Hamilton Sundstrand Company Gas Fuel Metering Valve Hfg2 0 Users Manual This Provides Installation, Maintenance, And Operating Instructions For The ACT2000 All Electric Actuator
HFG2.0 to the manual cbe3472a-660e-488b-af4a-1cc670257c04
2015-02-09
: Hamilton-Sundstrand-Company Hamilton-Sundstrand-Company-Gas-Fuel-Metering-Valve-Hfg2-0-Users-Manual-563386 hamilton-sundstrand-company-gas-fuel-metering-valve-hfg2-0-users-manual-563386 hamilton-sundstrand-company pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 70
- Purpose of This Guide
- Product Identification
- What the User Should Know
- Related Publications
- 1 INSTALLING THE HFG2.0
- Power Input
- 2 UNDERSTANDING THE HFG2.0
- 3 OPERATING THE HFG2.0
- 4 MAINTAINING THE HFG2.0
- 5 TROUBLESHOOTING
User Manual
HFG2.0 Gas Fuel Metering Valve
SD-6009 Rev. 6
August 2008
PRECISION ENGINE CONTROLS CORPORATION
This manual provides installation, maintenance, and operating instructions for the HFG2.0
Gas Fuel Metering Valve.
Every attempt has been made to provide sufficient information in this manual for the
proper operation and preventive maintenance of the valve. Read this manual in its
entirety to fully understand the system.
Operating the HFG2.0 Gas Fuel Metering Valve in accordance with instructions herein
ensures long term and reliable operation.
If you need additional information, please contact:
Precision Engine Controls Corporation
11661 Sorrento Valley Road
San Diego, California 92121
(858) 792-3217 • (800) 200-4404
Fax: (858) 792-3200
E-mail: peccntl@precisioneng.com
© 2006 PRECISION ENGINE CONTROLS CORPORATION. ALL RIGHTS RESERVED
TABLE OF CONTENTS
Purpose of This Guide ................................................................................................................................... iii
Product Identification...................................................................................................................................... iii
What the User Should Know ......................................................................................................................... iv
Related Publications....................................................................................................................................... iv
1 INSTALLING THE HFG2.0 ........................................................................................................................ 1
1.1 Before Beginning..................................................................................................................................... 1
1.2 General Specification Summary............................................................................................................. 3
1.3 Mechanical Installation............................................................................................................................ 4
1.4 Electrical Connections............................................................................................................................. 14
2 UNDERSTANDING THE HFG2.0 ............................................................................................................. 25
2.1 System Description ................................................................................................................................. 25
2.2 Electrical Description............................................................................................................................... 26
2.3 Mechanical Description........................................................................................................................... 30
2.4 Identification Plate ................................................................................................................................... 36
3 OPERATING THE HFG2.0........................................................................................................................ 39
3.1 Powering Up ............................................................................................................................................ 39
3.2 Finding Home Position............................................................................................................................ 39
3.3 Holding Motor Current State................................................................................................................... 40
3.4 Moving to Stop Position .......................................................................................................................... 42
3.5 Controlling Motion ................................................................................................................................... 42
3.6 Resetting the Actuator............................................................................................................................. 44
3.7 Monitoring System Health....................................................................................................................... 45
3.8 Changing Set-Up Parameters ................................................................................................................ 50
4 MAINTAINING THE HFG2.0 ..................................................................................................................... 53
4.1 Refurbishment ......................................................................................................................................... 53
5 TROUBLESHOOTING............................................................................................................................... 55
5.1 FAULT File............................................................................................................................................... 59
APPENDIX A: DECOMMISSIONING & DISPOSAL ...................................................................................... 61
APPENDIX B: GLOSSARY ............................................................................................................................. 63
LIST OF FIGURES
Figure 1-1. Typical HFG2.0 Gas Fuel System Installation ................................................. 5
Figure 1-2. Alternate HFG2.0 Gas Fuel System Installation ..............................................5
Figure 1-3. HFG2.0 Dimensions, 3-Piece Housing ............................................................ 8
Figure 1-4. HFG2.0 Dimensions, 1-Piece Housing ............................................................ 9
Figure 1-5. HFG2.0 Mounting Orientations .......................................................................10
Figure 1-6. HFG2.0 Mounting Provisions, 3-Piece Housing (Standard Mounting) .........11
Figure 1-7. HFG2.0 Mounting Provisions, 1-Piece Housing (Standard Mounting) .........12
Figure 1-8. HFG2.0 Mounting Provisions, 1-Piece Housing (Reversed Mounting) ........13
Figure 1-9: HFG2.0 System Power Wiring Diagram ........................................................15
Figure 1-10. Typical Power Connection With Power Supply ...........................................15
INSTALLING THE HFG2.0 i
ii HFG2.0 USER GUIDE
Figure 1-11. Typical Power Connection With Battery.......................................................15
Figure 1-12: HFG2.0 System Signal Wiring Diagram......................................................19
Figure 1-13. Typical Analog Input Connection..................................................................20
Figure 1-14. Typical Analog Output Connection ...............................................................20
Figure 1-15. Typical Discrete Input Command Connection .............................................20
Figure 1-16. Typical Discrete Output Alarm Connections ................................................21
Figure 1-17. Typical RS232 Serial Interface Connection .................................................21
Figure 2-1. HFG2.0 Electronics System Block Diagram ..................................................28
Figure 2-2. HFG2.0 Cut-Away View – Actuator Main Housing Assembly.......................34
Figure 2-3. HFG2.0 Cut-Away View (Partial) ....................................................................35
Figure 2-4. Typical Identification Plate...............................................................................36
Figure 2-5. Typical Refurbishment Plate ...........................................................................37
Figure 3-1. HFG2.0 Basic Operation Flow Chart..............................................................41
Figure 3-2. HFG2.0 Actuator Position vs. DEMAND ........................................................43
Figure 3-3. Dead Band of Actuator, Position vs. DEMAND Curve ..................................44
LIST OF TABLES
Table 1-1. Wire List for HFG2.0 Power Harness ..............................................................14
Table 1-2. Power Supply Requirements............................................................................16
Table 1-3. Wire Size for HFG2.0 Power Harness.............................................................17
Table 1-4. Wire List for HFG2.0 System Signal Harness .................................................18
Table 1-5. Computer COM Port Pin Outs .........................................................................22
Table 1-6. Wire Size for HFG2.0 Signal Harness .............................................................23
Table 3-1. Default Configuration For FAULT Alarm ..................................................47
Table 3-2. Default Configuration For OVERTEMP Alarm .........................................47
Table 3-3. Fault Configuration For FAULT Alarm ...........................................48
Table 3-4. Fault Configuration For OVERTEMP Alarm ..................................49
Table 3-5. Typical HFG2.0 Setup Parameters With Default Values................................51
Table 5-1. Initial Installation Troubleshooting Chart..........................................................57
Table 5-2. HFG2.0 In-Service Troubleshooting Chart......................................................57
Table 5-3. HFG2.0 Electrical Continuity Troubleshooting Chart ......................................58
Purpose of This Guide
This publication is designed to help the user install, operate, maintain and
troubleshoot the HFG2.0 Gas Fuel Metering Valve.
Product Identification
Most of the information in this manual is applicable to all generations of
the product. Where unique information applies to a specific generation,
one of the following symbols will be shown to indicate as such:
Fourth generation (isolated RS-232)
P/Ns: 5002605-XXX, 5002610-XXX, 5002447-XXX or:
Any Remanufactured Part with Config 116 and above
Configuration: 116 and above
Firmware version: 3.00 and above
Third generation (isolated RS-232)
P/Ns: 5002605-XXX, 5002610-XXX, 5002447-XXX or:
Any Remanufactured Part with Config 109 and DP 1028
Any Remanufactured Part with Config 110 and above
Configuration: 110 and above
Firmware version: 2.02 and above
Second generation (non-isolated RS-232)
P/Ns: 5002605-XXX, 5002610-XXX, 5002447-XXX
Configuration: between 105 and 108
Firmware versions: 2.0, 2.1
First generation (non-isolated RS-232)
P/Ns: 50024XX-XXX
Configuration: earlier than 105
Firmware versions: 1.00, 1.01
INSTALLING THE HFG2.0 iii

iv HFG2.0 USER GUIDE
What the User Should Know
To install, operate and troubleshoot the HFG2.0, it is necessary for the
user to have a fundamental understanding of:
• Electronics concepts, such as voltage, current, and switches
• Mechanical motion control concepts, such as inertia, torque,
velocity, distance, force
Related Publications
• ActWiz Software Operations Manual (p/n SD-6010)
1 INSTALLING THE HFG2.0
1.1 Before Beginning
Inspection
The HFG2.0 should be inspected immediately after unpacking. Check for
dings or dents or any other obvious signs of damage. Remove the
protective caps from the connectors and check for any bent pins or
damage to the threads of the connectors. Examine the wires of the signal
and power harnesses for any signs of damage to the wire insulation.
In the event that any damage is detected, contact PECC for instructions
about how to proceed.
Note: Retain the actuator’s original shipping container. In the
event of future transportation requirements, this container
will minimize any damage during shipment.
Recommended Installation Process
Users must determine if it is best to couple the HFG2.0 to the load before
or after the installation has been tested.
• Review the general specifications
• Mechanically connect the clevis of the HFG2.0
• Mechanically mount the valve body of the HFG2.0
• Mechanically connect the input pipe of the HFG2.0
• Mechanically connect the output pipe of the HFG2.0
• Connect Case Ground of the HFG2.0 to System Ground
• Connect the 4-wire Power Harness of the HFG2.0 to the user’s
power supply or battery
• Connect the 17-wire Signal Harness of the HFG2.0 to the user’s
controller
• Test the installation
INSTALLING THE HFG2.0 1
2 HFG2.0 USER GUIDE
Electrical Noise Guidelines
PECC has taken the following measures to reduce electrical noise with
the HFG2.0:
• High-voltage wires are routed separately from low-level signals
through the use of separate power and signal harnesses.
An additional measure to reduce electrical noise is to:
• Ensure that the HFG2.0 is properly grounded, as per Section 1.4
of this manual.
Environmental Considerations
The HFG2.0 operates satisfactorily with ambient air temperature of -40 °C
(-40 °F) to +93 °C (+200 °F), and is designed as an explosion-proof
assembly. The HFG2.0 enclosure is Canadian Standards Association
(CSA) Type 3, European IP65.
CAUTION
Solvent/water may enter the electronics area during a high-pressure
wash, which can cause decreased performance or failure of the unit.
1.2 General Specification Summary
PARAMETER VALUE
Power Input
Voltage Range 80-160 VDC; 120 VDC nominal
Maximum Current 20 A
Typical Transient Current +20A < 60ms; +10A < 120ms; -5A < 100ms
Typical Continuous Current < 1A
Inputs and Outputs
Discrete Inputs
RUN and RESET commands
ON Voltage: 12 – 32 VDC,
+24 VDC nominal @ 6.5 mA
OFF Voltage: 1.0 VDC, maximum
Discrete Outputs
FAULT & OVERTEMP alarms
OFF Voltage: 32 VDC maximum @ 150 µA typical
Effective ON Resistance 1.1 kΏ, nominal
@ ≥ 1.5 VDC:
Analog Input
DEMAND command signal
Current: 4 to 20 mA; 25 mA Maximum
Voltage: 5 VDC Maximum
Internal Impedance: 200 Ώ
Analog Outputs
POSITION & MTR CURRENT feedback
Current: 4 to 20 mA
External Load Resistance: 300 Ώ, Maximum
Maximum Common Mode Voltage ±200 VDC User I/O to 120 VDC Return (less serial interface)
Performance All performance values are based on use with HFG2.0 in default configuration.
Any changes to HFG2.0 firmware settings to change stroke profile will alter
performance values.
Maximum Operating Pressure 500 psig
Proof Pressure 2000 psig
Minimum Controllable Flow (Natural Gas) 15 pph (configuration dependent)
Maximum Controllable Flow 30,000 pph (configuration dependent)
Step Response (10% to 90%) 100 ms
Flow Accuracy ± 5% of flow point, typical
Mean Time Before Unscheduled Removal 30,000 Hours
Life Cycles 32,000 Minimum
Environmental
Temperature, Operating Ambient: -40° C (-40° F) to +93° C (+200° F)
Temperature, Operating Fuel: -40° C (-40° F) to +125° C (+257° F)
Temperature, Storage -40° C (-40° F) to +125° C (+257° F)
Environmental Rating Rated to CSA Type 3 and European IP65
Sealed against dust, protected against water
EMC Meets EN 50081-2 and EN50082-2 for DC powered industrial equipment
Vibration Meets Mil-Std-810E, Category 4 (5 – 2000 Hz)
INSTALLING THE HFG2.0 3
4 HFG2.0 USER GUIDE
Certifications
North American Certifications CSA Class I, Div 1, Group B, C, D; T4
European Directive Compliance (CE Mark)
EEx d, IIB+H2; T4
97/23/EC Pressure Equipment Directive (PED)
94/9/EC Potentially Explosive Atmospheres (ATEX) 02ATEX6051X
98/37/EC Machinery Directive
89/336/EEC Electromagnetic Compatibility Directive (EMC)
Materials
Actuator Housing 6061-T6 Anodized Aluminum
Valve Housing 6061-T6 Anodized Aluminum
316 Stainless Steel (Optional)
Conduit Union Zinc Plated Steel
Seals Viton and Teflon
Connectors Aluminum
Dimensions 9.7 in x7.7 in x 25.4 in
Weight 100 lbs. Max (Aluminum Valve Housing, 3-piece)
85 lbs. Max (Aluminum Valve Housing, 1-piece)
190 lbs. Max (Stainless Steel Valve Housing, 3 piece)
1.3 Mechanical Installation
This section describes proper HFG2.0 installation. Ensure compliance
with the factory recommendations.
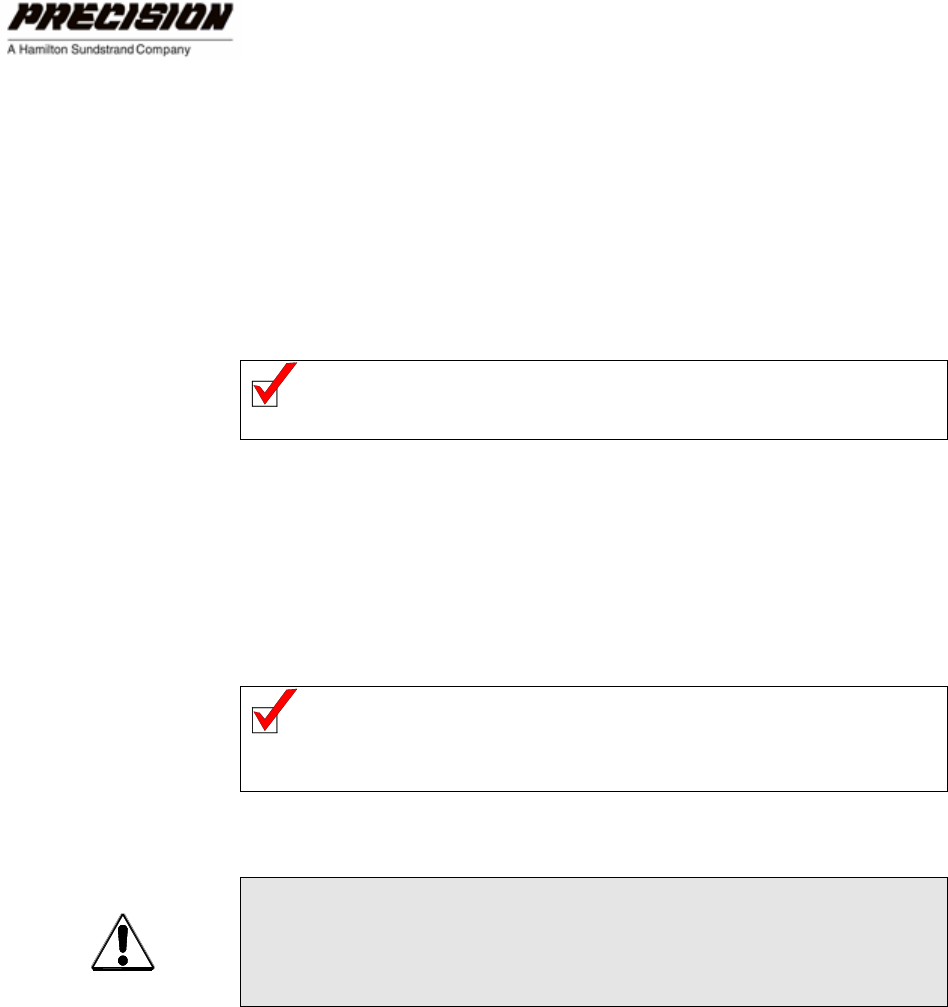
Typical Fuel System
The HFG2.0 installs as part of a gas fuel system as shown in Figure 1-1.
In this arrangement, the HFG2.0 is located downstream from two
normally closed gas shut-off valves.
An alternate arrangement is shown in Figure 1-2. In this installation, the
HFG2.0 is located between two normally closed gas shut-off valves.
Fuel Filtering
For efficient valve operation, filter the fuel through a 40-micron absolute
filter before it reaches the valve. This extends the time between routine
maintenance. Locate the fuel filter as close as possible to the valve
INLET.
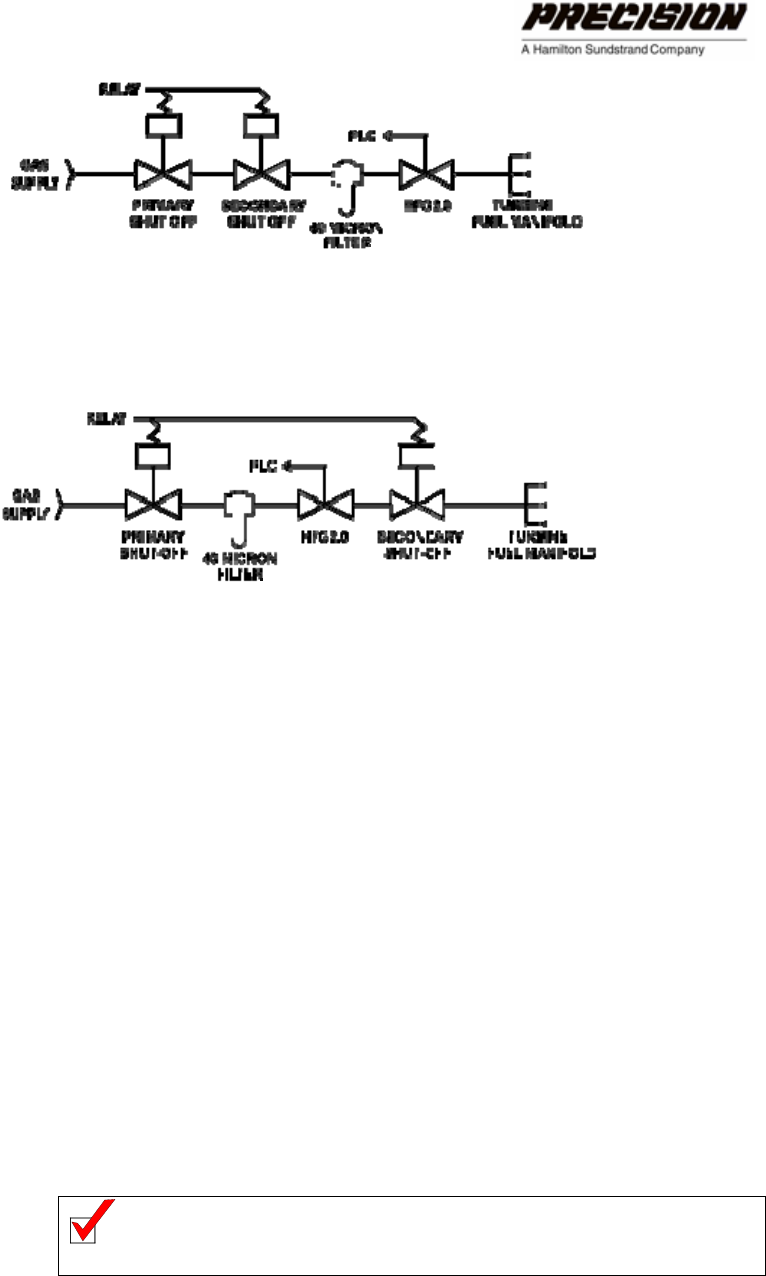
Figure 1-1. Typical HFG2.0 Gas Fuel System Installation
Figure 1-2. Alternate HFG2.0 Gas Fuel System Installation
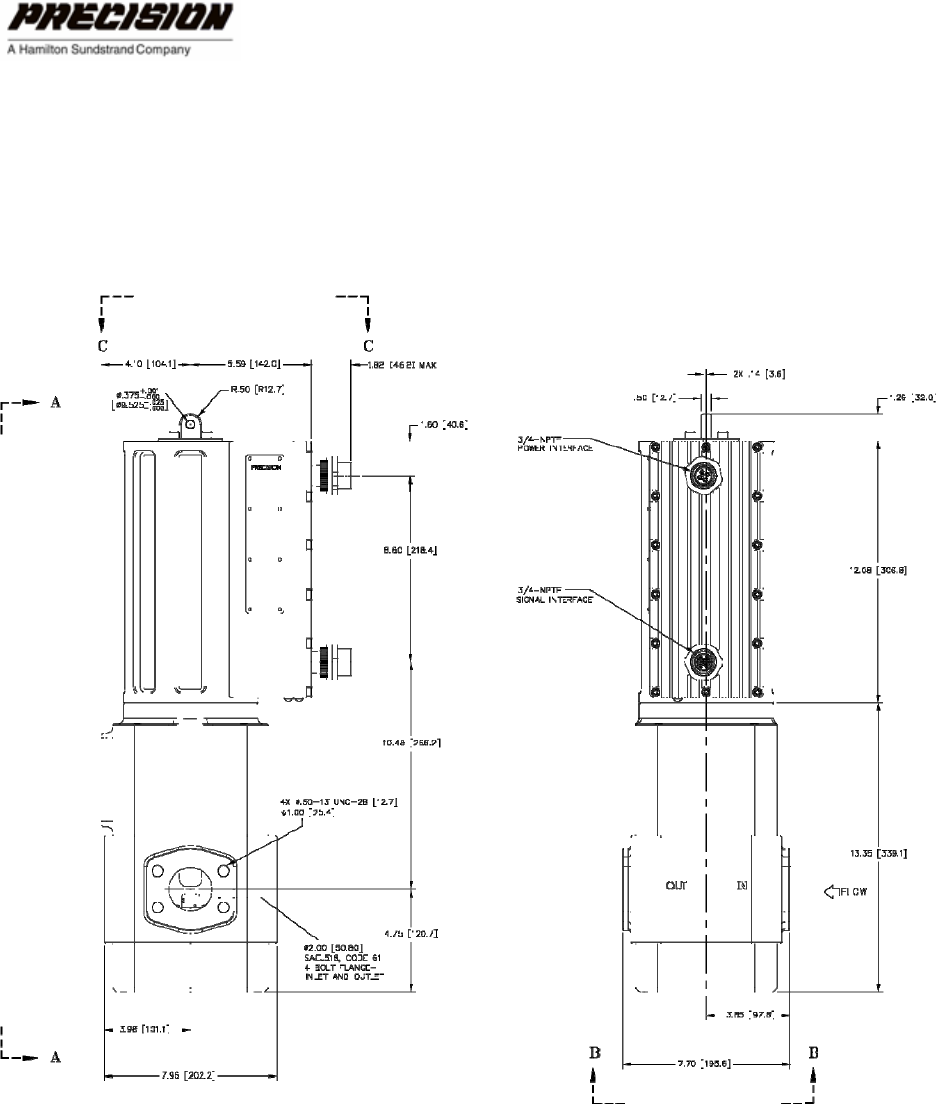
Dimensions
Figure 1-3 and Figure 1-4 show external dimensions for the 3-piece
housing and 1-piece housing versions of the HFG2.0, respectively.
Mounting Considerations
The HFG2.0 can be mounted directly to a gas turbine engine skid using
brackets provided by the engine manufacturer. The HFG2.0 can be
mounted with any directional orientation, whether horizontal, vertical, or at
an angle. The clevis must be supported if the HFG2.0 is mounted
horizontally.
Valve life can be maximized if the HFG2.0 is mounted with the vertical
orientation shown in Figure 1-3 or Figure 1-4, where the valve end is on
the bottom. The drain hole is most effective when mounted in this vertical
orientation.
Note: The one-piece housing version of the HFG2.0 does not
have a drain hole.
INSTALLING THE HFG2.0 5
6 HFG2.0 USER GUIDE
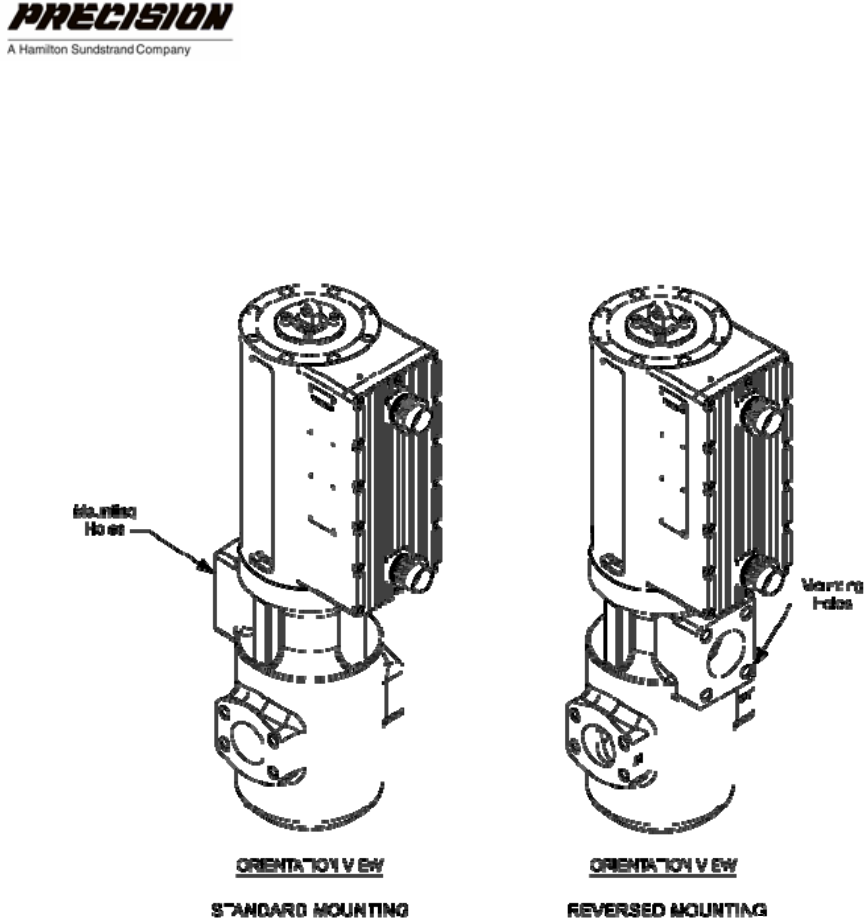
The HFG2.0 includes four (4) 0.50-24 UNC-2B mounting holes with
stainless steel heli-coil inserts for securing the valve body. The mounting
holes on the standard version of the HFG2.0 are located on the opposite
side from the electrical connectors. The mounting holes on the reversed
version of the HFG2.0 are located on the same side as the electrical
connectors (see Figure 1-5).
Figure 1-6 shows mounting provisions for the 3-piece housing version of
the HFG2.0. Figure 1-7 and Figure 1-8 show mounting provisions for the
1-piece housing version of the HFG2.0.
Note: Provide adequate clearance to the OUTLET port to facilitate
cleaning.
Lifting Considerations
The aluminum body HFG2.0 weighs approximately 100 lbs. The stainless
steel body HFG2.0 weighs approximately 190 lbs. PECC recommends
using the 0.375-inch diameter clevis to lift the valve, in conjunction with
the appropriate lifting equipment.
Note: The clevis exceeds the Factor of Safety (FOS) requirement
of 3, based on component yield strength, per ASME B30.20-
1999.
WARNING
Lifting Hazard – Do not attempt to hand-lift the actuator. Use
appropriate lifting equipment.
Connecting the Clevis
The clevis can be used to secure the actuator end of the HFG2.0. A high-
strength shoulder bolt (0.375” diameter) is recommended to fasten the
clevis to a user-provided mount bracket.
The clevis can be rotated to any orientation to support installation. Loosen
the four retaining screws and rotate to the desired angle. The screw
pattern can be indexed ± 45 degrees to provide additional adjustment.
When adjustments are complete, torque the four retaining screws to
117-138 in-lbs.
WARNING
Explosion Hazard – Do not remove the clevis. Removing the clevis
violates the warranty.
Care should also be taken when rotating the clevis or indexing the
screw pattern to avoid scratching the flame path or introducing
particulates to the assembly.
Pipe Connections
The standard pipe connection for the HFG2.0 is per SAE J518, -32
(2 inch), code 61. The valve bodies contain locking helical inserts. Contact
Precision Engine Controls for other connection options.
Note: To maintain flow control accuracy, ten-(10) pipe diameters
(15 inches) straight length minimum is recommended
upstream and downstream.
Flange Bolts
Precision Engine Controls Corporation recommends SAE Grade 5 or
better flange bolts. Torque to 650 – 800 in-lb.
CAUTION
Do not over-torque fittings. Over-torque may result in stripped
threads and/or helical insert damage.
Drain Plug
PECC recommends 60 – 65 in-lb of torque for the drain plug (see
Figure 1-6, View B-B).
Note: The one-piece housing version of the HFG2.0 does not
have a drain hole.
INSTALLING THE HFG2.0 7
8 HFG2.0 USER GUIDE
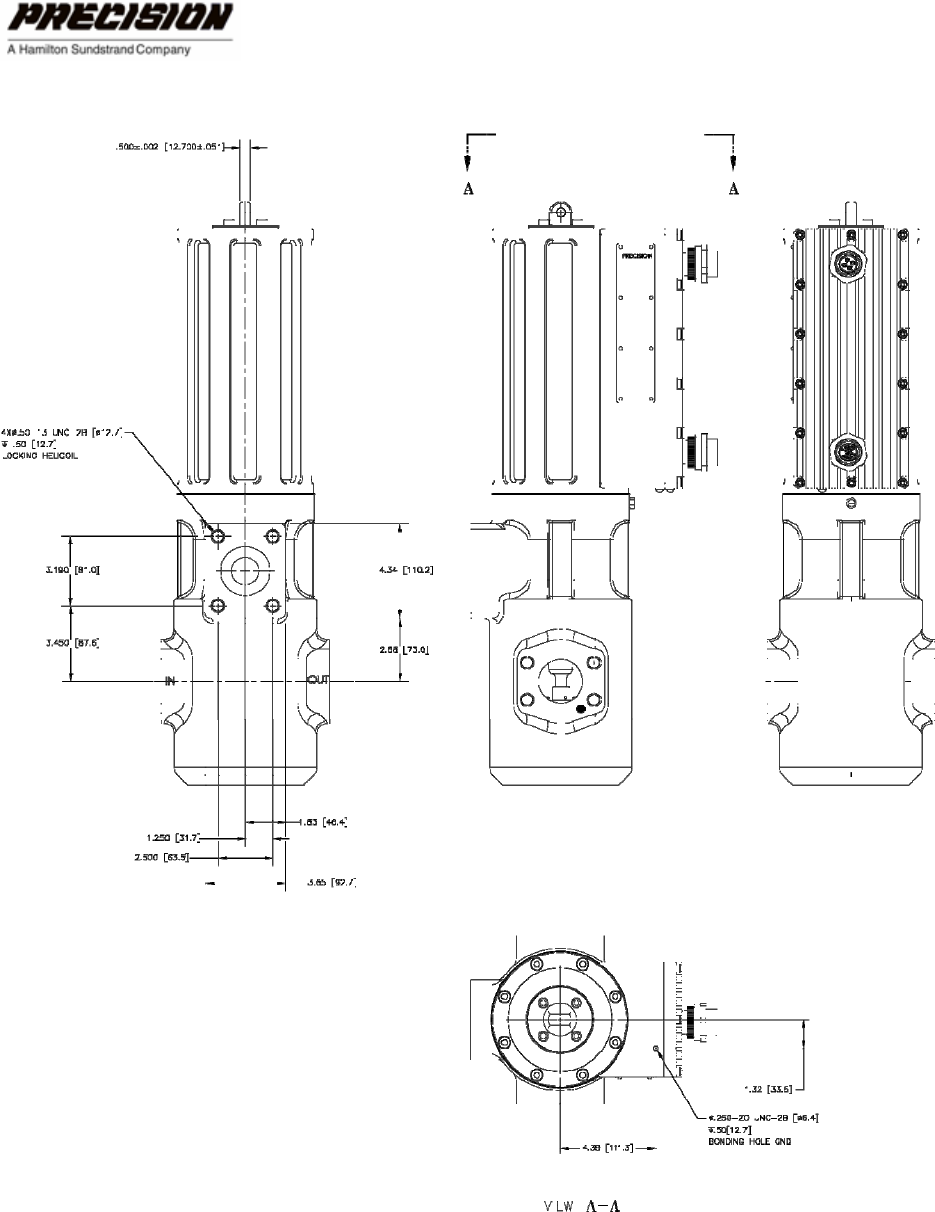
Vent Port
The gas leakage rate through the vent port is less than 200 cm3/hr (air or
N2 as test flow). The vent port features a 1/8-NPT fitting. See Figure 1-4.
Consult local installation codes to determine whether and how to connect
this port.
Figure 1-3. HFG2.0 Dimensions, 3-Piece Housing
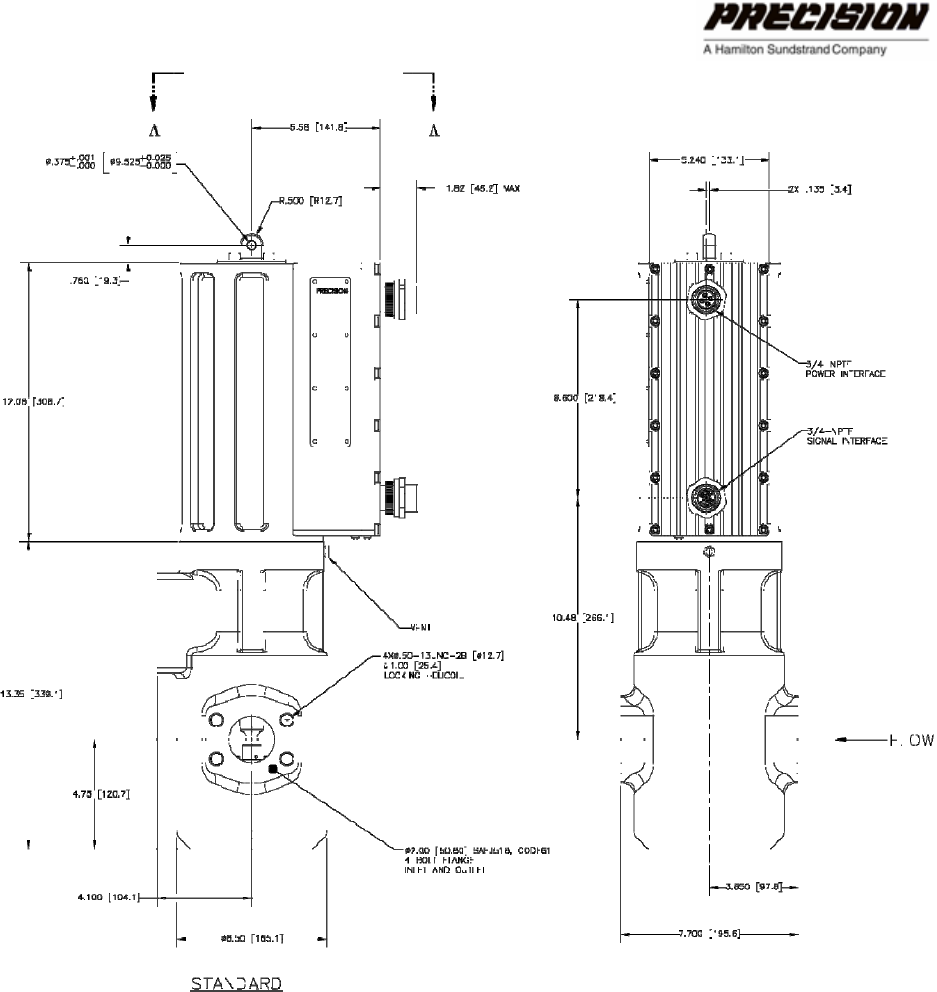
Figure 1-4. HFG2.0 Dimensions, 1-Piece Housing
INSTALLING THE HFG2.0 9
10 HFG2.0 USER GUIDE
Figure 1-5. HFG2.0 Mounting Orientations
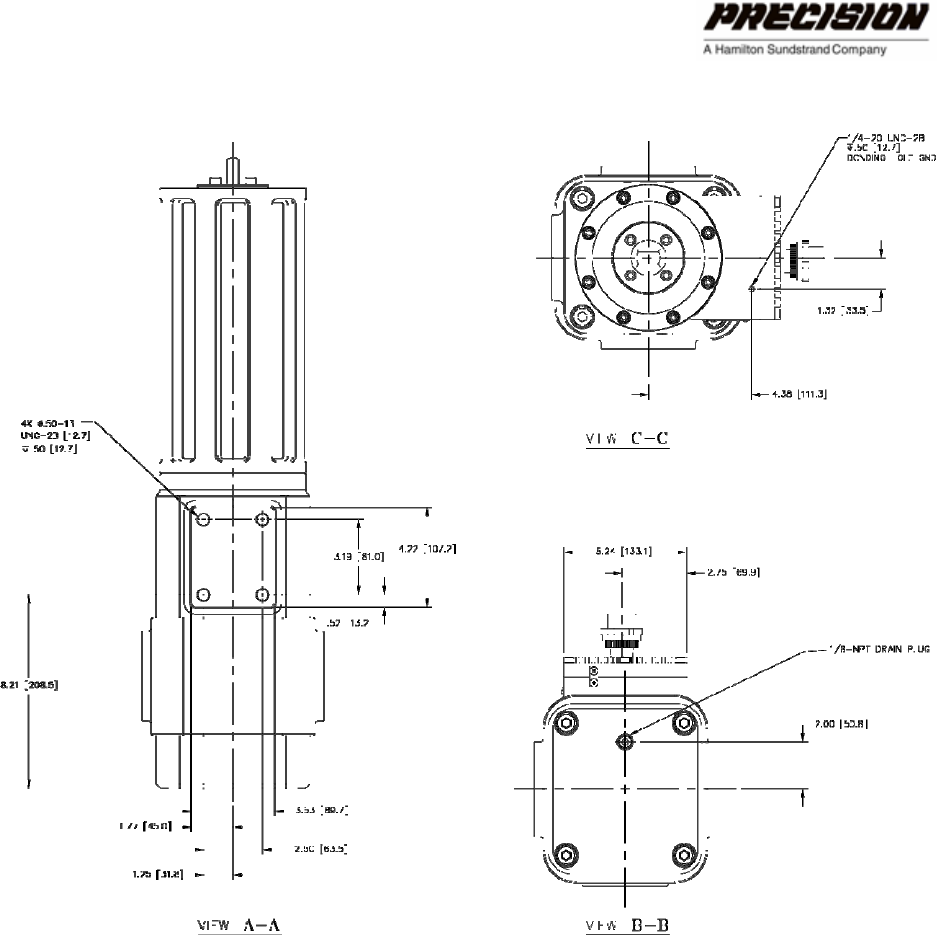
Figure 1-6. HFG2.0 Mounting Provisions, 3-Piece Housing
(Standard Mounting Orientation Shown)
INSTALLING THE HFG2.0 11
12 HFG2.0 USER GUIDE
Figure 1-7. HFG2.0 Mounting Provisions, 1-Piece Housing
(Standard Mounting Orientation Shown)
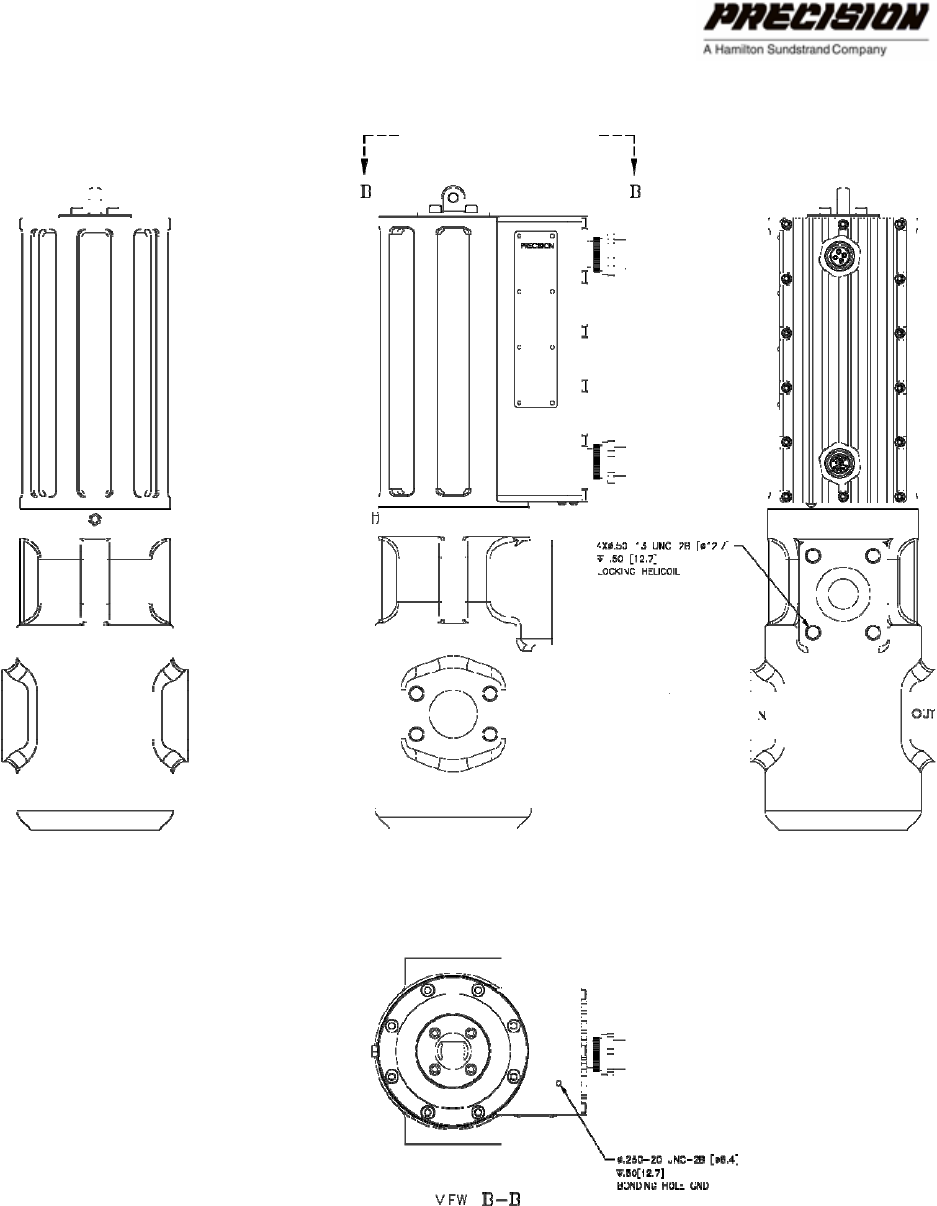
Figure 1-8. HFG2.0 Mounting Provisions, 1-Piece Housing
(Reversed Mounting Orientation Shown)
INSTALLING THE HFG2.0 13
14 HFG2.0 USER GUIDE
1.4 Electrical Connections
The HFG2.0 is suitable for use in hazardous locations. See the General
Specification Summary in Section 1.2 for certifications. Ensure compliance
with the factory recommendations, and that wiring is in accordance with
local requirements.
WARNING:
94/9/EC (ATEX) Compliance – Special Conditions for Safe Use:
Two special factory-sealed unions are mounted on the equipment to
ensure the electrical connection to the network and to provide the
feedback signal to the user.
The installation of these devices and the final connections to the
conduit shall comply with the requirements of the European
standards.
Ground Connection
The case of the HFG2.0 features a threaded hole (0.250-20 UNC-2B
female thread) that is dedicated for the ground connection. This hole has
been left unpainted and uncoated to ensure a good electrical contact.
This threaded hole is located on the clevis end of the unit, (see
Figure 1-6, Figure 1-7 or Figure 1-8). Use a screw with a 0.250-20 UNC-
2A thread to connect the case of the HFG2.0 to the same ground plane
as the user’s controller.
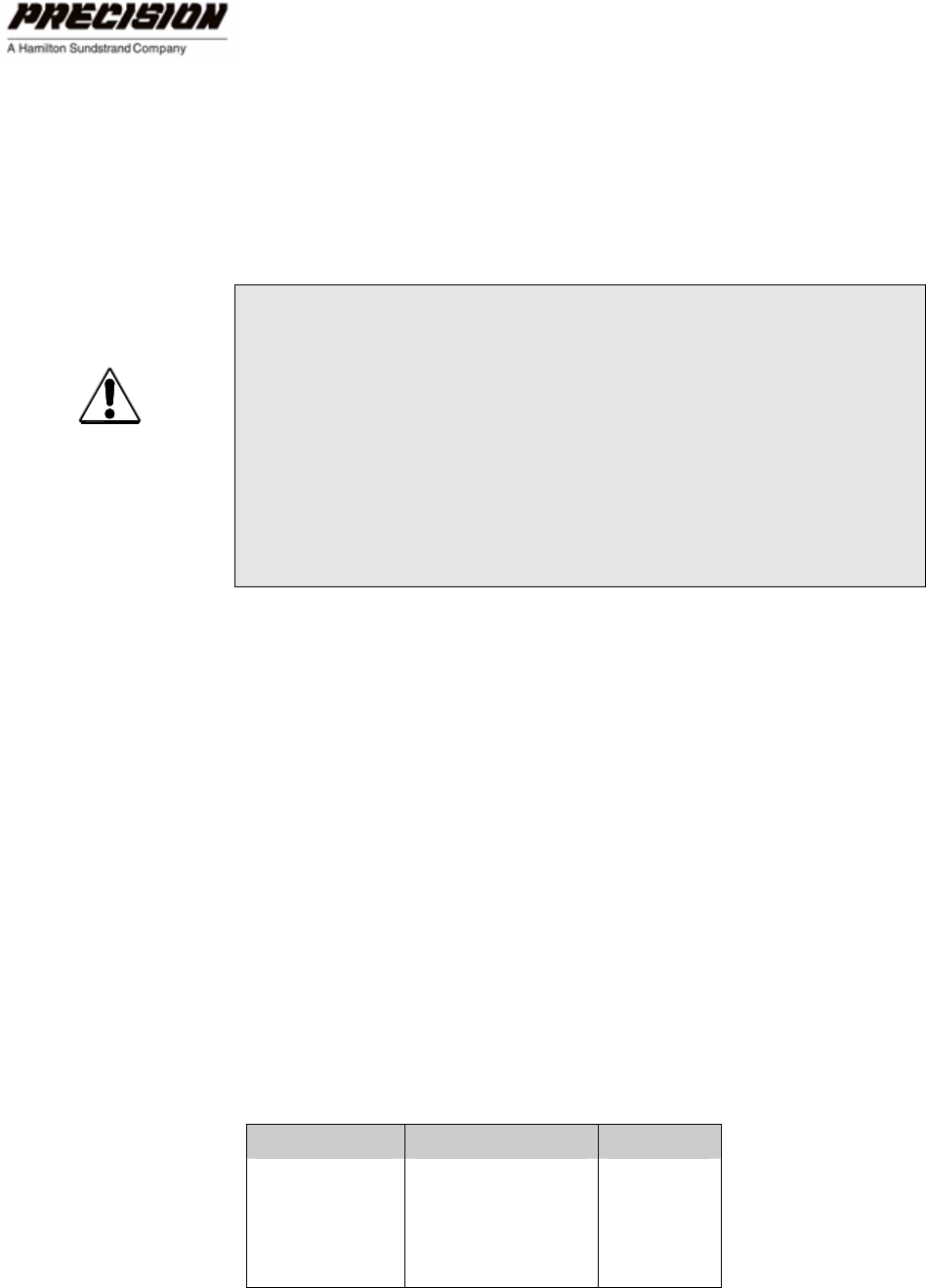
Power Connections
The HFG2.0 operates on a 120VDC (nominal), user-provided input
voltage, which is supplied to the unit through the integral four-wire power
harness. See Table 1-1 for the wire list for the HFG2.0 power harness.
See Figure 1-9 for the HFG2.0 system power wiring diagram. See Figure
1-10 for a typical power connection with a power supply. See Figure 1-11
for a typical power connection with a battery.
WIRE COLOR FUNCTION AWG
RED Power 14
WHITE/RED Power (AUX) 14
GREEN Power Return 14
WHITE/GREEN Power Return (AUX) 14
Table 1-1. Wire List for HFG2.0 Power Harness
Figure 1-9: HFG2.0 System Power Wiring Diagram
Figure 1-10. Typical Power Connection With Power Supply
Figure 1-11. Typical Power Connection With Battery
WARNING - Shock Hazard
Connect both the 120 VDC power and auxiliary wires. If only the
primary power wires are connected, the 120 VDC auxiliary power
wires are electrically live and must be insulated on the ends.
INSTALLING THE HFG2.0 15
16 HFG2.0 USER GUIDE
Note: A battery system is recommended for highest reliability.
Note: If a 120 VDC power supply is used rather than a battery,
ensure an output capacitance of at least 12,000 µF, which
can both sink and source electric current. See Power
Supply Requirements (Table 1-2).
Note: Use a separate conduit for the power wiring. This prevents
noise pickup and transmission from ancillary equipment,
which could cause instability in the actuator.
Power Supply Requirements
Table 1-2 below lists the power supply requirements for the HFG2.0.
PARAMETER VALUE
Voltage
Nominal
Range
120 VDC
80 – 160 VDC
Max. Ripple 4 VAC RMS or 12 VAC p-p
Current
Maximum
Continuous , Typical
Transient, Typical
20 Amps
<1 Amp
+20 A <60 ms
+10 A <600 ms
-5 A <100 ms
*Output Capacitance 12,000 µF (typical)
Table 1-2. Power Supply Requirements
*The output capacitance applies for non-battery power systems and assumes full-stroke step
changes in actuator position at rated load. This value is typical. The actual value required is
dependent on the user’s specific DC power system design, including:
• Power sources used in the DC power system (their output impedance, transient response,
rating, diode decoupling [if any], topology, etc.)
• All electrical loads and components connected to each respective power bus branch
• Switching relationships of these electrical loads and components to each other (for example,
does a large motor and actuator turn off at about the same time, etc.)
• Bus branch conductor length and arrangement (flat bus bars, round cables, twisted, etc.)
Therefore, it is not possible to correctly state a single capacitance value that should be placed on
the bus. It may require no added bus capacitance or hundreds of thousands of microfarads of
capacitance. A typical output capacitance value used for non-battery power systems is 50,000uF,
but the actual value depends on the specific power system as discussed above.
It is best to test the power system for adequate capacitance by executing full-stroke step changes
with the actuator at the same time as all other devices on the bus are switched and measuring the
bus voltage at the actuator power input point to verify that it does not dip below the minimum or
exceed the maximum bus voltage specifications. This test should be performed at both the
minimum and maximum expected operating voltages
Also, the output capacitance should be carefully positioned so that it is never disconnected from
the HFG2.0 power input during any contact or switching operations.
Recommended Wiring for System Power
The recommended wire for connecting to system power is a two-
conductor shielded cable containing twisted-pair wires with individual
shields. Use a wire size large enough to accommodate the installation
and provide a maximum one (1) ohm loop resistance. See Table 1-3
(below) for recommended wire sizes.
DISTANCE TO
USER POWER
RECOMMENDED WIRE SIZE
(Minimum)
≤ 500 ft. AWG 10, stranded
> 500 ft. Consult Factory
Table 1-3. Wire Size for HFG2.0 Power Harness
WARNING
Explosion Hazard – Do not connect or disconnect while circuit is
live. For US Group B hazardous locations, an explosion proof seal
must be placed within 18 inches.
CAUTION
Disconnect all HFG2.0 connections prior to welding.
INSTALLING THE HFG2.0 17
18 HFG2.0 USER GUIDE
Signal Connections
Signals are sent between the HFG2.0 and the user’s controller through
the integral 17-wire signal harness. See Table 1-4 for the wire list for this
harness. See Figure 1-12 for the system signal wiring diagram.
WIRE COLOR FUNCTION AWG
WHITE/ORANGE/YELLOW Serial/RX In 20
WHITE/ORANGE/BLUE Serial/TX Out 20
WHITE/ORANGE/GREEN Serial RETURN 20
BLACK OVER TEMP Alarm 20
WHITE/BLACK OVER TEMP Alarm RETURN 20
ORANGE FAULT Alarm 20
WHITE/ORANGE FAULT Alarm RETURN 20
VIOLET RUN Command 20
WHITE/VIOLET RUN Command RETURN 20
GRAY RESET Command 20
WHITE/GRAY RESET Command RETURN 20
BROWN Position Demand 20
WHITE/BROWN Position Demand RETURN 20
YELLOW Position Feedback 20
WHITE/YELLOW Position Feedback RETURN 20
BLUE Motor Current 20
WHITE/BLUE Motor Current RETURN 20
Table 1-4. Wire List for HFG2.0 System Signal Harness
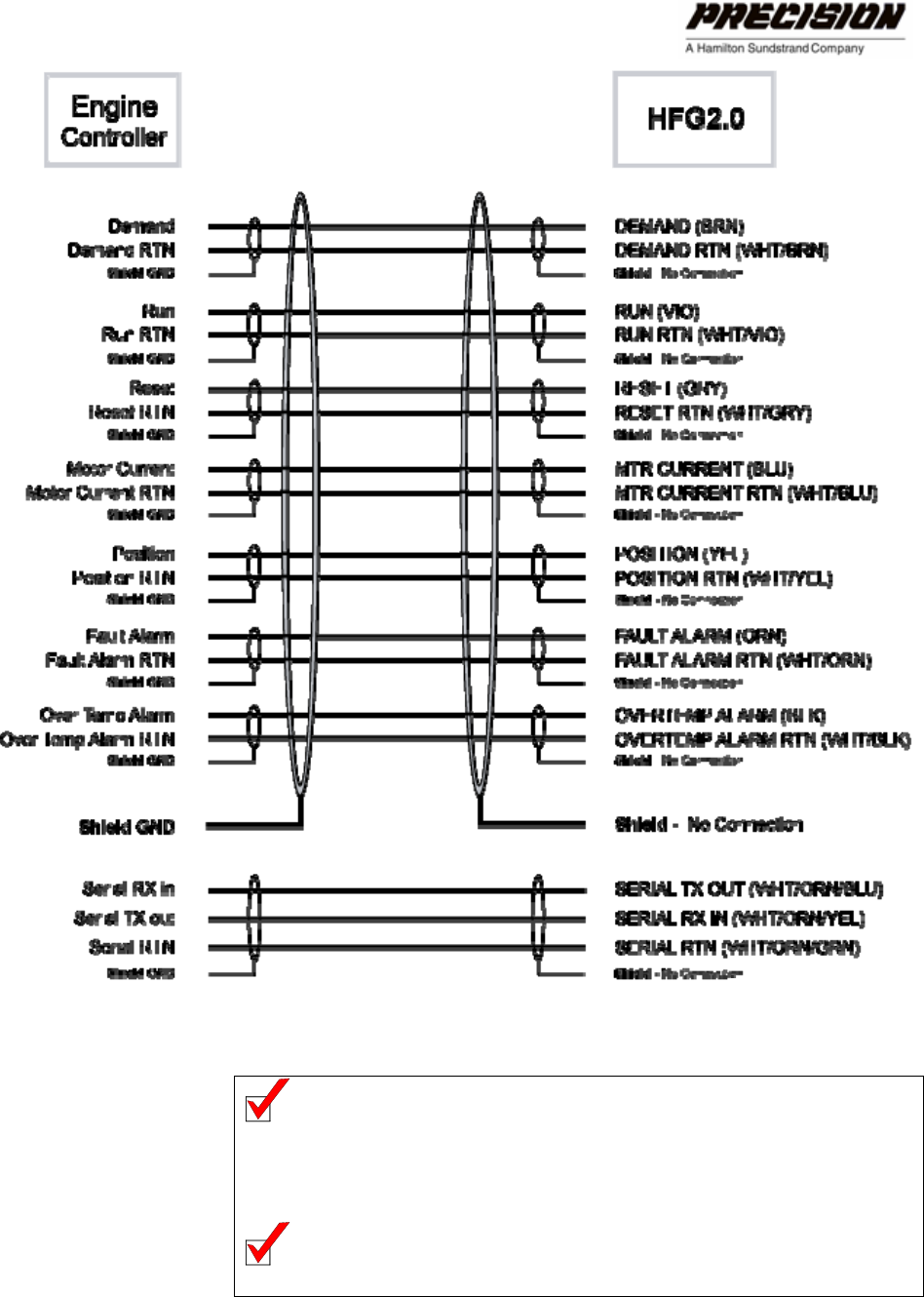
Figure 1-12: HFG2.0 System Signal Wiring Diagram
Note: For proper operation of the controller, the voltage between
the control inputs and the negative terminal of the power
supply should be below 200 VDC.
Note: The Serial Return is internally connected to the 120 VDC
input Return.
INSTALLING THE HFG2.0 19
20 HFG2.0 USER GUIDE
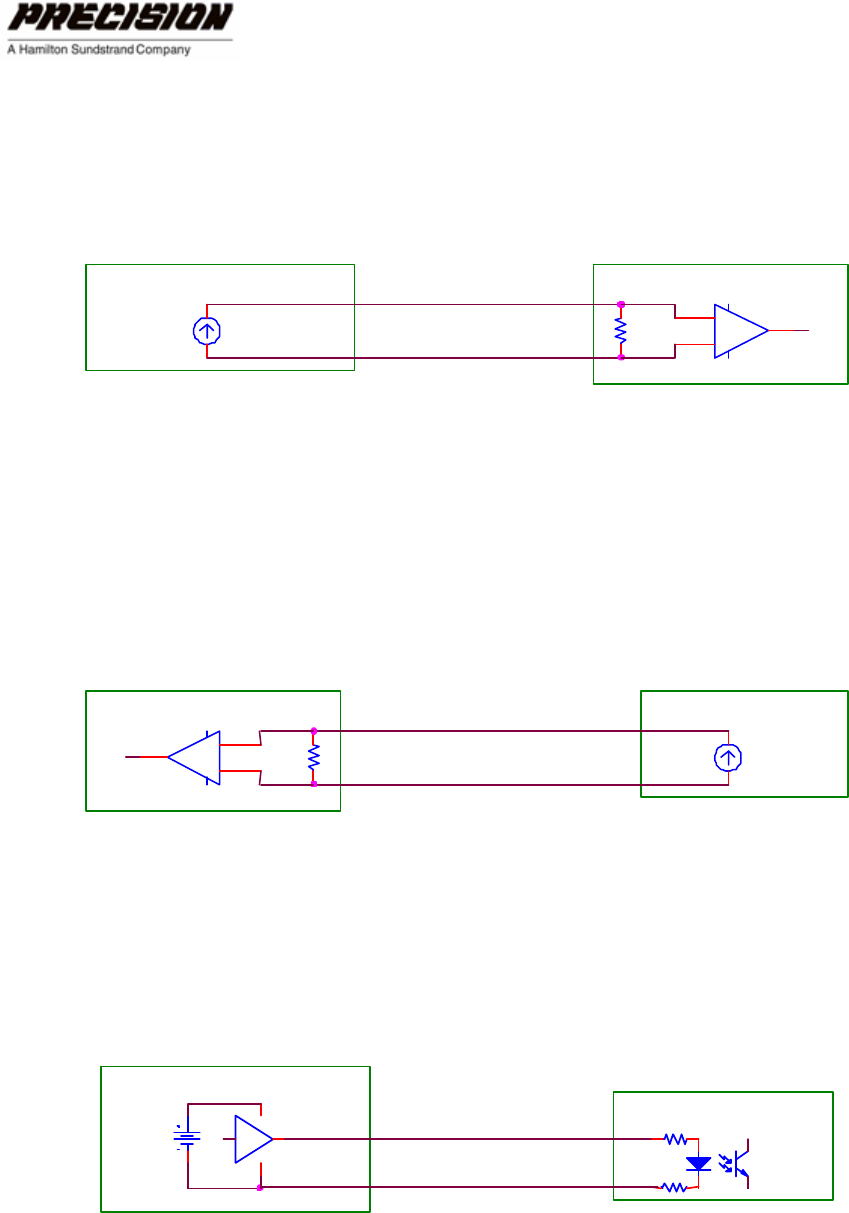
Analog Inputs
The analog input, DEMAND, has a current range of 4 - 20 mA. It is
electrically isolated up to 500 VAC from the enclosure, 120 VDC power,
digital I/O, and serial interface. The analog interfaces are not isolated from
each other. See Figure 1-13 for a typical analog input connection.
HFG2.0 4-20mA INPUT CONTROLLER 4-20 mA OUTPUT
+
-
DEMAND [BRN]
DEMAND RTN [WHT/BRN]
20 0
Ω
+
-
Figure 1-13. Typical Analog Input Connection
Analog Outputs
The analog outputs, MOTOR CURRENT and POSITION, have a current
range of 4 - 20 mA. They are electrically isolated up to 500 VAC from the
enclosure, 120 VDC power, digital I/O, and serial interface. The analog
interfaces are not isolated from each other. See Figure 1-14 for a typical
analog output connection.
CO NTROLLER 4-20mA INPUT HFG2.0 4-20mA OUTPUT
+
-
PO SIT ION [Y EL]
MTR CURRENT [BLU]
PO SIT ION RT N [W HT /YEL ]
MTR CURRENT RTN [W HT /BLU]
<500Ω
+
-
Figure 1-14. Typical Analog Output Connection
Discrete Inputs
The discrete inputs are 24 VDC ON (High) and 0 VDC OFF (Low). They
are electrically isolated up to 500 VAC. See Figure 1-15 for a typical
discrete input connection.
CONTROLLER DISCR ETE OUTPUT
HFG2.0 DISCRET E INPUT
RUN RTN [WHT/VIO]
RESET RTN [WHTGRY]
RUN [VIO]
RESET [GRY]
Figure 1-15. Typical Discrete Input Command Connection
Discrete Outputs
The discrete outputs are +24 VDC. They are electrically isolated up to 500
VAC. See Figure 1-16 for a typical discrete output alarm connection.
CONTROLLER DISCRETE INPUT
HFG2.0 DISCRETE OUTPUT
FAULT RTN [WH T/ORN]
OVERTEMP RTN [WH T/BLK]
FAULT ALARM [ORN]
OVERTEMP ALARM [BLK]
CONTROLLER DISCRETE INPUT HFG2.0 DISCRETE OUTPUT
FAULT ALARM [ORN]
OVERTEMP ALARM [BLK]
FAULT RTN [WHT/ORN]
OVERTEMP ALARM RTN [WHT/BLK]
Figure 1-16. Typical Discrete Output Alarm Connections
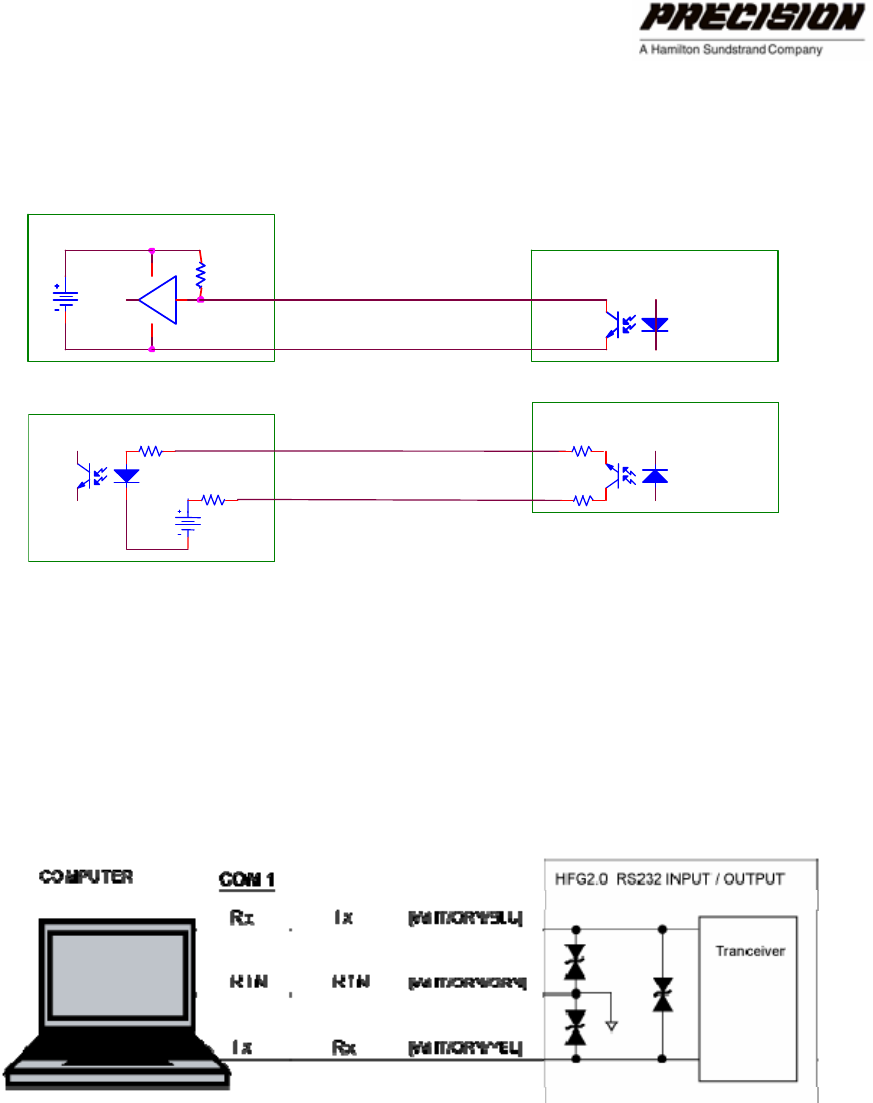
RS232 Serial Communications Interface
Signal levels for the serial communications input and output are per
RS232 standards. See Figure 1-17 for a typical RS232 serial interface
connection. See Table 1-5 for computer COM port pin-outs for RS232.
Figure 1-17. Typical RS232 Serial Interface Connection
INSTALLING THE HFG2.0 21
22 HFG2.0 USER GUIDE
FUNCTION Standard 9-Pin
COM Port
Standard 25-Pin
COM Port
Transmit (Tx). Pin 3 Pin 2
Receive (Rx) Pin 2 Pin 3
Ground (GND) Pin 5 Pin 7
Table 1-5. Computer COM Port Pin Outs
WARNING
Property Damage Hazard – The serial inputs are not electrically
isolated . Failure to properly isolate the user serial interface
could result in actuator or computer damage. Use separate
conduits for power and signal wiring. Close proximity to power lines
may cause signal interference.
Shock Hazard – The serial inputs are not electrically isolated .
If the power input is floating (not grounded), the serial input
connections may have up to 120 VDC present.
Property Damage Hazard – DO NOT connect 24 VDC power to any of
the serial interface connections.
Note: The pin designations shown in Table 1-5 are for the COM
port on the computer. Make sure that the wiring to the
COM port mating connector correctly matches Transmit
from the HFG2.0 to Receive on the computer’s COM port,
and vice versa.
Note: The maximum distance for serial connections is 50 ft. This
will typically only allow for local interface with a laptop PC.
Note: The serial interface connections are not isolated .
Isolation must be provided when connecting to a computer.
Recommended Wiring for System Signals
The recommended wiring is a 17-conductor shielded cable containing
twisted-pair wires with individual shields. Use a wire size large enough to
accommodate the installation and provide a maximum fifty (50) ohm loop
resistance. See Table 1-6 for recommended wire sizes.
DISTANCE TO USER’S
CONTROLLER
RECOMMENDED
WIRE SIZE
(Minimum)
≤ 1000 ft. AWG 18, stranded
> 1000 ft. Consult Factory
Table 1-6. Wire Size for HFG2.0 Signal Harness
Note: Use a separate conduit for the signal wiring. This prevents
noise pickup and transmission from ancillary equipment,
which could cause instability in the actuator. If conduit is not
used, signal wires should be at least 4-6 inches from any
other wires.
Ensure that all shielded cables are twisted conductor pairs with either a
foil or braided shield. PECC recommends Belden 8719 shielded twisted-
pair audio, broadcast and instrumentation cable. All signal lines should be
shielded to prevent picking up stray signals. Connect shields as shown in
Figure 1-12. Wire exposed beyond the shield should be as short as
possible.
CAUTION
This valve is 89/339/EEC EMC Directive compliant (CE mark) using
watertight, flexible conduit (plastic over steel) and Belden 8719
shielded, twisted pair-audio, broadcast and instrumentation cable.
Use of other conduit or wire invalidates EMC Directive compliance.
Do not connect 24 VDC power without current limiting (25 mA)
across digital or analog outputs.
INSTALLING THE HFG2.0 23
24 HFG2.0 USER GUIDE
INTENTIONALLY BLANK
2 UNDERSTANDING THE HFG2.0
2.1 System Description
The HFG2.0 is an electrically operated gas fuel-metering valve that
requires only 120 VDC power, an analog fuel demand signal, and a
discrete RUN command to achieve basic operational capability. No
pneumatic or hydraulic power is required.
The HFG2.0 is a closed loop servo system containing Motor Control
Electronics (MCE), a brushless DC-motor-driven ball screw actuator and
valve flow body assembly. The valve closes its own control loop on a
position feedback signal from an internal resolver. Thus, the valve
continuously modulates its position and provides precise fuel metering.
Gas fuel enters the valve flow body assembly INLET port. The fuel flow is
evenly split via a contamination deflector and pressure-balanced orifice
assembly as it enters the INLET port chamber. The orifice assembly
contains a set of poppets and control orifices. As the valve actuator
retracts, the poppet assembly exposes fuel from the INLET port chamber
to the two orifices. The fuel flows through in the annulus between each
poppet and fixed orifice and recombines in the OUTLET port chamber.
The fuel exits through the OUTLET port.
Flow is metered between the poppets and control orifices in proportion to
the poppet position and resultant flow area. The flow area ranges from
zero with a Demand signal at 0 % of its range to maximum with a
Demand signal at 100% of its range. The orifices contain pressure-
energized soft seats and metal-to-metal hard seats, which provide a leak-
tight seal when the poppets are in a closed position.
A pre-loaded, fail-safe spring is located between the valve housing and
poppet assembly. The spring load increases as the valve opens. If a
power failure occurs, the spring causes the poppets to return to the soft
seats, thereby closing the valve.
WARNING
The soft seats are unidirectional and will leak if the OUTLET is more
than 50 psi greater than the INLET. PECC recommends that the
INLET port pressure always be ≥ to the OUTLET port pressure.
CH. 2: UNDERSTANDING THE HFG2.0 25
26 HFG2.0 USER GUIDE
2.2 Electrical Description
The electric actuator in the HFG2.0 incorporates digital motor control
electronics (MCE). The MCE contain analog to digital converters, a digital
signal processor (DSP), application specific integrated circuit (ASIC) and
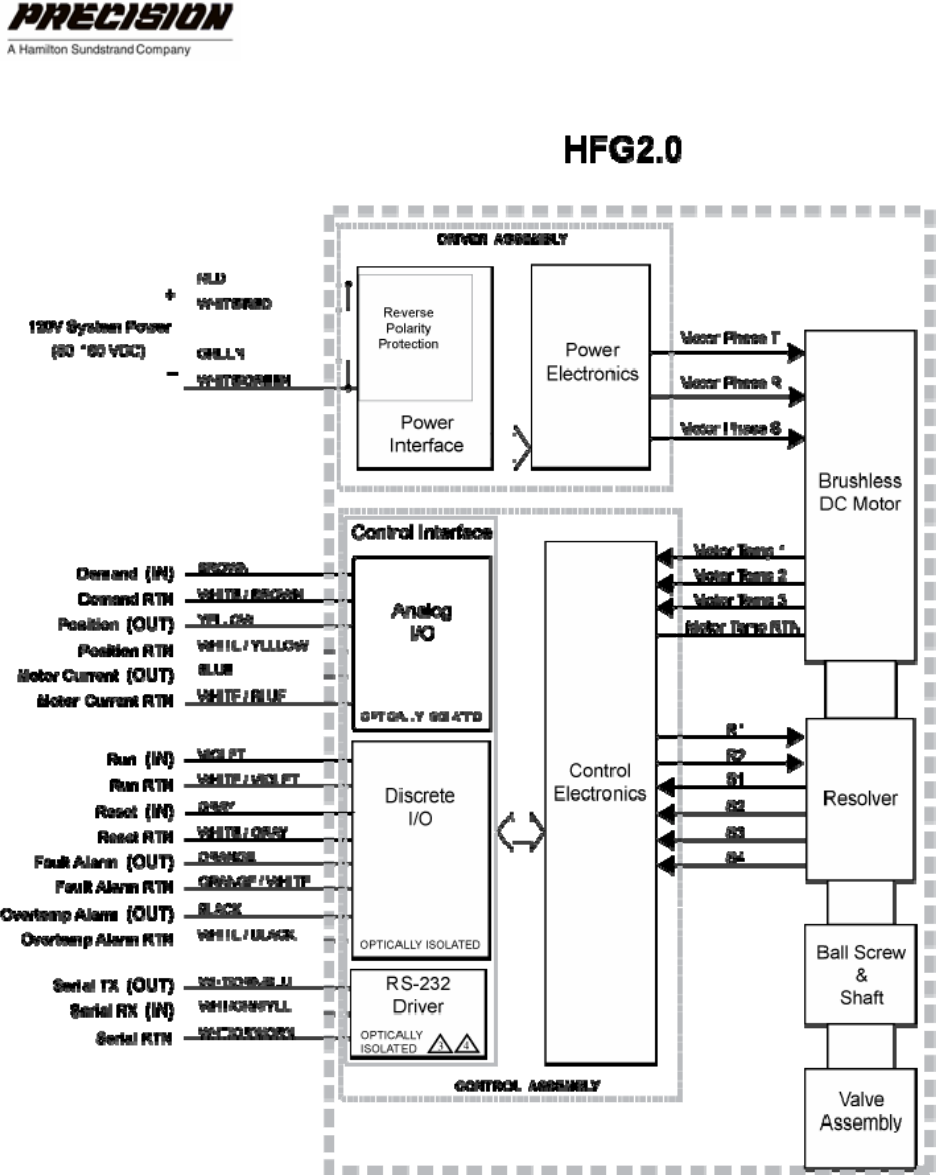
power supplies. Figure 2-1 shows the system block diagram.
The MCE provides the interface for the user’s engine control system and
power supply. The MCE incorporates analog and discrete inputs and
outputs, and a serial interface. The MCE provides signal conditioning for
all external analog and discrete I/O, as well as internal resolver and
thermistor inputs.
Note: The MCE analog and discrete signal interfaces are
electrically isolated. The serial communication interface is
optically isolated
The MCE internally interfaces with the brushless DC motor, resolver and
thermistors. The MCE performs all necessary commutation, control and
status monitoring for the HFG2.0.
Power
The HFG2.0 operates on an input voltage of 120 VDC (nominal) that is
provided by the user via an integral four-wire power harness. Refer to
Figure 1-10 or 1-11 for a typical connection. Refer to the General
Specification Summary Table in Section 1.2 for load specification values.
Control Signals
The HFG2.0 accepts three two-wire external control signals via the
integral 17-wire signal harness. Refer to Figures 1-13 and 1-15 for typical
connections. Refer to the General Specification Summary Table in
Section 1.2 for signal specification values.
RUN Command
The user-provided RUN command is a discrete input. The RUN
command must be ON to enable the HFG2.0 to perform the homing
sequence after resetting or powering up. The RUN command also
enables the HFG2.0 to track the DEMAND signal. The valve will move to
the Stop Position if the RUN command is set to OFF or lost.
RESET Command
The RESET command is a user-provided discrete input to the HFG2.0.
This command causes the HFG2.0 to reset all internal position indicators,
reload all set-up parameters, and to then move the valve through its initial
homing sequence again. (The RUN command must be set to ON before
the homing sequence can begin.) RUN and DEMAND inputs are ignored

during the RESET command. To reset the HFG2.0, +24 VDC must be
applied across the RESET wires for at least 0.5 seconds in order to reset
the controller and actuator.
DEMAND Signal
The DEMAND signal is a user-provided analog input that is used to
control the position of the valve. The current level of the DEMAND signal
is correlated to the position of the valve within its range. The minimum
Demand signal of 4.0 mA is correlated to the CLOSED (Home) position.
The maximum Demand signal of 20 mA is correlated to the OPEN
(maximum flow) position.
Feedback Signals
The HFG2.0 provides two two-wire feedback signals via the integral
17-wire signal harness. Refer to Figure 1-14 for typical connections. Refer
to the General Specification Summary Table in Section 1.2 for feedback
specification values.
Position Feedback
The HFG2.0 provides analog valve position feedback to the user. This
internally-generated feedback signal is proportional to the valve position.
A signal level of 4 mA represents that the valve is at its CLOSED (Home)
position; while a signal level of 20 mA represents that the valve is at its
maximum span.
Motor Current Feedback
The HFG2.0 provides motor current feedback. This internally-generated
feedback signal is proportional to actuator load. A signal level of 4 mA
represents no load on the actuator; while a signal level of 20 mA is the
maximum load.
CH. 2: UNDERSTANDING THE HFG2.0 27
28 HFG2.0 USER GUIDE
Figure 2-1. HFG2.0 Electronics System Block Diagram
Alarms
The HFG2.0 provides two two-wire alarm signals via the integral 17-wire
signal harness. The discrete alarm outputs are solid-state switches which
are normally closed. The user’s controller provides +24 VDC to complete
the circuit. Refer to Figure 1-16 for typical connections. Refer to the
General Specification Summary Table in Section 1.2 for alarm
specification values. See Section 3.7 for additional details about alarms.
FAULT Alarm
The fault configuration for the FAULT alarm is programmable in the most
recent generation of the HFG2.0 (factory-configurable only). If a fault
condition occurs, the FAULT alarm switch will open, interrupting the circuit
with the user’s controller. See Table 3-1 for the default configuration .
See Table 3-3 for a list of fault conditions represented by the FAULT
alarm in earlier generations of the HFG2.0.
OVERTEMP Alarm
The fault configuration for the OVERTEMP alarm is programmable in the
most recent generation of the HFG2.0 (factory-configurable only). If a
fault condition occurs, the OVERTEMP alarm switch will open,
interrupting the circuit with the user’s controller. The default configuration
for the OVERTEMP alarm is Motor OVERTEMP, where the circuit will
open if the temperature in two or more of the motor winding exceeds
135°C. See Table 3-2 for details about the default configuration .
In earlier generations of the HFG2.0, the OVERTEMP alarm is dedicated
to Motor Over Temp and Electronics Over Temp faults. If
the HFG2.0 detects that the temperature in two or more of the motor
windings exceeds 130° C or the electronics temperature
exceeds 110° C the OVERTEMP circuit will open (see Table 3-4).
In generation , the Electronics Over Temp fault is assigned to the
FAULT alarm. If the electronics temperature exceeds 110° C the
FAULT circuit will open (see Table 3-3).
RS232 Communications
The HFG2.0 allows for RS232 serial communication through three wires
in the integral 17-wire signal harness. The RS232 wires, Rx IN, Serial Tx
OUT and Serial RTN, are used to communicate with a user-provided
computer. Serial communication can be used to change the HFG2.0 set-
up parameters and to retrieve fault diagnostics. Contact Precision Engine
Controls Corporation to request fault diagnostic software. See Section 3.8
for additional details about set-up parameters.
CH. 2: UNDERSTANDING THE HFG2.0 29
30 HFG2.0 USER GUIDE
Note: The MCE analog and discrete signal interfaces are
electrically isolated. The serial communication interface is
optically isolated
2.3 Mechanical Description
The HFG2.0 consists of two main parts, an actuator and a valve
assembly.
Actuator
The actuator is the primary drive mechanism for the valve assembly. The
actuator portion of the HFG2.0 consists of four main assemblies:
• Main Housing Assembly
• Brushless DC Motor Assembly
• Resolver Assembly
• Linear Drive Mechanism
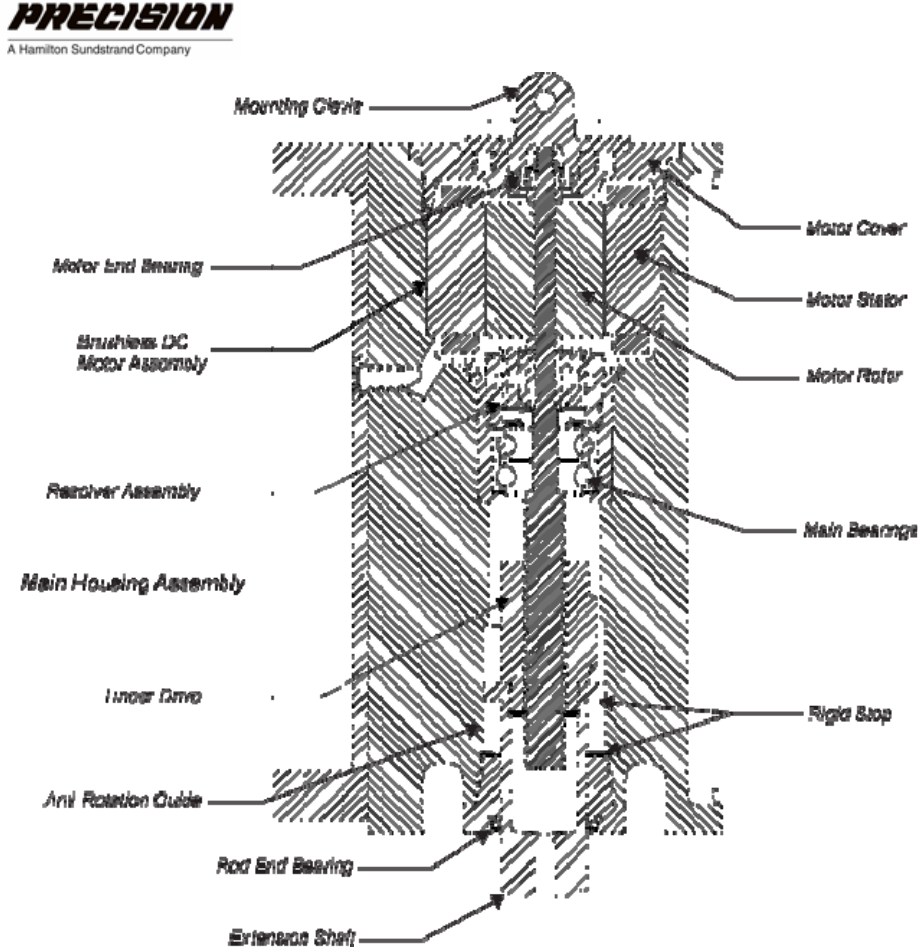
Main Housing Assembly
The main housing assembly consists of the main housing, motor cover,
extension-rod bearing, and associated seals. The main housing assembly
is the primary structural system component and supports all the bearings,
motor cover, mountings, and connectors. It also provides explosion-proof
containment.
The housing is fitted with a stainless steel liner to provide thermal and
dimensional stability for the main bearing. This liner is permanently
installed into the aluminum main housing. A retaining ring is included for
redundant retention.
The main housing also contains rigid mechanical stops to prevent
extension rod travel beyond the design specification. See Figure 2-2.
Brushless DC Motor Assembly
A brushless DC motor powers the HFG2.0 linear drive mechanism. The
DC motor consists of a stator and rotor. See Figure 2-2.
Motor Stator
The motor stator is attached to the main housing by a pre-loaded wave
spring and screws. Thermistors are embedded in the stator windings to

monitor winding temperatures. The motor electrical power and thermistor
wires pass through a conduit into the electronics housing.
Motor Rotor
The motor rotor is locked to the ball screw shaft via a straight key. The
motor rotor contains powerful magnets that align with the energized stator
windings, thereby creating torque and shaft rotation.
Resolver Assembly
A brushless, non-contacting resolver is the primary HFG2.0 feedback
sensor. Resolver excitation is achieved via a sinusoidal signal from the
MCE. The resolver provides two sinusoidal feedback signals back to the
MCE. The resolver assembly includes a stator and rotor. See Figure 2-2.
Resolver Stator
The resolver stator is clamped to the main housing between the main
bearing retaining nut and resolver retainer. The angular position of the
resolver stator relative to the resolver rotor is adjustable. Electrical wires
from the resolver are reeled in the resolver adapter to allow rotation. The
resolver wires, along with the motor and thermistor leads, pass through a
conduit into the electronics housing.
Resolver Rotor
The resolver rotor is mounted to the ball screw shaft by a key. As the rotor
rotates, the stator transformer output signals provide shaft rotation
information to the MCE.
Linear Drive Mechanism
The Linear Drive Mechanism converts the rotary motion of the Motor
Assembly to linear actuator motion. The core of the mechanical drive
system is the linear ball screw drive containing a screw shaft, ball-
bearing-fitted nut, extension rod and main duplex thrust bearings. See
Figure 2-2.
Screw Shaft
The thrust bearings, motor rotor, motor end bearing, and resolver rotor
are mounted directly to the screw shaft. A ball-bearing track is machined
into the screw shaft.
Ball Nut
As the screw shaft rotates, the ball nut translates the rotary motion into
linear motion along the shaft axis. The direction of movement along the
shaft axis is determined by direction of rotation.
CH. 2: UNDERSTANDING THE HFG2.0 31

32 HFG2.0 USER GUIDE
Extension Rod and Bearings
The extension rod is threaded on the ball nut. As the ball nut translates,
the extension rod moves in and out of the HFG2.0 main housing.
Counter-clockwise (CCW) rotation (facing the motor end of the actuator)
of the motor rotor and screw shaft results in the extension rod extending
out of the main housing. Clockwise (CW) rotation results in the extension
rod retracting back into the main housing.
The extension rod support bearing is provided for lateral support. Thrust
and radial loads are transferred from the extension rod through the ball
nut to the main preloaded duplex thrust bearings. The thrust bearings
transfer the loads to the main housing by the main bearing and shaft
retaining nuts.
A motor end bearing is provided for additional radial shaft stability. The
resolver rotor, motor rotor, motor bearing, and spacers are all stacked on
the ball screw shaft and retained by a single nut. This arrangement
prevents actuator axial loads from passing through the resolver rotor and
motor rotor.
The end of the extension rod is connected to the poppet assembly of the
valve. The linear motion of the extension rod, both extension and
retraction, is directly translated to the poppet assembly.
Valve
The valve portion of the HFG2.0 consists of four main components:
• Valve Housing Assembly
• Orifice Assembly
• Soft Seats
• Return Spring
Valve Housing Assembly
The valve housing assembly may be either three pieces or one piece.
The three-piece version consists of upper, center, and lower valve body
sub-assemblies, which are bolted together with eight, ½” diameter, high-
strength, steel bolts. The assembly is made of either machined aluminum
or stainless steel.
The one-piece version consists of a cast aluminum main pressure vessel
and valve cover assembly. The cover assembly attaches to the bottom of
the vessel. This version does not have a drain port.
See Figure 2-3.

Orifice Assembly
The orifice assembly contains a set of poppets and orifice plates. Fuel
flow is metered between the INLET port chamber and OUTLET port
chamber in proportion to the poppet position and resultant flow area.
The poppet assembly is connected to the extension rod of the actuator.
As the actuator retracts, the poppet assembly retracts to increase the flow
area between the poppets and the two orifices. As the actuator extends,
the poppet assembly extends to reduce the fuel exposure from the INLET
port chambers to the two orifices. When the actuator is fully extended, the
poppets seat in the orifices to close the valve. See Figure 2-3.
Soft Seats
The orifices contain pressure-energized soft seats and metal-to-metal
hard seats, which provide a leak-tight seal when the poppets are in a
closed position. See Figure 2-3.
Return Spring
A pre-loaded, fail-safe spring is located between the valve housing and
poppet assembly. The spring load increases as the valve opens. If a
power failure occurs, the spring causes the poppets to return to the soft
seats, thereby closing the valve. See Figure 2-3.
CH. 2: UNDERSTANDING THE HFG2.0 33
34 HFG2.0 USER GUIDE
Figure 2-2. HFG2.0 Cut-Away View – Actuator Main Housing Assembly
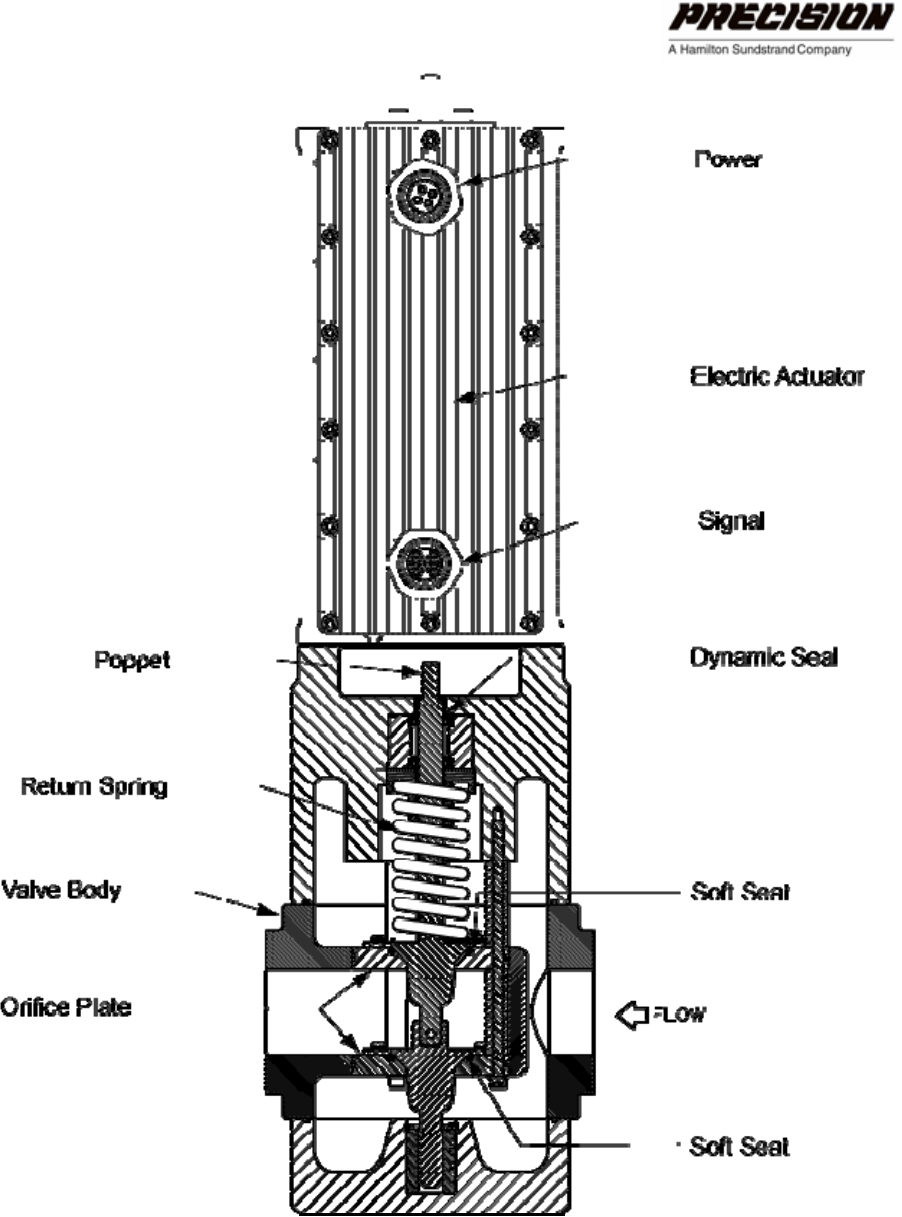
Figure 2-3. HFG2.0 Cut-Away View (Partial)
CH. 2: UNDERSTANDING THE HFG2.0 35

36 HFG2.0 USER GUIDE
2.4 Identification Plate
A product identification plate is attached to
the HFG2.0 housing assembly. Figure 2-4
shows a typical identification plate.
The identification plate lists model
designation, product part number, revision
and unit serial number. Hazardous area
operation, certification and electrical wiring
interface information is also provided.
When a unit is refurbished by PECC, a
product refurbishment plate is also
attached to the HFG2.0 housing assembly.
Figure 2-5 shows a typical refurbishment
plate.
The refurbishment plate lists the original
manufacture date, refurbishment date,
refurbishment kit number, and product
revision number.
Figure 2-4. Typical Identification Plate
Figure 2-5. Typical Refurbishment Plate
CH. 2: UNDERSTANDING THE HFG2.0 37
38 HFG2.0 USER GUIDE
INTENTIONALLY BLANK
3 OPERATING THE HFG2.0
This section refers to the position of the actuator when describing
operation of the HFG2.0 valve. The end of the actuator extension rod is
connected to the poppet assembly of the valve. The linear motion of the
actuator, both extension and retraction, is directly translated to the poppet
assembly. The position of the actuator correlates directly to the position of
the valve poppets relative to the orifices. The Home position of the
actuator is the CLOSED position (zero position) of the valve.
3.1 Powering Up
When 120 VDC is applied, the firmware program in the HFG2.0 will clear
all system registers, retrieve all necessary operating parameters from the
electrically erasable programmable read only memory (EEPROM), and
perform an internal status check. This will also happen after a RESET
command has been received. See the flow chart in Figure 3-1 for an
overview of this process.
Note: If the HFG2.0 receives a SET-UP command from the
ActWiz software via the RS232 interface after these steps,
the system will transition to the Set-Up state. This state
allows the user to change the Set-Up parameters and to
download the fault file. See Section 3.8 for details.
CAUTION
Always remove the RUN command during power up. If a RUN
command is given during the Set-Up parameter download phase of
power-up, the valve will not respond until the download is complete
and the Home position has been established.
3.2 Finding Home Position
When the program is complete with a status check, it waits for the RUN
command.
When the status check and other steps in the Power-Up/Reset process
are complete, the HFG2.0 will wait until it receives the RUN command. At
CH. 3: OPERATING THE HFG2.0 39

40 HFG2.0 USER GUIDE
this point, the HFG2.0 has no information about the position of the
actuator extension shaft.
When the HFG2.0 receives the RUN command, it will initiate motion in
the homing direction. The default homing direction for the HFG2.0 is
“Extend”. This means that the first movement after Power Up or Reset will
be an extension of the actuator in the HFG2.0. The actuator will extend at
the rate specified by the Homing Velocity in the Set Up parameters
(default is 0.5 in/sec) until a mechanical stop is encountered. In the
HFG2.0, this stop reached when the poppets seat in the orifices, thus
closing the valve. The HFG2.0 recognizes that a mechanical stop has
been reached when the actuator velocity drops to 0.05 in/sec or less.
The HFG2.0 will then slowly increase the motor current until the current
level corresponding to the Maximum Homing Force has been applied.
This Maximum Homing Force is also specified in the Set Up parameters
and has a default value of 500 lbf. When the pre-determined motor
current limit is reached, the HFG2.0 defines this valve position as Home.
Home is “Valve Closed” for the HFG2.0. The system will then transition to
the Holding Motor Current State. See the flow chart in Figure 3-1 for an
overview of this process.
The DEMAND current determines subsequent positioning of the actuator,
and thus the valve, within its span once the Home position has been
established
See Section 3.8 for additional information about Set-Up parameters.
3.3 Holding Motor Current State
In the Holding Motor Current state, the actuator applies a constant
Holding Force. This feature allows the Home position to thermally expand
or contract without damaging the HFG2.0. This Holding Force is specified
in the Set Up parameters and has a default value of 500 lbf.
The system is in the Holding Motor Current state immediately after
Homing. The system will also move into this state when the DEMAND
signal is > 2mA and < 4.1mA. See the flow chart in Figure 3-1.

Figure 3-1. HFG2.0 Basic Operation Flow Chart
CH. 3: OPERATING THE HFG2.0 41
42 HFG2.0 USER GUIDE
3.4 Moving to Stop Position
The Stop position is a fail-safe position that may be set anywhere
between Home (zero position, Valve Closed) and maximum span
(maximum flow). The default value for Stop position is 0.0 inches, as
defined in the Set-Up parameters.
The actuator will move to the Stop position if the DEMAND signal is ≤ 2
mA (signal loss) at any time after the actuator has completed Homing. It
will also move to the Stop position if the RUN command is removed
during any of the running modes. See the flow chart in Figure 3-1.
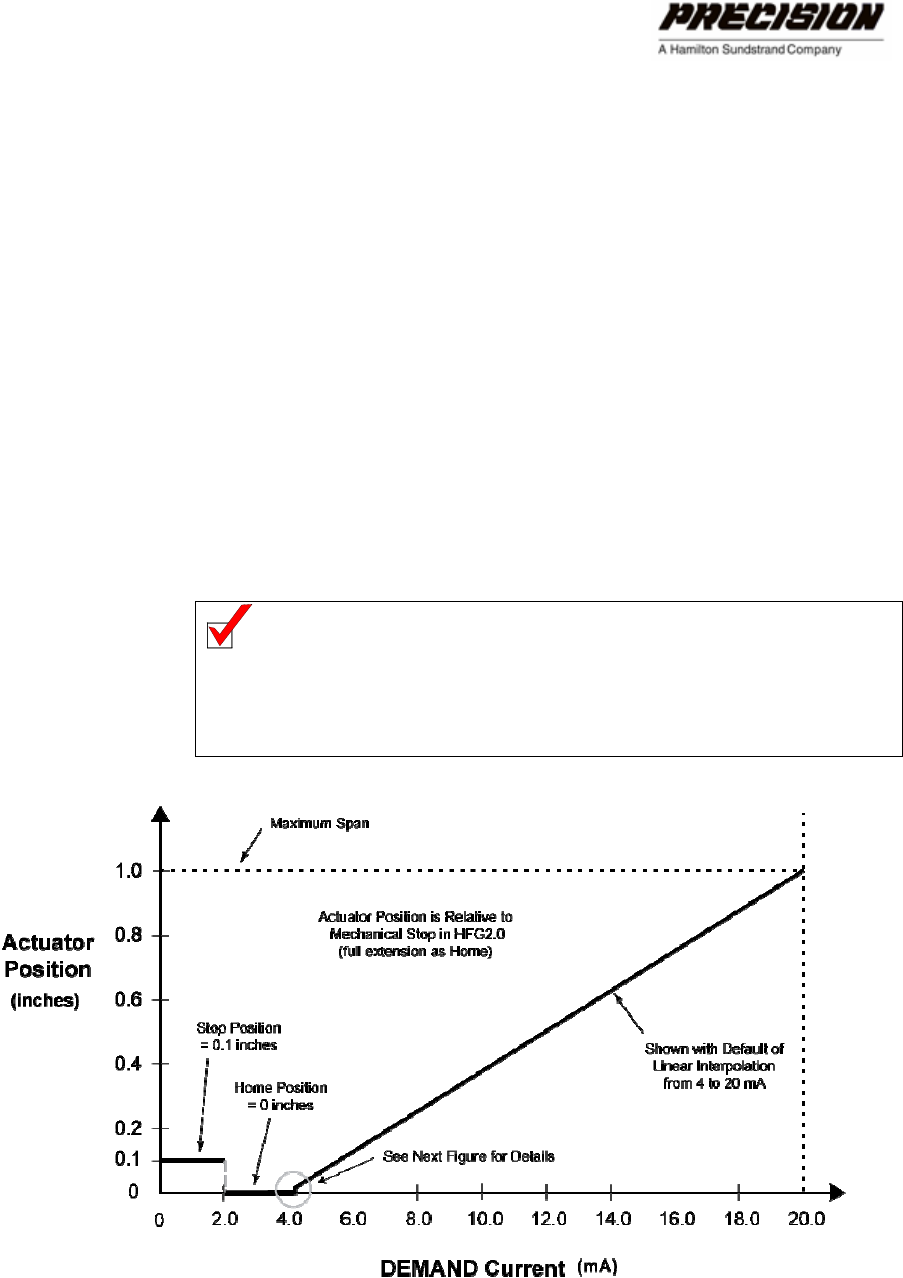
3.5 Controlling Motion
Once the Home position has been established, the DEMAND current
determines subsequent positioning of the actuator, and thus the valve,
within its span. The valve will track the DEMAND signal as long as
DEMAND ≥ 4.1 mA and RUN is ON, and will apply up to the maximum
force to reach this DEMAND position. See Figure 3-2. This is defined as
the RUN state, and it is the normal operating mode for the HFG2.0.
The actuator firmware program will remain in this state as long as the
demand is greater than 4.1 mA.
Note: If RUN command is removed or position DEMAND ≤ 2 mA,
the actuator will go to the STOP position.
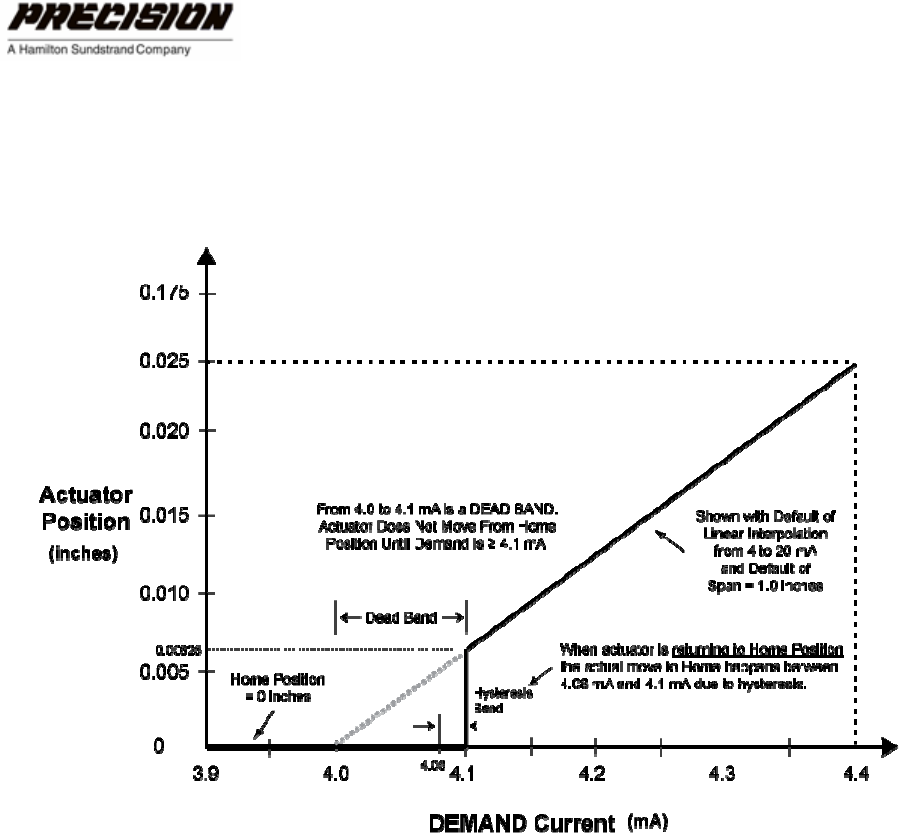
Home Position
The Home position correlates to a DEMAND signal of 4 mA. The Home
position is determined after Power Up or after the HFG2.0 has been reset.
Dead Band
While the Home position correlates to a DEMAND signal of 4 mA, the
actuator will only move for DEMAND signals ≥ 4.1 mA. The DEMAND
signal range between 4.0 mA and 4.1 mA is therefore considered a Dead
Band. See Figure 3-3.
Once a DEMAND signal ≥ 4.1 mA is detected, the actuator will move to
the position that correlates to that current level. See Interpolation of
DEMAND Signal below.
Hysteresis Band
The actuator should return to the Home position when the DEMAND
Signal drops below the 4.1 mA Dead Band threshold. In practice,
hysteresis may result in the actuator not returning to Home position until
the DEMAND signal drops below a threshold as low as 4.08 mA. The
DEMAND signal range between 4.08 mA and 4.1 mA is therefore
considered the Hysteresis Band. See Figure 3-3.
Full Span Position (Maximum Flow)
The Full Span (Maximum Flow) position correlates to a DEMAND signal
of 20 mA. The maximum Span possible for the HFG2.0 is 1.0 inches due
to the configuration of the valve assembly. The maximum Span possible
for the actuator used in the HFG2.0 is 2.0 inches due to its mechanical
configuration.
The Span value in the Set-Up parameters has a default setting of 1.0
inches of retraction to allow for the distance between the mechanical stop
in the valve and the mechanical stop in the actuator. (The default
definition of Home is Extend, so default Span is a retraction.)
Interpolation of DEMAND Signal
Linear interpolation of the DEMAND signal in the range between 4 mA
and 20 mA is the default condition, as specified in the Set-Up parameters.
With linear interpolation, a DEMAND signal of 12 mA (midway in range of
DEMAND signal) will correlate to a position at 0.5 inches (midway in the
1.0 inch span). See Figure 3-2 for an illustration of linear interpolation.
Note: The actuator and valve position is linear relative to the
DEMAND signal in the default condition. However, due to
the physical profile of the poppets, orifices and soft seats,
the resultant flow area will NOT be linear relative to the
DEMAND signal.
Figure 3-2. HFG2.0 Actuator Position vs. DEMAND, with default conditions
Home as a Mech. Stop in HFG2.0
CH. 3: OPERATING THE HFG2.0 43
44 HFG2.0 USER GUIDE
A non-linear interpolation table can be created to define positioning at 16
discrete current levels in the DEMAND signal range, but only during Set
Up using the ActWiz Software. See the Section 3.8 for additional details
about Set Up parameters.
Figure 3-3. Dead Band of Actuator, Position vs. DEMAND Curve
3.6 Resetting the Actuator
To reset the HFG2.0, +24 VDC must be applied across the RESET wires
for at least 0.5 seconds. The leading edge of the RESET command
causes the HFG2.0 to stop all other operations, but the actual resetting of
the HFG2.0 does not begin until RESET is returned to its OFF state. The
RESET command causes the HFG2.0 to reset all internal position
indicators, reload all Set-Up parameters, and check the health of the
electronics. See the flow chart in Figure 3-1 for an illustration of this. The
HFG2.0 is now in the Power Up / Reset state.
Once the RUN command is detected as ON, the actuator will then move
through its initial homing sequence again. RUN and DEMAND inputs are
ignored during the RESET command.
If FAULT alarm is detected, toggling the RESET command will clear the
FAULT alarm, but it will NOT clear the fault file.

3.7 Monitoring System Health
The firmware program continuously monitors system health while the
HFG2.0 is powered. If any of the health parameters are out of the normal
operating range, the MCE outputs a discrete fault alarm to the user’s
controller.
Some fault causes are:
• MCE over-current
• Tracking error
• RDC failure
• Input voltage out of range
Fault Alarms
The HFG2.0 features two discrete, non-latching outputs that are
configured as fault alarms. Upon power-up, the fault circuits close and
stay closed in the normal operating condition. When the HFG2.0 detects
a system fault, it opens the fault circuit designated for that particular fault.
If a fault alarm is detected, the user should shut down the HFG2.0 to
investigate the failure cause. Removing 120 VDC power shuts down the
HFG2.0 valve.
Toggling the RESET command will clear the alarms.
FAULT Alarm
The configuration of faults assigned to the FAULT alarm is programmable
in the most recent generation of the HFG2.0 (factory-configurable
only). See Table 3-1 for the default configuration of faults assigned to
the FAULT alarm.
See Table 3-3 for a list of fault conditions represented by the FAULT
alarm in earlier generations of the HFG2.0.
OVERTEMP Alarm
The configuration of faults assigned to the OVERTEMP alarm is
programmable in the most recent generation of the HFG2.0 (factory-
configurable only). In the default configuration, the Motor Over Temp fault
is the only fault assigned to the OVERTEMP alarm. If the HFG2.0 detects
that the temperature in two or more of the motor windings is 135° C or
higher, the OVERTEMP alarm circuit opens. See Table 3-2 for details
about the default configuration of the OVERTEMP alarm.
CH. 3: OPERATING THE HFG2.0 45
46 HFG2.0 USER GUIDE
See Table 3-4 for a list of Over Temp conditions represented by the
OVERTEMP alarm in earlier generations of the HFG.
Fault File
The HFG2.0 firmware also captures the fault data in the EEPROM. If the
HFG2.0 is operational, a fault file can be downloaded using ActWiz
software via the RS232 interface. The fault file will provide fault
information and possible causes. The HFG2.0 must be in the Power Up /
Set Up state to download the fault file. See Section 3.8 for details about
the Power Up / Set Up state. Contact Precision Engine Controls
Corporation to request ActWiz software.
Toggling the RESET command will clear the fault alarm, but it does NOT
clear the fault file.
See Section 5: Troubleshooting for a more detailed list of fault causes.
Note: The fault file only records the programmable faults that have
been enabled .
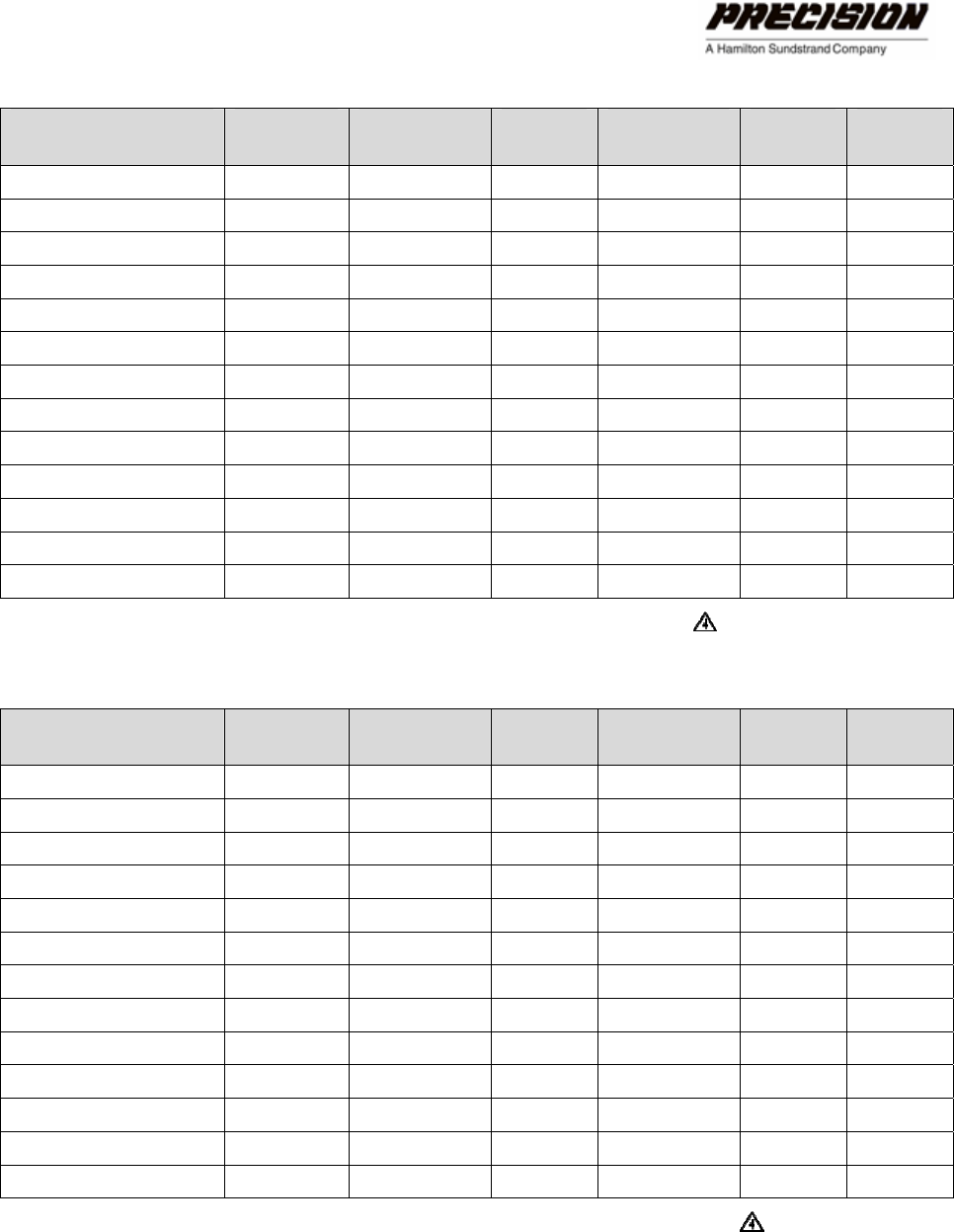
Fault Type Low
Alarm
High
Alarm
Fault
Enable
Persist
Time
Auto
Reset
Output
Driver Overcurrent N/A 1000 lbf Yes 10 Sec Yes Yes
Tracking Error N/A 3.33 % Yes 10 Sec Yes Yes
Position Demand 3.5 mA 20.5 mA No 1 Sec No No
RDC Failure N/A N/A Yes N/A No Yes
+14 Volts 12.0 Volts 16.0 Volts Yes 7.5 Sec Yes Yes
–14 Volts –16.0 Volts –12.0 Volts Yes 7.5 Sec Yes Yes
Input Voltage 75.0 Volts 180.0 Volts Yes 7.5 Sec Yes Yes
EEPROM Checksum N/A N/A Yes N/A No Yes
Motor High Temp N/A 130° C No 10 Sec No No
Electronics High Temp N/A 110° C Yes 10 Sec Yes Yes
+5 Volts 4.5 Volts 5.5 Volts Yes 7.5 Sec Yes Yes
Watchdog Expired N/A N/A Yes N/A No Yes
EEPROM Write N/A N/A Yes N/A No Yes
Table 3-1. Default Configuration For FAULT Alarm
Fault Type Low
Alarm
High
Alarm
Fault
Enable
Persist
Time
Shut-
Down
Output
Driver Overcurrent N/A 1000 lbf No 10 Sec No No
Tracking Error N/A 3.33 % No 10 Sec No No
Position Demand 2 mA 22 mA No 1 Sec No No
RDC Failure N/A N/A No N/A No No
+14 Volts 12.0 Volts 16.0 Volts No 7.5 Sec No No
–14 Volts –16.0 Volts –12.0 Volts No 7.5 Sec No No
Input Voltage 75.0 Volts 180.0 Volts No 7.5 Sec No No
EEPROM Checksum N/A N/A No 7.5 Sec No No
Motor High Temp N/A 135° C Yes 10 Sec Yes Yes
Electronics High Temp N/A 110° C No 10 Sec No No
+5 Volts 4.0 Volts 6.0 Volts No 7.5 Sec No No
Watchdog Expired N/A N/A No N/A No No
EEPROM Write N/A N/A No N/A No No
Table 3-2. Default Configuration For OVERTEMP Alarm
CH. 3: OPERATING THE HFG2.0 47
48 HFG2.0 USER GUIDE
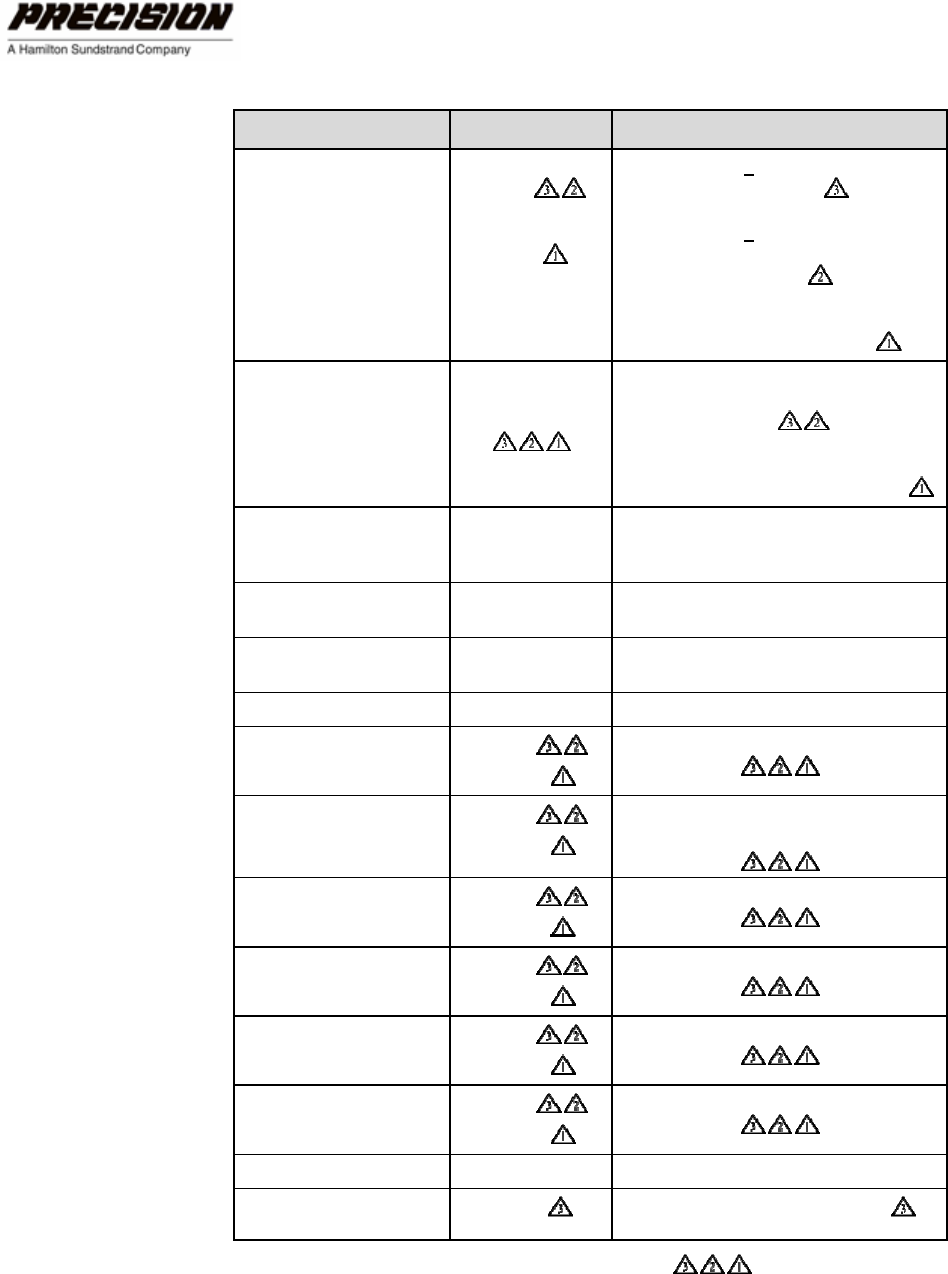
Fault Alarm Type Persist Time Fault Action
Driver Over Current
10 Sec
1 Sec
Driver current > Max Force equivalent
current, Fault.
Driver current > Max Force equivalent
current, Fault. If persists for 1 Min.,
Shutdown
Driver current > 18 Amps, Fault. If
persists for 1 Min., Shutdown
Tracking Error
10 Sec
If in RUN state, not in home dead band
and position error > allowable,
Fault.
If not in overcurrent, RDC not faulted and
feedback not equal to demand, Fault.
Watchdog Expired
< 1 Sec
If last reset was caused by watchdog
timer timeout or illegal address attempt,
Fault.
RDC Failure < 1 Sec Tests hardware for RDC failure, sets
Fault if RDC failure bit set.
Retract/Extended
Command
N/A Fault not used.
Unregulated Voltage Low 10 Sec Unregulated voltage low, Fault.
+14 Volts Low 7.5 Sec
< 1 Sec
+14 V supply < 12 V, Fault.
+14 Volts High 7.5 Sec
< 1 Sec
+14 V supply > 16 V, Fault.
-14 Volts Low 7.5 Sec
< 1 Sec
-14 V supply > -12 V, Fault.
-14 Volts High 7.5 Sec
< 1 Sec
-14 V supply < -16 V, Fault.
Input Voltage Low 7.5 Sec
< 1 Sec
Input Voltage < 75 V, Fault.
Input Voltage High 7.5 Sec
< 1 Sec
Input Voltage > 180 V, Fault.
DSP Failure N/A Fault not implemented.
Electronics Over Temp 10 Sec Electronics temp ≥ 110 °C, Fault
Table 3-3. Fault Configuration For FAULT Alarm
Fault Type Persist Time Fault Action
Motor 10 Sec
1 Sec
Motor temp > 130° C, Fault. . If fault exists and
Motor temp > 135° C for 10 Sec, shutdown.
Motor temp > 130° C, Fault . If fault exists and Motor
temp > 130° C for 60 Sec, shutdown.
Electronics 10 Sec
1 Sec
Electronics temp > 110° C, Fault.
If fault exists and Electronics temp > 115° C for 10 Sec,
shutdown.
Electronics temp > 110° C, Fault.
If fault exists and Electronics temp > 100° C for 15 Sec,
shutdown.
Table 3-4. Fault Configuration For OVERTEMP Alarm
Automatic Shutdown Feature
The HFG2.0 has a self-protective shutdown feature. The HFG2.0 will
shutdown if:
• Any two motor winding temperatures exceed 135 °C for ten (10)
seconds or more (130 °C for 60 seconds )
• The electronics temperature exceeds 115 °C for 10 seconds or
more (100 °C for 15 seconds )
Note: The POSITION and MOTOR CURRENT feedback signals
will both be set to 0 mA when the current to the actuator
motor is removed.
WARNING
Property Damage and Injury Hazard – If the motor windings exceed
135° C (130°C ) or the electronics exceed 115° C
(100° C ), the MCE will shut down power to the motor and
electronics thereby allowing the actuator to move with load. When
power is removed, the return spring causes the poppets to return to
the soft seats, thereby closing the valve. Touching the HFG2.0 may
result in serious burn injury
CH. 3: OPERATING THE HFG2.0 49
50 HFG2.0 USER GUIDE
3.8 Changing Set-Up Parameters
The HFG2.0 uses a number of variables to define its functionality. These
variables are called Set-Up parameters and they are stored in the
EEPROM in the HFG2.0. Default values for these variables are loaded
into the EEPROM at the PECC factory. The Set-Up parameters are
reloaded into the system registers each time the HFG2.0 is powered up
or reset. See Table 3-5 for typical Set-Up parameters.
Users can change the Set-Up parameters to better suit their specific
applications. These parameters are uploaded to the HFG2.0 via the
RS232 interface using PECC’s ActWiz software. The Set-Up parameters
can only be accessed when the HFG2.0 is in the Power Up / Set Up
state. See the Basic Operation Flow Chart in Figure 3-1 and the Power
Up / Set Up State section below for details.
Contact PECC for a copy of ActWiz software. See the ActWiz Software
Manual for further details.
Power Up / Set-Up State
The HFG2.0 is in Power Up / Set Up state immediately after the HFG2.0
has been powered up or reset. This is after the system registers have
been cleared and the Set Up parameters have been reloaded, but before
the Homing process has begun (RUN command = OFF). This is the only
state in which the user can communicate with HFG2.0 via the RS232
interface. In this state, a set-up file can be downloaded to view the current
Set-Up parameters or uploaded to establish new Set-Up parameters. A
Fault file can also be downloaded, also using the ActWiz software. Please
see the ActWiz software manual for more information.
CAUTION
The HFG2.0 will not hold position when communicating with ActWiz
software. The return spring causes the poppets to return to the soft
seats, thereby closing the valve.
A fault file also can be downloaded when the HFG2.0 is in the Power Up /
Set Up state by using ActWiz software via the RS232 interface. The fault
file will provide fault information and possible causes
PARAMETER DESCRIPTION FACTORY
SETTING
Part Number Describes part number of actuator model Per Drawing
Actuator Type Describes type of actuator Stand Alone
Command Source Sets type of command signal Analog
Home Controls the direction the actuator will
move, extending or retracting, to find the
mechanical stop (HOME)
Extend
Span Sets the maximum stroke length,
measured from the HOME position
1.0 inches
Stop Position Sets the signal loss position, measured
from the HOME position
0.0 inches
Interpolation Table Sets how Demand signal is interpolated
between defined points
Linear
Position Loop Constant 63
Current Loop PID Constants
Proportional 2.0
Integral 200
Derivative 0
Velocity Loop PID Constants
Proportional 30
Integral 3,000
Derivative 0
Maximum Velocity Sets the maximum velocity 10 in/s
Maximum Force Sets the maximum force output 1267 lbf
Maximum Homing Velocity Sets the maximum velocity used to find
the HOME position
0.5 in/s
Maximum Homing Force Sets the maximum force the HFG2.0 will
use to find the HOME position
500 lbf
Maximum Holding Force Sets the maximum force to be used to
hold at the HOME position while the
position demand is < 4.1mA and > 2mA
500 lbf
Table 3-5. Typical HFG2.0 Setup Parameters With Default Values
CH. 3: OPERATING THE HFG2.0 51
52 HFG2.0 USER GUIDE
INTENTIONALLY BLANK

4 MAINTAINING THE HFG2.0
Under normal operation, the HFG2.0 requires no formal maintenance
program.
Regularly scheduled inspections should be performed to check for:
• any damage to wire insulation on integral 17-wire signal harness
• any damage to wire insulation on integral 4-wire power harness
• actuator-to-valve alignment (or actuator-to-load alignment)
• any damage to housing or mounting hardware
• any damage to power and signal harnesses
• parts that are worn, loose, or shifted due to shock, vibration, etc.
4.1 Refurbishment
PECC recommends that the HFG2.0 be shipped back to the factory for
refurbishment when the user’s system is shut down for overhaul (typically
after approximately 30,000 hours of operation.) Contact PECC for details
about refurbishment.
CH. 4: MAINTAINING THE HFG2.0 53
54 HFG2.0 USER GUIDE
INTENTIONALLY BLANK
5 TROUBLESHOOTING
This section provides troubleshooting information for the HFG2.0. You
can isolate most electrical faults by using an external oscilloscope and
digital voltmeter (DVM) and computer with diagnostic software.
The HFG2.0 is comprised of highly reliable components and should not
develop service problems under normal operating conditions. However,
over a period of time and service, failures may develop. Whoever is
responsible for fault analysis should be thoroughly acquainted with
physical and electrical configurations, Theory of Operation (Section 2),
and Installation (Section 1).
Resolve problems noted during operation or maintenance as soon as
possible. The causes of many problems can be traced through the
information contained in the block diagram shown in Section 2.
CAUTION
Continuing to operate the valve in a malfunctioning condition is
hazardous to personnel and can cause property damage.
Tables 5-1 and 5-2 list common failures that can occur before or after
valve installation, respectively.
In addition, the HFG2.0 has on-board troubleshooting capability. The
ActWiz software has a fault file that you can upload to pinpoint a failure
cause. See the ActWiz Software Manual for more details.
If, after following the troubleshooting procedures, you still can’t find the
cause of the problem and repair it, contact the factory for assistance.
CH. 4: TROUBLESHOOTING THE HFG2.0 55
56 HFG2.0 USER GUIDE
Symptom Probable Causes Corrective Action
Valve Inoperative -
FAULT alarm
Power Wires not connected
No or low 120 VDC power
Ensure RED and GREEN wires correctly connected to
valve
Ensure 120 VDC Primary System Power at valve
Valve Inoperative -
NO FAULT alarm
No RUN or position command Ensure VIOLET and WHITE/VIOLET wires correctly
connected to valve
Ensure 24 VDC RUN and position command at valve
Actuator moves toward
HOME then stops
Intermittent RUN command
Homing Force Too Low
No position demand
Ensure consistent 24 VDC RUN command and fuel
demand signal
Ensure position command at valve
Actuator moves toward
HOME intermittently
Intermittent RESET command Ensure GRAY and WHITE/GRAY wires correctly
connected to Actuator
Ensure consistent 24 VDC RESET command
Actuator finds HOME then
moves to STOP position
No fuel demand signal Ensure BROWN and WHITE/BROWN wires correctly
connected to Actuator
Ensure fuel demand > 2.0 mA at Actuator
Valve does not track fuel
demand
No fuel demand signal or RUN
command
Ensure BROWN and WHITE/BROWN wires correctly
connected to valve
Ensure valve demand > 4.1 mA at valve
Ensure RUN command present at valve
Valve does not hold
consistent position-oscillates
or dithers
Varying fuel demand signal
No or low 120 VDC power
Ensure stable fuel demand at the actuator
Ensure 120 VDC at valve
No valve feedback Valve feedback wires not
connected
No or low 120 VDC power
Self-protective valve auto shut
down
No RUN command
Ensure YELLOW and WHITE/YELLOW wires correctly
connected
Ensure 120 VDC at valve
Upload Fault File- check for motor windings over -
temperature faults.
Check for valve contamination
Ensure RUN command present at valve
No motor current feedback Motor current wires not
connected
No or low 120 VDC power
No RUN command
Ensure BLUE and WHITE/BLUE wires correctly
connected
Ensure 120 VDC at valve
Ensure RUN command present at valve
Valve Operative- FAULT
alarm active
FAULT wiring incorrect
Internal FAULT
Ensure ORANGE and WHITE/ORANGE wires
correctly connected to Actuator
Upload Fault File to identify source of fault
Valve Operative- OVER
TEMP alarm active
OVERTEMP wiring incorrect
Electronics or motor winding
temperature out of range
Valve jammed
Ensure BLACK and WHITE/BLACK wires correctly
connected to valve
Reduce External ambient temperature
Check for valve contamination
Valve leaks when closed Poppet assembly fouled
Valve installed backwards
Stroke valve OPEN and clear foul at orifice
Ensure supply is connected to valve IN port
Symptom Probable Causes Corrective Action
RS232 Interface Inoperative Incorrect wiring
No or low 120 VDC power
COM1 not connected
RESET or RUN command is
ON
Ensure WHITE/ORANGE/YELLOW,
WHITE/ORANGE/BLUE, WHITE/ORANGE/GREEN
wires correctly connected to valve and laptop PC.
Ensure 120 VDC Primary System Power at Valve
Check laptop/PC com port
Remove RESET or RUN command
Table 5-1. Initial Installation Troubleshooting Chart
Symptom Probable Causes Corrective Action
No valve feedback No or low 120 VDC power
Self-protective valve auto shut
down
Ensure 120 VDC at valve
Upload Fault File- check for motor windings over -
temperature faults.
Check for valve contamination
FAULT alarm Various Upload Fault File to identify source of fault
Clear indicated fault
OVER TEMP alarm Ambient temperature limit
exceeded
Electronics or motor winding
temperature out of range
Allow actuator to cool and re-start
Reduce ambient temperature
Check for valve contamination
FAULT and OVERTEMP
alarm
No 120 VDC Power
DSP Failure
Ensure 120 VDC at actuator
Contact factory
Table 5-2. HFG2.0 In-Service Troubleshooting Chart
For troubleshooting purposes, use Table 5-3 to verify the valve electrical
continuity integrity.
Disconnect the HFG2.0 power and digital harness connectors and use a
digital multi-meter (DMM) to check the resistance values between the
wires indicated on the table. If an open circuit is detected, send the
HFG2.0 to Precision Engine Controls Corporation for test and repair.
WARNING – Shock Hazard
Remove all power to the HFG2.0 prior to continuity check.
CH. 4: TROUBLESHOOTING THE HFG2.0 57
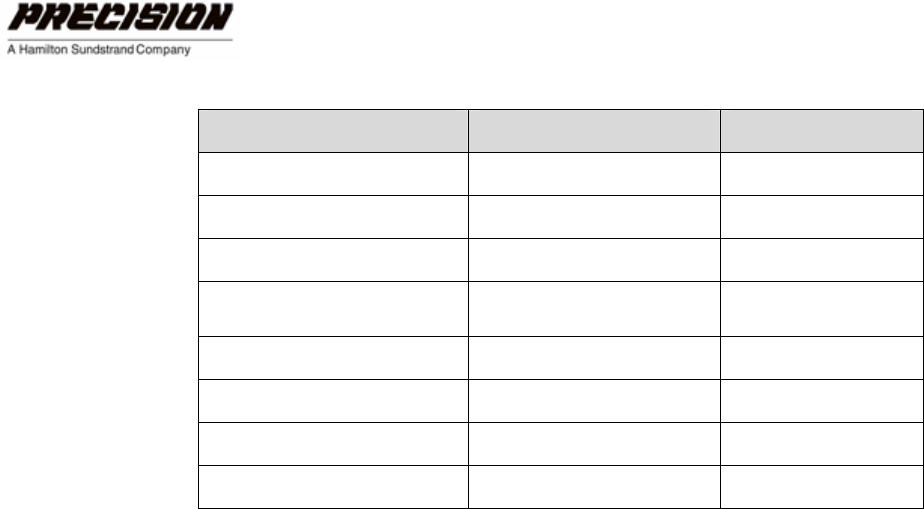
58 HFG2.0 USER GUIDE
Function Actuator Wire Colors Resistance Value
DEMAND BRN and WHT/BRN 225Ω
RUN VIO and WHT/VIO 4.7 KΩ
RESET GRY and WHT/GRY
4.7 KΩ
POWER RED and GREEN High Impedance, but
not open circuit.
MOTOR CURRENT BLU and WHT/BLU High Impedance
POSITION YEL and WHT/YEL High Impedance
FAULT Alarm ORN and WHT/ORN High Impedance
OVERTEMP Alarm BLK and WHT/BLK High Impedance
Table 5-3. HFG2.0 Electrical Continuity Troubleshooting Chart
5.1 FAULT File
The FAULT and OVERTEMP alarms are discrete outputs from the
HFG2.0. The FAULT and OVERTEMP alarm circuits are closed in the
normal operating condition. If the HFG2.0 detects a fault, the alarm circuit
for that fault opens, and the user-provided controller should detect the
open circuit. The fault is recorded in the fault file.
The HFG2.0 firmware captures the fault data in the EEPROM. If the
HFG2.0 is operational, a fault file can be downloaded using ActWiz
software via the RS232 interface. The fault file will provide fault
information and possible causes. The HFG2.0 must be in the Power Up /
Set Up state to download the fault file. See Section 3.8 for details about
the Power Up / Set Up state. Contact Precision Engine Controls
Corporation to request ActWiz software.
Should a fault occur, the user should shut down to troubleshoot the
failure. Removing 120 VDC power shuts down the HFG2.0. Toggling the
RESET command will clear the fault, but it does NOT clear the fault file.
Note: The fault file only records the programmable faults that have
been enabled .
Fault Descriptions
The following are brief description of some of the faults that can be
detected by the HFG2.0. See Section 3.7 and Table 3-1 , Table 3-2
, Table 3-3 , and Table 3-4 for additional details
about system faults.
Driver over-current
The maximum MCE current output limit is 25 amps. If the MCE is
outputting its maximum current for ten (10) seconds, the MCE signals a
fault.
If MCE maximum current drop below the maximum current, the fault
signal is cleared.
Tracking error
The HFG2.0 position should continuously track demand. Should the
position versus demand vary more than one motor revolution (0.20
inches) for more than ten (10) seconds, the MCE signals a fault.
If the position returns to within one motor revolution, the fault signal is
cleared.
CH. 4: TROUBLESHOOTING THE HFG2.0 59

60 HFG2.0 USER GUIDE
Watchdog expired
The MCE watchdog timer continuously monitors the firmware program.
Should the MCE firmware program stop functioning, or attempt to access
an illegal address, the MCE signals a fault.
This fault does not clear without RESET command.
Resolver to Digital Converter (RDC) failure
The MCE contains a resolver to digital converter chip (RDC) that provides
position feedback information to the DSP. The RDC chip has on-board
health monitoring.
If the RDC detect an internal tracking error, a signal is sent to the MCE.
Upon receipt, the MCE signals a fault.
This fault does not clear without RESET command.
Unregulated Voltage Low
The MCE signals a fault if the reference voltage drops below minimum for
ten (10) seconds .
If the voltage returns to acceptable level, the fault signal is cleared.
+/- 14V High/Low
The MCE signals a FAULT if the internal ±14 VDC power supplies
exceed operating limits. This fault does not clear without RESET
command.
Input voltage High/Low
The MCE signals a fault if the 120 VDC supply exceeds 180 VDC or
drops below 75 VDC for more than 7.5 seconds (1 second for
). This fault clears when the 120 VDC supply voltage returns.
APPENDIX A: DECOMMISSIONING & DISPOSAL
This section contains recommended HFG2.0 decommissioning and
disposal practices. It is for permanent removal or replacement of the
installed product, with no intentions of rework, overhaul, or to be used as
spares.
For removal follow proper lockout /tagout procedures and verify no live
electrical circuits:
• Disconnect the 4 wires of the integral power harness to the
HFG2.0.
• Disconnect the 17 wires of the integral signal harness to the
HFG2.0
• Disconnect the ground wire from the HFG2.0 chassis
• Disconnect the fuel inlet pipe
• Disconnect the fuel outlet pipe
Note: Follow local environmental codes in regards to disposal of
electronic components, specifically all electrolytic
capacitors.
APPENDIX A: DECOMMISIONING 61
62 HFG2.0 USER GUIDE
INTENTIONALLY BLANK

APPENDIX B: GLOSSARY
Term Definition
RUN Command A discrete 24 VDC signal that enables the HFG2.0 actuator and valve
to move.
RESET Command A discrete 24 VDC signal that causes the HFG2.0 internal program
(firmware) to jump to the beginning.
Controller A user-provided computer that executes commands to the HFG2.0
and accepts analog and discrete feedback.
Fuel Demand A 4 mA to 20 mA signal that commands the HFG2.0 to move to a
certain actuator/valve position. The signal is scaled with SPAN.
Position Demand Feedback A 4 mA to 20 mA signal that communicates the actual HFG2.0
actuator/valve position to the controller.
Motor Current Feedback A 4 mA to 20 mA signal that is proportional to the HFG2.0 motor
current. The signal is scaled with Max. Force.
FAULT alarm A discrete signal from the HFG2.0 that communicates an internal
failure. The user’s controller will see an open circuit when a FAULT
alarm is active.
OVERTEMP alarm A discrete signal from the HFG2.0 that communicates an internal
over temperature; electronics or motor. The user’s controller will see
an open circuit when the OVERTEMP alarm is active.
HOME A mechanical rigid stop from which the HFG2.0 calculates position.
HOME is found at start-up during the Homing sequence. The HFG2.0
defines HOME when the motor current exceeds the HOMING
FORCE and velocity is zero. HOME is defined as the actuator/valve
position when the Demand signal is 4 mA. HOME is the Valve Closed
condition for the HFG2.0
Homing sequence When the HFG2.0 extends or retracts to find a rigid mechanical stop.
SPAN Maximum distance from HOME. SPAN is defined as the position
when the Demand signal is 20 mA.
STOP position A user-defined position between HOME and SPAN that the HFG2.0
travels to upon loss of RUN or position Demand signal.
Maximum Velocity A user defined maximum velocity in inches per second.
Maximum Homing Force A user defined maximum homing force output setting. The motor
control electronics uses this setting to determine the maximum motor
current in the Homing sequence.
Maximum Holding Force A user-defined maximum force while in the Holding Motor Current
state.
APPENDIX C: GLOSSARY 63
INTENTIONALLY BLANK
64 HFG2.0 USER GUIDE
