Graupner and KG MC-32 ComputerSystem Graupner HoTT User Manual 33124 mx20 HoTT 1 EN indd
Graupner GmbH & Co. KG ComputerSystem Graupner HoTT 33124 mx20 HoTT 1 EN indd
UserManual.wiki
>
Graupner and KG
>
MC 32 User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation

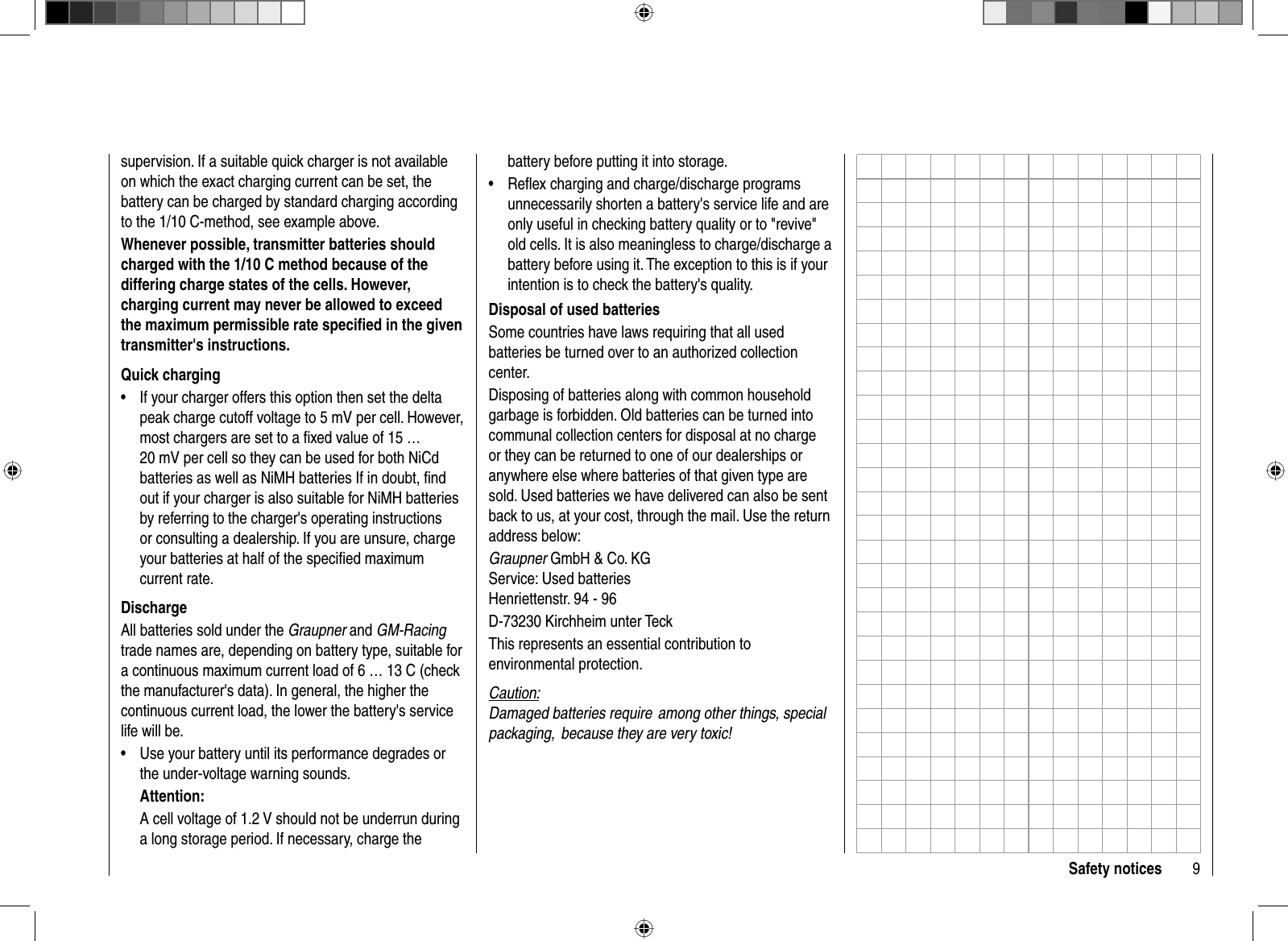
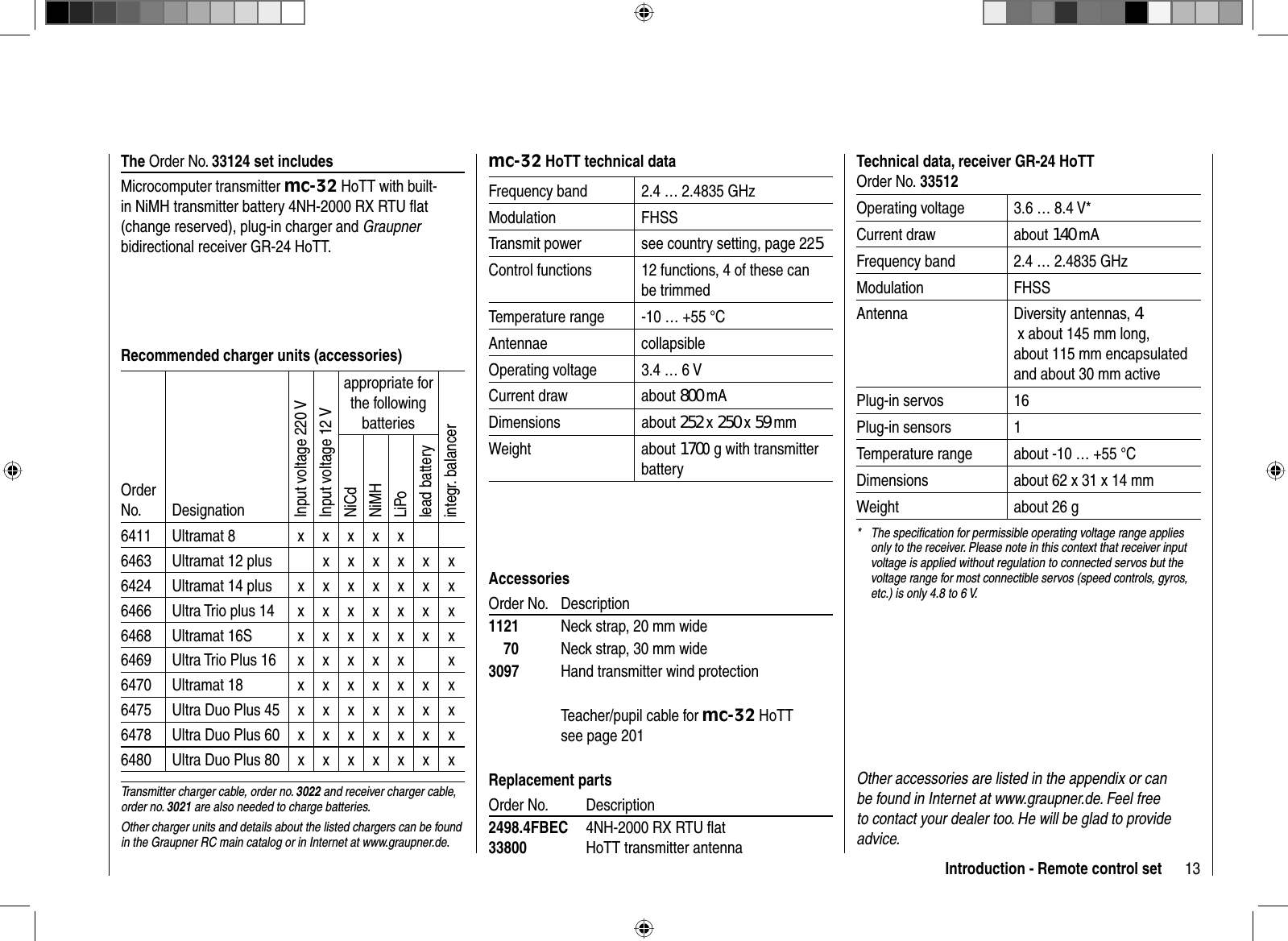
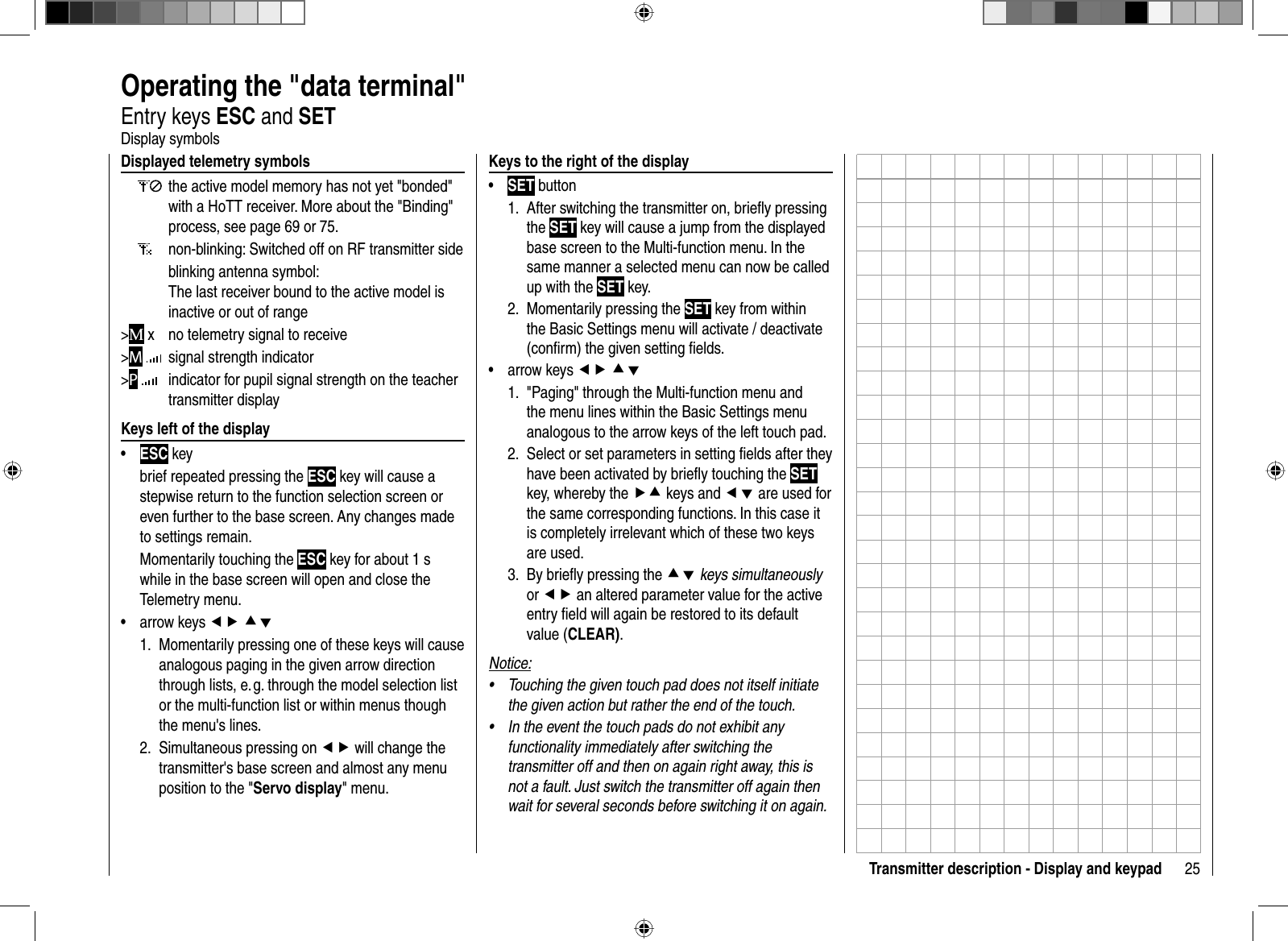
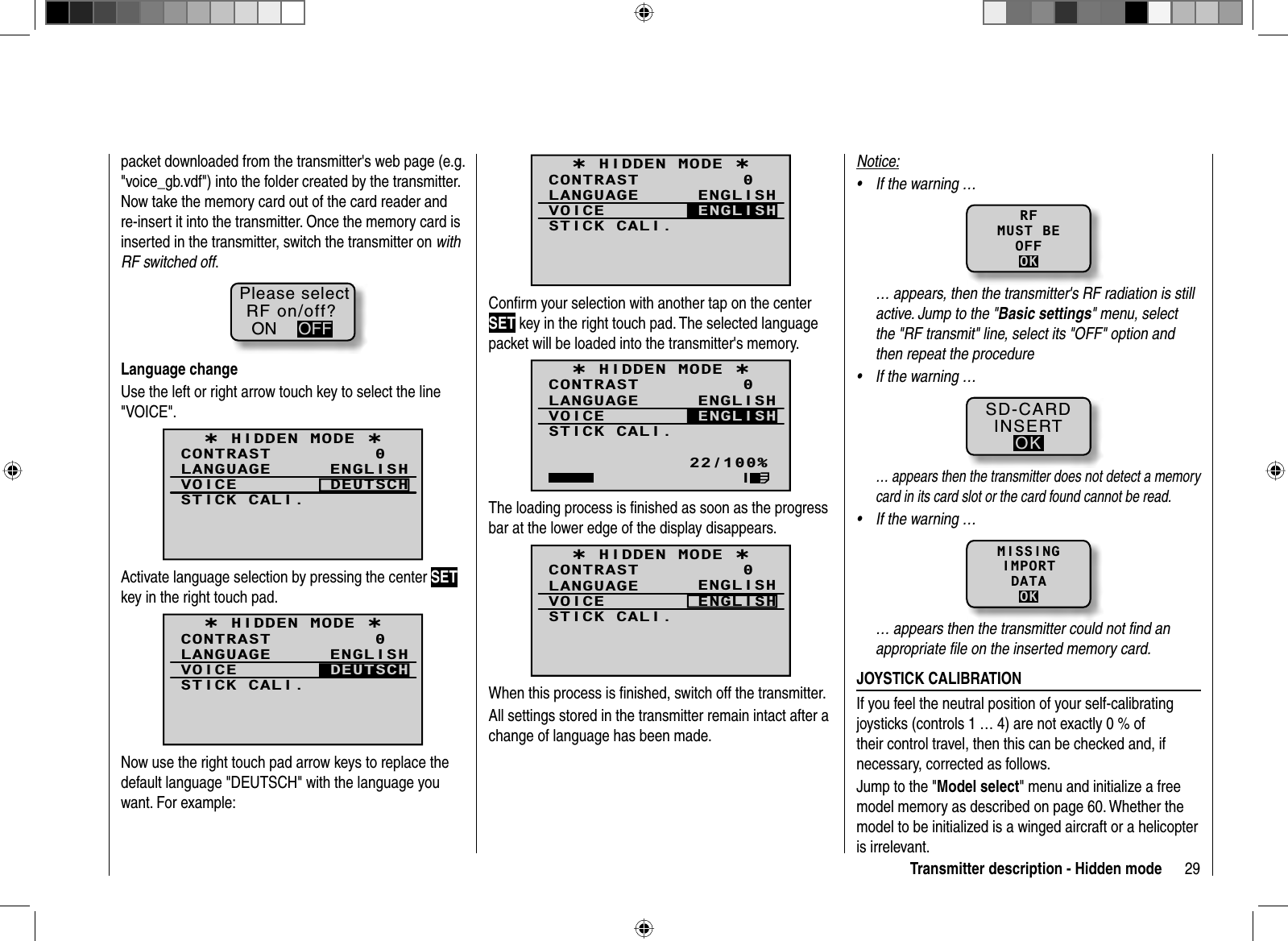
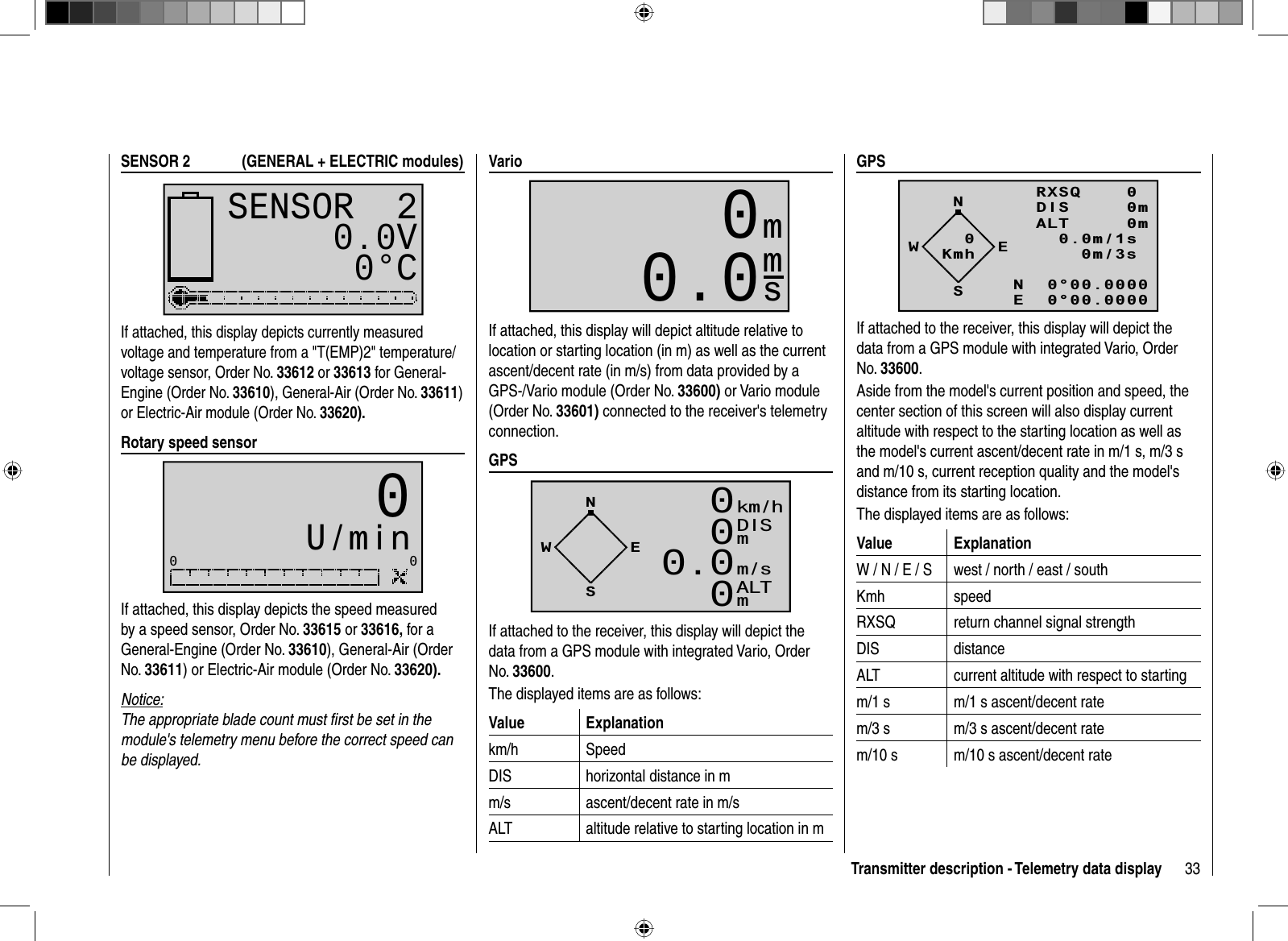
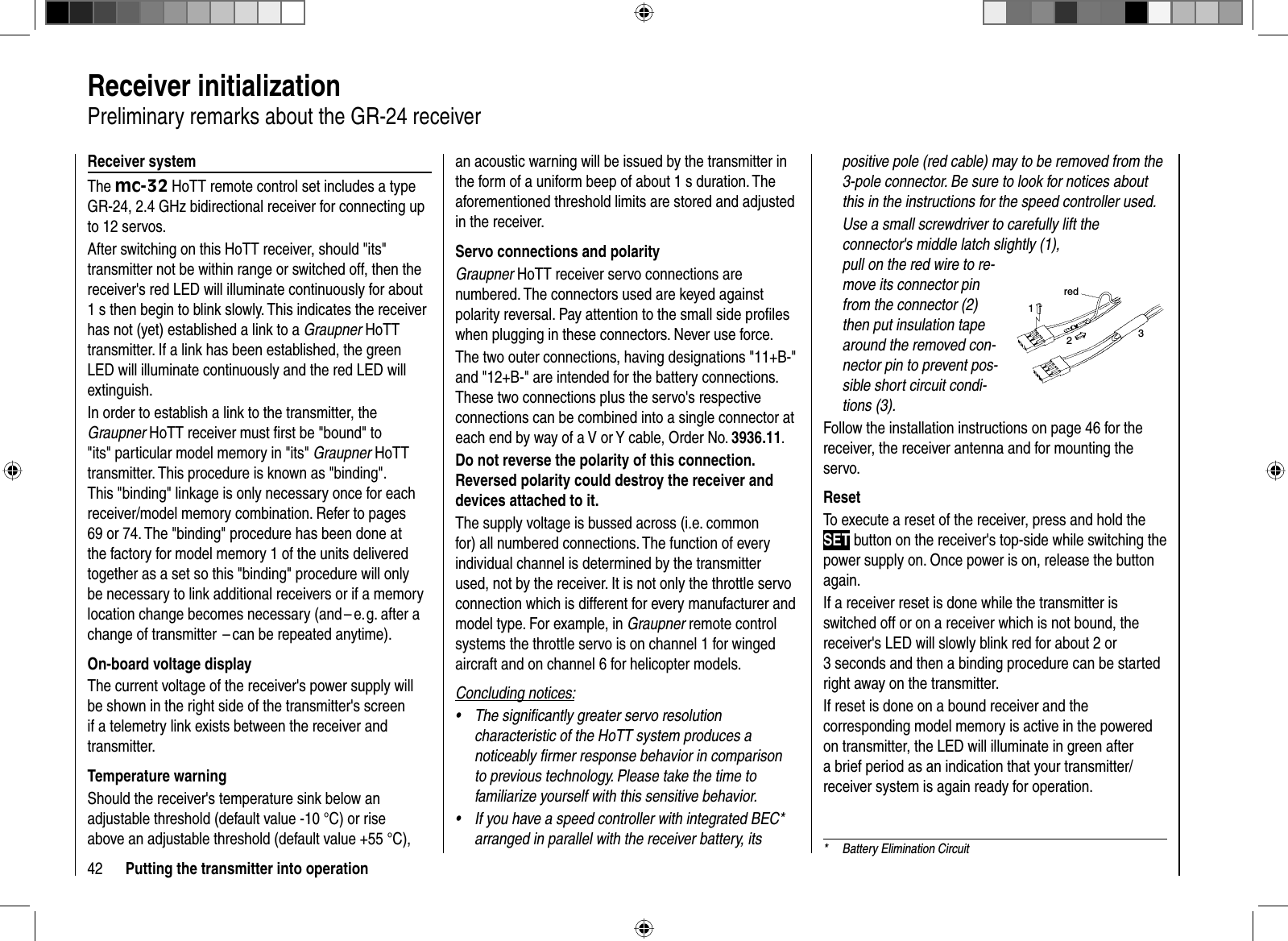
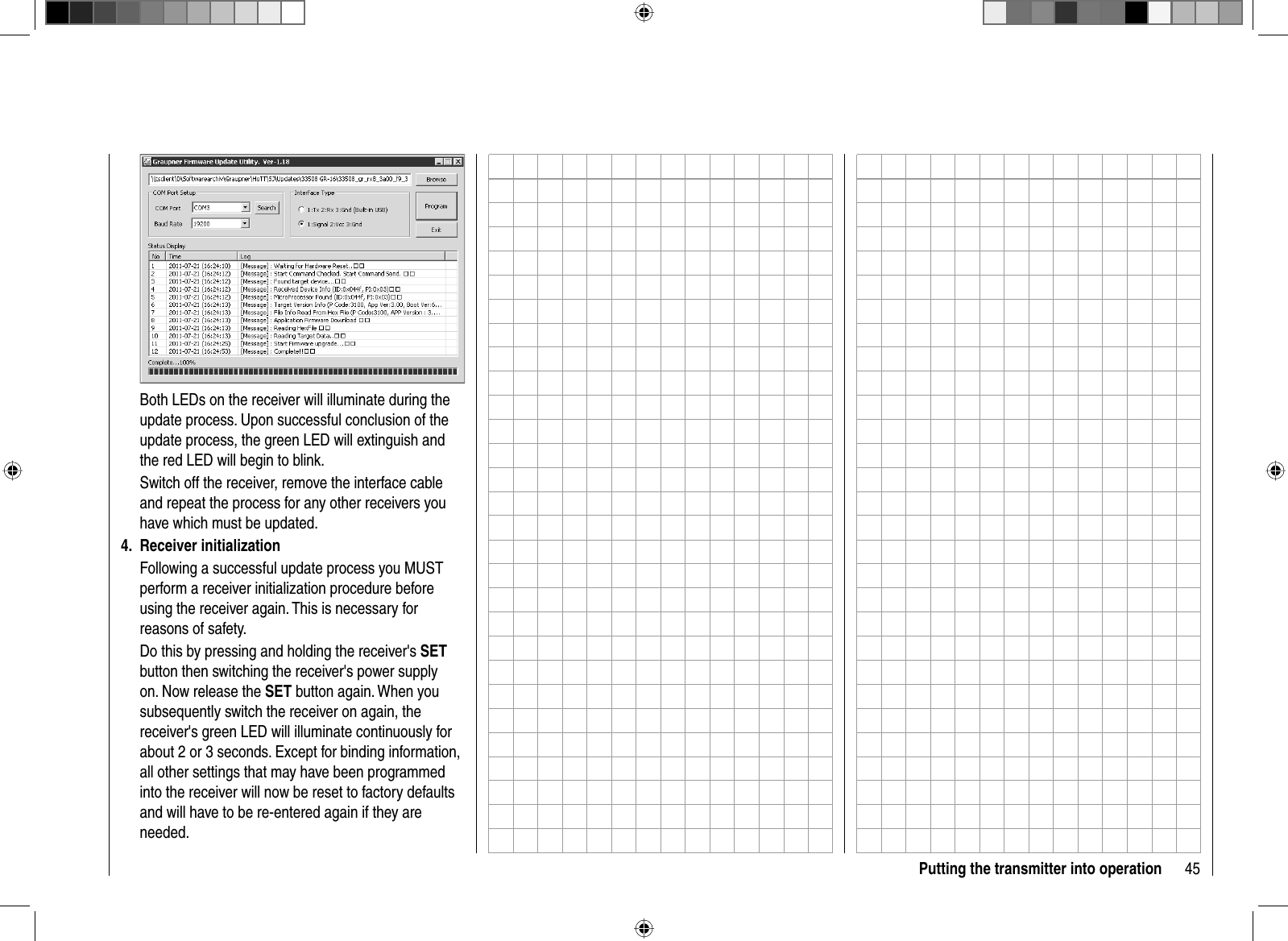
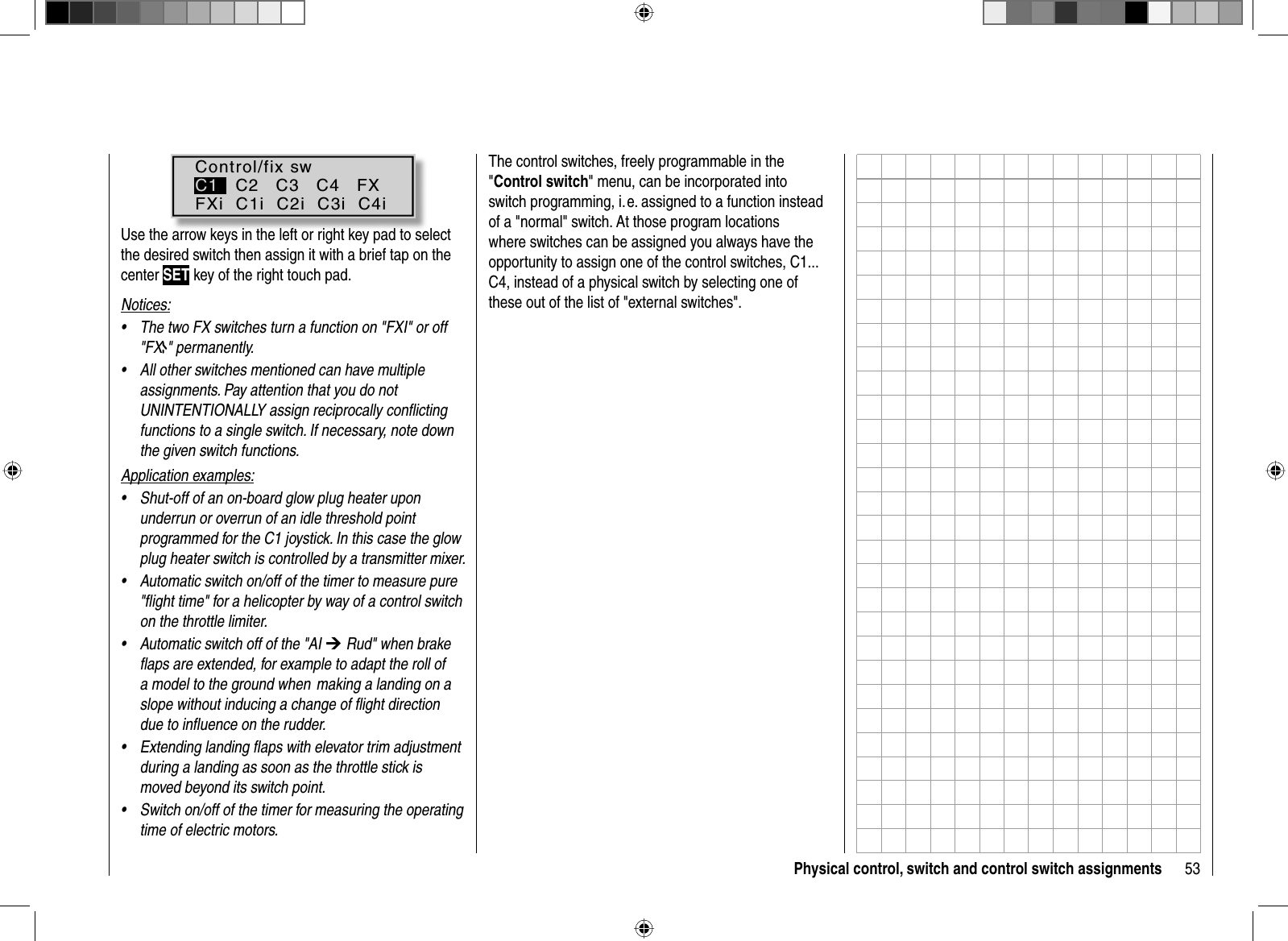
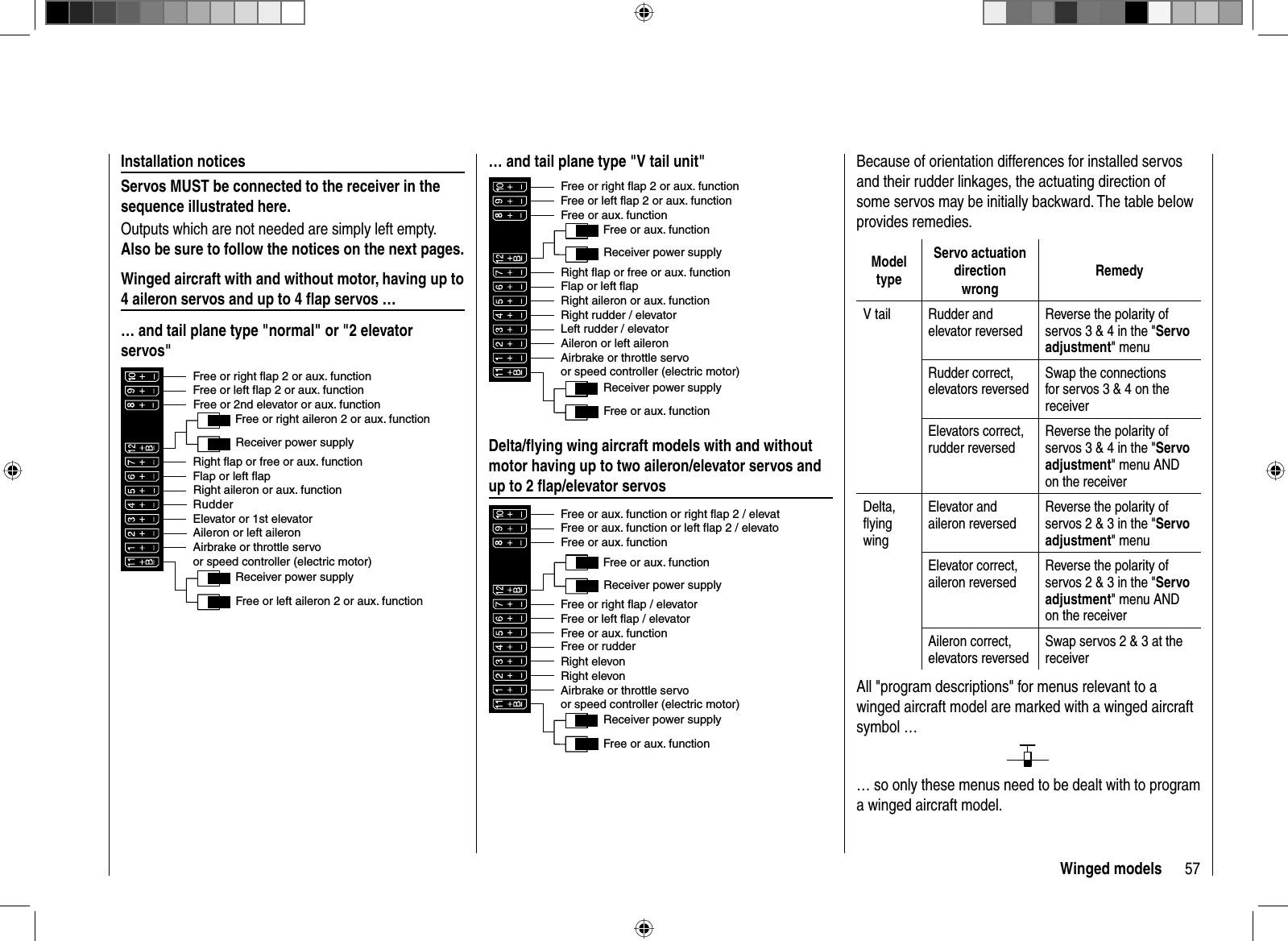
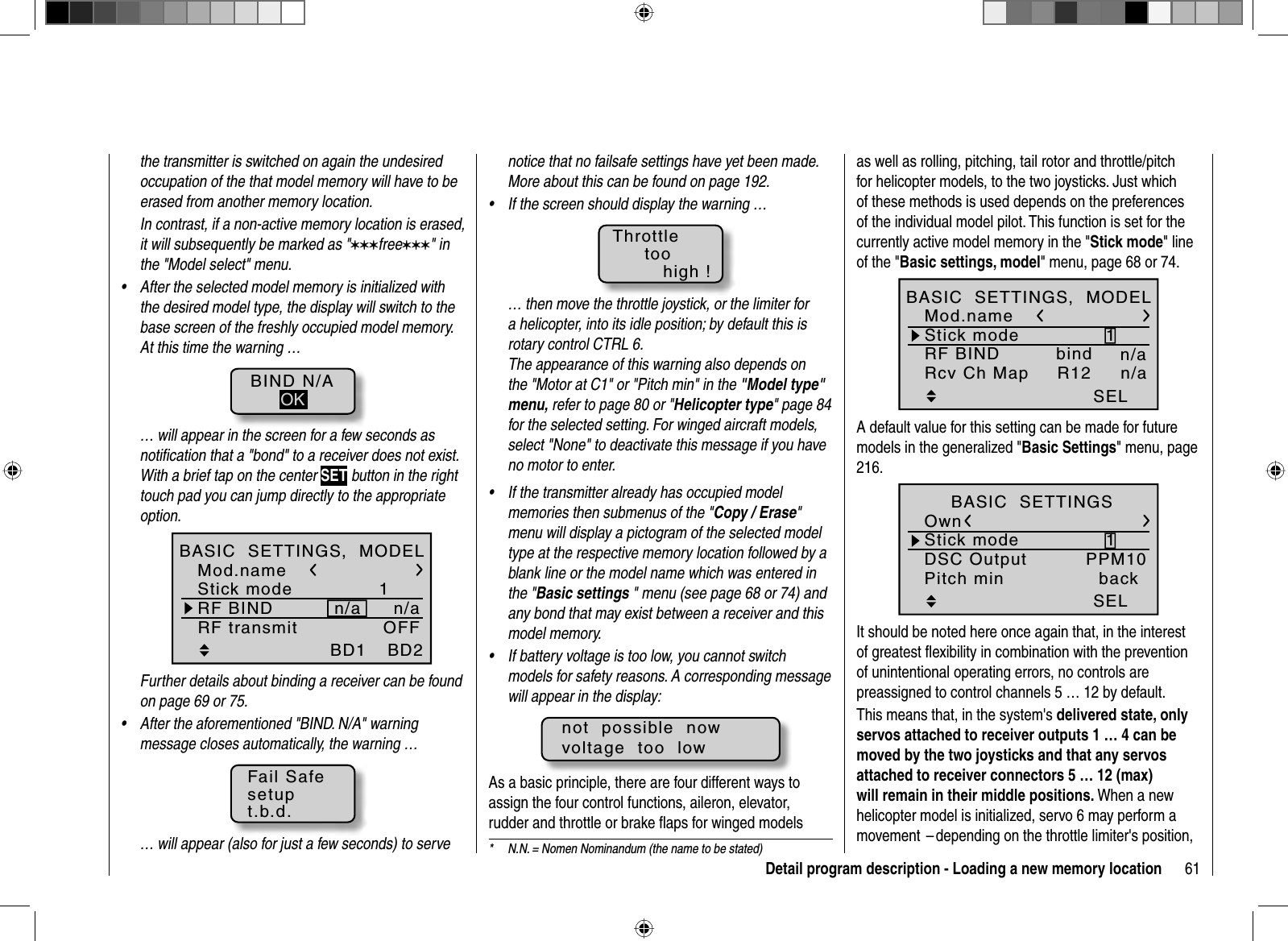
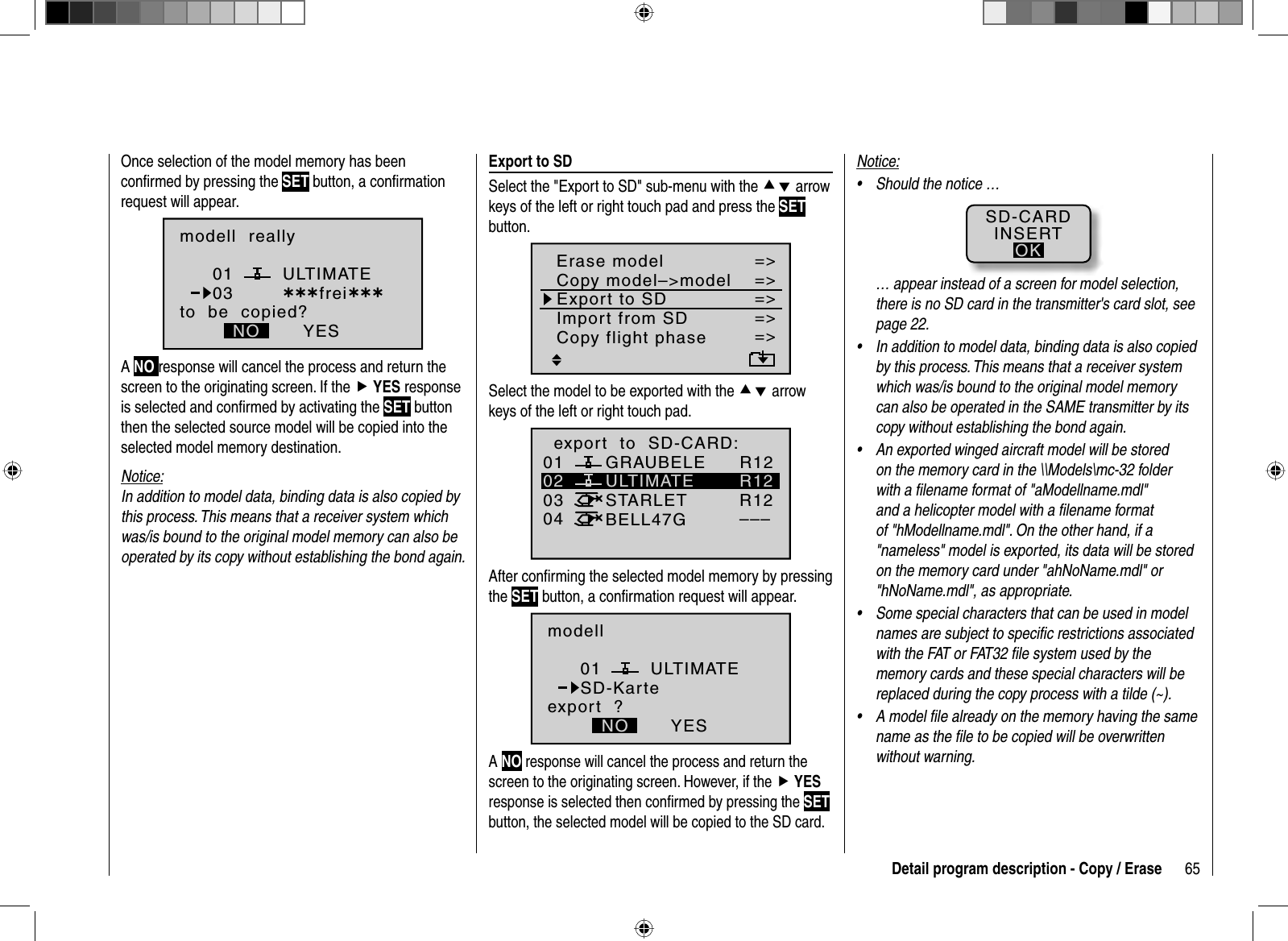
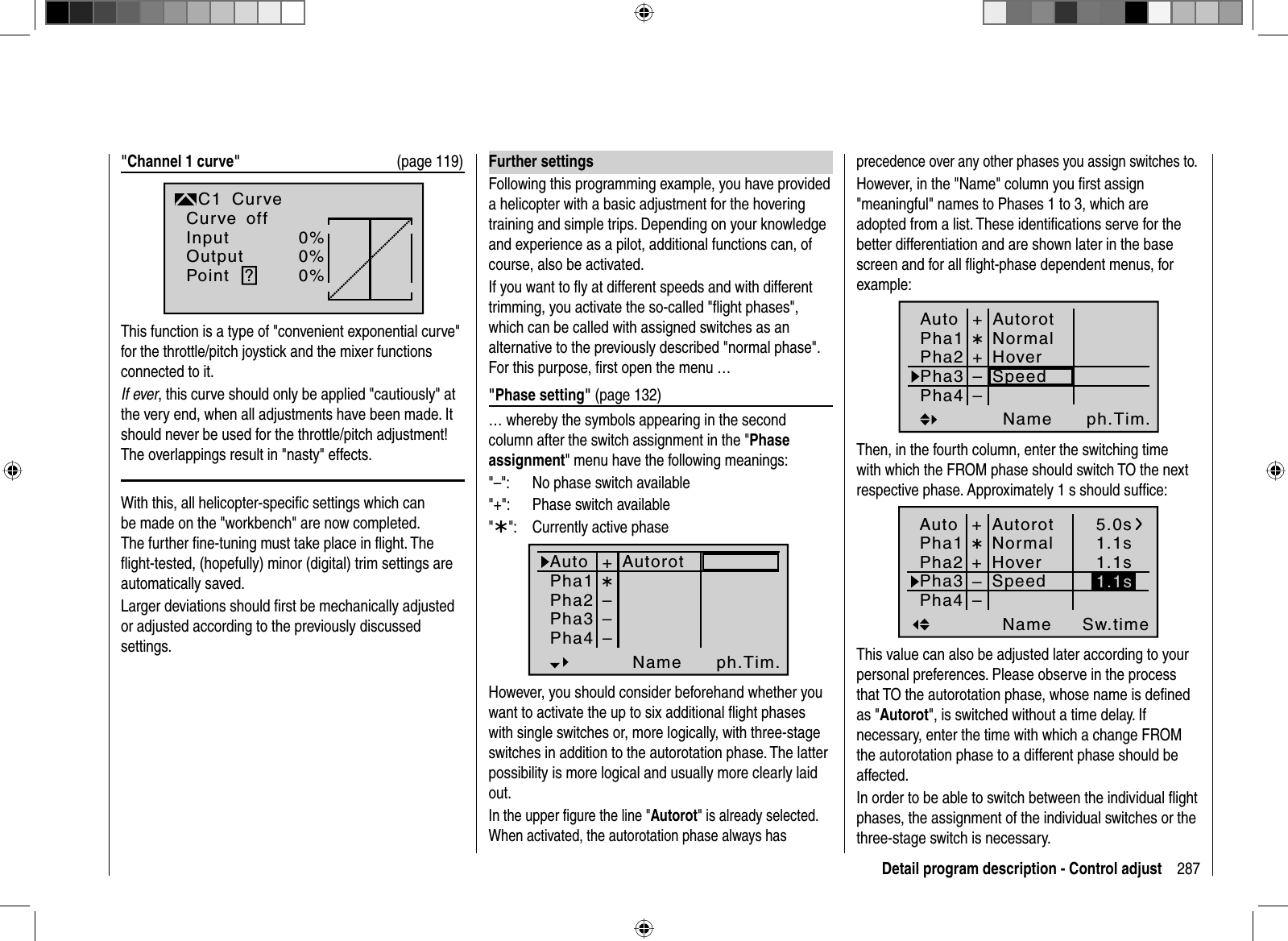
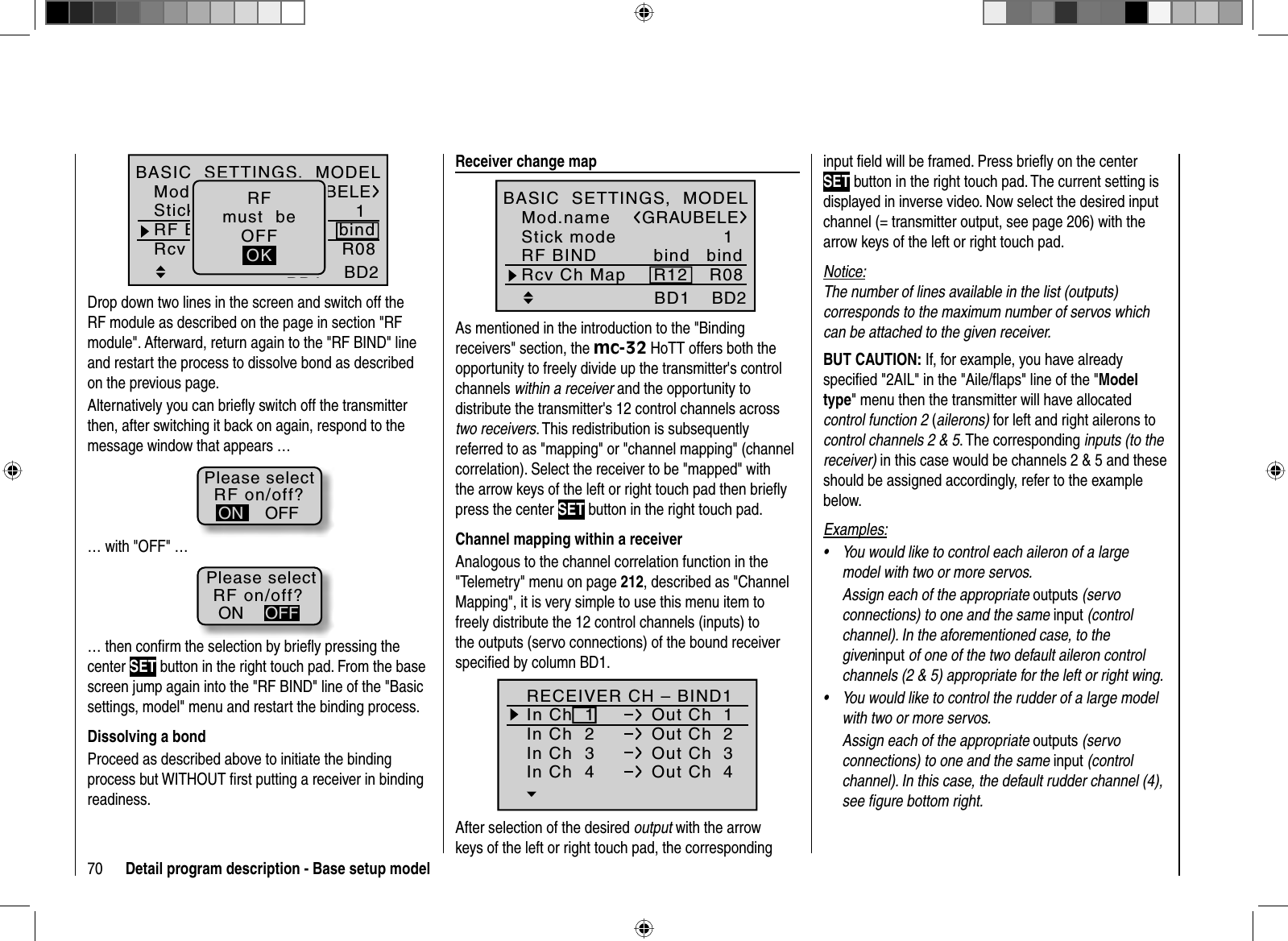
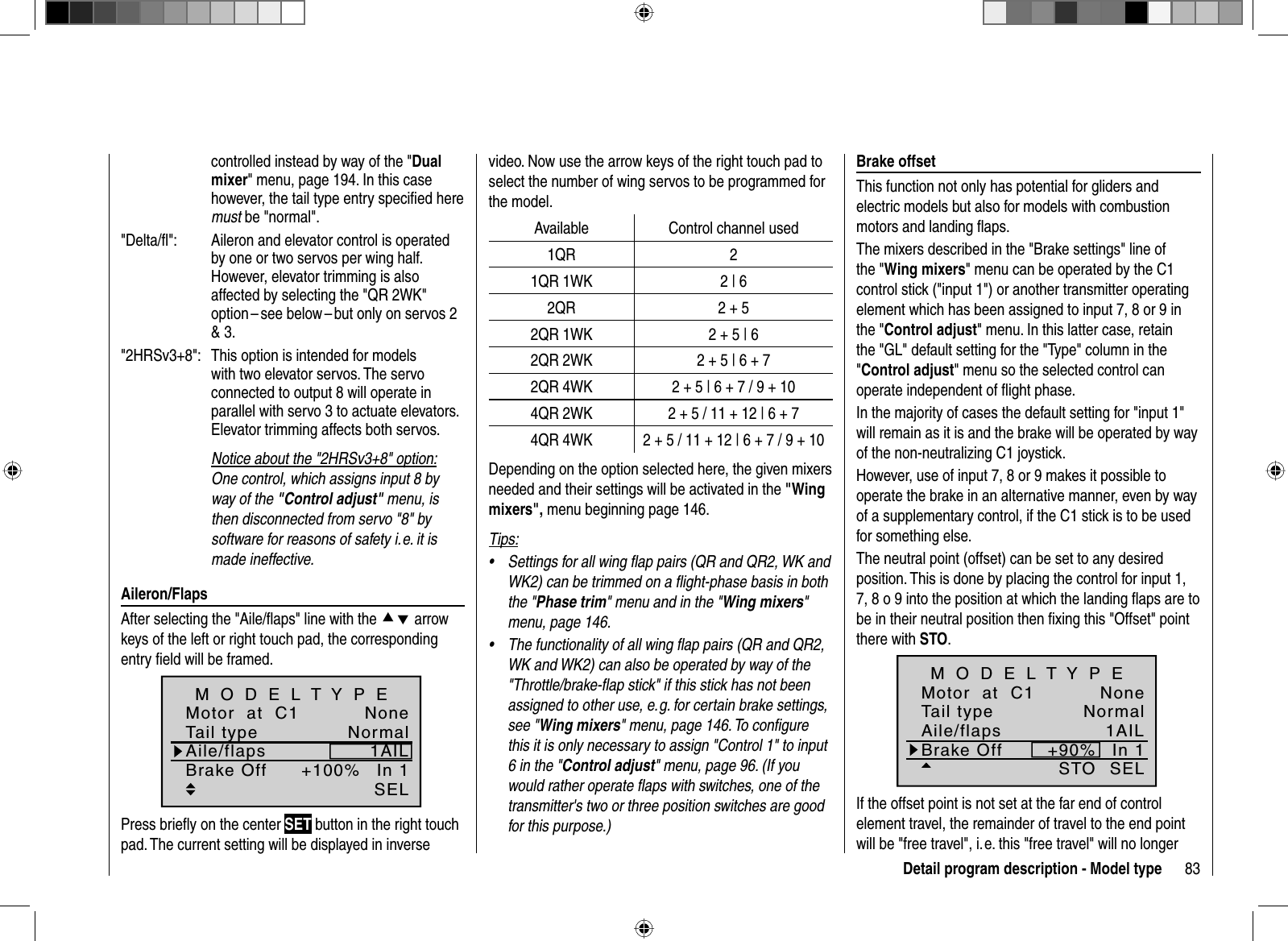
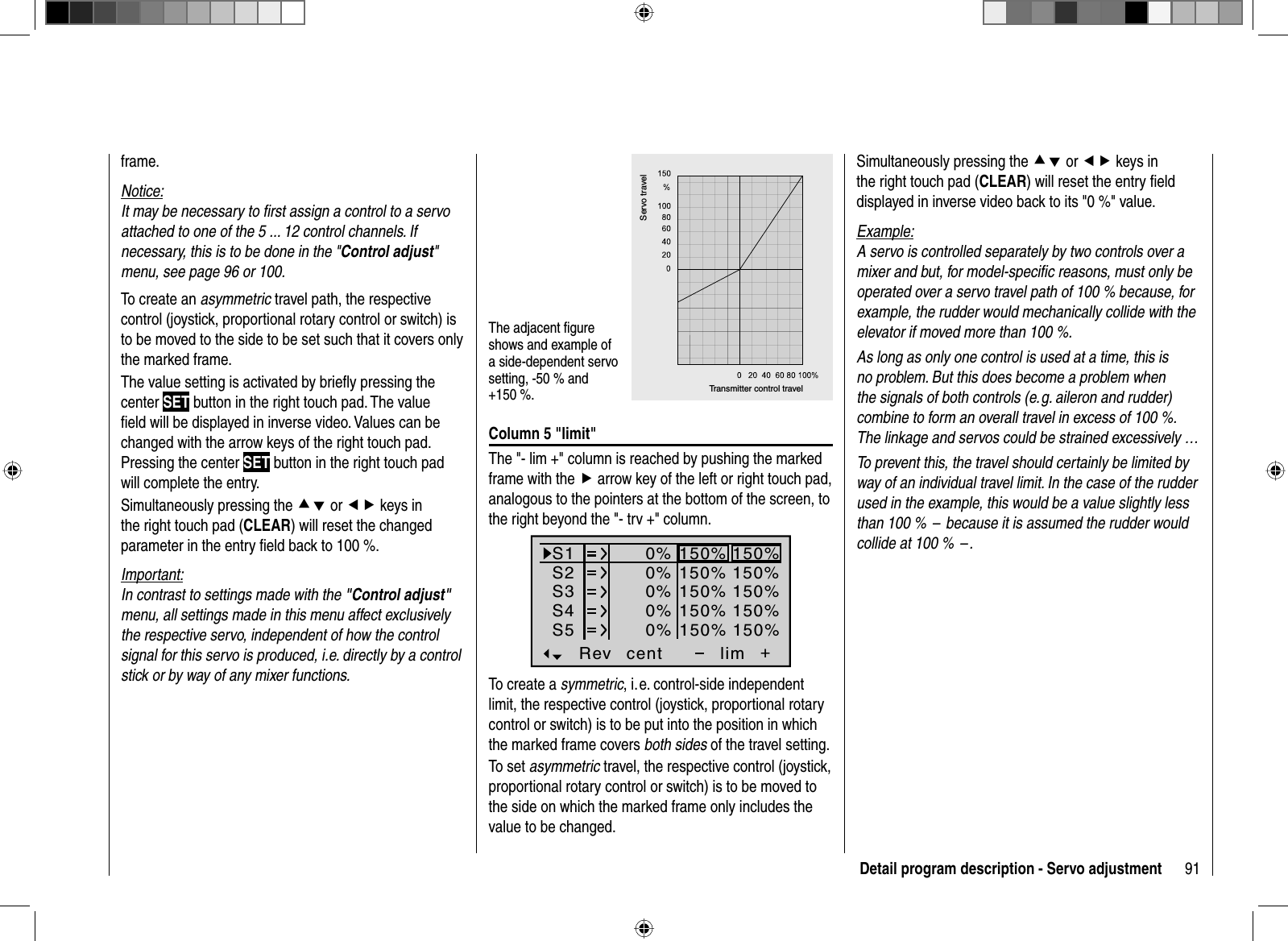
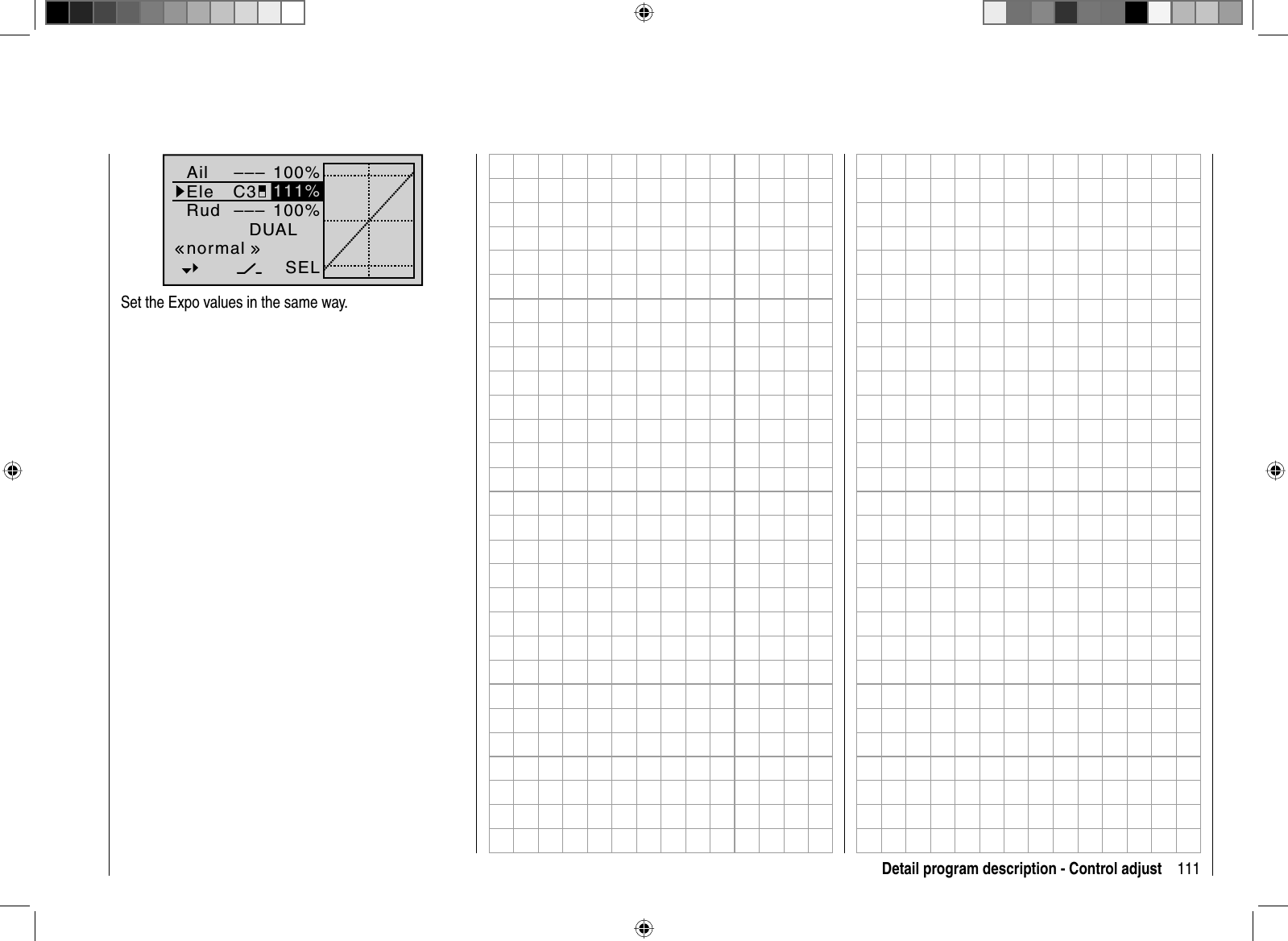
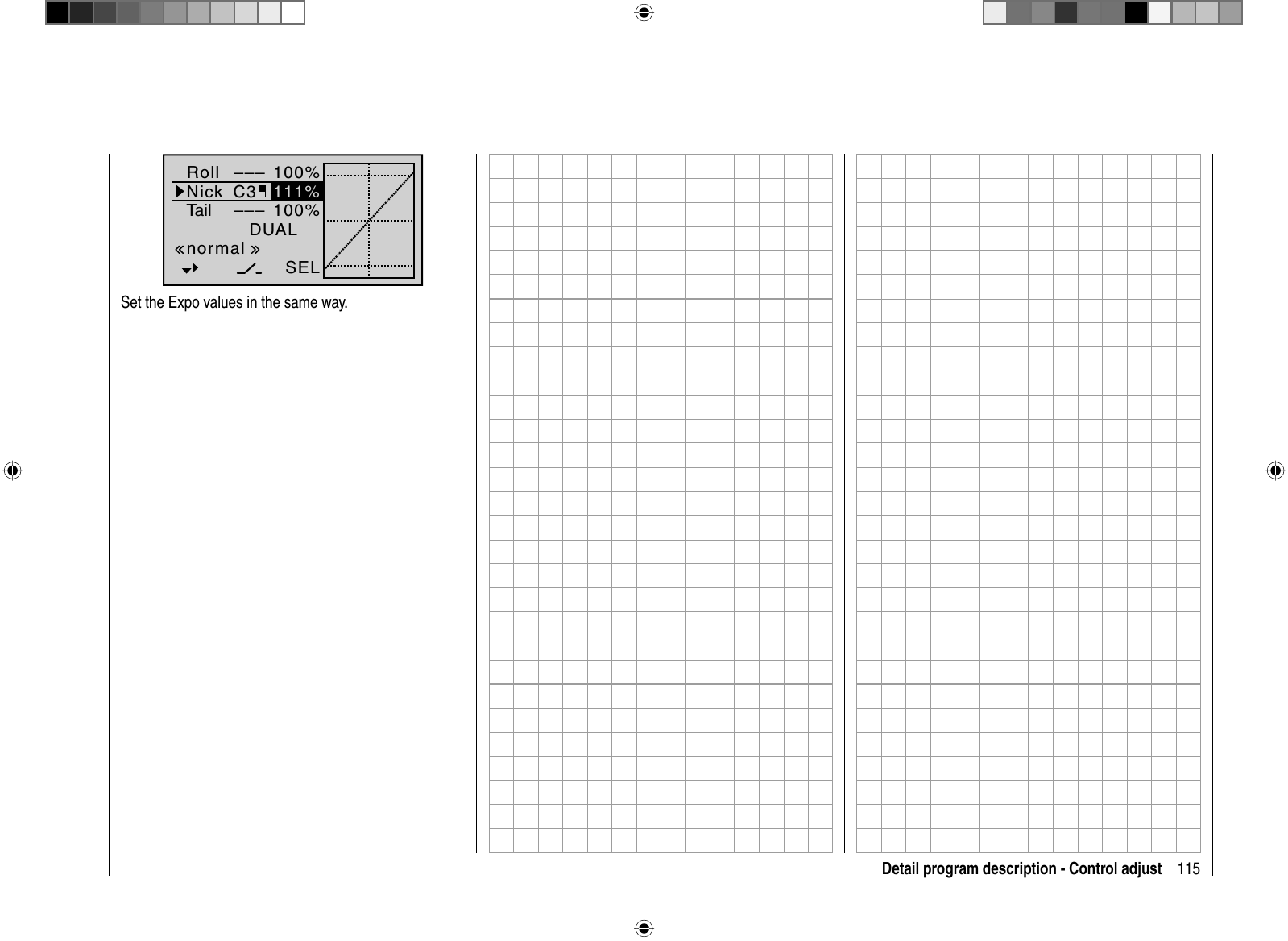
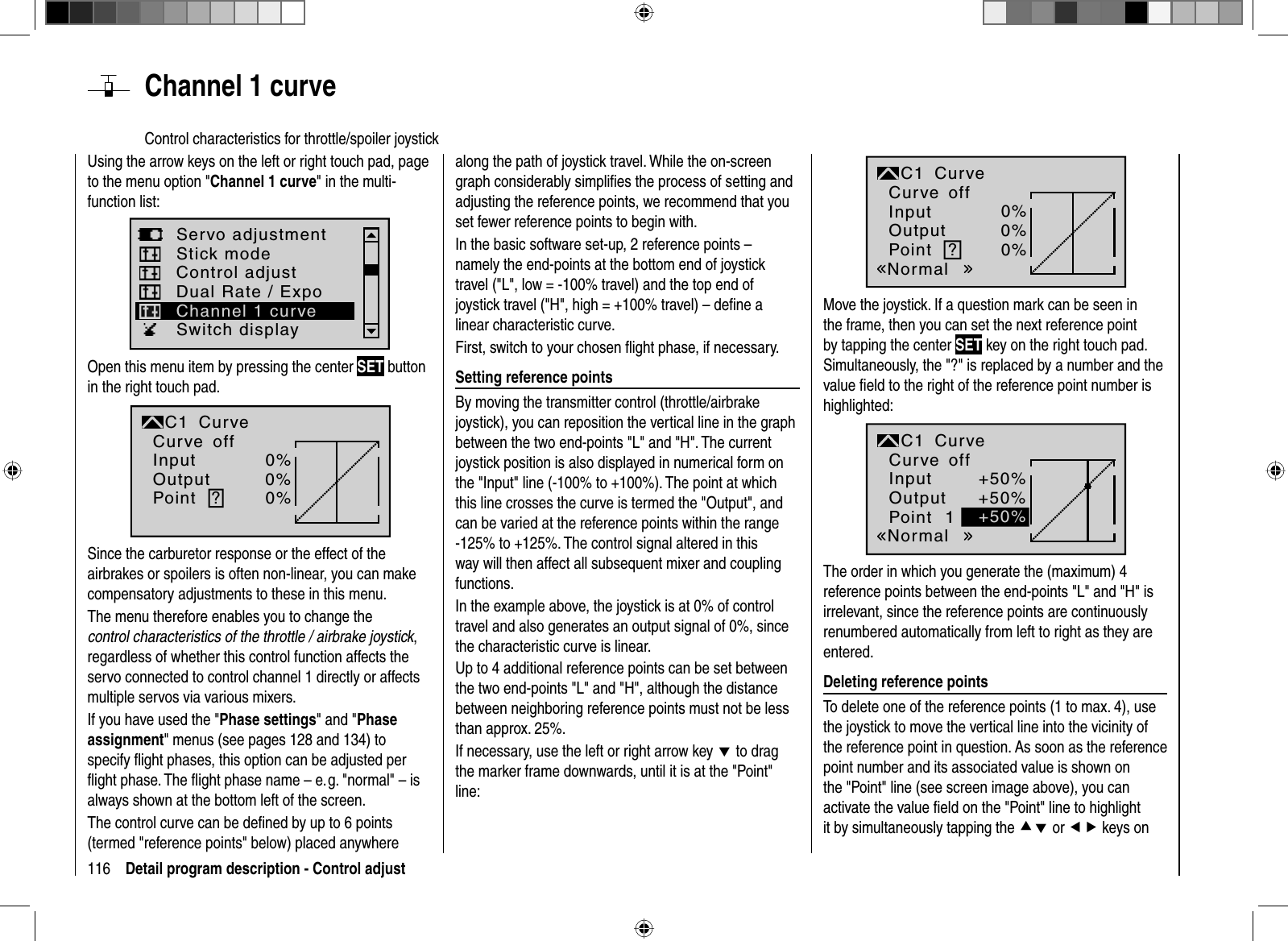
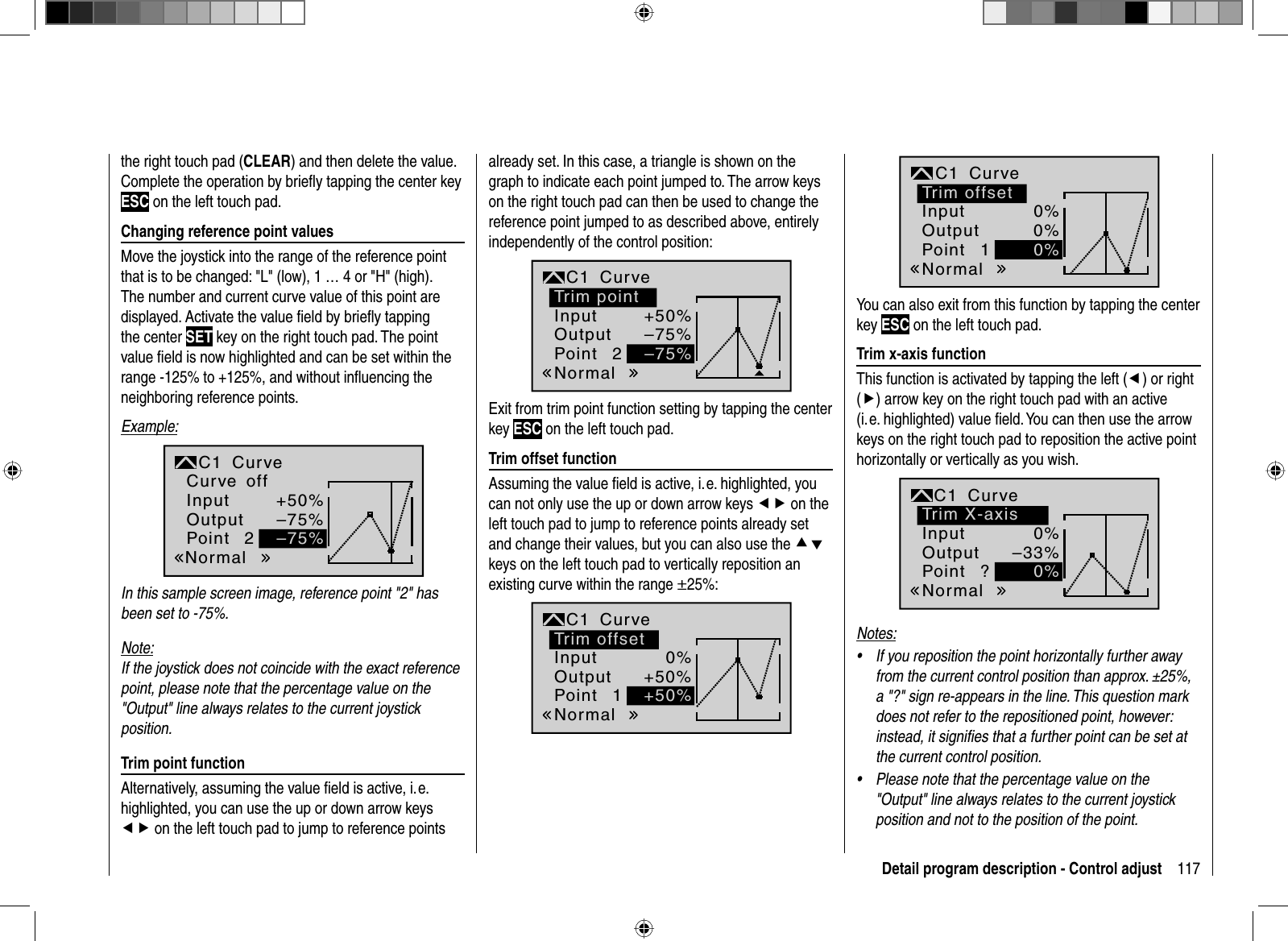
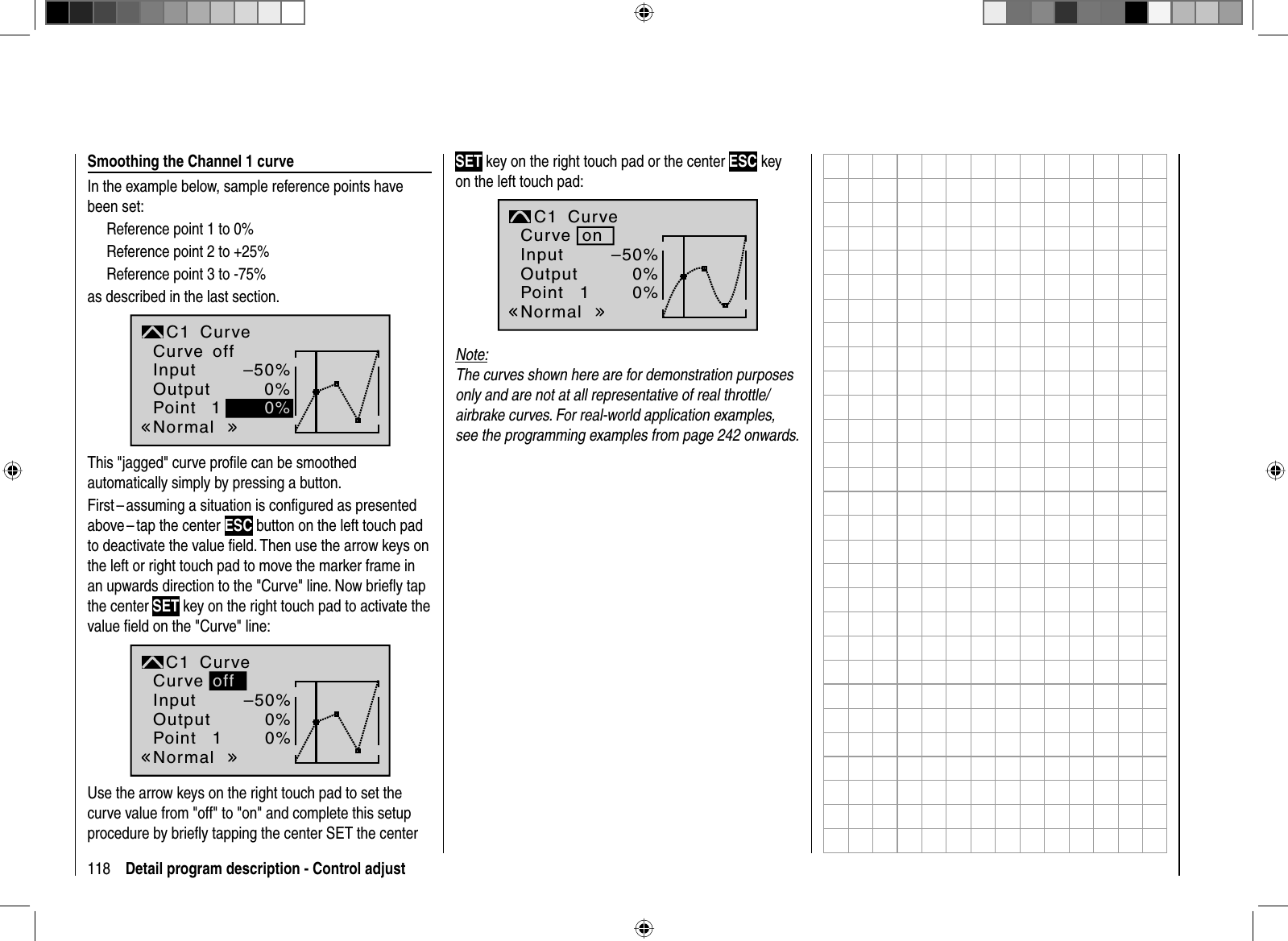
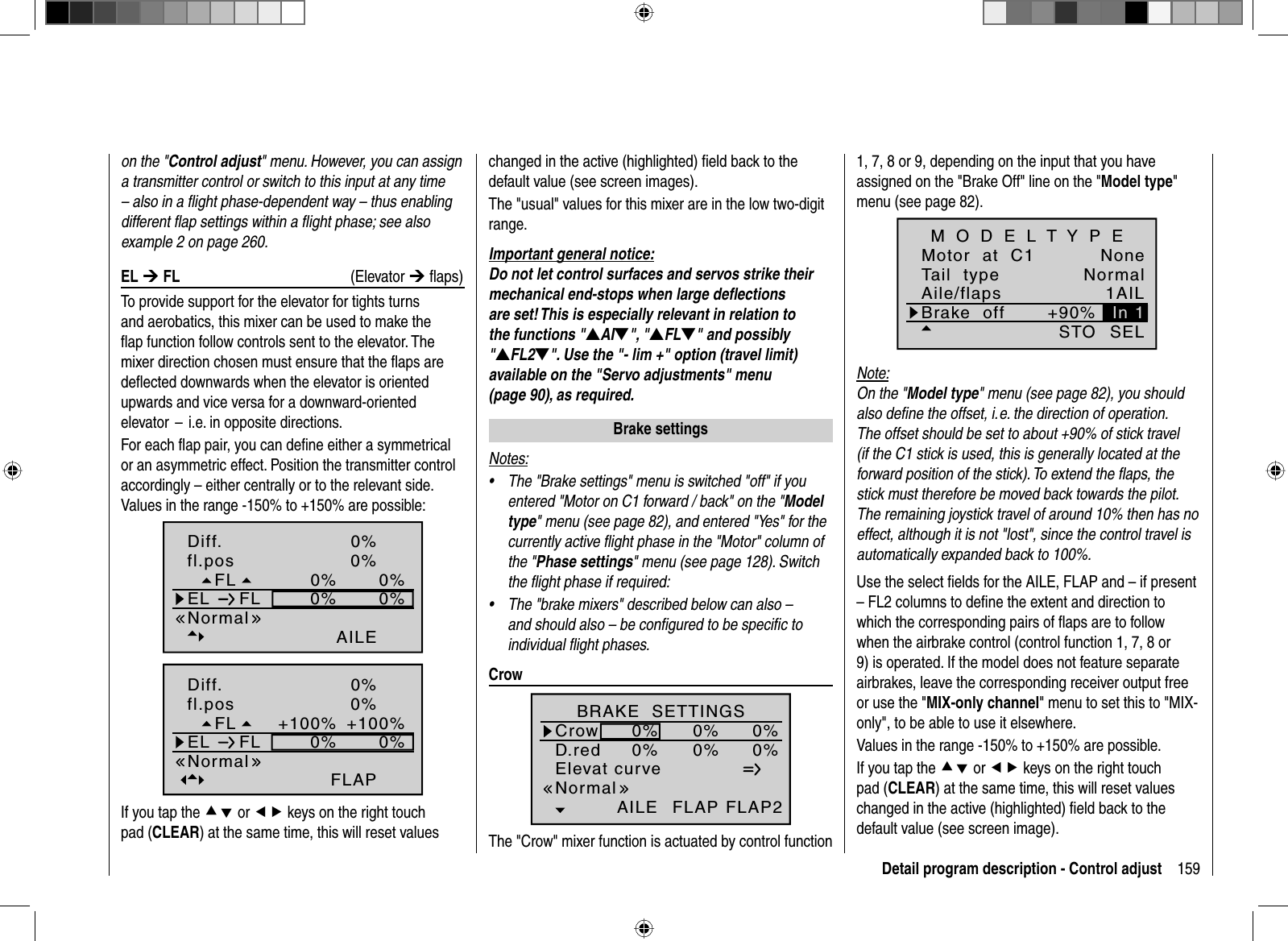
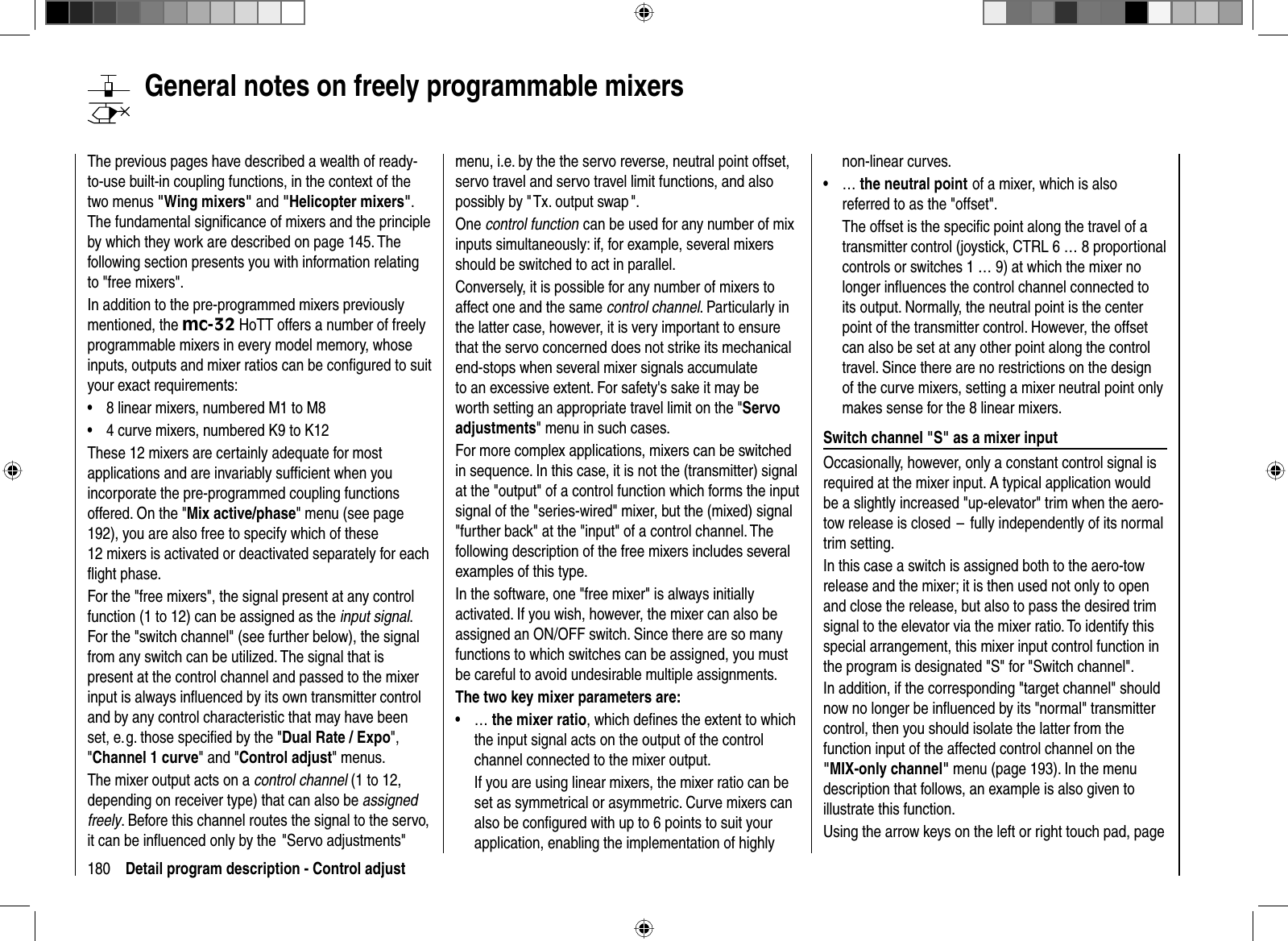
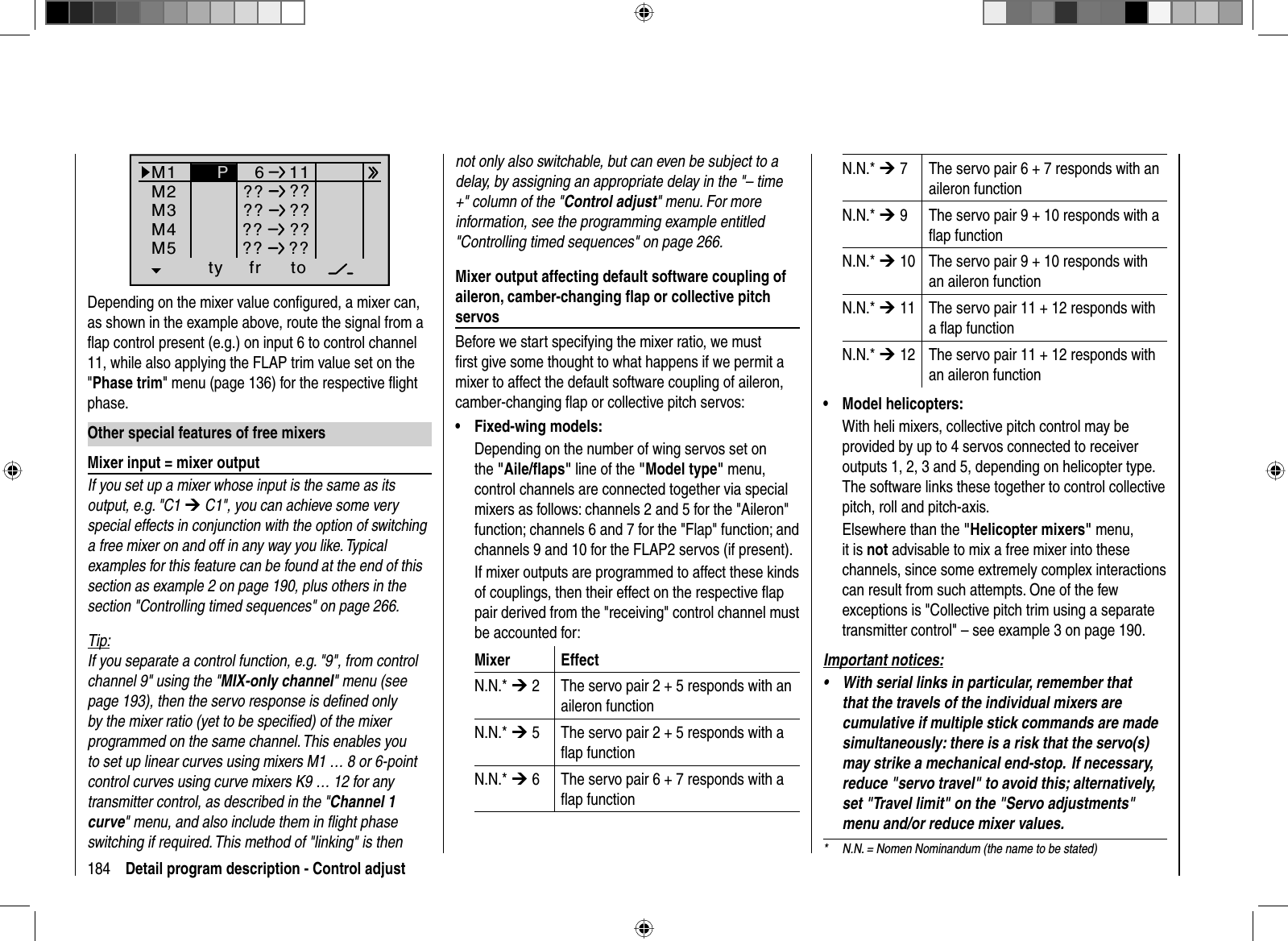
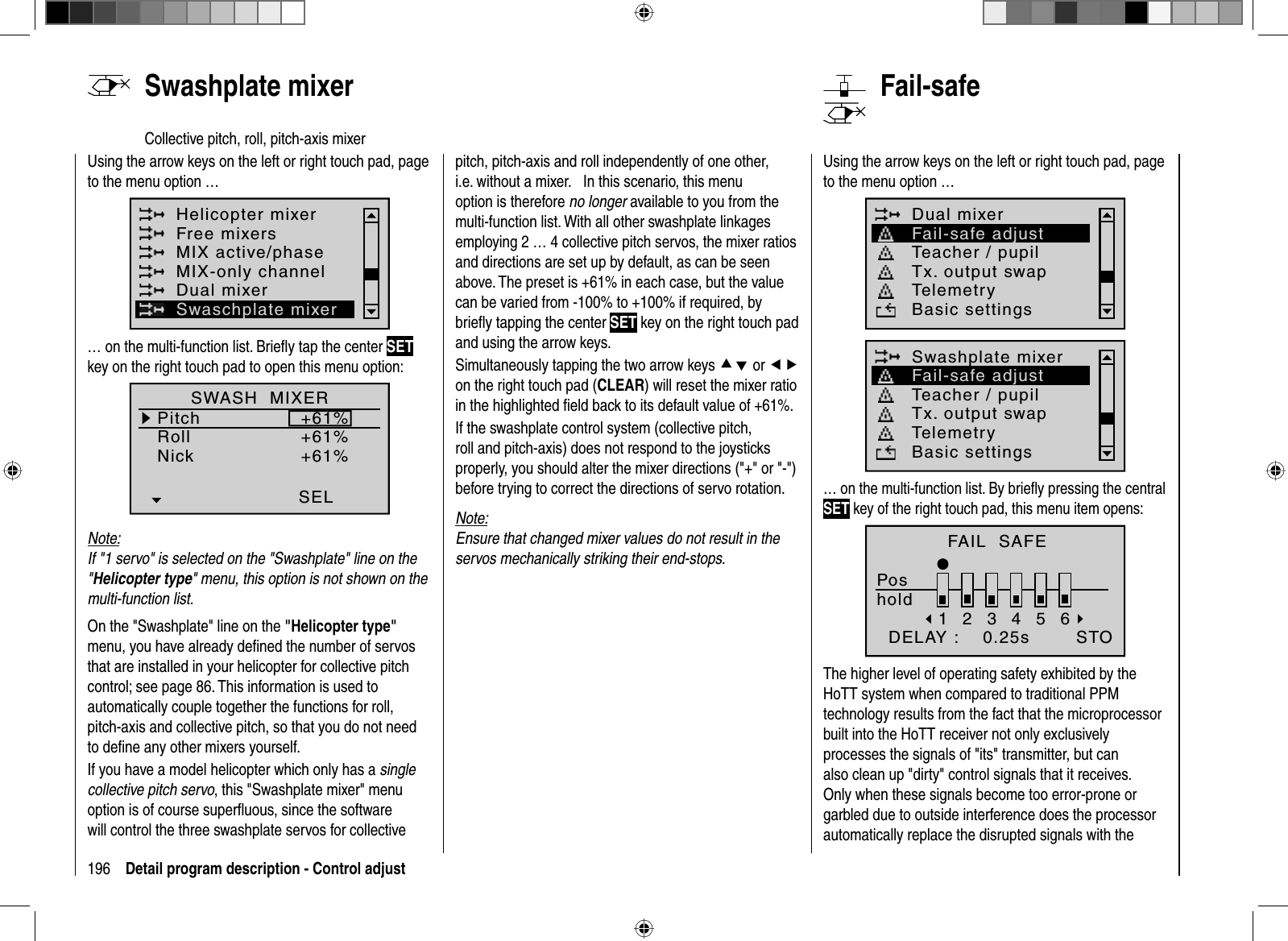
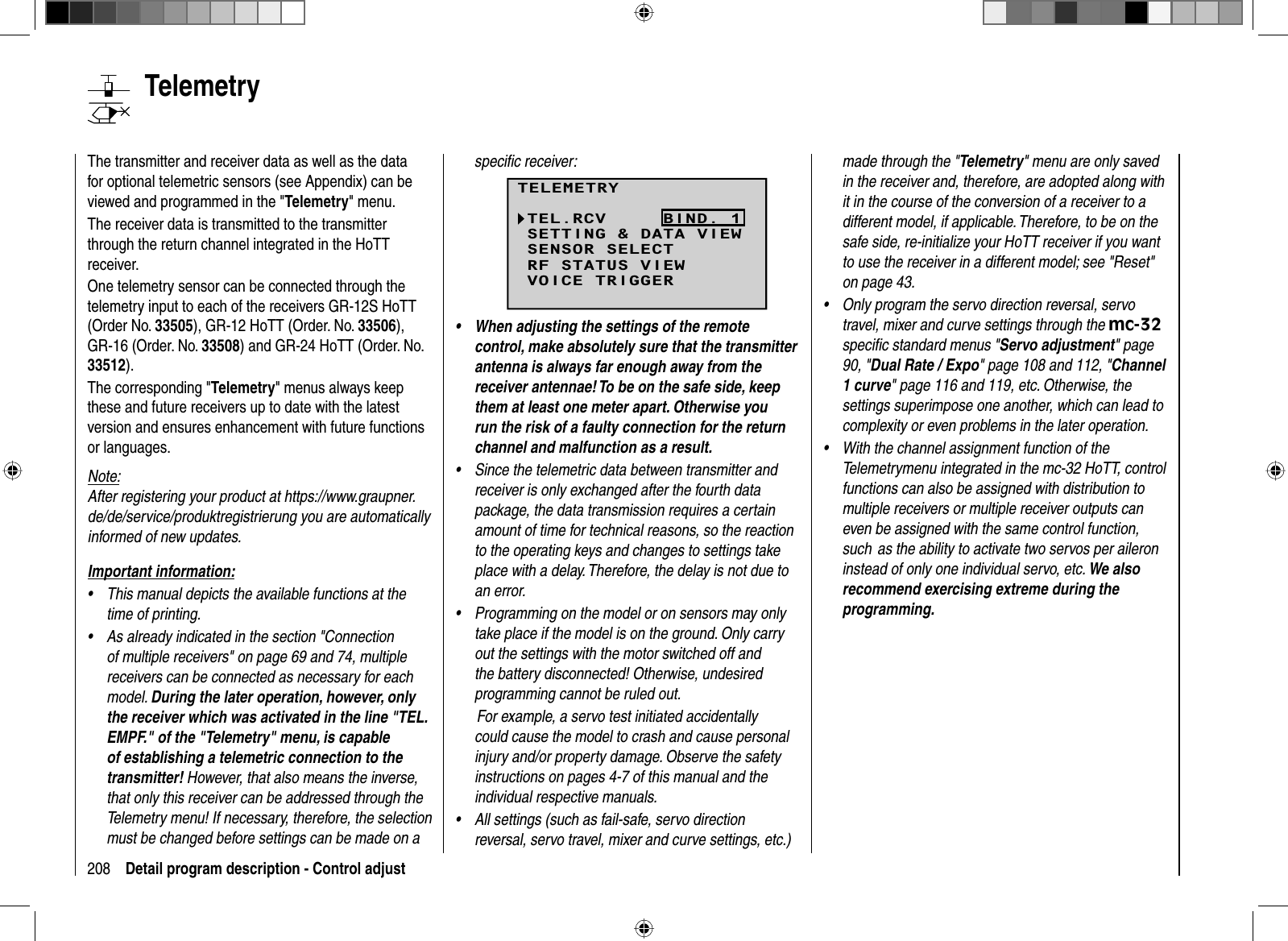
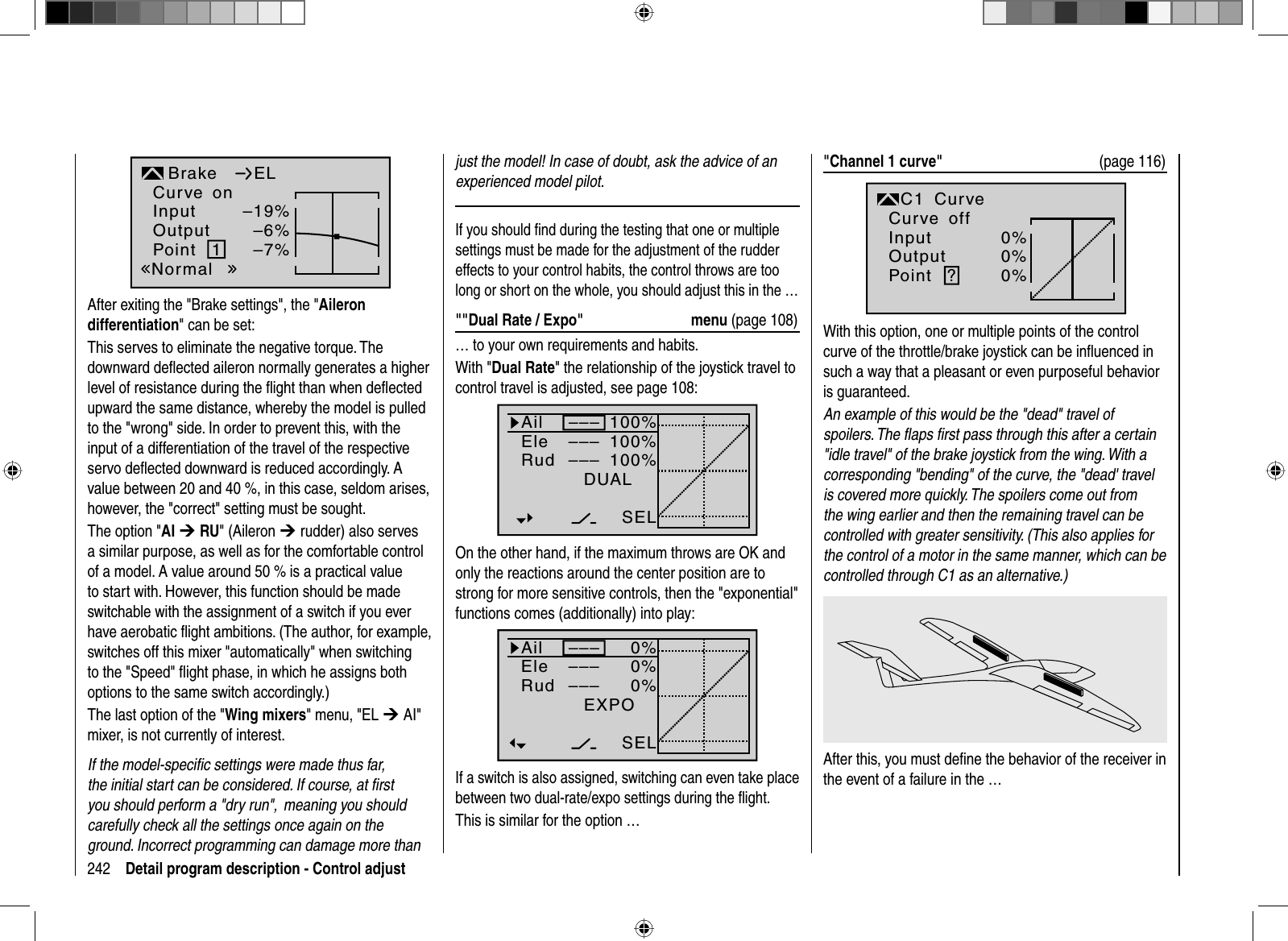
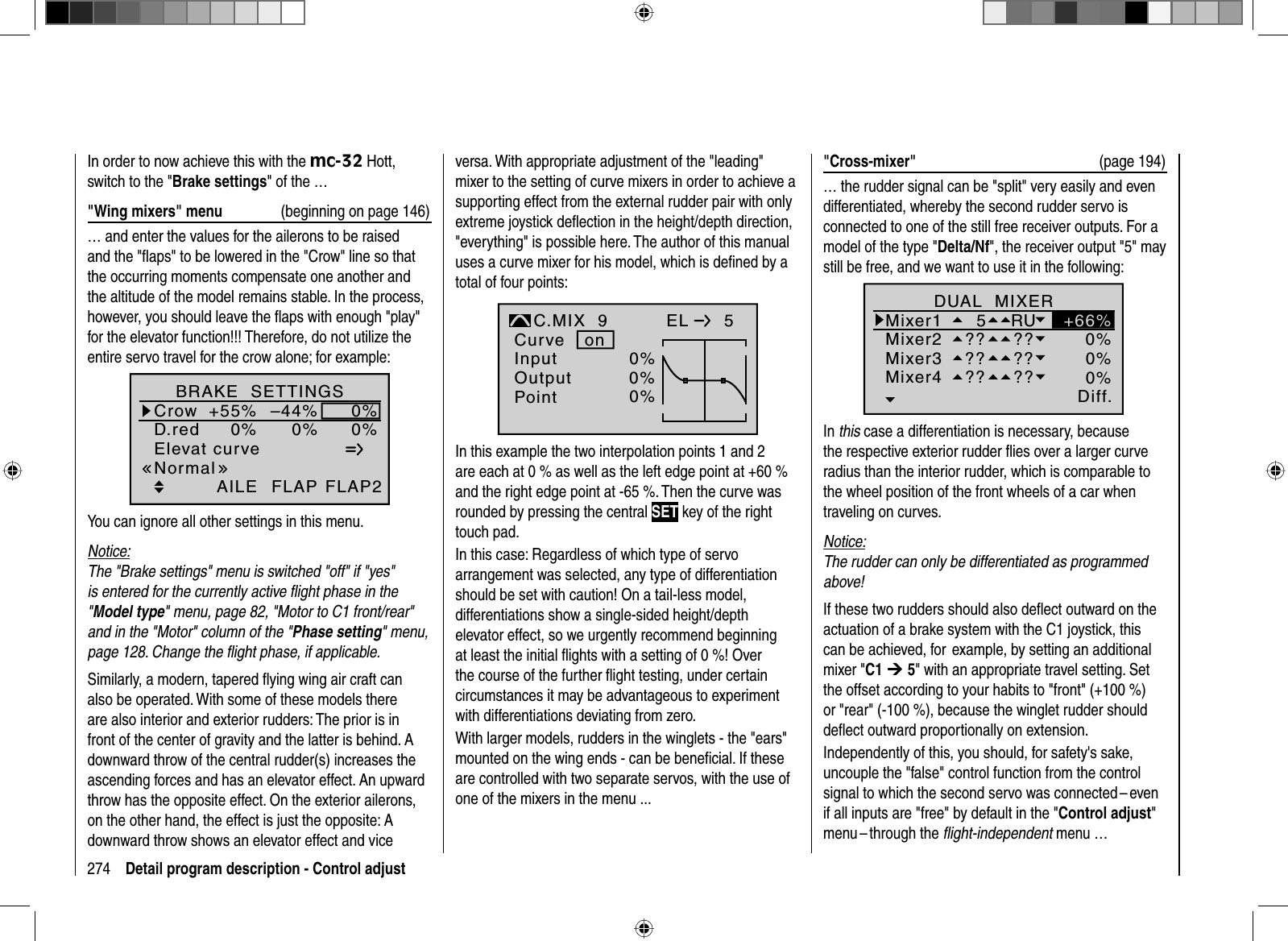
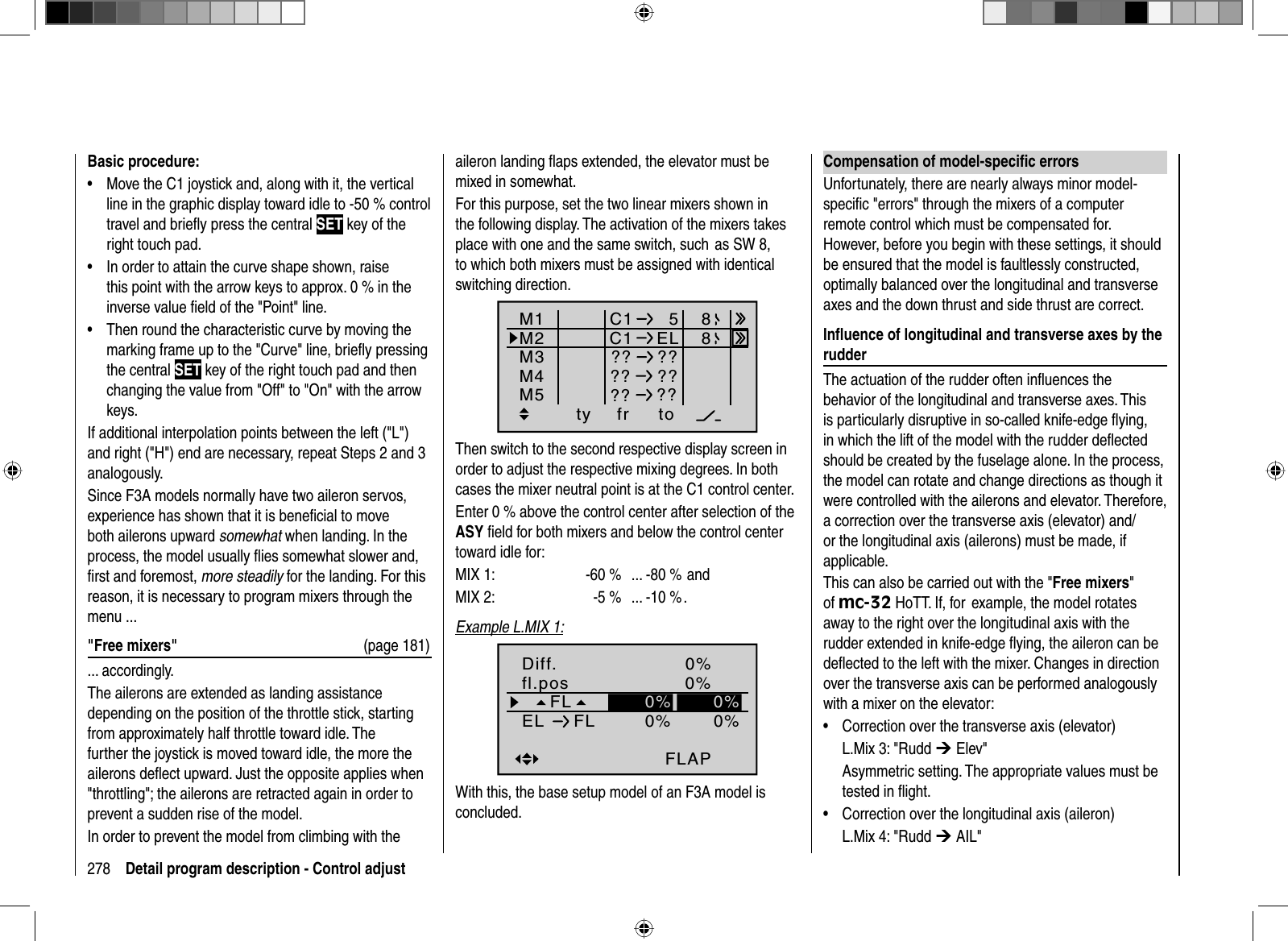
![68 Detail program description - Base setup model Base setup modelModel-specifi c base settings for winged aircraft modelsBefore programming specifi c parameters, there are some basic settings to be made which effect the currently active model memory.Select the "Base setup model" menu with the arrow keys of the left or right touch pad then press the center SET button in the right touch pad.Model typeSuppress modelsBase setup modelServo adjustmentControl adjustStick mode Model nameMod.nameStick modeRF BIND1n/aBASIC SETTINGS, MODELn/aBD2BD1RF transmit OFFChange to the next screen page by pressing the SETbutton briefl y. This will open a screen of characters for entry of the model's name. A maximum of 9 characters can be used to specify a model name. !"#$%&’()+,–./0123456789:;Mod Name GRAUBFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDESelect the desired characters with the arrow keys of the left touch pad. Move to select the next character position by pressing the f arrow key of the right touch pad or its center SET button. Simultaneously pressing the cd or ef of the right touch pad (CLEAR) will place a space character at the position.Positioning to any character position within the entry fi eld can be done with the ef keys of the right touch pad.A return to the previous menu screen is accomplished by pressing the center ESC button in the left touch pad.After entering the model name it will appear in the base screen of the "Model select" menu and in the sub-menufor the "Copy /Erase" menu item. S t i c kmode"MODE 2" (throttle left)"MODE 3" (throttle right) "MODE 4" (throttle left)"MODE 1" (throttle left)Stick forwardStick backRudder leftRudder rightMotor full throttleMotor idleAileron leftAileron rightMotor full throttleRudder leftRudder rightMotor idleStick forwardStick backAileron leftAileron rightStick forwardStick backAileron leftAileron rightMotor full throttleMotor idleRudder leftRudder rightMotor full throttleMotor idleAileron leftAileron rightStick forwardStick backRudder leftRudder rightThere are four fundamental options for assigning the four control functions (aileron, elevator, rudder and throttle/brake fl ap) for a winged aircraft model to the two joysticks. Just which of these options is chosen depends on the individual preferences of the individual model pilot. Select the "Stick mode" line with the cd arrow keys of the left or right touch pad. The option fi eld will be enclosed in a frame.1SELGRAUBELEMod.nameStick modeRF BIND n/aBASIC SETTINGS, MODELn/aRF transmit OFFPress the SET button. The currently displayed stick mode will be displayed in inverse video. Now use the arrow keys of the right touch pad to select from among options 1 through 4.Pressing simultaneously on the cd or ef keys of the right touch pad (CLEAR) will return the option selection back to stick mode "1".Pressing the SET button again will deactivate option selection so that you can change to another line. Bound receiverGraupner HoTT receivers must be "instructed" to communicate exclusively with one particular model (memory) in a Graupner HoTT transmitter. This procedure is known as "binding" and must only be done once for every new receiver/model memory location combination (and can be repeated anytime).Important notice:During the binding procedure be sure the transmitter's antenna is always far enough away from the receiver's antenna. To be on the safe side, keep them at least one meter apart. Otherwise you run the risk of a faulty connection to the return channel and malfunctions will result.](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-68.png)
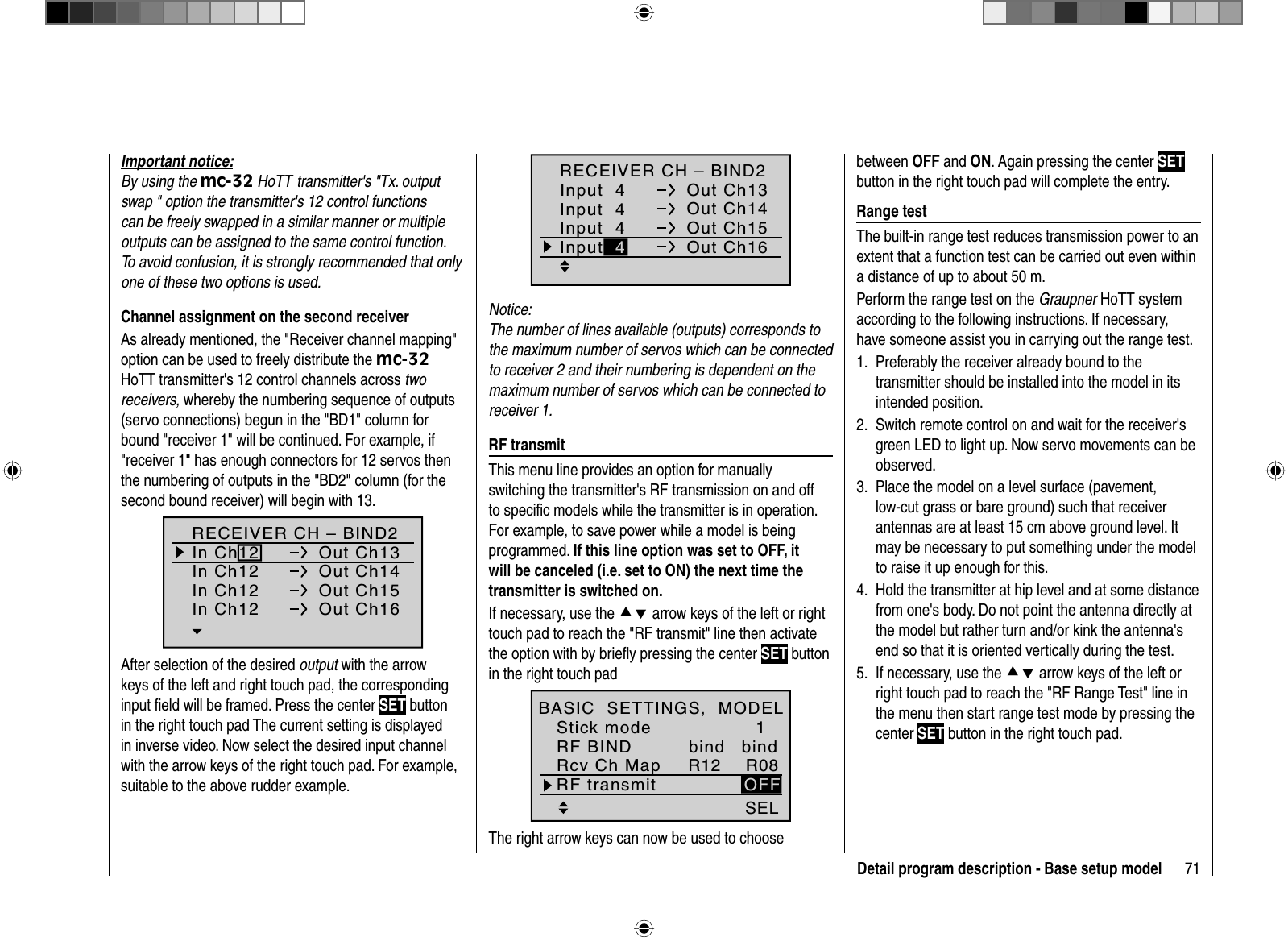
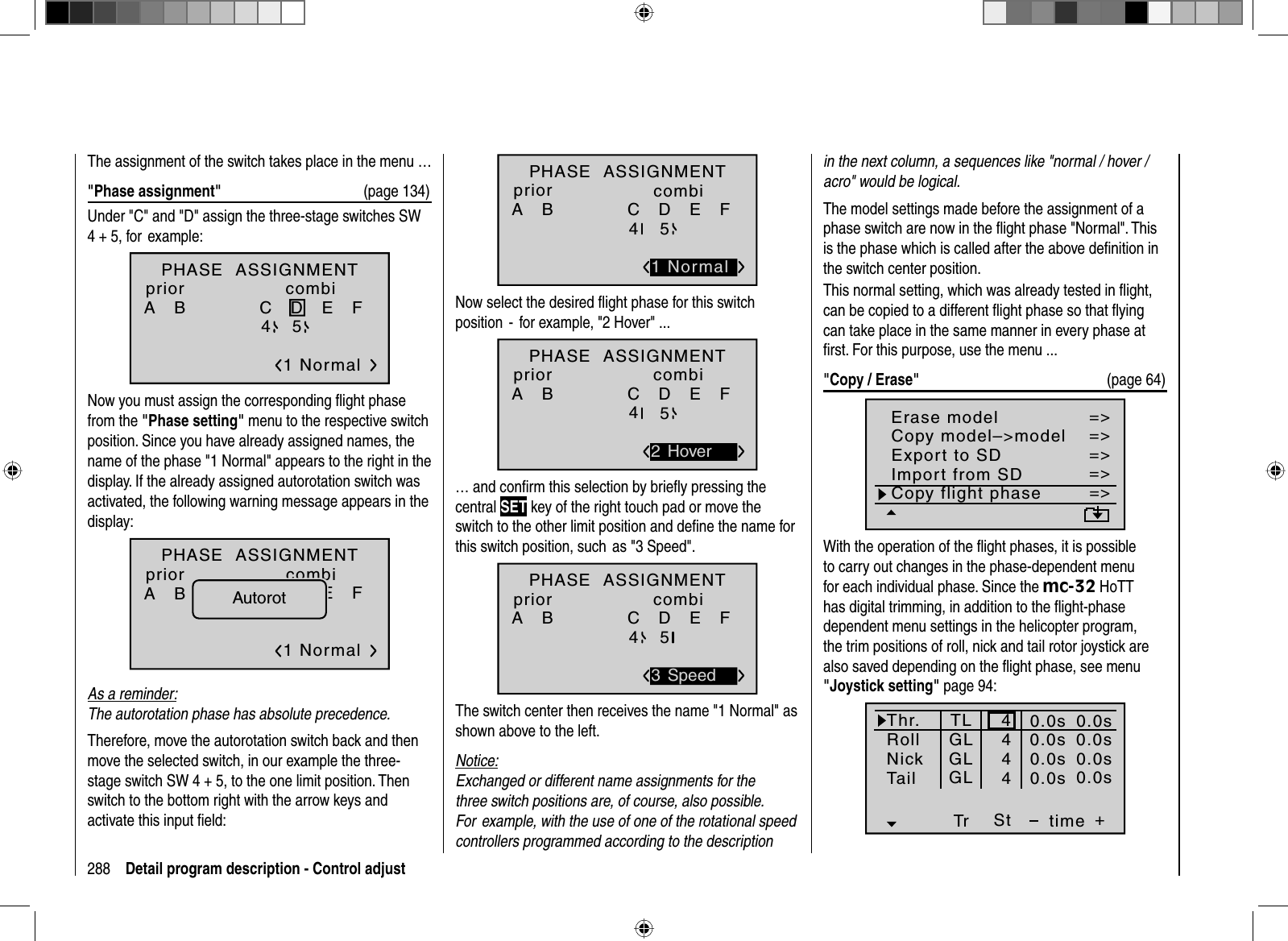
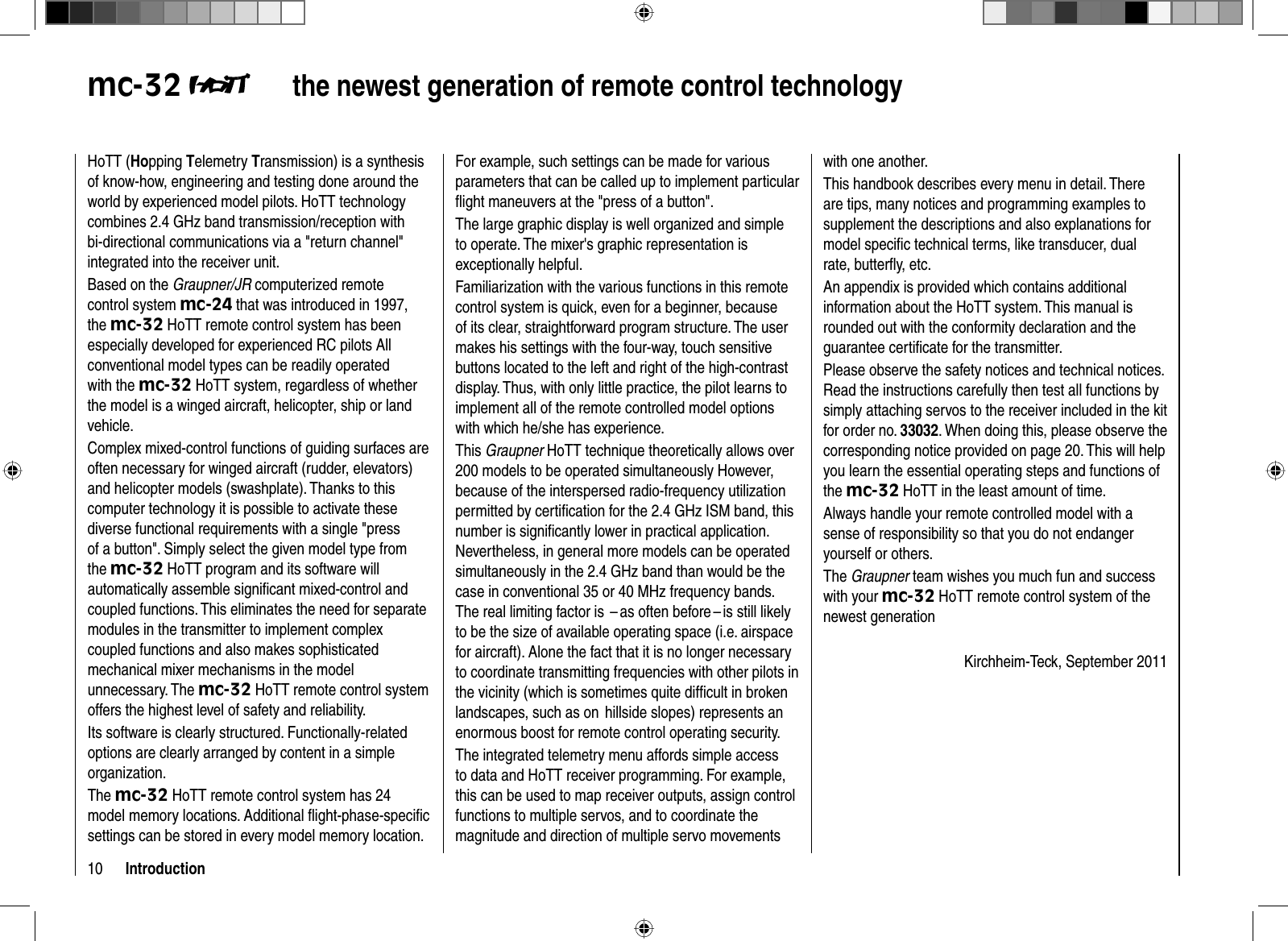
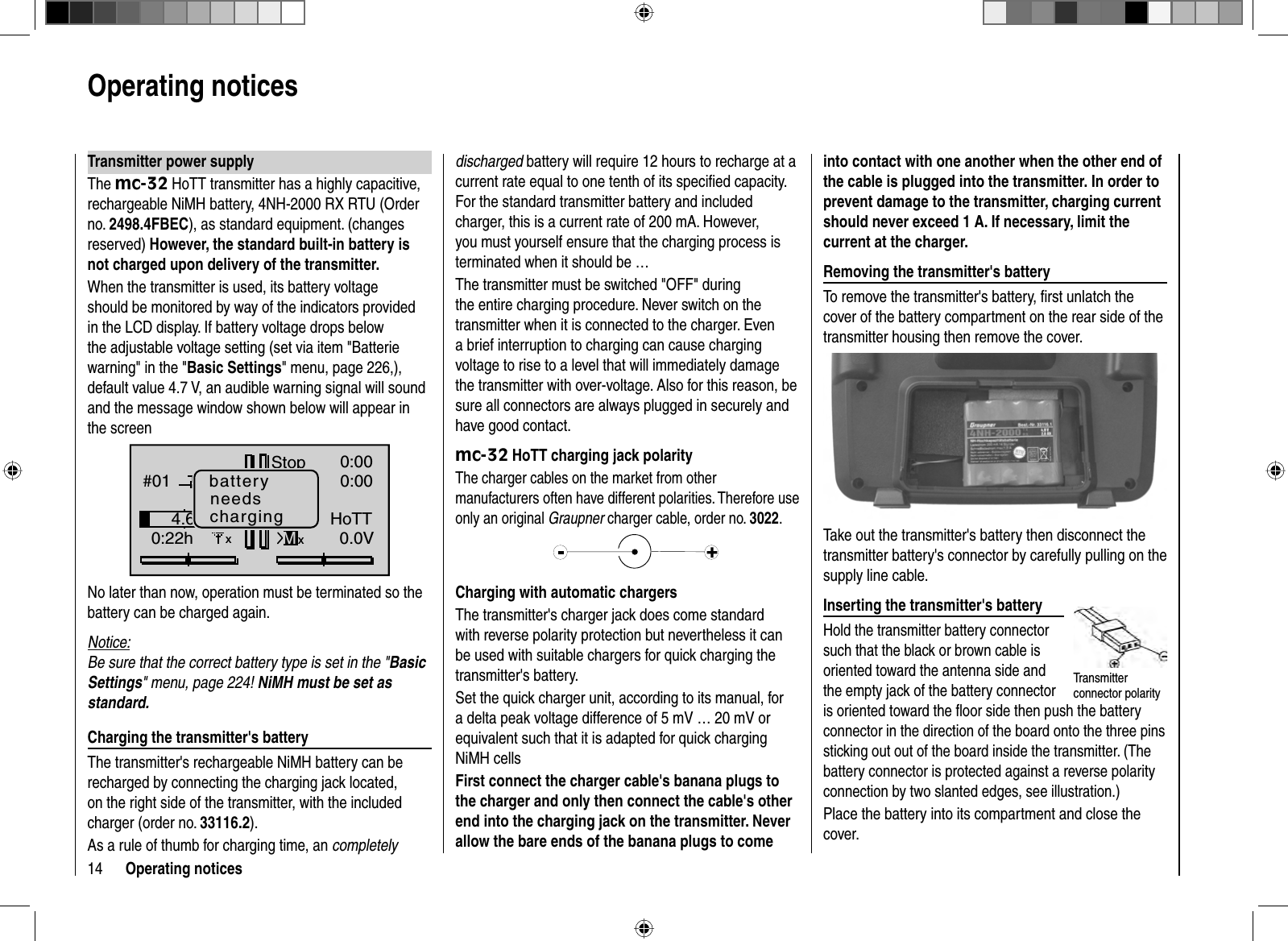
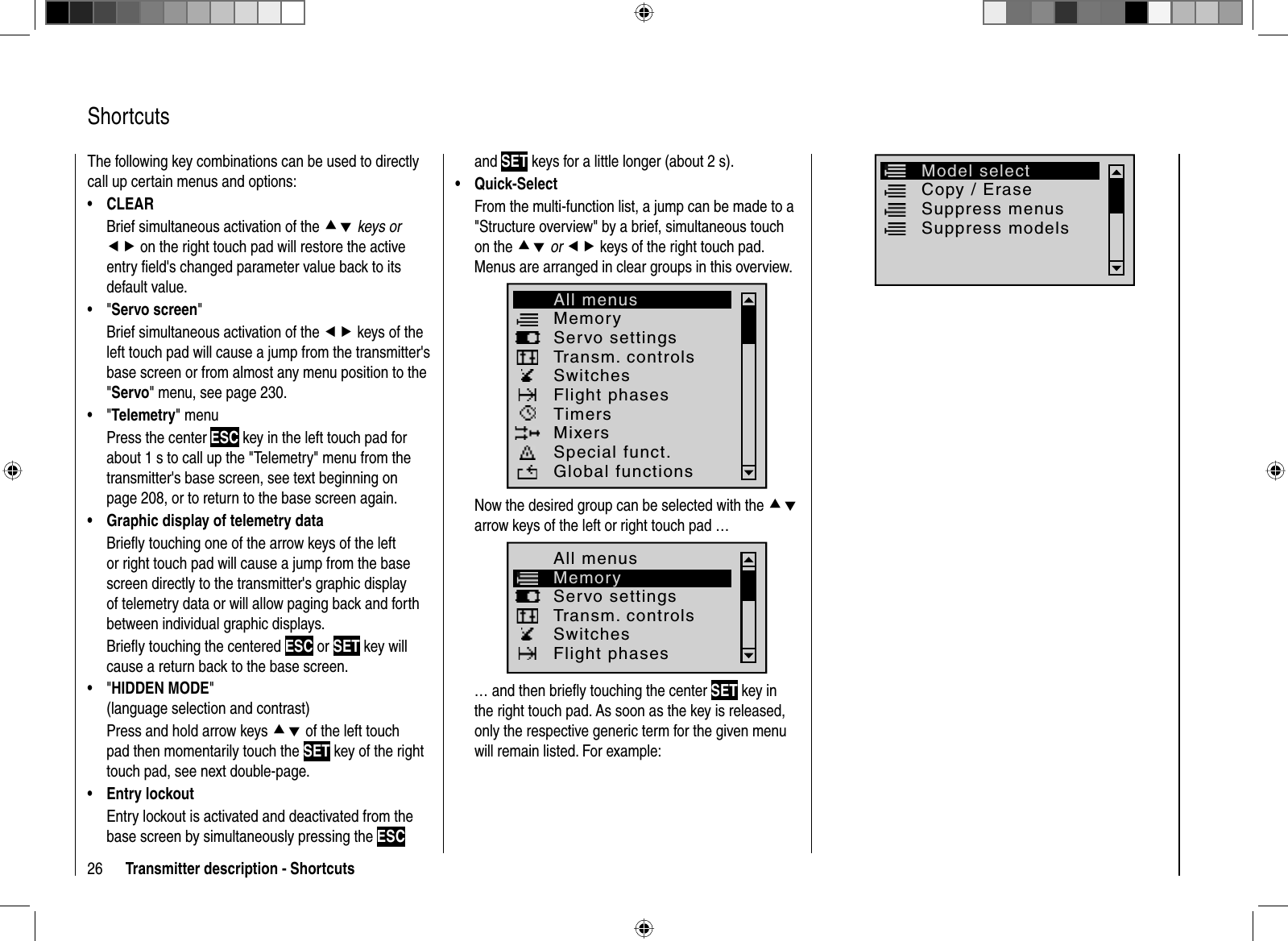
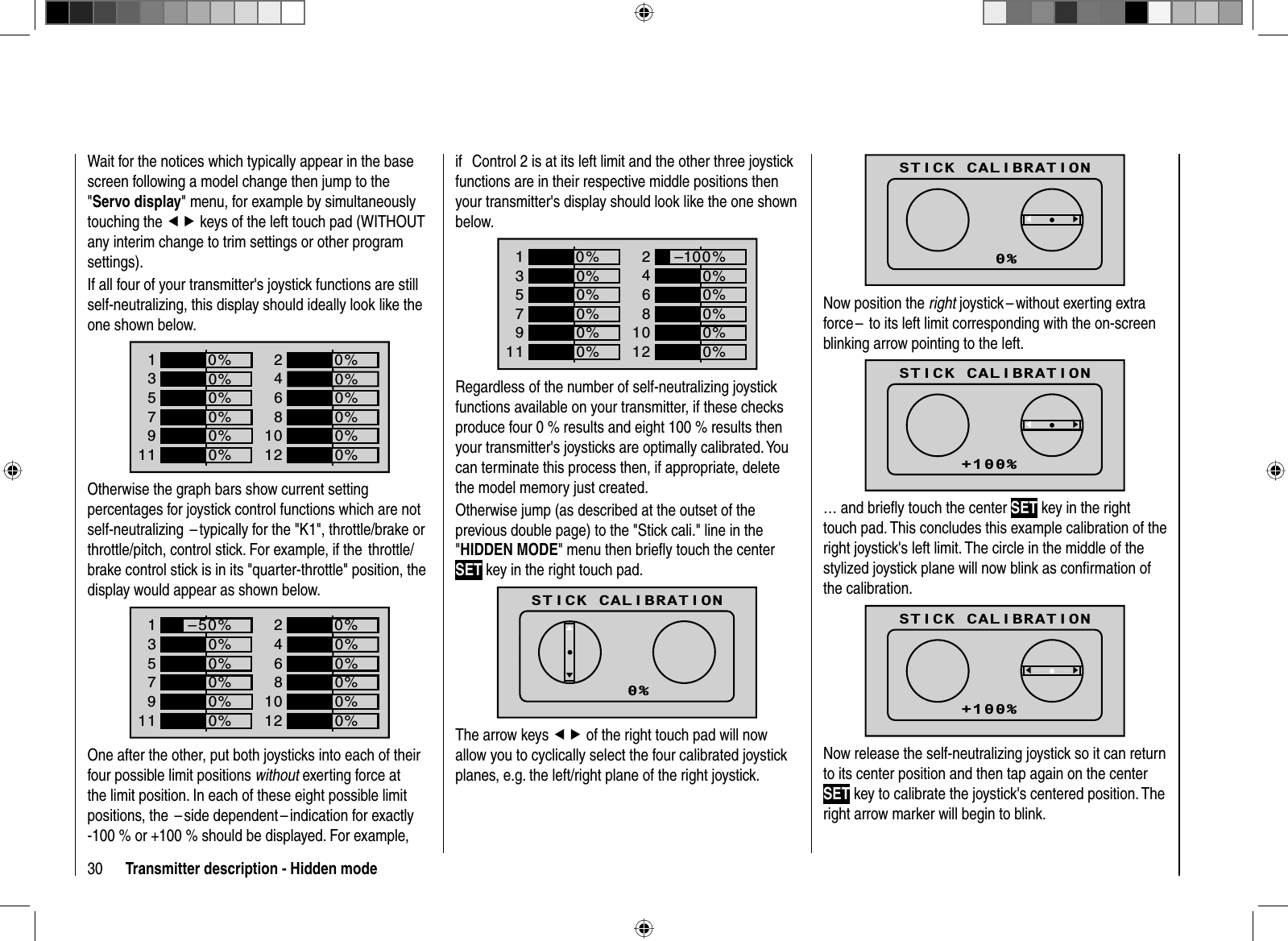
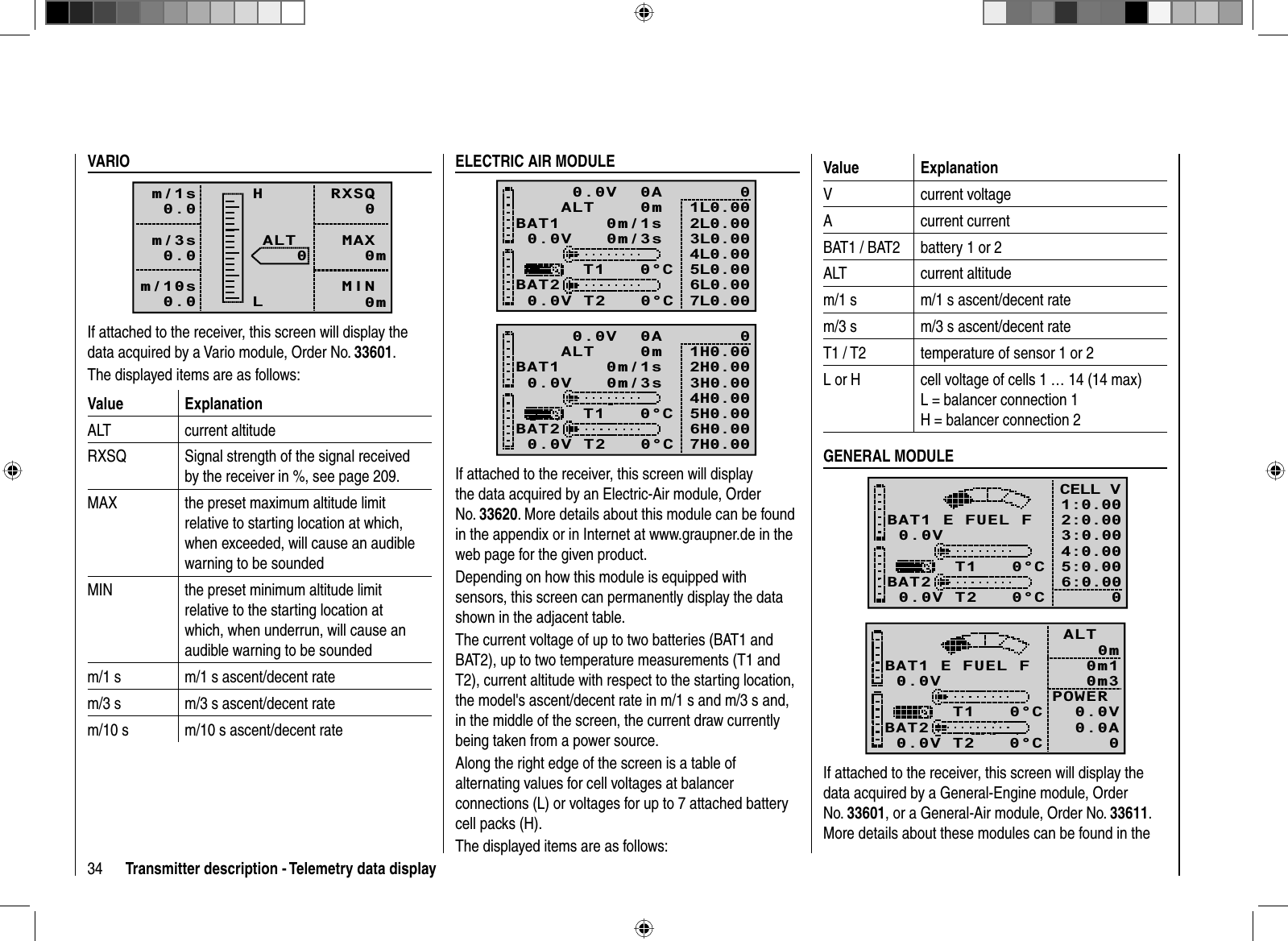
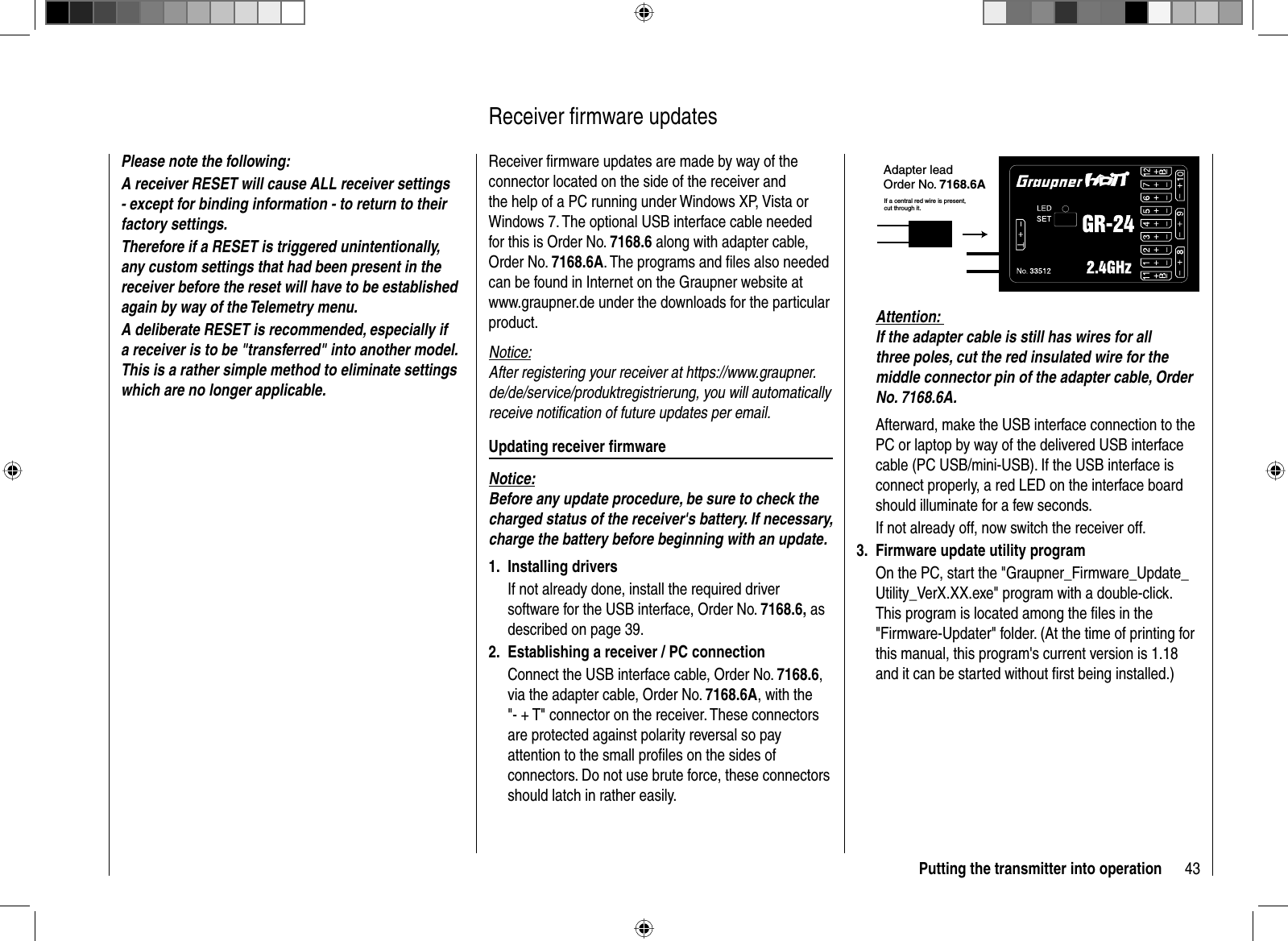
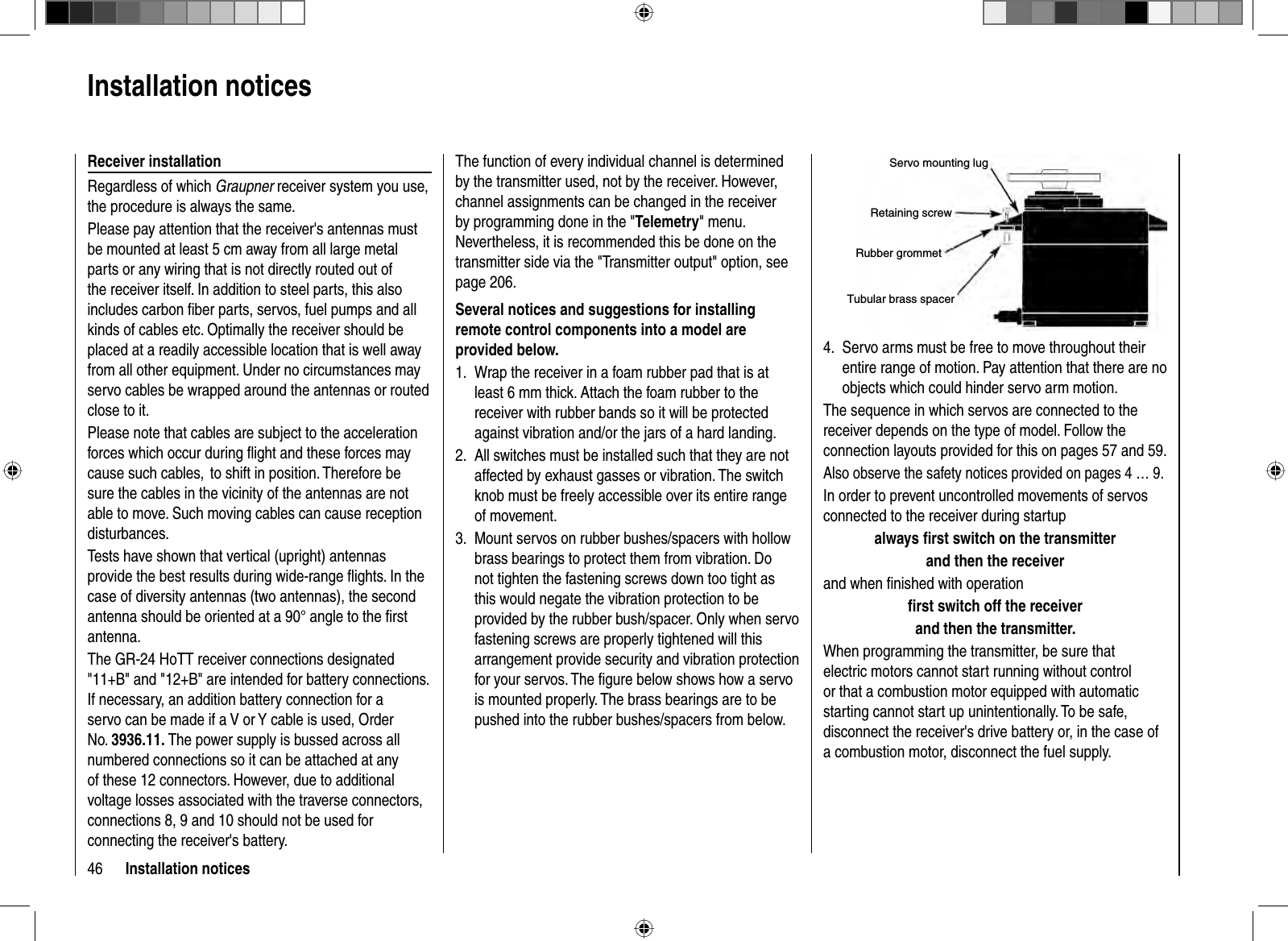
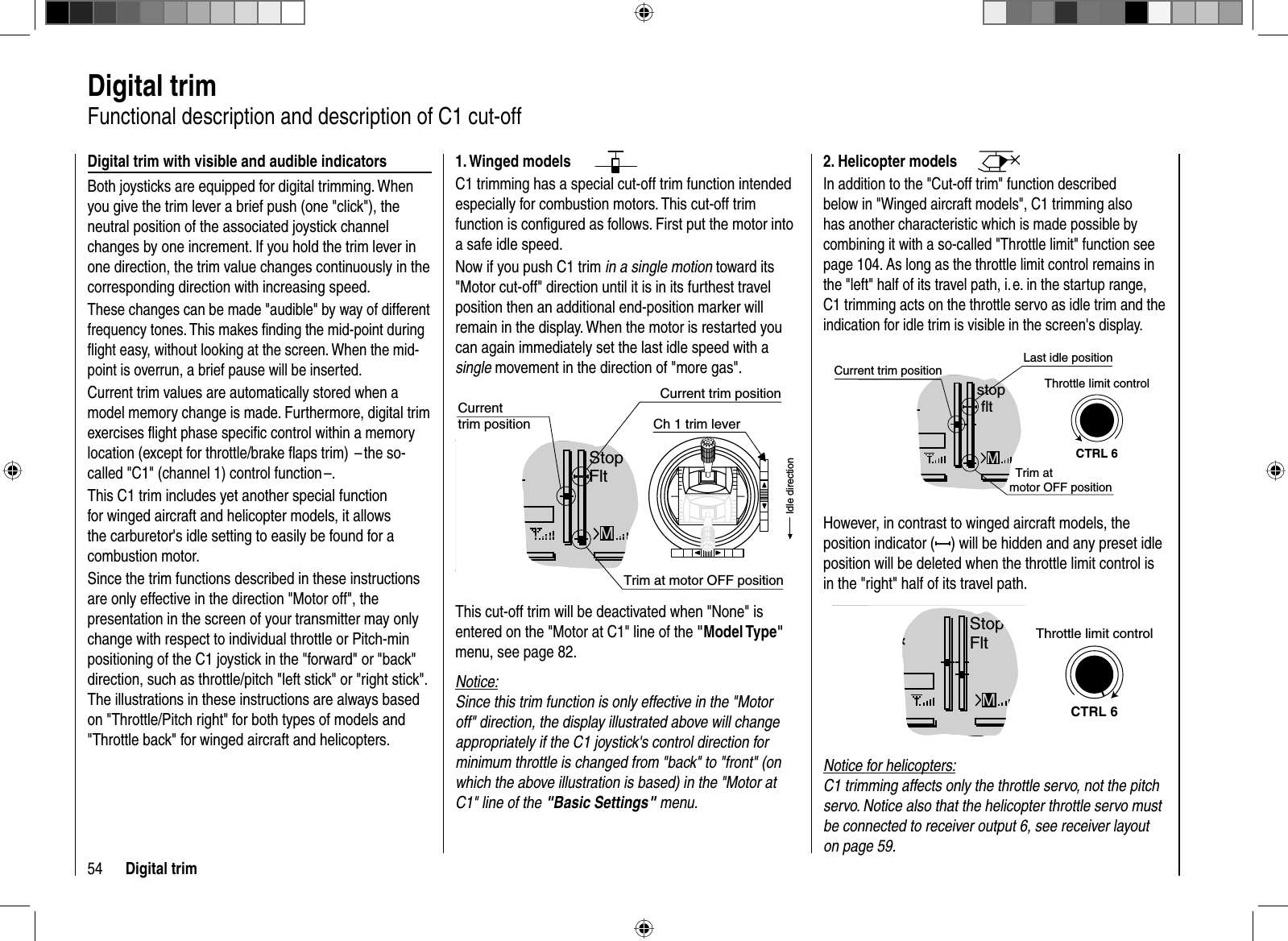
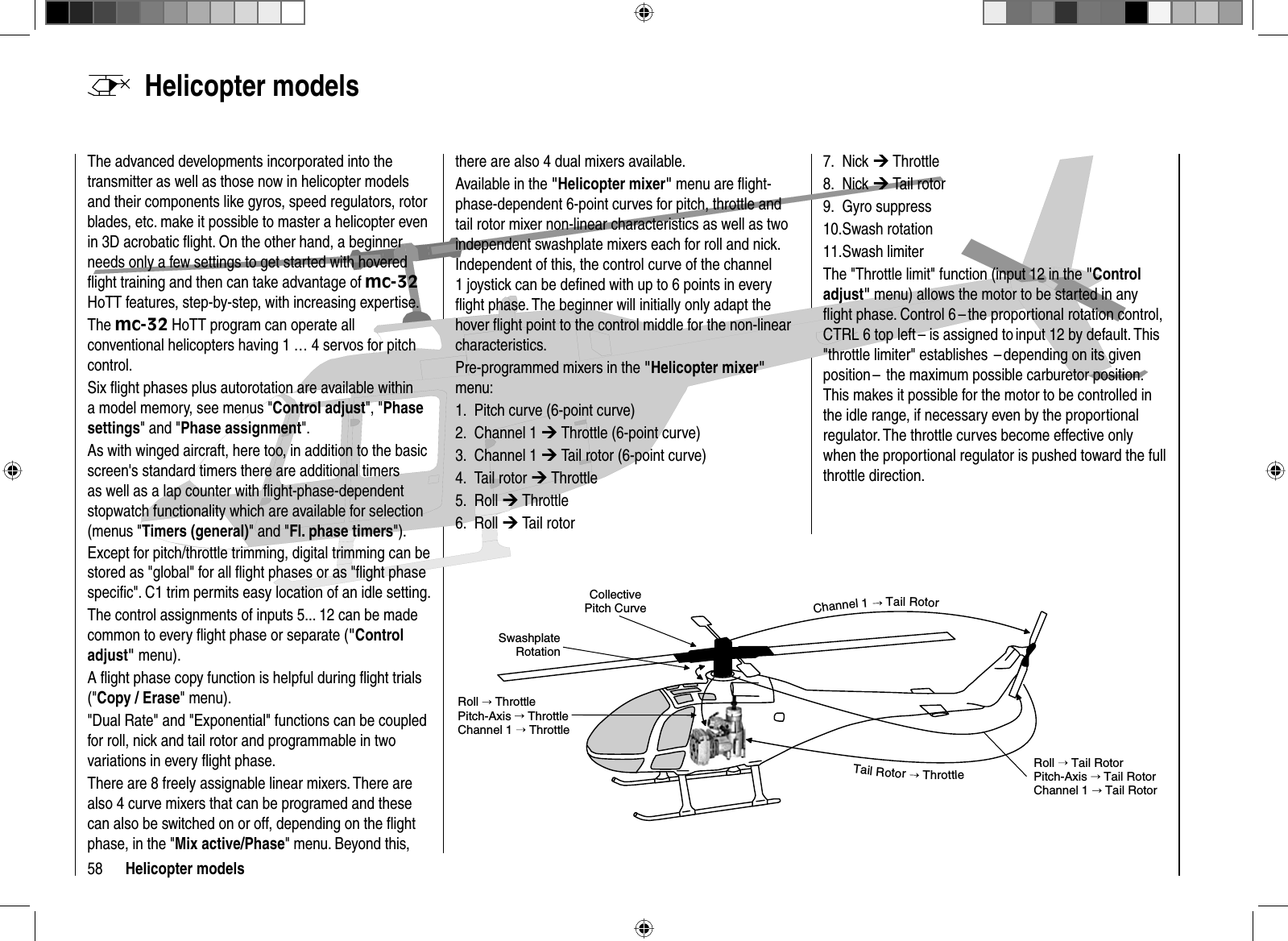
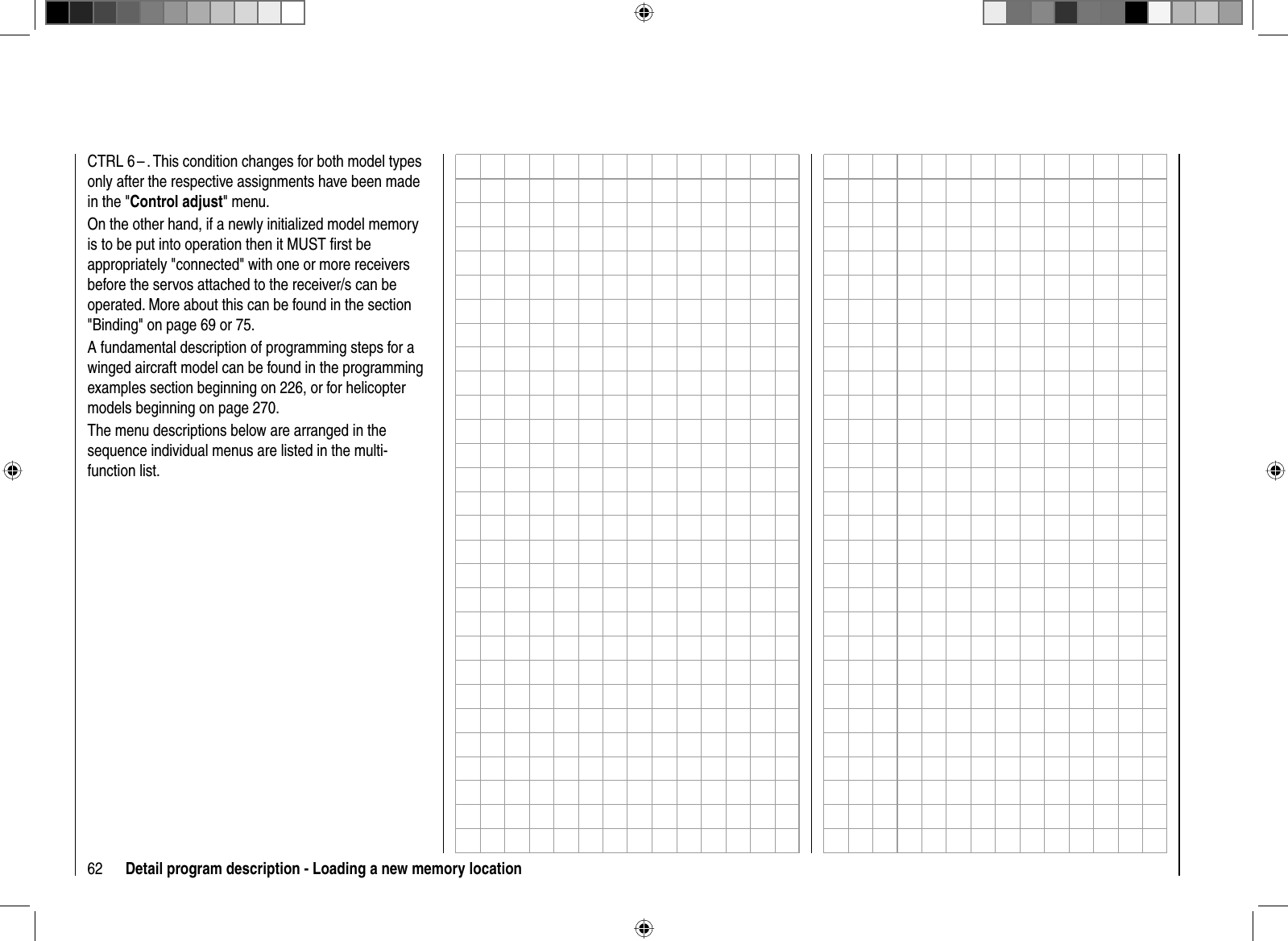
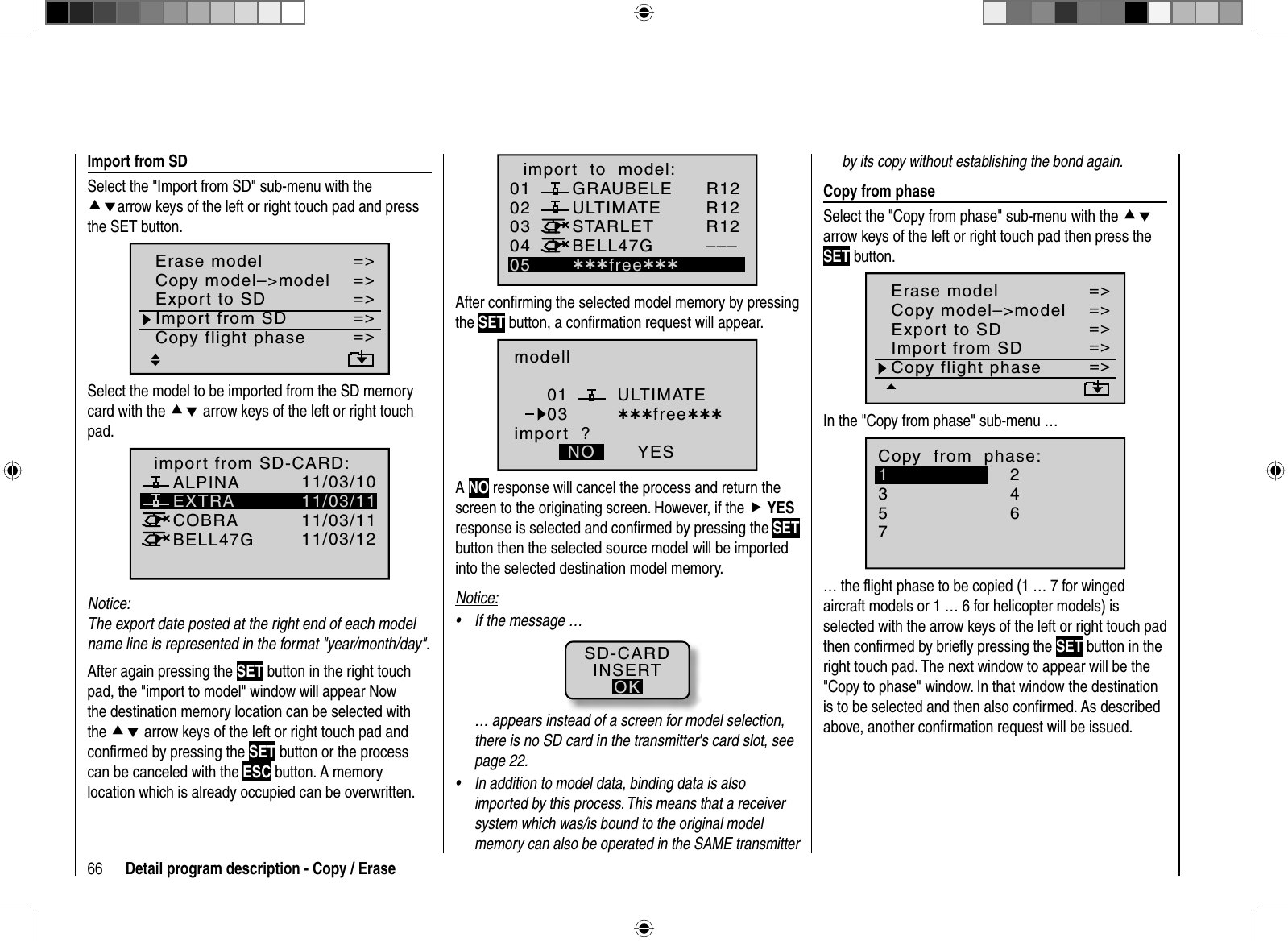
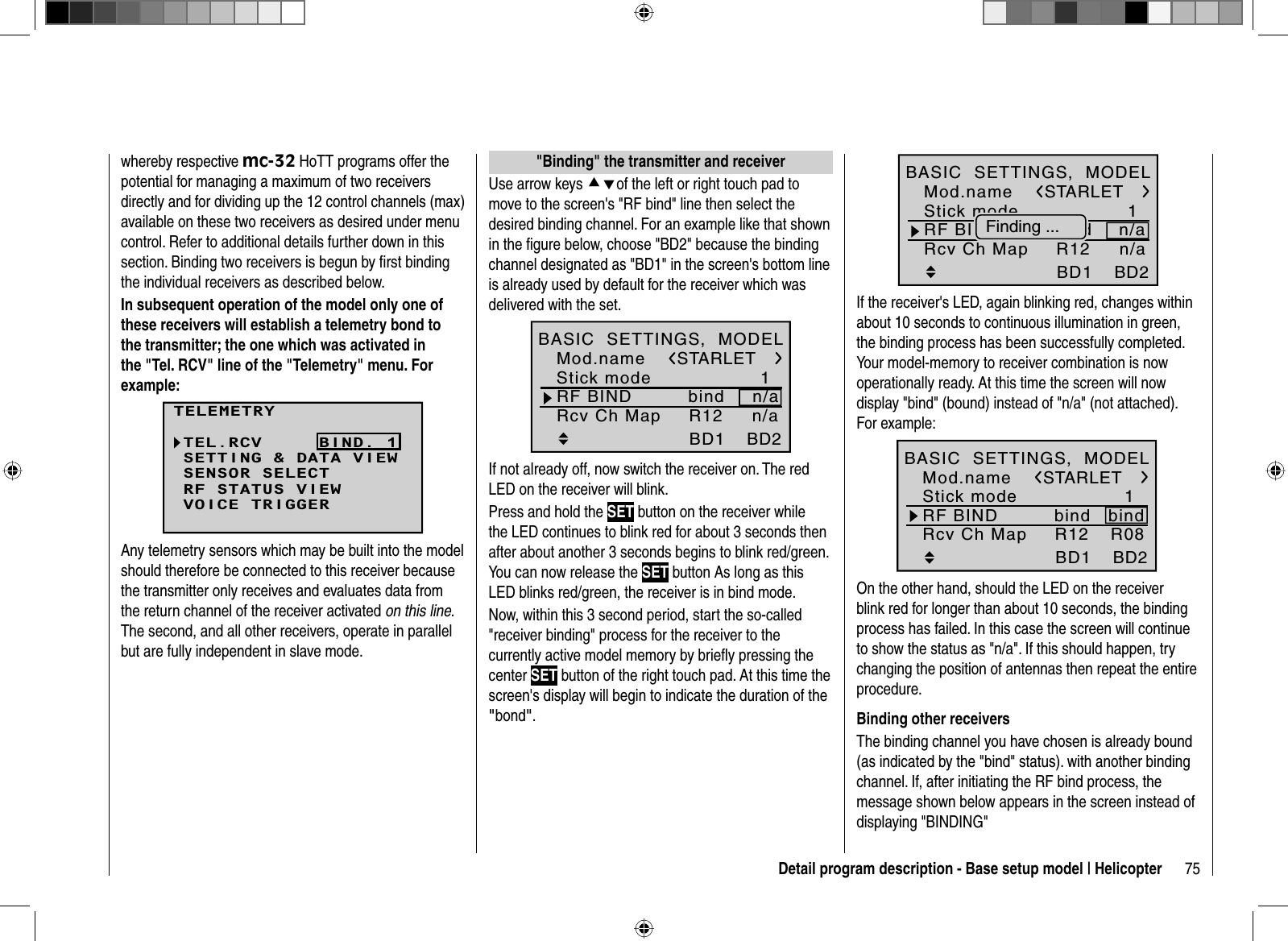
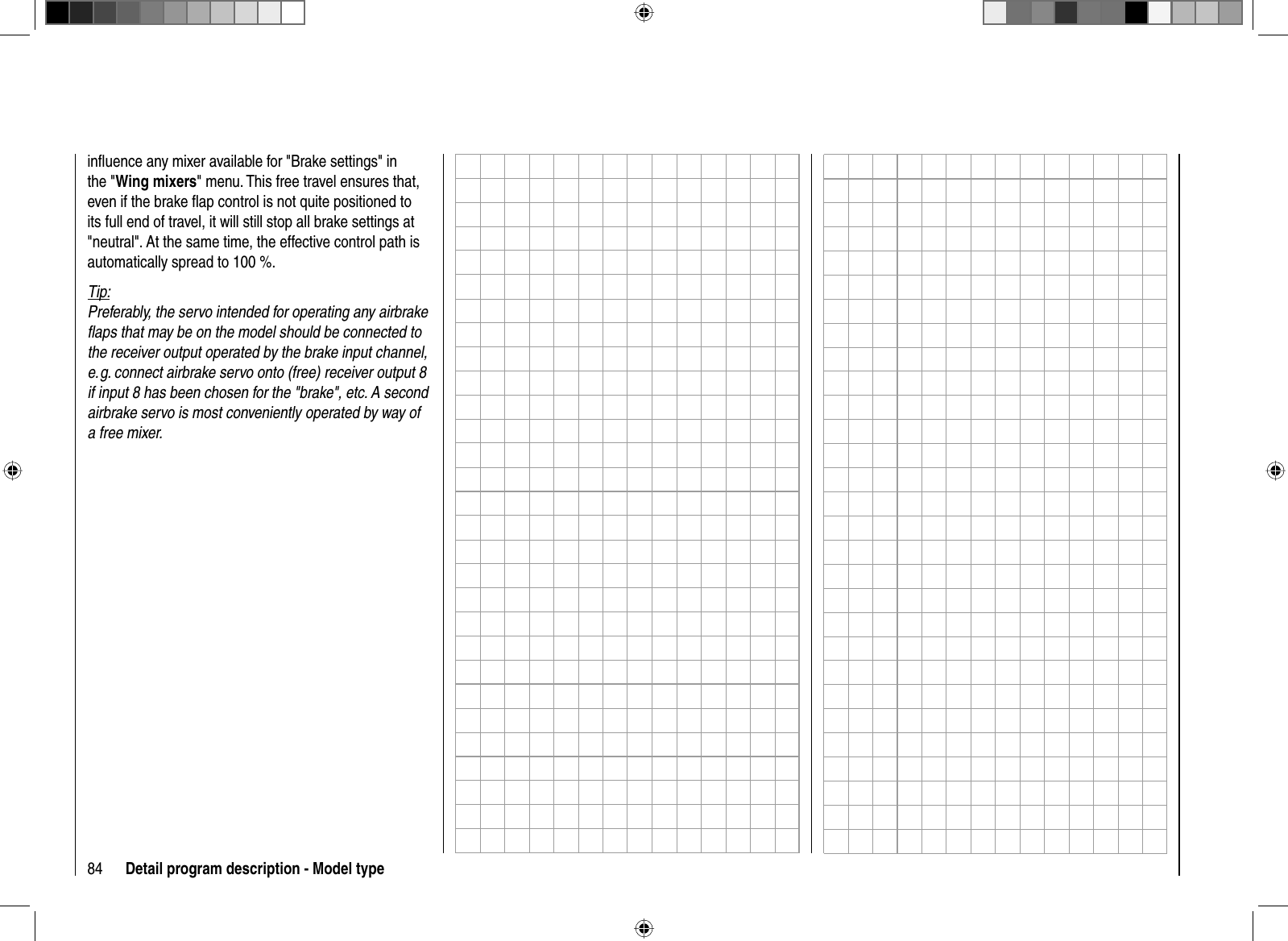
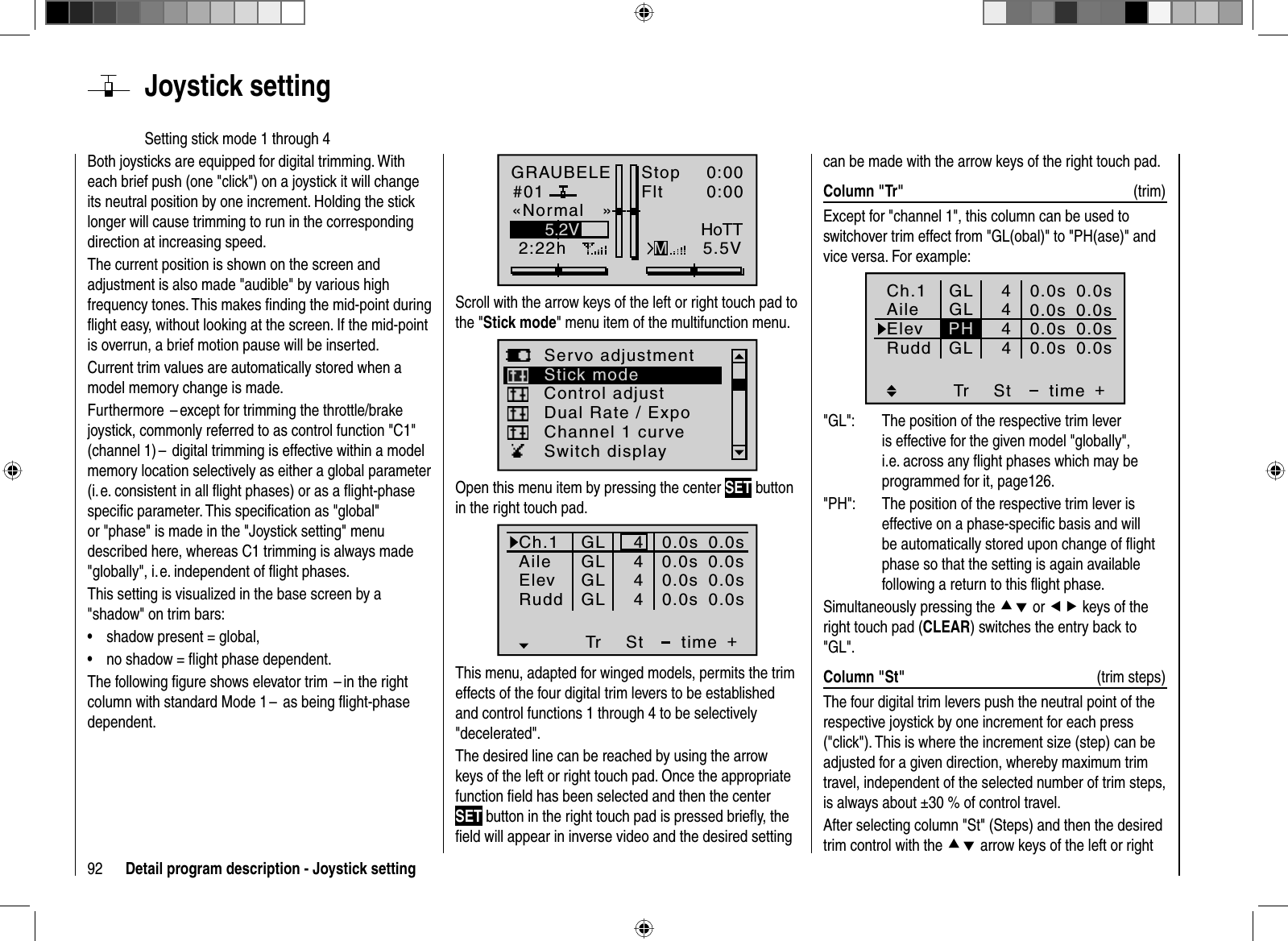
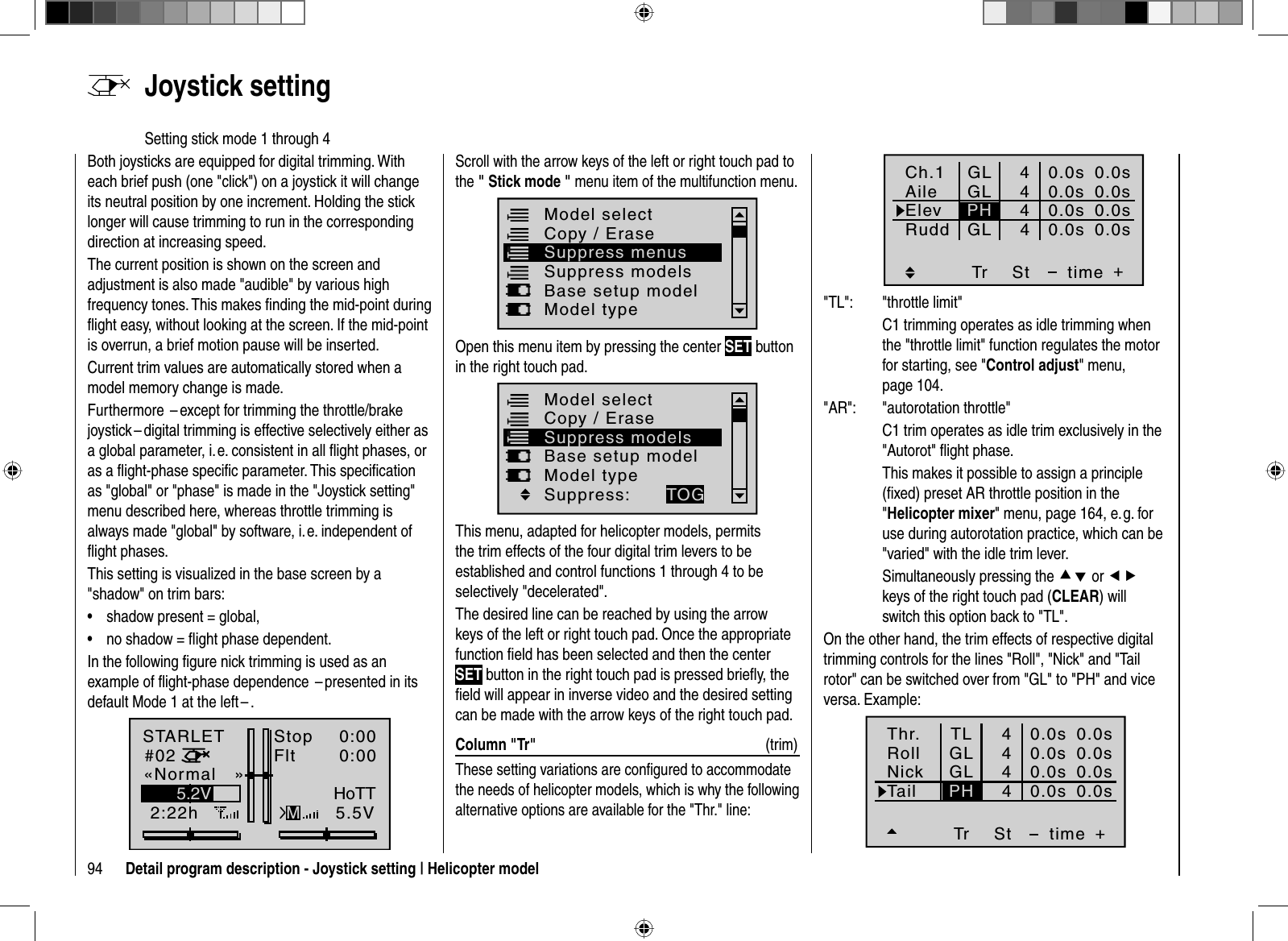
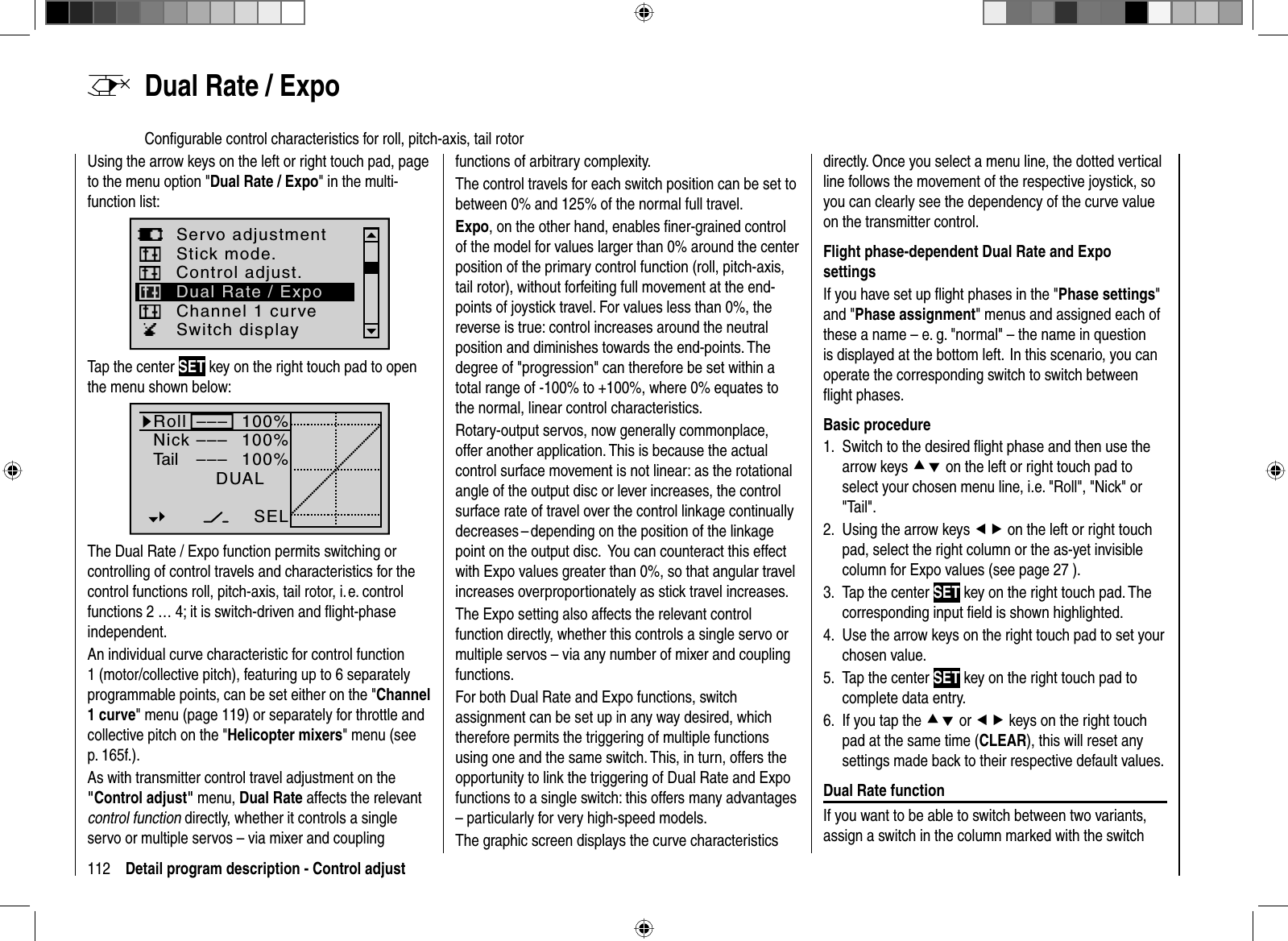
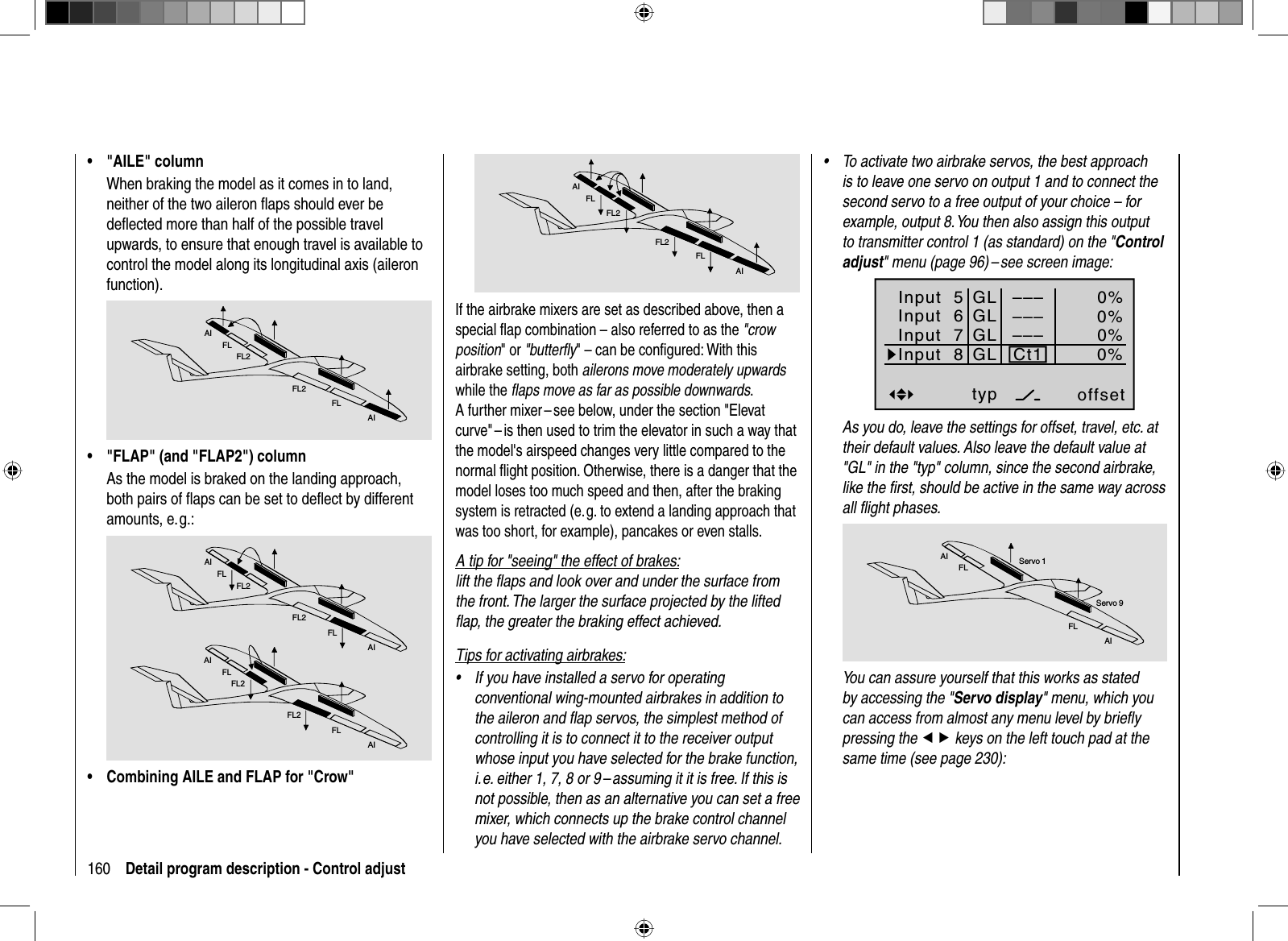
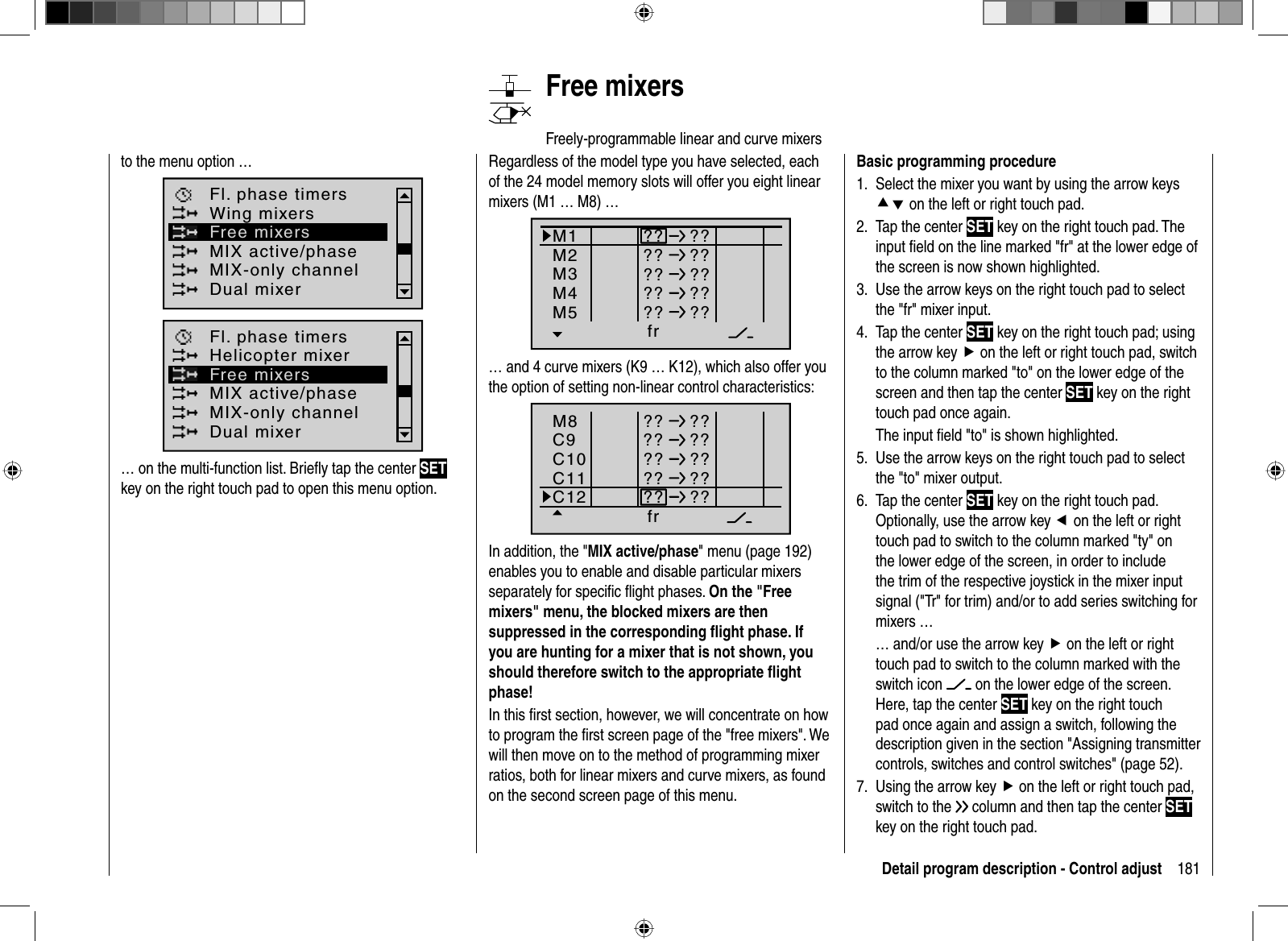
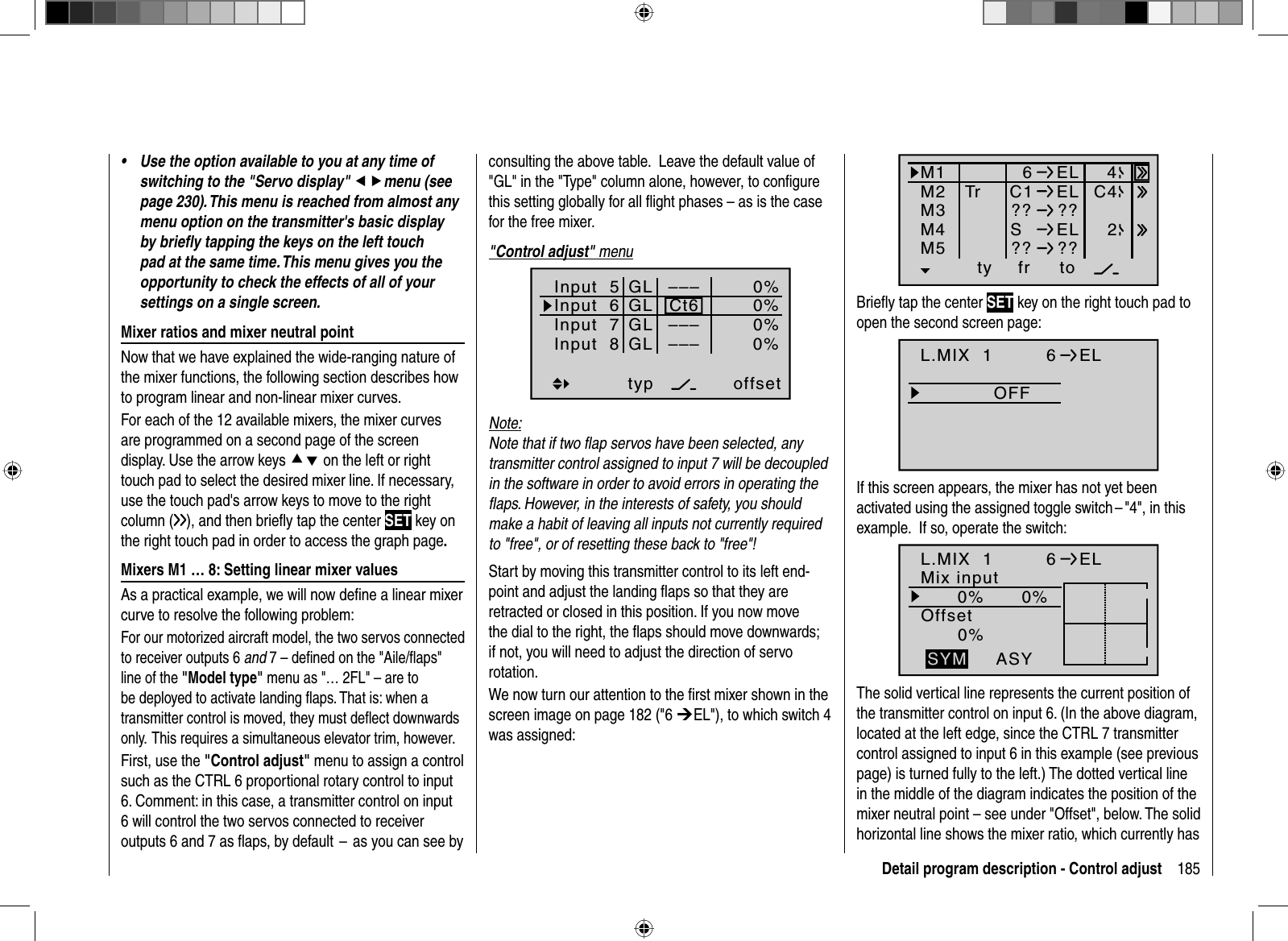
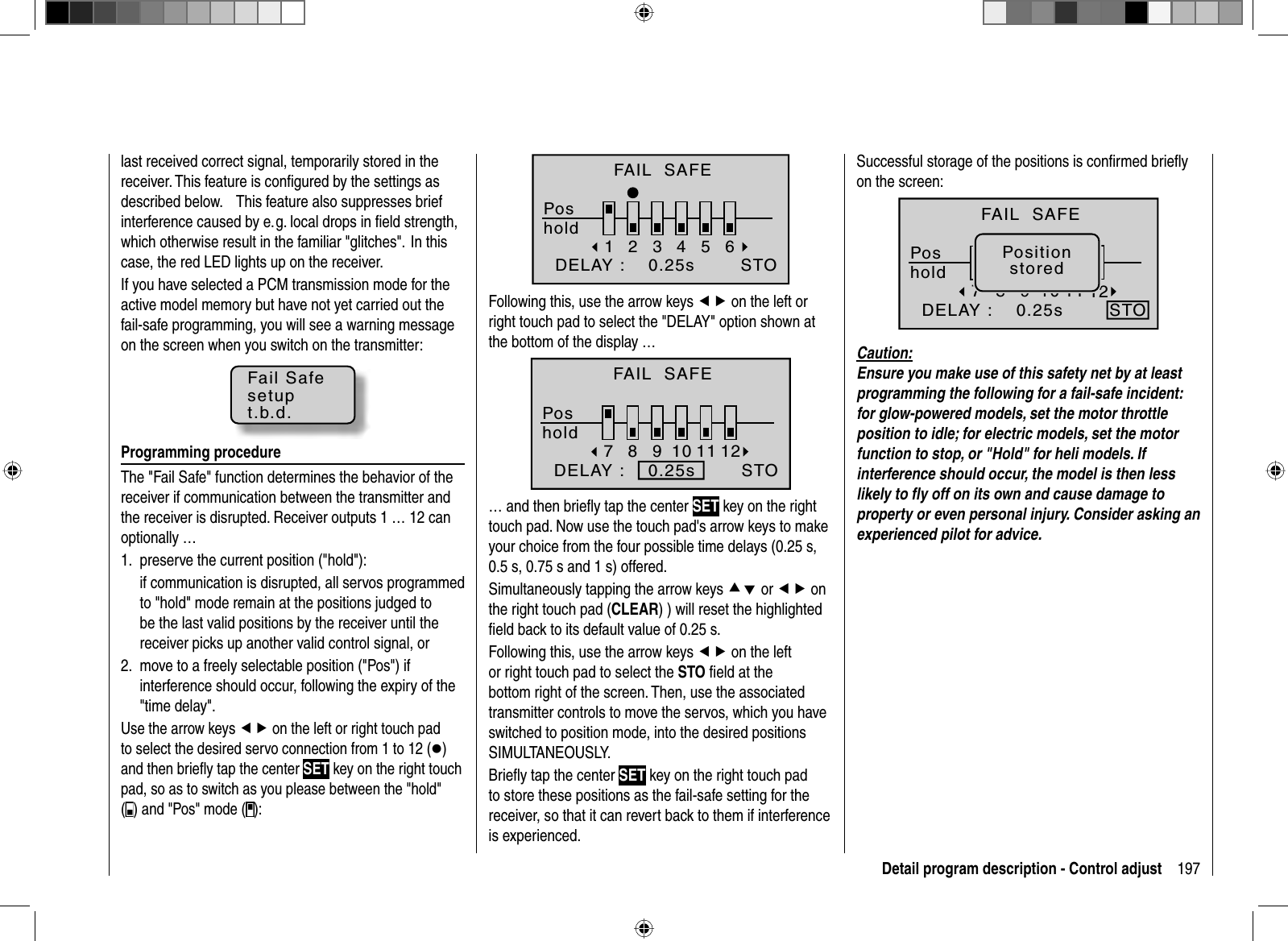
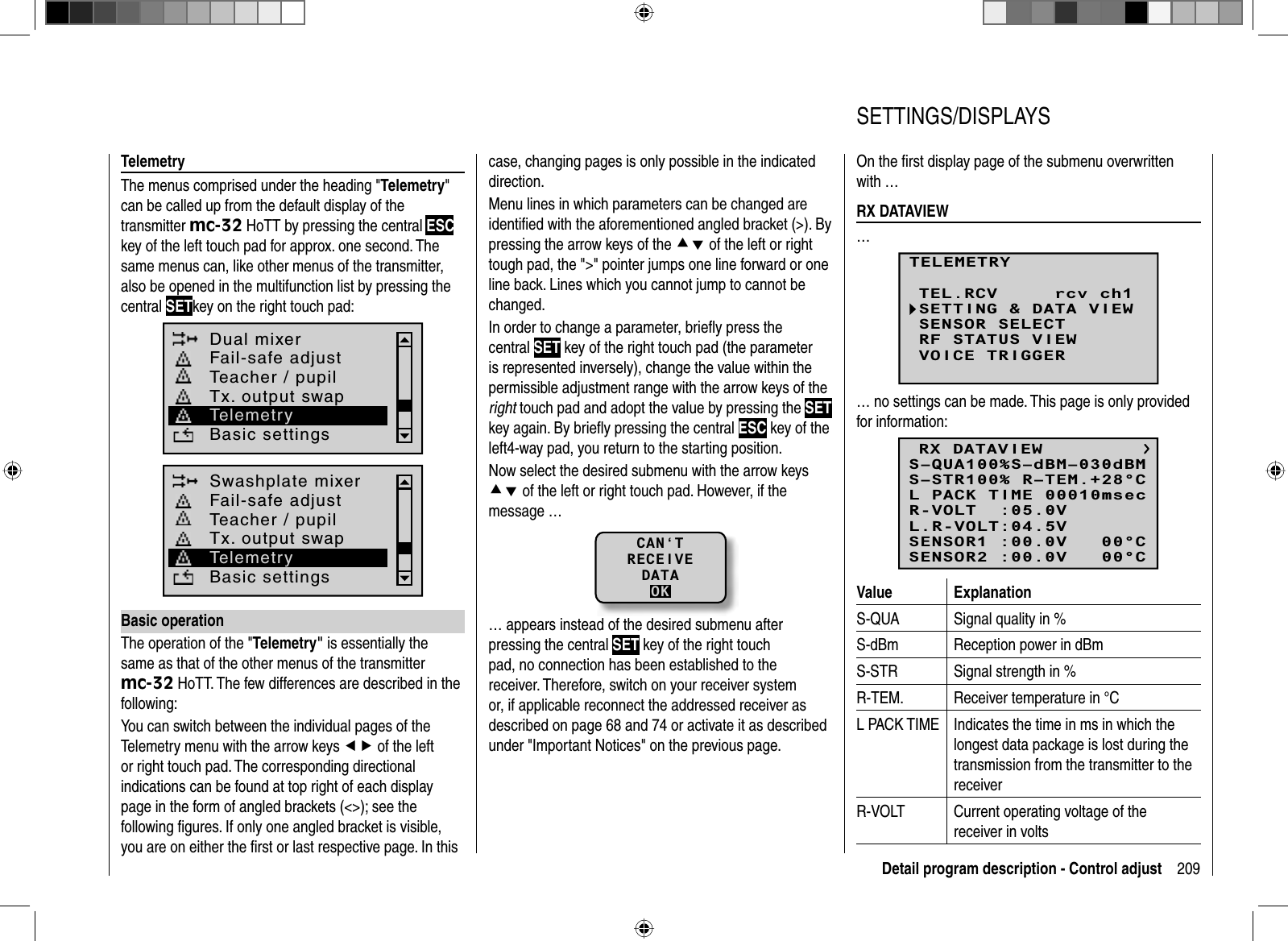
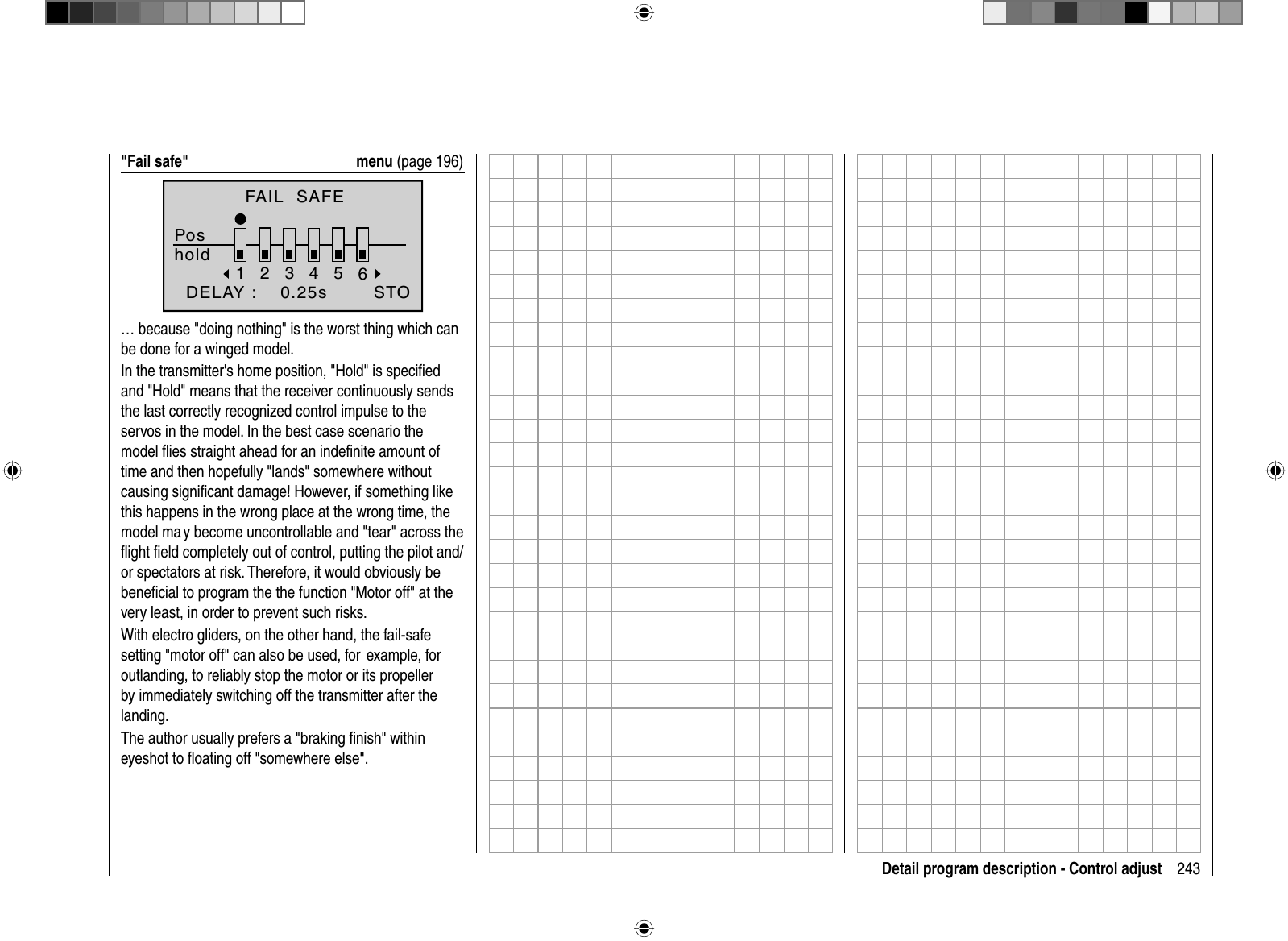
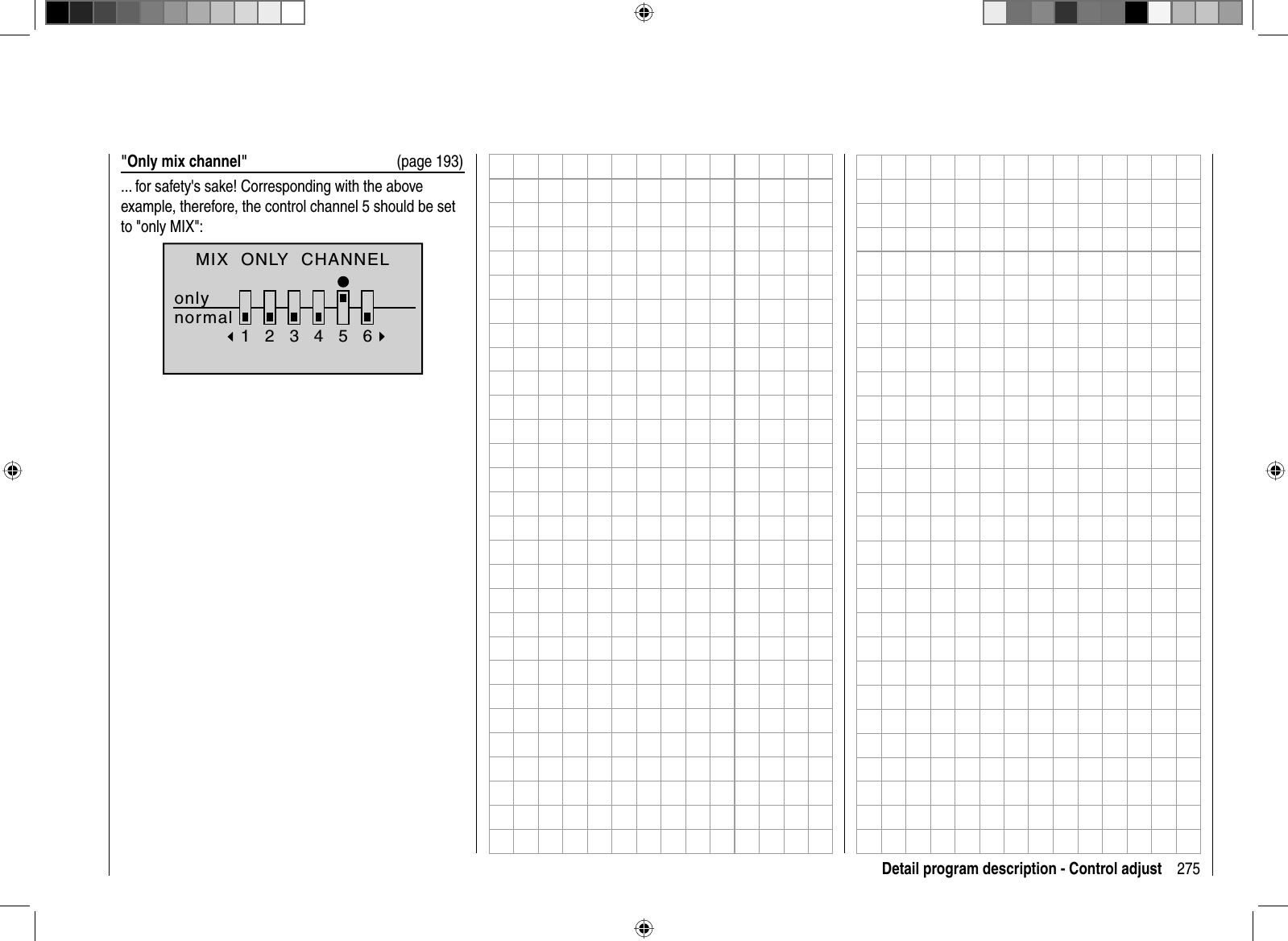
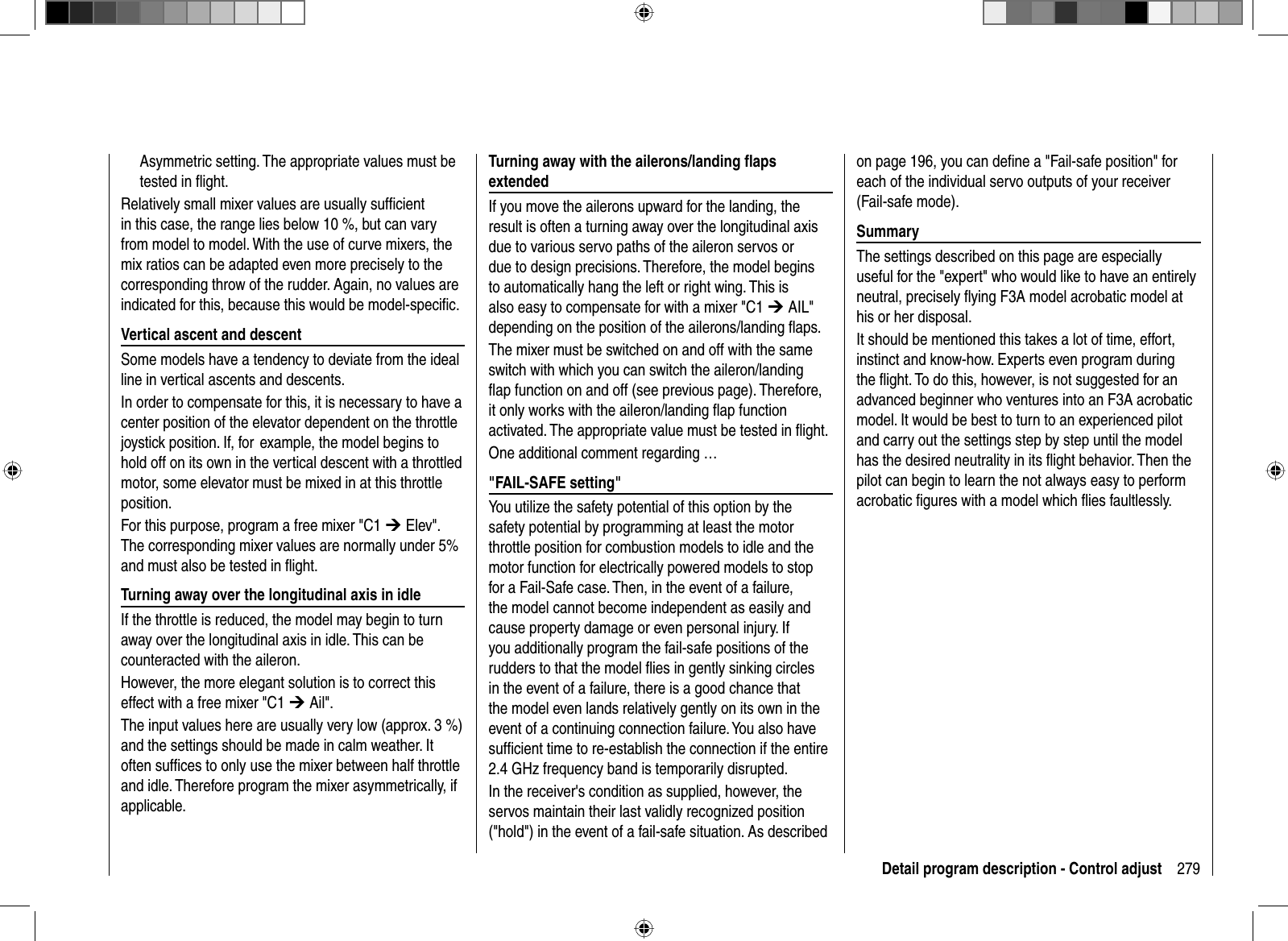
![74 Detail program description - Base setup model | HelicopterBefore programming specifi c parameters, there are some basic settings to be made which effect the currently active model memory. Select the "Base setup model " menu with the arrow keys of the left or right touch pad then press the center SET button in the right touch pad.Helicopter typeSuppress modelsBase setup modelServo adjustmentControl adjustStick mode. Model nameMod.nameStick modeRF BIND1n/aBASIC SETTINGS, MODELn/aBD2BD1RF transmit OFFChange to the next screen page by briefl y pressing the SET button in the right touch pad. This will open a screen of characters for entry of the model's name. A maximum of 9 characters can be used to specify a model name. !"#$%&’()+,–./0123456789:;Mod Name STARLFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDESelect the desired characters with the arrow keys of the left touch pad. Move to select the next character position by pressing the f arrow key of the right touch pad or its center SET button Simultaneously pressing on the cdor ef keys of the right touch pad (CLEAR) will place a space character at the position.Positioning to any character position within the entry fi eld can be done with the ef keys of the right touch pad.A return to the previous menu screen is accomplished by pressing the center ESC button in the left touch pad.A model name entered in this manner will appear in the base screen of the "Model select" menu and in the sub-menus of the "Copy / Erase" menu item. Stick mode"MODE 2" (throttle left)"MODE 3" (throttle right) "MODE 4" (throttle left)"MODE 1" (throttle left)TS-NickTailNickTailMotor/PitchRollRollMotor/PitchTailTailMotor/Pitch Motor/PitchNickNickRollRollNickNickRollRollMotor/PitchMotor/PitchTailTailMotor/PitchMotor/PitchRollRollNickNickTailTailBasically there are four different ways to assign the four helicopter control functions, roll, nick, tail rotor and throttle/pitch to the two joysticks. Just which of these is used depends on the preferences of the individual model pilot.Use the cd arrow keys of the left or right touch pad to select the "Stick mode" line. The option fi eld will be framed.1SELSTARLETMod.nameStick modeRF BIND n/aBASIC SETTINGS, MODELn/aRF transmit OFFPress the SET button. The currently displayed stick mode will be displayed in inverse video. Now use the arrow keys of the right touch pad to select from among options 1 through 4.Pressing simultaneously on the cd or ef keys of the right touch pad (CLEAR) will return the option selection back to stick mode "1".Pressing the SET button again will deactivate option selection so that you can change to another line. Bound receiverGraupner-HoTT receivers must be "instructed " to communicate exclusively with one particular model (memory) in a Graupner-HoTT transmitter. This procedure is known as "binding" and must only be done once for every new receiver/model memory location combination (and can be repeated anytime).Important notice:During the binding procedure be sure the transmitter's antenna is always far enough away from the receiver's antenna. To be on the safe side, keep them at least one meter apart. Otherwise you run the risk of a faulty connection to the return channel and malfunctions will result."Binding" multiple receivers per modelMultiple receivers per model can be bound if desired, Base setup modelModel-specifi c base settings for helicopter models](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-74.png)
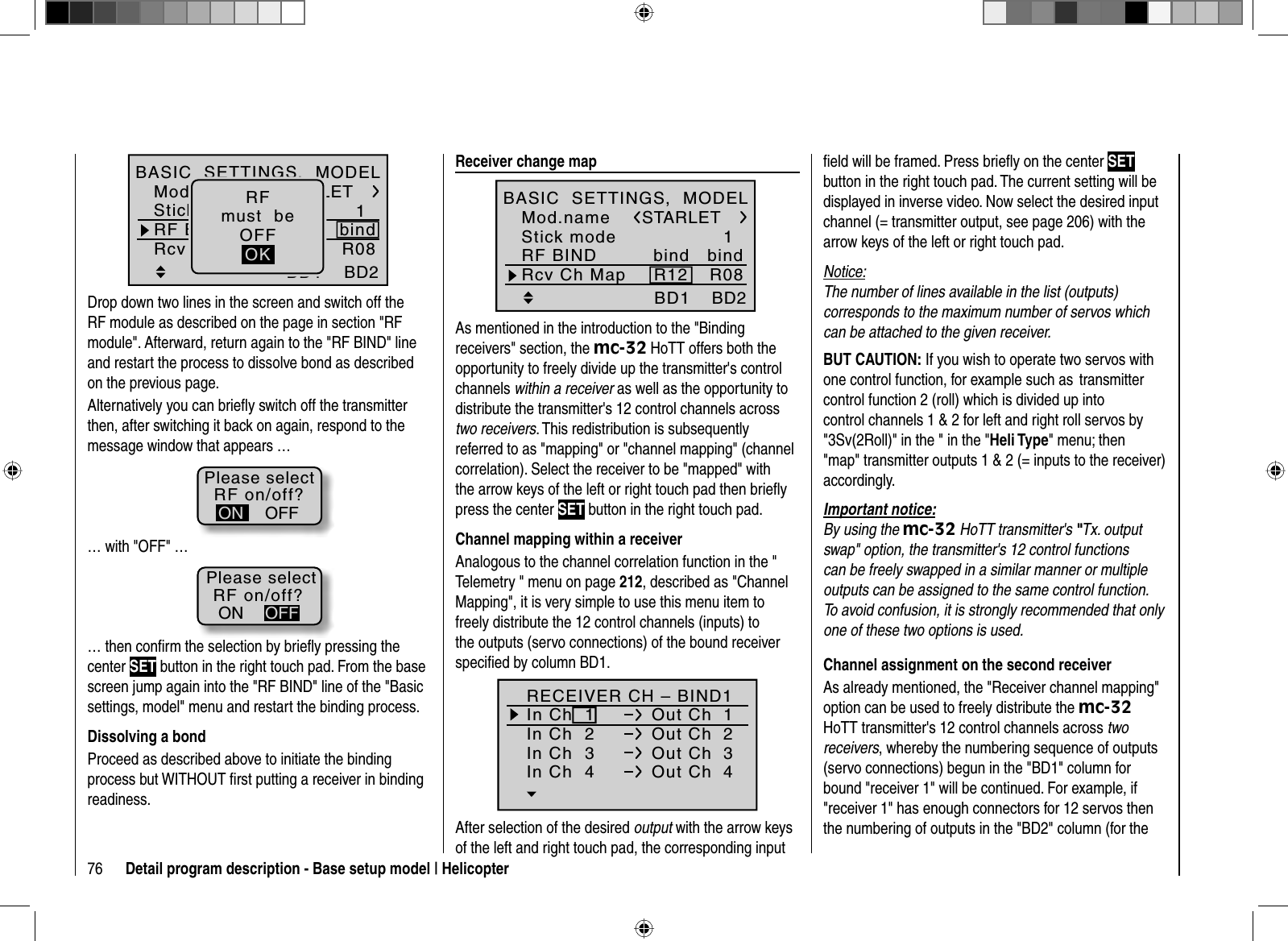
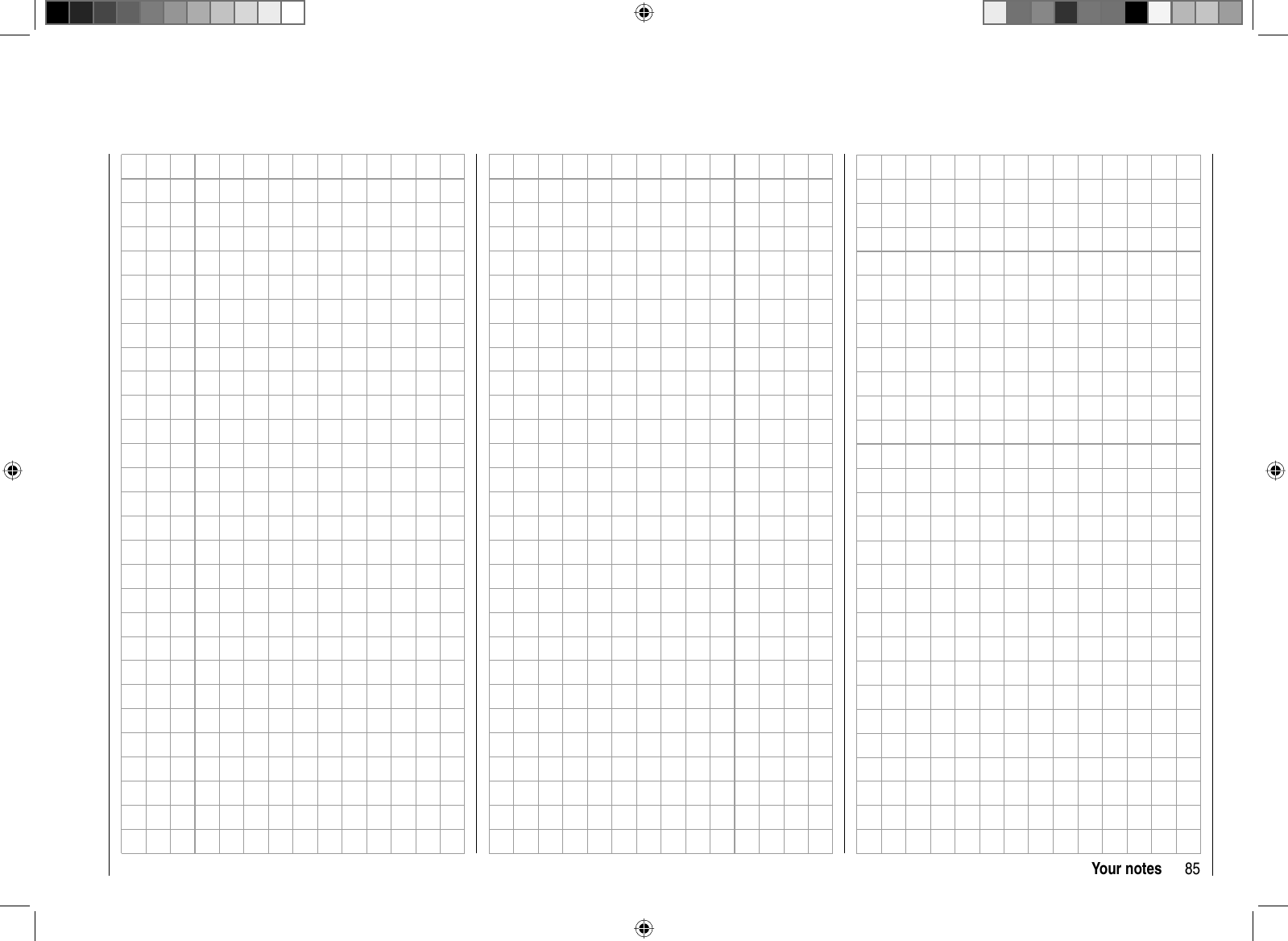
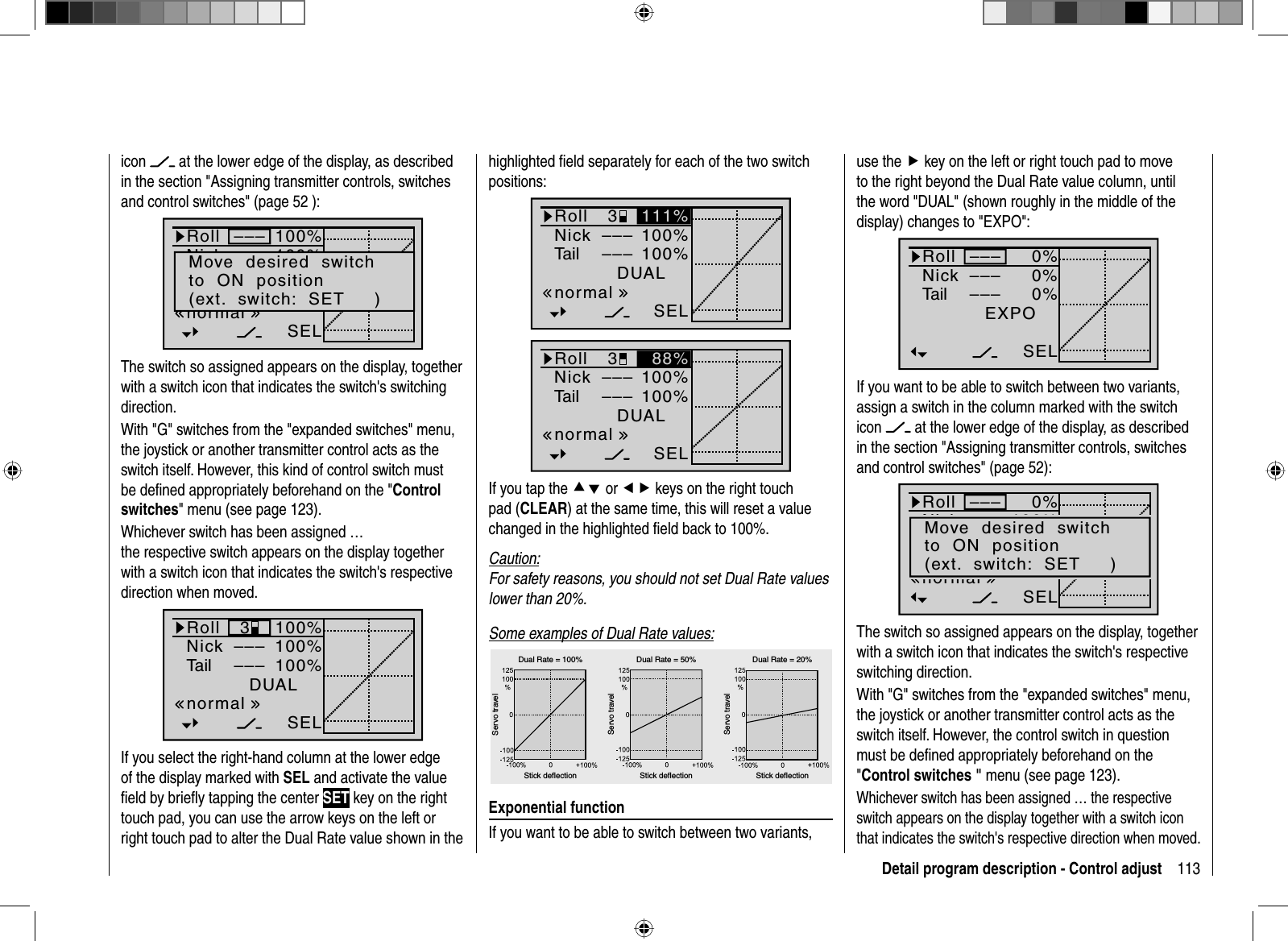
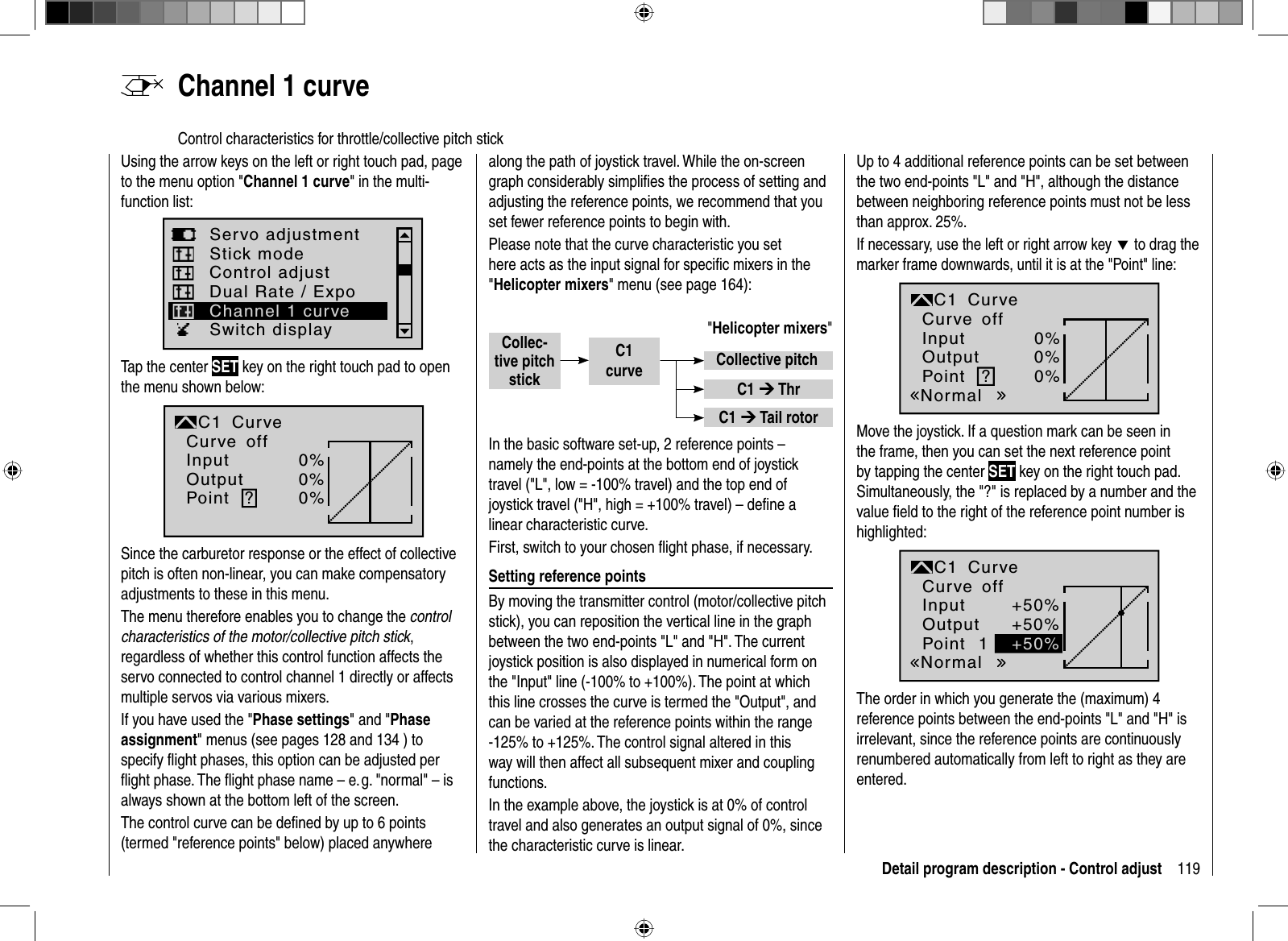
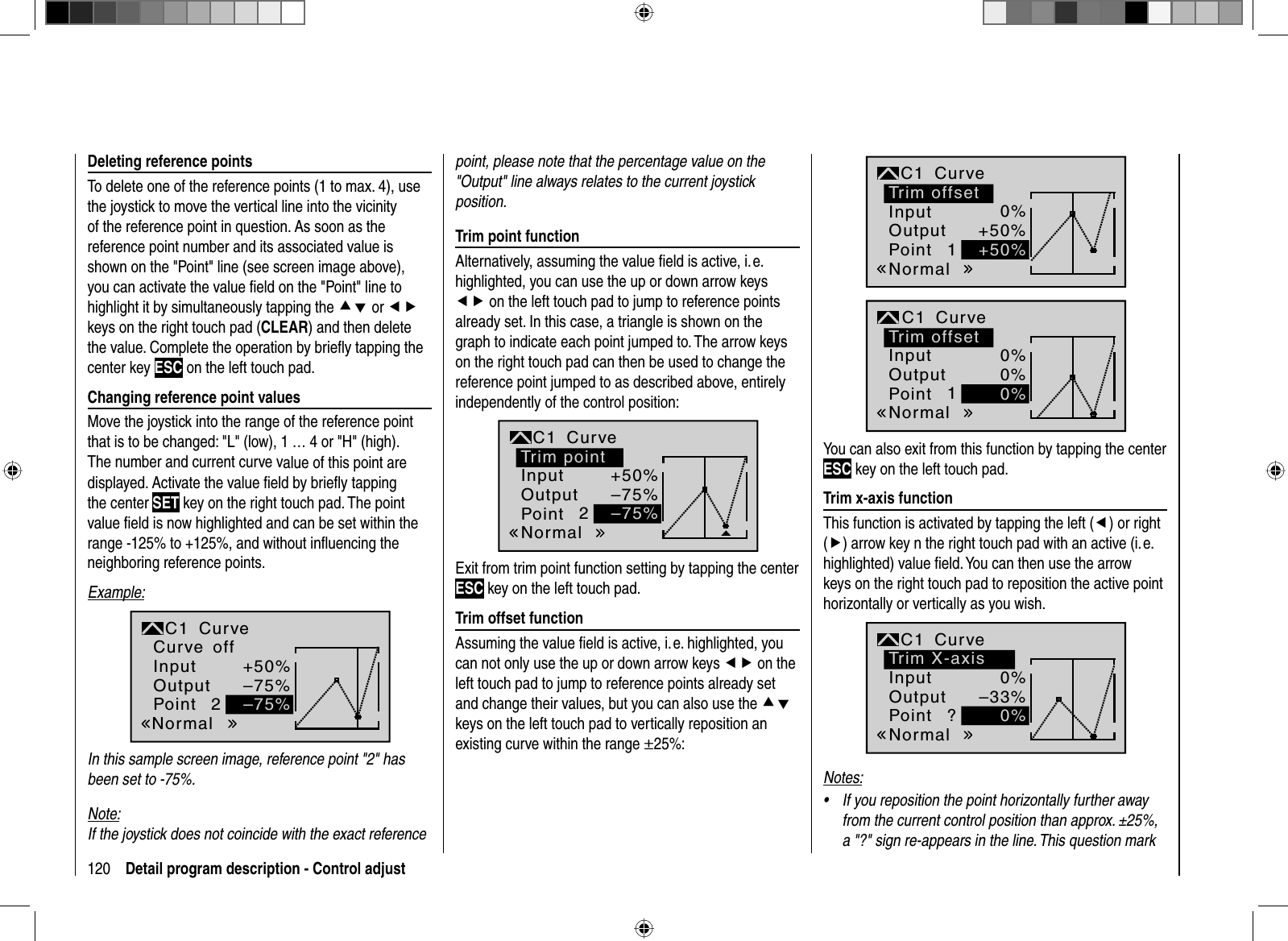
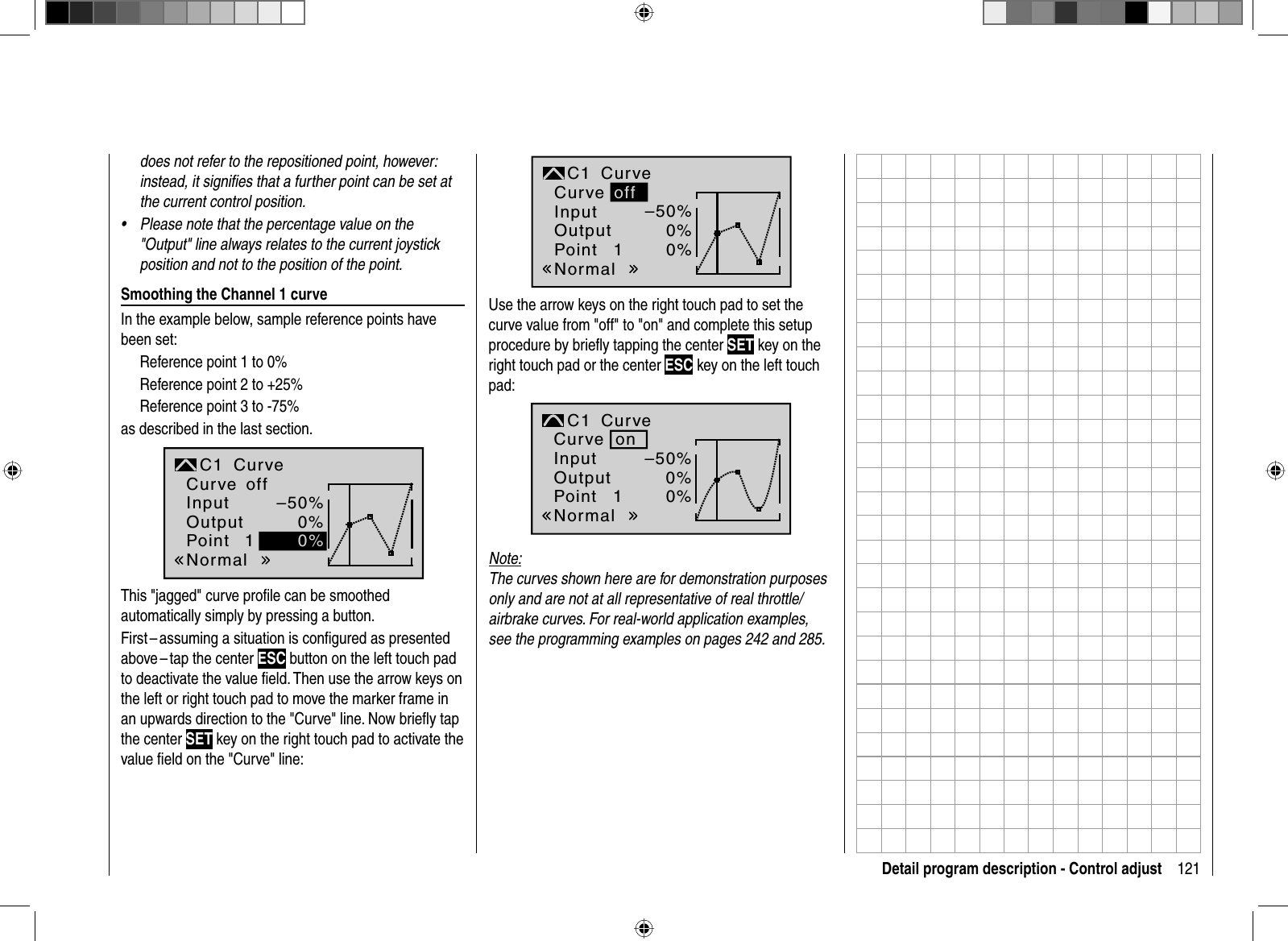
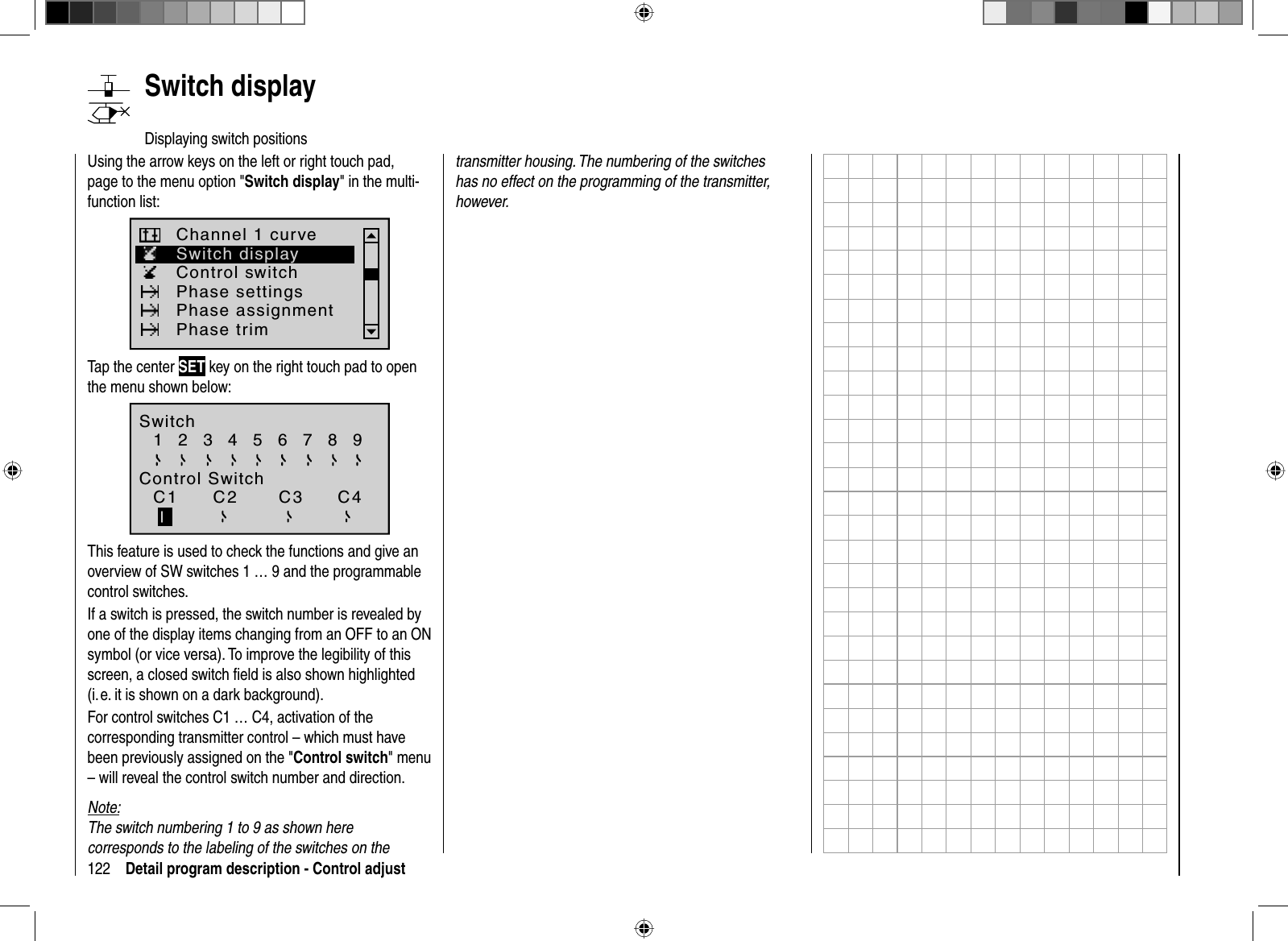
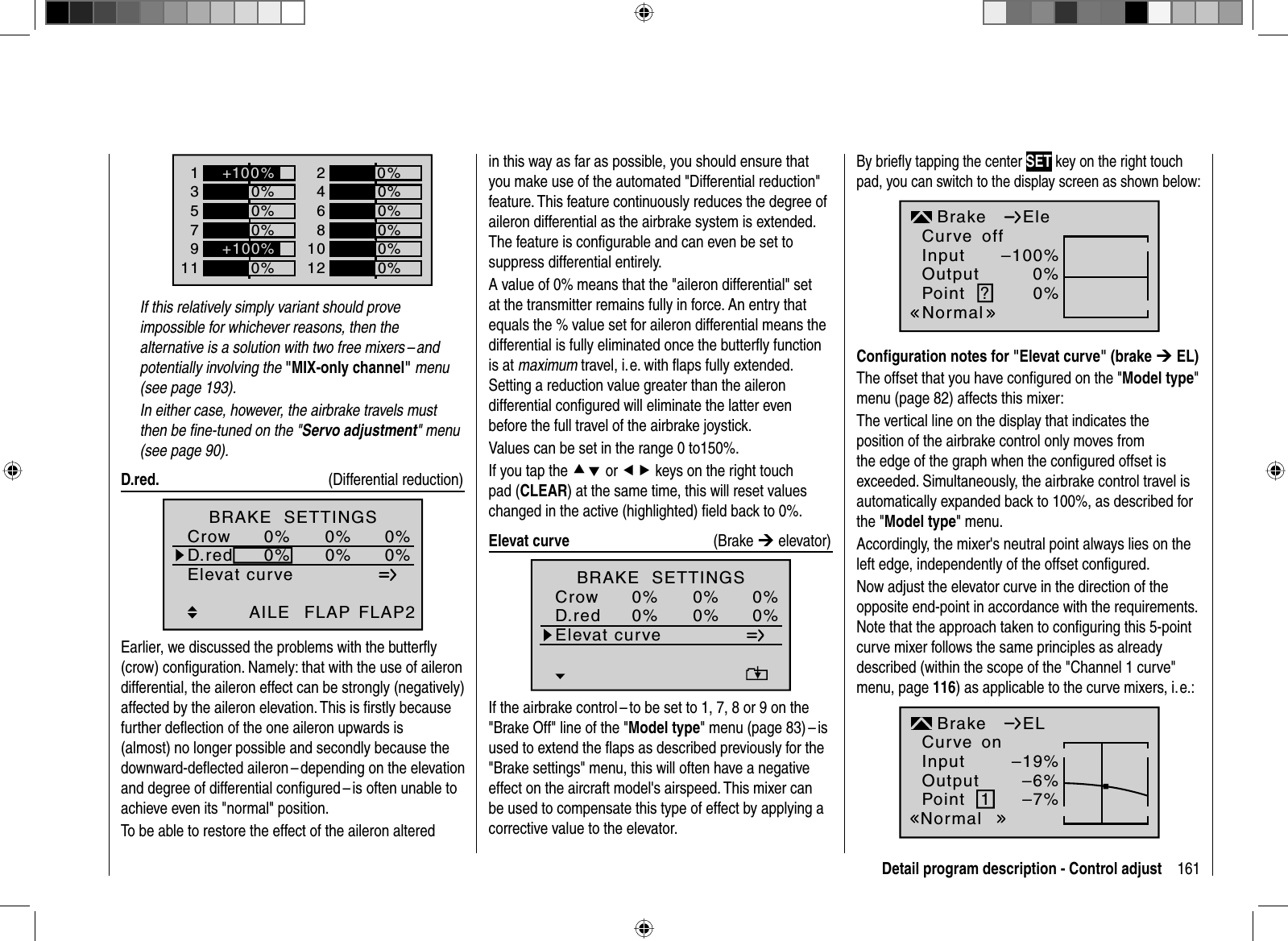

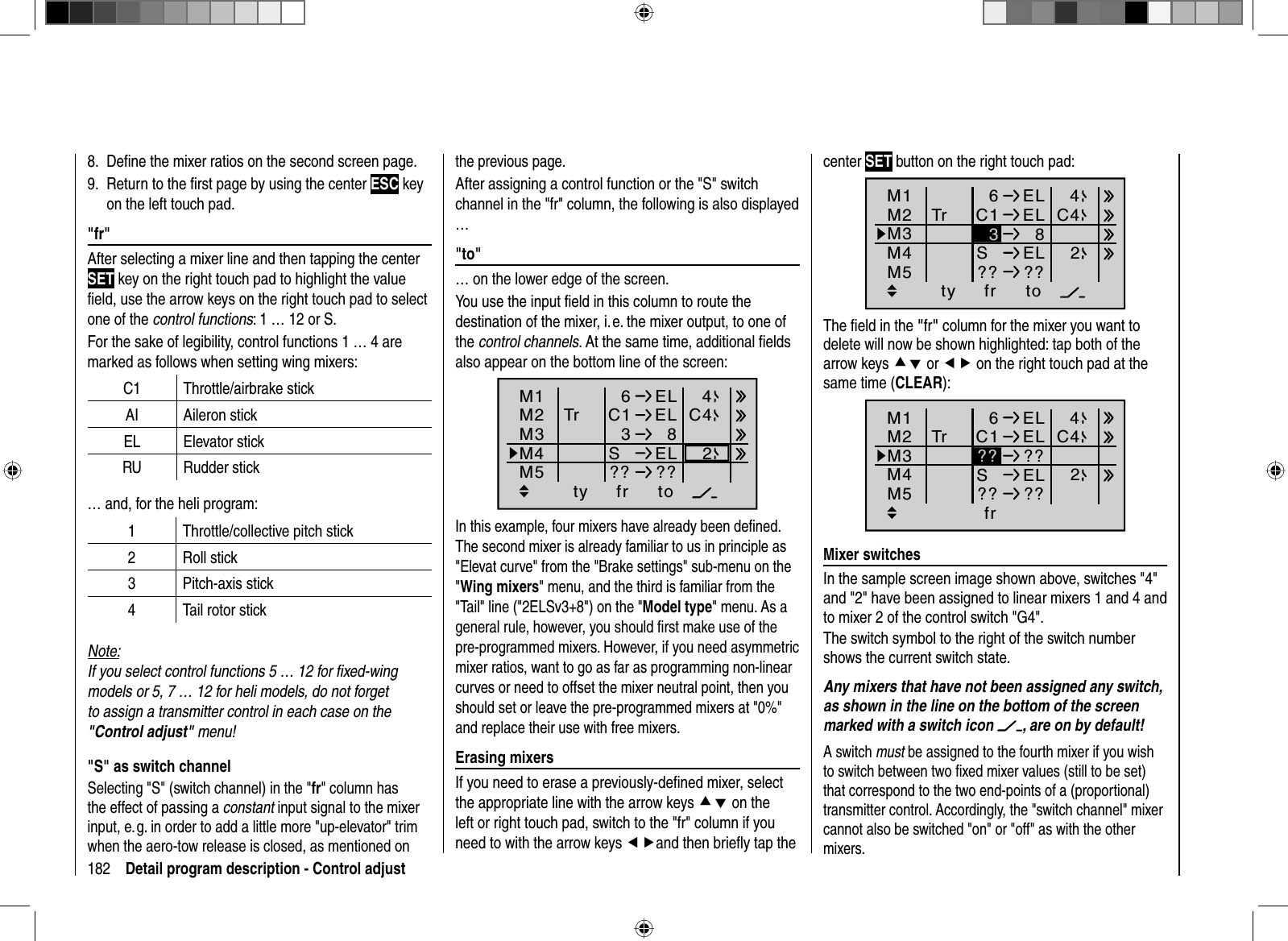
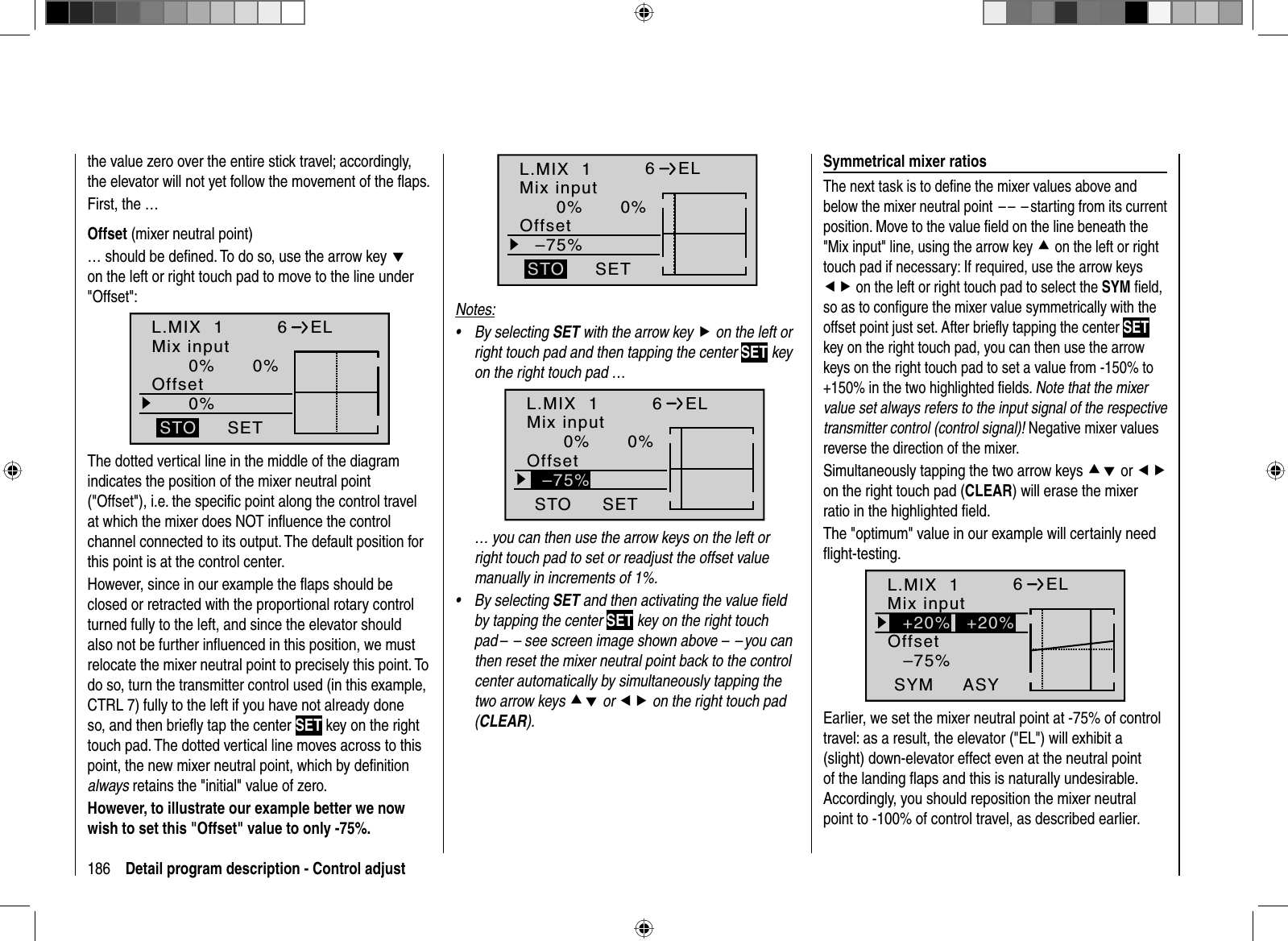
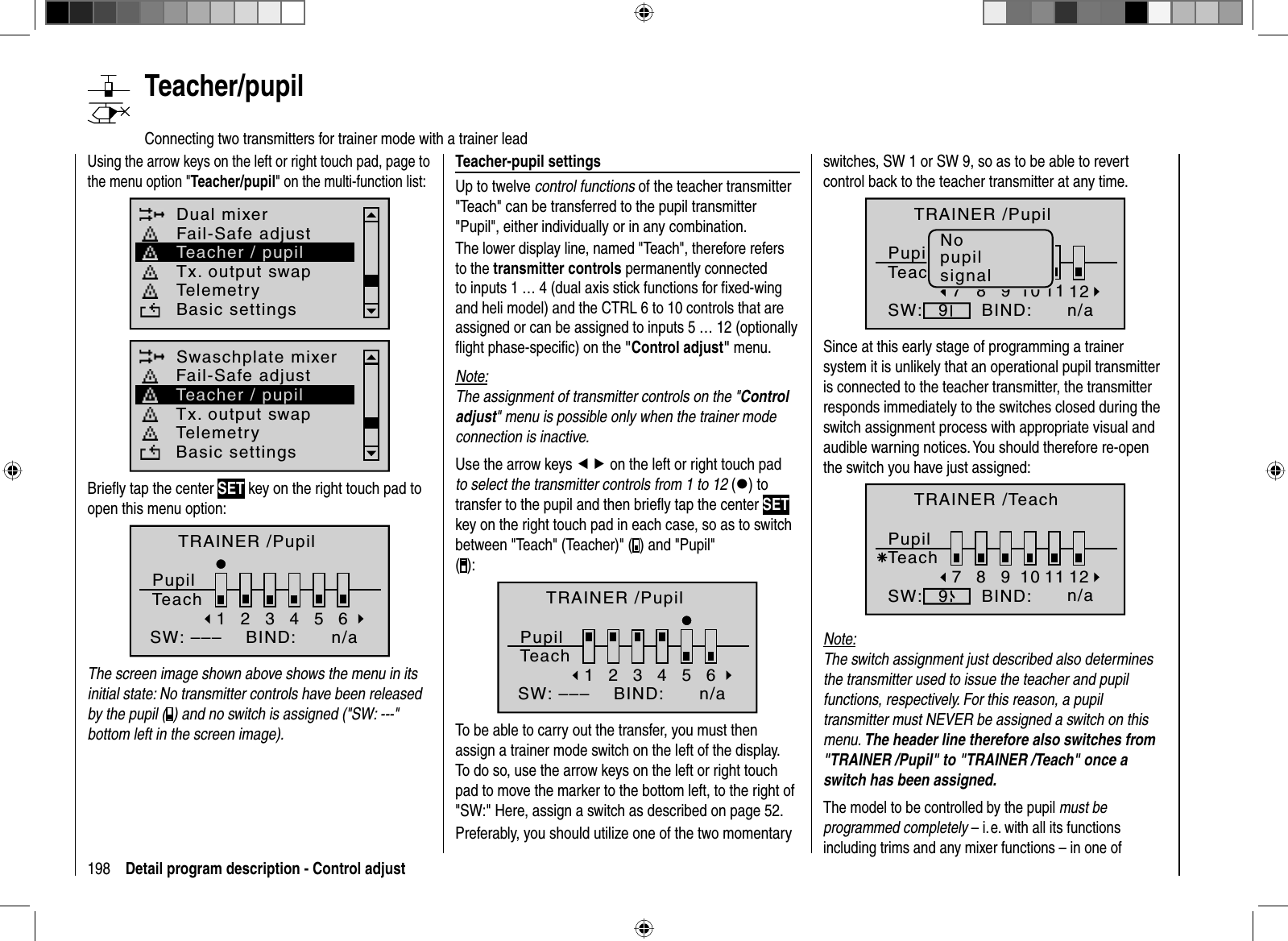
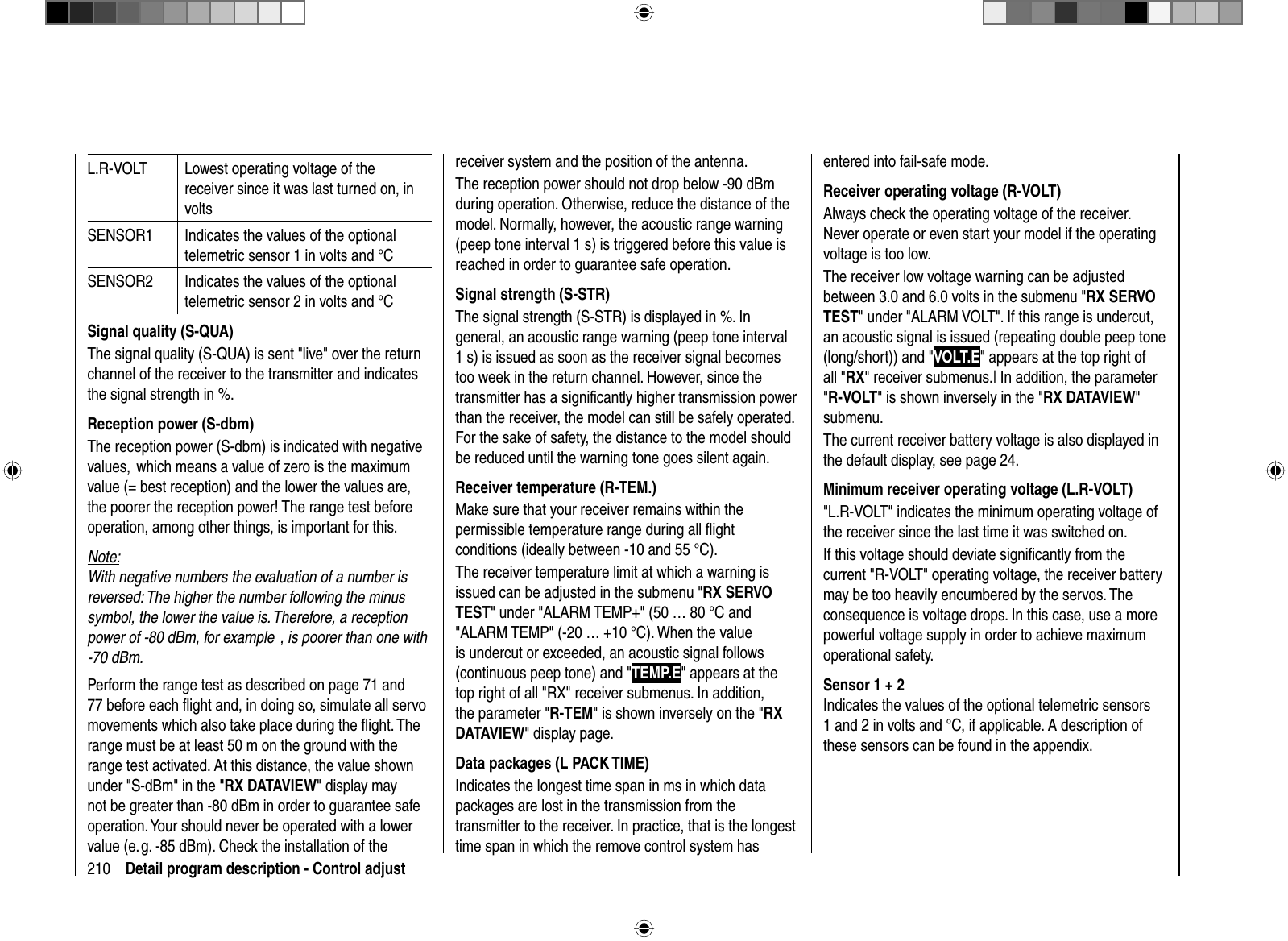
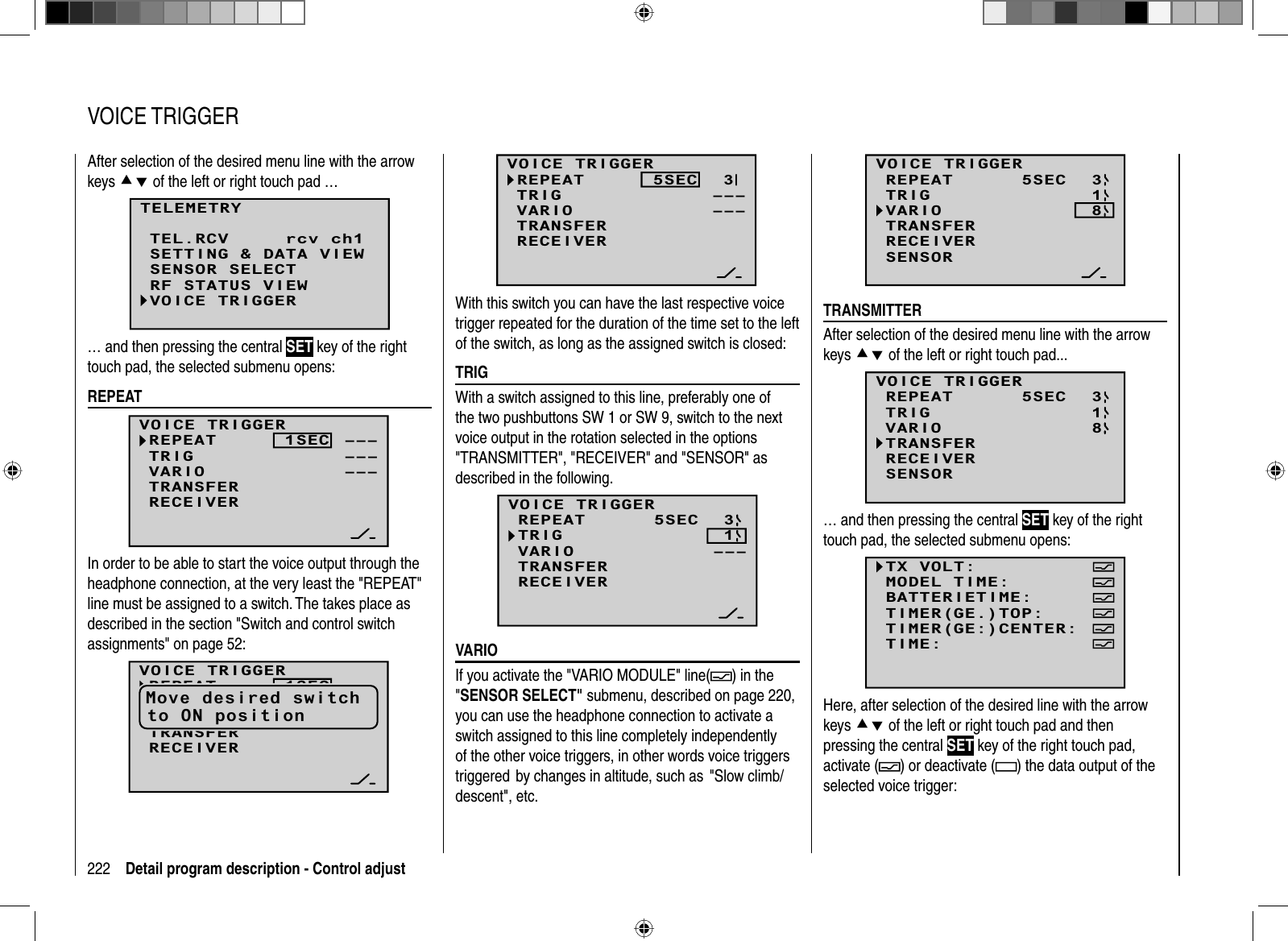
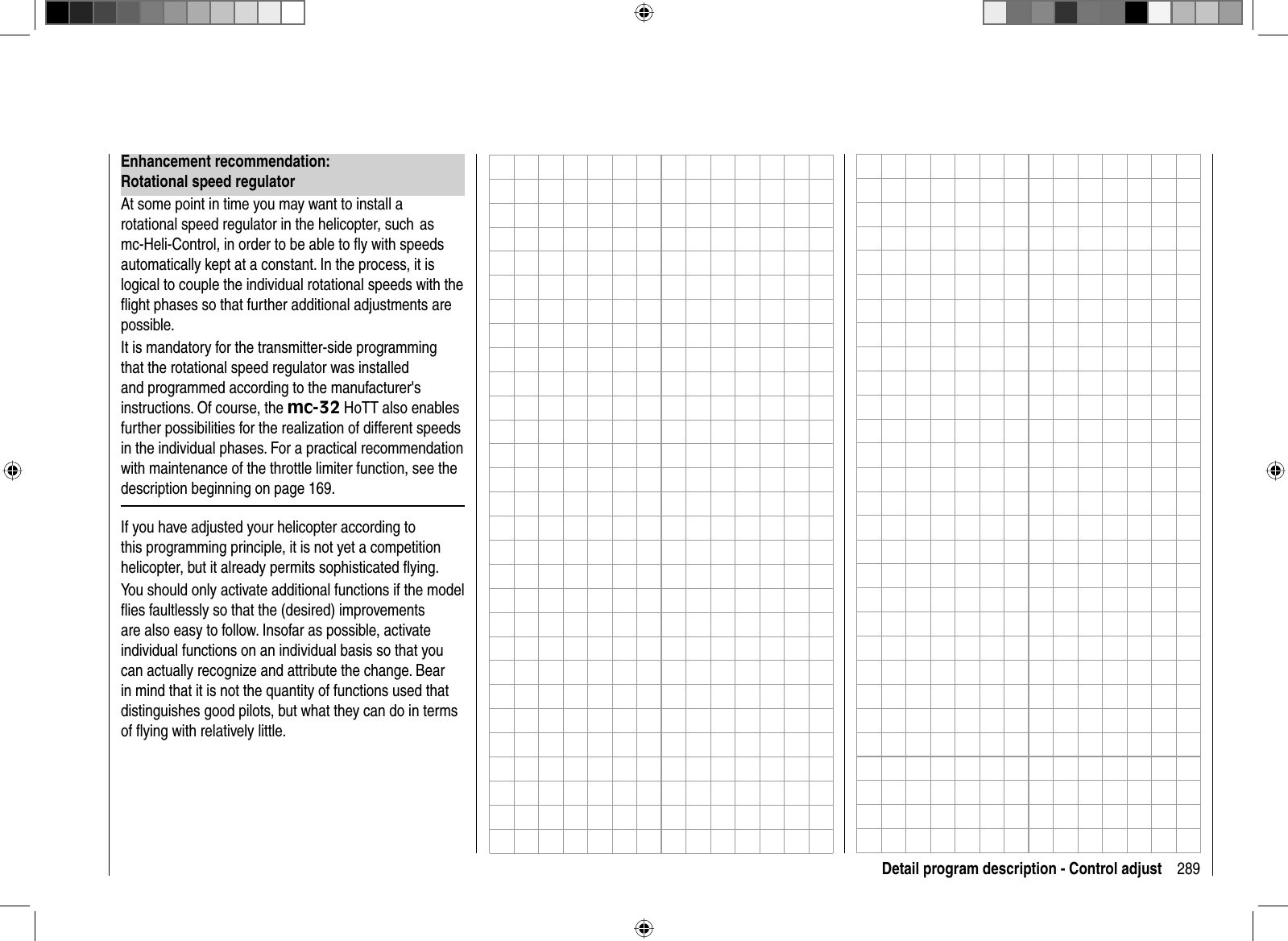
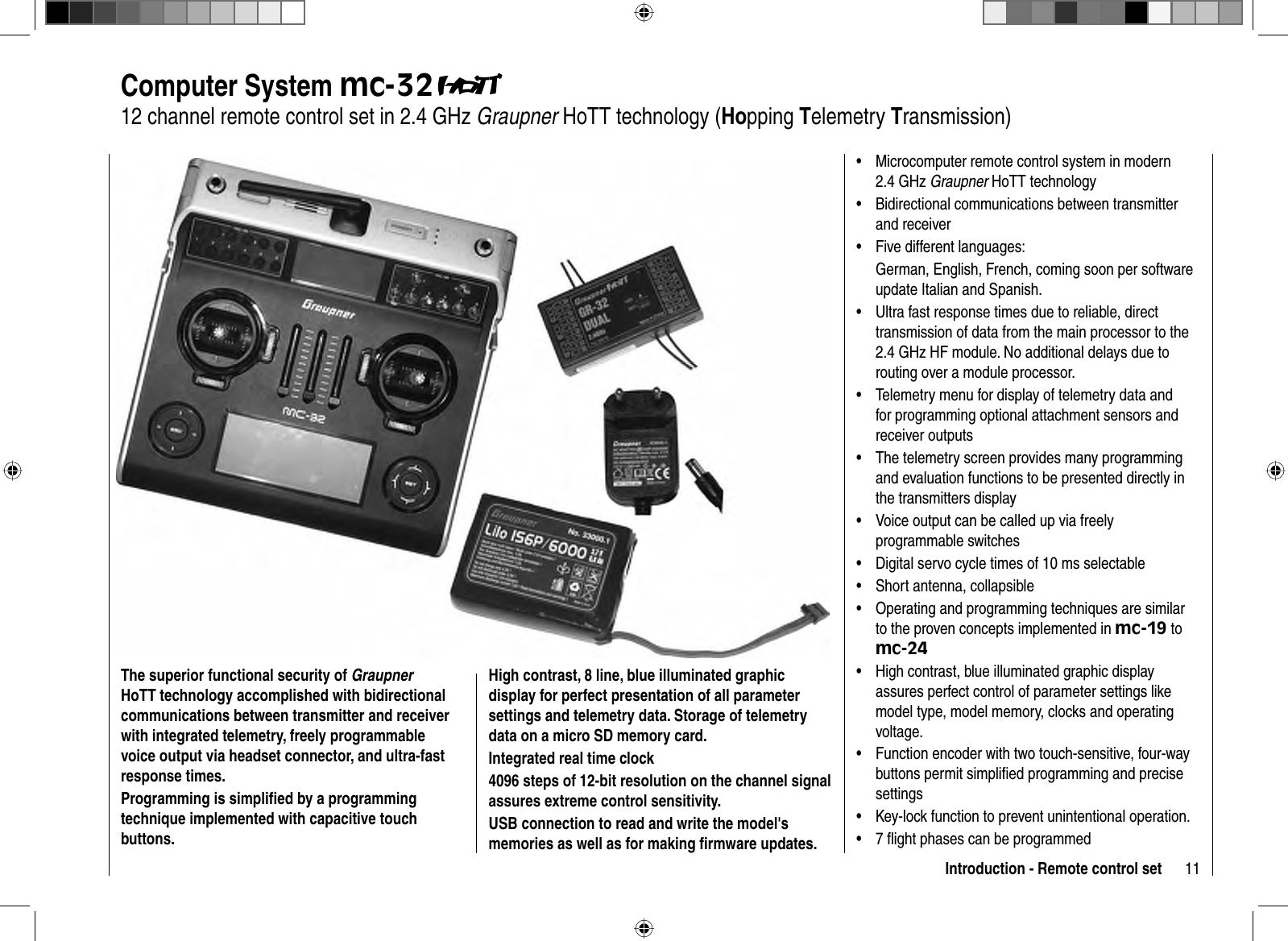
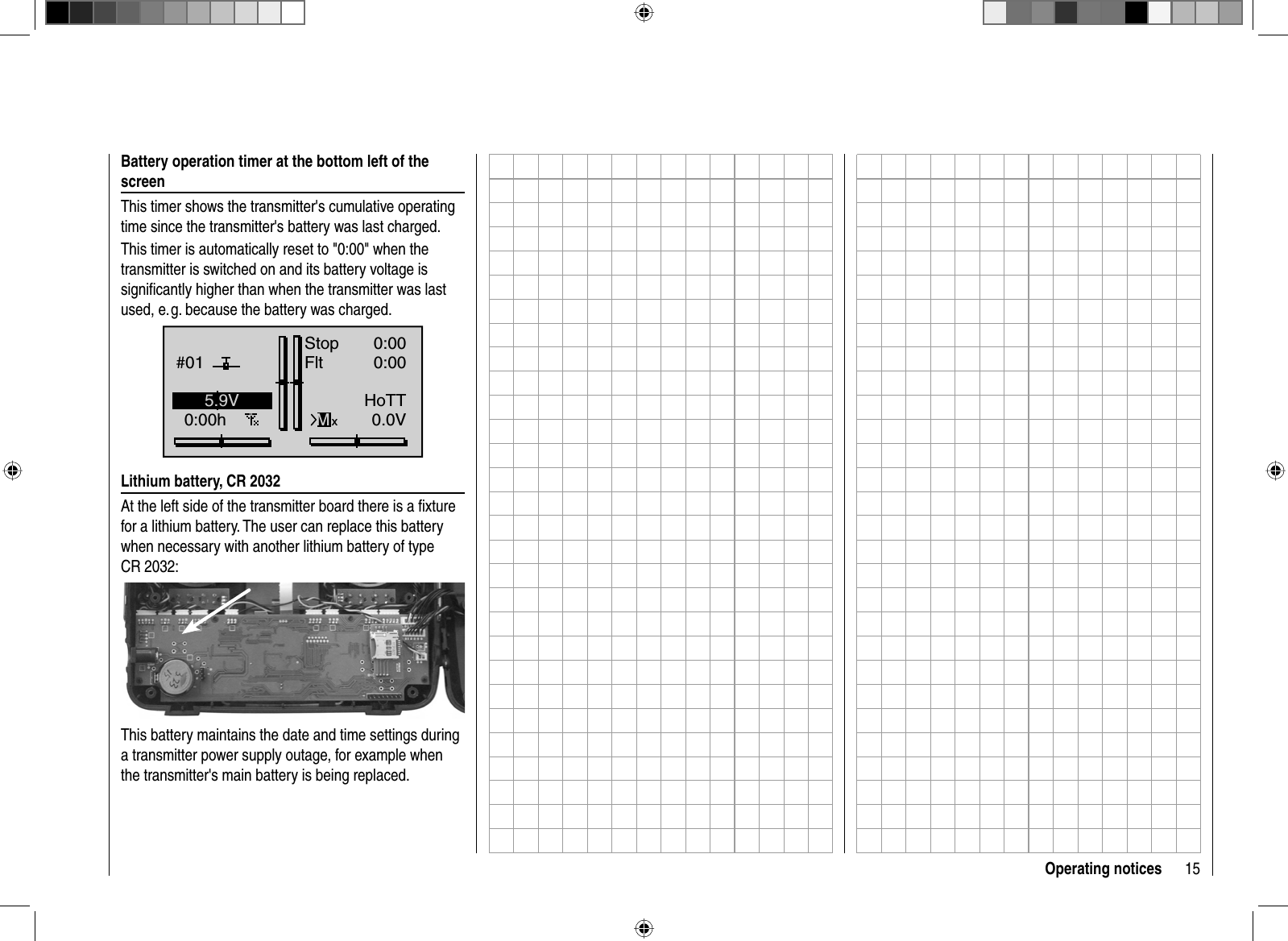
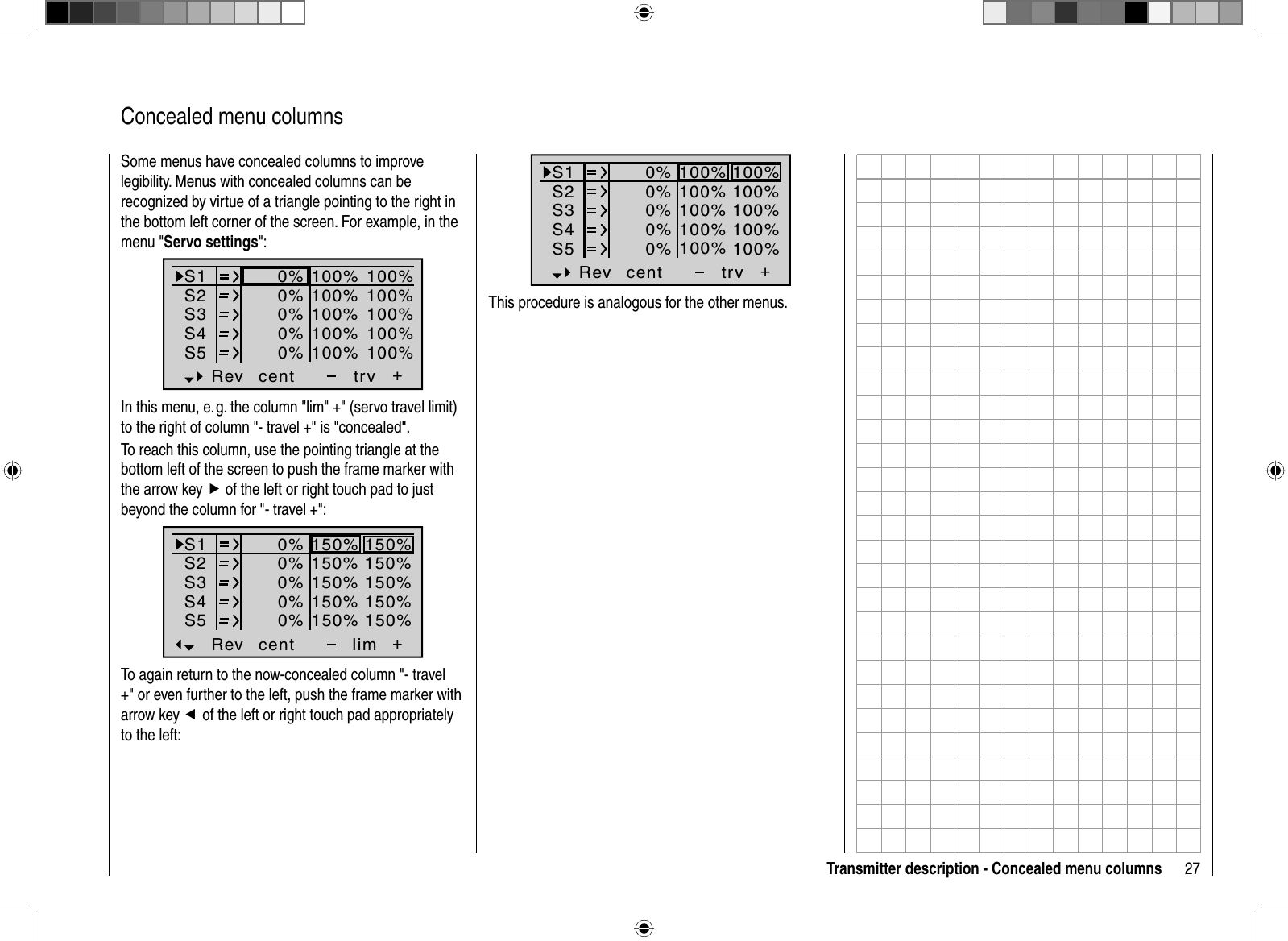
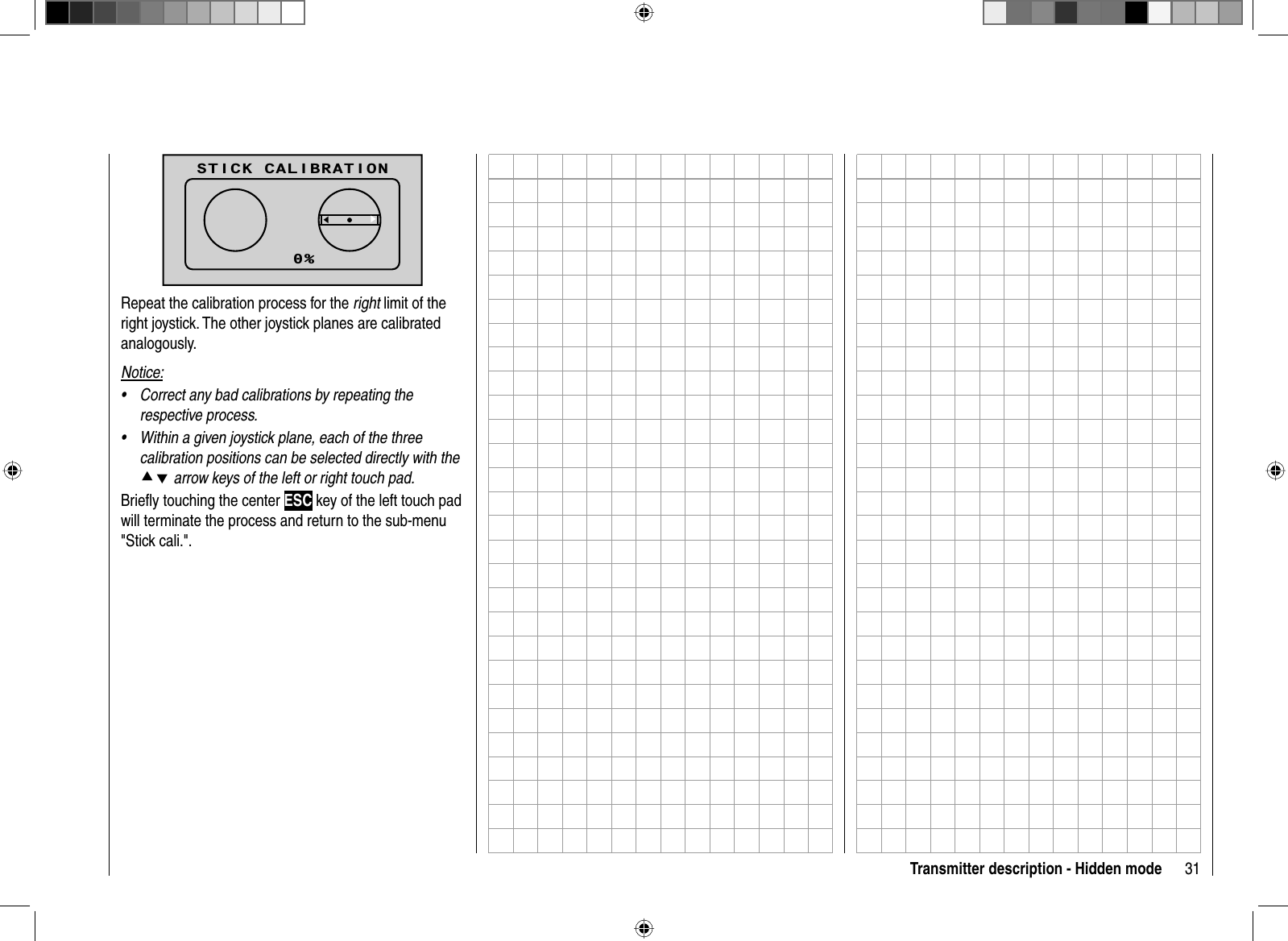
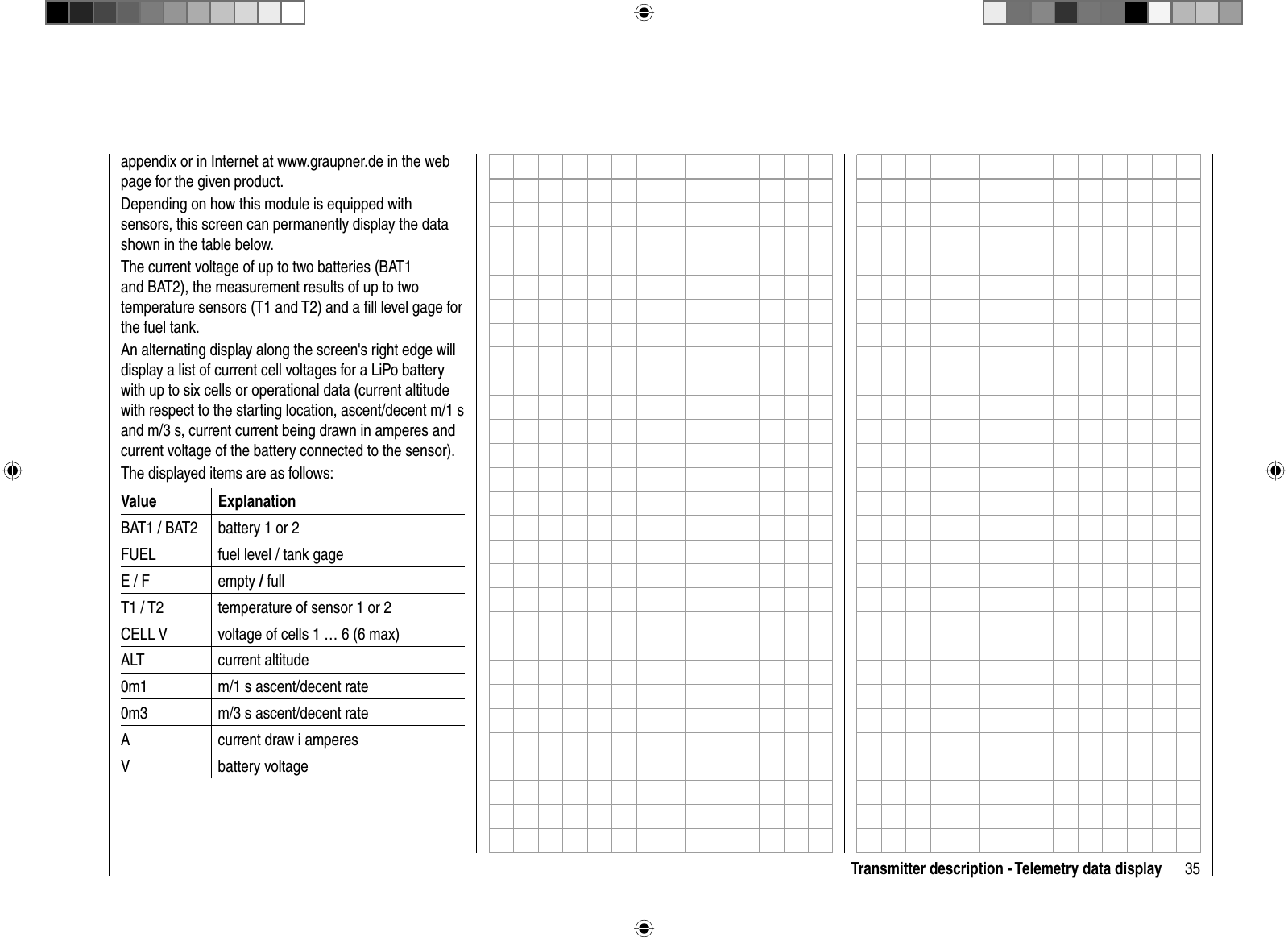
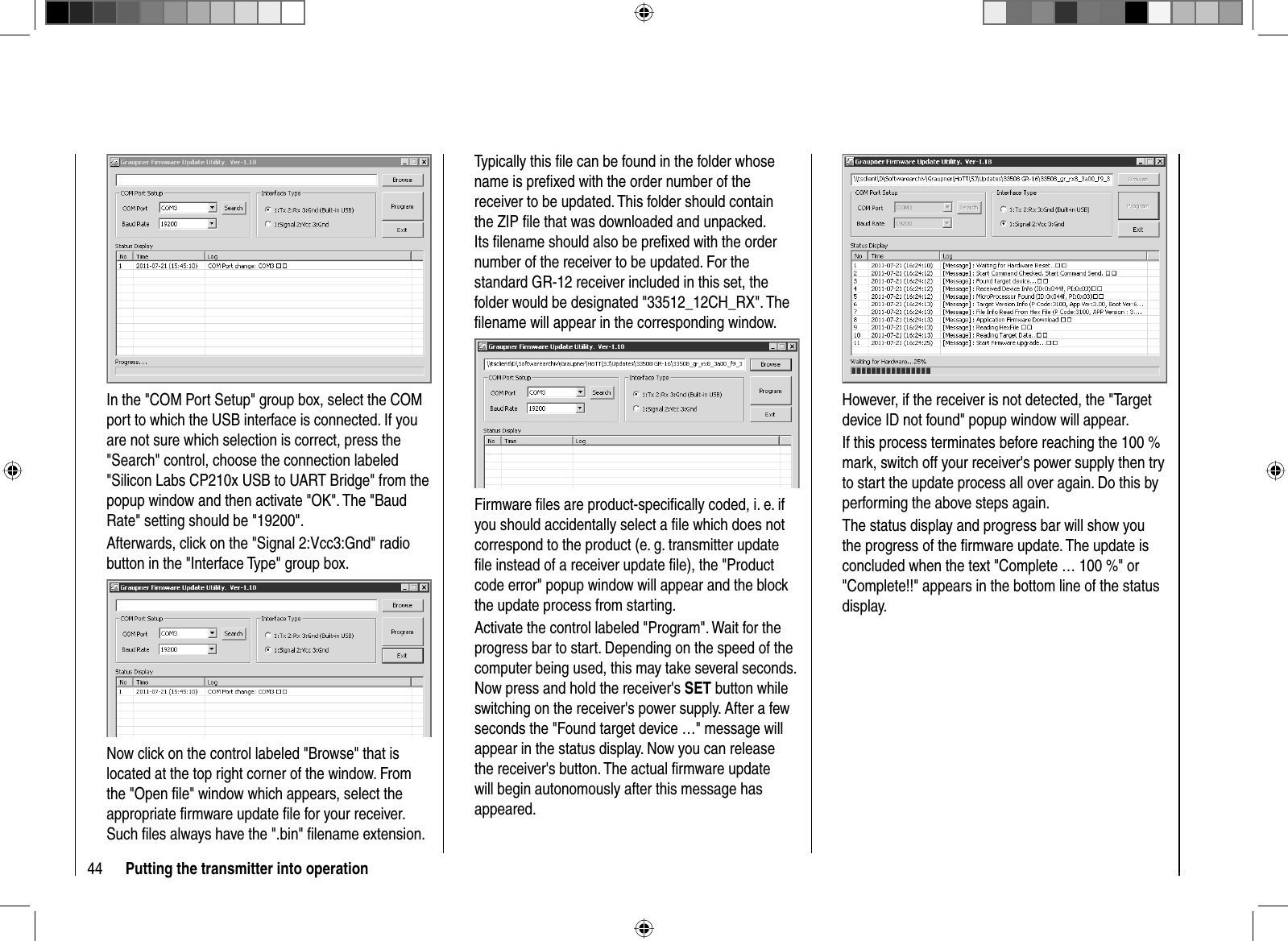
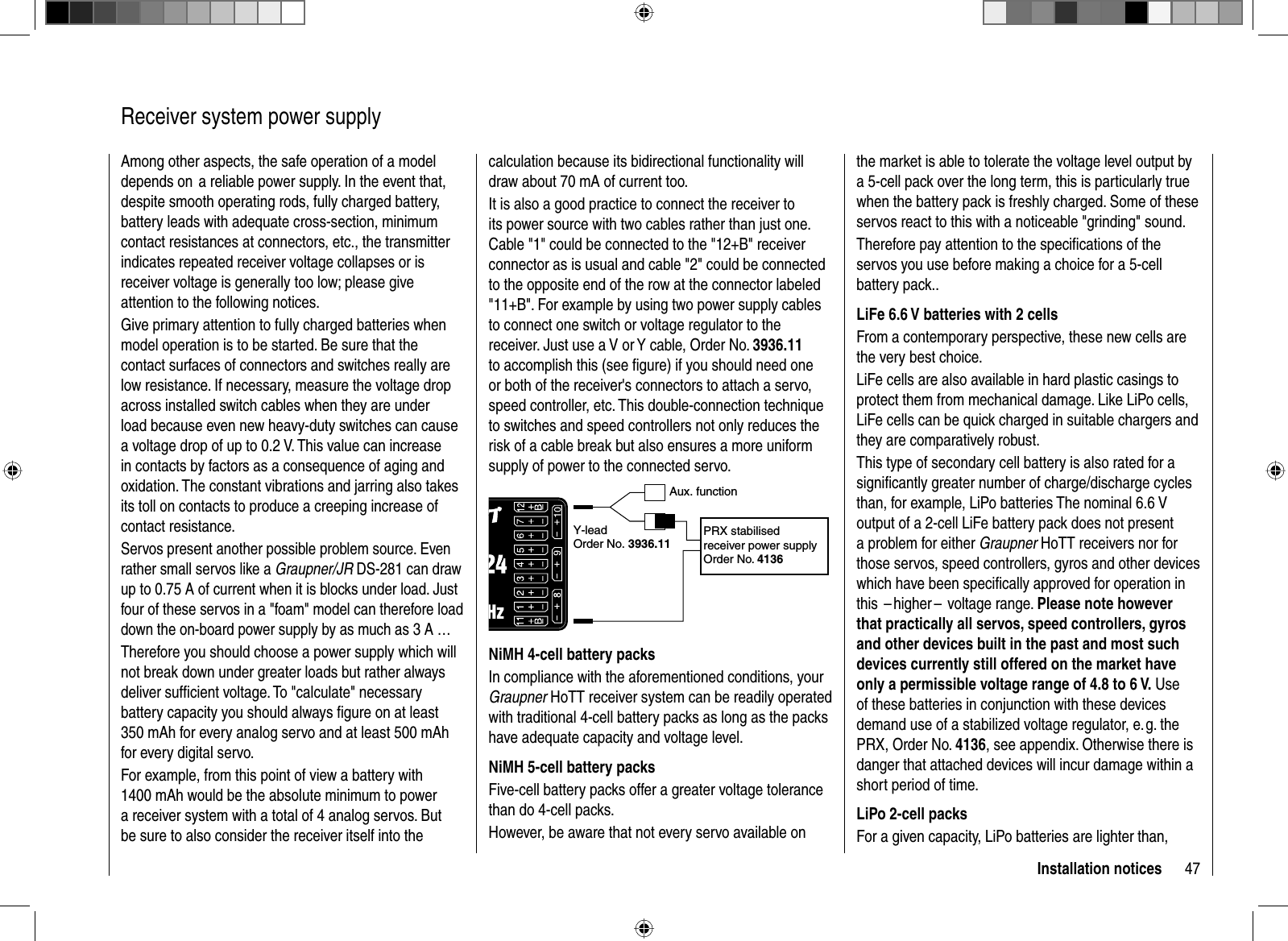
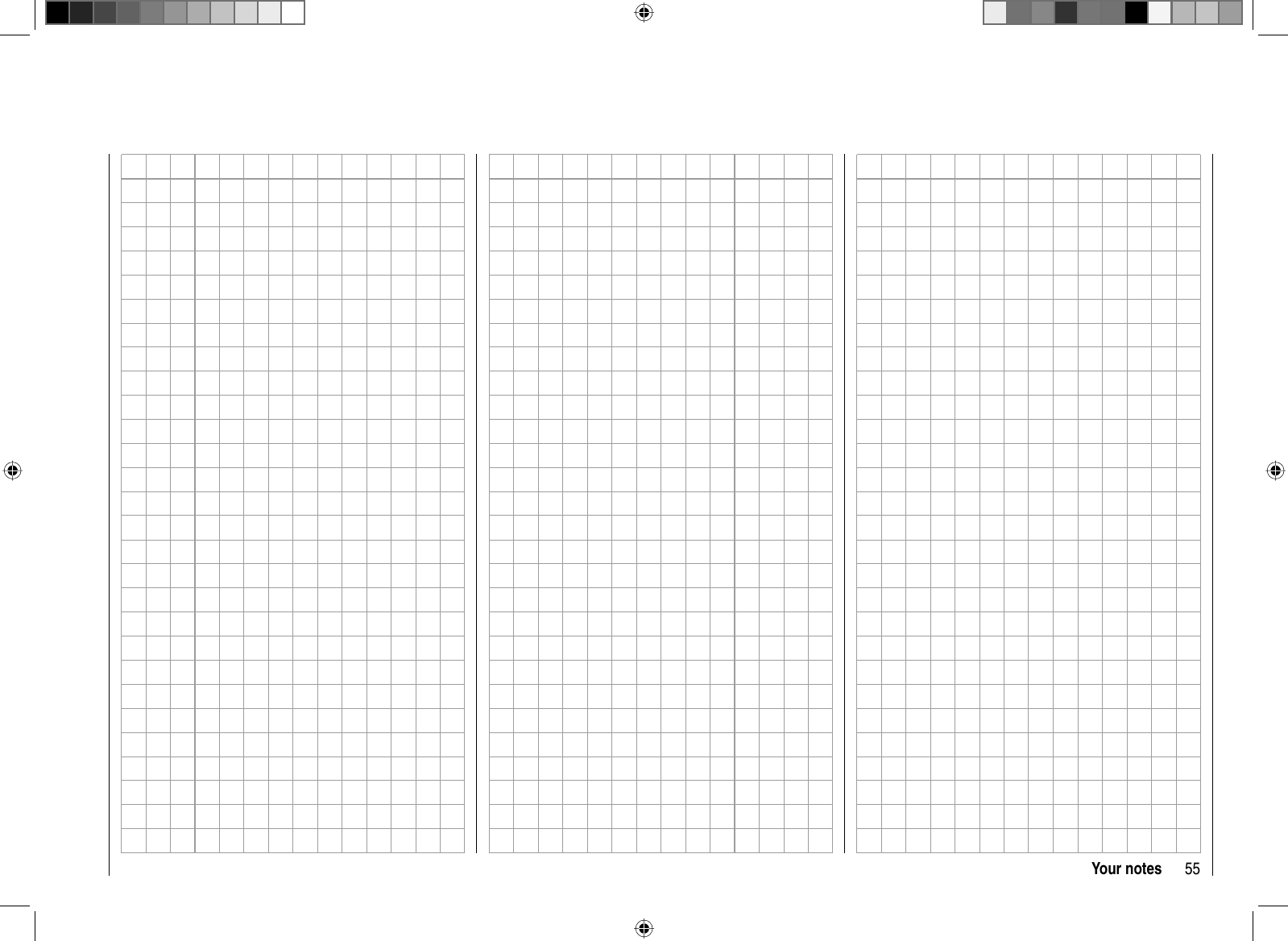
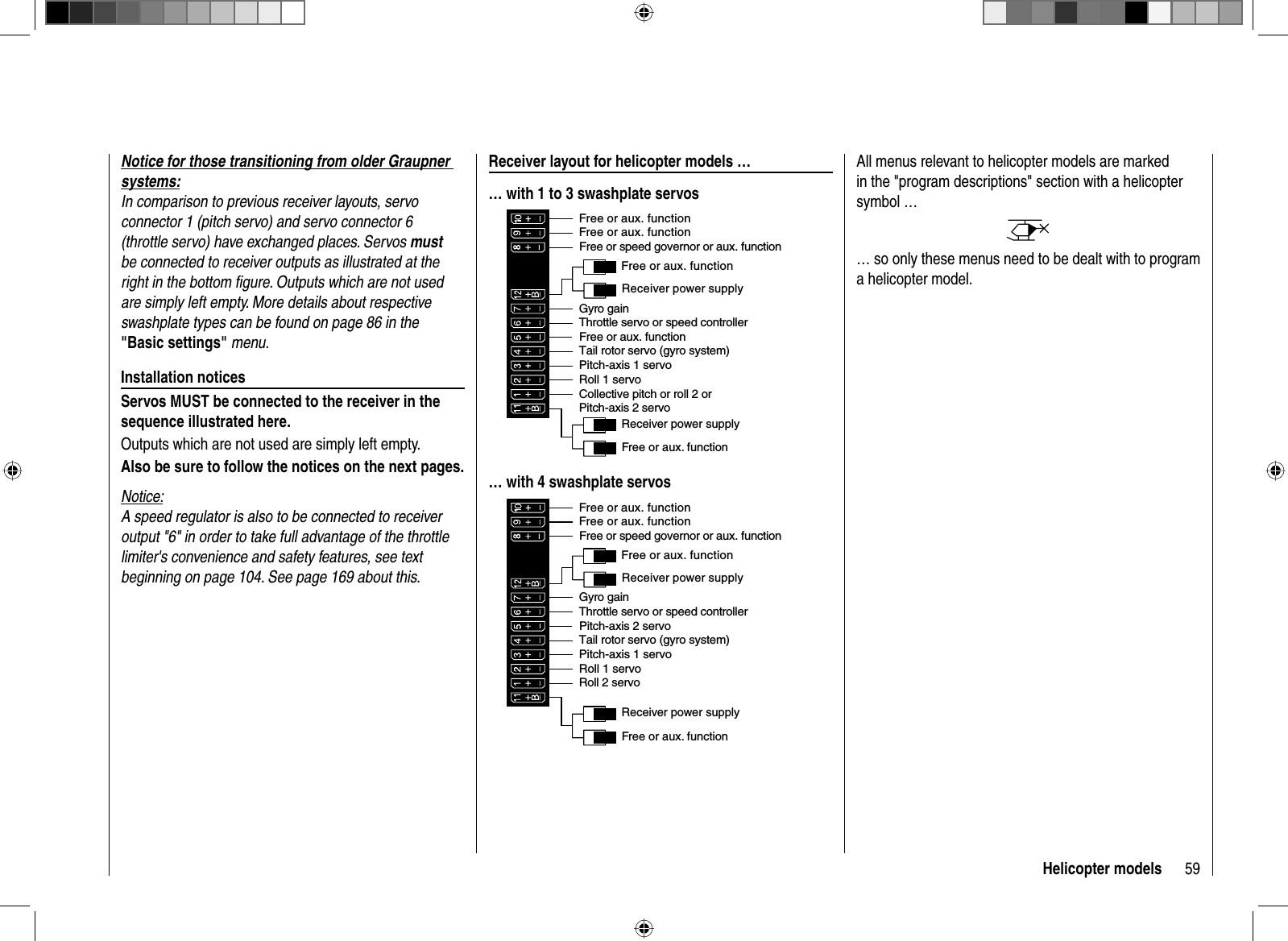
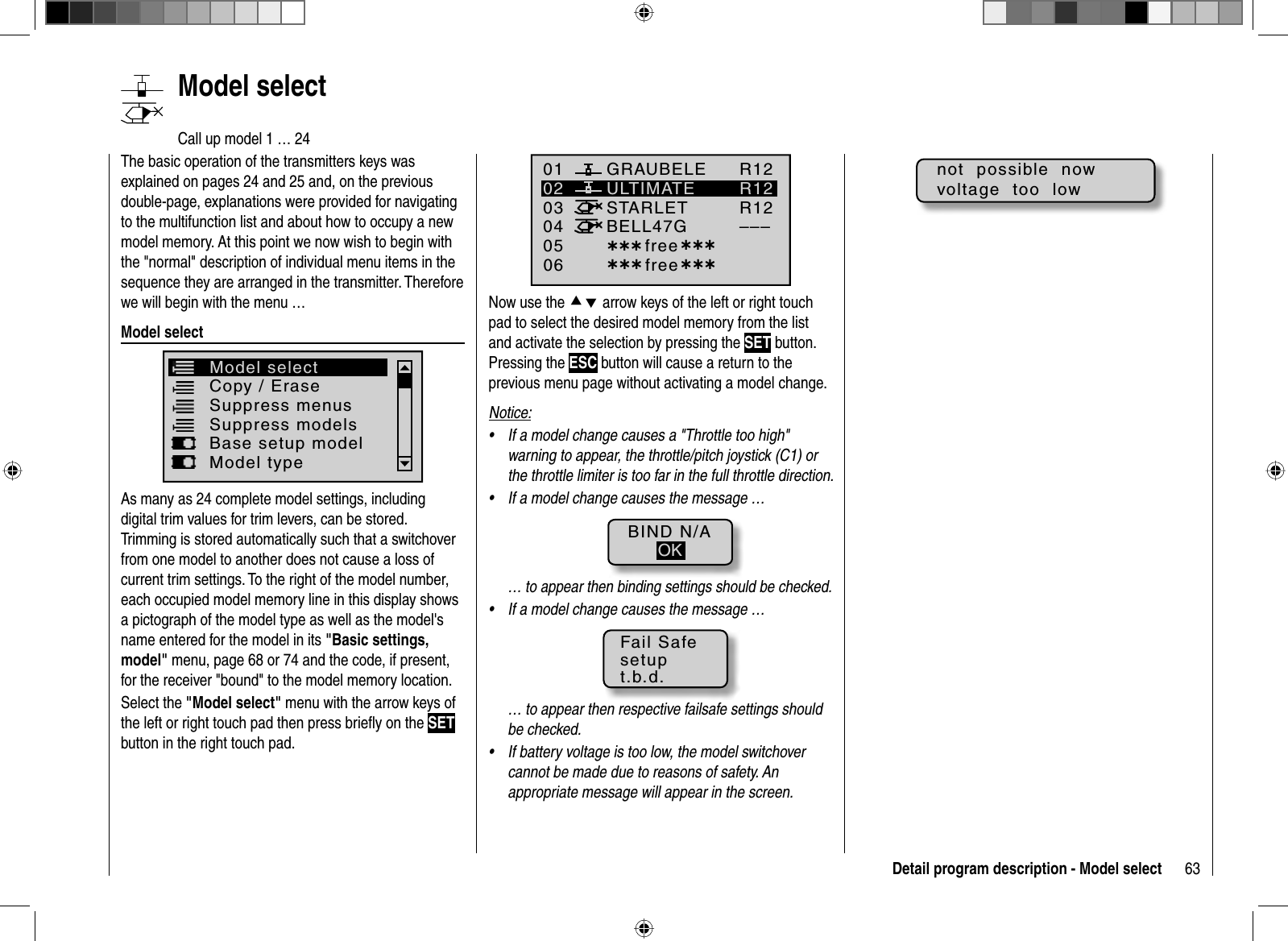
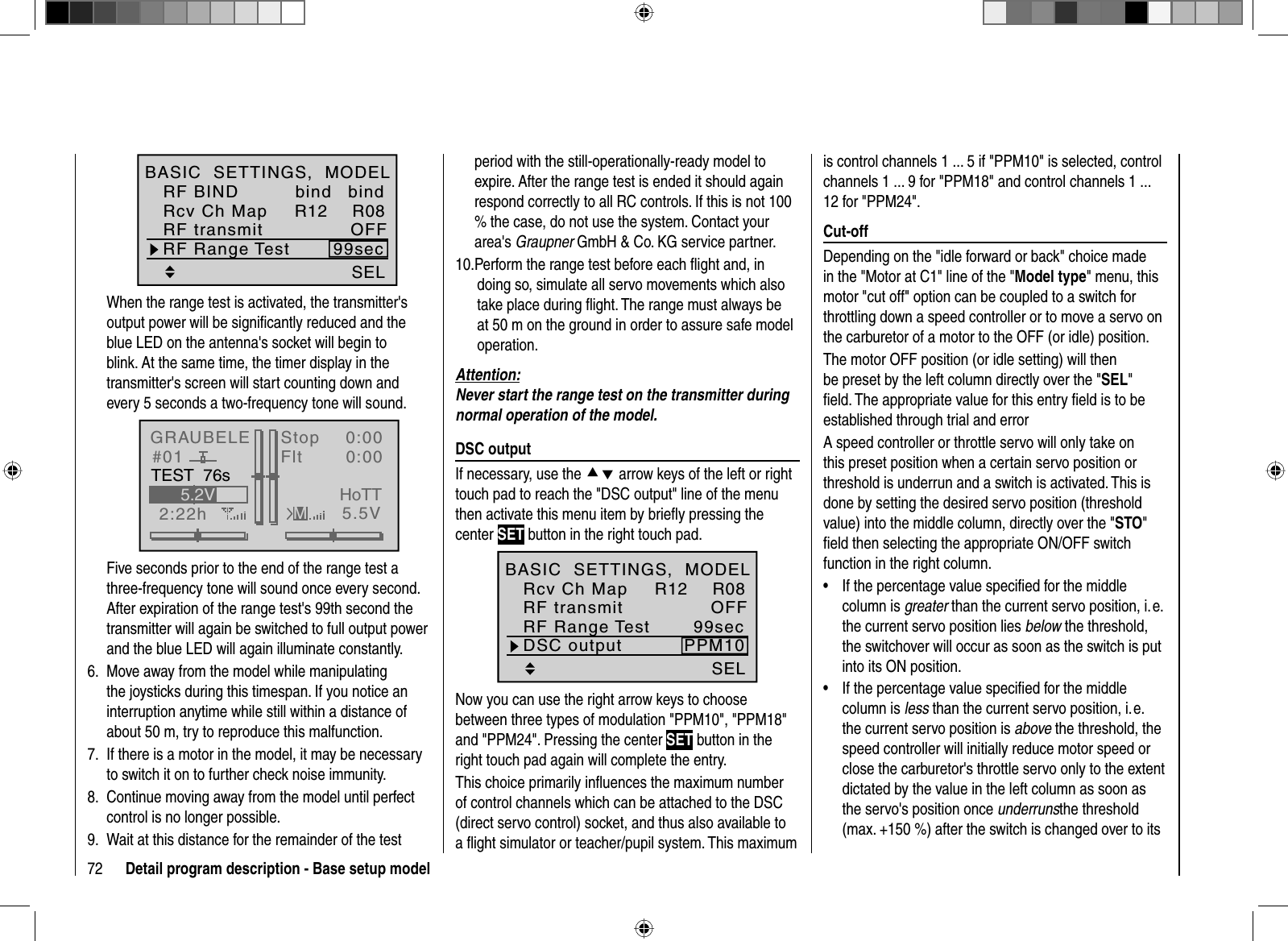
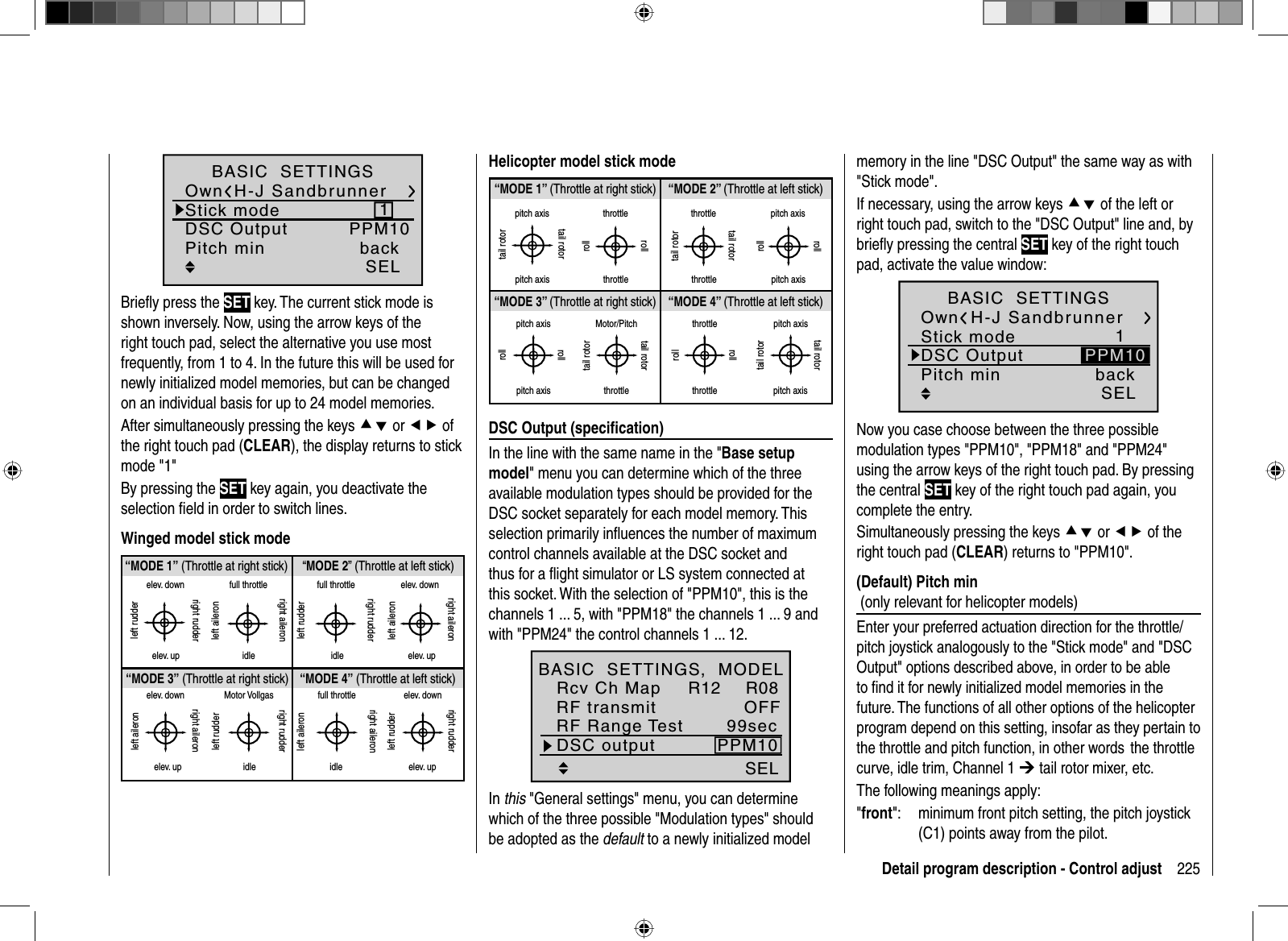
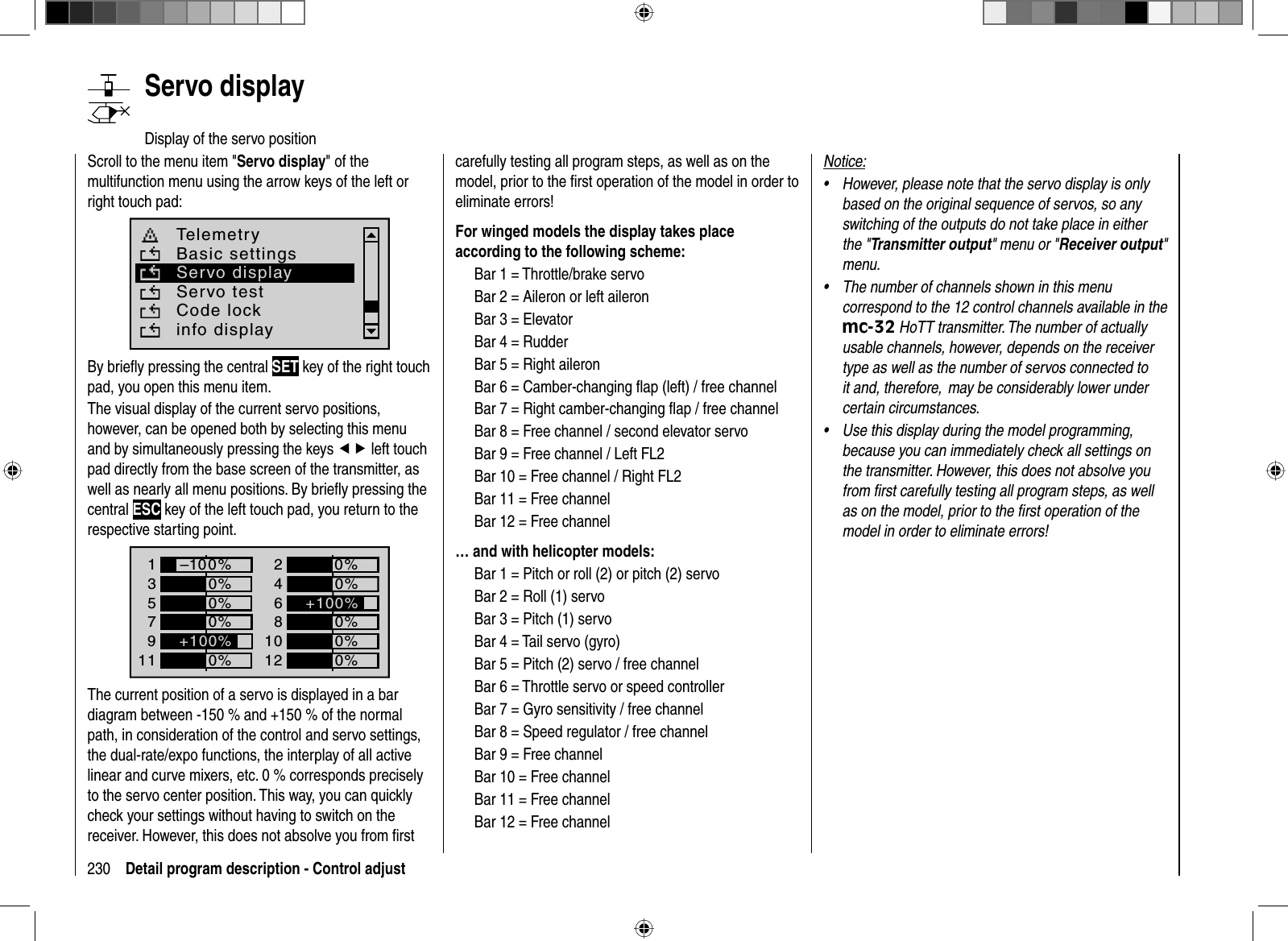
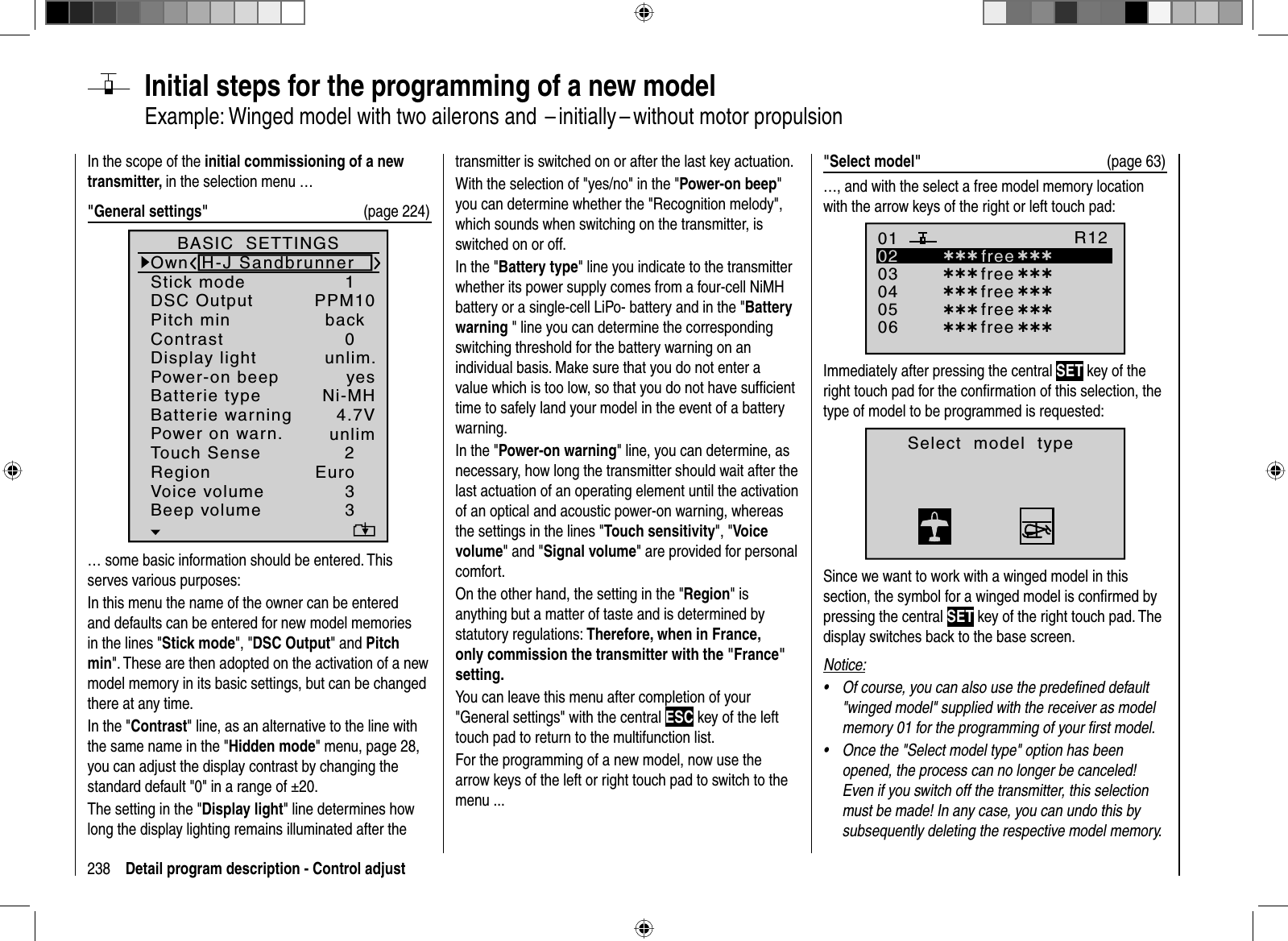
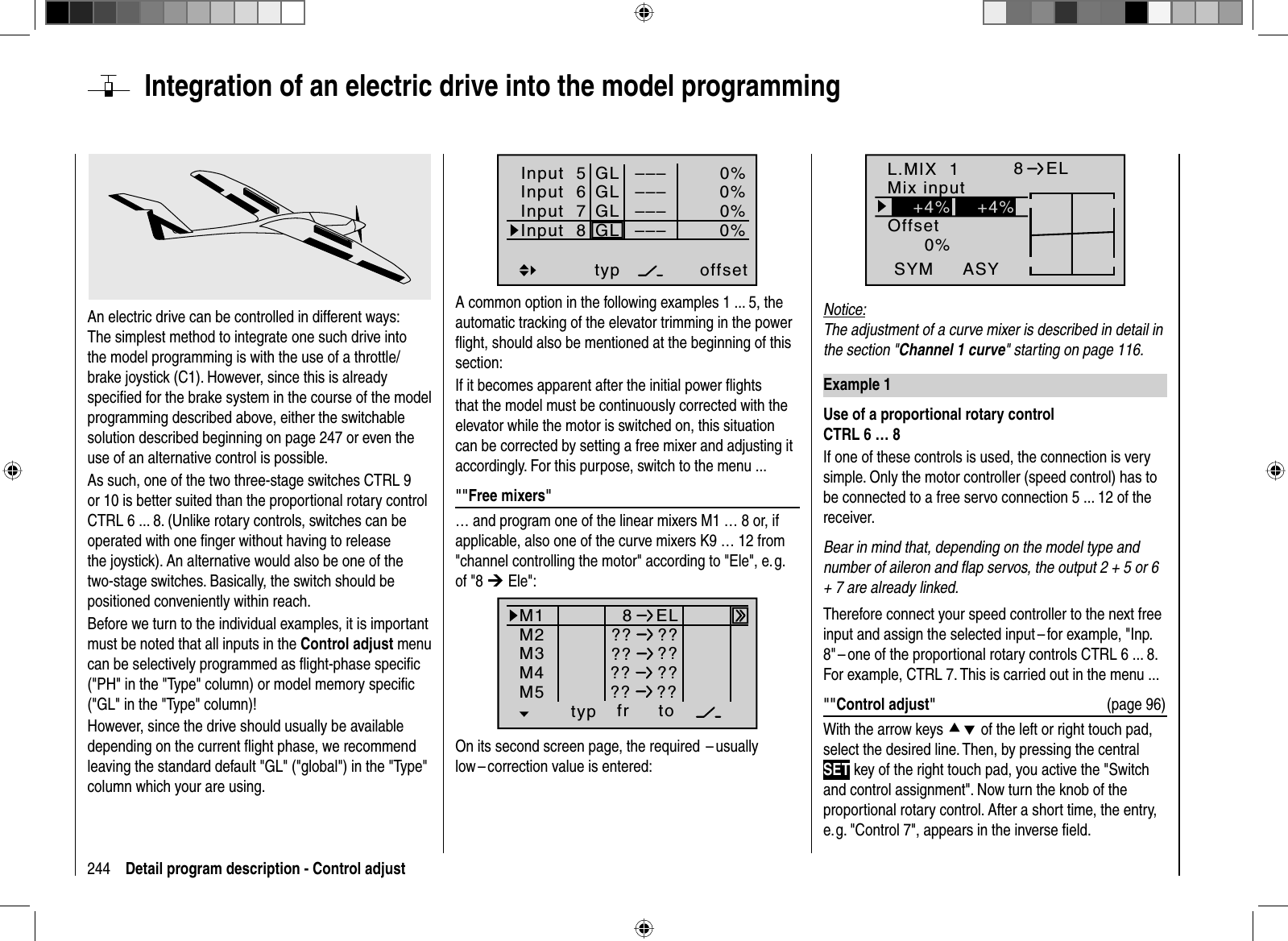
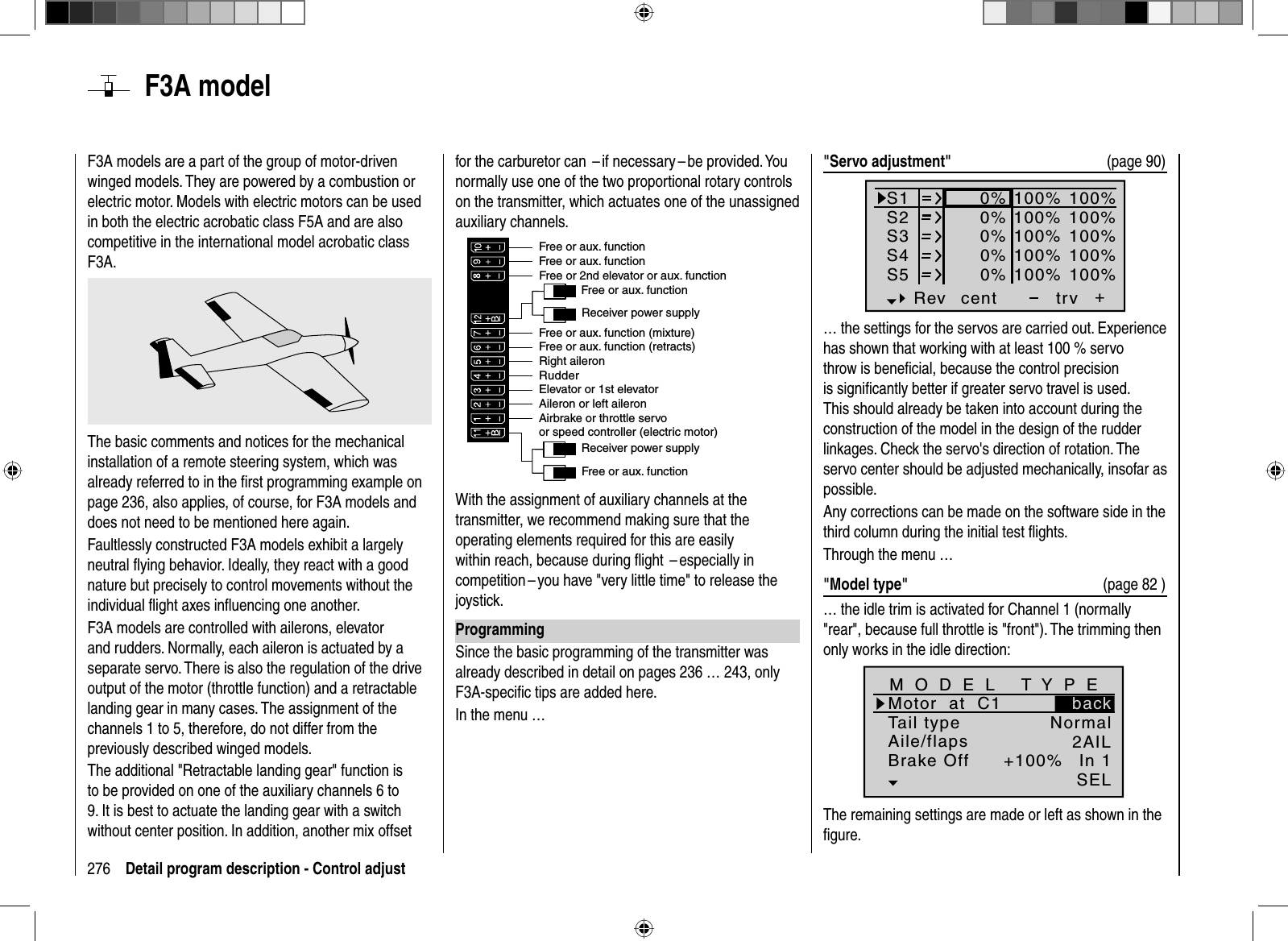
![224 Detail program description - Control adjustUsing the arrow keys of the left or right touch pad, scroll to the "Basic Settings" menu item of the multifunction menu: Telemetryinfo displayBasic settingsServo displayServo testCode lockBy briefl y pressing the central SET key of the right touch pad, this menu item opens:Batterie typeBatterie warningTouch SenseContrastNi-MHDisplay lightRegionVoice volume24.7V0Euro3unlim.Beep volume 3BASIC SETTINGSOwnStick mode 1DSC Output PPM10Pitch min backPower-on beep yesPower on warn. unlimGeneral basic settings are entered in this menu … specifi c to the transmitter, such as the owner's name and defaults for new model memories.The settings saved in this menu in the lines ..."Stick mode",•"DSC Output",•"Pitch min"•… have no infl uence whatsoever on already existing model memories; they are only defaults, which are automatically adopted to newly initialized model memories and can be changed there on an individually basis at any time in the "Basic model settings"and "Helicopter type" menus. A change to the "specifi cations" in this menu, therefore, only infl uences model memories created at a later time.Notice:Settings in this menu are only assigned once for transmitters. After opening this menu in another model memory, therefore, the last valid settings always appear.Select the appropriate line with the arrow keys cd of the left or right touch pad and then press the central SET key of the right touch pad. In the inverse value fi eld you can now change the respective specifi ed value with the arrow keys of the right touch pad and complete your entry by pressing the central SET key of the right touch pad or the ESC key of the left touch pad.Own(er)H.J.Sandbrunner1PPM10BASIC SETTINGSOwnStick modeDSC OutputPitch min backUp to 15 characters can be used to specify the owner's name. Change to the next screen page ( ) by pressing the SET key of the right touch pad: !"#$%&’()+,–./0123456789:;Owner H-J SandbFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDESelect the desired characters with the arrow keys of the left touch pad. Switch to the next position by briefl y pressing the arrow key f of the right touch pad of the SET key to be able to select the next character. A blank space can be entered by simultaneously pressing the keys cd or ef of the right touch pad (CLEAR).You can reach any arbitrary character position within the input fi eld with the ef keys of the right touch pad.You return to the previous menu page by briefl y pressing the central ESC key of the left touch pad. S t i c k mode (specifi cation)As a basic principle, there are four different ways to assign the four control functions, aileron, elevator, rudder and throttle or brake fl aps for winged models as well as rolling, pitching, tail rotor and throttle/pitch for helicopter models to the two joysticks. The model pilot determines which way to do so according to individual preferences.With the arrow keys cd of the left or right touch pad, select the "Stick mode" line. The selection fi eld is shown in a box: General settingsBasic transmitter settings](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-224.png)
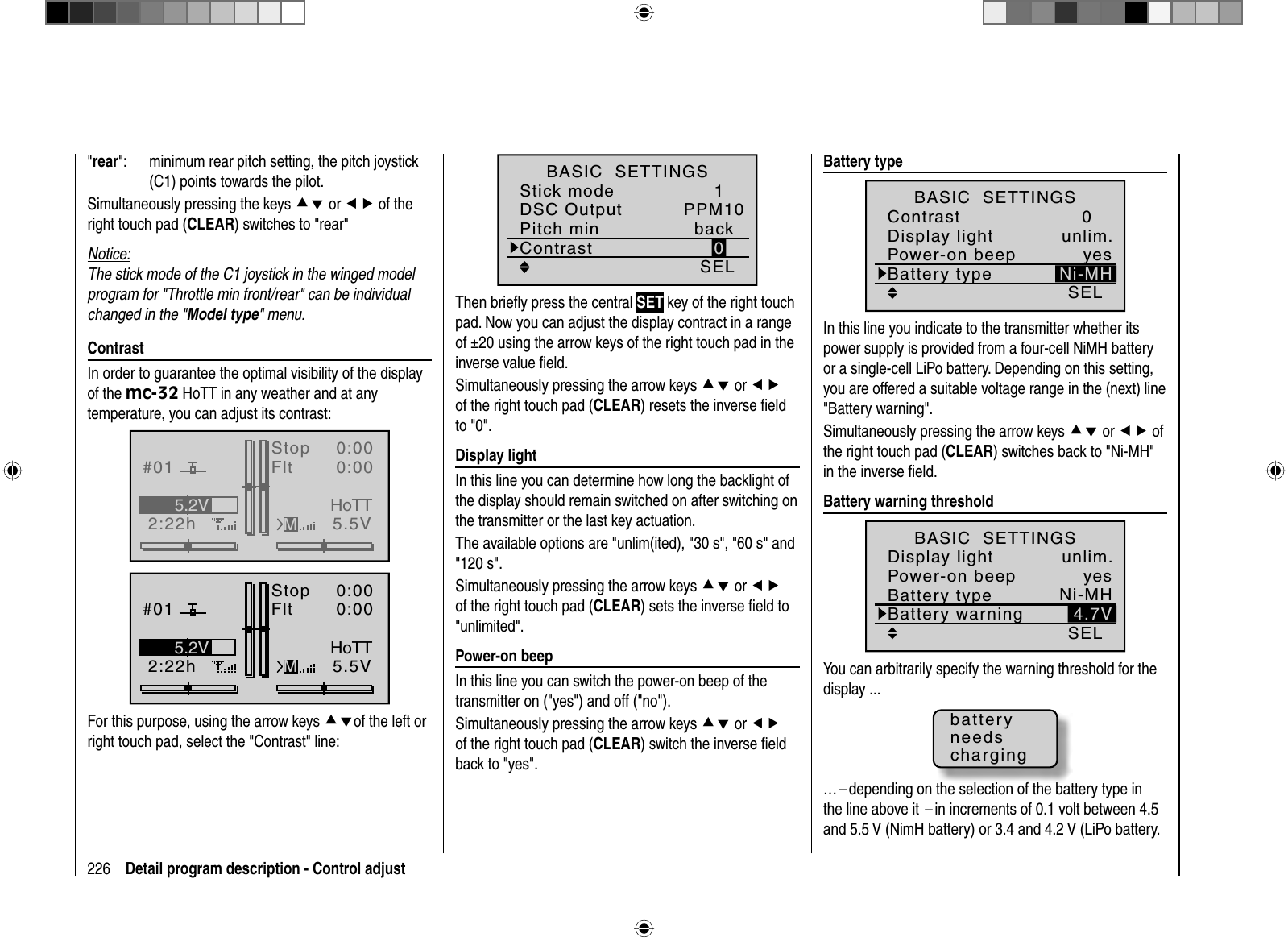
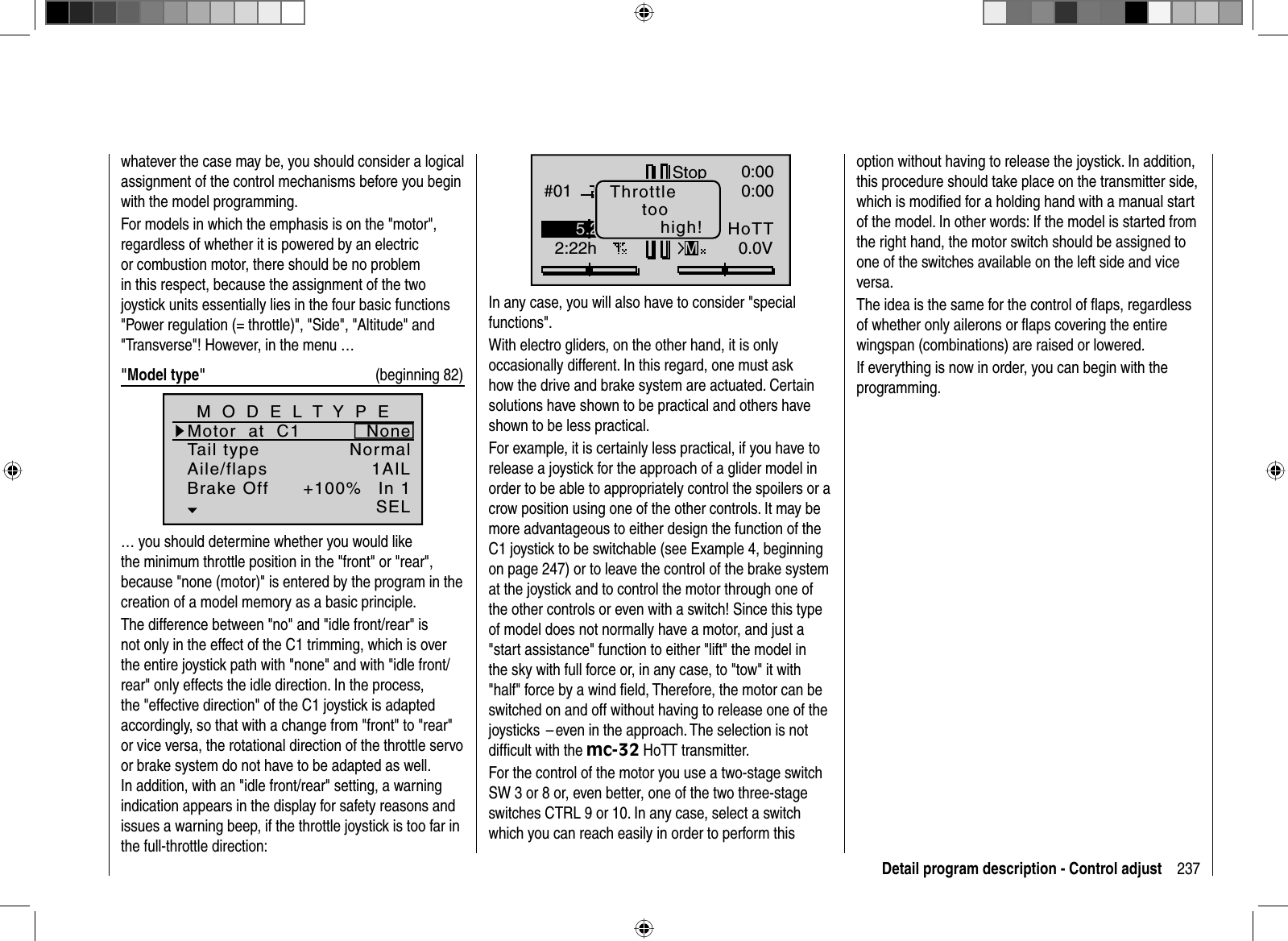
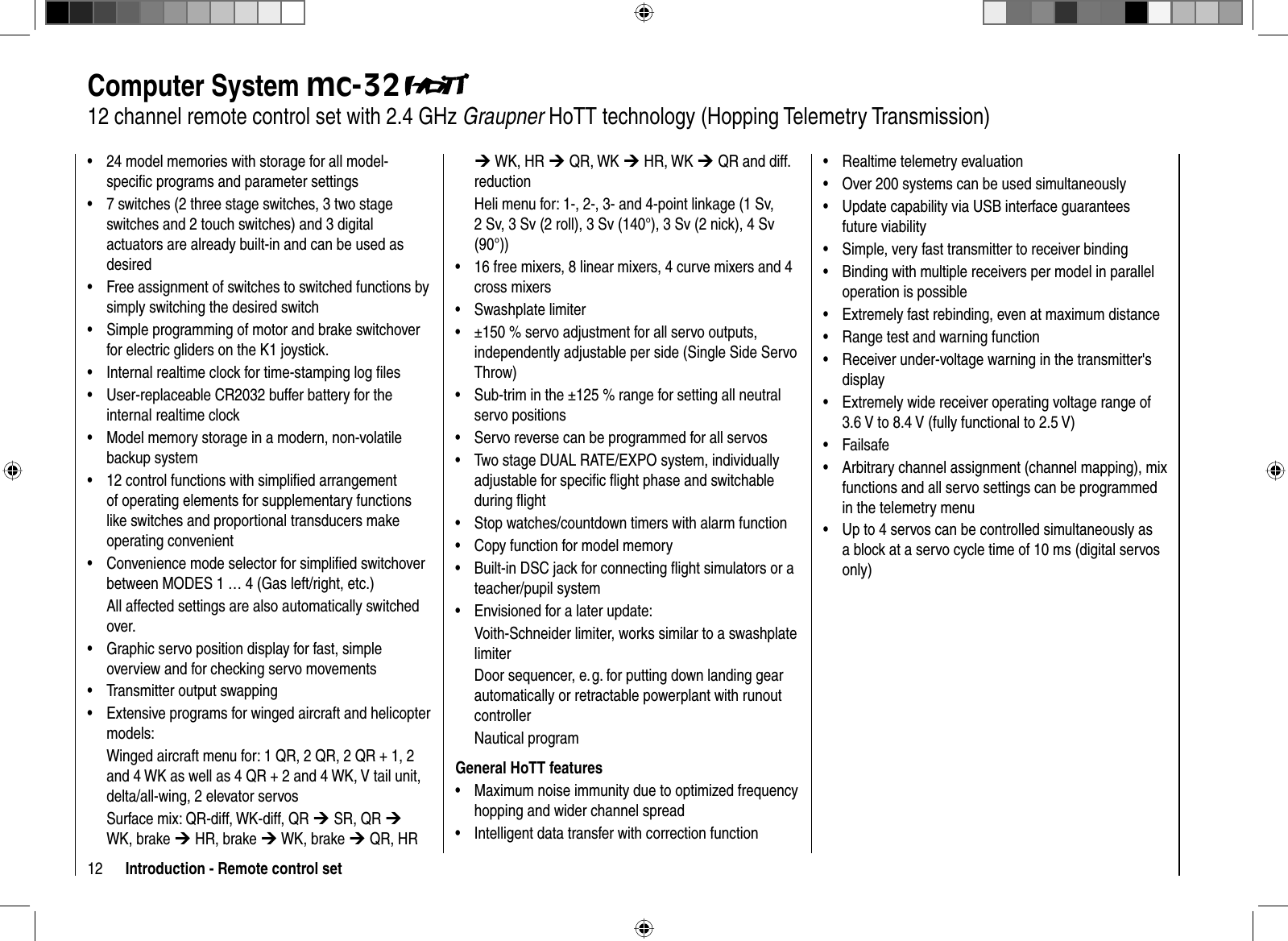
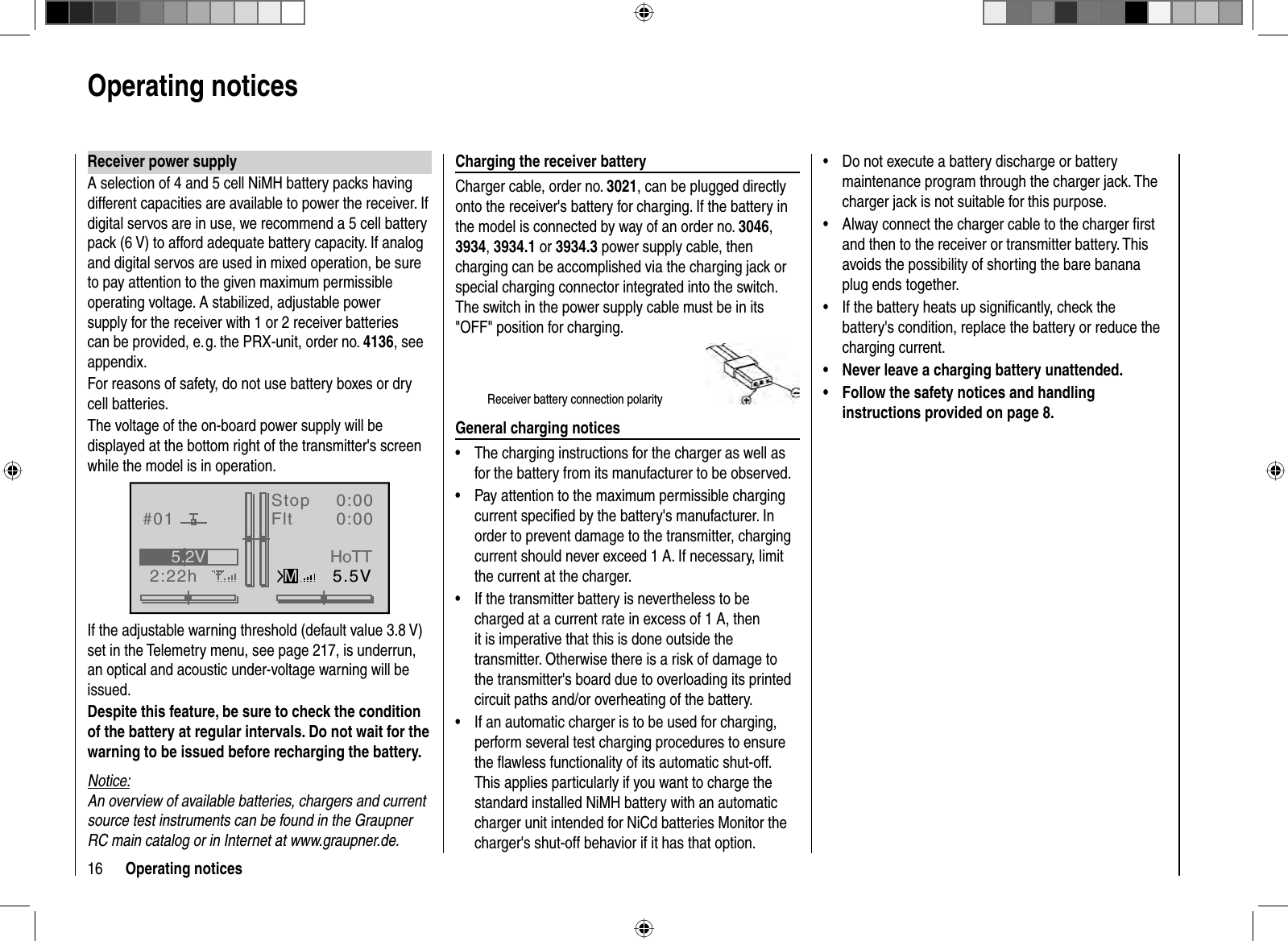
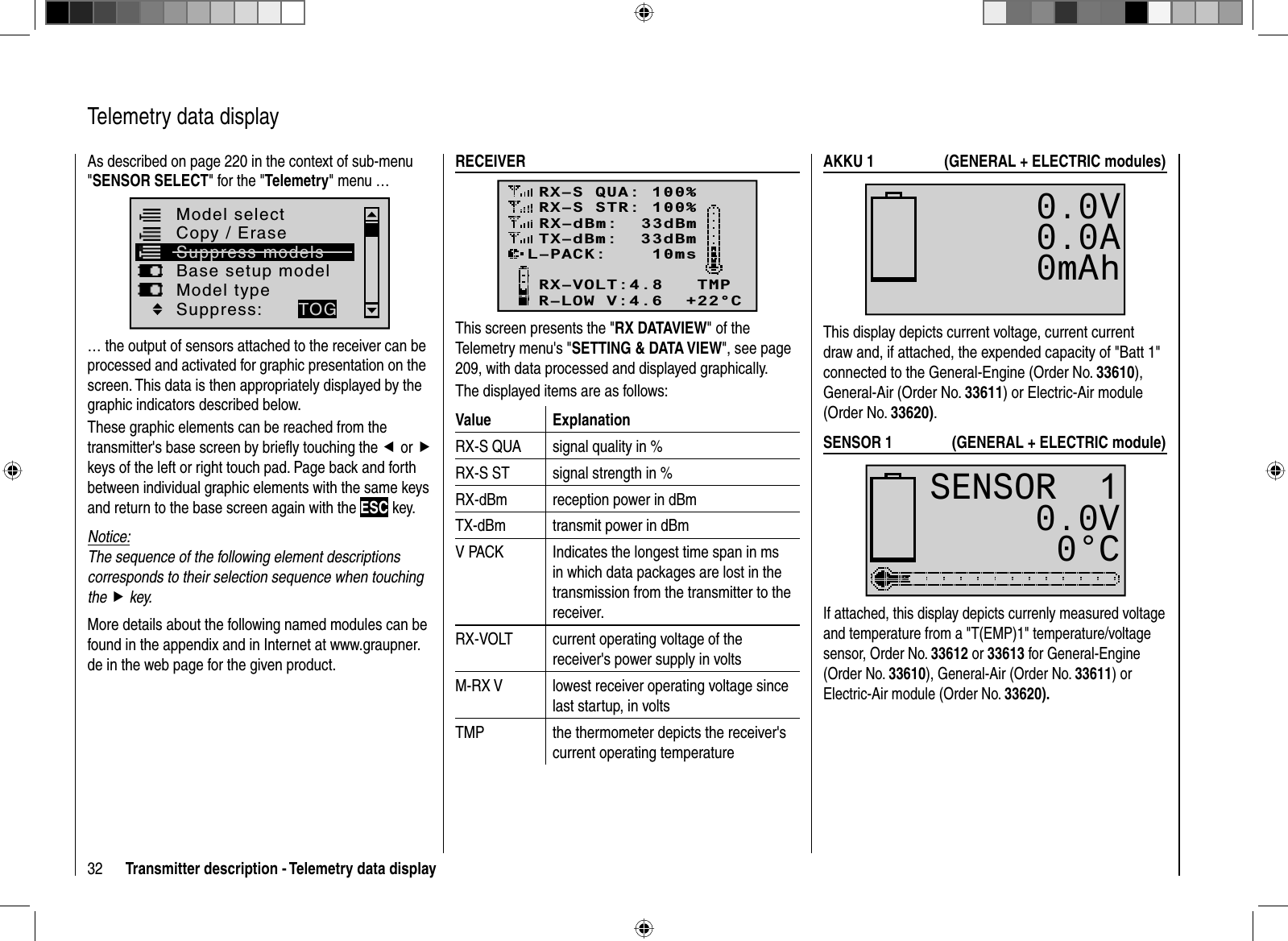
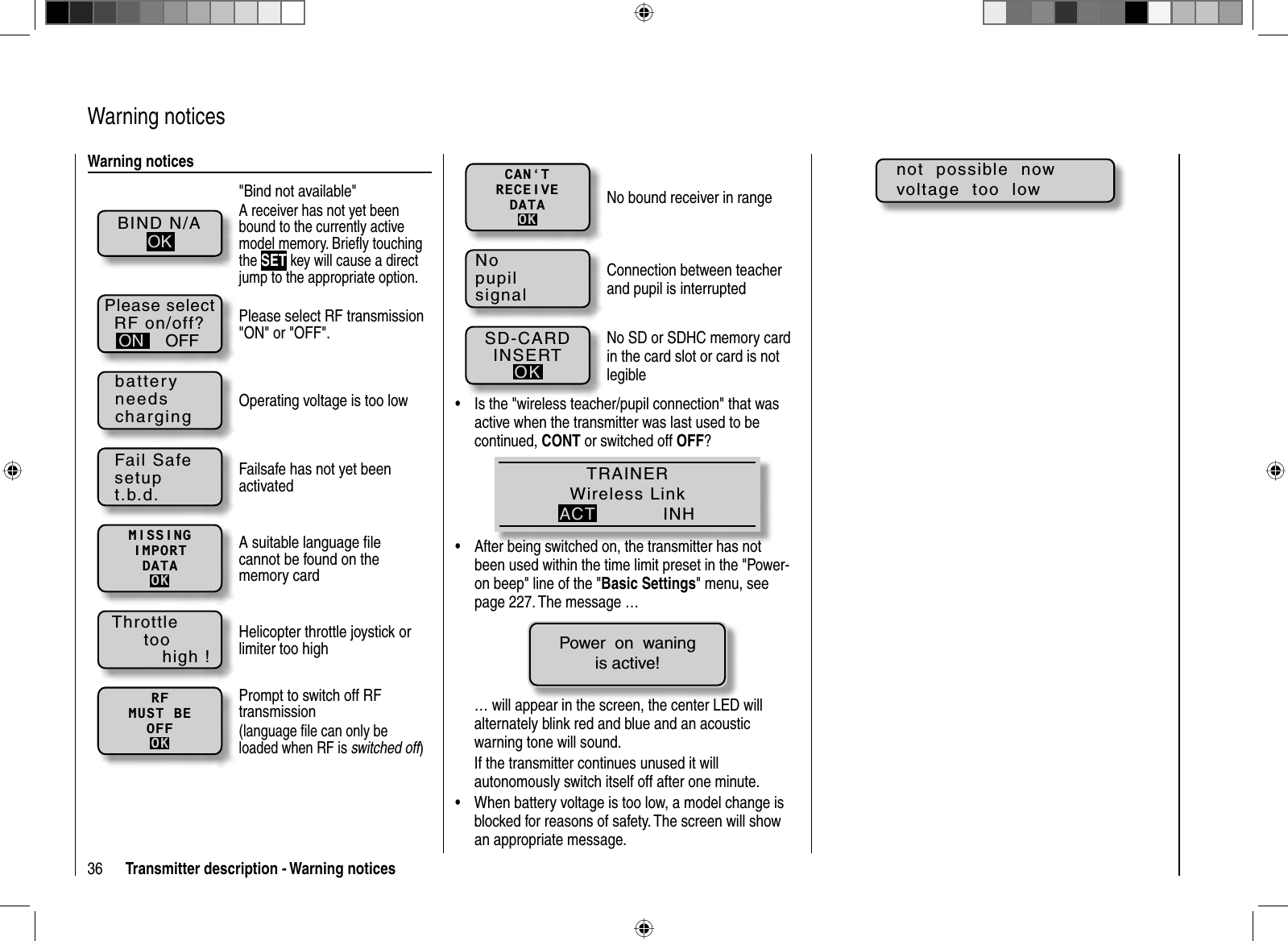
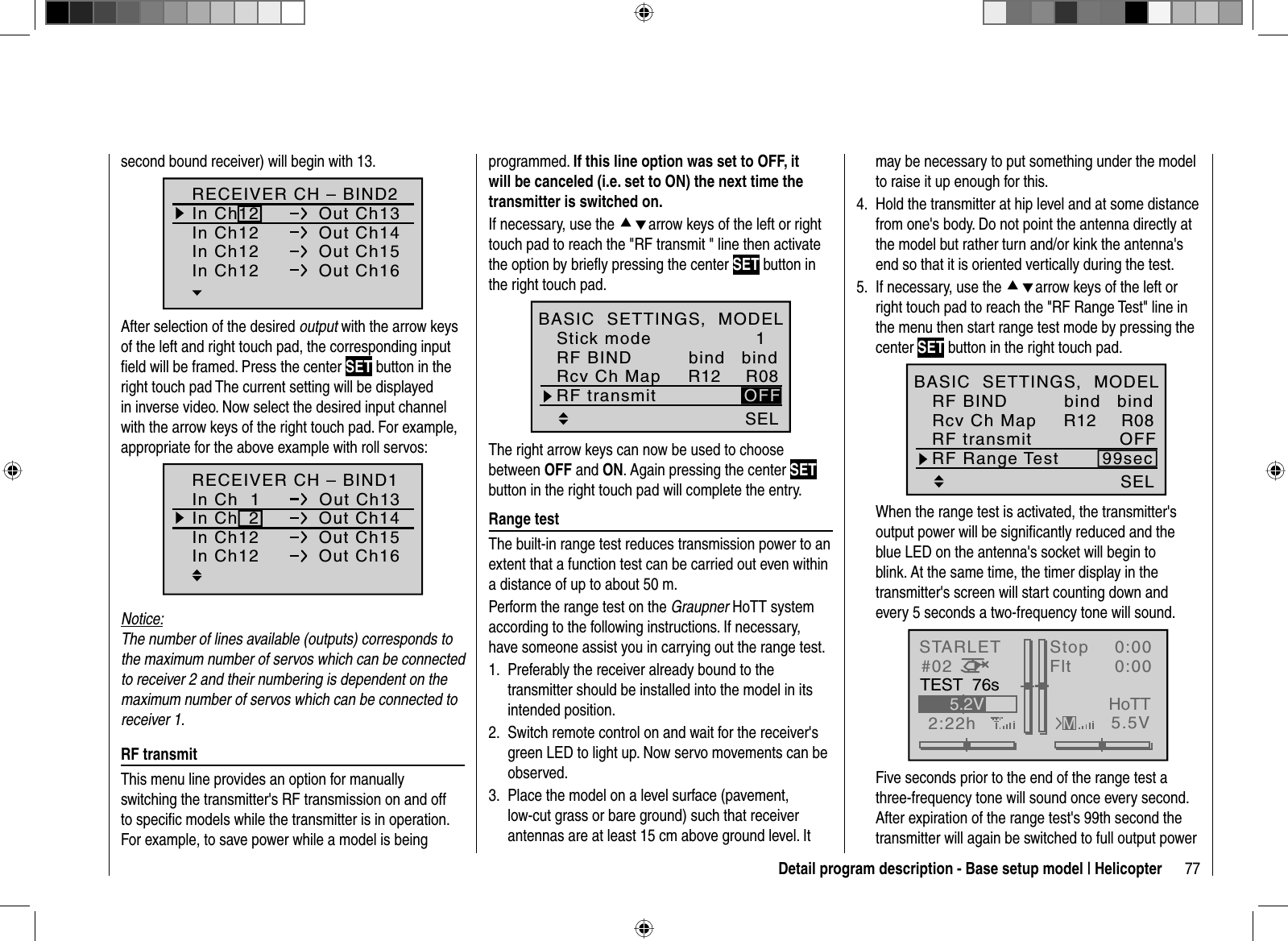
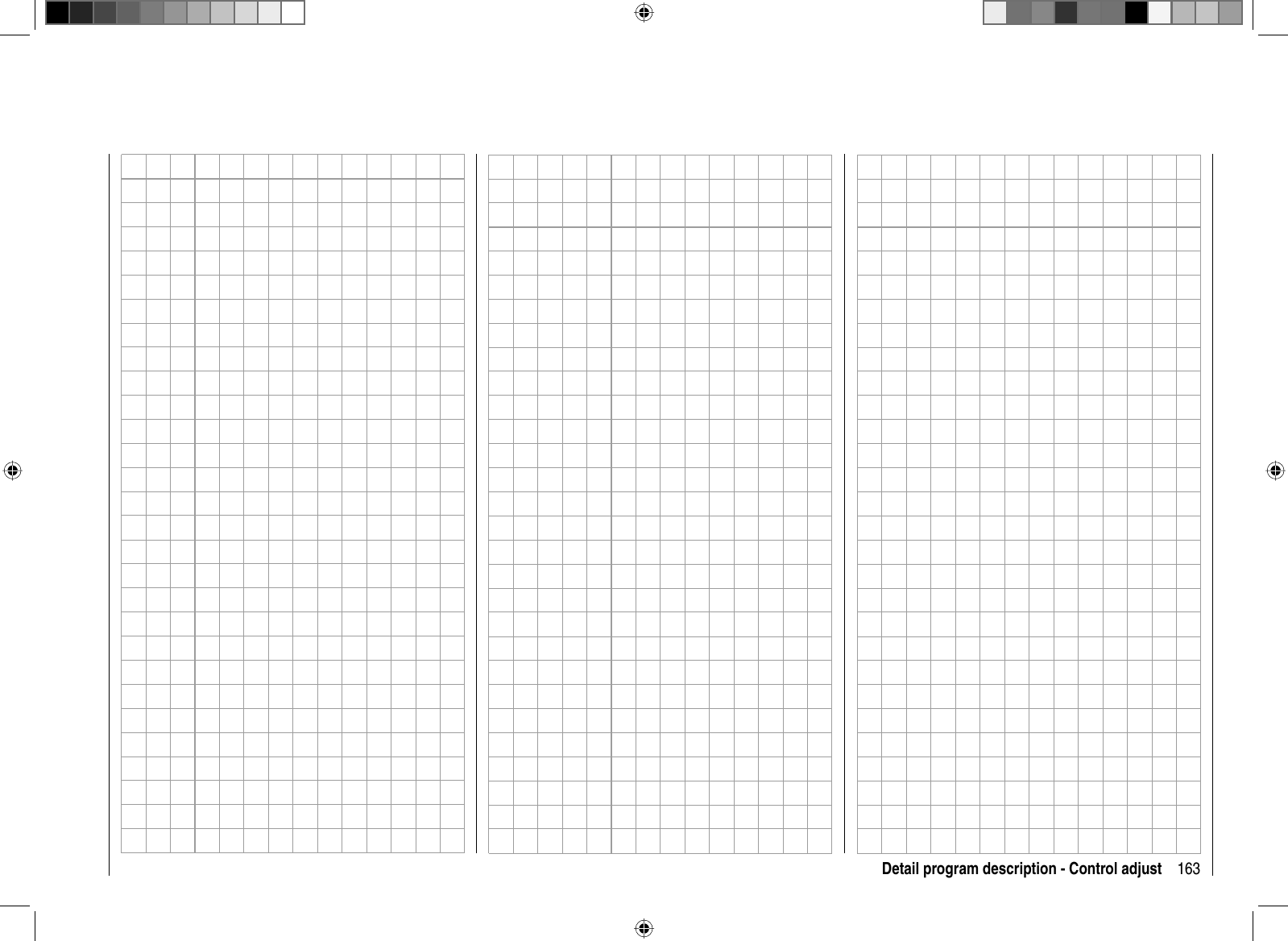
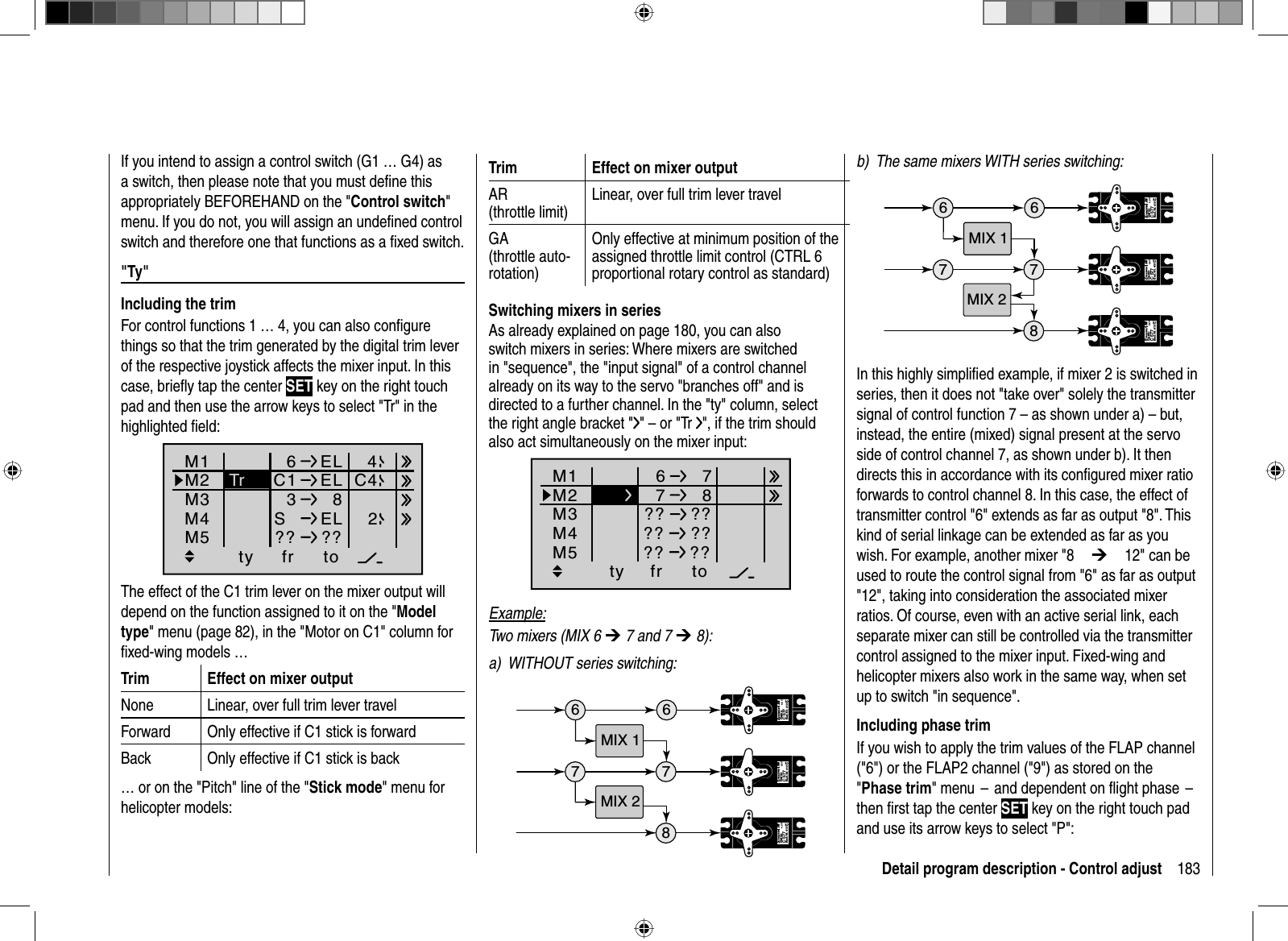
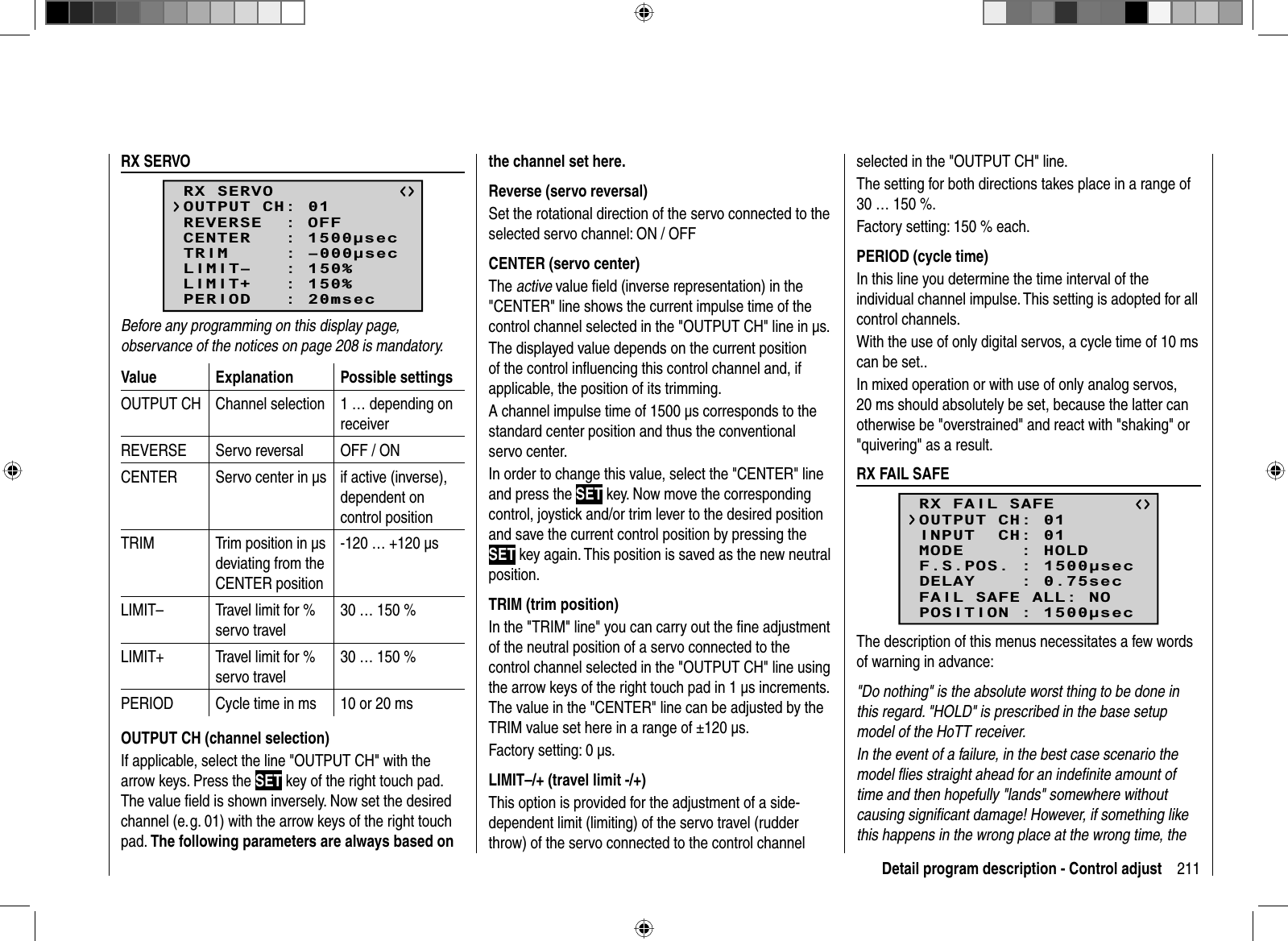
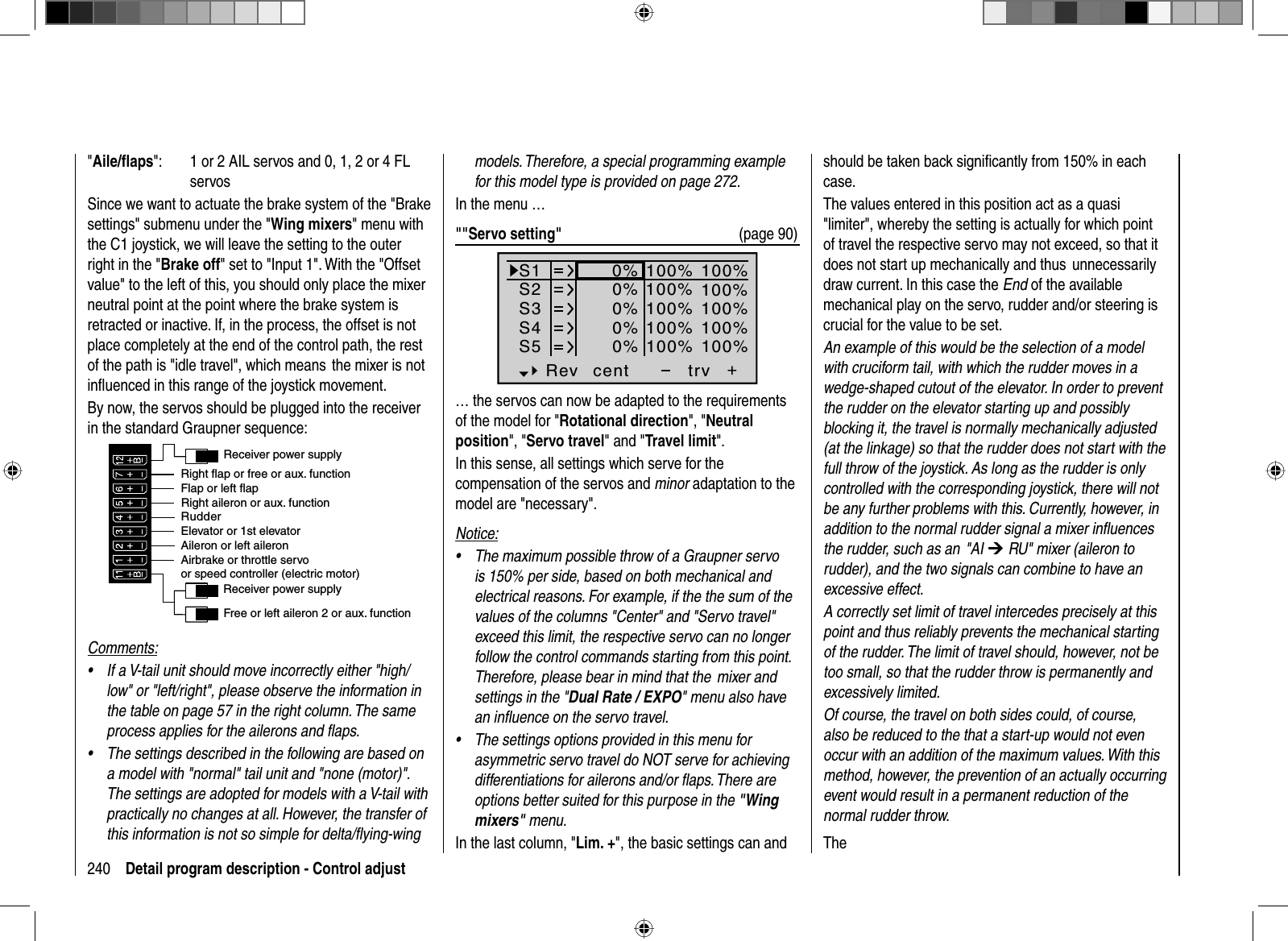
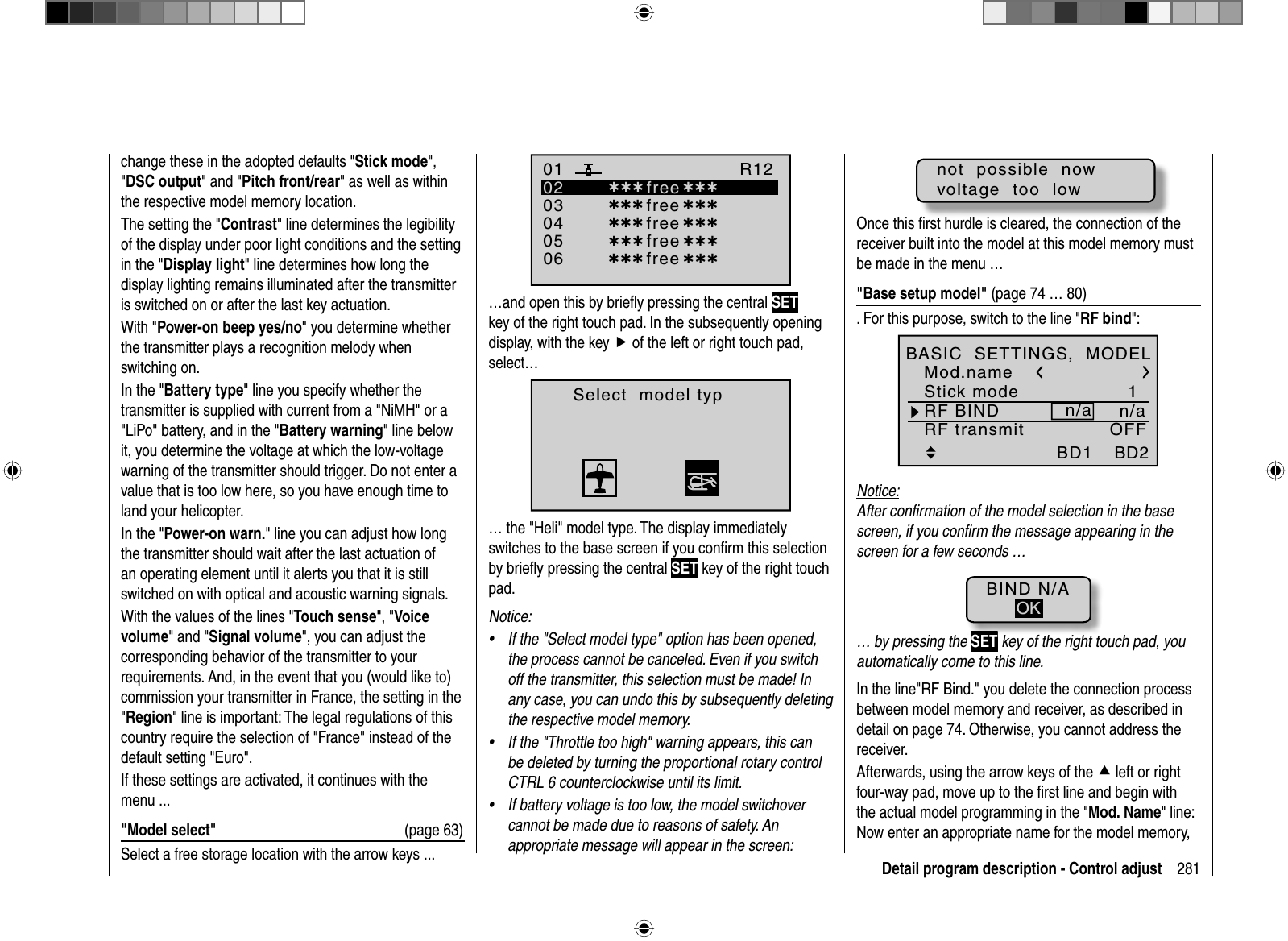
![239Detail program description - Control adjustIf the battery voltage is too low, you cannot switch •models for safety reasons. A corresponding message appears in the display:not possible nowvoltage too lowOnce this fi rst hurdle is cleared, the connection of the receiver built into the model to this model memory can be made in the menu …""Basic model settings" (page 68 … 73). For this purpose, switch to the line "RF bind":1n/an/aBD1GRAUBELEBD2RF transmit n/v OFFMod.nameStick modeRF BINDBASIC SETTINGS, MODELNotice:After confi rmation of the model selection in the base screen, if you confi rm the message appearing in the screen for a few seconds …BIND N/AOK… by pressing the SET key of the right touch pad, you automatically come to this line.In this line you delete the connection process between model memory and receiver, as described in detail on page 69. Otherwise, you cannot address the receiver.Afterwards, using the arrow keys c of the left or right four-way pad, move up to the fi rst line and begin with the actual model programming in the "Mod. Name" line:1n/aBD2BD1n/aR12bindMod.nameStick modeRF BINDBASIC SETTINGS, MODELRcv Ch MapNow enter the "Model name" here by briefl y pressing the central SET key of the right touch pad to switch to the character map: !"#$%&’()+,–./0123456789:;Mod Name GRAUBFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDEIf applicable, the defaults adopted from the "Generalsettings" menu for "Stick mode" and "DSC output"are also checked and changed as necessary.In the menu …"Model type"Tail typeMotor at C1NormalNoneAile/flaps 1AILM O D E L T Y P EBrake Off In 1+100%SEL… the principle arrangement of the servos in the model is selected and communicated to the transmitter. The following selections are available:"Motor at C1""none"• Trimming works independently of the joystick position and the "Brake settings" submenu of the "Wingmixers" menu, beginning on page 146, is available without limitation.The "Throttle too high" warning message, see page 36 and/or 61, and the "Motor stop" option are deactivated."(Idle) front or rear"•C1 trimming is affected in the front or rear and the "Motor stop" option is activated.If the throttle joystick is too far in the full throttle direction when switching on the transmitter, this is indicated to you with the warning message "Throttle too high".In parallel to this, the "Brake settings" submenu of the "Wing mixers" menu, beginning on page146, is only available if "none" is entered in the "Motor" column for the currently active fl ight phase in the "Phase settings" menu, page 128.In the next two lines, the principle arrangement of the servos in the model is selected and communicated to the transmitter:+100%SELTail typeMotor at C1NormalNoneAile/flaps 1AILM O D E L T Y P EBrake Off In 1Tail type: "Normal", "V-ta(il)", "Delta/fl " or "2ELSv3+8"](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-239.png)
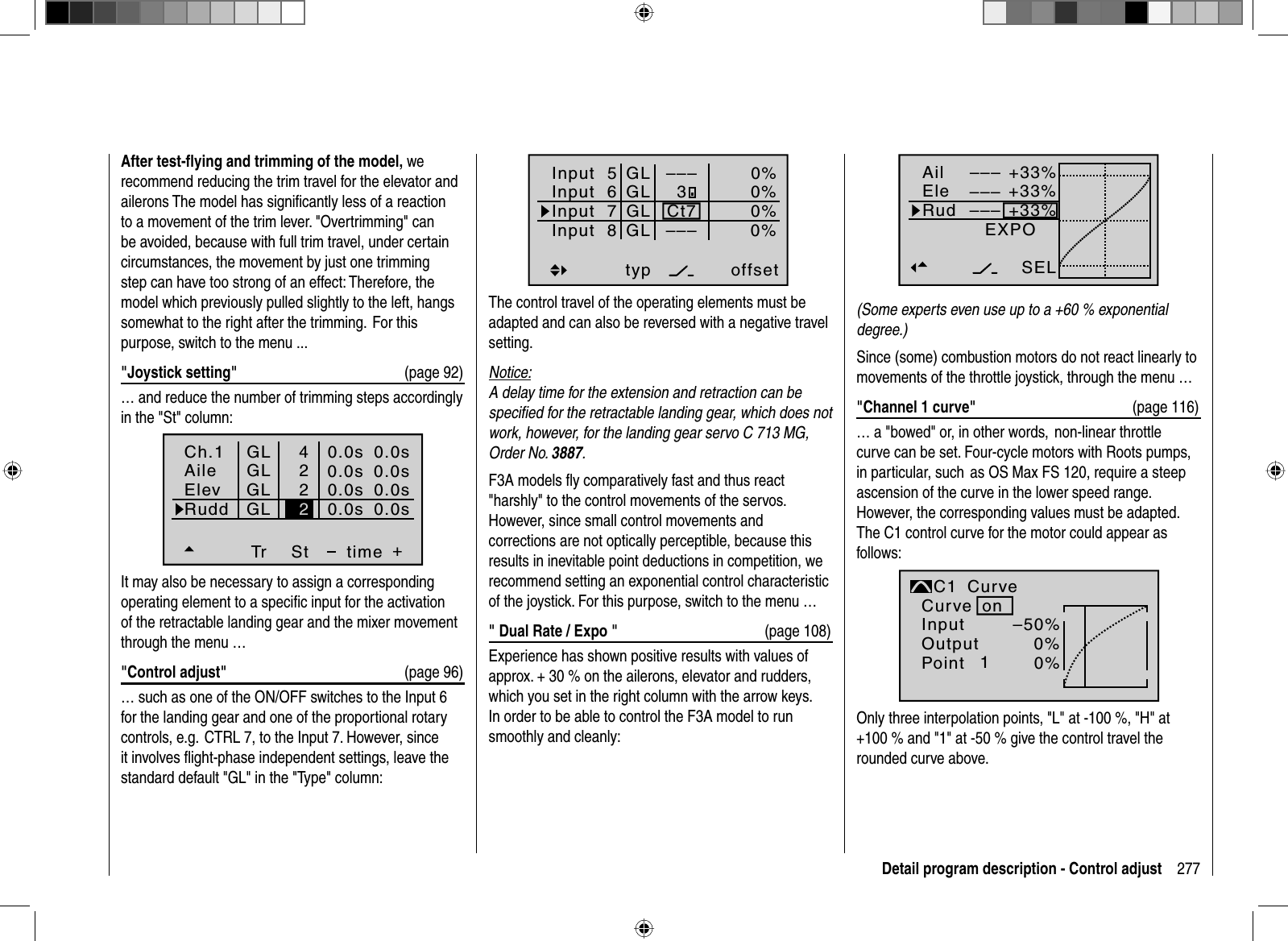
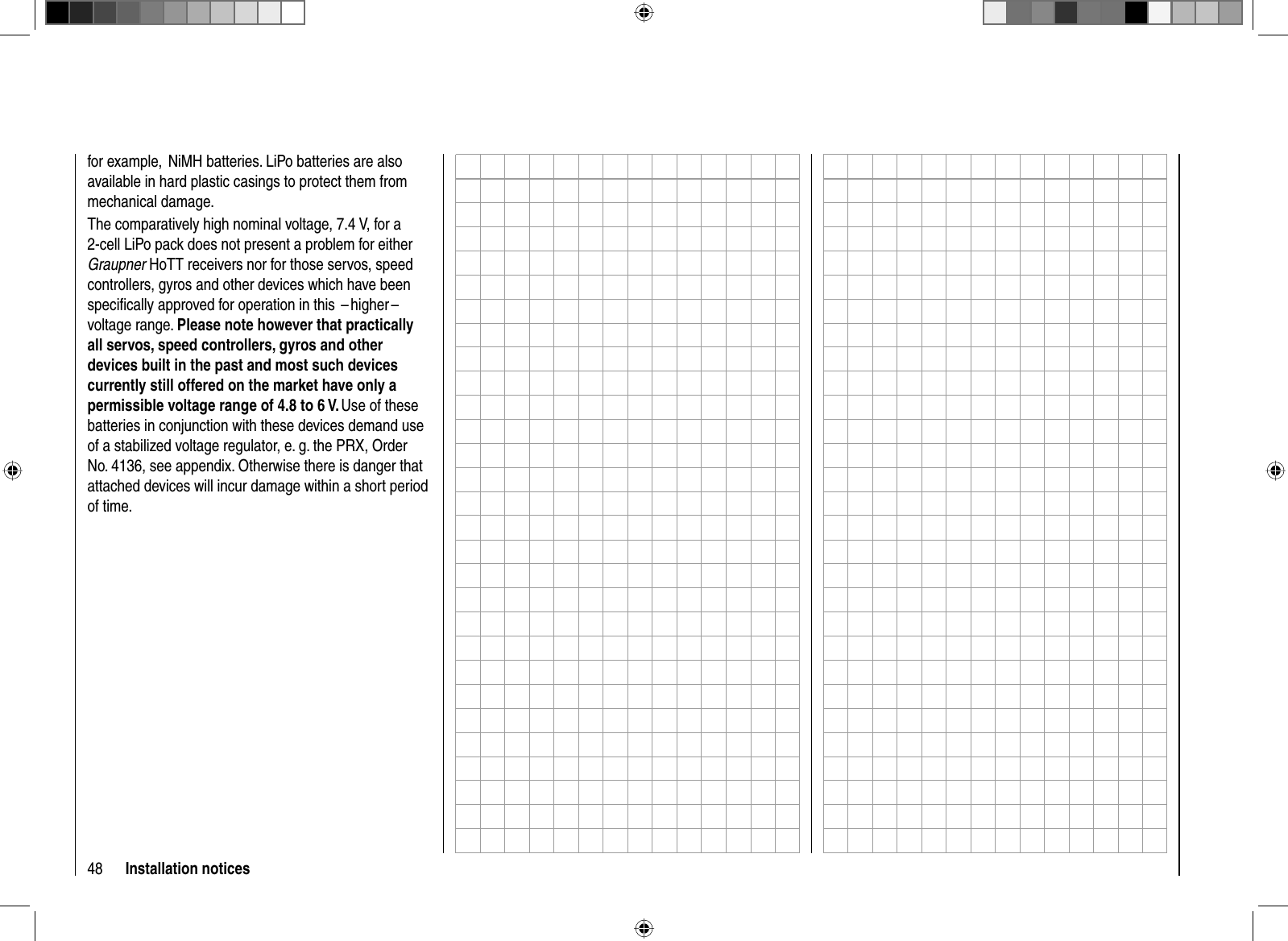
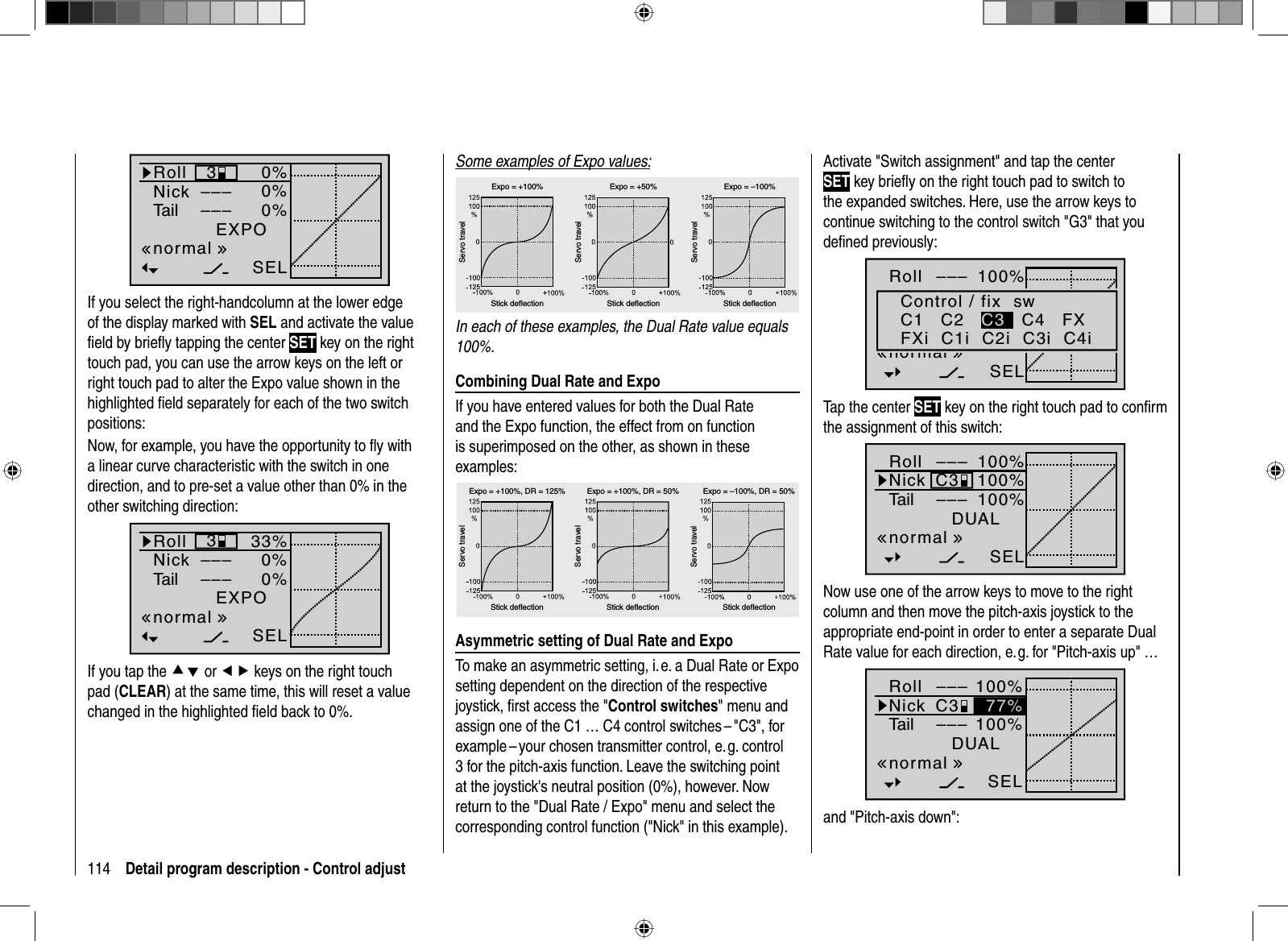
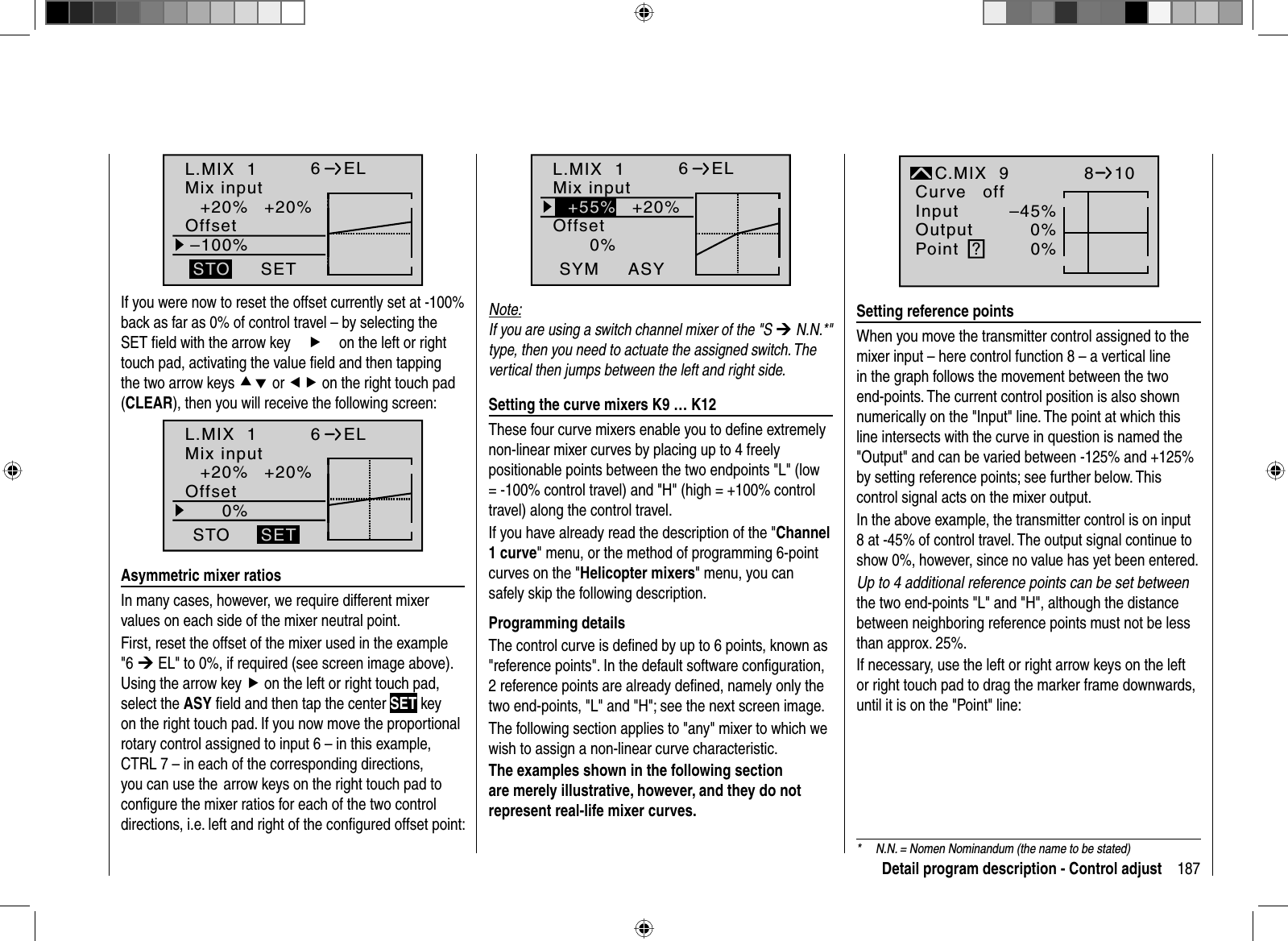
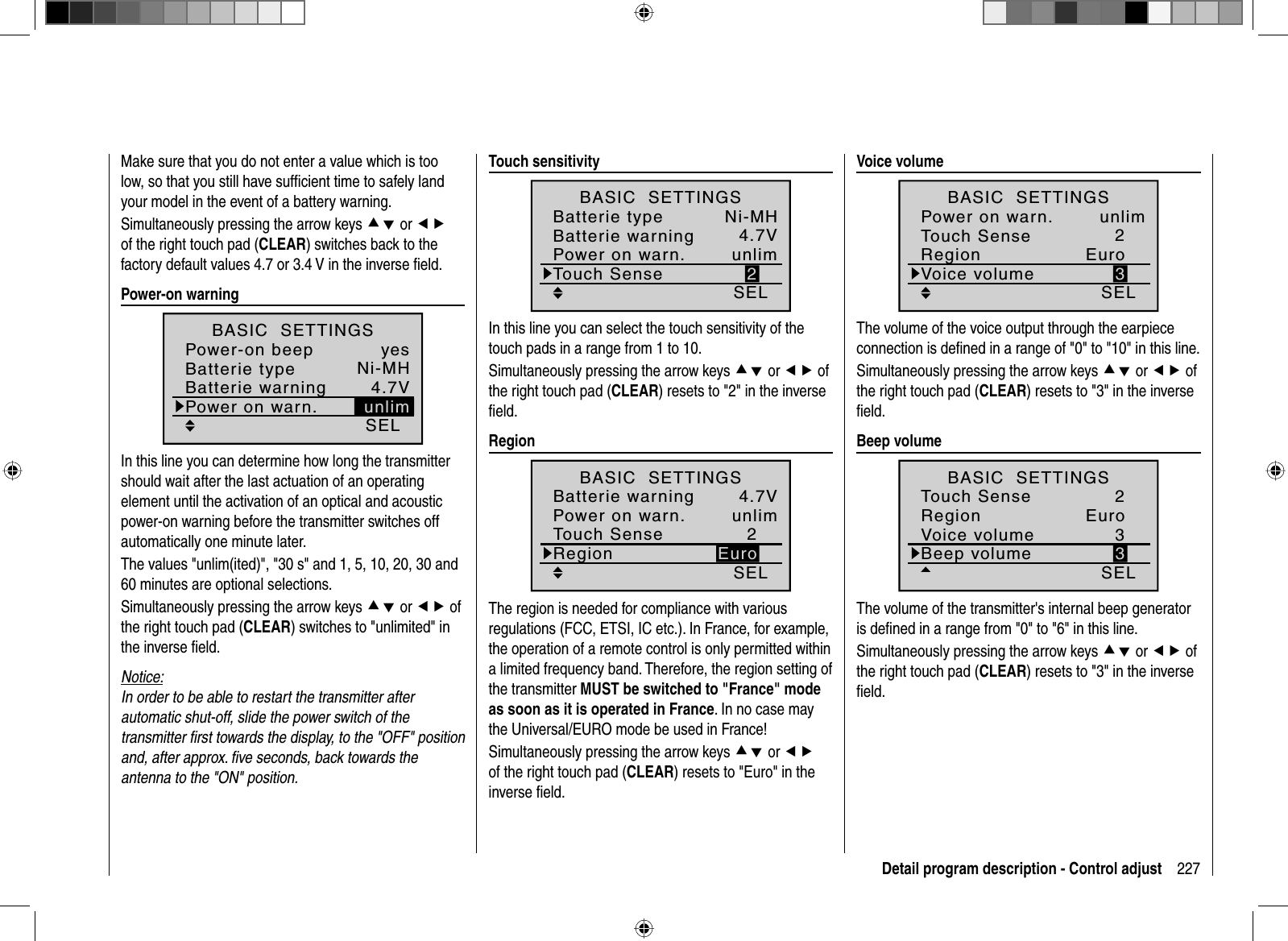
![280 Detail program description - Control adjust Helicopter modelsWith this programming example, you must have already covered the description of the individual menus and you must be familiar with the use of the transmitter. In addition, the helicopter's mechanical construction should correspond exactly to the corresponding manual. The electronic capabilities of the transmitter should by no means be used to straighten out rough mechanical imprecision.As the case often is in life, there are also various ways and possibilities of achieving a specifi c goal with the programming of the mc-32 HoTT. The following example should provide you with a clearer structure for logical programming. If there are multiple possibilities, the simplest and most clearly arranged solutions are recommended fi rst. In order for the helicopter to function faultlessly later on, you are, of course, free to try out other solutions which may be better for you.The programming example is based on the clockwise-rotating STARLET 50 helicopter from Graupner with three pivot points each offset 120° of the swashplate type "3sv(2 Roll)", beginner adjustment without increased throttle curve; without heading-lock gyro system and without transmitter-side gyro infl uence of the "normal operating mode" and without speed regulator. This simple program was also consciously selected to demonstrate that a helicopter which fl ies really well can also be attained with relatively little (programming) effort. However, we do not want to dispense entirely with the enhancement possibilities: Therefore, after the basic description, you will fi nd adjustment information for the gyro effect, the speed regulators and for the fl ight-phase programming.Notice:If you are not interested in the combustion helicopter described here, but a electric helicopter, please continue reading anyhow! With the exception of the omitted idle settings, you can practically adopt most of the settings described in the following unchanged.Some basic settings of the transmitter are necessary with the initial commissioning. For this purpose, switch to the menu …"General settings (page 224)Batterie typeBatterie warningTouch SenseContrastNi-MHDisplay lightRegionVoice volume24.7V0Euro3unlim.Beep volume 3BASIC SETTINGSOwnStick mode 1DSC Output PPM10Pitch min backPower-on beep yesPower on warn. unlim… and start with the entry of the "Owner name". Select the characters for this from an extensive list on the second display screen, which you can reach through the symbol by briefl y pressing the central SET key of the right touch pad: !"#$%&’()+,–./0123456789:;Owner H-J SandbFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDESelect the default "Stick mode" according to the criteria described on page 224.The same applies for the default "DSC output".The default "Pitch min" is based on your control habits. With the creation of a new model memory you can](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-280.png)
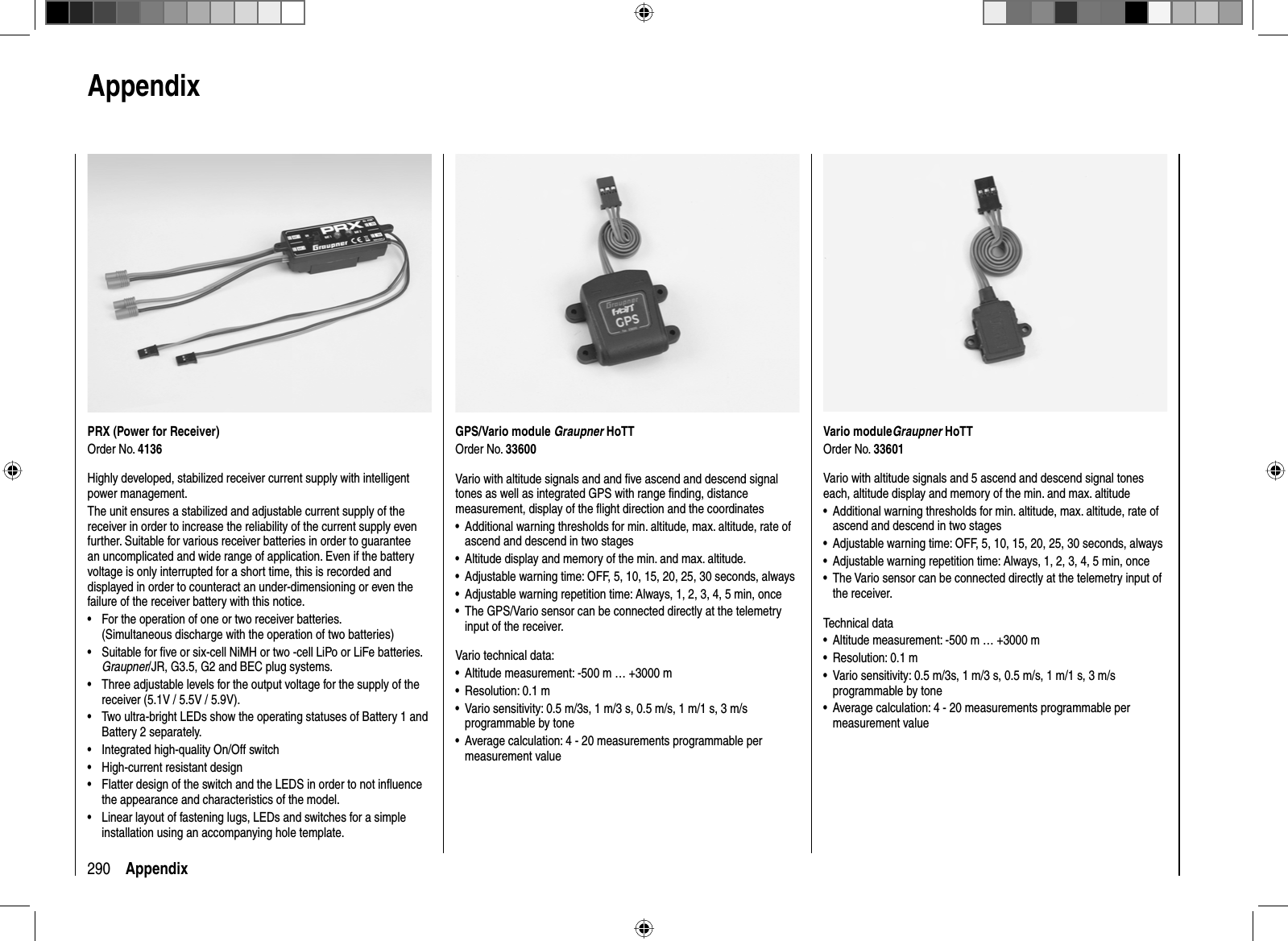
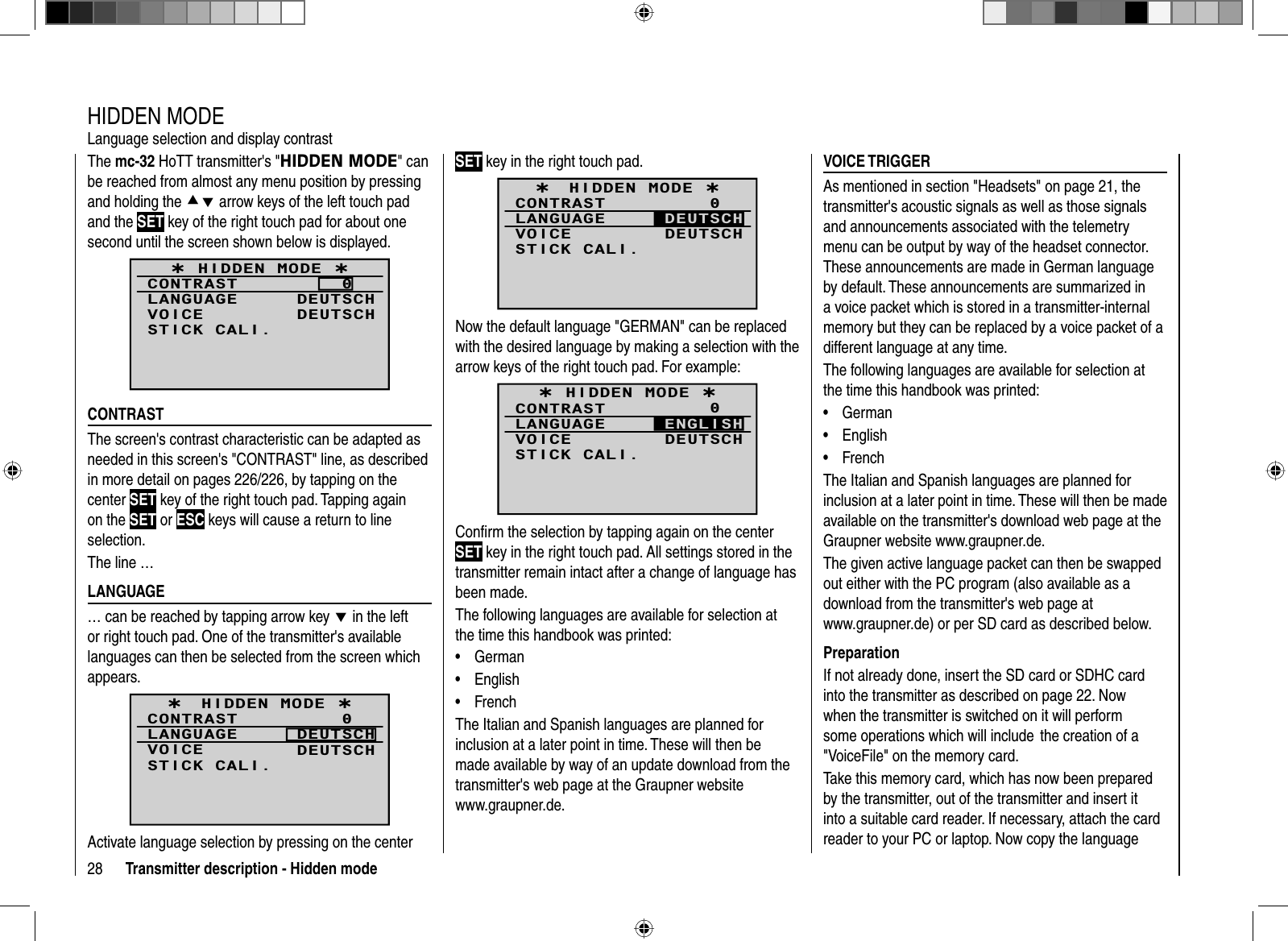
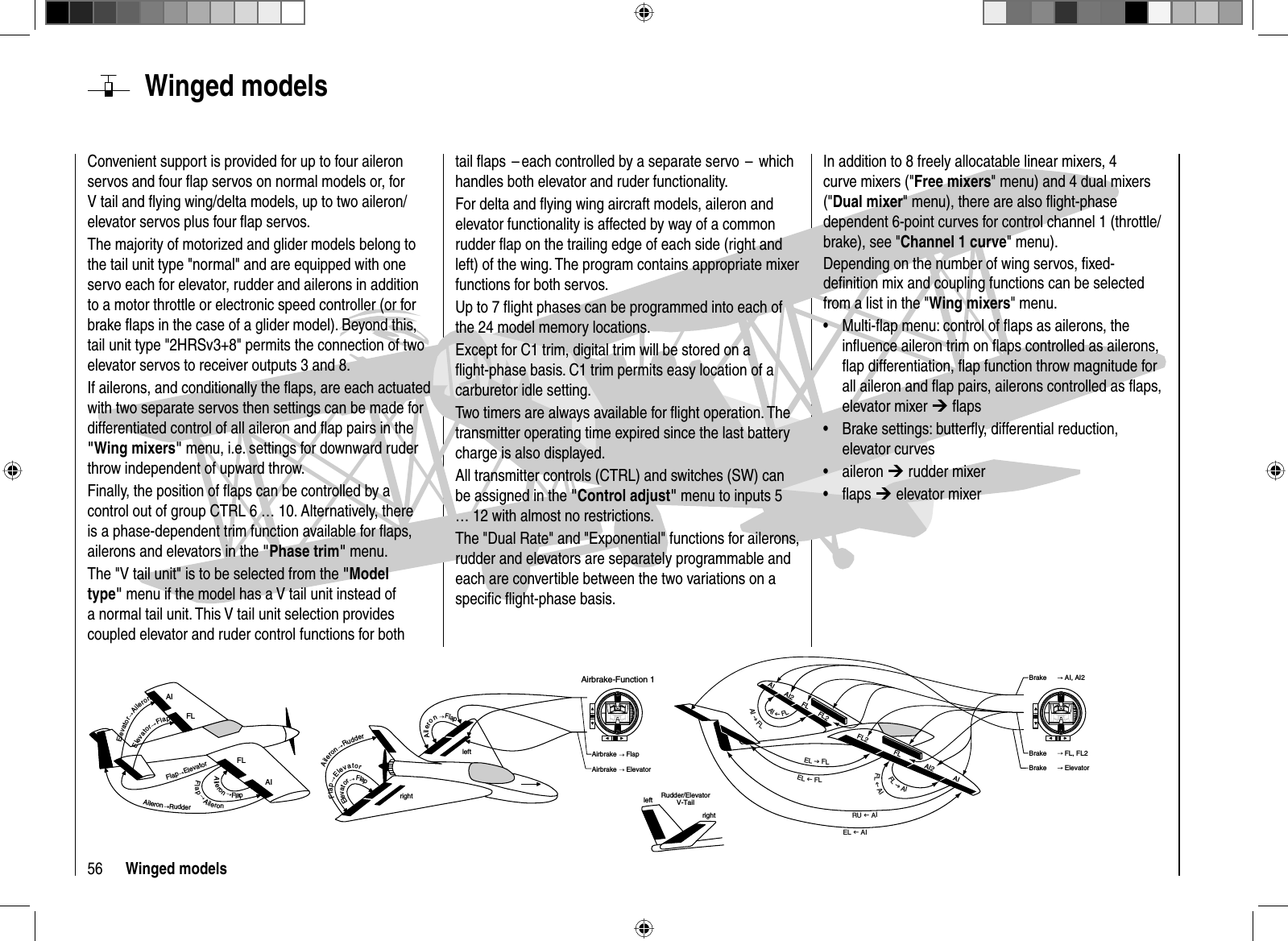
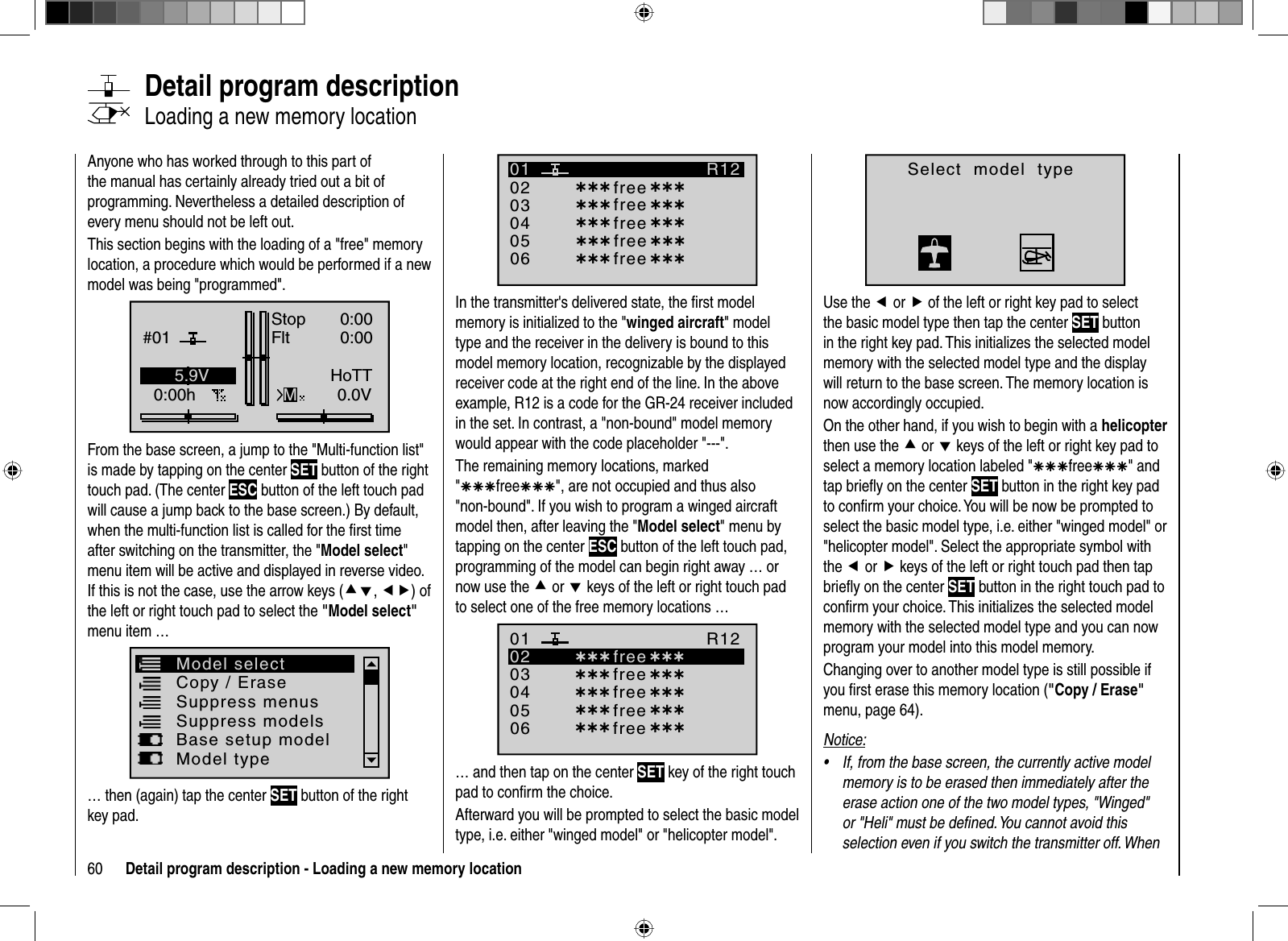
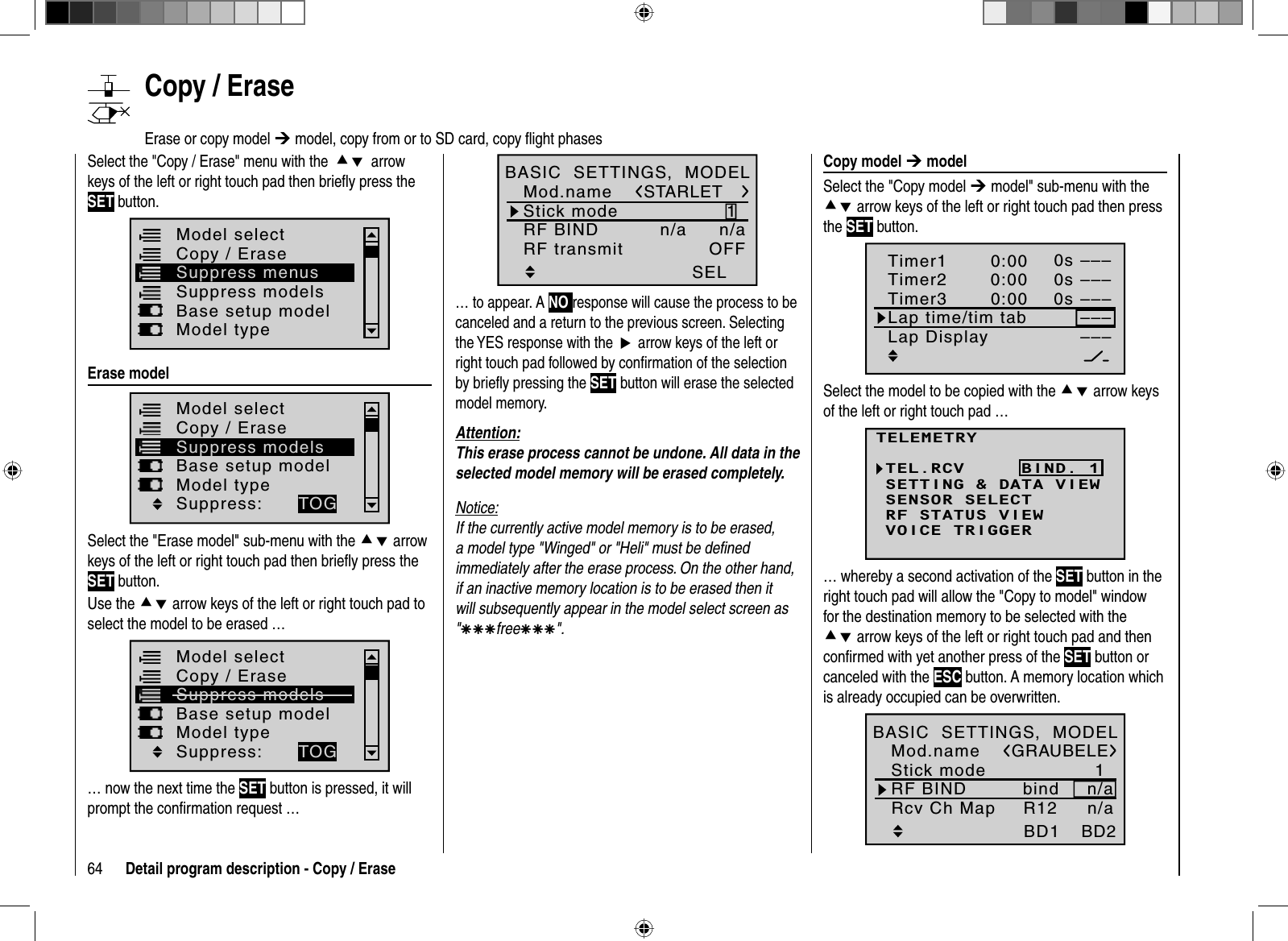
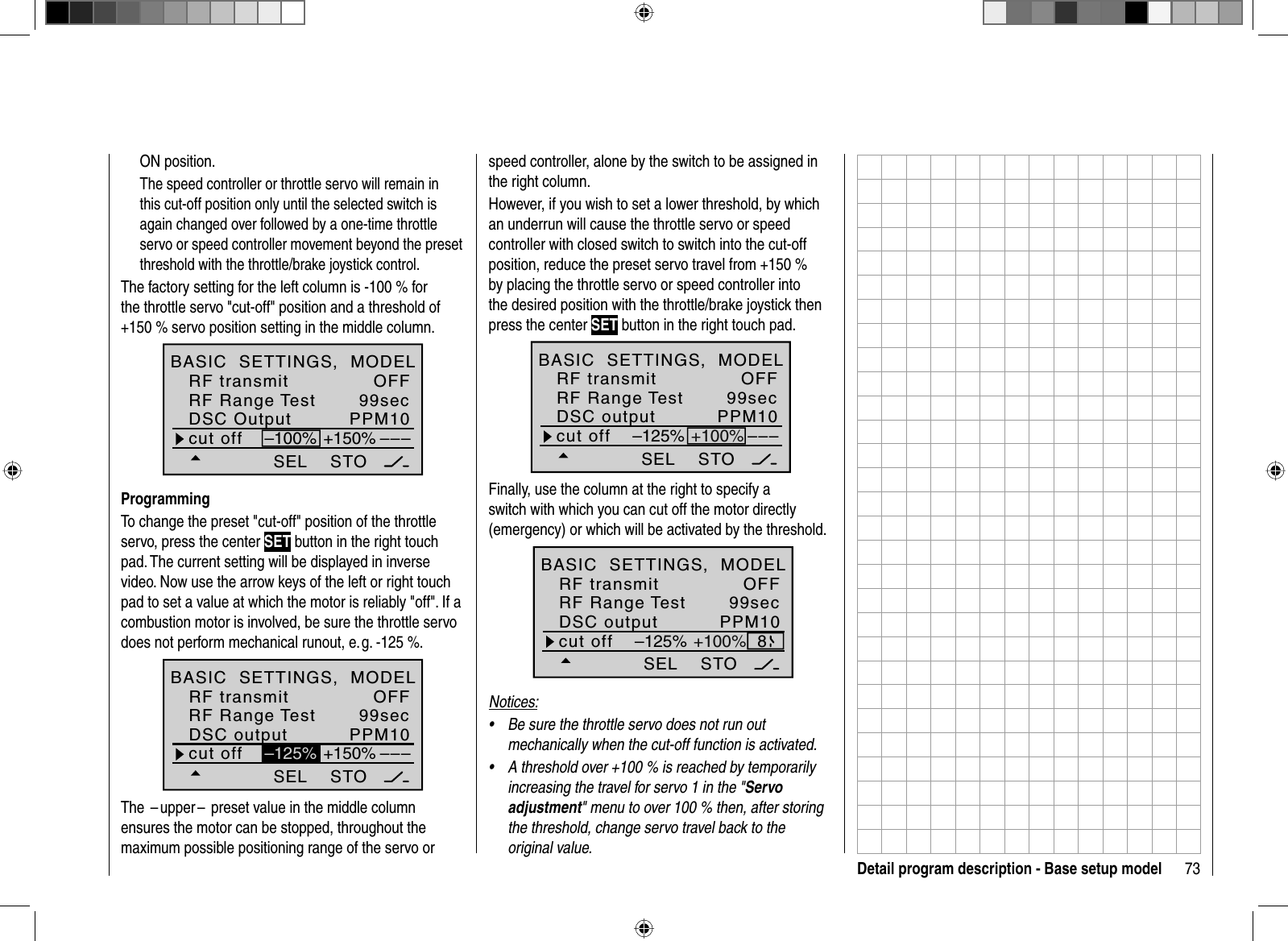
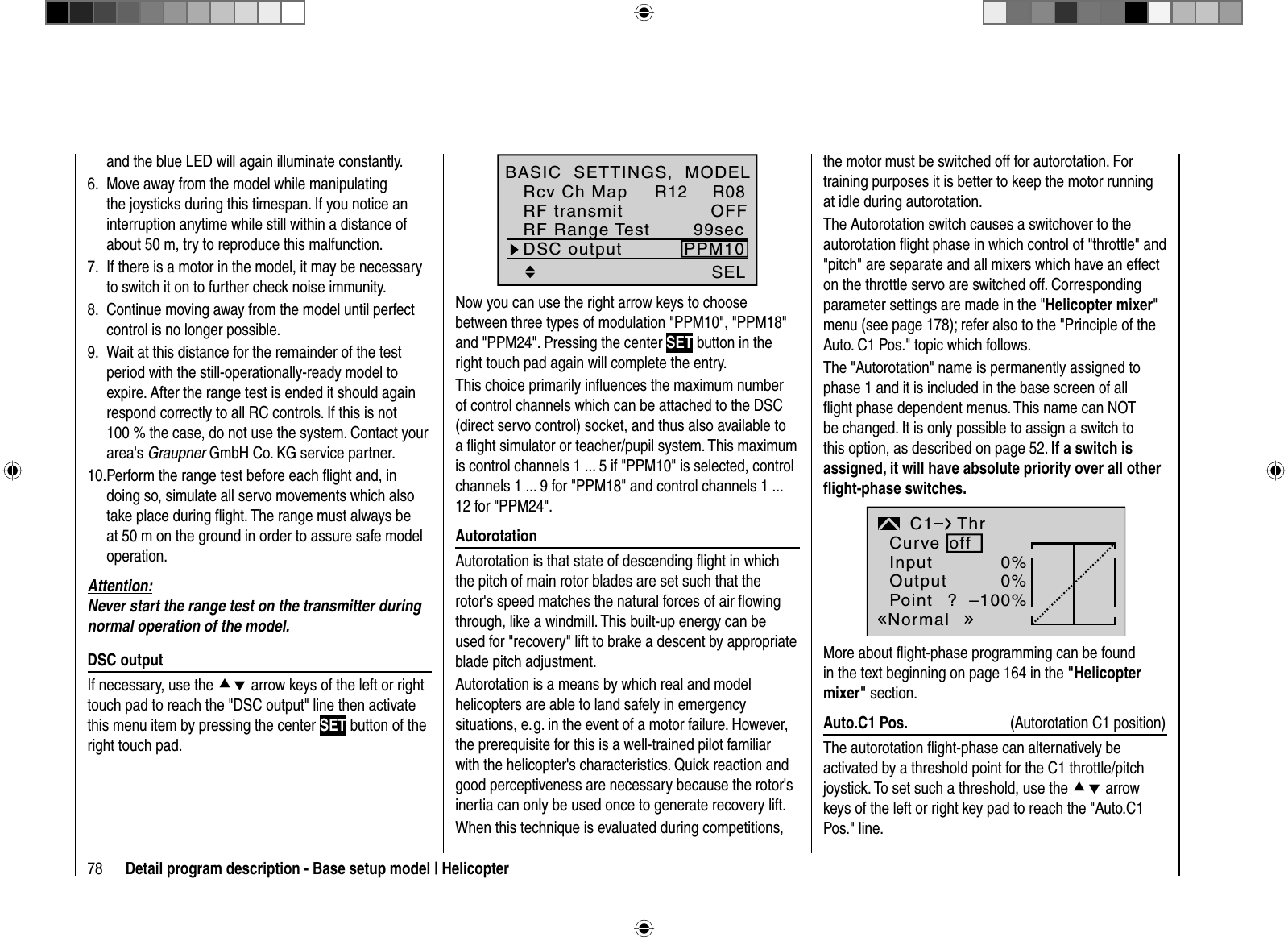
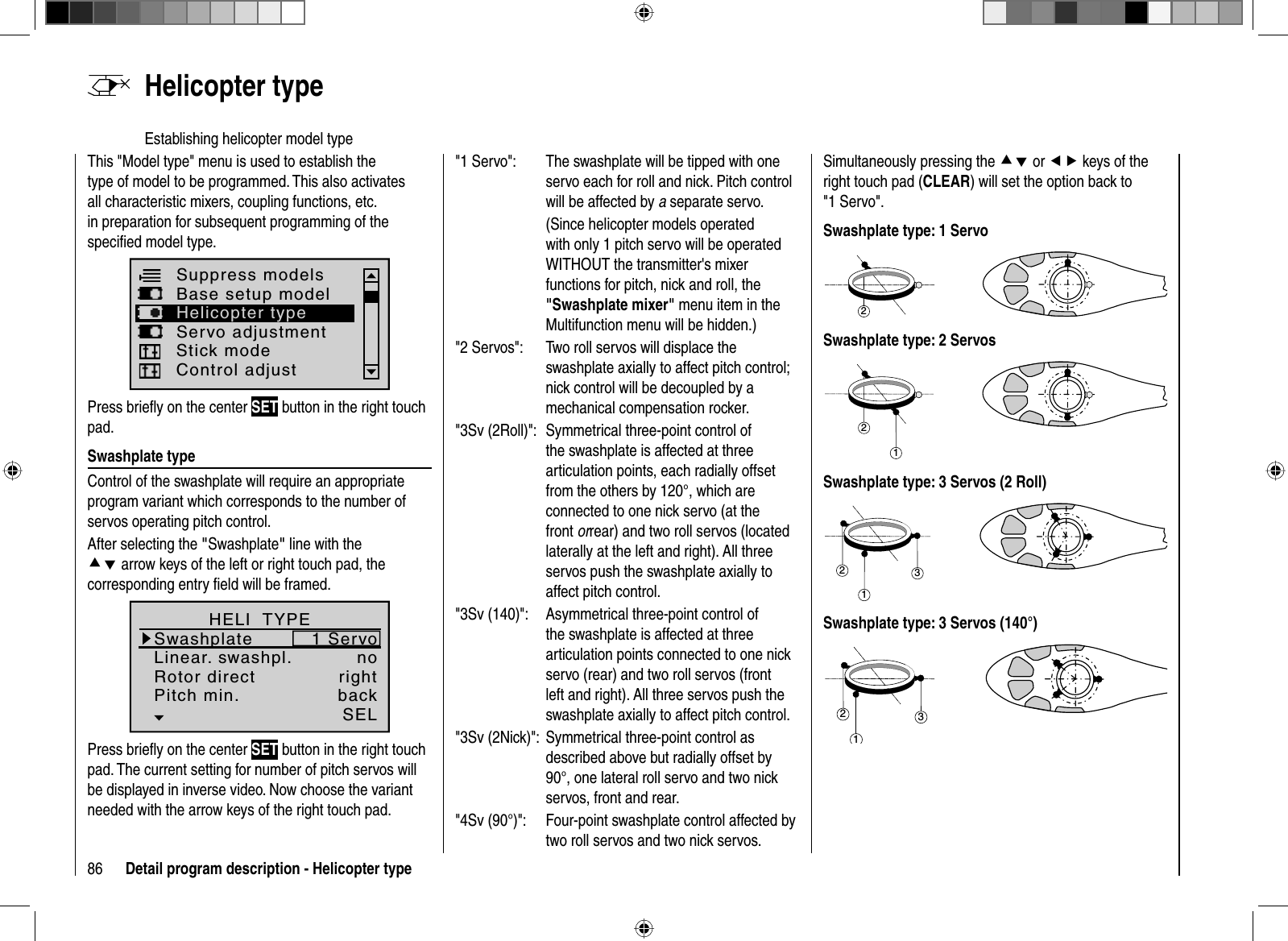
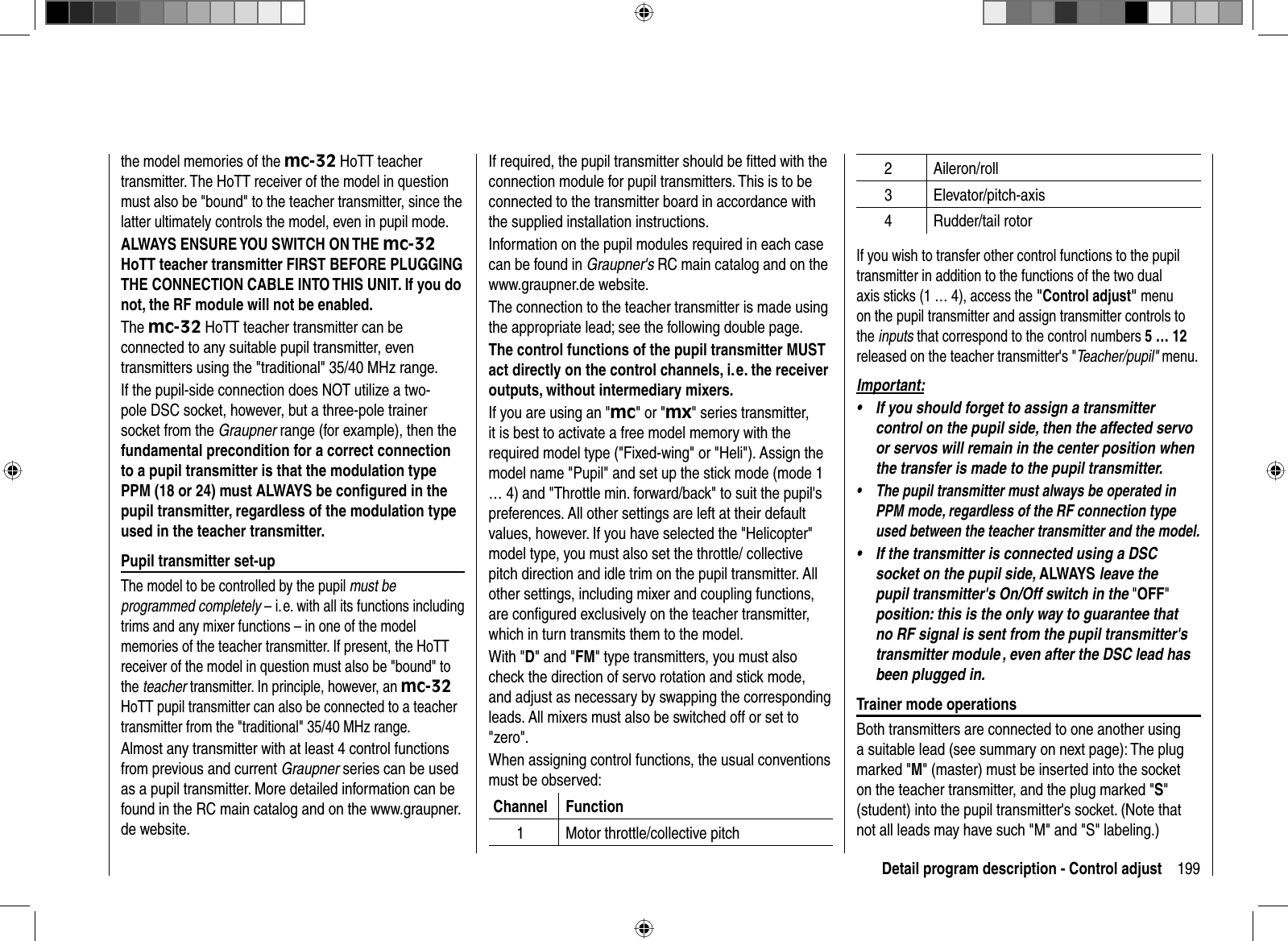
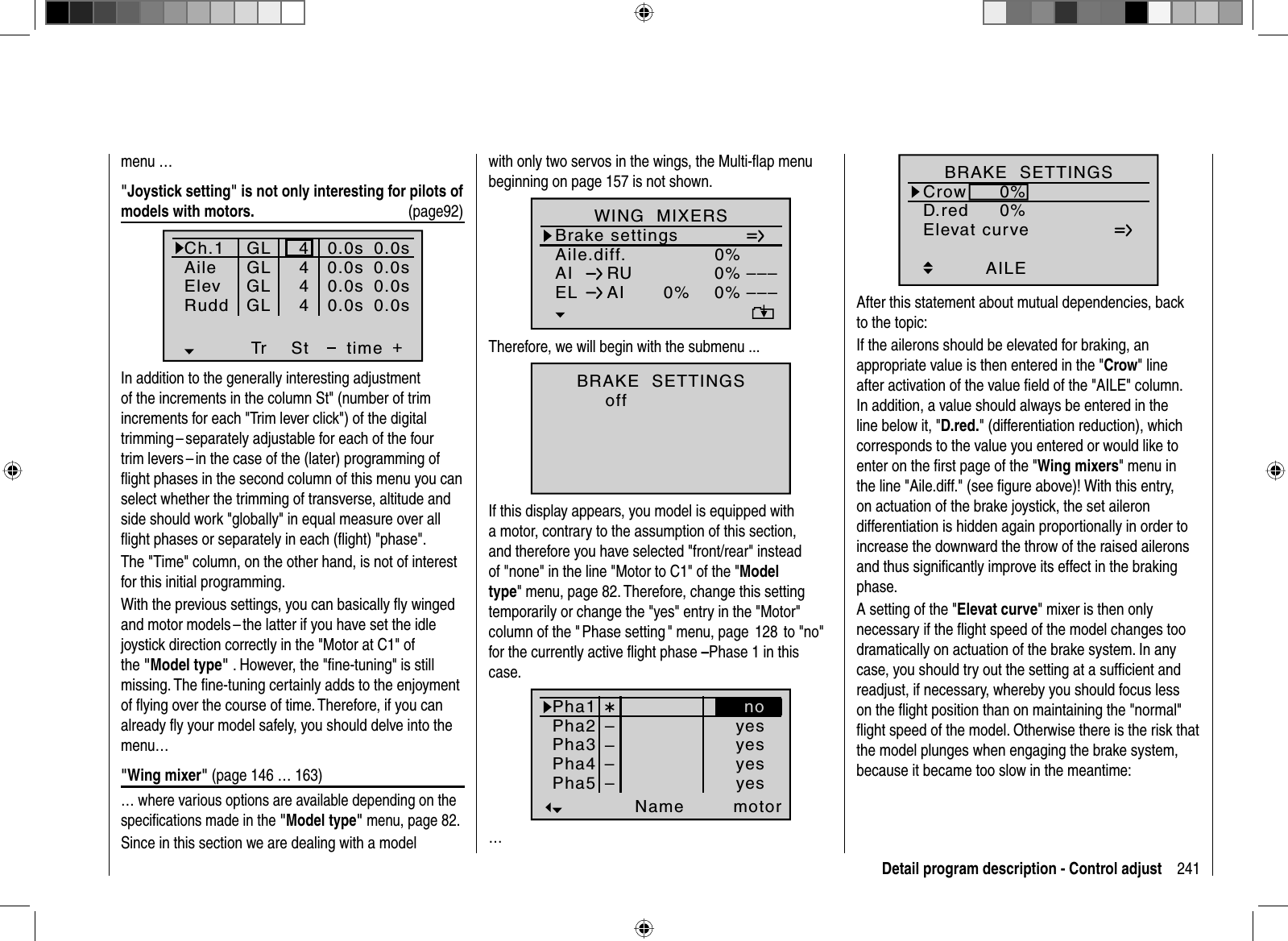
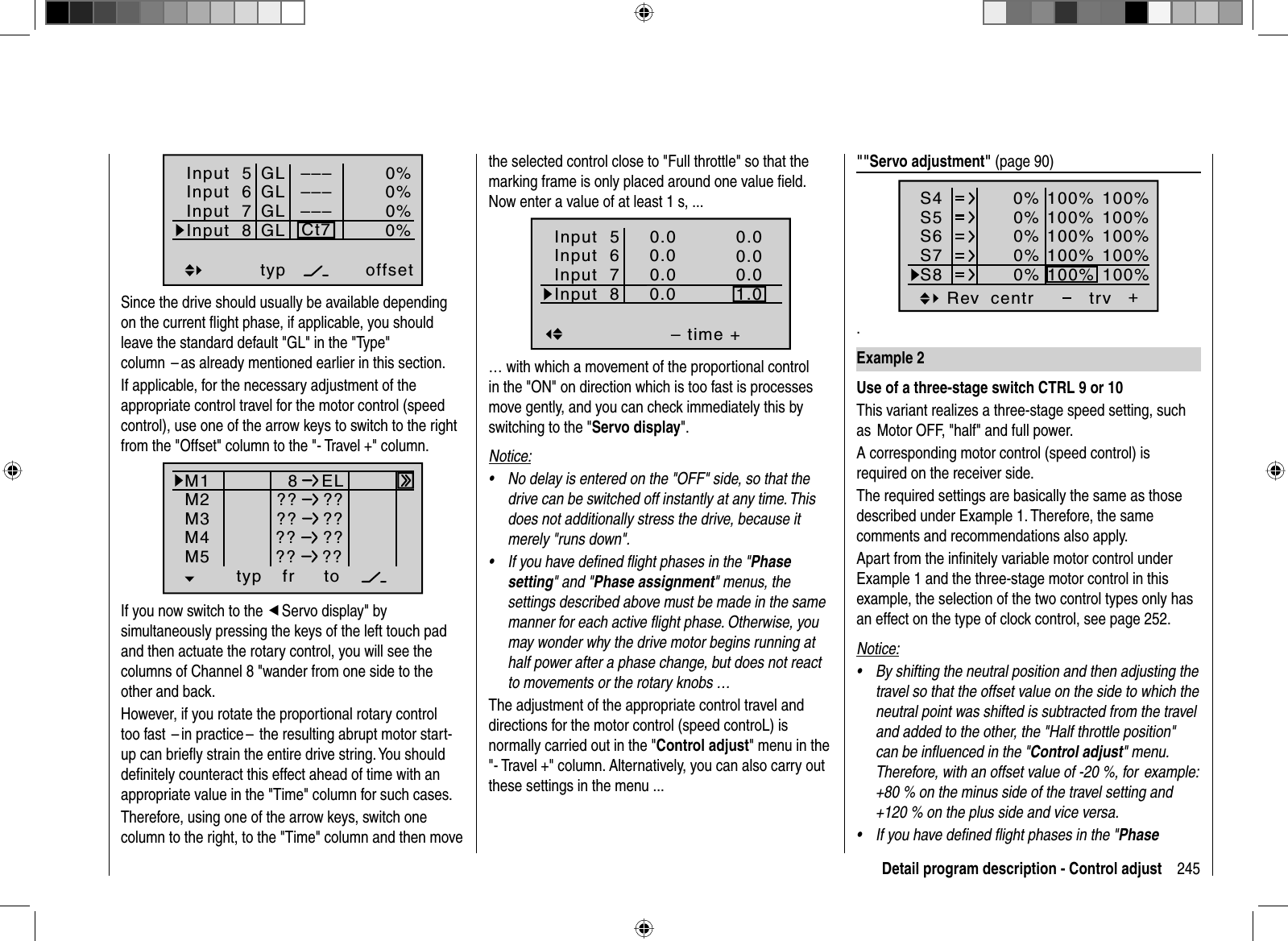
![282 Detail program description - Control adjust99secPPM108IONDSC OutputAutorotationRF transmitBASIC SETTINGS, MODELRF Range TestThe selected switch should be in a location on the transmitter which is easily within reach – without releasing a joystick – e. g. above the pitch joystick.Notice:More more information about the setting of this "emergency shutoff", see the beginning of the second following double-page.Another tip:Make a habit of giving all switches a common switch-on direction; then a quick glance over the transmitter prior to the fl ight should suffi ce – all switches off. The possible settings of the lines "Automatic C1 position" and "Motor stop" are not of interest at fi rst.Additional settings specifi c to helicopters are made in the menu …"Helicopter type" (page 86)Under "Swashplate type", select the control of the swashplate and/or the pitch function. In this example: "3Sv(2rol)".The lineLinear swashpl." is not of interest at fi rst.In the line "Rotor direct" you defi ne whether the rotor - as viewed from above - rotates to the right or left. In other words, whether it rotates counterclockwise or clockwise. In this example "right". With the default "Pitch min" adopted from the "General…1n/abindBD2BD1n/aR12Mod.nameStick modeRF BINDBASIC SETTINGS, MODELRcv Ch Map… which is comprised of the characters available for selection on the second screen of the "Mod. Name" line: !"#$%&’()+,–./0123456789:;Mod Name STARLFGHIJKLMNOPQRSTUVWXYZ[¥]^_`abcdefghijk?@ABCDEAfter entering the "Model name" the specifi cations for the "Stick mode" and "DSC output" adopted from the "General settings" are checked again, for which you can change the storage location, if applicable.An additional option is activated in the line "Autorotation". Even if you are not an advanced pilot, the autorotation switch should at least be set an an emergency shutoff switch for the motor. For this purpose, select the line "Autorotation", activate the switch assignment by briefl y pressing the central SET key of the right touch pad and move one of the two-stage switches, e. g. SW 8, to the ON position:settings", it is checked whether the entry "front" or "back" corresponds to your habits and changed, if applicable:3Sv(2rol)SELLinear. swashpl.SwashplatenoRotor direct rightHELI TYPEPitch min. back"Expo thro lim." in the bottom line of this display is not of interest yet.By now, the servos should be plugged into the receiver in the intended sequence:Receiver power supplyFree or aux. functionFree or aux. functionTail rotor servo (gyro system)Roll 1 servoPitch-axis 1 servoFree or speed governor or aux. functionReceiver power supplyCollective pitch or roll 2 or Pitch-axis 2 servoFree or aux. functionThrottle servo or speed controllerGyro gainFree or aux. functionFree or aux. functionNotice:Please note that with the newer Graupner mc and mx remote control systems the fi rst pitch servo and the throttle servo are reversed when compared with the older systems.The degrees of mixing and mixing directions of the swashplate servos for pitch, roll and nick are already preadjusted to +61 % in the menu ...](https://usermanual.wiki/Graupner-and-KG/MC-32/User-Guide-1608395-Page-282.png)