Honeywell Enraf 990SRFL-2 Radar Level Tank Gauge User Manual Service Manual
Honeywell Enraf Radar Level Tank Gauge Service Manual
Manual

3ERVICEæ-ANUAL
3MART2ADARæ&LEX,INE

+RQH\ZHOO,QWHUQDWLRQDO,QF
Contact Information:
Head Office - Delft, The Netherlands
Honeywell Enraf
Delftechpark 39, 2628 XJ Delft
PO Box 812, 2600 AV Delft
The Netherlands
Tel.: +31 (0)15 2701 100
Fax: +31 (0)15 2701 111
E-mail: enraf.helpdesk@honeywell .com
Website: http://www.honeywell.com/ps

Table of Contents
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual i
CHAPTER 1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.1 Target Group for this Service Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 Structure of this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.3 Related Documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.4 Trademarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.5 Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
CHAPTER 2 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2 Safety Conventions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2.1 Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2.2 Cautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.3 Safety Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.3.1 Safety Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.3.2 EC Declaration of Conformity (for EU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3.3 Control Drawings for FM & CSA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3.4 Users . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3.5 Additional Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3.6 Environmental Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.4 Liability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.5 Labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.6 Personal Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.7 Warnings and Cautions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.1 Opening of the Instrument . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.2 Closing of the Instrument. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.3 Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.4 Working Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.4.1 Hazardous Zone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.7.1.4.2 Safe Zone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.7.1.5 Required Skills. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.8 Electrical. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.8.1 IEC Safety Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.8.2 Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.9 Accordance to Regulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.9.1 Explosion Safety - Without SmartConn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.9.2 Explosion Safety - With SmartConn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.9.3 Compliance to FCC, R&TTE, IC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.9.4 EN302372-1 ANNEX B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.9.5 Low-Voltage Directive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
CHAPTER 3 System Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1 SmartRadar FlexLine Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1

Table of Contents
SmartRadar FlexLine Part No.: 4417.762_Rev07
ii Service Manual
3.2 FlexConn Modules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3.3 Entities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3.3.1 Status Entities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3.3.1.1 Health Entity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
3.3.1.2 Commissioned Entity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3.3.2 Generic Entity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3.3.3 Function-specific Entities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3.4 SmartView Display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
3.4.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
3.4.2 Status Entities on SmartView. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
3.4.3 Generic Entities on SmartView . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
3.4.4 Specific Entities on SmartView . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
3.5 Engauge Service Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-12
3.5.1 Status Entities in Engauge. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3.5.2 Generic Entities in Engauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3.5.3 Board-specific Entities in Engauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3.5.4 Specific Entities on Engauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
3.5.5 Function-generic Entities on Engauge. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
CHAPTER 4 Service Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1 SmartView . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1.2 SmartView Versions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1.3 Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.1.4 SmartView Controls. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
4.1.5 SmartView Menu Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.1.5.1 SmartView Screens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4.1.5.1.1 Start-up Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4.1.5.1.2 Menu Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
4.1.5.1.3 Backlight Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
4.1.5.1.4 Display Contrast Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4.1.5.1.5 Display Settings Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4.1.5.1.6 Display Test Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4.1.5.1.7 Identification Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
4.1.5.1.8 Extra Information Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4.1.5.1.9 Primary Value Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4.1.5.1.10 Password Screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
4.1.5.1.11 Commands Menu Screens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12
4.1.5.1.12 Commissioning Menu Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4.2 Engauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-16
4.2.1 Connecting the Engauge Service Tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-16
4.2.1.1 Wired Connections Situation (FIGURE 4-17) . . . . . . . . . . . . . . . . . . . . . . . 4-16
4.2.1.2 OneWireless Situation (FIGURE 4-18) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
4.2.2 Using Engauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
4.2.3 Some Engauge Screen Examples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19

Table of Contents
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual iii
CHAPTER 5 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
CHAPTER 6 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.1.2 Text Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.2 Enraf Fieldbus (HCI-BPM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
6.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
6.2.2 Commissioning the HCI-BPM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
6.3 Enraf GPU-FlexConn / Modbus Protocol (HCI-GPU) . . . . . . . . . . . . . . . . 6-5
6.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-5
6.3.2 Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
6.3.3 Commissioning the HCI-GPU - Modbus Protocol . . . . . . . . . . . . . . . . . . . . . 6-8
6.3.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
6.3.3.2 Modbus Protocol Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
6.3.3.2.1 Function Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-9
6.3.3.3 Commisioning Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
6.3.3.4 Commisioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-12
6.3.3.5 Modbus Holding Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
6.3.3.5.1 Fixed Point Format Gauge Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-14
6.3.3.5.2 Floating Point Format Gauge Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19
6.3.3.6 Status Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.3.3.6.1 Product Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.3.3.6.2 Water Level. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.3.3.6.3 Product Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.3.3.6.4 Vapour Room Temperature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-24
6.3.3.6.5 Vapour Room Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-25
6.3.3.6.6 Observed Density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26
6.3.3.6.7 Ambient Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26
6.3.3.6.8 Product Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-27
6.3.3.6.9 HART variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-28
6.3.3.6.10 Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-29
6.3.3.6.11 Analog Output. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-30
6.3.3.6.12 Overfill Protection Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.3.3.6.13 Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.3.3.6.14 Gauge Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.3.3.7 Modbus Coils. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-32
6.3.3.8 Modbus Exception Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-32
6.3.4 Standard ASCII codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-34
6.4 The OneWireless Communication Option (HCI-1WL) . . . . . . . . . . . . . . 6-35
6.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-35
6.4.2 Potential Electrostatic Charging Hazard . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36
6.4.3 Adding a Radar to the OneWireless Network . . . . . . . . . . . . . . . . . . . . . . . 6-36
6.4.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36
6.4.3.2 Preparing the Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-37
6.4.3.3 Authentication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-37

Table of Contents
SmartRadar FlexLine Part No.: 4417.762_Rev07
iv Service Manual
6.4.4 Removing a Radar From the OneWireless Network . . . . . . . . . . . . . . . . . . 6-38
6.4.5 Commissioning the HCI-1WL in the OneWireless Network. . . . . . . . . . . . . 6-39
6.4.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-39
6.4.5.2 Transducer Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-40
6.4.5.2.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-40
6.4.5.2.2 Adding Transducer Blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-40
6.4.5.2.3 General Transducer Block Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-41
6.4.5.2.4 Wireless Builder Screens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-42
6.4.5.2.5 Configurable Transducer Block Settings . . . . . . . . . . . . . . . . . . . . . . . . . . 6-48
6.4.5.2.6 Temperature Details Transducer Block Settings. . . . . . . . . . . . . . . . . . . . . 6-50
6.4.5.2.7 Relay Output Transducer Block Settings . . . . . . . . . . . . . . . . . . . . . . . . . . 6-53
6.4.5.2.8 Supported Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-55
6.4.6 Commissioning the HCI-1WL Configurable Transducer Blocks . . . . . . . . . 6-55
6.4.7 Commissioning the HCI-1WL for GPU and FlexConn Communication . . . . 6-57
6.4.8 Using the SmartView with the OneWireless Communication Option. . . . . . 6-60
6.4.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-60
6.4.8.2 SmartView OneWireless Status Display . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-60
6.4.9 Radio Board Diagnostic Information and Commands . . . . . . . . . . . . . . . . . 6-61
6.4.9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-61
6.4.9.2 Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-62
6.4.9.3 Diagnostic Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-62
6.4.10 Advanced Settings - Transmission Power Level . . . . . . . . . . . . . . . . . . . . . 6-64
6.4.11 Firmware Upgrade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-65
6.5 Product Level Measurement (TII-XR). . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-66
6.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-66
6.5.2 Basic Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-66
6.5.2.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-66
6.5.2.2 Level Start-Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-67
6.5.2.3 Level Check. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-69
6.5.2.4 Alarm Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-71
6.5.2.5 Alarm Loop Checking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-72
6.5.2.6 Compensations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-72
6.5.2.6.1 Filtering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-72
6.5.2.6.2 Verification Pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-73
6.5.2.7 Errors and Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-79
6.5.2.8 Additional Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-79
6.5.2.9 Overfill Protection Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-80
6.6 Relay Contacts (FII-DO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-80
6.6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-80
6.6.2 Operation Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-81
6.6.3 Relay Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-82
6.6.3.1 Jumper Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-82
6.6.3.2 Relay Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-82
6.6.4 Alarm Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-83
6.6.4.1 PV Monitor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-83

Table of Contents
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual v
6.6.4.1.1 Monitor Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-84
6.6.4.1.2 Status Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-84
6.6.4.2 Remote Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-85
6.6.4.3 Not in Use . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-85
6.6.5 Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-85
6.6.5.1 Activate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86
6.6.5.2 Deactivate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86
6.6.5.3 Acknowledge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86
6.6.6 LED Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-86
6.6.7 Terminal Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-87
6.6.8 Commissioned Entities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-88
6.6.9 Board Commissioned Entity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-89
6.6.10 Fail-safe Level Application. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-89
6.6.11 Overfill Protection Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-91
6.6.11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-91
6.6.11.2 Essential FlexConn Boards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-91
6.6.11.3 Application Principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-91
6.6.11.4 Overfill Protection Board Actions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-92
6.6.11.5 Merging the Status to GPU-level status. . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-95
6.6.11.6 Overfill Protection Application Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-96
6.6.11.7 Commissioning the Overfill Protection Application . . . . . . . . . . . . . . . . . . . 6-96
6.6.11.7.1 FII-DO (redundant) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-96
6.6.11.7.2 TII-XR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-98
6.6.11.7.3 PSX (Power Supply). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-98
6.6.11.8 Proof Testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-99
6.7 SmartView Display Interface (FII-SMV) . . . . . . . . . . . . . . . . . . . . . . . . . 6-100
6.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-100
6.7.2 Commissioning the FII-SMV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-101
6.8 Pressure & Density Measurement and Other HART Inputs (FCI-HT) . 6-102
6.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-102
6.8.2 Software Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-103
6.8.3 Software Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-107
6.8.3.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-107
6.8.3.2 P1 Pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-108
6.8.3.3 P3 Pressure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-109
6.8.3.4 HIMS Density. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-111
6.8.3.5 Generic HART Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-112
6.8.3.6 Function Identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-114
6.8.3.7 SmartView Display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-116
6.8.4 Board Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-117
6.8.4.1 Function 1 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-117
6.8.4.2 Function 2 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-118
6.8.4.3 Function 3 through 7 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-118
6.8.4.4 Function 8 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-119

Table of Contents
SmartRadar FlexLine Part No.: 4417.762_Rev07
vi Service Manual
6.8.5 Hardware Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-121
6.8.5.1 Terminal Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-121
6.8.5.2 LED Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-121
6.9 HART Analog Outputs (HCI-HAO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-122
6.9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-122
6.9.2 Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-123
6.9.3 Other HCI-HAO features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-125
6.9.4 Calibration of the HCI-HAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-126
6.9.5 Board Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-128
6.9.5.1 Basic Configurable Entities Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-128
6.9.5.2 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-129
6.9.6 Hardware Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-133
6.9.6.1 Jumper Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-133
6.9.6.2 Terminal Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-133
6.9.6.3 LED Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-133
6.10 Average Temperature & Water Level Measurement (FII-VT) . . . . . . . . 6-134
6.10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-134
6.10.2 VITO Interface Types. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-135
6.10.3 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-135
6.10.3.1 Commissioning Parameters for MTT/LT Probes . . . . . . . . . . . . . . . . . . . . 6-135
6.10.3.1.1 Product Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-138
6.10.3.1.2 Vapour Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-139
6.10.3.1.3 Water Level (for 766/768 Combi probes and 765 Water probe only) . . . . 6-140
6.10.3.2 Commissioning Parameters for MRT or RTD . . . . . . . . . . . . . . . . . . . . . . 6-142
6.10.3.2.1 Product Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-143
6.10.3.2.2 Vapour Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-147
6.10.3.3 Commissioning Parameters for the 765 VITO Water Probe . . . . . . . . . . . 6-148
6.10.3.3.1 Water Level. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-149
6.10.4 Commissioning Check. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-150
6.11 Average Temperature Measurement (FII-RTD) . . . . . . . . . . . . . . . . . . . 6-151
6.11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-151
6.11.2 Some Important Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-152
6.11.3 Some Important Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-152
6.11.4 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-155
6.11.4.1 Commissioning Parameters for 1 or 2 RTDs (3- and 4-wire) Temperature . . .
Calculations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-155
6.11.4.2 Commissioning Parameters for MPT Temperature Calculations . . . . . . . . 6-156
6.11.4.3 Commissioning Parameters for MRT Temperature Calculations. . . . . . . . 6-156
6.11.4.4 Commissioning Parameters for All Types of Probes . . . . . . . . . . . . . . . . 6-157
6.11.4.4.1 Engauge *Product temperature* Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-157
6.11.4.4.2 Engauge * Vapour temperature * Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-160
6.11.4.4.3 Engauge * Ambient temperature * Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-161
6.11.5 Commissioning Check. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-162
General
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 1 - 1
CHAPTER 1 GENERAL
1.1 Target Group for this Service Manual
This SmartRadar FlexLine Service Manual is meant for service
engineers who are assigned to commission a SmartRadar FlexLine.
1.2 Structure of this Manual
1.3 Related Documents
SmartRadar FlexLine Safety instructions for installation, commis-
sioning, operation, and maintenance; shipped with the device
Installation Guide SmartRadar Antennas
CE Declaration of Conformity [not available for OneWireless option]
EC-Type Examination Certificate [not available for OneWireless option]
IEC-Ex Certificate of Conformity [not available for OneWireless option]
FCC Authorization
Control drawings for FM and CSA
OneWireless Wireless Builder User’s Guide
OneWireless Key Server Manager User’s Guide
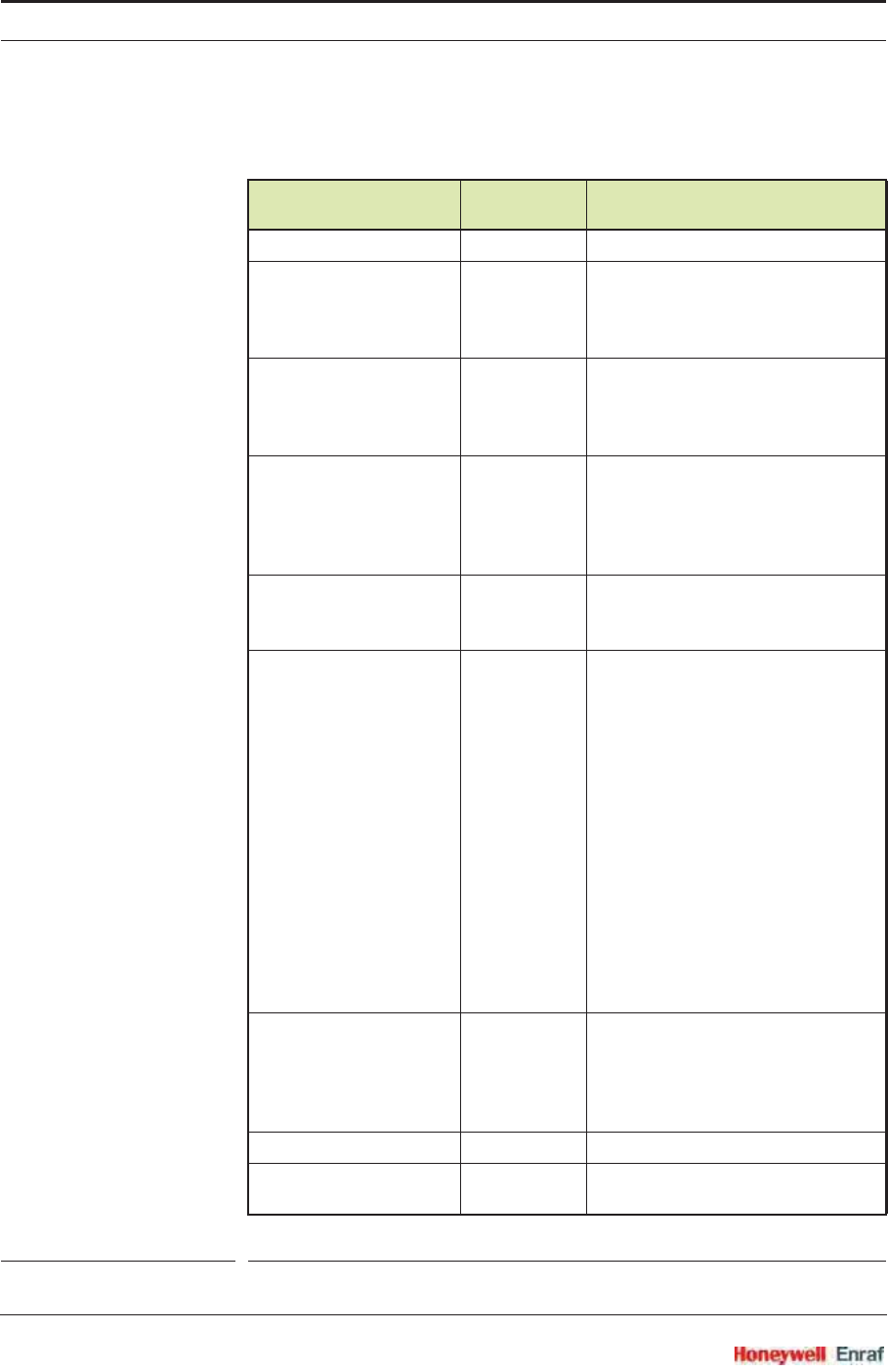
Chapter Title Contents Description
1 - GENERAL This introductory manual part
2 - SAFETY Here all safety-related information is housed. All
essential and mandatory safety instructions, pre-
cautions, and measures are described here.
Moreover, the used safety conventions, the label-
ling information, and compliance information can
be found in this chapter.
3 - SYSTEM ARCHITECTURE This chapter gives an introductory impression of
the SmartRadar FlexLine’s modular-shaped hard-
ware architecture.
4 - SERVICE TOOLS In this chapter, both the SmartView and the
Engauge service tool are described in more detail.
5 - INSTALLATION To make sure the relevant module (s) is (are)
properly installed, before starting with commis-
sioning, only a reference is made here to the
Installation Guide for the SmartRadar FlexLine.
6 - COMMISSIONING This chapter gives all information needed for a
proper commissioning of one or more SmartRadar
FlexConn modules.

General
SmartRadar FlexLine Part No.: 4417.762_Rev07
1 - 2 Service Manual
1.4 Trademarks
HART® is a registered trademark of the HART Communication
Foundation.
1.5 Contact
Head Office - Delft, The Netherlands
Honeywell Enraf
Delftechpark 39, 2628 XJ Delft
PO Box 812, 2600 AV Delft
The Netherlands
Tel.: +31 (0)15 2701 100
Fax: +31 (0)15 2701 111
E-mail: enraf.helpdesk@honeywell .com
Website: http://www.honeywell.com/ps
Safety
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 2 - 1
CHAPTER 2 SAFETY
2.1 General
The SmartRadar FlexLine is a radar-based level gauge to be used in
inventory measurement systems. It can also be used to interface with
other systems and sensors such as pressure, density, or temperature
sensors.
For the correct and safe servicing of this product, it is essential that all
personnel follow generally accepted safety procedures in addition to the
safety precautions specified in this document.
2.2 Safety Conventions
2.2.1 Warnings
Following warning mark is used within this document to urge attention in
order to prevent personal injuries or dangerous situations, further
described within this document.
2.2.2 Cautions
Following caution mark is used within this document to urge attention in
order to prevent damages to the equipment further described within
this document.
2.3 Safety Instructions
2.3.1 Safety Instructions
See the safety instructions shipped with the device for installation,
commissioning, operation, and maintenance.
Symbol Description Remark
General warning Will always be explained by text.
Symbol Description
General caution sign

Safety
SmartRadar FlexLine Part No.: 4417.762_Rev07
2 - 2 Service Manual
2.3.2 EC Declaration of Conformity (for EU)
Refer to the EC declaration of conformity shipped with the device.
2.3.3 Control Drawings for FM & CSA
Refer to the control drawings shipped with the device.
2.3.4 Users
The mechanical and electrical installation must be carried out only by
trained personnel with knowledge of the requirements for installation of
explosion-proof equipment in hazardous areas.
The entire installation procedure must be carried out in accordance with
national, local, and company regulations.
The entire electrical installation shall be carried out in accordance with
the national requirements for electrical equipment to be installed in
hazardous areas.
NOTE: See EN IEC 60079-14 or NEC (NFPA70).
2.3.5 Additional Information
If you require additional information, contact Enraf or its representative.
2.3.6 Environmental Conditions
Observe the environmental conditions for the temperature and the
pressure.
2.4 Liability
The information in this installation guide is the copyright property of
Enraf B.V., Netherlands. Enraf B.V. disclaims any responsibility for
personal injury or damage to equipment caused by:
Deviation from any of the prescribed procedures,
Execution of activities that are not prescribed,
Neglect of the safety regulations for handling tools and use of elec-
tricity.
The contents, descriptions and specifications in this Service Manual are
subject to change without notice. Enraf B.V. accepts no responsibility for
any errors that may appear in this Service Manual.
WARNING! Only certified technicians are authorized to make
changes on the SmartRadar configuration. All modifi-
cations must be in accordance to the guidelines as
set forth by Enraf. Modifications not authorized by
Enraf will invalidate the approval certificates.
Safety
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 2 - 3
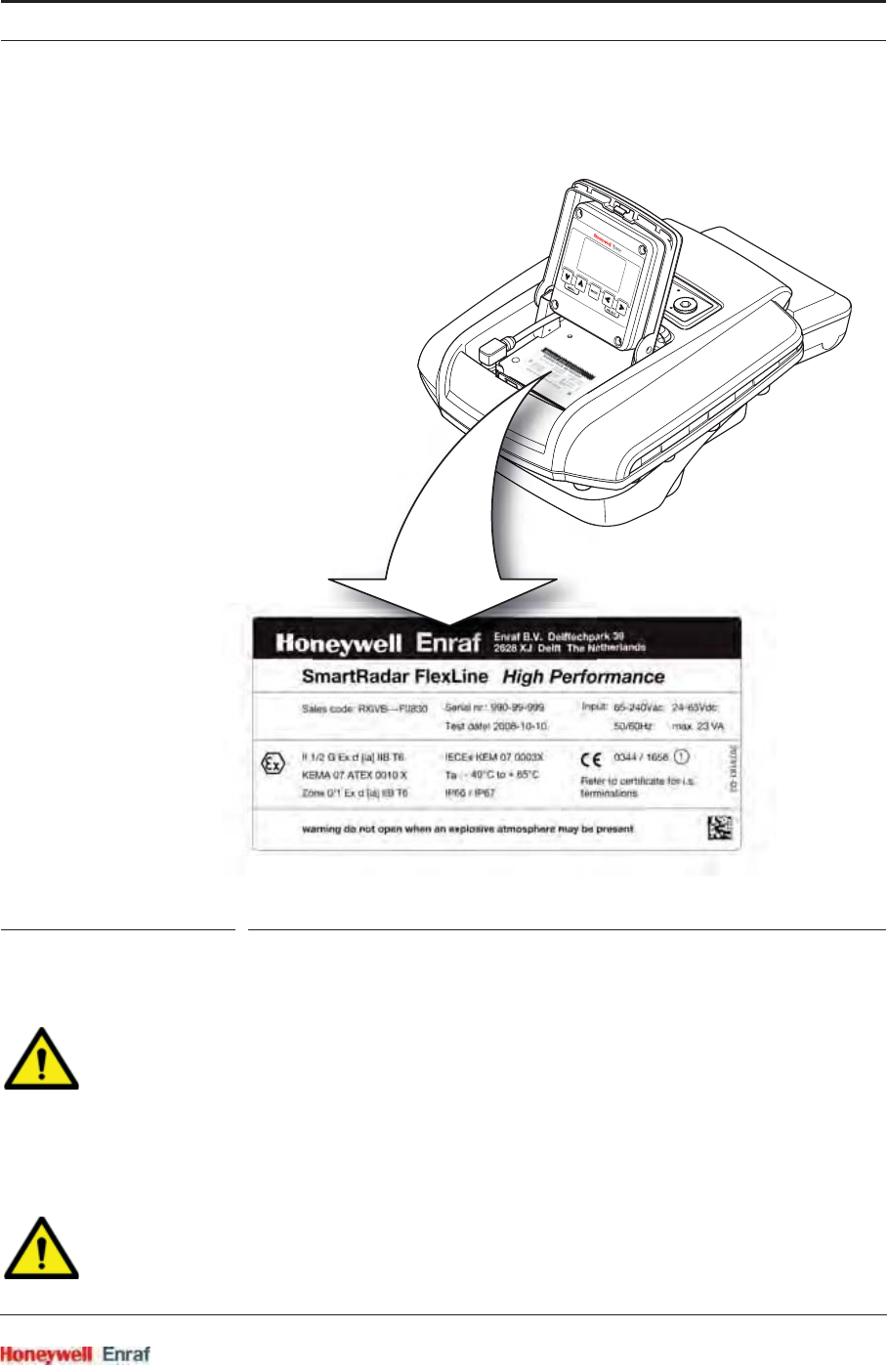
2.5 Labels
FIGURE 2-1 Identification label with Safety note on the SmartRadar FlexLine
2.6 Personal Safety
WARNING! In hazardous areas it is compulsory to use personal
protection and safety gear.
This can be: Safety helmet, fire-resistive overall,
safety shoes, safety glasses, working gloves, LEL-
meter.
Pay attention to the kind of product in the tank. If
there is any danger for your health, wear a gas mask
and take all necessary precautions.
WARNING! Take appropriate precautions when chemical or toxic
product vapors are present (compressed air,
chemical protection suit, detection equipment).
Safety
SmartRadar FlexLine Part No.: 4417.762_Rev07
2 - 4 Service Manual
NOTE: The emitted microwave energy is far below the
accepted limits for exposure to the human body. The
device was tested in conformity with parts of the
following standards and/or publications:
- 1999/519/EC COUNCIL RECOMMENDATION of
12 July 1999
- t.b.d.
2.7 Warnings and Cautions
2.7.1 General
2.7.1.1 Opening of the Instrument
When it is required to open the instrument in an explosive hazardous
environment, take care of the following.
WARNING! Make sure that all power to the device is switched off
before you open the covers of the device. Failure to
do so may cause danger to persons or damage the
equipment. All covers of the device must be closed
before switching the power on again.
WARNING! Treat the flange surface of the cover and the housing
with care.
Keep the flange surface free of dirt.
The O-ring must be present and undamaged.
2.7.1.2 Closing of the Instrument
Cover flanged joint must be cleaned before closing.
The closing flange bolts of the lid of the SmartRadar FlexLine must be
fastened with a torque of 15.5 Nm.
2.7.1.3 Tools
WARNING! Use non-sparking tools and explosion-proof testers.
Use suitable explosion-proof tools (e.g. testing
devices)!
2.7.1.4 Working Environment
2.7.1.4.1 Hazardous Zone
WARNING! Potential Electrostatic Charging Hazard!
Avoid generation of static electricity.
In case a OneWireless SmartRadar FlexLine is
installed, do NOT wipe the surface of the antenna
with dry cloth, and do NOT clean its surface with a
solvent.
If electrostatically charged, discharge of the antenna
surface to a person or a tool could ignite a
surrounding hazardous atmosphere.
Safety
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 2 - 5
2.7.1.4.2 Safe Zone
WARNING! Avoid generation of static electricity. Make sure no
explosive gas mixtures build up in the working area.
2.7.1.5 Required Skills
WARNING! The technician must have technical skills to be able
to safely install the equipment. The technician also
must be trained to work in accordance with the
national requirements for electrical equipment in
hazardous areas.
2.8 Electrical
2.8.1 IEC Safety Standards
The entire electrical installation must be in accordance with the Inter-
national Standard EN IEC 60079-14 for electrical equipment in
hazardous areas or with NEC (NFPA70) requirements.
The stopping plugs, cable glands and reducers must be installed in
accordance with appropriate IP requirements
Use explosion proof (Ex-d) compound barrier glands (due >2 litres
IIB) in case of use without SmartConn (Ex-e junction box).
Use increased safe (Ex-e) cable glands in case a SmartConn box is
used.
Improper installation of cable glands, conduits or stopping plugs will
invalidate the Ex approval of this device.
2.8.2 Grounding
WARNING! Make sure the housing of the device is properly
connected to the ground reference! Make sure that
the electrical resistance of the ground connection is
below the maximum of prescribed by local
requirements!
2.9 Accordance to Regulations
2.9.1 Explosion Safety - Without SmartConn
Type of protection:
ATEX / IEC Ex / CSA / FM
Certificate numbers:
ATEX / IEC Ex [pending for OneWireless option]
SmartRadar FlexLine:
KEMA 07ATEX0010X and IECEX KEM 07.0003 X.

Safety
SmartRadar FlexLine Part No.: 4417.762_Rev07
2 - 6 Service Manual
SmartView: KEMA 07ATEX0011X and IECEX KEM 07.0004 X.
SmartConn: KEMA 07ATEX0093 and IECEX KEM 07.0031.
Without SmartView: Ex d [ia] T6 Ta: -40 °C - +65 °C.
With SmartView: Ex d [ia] ia T4 Ta: -25 °C - +65 °C.
FM [including OneWireless option]
Without SmartView:
Class I DIV I group C,D T6 NEMA 4X Ta: -40 °C - +65 °C.
With SmartView:
Class I DIV I group C,D T4 NEMA 4X Ta: -25 °C - +65 °C.
CSA [pending for OneWireless option]
Without SmartView:
Class I DIV I group C,D T6 NEMA 4X Ta: -40 °C - +65 °C.
With SmartView:
Class I DIV I group C,D T4 NEMA 4X Ta: -25 °C - +65 °C.
2.9.2 Explosion Safety - With SmartConn
Type of protection:
ATEX / IEC Ex / CSA [pending for OneWireless option]
Without SmartView: Ex de [ia] T6 Ta: -40 °C - +65 °C.
With SmartView: Ex de [ia] ia T4 Ta: -25 °C - +65 °C.
2.9.3 Compliance to FCC, R&TTE, IC
This device complies with EN 302372 of the R&TTE Directive, Part 15
of the FCC Rules, and RSS-Gen of IC. The device does not cause
harmful interference and accepts any interference received.
WARNING! Changes or modifications made to this equipment
not approved by Enraf B.V. invalidate the R&TTE/
FCC/IC authorization to operate this equipment.
CAUTION! This equipment has been tested. It complies with a
Field disturbance sensor device, pursuant to Part 15
of the FCC Rules and FCC-Gen for IC. Operation is
subject to the following two conditions: (1) this device
may not cause interference, and (2) this device must
accept any interference, including interference that
may cause undesired operation of the device. These
limits are designed to provide reasonable protection
against harmful interference in a residential instal-
lation. This device generates, uses and radiates
radio frequency energy. If this device is not installed
and used in accordance with the instructions, it can
cause harmful interference to radio communications.
However, there is no guarantee that interference will
not occur in a particular installation.
NOTE: This device is certified to measure liquid levels in
metal, concrete or similar materials, enclosed tanks.
2.9.3 Compliance to radio communication equipment approvals
2.9.3.1 R&TTE (Radio & Telecommunication Terminal Equipment)
This device complies with EN 302372 of the R&TTE Directive
The device does not cause harmful interference and accepts any interference received.
WARNING! Changes or modifications made to this equipment not approved by Enraf B.V.
invalidate the R&TTE
2.9.3.2 FCC (Federal Communication Commission)
FCC information:
This device complies with Part 15 of the FCC Rules. Operation is subject to the
following two conditions:
1. This device may not cause harmful interference, and 2. This device must accept any
interference received, including interference that may cause undesired operation.
Note: This equipment has been tested and found to comply with the limits for a Class B
digital device, pursuant to part 15 of the FCC Rules. These limits are designed to
provide reasonable protection against harmful interference in a residential installation.
This equipment generates uses and can radiate radio frequency energy and, if not
installed and used in accordance with the instructions, may cause harmful interference
to radio communications. However, there is no guarantee that interference will not
occur in a particular installation. If this equipment does cause harmful interference to
radio or television reception, which can be determined by turning the equipment off and
on, the user is encouraged to try to correct the interference by one or more of the
following measures:
--Reorient or relocate the receiving antenna.
--Increase the separation between the equipment and receiver.
--Connect the equipment into an outlet on a circuit different from that to which the
receiver is connected.
--Consult the dealer or an experienced radio/TV technician for help.
Safety
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 2 - 7
NOTE: The radiated output power of the device is far below
the exposure limits. Nevertheless, use the device in
such a manner that the potential for human contact
during normal operation is minimal.
2.9.4 EN302372-1 ANNEX B
The following installation requirements shall be fulfilled:
1. SmartRadar FlexLine instruments are required to be installed at a
permanent fixed position at a closed (not open) metallic tank or rein-
forced concrete tank, or similar enclosure structure made of
comparable attenuating material.
2. Flanges and attachments of the radar equipment shall provide the
necessary microwave sealing by design.
3. Sight glasses shall be coated with a microwave proof coating when
necessary (i.e. electrically conductive coating).
4. Manholes or connection flanges at the tank shall be closed to ensure
a low-level leakage of the signal into the air outside the tank.
5. Whenever possible, mounting of the radar equipment shall be on top
of the tank structure with the orientation of the radar antenna to
pointing in a downward direction.
WARNING! Do not rub the radio antenna to prevent sparks.
6. Installation and maintenance of the radar equipment shall be
performed by professionally trained individuals only.
2.9.5 Low-Voltage Directive
The device is suitable for:
Pollution degree 2
Overvoltage category II
Class I equipment
CAUTION Any changes or modifications not expressly approved by the party responsible for
compliance could void the user's authority to operate this equipment.
2.9.3.3 IC (Industry Canada)
Industry Canada Statement:
This device complies with RSS-210 of the Industry Canada Rules. Operation is subject
to the following two conditions: 1) this device may not cause interference and 2) this
device must accept any interference, including interference that may cause undesired
operation of the device.
This class B digital apparatus complies with Canadian ICES-003
Cet appareil est conforme à la norme CNR-210 des règlements d'Industrie Canada. Son
fonctionnement est sujet aux deux conditions suivantes: 1) Cet appareil ne doit pas
provoquer d'interférences et 2) Cet appareil doit accepter toutes les interférences, y
compris celles pouvant entraîner son dysfonctionnement.
Cet appareil numérique de la classe B est conforme à la norme NMB-003 du Canada.
NOTE: This device is certified to measure liquid levels in
metal, concrete or similar materials, enclosed tanks
NOTE: The radiated output power of the device is far below
the exposure limits. Nevertheless, use the device in
such a manner that the potential for human contact
during normal operation is minimal..
2.9.4 EN302372-1 ANNEX B
The following installation requirements shall be fulfilled:
1. SmartRadar FlexLine instruments are required to be installed at a
permanent fixed position at a closed (not open) metallic tank or
reinforced concrete tank, or similar enclosure structure made of
comparable attenuating material.
2. Flanges and attachments of the radar equipment shall provide the
necessary microwave sealing by design.
3. Sight glasses shall be coated with a microwave proof coating when
necessary (i.e. electrically conductive coating).
4. Manholes or connection flanges at the tank shall be closed to ensure
a low-level leakage of the signal into the air outside the tank.
5. Whenever possible, mounting of the radar equipment shall be on top
of the tank structure with the orientation of the radar antenna to
pointing in a downward direction.
WARNING! Do not rub the radio antenna to prevent sparks.
6. Installation and maintenance of the radar equipment shall be
performed by professionally trained individuals only.
2.9.5 Low-Voltage Directive
The device is suitable for:
Pollution degree 2
Overvoltage category II
Class I equipment

Safety
SmartRadar FlexLine Part No.: 4417.762_Rev07
2 - 8 Service Manual
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 1
CHAPTER 3 SYSTEM ARCHITECTURE
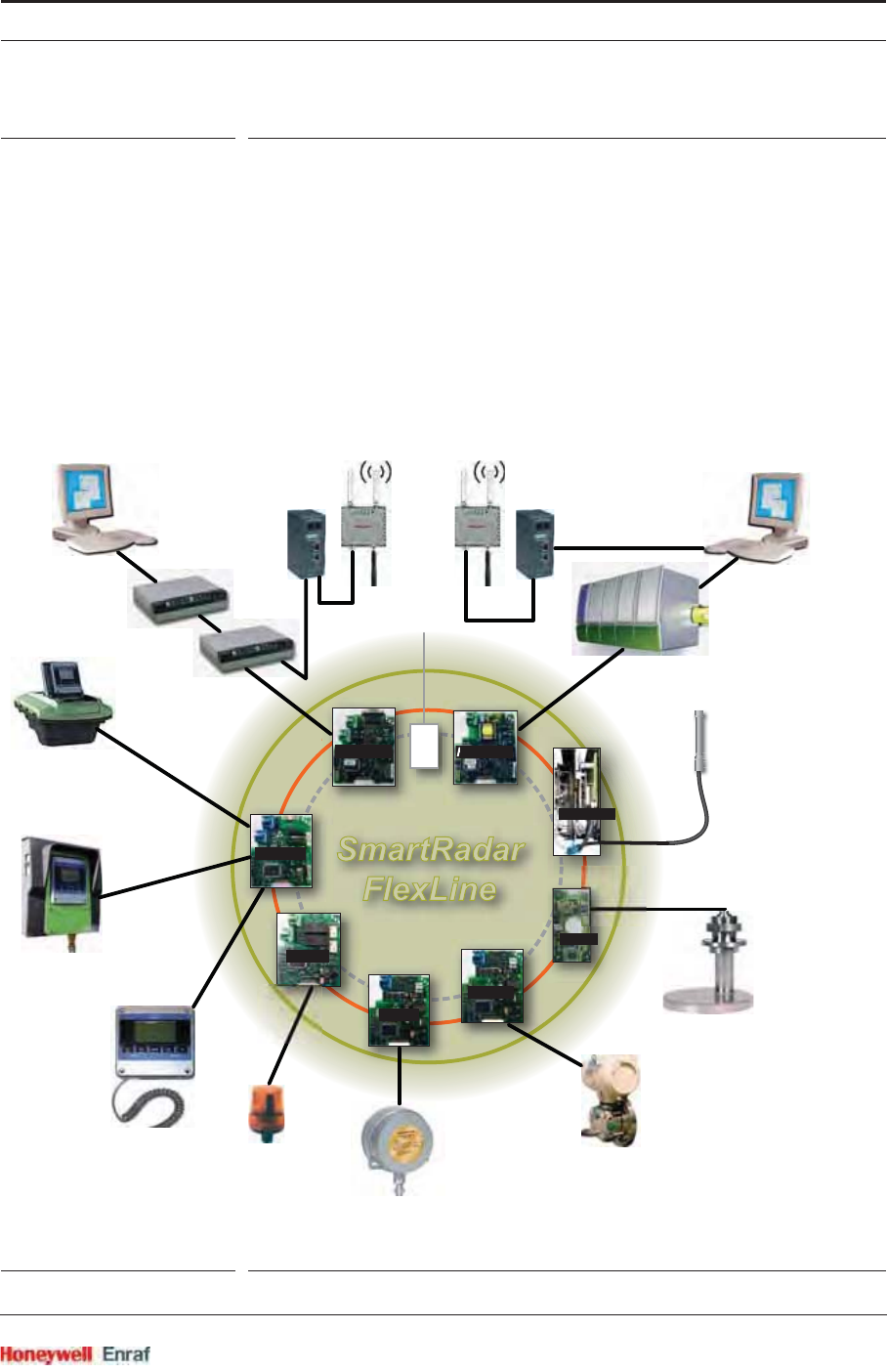
3.1 SmartRadar FlexLine Architecture
The SmartRadar FlexLine system is built up from interchangeable
hardware modules. These modules consist of uniform printed circuit
boards (PCBs), each of them representing a different, unique
functionality. Together with the software implemented on these
hardware parts, each PCB makes up a so-called FlexConn module.
These modules communicate with each other via the serial CAN-bus on
the DIN rail backplane - on which they are mounted - or wireless by
using the OneWireless Network option. See FIGURE 3-1.
ESF07-0026
FIGURE 3-1 SmartRadar FlexLine system architecture overview
C
A
N
-
b
u
s
HCI-GPU HCI-BPM
HCI-1WL
FII-SMV
FII-DO
FCI-HT
TII-XR
FII-VT
Mains
Supply
PSX
GPU BPM
RS-232/485
RS-232/485
RS-232/485
RS-232/485
2 or 4
Alarm relays
762 VITO
INTERFACE
temperature and/or
water bottom
measurement
PRESSURE
TRANSMITTERS
HIMS or
vapour pressure
measurement
and/or
external water probe
(HART-bus)
RADAR ANTENNA
level measurement
ONEWIRELESS
ANTENNA
wireless gauge
connection
ENTIS PRO ENTIS XS
Integrated
SmartView
Stand-alone
SmartView
Portable
SmartView
Enraf
field bus
Lantronix Lantronix
OneWireless
Gateway
OneWireless
Gateway
System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 2 Service Manual
3.2 FlexConn Modules
One of the main characteristics of the SmartRadar FlexLine architecture
is its placement flexibility of the FlexConn modules. If desired, any types
of modules can be added at any locations. Even placement of 2
identical modules is possible within the SmartRadar FlexLine system.
Each FlexConn module has one or more functions. In general, this can
be a sensor function, a communication function, or a digital-interface
function.
Asensor function measures or calculates a process value, or it obtains
a process value from a connected external instrument.
Acommunication function takes care of the communication with a
communication interface unit or with a DCS, SCADA, tank inventory, or
another terminal automation system.
Adigital-interface function controls digital output or reads digital input
from instruments around the storage tank.
NOTE: Some FlexConn PCBs are also used within the so-
called SmartLink system.
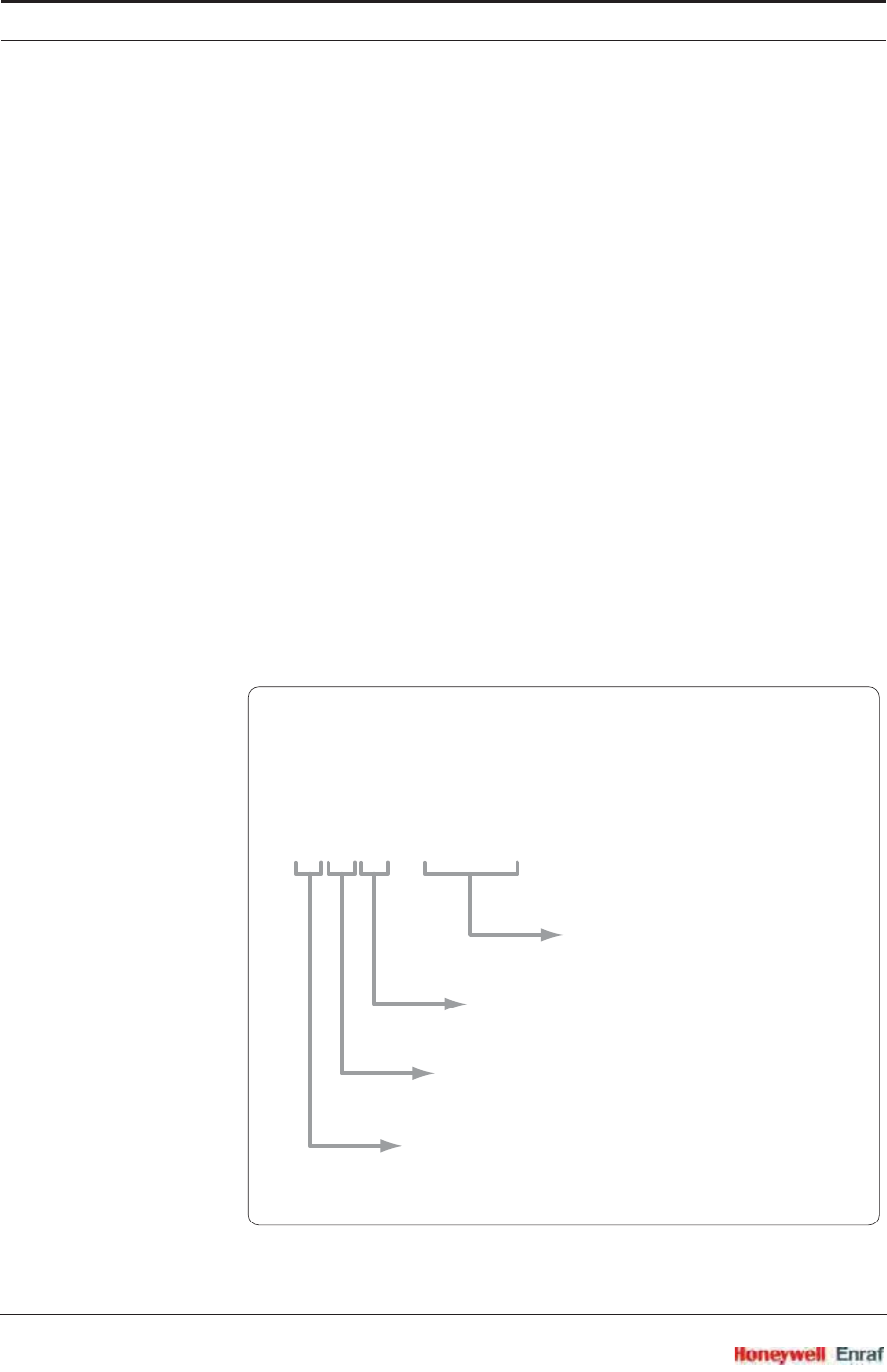
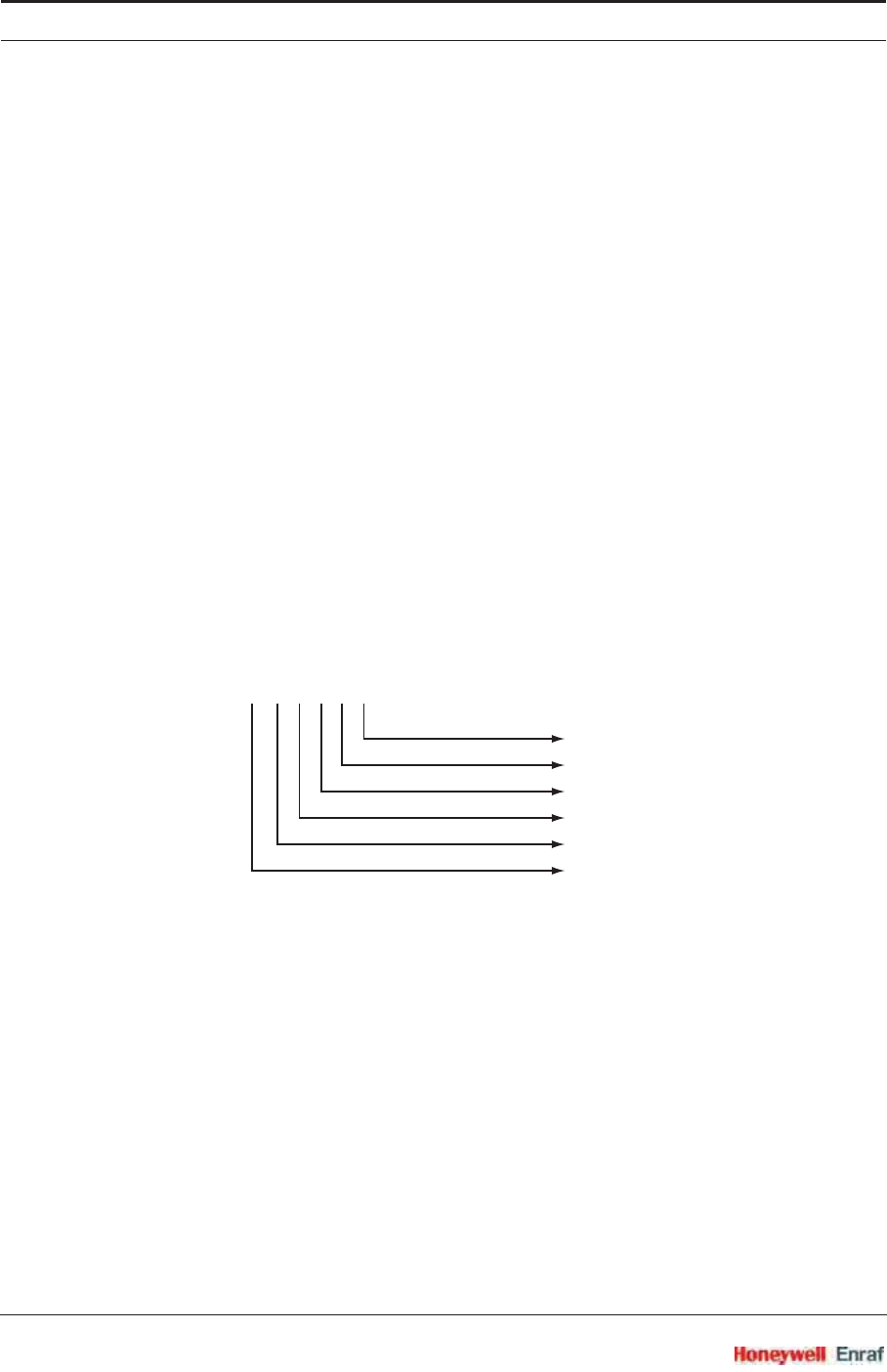
Each FlexConn module has a unique name, which is built up according
to the following outline:
FlexConn Module Name
XXX-YYY
prefix - suffix
specific name or function
M = positioned in SmartLink (safe zone)
I = positioned in gauge
or field instrument (hazardous zone)
C = Communication with generic devices
I = Interface with dedicated equipment
H = connects to Host instrumentation
F = connects to Field instrumentation
T = Transducer, typical gauge function
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 3
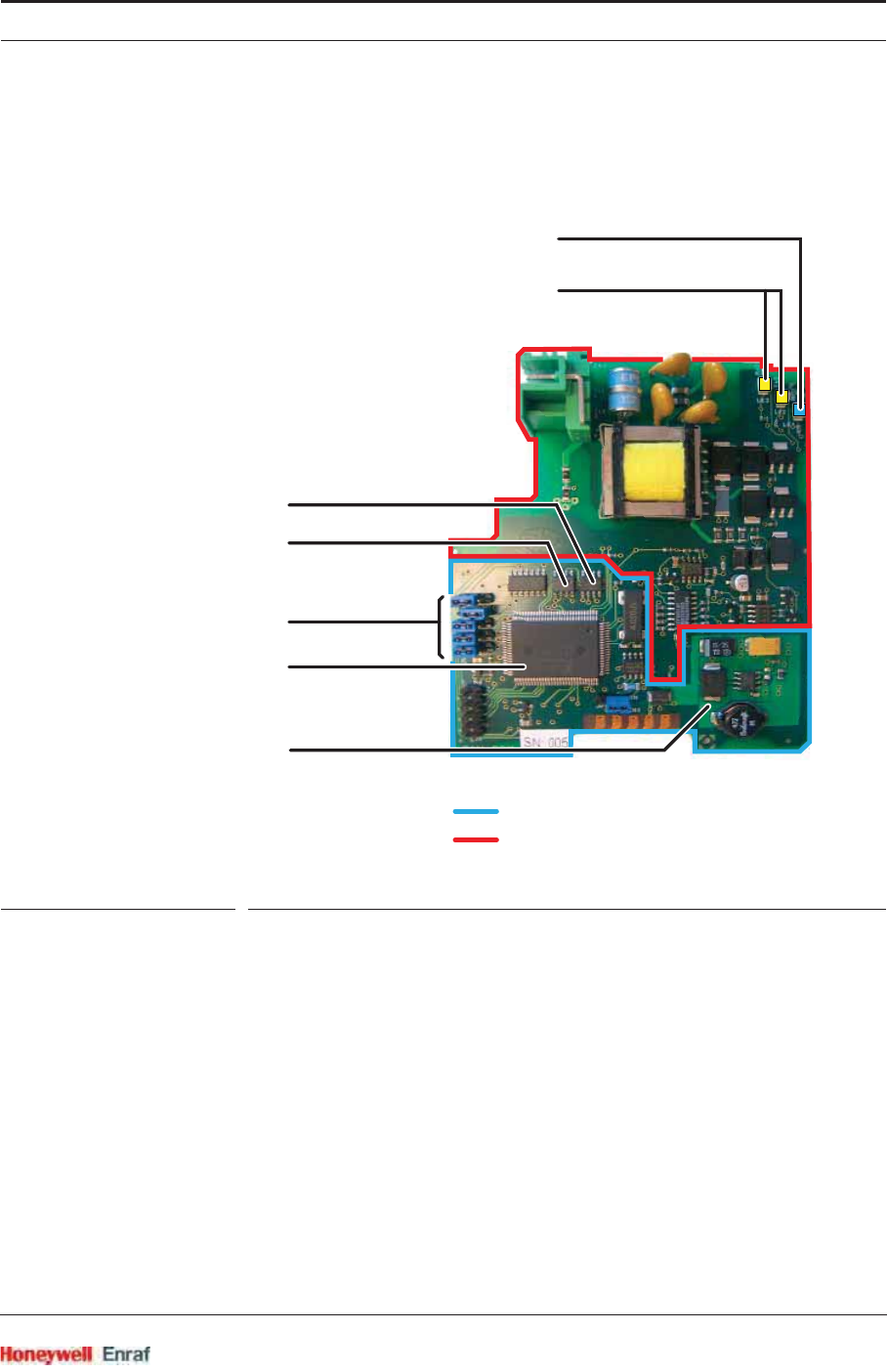
Each FlexConn PCB consists of a generic and a specific electronics
part. The generic part can be found on any FlexConn modules. The
specific electronics part represents an application-specific function. See
FIGURE 3-2
ESF07-0021
FIGURE 3-2 A typical FlexConn PCB layout
On the generic electronics part, the following parts can be found:
The program memory
This memory contains the module-specific software.
The microprocessor / controller
The microprocessor executes the module-specific software stored in
the program memory.
The non-volatile memory
Here the commissioning parameters and the diagnostics data are
stored when the power is switched off.
generic FlexConn part
application-specific part
NOVRAM
temperature sensor
jumpers
microcontroller
with program memory
function LEDs
health LED
power supply
System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 4 Service Manual
Jumpers:
With the jumpers, specific hardware settings can be made:
a) For an explanation of the entities concept, see 3.3.
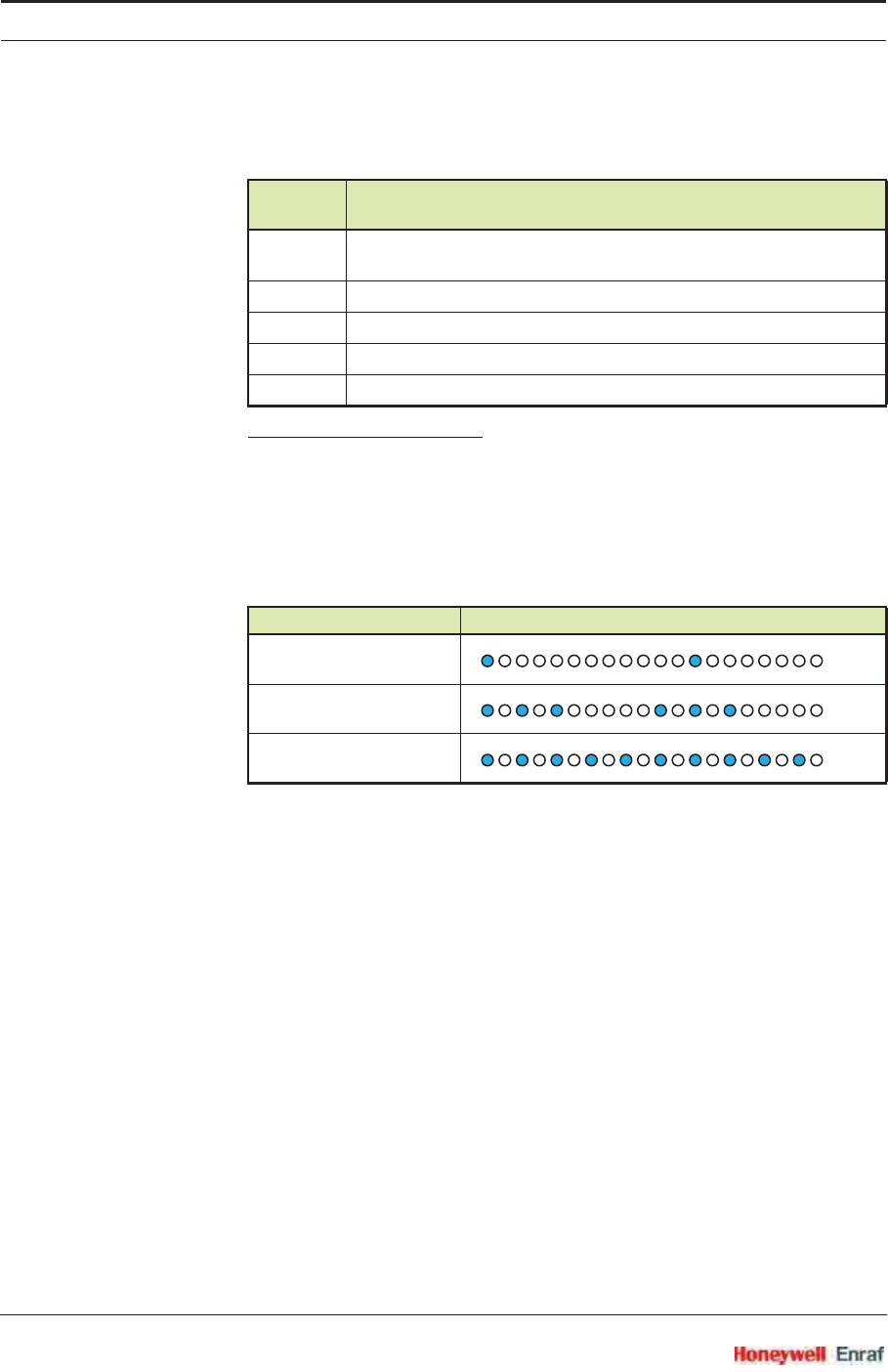
Health LED
The Health LED (= LE1, the blue one) indicates the general health
status of the FlexConn module:
2 function LEDs
These LEDS indicate module-specific activities, such as for instance
data being transmitted or received.
Jumper
Number Function
1 all warning and monitoring-related commissioning entitiesa are
protected and cannot be changed
2 the password is protected from being read
3 all commissioning entities are protected and cannot be changed
4 board-specific jumper
5 board-specific jumper
Health Status Flashing Pattern
Good
Uncertain
Bad
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 5
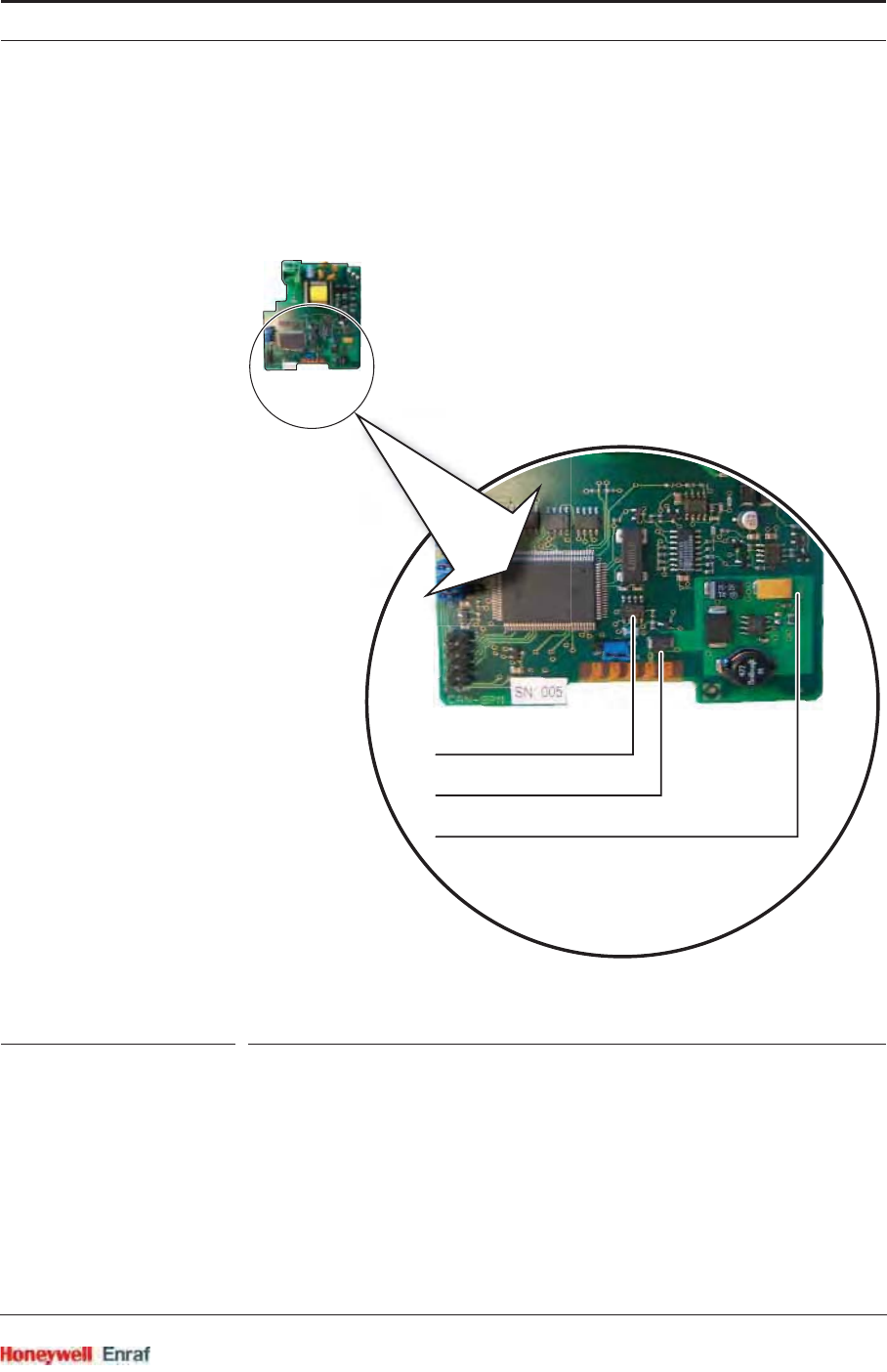
3 voltage monitors
The output of these monitors, being voltage levels from 3 different
FlexConn PCB locations, are used for diagnostics purposes.
See FIGURE 3-3.
ESF07-0023
FIGURE 3-3 Locations of the 3 voltage monitors
1 temperature sensor
For the operational PCB, this sensor acts as an input for environmental-
temperature diagnostics. The PCB’s environmental temperature is
taken as a measure for the temperature inside the SmartRadar
FlexLine.
voltage monitor VM3
voltage monitor VM1
voltage monitor VM2

System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 6 Service Manual
3.3 Entities
Information exchange between the various FlexConn modules takes
place by means of the so-called entities.
An entity represents a unique information association within the
FlexConn architecture. This information may consist of measuring data,
status data, commissioning parameters, diagnostics data, or
commands.
In addition to information exchange between FlexConn modules,
entities are used for data presentation on the SmartView display, and for
the communication between the Engauge service tool and the
SmartRadar FlexLine.
The entities are represented by a textual description, for example,
“Reset”, “Tank bottom”, “Health”, or “Baudrate”.
The entities’ structure is related to:
general status information;
the generic FlexConn part;
the function-specific FlexConn part.
3.3.1 Status Entities
The “Health” and “Commissioned” entities give information about the
general FlexConn module status and the functions implemented on this
module.
3.3.1.1 Health Entity
The “Health” entity reflects the condition of the entire module, each
single module function, and the calculated or measured value of a
sensor function.
The “Health” entity structure is defined by following items:
1. status
2. status category
3. status code
The status field gives high-level information:
good
uncertain
bad
Residing one level below, the status category informs about the general
reason why the status is good, uncertain, or bad.
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 7
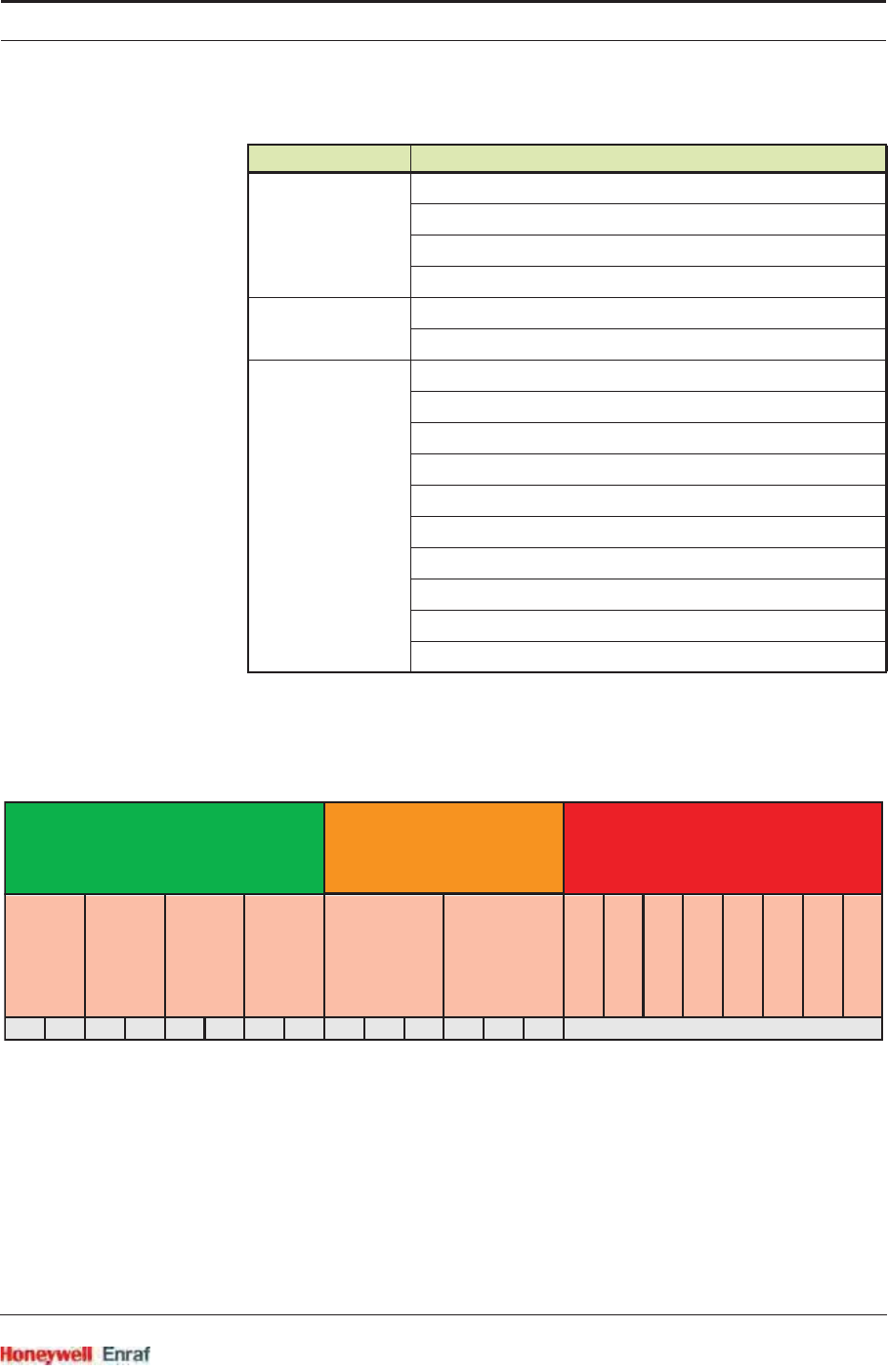
Finally the status code informs about the specific reason why the status
is good, uncertain, or bad. This information is presented as an
information number coupled with a textual description of this specific
situation. See table below.
Each board implements “health” as generic information based on the
function (s) health(s).
Each function implements “health” as generic information.
Each sensor and digital I/O function implements an entity called
“Primary Value”, which in addition to the actual measured value also
contains a “health” status.
Status Status Category
Good
actual
manual
last valid
stored
Uncertain
instrument
environment
Bad
general hardware fail
general firmware fail
general commissioning fail
general calibration fail
general operational fail
over range (data available!)
under range (data available!)
no data available
un-initialized
killed
001 056 077 104 632 328 207 782 065 478 199 389 011 072 ........................................................
manual stored instrument environment
last
valid
actual
un-init
killed
no data
under range
over range
hw fail
sw fail
cal fail
Good Uncertain Bad
System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 8 Service Manual
3.3.1.2 Commissioned Entity
The “Commissioned” entity informs the end user if the most important
commissioning entities of the concerned FlexConn module and its
implemented functions are set correctly.
True = the most important entities are set correctly
False = the most important entities are not set correctly
3.3.2 Generic Entity
The following command entities are implemented as generic functions:
“Reset device”
“Reset board”
The following information is available through the entities:
“Board name” = FlexConn module name
“Board hardware version” = Hardware version of the FlexConn PCB
“Firmware version” = Version of the software running on the
FlexConn module
De firmware (software) version data is built up according to the format
below:
The last digit will not been shown in the official or formal releases.
3.3.3 Function-specific Entities
For the function-specific entities, see Chapter 6 - Commissioning.
A 1 0 0 0 0
internal preliminary
bug fixes
minor functionality
warning + measuring data related part
main functionality
hardware modifications
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 9
3.4 SmartView Display
3.4.1 General
By means of the SmartView most of the FlexConn module settings can
be controlled.
ESF07-0024
FIGURE 3-4 An impression of the SmartView
For each sensor and digital I/O function implemented on a FlexConn
module, a Primary Value screen becomes available on the SmartView
display.
In the left bottom quarter of the display, the Primary Value’s “Health”
status is shown:
Below the Status field, the Status category is displayed:
Status Display Text
Good
Uncertain uncertain
Bad bad
Status Category Display Text
actual
manual manual
last valid last valid
stored stored
instrument instrument
environment environment
general hardware fail hardware
general firmware fail software
general commissioning fail commission
general calibration fail calibration
general operational fail operational
><
<
<
MAIN
System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 10 Service Manual
3.4.2 Status Entities on SmartView
Choosing sub-menu “commissioning” from the main menu, a survey
results of all FlexConn modules present in the SmartRadar FlexLine
system.
Each module is followed by an indication for the “Health” and the
“Commissioned” status respectively. In case of an unreliable or fault
situation, the “Information” column shows an information code in
addition. This information code reveals the specific reason about the
current status.
This diagnostics goes for each individual FlexConn module. See
example below.
The “Health” indication can be:
“G” = Good
“U” = Uncertain
“B” = Bad
The “Commissioned” indication can be:
“Y” = the most important entities are set correctly
“N” = the most important entities are not set correctly
Starting from the “commissioned” menu and choosing the specific
FlexConn module, the above diagnostics is repeated for each module
function. See example below.
over range over range
under range under range
no data available no data
un-initialized no init
killed killed
H C I
FII-DO G N
FII-DO:>
board H C I
Relay 1 G N
Relay 2 G Y
Relay 3 U Y nnn
Relay 4 B Y
Status Category Display Text
System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 11
3.4.3 Generic Entities on SmartView
From the functions survey screen of the concerning FlexConn module,
the generic entity commands or the commissioning entity can be
selected via the “board” entry.
3.4.4 Specific Entities on SmartView
Selecting a specific function, for instance, “Relay 2”, gives access to the
specific entities for this function.
The specific entities are described in Chapter 6 - Commissioning.
FII-DO:>
board H C I
Relay 1 G N
Relay 2 G Y
Relay 3 U Y nnn
Relay 4 B Y
System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 12 Service Manual
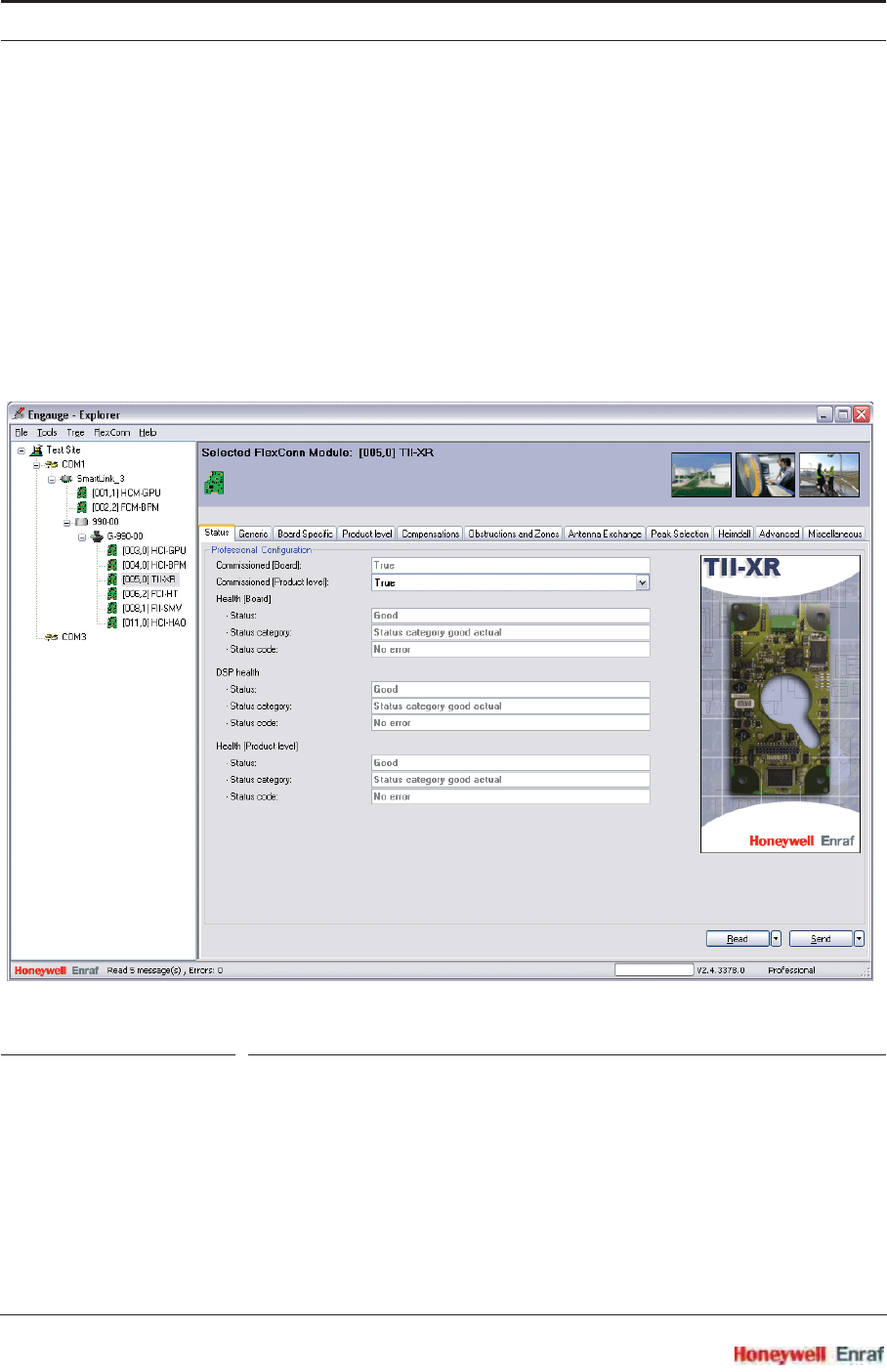
3.5 Engauge Service Tool
The Engauge service tool is a PC application with which all FlexConn
module settings can be done as well.
By means of the Engauge’s explorer, each FlexConn module of the
concerned SmartRadar FlexLine system can individually be selected by
double-clicking on the module’s icon. The so-called “board descriptor” is
loaded then resulting in a screen with “tab” pages. By selecting these
tab pages, all settings of the specific module are accessible.
See example below.
ESF09-0001
FIGURE 3-5 Example of an Engauge screen

System Architecture
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 3 - 13
3.5.1 Status Entities in Engauge
Each board descriptor user interface starts with the tab page “Status”.
On this tab page the “Health” and “Commissioning” entities for the
whole module and the individual functions are placed.
3.5.2 Generic Entities in Engauge
The “Status” tab page is always followed by the “Generic” tab page, on
which the general commands and diagnostics entities are placed.
3.5.3 Board-specific Entities in Engauge
The “Generic” tab page is always followed by the “Board specific” tab
page, on which the board-specific entities are placed. These entities are
specific for each individual FlexConn module type. The board-specific
entities are further described in Chapter 6 - Commissioning.
3.5.4 Specific Entities on Engauge
After the board-specific tab page, for each implemented function on the
concerned FlexConn module a specific tab page follows.
For example, for the FII-DO module, the below listed specific tab pages
will be present:
Relay 1
Relay 2
Relay 3
Relay 4
In case of complex functions, extra tab pages may exist, containing
those specific functions involved.
The specific entities are described in Chapter 6 - Commissioning.
3.5.5 Function-generic Entities on Engauge
The function category “generic entities” are placed at the bottom of each
function tab page in Engauge.
For each category (sensor, digital I/O, communication, display), the
basic Engauge version will have only one entity:
“Function identification”.
With this entity, the user can change the function name, which will then
become available on the SmartView Primary Value screen and in
Engauge as well.

System Architecture
SmartRadar FlexLine Part No.: 4417.762_Rev07
3 - 14 Service Manual

Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 1
CHAPTER 4 SERVICE TOOLS
4.1 SmartView
4.1.1 General
The SmartView is the basic tool with which the user can communicate
with the SmartRadar FlexLine modules.
As normally open keyboard contacts may be dangerous in an
explosion-hazardous environment, the SmartView is built up as a totally
shielded explosion-safe tool.
4.1.2 SmartView Versions
The SmartView can be delivered in 3 versions:
SmartView fixed on the instrument
SmartView as a tank-side indicator (stand-alone)
A portable SmartView
ESF07-0027
FIGURE 4-1 The 3 different SmartView options
4.1.3 Connections
Within a hazardous environment, connecting or disconnecting electrical
equipment is dangerous, because of sparking risks.
The portable SmartView however is designed such that it may be
connected/disconnected within a hazardous zone.
The fixed version SmartViews (integrated within the instrument or tank-
side mounted) have pre-installed fixed connections.
fixed on the instrument as a tank-side indicator as a portable tool
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 2 Service Manual
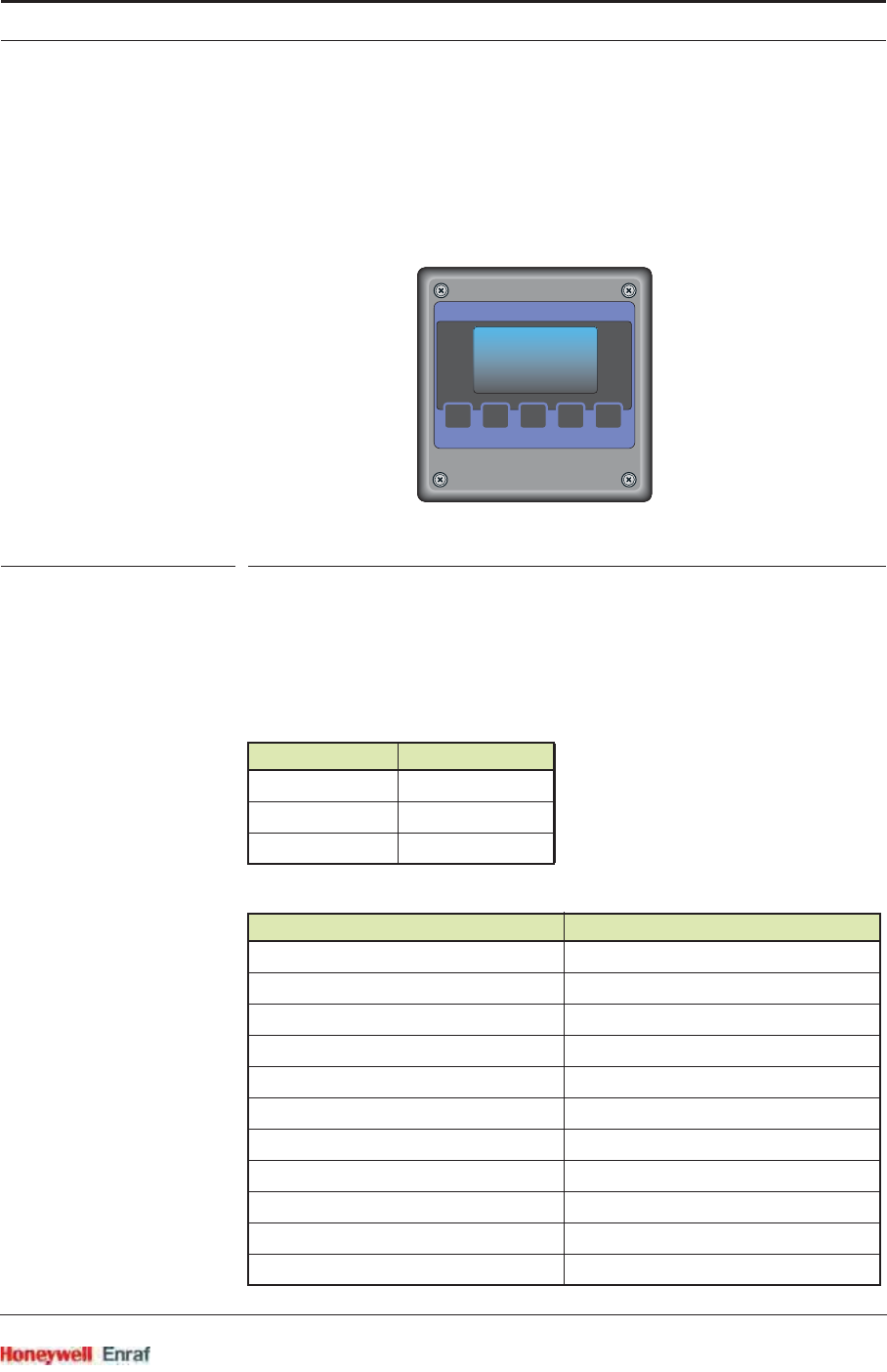
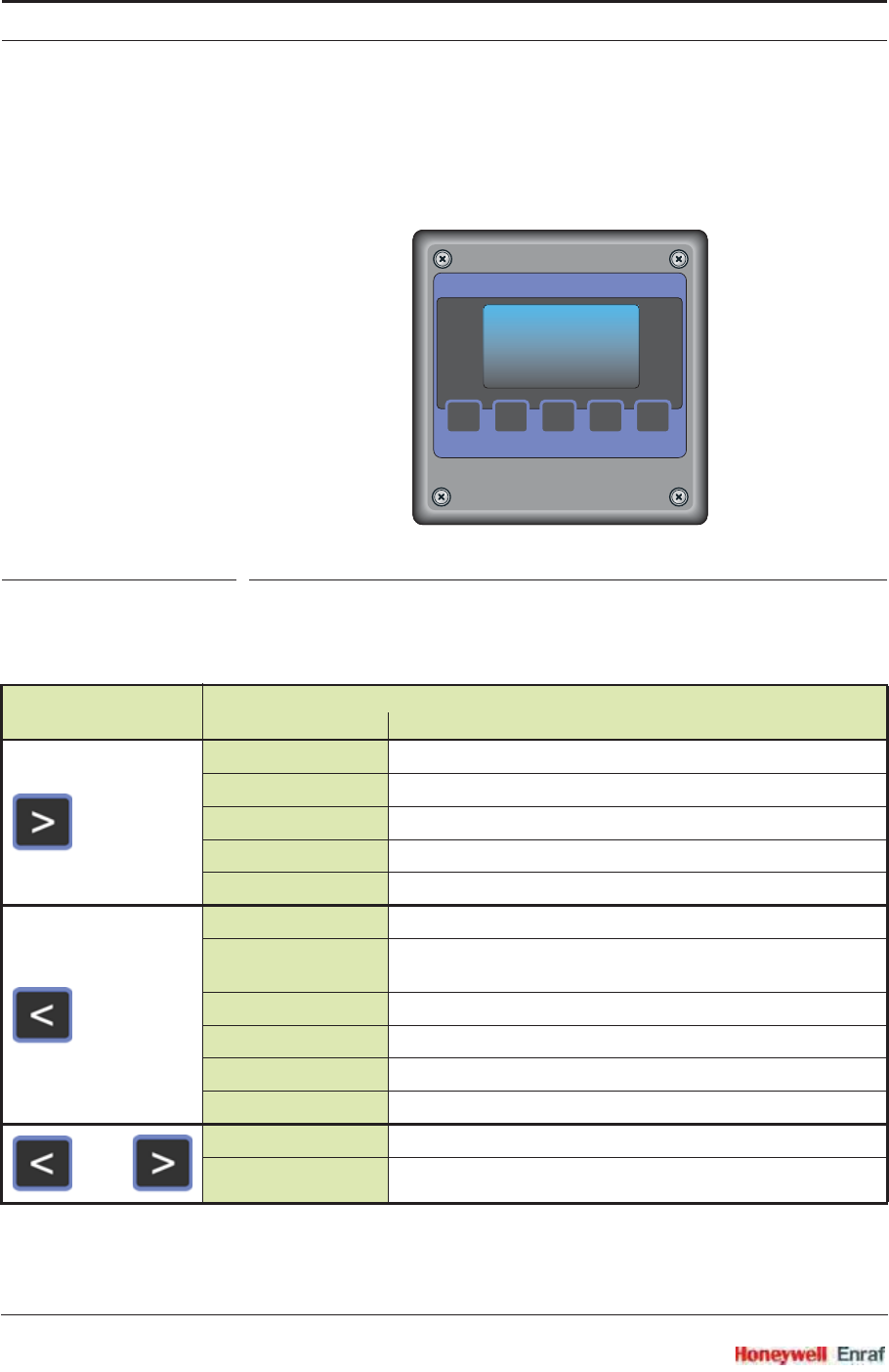
4.1.4 SmartView Controls
The SmartView has 5 push buttons and an LCD-screen with a backlight
that can be switched on/off as desired. By using a menu, most
SmartRadar FlexLine control operations can be done.
ESF07-0024
FIGURE 4-2 The SmartView controls
The buttons have the following functions:
Button Function
within menu ...
PV Go to next PV screen
Commissioning Move cursor 1 position to the right
Display contrast Increase contrast
Backlight Toggle between ON and OFF
Display settings Toggle between ON and OFF
PV Go to previous PV screen
Commissioning Leave current menu screen, and go to higher-level menu.
Important: Leaving an edit screen this way will undo all editing!
Commands Leave current menu screen, and go to higher-level menu.
Display contrast Decrease contrast
Backlight Toggle between ON and OFF
Display settings Toggle between ON and OFF
Commissioning Confirm selected choice
Commands Confirm selected choice
><
<
<
MAIN
+
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 3
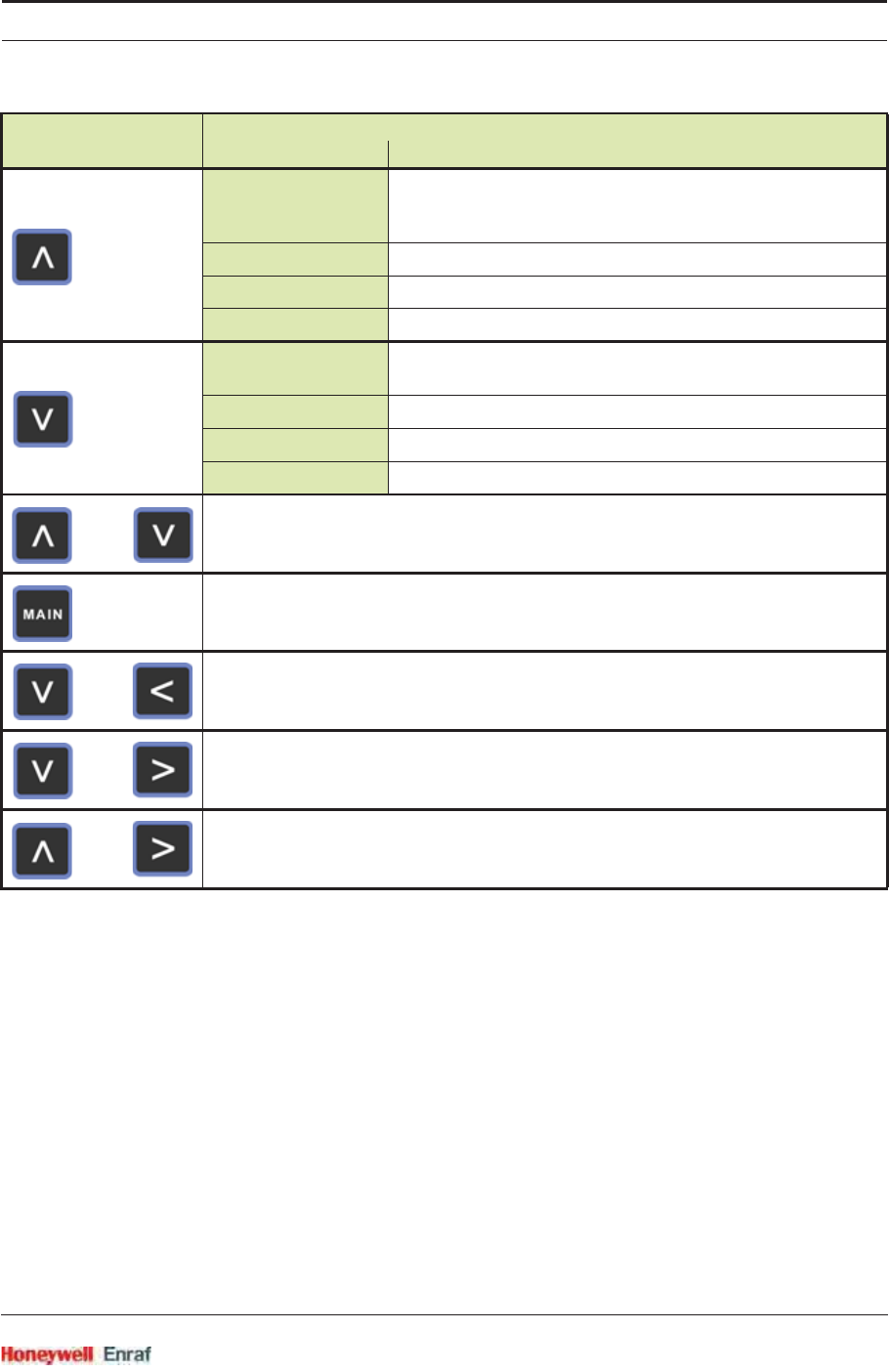
Commissioning Within the menu screens, move cursor 1 line up
Within the edit screens, scroll characters as long as the button is
pressed
Commands Move cursor 1 line up
Display settings Toggle between Main screen and Standby mode
Identification Go to next identification screen
Commissioning Within the menu screens, move cursor 1 line down
Within the edit screens, scroll down 1 character
Commands Move cursor 1 line down
Display settings Toggle between Main screen and Standby mode
Identification Go to next identification screen
Show menu
Go to PV screen
Decrease contrast
Increase contrast
Standby mode - Pressing any buttons will activate SmartView again
Button Function
within menu ...
+
+
+
+
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 4 Service Manual
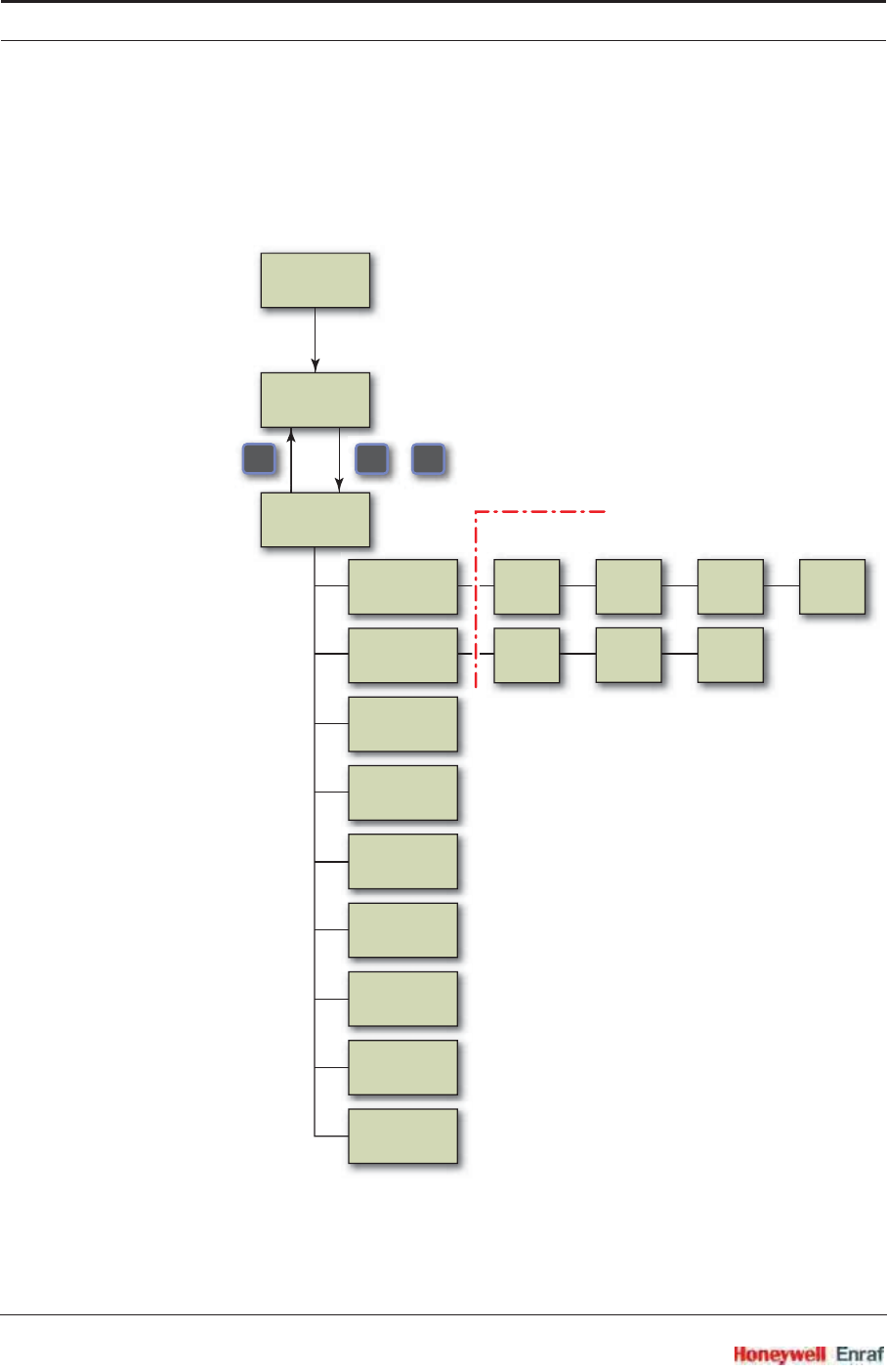
4.1.5 SmartView Menu Structure
4.1.5.1 SmartView Screens
Depending on the state of the menu process and the pressed button(s),
following screens can be displayed:
ESF07-0043
<
<
MAIN
+
start-up
PV
screen
menu
SmartView
Menu Structure
commissioning
commands
extra
information
display
contrast
backlight
identification
display
settings
display test
primary
values (PV)
board
list
board
list
value
edit
entity
list
function
list
function
list
command
list
password-protected
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 5
4.1.5.1.1 Start-up Screen
The SmartView starts up showing:
1. Black test
2. Blank test
3. Enraf logo + software version + tank ID
4. PV screen
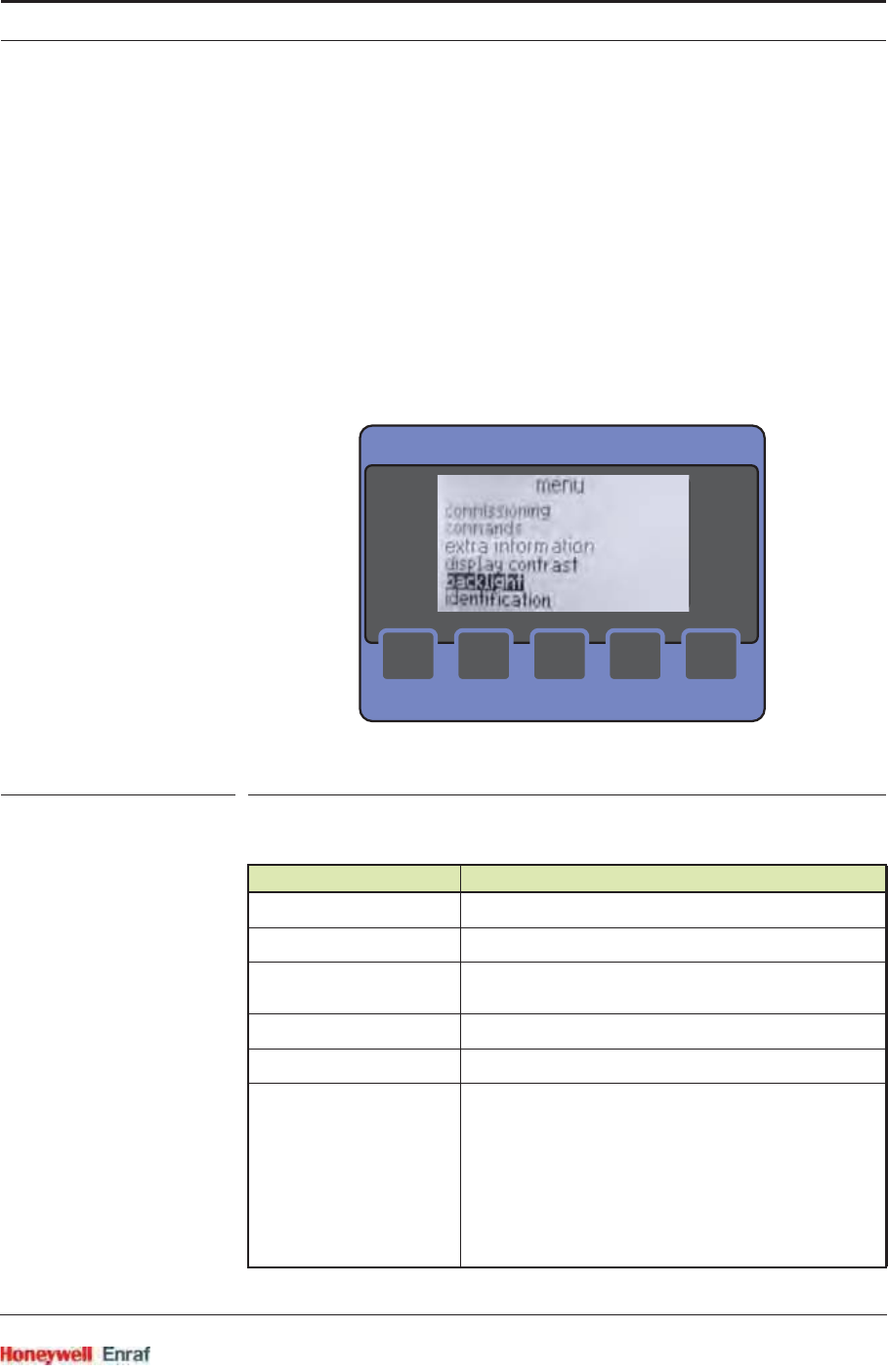
4.1.5.1.2 Menu Screen
By using the [menu] screen of the SmartView (see FIGURE 4-3) you can
view and/or modify settings, or you can send a specific command to a
sensor or a digital I/O board.
ESF07-0030
FIGURE 4-3 The menu screen
Menu Item Description
[menu] Screen title.
[commissioning] Within this menu, configuration parameters can be set
[commands] Allows you to send a command to a sensor or digital I/O
board
[display contrast] Allows you to adjust the display contrast
[backlight] Allows you to switch ON or OFF the backlight
[identification] Shows information about:
xTank name
xTank address
xCustomer ID
xSmartView software version
xSmartView address
xFlexConn module name, board ID, board instance,
and software version
><
<
<
MAIN
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 6 Service Manual
TABLE 4-1 The menu items
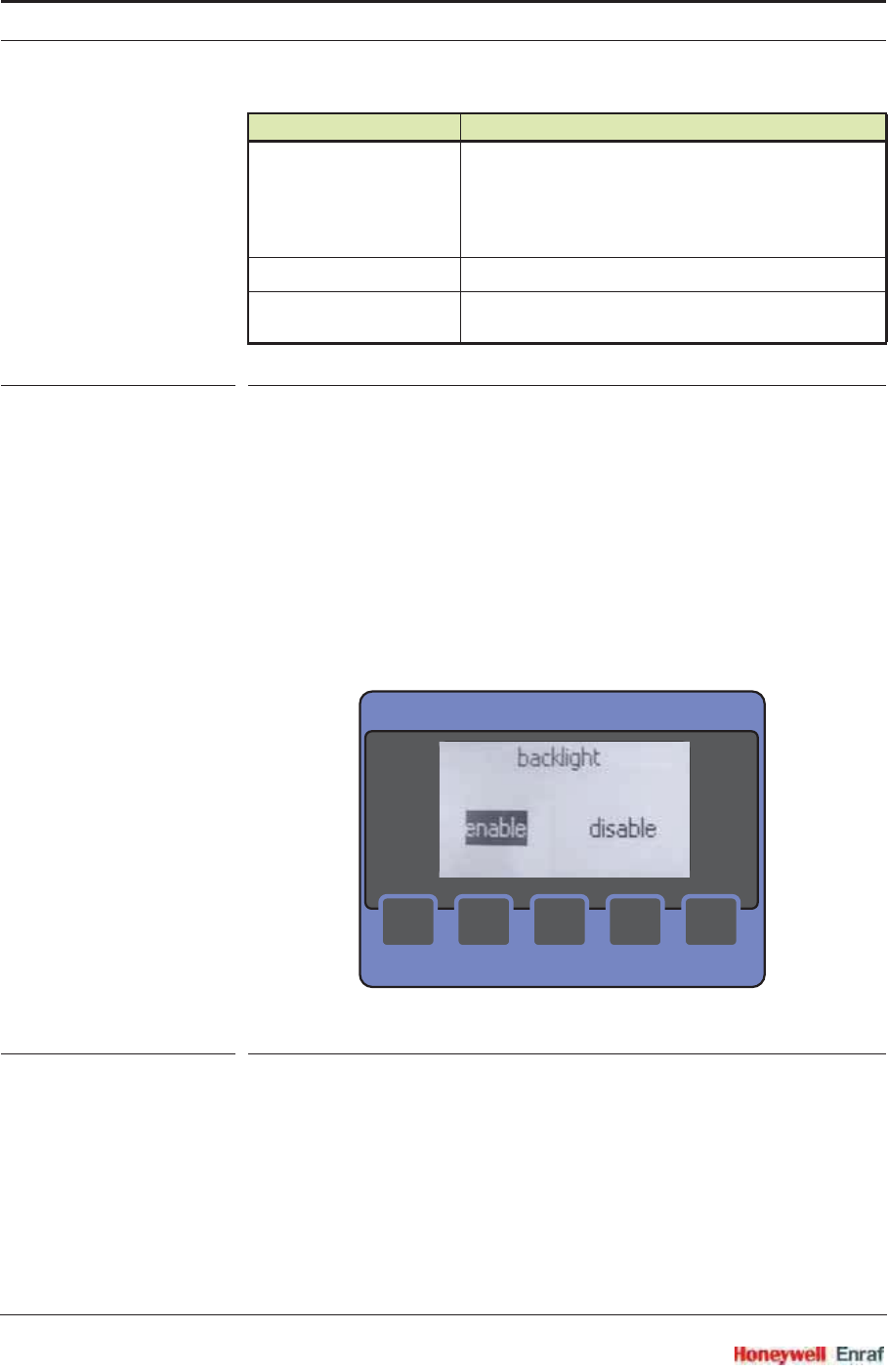
4.1.5.1.3 Backlight Screen
The [backlight] screen (see FIGURE 4-4) allows you to enable/disable the
backlight. The SmartView will only turn the backlight ON if following
conditions are met:
[backlight] is enabled by the host
[backlight] is enabled by the user
When the left or right button is pressed, the backlight setting
immediately changes. The backlight setting is stored in non-volatile
memory.
ESF07-0031
FIGURE 4-4 The backlight screen
[display settings] Allows you to switch ON/OFF buttons time-out:
xMain screen: If no button is pressed within 15
minutes, SmartView switches to PV screen
xStandby mode: If no button is pressed within
15 minutes, SmartView switches to standby mode
[display test] Performs blank/black test
[extra information] The [extra information] screen shows information about
a specific function. See also 4.1.5.1.8.
Menu Item Description
><
<
<
MAIN
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 7
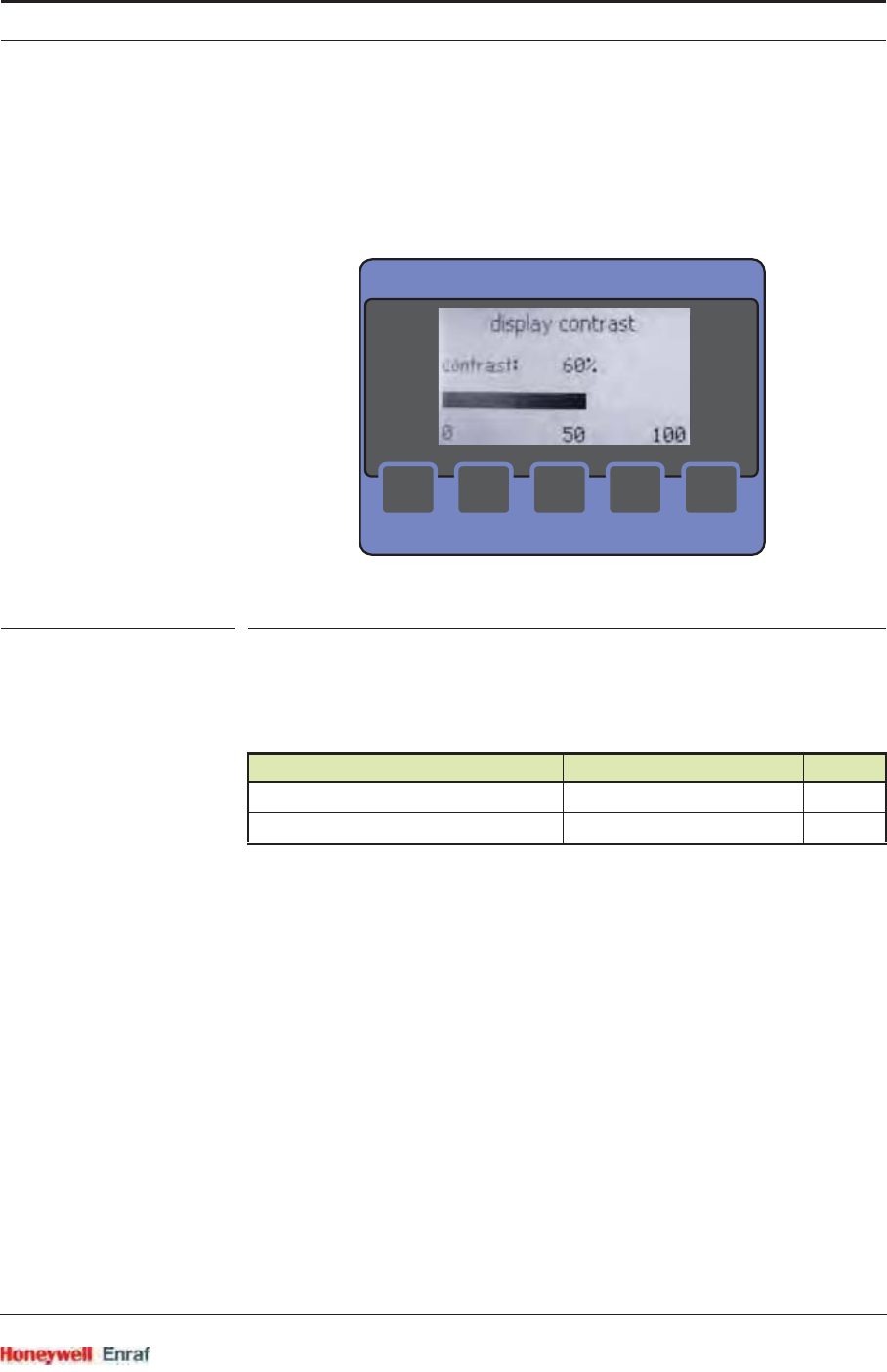
4.1.5.1.4 Display Contrast Screen
The [display contrast] screen (see FIGURE 4-5) displays a horizontal scroll
bar. By moving the scroll bar, you can adjust the contrast. Moving to the
right immediately increases contrast, moving to the left decreases
contrast.
ESF07-0032
FIGURE 4-5 The display contrast screen
4.1.5.1.5 Display Settings Screen
The [display settings] screen allows you to set the buttons time-outs. The
screen displays the following items:
4.1.5.1.6 Display Test Screen
When the [display test] screen is selected, SmartView performs a black/
blank test. SmartView begins drawing a rectangle of 64 x 128 pixels,
filled with black pixels for a period of 2s. After that, the screen is cleared
using a rectangle filled with white pixels for a period of 2s.
Feature Possible States Default
Buttons time-out to main screen ON/OFF ON
Buttons time-out to standby mode ON/OFF ON
><
<
<
MAIN
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 8 Service Manual
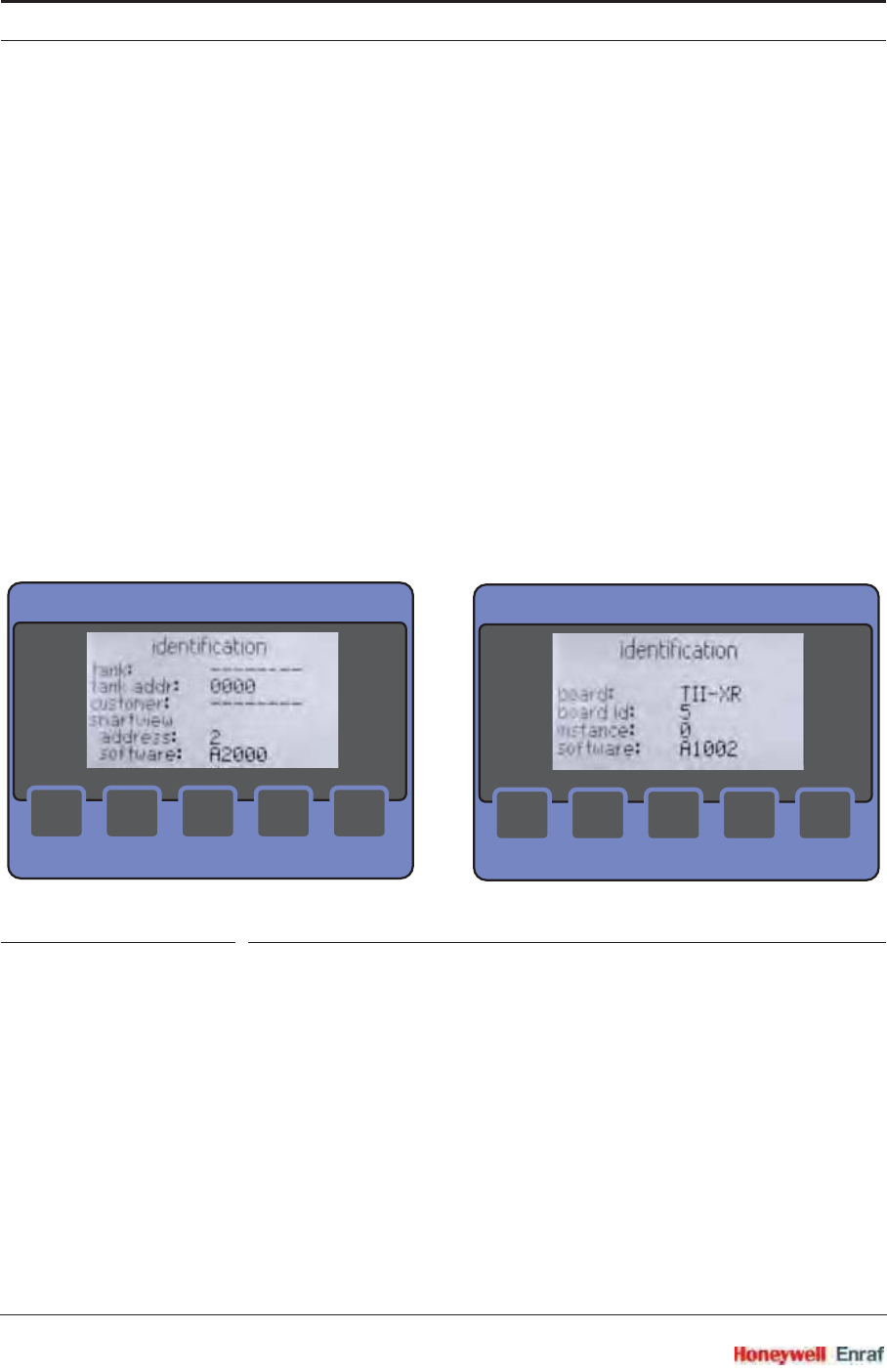
4.1.5.1.7 Identification Screen
The [identification] screen (see examples in FIGURE 4-6) allows you to
scroll through the available FlexConn modules, using the up and down
buttons, to obtain information about:
SmartView (see left screen)
· the tank name
· the tank address
· software version
· SmartView address
· customer ID
FlexConn modules (see right screen)
· board name
· board ID
· instance
· software version
ESF07-0033 + 0029
FIGURE 4-6 Identification screen examples
><
<
<
MAIN
><
<
<
MAIN

Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 9
4.1.5.1.8 Extra Information Screen
The [extra information] mode can be configured to show either the [level &
temperature] screen or the [extra information] screen (see FIGURE 4-7). The
[extra information] screen shows information about a specific function. The
specific functions are described in chapter 6. The [level & temperature]
screen (see FIGURE 4-7) shows information about the measured
product level and temperature. In this menu mode, it is not possible to
change any settings.
NOTE: In case of an error situation, the level fields are filled
with “#” and the temperature fields with “9”.
ESF07-0039/0012
FIGURE 4-7 The level & temperature screen (left) and the extra information screen (right)
4.1.5.1.9 Primary Value Screen
The [Primary Value] screen (PV-screen), shown in FIGURE 4-8, depicts
information about data measured by a sensor, or information about the
status of a digital I/O. See table TABLE 4-2.
ESF07-0028 + 0044
FIGURE 4-8 PV-screen examples (left: level status, right: digital I/O status)
><
<
<
MAIN
><
<
<
MAIN
><
<
<
MAIN
><
<
<
MAIN
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 10 Service Manual
TABLE 4-2 Primary Value (PV) items
Data Field Max. Size
[characters] Description
Primary Value 9 The measured value, e.g. +025.1277
PV identification 13 Quantity name, e.g.
xProduct level
xProduct temperature
xP1 pressure
PV units 5 Quantity unit, e.g.
xm
xkg/m3
xkPa
PV type 3 Type can be:
xINN (innage)
xULL (ullage)
xREL (relative)
xABS (absolute)
PV health 9 Status of the Primary Value:
xUNCERTAIN
xBAD
PV representation 15 Representation of the PV:
xManual
xLast valid
xStored
xInstrument
xEnvironment
xHardware
xSoftware
xCommission
xCalibration
xOperational
xNo data
xNo init.
xKilled
xOver range
xUnder range
PV alarms 9 Alarm type that occurred:
xHigh High
xHigh
xLow
xLow Low
Tank identification 8 Tank name, e.g. CRUDE 07
Alive indicator 1 Blinking cursor (bottom right) indicates
PV being updated
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 11
REMARKS: 1. In error situation, the data fields are filled with “#”.
2. SmartView will enter standby mode when the
communication with the host is lost.
3. The data fields PV health, PV representation, and
PV alarms are only visible if they are applicable.
4.1.5.1.10 Password Screen
The [commands] and [commissioning] menus are password-protected. The
[password] screen (see FIGURE 4-9) appears when you enter the
[commands] or the [commissioning] menu.
Once the password is entered correctly (only once will do for both menu
entries), you can change the values. 15 minutes after the last button
was pressed, the password needs to be re-entered.
ESF07-0040
FIGURE 4-9 The password screen
><
<
<
MAIN
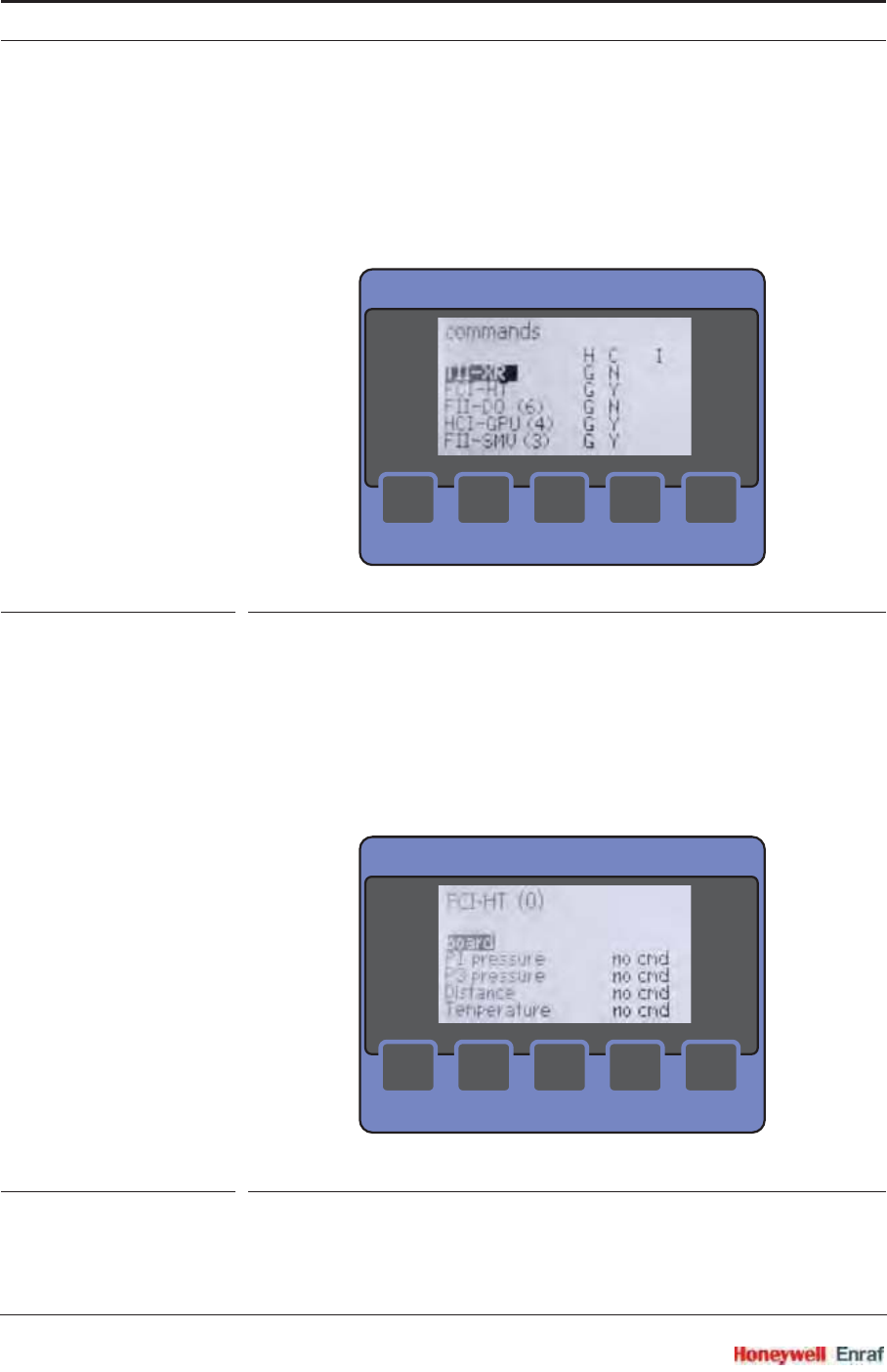
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 12 Service Manual
4.1.5.1.11 Commands Menu Screens
The [commands] menu starts with the [board list] screen
(see FIGURE 4-10).
You can navigate through the board list by using the up and down
buttons. A board can be selected by simultaneously pressing the left
+ right button.
ESF07-0034
FIGURE 4-10 The board list screen
The [function list] screen (see FIGURE 4-11) shows all available
functions of the previously selected board. You can navigate through
the function list by using the up and down buttons. You can return to
the [board list] screen by pressing the left button. A function can be
selected by simultaneously pressing the left + right button. If a
FlexConn module does not contain any function commands, this will
be indicated in the list (<no cmd>).
ESF07-0045
FIGURE 4-11 The function list screen
On selection of an available function, the [command list] screen is
presented (see FIGURE 4-12). You can navigate through the
><
<
<
MAIN
><
<
<
MAIN
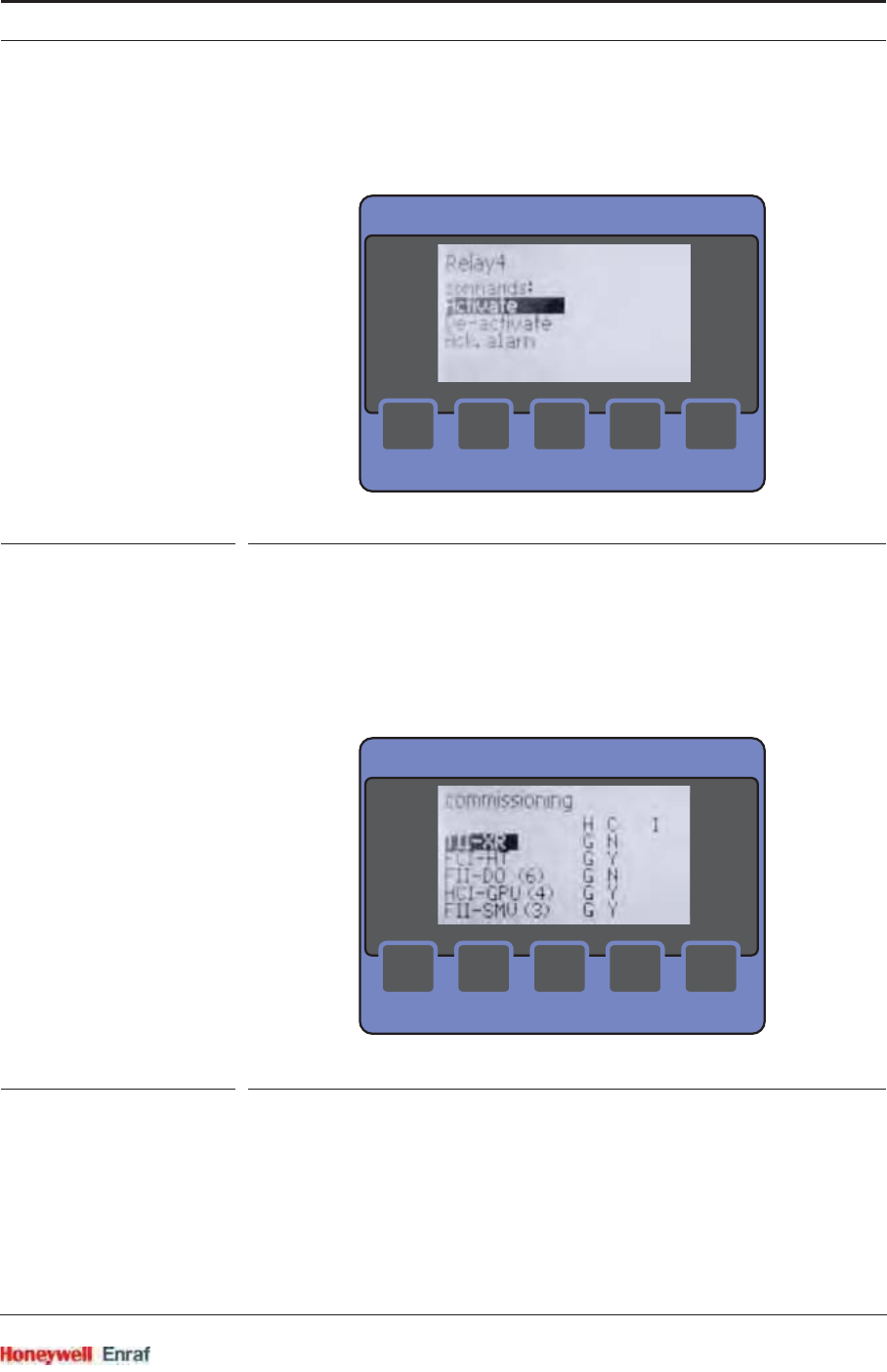
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 13
function list by using the up or down button. A command can be
selected by simultaneously pressing the left + right button. You can
return to the [function list] screen by pressing the left button.
ESF07-0035
FIGURE 4-12 The command list screen
4.1.5.1.12 Commissioning Menu Screen
The [commissioning] menu starts with the [board list] screen
(see FIGURE 4-13).
You can navigate through the board list by using the up or down
button. A board can be selected by simultaneously pressing the left +
right button.
ESF07-0036
FIGURE 4-13 The board list screen (commissioning)
><
<
<
MAIN
><
<
<
MAIN
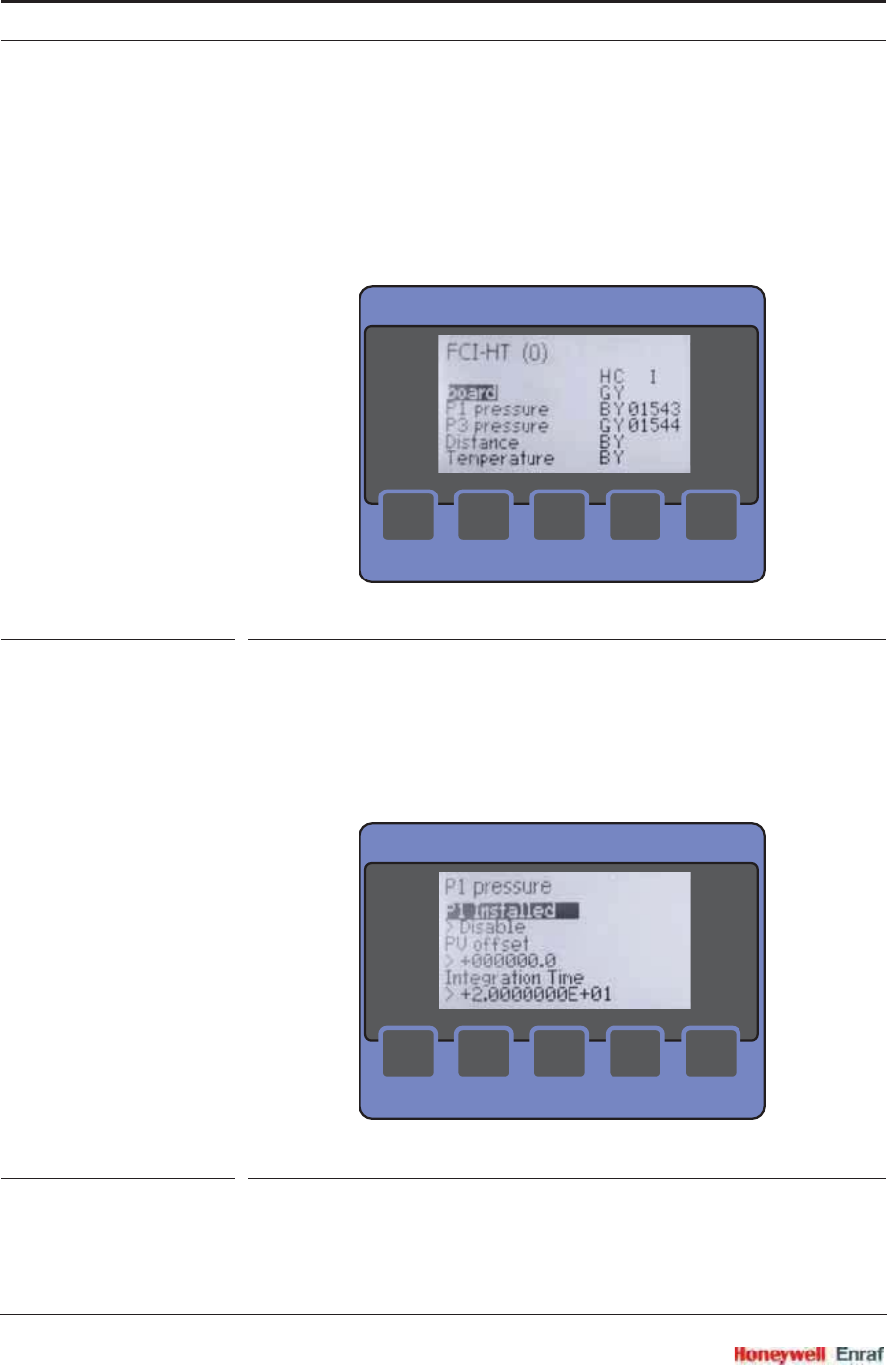
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 14 Service Manual
The [function list] screen (see FIGURE 4-14) displays all configurable
entities of a function.
The actual entity value is visible as well.
You can navigate through the board list by using the up or down
button. A function can be selected by simultaneously pressing the
left + right button. You can return to the [board list] screen by pressing
the left button.
ESF07-0046
FIGURE 4-14 The function list screen (commissioning)
On selection of an available function, the [entity list] screen is
presented (see FIGURE 4-15). You can navigate through the entity
list by using the up or down button. An entity can be selected by
simultaneously pressing the left + right button. You can return to the
[function list] screen by pressing the left button.
ESF07-0047
FIGURE 4-15 The entity list screen
><
<
<
MAIN
><
<
<
MAIN

Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 15
On selection of an available entity, the [value edit] screen is presented
(see FIGURE 4-16).
· If an invalid value is entered, the message “value out of range” will
be displayed.
· If the value is not accepted by the FlexConn module, the message
“value not accepted” will be displayed.
· You can scroll along the characters by push and hold the up
button.
· An entity modification is only executed on simultaneously
pressing the left + right button. After this, first a range check is
done. If the modification is accepted, you will be returned to the
[value edit] screen.
· The cursor can be shift to the right by pressing the right button.
· You can return to the [entity list] screen by pressing the left button.
NOTE: By using the left button to return to the [entity list]
screen without executing the modification(s) by
pressing the left + right button simultaneously will
undo this (these) modification(s)!
ESF07-0037
FIGURE 4-16 Examples of the value edit screen
><
<
<
MAIN
><
<
<
MAIN
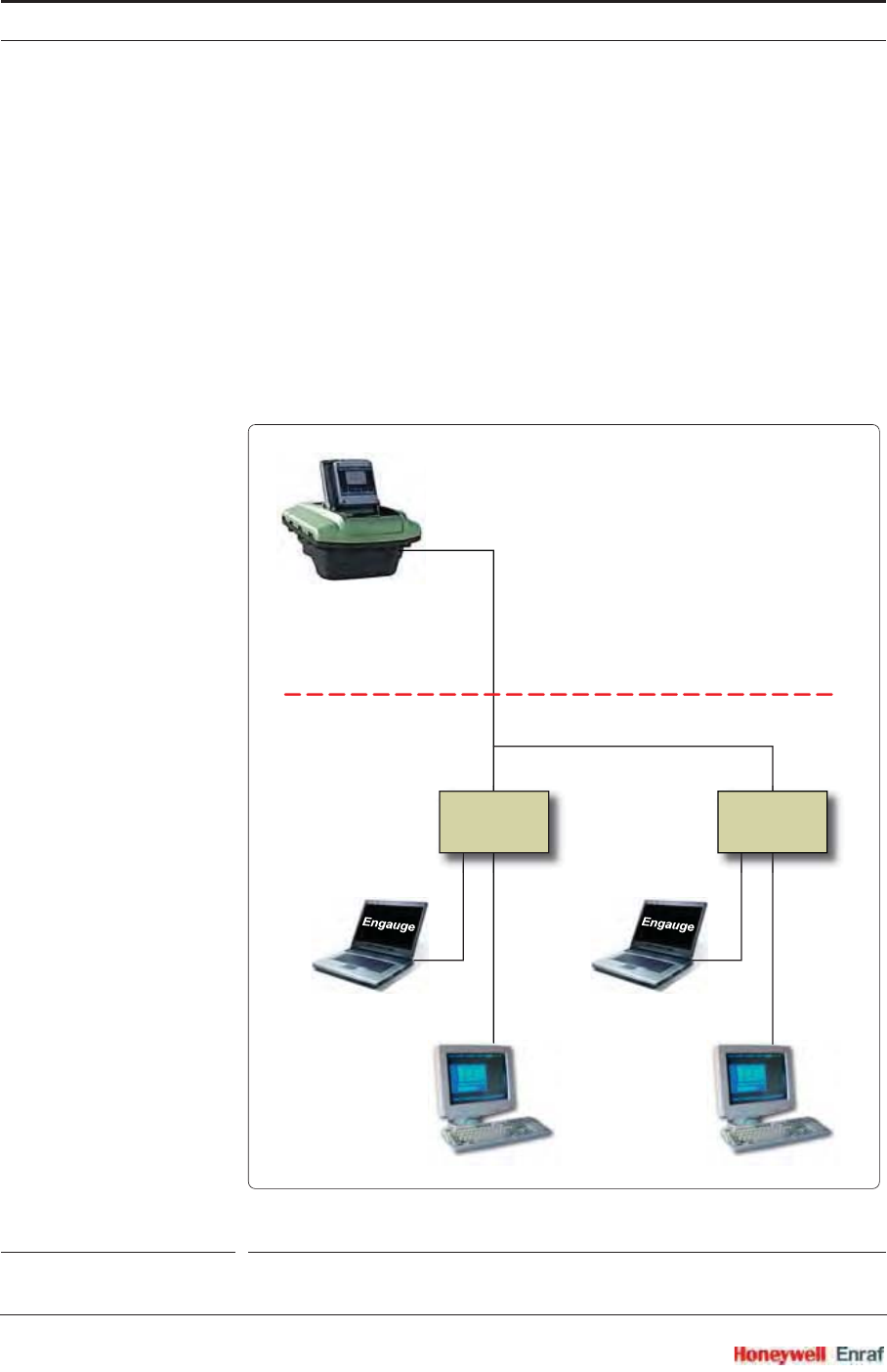
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 16 Service Manual
4.2 Engauge
4.2.1 Connecting the Engauge Service Tool
The Engauge service tool is a PC application with which all FlexConn
module settings can be done as well.
4.2.1.1 Wired Connections Situation (FIGURE 4-17)
Connecting the serial COM-port of a PC or laptop via an RS-232 (or RS-
485) transmission line to either a Communication Interface Unit (CIU) or
a SmartLink, enables the control of a SmartRadar FlexLine system.
ESF07-0041
FIGURE 4-17 Connecting the Engauge service tool - wired connections
SAFE ZONE (control room)
HAZARDOUS ZONE (field)
CIU Prime SmartLink
field line
BPM or RS-485
ENTIS or other host
RS-232
(or RS-485)
RS-232
(or RS-485)
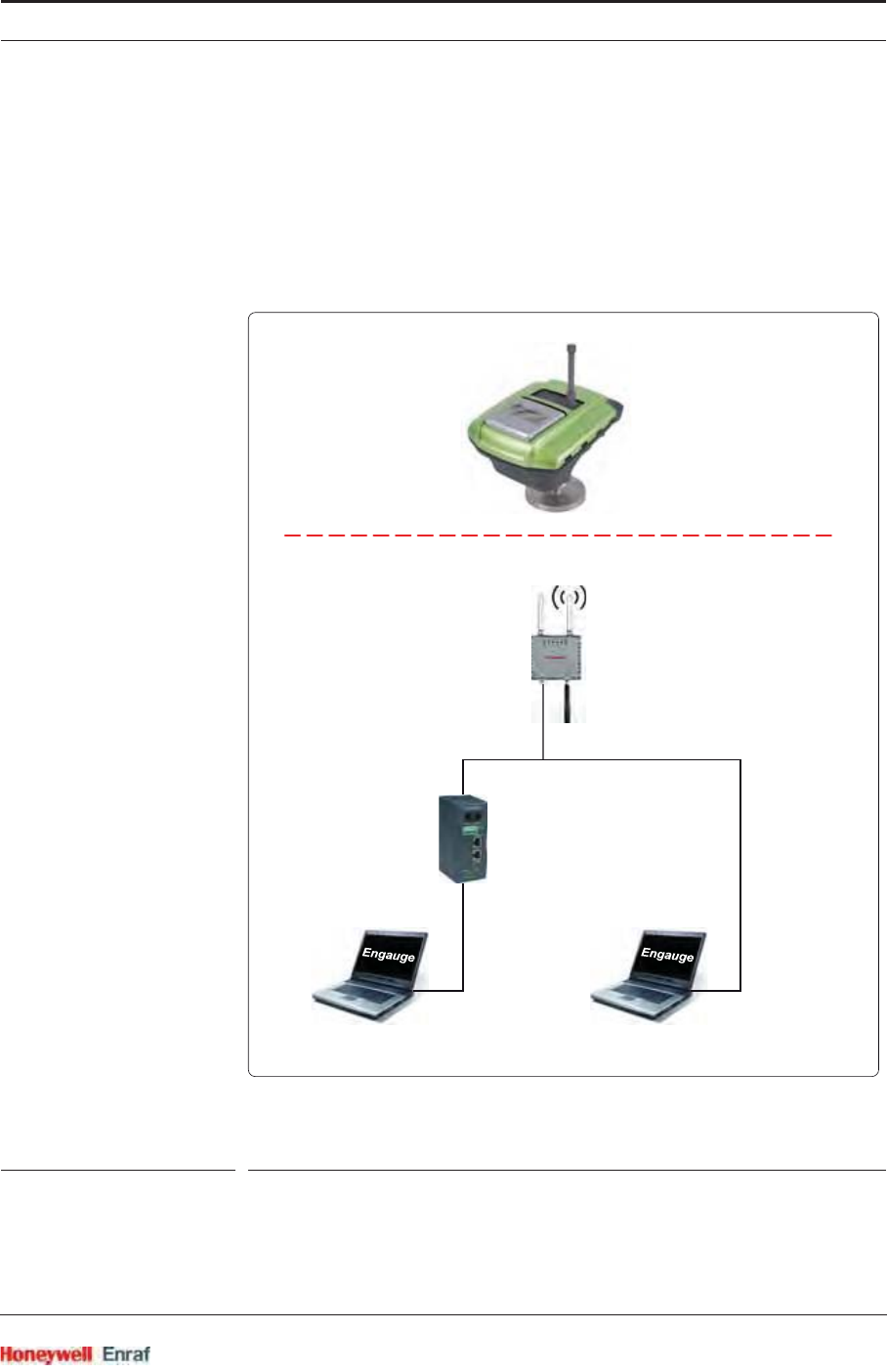
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 17
4.2.1.2 OneWireless Situation (FIGURE 4-18)
Connecting the serial COM-port of a PC or laptop via an RS-232 (or
RS-485) transmission line and a Lantronix server, or directly via an
Ethernet connection (Engauge version 2.4 and up only), to a
OneWireless gateway enables the control of a OneWireless
SmartRadar FlexLine system.
ESF09-0010
FIGURE 4-18 Connecting the Engauge service tool - OneWireless
SAFE ZONE (control room)
HAZARDOUS ZONE (field)
RS-232
(or RS-485)
Ethernet
Lantronix
OneWireless
Gateway
OneWireless
SmartRadar FlexLine
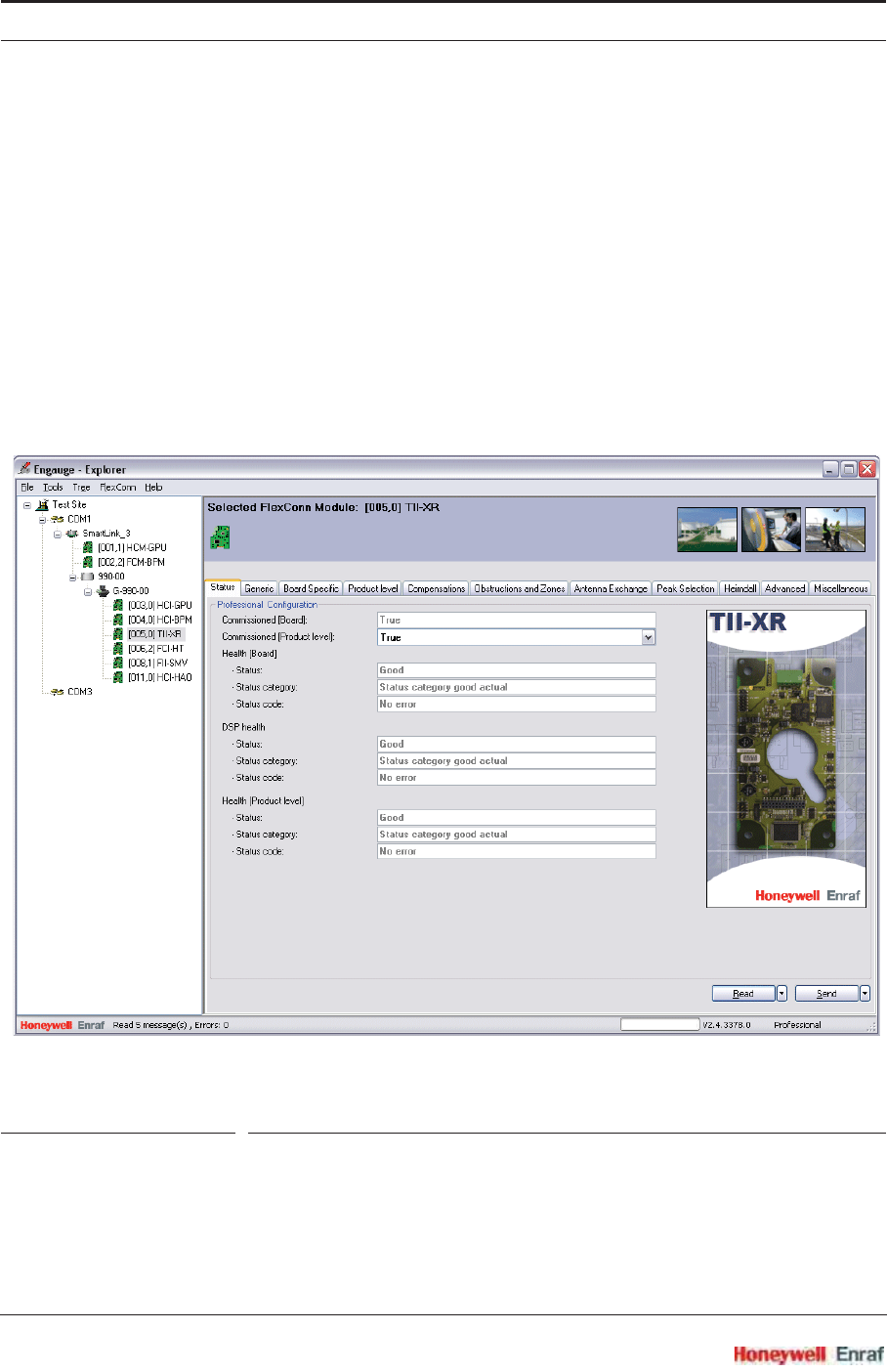
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 18 Service Manual
4.2.2 Using Engauge
After starting up the Engauge application, first the specific transmission
address of the concerned SmartRadar FlexLine system must be set
correctly. Also the transmission speed (baudrate) must be set.
After this is done, Engauge’s explorer appears, and each FlexConn
module of the concerned SmartRadar FlexLine system is visible on the
left panel. See FIGURE 4-19.
Now each individual SmartRadar FlexLine module can be controlled by
double-clicking on the module’s icon on the left panel. The so-called
“board descriptor” is then loaded and a screen with “tab” pages
appears.
ESF09-0001
FIGURE 4-19 Example (1) of an Engauge screen
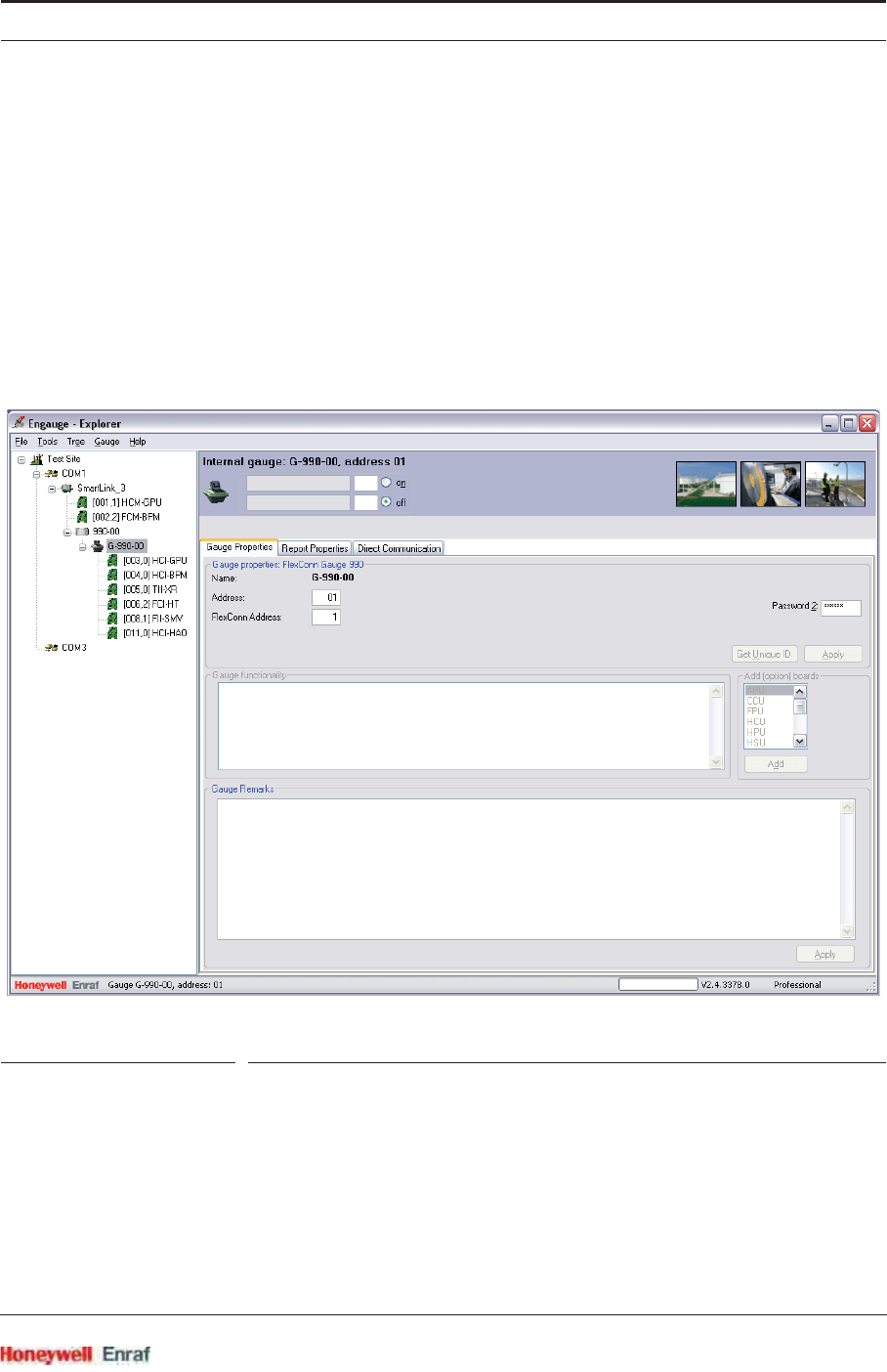
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 19
Browsing through the tab pages reveals the same information/
parameter settings as can be found using the SmartView, although in a
more user friendly way.
However, some settings or commands can only be executed by
Engauge. For example, executing an Alarm simulation test is only
possible with Engauge.
4.2.3 Some Engauge Screen Examples
In the following some Engauge screen samples follow.
ESF09-0002
FIGURE 4-20 Example (2) of an Engauge screen
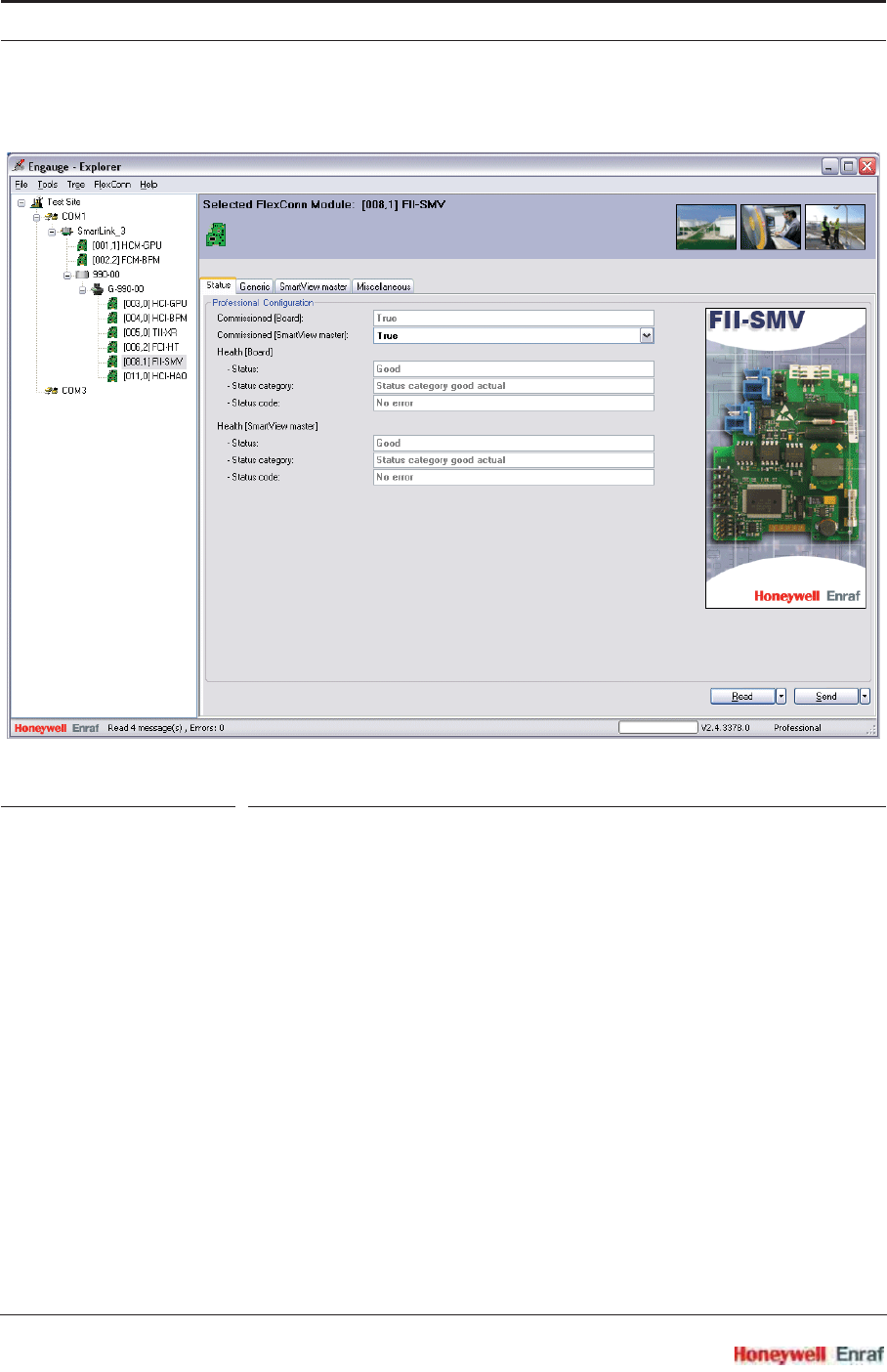
Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 20 Service Manual
ESF09-0003
FIGURE 4-21 Example (3) of an Engauge screen
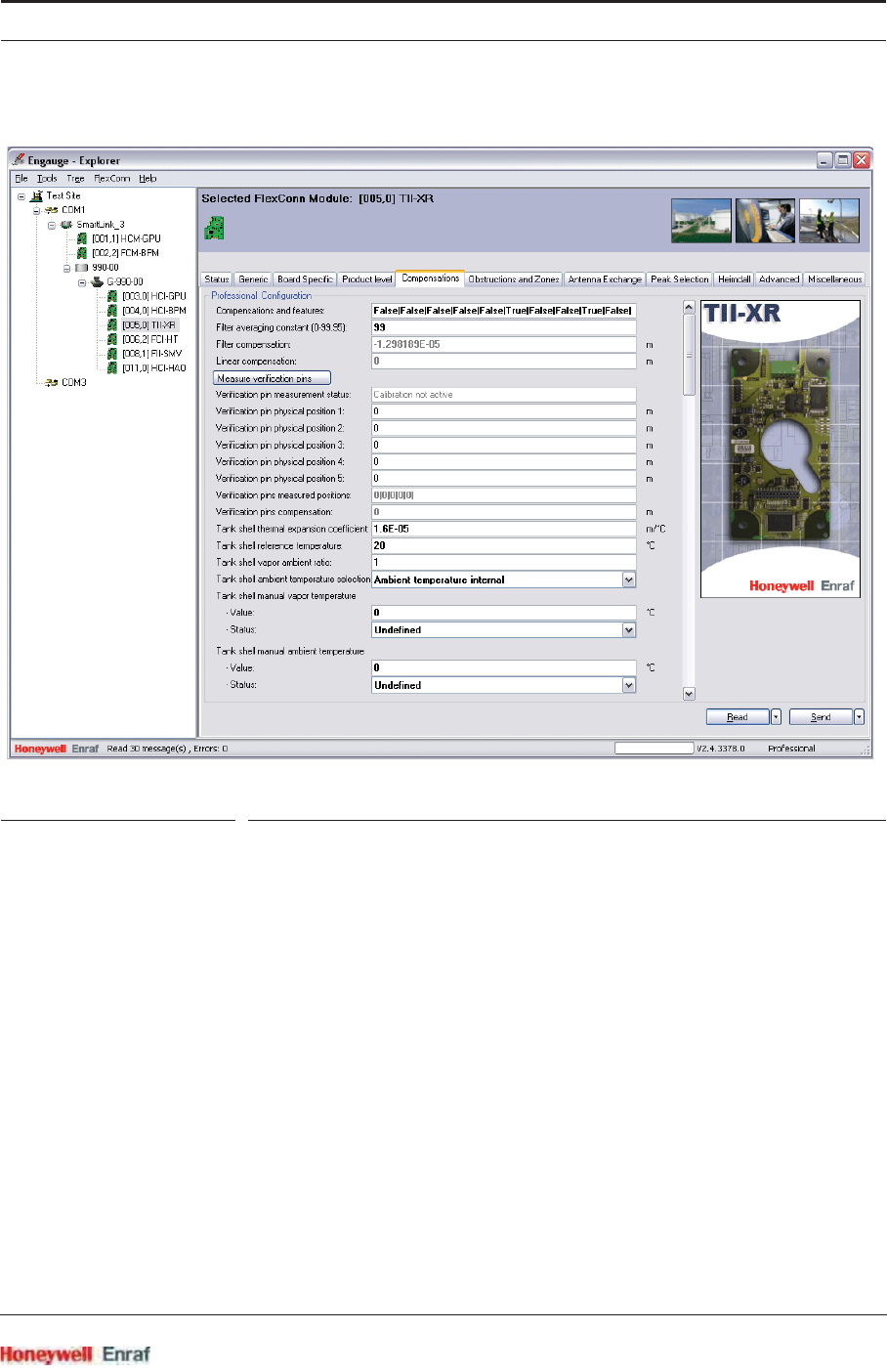
Service Tools
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 4 - 21
ESF09-0004
FIGURE 4-22 Example (4) of an Engauge screen

Service Tools
SmartRadar FlexLine Part No.: 4417.762_Rev07
4 - 22 Service Manual
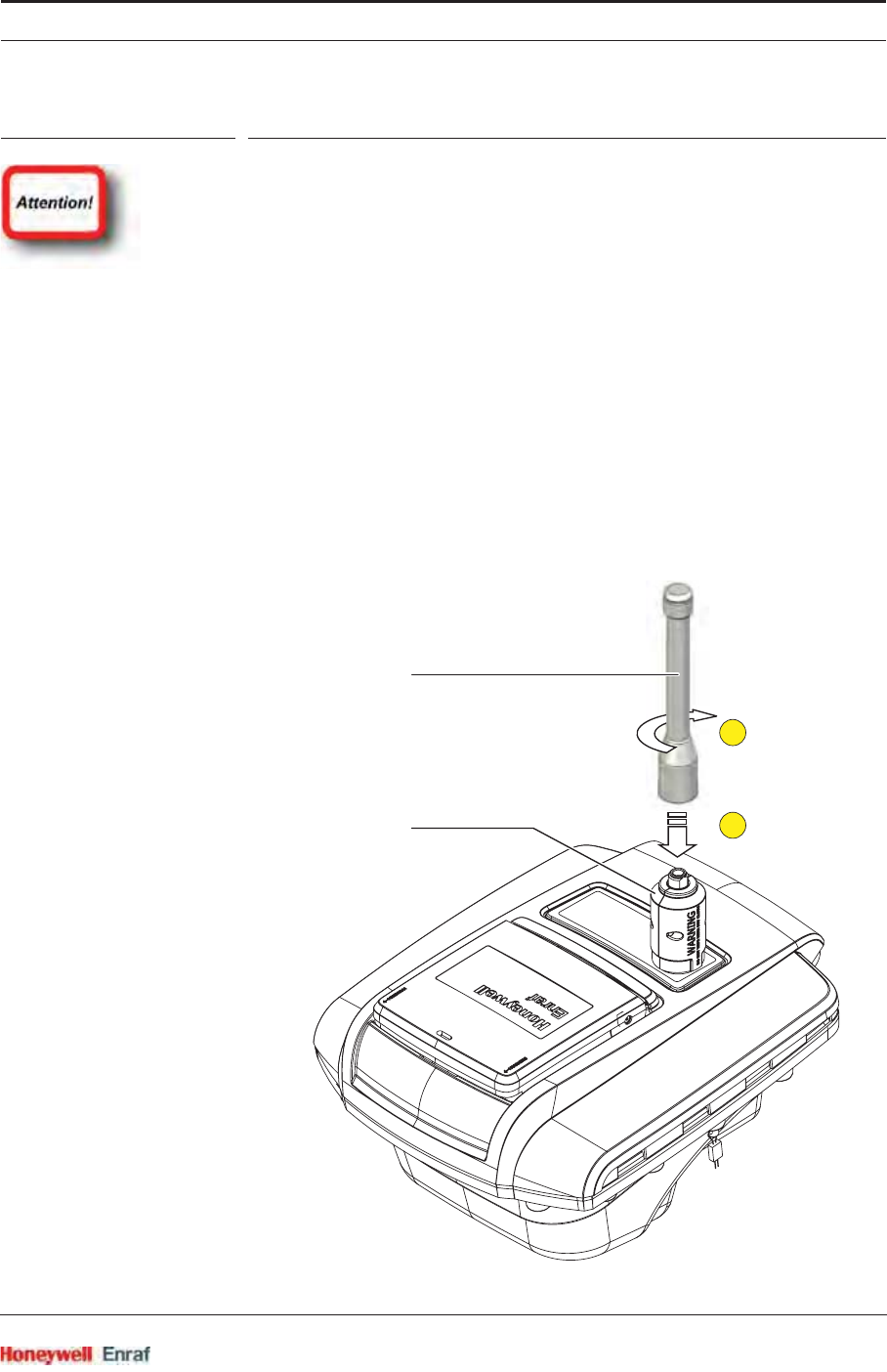
Installation
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 5 - 1
CHAPTER 5 INSTALLATION
Before starting with commissioning activities, first make sure all
mechanical and electrical installation aspects have been
completed correctly.
For installation, see the Installation Guide for the SmartRadar
FlexLine.
In case the OneWireless Communication Option (HCI-1WL) is
installed, a lightning arrestor is integrated by default. The lightning
arrestor (see figure below) will prevent the inside electronics from
being affected in case of a nearby lightning strike. Although it will
protect against multiple discharges, it can be replaced as a
preventive maintenance action. Preventive maintenance interval
depends on location, position of the equipment, grounding, and other
protection measures installed.
NOTE: Contact our service department for any guidance if
needed, via e-mail: enraf.helpdesk@honeywell.com
2
1
communication antenna
lightning arrestor

Installation
SmartRadar FlexLine Part No.: 4417.762_Rev07
5 - 2 Service Manual
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 1
CHAPTER 6 COMMISSIONING
6.1 General
6.1.1 Introduction
This chapter gives an overview of the commissioning information per
FlexConn module.
NOTE: Not all modules are always present.
Commissioning a FlexConn module is done by setting software
parameters, the so-called entities (see Chapter 3), to the desired
specific values. This can either be done by using Engauge or
SmartView (see Chapter 4).
6.1.2 Text Conventions
In contrast with explanatory text, all instruction text will be preceded by
a☛.
All [Entity] and <entity-related> text is recognizable formatted. When - for
instance - all required FlexConn module entities are commissioned, the
[Board Commissioned] entity will display <True>. If not, it will display <False>.
All !Command! text is also recognizable formatted, If - for instance - an
!Activate! command is given, the result will be <Activated>.
In this chapter, each commissioning-instruction text is recognizable by
the Engauge/SmartView icon in the margin.
When a commissioning instruction or command cannot be initiated by
SmartView, the icon will be given.
When a commissioning instruction or command can only be initiated via
SmartView, the SmartView-only button is visible (left).
In some cases the Wireless Builder and/or the Key Server Manager
application(s) are used. This is indicated by a corresponding button
(left).
Wireless
Builder
Key Server
Manager
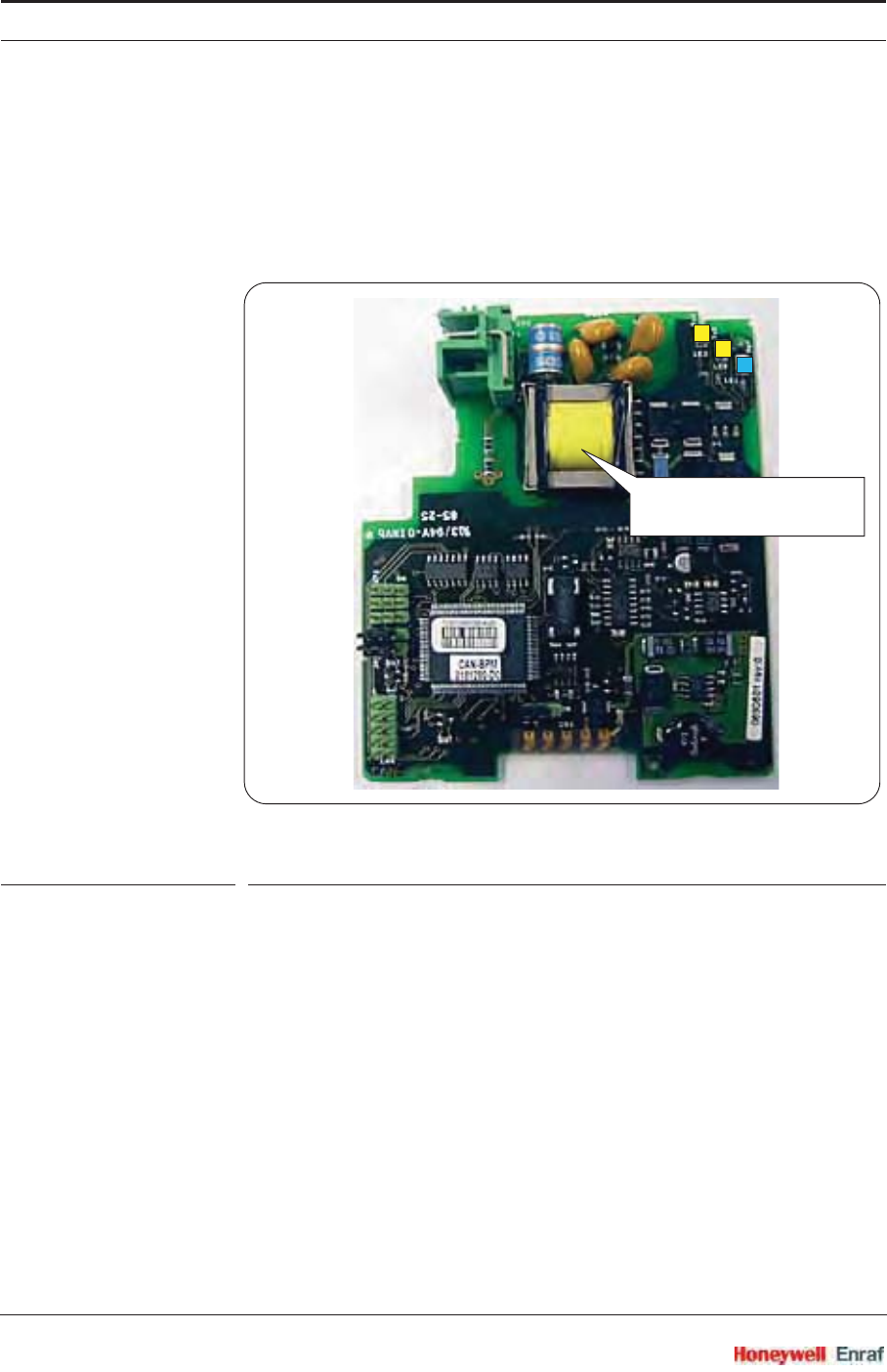
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 2 Service Manual
6.2 Enraf Fieldbus (HCI-BPM)
6.2.1 Introduction
The Host Communication Instrument - Bi-Phase Mark (HCI-BPM) board
is a communication module for the instrument (gauge).
ESF07-0005
FIGURE 6-1 The HCI-BPM board with its isolation transformer
As a result of hardly any requirements on cable quality, the connection
of 10 to 15 devices per field bus, and cable lenghts up to 10 km, the Bi-
Phase Mark (BPM) signalling is used in many data transmission
installations between various instrumentation and Communication
Interface Unit (CIU) configurations.
Moreover, the BPM technology provides excellent protection against
lightning. For the exchange of the BPM signals, the HCI-BPM board
uses an isolation transformer for galvanic isolation (see FIGURE 6-1).
Further protection against heavy lightning is realized by internal ground
shields, separated wiring, and ground tracks.
isolation transformer
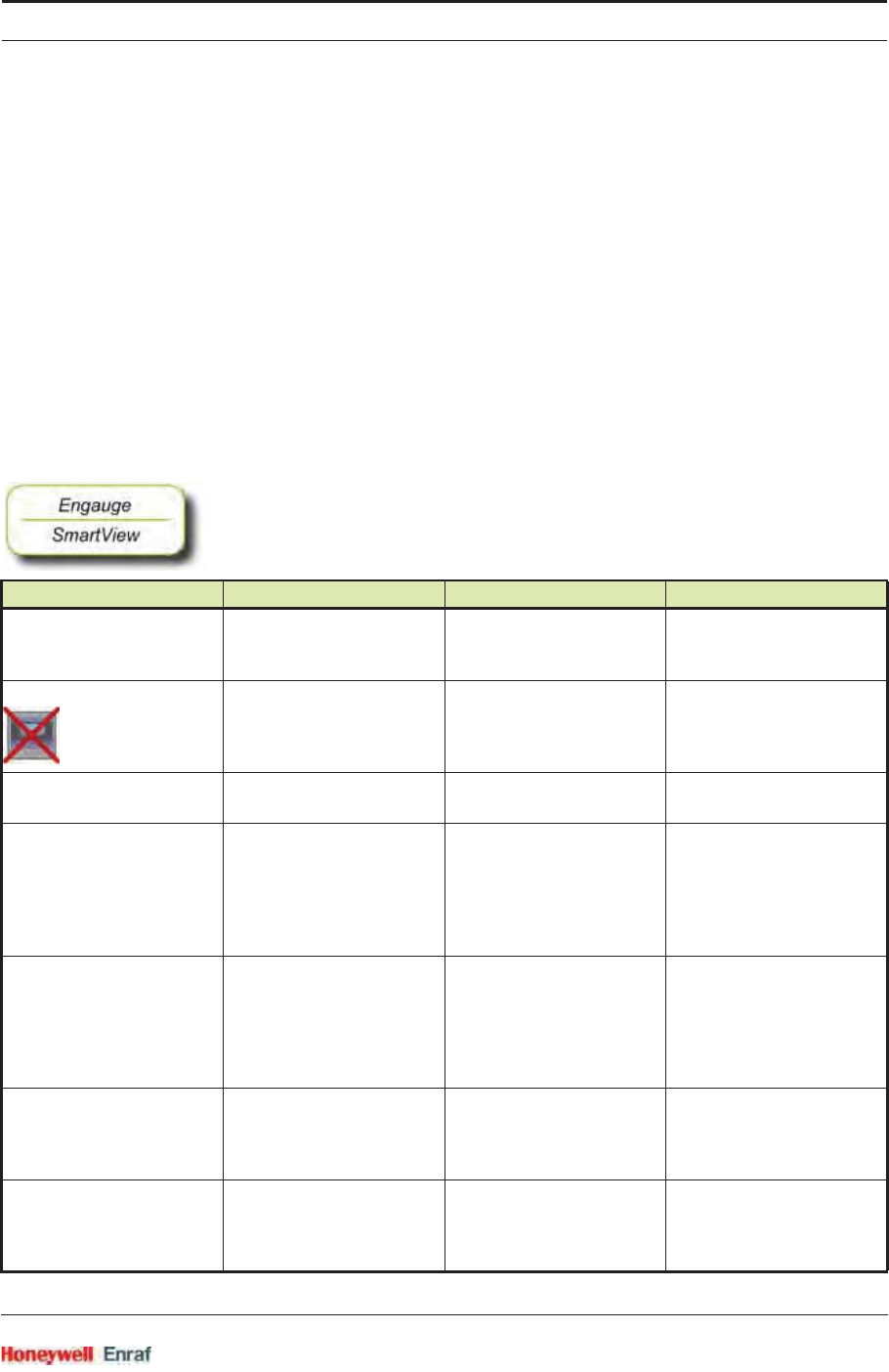
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 3
The HCI-BPM module supports 2 protocols:
The Enraf GPU protocol with its records and items (limited);
The Enraf FlexConn protocol with its so-called entities.
The module can communicate with:
880 CIU prime
858 CIU
780 SmartLink
6.2.2 Commissioning the HCI-BPM
For a correct functioning of the HCI-BPM module within an instrument
(gauge), the following entities can be set by using either Engauge or
SmartView.
☛By using the following table, check each entity for correctness.
Name Value Range Default Value Explanation
[Baudrate] <1200>
<2400>
<4800>
<1200> Communication speed
[BPM sensitivity] <1..8> <8> The sensitivity of the
receiver circuit
1 = weakest
8 = strongest
[Identification] 8 characters e.g.
<TANK1234>
<--------> Name of a tank or
instrument
[GPU instrument address] <0..99> <0> The address of this
instrument for GPU
messages.
Note: Each instrument must
have a unique GPU
address.
[FlexConn instrument address] <0..1899> <0> The address of this
instrument for FlexConn
messages.
Note: Each instrument must
have a unique FlexConn
address.
[Level units] <meters>
<inches>
<feet>
<fractions>
<meters> The unit in which level-
related GPU records and
items are shown
[Temperature units] <celsius>
<fahrenheit>
<celsius> The unit in which
temperature-related GPU
records and items are
shown
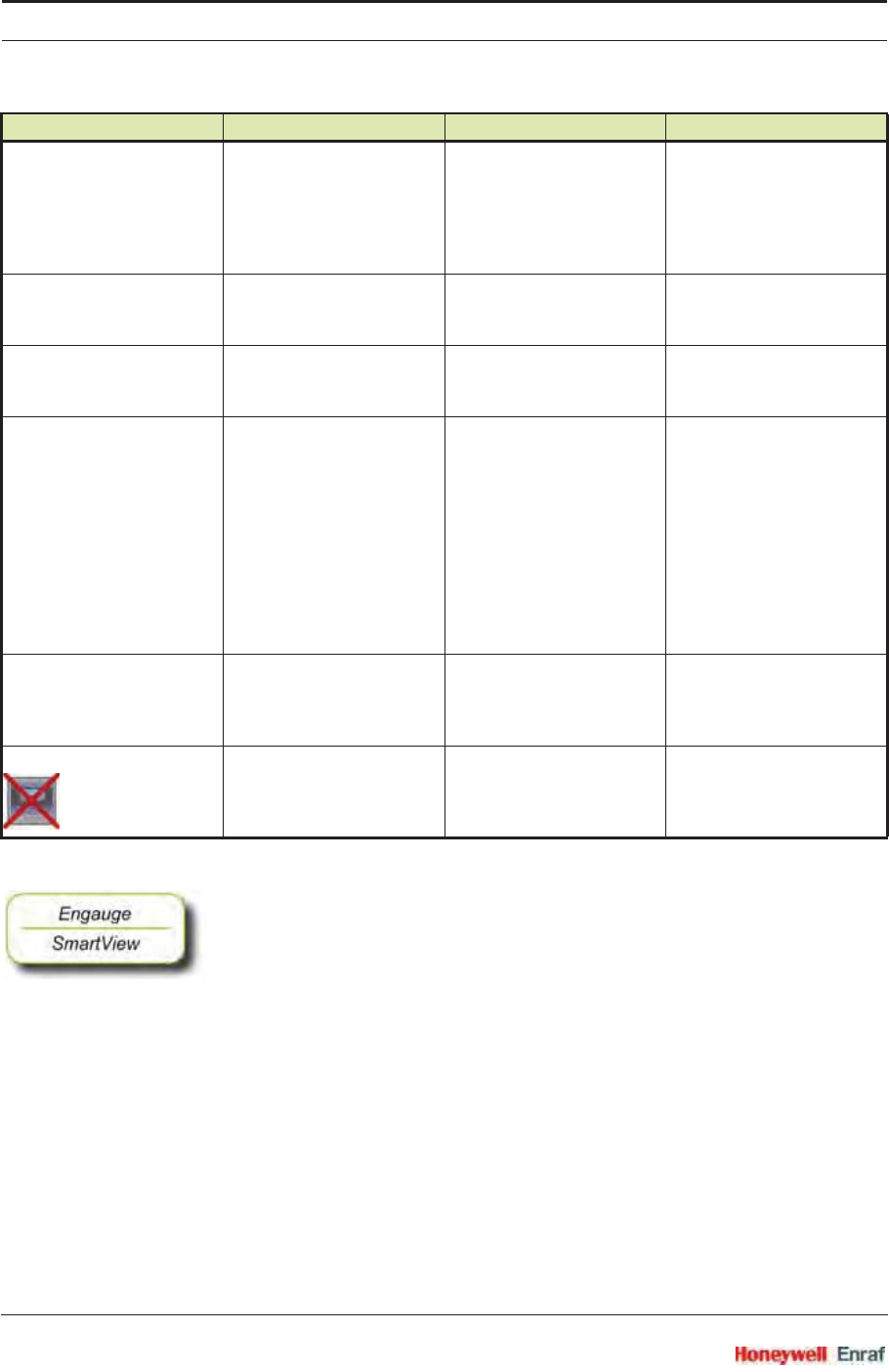
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 4 Service Manual
☛After having checked/set all before listed entities, make sure
the [Board Commissioned] and the [BPM slave Commissioned] entities are
<True>;
the [Board Health] and the [BPM slave Health] entities are <GOOD>.
[Pressure units] <pascal>
<kilo pascal>
<psi small> (2 digits before
separator)
<psi large> (3 digits before
separator)
<pascal> The unit in which pressure-
related GPU records and
items are shown
[Density units] <kilogram m3>
<degrees API>
<pounds ft3>
<kilogram m3> The unit in which density-
related GPU records and
items are shown
[Decimal separator] <point>
<comma>
<point> The decimal separator in
which GPU-related records
and items are shown
[Level type] <innage>
<ullage>
<innage> The level-related GPU
records and items can be
shown as an innage or
ullage.
Note:
•Innage is the level of the
product measured from
the bottom.
•Ullage is the level of
free space from the roof
till the product.
[Password] <......> 6 characters <ENRAF2> Password for entering the
protected level.
Note: Some settings reside
under the protected level.
[Function identification] <......> 13 characters <BPM-slave> The name of the current
function of this module.
This name is visible on the
SmartView display.
Name Value Range Default Value Explanation
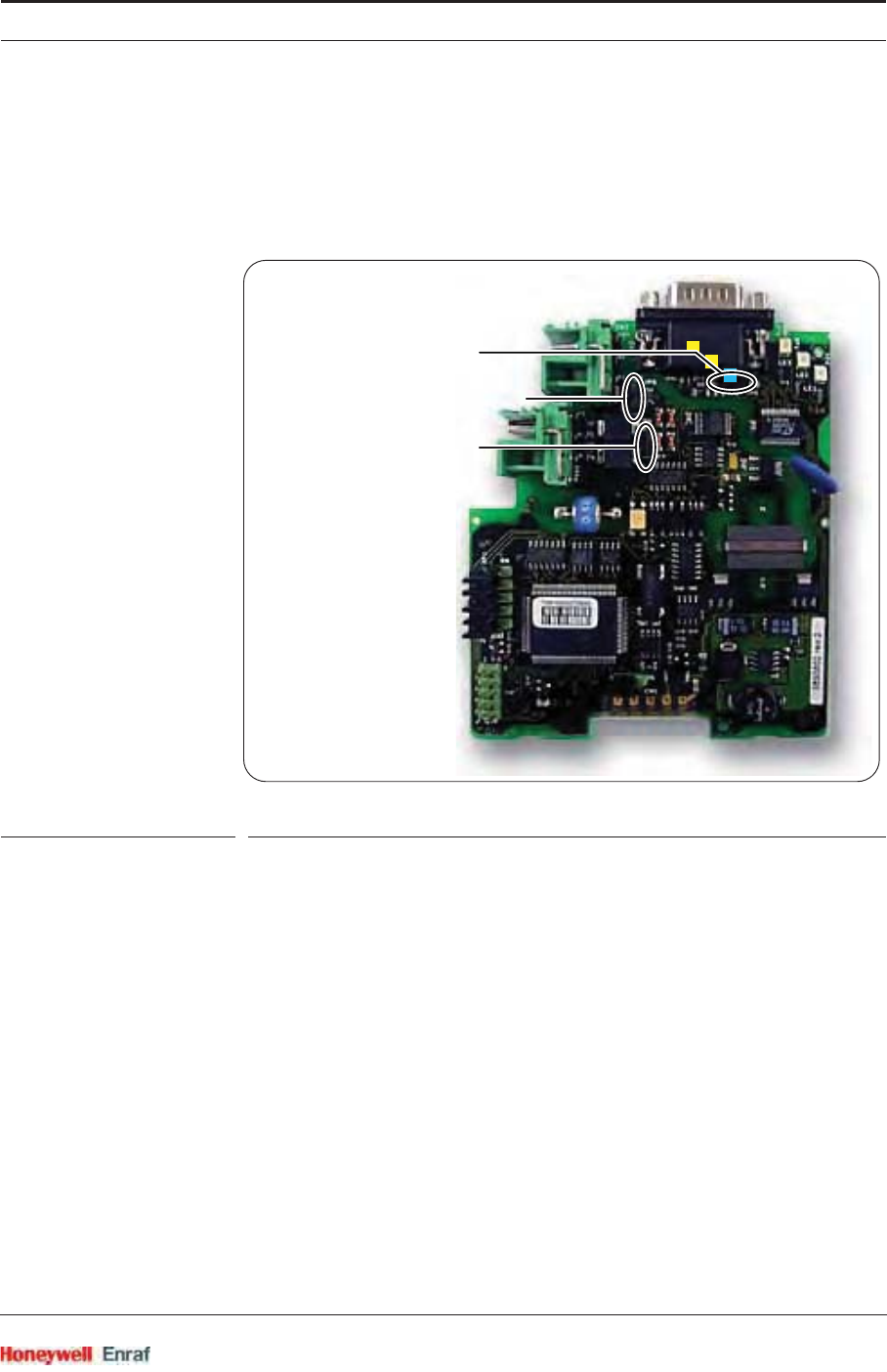
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 5
6.3 Enraf GPU-FlexConn / Modbus Protocol (HCI-GPU)
6.3.1 Introduction
The Host Communication Instrument - Gauge Processing Unit (HCI-
GPU) board is a communication module for the instrument (gauge).
ESF07-0006a
FIGURE 6-2 The HCI-GPU board
The HCI-GPU can communicate with any hosts via three different
communication protocols:
The Enraf GPU protocol with its records and items (limited);
The Enraf FlexConn protocol with its so-called entities;
The Modbus protocol.
In the first situation the CAN-RS module behaves like an Enraf GPU
slave, communicating via the Enraf GPU protocol. If a valid record or
item is received, a related FlexConn message type A will be issued to
the CAN-bus for obtaining the desired data.
In the second situation, when production-, test-, configuration-, and
service tools are used, the FlexConn protocol must be used via the
RS232/485 physical layer.
In the third situation the CAN-RS module behaves like a Modbus slave
communicating via the Modbus protocol.
JP7 = RS-485 terminator
JP8 = +5 V-ISO enable on CN2
JP9 = RS-422 terminator
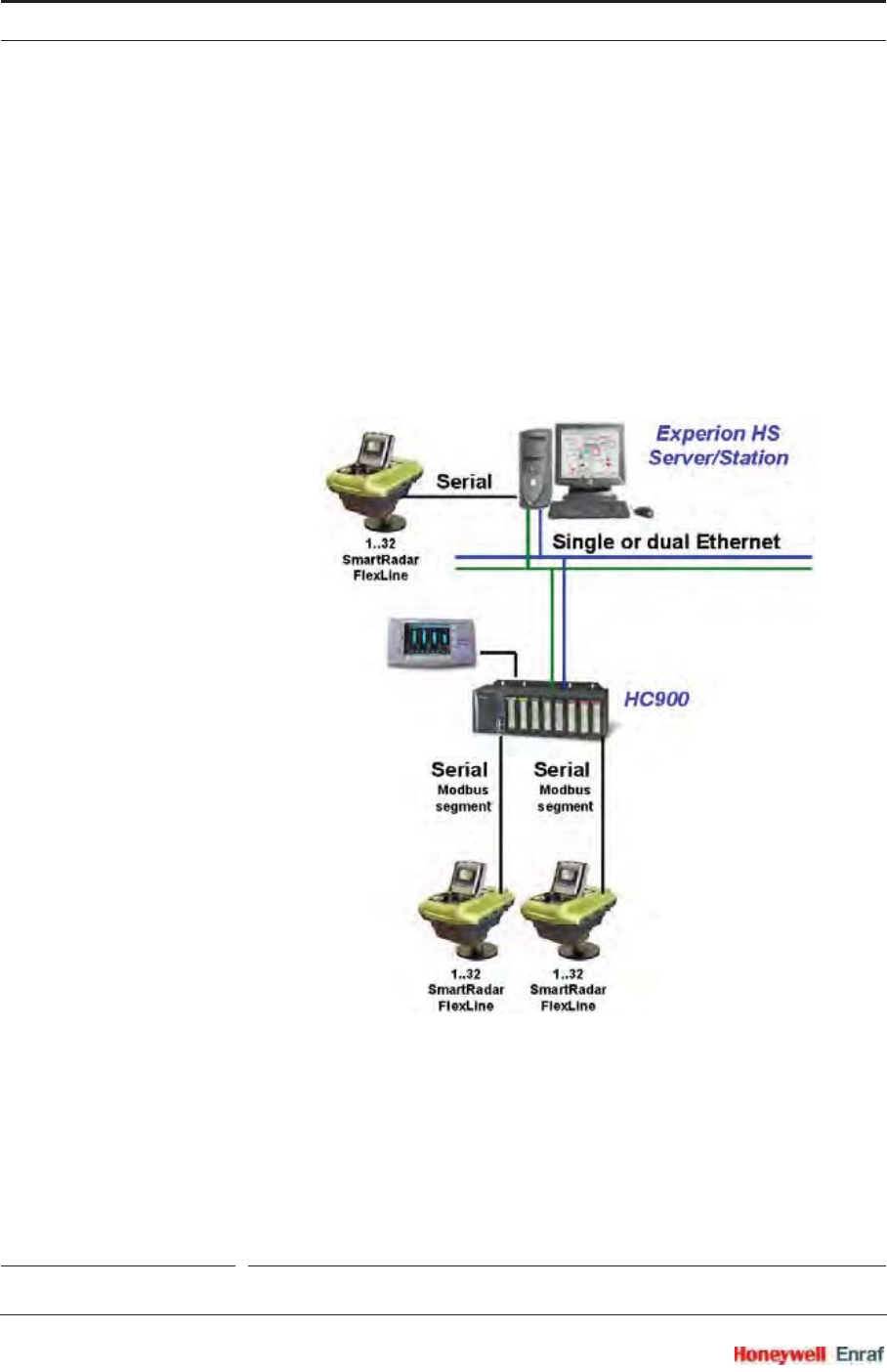
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 6 Service Manual
NOTE: A protocol switch has been implemented as to switch
back and forward between the GPU-FlexConn and
the Modbus protocol.
The physical layers for the communication are RS-232, isolated and
non-isolated, and RS-485, isolated. RS-232 is used for direct point-to-
point connections whereas RS-485 facilitates a multi-point network with
up to 32 drivers and 32 receivers.
The HCI-GPU (slave) module can be used in any field devices provided
with the FlexConn architecture.
The Modbus protocols can be used when the SmartRadar FlexLine
interfaces to a DCS or SCADA system.
FIGURE 6-3 Typical example of a SmartRadar FlexLine in a Modbus topology
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 7
6.3.2 Specifications
System Specification:
• Typical TurnAround Delay (TAD) = 35 ms *
• Maximum TAD = 65 ms *
• Refresh rate of 32 FlexLines on one link = 5.76 sec * (@ scan rate
of 180 ms)
• Refresh rate of 32 FlexLines on one link = 4.80 sec * (free running
host mode: no scan rate setting)
Recommended minimum host settings:
• Time out >= 65 ms * (assuming time out measurement resets at
start of slave message)
• Scan rate >= 180 ms *
* Note: @ 100 register @ 19K2 baud

Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 8 Service Manual
6.3.3 Commissioning the HCI-GPU - Modbus Protocol
6.3.3.1 Introduction
The Modbus protocol has been developed by Modicon and is used to
establish master-slave/client-server communication between intelligent
devices. Modbus is a de facto open standard and the most widely used
network protocol in the industrial manufacturing environment.
There are different flavors of Modbus. The most common is Modbus
RTU (Remote Terminal Unit) which is based on serial (twisted pair)
communication like RS-485 and RS-232. Honeywell Enraf has
implemented this Modbus RTU protocol in its gauges as an option.
As with RS-485 communication a bus structure can be built, it is
possible to connect a maximum of 32 gauges (as slaves) to one host
(master). Each slave has its unique address.
The host (master) initiates the communication by addressing one of the
slaves in its query. Only the addressed slave (gauge) will respond.
With RS-232 communication there can be only one slave (the gauge)
and one master (the host).
6.3.3.2 Modbus Protocol Description
A Modbus message is placed by the transmitting device into a frame
that has a known beginning and ending point.This allows receiving
devices to begin at the start of the message, read the address portion
and determine which device is addressed, and to know when the
message is completed.
RTU mode is a binary mode of data representation. Messages start with
a silent interval of at least 3.5 character times. This is most easily
implemented as a multiple of character times at the baud rate that is
being used on the network (shown as T1T2T3T4 in next figure).
The first field then transmitted is the device address. The gauges
monitor the bus continuously, including during the silent intervals. When
the first byte (the address byte) is received, each gauge decodes it to
find out if it is the addressed gauge.
Following the last transmitted byte, a similar interval of at least 3.5
character times marks the end of the message. A new message can
begin after this interval.

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 9
A typical message frame is shown below:
Start: Synchronisation 3.5 character time elapsed.
Address: The address field of a message frame contains eight bits.
The address must be within the range 1 to 247 (decimal). A master
addresses a slave by placing the slave address in the address field
of the message. When the slave sends its response, it places its own
address in this address field of the response to let the master know
which slave is responding.
Function: The function code field of a message frame contains eight
bits. With the Modbus protocol only function code 03 (read
holding registers) and function code 05 (force single coil) are
supported. When a message is sent from a master to a slave the
function code field tells the slave what kind of action to perform. For
a normal response, the slave simply echoes the original function
code.
Data: The data field is constructed using sets of two 8 bit bytes (16
bit registers). The data field of messages sent from a master to slave
devices contains additional information which the slave must use to
take the action defined by the function code. The data field of a
response from a slave to a master contains the requested data.
CRC check: The CRC check field contains a 16-bit value imple-
mented as two eight-bit bytes. The error check value is the result of a
CRC (Cyclical Redundancy Check) calculation performed on the
message contents. The CRC field is appended to the message as
the last field in the message.
End: Synchronization 3.5 character time elapsed.
6.3.3.2.1 Function Codes
Function code 03: Read holding registers
Holding registers are located in the memory range (4)0000 ... (4)
FFFFH. Register values can range from 0000 to FFFFH. Depending
on the use, the registers contain a value or bit coded status in single
(16 bit) or double (32 bit) register signed (two=s complement) or not
signed.
• The query message specifies the starting register and quantity of
registers to be read:
Start Address Function Data CRC
check End
T1T2T3T4 8 bits 8 bits n * 8 bits 2 * 8 bits T1T2T3T4
Slave
address Function 03 Start
address No. of
registers CRC check
8 bits 8 bits 16 bits 16 bits 16 bits
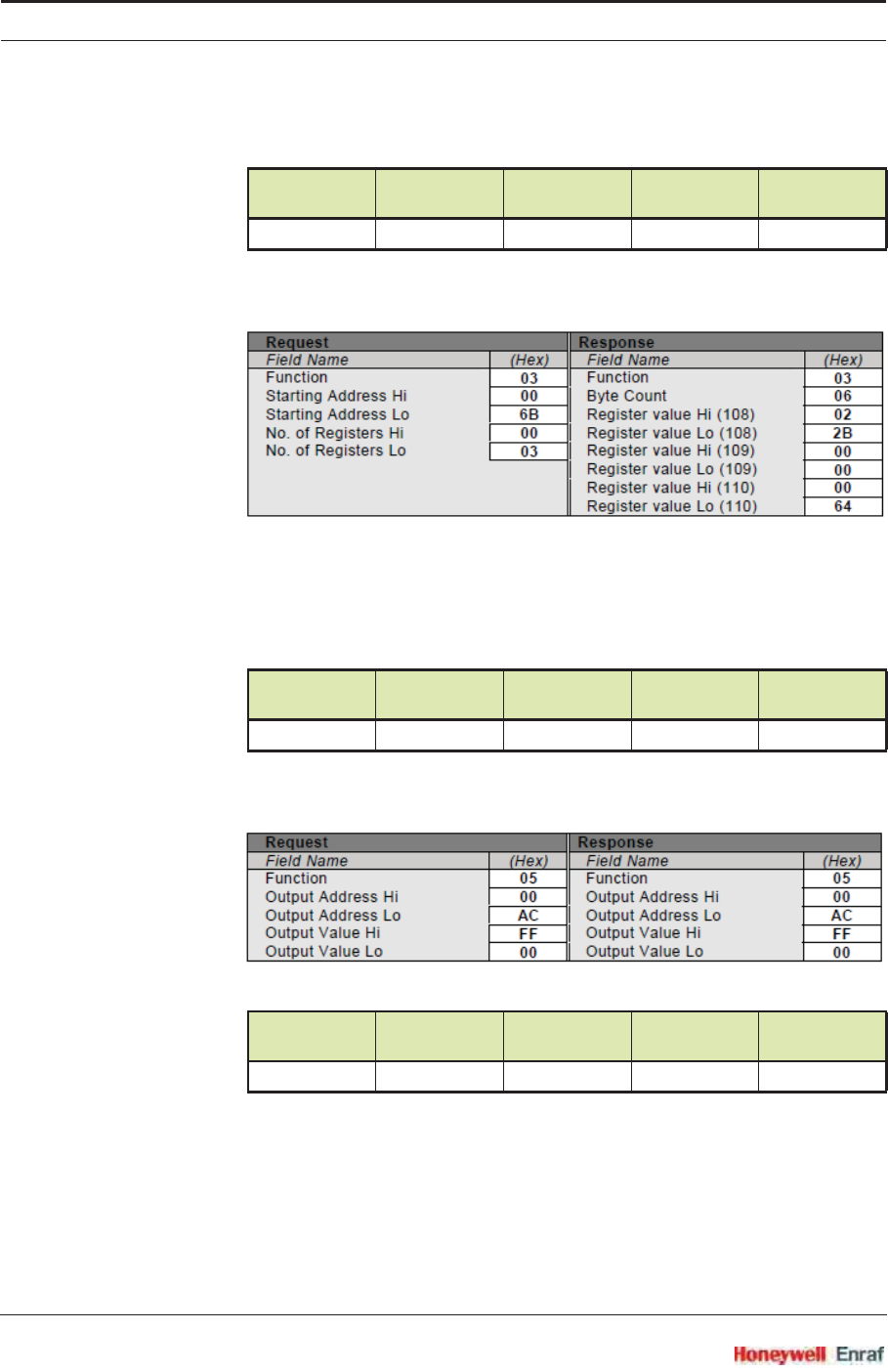
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 10 Service Manual
• The register data in the response message is packed as two
bytes:
• The amount of bytes N is double the amount of requested
registers, because each register occupies two bytes.
Function code 05 Write single coil
Coils are located in the memory range (0)0000 ... (0) FFFFH. The
value of a coil can be forced to: FF00H = ON, or 0000H = OFF.
• The query message specifies the coil reference to be forced:
• The normal response is an echo of the query, returned after the
coil state has been forced:
6.3.3.3 Commisioning Notes
While commissioning, please keep the following in mind:
For gauge configuration --> FlexConn must be used.
For data monitoring and certain gauge commands--> Modbus
can be used.
Slave
address Function 03 Byte count
(N) Data CRC check
8 bits 8 bits 8 bits (N) x 8 bits 16 bits
Slave
address Function 05 Coil
address Force data CRC check
8 bits 8 bits 16 bits 16 bits 16 bits
Slave
address Function 05 Coil
address Force data CRC check
8 bits 8 bits 16 bits 16 bits 16 bits
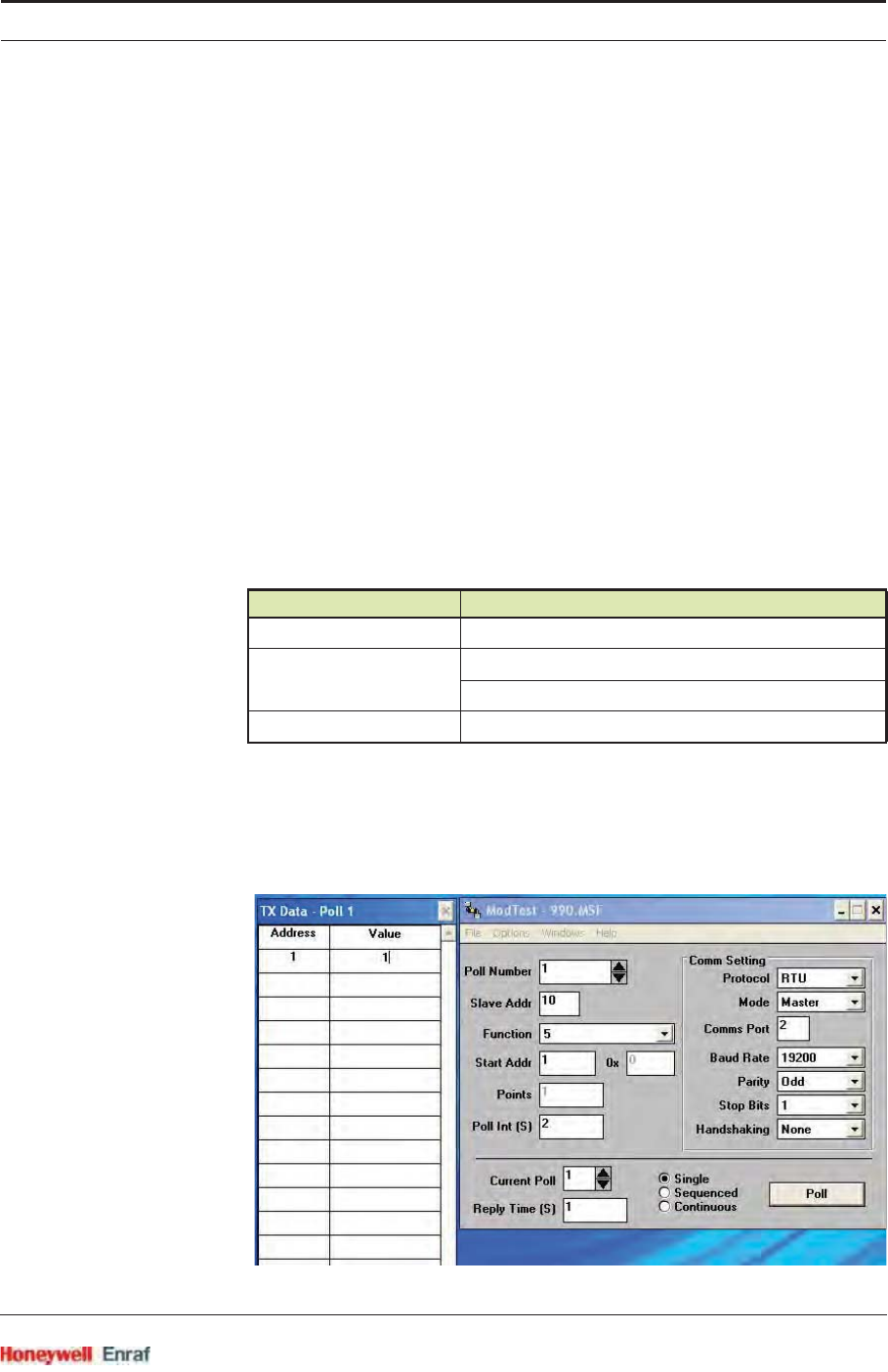
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 11
A changeover is done by the protocol switch.
Protocol switching is bound to the following:
Engauge only supports GPU-FlexConn to Modbus switching.
Once the HCI-GPU is in Modbus mode, Engauge cannot execute
any modifications as Engauge does NOT support Modbus communi-
cation.
This scenario may be found at a first-time installation or during
servicing issues.
SmartView supports both GPU-FlexConn to Modbus and Modbus to
GPU-FlexConn switching at any time, the actual protocol type being
visible real time.
Suitable on issues in the field.
Along with data monitoring the Modbus host can issue certain
commands such as Overfill test, Reset, Alarm Test, and Modbus to
GPU-FlexConn switching.
It is recommended to disconnect the SmartRadar FlexLine from the
Modbus communication link when using Engauge with the GPU-
FlexConn protocol.
Example (with ModTest screen example of Daniel Europe Ltd. below):
To switch from Modbus to GPU-FlexConn, the following must be done:
Set Function = 5; Address = 1; Value = 1.
Activate by pressing the Poll button.
Using ... Switching possible from ...
Engauge GPU-FlexConn --> Modbus
SmartView GPU-FlexConn --> Modbus
Modbus --> GPU-FlexConn
Modbus command Modbus --> GPU-FlexConn
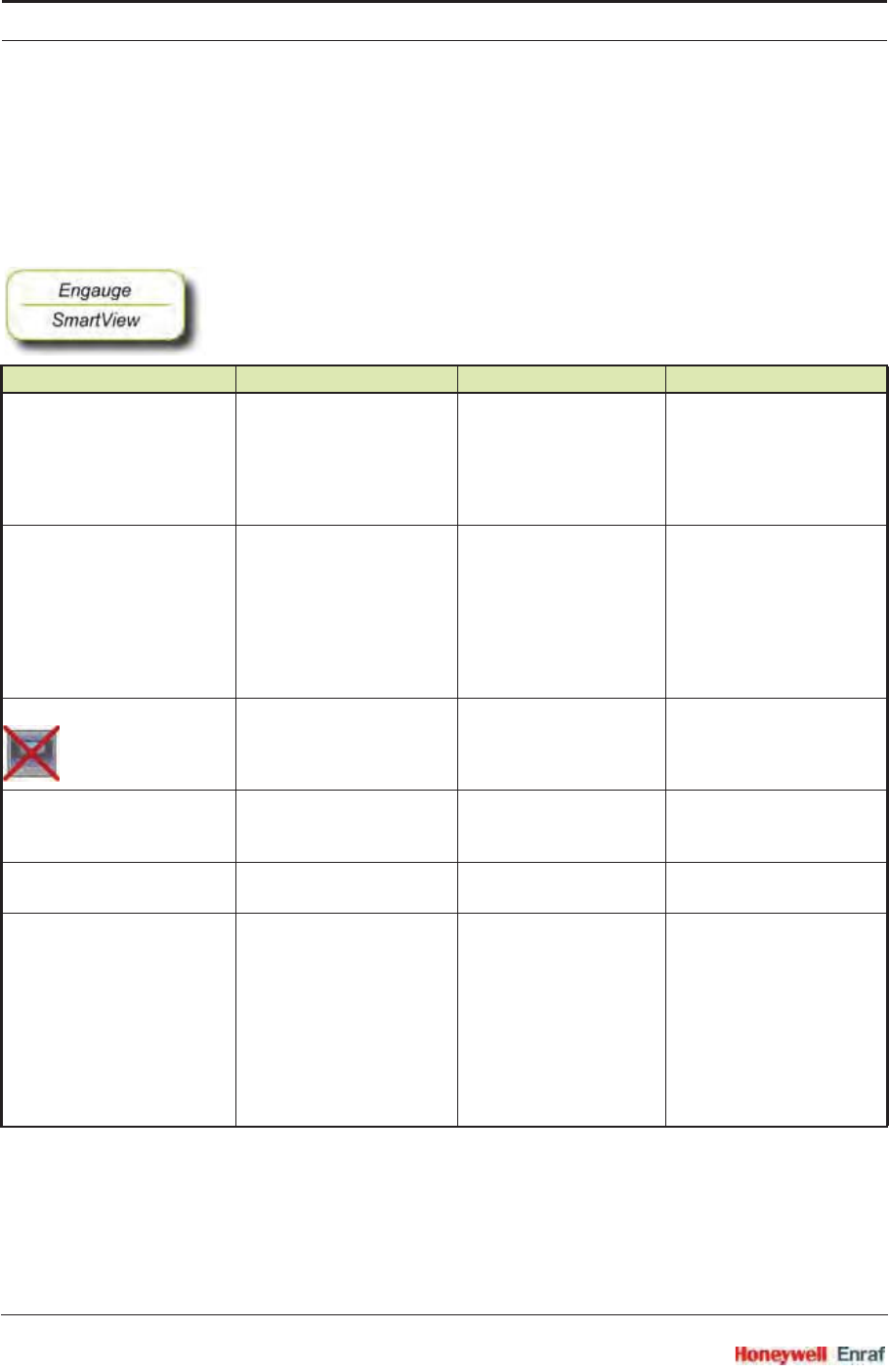
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 12 Service Manual
6.3.3.4 Commisioning
For a correct functioning of the HCI-GPU module within an instrument
(gauge), the following entities can be set by using either Engauge or
SmartView.
☛By using the following table, check each entity for correctness.
Name Value Range Default Value Explanation
[FlexConn Modbus protocol switch] <FlexConn-GPU>
<Modbus>
<FlexConn-GPU> If production-, test-,
configuration-, and/or
service tools are to be
used, switch to the
FlexConn protocol by
selecting <FlexConn-GPU>.
[RS Baudrate] <1200>
<2400>
<4800>
<9600>
<19200>
<38400>
<57600>
<115200>
<19200> Communication speed
[Turn around delay] <0..2000 ms> <0 ms> The turnaround delay is the
minimum time the HCI-
GPU waits, before starting
answering the host.
[Parity] <Odd>
<Even>
<None>
<Odd> User can have different
parity depending upon
application.
<Stopbits> <One>
<Two>
<One>
[Modbus slave address] <1..247> <1> On a site there can be
multiple gauges connected
via the RS-485 physical link
and hence different CAN-
RS boards can be identified
by unique slave addresses.
However, note that RS-485
supports only 32 devices
in multidrop and so must be
the addresses.
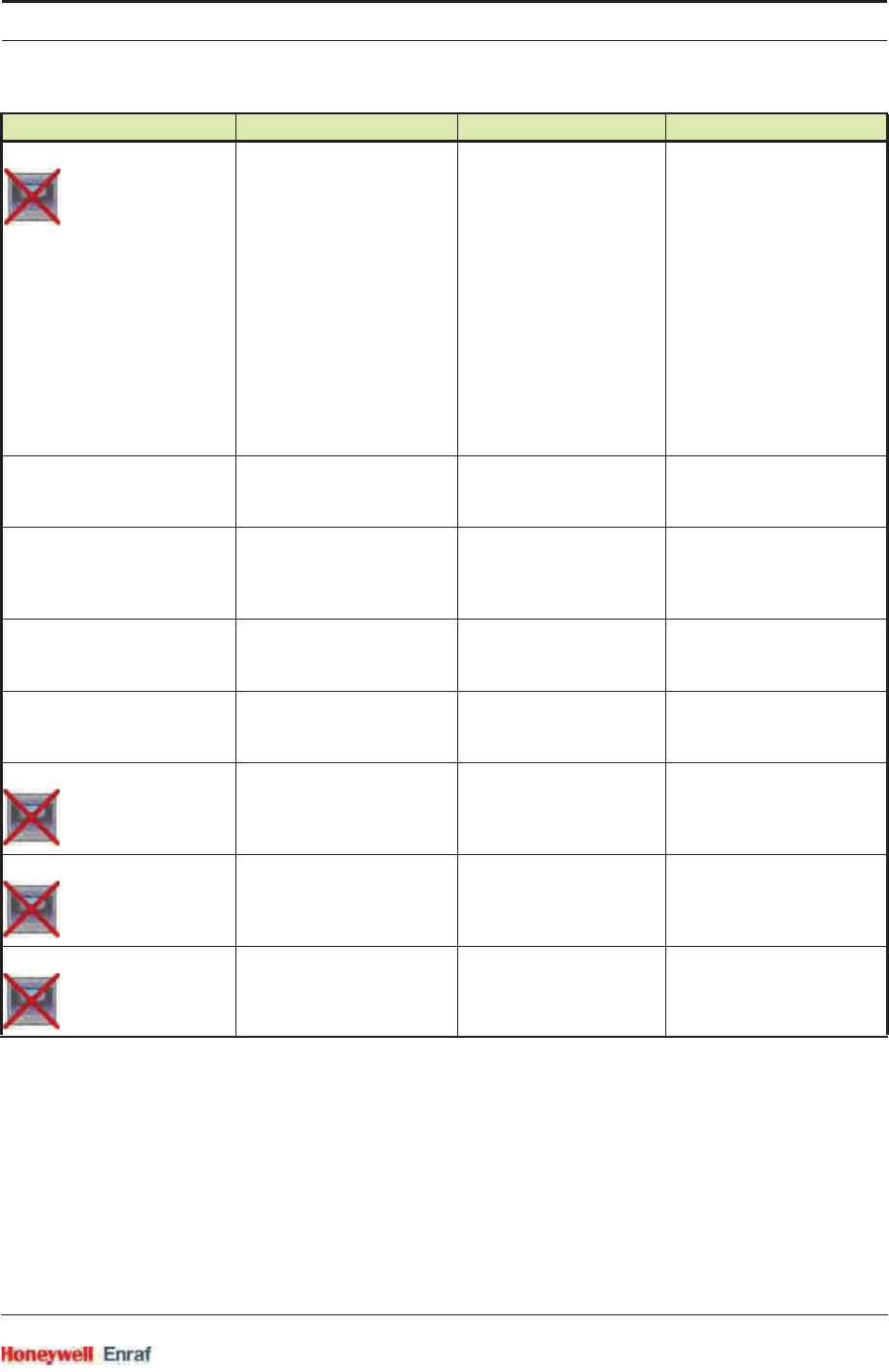
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 13
6.3.3.5 Modbus Holding Registers
Internal values in a Modbus device are stored in holding registers.
These registers are two bytes wide and can be used for various
purposes. Some registers contain configuration parameters where
others are used to return measured values (temperatures etc.) to the
host.
The holding registers start counting at 40001. They are addressed in
the Modbus message structure with addresses starting at 0.
[Modbus register address offset] <0x0000..0xEE00> <0> As per Modbus, function
code 03 supports 0000 to
FFFF register addressing.
Considering modbus map
starting at 0x0000 and
0x1000 and keeping this
constant, the offset address
should be (0xFFFF -
0x1138 = 0xEEC7) . For
Round off number 0xEE00.
Offset can be moved any
where between 0x0000 to
0xEE00. 0x1138 is total
number of registers of both
modbus map.
[Level units] <meters>
<inches>
<feet>
<meters> The unit in which level-
related records and items
are shown
[Temperature units] <celsius>
<fahrenheit>
<celsius> The unit in which
temperature-related
records and items are
shown
[Pressure units] <pascal>
<kilo pascal>
<psi>
<pascal> The unit in which pressure-
related records and items
are shown
[Density units] <kilogram m3>
<degrees API>
<pounds ft3>
<kilogram m3> The unit in which density-
related GPU records and
items are shown
[Communication type] <comm ni RS232>
<comm iso RS232>
<comm iso RS485>
<comm ni RS232> Communication type
NOTE: must be configured
at the GPU slave tab of
Engauge. See 6.3.3.
[Function identification] <......> 13 characters <GPU-slave> The name of the current
function of this module.
This name is visible on the
SmartView display.
[Function priority]
Name Value Range Default Value Explanation
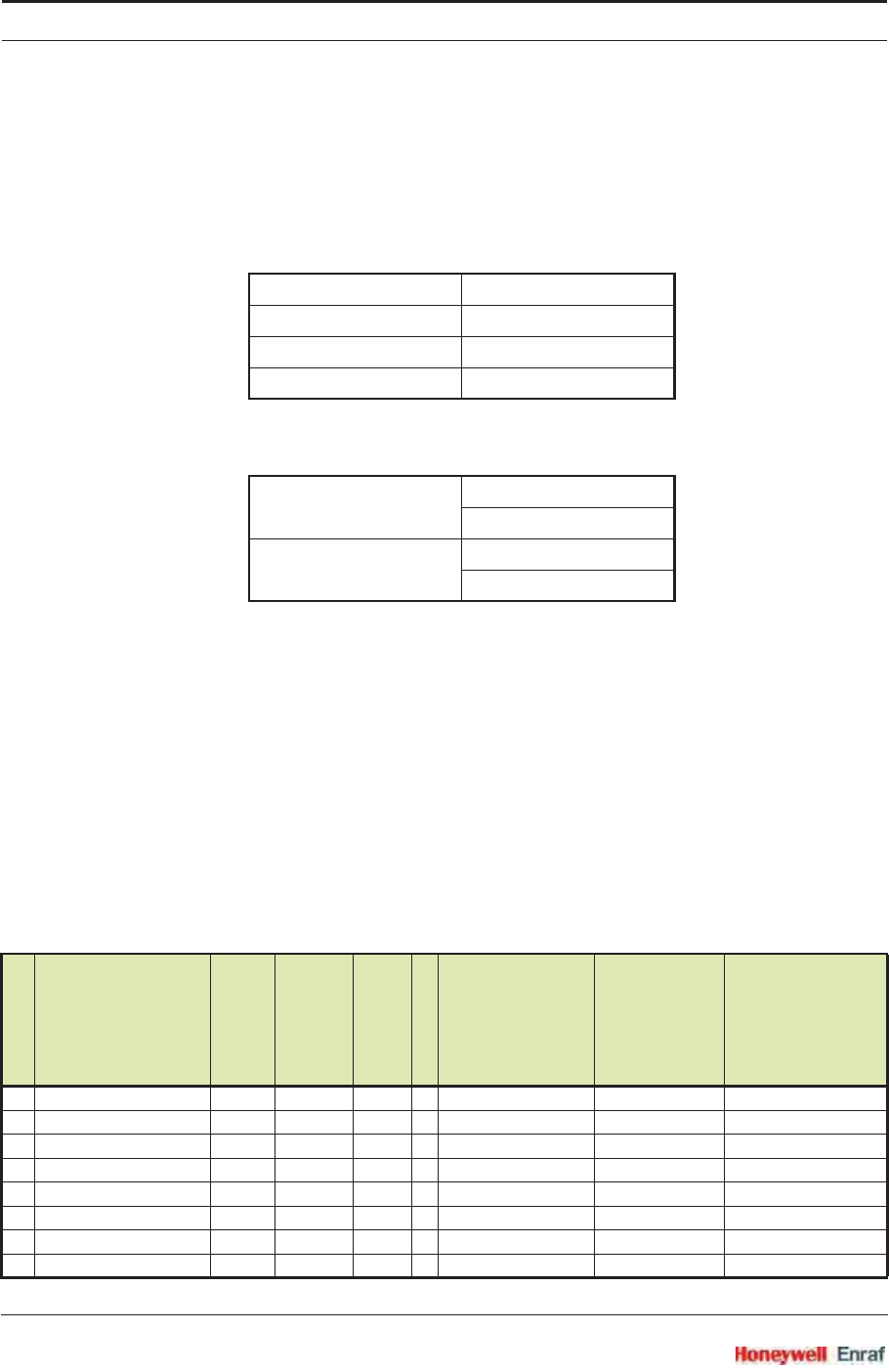
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 14 Service Manual
Byte order in Modbus registers
For data type that is long and float IEEE-754, the 32 bits are devided
over two 16-bits registers.
Reference:
• Long and Floating point, IEEE-754 (little endian):
• Long and Floating point, IEEE-754 Modbus presentation
(big endian), so word swapped and byte swapped:
The first table that follows contains all gauge data in fixed point
format starting at 0x0000. A scaling factor needs to be applied
here.
The second table contains all gauge data in floating point format
starting at 0x1000.No scaling to be applied here.
• Floating point: IEEE-754
• Signed integers: two’s complement
6.3.3.5.1 Fixed Point Format Gauge Data
address+0 Byte 1
address+1 Byte 2
address+2 Byte 3
address+3 Byte 4
Register x Lo Byte 4
Hi Byte 3
Register x+1 Lo Byte 2
Hi Byte 1
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Scaling
factor
Interpretation
1 Product Level 0x0000 SD40001 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
ProductLevelStatus 0x0002 40003 char 1 See 6.3.3.6.1
ProductLevelAlarms 0x0003 40004 char 1 See 6.3.3.6.13
2 Water Level 0x0004 SD40005 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 15
WaterLevelStatus 0x0006 40007 char 1 See 6.3.3.6.2
3 ProductTemp 0x0007 SD40008 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
ProductTempStatus 0x0009 40010 char 1 See 6.3.3.6.3
4 VapRoomTemp 0x000A SD40011 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
VapRoomTempStatus 0x000C 40013..16 byte 4 See 6.3.3.6.4
5 VapRoomPress 0x0010 SD40017 long 2 PASCAL multiply by 100
KILO_PASCAL devide by 1000
PSI devide by 1000
VapRoomPressStatus 0x0012 40019..23 byte 5 See 6.3.3.6.5
6 ObsDensity 0x0017 SD40024 long 2 KILOGRAM_PER_M3 devide by 100
POUNDS_PER_FT3 devide by 10000
DEGREES_API devide by 1000
ObsDensityStatus 0x0019 40026..30 byte 5 See 6.3.3.6.6
7 Gauge Status 0x002A 40043 byte 1 See 6.3.3.6.14
8 Spot temperature 1 0x0200 SD40513 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
9 Spot temperature 1 pos. 0x0202 SD40515 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
10 Spot temperature 2 0x0204 SD40517 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
11 Spot temperature 2 pos 0x0206 SD40519 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
12 Spot temperature 3 0x0208 SD40521 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
13 Spot temperature 3 pos. 0x020A SD40523 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
14 Spot temperature 4 0x020C SD40525 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
15 Spot temperature 4 pos. 0x020E SD40527 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
16 Spot temperature 5 0x0210 SD40529 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
17 Spot temperature 5 pos. 0x0212 SD40531 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
18 Spot temperature 6 0x0214 SD40533 long 2 CELSIUS devide by 100
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Scaling
factor
Interpretation
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 16 Service Manual
FAHRENHEIT devide by 100
19 Spot temperature pos. 6 0x0216 SD40535 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
20 Spot temperature 7 0x0218 SD40537 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
21 Spot temperature 7 pos. 0x021A SD40539 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
22 Spot temperature 8 0x021C SD40541 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
23 Spot temperature 8 pos. 0x021E SD40543 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
24 Spot temperature 9 0x0220 SD40545 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
25 Spot temperature 9 pos. 0x0222 SD40547 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
26 Spot temperature 10 0x0224 SD40549 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
27 Spot temperature 10 pos. 0x0226 SD40551 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
28 Spot temperature 11 0x0228 SD40553 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
29 Spot temperature 11 pos. 0x022A SD40555 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
30 Spot temperature 12 0x022C SD40557 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
31 Spot temperature 12 pos. 0x022E SD40559 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
32 Spot temperature 13 0x0230 SD40561 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
33 Spot temperature 13 pos. 0x0232 SD40563 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
34 Spot temperature 14 0x0234 SD40565 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
35 Spot temperature 14 pos. 0x0236 SD40567 long 2 METRES devide by 10000
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Scaling
factor
Interpretation
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 17
FEET devide by 1000
INCHES devide by 100
36 Spot temperature 15 0x0238 SD40569 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
37 Spot temperature 15 pos. 0x023A SD40571 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
38 Spot temperature 16 0x023C SD40573 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
39 Spot temperature 16 pos. 0x023E SD40575 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
40 Ambient Temperature 0x0300 SD40769 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
Ambient
TemperatureStatus 0x0302 40771 integer 1 See 6.3.3.6.7
41 Product Pressure 0x0303 SD40772 long 2 PASCAL multiply by 100
KILO_PASCAL devide by 1000
PSI devide by 1000
Product PressureStatus 0x0305 40774 byte 5 See 6.3.3.6.8
42 Hart Input Variable 1 0x030A SD40779 long 2 METRES devide by 10000
FEET devide by 1000
INCHES devide by 100
Hart Input Variable 1
Status
0x030C 40781 Integer 1 See 6.3.3.6.9
43 Hart Input Variable 2 0x030D SD40782 long 2 CELSIUS devide by 100
FAHRENHEIT devide by 100
Hart Input Variable 2
Status
0x030F 40784 Integer 1 See 6.3.3.6.9
44 Hart Input Variable 3 0x0310 SD40785 long 2 PASCAL multiply by 100
KILO_PASCAL devide by 1000
PSI devide by 1000
Hart Input Variable 3
status
0x0312 40787 Integer 1 See 6.3.3.6.9
45 Hart Input Variable 4 0x0313 SD40788 long 2 KILOGRAM_PER_M3 devide by 100
POUNDS_PER_FT3 devide by 10000
DEGREES_API devide by 1000
Hart Input Variable 4
status
0x0315 40790 Integer 1 See 6.3.3.6.9
46 Hart Input Variable 5 0x0316 SD40791 long 2 Free format devide by 100
Hart Input Variable 5
status
0x0318 40793 Integer 1 See 6.3.3.6.9
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Scaling
factor
Interpretation
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 18 Service Manual
47 First Relay Board
- Relay 1
0x0319 SD40794 long 2
First Relay Board
- Relay 1 Status
0x031B 40796 Integer 1 See 6.3.3.6.10
48 First Relay Board
- Relay 2
0x031C SD40797 long 2
First Relay Board
- Relay 2 Status
0x031E 40799 Integer 1 See 6.3.3.6.10
49 First Relay Board
- Relay 3
0x031F SD40800 long 2
First Relay Board
- Relay 3 Status
0x0321 40802 Integer 1 See 6.3.3.6.10
50 First Relay Board
- Relay 4
0x0322 SD40803 long 2
First Relay Board
- Relay 4 Status
0x0324 40805 Integer 1 See 6.3.3.6.10
51 Second Relay Board
- Relay 1
0x0325 SD40806 long 2
Second Relay Board
- Relay 1 Status
0x0327 40808 Integer 1 See 6.3.3.6.10
52 Second Relay Board
- Relay 2
0x0328 SD40809 long 2
Second Relay Board
- Relay 2 Status
0x032A 40811 Integer 1 See 6.3.3.6.10
53 Second Relay Board
- Relay 3
0x032B SD40812 long 2
Second Relay Board
- Relay 3 Status
0x032D 40814 Integer 1 See 6.3.3.6.10
54 Second Relay Board
- Relay 4
0x032E SD40815 long 2
Second Relay Board
- Relay 4 Status
0x0330 40817 Integer 1 See 6.3.3.6.10
55 Overfill Protection Status
First Relay Board
0x0331 40818 char 1 See 6.3.3.6.12
56 Overfill Protection Status
Second Relay Board
0x0332 40819 char 1
57 Safety ShutDown Timer
Left First Relay Board
0x0333 40820 Integer 1
58 Safety ShutDown Timer
Left Second Relay Board
0x0334 40821 Integer 1
59 Analog Output 0x0335 SD40822 long 2 N.A. devide by 100
Analog OutputStatus 0x0337 40824 integer 1 See 6.3.3.6.11
60 Tank Identification 0x0338 40825 char 8 N.A.
61 GPU Device Number 0x0340 40833 integer 1
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Scaling
factor
Interpretation
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 19
6.3.3.5.2 Floating Point Format Gauge Data
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Interpretation
1 ProductLevel 0x1000 SD44097 floating
point
2METRES
FEET
INCHES
ProductLevelStatus 0x1002 44099 char 1 See 6.3.3.6.1
ProductLevelAlarms 0x1003 44100 char 1 See 6.3.3.6.13
2 WaterLevel 0x1004 SD44101 floating
point
2METRES
FEET
INCHES
WaterLevelStatus 0x1006 44103 char 1 See 6.3.3.6.2
3 ProductTemp 0x1007 SD44104 floating
point
2 CELSIUS
FAHRENHEIT
ProductTempStatus 0x1009 44106 char 1 See 6.3.3.6.3
4 VapRoomTemp 0x100A SD44107 floating
point
2 CELSIUS
FAHRENHEIT
VapRoomTempStatus 0x100C 44109..12 byte 4 See 6.3.3.6.4
5 VapRoomPress 0x1010 SD44113 floating
point
2PASCAL
KILO_PASCAL
PSI
VapRoomPressStatus 0x1012 44115..19 byte 5 See 6.3.3.6.5
6 ObsDensity 0x1017 SD44120 floating
point
2 KILOGRAM_PER_M3
POUNDS_PER_FT3
DEGREES_API
ObsDensityStatus 0x1019 44122..26 byte 5 See 6.3.3.6.6
7 Gauge Status 0x102A 44139 byte 1 See 6.3.3.6.14
8 Spot temperature 1 0x1200 SD44609 floating
point
2 CELSIUS
FAHRENHEIT
9 Spot temperature 1 pos. 0x1202 SD44611 floating
point
2METRES
FEET
INCHES
10 Spot temperature 2 0x1204 SD44613 floating
point
2 CELSIUS
FAHRENHEIT
11 Spot temperature 2 pos. 0x1206 SD44615 floating
point
2METRES
FEET
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 20 Service Manual
INCHES
12 Spot temperature 3 0x1208 SD44617 floating
point
2 CELSIUS
FAHRENHEIT
13 Spot temperature 3 pos. 0x120A SD44619 floating
point
2METRES
FEET
INCHES
14 Spot temperature 4 0x120C SD44621 floating
point
2 CELSIUS
FAHRENHEIT
15 Spot temperature 4 pos. 0x120E SD44623 floating
point
2METRES
FEET
INCHES
16 Spot temperature 5 0x1210 SD44625 floating
point
2 CELSIUS
FAHRENHEIT
17 Spot temperature 5 pos. 0x1212 SD44627 floating
point
2METRES
FEET
INCHES
18 Spot temperature 6 0x1214 SD44629 floating
point
2 CELSIUS
FAHRENHEIT
19 Spot temperature 6 pos. 0x1216 SD44631 floating
point
2METRES
FEET
INCHES
20 Spot temperature 7 0x1218 SD44633 floating
point
2 CELSIUS
FAHRENHEIT
21 Spot temperature 7 pos. 0x121A SD44635 floating
point
2METRES
FEET
INCHES
22 Spot temperature 8 0x121C SD44637 floating
point
2 CELSIUS
FAHRENHEIT
23 Spot temperature 8 pos. 0x121E SD44639 floating
point
2METRES
FEET
INCHES
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Interpretation
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 21
24 Spot temperature 9 0x1220 SD44641 floating
point
2 CELSIUS
FAHRENHEIT
25 Spot temperature 9 pos. 0x1222 SD44643 floating
point
2METRES
FEET
INCHES
26 Spot temperature 10 0x1224 SD44645 floating
point
2 CELSIUS
FAHRENHEIT
27 Spot temperature 10 pos. 0x1226 SD44647 floating
point
2METRES
FEET
INCHES
28 Spot temperature 11 0x1228 SD44649 floating
point
2 CELSIUS
FAHRENHEIT
29 Spot temperature 11 pos. 0x122A SD44651 floating
point
2METRES
FEET
INCHES
30 Spot temperature 12 0x122C SD44653 floating
point
2 CELSIUS
FAHRENHEIT
31 Spot temperature 12 pos. 0x122E SD44655 floating
point
2METRES
FEET
INCHES
32 Spot temperature 13 0x1230 SD44657 floating
point
2 CELSIUS
FAHRENHEIT
33 Spot temperature 13 pos. 0x1232 SD44659 floating
point
2METRES
FEET
INCHES
34 Spot temperature 14 0x1234 SD44661 floating
point
2 CELSIUS
FAHRENHEIT
35 Spot temperature 14 pos. 0x1236 SD44663 floating
point
2METRES
FEET
INCHES
36 Spot temperature 15 0x1238 SD44665 floating
point
2 CELSIUS
FAHRENHEIT
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Interpretation
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 22 Service Manual
37 Spot temperature 15 pos. 0x123A SD44667 floating
point
2METRES
FEET
INCHES
38 Spot temperature 16 0x123C SD44669 floating
point
2 CELSIUS
FAHRENHEIT
39 Spot temperature 16 pos. 0x123E SD44671 floating
point
2METRES
FEET
INCHES
40 Ambient Temperature 0x1300 SD44865 floating
point
2 CELSIUS
FAHRENHEIT
Ambient
TemperatureStatus 0x1302 44867 integer 1 See 6.3.3.6.7
41 Product Pressure 0x1303 SD44868 floating
point
2PASCAL
KILO_PASCAL
PSI
Product Pressure Status 0x1305 44870 byte 5 See 6.3.3.6.5
42 Hart Input Variable 1 0x130A SD44875 floating
point
2METRES
FEET
INCHES
Hart Input Variable 1
Status
0x130C 44877
Integer
1 See 6.3.3.6.9
43 Hart Input Variable 2 0x130D SD44878 floating
point
2 CELSIUS
FAHRENHEIT
Hart Input Variable 2
Status
0x130F 44880 Integer 1 See 6.3.3.6.9
44 Hart Input Variable 3 0x1310 SD44881 floating
point
2PASCAL
KILO_PASCAL
PSI
Hart Input Variable 3
status
0x1312 44883 Integer 1 See 6.3.3.6.9
45 Hart Input Variable 4 0x1313 SD44884 floating
point
2 KILOGRAM_PER_M3
POUNDS_PER_FT3
DEGREES_API
Hart Input Variable 4
status
0x1315 44886 Integer 1 See 6.3.3.6.9
46 Hart Input Variable 5 0x1316 SD44887 floating
point
2 Free format
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Interpretation
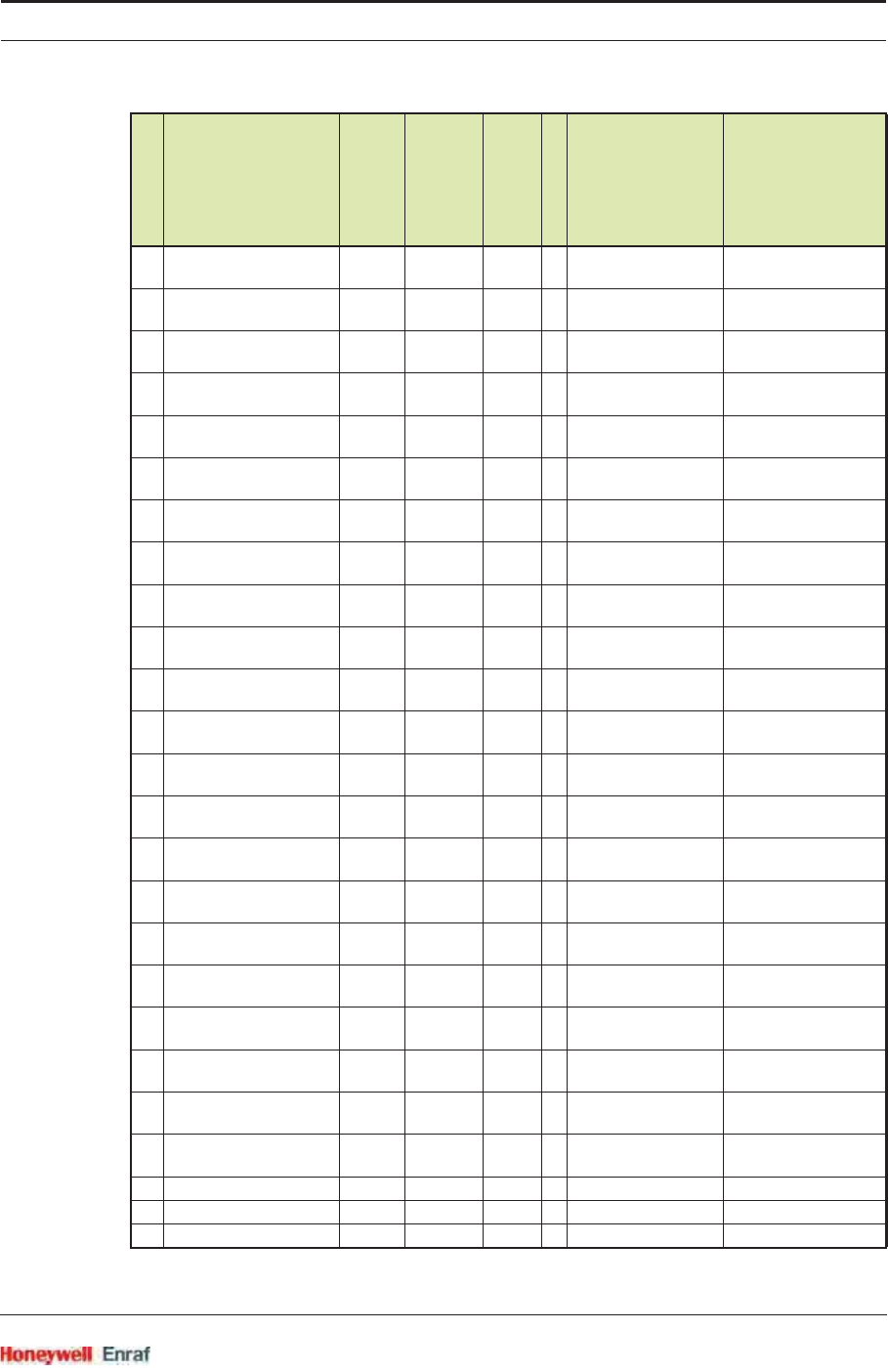
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 23
Hart Input Variable 5
status
0x1318 44889 Integer 1 See 6.3.3.6.9
47 First Relay Board - Relay
1
0x1319 SD44890 floating
point
2
First Relay Board - Relay
1 Status
0x131B 44892 Integer 1 See 6.3.3.6.10
48 First Relay Board - Relay
2
0x131C SD44893 floating
point
2
First Relay Board - Relay
2 Status
0x131E 44895 Integer 1 See 6.3.3.6.10
49 First Relay Board - Relay
3
0x131F SD44896 floating
point
2
First Relay Board - Relay
3 Status
0x1321 44898 Integer 1 See 6.3.3.6.10
50 First Relay Board - Relay
4
0x1322 SD44899 floating
point
2
First Relay Board - Relay
4 Status
0x1324 44901 Integer 1 See 6.3.3.6.10
51 Second Relay Board -
Relay 1
0x1325 SD44902 floating
point
2
Second Relay Board -
Relay 1 Status
0x1327 44904 Integer 1 See 6.3.3.6.10
52 Second Relay Board -
Relay 2
0x1328 SD44905 floating
point
2
Second Relay Board -
Relay 2 Status
0x132A 44907 Integer 1 See 6.3.3.6.10
53 Second Relay Board -
Relay 3
0x132B SD44908 floating
point
2
Second Relay Board -
Relay 3 Status
0x132D 44910 Integer 1 See 6.3.3.6.10
54 Second Relay Board -
Relay 4
0x132E SD44911 floating
point
2
Second Relay Board -
Relay 4 Status
0x1330 44913 Integer 1 See 6.3.3.6.10
55 Overfill Protection Status
First Relay Board
0x1331 44914 char 1 See 6.3.3.6.12
56 Overfill Protection Status
Second Relay Board
0x1332 44915 char 1 See 6.3.3.6.12
57 Safety Shutdown Timer
Left First Relay Board
0x1333 44916 Integer 1
58 Safety Shutdown Timer
Left Second Relay Board
0x1334 44917 Integer 1
59 Analog Output 0x1335 SD44918 floating
point
2N.A.
Analog Output Status 0x1337 44920 integer 1 See 6.3.3.6.11
60 Tank Identification 0x1338 44921 char 8 N.A.
61 GPU Device Number 0x1340 44929 integer 1
Par.no.
Modbus
parameter
Modbus
address (hex)
Modbus
Address (dec)
Data type
No. of registers
Conversion
units
Interpretation
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 24 Service Manual
6.3.3.6 Status Information
After being requested so by the host, the slave will return the relevant
status information. The following tables give the possible received
status bytes from the relevant registers, such as product level, product
temperature etc.
For a listing of ASCII codes, see 6.3.4.
6.3.3.6.1 Product Level
This register contains the bit-coded product level status. This status
information is coded in such a way that an ASCII code for a character is
generated. The ASCII characters are listed below.
6.3.3.6.2 Water Level
This register contains the bit-coded water level status. This status
information is coded in such a way that an ASCII code for a character is
generated. The ASCII characters are listed below.
6.3.3.6.3 Product Temperature
This register contains the bit-coded product temperature status. This
status information is coded in such a way that an ASCII code for a
character is generated. The ASCII characters are listed below.
6.3.3.6.4 Vapour Room Temperature
Four registers contains the bit-coded vapour room temperature status.
With exception of the first register, the status information is coded in
Product Level status Meaning
F invalid level data
C out of measuring range
B measurement blocked
Mwarning
? reduced accuracy
- valid product level
Water Level status Meaning
F invalid water alarm data
A water above probe warning
Z water below probe warning
- valid water level
Product Temperature status Meaning
F invalid temperature alarm data
T reduced accuracy
- valid data
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 25
such a way that an ASCII code for a character is generated. The 8-bits
ASCII coded character is placed in the Low byte of the register; the High
byte remains empty (zero).
6.3.3.6.5 Vapour Room Pressure
Five registers contain the bit-coded vapour room pressure and
observed density status. The status information is coded in such a way
that an ASCII code for a character is generated. The 8-bits ASCII coded
character is placed in the Low byte of the register; the High byte
remains empty (zero).
Vapour Room Temperature status Meaning
0
indicating the highest immersed
(spot)element of the temperature
element
1
bit 0 - General temperature fail
1 - Fail in average product temperature
2 - Fail in average vapour temperature
3 - Level exceeds lowest (spot)element
4 - Level exceeds highest (spot)element
5 - (Spot)element fail
6 - one
7 - zero
2
bit 0 - Last valid level used
1 - Manual level used
2 - Level time out
3 - Device not calibrated (MTT)
4 - Exceeding differential temp. range
(MTT)
5 - Out of specified temperature range
6 - one
7 - zero
3
bit 0 - No previous store command
1 - Alternative element selected (MRT)
2-5 - zero
6 - one
7 - zero
Vapour Room Pressure status Meaning
0
bit 0 - General option board fail
1 - Low level alarm
2 - Low low level alarm
3 - High level alarm
4 - High high level alarm
5 - Level time out
6 - one
7 - zero
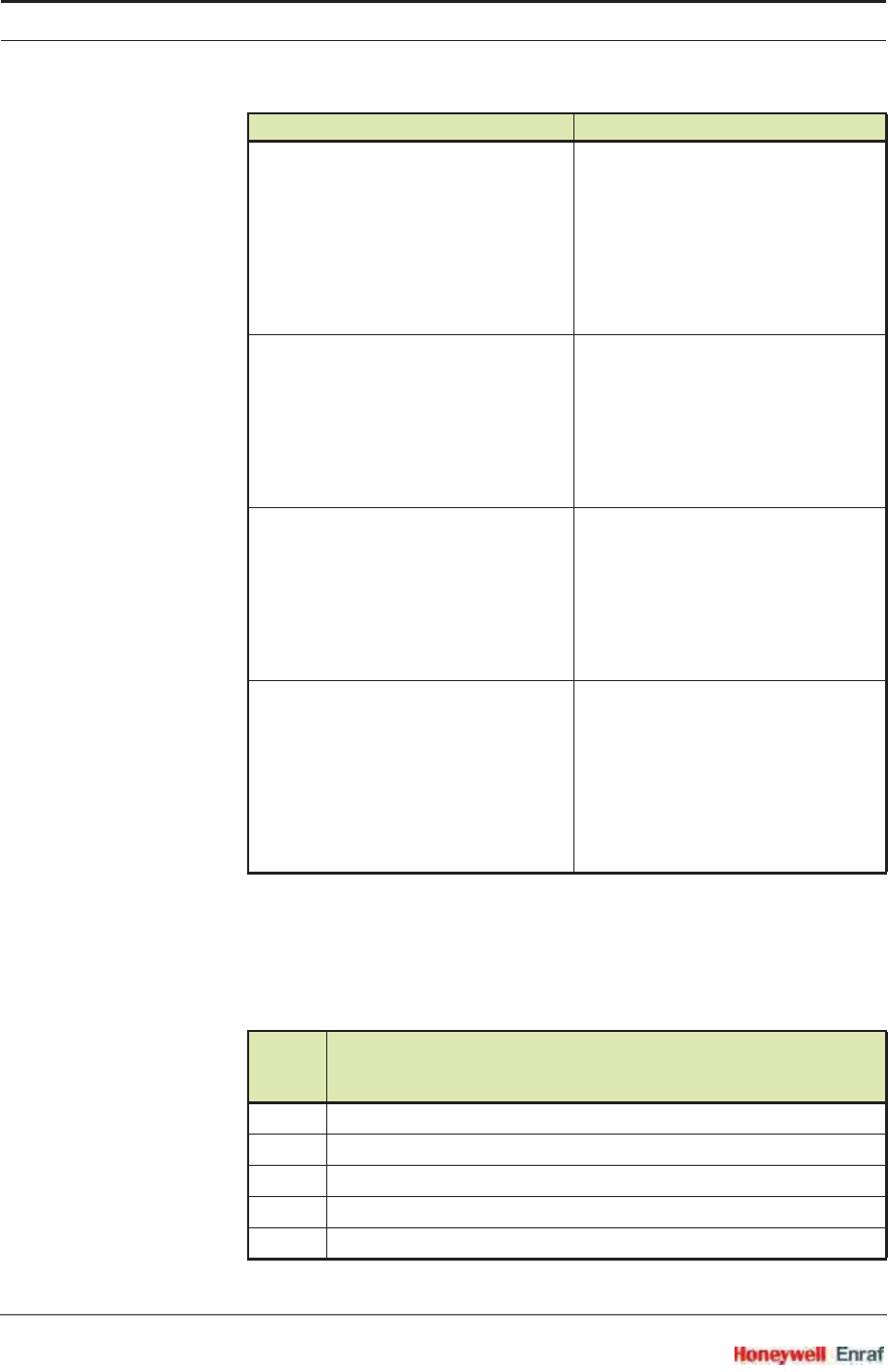
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 26 Service Manual
6.3.3.6.6 Observed Density
See 6.3.3.6.5 - Vapour Room Pressure.
6.3.3.6.7 Ambient Temperature
1
bit 0 - P1 exceeds min. / max. trip
pressure
1 - P2 exceeds min. / max. trip pressure
2 - P3 exceeds min. / max. trip pressure
3 - Exceeding range P1
4 - Exceeding range P2
5 - Exceeding range P3
6 - one
7 - zero
2
bit 0 - Fail P1
1 - Fail P2
2 - Fail P1
3 - Manual P3 used
4 - Last valid P3 used
5 - Manual level used
6 - one
7 - zero
3
bit 0 - Last valid density used
1 - Manual density used
2 - High density alarm
3 - Low density used
4 - HTG level fail
5 - No previous store command
6 - one
7 - zero
4
bit 0 - Manual gas density used
1 - Level below LN
2 - Last valid level used
3 - Invalid level reading
4 - API underflow/overflow or negative
density
5 - zero
6 - one
7 - zero
Health
status
code Meaning
2561 LOWEST_ELEMENT_OFFSET_NOT_COMMISSIONED
2562 MRT_ELEMENT_LENGTH_NOT_COMMISSIONED
2563 MEASUREMENT_TYPE_NOT_COMMISSIONED
2564 ELEMENT_TYPE_NOT_COMMISSIONED
2565 NUMBER_OF_ELEMENTS_NOT_COMMISSIONED
Vapour Room Pressure status Meaning
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 27
6.3.3.6.8 Product Pressure
See 6.3.3.6.5 - Vapour Room Pressure.
2566 SECOND_ELEMENT_OFFSET_NOT_COMMISSIONED
2567 SENSOR_LENGTH_NOT_COMMISSIONED
2568 RTD_ELEMENT_POSITION_NOT_COMMISSIONED
2569 RTD_CONFIGURATION_NOT_COMMISSIONED
2570 MULTI_ELEMENT_OPTION_NOT_COMMISSIONED
2571 DYNAMIC_EXCLUSION_NR_OF_ELEMENTS_NOT_COMMISSIONED
2572
LOW_ELEMENT_USAGE_MEASUREMENT_TYPE_NOT_COMMISIONED
2573 TEMPERATURE_ELEMENT_EXCLUDE_ZONE_NOT_COMMISSIONED
2574 SMOOTHING_LEVEL_NOT_COMMISSIONED
2575 R_ELEMENT_SHORTCUT
2576 R_ELEMENT_NOT_CONNECTED
2577 T_ELEMENT_OUT_OF_RANGE
2578 ELEMENT_IN_WATER
2579 ELEMENT_FAIL
2580 NO_VALID_PRODUCT_LEVEL
2581 ELEMENT_SKIPPING
2582 NO_RELEVANT_ELEMENTS
2583 LEVEL_BELOW_LOWEST_ELEMENT
2584 NO_LAST_VALID_VALUE_AVAILABLE
2585 LEVEL_BELOW_TEMP_EXCLUDE_ZONE
2586 LEVEL_IN_TEMP_EXCLUDE_ZONE
2587 R_CABLE_OUT_OF_LIMITS
2588 R_TEST_OUT_OF_LIMITS
2589 VCC1_OUT_OF_LIMITS
2590 R_ELEMENT_INVALID_VALUE
2591 VOLTAGE_MON_PRIMARY_CIRCUIT_LO_LIM_EXCEEDED
2592 VOLTAGE_MON_PRIMARY_CIRCUIT_HI_LIM_EXCEEDED
2593 PROBE_RANGE_NOT_COMMISSIONED
2594 PROBE_OUT_OF_WNM_RANGE
2596 PRODUCT_LEVEL_NO_STATUS_CATEGORY_GOOD_ACTUAL
Health
status
code Meaning
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 28 Service Manual
6.3.3.6.9 HART variable
Health
status
code Meaning
1536 MORE_STATUS_AVAILABLE
1537 PV_OUT_OF_LIMITS
1538 SV_OR_TV_OUT_OF_LIMITS
1539 DEVICE_MALFUNCTION
1540 WRONG_PV_UNIT_CODE
1541 SCAN_INITIALIZING
1542 PRODUCT_LEVEL_SCAN_ERROR
1543 P1_NOT_INSTALLED
1544 P3_NOT_INSTALLED
1545 NO_P1_AVAILABLE
1546 NO_P3_AVAILABLE
1547 UNCERTAIN_P1
1548 UNCERTAIN_P3
1549 MANUAL_P1_USED
1550 MANUAL_P3_USED
1551 LAST_VALID_P3_USED
1552 NO_MANUAL_OR_LAST_VALID_P3
1553 NO_PRODUCT_LEVEL_AVAILABLE
1554 UNCERTAIN_PRODUCT_LEVEL
1555 PRODUCT_LEVEL_BELOW_MINIMUM_HIMS
1556 LAST_VALID_PRODUCT_LEVEL_USED
1557 MANUAL_PRODUCT_LEVEL_USED
1558 NO_WATER_LEVEL_AVAILABLE
1559 UNCERTAIN_WATER_LEVEL
1560 LAST_VALID_WATER_LEVEL_USED
1561 WATER_LEVEL_ABOVE_P1
1562 NEGATIVE_DENSITY_CALCULATED
1563 NO_MANUAL_OR_LAST_VALID_DENSITY
1564 MANUAL_WATER_LEVEL_USED
1565 DENSITY_OPTION_NOT_ENABLED
1566 P1_ERROR
1567 P3_ERROR
1568 G1_ERROR
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 29
6.3.3.6.10 Relay
1569 G2_ERROR
1570 G3_ERROR
1571 G4_ERROR
1572 G5_ERROR
1573 DENSITY_ERROR
1574 P1_UNCERTAIN
1575 P3_UNCERTAIN
1576 G1_UNCERTAIN
1577 G2_UNCERTAIN
1578 G3_UNCERTAIN
1579 G4_UNCERTAIN
1580 G5_UNCERTAIN
1581 DENSITY_UNCERTAIN
1582 TOO_MANY_HART_DEVICES_DETECTED
1583 WATER_LEVEL_SCAN_ERROR
Health
status
code Meaning
2305 RELAY_TEST_FAILED
2307 PV_SCAN_VALUE_BAD
2308 PV_SCAN_VALUE_UNCERTAIN
2309 INVALID_MESSAGE_LENGTH
2310 NACK_CODE_RECEIVED
2311 ERROR_REQUESTING_ENTITY
2312 NO_BOARD_AVAILABLE
2313 ERROR_RELAY_1
2314 ERROR_RELAY_2
2315 ERROR_RELAY_3
2316 ERROR_RELAY_4
2317 LICENSE_NOT_SET
2318 REDUNDANT_BOARD_ERROR
2319 XBAND_OVERFILL_DISABLED
Health
status
code Meaning
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 30 Service Manual
6.3.3.6.11 Analog Output
2320 NOT_COMMISSIONED
2321 BOARD_HEALTH_BAD
2322 REDUNDANT_BOARD_HEALTH_BAD
2323 REDUNDANT_BOARD_COM_FAIL
2324 SAFETY_TIMER_EXPIRED
2325 COMMISSIONING_MISMATCH
2326 RELAY_MODE_NOT_COMMISSIONED
2327 XBAND_BOARD_MISSING
2328 XBAND_LEVEL_BAD
2329 ALARM_MODE_NOT_COMMISSIONED
2330 MONITOR_BOARD_PARAMETERS_NOT_COMMISSIONED
Health
status
code Meaning
2817 CALIBRATION_SET_POINTS_NOT_CALIBARTED
2818 POLLING_ADDRESS_SET_TO_NON_ZERO
2819 DAC_READ_BACK_FAIL
2820 AO_INITIALIZING
2821 BURNOUT_VALUE_OUT_OF_RANGE
2822 ANAOUT_FIXED_AT_4MA
2823 MULTI_DROP_MODE
2824 TUNNEL_FAILED_IN_GETTING_AN_ENTITY
2825 TUNNEL_FAILED_IN_PUTTING_AN_ENTITY
2826 UNITS_NOT_SELECTED
2827 LINKED_PV_NOT_SET
2828 LINKED_SV_NOT_SET
2829 LINKED_TV_NOT_SET
2830 LINKED_QV_NOT_SET
2831 PV_UNIT_CODE_NOT_SELECTED
2832 RANGE_VALUES_NOT_SELECTED
2833 PV_OUT_OF_LIMITS
2834 UPPER_TRANSDUCER_LIMIT_NOT_SET
Health
status
code Meaning
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 31
6.3.3.6.12 Overfill Protection Status
For a listing of ASCII codes, see 6.3.4.
6.3.3.6.13 Alarms
6.3.3.6.14 Gauge Status
The following table lists the Gauge status information and meaning.
2835 TRANSDUCER_SERIAL_NUMBER_NOT_SET
2836 UNABLE_TO_GET_LINKED_VARIABLE
2837 UPPER_RANGE_VALUE_GREATER_THAN_UPPER_TRANSDUCER_
LIMIT
2838 LOWER_RANGE_VALUE_LESS_THAN_LOWER_TRANSDUCER_LIMIT
Overfill Protection status Meaning
O Overfill
W Warning
HHealthy
Product Level Alarm status Meaning
0 no alarm
1 Low level product alarm tripped
2 High level product alarm tripped
3 Low low level product alarm tripped
4 High high level product alarm tripped
255 alarm failure
Gauge status (decimal) Meaning
0 Level gauge is measuring level
255 Level gauge is in failure
Health
status
code Meaning
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 32 Service Manual
6.3.3.7 Modbus Coils
The following table lists Modbus commands and their related addresses
(coils) and data.
NOTE: Coils are just names for memory addresses. The
other way to look at it is that they are just pre-defined
variable names. A coil is a boolean (bit) variable, and
a register is an integer (word) variable.
6.3.3.8 Modbus Exception Handling
When a Modbus master device sends a request to a FlexLine device, it
expects a normal response. One of four possible events can occur from
the master’s query:
If the FlexLine device receives the request without a communication
error, and can handle the query normally, it returns a normal
response.
If the FlexLine device does not receive the request due to a commu-
nication error, no response is returned. The master program will
eventually process a timeout condition for the request. Typically 2
retries are carried out before going into fail.
If the FlexLine device receives the request, but detects a communi-
cation error (parity, LRC, CRC), no response is returned. The master
program will eventually process a timeout condition for the request.
If the FlexLine device receives the request without a communication
error, but cannot handle it (for example, if the request is to read a
non–existent output or register), the FlexLine device will return an
exception response informing the master of the nature of the error.
The exception-response message has two fields that differentiate it
from a normal response:
Function code field:
In a normal response, the FlexLine device echoes the function code
Modbus command Modbus
address (hex) Modbus
address (dec) Data Number of
registers
FlexConn Modbus Protocol Switch 0x00 00001 0xFF00 1
Reset Device 0x10 00017 0xFF00 1
Product Level Alarm Test Hi Hi 0x11 00018 0xFF00 1
Product Level Alarm Test Hi 0x12 00019 0xFF00 1
Product Level Alarm Test Lo 0x13 00020 0xFF00 1
Product Level Alarm Test Lo Lo 0x14 00021 0xFF00 1
Start Proof Test First Relay Board 0x15 00022 0xFF00 1
Stop Proof Test First Relay Board 0x16 00023 0xFF00 1
Start Proof Test Second Relay Board 0x17 00024 0xFF00 1
Stop Proof Test Second Relay Board 0x18 00025 0xFF00 1
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 33
of the original request in the function code field of the response. All
function codes have a most–significant bit (MSB) of 0 (their values
are all below 80 hexadecimal). In an exception response, the
FlexLine device sets the MSB of the function code to 1. This makes
the function code value in an exception response exactly 80 hexa-
decimal higher than the value would be for a normal response.
With the function code’s MSB set, the master’s application program
can recognize the exception response and can examine the data
field for the exception code.
Data field:
In a normal response, the FlexLine device may return data or
statistics in the data field (any information that was requested in the
request). In an exception response, the FlexLine device returns an
exception code in the data field. This defines the FlexLine device
condition that caused the exception.
Code Name Meaning
01 Illegal Function The function code received in the query is not an
allowable action for the FlexLine device. This
may be because the function code is only
applicable to newer devices, and was not
implemented in the unit selected. It could also
indicate that the FlexLine device is in the wrong
state to process a request of this type, for
example because it is unconfigured and is being
asked to return register values.
02 Illegal Data Address The data address received in the query is not an
allowable address for the FlexLine device. More
specifically, the combination of reference
number and transfer length is invalid.
03 Illegal Data Value A value contained in the query data field is not
an allowable value for FlexLine device.
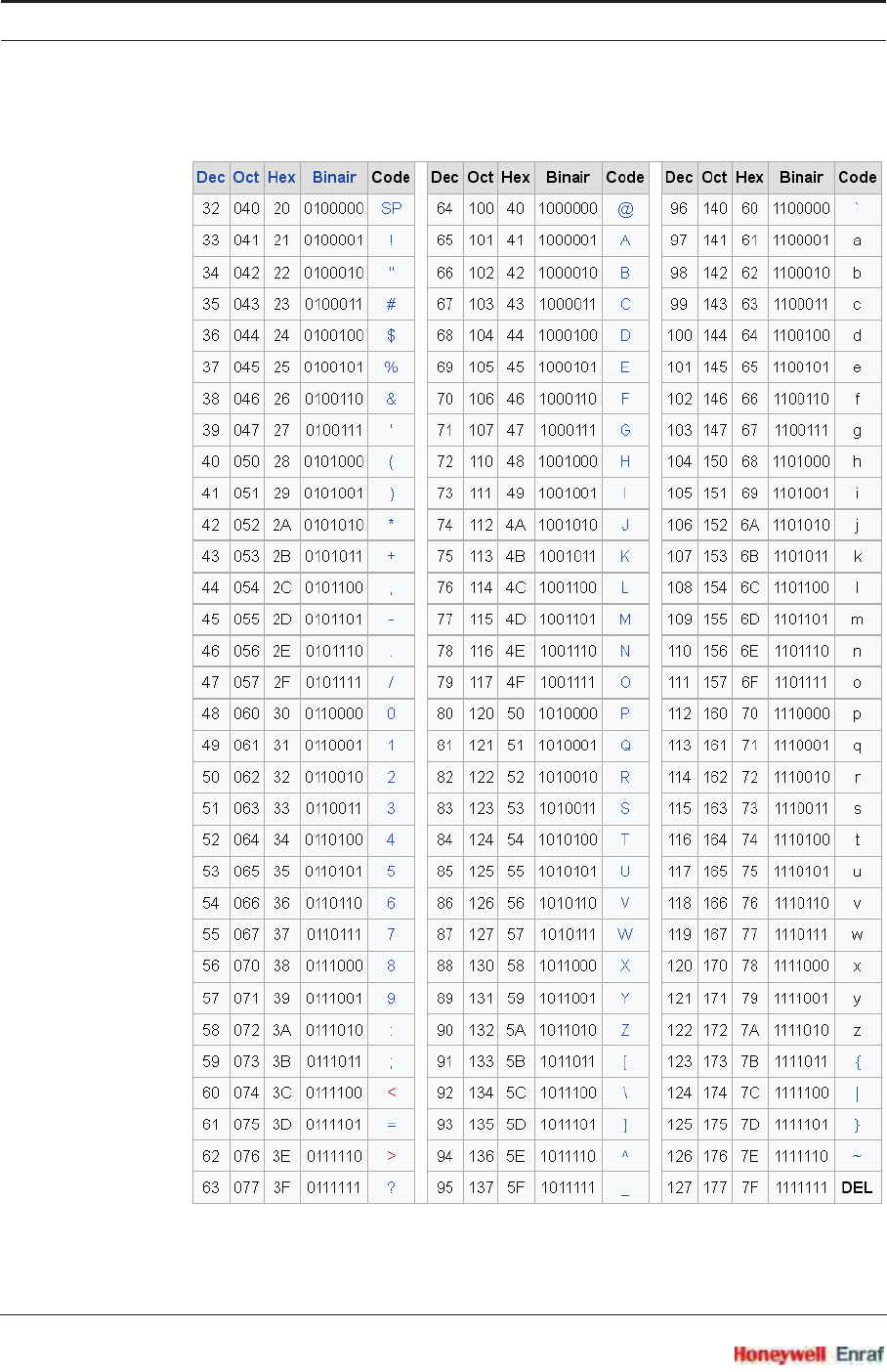
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 34 Service Manual
6.3.4 Standard ASCII codes
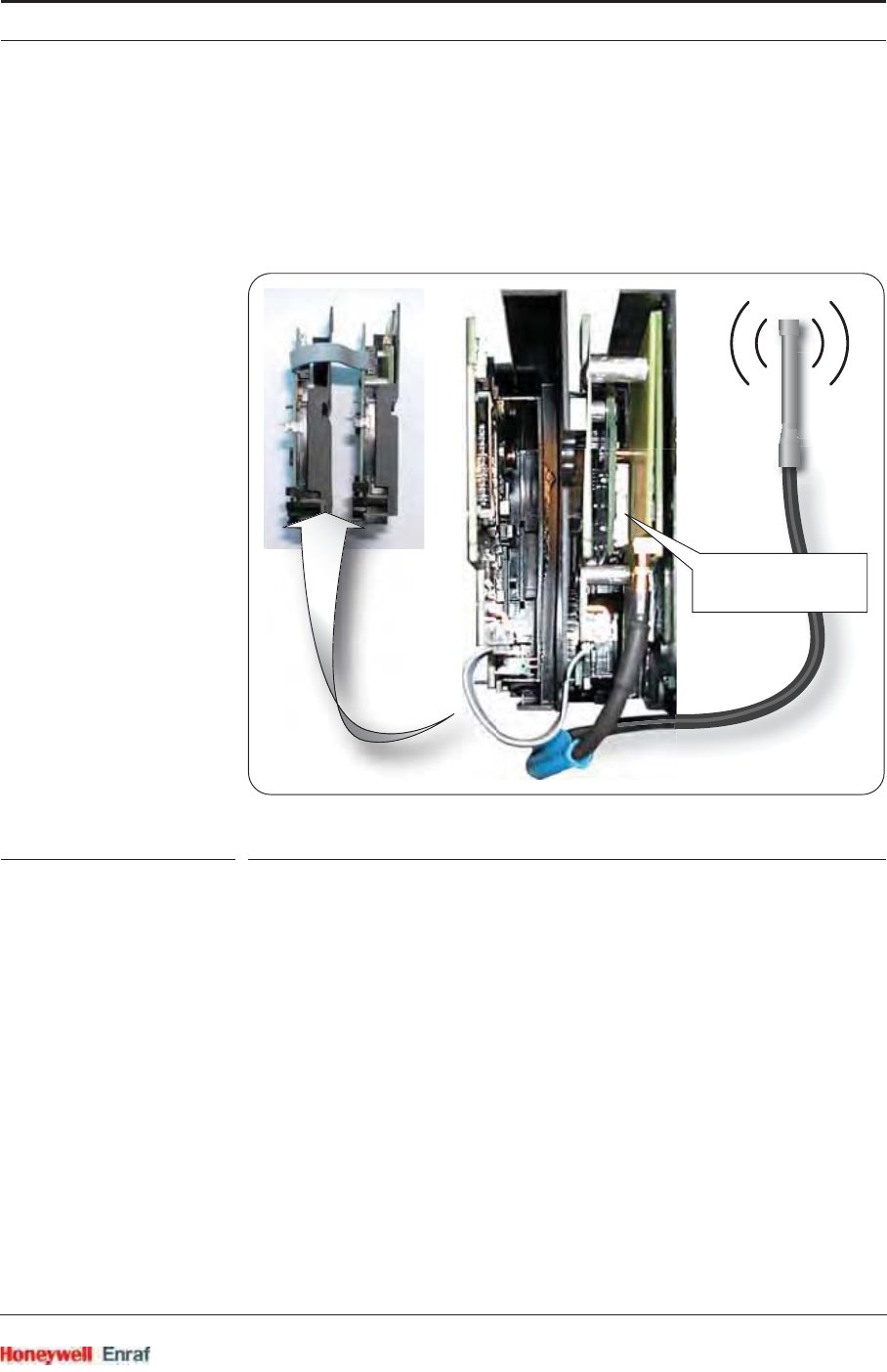
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 35
6.4 The OneWireless Communication Option (HCI-1WL)
6.4.1 Introduction
The Host Communication Instrument OneWireless (HCI-1WL) board is
a communication module for the instrument (gauge).
ESF09-0011
FIGURE 6-4 The HCI-1WL duplex board with flatcable interconnection
This module consists of 2 boards (see FIGURE 6-4): a standard
FlexConn board with a memory-card interface, and an interface board
with a standard Honeywell OneWireless Radio board attached. If this
wireless communication option is installed, the Instrument (gauge) can
communicate with a host system using the OneWireless network via 3
different ways :
Directly via the OneWireless Network (using the HCI-1WL board).
By using a protocol tunnel through the OneWireless network:
• Via the Enraf FlexConn Protocol.
• Via the Enraf GPU protocol.
OneWireless is an all digital, two-way communication mesh network
that interconnects industrial field sensors to a central system.
OneWireless has defined standards to which field devices and operator
stations communicate with one another. The communications protocol
radio module
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 36 Service Manual
is built as an "open system" to allow all field devices and equipment that
are built to the OneWireless standard to be integrated into a system,
regardless of the device manufacturer. This interoperability of devices
using OneWireless technology is to become an industry standard for
automation systems.
In the Onewireless network, devices like the Smartradar FlexLine
publish their measuring values autonomously at the network. Via an
OPC server connected to gateway(s), the data is made available for
further use.
The Honeywell Enraf GPU and FlexConn protocols are implemented for
communication with Honeywell Enraf Tank Inventory Software systems
like Entis Pro, Entis XL, and Entis XS. Additionally, these protocols
enable communication with configuration and diagnostic tools such as
Engauge. These protocols are implemented in the same way as in the
HCI-GPU and HCI-BPM. Therefore they only support the same limited
set of GPU records and so-called items.
6.4.2 Potential Electrostatic Charging Hazard
WARNING! Do NOT wipe the surface of the antenna with dry
cloth, and do NOT clean its surface with a solvent.
If electrostatically charged, discharge of the antenna
surface to a person or a tool could ignite a
surrounding hazardous atmosphere.
6.4.3 Adding a Radar to the OneWireless Network
6.4.3.1 Introduction
Before a radar will be visible in the OneWireless network, it must be
supplied with a correct network security key, so it will be allowed to join
the protected wireless network.
Users must be properly trained in Honeywell OneWireless solutions
before adding the SmartRadar in a OneWireless network. To establish
communication with the Onewireless network the Key Server Manager
and Wireless Builder (R120 or later) tools are required. Please refer to
the respective manuals for details.
CAUTION! France restricts outdoor use to 10mW (10 dBm)
EIRP in the frequency range of 2,454-2,483.5 MHz.
Installations in France must limit EIRP to 10 dBm for
operating modes utilizing frequencies in the range of
2,454 – 2,483.5MHz. For this reason, Honeywell
Enraf does not recommend configuring frequency
hopping modes that use this frequency range.
For installations in France, use only the following
OneWireless Frequency Hopping (FH) Mode
Selections: EU Channel #1, EU Channel #7, NA/EU
Guard Bands and NA/EU Channel 3 (FH Mode
selections #4, 5, 8 and 10).
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 37
6.4.3.2 Preparing the Radar
Before adding a radar to a one wireless Network, old security
information must be removed from the radar. To prevent this from
happening by accident, this functionality is only available via the
SmartView. To erase the security information:
☛Go to [Menu] > [Commands]
☛Enter the password
☛Go to the HCI-1WL
☛Select [Board] and issue the [Restore Default] command.
6.4.3.3 Authentication
☛Ensure the OneWireless Network is operational, including running
Key Server Manager (KSM) software, and at least 1 multi-node
configured as gateway.
☛Use the KSM to write security information to a memory card. See the
Key Server Manager manual for instructions on how to use the key
server. For a sample screen, see FIGURE 6-5.
☛Insert the memory card into the memory card slot of the HCI-1WL
device.
☛Make sure to fully close the device if it is installed in an explosion
hazardous area.
☛Switch on the device
The device will now automatically join the OneWireless network.
You can follow the authentication/joining process by navigating to the
correct page on the SmartView, see 6.4.8.1. Or by using Engauge, see
6.4.9.1, if there is also a wired connection available.
If the message [NOREDUN] or [CONNECT] does NOT become visible, the
authentication failed.
☛If authentication failed, verify that the wireless network is operating
correctly, and try again with a new security key.
Key Server
Manager
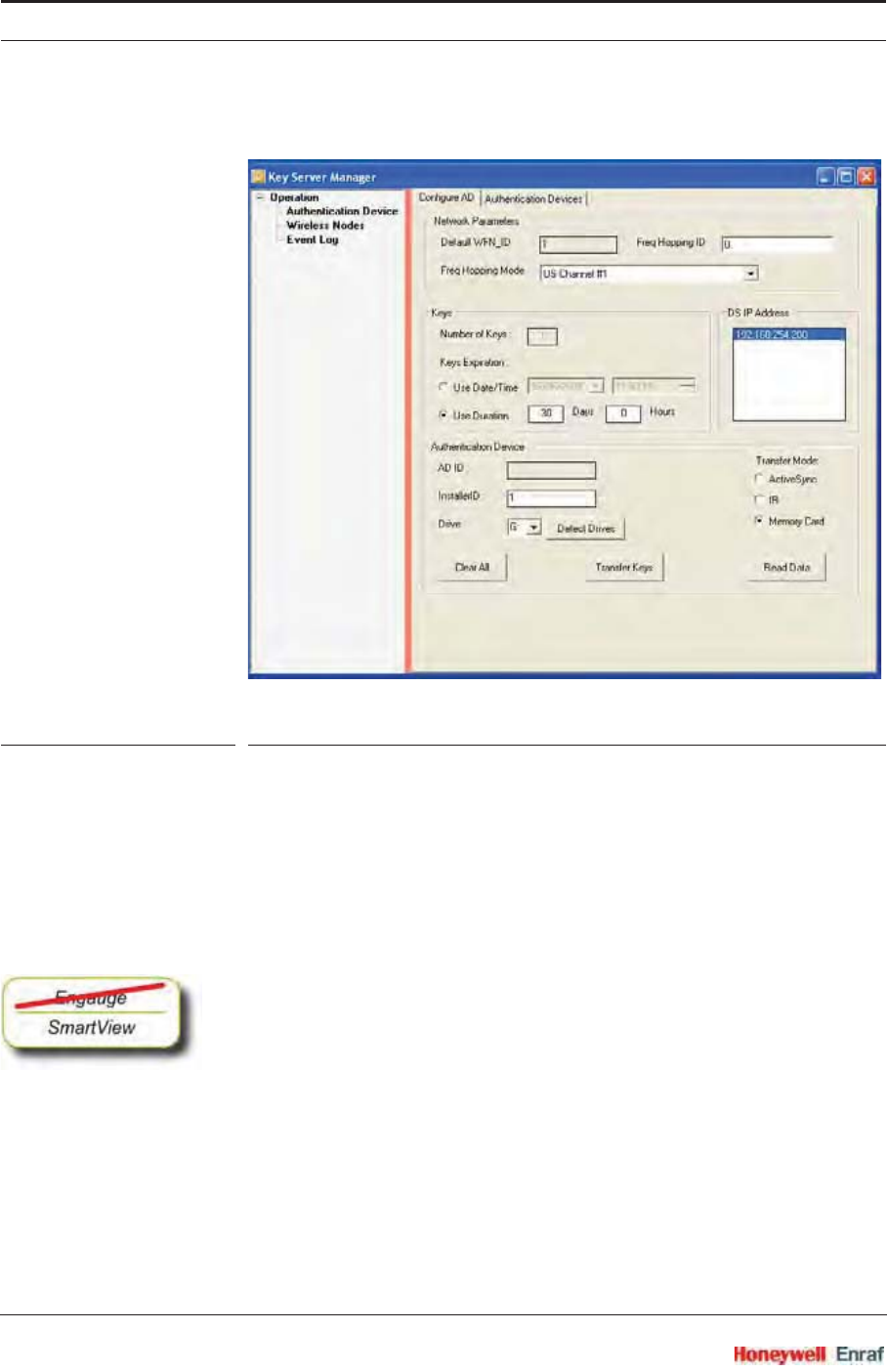
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 38 Service Manual
FIGURE 6-5 Sample screen of the Key Server Manager
6.4.4 Removing a Radar From the OneWireless Network
To remove a radar from a Onewireless Network, the security key
information must be removed from the radar. To prevent this from
happening by accident, this functionality is only available via the
SmartView.
To erase the security key information:
☛Go to [Menu] > [Commands]
☛Enter the password
☛Go to the HCI-1WL
☛Select [Board] and issue the [Restore Default] command.

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 39
6.4.5 Commissioning the HCI-1WL in the OneWireless Network
6.4.5.1 Introduction
Once the authentication process is completed, the SmartRadar can be
commissioned in the OneWireless network.
Before you continue with this step, familiarize yourself with the
Wireless Builder configuration tool for the OneWireless network. For
a detailed operation guide for the Wireless Builder, please refer to the
OneWireless Wireless Builder User’s Guide, R120 or later.
With the Wireless Builder you can create, delete, commission, load, and
unload the SmartRadar just like any other OneWireless devices. You
can also activate and inactivate transducer blocks, and program the
different parameters, such as publication period, as with any other
devices.
Once the Authentication process has been successfully completed, the
SmartRadar will automatically be listed in the Online window of
Wireless Builder as an uncommissioned device.
With a right mouse click it can be commissioned as described in the
Wireless Builder manual.
After having finished all steps before, the SmartRadar will have one
transducer block: Radar Level.
During further commissioning, more transducer blocks can be added.
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 40 Service Manual
6.4.5.2 Transducer Blocks
6.4.5.2.1 Introduction
Besides the Radar Level transducer block, up to 16 additional
transducer blocks can be added to the device via Wireless Builder. This
can easily be done by “drag and drop”.
The specific parameters of all available transducer blocks can be set via
Wireless Builder. This section describes how to use the Configuration
Form to configure the transducer blocks (channels).
Please refer to the Configuring Channels chapter in the OneWireless
manual. This Transducer Blocks section only explains the
additional or non-standard items.
6.4.5.2.2 Adding Transducer Blocks
In order to configure each channel, a user must add transducer blocks
to this device.
☛Expand the device template in the Library tree (click +), to see all
available transducer blocks.
☛Drag and drop the transducer block(s) that must be instantiated
(= made concrete) from the Library tree to the device in the Offline
tree.
NOTE: Each transducer block can only be added to the
instrument once.
☛After adding the relevant transducer block(s), load the device to
activate the transducer blocks.
NOTE: Please refer to Block instantiation in the OneWireless
Wireless builder User’s Guide for more information.
The following additional transducer blocks are available:
Transducer Block See section
Ambient temp -
Average product temperature -
Configurable Transducer block 1 6.4.5.2.5
Configurable Transducer block 2
Configurable Transducer block 3
Configurable Transducer block 4
Observed Density -
Product pressure -
Relay output 1 6.4.5.2.7
Relay output 2
Relay output 3
Relay output 4
Temperature Details 6.4.5.2.6
Wireless
Builder

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 41
All Transducer blocks can be loaded for any SmartRadars. However a
transducer block will only give valid data when a relevant option is
installed in the SmartRadar.
So for temperature transducer blocks to become actual available, an
FII-RTD or FII-VT must be installed in the SmartRadar, and for the
Relay output transducer blocks to work correctly, an FII-DO must be
installed etc.
6.4.5.2.3 General Transducer Block Settings
By clicking on a transducer block of an instrument in the Online window,
a window pops up with more details for this transducer block.
Vapour pressure -
Vapour temperature -
Water level -
Transducer Block See section
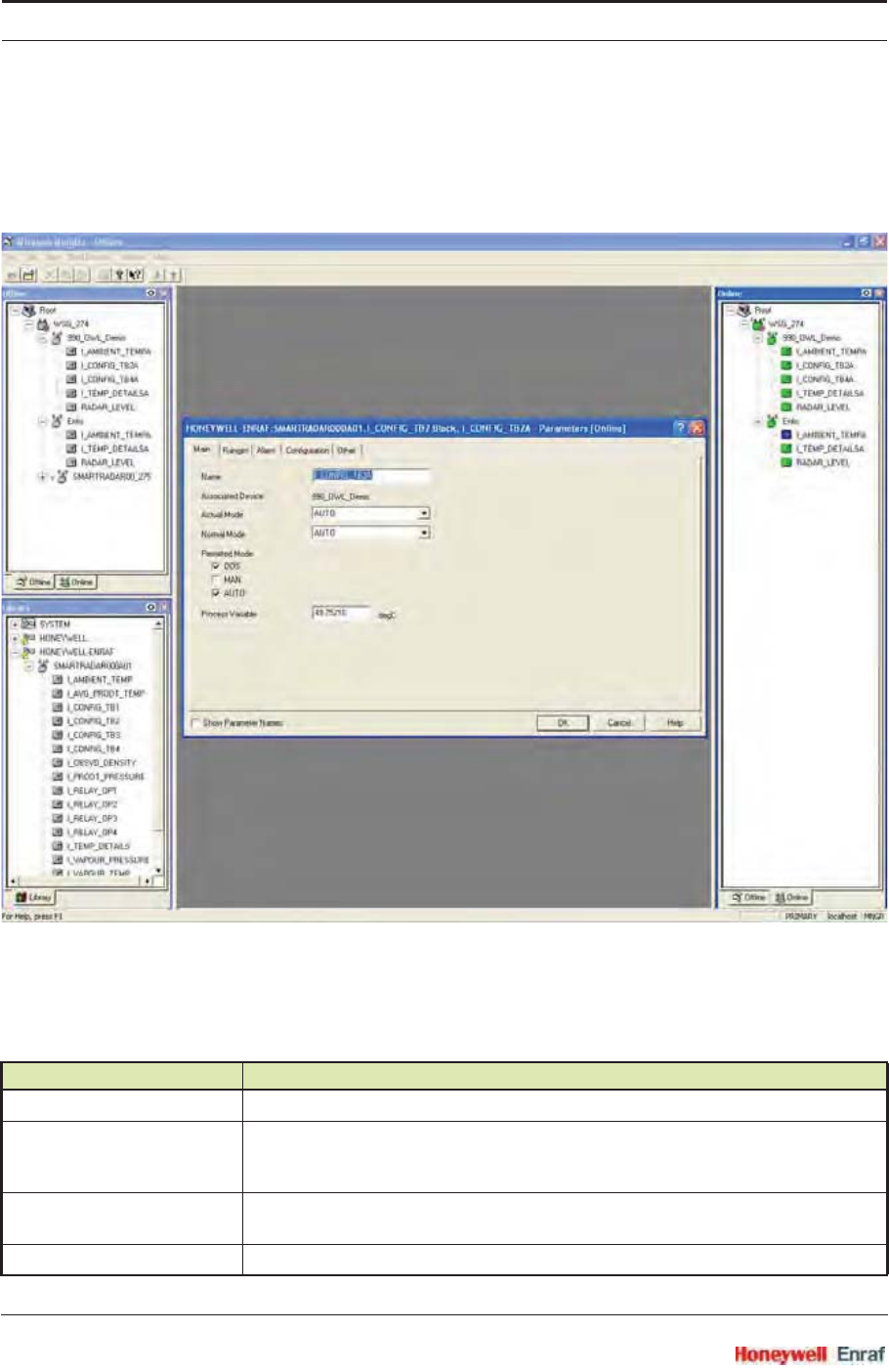
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 42 Service Manual
6.4.5.2.4 Wireless Builder Screens
6.4.5.2.4.1 Main Tab
This tab contains the general settings of the Transducer Block (TB).
Parameter Description
Name Here you can specify the name of the transducer block.
Associated Device The device that contains the transducer block you are editing.
The device name is set during commissioning with Wireless Builder and is stored in
the TAG descriptor entity.
Actual Mode The actual operation mode of the transducer block. This may differ from the normal
mode, for example if the device is Out of Service.
Normal Mode This is the mode the transducer block should be in, in normal situations.
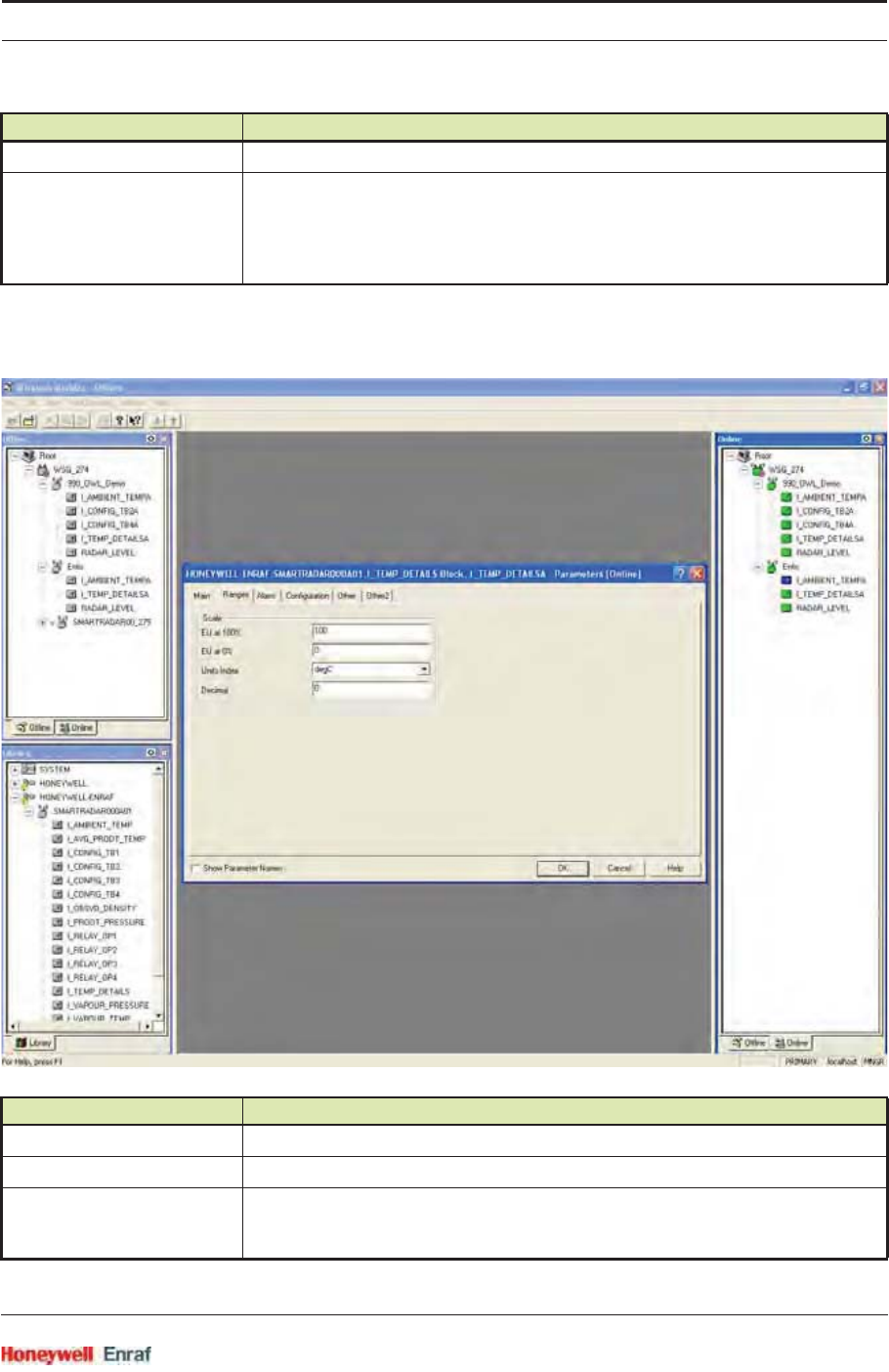
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 43
6.4.5.2.4.2 Ranges Tab
This tab contains the settings for Engineering units.
Permitted Mode With these check boxes you can select the permitted modes for the transducer block.
Process Variable If the transducer block is set to manual mode, you can manually overwrite the
parameter (such as level).
This is not standard within OneWireless. The manual value entered here will also be
available in the FlexConn environment. If the Transducer block is not in Manual mode
an error code will be generated after pressing the OK button.
Parameter Description
EU at 100% Not used in The SmartRadar FlexLine
EU at 0% Not used in The SmartRadar FlexLine
Units Index In this field you can select the required engineering unit from the list of available units.
(Level units for the level TB, and temperature units for the Temperature TB)
Note: For supported units, see 6.4.5.2.8.
Parameter Description
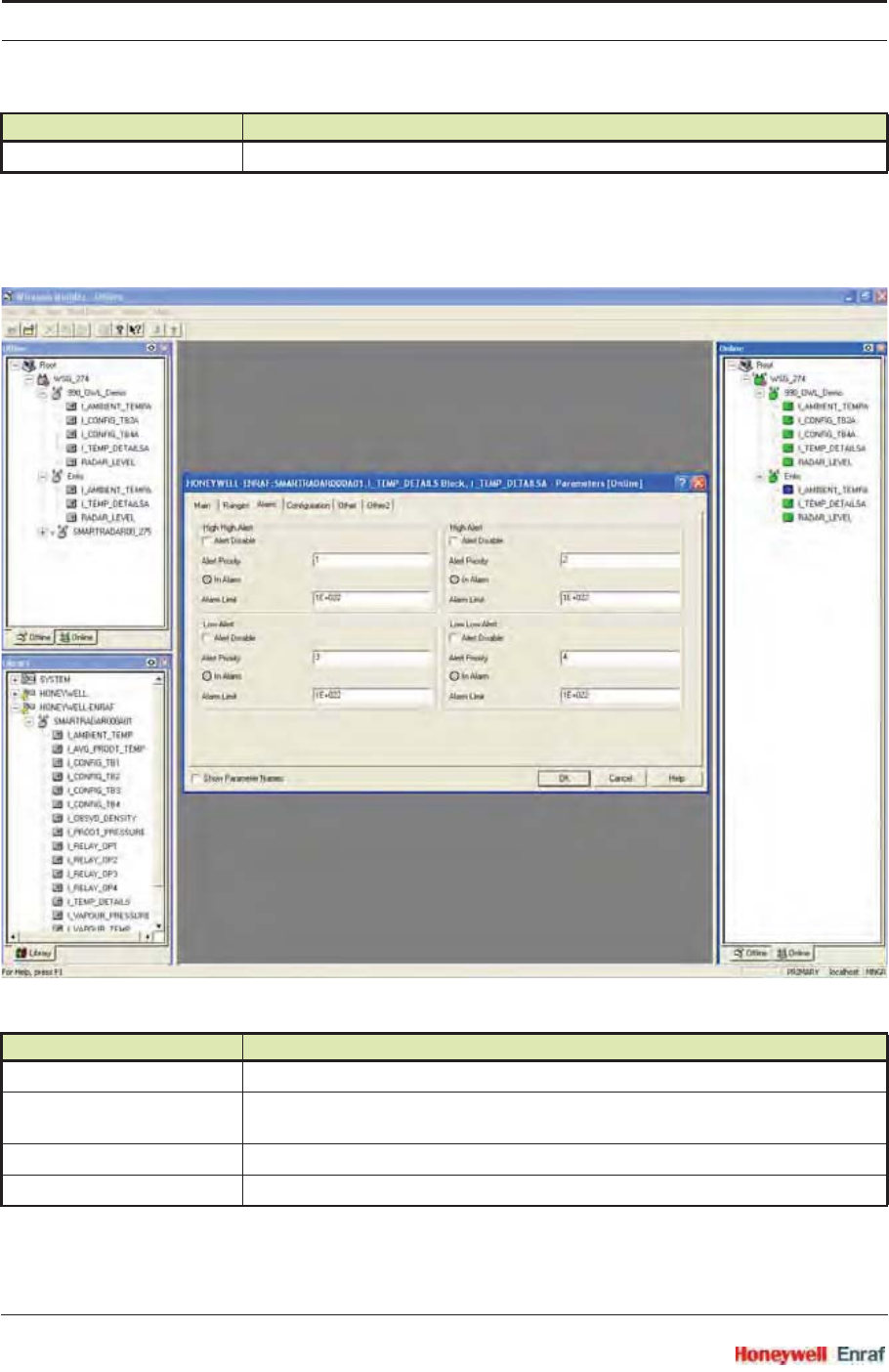
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 44 Service Manual
6.4.5.2.4.3 Alarm Tab
This tab contains the various alarm settings (High high, High, Low, and
Low low).
NOTE: The alarm hysteresis is defined in the “Other” tab.
Decimal Not used in The SmartRadar FlexLine
Parameter Description
Alert Disable With this settings it is possible to disable an alarm.
Alert Priority With this setting it is possible to define the alert priority.
For more information on alert priority, see the Onewireless Documentation.
In Alarm This light shows the actual alarm status.
Alarm Limit This is the alarm trip point.
Parameter Description
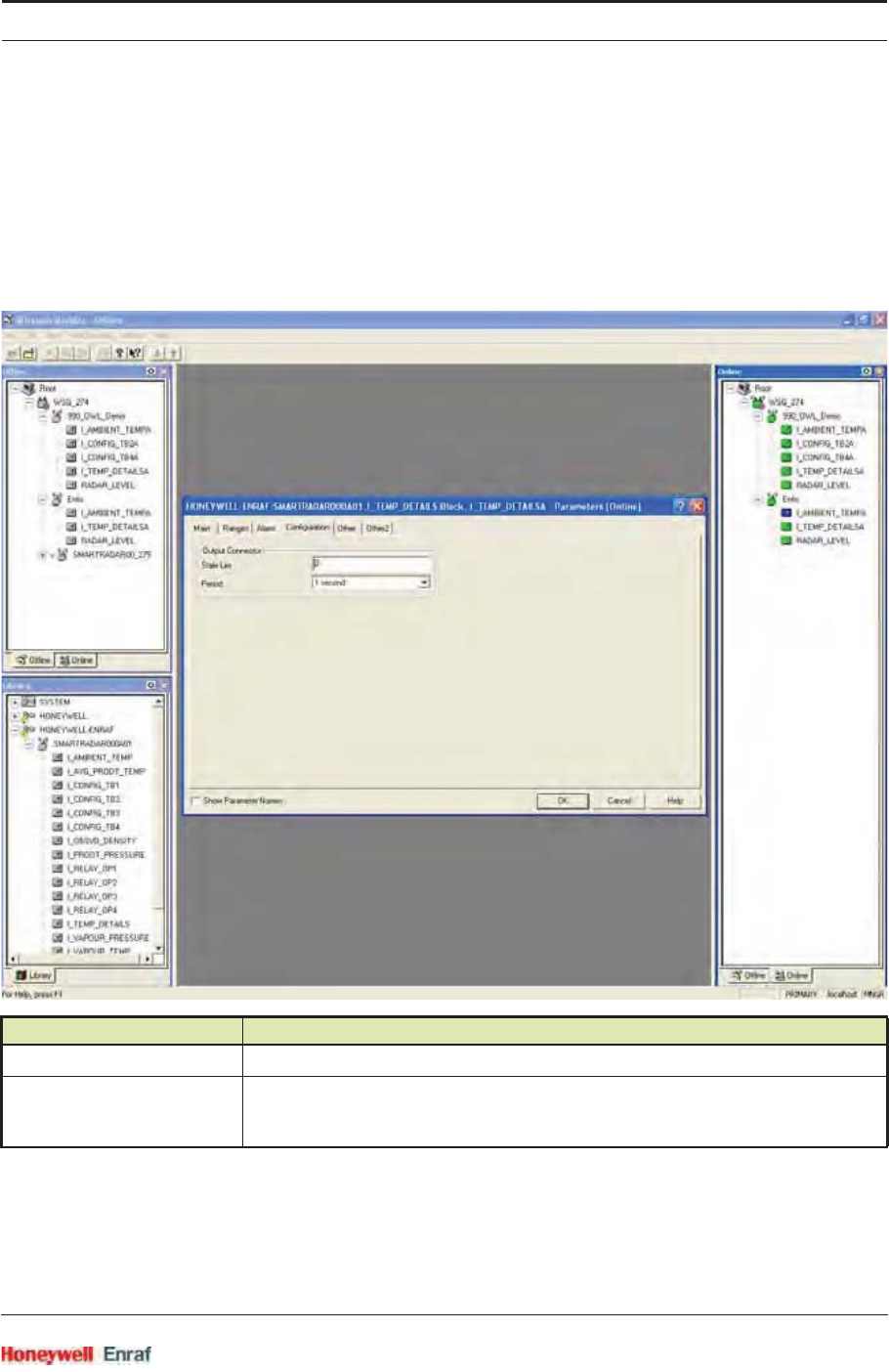
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 45
NOTE: Having alerts on measured variables is not standard
in OneWireless. Be careful using these alarms when
the user is also using Experion. As these alarms will
be visible as system alarms and NOT as process
alarms.
6.4.5.2.4.4 Configuration Tab
This tab describes the publication time and time-out settings.
Parameter Description
Stale Lim Publication data stale limit. For more details, see OneWireless documentation.
Period This setting determines the publication time for the primary variable of this transducer
block. This can be 1, 5, 10, or 30 seconds. For more details, see OneWireless
documentation.
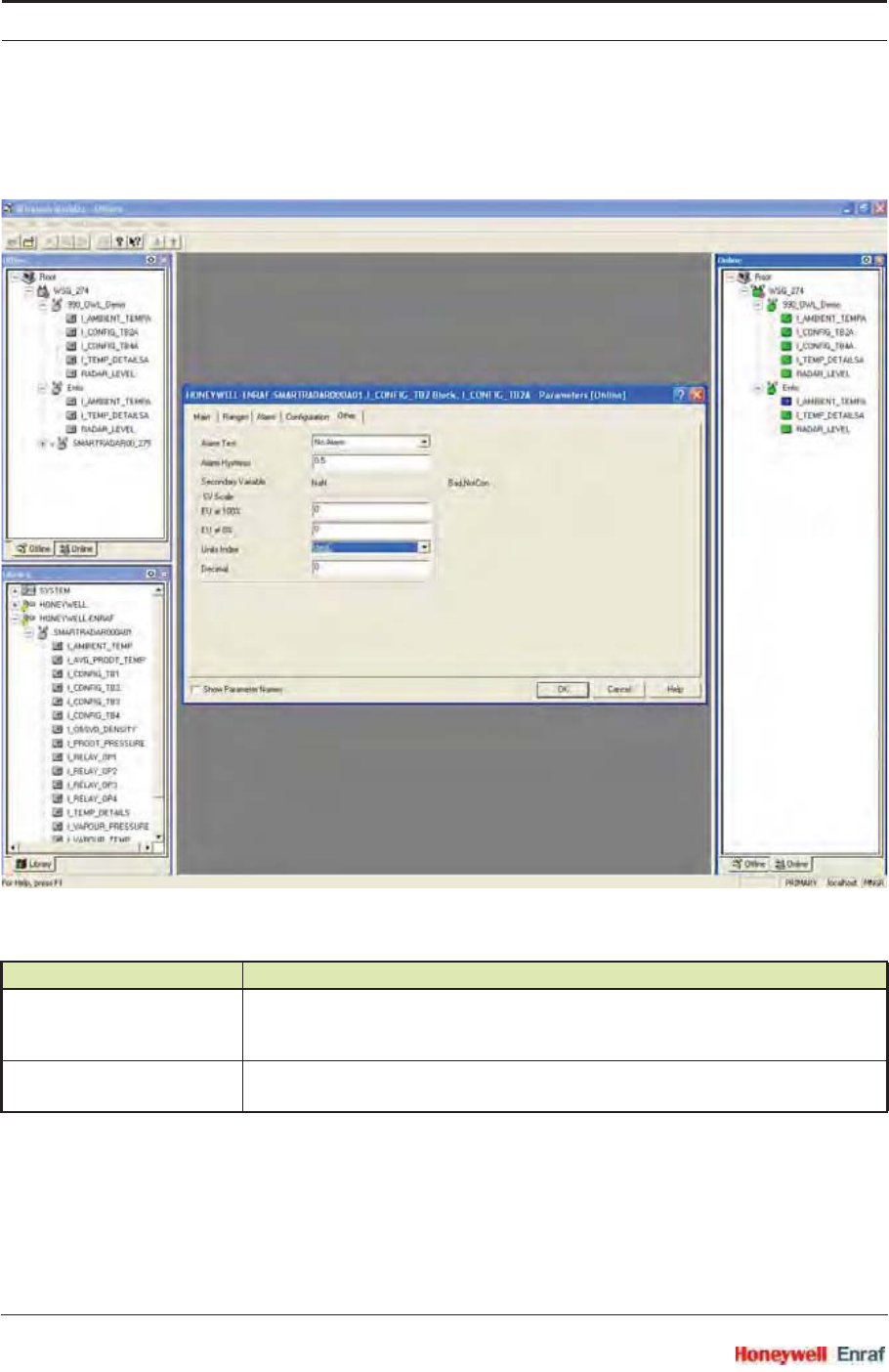
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 46 Service Manual
6.4.5.2.4.5 Other Tab (1)
Via this tab, an alarm test can be initiated.
Parameter Description
Alarm Test By selecting an alarm level to test - High high, High, Low, or Low low - and pressing
OK, the SmartRadar will perform an Alarm test command.
For detail settings, see 6.4.5.2.4.6.
Alarm Hysteresis This is the alarm hysteresis setting.
For detail settings, see 6.4.5.2.4.6.
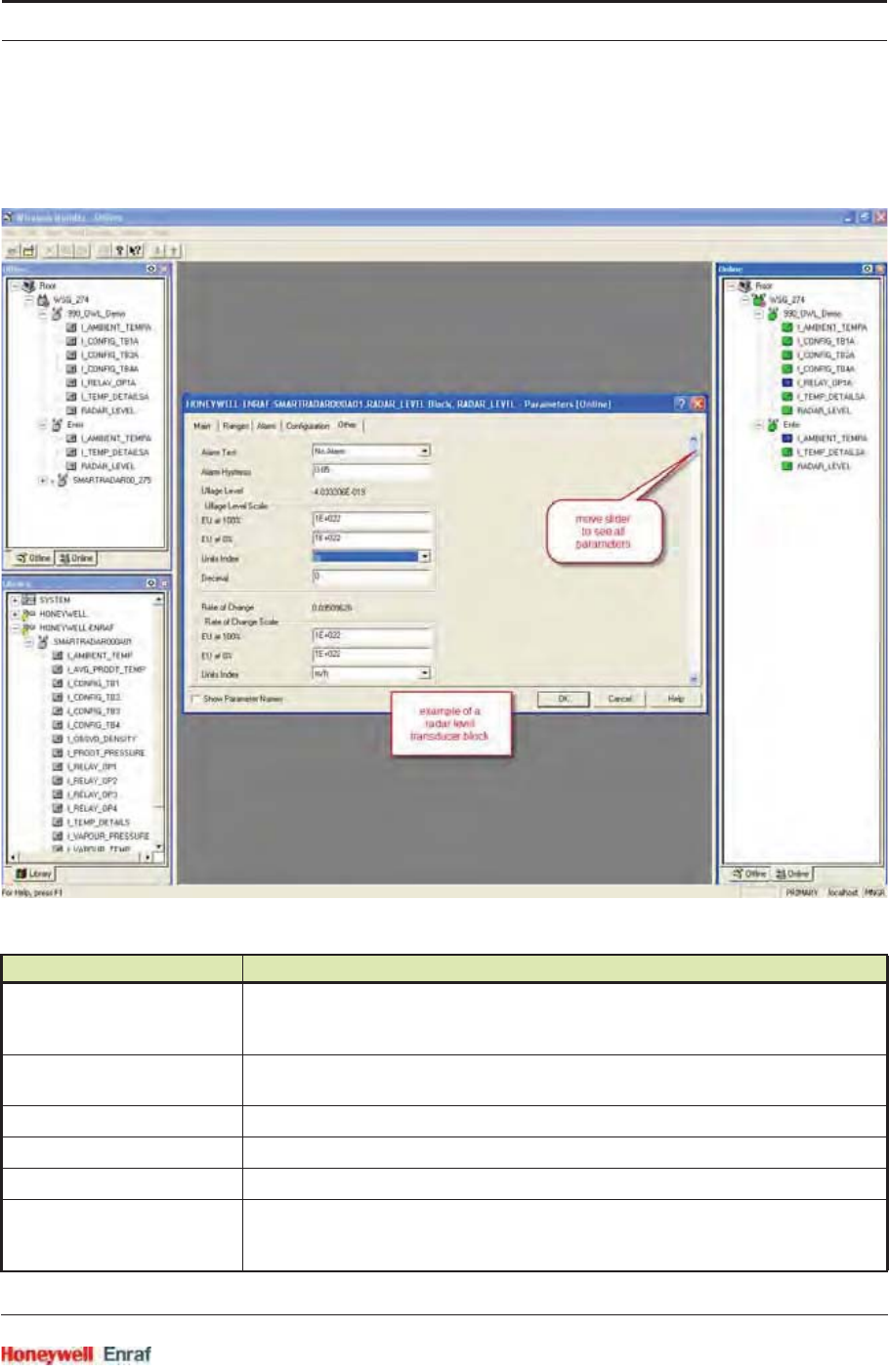
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 47
6.4.5.2.4.6 Other Tab (2)
The following example screen shows possible detail settings of the
Other tab.
Parameter Description
Alarm Test By selecting an alarm level to test - High high, High, Low, or Low low - and pressing
OK, the SmartRadar will perform an Alarm test command.
For detail settings, see 6.4.5.2.4.6.
Alarm Hysteresis This is the alarm hysteresis setting.
For detail settings, see 6.4.5.2.4.6.
Ullage Level Scale:
- EU at 100% Not used in the SmartRadar FlexLine
- EU at 0% Not used in the SmartRadar FlexLine
- Units Index In this field you can select the required engineering unit from the list of available units.
(level units for the level TB, and temperature units for the temperature TB).
Note: For supported units, see 6.4.5.2.8.
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 48 Service Manual
6.4.5.2.5 Configurable Transducer Block Settings
The configurable transducer blocks are special in the way that they do
not represent a fixed input function of the SmartRadar. Configurable
transducer blocks can be programmed to represent any available
functions on any of the available FlexConn boards in the SmartRadar.
NOTE: The configuration of the configurable transducer
blocks must be done using Engauge.
The current firmware version does have some limitations on what can
be programmed in these transducer blocks.
Configurable Transducer block 1 can only represent Levels. This is
valid for both the PV and the SV.
Configurable Transducer block 2 can only represent Temperatures.
This is valid for both the PV as the SV.
Configurable Transducer block 3 can only represent either pressure
or Density. This is valid for both the PV and the SV.
Configurable Transducer block 4 can represent parameters with
variable dimensional units. The following parameters are supported:
Level, Temperature, Pressure, Density, Current, or NO UNIT. This is
valid for both the PV and the SV.
In wireless builder these limitations must be taken into account when
changing the units index, for both the PV as the SV. Selecting a
dimensional unit that is not supported by the Transducer block will give
an error message.
The Units Index for the PV can be found on the Ranges tab.
- Decimal Not used in the SmartRadar FlexLine
Rate of Change Scale:
- EU at 100% Not used in the SmartRadar FlexLine
- EU at 0% Not used in the SmartRadar FlexLine
- Units Index In this field you can select the required engineering unit from the list of available units.
(level units for the level TB, and temperature units for the temperature TB).
Note: For supported units, see 6.4.5.2.8.
- Decimal Not used in the SmartRadar FlexLine
Example
Configurable Transducer block 1 could be programmed to represent
the radar level from the CAN-XBAND. Then the PV of this tranducer
block will represent the PV of the radar level function, the Innage
value. The SV of this transducer block will represent the SV of the
radar level function, the Ullage level.
Parameter Description
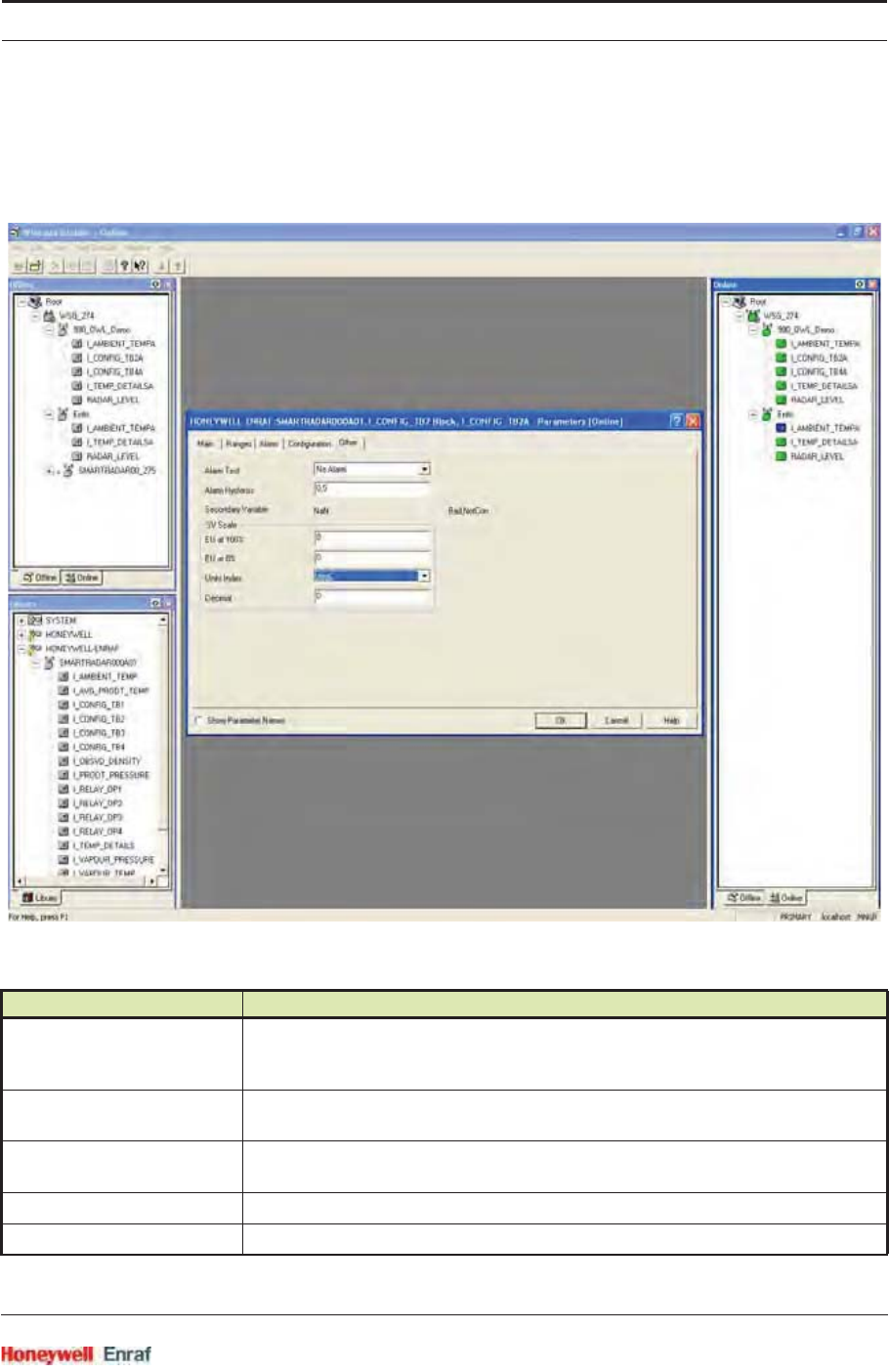
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 49
The Units Index for the SV can be found on the Other tab. This tab has
a different layout than in a standard transducer block, and is described
hereafter.
Parameter Description
Alarm Test By selecting an alarm level to test - High high, High, Low, or Low low - and pressing
OK, the SmartRadar will perform an Alarm test command.
For detail settings, see 6.4.5.2.4.6.
Alarm Hysteresis This is the alarm hysteresis setting.
For detail settings, see 6.4.5.2.4.6.
Secondary Variable The secondary variable of this transducer block. This Secondary Variable equals the
Secondary Value (SV) of the assigned FlexConn function.
- EU at 100% Not used in the SmartRadar FlexLine
- EU at 0% Not used in the SmartRadar FlexLine
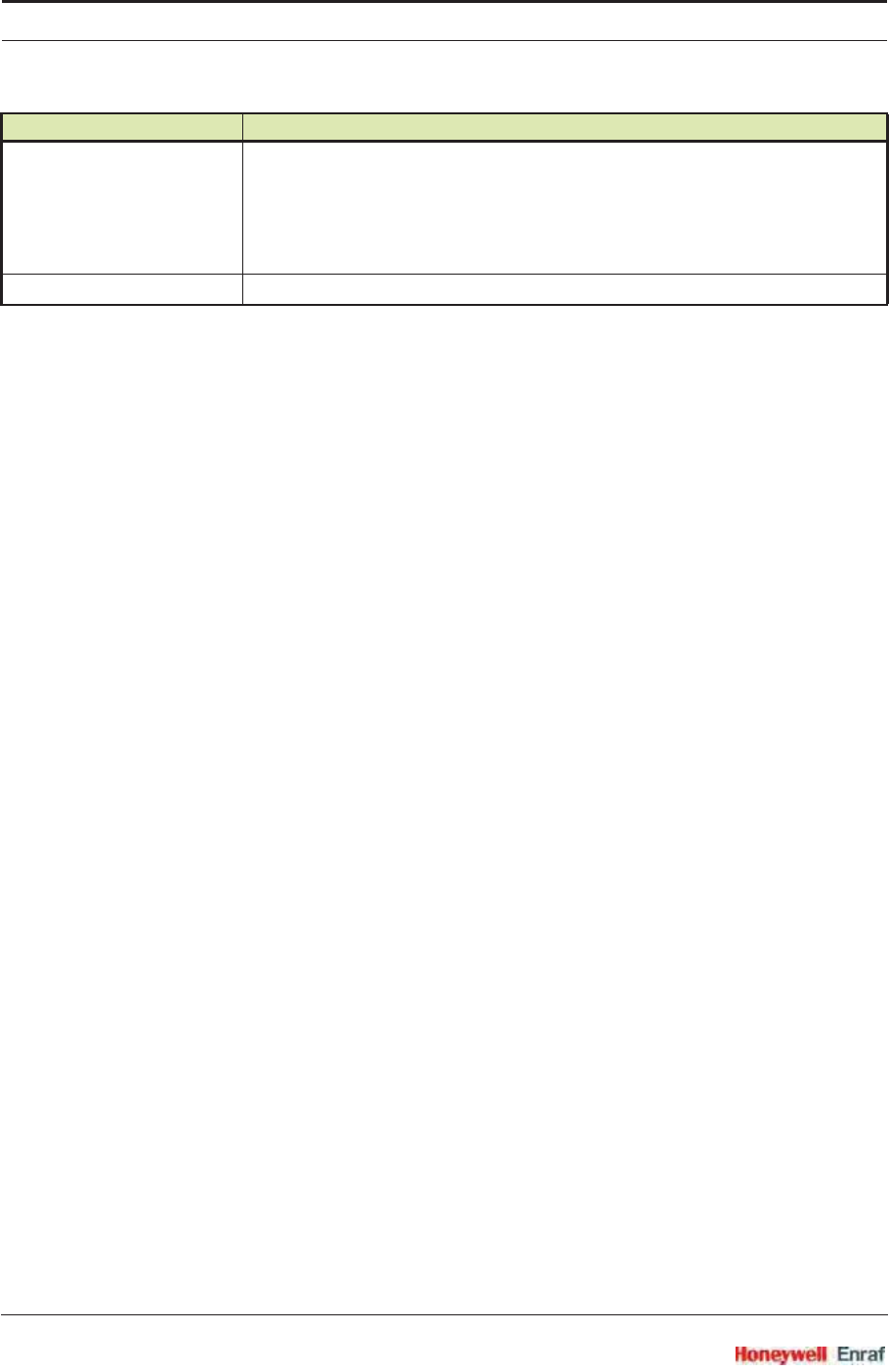
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 50 Service Manual
6.4.5.2.6 Temperature Details Transducer Block Settings
The Temperature Details transducer block is an additional temperature
transducer block that can be used if details of individual temperature
elements (for example, to make a temperature profile) are relevant.
Just like the Average product temperature transducer block, it publishes
the average product temperature as PV and the Vapour Temperature as
SV.
The additional parameters can be used via Wireless Builder or the OPC
server.
NOTE: This Transducer block is not necessary when making
temperature profiles via a tool that uses GPU
communication.
- Units Index In this field you can select the required engineering unit from the list of available units.
(level units for the level TB, and temperature units for the temperature TB).
Note: See also limitations described before.
Note: For supported units, see 6.4.5.2.8.
- Decimal Not used in the SmartRadar FlexLine
Parameter Description
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 51
The temperature details can be found on the Other tab that. This tab
has a different layout than it has in a standard transducer block. It is
described below.
Parameter Description
Alarm Test By selecting an alarm level to test - High high, High, Low, or Low low - and pressing
OK, the SmartRadar will perform an Alarm test command.
For detail settings, see 6.4.5.2.4.6.
Alarm Hysteresis This is the alarm hysteresis setting.
For detail settings, see 6.4.5.2.4.6.
Average Vapour temperature This is the average vapour temperature
EU at 100% (avg temp scale) Not used in the SmartRadar FlexLine
EU at 0% Not used in the SmartRadar FlexLine
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 52 Service Manual
Units Index In this field you can select the required engineering unit from the list of available units.
(level units for the level TB, and temperature units for the temperature TB).
Note: For supported units, see 6.4.5.2.8.
Decimal Not used in the SmartRadar FlexLine
Average Ambient temperature This is the average ambient temperature
Lowest element offset Offset of lowest temperature element relative to the bottom of the tank
Element position 1...8 Position of the temperature elements 1...8
Element position 9...16 Position of the temperature elements 9...16
EU at 100% (level scale) Not used in the SmartRadar FlexLine
EU at 0% Not used in the SmartRadar FlexLine
Units Index In this field you can select the required engineering unit from the list of available units.
(level units for the level TB, and temperature units for the temperature TB).
Note: For supported units, see 6.4.5.2.8.
Decimal Not used in the SmartRadar FlexLine
Element temperature 1...8 Temperature of element 1...8
Element temperature 9...16 Temperature of element 9...16
Element temperature status
1...8
Status of element temperature 1...8
Element temperature status
9...16
Status of element temperature 9...16
Number of elements Number of installed temperature elements
MRT or RTD element type Type of installed temperature element
TPL = MTT Honeywell Enraf
QSA = MRT Sangamo
SPL = Spot PT100 Large
SPS = Spot PT100 Small
SNI = Spot Ni191
SSS = Spot Sangamo CU90
SCB = Spot Beacon CU90
SCN = Spot CU90 Nulectohm
Parameter Description
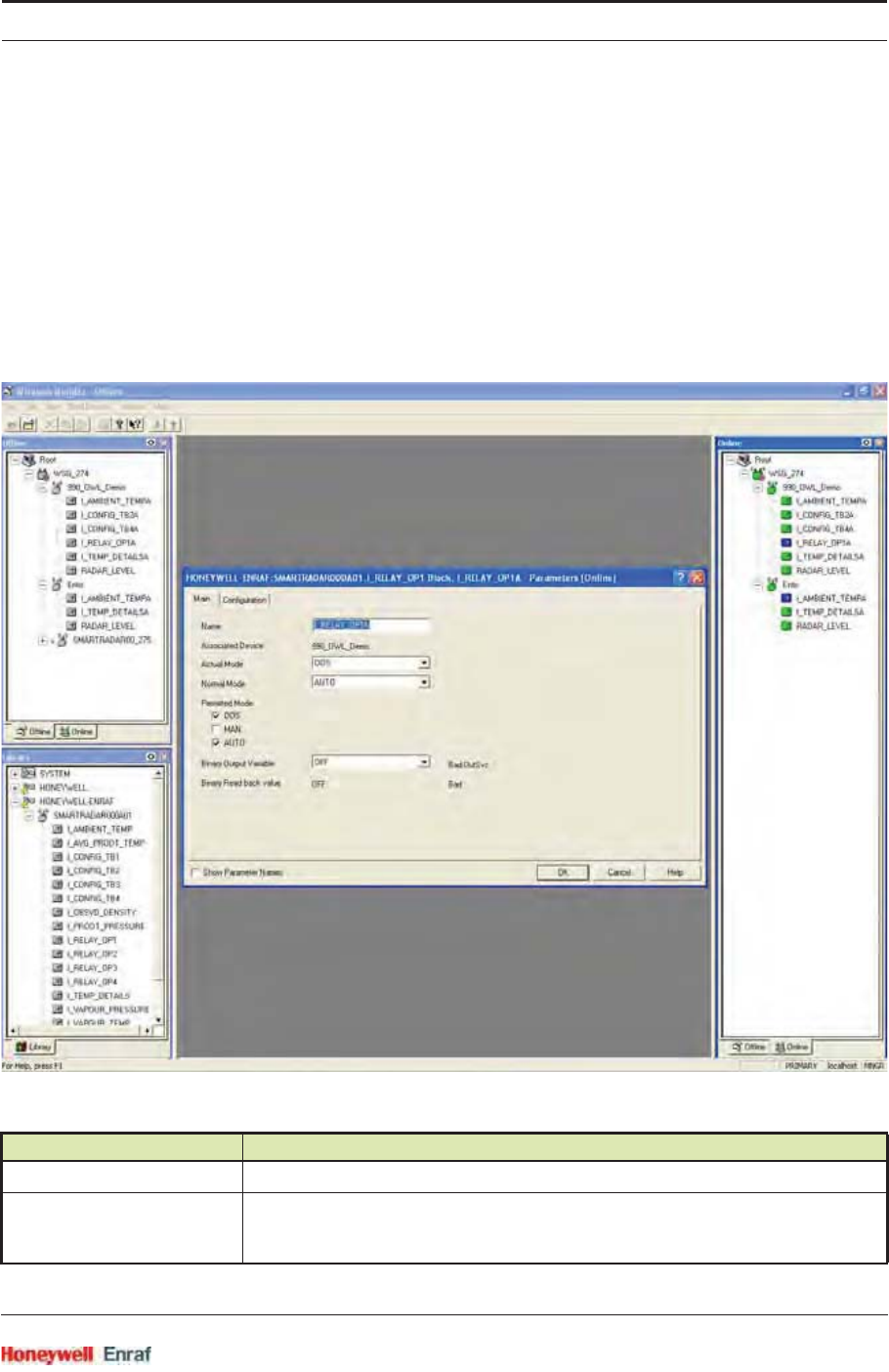
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 53
6.4.5.2.7 Relay Output Transducer Block Settings
The Relay output transducer blocks are standard Binary Output
transducer blocks. (In contrast to all other transducer blocks, which are
Analog Input transducer blocks.)
There are 4 relay output blocks, each representing one of the 4 relays
that can be installed in the SmartRadar FlexLine. These transducer
blocks can be used to remotely control the relays, provided these relays
are programmed as remote controllable in Engauge.
For sample screens and parameter descriptions, see below.
Parameter Description
Name Here you can specify the name of the transducer block.
Associated Device The device that contains the transducer block you are editing.
The device name is set during commissioning with Wireless Builder and is stored in
the TAG descriptor entity.
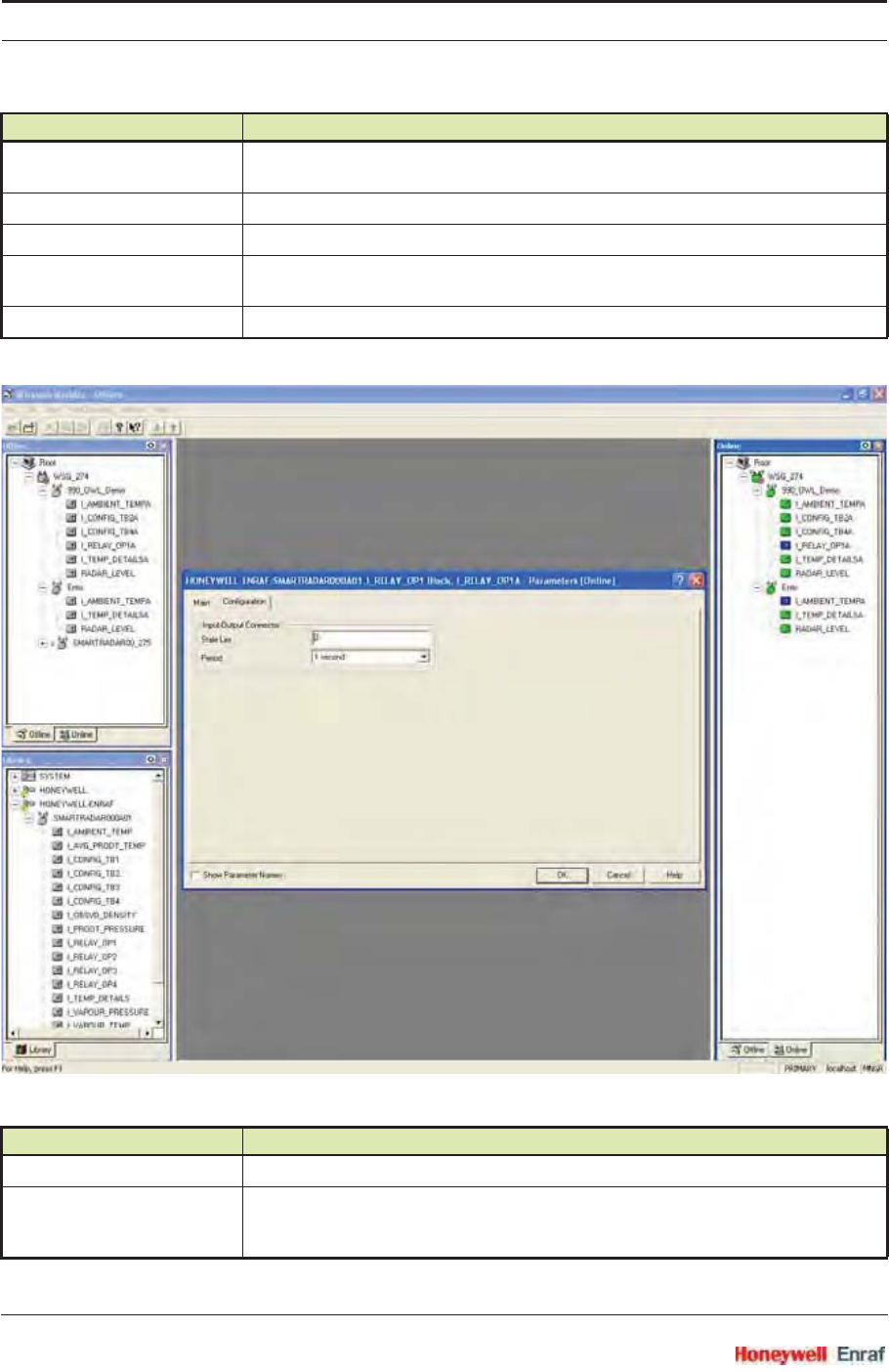
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 54 Service Manual
Actual Mode The actual operation mode of the transducer block. This may differ from the normal
mode, for example if the device is Out of Service.
Normal Mode This is the mode the transducer block should be in, in normal situations.
Permitted Mode With these check boxes you can select the permitted modes for the transducer block.
Binary Output Variable This field can be used to control the relay. This field has no function if the relay itself is
not programmed to be a remote controlled relay.
Binary Read back value This is the read-back value that represents the actual position of the relay.
Parameter Description
Stale Lim Publication data stale limit. For more details, see OneWireless documentation.
Period This setting determines the publication time for the primary variable of this transducer
block. This can be 1, 5, 10, or 30 seconds. For more details, see OneWireless
documentation.
Parameter Description
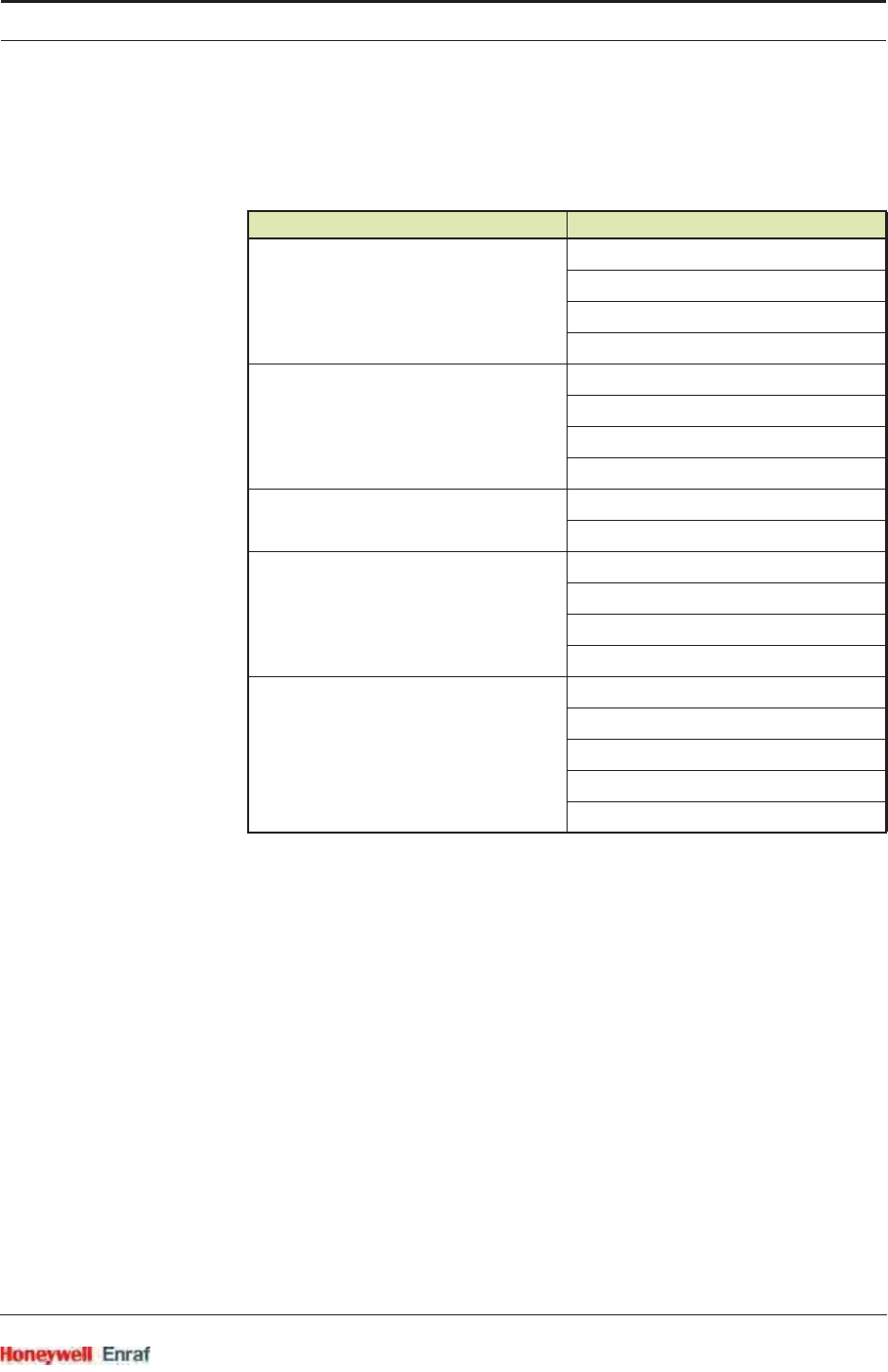
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 55
6.4.5.2.8 Supported Units
The SmartRadar Flexline supports the following units:
6.4.6 Commissioning the HCI-1WL Configurable Transducer Blocks
The configuration of the configurable transducer blocks can not entirely
be done via Wireless Builder. To configure the configurable transducer
blocks, the following entities must be set by using Engauge.
NOTE: These settings are only available for Engauge
Professional users.
Parameter Supported Units
Level and position Meters (m)
Millimeters (mm)
Inches (in)
Feet (ft)
Level rate of change Millimeters / second (mm/s)
Meters / hour (m/h)
Inch / minute (in/min)
Feet / minute (ft / minute)
Temperature Degrees Celsius (ºC)
Degrees Fahrenheit (ºF)
Pressure Pascal (Pa)
kilo Pascal (kPa)
bar
psi
Density kg / m3
kg / l
g / ml
lbs / ft3
deg API
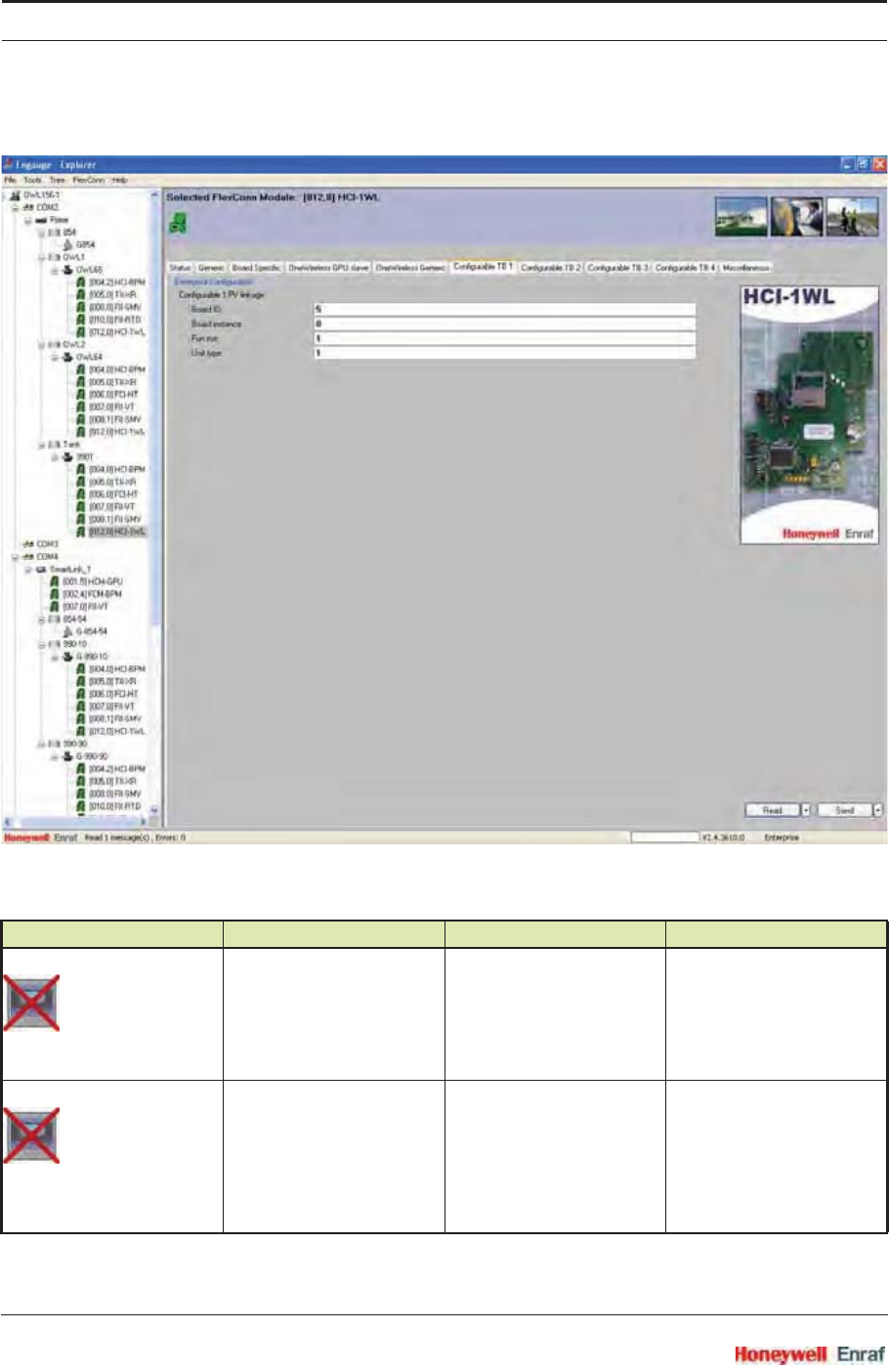
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 56 Service Manual
Name Explanation Value Range Default
[Board ID] The board ID of the board
that contains the function
you want to map to the
configurable transducer
block. Look in the board list
which boards are available.
<0...255> <0>
[Board Instance] The board instance of the
board that contains the
function you want to map.
This is usually 0. Look in
the board list to see if any
boards are available more
than once in the instrument.
<0...7> <0>
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 57
All 4 configurable transducer blocks have the same settings in
Engauge. However the various configurable transducer blocks are
reserved for particular types of data:
Configurable Transducer block 1 is reserved for level data
Configurable Transducer block 2 is reserved for temperature data
Configurable Transducer block 3 is reserved for density and pressure
data
Configurable Transducer block 4 can be used for any of the data
types mentioned above.
The Secondary Variable (SV) of the configurable function block is
automatically assigned to the Secondary Value of the FlexConn board
function that is linked to the Primary Variable PV as described before.
6.4.7 Commissioning the HCI-1WL for GPU and FlexConn Communication
By using a protocol tunnel through the OneWireless network, it is
possible to connect the standard Honeywell Enraf Entis systems, or
service tools.
The physical connection between the Entis systems or service tools is
either via an Ethernet connection to the Gateway, or via an RS-232 line
through a Lantronix RS-to-Ethernet convertor to the Gateway. See
chapter 4.2.1 for details.
[Function Instance] This identifies the function
which data you want to map
to this transducer block.
<0...15> <0>
[Unit Type] The unit type is necessary
to identify in One Wireless.
<0...5> <0>
units of data:
0 = no unit
1 = level
2 = temperature
3 = pressure
4 = density
5 = current
Example
To link a configurable transducer block to the Radar Level of
the TII-XR, the following settings need to be configured:
[Board ID] = 5
[Board instance] = 0
[Function instance] = 1
[Unit type] = 1
Name Explanation Value Range Default
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 58 Service Manual
For a correct functioning of the HCI-GPU module in an instrument
(gauge), the following entities can be set by using either Engauge or
SmartView.
☛By using the following table, check each entity for correctness.
Name Value Range Default Value Explanation
[Identification] 8 characters e.g.
<TANK1234>
<--------> Name of a tank or
instrument
[GPU instrument address] <0..99> <0> The address of this
instrument for GPU
messages.
Note: Each instrument must
have a unique GPU
address.
[GPU Caching] <caching off>
<GPU B record>
<GPU C record>
<GPU D record>
<GPU L record>
<GPU M record>
<caching off> By switching on caching,
the system performance
can be greatly improved.
Switching caching on for a
record means that the
OneWireless network will
automatically keep an up-
to-date copy of this record
in the internal cache of the
gateway. This copy will be
refreshed each second.
Any request for this record
will NOT be sent to the
instrument but directly be
answered from the cache.
Note: Do not use this
setting for W&M approved
systems.
[FlexConn instrument address] <0..1899> <0> The address of this
instrument for FlexConn
messages.
Note: Each instrument must
have a unique FlexConn
address.
[Level units] <meters>
<inches>
<feet>
<fractions>
<meters> The unit in which level-
related GPU records and
items are shown
[Temperature units] <celsius>
<fahrenheit>
<celsius> The unit in which
temperature-related GPU
records and items are
shown
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 59
☛After having checked/set all before listed entities, make sure
the [Board Commissioned] and the [OneWireless GPU slave Commissioned]
entities are <True>;
the [Board Health] and the [OneWireless GPU slave Health] entities are <GOOD>.
[Pressure units] <pascal>
<kilo pascal>
<psi small> (2 digits before
separator)
<psi large> (3 digits before
separator)
<pascal> The unit in which pressure-
related GPU records and
items are shown
[Density units] <kilogram m3>
<degrees API>
<pounds ft3>
<kilogram m3> The unit in which density-
related GPU records and
items are shown
[Decimal separator] <point>
<comma>
<point> The decimal separator in
which GPU-related records
and items are shown
[Level type] <innage>
<ullage>
<innage> The level-related GPU
records and items can be
shown as an innage or
ullage.
Note:
•Innage is the level of the
product measured from
the bottom.
•Ullage is the level of
free space from the roof
till the product.
[Password] <......> 6 characters <ENRAF2> Password for entering the
protected level.
Note: Some settings reside
under the protected level.
[Function identification] <......> 13 characters <GPU-slave> The name of the current
function of this module.
This name is visible on the
SmartView display.
Name Value Range Default Value Explanation
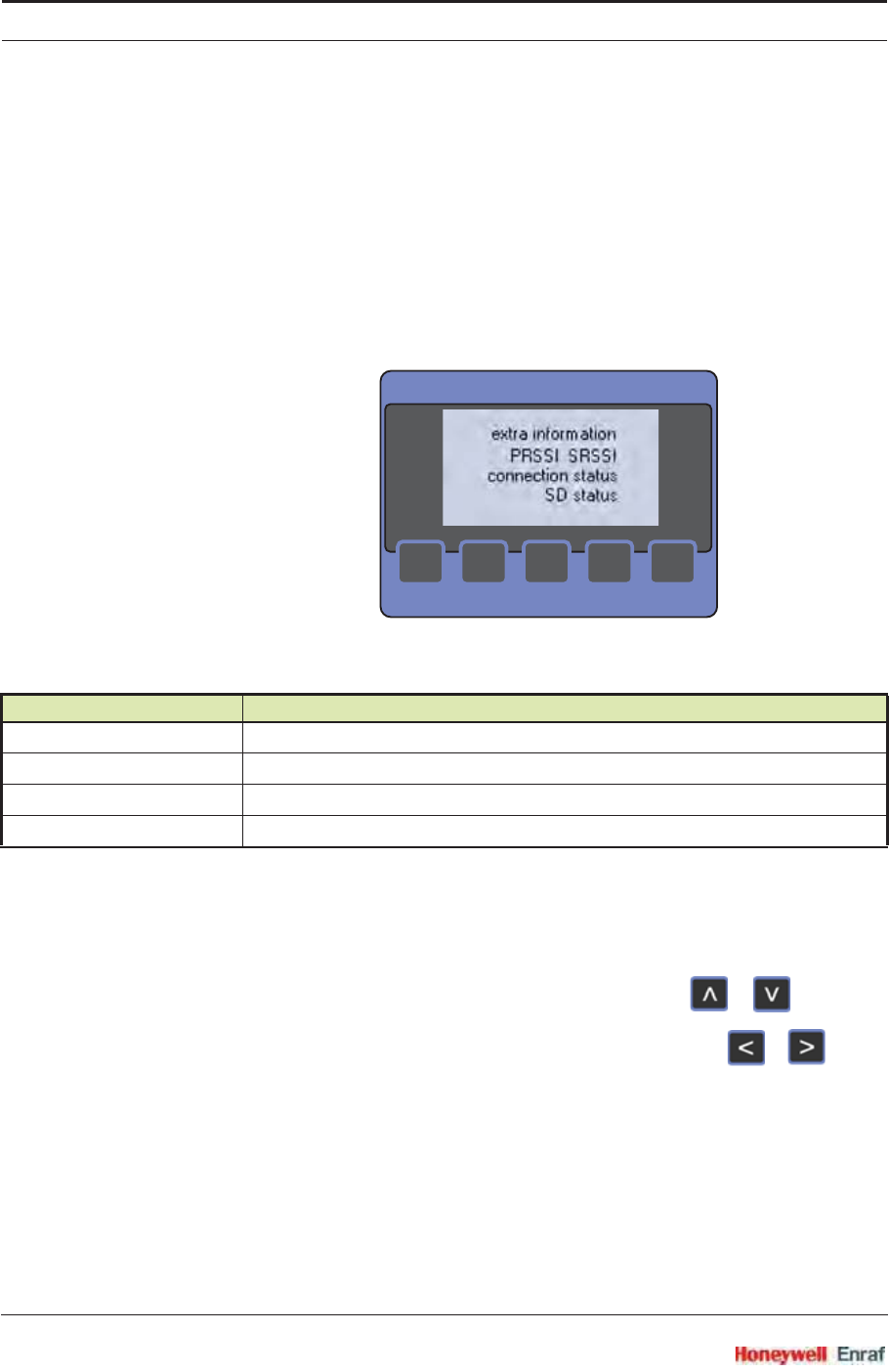
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 60 Service Manual
6.4.8 Using the SmartView with the OneWireless Communication Option
6.4.8.1 Introduction
The SmartView replaces the display that is usually available on
OneWireless transmitters.
6.4.8.2 SmartView OneWireless Status Display
At the Smartview, there is a special OneWireless status display
available, called the [extra information] display. See screen below.
This screen is required during commissioning for the authentication
process and to check the wireless connection quality. It can also be
used in case of wireless connection problems.
☛At the Smartview, enter the menu by pressing +
simultaneously.
☛Scroll to the menu item [extra information], and press +
simultaneously, to enter the OneWireless screen.
NOTE: Since this [extra information] screen is also used for
other purposes, it may be possible that you have to
configure the 990 SmartRadar to show this screen
when the [extra information] menu item is selected.
This can be done on the SmartView itself or by using
Engauge, see 6.7.2.
Parameter Description
PRSSI Primary RSSI = Signal strength indicator for primary wireless connection
SRSSI Secondary RSSI = Signal strength indicator for the redundant wireless connection
Connection status Radio connection status
SD Status SD-memory card status
><
<
<
MAIN
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 61
Signal strength (RSSI = Radio Signal Strength Indicator)
The signal strength is shown in dBm. Below -80 to -85 dBm no reliable
connection is possible.
When there is no redundant wireless connection the secondary RSSI
does not show a relevant value.
Connection status
In the display of the Smartview the following Connection status
messages can / will be visible:
SD Status
In the display of the SmartView one out of the following SD card
statuses will be visible:
6.4.9 Radio Board Diagnostic Information and Commands
6.4.9.1 Introduction
Diagnostic information, such as the data in the [extra information] screen,
and more, can also be read using Engauge (professional version), or
with the [Commissioning] screen of the SmartView.
Additionally, there are 3 commands that can be given to the radio board
on the HCI-1WL module.
Display Text Description
NO KEY: No security key information available
Insert a memory card with security information.
MACCONN Intermediate message during connection process
SECCONN
CONNECT The device is connected to the OneWireless network via 2 multinodes / gateways.
DISCOVR Intermediate message during connection process
NOTCONN The radio is not connected.
Make sure the OneWireless network is operational.
Could also happen if the radar is moved to another network.
SECURNG Intermediate message during connection process
NOREDUN The device is connected to the OneWireless network via 1 multinode / gateway only.
BAD KEY No valid key available.
Could happen if the radar is moved to another network (e.g. from factory to customer/
from workshop to real-life network etcetera).
Display Text Description
SDOK SD card with security key present
NOSD No security key / No SD card / Bad SD card
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 62 Service Manual
6.4.9.2 Commands
☛Select [Read device information], to read the static information from the
radio board.
After executing this command, the static information from the radio
board is read from the radio board and made available in diagnostic
entities. See 6.4.9.3.
☛Select [Read dynamic info], to read the dynamic information from the
radio board.
After executing this command, the dynamic information from the radio
board is read from the radio board and made available in diagnostic
entities. See 6.4.9.3.
☛Select [Restore Defaults], to remove the security key information from
the radar.
In this way, the radar is disconnect from the wireless network.
NOTE: This command CANNOT be given via Engauge.
CAUTION! With this command all settings on the radio board will
be erased!
6.4.9.3 Diagnostic Information
SD Card Status
Connection Status
Display Text Description
SDOK SD card with security key present
NOSD No security key / No SD card / Bad SD card
Display Text Description
NO KEY: No security key information available
Insert a memory card with security information.
MACCONN Intermediate message during connection process
SECCONN
CONNECT The device is connected to the OneWireless network via 2 multinodes / gateways.
DISCOVR Intermediate message during connection process
NOTCONN The radio is not connected.
Make sure the OneWireless network is operational.
Could also happen if the radar is moved to another network.
SECURNG Intermediate message during connection process
NOREDUN The device is connected to the OneWireless network via 1 multinode / gateway only.
BAD KEY No valid key available.
Could happen if the radar is moved to another network (e.g. from factory to customer/
from workshop to real-life network etcetera).
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 63
Radio Signal Status
Additional Items
Parameter Description
TX power level Transmission power level
Note: This is an Advanced Setting! Please read section 6.4.10 before changing this
setting.
PRSSI Primary RSSI = Signal strength indicator for primary wireless connection
SRSSI Secondary RSSI = Signal strength indicator for the redundant wireless connection
Parameter Description
Radio diagnostic No explanation.
These diagnostic information items are only relevant if requested by the factory.
Radio software
build number
Radio Network
address
Radio
communication
channel
Wireless Network
ID
Radio mode
Radio IEEE Address
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 64 Service Manual
6.4.10 Advanced Settings - Transmission Power Level
Professional installers are allowed to change to power settings in
situations that an external antenna is used to compensate for long
external cables.
CAUTION! It is NOT allowed to set the transmission power to a
higher level than is allowed by the local authorities.
When a radar with an integrated antenna is ordered,
the value is set to the correct value in the factory.
CAUTION! Only when an external antenna is used, it is allowed
to change this setting and only according to the table
below.
For transmission power-level settings, see table below.
CAUTION! For the remote antenna cables only the cables
provided by Honeywell Enraf are approved for use.
The use of any other cables or cable lengths are
NOT allowed by the Radio approvals.
The values in the above tables have been determined through
agency certification testing.
The above output-power levels include the loss from the Lightning
Arrestor (0.5dBm).
CAUTION! Lightning arrestor must be in place for all instal-
lations.
The following shall apply for antenna type, frequency range, appli-
cation/usage, and agency/country compliance:
• Antennas with a higher gain as shown above shall not be used.
• Maximum overall radio output power shall not exceed 10 mW
EIRP (Europe) respectively 100 mW EIRP (USA and Canada)
over the full band.
Industry Canada Compliance Statement:
• This device has been designed to operate with the antenna types
listed in this document, and having a maximum gain of 14 dBi.
Antenna types not included in this list or having a gain greater
than 14 dBi are strictly prohibited for use with this device. The
required antenna impedance is 50 ohms.
• This device complies with Part 15 of the FCC rules and RSS-210
of IC.
Area Antenna
Type
Integrated Remote
Cable lenght
1 m
Remote
Cable length
3 m
Remote
Cable length
10 m
Maximum transmission power level setting
Europe 4 dBi 9 10 10 12
8 dBi 4 5 6 7
14 dBi Not possible 1 1 2
USA and Canada All types 20

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 65
6.4.11 Firmware Upgrade
You can upgrade the radio firmware via OneWireless Wireless Builder.
For more details see the Wireless Builder manual in the chapter
“Upgrading Firmware in commissioned device”.
NOTE: Only the radio firmware can be upgraded via
Wireless Builder. Firmware upgrade of the HCI-1WL
board and the other FlexConn boards is done via the
normal FlexConn upgrade procedures.
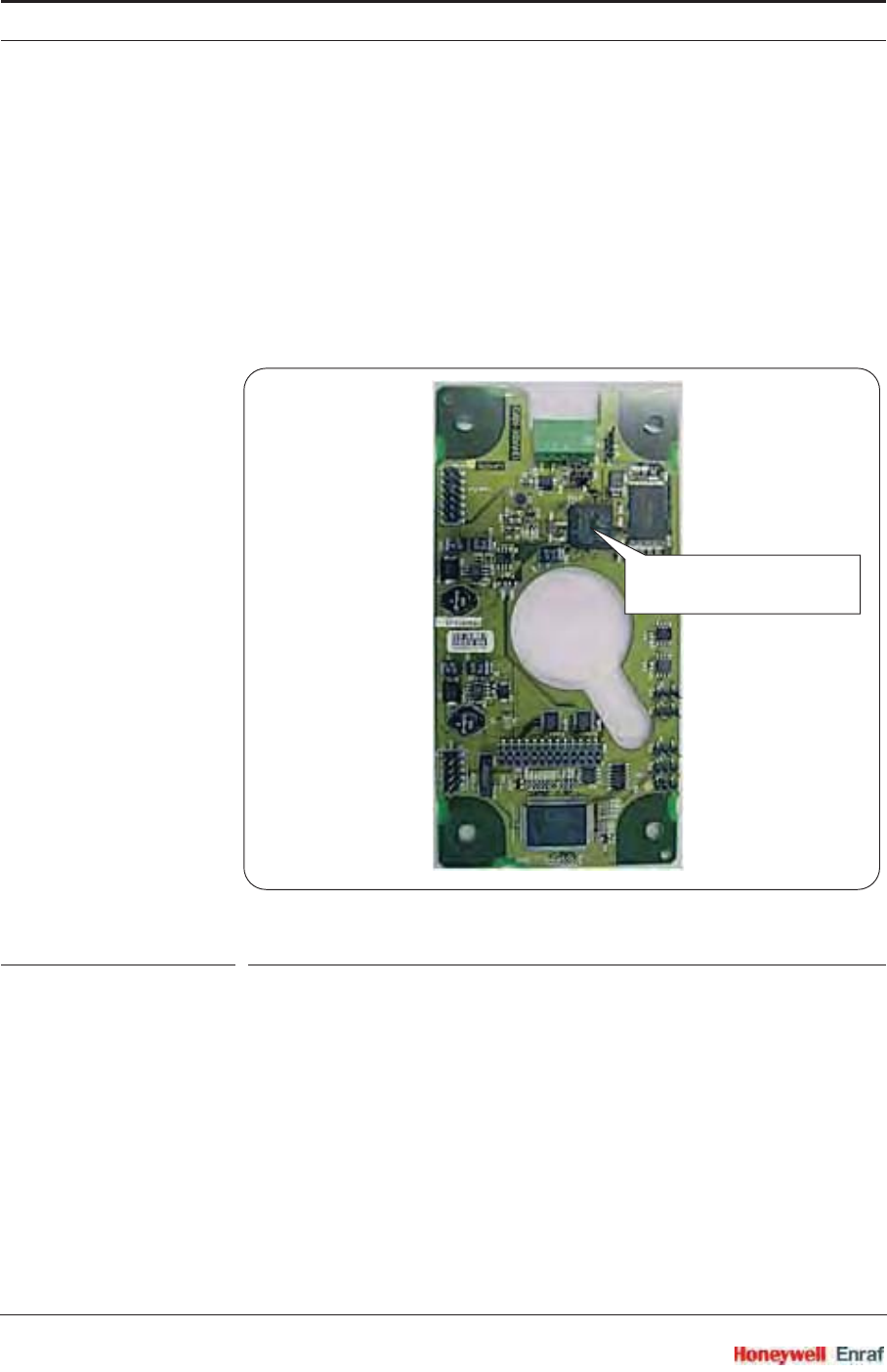
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 66 Service Manual
6.5 Product Level Measurement (TII-XR)
6.5.1 Introduction
The Transducer Interface Instrument - X-Band Radar (TII-XR) - is the
heart of Enraf’s precision X-band (10 GHz) radar system.
It uses the Frequency Modulated Continuous Wave (FMCW) and
synthesized pulse reflection principle. Using Enhanced Performance
Signal processing (EPS), a smart level detection is possible by filtering
out known obstacles.
ESF07-0007
FIGURE 6-6 The TII-XR board with its Digital Signal Processor
Housed within an explosion-proof, RF-shielded compartment - which
also contains a number of other FlexLine modules - and together with a
planar radar antenna, it forms the SmartRadar FlexLine system.
6.5.2 Basic Commissioning
6.5.2.1 General
In general the user is interested in the tank’s product volume. To
calculate this volume, the primary input is the product level within the
tank. This level is measured by the radar.
Digital Signal Processor
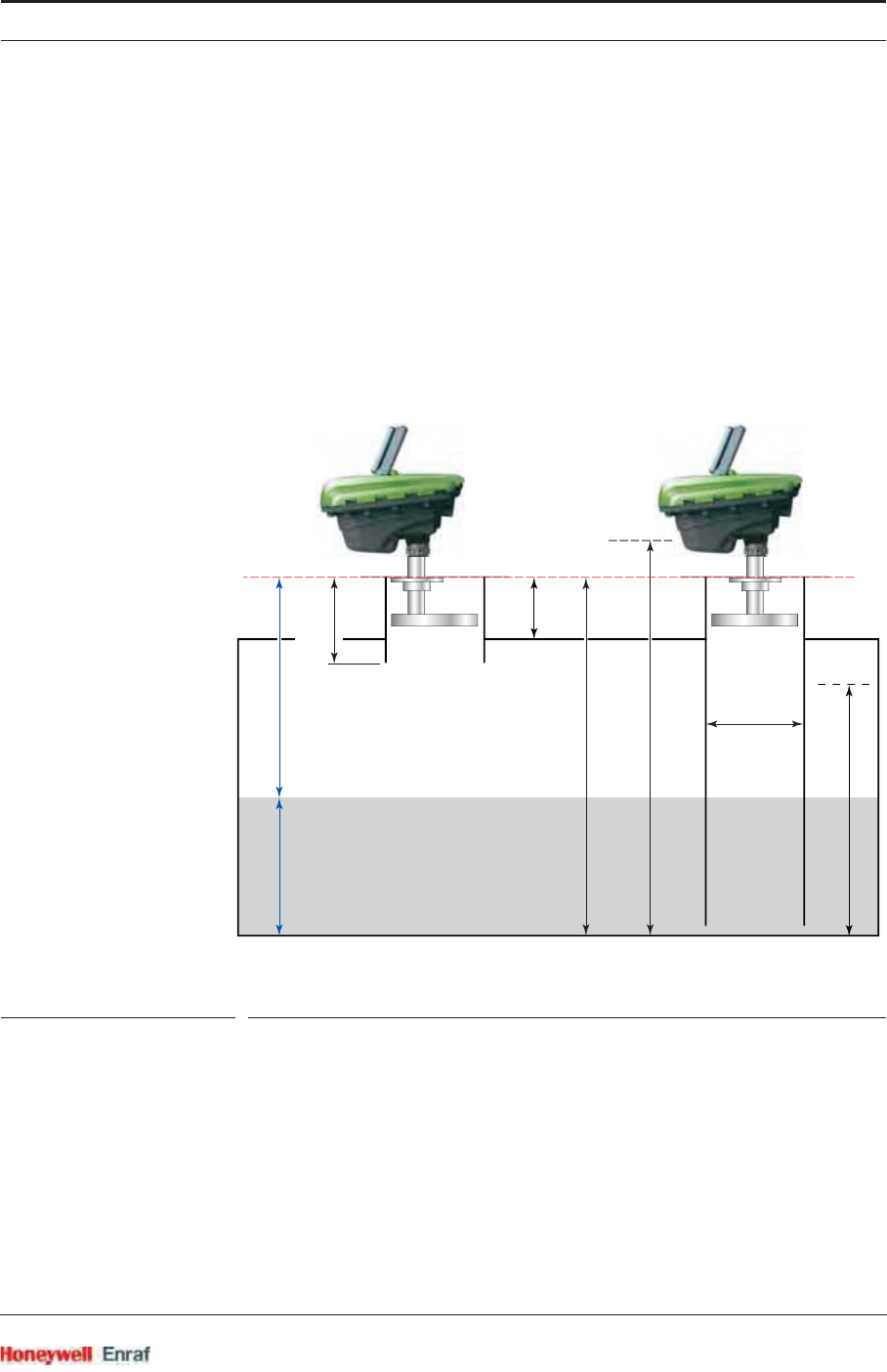
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 67
For correct measuring results, a number of parameters such as
[Tank bottom position],[Upper reference position], and [Offset to roof] must be
defined before.
In addition, alarm settings and compensation (filtering) constants are to
be set.
This can be done by using either Engauge or SmartView.
6.5.2.2 Level Start-Up
For entity definitions, see FIGURE 6-7 and FIGURE 6-8.
ESF07-0008
FIGURE 6-7 Basic commissioning entities
Radar reference
Maximum Safe Fill height
level ullage
(innage)
Nozzle
length
Free Space applications Stilling Well applications
Offset
to roof
Tank bottom position
Upper reference position
Stilling well
diameter
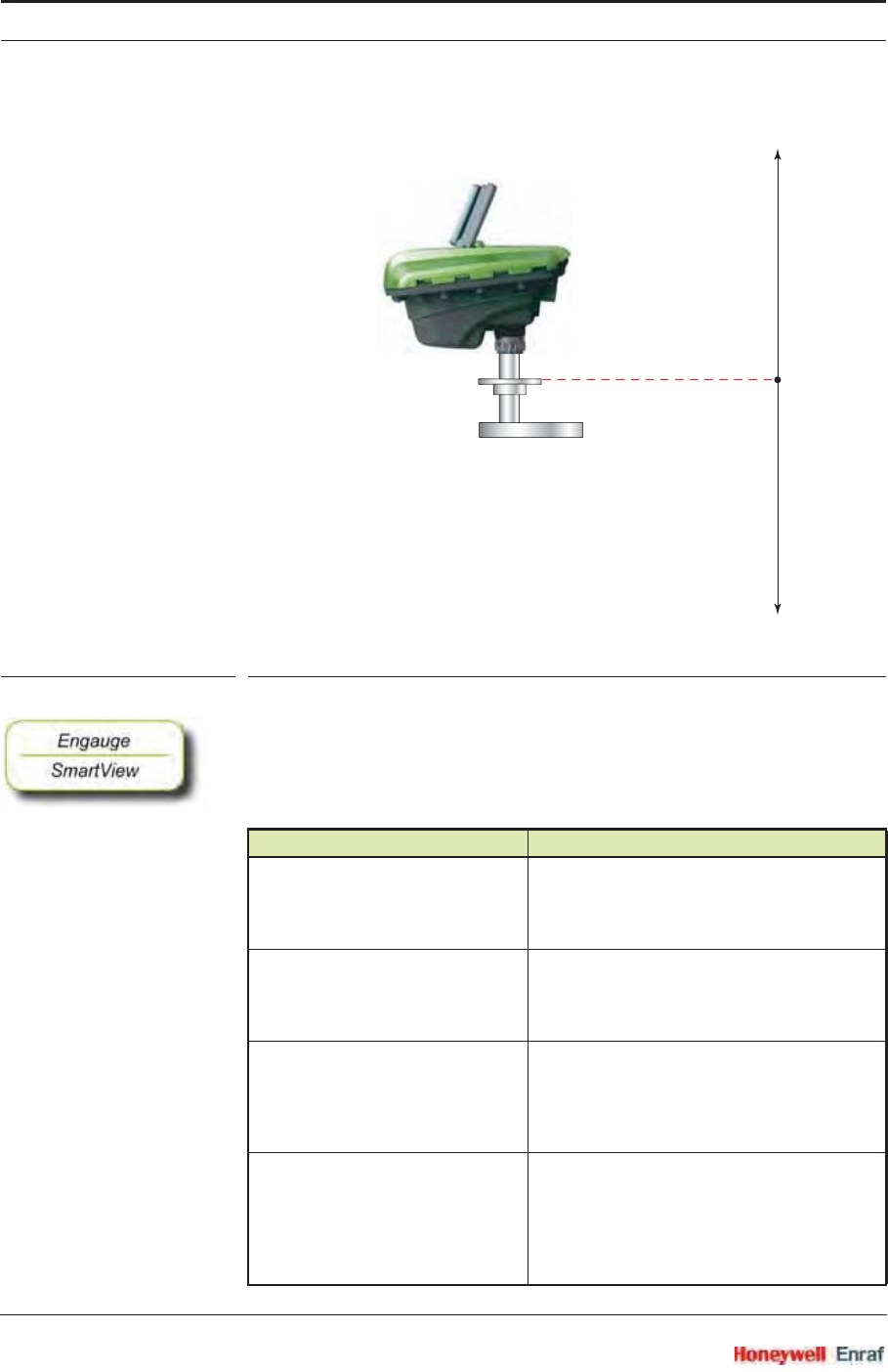
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 68 Service Manual
ESF07-0011
FIGURE 6-8 Definition of [Offset to roof]
☛To get the radar gauge level without any compensations enabled (but
with averaging filter and maximum Safe fill warnings enabled),
program the entities listed in the tables below.
☛For a Free space application, program following entities:
Entity Name Explanation
[Tank bottom position] The gauge uses this information to calculate
the level (innage), and to determine the
position of the bottom reflection (part of peak
selection).
[Maximum Safe fill] With this entity the gauge checks if the
programmed upper measuring range is valid
([Minimum measurable distance] at least
<0.5 m> from the antenna).
[Upper reference position] This entity is only used if “ullage” is to be read
from the SmartRadar FlexLine. The ullage is
then calculated from the measured level
(innage) as [Upper reference position]-measured
level.
[Offset to roof] The distance between radar reference and the
tank roof. The gauge uses this information to
determine the position of the echoes caused
by the product and the roof. A positive value
means the roof is below radar reference (see
also FIGURE 6-8).
radar reference
Offset to roof negativeOffset to roof positive
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 69
☛For a Stilling well application, program following entities:
6.5.2.3 Level Check
With the [Accept reference] command, the gauge’s innage or ullage value
is initialized in accordance with the before programmed reference data.
From here the gauge will follow all relative level changes.
This command will only be accepted if the product level is <GOOD>.
This command also puts the SmartRadar FlexLine in accurate level
measurement mode, so this command MUST be given!
The [Accept reference] command can handle either a reference innage or a
reference ullage level. To adjust to an innage level fill in entity [Reference
innage], to adjust to an ullage level fill in entity [Reference ullage]. This level
value is mostly obtained by a manual level measurement (hand dip);
see FIGURE 6-9.
When all values are sent to the SmartRadar FlexLine, the [Accept
reference] command can be given.
When an innage or ullage reference value is not available, the [Accept
reference] command must be given without filling any of these entities.
The SmartRadar FlexLine will now be put into accurate level
measurement mode.
[Nozzle length] Needs only to be set if the antenna is installed
inside the nozzle.
Entity Name Explanation
[Tank bottom position] The gauge uses this information to calculate
the level (innage), and to determine the
position of the bottom reflection (part of peak
selection).
[Maximum Safe fill] With this entity the gauge checks if the
programmed upper measuring range is valid
([Minimum measurable distance] at least
<0.5 m> from the antenna).
[Upper reference position] This entity is only used if “ullage” is to be read
from the SmartRadar FlexLine. The ullage is
then calculated from the measured level
(innage) as [Upper reference position]-measured
level.
[Stilling well diameter] The inner diameter of the stilling well
Entity Name Explanation
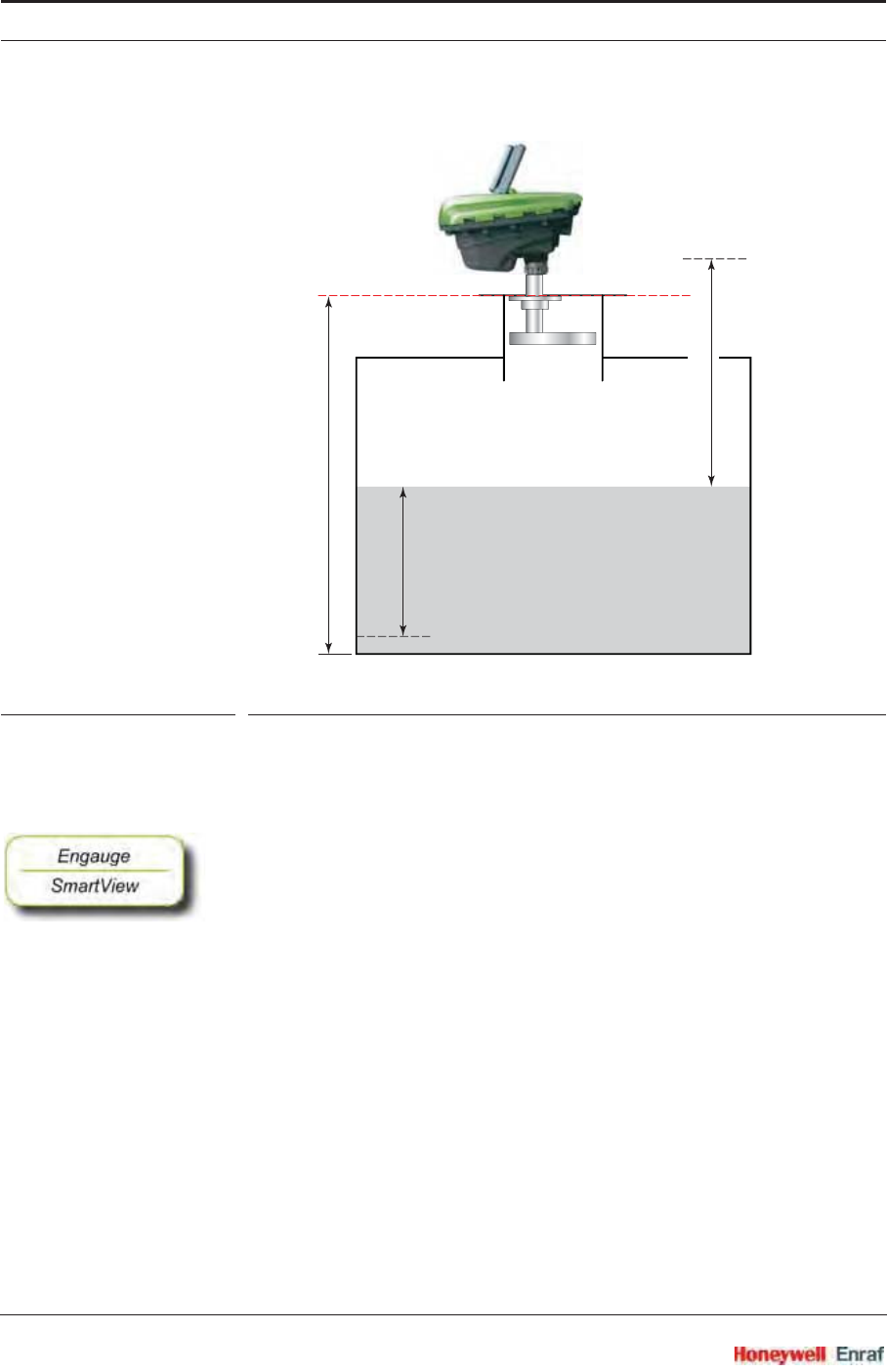
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 70 Service Manual
ESF07-0009
FIGURE 6-9 Level check entities
NOTE: This command does not adjust the [Tank bottom
position], so this entity should be set manually to
approximately the correct value (within ± 0.1 m).
☛Give the [Accept reference] command.
☛Make sure the [Accept reference status] is <GOOD>.
Some remarks for the Engauge users:
To make sure the [Accept reference] command works fine, all entities
must have been sent to the gauge (no yellow backgrounds may be
visible) prior to giving the command.
☛To read the [Accept reference status], push the [Read] button (is not auto-
matically displayed).
Some remarks for the SmartView users:
On the SmartView display, the advanced entity [Reference radar] is
visible as well. The value of this entity must be left to the default
value <+999.9999>.
☛Check [Reference status] in the commissioning menu, to see if the
command has been accepted.
Reference innage
Radar reference
Tank bottom position
Reference ullage
Upper reference position
Tank zero (dipping plate)
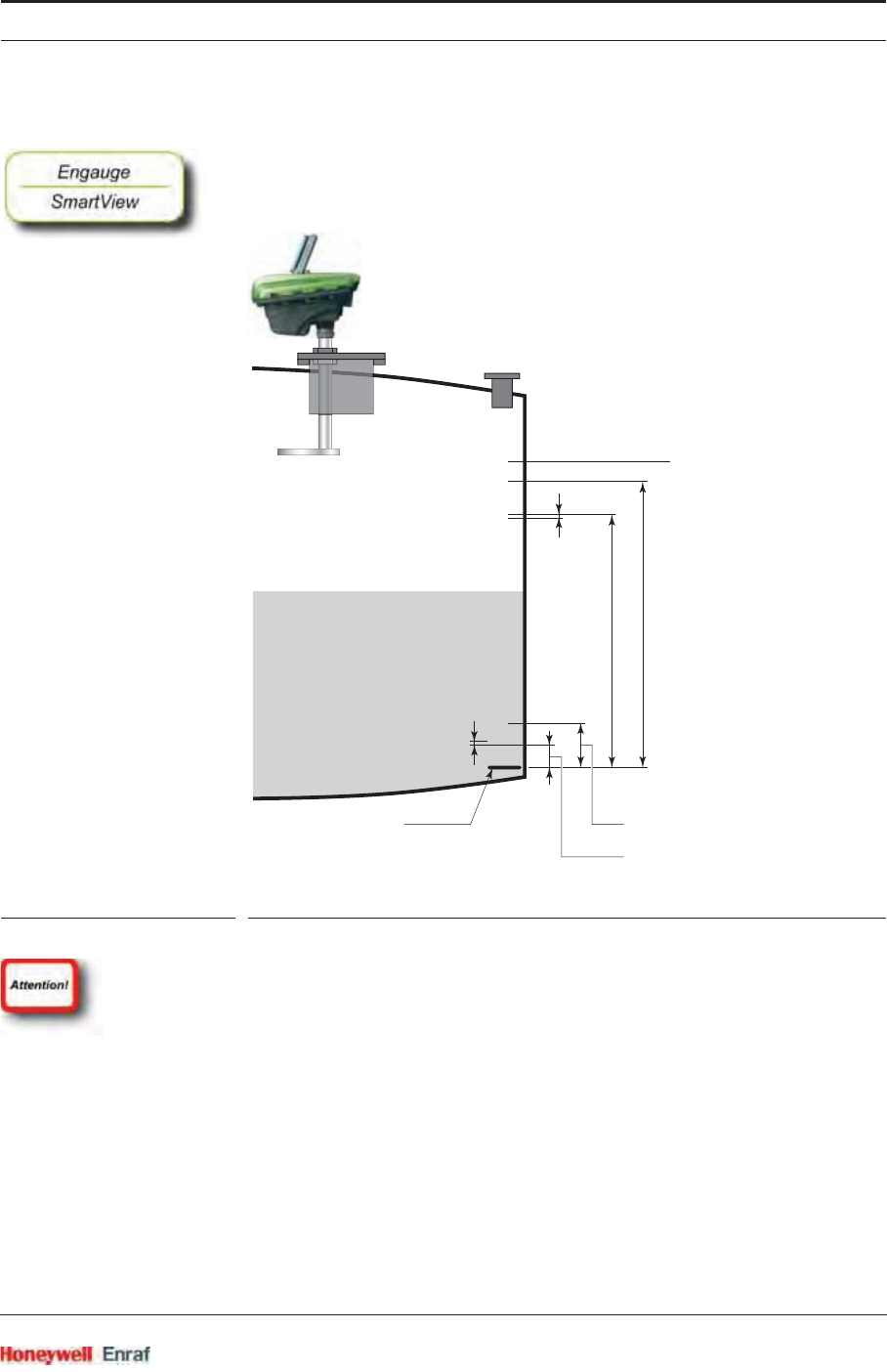
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 71
6.5.2.4 Alarm Settings
☛Set the entities [High high alarm],[High alarm],[Low alarm],[Low low alarm],
and [Alarm hysteresis] to the desired values.
For definitions, see FIGURE 6-10
ESF07-0012
FIGURE 6-10 Alarm and hysteresis definitions
All above mentioned entities MUST be set as the defaults are
extremes (1E+12). If they are not, no errors will be displayed, but the
[Commissioned] entity will be <False>.
If the alarm entities are correctly set, but the [Alarm hysteresis] is not,
then any alarms that would raise will never be set off! So watch the
[Commissioned] status.
Be aware that the alarm status is only visible in the [Primary value]
entity (innage)! It is not visible in the [Secondary value] entity (ullage).
Although the GPU-protocol always contains the alarm status, the
current software only passes the actual alarm status to this protocol if
the gauge is set to innage control. So when ullage status is asked for
by the GPU-protocol, NO alarm statuses are displayed.
Workaround solution: Set the GPU records to innage.
Tank zero
Alarm Hysteresis
Alarm Hysteresis
Maximum safe fill
High High alarm
High Alarm
Low Alarm
Low Low alarm
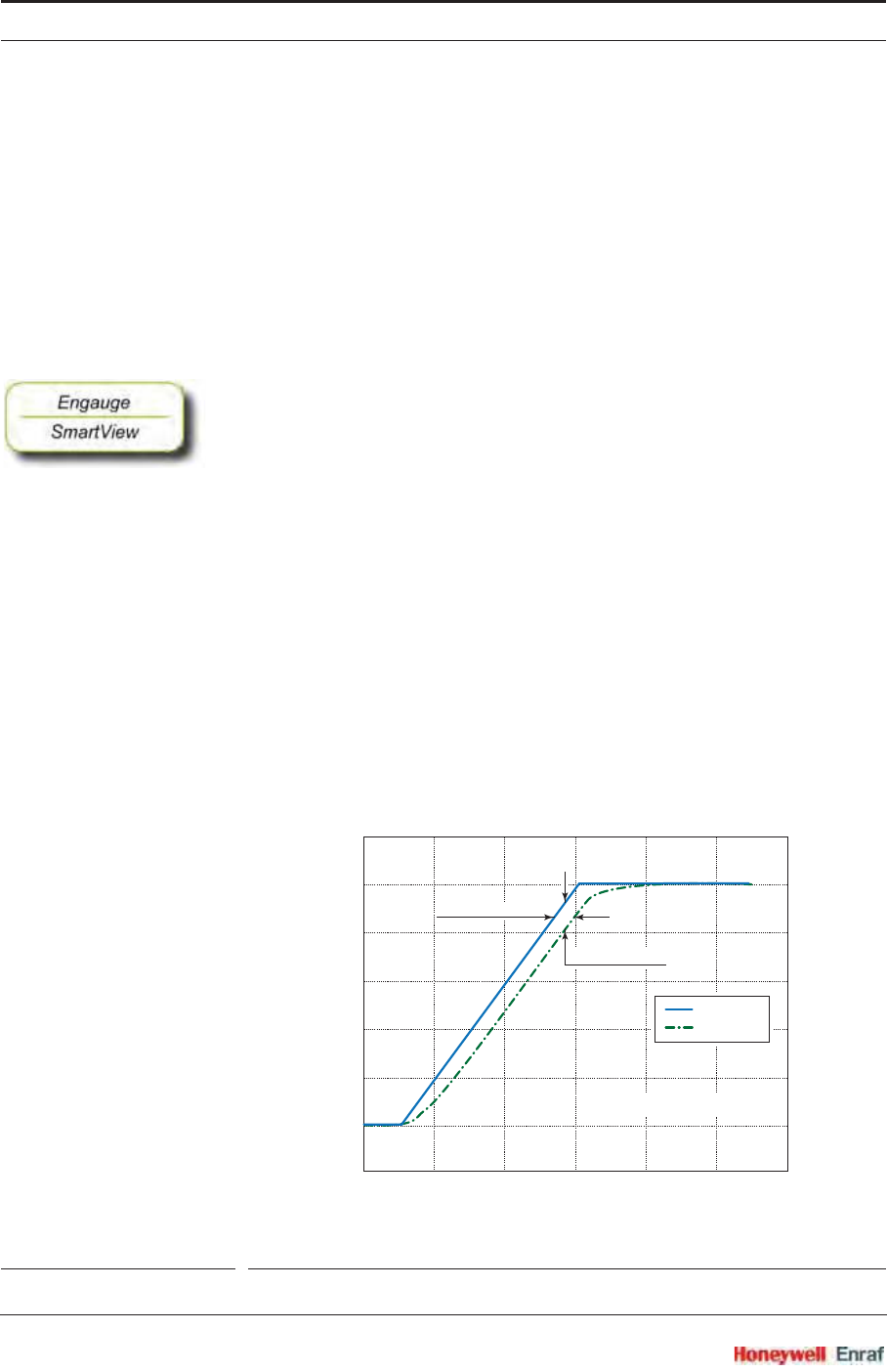
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 72 Service Manual
6.5.2.5 Alarm Loop Checking
Normally, level alarms can be verified when the level reaches the low-
level or high-level alarm set point. The level alarms and, if applicable,
the hard alarm contact coupled to one of the level alarms can be
checked by a “loop check” command. This check is independent from
the actual level value.
The level alarm signalling can be checked in several ways:
via the communication line to the host
via the hard alarm output contact
☛To perform the alarm test, set [Alarm test enable] to <Enable> and set
[Alarm test] to the required alarm (<High High alarm>,<High Alarm>,<Low
Alarm>, or <Low Low alarm>). [Alarm test] is a parameter command, and
the command will be executed when the parameter is sent to the
gauge. When the command is given, the corresponding alarm will be
set for 1 minute.
6.5.2.6 Compensations
6.5.2.6.1 Filtering
The gauge contains an output filter for both radar innage and radar
ullage. The higher the [Filter averaging constant], the more damping on the
radar innage and radar ullage values. The filter also introduces a lag
between actual ullage/innage and filtered ullage/innage when the
product level is changing. The higher the [Filter averaging constant], the
larger the lag. The minimum [Filter averaging constant] value is 0 (no
filtering), the maximum [Filter averaging constant] value is 99. For the
general filter behavior, see FIGURE 6-11.
FIGURE 6-11 Filtering characteristic example (level change = 5 mm/s)
5.3
5.25
5.2
5.15
5.1
5.05
5.0
4.95
0 20406080100120
Filtering averaging constant = 98
Ullage
Average
Ullage [m]
Time [s]
Exponentially weighted moving average filter
maximum lag [m]
maximum lag [s]
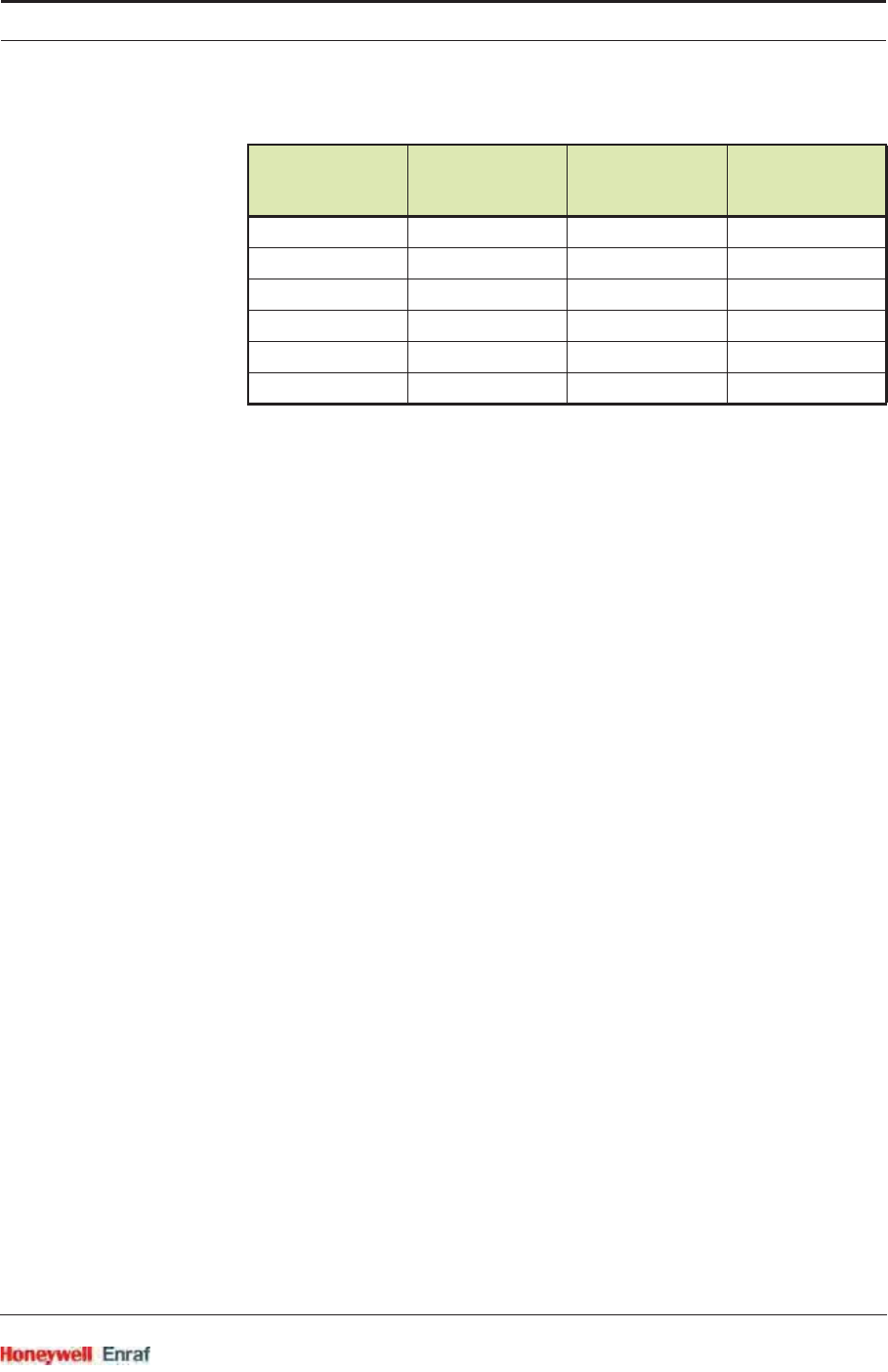
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 73
In the table below some filtering figures are given.
6.5.2.6.2 Verification Pins
When a radar level gauge is installed on a pressurized tank, both ISO
and API suggest to use so-called verification pins to verify the radar
level measurement. Prime reason to use said verification pins is the
impossibility of doing a manual reference dip. With verification pins it is
possible to verify the correct reading of the radar measurement at
specific heights while the tank is in operation.
The SmartRadar FlexLine can be switched to measure the pin
positions. The reading can then be compared with the known position of
the pins. It is advised to have three verification pins:
Pin 1 at approximately 80 - 90 % of tank height
Pin 2 at approximately 50 % of tank height
Pin 3 at approximately 10 - 20 % of tank height
Pin 1 should be above maximum safe fill (so, it can always be
measured), however there must be at least 0.6 m (2') free space from
pin 1 to cone end. All pin positions should be measured with 1 mm (1/
32”) uncertainty with reference to the ball valve.
The SmartRadar FlexLine can measure the position of the three pins
when the housing is rotated 90°. The verification pins are then ‘visible’
to the SmartRadar FlexLine.
This can be done without closing the 1" (or 4") ball valve, as the
FlexLine housing is located above the tank separator.
After the command “Measure verification pins” is given, the measured
positions of the three pins can be requested. The “real” position of the
pins (from tank drawing) and the “measured” position of the pins are
compared and a correction is applied.
After the SmartRadar FlexLine is placed in the normal (product
measuring) mode, the measurement is automatically corrected for the
found verification pin positions.
FIGURE 6-12 illustrates the correction method for verification pins.
Once the position of the verification pins is determined, the FlexLine can
be switched into verification mode to verify the measured (and
[Filter averaging
constant]
Approximate
noise reduction
factor
Maximum lag
[s] Maximum lag
[distance]
50 1.4 0.1 0.1 * dL/s
70 1.8 0.25 0.25 * dL/s
90 3 1 1 * dL/s
95 4.5 2 2 * dL/s
98 7 5.5 5.5 * dL/s
99 10 11 11 * dL/s
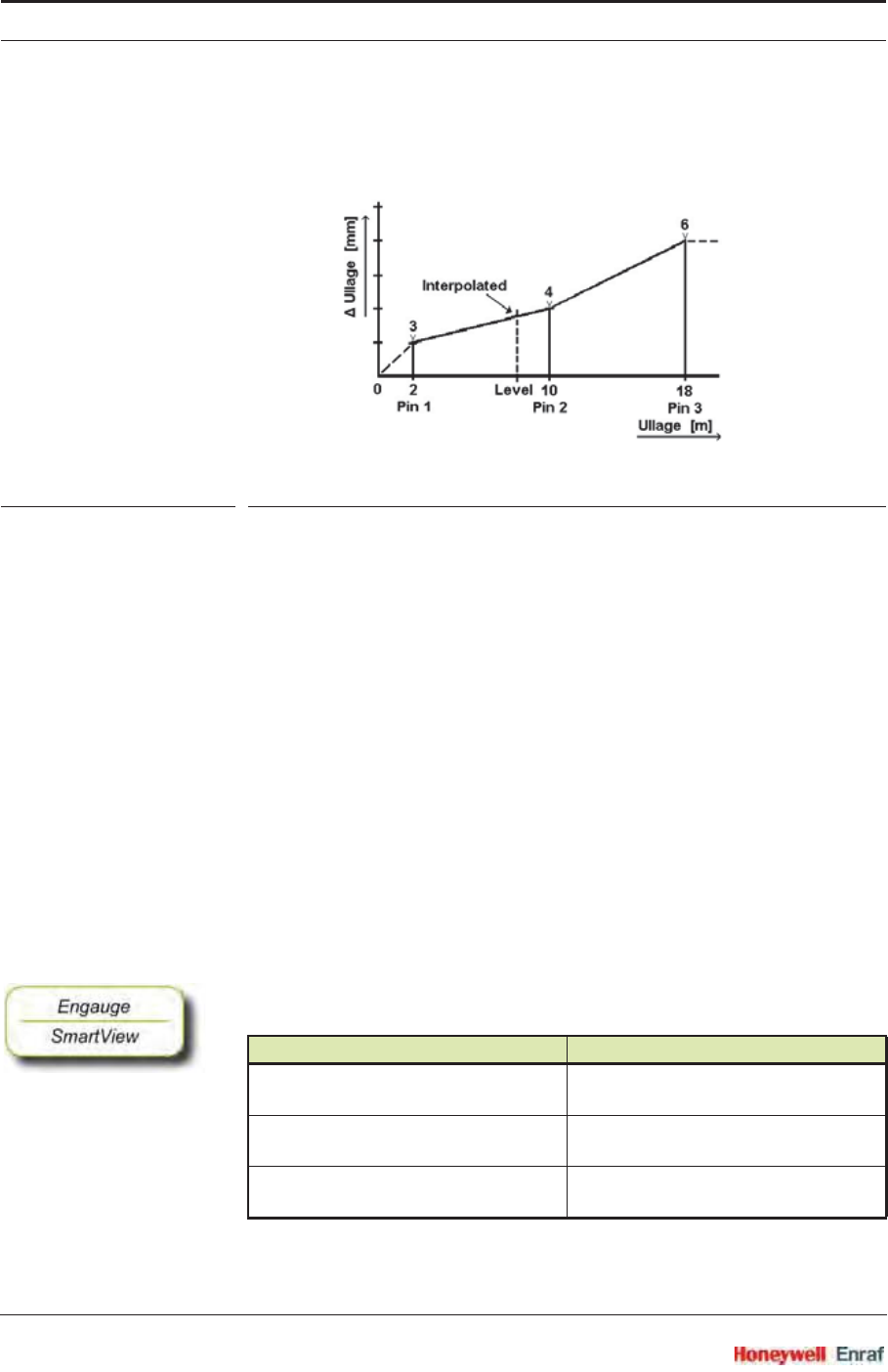
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 74 Service Manual
corrected) distances with the real pin positions.
If the correction is properly made, both values of each of the three pins
should be equal to each other.
FIGURE 6-12 Ullage correction using the verification pins
If the product level in the tank is above pin position 1 or below pin
position 3, the correction is extended by the following estimation:
above pin1: there is an interpolation from the radar zero point (no
correction) to the position of pin 1 (with its correction).
below pin 3: the correction found at pin 3 is valid for the range below
pin position 3.
At installation of the verification pins, the distances of the pins towards
the flange of the stilling well (L1, L2, and L3) are noted.
The FlexLine measures ullage from the radar zero point.
NOTE: The radar zero point from the FlexLine with an H04
Antenna is located at the flange of the tank
separator. See FIGURE 6-13.
In case the 1” ball valve is used (that is with antenna models H04/N1
and H04/N4), an offset must be added to the distances of the
verification pins.
☛The above found verification pin distances must be entered in the
following entities:
Entity name Explanation
Verification pin physical position 1 Physical ullage of verification pin 1 with
respect to radar zero
Verification pin physical position 2 Physical ullage of verification pin 2 with
respect to radar zero
Verification pin physical position 3 Physical ullage of verification pin 3 with
respect to radar zero
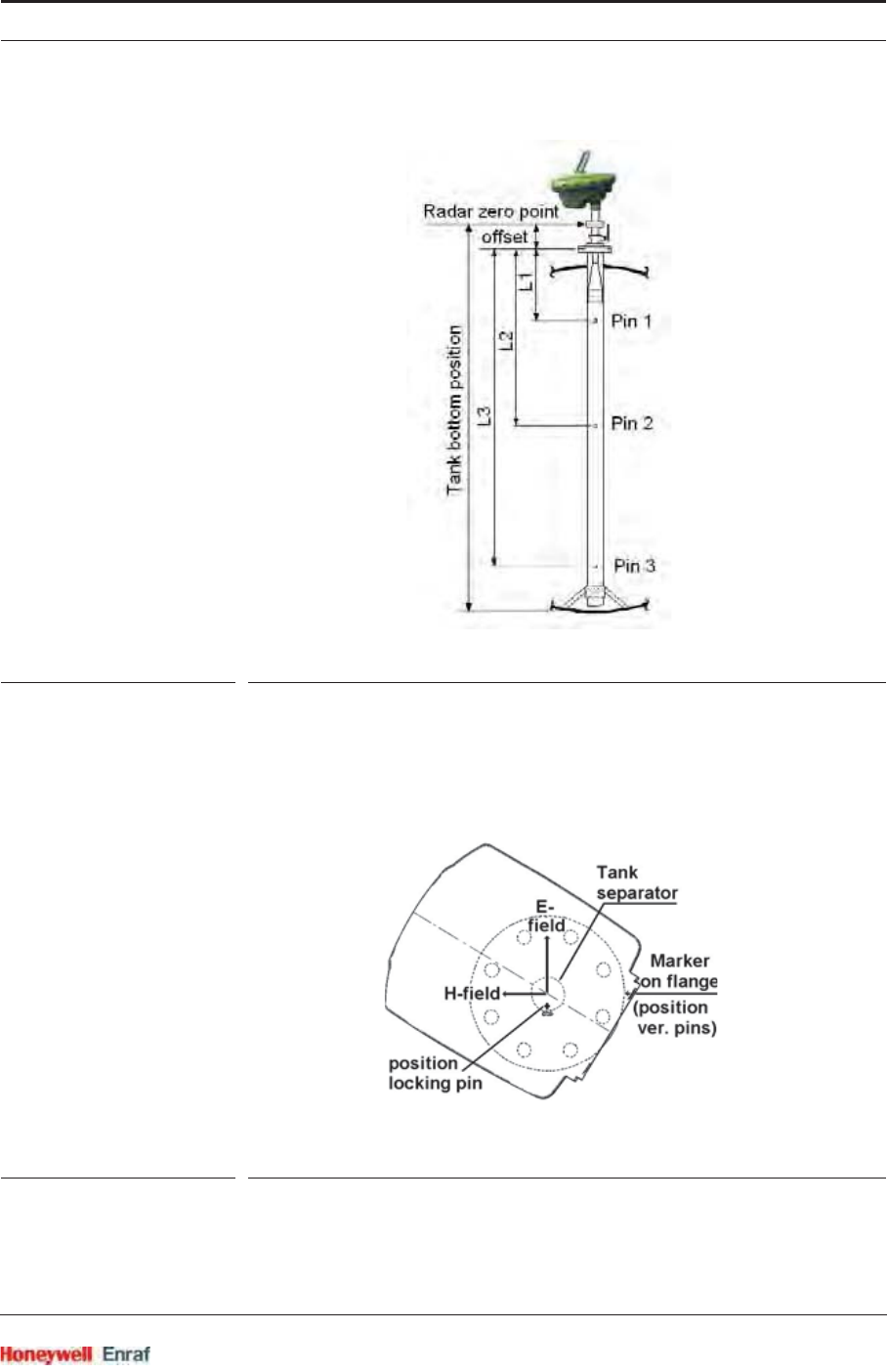
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 75
FIGURE 6-13 Radar zero point and verification pins positions
In normal (product measuring) position (see FIGURE 6-14), the E-field
(electrical field of the microwave) is located perpendicular to the
direction of the verification pins. In this position, the verification pins are
less visible to the SmartRadar FlexLine.
FIGURE 6-14 Product measuring position
In verification pin measuring position (see FIGURE 6-15), the E-field
should be in parallel with the verification pin direction. Then the
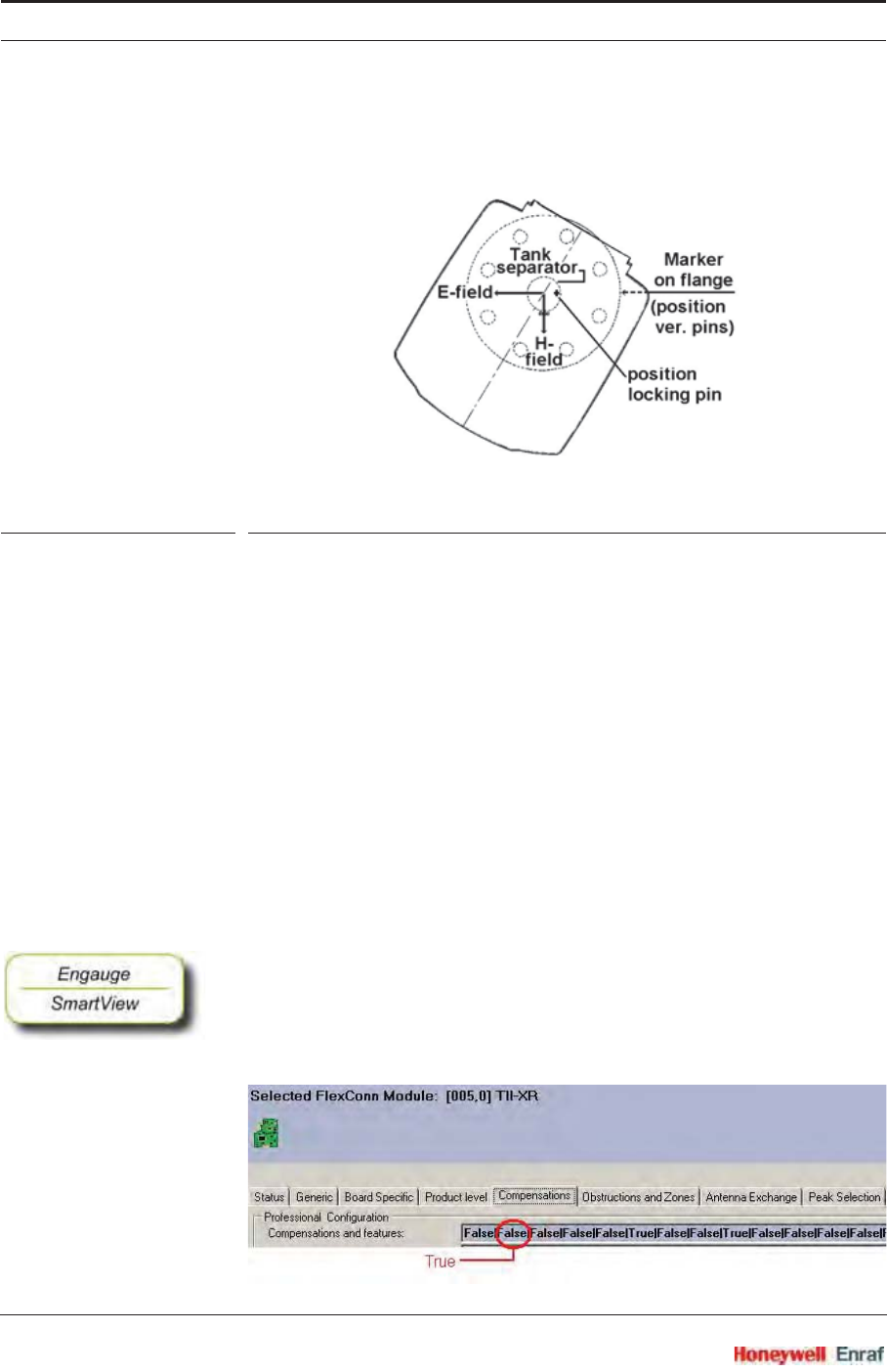
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 76 Service Manual
reflections from the verification pins are stronger and recognized by the
SmartRadar FlexLine.
FIGURE 6-15 Verification pin measuring position
To measure the position of the verification pins, the SmartRadar
FlexLine must be turned 90 degrees as follows:
Release the coupling nut of the SmartRadar FlexLine housing.
Lift the SmartRadar FlexLine housing from tank separator.
Rotate the SmartRadar FlexLine for 90°. This can only be done in
one direction because of the locking pin.
Place SmartRadar FlexLine on tank separator; mind locking pin.
Secure the coupling nut of the SmartRadar FlexLine housing.
Then issue the command: [Measure verification pins] (on SmartView:
Calibrate v-pins).
When the verification pin measurement is completed, the SmartRadar
FlexLine housing must be turned back 90° (follow above procedure in
reverse order).
The verification-pin compensation must be enabled by the appropriate
switch. In Engauge, that is (depending on installed TII-XR firmware and
board descriptor):
• the second position of correction field:
(up to TII-XR firmware version A1130 and board descriptor V4)
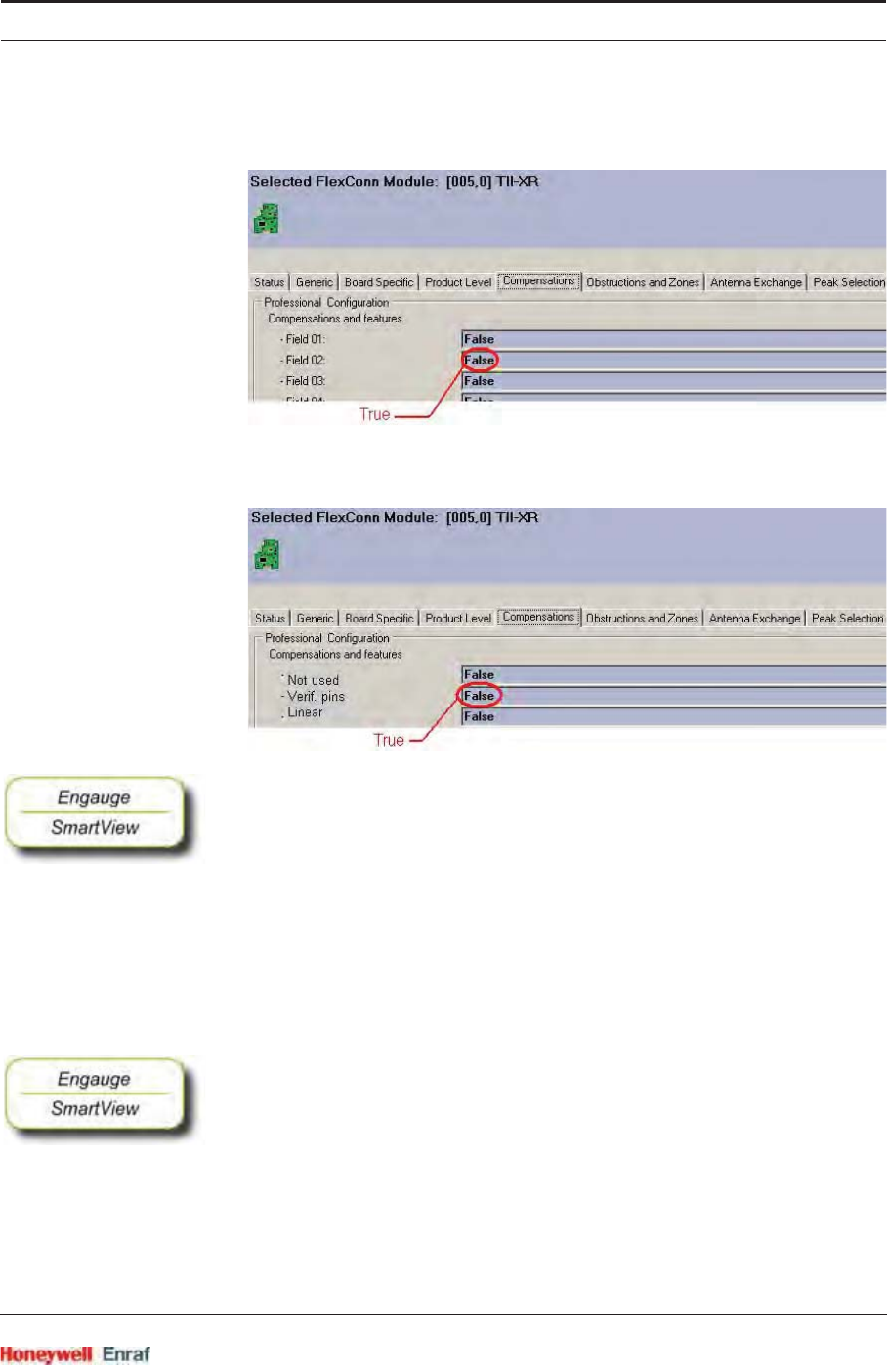
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 77
• or, Field02:
(with TII-XR firmware version A1131 and board descriptor V5)
• or, Verification pins:
(from TII-XR firmware version A1140 and board descriptor V6)
For the SmartView the command is implemented from TII-XR firmware
version A1142, and resides under the Command menu as follows:
☛From the menu select:
[Commands]
board [TII-XR] and
[Product level].
☛Then scroll through the list of commands, and select the command
[Enable v-pins].
To disable the verification pin compensation, proceed as follows:
By Engauge:
☛Set the appropriate field in the Compensation TAB to <False>.
By SmartView:
☛From the menu select:
[Commands]
board [TII-XR] and
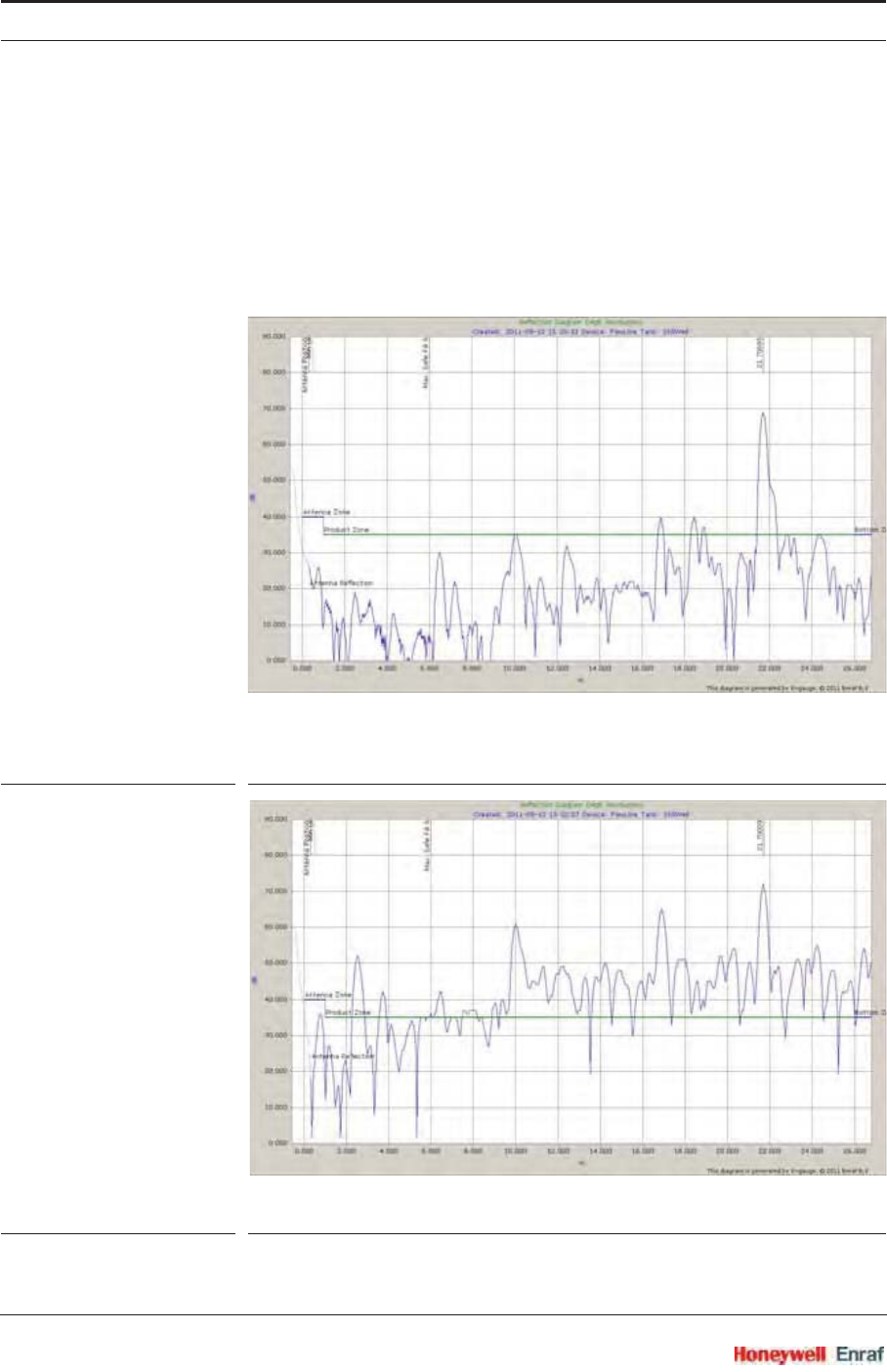
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 78 Service Manual
[Product level].
☛Then scroll through the list of commands, and select the command
[Disable v-pins].
Below an example of two reflection diagrams from product measuring
mode and verification-pin measuring mode, and an example of the
compensation sheet.
FIGURE 6-16 Product measuring mode, reflection diagram example
FIGURE 6-17 Verification pin measuring mode, reflection diagram example
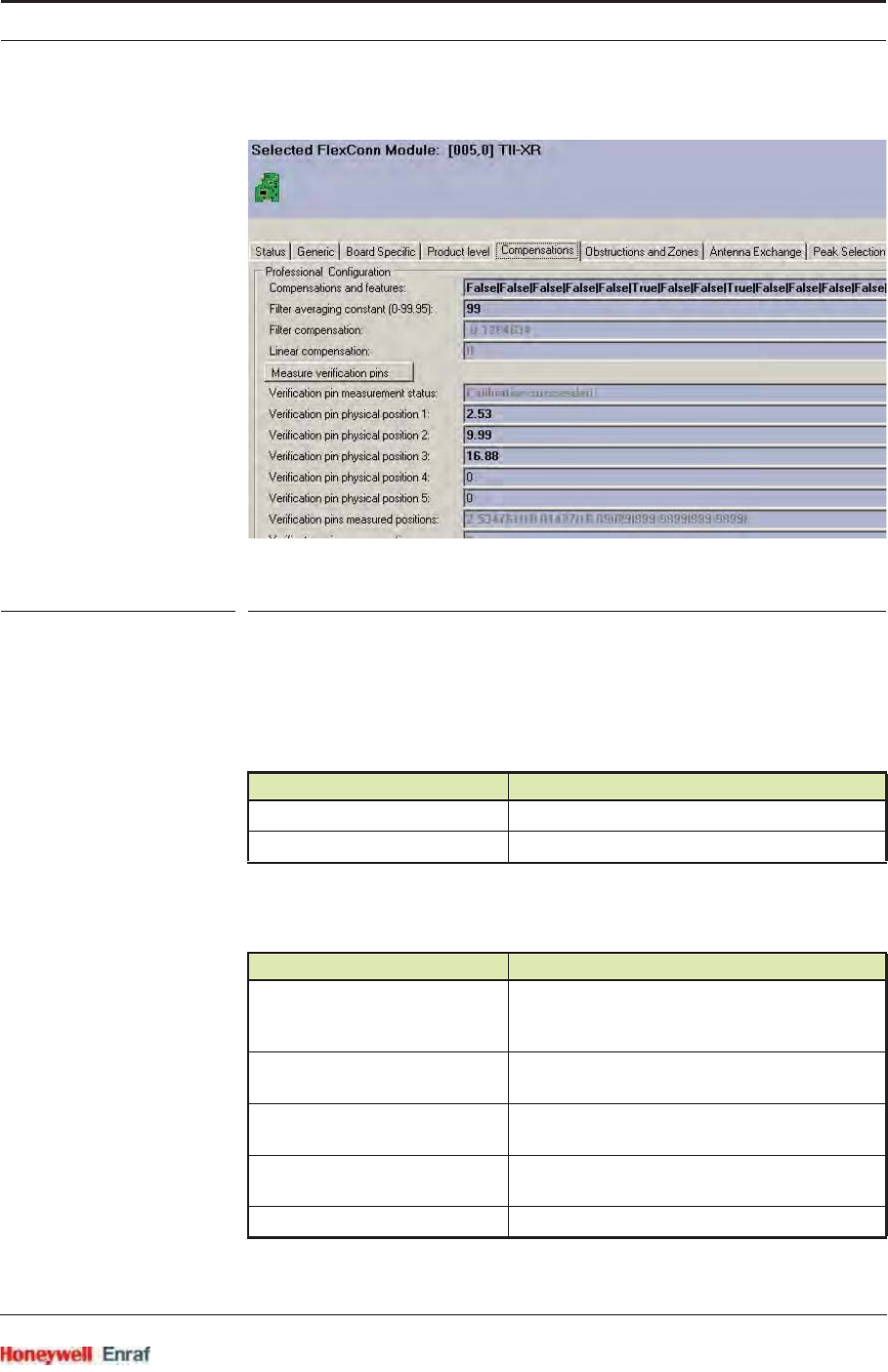
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 79
FIGURE 6-18 Verification pin compensation, example
6.5.2.7 Errors and Warnings
The status code of the [Primary value] or the [Secondary value] can display
an error (status = <BAD>) or a warning (status = <UNCERTAIN>).
Most common error messages are:
6.5.2.8 Additional Information
Following information can be extracted from the TII-XR system:
Message Cause
Radar max safe fill not set error [Maximum safe fill] still set to 0 (zero)
Radar max safe fill out of range [Maximum safe fill] value too high
Entity Description
[DSP firmware version] Besides a generic processor, the TII-XR has a
Digital Signal Processor for algorithm
calculations. See also FIGURE 6-6.
[Production date] Production date of the complete SmartRadar
FlexConn system.
[ART2A serial number] The serial number of the high-frequency module.
This module does all measurements.
[Device serial number] Serial number of the complete SmartRadar
FlexConn system.
[Antenna serial number] Serial number of the measuring antenna.
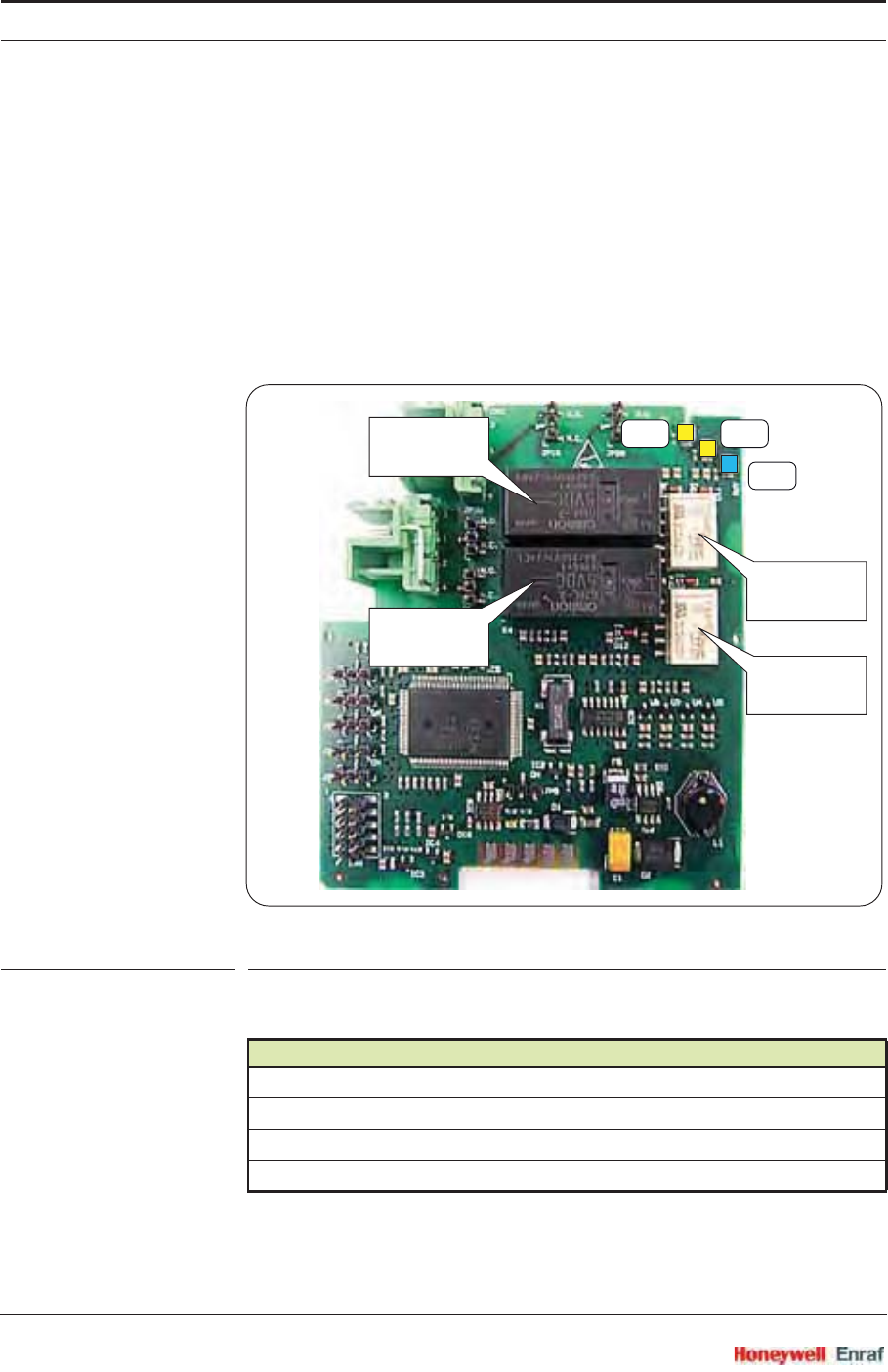
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 80 Service Manual
6.5.2.9 Overfill Protection Application
For the configuration of the TII-XR within an Overfill protection
application, see 6.6.11.
6.6 Relay Contacts (FII-DO)
6.6.1 Introduction
The Field Interface Instrument - Digital Output (FII-DO) board has 4
software-controlled, electromechanical relays; see FIGURE 6-19.
ESF07-0001
FIGURE 6-19 The relays and LEDs on the FII-DO board
These relays are allocated to FlexConn functions as shown below:
The relays have output status read-back lines.
Function Number Function
1 Relay 1
2 Relay 2
3 Relay 3
4 Relay 4
relay 3
relay 2
relay 1
relay 4
LE1
LE2LE3

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 81
With jumpers, the relays can individually be set to Normally Open (NO)
or Normally Closed (NC).
In addition to the board’s [Health] LED LE1, the LEDs LE2 and LE3 are
available (see FIGURE 6-19). They can be associated to a relay, by
setting the [LED Association] entity.
☛For a fail-safe level application, continue with section 6.6.10.
6.6.2 Operation Mode
The FII-DO can operate in one of two modes: [Alarm Mode] and [Fallback
Mode]. This is controlled by the [Operation Mode] entity.
Fallback Mode is not implemented yet.
☛Set the [Operation Mode] entity to [Alarm Mode].
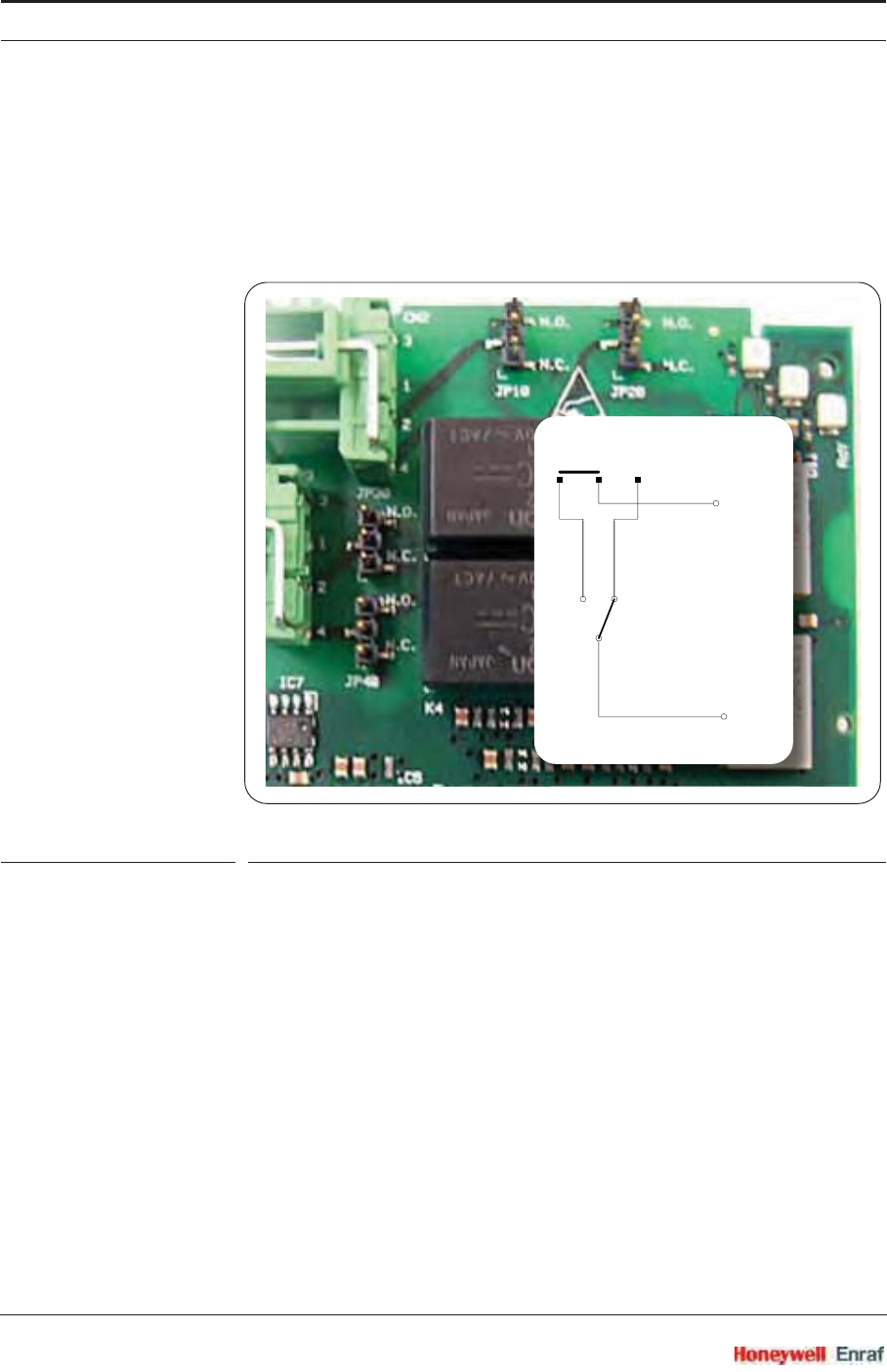
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 82 Service Manual
6.6.3 Relay Configuration
6.6.3.1 Jumper Settings
At installation, each individual relay contact was configured as required
with the hardware jumpers JPx0, where x = Relay 1 to 4 respectively.
See FIGURE 6-20.
ESF07-0002
FIGURE 6-20 The relays’ hardware jumpers
NOTE: In the Commissioning stage, no jumper setting can
be changed without breaking the compartment screw
sealing.
6.6.3.2 Relay Mode
Each individual relay can be set to be energized or de-energized during
operation, by setting the [Relay Mode] entity to <Energized> or <De-energized>
respectively.
If the [Relay Mode] entity is set to <Energized>, the relay coil will be
energized when the relay state is <Deactivated>, and the relay coil will be
de-energized when the relay state is <Activated>.
If the [Relay Mode] entity is set to <De-Energized>, the relay coil will be de-
energized when the relay state is <Deactivated>, and the relay coil will be
energized when the relay state is <Activated>.
Ryx_b
Ryx_a
JPx0
n.o. n.c.
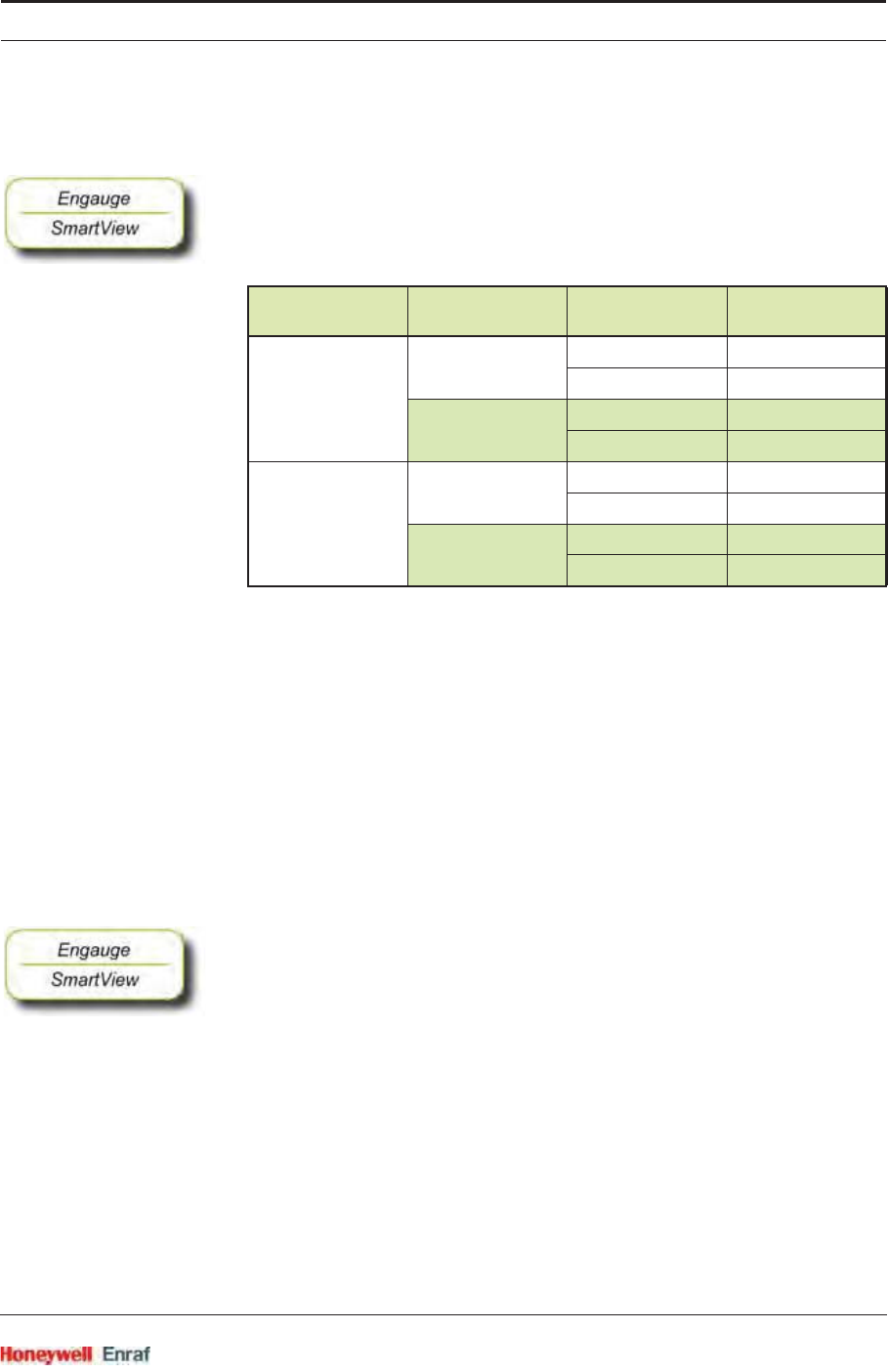
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 83
The <Energized> option is used for fail-safe operation whereas the <De-
Energized> option is used for non-fail-safe operation.
☛Set each individual relay to the required configuration, by selecting
the proper entities. See also next overview (fail-safe configuration is
coloured).
6.6.4 Alarm Mode
Each individual relay can operate in one out of three modes, by setting
the [Alarm Mode] entity to either [PV Monitor],[Remote Control], or [Not In Use].
6.6.4.1 PV Monitor
In [PV Monitor] mode, each individual FII-DO-relay unit can monitor the
Primary Value (PV) or Secondary Value (SV) of another board
connected to the CAN bus, and either activate or deactivate the
associated relay if a certain condition is <True> or <False>.
☛If [Remote Control] or [Not In Use] mode must be selected, skip to section
6.6.4.2 or 6.6.4.3 respectively.
☛From the [Alarm Mode] menu, select [PV Monitor].
☛Select [Monitor Board ID], set proper value.
☛Select [Monitor Board Instance], set proper value.
☛Select [Monitor Function Instance], set proper value.
☛Select [Monitor Source], select either <PV> or <SV>, as desired.
The [Monitor Board ID],[Monitor Board Instance], and [Monitor Function Instance]
entities determine the location of the entity to be scanned.
The [Monitor Source] entity determines if either the Primary Value <PV> or
Secondary Value <SV> entity shall be scanned.
The behavior of each individual relay in PV Monitor mode is further
controlled by the [Monitor Mode] and the [Status Behavior] entities; see next.
Physically
Configured Relay Mode Relay State Physical Result
Normally Open
(NO)
De-Energized Activated Closed
Deactivated Open
Energized Activated Open
Deactivated Closed
Normally Closed
(NC)
De-Energized Activated Open
Deactivated Closed
Energized Activated Closed
Deactivated Open
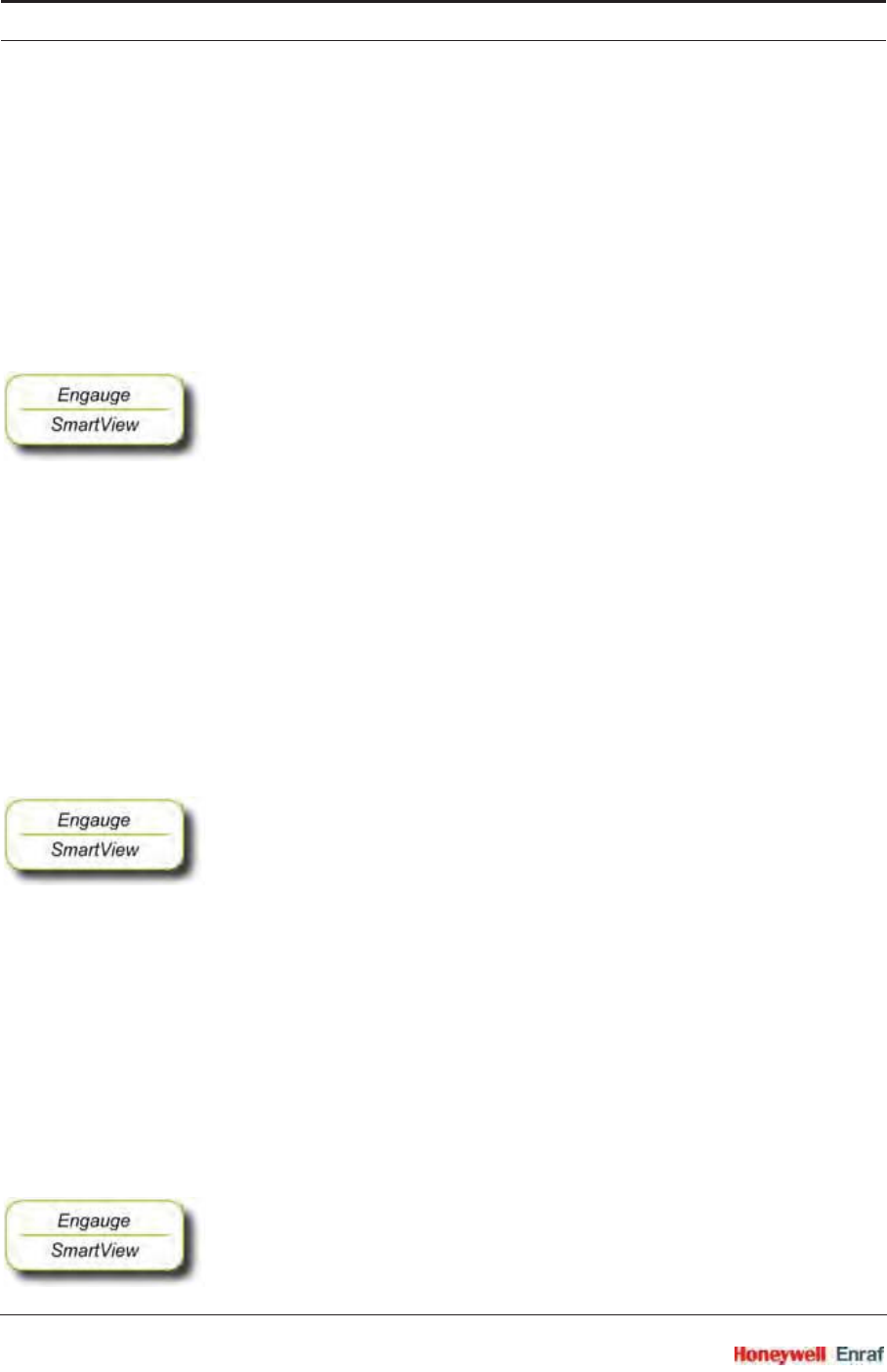
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 84 Service Manual
6.6.4.1.1 Monitor Mode
The [Monitor Mode] entity can either be set to [Remote] or [Local].
If the [Monitor Mode] is set to [Remote], the alarm status of the scanned
PV or SV is monitored. The alarm status is compared against the
value set in the [Remote Threshold Source] entity. The [Remote Threshold
Source] entity can be set to <HH>,<HA>,<LA>, or <LL>.
Example: If the [Remote Threshold Source] is set to <HH> and a High High
Alarm occurs, the relay will be activated. It will not be activated by any
other alarms.
☛If [Local] [Monitor Mode] is to be set, skip to next bullet ().
☛From the [Monitor Mode], select [Remote].
☛Select [Remote Threshold Source], set desired value.
If the [Monitor Mode] is set to [Local], the scanned PV or SV value is
compared against the value set in the [Threshold] entity. The behavior
is modified by the [Threshold Mode] and the [Hysteresis] entities. The
[Threshold Mode] entity can be set to either <Treat as HA> or <Treat as LA>.
If the [Threshold Mode] entity is set to <Treat as HA>, the relay is activated
if the scanned PV or SV is greater than or equal to the [Threshold]
entity value, and the relay is deactivated if the scanned PV or SV is
less than the [Threshold] entity value minus the [Hysteresis] entity value.
If the [Threshold Mode] entity is set to <Treat as LA>, the relay is activated
if the scanned PV or SV is greater than or equal to the [Threshold]
entity value, and the relay is deactivated if the scanned PV or SV is
less than the [Threshold] entity value plus the [Hysteresis] entity value.
☛From the [Monitor Mode], select [Local].
☛Select [Threshold Mode], and choose either <Treat as HA> or <Treat as LA>.
☛Select [Hysteresis], set desired value.
6.6.4.1.2 Status Behavior
The Status Behavior entity determines what happens to the relay if the
health of the scanned PV or SV differs from Good. The [Status Behavior]
should be set to one of the following options: <BAD>,<BAD-UNCERTAIN>,
or <Not Used>.
If the [Status Behavior] is set to <BAD>, and the scanned PV or SV
health is Bad, the respective relay will be activated.
If the [Status Behavior] is set to <BAD-UNCERTAIN>, and the scanned PV
or SV health is Bad or Uncertain, the respective relay will be
activated.
If the [Status Behavior] is set to <Not Used>, the respective relay will not
be activated if the scanned PV or SV health is Bad or Uncertain.
☛Set the [Status Behavior] entity either to <BAD>,<BAD-UNCERTAIN>, or
<Not Used>.
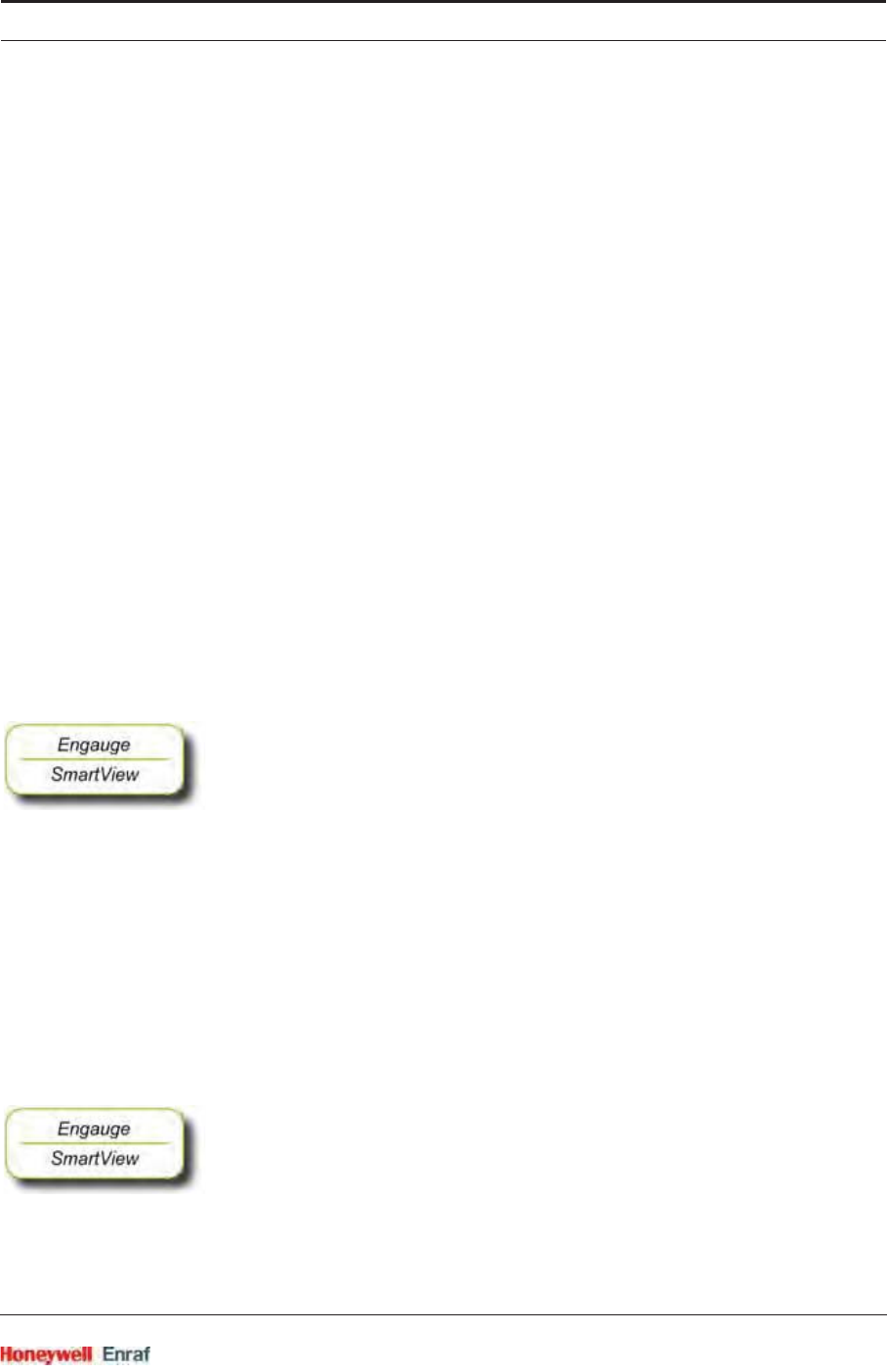
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 85
NOTE: This behavior takes priority over the [Remote] or
[Local] monitoring. For example: If the [Status
Behavior] is set to <BAD>, and the scanned PV or SV
health is Bad, the respective relay will be activated
regardless of the [Monitor Mode] entity settings. The
[Remote] or [Local] option PV or SV checks will then
not affect the relay status.
6.6.4.2 Remote Control
In [Remote Control] mode, each individual relay can directly be activated or
deactivated, by sending an !Activate! respectively a !Deactivate! command
via the CAN bus.
The behavior of each individual relay is further controlled by the [Remote
Control] mode entity, which can be set to either <Restricted> or <Not
Restricted>.
If the [Remote Control] mode entity is set to <Not Restricted>, any source
can be used to control the relay with an !Activate! or a !Deactivate!
command.
If the [Remote Control] mode entity is set to <Restricted>, the relay can
only be controlled by the source that matches the values set in the
[Control Board ID], the [Control Board Instance], and the [Control Function
Instance].
☛From the [Remote Control] mode menu, select either <Restricted> or <Not
Restricted>.
☛If Not Restricted was selected, skip to 6.6.4.3.
☛Select [Control Board ID], set proper value.
☛Select [Control Board Instance], set proper value.
☛Select [Control Function Instance], set proper value.
6.6.4.3 Not in Use
If an individual relay is not required in a particular application, the [Alarm
Mode] entity must be set to <Not In Use>.
Example: If a particular application requires only two relays to be used,
say relay 1 and 2, then for relay 3 and 4 the [Alarm Mode] entities must be
set to <Not In Use>.
☛For the FII-DO relays not used within the application, set the [Alarm
Mode] entities to <Not In Use>.
6.6.5 Commands
The following commands can be given to the FII-DO:

Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 86 Service Manual
Activate
Deactivate
Acknowledge
6.6.5.1 Activate
The !Activate! command will cause the specified relay to become
<Activated>. This command is only available in [Remote Control] mode; see
6.6.4.2.
The !Activate! command behavior is modified by the [Time Setting] entity. If
the [Time Setting] entity is set to zero, the relay will stay permanently
activated until a !Deactivate! command is given.
If the [Time Setting] entity is set to a value other than zero, the relay will be
activated for a time in seconds equal to the value set in the [Time Setting]
entity, then deactivated. During the period the relay is activated, the
relay state will be !Time Setting Active!. This is useful for site
commissioning.
☛For each relay, set the [Time Setting] entity to the desired value.
6.6.5.2 Deactivate
The !Deactivate! command will cause the specified relay to become
<Deactivated>. This command is only available in [Remote Control] mode;
see 6.6.4.2.
6.6.5.3 Acknowledge
The !Acknowledge! command will cause the specified relay to be
physically deactivated, but the relay status will be set to !Acknowledged!.
This command is only available in [PV Monitor] mode; see 6.6.4.1. This
command can only be given when the concerned relay has already
been activated.
For example, this command is useful if the relay is connected to an
alarm system. The alarm can be silenced by the command, but it is still
possible to determine if an alarm has occurred. When the alarm
condition is then removed, the relay state will become deactivated, and
normal operation will resume.
6.6.6 LED Association
Depending on the value set in the [LED Association] entity, the 4 individual
relays on the FII-DO board can be associated with one out of 2 LEDs,
LE2 or LE3 (see FIGURE 6-19).
The associated LED will be ON when the relay state is <Activated>, and
the LED will be OFF when the relay state is <Deactivated>.
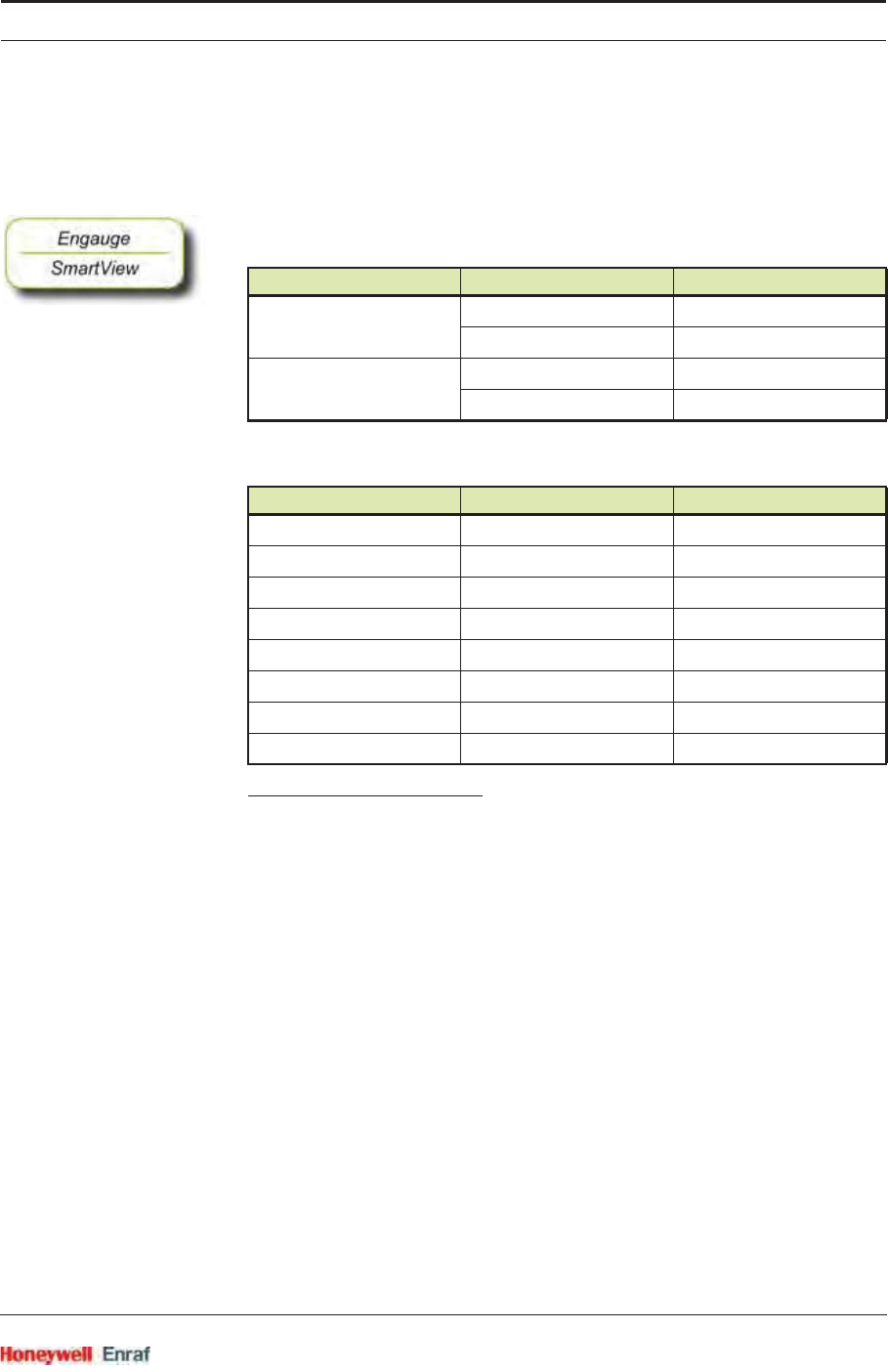
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 87
NOTE: The LEDs do not indicate the physical relay state
(coil state or contacts state), as this depends on the
software settings and the physical settings (jumper),
see 6.6.3.
☛Set the value of the [LED Association] entity as desired (optional). For
an example, see table below.
6.6.7 Terminal Allocation
*) See jumper settings, section 6.6.3.1.
LED Association LED Number Relay Number
1 + 2 LE2 1
LE3 2
3 + 4 LE2 3
LE3 4
Terminal Number Name Function
14 Ry1_a Relay 1 Common
15 Ry1_b Relay 1 NO or NC*
16 Ry2_a Relay 2 Common
17 Ry2_b Relay 2 NO or NC*
18 Ry3_a Relay 3 Common
19 Ry3_b Relay 3 NO or NC*
20 Ry4_a Relay 4 Common
21 Ry4_b Relay 4 NO or NC*
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 88 Service Manual
6.6.8 Commissioned Entities
☛By using the table below, make sure all entities are commissioned.
The [Commissioned] entity will display either <True> if the function is
commissioned or <False> if the function is not commissioned. To
commission the function, the entities must be set in accordance with the
table below.
Operation
Mode Alarm
Mode
Remote
Control
Mode Parameters Commissioned
Alarm Mode Remote
Control
Restricted [Control Board ID] >=1 and <=255
[Control Board Instance] >=0 and <=7
[Control Function Instance] >=1 and <=15
[Time Setting] = 0
<True>
[Control Board ID] <1 or >255
[Control Board Instance] <0 and >7
[Control Function Instance] <1 and >15
[Time Setting] z 0
<False>
Not
Restricted
[Time Setting] = 0 <True>
[Time Setting] z 0 <False>
PV Monitor Remote [Monitor Board ID] >=1 and <=255
[Monitor Board Instance] >=0 and <=7
[Monitor Function Instance] >=1 and <=15
[Time Setting] = 0
<True>
[Monitor Board ID] <1 or >255
[Monitor Board Instance] <0 and >7
[Monitor Function Instance] <1 and >15
[Time Setting] z 0
<False>
Local [Monitor Board ID] >=1 and <=255
[Monitor Board Instance] >=0 and <=7
[Monitor Function Instance] >=1 and <=15
[Time Setting] = 0
[Threshold] = value entered
[Hysteresis] = value entered
<True>
[Monitor Board ID] <1 or >255
[Monitor Board Instance] <0 and >7
[Monitor Function Instance] <1 and >15
[Time Setting] z 0
[Threshold] = value entered
[Hysteresis] = value entered
<False>
Not In Use N/A N/A <True>
Fallback
Mode
N/A N/A N/A <False>

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 89
6.6.9 Board Commissioned Entity
The [Board Commissioned] entity will display either <True> if all functions are
commissioned or <False> if any of the functions are not commissioned.
☛If the [Board Commissioned] entity displays <False>, check each function
parameter again. Use the table from 6.6.8.
6.6.10 Fail-safe Level Application
Following steps include all commissioning-aspects settings for the Fail-
safe level application.
☛The corresponding jumper of the concerned relay must be in the
Normally Open (NO) state (= default setting).
NOTE: In the Commissioning stage, no jumper setting can
be changed without breaking the compartment screw
sealing. See also section 6.6.3.1.
☛Set [Operation Mode] to [Alarm Mode].
☛Set [Relay Mode] to <Energized>.
☛Set [Alarm Mode] to [PV Monitor].
☛Set [Monitor Board ID] to <board id> of product-level board.
☛Set [Monitor Board Instance] to <board instance> of related product-level
board.
☛Set [Monitor Function Instance] to <function instance> of related product-
level board.
☛Set [Monitor Source] to <PV>.
☛Set [Monitor Mode] to [Remote].
☛Set [Remote Threshold Source] to <HH>,<HA>,<LA>, or <LL>.
☛Set corresponding alarm setting of the related product-level board.
☛Set [Status Behavior] to <BAD-UNCERTAIN>
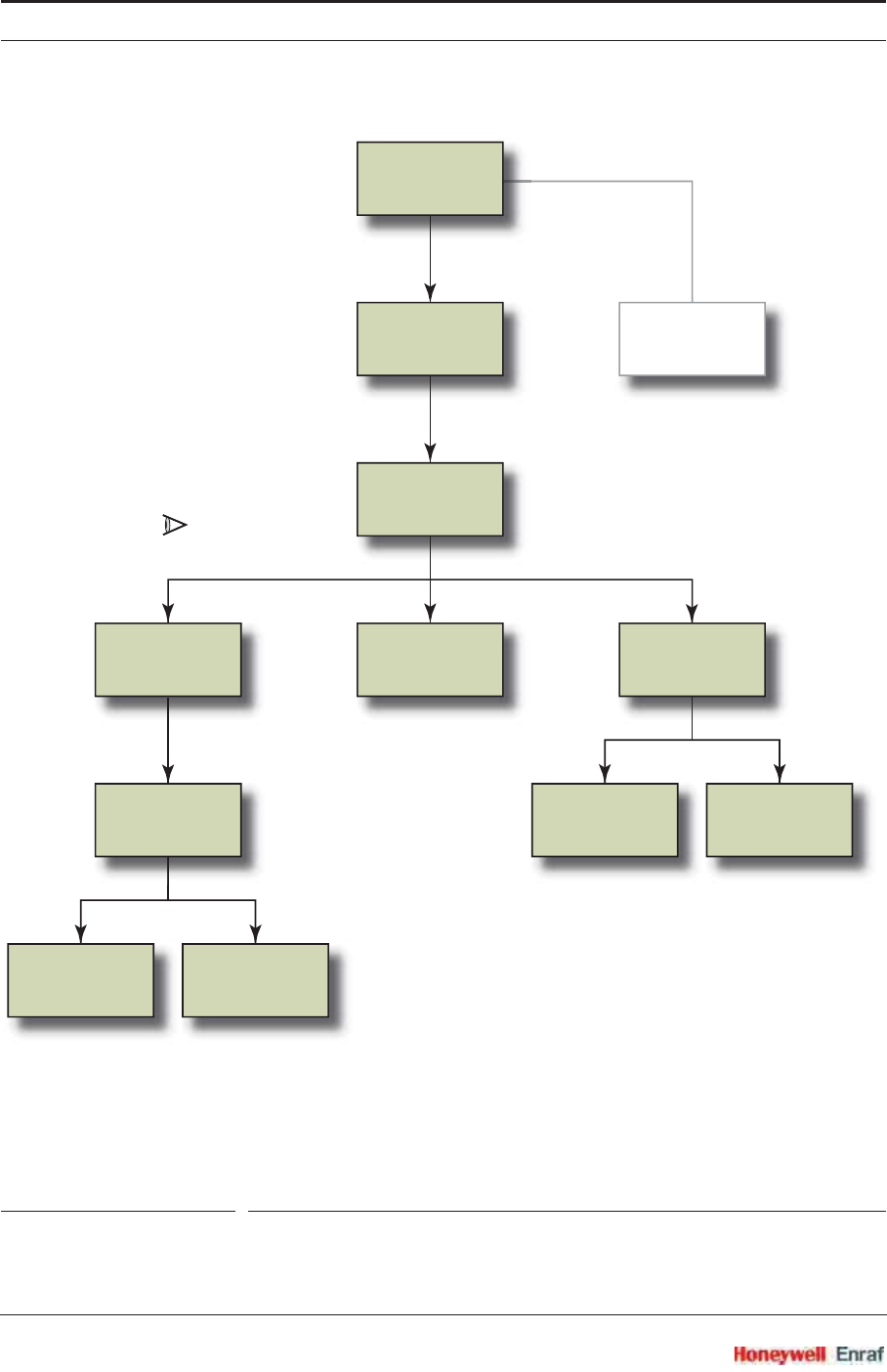
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 90 Service Manual
ESF07-0004
FIGURE 6-21 FII-DO operation mode survey
Operation
Mode
Relay
Mode
Alarm
Mode
Not
In Use
PV
Monitor
Status
Behavior
Remote
Mode
Local
Mode
Not
Restricted Restricted
Remote
Control
Fallback
Mode
Activate /
Deactivate
commands
Energized/
De-Energized
Bad /
Bad-Uncertain /
Not used
monitoring
Alarm
status
(HH/HA/LA/LL)
PV/SV
data
FII-DO
☛
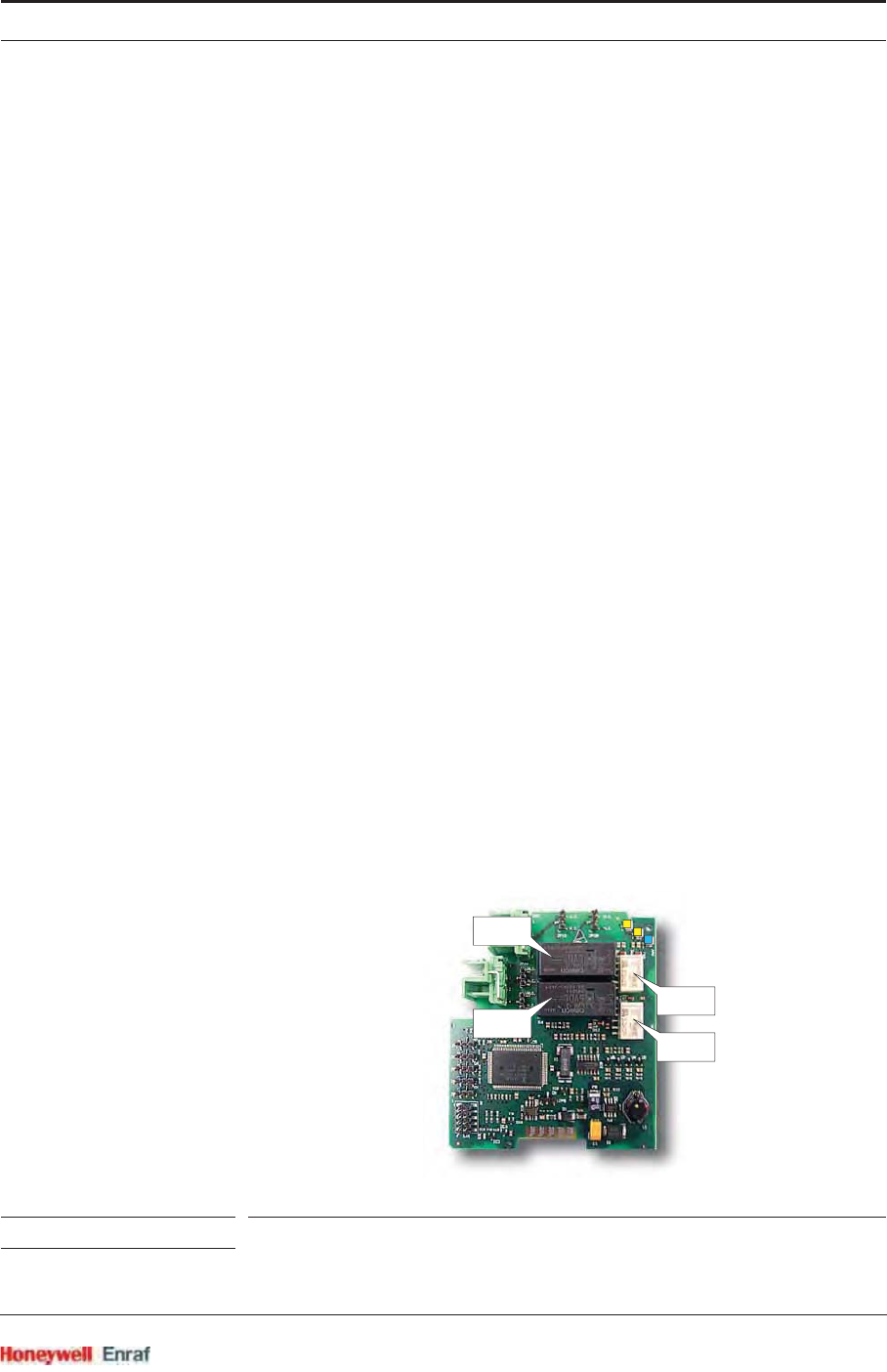
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 91
6.6.11 Overfill Protection Application
6.6.11.1 Introduction
Because of some tank storage overfill accidents in the past, there is an
increased need for a qualified overfill-protected level measuring system.
The SmartRadar FlexLine can be configured such that an adequate
overfill protection level is achieved. As such it is qualified as a Safety
Instrumented Function (SIF) for overfill protection of storage tanks in the
oil and gas industry, to a SIL1 2 level.
The safety parameters are within the range of SIL 2 if the following
conditions are met:
The SmartRadar FlexLine uses the Overfill Protection Appli-
cation with the dual redundant configuration of the FII-DO as
described in this manual, and
All relevant entities are commissioned as decribed in this
manual.
6.6.11.2 Essential FlexConn Boards
The essential FlexConn boards for an overfill protection application are:
FII-DO (1)
FII-DO (2)
TII-XR
PSX
6.6.11.3 Application Principle
In order to achieve the correct SIL, 2 SmartRadar FII-DO modules
are combined into a special safety configuration.
For this special configuration, only relay 3 and relay 4 are used.
For their locations, see FIGURE 6-22.
ESF10-0001
FIGURE 6-22 Locations and ratings of the Electro Mechanical Relays on the FII-DO board
1. SIL = Safety Integrity Level.
relay 3
relay 2
relay 1
relay 4
125 VAC / 0.5 A
(ca. 110 VDC / 0.3 A)
250 VAC / 3 A
(ca. 40 VDC / 3 A)
250 VAC / 3 A
(ca. 40 VDC / 3 A) 125 VAC / 0.5 A
(ca. 110 VDC / 0.3 A)
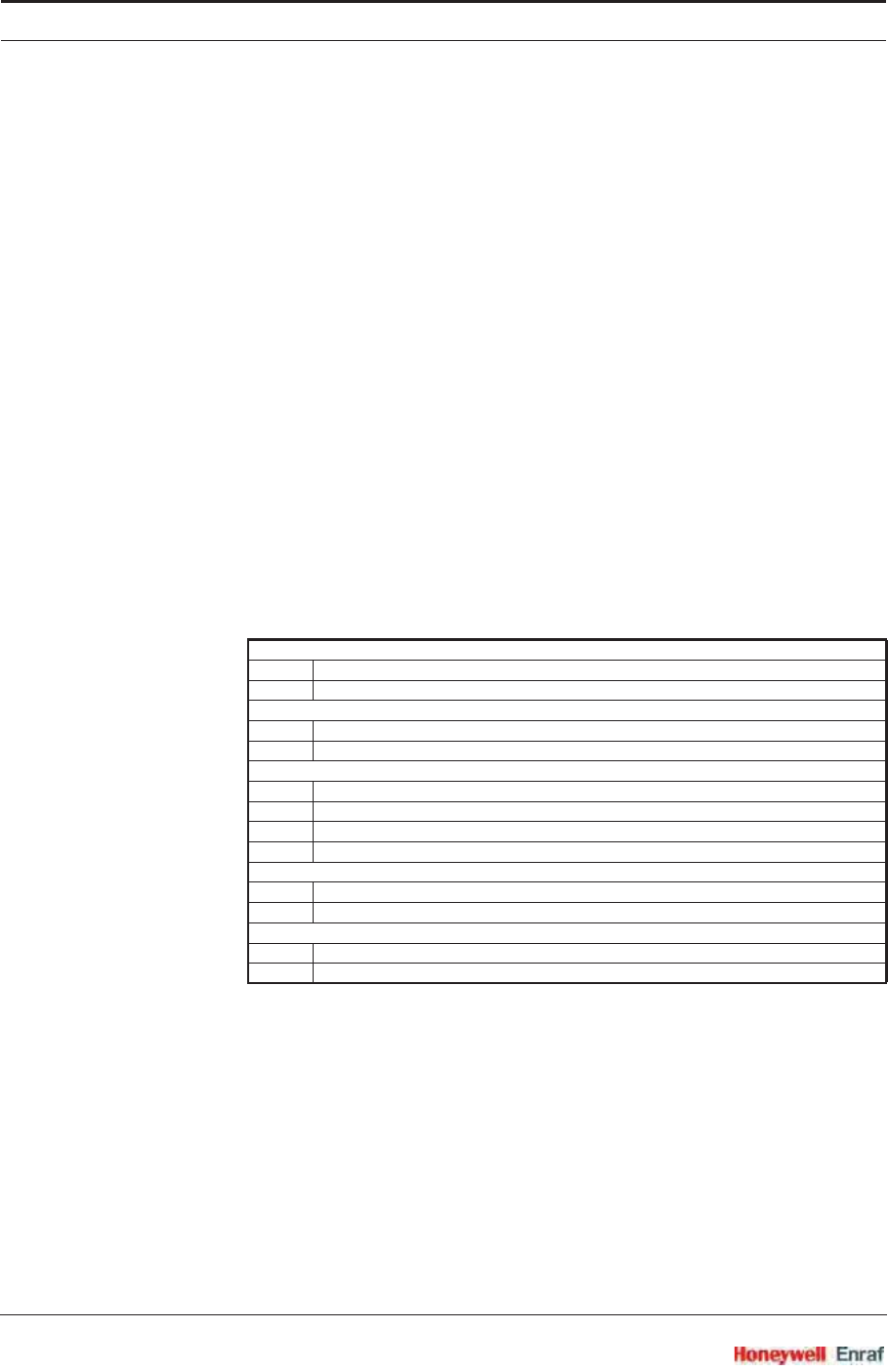
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 92 Service Manual
The relays must be set to Normally Open (jumper, see 6.6.3.1) and
Normally Energized (configuration parameter, see 6.6.3.2).
In a normal situation, the relay contacts are closed.
Relays 4 are used to increase the availability: if a problem is
detected with the other relays, the redundancy takes care that the
overfill protection function will work (see also FIGURE 6-23).
The relays typically can stop a pump or close a valve that is used
filling a storage tank. See FIGURE 6-23.
Overfill safety analysis, including diagnostic tests is done every
second.
The 2 FII-DO boards are continuously checking each other for a
correct functioning. This is done every second. In case of
malfunction, 2 retries are executed before the status is definitely
determined.
The radar scans the overfill protection status every second and will
react accordingly.
6.6.11.4 Overfill Protection Board Actions
The following table shows the important parameters for overfill
protection.
Both board contacts are always opened if one out of the following
events occurs:
•Level = 0 (product level >= threshold, product level TV = BAD/
UNCERTAIN, TII-XR board does not respond)
•Voltage = 0 (one of more board voltages out of range)
•Board diagnostic = 0 (board status = BAD / UNCERTAIN)
•Board diagnostic of counter part (redundant board) = 0 (board
status = BAD / UNCERTAIN)
•Counter part (redundant board) communication = 0 (other
relay board does not respond)
Output = Function PV
1 = relay contact closed
0 = relay contact opened (safe situation)
Diagnostics = Function health + Board health
1 = status = GOOD, healthy
0 = status = BAD, UNCERTAIN, not healthy (force safe situation)
Level = product level analysis
1 = product level < threshold
0 = product level >= threshold (force safe situation)
0 = product level status = BAD, UNCERTAIN, not healthy
0 = no communication with the TII-XR
Voltage = all FlexConn monitored voltages
1 = voltage within specifications (OK)
0 = voltage too high (one or more) (force safe situation)
Counter part communication = communication with other relay board
1 = valid communication
0 = no communication (force safe situation)
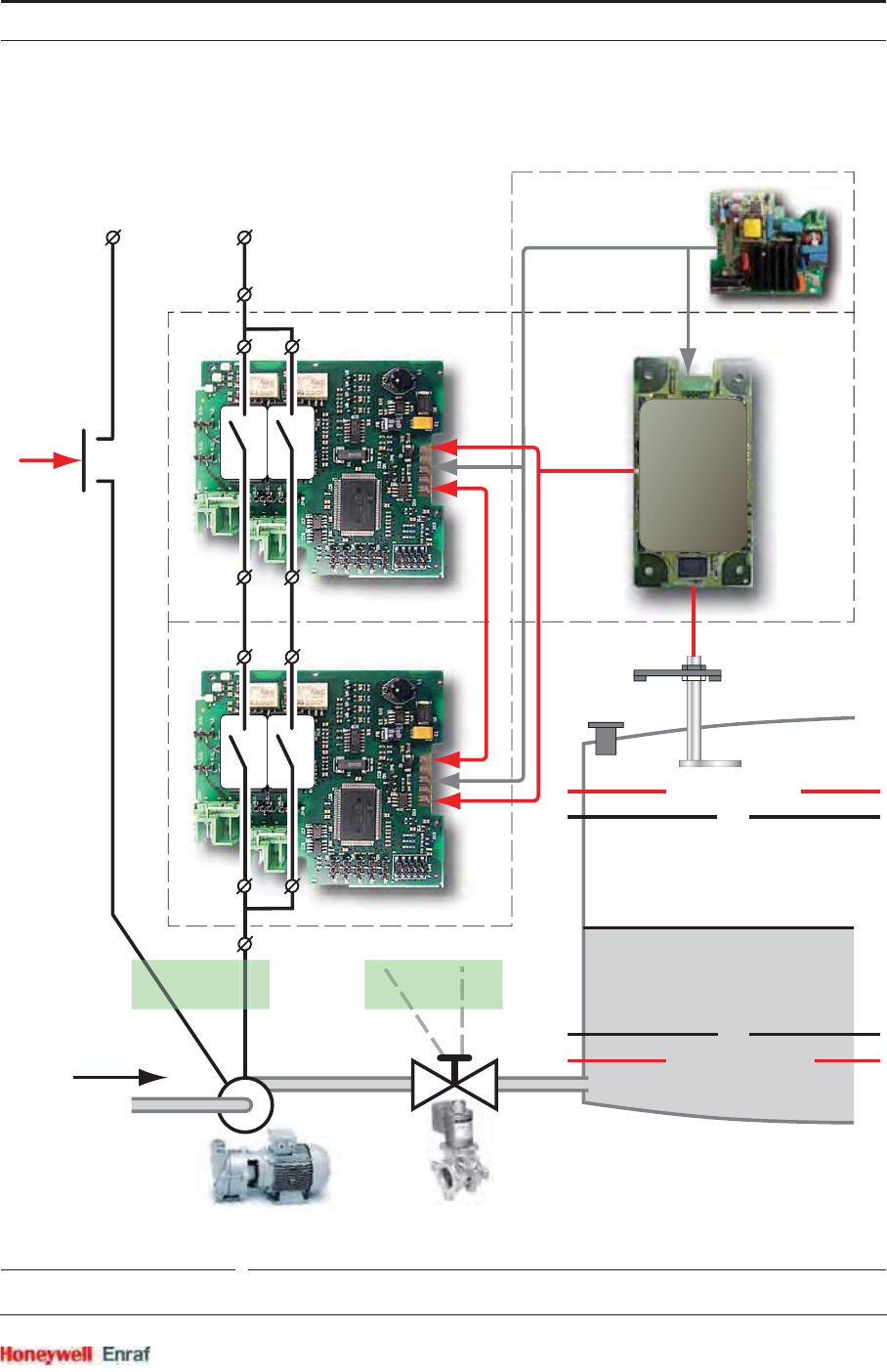
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 93
ESF10-0002
FIGURE 6-23 Overfill protection application using 2 FII-DO boards
overfill threshold
underfill threshold
HH
LL
product level
250 VAC, 3A
(ca. 40 VDC, 3A)
FII-DO 1 TII-XR
FII-DO 2
R3 R4
R3 R4
product
level
diagnostics
product flow
application-
controlled
pump valve
storage tank
PSX
ART2A
49
48
power
85 - 240 VAC, 3A
OR
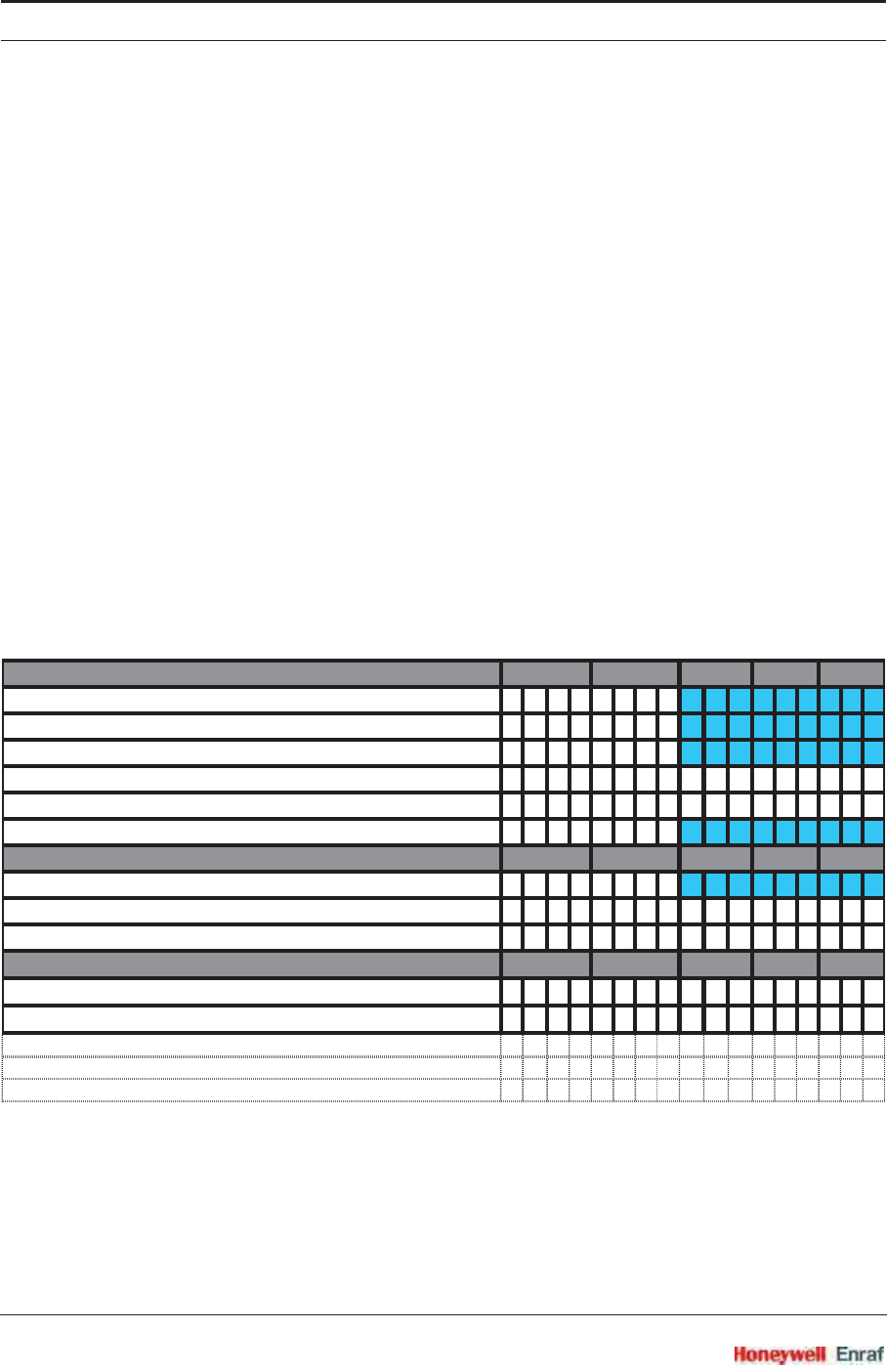
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 94 Service Manual
An individual board relay contact is closed if all following
conditions are met:
•Level = 1 (product level < threshold, product level TV = GOOD,
valid communication with TII-XR)
•Voltage = 1 (board voltages within ranges)
•Board diagnostic = 1 (board status = GOOD)
•Board diagnostic counter part = 1 (board status = GOOD)
•Counter part = 1 (other relay board responds)
•Relay (Rn) diagnostic = 1 (function status = GOOD)
•Relay (Rn) diagnostic counter part = 1 (function status =
GOOD)
NOTE: Both boards needs to be configured identically for
relay behaviour, threshold, and hysteresis.
The following matrix gives an overview of the relations between the
status and resulting events:
1 2 3 4 5 6 7 8 91011121314
Own board status
Level
(incl. TII-XR comms + TV Health + status check) 0XXXX 1 1 1 111111
Voltage X0XXX 111111111
Diag board XX0XX 111111111
Diag R3 XXXXX 000111111
Diag R4 XXXXX 111000111
Counter part (redundant board) communication XXX0X 111111111
Other board status
Diag board
(incl. Voltage) XXXX0 111111111
Diag R3 XXXXX 011011011
Diag R4 XXXXX 101101101
Board action
Output R3 00000 000011011
Output R4 00000 101000101
Application status SD SD SD SD SD NO SD NO SD NO NO NO NO NO
Overfill Protection Status OWWWW WW WWWWWWH
Start safety timer
NNNNN YNYNYYYYN
SD = Shut Down
NO = Normal Operation
O = Overfill alarm
W = Gauge alarm (warning)
H = Healthy
N = No
Y = Yes
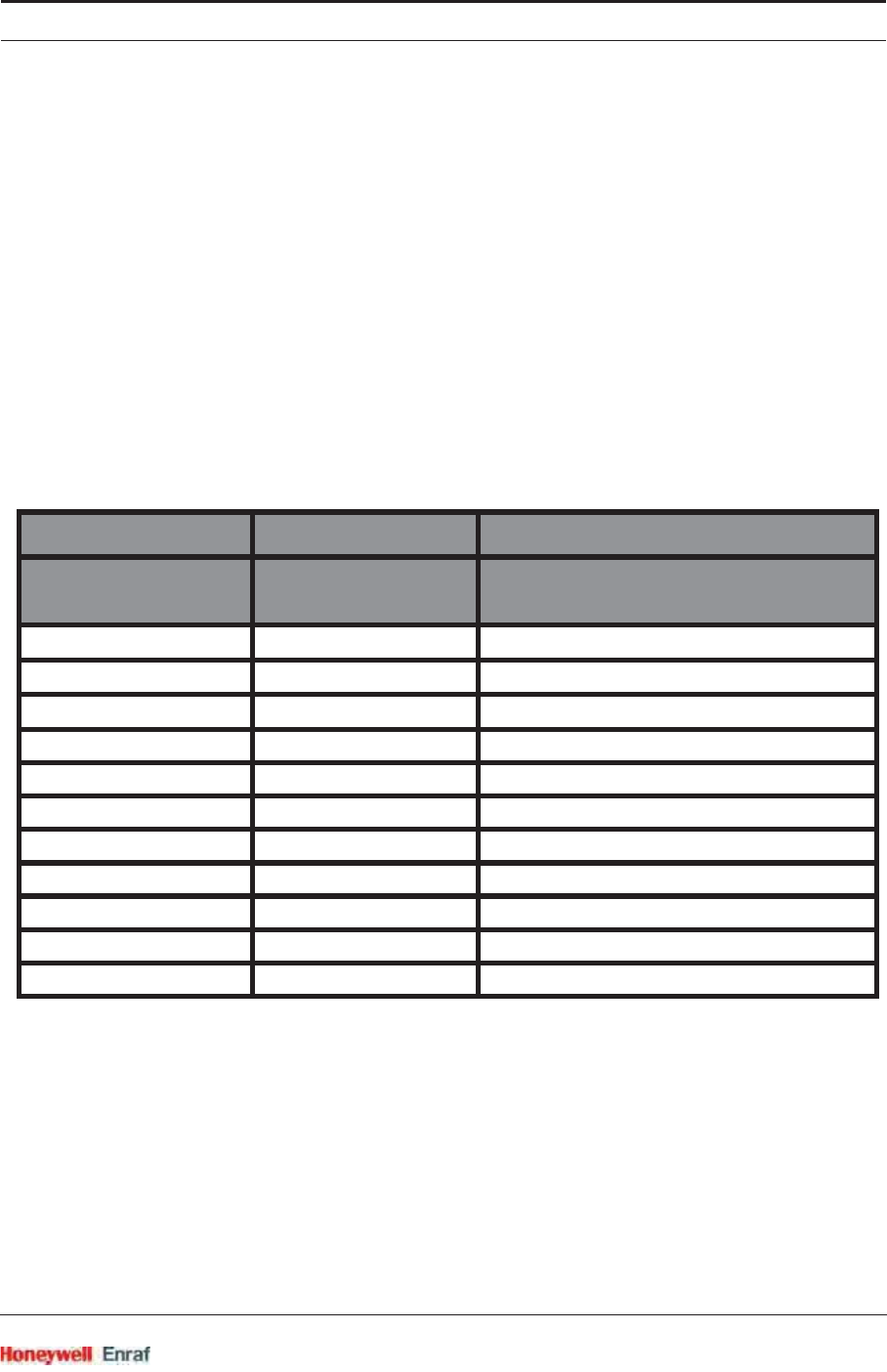
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 95
6.6.11.5 Merging the Status to GPU-level status
The TII-XR firmware implements an alarm for the operator by merging
the output status of each board with the GPU level status, in order to
communicate shut down information to the control room. See following
matrix.
NOTE: For field installations upgraded with the Overfill
Protection functionality, the TII-XR firmware must be
upgraded.
FII-DO 1 FII-DO 2 TII-XR
Overfill Protection
status
level status GPU protocol
OO F
OHF
OWF
WOF
WH?
WW ?
HOF
HH -
HW?
no comms X F
X no comms F
Overfill Protection
status
F = Fail
? = Warning, reduced accuracy
- = valid
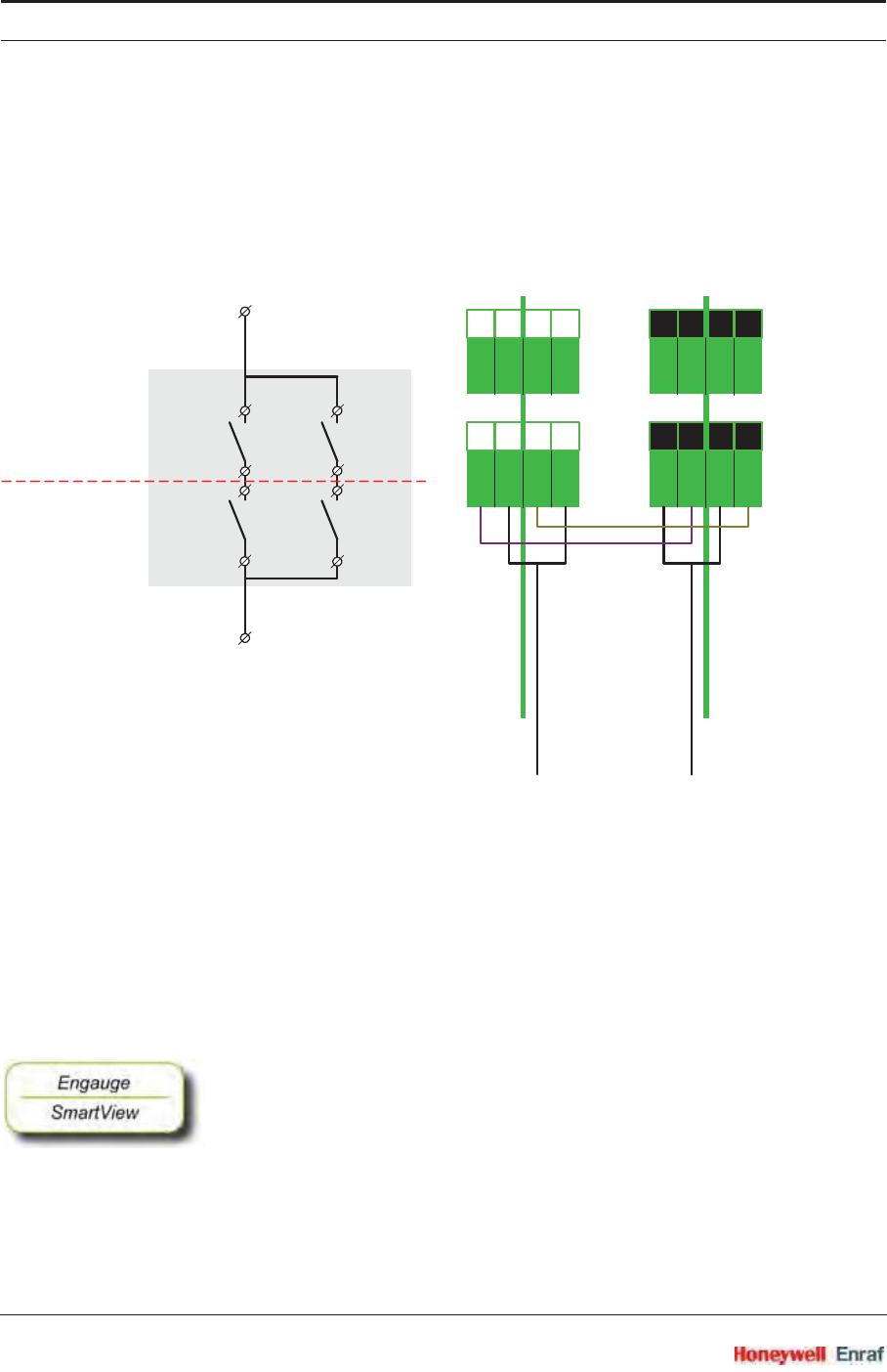
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 96 Service Manual
6.6.11.6 Overfill Protection Application Wiring
☛Connect the external wiring (see illustrations below):
• Connect terminal 48 to the pump or to the valve.
• Connect terminal 49 to the mains.
6.6.11.7 Commissioning the Overfill Protection Application
To configure the Overfill Protection Application all essential boards
needs to be configured.
6.6.11.7.1 FII-DO (redundant)
☛Make sure all jumpers are set to Normally Open (N.O.). See 6.6.3.1.
☛Set the [Board Instance] entity of each FII-DO board to a different value
(e.g. 0 and 1).
The boards are redundant and share the same board ID, so to be
able to address the board uniquely by the internal (CAN-bus) or
external FlexConn protocol, the board instance must be different to
distinguish the boards from each other.
☛Set the [Counterpart Board Instance] entity of each FII-DO board to the
[Board instance] of the counterpart FII-DO board (redundant board).
R3
R3
R4
R4
Ry3_b Ry4_b19 21
Ry3_a Ry4_a
Ry3_b Ry4_b
Ry3_a Ry4_a
18 20
19 21
18 20
Ofp_b
Ofp_a
49
48
CN3 FII-DO 1
CN3 FII-DO 2
14 15 16 17
18 19 20 21
FII-DO 1
14 15 16 17
18 19 20 21
FII-DO 2
CN2 (R1 + R2)
CN3 (R3 + R4)
Ofp_b
49 Ofp_a
48

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 97
☛Set the [Relay Mode] entity of R3 and R4 relay to <Normally Energized> for
both FII-DO boards.
☛Set the [Alarm Mode] entity of R3 and R4 relay to <PV Monitoring> for
both FII-DO boards.
☛Set the [Monitor Mode] entity of R3 and R4 relay to <Local> for both FII-
DO boards.
☛Set the [Threshold] entity and [Hysteresis] entity of R3 and R4 relay to
the application-specific desired values, for both FII-DO boards iden-
tically.
☛For overfill protection, configure the [Threshold] entity above the HA
and HH setting of the TII-XR board. Entities [High alarm] and [High high
alarm].
☛For underfill protection, configure the [Threshold] entity below the LA
and LL setting of the TII-XR board. Entities [Low alarm] and [Low low
alarm].
☛For overfill protection, configure the [Threshold Mode] entity of R3 and
R4 relay to <Treat as HA> for both FII-DO boards.
The threshold will now be approached as high alarm above [High
alarm] and [High high alarm], with the relevant hystresis behaviour.
☛For underfill protection, configure the [Threshold Mode] entity of R3 and
R4 relay to <Treat as LA> for both FII-DO boards.
The threshold will now be approached as low alarm below [Low alarm]
and [Low low alarm], with the relevant hysteresis behaviour.
☛Set the other relevant entities:
The [Overfill Protection Status] entity shows the Overfill Protection Status of
each FII-DO board.
<H> = Healthy
<W> = Gauge alarm (Warning)
<O> = Overfill alarm
With the [Safety shut down timer] entity, the user can set the time that a safe
shutdown will be forced when only an error or failure in one relay chain
is detected. Default value: <0>: Safety Shutdown Timer DISABLED.
NOTE: This is an enhanced safety function.
When one potential fail situation is detected in one chain, the other
chain will be forced to fail safe (contacts opened) after the safety shut
down time.
Philosophy: the first detected fail will not result in a shut down directly
but should be solved within a certain time.
If the Safety shut down timer is enabled, so value z<0>, then
operation can continue with one branch till second fault is detected.
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 98 Service Manual
In other words, this means: In case an anomaly is deteced by the
internal gauge diagnostics, the gauge needs service within the time
set by this timer.
Typical value: <72> hours.
If the Safety shut down time is disabled, so value = <0>, then the
customer wants to continue permanently with the other branch.
NOTE: When the "Safety shut down timer" is active or
running, the remaining time until shutdown can be
inspected by reading the [Safety shut down timer left]
entity.
6.6.11.7.2 TII-XR
☛Set the [Overfill Protection Function] entity to <Enabled>.
☛Set the [First Relay Board Instance] entity of the [Board Instance] entity to
the first FII-DO board.
☛Set the [Second Relay Board Instance] entity of the [Board Instance] entity to
the second FII-DO board.
The "Maximum Safe Fill" mechanism of the TII-XR should be ignored
for the SmartRadar FlexLine overfill protection application.
When the "Maximum Safe Fill" level is configured lower than the Over
fill Threshold, the PV status becomes BAD much earlier, and the FII-DO
will open the contacts.
☛Set the [Maximum safe fill level] entity above the [Threshold] values of the
FII-DO boards when used for overfill protection.
OR
☛Set the 9th switch [Compensations and features] entity to <FALSE>.
6.6.11.7.3 PSX (Power Supply)
CAUTION! The Overfill Protection Application may ONLY be
powered by AC mains. Only 85VAC - 240 VAC can
be used for mains connected to the SmartRadar
FlexLine having the Overfill Protection Application
option.

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 99
6.6.11.8 Proof Testing
By activating the command [Start Proof test] entity, the FII-DO simulates
an overfill or underfill. The remainder of the SIF should work as
expected (e.g. close a valve, stop a pump, generate an alarm) this
should be validated.
NOTE: This test must only be performed in a healthy
situation when the product level in the tank is below
the overfill threshold or above the underfill threshold.
During the proof test - when the level is simulated above or below the
threshold - the "Overfill protection status" will indicate "O" in order to
enable checking the "Proof test" results in the control room as well.
Each FII-DO of the overfill protection application implements the proof
test functionality, so the proof test has to be performed successively for
both modules.
By activating the command [Stop Proof test] entity, the FII-DO returns to
normal overfill analysis mode again.
NOTE: The FII-DO module of the SmartRadar FlexLine
overfill protection safety application implements an
automatic termination of the "Proof test" function in
case the user forgets the command [Stop Proof test].
☛Set the [Proof test termination time out] entity to the most desired value in
minutes:
•<0> (auto termination off)
•<5> (default)
•<10>
•<20>
•<30>

Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 100 Service Manual
6.7 SmartView Display Interface (FII-SMV)
6.7.1 Introduction
The Field Interface Instrument - SmartView (FII-SMV) board is a module
that communicates with SmartView.
ESF07-0013
FIGURE 6-24 The FII-SMV board with the SmartView display
At request from SmartView the FII-SMV board prepares data sets for it.
The requests from SmartView depend on the actual screen at the time.
The communication between the FII-SMV and SmartView uses an own
protocol on an RS-485 physical layer.
The SmartView display can be delivered in 3 versions, each version
having its own specific address:
Portable SmartView (address 1)
SmartView fixed on the instrument (address 2)
SmartView as a tank-side indicator (address 3)
The FII-SMV board continuously scans all addresses, and only the one
with the lowest address will be served.
><
<
<
MAIN
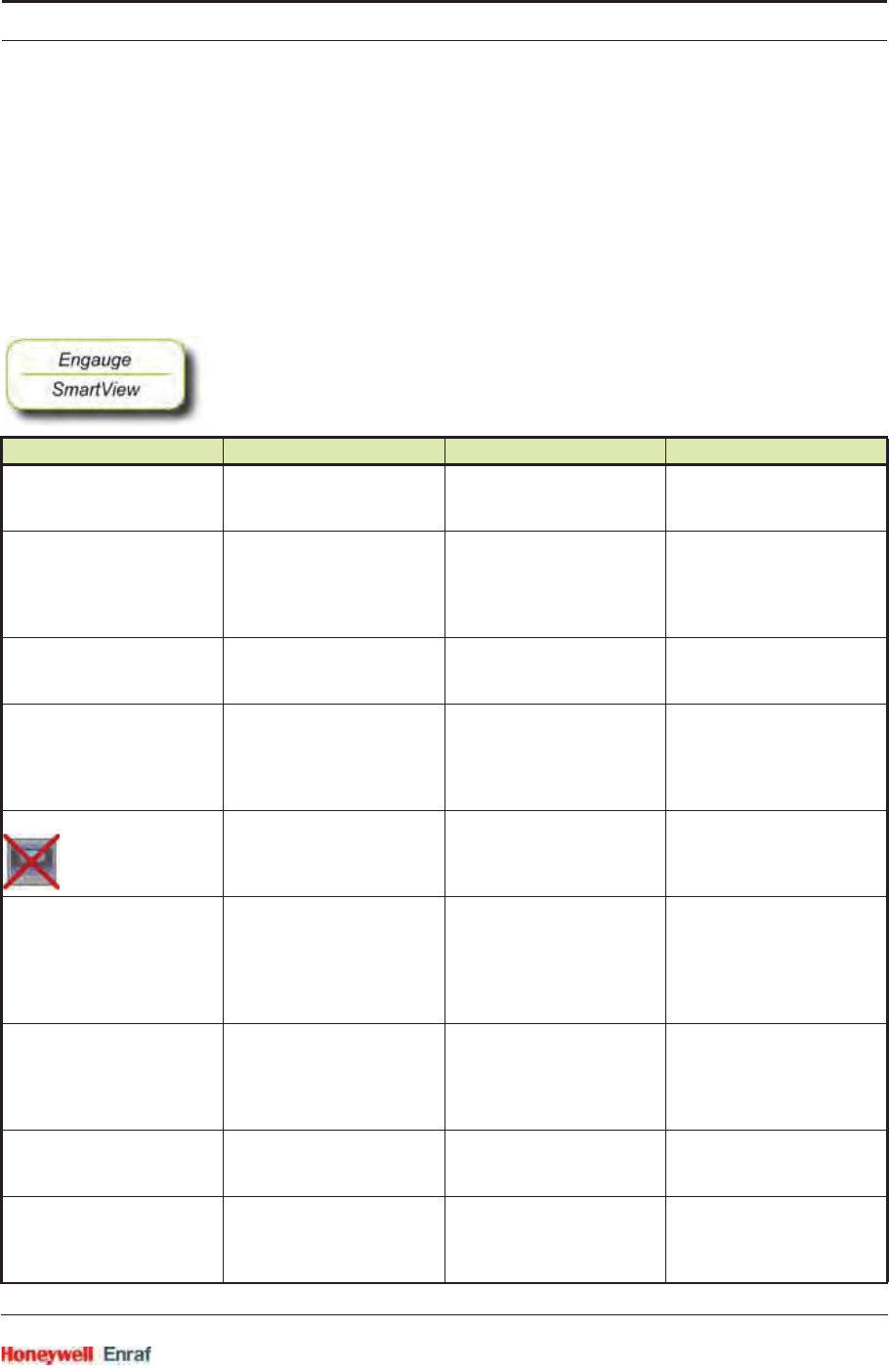
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 101
So, for example, if a stand-alone SmartView (address 3) and an
integrated SmartView (address 2) are connected, the stand-alone
SmartView (address 3) will be served as soon as the integrated
SmartView (address 2) is closed (set to idle).
6.7.2 Commissioning the FII-SMV
For a correct functioning of the FII-SMV module in an instrument the
following entities can be set by using either Engauge or SmartView.
☛By using the following table, check each entity for correctness.
Name Value Range Default Value Explanation
[Decimal separator] <point>
<comma>
<point> The decimal separator in
which entities are shown on
the SmartView display.
[Tenth millimeter selection] <enable>
<disable>
<enable> Determines whether the
tenth millimeter is shown on
the display in the [PV screen]
in case a level entity is
shown.
[Identification] 8 characters e.g.
<TANK1234>
<--------> Name of a tank or
instrument. This string is
visible within a [PV screen].
[Password] <......> 6 characters <ENRAF2> The password SmartView
uses for entering the
protected level.
Note: Some settings reside
under the protected level.
[Function identification] <......> 13 characters <SmartView mst> The name of the current
function of this module.
This name is visible on the
SmartView display.
[Extra information switch] <level temperature>
<Info Switch>
<Info Switch> Determines whether the
[extra information] screen on
the SmartView will display
level and temperature or
extra information from a
specific function.
[Extra info board ID] <01......XX> 2 digits <01> Board ID of the board that
has the [extra information] to
display.
In case of OneWireless, the
ID = 12.
[Extra info board instance] <00......XX> 2 digits <00> Board instance of the board
that has the [extra information]
to display.
[Extra info function instance] <01......XX> 2 digits <01> Function instance that has
extra information to display.
In case of OneWireless,
this = 01.
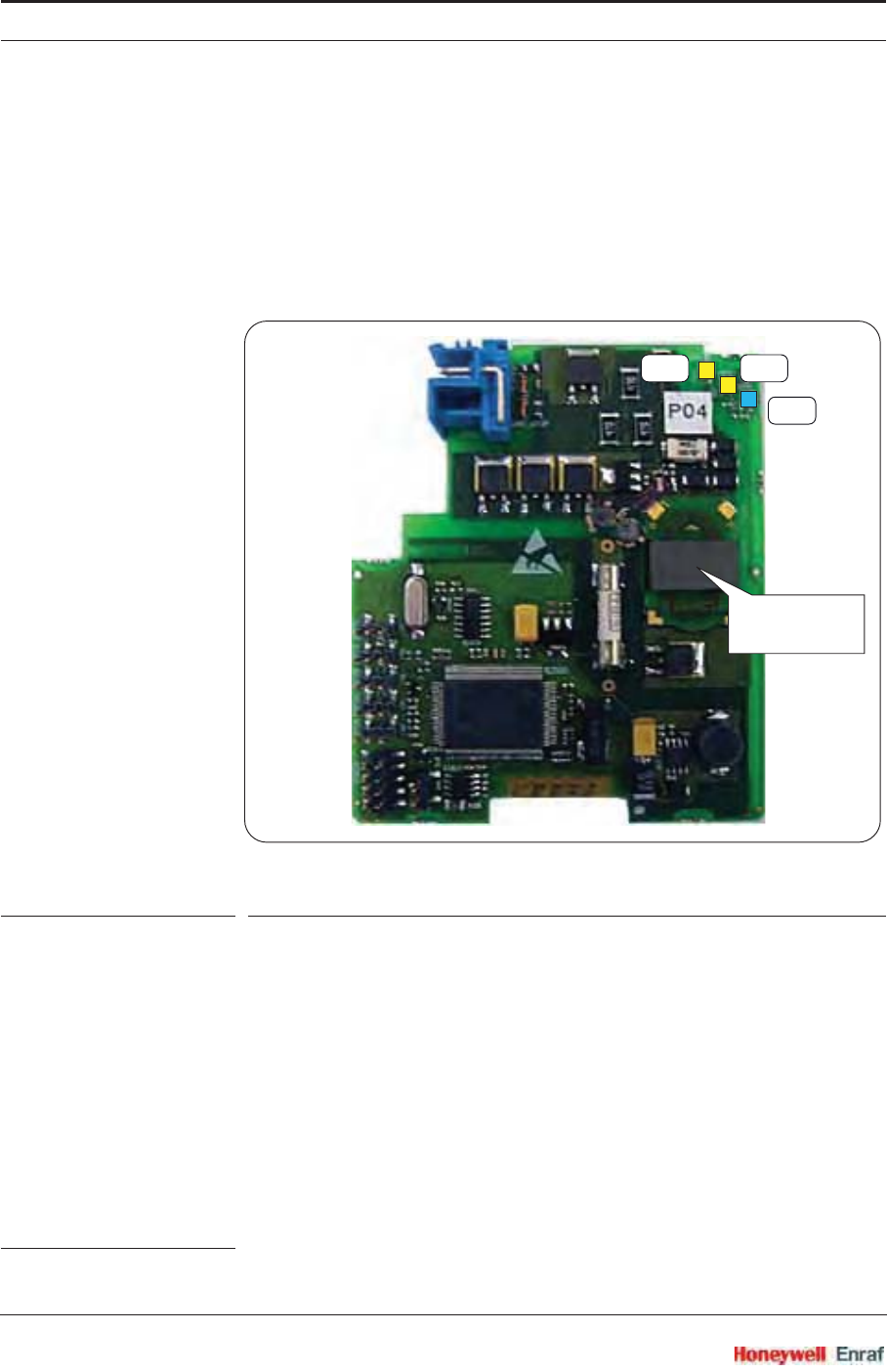
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 102 Service Manual
6.8 Pressure & Density Measurement and Other HART Inputs (FCI-HT)
6.8.1 Introduction
The Field Communication Instrument - HART (FCI-HT) board is a
HART®1 master module that enables hybrid-signal (both analog +
digital) communication between the FlexConn instrument and a HART
sensor.
ESF07-0014
FIGURE 6-25 The FCI-HT board
The HART protocol is a bi-directional master-slave communication
protocol, which is used to communicate between intelligent field
instruments and host systems.
The FCI-HT board has a planar transformer for galvanic isolation from
the HART bus. See FIGURE 6-25.
LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing
to indicate activity on the HART bus. LE2 indicates data is being
transmitted (Tx), LE3 indicates data is being received (Rx).
With the HART protocol, an analog 4-20 mA signal can be combined
with a digital Frequency Shift Keying (FSK) signal. See FIGURE 6-26.
1. Highway Addressable Remote Transducer.
LE1
LE2LE3
planar
transformer
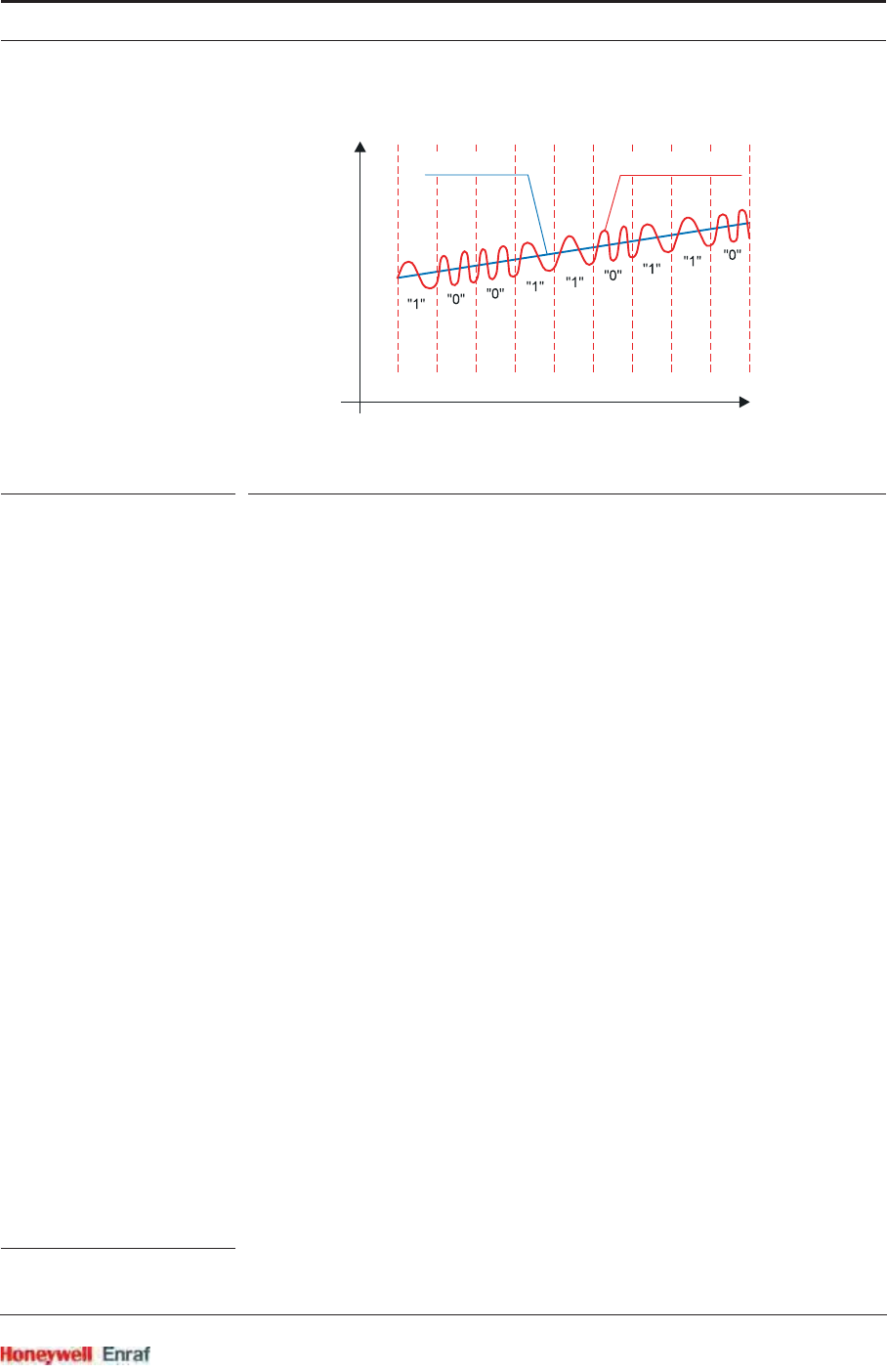
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 103
ESF07-0015
FIGURE 6-26 The analog and digital signals within the HART® communication
6.8.2 Software Description
The FCI-HT board, being a functional module of the SmartRadar
FlexLine, contains embedded software which enables it to collect data
input from sensors via both the HART bus and the FlexConn CAN bus.
Moreover the FCI-HT module can calculate the HIMS1 product density.
The main function of the FCI-HT software is to measure HIMS product
density, by connecting the FCI-HT board via the HART bus to 1 or 2
pressure sensors, and via the FlexConn bus to a product level and a
water level sensor.
To measure product density, the needed standard system configuration
is:
HART pressure sensor P1 (product pressure)
HART pressure sensor P3 (vapour pressure)
Product level scanned from a FlexConn board (e.g. TII-XR)
Water level scanned from a FlexConn board (e.g. FII-VT)
For tanks that are free venting to the atmosphere or floating-roof tanks,
P3 pressure is not required. The water level sensor is also optional.
1. Hybrid Inventory Measurement System.
20 mA
4 mA
Time
analog signal digital FSK signal
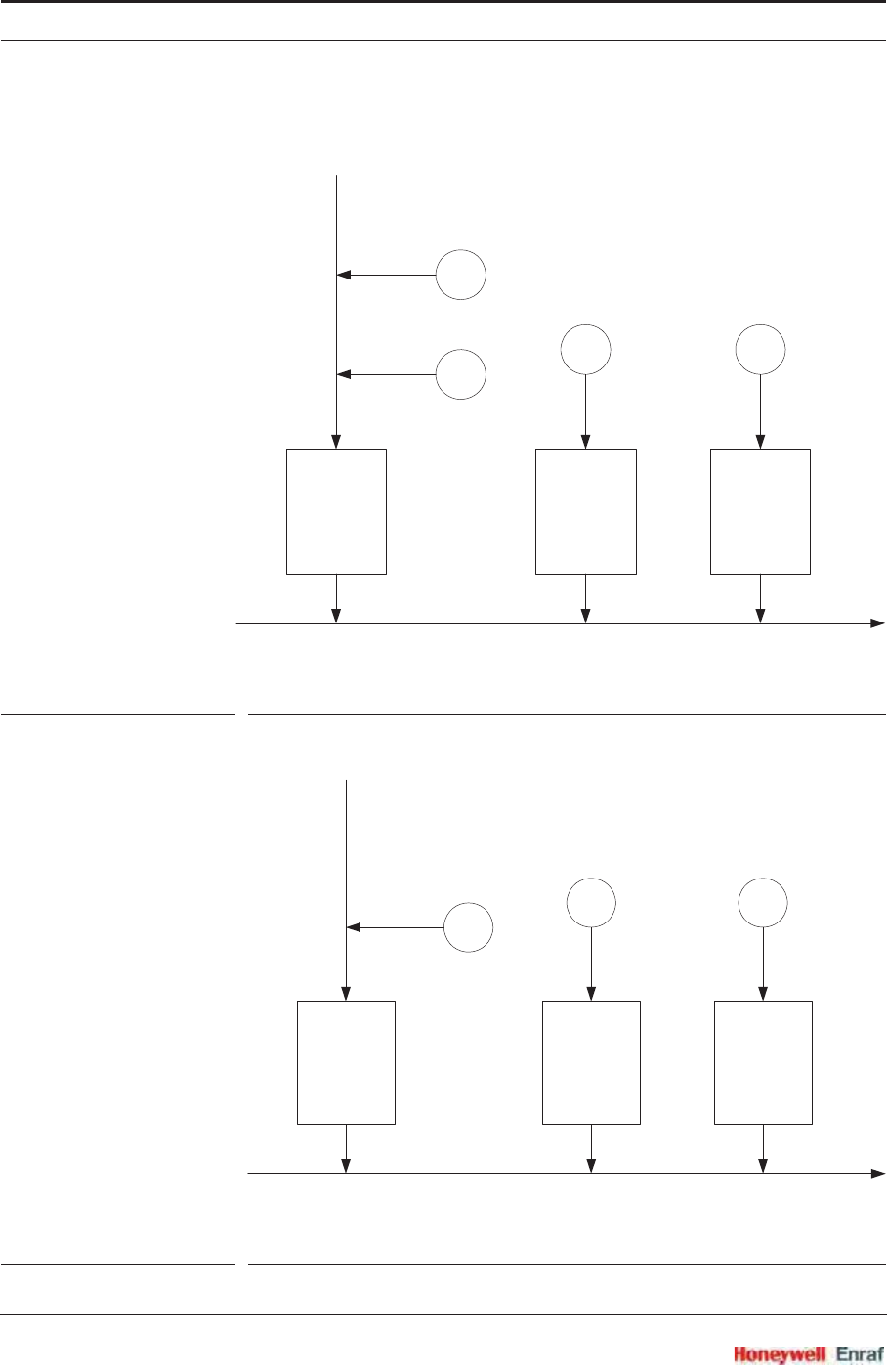
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 104 Service Manual
For HIMS density measurement system diagrams, see FIGURE 6-27
and FIGURE 6-28.
FIGURE 6-27 Standard HIMS density measurement system diagram
FIGURE 6-28 Floating-roof or free-venting tank HIMS density measurement system diagram
P3
P1
CAN-Bus
HART-Bus
FCI-HT FII-VT TII-XR or
X-Band radar
VITO LEVEL
Water
Level
Product
Level
Vapour
Pressure
Product
Pressure
CAN-Bus
HART-Bus
FCI-HT FII-VT TII-XR or
X-Band radar
VITO LEVEL
Water
Level
Product
Level
P1
Product
Pressure
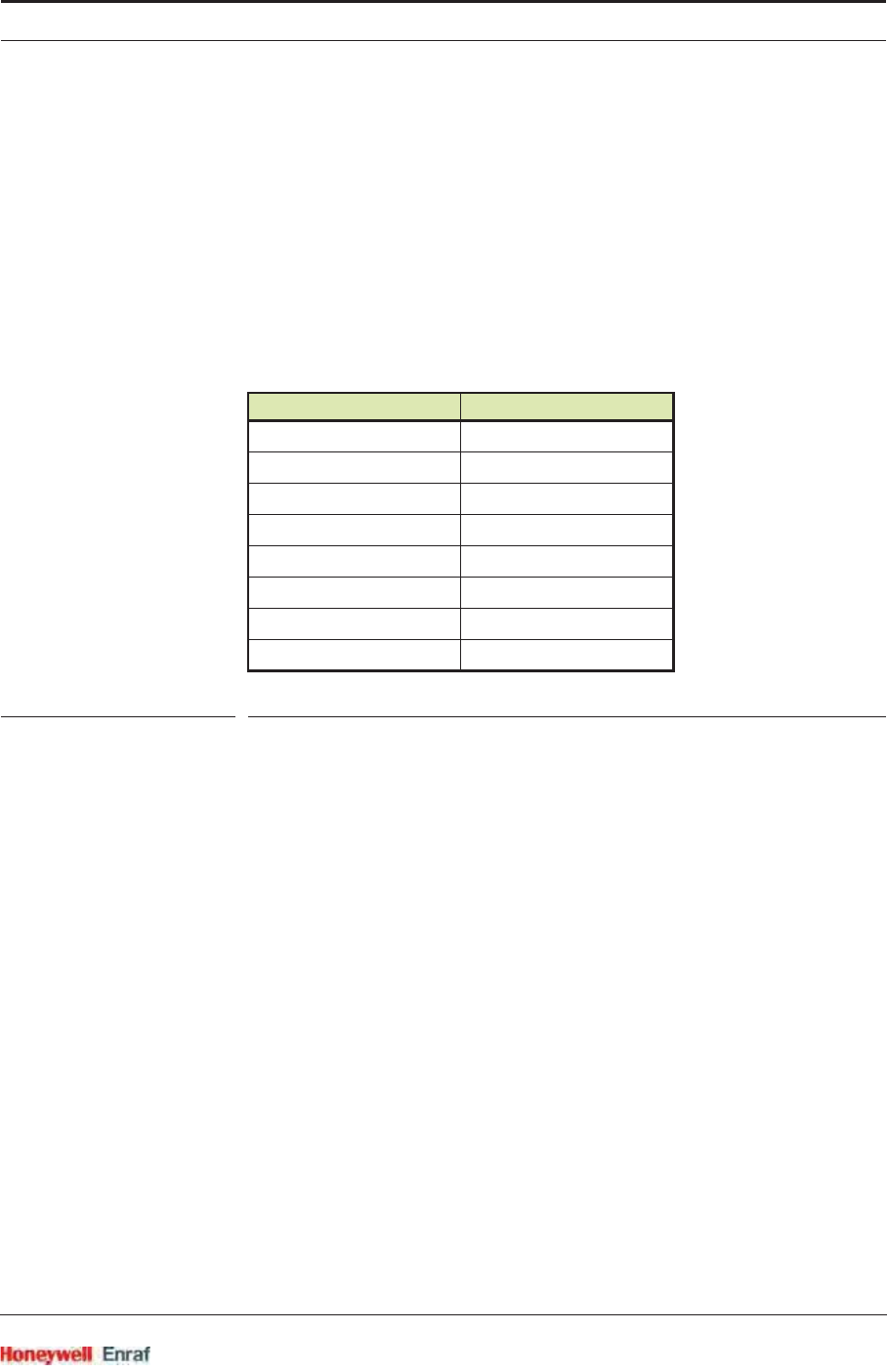
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 105
As an alternative function, the FCI-HT board also allows the connection
of up to 5 generic HART sensors operating in multi-drop digital mode or
one generic HART sensor operating in analog mode.
In the multi-drop digital mode situation, one or two of the generic HART
sensors can be [P1 Pressure] or [P3 Pressure], providing product pressure
and vapour pressure respectively, but no HIMS density calculation will
be available.
The HART sensors and HIMS density measurement are allocated to a
function number in the FCI-HT software. See table below.
TABLE 6-1 FlexConn function allocation
Function 1 is exclusively reserved for P1 pressure, Function 2 is
exclusively reserved for P3 pressure, and Function 8 is exclusively
reserved for HIMS density calculation.
Only one of each type of HART device can be allocated to a function.
Therefore this limits the number of HART devices of each type that can
be fitted.
Example 1
4 HART pressure devices and 1 temperature device can be connected.
P1 pressure device allocated to Function 1
P3 pressure device allocated to Function 2
one pressure device allocated to Function 5
one pressure device allocated to Function 7
the temperature device allocated to Function 4
FlexConn Function Device Type
Function 1 [P1 Pressure]
Function 2 [P3 Pressure]
Function 3 [Distance]
Function 4 [Temperature]
Function 5 [Pressure]
Function 6 [Density]
Function 7 [Other]
Function 8 [HIMS Density]
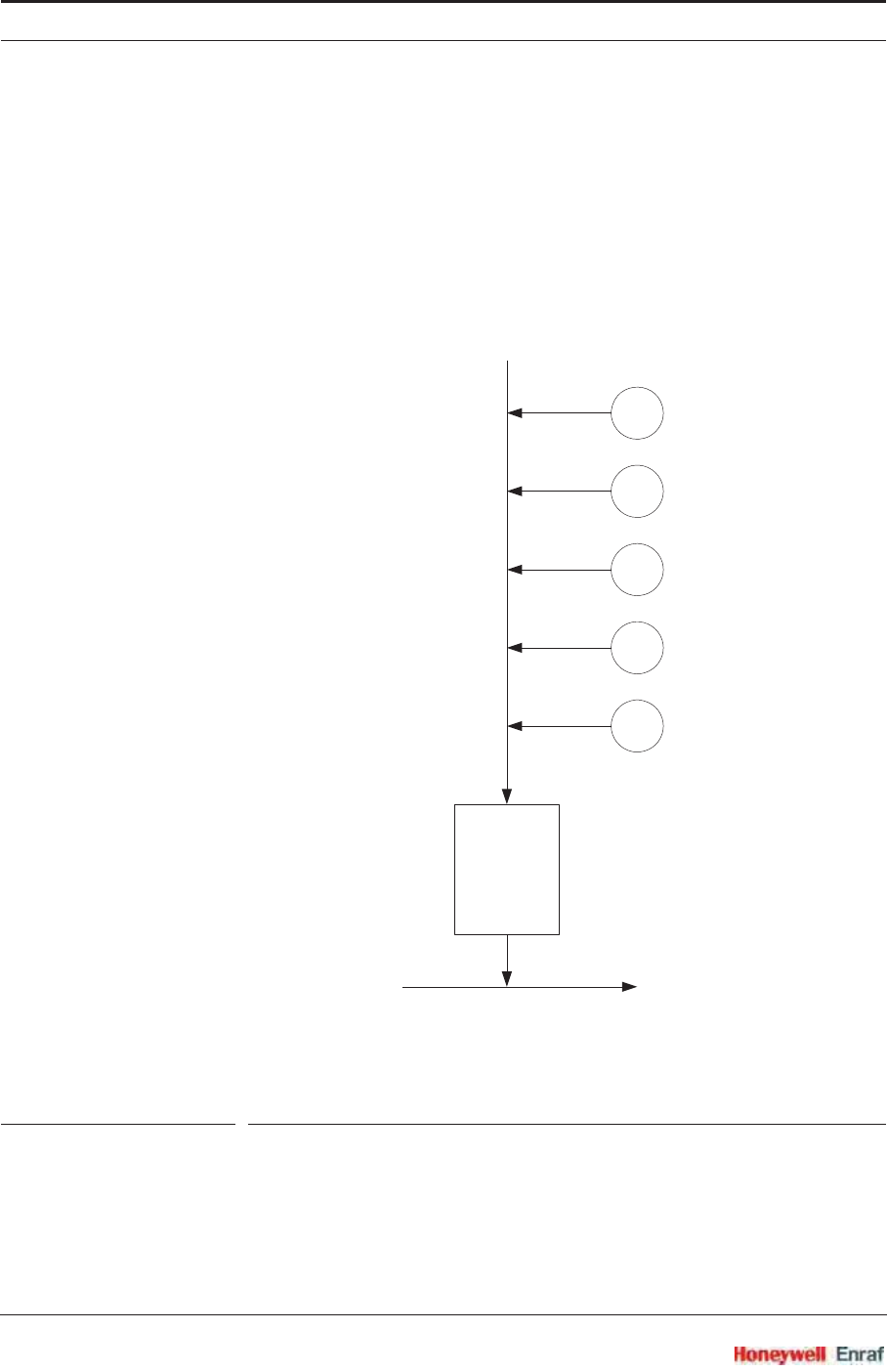
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 106 Service Manual
Example 2
2 HART density devices and 1 distance device can be connected.
density device 1 allocated to Function 6
density device 2 allocated to Function 7
the distance device allocated to Function 3
FIGURE 6-29 Alternate system diagram multi-drop digital mode
1
2
CAN-Bus
HART-Bus
FCI-HT
3
4
5Generic
HART
Generic
HART
Generic
HART
Generic
HART
Generic
HART
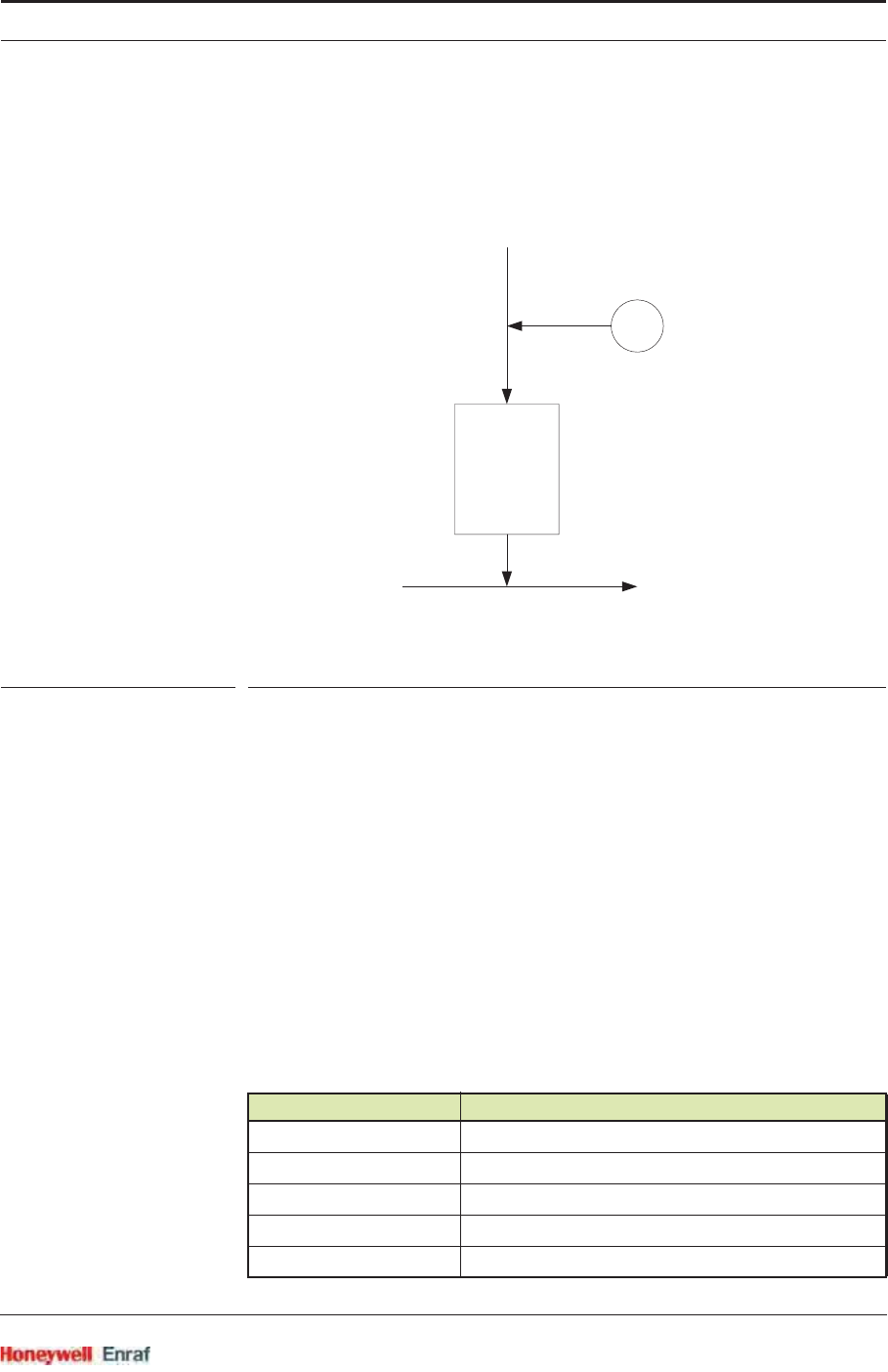
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 107
In analog mode, the connected HART device will be allocated to
Function 1 through 7, depending on the type of HART device
connected.
FIGURE 6-30 Analog mode system diagram
6.8.3 Software Specifications
6.8.3.1 General
The main function of the FCI-HT software is to measure HIMS product
density, by connecting the FCI-HT board via the HART bus to 2
pressure sensors (P1 and P3), and via the FlexConn bus to a product
level sensor and an optional water level sensor.
The alternative function is to connect up to 5 generic HART devices
operating in multi-drop digital mode, or 1 generic HART device
operating in analog mode.
The FCI-HT software only supports HART devices with the following
addresses.
HART Address Function
00 Reserved for HART device in analog mode
01 Reserved for P1 pressure sensor
02 N/A Reserved for future use
03 Reserved for P3 pressure sensor
04 HART generic sensor
1
CAN-Bus
FCI-HT
Generic
HART
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 108 Service Manual
TABLE 6-2 Accepted HART addresses
☛Before proceeding with commissioning, first check the maximum
start-up current of all connected HART devices.
☛Make sure the HART address of the installed device(s) are in
accordance with TABLE 6-2.
6.8.3.2 P1 Pressure
The FCI-HT software only accepts the Primary Value of a P1 pressure
HART device in SI units kilo Pascals (kPa).
☛Make sure the P1 pressure HART device is configured to output data
in kilo Pascals (kPa). If not, correctly configure as yet, by using an
appropriate HART configuration tool.
TABLE 6-3 Accepted PV unit for a P1 HART device
NOTE: The Secondary and Tertiary values of a P1 pressure
HART device may be any units.
The PV of the P1 pressure HART device is read and converted into SI
Units Pascals (Pa) within the FlexConn function PV.
The value is filtered, and the filtering factor depends on the value set in
the entity [P1 Integration time]. A higher value gives more filtering, and a
lower value gives less filtering.
05 HART generic sensor
06 HART generic sensor
07 HART generic sensor
08 HART generic sensor
09 HART generic sensor
10 HART generic sensor
11 HART generic sensor
12 HART generic sensor
13 HART generic sensor
14 HART generic sensor
15 HART generic sensor
Sensor Type Accepted HART
PV Unit Abbreviation HART PV Unit
Code
P1 Pressure Kilo Pascal kPa 12
HART Address Function
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 109
The correction factor stored in the [P1 PV offset] entity is then subtracted
from the filtered value. If the [P1 PV offset] entity = 0 no offset is applied.
Depending on the [PV selected type] entity, the P1 pressure can be
displayed as either absolute pressure or relative pressure.
TABLE 6-4 P1 pressure displayed unit types
If Relative pressure is selected, the value stored in the [Ambient Air
Pressure] entity is added to the measured pressure. If Absolute pressure
is selected, no factor is added. The final result is available in the [Primary
Value] entity.
NOTE: Absolute pressure is used in the density calculation;
the relative pressure is only displayed in P1 [Primary
Value].
For the FCI-HT software to differentiate between a HART device
malfunction and a HART device not actually installed, P1 pressure has
the entity [P1 Installed] which must be set to either <Installed> if a P1
pressure HART device is actually fitted or <Not Installed> if a P1 pressure
HART device is not actually fitted.
The Secondary and Tertiary values of a P1 pressure HART device are
not converted, and they are simply translated from the HART device to
the FlexConn environment.
6.8.3.3 P3 Pressure
The FCI-HT software only accepts the Primary Value of a P3 pressure
HART device in SI units kilo Pascals (kPa).
☛Make sure the P3 pressure HART device is configured to output data
in kilo Pascals (kPa). If not, correctly configure as yet, by using an
appropriate HART configuration tool.
TABLE 6-5 Accepted PV unit for a P3 HART device
NOTE: The Secondary and Tertiary values of a P3 pressure
HART device may be any units.
PV Unit Type Display Unit Type PV selected type
P1 Pressure Absolute 1
Relative 2
Sensor Type Accepted HART
PV Unit Abbreviation HART PV Unit
Code
P3 Pressure Kilo Pascal kPa 12
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 110 Service Manual
The PV of the P3 pressure HART device is read and converted into SI
Units Pascals (Pa) within the FlexConn function PV.
The value is filtered, and the filtering factor depends on the value set in
the entity [P3 Integration time]. A higher value gives more filtering, and a
lower value gives less filtering.
The correction factor stored in the [P3 PV offset] entity is then subtracted
from the filtered value. If the [P3 PV offset] entity = 0 no offset is applied.
Depending on the [PV selected type] entity, the P3 pressure can be
displayed as either absolute pressure or relative pressure.
TABLE 6-6 P3 pressure displayed unit types
If Relative pressure is selected, the value stored in the [Ambient Air
Pressure] entity is added to the measured pressure. If Absolute pressure
is selected, no factor is added. The final result is available in the [Primary
Value] entity.
NOTE: Absolute pressure is used in the density calculation;
the relative pressure is only displayed in P3 [Primary
Value].
For the FCI-HT software to differentiate between a HART device
malfunction and a HART device not actually installed, P3 pressure has
the entity [P3 Installed] which must be set to either <Installed> if a P3
pressure HART device is actually fitted or <Not Installed> if a P3 pressure
HART device is not actually fitted. For example, in the case of free-
venting tanks, P3 would usually not be installed.
If the P3 pressure status is <Good Actual>, the P3 pressure value is also
stored in memory in the [Last Valid P3] entity, to allow recovery from a
power-down situation when a P3 pressure is not available.
If the measured P3 pressure is invalid (e.g. HART scan error), the
software will check the [P3 Installed] entity to determine if P3 is actually
fitted. If P3 is fitted, the software will check for a [Manual P3 Pressure] entity
value to be entered. If no manual P3 pressure value is entered, the [Last
Valid P3] is used in the density calculation. If no [Last Valid P3] is available,
an error will be reported.
If P3 pressure is not installed - in the case of free-venting tanks - a
default value of 0.0 for P3 pressure is used for density calculations.
PV Unit Type Display Unit Type PV selected type
P3 Pressure Absolute 1
Relative 2
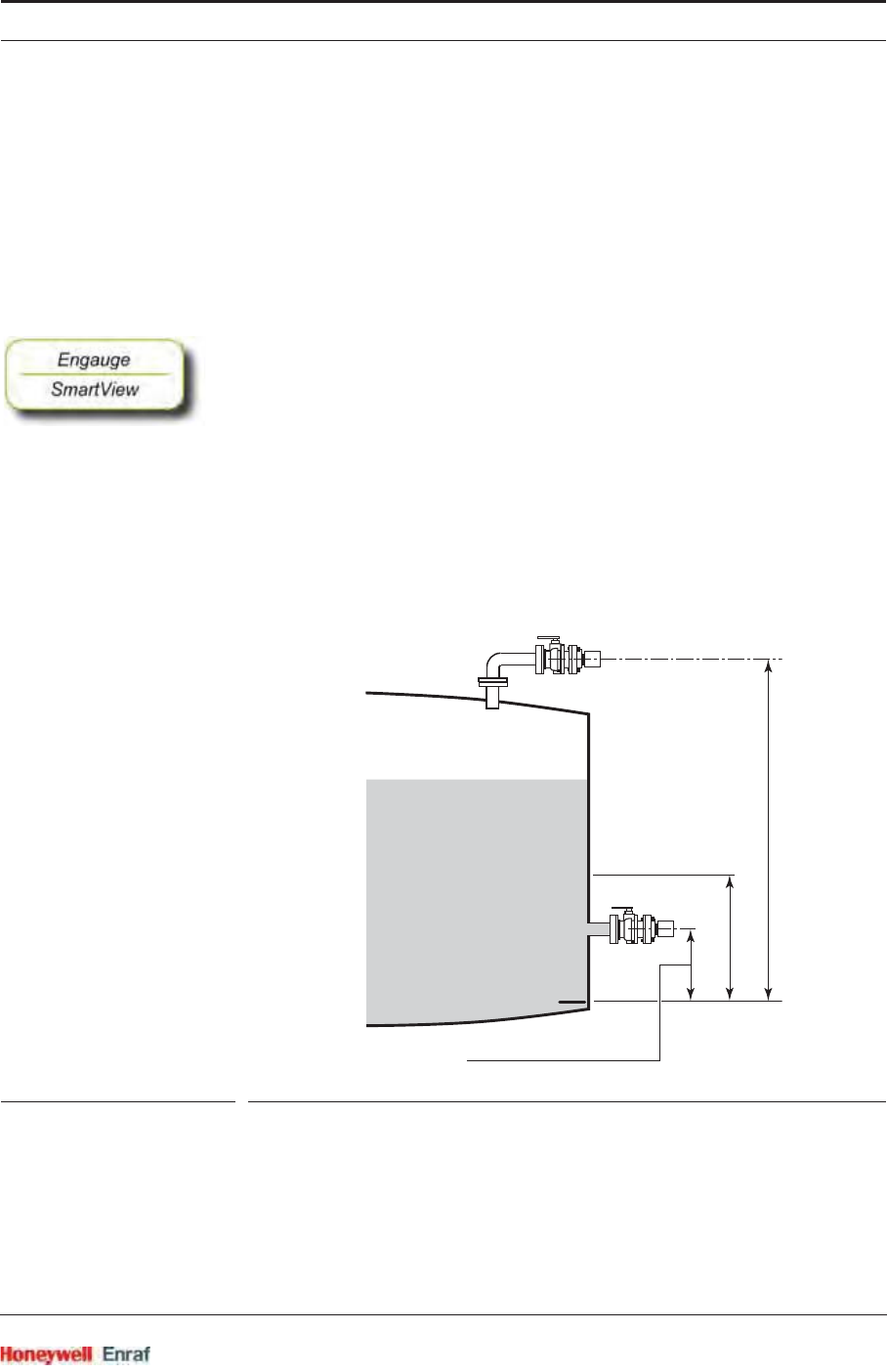
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 111
The Secondary and Tertiary values of a P3 pressure HART device are
not converted, and they are simply translated from the HART device to
the FlexConn environment.
6.8.3.4 HIMS Density
To make HIMS density calculation possible, the relevant entity values
must be available. See also FIGURE 6-31.
☛Read also the Instruction Manual HIMS pressure measurement.
☛Enter the appropriate values into the following entities:
[Distance P1 to Zero Level]
[Distance P3 to Zero Level]
[Hydrostatic Deformation Level]
[Hydrostatic Deformation Factor]
[Local Gravity]
[Minimum HIMS Level]
[HIMS Level Hysteresis]
[Ambient Air Density]
[Tank Vapour Density]
ESF07-0022
FIGURE 6-31 HIMS configuration principle
To calculate HIMS density, the following valid data must be available:
P1 pressure
P3 pressure
Product level
Water level (optional)
datum plate (zero level)
P3
P1
[Distance P3 to Zero Level]
[Distance P1 to Zero Level]
[Minimum HIMS Level]
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 112 Service Manual
The software analyses the status of these 4 (3) inputs, to determine the
value and status of the [HIMS Density PV].
If the HIMS Density PV status is <Good Actual>, the HIMS Density PV
value is also stored in memory in the [Last Valid Density] entity, to allow
recovery from a power-down situation when a HIMS Density PV value is
not available.
If any of the 4 input statuses are bad, the software will check for a
[Manual Product Density] entity value to be entered. If a [Manual Product
Density] entity value is entered, this value will be used for the HIMS
Density PV. If no [Manual Product Density] entity value is entered, the
software will check if a [Last Valid Product Density] entity value was stored. If
a[Last Valid Product Density] entity value was stored, this value will be used
for the HIMS Density PV. If no [Manual Product Density] or [Last Valid Product
Density] entity value is found, an error will be reported.
When calculating HIMS Density, the software will check for a negative
density value. If the value is negative, the same manual or last-valid
mechanism is used as described before. If the value is positive, HIMS
Density is calculated.
When calculating HIMS Density, in order to achieve a valid result, the
software will also check if the product level is above the [Minimum HIMS
Level] entity value. If this condition is <True>, HIMS Density is calculated.
If the product level is below the [Minimum HIMS Level] entity value, the
same manual or last valid mechanism is used as described before.
When calculating HIMS Density, if the [Water Level Correction] entity is
<Enabled>, the software will check if the scanned water level <= [Distance
P1 to Zero Level]. If this is <True>, the HIMS Density is calculated. If the
water level > [Distance P1 to Zero Level], the same manual or last valid
mechanism is used as described before. If [Water Level Correction] entity is
<Disabled>, the software will not check the scanned water level.
6.8.3.5 Generic HART Devices
The FCI-HT software only accepts Generic HART devices at addresses
0 and 4 through 15 with the required sensor type configured.
The generic HART devices are scanned sequentially from address 0
and then address 4 through 15. When a device is detected, initially the
HART PV unit code is checked against TABLE 6-7 in the following
order: Distance, Temperature, Pressure, and Density.
Sensor Type Accepted HART Units Abbreviation HART Unit
Code
Pressure Pounds per square inch psi 6
Pascal Pa 11
Kilo Pascal kPa 12
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 113
TABLE 6-7 Accepted units for generic HART devices
If an accepted HART PV unit code is found, the HART device is
allocated to the relevant FlexConn function as detailed in TABLE 6-8.
If the HART PV unit code is not accepted, the HART SV unit code is
checked against TABLE 6-7 in the following order: Distance,
Temperature, Pressure, and Density. If an accepted HART SV unit
code is found, the HART device is allocated to the relevant FlexConn
function as detailed in TABLE 6-8.
The process is repeated for the HART TV unit code.
If none of the unit codes are accepted, the device is allocated to
Function 7.
☛If a generic HART device output is not in the accepted units,
configure it to accepted units output data, by using the HART config-
uration tool.
TABLE 6-8 FlexConn function allocation
Once a device has been allocated to a function, the HART PV, SV, and
TV are translated into the FlexConn function’s PV, SV, and TV.
The required sensor value of the generic HART device may not be in
the HART PV but it is translated into the FlexConn PV.
Example:
Temperature Degrees Celsius °C 32
Degrees Fahrenheit °F 33
Distance Feet ft 44
Meters m 45
Inches in 47
Density Kilograms per cubic meter kg/m392
Pounds per cubic foot lb/ft394
Degrees API API 104
FlexConn Function Device Type
Function 1 [P1 Pressure]
Function 2 [P3 Pressure]
Function 3 [Distance]
Function 4 [Temperature]
Function 5 [Pressure]
Function 6 [Density]
Function 7 [Other]
Function 8 [HIMS Density]
Sensor Type Accepted HART Units Abbreviation HART Unit
Code
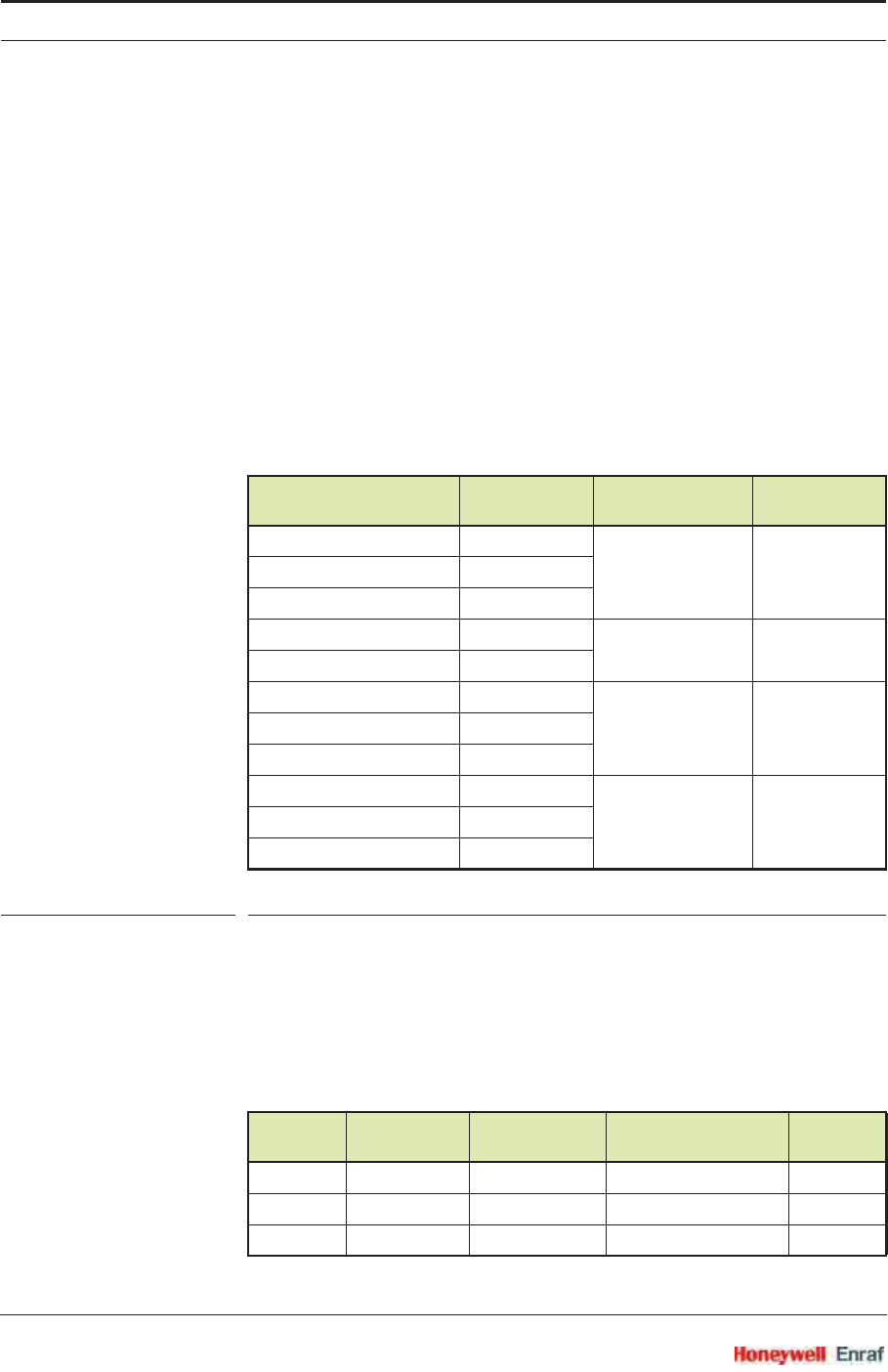
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 114 Service Manual
A HART temperature sensor may have a PV unit code Ohms, and a SV
unit code Celsius. The required sensor value is temperature in Celsius,
and this is translated into the FlexConn PV, and the Ohms value is
translated into the FlexConn SV.
Translation is performed in the order: PV (Distance, Temperature,
Pressure, and Density), SV (Distance, Temperature, Pressure, and
Density), TV (Distance, Temperature, Pressure, and Density).
The required sensor value read from the generic HART devices will be
converted into SI Units within the FlexConn PV as shown in TABLE 6-9.
The other sensor values of a generic HART device are not converted,
and they are simply translated from the HART device environment into
the FlexConn environment SV and TV.
TABLE 6-9 Generic HART device units into FlexConn PV unit translation
6.8.3.6 Function Identification
Functions 1 through 8 are identified by the entities: [Function Category],
[Function Type], and [Function Sub-type].
Their default identification information is detailed in TABLE 6-10.
Accepted HART Units Abbreviation FlexConn PV
Unit Translation Abbreviation
Pounds per square inch psi Pascal Pa
Pascal Pa
Kilo Pascal kPa
Degrees Celsius °C Celsius °C
Degrees Fahrenheit °F
Feet ft Meters m
Meters m
Inches in
Kilograms per cubic meter kg/m3Kilograms per
cubic meter
kg/m3
Pounds per cubic foot lb/ft3
Degrees API API
Function Allocation Function
Category Function Type Function
Sub-type
Function 1 P1 Pressure Sensor (1) Product pressure (5) (6)
Function 2 P3 Pressure Sensor (1) Vapour pressure (13) (7)
Function 3 Distance Sensor (1) HART transmitter (12) (16)
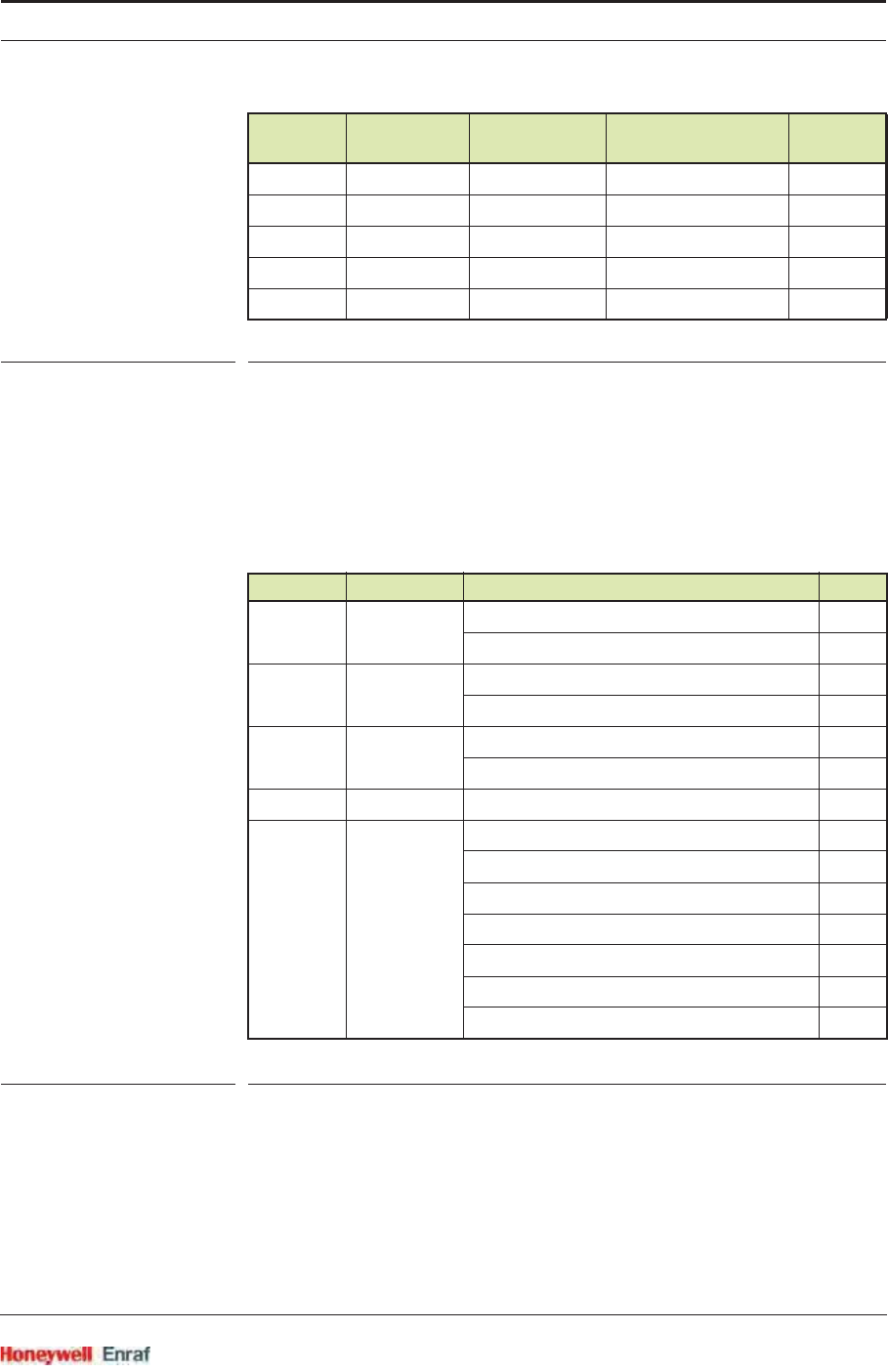
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 115
TABLE 6-10 Default function category, type, and sub-type
The function type entity for Functions 3 through 7 can be changed from
the default value <HART transmitter> to provide more information about the
sensor, by setting the [User function type] entity and then resetting the FCI-
HT board.
The possible values are detailed in TABLE 6-11.
TABLE 6-11 Generic HART user function types
Functions 1 through 8 have fixed values for [PV Unit Type] and [Function
Identification] entities, as detailed in TABLE 6-12.
Function 4 Temperature Sensor (1) HART transmitter (12) (16)
Function 5 Pressure Sensor (1) HART transmitter (12) (16)
Function 6 Density Sensor (1) HART transmitter (12) (16)
Function 7 Other Sensor (1) HART transmitter (12) (16)
Function 8 HIMS Density Sensor (1) Product density (6) (8)
Function Allocation User Function Type Value
Function 3 Distance User function type product level 4
User function type water level 9
Function 4 Temperature User function type product temperature 8
User function type vapour temperature 7
Function 5 Pressure User function type product pressure 5
User function type vapour pressure 13
Function 6 Density User function type product density 6
Function 7 Other User function type product level 4
User function type water level 9
User function type product temperature 8
User function type vapour temperature 7
User function type product pressure 5
User function type vapour pressure 13
User function type product density 6
Function Allocation Function
Category Function Type Function
Sub-type
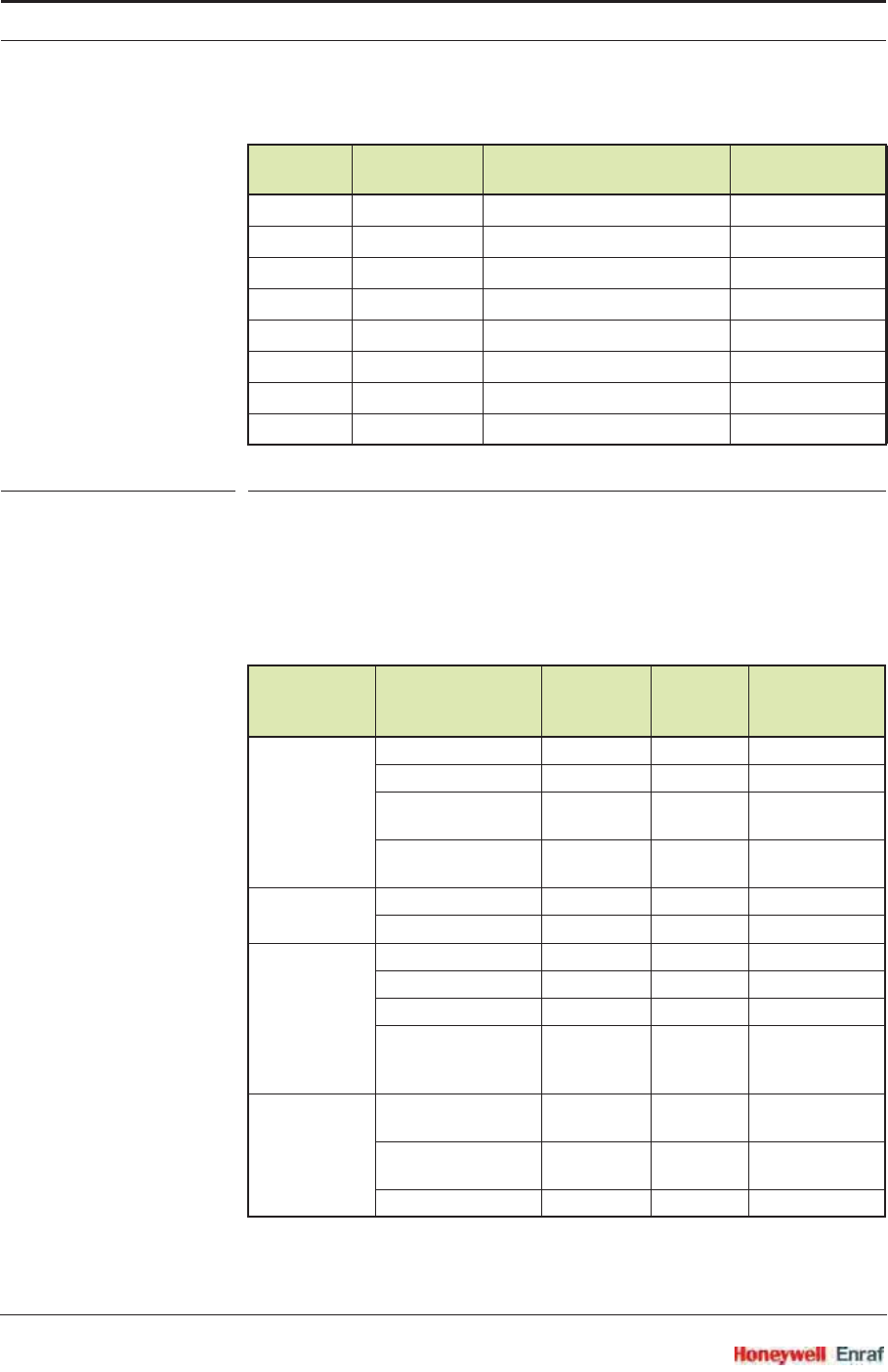
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 116 Service Manual
TABLE 6-12 PV unit type and function identification
6.8.3.7 SmartView Display
Although the Primary Values (PV) of functions 1 through 8 are
calculated in SI units, the SmartView display supports the following
units for local calibration, commissioning etc. The displayed unit
depends on the value of the [PV selected unit] entity.
Function Allocation PV Unit Type Function
Identification
Function 1 P1 Pressure UNIT_TYPE_PRESSURE <P1 Pressure>
Function 2 P3 Pressure UNIT_TYPE_PRESSURE <P3 Pressure>
Function 3 Distance UNIT_TYPE_LENGTH <Distance>
Function 4 Temperature UNIT_TYPE_TEMPERATURE <Temperature>
Function 5 Pressure UNIT_TYPE_PRESSURE <Pressure>
Function 6 Density UNIT_TYPE_DENSITY <Density>
Function 7 Other UNIT_TYPE_UNDEFINED <Other Units>
Function 8 HIMS Density UNIT_TYPE_DENSITY <HIMS Density>
PV Unit
Type Display Unit
Type Displayed
Units
PV
Selected
Unit Range
Pressure Pascal <pas> 1 max. 0.99 MPa
Kilo Pascal <kpas> 2 max. 9.9 MPa
Pounds per square
inch (small)
<psi s> 3 max. 99 psi
Pounds per square
inch (large)
<psi l> 4 max. 999 psi
Temperature Degrees Celsius <°C> 1-
Degrees Fahrenheit <°F> 2-
Distance Meters <m> 1-
Feet <ft> 2-
Inches <in> 3-
Fractions
(feet, inches,
1/16th inch)
<f.i.s.> 4-
Density Kilograms per cubic
meter
<kg/m3> 1-
Pounds per cubic
foot
<lb/f3> 2-
Degrees API <a.p.i> 3-
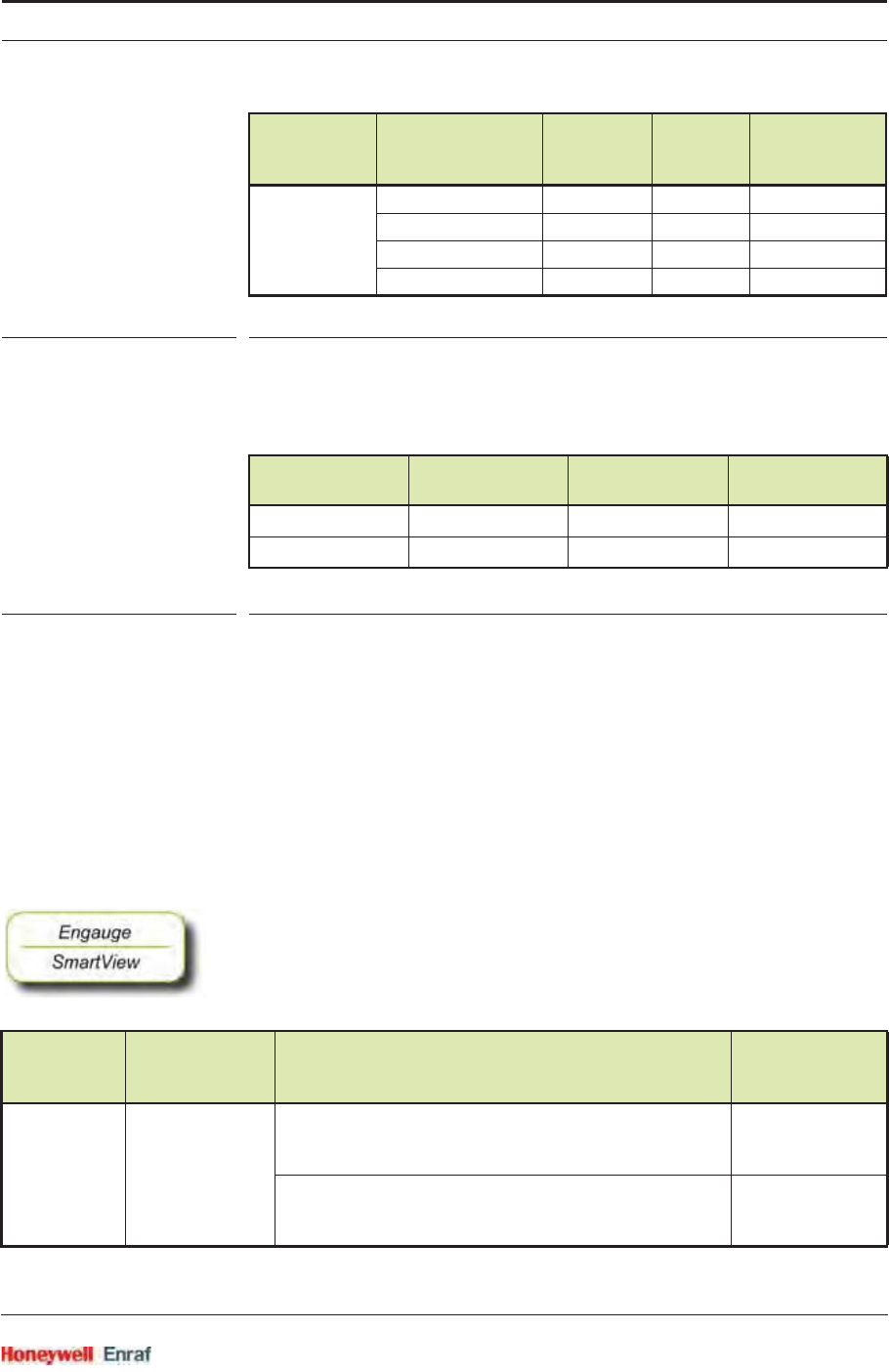
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 117
TABLE 6-13 SmartView displayed unit types
The following PV types are supported on the SmartView display for P1
pressure and P3 pressure only. These are available changed by setting
the [PV selected type] entity. This is detailed in TABLE 6-14.
TABLE 6-14 P1 and P3 pressure displayed unit types
6.8.4 Board Commissioning
The commissioning entity for each function is initially default to <False>.
The commissioning entity for each function will only be <True> when the
associated entities of each function have been set within normal
operating range.
The board-level commissioned entity default is also <False>. It will only
be <True> when all the function-level commissioned entities are <True>.
6.8.4.1 Function 1 Commissioning
☛Set all Function 1 entities according to TABLE 6-15 requirements, to
commission P1.
Other Milli <m ...> 1-
(none) <-> 2-
Kilo <k ...> 3-
Mega <M ...> 4-
PV Unit Type Display Unit
Type Displayed Type PV selected
type
P1 Pressure Absolute <ABS> 1
P3 Pressure Relative <REL> 2
HIMS
Density
P1 Pressure
Sensor
Detected P1 Ambient Air Pressure and P1 Installed Commissioned
<Enabled> N/A [P1 ambient air pressure] z<default>
AND
[P1 installed] = <enable>
<True>
[P1 ambient air pressure] = <default>
OR
[P1 installed]=<disable>
<False>
PV Unit
Type Display Unit
Type Displayed
Units
PV
Selected
Unit Range
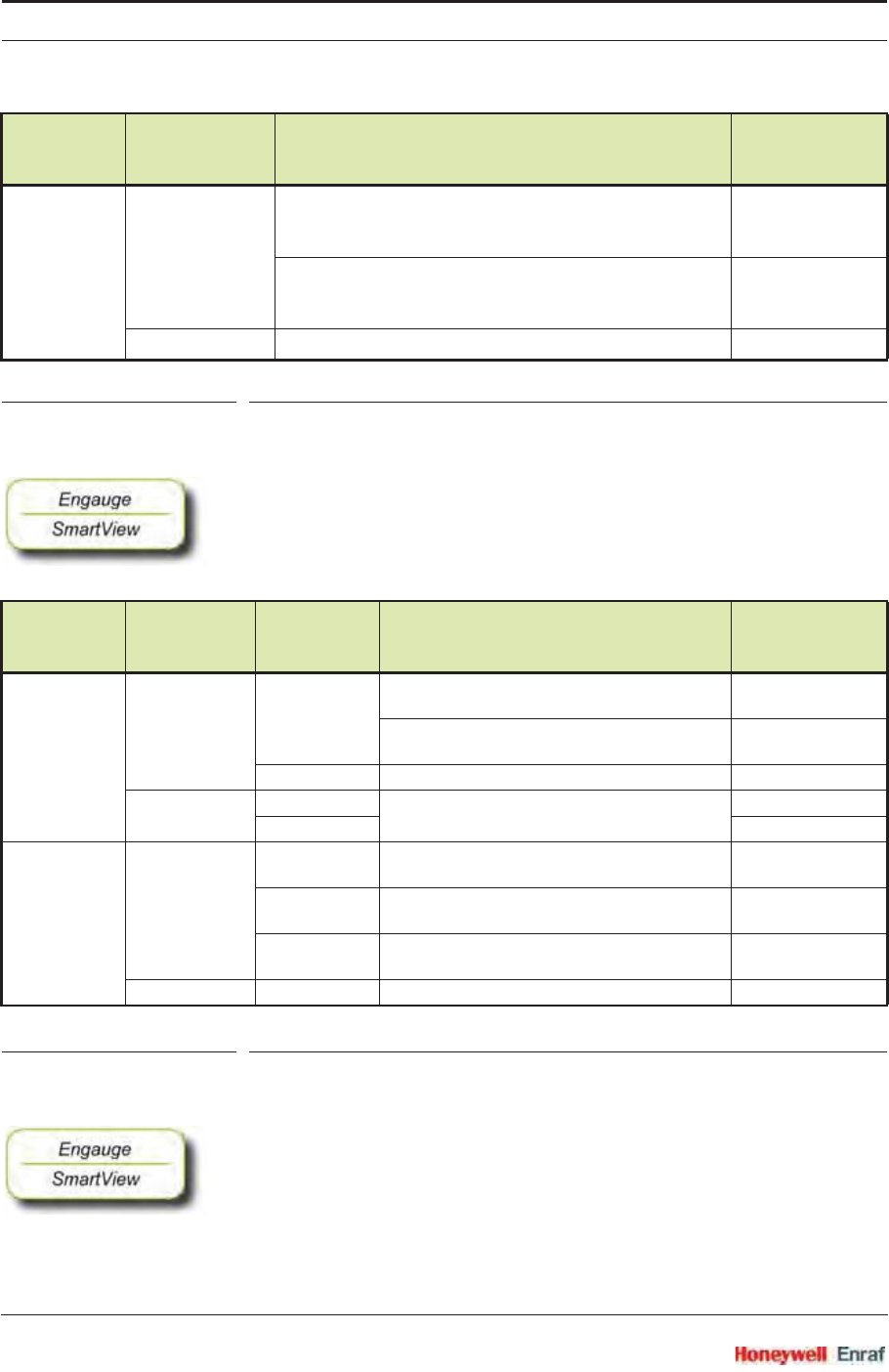
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 118 Service Manual
TABLE 6-15 Function 1 commissioning entities
6.8.4.2 Function 2 Commissioning
☛Set all Function 2 entities according to TABLE 6-16 requirements, to
commission P3.
TABLE 6-16 Function 2 commissioning entities
6.8.4.3 Function 3 through 7 Commissioning
☛Set all Function 3 through 7 entities according to TABLE 6-17
requirements, to commission all generic HART sensors.
<Disabled> Yes [P1 ambient air pressure] z<default>
AND
[P1 installed] = <enable>
<True>
[P1 ambient air pressure] = <default>
OR
[P1 installed] = <disable>
<False>
No N/A <True>
HIMS
Density
P3 Pressure
Sensor
Detected P3 Installed P3 Ambient Air Pressure Commissioned
<Enabled> Yes <Enable> [P3 ambient air pressure]
z<default>
<True>
[P3 ambient air pressure]
=<default>
<False>
<Disable> N/A <False>
No <Enable> N/A <False>
<Disable> <True>
<Disabled> Yes <Enable> [P3 ambient air pressure]
z<default>
<True>
<Disable> [P3 ambient air pressure]
z<default>
<False>
N/A [P3 ambient air pressure]
=<default>
<False>
No N/A N/A <True>
HIMS
Density
P1 Pressure
Sensor
Detected P1 Ambient Air Pressure and P1 Installed Commissioned
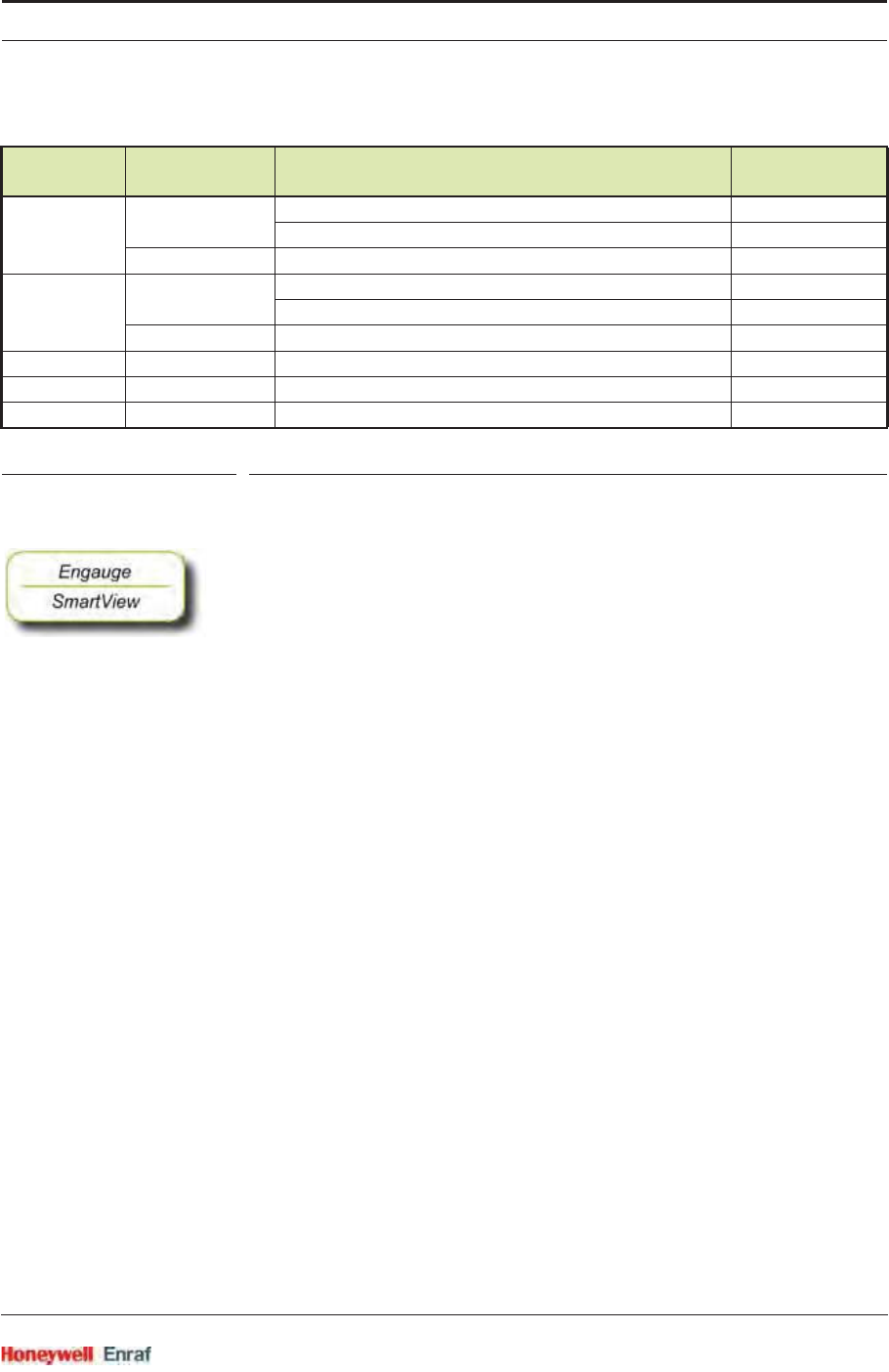
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 119
TABLE 6-17 Function 3 through 7 commissioning entities
6.8.4.4 Function 8 Commissioning
☛Set Function 8 entities according to TABLE 6-18 requirements, to
commission the HIMS density function.
Function HART Sensor
Detected User Function Type Commissioned
3Yes =<Product level> OR <Water level> <True>
z<Product level> OR <Water level> <False>
No N/A <True>
4Yes =<Product temp.> OR <Vapour temp.> <True>
z<Product temp.> OR <Vapour temp.> <False>
No N/A <True>
5N/A N/A <True>
6N/A N/A <True>
7N/A N/A <True>
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 120 Service Manual
TABLE 6-18 Function 8 commissioning entities
HIMS Density Function 8 Commissioning Entities Commissioned
Enabled <Hydrostatic deformation level> z<Default>
AND
<Hydrostatic deformation factor> z<Default>
AND
<Local gravity> z<Default>
AND
<Minimum HIMS level> z<Default>
AND
<Ambient air density> z<Default>
AND
<Tank vapour density> z<Default>
AND
<Distance P1 to zero level> z<Default>
AND
<Distance P3 to zero level> z<Default>
<True>
<Hydrostatic deformation level> =<Default>
OR
<Hydrostatic deformation factor> =<Default>
OR
<Local gravity> =<Default>
OR
<Minimum HIMS level> =<Default>
OR
<Ambient air density> =<Default>
OR
<Tank vapour density> =<Default>
OR
<Distance P1 to zero level> =<Default>
OR
<Distance P3 to zero level> =<Default>
<False>
Disabled N/A <True>
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 121
6.8.5 Hardware Configuration
6.8.5.1 Terminal Allocation
6.8.5.2 LED Allocation
Terminal
Number Name Function
24 V_Loop HART Bus power
25 GND_Loop HART Bus ground
LED
Number Function
LE2 HART data Transmit
LE3 HART data Receive
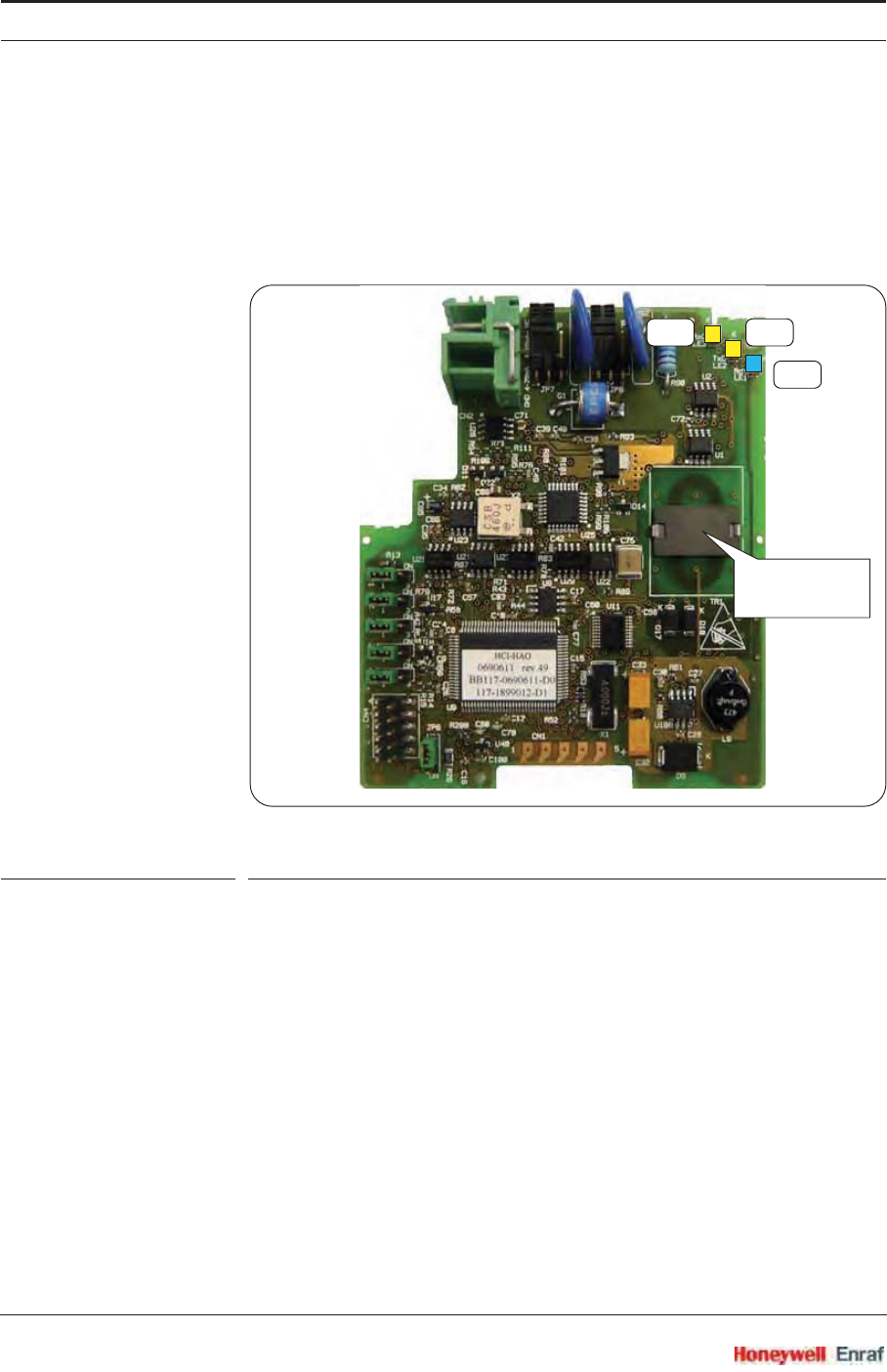
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 122 Service Manual
6.9 HART Analog Outputs (HCI-HAO)
6.9.1 Introduction
The Host Communication Interface – HART Analog Output (HCI-HAO)
is a HART® slave module which communicates with the associated
HART master over the HART bus.
ESF09-0005
FIGURE 6-32 The HCI-HAO board
The HART protocol is a bi-directional master-slave communication
protocol, which is used to communicate between intelligent field
instruments and host systems.
The HCI-HAO board has a planar transformer for galvanic isolation from
the HART bus. See FIGURE 6-32.
LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing
to indicate activity on the HART bus. LE2 indicates data is being
transmitted (Tx), LE3 indicates data is being received (Rx).
LE1
LE2LE3
planar
transformer
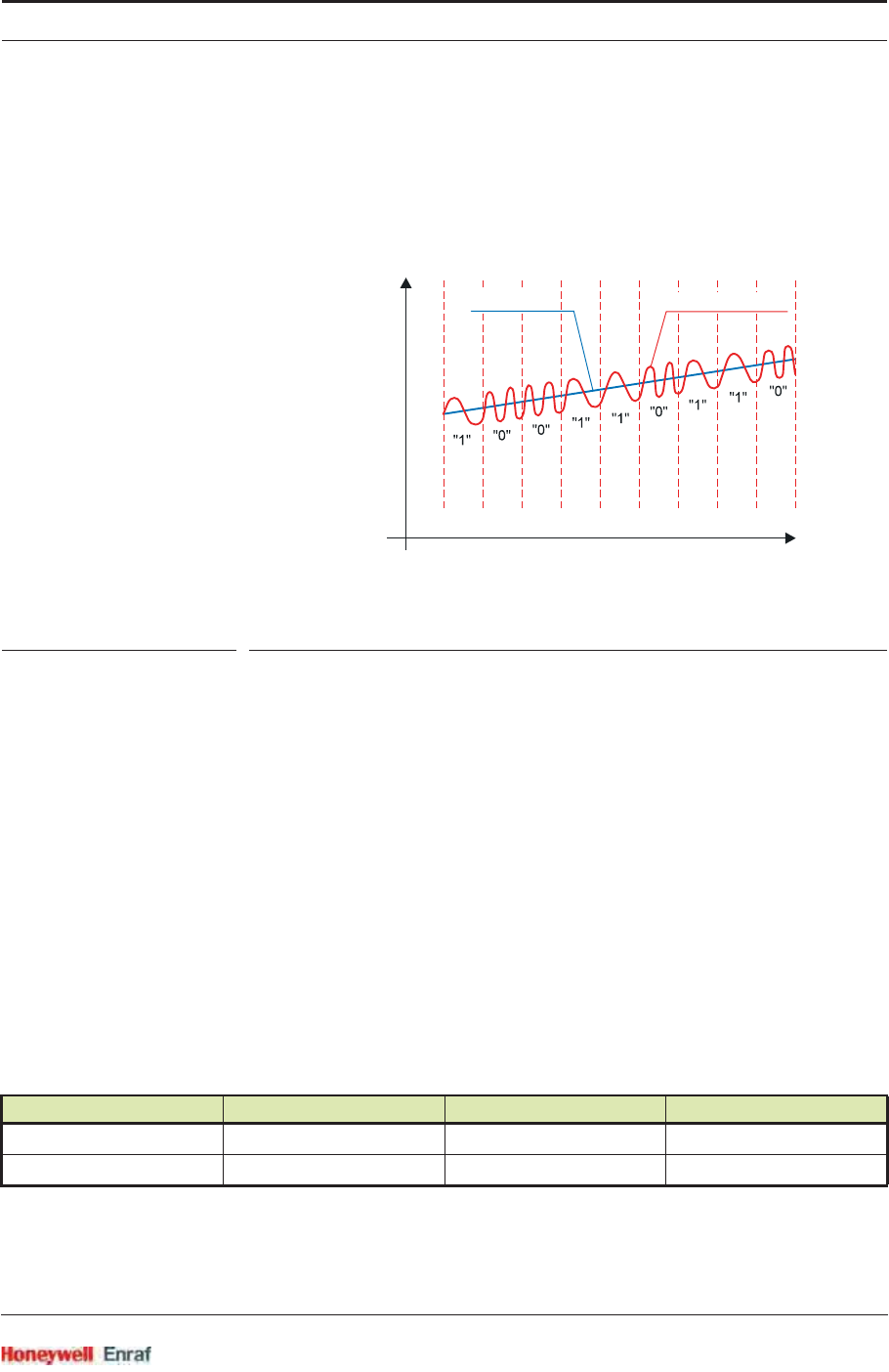
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 123
6.9.2 Functional Description
HCI-HAO is a HART slave module, which uses standard HART
communication to communicate with HART-devices. This module
makes use of the Bell 202 Frequency Shift Keying (FSK) standard to
superimpose digital signals at a low level on the 4–20 mA analog signal.
ESF07-0015
FIGURE 6-33 The analog and digital signals within the HART® communication
The HCI-HAO works as an interface board between FlexConn boards
and a HART master, and it makes the data available on the HART bus.
The user needs to set the required linked variable details.
The linked primary variable is mapped between 4–20 mA on the analog
output depending on the range values set. The linked variables are
scanned every 1 second and so is the analog output refresh rate.
The HCI-HAO is configurable by:
a HART communicator
a local SmartView
Engauge
The HCI-HAO (board ID = 11) has following two functions:
Function Category Type Sub-type
1 - HART communication Communication Instrument slave HART
2 - Analog output Sensor Analog output 4 - 20 mA
20 mA
4 mA
Time
analog signal digital FSK signal
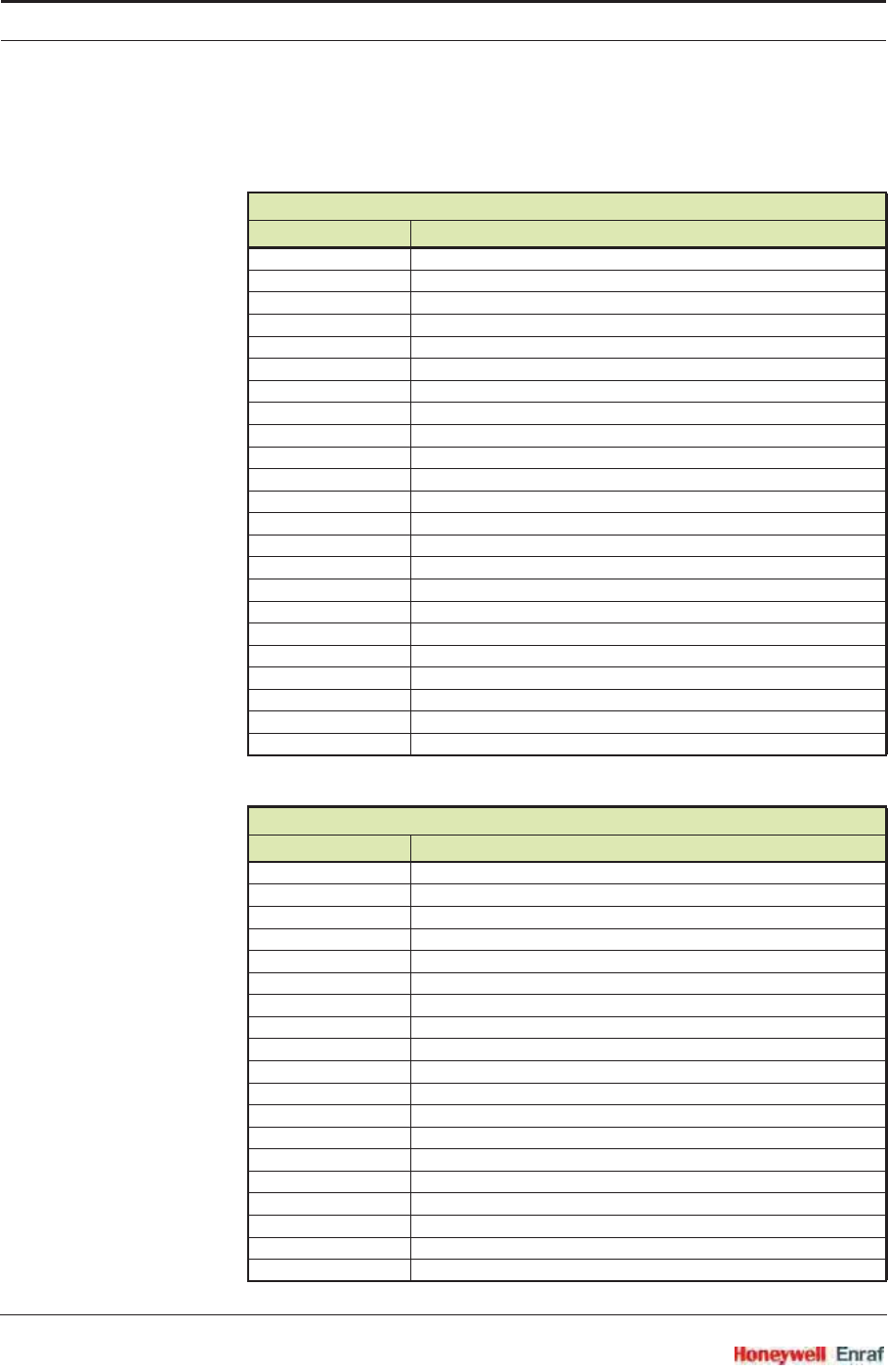
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 124 Service Manual
All the HART universal commands and some common practice
commands are supported by HCI-HAO. These are listed in the below
tables.
HART Universal Ccommands
Command no. Description
0 Read Unique Identifier
1 Read Primary Variable
2 Read Loop Current and Percentage of Range
3 Read Dynamic variables and Loop Current
4Reserved
5Reserved
6 Write Polling Address
7 Read Loop Configuration
8 Read Dynamic Variable Classifications
9 Read Device Variable With Status
10 Reserved
11 Read Unique Identifier Associated with Tag
12 Read Message
13 Read Tag, Descriptor, Date
14 Read PV Sensor Information
15 Read Device Information
16 Read Final Assembly Number
17 Write Message
18 Write Tag, Descriptor, Date
19 Write Final Assembly Number
20 Read Long Tag
21 Read Unique Identifier Associated With Long Tag
22 Write Long Tag
HART Common Practice Commands
Command no. Description
34 Write Primary Variable Damping Value
35 Write Primary Variable Range Values
36 Set Primary Variable Upper Range Value
37 Set Primary Variable Lower Range Value
38 Reset Configuration Changed Flags
40 Enter / Exit Fixed Current Mode
41 Perform Self Test
42 Perform Device Reset
44 Write Primary Variable Units
48 Read Additional Device Status
50 Read Dynamic Variable Assignments
51 Write Dynamic Variable Assignments
53 Write Device Variable Units
54 Read Device Variable Information
55 Write Device Variable Damping Value
59 Write Number Of Response Preambles
72 Squawk
79 Write Device Variable
113 Catch Device Variable
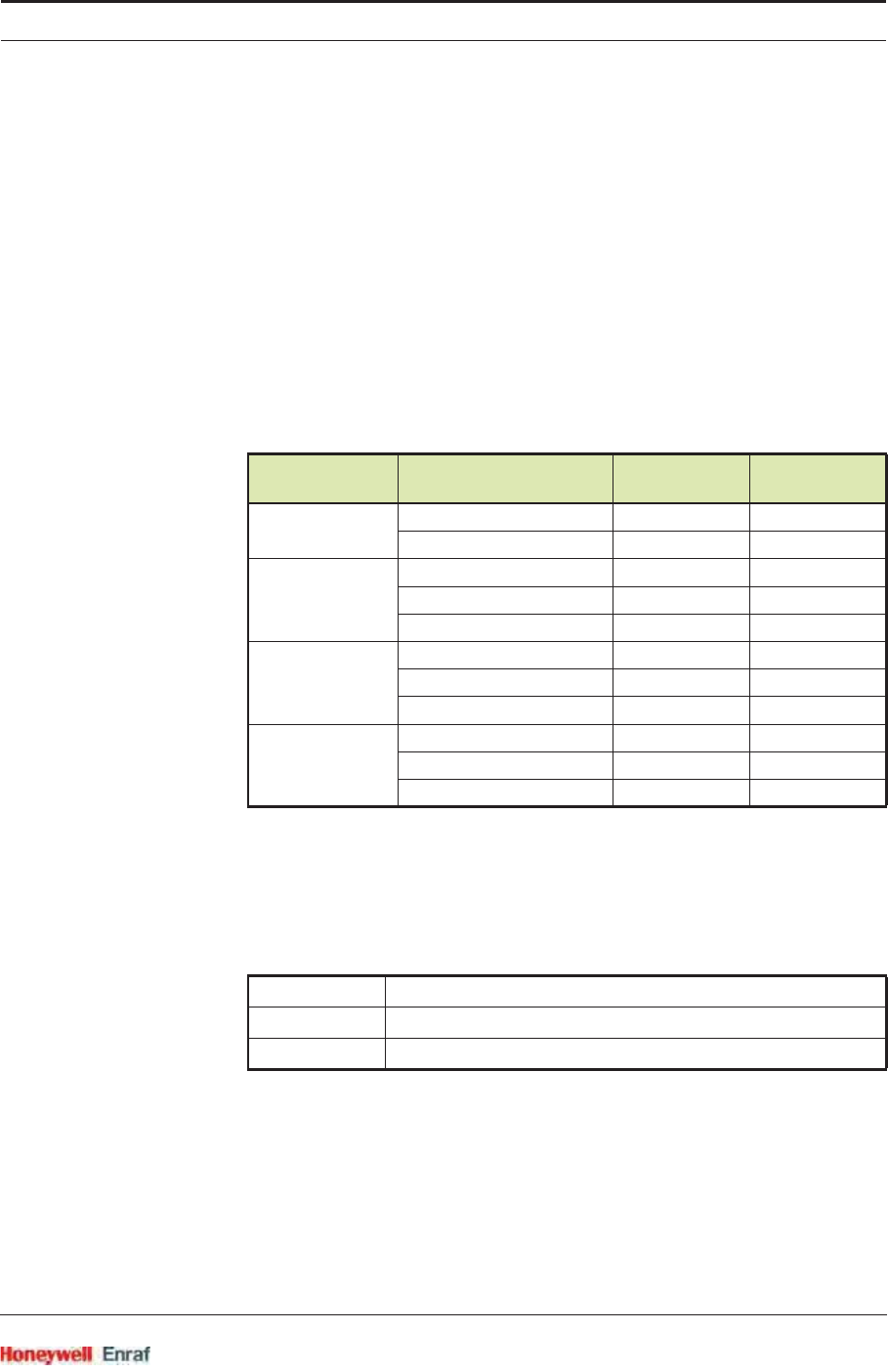
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 125
6.9.3 Other HCI-HAO features
Planar transformer for galvanic isolation from HART bus.
Malfunctioning of the HCI-HAO card (or any linked cards) is reveiled
on the HART bus by means of the device status.
If any fatal errors occur during operation - which will run the program
into an undesired situation - then a software reset (Warm Reset) is
given to the HCI-HAO software. During this situation, the output of
the module remains at the desired level till the software starts normal
working. Handling of a fatal error is a general FlexConn function.
This will update the appropriate entity as well.
Unit conversions for the linked variables are possible. All the linked
variables available through linking (data read from other FlexConn
boards) are in SI units. Accepted units are listed in the table below.
Analog output read back mechanism, which is used to indicate any
errors in the analog output section. An error can be indicated using
the control relay on the FII-DO module over the CAN bus. If some
error is found in the DAC read back, then the same is updated in
function 2 (sensor) health, as per following details in status and
status codes:
Active and Passive mode of operation for Loop current.
Multi-drop mode supported to connect more than one HART-
compatible device on HART bus. For operating the device in Multi-
Drop mode, user needs to select the polling address to a non-zero
value. Making the polling address to a non-zero value makes the
output current mode to Fixed_4_20_MA (4 mA fixed). Non-zero polling
address will automatically make the output current mode to
Fixed_4_20_MA.
Sensor Type Accepted HART Units Abbreviation HART Unit
Code
Temperature Degrees Celsius °C 32
Degrees Fahrenheit °F 33
Pressure Pounds per square inch psi 6
Pascal Pa 11
Kilo Pascal kPa 12
Level Feet ft 44
Meters m 45
Inches in 47
Density Kilograms per cubic meter kg/m392
Pounds per cubic foot lb/ft394
Degrees API API 104
Status <BAD>
Status Category <GENERAL_HARDWARE_FAIL>
Status Code <DAC_READ-BACK_FAIL>
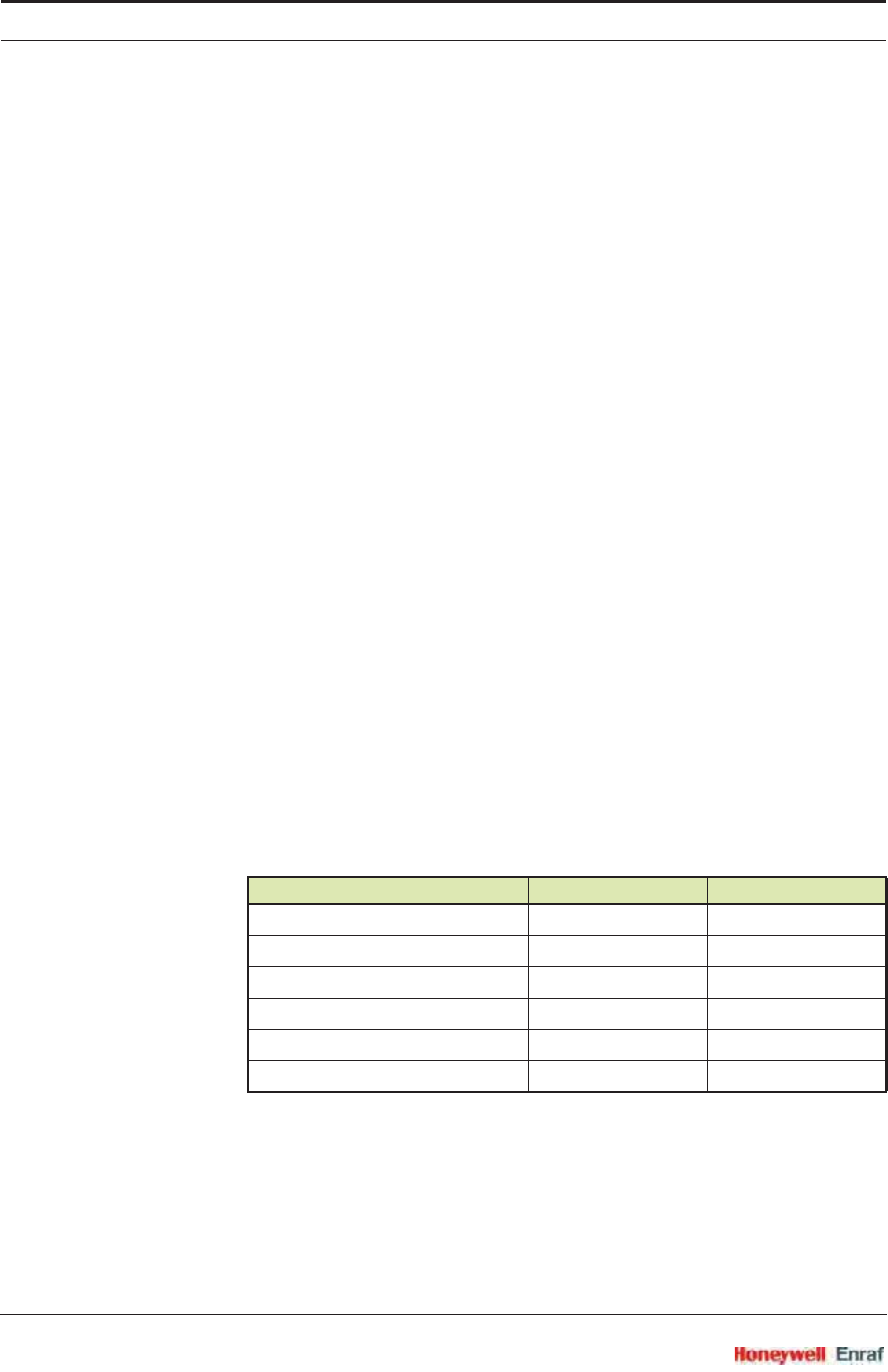
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 126 Service Manual
All the HART-compatible devices connected over the HART bus
must have different polling addresses. Multi-drop mode is supported
only in Passive mode of loop configuration. When the output current
mode is set to Standard_4_20_MA, the polling address of the device
must be made zero.
When the device is not in multi-drop mode (STANDARD_4_20_MA mode
selected) then the output current follows the changes in linked PV
value.
Scanning of each linked available PV, SV, TV and QV on the CAN-
bus with frequency of 1 Hz. That means all the available linked
variables are scanned every 1 second.
The analog output is refreshed every 1 second, even if there is no
change in the scanned variables. So, the watchdog for analog output
is automatically implemented. If the output is not refreshed within 45
seconds then a watchdog to analog output is generated and the
output is forced to 0 mA.
During startup, the analog output of the HCI-HAO module is kept low
(< 0.5 mA). This value will be there till initialization takes place. Once
the normal operation starts the output will follow the linked PV
depending upon the output mode setting.
Manual overwrite mechanism. This is a standard FlexConn func-
tionality. Separate configuration and command entities are defined
for this. See 6.9.5 - Board Commissioning.
6.9.4 Calibration of the HCI-HAO
A calibration provision is given, which is used to accurately map the
analog output between 4 -20 mA using the two range values entered for
Primary Variable.
Following table lists all entities required for calibration.
NOTE: Commands used in the following calibration
procedure can be executed either by using the CAN
tool, the SmartView, or Engauge.
Calibrate the analog output of the HCI-HAO as follows:
☛Connect loop resistor at connector CN2
☛Power up HCI-HAO board
Entity Data Type Type
[Analog Output at 4 mA] Float non-volatile R/W
[Analog Output at 18 mA] Float non-volatile R/W
[Calibrate at 4 mA] Undefined command
[Calibrate at 18 mA] Undefined command
[Enter Calibration Mode] Undefined command
[Exit Calibration Mode] Undefined command
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 127
☛Give command [Enter Calibration Mode]
☛Give command [Calibrate Analog Output at 4mA]
☛Measure actual output current through the loop resistor, using a
current meter
☛Enter this value in the [Analog Output at 4mA] entity
☛Give command [Calibrate Analog Output at 18mA]
☛Measure actual output current through the loop resistor, using a
current meter
☛Enter this value in the [Analog Output at 18mA] entity
☛Give command [Exit Calibration Mode], to exit the calibration mode
These calibration data are used to calculate the analog output current
for the Primary Value (PV).
Untill calibration has been carried out, the Health status of the PV and
the analog output function will be:
Status <BAD>
Status Category <STATUS_CATEGORY_BAD_GENERAL_CALIBRATION_FAIL>
Status Code <CALIBRATION_SET_POINTS_NOT_CALIBRATED>
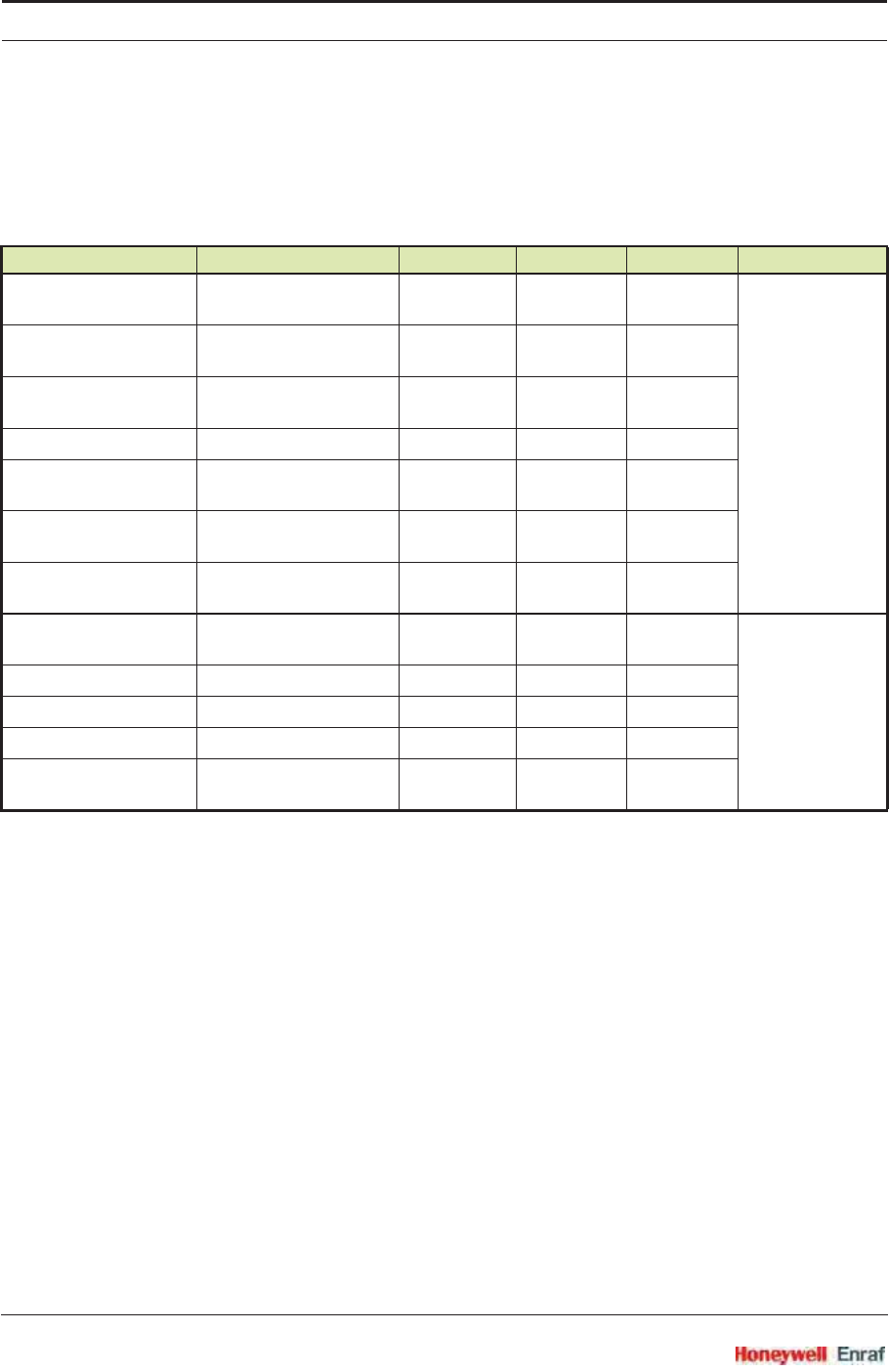
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 128 Service Manual
6.9.5 Board Commissioning
6.9.5.1 Basic Configurable Entities Overview
Basic configuration entities of the HCI-HAO board, which are
configurable by using SmartView, are listed in the following table.
Entity SmartView Display Data Type Type Default Function
[PV Link board ID] PV linked Brd ID Unsigned int
8 bits
Non-Volatile <0> Board Specific
[PV Link board instance] PV linked Brd IN Unsigned int
8 bits
Non-Volatile <0>
[PV Link function instance] PV linked Brd FI Unsigned int
8 bits
Non-Volatile <0>
[PV Link Board Sensor Value] PV link Brd SVAL Enumeration Non-Volatile <PV_LINK>
[SV Link board ID] SV linked Brd ID Unsigned int
8 bits
Non-Volatile <0>
[SV Link board instance] SV linked Brd IN Unsigned int
8 bits
Non-Volatile <0>
[SV Link function instance] SV linked Brd FI Unsigned int
8 bits
Non-Volatile <0>
[Polling Address] Polling Address Unsigned int
8 bits
Non-Volatile <0> Communication
[HART PV unit code] PV Unit Code Enumeration Non-Volatile <UNKNOWN>
[Upper Transducer Limit] Upper Tran Limit Float Non-Volatile <0>
[Lower Transducer Limit] Lower Tran Limit Float Non-Volatile <0>
[Transducer Serial Number] Transducer Sr No Unsigned int
32 bits
Non-Volatile <123>
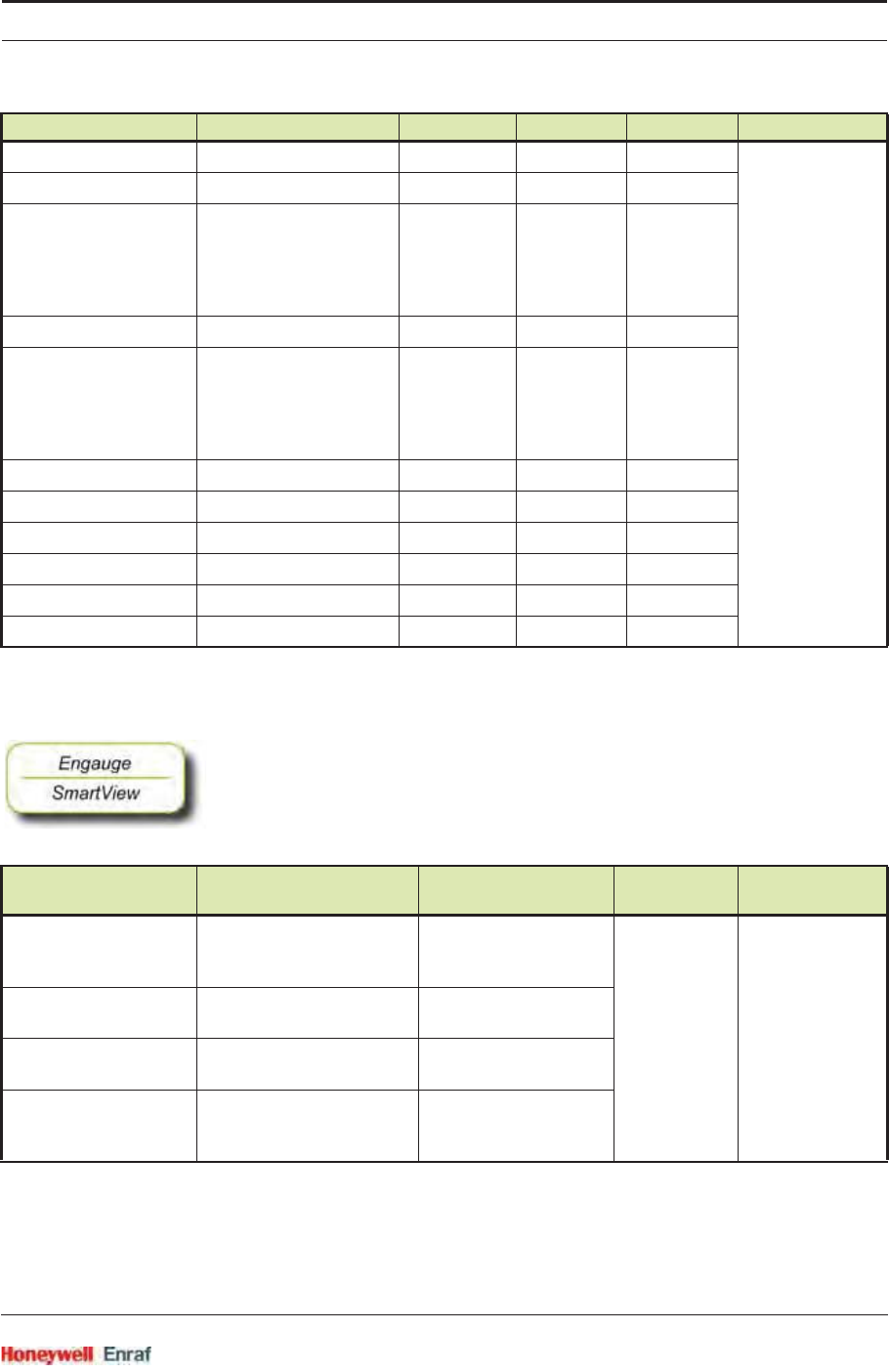
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 129
6.9.5.2 Commissioning
☛The following entities must be set by Engauge or SmartView for a
correct functioning of the HCI-HAO module in an instrument.
[PV Lower range value] Lw Range Value Float Non-Volatile <0> Sensor (Analog
Output)
[PV Upper range value] Up Range Value Float Non-Volatile <0>
[Analog Output mode] HART Mode Enumeration
<Fixed 4-
20mA>
<Standard 4-
20mA>
Non-Volatile <Standard 4-
20mA>
[Burnout Value] Burnout Value Float Non-Volatile <3.6>
[Burnout Behavior] Burnout Behavior Enumeration
<BAD>
<UNCERTAIN>
<BAD +
UNCERTAIN>
Non-Volatile <BAD>
[Enter Calibration Mode] Enter Cal Mode Undefined Command
[Cal Value at 4 mA] Cal Value at 4 mA Float Non-Volatile <0>
[Cal Value at 18 mA] Cal Value at 18 mA Float Non-Volatile <0>
[Calibrate at 4 mA] Calibrate at 4 mA Undefined Command
[Calibrate at 18 mA] Calibrate at 18 mA Undefined Command
[Exit Calibration Mode] Exit Cal Mode Undefined Command
Name Explanation Default Value Function
Part Function
[PV Link board ID] Board ID of Other FlexConn
to be linked as PV to HCI-
HAO
<0> Board Board Specific
[PV Link board instance] Board Instance of the linked
PV board
<0>
[PV Link function instance] Function Instance of the
linked PV board
<0>
[PV Link Sensor Value]* Primary or secondary
variable of linked card can
be assigned to this
<PV_LINK>
Entity SmartView Display Data Type Type Default Function
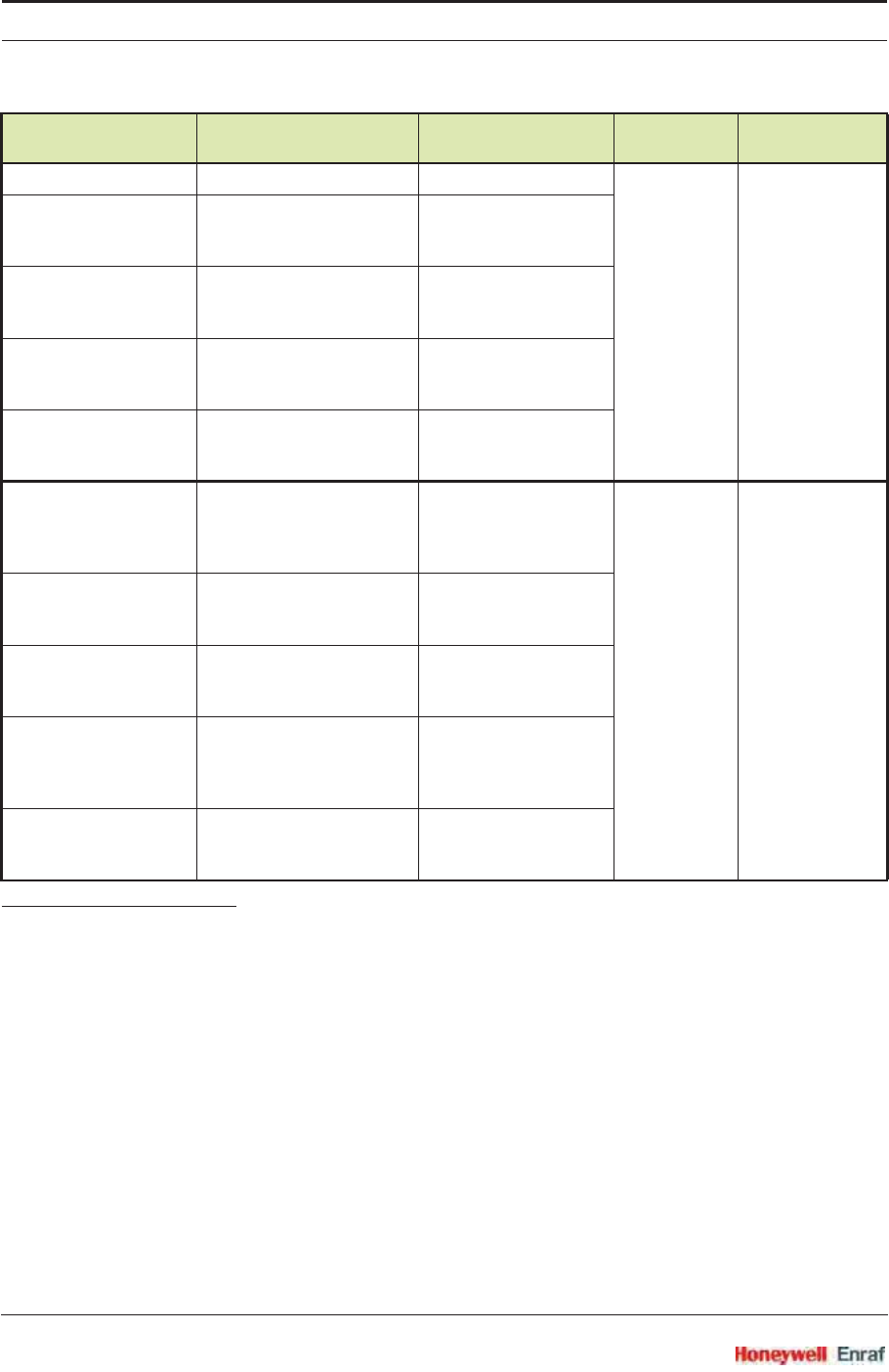
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 130 Service Manual
*) Default values for entities marked in GREEN in the
above table could be considered as proper values for
making the health for respective Function or Board
<GOOD>. However, the user is free to choose these
values as per the requirement along with the rest of the
entities.
All the entities in the above table would be initialized to their default
values after [init novram] command is given. All the entities should have
their proper values so as to make the respective Function and Board
health to <GOOD> status.
The [Analog Output at 4 mA] and [Analog Output at 18 mA] fields should be
entered after giving proper calibration commands (for more details, see
6.9.4).
[HART PV unit code] Unit code for linked PV <UNIT_CODE_UNKNOWN> Function 1 Communication
(HART
communication)
[HART Upper Transducer
Limit]
Upper transducer limit for
connected sensor of linked
PV board
<0>
[HART Lower
Transducer Limit]
Lower transducer limit for
connected sensor of linked
PV board
<0>
[Polling Address] Polling address of the
device, which is used for
poll-based addressing
<0>
[Transducer Serial
Number]
Transducer serial number
of connected sensor of
linked PV board
<123>
[Upper Range Value] Upper range value for PV.
This value is used to
calculate the analog output
current.
<0> Function 2 Sensor
(Analog Output)
[Analog Output at 4mA] Calibration reading when
[Calibrate at 4 mA] command
is given
<0>
[Analog Output at 18
mA]
Calibration reading when
[Calibrate at 18 mA] command
is given
<0>
[Lower Range Value] Lower range value for PV.
This value is used to
calculate the analog output
current.
<0>
[Analog Burnout Value] Analog burnout value in
case of malfunctioning
device
<3.6mA>
Name Explanation Default Value Function
Part Function
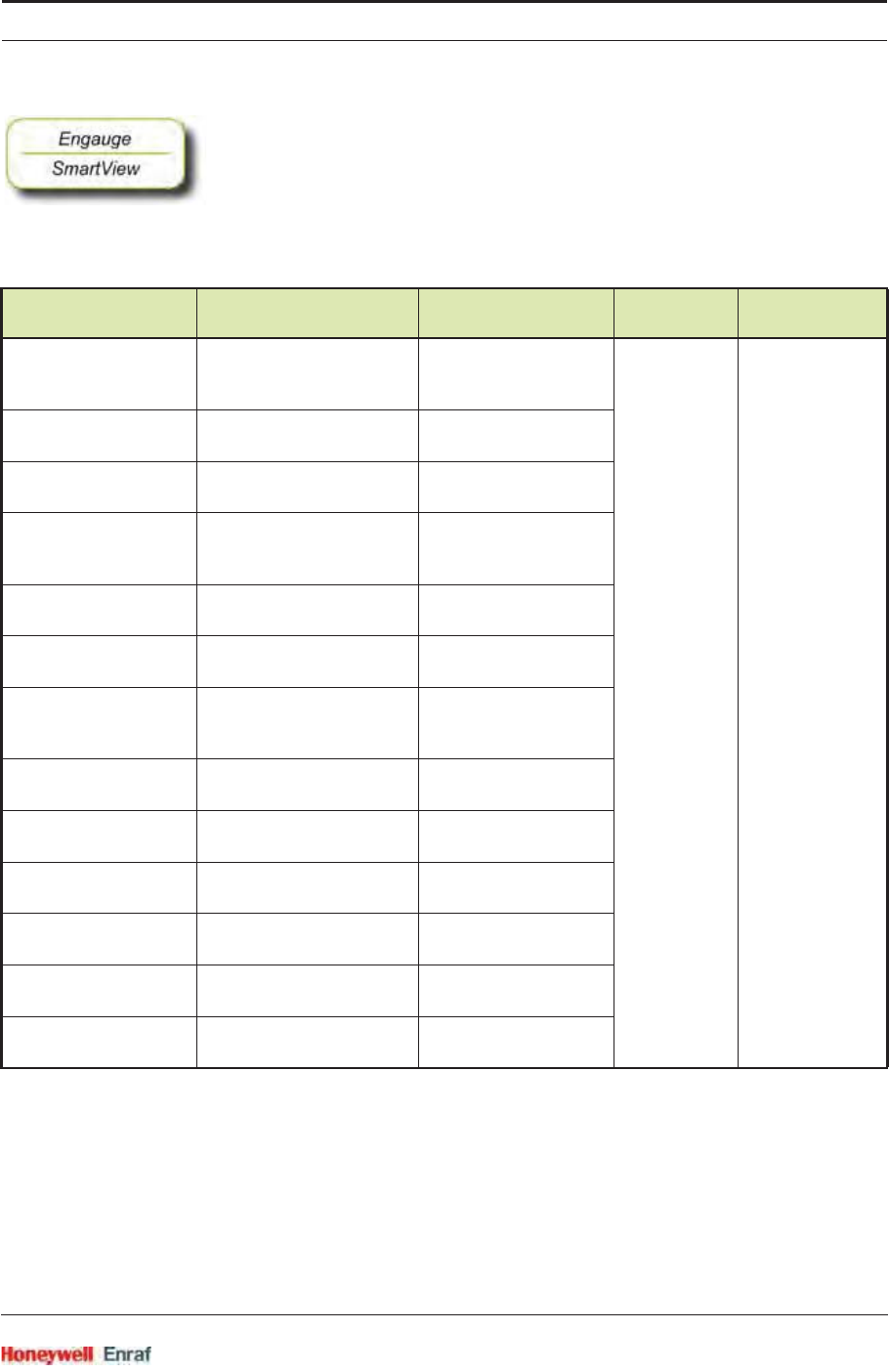
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 131
☛The following entities can be set by Engauge or SmartView for a
correct functioning of the HCI-HAO module in an instrument.
If one needs to assign SV, TV, QV to HCI-HAO then the corresponding
unit codes also needs to be set properly so that the value read from
other FlexConn board will be proper.
Name Explanation Default Value Function
Part Function
[SV Link board ID] Board ID of Other FlexConn
which is linked as SV to
HCI-HAO
<0> Board Board Specific
[SV Link board instance] Board Instance of the linked
SV board
<0>
[SV Link function instance] Function Instance of the
linked SV board
<0>
[TV Link board ID] Board ID of Other FlexConn
which is linked as TV to
HCI-HAO
<0>
[TV Link board instance] Board Instance of the linked
TV board
<0>
[TV Link function
instance]
Function Instance of the
linked TV board
<0>
[QV Link board ID] Board ID of Other FlexConn
which is linked as QV to
HCI-HAO
<0>
[QV Link board
instance]
Board Instance of the linked
QV board
<0>
[QV Link function
instance]
Function Instance of the
linked QV board
<0>
[Linked Primary Value] PV / SV value of linked PV
board in the set unit code
<0>
[Linked Secondary
Value]
PV value of linked SV
board in the set unit code
<0>
[Linked Tertiary Value] PV value of linked TV board
in the set unit code
<0>
[Linked Quarternary
Value]
PV value of linked QV
board in the set unit code
<0>
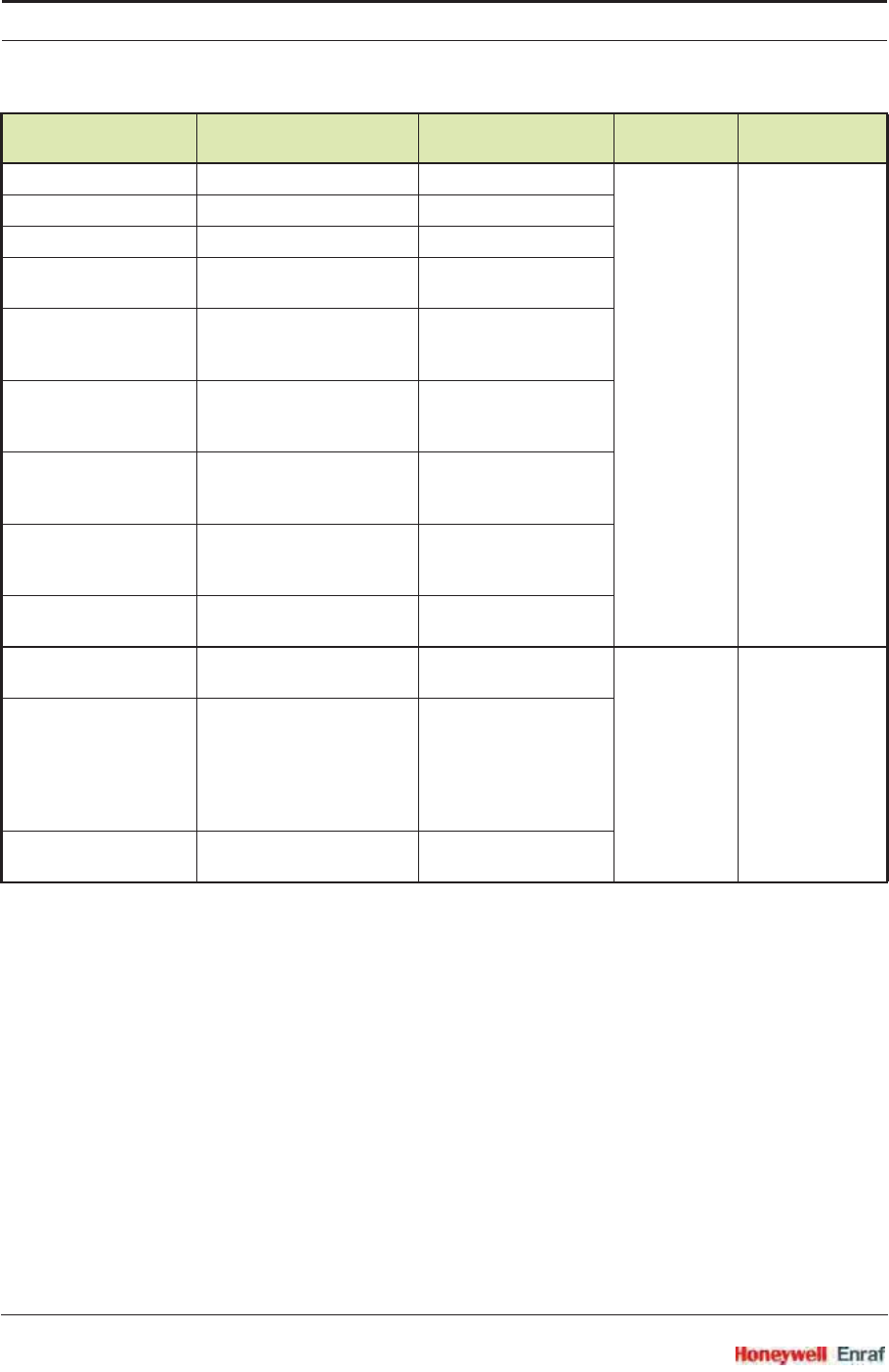
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 132 Service Manual
[HART SV unit code] Unit code for linked SV <UNIT_CODE_UNKNOWN> Function 1 Communication
(HART
communication)
[HART TV unit code] Unit code for linked TV <UNIT_CODE_UNKNOWN>
[HART QV unit code] Unit code for linked QV <UNIT_CODE_UNKNOWN>
[Configuration changed
Counter]
Increments every time the
configuration is changed
<0>
[Device ID] Same as Enraf Serial
number. This is a unique
number to every board.
[Device Type] Device type registered with
the HART Communication
Foundation
<127>
[Manufacturer ID Number] Manufacturer ID registered
with the HART
Communication Foundation
<148>
[Number of Preambles] Number of preambles
required for a request from
the HART master
<7>
[Number of Response
Preambles]
Number of preambles in the
HCI-HAO response stream
<7>
[Fixed Current Value] Fixed analog output current
set by HART command 40
<0> Function 2 Sensor
(Analog Output)
[Loop Current Mode] If HART mode selected is
<Standard 4-20mA>, then it is
enabled.
If HART mode selected is
<Fixed 4-20mA>, then it is
disabled.
<Enabled>
[Percentage of Range] Percentage of current PV
with respect to the limits set
<0>
Name Explanation Default Value Function
Part Function
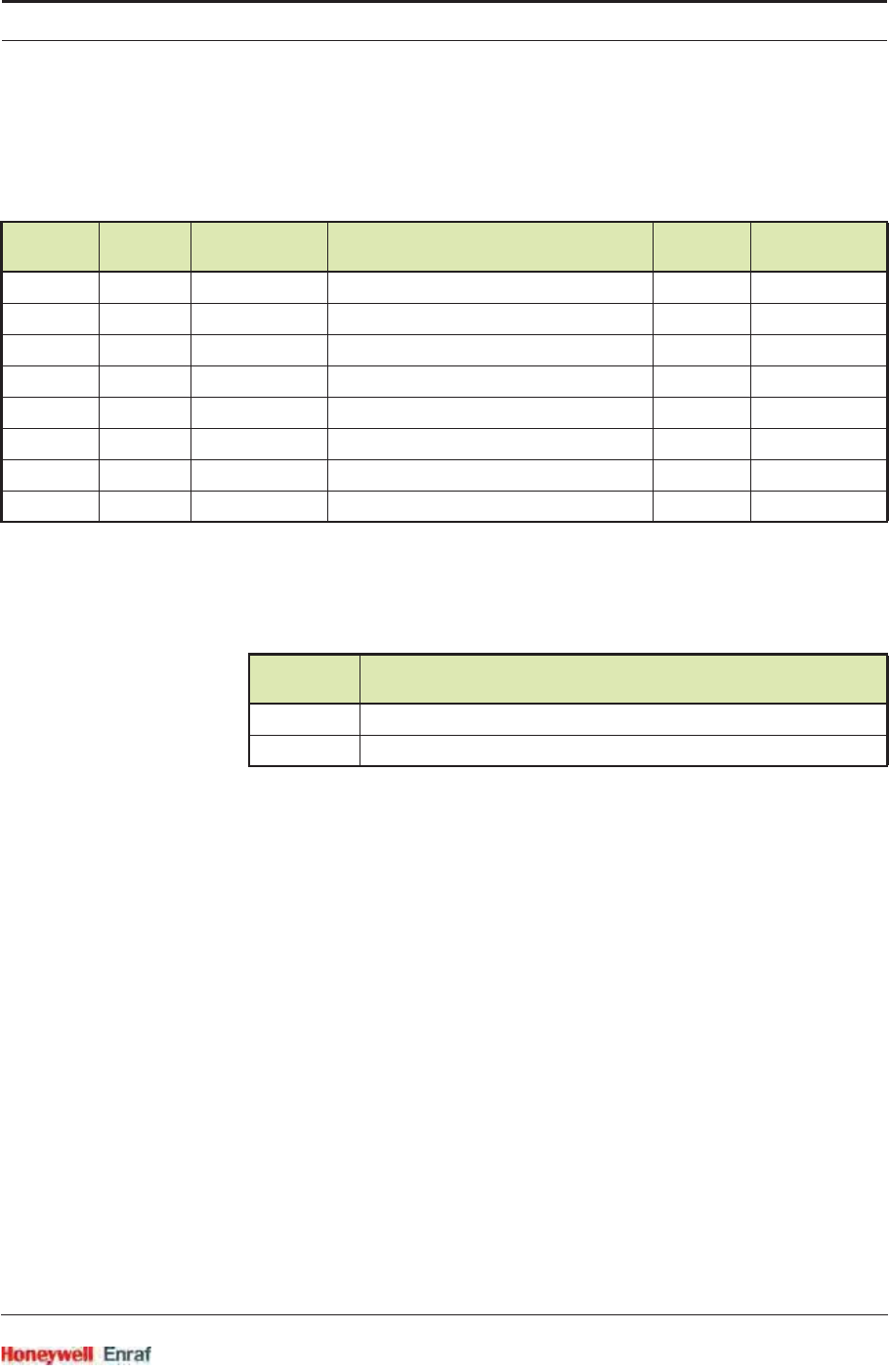
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 133
6.9.6 Hardware Configuration
6.9.6.1 Jumper Allocation
The following are typical jumper settings done on the HCI-HAO board.
6.9.6.2 Terminal Allocation
t.b.d.
6.9.6.3 LED Allocation
Jumper
Number Position Connection
Details Description Default
Position Default
Connections
JP1 ON Short 2 & 3 W&M Entity Protection OFF Short 1 & 2
JP2 ON Short 2 & 3 Password Read Protection OFF Short 1 & 2
JP3 ON Short 2 & 3 Write Protection All Entities OFF Short 1 & 2
JP4 ON Short 2 & 3 Free OFF Short 1 & 2
JP5 ON Short 2 & 3 Free OFF Short 1 & 2
JP6 ON Short 2 & 3 CAN termination 120E resistor OFF Short 1 & 2
JP7 & JP8 A Short 1 & 2 Active mode for Analog Output A Short 1 & 2
JP7 & JP8 P Short 2 & 3 Passive mode for Analog Output
LED
Number Function
LE2 HART data Transmit
LE3 HART data Receive
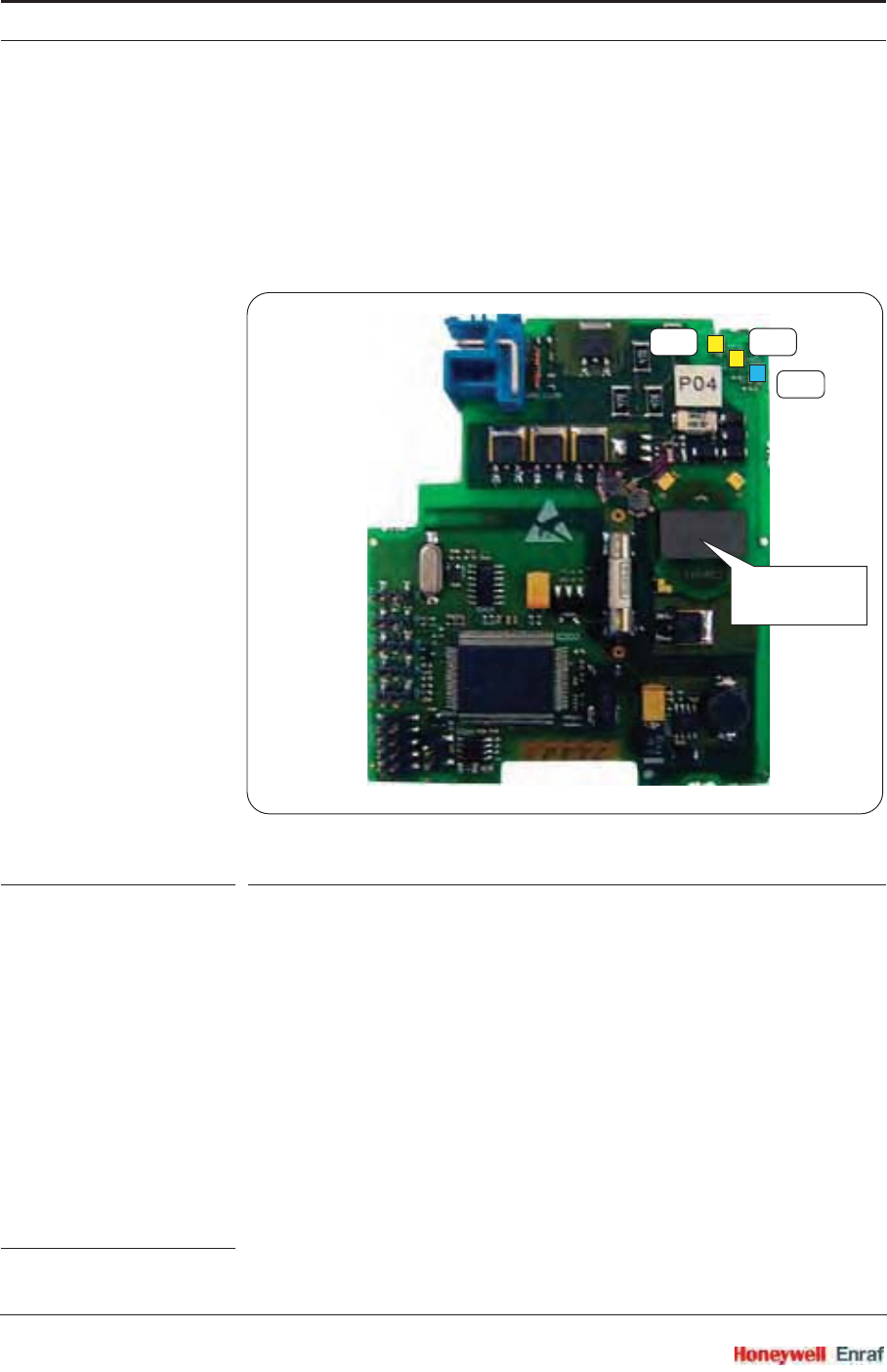
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 134 Service Manual
6.10 Average Temperature & Water Level Measurement (FII-VT)
6.10.1 Introduction
The Field Interface Instrument - VITO1 (FII-VT) board is a VITO-data
processor module, which calculates average product- and vapour
temperatures, and optionally a water level.
ESF07-0016
FIGURE 6-34 The FII-VT board with its planar transformer
By using the HART® protocol (see also 6.8.1), the FII-VT module can be
connected to one VITO-interface which in turn is connected to a probe
for product temperature,vapour temperature,water level, or a
combination of these.
The FII-VT board has a planar transformer for galvanic isolation from
the HART bus. See FIGURE 6-34.
LED LE1 is the board’s [Health] LED. LEDs LE2 and LE3 will be flashing
to indicate activity on the HART bus. LE2 indicates data is being
transmitted (Tx), LE3 indicates data is being received (Rx).
1. Versatile In-Tank Observer
LE1
LE2LE3
planar
transformer
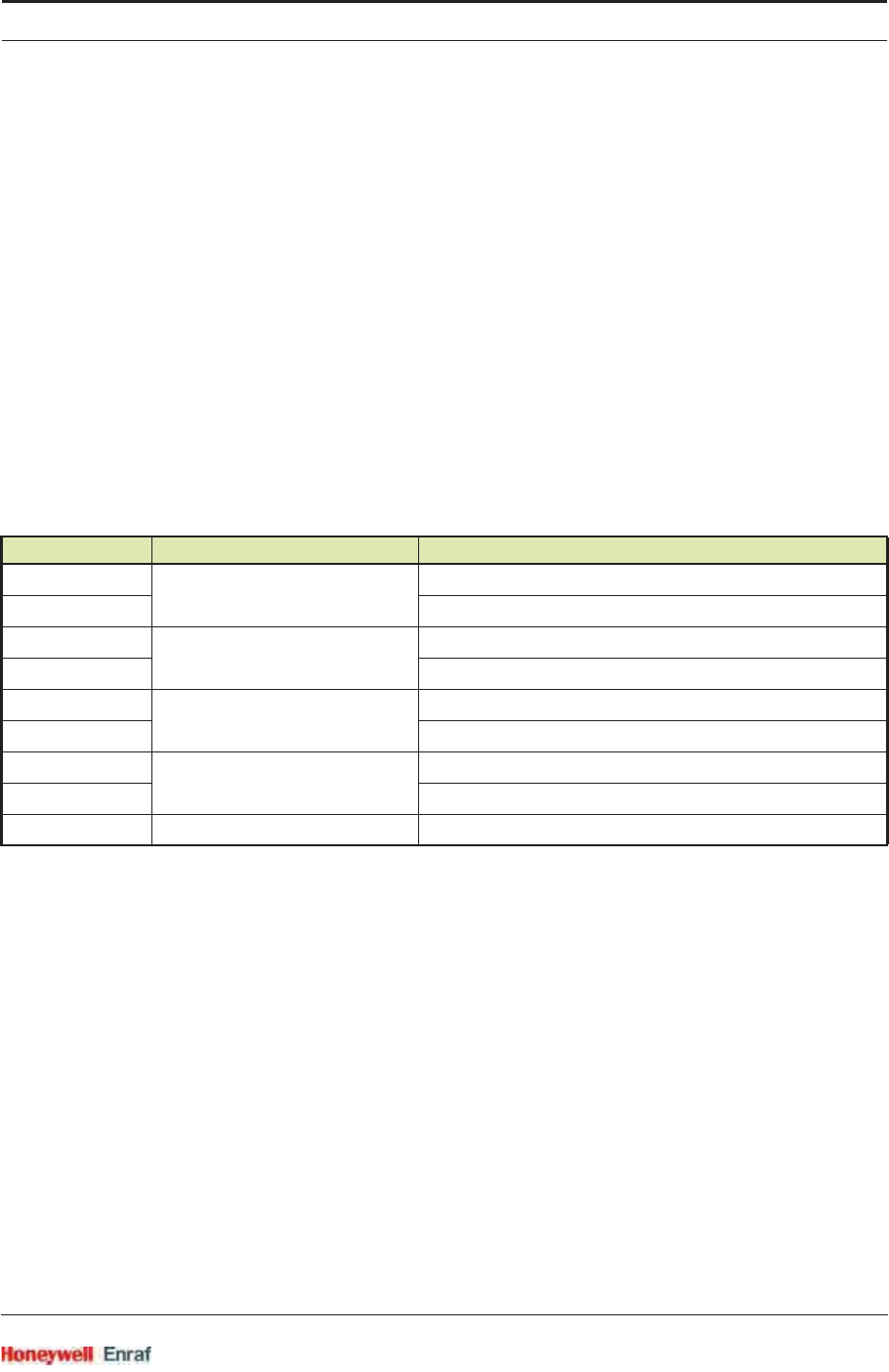
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 135
6.10.2 VITO Interface Types
For temperature and/or water level measurement, a proper VITO probe
must be connected to the FII-VT module, using a VITO interface.
There are 3 VITO interface types:
762 VITO MTT interface for 16-spot temperature measurement (ther-
mocouple principle) and optionally a water bottom measurement
762 VITO LT interface for 9-spot temperature measurement (thermo-
couple principle) and optionally a water bottom measurement
762 VITO MRT interface for Multiple Resistance Thermometer and
multi-spot (resistance variation principle) measurement
6.10.3 Commissioning
6.10.3.1 Commissioning Parameters for MTT/LT Probes
The following 9 configurations are possible:
These models are depicted in FIGURE 6-35 and FIGURE 6-36.
Enraf Model VITO Type Description
764C MTT Temperature probe lowest spot next to Pt100, no water probe
764D lowest spot below Pt100, no water probe
766C MTT Combi probe lowest spot next to Pt100, combined with water probe
766D lowest spot below Pt100, combined with water probe
767C LT Temperature probe lowest spot next to Pt100, no water probe
767D lowest spot below Pt100, no water probe
768C LT Combi probe lowest spot next to Pt100, combined with water probe
768D lowest spot below Pt100, combined with water probe
765 Water probe water probe only
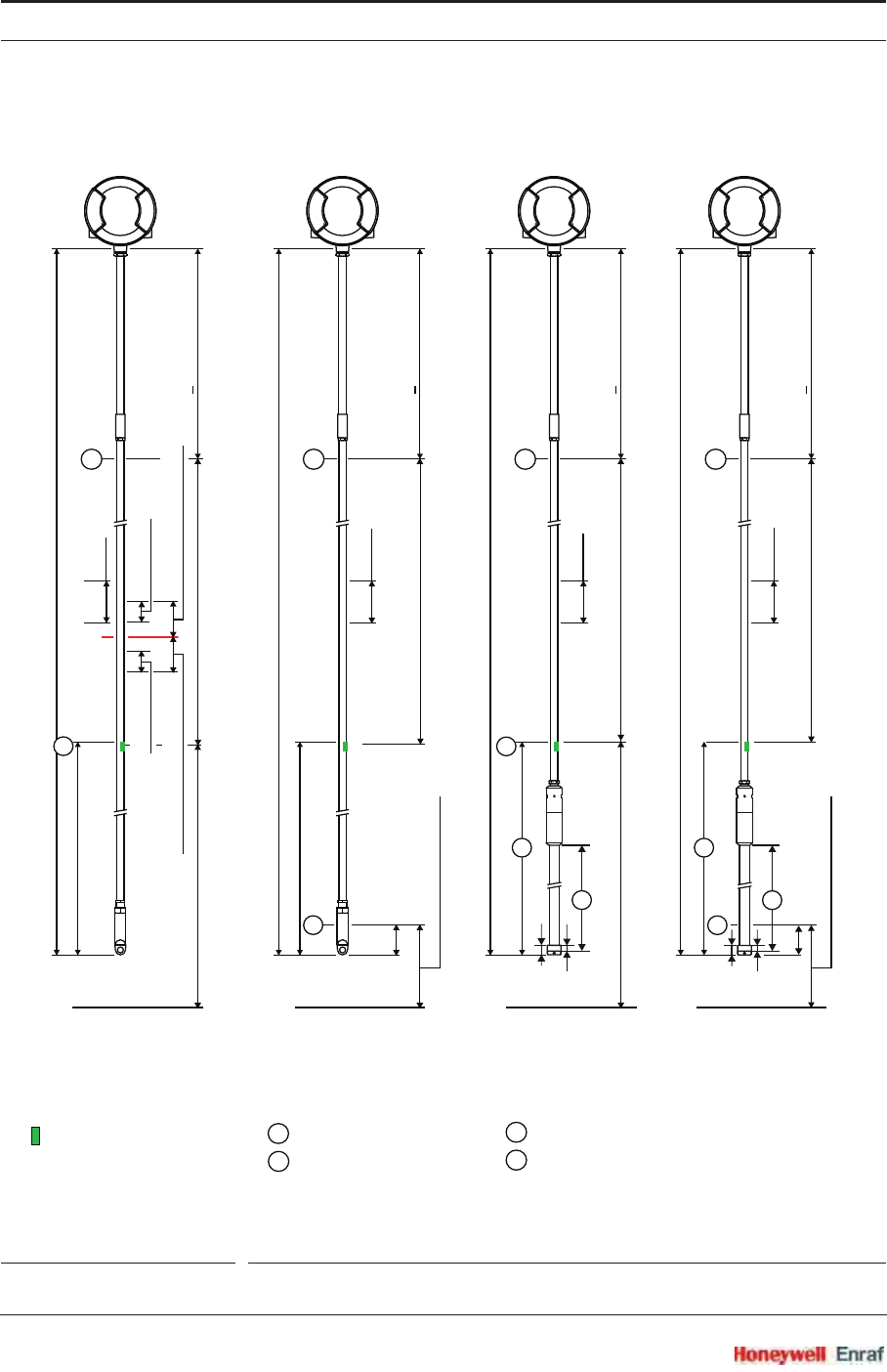
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 136 Service Manual
ESF07-0017
FIGURE 6-35 Tank and temperature probe data (1)
25
15
65
S
25
15
S
X X
X
Pt 100 reference resistor
Thermocouple (spot)
level
L
> 700 mm
overall length
sensor length/14
tank zero
x
.
x
x
x
65
1000 mm
x
x
x
> 700 mm
overall length
sensor length/15
tank zero
x
.
.
x
x
x
x
x
762 VITO MTT interface 762 VITO MTT interface
HH
. . . . 764 D<ol><he>
Model
.A . . 766 C<ol><he>
Model
L
.
> 700 mm
overall length
tank zero
x
.
.
x
x
x
x
x
762 VITO MTT interface
H
.A . . 766 D<ol><he>
Model
L
x
sensor length/14
lowest element offset
lowest element offset
lowest element offset
L
> 700 mm
overall length
sensor length
sensor length
sensor length
sensor length
tank zero
x
.
x
x
1000 mm
x
x
x
762 VITO MTT interface
H
. . . . 764 C<ol><he>
Model
.
sensor length/15
L
Highest spot
Lowest spot
HSensitive length = 0.5 / 1.0 / 1.5 / 2.0 m
S
Depending on actual Sensitive length,
this length = 1.0 / 1.5 / 2.0 / 2.5 m
X
hysteresishysteresis
gas immersion depth
product immersion depth
lowest element offset
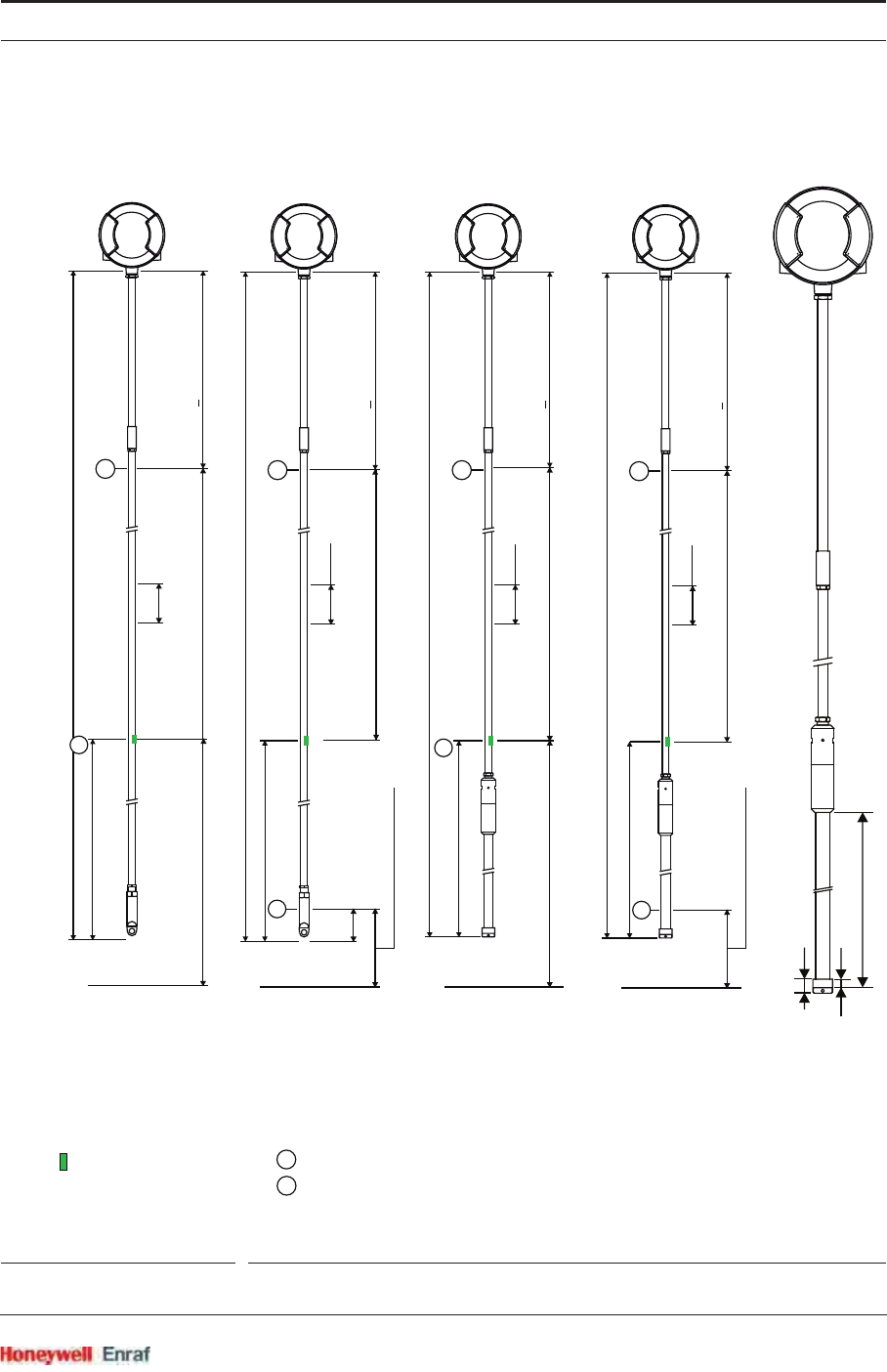
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 137
ESF07-0018
FIGURE 6-36 Tank and temperature probe data (2)
X
Pt 100 reference resistor
Thermocouple (spot)
Highest spot
Lowest spot
L
> 700 mm
overall length
tank zero
x
.
x
x
1000 mm
x
x
x
762 VITO
LT interface
762 VITO
LT interface
762 VITO
LT interface
762 VITO
LT interface
762 VITO
LT interface
H
. . . . 767 D<ol><he>
Model
.
> 700 mm
overall length
tank zero
x
.
.
x
x
1000 mm
x
x
x
H
.A . . 768 D<ol><he>
Model
. . . 765
Model
L
x
sensor length/8
sensor length/7
L
> 700 mm
overall length
tank zero
x
.
x
x
x
65
1000 mm
x
x
x
H
. . . . 767 C<ol><he>
Model
.
> 700 mm
overall length
tank zero
x
.
.
x
x
1000 mm
x
x
x
H
.A . . 768 C<ol><he>
Model
sensor length/7
sensor length/8
L
H
L
lowest element offset
lowest element offset
lowest element offset
lowest element offset
sensor length
sensor length
sensor length
sensor length
sensitive length
0.5 / 1.0 / 1.5 / 2.0 m
25
15
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 138 Service Manual
6.10.3.1.1 Product Temperature
☛The following entities must be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
NOTE: Using Engauge, following entities are set within the
Engauge Product temperature tab.
The following entities can be set by Engauge or SmartView for a correct
functioning of the FII-VT module in an instrument.
☛Check each entity for its correctness.
Name Explanation Value Range Default
[Lowest element offset] The distance from tank zero
till the lowest element
position in the temperature
probe
floating point number:
<-x.x .. +x.x>
<80.0>
[Sensor length] The distance from the
Pt100 position till the
highest element position
floating point number:
<-x.x .. +x.x>
<80.0>
Name Explanation Value Range Default
[Product immersion depth] The minimum required
distance of the product
level above an element
before it is taken into
account in the average
product temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[Hysteresis] The distance for a
hysteresis mechanism
around the switching point
of the elements that are
taken into account in the
calculation
floating point number:
<-x.x .. +x.x>
<0.1>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point number:
<-x.x .. +x.x>
<+1.0E22>
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 139
6.10.3.1.2 Vapour Temperature
NOTE: Using Engauge, following entities are set within the
Engauge Vapour temperature tab.
Some Vapour temperature settings are shared with
Product temperature settings.
The following entities can be set by Engauge or SmartView for a correct
functioning of the FII-VT module in an instrument.
☛Check each entity for its correctness.
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Element wiring] Used for excluding an
element from the average
product temperature
calculation.
16 characters
A non-zero (z 0) character
at position x results in
element x being excluded
from calculation.
<0000000000000000>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Product temp.>
Name Explanation Value Range Default
[Gas immersion depth] The minimum required
distance below an element
before it is taken into
account in the average
vapour temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point number:
<-x.x .. +x.x>
<+1.0E22>
Name Explanation Value Range Default
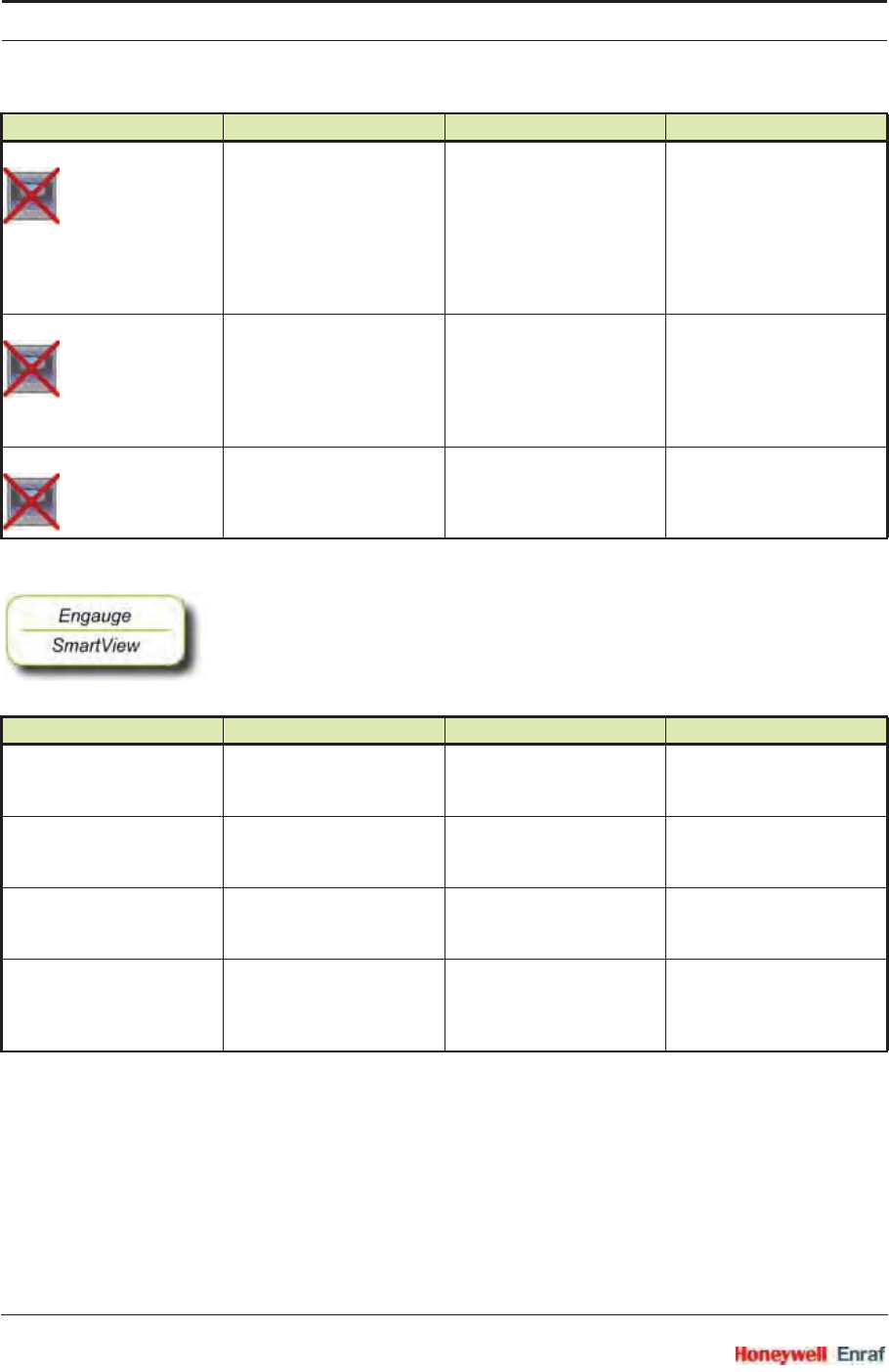
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 140 Service Manual
6.10.3.1.3 Water Level (for 766/768 Combi probes and 765 Water probe only)
☛The following entities must be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Vapour temp.>
Name Explanation Value Range Default
[Maximum water capacity] The maximum capacity
when the probe is fully
submerged in water (in pF)
floating point number:
<-x.x .. +x.x>
<20000>
[Minimum water capacity] The minimum capacity
when the probe is not
submerged in water (in pF)
floating point number:
<-x.x .. +x.x>
<20000>
[Water probe bottom position] The offset to the water
probe zero point in relation
with the tank zero point
floating point number:
<-x.x .. +x.x>
<80>
[Upper reference level] The distance from tank zero
point to upper reference
point; is used for water
ullage calculation
floating point number:
<-x.x .. +x.x>
<80>
Name Explanation Value Range Default

Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 141
☛The following entities can be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
Name Explanation Value Range Default
[Water probe length] The length of a water probe floating point number:
<-x.x .. +x.x>
<0.5>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<+1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Water level>
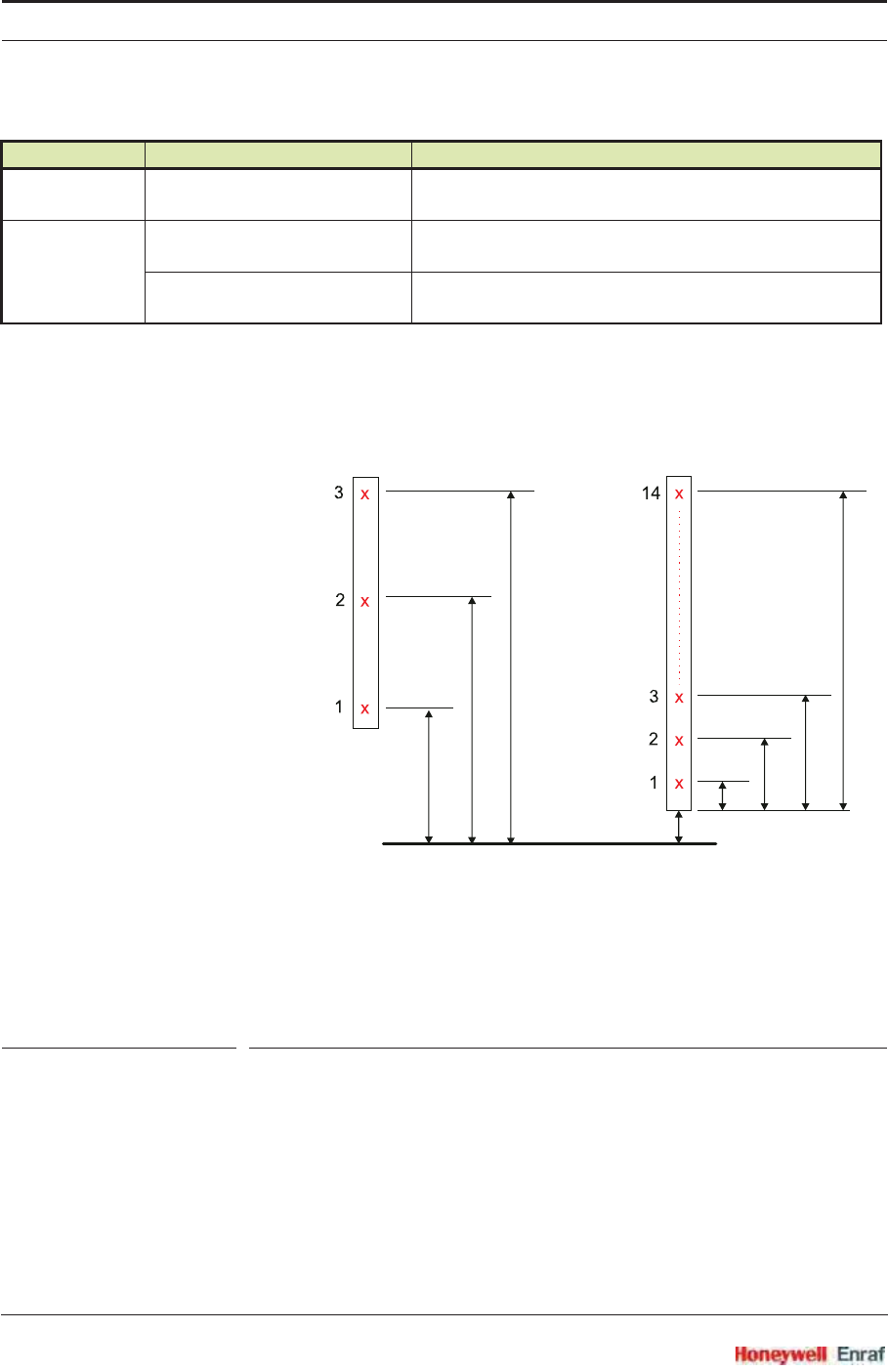
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 142 Service Manual
6.10.3.2 Commissioning Parameters for MRT or RTD
See FIGURE 6-37 and FIGURE 6-38.
ESF07-0020
FIGURE 6-37 Resistance Temperature Detector (RTD) elements positions
Enraf Model VITO Type Description
MRT Multiple Resistance Thermometer MRT with up to 13 temperature elements with one spot
element
RTD 3-spot
Resistance Temperature Detector
1..3 RTD spots in a 3-wire connection
multi-spot
Resistance Temperature Detector
1..14 RTD spots in a 2-wire connection
lowest element offset
tank zero level
lowest element offset
must be +000.0000
(RTD 3-wire only)
RTD element positions
RTD element positions
RTD
3 spots
Multi
RTD probe
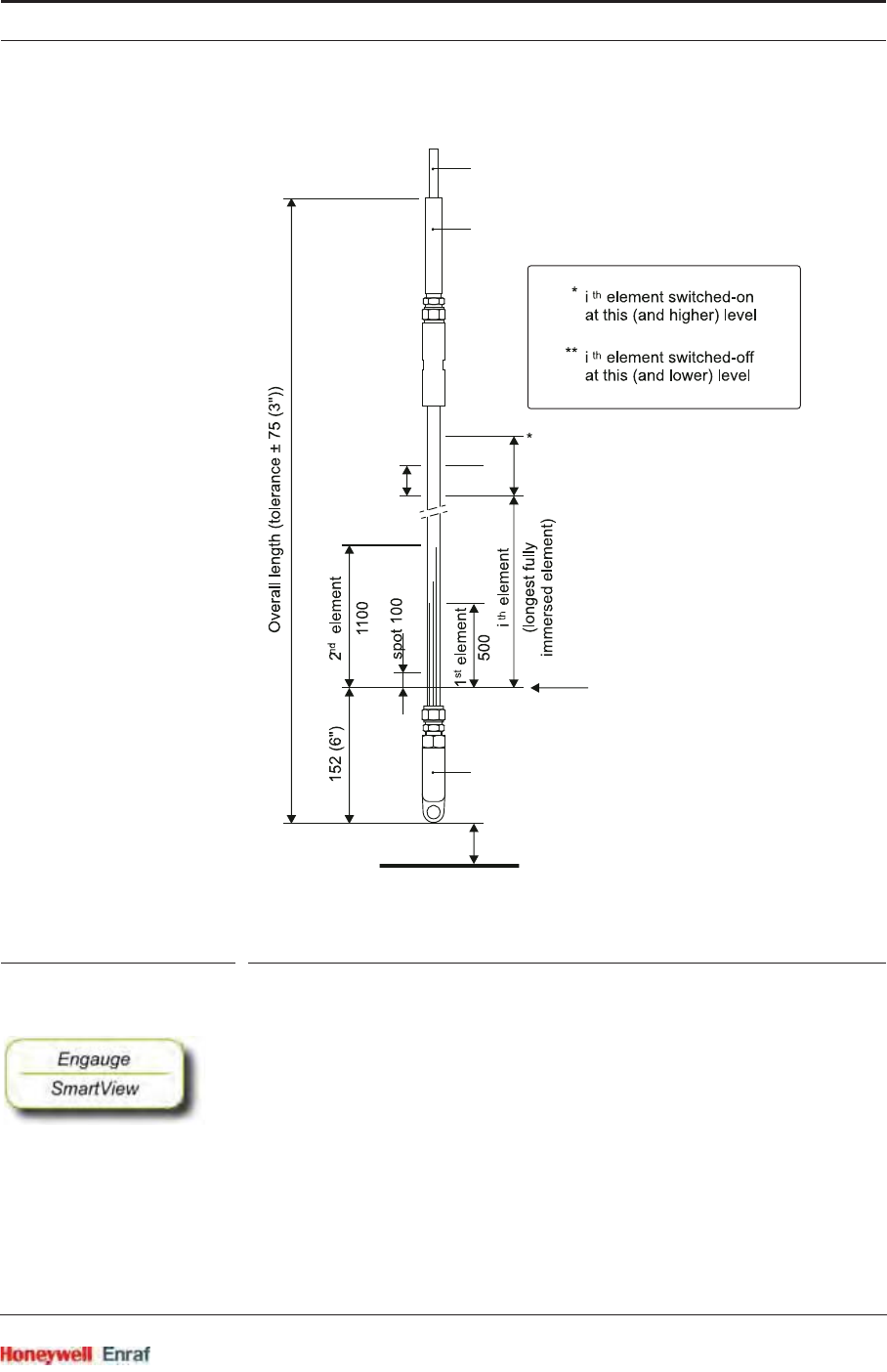
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 143
ESF07-0019
FIGURE 6-38 Multiple Resistance Thermometer (MRT) parameters
6.10.3.2.1 Product Temperature
☛The following entities must be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
NOTE: Using Engauge, following entities are set within the
Engauge Product temperature tab.
anchor eye
Zero level of tank
lowest point of all elements
lowest element offset
hysteresis product immersion depth
extension tube
flying leads
**
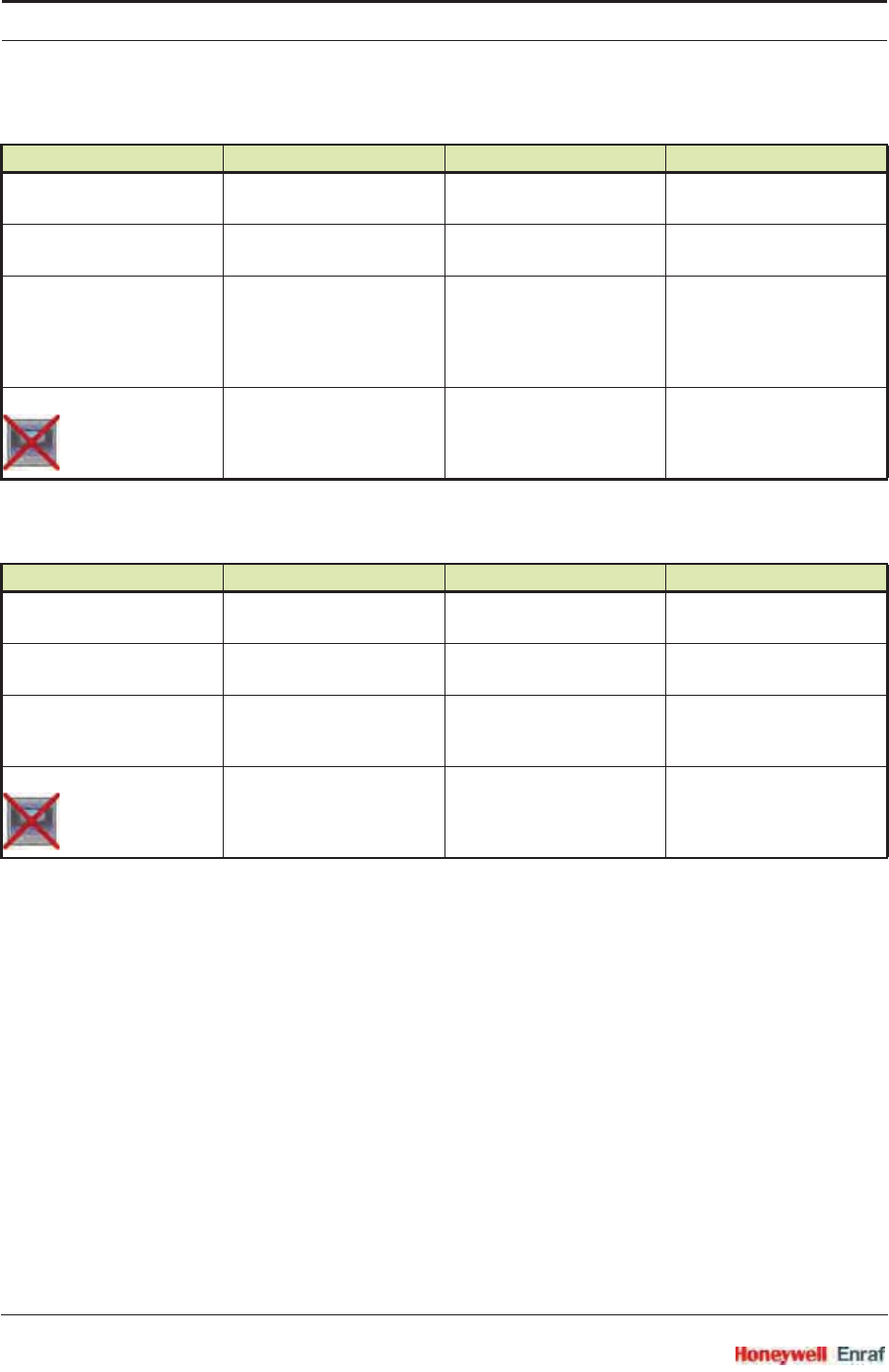
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 144 Service Manual
RTD 3 spots (see FIGURE 6-37 left side)
Multi RTD probe (see FIGURE 6-37 right side)
Name Explanation Value Range Default
[Element type] The supported element
type is: SPL
3 characters
<SPL>
<--->
[Number of elements] The number of elements a
RTD probe has
<1 .. 3> <0>
[Lowest element offset] The distance from tank zero
till the lowest position of the
multi-RTD probe.
So not used for the 3-wire
version and it must be 0.
floating point number:
<-x.x .. +x.x>
MUST BE <0.0>
<80.0>
[RTD element positions] The positions of the RTDs
from tank zero level
3 floating point numbers:
<-x.x .. +x.x>
Note: Only actually used
elements to be entered.
<0,0,0>
Name Explanation Value Range Default
[Element type] The supported element
type is : SPL
3 characters
<SPL>
<--->
[Number of elements] The number of elements a
RTD probe has
<1 .. 14> <0>
[Lowest element offset] The distance from tank zero
till the lowest position of the
multi-RTD probe
floating point number:
<-x.x .. +x.x>
<80.0>
[RTD element positions] The positions of the RTDs
from the lowest position of
the probe.
So not tank zero level!
14 floating point numbers:
<-x.x .. +x.x>
Note: Only actually used
elements to be entered.
<0,0,0,0,0,0,0,0,0,0,0,0,0,0>
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 145
MRT (see FIGURE 6-38)
TABLE 6-19 Element type definitions
Name Explanation Value Range Default
[Element type] See Table TABLE 6-19
below.
3 characters
<RCB>
<RCN>
<RCS>
<QCB>
<QCN>
<QCS>
<--->
[Number of elements] The number of elements
(resistors) an MRT probe
has
<1 .. 14> <0>
[Lowest element offset] The distance from tank zero
till the lowest position of the
MRT probe
floating point number:
<-x.x .. +x.x>
<80.0>
[MRT element length] if MRT
length table = <T>
The lengths of the MRTs
including anchor eye
14 floating point numbers:
<-x.x .. +x.x>
<0,0,0,0,0,0,0,0,0,0,0,0,0,0>
[MRT length table] Specifies whether a fixed
range of MRT resistors is
used (= <F>) or user-
configured lengths (= <T>).
Fixed lengths are:
0.25 / 0.65 / 1.25 / 1.95 /
2.85 / 4.15 / 5.65 / 7.35 /
9.25 / 11.65 / 14.65 /
18.45 / 22.95 / 29.65
1 character
<F>
<T>
<F>
R.. = an MRT without spot element
Q.. = an MRT with spot element
.CB Rth = 90.2935 + T x 0.38826 (- 100 through + 280 °C)
.CN Rth = 90.4778 + T x 0.38090 (- 100 through + 280 °C)
.CS Rth = 90.5000 + T x 0.38730 (- 100 through + 280 °C)
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 146 Service Manual
The following entities can be set by Engauge or SmartView for a correct
functioning of the FII-VT module in an instrument.
☛Check each entity for its correctness.
Name Explanation Value Range Default
[Product immersion depth] The minimum required
product level distance
above an element before
this element is taken into
account in the average
product temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[Hysteresis] This is a hysteresis
mechanism distance
around the switching points
of the elements that are
taken into account in the
calculation.
floating point number:
<-x.x .. +x.x>
<0.1>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Product temp.>
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 147
6.10.3.2.2 Vapour Temperature
NOTE: Using Engauge, following entities are set within the
Engauge Vapour temperature tab.
Some Vapour temperature settings are shared with
Product temperature settings.
The following entities can be set by Engauge or SmartView for a correct
functioning of the FII-VT module in an instrument.
☛Check each entity for its correctness.
Name Explanation Value Range Default
[Gas immersion depth] The minimum required
distance below an element
before it is taken into
account in the average
vapour temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<+1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Vapour temp.>
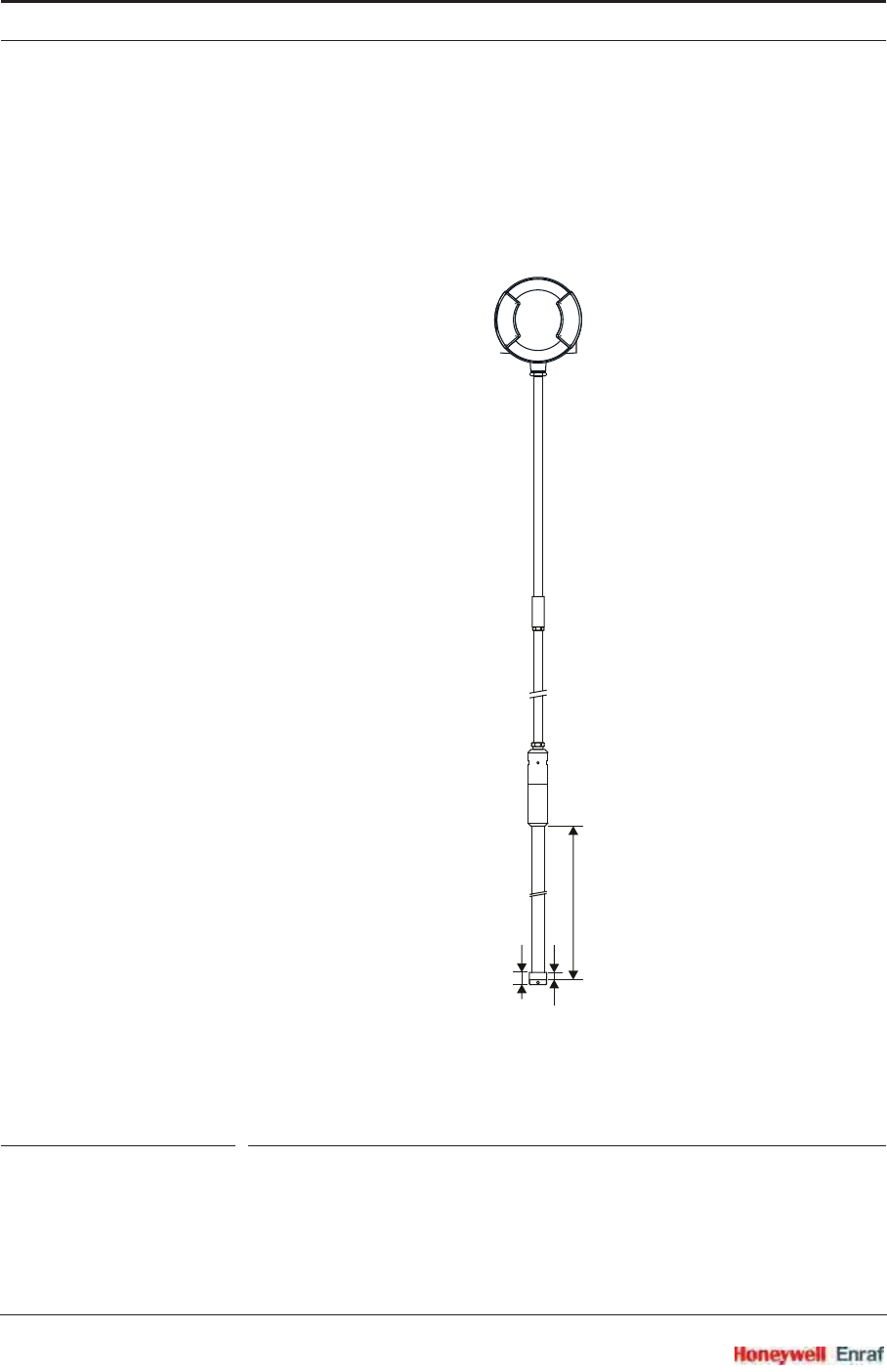
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 148 Service Manual
6.10.3.3 Commissioning Parameters for the 765 VITO Water Probe
For the entities to be set for the stand-alone 765 VITO water probe (see
FIGURE 6-39), see 6.10.3.3.1.
ESF07-0042
FIGURE 6-39 The model 765 VITO water probe
762 VITO
LT interface
Model 765 VITO water probe
sensitive length
0.5 / 1.0 / 1.5 / 2.0 m
25
15
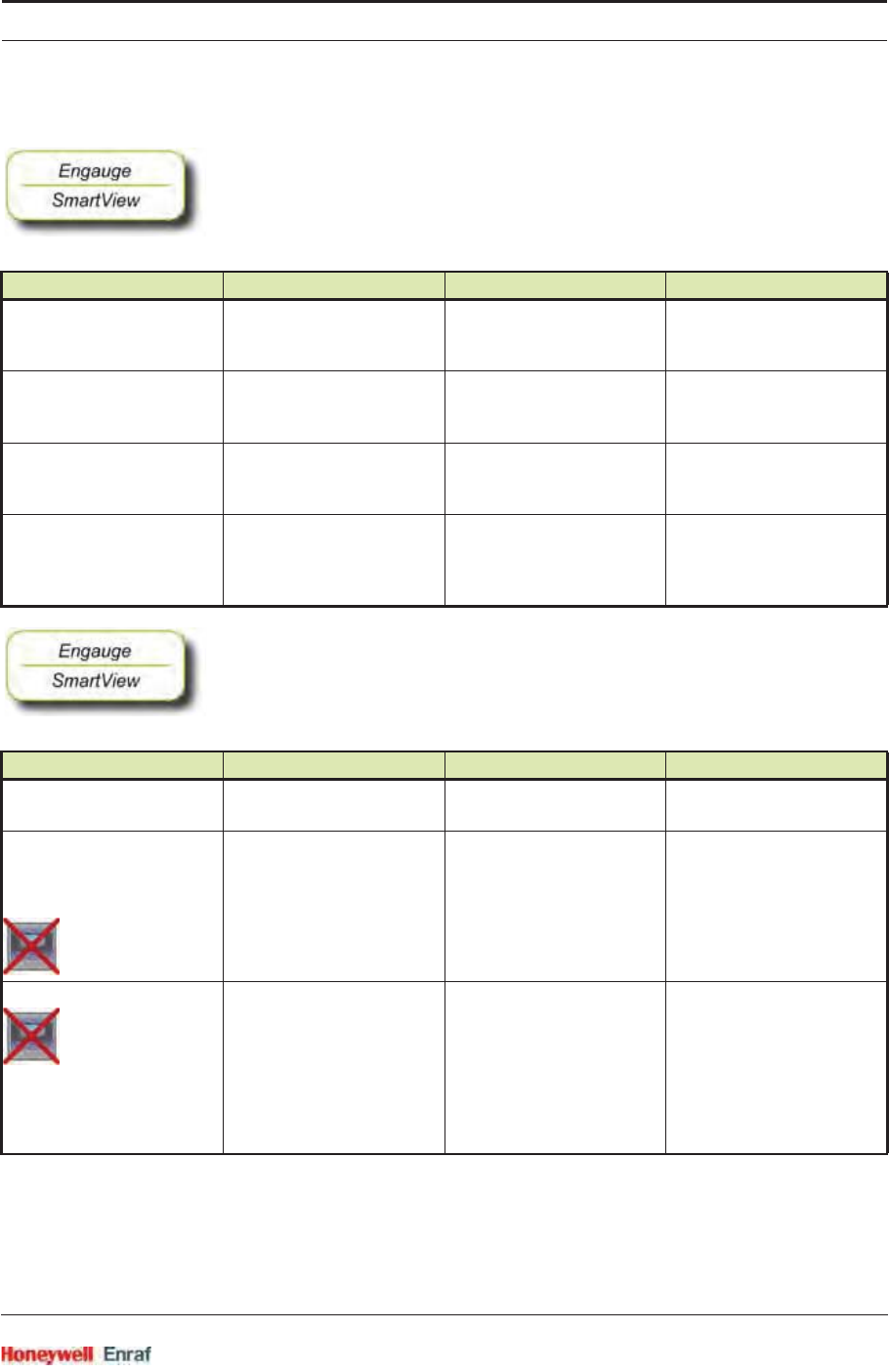
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 149
6.10.3.3.1 Water Level
☛The following entities must be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
☛The following entities can be set by Engauge or SmartView for a
correct functioning of the FII-VT module in an instrument.
Name Explanation Value Range Default
[Maximum water capacity] The maximum capacity
when the probe is fully
submerged in water (in pF)
floating point number:
<-x.x .. +x.x>
<20000>
[Minimum water capacity] The minimum capacity
when the probe is not
submerged in water (in pF)
floating point number:
<-x.x .. +x.x>
<20000>
[Water probe bottom position] The offset to the water
probe zero point in relation
with the tank zero point
floating point number:
<-x.x .. +x.x>
<80>
[Upper reference level] The distance from tank zero
point to upper reference
point; is used for water
ullage calculation
floating point number:
<-x.x .. +x.x>
<80>
Name Explanation Value Range Default
[Water probe length] The length of the 765 VITO
water probe
floating point number:
<-x.x .. +x.x>
<0.5>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<+1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
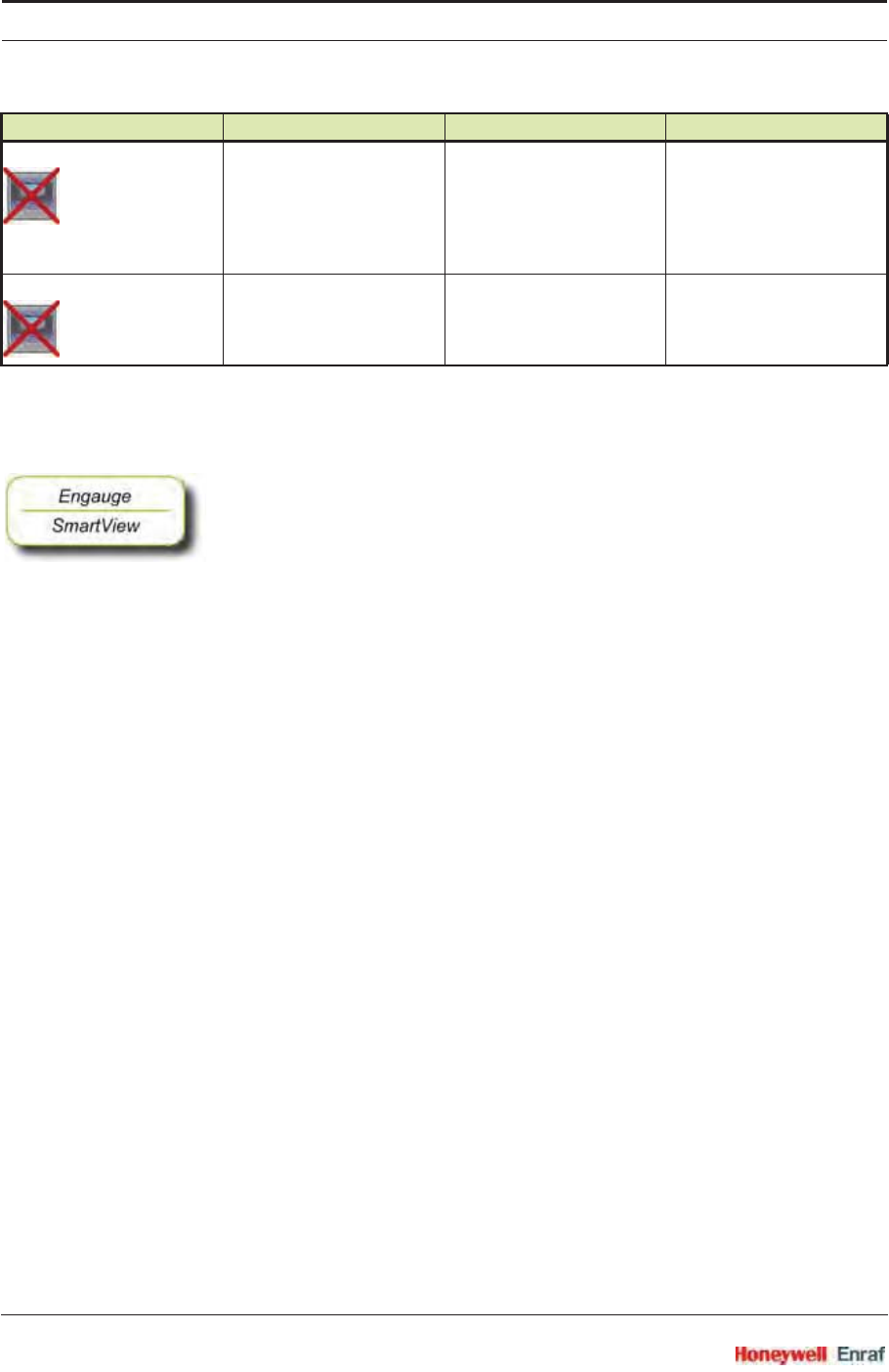
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 150 Service Manual
6.10.4 Commissioning Check
☛After having checked/set all before listed entities, make sure
the [Board Commissioned], the [Product temperature Commissioned], the
[Vapour temperature Commissioned], and - if applicable - the [Water level
Commissioned] entities are <True>;
the [Board Health], the [Product temperature Health], the [Vapour temperature
Health], and - if applicable - the [Water level Health] entities are <GOOD>.
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Water level>
Name Explanation Value Range Default
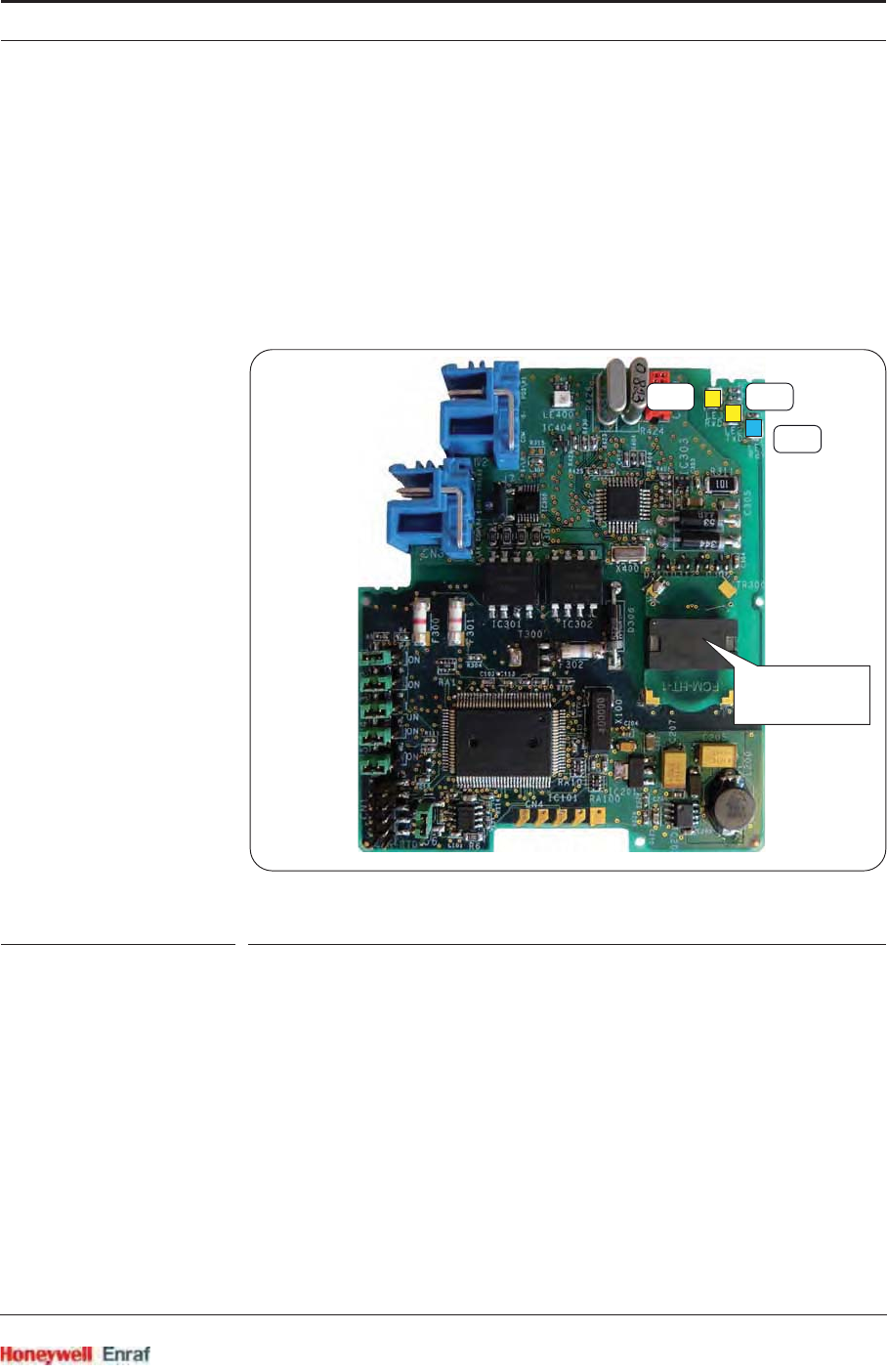
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 151
6.11 Average Temperature Measurement (FII-RTD)
6.11.1 Introduction
The Field Interface Instrument - Resistance Temperature Detector (FII-
RTD) board is a sensor module for the instrument (gauge) and
calculates average product- , vapour- and ambient temperatures.
For realizing this, RTDs or MRTs must be directly connected to the FII-
RTD module.
ESF09-0008
FIGURE 6-40 The FII-RTD board
There are 4 possible configurations:
1 or 2 RTDs in a 3-wire configuration
1 or 2 RTDs in 4-wire configuration
2 till 6 RTDs as a probe, called MPT, and which has 1 wire per RTD +
2 common wires for all RTDs
2 till 6 MRTs as a probe, and which has 1 wire per MRT + 2 common
wires for all MRTs
NOTE: Only in RTD 3- or 4-wire configurations ambient
temperature calculation is possible.
LE1
LE2LE3
planar
transformer
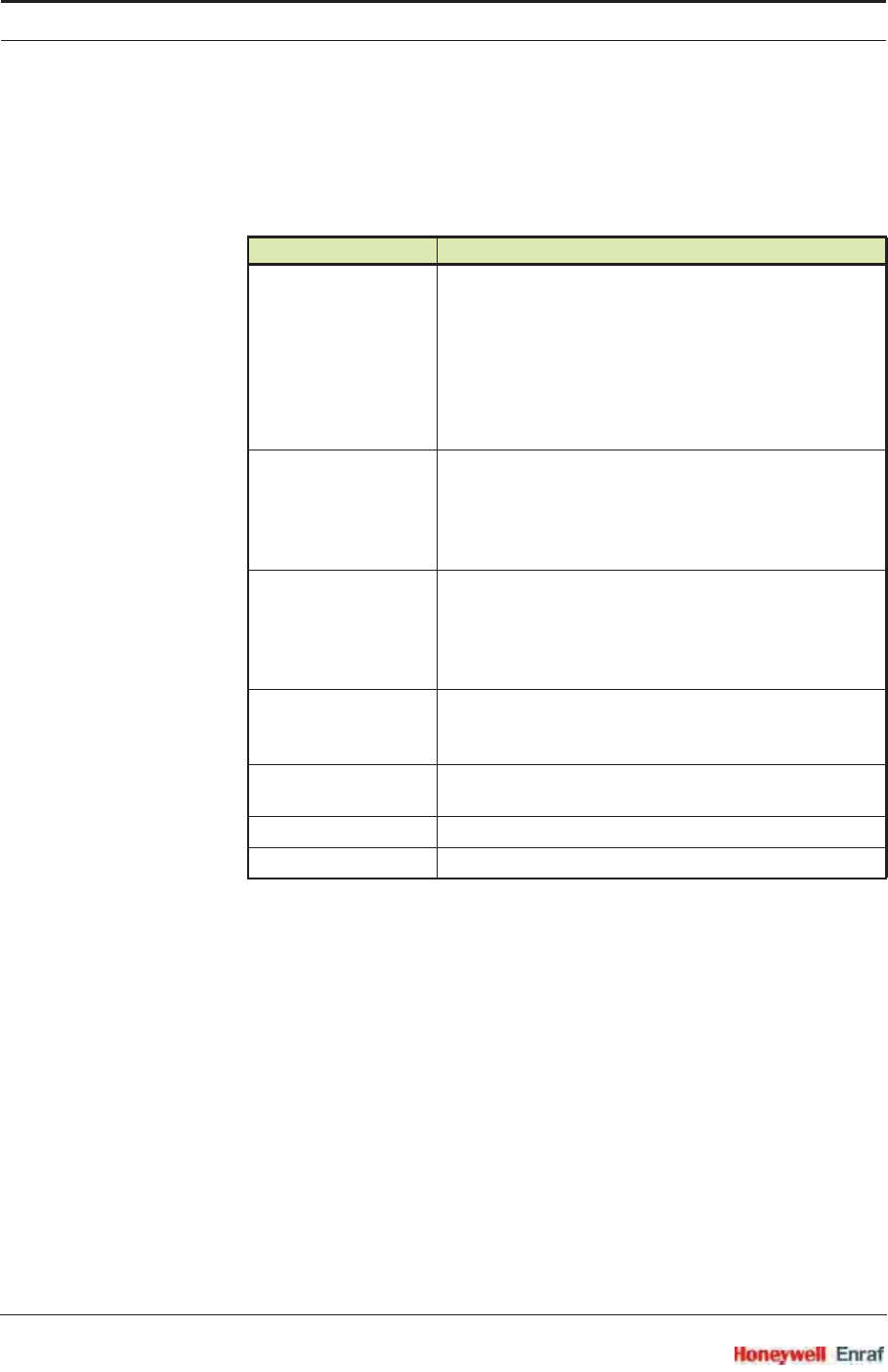
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 152 Service Manual
6.11.2 Some Important Settings
The FII-RTD can be tailored to the need of the customer by a lot of
settings. See 6.11.4 - Commissioning.
Some important settings of the FII-RTD are listed below.
6.11.3 Some Important Features
Temperature calculations can be:
•Standard (just simple averaging the spot temperatures).
•Enhanced (averaging the spot temperatures and taking into
account the contribution of each spot in respect to its immersion).
•Custom (as standard but then giving it a weighing factor).
Atemperature-range check can be turned on. In this case, if spot
elements are out of range, a fail state results (if not skipped), see
FIGURE 6-41.
Setting Remarks
[Element type] Can consist of following types:
• Pt100 large + small
• Ni191
• PtCu100
• Cu100
• Cu90 Enraf + Beacon + Weston/Solartron/Nulectrohms
• Sangamo MRT
• Sangamo spot
[Measurement type] Can be:
• RTD 3-wire
• RTD 4-wire
• MPT
•MRT
[RTD configuration] Can be:
• RTD1 in tank
• RTD1 + RTD2 in tank
• RTD1 in tank + RTD2 ambient
• RTD1 ambient
[Gauge temperature scale] Can be:
• IPTS-68
• ITS-90
[Lowest element offset] This is the distance from tank bottom till lowest element
position
[Number of elements] Can be 1..6
[MPT sensor length] -
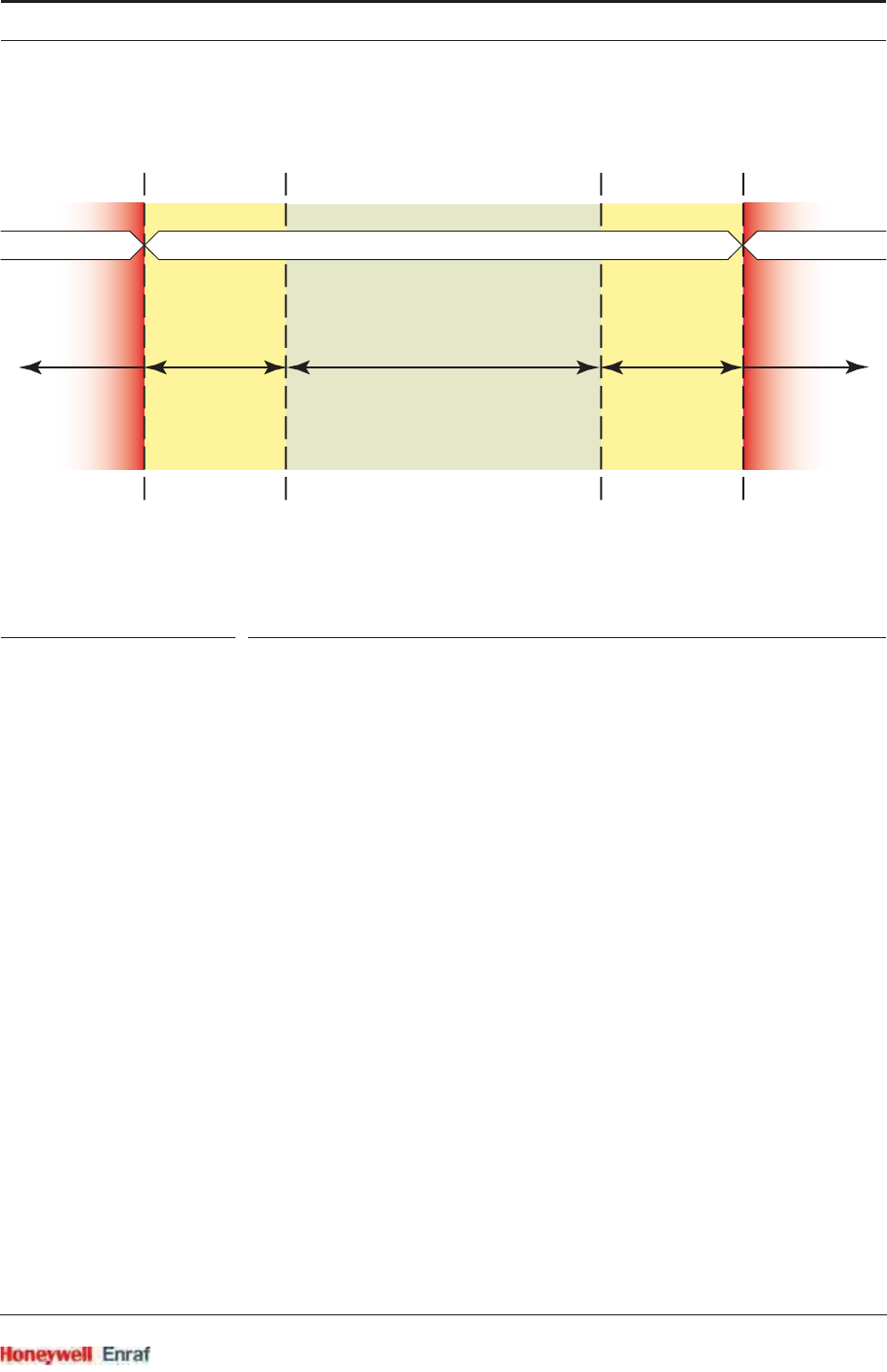
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 153
ESF09-0006
FIGURE 6-41 Temperature range check feature
Amedian filter can be turn on or off, which eliminates spikes of each
individual calculated spot tempearture.
An averaging constant filter can be turned on or off, which takes a
certain part of the previous calculated average temperature and a
certain part of the new calculated temperature into account.
Low element usage with following possible sub-settings can be
applied:
• No exclusion
• Static exclusion
• Dynamic exclusion
These settings are then to be refined further with:
• Exclude zone
• Smoothing level
• Low element behaviour
See FIGURE 6-42 on next page.
range check result = OKspot element
in fail*)
spot element
in fail
(3 retries)
spot element
in fail
(3 retries)
spot element
in fail*)
*) if [Element skipping]
is enabled,
“spot element in fail”
can be skipped
*) if [Element skipping]
is enabled,
“spot element in fail”
can be skipped
checking range if [Temperature range check] is enabled
permanent check permanent check
upper
shortcut
range
lower
temperature
range
upper
temperature
range
lower
not-connected
range
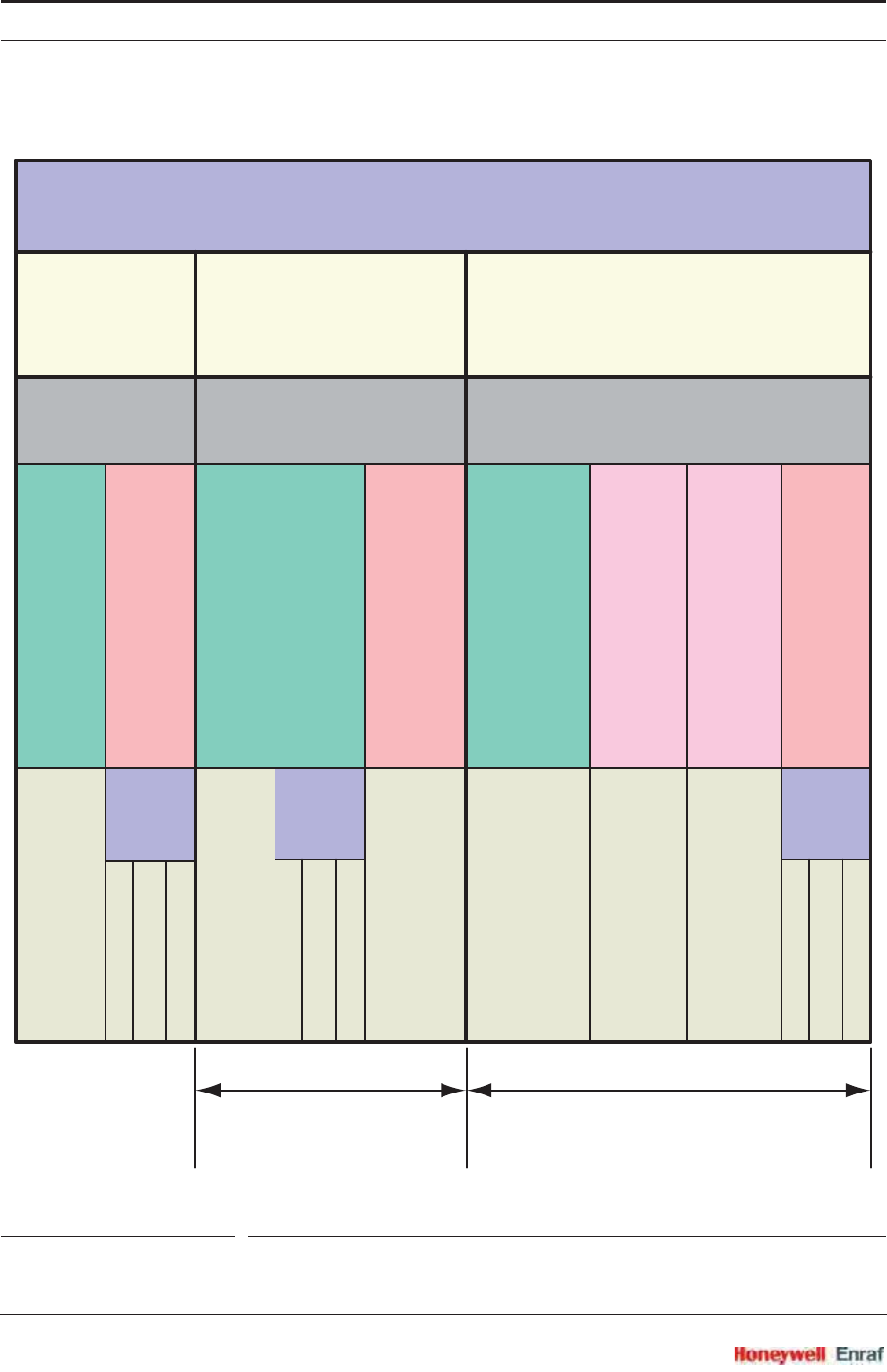
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 154 Service Manual
ESF09-0007
FIGURE 6-42 Low element usage settings overview
lowest
element
roduct leel
=
lowest
element
ow element usage
O
s = elements
O O
(default)
s and
O
s = 3 elements
roduct leel
empe
rature
element
eclude
one
empe
rature
element
eclude
one
AND
p o s
=
roduct leel
smoothing
leel
=
smoothing
leel
AND
p o s
=
pos
AND
pos
=
pos
empe
rature
element
eclude
one
AND
= pos
low
element
behaiour
low
element
behaiour
low
element
behaiour
all
submerged
elements
all
submerged
elements
with
ecluded
all
submerged
elements
with
ecluded
moothing
(oerrules
selected
temperature
calculation
method)
temperature
fail
use
pos moothing leel 3 pos
pos emperature element
eclude one pos
Temperature element exclude zone
default = 1 m
Smoothing level
default = 0 m
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 155
W&M Sealing1: This board can be electronically sealed via the
software. A Notified Body can set his password via [W&M notified body
seal password]. He can apply the seal by setting [W&M seal]. Here some
data logging is filled in and the related password. This requires a
W&M module for Engauge.
If the primary value of the product temperature is completely valid,
then a W&M indication will be set (e.g. visible in SmartView).
Unsealing: give the [W&M unseal level 1] and [W&M unseal the level 2]
commands successively.
History can be made visible via [W&M seal history].
6.11.4 Commissioning
6.11.4.1 Commissioning Parameters for 1 or 2 RTDs (3- and 4-wire) Temperature Calcula-
tions
NOTE: Make sure the RTD/MPT jumper is set to RTD.
☛The following entities must be set set by Engauge or SmartView for
a correct functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non-volatile
memory.
1. Weights & Measures Sealing.
Name Explanation Value Range Default
[Lowest element offset] The distance from tank zero
till the first RTD
floating point number:
<-x.x .. +x.x>
<80.0>
[Second element offset]
if applicable
The distance from tank zero
till the second RTD
floating point number:
<-x.x .. +x.x>
<0.0>
[Number of elements] The number of RTDs used <1..2> <0>
[Element type] The type (material) of the
used RTDs
<Pt100 large + small>
<Ni191>
<PtCu100>
<Cu100>
<Cu90 enraf + beacon + weston/
solartron/nulectrohms>
<Sangamo MRT>
<Sangamo spot>
<No type>
[Measurement type] Selects RTDs, MPT, or
MRT.
<RTD 3wire>
<RTD 4wire>
<MPT>
<MRT>
<No type>
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 156 Service Manual
6.11.4.2 Commissioning Parameters for MPT Temperature Calculations
NOTE: Make sure the RTD/MPT jumper is set to MPT.
☛The following entities must be set set by Engauge or SmartView for
a correct functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non-volatile
memory.
6.11.4.3 Commissioning Parameters for MRT Temperature Calculations
NOTE: Make sure the RTD/MPT jumper is set to MRT
(= MPT position).
☛The following entities must be set set by Engauge or SmartView for
a correct functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non-volatile
memory.
[RTD configuration] Selects how the RTDs are
positioned.
<RTD1 in tank>
<RTD1 and RTD2 in tank>
<RTD1 in tank and RTD2
ambient> <RTD1 ambient>
<No configuration>
Name Explanation Value Range Default
[Lowest element offset] The distance from tank zero
till the bottom of the probe
floating point number:
<-x.x .. +x.x>
<80.0>
[Number of elements] The number of elements
used
<1..6> <0>
[Element type] The type (material) of the
used RTDs
<Pt100 large + small>
<Ni191>
<PtCu100>
<Cu100>
<Cu90 enraf + beacon + weston/
solartron/nulectrohms>
<Sangamo MRT>
<Sangamo spot>
<No type>
[Measurement type] Selects RTDs, MPT, or
MRT.
<RTD 3wire>
<RTD 4wire>
<MPT>
<MRT>
<No type>
[MPT sensor length] The length of the MPT
probe
floating point number:
<-x.x .. +x.x>
<80.0>
Name Explanation Value Range Default
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 157
6.11.4.4 Commissioning Parameters for All Types of Probes
6.11.4.4.1 Engauge *Product temperature* Tab
☛The following entities can be set set by Engauge or SmartView for a
specific functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non-volatile
memory; so check each entity for its correctness.
Name Explanation Value Range Default
[Lowest element offset] The distance from tank zero
till the bottom of the probe
floating point number:
<-x.x .. +x.x>
<80.0>
[Number of elements] The number of elements
used
<1..6> <0>
[Element type] The type (material) of the
used RTDs
<Pt100 large + small>
<Ni191>
<PtCu100>
<Cu100>
<Cu90 enraf + beacon + weston/
solartron/nulectrohms>
<Sangamo MRT>
<Sangamo spot>
<No type>
[Measurement type] Selects RTDs, MPT, or
MRT.
<RTD 3wire>
<RTD 4wire>
<MPT>
<MRT>
<No type>
Name Explanation Value Range Default
[Product immersion depth] The minimum required
product level distance
above an element before
this element is taken into
account in the average
product temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[Hysteresis] This is a hysteresis
mechanism distance
around the switching points
of the elements that are
taken into account in the
calculation.
floating point number:
<-x.x .. +x.x>
<0.1>
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 158 Service Manual
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 thresholds for activating a
related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
slightly below or above the
alarm threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
<No Alarm>
<High High alarm>
<High Alarm>
<Low Alarm>
<Low Low alarm>
<No Alarm>
[Function identification] The current module’s
function name. This
function is visible on the
SmartView display.
13 characters <Product temp.>
[Element offset] Each element can
individually be given an
offset.
floating point numbers:
<-x.x .. +x.x>
<0.0>
[Element weighing factor] Each element can
individually be given a
weighing factor, which is
applicable if the calculation
method is CUSTOM.
floating point numbers:
<-x.x .. +x.x>
<1.0>
[Gauge temperature scale] Determines whether the
IPTS-68 or ITS-90 scale is
used.
<IPTS-68>
<ITS-90>
<ITS-90>
[Low element usage] See FIGURE 6-42 <No Exclusion>
<Static Exclusion>
<Dynamic Exclusion>
<No Exclusion>
[Low element behaviour] See FIGURE 6-42 <Temp To Fail>
<Temp To Last Valid>
<Temp Use First Element>
<Temp Use Second Element>
<Temp To Fail>
[Temperature element exclude
zone]
See FIGURE 6-42 floating point number:
<-x.x .. +x.x>
<1.0>
Name Explanation Value Range Default
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 159
[Smoothing level] See FIGURE 6-42 floating point numbers:
<-x.x .. +x.x>
<0.0>
[MPT element position mode]
[Only for MPT] Determines whether the
element positions are
automatically calculated
(based on sensor length) or
manually entered.
<Automatically>
<Manually>
<Automatically>
[RTD element positions]
[Only for MPT] If MPT element position
mode is MANUALLY then
here the positions can be
filled in.
floating point numbers:
<-x.x .. +x.x>
<0.0>
[Averaging constant filter] Enables or disables a
averaging constant filter.
<enable>
<disable>
<enable>
[Averaging constant] Value of how much of the
old calculated value is used
with respect to the new
calculated value
<0.0 .. 1.0> <0.9>
[Temperature range check] Enables or disables the fact
that an element which is
outside a temperature
range will lead to
temperature fail.
(See also FIGURE 6-41.)
<enable>
<disable>
<disable>
[Element skipping] Enables or disables the fact
that elements can be
skipped if an element is
outside a temperature
range.
<enable>
<disable>
<disable>
[Maximum skipped elements] The number of elements
that can be skipped
<1,2> <1>
[Median filter] Enables or disables a
median filter of 5 levels
deep (spike filtering).
<enable>
<disable>
<enable>
[Temperature calculation method] The way the average
temperature is calculated
(see also features above)
<Standard>
<Custom>
<Enhanced>
<Enhanced>
Name Explanation Value Range Default
Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 160 Service Manual
6.11.4.4.2 Engauge * Vapour temperature * Tab
NOTE: Some settings for vapour temperature calculations
are shared via the product temperature settings.
☛The following entities can be set by Engauge or SmartView for a
specific functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non volatile
memory; so check each entity for its correctness.
[MRT length table]
[Only for MRT] Specifies whether a fixed
range of MRT resistors is
used (= <F> ) or user
configured lenghts (= <T>).
Fixed lengths are:
0.65, 1.25, 1.95, 2.85, 4.15,
5.65
1 character
<F>
<T>
<F>
[MRT element length
used if MRT length table is 'T']
[Only for MRT]
The lengths of the MRTs
including anchor eye
floating point numbers:
<-x.x .. +x.x>
<0.0>
Name Explanation Value Range Default
[Gas immersion depth] The minimum required
distance below an element
before it is taken into
account in the average
vapour temperature
calculation
floating point number:
<-x.x .. +x.x>
<0.5>
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 Thresholds for activating
a related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<+1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
Name Explanation Value Range Default
Commissioning
Part No.: 4417.762_Rev07 SmartRadar FlexLine
Service Manual 6 - 161
6.11.4.4.3 Engauge * Ambient temperature * Tab
NOTE: Some settings for ambient temperature calculations
are shared via the product temperature settings.
☛The following entities can be set by Engauge or SmartView for a
specific functioning of the FII-RTD module in an instrument. The
default values are available after initialization of the non volatile
memory; so check each entity for its correctness.
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The name of the current
function of this module.
This name is visible on the
SmartView.
13 characters <Vapour temp.>
Name Explanation Value Range Default
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
4 Thresholds for activating
a related alarm status in the
Primary Value
floating point numbers:
<-x.x .. +x.x>
<+1.0E22>
[Alarm test enable] Enables (if activated, see
next listed entity) the
simulation of one of the 4
alarms for a minute, by
simulating the actual
measured Primary Value is
below or above the alarm
threshold.
<enable>
<disable>
<disable>
[Alarm test] Activates and selects at the
same time the Alarm test (if
enabled with the [Alarm test
enable] listed before, and the
4 alarm thresholds are
properly set).
[No Alarm]
[High High alarm]
[High Alarm]
[Low Alarm]
[Low Low alarm]
<No Alarm>
[Function identification] The name of the current
function of this module.
This name is visible on the
SmartView.
13 characters <Ambient temp.>
Name Explanation Value Range Default

Commissioning
SmartRadar FlexLine Part No.: 4417.762_Rev07
6 - 162 Service Manual
6.11.5 Commissioning Check
☛After having checked/set all before listed entities, make sure
the [Board Commissioned], the [Product temperature Commissioned], the
[Vapour temperature Commissioned], and the [Ambient Temperature Commis-
sioned] entities are <True>;
the [Board Health], the [Product temperature Health], the [Vapour temperature
Health], and the [Ambient Temperature Health] entities are <GOOD>.
For viewing the software version, the Engauge Generic tab can be
viewed; also a Reset board command can be issued here.
NOTE: In the SmartView situation, the Commissioning flag
must be ‘G’ and the Health flag must be ‘Y’.

Honeywell Enraf
Delftechpark 39
2628 XJ Delft
The Netherlands
Tel: +31 (0)15-2701 100
www.honeywell.com/ps
4417762 - Revision
6HSWHPEHU
© 20 Honeywell International Inc.