Graupner and KG MX-10 ComputerSystem Graupner HoTT User Manual 33110 mx10 HoTT 1 DE indd
Graupner GmbH & Co. KG ComputerSystem Graupner HoTT 33110 mx10 HoTT 1 DE indd
Users Manual

HOPPING.TELEMETRY.TRANSMISSION
GRAUPNER GMBH & CO. KG
POSTFACH 1242
D-73220 KIRCHHEIM/TECK
GERMANY
http://www.graupner.de
Änderungen sowie Liefermöglichkeiten vorbehalten.
Lieferung nur durch den Fachhandel. Bezugsquellen
werden nachgewiesen. Für Druckfehler kann keine Haftung
übernommen werden.
Printed in Germany PN.PJ-01
Obwohl die in dieser Anleitung enthaltenen Informationen sorgfältig auf ihre Funktion
hin überprüft wurden, kann für Fehler, Unvollständigkeiten und Druckfehler keinerlei
Haftung übernommen werden. Graupner behält sich das Recht vor, die beschriebenen
Software- und Hardwaremerkmale jederzeit unangekündigt zu ändern.
Programmier-Handbuch
33110.mx-10 HoTT.1.de
HOPPING.TELEMETRY.TRANSMISSION
mx-10
Programming Manual
Manuel de programmation
33110_mx10_HoTT_1_DE.indd Druckbogen 1 von 104 - Seiten (208, 1)
33110_mx10_HoTT_1_DE.indd Druckbogen 1 von 104 - Seiten (208, 1)
21.10.2011 13:22:29
21.10.2011 13:22:29
2Inhaltsverzeichnis
Reichweitetest .................................................38
Hubschraubermodell ............................................. 40
Ländereinstellung ............................................ 40
Binden von Empfängern..................................42
Reichweitetest .................................................42
»Servoeinstellung« ....................................................43
»Fail Safe Einstellung« .............................................43
»Telemetrie«
EINSTELLEN/ANZEIGEN ..................................... 46
TX Display ........................................................ 46
RX Datenanzeige ............................................. 47
RX Servo .......................................................... 48
RX Fail Safe ..................................................... 49
RX Freie Mischer .............................................. 52
RX Expo ........................................................... 53
RX Servotest .................................................... 53
GRAFISCHE SENSORANZEIGE .........................57
Empfänger ........................................................ 57
General Modul .................................................. 58
Electric Air Modul .............................................58
Vario Modul.......................................................59
GPS Modul ....................................................... 59
»Lehrer/Schüler«
Lehrer-Betrieb ....................................................... 60
Schüler-Betrieb ..................................................... 61
Anhang
Anhang ........................................................................ 65
FCC Information ........................................................ 202
Konformitätserklärung ............................................... 203
Garantieurkunde ........................................................ 204
Allgemeine Hinweise
Sicherheitshinweise .......................................................3
Sicherheitshinweise und Behandlungsvorschriften
für Nickel-Metall-Hydrid Akkumulatoren ........................7
Vorwort .......................................................................... 9
Beschreibung des Fernlenksets ..................................10
Empfohlene Ladegeräte .............................................. 12
Stromversorgung des Senders .................................... 13
… des Empfängers................................................ 14
Längenverstellung der Steuerknüppel ......................... 15
Sendergehäuse öffnen ................................................ 15
Umstellen der Kreuzknüppel ....................................... 16
Senderbeschreibung ...................................................18
Bedienelemente .................................................... 18
Senderrückseite ....................................................19
Data-Buchse.......................................................... 19
Inbetriebnahme des Senders ......................................20
Firmware-Update des Senders .............................21
Inbetriebnahme des Empfängers ................................ 24
Firmware-Update des Empfängers .......................26
Installationshinweise ....................................................28
Stromversorgung der Empfangsanlage ................. 29
Begriffsdefi nitionen ...................................................... 31
Digitale Trimmung und Knüppelkalibrierung ................32
Flächenmodelle ........................................................... 33
Empfängerbelegung .............................................. 34
Helikoptermodelle ........................................................ 35
Empfängerbelegung .............................................. 35
Programmbeschreibungen
»Grundeinstellung« (Modell)
Flächenmodell ....................................................... 36
Ländereinstellung ............................................ 36
Leitwerkskonfi guration ....................................37
Binden von Empfängern..................................38
Inhaltsverzeichnis
Hinweise zum Umweltschutz
Das Symbol auf dem Produkt, der Gebrauchsanleitung
oder der Verpackung weist darauf hin, dass dieses Pro-
dukt am Ende seiner Lebensdauer nicht über den nor-
malen Haushaltsabfall entsorgt werden darf. Es muss an
einem Sammelpunkt für das Recycling von elektrischen
und elektronischen Geräten abgegeben werden.
Die Werkstoffe sind gemäß ihrer Kennzeichnung wieder-
verwertbar. Mit der Wiederverwendung, der stoffl ichen
Verwertung oder anderen Formen der Verwertung von
Altgeräten leisten Sie einen wichtigen Beitrag zum
Umweltschutz.
Batterien und Akkus müssen aus dem
Gerät entfernt werden und bei einer
entsprechenden Sammelstelle getrennt
entsorgt werden.
Bitte erkundigen Sie sich ggf. bei der
Gemeindeverwaltung nach der zustän-
digen Entsorgungsstelle.
Dieses Handbuch dient ausschließlich Informationszwe-
cken und kann ohne Vorankündigung geändert werden.
Die Firma Graupner übernimmt keine Verantwortung
oder Haftung für Fehler bzw. Ungenauigkeiten, die im
Informationsteil dieses Handbuches auftreten können.
207
33110_mx10_HoTT_1_DE.indd Druckbogen 2 von 104 - Seiten (2, 207)
33110_mx10_HoTT_1_DE.indd Druckbogen 2 von 104 - Seiten (2, 207)
21.10.2011 13:22:43
21.10.2011 13:22:43
206 3
Sicherheitshinweise
Um noch lange Freude an Ihrem Modellbauhobby zu
haben, lesen Sie diese Anleitung unbedingt genau
durch und beachten Sie vor allem die Sicherheitshinwei-
se. Auch sollten Sie sich umgehend unter http://www.
graupner.de/de/service/produktregistrierung registrieren,
denn nur so erhalten Sie automatisch per E-Mail aktuel-
le Informationen zu Ihrem Produkt.
Wenn Sie Anfänger im Bereich ferngesteuerter Modell-
fl ugzeuge, -schiffe oder -autos sind, sollten Sie unbe-
dingt einen erfahrenen Modellpiloten um Hilfe bitten.
Diese Anleitung ist bei Weitergabe des Senders unbe-
dingt mit auszuhändigen.
Anwendungsbereich
Diese Fernsteueranlage darf ausschließlich nur für den
vom Hersteller vorgesehenen Zweck, für den Betrieb in
nicht manntragenden Fernsteuermodellen eingesetzt
werden. Eine anderweitige Verwendung ist unzulässig.
Sicherheitshinweise
SICHERHEIT IST KEIN ZUFALL
und
FERNGESTEUERTE MODELLE SIND KEIN
SPIELZEUG
… denn auch kleine Modelle können durch unsach-
gemäße Handhabung, aber auch durch fremdes Ver-
schulden, erhebliche Sach- und/oder Personenschäden
verursachen.
Technische Defekte elektrischer oder mechanischer Art
können zum unverhofften Anlaufen eines Motors und/
oder zu herumfl iegenden Teilen führen, die nicht nur Sie
erheblich verletzen können!
Kurzschlüsse jeglicher Art sind unbedingt zu vermeiden!
Durch Kurzschluss können nicht nur Teile der Fernsteu-
erung zerstört werden, sondern je nach dessen Umstän-
den und dem Energiegehalt des Akkus besteht darüber
hinaus akute Verbrennungs- bis Explosionsgefahr.
Alle durch einen Motor angetriebenen Teile wie Luft- und
Schiffsschrauben, Rotoren bei Hubschraubern, offene
Getriebe usw. stellen eine ständige Verletzungsgefahr
dar. Sie dürfen keinesfalls berührt werden! Eine schnell
drehende Luftschraube kann z. B. einen Finger abschla-
gen! Achten Sie darauf, dass auch kein sonstiger Ge-
genstand mit angetriebenen Teilen in Berührung kommt!
Bei angeschlossenem Antriebsakku oder laufendem
Motor gilt: Halten Sie sich niemals im Gefährdungsbe-
reich des Antriebs auf!
Achten Sie auch während der Programmierung un-
bedingt darauf, dass ein angeschlossener Verbren-
nungs- oder Elektromotor nicht unbeabsichtigt anläuft.
Unterbrechen Sie ggf. die Treibstoffversorgung bzw.
klemmen Sie den Antriebsakku zuvor ab.
Schützen Sie alle Geräte vor Staub, Schmutz, Feuch-
tigkeit und anderen Fremdteilen. Setzen Sie diese
niemals Vibrationen sowie übermäßiger Hitze oder Kälte
aus. Der Fernsteuerbetrieb darf nur bei „normalen“
Außentemperaturen durchgeführt werden, d. h. in einem
Bereich von -10 °C bis +55 °C.
Vermeiden Sie Stoß- und Druckbelastung. Überprüfen
Sie die Geräte stets auf Beschädigungen an Gehäusen
und Kabeln. Beschädigte oder nass gewordene Geräte,
selbst wenn sie wieder trocken sind, nicht mehr verwen-
den!
Es dürfen nur die von uns empfohlenen Komponenten
und Zubehörteile verwendet werden. Verwenden Sie
immer nur zueinander passende, original Graupner-
Steckverbindungen gleicher Konstruktion und gleichen
Materials.
Achten Sie beim Verlegen der Kabel darauf, dass diese
nicht auf Zug belastet, übermäßig geknickt oder gebro-
chen sind. Auch sind scharfe Kanten eine Gefahr für die
Isolation.
Achten Sie darauf, dass alle Steckverbindungen fest
sitzen. Beim Lösen der Steckverbindung nicht an den
Kabeln ziehen.
Es dürfen keinerlei Veränderungen an den Geräten
durchgeführt werden. Andernfalls erlischt die Betriebser-
laubnis und Sie verlieren jeglichen Versicherungsschutz.
Einbau der Empfangsanlage
Der Empfänger wird stoßgesichert in Schaumgummi
gelagert, im Flugmodell hinter einem kräftigen Spant
bzw. im Auto- oder Schiffsmodell gegen Staub und
Spritzwasser geschützt untergebracht.
Der Empfänger darf an keiner Stelle unmittelbar
am Rumpf oder Chassis anliegen, da sonst Motor-
erschütterungen oder Landestöße direkt auf ihn über-
tragen werden. Beim Einbau der Empfangsanlage in
ein Modell mit Verbrennungsmotor alle Teile immer
geschützt einbauen, damit keine Abgase oder Ölreste
eindringen können. Dies gilt vor allem für den meist in
der Außenhaut des Modells eingebauten EIN-/AUS-
Schalter.
Den Empfänger so festlegen, dass die Anschlusskabel
zu den Servos und zum Stromversorgungsteil locker
liegen und die Empfangsantenne mindestens 5 cm von
allen großen Metallteilen oder Verdrahtungen, die nicht
direkt aus dem Empfänger kommen, entfernt ist. Das
umfasst neben Stahl- auch Kohlefaserteile, Servos,
Elektromotoren, Kraftstoffpumpen, alle Sorten von
Kabeln usw..
Am besten wird der Empfänger abseits aller anderen
Einbauten an gut zugänglicher Stelle im Modell ange-
Sicherheitshinweise
Bitte unbedingt beachten!
33110_mx10_HoTT_1_DE.indd Druckbogen 3 von 104 - Seiten (206, 3)
33110_mx10_HoTT_1_DE.indd Druckbogen 3 von 104 - Seiten (206, 3)
21.10.2011 13:22:43
21.10.2011 13:22:43
4Sicherheitshinweise
nander reiben. Hierbei entstehen so genannte Knackim-
pulse, die den Empfänger stören.
Ausrichtung Senderantenne
In geradliniger Verlängerung der Senderantenne bildet
sich nur eine geringe Feldstärke aus. Es ist demnach
falsch, mit der Antenne des Senders auf das Modell
zu „zielen“, um die Empfangsverhältnisse günstig zu
beeinfl ussen.
Bei gleichzeitigem Betrieb von Fernlenkanlagen sollen
die Piloten in einer losen Gruppe beieinander stehen.
Abseits stehende Piloten gefährden sowohl die eigenen
als auch die Modelle der anderen.
Wenn 2 oder mehr Piloten mit 2.4-GHz-Fernsteuer-
system näher als 5 m beieinander stehen kann dies
allerdings ein Übersteuern des Rückkanals zur Folge
haben und infolgedessen deutlich zu früh eine Reich-
weitewarnung auslösen. Vergrößern Sie den Abstand,
bis die Reichweitewarnung wieder verstummt.
Überprüfung vor dem Start
Bevor Sie den Empfänger einschalten, vergewissern
Sie sich, dass der Gasknüppel auf Stopp/Leerlauf steht.
Immer zuerst den Sender einschalten und dann erst
den Empfänger.
Immer zuerst den Empfänger ausschalten und dann
erst den Sender.
Wenn diese Reihenfolge nicht eingehalten wird, also der
Empfänger eingeschaltet ist, der dazugehörige Sender
jedoch auf „AUS“ steht, kann der Empfänger durch an-
dere Sender, Störungen usw. zum Ansprechen gebracht
werden. Das Modell kann in der Folge unkontrollierte
Steuerbewegungen ausführen und dadurch ggf. Sach-
und/oder Personenschäden verursachen.
Insbesondere bei Modellen mit mechanischem Kreisel
gilt:
Bevor Sie Ihren Empfänger ausschalten: Stellen Sie
durch Unterbrechen der Energieversorgung sicher, dass
der Motor nicht ungewollt hochlaufen kann.
Ein auslaufender Kreisel erzeugt oftmals so viel
Spannung, dass der Empfänger gültige Gas-Signale
zu erkennen glaubt. Daraufhin kann der Motor unbe-
absichtigt anlaufen!
Reichweitetest
Vor jedem Einsatz korrekte Funktion und Reichweite
überprüfen. Befestigen Sie das Modell ausreichend und
achten Sie darauf, dass sich keine Personen vor dem
Modell aufhalten.
Führen Sie am Boden mindestens einen vollständigen
Funktionstest und eine komplette Flugsimulation durch,
um Fehler im System oder der Programmierung des
Modells auszuschließen. Beachten Sie dazu unbedingt
die Hinweise auf den Seiten 72/73 bzw. 81/82.
Betreiben Sie im Modellbetrieb, also beim Fliegen oder
Fahren, den Sender niemals ohne Antenne. Achten Sie
auf einen festen Sitz der Antenne.
Modellbetrieb Fläche-Heli-Schiff-Auto
Überfl iegen Sie niemals Zuschauer oder andere Piloten.
Gefährden Sie niemals Menschen oder Tiere. Fliegen
Sie niemals in der Nähe von Hochspannungsleitungen.
Betreiben Sie Ihr Modell auch nicht in der Nähe von
Schleusen und öffentlicher Schifffahrt. Betreiben Sie
Ihr Modell ebenso wenig auf öffentlichen Straßen und
Autobahnen, Wegen und Plätzen etc..
Kontrolle Sender- und Empfängerbatterie
Spätestens, wenn bei sinkender Sender-Akku-Span-
bracht. Unter keinen Umständen dürfen Servokabel um
die Antenne gewickelt oder dicht daran vorbei verlegt
werden!
Stellen Sie sicher, dass sich Kabel in der näheren Um-
gebung der Antenne im Fluge nicht bewegen können!
Verlegen der Empfangsantenne
Der Empfänger und die Antennen sollten möglichst weit
weg von Antrieben aller Art angebracht werden. Bei
Kohlefaserrümpfen sollten die Antennenenden auf jeden
Fall aus dem Rumpf heraus geführt werden.
Die Ausrichtung der Antenne(n) ist unkritisch. Vorteil-
haft ist aber eine vertikale (aufrechte) Montage der
Empfängerantenne(n) im Modell. Bei Diversity-Antennen
(zwei Antennen) sollte die zweite Antenne im 90° Winkel
zur ersten Antenne ausgerichtet werden.
Einbau der Servos
Servos stets mit den beigefügten Vibrationsdämpfer-
gummis befestigen. Nur so sind diese vor allzu harten
Vibrationsschlägen einigermaßen geschützt.
Einbau der Gestänge
Grundsätzlich muss der Einbau so erfolgen, dass die
Gestänge frei und leichtgängig laufen. Besonders
wichtig ist, dass alle Ruderhebel ihre vollen Ausschläge
ausführen können, also nicht mechanisch begrenzt
werden.
Um einen laufenden Motor jederzeit anhalten zu kön-
nen, muss das Gestänge so eingestellt sein, dass das
Vergaserküken ganz geschlossen wird, wenn Steu-
erknüppel und Trimmhebel in die Leerlaufendstellung
gebracht werden.
Achten Sie darauf, dass keine Metallteile, z. B. durch
Ruderbetätigung, Vibration, drehende Teile usw., anei-
205
33110_mx10_HoTT_1_DE.indd Druckbogen 4 von 104 - Seiten (4, 205)
33110_mx10_HoTT_1_DE.indd Druckbogen 4 von 104 - Seiten (4, 205)
21.10.2011 13:22:43
21.10.2011 13:22:43
204 Garantie - Warranty - Garantie
Wir gewähren auf dieses Erzeugnis eine Garantie von
This product is warrantied for
Sur ce produit nous accordons une garantie de
24
Monaten
months
mois
Garantieurkunde
Servicestellen / Service / Service après-vente
Graupner-Zentralservice
Graupner GmbH & Co. KG
Henriettenstrasse 94 - 96
D-73230 Kirchheim
Servicehotline
(+49) 0 18 05 47 28 76*
Montag - Freitag
9:30-11:30 + 13:00-15:00 Uhr
United Kingdom
Graupner Service
Brunel Drive
GB, NEWARK, Nottingham-
shire
NG242EG
(+44) 16 36 61 05 39
Sverige
Baltechno Electronics
Box 5307
S 40227 Göteborg
(+46) 31 70 73 00 0
Schweiz
Graupner Service Schweiz
CD-Electronics GmbH
Kirchweg 18
CH 5614 Sarmenstorf
(+41) 56 667 14 91
c.dunkel@graupner.ch
Luxembourg
Kit Flammang
129, route d’Arlon
L 8009 Strassen
(+35) 23 12 23 2
France
Graupner France
Gérard Altmayer
86, rue St. Antoine
F 57601 Forbach-Oeting
(+33) 3 87 85 62 12
Espana
Anguera Hobbies
C/Terrassa 14
E 43206 Reus (Tarragona).
(+34) 97 77 55 32 0
info@anguera-hobbies.com
Ceská Republika
Slovenská Republika
RC Service Z. Hnizdil
Letecka 666/22
CZ 16100 Praha 6 - Ruzyne
(+42) 2 33 31 30 95
Belgie/Belgique/Nederland
Jan van Mouwerik
Slot de Houvelaan 30
NL 3155 Maasland VT
(+31) 10 59 13 59 4
Italia
GiMax
Via Manzoni, no. 8
I 25064 Gussago
(+39) 030 25 22 73 2
* 0,14 Cent / Minute aus dem
Festnetz der deutschen
T-Com. Abweichende Preise
für Anrufe aus Mobilfunknet-
zen oder aus dem Festnetz
anderer Anbieter möglich.
Die Fa. Graupner GmbH & Co. KG, Henriettenstraße 94 - 96,
D-73230 Kirchheim/Teck gewährt ab dem Kaufdatum auf
dieses Produkt eine Garantie von 24 Monaten. Die Garantie
gilt nur für die bereits beim Kauf des Produktes vorhandenen
Material- oder Funktionsmängel. Schäden, die auf Abnützung,
Überlastung, falsches Zubehör oder unsachgemäße Behand-
lung zurückzuführen sind, sind von der Garantie ausgeschlos-
sen. Die gesetzlichen Rechte und Gewährleistunsansprüche
des Verbrauchers werden durch diese Garantie nicht berührt.
Bitte überprüfen Sie vor einer Reklamation oder Rücksendung
das Produkt genau auf Mängel, da wir Ihnen bei Mängelfreiheit
die entstandenen Unkosten in Rechnung stellen müssen.
Graupner GmbH & Co. KG, Henriettenstraße 94 - 96. D-73230
Kirchheim/Teck, Germany guarantees this product for a period
of 24 months from date of purchase. The guarantee applies
only to such material or operational defects witch are present
at the time of purchase of the product. Damage due to wear,
overloading, incompetent handling or the use of incorrect
accessories is not covered by the guarantee. The user´s legal
rights and claims under guarantee are not affected by this
guarantee. Please check the product carefully for defects be-
fore you are make a claim or send the item to us, since we are
obliged to make a charge for our cost if the product is found to
be free of faults.
La société Graupner GmbH & Co. KG, Henriettenstraße 94-96,
D-73230 Kirchheim/Teck, accorde sur ce produit une garantie
de 24 mois à compter de la date d’achat. La garantie ne
s’applique qu’aux défauts de matériel et de fonctionnement
du produit acheté. Les dommages dus à une usure, à une
surcharge, à l’emploi d’accessoires non compatibles ou à une
manipulation non conforme sont exclus de la garantie. Cette
garantie ne remet pas en cause les droits légaux des consom-
mateurs. Avant toute réclamation ou retour de matériel, vérifi ez
précisément les défauts ou vices constatés, car si le matériel
est conforme et qu’aucun défaut n’a été constaté par nos
services, nous nous verrions contraints de facturer le coût de
cette intervention.
Garantie-Urkunde
Warranty certifi cate / Certifi cat de garantie
mx-10 HoTT Set
Best.-Nr. 33110
Übergabedatum:
Date of purchase/delivery:
Date d’achat :
Name des Käufers:
Owner´s name:
Nom de I`acheteur :
Straße, Wohnort:
Complete address:
Adresse complète :
Firmenstempel und Unterschrift des Einzelhändlers:
Stamp and signature of dealer:
Cachet et signature du détaillant :
5
Sicherheitshinweise
nung die Anzeige „Akku muss geladen werden!!“
im Display erscheint und ein akustisches Warnsignal
abgegeben wird, ist der Betrieb sofort einzustellen und
der Senderakku zu laden.
Kontrollieren Sie regelmäßig den Zustand der Akkus,
insbesondere des Empfängerakkus. Warten Sie nicht so
lange, bis die Bewegungen der Rudermaschinen merk-
lich langsamer geworden sind! Ersetzen Sie verbrauchte
Akkus rechtzeitig.
Es sind stets die Ladehinweise des Akkuherstellers zu
beachten und die Ladezeiten unbedingt genau einzuhal-
ten. Laden Sie Akkus niemals unbeaufsichtigt auf!
Versuchen Sie niemals, Trockenbatterien aufzuladen
(Explosionsgefahr).
Alle Akkus müssen vor jedem Betrieb geladen werden.
Um Kurzschlüsse zu vermeiden, zuerst die Bananen-
stecker der Ladekabel polungsrichtig am Ladegerät
anschließen, dann erst Stecker des Ladekabels an den
Ladebuchsen von Sender und Empfängerakku anschlie-
ßen.
Trennen Sie immer alle Stromquellen von ihrem Modell,
wenn Sie es längere Zeit nicht mehr benützen wollen.
Verwenden Sie niemals defekte oder beschädigte
Akkus bzw. Batterien mit unterschiedlichen Zellentypen.
Mischungen aus alten und neuen Zellen oder Zellen
unterschiedlicher Fertigung.
Kapazität und Betriebszeit
Für alle Stromquellen gilt: Die Kapazität verringert sich
mit jeder Ladung. Bei niedrigen Temperaturen steigt der
Innenwiderstand bei zusätzlich reduzierter Kapazität.
Infolgedessen verringert sich die Fähigkeit zur Stromab-
gabe und zum Halten der Spannung.
Häufi ges Laden oder Benutzen von Batteriepfl egepro-
grammen kann ebenfalls zu allmählicher Kapazitätsmin-
derung führen. Deshalb sollten Stromquellen spätestens
alle 6 Monate auf ihre Kapazität hin überprüft und bei
deutlichem Leistungsabfall ersetzt werden.
Erwerben Sie nur original Graupner-Akkus!
Entstörung von Elektromotoren
Alle konventionellen Elektromotoren erzeugen zwischen
Kollektor und Bürsten Funken, die je nach Art des Mo-
tors die Funktion der Fernlenkanlage mehr oder weniger
stören.
Zu einer technisch einwandfreien Anlage gehören
deshalb entstörte Elektromotoren. Besonders aber in
Modellen mit Elektroantrieb muss jeder Motor daher
sorgfältig entstört werden. Entstörfi lter unterdrücken
solche Störimpulse weitgehend und sollen grundsätzlich
eingebaut werden.
Beachten Sie die entsprechenden Hinweise in der
Bedienungs- und Montageanleitung des Motors.
Weitere Details zu den Entstörfi ltern siehe Graupner
Hauptkatalog FS oder im Internet unter www.graupner.
de.
Servo-Entstörfi lter für Verlängerungskabel
Best.-Nr. 1040
Das Servo-Entstörfi lter ist bei Verwendung überlanger
Servokabel erforderlich. Das Filter wird direkt am Emp-
fängerausgang angeschlossen. In kritischen Fällen kann
ein zweites Filter am Servo angeordnet werden.
Einsatz elektronischer Drehzahlsteller
Die richtige Auswahl eines elektronischen Drehzahlstel-
lers richtet sich vor allem nach der Leistung des verwen-
deten Elektromotors.
Um ein Überlasten/Beschädigen des Drehzahlstellers zu
verhindern, sollte die Strombelastbarkeit des Drehzahl-
stellers mindestens die Hälfte des maximalen Blockier-
stromes des Motors betragen.
Besondere Vorsicht ist bei so genannten Tuning-Motoren
angebracht, die auf Grund ihrer niedrigen Windungs-
zahlen im Blockierfall ein Vielfaches ihres Nennstromes
aufnehmen und somit den Drehzahlsteller zerstören
können.
Elektrische Zündungen
Auch Zündungen von Verbrennungsmotoren erzeugen
Störungen, die die Funktion der Fernsteuerung negativ
beeinfl ussen können.
Versorgen Sie elektrische Zündungen immer aus einer
separaten Stromquelle.
Verwenden Sie nur entstörte Zündkerzen, Zündkerzen-
stecker und abgeschirmte Zündkabel.
Halten Sie mit der Empfangsanlage ausreichenden
Abstand zu einer Zündanlage.
Statische Aufl adung
Die Funktion einer Fernlenkanlage wird durch die bei
Blitzschlägen entstehenden magnetischen Schockwel-
len gestört, auch wenn das Gewitter noch kilometerweit
entfernt ist. Deshalb …
… bei Annäherung eines Gewitters sofort den Flug-
betrieb einstellen! Durch statische Aufl adung über
die Antenne besteht darüber hinaus Lebensgefahr!
Achtung
Um die FCC HF-Abstrahlungsanforderungen für •
mobile Sendeanlage zu erfüllen, muss beim Betrieb
der Anlage eine Entfernung zwischen der Antenne
der Anlage und Personen von 20 cm oder mehr
eingehalten werden. Ein Betrieb in einer geringeren
Sicherheitshinweise
33110_mx10_HoTT_1_DE.indd Druckbogen 5 von 104 - Seiten (204, 5)
33110_mx10_HoTT_1_DE.indd Druckbogen 5 von 104 - Seiten (204, 5)
21.10.2011 13:22:43
21.10.2011 13:22:43
6Sicherheitshinweise
Entfernung wird daher nicht empfohlen.
Um störende Beeinflussungen der elektrischen •
Eigenschaften und der Abstrahlcharakteristik zu
vermeiden, achten Sie darauf, dass sich kein anderer
Sender näher als in 20 cm Entfernung befindet.
Der Betrieb der Fernsteueranlage erfordert sender-•
seitig eine korrekte Programmierung der Länderein-
stellung. Dies ist erforderlich, um diversen Richtlinien,
FCC, ETSI, CE usw. gerecht zu werden. Beachten
Sie hierzu die jeweilige Anleitung zum Sender und
Empfänger.
Führen Sie vor jedem Flug einen vollständigen •
Funktions- und Reichweitetest mit kompletter Flug-
simulation durch, um Fehler im System oder der
Programmierung des Modells auszuschließen.
Programmieren Sie weder Sender noch Empfänger •
während des Modellbetriebs.
Pfl egehinweise
Reinigen Sie Gehäuse, Antenne etc. niemals mit Reini-
gungsmitteln, Benzin, Wasser und dergleichen, sondern
ausschließlich mit einem trockenen, weichen Tuch.
Komponenten und Zubehör
Die Firma Graupner GmbH & Co. KG als Hersteller
empfi ehlt, nur Komponenten und Zubehörprodukte zu
verwenden, die von der Firma Graupner auf Tauglich-
keit, Funktion und Sicherheit geprüft und freigegeben
sind. Die Fa. Graupner übernimmt in diesem Fall für Sie
die Produktverantwortung.
Die Fa. Graupner übernimmt für nicht freigegebene
Teile oder Zubehörprodukte von anderen Herstellern
keine Haftung und kann auch nicht jedes einzelne
Fremdprodukt beurteilen, ob es ohne Sicherheitsri-
siko eingesetzt werden kann.
Haftungsausschluss/Schadenersatz
Sowohl die Einhaltung der Montage- und Betriebsan-
leitung als auch die Bedingungen und Methoden bei
Installation, Betrieb, Verwendung und Wartung der Fern-
steuerkomponenten können von der Fa. Graupner nicht
überwacht werden. Daher übernimmt die Fa. Graupner
keinerlei Haftung für Verluste, Schäden oder Kosten, die
sich aus fehlerhafter Verwendung und Betrieb ergeben
oder in irgendeiner Weise damit zusammenhängen.
Soweit gesetzlich zulässig, ist die Verpfl ichtung der Fa.
Graupner zur Leistung von Schadenersatz, gleich aus
welchem Rechtsgrund, begrenzt auf den Rechnungs-
wert der an dem schadensstiftenden Ereignis unmit-
telbar beteiligten Warenmenge der Fa. Graupner. Dies
gilt nicht, soweit die Fa. Graupner nach zwingenden
gesetzlichen Vorschriften wegen Vorsatzes oder grober
Fahrlässigkeit unbeschränkt haftet.
203
Konformitätserklärung - Declaration of Conformity - Déclaration de conformité
Konformitätserklärung - Declaration of Conformity - Déclaration de conformité
33110_mx10_HoTT_1_DE.indd Druckbogen 6 von 104 - Seiten (6, 203)
33110_mx10_HoTT_1_DE.indd Druckbogen 6 von 104 - Seiten (6, 203)
21.10.2011 13:22:43
21.10.2011 13:22:43
202 FCC Information
FCC Information
Graupner mx-10 HoTT #33110
FCC ID: ZKZ-MX-10
FCC Statement
This device complies with Part 15C of the FCC Ru- 1.
les. Operation is subject to the following two condi-
tions:
(1) This device may not cause harmful interference.
(2) This device must accept any interference recei-
ved, including interference that may cause un
desired operation.
2. Changes or modifi cations not expressly approved
by the party responsible for compliance could void
the user‘s authority to operate the equipment.
NOTE
This equipment has been tested and found to comply
with the limits for a Class B digital device, pursuant to
Part 15 of the FCC Rules. These limits are designed
to provide reasonable protection against harmful in-
terference in a residential installation. This equipment
generates uses and can radiate radio frequency energy
and, if not installed and used in accordance with the
instructions, may cause harmful interference to radio
communications. However, there is no guarantee that
interference will not occur in a particular installation. If
this equipment does cause harmful interference to radio
or television reception, which can be determined by tur-
ning the equipment off and on, the user is encouraged
to try to correct the interference by one or more of the
following measures:
Reorient or relocate the receiving antenna.•
Increase the separation between the equipment and •
receiver.
Connect the equipment into an outlet on a circuit •
different from that to which the receiver is connected.
Consult the dealer or an experienced radio/TV tech-•
nician for help.
FCC Radiation Exposure Statement
This equipment complies with FCC radiation exposure
limits set forth for un uncontrolled envirionment. This
equipment should be installed and operated with a
minimum distance of 20 cm between the antenna and
your body.
7
Sicherheitshinweise
Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
Wie für alle technisch hochwertigen Produkte ist die Be-
achtung der nachfolgenden Sicherheitshinweise sowie
der Behandlungsvorschriften für einen langen, störungs-
freien und ungefährlichen Einsatz unerlässlich.
Sicherheitshinweise
Akkus sind kein Spielzeug und dürfen deshalb nicht •
in die Hände von Kinder gelangen. Akkus deshalb
außerhalb der Reichweite von Kindern aufbewahren.
Vor jedem Gebrauch den einwandfreien Zustand der •
Akkus überprüfen. Defekte oder beschädigte Akkus
nicht mehr verwenden.
Akkus dürfen nur innerhalb der für den jeweiligen •
Zellentyp spezifi zierten technischen Daten eingesetzt
werden.
Akkus nicht erhitzen, verbrennen, kurzschließen •
oder mit überhöhten oder verpolten Strömen la-
den.
Akkus aus parallel geschalteten Zellen, Kombi-•
nationen aus alten und neuen Zellen, Zellen un-
terschiedlicher Fertigung, Größe, Kapazität, Her-
steller, Marken oder Zellentypen dürfen nicht
verwendet werden.
In Geräte eingebaute Akkus immer aus den Geräten •
entnehmen, wenn das Gerät gerade nicht verwendet
wird. Geräte nach dem Gebrauch immer ausschal-
ten, um Tiefentladungen zu vermeiden. Akkus immer
rechtzeitig aufl aden.
Der zu ladende Akku muss während des Ladevor-•
gangs auf einer nicht brennbaren, hitzebeständigen
und nicht leitenden Unterlage stehen! Auch sind
brennbare oder leicht entzündliche Gegenstände von
der Ladeanordnung fernzuhalten.
Akkus dürfen nur unter Aufsicht geladen werden. •
Der für den jeweiligen Akkutyp angegebene max.
Schnellladestrom darf niemals überschritten werden.
Erwärmt sich der Akku während des Ladevorgangs •
auf mehr als 60 °C, ist der Ladevorgang sofort zu
unterbrechen und der Akku auf ca. 30 °C abkühlen
zu lassen.
Niemals bereits geladene, heiße oder nicht völlig •
entleerte Akkus aufl aden.
An den Akkus dürfen keine Veränderungen vorge-•
nommen werden. Niemals direkt an den Zellen löten
oder schweißen.
Bei falscher Behandlung besteht Entzündungs-, •
Explosions-, Verätzungs- und Verbrennungsgefahr.
Geeignete Löschmittel sind Löschdecke, CO2-Feuer-
löscher oder Sand.
Auslaufendes Elektrolyt ist ätzend, nicht mit Haut •
oder Augen in Berührung bringen. Im Notfall sofort
mit reichlich Wasser ausspülen und anschließend
einen Arzt aufsuchen.
Die Ventilöffnungen der Zellen dürfen auf keinen Fall •
blockiert oder versiegelt werden, z. B. durch Lötzinn.
Beim Löten darf eine Löttemperatur von höchstens
220 °C nicht länger als 20 Sek. einwirken.
Um eine Deformation zu vermeiden, darf kein über-•
mäßiger mechanischer Druck einwirken.
Bei eventuellem Überladen der Akkus gehen Sie wie •
folgt vor:
Stecken Sie den Akku einfach ab und legen Sie die-
sen auf einen unbrennbaren Untergrund (z. B. Stein-
boden) bis er abgekühlt ist. Behalten Sie den Akku
niemals in der Hand, um dem Risiko einer Explosion
aus dem Wege zu gehen.
Achten Sie darauf, dass die Lade- und Entladevor-•
schriften eingehalten werden.
Allgemeine Hinweise
Die Kapazität Ihres Akkus verringert sich mit jeder La-
dung/Entladung. Auch die Lagerung kann eine allmäh-
liche Verringerung der Kapazität zur Folge haben.
Lagerung
Eine Lagerung sollte nur im nicht vollständig entla-
denem Zustand in trockenen Räumen bei einer Umge-
bungstemperatur von +5 °C bis +25 °C erfolgen. Die
Zellenspannung sollte bei Lagerung über 4 Wochen
1,2 V nicht unterschreiten.
Angleichen der einzelnen Akkuzellen
Um neue Zellen anzugleichen, bringen Sie diese •
über die sogenannte Normalladung auf den max.
Ladezustand. Als Faustregel gilt in diesem Fall, dass
ein leerer Akku 12 Stunden lang mit einem Strom in
der Höhe eines Zehntels der aufgedruckten Kapazi-
tät geladen wird („1/10 C“-Methode). Die Zellen sind
dann alle gleich voll. Eine solche Angleichung sollte
in etwa bei jeder 10. Ladung wiederholt werden,
damit die Zellen immer wieder angeglichen werden
und somit die Lebensdauer erhöht wird.
Wenn Sie die Möglichkeit der Einzelzellenentladung •
haben, sollten Sie diese vor jeder Ladung nutzen.
Ansonsten sollte der Akkupack bis zu einer Entlade-
spannung von 0,9 V pro Zelle entladen werden. Dies
entspricht beispielsweise bei dem im Sender verwen-
deten 4er-Pack einer Entladeschlussspannung von
3,6 V.
Ladung
Laden ist nur mit den spezifi zierten Strömen, Lade-
zeiten, Temperaturbereichen und ständiger Aufsicht
33110_mx10_HoTT_1_DE.indd Druckbogen 7 von 104 - Seiten (202, 7)
33110_mx10_HoTT_1_DE.indd Druckbogen 7 von 104 - Seiten (202, 7)
21.10.2011 13:22:45
21.10.2011 13:22:45
8Sicherheitshinweise
zulässig. Steht kein geeignetes Schnellladegerät zur
Verfügung, an dem sich der Ladestrom genau einstellen
lässt, so ist der Akku durch Normalladung nach der
1/10 C-Methode aufzuladen, siehe Beispiel oben.
Senderakkus sollten wegen der unterschiedlichen
Ladezustände der Zellen, wenn immer möglich, mit
1/10 C geladen werden. Der Ladestrom darf aber
keinesfalls den in der jeweiligen Senderanleitung als
maximal zulässig angegebenen Wert überschreiten!
Schnell-Ladung
Sollte Ihr Ladegerät diese Möglichkeiten bieten, dann •
stellen Sie die Deltapeak-Ladeabschaltspannung
auf 5 mV pro Zelle. Die meisten Ladegeräte sind
jedoch fest auf 15 … 20 mV pro Zelle eingestellt
und können daher sowohl für NiCd-Akkus wie auch
NiMH-Akkus verwendet werden. Erkundigen Sie sich
im Zweifelsfalle in der Bedienungsanleitung oder
beim Fachhändler, ob auch Ihr Gerät für NiMH-Akkus
geeignet ist. Im Zweifelsfalle laden Sie Ihre Akkus mit
der Hälfte der angegebenen max. Ladeströme.
Entladung
Alle von Graupner und GM-Racing vertriebenen Akkus
sind je nach Akkutyp für eine maximale Dauerstrom-
belastung von 6 … 13 C geeignet (Herstellerangaben
beachten!). Je höher die Dauerstrombelastung, um so
niedriger ist die Lebensdauer.
Benutzen Sie Ihren Akku, bis die Leistung nachlässt, •
bzw. die Unterspannungswarnung ertönt.
Achtung:
Die Zellenspannung sollte bei längerer Lagerung
1,2 V nicht unterschreiten. Ggf. müssen Sie den Akku
vor dem Einlagern aufl aden.
Refl exladen wie auch Lade-/Entlade-Programme •
verkürzen unnötig die Lebensdauer von Akkus und
sind nur zum Überprüfen der Akkuqualität oder zum
„Wiederbeleben“ älterer Zellen geeignet. Genauso-
wenig macht das Laden-/Entladen eines Akkus
vor einem Einsatz Sinn. Es sei denn, Sie möchten
dessen Qualität überprüfen.
Entsorgung verbrauchter Batterien und Akkus
Jeder Verbraucher ist nach der deutschen Batteriever-
ordnung gesetzlich zur Rückgabe aller gebrauchten und
verbrauchten Batterien bzw. Akkus verpfl ichtet.
Eine Entsorgung über den Hausmüll ist verboten. Alte
Batterien und Akkus können unentgeltlich bei den
öffentlichen Sammelstellen der Gemeinde, in unseren
Verkaufsstellen und überall dort abgegeben werden, wo
Batterien und Akkus der betreffenden Art verkauft wer-
den. Sie können die von uns gelieferten Batterien nach
Gebrauch aber auch ausreichend frankiert an folgende
Adresse zurücksenden:
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
Sie leisten damit einen wesentlichen Beitrag zum
Umweltschutz!
Vorsicht:
Beschädigte Akkus bedürfen für den Versand u. U. einer
besonderen Verpackung, da z. T. sehr giftig!!!!!
201
Annexe
Smart-Box Graupner HoTT
Réf.Cde 33700
Les différentes fonctions diverses et variées réunies dans un seul et
même appareil font de la SMART-BOX votre meilleur ami. Que vous
vouliez affi cher des données télémétriques en temps réel ou effectuer
des réglages sur votre système HoTT, l’écran largement dimensionné
de 8 x 21 caractères vous facilitera la tâche. Un Buzzer intégré pour
l’émission de signaux sonores et tonalités d’alerte rend la manipulati-
on de la BOX encore plus fl exible.
Avec le set de montage fourni, cet appareil se monte sur les tiges
support de l’émetteur ce qui permet un excellent positionnement, de
manière à pouvoir consulter, durant le vol, les données télémétriques
de votre modèle, et ce, en temps réel.
La possibilité de mise à jour, que l’utilisateur lui-même peut effectuer,
permet de toujours maintenir la SMART-BOX au plus haut niveau, en
assurant l’extension pour les fonctions futures.
affi chage de la tension émet-•
teur, avec seuil réglable
Réglage Pays•
Essai de portée• Qualité du signal•
Température récepteur• Tension récepteur•
Inversion servos• Neutre servos•
Course servos• Temps cycle•
Inversion des voies• Réglages Fail-Safe•
Réglages mixages• Test servos•
Dimensions : 76 mm x 72 mm x 17 mm (L x I x H)
Poids : 55grs
Capteur magnétique RPM Graupner HoTT
Réf.Cde 33616
Capteur optique RPM Graupner HoTT
Réf.Cde 33615
Graupner HoTT Port USB
Réf.Cde 7168.6
Ce câble d‘interface USB est utilisé avec ‘adaptateur disponible sé-
parément Réf.Cde 7168.6A pour mise à jour des récepteurs et des
capteurs.
Graupner HoTT Adapteur port USB interface/JR
Réf.Cde 7168.6A
Cette adaptateur est utilisé avec le câble d‘interface USB Réf.Cde
7168.6 disponible séparément pour mise à jour des récepteurs et des
capteurs.
33110_mx10_HoTT_1_DE.indd Druckbogen 8 von 104 - Seiten (8, 201)
33110_mx10_HoTT_1_DE.indd Druckbogen 8 von 104 - Seiten (8, 201)
21.10.2011 13:22:45
21.10.2011 13:22:45

200 Annexe
Module General Engine Graupner HoTT
Réf.Cde 33610
Capteur universel pour récepteurs Graupner HoTT et modèles à
motorisation thermique et électrique
2 x mesures de tension et de température avec seuils de déclenche-•
ment d’alarme pour tension mini, maxi et température mini, maxi
Mesure de la tension de chaque élément, avec seuils pour tensi-•
on mini.
Mesure de la tension, de l’intensité et de la capacité, avec seuils •
pour tension mini et maxi, capacité maxi et intensité maxi
Limitation programmable du courant•
Mesure du courant avec résistances Shunt 2 x 1 mOhm, parallèle = •
0,5 mOhm
Compte tours avec seuils de vitesse de rotation mini et maxi.•
Jauge carburant avec seuils par tranche de 25% (après mise à jour)•
Temps d’alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en •
permanence
Temps répétition : en permanence, 1, 2, 3, 4, 5 min., un seule fois•
2 x température, au choix, de 0 à 120 °C ou 200 °C et mesure de •
courant jusqu’à 80V DC
1 x Compte tours jusqu’à 100 000 tours/min avec une hélice bipale•
1 x entrée variateur/servo, 1 x entrée régulateur de vitesse de ro-•
tation
1 x sortie variateur/servo pour régulateur de vitesse de rotation•
1 x mesure de l’intensité, de la tension et de la capacité jusqu’à 40 A •
(60 A en pointe 1 sec.) et jusqu’à 30 V
etc., voir sous www.graupner.de•
General Air-Module Graupner HoTT
Réf.Cde 33611
Capteur universel pour récepteurs Graupner HoTT et modèles à
motorisation thermique et électrique
Vario avec tonalités de variation d’altitude, tonalités de montée, to-•
nalités de chute et seuils de déclenchement d’alarme supplémen-
taires, pour altitude minimale, altitude maximale, vitesse de montée
et vitesse de chute, sur deux niveaux
Affi chage de l’altitude (-500 … +3000 m) et enregistrement de •
l’altitude minimale et maximale
2 x mesures de tension et de température avec seuils de déclenche-•
ment d’alarme pour tension mini, maxi et température mini, maxi
Mesure de la tension de chaque élément avec seuils pour tensi-•
on mini
Mesure de la tension, de l’intensité et de la capacité, avec seuils •
pour tension mini et maxi, capacité maxi et intensité maxi
Compte tours avec régulation de la vitesse (programmable) et seuils •
de vitesse de rotation mini et maxi
Jauge carburant avec seuils par tranche de 25%•
Temps d’alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en •
permanence
Temps répétition : en permanence, 1, 2, 3, 4, 5 min., un seule fois•
2 x température, au choix, de 0 à 120 °C ou 200 °C et mesure de •
courant jusqu’à 80V DC
1 x Compte tours jusqu’à 100 000 tours/min avec une hélice bipale•
1 x entrée variateur/servo, 1 x entrée régulateur de vitesse de rotati-•
on etc., voir sous www.graupner.de
Module Electric Air Graupner HoTT
Réf.Cde 33620
Capteur universel pour récepteurs Graupner HoTT et modèles à
motorisation électrique
Vario avec tonalités de variation d’altitude, tonalités de montée, to-•
nalités de chute et seuils de déclenchement d’alarme supplémen-
taires, pour altitude minimale, altitude maximale, vitesse de montée
et vitesse de chute, sur deux niveaux
Affi chage de l’altitude (-500 … +3000 m) et enregistrement de •
l’altitude minimale et maximale
2 x mesures de tension et de température avec seuils de déclenche-•
ment d’alarme pour tension mini, maxi et température mini, maxi.
Mesure de la tension de chaque élément 2 … 14 S avec seuils pour •
tension mini.
Mesure de la tension, de l’intensité et de la capacité, avec seuils •
pour tension mini et maxi, capacité maxi et intensité maxi.
Temps d’alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en •
permanence
Temps répétition : en permanence, 1, 2, 3, 4, 5 min., un seule fois•
2 x température, au choix, de 0 à 120 °C ou 200 °C et mesure de •
courant jusqu’à 80V DC
1 x entrée variateur, 1 x sortie variateur pour la régulation de la ten-•
sion de chaque élément
1 x mesure de l’intensité, de la tension et de la capacité jusqu’à •
150 A (320 A en pointe 1 sec.) et jusqu’à 60 V
1 x surveillance de chaque élément, pour accus LiPo, LiLo, Life de 2 •
– 14 S etc., voir sous www.graupner.de
9
Einleitung
mx-10 Fernsteuertechnologie der neuesten Generation
HoTT (Hopping Telemetry Transmission) ist die Syn-
these aus Know-How, Engineering und weltweiten Tests
durch Profi -Piloten im 2,4-GHz-Bereich mit bidirektio-
naler Kommunikation zwischen Sender und Empfänger
über einen im Empfänger integrierten Rückkanal.
Basierend auf dem bereits 1997 eingeführte Graupner/
JR-Computer-Fernlenk-System mc-24, wurde das
Fernlenk-System mx-10 HoTT speziell für den Einstei-
ger entwickelt. Dennoch können alle gängigen Mo-
delltypen problemlos mit der mx-10 HoTT betrieben
werden, gleichgültig ob Flächen- und Hubschraubermo-
delle oder Schiffs- und Automodelle.
Gerade im Flächenmodellbau sind oft komplizierte
Mischfunktionen der jeweiligen Ruderklappen erfor-
derlich. Dank der Computertechnologie sind die unter-
schiedlichsten Modellanforderungen mit dem einfachen
Setzen eines „Jumpers“ aktivierbar. Wählen Sie lediglich
den jeweiligen Modelltyp aus, dann stellt die Software
alle bedeutsamen Misch- und Koppelfunktionen automa-
tisch zusammen. Im Sender entfallen dadurch separate
Module für die Realisierung komplexer Koppelfunkti-
onen, und im Modell werden aufwendige mechanische
Mischerkonstruktionen überfl üssig.
Auch Helikoptermodelle können über ein „Flybarless“-
System gesteuert werden.
Die mx-10 HoTT bietet ein Höchstmaß an Sicherheit
und Zuverlässigkeit.
Der Einsteiger wird durch die klare und übersichtliche
Programmstruktur schnell mit den unterschiedlichen
Funktionen vertraut.
Das Graupner HoTT-Verfahren erlaubt theoretisch mehr
als 200 Modelle gleichzeitig zu betreiben. Aufgrund des
zulassungsbedingten funktechnischen Mischbetriebes
im 2,4-GHz-ISM-Band wird aber diese Anzahl in der
Praxis erheblich geringer sein. In der Regel werden aber
immer noch mehr Modelle im 2,4-GHz-Band gleichzeitig
betrieben werden können als in den konventionellen
35-/40-MHz-Frequenzbereichen. Der letztendlich li-
mitierende Faktor dürfte aber – wie häufi g schon bis-
her – doch eher die Größe des zur Verfügung stehenden
(Luft-) Raumes sein. Allein aber in der Tatsache, dass
keine Frequenzabsprache mehr erfolgen muss, ist
besonders bei in unübersichtlichem Gelände verteilt
stehenden Pilotengruppen, wie es z. B. beim Hangfl ug
gelegentlich vorkommen kann, ein enormer Sicherheits-
gewinn zu sehen.
Die durch die optionale Smart-Box wird ein einfacher
Zugriff auf Daten und Programmierung der HoTT-Emp-
fänger sowie der optionalen Telemetriesensoren mög-
lich. Beispielsweise können auf diesem Wege Empfän-
gerausgänge gemappt, Steuerfunktionen auf mehrere
Servos aufgeteilt wie auch Wege und Drehrichtungen
von Servos aufeinander abgestimmt werden.
In dem vorliegenden Handbuch wird jedes Menü
ausführlich beschrieben. Tipps, viele Hinweise und
Programmierbeispiele ergänzen die Beschreibungen.
Im Anhang fi nden Sie weitere Informationen zum HoTT-
System. Abgeschlossen wird dieses Handbuch mit der
Konformitätserklärung und der Garantie urkunde des
Senders.
Beachten Sie die Sicherheitshinweise und technischen
Hinweise. Lesen Sie die Anleitung aufmerksam durch
und testen Sie vor dem Einsatz zunächst alle Funkti-
onen durch einfaches Anschließen von Servos an dem
beiliegenden Empfänger. Beachten Sie aber dabei die
entsprechenden Hinweise auf Seite 28. So erlernen Sie
in kürzester Zeit die wesentlichen Bedienschritte und
Funktionen der mx-10 HoTT.
Gehen Sie verantwortungsvoll mit Ihrem ferngesteu-
erten Modell um, damit Sie sich und andere nicht
gefährden.
Das Graupner-Team wünscht Ihnen viel Freude und
Erfolg mit Ihrem mx-10 HoTT-Fernlenksystem der
neuesten Generation.
Kirchheim-Teck, im Oktober 2011
33110_mx10_HoTT_1_DE.indd Druckbogen 9 von 104 - Seiten (200, 9)
33110_mx10_HoTT_1_DE.indd Druckbogen 9 von 104 - Seiten (200, 9)
21.10.2011 13:22:52
21.10.2011 13:22:52
10 Beschreibung Fernlenkset
Computer System mx-10
5-Kanal-Fernlenkset in 2,4 GHz Graupner HoTT-Technologie (Hopping Telemetry Transmission)
Hohe Funktionssicherheit der Graupner HoTT-
Technologie durch bidirektionale Kommunikation
zwischen Sender und Empfänger mit integrierter
Telemetrie (durch optionale Smart-Box) und ultra-
schnellen Reaktionszeiten.
Einfache Programmierung durch „Jumper“.
Microcomputer-Fernlenksystem in modernster 2,4 •
GHz Graupner HoTT-Technology
Bidirektionale Kommunikation zwischen Sender und •
Empfänger
Ultraschnelle Reaktionszeiten durch direkte Übertra-•
gung der Daten vom Hauptprozessor zum 2.4-GHz-
HF-Modul mit zuverlässiger Übertragung.
Telemetrie-Menü (optional durch Smart-Box) zur •
Anzeige der Telemetrie-Daten sowie zur Program-
mierung der optional anschließbaren Sensoren und
der Empfängerausgänge
Kurze Antenne, klappbar•
Einfache Programmierung und präzise Einstellung •
durch Kippschalter und einen Taster
3 Schalter: ein Drei-Stufen-Schalter für L/S-Betrieb, 2 •
Zwei-Stufen-Schalter für Dual Rate und Schaltkanal
5 sind bereits eingebaut
5 Steuerfunktionen, davon 1 Schaltkanal•
Servoreverse•
Mode-Selector zur einfachen Umschaltung des •
Betriebs-MODES 1 … 4 (Gas links/rechts usw.)
Alle davon betroffenen Einstellungen werden auto-
matisch mit umgestellt.
Flächen-Menü für: 1 QR, 2 QR, V-Leitwerk, Delta/•
Nurfl ügel
Die folgenden Einstellungen können nur über die optio-
nale Smart-Box erfolgen:
Servozykluszeiten für Digitalservos von 10 ms •
wählbar
Servo-Verstellung ±150 % für alle Servoausgänge, •
getrennt einstellbar je Seite (Single Side Servo
Throw)
Sub-Trimm im Bereich von ±125 % zur Einstellung •
der Neutralstellung aller Servos
Allgemeine HoTT-Merkmale
Einfaches und extrem schnelles Binden von Sender •
und Empfänger
Binden auch mehrerer Empfänger pro Modell • im
Parallelbetrieb möglich
Extrem schnelles Re-Binding auch bei maximaler •
199
FCC Information
Module Vario Graupner HoTT
Réf.Cde 33601
Vario avec tonalités de variation d‘altitude et respectivement 5 tonali-
tés de montée, et 5 de chute, affi chage de l‘altitude et enregistrement
de l‘altitude minimale et de l‘altitude maximale.
Seuils de déclenchement d’alarme supplémentaires, pour altitude •
minimale, altitude maximale, vitesse de montée et vitesse de chute,
sur deux niveaux
Temps d’alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en •
permanence
Temps répétition : en permanence, 1, 2, 3, 4, 5 min., un seule fois.•
Le vario se branche directement sur la sortie télémétrique du ré-•
cepteur
Caractéristiques techniques :
Plage de mesure d’altitude : - 500 m … + 3000 m•
Résolution : 0,1 m•
Sensibilité vario : 0,5 m/3s, 1m/3s, 0,5/s, 1m/1s, 3m/s programmab-•
le par tonalité
Calcul de la valeur moyenne : 4-20 relevés programmables par me-•
sure
PRX (Power for Receiver)
Réf.Cde 4136
Alimentation de réception stabilisée avec Power-Management
intelligent.
Cet élément garanti une alimentation stabilisée et réglable de
l’alimentation de la réception, ce qui augmente encore davantage la
fi abilité de l’alimentation. S’adapte à différents accus de réception, ce
qui simplifi e sa mise en oeuvre et augmente sa plage d’utilisation. Si
durant l’utilisation il devait y avoir une chute de tension, même mo-
mentanée, celle-ci est enregistrée et affi chée, permettant de prévenir
un accu défectueux, ou un accu de trop faible capacité.
Pour l’utilisation avec un ou deux accus de réception. (décharge si-•
multanée en cas d’utilisation de deux accus).
Pour accus NiMH avec 5 ou 6 éléments, 2 éléments LiPo ou LiFe. •
Fiches Graupner/JR G3,5, G2 et BEC
trois tensions de sorties réglables pour l’alimentation du récepteur •
(5,1V, 5,5V, 5,9V)
deux LEDs, très visibles, indiquent séparément l’état des accus •
(accu 1 et accu 2)
interrupteur Marche / Arrêt, de qualité, intégré•
capable d’absorber de fortes intensités•
faible encombrement, conception plate au niveau interrupteur et •
LEDs pour ne pas altérer l’aspect et les caractéristiques du modèle.
montage simple à plat, avec pattes de fi xation, gabarit de perça-•
ge fourni.
Module GPS-/Vario Graupner HoTT
Réf.Cde 33600
Variomètre avec tonalités de variation d’altitude et respectivement
5 tonalités de montée, et 5 de chute, GPS intégré avec mesure de
l’éloignement, de la distance parcourue, affi chage de la vitesse, du
cap et des coordonnées.
Seuils de déclenchement d’alarme supplémentaires pour l’altitude •
minimale, altitude maximale, vitesse de montée et vitesse de chute,
sur deux niveaux
Affi chage de l’altitude et enregistrement de l’altitude minimale et ma-•
ximale
Temps d’alarme réglable : OFF, 5, 10, 15, 20, 25, 30 secondes, en •
permanence
Temps répétition : en permanence, 1, 2, 3, 4, 5 min., un seule fois•
Le GPS/Vario se branche directement sur la sortie télémétrique du •
récepteur
Caractéristiques techniques :
Plage de mesure d’altitude : - 500 m … + 3000 m•
Résolution : 0,1 m•
Sensibilité vario : 0,5 m/3s, 1m/3s, 0,5/s, 1m/1s, 3m/s programmab-•
le par tonalité
Calcul de la valeur moyenne : 4-20 relevés programmables par me-•
sure
Annexe
33110_mx10_HoTT_1_DE.indd Druckbogen 10 von 104 - Seiten (10, 199)
33110_mx10_HoTT_1_DE.indd Druckbogen 10 von 104 - Seiten (10, 199)
21.10.2011 13:23:03
21.10.2011 13:23:03
198
d‘alerte.
Le modèle est à nouveau pilotable par l‘émetteur-mo-
niteur. Si ce message d‘alerte ne devait pas s‘affi cher,
mettez, dans le menu „Télémétrie“ de l‘émetteur-élève,
sur le récepteur programmé en tant que SUMO, le
réglage de la position Fail-Safe de la voie 1 sur „AUS“ et
une autre voie, n‘importe laquelle, sur „FAIL SAFE“.
Si des tonalités d‘alarme se faisaient entendre, augmen-
tez la distance entre l‘émetteur-moniteur et l‘émetteur-
élève et respectez une distance suffi samment grande
entre le récepteur programmé en tant que SUMO et le
module HF HoTT de l‘émetteur-moniteur.
Description des programmes : Système Ecolage 11
Beschreibung Fernlenkset
Entfernung
Satellitenbetrieb zweier Empfänger über spezielle •
Kabelverbindung
Reichweite Test- und Warnfunktion•
Empfänger-Unterspannungswarnung im Senderdis-•
play
Extrem breiter Empfänger-Betriebsspannungsbereich •
von 3,6 V bis 8,4 V (voll funktionsfähig bis 2,5 V)
Fail Safe•
freie Kanalzuordnung (Channel Mapping), Misch-•
funktionen sowie sämtliche Servoeinstellungen sind
im Telemetrie-Menü programmierbar
Bis zu 4 Servos können blockweise mit einer Servo-•
Zykluszeit von 10 ms gleichzeitig angesteuert wer-
den (nur Digital-Servos!)
Maximale Störunempfi ndlichkeit durch optimiertes •
Frequenzhopping und breiter Kanalspreizung
Intelligente Datenübertragung mit Korrekturfunktion•
Telemetrieauswertung in Echtzeit•
Über 200 Systeme gleichzeitig einsetzbar•
Zukunftssicher durch Updatefähigkeit über Data-•
Schnittstelle
Computer System mx-10
5-Kanal-Fernlenkset in 2,4 GHz Graupner HoTT-Technologie (Hopping Telemetry Transmission)
33110_mx10_HoTT_1_DE.indd Druckbogen 11 von 104 - Seiten (198, 11)
33110_mx10_HoTT_1_DE.indd Druckbogen 11 von 104 - Seiten (198, 11)
21.10.2011 13:23:15
21.10.2011 13:23:15
12 Beschreibung Fernlenkset
Technische Daten Sender mx-10 HoTT
Frequenzband 2,4 … 2,4835 GHz
Modulation FHSS
Sendeleistung s. Ländereinstellung
Seite 36/40
Steuerfunktionen 5 Funktionen, davon 4
trimmbar
Temperaturbereich -10 … +55 °C
Antenne klappbar
Betriebsspannung 3,4 … 6 V
Stromaufnahme ca. 125 mA
Abmessungen ca. 190 x 195 x 90 mm
Gewicht ca. 630 g mit Senderakku
Zubehör
Best.-Nr. Beschreibung
1121 Umhängeriemen, 20 mm breit
70 Umhängeriemen, 30 mm breit
3097 Windschutz für Handsender
Ersatzteile
Best.-Nr. Beschreibung
33112.1 4NH-1500 TX RTU fl ach
33800 Senderantenne HoTT
Das Set Best.-Nr. 33110 enthält
Microcomputer-Sender mx-10 HoTT mit eingebautem
NiMH-Senderakku 4NH-1500 RX RTU fl ach (Änderung
vorbehalten), Steckerladegerät und bidirektionalem
Graupner Empfänger GR-12 HoTT.
Technische Daten Empfänger GR-12 HoTT
Betriebsspannung 3,6 … 8,4 V*
Stromaufnahme ca. 70 mA
Frequenzband 2,4 … 2,4835 GHz
Modulation FHSS
Antenne ca. 145 mm lang,
ca. 115 mm gekapselt und
ca. 30 mm aktiv
Ansteckbare Servos 6
Ansteckbare Sensoren 1 (anstelle von Servo 5)
Temperaturbereich ca. -10 ° … +55 °C
Abmessungen ca. 36 x 21 x 10 mm
Gewicht ca. 7 g
* Die Angabe des zulässigen Betriebspannungsbereiches gilt
ausschließlich für den Empfänger! Bitte beachten Sie in diesem
Zusammenhang, dass die Eingangsspannung des Empfängers
ungeregelt an den Servoanschlüssen bereitgestellt wird, der zuläs-
sige Betriebsspannungsbereich der überwiegenden Mehrzahl der
anschließbaren Servos, Drehzahlsteller, Gyros usw. aber nur 4,8 bis
6 Volt beträgt!
Empfohlene Ladegeräte (Zubehör)
Best.-
Nr. Bezeichnung
Anschluss 220 V
Anschluss 12 V
geeignet
für folgende
Akku typen
integr. Balancer
NiCd
NiMH
LiPo
Bleiakku
6411 Ultramat 8 xxxxx
6463 Ultramat 12 plus xxxxxx
6424 Ultramat 14 plus xxxxxxx
6466 Ultra Trio plus 14 xxxxxxx
6468 Ultramat 16S xxxxxxx
6469 Ultra Trio Plus 16 xxxxx x
6470 Ultramat 18 xxxxxxx
6475 Ultra Duo Plus 45 xxxxxxx
6478 Ultra Duo Plus 60 xxxxxxx
6480 Ultra Duo Plus 80 xxxxxxx
Für die Aufl adung ist zusätzlich für den Sender das Ladekabel Best.-
Nr. 3022 und für den Empfängerakku das Ladekabel Best.-Nr. 3021
erforderlich.
Weitere Ladegeräte sowie Einzelheiten zu den aufgeführten Ladege-
räten fi nden Sie im Graupner Hauptkatalog FS oder im Internet unter
www.graupner.de.
Weiteres Zubehör im Anhang oder im Internet unter
www.graupner.de. Wenden Sie sich auch an Ihren Fach-
händler. Er berät Sie gerne.
197
Description des programmes : Système Ecolage
–E
M
23456
BIND: ON
SW: –––
1
ECOLAGE/Eleve
Attention: Même si vous coupez brièvement l‘émetteur,
le mode élève restera activé lorsque vous allumez à
nouveau l‘émetteur.
Ecolage
Les deux émetteurs sont reliés entre eux, sans fi ls, par
la procédure BINDING.
Remarque importante:
AVANT de commencer la séance d‘écolage, vérifi ez
sur l‘avion –école, si toutes les voies se transmettent
correctement.
En cours d’écolage moniteur et élève peuvent être éloig-
né l’un de l’autre. Une distance de 50 m entre les deux
ne devrait néanmoins pas être dépassée, pour qu’ils
puissent au moins encore se parler! De plus, aucune
personne ne doit se trouver entre le moniteur et l’élève,
se qui pourrait réduire la portée de la voie de retour
utilisée par les deux émetteurs. Par ailleurs, il faut savoir
que la voie de retour étant utilisée en écolage sans fi ls,
aucune transmission de données télémétriques ne peut
avoir lieu.
Si durant l’écolage, il devait y avoir une perte de liaison
entre l’émetteur-moniteur et l’émetteur-élève, l’émetteur-
moniteur reprend automatiquement le contrôle du
modèle. Si dans cette situation, l’interrupteur écolage se
trouve en position „élève“, la LED centrale de l’émetteur-
moniteur mx-10 HoTT se met à clignoter 4 x à
l‘orange, et une alarme sonore se déclenche.
Dans les deux cas, un rapprochement des deux émet-
teurs devraient résoudre le problème. Si ce n‘est pas le
cas, atterrissez immédiatement et recherchez la cause
de ce dysfonctionnement.
Contrôle des functions
Causes possibles d‘erreurs
l‘émetteur-élève n‘est pas prêt•
Absence de procédure Binding entre l‘émetteur-•
moniteur et le récepteur HoTT de l‘avion-école.
Ecolage sans fi ls avec le cordon moniteur pour
émetteurs mx avec signal cumulé HoTT S-RX Réf.
Cde. 33310
Avec le cordon moniteur HoTT 33310 en option et un
récepteur HoTT avec une sortie de signal cumulé, tout
émetteur HoTT avec prise DSC peut passé en écolage
sans fi ls en émetteur-moniteur.
En tant qu‘émetteur d‘entrée de gamme, l‘émetteur
mx-10 HoTT peut donc être utilisé comme émetteur-
élève avec n‘importe quel émetteur HoTT.
La transmission des signaux de l‘émetteur-élève vers
l‘émetteur-moniteur se fait à travers un récepteur HoTT
qui est fi xé sur le boîtier de l‘émetteur avec de la bande
crochetée.
Ce récepteur doit être assigné à l‘émetteur-élève!
Branchez la prise JR du cordon sur la sortie du signal
cumulé du récepteur, par ex. sur la sortie 6 s‘il s‘agit du
récepteur GR-12, et l‘autre extrémité dans la prise DSC
de l‘émetteur. L‘alimentation de ce récepteur est assu-
rée par un accu complémentaire ou un cordon à 3 fi ls
qui va sur la prise DATA de l‘émetteur.
Pour conclure, enregistrez pour ce récepteur le signal
cumulé SUMO. A ce sujet, voir paragraphe „Télémétrie“
en page 179.
La transmission, une à une, des voies à l‘émetteur-élève
se fait par le menu „Ecolage“ de l‘émetteur-moniteur.
N‘oubliez pas d‘attribuer un interrupteur dans ce menu,
interrupteur qui permettra de transmettre les voies
libérées à l‘émetteur-élève.
AVANT de commencer l‘écolage, vérifi ez si tout foncti-
onne correctement.
Pour faire un essai, coupez l‘émetteur-élève. Sur
l‘émetteur-moniteur doit alors s‘affi cher un message
33110_mx10_HoTT_1_DE.indd Druckbogen 12 von 104 - Seiten (12, 197)
33110_mx10_HoTT_1_DE.indd Druckbogen 12 von 104 - Seiten (12, 197)
21.10.2011 13:23:15
21.10.2011 13:23:15

196 Description des programmes : Système Ecolage
Assignation de l‘émetteur-élève à l‘émetteur-moni-
teur
Remarque:
Durant la procédure Binding la distance entre les deux
émetteurs ne doit pas être trop grande. Il faudra peut
être positionner différemment les deux émetteurs si
vous voulez relancer une procédure.
Appuyez et maintenez la touche BIND enfoncée de
l‘émetteur mx-10 HoTT de l‘élève.
Emetteur Moniteur:
mx-10 HoTT: Appuyer sur la touche BIND et la main-
tenir enfoncée
Au bout de quelques secondes, la procédure Binding,
si elle a réussie, est confi rmée par un bref bip sonore,
l‘avion-école peut maintenant être piloté avec l‘émetteur-
moniteur.
mx-12/16/20 HoTT: allumez l‘émetteur, et avec
les fl èches de la touche quadridirectionnelle gauche ou
droite sélectionnez le point du menu „Lehrer/Sch“ du
menu Multifonctions (l‘ensemble de réception qui a été
assigné auparavant à l‘avion-école n‘a pas besoin d‘être
allumé pour la procédure qui suit.):
Aff. Servo Régl.génér
Fail-Safe Télémétrie
Régl Servo
D/R Expo
Mix ailes
Régl Contr
Trim Phase
Mix libres
Ecolage Aff. Infos
Avec une impulsion sur la touche centrale SET de la
touche quadridirectionnelle droite, vous ouvrez ce point
du menu:
–E
M
12346
5
BIND:SW: ––– non
ECOLAGE/Eleve
Libérez successivement , en appuyant à chaque fois sur
la touche centrale SET de la touche quadridirectionnelle
droite, les voies de commande qui doivent pouvoir être
transmises à l’élève. Le symbole passe de à . Par
exemple:
–E
M
12346
5
BIND:SW: ––– non
ECOLAGE/Eleve
Remarque importante :
Dans le cas d‘un système écolage HoTT sans fi ls, ce
sont des VOIES DE COMMANDE qui sont transmises !
Si par exemple, la fonction de commande des ailerons
(2) doit être transmise, et si le modèle est équipé de
deux servos d’ailerons, qui d’habitude sont branchés
sur les sorties 2 et 5, il faudra, avec le système sans
fi ls, transmettre également les voies 2 et 5, voir vue ci-
dessus. Pour pouvoir transmettre les commandes, il faut
encore attribuer, à l‘émetteur-moniteur, un interrupteur,
rien que pour l’écolage.
Avec les fl èches de la touche quadridirectionnelle gau-
che ou droite, placez le repère en bas à droite, à coté de
„SW „, et attribuez, un interrupteur.
Choisissez de préférence un interrupteur de type SW 1,
avec lequel l‘émetteur-moniteur pourra reprendre à tout
moment le contrôle du modèle:
¿
M
123456
E
BIND:SW: non
1
ECOLAGE/Monit
Avec les fl èches de la touche quadridirectionnelle gau-
che ou droite allez sur „BIND: n/v“:
rebasculez l‘interrupteur Ecolage défi nit précédemment
...
... et déclenchez la procédure Binding (BINDEN) avec
un impulsion sur la touche centrale SET de la touche
quadridirectionnelle droite.
Dès que la procédure est terminée, „ON“ sera affi ché à
la place du „BINDEN“ qui clignotait.
¿
M
123456
E
BIND:SW: non
1
ECOLAGE/Monit
¿M
123456
E
BIND:SW: non
1
ECOLAGE/Monit
13
Betriebshinweise
Betriebshinweise
Sender-Stromversorgung
Der Sender mx-10 HoTT ist serienmäßig mit einem
wiederaufl adbaren hochkapazitiven NiMH-Akku 4NH-
1500 RX RTU (Best.-Nr. 33112.1) ausgestattet. (Ände-
rung vorbehalten.) Der serienmäßig eingebaute Akku
ist bei Auslieferung jedoch nicht geladen.
Die Senderakkuspannung ist während des Betriebs
durch die Status-LED zu überwachen. Bei Unterschrei-
ten einer in der Zeile „Warnschwelle Akku“ des Menüs
»TX« der optionalen Smart-Box, Seite 46, einstellbaren
Spannung, standardmäßig 4.5 V, ertönt ein akustisches
Warnsignal und die orangene Status-LED beginnt in
schneller Abfolge jeweils 5-mal kurz hintereinander zu
blinken.
Spätestens jetzt ist der Betrieb unverzüglich einzustellen
und der Senderakku wieder zu laden!
Laden des Senderakkus
Der wiederaufl adbare NiMH-Senderakku kann über
die auf der rechten Seite des Senders angebrachte
Ladebuchse mit dem mitgelieferten Ladegerät (Best.-Nr.
33116.2) geladen werden.
Als Faustregel für die Ladedauer gilt, dass ein leerer
Akku 12 Stunden lang mit einem Strom in der Höhe
eines Zehntels der aufgedruckten Kapazität geladen
wird. Im Falle des standardmäßigen Senderakkus und
dem mitgelieferten Ladegerät sind das 200 mA. Für die
rechtzeitige Beendigung des Ladevorganges müssen
Sie jedoch selbst sorgen …
Der Sender muss während des gesamten Ladevorgangs
auf „OFF“ (AUS) geschaltet sein. Niemals den Sender,
solange er mit dem Ladegerät verbunden ist, einschal-
ten! Eine auch nur kurzzeitige Unterbrechung des
Ladevorgangs kann die Ladespannung derart ansteigen
lassen, dass der Sender durch Überspannung sofort be-
schädigt wird. Achten Sie deshalb auch immer auf einen
sicheren und guten Kontakt aller Steckverbindungen.
Polarität der mx-10 HoTT-Ladebuchse
Die auf dem Markt befi ndlichen Ladekabel anderer
Hersteller weisen oft unterschiedliche Polaritäten auf.
Verwenden Sie deshalb nur original Graupner-Ladeka-
bel mit der Best.-Nr. 3022.
Laden mit Automatik-Ladegeräten
Die Ladebuchse des Senders ist zwar serienmäßig
gegen Verpolung geschützt, kann aber mit geeigneten
Ladegeräten dennoch zur Schnellladung des Senderak-
kus benutzt werden.
Stellen Sie ggf. Ihr Schnellladegerät entsprechend des-
sen Anleitung auf eine Delta-Peak-Spannungsdifferenz
von 10 mV … 20 mV oder äquivalent ein, sodass es sich
zur Schnellladung von NiMH-Zellen eignet.
Verbinden Sie erst die Bananenstecker des Ladeka-
bels mit dem Ladegerät und stecken Sie dann erst
das andere Ende des Ladekabels in die Ladebuch-
se am Sender. Verbinden Sie niemals die blanken
Enden der Stecker eines bereits am Sender ange-
schlossenen Ladekabels miteinander! Um Schäden
am Sender zu vermeiden, darf der Ladestrom gene-
rell 1 A nicht überschreiten! Begrenzen Sie ggf. den
Strom am Ladegerät.
Entnahme des Senderakkus
Zur Entnahme des Senderakkus zunächst den Deckel
des Akkuschachtes auf der Senderrückseite entriegeln
und abnehmen:
Den Akku entnehmen und dann Stecker des Senderak-
kus durch vorsichtiges Ziehen am Zuleitungskabel lösen.
Einsetzen des Senderakkus
Halten Sie den Stecker des Senderakkus so, dass sich
das schwarze bzw. braune Kabel auf der zur Antenne
weisenden Seite und die unbelegte
Buchse des Akkusteckers auf der zum
Boden zeigenden Seite befi ndet und
schieben Sie dann den Akkuanschluss
in Richtung Platine auf die drei aus
dem Senderinneren ragenden Stifte.
(Der Akkuanschluss ist durch zwei angeschrägte Kanten
gegen Verpolung beim Wiedereinstecken geschützt,
siehe Abbildung.)
Legen Sie anschließend den Akku in das Fach und
schließen Sie den Deckel.
Polarität
Senderakkustecker
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
33110_mx10_HoTT_1_DE.indd Druckbogen 13 von 104 - Seiten (196, 13)
33110_mx10_HoTT_1_DE.indd Druckbogen 13 von 104 - Seiten (196, 13)
21.10.2011 13:23:15
21.10.2011 13:23:15
14 Betriebshinweise
Empfänger-Stromversorgung
Zur Stromversorgung des Empfängers stehen 4- und
5-zellige NiMH-Akkus unterschiedlicher Kapazität zur
Auswahl. Bei einem Einsatz von Digitalservos empfehlen
wir, einen 5-zelligen Akku (6 V) ausreichender Kapazität
zu verwenden. Im Falle eines Mischbetriebes von Ana-
log- und Digitalservos achten Sie jedoch unbedingt auf
die jeweils maximal zulässige Betriebsspannung. Für
eine stabilisierte und einstellbare Stromversorgung des
Empfängers mit 1 oder 2 Empfängerakkus sorgt z. B. die
PRX-Einheit Best.-Nr. 4136, siehe Anhang.
Verwenden Sie aus Sicherheitsgründen keinesfalls
Batterieboxen und auch keine Trockenbatterien.
Die Spannung der Bordstromversorgung „R-VOLT“ wird
während des Modellbetriebs im Display der optionalen
Smart-Box angezeigt:
Beim Unterschreiten einer im Telemetrie-Menü Seite 53,
einstellbaren Warnschwelle, standardmäßig 3,8 Volt,
erfolgt eine optische und akustische Unterspannungs-
warnung.
Überprüfen Sie dennoch in regelmäßigen Abständen
den Zustand der Akkus. Warten Sie mit dem Laden
der Akkus nicht, bis das Warnsignal ertönt.
Hinweis:
Eine Gesamtübersicht der Akkus, Ladegeräte sowie
Messgeräte zur Überprüfung der Stromquellen ist im
Graupner Hauptkatalog FS bzw. im Internet unter www.
graupner.de zu fi nden.
Laden des Empfängerakkus
Das Ladekabel Best.-Nr. 3021 kann zum Laden direkt
an den Empfängerakku angesteckt werden. Ist der Akku
im Modell über eines der Stromversorgungskabel Best.-
Nr. 3046,3934,3934.1 bzw. 3934.3 angeschlossen,
dann erfolgt die Ladung über die im Schalter integrierte
Ladebuchse bzw. den gesonderten Ladeanschluss. Der
Schalter des Stromversorgungskabels muss zum Laden
auf „AUS“ stehen.
Polarität Empfängerakkustecker
Allgemeine Ladehinweise
Es sind stets die Ladeanweisungen des Ladegeräte- •
sowie des Akkuherstellers einzuhalten.
Achten Sie auf den maximal zulässigen Ladestrom •
des Akkuherstellers. Um Schäden am Sender zu
vermeiden, darf der Ladestrom aber generell 1 A
nicht überschreiten! Begrenzen Sie ggf. den Strom
am Ladegerät.
Soll der Senderakku dennoch mit mehr als 1 A •
geladen werden, muss dieser unbedingt außerhalb
des Senders geladen werden! Andernfalls riskieren
Sie Schäden an der Platine durch Überlastung der
Leiterbahnen und/oder eine Überhitzung des Akkus.
Vergewissern Sie sich durch einige Probeladungen •
von der einwandfreien Funktion der Abschaltautoma-
tik bei Automatik-Ladegeräten. Dies gilt insbesonde-
re, wenn Sie den serienmäßig eingebauten NiMH-
Akku mit einem Automatik-Ladegerät für NiCd-Akkus
aufl aden wollen. Passen Sie ggf. das Abschaltver-
halten an, sofern das verwendete Ladegerät diese
Option besitzt.
Führen Sie keine Akku-Entladungen oder Akkupfl e-•
geprogramme über die Ladebuchse durch! Die
Ladebuchse ist für diese Verwendung nicht geeignet!
Immer zuerst das Ladekabel mit dem Ladegerät •
verbinden, dann erst mit dem Empfänger- oder Sen-
derakku. So verhindern Sie einen versehentlichen
Kurzschluss mit den blanken Enden der Ladekabel-
stecker.
Bei starker Erwärmung des Akkus überprüfen Sie •
den Zustand des Akkus, tauschen diesen ggf. aus
oder reduzieren den Ladestrom.
Lassen Sie den Ladevorgang eines Akkus nie-•
mals unbeaufsichtigt!
Beachten Sie die Sicherheitshinweise und Be-•
handlungsvorschriften ab Seite 7.
Betriebshinweise
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
195
Anhang
Aff. Servo Régl.génér
Fail-Safe Télémétrie
Régl Servo
D/R Expo
Mix ailes
Régl Contr
Trim Phase
Mix libres
Ecolage Aff. Infos
Avec une impulsion sur la touche centrale SET de la
touche quadridirectionnelle droite vous ouvre cette
fenêtre :
ECOLAGE/Eleve
–E
M
23456
BIND:SW: –––
1
non
Avec les fl èches de la touche quadridirectionnelle
gauche ou droite, placez le curseur sur le champ
d‘enregistrement „BIND“. Si çà droite de „SW“ vous
voyez un interrupteur, il faudra d‘abord le supprimer, voir
vue ci-dessous:
–E
M
23456
BIND: non
SW: –––
1
ECOLAGE/Eleve
Avec une impulsion sur la touche centrale SET de la
touche quadridirectionnelle droite, vous lancez la procé-
dure Binding, l‘affi chage non passe alors sur BINDING.
Si vous utilisez un autre émetteur HoTT en tant
qu‘émetteur-élève, consultez la notice relative au sys-
tème écolage sans fi ls.
Assignation de l‘émetteur-élève à l‘émetteur-moni-
teur
Remarque:
Durant la procédure Binding la distance entre les deux
émetteurs ne doit pas être trop grande. Il faudra peut
être positionner différemment les deux émetteurs si
vous voulez relancer une procédure.
L‘émetteur-moniteur mx-10 HoTT doit maintenant être
assigné à l‘émetteur-élève. Appuyez sur la touche BIND.
Au bout de quelques secondes, la procédure Binding,
si elle a réussie, est confi rmée par un bref bip sonore,
l‘avion-école peut maintenant être piloté avec l‘émetteur-
moniteur.
Sur les émetteurs mx-12/16/20 HoTT BIND passe
sur ON:
–E
M
23456
BIND: ON
SW: –––
1
ECOLAGE/Eleve
Afi n de pouvoir effectuer la transmission, il faut mettre
l‘interrupteur de mode de la mx-10 HoTT vers l‘avant,
en mode „élève“. Tant que vous maintenez cet interrup-
teur dans cette position, c‘est l‘émetteur-élève qui a le
contrôle du modèle. Si vous relâchez l‘interrupteur, c‘est
l‘émetteur-moniteur qui reprend le contrôle du modèle.
Attention: Même si vous coupez brièvement l‘émetteur,
le mode moniteur restera activé lorsque vous allumez à
nouveau l‘émetteur.
Réglage de l’émetteur-élève
Le modèle qui doit être piloté par l’élève doit être com-
plet, et doit correspondre aux habitudes de pilotage
de l‘élève. Toutes les autres options restent sur leurs
réglages de base. Toutes les autres fonctions de mixa-
ges se font exclusivement sur l‘émetteur-moniteur qui
les retransmet au récepteur.
Voie Fonction
1 Moteur / Pas
2 Ailerons / Roulis
3 Profondeur / Tangage
4 Direction / Anti-couple
Le récepteur HoTT du modèle concerné doit être
assigné à l‘émetteur-élève. Vous trouverez une de-
scription détaillée de la procédure Binding en pages 172
et 176.
Attention: l‘émetteur mx-10 HoTT ne peut être assi-
gné que s‘il est en mode „normal“. Avant d‘utiliser cet
émetteur en tant qu‘émetteur-élève, il faut donc assigner
le modèle en mode „normal“, et ce n‘est qu‘après, que
l‘on peut passer en mode „Elève“. En outre, aucun
mixage à être activé, déplacez le Jumper à la position
du „NO MIX“, voir page 171.
Dès que l‘émetteur est assigné, mettez l‘émetteur
mx-10 HoTT en mode élève. Pour ce faire, basculez,
lorsque l‘émetteur est coupé, l‘interrupteur de mode
vers l‘avant, appuyez sur la touche BIND et maintenez-
la enfoncée pendant que vous allumez l‘émetteur.
33110_mx10_HoTT_1_DE.indd Druckbogen 14 von 104 - Seiten (14, 195)
33110_mx10_HoTT_1_DE.indd Druckbogen 14 von 104 - Seiten (14, 195)
21.10.2011 13:23:20
21.10.2011 13:23:20
194 Anhang
Ecolage
Liaison de deux émetteurs pour une utilisation en Ecolage
Avec l‘émetteur mx-10 HoTT, deux émetteurs HoTT
peuvent être „reliés“ pour un écolage sans fi ls. Il n‘est
pas nécessaire que le deuxième émetteur soit une mx-
10 HoTT, tout autre émetteur HoTT qui offre la possi-
bilité d‘un écolage sans fi ls peut être utilisé. A ce sujet,
consultez la notice de votre radiocommande!
Le passage du Mode normal au mode écolage Moniteur
ou Elève se fait avec l‘interrupteur de mode situé en
haut à gauche de l‘émetteur:
Pour changer de mode, mettez l‘interrupteur de mode
dans la position souhaitée, appuyez sur la touche BIND
et maintenez-la enfoncée pendant que vous allumez
l‘émetteur.
Identifi cation du mode ...
Affi chage LED Buzzer Description
La LED orange
est allumée
L‘émetteur est
en mode normal,
Réglage pays:
General
La LED orange
clignote une
fois
deux bips
après mise en
route
L‘émetteur est en
mode Elève
La LED orange
clignote deux
fois
deux fois deux
bips brefs
après mise en
route
L‘émetteur est en
mode Moniteur
Voir également LED et Signaux cumulés en page
154.
Remarque importante:
La description qui suit se base sur la version actu-
elle 1.00, au moment de l‘impression de la présente
notice, et, est valable pour toutes les versions
précédentes. Il est cependant probable qu‘après
une mise à jour du logiciel que cette description ne
corresponde plus tout à fait au système écolage de
l‘émetteur.
Emetteur mx-10 HoTT en tant qu‘émetteur-moniteur
L‘avion-école doit être complet, c’est-à-dire équipé de
toutes les voies, y compris les trims et les éventuelles
fonctions de mixages et doit être enregistré dans une
mémoire de l’émetteur HoTT du moniteur, et dans une
mémoire de l‘émetteur HoTT de l‘élève. L‘avion-école,
indépendamment d‘autres émetteurs, doit donc être
pilotable sans restriction, aussi bien avec l‘émetteur-
élève qu‘avec l‘émetteur-moniteur. Evitez néanmoins de
trop grandes différences dans les réglages! Sinon vous
risquez d‘avoir des contraintes trop brutales et impor-
tantes au niveau des servos et du modèle en passant
le l‘émetteur élève à celui du moniteur, ou l‘inverse. Il est
cependant judicieux de programmer des débattements
moindres pour l‘élève, afi n de lui faciliter l‘apprentissage.
Si les deux émetteurs sont prêts pour l‘écolage, il faut
assigner l‘avion-école à l‘émetteur-élève.
Si vous utilisez l‘émetteur mx-10 HoTT en tant
qu‘émetteur-élève, sachez qu‘il ne pourra être assigné
que s‘il est en mode „normal“. Avant d‘utiliser cet émet-
teur en tant qu‘émetteur-élève, il faut donc assigner le
modèle en mode „normal“, et ce n‘est qu‘après, que l‘on
peut passer en mode „Elève“.
En outre, aucun mixage à être activé, déplacez le Jum-
per à la position du „NO MIX“, voir page 171.
Toutes les cinq voies de l‘émetteur-moniteur mx-10
HoTT sont transmises à l‘émetteur-élève.
Le mode de pilotage de l‘émetteur-élève, par ex. mi-
xages ailerons, peuvent être différents de ceux de
l‘émetteur-moniteur, étant donné que lors de la trans-
mission des commandes à l‘élève, les mixages sont
également transmis. De ce fait, il faut que l‘émetteur-
moniteur soit programmé avec toutes les fonctions et
mixages de l‘avion-école.
Dès que l‘émetteur-élève est assigné, mettez l‘émetteur
mx-10 HoTT en mode Moniteur. Pour ce faire, mettez
l‘interrupteur de mode au milieu, appuyez sur la touche
BIND et maintenez-la enfoncée pendant que vous
allumez l‘émetteur.
Appuyez maintenant sur la touche BIND de l‘émetteur-
élève: mx-10 HoTT: Appuyer sur la touche et rester
dessus
Dans ce qui suit, nous allons décrire comment confi gu-
rer un émetteur mx-12/16/20 HoTT en tant
qu‘émetteur-élève. Consultez également la notice de
votre émetteur!
Allumez l‘émetteur, puis, avec les fl èches de la touche
quadridirectionnelle gauche ou droite, sélectionnez
le point du menu „Ecolage“ du menu Multifonctions
(l‘ensemble de réception qui a été assigné auparavant
à l‘avion-école n‘a pas besoin d‘être allumé pour la
procédure qui suit.):
Mode normal
moniteur
elève
©
ª
15
Betriebshinweise
Längenverstellung der Steuerknüppel
Beide Steuerknüppel lassen sich in der Länge stufenlos
verstellen, um die Sendersteuerung an die Gewohn-
heiten des Piloten anpassen zu können.
Halten Sie die untere Hälfte des gerändelten Griff-
stückes fest und Lösen Sie durch Drehen des oberen
Teiles die Verschraubung:
Nun durch Hoch- bzw. Herunterdrehen den Steuer-
knüppel verlängern oder verkürzen. Anschließend den
oberen und unteren Teil des Griffstückes durch Gegen-
einanderverdrehen wieder festlegen.
Sendergehäuse öffnen
Lesen Sie sorgfältig die nachfolgenden Hinweise, bevor
Sie den Sender öffnen. Wir empfehlen Unerfahrenen,
die nachfolgend beschriebenen Eingriffe ggf. im Graup-
ner-Service durchführen zu lassen.
Der Sender sollte nur in folgenden Fällen geöffnet
werden:
wenn ein neutralisierender Steuerknüppel auf •
nichtneutralisierend oder ein nichtneutralisierender
Steuerknüppel auf neutralisierend umgebaut werden
soll,
zur Einstellung der Steuerknüppelrückstellkraft.•
Vor dem Öffnen des Gehäuses Sender ausschalten
(Power-Schalter auf „OFF“).
Öffnen Sie den Akkuschacht und entnehmen Sie wie auf
der vorherigen Doppelseite beschrieben, den Sender-
akku.
Lösen Sie hernach die auf der Senderrückseite versenkt
angebrachten sechs Schrauben mit einem Kreuzschlitz-
schraubendreher der Größe PH1, siehe Abbildung:
Anordnung der Gehäuseschrauben
Halten Sie die beiden Gehäuseteile mit der Hand
zusammen und lassen Sie diese 6 Schrauben durch
Umdrehen des Senders zunächst auf eine geeignete
Unterlage herausfallen. Heben Sie nun die Unterschale
vorsichtig an und klappen Sie diese nach rechts auf, so,
als ob Sie ein Buch öffnen würden.
Wichtige Hinweise:
Nehmen Sie keinerlei Veränderungen an der •
Schaltung vor, da ansonsten der Garantiean-
spruch und auch die behördliche Zulassung er-
löschen!
Berühren Sie keinesfalls die Platinen mit metal-•
lischen Gegenständen. Berühren Sie Kontakte
auch nicht mit den Fingern.
Schalten Sie bei geöffnetem Sendergehäuse nie-•
mals den Sender ein!
Beim Schließen des Senders achten Sie bitte da-
rauf, dass …
… keine Kabel beim Aufsetzen der Unterschale ein-•
geklemmt werden.
… die beiden Gehäuseteile vor dem Verschrauben •
bündig aufeinander sitzen. Niemals die beiden Ge-
häuseteile mit Gewalt zusammendrücken.
Drehen Sie die Gehäuseschrauben mit Gefühl in die •
bereits vorhandenen Gewindegänge, damit diese
nicht ausreißen.
… Sie wieder den Akku anschließen.•
33110_mx10_HoTT_1_DE.indd Druckbogen 15 von 104 - Seiten (194, 15)
33110_mx10_HoTT_1_DE.indd Druckbogen 15 von 104 - Seiten (194, 15)
21.10.2011 13:23:20
21.10.2011 13:23:20
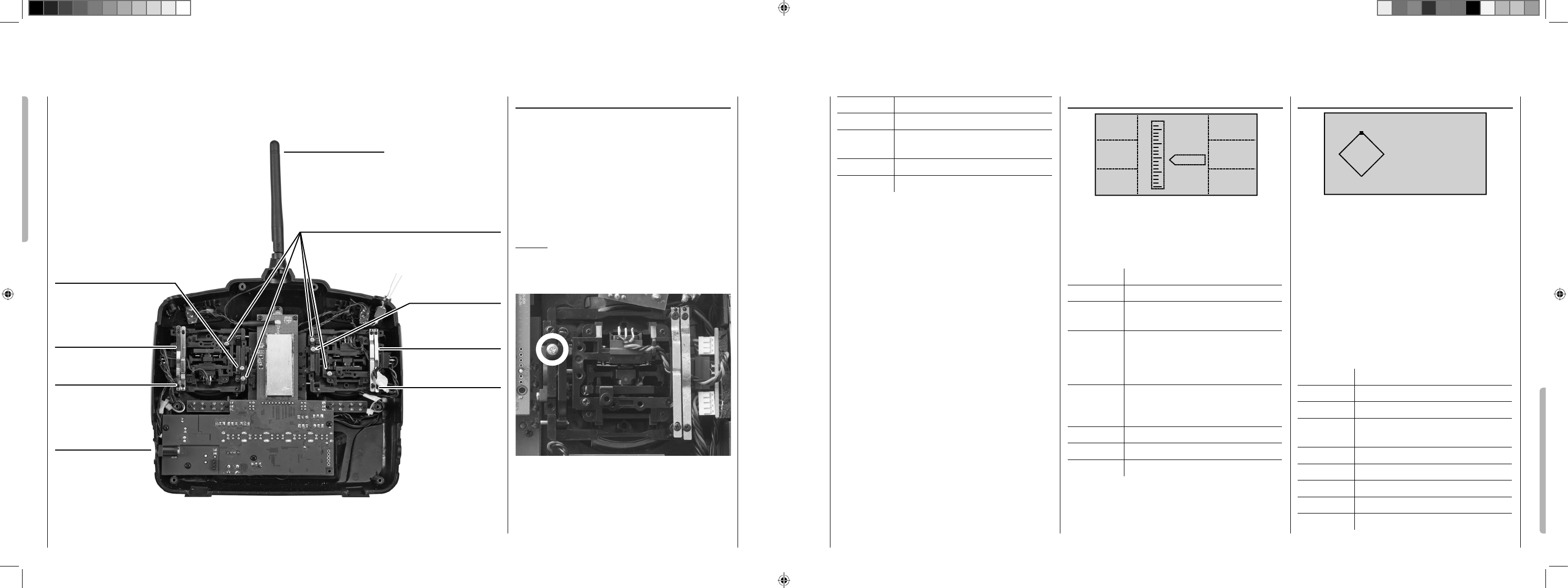
16 Betriebshinweise
Betriebshinweise
Umstellen der Kreuzknüppel
Neutralisierung
Wahlweise kann sowohl der linke wie auch der rechte
Steuerknüppel von neutralisierend auf nichtneutralisie-
rend umgestellt werden: Sender wie auf der Seite zuvor
beschrieben öffnen.
Zum Wechsel der serienmäßigen Einstellung des Steu-
erknüppels lokalisieren Sie die auf der nachfolgenden
Abbildung des linken Knüppelaggregates weiß umran-
dete Schraube.
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich aufge-
baut, sodass bei diesem die gesuchte Schraube rechts
unterhalb der Mitte zu fi nden ist.
Drehen Sie nun diese Schraube hinein, bis der betref-
fende Steuerknüppel von Anschlag bis Anschlag frei
beweglich ist bzw. drehen Sie diese heraus, bis der
Steuerknüppel wieder komplett selbstrückstellend ist.
Senderplatine
Senderplatine
nicht berühren!
nicht berühren!
Senderplatine
Senderplatine
nicht berühren!
nicht berühren!
Ladebuchse
linkes
linkes
Knüppelagreggat
Knüppelagreggat
Bremsfedern
Justierschrauben
Justierschrauben
Bremsfedern
Justierschrauben
klappbare Antenne
Neutralisationsschraube
Neutralisationsschraube
rechtes
rechtes
Knüppelagreggat
Knüppelagreggat
Neutralisationsschraube
Justierschrauben der Steuerknüppelrückstellkraft
193
Description des programmes : Télémétrie
m/3s Taux de montée / chute en m/3s
T1 / T2 Température de la sonde 1 / 2
CELL V Tension par élément de 1 … max. 14
élément
L Prise Balancer 1
H Prise Balancer 2
RX + VARIO
RXSQ
0
MAX
+500m
MIN
+500m
ALT
+500
H
B
m/1s
0
m/3s
0
m/10s
0
Cette page permet de visualiser les données d’un
récepteur branché à un module Vario, Réf.Cde 33601.
Vous trouverez plus d’informations sur ces modules en
annexe et sur notre site Internet sous www.graupner.de.
Cela signifi e :
Dénominat. Signifi cation
ALT Altitude actuelle
RXSQ Puissance du signal qui arrive au
récepteur en %
MAX Altitude limite préenregistrée, par
rapport au sol, qui déclenche une
alarme en cas de dépassement du
seuil
MIN Le dépassement maximum su seuil
par rapport au sol, à partir duquel une
alarme se déclenche
m/1s Taux de montée / chute en m/1s
m/3s Taux de montée / chute en m/3s
m/10s Taux de montée / chute en m/10s
RX + GPS
NRXSQ 0
DIS 0m
ALT +500m
0m/1s
0m/3s
0m/10s
N 0°00.0000
E 0°00.0000
WE
S
Kmh
0
Cette page permet de visualiser les données d’un
récepteur branché à un module GPS avec Vario intégré,
Réf.Cde 33600. Vous trouverez plus d’informations sur
ces modules en annexe et sur notre site Internet sous
www.graupner.de.
En plus des données de position actuelles et de la
vitesse du modèle, l’altitude actuelle par rapport au sol
est également affi chée au centre de l’écran ainsi que
les taux de montée et de chute du modèle en m/1s,
m/3s et m/10s, la qualité actuelle de la réception et
l’éloignement du modèle par rapport au point de décol-
lage.
Cela signifi e :
Dénominat. Signifi cation
W / N / E / S Ouest / Nord / Est / Sud
Kmh Vitesse
RXSQ Puissance du signal de la voie de
retout
DIS Eloignement
ALT Altitude par rapport au sol
m/1s Taux de montée / chute en m/1s
m/3s Taux de montée / chute en m/3s
m/10s Taux de montée / chute en m/10s
33110_mx10_HoTT_1_DE.indd Druckbogen 16 von 104 - Seiten (16, 193)
33110_mx10_HoTT_1_DE.indd Druckbogen 16 von 104 - Seiten (16, 193)
21.10.2011 13:23:22
21.10.2011 13:23:22
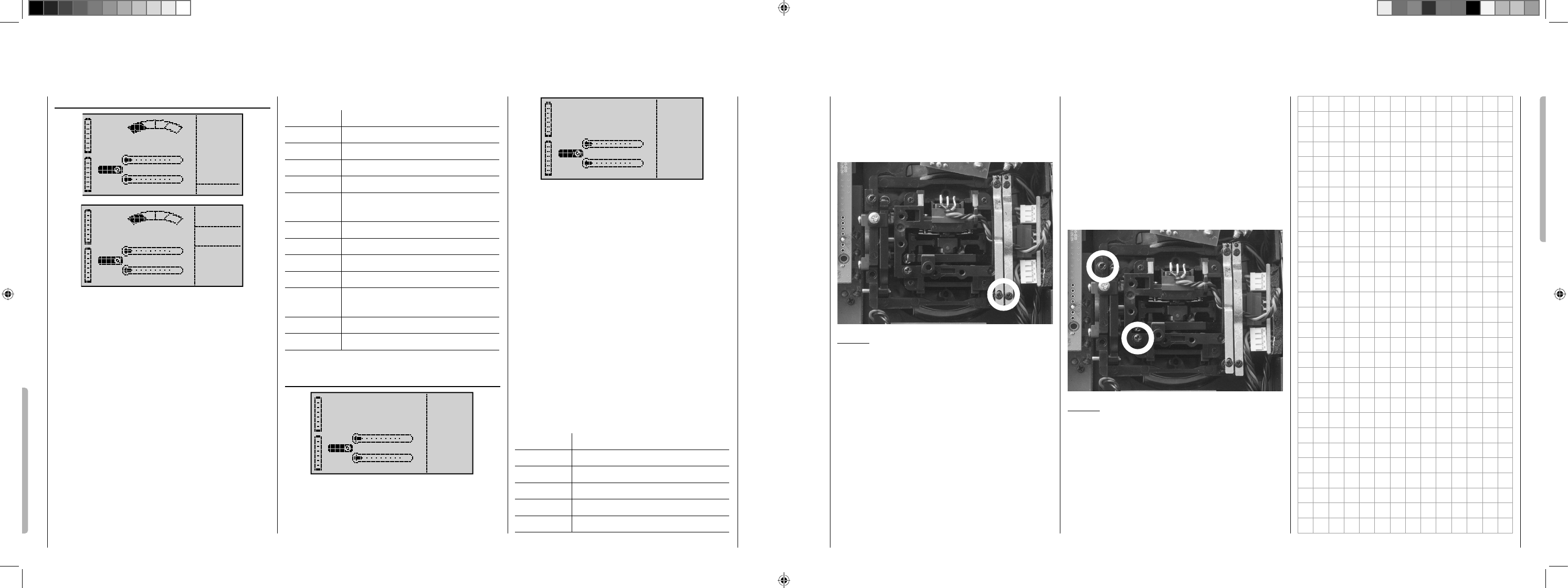
192 Description des programmes : Télémétrie
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1H0.00
2H0.00
3H0.00
4H0.00
5H0.00
6H0.00
0.0V 0A
ALT +500m
7H0.00
Cette page permet de visualiser les données d’un
récepteur branché à un module Electric’Air, Réf.Cde
33620. Vous trouverez plus d’informations sur ces
modules en annexe et sur notre site Internet sous www.
graupner.de.
En fonction du nombre de capteurs branchés sur ces
modules, vous pouvez, sur cette page de l’écran, con-
sulter en permanence les données suivantes :
La tension actuelle de maximum 2 accus (ACC1 et
ACC2) ; le résultats de mesures de maximum 2 sondes
de températures (T1 et T2) ainsi que les taux de montée
et de chute en m/1s et m/3s et, au milieu de l’écran,
l’intensité consommée actuelle puisée dans la source
d’énergie.
Sur le bord droit s’affi che en alternance, les tensions
actuelles des éléments d’un pack d’accus LiPo de 7 élé-
ments max. branché sur la prise Balancer 1 (L) ou 2 (H).
Cela signifi e :
Dénominat. Signifi cation
V Tension actuelle de l’accu
A Intensité actuelle en Ampere
ACC1 / ACC2 Accu 1 / Accu 2
ALT Altitude actuelle
m/1s Taux de montée / chute en m/1s
RX + MODULE GÉNÉRAL
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
CELL V
1:0.00
2:0.00
3:0.00
4:0.00
5:0.00
6:0.00
1500
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
ALT
+500m
0m1
0m3
POWER
14.8V
10.3A
450
Cette page permet de visualiser les données d’un ré-
cepteur branché à un module Général-Engine, Réf.Cde
33610, ou à un module Général-Air, Réf.Cde 33611.
Vous trouverez plus d’informations sur ces modules en
annexe et sur notre site Internet sous www.graupner.de
En fonction du nombre de capteurs branchés sur ces
modules, vous pouvez, sur cette page de l’écran, con-
sulter en permanence les données suivantes :
La tension actuelle de maximum 2 accus (ACC1 et
ACC2) ; le résultats de mesures de maximum 2 son-
des de températures (T1 et T2) ainsi que le niveau du
réservoir.
Sur le bord droit s’affi che en alternance, soit une liste
des tensions actuelles des éléments pour des accus
LiPo de 1 à 6 éléments, soit l’altitude par rapport au
sol, les taux de montée et de chute en m/1s et m/3s,
l’intensité actuelle en Ampere ainsi que la tension actu-
elle de l’accu qui est branché sur le capteur.
Cela signifi e :
Dénominat. Signifi cation
BAT1/ BAT22 Accu 1 / Accu 2
FUEL Niveau carburant / jauge réservoir
E / F Vide / Plein
T1 / T2 Température de la sonde 1 / 2
CELL V Tension par élément de 1 … max. 6
élém.
1500 Vitesse de rot. actuelle en tours/min.
ALT Altitude actuelle
0m1 Taux de montée / chute en m/1s
0m3 Taux de montée / chute en m/3s
POWER V Tension actuelle de l’accu de
propulsion
A Intensité actuelle en Ampere
450 Capacité consommée en mAh
RX + MODULE ELECTRIC AIR
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1L0.00
2L0.00
3L0.00
4L0.00
5L0.00
6L0.00
0.0V 0A
ALT +500m
7L0.00
17
Betriebshinweise
Steuerknüppelrückstellkraft
Die Rückstellkraft der Steuerknüppel ist ebenfalls auf
die Gewohnheiten des Piloten einstellbar. Das Justier-
system befi ndet sich neben den Rückholfedern, siehe
Markierungen auf der folgenden Abbildung.
Durch Drehen der jeweiligen Einstellschraube mit einem
(Kreuz)-Schlitzschraubendreher kann die gewünschte
Federkraft justiert werden:
Rechtsdrehung = Rückstellung härter,•
Linksdrehung = Rückstellkraft weicher.•
horizontal
horizontal
vertikal
vertikal
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich auf-
gebaut, sodass bei diesem die gesuchten Schrauben
rechts der Mitte zu fi nden sind.
Bremsfeder und Ratsche
Mit der äußeren der beiden in der nächsten Abbildung
markierten Schrauben stellen Sie die Bremskraft ein
und mit der inneren die Stärke der Ratsche des jewei-
ligen Steuerknüppels:
Hinweis:
Das rechte Knüppelaggregat ist spiegelbildlich aufge-
baut, sodass bei diesem die gesuchten Schrauben links
oben zu fi nden sind.
33110_mx10_HoTT_1_DE.indd Druckbogen 17 von 104 - Seiten (192, 17)
33110_mx10_HoTT_1_DE.indd Druckbogen 17 von 104 - Seiten (192, 17)
21.10.2011 13:23:25
21.10.2011 13:23:25
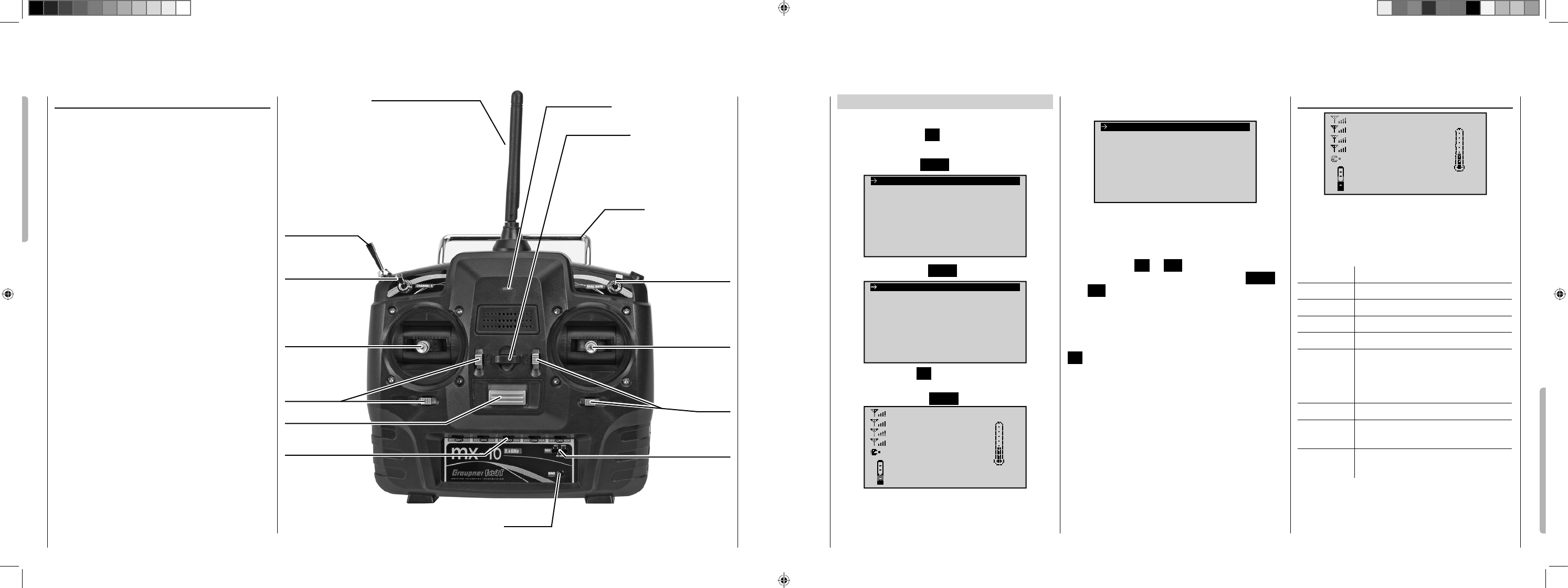
18 Senderbeschreibung
Senderbeschreibung
Bedienelemente am Sender
Antenne mit Knick- und Drehgelenk
3-Stufenschalter
Modus: Schüler / Lehrer /
normal
2-Stufenschalter
Kanal 5
linker Knüppel
Trimmung
EIN/AUS-Schalter
Trimmung
rechter Knüppel
2-Stufenschalter
Dual Rate
Tragegriff
Öse für Trageriemen
Befestigen des Sendertragegurts
An der Oberseite des mx-10 HoTT-Senders fi nden
Sie eine Befestigungsöse, siehe Abbildung rechts,
an der Sie einen Tragegurt anbringen können. Dieser
Haltepunkt ist so ausgerichtet, dass der Sender optimal
ausbalanciert ist, wenn er am Gurt hängt.
Best.-Nr. 1121 Umhängeriemen, 20 mm breit
Best.-Nr. 70 Umhängeriemen, 30 mm breit
zentrale Status-LED
Servoreverse Schalter Flächenmischer
Kanal 1 - 5
BIND-Taster
191
Description des programmes :Télémétrie
CHOIX D‘UN CAPTEUR
MENU MODEL SELECT
Appuyez sur la touche INC pour aller sur la ligne „MO-
DEL SELECT“.
Appuyez ensuite sur ENTER ...
CAR
AIRPLANE,HELI.,GLID.
et une nouvelle fois sur ENTER ...
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
... puis sur la touche INC pour choisir votre capteur
avec le symbole de la fl èche puis de le sélectionner en
appuyant sur la touche ENTER :
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
RÉCEPTEUR
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
Cet écran représente également sous forme graphique,
les données que l’on peut voir à l’écran « RX DATA
VIEW » du menu de télémétrie « REGLAGES / AFFI-
CHAGES ».
Cela signifi e :
Dénominat. Signifi cation
RX-S QUA Qualité du signal en %
RX-S ST Puissance du signal en %
RX-dBm Puissance de la réception en dBm
TX-dBm Puissance d’émission en dBm
V PACK Affi che le laps de temps le plus long
durant lequel des paquets de données
ont été perdus lors de la transmission
de l’émetteur vers le récepteur
RX-VOLT Tension actuelle du récepteur en Volt
M-RX V Tension minimale de l’émetteur depuis
la dernière mise en route
TMP Ce thermomètre visualise la
température actuelle du récepteur
AFFICHAGE GRAPHIQUE DES CAPTEURS
Comme décrit précédemment dans le menu „CHOIX
D‘UN CAPTEUR“ ...
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
... vous pouvez activer un affi chage sous forme de
graphique des données d‘un capteur ou d‘une sonde
branché sur le récepteur. Ces données sont alors repré-
sentées sur une page graphique décrite ci-dessous.
Avec les touches INC ou DEC vous pouvez passer d‘un
écran graphique à l‘autre, et sélectionner avec ENTER,
avec ESC, vous revenez sur la page initiale.
Remarque:
L‘ordre chronologiques des pages d‘écran décrites
ci-dessous correspond aux impulsions de la touche
INC.
Vous trouverez plus de détails concernant les modules
évoqués par la suite, en annexe et sur Internet sous
www.graupner.de
33110_mx10_HoTT_1_DE.indd Druckbogen 18 von 104 - Seiten (18, 191)
33110_mx10_HoTT_1_DE.indd Druckbogen 18 von 104 - Seiten (18, 191)
21.10.2011 13:23:28
21.10.2011 13:23:28
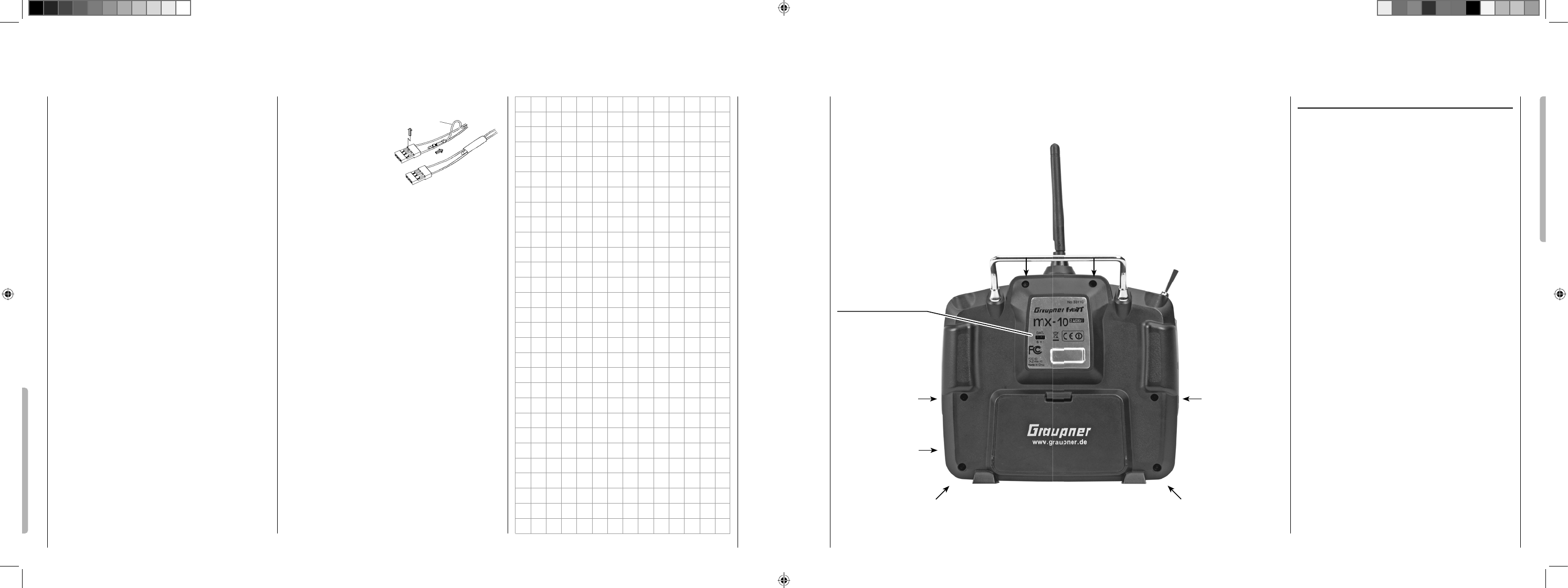
190 Description des programmes : Télémétrie
taire, indépendamment du récepteur principal.
Si par contre les deux récepteurs ont une perte de
réception en même temps, en principe, les servos
prendront la position Faile-Safe du SUMO, du moins
à l’heure actuelle, au moment de l’impression de la
présente notice. Selon le cas, on ne peut néanmoins
pas exclure des effets interactifs, c’est pourquoi
nous vous recommandons vivement de faire des
tests AVANT d’utiliser un modèle.
Cette confi guration est tout particulièrement recom-
mandée, lorsque un des deux récepteurs est situé à
un endroit du modèle qui ne favorise pas la récepti-
on, ou près des tuyères, ou à proximités d’éléments
en carbone, là ou il y a risques de réduction de la
puissance du signal de réception, ce qui peut avoir
comme conséquence une perte de portée.
C’est pourquoi, branchez toujours les fonctions de
commande importantes sur le récepteur principal
programmé en tant que SUMI, pour que le modè-
le reste contrôlable en cas de perturbations, quand
le récepteur satellitaire SUMO ne reçoit plus de sig-
nal correct.
Par contre, seul le récepteur satellitaire confi guré
comme SUMO est capable de transmettre des don-
nées télémétriques vers l’émetteur, par ex. la tension
d’alimentation à bord. D’ou la nécessité de brancher
les capteurs et sondes sur le récepteur satellitaire
SUMO.
Chaque récepteur doit être équipé de son propre cor-
don d’alimentation mais chacun puise son énergie
dans la même source. Lorsque les intensités sont
fortes, il vaut même mieux les dédoubler.
Si par contre vous
souhaitez une alimen-
tation séparée pour
chaque récepteur, il faut
impérativement retirer
le fi ls central d’une des
deux prises du cordon
satellitaire, voir vue ci-
contre.
rouge
1
23
Si vous voulez faire d’autres programmations, par ex.
des réglages Fail-Safe, débranchez le cordon satelli-
taire trois fi ls entre les deux récepteurs et n’alimentez
que le récepteur en question. Il faudra peut être mo-
difi é l’ordre chronologique de la procédure Binding.
19
Senderbeschreibung
Gehäuseschraube Gehäuseschraube
Gehäuseschraube Gehäuseschraube
Akkufach-Abdeckung
Gehäuseschraube Gehäuseschraube
Ladebuchse für
Senderakku
Data-Buchse zum Anschluss
der Smart-Box Best.-Nr. 33700
und für Senderupdates
DATA-Buchse
Zum Anschluss der optional erhältlichen Smart-Box
Best.-Nr. 33700.
Die Smart-Box erlaubt die Nutzung vieler weiterer
HoTT-Funktionen wie z.B. Servokurven, Servoweg,
Servo-Zykluszeit oder Channel-Mapping sowie die
HoTT Telemetrie - siehe dazu den Abschnitt „Telemetrie“
auf Seite 45.
Näheres zur Smart-Box fi nden Sie im Graupner Haupt-
katalog FS sowie im Internet unter www.graupner.de bei
dem jeweiligen Produkt.
Über diese Anschlussbuchse wird auch ggf. eine Verbin-
dung über den optionalen USB-Adapter Best.-Nr. 7168.6
und das Anschlusskabel Best.-Nr. 7168.6A zu einem PC
mit einem der Windows-Betriebssysteme XP, Vista oder
7 hergestellt.
Die PC-seitig nötige Software wie beispielsweise den
passenden USB-Treiber fi nden Sie auf der Download-
seite des jeweiligen Produkts unter www.graupner.de.
Nach Installation der nötigen Software kann dann über
diese Verbindung der Sender auch upgedatet werden.
33110_mx10_HoTT_1_DE.indd Druckbogen 19 von 104 - Seiten (190, 19)
33110_mx10_HoTT_1_DE.indd Druckbogen 19 von 104 - Seiten (190, 19)
21.10.2011 13:23:29
21.10.2011 13:23:29
20 Inbetriebnahme des Senders
Vorbemerkungen
Theoretisch erlaubt das Graupner-HoTT-System den
gleichzeitigen Betrieb von mehr als 200 Modellen.
Aufgrund des zulassungsbedingten funktechnischen
Mischbetriebes im 2,4-GHz-ISM-Band wird aber diese
Anzahl in der Praxis erheblich geringer sein. In der Re-
gel werden aber immer noch mehr Modelle im 2,4-GHz-
Band gleichzeitig betrieben werden können als in den
konventionellen 35-/40-MHz-Frequenzbereichen. Der
letztendlich limitierende Faktor dürfte aber – wie häufi g
schon bisher – doch eher die Größe des zur Verfügung
stehenden (Luft-) Raumes sein. Allein aber in der
Tatsache, dass keine Frequenz absprache mehr erfol-
gen muss, ist nicht nur komfortabel, sondern darin ist
insbesondere bei in unübersichtlichem Gelände verteilt
stehenden Pilotengruppen auch ein enormer Zugewinn
an Sicherheit zu sehen.
Akku geladen?
Da der Sender mit ungeladenem Akku ausgeliefert wird,
müssen Sie ihn unter Beachtung der Ladevorschriften
auf Seite 7 aufl aden. Ansonsten ertönt bei Unterschrei-
ten einer bestimmten Spannung, die in der Zeile „Warn-
schwelle Akku“ des Menüs »TX« der Smart-Box, Seite
46, eingestellt werden kann, bereits nach kurzer Zeit
ein Warnsignal und die LED blinkt jeweils fünfmal kurz
hintereinander.
Senderinbetriebnahme
Nach dem Einschalten leuchtet/blinkt die Status-LED
des Senders, um den aktuellen Modus anzuzeigen
Siehe die folgende Tabelle:
LED Anzeige Summer Beschreibung
grüne LED leuchtet - Sender eingeschaltet, aber kein Empfänger gebunden
oder Empfänger gebunden, aber keine Telemetrie
orange LED leuchtet - Sender in Modus normal, Ländereinstellung: general
orange LED blinkt - Sender in Modus normal, Ländereinstellung: Frankreich
orange LED blinkt einmal zwei Pieptöne nach dem
Einschalten
Sender in Schüler Modus
orange LED blinkt zweimal 2x zwei kurze Pieptöne
nach dem Einschalten
Sender in Lehrer Modus
orange LED blinkt dreimal drei kurze Pieptöne schnell
hintereinander
schlechte Empfangsleistung des Empfängers
orange LED blinkt viermal vier kurze Pieptöne schnell
hintereinander
schlechte Empfangsleistung des Rückkanals
orange LED blinkt fünf mal fünf kurze Pieptöne schnell
hintereinander
Senderakku leer. Erreichen der in der Zeile „Warn-
schwelle Akku“ des Menüs »TX« der optionalen Smart-
Box, Seite 46, eingestellten Spannung, standardmäßig
4.5 V.
Zuerst müssen Sie den Betriebsmodus „normal“, „Leh-
rer-“ oder „Schüler-“ Sender durch den Modus-Schalter
auf der linken Oberseite des Senders auswählen:
Der Sender wird im Modus „normal“ ausgeliefert. Für
den normalen Betrieb müssen Sie also nichts verän-
dern. Um den Sender in den Lehrer- oder Schülermodus
Inbetriebnahme des Senders
Vorbemerkungen zum Sender mx-10 HoTT
zu bringen, lesen Sie das Kapitel „Lehrer/Schüler“ auf
Seite 60.
Um den Modus zu wechseln, bringen Sie den Modus-
Schalter bei ausgeschaltetem Sender in die gewünschte
Position, drücken und halten den BIND-Taster und
schalten anschließend den Sender ein.
Beachte: nach dem Programmieren des Modus „nor-
mal“ ist der Sender im Fail-Safe Programmiermodus
(siehe Seite 43), wenn Sie hier nichts programmieren
wollen, schalten Sie den Sender jetzt wieder aus.
Die Anzeige des programmierten Modus erfolgt nach
dem Einschalten des Senders durch LED- und Summer-
signale, siehe dazu die obige Tabelle.
©
ª
Modus Normal
Lehrer
Schüler
189
Description des programmes : Télémétrie
le paramètre « R-TEM » s’affi che en surbrillance.
Assurez-vous toujours, quelque soient les conditions de
vol, que vous êtes toujours dans la plage de tempéra-
ture récepteur autorisée (dans le meilleur des cas, entre
–10 et 55°C).
CH OUTPUT TYPE (type de branchement)
Vous déterminez ici la manière dont les sorties récep-
teurs doivent être commandées :
ONCE•
Les sorties servo récepteur sont commandées les
unes après les autres. Conseillé pour servos analo-
giques.
Avec ce réglage, les servos sont automatiquement
réglés à 20 ms – pour un récepteur 12 voies (Réf.
Cde 33512), 30 ms – qu’importe ce qui a été enre-
gistré dans « RX SERVO » sur la ligne « PERIOD »
ou ce qui est affi ché à l’écran !
SAME•
Les sorties servos sont commandées par paquet de
quatre, en parallèle. Cela signifi e que, pour le cas du
récepteur GR-12 livré avec l’émetteur, les voies 1 à 4
et voies 5 et 6 reçoivent leurs signaux respectifs en
même temps.
Conseillé pour les servos digitaux lorsque plusieurs
servos sont utilisés pour une seule et même fonction
(par ex. ailerons), pour que le déplacement des ser-
vos soit synchronisé.
En cas d’utilisation de servos digitaux, il est toutefois
recommandé d’enregistrer 10 μs dans la ligne « PE-
RIOD » de la page « RX SERVO » afi n de pouvoir
exploiter pleinement les réactions rapides des servos
digitaux. Pour les servos analogiques, il est impératif
d’enregistrer « 20 ms » !
Pour ce type de réglage, veillez toujours à ce que
l’alimentation de votre récepteur soit de capacité
suffi sante. Comme ce sont toujours 4 servos qui se
déplacent en même temps, l’alimentation sera plus
fortement sollicitée.
SUMO (signal cumulé OUT)•
Un récepteur HoTT confi guré en tant que SUMO
génère en permanence un soi-disant signal cumulé à
partir des signaux de commande de toutes ses voies,
et le rend disponible, par exemple avec un récepteur
GR-12, sur la sortie 6. Par ailleurs, le signal cumu-
lé, indépendamment du récepteur, peut être répar-
ti sur un maximum de 16 voies, cela signifi e qu‘un ré-
cepteur 6 voies peut être mis en SUMO 12 et reporte
alors les 12 voies sur la sortie.
Après avoir sélectionné et enregistré SUMO avec
une impulsion simultanée sur les touches INC+DEC ,
le marquage en surbrillance passe sur le numéro de
la voie, dans cet exemple, 06:
Avec les touches INC ou DEC vous pouvez sélecti-
onner le numéro de la voie à transmettre comprise
dans le signal cumulé. Une nouvelle impulsion simul-
tanée sur les touches INC+DEC permet d‘enregistrer
ces réglages.
Les sorties récepteur sont commandées, l’une ap-
rès l’autre, avec un cycle de 20 ms (30 ms sur le ré-
cepteur GR-24, Réf.Cde. 33512), même si 10 ms
sont affi chés sur la ligne «PERIOD» de la page «
RX Servo ».
Conçu dans un premier temps pour une utilisation
en mode satellitaire décrit ci-dessous de deux récep-
teurs HoTT, le signal cumulé, généré par le récep-
teur défi nit en tant que SUMO, peut par exemple être
utilisé pour la commande de sytèmes Flybarless ou,
avec le cordon adaptateur Réf.Cde. 33310, être utili-
sé pour des simulateurs.
En mode …
Satellitaire
… les deux récepteurs HoTT sont reliés entre eux
avec un cordons 3 fi ls (Réf.Cde 33700.1 (300 mm)
ou 33700.2 (100 mm) puis branchés sur la sortie ré-
cepteur qui porte le numéro le plus grand. Vous trou-
verez tous les détails à ce sujet sur notre site Internet
sous www.graupner.de.
C’est par cette liaison que toutes les voies du récep-
teur HoTT, confi guré en tant que SUMO et désig-
né en tant que récepteur satellitaire, sont transmises
en permanence au deuxième récepteur HoTT, le ré-
cepteur principal, qui lui, doit être programmé en tant
que …
SUMI (Signal cumulé IN)•
Le signal va donc toujours en direction SUMI.
Par ailleurs, en cas d’absence de signaux, le récep-
teur défi nit en tant que SUMI utilise le signal cumulé
venant du SUMO, si au moins 1 voie du SUMI a été
programmée en mode Fail-Safe.
Si le récepteur satellitaire, programmé en tant que
SUMO, a une perte de réception, tous les servos
branchés sur ce récepteur se mettent en position
Fail-Safe, position enregistrée sur le récepteur satelli-
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUTPUT TYPE:SUMO06
33110_mx10_HoTT_1_DE.indd Druckbogen 20 von 104 - Seiten (20, 189)
33110_mx10_HoTT_1_DE.indd Druckbogen 20 von 104 - Seiten (20, 189)
21.10.2011 13:23:34
21.10.2011 13:23:34
188 Description des programmes : Télémétrie
Dénominat. Signifi cation Réglage possible
ALARM
VOLT
Seuil de déclench.
mini de l’alarme
en cas de tension
trop faible de
l’accu
3,0 … 6,0 V
Réglage d’origine :
3,8 V
ALARM
TEMP+
Seuil de déclench.
de l’alarme en cas
de température
trop élevée du
récepteur
50 … 80 °C
Réglage d’origine :
70 °C
ALARM
TEMP–
Seuil de déclench.
de l’alarme en cas
de température
trop basse du
récepteur
-20 … +10 °C
Réglage d’origine :
-10 °C
CH OUTPUT
TYPE
Ordre
chronologique des
voies
ONCE, SAME,
SUMI, SUMO
ALL MAX (débattement maxi du servo)
Dans cette ligne, vous régler la course maximale du
servo, coté Plus, pour les Test servo.
2000 μs correspondent au débattement maximum, 1500
μs correspondent à la position neutre.
ALL MIN (débattement mini du servo)
Dans cette ligne, vous régler la course maximale du
servo, coté Moins, pour les Test servo.
1000 μs correspondent au débattement maximum, 1500
μs correspondent à la position neutre.
TEST
Dans cette ligne, vous pouvez lancer et stopper la
procédure de test servo, intégré au récepteur.
Une impulsion sur la touche INC+DEC vous permet
d’activer le champ d’enregistrement :
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : STOP
Avec une des touches INC ou DEC, sélectionnez
START :
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
Une nouvelle impulsion sur la touche INC+DEC déclen-
che le Test. Le champ est alors de nouveau affi ché en
« normal » :
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
Pour stopper le test, il suffi t d’activer à nouveau le
champ, comme décrit précédemment, de sélectionner
STOP et de confi rmer avec la touche INC+DEC.
ALARM VOLT
(Alarme récepteur en cas de tension trop faible)
Avec ALARM VOLT, vous surveillez la tension de
l’alimentation du récepteur. L’intervalle peut se régler
entre 3,0 et 6,0 Volt. Lorsque la tension chute en-des-
sous d’un seuil, enregistré auparavant, un signal sonore
se déclenche (tonalité courte/longue à intervalles) et sur
tous les affi chages « RX … » écran, « VOLT.E » clignote
en haut à droite :
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
VOLT.E
De plus, sur la page « RX DATAVIEW », le paramètre
«R-VOLT » s’affi che en surbrillance :
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :03.7V
RX DATAVIEW VOLT.E
ALARM TEMP +/-
(surveillance de la température du récepteur)
Ces deux options surveillent la température du récep-
teur. Vous pouvez programmer un seuil mini « ALARM
TEMP– » (-20 … +10 °C) et un seuil maxi « ALARM
TEMP+ » (50 … 80 °C). En cas de dépassement d’un
de ces seuils, un signal sonore retentit (tonalité longue)
et sur tous les écrans récepteur apparaît en haut à droi-
te « TEMP.E ». De plus, sur la page « RX DATAVIEW »,
21
Inbetriebnahme des Senders
Wichtige Hinweise:
Der im Set enthaltene Sender ist ab Werk auf die •
korrekten Einstellungen für den Betrieb in den
meisten Ländern Europas (außer Frankreich) ein-
gestellt.
Wird dagegen das Fernsteuer-System in Frank-
reich betrieben, MUSS zuerst die Ländereinstel-
lung am Sender auf den Modus „FRANKREICH“
gestellt werden, siehe Seite 36/40. AUF KEINEN
FALL DARF IN FRANKREICH der Universal/EU-
ROPE-Modus verwendet werden!
Mit dem Sender • mx-10 HoTT 2.4 können an dem
dem Set beiliegenden und werkseitig bereits an
den Sender gebundenen Empfänger bis zu 5 Ser-
vos betrieben werden.
Achten Sie beim Einschalten, Binden oder Ein-•
stellen der Fernsteuerung unbedingt darauf, dass
die Senderantenne immer ausreichend weit von
den Empfängerantennen entfernt ist! Befi nden
Sie sich nämlich mit der Senderantenne zu nahe
an den Empfängerantennen, übersteuert der
Empfänger und die grüne LED am Empfänger er-
lischt. Parallel dazu fällt der Rückkanal aus und
infolgedessen blinkt die orange Status-LED vier-
mal kurz hintereinander und die korrespondieren-
den Warntöne beginnen. Die Fernsteuerung befi n-
det sich zeitgleich im Fail-Safe-Modus.
Vergrößern Sie in diesem Fall den Abstand solan-
ge, bis die Anzeigen wieder „normal“ sind.
Firmware-Updates des Senders werden über die auf
der Rückseite des Senders befi ndliche dreipolige
PC-Schnittstelle mit Hilfe eines PCs unter Windows XP,
Vista oder 7 auf eigene Gefahr durchgeführt.
Aktuelle Software und Informationen fi nden Sie bei dem
entsprechenden Produkt unter Download auf www.
graupner.de.
Hinweis:
Nach Registrierung Ihres Senders unter httsp://www.
graupner.de/de/service/produktregistrierung werden Sie
automatisch per E-Mail über neue Updates informiert.
Für ein Update der Sendersoftware benötigen Sie
die optionale USB-Schnittstelle Best.-Nr. 7168.6 so-
wie das optionale zweipolige Adapterkabel mit der
Best.-Nr. 7168.6A. Dieses wird direkt in die 3-polige
PC-Anschlussbuchse auf der Rückseite des Senders
eingesteckt.
Update der mx-10 HoTT-Software
Hinweis:
Überprüfen Sie vor jedem Update unbedingt den
Ladezustand Ihres Senderakkus bzw. laden Sie
diesen vorsichtshalber und sichern Sie alle belegten
Modellspeicher, um sie ggf. wiederherstellen zu
können.
Treiber installieren1.
Installieren Sie die erforderliche Treibersoftware, die
den Programmpaketen im Verzeichnis „USB Trei-
ber“ beigefügt ist, um die USB-Schnittstelle Best.-Nr.
7168.6 in Betrieb nehmen zu können.
Starten Sie die Treiberinstallation durch einen Dop-
pelklick auf die entsprechende Datei und folgen Sie
den Anweisungen. Nach erfolgreicher Installation
Firmware-Update des Senders
muss der Computer neu gestartet werden. Der Trei-
ber ist nur einmal zu installieren.
Verbindung Sender / PC herstellen2.
Verbinden Sie das USB-Kabel mit der 3-poligen PC-
Buchse auf der Senderrückseite bei ausgeschalte-
tem Sender. Stecken Sie das Kabel so ein, dass die
orange Leitung nach links, zur Sendermitte zeigt
und die braune nach rechts, zum Rand des Senders.
Wenden Sie keine Gewalt an.
Update 3. mx-10 HoTT-Sendersoftware
Starten Sie das unter den Download-Dateien im Ver-
zeichnis „Firmware-Updater“ enthaltene Programm
„Firmware_Upgrade_ grStudio_VerX.XX.exe“ durch
einen Doppelklick. (Die zum Zeitpunkt der Druckle-
gung dieses Handbuches aktuelle Version 1.3 startet
ohne zuvor erfolgte Installation.):
Wählen Sie unter „Menu“ „Port Setup“ oder öffnen
Sie das „Controller Menu“ und klicken auf „Port se-
lect“:
33110_mx10_HoTT_1_DE.indd Druckbogen 21 von 104 - Seiten (188, 21)
33110_mx10_HoTT_1_DE.indd Druckbogen 21 von 104 - Seiten (188, 21)
21.10.2011 13:23:35
21.10.2011 13:23:35
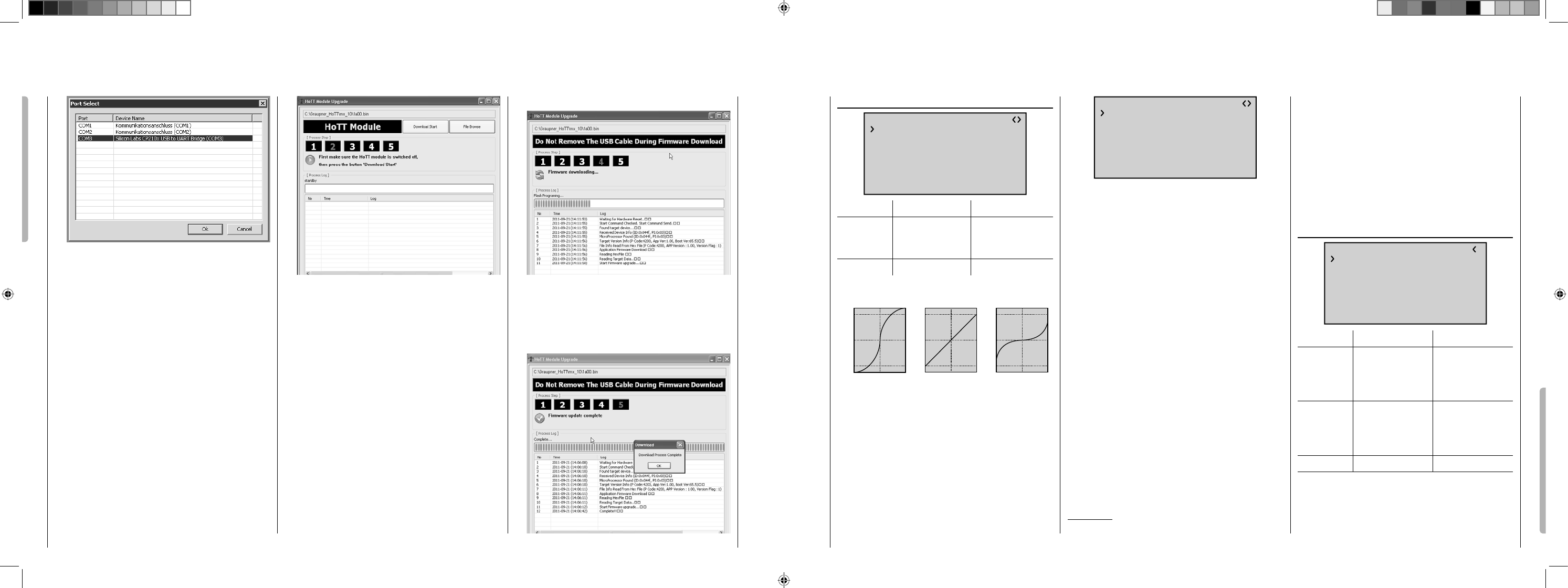
22 Inbetriebnahme des Senders
Wählen Sie nun im Fenster „Port select“ den kor-
rekten COM-Port aus, an welcher die USB-Schnitt-
stelle angeschlossen ist. Erkennbar ist diese an der
Bezeichnung „Silicon Labs CP210x USB to UART
Bridge“ in der Spalte „Device Name“. In obiger Abbil-
dung wäre dieser Port „COM 3“.
Rufen Sie anschließend unter „Menu“ die Opti-
on „HoTT Module Upgrade“ auf oder öffnen Sie das
„Controller Menu“ und klicken auf „HoTT Module“:
Klicken Sie auf den Button mit der Aufschrift „File
Browse“ und wählen Sie in dem nun erscheinenden
„Datei öffen“-Dialog die gewünschte Firmware-Up-
date-Datei mit der Endung „bin“ aus.
Die Firmware-Dateien sind produktspezifi sch codiert,
d. h., sollten Sie aus Versehen eine nicht zum Pro-
dukt passende Datei auswählen (z. B. Empfänger-Up-
date-Datei anstatt Sender-Update-Datei) erscheint
das Popup-Fenster „Product code error“ und der Up-
date-Vorgang lässt sich nicht starten.
Drücken Sie nun den Button „Download Start“. War-
ten Sie, bis der Balken in der Progress-Leiste anläuft.
Dies kann je nach Computer bis zu mehreren Sekun-
den dauern. Nun schalten Sie den Sender bei ge-
drückt gehaltenem BIND-Taster ein. Nach ein paar
Sekunden erscheint im Status Display „Found target
device …“. Nun können Sie den Taster wieder los-
lassen.
Daraufhin startet der eigentliche Update-Vorgang
und oberhalb durchlaufender Textzeilen beginnt ein
Fortschrittsbalken zu laufen:
Unterbrechen Sie den Update-Vorgang nicht, bevor
der Fortschrittsbalken den rechten Rand erreicht hat
und die Meldung „Firmware Download Success“ er-
scheint - ausserdem ertönt eine kurze Betsätigungs-
melodie des Senders und die Status-LED wechselt
von orange zu grün:
187
Description des programmes : Télémétrie
RX CURVE (EXPO)
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Dénominat. Signifi cation Réglage possible
CURVE1, 2
ou 3 CH
Attribution de la
voie de la courbe
correspondante
1 … selon le
récepteur
TYPE Type de courbe A, B, C Voir vue
Expo = +100%
–100% +100%
0
–100% +100%
0
Expo = –100%
TYPE A
–100% +100%
0
–100% +100%
0
linear
–100% +100%
0
–100% +100%
0
TYPE B
TYPE C
DR = 125% DR = 70%
course servo
Débattement de
l’élément de cde
course servo
Débattement de
l’élément de cde
course servo
Débattement de
l’élément de cde
En règle générale, on utilise une courbe de commande
non linéaire pour les ailerons (voie 2), la profondeur
(voie 3) et la direction (voie 4). Cela correspond égale-
ment aux réglages d’origine. Si par exemple, vous avez
enregistré « AILE » sur l’émetteur et que vous voulez
vous servir de l’option RX CURVE dont on parle ici,il
faut, dans ce cas défi nir deux courbes :
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Sinon, l’aileron gauche et l’aileron droit ne présenterai-
ent pas les mêmes caractéristiques de commande.
Avec la fonction RX CURVE, vous pouvez gérer les
caractéristiques de commande de trois servos :
CURVE 1, 2 ou 3 CH•
Choisissez une première voie de commande (INPUT
CH) pour le premier servo.
Le réglage qui suit, dans TYPE, ne concerne que la
voie sélectionnée ici.
TYPE
Choisissez la courbe servo :
A : EXPO = -100% et DUAL RATE = 125%
Le servo de commande réagit violemment lorsque
le manche de commande se déplace près du neut-
re. Plus le débattement de la gouverne augmente et
plus la courbe s’aplatie.
B : Réglage linéaire.
Le servo suit les déplacements du manche de mani-
ère linéaire.
C : EXPO = +100% et DUAL RATE = 70%
Le servo réagit lentement lorsque le manche de com-
mande se déplace près du neutre. Plus le débatte-
ment de la gouverne augmente et plus la courbe se
relève.
Remarque :
Les caractéristiques de commande enregistrées ici agis-
sent également sur les sorties récepteur « mappées ».
Sortie servo 5/Fonction 5 CH
„SERVO“ ou „CAPTEUR“
Sur la sortie 5 qui en plus est repérée par un „T“, on
peut également brancher un capteur de télémétrie.
Mais pour que le récepteur puisse reconnaître correc-
tement le capteur qui y est branché, il FAUT passer la
sortie 5 de „SERVO“ à „SENSOR“ ou inversement.
RX SERVO TEST
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
TEST : STOP
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
Dénominat. Signifi cation Réglage possible
ALL-MAX Pour le Test servo,
course servo coté
« + » pour toutes
les sorties servos
1500 … 2000 μs
ALL-MIN Pour le Test servo,
course servo coté
« - » pour toutes
les sorties servos
1500 … 1000 μs
TEST Procédure Test START / STOP
33110_mx10_HoTT_1_DE.indd Druckbogen 22 von 104 - Seiten (22, 187)
33110_mx10_HoTT_1_DE.indd Druckbogen 22 von 104 - Seiten (22, 187)
21.10.2011 13:23:36
21.10.2011 13:23:36

186 Description des programmes : Télémétrie
Dans ce cas, la sortie servo 04 réagirait en fonction du
réglage Fail Safe de CH 01.
Les temps de réaction ou de retardement enregistrés
dans la ligne « DELAY » s’appliqueront toujours à toutes
les voies réglées sur « FAI(L) SAFE ».
RX FREE MIXER
RX FREE MIXER
MASTER CH: 00
SLAVE CH : 00
S–TRAVEL–: 100
S–TRAVEL+: 100
MODE : 1
RX WING MIXER
TAIL TYPE: NORMAL
Dénominat. Signifi cation Réglage possible
MIXER Choix du mixage 1, 2 ou 3
MASTER CH Voie de cde 0, 1 … 6
SLAVE CH Voie entraînée 0, 1 … selon le
récepteur
S-TRAVEL– Part de mixage
négative
0 … 100%
S-TRAVEL+ Part de mixage
positive
0 … 100%
RX WING
MIXER
Type
d’empennage
(TAIL TYPE)
NORMAL,
V-TAIL
(Empen. en V)
ELEVON
(Mixage Prof./
Ailerons pour Delta
et ailes volantes)
MIXER
Vous pouvez programmer simultanément jusqu’à 3
mixages. Dans « MIXER », sélectionnez le mixage 1,
mixage 2 ou mixage 3.
Les réglages ci-dessous concernent toujours le mixage
sélectionné dans la ligne MIXER.
Remarque importante :
Si vous avez déjà programmé une fonction de mi-
xage dans le menu « Mixages ailes » ou « Mixages
libres », veillez à ce que les mixages ne se recou-
pent pas avec ceux du menu « RX FREE MIXER » !
MASTER CH (« de »)
Selon le même principe, décrit en page 108 au para-
graphe « Mixages libres », le signal de MASTER CH
(source du signal) sera mixé, dans une part réglable à
SLAVE CH (voie cible).
Si vous ne souhaitez aucun mixage, sélectionnez « 00 ».
SLAVE CH (« vers »)
On mixe une part du signal de MASTER CH (voie de
l’élément de cde) à SLAVE CH (voie entraînée). La part
de mixage est déterminée par les valeurs en % enregis-
trées dans les lignes « TRAVEL – » et « TRAVEL + ».
Si vous ne souhaitez aucun mixage, sélectionnez « 00 ».
TRAVEL–/+ (part de mixage en %)
Avec ces valeurs de réglages de ces deux lignes, on
défi nit le pourcentage de la part du mixage, séparément
dans les deux sens, en relation avec le signal MASTER.
TAIL TYPE (type d’empennage)
Les types de modèle qui suivent sont également acces-
sibles en partie par les mixages qui fi gurent sur l‘avant
de l‘émetteur, page 171, et il est conseillé de les enre-
gistrer par là. Dans ce cas, laissez TAIL TYPE toujours
sur NORMAL.
Si toutefois vous souhaitez utiliser des mixages intég-
rés au récepteur, vous pouvez alors choisir entre les dif-
férents mixages préenregistrés pour le type de modè-
le en question:
NORMAL•
Ce réglage correspond à un empennage classique,
avec gouverne de profondeur et gouverne de direc-
tion séparée. Pour ce type de modèle, aucune fonc-
tion de mixage n’est nécessaire.
V-TAIL (Empennage en V)•
Sur ce type de modèle, les fonctions de commandes
de la profondeur et de la direction sont mixées de tel-
le sorte que chaque gouverne de l’empennage est
commandée chacune par un servo séparé. En règle
générale, les servos sont branchés de la manière su-
ivante sur le récepteur :
OUTPUT CH3 : Empennage en V servo gauche
OUTPUT CH4 : Empennage en V servo droit
Si le sens de rotation du servo devait être inversé,
suivez les instructions en page 177.
ELEVON (Delta-/Ailes volantes)•
Les servos branchés sur les sorties 2 et 3 command-
ent les ailerons et la profondeur. Les servos se bran-
chent sur le récepteur de la manière suivante :
OUTPUT CH 2 : Aileron/profondeur gauche
OUTPUT CH 3 : Aileron/profondeur droit
Si le sens de rotation du servo devait être inversé,
suivez les instructions en page 177.
23
Inbetriebnahme des Senders
Klicken Sie auf „OK“. Schalten Sie anschließend den
Sender aus und trennen Sie schließlich die Verbin-
dung zum PC oder Laptop.
Sollte der Fortschrittsbalken nicht vorrücken, schlie-
ßen Sie das Programm und wiederholen Sie den Up-
date-Vorgang. Beachten Sie ggf. erscheinende Feh-
lermeldungen.
I4. nitialisierung des Senders
Nach erfolgreichem Update-Vorgang MÜSSEN Sie
vor der erneuten Benutzung des Senderss aus Si-
cherheitsgründen eine Initialisierung durchführen:
Drücken und halten Sie dazu den BIND-Taster am
Sender und schalten ihn ein. Lassen Sie nun den
BIND-Taster wieder los. Außer den Bindungs-Infor-
mationen sind dabei alle anderen ggf. zuvor program-
mierten Einstellungen im Sender auf die Werksein-
stellungen zurückgesetzt und müssen bei Bedarf neu
eingegeben werden.
Beachte: nach der Initialisierung im Modus „normal“
ist der Sender im Fail-Safe Programmiermodus
(siehe Seite 43), wenn Sie hier nichts programmie-
ren wollen, schalten Sie den Sender jetzt wieder aus.
33110_mx10_HoTT_1_DE.indd Druckbogen 23 von 104 - Seiten (186, 23)
33110_mx10_HoTT_1_DE.indd Druckbogen 23 von 104 - Seiten (186, 23)
21.10.2011 13:23:37
21.10.2011 13:23:37
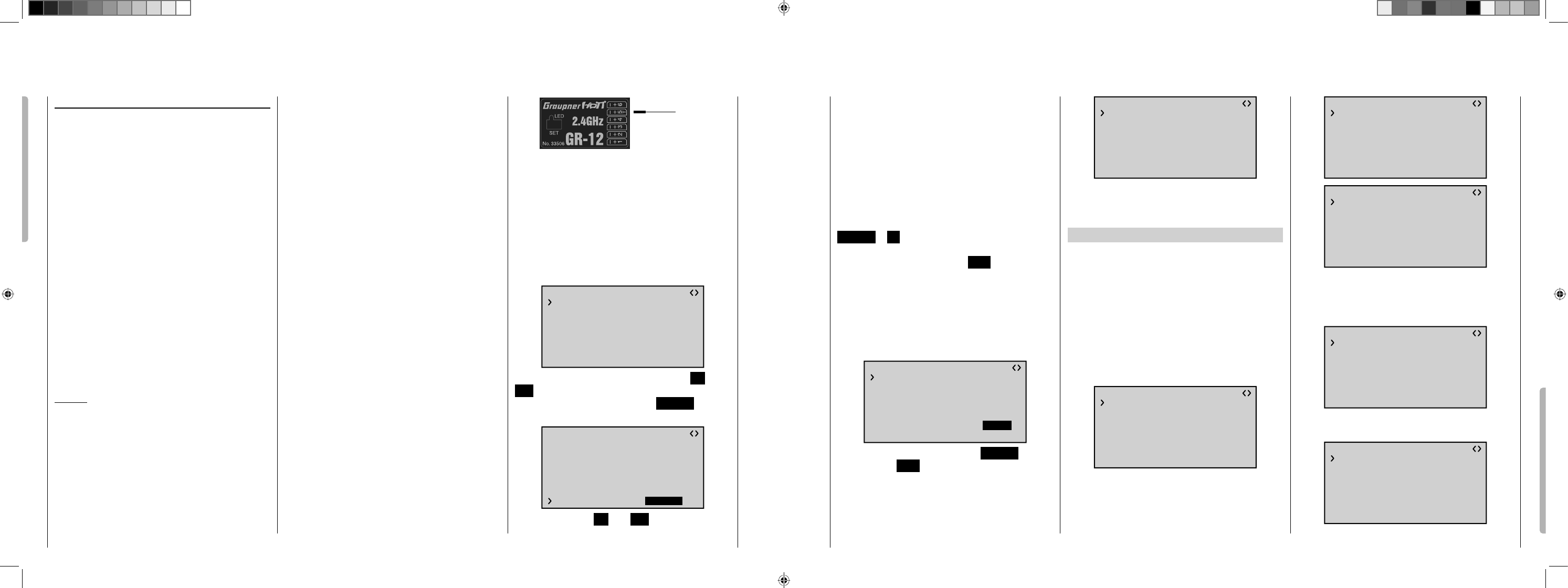
24 Inbetriebnahme des Empfängers
Temperaturwarnung
Sinkt die Temperatur des Empfängers unter einen im
Empfänger einstellbaren Grenzwert (standardmäßig
-10 °C) oder übersteigt diese die ebenfalls im Empfän-
ger einstellbare obere Warnschwelle (standardmäßig
+55 °C), erfolgt eine Warnung durch den Sender in
Form eines gleichmäßigen Piepsen im Rhythmus von
ca. einer Sekunde.
Servoanschlüsse und Polarität
Die Servoanschlüsse der Graupner-HoTT-Empfänger
sind nummeriert. Das Stecksystem ist verpolungssicher.
Achten Sie beim Einstecken der Stecker auf die kleinen
seitlichen Phasen. Wenden Sie auf keinen Fall Gewalt
an.
Die Versorgungsspannung ist über sämtliche num-
merierten Anschlüsse durchverbunden. Sollte kein
Servosteckplatz frei sein, kann über ein V- bzw. Y-Kabel
Best.-Nr. 3936.11 ein Servo auch gemeinsam mit der
Stromversorgung angeschlossen werden.
Verpolen Sie diesen Anschluss nicht! Der Empfän-
ger und ggf. daran angeschlossene Geräte können
zerstört werden.
Die Funktion jedes einzelnen Kanals wird bestimmt
durch den verwendeten Sender, nicht durch den Emp-
fänger. Nicht nur der Gasservoanschluss ist je nach
Fabrikat und Modelltyp unterschiedlich. Bei Graupner-
Fernsteuerungen liegt dieser beispielsweise beim
Flächenmodell auf Kanal 1 und beim Helikopter auf
Kanal 6.
Servoanschluss 5: „SERVO“ oder „SENSOR“
Am, mit einem zusätzlichen „T“ gekennzeichneten,
Servoanschluss 5 …
Servo
Sensor ODER
… kann alternativ nicht nur das Adapterkabel Best.-Nr.
7168.6A zum Updaten des Empfängers sondern auch
ein Telemetrie-Sensor angeschlossenen werden.
Damit das jeweils angeschlossene Gerät jedoch vom
Empfänger auch richtig erkannt wird, MUSS der Servo-
anschluss 5 entsprechend von „SERVO“ auf „SENSOR“
und vice versa umgestellt werden. Dies erfolgt durch
die optionale Smart-Box auf der Seite „RX CURVE“ des
Untermenüs »SETTING AND DATAVIEW«. Näheres
dazu siehe ab Seite 53:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Auf dieser Menüseite verschieben Sie mit der INC oder
DEC-Taste das Symbol „>“ am linken Rand vor die
unterste Zeile und Drücken dann die INC+DEC Tasten
gemeinsam:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Mit einer der beiden INC oder DEC Tasten wählen Sie
Inbetriebnahme des Empfängers
Vorbemerkungen zum GR-12 Empfänger
Empfangsanlage
Im Lieferumfang des Fernsteuer-Sets mx-10 HoTT ist
ein bidirektionaler 2,4-GHz-Empfänger vom Typ GR-12
für den Anschluss von bis zu 6 Servos enthalten.
Um eine Verbindung zum Sender aufbauen zu können,
muss zunächst der Graupner-HoTT-Empfänger mit
„seinem“ Modellspeicher in „seinem“ Graupner-HoTT-
Sender „verbunden“ werden. Diesen Vorgang bezeich-
net man als „Binding“. Dieses „Binding“ ist allerdings nur
einmal je Empfänger-/Modellspeicher-Kombination erfor-
derlich, siehe die Seiten 38 bzw. 42, und wurde bei den
jeweils zusammen im Set gelieferten Geräten bereits
werkseitig vorgenommen, sodass Sie das „Binden“ nur
bei weiteren Empfängern durchführen müssen (und – z.
B. nach einem Senderwechsel – jederzeit wiederholen
können).
Nachdem Sie den mitgelieferten HoTT-Empfänger vom
Typ GR-12 an eine Stromversorgung angeschlossen
und diese eingeschaltet haben, leuchtet deshalb dessen
LED einmal kurz grün auf und bleibt dann dunkel, wenn
„sein“ Sender nicht in Reichweite bzw. ausgeschaltet ist.
Ist eine Verbindung hergestellt, leuchtet die LED dauer-
haft grün.
Hinweis:
Leuchtet die LED dauerhaft grün und der Empfänger
reagiert dennoch weder auf den SET-Taster noch auf
Steuerbefehle, dann überprüfen Sie bitte die Polarität
Ihrer Empfängerstromversorgung.
Bordspannungsanzeige
Die aktuelle Spannung der Empfängerstromversorgung
wird bei bestehender Telemetrie-Verbindung im Display
„RX DATAVIEW“ der optionalen Smart-Box unter RVOLT
angezeigt.
185
Description des programmes : Télémétrie
toutes les voies et ne concerne que les servos qui ont
été programmés en mode « FAI(L) SAFE ».
Réglage d’origine : 0,75 sec.
FAIL SAFE ALL (réglage global Fail-Safe)
Ce sous-menu permet de manière simple de défi nir les
positions Fail Safe des servos par simple impulsion sur
une touche, comme décrit en page 118 dans le menu
«Fail-Safe » :
Allez sur la ligne « FAIL SAFE ALL » et activez le
champ d’enregistrement en appuyant sur les touches
INC+DEC. « NO » s’affi che en surbrillance. Avec une
des fl
èches de la touche quadridirectionnelle droite,
mettez ensuite le paramètre sur « SAVE ». Avec les
éléments de commande de l’émetteur, déplacez tous
les servos dans la position souhaitée auxquels vous
avez attribué, ou que vous voulez attribuer plus tard,
dans la ligne « MODE », « FAI(L) SAFE ». Dans la ligne
inférieure « Position » s’affi che alors la position actuelle
de l’élément de commande pour la voie que vous venez
de régler :
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: SAVE
Une nouvelle impulsion sur la touche INC+DEC, permet
de passer de « SAVE » à « NO ».
Les positions de tous les servos concernés par cette
mesure sont ainsi enregistrées, et parallèlement à cela,
reprises dans la ligne « F.S.Pos. » et affi ché à l’écran
pour l’actuel OUTPUT CH (branchement servo) :
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: NO
Coupez l’émetteur et vérifi ez les positions Fail Safe en
observant les débattements des servos.
« Fail Safe » avec « Channel Mapping »
Pour être sûr, qu’en cas de perturbations les servos
« mappés » - c’est-à-dire tous les servos qui sont com-
mandés par une même voie (INPUT CH) - réagissent de
la même manière, il faut savoir que ce sont les réglages
correspondants de INPUT CH qui déterminent le com-
portement des servos mappés !!!
Si par exemple, les sorties 6, 7 et 8 du récepteur 8 voies
GR-16 Réf.Cde. 33508 sont « mappés », en attribuant
OUTPUT CH (sorties récepteur) servos 06, 07 et 08 en
tant qu’ INPUT CH la même voie de commande « 04 »
…
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 06
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1230sec
DELAY : 0.75sec
OUTPUT CH: 07
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : HOLD
F.S.Pos. : 1770sec
DELAY : 0.75sec
OUTPUT CH: 08
POSITION : 1670sec
FAIL SAFE ALL: NO
… c’est l’INPUT CH 04 qui détermine le comportement
des trois servos branchés sur la voie 4, indépendam-
ment des réglages individuels effectués dans OUTPUT
CH :
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
Egalement si celui-ci est « mappé » par exemple avec
INPUT CH 01 :
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
33110_mx10_HoTT_1_DE.indd Druckbogen 24 von 104 - Seiten (24, 185)
33110_mx10_HoTT_1_DE.indd Druckbogen 24 von 104 - Seiten (24, 185)
21.10.2011 13:23:37
21.10.2011 13:23:37
184 Description des programmes : Télémétrie
INPUT CH (choix de la voie d’entrée)
Comme déjà évoqué, vous avez la possibilité, en cas
de besoin, de répartir les 6 voies de l’émetteur mx-
10 HoTT sur plusieurs récepteurs, mais également
d’attribuer une seule et même fonction à plusieurs
sorties récepteur. Par exemple pour pouvoir commander
une gouverne d’aileron avec deux servos ou une gou-
verne de direction surdimensionnée avec deux servos
accouplés au lieu de les commander avec un seul servo.
Une répartition sur plusieurs récepteurs HoTT est
vivement conseillé, notamment sur les gros modèles,
pour éviter, par exemple, des longueurs de fi ls trop
importantes. Dans ce cas, n’oubliez pas que seul le
dernier récepteur assigné vous donne accès au menu
de « Télémétrie » !
Les 5 voies (INPUT CH) de l’émetteur mx-10 HoTT
peuvent être gérées en conséquence, avec « Channel
Mapping » en attribuant à la sortie récepteur sélecti-
onnée dans la ligne OUTPUT CH, une autre voie de
commande, sur la ligne INPUT CH. MAIS ATTENTION :
Si par exemple coté émetteur, vous avez enregistré
« 2 AL » sur la ligne « Ailerons/Volets » du menu
«Réglages de base », dans ce cas, sur l’émetteur, la
fonction de commande 2 (ailerons) sera répartie sur
les voies 2 + 5 pour la commande de l’aileron gauche
et droit. Dans ce cas, la correspondance et ainsi éga-
lement le mapping éventuel INPUT CH du récepteur
seraient les voies 02 + 05.
Exemples :
Sur un grand modèle vous souhaitez commander un •
volet d’aileron avec deux servos :
Attribuez à OUTPUT CH (branchement servo) le
même INPUT CH (voie de commande). Dans ce cas,
en fonction de l’aile gauche ou droite, comme INPUT
CH c’est une des deux voies de commande stan-
dards des ailerons 2 + 5.
Sur un grand modèle vous souhaitez commander la •
gouverne de direction avec deux ou plusieurs ser-
vos :
Attribuez à OUTPUT CH (branchement servo) le
même INPUT CH (voie de commande). Dans ce cas,
la voie de commande standard de la direction 4.
MODE
Les réglages des options « MODE », « F.S. Pos », et
« DELAY » déterminent le comportement du récepteur
en cas de perturbations de la transmission de l’émetteur
vers le récepteur.
Le réglage enregistré sous « MODE » se réfère toujours
à la voie enregistrée dans la ligne OUTPUT CH.
Le réglage d’origine pour tous les servos est « HOLD ».
Pour chaque OUTPUT CH (branchement servo du
récepteur) sélectionné, vous avez le choix entre :
FAI(L) SAFE•
En cas de perturbations, le servo se met dans la po-
sition affi chée sur la ligne « POSITION » après écou-
lement du temps « Retardement » enregistré sur la
ligne « DELAY », et ce, pour la durée de la perturba-
tion.
HOLD•
Lors d’un réglage « HOLD », en cas de perturba-
tions, le servo reste dans la dernière position recon-
nue correcte, et ce, pour la durée de la perturbation.
OFF•
Lors d’un réglage « OFF », en cas de perturbations,
le récepteur coupe, pour ainsi dire, la transmission
des signaux (enregistrés entre temps) de la sortie ré-
cepteur concernée pour la durée de la perturbation
MAIS ATTENTION : en cas d’absence de signal,
les servos analogiques et certains servos digitaux
n’opposent plus aucune résistance à la contrainte
exercée par la gouverne et peuvent donc être dépla-
cés plus ou moins rapidement de leur position.
F.S.Pos. (Position Fail Safe)
Pour chaque OUTPUT CH (branchement servo du
récepteur), enregistrez avec les touches INC+DEC,
dans la ligne „F
.S. Pos.“ après avoir activé le champ
(en surbrillance) en appuyant simultanément sur la
touche INC+DEC , la position du servo en question,
dans laquelle il doit se mettre en cas de perturbation, en
mode « FAI(L) SAFE ». Le réglage se fait par intervalle
de 10μs.
Réglage d’origine : 1500 μs (neutre du servo)
Remarque importante :
Dans les trois modes, « OFF », « HOLD » et « FAI(L)
SAFE », la fonction « F.S.Pos. » a encore une signifi ca-
tion particulière, dans le cas ou le récepteur est allumé,
mais qu’il ne reçoit pas (encore) un signal correct :
Le servo se met immédiatement dans la position préen-
registrée dans la ligne « Position ». Vous pouvez ainsi
éviter par exemple, que le train rentre, si vous alimentez
par inadvertance le récepteur alors que l’émetteur est
encore coupé. Par contre, en utilisation normale, le
servo en question se comporte, en cas de perturbations,
selon le « MODE » enregistré.
DELAY (Temps de mise en position Fail Safe ou
retardement)
Enregistrez ici le temps au bout duquel les servos
doivent prendre leur position préenregistrée en cas
d’interruption du signal. Ce réglage sera repris pour
25
Inbetriebnahme des Empfängers
nun die alternative Einstellung „SENSOR“:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SENSOR
Mit einem weiteren Druck auf die INC+DEC Tasten
schließen Sie Ihre Wahl ab.
Abschließende Hinweise:
Die erheblich höhere Servoaufl ösung des HoTT-Sys-•
tems führt zu einem spürbar direkteren Ansprechver-
halten im Vergleich zur bisherigen Technologie. Bit-
te machen Sie sich mit dem feinfühligeren Ver halten
vertraut!
Falls Sie parallel zum Empfängerakku einen Dreh-•
zahlsteller mit integriertem BEC*-System verwenden,
muss drehzahlstellerabhängig gegebenenfalls der
Pluspol (rotes Kabel) aus dem 3-poligen Stecker he-
rausgelöst werden. Beachten Sie diesbezüglich unbe-
dingt die entsprechenden Hinweise in der An leitung
des verwendeten Drehzahlstellers.
Mit einem kleinen Schraubendreher vorsichtig die
mittlere Lasche des Ste-
ckers etwas anheben (1),
rotes Kabel herausziehen
(2) und mit Isolierband ge-
gen mögliche Kurzschlüs-
se sichern (3).
rot
1
23
* Battery Elimination Circuit
Servoanschluss 6: Summensignal
Am Servoanschluss 6 ist serienmäßig das Summen-
signal SUMO 05 (siehe auch Seite 55) aktiviert,
somit kann der Empfänger direkt ohne vorherige
Programmierung durch die optionale Smart-Box z.B. für
Mikrokopter oder Flugsimulatoren verwendet werden.
Reset
Um einen Reset des Empfängers durchzuführen, Drü-
cken und Halten Sie den SET-Taster auf der Oberseite
des Empfängers, während Sie dessen Stromversorgung
einschalten. Lassen Sie anschließend den Taster wieder
los.
Wurde der Reset bei abgeschaltetem Sender oder mit
einem ungebundenen Empfänger durchgeführt, erlischt
die LED des Empfänger nach ca. 3 Sekunden und es
kann senderseitig unmittelbar anschließend ein Binde-
Prozess eingeleitet werden.
Wurde bei einem bereits gebundenen Empfänger ein
Reset durchgeführt und ist der zugehörige Modell-
speicher im eingeschalteten Sender aktiv, leuchtet die
LED nach kurzer Zeit grün als Zeichen dafür, dass Ihre
Sende-/Empfangsanlage wieder betriebsbereit ist.
Beachten Sie bitte:
Durch einen RESET werden mit Ausnahme von
Bindings-Informationen ALLE Einstellungen im
Empfänger auf die Werkseinstellungen zurückge-
setzt!
Unbeabsichtigt ausgelöst, sind deshalb nach einem
RESET alle ggf. zuvor per Telemetrie-Menü im Emp-
fänger vorgenommenen Einstellungen wiederherzu-
stellen.
Ein absichtlicher RESET empfi ehlt sich dagegen
insbesondere dann, wenn ein Empfänger in ein
anderes Modell „versetzt“ werden soll! Hierdurch
kann ggf. ohne großen Aufwand die Übernahme
unpassender Einstellungen vermieden werden.
33110_mx10_HoTT_1_DE.indd Druckbogen 25 von 104 - Seiten (184, 25)
33110_mx10_HoTT_1_DE.indd Druckbogen 25 von 104 - Seiten (184, 25)
21.10.2011 13:23:39
21.10.2011 13:23:39
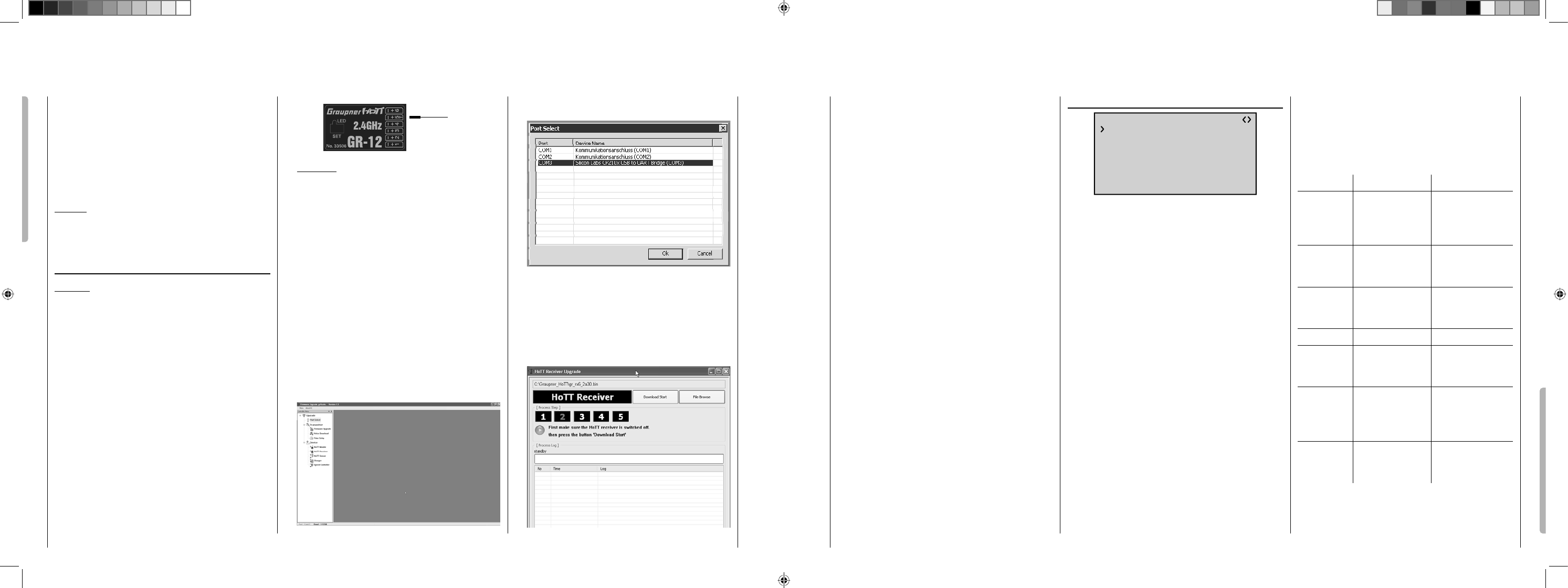
26 Inbetriebnahme des Empfängers
Firmware-Updates des Empfängers werden über den
Telemetrie-Anschluss des Empfängers mit Hilfe eines
PCs unter Windows XP, Vista oder 7 durchgeführt. Dazu
benötigen Sie die optionale USB-Schnittstelle Best.-Nr.
7168.6 sowie das optionale zweipolige Adapterkabel
Best.-Nr. 7168.6A. Die dazu ebenfalls nötigen Pro-
gramme und Dateien fi nden Sie beim entsprechenden
Produkt unter Download auf www.graupner.de.
Hinweis:
Nach Registrierung Ihres Empfängers unter https://www.
graupner.de/de/service/produktregistrierung werden Sie
automatisch per E-Mail über neue Updates informiert.
Update der Empfänger-Firmware
Hinweis:
Überprüfen Sie vor jedem Update unbedingt den La-
dezustand des Empfängerakkus. Laden Sie diesen
ggf. auf, bevor Sie ein Update starten.
Treiber installieren1.
Installieren Sie, falls noch nicht erfolgt, die erforder-
liche Treibersoftware für die USB-Schnittstelle Best.-
Nr. 7168.6 wie auf Seite 21 beschrieben.
Verbindung Empfänger / PC herstellen2.
Verbinden Sie die USB-Schnittstelle Best.-Nr. 7168.6
über das Adapterkabel Best.-Nr. 7168.6A mit dem
Anschluss „- + T“ am Empfänger. Das Stecksystem
ist verpolungssicher, achten Sie auf die kleinen seitli-
chen Phasen. Wenden Sie auf keinen Fall Gewalt an,
der Stecker sollte leicht einrasten:
Firmware-Update des Empfängers
Adapterkabel
Best.-Nr. 7168.6A
falls vorhanden:
mittlere, rote Litze trennen
Achtung:
Sollte das Adapterkabel noch 3-adrig ausgeführt
sein, trennen Sie zuvor die mittlere, rote Litze des
Adapter-Kabels Best.-Nr. 7168.6A durch.
Verbinden Sie anschließend die USB-Schnittstel-
le über das mitgelieferte USB-Kabel (PC-USB/mi-
ni-USB) mit dem PC bzw. Laptop. Bei ordnungsge-
mäßem Anschluss sollte für ein paar Sekunden eine
rote LED auf der Schnittstellenplatine aufl euchten.
Schalten Sie spätestens jetzt die Stromversorgung
Ihres Empfängers ab.
Firmware-Update Utility3.
Starten Sie das unter den Download-Dateien im Ver-
zeichnis „Firmware-Updater“ enthaltene Programm
„Firmware_Upgrade_ grStudio_VerX.XX.exe“ durch
einen Doppelklick. (Die zum Zeitpunkt der Druckle-
gung dieses Handbuches aktuelle Version 1.3 startet
ohne zuvor erfolgte Installation.):
Wählen Sie unter „Port Select“ den COM-Port aus,
an dem die USB-Schnittstelle angeschlossen ist.
Klicken Sie auf den Button mit der Aufschrift „Brow-
se“ rechts oben und wählen Sie in dem nun erschei-
nenden „Datei öffen“-Dialog die zu Ihrem Empfänger
passende Firmware-Update-Datei mit der Endung
„bin“ aus. Diese ist üblicherweise in der zuvor herun-
tergeladenen und entpackten zip-Datei in dem Ver-
zeichnis zu fi nden, dessen Bezeichnung mit der Be-
stellnummer des upzudatenden Empfängers beginnt.
Beim standardmäßig dem Set beiliegenden Empfän-
ger GR-12 wäre dies das Verzeichnis „33506_06CH_
RX“. Die Datei erscheint im zugehörigen Fenster:
Erkennbar ist diese an der Bezeichnung „Silicon
Labs CP210x USB to UART Bridge“ in der Spalte
„Device Name“. In obiger Abbildung wäre dieser Port
„COM 3“.
Rufen Sie anschließend unter „Menu“ die Option
„HoTT Receiver Upgrade“ auf oder öffnen Sie das
„Controller Menu“ und klicken auf „HoTT Receiver“:
K
Kl
K
Kl
Kl
Kl
l
l
i
ic
ic
ic
c
k
ke
ke
ke
ke
ke
n
n
n
Si
Si
S
S
S
e au
f
f
d
d
en
B
B
utton m
i
i
t
d
d
er
A
A
f
u
f
sc
h
h
r
if
if
t
„B
„B
ro
w-
w-
w-
w-
w-
-
w-
w
w
se
se
s
se
e
e
e
“
“
“
“
“
re
re
re
re
re
re
re
re
re
e
ch
ch
ch
ch
ch
ch
ts
ts
ts
ts
ts
ts
o
o
o
o
o
o
be
be
be
be
be
b
be
be
be
e
n
n
n
n
n
n
n
n
n
un
n
un
un
un
un
un
un
un
d
d
d
d
d
d
d
d
d
d
wä
ä
wä
wä
wä
wä
hl
hl
hl
hl
hl
hl
en
en
en
en
en
en
S
S
S
S
S
S
ie
ie
ie
ie
ie
ie
i
i
i
i
i
i
n
n
n
n
n
n
de
de
de
de
de
de
m
m
m
m
m
m
nu
n
nu
nu
nu
nu
n
n
n
n
n
n
er
er
er
er
er
er
sc
sc
sc
sc
sc
sc
he
he
he
he
he
he
h
i-
i
i
i
i
i
ne
ne
ne
ne
e
e
e
nd
nd
nd
nd
nd
nd
en
en
en
en
en
en
„
Da
Da
Da
tetete
ee
e
e
t
i
i
i
i
i
öf
öföf
öf
öf
öf
fefefe
f
fe
fe
fe
n“n“n“
n
n
n
-D
-D
-D
-
-D
-D
-D
ia
iaia
ia
ia
ia
lolo
lo
l
lo
lo
lo
g
g
g
g
g
g
g
dididi
di
di
di
eee
e
e
e
zu
z
z
z
zu
z
z
zu
I
I
I
hr
hr
hr
em
em
em
E
E
E
mp
mp
mp
fä
fä
fä
ngngng
n
e
er
e
pa
pa
pa
pa
a
a
a
ss
ss
ss
ss
ss
ss
en
en
en
en
en
en
de
de
de
de
F
F
F
F
ir
i
ir
ir
r
ir
i
mw
mw
mw
mw
mw
mw
ar
ar
ar
ar
r
ar
ar
e-
e-
e
e
e-
e-
Up
Up
Up
Up
Up
Up
Up
da
da
da
da
da
da
te
te
te
te
te
te
-D
-D
D
D
-D
-D
at
at
at
at
at
at
ei
ei
ei
ei
e
ei
ei
m
m
m
m
m
m
m
it
it
it
t
it
it
d
d
d
d
d
d
d
er
er
er
er
er
er
E
E
E
E
nd
nd
nd
nd
un
un
un
un
ggg
g
„
„b
„
„
in
i
i
i
i
n
n
“
au
au
au
s.
s
s
D
D
D
ieieie
e
se
se
se
i
i
i
st
st
st
ü
ü
ü
bl
bl
bl
ic
ic
ic
he
he
he
rw
rw
rw
ei
ei
ei
se
se
se
i
i
i
n
n
n
de
de
de
r
r
r
zu
zu
zu
vo
vo
vo
r
r
r
he
he
he
rururu
r
n
n-
n
t
te
te
rg
r
r
r
r
rg
rg
el
el
ad
ad
en
en
en
enenen
n
u
u
u
nd
nd
e
e
e
nt
nt
nt
pa
pa
pa
ck
ck
te
te
te
n
n
n
zi
zi
p-
p-
p
Da
Da
te
te
te
i
i
in
in
d
d
em
em
em
V
V
ererer
e
-
-
ze
ze
z
ze
e
ic
ic
hn
hn
is
is
z
z
u
u
fi
fi
fi
nd
nd
en
en
,
de
de
ss
ss
en
en
B
B
ez
ez
ei
ei
ch
ch
nu
nu
ng
ng
m
m
it
it
d
d
er
er
B B
B
e-
e-
-
s
st
s
s
el
e
e
e
e
el
ln
ln
um
um
um
me
me
me
rrr
r
de
de
s
s
s
up
up
up
zu
zu
zu
da
da
te
te
te
nd
nd
en
en
en
E
E
mp
mp
mp
fä
fä
ng
ng
ng
er
er
er
s
s
s
be
be
gigi
nn
nn
nn
t
.
.
Be
Be
Be
Be
e
e
e
im
im
im
s
s
s
ta
ta
ta
nd
nd
nd
ararar
a
dm
dm
dm
äß
äß
äß
ig
ig
ig
d
d
d
em
em
em
S
S
S
et
et
et
b
b
b
ei
ei
ei
li
li
li
eg
eg
eg
en
en
en
de
de
de
n
n
n
Em
Em
Em
pf
pfpf
f
än
än
än
-
ge
ge
ge
ge
e
e
e
r
r
r
GR
GR
GR
-1
-1
-1
2
2
2
wä
wä
wä
w
re
re
re
d
d
d
ie
ie
ie
s
s
s
da
da
da
s
s
s
Ve
Ve
Ve
rz
rz
rz
ei
ei
ei
ch
ch
ch
ni
ni
ni
s
s
s
„3
„3
„3
35
35
35
06
06
06
_0
0
0
6C
6C
6C
C
H
H_
H
_
_
_
R
R
RX
R
“
. Die Datei erscheint im zu
ge
e
e
e
hö
ri
ri
ri
ri
ge
g
ge
ge
g
g
g
n
Fe
F
F
ns
s
s
s
te
te
te
te
r:
r
r
r
183
Description des programmes : Télémétrie
tenant retenue comme nouvelle position neutre.
TRIM (Position Trim)
Sur cette ligne « TRIM », vous pouvez ajuster de ma-
nière fi ne la position neutre du servo branché sur la
voie de commande sélectionnée dans la ligne « OUT-
PUT CH » avec les fl èches de la touche droite, par cran
de 1-μs : la valeur Trim enregistrée ici est ajustable dans
la ligne « CENTER » dans une plage de +/-120 μs.
Réglage d’origine : 0 μs
TRAVEL–/+ (Course servo, -/+)
Cette option sert à régler la limitation d’un coté ou de
l’autre de la course du servo (débattement de la gou-
verne) branché sur la voie de commande sélectionnée
dans la ligne « OUTPUT CH ».
Le réglage se fait séparément, de chaque coté, dans
une plage de 30 … 150%.
Réglage d’origine : 150% de part et d’autre
PERIOD (Temps cycle)
Sur cette ligne, vous déterminez l’intervalle de temps de
chaque impulsion. Ce réglage sera le même pour toutes
les voies.
Si vous n’utilisez que des servos digitaux, vous pouvez
enregistrer un temps cycle de 10 μs.
Si vous n’utilisez que des servos analogiques, ou si
utilisez des servos digitaux et analogiques, vous devez
impérativement enregistrer 20 μs, sinon les servos ana-
logiques risquent d’être « surchargés », ils commencent
alors à « frétiller » et à « grogner ».
RX FAIL SAFE
RX FAIL SAFE
INPUT CH: 01
MODE : HOLD
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500sec
La description de ce menu nécessite auparavant quel-
ques mots d’explication :
« Ne rien faire est la pire des choses ! ». D’origine, c’est
le mode « HOLD (maintien en position) » qui est enre-
gistré sur le récepteur HoTT. En cas de perturbations, et
dans le meilleur des cas, le modèle poursuit une trajec-
toire rectiligne pendant un certain temps et se « pose »,
du moins il faut l’espérer, quelque part sans faire trop
de dégâts ! Si cela arrive au mauvais moment et au
mauvais endroit, le modèle peut par exemple devenir
incontrôlable, fi ler au-dessus du terrain en mettant les
pilotes ou les spectateurs en danger !
C’est pourquoi, il faut tout de même se poser la questi-
on, pour diminuer les risques, s’il ne faut pas program-
mer, au moins, une coupure moteur !?
Et encore une petite remarque relative aux trois pos-
sibilités de réglage Fail Safe que propose l’émetteur
mx-10 HoTT :
Pour le réglage Fail Safe, la manière la plus simple, et
celle qui est d’ailleurs conseillée, est de passer par le
menu « Fail Safe » que vous pouvez atteindre à partir
de la liste Multifonctions, voir page 177.
De manière similaire, mais un peu plus compliqué à
atteindre, vous pouvez également vous servir de l’option
« FAIL SAFE ALL » décrite sur la double page qui suit.
En dernier ressort, vous avez encore à disposition,
une méthode relativement complexe pour un réglage
individuel avec les options « MODE », « F.S. Pos », et
« DELAY ». La description de ces différentes variantes
débute avec l’option « MODE » ci-dessous.
Dénominat. Signifi cation Réglage possible
OUTPUT CH Sortie récept.
(branchement
servo du
récepteur)
1 … selon le
récepteur
INPUT CH Entrée (voie de
cde venant de
l’émetteur)
1 … 16
MODE Mode Fail Safe HOLD
FAIL SAFE
OFF
F.S.Pos. Position Fail Safe 1000 … 2000 μs
DELAY Temps de
réaction
(retardement)
0,25, 0,50, 0,75 et
1,00 s
FAIL SAFE
ALL
enregistre les
positions Fail
Safe de toutes les
voies
NO / SAVE
POSITION Affi chage des
positions Fail Safe
enregistrées
entre 1000 et 2000
μs
OUTPUT CH (branchement servo)
Dans cette ligne, vous sélectionnez OUTPUT CH (bran-
chement servo sur le récepteur) à régler.
33110_mx10_HoTT_1_DE.indd Druckbogen 26 von 104 - Seiten (26, 183)
33110_mx10_HoTT_1_DE.indd Druckbogen 26 von 104 - Seiten (26, 183)
21.10.2011 13:23:39
21.10.2011 13:23:39
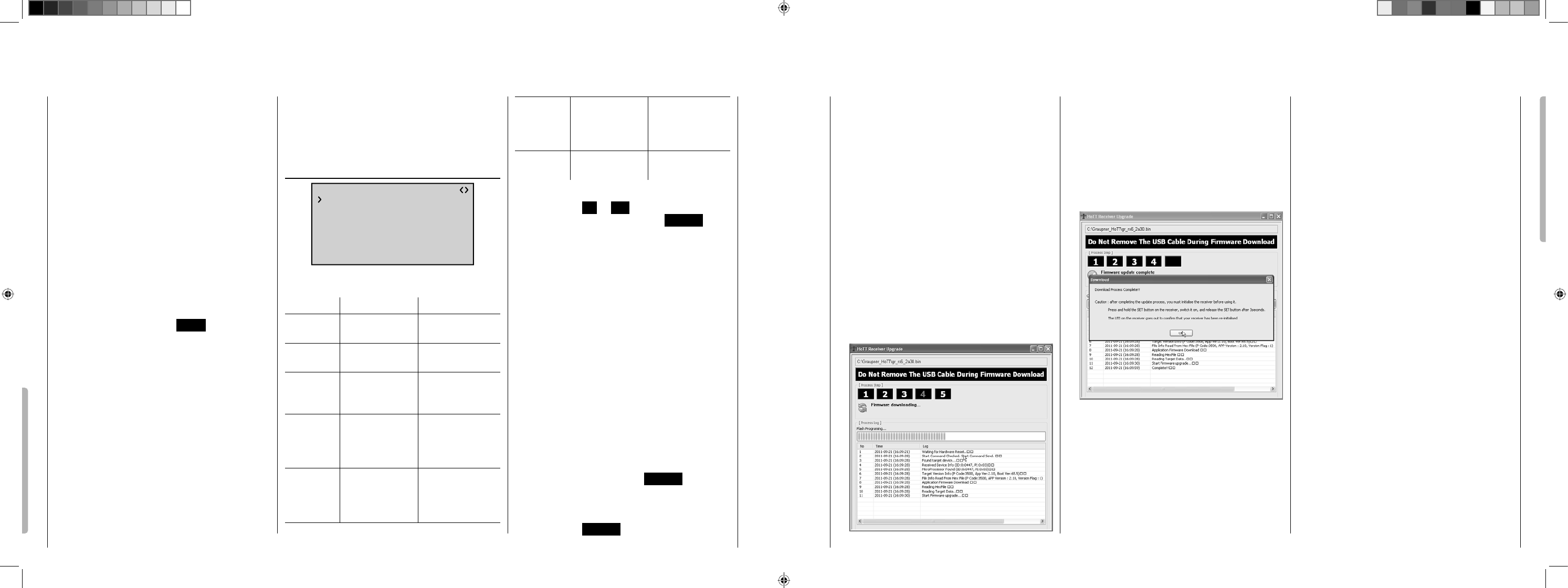
182 Description des programmes : Télémétrie
Paquet de données (L PACK TIME)
Affi che le laps de temps le plus long durant lequel des
paquets de données ont été perdus lors de la transmis-
sion de l’émetteur vers le récepteur. En pratique, c’est le
temps le plus long durant lequel la radio a été en mode
Fail Safe.
Tension de fonctionnement (R-VOLT)
Vérifi ez toujours la tension d’alimentation de votre ré-
cepteur. Si elle est trop basse, pas question de décoller.
Vérifi ez toujours la tension d’alimentation de votre ré-
cepteur. Si elle est trop basse, pas question de décoller.
Le seuil de déclenchement de l’alarme en cas de tensi-
on trop basse peut être réglé dans le sous-menu « RX
SERVO TEST » sous « ALARM VOLT » entre 3,0 et 6,0
Volt. En cas de dépassement de ce seuil, une alarme
sonore se déclenche (double tonalité courte/longue,
répétitive) et dans tous les sous-menus récepteur « RX
… » apparaît en haut à droite « VOLT.E ». Par ailleurs,
dans le sous-menu « RX DATAVIEW », la paramètre
«R-VOLT » s’affi che en surbrillance.
La tension actuelle de l’accu de réception est également
affi chée sur la page d’ouverture de l’écran, voir page 24.
Tension minimale (L.R-VOLT)
« L.R-VOLT » indique la tension minimale du récepteur
depuis sa dernière mise en route.
Si l’écart de cette tension devait être trop important par
rapport à la tension actuelle « R-VOLT », il est possible
que l’accu de réception soit trop fortement sollicité par
les servos. Il en résulte des chutes de tension. Dans ce
cas, utilisez un accu de réception plus puissant, pour
obtenir une plus grande fi abilité.
Capteur 1 + 2
Indique les valeurs des capteurs télémétriques 1 et/
ou 2, en option, en Volt et en °C. Vous trouverez une
description de ces sondes et capteurs en annexe.
RX SERVO
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
Avant toute programmation, consultez cette page et
suivez les consignes donnés en page 120.
Dénominat. Signifi cation Réglage possible
OUTPUT CH Choix canal 1 … selon le
récepteur
REVERSE Inv. du sens du
servo
OFF / ON
CENTER Neutre servo
en μs
si activé (invers)
dépend de la pos.
de l’élém. de cde
TRIM Pos. du trim en
μs Différent de la
position CENTER
(neutre)
-120 … +120 μs
TRAVEL– Limitation du
débattement à
% de la course
servo
30 … 150%
TRAVEL+ Limitation du
débattement à
% de la course
servo
30 … 150%
PERIOD Temps cycle en
ms
10 ou 20 ms
OUTPUT CH (Choix du canal)
Avec les touches INC ou DEC, sélectionnez la ligne
« Canal ». Appuyez simultanément sur INC+DEC . Le
champ en question s’affi che en surbrillance. Avec les
fl èches de la touche quadridirectionnelle droite, vous
pouvez maintenant choisir le canal souhaité (par ex. 01).
Les paramètres qui suivent se réfèrent toujours au
canal enregistré ici :
Reverse (Inversion du sens de rotation servo)
Permet de régler le sens de rotation du servo branché
sur la voie de commande sélectionnée : ON / OFF
CENTER (neutre du servo)
Dans cette ligne « CENTER », lorsque le champ est
activé, (en surbrillance) s’affi che le temps d’impulsion
actuel en μs de la voie de commande sélectionnée dans
la ligne « OUTPUT CH ».
La valeur affi chée dépend de la position de l’élément de
commande et éventuellement de la position de son trim.
Un temps d’impulsion de 1500 μs correspond au neutre,
c’est standard et à la position milieu du servo.
Pour modifi er cette valeur, sélectionnez la ligne « CEN-
TER », puis appuyez sur touches INC+DEC. Déplacez
maintenant l’élément de commande correspondant dans
la position souhaitée et enregistrez la position actuelle
de cet élément de commande en appuyant une nouvelle
fois sur la touche INC+DEC. Cette position sera main-
27
Inbetriebnahme des Empfängers
Die Firmware-Dateien sind produktspezifi sch codiert,
d. h., sollten Sie aus Versehen eine nicht zum Pro-
dukt passende Datei auswählen (z. B. Sender-Up-
date-Datei anstatt Empfängerdatei) erscheint das
Popup-Fenster „Product code error“ und der Update-
Vorgang lässt sich nicht starten.
Drücken Sie nun den Button „Download Start“. War-
ten Sie, bis der Balken in der Progress-Leiste anläuft.
Dies kann je nach Computer bis zu mehreren Sekun-
den dauern. Nun schalten Sie den Empfänger bei ge-
drückt gehaltenem SET-Taster ein. Nach ein paar
Sekunden erscheint im Status Display „Found target
device …“. Nun können Sie den Taster wieder los-
lassen.
Wird das Gerät hingegen nicht erkannt, erscheint das
Popup- Fenster „Target device ID not found“.
Daraufhin startet der eigentliche Update-Vorgang
und oberhalb durchlaufender Textzeilen beginnt ein
Fortschrittsbalken zu laufen:
Bricht der Prozess vor Erreichen der 100 %-Mar-
ke ab, dann schalten Sie die Stromversorgung Ihres
Empfängers ab und starten anschließen einen wei-
teren Updateversuch. Führen Sie dazu die obigen
Schritte erneut aus.
Im Status-Display und in der Progress-Leiste sehen
Sie den Fortschritt des Firmware-Updates. Das Up-
date ist abgeschlossen, wenn das Popup-Fenster
„Download Process Complete!!“ erscheint:
Während des Update-Vorgangs leuchtet am Empfän-
ger die grüne LED. Parallel zum erfolgreichem Ab-
schluss des Updates erlischt die grüne LED.
Schalten Sie den Empfänger aus und entfernen Sie
das Schnittstellenkabel. Ggf. wiederholen Sie den
Vorgang bei weiteren Empfängern.
Initialisierung des Empfängers4.
Nach erfolgreichem Update-Vorgang MÜSSEN Sie
vor der erneuten Benutzung des Empfängers aus Si-
cherheitsgründen eine Initialisierung durchführen:
Drücken und halten Sie dazu den SET-Taster am
Empfänger und schalten Sie dann dessen Stromver-
sorgung ein. Lassen Sie den den SET-Taster nach
ca. 3 Sekunden wieder los - bzw. sobald die grüne
LED erlischt. Wenn Sie anschließend auch den Sen-
der wieder einschalten, leuchtet nach ca. 2 bis 3 Se-
kunden die grüne LED des Empfängers dauerhaft.
Außer den Bindungs-Informationen sind jedoch alle
anderen ggf. zuvor programmierten Einstellungen im
Empfänger auf die Werkseinstellungen zurückgesetzt
und müssen bei Bedarf neu eingegeben werden.
33110_mx10_HoTT_1_DE.indd Druckbogen 27 von 104 - Seiten (182, 27)
33110_mx10_HoTT_1_DE.indd Druckbogen 27 von 104 - Seiten (182, 27)
21.10.2011 13:23:40
21.10.2011 13:23:40
28 Installationshinweise
Die Reihenfolge, in der die Servos anzuschließen sind,
ist modelltypabhängig vorgegeben. Beachten Sie dazu
die Anschlussbelegungen auf den Seiten 34 und 35.
Beachten Sie darüber hinaus die Sicherheitshinweise
auf den Seiten 3 … 6.
Um unkontrollierte Bewegungen der an der Empfangs-
anlage angeschlossenen Servos zu vermeiden, bei der
Inbetriebnahme
zuerst den Sender
dann den Empfänger einschalten
und bei Einstellung des Betriebs
erst den Empfänger
dann den Sender ausschalten.
Achten Sie beim Programmieren des Senders unbedingt
darauf, dass Elektromotoren nicht unkontrolliert anlaufen
können oder ein mit einer Startautomatik betriebener
Verbrennungsmotor nicht unbeabsichtigt startet. Trennen
Sie sicherheitshalber den Antriebsakku ab bzw. unter-
brechen Sie die Treibstoffzufuhr.
Im Folgenden einige Hinweise und Anregungen für
den Einbau von Fernsteuerkomponenten im Modell:
Wickeln Sie den Empfänger in einen mindestens 1.
6 mm dicken Schaumgummi. Fixieren Sie den
Schaumgummi mit Gummibändern am Empfänger,
um diesen gegen Vibrationen, harte Landungen oder
einen Crash zu schützen.
Alle Schalter müssen unbehelligt von Auspuffgasen 2.
oder Vibrationen eingebaut sein. Der Schalterknauf
muss über seinen gesamten Arbeitsbereich frei zu-
gänglich sein.
Montieren Sie die Servos auf Gummitüllen mit Mes-3.
sing-Hohllagern, um diese vor Vibration zu schüt-
zen. Ziehen Sie die Befestigungsschrauben aber
nicht zu fest an, sonst wird der Vibrationsschutz
durch die Gummitüllen hinfällig. Nur wenn die Ser-
vo-Befestigungsschrauben richtig angezogen sind,
bietet dieses System Sicherheit sowie einen Vibrati-
onsschutz für Ihre Servos. Im Bild unten sehen Sie,
wie ein Servo richtig montiert wird. Die Messinglager
werden von unten in die Gummitüllen eingeschoben.
Befestigungslasche
Schraube
Gummitülle
Messing-Hohllager
Die Servoarme müssen im gesamten Ausschlagbe-4.
reich frei beweglich sein. Achten Sie darauf, dass kei-
ne Gestängeteile den freien Servoausschlag behin-
dern können.
Installationshinweise
Einbau des Empfängers
Gleichgültig, welches Graupner-Empfangssystem Sie
verwenden, die Vorgehensweise ist stets die gleiche:
Bitte beachten Sie, dass die Empfangsantennen minde-
stens 5 cm von allen großen Metallteilen oder Verdrah-
tungen, die nicht direkt aus dem Empfänger kommen,
entfernt angeordnet werden müssen. Das umfasst
neben Stahl- auch Kohlefaserteile, Servos, Kraftstoff-
pumpen, alle Sorten von Kabeln usw.. Am besten wird
der Empfänger abseits aller anderen Einbauten an gut
zugänglicher Stelle im Modell angebracht. Unter keinen
Umständen dürfen Servokabel um die Antennen gewi-
ckelt oder dicht daran vorbei verlegt werden!
Bitte beachten Sie, dass Kabel unter dem Einfl uss der
im Fluge auftretenden Beschleunigungskräfte u. U. ihre
Lage verändern könnten. Stellen Sie daher sicher, dass
sich die Kabel in der Umgebung der Antennen nicht be-
wegen können. Sich bewegende Kabel können nämlich
den Empfang stören.
Tests ergaben, dass eine vertikale (aufrechte) Montage
einer einzelnen Antenne bei weiten Anfl ügen die besten
Ergebnisse liefert. Bei Diversity-Antennen (zwei Anten-
nen) sollte die zweite Antenne im 90° Winkel zur ersten
Antenne ausgerichtet werden.
Die Servoanschlüsse der Graupner-Empfänger sind
nummeriert. Die Stromversorgung ist über sämtliche
nummerierten Anschlüsse durchverbunden und kann
prinzipiell an jedem beliebigen der 6 Anschlüsse er-
folgen. Ggf. kann über ein V- bzw. Y-Kabel Best.-Nr.
3936.11, parallel zur Stromversorgung auch ein Servo
angeschlossen werden.
181
Description des programmes : Télémétrie
ACTION VOLT et ALARM VOLT sont affi chés en surbril-
lance.
Réglage pays (COUNTRY)
Ce réglage pays est nécessaire pour respecter les diver-
ses législations et directives en vigueur dans les diffé-
rents pays. Les radios HoTT 2,4 sont équipé d‘un bande
de fréquence restreinte, notamment pour la France. Si
l’émetteur doit être utilisé en France, il faut tout d’abord
mettre l’émetteur en mode „Frankreich (France)“. Il est
interdit de l‘utiliser en mode „GENERAL (EUROPA)“.
Réglage d‘origine, GENERAL.
Essai de portée (RANGE TEST)
permet de lancer ou de stopper l‘essai de portée, le
temps restant est affi ché à l‘écran. Cet affi chage se fait
également même si l‘essai de portée a été déclenché
avec la touche BIND de l‘émetteur.
RX DATAVIEW
… du sous menu « REGLAGE/AFFICHAGE » aucun
réglage ne peut être réalisé. Cette page n’est là qu’à
titre informatif :
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
Dénominat. Signifi cation
S-QUA Qualité du signal en %
S-dBm Puissance de réception en dBm
S-STR Puissance du signal en %
R-TEM. Température récepteur en °C
L PACK TIME Affi che le laps de temps le plus long
durant lequel des paquets de données
ont été perdus lors de la transmission
de l’émetteur vers le récepteur
R-VOLT Tension actuelle du récepteur en Volt
Qualité du signal (S-QUA)
La qualité du signal (S-QUA) est transmise à l’émetteur
par la voie retour du récepteur, en temps réel, et indique
la puissance du signal en %.
Puissance de réception (S-dbm)
La puissance de réception (S-dBm) est affi chée avec
des valeurs négatives, cela signifi e qu’une valeur proche
de zéro est la valeur maximale (= réception la meil-
leure), plus les valeurs diminuent, moins bonne sera la
puissance de réception ! Cela est important, entre autre
lors de l’essai de portée, avant utilisation du modèle.
Remarque :
Dans le cas de valeurs négatives, l’estimation d’un
chiffre s’inverse : Plus la valeur qui suit le sigle Moins
est élevée, plus sa valeur est minime.
Avant chaque vol, faites un essai de portée comme
décrit en pages 173 et 176 et simulez toutes les dé-
placements servos susceptibles d’intervenir en vol. La
portée, lorsque le mode essai de portée est activé, doit
être de 50 m minimum. Pour garantir un fonctionnement
en toute sécurité, il faut qu’à l’écran « RX DATAVIEW
(Données RX) » sous « S-dBm » ne soit pas affi chée
une valeur supérieure à -80 dBm. Si la valeur est
en-dessous (par ex. - 85 dBm), il ne faut en aucun cas
décoller avec vote modèle. Vérifi ez le montage de votre
ensemble de réception et la position des antennes.
En vol, cette valeur ne devrait pas chuter en-dessous
des -90 dBm, sinon rapprochez-vous du modèle. Mais
normalement, avant d’atteindre cette valeur, une alarme
de limite de portée sonore est déclenchée (tonalité à
intervalle d’une seconde) pour garantir une utilisation en
toute sécurité.
Puissance du signal (S-STR)
La puissance du signal (S-STR) est affi chée en %. En
règle générale, une alarme de limite de portée sonore
est déclenchée (tonalité à intervalle d’une seconde) dès
que le signal récepteur de la voie de retour est trop fai-
ble. Mais comme la puissance d’émission de l’émetteur
est bien supérieure à celle du récepteur, le modèle
peut encore être piloté de manière sûre. Mais il faudra
néanmoins réduire l’éloignement du modèle jusqu’à
extinction de l’alarme.
Température récepteur (R-TEM.)
Assurez-vous, quelque soient les conditions de vol,
que votre récepteur reste dans la plage de température
autorisée (idéalement entre –10 et +55°C)
Les seuils de température du récepteur, à partir
desquels l’alarme se déclenche sont réglables dans
le sous-menu « RX SERVO TEST » sous « ALARM
TEMP+ » (50 … 80°C et sous « ALARM TEMP- » (-20
… +10°C). En cas de dépassement, vers le haut ou
vers le bas, une alarme sonore se déclenche, et dans
tous les sous-menus récepteur « RX »apparaît en haut
à gauche « TEMP.E ». Par ailleurs, sur la page « RX
DATAVIEW », le paramètre « R-TEM » s’affi che en
surbrillance.
33110_mx10_HoTT_1_DE.indd Druckbogen 28 von 104 - Seiten (28, 181)
33110_mx10_HoTT_1_DE.indd Druckbogen 28 von 104 - Seiten (28, 181)
21.10.2011 13:23:40
21.10.2011 13:23:40
180 Description des programmes : Télémétrie
teur peuvent également être affectées à une seule et
même fonction. Par exemple pour commander un ai-
leron avec deux servos au lieu d’un seul, etc. Là aus-
si, la plus grande attention est requise lors de la
programmation.
Télémétrie
Tous les menus relatifs à la „Télémétrie“ sont accessib-
les avec la Smart-Box en option.
Fixez la SMART-BOX sur la poignée de l‘émetteur, c‘est
un emplacement idéal. Avec le cordon à 3 fi ls, reliez
la Box à l‘émetteur. Branchez une extrémité du cordon
dans la prise DATA de l‘émetteur et l‘autre dans la prise
située sur le coté droit de la SMART-BOX. La connec-
tique est équipée de détrompeurs, il s‘agit des petites
arêtes latérales de la prise. Ne les montez pas en force,
les prises doivent se brancher facilement. Les fi ches
sont également repérées: Fils noir (-), fi ls rouge (+) et
fi ls orange (Signal).
Utilisation - Généralités
La navigation dans le menu „Télémétrie“ de la Smart-
Box se fait avec les quatre touches de fonction en haut
de la Box.
Les touches ESC et ENTER vous permettent d‘aller
d‘une page d‘écran à l‘autre. En haut à droite de chaque
page, le sens dans lequel vous allez sera indiqué par (<
>), voir ci-contre. S‘il n‘y a qu‘un seul signe, vous êtes
soit sur la première ou la dernière page. Vous ne pouvez
donc allez que dans le sens indiqué.
Avec les touches DEC et INC vous pouvez, sur une
page, sélectionner les paramètres (INC déplace le
curseur vers le bas, DEC vers le haut).
Vous pouvez marquer les lignes sur lesquelles des
paramètres ont été modifi és en plaçant devant la ligne
un sigle (>). En appuyant sur les touches INC ou DEC,
le sigle „ > „ saute à la ligne suivante ou se place sur la
ligne précédente. Les lignes non accessibles ne sont
pas utilisables.
Pour modifi er un paramètre, appuyez simultanément
sur les touches INC+DEC (le paramètre s‘affi che alors
en surbrillance), modifi ez la valeur dans la limite de la
plage de réglage, avec les touches INC ou DEC et enre-
gistrez la valeur en appuyant une nouvelle fois simulta-
nément sur les touches INC+DEC. Avec une impulsion
sur la touche ESC vous revenez au point de départ.
REGLAGE/AFFICHAGE
MENU SETTING AND DATAVIEW
Sur la première page intitulée ...
TX
... du sous menu „ REGLAGE/AFFICHAGE“ une partie
seulement des réglages peut être effectuée. Cette page
n‘a le mérite d‘exister que pour donner des informations
sur les réglages généraux de l‘émetteur.
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
Dénomination Signifi cation Réglages
possibles
ACTION VOLT Tension actuelle
de l‘émetteur en
Volt
-
MAXIMUM
VOLT
Tension maximale
depuis la dernière
mise en route
-
MINIMUM
VOLT
Tension minimale
depuis la dernière
mise en route
-
ALARM VOLT Tension à partir
de laquelle
l‘émetteur
déclenche un
signal d‘alerte.
4 – 15 V par cran
de 0.1 V
D‘origine à 4.5 V
COUNTRY Réglage pays GENERAL /
FRANCE
RANGE TEST Indique si un
essai de portée
est en cours, si
c‘est la cas, le
temps restant
s‘affi che
OFF / ON
Alarme tension émetteur trop faible (ALARM VOLT)
Vous pouvez régler le seuil de déclenchement de
l‘alarme lorsque la tension passe en-dessous de ce
seuil qui est réglable entre 4 – 15 V – d‘origine il est
réglé à 4,5 Volt.
Si cette alarme est activée, „VOLT.E“ clignote en haut à
droite de l‘écran de la SMART-BOX, et les paramètres
REGLAGE/AFFICHAGE
29
Installationshinweise
Stromversorgung der Empfangsanlage
Ein sicherer Modellbetrieb setzt u. a. eine zuverlässige
Stromversorgung voraus. Sollte trotz leichtgängiger
Gestänge, vollem Akku, Akku-Anschlusskabel mit genü-
gend Querschnitt, minimalen Übergangswiderständen
an den Steckverbindungen usw. die auf dem Sender-
display angezeigte Empfängerspannung immer wieder
einbrechen bzw. generell (zu) niedrig sein, beachten Sie
bitte die nachfolgenden Hinweise:
Achten Sie zuvorderst darauf, dass die Akkus bei
Aufnahme des Modellbetriebs stets vollgeladen sind.
Achten Sie auch auf widerstandsarme Kontakte und
Schalter. Messen Sie ggf. den Spannungsabfall über
das verbaute Schalterkabel unter Last, da dabei selbst
hochbelastbare, neue Schalter einen Spannungsabfall
von bis zu 0,2 Volt verursachen. Infolge von Alterung
und Oxydation der Kontakte kann sich dieser Wert auf
ein mehrfaches erhöhen. Zudem „nagen“ andauernde
Vibrationen und Erschütterungen an den Kontakten
und sorgen solcherart ebenfalls für eine schleichende
Erhöhung der Übergangswiderstände.
Darüber hinaus können selbst kleine Servos wie ein
Graupner/JR DS-281 bis zu 0,75 Ampere „ziehen“ wenn
Sie unter Last blockieren. Allein vier dieser Servos in
einem „Foamie“ können somit schon dessen Bordstrom-
versorgung mit bis zu 3 Ampere belasten …
Sie sollten deshalb eine Stromversorgung wählen,
welche auch unter hoher Last nicht zusammenbricht,
sondern auch dann eine immer noch ausreichende
Spannung liefert. Zur „Berechnung“ der nötigen Akku-
kapazität sollten Sie mindestens 350 mAh für jedes
analoge Servo und mindestens 500 mAh für jedes
digitale Servo ansetzen.
Unter diesem Gesichtspunkt würde beispielsweise
ein Akku mit 1400 mAh zur Stromversorgung einer
Empfangsanlage mit insgesamt 4 Analogservos das
absolute Minimum darstellen. Berücksichtigen Sie bei
Ihren Berechnungen aber auch den Empfänger, der auf
Grund seiner bidirektionalen Funktion etwa 70 mA an
Strom benötigt.
Unabhängig davon empfi ehlt es sich generell, den
Empfänger über zwei Kabel an die Stromversorgung an-
zuschließen. Beispielsweise, indem Sie einen Schalter
oder Spannungsregler mit zwei zum Empfänger führen-
den Stromversorgungskabel verwenden. Benutzen Sie
ggf. zwischen Kabel und Empfänger ein V- bzw- Y-Kabel
Best.-Nr.: 3936.11, siehe Abbildung, falls Sie einen oder
beide Anschlüsse des Empfängers auch zum Anschluss
eines Servos, Drehzahlstellers etc. benötigen. Sie redu-
zieren durch die doppelte Anbindung an den Schalter
bzw. Spannungsregler nicht nur das Risiko eines Kabel-
bruchs, sondern sorgen auch für eine gleichmäßigere
Stromversorgung der angeschlossenen Servos.
Sonderfunktion
V-Kabel
Best.-Nr. 3936.11
PRX stabilisierte Emp-
fängerstromversorgung
Best.-Nr. 4136
NiMH-Akku-Packs mit 4 Zellen
Mit den traditionellen 4-Zellen-Packs können Sie Ihre
Graupner-HoTT-Empfangsanlage unter Beachtung der
vorstehend beschriebenen Bedingungen gut betreiben,
vorausgesetzt, die Packs haben ausreichende Kapazität
und Spannungslage!
NiMH-Akku-Packs mit 5 Zellen
Akku-Packs mit fünf Zellen bieten einen größeren Span-
nungsspielraum im Vergleich zu 4-Zellen-Packs.
Beachten Sie jedoch bitte, dass nicht jedes auf
dem Markt erhältliche Servo die Spannung eines
5 -Zellen-Packs (auf Dauer) verträgt, insbesondere dann,
wenn diese frisch geladen sind. Manche dieser Servos
reagieren darauf beispielsweise mit deutlich vernehm-
barem „knurren“.
Achten Sie deshalb auf die Spezifi kation der von Ihnen
verwendeten Servos, bevor Sie sich für den Einsatz
eines 5-Zellen-Pack entscheiden.
LiFe, 6,6 V mit 2 Zellen
Unter den derzeit gegebenen Gesichtspunkten sind
diese neuartigen Zellen die beste Wahl!
Zum Schutz gegen mechanische Beschädigungen sind
LiFe-Zellen auch in Hardcase-Plastikgehäusen lieferbar.
LiFe-Zellen sind ebenso wie LiPo-Zellen in Verbindung
mit geeigneten Ladegeräten schnellladefähig und
vergleichsweise robust.
Darüber hinaus wird diesem Zellentyp eine deutlich hö-
here Anzahl von Lade-/Entladezyklen als beispielsweise
LiPo-Akkus zugeschrieben. Die Nennspannung von 6,6
Volt eines zweizelligen LiFe-Akku-Packs bereiten weder
den Graupner-HoTT-Empfängern Probleme noch den
ausdrücklich zum Betrieb in diesem – höheren – Span-
nungsbereich zugelassenen Servos, Drehzahlsteller,
Gyros usw.. Bitte beachten Sie jedoch, dass prak-
tisch alle in der Vergangenheit und auch die meisten
der derzeit am Markt angebotenen Servos, Drehzahl-
steller, Gyros usw. nur einen zulässigen Betriebs-
spannungsbereich von 4,8 bis 6 Volt haben. Deren
Anschluss an den Empfänger erfordert also zwingend
den Einsatz einer stabilisierten Spannungsregelung wie
z. B. dem PRX mit der Best.-Nr. 4136, siehe Anhang.
Anderenfalls besteht die Gefahr, dass die angeschlos-
senen Geräte in kürzester Zeit Schaden erleiden.
33110_mx10_HoTT_1_DE.indd Druckbogen 29 von 104 - Seiten (180, 29)
33110_mx10_HoTT_1_DE.indd Druckbogen 29 von 104 - Seiten (180, 29)
21.10.2011 13:23:41
21.10.2011 13:23:41
30 Installationshinweise
LiPo Packs mit 2-Zellen
Bei gleicher Kapazität sind LiPo-Akkus leichter als z. B.
NiMH-Akkus. Zum Schutz gegen mechanische Beschä-
digungen sind LiPo-Akkus auch mit einem Hardcase-
Plastikgehäuse lieferbar.
Die vergleichsweise hohe Nennspannung von 7,4 Volt
eines zweizelligen LiPo-Packs bereiten dagegen weder
den Graupner-HoTT-Empfängern Probleme noch den
ausdrücklich zum Betrieb in diesem – höheren – Span-
nungsbereich zugelassenen Servos, Drehzahlsteller,
Gyros usw.. Bitte beachten Sie jedoch, dass prak-
tisch alle in der Vergangenheit und auch die meisten
der derzeit am Markt angebotenen Servos, Drehzahl-
steller, Gyros usw. nur einen zulässigen Betriebs-
spannungsbereich von 4,8 bis 6 Volt haben. Deren
Anschluss an den Empfänger erfordert also zwingend
den Einsatz einer stabilisierten Spannungsregelung wie
z. B. dem PRX mit der Best.-Nr. 4136, siehe Anhang.
Anderenfalls besteht die Gefahr, dass die angeschlos-
senen Geräte in kürzester Zeit Schaden erleiden.
179
Description des programmes : Télémétrie
Télémétrie
Avec ce menu « Télémétrie », vous avez accès, en
temps réel, aux données de l’émetteur et du récepteur
ainsi qu’aux données optionnelles transmises par les
capteurs et sondes, voir annexe, ces données sont
consultables et programmables.
Les données récepteur sont transmises à l’émetteur par
la voie de retour d’informations intégrée dans le récep-
teur HoTT.
Sur les récepteurs GR-12S HoTT (Réf.Cde 33505),
GR-12 HoTT (Réf.Cde 33506), GR-16 (Réf.Cde 33508)
et GR-24 HoTT (Réf.Cde 33512) vous pouvez brancher
1 capteur ou sonde de télémétrie sur la sortie télémé-
trique.
La possibilité de mise à jour (Update), par l’utilisateur
lui-même, de ces récepteurs, et de ceux à venir, permet
d’avoir toujours les menus de télémétrie corresponds à
jour et permet d’assurer une extension des fonctions ou
langues par la suite.
Remarque :
Après avoir enregistré votre produit sous http://www.
graupner.de/fr/service/enregistrer_produit, vous serez
informé automatiquement par Mail des dernières mises
à jour disponibles.
Sauvegardez sur un portable ou sur un PC compatible,
avant toute mise à jour de l’émetteur, toutes les mé-
moires de modèle occupées, pour y avoir à nouveau
accès en cas de pertes de données.
Les mises à jour, ainsi que les sauvegardes évoquées
ci-dessus se font par prise PC de l’émetteur avec le
cordon adaptateur USB en option Réf.Cde. 7168.6 et le
cordon de branchement Réf.Cde. 7168.6A sur PC équi-
pé du système d’exploitation Windows XP, Vista ou 7.
Vous trouverez les logiciels et informations nécessaires,
par produit, en téléchargement sous www.graupner.de. Il
est toujours conseillé de télécharger les dernières mises
à jour, pour être sûr de toujours avoir un produit à la
dernière version.
Remarques importantes :
cette notice, à l’heure de sa mise sous presse, ne ti-•
ent compte que des fonctions actuellement disponi-
bles.
comme déjà mentionné en pages 172 et 175 au pa-•
ragraphe « Binding de plusieurs récepteurs », vous
pouvez, en cas de besoin assigner plusieurs récep-
teurs à un seul modèle. Mais ce n’est que le derni-
er récepteur assigné qui sera en mesure d’établir
une liaison télémétrique avec l’émetteur. Mais
cela signifi e également que ce n’est que le dernier
récepteur assigné qui permettra l’accès au menu de
télémétrie ! Il faudra éventuellement modifi er la sui-
te chronologique des procédures Binding avant de
pouvoir effectuer des réglages particuliers sur un ré-
cepteur.
Lors des réglages de l’émetteur, veillez impérati-•
vement à ce que l’antenne d’émission soit suffi -
samment éloignée des antennes de réception ! A
1 mètre de distance, vous ne courrez plus aucun
risque. Si vous êtes trop près, la voie du retour
d’informations risque d’être perturbée avec com-
me conséquence, des dysfonctionnements.
Comme les données télémétriques entre émetteur et •
récepteur ne sont transmises que par paquet de qua-
tre données à la fois, la transmission des données
nécessite un peu de temps, la réaction lorsque vous
appuyez sur un touche de fonction et lorsque vous
modifi ez des réglages ne pourra donc pas se fai-
re immédiatement. Dans ce cas, il ne s’agit pas d’un
dysfonctionnement.
Des programmations au niveau du modèle ou des •
capteurs/sondes, ne peuvent se faire que si le mo-
dèle est au sol. Ne faites ces réglages que lorsque le
moteur est coupé ou lorsque l’accu de propulsion est
débranché ! Sinon, des programmations non souhai-
tées ne sont pas à exclure.
Un test servos activé par inadvertance au niveau du
récepteur peut conduire au crash du modèle avec
toutes les conséquences matérielles et physiques
qu’il pourrait entraîner. Respectez les consignes de
sécurité en pages 137 … 140 de cette notice et les
instructions de chaque élément utilisé.
Tous les réglages effectués dans le menu « • Té-
lémétrie » (Fail-Safe, sens de rotation servo, course
servo, mixages et réglages des courbes) ne sont en-
registrés que dans le récepteur, et seront repris au-
tomatiquement si vous montez ce récepteur dans un
autre modèle. C’est pourquoi, il vaut mieux réinitiali-
ser le récepteur si vous souhaitez le monter dans un
autre modèle, voir « Reset », page 159.
C’est pourquoi, ne programmez le sens de rotati-•
on servo, course servo, mixages et réglages des
courbes qu’à travers les menus standards et spéci-
fi ques de l’émetteur mx-10 HoTT, « Réglages ser-
vos » (page 177), « Mixages » (page 171) et « Dual
Rate » (page 177), sinon les réglages successifs
peuvent s’écraser, ce qui peut se traduire par la sui-
te, en utilisation, par une grande confusion, et dans
le pire des cas, par de sérieux problèmes.
Avec la fonction Channel-Mapping qui est intég-•
rée dans le menu « Télémétrie » de l’a Smart-Box
en option, des fonctions peuvent être réparties sur
plusieurs récepteurs, mais plusieurs sorties récep-
33110_mx10_HoTT_1_DE.indd Druckbogen 30 von 104 - Seiten (30, 179)
33110_mx10_HoTT_1_DE.indd Druckbogen 30 von 104 - Seiten (30, 179)
21.10.2011 13:23:41
21.10.2011 13:23:41
178 Description des programmes: Réglages servos
Allumez votre ensemble de réception.
Mettez l‘interrupteur de mode en position „normal“. Ap-
puyez et maintenez la touche BIND enfoncée pendant
que vous allumez l‘émetteur.
Ne relâchez la touche qu‘une fois l‘émetteur allumé.
Le mode Fail-Safe souhaité (Fail-Safe ON/OFF, Hold
ou Standard) pourra être sélectionné en appuyant à
chaque fois brièvement sur la touche BIND située sur le
devant de l‘émetteur, de manière circulaire:
Mode Fail-Safe•
Après avoir appuyé sur la touche BIND, l‘émetteur émet
une fois un bip sonore. La LED de l‘émetteur clignote
alternativement du vert à l‘orange. Pour enregistrer
la position que les servos doivent prendre en cas de
Fail-Safe après un temps „Hold“ de 0,75 sec., mettez
les éléments de commande correspondants de votre
émetteur EN MÊME TEMPS dans la position Fail-Safe
souhaitée. Appuyez ensuite sur la touche BIND et restez
dessus durant 3 à 4 secondes. Après avoir relâché la
touche, la LED doit rester allumée à l‘orange et le signal
sonore de l‘émetteur devrait disparaître. Celui-ci se
retrouve de nouveau en mode de commande. Sinon,
reprenez la procédure.
Mode Hold (conseillé pour les hélicoptères!)•
Réglage d‘origine. L‘émetteur émet deux bips sono-
res après impulsion sur la touche BIND, la LED de
l‘émetteur clignote, alternativement au vert et deux fois
à l‘orange. En cas de perturbations, tous les servos
programmés sur „maintien“ resteront dans leur derni-
ère position reconnue correcte jusqu‘à réception d‘un
signal correct par le récepteur. Pour confi rmer ce choix,
appuyez sur la touche BIND et restez dessus durant
3 à 4 secondes. Après avoir relâché la touche, la LED
doit rester allumée à l‘orange et le signal sonore de
l‘émetteur devrait disparaître. Celui-ci se retrouve de
nouveau en mode de commande. Sinon, reprenez la
procédure
Fail-Safe OFF•
Après avoir appuyé sur la touche BIND, l‘émetteur émet
trois bips sonores. La LED de l‘émetteur clignote alter-
nativement au vert et trois fois à l‘orange. Pour confi rmer
ce choix, appuyez sur la touche BIND et restez dessus
durant 3 à 4 secondes. Après avoir relâché la touche,
la LED doit rester allumée à l‘orange et le signal Après
avoir relâché la touche, la LED doit rester allumée à
l‘orange et le signal sonore de l‘émetteur devrait dis-
paraître. Celui-ci se retrouve de nouveau en mode de
commande. Sinon, reprenez la procédure.
Mode standard (n‘est adapté qu‘aux modèles à •
voilure fi xe!)
Après avoir appuyé sur la touche BIND, l‘émetteur émet
quatre bips sonores. La LED de l‘émetteur clignote
alternativement au vert et quatre fois à l‘orange. Dans
ce mode, en cas de Fail-Safe, le servo de commande
des gaz (voie 1) se mettra en position Fail-Safe enre-
gistrée auparavant, toutes les autres voies resteront en
„Hold“. Mettez alors le manche de commande des gaz
dans la position souhaitée, puis appuyez, pour confi rmer
ce choix, sur la touche BIND durant 3 ou 4 secondes.
Après avoir relâché la touche, la LED doit rester allu-
mée à l‘orange et le signal sonore de l‘émetteur devrait
disparaître our confi rmer ce choix, appuyez sur la
touche BIND et restez dessus durant 3 à 4 secondes.
Après avoir relâché la touche, la LED doit rester allumée
à l‘orange et le signal sonore de l‘émetteur disparaît.
Celui-ci se retrouve de nouveau en mode de comman-
de. Sinon, reprenez la procédure.
Remarque:
Avec la Smart-Box en option, on peut programmer des
positions Fail-Safe séparément, pour toutes les voies. A
ce sujet, voir paragraphe „Télémétrie“ en page 183.
31
Installationshinweise
Begriffsdefi nitionen
Steuerfunktion, Geber, Funktionseingang, Steuerkanal, Mischer, Schalter, Smart-Box
Um Ihnen den Umgang mit dem mx-10 HoTT-Hand-
buch zu erleichtern, fi nden Sie nachfolgend einige
Defi nitionen von Begriffen, die im laufenden Text immer
wieder verwendet werden.
Steuerfunktion
Unter „Steuerfunktion“ ist – vorerst einmal unabhängig
vom Signalverlauf im Sender – das Signal für eine
bestimmte Steuerfunktion zu verstehen. Bei Flächen-
fl ugzeugen stellen z. B. Gas, Seite oder Quer eine
solche dar, bei Hubschraubern z. B. Pitch, Rollen oder
Nicken. Das Signal einer Steuerfunktion kann direkt
einem bzw. über Mischer auch mehreren Steuerkanälen
zugeführt werden. Ein typisches Beispiel für Letzteres
sind getrennte Querruderservos oder ein V-Leitwerk.
Die Steuerfunktion schließt insbesondere den Einfl uss
des mechanischen Geberweges auf das entsprechende
Servo ein.
Geber
Unter „Geber“ sind die vom Piloten unmittelbar zu betä-
tigenden Bedienelemente am Sender zu verstehen, mit
denen empfängerseitig die angeschlossenen Servos,
Drehzahlsteller etc. betrieben werden. Dazu zählen:
die beiden Kreuzknüppel für die Steuerfunktionen •
1 bis 4, wobei diese vier Funktionen in beiden
Modelltypen („Fläche“ und „Hubschrauber“) mittels
„Mode“-Einstellung softwaremäßig beliebig unterei-
nander vertauschbar sind, z. B. Gas links oder rechts.
Die Kreuzknüppelfunktion zur Gas-/Bremsklappen-
steuerung wird häufi g auch mit K1-Geber (Kanal 1)
bezeichnet.
die Schalter für Kanal 5•
Bei den proportionalen Bedienelementen werden •
die Servos der Geberposition entsprechend direkt
folgen, während im Falle eines der Schaltmodule nur
eine zwei- bzw. dreistufi ge Verstellung möglich ist.
Funktionseingang
Dieser ist ein eher imaginärer Punkt im Signalfl uss und
darf keinesfalls mit dem Geberanschluss auf der Platine
gleichgesetzt werden! Die Wahl der „Steueranord-
nung“ beeinfl usst nämlich „hinter“ diesen Anschlus-
spunkten noch die Reihenfolge, wodurch durchaus
Differenzen zwischen der Nummer des Gebereinganges
und der Nummer des nachfolgenden Steuerkanals
entstehen können.
Steuerkanal
Ab dem Punkt, ab dem im Signal für ein bestimmtes
Servo alle Steuerinformationen – ob direkt vom Geber
oder indirekt über Mischer – enthalten sind, wird von
einem Steuerkanal gesprochen. Dieses Signal wird nur
noch von den im Menü »Servoeinstellung« vorgenom-
menen Einstellungen beeinfl usst und verlässt dann über
das HF-Modul den Sender. Im Empfänger angekom-
men, wird dieses Signal ggf. noch von den per Teleme-
trie-Menü vorgenommenen Einstellungen modifi ziert um
dann letztlich das zugehörige Servo zu steuern.
Mischer
In der Software des Sender sind Mischer für verschie-
dene Ruderanordnungen wie Querruder oder Deltafl ügel
enthalten. Diese dienen dazu, eine Steuerfunktion
gegebenenfalls auch auf mehrere Servos oder auch um
mehrere Steuerfunktion auf ein Servo wirken zu lassen.
Beachten Sie bitte die Mischfunktionen der optionalen
Smart-Box ab Seite 53 im Handbuch.
Schalter
Der serienmäßige Kippschalter für Kanal 5 bewegt das
angeschlossene Servo in die max./min. Endposition.
Smart-Box
Die optional erhältliche Smart-Box erlaubt die Nutzung
vieler weiterer HoTT-Funktionen wie z.B.
Senderspannungsanzeige mit instellbarer Warn-•
schwelle
Empfängertemperatur•
Servoweg•
Kanalvertauschung - Channel Mapping•
Mischereinstellungen•
Signalqualität•
Empfängerspannung•
Servoneutralstellung•
Zykluszeit•
kanalabhängige Fail-Safe-Einstellungen•
Servotest•
siehe dazu den Abschnitt „Telemetrie“ auf Seite 45.
Näheres zur Smart-Box fi nden Sie im Graupner Haupt-
katalog FS sowie im Internet unter www.graupner.de bei
dem jeweiligen Produkt.
33110_mx10_HoTT_1_DE.indd Druckbogen 31 von 104 - Seiten (178, 31)
33110_mx10_HoTT_1_DE.indd Druckbogen 31 von 104 - Seiten (178, 31)
21.10.2011 13:23:42
21.10.2011 13:23:42
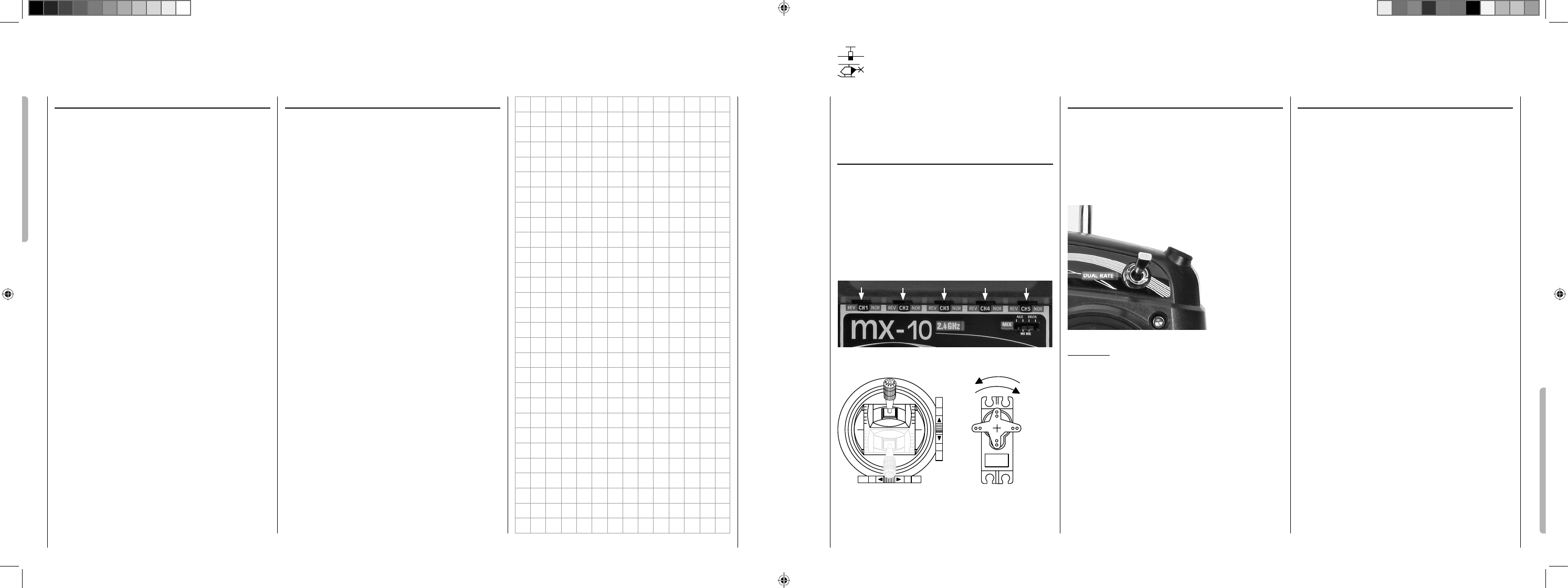
32 Digitale Trimmung und Knüppelkalibrierung
Digitale Trimmung und Knüppelkalibrierung
Funktionsbeschreibung
Digitale Trimmung mit akustischer Anzeige
Die beiden Kreuzknüppel sind mit einer digitalen Trim-
mung ausgestattet. Kurzes Drücken der Trimmschalter
verstellt mit jedem „Klick“ die Neutralposition der
Kreuzknüppel um einen bestimmten Wert. Bei längerem
Festhalten läuft die Trimmung mit zunehmender Ge-
schwindigkeit in die entsprechende Richtung.
Die Verstellung wird auch akustisch durch unterschied-
lich hohe Töne „hörbar“ gemacht. Während des Fluges
die Mittenposition wiederzufi nden, ist daher auch ohne
Blick auf das Display problemlos: Bei Überfahren der
Mittenposition wird eine kurze Pause eingelegt.
Die aktuellen Trimmwerte werden automatisch abge-
speichert.
Die digitale Trimmung funktioniert nur bei eingeschal-
tetem Sender, ist der Sender hingegegen aus, ändert
auch ein versehentliches Berühren der Trimmhebel nicht
die eingestellten Werte.
Knüppelkalibrierung
Sollten Sie das Gefühl haben, dass die Mittelstellung
Ihrer selbstneutralisierenden Steuerknüppel nicht exakt
0 % Geberweg entspricht bzw. die Endposition nicht
exakt 100%, dann können Sie dies folgendermaßen
korrigieren:
Schalten Sie den Sender, wenn noch nicht geschehen
aus, und stecken den mitgelieferten Programmierste-
cker in die DATA-Buchse auf der Rückseite und den
Jumper in die Position „DELTA“ auf der Vorderseite des
Senders. Bringen Sie nun beide Steuerknüppel in die
Mittelstellung. Schalten Sie den Sender ein. Der Sender
beginnt nach einer Sekunde für 10 Sek. einmal pro Sek.
zu piepsen. Bewegen Sie während dieser 10 Sekunden
beide Steuerknüppel in alle Endpositionen, damit der
Sender diese speichern kann. Nach Ablauf der 10 Sek.
ist die Kalibrierung beendet und der Sender geht in den
Normalbetrieb über, die Pieptöne verstummen. Schalten
Sie den Sender aus und entfernen Sie anschließend
den Programmierstecker auf der Rückseite. Benutzen
Sie keinesfalls die Fernsteuerung mit eingestecktem
Programmierstecker!
Gegebenfalls stecken Sie noch den Jumper in die
korrekte Position für Ihr Modell.
Sollten Sie während dieser 10 Sek. nicht alle Knüppel-
Endpositionen erreicht haben, wiederholen Sie den
gesamten Vorgang.
177
Description des programmes: Réglages servos
Débattements servos „Dual Rate“
Pour un réglage symétrique du débattement de la
profondeur, de la direction et des ailerons, quelque soit
le coté du débattement.
Au niveau de l‘émetteur, la course du servo est enregis-
trée de manière fi xe et peut être réglée soit à 70% (en
mettant l‘interrupteur vers l‘avant) ou 100% (en mettant
l‘interrupteur en position arrière).
Remarque:
Avec la Smart-Box en option, la course du servo peut
être programmée également de manière asymétrique
pour toutes les voies. Voir paragraphe „Télémétrie“ en
page 183.
Avec l‘émetteur mx-10 HoTT, vous avez la possibilité
d‘inverser le sens de rotation des servos et de modifi er
leurs débattements.
Sens de rotation des servos
Le sens de rotation des servos sera adapté en fonction
de leur montage dans le modèle, de manière à ce que
pour le montage des tringles vous n‘ayez pas à tenir
compte du sens de rotation des servos. Le sens de rota-
tion de chaque servo peut être inversé séparément sur
la barrette des interrupteurs Servoreverse située sur le
devant de l‘émetteur. Le sens de rotation est symbolisé
par „NOR“ pour le sens de rotation normal, et par „REV“
lorsqu‘il est inversé.
Réglages Servos
Sens de rotation, débattements des servos et Failsafe
Voie 1 Voie 3Voie 2 Voie 4 Voie 5
normal
inversé
normal
inversé
S
S
T
T
S
S100 %
T
T70 %
Fail Safe
D‘origine, le récepteur maintient, en cas de situation Fail
Safe, les servos dans leurs dernières positions reconnu-
es correctes („hold“). En cas de Fail Safe, la LED verte
du récepteur s‘éteint, et sur l‘émetteur, la LED orange
clignote 3 fois de suite consécutivement. Par ailleurs,
celui-ci émet alors 3 bips sonores pour attirer l‘attention,
conformément au clignotement de la LED. Utilisez tout
epotentiel de sécurité de cette option, pour que dans un
cas Fail-Safe, qu’au moins le moteur thermique se mette
au ralenti, ou dans le cas d’une motorisation électrique,
que le moteur se coupe (Stop), et en programmant par
ex. „Hold (maintien)“ s’il s’agit d’un hélicoptère. En cas
de perturbations ou d’interférences le modèle ne pourra
pas faire n’importe quoi aussi facilement et vous pourrez
éviter des dégâts matériels, voire corporels.
Remarque importante:
Vous pouvez lancer les deux procédures „Binding“ et
„Essai de portée“ indépendamment du fait que vous
ayez programmé l‘émetteur avec la touche de program-
mation ou avec la Smart-Box. Aucune de ces deux
options n‘a de conséquences réelles sur les réglages
enregistrés sur le récepteur. Par contre, TOUS les régla-
ges seront remis à leur valeur d‘origine, également ceux
entrepris avec la Smart-Box sur la page Fail-Safe (RX
FAIL SAFE) si vous ouvrez la fonction Fail-Safe, comme
décrit ci-dessous, avec la touche de programmation.
Si auparavant vous avez enregistré avec la touche de
programmation le réglage pays „France“, celui-ci sera
également perdu, voir ci-dessous!
De ce fait, il faudra refaire à nouveau ce réglage. Dans
la mesure du possible, faites toujours vos réglages avec
la Smart-Box!
33110_mx10_HoTT_1_DE.indd Druckbogen 32 von 104 - Seiten (32, 177)
33110_mx10_HoTT_1_DE.indd Druckbogen 32 von 104 - Seiten (32, 177)
21.10.2011 13:23:42
21.10.2011 13:23:42
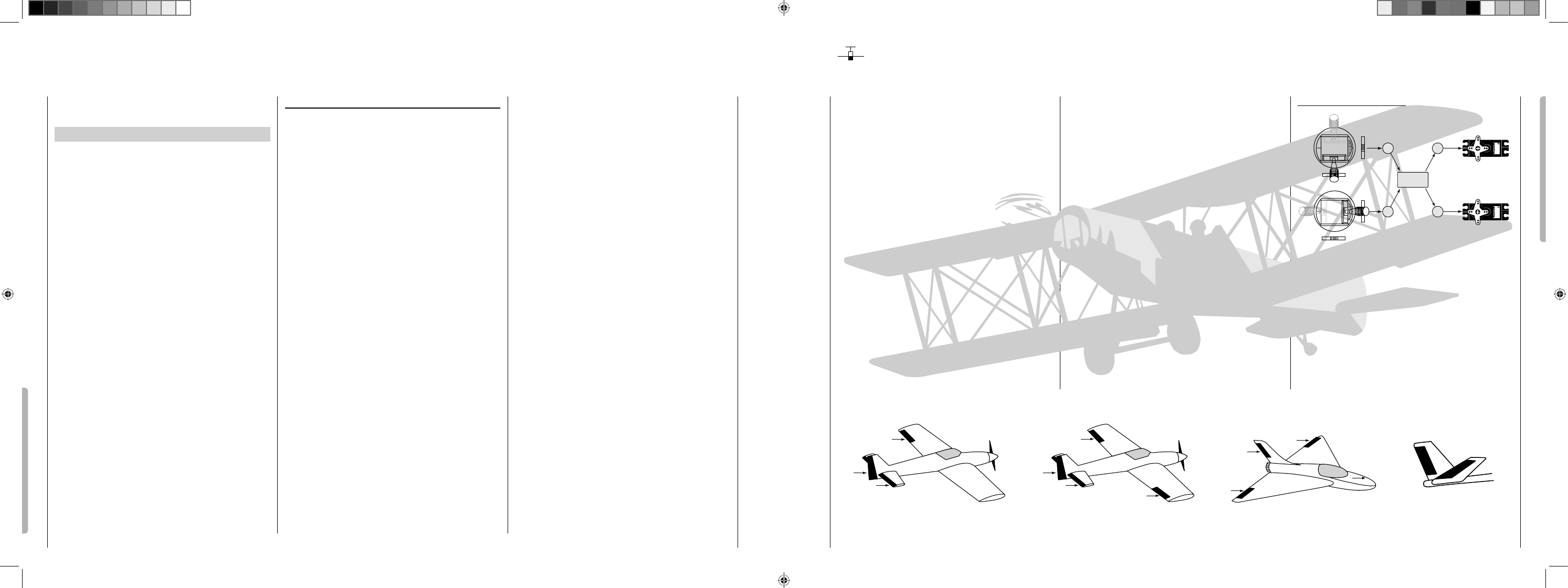
176 Description des programmes : Réglages de base – Hélicoptères
l‘orange au vert.
Assignation Emetteur - récepteur
Attention: L‘émetteur mx-10 HoTT ne peut être
assigné que s‘il est e mode „normal“. Assurez-vous,
avant de lancer la procédure Binding que l‘émetteur se
trouve bien dans ce mode là. Voir page 20 sélection du
mode.
Allumez l‘émetteur et branchez ensuite l‘alimentation de
votre récepteur: Sur le récepteur, la LED verte clignote
une seule fois puis reste éteinte.
La LED de l‘émetteur est allumée au vert pour signaler
qu‘aucun récepteur assigné n‘est branché.
Appuyez sur la touche SET du récepteur et restez
dessus:
La LED verte se met à clignoter.
Lancez ensuite la procédure Binding d‘un récepteur
avec une impulsion sur la touche BIND du récepteur.
Si au bout de 10 secondes la LED du récepteur reste
allumée au vert, la procédure Binding a réussie. Vous
pouvez relâcher la touche SET du récepteur et la touche
BIND de l‘émetteur.
Votre ensemble modèle/récepteur est maintenant
fonctionnel. Parallèlement à cela, la LED de l‘émetteur
passe du vert à l‘orange.
Si par contre, la LED verte du récepteur clignote plus de
10 secondes et que la LED de l‘émetteur ne passe pas
à l‘orange, c‘est que la procédure Binding a échouée.
Modifi ez éventuellement la position des antennes et
reprenez toute la procédure.
Essai de portée
L’essai de portée intégré réduit la puissance d’émission
de telle sorte que vous pouvez effectuer un essai de
portée dans les 50 mètres. Effectuez l’essai de portée
du système Graupner HoTT selon les instructions
qui suivent. Pour cet essai, demandez à un de vos
collègues de vous donner un coup de main.
1. Montez le récepteur, qui a été assigné à l’émetteur,
dans le modèle, selon les instructions de montage
2. Allumez la radio et attendez que la LED verte
du récepteur s’allume. Vous pouvez maintenant
observer le déplacement des servos.
3. Posez le modèle par terre sur un sol plat (bitume,
herbe rase ou terre) de manière à ce que les
antennes de réception soient au moins à 15 cm
au-dessus du sol. Pour l’essai, il sera peut être
nécessaire de caler, surélever le modèle.
4. Tenez l’émetteur à hauteur de hanches, sans
toutefois le coller au corps. Ne visez pas directement
le modèle avec l’antenne, mais tournez/repliez
l’antenne de manière à ce qu’elle soit à la verticale
durant l’utilisation.
5. Assurez-vous que l‘émetteur est bien en mode
„normal“, c‘est-à-dire l‘interrupteur de mode vers
l‘arrière. Appuyez maintenant sur la touche BIND
durant 5 secondes jusqu‘à ce que l‘émetteur émet un
bip sonore en continu. Relâchez la touche BIND.
Attention lorsque vous utilisez plusieurs
récepteurs par modèle: L‘essai de portée ne
fonctionne qu‘avec le récepteur qui transmet les
données télémétriques – c‘est-à-dire qu‘avec le
dernier récepteur assigné.
6. Le fait de déclencher l’essai de portée, réduit la
puissance d’émission de l’émetteur de manière
signifi cative. En même temps, une tonalité en continu
se déclenche.
Au bout des 99 secondes que dure l’essai de portée,
l’émetteur reprend sa pleine puissance d’émission et
la tonalité se coupe.
Attention: vous pouvez stopper l‘essai de portée à tout
moment en appuyant une nouvelle fois sur la touche
BIND.
7. Pendant ce laps de temps, éloignez-vous du modèle
en déplaçant les manches de commande. Si vous
constatez une interruption dans la liaison, dans la
limite des 50 mètres, essayez de la reproduire
8. Une vérifi cation supplémentaire : si le modèle est
équipé d’un moteur, lancez le moteur, pour vous
assurer que ce dernier ne crée pas d’interférences
9. Continuez à vous éloigner du modèle jusqu’à ce
qu’un contrôle correct ne soit plus possible
10. A cet endroit, attendez que le temps de l’essai
soit écoulé, avec le modèle toujours prêt. Dès que
le temps de l’essai est écoulé, le modèle doit à
nouveau réagir aux ordres de commande. Si ce n’est
pas le cas à 100%, ne persistez pas et contactez un
Service Après Vente Graupner GmbH &Co. KG.
11. Avant chaque vol, faites cet essai de portée et
simulez tous les déplacements servos susceptibles
d’intervenir en vol. Pour une évolution en toute
sécurité, la portée au sol doit toujours être d’au
moins 50 mètres.
Attention:
Ne jamais lancer une procédure d’essai de portée en
plein vol!
33
Flächenmodelle
Flächenmodelle
Bis zu zwei Querruderservos bei Normalmodellen sowie
V-Leitwerk und Nurfl ügel/Delta-Modelle mit zwei Quer-/
Höhenruderservos werden komfortabel unterstützt.
Der größte Teil der Motor- und Segelfl ugmodelle wird
aber zum Leitwerkstyp „normal“ gehören und mit jeweils
einem Servo für Höhen-, Seiten- und Querruder sowie
Motordrossel oder elektronischem Fahrtregler (bzw.
Bremsklappen beim Segelfl ugmodell) ausgestattet sein.
Die Software des Senders mx-10 HoTT enthält bereits
vorprogrammierter Koppelfunktionen (= Mischer) für
die gängigsten Modelltypen, bei denen zwei Steuer-
kanäle miteinander vermischt werden. So kann z.B.
ein „V-Leitwerk“ softwaremäßig aktiviert werden, die
Steuerfunk tionen von Höhen- und Seitenruder wer-
den so miteinander verknüpft, dass jede der beiden
Leitwerksklappen – durch je ein separates Servo ange-
steuert – sowohl Höhen- als auch Seitenruderfunktion
übernehmen.
Bei den Delta- und Nurfl ügelmodellen wird die Quer-
und Höhenruderfunktion über je eine gemeinsame
Ruderklappe an der Hinterkante der rechten und linken
Tragfl äche ausgeführt. Der Sender enthält die entspre-
chenden Mischfunktionen der beiden Servos.
Weitere Funktionen sind mit der optionalen Smart-Box
möglich. Sehen Sie dazu den Abschnitt „Telemetrie“ ab
Seite 45.
In der mx-10 HoTT installierte Mischer:
Kein Mischer 1. ¼ Leitwerkstyp „normal“
Mischer AILERON 2. ¼ zwei Querruder
Mischer DELTA 3. ¼ Nurfl ügelmodelle
Mischer V-TAIL 4. ¼ V-Leitwerk
Siehe auch die Abbildungen unten auf dieser Seite.
links
rechts
links
rechts
Seite+Höhe
Leitwerkstyp „normal“
Quer
Höhe
Seite
Mischer AILE „2 Querruder“
Quer+Höhe
Höhe
Seite
Quer
Mischer DELTA „Nurflügel“
Seite
Quer+Höhe
Mischer V-Tail „V-Leitwerk“
Quer
Beispiel: V-Leitwerksmischer
33
4
Servo 4,8 V
C 577
Best.-Nr. 4101
Servo 4,8 V
C 577
Best.-Nr. 4101
4
V-Leitwerks
mischer
Steuerfunktions-
eingänge
Steuerkanäle
(Empfänger-
ausgänge)
Höhenrudersteuerknüppel
Seitenrudersteuerknüppel
Seite / Höhe rechts
Seite / Höhe links
Seite
Höhe
Höhe
Seite
Seite
Höhe
33110_mx10_HoTT_1_DE.indd Druckbogen 33 von 104 - Seiten (176, 33)
33110_mx10_HoTT_1_DE.indd Druckbogen 33 von 104 - Seiten (176, 33)
21.10.2011 13:23:43
21.10.2011 13:23:43
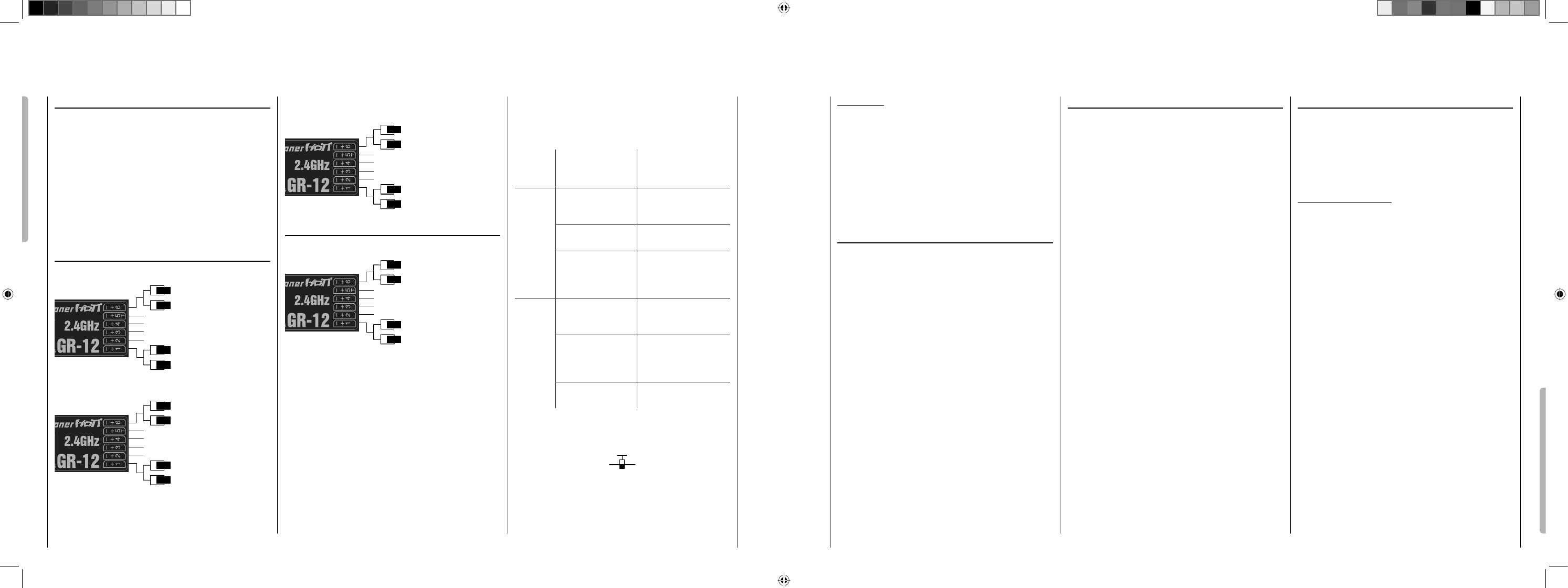
34 Flächenmodelle - Empfängerbelegung
Installationshinweise
Die Servos MÜSSEN in der hier abgebildeten Rei-
henfolge am Empfänger angeschlossen sein.
Nicht benötigte Ausgänge werden einfach nicht belegt.
Insbesondere gilt:
Bei Verwendung von nur 1 Querruderservo bleibt der •
Empfängerausgang 5 für das rechte Querruder frei
Beachten Sie darüber hinaus die Hinweise auf •
den folgenden Seiten.
Flächenmodelle mit und ohne Motor, mit bis zu
2 Querruderservos …
… und Leitwerkstyp „normal“
frei oder Sonderfunktion
Seitenruder
Querruder oder Querruder links
Höhenruder
Telemetrie-Sensor oder QR rechts
Empfängerstromversorgung
Empfängerstromversorgung
Bremsklappen- oder Motorservo
oder Regler bei Elektroantrieb
… und Leitwerkstyp „V-Leitwerk“
frei oder Sonderfunktion
Höhe/Seite rechts
Querruder oder Querruder links
Höhe/Seite links
Telemetrie-Sensor oder QR rechts
Empfängerstromversorgung
Empfängerstromversorgung
Bremsklappen- oder Motorservo
oder Regler bei Elektroantrieb
… und Leitwerkstyp „2 Höhenruderservos“ - nur mit
optionaler Smart-Box
2. Höhenruder
Seitenruder
Querruder oder Querruder links
1. Höhenruder
Telemetrie-Sensor oder QR rechts
Empfängerstromversorgung
Empfängerstromversorgung
Bremsklappen- oder Motorservo
oder Regler bei Elektroantrieb
Delta-/Nurfl ügelmodelle mit und ohne Motor, …
… mit 2 Quer-/Höhenruderservos
frei oder Sonderfunktion
frei oder Seitenruder
Quer/Höhe links
Quer/Höhe rechts
frei od. Telemet.-Sensor od. Sonderfunkt.
Empfängerstromversorgung
Empfängerstromversorgung
Bremsklappen- oder Motorservo
oder Regler bei Elektroantrieb
Bedingt durch den unterschiedlichen Einbau der Servos
und Ruderanlenkungen kann anfangs die Servolauf-
richtung bestimmter Servo verkehrt sein. Nachfolgende
Tabelle gibt Hinweise zur Abhilfe.
Modell
Typ
Servo mit
falscher
Drehrichtung
Abhilfe
V-Leit-
werk
Seiten- und
Hö henruder verkehrt
Servo 3 + 4 im Menü
»Servoeinstellung«
umpolen
Seitenruder richtig,
Höhenruder verkehrt
Servo 3 + 4 am Empfän-
ger vertauschen
Höhenruder richtig,
Seitenruder verkehrt
Servo 3 + 4 im Menü
»Servoeinstellung«
umpolen UND am Emp-
fänger vertauschen
Delta,
Nurfl ügel
Höhen- und Querru-
der verkehrt
Servo 2 + 3 im Menü
»Servoeinstellung«
umpolen
Höhenruder richtig,
Querruder verkehrt
Servo 2 + 3 im Menü
»Servoeinstellung«
umpolen UND am Emp-
fänger vertauschen
Querruder richtig,
Höhenruder verkehrt
Servo 2 + 3 am Empfän-
ger vertauschen
Alle für ein Flächenmodell relevanten Menüs sind bei
den „Programmbeschreibungen“ mit dem Symbol eines
Flächenfl ugzeuges …
… gekennzeichnet, sodass Sie sich bei einer Flächen-
modellprogrammierung nur mit diesen Menüs befassen
müssen.
175
Description des programmes : Réglages de base – Hélicoptères
Remarques:
Lors de la programmation, veillez à ce que les •
moteurs électriques ne peuvent pas démarrer
par inadvertance ou si vous avez un moteur ther-
mique avec démarrage automatique, que celui ne
puisse pas démarrer tout seul. Par mesure de sé-
curité, débranchez toujours l’accu de propulsion
et coupez l’alimentation carburant s’il s’agit d’un
moteur thermique.
Systèmes sans barre stabilisatrice
Selon votre type d‘hélicoptère, branchez votre système
Flybarless sur les voies 1 – 4 du récepteur. Respectez la
notice de votre système.
Récepteurs liés
Les récepteurs Graupner HoTT doivent être assignés,
exclusivement à un modèle (mémoire) d’un émetteur
Graupner HoTT afi n de pouvoir communiquer. Cette
procédure est appelée Binding, et n’a besoin d’être
effectuée qu’une seule fois pour tout nouvel ensemble
récepteur/modèle (et peut être reprise à tout moment).
Remarque importante :
Durant la procédure Binding, veillez impérativement
à ce que l’antenne d’émission soit suffi sament
éloignée des antennes de recéption ! A 1 mètre de
distance, vous ne courrez plus aucun risque. Si
vous êtes trop près, la voie du retour d’informations
risque d’être perturbée avec comme conséquences,
des dysfonctionnements.
Assignation (Binding) de plusieurs récepteurs par
modèle
En cas de besoin, vous pouvez assigner plusieurs
récepteurs à un seul et même modèle. Assignez tout
d’abord un récepteur après l’autre, comme décrit
ci-dessous : Par la suite, en cours d’utilisation, seul
le récepteur assigné en dernier, sera en mesure
d’établir une liaison télémétrique avec l’émetteur.
C’est sur ce récepteur qu’il faudra brancher les sondes
et capteurs télémétriques du modèle étant donné que
seul le récepteur assigné en dernier est capable de
retransmettre les données par la voie retour. Le deuxi-
ème récepteur, et les autres fonctionnent en parallèle
par rapport au dernier récepteur assigné à l’émetteur,
néanmoins de manière indépendante, en mode Slave,
avec voie de retour coupée !
Si un récepteur qui ne transmet pas des données de
télémétrie est allumé, la LED de l‘émetteur passe de
Sorties récepteur
Pour un maximum de fl exibilité en ce qui concerne
l’affectation des sorties récepteur, la Smart-Box en
option, avec le „Channel Mapping“ offre la possibilité
d’intervertir toutes les sorties servos 1 à 6. A ce sujet,
voir chapitre „Télémétrie“ en page 183.
Avec la fonction Channel-Mapping de la Smart-Box,
les 5 voies de l‘émetteur peuvent être réparties sur
plusieurs récepteurs, mais une voie peut également être
attribuée à plusieurs sorties récepteur avec la même
fonction. Par exemple pour la commande d’un volet
d’aileron avec deux servos au lieu d’un seul etc.
33110_mx10_HoTT_1_DE.indd Druckbogen 34 von 104 - Seiten (34, 175)
33110_mx10_HoTT_1_DE.indd Druckbogen 34 von 104 - Seiten (34, 175)
21.10.2011 13:23:43
21.10.2011 13:23:43
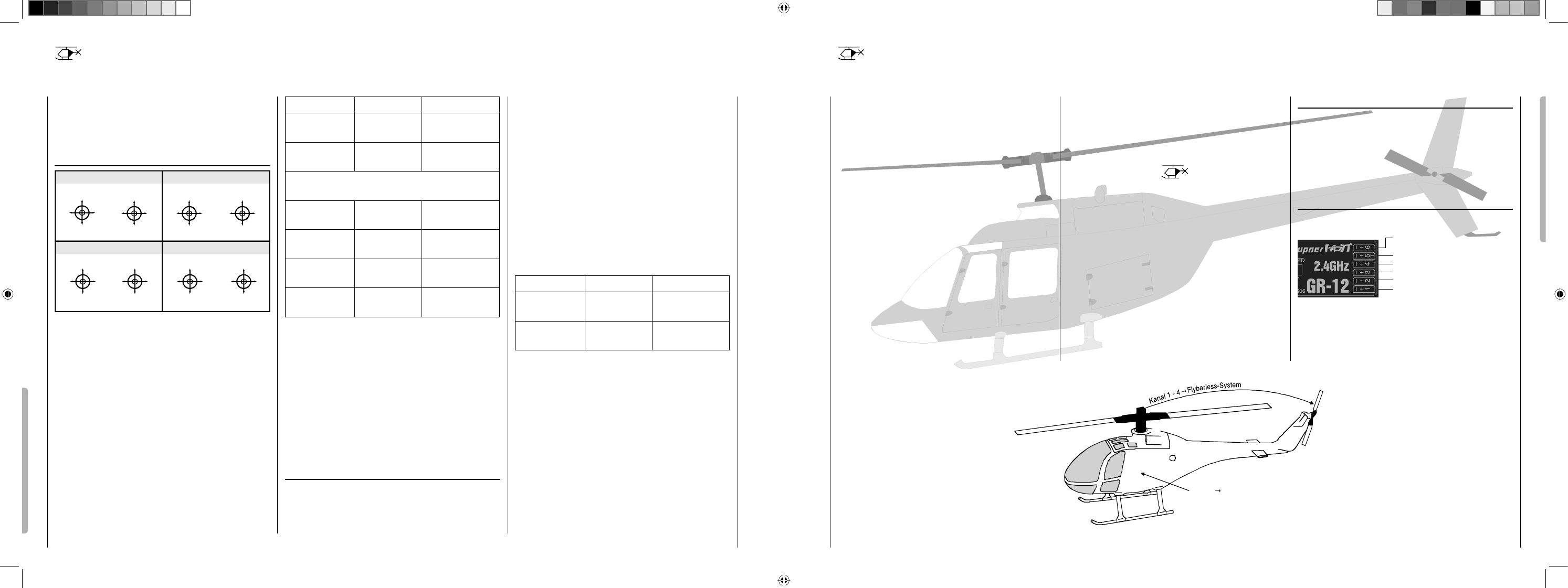
174 Description des programmes : Réglages de base – Hélicoptères
Réglages de base
Réglages de base pour hélicoptères
Avant de commencer la programmation des paramètres
proprement dite, il y a encore quelques réglages de
base à faire.
Mode de pilotage
»MODE 2« (Gaz gauche)
»MODE 1« (Gaz droite)
Tangage
Anti couple
Tangage
Anti couple
Moteur/Pitch
Roll plateau
Roll plateau
Moteur/Pitch
Anti couple
Anti couple
Moteur/Pitch Moteur/Pitch
Tangage
Tangage
Roll plateau
Roll plateau
»MODE 3« (Gaz droite) »MODE 4« (Gaz gauche)
Tangage
Tangage
Roll plateauv
Roll plateau
Moteur/Pitch
Moteur/Pitch
Anti couple
Anti couple
Moteur/Pitch
Moteur/Pitch
Roll plateau
Roll plateau
Tangage
Tangage
Anti couple
Anti couple
En principe, il existe quatre possibilités, d’attribuer les
fonctions de commande roulis (cyclique latéral), tanga-
ge (cyclique longitudinal), anti couple et Gaz/Pas d’un
hélicoptère, aux deux manches de commande. C’est
le pilote lui-même, selon ses propres habitudes, qui
choisira une de ces quatre possibilités.
Pour sélectionner un mode de pilotage, il faut d‘abord
mettre l‘interrupteur du mode de l‘émetteur sur „normal“.
Si ce n‘est pas déjà fait, coupez l‘émetteur et bran-
chez la fi che de programmation fournie, dans la prise
DATA située au dos de l‘émetteur. Allumez l‘émetteur:
à chaque impulsion sur la touche BIND située sur le
devant de l‘émetteur on passe d‘un mode à l‘autre de
manière circulaire.
Buzzer LED Description
1 x bip émet-
teur
LED orange
allumée
Réglage pays
Universal/Europe
2 x bip émet-
teur
LED orange
clignote
Réglage pays-
France
Le réglage selon le pays est décrit en détail dans ce
qui suit..
3 x bip émet-
teur
LED orange
allumée
»MODE 1«
4 x bip émet-
teur
LED orange
allumée
»MODE 2«
5 x bip émet-
teur
LED orange
allumée
»MODE 3«
6 x bip émet-
teur
LED orange
allumée
»MODE 4«
Vous sélectionnez votre réglage en appuyant sur la
touche BIND durant 3 secondes env. Après avoir relâ-
ché la touche une brève mélodie de confi rmation se fait
entendre et le bip s‘arrête. Coupez ensuite l‘émetteur et
retirez la fi che de programmation au dos de l‘émetteur.
Ne jamais utiliser l‘émetteur avec la fi che de pro-
grammation branchée!
Par la suite, pour vérifi er le mode dans lequel se trouve
votre émetteur, il faut se référer à la LED de l‘émetteur.
Réglage selon le pays
Après avoir réglé le mode de pilotage, il faut, dans un
deuxième temps, enregistrer le réglage pays
Ce réglage selon le pays dans lequel vous vous trouvez
est nécessaire pour respecter les diverses législations
et directives en vigueur (FCC, ETSI, CE, etc.). En
France par exemple, l‘utilisation de la radiocommande
n‘est autorisée que dans une bande de fréquence
restreinte. C‘est pourquoi, IL FAUT tout d’abord mettre
l’émetteur en mode „France“ si vous l‘utilisez en France.
Il est interdit d‘utiliser le mode UNIVERSAL/EUROPE
en France.
Si ce n‘est pas déjà fait, coupez l‘émetteur et bran-
chez la fi che de programmation fournie, dans la prise
DATA située au dos de l‘émetteur, et le Jumper en
position „NO MIX“ sur le devant de l‘émetteur. Allumez
l‘émetteur: à chaque impulsion sur la touche BIND
située sur le devant de l‘émetteur on passe d‘un réglage
à l‘autre de manière circulaire:
Buzzer LED Description
1 x bip émet-
teur
LED orange
allumée
Réglage pays
Universal/Europe
2 x bip émet-
teur
LED orange
clignote
Réglage pays
France
Vous sélectionnez votre réglage en appuyant sur la
touche BIND durant 3 secondes env. Après avoir relâ-
ché la touche une brève mélodie de confi rmation se fait
entendre et le bip s‘arrête. Coupez ensuite l‘émetteur et
retirez la fi che de programmation au dos de l‘émetteur.
Ne jamais utiliser l‘émetteur avec la fi che de pro-
grammation branchée!
Par la suite, pour vérifi er avec quel réglage vous utilisez
l‘émetteur, référez-vous à la LED de l‘émetteur après
l‘avoir allumé.
35
Hubschraubermodelle - Empfängerbelegung
Hubschraubermodelle
Kanal 5 Motor
Die Weiterentwicklung der Modellhubschrauber und
deren Komponenten wie Gyrosensoren, Drehzahlregler,
Rotorblätter usw. ermöglicht heute, einen Hubschrauber
sogar im 3D-Kunstfl ug zu beherrschen.
Hubschraubermodelle können mit der mx-10 HoTT
nur mit stabilisatorlosen Systemen „fl ybarless“ wie zum
Beispiel V-Stabi, Microbeast oder ähnliche betrieben
werden. Dieser mischt dann alle für die Taumelscheibe
und Heckrotor nötigen Servos.
Die Motorsteuerung erfolgt über den Schaltkanal 5.
Den genauen Anschluss der Servos entnehmen Sie der
Anleitung zu Ihrem Flybarless-System.
Soll die Telemetriefunktion des Empfängers genutzt wer-
den, muss die Motorsteuerung mit Hilfe der optionalen
Smart-Box auf Kanal 6 gemappt werden (siehe Seite 51
Channel Mapping), um die Telemetriesensoren an Kanal
5 anschließen zu können.
Alle für ein Hubschraubermodell relevanten Menüs sind
im Abschnitt „Programmbeschreibung“ mit einem Heli-
Symbol gekennzeichnet …
… sodass Sie sich bei einer Hubschrauberprogrammie-
rung nur mit diesen Menüs befassen müssen.
Installationshinweise
Die Servos werden in der hier abgebildeten Reihen-
folge am Empfänger angeschlossen.
Nicht benötigte Ausgänge werden einfach nicht belegt.
Beachten Sie darüber hinaus die Hinweise Ihres
stabilisatorlosen Systems.
Empfängerbelegung von Hubschraubermodellen …
… mit stabilisatorlosen Systemen
Heck-Servo (Gyro-System)
Roll-Servo
Nick-Servo
Telemetrie-Sensor oder Motorregelung
frei oder Motorregelung (Channel Mappin
g
mit optionaler Smart-Box)
Pitch- oder Roll-2
oder Nick-2-Servo
33110_mx10_HoTT_1_DE.indd Druckbogen 35 von 104 - Seiten (174, 35)
33110_mx10_HoTT_1_DE.indd Druckbogen 35 von 104 - Seiten (174, 35)
21.10.2011 13:23:43
21.10.2011 13:23:43
36 Programmbeschreibung: Grundeinstellung - Flächenmodell
Grundeinstellung
Modellspezifi sche Basiseinstellungen für Flächenmodelle
Bevor mit der Programmierung spezifi scher Parameter
begonnen wird, sind einige Grundeinstellungen vorzu-
nehmen.
Steueranordnung
»MODE 2« (Gas links)
»MODE 3« (Gas rechts) »MODE 4« (Gas links)
»MODE 1« (Gas rechts)
Tiefenruder
Höhenruder
Seitenr. links
Seitenr. rechts
Motor Vollgas
Motor Leerlauf
Querr. links
Querr. rechts
Motor Vollgas
Seitenr. links
Seitenr. rechts
Motor Leerlauf
Tiefenruder
Höhenruder
Querr. links
Querr. rechts
Tiefenruder
Höhenruder
Querr. links
Querr. rechts
Motor Vollgas
Motor Leerlauf
Seitenr. links
Seitenr. rechts
Motor Vollgas
Motor Leerlauf
Querr. links
Querr. rechts
Tiefenruder
Höhenruder
Seitenr. links
Seitenr. rechts
Grundsätzlich gibt es 4 verschiedene Möglichkeiten, die
vier Steuerfunktionen Quer-, Höhen- und Seitenruder
sowie Gas bzw. Bremsklappen eines Flächenmodells
den beiden Steuerknüppeln zuzuordnen. Welche dieser
Möglichkeiten benutzt wird, hängt von den individuellen
Gewohnheiten des einzelnen Modellfl iegers ab.
Um die Steueranordnung auszuwählen, muss zuerst
der Schalter für den Sendermodus auf »normal« ge-
stellt werden. Schalten Sie den Sender, wenn noch
nicht geschehen aus, und stecken den mitgelieferten
Programmierstecker in die DATA-Buchse auf der Rück-
seite des Senders. Schalten Sie den Sender ein: durch
jeweils einem kurzen Druck auf den BIND-Taster auf
der Sendervorderseite kann nun zwischen folgenden
Einstellungen im Rotationsverfahren gewechselt werden.
Summer LED Beschreibung
Sender piept 1x orange LED an Ländereinstellung
Universal/Europe
Sender piept 2x orange LED
blinkt
Ländereinstellung
Frankreich
Die Ländereinstellung wird im folgenden detailliert
beschrieben.
Sender piept 3x orange LED an »MODE 1«
Sender piept 4x orange LED an »MODE 2«
Sender piept 5x orange LED an »MODE 3«
Sender piept 6x orange LED an »MODE 4«
Die gewählte Einstellung übernehmen Sie in den Sen-
der, indem Sie den BIND-Taster für ca. 3 Sekunden
drücken. Nach dem Loslassen ertönt eine kurze Bestäti-
gungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfernen Sie an-
schließend den Programmierstecker. Benutzen Sie
keinesfalls die Fernsteuerung mit eingestecktem
Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Ein-
stellung der Sender betrieben wird, achten Sie auf die
LED des Senders.
Ländereinstellung
Nachdem Sie die Steueranordnung eingestellt haben,
muss in einem zweiten Schritt die Ländereinstellung
erfolgen.
Die Ländereinstellung ist erforderlich, um diversen
Richtlinien (FCC, ETSI, IC etc.) gerecht zu werden. In
Frankreich beispielsweise, ist der Betrieb einer Fern-
steuerung nur in einem eingeschränktem Frequenzband
zulässig. Deshalb MUSS die Ländereinstellung des
Senders auf den Modus „Frankreich“ umgestellt werden,
sobald dieser in Frankreich betrieben wird. Auf keinen
Fall darf der UNIVERSAL/EUROPE-Modus verwendet
werden!
Schalten Sie den Sender, wenn noch nicht geschehen
aus, und stecken den mitgelieferten Programmierstecker
in die DATA-Buchse auf der Rückseite und den Jumper
in die Position „NO MIX“ auf der Vorderseite des Sen-
ders. Schalten Sie den Sender ein: durch jeweils einem
kurzen Druck auf den BIND-Taster auf der Sendervor-
derseite kann nun zwischen folgenden Einstellungen im
Rotationsverfahren gewechselt werden:
Summer LED Beschreibung
Sender piept 1x orange LED an Ländereinstellung
Universal/Europe
Sender piept 2x orange LED
blinkt
Ländereinstellung
Frankreich
Die gewählte Einstellung übernehmen Sie in den Sen-
der, indem Sie den BIND-Taster für ca. 3 Sekunden
drücken. Nach dem Loslassen ertönt eine kurze Bestäti-
gungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfernen Sie an-
schließend den Programmierstecker. Benutzen Sie
keinesfalls die Fernsteuerung mit eingestecktem
Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Ein-
stellung der Sender betrieben wird, achten Sie nach
dem Einschalten auf die Status-LED des Senders.
173
Description des programmes : Réglages de base – Modèles à voilure fi xe
Essai de portée
L’essai de portée intégré réduit la puissance d’émission
de telle sorte que vous pouvez effectuer un essai de
portée dans les 50 mètres. Effectuez l’essai de portée
du système Graupner HoTT selon les instructions
qui suivent. Pour cet essai, demandez à un de vos
collègues de vous donner un coup de main.
1. Montez le récepteur, qui a été assigné à l’émetteur,
dans le modèle, selon les instructions de montage
2. Allumez la radio et attendez que la LED verte
du récepteur s’allume. Vous pouvez maintenant
observer le déplacement des servos.
3. Posez le modèle par terre sur un sol plat (bitume,
herbe rase ou terre) de manière à ce que les
antennes de réception soient au moins à 15 cm
au-dessus du sol. Pour l’essai, il sera peut être
nécessaire de caler, surélever le modèle.
4. Tenez l’émetteur à hauteur de hanches, sans
toutefois le coller au corps. Ne visez pas directement
le modèle avec l’antenne, mais tournez/repliez
l’antenne de manière à ce qu’elle soit à la verticale
durant l’utilisation.
5. Assurez-vous que l‘émetteur est bien en mode
„normal“, c‘est-à-dire l‘interrupteur de mode vers
l‘arrière. Appuyez maintenant sur la touche BIND
durant 5 secondes jusqu‘à ce que l‘émetteur émet un
bip sonore en continu. Relâchez la touche BIND.
Attention lorsque vous utilisez plusieurs récepteurs par
modèle: L‘essai de portée ne fonctionne qu‘avec le
récepteur qui transmet les données télémétriques –
c‘est-à-dire qu‘avec le dernier récepteur assigné.
6. Le fait de déclencher l’essai de portée, réduit la
puissance d’émission de l’émetteur de manière
signifi cative. En même temps, une tonalité en continu
se déclenche.
Au bout des 99 secondes que dure l’essai de portée,
l’émetteur reprend sa pleine puissance d’émission et
la tonalité se coupe.
Attention: vous pouvez stopper l‘essai de portée à tout
moment en appuyant une nouvelle fois sur la touche
BIND.
7. Pendant ce laps de temps, éloignez-vous du modèle
en déplaçant les manches de commande. Si vous
constatez une interruption dans la liaison, dans la
limite des 50 mètres, essayez de la reproduire
8. Une vérifi cation supplémentaire : si le modèle est
équipé d’un moteur, lancez le moteur, pour vous
assurer que ce dernier ne crée pas d’interférences
9. Continuez à vous éloigner du modèle jusqu’à ce
qu’un contrôle correct ne soit plus possible
10. A cet endroit, attendez que le temps de l’essai
soit écoulé, avec le modèle toujours prêt. Dès que
le temps de l’essai est écoulé, le modèle doit à
nouveau réagir aux ordres de commande. Si ce n’est
pas le cas à 100%, ne persistez pas et contactez un
Service Après Vente Graupner GmbH &Co. KG.
11. Avant chaque vol, faites cet essai de portée et
simulez tous les déplacements servos susceptibles
d’intervenir en vol. Pour une évolution en toute
sécurité, la portée au sol doit toujours être d’au
moins 50 mètres.
Attention:
Ne jamais lancer une procédure d’essai de portée en
plein vol!
33110_mx10_HoTT_1_DE.indd Druckbogen 36 von 104 - Seiten (36, 173)
33110_mx10_HoTT_1_DE.indd Druckbogen 36 von 104 - Seiten (36, 173)
21.10.2011 13:23:44
21.10.2011 13:23:44
172 Description des programmes : Réglages de base – Modèles à voilure fi xe
Sorties récepteur
Pour un maximum de fl exibilité en ce qui concerne
l’affectation des sorties récepteur, la Smart-Box en
option, avec le „Channel Mapping“ offre la possibilité
d’intervertir toutes les sorties servos 1 à 6. A ce sujet,
voir chapitre „Télémétrie“ en page 183.
Avec la fonction Channel-Mapping de la Smart-Box,
les 5 voies de l‘émetteur peuvent être réparties sur
plusieurs récepteurs, mais une voie peut également être
attribuée à plusieurs sorties récepteur avec la même
fonction.
Par exemple pour la commande d’un volet d’aileron
avec deux servos au lieu d’un seul etc.
Récepteurs liés
Les récepteurs Graupner HoTT doivent être assignés,
exclusivement à un modèle (mémoire) d’un émetteur
Graupner HoTT afi n de pouvoir communiquer. Cette
procédure est appelée Binding, et n’a besoin d’être
effectuée qu’une seule fois pour tout nouvel ensemble
récepteur/modèle (et peut être reprise à tout moment).
Remarque importante :
Durant la procédure Binding, veillez impérativement
à ce que l’antenne d’émission soit suffi sament
éloignée des antennes de recéption ! A 1 mètre de
distance, vous ne courrez plus aucun risque. Si
vous êtes trop près, la voie du retour d’informations
risque d’être perturbée avec comme conséquences,
des dysfonctionnements.
Assignation (Binding) de plusieurs récepteurs par
modèle
En cas de besoin, vous pouvez assigner plusieurs
récepteurs à un seul et même modèle. Assignez tout
d’abord un récepteur après l’autre, comme décrit
ci-dessous : Par la suite, en cours d’utilisation, seul
le récepteur assigné en dernier, sera en mesure
d’établir une liaison télémétrique avec l’émetteur.
C’est sur ce récepteur qu’il faudra brancher les sondes
et capteurs télémétriques du modèle étant donné que
seul le récepteur assigné en dernier est capable de
retransmettre les données par la voie retour. Le deuxi-
ème récepteur, et les autres fonctionnent en parallèle
par rapport au dernier récepteur assigné à l’émetteur,
néanmoins de manière indépendante, en mode Slave,
avec voie de retour coupée !
Si un récepteur qui ne transmet pas des données de
télémétrie est allumé, la LED de l‘émetteur passe de
l‘orange au vert.
Assignation Emetteur - récepteur
Attention: L‘émetteur mx-10 HoTT ne peut être
assigné que s‘il est e mode „normal“. Assurez-vous,
avant de lancer la procédure Binding que l‘émetteur se
trouve bien dans ce mode là. Voir page 20 sélection du
mode.
Allumez l‘émetteur et branchez ensuite l‘alimentation de
votre récepteur: Sur le récepteur, la LED verte clignote
une seule fois puis reste éteinte.
La LED de l‘émetteur est allumée au vert pour signaler
qu‘aucun récepteur assigné n‘est branché.
Appuyez sur la touche SET du récepteur et restez
dessus:
La LED verte se met à clignoter.
Lancez ensuite la procédure Binding d‘un récepteur
avec une impulsion sur la touche BIND du récepteur.
Si au bout de 10 secondes la LED du récepteur reste
allumée au vert, la procédure Binding a réussie. Vous
pouvez relâcher la touche SET du récepteur et la touche
BIND de l‘émetteur.
Votre ensemble modèle/récepteur est maintenant
fonctionnel. Parallèlement à cela, la LED de l‘émetteur
passe du vert à l‘orange.
Si par contre, la LED verte du récepteur clignote plus de
10 secondes et que la LED de l‘émetteur ne passe pas
à l‘orange, c‘est que la procédure Binding a échouée.
Modifi ez éventuellement la position des antennes et
reprenez toute la procédure.
37
Programmbeschreibung: Grundeinstellung - Flächenmodell
„Delta/Nf“: Die Quer- und Höhenrudersteuerung
erfolgt über ein oder zwei Servos je Trag-
fl ächenhälfte, angeschlossen an Kanal 2
und 3. Die Koppelfunktion für die Quer-
und Höhenrudersteuerung wird vom Sen-
dermischer automatisch vorgenommen.
Der Jumper verbindet die beiden rechten
Pins „DELTA“.
„V-Leitwerk“: Die Höhen- und Seitenrudersteuerung
erfolgt über zwei getrennt angelenkte, V-
förmig angeordnete Ruder, angeschlos-
sen an Kanal 3 und 4. Die Koppelfunktion
für die Seiten- und Höhenrudersteuerung
wird vom Sendermischer automatisch
vorgenommen.
Zwei Jumper verbinden jeweils die bei-
den linken „AILE“ und die beiden rechten
„DELTA“ Pins.
Hinweise:
Achten Sie während der Programmierung un-•
bedingt darauf, dass ein angeschlossener Ver-
brennungs- oder Elektromotor nicht unbe-
absichtigt anläuft. Unterbrechen Sie ggf. die
Treibstoffversorgung bzw. klemmen Sie den An-
triebsakku zuvor ab.
Leitwerkskonfi guration
Die Leitwerkskonfi guration wird mit dem beiliegenden
Jumper in der Kontaktleiste »MIX« auf der Vorderseite
des Senders ausgewählt.
Wählen Sie durch die Positionierung des Jumpers den
auf Ihr Modell zutreffenden Typ aus:
„normal“: Das Höhen- und Seitenruder wird über
jeweils nur ein Servo betätigt.
Der Jumper verbindet die beiden mittle-
ren Pins „NO MIX“.
„2 Querruder“: Diese Option ist für Modelle mit 1 oder
2 Querruder gedacht. Bei Querruderbe-
tätigung läuft das am Ausgang 5 ange-
schlossene Servo parallel zum Servo 2.
Die Querrudertrimmung wirkt auf beide
Servos.
Der Jumper verbindet die beiden linken
Pins „AILE“.
Bedingt durch den unterschiedlichen Einbau der Servos
und Ruderanlenkungen kann anfangs die Servolauf-
richtung bestimmter Servo verkehrt sein. Nachfolgende
Tabelle gibt Hinweise zur Abhilfe.
Modell
Typ
Servo mit
falscher
Drehrichtung
Abhilfe
V-Leit-
werk
Seiten- und
Hö henruder verkehrt
Servo 3 + 4 in der
Schalterleiste »Servore-
verse« umpolen
Seitenruder richtig,
Höhenruder verkehrt
Servo 3 + 4 am Empfän-
ger vertauschen
Höhenruder richtig,
Seitenruder verkehrt
Servo 3 + 4 in der
Schalterleiste »Ser-
voreverse« umpolen
UND am Empfänger
vertauschen
Delta,
Nurfl ügel
Höhen- und Querru-
der verkehrt
Servo 2 + 3 in der
Schalterleiste »Servore-
verse« umpolen
Höhenruder richtig,
Querruder verkehrt
Servo 2 + 3 in der
Schalterleiste »Ser-
voreverse« umpolen
UND am Empfänger
vertauschen
Querruder richtig,
Höhenruder verkehrt
Servo 2 + 3 am Empfän-
ger vertauschen
33110_mx10_HoTT_1_DE.indd Druckbogen 37 von 104 - Seiten (172, 37)
33110_mx10_HoTT_1_DE.indd Druckbogen 37 von 104 - Seiten (172, 37)
21.10.2011 13:23:44
21.10.2011 13:23:44
38 Programmbeschreibung: Grundeinstellung - Flächenmodell
Empfängerausgang
Um maximale Flexibilität hinsichtlich der Empfängerbe-
legung zu erreichen, bietet die optionale Smart-Box mit
dem „Channel Mapping“ die Möglichkeit zum beliebigen
Vertauschen der Servoausgänge 1 bis 6. Siehe dazu
das Kapitel „Telemetrie“ auf Seite 46.
Mit der Channel-Mapping Funktion der Smart-Box
können die 5 Steuerfunktionen des Senders auch be-
liebig auf mehrere Empfänger aufgeteilt oder aber auch
mehrere Empfängerausgänge mit derselben Steuerfunk-
tion belegt werden. Beispielsweise um je Querruderblatt
zwei Servos anstatt mit nur einem einzelnen ansteuern
zu können usw.
gebundener Empfänger
Graupner-HoTT-Empfänger müssen „angewiesen“ wer-
den, ausschließlich mit einem bestimmten Modell(-spei-
cher) eines Graupner-HoTT-Senders zu kommunizieren.
Dieser Vorgang wird als „Binding“ bezeichnet und ist
lediglich einmal für jede neue Empfänger/Modellspei-
cherplatz-Kombination erforderlich (und kann jederzeit
wiederholt werden).
Wichtiger Hinweis:
Achten Sie beim Binden unbedingt darauf, dass die
Senderantenne immer ausreichend weit von den
Empfängerantennen entfernt ist! Mit etwa 1 m Ab-
stand sind Sie diesbezüglich auf der sicheren Seite.
Andernfalls riskieren Sie eine gestörte Verbindung
zum Rückkanal und in Folge Fehlverhalten.
„Binding“ mehrerer Empfänger pro Modell
Bei Bedarf können auch mehrere Empfänger pro Modell
gebunden werden. Binden Sie dazu die jeweiligen
Empfänger zuerst einzeln wie nachfolgend beschrieben.
Beim späteren Betrieb baut allerdings nur derjeni-
ge Empfänger, der zuletzt gebunden wurde, eine
Telemetrie-Verbindung zum Sender auf. An diesem
sind deshalb auch ggf. im Modell eingebaute Telemetrie-
sensoren anzuschließen, da nur dieser zuletzt gebun-
dene Empfänger in der Lage ist, deren Daten über den
Rückkanal zu senden. Der zweite und alle weiteren
Empfänger laufen parallel zum zuletzt an den Sender
gebundenen Empfänger, jedoch völlig unabhängig von
diesem, im Slave-Mode mit abgeschaltetem Rückkanal!
Ist ein Empfänger eingeschaltet, der keine Telemetrie
sendet, wechselt die Sender-LED von orange auf grün.
„Binden“ von Sender und Empfänger
Beachte: die mx-10 HoTT kann nur im Modus „nor-
mal“ gebunden werden. Vergewissern Sie sich vor dem
Start des Bindingvorgangs, dass der Sender in diesem
Modus programmiert ist. Siehe Seite 20 zur Mode-
Einstellung.
Schalten Sie den Sender und anschließend die Strom-
versorgung Ihres Empfängers ein: Am Empfänger blinkt
die grüne LED einmal kurz auf und bleibt dann dunkel.
Die LED des Senders leuchtet grün, um zu zeigen, dass
kein gebundener Empfänger angeschlossen ist.
Drücken und halten Sie den SET-Taster am Empfänger:
Die grüne LED beginnt zu blinken.
Starten Sie anschließend das so genannte Binden eines
Empfängers mit einem Druck auf die BIND-Taste des
Senders.
Leuchtet innerhalb von etwa 10 Sekunden die LED des
Empfängers dauerhaft grün, wurde der Binde-Vorgang
erfolgreich abgeschlossen. Sie können nun den SET-Ta-
ster des Empfängers und die BIND-Taste des Senders
loslassen.
Ihre Modell-/Empfängerkombination ist nun betriebsbe-
reit. Parallel dazu wechselt die Sender-LED von grün auf
orange.
Blinkt dagegen die grüne LED am Empfänger länger als
ca. 10 Sekunden und wechselt die Sender-LED nicht auf
orange, ist der Binde-Vorgang fehlgeschlagen. Verän-
dern Sie ggf. die Positionen der Antennen und wiederho-
len Sie die gesamte Prozedur.
Test Reichweite
Der integrierte Reichweitetest reduziert die Sendeleis-
tung derart, dass Sie einen Funktionstest bereits in ei-
nem Abstand von bis zu etwa 50 m durchführen können.
171
Description des programmes : Réglages de base – Modèles à voilure fi xe
La commande des ailerons et de la pro-
fondeur se fait avec un ou deux servos
par aile, branché sur les voies 2 et 3. Le
couplage nécessaire pour la commande
des ailerons et de la profondeur est as-
suré automatiquement par le mixage de
l‘émetteur.
Le Jumper relie les deux Pins de droite
„DELTA“.
La commande de la profondeur et de la
direction est assurée par deux servos
séparés fi xés à deux gouvernes en
V et branchés sur les voies 3 et 4. Le
couplage nécessaire pour la commande
de la direction et de la profondeur est as-
suré automatiquement par le mixage de
l’émetteur.
Le Jumper relie les deux Pins de gauche
et les deux Pins de droite.
Remarques:
Lors de la programmation, veillez à ce que les •
moteurs électriques ne peuvent pas démarrer
par inadvertance ou si vous avez un moteur ther-
mique avec démarrage automatique, que celui ne
puisse pas démarrer tout seul. Par mesure de sé-
curité, débranchez toujours l’accu de propulsion
et coupez l’alimentation carburant s’il s’agit d’un
moteur thermique.
Confi guration Empennage
La confi guration de l‘empennage est sélectionnée, avec
le Jumper fourni, au niveau des barrettes de contact
„MIX“ sur le devant de l‘émetteur.
Sélectionnez le type correspond à votre modèle en
positionnant le Jumper en conséquence.
„normal“: La profondeur et la Direction sont com-
mandées chacune par un servo.
Le Jumper relié les deux pins du milieu
„NO MIX“
„2 ailerons“: Cette option est destinée aux modèles
avec 1 ou deux servos de commande
des ailerons. Lorsque vous bougez les
ailerons le servo branché sur la sortie
5 se déplacera parallèlement au servo
2. Le trim des ailerons agit sur les deux
servos.
Le Jumper relie les deux Pins de gauche
„AILE“
„Delta/Ailes
volantes“:
„Empennage
en V“:
Etant donné les différents montages possibles des
servos et la fi xation des tringles de commande, il est
tout à fait probable qu’il soit nécessaire d’inverser ici ou
là le sens de rotation des servos. Le tableau ci-dessous
donne quelques conseils bien pratiques :
Type de
modèle
Servos qui tournent à
l’envers Solution
Empenna-
ge V
Direction et profondeur
inversés
Inverser les servos 3 +
4 dans le menu »Régl.
Servo«
Direction correcte,
Profondeur inversée
Inverser le branchement
des servos 3 + 4 sur le
récepteur
Profondeur correcte,
Direction inversée
Inverser le branchement
des servos 3 + 4 dans le
menu »Régl. Servo« ET
sur le récepteur
Delta, Aile
volantes
Profondeur et ailerons
inversés
Inverser les sens de rota-
tion des servos 2 + 3 dans
le menu »Régl. Servo« ET
sur le récepteur
Profondeur correcte,
Ailerons inversés
Inverser les sens de rota-
tion des servos 2 + 3 dans
le menu »Régl. Servo« ET
sur le récepteur
Ailerons corrects,
Profondeur inversée
Inverser le branchement
des Servos 2 + 3 sur le
récepteur
33110_mx10_HoTT_1_DE.indd Druckbogen 38 von 104 - Seiten (38, 171)
33110_mx10_HoTT_1_DE.indd Druckbogen 38 von 104 - Seiten (38, 171)
21.10.2011 13:23:45
21.10.2011 13:23:45
170 Description des programmes : Réglages de base – Modèles à voilure fi xe
Réglages de base
Réglages de base pour modèles à voilure fi xe
Avant de commencer la programmation des paramètres
proprement dite, il y a encore quelques réglages de
base à faire.
Mode de pilotage
En principe, il existe quatre possibilités, d’attribuer les
fonctions de commande, ailerons, profondeur, direction
et gaz/aérofreins d’un modèle à voilure fi xe aux deux
manches de commande. C’est le pilote lui-même, selon
ses propres habitudes, qui choisira une de ces quatre
possibilités.
Pour sélectionner un mode de pilotage, il faut d‘abord
mettre l‘interrupteur du mode de l‘émetteur sur „normal“.
Si ce n‘est pas déjà fait, coupez l‘émetteur et bran-
chez la fi che de programmation fournie, dans la prise
DATA située au dos de l‘émetteur. Allumez l‘émetteur:
à chaque impulsion sur la touche BIND située sur le
devant de l‘émetteur on passe d‘un mode à l‘autre de
manière circulaire.
Buzzer LED Description
1 x bip émet-
teur
LED orange
allumée
Réglage pays
Universal/Europe
2 x bip émet-
teur
LED orange
clignote
Réglage pays-
France
Le réglage selon le pays est décrit en détail dans ce
qui suit..
3 x bip émet-
teur
LED orange
allumée
»MODE 1«
4 x bip émet-
teur
LED orange
allumée
»MODE 2«
5 x bip émet-
teur
LED orange
allumée
»MODE 3«
6 x bip émet-
teur
LED orange
allumée
»MODE 4«
Vous sélectionnez votre réglage en appuyant sur la
touche BIND durant 3 secondes env. Après avoir relâ-
ché la touche une brève mélodie de confi rmation se fait
entendre et le bip s‘arrête. Coupez ensuite l‘émetteur et
retirez la fi che de programmation au dos de l‘émetteur.
Ne jamais utiliser l‘émetteur avec la fi che de pro-
grammation branchée!
Par la suite, pour vérifi er le mode dans lequel se trouve
votre émetteur, il faut se référer à la LED de l‘émetteur.
Réglage selon le pays
Après avoir réglé le mode de pilotage, il faut, dans un
deuxième temps, enregistrer le réglage pays
Ce réglage selon le pays dans lequel vous vous trouvez
est nécessaire pour respecter les diverses législations
et directives en vigueur (FCC, ETSI, CE, etc.). En
France par exemple, l‘utilisation de la radiocommande
n‘est autorisée que dans une bande de fréquence
restreinte. C‘est pourquoi, IL FAUT tout d’abord mettre
l’émetteur en mode „France“ si vous l‘utilisez en France.
Il est interdit d‘utiliser le mode UNIVERSAL/EUROPE
en France.
Si ce n‘est pas déjà fait, coupez l‘émetteur et bran-
chez la fi che de programmation fournie, dans la prise
DATA située au dos de l‘émetteur, et le Jumper en
position „NO MIX“ sur le devant de l‘émetteur. Allumez
l‘émetteur: à chaque impulsion sur la touche BIND
située sur le devant de l‘émetteur on passe d‘un réglage
à l‘autre de manière circulaire:
Buzzer LED Description
1 x bip émet-
teur
LED orange
allumée
Réglage pays
Universal/Europe
2 x bip émet-
teur
LED orange
clignote
Réglage pays
France
Vous sélectionnez votre réglage en appuyant sur la
touche BIND durant 3 secondes env. Après avoir relâ-
ché la touche une brève mélodie de confi rmation se fait
entendre et le bip s‘arrête. Coupez ensuite l‘émetteur et
retirez la fi che de programmation au dos de l‘émetteur.
Ne jamais utiliser l‘émetteur avec la fi che de pro-
grammation branchée!
Par la suite, pour vérifi er avec quel réglage vous utilisez
l‘émetteur, référez-vous à la LED de l‘émetteur après
l‘avoir allumé.
»MODE 2« (Gaz gauche)
»MODE 3« (Gaz droite) »MODE 4« (Gaz gauche)
»MODE 1« (Gaz droite)
Profondeur
Profondeur
Direction
Direction
Gaz max
Gaz min
Aileron
Aileron
Gaz max
Direction
Direction
Gaz min
Profondeur
Profondeur
Aileron
Aileron
Profondeur
Profondeur
Aileron
Aileron
Gaz max
Gaz min
Direction
Direction
Gaz max
Gaz min
Aileron
Aileron
Profondeur
Profondeur
Direction
Direction
39
Programmbeschreibung: Grundeinstellung - Flächenmodell
Führen Sie den Reichweitetest des Graupner-HoTT-
Systems entsprechend den nachfolgenden Anweisun-
gen durch. Lassen Sie sich ggf. von einem Helfer beim
Reichweitetest unterstützen.
Bauen Sie den vorzugsweise bereits an den Sen-1.
der gebundenen Empfänger, wie vorgesehen, im Mo-
dell ein.
Schalten Sie die Fernsteuerung ein und warten Sie, 2.
bis am Empfänger die grüne LED leuchtet. Nun kön-
nen die Servobewegungen beobachtet werden.
Stellen Sie das Modell so auf ebenen Untergrund 3.
(Pfl aster, kurzer Rasen oder Erde), dass die Empfän-
gerantennen mindestens 15 cm über dem Erdboden
liegen. Es ist deshalb ggf. nötig, das Modell während
des Tests entsprechend zu unterlegen.
Halten Sie den Sender in Hüfthöhe und mit Abstand 4.
zum Körper. Zielen Sie aber mit der Antenne nicht di-
rekt auf das Modell, sondern drehen und/oder knicken
Sie die Antennenspitze so, dass sie während des Be-
triebs senkrecht ausgerichtet ist.
Vergewissern Sie sich, dass sich der Sender im 5.
»normal« Modus befi ndet - Modus Schalter nach hin-
ten. Drücken Sie nun ca. 5 s den BIND-Taster, bis
der Sender dauerhaft zu piepsen beginnt. Lassen Sie
den BIND-Taster wieder los.
Beachte bei Verwendung mehrerer Empfänger
pro Modell: der Reichweitentest funktioniert nur mit
dem Empfänger, der die Telemetrie sendet - also mit
dem zuletzt gebundenen Empfänger.
6. Mit dem Auslösen des Reichweitetests wird die Aus-
gangsleistung des Senders signifi kant reduziert. Zeit-
gleich ertönt ein Dauersignalton.
Nach Ablauf des 99 Sekunden währenden Reich-
weitetests schaltet der Sender wieder auf volle Aus-
gangsleistung und der Signalton verstummt.
Beachte: Sie können den Reichweitentest auch je-
derzeit durch erneutes Drücken des BIND-Tasters
stoppen.
7. Bewegen Sie sich innerhalb dieser Zeitspanne vom
Modell weg und bewegen Sie währenddessen die
Knüppel. Wenn Sie innerhalb einer Entfernung von ca.
50 m zu irgendeinem Zeitpunkt eine Unterbrechung
der Verbindung feststellen, versuchen Sie diese zu re-
produzieren.
8. Gegebenenfalls einen vorhandenen Motor einschal-
ten, um zusätzlich die Störsicherheit zu überprüfen.
9. Bewegen Sie sich weiter vom Modell weg, solange bis
keine perfekte Kontrolle mehr möglich ist.
. Warten Sie an dieser Stelle den Ablauf des Testzeit-
raumes mit dem weiterhin betriebsbereiten Modell ab.
Dieses sollte auf Steuerbefehle wieder reagieren, so-
bald der Reichweitetest beendet ist. Falls dies nicht
100 %-ig der Fall ist, benutzen Sie das System nicht
und kontaktieren Sie den zuständigen Service der
Graupner GmbH & Co. KG.
10. Führen Sie den Reichweitetest vor jedem Flug durch
und simulieren Sie dabei alle Servobewegungen, die
auch im Flug vorkommen. Die Reichweite muss dabei
immer mindestens 50 m am Boden betragen, um ei-
nen sicheren Modellbetrieb zu gewährleisten.
Achtung:
Während des normalen Modellbetriebs keinesfalls
den Reichweitetest am Sender starten!
33110_mx10_HoTT_1_DE.indd Druckbogen 39 von 104 - Seiten (170, 39)
33110_mx10_HoTT_1_DE.indd Druckbogen 39 von 104 - Seiten (170, 39)
21.10.2011 13:23:46
21.10.2011 13:23:46
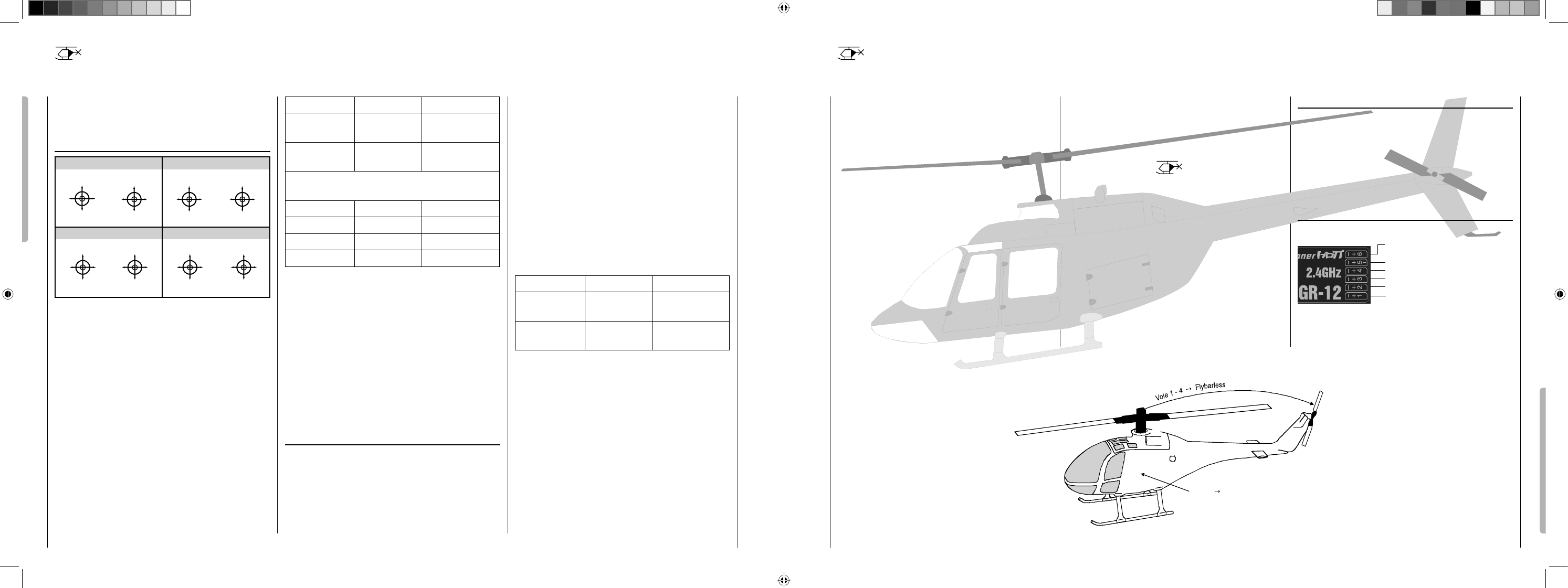
40 Programmbeschreibung: Grundeinstellung - Hubschraubermodell
Grundeinstellung
Modellspezifi sche Basiseinstellungen für Hubschraubermodelle
Bevor mit der Programmierung spezifi scher Parameter
begonnen wird, sind einige Grundeinstellungen vorzu-
nehmen.
Steueranordnung
»MODE 2« (Gas links)
»MODE 3« (Gas rechts) »MODE 4« (Gas links)
»MODE 1« (Gas rechts)
TS-Nick
Heck
TS-Nick
Heck
Motor/Pitch
TS-Roll
TS-Roll
Motor/Pitch
Heck
Heck
Motor/Pitch Motor/Pitch
TS-Nick
TS-Nick
TS-Roll
TS-Roll
TS-Nick
TS-Nick
TS-Roll
TS-Roll
Motor/Pitch
Motor/Pitch
Heck
Heck
Motor/Pitch
Motor/Pitch
TS-Roll
TS-Roll
TS-Nick
TS-Nick
Heck
Heck
Grundsätzlich gibt es vier verschiedene Möglichkeiten,
die vier Steuerfunktionen Rollen, Nicken, Heckrotor und
Gas bzw. Pitch eines Hubschraubers den beiden Steu-
erknüppeln zuzuordnen. Welche dieser Möglichkeiten
benutzt wird, hängt von den individuellen Gewohnheiten
des einzelnen Modellpiloten ab.
Um die Steueranordnung auszuwählen, muss zuerst
der Schalter für den Sendermodus auf »normal« ge-
stellt werden. Schalten Sie den Sender, wenn noch
nicht geschehen aus, und stecken den mitgelieferten
Programmierstecker in die DATA-Buchse auf der Rück-
seite des Senders. Schalten Sie den Sender ein: durch
jeweils einem kurzen Druck auf den BIND-Taster auf
der Sendervorderseite kann nun zwischen folgenden
Einstellungen im Rotationsverfahren gewechselt werden.
Summer LED Beschreibung
Sender piept 1x orange LED an Ländereinstellung
Universal/Europe
Sender piept 2x orange LED
blinkt
Ländereinstellung
Frankreich
Die Ländereinstellung wird im folgenden detailliert
beschrieben.
Sender piept 3x orange LED an »MODE 1«
Sender piept 4x orange LED an »MODE 2«
Sender piept 5x orange LED an »MODE 3«
Sender piept 6x orange LED an »MODE 4«
Die gewählte Einstellung übernehmen Sie in den Sen-
der, indem Sie den BIND-Taster für ca. 3 Sekunden
drücken. Nach dem Loslassen ertönt eine kurze Bestäti-
gungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfernen Sie an-
schließend den Programmierstecker. Benutzen Sie
keinesfalls die Fernsteuerung mit eingestecktem
Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Ein-
stellung der Sender betrieben wird, achten Sie auf die
LED des Senders.
Ländereinstellung
Nachdem Sie die Steueranordnung eingestellt haben,
muss in einem zweiten Schritt die Ländereinstellung
erfolgen.
Die Ländereinstellung ist erforderlich, um diversen
Richtlinien (FCC, ETSI, IC etc.) gerecht zu werden. In
Frankreich beispielsweise, ist der Betrieb einer Fern
steuerung nur in einem eingeschränktem Frequenzband
zulässig. Deshalb MUSS die Ländereinstellung des
Senders auf den Modus „Frankreich“ umgestellt werden,
sobald dieser in Frankreich betrieben wird. Auf keinen
Fall darf der UNIVERSAL/EUROPE-Modus verwendet
werden!
Schalten Sie den Sender, wenn noch nicht geschehen
aus, und stecken den mitgelieferten Programmierstecker
in die DATA-Buchse auf der Rückseite und den Jumper
in die Position „NO MIX“ auf der Vorderseite des Sen-
ders. Schalten Sie den Sender ein: durch jeweils einem
kurzen Druck auf den BIND-Taster auf der Sendervor-
derseite kann nun zwischen folgenden Einstellungen im
Rotationsverfahren gewechselt werden:
Summer LED Beschreibung
Sender piept 1x orange LED an Ländereinstellung
Universal/Europe
Sender piept 2x orange LED
blinkt
Ländereinstellung
Frankreich
Die gewählte Einstellung übernehmen Sie in den Sen-
der, indem Sie den BIND-Taster für ca. 3 Sekunden
drücken. Nach dem Loslassen ertönt eine kurze Bestäti-
gungsmelodie und der Piepton verstummt.
Schalten Sie den Sender aus und entfernen Sie an-
schließend den Programmierstecker. Benutzen Sie
keinesfalls die Fernsteuerung mit eingestecktem
Programmierstecker!
Um später im Betrieb zu überprüfen, mit welcher Ein-
stellung der Sender betrieben wird, achten Sie nach
dem Einschalten auf die Status-LED des Senders.
169
Hélicoptères
Hélicoptères
L’évolution permanente des hélicoptères ainsi que celle
des différents composants, tels que les gyroscopes,
variateurs, pales de rotor etc. permet aujourd’hui de
maîtriser un hélicoptère, même en vol 3D. Ne peuvent
être piloté avec l‘émetteur mx-10 HoTT que les
hélicoptères équipés d‘un système „Flybarless“, par ex.
V-Stabi, Microbeast ou similaires. Celui-ci mixe alors
tous les servos nécessaires à la commande du plateau
cyclique et du rotor arrière.
La commande moteur se fait par la voie 5.
Pour le branchement des servos, voir la notice de votre
système Flybarless.
Si la fonction de télémétrie du récepteur doit être utili-
sée, il faut, à l‘aide de la Smart-Box en option, „map-
per“ la commande moteur sur la voie 6 (voir page 51,
Channel Mapping) afi n de pouvoir brancher les capteurs
télémétriques sur la voie 5.
Les principaux menus des hélicoptères sont signalés,
dans les „Descriptions des programmes“ par le symbole
ci-dessous...
... de telle sorte que vous n’avez plus à vous occupez,
lors de la programmation d’un hélicoptère, que de ces
menus là.
Conseils pour l’installation
Les servos DOIVENT être branchés dans cet ordre-
là sur le récepteur.
Les sorties non utilisées restent tout simplement libres.
De plus, nous vous conseillons de suivre attentive-
ment les consignes qui fi gurent dans les pages qui
suivent.
Affectation des sorties récepteur pour des hélicop-
tères …
… avec système sans stabilisateurs (Flybarless)
Servo anti-couple (système gyroscopique)
Servo cyclique Latéral
Servo cyclique Longitudinal
Capteur télémétrique ou régulation moteur
Libre ou régulation moteur (Channel
Mapping avec Smart-Box en option)
Pas ou Latéral 2
ou Longitudinal 2
Voie 5 Moteur
33110_mx10_HoTT_1_DE.indd Druckbogen 40 von 104 - Seiten (40, 169)
33110_mx10_HoTT_1_DE.indd Druckbogen 40 von 104 - Seiten (40, 169)
21.10.2011 13:23:46
21.10.2011 13:23:46
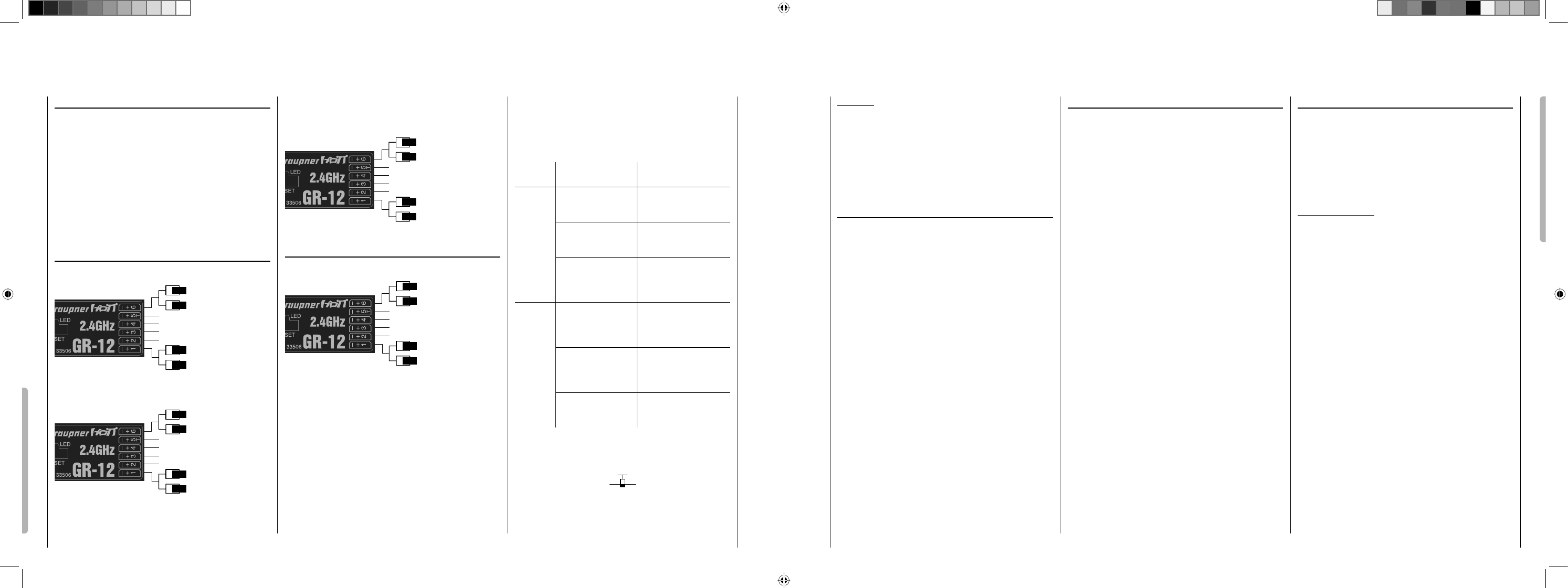
168 Modèles à voilure fi xe
Conseils pour l’installation
Les servos DOIVENT être branchés dans cet ordre-
là sur le récepteur.
Les sorties non utilisées restent tout simplement inoc-
cupées :
Si seul un seul servo est utilisé pour la commande •
des ailerons, la sortie 5 du récepteur reste libre
Par ailleurs, suivez les instructions des pages qui •
suivent.
Modèles à voilure fi xe, avec ou sans moteur, avec 2
servos de commande des ailerons …
… et avec empennage de type « normal »
Libre ou fonction auxiliaire
Direction
Ailerons ou aileron gauche
Profondeur
Sonde télémétrique ou aileron droit
Alimentation récepteur
Alimentation récepteur
Aérofreins ou servo de cde
moteur ou variateur si
motorisation électrique
… et avec empennage « en V »
Libre ou fonction auxiliaire
Profondeur/ Direction droite
Ailerons ou aileron gauche
Profondeur/ Direction gauche
Sonde télémétrique ou aileron droit
Alimentation récepteur
Alimentation récepteur
Aérofreins ou servo de cde
moteur ou variateur si
motorisation électrique
… et avec empennage de type « 2 servos de cde de
profondeur » - uniquement avec la Smart-Box en
option
Gouverne de profondeur 2
Direction
Ailerons ou aileron gauche
Gouverne de profondeur 1
Sonde télémétrique ou aileron droit
Alimentation récepteur
Alimentation récepteur
Aérofreins ou servo de cde
moteur ou variateur si
motorisation électrique
Delta / Ailes volantes avec ou sans moteur, …
… avec 2 servos ailerons/profondeur
Libre ou fonction auxiliaire
Libre ou Direction
Aileron / Profondeur gauche
Aileron / Profondeur droit
Libre ou sonde télém. ou aileron droit
Alimentation récepteur
Alimentation récepteur
Aérofreins ou servo de cde
moteur ou variateur si
motorisation électrique
Etant donné les différents montages possibles des
servos et la fi xation des tringles de commande, il est
tout à fait probable qu’il soit nécessaire d’inverser ici ou
là le sens de rotation des servos. Le tableau ci-dessous
donne quelques conseils bien pratiques :
Type de
modèle
Servos qui tournent à
l’envers Solution
Empenna-
ge V
Direction et profondeur
inversés
Inverser les servos 3 +
4 dans le menu »Régl.
Servo«
Direction correcte,
Profondeur inversée
Inverser le branchement
des servos 3 + 4 sur le
récepteur
Profondeur correcte,
Direction inversée
Inverser le branchement
des servos 3 + 4 dans le
menu »Régl. Servo« ET
sur le récepteur
Delta, Aile
volantes
Profondeur et ailerons
inversés
Inverser les sens de rota-
tion des servos 2 + 3 dans
le menu »Régl. Servo« ET
sur le récepteur
Profondeur correcte,
Ailerons inversés
Inverser les sens de rota-
tion des servos 2 + 3 dans
le menu »Régl. Servo« ET
sur le récepteur
Ailerons corrects,
Profondeur inversée
Inverser le branchement
des Servos 2 + 3 sur le
récepteur
Les principaux menus des modèles à voilure fi xe sont
signalés, dans les « Descriptions des programmes » par
le symbole ci-dessous …
… de telle sorte que vous n’avez à vous occupez, lors
de la programmation d’un modèle à voilure fi xe, que de
ces menus là.
41
Programmbeschreibung: Grundeinstellung - Hubschraubermodell
Hinweise:
Achten Sie während der Programmierung un-•
bedingt darauf, dass ein angeschlossener Ver-
brennungs- oder Elektromotor nicht unbe-
absichtigt anläuft. Unterbrechen Sie ggf. die
Treibstoffversorgung bzw. klemmen Sie den An-
triebsakku zuvor ab.
Stabilisatorlose Systeme
Schließen Sie Ihr Flybarless System entsprechend
Ihrem Helikoptertyp an die Kanäle 1 - 4 an den Empfän-
ger an.
Beachten Sie dazu die Anleitung Ihres Systems.
Empfängerausgang
Um maximale Flexibilität hinsichtlich der Empfängerbe-
legung zu erreichen, bietet die optionale Smart-Box mit
dem „Channel Mapping“ die Möglichkeit zum beliebigen
Vertauschen der Servoausgänge 1 bis maximal 6. Siehe
dazu das Kapitel „Telemetrie“ auf Seite 46.
Mit der Channel-Mapping Funktion der Smart-Box
können die 5 Steuerfunktionen des Senders auch be-
liebig auf mehrere Empfänger aufgeteilt oder aber auch
mehrere Empfängerausgänge mit derselben Steuerfunk-
tion belegt werden. Beispielsweise um je Querruderblatt
zwei Servos anstatt mit nur einem einzelnen ansteuern
zu können usw.
gebundener Empfänger
Graupner-HoTT-Empfänger müssen „angewiesen“ wer-
den, ausschließlich mit einem bestimmten Modell(-spei-
cher) eines Graupner-HoTT-Senders zu kommunizieren.
Dieser Vorgang wird als „Binding“ bezeichnet und ist
lediglich einmal für jede neue Empfänger/Modellspei-
cherplatz-Kombination erforderlich (und kann jederzeit
wiederholt werden).
Wichtiger Hinweis:
Achten Sie beim Binden unbedingt darauf, dass die
Senderantenne immer ausreichend weit von den
Empfängerantennen entfernt ist! Mit etwa 1 m Ab-
stand sind Sie diesbezüglich auf der sicheren Seite.
Andernfalls riskieren Sie eine gestörte Verbindung
zum Rückkanal und in Folge Fehlverhalten.
„Binding“ mehrerer Empfänger pro Modell
Bei Bedarf können auch mehrere Empfänger pro Modell
gebunden werden. Binden Sie dazu die jeweiligen
Empfänger zuerst einzeln wie nachfolgend beschrieben.
Beim späteren Betrieb baut allerdings nur derjeni-
ge Empfänger, der zuletzt gebunden wurde, eine
Telemetrie-Verbindung zum Sender auf. An diesem
sind deshalb auch ggf. im Modell eingebaute Telemetrie-
sensoren anzuschließen, da nur dieser zuletzt gebun-
dene Empfänger in der Lage ist, deren Daten über den
Rückkanal zu senden. Der zweite und alle weiteren
Empfänger laufen parallel zum zuletzt an den Sender
gebundenen Empfänger, jedoch völlig unabhängig von
diesem, im Slave-Mode mit abgeschaltetem Rückkanal!
Ist ein Empfänger eingeschaltet, der keine Telemetrie
sendet, wechselt die Sender-LED von orange auf grün.
33110_mx10_HoTT_1_DE.indd Druckbogen 41 von 104 - Seiten (168, 41)
33110_mx10_HoTT_1_DE.indd Druckbogen 41 von 104 - Seiten (168, 41)
21.10.2011 13:23:47
21.10.2011 13:23:47
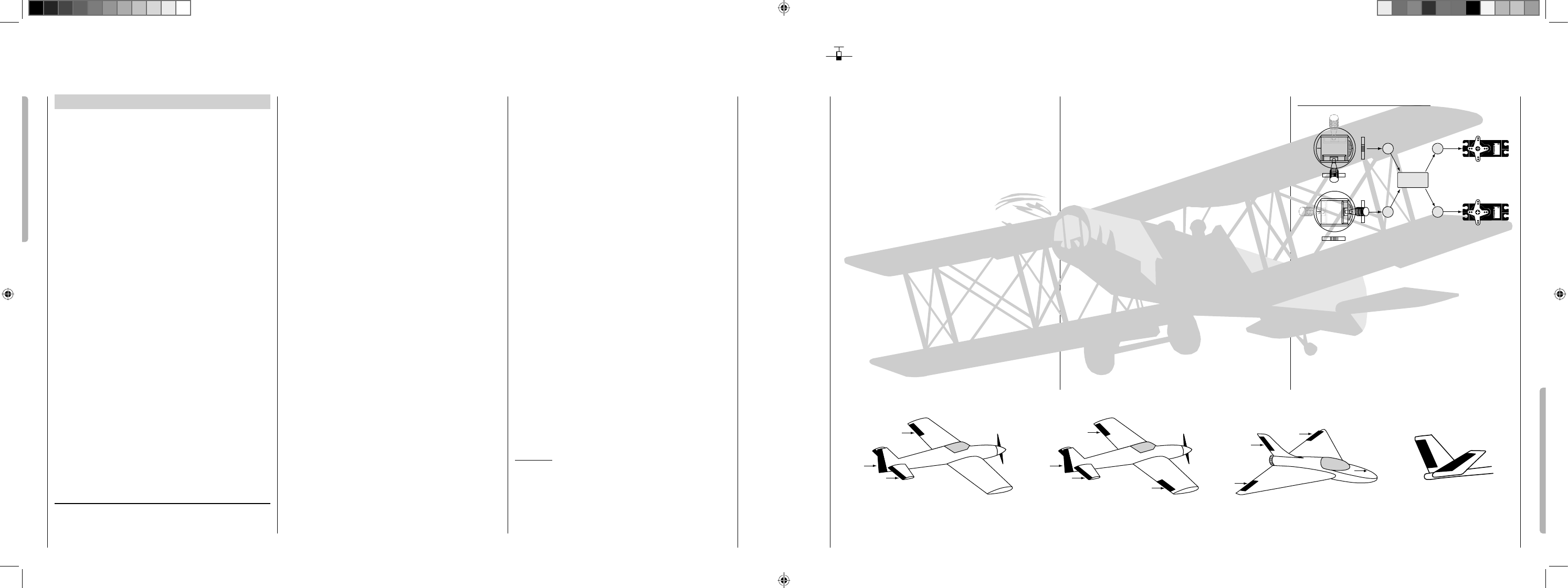
42 Programmbeschreibung: Grundeinstellung - Hubschraubermodell
„Binden“ von Sender und Empfänger
Beachte: die mx-10 HoTT kann nur im Modus „nor-
mal“ gebunden werden. Vergewissern Sie sich vor dem
Start des Bindingvorgangs, dass der Sender in diesem
Modus programmiert ist. Siehe Seite 20 zur Mode-
Einstellung.
Schalten Sie den Sender ein und anschließend die
Stromversorgung Ihres Empfängers ein: Am Empfänger
blinkt die grüne LED einmal kurz auf und bleibt dann
dunkel.
Die LED des Senders leuchtet grün, um zu zeigen, dass
kein gebundener Empfänger angeschlossen ist.
Drücken und halten Sie den SET-Taster am Empfänger:
Die grüne LED beginnt zu blinken.
Starten Sie anschließend das so genannte Binden eines
Empfängers mit einem Druck auf die BIND-Taste des
Senders.
Leuchtet innerhalb von etwa 10 Sekunden die LED des
Empfängers dauerhaft grün, wurde der Binde-Vorgang
erfolgreich abgeschlossen. Sie können nun den SET-Ta-
ster des Empfängers und die BIND-Taste des Senders
loslassen.
Ihre Modell-/Empfängerkombination ist nun betriebsbe-
reit. Parallel dazu wechselt die Sender-LED von grün auf
orange.
Blinkt dagegen die grüne LED am Empfänger länger als
ca. 10 Sekunden und wechselt die Sender-LED nicht auf
orange, ist der Binde-Vorgang fehlgeschlagen. Verän-
dern Sie ggf. die Positionen der Antennen und wiederho-
len Sie die gesamte Prozedur.
Test Reichweite
Der integrierte Reichweitetest reduziert die Sendeleis-
tung derart, dass Sie einen Funktionstest bereits in ei
nem Abstand von bis zu etwa 50 m durchführen können.
Führen Sie den Reichweitetest des Graupner-HoTT-
Systems entsprechend den nachfolgenden Anweisun-
gen durch. Lassen Sie sich ggf. von einem Helfer beim
Reichweitetest unterstützen.
Bauen Sie den vorzugsweise bereits an den Sen-1.
der gebundenen Empfänger, wie vorgesehen, im Mo-
dell ein.
Schalten Sie die Fernsteuerung ein und warten Sie, 2.
bis am Empfänger die grüne LED leuchtet. Nun kön-
nen die Servobewegungen beobachtet werden.
Stellen Sie das Modell so auf ebenen Untergrund 3.
(Pfl aster, kurzer Rasen oder Erde), dass die Empfän-
gerantennen mindestens 15 cm über dem Erdboden
liegen. Es ist deshalb ggf. nötig, das Modell während
des Tests entsprechend zu unterlegen.
Halten Sie den Sender in Hüfthöhe und mit Abstand 4.
zum Körper. Zielen Sie aber mit der Antenne nicht di-
rekt auf das Modell, sondern drehen und/oder knicken
Sie die Antennenspitze so, dass sie während des Be-
triebs senkrecht ausgerichtet ist.
Vergewissern Sie sich, dass sich der Sender im 5.
»normal« Modus befi ndet - Modus Schalter nach hin-
ten. Drücken Sie nun ca. 5 s den BIND-Taster, bis
der Sender dauerhaft zu piepsen beginnt. Lassen Sie
den BIND-Taster wieder los.
Beachte bei Verwendung mehrerer Empfänger
pro Modell: der Reichweitentest funktioniert nur mit
dem Empfänger, der die Telemetrie sendet - also mit
dem zuletzt gebundenen Empfänger.
6. Mit dem Auslösen des Reichweitetests wird die Aus-
gangsleistung des Senders signifi kant reduziert. Zeit-
gleich ertönt ein Dauersignalton.
Nach Ablauf des 99 Sekunden währenden Reich-
weitetests schaltet der Sender wieder auf volle Aus-
gangsleistung und der Signalton verstummt.
Beachte: Sie können den Reichweitentest auch je-
derzeit durch erneutes Drücken des BIND-Tasters
stoppen.
7. Bewegen Sie sich innerhalb dieser Zeitspanne vom
Modell weg und bewegen Sie währenddessen die
Knüppel. Wenn Sie innerhalb einer Entfernung von ca.
50 m zu irgendeinem Zeitpunkt eine Unterbrechung
der Verbindung feststellen, versuchen Sie diese zu re-
produzieren.
Gegebenenfalls einen vorhandenen Motor einschal-6.
ten, um zusätzlich die Störsicherheit zu überprüfen.
Bewegen Sie sich weiter vom Modell weg, solange bis 7.
keine perfekte Kontrolle mehr möglich ist.
Warten Sie an dieser Stelle den Ablauf des Testzeit-8.
raumes mit dem weiterhin betriebsbereiten Modell ab.
Dieses sollte auf Steuerbefehle wieder reagieren, so-
bald der Reichweitetest beendet ist. Falls dies nicht
100 %-ig der Fall ist, benutzen Sie das System nicht
und kontaktieren Sie den zuständigen Service der
Graupner GmbH & Co. KG.
Führen Sie den Reichweitetest vor jedem Flug durch 9.
und simulieren Sie dabei alle Servobewegungen, die
auch im Flug vorkommen. Die Reichweite muss dabei
immer mindestens 50 m am Boden betragen, um ei-
nen sicheren Modellbetrieb zu gewährleisten.
Achtung:
Während des normalen Modellbetriebs keinesfalls
den Reichweitetest am Sender starten!
167
Modèles à voilure fi xe
Modèles à voilure fi xe
Sur des modèles classiques, vous pouvez monter sans
problèmes jusqu’à deux servos pour la commande des
ailerons, pour un empennage en V, et pour des modèles
Delta/Ailes volantes avec deux servos d’ailerons et de
profondeur.
La plupart des avions et des planeurs appartiennent
aux modèles au type d‘empennage dit „normal“ avec
respectivement un servo pour la profondeur, la direction,
les ailerons et le moteur ou le variateur électronique
(aérofreins sur un planeur).
Le logiciel de l‘émetteur mx-10 HoTT comprend
déjà des fonctions de couplage (=mixages) pour les
types de modèles les plus courants, sur lesquels deux
voies de commande sont mixées. On peut ainsi activer
directement un mixage pour un empennage en V sur
lequel les fonctions de commande de la direction et de
la profondeur sont mixées entre elles, pour que chacune
des gouvernes – qui sont commandées chacune par un
servo séparé – puisse prendre la fonction de commande
de la profondeur, mais également celle de la direction.
Sur des modèles Delta et des ailes volantes, la fonction
de commande des ailerons et de la profondeur s’exerce
sur une seule et même gouverne située de part et
d’autre de l’aile. Le programme de l‘émetteur inclu le
mixage nécessaire pour ces deux servos.
D‘autres fonctions sont encore possibles avec la Smart-
Box en option. A ce sujet, voir paragraphe „Télémétrie“ à
partir de la page 179.
Mixages déjà programmés dans l‘émetteur mx-10
HoTT:
Aucun mixage ; Type d‘empennage „normal“1.
Mixage ailerons2. ¼ deux ailerons
Mixage Delta 3. ¼ Ailes volantes
Mixage V-Tail 4. ¼ Empannage en V
Voir croquis en bas de page.
gauche
droite
gauche
droite
Dir. + Prof.
Type d’empennage „normal“
Aileron
Profondeur
Direction
Mixage AILE „2 Aileron“
AIL+Prof.
Profondeur
Direction
Aileron
Mixage DELTA „Ailes volantes“
Direction
AIL+Prof.
Mixage „Empannage en V“
Aileron
33
4
Servo 4,8 V
C 577
Best.-Nr. 41 01
Servo 4,8 V
C 577
Best.-Nr. 4101
4
Mix. empen.
en V
Entrées fonctions de cde
Voies (sorties
récepteur)
Manche de cde de la Profondeur
Manche de cde de la Direction
Dir. / Prof. droite
Dir. / Prof. gauche
Direct.
Prof.
Profon-
deur
Direc-
tion
Direct.
Prof.
Exemple: Mixage empennage en V
33110_mx10_HoTT_1_DE.indd Druckbogen 42 von 104 - Seiten (42, 167)
33110_mx10_HoTT_1_DE.indd Druckbogen 42 von 104 - Seiten (42, 167)
21.10.2011 13:23:47
21.10.2011 13:23:47
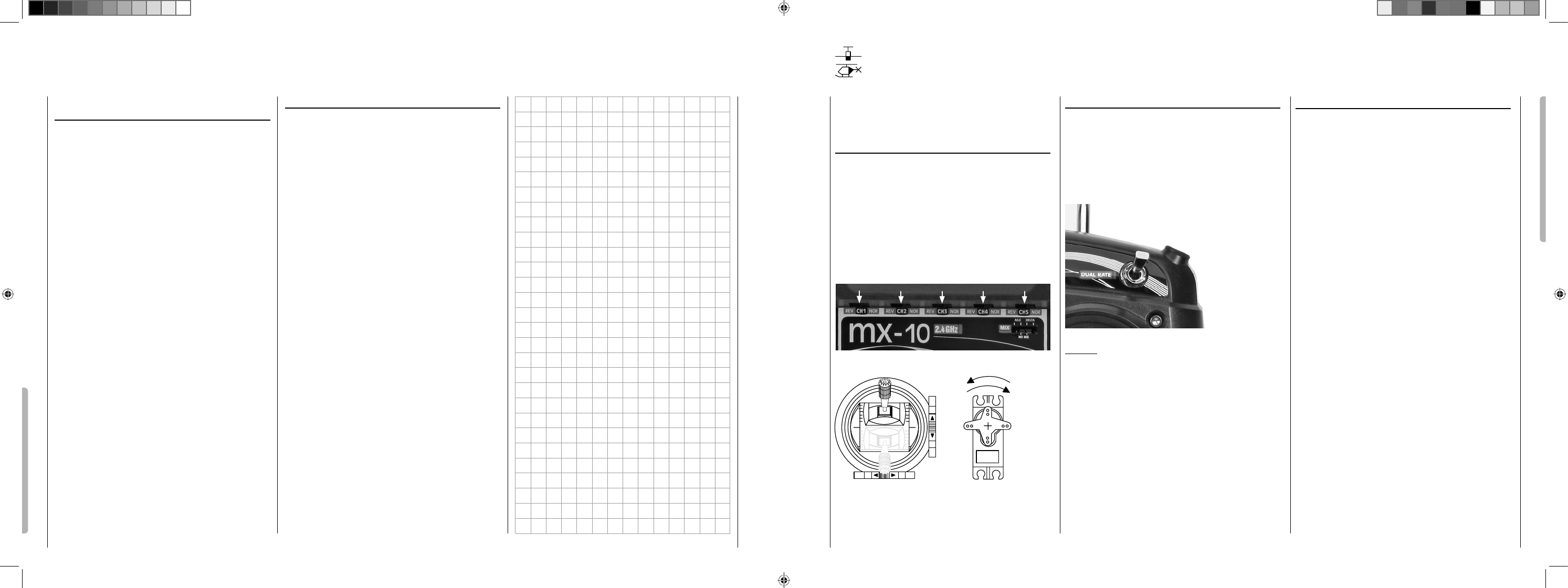
166 Trim digital
Trim digital et calibrage des manches de commande
Description
Trim digital avec affi chage de la position à l’écran et
signal sonore
Les deux manches de commandes sont équipés de
trims digitaux. Une brève impulsion sur la touche de
trim, décale d‘un „clic“ le neutre du servo d’une valeur
déterminée. Si vous maintenez la touche plus longue-
ment, la vitesse de déplacement du trim augmente dans
la direction correspondante.
Ce décalage est également signalé de manière acous-
tique par des bips sonores de différentes tonalités. Pour
retrouver le neutre en plein vol, inutile donc de jeter un
coup d’oeil sur l’écran: en dépassant le neutre, un petit
temps d’arrêt est marqué.
Les positions des trims sont automatiquement enregis-
trées.
Le trim digital ne fonctionne que si l‘émetteur est allumé,
si l‘émetteur est éteint et que vous touchiez par inadver-
tance les touches des trims, cela ne modifi e en rien les
valeurs de trim enregistrées.
Calibrage des manches de commande
Si vous avez l‘impression que le rappel au neutre de
votre manche de commande ne correspond pas exac-
tement à 0% de la course de l‘élément de commande,
c‘est-à-dire que la butée n‘est pas exactement à 100%,
vous pouvez corriger cela de la manière suivante:
Si ce n‘est pas déjà fait, coupez l‘émetteur et branchez
la fi che de programmation fournie, dans la prise DATA
située au dos de l‘émetteur, et le Jumper en position
„DELTA“ sur le devant de l‘émetteur. Mettez maintenant
les deux manches de commande au neutre (milieu).
Allumez l‘émetteur. Au bout d‘une seconde, et pour une
durée de 10 secondes, l‘émetteur émettra un bip sonore
toutes les secondes. Durant ces dix secondes, mettez
les deux manches en butée (gauche, droite, haut,
bas) pour que l‘émetteur puisse enregistrer ces fi ns de
course. Au bout des 10 secondes le calibrage est ter-
miné, l‘émetteur se remet en fonctionnement normal, et
les bips sonores cessent. Coupez ensuite l‘émetteur et
retirez la fi che de programmation au dos de l‘émetteur.
Ne jamais utiliser l‘émetteur avec la fi che de
programmation branchée! Mettez éventuellement
encore le Jumper dans la position qui correspond à
votre modèle.
Si dans les 10 secondes, vous n‘avez pas pu mettre les
manches dans toutes les butées, refaites toute cette
procédure.
43
Programmbeschreibung: Servoeinstellung
Servoweg „Dual Rate“
Zur Einstellung eines symmetrischen, d. h. steuerseiten-
unabhängigen Weges für das Höhen-, Seiten- und
Querruder.
Der Servoweg ist senderseitig fest eingestellt und kann
zwischen 70% (Schalter in unterer Position) und 100%
(Schalter in oberer Position) verändert werden.
Hinweis:
Mit der optional erhältlichen Smart-Box kann der
Servoweg getrennt und auch asymmetrisch für alle
Kanäle programmiert werden. Siehe dazu den Abschnitt
„Telemetrie“ auf Seite 46.
Bei der mx-10 HoTT haben Sie die Möglichkeit die
Servodrehrichtung und den Servoweg zu verändern.
Servodrehrichtung
Die Servodrehrichtung wird an die praktischen Gege-
benheiten im jeweiligen Modell angepasst, sodass bei
der Montage der Steuergestänge und Anlenkungen
keinerlei Rücksicht auf den vorgegebenen Drehsinn der
Servos genommen werden muss. Die Laufrichtung kann
mit den Servoreverse-Schaltern auf der Frontseite des
Senders für jeden Kanal getrennt eingestellt werden. Die
Laufrichtung wird symbolisiert durch „NOR“ für normale
Drehrichtung und „REV“ für die umgekehrte Drehrich-
tung.
normal
umgekehrt
normal
umgekehrt
Servoeinstellung
Servorichtung, Servoweg und Fail Safe
Kanal 1 Kanal 3Kanal 2 Kanal 4 Kanal 5
S
S
T
T
S
S100 %
T
T70 %
Fail Safe
Im Lieferzustand des Empfängers behalten die Servos
im Falle einer Fail-Safe-Situation ihre zuletzt als gültig
erkannten Positionen bei („hold“). Im Fail-Safe-Fall
erlischt die grüne LED am Empfänger und am Sender
beginnt die orange LED 3x kurz hintereinander zu
blinken. Darüber hinaus piept dieser entsprechend der
Status-LED 3x kurz hintereinander zur akustischen
Warnung.
Nutzen Sie das Sicherheitspotenzial dieser Option,
indem Sie für einen Fail-Safe-Fall wenigstens die Mo-
tordrosselposition bei Verbrennermodellen auf Leerlauf
bzw. die Motorfunktion bei Elektromodellen auf „Stopp“
bzw. bei Heli-Modellen auf „Hold“ programmieren. Das
Modell kann sich dann im Störungsfall nicht so leicht
selbstständig machen und so Sach- oder gar Personen-
schäden hervorrufen.
Wichtiger Hinweis:
Die beiden Einstellungen „Binding“ und „Reichweitetest“
(siehe Seite 38/42) können Sie völlig unabhängig davon,
ob Sie den Sender zuletzt per Programmiertaster oder
aber per Smart-Box programmiert haben, tätigen. Keine
dieser beiden Optionen hat nennenswerte Änderungen
an den im Empfänger gespeicherten Einstellungen zur
Folge. Im Gegensatz dazu werden jedoch ALLE, und
somit auch die über die Möglichkeiten des Programmier-
tasters hinausgehenden Einstellungen der optionalen
Smart-Box im Display Failsafe (RX FAIL SAFE) zurück-
gesetzt, wenn Sie, wie nachfolgend beschrieben, die
Fail-Safe-Funktion per Programmiertaster aufrufen.
Ebenso verloren geht aber auch eine ggf. zuvor per
Programmiertaster vorgenommene Umstellung der
Ländereinstellung auf „Frankreich“, siehe weiter unten!
Sie MÜSSEN deshalb ggf. die Ländereinstellung erneut
33110_mx10_HoTT_1_DE.indd Druckbogen 43 von 104 - Seiten (166, 43)
33110_mx10_HoTT_1_DE.indd Druckbogen 43 von 104 - Seiten (166, 43)
21.10.2011 13:23:48
21.10.2011 13:23:48
44 Programmbeschreibung: Servoeinstellung
vornehmen. Sie sollten deshalb wenn immer möglich,
die Programmierung über die Smart-Box beibehalten!
Schalten Sie Ihre Empfangsanlage ein.
Bringen Sie den Modus-Schalter in die Position „nor-
mal“. Drücken und Halten Sie den BIND-Taster auf der
Vorderseite des Senders während Sie diesen anschlie-
ßend einschalten.
Lassen Sie diesen Taster nach dem Einschalten des
Senders wieder los.
Der gewünschte Fail-Safe-Modus (Fail-Safe ein/aus,
Hold, oder Standard) wird durch jeweils einen kurzen
Druck auf den BIND-Taster auf der Sendervorderseite
im Rotationsverfahren aufgerufen:
• Fail-Safe-Modus
Der Sender piept nach dem Druck auf den BIND-Taster
einmal. Die Status-LED des Senders blinkt abwech-
selnd grün und orange. Um die im Fail-Safe-Fall nach
einer „Hold“-Zeit von 0,75 Sekunden von den Servos
einzunehmenden Positionen zu programmieren, bringen
Sie die betreffenden Steuerorgane Ihres Senders
GLEICHZEITIG in die gewünschte Fail-Safe-Position.
Drücken Sie anschließend den BIND-Taster drei bis vier
Sekunden. Nach dem Loslassen des Tasters sollten so-
wohl die Status-LED konstant orange leuchten und das
akustische Signal des Senders verstummt sein. Dieser
befi ndet sich nun wieder im Steuermodus. Anderenfalls
wiederholen Sie die Prozedur.
• Hold-Modus (empfohlen für Helikoptermodelle!)
Werkseinstellung. Der Sender piept nach dem Druck
auf den BIND-Taster zweimal, die Status-LED des Sen-
ders blinkt abwechselnd grün und zweimal kurz orange.
Alle auf „halten“ programmierten Servos bleiben im
Falle einer Übertragungsstörung so lange an den vom
Empfänger zuletzt noch als korrekt erkannten Positionen
stehen, bis ein neues, korrektes Steuersignal beim
Empfänger eintrifft.
Zum Speichern dieser Wahl drücken Sie den BIND-
Taster drei bis vier Sekunden. Nach dem Loslassen des
Tasters sollten sowohl die Status-LED konstant orange
leuchten und das akustische Signal des Senders ver-
stummt sein. Dieser befi ndet sich nun wieder im Steuer-
modus. Anderenfalls wiederholen Sie die Prozedur.
Fail-Safe aus (OFF)•
Der Sender piept nach dem Druck auf den BIND-Taster
dreimal. Die Status-LED des Senders blinkt abwech-
selnd grün und dreimal kurz orange. Zum Speichern
dieser Wahl drücken Sie den BIND-Taster drei bis vier
Sekunden. Nach dem Loslassen des Tasters sollten so-
wohl die Status-LED konstant orange leuchten und das
akustische Signal des Senders verstummt sein. Dieser
befi ndet sich nun wieder im Steuermodus. Anderenfalls
wiederholen Sie die Prozedur.
• Standard-Modus (nur für Flächenmodelle geeig-
net!)
Der Sender piept nach dem Druck auf den BIND-Taster
viermal. Die Status-LED des Senders blinkt abwech-
selnd grün und viermal kurz orange. In diesem Modus
bewegt sich im Fail-Safe-Fall das Gasservo (Kanal 1) in
die für diesen Fall vorgegebene Fail-Safe-Position, alle
anderen Kanäle bleiben auf „Hold“. Bringen Sie also
den Gas-Steuerknüppel sowie ggf. dessen Trimmung
in die gewünschte Position und drücken Sie dann zum
Speichern dieser Wahl den BIND-Taster drei bis vier
Sekunden. Nach dem Loslassen des Tasters sollten so-
wohl die Status-LED konstant orange leuchten und das
akustische Signal des Senders verstummt sein. Dieser
befi ndet sich nun wieder im Steuermodus. Anderenfalls
wiederholen Sie die Prozedur.
Hinweis:
Mit der optional erhältlichen Smart-Box kann Fail Safe
auch getrennt für alle Kanäle programmiert werden.
Siehe dazu den Abschnitt „Telemetrie“ auf Seite 46.
165
Glossaire – Défi nitions
Glossaire – Défi nitions
Fonction de commande, éléments de commande, entrée de fonction, voie de commande, mixage, interrupteur, Smart-Box
Pour vous faciliter l’utilisation de la notice de la mx-
10 HoTT, vous trouverez ci-dessous les défi nitions de
certaines expressions qui sont reprises tout au long de
cette notice.
Fonctions de commande / Voies
On entend par „fonction de commande“ – indépendam-
ment du traitement du signal dans l’émetteur- le signal
émit pour commander une fonction bien précise. Sur
des modèles à voilure fi xe, la commande des gaz, de
la direction ou des ailerons par exemple représentent
une telle fonction, sur hélicoptères, par exemple c’est le
Pas, le tangage ou le roulis. Le signal d’une fonction
de commande peut être transmis directement ou par
un mixage à une ou plusieurs voies de commande. Un
exemple typique est l’utilisation de deux servos séparés
pour la commande des ailerons, ou pour la commande
d‘un empennage en V. La fonction de commande tient
compte du déplacement mécanique du manche de
commande par rapport au déplacement du servo en
question.
Eléments de commande
On entend par éléments de commande, les manches
et interrupteurs de l’émetteur à déplacer par le pilote
pour que les servos, variateurs branchés coté récepteur
puissent fonctionner. Sont compris :
les deux manches de commande pour les voies 1 •
à 4, sachant que pour les deux types de modèles
(voilure fi xe et tournante (hélicoptère)) ces modes de
commande peuvent être inversés, par exemple gaz
à gauche ou à droite. La fonction du manche pour la
commande moteur/aérofreins est souvent désignée
comme élément de commande V1 (voie 1).
les interrupteurs pour la voie 5•
dans le cas d’éléments de commande proportion-•
nels, le déplacement des servos est proportionnel au
déplacement de l’élément de commande, dans le cas
d’un interrupteur deux ou trois positions, le servo ne
se déplacera que de deux ou de trois positions.
Entrée de fonction
Il s’agit là d’un point imaginaire dans l’émission des si-
gnaux qui ne peut en aucun cas être comparé au bran-
chement des éléments de commande sur la platine! Le
choix du mode de pilotage infl ue notamment „derrière“
ces branchements l’emplacement, qui peut conduire à
des différences entre le numéro d’entrée de l’élément de
commande et le numéro de la voie suivante.
Voies de commande
A partir de ce point, à partir duquel le signal contient
toutes les informations pour un servo déterminé – que
ce soit directement de l’ élément de commande ou indi-
rectement à travers d’un mixage – on parle d’une voie
de commande. Ce signal, qui ne peut plus être infl uencé
que par des réglages effectués dans le menu « Réglage
servos » quitte alors, par le module HF, l’émetteur. Une
fois arrivé au récepteur, ce signal est encore éventuel-
lement modifi é par les réglages entrepris dans le menu
de télémétrie, pour enfi n commander le servo corres-
pondant.
Mixages
Dans la Software de l’émetteur, il y a de nombreuses
fonctions de mixage pour différentes confi gurations
des ailerons ou des ailes Delta.. Elles sont destinées à
infl uencer à travers différents programmes de mixage un
ou plusieurs servos. Voir les nombreuses possibilités de
mixage de la Smart-Box à partir de la page 168 de cette
notice.
Interrupteurs
L‘interrupteur „tout ou rien“ déplace le servo branché sur
la voie 5 soit en butée mini, soit en butée maxi..
Smart-Box
Cette Smart-Box, disponible en option, permet la mise
en œuvre de nombreuses autres fonctions HoTT, par
exemple:
Affi chage de la tension de l‘émetteur avec seuil •
d‘alarme réglable.
Température du récepteur•
Course servo•
Saut de fréquence – Channel Mapping•
Réglages des mixages•
Qualité du signal•
Tension d‘alimentation du récepteur•
Neutre des servos•
Temps cycle•
Réglages Fail-Safe selon la voie•
Test servos•
A ce sujet, voir paragraphe „Télémétrie en page 179.
Vous trouverez de plus amples informations relative à la
Smart-Box dans le catalogue général FS Graupner ainsi
que sur internet sous www.graupner.de
33110_mx10_HoTT_1_DE.indd Druckbogen 44 von 104 - Seiten (44, 165)
33110_mx10_HoTT_1_DE.indd Druckbogen 44 von 104 - Seiten (44, 165)
21.10.2011 13:23:48
21.10.2011 13:23:48
164 Conseils d’installation
La tension nominale élevée de 7,4 Volt d’un pack d’accu
LiPo 2 éléments ne pose aucun problème aux récep-
teurs Graupner HoTT, ni aux servos, variateurs, gyro-
scopes etc dont il est expressement spécifi é qu’ils sont
en mesure de fonctionner dans des plages de tension
élevées. Sachez néanmoins que tous les servos,
variateurs, gyroscopes etc, mis sur le marché par
le passé, n’admettent qu’une tension de 4,8 à 6
Volt. Leur branchement sur le récepteur nécessite donc
impérativement l’utilisation d’une alimentation régulée,
stabilisée, par ex. PRX Réf . 4136, voir annexe. Sinon, le
risque de voir se détériorer rapidement les appareils qui
y sont branché est très grand.
45
Programmbeschreibung: Telemetrie
Telemetrie
Über das »Telemetrie«-Menü sind in Echtzeit Sender-
und Empfängerdaten sowie Daten optional angeschlos-
sener Telemetrie-Sensoren, siehe Anhang, abrufbar und
programmierbar.
Die Empfängerdaten werden über den im HoTT-Empfän-
ger integrierten Rückkanal an den Sender übertragen.
An den Empfängern GR-12S HoTT (Best.-Nr. 33505),
GR-12 HoTT (Best.-Nr. 33506), GR-16 (Best.-Nr. 33508)
sowie GR-24 HoTT (Best.-Nr. 33512) kann über den
Telemetrie-Eingang jeweils 1 Telemetrie-Sensor ange-
schlossen werden.
Die Updatefähigkeit dieser und zukünftiger Emp-
fänger durch den Anwender hält die zugehörigen
»Telemetrie«-Menüs immer auf dem neuesten Stand
und sichert die Erweiterung um zukünftige Funktionen
oder Sprachen.
Hinweis:
Nach der Registrierung Ihres Produkts unter http://www.
graupner.de/de/service/produktregistrierung werden Sie
automatisch per E-Mail über neue Updates informiert.
Vor einem Update der Sendersoftware sollten Sie je-
doch unbedingt alle belegten Modellspeicher auf einem
kompatiblen Laptop bzw. PC sichern, um einem evtl.
Datenverlust vorzubeugen.
Firmware-Updates wie auch die vorstehend erwähnten
Sicherungen werden über den PC-Anschluss des
Senders mittels des optionalen USB-Adapters Best.-Nr.
7168.6 und dem Anschlusskabel Best.-Nr. 7168.6A mit
Hilfe eines PCs mit dem Betriebssystem Windows XP,
Vista oder 7 durchgeführt.
Die erforderlichen Programme und Informationen fi nden
Sie beim entsprechenden Produkt jeweils unter Down-
load auf www.graupner.de. Es wird empfohlen, immer
die aktuelle Firmware auf die Geräte zu übertragen, um
so auf dem neuesten Stand zu bleiben.
Wichtige Hinweise:
Diese Anleitung stellt die zum Zeitpunkt der Druckle-•
gung zur Verfügung stehenden Funktionen dar.
Wie bereits im Abschnitt „Binding mehrerer Empfän-•
ger“ auf Seite 38 bzw. 42 angemerkt, können bei Be-
darf auch mehrere Empfänger pro Modell gebunden
werden. Beim späteren Betrieb ist jedoch nur der-
jenige Empfänger, der zuletzt gebunden wurde,
imstande, eine Telemetrie-Verbindung zum Sen-
der aufzubauen! Das bedeutet aber umgekehrt,
dass nur der zuletzt gebundene Empfänger auch per
Telemetrie-Menü angesprochen werden kann! Ggf.
ist also die Bindungs-Reihenfolge zu ändern, bevor
an einem bestimmten Empfänger Einstellungen vor-
genommen werden können.
Achten Sie beim Einstellen der Fernsteuerung •
unbedingt darauf, dass die Senderantenne immer
ausreichend weit von den Empfängerantennen
entfernt ist! Mit etwa 1 m Abstand sind Sie dies-
bezüglich auf der sicheren Seite. Andernfalls ris-
kieren Sie eine gestörte Verbindung zum Rückka-
nal und in Folge Fehlverhalten.
Da die Telemetriedaten zwischen Sender und Emp-•
fänger nur nach jedem vierten Datenpaket ausge-
tauscht werden, benötigt die Datenübertragung tech-
nisch bedingt eine gewisse Zeit, sodass die Reaktion
auf Bedientasten und Einstellungsänderungen nur
verzögert erfolgt. Hierbei handelt es sich also nicht
um einen Fehler.
Programmierungen am Modell oder an Sensoren •
dürfen nur erfolgen, wenn sich das Modell am Boden
befi ndet. Nehmen Sie Einstellungen nur bei ausge-
schaltetem Motor bzw. abgeklemmtem Antriebsakku
vor! Ungewollte Programmierungen sind sonst nicht
auszuschließen.
Ein z. B. aus Versehen im Empfänger aktivierter Ser-
votest könnte ggf. das Modell zum Absturz bringen
und Personen- und/oder Sachschäden verursachen.
Beachten Sie die Sicherheitshinweise auf den Seiten
3 … 6 dieses Handbuches und in den jeweiligen Ein-
zelanleitungen.
Alle Einstellungen (wie Fail-Safe, Servodrehrich-•
tungsumkehr, Servoweg, Mischer- und Kurvenein-
stellungen usw.), die Sie über das »Telemetrie«-Me-
nü vornehmen, werden ausschließlich im Empfänger
gespeichert und ggf. im Zuge des Umsetzens eines
Empfängers in ein anderes Modell mit übernommen.
Initialisieren Sie Ihren HoTT-Empfänger daher sicher-
heitshalber neu, wenn Sie den Empfänger in einem
anderen Modell einsetzen wollen, siehe „Reset“ auf
Seite 41.
Programmieren Sie deshalb Servodrehrichtungs-•
umkehr, Servoweg und Mischereinstellungen vor-
zugsweise nur über die mx-10-spezifi schen Ein-
stellmöglichkeiten »Servoeinstellung« (Seite 43),
»Mixer« (Seite 37) und »Dual Rate« (Seite 43). An-
derenfalls überlagern sich die Einstellungen gegen-
seitig, was im späteren Betrieb günstigstenfalls zu
Unübersichtlichkeit, ungünstigstenfalls zu Problemen
führen kann.
Mit der Channel-Mapping-Funktion der optionalen •
Smart-Box können Steuerfunktionen auch beliebig
auf mehrere Empfänger aufgeteilt oder aber auch
mehrere Empfängerausgänge mit derselben Steuer-
funktion belegt werden. Beispielsweise um je Quer-
ruderblatt zwei Servos anstatt nur einem einzelnen
ansteuern zu können usw.. Auch hierbei wird drin-
33110_mx10_HoTT_1_DE.indd Druckbogen 45 von 104 - Seiten (164, 45)
33110_mx10_HoTT_1_DE.indd Druckbogen 45 von 104 - Seiten (164, 45)
21.10.2011 13:23:49
21.10.2011 13:23:49
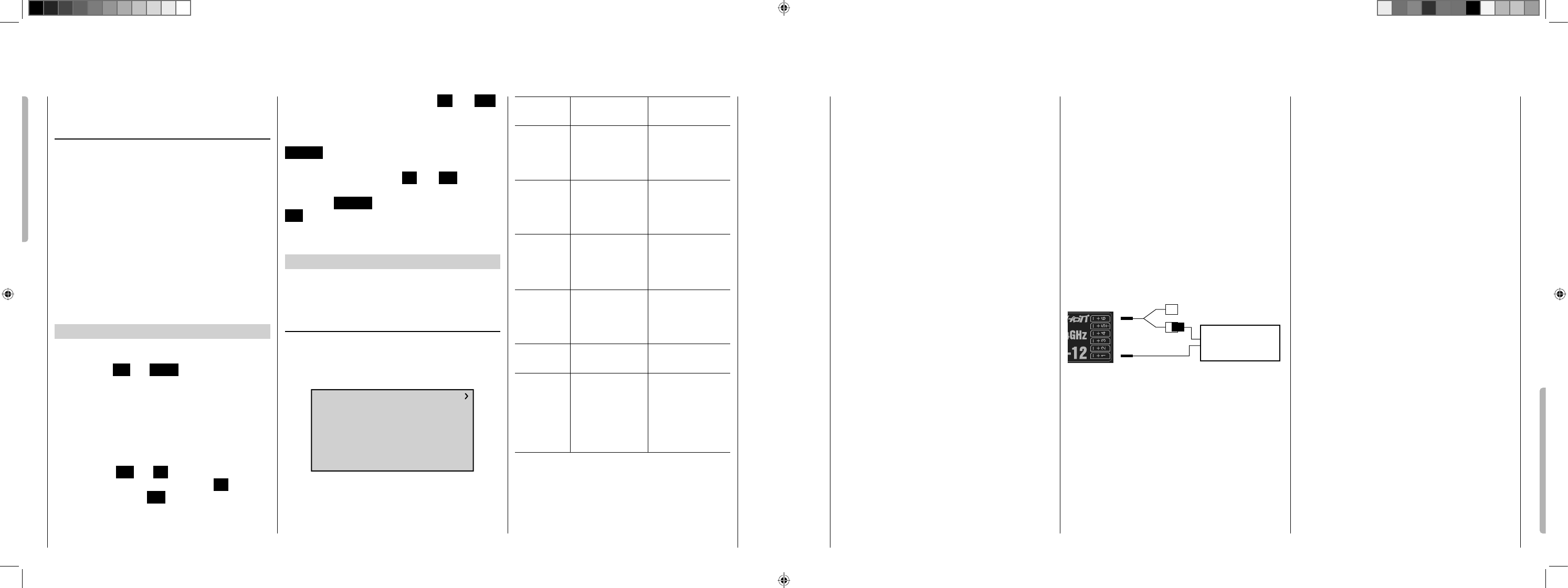
46 Programmbeschreibung: Telemetrie
gend empfohlen, beim Programmieren höchste
Vorsicht walten zu lassen.
Telemetrie
Die unter dem Oberbegriff »Telemetrie« zusammen-
gefassten Menüs können mit der optional erhältlichen
Smart-Box aufgerufen werden.
Montieren Sie die SMART-BOX idealerweise am Halte-
bügel Ihres Senders. Verbinden Sie die Box anschlie-
ßend mit dem 3-poligen Kabel mit dem Sender. Stecken
Sie dazu ein Ende des Kabels in die DATA-Buchse des
Senders und das andere in die Buchse auf der rechten
Seite der SMART-BOX. Das Stecksystem ist verpol-
ungssicher, achten Sie auf die kleinen seitlichen Fasen.
Wenden Sie auf keinen Fall Gewalt an, der Stecker
sollte leicht einrasten. Die Buchsen sind auch entspre-
chend beschriftet: schwarze Litze (-), rote Litze (+) und
orangefarbene Litze (S).
Grundsätzliche Bedienung
Die Bedienung des »Tele metrie«-Menüs der Smart-
Box geschieht über die vier oben angebrachten Tasten.
Mit den Tasten ESC und ENTER können Sie zwischen
den verschiedenen Displays umschalten. Die korres-
pondierenden Richtungshinweise fi nden Sie auf jeder
Displayseite rechts oben in Form von spitzen Klammern
(<>), siehe Abbildungen. Ist nur eine spitze Klammer
zu sehen, dann befi nden Sie sich auf der jeweils ersten
bzw. letzten Seite. Ein Seitenwechsel ist dann nur noch
in der angezeigten Richtung möglich.
Mit den Tastern DEC und INC können Sie die Parameter
innerhalb der Display-Anzeige anwählen (INC bewegt
den Cursor nach unten, DEC nach oben).
Menüzeilen, in denen Parameter geändert werden kön-
nen, sind durch eine vorangestellte spitze Klammer (>)
markiert. Durch Drücken der Pfeiltasten INC oder DEC-
Taste springt der „>“-Zeiger eine Zeile vor bzw. zurück.
Nicht anspringbare Zeilen sind nicht veränderbar.
Um einen Parameter zu ändern, drücken Sie die
INC+DEC Tasten gleichzeitig (der Parameter wird invers
dargestellt), verändern den Wert innerhalb des mögli-
chen Einstellbereiches mit der INC oder DEC Taste und
übernehmen den Wert durch nochmaliges gleichzeitiges
Drücken der INC+DEC Tasten. Mit einem Druck auf die
ESC Taste kehren Sie wieder zur Ausgangsposition
zurück.
EINSTELLEN/ANZEIGEN
MENÜ SETTING AND DATAVIEW
Auf der ersten, mit …
TX
… überschriebenen Displayseite des Untermenüs
»EINSTELLEN/ANZEIGEN« können nur teilweise Ein-
stellungen vorgenommen werden. Diese Seite dient zur
Information der allgemeinen Sendereinstellungen:
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
Wert Erläuterung mögliche
Einstellungen
ACTION
VOLT
Aktuelle
Betriebsspannung
des Senders in
Volt
-
MAXIMUM
VOLT
maximale
Betriebsspannung
seit dem letzten
Einschalten in Volt
-
MINIMUM
VOLT
minimale
Betriebsspannung
seit dem letzten
Einschalten in Volt
-
ALARM
VOLT
Spannung, bei
der das Sender-
Unterspannungs-
warnsignal ertönt
4-15 V in 0.1 V
Schritten
Werkseinstellung
4.5 V
COUNTRY Ländereinstellung GENERAL /
FRANCE
RANGE
TEST
zeigt an, ob der
Reichweitentest
läuft, bei
laufendem Test
wird die Restzeit
angezeigt
OFF / ON
Unterspannungswarnung Sender (ALARM VOLT)
Sie können die Spannung, bei deren Unterschreitung
der Alarm (Dauer Piepton) ausgelöst wird, zwischen 4 –
15 V einstellen - Werkseinstellung 4.5 Volt.
Ist der Alarm aktiv, blinkt oben rechts im Sender Display
EINSTELLEN/ANZEIGEN
163
Conseils d’installation
Alimentation de la réception
L’utilisation du modèle ne peut se faire en toute sécurité
qu’avec une alimentation correcte et fi able. Si, malgré
des tringles de commande sans points durs, un accu
chargé, des cordons accu de section suffi sante, une
résistance minimale au niveau des prises, etc, la tension
récepteur affi chée à l’écran de l’émetteur chute sans
arrêt, donc trop basse, suivez les consignes qui suivent :
En tout premier lieu, assurez-vous que l’accu est bel et
bien chargé, lorsque vous mettez le modèle en route.
Utilisez des contacts et des interrupteurs de résistance
minimale. Mesurez éventuellement la chute de ten-
sion au niveau du cordon interrupteur, sous tension,
car même les nouveaux interrupteurs haute intensité
peuvent provoquer des chutes de tension de l’ordre de
0,2 Volt. En fonction du veillissement et de l’oxydation
au niveau des contacts, cette valeur peut être multipliée
plusieurs fois. Les petites vibrations constantes auxquel-
les sont soumis les contacts peuvent également provo-
quer une lente augmentation de la résistance.
De plus, même de petits servos de type Graupner/
JR DS-281 peuvent « tirer » jusqu’à 0,75 Ampère
lorsqu’ils se bloquent. Quatre servos de ce type dans
un « Foamie » par exemple, peuvent donc peser sur
l’alimentation à bord, en consommant, sous contrainte,
jusqu’à 3 Ampère …
C’est pour cette raison qu’il est judicieux de choisir une
alimentation qui ne s’écroule pas sous fortes contrain-
tes et qui est encore capable dans ce cas, de délivrer
une tension suffi sante. Pour le calcul de la capacité
nécessaire de l’accu, il faut partir du principe qu’il faut
au moins 350 mAh pour chaque servo analogique et au
moins 500 mAh pour chaque servo digital.
En partant de ce principe, un accu de 1400 mAh d’une
réception avec 4 servos analogiques, serait un minimum
absolu.
Dans votre calcul, tenez également compte du récep-
teur, qui, de part sa fonction bi-directionnelle, absorbe
env. 70 mA.
Indépendamment de cela, il est conseillé d’alimenter
le récepteur avec deux cordons. Pour exemple, si vous
utilisez un interrupteur ou un régulateur de tension avec
deux cordons d’alimentation qui vont sur le récepteur.
Si vous avez besoin d’une ou des deux de ces sorties
récepteur pour brancher un servo, un variateur etc.
vous pouvez utiliser un cordon en Y Réf. 3936.11 qui
se branche entre le cordon et le récepteur, voir vue
ci-dessous. De ce fait, vous réduisez, par cette double
liaison sur l’interrupteur ou sur le régulateur de tension,
non seulement le risque d’une rupture du cordon, mais
vous assurez une alimentation constante des servos.
Fonction auxiliaire
Cordon en Y
Réf. 3936.11
Alimentation de
réception stabilisée
PRX Réf. 4136
Accus NiMH 4 éléments
Avec les packs 4 éléments traditionnels vous pouvez
alimenter sans crainte votre ensemble de réception
Graupner HoTT, à condition de respecter les consignes
ci-dessus, à savoir,capacité et tension suffi sante !
Accus NiMH 5 éléments
Contrairement aux packs 4 éléments, les packs accus 5
éléments offrent une plus grande plage de tension.
Sachez néanmoins que tous les servos du marché ne
supportent pas la tension (en continu) d’un pack 5 élé-
ments, notamment lorsque celui-ci vient d’être chargé.
Certains de ces servos réagissent à cela, par exemple
par des « grognements » caractéristiques.
C’est pourquoi, consultez les spécifi cations des servos
utilisés, avant de choisir l’option d’un pack 5 éléments.
Accus Nano-phosphate 2 éléments (A123)
A l’heure actuelle, ces nouveaux éléments sont sure-
ment le meilleur choix ! Avec une enveloppe métallique,
protectrice, ces éléments, capables d’absorber la charge
rapide, avec un chargeur approprié, sont beaucoup plus
résistants. Par ailleurs, le nombre de cycles de charge /
décharge de ces éléments est nettement supérieur par
rapport à un accu LiPo.
La tension nominale de 6,6 Volt d’un pack d’accu Nano-
phosphate 2 éléments ne pose aucun problème aux
récepteurs Graupner HoTT, ni aux servos, variateurs,
gyroscopes etc. dont il est expressément spécifi é qu’ils
sont en mesure de fonctionner dans des plages de
tension élevées. Sachez néanmoins que tous les ser-
vos, variateurs, gyroscopes etc, mis sur le marché
par le passé, n’admettent qu’une tension de 4,8 à 6
Volt. Leur branchement sur le récepteur nécessite donc
impérativement l’utilisation d’une alimentation régulée,
stabilisée, par ex. PRX Réf . 4136, voir annexe. Sinon, le
risque de voir se détériorer rapidement les appareils qui
y sont branché est très grand.
Accus LiPo 2 éléments
A capacité égale, les packs LiPo sont nettement plus lé-
gers que les types d’accu cités précédemment, mais du
fait de l’absence d’enveloppes métalliques, ils sont plus
sensibles aux contraintes mécaniques et aux chocs. Par
ailleurs, ils ne sont capables d’absorber des charges
rapides que dans des conditions limitées, et n’atteignent
pas un nombre de cycle de charge / décharge aussi
important que les accus Nano-phosphate par exemple.
33110_mx10_HoTT_1_DE.indd Druckbogen 46 von 104 - Seiten (46, 163)
33110_mx10_HoTT_1_DE.indd Druckbogen 46 von 104 - Seiten (46, 163)
21.10.2011 13:23:49
21.10.2011 13:23:49
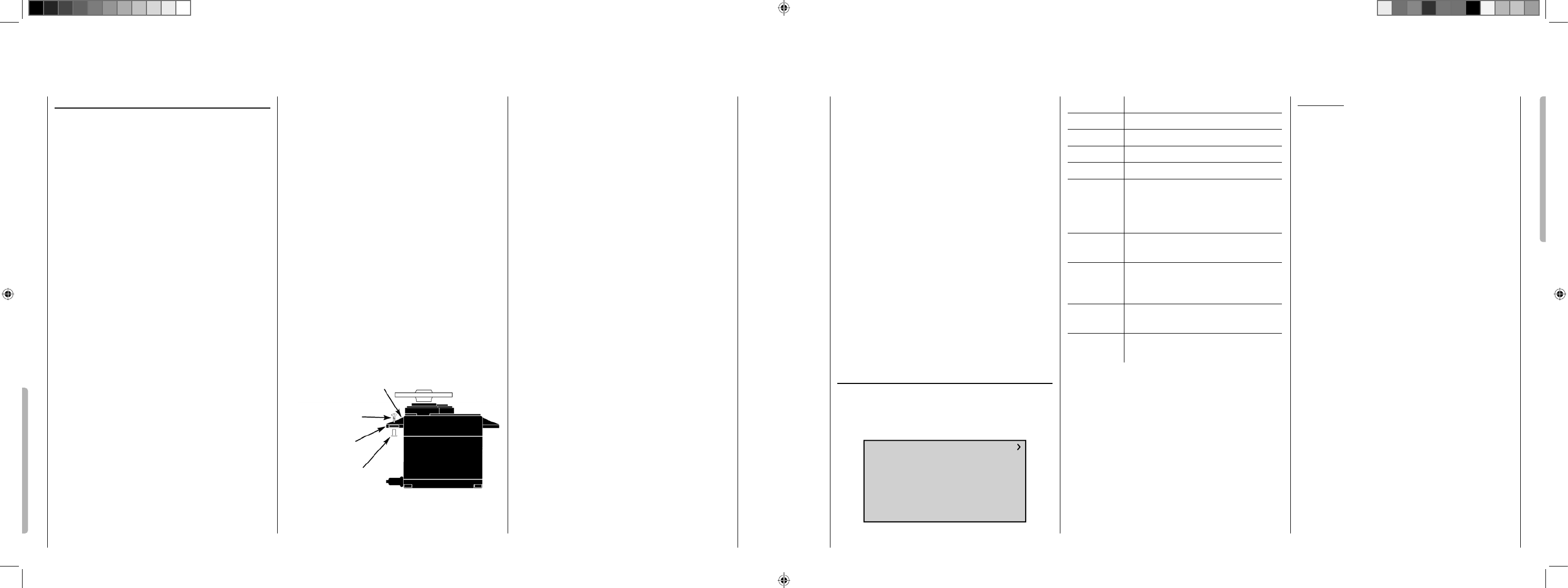
162 Conseils d’installation
du palonnier.
L’ordre dans lequel les servos doivent être branchés
dépend du type de modèle. Voir affectation des sorties
servos pages 168 et 169. De plus, respectez les consig-
nes de sécurité donnés en pages 137 … 140.
Pour éviter des frétillements incontrôlés des servos, lors
de l’utilisation
allumez toujours d’abord l’émetteur
puis après seulement le récepteur
et lorsque le vol est terminé,
coupez d’abord le récepteur
puis après seulement l’émetteur.
Lors de la programmation de l’émetteur, veillez à ce
que les moteurs électriques ne peuvent pas démarrer
par inadvertance ou si vous avez un moteur thermique
avec démarrage automatique, que celui ne puisse pas
démarrer tout seul. Par mesure de sécurité, débranchez
toujours l’accu de propulsion et coupez l’alimentation
carburant s’il s’agit d’un moteur thermique.
Dans ce qui suit, quels conseils et remarques
concernant l’installation des éléments de réception
dans le modèle :
Emballez le récepteur dans une mousse de mini-1.
mum 6 mm d’épaisseur. Fixez la mousse avec des
élastiques autour du récepteur pour le protéger con-
tre les vibrations, les atterrissages un peu violent et
les Crashs.
Les interrupteurs doivent impérativement être pro-2.
tégés contre les vibrations et être à l’abri des gaz
d’échappement. Le bouton de l’interrupteur doit pou-
voir se déplacer sur toute sa course.
Montez les servos sur les blocs caoutchouc avec les 3.
douilles en laiton, pour les protéger contre les vibra-
tions. Ne serrez pas les vis trop fort, sinon les douil-
les caoutchouc seront écrasées et ne feront plus leur
effet d’amortissement. Seulement si les vis sont ser-
rées correctement que vos servos seront protégés
effi cacement contre les vibrations. La vue ci-dessous
montre comment fi xer correctement un servo. Les
douilles en laiton sont montées, par le dessous, dans
les blocs caoutchouc.
Patte de fixation
Vis
Bloc caoutchouc
Douille laiton
Les palonniers des servos doivent pouvoir débatt-4.
re librement sur toute la course du servo. Veillez à ce
qu’il n’y ait aucun obstacle qui bloque le débattement
Conseils de mise en place
Installation du récepteur
Quelque soit le système de réception Graupner, la ma-
nière de le monter est pratiquement toujours la même :
Veillez à ce que les antennes de réception soient à au
moins 5 cm de toute grande partie métallique, ou câb-
lages qui ne ressortent pas directement du récepteur et
qui doivent être éloignés des antennes. Cela comprend,
non seulement les pièces métalliques ou celles en car-
bone, mais également les servos, moteurs électriques,
pompes, tous types de cordons, etc. Le mieux, c’est de
placer le récepteur à un endroit facilement accessible du
modèle, loin de tout autre emplacement. Il ne faut en au-
cun cas enrouler les cordons servo autour de l’antenne
ou de la faire passer à proximité !
Veillez également à ce que les cordons les plus proches
de l’antenne, ne puissent pas se déplacer en vol ! Des
cordons qui bougent en vol peuvent perturber la récep-
tion.
Des tests ont démontrés que le fait de placer une seule
antenne à la verticale était la meilleure solution, lors de
l’approche à grande distance. En mode Diversity (deux
antennes), la deuxième antenne doit être positionnée
de manière à former un angle de 90° par rapport à la
première.
Les sorties des récepteurs Graupner sont numérotées.
L’alimentation est reliée à toutes les sorties numérotées
et peut être branchée en principe sur n’importe laquelle
des 6 sorties récepteur. On peut éventuellement, avec le
cordon en Y Réf. 3936.11, brancher également un servo
en parallèle avec l’alimentation.
47
Programmbeschreibung: Telemetrie
der SMART-BOX „VOLT.E“, die Parameter ACTION
VOLT und ALARM VOLT werden invers dargestellt.
Ländereinstellung (COUNTRY)
Die Ländereinstellung ist erforderlich, um den diversen
Richtlinien der einzelnen Länder gerecht zu werden.
Das Fernsteuer-System HoTT 2.4 verfügt über ein ein-
geschränktes Frequenzband für Frankreich. Wird das
Fernsteuer-System in Frankreich betrieben, muss zuerst
die Ländereinstellung auf den Modus „Frankreich
(FRANCE)“ gestellt werden. Auf keinen Fall darf der
„GENERAL (EUROPA)“-Modus verwendet werden!
Werkseinstellung ist GENERAL.
Reichweitentest (RANGE TEST)
schaltet den Reichweitentest ein oder aus, die verblei-
bende Restzeit wird im Display angezeigt. Die Anzeige
funktioniert auch, wenn der Reichweitentest über den
BIND-Taster am Sender gestartet wird.
RX DATAVIEW
… überschriebenen Displayseite des Untermenüs
»EINSTELLEN/ANZEIGEN« können keine Einstellun-
gen vorgenommen werden. Diese Seite dient nur zur
Information:
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
Wert Erläuterung
S-QUA Signalqualität in %
S-dBm Empfangsleistung in dBm
S-STR Signalstärke in %
R-TEM. Empfängertemperatur in °C
L PACK TIME zeigt die Zeit in ms an, in der
das längste Datenpaket bei der
Übertragung Sender zum Empfänger
verlorengegangen ist
R-VOLT Aktuelle Betriebsspannung des
Empfängers in Volt
L.R-VOLT minimalste Betriebsspannung
des Empfängers seit dem letzten
Einschalten in Volt
SENSOR1 Zeigt die Werte des optionalen
Telemetrie-Sensors 1 in Volt und °C an
SENSOR2 Zeigt die Werte des optionalen
Telemetrie-Sensors 2 in Volt und °C an
Signalquallität (S-QUA)
Die Signalqualität (S-QUA) wird über den Rückkanal des
Empfängers „live“ an den Sender gesendet und zeigt die
Signalstärke in % an.
Empfangsleistung (S-dbm)
Die Empfangsleistung (S-dbm) wird mit negativen
Werten angezeigt, d. h., ein Wert gegen Null ist der
Maximalwert (= bester Empfang), je niedriger die Werte
werden, desto schlechter ist die Empfangsleistung!
Wichtig ist dies unter anderem beim Reichweitetest vor
dem Betrieb.
Anmerkung:
Bei negativen Zahlen kehrt sich die Bewertung einer
Zahl um: Je höher die auf das Minus-Zeichen folgende
Zahl, desto niedriger ist deren Wert.
Führen Sie den Reichweitetest, wie auf Seite 38 bzw.
42 beschrieben, vor jedem Flug durch und simulieren
Sie dabei alle Servobewegungen, die auch im Flug
vorkommen. Die Reichweite muss bei aktiviertem
Reichweitetest min. 50 m am Boden betragen. Bei
dieser Entfernung darf im „RX DATAVIEW“-Display unter
„S-dBm“ höchstens -80 dBm angezeigt werden, um
einen sicheren Betrieb zu gewährleisten. Liegt der Wert
darunter (z. B. -85 dBm), sollten Sie Ihr Modell keines-
falls in Betrieb nehmen. Überprüfen Sie den Einbau
Ihrer Empfangsanlage und die Lage der Antennen.
Im Betrieb sollte dieser Wert nicht unter -90 dBm fallen,
ansonsten sollten Sie die Entfernung des Modells ver-
ringern. Normalerweise wird aber vor Erreichen dieses
Wertes die akustische Reichweitewarnung (Piepton-
Intervall 1 s) ausgelöst, um einen sicheren Betrieb zu
gewährleisten.
Signalstärke (S-STR)
Die Signalstärke (S-STR) wird in % angezeigt. Generell
wird eine akustische Reichweitenwarnung (Piepton-
Intervall 1 s) ausgegeben, sobald das Empfängersignal
im Rückkanal zu schwach wird. Da der Sender aber
eine wesentlich höhere Sendeleistung besitzt als der
Empfänger, kann das Modell immer noch sicher betrie-
ben werden. Die Modellentfernung sollte aber dennoch
sicherheitshalber verringert werden, bis der Warnton
wieder verstummt.
Empfängertemperatur (R-TEM.)
Vergewissern Sie sich, unter allen Flugbedingungen im
33110_mx10_HoTT_1_DE.indd Druckbogen 47 von 104 - Seiten (162, 47)
33110_mx10_HoTT_1_DE.indd Druckbogen 47 von 104 - Seiten (162, 47)
21.10.2011 13:23:49
21.10.2011 13:23:49
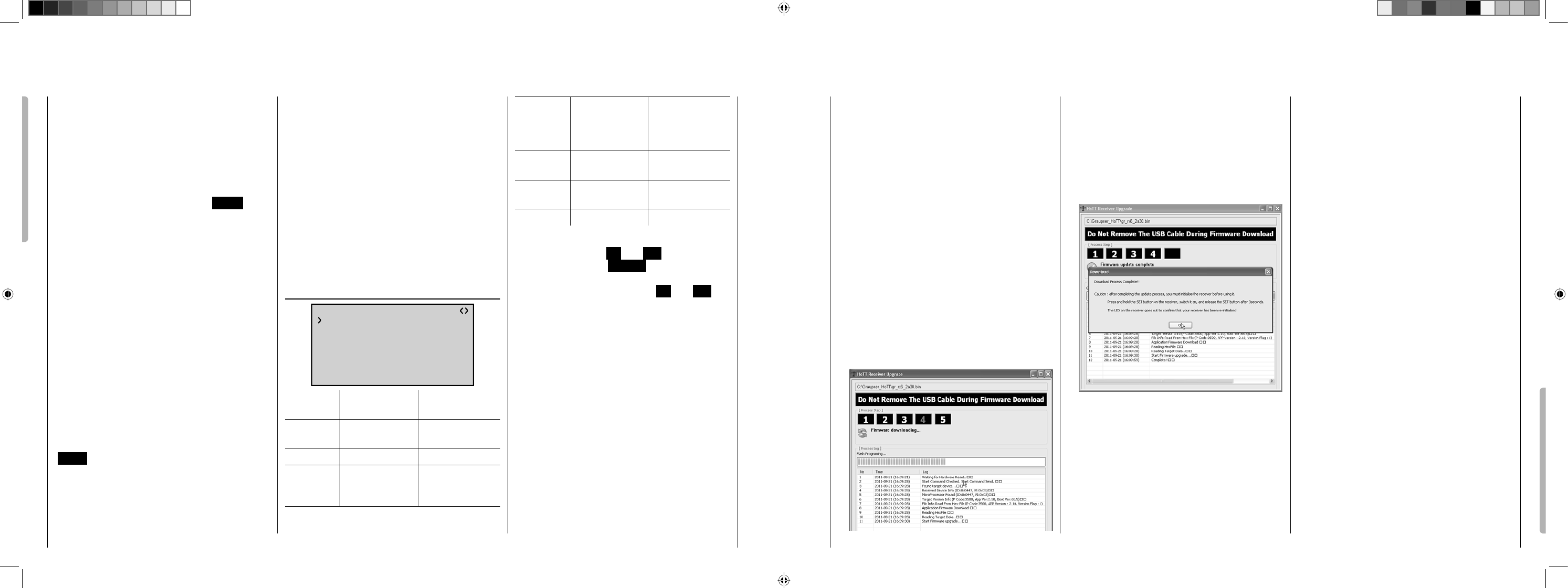
48 Programmbeschreibung: Telemetrie
Rahmen der erlaubten Temperaturen Ihres Empfängers
zu bleiben (idealerweise zwischen -10 und 55 °C).
Die Empfänger-Temperaturgrenzwerte, ab denen eine
Warnung erfolgt, können im Untermenü »RX SER-
VO TEST« unter „ALARM TEMP+“ (50 … 80 °C und
„ALARM TEMP-“ (-20 … +10 °C) eingestellt werden.
Bei Unter- oder Überschreitung erfolgt ein akustisches
Signal (Dauer-Piepton) und in allen Empfänger-
Untermenüs „RX“ erscheint oben rechts „TEMP.E“. Auf
der Display-Seite »RX DATAVIEW« wird außerdem der
Parameter „R-TEM“ invers dargestellt.
Datenpakete (L PACK TIME)
Zeigt den längsten Zeitraum in ms an, in dem Datenpa-
kete bei der Übertragung vom Sender zum Empfänger
verloren gegangen sind. In der Praxis ist das der längste
Zeitraum, in dem das Fernsteuersytem in den Fail-Safe-
Modus gegangen ist.
Betriebsspannung (R-VOLT)
Kontrollieren Sie immer die Betriebsspannung des Emp-
fängers. Sollte sie zu niedrig sein, dürfen Sie Ihr Modell
auf keinen Fall weiter betreiben bzw. überhaupt starten.
Die Empfänger-Unterspannungswarnung kann im
Untermenü »RX SERVO TEST« unter „ALARM VOLT“
zwischen 3,0 und 6,0 Volt eingestellt werden. Bei
Unterschreitung erfolgt ein akustisches Signal (sich
wiederholender Doppel-Piepton (lang/kurz)) und in allen
Empfänger-Untermenüs »RX …« erscheint oben rechts
„VOLT.E“. Im Untermenü »RX DATAVIEW« wird außer-
dem der Parameter „R-VOLT“ invers dargestellt.
Die aktuelle Empfängerakkuspannung wird auch im
Grunddisplay, siehe Seite 24, angezeigt.
Minimale Betriebsspannung (L.R-VOLT)
„L.R-VOLT“ zeigt die minimale Betriebsspannung des
Empfängers seit dem letzten Einschalten an.
Sollte diese Spannung deutlich von der aktuellen
Betriebsspannung „R-VOLT“ abweichen, wird der
Empfängerakku durch die Servos möglicherweise zu
stark belastet. Spannungseinbrüche sind die Folge.
Verwenden Sie in diesem Fall eine leistungsfähigere
Spannungsversorgung, um maximale Betriebssicherheit
zu erreichen.
Sensor 1 + 2
Zeigt die Werte des optionalen Telemetrie-Sensors 1
und ggf. 2 in Volt und °C an. Eine Beschreibung dieser
Sensoren ist im Anhang zu fi nden.
RX SERVO
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
LIMIT– : 150%
OUTPUT CH: 01
LIMIT+ : 150%
PERIOD : 20msec
Wert Erläuterung mögliche
Einstellungen
OUTPUT CH Kanalauswahl 1 … je nach
Empfänger
REVERSE Servoumkehr AUS / EIN
CENTER Servomitte in μs wenn aktiv (invers),
abhängig von
Geberposition
TRIM Trimmposition in
μs Abweichung
von der CENTER-
Position
-120 … +120 μs
LIMIT– Wegbegrenzung
bei % Servoweg
30 … 150 %
LIMIT+ Wegbegrenzung
bei % Servoweg
30 … 150 %
PERIOD Zykluszeit in ms 10 oder 20 ms
OUTPUT CH (Kanalauswahl)
Wählen Sie ggf. mit der INC oder DEC Tasten die Zeile
„Kanal“ an. Drücken Sie INC+DEC gleichzeitig. Das
Wertefeld wird invers dargestellt. Stellen Sie nun den
gewünschten Kanal (z. B. 01) mit der INC oder DEC
Taste ein. Die nachfolgenden Parameter beziehen
sich immer auf den hier eingestellten Kanal:
Reverse (Servo-Umkehr)
Stellt die Drehrichtung des an den gewählten Steuerka-
nal angeschlossenen Servos ein: ON / OFF
CENTER (Servo-Mitte)
In der Zeile „CENTER“ wird bei aktivem Wertefeld
(inverse Darstellung) die aktuelle Impulszeit des in der
Zeile „OUTPUT CH“ gewählten Steuerkanals in μs
angezeigt.
Der angezeigte Wert ist abhängig von der aktuellen Stel-
lung des diesen Steuerkanal beeinfl ussenden Gebers
und ggf. der Stellung von dessen Trimmung.
Eine Kanalimpulszeit von 1500 μs entspricht der stan-
dardmäßigen Mittenposition und damit der üblichen
Servomitte.
Um diesen Wert zu verändern, wählen Sie die Zeile
161
Utilisation du récepteur
tionnez dans la boîte de dialogue „Datei öffnen“ le
fi chier de mise à jour souhaité, avec l‘extension „bin“.
Les fi chiers Firmware sont codifi és selon le produ-
it, cela signifi e que si par inadvertance, vous sélec-
tionnez un fi chier qui ne correspond pas à l‘article
(par exemple un fi chier de mise à jour de l‘émetteur à
la place du fi chier de mise à jour du récepteur), une
fenêtre Popup „Product code error“ apparaît, et la pro-
cédure de mise à jour ne se lance pas.
Cliquez maintenant sur le Button „Download Start“.
Attendez que la barre de progression démarre.
En fonction des PC, cela peut prendre plusieurs se-
condes. Allumez maintenant le récepteur en gardant
la touche SET enfoncée. Au bout de quelques secon-
des „Found Target device...“ s‘affi che. Vous pouvez
maintenant relâcher la touche.
Si la reconnaissance ne se fait, la fenêtre Popup „Tar-
get device ID not found“ s‘affi che.
Suite à cela, la procédure de mise à jour proprement
dite se lance, et au-dessus du texte qui défi le,
une barre de progression s‘affi che et démarre:
Si la procédure s‘interrompt avant d‘avoir atteint les
100%, coupez l‘alimentation de votre récepteur et re-
lancez une nouvelle procédure de mise à jour. Répé-
tez les différentes étapes ci-dessus à nouveau.
Sur l‘écran et sur la barre de progression, vous pou-
vez suivre l‘avancement de la mise à jour. La mise à
jour est terminée si la fenêtre Popup „Download Pro-
cess Complete!!“ s‘affi che:
Durant la mise à jour, la LED verte du récepteur est
allumée. De plus, si la mise à jour s‘est effectuée cor-
rectement, la LED verte s‘éteint.
Coupez l‘alimentation du récepteur et débranchez le
cordon. Répétez cette manipulation pour d‘éventuels
autres récepteurs.
4. Initialisation du récepteur
Une fois que la procédure de mise à jour s‘est effec-
tuée avec succès, il FAUT, avant toute nouvelle mise
en route du récepteur, et pour des raisons de sécuri-
té, faire une initialisation:
Pour cela, appuyez sur la touche SET du récepteur et
branchez son alimentation. Relâchez la touche SET
au bout de 3 secondes environ – dès que la LED ver-
te s‘éteint. Si après, vous allumez également votre
émetteur, la LED verte du récepteur reste allumée du-
rant 2 – 3 secondes au vert. A part les données rela-
tives à la procédure Binding, tous les autres réglages
enregistrés dans le récepteur se remettent sur les ré-
glages d‘origine, et doivent, en cas de besoin, être ré-
enregistrés.
33110_mx10_HoTT_1_DE.indd Druckbogen 48 von 104 - Seiten (48, 161)
33110_mx10_HoTT_1_DE.indd Druckbogen 48 von 104 - Seiten (48, 161)
21.10.2011 13:23:50
21.10.2011 13:23:50
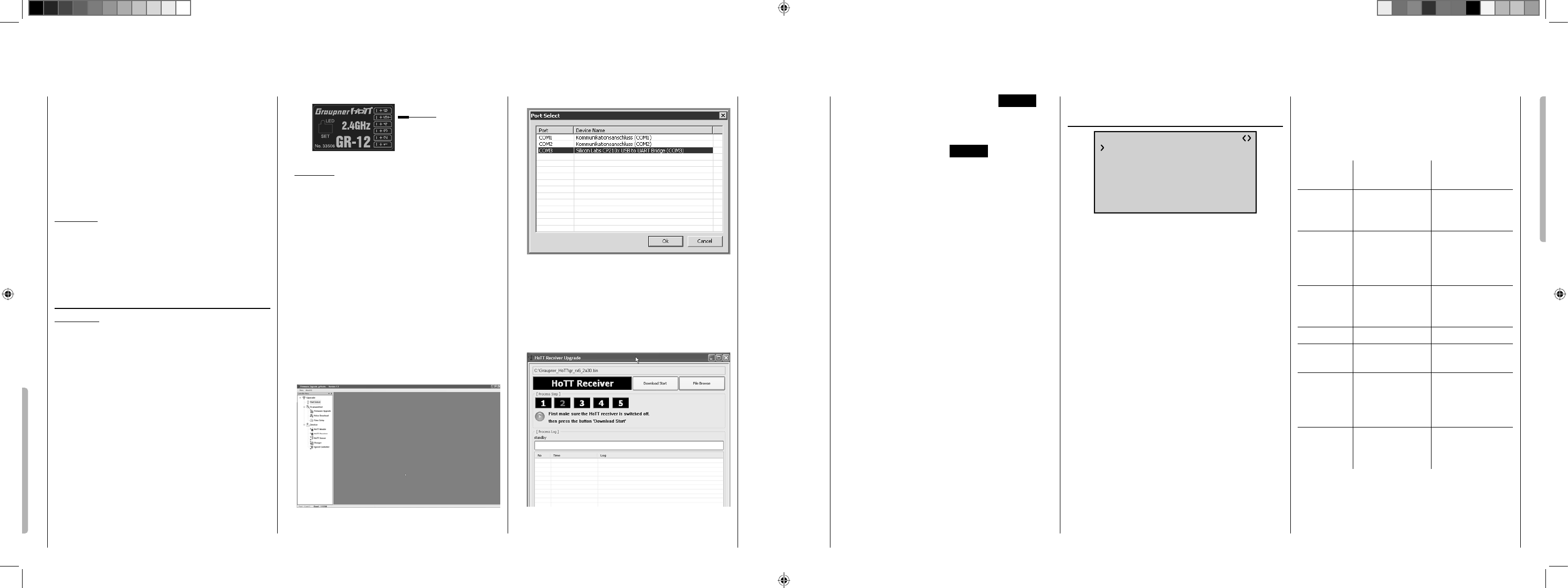
160 Utilisation du récepteur
Les mises à jour du récepteur se font par la prise de té-
lémétrie du récepteur à l‘aide d‘un PC équipé d‘un sys-
tème d‘exploitation Windows XP, Vista ou 7. Pour cela,
il vous faut le port USB Réf.Cde. 7168.6 en option ainsi
que le cordon adaptateur Réf.Cde. 7168.6A. Vous trou-
verez également tous les fi chiers et programmes né-
cessaires sur notre site internet www.graupner.de, sous
Download.
Remarque:
Après avoir enregistré votre récepteur sous https://
ww.graupner.de/de/service/produktregistrierung, vous
serez informé automatiquement par mail des dernières
mises à jour disponibles.
Firmware-Update de récepteur
Remarque:
Avant toute mise à jour, vérifi ez l‘état de charge de
votre accu, rechargez-le par précaution avant de lan-
cer la mise à jour.
1. Installation des pilotes
Si ce n‘est pas encore fait, installez les pilotes néces-
saires pour le port USB Réf.Cde. 7168.6 comme dé-
crit en page 155.
2. Liaison Récepteur / PC
Branchez le cordon adaptateur Réf.Cde. 7168.6A sur
le port USB Réf.Cde. 7168.6 et sur la sortie „-+T“ du
récepteur. Les petites arêtes latérales font offi ce de
détrompeurs. Ne forcez en aucun cas, la prise doit se
monter sans effort.
Firmware-Update du récepteur
Attention:
Si le cordon adaptateur Réf.Cde. 7168.6A est en-
core composé de 3 fi ls, coupez auparavant le fi l
rouge du milieu.
Reliez ensuite le cordon USB également livré avec
(PC-USB/mini-USB) sur le port USB avec le PC ou
avec un portable. Si le branchement est correct, une
LED rouge située sur la platine du port doit s‘allumer
quelques secondes. Coupez maintenant l‘alimentation
de votre récepteur.
3. Firmware Update Utility
Avec un double-clic, lancez le programme „ Firm-
ware_Upgrade_grStudio_VerX.XX.exe“ qui se trou-
ve dans les fi chiers Download du répertoire „Firmwa-
re Updater“. (au jour de l‘impression de ce manuel, la
version actuelle 1.3 se lance sans installation préala-
ble.):
Sous „COM Port Setup“, sélectionnez le port sur le-
Cordon adaptateur
Réf.Cde. 7168.6A
Si present:
coupez le fil rouge du milieu
quel le port USB est branché
Celui-ci est reconnaissable à sa désignation „Silicon
Labs CP210x USB to UART Bridge“, dans la colonne
„Device Name“. Dans la vue ci-dessus, il s‘agirait du
Port „COM 3“.
Dans „Menu“, allez ensuite sur l‘option „HoTT Recei-
ver Upgrade“, ou ouvrez „Controller Menu“ et cliquez
sur „ HoTT Receiver „:
Cliquez sur le Button marque „File Browse“ et sélec-
49
Programmbeschreibung: Telemetrie
„CENTER“ an und drücken Sie die Tasten INC+DEC.
Nun bewegen Sie den entsprechenden Geber, Steu-
erknüppel und/oder Trimmhebel in die gewünschte
Position und speichern die aktuelle Geberpostion durch
erneutes Drücken der Tasten INC+DEC. Diese Position
wird als neue Neutralposition abgespeichert.
TRIM (Trimmposition)
In der Zeile „TRIM“ können Sie die Neutralposition eines
an den in der Zeile „OUTPUT CH“ gewählten Steuer-
kanal angeschlossenen Servos mittels der Pfeiltasten
der rechten 4-Wege-Taste in 1-μs-Schritten feinfühlig
nachjustieren: Um den hier eingestellten TRIM-Wert ist
der Wert in der Zeile „CENTER“ im Bereich von ±120 μs
anpassbar.
Werkseinstellung: 0 μs.
LIMIT–/+ (Servo-Wegbegrenzung –/+)
Diese Option dient zur Einstellung einer seitenabhängi-
gen Begrenzung (Limitierung) des Servowegs (Ruder-
ausschlag) des am in der Zeile „OUTPUT CH“ gewähl-
ten Steuerkanal angeschlossenen Servos.
Die Einstellung erfolgt getrennt für beide Richtungen im
Bereich von 30 … 150 %.
Werkseinstellung: je 150 %.
PERIOD (Zykluszeit)
In dieser Zeile bestimmen Sie den Zeitabstand der
einzelnen Kanalimpulse. Diese Einstellung wird für alle
Steuerkanäle übernommen.
Bei ausschließlicher Verwendung von Digitalservos kann
eine Zykluszeit von 10 ms eingestellt werden.
Im Mischbetrieb oder bei ausschließlicher Verwendung
von Analogservos sollte unbedingt 20 ms eingestellt
sein, da letztere andernfalls „überfordert“ sein können
und infolgedessen mit „Zittern“ oder „Knurren“ reagieren.
RX FAIL SAFE
RX FAIL SAFE
INPUT CH: 01
MODE : HOLD
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500sec
Der Beschreibung dieses Menüs vorangestellt seien ein
paar mahnende Worte:
„Nichts tun” ist das schlechteste, was diesbezüglich
getan werden kann. In der Grundeinstellung des HoTT-
Empfängers ist nämlich „HOLD” vorgegeben.
Im Falle einer Störung fl iegt günstigstenfalls das Flug-
modell unbestimmte Zeit geradeaus und „landet” dann
hoffentlich irgendwo, ohne größeren Schaden anzurich-
ten! Passiert so etwas allerdings an unrechtem Ort und
zu unrechter Zeit, dann könnte z. B. das Motormodell un-
steuerbar und somit auch unkontrollierbar übers Flugfeld
„rasen” und Piloten oder Zuschauer gefährden!
Deshalb sollte schon bedacht werden, ob zur Vermei-
dung derartiger Risiken nicht doch wenigstens „Motor
aus” programmiert werden sollte!?
Und nach dem erhobenen Zeigefi nger noch ein kurzer
Hinweis auf die drei möglichen Varianten des Senders
mx-10 HoTT zur Einstellung von Fail Safe:
Der einfachste Weg zu Fail-Safe-Einstellungen ist die
Benutzung der sendereigenen, mit dem BIND-Taster
erreichbaren »Fail Safe«, siehe Seite 43.
Ähnlich, wenn auch etwas umständlicher zu erreichen,
funktioniert die auf der nächsten Doppelseite beschrie-
bene Option „FAIL SAFE ALL“.
Und zuletzt steht noch die relativ aufwendige Metho-
de der individuellen Einstellung mittels der Optionen
„MODE“, „F.S.Pos.“ und „DELAY“ zur Verfügung. Die
Beschreibung dieser Variante beginnt mit der Option
„MODE“ weiter unten.
Wert Erläuterung mögliche
Einstellungen
OUTPUT CH Ausgangskanal
(Servoanschluss
des Empfängers)
1 … je nach
Empfänger
INPUT CH Eingangskanal
(vom Sender
kommender
Steuerkanal)
1 … 16
MODE Fail-Safe-Modus HOLD
FAIL SAFE
OFF
F.S.POS. Fail-Safe-Position 1000 … 2000 μs
DELAY Reaktionszeit
(Verzögerung)
0,25, 0,50, 0,75
und 1,00 s
FAIL SAFE
ALL
Speichern der
Fail-Safe-
Positionen aller
Steuerkanäle
NO / SAVE
POSITION Anzeige der
gespeicherten
Fail-Safe-Position
zwischen ca. 1000
und 2000 μs
OUTPUT CH (Servoanschluss)
In dieser Zeile wählen Sie den jeweils einzustellenden
OUTPUT CH (Servoanschluss des Empfängers) aus.
33110_mx10_HoTT_1_DE.indd Druckbogen 49 von 104 - Seiten (160, 49)
33110_mx10_HoTT_1_DE.indd Druckbogen 49 von 104 - Seiten (160, 49)
21.10.2011 13:23:50
21.10.2011 13:23:50
50 Programmbeschreibung: Telemetrie
INPUT CH (Auswahl des Eingangkanals)
Wie schon erwähnt, können die 5 Steuerfunktionen des
Senders mx-10 HoTT bei Bedarf mit der optionalen
Smart-Box beliebig auf mehrere Empfänger aufgeteilt
oder aber auch mehrere Empfänger ausgänge mit
derselben Steuerfunktion belegt werden. Beispielsweise
um je Querruderblatt zwei Servos oder ein übergroßes
Seitenruder mit miteinander gekoppelten Servos anstel-
le eines einzelnen ansteuern zu können.
Eine Aufteilung auf mehrere HoTT-Empfänger wiederum
bietet sich u. a. in Großmodellen an, um beispielsweise
lange Servokabel zu vermeiden. Bedenken Sie in die-
sem Fall, dass per »Telemetrie«-Menü immer nur der
zuletzt gebundene Empfänger angesprochen werden
kann!
Die 5 Steuerkanäle (INPUT CH) der mx-10 HoTT
können entsprechend verwaltet werden, indem durch
so genanntes „Channel Mapping“ dem in der Zeile
OUTPUT CH ausgewählten Servoanschluss des Emp-
fängers in der Zeile INPUT CH ein anderer Steuerkanal
zugewiesen wird. ABER ACHTUNG: Wenn Sie beispiels-
weise senderseitig die Mischer „Querruder - AILE“ oder
„DELTA“ durch den Jumper vorgegeben haben, dann
wird bereits im Sender die Steuerfunktion 2 (Querruder)
auf die Steuerkanäle 2 + 5 für linkes und rechtes Quer-
ruder aufgeteilt. Die korrespondierenden und damit ggf.
auch zu mappenden INPUT CH des Empfängers wären
in diesem Fall dann die Kanäle 02 + 05, siehe nachfol-
gendes Beispiel.
Beispiele:
Sie möchten bei einem Modell jede Querruderklappe •
über zwei oder mehr Servos ansteuern:
Weisen Sie den betreffenden OUTPUT CH (Servo-
anschlüssen) jeweils ein und denselben INPUT CH
(Steuerkanal) zu. In diesem Fall abhängig von lin-
ker oder rechter Tragfl äche, als INPUT CH jeweils ei-
nen der beiden standardmäßigen Querrudersteuer-
kanäle 2 + 5.
Sie möchten bei einem Modell das Seitenruder mit •
zwei oder mehr Servos ansteuern:
Weisen Sie den betreffenden OUTPUT CH (Servo-
anschlüssen) jeweils ein und denselben INPUT CH
(Steuerkanal) zu. In diesem Fall den standardmäßi-
gen Seitenruderkanal 4.
MODE
Die Einstellungen der Optionen „MODE“, „F.S.Pos.“ und
„DELAY“ bestimmen das Verhalten des Empfängers im
Falle einer Störung der Übertragung vom Sender zum
Empfänger.
Die unter „MODE“ programmierte Einstellung bezieht
sich immer auf den in der Zeile OUTPUT CH eingestell-
ten Kanal.
Die Werkseinstellung ist für alle Servos „HOLD“.
Für jeden angewählten OUTPUT CH (Servoanschluss
des Empfängers) können Sie wählen zwischen:
FAI(L) SAFE•
Bei dieser Wahl bewegt sich das entsprechende Ser-
vo im Falle einer Störung nach Ablauf der in der Zei-
le „DELAY“ eingestellten „Verzögerungszeit“ für die
Restdauer der Störung in die in der Zeile „POSITI-
ON“ angezeigte Position.
HOLD•
Bei einer Einstellung von „HOLD“ behält das Servo
im Falle einer Störung die zuletzt als korrekt empfan-
gene Servoposition für die Dauer der Störung bei.
OFF•
Bei einer Einstellung von „OFF“ stellt der Empfän-
ger im Falle einer Störung die Weitergabe von (zwi-
schengespeicherten) Steuerimpulsen für den betref-
fenden Servoausgang für die Dauer der Störung ein.
Der Empfänger schaltet die Impulsleitung sozusa-
gen „ab“.
ABER ACHTUNG: Analogservos und auch so man-
ches Digitalservo setzen während des Ausfalls der
Steuerimpulse dem nach wie vor vorhandenen Steu-
erdruck keinen Widerstand mehr entgegen und wer-
den infolgedessen mehr oder weniger schnell aus ih-
rer Position gedrückt.
F.S.POS. (Fail-Safe-Position)
Für jeden OUTPUT CH (Servoanschluss des Emp-
fängers) stellen Sie in der Zeile „F.S.POS.“ nach Ak-
tivierung des Wertefeldes (inverse Darstellung) durch
gleichzeitiges Drücken der Taste INC+DEC, mit den
Tasten INC oder DEC diejenige Servoposition ein, die
das Servo im Störfall im Modus „FAI(L) SAFE“ einneh-
men soll. Die Einstellung erfolgt in 10-μs-Schritten.
Werkseinstellung: 1500 μs (Servomitte).
Wichtiger Hinweis:
Die Funktion „F.S.POS.“ hat darüber hinaus in allen
drei Modi „OFF“, „HOLD“ und „FAI(L) SAFE“ noch eine
besondere Bedeutung für den Fall, dass der Empfänger
eingeschaltet wird, aber (noch) kein gültiges Signal
erhält:
Das Servo fährt sofort in die in der Zeile „Position“ vor-
eingestellte Fail-Safe-Position. Dadurch können Sie z. B.
verhindern, dass beim versehentlichen Einschalten des
Empfängers bei ausgeschaltetem Sender ein Fahrwerk
einfährt o. ä.. Im normalen Modellbetrieb verhält sich da-
gegen das entsprechende Servo im Störungsfall gemäß
dem eingestellten „MODE“.
159
Utilisation du récepteur
Une nouvelle impulsion sur les touches INC+DEC
confi rmera votre choix.
Dernières remarques :
La résolution servo du système HoTT, nettement su-•
périeure conduit à une réaction plus directe, en com-
paraison avec les technologies utilisées jusqu’ici. Fa-
miliarisez-vous avec ce comportement beaucoup
plus fi n !
Si, parallèlement à l’accu de réception vous utili-•
sez un variateur avec système BEC* intégré, il faud-
ra éventuellement interrompre le fi l rouge (Plus) en
le retirant de la prise. Respectez impérativement les
conseils données à ce sujet dans la notice du varia-
teur. Avec un petit tourne-
vis, soulever légèrement la
patte centrale de la prise
(1), retirer le fi ls rouge (2),
et l’isoler pour éviter tout
court-circuit (3).
rouge
1
23
Respectez les consignes de montage du récepteur, de
l’antenne de réception et des servos en page 34.
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SENSOR
Sortie servo 6: Signal cumulé
D‘origine, le signal cumulé SUMO 5 (voir également
page 187) est activé sur la sortie 6, de ce fait, on peut
l‘utiliser, sans programmation préalable par la Smart-
Box en option, pour le Mikrokopter ou pour simulateurs.
Reset
Pour effectuer un Reset du récepteur, appuyez sur la
touche SET du récepteur et maintenez-la enfoncée pen-
dant que vous allumez la réception. Relâchez ensuite la
touche.
Si le Reset a été effectué émetteur coupé ou avec un
récepteur non liée, la LED du récepteur clignotera alors
au bout de 2 – 3 secondes au rouge, à cadence lente, et
il sera possible, coté émetteur, de lancer une procédure
Binding immédiatement après.
Si un Reset a été effectué avec un récepteur lié, et si la
mémoire correspondante au modèle est activée lorsque
l’émetteur est allumé, la LED se met au Vert peu de
temps après, pour signaler que votre votre ensemble
émetteur / récepteur est à nouveau opérationnel.
Attention :
Lors d’un Reset, TOUS les réglages récepteur sont
remis aux réglages usine, à l’exception des données
spécifi ques à la procédure Binding !
Déclenché par inadvertance, il faudra reprendre,
après un RESET, tous les réglages récepteur en-
registré auparavant dans le menu de télémétrie du
récepteur.
Par contre, un RESET est vivement conseillé, lors-
que vous placez le récepteur dans un autre modèle !
On peut, dans ce cas, éviter de reprendre des
* Battery Elimination Circuit
réglages qui ne correspondraient plus à cet autre
modèle.
33110_mx10_HoTT_1_DE.indd Druckbogen 50 von 104 - Seiten (50, 159)
33110_mx10_HoTT_1_DE.indd Druckbogen 50 von 104 - Seiten (50, 159)
21.10.2011 13:23:51
21.10.2011 13:23:51
158 Utilisation du récepteur
Utilisation du récepteur
Généralités relatives au récepteur GR-12
Ensemble de réception
Un récepteur bi-directionnel, en 2,4 GHz de type GR-12
est fourni avec le set de l’émetteur mx-10 HoTT, qui
permet de brancher jusqu’à 6 servos
Pour établir une liaison avec l’émetteur, il faut d’abord
que le récepteur Graupner Hott soit lié à « son » émet-
teur Graupner Hott. Cette procédure est appelée « Bin-
ding ». Mais cette procédure n’est nécessaire qu’une
seule fois par ensemble récepteur / mémoire, voir pages
172 ou 174, et a déjà été réalisée en usine pour les
éléments fournis dans le Set, et ce, pour la mémoire de
modèle Nr. 1, de telle sorte qu’une procédure Binding ne
devra être faite que pour d’autres récepteurs ou si vous
changez d’emplacement mémoire (procédure qui peut,
par ex. en cas de changement d’émetteur, être reprise à
tout moment).
Dès que vous avez branché le récepteur HoTT de type
GR-12 livré avec le set, à l’alimentation, la LED du ré-
cepteur s’allume brièvement au vert, puis reste éteinte,
lorsque « son » émetteur est hors de portée ou lorsqu’il
est coupé. Lorsque la liaison est établie, la LED reste
allumée au vert.
Remarque:
Si la LED reste allumée au vert et que malgré cela le
récepteur ne réagit ni à la touche SET ni aux ordres de
commande, vérifi ez la polarité de votre alimentation du
récepteur.
Affi chage de la tension à bord
Si la liaison télémétrique est établie, la tension de l’accu
de réception est affi
chée à droite de l’écran „RX DATA-
VIEW“ de la Smart-Box en option, sous RVOLT.
Alarme température
Si la température chute en-dessous d’une certaine va-
leur, (d’origine -10°C) ou si elle passe au-dessus d’une
certaine valeur préenregistrée (d’origine + 70°C), une
alarme sonore se déclenche au niveau de l’émetteur
sous forme d’un Bip régulier à intervalle d’une seconde.
Branchements servos et polarité
Les sorties récepteur des récepteurs Graupner HoTT
sont numérotées. La connectique est équipée de dé-
trompeurs. En branchant les fi ches, attention aux petits
chanfreins latéraux. Ne le montez en aucun cas avec
force.
L’alimentation se fait par les différentes sorties servos. Si
plus aucune sortie servo n’est libre, vous pouvez, avec
un cordon en Y Réf. Cde. 3936.11, brancher un servo et
l’alimentation sur la même sortie récepteur.
N’inversez pas la polarité de ce branchement !
Une telle inversion peut détruire le récepteur et les
éléments qui y sont branchés.
La fonction de chaque voie est déterminée par
l’émetteur, et non par le récepteur. Il n’y a pas que la
sortie servo de commande des gaz qui peut être dif-
férente. Sur les radiocommandes Graupner celle-ci se
trouve par exemple sur la voie 1 pour des modèles à
voilure fi xe, et sur la voie 6 pour les hélicoptères.
Sortie servo 5 : « SERVO » ou « CAPTEUR »
Sur la sortie 5, répérée en plus d’un «T» …
Servo OU
Capteur/Sonde
… on peut non seulement brancher un cordon adapta-
teur Réf.Cde. 7168.6A pour la mise à jour du récepteur,
mais également un capteur ou sonde de télémétrie.
Mais pour que l’élément branché puisse être reconnu
correctement par le récepteur, il FAUT que la sortie
récepteur soit basculée soit sur « SERVO », soit sur
« CAPTEUR ». Cela se fait dans le menu « Télémé-
trie », sur la page « Courbe RX » du sous menu « REG-
LAGES/AFFICHAGE ». Pour plus de détails, voir à partir
de la page 187 :
Sur cette page du menu, déplacez, avec la touche INC
ou DEC le symbole „;>“ du bord gauche pour le mettre
devant la ligne inférieure puis appuyez ensuite simulta-
nément sur les touches INC+DEC :
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Avec une des deux touches INC ou DEC, sélectionnez
le réglage „SENSOR (capteur)“:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
51
Programmbeschreibung: Telemetrie
DELAY (Fail-Safe-Reaktionszeit oder Verzögerung)
Stellen Sie hier die Verzögerungszeit ein, nach der die
Servos bei Signalunterbrechung in ihre vorgewählten
Positionen laufen sollen. Diese Einstellung wird für alle
Kanäle übernommen und betrifft nur die auf den Mode
„FAI(L) SAFE“ programmierten Servos.
Werkseinstellung: 0,75 s.
FAIL SAFE ALL (Globale Fail-Safe-Einstellung)
Dieses Untermenü gestattet auf ähnlich einfache Weise
wie das auf Seite 128 beschriebene Menü »Fail Safe«,
die Fail-Safe-Positionen von Servos mit einem „Knopf-
druck“ festzulegen:
Wechseln Sie zur Zeile „FAIL SAFE ALL“ und aktivieren
Sie das Wertefeld mit einem gleichzeitigen Druck auf die
INC+DEC Tasten. „NO“ wird invers dargestellt. Stellen
Sie anschließend den Parameter mit einer der Tasten
INC oder DEC auf „SAVE“. Nun bewegen Sie mit den
Bedienelementen des Senders alle Servos, denen Sie in
der Zeile „MODE“ „FAI(L) SAFE“ zugeordnet haben oder
später zuordnen wollen, in die gewünschte Fail-Safe-Po-
sition. In der untersten Zeile „Position“ wird die aktuelle
Stellung des Gebers für den gerade eingestellten Kanal
angezeigt:
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: SAVE
Nach einem erneuten gleichzeitigen Druck auf die
INC+DEC Tasten wechselt die Anzeige wieder von
„SAVE“ nach „NO“. Die Positionen aller von dieser Maß-
nahme betroffenen Servos wurden damit abgespeichert
und parallel dazu in die Zeile „F.S.Pos.“ übernommen
und für den aktuellen OUTPUT CH (Servoanschluss) im
Display auch unmittelbar angezeigt:
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: NO
Schalten Sie den Sender aus und überprüfen Sie die
Fail-Safe-Positionen anhand der Servoausschläge.
„Fail Safe“ in Kombination mit „Channel Mapping“
Um sicherzustellen, dass auch im Störungsfall ge-
mappte Servos – also Servos, welche von einem
gemeinsamen Steuerkanal (INPUT CH) angesteuert
werden – gleichartig reagieren, bestimmen die entspre-
chenden Einstellungen des INPUT CH das Verhalten
gemappter Servos!!!
Werden demnach beispielsweise die Servoanschlüsse
6, 7 und 8 des 8-Kanal-Empfängers GR-16, Best.-Nr.
33508, miteinander gemappt, indem den OUTPUT CH
(Servoanschlüssen) 06, 07 und 08 als INPUT CH der
jeweils gleiche Steuerkanal „04“ zugewiesen wird …
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 06
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1230sec
DELAY : 0.75sec
OUTPUT CH: 07
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : HOLD
F.S.Pos. : 1770sec
DELAY : 0.75sec
OUTPUT CH: 08
POSITION : 1670sec
FAIL SAFE ALL: NO
… dann bestimmt völlig unabhängig von den indivi-
duellen Einstellungen der jeweiligen OUTPUT CH der
INPUT CH 04 das Fail-Safe-Verhalten dieser drei mit
dem Steuerkanal 4 verbundenen Servos:
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
Dies auch dann, wenn dieser seinerseits beispielsweise
mit INPUT CH 01 gemappt ist:
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
33110_mx10_HoTT_1_DE.indd Druckbogen 51 von 104 - Seiten (158, 51)
33110_mx10_HoTT_1_DE.indd Druckbogen 51 von 104 - Seiten (158, 51)
21.10.2011 13:23:51
21.10.2011 13:23:51

52 Programmbeschreibung: Telemetrie
In diesem Fall würde der Servoanschluss 04 wiederum
entsprechend der Fail-Safe-Einstellungen von CH 01
reagieren.
Die in der Zeile „DELAY“ eingestellte Reaktions- oder
Verzögerungszeit dagegen gilt immer einheitlich für alle
auf „FAI(L) SAFE“ gestellten Kanäle.
RX FREE MIXER
RX FREE MIXER
MASTER CH: 00
SLAVE CH : 00
S–TRAVEL–: 100
S–TRAVEL+: 100
MODE : 1
RX WING MIXER
TAIL TYPE: NORMAL
Wert Erläuterung mögliche
Einstellungen
MIXER Mischerauswahl 1, 2 oder 3
MASTER CH Signalquelle bzw.
Quellkanal
0, 1 … je nach
Empfänger
SLAVE CH Zielkanal 0, 1 … je nach
Empfänger
S-TRAVEL– Zumischung
negativ
0 … 100 %
S-TRAVEL+ Zumischung
positiv
0 … 100 %
RX WING
MIXER
Leitwerkstyp
(TAIL TYPE)
NORMAL,
V-TAIL (V-LW)
ELEVON
(Höhe/Quer-
Mischer für Delta
und Nurfl ügel)
MIXER
Bis zu drei Mischer können gleichzeitig programmiert
werden. Wechseln Sie über „MIXER“ zwischen Mi-
scher 1, Mischer 2 und Mischer 3.
Die folgenden Einstellungen in diesem Display betref-
fen immer nur den in der Zeile „MIXER“ ausgewählten
Mischer.
Wichtiger Hinweis:
Falls Sie im Menü »Tail type« auf der Sendervor-
derseite bereits Mischerfunktionen programmiert
haben, achten Sie unbedingt darauf, dass sich jene
Mischer mit denen des Menüs „RX FREE MIXER“
nicht überschneiden!
MASTER CH („von“)
Das am MASTER CH (Signalquelle) anliegende Signal
in einstellbarem Maße dem SLAVE CH (Zielkanal)
zugemischt.
Wählen Sie „00“, wenn kein Mischer gesetzt werden soll.
SLAVE CH („zu“)
Dem SLAVE CH (Zielkanal) wird anteilig das Signal des
MASTER CH (Quellkanal) zugemischt. Der Misch anteil
wird von den in den Zeilen „TRAVEL–“ und „TRAVEL+“
eingetragenen Prozentsätzen bestimmt.
Wählen Sie „00“, wenn kein Mischer gesetzt werden soll.
TRAVEL–/+ (Anteil der Zumischung in %)
Mit den Einstellwerten dieser beiden Zeilen wird der
Prozentsatz der Zumischung in Relation zum MASTER-
Signal getrennt für beiden Richtungen vorgegeben.
TAIL TYPE (Leitwerkstyp)
Die nachfolgenden Modelltypen stehen Ihnen teilweise
auch im Mischer auf der Sendervorderseite, Seite 37,
zur Verfügung und sollten vorzugsweise dort vorein-
gestellt werden. In diesem Fall belassen Sie den TAIL
TYPE immer auf NO MIX.
Möchten Sie dennoch die im Empfänger inte grier ten
Mischer nutzen, dann können Sie die bereits voreinge-
stellte Mischerfunktion für den entsprechenden Modell-
typ auswählen:
NORMAL•
Diese Einstellung entspricht dem klassischen Flug-
zeugtyp mit Heck-Leitwerk und getrenntem Seiten-
und Höhenruder. Für diesen Modelltyp wird keine
Mischfunktion benötigt.
V-TAIL (V-Leitwerk)•
Bei diesem Modelltyp werden die Steuerfunktionen
Höhen- und Seitenruder so miteinander verknüpft,
dass jede der beiden Leitwerksklappen – durch je ein
separates Servo angesteuert – sowohl die Höhen- als
auch Seitenruderfunktion übernimmt.
Die Servos werden üblicherweise wie folgt am Emp-
fänger angeschlossen:
OUTPUT CH 3: V-Leitwerksservo links
OUTPUT CH 4: V-Leitwerksservo rechts
Sollte die Servodrehrichtung falsch sein, beachten
Sie bitte die Hinweise auf Seite 43.
ELEVON (Delta-/Nurfl ügelmodelle)•
Die an den Ausgängen 2 und 3 angeschlossenen
Servos übernehmen Quer- und Höhenruderfunktion.
Die Servos werden üblicherweise wie folgt am Emp-
fänger angeschlossen:
OUTPUT CH 2: Quer/Höhe links
OUTPUT CH 3: Quer/Höhe rechts
Sollte die Servodrehrichtung falsch sein, beachten
Sie bitte die Hinweise auf Seite 43.
157
Utilisation de l’émetteur
Cliquez sur „OK“. Coupez ensuite l‘émetteur, et dé-
connectez l‘émetteur du PC ou du portable.
Si la barre de progression n‘avance pas, fermez le
programme et relancez la procédure de mise à jour.
Respecter les messages d‘erreurs éventuels
4. Initialisation de l‘émetteur
Après une mise à jour réussie de l‘émetteur, il FAUT,
pour des raisons de sécurité, réinitialiser l‘émetteur:
Appuyez sur la touche BIND de l‘émetteur, main-
tenez-la enfoncée et allumez l‘émetteur. Relâchez
maintenant la touche BIND. A l‘exception des don-
nées de procédure Binding, tous les réglages effec-
tués sur l‘émetteur sont remis aux réglages d‘origine
et doivent, en cas de besoin, être réenregistrés.
Attention: après initialisation en mode „normal“,
l‘émetteur se trouve en mode de programmation Fail-
Safe (voir page 177), mais si vous ne souhaitez pas
effectuer de programmation ici, l‘émetteur se coupe
de lui-même.
33110_mx10_HoTT_1_DE.indd Druckbogen 52 von 104 - Seiten (52, 157)
33110_mx10_HoTT_1_DE.indd Druckbogen 52 von 104 - Seiten (52, 157)
21.10.2011 13:23:52
21.10.2011 13:23:52
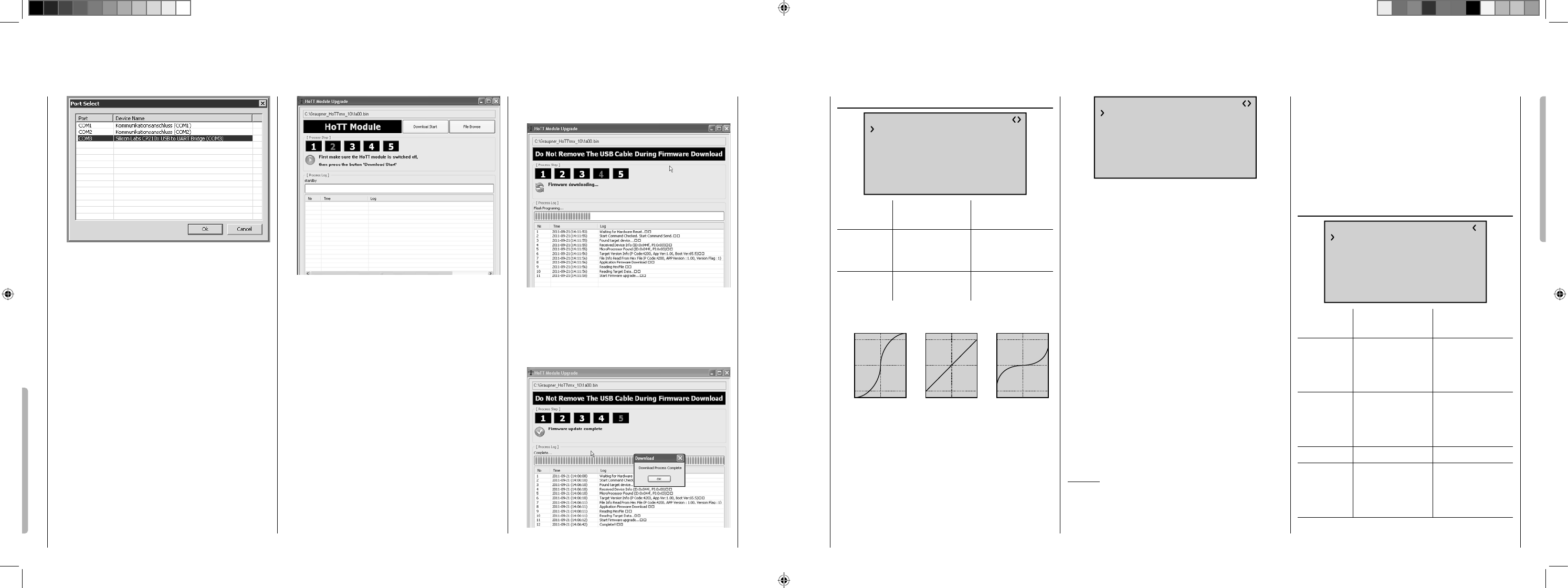
156 Utilisation de l’émetteur
Dans „Menu“, sélectionnez „Port Setup“ ou ouvrez
„Controller Menu“ et cliquez sur „Port select“.
Dans la fenêtre „Port select“ sélectionnez le Port
COM correct sur lequel est branché le port USB. Ce-
lui-ci est reconnaissable à sa désignation „Silicon
Labs CP210x USB to UART Bridge“, dans la colon-
ne „Device Name“. Dans la vue ci-dessus, il s‘agirait
du Port „COM 3“.
Dans „Menu“, allez sur l‘option „HoTT Module Up-
grade“, ou ouvrez „Controller Menu“ et cliquez sur „
HoTT Module „:
Cliquez sur le Button marque „File Browse“ et sélec-
tionnez dans la boîte de dialogue „Datei öffnen“ le
fi chier de mise à jour souhaité, avec l‘extension „bin“.
Les fi chiers Firmware sont codifi és selon le produit,
cela signifi e que si par inadvertance, vous sélection-
nez un fi chier qui ne correspond pas à l‘article (par
exemple un fi chier de mise à jour du récepteur à la
place du fi chier de mise à jour de l‘émetteur), une
fenêtre Popup „Product code error“ apparaît, et la
procédure de mise à jour ne se lance pas.
Cliquez maintenant sur le Button „Download Start“.
Attendez que la barre de progression démarre.
En fonction des PC, cela peut prendre plusieurs se-
condes. Allumez maintenant l‘émetteur en gardant la
touche BIND enfoncée. Au bout de quelques secon-
des „Found Target device...“ s‘affi che. Vous pouvez
maintenant relâcher la touche.
Suite à cela, la procédure de mise à jour proprement
dite se lance, et au-dessus du texte qui défi le, une
barre de progression s‘affi che et démarre:
N‘interrompez pas la procédure de mise à jour avant
que la barre de progression n‘ait atteint le bord droit
et pas avant que le message „Firmware Download
Success“ n‘apparaisse- par ailleurs l‘émetteur émet
une brève mélodie de confi rmation, et la LED passe
de l‘orange au vert:
53
Programmbeschreibung: Telemetrie
RX CURVE (EXPO)
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Wert Erläuterung mögliche
Einstellungen
CURVE1, 2
oder 3 CH
Kanalzuordnung
der jeweiligen
Kurveneinstellung
1 … je nach
Empfänger
TYPE Kurventyp A, B, C
siehe Abbildung
Expo = +100%
–100% +100%
0
–100% +100%
0
Expo = –100%
TYP A
–100% +100%
0
–100% +100%
0
linear
–100% +100%
0
–100% +100%
0
TYP B
TYP C
DR = 125% DR = 70%
Servoweg
Geberweg
Servoweg
Geberweg
Servoweg
Geberweg
In der Regel wird eine nichtlineare Steuerfunktion ggf.
verwendet für Querruder (Kanal 2), Höhenruder (Kanal
3) und Seitenruder (Kanal 4). Diese Kanal-Vorgaben
entsprechen auch der Werkseinstellung. Wenn Sie also
beispielsweise senderseitig „AILE“ vorgegeben haben
und die hier zu besprechende Option RX CURVE nut-
zen möchten, dann sind 2 Kurven zu setzen:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Andernfalls würden linkes und rechtes Querruder unter-
schiedliche Steuercharakteristiken aufweisen.
Mit der Funktion RX CURVE können Sie die Steuercha-
rakteristiken für bis zu drei Servos verwalten:
CURVE 1, 2 oder 3 CH•
Wählen Sie den gewünschten Steuerkanal (INPUT
CH) des ersten Servos aus.
Die folgende Einstellung in TYPE betrifft nur den hier
ausgewählten Kanal.
TYPE
Wählen Sie die Servokurve aus:
A: EXPO = -100 % und DUAL RATE = 125 %
Das Servo reagiert stark auf Knüppelbewegungen
um die Neutralstellung. Mit zunehmendem Ruderaus-
schlag verläuft die Kurve fl acher.
B: Lineare Einstellung.
Das Servo folgt der Knüppelbewegung linear.
C: EXPO = +100 % und DUAL RATE = 70 %
Das Servo reagiert schwach auf Knüppelbewegun-
gen um die Neutralstellung. Mit zunehmendem Ru-
derausschlag verläuft die Kurve steiler.
Hinweis:
Die hier programmierten Steuercharakteristiken wirken
auch auf gemappte Empfängerausgänge.
Servoanschluss 5: 5CH FUNCTION
„SERVO“ oder „SENSOR“
Am, mit einem zusätzlichen „T“ gekennzeichneten,
Servoanschluss 5 kann auch ein Telemetrie-Sensor
angeschlossenen werden.
Damit das jeweils angeschlossene Gerät jedoch vom
Empfänger auch richtig erkannt wird, MUSS der Servo-
anschluss 5 entsprechend von „SERVO“ auf „SENSOR“
und vice versa umgestellt werden.
RX SERVO TEST
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
TEST : STOP
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
Wert Erläuterung mögliche
Einstellungen
ALL-MAX Servoweg auf der
„+“-Seite für alle
Servoausgänge
für den Servotest
1500 … 2000 μs
ALL-MIN Servoweg auf der
„-“-Seite für alle
Servoausgänge
für den Servotest
1500 … 1000 μs
TEST Testprozedur START / STOP
ALARM
VOLT
Alarmgrenze der
Unterspannungs-
warnung des
Empfängers
3,0 … 6,0 V
Werkseinstellung:
3,8 V
33110_mx10_HoTT_1_DE.indd Druckbogen 53 von 104 - Seiten (156, 53)
33110_mx10_HoTT_1_DE.indd Druckbogen 53 von 104 - Seiten (156, 53)
21.10.2011 13:23:52
21.10.2011 13:23:52
54 Programmbeschreibung: Telemetrie
Wert Erläuterung mögliche
Einstellungen
ALARM
TEMP+
Alarmgrenze
für zu hohe
Temperatur des
Empfängers
50 … 80 °C
Werkseinstellung:
70 °C
ALARM
TEMP–
Alarmgrenze
für zu niedrige
Temperatur des
Empfängers
-20 … +10 °C
Werkseinstellung:
-10 °C
CH OUTPUT
TYPE
Kanal-Reihenfolge ONCE, SAME,
SUMI, SUMO
ALL MAX (Maximaler Servoweg)
In dieser Zeile stellen Sie den maximalen Servoweg auf
der Plus-Seite des Steuerweges für den Servotest ein.
2000 μs entspricht dem Vollausschlag, 1500 μs ent-
spricht der Neutralposition.
Achten Sie darauf dass die Servos während der Testrou-
tine nicht mechanisch aufl aufen.
ALL MIN (Minimaler Servoweg)
In dieser Zeile stellen Sie den maximalen Servoweg auf
der Minus-Seite des Steuerweges für den Servotest ein.
1000 μs entspricht dem Vollausschlag, 1500 μs ent-
spricht der Neutralposition.
TEST
In dieser Zeile starten und stoppen Sie den in den
Empfänger integrierten Servotest.
Mit einem gleichzeitigen Druck auf die INC+DEC Taster
aktivieren Sie das Eingabefeld:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : STOP
Mit einer der Tasten INC oder DEC wählen Sie nun
START:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
Mit einem weiteren gleichzeitigen Druck auf die
INC+DEC Tasten starten Sie nun den Testlauf. Das
Eingabefeld wird wieder „normal“ dargestellt:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
Zum Stoppen des Servotest aktivieren Sie wie zuvor
beschrieben wieder das Eingabefeld, wählen STOP und
bestätigen diese Wahl mit den INC+DEC Tasten.
ALARM VOLT (Empfänger-Unterspannungswarnung)
Über ALARM VOLT wird die Empfängerspannung
überwacht. Das Intervall kann zwischen 3,0 und 6,0 Volt
eingestellt werden. Bei Unterschreitung der eingestellten
Alarmgrenze erfolgt ein akustisches Signal (Intervall-
Piepton lang/kurz) und in allen »RX …«-Displays blinkt
rechts oben „VOLT.E“:
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
VOLT.E
Im Display »RX DATAVIEW« wird außerdem der Para-
meter „R-VOLT“ invers dargestellt:
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :03.7V
RX DATAVIEW VOLT.E
ALARM TEMP +/- (Empf.-Temperaturüberwachung)
Diese beiden Optionen überwachen die Empfängertem-
peratur. Ein unterer Grenzwert „ALARM TEMP-“ (-20 …
+10 °C) und ein oberer Grenzwert „ALARM TEMP+“ (50
… 80 °C) können programmiert werden. Bei Unter- oder
Überschreitung dieser Vorgaben ertönt ein akustisches
Signal (Dauer Piepton) und in allen Empfänger-Displays
erscheint oben rechts „TEMP.E“. Auf der Displayseite
»RX DATAVIEW« wird außerdem der Parameter „R-
TEM“ invers dargestellt.
Vergewissern Sie sich, dass Sie unter allen Flugbedin-
gungen im Rahmen der erlaubten Temperaturen Ihres
Empfängers bleiben (idealerweise zwischen -10 und
55° C).
155
Utilisation de l’émetteur
Remarque importante :
l’émetteur fourni dans le Set est réglé d’origine •
de telle sorte qu’il peut être utilisé dans la plupart
des pays européen (à l’exception de la France).
Si l’émetteur doit être utilisé en France, IL
FAUT tout d’abord mettre l’émetteur en mode
« FRANCE », voir page 170 ou 174. IL EST INTER-
DIT D’UTILISER le mode Universal/EUROPE EN
FRANCE !
avec l’émetteur • mx-10 HoTT et le récepteur as-
signé d’origine déjà à l’émetteur, vous pouvez
commander jusqu’à 5 servos.
Lorsque vous allumez l’émetteur, lorsque vous •
lancez la procédure Binding ou lors des réglages,
veillez toujours à ce que l’antenne de l’émetteur
soit suffi sament éloignée des antennes de ré-
ception ! Si avec l’antenne d’émission vous êtes
trop près des antennes de réception, le récepteur
s’affole et la LED rouge du récepteur s’allume.
Par ailleurs, la voie de retour d’informations n’est
plus fonctionnelle, et les jauges de puissance
sont remplacées à l’écran par « x », et la tension
actuelle de l’accu de réception par 0,0 V. Simulta-
nément l’émetteurest en mode Fail-Safe.
Dans ce cas, augmentez la distance entre les
antennes jusqu’à ce que les affi chages redevi-
ennent « normaux ».
Les mises à jour de l’émetteur se font, à ses propres
risques et périls, par le port PC à 3 plots qui se trouve
au dos de l’émetteur à l‘aide d‘un PC équipé d’un sys-
tème d’exploitation Windows XP,
Vista ou 7.
Vous trouverez les mises à jour et informations actuelle-
ment disponibles et téléchargeables sur notre site, sous
www.graupner.de
Remarque:
Après avoir enregistré votre émetteur sous http://
ww.graupner.de/de/service/produktregistrierung, vous
serez informé automatiquement par mail des dernières
mises à jour disponibles.
Pour la mise à jour du logiciel de l‘émetteur il vous faut
le port USB Réf.Cde. 7168.6, en option, ainsi que le cor-
don adaptateur deux plots, également en option, Réf.
Cde. 7168.6A. Celui-ci se branche directement dans la
prise PC à trois plots située au dos de l‘émetteur.
Mise à jour du logiciel de la mx-10 HoTT
Remarque:
Avant toute mise à jour, vérifi ez l‘état de charge de
votre accu, rechargez-le par précaution et sauve-
gardez, avant toute mise à jour, toutes les mémoires
de modèle utilisées, pour y avoir à nouveau accès
en cas de besoin.
1. Installation des pilotes
Pour pouvoir utiliser le port USB Réf.Cde. 7168.6, il
faut installer les pilotes nécessaires fournis avec le
programme, vous les trouverez dans le répertoire „Pi-
lotes USB“.
Firmware-Update de l‘émetteur
Lancer l‘installation des pilotes par un double-clic
sur le fi chier correspondant et suivez les instructions.
Une fois l‘installation terminée, il faut redémarrer le
PC. Cette installation n‘est nécessaire qu‘une seu-
le fois.
2. Liaison Emetteur / PC
Lorsque l‘émetteur est coupé, branchez le cor-
don USB dans la prise PC à 3 plots située au dos
de l‘émetteur. Branchez-le de manière à ce que
le fi l orange soit vers la gauche, vers le milieu de
l‘émetteur, et le fi l brun vers la droite, vers le bord de
l‘émetteur. Ne forcez pas sur les prises.
3. Mise à jour du logiciel de l‘émetteur mx-10 HoTT
Lancez le programme „Firmware_Upgrade_grStu-
dio_VerX.XX.exe“ qui se trouve dans les fi chiers té-
léchargés du répertoire „Firmware-Updater“ avec un
double-clic. (la version 1.3 actuelle, au moment de
l‘impression de ce manuel, se lance sans installation
préalable):
Dans „Menu“, sélectionnez „Port Setup“ ou o
uvrez „Controller Menu“ et cliquez sur „Port select“.
33110_mx10_HoTT_1_DE.indd Druckbogen 54 von 104 - Seiten (54, 155)
33110_mx10_HoTT_1_DE.indd Druckbogen 54 von 104 - Seiten (54, 155)
21.10.2011 13:23:53
21.10.2011 13:23:53
154 Utilisation de l’émetteur
Généralités
Théoriquement, le système Graupner HoTT permet,
d’utiliser plus 200 modèles en même temps. Mais en
pratique, et compte tenu des conditions d’homologation
pour l’utilisation d’émetteurs dans la bande ISM des 2,4
GHz, ce nombre est sensiblement réduit. Néanmoins,
vous pourrez toujours utiliser un bien plus grand nombre
de modèles à la fois dans la bande des 2,4 GHz, que
dans la bande des 35-/40 MHz conventionnelle. Mais
le facteur déterminant qui limite tout cela, est - comme
c’est d’ailleurs souvent le cas - la dimension de l’espace
aérien disponible. Mais le seul fait, qu’il n’y a plus besoin
de se mettre d’accord sur les fréquences, notamment à
la pente, où on ne voit pas toujours tous les pilotes, est
un énorme gain au niveau de la sécurité.
L’accu est-il chargé ?
Comme l’émetteur est livré avec un accu non chargé, il
faut, en respectant les conseils de charge, charger cet
accu, voir page 7. Sinon, lorsque la tension chute en
dessous d’un certain seuil réglable sur la ligne „Seuil
de déclenchement alarme accu“ du menu „TX“ de la
Smart-Box, page 180, une alarme se déclenche et la
LED se met à clignoter par une suite de 5 clignotements
rapides.
Mise en route de l’émetteur
Après avoir allumé l‘émetteur, la LED de l‘émetteur
clignote ou reste allumée pour indiquer le mode dans
lequel il se trouve
Voir tableau ci-dessous:
Affi chage LED Buzzer Description
LED verte allumée - L‘émetteur est allumé, mais aucun récepteur n‘est
assigné ou récepteur assigné, mais de télémétrie
LED orange allumée - Emetteur en mode normal, Réglage pays: général
LED orange clignote - Emetteur en mode normal, Réglage pays: France
LED orange clignote une
fois
deux tonalités après la
mise en route
Emetteur en mode Elève
LED orange clignote deux
fois
2 x deux courtes tonalités
après la mise en route
Emetteur en mode Moniteur
LED orange clignote trois
fois
trois courtes tonalités rapi-
des, l‘une après l‘autre
Mauvaise qualité de réception du récepteur
LED orange clignote
quatre fois
quatre courtes tonalités
rapides, l‘une après l‘autre
Mauvaise qualité de réception de la voie de retour
LED orange clignote cinq
fois
cinq courtes tonalités rapi-
des, l‘une après l‘autre
Accu d‘émission vide: Vous avez atteint le „seuil de
déclenchement de l‘alarme de l‘accu“ du menu „TX“ de
la Smart-Box en option, réglable, page 180, seuil réglé
d‘origine à 4.5 V.
Il faut d‘abord sélectionner le mode d‘utilisation, soit
„normal“, „Moniteur“ ou „Elève“ avec l‘interrupteur de
mode situé en haut à gauche de l‘émetteur:
D‘origine, l‘émetteur est livré en mode „normal“. Vous
n‘avez donc rien à modifi er si vous êtes en utilisation
classique, normale. Pour mettre l‘émetteur en mode
Moniteur ou Elève, consultez le chapitre consacré à
l‘écolage en page 194.
Utilisation de l’émetteur
Généralités relatives à l’émetteur mx-10 HoTT
Pour changer de mode, il suffi t de basculer l‘interrupteur
de mode dans la position souhaitée, d‘appuyer sur la
touche BIND de la maintenir enfoncée, puis d‘allumer
l‘émetteur.
Attention: Après la programmation du mode „normal“,
l‘émetteur se trouve en mode de programmation Fail-
Safe (voir page 177), mais si vous ne souhaitez pas
effectuer de programmation ici, l‘émetteur se coupe de
lui-même.
La visualisation du mode de programmation se fait,
après avoir allumé l‘émetteur par LED et Buzzer, voir
tableau ci-dessus.
Mode normal
moniteur
elève
©
ª
55
Programmbeschreibung: Telemetrie
CH OUTPUT TYPE (Anschlusstyp)
Hier wählen Sie aus, wie Empfängerausgänge ange-
steuert werden.
ONCE•
Die Servoanschlüsse des Empfängers werden nach-
einander angesteuert. Empfohlen für Analogservos.
Bei dieser Einstellung werden die Servos automa-
tisch in einem Zyklus von 20 ms – beim 12-Kanal-
Empfänger (Best.-Nr. 33512) 30 ms – betrieben, egal
was im Display »RX SERVO« in der Zeile „PERIOD“
eingestellt bzw. angezeigt wird!
SAME•
Die Servoanschlüsse des Empfängers werden in Vie-
rerblöcken parallel angesteuert. D. h., beim im Set
enthaltenen Empfänger GR-12 bekommen Kanal 1
bis 4 und Kanal 5 und 6 die Steuersignale jeweils
gleichzeitig.
Empfohlen bei Digitalservos, wenn mehrere Servos
für eine Funktion eingesetzt werden (z. B. Querru-
der), damit die Servos absolut synchron laufen.
Bei ausschließlicher Verwendung von Digitalservos
empfi ehlt sich, in der Zeile „PERIOD“ des Displays
»RX SERVO« 10 ms einzustellen, um die schnel-
le Reaktion von Digitalservos nutzen zu können. Bei
Verwendung von Analogservos oder im Mischbetrieb
ist unbedingt „20 ms“ zu wählen!
Achten Sie bei dieser Einstellung besonders auf
eine ausreichende Dimensionierung der Empfän-
gerstromversorgung. Da immer bis zu vier Servos
gleichzeitig anlaufen, wird diese stärker belastet.
SUMO (Summensignal OUT)•
Ein als SUMO konfi gurierter HoTT-Empfänger gene-
riert permanent aus den Steuersignalen aller seiner
Steuerkanäle ein so genanntes Summensignal und
stellt dieses beispielsweise beim Empfänger GR-12
am Servoanschluss 6 bereit.
Des weiteren kann das Summensignal unabhängig
vom Empfänger auf max. 16 Kanäle eingestellt wer-
den, d.h. auch ein 6-Kanal Empfänger kann z.B. auf
SUMO 12 gestellt werden und überträgt dann alle 12
Kanäle auf den Ausgang.
Nachdem Sie SUMO angewählt und mit einem
gleichzeitigen Druck auf die INC+DEC gespeichert
haben, springt die inverse Markierung weiter auf die
Kanalzahl, hier 06:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUTPUT TYPE:SUMO06
Durch Drücken der INC oder DEC Taste kann die im
Summensignal zu übertragende Kanalzahl gewählt
werden. Ein erneutes gleichzeitiges Drücken der
INC+DEC Tasten speichert die Einstellungen.
Die Empfängerausgänge werden nacheinander in
einem Zyklus von 20 ms (beim Empfänger GR-24,
Best.-Nr. 33512, 30 ms) angesteuert, auch wenn auf
der Display-Seite »RX SERVO« in der Zeile „PERI-
OD“ 10 ms voreingestellt ist.
In erster Linie für den nachfolgend beschriebenen
„Satellitenbetrieb“ zweier HoTT-Empfänger gedacht,
kann das von einem als SUMO defi nierten Empfän-
ger generierte Summensignal beispielsweise aber
auch zur Ansteuerung von Flybarless-Systemen oder
über das Adapterkabel mit der Best.-Nr. 33310 zur
Ansteuerung von Flugsimulatoren genutzt werden.
Im …
Satellitenbetrieb
… werden zwei HoTT-Empfänger über ein 3-adriges
Verbindungskabel (Best.-Nr. 33700.1 (300 mm) oder
33700.2 (100 mm)) am Servoanschluss mit der je-
weils höchsten Nummer miteinander verbunden. Nä-
here Einzelheiten hierzu fi nden Sie im Internet unter
www.graupner.de.
Über diese Verbindung werden alle Kanäle desjeni-
gen HoTT-Empfängers, der als SUMO konfi guriert
wurde, und als Satellitenempfänger bezeichnet wird,
permanent auf den zweiten HoTT-Empfänger, den
Hauptempfänger, welcher als …
SUMI (Summensignal IN)•
… zu programmieren ist, übertragen. Das Signal geht
also immer nur in Richtung SUMI.
Der als SUMI defi nierte Empfänger wiederum nutzt
bei Empfangsausfall jedoch nur dann das vom
SUMO kommende Summensignal, wenn mindestens
1 Kanal im SUMI auf Fail-Safe programmiert ist.
Hat der als Satellitenempfänger SUMO programmier-
te Empfänger einen Empfangsausfall, nehmen die an
diesem Empfänger angeschlossenen Servos völlig
unabhängig vom Hauptempfänger, die im Satelliten-
empfänger programmierten Fail-Safe-Positionen ein.
Kommt es dagegen bei beiden Empfängern gleich-
zeitig zu einem Empfangsausfall, dann greifen bei
der zum Zeitpunkt der Drucklegung dieser Anleitung
aktuellen Empfängersoftware im Prinzip die Fail-Sa-
fe-Einstellungen des SUMO‘s. Im Einzelfall sind je-
doch Wechselwirkungen keinesfalls auszuschließen,
33110_mx10_HoTT_1_DE.indd Druckbogen 55 von 104 - Seiten (154, 55)
33110_mx10_HoTT_1_DE.indd Druckbogen 55 von 104 - Seiten (154, 55)
21.10.2011 13:23:54
21.10.2011 13:23:54
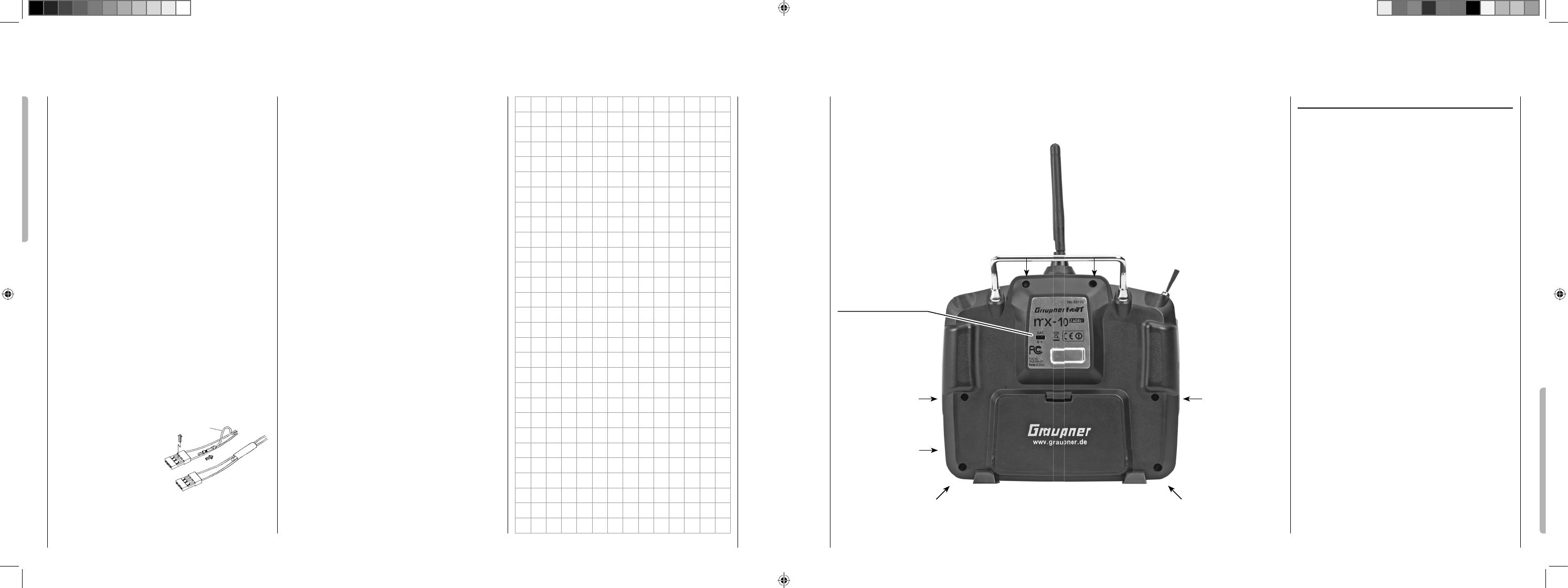
56 Programmbeschreibung: Telemetrie
weshalb hier nur dringend empfohlen werden
kann, VOR Inbetriebnahme eines Modells ent-
sprechende Tests durchzuführen.
Diese Empfänger-Konfi guration ist dann zu empfeh-
len, wenn z. B. einer der beiden Empfänger an emp-
fangstechnisch ungünstiger Stelle im Modell einge-
baut ist oder infolge Düsen, Kohlefasermaterial oder
dergleichen die Gefahr besteht, dass das Empfangs-
signal fl uglagenabhängig abgeschwächt wird, sodass
mit Einbrüchen der Reichweite zu rechnen ist.
Schließen Sie daher die wichtigsten Steuerfunkti-
onen unbedingt an den als SUMI programmierten
Hauptempfänger an, damit das Modell im Störungs-
fall auch dann steuerbar bleibt, sobald der Satelliten-
empfänger SUMO kein gültiges Signal mehr erhält.
Telemetrie-Daten wie z. B. die Spannung der Bord-
stromversorgung sendet dagegen nur der als SUMO
konfi gurierte Satellitenempfänger zum Sender. Tele-
metrie-Sensoren sind demzufolge an den Satelliten-
empfänger (SUMO) anzuschließen.
Jeder Empfänger sollte mit einer eigenen Zuleitung
aus der gemeinsamen Spannungsversorgung ange-
schlossen werden. Bei hohen Strömen eventuell so-
gar in doppelter Ausführung. Soll dagegen jeder der
beiden Empfänger aus einer eigenen Spannungs-
quelle versorgt werden,
dann ist unbedingt das
mittlere Kabel aus ei-
nem der beiden Stecker
des Satellitenkabels zu
entfernen, siehe Abbil-
dung.
rot
1
23
Falls Sie weitere Programmierungen wie z. B. Fail-
Safe-Einstellungen vornehmen möchten, trennen Sie
die dreipolige Satelliten-Verbindung zwischen den
beiden Empfängern und schalten Sie nur den be-
treffenden Empfänger ein. Ggf. müssen Sie auch die
Bindungs-Reihenfolge ändern.
153
Description de l’émetteur
Vis de fi xation boîtier Vis de fi xation boîtier
Vis de fi xation boîtier Vis de fi xation boîtier
Couvercle du logement accu
Vis de fi xation boîtier Vis de fi xation boîtier
Prise de charge de
l’accu d’émission
Prise Data pour le branchement
de la SmartBox Réf. 33700 et
sur un PC
Prise Data
Pour le branchement de la Smart-Box, en option, Réf.
Cde. 33700.
Le HoTT Smart-Box permet multiples autres fonctionali-
tées, p. ex. Expo, course ou temps de cycle des servos,
channel mapping ou les fonctions de télémétrie - voir le
paragraphe „Télémétrie“ à la page 179.
Vous trouverez de plus amples informations sur la Smart-
Boxb dans la catalogue général FS Graupner ainsi que
sur notre site internet, sous www.graupner.de.
Cette prise permet de relier l’émetteur à un PC équipé
du système d’exploitation Windows XP, Vista ou 7 avec
l’adaptateur USB Réf. Cde. 7168.6 en option, et le cordon
Réf. Cde. 7168.6A. Vous pourrez télécharger les outils
nécessaires, comme par exemple, le pilote USB qui
va bien, sur notre page de téléchargement sous www.
graupner.de.
Après installation, vous pourrez alors également mettre
votre émetteur à jour (Update).
33110_mx10_HoTT_1_DE.indd Druckbogen 56 von 104 - Seiten (56, 153)
33110_mx10_HoTT_1_DE.indd Druckbogen 56 von 104 - Seiten (56, 153)
21.10.2011 13:23:54
21.10.2011 13:23:54
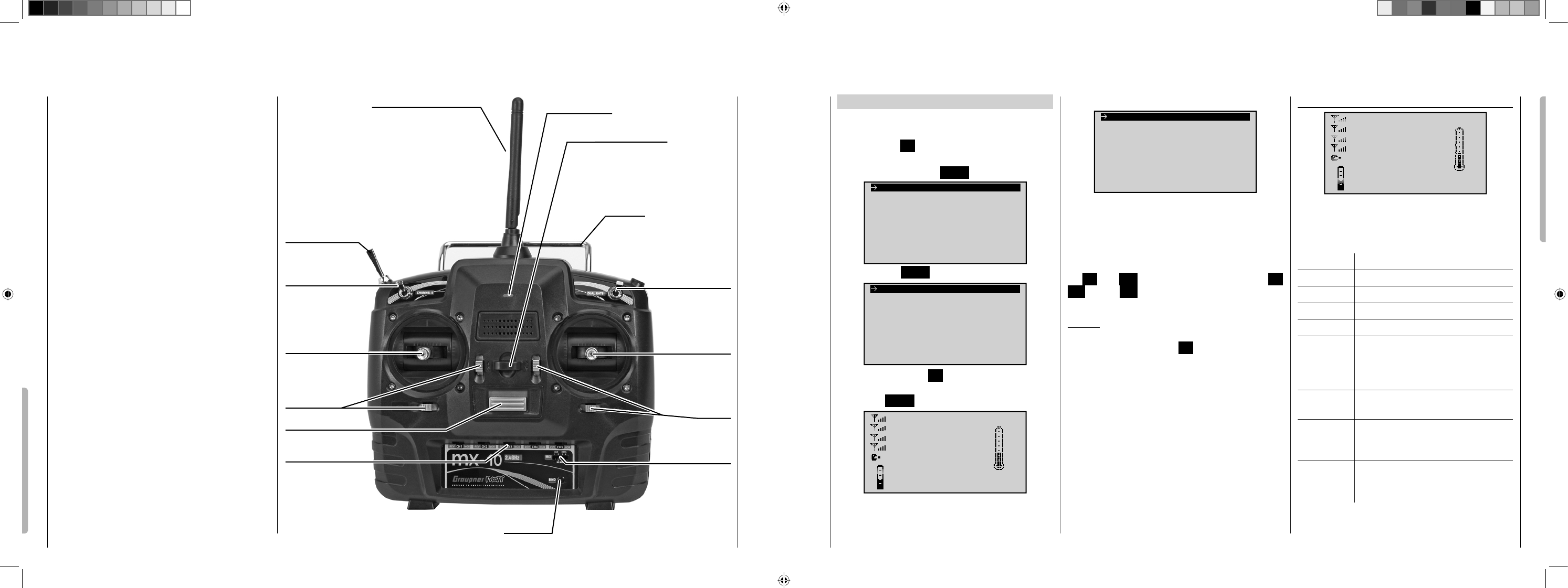
152 Description de l’émetteur
Description de l’émetteur
Eléments de commande de l’émetteur
Sur le dessus de l’émetteur mx-10 Hott se trouve un
anneau de fi xation, voir vue de droite, sur lequel vous
pouvez fi xer une sangle. La position de cet anneau per-
met à l’émetteur d’être équilibré lorsqu’il est accroché à
la sangle.
Réf.Cde. 1121 Sangle, largeur 20 mm
Réf.Cde. 70 Sangle, largeur 30 mm
Antenne coudée sur rotule
Interrupteur 3 positions
Mode: Ecolage / normal
Interrupteur 2 posi-
tions Voie 5
Manche de com-
mande gauche
Trim
Interrupteur
Marche / Arrêt
Trim
Manche de
commande droit
Interrupteur 2 positions
Dual Rate
Poignée
Anneau de fi xation de la sangle
Affi chage central LED
Interrupteur inversion
servo
Voies 1 – 5
Mixage ailes
Touche BIND
57
Programmbeschreibung: Telemetrie
GRAFISCHE SENSORANZEIGE
SENSOR AUSWÄHLEN
MENÜ MODEL SELECT
Drücken Sie die INC-Taste um in die Zeile „MODEL
SELECT“ zu wechseln.
Drücken Sie anschließend ENTER …
und nocheinmal ENTER ...
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
… und nachfolgend die INC-Taste, um Ihren Sensor mit
dem Pfeilsymbol anzuwählen und abschließend durch
drücken der ENTER-Taste auszuwählen:
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
CAR
AIRPLANE,HELI.,GLID.
Wie gerade im Menü »SENSOR AUSWÄHLEN« …
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
… beschrieben, kann die Ausgabe grafi sch aufbereiteter
Daten eines ggf. an den Empfänger angeschlossenen
Sensors aktiviert werden. Diese Daten werden dann in
den nachfolgend beschriebenen Grafi kdisplays entspre-
chend dargestellt.
Zwischen den einzelnen Grafi kdisplays blättern Sie mit
der INC oder DEC Taste hin und her und wählen mit EN-
TER aus, mit ESC kehren Sie wieder zur Grundanzeige
zurück.
Hinweis:
Die Reihenfolge der nachfolgend beschriebenen Dis-
plays folgt dem Antippen der INC-Taste.
Näheres zu den nachfolgend genannten Modulen fi nden
Sie im Anhang sowie im Internet unter www.graupner.de
bei dem jeweiligen Produkt.
Anzeige Telemetrie-Daten
EMPFÄNGER „RECEIVE“
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
Dieses Display stellt die im Display »RX DATAVIEW«
des Telemetrie-Menüs »EINSTELLEN/ANZEIGEN«,
Seite 46, dargestellten Daten grafi sch aufbereitet dar.
Es bedeutet:
Wert Erläuterung
RX-S QUA Signalqualität in %
RX-S ST Signalstärke in %
RX-dBm Empfangsleistung in dBm
TX-dBm Sendeleistung in dBm
V PACK zeigt den längsten Zeitraum in ms
an, in dem Datenpakete bei der
Übertragung vom Sender zum
Empfänger verlorengegangen sind
RX-VOLT Aktuelle Betriebsspannung des
Empfängers in Volt
M-RX V minimalste Betriebsspannung
des Empfängers seit der letzten
Inbetriebnahme in Volt
TMP das Thermometer visualisiert die
aktuelle Betriebstemperatur des
Empfängers
33110_mx10_HoTT_1_DE.indd Druckbogen 57 von 104 - Seiten (152, 57)
33110_mx10_HoTT_1_DE.indd Druckbogen 57 von 104 - Seiten (152, 57)
21.10.2011 13:23:59
21.10.2011 13:23:59
58 Programmbeschreibung: Telemetrie
GENERAL MODUL
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
CELL V
1:0.00
2:0.00
3:0.00
4:0.00
5:0.00
6:0.00
1500
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
ALT
+500m
0m1
0m3
POWER
14.8V
10.3A
450
Dieses Display visualisiert die Daten eines ggf. an den
Empfänger angeschlossenen General-Engine-Moduls,
Best.-Nr. 33610, oder eines General-Air-Moduls, Best.-
Nr. 33611. Näheres zu diesen Modulen fi nden Sie im
Anhang oder im Internet unter www.graupner.de bei
dem jeweiligen Produkt.
Abhängig von der Bestückung der Module mit Sensoren,
können in diesem Display folgende Daten permanent
ausgegeben werden:
Die aktuelle Spannung von bis zu zwei Akkus (BAT1 und
BAT2); die Messergebnisse von bis zu zwei Temperatur-
sensoren (T1 und T2) sowie eine Füllstandsanzeige des
Treibstofftankes.
Am rechten Rand wird alternierend entweder eine
Aufl istung der aktuellen Zellenspannungen eines bis zu
sechszelligen LiPo-Akkus ausgegeben oder die aktuelle
Höhe relativ zum Standort, Steigen/Sinken in m/1s und
m/3 s, der aktuelle Strom in Ampere sowie die aktuelle
Spannung des am Sensor angeschlossenen Akkus.
Es bedeutet:
Wert Erläuterung
BAT1 / BAT2 Akku 1 bzw. Akku 2
FUEL Treibstoffstand / Tankanzeige
E / F Leer /Voll
T1 / T2 Temperatur von Sensor 1 bzw. 2
CELL.V Zellenspannung von Zelle 1 … max. 6
1500 aktuelle Drehzahl in U/min
ALT aktuelle Höhe
0m1 m/1 s Steigen/Sinken
0m3 m/3 s Steigen/Sinken
POWER V aktuelle Spannung des Antriebsakkus
A aktueller Strom in A
„450“ entnommene Kapazität in mAh
ELECTRIC AIR-MODUL
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1L0.00
2L0.00
3L0.00
4L0.00
5L0.00
6L0.00
0.0V 0A
ALT +500m
7L0.00
Dieses Display visualisiert die Daten eines ggf. an
den Empfänger angeschlossenen Electric-Air-Moduls
Best.-Nr. 33620. Näheres zu diesem Modul fi nden Sie
im Anhang oder im Internet unter www.graupner.de bei
dem jeweiligen Produkt.
Abhängig von der Bestückung des Moduls mit Senso-
ren, können in diesem Display folgende Daten perma-
nent ausgegeben werden:
Die aktuelle Spannung von bis zu zwei Akkus (BAT1
und BAT2); die Messergebnisse von bis zu zwei Tempe-
ratursensoren (T1 und T2); die aktuelle Höhe relativ zum
Standort sowie das Steigen/Sinken des Modells in m/1 s
und m/3 s und in der Mitte des Displays noch der aktuell
einer Spannungsquelle entnommene Strom angezeigt
Am rechten Rand werden alternierend die aktuellen Zel-
lenspannungen der an Balancer-Anschluss 1 (L) oder
2 (H) angeschlossenen je max. 7-zelligen Akku-Packs
ausgegeben.
Es bedeutet:
Wert Erläuterung
V aktuelle Spannung
A aktueller Strom
BAT1 / BAT2 Akku 1 bzw. Akku 2
ALT aktuelle Höhe
m/1s m/1 s Steigen/Sinken
m/3s m/3 s Steigen/Sinken
T1 / T2 Temperatur von Sensor 1 bzw. 2
L bzw. H Zellenspannung von Zelle 1 … max. 14
L = Balancer-Anschluss 1
H = Balancer-Anschluss 2
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1H0.00
2H0.00
3H0.00
4H0.00
5H0.00
6H0.00
0.0V 0A
ALT +500m
7H0.00
151
Conseils d’utilisation
Effort de rappel des manches de commande
Cet effort de rappel est également réglable, selon les
habitudes du pilote. Le système de réglage se trouve
à coté du ressort de rappel. Voir marquage sur la vue
ci-dessous.
En tournant la vis de réglage, avec un tournevis à
empreinte cruciforme, on peut régler l’effort de rappel.
en tournant vers la droite = l’effort de rappel sera •
plus important
en tournant vers la gauche = l’effort de rappel sera •
moindre.
horizontal
horizontal
vertical
vertical
Remarque :
Le manche de commande de droite étant inversé, les vis
recherchées se trouvent à droite du milieu.
Ressort et crantage
Avec les deux vis extérieures répérées sur la vue ci-
dessous, vous pouvez régler avec l’une l’effort de rappel
et avec l’autre, celle le plus à l’intérieure, l’effort du
crantage, et ce, pour chaque manche de commande.
Remarque :
Le manche de droite est monté à l’inverse, c’est-à-dire
que les vis recherchées sont situées en haut à gauche.
33110_mx10_HoTT_1_DE.indd Druckbogen 58 von 104 - Seiten (58, 151)
33110_mx10_HoTT_1_DE.indd Druckbogen 58 von 104 - Seiten (58, 151)
21.10.2011 13:24:00
21.10.2011 13:24:00
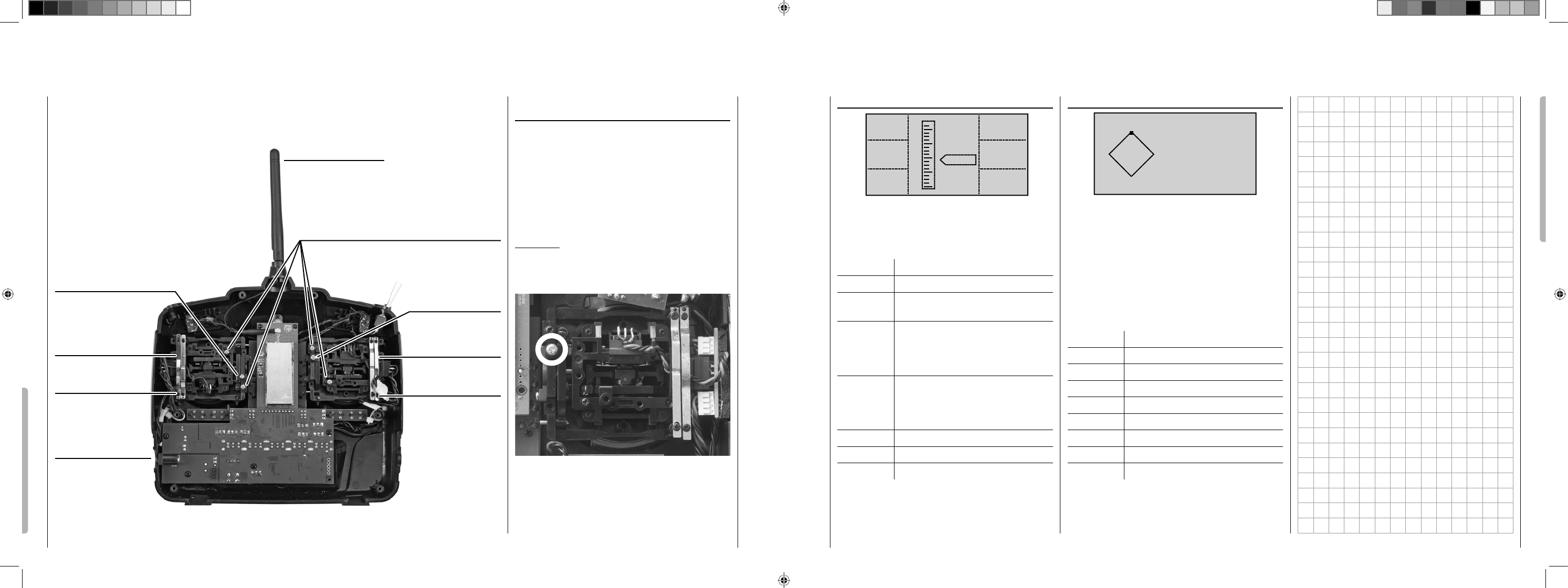
150 Conseils d’utilisation
Conseils d’utilisation
Inversion du crantage du manche de commande des
gaz
Neutralisation du crantage
Le crantage du manche de commande peut être mis sur
le manche de gauche ou sur celui de droite, au choix.
Ouvrez le boîtier de l’émetteur comme décrit précédem-
ment.
Pour inverser le crantage monté d’origine, repérez la
vis blanche moletée sur la vue du manche de gauche
ci-dessous
Remarque :
Le manche de droite est confi guré de la même manière,
en inverse, de telle sorte que la vis recherchéese trouve
à droite en dessous du milieu.
Vissez maintenant cette vis jusqu’à ce que le manche
puisse se déplacer librement d’une fi n de course à
l’autre, c’est-à-dire jusqu’à ce que le manche revienne
de lui-même au neutre.
Prise de charge
Ressort de rappel
Vis de réglage du
crantage
Ressort de rappel
Vis de réglage du
crantage
Antenne repliable
Vis de neutralisation du
crantage
Vis de neutralisation du
crantage
Vis de réglage de l’effort de rappel des manches
Manche de com-
Manche de com-
mande gauche
mande gauche
Manche de com-
Manche de com-
mande droit
mande droit
Ne pas toucher la
Ne pas toucher la
platine émetteur !
platine émetteur !
Ne pas toucher la
Ne pas toucher la
platine émetteur ! v
platine émetteur ! v
59
Programmbeschreibung: Telemetrie
VARIO
RXSQ
0
MAX
0m
MIN
0m
HÖHE
0
H
T
m/1s
0.0
m/3s
0.0
m/10s
0.0
Dieses Display visualisiert die Daten eines ggf. an den
Empfänger angeschlossenen Vario-Moduls Best.-Nr.
33601.
Es bedeutet:
Wert Erläuterung
HÖHE aktuelle Höhe
RXSQ Signalstärke des beim Empfänger
ankommenden Signals in %
MAX das voreingestellte Höhenlimit
relativ zum Startort, bei dessen
Überschreitung akustische
Warnsignale ausgegeben werden
MIN die voreingestellte maximale
Unterschreitung des Startortes, ab
welcher akustische Warnsignale
ausgegeben werden
m/1s m/1 s Steigen/Sinken
m/3s m/3 s Steigen/Sinken
m/10s m/10 s Steigen/Sinken
GPS
NRXSQ 0
ENTF. 0m
HÖHE 0m
0m/1s
0m/3s
0m/10s
N 0°00.0000
O 0°00.0000
WO
S
Kmh
0
Dieses Display visualisiert die Daten eines ggf. an den
Empfänger angeschlossenen GPS-Moduls mit integrier-
tem Vario, Best.-Nr. 33600.
Neben den aktuellen Positionsdaten und der Geschwin-
digkeit des Modells im Zentrum des Displays wird noch
die aktuelle Höhe in Relation zum Startort sowie das
Steigen/Sinken des Modells in m/1 s, m/3 s und m/10s;
die aktuelle Empfangsqualität sowie die Entfernung des
Modells vom Startort angezeigt.
Es bedeutet:
Wert Erläuterung
W / N / O / S Westen / Norden / Osten / Süden
Kmh Geschwindigkeit
RXSQ Signalstärke des Rückkanals
ENTF. Entfernung
HÖHE aktuelle Höhe relativ zum Startort
m/1s m/1 s Steigen/Sinken
m/3s m/3 s Steigen/Sinken
m/10s m/10 s Steigen/Sinken
33110_mx10_HoTT_1_DE.indd Druckbogen 59 von 104 - Seiten (150, 59)
33110_mx10_HoTT_1_DE.indd Druckbogen 59 von 104 - Seiten (150, 59)
21.10.2011 13:24:03
21.10.2011 13:24:03
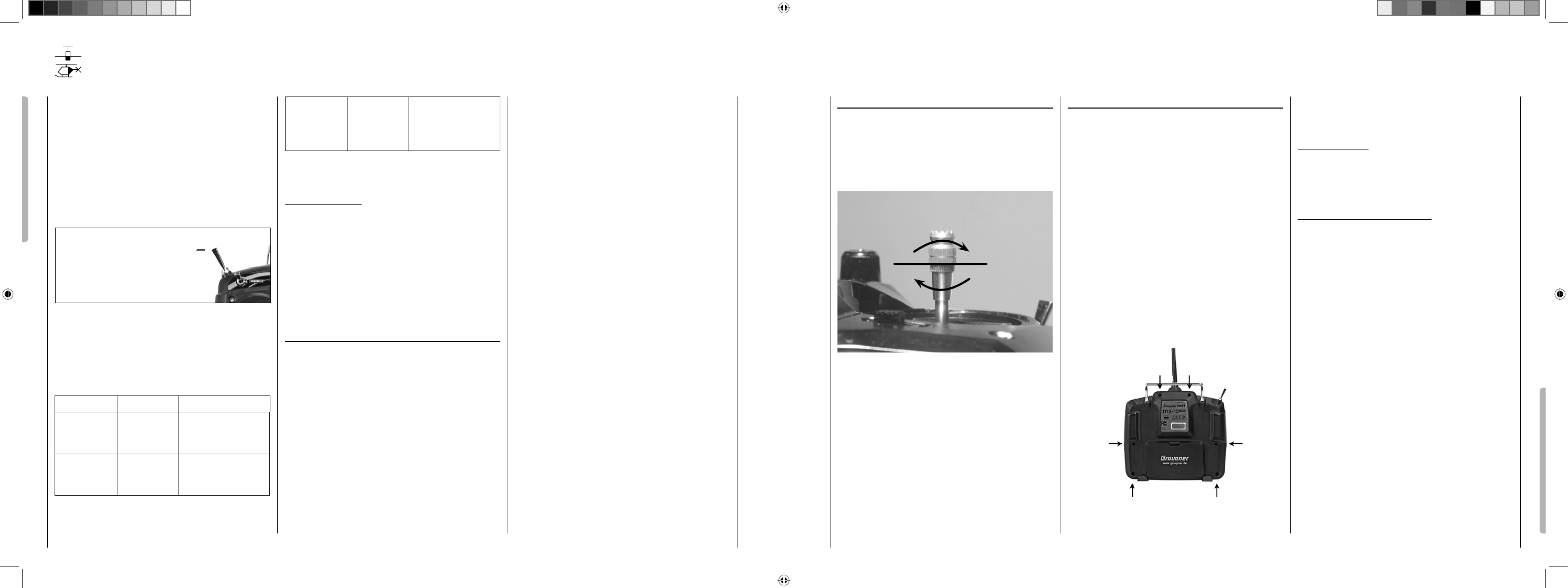
60 Programmbeschreibung: Lehrer/Schüler-System
Lehrer/Schüler
Verbindung zweier Sender für L/S-Betrieb
Mit der mx-10 HoTT können zwei HoTT-Sender auch
kabellos zu einem Lehrer-/Schüler-System kombiniert
werden. Dabei muss der zweite Sender keine mx-10
HoTT sein, auch jeder andere HoTT-Sender mit der
Möglichkeit des kabellosen L/S-Betriebs ist dazu ge-
eignet. Lesen Sie dazu die Bedienungsanleitung Ihres
HoTT-Fernsteuersystems!
Die Umschaltung vom normalen Betriebsmodus zum
Lehrer- oder Schüler Sender erfolgt durch den Modus-
Schalter auf der linken Oberseite des Senders:
Um den Modus zu wechseln, bringen Sie den Modus-
Schalter bei ausgeschaltetem Sender in die gewünschte
Position, drücken und halten den BIND-Taster und
schalten anschließend den Sender ein.
Zur Anzeige des eingestellten Modus...
LED Anzeige Summer Beschreibung
orange LED
leuchtet
- Sender in Modus
normal, Länderein-
stellung: general
orange LED
blinkt einmal
zwei Pieptö-
ne nach dem
Einschalten
Sender in Schüler
Modus
orange LED
blinkt zweimal
2x zwei
kurze Pieptö-
ne nach dem
Einschalten
Sender in Lehrer
Modus
Siehe auch LED und Summersignale auf Seite 20.
Wichtiger Hinweis:
Die nachfolgende Beschreibung basiert auf der
zum Zeitpunkt der Drucklegung dieser Anleitung
aktuellen Version 1. 00 der Sendersoftware und ist
gleichermaßen gültig für alle vorangegangenen
Softwareversionen. Es ist jedoch nicht auszuschlie-
ßen, dass nach einem der nächsten Updates die
nachfolgende Beschreibung nicht mehr mit der
dann gegebenen Funktionalität des LS-Systems des
Senders übereinstimmt.
mx-10 HoTT als Lehrer-Sender
Das Schulungsmodell muss komplett, d. h. mit all sei-
nen Funktionen einschließlich Trimmung und etwaigen
Mischfunktionen im HoTT-Lehrer-Sender einprogram-
miert sein. Das zur Schulung vorgesehene Modell
muss somit völlig unabhängig vom jeweils anderen
Sender, vom Lehrer-Sender uneingeschränkt steu-
erbar sein. Zum Abschluss der Vorbereitungen ist
jedoch das Schulungsmodell an den Schüler-Sender
zu binden.
Beachte beim Einsatz der
mx-10
HoTT als Schüler-
sender: die mx-10 HoTT kann nur im Modus „normal“
gebunden werden. Vor einem Einsatz als Schüler-Sen-
der ist das Modell also im Modus „normal“ zu binden,
erst dann kann in den „Schüler“-Modus umgeschaltet
werden.
Außerdem darf kein Mischer aktiviert sein, stecken Sie
den Jumper daher in die mittlere Position „NO MIX“,
siehe dazu Seite 37.
Alle fünf Kanäle des Lehrer-Senders mx-10 HoTT
werden an den Schüler-Sender übergeben.
Die Steueranordnung des Schüler-Senders kann vom
Lehrer-Sender abweichen, da bei der Übergabe an den
Schüler-Sender auch Steueranordnung und die Mischer
übergeben werden. Der Lehrer-Sender muss daher aber
mit allen Funktionen und Mischern für das Schulungs-
modell programmiert werden.
Nachdem der Schüler-Sender gebunden ist, bringen Sie
die mx-10 HoTT in den Lehrer-Modus. Bringen Sie
dazu bei ausgeschaltetem Sender den Modus-Schalter
in die Mittelstellung, drücken und halten den BIND-
Taster und schalten anschließend den Sender ein.
Drücken Sie nun den BIND-Taster des Schüler-Senders:
mx-10 HoTT: drücken und halten
Nachfolgend wird die Einstellung der mx-12/16/20
HoTT zum Schüler-Sender beschrieben. Lesen Sie dazu
auch die Anleitung Ihres Fernsteuersystems!
Schalten Sie den Sender ein und blättern Sie mit den
Pfeiltasten der linken oder rechten 4-Wege-Taste zum
Menüpunkt »Lehrer/Sch« des Multifunktionsmenüs. (Die
zuvor an den Schüler-Sender gebundene Empfangsan-
lage des Schulungsmodells muss während des folgen-
den Prozesses nicht zwingend eingeschaltet sein.):
©
ª
Modus Normal
Lehrer
Schüler
149
Conseils d’utilisation
Réglage de la hauteur des manches de commande
Les deux manches de commande sont réglables en
hauteur pour s’adapter aux convenances personnelles
et permettre un pilotage plus fi n et plus précis.
Maintenez la partie inférieure moletée du manche, puis
desserrez, en tournant la partie supérieure moletée du
manche.
Vous pourrez maintenant augmenter ou diminuer la
hauteur du manche en le tournant. Une fois la hauteur
réglée, resserrez à nouveau les deux parties moletées
en les tournant en sens contraire.
Ouverture du boîtier de l’émetteur
Lisez attentivement les conseils qui suivent, avant
d’ouvrir le boîtier. Nous conseillons aux personnes qui
n’ont jamais fait cela, de se rapprocher d’un Service
Après-Vente Graupner.
Le boîtier ne doit être ouvert que dans les cas suivants :
pour l’inversion du crantage du manche de comman-•
de des Gaz
pour le réglage de la tension du ressort de rappel •
des manches
Avant l’ouverture du boîtier, couper l’émetteur (Interrup-
teur sur « OFF »)
Ouvrez le logement accu et retirez l’accu d’émission
comme décrit sur la double page précédente.
Au dos de l’émetteur, retirez les 6 vis avec un petit tour-
nevis cruciforme de taille PH 1, voir vue ci-dessous :
Emplacement des vis du boîtier
Maintenez les deux moitiés de boîtier ensemble, puis
retournez l’émetteur et laissez simplement tomber les
vis sur la table. Retirez maintenant avec soin le fond du
boîtier en l’ouvrant vers la droite, comme si vous ouvriez
un livre.
A T T E N T I O N :
Un cordon à deux fi ls relie le couvercle à la platine
électronique de l’émetteur qui se trouve dans la
partie supérieure. Ce cordon ne doit en aucun cas
être endommagé !
Recommandations importantes :
Ne faites aucune modifi cations, sinon vous per-•
dez la garantie et de surcroît, l’homologation de
l’émetteur !
N’entrez pas en contact de la platine avec des •
éléments métalliques. Ne touchez pas la platine,
même avec les doigts.
N’allumez jamais l’émetteur lorsqu’il est ouvert !•
Lorsque vous refermez le boîtier, veillez à :
ce qu’aucun fils ne soit coincé•
ce que les deux parties de l’émetteur s’adaptent par-•
faitement l’une sur l’autre. Ne jamais forcer pour ajus-
ter les deux parties entrelles
ne pas trop serrer les visde fixation du couvercle •
pour ne pas arracher le taraudage
… à rebrancher l’accu.•
33110_mx10_HoTT_1_DE.indd Druckbogen 60 von 104 - Seiten (60, 149)
33110_mx10_HoTT_1_DE.indd Druckbogen 60 von 104 - Seiten (60, 149)
21.10.2011 13:24:05
21.10.2011 13:24:05
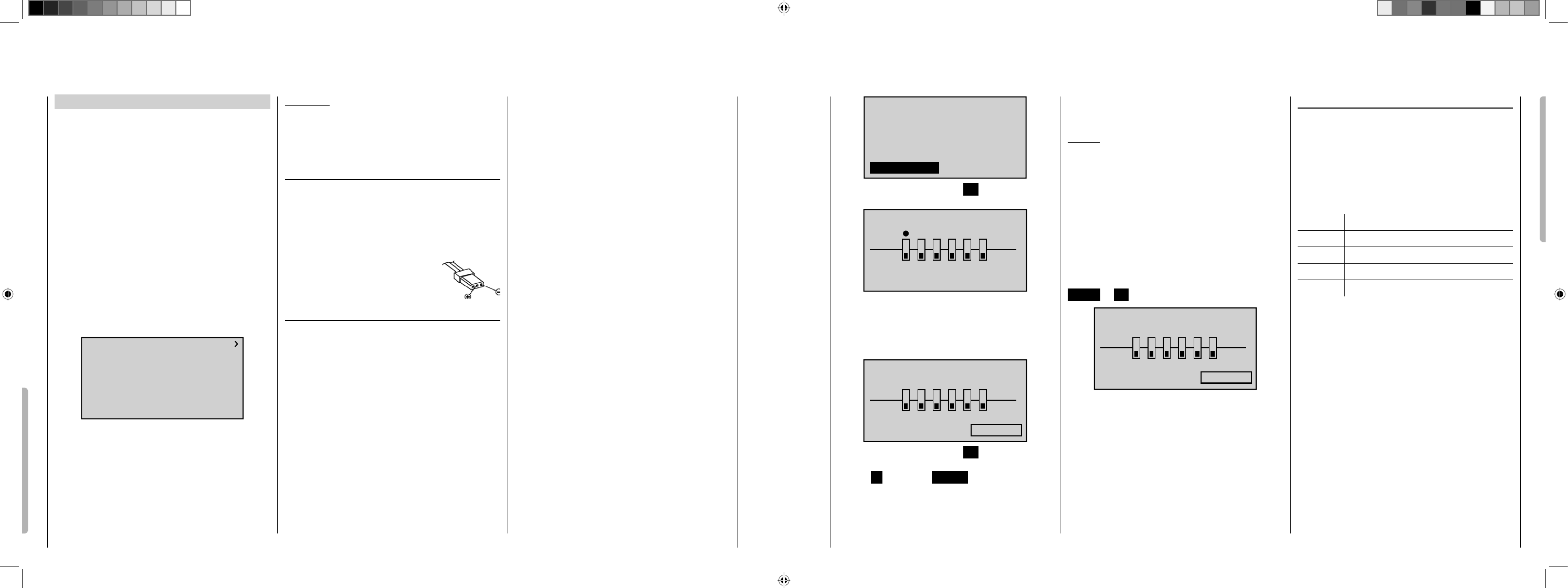
148 Conseils d’utilisation
Alimentation du récepteur
Pour l’alimentation du récepteur vous avez le choix entre
différents accus 4-5 éléments NiMH de capacités diffé-
rentes. Si vous utilisez des servos digitaux, nous vous
conseillons un accu 5 éléments (6V) avec une capacité
suffi sante. Si vous utilisez des servos digitaux et analo-
giques, veillez à ne pas dépasser la tension maximale
autorisée. Pour une alimentation stabilisée, réglable
de l’alimentation du récepteur, avec 1 ou 2 accus de
réception, vous pouvez utiliser par ex. l’unité PRX Réf.
Cde 4136, voir annexe.
Pour des raisons de sécurité, n’utilisez jamais de boîtier
porte-piles, ou des piles sèches.
Pour des raisons de sécurité, n’utilisez jamais de boîtier
porte-piles ou des piles sèches.
La tension de l’alimentation embarquée „R-VOLT“ est
affi chée durant toute l’évolution du modèle, sur l’écran
de la Smart-Box, en option:
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
Dès dépassement du seuil mini, réglable, enregistré
dans le menu de télémétrie page 187, d’origine réglé à
3,8 Volt, un message d’alerte s’affi che à l’écran en cas
de tension trop faible, accompagné d’un signal sonore.
C’est pourquoi, il faut tout de même vérifi er, à inter-
valles réguliers, l’état de vos accus. N’attendez pas
le message d’alerte pour recharger vos accus.
Remarque :
Vous trouverez tout ce qui concerne les accus, les
chargeurs et les différents appareils de mesure dans le
catalogue général FS Graupner, ainsi que sur notre site
internet sous www.graupner.de.
Charge de l’accu de réception
Le cordon de charge Réf. 3021 peut directement être
branché sur l’accu de réception. Si l’accu dans le modè-
le, et relié à un des cordons Réf. 3046,3934,3934.1 ou
3943.3, la charge se fait par la prise de charge intégrée
dans l’interrupteur. Pour la charge, l’interrupteur doit être
en position « OFF » Arrêt).
Polarité de la prise de l’accu de réception
Remarques générales pour la charge
Il faut respecter les recommandations données par •
le fabricant du chargeur et de celles données par le
fabricant de l’accu.
Respectez la tension de charge maxi donnée par le •
fabricant de l’accu. Afi n d’éviter des dégradations sur
l’émetteur, la tension de charge ne doit pas dépasser
1 A ! Si nécessaire, limitez la tension à la sortie du
chargeur.
Si vous voulez charger votre accu d’émission à plus •
de 1 A, il faut impérativement le retirer de l’émetteur !
Faute de quoi, vous risquez d’endommager la platine
du fait d’une intensité de charge trop forte et/ou de
l’échauffement de l’accu.
Assurez-vous toujours, en faisant un essai de char-•
ge, du bon fonctionnement de la coupure automa-
tique dans le cas de chargeurs disposant de cette
fonction. Ceci est particulièrement valable si vous
voulez charger l’accu NiMH fourni avec un chargeur
automatique pour accus NiCd. Réglez éventuel-
lement le seuil de coupure, dans la mesure ou le
chargeur offre cette possibilité.
N’effectuez jamais un cycle de décharge de l’accu •
ou un programme de maintenance accu à travers la
prise de charge ! Elle n’est pas prévue pour cela !
Branchez d’abord le cordon de charge sur le char-•
geur, puis ensuite seulement l’accu d’émission ou de
réception. Vous éviterez ainsi les court-circuits que
pourraient provoqués les prises du cordon, si elles
entraient en contact l’une avec l’autre.
Si l’accu chauffe anormalement, vérifi ez son état, •
changez-le si nécessaire ou réduisez l’intensité de
charge.
Ne laissez jamais un accu en charge, sans sur-•
veillance !
Respectez les consignes de sécurité et •
d‘utilisation à partir de la page 37.
Conseils d’utilisation
61
Programmbeschreibung: Lehrer/Schüler-System
Servoeinst
Flächenmix
Gebereinst
Phasentrim
Servoanz. Allg.Einst
Fail-Safe
D/R Expo
Freie Mix
Lehrer/Sch
Telemetrie
Info Anz.
Mit einem Druck auf die zentrale SET-Taste der rechten
4-Wege-Taste öffnen Sie diesen Menüpunkt:
TRAINER/Schül
–S
L
23456
BIND:SW: –––
1
n/v
Bringen Sie den Marker / Cursor mit den Pfeiltasten
der linken oder rechten 4-Wege-Taste zum Eingabe-
feld „BIND“. Sollte rechts neben „SW:“ ein Schalter zu
sehen sein, ist dieser zuvor zwingend zu löschen, siehe
Abbildung:
–S
L
23456
BIND: n/v
SW: –––
1
TRAINER/Schül
Mit einem Druck auf die zentrale SET-Taste der rechten
4-Wege-Taste aktivieren Sie den Binding-Prozess, die
Anzeige n/v wechselt zu BINDING.
Bei Verwendung eines andereren HoTT-Senders als
Schüler-Sender lesen Sie bitte die entsprechende Anlei-
tung zum kabellosen Lehrer/Schüler-System.
Binden des Schüler-Senders an den Lehrer-Sender
Hinweis:
Während des Binde-Vorganges sollte der Abstand der
beiden Sender nicht allzu groß sein. Ggf. ist die Positio-
nierung der beiden Sender zu ändern und der Binde-
Prozess erneut auszulösen.
Der Lehrer-Sender mx-10 HoTT muss abschließend
an den Schüler-Sender gebunden werden. Drücken Sie
dazu den BIND-Taster an der Vorderseite. Nach ein paar
Sekunden wird der erfolgreiche Binding-Vorgang durch
einen kurzen Piepton bestätigt, das Schulungsmodell
kann mit dem Lehrer-Sender gesteuert werden.
Beim Schüler-Sender mx-12/16/20 HoTT wechselt
BINDEN zu EIN:
–S
L
23456
BIND:SW: –––
1
BINDEN
TRAINER/Schül
Um die Übergabe durchführen zu können, müssen Sie
den Modus-Schalter der mx-10 HoTT nach vorne drü-
cken - in den Modus „Schüler“. Solange dieser Schalter
gedrückt bleibt, hat der Schüler-Sender die Kontrolle
über das Modell. Lassen Sie den Schalter wieder los,
um die Steuerkontrolle wieder dem Lehrer-Sender zu
übergeben.
Beachte: auch wenn der Sender vorübergehend aus-
geschaltet wird, bleibt der Lehrer-Modus beim erneuten
Einschalten aktiv.
Einstellung Schüler-Sender
Das vom Schüler zu steuernde Modell muss komplett im
Lehrersender programmiert werden. Im Schülersender
verbleibt die Programmierung in der Grundstellung. Alle
anderen Einstellungen sowie alle Misch- und Koppel-
funktionen erfolgen ausschließlich im Lehrer-Sender
und werden von diesem zum Empfänger übertragen. Bei
der Zuordnung der Steuerfunktionen sind die üblichen
Konventionen einzuhalten:
Kanal Funktion
1 Motordrossel/Pitch
2 Querruder/Rollen
3 Höhenruder/Nicken
4 Seitenruder/Heckrotor
Der HoTT-Empfänger des betreffenden Modells
muss an den Schüler-Sender „gebunden“ sein. Eine
ausführliche Beschreibung des Binde-Vorganges fi nden
Sie auf Seite 38 bzw. 42.
Beachte: die mx-10 HoTT kann nur im Modus „nor-
mal“ gebunden werden. Vor einem Einsatz als Schüler-
Sender ist das Modell also im Modus „normal“ zu
binden, erst dann kann in den „Schüler“-Modus umge-
schaltet werden. Außerdem darf kein Mischer aktiviert
sein, stecken Sie den Jumper daher in die mittlere
Position „NO MIX“, siehe dazu Seite 37.
Nachdem der Sender gebunden ist, bringen Sie die
mx-10 HoTT in den Schüler-Modus. Bringen Sie dazu
bei ausgeschaltetem Sender den Modus-Schalter in die
vordere Stellung, drücken und halten den BIND-Taster
und schalten anschließend den Sender ein.
EIN
33110_mx10_HoTT_1_DE.indd Druckbogen 61 von 104 - Seiten (148, 61)
33110_mx10_HoTT_1_DE.indd Druckbogen 61 von 104 - Seiten (148, 61)
21.10.2011 13:24:07
21.10.2011 13:24:07
62 Programmbeschreibung: Lehrer/Schüler-System
Binden des Schüler-Senders an den Lehrer-Sender
Hinweis:
Während des Binde-Vorganges sollte der Abstand der
beiden Sender nicht allzu groß sein. Ggf. ist die Positio-
nierung der beiden Sender zu ändern und der Binde-
Prozess erneut auszulösen.
Drücken und halten Sie nun den BIND-Taster des
Schüler-Senders mx-10 HoTT.
Lehrer-Sender:
mx-10 HoTT: BIND-Taster drücken und halten
Nach ein paar Sekunden wird der erfolgreiche Binding-
Vorgang durch einen kurzen Piepton bestätigt, das
Schulungsmodell kann mit dem Lehrer-Sender gesteu-
ert werden.
mx-12/16/20 HoTT: Schalten Sie den Sender ein
und blättern Sie mit den Pfeiltasten der linken oder rech-
ten 4-Wege-Taste zum Menüpunkt »Lehrer/Sch« des
Multifunktionsmenüs. (Die zuvor an den Schüler-Sender
gebundene Empfangsanlage des Schulungsmodells
muss während des folgenden Prozesses nicht zwingend
eingeschaltet sein):
Servoeinst
Flächenmix
Gebereinst
Phasentrim
Servoanz. Allg.Einst
Fail-Safe
D/R Expo
Freie Mix
Lehrer/Sch
Telemetrie
Info Anz.
Mit einem Druck auf die zentrale SET-Taste der rechten
4-Wege-Taste öffnen Sie diesen Menüpunkt:
–S
L
23456
BIND: n/v
SW: –––
1
TRAINER/Schül
Geben Sie mit jeweils einem Druck auf die zentrale SET-
Taste der rechten 4-Wege-Taste die an den Schüler zu
übergebenden Steuerkanäle frei. Das Symbol wechselt
jeweils von zu . Beispielsweise:
–S
L
12346
5
BIND:SW: ––– n/v
TRAINER/Schül
Wichtiger Hinweis:
Beim hier zu beschreibenden kabellosen HoTT-System
werden STEUERKANÄLE übergeben!
Soll also beispielsweise die Querruder-Funktion (2)
übergeben werden und ist das Modell mit zwei Quer-
ruderservos ausgestattet, welche üblicherweise an
den Empfängeranschlüssen 2 und 5 angeschlossen
sind, dann sind beim kabellosen System folglich auch
die Steuerkanäle 2 und 5 zu übergeben - siehe obige
Abbildung. Um die Übergabe durchführen zu können,
müssen Sie noch einen Lehrer-Schüler-Umschalter
zuordnen. Platzieren Sie dazu die Markierung mit den
Pfeiltasten der linken oder rechten 4-Wege-Taste links
unten neben „SW:“ und weisen Sie einen Schalter zu.
Verwenden Sie dazu vorzugsweise den Momentschalter
SW 1, um die Steuerung jederzeit an den Lehrer-Sender
zurücknehmen zu können:
¿
L
123456
S
BIND:SW: n/v
1
TRAINER/Lehr.
bringen Sie nun die Markierung mit den Pfeiltasten
der linken oder rechten 4-Wege-Taste nach rechts, zu
„BIND: n/v“:
¿
L
123456
S
BIND:SW: n/v
1
TRAINER/Lehr.
Schließen Sie ggf. den zuvor defi nierten Lehrer-/Schü-
ler-Umschalter …
¿
L
123456
BIND:
SW: 1
S
BINDEN
TRAINER/Lehr.
… und lösen mit einem Druck auf die zentrale SET-Taste
der rechten 4-Wege-Taste den „BINDEN“-Prozess aus.
Sobald dieser Prozess abgeschlossen ist, erscheint im
Display anstelle des blinkenden „BINDEN“ „EIN“.
147
Conseils d’utilisation
Conseils d’utilisation
Alimentation de l’émetteur
D’origine, l’émetteur mx-10 Hott est fourni avec un
accu rechargeable de haute capacité NiMH-4NH-1500
RX RTU (Réf. 33112.1). (Sous réserve de modifi cation).
A la livraison, l’accu n’est pas chargé.
Durant l’utilisation, la tension de l’accu d’émission doit
être surveillée en permanence, à l’écran.
Durant l‘utilisation, la tension de l’accu d‘émission, dont
l‘état est indiqué par une LED, doit être surveillée.
Lorsque la tension chute en dessous d’un certain seuil
réglable sur la ligne „Seuil de déclenchement alarme
accu“ du menu „TX“ de la Smart-Box en option, seuil
réglé d‘origine à 4.5 V, une alarme se déclenche et la
LED orange se met à clignoter par une suite de 5 cligno-
tements rapides.
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
Il est maintenant grand temps de poser, de couper
l’émetteur et de recharger l’accu !
Charge de l’ accu d’émission
L’accu d’émission Ni-MH peut être rechargé grâce à la
prise de charge située sur le coté droit de l’émetteur,
avec le chargeur (Réf. 33116.2) fourni avec l’émetteur.
En ce qui concerne l durée de la chargeIl existe une
règle empirique qui dit qu’un accu vide peut être re-
chargé en 12 heures env. avec une tension de charge
équivalente à 10% de la capacité de l’accu. Si vous êtes
en possession du chargeur et de l’accu standard fourni,
la tension de charge est alors de 200 mA. Pour couper
la charge, ça, c’est à vous de le faire …
Durant toute la durée de la charge, l’émetteur doit être
en position « OFF », c’est-à-dire coupé. ne jamais allu-
mé l’émetteur, tant qu’il est relié au chargeur !
Une interruption, aussi brève soit-elle, du processus de
charge peut faire monter la tension de charge au point
d’endommager immédiatement l’émetteur. C’est pour-
quoi, il faut toujours veiller à ce les connexions utilisées,
prises, fi ches, soient correctes et fi ables.
Polarité de la prise de charge mx-10 Hott
Les cordons de charge d’autres marques que l’on trouve
dans le commerce ont souvent des polarités différentes.
C’est pourquoi, n’utilisez que des cordons de charge
originaux Graupner avec la Réf. 3022.
Charge avec des chargeurs automatiques
D’origine, la prise de charge de l’émetteur est équipée
d’un détrompeur et peut néanmoins être utilisée, avec
des chargeurs appropriés pour une charge rapide de
l’accu d’émission.
Réglez votre chargeur rapide, conformément à sa noti-
ce, sur une différence de tension Delta Peak de 10 mV
… 20 mV ou équivalent, afi n qu’il soit compatible à la
charge rapide des accus Ni-MH.
Branchez d’abord les fi ches bananes du cordon de
charge sur le chargeur, puis branchez l’autre extré-
mité du cordon de charge dans la prise de charge de
l’émetteur. Ne reliez jamais des extrémités dénudées
à un cordon de charge branché sur l’émetteur ! Pour
éviter tous dégâts sur l’émetteur, ne dépassez pas
une intensité de charge de 1 A. Vous pouvez régler
cela, si nécessaire, sur le chargeur.
Pour retirer l’accu d’émission
Pour retirer l’accu, il faut d’abord déverrouiller le couver-
cle du logement accu, au dos du boîtier, puis l’enlever.
Enlevez l’accu puis débranchez avec précaution la prise
de l’accu d’émission en tirant soigneusement sur le
cordon.
Remise en place de l’accu d’émission
Tenez la prise de l’accu d’émission de manière à ce que
le fi l noir ou brun soit en face de l’antenne et que la fi che
inoccupée de la connexion de l’accu soit dirigée vers
le bas, puis enfi lez la prise de branchement de l’accu
sur les trois plots de l’intérieur de l’émetteur (la prise de
branchement de l’accu a deux arêtes cassées (détrom-
peur) pour éviter toute inversion de
polarité (voir croquis ci-contre).
Remontez ensuite l’accu dans son
logement et refermez le couvercle. Polarité de la
prise de l’accu
d’émission
33110_mx10_HoTT_1_DE.indd Druckbogen 62 von 104 - Seiten (62, 147)
33110_mx10_HoTT_1_DE.indd Druckbogen 62 von 104 - Seiten (62, 147)
21.10.2011 13:24:08
21.10.2011 13:24:08
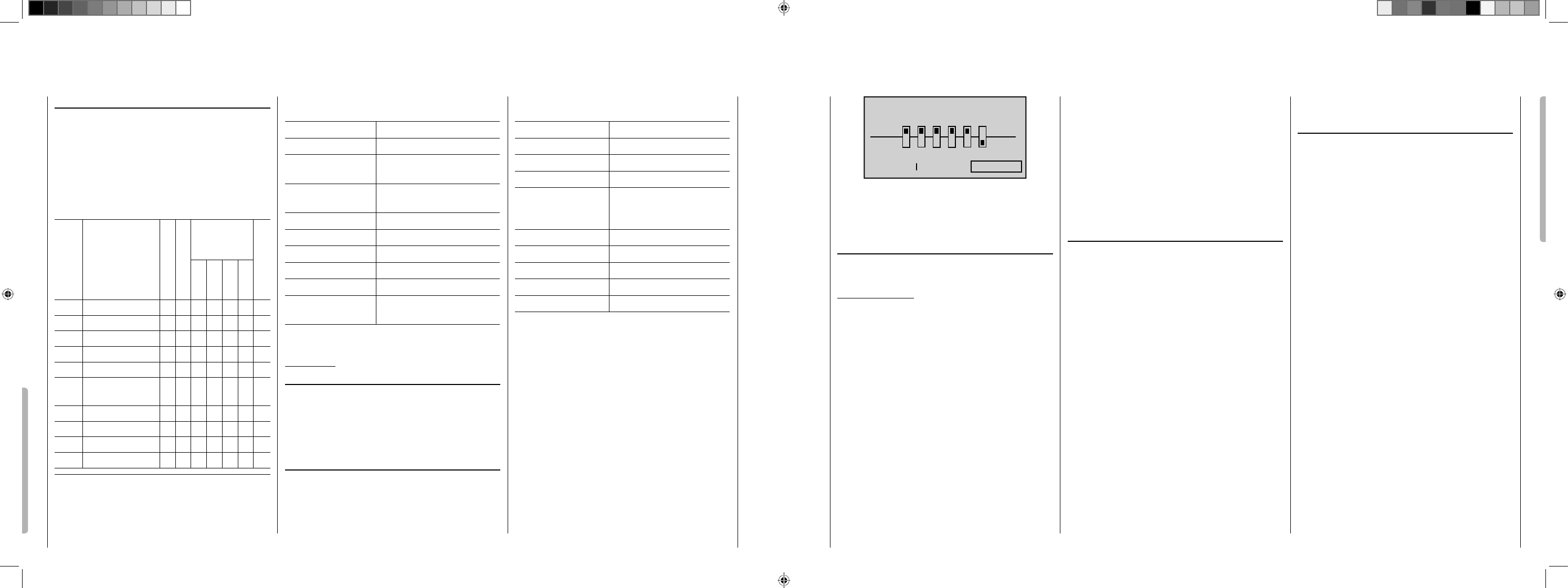
146 Description de l’émetteur
Caractéristiques techniques de l’émetteur mx-10
Hott
Bande de fréquence 2,4 … 2,4835 GHz
Modulation FHSS
Puissance émetteur Voir réglages selon les pays,
page 170 ou 174
Nbre de voies 5 voies, dont 4 réglables par
trim
Plage de température -10 … +55 °C
Antenne repliable
Tension 3,4 … 6 V
Consommation ca. 125 mA
Dimensions ca. 190 x 195 x 90 mm
Poids ca. 630 g grs avec accu
d’émission
Accessoires
Réf. Cde. Désignation
1121 Sangle, largeur 20 mm
70 Sangle, largeur 30 mm
3097 3097 Protection intempéries pour émetteur
Pièces de rechange
Réf. Cde. Désignation
33112.1 4NH-1500 RX RTU à plat
33800 Antenne Hott émetteur
Caractéristiques techniques du récepteur GR-12
Hott
Tension 3,6 … 8,4 V
Consommation ca. 70 mA
Bande de fréquence 2,4 … 2,4835 GHz
Modulation FHSS
Antenne long. 145 mm,
gainées sur 115 mm avec ca.
30 mm actif
Nbre de sorties 6
Nbre de sondes 1 (à la place du servo 5)
Plage de température -15° … +70 °C
Dimensions 36 x 21 x 10 mm
Poids 7 g
* La tension de fonctionnement autorisée ci-dessus ne s‘applique
qu‘au récepteur! A ce sujet, sachez que la tension d‘entrée du
récepteur qui est retransmise aux sorties récepteur n‘est pas régulée,
alors que la plage de tension de la plupart des servos, variateurs,
gyroscopes ou autres n‘ont qu‘une plage de tension de 4,8 à 6 Volt!
Vous trouverez d‘autres accessoires en annexe ou sur notre
site Internet sous www.graupner.de. Vous pouvez également
vous renseigner auprès de votre détaillant, qui saura vous
conseiller.
Le Set Réf.Cde. 33110 contient
Emetteur Microcomputer mx-10 Hott avec accu
d‘émission NiMH 4NH-1500 RX RTU plat (sous réserve
de modifi cation), récepteur bi-directionnel Graupner GR-
12 HoTT, cordon interrupteur et chargeur secteur.
Chargeurs recommandés (Accessoires)
Réf. Cde. :
Désignation
Branchem. 220 V
Branchement 12 V
pour accus de
type
Cordon de charge. intégré
NiCd
Ni-MH
LiPo
Plomb
6407 Multilader 3 x x x x
6411 Ultramat 8 xxxxx
6425 Twin Charger x x
6427 Multilader 3 x x x x
6455 Multilader 7E x x x x
6463 Ultramat 12 plus
Pocket xxxxx
6464 Ultramat 14 plus xxxxxx
6466 Ultra Trio plus 14 xxxxxx
6468 Ultramat 16S xxxxxx
6470 Ultramat 18 xxxxxx
Pour la charge de l’accu d’émission il faut le cordon Réf. 3022, et pour
l’accu de réception, le cordon Réf. 3021, si ne n’est pas spécifi é dans
le tableau ci-dessus.
Vous trouverez d’autres chargeurs ainsi que des détails concernant
les chargeurs mentionnés ci-dessus dans notre catalogue général FS
Graupner ou sur notre site internet sous www.graupner.de
63
Programmbeschreibung: Lehrer/Schüler-System
¿
L
123456
BIND: EIN
SW: 1
S
TRAINER/Lehr.
Beachte: auch wenn der Sender vorübergehend ausge-
schaltet wird, bleibt der Schüler-Modus beim erneuten
Einschalten aktiv.
Lehrer-Schüler Betrieb
Beide Sender werden kabellos per „BINDUNG“ mitei-
nander verbunden.
Wichtiger Hinweis:
Überprüfen Sie unbedingt VOR der Aufnahme eines
Lehrer-/Schüler-Betriebs am betriebsbereiten Modell
alle Funktionen auf korrekte Übergabe.
Während des Schulungsbetriebs können Lehrer und
Schüler durchaus lockeren Abstand halten. Die so
genannte Rufweite (max. 50 m)sollte allerdings kei-
nesfalls überschritten werden, und es sollten sich auch
keine weitere Personen zwischen Lehrer und Schüler
befi nden, da dies die Reichweite des zur Verbindung der
beiden Sender genutzten Rückkanals verringern kann.
Desweiteren ist zu beachten, dass wegen der Nutzung
des Rückkanals für die kabellose Lehrer-/Schüler-
Funktion in diesem Modus keine Teleme triedaten des
Modells übertragen werden können.
Sollte es während des Schulungsbetriebes dennoch
einmal geschehen, dass die Verbindung zwischen
Lehrer- und Schüler-Sender verloren geht, dann über-
nimmt automatisch der Lehrer-Sender die Steuerung
des Modells. Befi ndet sich in dieser Situation der LS-
Umschalter in der „Schüler“-Position, dann beginnt für
die Dauer des Signalverlustes die zentrale LED des
Lehrer-Senders mx-10 HoTT 4x orange zu blinken
und es ertönen die korrespondierenden akustischen
Warnsignale.
In beiden Fällen sollten Sie vordergründig für geringeren
Abstand zwischen den beiden Sendern sorgen. Hilft
dies nicht, dann sollten Sie umgehend landen und nach
der Ursache suchen.
Funktionsüberprüfung
Mögliche Fehlerursachen:
Schüler-Sender nicht bereit•
Fehlendes „Binding“ zwischen Lehrer-Sender und •
HoTT-Empfänger im Schulungsmodell.
Kabelloser L/S-Betrieb mit dem HoTT Lehrer-Kabel
für mx-Sender mit HoTT S-RX Summensignal Best.-
Nr. 33310
Mit dem optional erhältlichen HoTT Lehrer-Kabel 33310
und einem HoTT-Empfänger mit Summensignalausgang
kann jeder HoTT-Sender mit DSC-Buchse zum kabel-
losen Lehrer-Sender ausgebaut werden.
Damit lässt sich die mx-10 HoTT als preisgünstiger
Schüler-Sender mit allen HoTT-Sendern kombinieren.
Die Übertragung der Signale des Schüler-Senders zum
Lehrer-Sender erfolgt über einen HoTT Empfänger,
der am Sendergehäuse z. B. mittels selbstklebendem
Klettband befestigt wird.
Dieser Empfänger muss mit dem Schüler-Sender
gebunden“ sein!
Verbinden Sie den JR-Stecker des Kabels mit dem
Summensignalausgang Ihres Empfängers, z.B. beim
Empfänger GR-12 Kanal 6 und den Klinkenstecker mit
der DSC-Buchse des Senders. Die Stromversorgung
dieses Empfängers übernimmt ein zusätzlicher Akku
oder ein dreipoliges Verbindungskabel zur DATA-Buchse
des Senders.
Programmieren Sie das abschließend für diesen Emp-
fänger das Summensignal SUMO. Siehe dazu den
Abschnitt „Telemetrie“ auf Seite 55.
Die Freigabe einzelner Kanäle an den Schüler-Sender
erfolgt über das »Lehrer/Schüler«-Menü des Lehrer-
Senders. Vergessen Sie nicht, innerhalb dieses Menüs
einen Lehrer-Schüler-Schalter zu setzen, um die freige-
gebenen Kanäle auf den Schüler-Sender übergeben zu
können.
Überprüfen Sie VOR dem Einsatz des Lehrer-Schüler-
Betriebs die einwandfreie Funktion.
33110_mx10_HoTT_1_DE.indd Druckbogen 63 von 104 - Seiten (146, 63)
33110_mx10_HoTT_1_DE.indd Druckbogen 63 von 104 - Seiten (146, 63)
21.10.2011 13:24:12
21.10.2011 13:24:12
64 Programmbeschreibung: Lehrer/Schüler-System
Schalten Sie für einen Test den Schüler-Sender aus. Im
Lehrer-Sender sollte eine Warnanzeige erscheinen.
Das Modell ist wieder über den Lehrer-Sender steu-
erbar. Sollte diese Anzeige nicht aufl euchten, dann
setzen Sie im »Telemetrie«-Menü des Schüler- Senders
beim als SUMA-programmierten Empfänger die Fail-
Safe-Einstellung des Kanals 1 auf „AUS“ und die eines
beliebigen anderen Kanals auf „FAIL SAFE“.
Sollten vereinzelt „Warntöne“ zu hören sein, vergrößern
Sie den Abstand zwischen Lehrer- und Schüler-Sender
und achten Sie auf einen möglichst großen Abstand des
als SUMO-programmierten Empfängers vom HoTT-HF-
Modul des Lehrer-Senders.
145
Description de l’émetteur
Caractéristiques HoTT
Procédure Binding émetteur - récepteur rapide et •
simple
Possibilité de d‘assigner plusieurs récepteurs par •
modèle, en parallèle
Re-Binding extrêmement rapide, même à portée •
maximale
Utilisation satellitaire de deux récepteurs par liaison •
spécifi que
Fonction Alarme et essai de portée•
Message d’alerte sur l’écran émetteur dès que la •
tension récepteur est trop faible
Plage de tension de fonctionnement du récepteur •
très large, de 3,6 V à 8,4 V (encore fonctionnel à 2,5
V)
Fail Safe•
Attribution libre des voies (Channel Mapping), fonc-•
tions de mixage, ainsi que différents réglages servos
sont programmables dans le menu de télémétrie
Jusqu’à 4 servos peuvent être commandé simultané-•
ment, en bloc, avec un temps cycle servo de 10 ms
(uniquement avec des servos digitaux !)
Insensibilité maximale grâce à une fréquence Hop-•
ping optimisée et une plage de fréquence large
Transmission intelligente des données avec fonction •
corrective
Affi chage des données télémétriques en temps réel•
possibilité d’utiliser plus de 200 ensembles en même •
temps
Résolument tourné vers l’avenir grâce à la possibilité •
de mises à jour par port Data
33110_mx10_HoTT_1_DE.indd Druckbogen 64 von 104 - Seiten (64, 145)
33110_mx10_HoTT_1_DE.indd Druckbogen 64 von 104 - Seiten (64, 145)
21.10.2011 13:24:12
21.10.2011 13:24:12
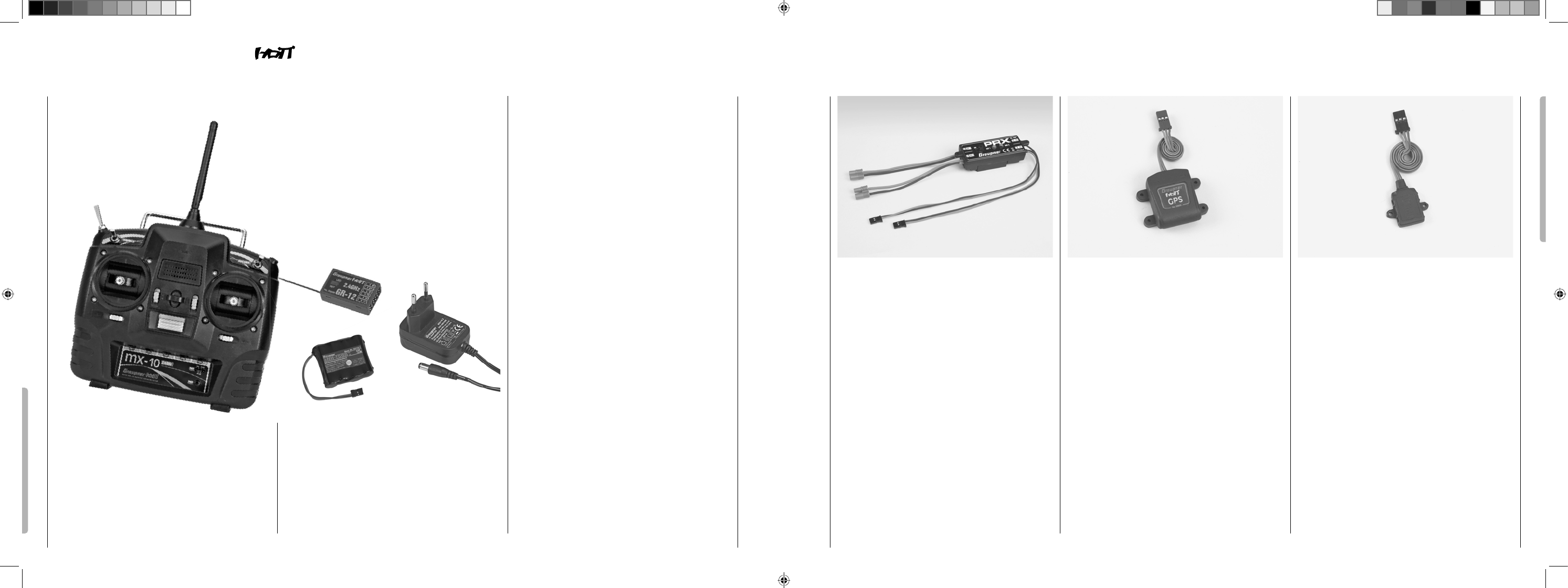
144 Description de l’émetteur
Computer System mx-10
Radiocommande 5 voies en 2,4 GHz, technologie Graupner HoTT (Hopping Telemetry Transmision)
Grande fi abilité et sécurité de fonctionnement de la
technologie Graupner HoTT, grâce à une communi-
cation bi-directionnelle entre émetteur et récepteur,
avec système télémétrique intégré, (par Smart-Box
en option) et temps de réaction ultra rapides.
Programmation simple par „Jumper“.
Système de commande Microcomputer avec une •
technologie 2,4 GHz Graupner HoTT de dernière
génération
Communication bidirectionnelle entre émetteur et •
récepteur
Temps de réaction ultra rapides, grâce à une trans-•
mission directe des données du processeur principal
au module HF en 2,4 GHz et ce, avec une transmis-
sion fi able.
Menu de télémétrie (par la Smart-Box en option) •
pour l’affi chage des données télémétriques ainsi
que la programmation des sondes et capteurs que
l’on peut y brancher (en option) et des sorties
récepteur.
Antenne courte, repliable•
Programmation simple et réglages précis par inter-•
rupteur et touche
3 interrupteurs montés: un interrupteur 3 positions •
pour l‘écolage, 2 interrupteurs 2 positions pour Dual
Rate et voie 5 sur interrupteur.
Sauvegarde des réglages émetteur par un système •
Backup des plus récents, sans batterie
5 voies de commande dont 1 sur interrupteur•
Inversion du sens de rotation servos•
Mode Selector, qui permet de passer d‘un mode de •
pilotage 1 ... 4 (Gaz à gauche/droite etc.) à l‘autre.
Tous les réglages concernés par ce changement de
mode sont automatiquement réadaptés.
Menu voilure pour: 1 QR (aileron), 2 QR (ailerons), •
empennage en V, Delta/ailes volantes
Les réglages ci-dessous ne peuvent ne peuvent se •
faire qu‘avec la Smart-Box, en option:
Temps cycle servos pour servos digitaux de 10 ms, •
sélectionnable
Réglage débattements servos +/- 150% pour toutes •
les sorties récepteurs, chaque coté réglable séparé-
ment (Single Side Servo Throw)
Sub-Trimm pour le réglage du neutre des servos •
dans une plage de +/- 125%
65
Anhang
Vario-Modul Graupner HoTT
Best.-Nr. 33601
Vario mit Höhensignalen und je 5 Steig- und Sinksignaltönen, Höhen-
anzeige und Speicherung der min. und max. Höhe.
Zusätzliche Warnschwellen für min. Höhe, max. Höhe, Steig- und •
Sinkgeschwindigkeit in zwei Stufen
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer•
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal•
Der Vario Sensor kann direkt am Telemetrieeingang des Empfängers •
angeschlossen werden.
Technische Daten
Höhenmessung: -500 m … +3000 m•
Aufl ösung: 0,1 m•
Empfi ndlichkeit Vario: 0,5 m/3s, 1 m/3 s, 0,5 m/s, 1 m/1 s, 3 m/s pro •
Ton programmierbar
Mittelwertberechnung: 4 - 20 Messungen pro Messwert program-•
mierbar
PRX (Power for Receiver)
Best.-Nr. 4136
Hoch entwickelte, stabilisierte Empfängerstromversorgung mit intelli-
gentem Power-Management.
Die Einheit sorgt für eine stabilisierte und einstellbare Stromversor-
gung des Empfängers, um die Zuverlässigkeit der Stromversorgung
noch weiter zu erhöhen. Passend für unterschiedliche Empfänger-
Akkus, um einen unkomplizierten und breit gefächerten Einsatz zu
garantieren. Sollte während des Betriebes die Akku-Spannung auch
nur kurzzeitig einbrechen, wird dies gespeichert und angezeigt, um
mit diesem Hinweis einer Unterdimensionierung oder gar Ausfall des
Empfänger-Akkus entgegenzuwirken.
• Zum Betrieb mit einem oder zwei Empfänger-Akkus.
(Simultane Entladung bei Betrieb mit zwei Akkus)
• Passend für 5- oder 6-zelligen NiMH bzw. 2-zelligen LiPo- oder
LiFe-Akku. Graupner/JR-, G3,5-, G2- und BEC-Stecksysteme.
• Drei einstellbare Pegel für die Ausgangsspannung zur Versorgung
des Empfängers (5,1V / 5,5V / 5,9V).
• Zwei ultrahelle LEDs zeigen getrennt den Betriebszustand von
Akku 1 und Akku 2 an.
• Integrierter, hochwertiger Ein-/Aus-Schalter
• Hochstromfähige Ausführung
• Flacher Aufbau des Schalters und der LEDs um die Optik und
Eigenschaften des Modells nicht zu beeinfl ussen.
• Geradliniger Aufbau von Befestigungslaschen, LEDs und Schalter
für eine einfache Montage mittels beiliegender Bohrschablone.
GPS-/Vario-Modul Graupner HoTT
Best.-Nr. 33600
Vario mit Höhensignalen und je 5 Steig- und Sinksignaltönen sowie
integriertes GPS mit Entfernungsmessung, Streckenmessung, Ge-
schwindigkeitsanzeige, Anzeige der Flugrichtung und der Koordinaten
Zusätzliche Warnschwellen für min. Höhe, max. Höhe, Steig- und •
Sinkgeschwindigkeit in zwei Stufen
Höhenanzeige und Speicherung der min. und max. Höhe.•
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer•
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal•
Der GPS/Vario Sensor kann direkt am Telemetrieeingang des Emp-•
fängers angeschlossen werden.
Technische Daten Vario:
Höhenmessung: -500 m … +3000 m•
Aufl ösung: 0,1 m•
Empfi ndlichkeit Vario: 0,5 m/3s, 1 m/3 s, 0,5 m/s, 1 m/1 s, 3 m/s pro •
Ton programmierbar
Mittelwertberechnung: 4 - 20 Messungen pro Messwert program-•
mierbar
Anhang
33110_mx10_HoTT_1_DE.indd Druckbogen 65 von 104 - Seiten (144, 65)
33110_mx10_HoTT_1_DE.indd Druckbogen 65 von 104 - Seiten (144, 65)
21.10.2011 13:24:12
21.10.2011 13:24:12

66 Anhang
General Engine-Module Graupner HoTT
Best.-Nr. 33610
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit
Verbrennungs- oder Elektromotor:
2x Temperatur- und Spannungsmessungen mit Warnschwellen für •
min. und max. Spannung und min. und max. Temperatur
Einzelzellenmessung mit Warnschwellen für min. Spannung•
Spannungs-, Strom- und Kapazitätsmessung mit Warnschwellen für •
min. und max. Spannung, max. Kapazität und max. Strom
Strombegrenzung programmierbar•
Strommessung mit Shuntwiderständen 2 x 1 mOhm parallel = 0,5 •
mOhm
Drehzahlmessung und Warnschwellen für min. und max. Drehzahl•
Treibstoffmessung mit Warnschwellen in 25 % Schritten (nach Soft-•
wareupdate).
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer•
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal•
2x Temperatur wahlweise 0 bis 120 °C oder 200 °C und Spannungs-•
messung bis 80 V DC
1x Drehzahlmessung bis 100 000 U/min mit Zweiblattluftschraube•
1x Fahrtenregler/Servo Eingang, 1x Eingang Drehzahlregelung, •
1x Fahrtenregler/Servo Ausgang für Drehzahlregelung
1x Strom-, Spannungs- und Kapazitätsmessung bis 40 A (Puls 1 s •
bis 60 A) und bis 30 V
1x Einzelzellenüberwachung für 2 - 6S Lithium-Akkus (LiPo, LiIo, •
LiFe)
usw., siehe www.graupner.de bei dem jeweiligen Produkt•
General Air-Module Graupner HoTT
Best.-Nr. 33611
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit
Verbrennungs- oder Elektromotor:
Vario mit Höhensignalen und Steig- und Sinksignalen und zusätzli-•
chen Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkge-
schwindigkeit in zwei Stufen
Höhenanzeige (-500 … +3000 m) und Speicherung der min. und •
max. Höhe.
2x Temperatur- und Spannungsmessungen mit Warnschwellen für •
min. und max. Spannung und min. und max. Temperatur
Einzelzellenmessung mit Warnschwellen für min. Spannung•
Spannungs-, Strom- und Kapazitätsmessung mit Warnschwellen für •
min. und max. Spannung, max. Kapazität und max. Strom
Drehzahlmessung mit Drehzahlregelung (programmierbar) und •
Warnschwellen für min. und max. Drehzahl
Treibstoffmessung mit Warnschwellen in 25 % Schritten.•
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer•
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal•
2x Temperatur wahlweise 0 bis 120 °C oder 200 °C und Spannungs-•
messung bis 80 V DC
1x Drehzahlmessung bis 100 000 U/min mit Zweiblattluftschraube•
1x Fahrtenregler/Servo Eingang, 1x Eingang Drehzahlregelung, 1x •
Fahrtenregler/Servo Ausgang für Drehzahlregelung
1x Strom- und Spannungs- und Kapazitätsmessung bis 40 A (Puls •
1s: 60 A ) und bis 30 V
usw., siehe www.graupner.de bei dem jeweiligen Produkt•
Electric Air-Module Graupner HoTT
Best.-Nr. 33620
Allgemeiner Sensor für Graupner HoTT-Empfänger und Modelle mit
Elektromotor
Vario mit Höhensignalen, Steig und Sinksignalen sowie zusätzlichen •
Warnschwellen für min. Höhe, max. Höhe, Steig- und Sinkgeschwin-
digkeit in zwei Stufen
Höhenanzeige (-500 … +3000 m) und Speicherung der min. und •
max. Höhe.
2x Temperatur- und Spannungsmessungen mit Warnschwellen für •
min. und max. Spannung und min. und max. Temperatur
Einzelzellenmessung 2 ... 14S mit Warnschwellen für min. Spannung•
Spannungs-, Strom- und Kapazitätsmessung mit Warnschwellen für •
min. und max. Spannung, max. Kapazität und max. Strom
Einstellbare Warnzeit: AUS, 5, 10, 15, 20, 25, 30 Sekunden, immer•
Einstellbare Warnwiederholzeit: Immer, 1, 2, 3, 4, 5 min, einmal•
2x Temperatur wahlweise 0 bis 120 °C oder 200 °C und Spannungs-•
messung bis 80 V DC
1x Fahrtenregler Eingang, 1x Fahrtenregler Ausgang für Einzelzel-•
lenunterspannungsabregelung
1x Strom- und Spannungs- und Kapazitätsmessung bis 150 A •
(kurzz. 1 Sek. 320 A) und bis 60 V
1x Einzelzellenüberwachung für 2 - 14S Lithium-Akkus (LiPo, LiIo, •
LiFe)
1x Telemetrieanschluss für Empfänger•
143
Introduction
mx-10 Une technologie de toute dernière génération
HoTT (Hopping Telemetry Transmission) est une synthè-
se du savoir-faire, d’Engineering et de nombreux essais
réalisés à travers le monde par des pilotes profession-
nels dans le domaine des 2,4 GHz avec communication
bi-directionnelle entre émetteur et récepteur grâce à une
voie de retour d’informations intégrée dans le récepteur.
Basé sur le système de la Graupner/JR -Computer
mc-24, introduite sur le marché en 1997, le système
de commande mx-10 HoTT a spécialement été
conçu pour les débutants. Néanmoins, tous les types de
modèles réduits classiques peuvent être pilotés avec la
mx-10 HoTT, qu’il s’agissent d’avions, de planeurs,
d’hélicoptères, de bateaux ou de voitures.
Des mixages complexes aux niveaux des gouvernes,
lorsqu’il s’agit d’avions ou de planeurs, ou des mixages
du plateau cyclique dans le cas d’un hélicoptère, sont
souvent incontournables. Grâce à cette nouvelle tech-
nologie, on peut, de manière simple et rapide activer ou
désactiver l’un ou l’autre des programmes de mixage,
requis par le modèle. Sélectionnez le type de modèle, et
le logiciel activera automatiquement tous les réglages et
mixages nécessaires à ce type de modèle.
De ce fait, plus besoin de modules à part au niveau
de l’émetteur, et plus besoin de mixages mécaniques
laborieux dans le modèle.
Même des hélicoptères équipés d‘un système „Fly-
barless“ peuvent être pilotés.
L’émetteur mx-10 HoTT offre une qualité et une fi abili-
té à toute épreuve.
Grâce à une structure claire des programmes, le dé-
butant se familiarisera rapidement avec les différentes
fonctions.
La technologie Graupner HoTT permet, en théorie,
d’utiliser 200 modèles à la fois. Mais en pratique, et
compte tenu des différentes conditions d’homologation
pour l’utilisation d’émetteurs dans la bande des 2,4
GHz ISM, ce nombre est sensiblement réduit. Néan-
moins, vous pourrez toujours utiliser un bien plus grand
nombre de modèles à la fois dans la bande des 2,4
GHz, que dans la bande des 35-/40 MHz convention-
nelle. Mais le facteur déterminant qui limite tout cela, est
- comme c’est d’ailleurs souvent le cas - la dimension
de l’espace aérien disponible. Mais le seul fait, qu’il n’y
a plus besoin de se mettre d’accord sur les fréquences,
notamment à la pente, où on ne voit pas toujours tous
les pilotes, est un énorme gain au niveau de la sécurité.
Grâce à la Smart-Box en option, vous avez un accès
simple et rapide aux données et à la programmation des
récepteurs HoTT ainsi qu‘aux capteurs et sondes de
télémétrie.
On peut par exemple inverser des sorties récepteur,
répartir des fonctions de commande sur plusieurs
servos et ajuster les débattements et le sens de rotation
des servos entre eux.
Dans cette notice, chaque menu est décrit en détail. De
nombreux conseils, recommandations et exemples de
programmation complètent ces descriptions.
En annexe, vous trouverez également d’autres informa-
tions relatives au système HoTT. En conclusion, vous
trouverez en fi n de notice, une déclaration de conformité
et la garantie de l’émetteur.
Respectez les consignes de sécurité et les recomman-
dations techniques. Lisez attentivement la notice et
testez les différentes possibilités en branchant simple-
ment les servos au récepteur fourni. Mais suivez les in-
structions données en page 162. Vous apprendrez ainsi
très rapidement comment s’en servir, et les différentes
fonctions qu’offre l’émetteur mx-10 HoTT.
Ayez un comportement responsable lorsque vous utili-
sez votre émetteur et votre modèle, pour ne pas mettre
les autres personnes en danger.
Tout le Team-Graupner vous souhaite de nombreux
et beaux vols avec votre mx-10 Hott de toute dernière
génération.
Kirchheim-Teck, Octobre 2011
33110_mx10_HoTT_1_DE.indd Druckbogen 66 von 104 - Seiten (66, 143)
33110_mx10_HoTT_1_DE.indd Druckbogen 66 von 104 - Seiten (66, 143)
21.10.2011 13:24:23
21.10.2011 13:24:23

142 Conseils de sécurité
Charge
La charge ne peut se faire qu’avec des intensités, des
temps de charge et des plages de températures de
charge bien précises, et toujours sous surveillance. Si
vous n’avez aucun chargeur rapide sous la main, sur
lequel vous pouvez régler la tension de charge avec
précision, l’accu peut être rechargé, en charge normale,
selon la méthode du 1/10 C, voir exemple ci-dessus.
En régle générale, et compte tenu des différents ni-
veaux de charge des éléments, un accu d’émission
ne devrait être chargé qu’à 1/10 C. Mais l’intensité
de charge ne doit en aucun cas dépasser l’intensité
de charge maximale indiquée dans la notice de
l’émetteur :
Charge rapide
Si votre chargeur offre cette possibilité, réglez la cou-•
pure Deltapeak à 5 mV par élément. Néanmoins, la
plupart des chargeurs sont réglés d’origine, de mani-
ère fi xe à 15 ... 20 mV par élément, et peuvent de ce
fait, être utiliser aussi bien pour la charge des accus
NiCd que pour celle des accus NiMH. Si vous avez
le moindre doute, consultez la notice ou renseignez-
vous auprès de votre détaillant pour savoir si votre
chargeur est adapté à la charge des accus NiMH. Si
le doute persiste, vous pouvez tout de même charger
votre accu avec une intensité reduite de moitié, par
rapport à l’intensité de charge maximale indiquée.
Décharge
Tous les accus distribués par Graupner et GM Racing
sont adapte, selon le type d’accu, à une décharge en
continu maximale de 6 … 13 C (respectez les consignes
fabricant !) Plus l’intensité de décharge en continu est
élevée, et plus la durée de vie est réduite.
Utilisez votre accu jusqu’à ce que son rendement •
diminue, c’est-à-dire, jusqu’au déclenchement de
l’alarme de tension trop faible.
Attention :
Si vous stockez votre accu pendant une période as-
sez longue, la tension des différents éléments ne doit
pas chuter en dessous de 1,2. Si nécessaire, il faud-
ra recharger l’accu avant de le stocker.
Les charges réfl exes ou les programmes de charges •
/ décharge réduisent inutilement la durée de vie des
accus et ne sont destinées qu’à vérifi er la qualité de
l’accu ou à redonner une seconde chance à de vieux
éléments. De la même manière, faire un cycle de
charge/décharge avant utilisation de l’accu, est sans
intérêt, à moins que vous ne vouliez vérifi er la qualité
de ce dernier.
Recyclage des piles et accus usagés
Selon la loi allemande actuellement en vigueur, chaque
utilisateur est tenu de rendre les piles ou accus usagés.
Il est interdit de les jeter aux ordures ménagères. Vous
pouvez les déposer dans un centre de tri ou de collecte
de votre commune, dans un de nos points de vente, ou
dans tout autre commerce qui revend ce type de produit.
Vous pouvez également nous retourner les piles ou ac-
cus usagés que nous vous avons vendus, suffi samment
affranchi, à l’adresse suivante :
Graupner GmbH & Co. KG
Service : Gebrauchte Batterien
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
Vous participez ainsi, de manière effi cace, à la protec-
tion de l’environnement !
Attention :
Des accus endommagés nécessitent un emballage
particulier et bien spécifi que, car ils peuvent s’avérer
dangereux !!!!
67
Anhang
Graupner HoTT Smart-Box
Best.-Nr. 33700
Unterschiedlichste Funktionen vereint in einem Gerät machen die
SMART-BOX zu Ihrem künftigen smarten Begleiter. Egal ob Echtzeit
Telemetriedaten angezeigt oder Einstellungen an Ihrem HoTT System
vorgenommen werden sollen, 8 x 21 Zeichen auf einem großzügigen
Display machen ein einfaches Handling möglich. Ein integrierter Sum-
mer zur Ausgabe akustischer Signal- und Warntöne erweitert zudem
nochmals die fl exible Verwendung der BOX.
Mittels des beigelegten Montagesets, kann das Gerät an den
Haltebügeln der Handsender befestigt werden und ist somit optimal
positioniert, um auch während des Steuerns Ihres Modells in Echtzeit
Telemetriedaten ablesen zu können.
Die Updatefähigkeit durch den Anwender hält die SMART-BOX immer
auf dem neusten Stand und sichert die Erweiterung um zukünftige
Funktionen.
Senderspannungsanzeige mit •
einstellbarer Warnschwelle
Ländereinstellung•
Reichweitetest• Signalqualität•
Empfängertemperatur• Empfängerspannung•
Servoumkehr• Servoneutralstellung•
Servoweg• Zykluszeit•
Kanalvertauschung• Fail-Safe-Einstellungen•
Mischereinstellungen• Servotest•
Abmessungen: ca. 76 mm x 72 mm x 17 mm (L x B x H)
Gewicht: ca. 55 g
RPM Magnet-Sensor Graupner HoTT
Best.-Nr. 33616
Zum Anschluss an das General-Engine- (Best.-Nr. 33610), General-
Air- (Best.-Nr. 33611) oder Electric-Air-Modul (Best.-Nr. 33620).
Die jeweilige Blattzahl ist im Telemetrie-Menü des Moduls vorzuwäh-
len.
RPM Optik-Sensor Graupner HoTT
Best.-Nr. 33615
Zum Anschluss an das General-Engine- (Best.-Nr. 33610), General-
Air- (Best.-Nr. 33611) oder Electric-Air-Modul (Best.-Nr. 33620).
Die jeweilige Blattzahl ist im Telemetrie-Menü des Moduls vorzuwäh-
len.
Graupner HoTT USB-Schnittstelle
Best.-Nr. 7168.6
Diese USB-Schnittstelle wird zusammen mit dem separat lieferbaren
Adapterkabel Best.-Nr. 7168.6A zum Updaten von Empfängern und
Sensoren benötigt.
Graupner HoTT Adapterkabel
Best.-Nr. 7168.6A
Dieses Adapterkabel wird zusammen mit der separat lieferbaren
USB-Schnittstelle Best.-Nr. 7168.6 zum Updaten von Empfängern und
Sensoren benötigt.
33110_mx10_HoTT_1_DE.indd Druckbogen 67 von 104 - Seiten (142, 67)
33110_mx10_HoTT_1_DE.indd Druckbogen 67 von 104 - Seiten (142, 67)
21.10.2011 13:24:32
21.10.2011 13:24:32
68 Für Ihre Notizen 141
Conseils de sécurité
Conseils de sécurité et d’utilisation des accus NiMH
Comme pour tous les produits de haute téchnologie,
le respect des consignes de sécurité et des conseils
d’utilisation ci-dessous sont des conditions incontourna-
bles pour une longue durée de vie, et pour un fonction-
nement fi able en toute sécurité.
Conseils de sécurité
Les accus ne sont pas des jouets, c’est pourquoi, il •
ne faut pas que les enfants puissent jouer avec. C’est
pour cette raison qu’il faut les stocker hors de portée
des enfants.
Avant chaque utilisation, vérifi ez l’état des accus. •
Ne plus jamais utiliser des accus endommagés ou
défectueux.
Les accus ne peuvent être utilisé que dans le cadre •
du domaine d’application et de leur caractéristiques
techniques spécifi ques.
Ne jamais surchauffer les accus, ne pas les jeter •
au feu, ne pas les court-circuiter ou les charger
avec des intensités trop élevées.
Des accus composés : d‘éléments branchés en •
parallèle, d’un mélange d’éléments neufs et usa-
gés, d’éléments de différentes marques, de diffé-
rentes tailles, de différentes capacités, ou de dif-
férents type d’éléments ne peuvent en aucun cas
être utilisés.
Retirez toujours les accus des appareils si vous ne •
vous en servez pas. Pour éviter toute décharge trop
forte, coupez toujours l’appareil quand vous ne vous
en servez plus. Rechargez les accus en temps et en
heure.
Durant la charge, placez les accus sur une surface •
résistant à la chaleur, non infl ammable et non con-
ductrice, loin de tout objet facilement infl ammable.
Ne jamais laisser des accus en charge sans sur-•
veillance. La tension de charge rapide maximale
indiquée sur chaque type d’accu ne doit jamais être
dépassée.
Si, durant la charge, l’accu chauffe à plus de 60° C, il •
faut immédiatement interrompre la charge de l’accu
et le laisser revenir à une température de 30° C env.
Ne jamais recharger des accus qui sont déjà char-•
gés, des accus qui sont encore chauds ou des accus
qui ne sont pas entièrement déchargés.
Il est formellement interdit d’effectuer une modifi ca-•
tion quelconque sur le pack d’accus. Ne jamais faire
de soudures ou de soudure à l’arc sur un élément.
en cas de mauvaises manipulations, il y a risques •
d’incendies, d’explosions et de brûlures. Pour com-
battre un tel feu, seules des couvertures anti-feu, du
sable ou des extincteurs CO² sont appropriés.
L’electrolyte qui s’échappe d’un élément est corrosi-•
ve. Evitez tout contact avec la peau ou avec les yeux.
En cas de problèmes, rincez abondamment avec de
l’eau et consultez immédiatement un médecin.
les ouilles de refroidissement des éléments ne doi-•
vent en aucun cas être bouchées ou obturées par ex.
par de l’étain. Lors des soudures à l’étain, il ne faut
pas dépasser une température de 220° C pendant
plus de 20 secondes.
Pour éviter toute déformation, ne pas mettre les •
éléments sous contrainte mécanique.
En cas de surcharge de l’accu, procédez de la •
manière suivante :
Débranchez tout simplement l’accu et posez-le sur
une surface non infl ammable (par ex. sur une pierre)
et laissez-le refroidir. Ne le gardez jamais en main,
pour échapper au risque d’explosion.
Veillez à ce que les instructions de charge et de •
décharge soient respectées.
Généralités
La capacité de votre accu se réduit au fur et à mesure
des charges et des décharges. Même le stockage peut
contribuer à une diminution de sa capacité.
Stockage
Un stockage correct de ces accus ne peut se faire que
lorsque l’accu est totalement déchargé, dans un endroit
sec, à des températures ambiantes de + 5° C à + 25° C.
En cas de stockage de plus de 4 semaines, la tension
des élements ne doit pas chuter en dessous de 1,2 V.
Etalonnage des différents éléments de l’accu
Pour étalonner de nouveaux éléments, amenez-les, •
par une charge normale, à leur capacité de charge
maximale. Dans ce cas, on peut appliquer une
formule empirique qui conseille de charger un accu
vide pendant 12 heures à 1/10ème de la capacité
indiquée. Dans ce cas, chaque élément aura absorbé
la même capacité. Un tel étalonnage devrait être ef-
fectué à chaque fois, toutes les dix charges, de cette
manière, les éléments sont toujours étalonnées, et
leur durée de vie sera ainsi augmentée.
Si vous avez la possibilité d’effectuer une décharge •
individuelle de chaque élément, il faut utiliser cette
possibilité avant toute nouvelle charge. Sinon, il faut
décharger le pack d’accus jusqu’à atteindre une
tension de 0,9 V par élément. Cela correspond, si on
prend l’exemple du pack de 4 éléments monté dans
l’émetteur, à une tension de décharge de 3,6 V.
33110_mx10_HoTT_1_DE.indd Druckbogen 68 von 104 - Seiten (68, 141)
33110_mx10_HoTT_1_DE.indd Druckbogen 68 von 104 - Seiten (68, 141)
21.10.2011 13:24:40
21.10.2011 13:24:40
140 Conseils de sécurité
Electricité statique
Les fonctions de l’émetteur peuvent être perturbées par
des ondes magnétiques générées par les éclairs des
orages, même si ceux ci se trouvent encore à plusieurs
kilomètres de vous. C’est pourquoi …
… si vous voyez que le temps se met à l’orage,
cessez toute activité !
Par ailleurs, le chargement d’électricité statique par
l’antenne d’émission, peut présenter un réel danger
de mort !
Attention
pour remplir correctement les conditions d’émission •
HF FCC d’un émetteur mobile, il faut, lors de son
utilisation, respecter une distance d’au moins 20 cm
ou plus entre l’antenne d’émission et les personnes.
De ce fait, il est déconseillé de s’en servir à des
distances inférieures.
pour éviter des interférences et perturbations •
dues aux caractéristiques électriques et au mode
d’émission, veillez à ce qu’il n’y ait aucun autre
émetteur à moins de 20 cm.
Coté émetteur, l’utilisation d’un ensemble de radio-•
commande nécessite une programmation correcte,
en fonction du pays dans lequel vous vous trouvez.
Ceci est nécessaire pour respecter les diverses
législations et directives en vigueur, FCC, ETSI, CE,
etc.. Suivez les consignes données dans la notice de
l’émetteur et de celles du récepteur.
Avant chaque vol, faites un essai de portée et du •
bon fonctionnement de toutes les commandes en
faisant une simulation de vol complète, pour déceler
d’éventuelles erreurs de programmation ou autres.
N’effectuez jamais de programmation au niveau •
de l’émetteur, ni du récepteur durant l’utilisation du
modèle.
Entretien
Ne jamais nettoyer le boîtier de l’émetteur, l’antenne etc.
avec des produits d’entretien ménager, essence, eau,
mais exclusivement avec un chiffon sec et doux.
Composants et accessoires
La Société Graupner GmbH & Co. KG recommande, en
temps que fabricant, de n’utiliser que des composants et
accessoires de la société Graupner, produits qui ont été
testés et contrôlés. Dans ce cas, la société Graupner
accorde une garantie constructeur.
La société Graupner décline toute responsabilité
en cas d’utilisation de pièces non homologuées ou
accessoires d’autres fabricants et ne peut pas juger,
pour chaque composant étranger, si celui présente
un risque ou non.
Exclusion de responsabilité / Dédommagement
Le respect de la notice de montage et d’utilisation, ainsi
que l’installation des différents éléments et l’entretien de
la radiocommande, ne peuvent pas être surveillé par la
société Graupner. C’est pourquoi, la société Graupner
décline toute responsabilité en cas de perte, dommages
ou autres coûts résultant d’une utilisation de compo-
sants non adaptés pouvant avoir un lien avec l’incident.
Dans la limite du cadre légal, la responsabilité de la
société Graupner est limitée, quelque en soit la raison, à
la valeur d’achat et à la quantité du produit fourni par la
société Graupner lié à l’incident. Ceci n’est pas valable
si la société Graupner, contrainte juridiquement, suite à
un manquement grave constaté, porte l’entière respon-
sabilité.
Conseils de sécurité
69
Für Ihre Notizen
33110_mx10_HoTT_1_DE.indd Druckbogen 69 von 104 - Seiten (140, 69)
33110_mx10_HoTT_1_DE.indd Druckbogen 69 von 104 - Seiten (140, 69)
21.10.2011 13:24:40
21.10.2011 13:24:40
70 Contents
Binding receivers ...........................................106
Range-checking ............................................106
Model helicopter .................................................. 108
Country setting .............................................. 108
Binding receivers ...........................................110
Range-checking ............................................110
“Servo settings” ........................................................ 111
““Fail-Safe” ................................................................ 111
“Telemetry” ............................................................... 113
SETTING & DATA VIEW ...................................... 114
TX display ..................................................... 114
RX Dataview ................................................. 115
RX Servo ....................................................... 116
RX Fail Safe ..................................................117
RX Free mixers ............................................. 119
RX Expo ........................................................ 120
RX Servotest ................................................. 121
DATA VIEW .......................................................... 124
Receiver ........................................................ 125
General Module .............................................125
Electric Air Module ........................................ 125
Vario Module ................................................. 126
GPS Module .................................................. 126
“Trainer mode” .........................................................127
Teacher ................................................................ 127
Pupil .................................................................... 128
Appendix
Appendix .................................................................... 174
Conformity declaration ............................................... 202
FCC Information ........................................................ 203
Guarantee certifi cate ................................................. 204
General Information
Safety Notes ................................................................ 71
Safety notes and handling instructions relating
to Nickel-Metal-Hydride rechargeable batteries .......... 75
Foreword ......................................................................77
Description of radio control set .................................... 78
Recommended battery chargers ................................. 80
Transmitter power supply ............................................. 81
Receiver power supply ................................................82
Adjusting the stick length ............................................. 83
Opening the transmitter case ...................................... 83
Changing the stick mode ............................................. 84
Description of transmitter............................................. 86
Transmitter controls ............................................... 86
Rear of transmitter .................................................87
Data socket ...........................................................87
Using the transmitter for the fi rst time .......................... 88
Transmitter fi rmware update .................................. 89
Using the receiver for the fi rst time .............................. 92
Receiver fi rmware update .....................................94
Installation notes ..........................................................96
Receiving system power supply ............................ 97
Defi nition of terms .......................................................99
Digital trims and stick calibration ............................... 100
Fixed-wing model aircraft........................................... 101
Receiver socket sequence .................................. 102
Model helicopters ......................................................103
Receiver socket sequence .................................. 103
Program descriptions
“Base settings” (model)
Fixed-wing model aircraft .................................... 104
Country setting .............................................. 104
Tail type setting .............................................105
Contents
Environmental protection
This symbol on the product, in the operating instructions
or the packaging indicates that the product must not be
discarded via the normal household refuse at the end
of its useful life. Instead it must be taken to a collection
point for the recycling of electrical and electronic appa-
ratus.
The materials can be re-used according to their identifi -
cation code. You can make an important contribution to
the protection of our shared environment by recycling
old equipment and making use of its
basic materials.
Dry and rechargeable batteries must
be removed from the device and taken
to the appropriate collection point.
Please ask your local authority for the
location of your nearest waste dispo-
sal site.
The sole purpose of this manual is to provide informati-
on; it is subject to amendment without prior notifi cation.
Graupner accepts no responsibility or liability for errors
or inaccuracies which may occur in the information
section of this manual.
139
Conseils de sécurité
Evolution avec des avions, hélicoptères, voitures,
bateaux
Ne survolez jamais le public ou les autres pilotes. Ne
mettez jamais en danger les gens ou les animaux à
proximité. Ne volez jamais à proximité des lignes à
haute tension. Ne faites pas naviguer votre bateau à
proximité des écluses ou sur les canaux réservés au
trafi c fl uvial réel. Eviter de faire évoluer votre voiture sur
des routes, autoroutes, chemins ouverts à la circulation
des véhicules, etc.
Contrôle des accus d’émission et de réception
Quand la tension de la batterie de l’émetteur faiblie,
une alerte visuelle sur l’écran apparaît « Rechargez
l’accu » accompagné d’une signal d’alarme sonore,
il est impératif d’arrêter immédiatement l’utilisation de
l’émetteur et de procéder à la charge de l’accu.
Vérifi ez régulièrement l’état de vos accus, notamment
celui de l’accu de réception. N’attendez pas pour le
recharger seulement lorsque vous remarquez la lenteur
de déplacement des palonniers de vos servos !
Si vous avez le moindre doute, n’hésitez pas à rempla-
cer vos accus usagés.
Respectez toujours les temps de charge ainsi que les
valeurs de charge indiquées par le fabricant. Ne laissez
jamais un accu en charge, sans surveillance !
N’essayer jamais de recharger des piles sèches, non
rechargeables (danger d’explosion).
Chaque accu doit être rechargé avant toute nouvelle
utilisation. Afi n d’éviter les courts-circuits, branchez en
premier les fi ches bananes sur votre chargeur en res-
pectant la polarité, puis seulement le cordon de charge
sur l’émetteur et l’accu de réception.
Débranchez systématiquement tout accu de votre
modèle en cas d’une inutilisation prolongée.
Capacité et temps de d’utilisation
Valable pour toute source d’énergie : la capacité de
charge baisse à chaque nouvelle charge. En cas de
températures très basses, la résistance interne aug-
mente lorsque la capacité se réduit, et, dans ce cas, la
capacité de restitution de l’énergie et le maintien de la
tension se réduisent également.
Les charges fréquentes ou l’utilisation de chargeurs
rapides peuvent détériorer plus rapidement l’état de vos
accus et diminuer leur capacité. C’est pourquoi il est
conseillé de vérifi er tous les 6 mois au moins, leur état
et leur capacité, et les remplacer immédiatement en cas
de doute ou de défaut.
N’utilisez que des accus originaux Graupner !
Antiparasitage des moteurs électriques
Tous les moteurs électriques provoquent des étincelles
entre le collecteur et les charbons, qui, selon le type de
moteur, peuvent plus ou moins perturber le bon foncti-
onnement de la radiocommande.
Pour un fonctionnement correct, il est indispensable
d’antiparasiter les moteurs électriques. C’est pourquoi,
dans des modèles à motorisation électrique il faut anti-
parasiter correctement les moteurs. Le fait de les antipa-
rasiter diminue sensiblement le risque de perturbations,
mesure qui devrait être appliquée dans tous les cas.
Suivez les conseils d’utilisation et de montage qui fi gu-
rent dans la notice du moteur.
Pour de plus amples précisions relatives à
l’antiparasitage des moteurs, voir catalogue général FS
Graupner ou notre site internet sous www.graupner.de.
Ferrites d’antiparasitage servos pour rallonges
Réf. Cde : 1040
L’utilisation des ferrites (fi ltre) est indispensable si vous
êtes obligés d’utiliser de grandes longueurs de fi ls pour
le branchement des servos. Ce fi ltre est donc branché
directement sur la sortie récepteur. Dans des cas
extrêmes, un deuxième fi ltre peut être placé sur le servo
lui-même.
Utilisation d’un variateur électronique
Le bon choix d’un variateur électronique dépend avant
tout de la puissance du moteur utilisé.
Afi n d’éviter une surcharge ou une détérioration du
variateur, la capacité de celui-ci devrait être au moins
égale à la moitié de la tension de blocage supportée par
le moteur.
Une attention toute particulière doit être apportée aux
moteurs Tuning, qui compte tenu de leur faible nombre
d’enroulements, peuvent absorber, en cas de blocage,
plusieurs fois la capacité nominale et détériorer ainsi le
variateur.
Allumage électrique
Même des allumages de moteurs thermiques peuvent
provoquer des interférences qui se traduisent par une
infl uence négative sur le bon fonctionnement de la
radiocommande.
Alimentez votre allumage électrique toujours à partir
d’une source d’alimentation séparée
N’utilisez que des bougie antiparasitées, des connec-
tions et câbles blindés.
Placez toujours votre réception le plus loin possible du
système d’allumage.
33110_mx10_HoTT_1_DE.indd Druckbogen 70 von 104 - Seiten (70, 139)
33110_mx10_HoTT_1_DE.indd Druckbogen 70 von 104 - Seiten (70, 139)
21.10.2011 13:24:40
21.10.2011 13:24:40
138 Conseils de sécurité
Conseils de sécurité
sens, sans être bloqué mécaniquement.
Pour pouvoir couper un moteur thermique, il faut que la
commande soit installée de telle sorte que le carbura-
teur soit complètement fermé quand le manche des gaz
est au minimum ainsi que son trim.
Veillez tout particulièrement à ce que aucune partie mé-
tallique ne frotte à une autre partie métallique, lorsque
vous déplacez une gouverne par exemple, lorsqu’il y a
des vibrations ou lorsque des pièces sont en mouve-
ment.
Vous risqueriez des „tops radio“ qui pourraient endom-
mager votre récepteur.
Positionnement de l’antenne d’émission
Une antenne déployée de manière rectiligne n’offre
qu’un champ réduit de réception en bout d’antenne. Il
est donc illusoire de penser qu ‘en pointant le bout de
son antenne vers le modèle en évolution, on augmente
la qualité de réception.
Lors de l’utilisation de votre ensemble RC avec d’autres
pilotes, rapprochez-vous les uns des autres. Plus la
distance entre pilotes est importante, plus vous risquez
de perturber votre modèle et celui des autres.
Lorsque deux ou plusieurs pilotes avec des radios en
2,4 GHz sont regroupés à moins de 5 m, les uns des
autres, il est possible que la voie de retour des données
soit perturbée, et que cela déclenche une alerte de limi-
te de portée. Dans ce cas, augmentez la distance entre
les pilotes jusqu’à ce que l’alerte disparaisse.
Vérifi cations avant le vol
Avant d’allumer l’émetteur, assurez-vous que le manche
de commande des gaz est en position arrêt/ralenti.
Toujours allumer d’abord l’émetteur et ensuite seu-
lement le récepteur.
Toujours éteindre d’abord le récepteur, et ensuite
seulement l’émetteur
Si cette procédure n’est pas respectée, c’est-à-dire ré-
cepteur sur ON et émetteur sur OFF, d’autres émetteurs
utilisant la même fréquence peuvent prendre le contrôle
de votre modèle et le rendre incontrôlable pouvant
occasionner des dégâts matériels ainsi que blesser les
personnes se trouvant à proximité.
Ceci est particulièrement vrai pour les modèles équipés
d’un gyroscope mécanique :
Avant de couper votre récepteur : coupez l’alimentation
du moteur et assurez-vous que celui-ci ne peut plus se
mettre ne route de manière involontaire.
Un gyroscope qui vient d’être coupé peut générer
une telle tension que le récepteur pense reconnaî-
tre un signal correct pour la commande des Gaz,
et donc mettre en marche, involontairement, votre
moteur !
Essai de portée
Avant chaque vol, vérifi ez toujours le bon fonctionne-
ment de toutes les voies, et faites un essai de portée.
Fixez correctement le modèle et veillez à ce que person-
ne ne se trouve devant le modèle.
Au sol, testez toutes les voies/fonctions du modèle, en
faisant une simulation complète de vol, pour déceler
d‘éventuelles erreurs de programmation ou autres. A ce
sujet, suivez les conseils en pages 62 et 71.
Pour le pilotage de votre voiture ou avion RC, n’utilisez
jamais votre émetteur sans antenne, et vérifi ez toujours
que celle-ci soit montée correctement sur l’émetteur.
l’alimentation ne soient soumis à aucune tension et que
l’antenne de réception soit à au moins 5 cm de toute
partie métallique, ou câblage, qui ne sont pas directe-
ment branchés sur le récepteur. Cela comprend, non
seulement les pièces métalliques ou en carbone, mais
également les servos, moteurs électriques, pompes,
tous types de cordons, etc.
Le mieux, c’est de placer le récepteur à un endroit
facilement accessible du modèle, en l’éloignant le plus
possible de tous les autres éléments. Il ne faut en aucun
cas enrouler l’antenne autour d’un fi l servo ou de la faire
passer à proximité !
Veillez également à ce que les cordons les plus proches
de l’antenne, ne puissent pas se déplacer en vol !
Positionnement de l’antenne de réception
Le récepteur et les antennes doivent être placés, de
préférence, le plus loin possible de toute motorisation.
Dans des fuselages carbone, il est impératif de faire res-
sortir l’extrémité de l’antenne du fuselage. Le sens dans
lequel vous placer l’antenne de réception n’a pas grande
importance. Il est néanmoins préférable de la monter
verticalement dans le modèle. dans le cas d’antennes
Diversity (deux antennes), la deuxième antenne doit
être positionnée à 90° par rapport à la première.
Montage des servos
Toujours fi xer les servos avec les douilles caoutchoucs
anti-vibratoires fournies, seule cette solution permettra
d’éviter les fortes vibrations.
Montage des tringles de commande
Ces commandes doivent toujours être positionnées et
ajustées pour que leur mouvement soit souple et sans
point dur. Il est particulièrement important que tous les
servos puissent se déplacer librement, dans les deux
71
Safety Notey
We all want you to have many hours of pleasure in our
mutual hobby of modelling, and safety is an important
aspect of this. It is absolutely essential that you read
right through these instructions and take careful note
of all our safety recommendations. We also strongly
recommend that you register without delay at http://
www.graupner.de/en/service/product_registration, as
this ensures that you automatically receive the latest
information relating to your product by e-mail.
If you are a beginner to the world of radio-controlled
model aircraft, boats and cars, we strongly advise that
you seek out an experienced modeller in your fi eld, and
ask him or her for help and advice.
If you ever dispose of this transmitter, these instructions
must be passed on to the new owner.
Application
This radio control system may only be used for the
purpose for which the manufacturer intended it, i. e. for
operating radio-controlled models which do not carry hu-
mans. No other type of use is approved or permissible.
Safety notes
SAFETY IS NO ACCIDENT
and
RADIO-CONTROLLED MODELS
ARE NOT PLAYTHINGS
Even small models can cause serious personal injury
and damage to property if they are handled incompe-
tently, or if an accident occurs due to the fault of others.
Technical problems in electrical and mechanical sys-
tems can cause motors to rev up or burst into life unex-
pectedly, with the result that parts may fl y off at great
speed, causing considerable injury.
Short-circuits of all kinds must be avoided at all times.
Short-circuits can easily destroy parts of the radio con-
trol system, but even more dangerous is the acute risk
of fi re and explosion, depending on the circumstances
and the energy content of the batteries.
Aircraft and boat propellers, helicopter rotors, open
gearboxes and all other rotating parts which are driven
by a motor or engine represent a constant injury hazard.
Do not touch these items with any object or part of your
body. Remember that a propeller spinning at high speed
can easily slice off a fi nger! Ensure that no other object
can make contact with the driven components.
Never stand in the primary danger zone, i. e. in the rota-
tional plane of the propeller or other rotating parts, when
the motor is running or the drive battery is connected.
Please note that a glowplug engine or electric motor
could burst into life accidentally if the receiving system
is switched on when you are transmitting the transmitter.
To be on the safe side, disconnect the fueltank or the
fl ight battery.
Protect all electronic equipment from dust, dirt, damp,
and foreign bodies. Avoid subjecting the equipment
to vibration and excessive heat or cold. Radio control
equipment should only be used in “normal” ambient
temperatures, i. e. within the range -15°C to +55°C.
Avoid subjecting the equipment to shock and pressure.
Check the units at regular intervals for damage to cases
and leads. Do not re-use any item which is damaged
or has become wet, even after you have dried it out
thoroughly.
Use only those components and accessories which
we expressly recommend. Be sure to use only genuine
matching Graupner connectors of the same design with
contacts of the same material.
When deploying cables ensure that they are not under
strain, are not tightly bent (kinked) or broken. Avoid
sharp edges, as they can chafe through insulating
materials.
Before you use the system, check that all connectors
are pushed home fi rmly. When disconnecting compo-
nents, pull on the connectors themselves – not on the
wires.
It is not permissible to carry out any modifi cations to the
RC system components, as any such changes invalidate
both your operating licence and your insurance cover.
Installing the receiving system
In a model aircraft the receiver must be packed in soft
foam and stowed behind a stout bulkhead, and in a
model boat or car it should be protected effectively from
dust and spray.
The receiver must not make direct contact with the
fuselage, hull or chassis at any point, otherwise motor
vibration and landing shocks will be transmitted directly
to it. When installing the receiving system in a model
with a glowplug or petrol engine, be sure to install all
the components in well-protected positions, so that no
exhaust gas or oil residues can reach the units and
get inside them. This applies above all to the ON / OFF
switch, which is usually installed in the outer skin of the
model.
Secure the receiver in such a way that the aerial, servo
leads and switch harness are not under any strain. The
receiver aerial should be at least 5 cm away from all
large metal parts and any wiring which is not connected
directly to the receiver. This includes steel and carbon
fi bre components, servos, electric motors, fuel pumps,
cabling of all kinds, etc..
Ideally the receiver should be installed well away from
Safety Notes
Please read carefully!
33110_mx10_HoTT_1_DE.indd Druckbogen 71 von 104 - Seiten (138, 71)
33110_mx10_HoTT_1_DE.indd Druckbogen 71 von 104 - Seiten (138, 71)
21.10.2011 13:24:40
21.10.2011 13:24:40
72 Safety Notes
Safety Notes
Ensure that no metal parts are able to rub against each
other, e. g. when controls are operated, when parts
rotate, or when motor vibration affects the model. Metal-
to-metal contact causes electrical “noise” which can
interfere with the correct working of the receiver.
Directing the transmitter aerial
Transmitter fi eld strength is at a minimum in an ima-
ginary line extending straight out from the transmitter
aerial. It is therefore fundamentally misguided to “point”
the transmitter aerial at the model with the intention of
obtaining good reception.
When several radio control systems are in use on adja-
cent channels, the pilots should always stand together in
a loose group. Pilots who insist on standing away from
the group endanger their own models as well as those
of the other pilots.
However, if two or more pilots operating 2.4 GHz radio
control systems stand closer together than 5 m, the
down-link channel may be swamped, triggering a very
premature range warning. If this should occur, walk
away from the other pilots until the range warning
ceases again.
Pre-fl ight checking
Before you switch on the receiver, ensure that the
throttle stick is at the stop / idle end-point.
Always switch on the transmitter fi rst,
and only then the receiver.
Always switch off the receiver fi rst,
and only then the transmitter.
If you do not keep to this sequence, i. e. if the receiver
is at any time switched on when “its” transmitter is
switched OFF, then the receiver is wide open to signals
from other transmitters and any interference, and may
respond. The model could then carry out uncontrolled
movements, which could easily result in personal injury
or damage to property.
Please take particular care if your model is fi tted with
amechanical gyro: before you switch your receiver off,
disconnect the power supply to ensure that the motor
cannot run up to high speed accidentally.
As it runs down, the gyro can generate such a high
voltage that the receiver picks up apparently valid
throttle commands, and the motor could respond by
unexpectedly bursting into life.
Range checking
Before every session check that the system works properly
in all respects, and has adequate range. Secure the model
adequately, and ensure that no persons are standing in
front of the model.
Carry out at least one complete function check on the
ground, followed by a complete simulated fl ight, in order
to show up any errors in the system and the model’s
programming. Be sure to read the notes on pages 106
and 110 in this regard.
When operating a model, i. e. when fl ying or driving,
do not operate the transmitter without the aerial fi tted.
Check that the transmitter aerial is fi rmly seated.
Operating your model aircraft, helicopter, boat or car
Never fl y directly over spectators or other pilots, and
take care at all times not to endanger people or animals.
Keep well clear of high-tension overhead cables. Never
operate your model boat close to locks and full-size ves-
sels. Model cars should never be run on public streets or
motorways, footpaths, public squares etc..
any other installed equipment in the model, but in an
easily accessible position. Under no circumstances
allow servo leads to run close to the aerial, far less
coiled round it!
Ensure that cables are fastened securely, so that they
cannot move close to the receiver aerial when the model
is fl ying.
Deploying the receiver aerial(s)
The receiver and its aerials should be installed as far
away as possible from all kinds of power system. If your
model has a carbon fi bre fuselage, the aerial tips must
always be deployed outside the fuselage. The orientation
of the aerial(s) is not critical, but we recommend instal-
ling them vertically (upright) in the model. If the receiver
features aerial diversity (two aerials), the second aerial
should be arranged at 90° to the fi rst.
Installing the servos
Always install servos using the vibration-damping
grommets supplied. The rubber grommets provide some
degree of protection from mechanical shock and severe
vibration.
Installing control linkages
The basic rule is that all linkages should be installed in
such a way that the pushrods move accurately, smoothly
and freely. It is particularly important that all servo output
arms can move to their full extent without fouling or
rubbing on anything, or being obstructed mechanically
at any point in their travel.
It is essential that you should be able to stop your
motor at any time. With a glow motor this is achieved by
adjusting the throttle so that the barrel closes completely
when you move the throttle stick and trim to their end-
points.
137
Conseils de sécurité
Afi n de profi ter pleinement et longtemps de votre passi-
on, lisez impérativement cette notice, et respectez avant
tout les conseils de sécurité qui y fi gurent. Vous devrier
vous inscrire sous http://www.graupner.de/fr/service/
enregistrer_produit, c’est le seul moyen pour obtenir au-
tomatiquement par mail les dernières infos concernant
votre produit.
Si vous êtes débutants dans le domaine du modélis-
me radiocommandé, avions, hélicoptères, bateaux ou
voitures, faites-vous absolument assister par un pilote
modéliste expérimenté.
Ce mode d’emploi est absolument à remettre au nouvel
acquéreur en cas de revente de l’émetteur.
Domaine d’application
L’utilisation de cet ensemble de radiocommande est uni-
quement destiné à l’usage décrit par le fabricant dans
ce manuel, c’est-à-dire au contrôle de modèles réduits
ne transportant aucun passager. Toute autre utilisation
ou application n’est pas autorisée.
Conseils de sécurité
LA SECURITE N’EST PAS DUE AU HASARD
et
LES MODELES RADIO-COMMANDES NE SONT PAS
DES JOUETS
… car même de très petits modèles peuvent s’avérer
être particulièrement dangereux par une mauvaise uti-
lisation pour les personnes autour, pouvant causer des
blessures physiques graves et occasionner des dégâts
matériels aux infrastructures à proximité.
L’allumage inopiné des moteurs lié à un défaut méca-
nique ou électrique peut provoquer de graves blessures,
et pas qu’à vous seuls !
Tout court-circuit de quelque nature que ce soit, est
absolument à éviter !
De plus il peut endommager votre matériel, ainsi que
vos accus, qui risquent de prendre feu, voire même
d’exploser.
Toute motorisation entraînant des hélices d’avion ou de
bateaux, de rotors d’hélicoptère, présentent à chaque
instant un danger réel.
Ne les touchez pas lorsqu’ils sont en rotation !
Une hélice en mouvement peut facilement vous section-
ner un doigt !
Portez une attention toute particulière à tout objet à pro-
ximité de la rotation de l’hélice qui pourrait être happé !
Dès que l’accu de propulsion est branché, ou que le
moteur tourne, ne restez jamais à proximité de tout élé-
ment en mouvement, ou dans son champ de rotation !
Durant la programmation, veillez impérativement à ce
que le moteur électrique ou thermique ne puisse pas
se mettre inopinément en route. Si nécessaire coupez
l’alimentation du carburant, en pinçant la durite, et, dans
le cas d’un moteur électrique, débranchez l’accu de
propulsion.
Protégez tout appareillage de la poussière, de la saleté,
de l’humidité et de tout élément étranger. Ne soumettez
jamais l’appareillage aux vibrations, à la chaleur ou au
froid. L’ensemble radiocommande ne doit être utilisé que
par des températures dites „normales“, c’est à dire dans
une plage de - 15° C à + 55° C.
Evitez les chocs, et les écrasements divers. Vérifi ez
régulièrement l’état général de votre ensemble, des fi ls
et de sa connectique. Les éléments endommagés ou
mouillés ne sont plus à utiliser même s’ils ont séchés !
Seuls les éléments que nous préconisons doivent être
utilisés. Au cas où vous décidiez de modifi er ou de
réparer un élément défectueux, n’utilisez que des pro-
duits originaux Graupner compatibles entre eux, avec la
même connextique et le même matériau.
Lorsque vous posez vos fi ls ou cordons dans le modèle,
veillez à ce qu’ils ne soient pas sous tension et qu’ils ne
soient pas pincés ou cassés. Les arêtes vives sont un
réel danger pour l’isolation.
Veillez à ce que les branchements et la connectique
soient fi ables. En débranchant une prise, ne jamais tirer
sur le cordon.
Aucune modifi cation sur l’appareillage ne doit être effec-
tuée. Evitez tout court-circuit et inversion de polarité, le
matériel n’est pas pourvu de protection pour ce genre
d’erreurs.
Implantation de l’ensemble de réception
Le récepteur doit être protégé à l’intérieur du modèle
contre les chocs en l’enveloppant dans de la mousse,
et fi xé sur un couple résistant, et doit également être
protégé contre toutes projections de poussière ou d’eau,
notamment pour les modèles de voitures ou de bateaux.
Le récepteur de doit jamais être directement fi xé sur le
fuselage ou le châssis de la voiture à cause des vibra-
tions du moteur et pour éviter que les chocs ne se trans-
mettent directement au récepteur en cas d’atterrissage
violent.
Lors du placement de l’ensemble de réception dans un
modèle à moteur thermique, protégez toujours votre
récepteur des gaz d’échappement et de toute projection
d’huile. Ceci est particulièrement valable pour les modè-
les dont l’interrupteur ON/OFF est situé à l’extérieur du
modèle.
Toujours placer le récepteur de façon à ce que l’antenne
et les différents câblages vers les servos et vers
Conseils de sécurité
A respecter impérativement !
33110_mx10_HoTT_1_DE.indd Druckbogen 72 von 104 - Seiten (72, 137)
33110_mx10_HoTT_1_DE.indd Druckbogen 72 von 104 - Seiten (72, 137)
21.10.2011 13:24:40
21.10.2011 13:24:40
136 Sommaire
Hélicoptères ........................................................ 174
Réglage selon de pays ..................................174
Procédure Binding pour récepteurs .............. 176
Essai de portée ............................................. 176
«Réglage des Servos » ..........................................177
«Fail Safe » .............................................................. 177
«Télémétrie » ...........................................................179
RÉGLAGES / AFFICHAGE ................................. 180
Émetteur........................................................ 180
Récepteur Dataview ...................................... 181
Récepteur Servo ........................................... 182
Récepteur Failsafe ........................................183
Récepteur Mixage ......................................... 186
Récepteur Expo ............................................ 187
Récepteur Servo Test .................................... 187
AFFICHAGE DES DONNÉES .............................191
Récepteur...................................................... 191
Module General .............................................192
Module Electric Air ........................................ 192
Module Vario .................................................193
Module GPS .................................................. 193
«Ecolage » ............................................................... 194
Moniteur .............................................................. 194
Elève ...................................................................195
Annexe
Annexe ....................................................................... 200
FCC information ........................................................ 202
Déclaration de conformité .......................................... 203
Garantie .....................................................................204
Généralités
Conseils de sécurité .................................................. 137
Conseils de sécurité et utilisation des accus NiMH ... 141
Introduction ................................................................ 143
Description de l’ensemble RC ................................... 144
Chargeurs conseillés ................................................. 146
Alimentation émetteur ................................................147
… récepteur......................................................... 148
Réglage de la hauteur des manches de commande . 149
Ouverture du boîtier émetteur ................................... 150
Inversion du crantage des manches .......................... 150
Description de l’émetteur ........................................... 152
Eléments de commande ............................................ 152
Dos de l’émetteur ................................................ 153
Prise DATA .......................................................... 153
Mise en route de l’émetteur ....................................... 154
Mise à jour de l‘émetteur ..................................... 155
Mise en route du récepteur ........................................158
Mise à jour du récepteur...................................... 160
Conseils d’implantation ..............................................162
Alimentation de la réception ................................ 163
Glossaire ............................................................. 165
Trims digitaux et calibrage des manches ................... 166
Modèles à voilure fi xe ................................................ 167
Attribution des sorties récepteur ......................... 168
Hélicoptères ............................................................... 169
Attribution des sorties récepteur ......................... 169
Description des différents programmes
«Réglages de base » (modèle)
Modèles à voilure fi xe .......................................... 170
Réglage selon de pays ..................................170
Confi guration empennage ............................. 171
Procédure Binding pour récepteurs .............. 172
Essai de portée ............................................. 173
Sommaire
Protection de l’environnement
Le symbole sur le produit, sur le mode d’emploi ou sur
l’emballage, vous informe que ce matériel ne peut pas
simplement être jeté en fi n de vie. Il doit être confi é à un
centre de tri pour le recyclage des différents éléments
électriques et électroniques.
Conformément à leur marquage, la plupart des matéri-
aux utilisés sont réutilisables pour d’autres applications
Par cette action, vous participez activement à la protec-
tion de notre environnement.
Les piles et accus doivent être enlevés
de l’appareil et font l’objet d’un recycla-
ge spécifi que auprès de centres agrés.
Renseignez-vous auprès de votre
mairie ou des services compétents
pour connaître les différents centres de
ramassage et de recyclage.
Cette notice est avant tout une notice informative, et
peut, sans avis préalable, être modifi ée. La société
Graupner décline toute responsabilité en cas d’erreurs
ou d’inexactitudes qui pourraient apparaitre dans la
partie Informations de ce manuel.
73
Safety Notes
Checking the transmitter and receiver batteries
It is essential to stop using the radio control system and
recharge the batteries well before they are completely
discharged. In the case of the transmitter this means –
at the very latest – when the message “battery needs
charging” appears on the screen, and you hear an
audible warning signal.
It is vital to check the state of the batteries at regular
intervals – especially the receiver pack. When the
battery is almost fl at you may notice the servos running
more slowly, but it is by no means safe to keep fl ying or
running your model until this happens. Always replace or
recharge the batteries in good time.
Keep to the battery manufacturer’s instructions, and
don’t leave the batteries on charge for longer than sta-
ted. Do not leave batteries on charge unsupervised.
Never attempt to recharge dry cells, as they may explo-
de.
Rechargeable batteries should always be recharged be-
fore every session. When charging batteries it is impor-
tant to avoid short-circuits. Do this by fi rst connecting the
banana plugs on the charge lead to the charger, taking
care to maintain correct polarity. Only then connect the
charge lead to the transmitter or receiver battery.
Disconnect all batteries and remove them from your mo-
del if you know you will not be using it in the near future.
Capacity and operating times
This rule applies to all battery types: capacity diminishes
with each charge. At low temperatures the battery’s
internal resistance rises, and capacity falls. This means
that its ability to deliver current and maintain voltage is
reduced.
Frequent charging, and / or the use of maintenance
programs, tends to cause a gradual reduction in battery
capacity. We recommend that you check the capacity of
all your rechargeable batteries at least every six months,
and replace them if their performance has fallen off
signifi cantly.
Use only genuine Graupner rechargeable batteries!
Suppressing electric motors
All conventional (brushed) electric motors generate
sparks between the commutator and the brushes, which
cause more or less serious interference to the radio
control system, depending on the type of motor. If an
RC system is to work correctly, it is therefore important
to suppress the electric motors, and in electric-powered
models it is essential that every motor should be effec-
tively suppressed. Suppressor fi lters reliably eliminate
such interference, and should always be fi tted where
possible.
Please read the notes and recommendations supplied
by the motor manufacturer.
Refer to the main Graupner FS catalogue or the Internet
website at www.graupner.de for more information on
suppressor fi lters.
Servo suppressor fi lter for extension leads
Order No. 1040
Servo suppressor fi lters are required if you are obliged
to use long servo extension leads, as they eliminate the
danger of de-tuning the receiver. The fi lter is connected
directly to the receiver input. In very diffi cult cases a
second fi lter can be used, positioned close to the servo.
Using electronic speed controllers
The basic rule is that the electronic speed controller
must be chosen to suit the size of the electric motor it is
required to control.
There is always a danger of overloading and possibly
damaging the speed controller, but you can avoid this by
ensuring that the controller’s current-handling capacity is
at least half the motor’s maximum stall current.
Particular care is called for if you are using a “hot” (i. e.
upgrade) motor, as any low-turn motor (small number of
turns on the winding) can draw many times its nominal
current when stalled, and the high current will then burn
out the speed controller.
Electrical ignition systems
Ignition systems for internal combustion engines can
also produce interference, which has an adverse effect
on the working of the radio control system.
Electrical ignition systems should always be powered by
a separate battery – not the receiver battery.
Be sure to use effectively suppressed spark plugs and
plug caps, and shielded ignition leads.
Keep the receiving system an adequate distance away
from the ignition system.
Static charges
Lightning causes magnetic shock waves which can
interfere with the operation of a radio control transmitter
even if the thunderstorm actually occurs several kilomet-
res away. For this reason …
… cease fl ying operations immediately if you notice
an electrical storm approaching. Static charges
through the transmitter aerial can be life-threate-
ning!
Caution
In order to fulfi l the FCC RF radiation regulations •
33110_mx10_HoTT_1_DE.indd Druckbogen 73 von 104 - Seiten (136, 73)
33110_mx10_HoTT_1_DE.indd Druckbogen 73 von 104 - Seiten (136, 73)
21.10.2011 13:24:40
21.10.2011 13:24:40
74 Safety Notes
applicable to mobile transmitting apparatus, the •
equipment’s aerial must be at least 20 cm from any
person when the system is in use. We therefore do
not recommend using the equipment at a closer
range than 20 cm.
Ensure that no other transmitter is closer than 20 cm •
from your equipment, in order to avoid adverse
effects on the system’s electrical characteristics and
radiation pattern.
The radio control system should not be operated •
until the Country setting has been set correctly at
the transmitter. This is essential in order to fulfi l the
requirements of various directives - FCC, ETSI, CE
etc. Please refer to the instructions for your particular
transmitter and receiver for details of this procedure.
Check all working systems and carry out at least one •
full range check on the ground before every fl ight, in
order to show up any errors in the system and the
model’s programming.
Never make any changes to the programming of the •
transmitter or receiver whilst operating a model.
Care and maintenance
Don’t use cleaning agents, petrol, water or other sol-
vents to clean your equipment. If the case, the aerial etc.
gets dirty, simply wipe the surfaces clean with a soft dry
cloth.
Components and accessories
As manufacturers, the company of Graupner GmbH &
Co. KG recommends the exclusive use of components
and accessories which have been tested by Graupner
and approved for their capability, function and safety. If
you observe this rule, Graupner accepts responsibility
for the product.
Graupner cannot accept liability for non-approved
components or accessories made by other manu-
facturers. It is not possible for Graupner to assess
every individual item manufactured by other compa-
nies, so we are unable to state whether such parts
can be used without incurring a safety risk.
Liability exclusion / Compensation
It is not possible for Graupner to ensure that the user
observes the installation and operation instructions, and
the recommended conditions and methods when instal-
ling, operating, using and maintaining the radio control
components. For this reason Graupner denies all liability
for loss, damages or costs which arise through misuse
or mishandling of this equipment, or are connected with
such use in any way.
Unless obliged by law, Graupner’s obligation to pay com-
pensation, regardless of the legal argument employed,
is limited to the invoice value of that quantity of Graup-
ner products which were immediately involved in the
event in which the damage occurred, unless the com-
pany is deemed to have unlimited liability on account of
deliberate or gross negligence.
Safety Notes
135
For your notes
33110_mx10_HoTT_1_DE.indd Druckbogen 74 von 104 - Seiten (74, 135)
33110_mx10_HoTT_1_DE.indd Druckbogen 74 von 104 - Seiten (74, 135)
21.10.2011 13:24:40
21.10.2011 13:24:40
134 For your notes 75
Safety Notes
Safety notes and handling instructions relating to Nickel-Metal-Hydride rechargeable
batteries
As with all sophisticated technical products, it is vitally
important that you observe the following safety notes
and handling instructions if you wish the equipment to
operate safely and reliably for an extended period.
Safety notes
Rechargeable batteries are not playthings, and must •
be kept well away from children.
Store rechargeable batteries out of the reach of child-
ren.
Check that the batteries are in perfect, serviceable •
condition before every use. Do not re-use defective or
damaged batteries.
Rechargeable batteries must be used within the •
specifi ed limits stated for the corresponding cell type.
Do not heat, incinerate or short-circuit rechargea-•
ble batteries, and never charge them with exces-
sive currents or reversed polarity.
Never use rechargeable batteries consisting of •
parallel-wired cells, combinations of old and new
cells, cells of different construction, size, capaci-
ty, make, brand or cell type.
Batteries installed inside equipment should always be •
removed from the device when it is not in use and not
about to be used. Always keep equipment switched
off in order to avoid deep-discharged cells. Batteries
must be recharged in good time.
The battery to be charged should be placed on a •
non-infl ammable, heat-resistant, non-conductive
surface for the whole of the charge period. Keep
infl ammable and volatile objects and materials well
clear of the charging area.
Batteries must always be supervised when on char-•
ge. Never exceed the maximum fast-charge current
specifi ed for the cell type in use.
If the battery heats up to more than 60°C whilst on •
charge, halt the charge process immediately and
allow the pack to cool down to about 30°C.
Never recharge a battery which is already charged, •
hot, or not completely discharged.
Do not make any modifi cations to batteries. Never •
solder or weld directly to cells.
If incorrectly handled, rechargeable batteries are at •
risk of combustion, explosion, corrosive action and
burns. Suitable extinguishing materials include fi re
blankets, CO2 fi re extinguishers and sand.
Escaped electrolyte is corrosive - do not allow it to •
contact skin or eyes. In an emergency rinse the area
immediately with plenty of clean water before seeking
medical help.
The cells’ air vents must never be blocked or sealed, •
e. g. by solder. When soldering, the iron temperature
should not exceed 220°C, and each joint should be
completed in less than twenty seconds.
To avoid cell deformation, do not exert excessive •
mechanical pressure on battery cells.
If a battery should be accidentally overcharged, use •
the following procedure:
Simply disconnect the battery and leave it on a non-
infl ammable surface (e. g. stone fl oor) until it has
cooled down. Never hold the battery in your hand, as
there is a risk that cells might explode.
Always observe the recommended rates for charging •
and discharging.
General information
The capacity of your rechargeable battery diminishes
with every charge / discharge process. Stored batteries
may eventually exhibit reduced capacity.
Storage
Batteries should not be stored in a completely dischar-
ged state. Store them in a dry enclosed space at an
ambient temperature of +5°C to +25°C. If you are storing
a battery for a period longer than four weeks, ensure
that the cell voltage does not fall below 1.2 V
Balancing individual battery cells
To balance new battery cells, i. e. to bring them all •
to the same state of charge, charge them at what
is known as the ‘normal’ rate until they are full. As a
general guideline a fully discharged battery needs to
be charged for a period of twelve hours at a current
corresponding to one tenth of the capacity printed on
the cell label (the “1/10C” method). After this treat-
ment all the cells will be fully charged, and exhibit
the same voltage. This method of balancing battery
cells should be repeated after every ten fast-charge
processes, so that the cells are repeatedly balanced;
this helps to ensure an extended useful life for your
batteries.
If you have the facilities to discharge individual cells, •
we recommend that you make use of this before eve-
ry charge process. Otherwise the battery pack should
be run down to a discharge voltage of 0.9 V per cell.
For example, this corresponds to a fi nal discharge
voltage of 3.6 V in the case of the four-cell pack used
in the transmitter.
Charging
Ni-MH batteries should only be charged using the speci-
fi ed currents, charge times and temperature range, and
should be supervised constantly when on charge. If you
do not have access to a suitable fast charger, i. e. one
33110_mx10_HoTT_1_DE.indd Druckbogen 75 von 104 - Seiten (134, 75)
33110_mx10_HoTT_1_DE.indd Druckbogen 75 von 104 - Seiten (134, 75)
21.10.2011 13:24:41
21.10.2011 13:24:41
76 Safety Notes
which allows you to set the charge current accurately,
then the battery should always be recharged using the
“normal” charge rate of 1/10C; see the example stated
above.
Wherever possible, transmitter batteries should
always be recharged at the 1/10C rate, in order to
avoid differences in cell states. The charge current
must never exceed the maximum permissible value
stated in the transmitter instructions.
Fast charging
If your battery charger includes the facility to adjust •
the Delta Peak charge cut-off voltage, set this value
to 5 mV per cell. However, most chargers are set to
a fi xed cut-off value of 15 … 20 mV per cell, which
makes them suitable for use with both NiCd and
NiMH batteries. If you are not sure about this, please
refer to the operating instructions supplied with your
charger, or ask at your local model shop whether
your charger is also suitable for Ni-MH packs. If in
any doubt, charge your batteries at half the stated
maximum charge current.
Discharging
All rechargeable batteries sold by Graupner and GM-
Racing are suitable for a maximum continuous current
load of 6C … 13C, according to battery type (refer to the
manufacturer’s specifi cation!). The higher the continuous
current load, the shorter the batteries’ useful life.
Use your battery until its performance falls off, or until •
the low voltage warning is triggered.
Caution:
When stored for a long period, the cell voltage should
not be allowed to fall below 1.2 V. This means that
you may have to recharge the battery before sto-
ring it.
Refl ex charging and charge / discharge (cycle) •
programs shorten the effective life of batteries unne-
cessarily, and are only suitable for checking battery
quality or “reviving” relatively old cells. It also makes
no sense to charge / discharge a battery before using
it - unless you simply wish to check its quality.
Disposal of exhausted dry and rechargeable batte-
ries
The German Battery Order places a legal requirement
on every consumer to return all used and exhausted
dry cells and rechargeable batteries. It is prohibited to
dispose of these items in the ordinary domestic waste.
At no charge to the user, old dry and rechargeable
batteries can be surrendered at local authority collec-
tion points, Graupner retail outlets, and any other shop
where dry and rechargeable batteries of the same type
are sold. You can also send batteries supplied by us to
the following address - with adequate pre-paid postage
- for disposal:
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien (Used batteries)
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
You can make an important contribution to environmen-
tal protection in this way.
Caution:
Damaged batteries may require special packaging befo-
re despatch, as some contain highly toxic materials!!!!!
133
Appendix
Graupner HoTT Smart-Box
Order No. 33700
A vast range of different functions combined in a single device: that’s
what destines the SMART-BOX to be your intelligent companion in
future. Whether you want to display telemetry data in real time, or
enter changes to your HoTT system, the large-area screen with 8 x 21
characters makes the task simple. The fl exible Smart-Box includes an
integral buzzer for generating audible signals and warnings for even
greater fl exibility and practicality.
The installation set supplied makes it easy to mount the unit on the
support bars of hand-held transmitters, allowing you to position it in
such a way that you can read off telemetry data in real time while you
control your model.
The user-update facility ensures that the SMART-BOX is always up-to-
date, and provides a route for expanded functions in future.
Transmitter voltage display with •
user-variable warning threshold
Country setting•
Range check• Signal quality•
Receiver temperature• Receiver voltage•
Servo reverse• Servo neutral position•
Servo travel• Cycle time•
Channel swap• Fail-Safe settings•
Mixer settings• Servo test•
Dimensions: approx. 76 mm x 72 mm x 17 mm (L x W x H)
Weight: approx. 55g
Graupner HoTT RPM magnet sensor
Order No. 33616
Graupner HoTT RPM optical sensor
Order No. 33615
Graupner HoTT USB Interface cable
Order No. 7168.6
This USB interface cable is used with the separately available adapter
cable No. 7168.6A for updating receivers and sensors.
Graupner HoTT adapter cable USB interface/JR
Order No. 7168.6A
This adapter cable is used with the separately available USB interface
cable cable No. 7168.6 for updating receivers and sensors.
33110_mx10_HoTT_1_DE.indd Druckbogen 76 von 104 - Seiten (76, 133)
33110_mx10_HoTT_1_DE.indd Druckbogen 76 von 104 - Seiten (76, 133)
21.10.2011 13:24:41
21.10.2011 13:24:41
132 Appendix
Graupner HoTT General Engine Module
Order No. 33610
General sensor for Graupner HoTT receivers and models with internal-
combustion or electric power system:
2 x temperature and voltage measurements with warning thresholds •
for min. and max. voltage and min. and max. temperature
Individual cell measurement with min. voltage warning thresholds•
Voltage, current and capacity measurement with warning thresholds •
for min. and max. voltage, max. capacity and max. current
Programmable current limiting•
Current measurement with 2 x 1 mOhm shunt resistors in parallel = •
0.5 mOhm
Rev-count measurement and warning thresholds for min. and max. •
rotational speed
Fuel measurement with warning thresholds in 25% increments (re-•
quires software update)
User-variable warning time: OFF, 5, 10, 15, 20, 25, 30 seconds, con-•
stant
User-variable warning repeat time: constant, 1, 2, 3, 4, 5 min, once•
2 x temperature measurement, optionally 0 to 120°C or 200°C, also •
voltage measurement up to 80 V DC
1 x rev-count measurement up to 100,000 rpm with two-blade pro-•
peller
1 x speed controller / servo input, 1 x speed governor input, 1 x •
speed controller / servo output for rotational speed governor
etc. see product at www.graupner.de•
Graupner HoTT General Air Module
Order No. 33611
General sensor for Graupner HoTT receivers and models with internal-
combustion or electric power system:
Vario with altitude signals, climb and descent signals, and additional •
warning thresholds for min. altitude, max. altitude, climb and two-sta-
ge descent rate
Altitude indicator (-500 … +3000 m), storage of min. and max. alti-•
tude
2 x temperature and voltage measurements with warning thresholds •
for min. and max. voltage and min. and max. temperature
Individual cell measurement with min. voltage warning thresholds•
Voltage, current and capacity measurement with warning thresholds •
for min. and max. voltage, max. capacity and max. current
Rev-count measurement and programmable speed governor, also •
warning thresholds for min. and max. rotational speed
Fuel measurement with warning thresholds in 25% increments (re-•
quires software update)
User-variable warning time: OFF, 5, 10, 15, 20, 25, 30 seconds, con-•
stant
User-variable warning repeat time: constant, 1, 2, 3, 4, 5 min, once•
2 x temperature measurement, optionally 0 to 120°C or 200°C, also •
voltage measurement up to 80 V DC
1 x rev-count measurement up to 100,000 rpm with two-blade pro-•
peller
etc. see product at www.graupner.de•
Graupner HoTT Electric Air-Module
Order No. 33620
General sensor for Graupner HoTT receivers and electric-powered
models:
Vario with altitude signals, climb and descent signals, and additional •
warning thresholds for min. altitude, max. altitude, two-stage climb
and descent rate
Altitude indicator (-500 … +3000 m), storage of min. and max. alti-•
tude.
2 x temperature and voltage measurements with warning thresholds •
for min. and max. voltage and min. and max. temperature
Individual cell measurement 2 ... 14S with min. voltage warning •
thresholds
Voltage, current and capacity measurement with warning thresholds •
for min. and max. voltage, max. capacity and max. current
User-variable warning time: OFF, 5, 10, 15, 20, 25, 30 seconds, con-•
stant
User-variable warning repeat time: constant, 1, 2, 3, 4, 5 min, once•
2 x temperature measurement, optionally 0 to 120°C or 200°C, also •
voltage measurement up to 80 V DC
1 x speed controller input, 1 x speed controller output for power re-•
duction due to low voltage of individual cells
1 x current, voltage and capacity measurement, up to 150 A (peak 1 •
sec. 320 A) and up to 60 V
1 x individual cell monitoring for 2 - 14S Lithium batteries (LiPo, LiIo, •
LiFe)
etc. see product at www.graupner.de•
77
Introduction
mx-10 the latest generation of radio control technology
HoTT (Hopping Telemetry Transmission) is the synthe-
sis of expertise, engineering and world-wide testing by
professional pilots. The equipment operates on the 2.4
GHz band, and offers bi-directional communication bet-
ween transmitter and receiver via a down-link channel
integrated into the receiver.
The mx-10 HoTT RC system is based on the Graup-
ner/JR mc-24 computer radio control system which
was introduced back in 1997. It has been developed
specifi cally for the beginner, but the mx-10 HoTT is
still capable of controlling all current model types wit-
hout problem - whether fi xed-wing model or helicopter,
model boat or car.
In the area of fi xed-wing models it is often necessary
to employ complex mixer functions for the control
surfaces. Computer technology enables you to activate
a vast range of functions to cope with special model
requirements – with the simple setting of a „jumper“.
With the mx-10 HoTT all you do is select the appro-
priate model type, and the software then presents you
automatically with the appropriate mixer and coupling
functions. This means that the transmitter requires no
additional modules in order to implement complex coup-
led functions, and you can forget all about old-fashioned
mechanical mixers in the model. Even helicopters can
be controlled by a „Flybarless“ system.
The mx-10 HoTT provides an extremely high level of
safety and reliability in use.
The beginner quickly becomes familiar with the different
functions thanks to the clear, logically arranged program
structure.
In theory the Graupner HoTT process allows more than
200 models to be operated simultaneously. Although in
practice the mixed operation of different technical sys-
tems in the 2.4 GHz ISM band – as required by the ap-
proval regulations – reduces this number considerably.
Generally, however, it will always be possible to operate
even more models simultaneously on the 2.4 GHz band
than on the 35 / 40 MHz frequency bands which we
have used to date. However, the actual limiting factor –
as it has always been – is likely to remain the size of the
(air-) space available. The simple fact that no frequency
control procedure is necessary equates to an enormous
gain in safety, especially at fl ying sites such as gliding
slopes where groups of pilots may be distributed over a
large area, with nobody in overall control.
The optional Smart-Box provides a simple means of
accessing data and programming HoTT receivers. For
example, this method can be used to map receiver
outputs, distribute control functions to multiple servos,
and match servo travels and directions to each other.
This manual describes each menu in detail, and also
provides dozens of useful tips, notes and program-
ming examples to complement the basic information.
Please refer to the Appendix for additional information
on the HoTT system. This manual concludes with the
transmitter’s conformity declaration and guarantee
certifi cate.
Please read the safety notes and the technical infor-
mation. We recommend that you read right through the
instructions with great care, and check all the functions
as described in the text. This can be carried out simply
by connecting servos to the supplied receiver, and
watching their response as you program the transmit-
ter. However, please read the notes on page 96 in this
regard. This is the quickest method of becoming familiar
with the essential procedures and functions of the mx-
10 HoTT.
Always handle your radio-controlled model with a
responsible attitude to avoid endangering yourself and
others.
The Graupner team wishes you great pleasure and suc-
cess with your mx-10 HoTT - a radio control system of
the latest generation.
Kirchheim-Teck, October 2011
33110_mx10_HoTT_1_DE.indd Druckbogen 77 von 104 - Seiten (132, 77)
33110_mx10_HoTT_1_DE.indd Druckbogen 77 von 104 - Seiten (132, 77)
21.10.2011 13:24:48
21.10.2011 13:24:48
78 Description of radio control set
mx-10 Computer System
Five-channel radio control set with Graupner HoTT 2.4 GHz technology (Hopping Telemetry Transmission)
Graupner HoTT technology offers excellent reliabi-
lity in use, with bi-directional communication bet-
ween transmitter and receiver, integrated telemetry
(with the optional Smart-Box) and ultra-fast respon-
se times.
Simplifi ed programming technology with „Jumpers“.
Micro-computer radio control system exploiting the •
latest Graupner HoTT 2.4 GHz technology
Bi-directional communication between transmitter •
and receiver
Ultra-fast response times through direct, ultra-reliable •
data transmission from the main processor to the 2.4
GHz RF module.
Telemetry menu (with the optional Smart-Box) for •
displaying telemetry data, and programming receiver
outputs and optional sensors.
Short, folding aerial•
Easy programming and accurate setting with toggle •
switches and a switch key
3 switches: a three-position switch for Trainer/pupil-•
mode, 2 two-position switches for dual rate and
channel 5 are already built
5 control functions, including 1 switching channel•
Servo reverse•
Mode selector for simple switching between stick •
MODES 1 ... 4 (throttle left / right, etc.) All applicable
settings are automatically converted.
Wing menu: 1 Ail, 2 Ail, V-tail, delta/fl ying wing•
The following settings can only be done via the optional
Smart-Box:
User-selectable servo cycle times for digital servos, •
min. 10 ms
Servo-control ± 150% for all servo outputs can be set •
separately for each side (Single Side Servo Throw)
Sub-trim in the range of ± 125% to adjust the neutral •
position of all servos
General features of the HoTT system
Simple, ultra-fast binding of transmitter and receiver•
Multiple receivers can be bound per model for paral-•
lel operation
Extremely fast re-binding, even at maximum range•
Two-receiver satellite operation using special cable •
connection
131
Appendix
PRX (Power for Receiver)
Order No. 4136
A highly developed stabilised receiver power supply with intelligent
power management.
The unit constitutes a stabilised user-selectable power supply for the
receiver, and provides a further enhancement in the reliability of the
airborne power supply. It is designed for use with different types of
receiver battery, to ensure that it is straightforward and versatile in use.
When the model is operating, even brief collapses in battery voltage
are stored and displayed, offering the user the means of detecting a
receiver battery which is not “up to the job”, or failing.
For use with one or two receiver batteries (simultaneous discharge if •
two batteries are employed)
Suitable for fi ve-cell or six-cell NiMH batteries, or two-cell LiPo or •
LiFe packs. Graupner/JR, G3.5, G2 and BEC connector systems.
Three user-selectable receiver power voltage levels: 5.1 V / 5.5 V / •
5.9 V.
Two ultra-bright LEDs indicate the operational status of batteries 1 •
and 2 separately.
Integral high-quality On / Off switch.•
Constructed to cope with high-current applications.•
Low-profi le switch and LEDs to avoid spoiling the appearance and •
effi ciency of the model.
Straight-through design of mounting lugs, LEDs and switch for simp-•
le installation using drilling template (supplied).
Appendix
Graupner HoTT Vario module
Order No. 33601
Vario with altitude signals and fi ve different tones for climb and
descent; altitude display and storage of min. and max. altitude.
Additional warning thresholds for min. altitude, max. altitude, two-sta-•
ge climb and descent rate
Variable warning time: OFF, 5, 10, 15, 20, 25, 30 seconds, constant•
Variable warning repeat time: constant, 1, 2, 3, 4, 5 min, once•
The vario sensor can be connected directly to the receiver’s teleme-•
try input.
Specifi cation
Altitude measurement: -500 m ... +3000 m•
Resolution: 0.1 m•
Sensitivity, vario: 0.5 m/3s, 1 m/3s, 0.5 m/s, 1 m/s, 3 m/s, program-•
mable per beep
Calculated average value: 4 - 20 measurements per measured •
value, programmable
Graupner HoTT GPS / Vario module
Order No. 33600
Vario with altitude signals and fi ve different tones for climb and
descent, plus GPS with range measurement, distance measurement,
speed indicator, display of fl ight direction and co-ordinates
Additional warning thresholds for min. altitude, max. altitude, two-sta-•
ge climb and descent rate
Altitude display, storage of min. and max. altitude•
Variable warning time: OFF, 5, 10, 15, 20, 25, 30 seconds, constant•
Variable warning repeat time: constant, 1, 2, 3, 4, 5 min, once•
The GPS / Vario sensor can be connected directly to the receiver’s •
telemetry input.
Specifi cation, vario
Altitude measurement: -500 m ... +3000 m•
Resolution: 0.1 m•
Sensitivity, vario: 0.5 m/3s, 1 m/3s, 0.5 m/s, 1 m/s, 3 m/s, program-•
mable per beep
Calculated average value: 4 - 20 measurements per measured va-•
lue, programmable
33110_mx10_HoTT_1_DE.indd Druckbogen 78 von 104 - Seiten (78, 131)
33110_mx10_HoTT_1_DE.indd Druckbogen 78 von 104 - Seiten (78, 131)
21.10.2011 13:24:57
21.10.2011 13:24:57
80 Description of radio control set
Specifi cation, mx-10 HoTT transmitter
Frequency band 2,4 … 2,4835 GHz
Modulation FHSS
Transmitter power see country setting, page
104/108
Control functions fi ve functions; four with trims
Temperature range -10 … +55 °C
Aerial folding
Operating voltage 3,4 … 6 V
Current drain approx. 125 mA
Dimensions approx. 190 x 195 x 90 mm
Weight approx. 630 g with transmitter
battery
Accessories
Order No. Description
1121 Neckstrap, 20 mm wide
70 Neckstrap, 30 mm wide
3097 Wind-shield for hand-held transmitter
Replacement parts
Order No. Description
33112.1 4NH-1500 RX RTU, fl at-pack
33800 HoTT transmitter aerial
Specifi cation, GR-12 HoTT receiver
Operating voltage 3,6 … 8,4 V
Current drain ca. 70 mA
Frequency band 2,4 … 2,4835 GHz
Modulation FHSS
Aerial approx. 145 mm long,
approx. 115 mm encapsu-
lated and approx. 30 mm
active
Servo sockets 6
Sensor socket 1 (instead of servo 5)
Temperature range approx. -15° … +70 °C
Dimensions approx. 36 x 21 x 10 mm
Weight approx. 7 g
The set Order No. 33110 contains:
mx-10 HoTT micro-computer transmitter with integral
4NH-1500 RX RTU fl at-pack Ni-MH transmitter battery
(specifi cation reserved), Graupner GR-12 HoTT bi-di-
rectional receiver, switch harness and plug-type battery
charger
Recommended battery chargers (optional)
Order
No. Description
220 V mains conn.
12 V DC connect.
Suitable for
the following
battery types
Integral charge. lead
NiCd
Ni-MH
LiPo
Lead-ac.
6407 Multilader 3 x x x x
6411 Ultramat 8 xxxxx
6425 Twin Charger x x
6427 Multilader 3 x x x x
6455 Multilader 7E x x x x
6463 Ultramat 12 plus
Pocket xxxxx
6464 Ultramat 14 plus xxxxxx
6466 Ultra Trio plus 14 xxxxxx
6468 Ultramat 16S xxxxxx
6470 Ultramat 18 xxxxxx
To recharge the radio system you will also need the transmitter charge
lead, Order No. 3022, and the receiver battery charge lead, Order No.
3021, unless stated otherwise in the table.
For details of additional battery chargers, and details of the chargers
listed here, please refer to the main Graupner FS catalogue, or our
Internet site at www.graupner.de.
129
Program description: Trainer system
ner” menu point of the multi-function menu. (The trainer
model’s receiving system, previously bound to the Pupil
transmitter, does not need to be switched on during the
following procedure.):
servo set.
D/R expo
wing mixer
contr set.
phase trim
free mixer
servo disp basic sett
fail-safe telemetry
info dispteach/pupi
Press the central SET button of the right-hand four-way
button to open the following menu point:
–P
T
23456
BIND: N/A
SW: –––
1
TRAINER/Pupil
Press the central SET button of the right-hand four-way
button to release the control channels to be transferred
to the Pupil. When you do this, the corresponding sym-
bol changes from to . For example:
–P
T
12346
5
BIND:SW: ––– N/A
TRAINER/Pupil
In contrast to the wired Trainer system described in the
previous section, in which TRANSMITTER CONTROL
SIGNALS are released to the Pupil exclusively, it is
CONTROL CHANNELS which are transferred when
using the wireless HoTT system which is described in
this section.
For example, if the aileron function (2) is to be trans-
ferred, and if the model is equipped with two aileron
servos which are usually connected to receiver sockets
2 and 5, then in the wireless system control channels 2
and 5 must also be transferred. You still have to assign
a Trainer transfer switch on the right of the screen so
that you can actually transfer control to the Pupil. This is
accomplished by using the arrow buttons of the left or
right-hand four-way button to place the marker next to
“SW” at bottom right, and assign a switch.
We recommend that you use the momentary switch
SW 1 as the transfer switch, to ensure that the Teacher
transmitter can regain control instantly at any time.
¿
T
123456
P
BIND:SW: N/A
1
TRAINER/Teach
Now use the arrow buttons of the left or right-hand
four-way button to move the marker to “BIND: N/A” on
the right:
¿T
123456
P
BIND:SW: N/A
1
TRAINER/Teach
Close the previously defi ned transfer switch ...
¿
T
123456
P
BIND:SW: N/A
1
TRAINER/Teach
… and start the “BINDING” process by pressing the
central SET button of the right-hand four-way button. As
soon as this process is concluded, both screens display
“ON” instead of the fl ashing message “BINDING”:
¿
T
123456
BIND: ON
SW: 1
P
TRAINER/Teach
Note: even if the transmitter is turned off temporarily, the
teacher mode remains active when turned on again.
Trainer mode operations
Connect the two transmitters using the wireless Trainer
mode.
Important Note: Be sure to check all functions
BEFORE teacher-student operation for proper
change-over.
While the operation it is no problem for the Teacher and
Pupil to stand a little way apart. However, you should
never exceed a distance of 50 m (this is known as the
call range), and no other persons should stand between
33110_mx10_HoTT_1_DE.indd Druckbogen 80 von 104 - Seiten (80, 129)
33110_mx10_HoTT_1_DE.indd Druckbogen 80 von 104 - Seiten (80, 129)
21.10.2011 13:25:14
21.10.2011 13:25:14
128 Program description: Trainer system
menu: no transmitter controls have been released to the
Pupil ( ), and no switches have been assigned (SW: ---
bottom right and -S on left of illustration).
–P
T
23456
BIND: N/A
SW: –––
1
TRAINER/Pupil
Start the “BINDING” process fi rst at the Pupil transmitter
by pressing the central SET button of the right-hand
four-way button, the display n/v changes to the message
BINDING:
Binding the Pupil transmitter to the Teacher trans-
mitter
Note:
During the binding procedure the distance between the
two transmitters should not be too great. You may need
to change the relative position of the two transmitters
and initiate the binding process a second time.
The teachers mx-10 transmitter HoTT must be bound
conclusively to the pupils transmitter. To do this press
the BIND button on the front. After a few seconds a suc-
cessful binding operation is confi rmed by a short beep,
the trainer model can be controlled with the teacher
transmitter.
When using a mx-12/16/20 HoTT pupil transmitter,
BINDING changes to ON:
To perform the transfer, move the mode switch of the
mx-10 HoTT in forward direction- in the mode „pupil“.
As long as this switch is pressed, the pupil has control
over the trainer model. Release the key to give the
control back to the teacher transmitter.
Note: even if the transmitter is turned off temporarily, the
teacher mode remains active when turned on again.
Pupil transmitter settings mx-10 HoTT
The trainer model must be programmed completely,
i. e. with all its functions including trims and any mixer
functions in the mx-10 HoTT Teacher transmitter. This
means that it must be possible to control the trai-
ner model fully, without restriction, by the Teacher
transmitter. But, at the conclusion of these prepara-
tions, the trainer model must be bound to the Pupil
transmitter.
When assigning the control functions the usual conven-
tions should be observed:
Channel Function
1 Throttle / Collective pitch
2 Aileron / Roll
3 Elevator / Pitch-axis
4 Rudder / Tail rotor
–P
T
23456
BIND: ON
SW: –––
1
TRAINER/Pupil The HoTT receiver of the trainer model must be „bound“
to the pupils transmitter. A detailed description of the
binding process can be found on page 106 and 109.
Note: the mx-10 HoTT binding procedure can only be
done in „normal“ mode. Before using the transmitter in
Pupil mode, bind the receiver in mode „normal“, then
switch to the mode „pupil“. In addition, no mixer may be
activated, move the jumper in the middle position „NO
MIX“, see also page 105.
After the pupils transmitter is bound to the trainer model,
set the mx-10 HoTT in the pupils mode. To change
the mode, move the mode switch on the transmitter in
the „pupil“ position, press and hold the BIND-button and
then switch on the transmitter.
Binding the Pupil transmitter to the Teacher trans-
mitter
Note:
During the binding procedure the distance between the
two transmitters should not be too great. You may need
to change the relative position of the two transmitters
and initiate the binding process a second time.
Press and hold the BIND-button of the pupils transmitter
mx-10 HoTT.
Teacher transmitter:
mx-10 HoTT: press and hold the BIND-button
After a few seconds the successful binding is confi rmed
by a short beep, the trainer model can be controlled with
the teacher transmitter.
mx-12/16/20 HoTT: Switch on the transmitter, and
use the arrow buttons of the left or right-hand four-way
button to leaf through on both transmitters to the “Trai-
81
Operating Notes
Operating Notes
Transmitter power supply
The mx-10 HoTT transmitter is fi tted as standard with
a high-capacity rechargeable 4NH-1500 RX RTU Ni-MH
battery (Order No. 33112.1) (specifi cation reserved).
When delivered, the standard rechargeable battery
is not charged.
When you are using the transmitter you can monitor the
battery voltage on the Status-LED. If it drops below the
in the line „ALARM VOLT“ of the menu „TX“ of the opti-
onal Smart Box, page 114, adjustable voltage (default
4.5 V), an audible warning signal starts and the orange
Status-LED starts blinking 5 - times in quick succession.
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
Always recharge the transmitter battery in good time.
When you see this message, cease operations immedi-
ately and recharge the transmitter battery.
Charging the transmitter battery
The rechargeable Ni-MH transmitter battery can be
recharged with the battery charger (Order No. 33116.2)
supplied in the set, using the charge socket located on
the right-hand side of the transmitter. Leave the battery
inside the transmitter for charging, to avoid premature
damage to the internal battery socket.
As an approximate guideline a discharged battery
should be charged for twelve hours at a current corres-
ponding to one tenth of the capacity printed on the pack.
If you are using the standard transmitter battery and the
charger supplied in the set, this current is 200 mA.
The transmitter must be switched “OFF” for the whole
period of the charge process. Never switch on the
transmitter when it is still connected to the charger; even
a very brief interruption in the process can cause the
charge voltage to rise to the point where the transmitter
is immediately damaged. For this reason check carefully
that all connectors are secure, and are making really
good contact.
Polarity of the mx-10 HoTT charge socket
Commercially available battery charge leads produced
by other manufacturers are often made up with the op-
posite polarity. For this reason it is essential to use only
the genuine Graupner charge lead, Order No. 3022.
Using automatic battery chargers
Although the standard transmitter charge socket is pro-
tected against reversed polarity, it is still possible to use
suitable chargers to fast-charge the transmitter battery.
If possible, set the delta peak voltage difference of your
fast charger to a value in the range 10 mV … 20 mV or
equivalent, as described in the charger’s instructions;
this ensures that it is suitable for fast-charging Ni-MH
cells.
First connect the banana plugs on the charge lead
to the charger, and only then connect the other end
of the charge lead to the charge socket on the trans-
mitter. When the charge lead is connected to the
transmitter, never allow the bare ends of the plugs to
touch! To avoid damage to the transmitter, the charge
current must never exceed 1 A. If necessary, limit the
current on the charger itself.
Removing the transmitter battery
To remove the transmitter battery, fi rst disengage the
cover over the battery compartment on the back of the
transmitter, then lift it off:
Remove the battery, then carefully pull on the power
lead to disconnect the transmitter battery connector.
Installing the transmitter battery
Hold the connector attached to the transmitter battery
in such a way that the black or brown wire faces the
aerial, and the unused socket of the battery connector
is on the side facing the bottom, then push the battery
connector onto the three pins projecting out of the inside
of the transmitter, in the direction of the
circuit board. (The battery connector is
protected against reversed polarity by
two chamfered edges; see illustration).
Finally place the battery in the com-
partment, and close the cover.
Polarity of
transmitter battery
connector
33110_mx10_HoTT_1_DE.indd Druckbogen 81 von 104 - Seiten (128, 81)
33110_mx10_HoTT_1_DE.indd Druckbogen 81 von 104 - Seiten (128, 81)
21.10.2011 13:25:15
21.10.2011 13:25:15
82 Operating Nores
Receiver power supply
A wide range of rechargeable four-cell and fi ve-cell NiMH
batteries varying in capacity is available for use as the
receiver power supply. If you are using digital servos
we recommend that you use a fi ve-cell (6 V) pack of
generous capacity. If your model is fi tted with a mixture of
digital and analogue servos, it is important to check the
maximum permissible operating voltage of all the types.
The PRX unit, Order No. 4136, provides a stabilised
receiver power supply with a user-variable voltage from
one or two receiver batteries; see Appendix.
For reasons of safety battery boxes or dry cells should
never be used.
The voltage of the airborne power supply is displayed on
the optional Smart-Box screen while the model is fl ying:
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
If the voltage falls below the pre-set warning threshold -
3.8 Volt as standard, but variable in the Telemetry menu;
see page 115 - a visual and audible low-voltage warning
is triggered.
Nevertheless it is important to check the state of the
batteries at regular intervals. Don’t put off charging
the batteries until the warning signal is triggered.
Note:
Please refer to the main Graupner FS catalogue or visit
the Internet site at www.graupner.de for full details of
batteries, chargers, measuring equipment and battery
monitor units.
Charging the receiver battery
The charge lead, Order No. 3021, can be connected
directly to the NC receiver battery for charging. If the
battery is installed in a model and you have installed one
of the following switch harnesses: Order No. 3046,3934
or 3934.1 or 3934.3, the battery can be charged via the
separate charge socket, or the charge socket which is
built into the switch. The switch on the switch harness
must be left at the “OFF” position for charging.
Polarity of the receiver battery connector
General notes on battery charging
Observe the recommendations provided by the •
charger manufacturer and the battery manufacturer
at all times.
Keep to the maximum permissible charge current •
stated by the battery manufacturer.
The maximum charge current for the transmitter •
battery is 1.5 A. Limit the charge current to this value
on the charger.
If you wish to charge the transmitter battery at a •
current higher than 1.5 A, you must fi rst remove the
pack from the transmitter, otherwise you risk dama-
ging the circuit board through overloading the con-
ductor tracks, and / or overheating the battery.
Carry out a series of test charges to ensure that the •
automatic charge termination circuit works correctly
with your battery. This applies in particular if you
wish to charge the standard Ni-MH battery using an
automatic charger designed for Ni-Cd batteries.
You may need to adjust the Delta Peak trigger volta-•
ge, if your charger provides this option.
Do not discharge the battery or carry out a battery •
maintenance program via the integral charge socket.
The charge socket is not suitable for this application.
Always connect the charge lead to the charger fi rst, •
and only then to the transmitter or receiver battery.
Observing this rule eliminates the danger of acciden-
tal short-circuits between the bare contacts of the
charge lead plugs.
If the battery becomes hot when on charge, it is time •
to check the pack’s condition. Replace it if necessary,
or reduce the charge current.
Never leave batteries unsupervised when on •
charge.
Environmental protection notes
Important information on the disposal of dry and
rechargeable batteries:
The German Battery Order places a legal requirement
on every consumer to return all used and exhausted
dry cells and rechargeable batteries. It is prohibited to
dispose of these items in the ordinary domestic waste.
At no charge to the user, old dry and rechargeable
batteries can be surrendered at local authority collec-
tion points, Graupner retail outlets, and any other shop
where dry and rechargeable batteries of the same type
are sold. You can also send batteries supplied by us to
the following address - with adequate pre-paid postage
- for disposal:
Graupner GmbH & Co. KG
Service: Gebrauchte Batterien (Used batteries)
Henriettenstr. 94 - 96
D-73230 Kirchheim unter Teck
You can make an important contribution to environmen-
tal protection in this way.
Operating Notes
127
Program description: Trainer system
Trainer Mode
Connecting two transmitters for trainer mode operations
The mx-10 HoTT transmitter can be combined by wi-
reless means to form a Trainer system. Here, the second
transmitter must not be the mx-10 HoTT also, every
other HoTT transmitter with the possibility of wireless
Trainer operation is suitable. Therefore please read the
manual of your HoTT system!
Switching from the normal operating mode to the trans-
mitters teacher or student mode is done by the mode
switch on the left top side of the transmitter:
To change the mode, move the mode switch on the
transmitter in the desired position, press and hold the
BIND-button and then switch on the transmitter.
To display the selected mode ...
LED Status Buzzer Description
orange LED
on
- Transmitter mode
„normal“, country
setting: general
orange LED
fl ashes
beeping
twice after
switching on
Transmitter mode:
pupil
orange LED
fl ashes twice
2x beeping
twice after
switching on
Transmitter mode:
teacher
See LED and buzzer signals on page 88.
Important Note:
The following description is based on the time of
printing this manual current version 1.00 of the
transmitter software, and is equally valid for all
previous Software versions. It can not be excluded
that after the next update, the following description
will not be correspondend with the functionality of
the HoTT Trainer system.
Teacher transmitter settings mx-10 HoTT
The trainer model must be programmed completely,
i. e. with all its functions including trims and any mixer
functions in the mx-10 HoTT Teacher transmitter. This
means that it must be possible to control the trainer
model fully, without restriction, by the Teacher trans-
mitter. But, at the conclusion of these preparations,
the trainer model must be bound to the Pupil trans-
mitter. A detailed description of the binding process can
be found on page 106 and 109.
Note when using the mx-10 HoTT as pupil transmitter:
the mx-10 HoTT binding procedure can only be done
in „normal“ mode. Before using the transmitter in Pupil
mode, bind the receiver in mode „normal“, then switch to
the mode „pupil“. In addition, no mixer may be activated,
move the jumper in the middle position „NO MIX“, see
also page 105.
All fi ve transmitter control functions of the Teacher trans-
mitter “T” can be transferred to the pupil transmitter “P”.
The stick mode of the pupils transmitter may deviate
from the teacher transmitter, because the stick mode
and mixers will be transfered from the teachers transmit-
ter. Therefore the teachers transmitter must be properly
programmed for the training model with all functions and
mixers.
After the pupils transmitter is bound to the trainer model,
set the mx-10 HoTT in the teacher mode. To change
the mode, move the mode switch on the transmitter in
the „teacher“ position, press and hold the BIND-button
and then switch on the transmitter.
Now press the BIND-button of the puplis transmitter:
mx-10 HoTT: press and hold
In the following the student programming for the mx-
12/16/20 HoTT is described. Please read also the
instructions for your remote control system!
Switch on the transmitter, and use the arrow buttons of
the left or right-hand four-way button to leaf through on
both transmitters to the “Trainer” menu point of the multi-
function menu. (The trainer model’s receiving system,
previously bound to the Pupil transmitter, does not need
to be switched on during the following procedure.):
servo set.
D/R expo
wing mixer
contr set.
phase trim
free mixer
servo disp basic sett
fail-safe telemetry
info dispteach/pupi
Press the central SET button of the right-hand four-way
button to open the following menu point:
TRAINER/Pupil
–P
T
23456
BIND:SW: –––
1
N/A
The illustration above shows the initial state of this
Mode normal
teacher
pupil
©
ª
33110_mx10_HoTT_1_DE.indd Druckbogen 82 von 104 - Seiten (82, 127)
33110_mx10_HoTT_1_DE.indd Druckbogen 82 von 104 - Seiten (82, 127)
21.10.2011 13:25:19
21.10.2011 13:25:19
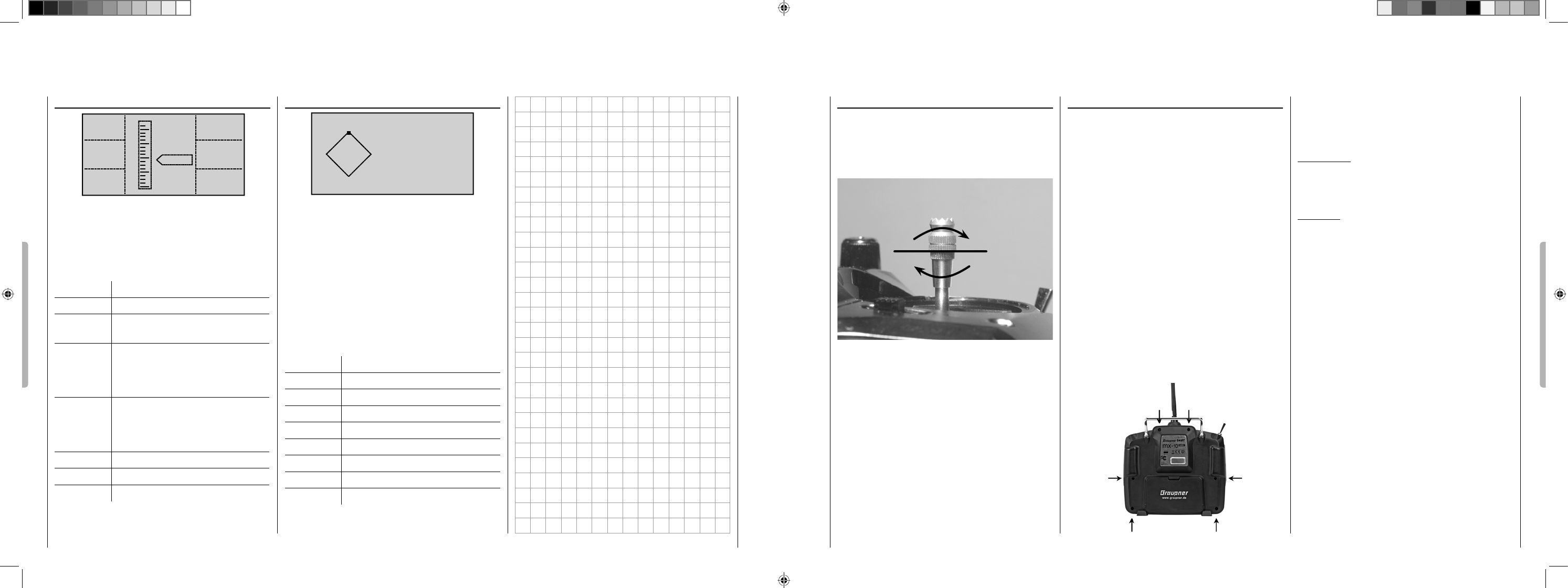
126 Program description: Telemetry menu
RX + VARIO
RXSQ
0
MAX
+500m
MIN
+500m
ALT
+500
H
L
m/1s
0
m/3s
0
m/10s
0
If a Vario module, Order No. 33601, is connected to the
receiver, then this screen provides a graphic display
of the data supplied by it. For more information on this
module please see the Appendix or refer to the product
on the Internet at www.graupner.de.
The meanings are as follows:
Value Explanation
ALT Current altitude
RXSQ Signal strength of the signal picked up
by the receiver in %
MAX The pre-set altitude limit relative to
the launch point; above this altitude
the transmitter emits audible warning
signals
MIN The pre-set altitude limit below the
launch point; below this altitude the
transmitter emits audible warning
signals
m/1s m/1 sec climb / descent
m/3s m/3 sec climb / descent
m/10s m/10 sec climb / descent
RX + GPS
NRXSQ 0
DIS 0m
ALT +500m
0m/1s
0m/3s
0m/10s
N 0°00.0000
E 0°00.0000
WE
S
Kmh
0
If a GPS module with integral vario, Order No. 33600,
is connected to the receiver, then this screen provides
a graphic display of the data supplied by it. For more
information on this module please see the Appendix, or
refer to the product on the Internet at www.graupner.de.
The centre of the screen shows the current positional
data and the model’s speed; the display also shows the
model’s current altitude in relation to the launch point, its
climb / descent rate at m/1 sec, m/3 sec and m/10 sec,
the current reception quality and the model’s range from
the launch point.
The meanings are as follows:
Value Explanation
W / N / E / S West / North / East / South
Kmh Speed
RXSQ Signal strength of downlink channel
DIS Distance
ALT Current altitude relative to launch point
m/1s m/1 sec climb / descent
m/3s m/3 sec climb / descent
m/10s m/10 sec climb / descent
83
Operating Notes
Adjusting stick length
Both sticks are infi nitely variable in length over a broad
range, enabling you to set them to suit your personal
preference.
Hold the bottom half of the knurled grip fi rmly, and
unscrew the top section:
Now screw the stick top in or out (shorter or longer)
to the length you prefer before tightening the top and
bottom sections against each other to fi x the stick top.
Opening the transmitter case
Please read the following notes carefully before you
open the transmitter. If you have no experience in such
matters, we recommend that you ask your nearest
Graupner Service Centre to carry out the work for you.
The transmitter should only be opened in the following
cases:
When a self-neutralising stick needs to be converted •
to non-neutralising action, or a non-neutralising stick
to a self-neutralising action.
If you wish to adjust the stick centring spring tension.•
Before opening the transmitter check that it is switched
off (move Power switch to “OFF”).
Open the battery compartment and remove the transmit-
ter battery as described on the previous double page.
After this, use a PH1-size cross-point screwdriver to
undo the six screws recessed into the back panel of the
transmitter, as shown in the illustration:
Arrangement of the case back screws
Hold the two case sections together with your hand, and
turn the unit over to allow these six screws to fall out
onto the table. Now carefully raise the case back and
fold it open to the right, as if you were opening a book.
C A U T I O N
Two multi-core cables connect the lower shell to the
transmitter electronics located in the top section.
Please take great care not to damage this cable!
Important:
Do not modify the transmitter circuit in any way, •
as this invalidates your guarantee and offi cial ap-
proval for the system.
Do not touch any part of the circuit boards with •
any metal object. Avoid touching the contacts
with your fi ngers.
Never switch the transmitter on while the case is •
open.
Please note the following points when closing the
transmitter:
Make sure that no cables are jammed between the •
transmitter case sections when you close the back.
Check that the two case sections fit together flush all •
round before fitting the retaining screws. Never force
the two case components together.
Fit the case screws in the existing threads, and tigh-•
ten them gently. Over-tightening them will strip the th-
reads in the plastic.
Remember to re-connect the battery.•
33110_mx10_HoTT_1_DE.indd Druckbogen 83 von 104 - Seiten (126, 83)
33110_mx10_HoTT_1_DE.indd Druckbogen 83 von 104 - Seiten (126, 83)
21.10.2011 13:25:19
21.10.2011 13:25:19
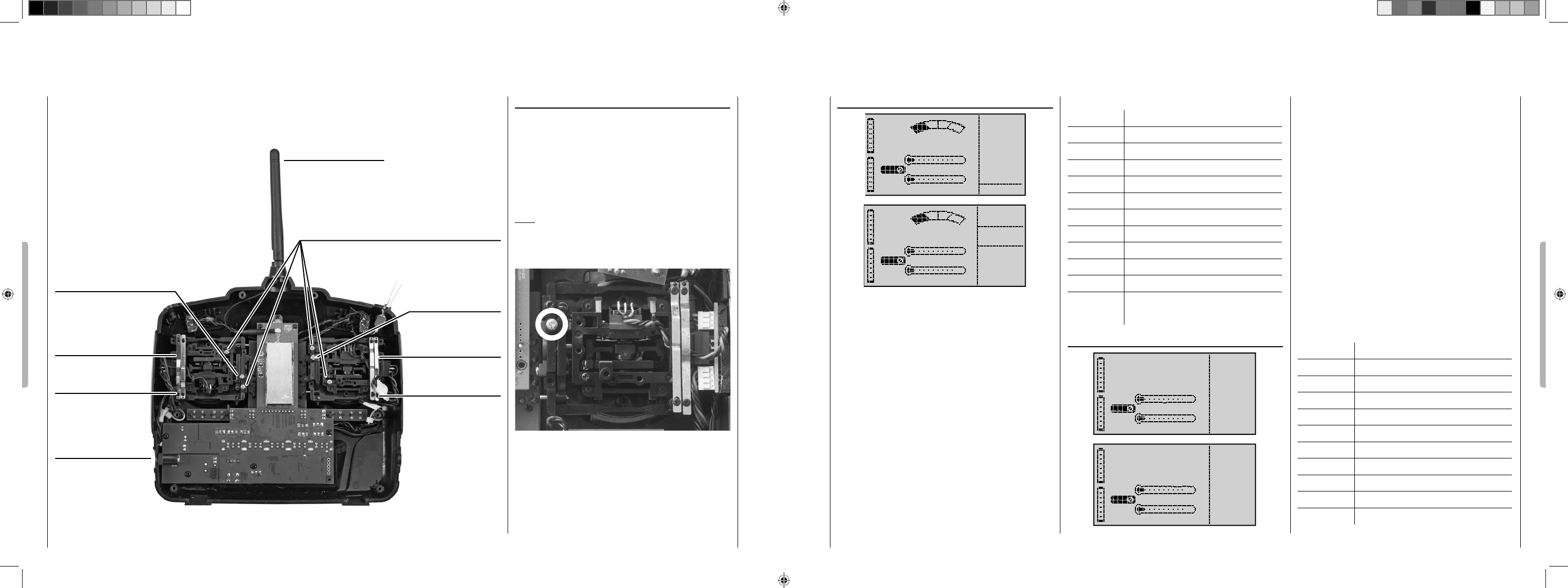
84 Operating Notes
Operating Notes
Converting the dual-axis stick units
Self-centring action
Either or both sticks can be converted from self-neutrali-
sing to non self-neutralising action: start by opening the
transmitter as described on the previous page.
If you wish to change the standard stick unit arrange-
ment, start by locating the screw on the left-hand stick
unit shown circled in white in the photo below.
Note:
The right-hand stick unit is of mirror-image construction,
i. e. the screw you require is located on the right, below
centre.
Turn this screw clockwise until the stick on that side
moves freely from one end-stop to the other; alterna-
tively unscrew it until the stick is fully self-centring again.
Charge socket
Brake springs
Adjuster screws
Brake springs
Adjuster screws
folding areal
Self-centring screw
Self-centring screw
Adjuster screws for stick centring force
Do not touch trans-
Do not touch trans-
mitter circuit board
mitter circuit board
Do not touch trans-
Do not touch trans-
mitter circuit board
mitter circuit board
Left-hand stick unit
Left-hand stick unit
Right-hand stick unit
Right-hand stick unit
125
Program description: Telemetry menu
The meanings are as follows:
Value Explanation
BAT1 / BAT2 Battery 1 / Battery 2
FUEL Fuel level / Fueltank indicator
E / F Empty / full
T1 / T2 Temperature of sensor 1 / sensor 2
CELL V Cell voltage of cell 1 … max. 6
1500 RPM
ALT Current altitude
0m1 m/1 sec climb / descent
0m3 m/3 sec climb / descent
POWER V. Actual voltage of the drive battery
A Actual current of drive battery
450 Actual used capacity
RX + ELECTRIC AIRMODUL
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1L0.00
2L0.00
3L0.00
4L0.00
5L0.00
6L0.00
0.0V 0A
ALT +500m
7L0.00
0.0V 0m/3s
BAT1 0m/1s
BAT2
0.0V T2 +20°C
T1 +20°C
CELL V
1H0.00
2H0.00
3H0.00
4H0.00
5H0.00
6H0.00
0.0V 0A
ALT +500m
7H0.00
RX + GENERAL MODUL
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
CELL V
1:0.00
2:0.00
3:0.00
4:0.00
5:0.00
6:0.00
1500
0.0V
BAT1
BAT2
0.0V T2 +20°C
T1 +20°C
E FUEL F
ALT
+500m
0m1
0m3
POWER
14.8V
10.3A
450
If a General Engine module, Order No. 33610, or a
General Air module, Order No. 33611, is connected to
the receiver, then this screen provides a graphic display
of the data supplied by it. For more information on these
modules please see the Appendix, or refer to the pro-
duct on the Internet at www.graupner.de.
Depending on the types of sensor fi tted to the modules,
the display constantly shows the following data:
The actual voltage of up to two rechargeable batteries
(BAT1 and BAT2); the measured values from up to two
temperature sensors (T1 and T2) and a fueltank level
indicator.
At the right-hand edge the screen shows either an al-
ternating list of the actual cell voltages of a LiPo battery
with up to six cells, or the current altitude relative to the
location, climb / descent in m/1sec and m/3sec, current
in Ampere plus the actual voltage of the battery connec-
ted to the sensor.
If an Electric-Air module, Order No. 33620, is connec-
ted to the receiver, then this screen provides a graphic
display of the data supplied by it. For more information
on this module please see the Appendix, or refer to the
product on the Internet at www.graupner.de.
Depending on the types of sensor fi tted to the module,
the display constantly shows the following data:
The actual voltage of up to two rechargeable batteries
(BAT1 and BAT2); the measured values from up to two
temperature sensors (T1 and T2); the current altitude
relative to the location, and the climb / descent of the
model in m/1sec and m/3sec; the centre of the screen
also displays the current actually being drawn from a
power source.
At the right-hand edge the screen shows an alternating
display of the actual cell voltages of the battery packs
(max. seven cells each) connected to balancer sockets
1 (L) or 2 (H).
The meanings are as follows:
Value Explanation
V Actual voltage
A Actual current
BAT1 / BAT2 Battery 1 / Battery 2
ALT Current altitude
m/1s m/1 sec climb / descent
m/3s m/3 sec climb / descent
T1 / T2 Temperature from sensor 1 / 2
CELL.V Cell voltage of cell 1 … max. 14
L Balancer socket 1
H Balancer socket 2
33110_mx10_HoTT_1_DE.indd Druckbogen 84 von 104 - Seiten (84, 125)
33110_mx10_HoTT_1_DE.indd Druckbogen 84 von 104 - Seiten (84, 125)
21.10.2011 13:25:22
21.10.2011 13:25:22

124 Program description: Telemetry menu
MODEL SELECT
Select the desired menu line „MODEL SELECT“ using
the INC button.
Now press ENTER …
CAR
AIRPLANE,HELI.,GLID.
and again ENTER ...
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
… press the INC-button to choose the sensor with the
arrow and fi nally press ENTER to select:
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
DATA VIEW
RECEIVER
RX–S QUA: 100%
RX–S ST : 100%
TX–dBm: 33dBm
RX–dBm: 33dBm
RX–VOLT:4.8 TMP
V–PACK: 10ms
CH OUTPUT TYPE:ONCE
M–RX V :4.6 +22°C
This screen displays the data which can also be viewed
in the “RX DATAVIEW” screen of the telemetry menu
“SETTING & DATA VIEW”, but in graphic form.
The meanings are as follows:
Value Explanation
RX-S QUA Signal quality in %
RX-S ST Signal strength in %
RX-dBm Receive performance in dBm
TX-dBm Transmit power in dBm
V PACK shows the longest period in ms in
which data packets were lost in
transmission from transmitter to
receiver
RX-VOLT Current receiver operating voltage in
Volt
M-RX V Lowest receiver operating voltage in
Volt since the last time it was switched
on
TMP The thermometer indicates the
receiver’s current operating
temperature
Just like described in the menu „MODEL SELECT“ ...
RECEIVE
RECEIVE+GENERAL/GAS
RECEIVE+ELECTRONIC
RECEIVE+VARIO
RECEIVE+GPS
...the output can be selected to graphically processed
data from a sensor connected to the receiver if
necessary. These data are then presented according to
the following graphic displays.
Scroll back and forth between the different graphic
displays with the INC or DEC key and choose by
pressing ENTER, press ESC to return back to the basic
display.
Note:
The order of displays described below follows the
sequence when pressing the INC button.
More details about the following modules can be found
in the appendix and on the internet at www.graupner.de
for the relevant product.
85
Operating Notes
Stick centring force
The centring force of the sticks is also variable to suit
your preference. The adjustment system is located
adjacent to the centring springs; see the white circles in
the following photo.
You can set the preferred centring spring force by
rotating the corresponding adjuster screw using a cross-
point screwdriver:
Turn to the right = harder spring tension;•
Turn to the left = softer spring tension.•
horizontal
horizontal
vertical
vertical
Note:
The right-hand stick unit is of mirror-image construction,
i. e. the screw you require is located on the right, below
centre.
Brake spring and ratchet
You can alter the braking force of the stick by adjusting
the outer of the two screws circled in white in the next
picture; adjusting the inner screw alters the strength of
the ratchet:
Note:
The right-hand stick unit is of mirror-image construction,
i. e. the screw you require is located on the right, below
centre.
33110_mx10_HoTT_1_DE.indd Druckbogen 85 von 104 - Seiten (124, 85)
33110_mx10_HoTT_1_DE.indd Druckbogen 85 von 104 - Seiten (124, 85)
21.10.2011 13:25:25
21.10.2011 13:25:25
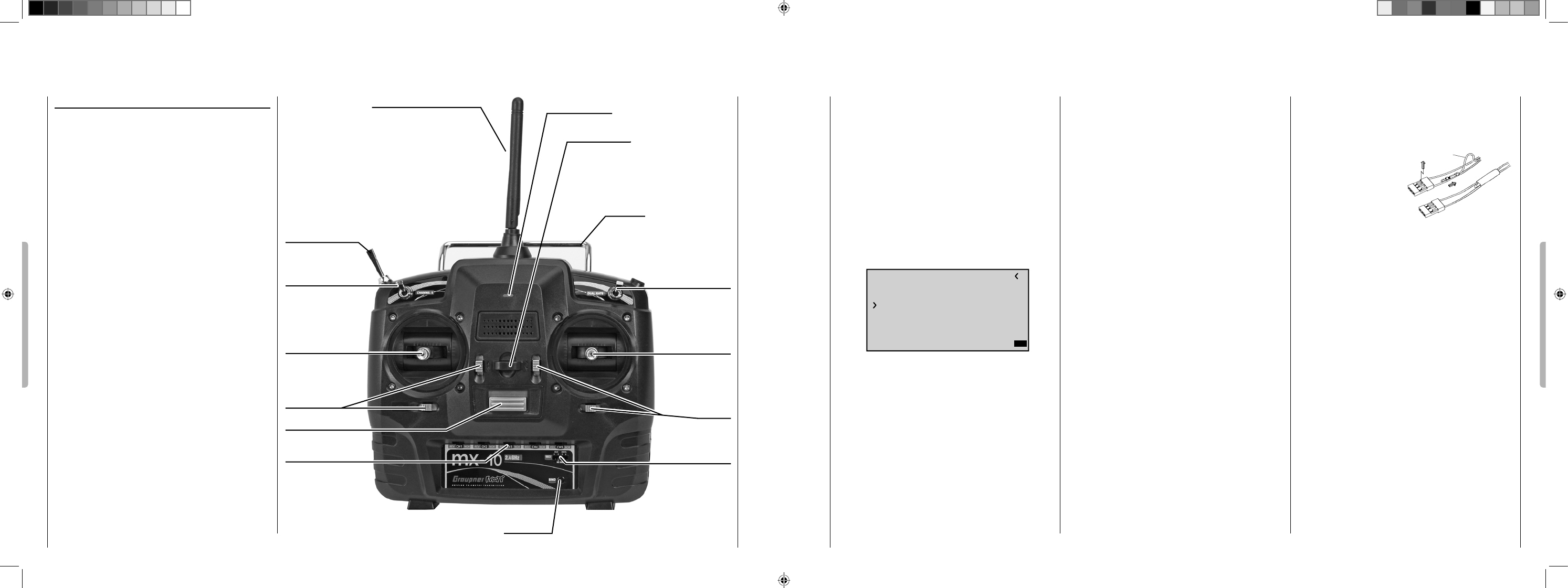
86 Description of transmitter
Description of transmitter
Transmitter controls
Attaching the transmitter neckstrap
You will fi nd a strap lug mounted in the centre of the
front face of the mx-10 HoTT transmitter, as shown in
the drawing on the right. This lug is positioned in such a
way that the transmitter is perfectly balanced even when
suspended from a neckstrap.
Order No. 1121 Neckstrap, 20 mm wide
Order No. 70 Neckstrap, 30 mm wide
Aerial with folding / rotating base
3-position switch
Mode: Pupil / Teacher /
normal
2-position switch
Channel 5
left hand stick
Trim
ON / OFF switch
Trim
Right-hand stick
2-position switch
Dual Rate
Carry handle
Neckstrap lug
Central Status LED
Servoreverse switch Wing mixer
Channel 1 - 5
BIND-Button
123
Program description: Telemetry menu
also be used, for example, to control a fl ybarless sys-
tem, or to control a fl ight simulator (using the adapter
lead, Order No. 33310).
Intended primarily for the following described „satel-
lite mode“ of two-HoTT receivers, the of the recei-
ver generated sum signal SUMO can be used, for ex-
ample, also for Flybarless systems or via the adapter
cable Order No. 33310 for of fl ight simulators.
In …
Satellite mode
… two HoTT receivers are inter-connected using a
three-core connecting lead (Order No. 33700.1 (300
mm) or 33700.2 (100 mm) by the highest-numbered
servo sockets. For more details on this please visit
www.graupner.de on the Internet.
All channels of the HoTT receiver which is confi gured
as SUMO, and is defi ned as the satellite receiver, are
constantly transferred to the second HoTT receiver -
the primary receiver - via this connection . The prima-
ry receiver must be programmed as the …
SUMI (Sum signal IN). •
Note that the signal only ever moves in one direction:
towards the SUMI.
However, if reception fails, the receiver defi ned as
SUMI only uses the sum signal coming from the
SUMO if at least one channel at the SUMI is pro-
grammed to Fail-Safe.
If the receiver programmed as the satellite (SUMO)
suffers signal reception failure, the servos connected
to that receiver take up the Fail-Safe positions pro-
grammed in the satellite receiver, regardless of the
primary receiver.
If, in contrast, reception fails at both receivers simul-
taneously, then the receiver software (the version
current at the time of printing these instructions) al-
ways reverts to the SUMO’s fail-safe settings. Howe-
ver, mutual interactions can certainly not be ruled
out in individual cases, and for this reason we ur-
gently advise you to carry out appropriate tests
BEFORE fl ying a model.
This receiver confi guration is recommended in parti-
cular circumstances: for example, if one of the two re-
ceivers has to be installed in an unfavourable position
in the model, or if there is a danger that the received
signal will be weak in certain fl ight attitudes, perhaps
due to a turbine, carbon fi bre in the airframe, or a si-
milar problem, with the result that sporadic range pro-
blems might be expected.
For this reason it is essential to connect the most im-
portant control functions to the primary receiver (the
one programmed as SUMI), so that interference to
the satellite receiver (SUMO) does not cause the mo-
del to go out of control.
Telemetry data, such as the voltage of the airborne
power supply, are only sent to the transmitter by the
satellite receiver (confi gured as SUMO), i. e. all tele-
metry sensors must be connected to the satellite re-
ceiver (SUMO).
Each receiver should be connected to the shared po-
wer supply using its own power lead. If high currents
can be expected, duplicated power connections are
recommended. However, if each of the two receivers
is to be powered by its own battery, then it is
essential to withdraw
the central (red) wire
from one of the two sa-
tellite lead connectors,
as shown in the illust-
ration.
red
1
23
If you wish to carry out further programming, such
as the Fail-Safe settings, disconnect the three-core
satellite connection between the two receivers, and
switch on just the receiver you wish to address. Note
that you may also need to change the binding se-
quence.
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
TEST : START
CH OUTPUT TYPE:SUMO06
33110_mx10_HoTT_1_DE.indd Druckbogen 86 von 104 - Seiten (86, 123)
33110_mx10_HoTT_1_DE.indd Druckbogen 86 von 104 - Seiten (86, 123)
21.10.2011 13:25:28
21.10.2011 13:25:28

122 Program description: Telemetry menu
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
To stop the servo test, re-activate the input fi eld as de-
scribed previously, then select STOP and confi rm your
choice with the INC+DEC button.
ALARM VOLT (low receiver voltage warning)
ALARM VOLT monitors the receiver voltage. The
threshold can be set to any value within the range 3.0
to 6.0 Volt. If the voltage falls below the set alarm limit,
an audible signal (interval beeping, long / short) is
triggered, and “VOLT.E” fl ashes at top right in all “RX …”
screen displays:
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
VOLT.E
The parameter “R-VOLT“ is also highlighted in the “RX
DATAVIEW” display:
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :03.7V
RX DATAVIEW VOLT.E
ALARM TEMP +/- (receiver temperature monitor)
These two options monitor the temperature of the
receiver: a lower limit value “ALARM TEMP-” (-20 ...
+10°C) and an upper limit value “ALARM TEMP+” (50 ...
80°C) can be programmed. If the temperature exceeds
the upper limit or falls below the lower one, an audible
signal (continuous beeping) is triggered, and “TEMP.E”
appears at top right in all receiver displays. The parame-
ter “R-TEM“ is also highlighted in the “RX DATAVIEW”
display.
Ensure that the receiver remains within the permitted
temperature range under all fl ight conditions (ideally
between -10 and +50°C).
CH OUTPUT TYPE
At this point you can select how the receiver outputs are
to be addressed.
ONCE•
The receiver servo sockets are addressed in se-
quence; this is recommended for use with analogue
servos. At this setting the servos are automatically
operated at a frame rate of 20 ms (30 ms with the
twelve-channel receiver, Order No. 33512) - regard-
less of what is set or displayed in the “PERIOD” line
of the “RX SERVO” display.
SAME•
The receiver servo sockets are addressed in parallel
blocks of four, i. e. if you are using the GR-12 recei-
ver included in the set, channels 1 to 4 and channels
5 and 6 each receive their control signals simultane-
ously.
This is recommended for use with digital servos, and
especially where multiple servos are employed for
a single function (e. g. ailerons), to ensure that the
groups of servos run absolutely synchronously.
If you are using digital servos, we recommend that
you set 10 ms in the “PERIOD” line of the “RX SER-
VO” display so that you can exploit the fast response
of these servos. If you are using analogue servos, it
is essential to select “20 ms”.
If you choose the faster setting, please take par-
ticular care when selecting the receiver power
supply: since up to four servos can start moving si-
multaneously, the load on the battery is fairly severe,
so it must be a high-performance type.
SUMO (Sum signal OUT)•
A HoTT receiver confi gured as SUMO constantly ge-
nerates what is known as a sum signal from the con-
trol signals of all its control channels. This signal is
present, for example, at servo socket 6 of the GR-12
receiver.
The maximum sum signal can be set independent
from the receiver up to 16 channels, e.g. a 6-channel
receiver can be programmed on SUMO 12 and trans-
mits all 12 channels on the output.
After SUMO is selected and saved with INC+DEC,
the inverse marker jumps forward to the channel
number, here 06:
Pressing INC or DEC selects the number of chan-
nels to be transmitted in the sum signal. INC+DEC
saves the settings.
The receiver outputs are addressed in sequence at a
frame rate of 20 ms (30 ms with the GR-24 receiver,
Order No. 33512), even if you have set 10 ms in the
“PERIOD” line of the “RX SERVO” screen page.
Although primarily intended for “satellite mode” with
two HoTT receivers, as described below, the sum si-
gnal generated by the receiver defi ned as SUMO can
87
Description of transmitter
Data socket
For connecting the optional Smart-Box, Order No. 33700.
The Smart Box allows many other HoTT functions such
as Servo curve, servo travel, cycle time or channel map-
ping and HoTT telemetry - see the section „telemetry“
on page 113.
For more details about the Smart-Box please refer to the
main Graupner FS catalogue, or refer to that product on
the Internet at www.graupner.de.
This socket can be used also to connect the transmitter
to a PC running Windows XP, Vista or 7 using the optio-
nal USB adapter, Order No. 7168.6 and the connecting
lead, Order No. 7168.6A.
The software required at the PC, including a suitable
USB driver, can be found in the Download section for
the corresponding product at www.graupner.de.
Once you have installed the software required, you can
also update the transmitter via this connection.
Case screw Case screw
Case screw Case screw
Battery Case Cover
Case screw Case screw
Transmitter battery
charge socket
Data socket for connecting
Smart-Box, Order No. 33700
and for connecting with a PC
33110_mx10_HoTT_1_DE.indd Druckbogen 87 von 104 - Seiten (122, 87)
33110_mx10_HoTT_1_DE.indd Druckbogen 87 von 104 - Seiten (122, 87)
21.10.2011 13:25:29
21.10.2011 13:25:29
88 Using the transmitter for the fi rst time
Preliminary notes
In theory the Graupner HoTT system permits the simul-
taneous operation of more than 200 models.
However, in practice the mixed operation of different
technical systems in the 2.4 GHz ISM band - as requi-
red by the approval regulations - reduces this number
considerably. Generally, however, it will always be
possible to operate even more models simultaneously
on the 2.4 GHz band than on the 35 / 40 MHz frequency
bands which we have used to date. However, the actual
limiting factor - as it has always been - is likely to remain
the size of the (air-) space available. The simple fact that
no frequency control procedure is necessary - a great
convenience in itself - equates to an enormous gain in
safety, especially at fl ying sites where groups of pilots
may be distributed over a large area, with nobody in
overall control.
Battery charged?
When you take receipt of your transmitter, the battery
will be in the discharged state, so you must fi rst charge
it as described on page 81. Otherwise you will hear a
warning signal and the Status-LED fl ashes fi ve times in
quick succession when falling below a certain voltage to
remind you to recharge it.
This warning threshold for the transmitter battery can be
selected in the menu „TX“ of the optional the Smart Box,
page 114.
Switching the transmitter on
After switching on the Status-LED glows constantly or is
blinking to indicate the current transmitter mode.
See the following table:
Using the transmitter for the fi rst time
Preliminary notes regarding the mx-10 HoTT transmitter
To change the mode, move the mode switch on the
transmitter in the desired position, press and hold the
BIND-button and then switch on the transmitter.
Note: after programming the „normal“ mode, the trans-
mitter is in fail-safe programming mode (see page 111),
if you do not want to program anything here, turn off the
transmitter again now.
The programmed mode is indicated with LED and
buzzer signals after switching on the transmitter, see the
table above.
Mode normal
teacher
pupil
©
ª
LED Status Buzzer Description
green LED on - Transmitter ON, but no bounded receiver
or receiver bound, but no telemetry signal
orange LED on - Transmitter mode „normal“, country setting: general
orange LED fl ashes - Transmitter mode „normal“, country setting: France
orange LED fl ashes once beeping twice after swit-
ching on
Transmitter mode: pupil
orange LED fl ashes twice 2x beeping twice after
switching on
Transmitter mode: teacher
orange LED fl ashes three
times
beeping three times after
switching on
Bad receiving quality of the receiver
orange LED fl ashes four
times
beeping four times after
switching on
Bad receiving quality of the downlink channel
orange LED fl ashes fi ve
times
beeping fi ve times after
switching on
Transmitter battery empty. Hit the battery warning
threshold, 4.5 V as standard, set in the menu „TX“ of
the optional Smart-Box, page 114
First select the transmitter mode „normal“, „teacher“ or
„pupil“ by the transmitter mode switch on the left top side
of the transmitter:
The transmitter is delivered in the mode „normal“. For
normal operation you have to change nothing. In order
to select the teacher or pupil mode, read the chapter
„Trainer model“ on page 127.
121
Program description: Telemetry menu
wish to use the RX CURVE option - then two curves
must be set:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
If you ignored this, the left and right ailerons would
exhibit different control characteristics.
The RX CURVE function can be used to manage the
control characteristics for up to three servos:
CURVE 1, 2 or 3 CH•
Select the desired control channel (INPUT CH) for
the fi rst servo.
The following setting in TYPE only affects the chan-
nel you select at this point.
TYPE
Select the servo curve:
A: EXPO = -100% and DUAL RATE = 125%
The servo responds slowly to stick movements
around the neutral position, but the curve becomes
steeper with increasing control travel.
B: Linear setting
The servo follows the stick movement with a linear
response.
C: EXPO = +100% and DUAL RATE = 70%
The servo responds slowly to stick movements
around the neutral position, but the curve becomes
steeper with increasing control travel.
Note:
The control characteristics programmed at this point
also affect mapped receiver outputs.
RX SERVO TEST
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
TEST : STOP
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
Value Explanation Possible settings
ALL-MAX Servo travel on
the “+” side for all
servo outputs in
the servo test
1500 … 2000 μs
ALL-MIN Servo travel on
the “-” side for all
servo outputs in
the servo test
1500 … 1000 μs
TEST Test procedure START / STOP
ALARM
VOLT
Alarm limit for the
receiver low-
voltage warning
3,0 … 6,0 V
Default setting:
3,8 V
ALARM
TEMP+
Alarm limit for
excessive receiver
temperature
50 … 80 °C
Default setting:
70 °C
ALARM
TEMP–
Alarm limit for
excessively
low receiver
temperature
-20 … +10 °C
Default setting:
-10 °C
CH OUTPUT
TYPE
Channel sequence ONCE, SAME,
SUMI, SUMO
ALL MAX (maximum servo travel)
In this line you can set the maximum servo travel for the
servo test on the plus side of control travel.
2000 μs corresponds to full travel, 1500 μs corresponds
to the neutral position.
ALL MIN (minimum servo travel)
In this line you can set the maximum servo travel for the
servo test on the minus side of control travel.
1000 μs corresponds to full travel, 1500 μs corresponds
to the neutral position.
TEST
In this line you can start and stop the receiver’s integral
servo test.
Press the INC+DEC button to activate the input fi eld:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : STOP
Now select START with one of the arrow buttons of the
right-hand four-way button:
RX SERVO TEST
ALL–MIN : 1000sec
ALL–MAX : 2000sec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 70°C
CH OUTPUT TYPE:ONCE
TEST : START
Press the INC+DEC button to start the test-run. The
input fi eld now reverts from highlighted to “normal”:
33110_mx10_HoTT_1_DE.indd Druckbogen 88 von 104 - Seiten (88, 121)
33110_mx10_HoTT_1_DE.indd Druckbogen 88 von 104 - Seiten (88, 121)
21.10.2011 13:25:34
21.10.2011 13:25:34
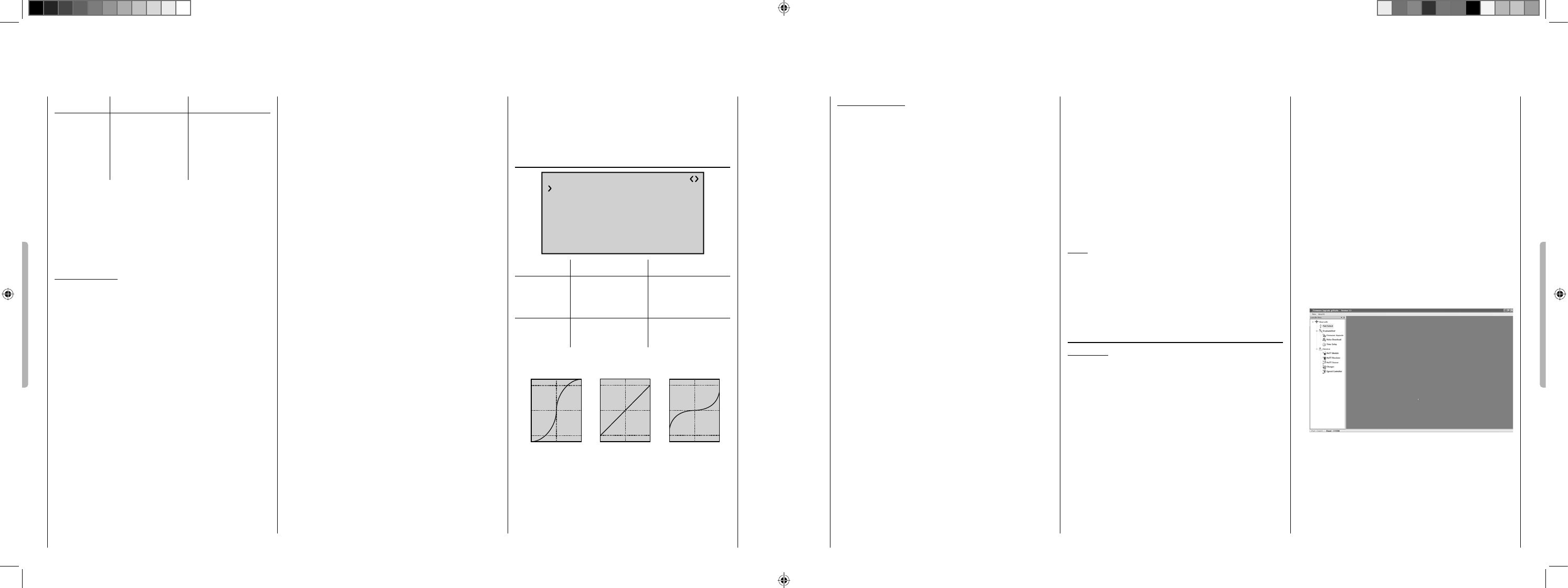
120 Program description: Telemetry menu
Value Explanation Possible settings
RX WING
MIXER
Tail type NORMAL, V-TAIL
ELEVON
(aileron / elevator
mixer for deltas
and fl ying wings)
MIXER
Up to three mixers can be programmed simultaneously.
You can switch between mixer 1, mixer 2 and mixer 3
using “MIXER”.
The following settings on this screen always apply to the
mixer selected in the MIXER line.
Important note:
If you have already programmed mixer functions in
the “Tail type” menu, page 105, check very carefully
that those mixers do not overlap with those of the
“RX FREE MIXER” menu.
MASTER CH (“from”)
The signal present at the MASTER CH (master chan-
nel) is mixed into the SLAVE CH (slave channel) to a
user-variable extent, following the same principles as
described in detail in the section entitled “Free mixers”
on page 107.
Select “00” if no mixer is to be set.
SLAVE CH (“to”)
A proportion of the signal of the MASTER CH (master
channel) is mixed into the SLAVE CH (slave channel);
the mixer ratio is determined by the percentage fi gures
entered in the “TRAVEL-” and “TRAVEL+” lines.
Select “00” if no mixer is to be set.
TRAVEL–/+ (mixer ratio in %)
The mixer ratio in relation to the MASTER signal is
determined separately for each direction by the values
entered in these two lines.
TAIL TYPE
The following model types are also available in the “Tail
type menu (see page 105), and should normally be set
up at that point. If you have done this, you should always
leave the TAIL TYPE at NO MIX.
However, if you prefer to use the receiver’s integral
mixers, you can select the pre-set mixer function for the
corresponding model type:
NORMAL•
This setting corresponds to the classic aircraft type
with tail-mounted stabiliser panels and separate rud-
der and elevator. No mixer function is required for this
model type.
V-TAIL•
For this model type the control functions elevator and
rudder are linked together in such a way that each of
the two control surfaces - actuated by a separate ser-
vos - carries out superimposed elevator and rudder
functions.
The servos are usually connected to the receiver as
follows:
OUTPUT CH 3: left V-tail servo
OUTPUT CH 4: right V-tail servo
If you fi nd that the servos rotate in the wrong direc-
tion, please see the notes on page 111.
ELEVON (delta / fl ying wing models)•
The servos connected to outputs 2 and 3 assume su-
perimposed aileron and elevator functions. The ser-
vos are usually connected to the receiver as follows:
OUTPUT CH 2: left elevon
OUTPUT CH 3: right elevon
If you fi nd that the servos rotate in the wrong direc-
tion, please see the notes on page 111.
RX CURVE (EXPO)
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Value Explanation Possible settings
CURVE1, 2
or 3 CH
Channel assign-
ment of the selec-
ted curve setting
1 … according to
receiver
TYPE Curve type A, B, C
see illustration
Servo travel
Transmitter control travel
Expo = +100%
–100% +100%
0
–100% +100%
0
Servo travel
Transmitter control travel
Expo = –100%
TYPE A
–100% +100%
0
–100% +100%
0
Servo travel
Transmitter control travel
linear
–100% +100%
0
–100% +100%
0
TYPE B
TYPE C
DR = 125% DR = 70%
In most cases a non-linear control function is used for
aileron (channel 2), elevator (channel 3) and rudder
(channel 4), and the default settings assume that this is
the case.
For example, if you have set “AIL” at the transmitter, and
89
Using the transmitter for the fi rst time
Firmware update
Firmware updates for the transmitter are carried out at
the owner’s discretion using the three-pin PC interface
on the back of the transmitter, in conjunction with a PC
running Windows XP, Vista or 7. To connect the transmit-
ter to a PC you also require the optional USB adapter,
Order No. 7168.6 and the connecting lead, Order No.
7168.6A.
The latest software and information can be found in the
Download section for the corresponding product at www.
graupner.de.
Note:
Once you have registered your transmitter at http://
graupner.de/de/service/produktregistrierung you will
automatically be informed of new updates by e-mail as
they become available.
Updating the mx-16 HoTT software
Attention:
It is essential to check the state of charge of your
transmitter battery before carrying out any update.
To be on the safe side we recommend that you give
the battery a full charge.
1. Installing the driver
In order to be able to use the transmitter’s integral
port you must fi rst install the driver software required,
which is included in the program packages in the
“USB driver” folder.
Start the driver installation by double-clicking on the
appropriate fi le and following the on-screen instruc-
tions. When the installation is complete, your comput-
Important notes:
The transmitter included in the set is prepared at •
the factory with the correct settings for most Eu-
ropean countries (except France).
If you wish to operate the RC system in France,
you MUST fi rst set the Country setting on the
transmitter to “FRANCE” mode; see page 104
or 108. IT IS PROHIBITED to use the system IN
FRANCE using the Universal / EUROPE mode!
You can operate up to fi ve servos using the •mx-
10 HoTT transmitter and the receiver supplied in
the set, which is already bound to the transmitter.
When switching on, binding or setting up the ra-•
dio control system, please ensure at all times
that the transmitter aerial is an adequate distance
from the receiver aerials. If the transmitter aeri-
al is too close to the receiver aerials, the receiver
will be swamped, and the green LED on the re-
ceiver will go out. At the same time the down-link
channel will stop working. In parallel the orange
status LED blinks four times in quick succession
and starts the corresponding buzzer warnings. At
the same time the radio control system switches
to Fail-Safe mode.
If this should happen, simply increase the dis-
tance between transmitter and receiver until the
displays revert to “normal”.
Transmitter fi rmware update
er must be re-started. The driver only has to be
installed once.
2. Connecting the transmitter to the PC
Make sure the transmitter is switched off, then con-
nect the USB lead to the 3-pole socket on the back
of the transmitter. Install the cable so that the orange
cord shows to the left (center of the transmitter) and
the brown cord to the right edge of the transmitter.
Do not apply excessive force.
3. Updating the mx-16 HoTT transmitter software
Start the program “Firmware_Upgrade_grStudio_
Ver-SX.X.exe” from the appropriate folder by a
double-click. (The at the time of printing this manual
current version 1.3 starts without prior installation.):
Select “Port Setup” under “Menu”; alternatively open
the “Controller Menu” and click on “Port select”:
33110_mx10_HoTT_1_DE.indd Druckbogen 89 von 104 - Seiten (120, 89)
33110_mx10_HoTT_1_DE.indd Druckbogen 89 von 104 - Seiten (120, 89)
21.10.2011 13:25:35
21.10.2011 13:25:35

90 Using the transmitter for the fi rst time
In the “Port select” window you can now select the
correct COM port, i.e. the one to which the USB in-
terface is connected. This can be identifi ed by the
name “Silicon Labs CP210x USB to UART Bridge” in
the “Device Name” column; in the screen-shot above
this would be the “COM 3” port.
Now call up the “HoTT Module Upgrade option un-
der “Menu”, open the “Controller Menu” and click on
“HoTT Module”:
Click on the button labelled “File Browse” and select
the desired fi rmware update fi le (with the suffi x “bin”)
in the “Open fi le” dialogue which now appears.
The fi rmware fi les are present in a product-speci-
fi c encoded form, i.e. if you inadvertently select a fi le
which does not match the product (e.g. receiver up-
date fi le instead of transmitter update fi le), the pop-
up window “Product code error” appears, and the up-
date process cannot be started.
If you have not already done so, switch the transmit-
ter OFF at this point and start the transmitter update
procedure by clicking on the “Download Start” button.
Wait until the progress bar starts running. This can
take up to several seconds. Now switch the transmit-
ter ON with the BIND-Button pressed. After a few se-
conds, the status display „Found target device ...“
appears. Now release the BIND-Button. The actual
update process now commences, and a progress bar
starts running:
Do not interrupt the update process until the progress
bar has reached the right-hand margin, and you see
the message “Firmware Download Success” - also a
a brief buzzer sound appears and the STATUS-LED
of the transmitter changes from orange to green:
119
Program description: Telemetry menu
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: SAVE
After pressing the INC+DEC button once more, the
display reverts from “SAVE” to “NO”. This indicates that
the position of all the servos affected by the procedure
have now been stored, and have also been adopted
in the “F.S.Pos.” line. At the same time the position for
the current OUTPUT CH (servo socket) is immediately
displayed on the screen.
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670sec
FAIL SAFE ALL: NO
Switch the transmitter off, and check the Fail-Safe posi-
tions by observing the servo movements.
“Fail-Safe” in combination with “channel mapping”
It is clearly desirable that mapped servos - i. e. servos
which are controlled by a common control channel
(INPUT CH) - should respond in the same way when
interference occurs, so the corresponding settings of the
INPUT CH determine the behaviour of mapped servos.
For example, if you are using a GR-16 eight-channel
receiver, Order No. 33508, and receiver servo sockets
6, 7 and 8 are mapped together, i. e. if the same control
channel “04” is assigned as INPUT CH to OUTPUT CH
(servo sockets) 06, 07 and 08 …
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1670sec
DELAY : 0.75sec
OUTPUT CH: 06
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : OFF
F.S.Pos. : 1230sec
DELAY : 0.75sec
OUTPUT CH: 07
POSITION : 1670sec
FAIL SAFE ALL: NO
RX FAIL SAFE
INPUT CH: 04
MODE : HOLD
F.S.Pos. : 1770sec
DELAY : 0.75sec
OUTPUT CH: 08
POSITION : 1670sec
FAIL SAFE ALL: NO
… then INPUT CH 04 determines the Fail-Safe behavi-
our of the three servos connected to control channel 4,
regardless of the individual settings of the OUTPUT CH
for INPUT CH 04:
RX FAIL SAFE
INPUT CH: 04
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
This also applies, for example, if it is mapped in turn to
INPUT CH 01:
RX FAIL SAFE
INPUT CH: 01
MODE : FAI-SAFE
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 04
POSITION : 1500sec
FAIL SAFE ALL: NO
In this case servo socket 04 would respond in ac-
cordance with the Fail-Safe settings for CH 01.
In contrast, the response or delay time set in the “DE-
LAY” line always applies uniformly to all channels which
are set to “FAIL-SAFE”.
RX FREE MIXER
RX FREE MIXER
MASTER CH: 00
SLAVE CH : 00
S–TRAVEL–: 100
S–TRAVEL+: 100
MODE : 1
RX WING MIXER
TAIL TYPE: NORMAL
Value Explanation Possible settings
MODE Mixer select 1, 2 or 3
MASTER CH Primary channel 0, 1 … according
to transmitter
SLAVE CH Secondary
channel
0, 1 … according
to receiver
S-TRAVEL– Negative mix
value
0 … 100%
S-TRAVEL+ Positive mix value 0 … 100%
33110_mx10_HoTT_1_DE.indd Druckbogen 90 von 104 - Seiten (90, 119)
33110_mx10_HoTT_1_DE.indd Druckbogen 90 von 104 - Seiten (90, 119)
21.10.2011 13:25:35
21.10.2011 13:25:35
118 Program description: Telemetry menu
ning a different control channel in the INPUT CH line to
the receiver servo socket selected in the OUTPUT CH
line. BUT CAUTION: if, for example, you have entered
“2AIL” in the “Aileron/fl ap” line of the “Basic settings”
menu at the transmitter, then control function 2 (aileron)
is already divided to control channels 2 + 5 for the left
and right ailerons. The corresponding receiver INPUT
CH, i. e. those to be mapped, would in this case be
channels 02 + 05.
Examples:
You wish to assign two or more servos to each aile-•
ron of a large-scale model aircraft:
Assign one and the same INPUT CH (control chan-
nel) to each of the appropriate OUTPUT CH (servo
sockets). The appropriate servo sockets are selected
for the left or right wing, while the INPUT CH will be
one of the two default aileron control channels 2 + 5.
You wish to control the rudder of a large-scale model •
aircraft using two or more servos:
Assign one and the same INPUT CH (control chan-
nel) to each of the appropriate OUTPUT CH (servo
sockets); in this case the default rudder channel 4.
MODE
The settings you enter for the options “MODE”, “F.S.Pos.”
and “DELAY” determine the receiver’s behaviour if inter-
ference should affect the transmission from transmitter
to receiver.
The setting programmed under “MODE” always refers to
the channel you have set in the OUTPUT CH line.
The default setting for all servos is “HOLD”.
For each selected OUTPUT CH (receiver servo socket)
you can choose between:
FAI(L) SAFE•
If interference occurs, the corresponding servo
moves to the position displayed in the “POSITION”
line for the duration of the interference, after the “de-
lay time” set in the “DELAY” line.
HOLD•
If interference occurs, a servo set to “HOLD” main-
tains the position last assessed as correct for the du-
ration of the interference.
OFF•
If set to “OFF” when interference occurs, the recei-
ver continues to send the last correct control signals
(which it has stored) to the corresponding servo out-
put for the duration of the interference. This can be
imagined as the receiver switching the signal wire
“off”.
But CAUTION: if the control signal is absent, ana-
logue servos and many digital servos offer no resis-
tance to the forces acting on the control surfaces,
with the result that the model’s control surface posi-
tions are more or less quickly lost.
F.S.Pos. (Fail-Safe position)
For each OUTPUT CH (receiver servo socket) activate
(highlight) the value fi eld by pressing the INC+DEC but-
ton, then use the INC or DEC buttons of the right-hand
four-way button in the “F.S.POS.” line to set the servo po-
sition which the servo is to take up in “FAIL-SAFE” mode
if interference should occur. The setting can be entered
in increments of 10 μs.
Default setting: 1500 μs (servo centre)
Important note:
The “F.S.POS.” function is also signifi cant if the receiver
is switched on, but is (not yet) receiving a valid signal;
this applies to all three modes “OFF”, “HOLD” and “FAIL-
SAFE”:
The servo immediately runs to the Fail-Safe position pre-
viously set in the “Position” line. This can be exploited,
for example, to prevent the operation of a retractable un-
dercarriage or similar function if the receiver is switched
on accidentally. However, during normal model opera-
tions the corresponding servo behaves in accordance
with the set “MODE” if interference should strike.
DELAY (fail-safe response time or delay)
At this point you can set the delay time after which the
servos are to run to their previously selected positions if
the signal should be interrupted. This setting applies to
all channels, but only affects the servos programmed to
“FAIL-SAFE” mode.
Default setting: 0.75 s
FAIL SAFE ALL (global fail-safe setting)
This sub-menu can be used to defi ne the Fail-Safe
position of the servos simply by “pressing a button”; it
operates in a similar manner to the “Fail-Safe” menu
described on page 116, and is simple to use:
Move to the “FAIL-SAFE ALL” line and press INC+DEC
button to activate the value fi eld; “NO” is highlighted
(black background). Now set the parameter to “SAVE”
using one of the INC or DEC buttons. Use the trans-
mitter controls to move all the servos which you have
assigned - or intend to assign later - in the “MODE
- FAIL-SAFE” line, to the desired fail-safe positions. In
the extreme bottom line “Position” displays the current
position of the transmitter control for the channel you
have just set:
91
Using the transmitter for the fi rst time
Click on “OK”, then switch the transmitter off and fi -
nally disconnect the PC or laptop.
If the progress bar does not move forward, close the
program and repeat the update procedure, taking
note of any error messages which might appear.
4. Initialisation of the transmitter
After a successful update process you MUST - befo-
re re-use the transmitter - proceed an initialization for
safety reasons:
Press and hold to the BIND-Button on the transmitter
and turn it on. Now release the BIND-Button. Except
the binding information all other necessary pre-pro-
grammed settings in the transmitter are reset to fac-
tory settings and must be entered again if needed.
Attention: When initialisation in mode „normal“ is
complete, the transmitter will be in Fail-Safe setting
mode (page 111), if you do not want to program any-
thing here, turn off the transmitter now.
33110_mx10_HoTT_1_DE.indd Druckbogen 91 von 104 - Seiten (118, 91)
33110_mx10_HoTT_1_DE.indd Druckbogen 91 von 104 - Seiten (118, 91)
21.10.2011 13:25:39
21.10.2011 13:25:39
92 Using the receiver for the fi rst time
Using the receiver for the fi rst time
Preliminary notes regarding the GR-12 receiver
Receiving system
The mx-10 HoTT radio control set includes a GR-12
2.4 GHz bi-directional receiver which is suitable for
connection to a maximum of six servos.
In order to create a connection to the transmitter, the
Graupner HoTT receiver must fi rst be “bound” to “its”
model memory in “its” Graupner HoTT transmitter; this
procedure is known as “binding”. However, binding is
only necessary once for each receiver / model memory
combination (see pages 106 or 109), and has already
been carried out at the factory using the components
supplied in the set. You therefore only need to carry out
the “binding” process with additional receivers, or if you
switch to a different model memory. The procedure can
also be repeated whenever you wish - for instance, if
you change the transmitter.
For this reason, if you connect the GR-12 HoTT receiver
supplied in the set to a power supply and switch it on,
the integral LED briefl y lights up green, and then goes
out again, assuming that “its” transmitter is not in range,
or is switched off. If a connection is made, the LED
glows a constant green.
Note:
If the LED glows a constant green, but the receiver
responds neither to the SET button nor to control com-
mands, then please check the polarity of your receiver
power supply.
Receiver voltage display
Once a telemetry connection exists, the actual voltage
of the receiver power supply is displayed on the right-
hand side of the transmitter screen.
Temperature warning
If the temperature of the receiver falls below a limit value
set on the receiver (the default is -10°C), or exceeds
the upper warning threshold, which is also set on the
receiver (the default is +70°C), the transmitter generates
a warning in the form of steady beeps at intervals of
about one second.
Servo connections and polarity
The servo sockets of Graupner HoTT receivers are
numbered. The connector system is polarised: look for
the small chamfers when inserting the connectors, and
on no account force the plugs into the sockets.
The power supply is through-connected via all the num-
bered sockets. If there is no vacant servo socket, it is
also possible to connect the power supply via a Y-lead,
Order No. 3936.11, in parallel with a servo.
Do not connect the battery to these sockets with
reversed polarity, as this is likely to ruin the receiver
and any devices connected to it.
The function of each individual channel is determined by
the transmitter you are using, rather than by the receiver.
The throttle servo socket is defi ned by the radio control
system, and may differ according to the make and type.
For example, in the case of Graupner radio control
systems the throttle function is assigned to channel 1 for
fi xed-wing models, and channel 6 for helicopters.
Servo socket 5: “SERVO” or “SENSOR”
The servo socket 5, which is marked with an additional
“T” …
Servo
sensor OR
… can be used not only to update the receiver by con-
necting the adapter lead, Order No. 7168.6A, but also to
connect a telemetry sensor.
However, to ensure that the receiver correctly detects
the device connected to this socket, servo socket 5
MUST be reset from “SERVO” to “SENSOR” and vice
versa to suit the device. This is carried out in the “Te-
lemetry” menu on the “RX CURVE” page of the “SET-
TING & DATA VIEW” sub-menu. See the section starting
on page 120 for more details:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
On this menu page locate the “>” symbol at the left-hand
edge of the screen, use the INC or DEC button to move
it to the bottom line, and then press the INC+DEC button
simultanously:
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SERVO
Now select the alternative “SENSOR” setting using one
of the INC or DEC buttons:
117
Program description: Telemetry menu
(control surface travel) for the servo connected to the
control channel selected in the “OUTPUT CH” line. The
value is set separately for each side of centre.
The setting can be altered separately for both directions
within the range 30 ... 150%.
Default setting: 150% on both sides.
PERIOD (cycle time)
In this line you can determine the frame time for the
individual channel signals. This setting applies to all
control channels.
If you use digital servos exclusively, it is safe to set a
cycle time of 10 ms.
If you are using a mixture of servo types, or exclusively
analogue servos, it is essential to set 20 ms, otherwise
the servos will be “over-stressed” and may response by
jittering or making rumbling noises.
RX FAIL SAFE
RX FAIL SAFE
INPUT CH: 01
MODE : HOLD
F.S.Pos. : 1500sec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500sec
Before we describe this menu a few words as a remin-
der:
“Doing nothing” is the worst thing you can do in this
regard. The default setting for the HoTT receiver is
“HOLD” mode.
If interference should occur with hold-mode in force, and
if you are very lucky, the model aircraft will fl y straight
ahead for an indefi nite period and then “land” somewhe-
re or other without causing major damage. However, if
the interference strikes in the wrong place and at the
wrong time, then a power model could become uncont-
rollable and tear wildly across the fl ying fi eld, endange-
ring pilots and spectators.
For this reason you really must consider whether you
should at least program the throttle to “motor stopped”,
to avoid the worst of these risks.
After that warning we present a brief description of the
three possible Fail-Safe variants offered by the mx-10
HoTT transmitter:
The simplest way of setting Fail-Safe - and the one we
recommend - is to use the “Fail-Safe” menu, which is
accessed from the multi-function list; see page 116.
A similar alternative, albeit slightly more diffi cult to
access, is to use the “FAIL-SAFE ALL” option described
on the next double-page.
And fi nally there is the relatively complex method of
entering individual settings using the “MODE”, “F.S.Pos.”
and “DELAY” options. The description of this variant
starts below with the “MODE” option.
Value Explanation Possible settings
OUTPUT CH Output channel
(receiver servo
socket)
1 … according to
receiver
INPUT CH Input channel
(control channel
coming from
transmitter)
1 … 16
MODE Fail-Safe mode HOLD
FAIL SAFE
OFF
F.S.Pos. Fail-Safe position 1000 … 2000 μs
DELAY Response time
(delay)
0,25, 0,50, 0,75
and 1,00 s
FAIL SAFE
ALL
Stores fail-safe
positions for all
control channels
NO / SAVE
POSITION Displays stored
Fail-Safe position
between approx.
1000 and 2000 μs
OUTPUT CH (servo socket)
In this line you select the OUTPUT CH (receiver servo
socket) which is to be adjusted.
INPUT CH (input channel select)
As already mentioned on page 117, the six control func-
tions of the mx-10 HoTT transmitter can be shared out
between several receivers if necessary, or alternatively
several receiver outputs can be assigned to the same
control function; for example, you may wish to be able
to operate each aileron with two servos, or to control an
oversized rudder using two coupled servos instead of a
single one.
Sharing control functions amongst multiple HoTT recei-
vers is a useful idea for large-scale models, for example,
to avoid long servo leads. In this case bear in mind that
only the last bound receiver can be addressed using the
“Telemetry” menu.
The fi ve control channels (INPUT CH) of the mx-10
HoTT can be managed in the appropriate manner using
the facility known as “channel mapping”, i. e. by assig-
33110_mx10_HoTT_1_DE.indd Druckbogen 92 von 104 - Seiten (92, 117)
33110_mx10_HoTT_1_DE.indd Druckbogen 92 von 104 - Seiten (92, 117)
21.10.2011 13:25:39
21.10.2011 13:25:39
116 Program description: Telemetry menu
the receiver. In practice this means the longest time in
which the radio control system went into Fail-Safe mode.
Operating voltage (R-VOLT)
Check the receiver’s operating voltage constantly. If it is
too low, you must under no circumstances continue to
operate your model, and certainly not launch it.
The low receiver voltage warning can be adjusted within
the range 3.0 to 6.0 Volt in the “SERVO TEST” sub-menu
under “ALARM VOLT”. If the voltage falls below the
threshold, an audible signal (repeated double beep, long
/ short) is generated, and in all the receiver sub-menus
“RX …” you will see “VOLT.E” at top right. At the same
time the parameter “R-VOLT” is highlighted in the “RX
DATAVIEW” sub-menu.
The current receiver battery voltage is also shown in the
basic display; see page 24.
Minimum operating voltage (L.R-VOLT)
“L.R-VOLT” shows the receiver’s minimum operating
voltage since the last time it was switched on.
If this voltage differs signifi cantly from the current
operating voltage “R-VOLT”, this could mean that the
receiver battery is being overstressed by the servos,
causing collapses in battery voltage. If this should occur,
we recommend installing a higher-performance receiver
battery to ensure maximum operating safety.
Sensor 1 + 2
Shows the values of the optional telemetry sensor 1
and, if present, sensor 2 in Volt and °C. You will fi nd a
description of these sensors in the Appendix.
RX SERVO
RX SERVO
REVERSE : OFF
CENTER : 1500sec
TRIM : –000sec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
Before you carry out any programming at this screen
display be sure to read the information on page 117.
Value Explanation Possible settings
OUTPUT CH Channel select 1 … according to
receiver
REVERSE Servo reverse OFF / ON
CENTER Servo centre in μs If active (high-
lighted), according
to transmitter
control position
TRIM Trim position in μs
deviating from the
CENTRE position
-120 … +120 μs
TRAVEL– Travel limitation at
% servo travel
30 … 150%
TRAVEL+ Travel limitation at
% servo travel
30 … 150%
PERIOD Cycle time in ms 10 or 20 ms
OUTPUT CH (Channel select)
Select the “Channel” line if necessary using the arrow
buttons. Press the INC+DEC button to highlight the
value fi eld. Now use the INC or DEC buttons to set the
desired channel (e. g. 01). The following parameters
always refer to the channel which you set at this
point:
REVERSE (servo reverse)
Sets the direction of rotation of the servo connected to
the selected control channel: ON / OFF
CENTER (servo centre)
The “CENTRE” line displays the current pulse width in
μs of the control channel selected in the “OUTPUT CH”
line.
The displayed value varies according to the current po-
sition of the transmitter control which affects this control
channel, and also its trim position.
A pulse width of 1500 μs corresponds to the standard
centre position, and therefore the usual servo centre
setting.
To change this value, select the “CENTRE” line and
press the INC+DEC button. Move the corresponding
transmitter control to the desired position, and press the
INC+DEC button again to store the current transmitter
control position. This position is now stored as the new
neutral position.
TRIM (trim position)
The purpose of the “TRIM” line is to provide fi ne ad-
justment of the neutral position of a servo connected to
the control channel selected in the “OUTPUT CH” line.
Adjustments are made in 1 μs increments using the ar-
row buttons of the right-hand four-way button. The value
in the “CENTRE” line can be adjusted over the range
+/- 120 μs around the TRIM value set here.
Default setting: 0 μs
TRAVEL–/+ (servo travel –/+)
This option can be used to place a limit on servo travel
93
Using the receiver for the fi rst time
* Battery Elimination Circuit
Reset
If you wish to carry out a receiver reset, locate the SET
button on the top of the receiver and hold it in while you
connect its power supply; release the button again.
If the reset is carried out with the transmitter switched
off, or if the receiver is not already bound, the receiver
LED fl ashes red slowly after about two or three seconds;
at this stage it is immediately possible to initiate a
binding process at the transmitter. If the reset is carried
out with an already bound receiver, if the transmitter
is switched on, and if the associated model memory is
active, then the LED lights up green after a short interval
to indicate that your transmitter / receiving system is
ready for use once more.
Please note the following:
Resetting the receiver resets ALL the settings
stored in the receiver to the default settings, with
the exception of the binding information! If you
carry out a reset by mistake, this means that you
will have to restore all the receiver settings entered
using the Telemetry menu.
On the other hand, a deliberate RESET is particu-
larly useful if you wish to “re-house” a receiver in a
different model, as it represents an easy method of
avoiding the transference of unsuitable settings.
RX CURVE
TYPE : A
CURVE1 CH : 02
TYPE : A
CURVE2 CH : 05
TYPE : B
CURVE3 CH : 04
5CH FUNCTION:SENSOR
A further press of the INC+DEC buttons concludes your
choice.
Concluding notes:
The much higher servo resolution of the HoTT sys-•
tem results in a substantially more direct response
compared with previous technologies. Please take a
little time to become accustomed to the fi ner control
characteristics offered by the system!
If you wish to use a speed controller with integral •
BEC* system in parallel with a separate receiver bat-
tery, in most cases (depending on the speed control-
ler) the positive terminal (red wire) must be removed
from the three-pin connector, as shown in the dia-
gram. Be sure to read the appropriate notes in the in-
structions supplied with your speed controller befo-
re doing this.
Carefully raise the central lug of the connector slight-
ly (1), withdraw the red
wire (2) and insulate the
bare contact with tape
to avoid possible short
circuits (3).
red
1
23
Observe the installation notes regarding the recei-
ver, receiver aerial and servos, which you will fi nd on
page 96.
33110_mx10_HoTT_1_DE.indd Druckbogen 93 von 104 - Seiten (116, 93)
33110_mx10_HoTT_1_DE.indd Druckbogen 93 von 104 - Seiten (116, 93)
21.10.2011 13:25:39
21.10.2011 13:25:39
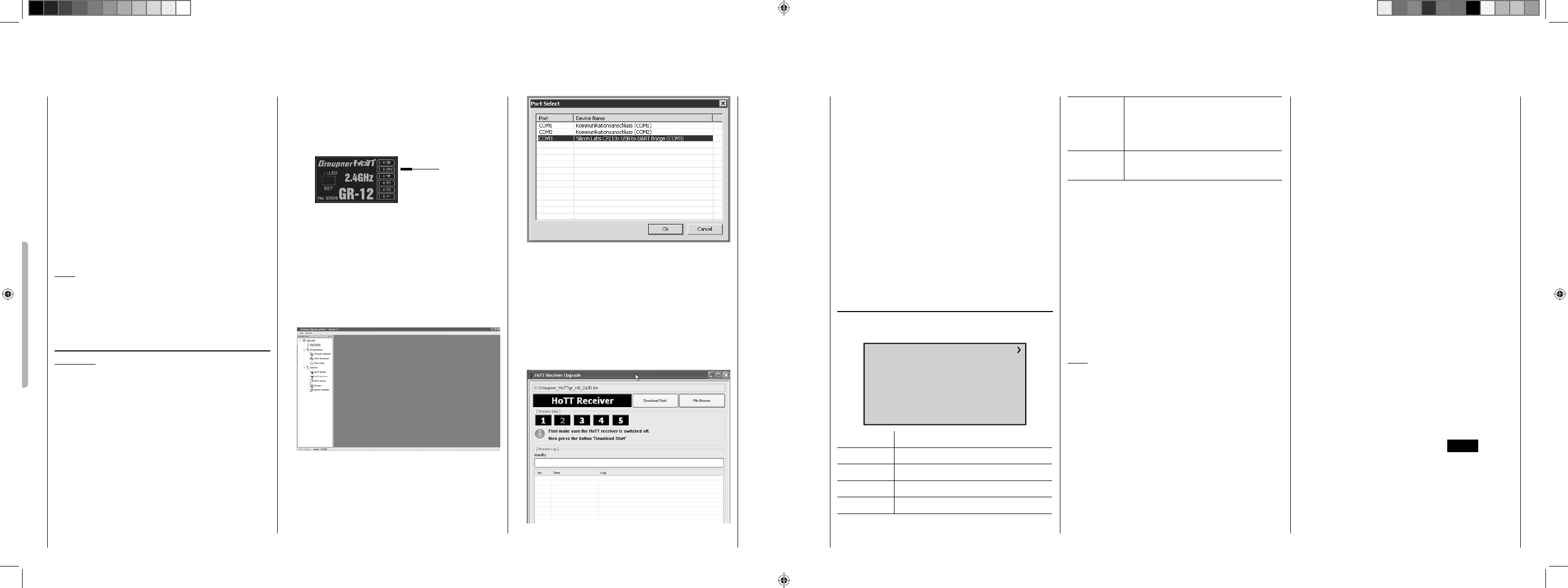
94 Using the receiver for the fi rst time
Firmware updates for the receiver are carried out using
the receiver’s telemetry socket - in the case of the GR-
12 receiver supplied as standard in the set this is servo
socket 5, which is also marked with a “T” - in conjunction
with a PC running Windows XP, Vista or 7. To connect
the receiver to a PC you require the separately available
USB interface, No. 7168.6 and the adapter lead, Order
No. 7168.6A. The latter - like all other connecting leads
- must always be connected to the GR-12 receiver with
the brown or black wire facing up.
The latest software and information can be found in the
Download area for the corresponding product at www.
graupner.de.
Note:
Once you have registered your transmitter at http://
graupner.de/de/service/produktregistrierung you will
automatically be informed of new updates by e-mail as
they become available.
Updating the GR-12 software
Attention:
It is essential to check the state of charge of your
receiver battery before carrying out any update. To
be on the safe side we recommend that you give the
battery a full charge.
1. Installing the driver
If you have not already done so, install the driver
software for the USB interface, Order No. 7168.6, as
described on page 89.
2. Connecting the receiver to the PC
Connect the USB interface, Order No. 7168.6 to the
receiver socket marked “-+T” using the adapter lead,
Receiver fi rmware update
Order No. 7168.6A. The connectors are polarised:
look for the small chamfer on the side. The connec
tors should engage easily; on no account use force.
Then connect the USB interface with the USB cable
(PC-USB/mini-USB) to your PC or laptop. With pro-
per connection the red LED on the interface board lit
up for a few seconds. Now turn off the power supply
of your receiver.
3. Firmware Update Utility
Start the program “Firmware_Upgrade_grStudio_
Ver-SX.X.exe” from the appropriate folder by a
double-click. (The at the time of printing this manual
current version 1.3 starts without prior installation.):
Select “Port Setup” under “Menu”; alternatively open
the “Controller Menu” and click on “Port select”:
In the “Port select” window you can now select the
correct COM port, i.e. the one to which the USB in-
terface is connected. This can be identifi ed by the
name “Silicon Labs CP210x USB to UART Bridge” in
the “Device Name” column; in the screen-shot above
this would be the “COM 3” port.
Now call up the “HoTT Receiver Upgrade option un-
der “Menu”, open the “Controller Menu” and click on
“HoTT Receiver”:
Adapter cable
Order No. 7168.6A
if present:
cut the central red braid
115
Program description: Telemetry menu
Country selection (COUNTRY)
The Country setting is present in order to cater for vari-
ous directives (FCC, ETSI, IC etc.). The HoTT 2.4 radio
system features a restricted frequency band for France.
If you wish to use the RC system in France, the country
setting on the transmitter must be set to “France” mode,
as described. It is essential not to use the Universal/
EUROPE mode. Factory setting is GENERAL.
Range checking (RANGE TEST)
switches the range test on or off, the remaining time is
displayed. The display also works if the range check
is started with the BIND / RANGE button on the trans-
mitter.
RX DATAVIEW
… you cannot enter any settings. This page is for infor-
mation purposes only:
RX DATAVIEW
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
R-VOLT :05.0V
L.R-VOLT:04.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
Value Explanation
S-QUA Signal quality in %
S-dBm Receive performance in dBm
S-STR Signal strength in %
R-TEM. Receiver temperature in °C
L PACK TIME Indicates the time in ms for which
the longest data packet was lost in
transmission between transmitter and
receiver
R-VOLT Current receiver operating voltage, in
Volt
Signal quality (S-QUA)
The signal quality (S-QUA) is sent “live” to the transmit-
ter via the receiver’s downlink channel, and shows the
signal strength in %.
Receive performance (S-dBm)
The receive performance (S-dBm) is displayed as a ne-
gative value, i. e. a value approaching zero is the highest
value (= best reception). The lower the value falls, the
worse is the receive performance. This is an important
item of information, particularly when you are carrying
out a range-check before operating the model.
Note:
In the case of negative numbers the value is reversed:
the higher the number following the minus sign, the
lower the value.
Carry out a range-check as described on pages 62 and
71 before every fl ight, and remember to simulate all the
servo movements which are likely to occur in the air.
In active range-check mode the range must be at least
fi fty metres on the ground. To guarantee safe operation
of your model, a value no higher than -80 dBm must be
displayed in the “RX DATA” display under “S-dBm” at this
distance. If the value falls below this (e. g. -85 dBm), you
should under no circumstances fl y your model. Instead
check the receiving system installation and the aerial
positions.
When operating a model this value should not fall below
-90 dBm; if it does, reduce the distance between the
pilot and the model. However, the audible range war-
ning (beeping at one-second intervals) will normally be
triggered before this value is reached, in order to ensure
safe operation.
Signal strength (S-STR)
The value for signal strength (S-STR) is displayed in %.
An audible range warning (beeping at one-second inter-
vals) will always be generated as soon as the receiver
signal in the downlink channel is too weak. However,
since the transmitter has a much higher transmitting
power than the receiver, the model can still be operated
safely at this point. Nevertheless, in the interests of
safety the distance to the model should be reduced until
the audible warning ceases.
Receiver temperature (R-TEM.)
Ensure under all fl ight conditions that the receiver stays
within its specifi ed temperature range (ideally between
-10 and +55°C).
The limit values for receiver temperature after which
a warning occurs can be set in the “SERVO TEST”
sub-menu under “ALARM TEMP+” (50 … 80°C) and
“ALARM TEMP-” (-20 … +10°C). If the temperature
exceeds or falls below the set limit, an audible signal
(continuous beeping) is triggered, and “TEMP.E” is
displayed at top right in all the “RX” receiver sub-menus.
At the same time the “R-TEM“ parameter is highlighted
on the “RX DATAVIEW” screen page.
Data packets (L PACK TIME)
This displays the longest period in ms in which data
packets were lost in transmission from the transmitter to
33110_mx10_HoTT_1_DE.indd Druckbogen 94 von 104 - Seiten (94, 115)
33110_mx10_HoTT_1_DE.indd Druckbogen 94 von 104 - Seiten (94, 115)
21.10.2011 13:25:40
21.10.2011 13:25:40
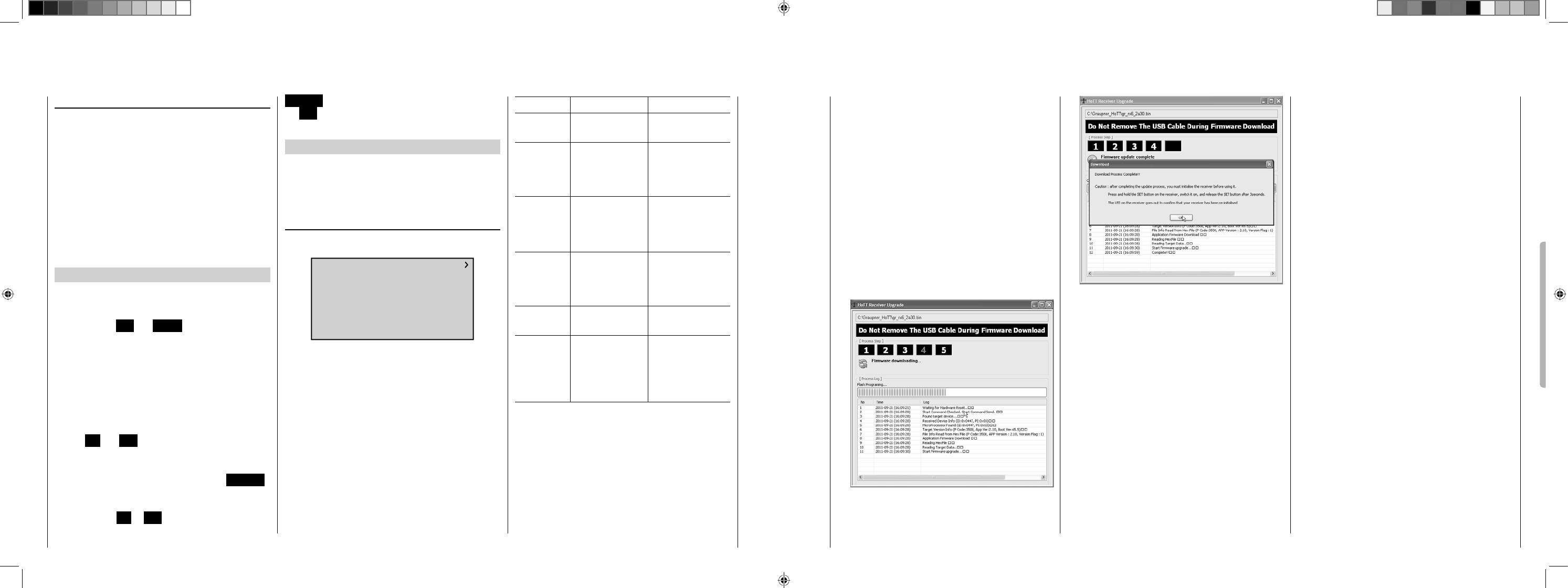
114 Program description: Telemetry menu
Telemetry
The menus grouped together under the overall heading
“Telemetry” are called up with the optional available
Smart-Box
Install the SMART-BOX at the mounting bracket of the
transmitter fi gure. Connect the box then the 3-pin lead to
the transmitter. Put one end of the cable into the DATA
jack on the transmitter and the other into the jack on the
right side of the SMART-BOX. The connector system is
polarised, look for the small camfer on the edges. Never
use force - the plug should engage easily and fully. The
sockets are labeled accordingly: black wire (-), red wire
(+) and orange wire (S).
Basic menu operation
In general terms the “Telemetry” menu is operated with
the four buttons on the top of the Smart-Box. You can
switch between the individual pages of the Telemetry
menu using the ESC and ENTER buttons: you will fi nd
corresponding direction indicators at top right of every
screen page in the form of angle brackets (< >); see
illustrations. If only one angle bracket is visible, then you
are currently at the fi rst or last page. In this case it is
only possible to switch pages in the direction indicated
by the angle bracket.
Menu lines in which parameters can be altered are
marked with an angle bracket prefi x (>). Pressing the
buttons INC and DEC causes the “>” pointer to jump
forward or back by one line. Lines to which you cannot
jump contain no user-variable values.
If you wish to change a parameter, press the INC+DEC
button simultanously to highlight the parameter (black
background)). Change the value within the possible
range using the INC or DEC buttons, and then press the
INC+DEC button again briefl y to accept the value. Press
the ESC button to return back to starting position.
SETTING & DATA VIEW
MENU SETTING AND DATAVIEW
On the fi rst screen page of the sub-menu “Setting &
Data View”, headed …
TX
... only partially adjustments can be made. This page
provides information to the general transmitter settings:
TX
MAXIMUM VOLT: 05.5V
MINIMUM VOLT: 05.4V
ALARM VOLT: 04.7V
COUNTRY : GENERAL
ACTION VOLT: 05.4V
RANGE TEST : OFF 90s
Display Description Setup
ACTION
VOLT
Current operating
voltage (V)
-
MAXIMUM
VOLT
Maximum
operating voltage
(since the last
power on - V)
-
MINIMUM
VOLT
Minimum
operating voltage
(since the last
power on - V)
-
ALARM
VOLT
voltage setup for
transmitter low
voltage warning
beep
4 – 15 V in steps of
0.1 V
Factory setting
4.5 V
COUNTRY Country setting GENERAL /
FRANCE
RANGE
TEST
indicates if the
range test is
engaged, the
remaining
time also appears
OFF / ON
Transmitter low-voltage warning (ALARM VOLT)
you can adjust the low voltage threshold at which the
alarm (continuous beeping) is triggered; the available
range is 4 - 15 V - factory default setting 4.5 Volt.
When the alarm is triggered, “VOLT-E” fl ashes at top
right in the SMART-BOX transmitter display, and the
parameters ACTION VOLT and ALARM VOLT are
displayed in inverse form.
SETTING & DATA VIEW
95
Using the receiver for the fi rst time
The fi rmware fi les are present in a product-speci-
fi c encoded form, i.e. if you inadvertently select a fi le
which does not match the product (e.g. transmitter
update fi le instead of receiver update fi le) the pop-up
window “Product code error” appears, and the update
process cannot be started.
If you have not already done so, switch the recei-
vers power supply OFF at this point and start the re-
ceivers update procedure by clicking on the “Down-
load Start” button. Wait until the progress bar starts
running. This can take up to several seconds. Now
switch the receiver ON with the SET-Button pressed.
After a few seconds, the status display „Found target
device ...“ appears. Now release the SET-Button. The
actual update process now commences, and a pro-
gress bar starts running:
On the other hand, if the device is not recognised,
the pop-up window “Target device ID not found” ap-
pears.
If the process is interrupted before the progress bar
reaches the 100% mark, switch off your receiver po-
wer supply and carry out another attempt at the up-
date process, i.e. repeat all the steps described abo-
ve.
The Status Display and the progress bar show the
progress of the fi rmware update process. The update
is completed when the message “Download Process
Complete!!” appears.
During the update process the green LED on the re-
ceiver light up. When the update is completed, the
green LED goes out.
Switch the receiver off, and disconnect the interface
lead. If you have multiple receivers, you must repeat
the procedure with each one.
4. Initialising the receiver
Once you have completed the update process, for
safety reasons you MUST initialise the receiver befo-
re using it again:
Hold the SET button on the receiver pressed in while
you switch on its power supply; then release the SET
button again after approx. 3 sec - the green LED ex-
pires. If you now switch the transmitter on again, after
about two or three seconds the green LED on the re-
ceiver will light up constantly. However, all the other
previously programmed settings in the receiver - with
the exception of the binding information - are now re-
set to the factory default values, and you will need to
re-enter them if required.
33110_mx10_HoTT_1_DE.indd Druckbogen 95 von 104 - Seiten (114, 95)
33110_mx10_HoTT_1_DE.indd Druckbogen 95 von 104 - Seiten (114, 95)
21.10.2011 13:25:41
21.10.2011 13:25:41
96 Installation Notes
order:
Always switch the transmitter on fi rst,
then the receiver.
When switching the system off:
Always switch the receiver off fi rst,
then the transmitter.
When programming the transmitter you must always
ensure that any electric motors in the system cannot
possibly burst into life accidentally, and that an I.C.
engine fi tted with an automatic starter cannot start
unintentionally. In the interests of safety it is always best
to disconnect the fl ight battery, or cut off the fuel supply.
on. The switch toggle must be free to move over its
full range of travel.
Always install servos using the vibration-damping 3.
grommets and tubular metal spacers supplied. The
rubber grommets provide some degree of protection
from mechanical shock and severe vibration. Don’t
over-tighten the servo retaining screws, as this will
compress the grommets and thereby reduce the vib-
ration protection they afford. The system offers good
security and vibration protection for your servos, but
only if the servo retaining screws are fi tted and tigh-
tened properly. The drawing below shows how to in-
stall a servo correctly. The brass spacers should be
pushed into the rubber grommets from the underside.
Servo mounting lug
Retaining screw
Rubber grommet
Tubular brass spacer
The servo output arms must be free to move over 4.
their full arc of travel. Ensure that no parts of the me-
chanical linkage can obstruct the servo’s movement.
The sequence in which the servos are connected to the
receiver is dictated by the model type. Please see the
socket assignments listed on pages 43 and 47.
Be sure to read the additional safety notes on pages 3
… 9.
If the receiver is ever switched on when the transmitter
is off, the servos may carry out uncontrolled movements.
You can avoid this by switching the system on in this
Installation Notes
Installing the receiver
Regardless of which Graupner receiving system you are
using, the procedure is always the same:
Please note that the receiver aerials must be arranged
at least 5 cm away from all large metal parts and leads
which are not attached or connected directly to the
receiver. This includes steel and carbon fi bre compo-
nents, servos, fuel pumps, cables of all sorts, etc. Ideally
the receiver should be installed in an easily accessible
position in the model, away from all other installed
components. Under no circumstances run servo leads
immediately adjacent to the receiver aerials, far less coil
them round it!
Tests have shown that a vertical (upright) position of a
single aerial produces the best results when long ap-
proaches are fl own with a model. If the receiver features
a diversity aerial system (two aerials), the second aerial
should be deployed at an angle of 90° to the fi rst.
The servo sockets of Graupner receivers are numbered.
The power supply is through-connected via all the num-
bered sockets, and in principle can be connected to any
of the servo sockets. It is also possible to connect the
power supply via a Y-lead, Order No. 3936.11, in parallel
with a servo.
The following section contains notes and helpful
ideas on installing radio control components in the
model:
Wrap the receiver in foam rubber at least 6 mm thick. 1.
Fix the foam round the receiver using rubber bands,
to protect it from vibration, hard landings and crash
damage.
All switches must be installed in a position where 2.
they will not be affected by exhaust gases or vibrati-
113
Program description: Telemetry menu
Telemetry
The “Telemetry” menu is used to call up and program
transmitter and receiver data, and data generated by
optional telemetry sensors (see Appendix), in real time.
Receiver data are transmitted to the transmitter via the
HoTT receiver’s integral downlink channel.
One telemetry sensor can be connected to the Tele-
metry input of the following receivers: GR-12S HoTT
(Order No. 33505), GR-12 HoTT (Order No. 33506) and
GR-16 (Order No. 33508). Two telemetry sensors can
be connected to the HoTT GR-24 HoTT receiver (Order
No. 33512).
Since this and future receivers can be updated by the
user, the associated “Telemetry” menus can constantly
be kept up-to-date, and expanded with the introduction
of additional functions or languages in future.
Note:
If you register your product under http://www.graupner.
de/en/service/product_registration you will automatically
be informed about new updates by e-mail.
Before updating the transmitter software you should
always back up all occupied model memories to a
compatible laptop or PC in order to avoid a possible loss
of data.
In addition to the back-ups mentioned above, fi rmware
updates are transferred using the transmitter’s PC
socket and the optional USB adapter, Order No. 7168.6
and the connecting lead, Order No. 7168.6A, in con-
junction with a PC running the Windows XP, Vista or 7
operating system.
The programs required for this and related information
can be found in the Download area for the correspon-
ding products at the website www.graupner.de. We
always recommend that you load the latest fi rmware into
your equipment, to ensure that your system is constantly
kept up-to-date.
Important information:
These instructions cover the functions available at •
the time of going to press.
As mentioned in the sections entitled “Binding mul-•
tiple receivers” on pages 106 and 109, it is possib-
le to bind more than one receiver per model. Howe-
ver, in subsequent operations only the receiver
which was bound last is able to make a telemetry
connection to the transmitter. On the other hand,
this also means that only the last bound receiver can
be addressed using the Telemetry menu. You may
therefore need to change the binding sequence be-
fore you can enter settings which relate to a particu-
lar receiver.
When setting up the radio control system, ple-•
ase ensure at all times that the transmitter aerial
is an adequate distance from the receiver aerials.
A safe distance is about one metre. If you neg-
lect this, you risk interference with the downlink
channel, and consequent malfunctions.
Since the transmitter and receiver only exchange te-•
lemetry data after each fourth data packet, data
transmission inevitably requires a certain amount of
time, which means that there will be some delay in
responding to button-presses and set-up changes.
This does not constitute an error.
Changes to model and sensor programming must •
only be carried out when the model is on the ground.
Do not make any alterations unless the motor is swit-
ched off and the fl ight battery is disconnected. If you
ignore this, unwanted effects of programming chan-
ges cannot be excluded.
For example, if you accidentally initiate an active ser-
vo test at the receiver, the model could crash and
cause personal injury or property damage. Please
see the Safety Notes on pages 71 … 74 of this ma-
nual and the various individual instructions.
All settings which you enter using the “• Telemetry”
menu, such as Fail-Safe, servo direction, servo tra-
vel, mixer and curve settings etc., are stored exclu-
sively in the receiver, and are therefore carried over
if you install the receiver in a different model. For this
reason we strongly recommend that you re-initiali-
se your HoTT receiver if you wish to use it in another
model; see “Reset” on page 93.
We therefore recommend that you program direc-•
tions of servo rotation, servo travel, mixer and cur-
ve settings using only the mx-10-specifi c stan-
dard menus “Servo settings” (page 111), “mixers”
(page 105) and “Dual Rate” (pages 11). If you ignore
this, the settings may overlap and interfere with each
other; in the most favourable case this can result in
confusion when operating the model, and in the least
favourable case it could cause problems.
The channel-mapping function of the optional Smart-•
Box can be used to share out control functions bet-
ween multiple receivers in any way, or even to assign
the same control function to several receiver outputs;
for example, you may wish to operate each aileron
with two servos instead of just one, etc. Once again
we strongly recommend that you act as cautious-
ly as possible when carrying out the program-
ming.
33110_mx10_HoTT_1_DE.indd Druckbogen 96 von 104 - Seiten (96, 113)
33110_mx10_HoTT_1_DE.indd Druckbogen 96 von 104 - Seiten (96, 113)
21.10.2011 13:25:41
21.10.2011 13:25:41
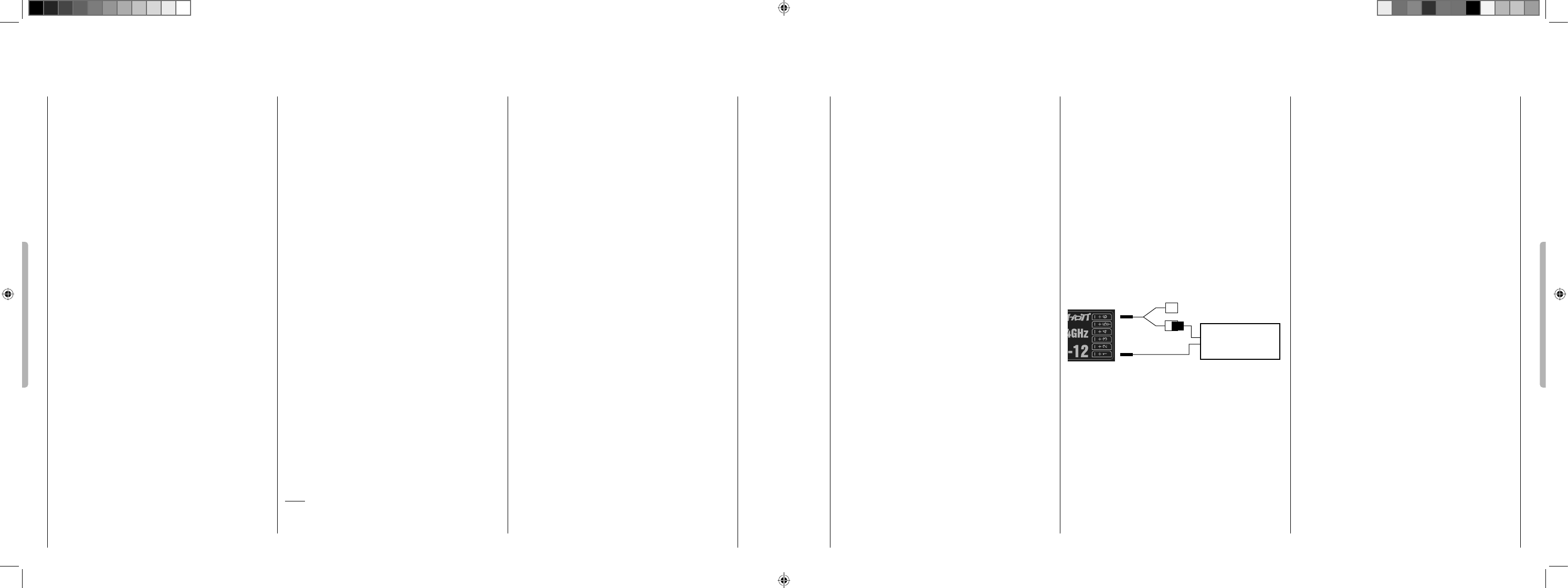
112 Program description: servo settings
possible it is always best to maintain your programmed
settings using the SMART-BOX.
Switch your receiving system on. Move the mode switch
in position „normal“. Locate the BIND-button on the front
of the transmitter, and hold it pressed in while you switch
the transmitter on.
Release the button again once it is switched on.
You can now call up the desired Fail-Safe mode (Fail-
Safe on / off, Hold, or Standard) by cycling through the
modes with a brief press of the BIND-button:
Fail-Safe mode: •
when you press the BIND-button, the transmitter beeps
once; the Status-LED fl ashes green and orange alter-
nately. It is now possible to program positions to which
the servos will move in a Fail-Safe situation; this occurs
after a “Hold” period of 0.75 seconds: move the corre-
sponding transmitter controls to the desired Fail-Safe
positions SIMULTANEOUSLY, then hold the BIND-button
pressed in for three to four seconds. When you release
the button, the orange LED should light up constantly,
and the transmitter should not emit an audible signal:
the transmitter now reverts to Control mode. If this does
not occur, repeat the procedure.
Hold mode (recommended for model helicop-•
ters):
Factory default setting. When you press the BIND /
RANGE button, the transmitter beeps twice; the Status-
LED fl ashes green and 2-times orange alternately. If
interference occurs, all servos programmed to “Hold”
remain at the last position detected by the receiver as
correct; this situation is maintained until such time as
the receiver picks up a new, valid control signal. You can
save your selection by holding the BIND-button pressed
in for three to four seconds. When you release the
button, the orange LED should light up constantly, and
the transmitter should not emit an audible signal: the
transmitter now reverts to Control mode. If this does not
occur, repeat the procedure.
Fail-Safe OFF: •
when you press the BIND-button, the transmitter beeps
three times; the Status-LED fl ashes green and 3-times
orange alternately. You can save your selection by
holding the BIND-button pressed in for three to four
seconds. When you release the button, the orange LED
should light up constantly, and the transmitter should
not emit an audible signal: the transmitter now reverts
to Control mode. If this does not occur, repeat the
procedure.
Standard mode (suitable for fi xed-wing model •
aircraft only):
when you press the BIND-button, the transmitter beeps
four times; the Status-LED fl ashes green and 4-times
orange alternately. In this mode the throttle servo (chan-
nel 1) moves to the Fail-Safe position, i.e. the position
you have programmed for a Fail-Safe situation, while all
the other channels remain at “Hold”. Move the throttle
stick to the desired position, then hold the BIND-button
pressed in for three to four seconds. When you release
the button, the orange LED should light up constantly,
and the transmitter should not emit an audible signal:
the transmitter now reverts to Control mode. If this does
not occur, repeat the procedure.
Note:
With the optional Smart-Box Fail Safe can also be pro-
grammed separately for each channel. See the section
„telemetry“ on page 113.
97
Installation Notes
Receiving system power supply
A reliable power supply is one of the basic essentials for
reliable model control. Free-moving pushrods, a fully-
charged battery, battery connecting leads of adequate
cross-section, minimal transfer resistance at the connec-
tors etc. all help to minimise energy consumption, but if
you have attended to all this, and the receiver voltage
displayed on the transmitter screen still collapses
repeatedly, or is generally (too) low, then please note the
following:
The fi rst point to check is that your batteries are always
fully charged at the start of each fl ying session. Check
that contacts and switches are low in resistance. It is a
good idea to measure the voltage drop over the installed
switch harness under load, as even a new, heavy-duty
switch can cause a voltage drop of up to 0.2 Volt. Ageing
effects and oxidation of the contacts can increase this
several times over. Constant vibration and movement
at the contacts also “gnaws away” at the contacts, and
tends to produce a creeping increase in transfer resis-
tance.
It is also true that even small servos, such as the Graup-
ner/JR DS-281, can draw currents of up to 0.75 Ampere
when stalled (mechanically obstructed). Just four servos
of this type in a “foamy” can therefore place a load of up
to 3 Amps on the airborne power supply ...
For this reason you should always choose a receiver
battery which constantly delivers an adequate voltage,
i. e. which does not collapse under severe load. To “cal-
culate” the necessary battery capacity we recommend
as a starting point that you provide 350 mAh for each
analogue servo, and at least 500 mAh for each digital
servo.
For example, a 1400 mAh battery would represent an
absolute minimum as the power supply for a receiving
system with a total of four analogue servos. When ma-
king your calculations, however, please bear the receiver
in mind as well, as it draws a current of around 70 mA
due to its bi-directional function.
Regardless of these considerations, it is generally
advisable to connect the power supply to the receiver
using two leads. For example, you could use a switch or
voltage regulator with two power supply leads running
to the receiver. You might install a Y-lead, Order No.
3936.11, between lead and receiver, as shown in the
diagram below, if you wish to use one or both of the
receiver sockets to connect a servo, speed controller,
etc. The dual connection at the switch or voltage regu-
lator not only reduces the risk of a cable fracture, but
also ensures a more even energy supply to the servos
connected to the receiver.
Auxiliary function
Y-lead,
Order No. 3936.11
PRX stabilised
receiver power supply,
Order No. 4136
Four-cell Ni-MH battery packs
Traditional four-cell packs are a good choice for pow-
ering your Graupner HoTT receiving system, provided
that you observe the conditions described above, i. e.
you must ensure that the packs have adequate capacity
and maintain their voltage well.
Five-cell NiMH battery packs
Five-cell batteries offer a wider margin of safety in terms
of voltage compared with four-cell packs. However,
please note that not all servos available on the market
can tolerate the voltage of a fi ve-cell pack (in the long-
term), especially when the battery is freshly charged.
For example, many of these servos respond to the high
voltage with a clearly audible “rumble”.
It is therefore important to check the specifi cation of the
servos you intend to use before you make the decision
to use fi ve-cell packs.
Two-cell Nanophosphate® (A123) batteries
Taking into account the current situation, these new cells
are now regarded as the optimum choice for receiver
packs. A123 cells can be fast-charged in conjunction
with a suitable battery charger, and are protected by a
metal case and therefore comparatively robust. It is also
true that a much higher number of charge / discharge
cycles is attributed to this cell type than, for example,
to LiPo cells. The nominal voltage of 6.6 Volt of a two-
cell Nanophosphate® pack presents no problems to
Graupner HoTT receivers, nor to those servos, speed
controllers, gyros, etc. which are expressly approved for
use at these higher voltages. Please note, however,
that virtually all servos, speed controllers, gyros etc.
sold in the past, and also most of those currently
available, are only approved for use on an operating
voltage in the range 4.8 to 6 Volt. If you wish to con-
nect these devices to the receiver, it is essential to use
a stabilised regulated power supply, such as the PRX,
Order No. 4136; see Appendix. If you neglect this, there
is a danger that the connected devices will quickly suffer
permanent damage
Two-cell LiPo battery packs
For a given capacity LiPo batteries are a great deal ligh-
ter than the battery types described above, but they are
more susceptible to mechanical stress and damage due
to their lack of a metal case. Moreover LiPo batteries
only have a limited ability to be fast-charged, and
33110_mx10_HoTT_1_DE.indd Druckbogen 97 von 104 - Seiten (112, 97)
33110_mx10_HoTT_1_DE.indd Druckbogen 97 von 104 - Seiten (112, 97)
21.10.2011 13:25:41
21.10.2011 13:25:41
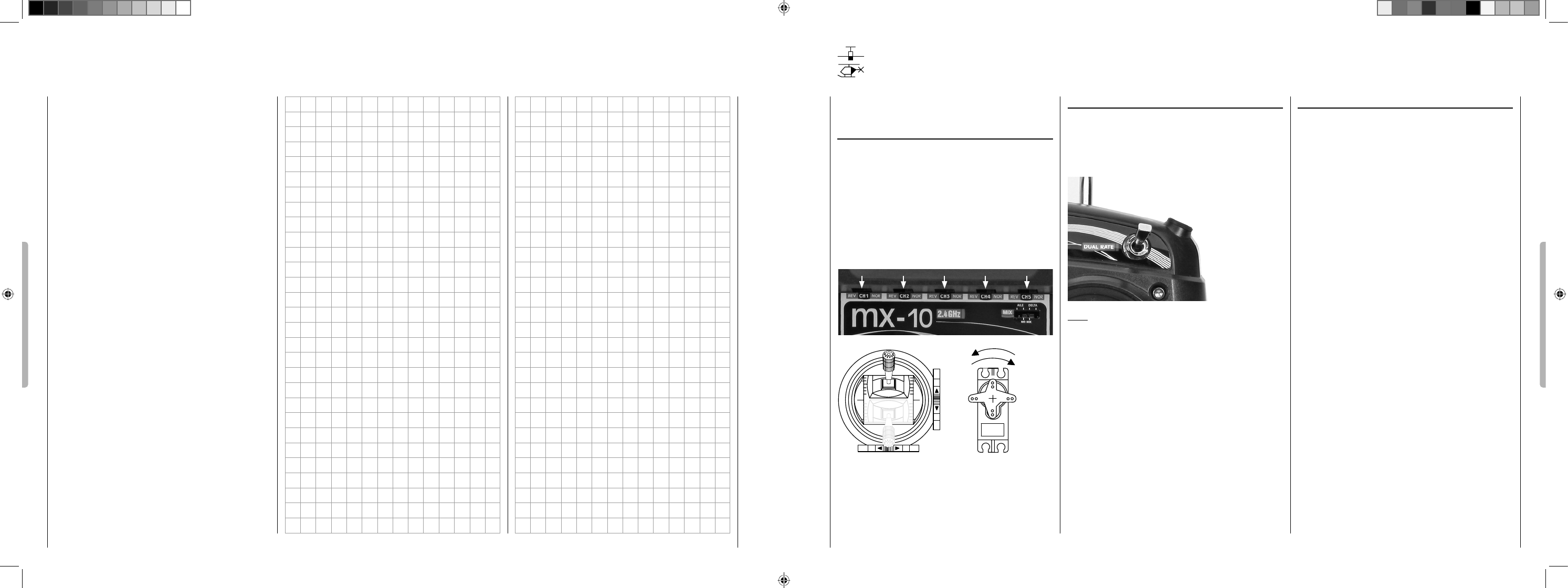
98 Installation Notes
generally do not survive such a high number of charge
/ discharge cycles as is claimed for other batteries,
such as Nanophosphate® types. The comparatively
high nominal voltage of 7.4 Volt of a two-cell LiPo pack
presents no problems to Graupner HoTT receivers, nor
to those servos, speed controllers, gyros, etc. which are
expressly approved for use at these higher voltages.
Please note, however, that virtually all servos, speed
controllers, gyros etc. sold in the past, and also
most of those currently available, are only approved
for use on an operating voltage in the range 4.8 to 6
Volt. If you wish to connect these devices to the recei-
ver, it is essential to use a stabilised regulated power
supply, such as the PRX, Order No. 4136; see Appendix.
If you neglect this, there is a danger that the connected
devices will quickly suffer permanent damage.
111
Program description: servo settings
Servo travel „Dual Rate“
To adjust servo travel symmetrically, i. e. to adjust travel
equally on both sides of neutral for elevator, rudder and
aileron. The adjustment range is fi xed and can be selec-
ted between 70% (switch in lower position) and 100%
(switch in upper position) of servo travel.
Note:
With the optional Smart-Box the servo travel can be
programmed separately and also asymmetrically for all
channels. See the section „telemetry“ on page 113.
The mx-10 HoTT can adjust the servo direction and
servo travel - dual rate.
Servo rotating direction
The direction of servo rotation can be adjusted to suit
the actual installation in your model. This means that
you don’t need to concern yourself with servo directions
when installing the mechanical linkages in the model,
as you can reverse them as and when necessary. The
rotationg direction is be set individually for each channel
with the servo reverse - switches on the front of the
transmitter. The direction is symbolized by „NOR“ for
normal rotation and „REV“ to reverse the direction of
rotation.
normal
reversed
normal
reversed
Servo settings
Servo direction, centre, travel
Channel 1 Channel 3Channel 2 Channel 4 Channel 5
Fail Safe
In its default state (as delivered) the receiver is set to
Hold” mode, i.e. if a fail-safe situation occurs, all the ser-
vos connected to it maintain the last position detected
as valid. In this mode the green LED on the receiver
expires when interference occurs, and the orange LED
on the transmitter starts fl ashing 3-times for a short pe-
riod. In addition the transmitter also starts beeping in the
same way like the Status-LED as an audible warning.
You can exploit the safety potential of the fail-safe option
by at least programming the throttle channel to respond
to a fail-safe situation: the throttle channel of an engine-
powered model should be set to idle, the throttle channel
of an electric-powered model to “stop”, and the throttle
channel of a model helicopter to “Hold”. If interference
should occur, these settings will help prevent the model
fl ying out of control, possibly causing personal injury or
property damage.
IMPORTANT:
The two functions “Binding” and “Range check” descri-
bed above can be used regardless of the method you
last employed to program the transmitter, i.e. using
the programming button or the SMART-BOX; neither
of these two options causes signifi cant changes to the
settings saved in the receiver. However, if you call up
the Fail-Safe function using the programming button
as described below, this resets ALL the settings of the
SMART-BOX at the Fail-Safe screen (RX FAIL SAFE)
- and this includes the settings available through the
facilities of the programming button. At the same time
the Country setting will revert to Universal if you have
previously selected “France” using the programming
button. You MUST therefore select the Country setting
again if necessary. For this reason, wherever
S
S
T
T
S
S100 %
T
T70 %
33110_mx10_HoTT_1_DE.indd Druckbogen 98 von 104 - Seiten (98, 111)
33110_mx10_HoTT_1_DE.indd Druckbogen 98 von 104 - Seiten (98, 111)
21.10.2011 13:25:42
21.10.2011 13:25:42
130 Program description: Trainer system
the Teacher and Pupil, as this could reduce the effective
range. Please note also that the wireless Trainer function
exploits the downlink connection, and for this reason no
telemetry data are transmitted from the model in this
mode.
If it should occur that the link between the Teacher and
Pupil transmitters is lost during Trainer mode operations,
note that the Teacher transmitter automatically assumes
control of the model.
In this situation, if the Trainer change-over switch is in
the “Pupil” position, then the central LED on the mx-10
HoTT Teacher transmitter starts to fl ash 4-times orange
and emits a audible warning signal. I
In either situation your fi rst recourse should be to reduce
the distance between the two transmitters. If this does
not help, land the model immediately, and seek the
cause.
Checking the system
Possible errors:
Pupil transmitter not ready•
Teacher transmitter and HoTT receiver in trainer •
model not correctly “bound”.
79
Description of radio control set
mx-10 Computer System
Five-channel radio control set with Graupner HoTT 2.4 GHz technology (Hopping Telemetry Transmission)
Range-check and warning function•
Receiver low-voltage warning on transmitter screen•
Ultra-wide receiver operating voltage range: 3.6 V to •
8.4 V (fully operational down to 2.5 V)
Fail-Safe•
Unrestricted channel assignment (channel-mapping), •
mixer functions and all servo settings programmable
in the Telemetry menu
Up to four servos can be actuated simultaneously •
as a block, with a servo cycle time of 10 ms (digital
servos only)
Optimised frequency hopping and broad channel •
spread for maximum interference rejection
Intelligent data transmission with corrective function•
Real-time telemetry analysis•
More than 200 systems can be operated simultane-•
ously
Future-proof update capability using data interface•
33110_mx10_HoTT_1_DE.indd Druckbogen 79 von 104 - Seiten (130, 79)
33110_mx10_HoTT_1_DE.indd Druckbogen 79 von 104 - Seiten (130, 79)
21.10.2011 13:25:14
21.10.2011 13:25:14
110 Program description: base settings - helicopter
“Binding” transmitter and receiver
Note: The mx-10 HoTT can be bound in the mode „nor-
mal“ only. Make sure before you start the binding pro-
cess, that the transmitter is programmed in this mode.
See page 88 for mode setting.
Turn the transmitter ON and then power up your recei-
ver: At the receiver, the green LED flashes once briefly,
and then goes out.
The LED on the transmitter lights up green to show that
no bound receiver is connected.
Press and hold the SET button on the receiver until the
green LED starts to flash.
Briefly press the BIND-button of the transmitter to initiate
the so-called binding process.
If the receiver LED glows a constant green within about
ten seconds, then the binding process has been com-
pleted successfully; you can now release the receiver’s
SET button.
Your model / receiver combination is now ready for use.
In parallel with this the Status-LED switches from green
to orange:
Conversely, if the green LED on the receiver fl ashes
for longer than about ten seconds or the transmitters
Status-LED remains green, then the binding process
has failed. If this should occur, alter the relative position
of the aerials, and repeat the whole procedure.
range test
The integral range-check reduces the transmitter’s out-
put power in such a way that you can test the system’s
operation at a distance of up to about fi fty metres.
Carry out the range-check of the Graupner HoTT sys-
tem in accordance with the following instructions. We
recommend that you ask a friend to help with range-
checking.
Install the receiver in the model as required, preferab-1.
ly after completing the binding process with the trans-
mitter.
Switch the radio control system on and wait until the 2.
green LED on the receiver glows. Now you can obser-
ve the servo movements.
Place the model on a fl at surface (paving, close-mown 3.
grass or earth), with the receiver aerials at least
15 cm above the ground. This means that you may
have to place the model on a raised object for the pe-
riod of the check.
Hold the transmitter at hip-height, and away from your 4.
body. However, do not point the aerial straight at the
model; instead rotate and / or angle the tip of the aeri-
al so that it is vertical while you carry out the check.
Make sure that the transmitter in the „normal“ mode 5.
- mode switch to the rear. Now press the BIND-but-
ton for about 5 s, until the transmitter starts to beep
permanently. Disengage the BIND-button again. Note
when using multiple receivers for each model: the
range test only works with the receiver which trans-
mits the telemetry signal - that is the last bound re-
ceiver.
When you start the range-check, the transmitter’s 6.
output power is signifi cantly reduced, at the same
time a permament beep sounds. When the 99 se-
conds of the range-check period have elapsed, the
transmitter switches back to full power, and the beep
sound stops. Note: you can stop the range test at
any time by pressing again the BIND button.
Within this period walk away from the model, moving 7.
the sticks all the while. If at any point within a distance
of about fi fty metres you notice a break in the connec-
tion, attempt to reproduce it.
If the model is fi tted with a motor, switch it on in order 8.
to check the system’s interference rejection.
Walk further away from the model until you no longer 9.
have full control over it.
At this point wait until the test period has elapsed, with 10.
the model still switched on and ready for use. When
the range-check period is over, the model should re-
spond again to control commands. It this is not 100%
the case, do not use the system. Contact your nearest
Service Centre of Graupner GmbH & Co. KG.
Carry out the range-check before every fl ight, and si-11.
mulate all the servo movements which are likely to oc-
cur in a typical fl ight. To ensure safe operation of the
model, the range must always be at least fi fty metres
on the ground.
Caution:
Never initiate a range-check when you are actually
operating a model!
99
Defi nition of terms
Defi nition of terms
Control functions, transmitter controls, function inputs, control channels, mixers, switches, control switches, Smart-Box
To make it easier for you to understand the mx-10
HoTT manual, the following section contains defi nitions
of many terms which crop up again and again in the
remainder of the text.
Control function
The term “control function” can be thought of as the
signal generated for a particular function which needs
to be controlled - initially independent of its subsequent
progress through the transmitter. In the case of fi xed-
wing model aircraft the control functions include throttle,
rudder and aileron, whereas collective pitch, roll and
pitch-axis are typical of those used for helicopters. The
signal of a control function may be assigned directly, or
to several control channels simultaneously via mixers. A
typical example of the latter is separate aileron servos or
a V-Tail. The essential feature of a control function is its
infl uence on the mechanical travel of the corresponding
servo.
Transmitter control
The term “transmitter control” refers to the mechanical
elements on the transmitter which are operated directly
by the pilot. Their movements in turn generate corres-
ponding movements in the servos, speed controllers etc.
at the receiver end. The transmitter controls include the
following:
The two dual-axis stick units for the control functions •
1 to 4; for both model types (“fi xed-wing” and “helicop-
ter”) these four functions can be interchanged in any
way you wish using the “Mode” function, e. g. throttle
left or right, without having to re-connect the servos.
The dual-axis stick function for throttle (or airbrakes) is
often referred to as the Ch 1 (Channel 1) control.
The switch for channel 5•
When a proportional transmitter control is operated,
the servo or servos follow the position of the control
directly, whereas a switched channel provides just the
two or three set servo positions.
Function input
This is an imaginary point on the signal path, and must
not be considered the same as the point on the circuit
board where the transmitter control is connected! The
two menus “Stick mode” and “Transmitter control
settings” affect the course of the signal “after” this point,
and it is possible (and likely) that there will be differences
between the number of the transmitter control (as stated
above) and the number of the subsequent control chan-
nel.
Control channel
There is a point on the signal path where the signal con-
tains all the control information required for a particular
servo – this may be directly generated by a transmitter
control or indirectly via a mixer – and from this point on
we call the signal a “control channel”. This signal is only
affected by any adjustments carried out in the “Servo
settings” menu before leaving the transmitter via the RF
module. Once picked up at the receiver, this signal may
be modifi ed by any settings made in the Telemetry menu
before fi nally passing to the corresponding servo in the
model.
Mixer
The transmitter’s software includes a wide range of mixer
functions. Their purpose is to enable a control function to
affect multiple servos at the branching point of the mixer
input, or alternatively to allow several control functions to
affect one servo. For more information please refer to the
numerous mixer functions of the Smart-Box as described
on page 119 of the manual.
Switch
The standard toggle switch for channel 5 moves the
connected servo to the min./max. position.
Smart Box
The optional Smart-Box allows the use of many other
HoTT functions such as:
• transmitter voltage display with programmable warning
threshold
• Receiver Temperature
• Servo travel
• Channel Mapping
• Mixer settings
• Signal quality
• Receiver Voltage
• Servo neutral position
• Cycle time
• Channel-dependent fail-safe settings
• Servo test
see the section „telemetry“ on page 113.
More details of the Smart-Box you will fi nd the Graupner
catalog FS and online under ww.graupner.de/en
33110_mx10_HoTT_1_DE.indd Druckbogen 99 von 104 - Seiten (110, 99)
33110_mx10_HoTT_1_DE.indd Druckbogen 99 von 104 - Seiten (110, 99)
21.10.2011 13:25:43
21.10.2011 13:25:43
100 Digital trims
Digital trims and stick calibration
Description of function
Digital trims with visual and audible indicators
Both the dual-axis stick units are fi tted with digital trim
systems. When you give the trim lever a brief push (one
“click”), the neutral position of the associated stick chan-
nel changes by one increment. If you hold the trim lever
in one direction, the trim value changes continuously in
the corresponding direction with increasing speed.
The degree of trim offset is also “audible”, as the pitch of
the tone changes to refl ect the setting. When you are fl y-
ing a model, you can fi nd the trim centre position easily
without having to look at the screen: if you over-run the
centre setting, the trim stays in the centre position for a
moment.
The current trim values are automatically stored.
The digital trim only works when the transmitter is swit-
ched ON. When switched OFF, even an accidental touch
of the trim lever does not change the set values.
Stick Calibration
If you suspect that the centre point of your self-centring
sticks (transmitter controls 1 … 4) does not correspond
exactly to 0% travel of the transmitter control, you can
check and - if necessary - correct it using the following
procedure:
Turn OFF the transmitter, and insert the supplied pro-
gramming plug into the DATA jack on the back and the
jumper in position „DELTA“ on the front of the transmit-
ter. Bring both sticks in the middle position. Turn the ra-
dio ON. The transmitter starts beeping after one second
for 10 seconds once per second. During this 10 seconds
move both control sticks to all the end positions, so that
the transmitter can save this positions. After expiration
of the 10 seconds the calibration is completed and
the transmitter is back in the normal mode, the beeps
become silent. Turn the transmitter off and then remove
the programming plug on the back.
Do not use the remote control with programming
connector plugged in!
If necessary, plug the jumper into the correct positi-
on for your model.
If you have achieved not all stick-end positions during
these 10 seconds, repeat the entire process.
109
Program description: base settings - helicopter
Notes:
During the programming process it is important •
to ensure that any internal-combustion engine or
electric motor cannot start running accidentally.
The safe option is always to disconnect the fuel
supply or the fl ight battery.
Flybarless systems
Connect your Flybarless system on the channels 1 - 4 at
the receiver to match your Helicopter type.
Please refer to the instructions of your system.
Receiver output
For maximum fl exibility in terms of receiver socket
assignment, the optional Smart-Box provides the means
to swap over the servo outputs 1 to max. 6 - „channel
mapping“; see also chapter „telemetry“ on page 113.
With the Channel mapping function of the Smart-Box
the six control functions of the mx-10 HoTT trans-
mitter can be shared out between several receivers if
necessary, or alternatively several receiver outputs can
be assigned to the same control function; for example,
you may wish to be able to operate each aileron with
two servos, or to control an oversized rudder using two
coupled servos instead of a single one.
rx bind
Graupner HoTT receivers have to be “instructed” to
communicate exclusively with a particular model (i. e.
model memory) of a Graupner HoTT transmitter. This
process is known as “binding”, and is only necessary
once for each new combination of receiver and model. It
can be repeated at any time.
Important note:
When carrying out the binding procedure, please
ensure that the transmitter aerial is always an
adequate distance from the receiver aerials: keeping
the aerials about 1 m apart is safe in this respect.
Otherwise you risk a failed connection to the down-
link channel, and consequent malfunctions.
“Binding” multiple receivers to one model
If necessary, it is possible to bind more than one recei-
ver to a single model. This is accomplished by initially
binding the receivers individually, as described in the
next section. When operating the system, please note
that only the receiver which was bound last will
establish a telemetry link to the transmitter. For this
reason all telemetry sensors installed in the model must
be connected to this receiver, since only the last bound
receiver is able to transmit their data via the down-link
channel. The second, and all other receivers, run in
parallel to the receiver last bound to the transmitter, but
completely independently of it; they operate in Slave
mode with the down-link channel switched off.
If a receiver is switched ON which does not transmit te-
lemetry, the Status-LED changes from orange to green.
33110_mx10_HoTT_1_DE.indd Druckbogen 100 von 104 - Seiten (100, 109)
33110_mx10_HoTT_1_DE.indd Druckbogen 100 von 104 - Seiten (100, 109)
21.10.2011 13:25:43
21.10.2011 13:25:43
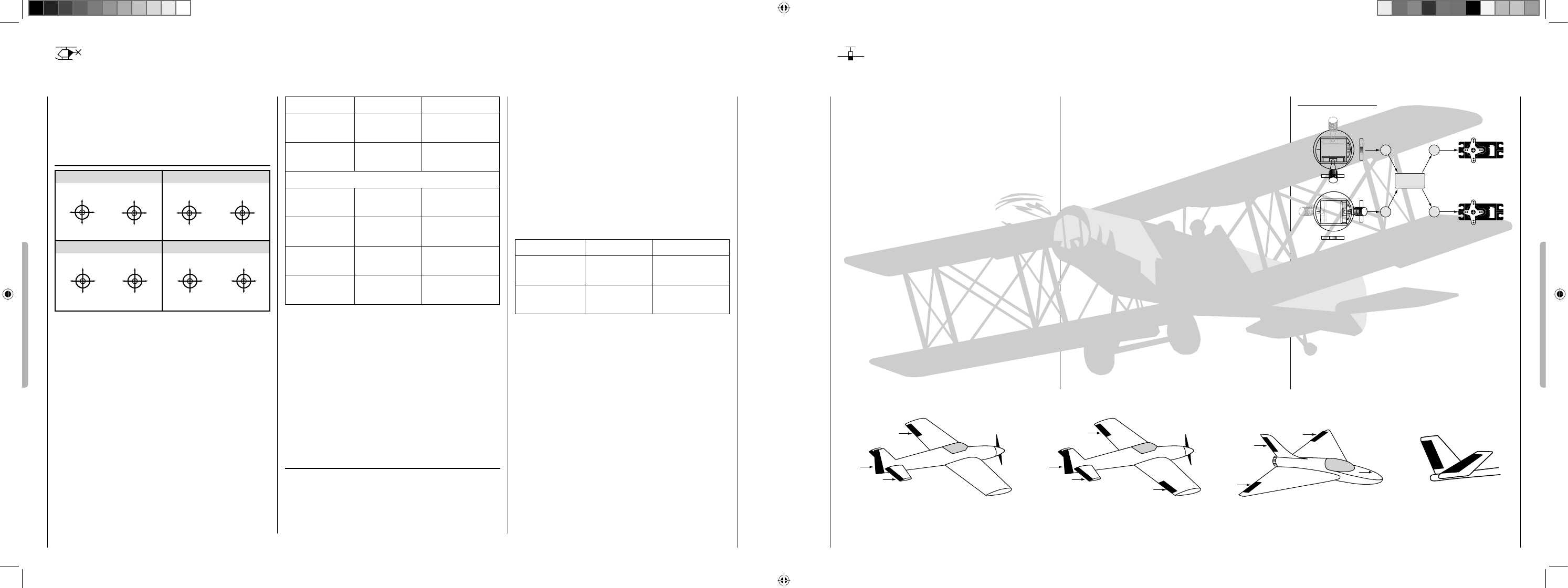
108 Program description: base settings - helicopter
Base settings
Basic model-specifi c settings for model helicopters
Before you start programming specifi c parameters,
some basic settings must be entered which apply only to
the currently active model memory.
Stick mode
Basically there are four possible ways of arranging the
principal control functions of a model helicopter on
the two dual-axis sticks: the primary functions are roll,
pitch-axis, tail rotor and throttle / collective pitch. Which
of these options you select depends on your individual
preferences and fl ying style:
To select the stick mode, fi rst select the transmitter
mode „ normal“ with the mode switch. Turn the transmit-
ter OFF and insert the supplied programming plug into
the DATA socket on the back of the transmitter. Turn ON
the transmitter: you can now call up the desired stick
mode by cycling through the modes with a brief press of
the BIND-button:
Buzzer LED Description
transmitter
buzzers 1x
orange LED on Country setting
Universal/Europe
transmitter buz-
zers 2 times
orange LED
fl ashes
County setting
France
The country setting is described in detail below.
transmitter buz-
zers 3 times
orange LED on »MODE 1«
transmitter buz-
zers 4 times
orange LED on »MODE 2«
transmitter buz-
zers 5 times
orange LED on »MODE 3«
transmitter buz-
zers 6 times
orange LED on »MODE 4«
To choose a mode, hold the BIND-button pressed for
approx. three seconds. When you release the button, the
transmitter should emit an audible signal and the buzzer
sound stops. Switch OFF the transmitter and remove
the programming plug.
Never use the remote control with programming
connector plugged in!
Later, to check the stick mode which is programmed,
watch out for the Status-LED on the transmitter.
Country setting
After you have set the stick mode, the country setting
must be done in a second step.
The Country setting is present in order to cater for vari-
ous directives (FCC, ETSI, IC etc.). The HoTT 2.4 radio
system features a restricted frequency band for France.
If you wish to use the RC system in France, the country
setting on the transmitter must be set to “France” mode,
as described. It is essential not to use the Universal/
EUROPE mode.
To select a Country setting, you must fi rst switch the
transmitter off, then insert the supplied programming
plug in the DATA socket on the back and the Jumper
in the position „NO MIX“ on the front of the transmitter.
Switch the transmitter on: you can now toggle between
the “GENERAL” and “France” settings by briefl y pressing
the BIND-button:
Buzzer LED Description
transmitter
buzzers 1x
orange LED on Country setting
Universal/Europe
transmitter buz-
zers 2 times
orange LED
fl ashes
County setting
France
To choose a country, hold the BIND-button pressed for
approx. three seconds. When you release the button, the
transmitter should emit an audible signal and the buzzer
sound stops. Switch OFF the transmitter and remove
the programming plug.
Never use the remote control with programming
connector plugged in!
Later, to check the country setting which is programmed,
watch out for the Status-LED on the transmitter.
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
pitch axis
tail rotor
pitch axis
tail rotor
throttle
roll
roll
throttle
tail rotor
tail rotor
throttle throttle
pitch axis
pitch axis
roll
roll
pitch axis
pitch axis
roll
roll
Motor/Pitch
throttle
tail rotor
tail rotor
throttle
throttle
roll
roll
pitch axis
pitch axis
tail rotor
tail rotor
101
Fixed-wing model aircraft
Fixed-wing model aircraft
This program provides convenient support for normal
model aircraft with up to two aileron servos, V-tail
models, fl ying wings and deltas with two elevon (aileron
/ elevator) servos.
The majority of power models and gliders belong to the
“normal” tail type with one servo each for elevator, rud-
der, ailerons and throttle or electronic speed controller
(airbrakes on a glider).
If your model features two separate aileron servos (and
also in some cases two fl ap servos), the aileron travel of
both pairs of control surfaces can be set up with diffe-
rential movement in the “Tail type” menu.
If the model features a V-tail instead of a conventional
tail, you need to select the tail type “V-tail” with in the
“Tail type” menu, as this automatically superimposes
the elevator and rudder control functions in such a way
that each tail panel can be actuated by a separate servo.
For deltas and fl ying wings it is easy to set up mixed
elevons, i. e. the aileron and elevator functions can be
carried out via common control surfaces at the trailing
edge of the right and left wing. As standard the program
contains the appropriate mixer functions for the two
servos.
More functions are programmable with the optional
Smart Box. See the section „Telemetry“ on page 113.
Pre-installed “wing mixers” of the mx-10 HoTT
1. No mixer ¼ Tail type „normal“
2. Mixer AILERON ¼ 2 Ailerons
3. Mixer DELTA ¼ Flying wings
4. Mixer V-Tail ¼ V-Tail
See the pictures below on this page.
left
right
left
right
Rudder+Elevator
Tail type „normal“
Aileron
Elevator
Rudder
Mixer AILE „2 Aileron“
AIL+EL
Elevator
Rudder
Aileron
Mixer DELTA „Flying wings“
Rudder
AIL+EL
Mixer „V-Tail“
Aileron
33
4
Servo 4,8 V
C 577
Best.-Nr. 41 01
Servo 4,8 V
C 577
Best.-Nr. 4101
4
V-tail mixer
Control function inputs
Control channels
(receiver outputs)
Elevator stick
Rudder stick
Right rudder / elevator
Left rudder / elevator
Rudder
Elevator
Elevator
Rudder
Rudder
Elevator
Example: V-tail mixer
33110_mx10_HoTT_1_DE.indd Druckbogen 101 von 104 - Seiten (108, 101)
33110_mx10_HoTT_1_DE.indd Druckbogen 101 von 104 - Seiten (108, 101)
21.10.2011 13:25:43
21.10.2011 13:25:43
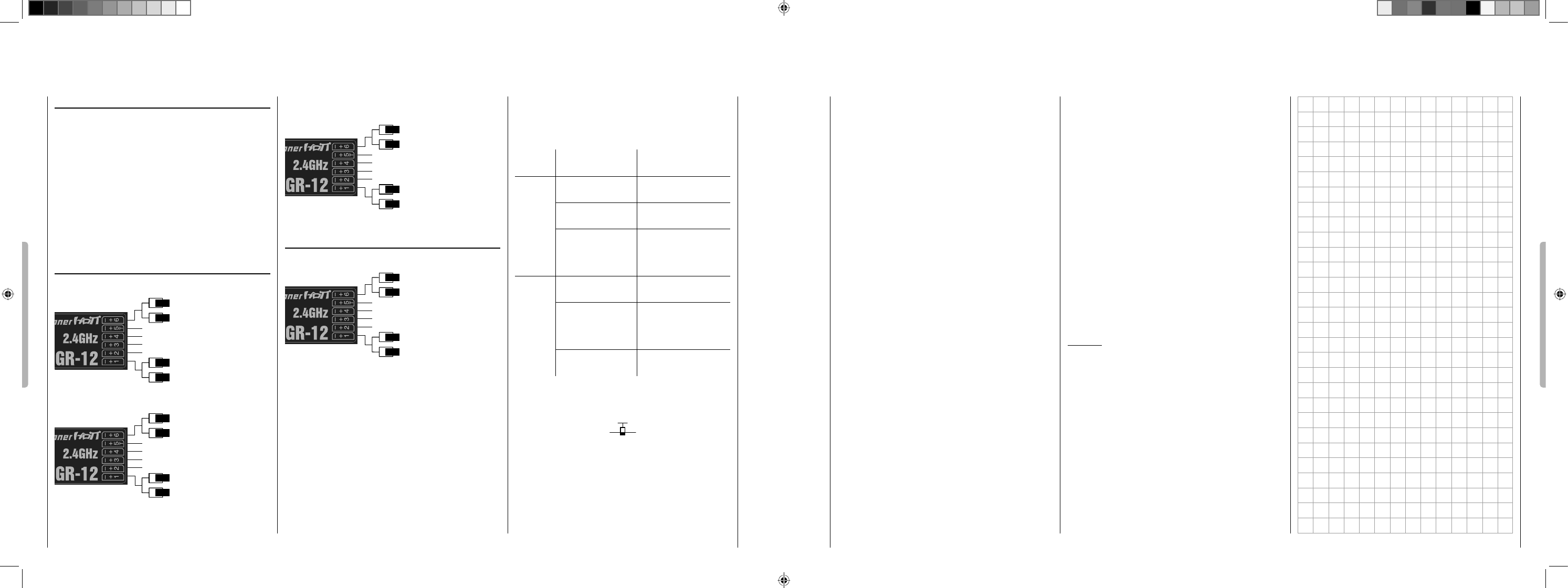
102 Fixed-wing model aircraft
Installation notes
The servos MUST be connected to the receiver
outputs in the following order:
Outputs not required are simply left vacant.
Please note the following points in particular:
If you are using only one aileron servo, receiver out-•
put 5 (right aileron) is left unused; it can also be used
for another purpose if you select “1 AIL” in the “Basic
settings” menu.
Please also read the information on the following •
pages.
Powered and unpowered fi xed-wing model aircraft,
with up to two ailerons …
… and “normal” tail type
Free, or auxiliary function
Rudder
Ailerons or left aileron
Elevator
Telemetry sensor or right aileron
Receiver power supply
Receiver power supply
Airbrakes - or throttle servo or
speed controller (electric model)
… and “V-tail” tail type
Free, or auxiliary function
Right rudder / elevator
Ailerons or left aileron
Left rudder / elevator
Telemetry sensor or right aileron
Receiver power supply
Receiver power supply
Airbrakes - or throttle servo or
speed controller (electric model)
... and “2 elevator servos” tail type - only with optio-
nal Smart-Box
2nd elevator
Rudder
Ailerons or left aileron
1st elevator
Telemetry sensor or right aileron
Receiver power supply
Receiver power supply
Airbrakes - or throttle servo or
speed controller (electric model)
Powered and unpowered delta / fl ying wing models
…
… with two elevon and two elevator servos
Left flap (aileron) / elevator
Free or rudder
Left elevon (aileron / elevator)
Right elevon (aileron / elevator)
Right flap (aileron) / elevator
Receiver power supply
Receiver power supply
Airbrakes - or throttle servo or
speed controller (electric model)
As there are several possible combinations of servo
orientation and control surface linkage, you may fi nd that
the direction of rotation of one or more servos is incor-
rect. Use the following table to solve the problem.
Model
type
Servo rotating in
wrong direction Remedy
V-tail Rudder and elevator
reversed
Reverse servos 3 + 4 in
the “servo set.” menu
Rudder correct,
elevator reversed
Swap over servos 3 + 4
at the receiver
Elevator correct,
rudder reversed
Reverse servos 3 + 4 in
the “servo set.” menu,
AND swap over at the
receiver
Delta,
fl ying
wing
Elevator and ailerons
reversed
Reverse servos 2 + 3 in
the “servo set.” menu
Elevator correct,
ailerons reversed
Reverse servos 2 + 3 in
the “servo set.” menu,
AND swap over at the
receiver
Ailerons correct,
elevator reversed
Swap over servos 2 + 3
at the receiver
All menus which are relevant to fi xed-wing models are
marked with an “aeroplane” symbol in the “Program
descriptions”:
This means that you can easily skip irrelevant menus
when programming a fi xed-wing model aircraft.
107
Program description: base settings - fi xed-wing model
recommend that you ask a friend to help with range-
checking.
Install the receiver in the model as required, preferab-1.
ly after completing the binding process with the trans-
mitter.
Switch the radio control system on and wait until the 2.
green LED on the receiver glows. Now you can obser-
ve the servo movements.
Place the model on a fl at surface (paving, close-mown 3.
grass or earth), with the receiver aerials at least
15 cm above the ground. This means that you may
have to place the model on a raised object for the pe-
riod of the check.
Hold the transmitter at hip-height, and away from your 4.
body. However, do not point the aerial straight at the
model; instead rotate and / or angle the tip of the aeri-
al so that it is vertical while you carry out the check.
Make sure that the transmitter in the „normal“ mode 5.
- mode switch to the rear. Now press the BIND-but-
ton for about 5 s, until the transmitter starts to beep
permanently. Disengage the BIND-button again. Note
when using multiple receivers for each model: the
range test only works with the receiver which trans-
mits the telemetry signal - that is the last bound re-
ceiver.
When you start the range-check, the transmitter’s 6.
output power is signifi cantly reduced, at the same
time a permament beep sounds. When the 99 se-
conds of the range-check period have elapsed, the
transmitter switches back to full power, and the beep
sound stops. Note: you can stop the range test at
any time by pressing again the BIND button.
Within this period walk away from the model, moving 7.
the sticks all the while. If at any point within a distance
of about fi fty metres you notice a break in the connec-
tion, attempt to reproduce it.
If the model is fi tted with a motor, switch it on in order 8.
to check the system’s interference rejection.
Walk further away from the model until you no longer 9.
have full control over it.
At this point wait until the test period has elapsed, with 10.
the model still switched on and ready for use. When
the range-check period is over, the model should re-
spond again to control commands. It this is not 100%
the case, do not use the system. Contact your nearest
Service Centre of Graupner GmbH & Co. KG.
Carry out the range-check before every fl ight, and si-11.
mulate all the servo movements which are likely to oc-
cur in a typical fl ight. To ensure safe operation of the
model, the range must always be at least fi fty metres
on the ground.
Caution:
Never initiate a range-check when you are actually
operating a model!
33110_mx10_HoTT_1_DE.indd Druckbogen 102 von 104 - Seiten (102, 107)
33110_mx10_HoTT_1_DE.indd Druckbogen 102 von 104 - Seiten (102, 107)
21.10.2011 13:25:44
21.10.2011 13:25:44
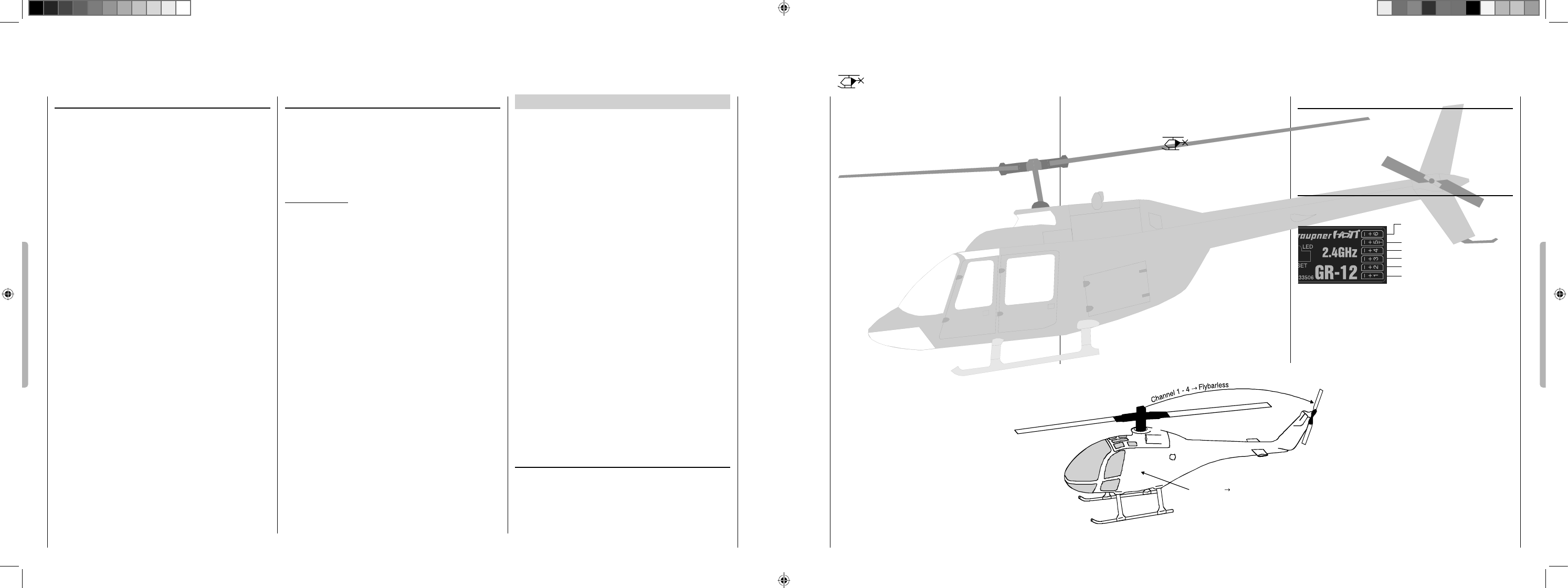
106 Program description: base settings - fi xed-wing model
Receiver output
For maximum fl exibility in terms of receiver socket
assignment, the optional Smart-Box provides the means
to swap over the servo outputs 1 to max. 6 - „channel
mapping“; see also chapter „telemetry“ on page 113.
With the Channel mapping function of the Smart-Box
the six control functions of the mx-10 HoTT trans-
mitter can be shared out between several receivers if
necessary, or alternatively several receiver outputs can
be assigned to the same control function; for example,
you may wish to be able to operate each aileron with
two servos, or to control an oversized rudder using two
coupled servos instead of a single one.
rx bind
Graupner HoTT receivers have to be “instructed” to
communicate exclusively with a particular model (i. e.
model memory) of a Graupner HoTT transmitter. This
process is known as “binding”, and is only necessary
once for each new combination of receiver and model. It
can be repeated at any time.
Important note:
When carrying out the binding procedure, please
ensure that the transmitter aerial is always an
adequate distance from the receiver aerials: keeping
the aerials about 1 m apart is safe in this respect.
Otherwise you risk a failed connection to the down-
link channel, and consequent malfunctions.
“Binding” multiple receivers to one model
If necessary, it is possible to bind more than one recei-
ver to a single model. This is accomplished by initially
binding the receivers individually, as described in the
next section. When operating the system, please note
that only the receiver which was bound last will
establish a telemetry link to the transmitter. For this
reason all telemetry sensors installed in the model must
be connected to this receiver, since only the last bound
receiver is able to transmit their data via the down-link
channel. The second, and all other receivers, run in
parallel to the receiver last bound to the transmitter, but
completely independently of it; they operate in Slave
mode with the down-link channel switched off.
If a receiver is switched ON which does not transmit te-
lemetry, the Status-LED changes from orange to green.
“Binding” transmitter and receiver
Note: The mx-10 HoTT can be bound in the mode „nor-
mal“ only. Make sure before you start the binding pro-
cess, that the transmitter is programmed in this mode.
See page 88 for mode setting.
Turn the transmitter ON and then power up your recei-
ver: At the receiver, the green LED flashes once briefly,
and then goes out.
The LED on the transmitter lights up green to show that
no bound receiver is connected.
Press and hold the SET button on the receiver until the
green LED starts to flash.
Briefly press the BIND-button of the transmitter to initiate
the so-called binding process.
If the receiver LED glows a constant green within about
ten seconds, then the binding process has been com-
pleted successfully; you can now release the receiver’s
SET button.
Your model / receiver combination is now ready for use.
In parallel with this the Status-LED switches from green
to orange:
Conversely, if the green LED on the receiver fl ashes
for longer than about ten seconds or the transmitters
Status-LED remains green, then the binding process
has failed. If this should occur, alter the relative position
of the aerials, and repeat the whole procedure.
range test
The integral range-check reduces the transmitter’s out-
put power in such a way that you can test the system’s
operation at a distance of up to about fi fty metres.
Carry out the range-check of the Graupner HoTT
system in accordance with the following instructions. We
103
Model helicopters
Model helicopters
The continued development of model helicopters and
helicopter components, such as gyros, speed governors,
rotor blades etc., has led to the current position where
helicopters are capable of sophisticated 3-D aerobatics.
Model helicopters can be operated with the mx-10
HoTT only with stabilizer-free systems „fl ybarless“, for
example V-Stabi or Microbeast be operated. This system
mixes it all for the swashplate and tail rotor necessary
servos.
The motor is controlled by switching channel 5.
For the connection of the servos for your fl ybarless
system refer to the related manual.
If the telemetry function of the receiver is used, the
motor control must be switched to channel 6 using the
optional Smart Box (see page 117 channel mapping) in
order to connect the telemetry sensors on channel 5.
Installation notes
The servos will be connected to the receiver outputs
in the order shown on this page:
Outputs not required are simply left vacant.
Please note the additional information of your
fl ybarless system.
Receiver assignment for model helicopters …
… with fl ybarless system
Tail rotor servo (Gyro system)
Roll servo
Pitch servo
Telemetry sensor or throttle
free or throttle (Channel Mapping
with optional Smart-Box)
Pitch- or Roll-2
servo
All menus which are relevant to model helicopters are
marked with a “helicopter” symbol in the “Program
descriptions”:
This means that you can easily skip irrelevant menus
when programming a model helicopter.
Channel 5 Motor
33110_mx10_HoTT_1_DE.indd Druckbogen 103 von 104 - Seiten (106, 103)
33110_mx10_HoTT_1_DE.indd Druckbogen 103 von 104 - Seiten (106, 103)
21.10.2011 13:25:44
21.10.2011 13:25:44
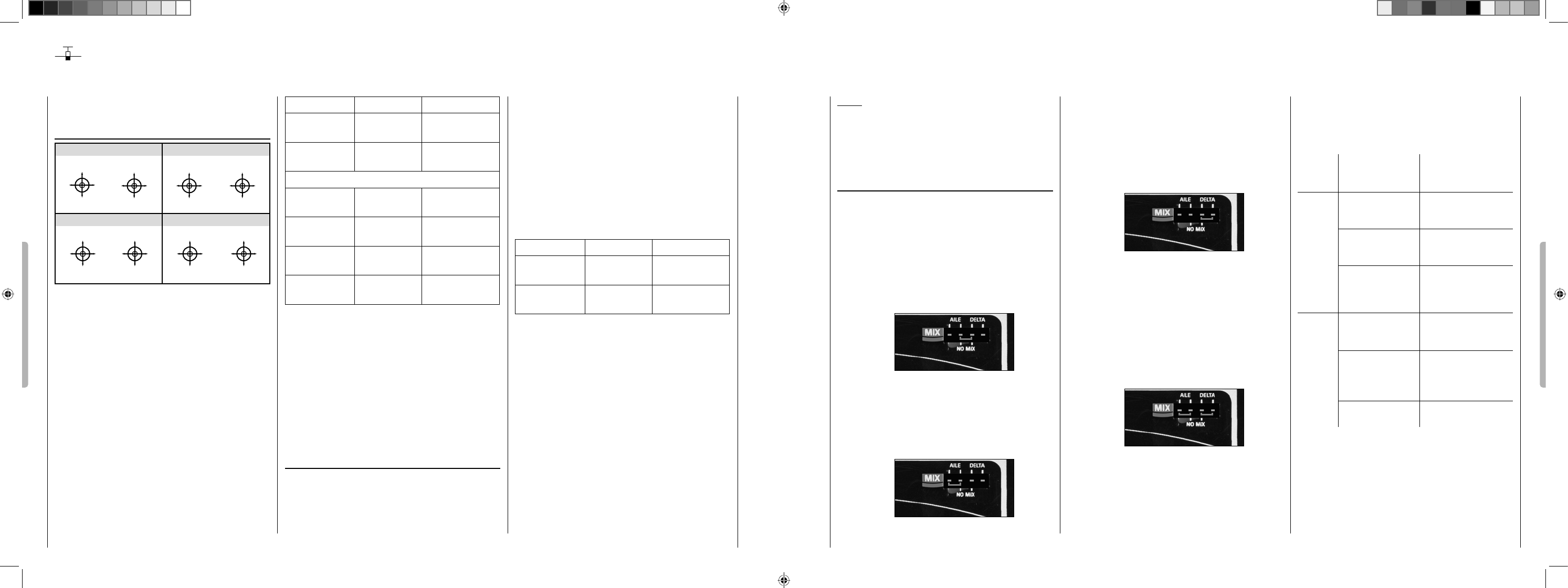
104 Program description: base settings - fi xed-wing model
“MODE 2” (Throttle at left stick)
“MODE 3” (Throttle at right stick) “MODE 4” (Throttle at left stick)
“MODE 1” (Throttle at right stick)
elev. down
elev. up
left rudder
right rudder
full throttle
idle
left aileron
right aileron
full throttle
left rudder
right rudder
idle
elev. down
elev. up
left aileron
right aileron
elev. down
elev. up
left aileron
right aileron
Motor Vollgas
idle
left rudder
right rudder
full throttle
idle
left aileron
right aileron
elev. down
elev. up
left rudder
right rudder
Base settings
Basic model-specifi c settings for fi xed-wing model aircraft
Before you start programming specifi c parameters,
some basic settings must be entered.
Stick mode
Basically there are four possible ways of arranging the
principal control functions of a fi xed-wing model on the
two dual-axis sticks: the primary functions are aileron,
elevator, rudder and throttle (or airbrakes). Which of
these options you select depends on your individual
preferences and fl ying style.
To select the stick mode, fi rst select the transmitter
mode „ normal“ with the mode switch. Turn the transmit-
ter OFF and insert the supplied programming plug into
the DATA socket on the back of the transmitter. Turn ON
the transmitter: you can now call up the desired stick
mode by cycling through the modes with a brief press of
the BIND-button:
Buzzer LED Description
transmitter
buzzers 1x
orange LED on Country setting
Universal/Europe
transmitter buz-
zers 2 times
orange LED
fl ashes
County setting
France
The country setting is described in detail below.
transmitter buz-
zers 3 times
orange LED on »MODE 1«
transmitter buz-
zers 4 times
orange LED on »MODE 2«
transmitter buz-
zers 5 times
orange LED on »MODE 3«
transmitter buz-
zers 6 times
orange LED on »MODE 4«
To choose a mode, hold the BIND-button pressed for
approx. three seconds. When you release the button, the
transmitter should emit an audible signal and the buzzer
sound stops. Switch OFF the transmitter and remove
the programming plug.
Never use the remote control with programming
connector plugged in!
Later, to check the stick mode which is programmed,
watch out for the Status-LED on the transmitter.
Stick mode
After you have set the stick mode, the country setting
must be done in a second step.
The Country setting is present in order to cater for vari-
ous directives (FCC, ETSI, IC etc.). The HoTT 2.4 radio
system features a restricted frequency band for France.
If you wish to use the RC system in France, the country
setting on the transmitter must be set to “France” mode,
as described. It is essential not to use the Universal/
EUROPE mode.
To select a Country setting, you must fi rst switch the
transmitter off, then insert the supplied programming
plug in the DATA socket on the back and the Jumper
in the position „NO MIX“ on the front of the transmitter.
Switch the transmitter on: you can now toggle between
the “GENERAL” and “France” settings by briefl y pressing
the BIND-button:
Buzzer LED Description
transmitter
buzzers 1x
orange LED on Country setting
Universal/Europe
transmitter buz-
zers 2 times
orange LED
fl ashes
County setting
France
To choose a country, hold the BIND-button pressed for
approx. three seconds. When you release the button, the
transmitter should emit an audible signal and the buzzer
sound stops. Switch OFF the transmitter and remove
the programming plug.
Never use the remote control with programming
connector plugged in!
Later, to check the country setting which is programmed,
watch out for the Status-LED on the transmitter.
105
Program description: base settings - fi xed-wing model
„Delta/FW“: The aileron and elevator rudder is
controlled by one servo per wing half,
connected on channel 2 and 3. The cou-
pling function for the aileron and elevator
control is performed automatically by the
transmitter mixer.
The jumper connects the two right pins
„DELTA“.
„V-Tail“: The elevator and rudder functions are
operated by two control surfaces set in a
V-shape, each controlled by a separate
servo, connected to channel 2 and 3. The
two-way coupling function for the rudder
and elevator control systems is automati-
cally carried out by the transmitter soft-
ware.
Two jumpers connect the two left „AILE“
and two right „DELTA“ pins.
Notes:
During the programming process it is important •
to ensure that any internal-combustion engine or
electric motor cannot start running accidentally.
The safe option is always to disconnect the fuel
supply or the fl ight battery.
Tail type
The tail confi guration is chosen with the supplied jumper
in the contact strip „MIX“ on the front of the transmitter.
Select the positioning of the jumpers to match your
model type
„normal“: The elevator and rudder is operated by
only one servo.
The jumper connects the two middle pins
„NO MIX“.
„2 Aileron“: This
option is for models with 1 or 2 ailerons.
The at the channel 5 connected servo
runs parallel to the servo on channel 2
The Aileron trim affects both servos.
The jumper connects the two left pins
„AILE“.
Due to the different installation of the servos and push-
rods the initially servo direction of certain servos may
be wrong. The following table provides guidance for
remedial action.
Model
type
Servo with
wrong
rotating direction
Solution
V-Tail Rudder and
elevator wrong
direction
servo reverse for
channel 3 + 4 in the bar
„Servo reverse“
Rudder correct,
elevator wrong
direction
change servo 3 + 4 at
the receiver
Elevator correct,
rudder wrong
direction
servo reverse for
channel 3 + 4 in the bar
„Servo reverse“ AND
change at the receiver
Delta,
Flying
wing
Elevator and Ail
wrong direction
servo reverse for
channel 2 + 3 in the bar
„Servo reverse“
Elevator correct, Ail
wrong direction
servo reverse for
channel 2 + 3 in the bar
„Servo reverse“ AND
change at the receiver
Ail correct, Elevator
wrong direction
change servo 2 + 3 at
the receiver
33110_mx10_HoTT_1_DE.indd Druckbogen 104 von 104 - Seiten (104, 105)
33110_mx10_HoTT_1_DE.indd Druckbogen 104 von 104 - Seiten (104, 105)
21.10.2011 13:25:45
21.10.2011 13:25:45