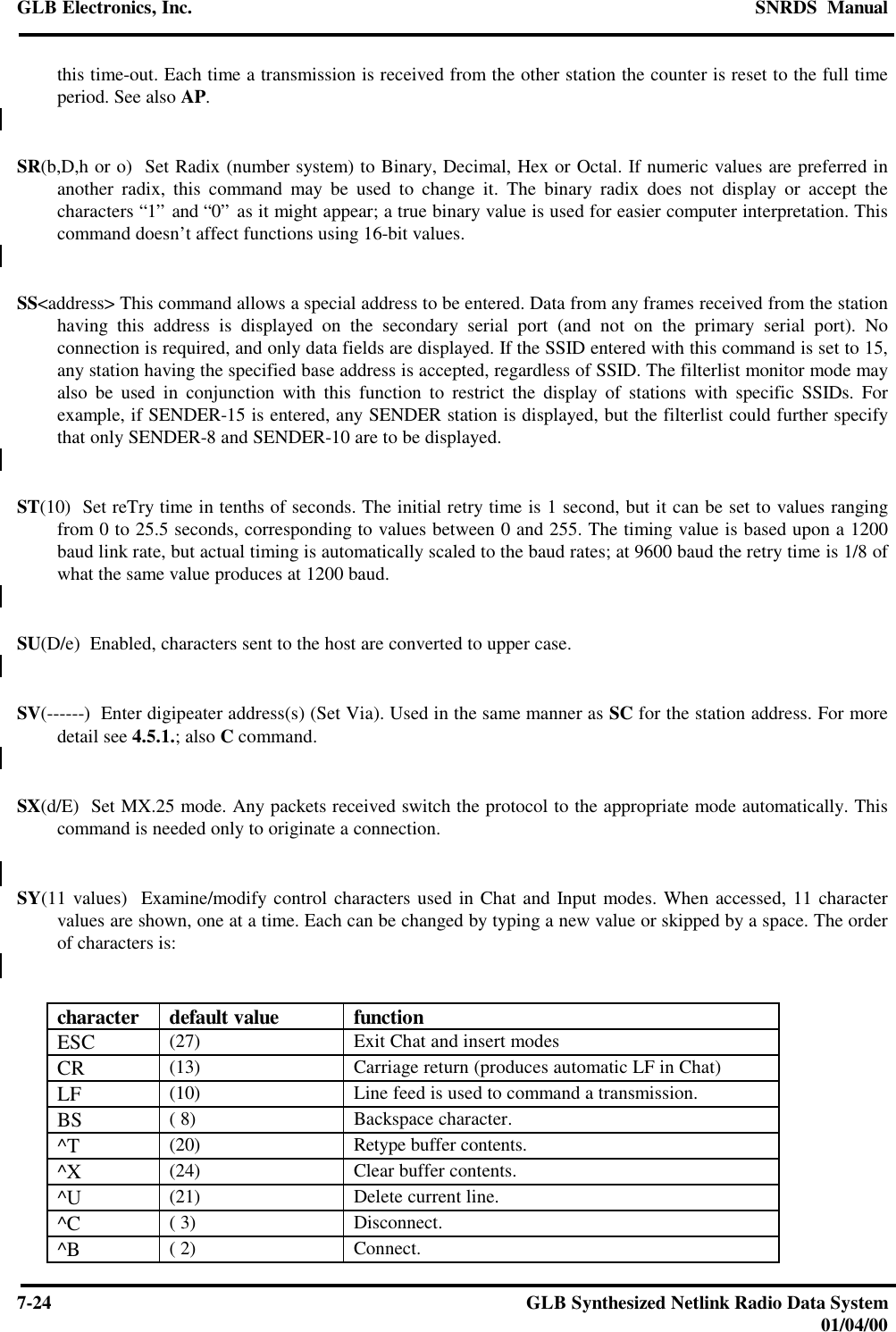
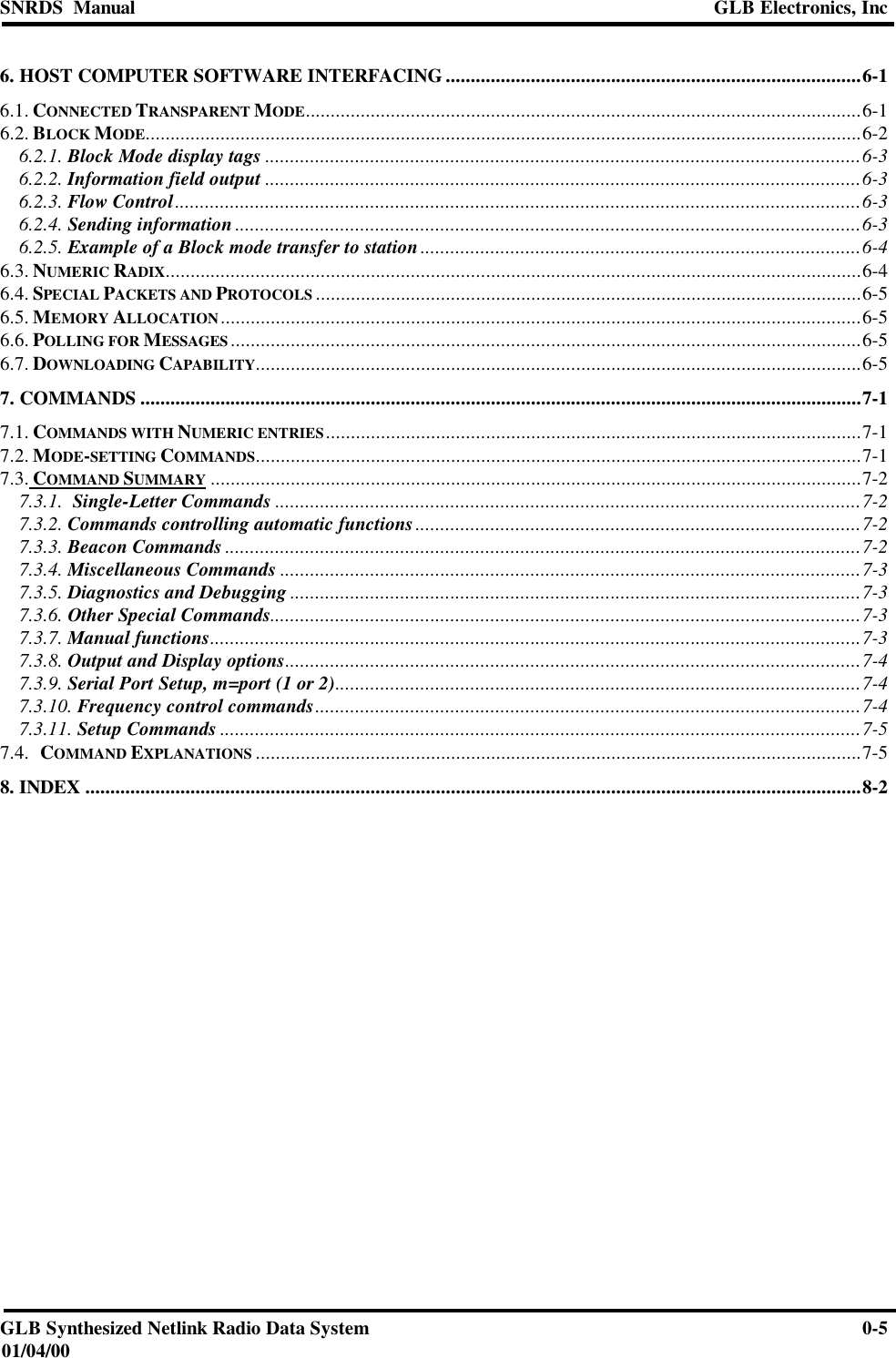
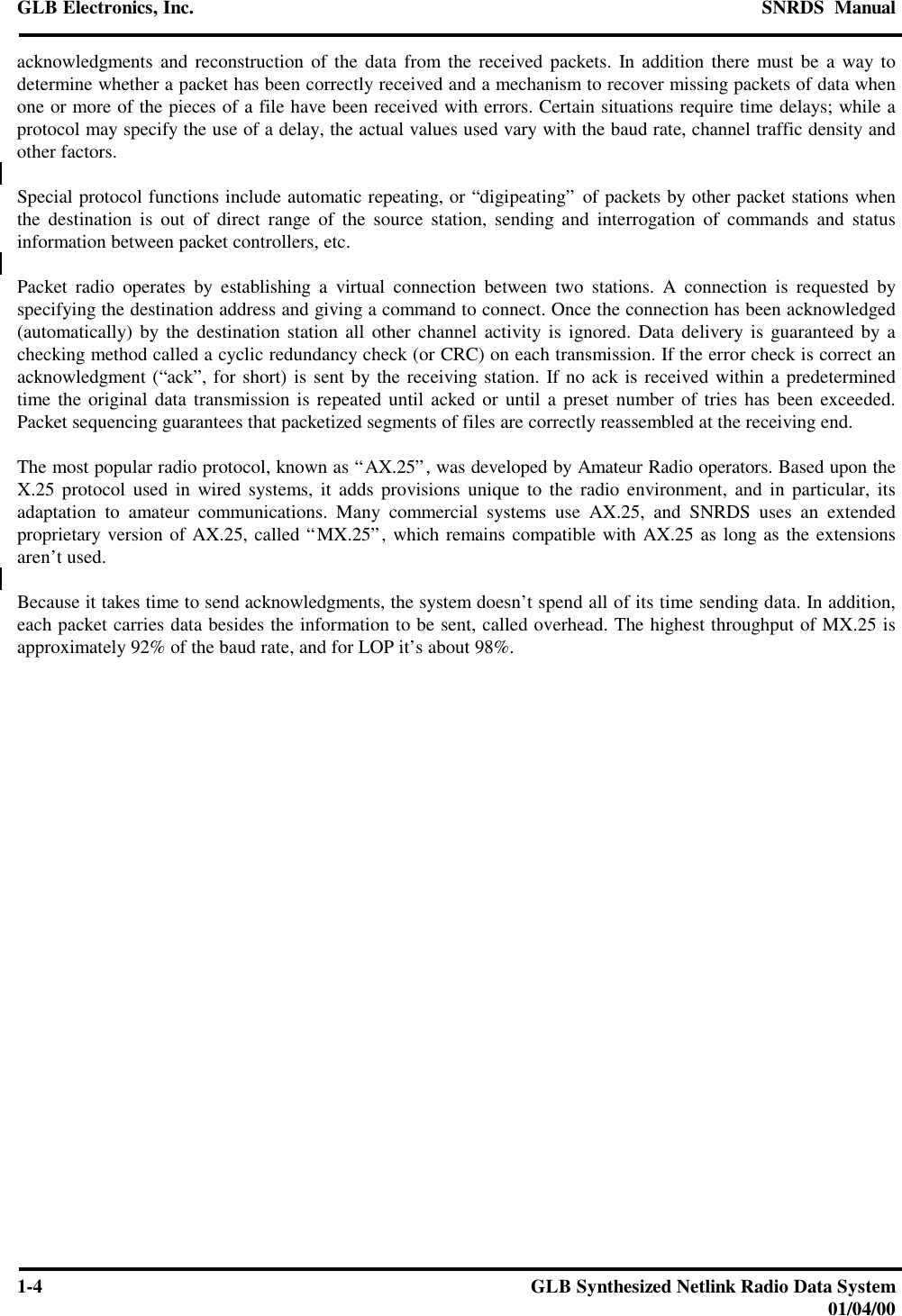
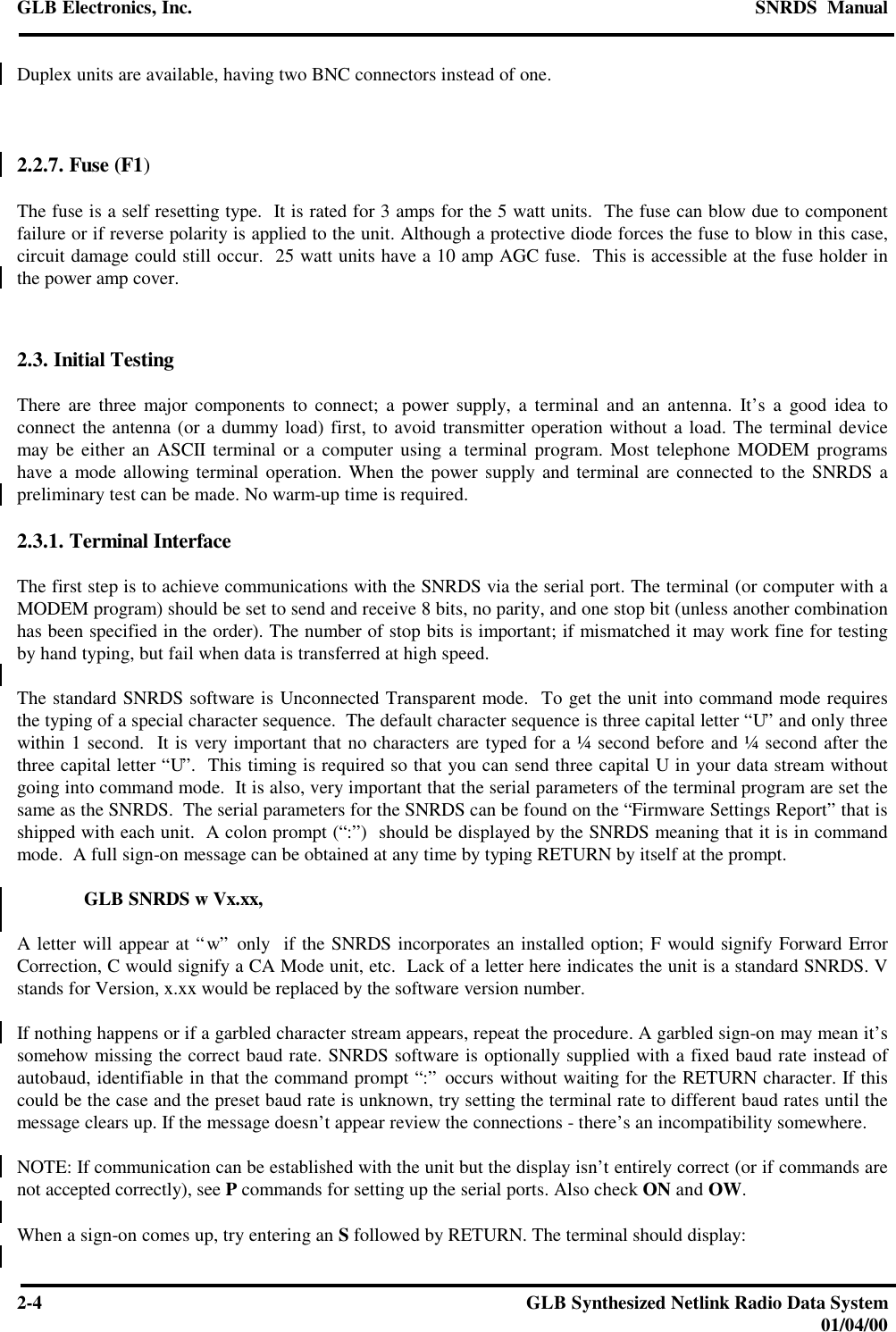
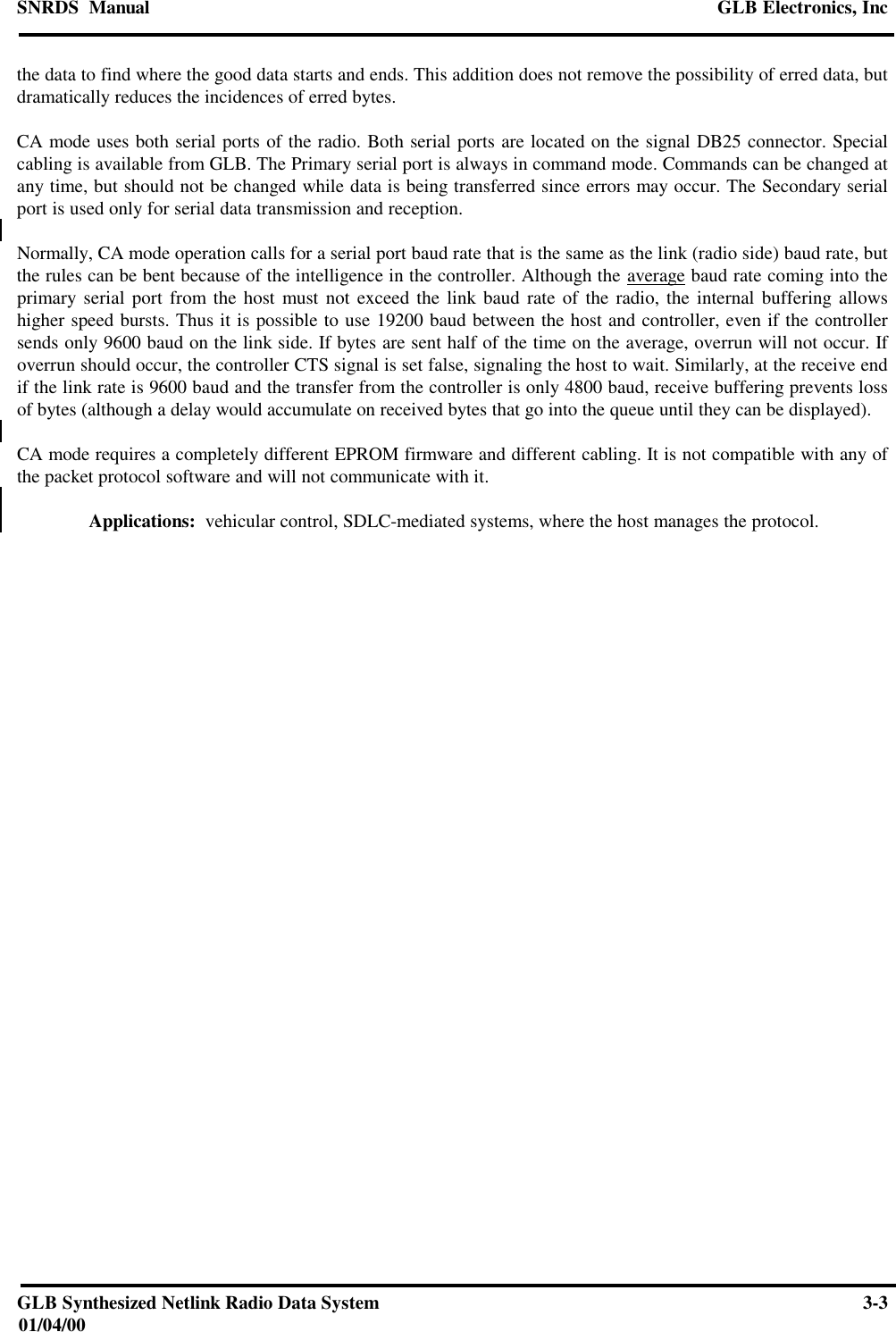
![GLB Electronics, Inc. SNRDS Manual7-2GLB Synthesized Netlink Radio Data System01/04/00The OH command controls the display of headers, listed as “OH(D/E)”. Type OH; the display continues with“D-“ indicating that the function is currently disabled.- to leave the function disabled, type just “CR” or space.- to enable the function, type “E”.Address entry is covered in Section 4.1.Commands not requiring a “CR” may be concatenated (run together).7.4. Command SummaryThis section is a command quick-reference. Commands are listed roughly in categories, and alpha-numericallywithin each category.7.4.1. Single-Letter Commands C[ONNECT]... Connect request (combined SD, [SV] and AC). D<CR> Disconnect (same as AD). I(ab)(data) Input (ab) bytes of data to send (Block mode). I(data)ESC Input all bytes up to ESC (Command mode). K“Kill” contents of transmit buffer. T“Type” transmitter buffer contents. V[IA]... used with “C” to enter digipeater addresses.7.4.2. Commands controlling automatic functions AA send info Acknowledgment (after an “AW”). AC initiate a Connect request to another station. AD send a Disconnect request. AH stop repeating an unacknowledged packet (Halt). AI send unnumbered Info packet AL(D/E) Suppress duplicate frames in LOP. AP(D/E) makes a connection to Permanent. AQ Used to send a remote command to another station. AR Resume sending (after a Halt). AS(D/E) Standby mode (no receive or transmit). AT Transmit current packet until acknowledged. AU Send Unnumbered info packet N times. AW send a “Wait” acknowledge (RNR) to control data flow. AX abort current transmission.7.4.3. Beacon Commands BA Alternate beacon message BC put beacon addresses into destination fields. BD(address) enter a beacon Destination address. BK “Kill” beacon message. BR Recall a beacon message. BS Store a beacon message. BT set Time value for automatic beacon. BV(addresses) enter beacon digipeater addresses (Via).](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-56.png)
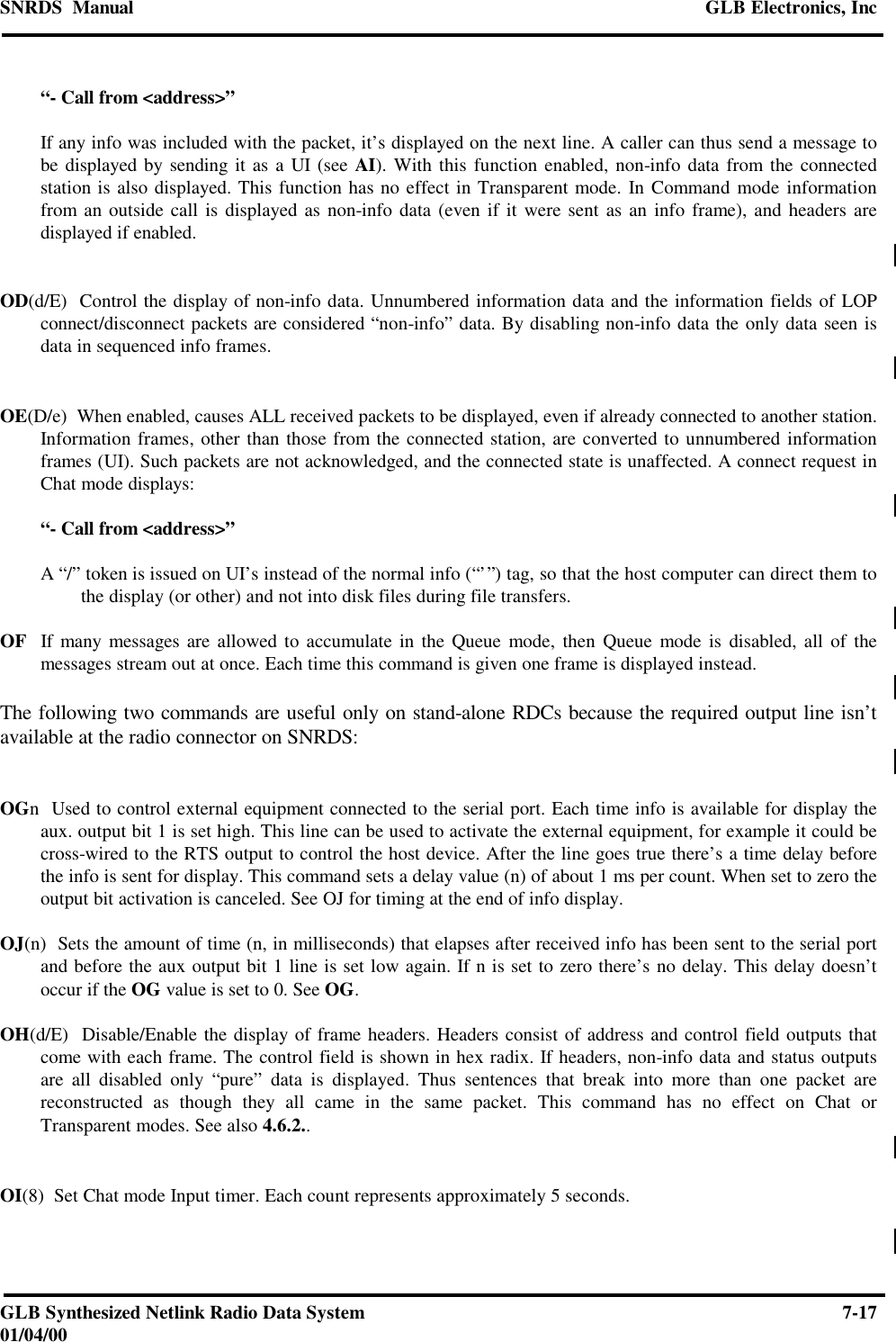
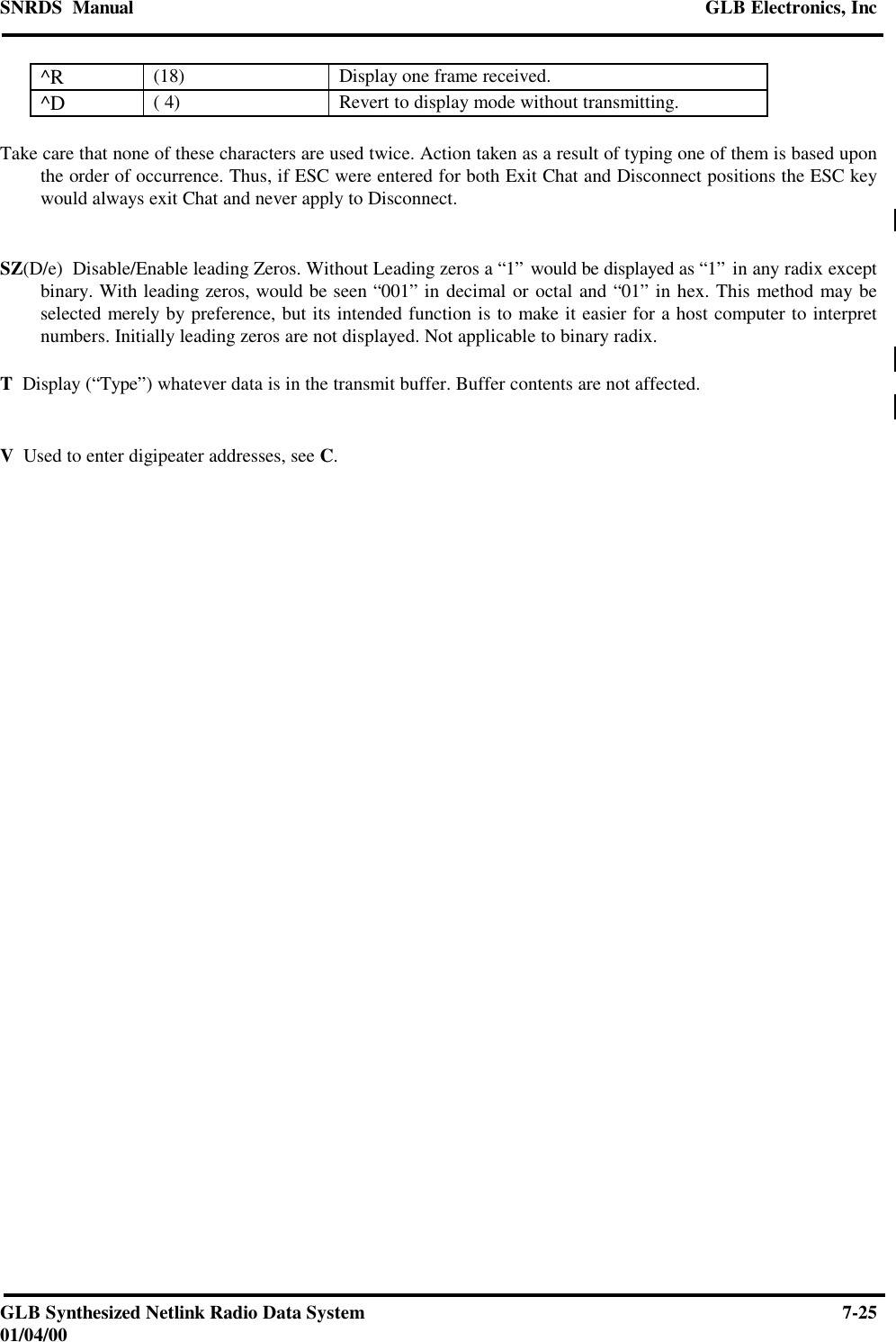
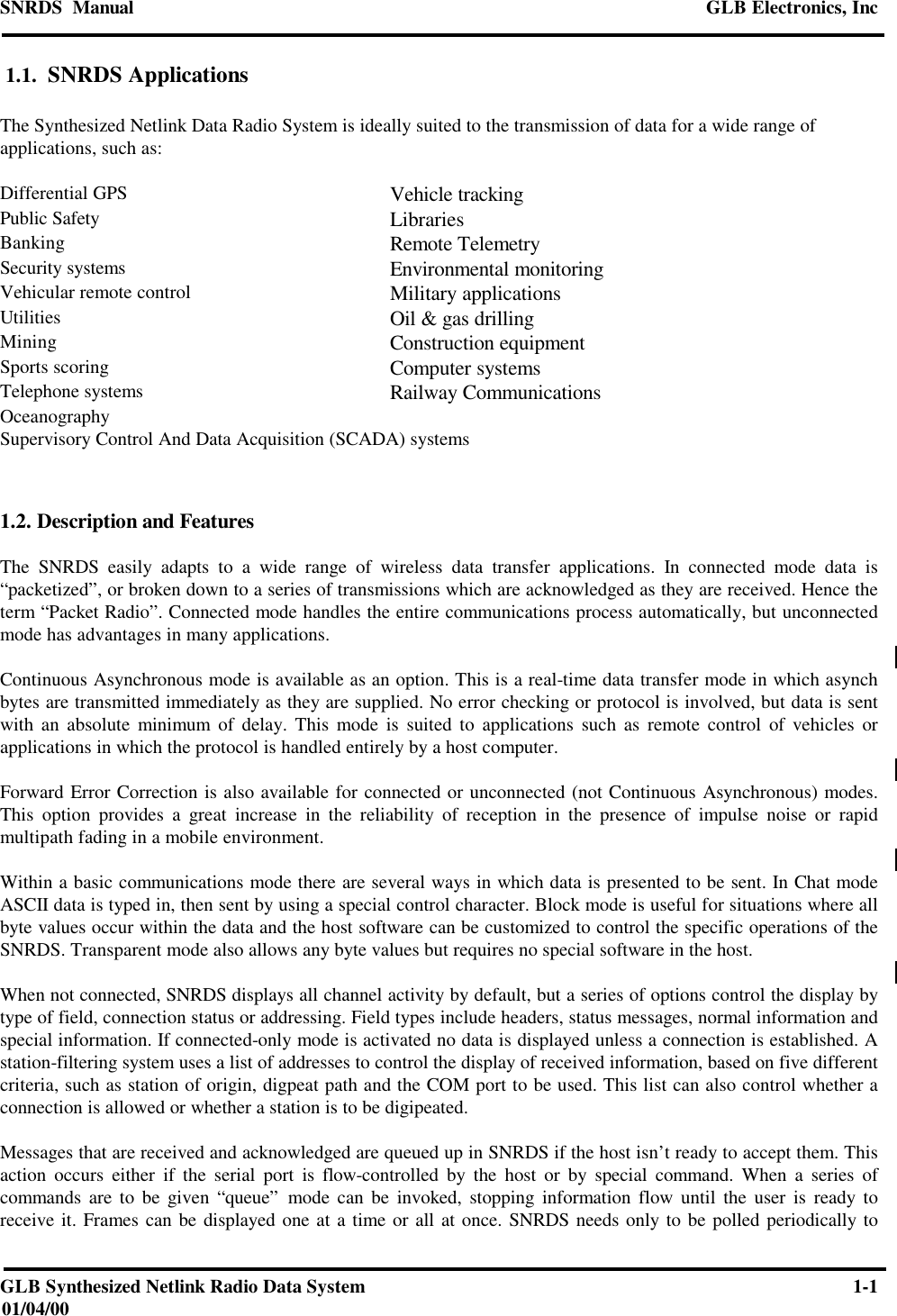
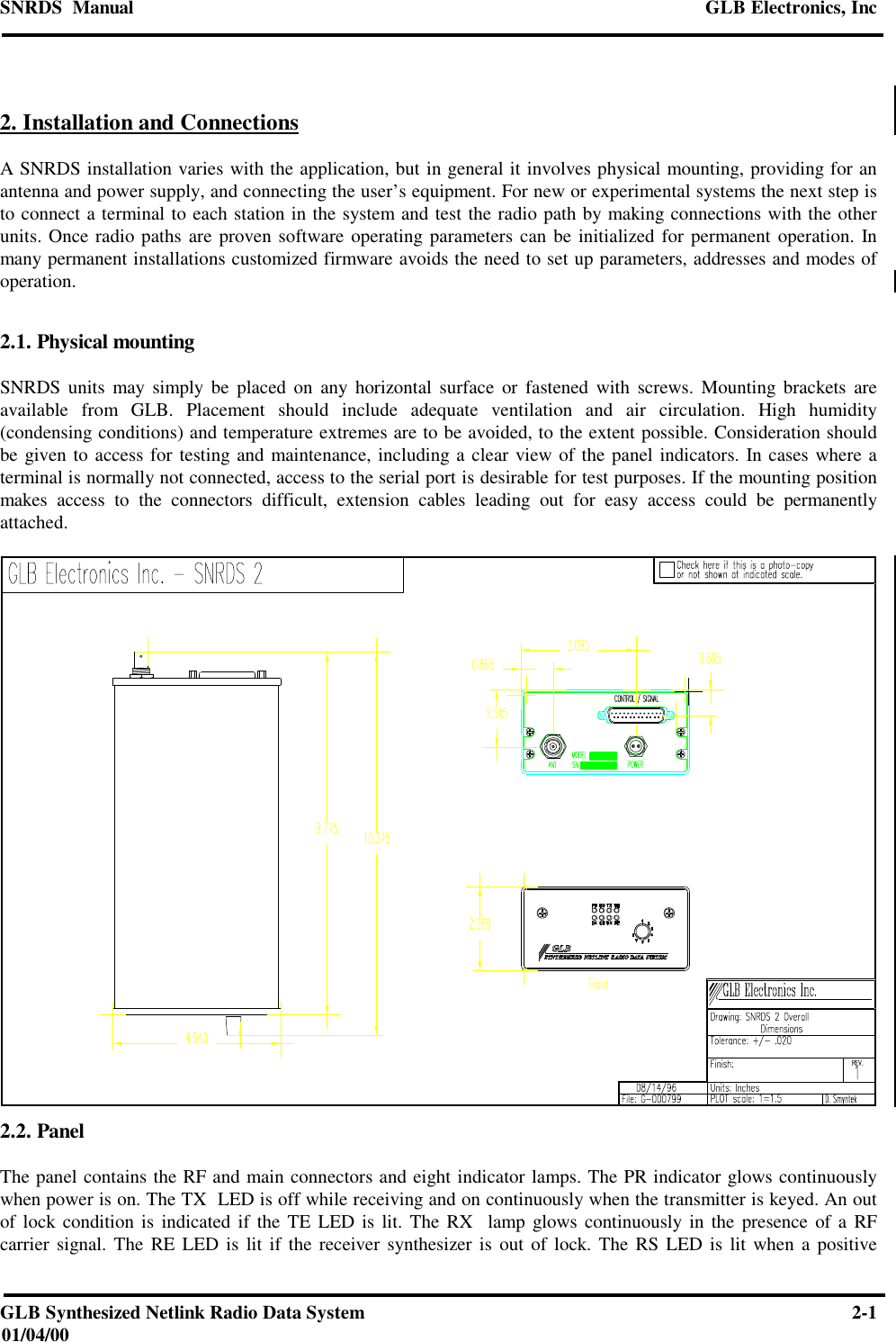
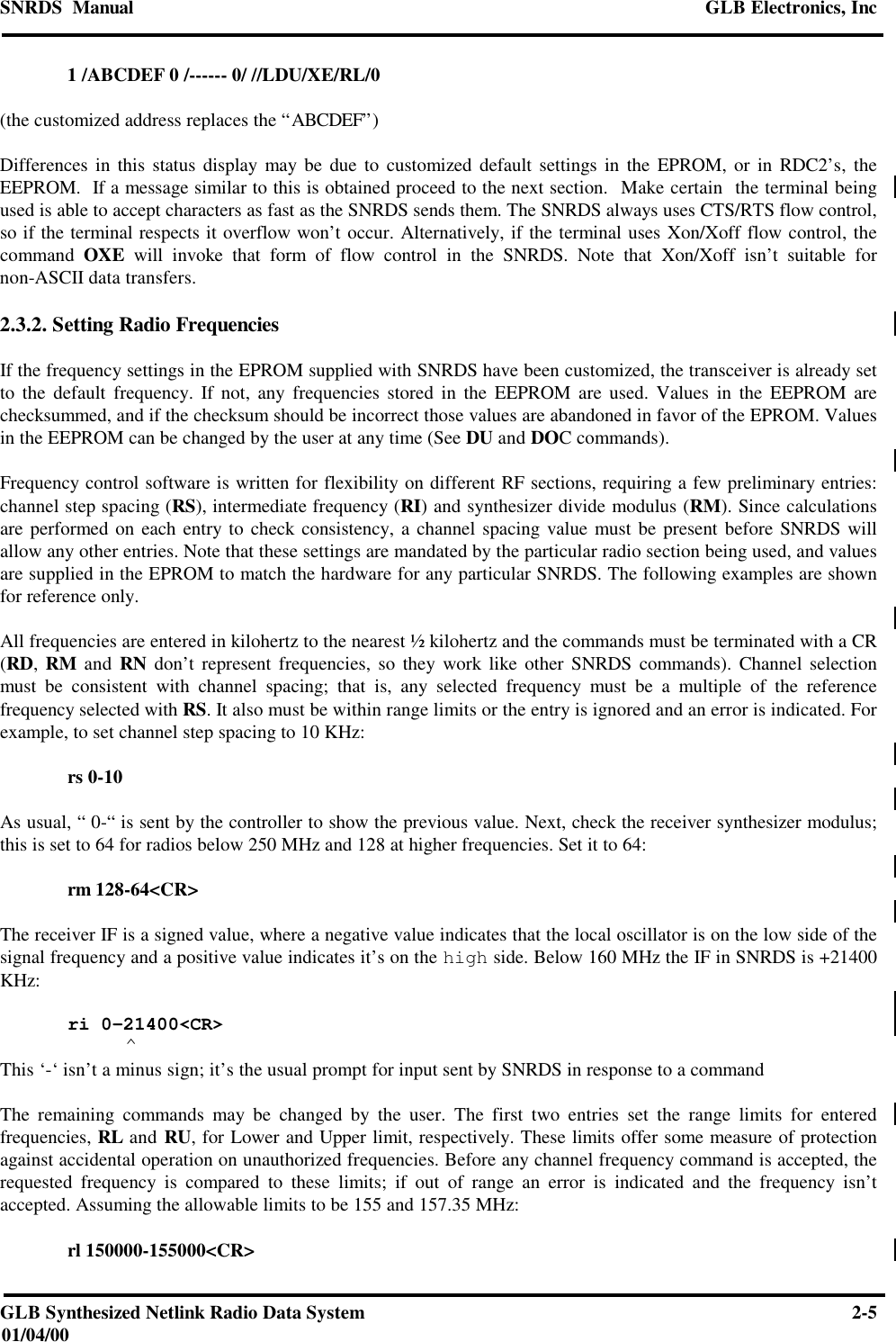
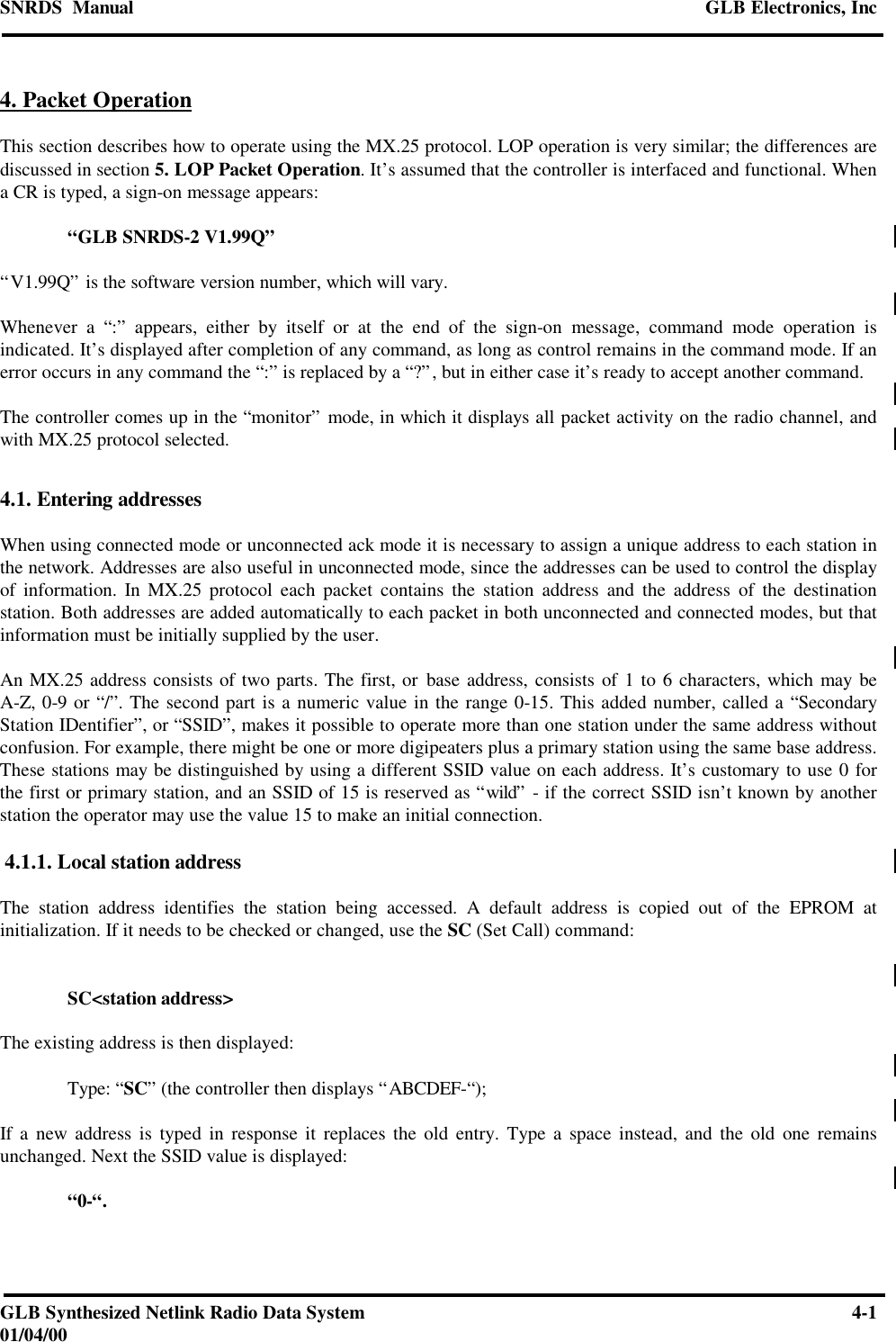
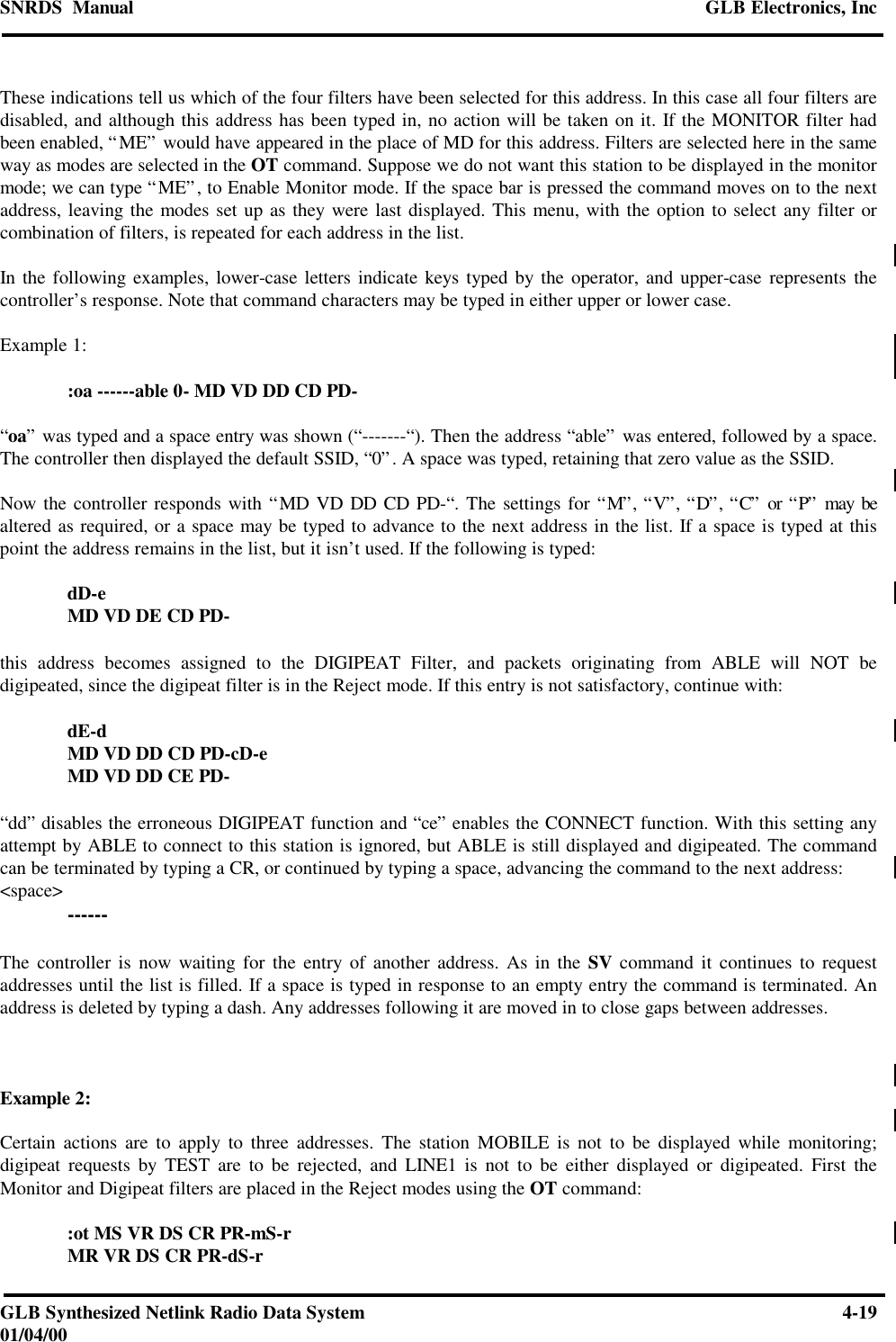
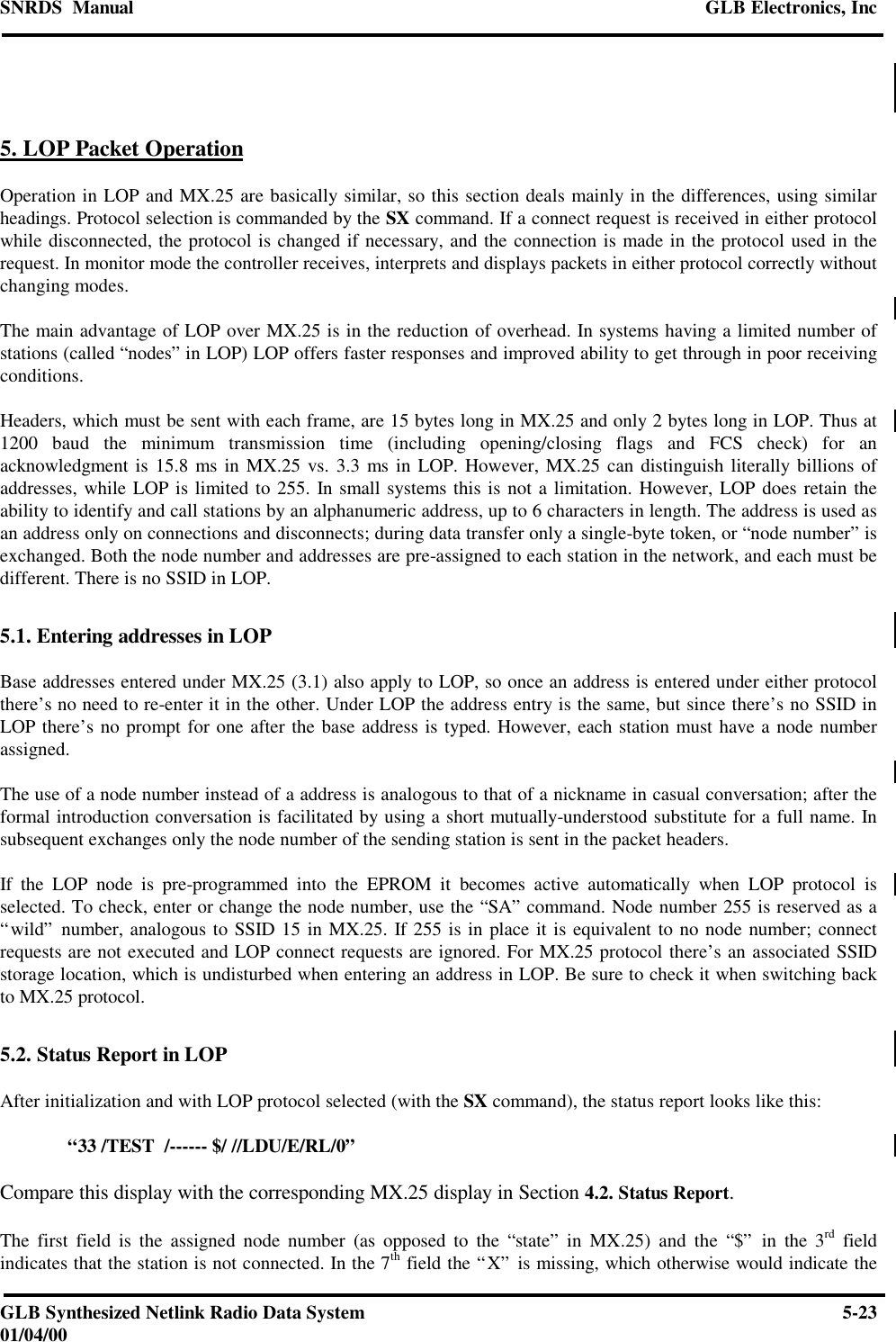
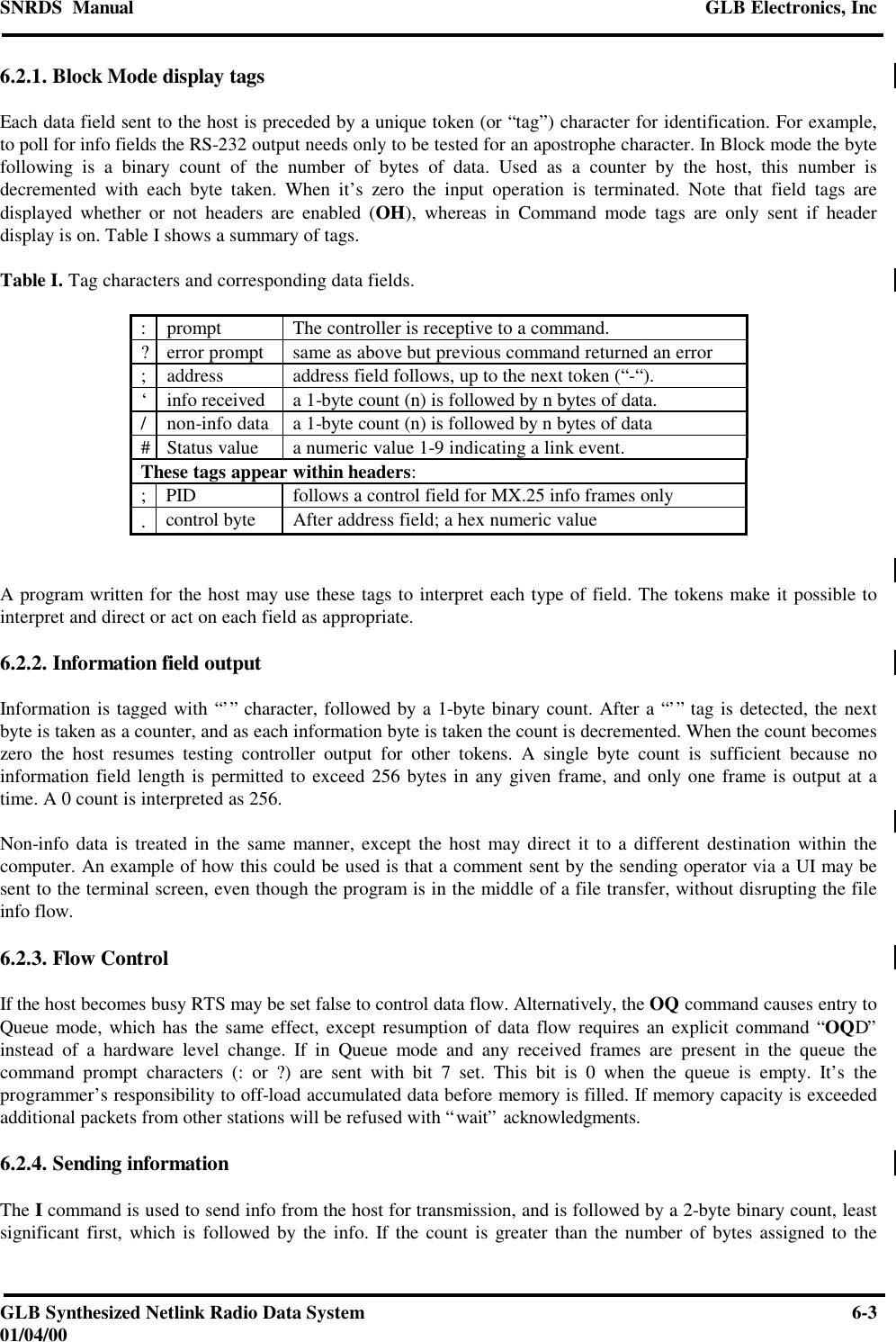
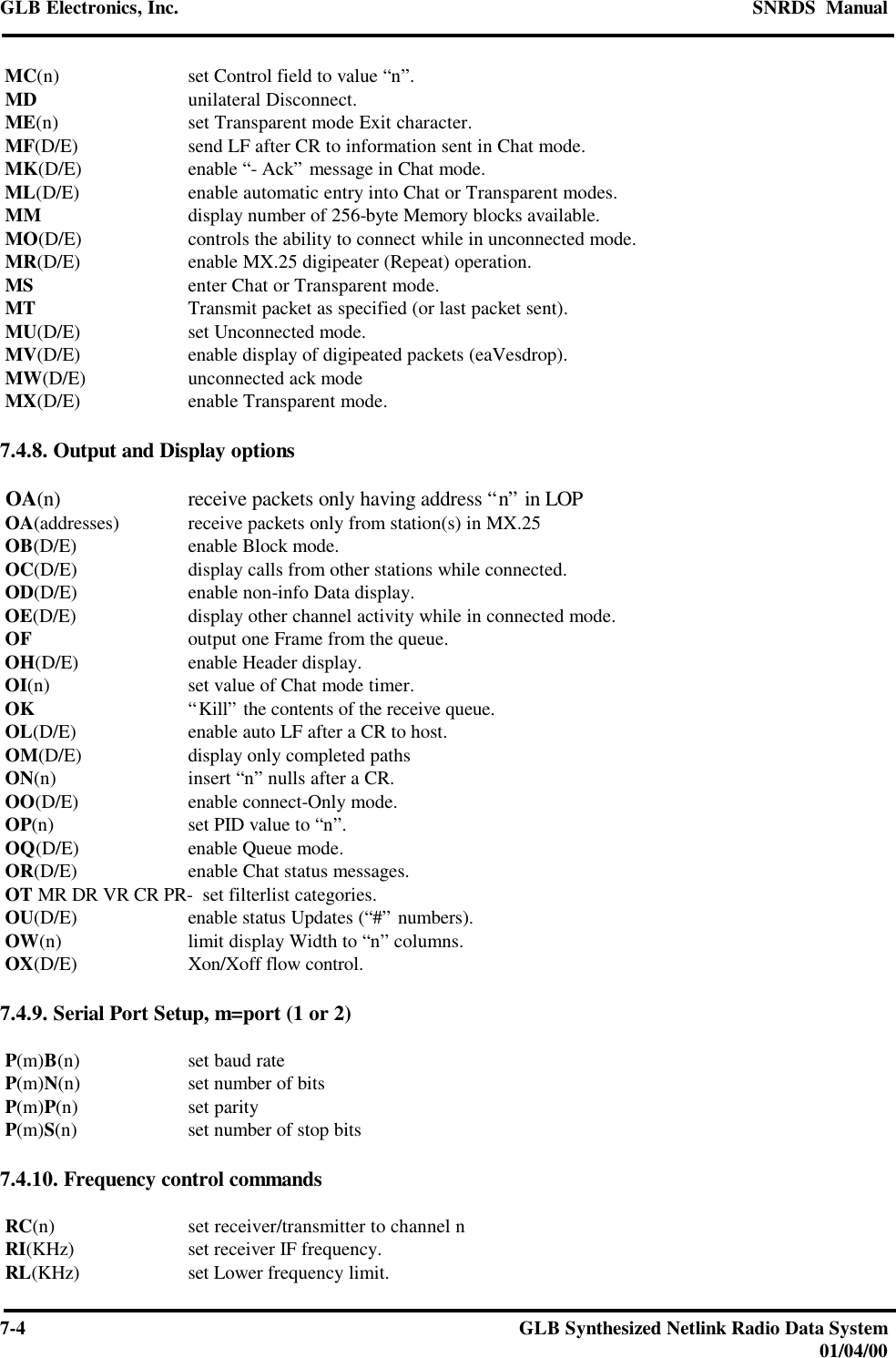
![SNRDS Manual GLB Electronics, IncGLB Synthesized Netlink Radio Data System 7-301/04/007.4.4. Miscellaneous CommandsDE(n) enter scramble keyDG(address) enter special digipeater addressDKcdisplay ASCII value of Keyboard character cDL(D/E) disable remote command lockoutDN(m) display/modify Number of retries accumulatedDOCsave parameters and settings to EEPROM.DU Unprotect EEPROM for writing or erasing.DZ(n) set closing flag count7.4.5. Diagnostics and Debugging DC key transmitter, send test signals continuously. DD(n),(m) dump memory contents in hex from address n to m. DF(n),(m),(x) fill memory with byte x from address n to m. DH(D/E) InHibit digipeat by our calling address. DI fills transmit buffer with test data for sending. DQ input/output to a port DS[n]... memory byte substitution mode, address n. DT(n),(m) Type memory contents in ASCII from address n to m.7.4.6. Other Special Commands F* Download a program. F#cRestart program in EPROM (c=’R’) or download (c=CR) F@(D/E) Enable serial bus operation for COM2. FA(D/E) Set Automatic Transparent mode entry on power-up. FD(YY/MM/DD/WW) set Date F^(D/E) Enable automatic remote error reporting. FG(n) Set digipeater delay value. FI re-Initialize all fields to default values FL(n) Display local error byte FP(n) Set serial bus device address FR Read and display serial bus device data FQ(D/E) Enable carrier sense backoff FT(HH:MM:SS) set Time FU(D/E) Enable unattended mode entry FX(D/E) filter control and non-ASCII characters from display. FW(n) output data to serial bus device FY(D/E) bit monitor mode FE(n) Display remote error byte GB(255) Embedded commands control character GK(0) Set Unconnected Transparent mode time value7.4.7. Manual functions MA(n) set Address field to value “n”.](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-57.png)
![GLB Electronics, Inc. SNRDS Manual7-6GLB Synthesized Netlink Radio Data System01/04/00AD Automatic disconnect. A disconnect request is sent and repeated up to 16 times or until an ack is received.Upon receipt of the ack a #1 message indicates the disconnected state. A #3 status indicates no response wasreceived. See D command.AH Halt. Used to prevent further repeats of a packet under automatic control. In the halted condition the statusdisplay includes an “H”. It resumes sending with the AR command.AI Send an unnumbered information packet (MX.25) or a normal information packet (LOP), numbered zero. Infois typed in the normal way, using the I command or in Chat mode. The display of UI’s at the receiving end isoptional, controlled by the commands OC, OD and OE.AL(D/e) This function affects only the display of LOP packets. While unconnected, if enabled, duplicate framedisplay is suppressed. For example, if a message is repeated n times by the sender, only the first one receivedis displayed, and the repeats are ignored.AP(D/e) Make connection Permanent. Prevents a disconnect from taking place. If disconnect is attempted, eitherautomatically, by operator command or from the other station, an immediate connect request is sent tomaintain the connection. Note that time-out can be avoided by setting the connection timer value (SQ) tozero. The connection remains as long as the other station continues to respond. This mode is needed tomaintain a permanent connection with some systems that send a disconnect request when they time out. If theother station fails to respond at some point and count-out occurs, the command is disabled to avoid callingforever. To keep it trying forever, the try counter (SN) may be set to 0, but it’ll eventually stop when theconnection timer expires. To keep it going forever set SQ to zero, too.AQ(command) Sends a command to a remote station. A connection with the target station must be established orthe command returns an error “?”. (command) is almost any command as described in this manual. Somemode changes are not accepted by remote command, nor is it allowed to send a remote control AQ command.The response sent by the destination station shows the interpretation of the command as though it had beentyped locally. This response is sent as non-info data, hence to see it the OD command must be enabled. If adisallowed mode command is sent the response may show the command accepted without error, but the modeis restored after the command.Neither the command nor its response packet has any effect on info being sent or received in the normalmanner. This capability is useful for adjusting parameters at the sending end of a data dump from thereceiving end as receiving conditions change. For example, the command: AQSF25<CR> causes the otherstation to set its flag count to 25. When a command is sent, a special acknowledgment is returned, displayedas the status message #8. Caution must be exercised when sending commands, since some are inappropriatefor remote use. For example, if the command is to change the remote station’s address, responses won’t bereceived again unless the destination address of the local station is similarly changed [4.9.2.] This, of course,applies even to the acknowledgment of the command itself! Other commands may make the remote stationinoperable. It’s a good idea to check out the effect of any doubtful commands before sending them to aremotely sited unattended station. See sections 4.8., 4.9.2..When the command being sent includes an ASCII string, control characters may be entered to the stringwithout terminating the command by preceding each control character with ‘\’. For example, to place aspecial beacon message into the remotely controlled station, ending with two CR characters, type:](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-60.png)
![GLB Electronics, Inc. SNRDS Manual7-8GLB Synthesized Netlink Radio Data System01/04/00BD(address) Used exactly as SD except that the address entered is the destination of beacon messages, or for laterretrieval via the BC command.BK Delete the stored beacon message. Note that this command doesn’t stop the sending of beacon packets (seeBT).BR Copies the current beacon message into the transmit buffer, where it can be transmitted as a normal packet orexamined. Any previous contents of the transmit buffer are deleted.BS Store the contents of the transmit buffer as a new beacon message. Any previous beacon message is replaced.BT(0) (Set the time interval for automatic beacon transmissions containing the beacon message. Each countrepresents approximately 10 seconds, but the time is automatically lengthened with increased channelactivity. A value of 0 terminates the function, but the beacon message remains in memory. Each message issent as an “Unnumbered Information” (UI) frame with address fields specified by the SC, SD and SVcommands. If the station becomes connected the beacon mode operation is suspended, to resume when theconnection is terminated.BV(addresses) Used exactly as SV except that the addresses entered are used in the destination fields for beaconmessages or for later retrieval via the BC command.C <address> [V] <path> Single-line connect request. “<address>” is the destination station address, “V” indicatesthat additional addresses are to follow, and “<path>” is a digipeater address or a series of up to 8 digipeateraddresses, separated by blanks. Be sure to include a blank between the “C” and the first address. When theline is completed, a CR originates a connect request to the specified station via the specified digipeater path.All addresses are assumed to have an SSID of 0 unless another SSID is designated by appending “-<SSID>”to it. For example, TEST has an SSID of 0, while TEST-5 has an SSID of 5.The command letter “C” is anabbreviation for “CONNECT”; and actually any word beginning with “C” is interpreted as the connectcommand. “V” is an abbreviation of “VIA”, and its inclusion is optional unless the first digipeater addressbegins with “V”.If “V” and the subsequent <path> addresses are left off, the connect request is sent directly to <address>. Ifthe C command is typed by itself, the connect request is sent to the <address> and <path> that was previouslyentered (the same as AC).NOTE: Some of the following ‘D’ commands are marked with ‘*’. These are intended for use as diagnostic,debugging or servicing aids. Descriptions are included here for the convenience of some users. They can bedangerous in terms of program function, potential data loss or protocol malfunction. They are offered with noguarantees.D Disconnect request, same as AD (In Chat mode use ^C).](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-62.png)
![SNRDS Manual GLB Electronics, IncGLB Synthesized Netlink Radio Data System 7-901/04/00DC * Keys the transmitter for MODEM Calibration, with a tone. Once started with this command, tones can bealternated by typing the space bar, and typing “D” causes a square-wave to be sent, alternating between thetwo tones at the current baud rate. If a hex value is typed during this square-wave test the byte valuerepresented is sent repeatedly instead of a square wave. Typing “Q” unkeys the transmitter, turns off the tonesand returns control to Command mode. When using this command note that the transmitter unkeys afterabout 15 seconds. This occurs because the transmit limit timer in hardware prevents continuous transmissionsfrom occurring. To reset the timer quit the command and type it again.DD(m),(n) *Dumps memory contents, starting at memory address m and ending at address n. Each line of thedisplay shows the starting address of that line followed by 16 hex values.DE(0) Data to be transmitted may be “scramblEd”, by entering a value with this command at both the sending andreceiving stations. Each byte of the information sent over the air is exclusive-OR’ed with the value given toproduce an unreadable display, and it’s recovered at the receive end by the same process. The security of thissystem is minimal, intended only to avoid displaying sensitive information to casual observers at otherlocations.DF(m),(n),(k) *Fills memory starting at address m and ending at n with the byte value of k. This function is adiagnostic having potentially disastrous consequences.DG<address> Enter a DiGipeater address for this station. Often it is desirable to use different addresses forconnecting to a station and for digipeating through it. By entering an address here other stations may digipeatvia this station by either address. See DH.DH(D/e) inHibit digipeating via the normal station address. When an alternate digipeater address has beenentered via the DG command other stations may specify either that address or the normal station address as adigipeater. When this function is enabled, packets specifying the normal station address are not digipeated,but they are digipeated via the address entered under DG. If no entry is present under DG this function hasno effect.DI *This diagnostic command fills the transmit buffer with information, consisting of the sequence of printableASCII characters, repeating until the end of the buffer is reached. When sent, (using MT and a control fieldof 0) the result is a packet of longest possible length for test purposes.DK(key) Displays the next Key typed and its numeric value.DL(E/d) Enable remote control lockout. The remote command lockout input is used to prevent unauthorized use ofthe remote command capability (see section 4.8. Remote Commands. An external device can be used to feedthis input (+5=disable) to enable or disable the remote command capability.DN[n] Display or modify Number of retries. n is displayed as a 16-bit hex value, followed by a hyphen. If a newhex value is typed the value of n is replaced accordingly, but if a CR is typed by itself the value of n remainsunchanged. n is initialized to zero on power-up, and it’s incremented every time a retry is sent (original](https://usermanual.wiki/GLB-Electronics/SX150EN11C-G/User-Guide-84984-Page-63.png)