Hangzhou Qifei Intelligence Technology 3WD4-QF-10B Q10Plant protection drone User Manual Network Video Recorder User s Manual
Hangzhou Qifei Intelligence Technology Co.,Ltd. Q10Plant protection drone Network Video Recorder User s Manual
Users Manual

User’s Manual
Q10Plant protection drone
Model: 3WD4-QF-10B
Q10Plant protection drone controller
Model: QF-T-1000
V 1.0.0
Hangzhou Qifei Intelligence Technology Co.,Ltd.

1
Table of Contents
1 Product Introduction ................................................................................................................................................. 9
1.1 Overview ............................................................................................................................................................ 9
1.2 Features .............................................................................................................................................................. 9
2 Structures and software ........................................................................................................................................... 11
2.1 Aircraft ............................................................................................................................................................. 11
2.1.1 Product Dimensions .................................................................................................................................. 11
2.1.2 Structural Components .............................................................................................................................. 11
2.2 spray system ..................................................................................................................................................... 13
2.3 Remote Control and the GCS .......................................................................................................................... 13
2.3.1 Appearance and components .................................................................................................................... 13
2.3.2 Charger...................................................................................................................................................... 15
2.3.3 APP interface............................................................................................................................................. 15
3 Flight Preparation ................................................................................................................................................... 18
3.1 preparation and inspection ............................................................................................................................... 18
3.1.1 remote control settings .............................................................................................................................. 18
3.1.2 Remote Control Calibration ...................................................................................................................... 22
3.1.3 Accelerometer Calibration ........................................................................................................................ 23
3.1.4 Magnetic Compass Calibration ................................................................................................................. 23
3.1.5 Setting Control Parameters ....................................................................................................................... 24
3.1.6 Voltage Reading and Setting..................................................................................................................... 25
3.1.7 Setting crop protection Functions ............................................................................................................. 26
3.1.8 Setting flight parameters ........................................................................................................................... 26
3.1.9 Starting/stopping the motor ....................................................................................................................... 26
3.1.10 Motor Test ............................................................................................................................................... 27
3.2 Charge .............................................................................................................................................................. 28
3.2.1 Charge the Aircraft Battery ....................................................................................................................... 28
3.2.2 Charge the Remote Controller .................................................................................................................. 29
3.3 Prepare Aircraft ................................................................................................................................................ 30
3.3.1 Unfold propeller ........................................................................................................................................ 30
3.3.2 Install smart battery................................................................................................................................... 30
4 Enable Flight ........................................................................................................................................................... 32
4.1 Overview .......................................................................................................................................................... 32
4.2 Manual Mode ................................................................................................................................................... 33
4.2.1 Flow Introduction of Manual Flight .......................................................................................................... 33
4.2.2 Unlock Flight Control ............................................................................................................................... 33
4.2.3 Manual Takeoff ......................................................................................................................................... 33
4.2.4 Manual Flight Control ............................................................................................................................... 34
4.2.5 Manual RTH and Landing ........................................................................................................................ 35
4.2.6 Manual Lock ............................................................................................................................................. 35
4.3 Intelligent Mode ............................................................................................................................................... 36
4.3.1 Overview ................................................................................................................................................... 36
4.3.2 Intelligent Flight Mode ............................................................................................................................. 37
4.3.3 A、B point operation mode ...................................................................................................................... 42

2
4.3.4 Electric fence system ................................................................................................................................ 43
5 End Flight ............................................................................................................................................................... 46
5.1 Cleaning after work ......................................................................................................................................... 46
5.2 Maintenance ..................................................................................................................................................... 46
6 Upgrade ................................................................................................................................................................... 47
7 Appendix I Specifications ......................................................................................................................................... 1
8 Appendix II Description of Aircraft Status Indicators .............................................................................................. 2
Legal Statement
3
Copyrights
© 2018 QiFei Intelligent Technology. All rights reserved.
Any or full contents of the user’s manual cannot be copied, transmitted, distributed, partially or wholly, by any
means, without the prior written notice of QiFei Intelligence Technology. (herein after “QiFei”).
QiFei or the third party may reserve the right of the product described in this user’s manual. Without the prior
written approval of the corresponding party, any person cannot (including but not limited to) copy, distribute,
amend, reverse compile, disassemble, engineering, rent, reverse engineer, reverse compile or disassemble the
software.
Trademark
are the trademarks or registered trademarks of the QiFei in various jurisdictions.
Other trademarks and registered trademarks mentioned are the properties of their respective owners.
Update and Modification
In order to enhance the product security and provide better user experience, QiFei may improve the product via
software auto update, but QiFei doesn't need to inform in advance and isn't liable to any responsibility.
QiFei reserves the right to modify any information in this document at any time, the modified contents will be
added into the new version without prior announcement. There may be minor difference about some product
functions after it is updated.
Preface
4
Document Overview
The document is to comprehensively introduce the product function features, structure parameters, installation
dismounting and flight guide etc.
Applied Model
Q10Plant protection drone
Model: 3WD4-QF-10B
Q10Plant protection drone controller
Model: QF-T-1000
Application Objective
The main readers of the manual are terminal users.
Reading Guide
Chapter
No.
Chapter
Name
Main Content
1
Product
Overview
It is to introduce the function features and application scenarios of the
product.
2
Product
Component
It is comprehensively to introduce the main components of the product.
It is recommended to read the chapter before use, which is to understand
the application methods of product structure and main components.
3
Flight
Preparation
It is to introduce the complete flow of aircraft unlock before takeoff in
details.
It has to strictly conform to the installation debudding sequence of the
chapter, install each component and make initial debugging before first
use.
If it is not the first time to use the device, you can select the installation
content according to the dismounting situation last time, but it has to be
confirmed that all the components (unnecessary steps excluded) listed in
the chapter have been stably installed.
4
Enable Flight
It is to introduce the complete flow of aircraft formal launch and landing
in details.
It has to complete the preparation steps listed in the chapter 3.
It needs to confirm that all the inspection items including environment
and the device itself have conformed to flight requirements before
enabling flight.
Please operate by strictly conforming to the steps described in the
chapter, the operation sequence can't be reversed.
5
End Flight
It is to introduce the operation steps after aircraft landing in details.
Please operate by strictly conforming to the steps described in this
chapter, the operation sequence can't be reversed.
6
Upgrade
It is to introduce upgrade methods and attentions.
7
Appendix 1
It is to introduce the technical parameters.
8
Appendix 2
It is to introduce the indicator definition of the aircraft.
5
Symbol Definition
The following symbol may appear in the document, please refer to the table below for the respective definition.
Symbol
Note
Danger
It means highly potential danger. It will cause severe injury or casualties if it
fails to avoid.
Warning
It means moderate or low potential danger. It may cause slight or moderate
injury if it fails to avoid.
Caution
It means potential risk. It may cause device damage, weaker performance or
other unpredictable consequences if it fails to avoid.
Tips
It means that it can help you to solve some problem or save your time.
Note
It means the additional information, which is the emphasis and supplement of
the main body.
Document Material
The product includes the following document materials, you can search according to your requirements:
<Quick Start Guide>
It can be applied to the first flight. Please refer to <User Manual> for operation details when it is used for the second
time or it has to use some other advanced functions.
Check the paper material affiliated in the packaging or log in www.qifeizn.com to acquire more details.
<User Manual> (the document it is)
It comprehensively introduces the product function features, structure parameters, installation dismounting and flight
guide etc.
Log in www.qifeizn.com and search 3WD4-QF-10B to acquire more details.
6
Important Safeguards and Warnings
The following description is the correct application method of the device. Please read the manually carefully before use
in order to prevent danger and property loss. It has to strictly conform to the manual during application and keep it
properly after reading.
Danger
Please fly the aircraft in an environment that meets the flight conditions, away from the no-fly zone.
Please do not touch the rotating parts to prevent injury.
The pesticide is toxic. Please use it with caution and operate according to the pesticide use specifications.
When using pesticides, please wear protective equipment to prevent direct contact with pesticides.After the
aircraft operation is completed, please clean the skin and clean the aircraft and remote control (wipe with a damp
cloth).
When using pesticides, it is strictly prohibited to pollute rivers and drinking water sources.
The use of highly toxic and special fluids is prohibited.
Warning
Please transport, use, and store the product and all other components in a compliant environment.
When disassembling the device, strictly follow the procedures described in the manual. Do not unduly remove
other components.
The use of 3WD4-QF-10BPlant protection drone has security risks and is not suitable for people under 18 years of
age.
Caution
Please operate the device by strictly conforming to the steps described in the chapter, the operation sequence can't
be reversed.
It needs to understand the local laws and regulations before using the aircraft. Please apply to local authorities for
flight permission if necessary.
Please select open wide environment outdoors for the first flight. It is to unlock the aircraft and take off when the
number of GPS satellites reaches more than 8.
Please make sure the device antenna has been properly installed before enabling the power of remote control,
ground station or aircraft, otherwise it may cause damage to internal module or make the control distance shorter.
When dispensing, please use clean water, it may cause the nozzle to be blocked. If there is any blockage during
use, please clean it up before use.
Avoid using powder pesticides, it may affect the service life of the spraying system.
Flight Environment
Warning
Please make flight in the environment which meets the following conditions:
7
Keep away from no-fly zone, please do not enter no-fly zone.
Maximum flight radius: 1 km.
Please do not fly the aircraft in rain, snow and thunder weather.
Please do not fly in narrow and small space.
Do not fly above the crowd to avoid personal injury or poisoning.
Please do not get close to high-voltage power line.
Power Requirements
Caution
Please strictly conform to your local electrical safety codes.
Make sure the power supply is correct before operating the device.
The power source shall conform to the requirement of the Safety Extra Low Voltage (SELV) standard, and supply
power with rated voltage according to the Limited Power Source requirement of IEC60950-1. Please note that the
power supply requirement is subject to the device label.
Prevent the power cable from being trampled or pressed, especially the plug, power socket and the junction
extruded from the device.
Battery Attentions
Warning
It has to use the exclusive power adapter to charge the device provided by QiFei, otherwise it may cause damage
to the battery or other unpredictable consequences.
It has to charge the device at a temperature which is between 0 and 50℃.
It has to distinguish positive and negative when charging the device, which is to prevent short circuit.
Please do not place the device close to fire source or inflammables.
Please do not charge and discharge the device in a situation where it is not guarded by people.
Please do no use undesignated battery to the device.
Please do not dismantle and destroy the battery without permission, water is not allowed to enter the device,
damages caused by human is not covered by warranty.
Please do not throw the battery into fire or make it exposed to the environment with high temperature.
Please do not dismantle or modify the battery, or make the battery transformed.
Avoid contact short circuit between positive and negative (Please do not place the battery together with the objects
such as necklace and hairpin etc. when carrying or storing the battery).
Please replace new battery in time when it is damaged.
Please charge the battery or discharge it to 30%~40% of remaining battery if it won't be used for a long time, and
place it in a dry and cool environment.
If the battery leaks and the liquid enters eyes accidentally, please do not rub your eyes, you should wash your eyes
with clean water and see a doctor immediately.
Caution
It is normal the battery heats up after it is running for a period of time, because the discharge power is quite big.
It is normal the battery heats up when it is being charged.
8
The cycle times of power battery is 300 in normal application situation.
Application Environment Requirements
Please transport, use and store the device in the allowed humidity and temperature range.
Please do not let any liquid flow into the device.
Please do not vibrate or soak the device.
Please pack the device with default package or material with equivalent quality.
Operation and Maintenance Requirements
Warning
Please do not dismantle the device unprofessionally.
Please use soft dry cloth or use clean soft cloth and dip a little mild detergent to clean the device.
Please use the accessories provided by manufacturer and it shall be installed and repaired by professional staff.
Disclaimer
This manual is for reference only. Please refer to the actual product for more details.
Minor differences might be found in user interface, and there might be deviation between the actual value of some
data and the value provided in the manual due to the reasons such as the real environment is not stable. Please
refer to the final explanation of the company if there is any doubt or dispute.
All the designs and software are subject to change without prior written notice. The manual will be regularly
updated according to the product upgrade without prior announcement.
Please contact the supplier or customer service if there is any problem occurred when using the device.
Other trademarks and registered trademarks mentioned in the document are the properties of their respective
owners.
Please use this product within the scope allowed by local laws. Qifei shall not be liable for any illegal use.
This product belongs to a low-level crop protection UAS. Please strictly abide by the relevant product's
operating specifications. Hangzhou Qifei Intelligence Technology Co., Ltd. shall not be responsible for any
performance, safety and legal liability caused by any operation and usage control.
Please fly under the guidance of professionals. Install and use this product according to this manual. Qifei is
not responsible for accidents caused by improper installation, configuration, operation, etc.

9
1 Product Introduction
1.1 Overview
The series is a four-axis unmanned aerial vehicle (UAV). It is designed for agriculture and forest areas. Drones are
mainly divided into Two modes: automatic and manual flight mode.
The product consists of flight platforms, spray systems, remote controls and ground control stations (GCS).
Flight platform: It consists of navigation system, flight control system and power system.
Spray system: Spray control system, pump, pipeline, medicine box, nozzle and other components.
Remote control: It consists of a remote controller and a digital radio station.
GCS: Composed of a Android smart phone and APP software.
1.2 Features
Integrated Design
The propeller adopts a folded structure. No need to install a propeller before takeoff.
The remote control integrates a mobile phone, a digital radio station, which is easy to operate.
The pesticide tank is fixed on the body and is not disassembled.
Accurately Positioning
GPS accuracy: 1.5m
Terrain Following Function
Millimeter-wave radar
Wireless Transmission
The aircraft has several antennas. They are used for: remote control receiver, communication with ground
station and GPS antenna, RTK spiral antenna (only RTK version includes this component).
Low Battery Level Protection
When the low battery level triggers the aircraft to return to home, it can trigger low battery level protection
such as alarm, return to home and landing.
Flight Log
The ground station automatically records the flight record logs.
Intelligent Battery
Anti-shock and wear-resistant housing to extend battery life.
LED automatic power display.
Charging smart alarm to prevent overvoltage, overcurrent, and high temperature damage to the battery and
eliminate potential safety hazards.
Low-voltage smart alarm (buzzer).
When the battery is not used for a long time, it will automatically discharge to the storage voltage, extending
the battery life.
Logging function.
Automatic shutdown function.If it is not used for more than 3 minutes, the battery will automatically shut
down to save power.
10
Parameter specifications:
Output voltage: 39.6 ~ 50.4 V Nominal voltage: 44.4V
Charging voltage: 50.4V Battery weight: 4.40kg
Charge Current: MAX 24A (1.5C) Nominal Capacity: 16000mA
Flight Control
The aircraft adopts a four-axis structure and has multiple control modes,which is simple and safe.
Maximum taking off weight 28.5kg.
Electronic Fence
Support electronic fence (e-fence) function in case the aircraft is out of the specified flight zone.
Support customized e-fence settings.
Battery alert
LED1
LED2
LED3
LED4
Current power
○
○
○
○
0%-8%
●
○
○
○
8%-25%
●
○
○
○
25%-37.5%
●
●
○
○
37.5%-50%
●
●
○
○
50%-62.5%
●
●
●
○
62%-75%
●
●
●
○
75%-92%
●
●
●
●
92%-100%
11
2 Structures and software
This series product includes aircraft, sprinkler systems, remote control, and ground control station (GCS).
This chapter introduces the structures of these four components and the software used for ground stations. The
detailed operations will be introduced in chapter 3.
Note
All figures listed below and all dimensions listed here for reference only. The figure and the dimensions may be
slightly different from the user data due to measure position, measure accuracy, and position indicator. Please refer
to the actual product for detailed information.
2.1 Aircraft
For detailed operation please refer to Chapter 3
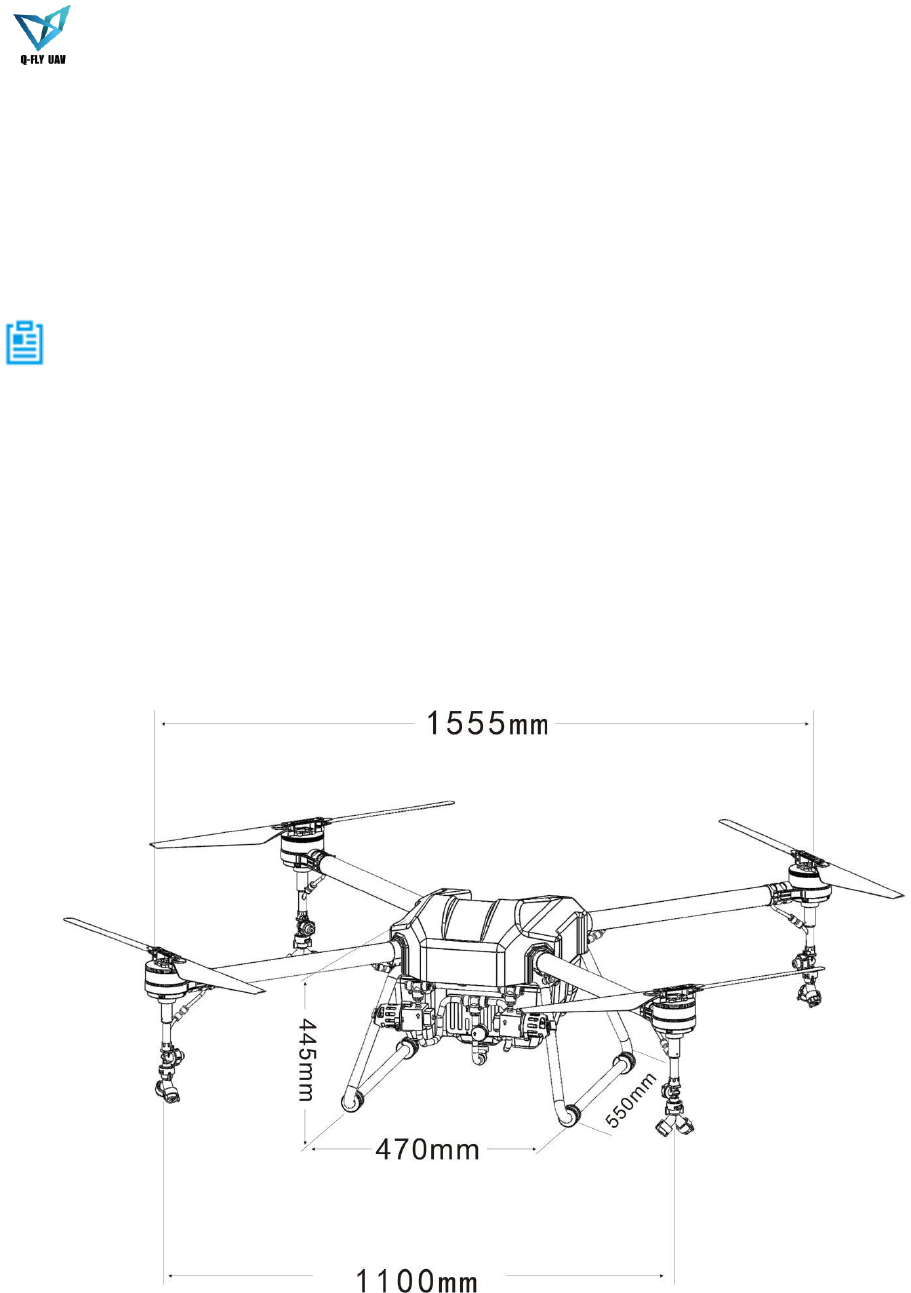
2.1.1 Product Dimensions
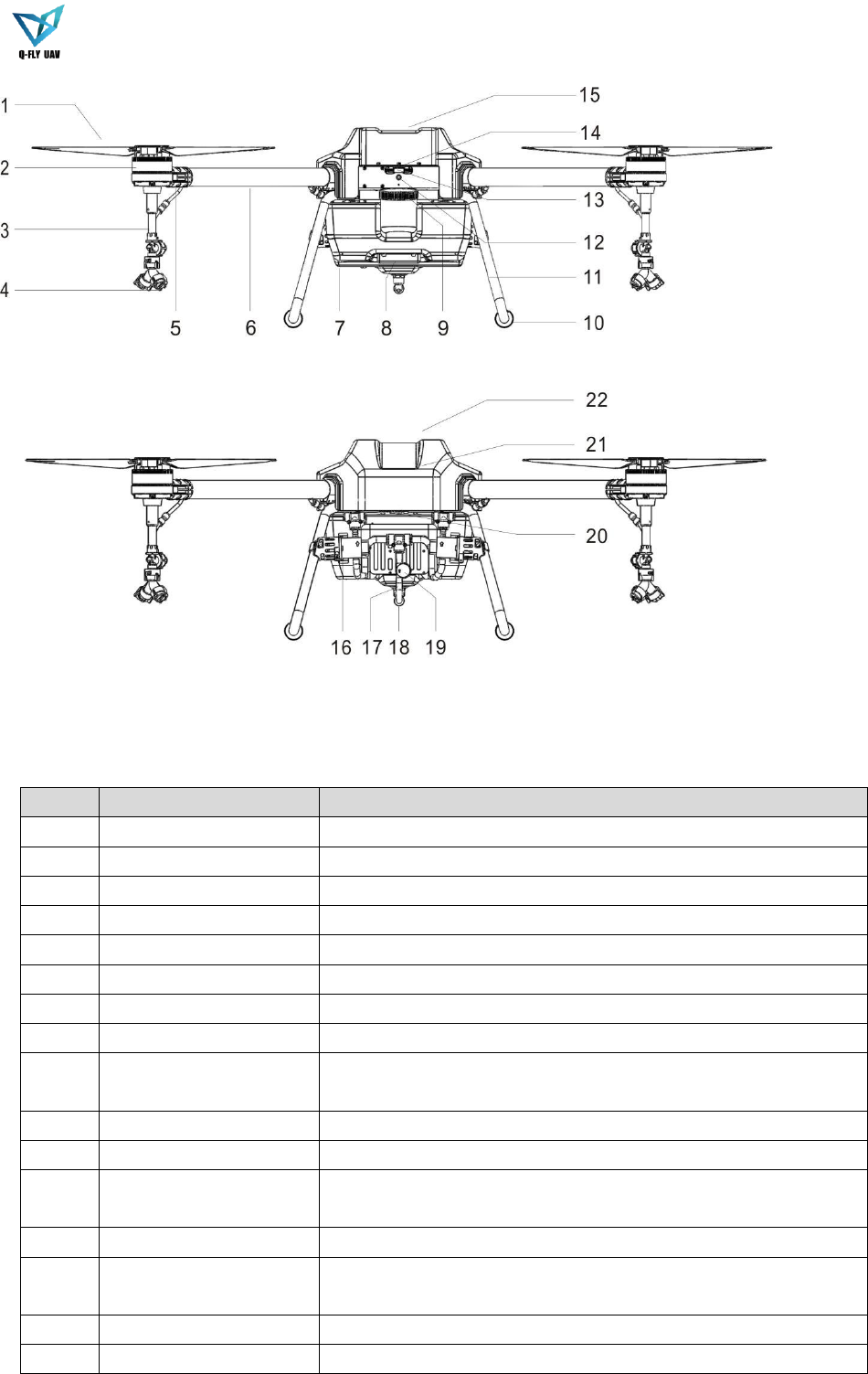
The aircraft is shown as in Figure 2-1.
Figure 2-1
2.1.2 Structural Components
The structure of the aircraft is shown as in Figure 2-2.
12
Figure 2-2
For details, please refer to the following table.
No.
Name
description
1
propeller
High-speed rotation provides lift,folding paddles to save space.
2
Motor
Drive propeller rotation.
3
Sprinkler pipe
Connecting pesticide pipes and nozzles.
4
nozzle
Spray and atomized pesticides.
5
Direction indicator
Indicate the direction.
6
Arm
Non-folding arm with higher strength, stronger and durable.
7
Pesticide tank
As a container for pesticides, volume: 10L.
8
radar
detect height and follow terrain.
9
Entrance for pesticide
loading
Entrance for pesticide loading.
10
Landing gear cushion
Reduce shock when landing.
11
landing gear
Support the aircraft.
12
LED flight status
indicator
Indicate the status of each flight. For details, please refer to the
appendix Instructions for indicating the status of the aircraft.
13
Battery retention hook
To fix the battery
14
Battery installation
position
Where to install the battery
15
Aircraft shell
Protect internal components
16
Pump
pumping pesticides.
13
No.
Name
description
17
Pesticide delivery
pipeline
Transport pesticides
18
pesticide outlet connector
Connection of the pump and the pipe.
19
Flow Meter
Measure real-time flow data and feed back to the sprinkler system
20
Night light
Illumination at night
21
GPS
Positioning
22
Aircraft body
Support the overall structure of the aircraft
2.2 spray system
3WD4-QF-10BPlant protection drone spray system adopts 12V diaphragm pump and Y-type pressure
spraying, which can achieve forward and backward switchable spraying. During operation, parameters such as
spray flow rate, spray width, and flight speed can be adjusted based on actual operating conditions.
Spraying flow: 1600-2000 ml/min.
Spray width: 1-20 meters (depending on flight altitude).
Flow meter: Real-time monitoring of the spray system (such as: flow , flow rate, remaining amount of
pesticide, etc.), automatic return or hovering when the drug is broken.
See Figure 2-2 for details.
2.3 T1000 Remote Control and the GCS
2.3.1 Appearance and components
The remote control T1000 is shown as below. See Figure 2-3 ,Figure 2-4,Figure 2-5.
Figure 2-3
14
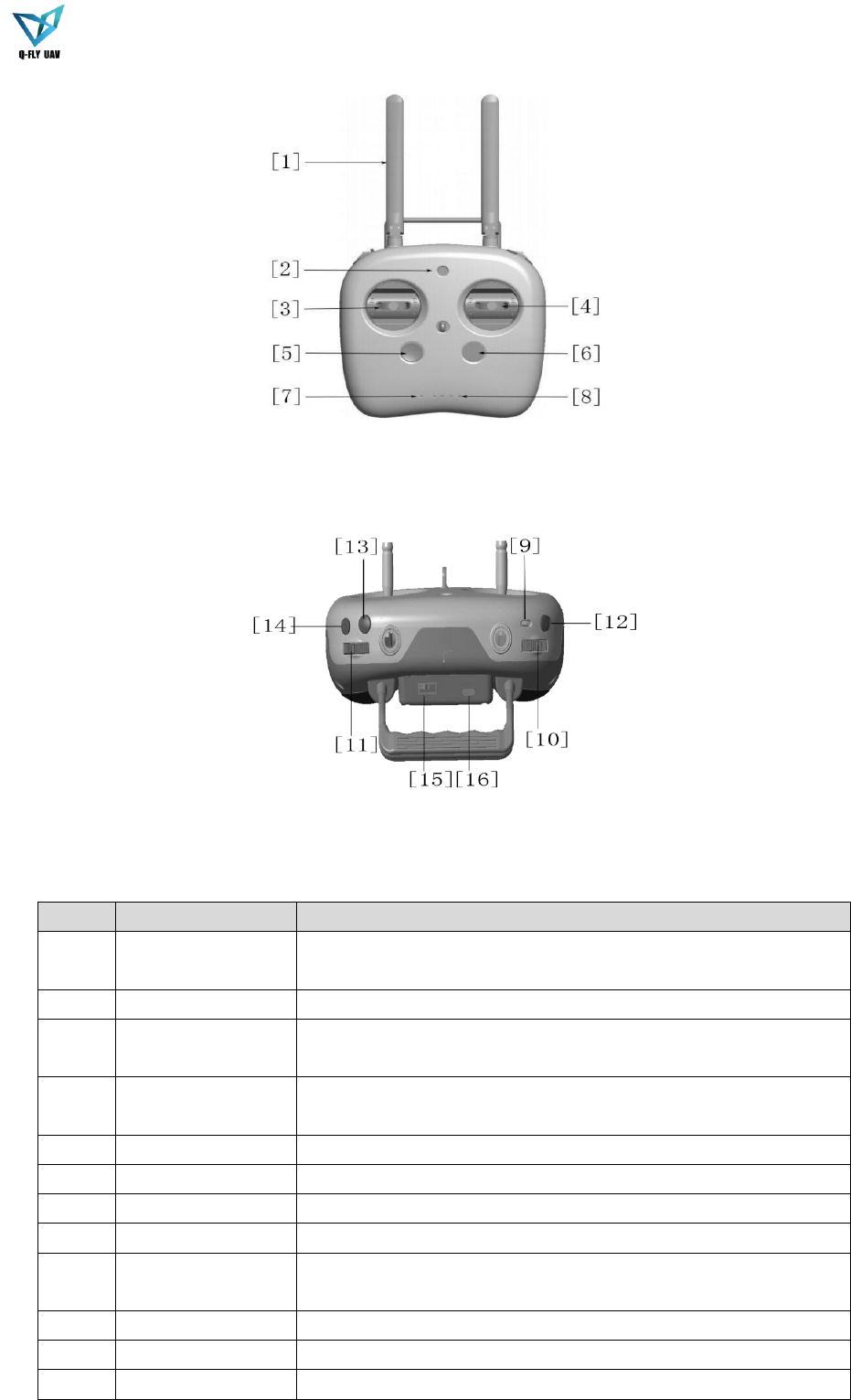
Figure 2-4
Figure 2-5
For details, please refer to the following table.
No.
Name
description
1
Remote control
antenna
Communicate with aircraft
2
Phone bracket hole
The hole used to install the phone holder
3
Left stick
The default left stick's Y axis is channel 3 (THRO) and X axis is
channel 4 (YAW).
4
Right stick
The default right stick's X axis is channel 1 (ROLL) and the Y axis is
channel 2 (PITCH).
5
Power switch
Power switch of the remote control.
6
One-click return key
It defaults to channel 6 (return).
7
work indicator
It defaults to red
8
Power indicator
Display the power of the remote control.
9
Mode switch
It is also called a three-state switch and defaults to channel 5
(MODE)
10
Left wheel
Not Enabled
11
Right wheel
The switch is used to record the A, B points
12
Channel 9
Not Enabled
15
No.
Name
description
13
Channel 10
Pump switch
14
Channel 11
Not Enabled
15
Micro USB Socket
It is used to connect the phone. Remote control software can be used
to adjust the mode.
16
USB TYPE C
Socket
It is used to connect the phone,and communicate with your smart
phone.
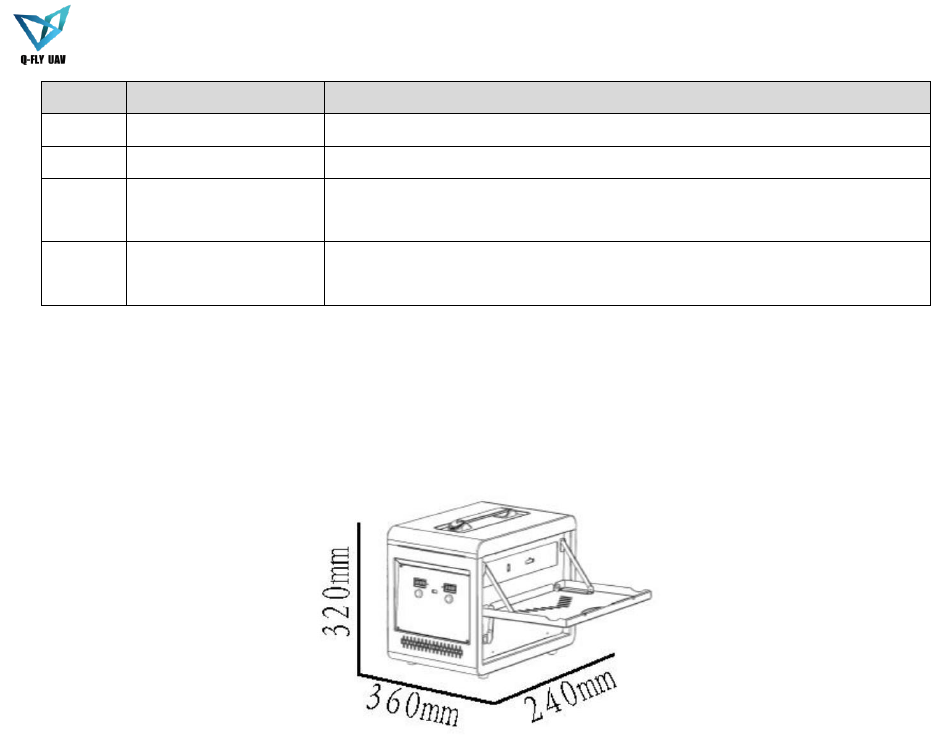
2.3.2 Charger
The shape and size of the charger are shown in Figure 2-6.
Figure 2-6
Product parameters
1. Input voltage: AC 190 ~ 220V
2. Maximum charging current: Channel CH1: 20.0A; Channel CH2: 20.0A
3. Average output voltage: Channel CH1: 50.4V; Channel CH2: 50.4V
4. Maximum balanced current: 400mA
5. Maximum static power consumption: 320mA
6. Display mode: LED display
7. Support battery type: 12S
8. Working environment temperature: 0 ~ 40°C
9. Weight: 12KG
2.3.3 APP interface
Advantages: simple operation, high degree of intelligence (voice broadcast the real-time data of each
module ), complete functions.
2.3.3.1 Flight data interface
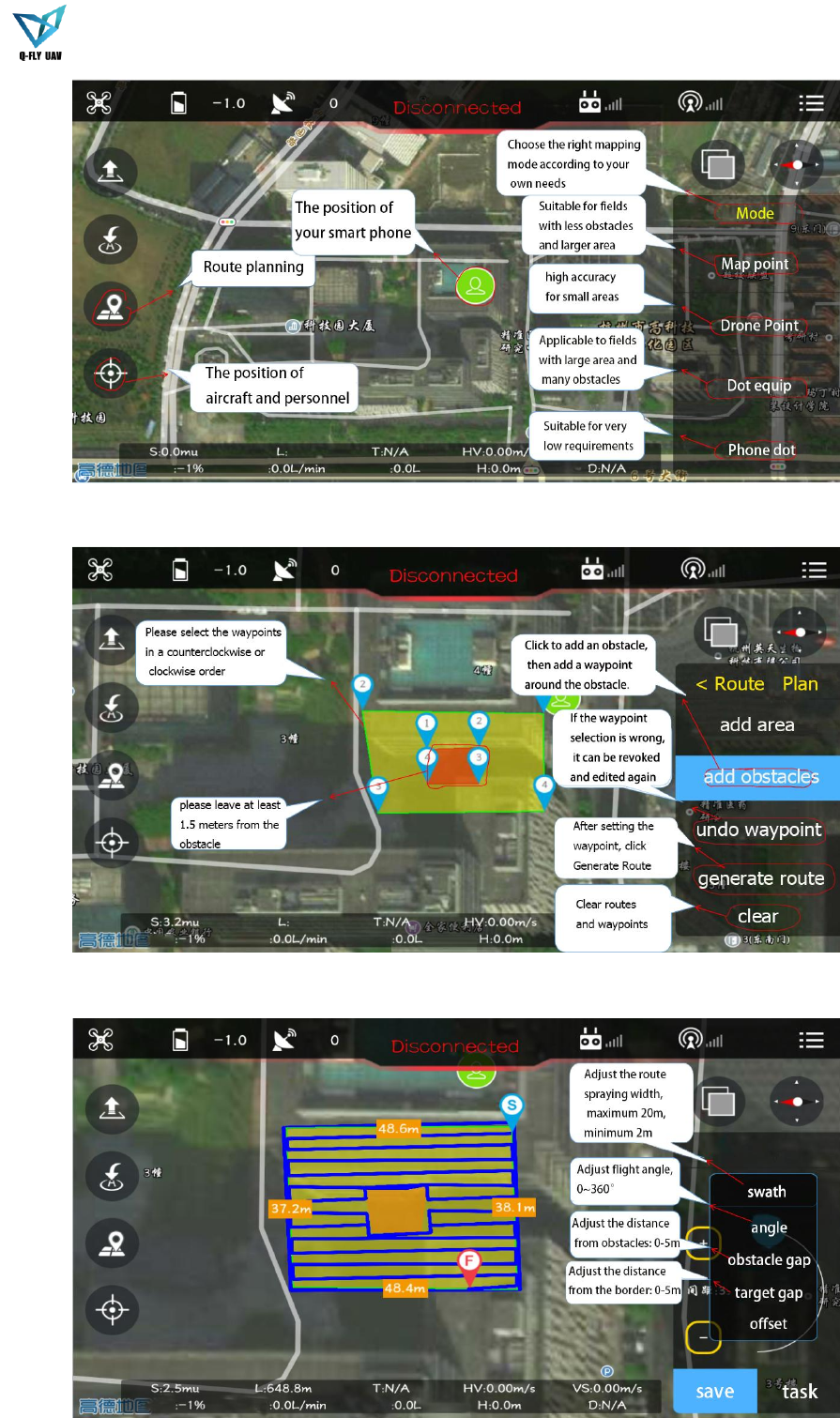
This screen shows the aircraft's flight status and basic flight operation buttons. At the top , the icons from left
to right are flight mode, battery voltage value, GPS star number (satellite display), connection status (all sensors
are displayed abnormally), remote control signal (connection will turn green), data link status(the connection will
turn green), parameter settings. On the left side, From top to bottom there are take-off button, return flight button,
route planning function button and human/aircraft positioning button. The upper right side is the status information
bar, and the two buttons at lower right are the map type switching button and the map rotation button. See Figure
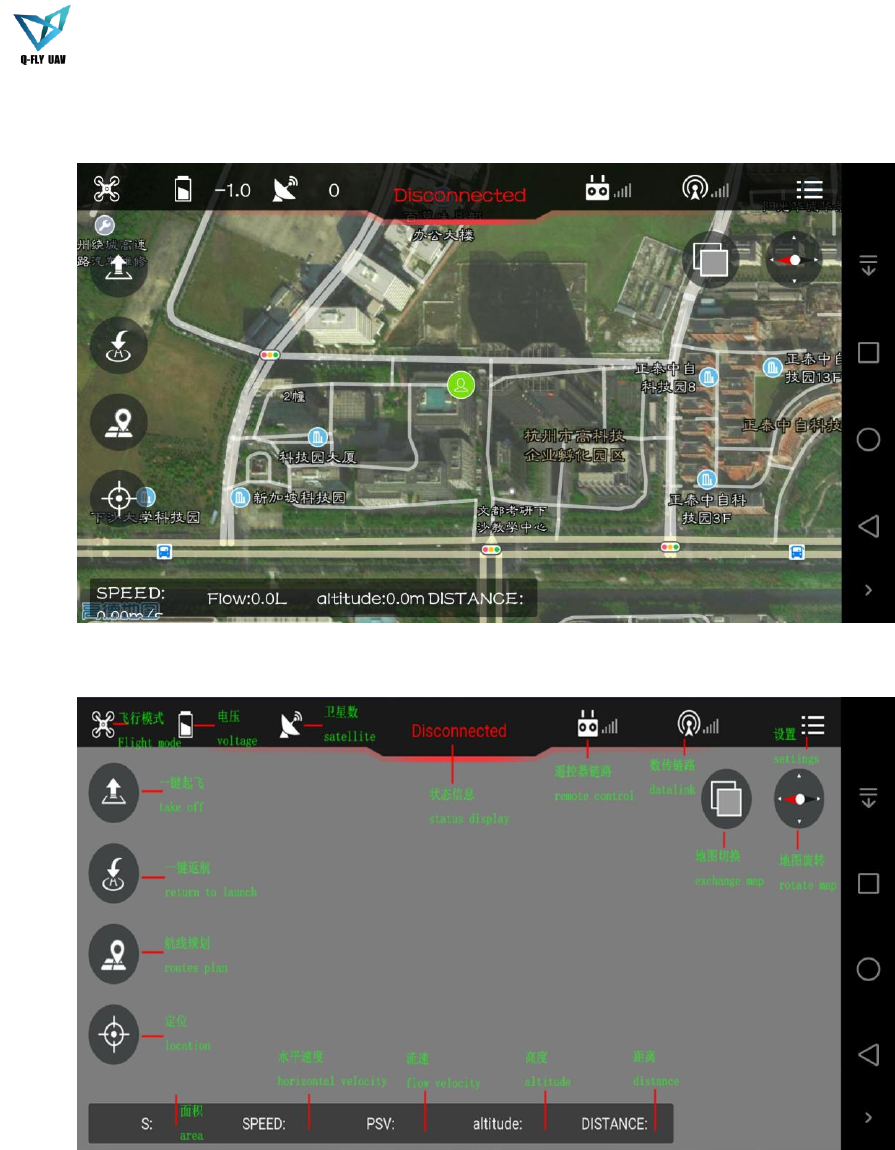
16
2-7 and Figure 2-8.
Figure 2-7
Figure 2-8
2.3.3.2 Description of the top menu bar
Flight Mode: Displays the flight mode of the current aircraft.
Battery voltage value: Displays the current battery level.
Satellite display: Displays the current number of searched stars for flight control.
Connection Status: Displays the status of all sensors connected to the flight controller. The icon
turns green when the connection is normal.
Remote control signal: Displays the remote control signal status.
Digital Radio Link: Shows the connection status of the data link. After the connection is normal, the
icon will turn green.
17
Parameter settings: Click to set the relevant parameters of the flight control.
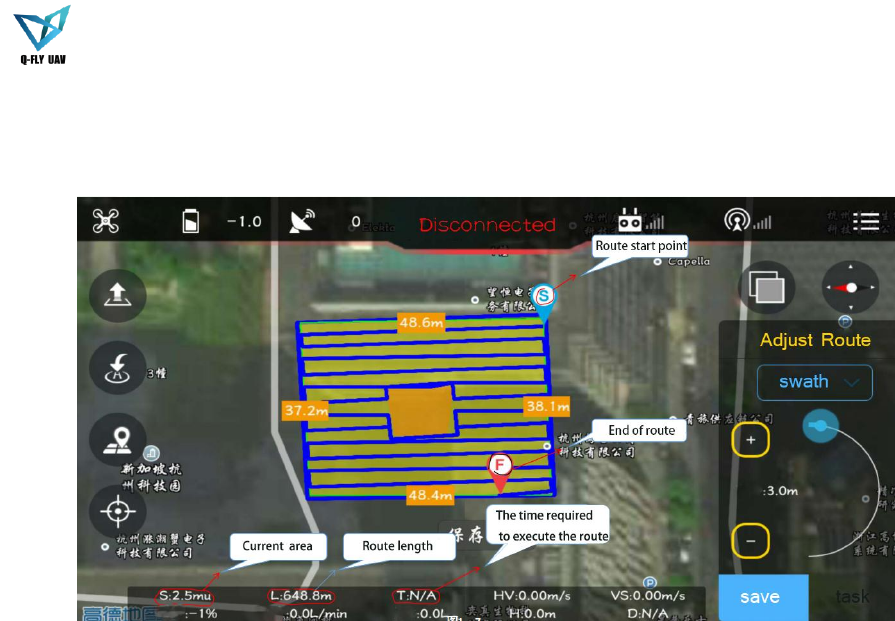
2.3.3.3 Route planning interface
Figure 2-9
18
3 Flight Preparation
Note
The following chapter is going to introduce complete flow in details before the aircraft unlocked and takes off.
Please select operation according to the actual situation after the first flight is over if it is not the used for the
first time.
Caution
Please operate by strictly conforming to the steps described in this chapter; the operation sequence can't be
reversed.
3.1 preparation and inspection
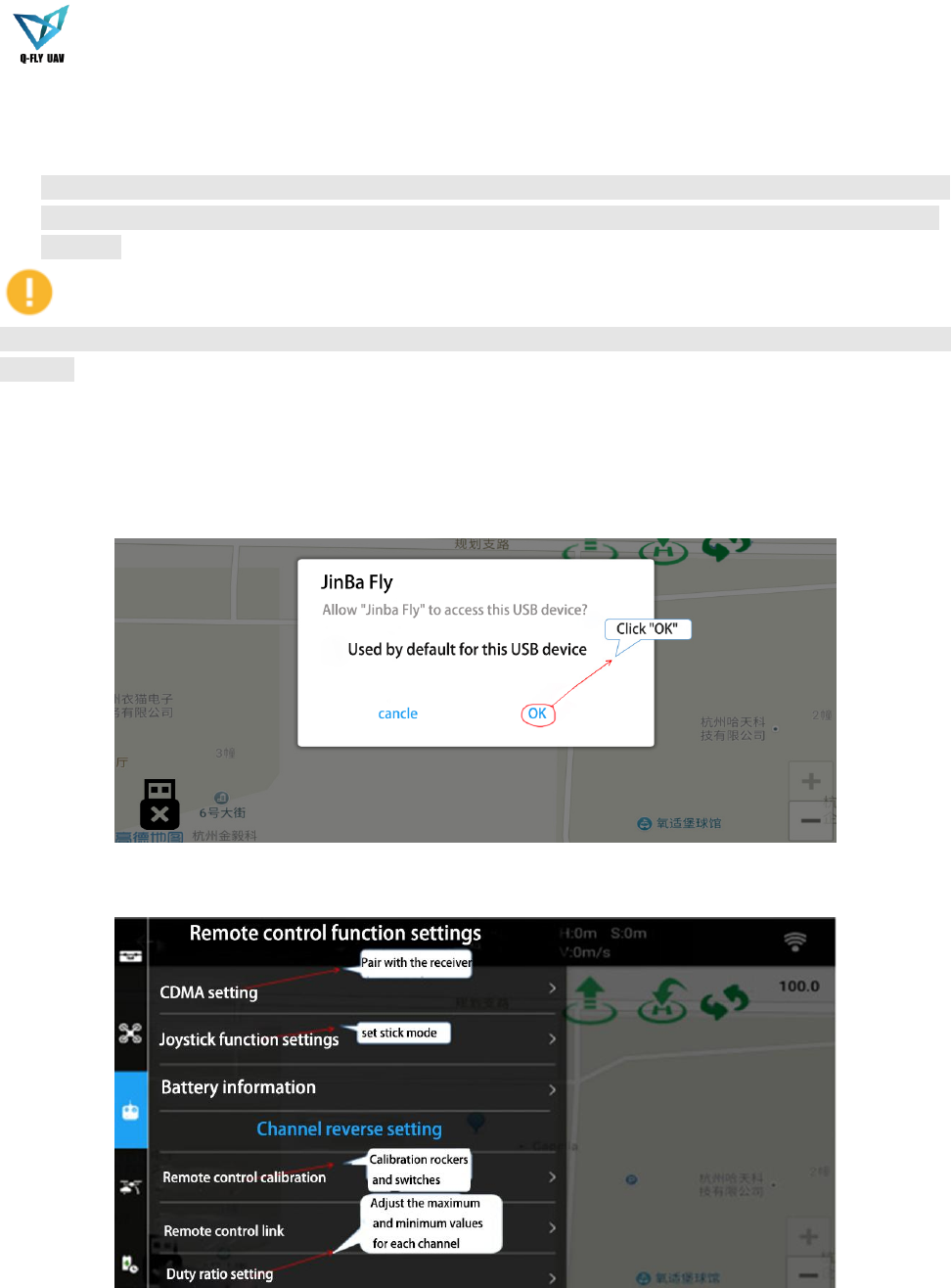
3.1.1 T1000 remote control settings
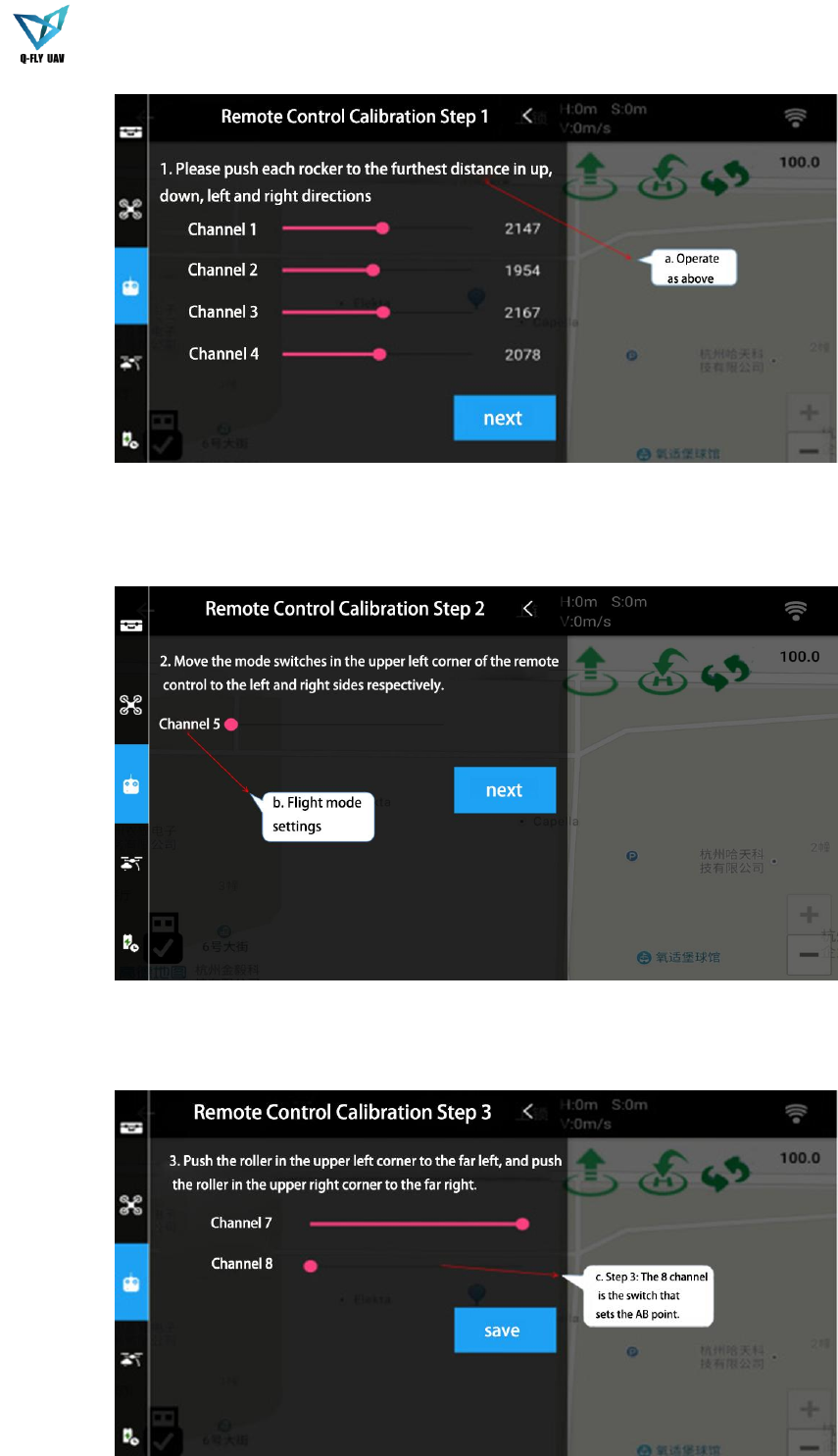
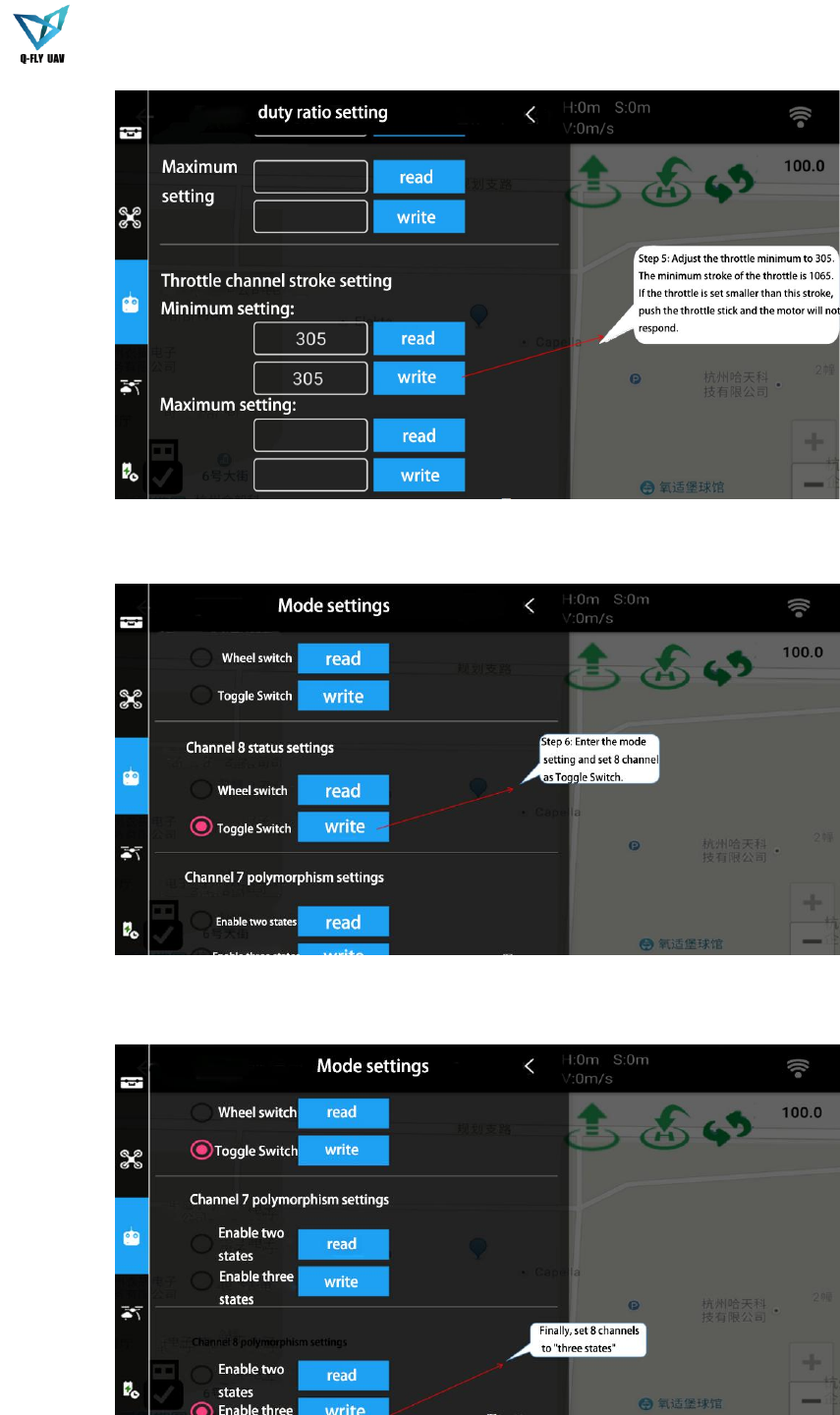
There are 6 steps (as shown in Figure 3-1 to Figure 3-11):
Figure 3-1
Figure 3-2
19
Figure 3-3
Figure 3-4
Figure 3-5
20
Figure 3-6
Figure 3-7
Figure 3-8
21
Figure 3-9
Figure 3-10
Figure 3-11
22
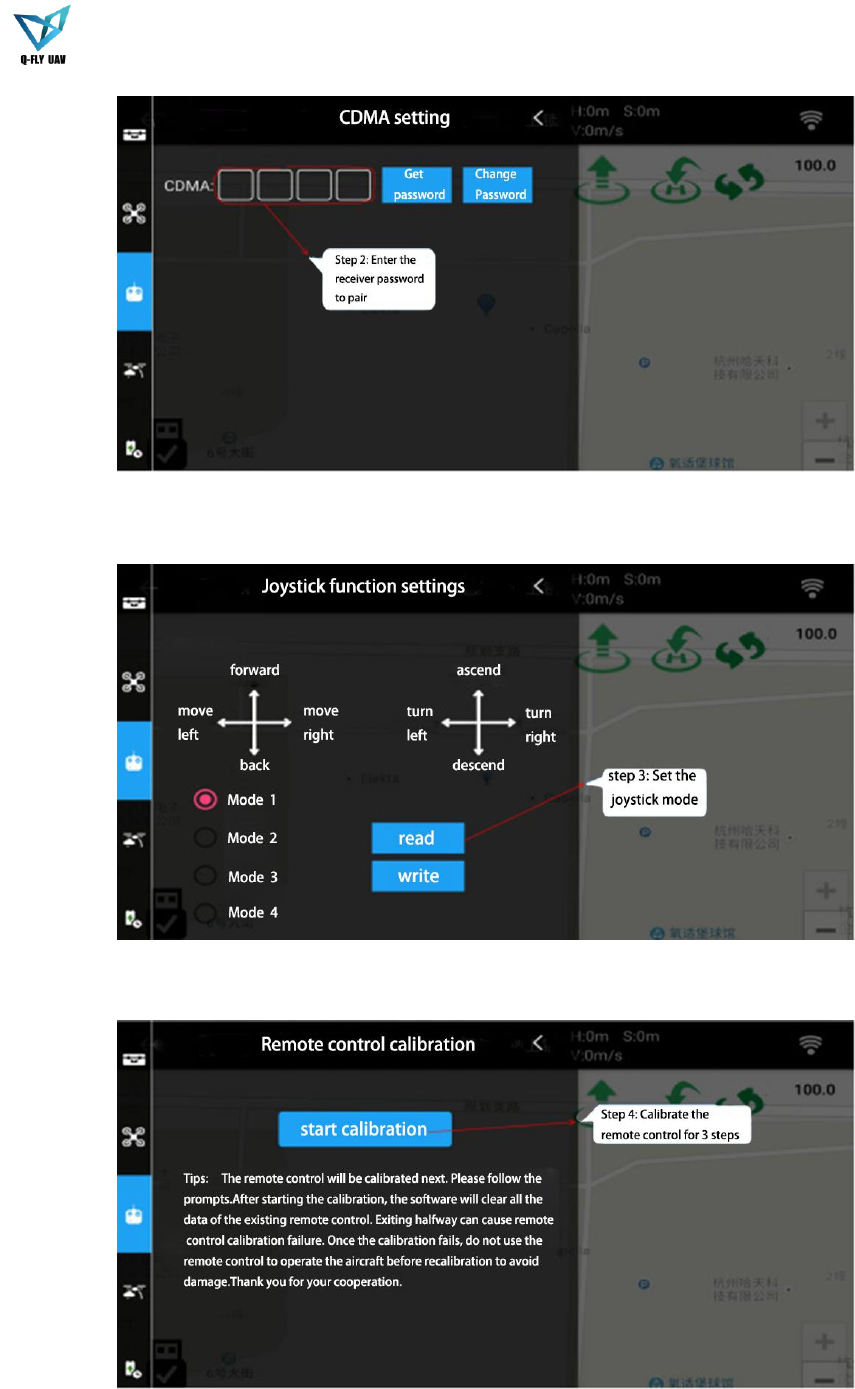
3.1.2 T1000 Remote Control Calibration
Warning
If the flight control or digital radio is not fully activated, you will not find the available device by clicking the
Bluetooth button.
The airborne and ground-side digital radio must be successfully paired with the code to use the Bluetooth
connection; otherwise, the connection cannot be successfully established.
The ground control station(GCS) uses the smart phone's own map. Just connect to the network to load the
map.
In order to ensure flight safety, the flight controller must connect the remote controller before using the GCS.
When the aircraft enters the waypoint, it will fly in a straight line with the shortest distance. In order to ensure
flight safety, it is important to plan the route reasonably and not to draw folded overlapping polygons.
Do not change the parameters while the aircraft is in the air.
Tips
After connecting the mobile phone and remote controller, click the parameter setting button in the upper right
corner of the IFLY (APP)flight interface to enter the parameter adjustment interface. The icons in the left menu bar
are model selection, remote control calibration, accelerometer calibration and magnetic compass from top to
bottom. Reading and writing of parameters such as calibration and sensitivity, reading and writing of voltage,
reading and writing of plant protection functions, flight control firmware versions and flight control serial numbers.
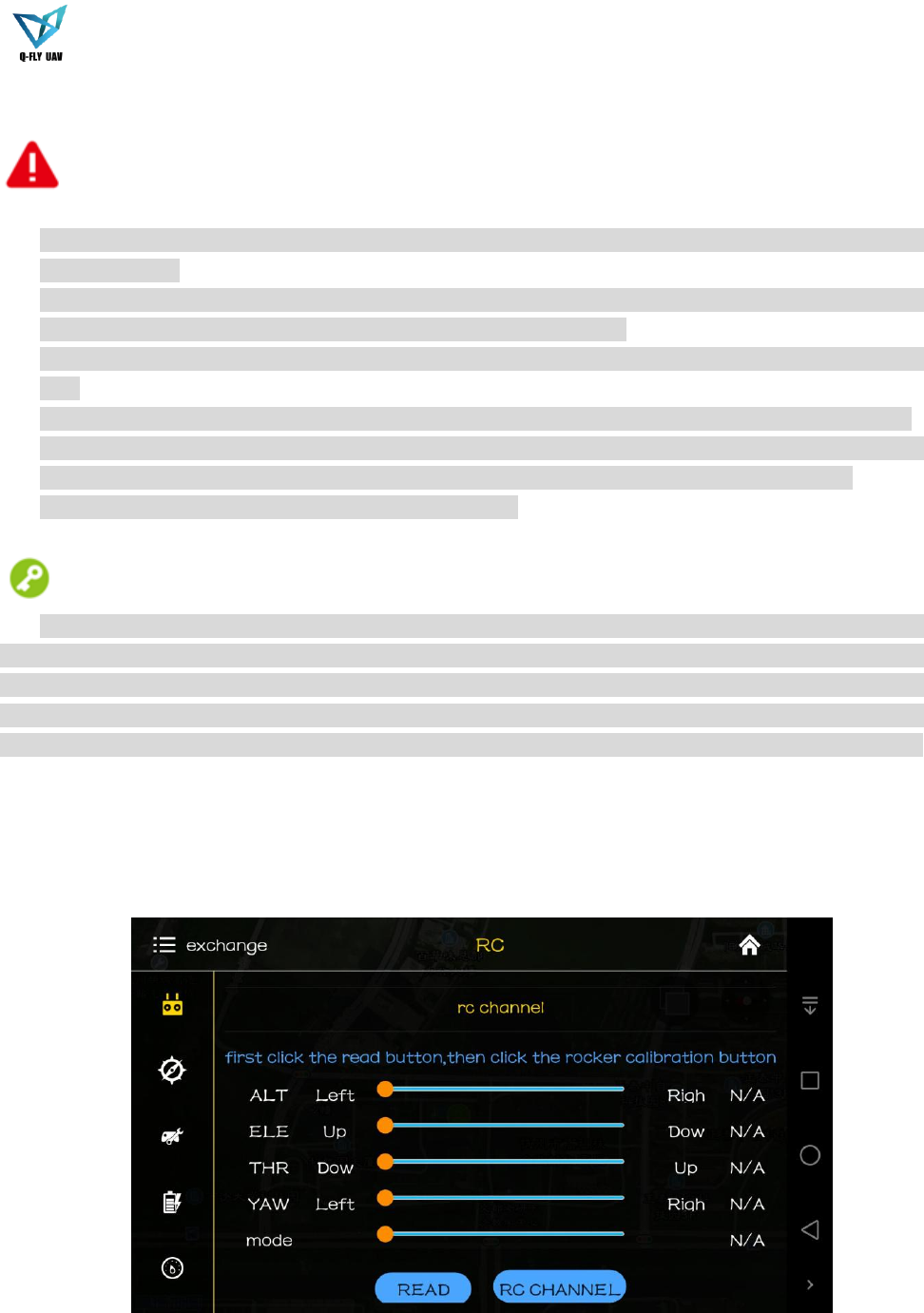
Calibration rocker:
Click "Calibrate Joystick" to start the calibration of the remote controller, and toggle the joystick to the
maximum and minimum value of each channel. After clicking this button again, the value of each channel will be
back to the middle, and the last time to click, if the prompt fails, it means there is a problem with the value of each
channel. If successful, the calibration is written successfully. (Requires 3 clicks)
Figure 3-12
23
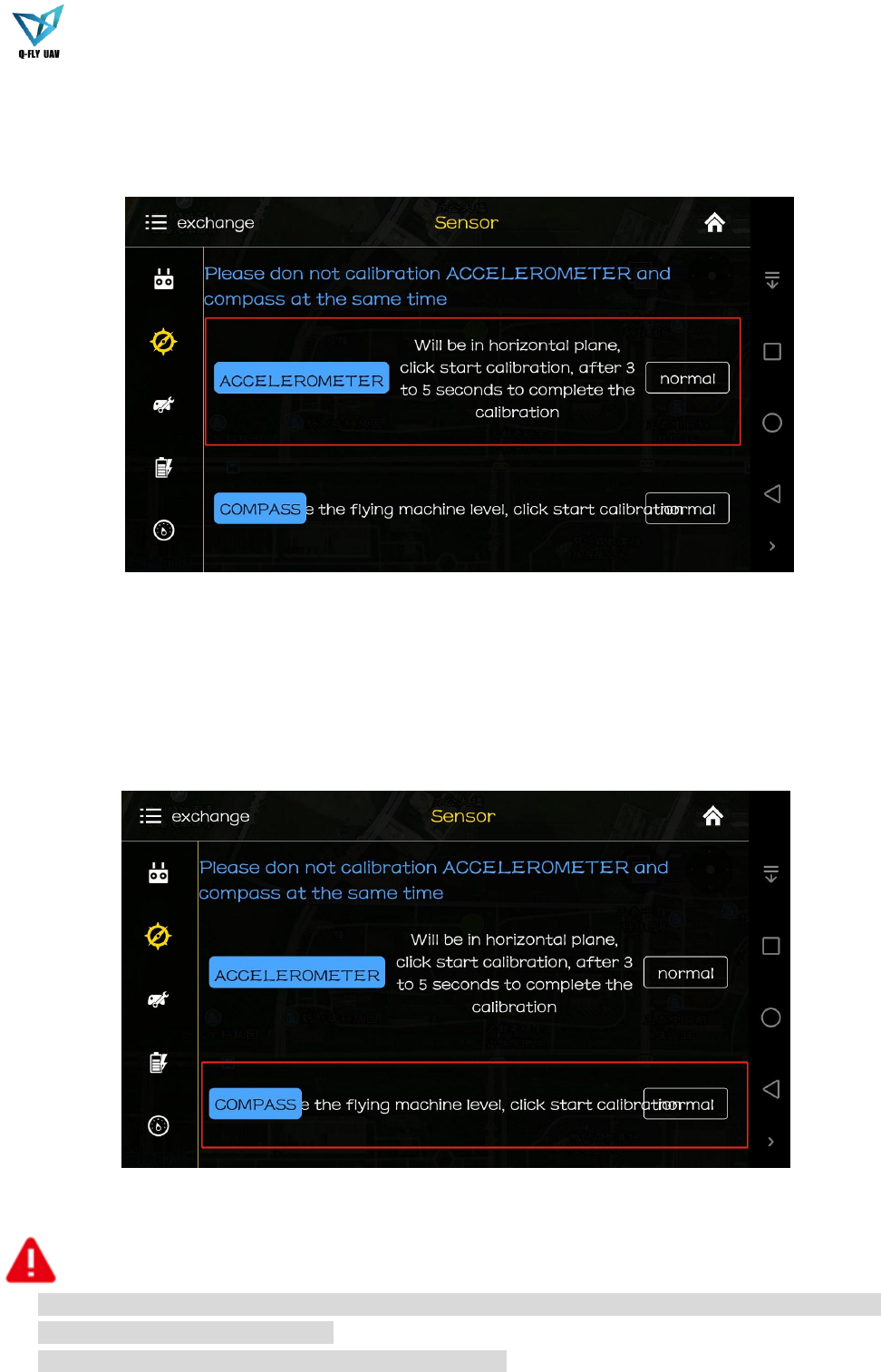
3.1.3 Accelerometer Calibration
After the aircraft is powered on and the ground station is connected to the aircraft, click the acceleration
calibration and a prompt will pop up. Accelerometer calibration will be performed as prompted.
Figure 3-13
3.1.4 Magnetic Compass Calibration
The magnetic compass is integrated in the GPS module. For first time use, magnetic compass calibration
must be performed ,otherwise, the system may not work properly, affecting flight safety. The magnetic compass is
easily disturbed by other electronic devices, which affects flight and even causes flight accidents. Regular
calibration can make the aircraft work in the best condition.
Figure 3-14
Warning
Do not calibrate in areas with strong magnetic fields, such as magnetic mines, parking lots, and construction
areas with underground reinforcement.
Do not carry ferromagnetic materials, such as mobile phones.
24
Do not calibrate near bulk metal.
Do not calibrate the compass indoors.
Calibration procedure:
Figure 3-15
Caution
Please vacate the venue and follow the steps below to calibrate the compass. It is recommended that the
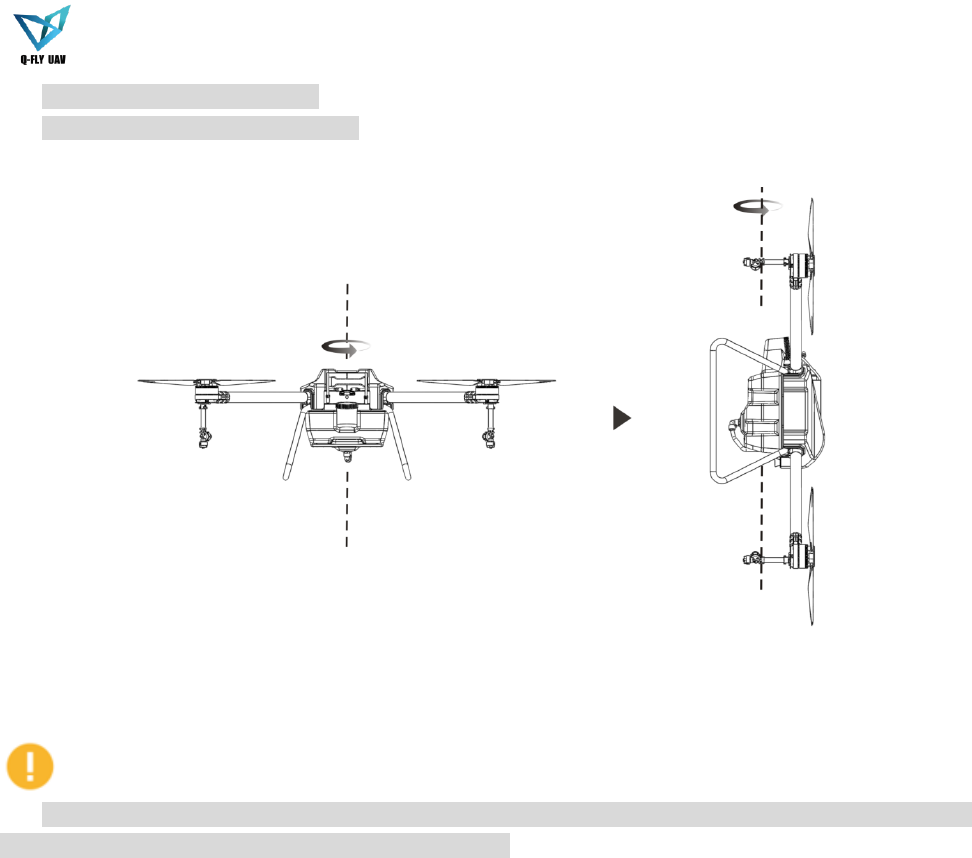
calibration be performed with no liquid in the pesticide tank.
1. Click Compass Calibration on the Magnetic Compass Calibration page in the APP, then enter calibration
mode.
2. Rotate the aircraft 360° horizontally. When the status indicator of the aircraft is steady green, horizontal
calibration is successful.
3. With the nose of the aircraft facing upwards, rotate 360° horizontally. When the red, yellow, and green
indicators flash alternately, the vertical calibration is successful.
4. Complete the calibration. If the aircraft status indicator flashes alternately red, yellow and green, it means
that the calibration was successful and you need to power on again. If the status indicator of the aircraft shows a
steady red light, it means that the calibration failed. Please power off and restart, and follow the above steps to
recalibrate the compass.
Need to recalibrate:
1. The magnetic compass is abnormal, and the aircraft status indicator shows that the yellow light flashes
rapidly or the red light flashes rapidly.
2. The site of this flight is far away from the site where the magnetic compass was calibrated last time.
3. The mechanical structure of the aircraft has changed.
4. The route is not straight during flight.
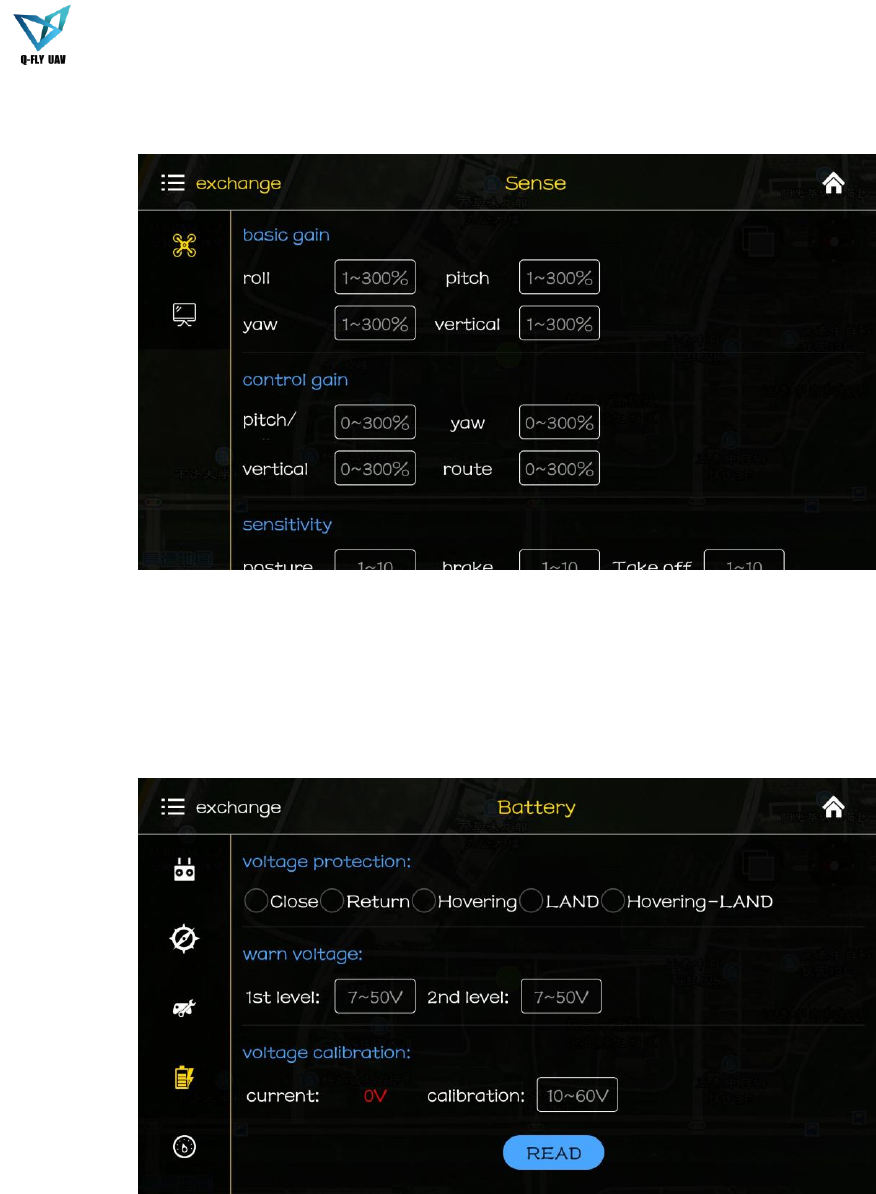
3.1.5 Setting Control Parameters
Click "Switch settings" in the upper left corner, and you can follow the instructions to read and adjust
parameters such as sensitivity.
25
Figure 3-16
3.1.6 Voltage Reading and Setting
Click “read” to display the write button, current voltage, voltage protection type, and alarm voltage. Click the
input box to enter the value and click Write to set it up.
Figure 3-17
26
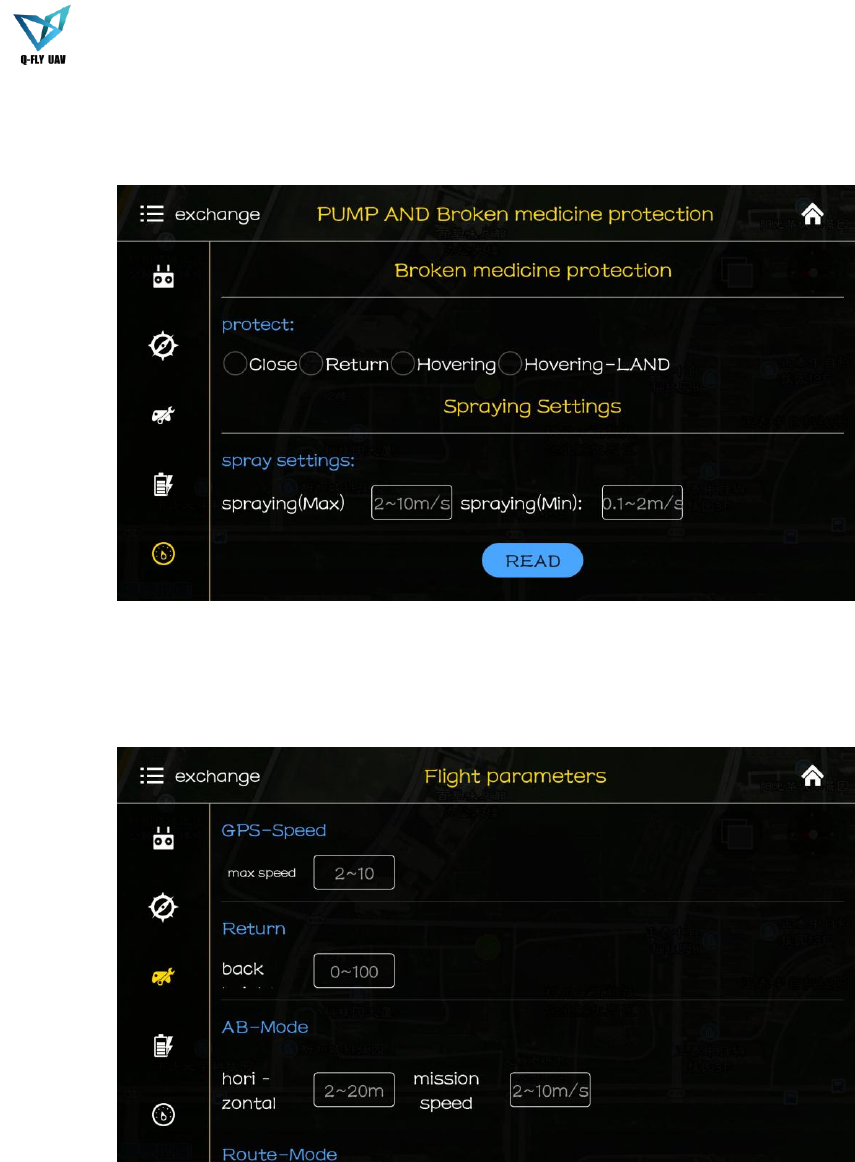
3.1.7 Setting crop protection Functions
Figure 3-18
3.1.8 Setting flight parameters
Figure 3-19
3.1.9 Starting/stopping the motor
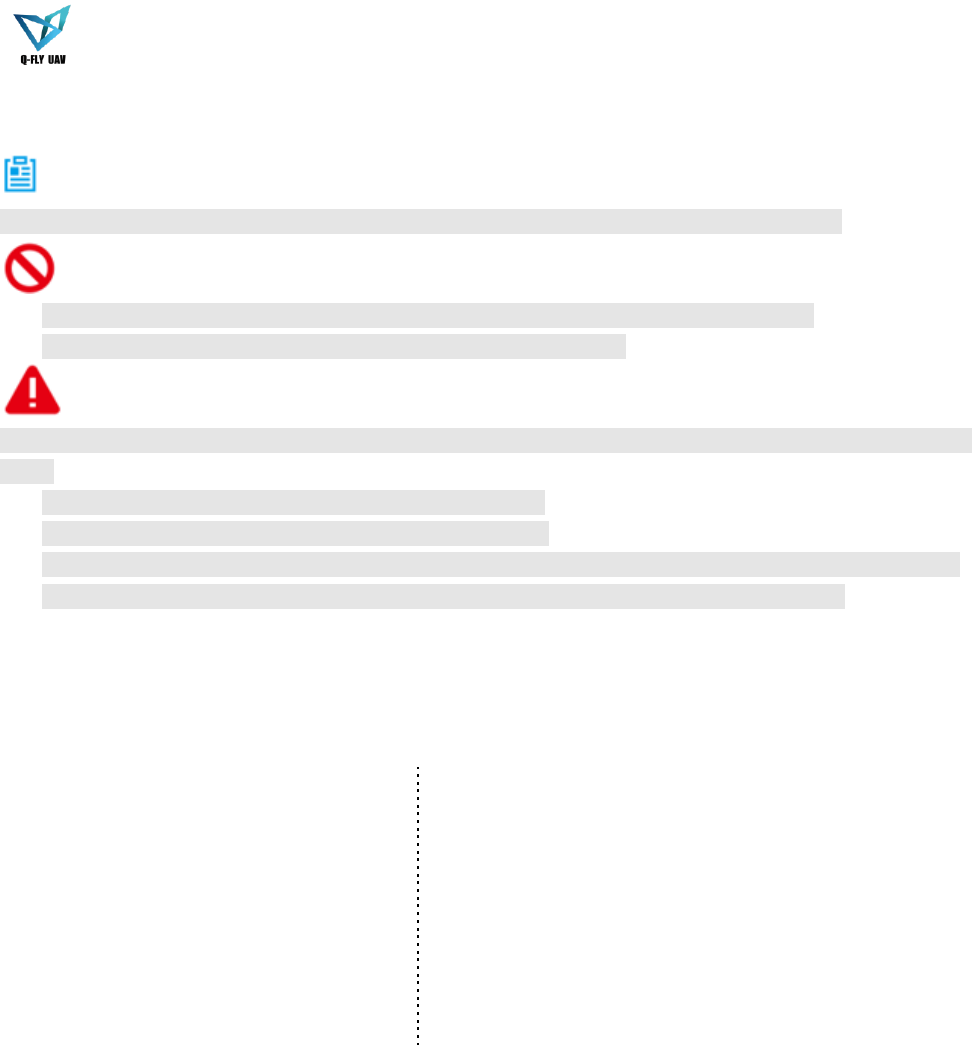
Unlock and lock:
Unlock as shown below. After unlocking, the motor will change to a low-speed rotation.
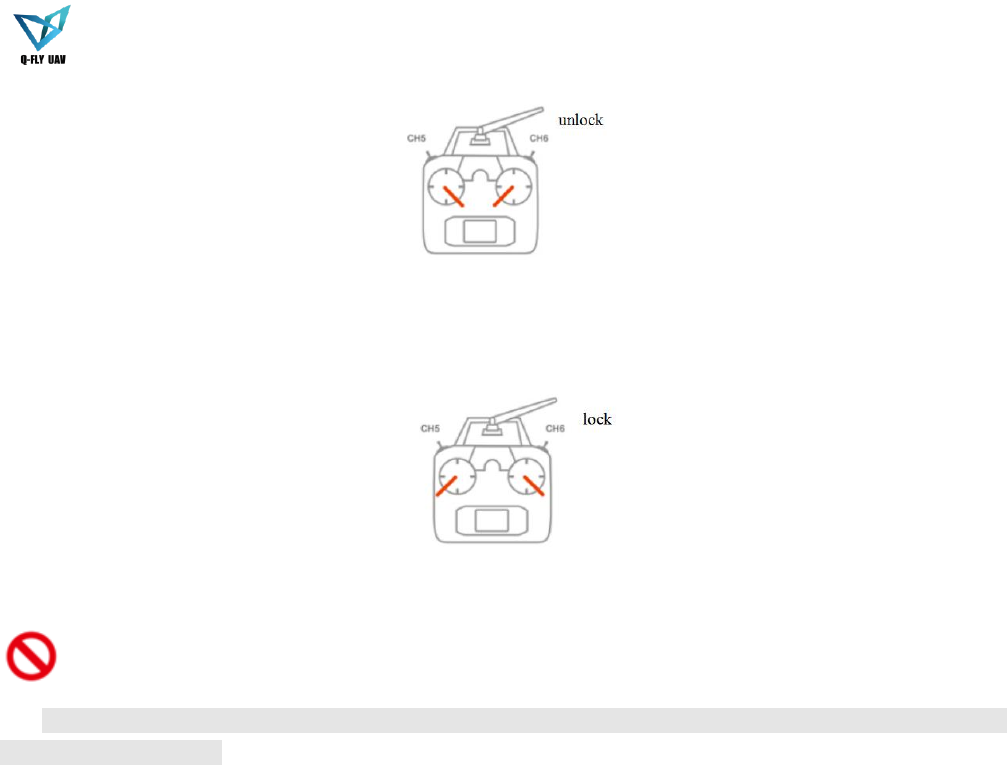
27
Figure 3-20
In all modes, as long as the motor is started, the operation of the rocker as shown below will stop the motor
immediately.
Figure 3-21
Danger
Do not perform the above operation during the flight, otherwise the motor will stop immediately and cause
irreversible consequences.
Automatic locking:
1. In any flight mode, after the aircraft is unlocked, the aircraft does not take off, the throttle is the lowest, and the
motor will automatically lock in 3 seconds without any operation;
2. In addition to the attitude mode, all other flight modes have the function of automatic landing recognition and
will automatically stop the rotation;
3. In addition to the attitude mode, the lowest throttle of the aircraft during flight will not cause the motor to stop.
3.1.10 Motor Test
The motor test function includes the motor sequence test and the movement direction test. It is mainly used to
detect whether the motor installation serial number and rotation direction are correct, so as to avoid accidents due
to installation errors.
Motor sequential test:
When it is locked, please push the left joystick of the remote control to the lower left↙, and then make the
right joystick do counterclockwise coiling (U.S. hand mode)↗↖↙↘, then the motor sequential test will be
triggered, and the motor will rotate at a low speed according to 1 to 4 Order.
Japanese hand mode, motor test method:
1. Put the left rocker to the bottom left↙, and turn the right rocker to the bottom right ↘and keep the position of
the rocker;
2. Then put the left rocker to the top left↖, and put the right rocker to the bottom left↙, then put the left rocker to
the bottom left↙, the right rocker dial to the bottom right↘. During the operation to the joystick, the left joystick
is left on the left and the right joystick is kept on the bottom. Repeat step 2 in order to trigger the motor sequence
detection.
Uniform
28
Caution
Normally only one rocker operation is required to trigger the motor sequence detection. If the rocker position
is operated incorrectly, you need to repeat step 2 to trigger the detection.
Direction test:
After unlocking, the aircraft propellers rotate at a low and constant speed (if there is no operation, the power
output will be turned off within 3 seconds). Operate the four channels of the remote controller to determine
whether the forward whether the rotation direction is correct. For example, when the propeller is rotated at the
lowest speed, Push up the "forward rocker", and the two propellers on the back side of the aircraft will rotate, and
the propellers on the front side will stop. In the same way, when the roll rocker is pushed to the left, the propellers
on the left side will stop and the propellers on the right side will rotate.
3.2 Charge
Note
If the remaining power is sufficient, you do not need to perform the following sections.
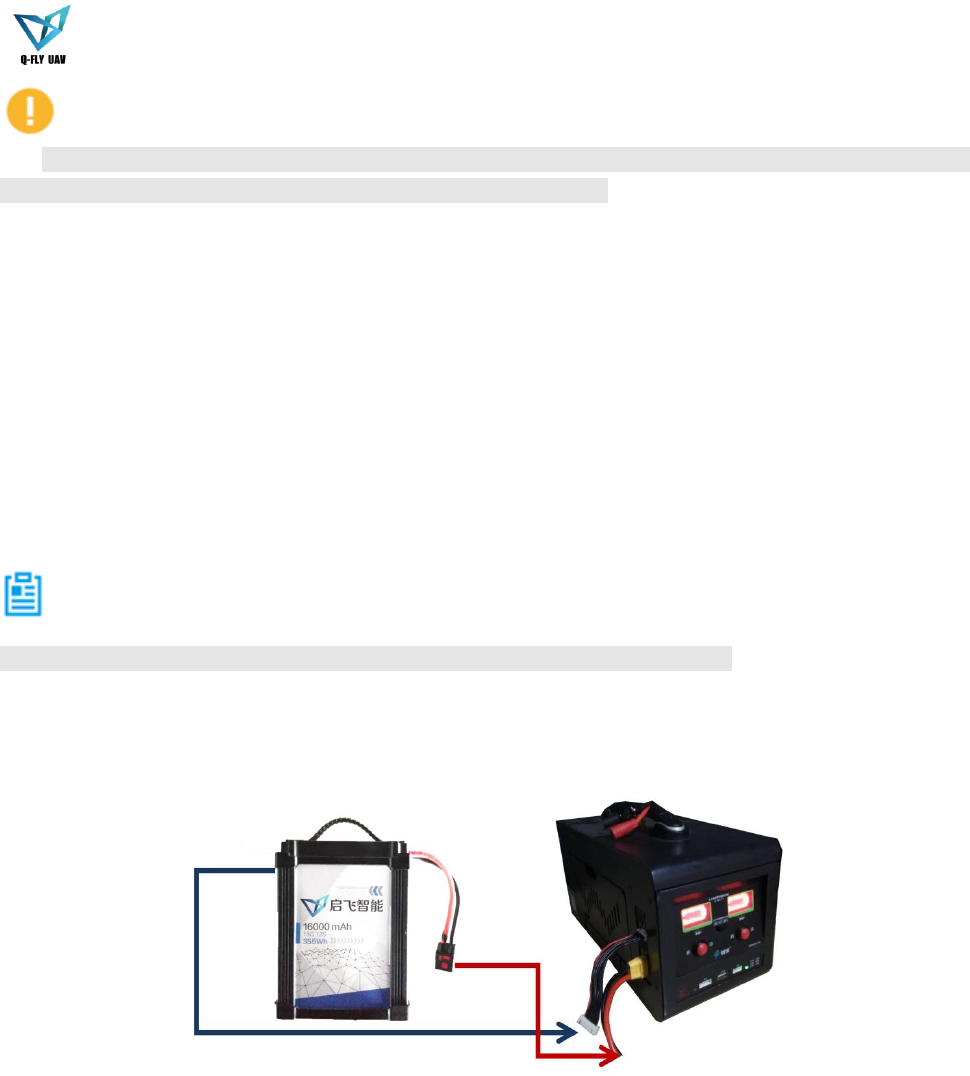
3.2.1 Charge the Aircraft Battery
The connection of the smart battery and charger is shown below.
Figure 3-22
Instructions:
1. Before connecting the 220V power supply, place the switch in the OFF position (0). At this time, the external
power supply channel is cut off and the charger does not work.
2. After connecting the 220V power supply, place the switch in the I position to open the external power supply
channel. The battery indicator L0 is lit and the internal fan starts to rotate. At this time, the charging channel is
closed.
3. Connect the battery's wiring to the output port and the equalizer port. The charging channel will be opened, the
battery charging progress bar will be wave-type flashing, the battery indicator light will be bright red, the internal
and external fans will rotate at the same time, and it will enter the charging state.When the battery indicator is full
and constant, charging is complete.
4. During the charging process, press the start button to exit the charge mode. If any abnormality occurs, press the
start button to exit the exception.
29
5. After the prompt is full, if the charging status is indicated (normal/very bad), it is not recommended to remove
the battery when it is not needed. The charger will further equalize the battery pack ,and extend the life of the
battery.
6. When the storage battery is full, the charger will discharge the battery pack.
7. End of discharge storage conditions: If the voltage of a single battery is lower than 3.85V or the battery pack is
lower than 46.2V, the discharge will stop, but the equilibrium will continue until the battery is balanced or removed;
if the battery is very unbalanced, it will appear The entire battery voltage is far less than 46.2V, and the charger has
reported the end of the storage; in this case, please do not remove the battery, the charger will further balance the
battery pack, the duration will be longer.
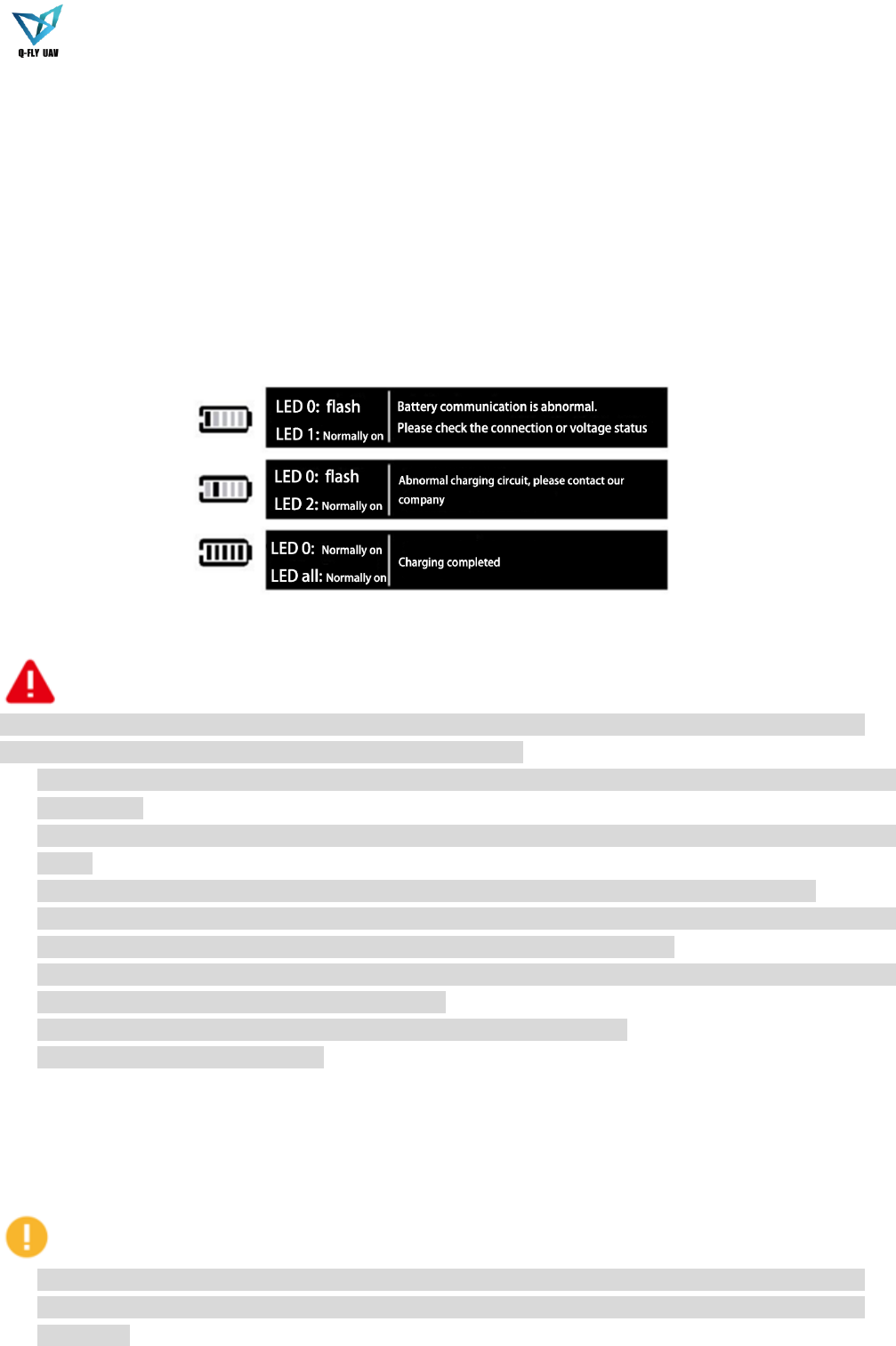
LED indicator:
Figure 3-23
Warning
The following warnings are especially important. To ensure maximum safety, strictly follow the instructions below,
otherwise the charger or battery may be damaged or even cause a fire.
If the charger's input voltage is too high or too low, it will cause the charger to work abnormally or cause damage
to the charger.
Do not short-circuit the positive and negative terminals of the charger or the positive and negative terminals of the
battery.
This product is compatible with 12S (50.4V) lithium battery. Please select the right battery for charging.
When the charger is connected to the power supply, always pay attention to the charging status, find any
abnormalities, immediately stop the operation, and consult the operating instructions.
Ensure that the charger is away from dust, moisture, rain, heat, direct sunlight, vibration, and other adverse
environments. Handle it carefully to avoid dropping it.
The battery and charger must be placed on a non-flammable, insulated surface.
Please follow the instructions strictly .
3.2.2 Charge the Remote Controller
After connecting the charger to the remote control, plug the charger into a power outlet (Android micro usb is
also available). There is no need to open the remote control.
Caution
If you charge without turning on the remote control, the remote control does not have a charging indicator.
You can observe the indicators of the remote control and determine the charge level when the remote control
is turned on.
30
The embedded battery is 2S 5000mAh. As the number of charge and discharge cycles increases, the capacity
will gradually decrease.
If you do not use it for a long time, it will affect the service life of the battery.
Generally not used for a long time, it is recommended to discharge each battery to 3.7~3.8V.
Charge and discharge once per month at least.
3.3 Prepare Aircraft
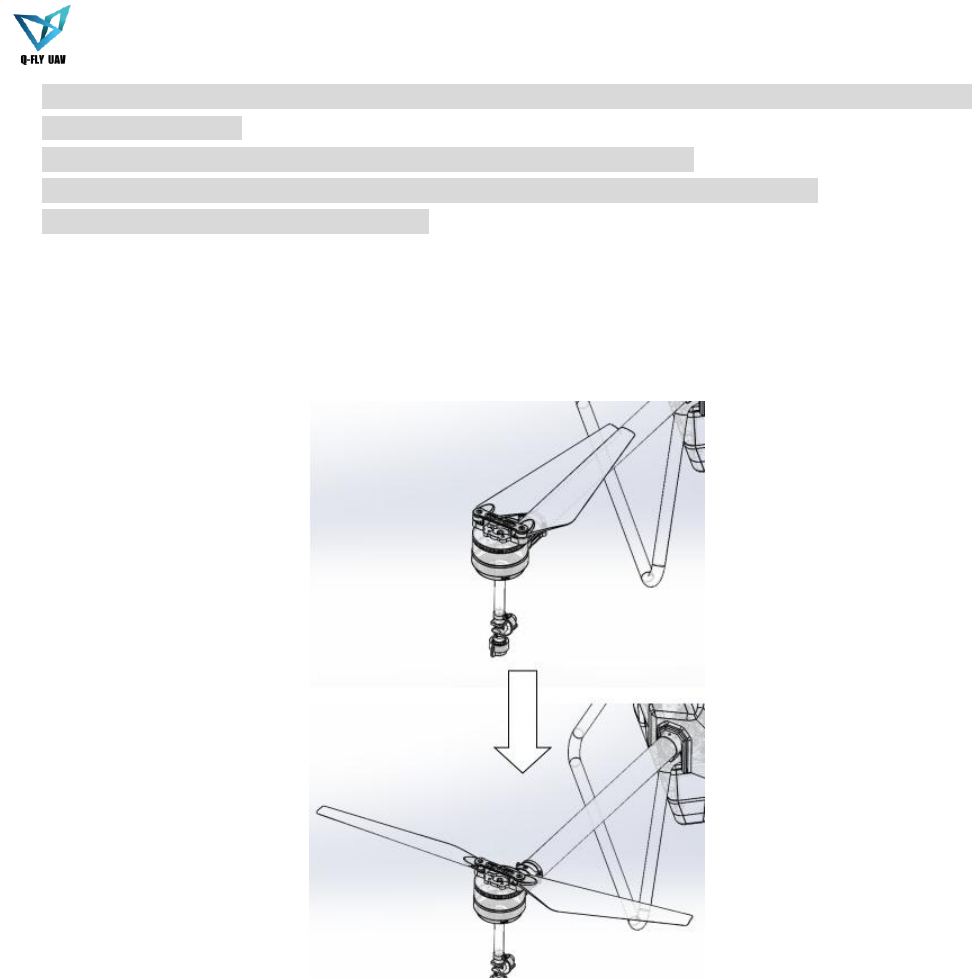
3.3.1 Unfold propeller
For easier transportation and storage, the propeller is folded. Unfold the propeller before take off as shown in
Figure 3-24:
Figure 3-24
3.3.2 Install smart battery
As is shown in Figure 3-25, the smart battery is installed. Place the smart battery on the battery's mounting
position. Attach the strap to one end of the fuselage and the other through the battery strap. Then plug in the battery
and power on the aircraft.
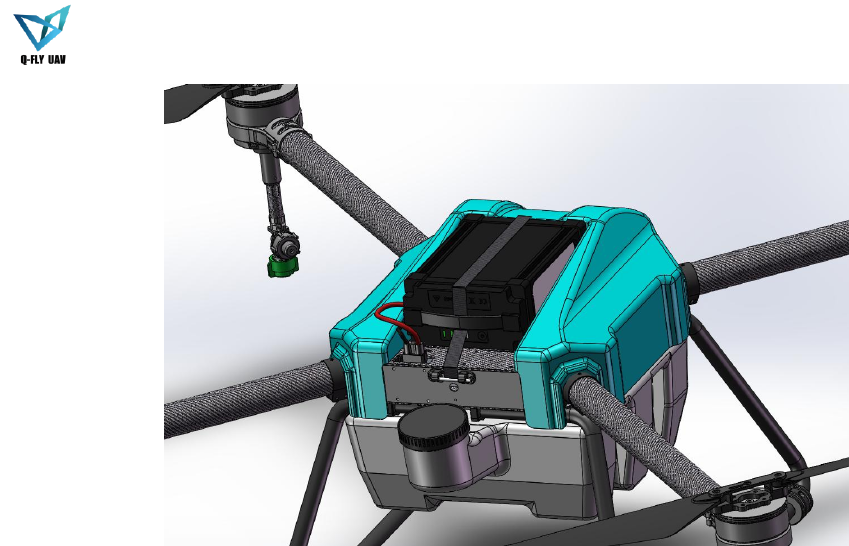
31
Figure 3-25
32
4 Enable Flight
Note
This chapter will introduce the complete flow of formal takeoff and landing of the aircraft in details.
Danger
Please do not get close to the rotating propellers or motor, which is to avoid personal injury.
Please operate the drone independently after training to avoid danger.
Warning
Please make sure to check the following items carefully before enabling flight for your personal and property
safety.
The flight preparations listed in chapter 3 are all completed.
All the components have been correctly and stably installed.
Make sure each spare part is in good condition, please do not fly the aircraft if some part is aged or damaged.
The flight environment meets the requirements listed in the important safeguards and warnings.
4.1 Overview
Take-off process as shown below:
Enable Flight
Unlock
↓
Take off
↓
Flight
↓
RTH and Landing
↓
Lock
1. Place the aircraft near the work area with the user facing the back.
2. Check the structure:
1) Check if the blades are unfolded and damaged.
2) Check if the shell is fixed firmly.
3. Turn on the remote control first and then connect the aircraft power supply. When connecting the aircraft power
supply, first insert the black connector (negative) and then insert the red connector (positive).
4. Open IFLY APP.
5. When the number of search satellites is more than 10, and the status indicator of the aircraft has no red light, the
GPS signal is good. Perform an unlock operation to start the motor.
6. Push the throttle rocker upwards to make the aircraft take off .
7. According to the need to choose the aircraft operating mode.
8. When landing, make sure that the operation mode switch is in the manual operation mode, slowly pull down the
throttle stick, and make the aircraft land on the flat ground slowly.
33
9. After landing, please power off the aircraft and then turn off the remote control.
4.2 Manual Mode
4.2.1 Flow Introduction of Manual Flight
Manual Flight Mode
Manual Unlock
↓
Manual Takeoff
↓
Manual Flight Control
↓
Manual RTH and Landing
↓
Manual Lock (Auto Lock Available)
4.2.2 Unlock Flight Control
Unlock and lock:
Unlock as shown below. After unlocking, the motor will change to a low-speed rotation.
Figure 4-1
Note
If there is a significant difference in the rotation speed between the propellers, move the left joystick to the
lower left corner while moving the right joystick to the lower right corner and then hold it until the propellers stop
rotating. Turn off the aircraft and contact our company.
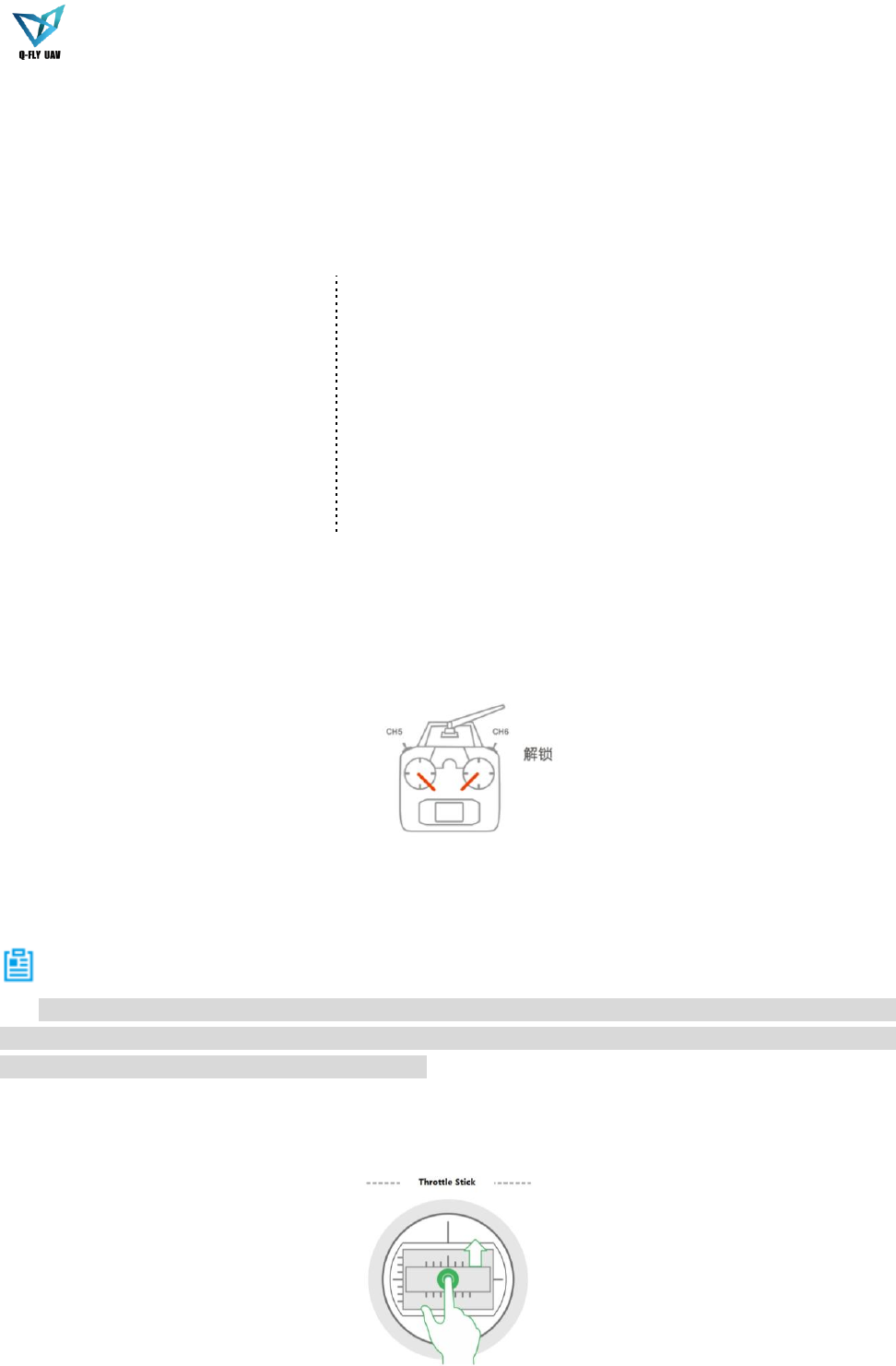
4.2.3 Manual Takeoff
Slight push the throttle to mid-point or higher, which is shown in the following figure.
Figure 4-2
34
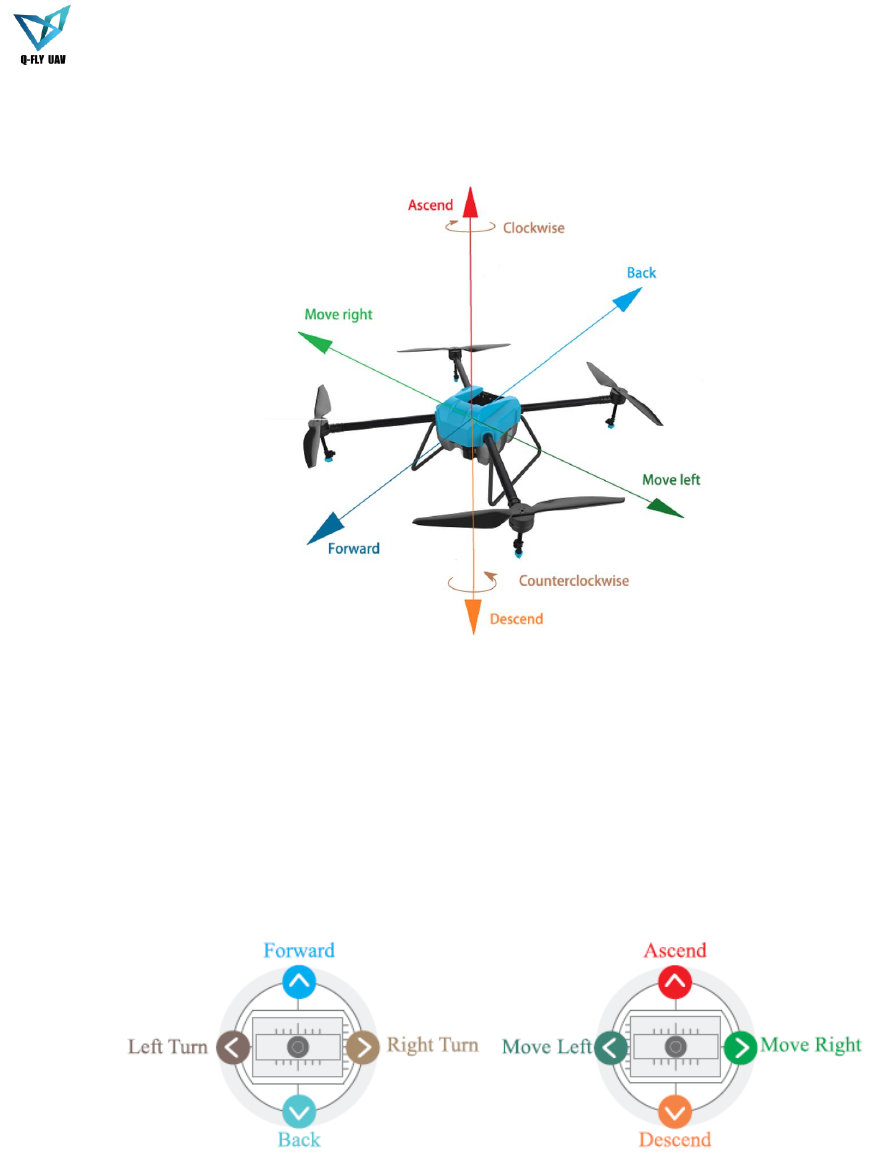
4.2.4 Manual Flight Control
Here it can set remote control mode and control flight direction of the aircraft.
Figure 4-3
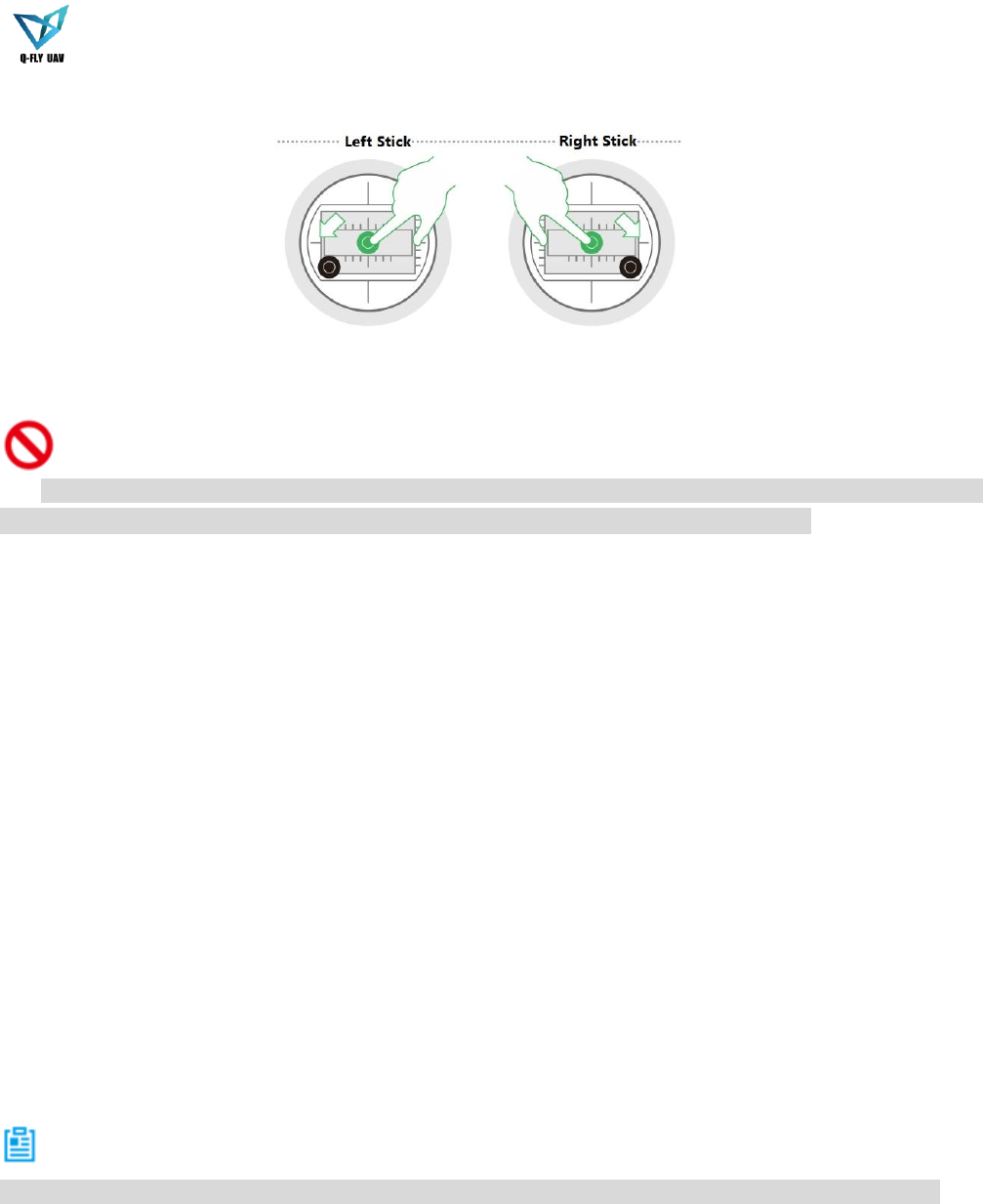
The stick presets two remote control modes.
Mode1(Japanese hand) :
Moving the left stick up and down to control aircraft's forward and backward horizontally.
Moving the left stick left and right to control aircraft's left and right turn horizontally.
Moving the right stick up and down to control aircraft's ascend and descend respectively.
Moving the right stick left and right to control aircraft's left and right movement horizontally.
Figure 4-4
Mode 2(American hand):
Moving the left stick up and down to control aircraft's ascend and descend respectively.
Moving the left stick left and right to control aircraft's left and right turn horizontally.
Moving the right stick up and down to control aircraft's forward and backward horizontally.
Moving the right stick left and right to control aircraft's left and right movement horizontally.
35
Figure 4-5
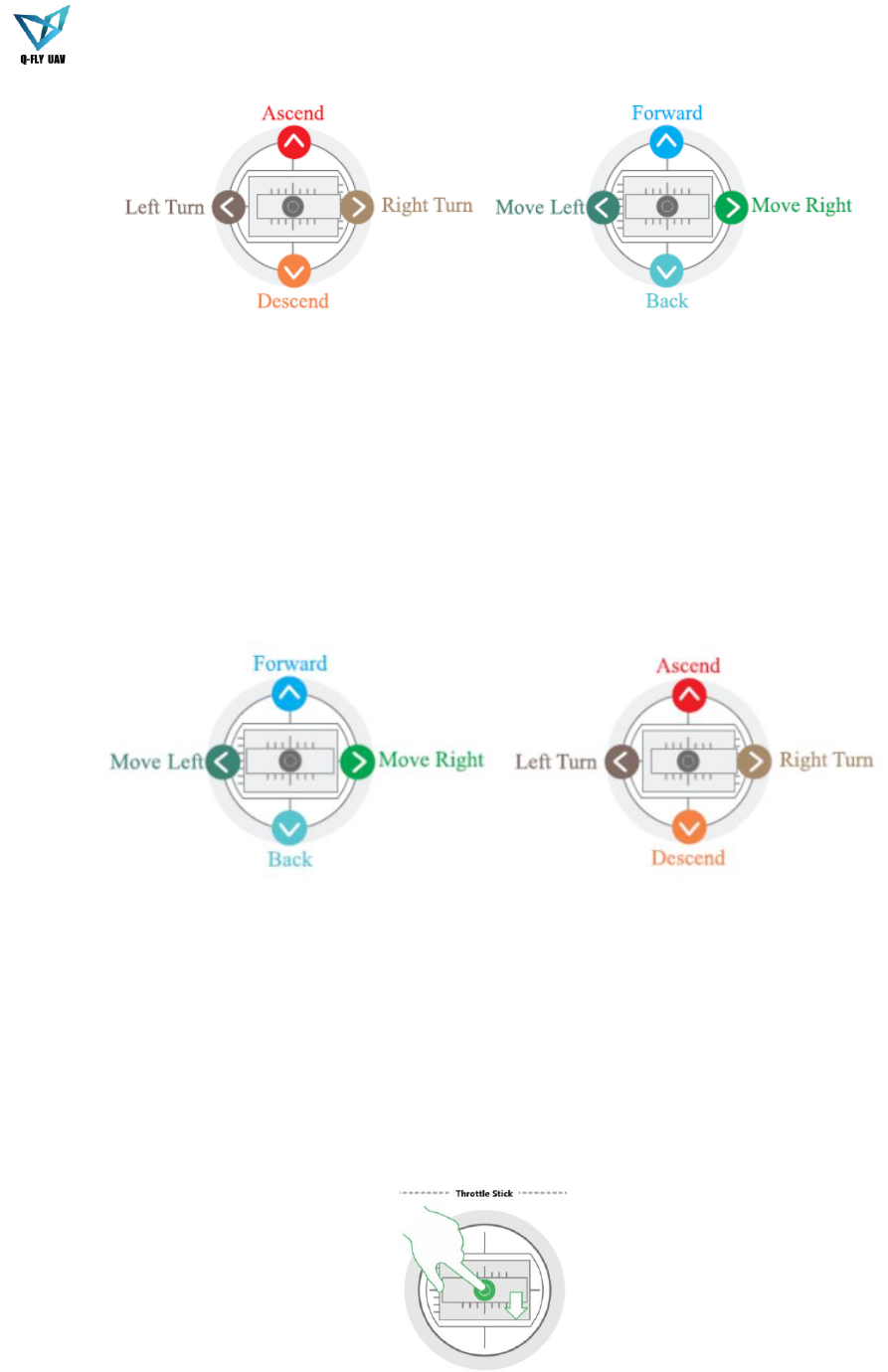
Mode 3(Chinese hand):
Moving the left stick up and down to control aircraft's forward and backward horizontally.
Moving the left stick left and right to control aircraft's left and right movement horizontally.
Moving the right stick up and down to control aircraft's ascend and descend respectively.
Moving the right stick left and right to control aircraft's left and right turn horizontally.
Figure 4-6
4.2.5 Manual RTH and Landing
Step 1
Manual RTH: Control the aircraft to hover over the proper landing point.
Step 2
Manual landing: Reduce the throttle to make the aircraft land slowly.
Figure 4-7
4.2.6 Manual Lock
36
Move the left stick to lower left and move the right stick to lower right at the same time ,Hold for two seconds.
Figure 4-8
Danger
Except for special circumstances such as emergency crash, do not perform the above operation during the flight,
otherwise the motor will stop immediately, resulting in damage to the aircraft or other accidents.。
4.3 Intelligent Mode
4.3.1 Overview
4.3.1.1 Process
1. Preparation before operation: Prepare aircraft, batteries, medicine boxes, tools and pesticides, and complete the
pre-flight inspection.
2. Surveying and Mapping: Enter the surveying and mapping interface, measure the required land (editing routes),
and upload the task.
3. According to the mapping area to configure the amount of pesticide required for plots, there should be protective
measures when dispensing, after the completion of dispensing, pesticide bottles should be centralized treatment,
prohibiting litter bottles.
4. Click on "Start Mission" and the aircraft will operate automatically.
4.3.1.2 Automatic take-off
Connect the remote control and mobile phone, open the IFLY app, connect the aircraft and complete a series
of checks and settings before take-off. After planning the route, click “Start Mission” and the aircraft will
automatically take off.
4.3.1.3 Automatic Return and Landing
Note
Each time the user unlocks, the flight controller automatically records the current position as the home point point.
The automatic return mode can be triggered by a joystick or triggered by a loss of control. When the remote
controller’s CH6 switch is set to the one-stroke return position or the flight controller enters runaway protection,
once the aircraft is more than 2 meters away from the home point, the aircraft will automatically rise to the set
altitude (if the current altitude is higher than the set return altitude, keep the current altitude.And the aircraft does
not accept manual intervention during the return flight. When the aircraft arrives at the home point, it will hover for
about 3 seconds in the air, and then it will descend slowly. At this time, the aircraft can be controlled by the remote
control(but the throttle stick will not work), so that the aircraft can find more suitable landing point. Until the
aircraft is fully grounded, the aircraft will automatically lock. If the aircraft is less than 2 meters away from the
return point, the aircraft will land and lock automatically.
37
4.3.2 Intelligent Flight Mode
4.3.2.1 Introduction of Ground Station Software and Notes
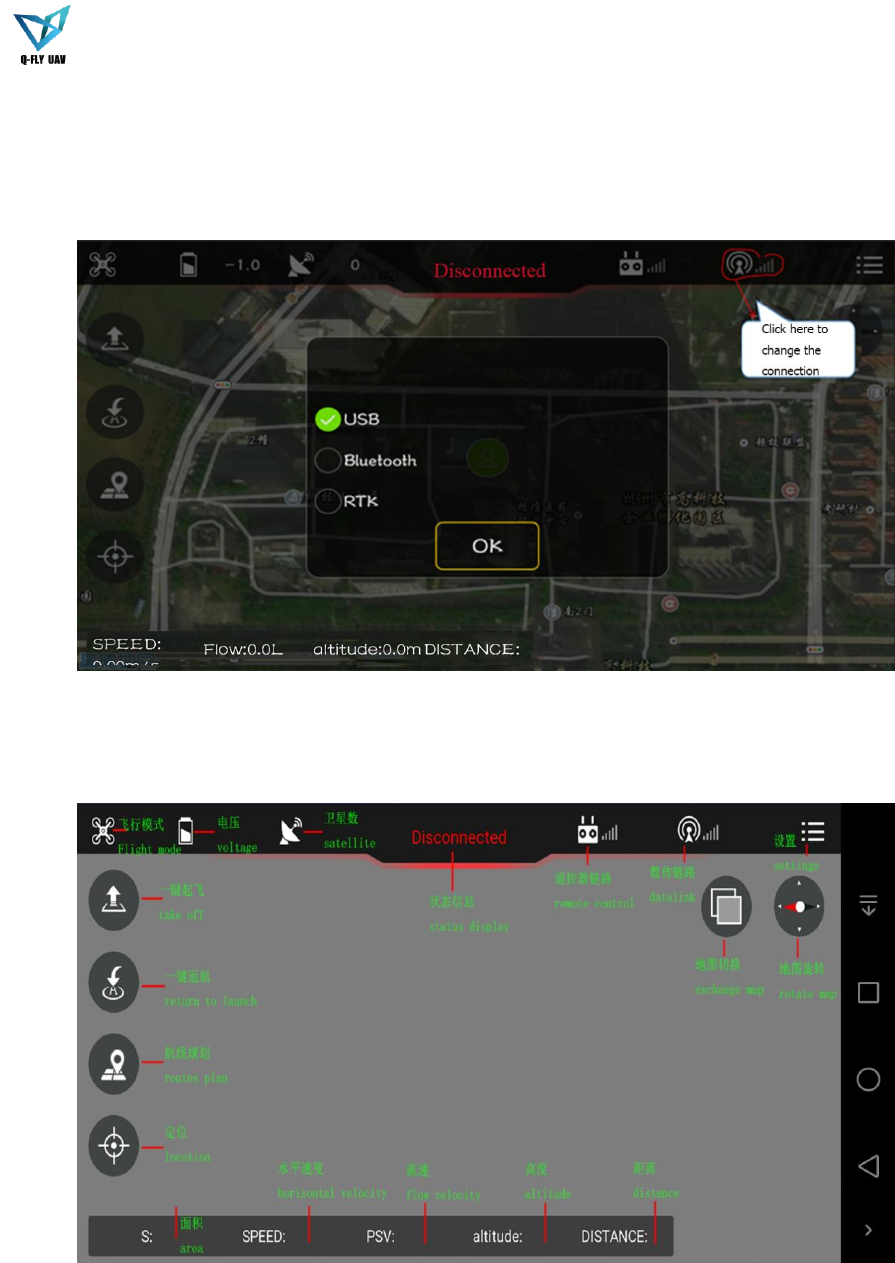
1. Connect the USB and open the IFLY APP, as shown in Figure 4-9:
Figure 4-9
2. Icon Description:
Figure 4-10
3. Precautions:
The attentions for using the ground station APP are shown in Figure 4-11~Figure 4-18.
38
Figure 4-11
Figure 4-12

39
Figure 4-13
Figure 4-14
Figure 4-15
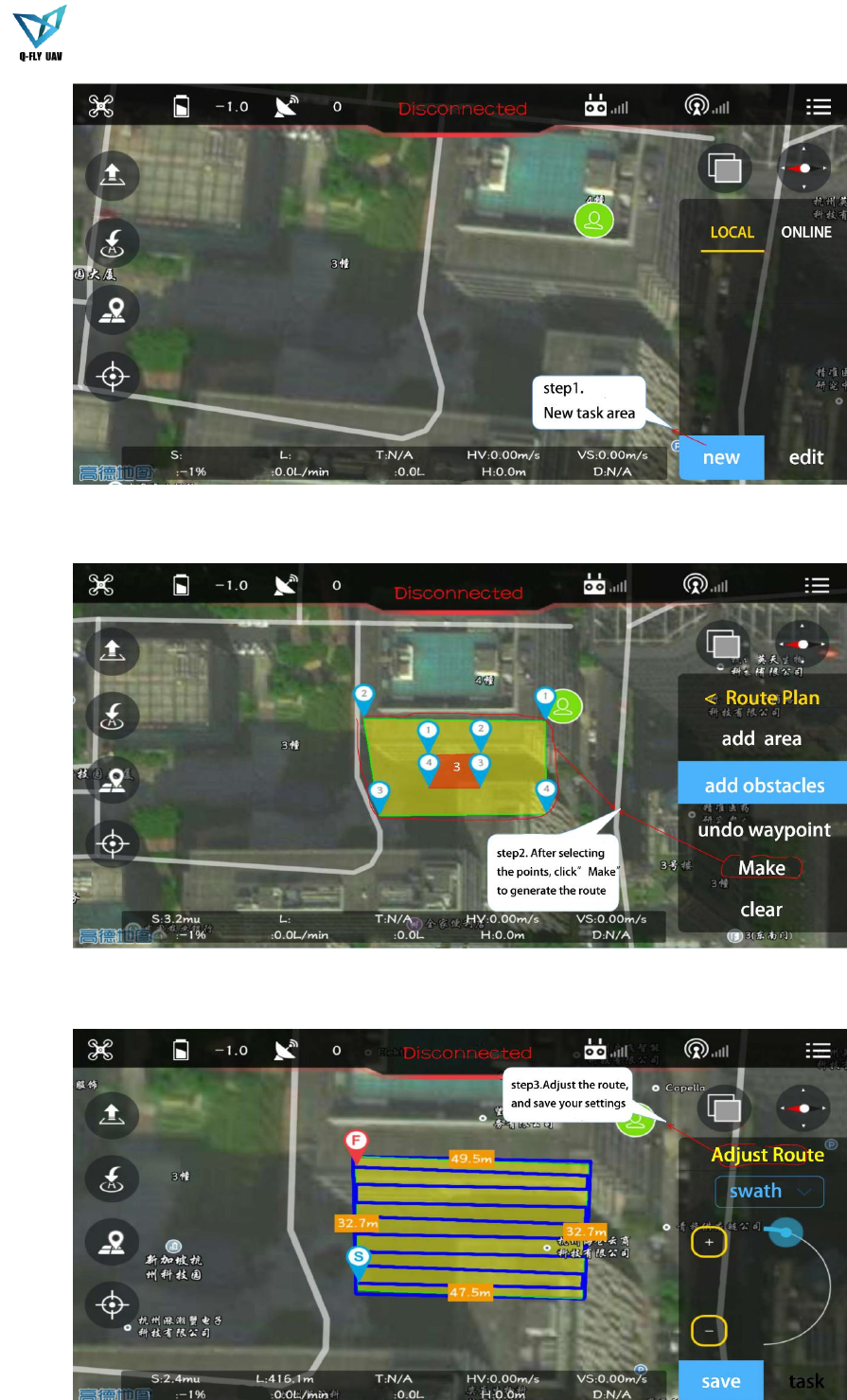
4.3.2.2 Route Planning
Click on the “Route Plan” button to carry out plot measurement and route planning. You can set flight
parameters (such as: spacing (blade), angle, obstacle margins, work margins, etc.), mainly in three steps (Figure
4-18 ~ 4-20):
40
Figure 4-16
Figure 4-17
Figure 4-18
41
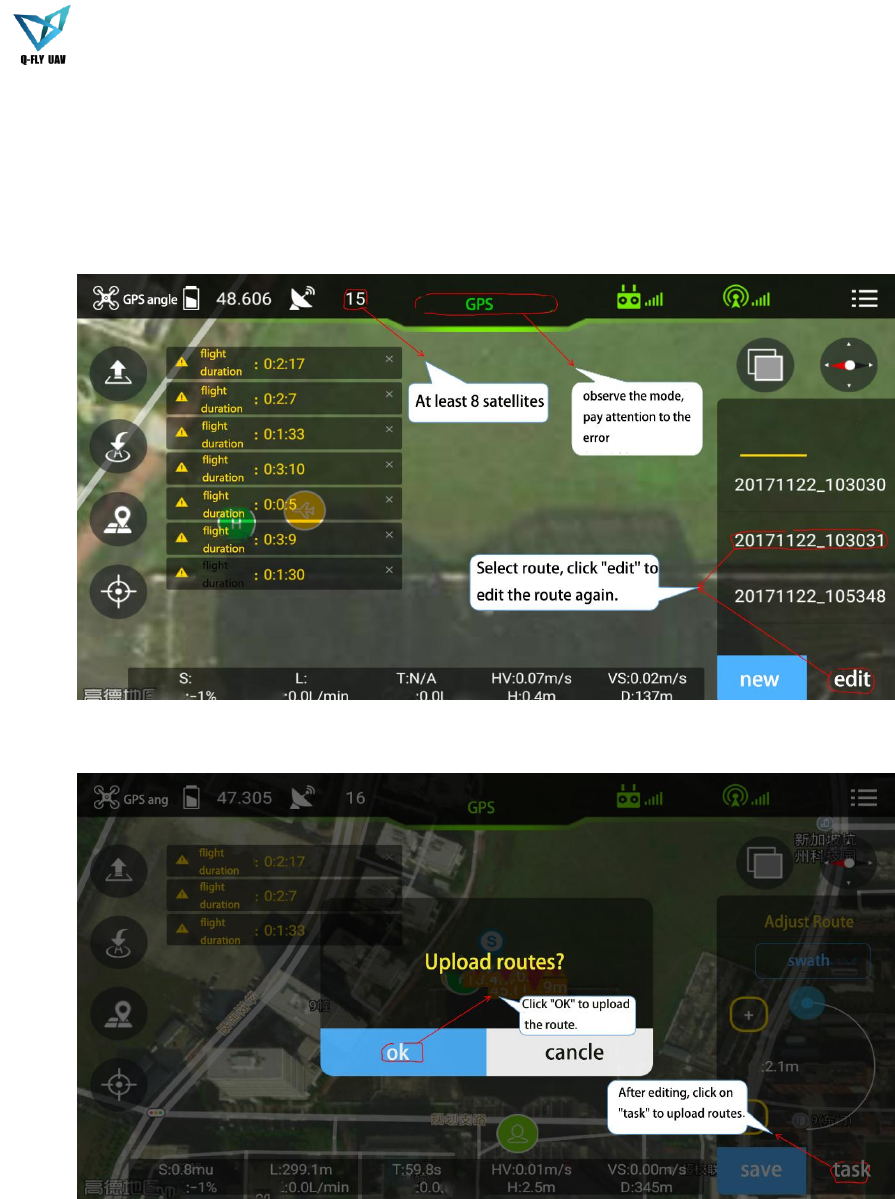
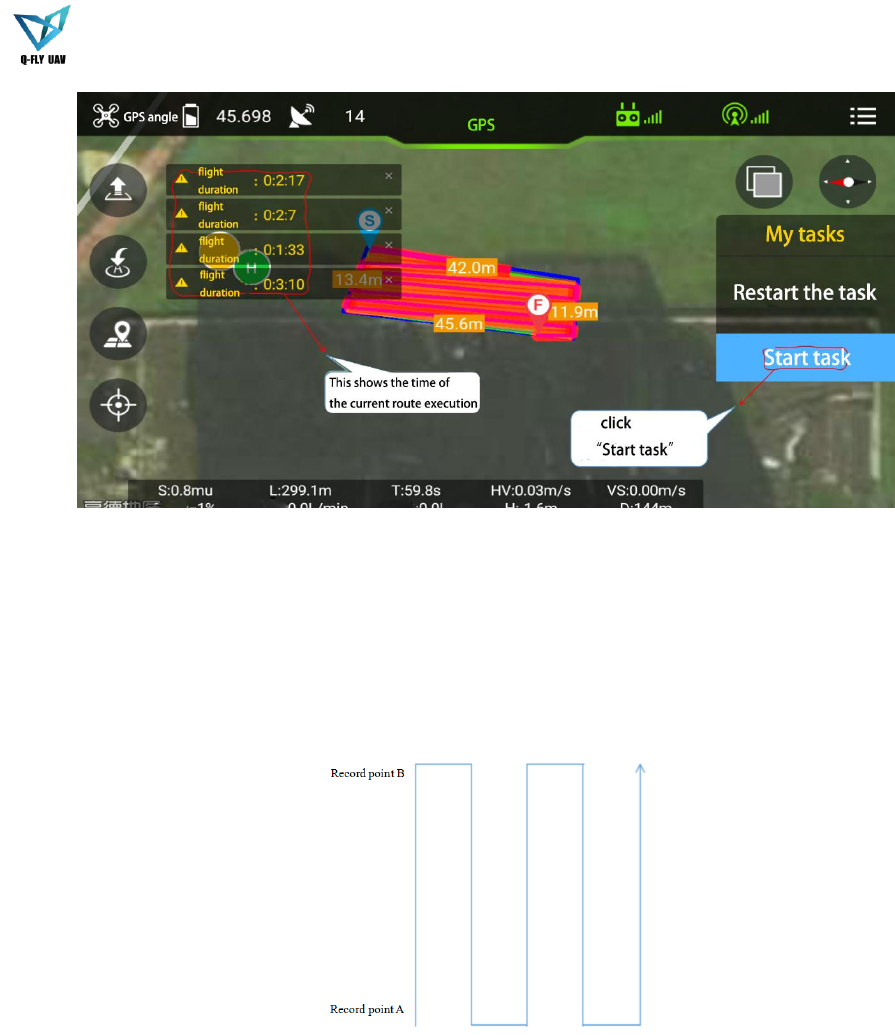
4.3.2.3 Start Mission
After the pre-flight inspection, power up the plant protection drone, click APP to plan the route, open the plot
of the surveying and mapping route, click the edit icon, and click the task icon after the editing is completed. The
steps are divided into three steps (see the figure below for the specific operation steps):
Figure 4-19
Figure 4-20
42
Figure 4-21
At this point, the UAV began to operate automatically.
4.3.3 A、B point operation mode
4.3.3.1 Operation method
Figure 4-22
1. Record A point
Hover in GPS mode, turn the AB stick to second gear. After completing the recording, the LED lights
flash yellow for 2 seconds.
2. Record B point
Hover in GPS mode and turn the AB stick to the third gear. After completing the recording,
the LED flashes green for 2 seconds.
3. AB execution
Turn on AB execution function.
4. Choose direction
Operate the roll bar to select the direction. Move the left roll rocker to the left and the right roll rocker to
the right. The premise of this step is to clear the previously recorded AB point, otherwise the aircraft will fly
at the last AB point and skip this step.
5. Interrupt AB operation
43
Turning the CH5 rocker, turning off the AB operation lever and cutting to the return path can interrupt
the AB operation.
The green LED flashes 4 times during execution.
During the execution, the remote control throttle channel and yaw channel can control the altitude and
heading.
4.3.3.2 point correction function
When flying from point A to point B:
Push up the pitch joystick , then pull the B point forward 1 meter,
pull the pitch joystick down, then shorten the B point by 1 meter.
When flying from point B to point A:
Push up the pitch joystick , then shorten the A point by 1 meter,
pull the pitch joystick down, then pull the A point forward 1 meter.
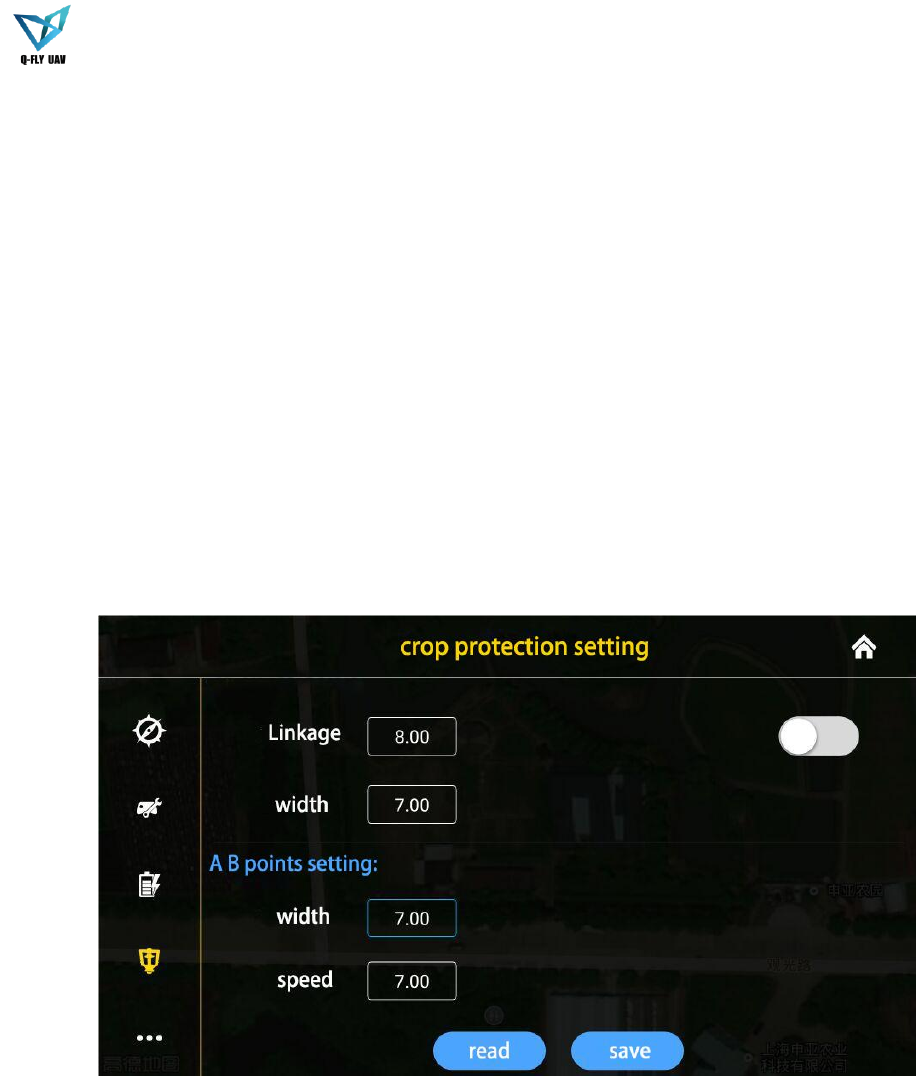
4.3.3.3 AB Point Parameter Settings
Open the APP and connect the UAV, click the setting button in the upper right corner, and select the plant
protection function in the left button bar to set the route spacing and speed of the AB point mode.
Figure 4-23
4.3.3.4 Others
Clear the AB points:
Quickly toggle the AB point recording switch 4-5 times, and the LED lights flash red, green and yellow
alternately, then the AB point is cleared. The AB point cannot be re-recorded without clearing the last recorded AB
point.
Continue spraying after power off:
After the AB operation is interrupted, and the battery is replaced, if the AB operation is performed without
clearing the AB point, the last AB route of the previous job will be resumed.
4.3.4 Electric fence system
4.3.4.1 Flying restrictions and Special airspace restrictions
44
In accordance with administrative regulations of the International Civil Aviation Organization (ICAO) and
national air traffic restrictions and UAV, the UAV must fly in the specified airspace. For flight safety consideration,
also to help users to use this product more safely and legitimately, the flight limitation is working by default,
including height and distance restriction and no fly zone. In the positioning mode (with GPS), altitude and distance
constraints jointly affect flight. In attitude mode, it is limited by height, and the maximum height of actual flight
will not exceed 20 m.
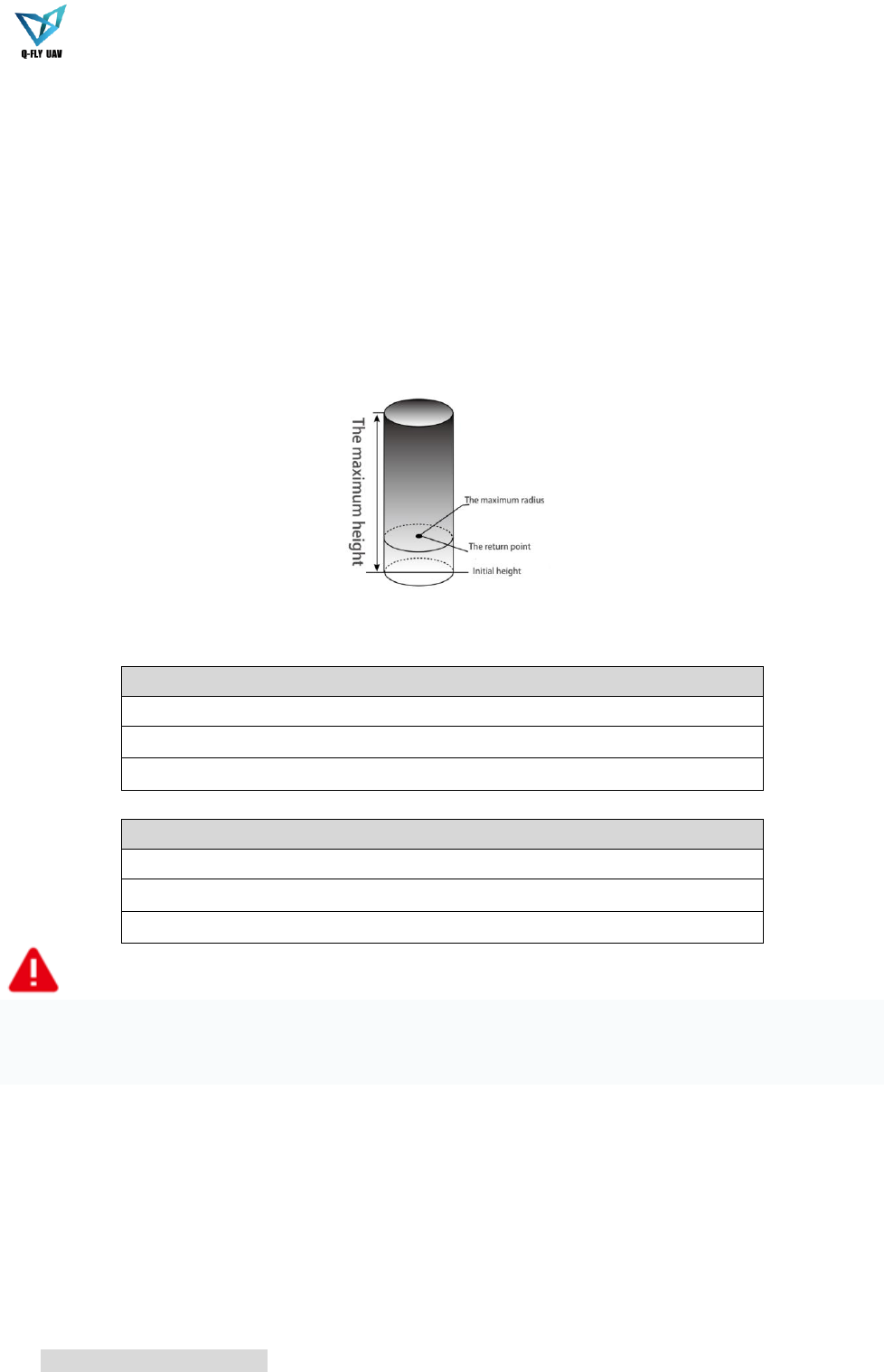
4.3.4.2 Height and distance restrictions
Height restrictions Used to limit the flight altitude of UAV, distance restrictions Used to limit Maximum flying
radius. User can modify parameter by configuration software. After the configuration is completed, flying ranges is
restricted a in cylindrical region, as shown below:
Figure 4-24
Attitude mode
Flight restrictions
The maximum height Cannot exceed the setting in the software
The maximum radius Cannot exceed the setting in the software
Positioning mode (GPS)
Flight restrictions
The maximum height Cannot exceed the setting in the software
The maximum radius Cannot exceed the setting in the software
Warning
The remote is also working when the aircraft is out of bounds on account of inertia, but you can't control the
flight away from Restricted Area. If UAV located out of maximum radius areas, the flying attitude should switch
from attitude mode to location mode (with GPS module), UAV return to a restricted area.
4.3.4.3 Special area flight restrictions
Special areas are divided into:
1. Airports:
Class A and Class B restrictions. For example, international large airports are Class A restricted flight areas,
while Class B areas are smaller airports.
2. Special no-fly zones:
Beijing and major cities in Xinjiang.Level A airport restricted area.
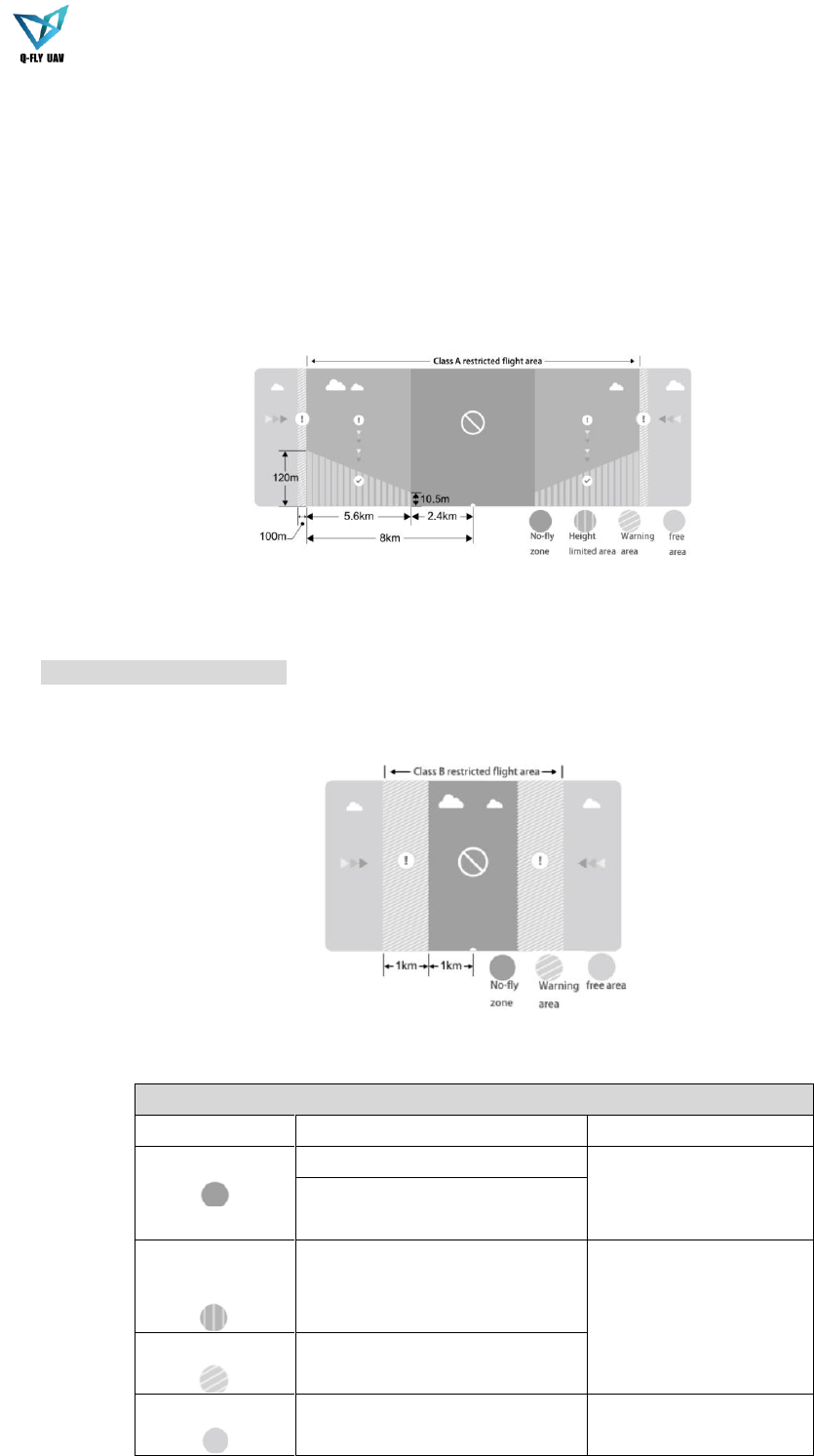
Level A airport restricted area
45
Includes: prohibited area and height restricted area. Prohibited area deny flight. restricted area limit flight
height.
Specific Sites as the center of a circle, the radius of 8 KM area is restricted area, the radius of 2.4 KM area is
prohibited area. prohibited area deny flight.
Aircraft is located in restricted area and out of prohibited area, flight height will be limited. Height
decreases with distance from prohibited area at a rate, range from120m to 10.5m.
100m alert zones is set between restricted area and Unrestricted airspace, more information reference below
picture.
Figure 4-25
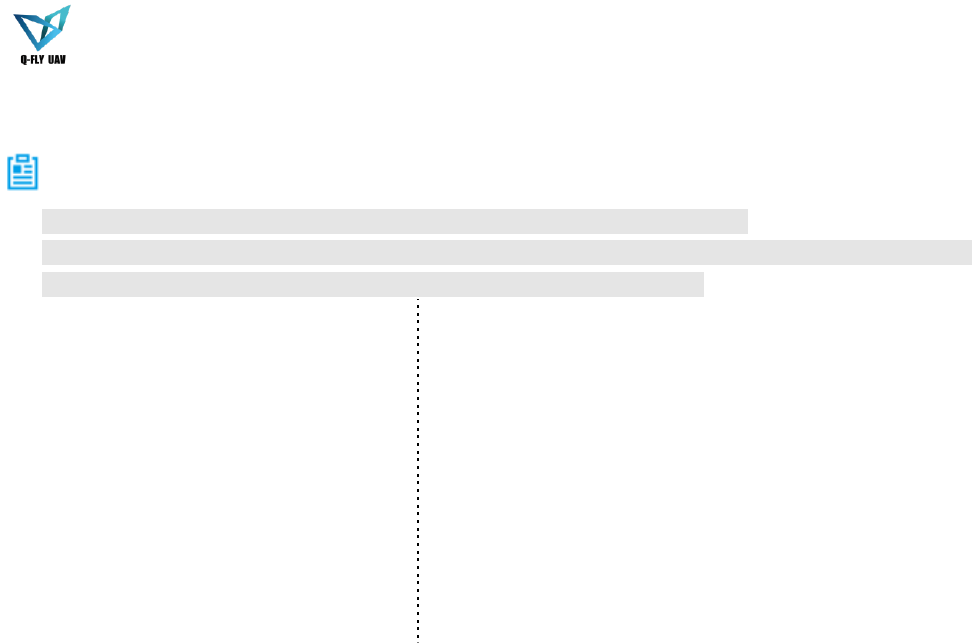
Level B airport restricted area
Specific Sites as the center of a circle, the radius of 1 KM area is prohibited area. Prohibited area deny flight.
100m Alert zones is set between restricted area and Unrestricted airspace. Details reference below picture.
Figure 4-26
Positioning mode (GPS)
area
Flight restrictions
Flight status indicator
No-fly zone
Motor will not start.
The red light flashes for 3
seconds before the normal flash.
If you switch from attitude mode to GPS
mode, the aircraft will automatically land.
Height limited
area
If you switch from attitude mode to GPS
mode,The aircraft will automatically land
at 5m and hover.
The yellow light flashes for 3
seconds before the normal flash.
Warning area
The aircraft can fly normally and issue a
warning message.
Free area
No flight restrictions.
No restriction indicator flashes.
46
5 End Flight
Note
The chapter is going to introduce the operation steps after aircraft landing in details.
Please operate according to the following flows to make sure normal application for the next time. Some of
the operations are not necessary, please select according to the actual situation.
End Flight
Turn off power
↓
Take out batter
↓
Dismantle airborne equipment
↓
Fold aircraft
↓
Fold image transmission antenna
↓
Take out other components
5.1 Cleaning after work
The spray pipe line should be cleaned immediately after spraying operations.(details: tank is filled with
soapy water, Manually turn on the spray switch, Until Clean water flows out when the pesticide is cleaned.)
The tank and Filling equipment clean residual pesticide (details: tank is filled with soapy water, then
repeatedly shake tank. Manually turn on the spray switch, Until Clean water flows out when the pesticide is
cleaned, Then rinse with water again.
Clean the aircraft, wipe the remaining pesticide on the aircraft shell, inspect the air frame structure, replace the
damaged pipes, check the tightness of the screws to eliminate the hidden dangers, and minimize the risk factor
of the flight.
If Long term non-use, store the aircraft in: clean, ventilated, away from high temperatures.
5.2 Maintenance
After work season, inspect the components of the aircraft (if the spray piping is obviously worn, replace it in
time).
Check the updated of aircraft module and update it in time
Check the Badly Damaged battery ,and return to the factory for repair in time .
Repair the aircraft and prepare for the next operation After work season.

1
7 Appendix I Specifications
3WD4-QF-10BPlant protection drone
Dimensions
1638mm×1638mm×440mm(Without propellers)
Symmetric motor wheelbase
1555mm
power system
X8 Power Pack
Spraying system
tank
Capacity
10L
nozzle
type
Pressure nozzle
amount
4
length
1100mm
Flight parameters
Remote control distance
≥1000
Aircraft weight
15.8kg
Full load takeoff weight
25.8kg
No-load endurance time
≥20min
full-load endurance time
≥10min
Best speed
4-6m/s
Spray flow
1.6-2.0L/min
Spray efficiency
0.16-0.25acre/min
Optimal flight height
1.5-2.0m(above the crops)
Safe wind speed
≤ 4 level
Recommended temperature
10-40℃
Spray width
3-4m
Continuous operating time for each
battery
6.0-8.0min
Spray area per flight
0.5-0.7hm2
2
8 Appendix II Description of Aircraft Status Indicators
Flight Mode
LED status
priority
Position (stabilize or fix) mode
● ● ● ......
low
GPS (angle or speed) mode
● ● ● ● ● ● ......
low
Functional mode (circling, cruising, agriculture,)
●●● ●●● ●●● ......
low
Smart direction mode
●●●● ●●●● ●●●● ......
low
Intelligent mode (ground station control, return
flight)
●●●●●●●●●● ......
middle
GPS status
LED status
priority
disconnected/Not found satellite
●●● ●●● ●●● ......
low
Poor GPS signal
● ● ● ● ● ● ......
low
General GPS signal
● ● ● ......
low
GPS signal is good
● Normally on
low
RTK positioning
● ● ● ......
Low voltage alarm
LED status
priority
Level 1 alarm
●●● ●●● ●●● ......
low
Level 2 alarm
●●●●●●●●●● ......
high
Magnetic compass calibration
LED status
priority
Horizontal calibration
● Normally on
middle
Vertical calibration
● Normally on
middle
Calibration failed
● Normally on
middle
Successful calibration
● ● ● ● ● ● ......
middle
Abnormal state
LED status
priority
Remote control loses control
●●●●●●●●●● ......
high
Magnetic compass is abnormal
● ● ● ● ● ● ......
high
Abnormal GPS
● ● ● ● ● ● ......
high
IMU is abnormal
● ● ● ● ● ● ......
high
Other states
LED status
priority
Initialization
● ● ● ● ● ● ● ● ● ......
high
Unlock
● ● ● ● ● ● ● ● ● ......
high
Failed to unlock
● Normally on
high
3
Note
This manual is for reference only. Slight difference may be found in the user interface.
All the designs and software here are subject to change without prior written notice.
All trademarks and registered trademarks are the properties of their respective owners.
If there is any uncertainty or controversy, please refer to the final explanation of us.
Please visit our website or contact your local service engineer for more information.
Hangzhou Qifei Intelligence Technology Co.,Ltd.
Postcode: 310018
Tel: +0571-85239009
15757164322
Website: www.qifeizn.com

4
FCC Statement:
This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15
of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a
residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed
and used in accordance with the instructions, may cause harmful interference to radio communications. However,
there is no guarantee that interference will not occur in a particular installation. If this equipment does cause
harmful interference to radio or television reception, which can be determined by turning the equipment off and on,
the user is encouraged to try to correct the interference by one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced radio/TV technician for help.
Caution: Any changes or modifications to this device not explicitly approved by manufacturer could void your
authority to operate this equipment.
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) This
device may not cause harmful interference, and (2) this device must accept any interference received, including
interference that may cause undesired operation.