Hangzhou Qifei Intelligence Technology 3WD4-QF-10B Q10Plant protection drone User Manual Network Video Recorder User s Manual
Hangzhou Qifei Intelligence Technology Co.,Ltd. Q10Plant protection drone Network Video Recorder User s Manual
UserManual.wiki
>
Hangzhou Qifei Intelligence Technology
>
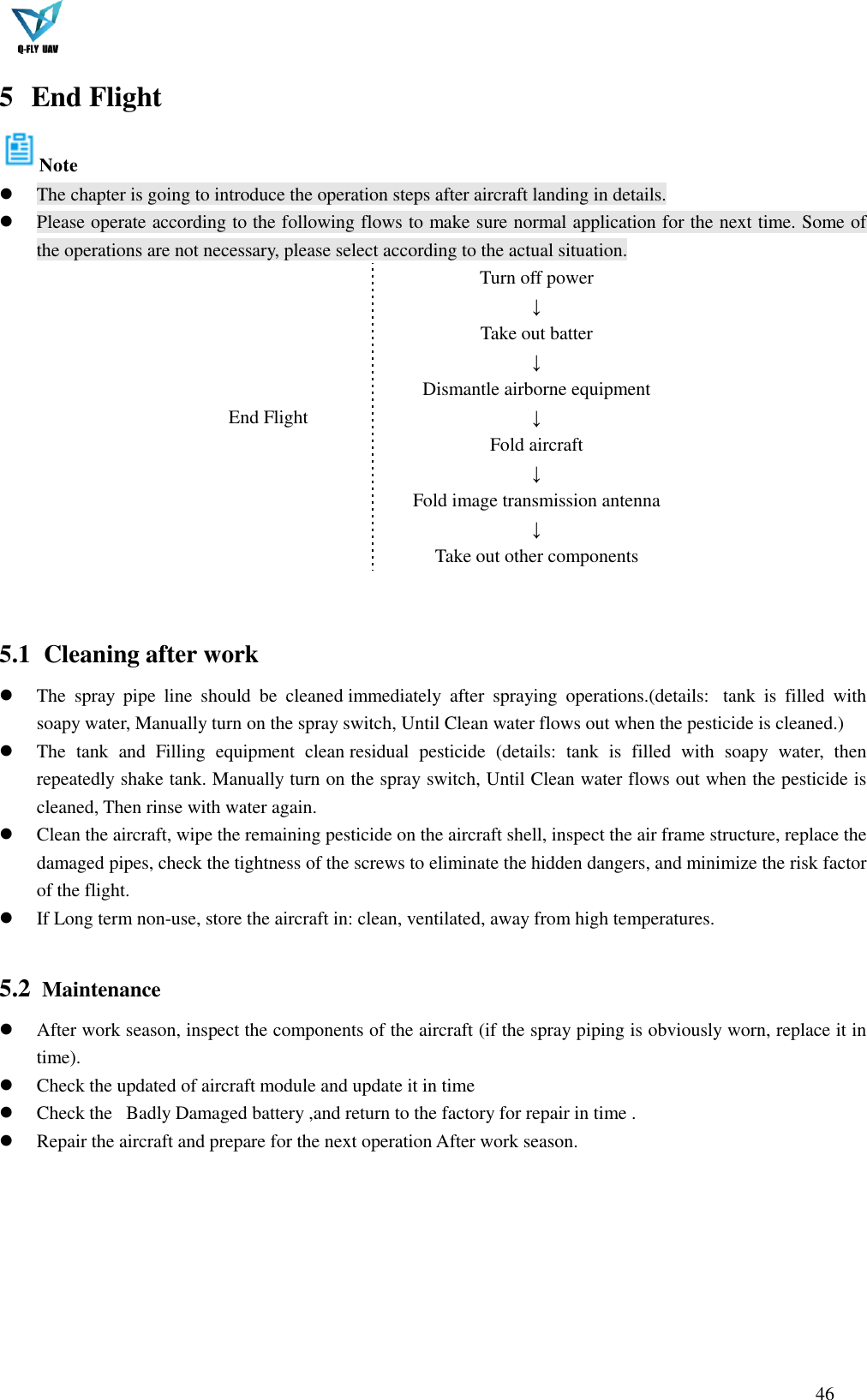
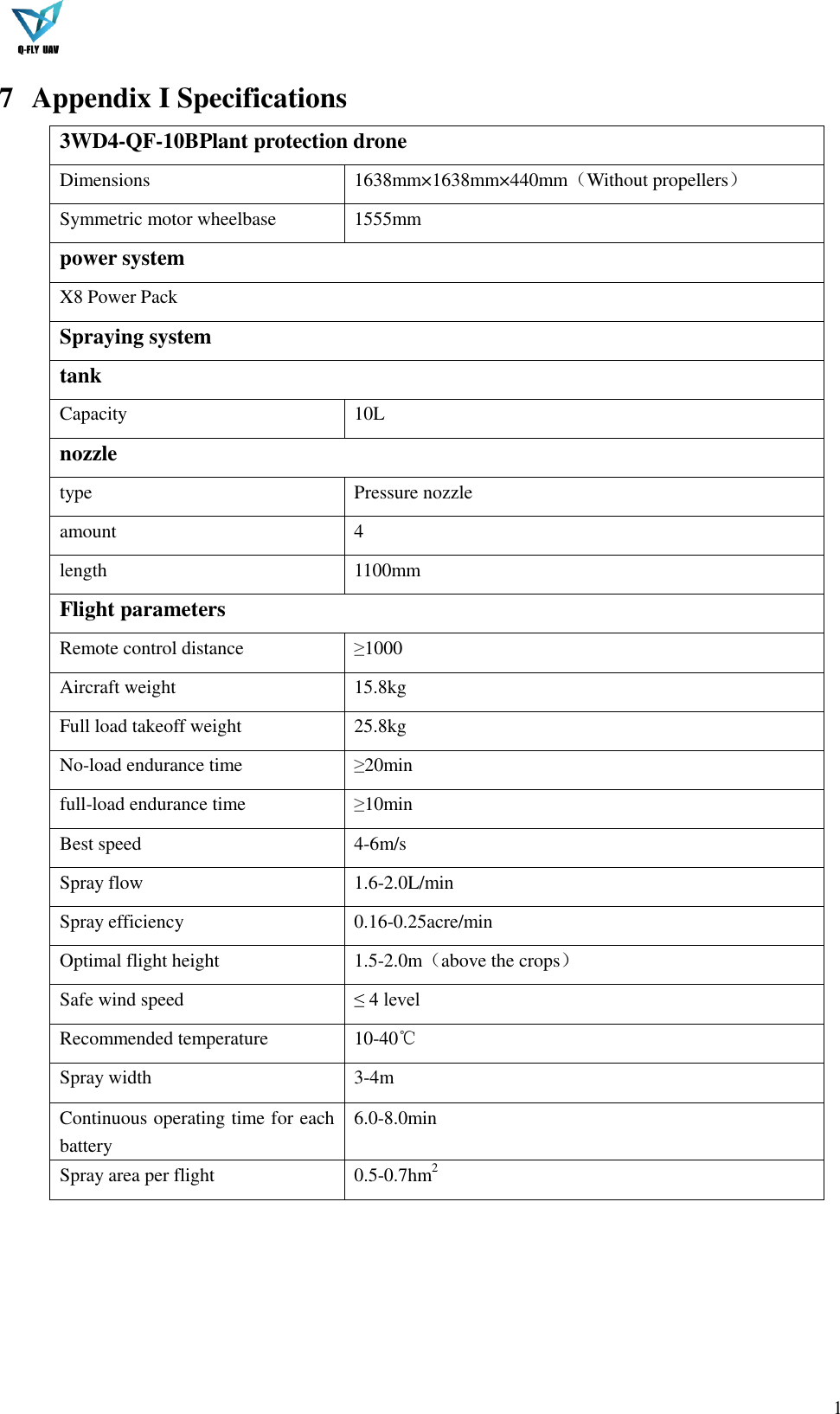
3WD4 QF 10B User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation