Hottinger Bruel and Kjaer T40S0TOS1 T40 Torquemeter User Manual Mounting instructions T40HS en V1
Hottinger Baldwin Messtechnik GmbH T40 Torquemeter Mounting instructions T40HS en V1
User Manual

Mounting Instructions
English
T40HS
3 V1 T40HS
Table of content
Safety instructions ............................................................................................ 1
1 Markings used .............................................................................................. 7
1.1
Symbols
on the
transducer
................................................................................................................... 7
1.2 The
markings
used in this
document
.................................................................................................... 7
2
Application
.................................................................................................. 8
3 Structure and mode of operation .................................................................. 9
4
Mechanical installation
............................................................................. 10
4.1 Important
precautions
during
installation
.......................................................................................... 10
4.2
Conditions
on site ................................................................................................................................ 11
4.3
Mounting position
............................................................................................................................... 11
4.4 Installation options ................................................................................................................................ 11
4.4.1 Installation with
subsequent
stator
mounting
........................................................................... 12
4.5 Mounting the rotor................................................................................................................................ 13
4.6 Mounting the
stator
............................................................................................................................. 14
5
Electrical connection
............................................................................... 17
5.1
General instructions
............................................................................................................................ 17
5.2 EMC
protection
.................................................................................................................................... 17
5.3 Connector pin assignment ..................................................................................................................... 19
5.4 Supply voltage ....................................................................................................................................... 21
6
Shunt signal
............................................................................................. 22
7 Functionality testing ................................................................................... 23
7.1 Rotor status, LED A (upper
LED)
............................................................................................................ 23
7.2 Stator status, LED B (lower LED) ............................................................................................................ 24
8
Loading capacity
...................................................................................... 25
9 M
aintenance
............................................................................................. 26

10
Waste disposal
and
environmental protection
....................................... 26
11
Dimensions
............................................................................................... 27
11.1 Dimensions Rotor 500N·m – 1kN·m ..................................................................................................... 27
11.2 Dimensions Rotor 2 – 3kN·m ................................................................................................................. 28
11.3 Dimensions Stator: 500N·m – 1kN·m .................................................................................................... 29
11.4 Dimensions Stator: 2– 3kN·m ................................................................................................................ 30
12
Order numbers, accessories
.................................................................... 31
13
Specifications
............................................................................................ 32
14
Supplementary technical information ......................................................... 35
1
Safety instructions
FCC Compliance & Advisory Statement
Important
Any changes or modification not expressly approved in writing by the party responsible for
compliance could void the user’s authority to operate the device. Where specified additional
components or accessories elsewhere defined to be used with the installation of the product,
they must be used in order to ensure compliance with FCC regulations.
This device complies with Part 15 of the FCC Rules. Operation is subject to the following two
conditions: (1) this device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause undesired operation.
The FCC identifier or the unique identifier, as appropriate, must be displayed on the device.
Model Measuring range FCC ID IC
T40HS-S0 100N·m – <2kN·m
2ADAT-T40S0TOS1
12438A-T40S0TOS1
T40HS-S1 >1 - 3 kN·m
2ADAT-T40S0TOS1
12438A-T40S0TOS1
T40HS-S0-MPZ1402023 >100N·m – <2kN·m
2ADAT-T40S0TOS1
12438A-T40S0TOS1

2
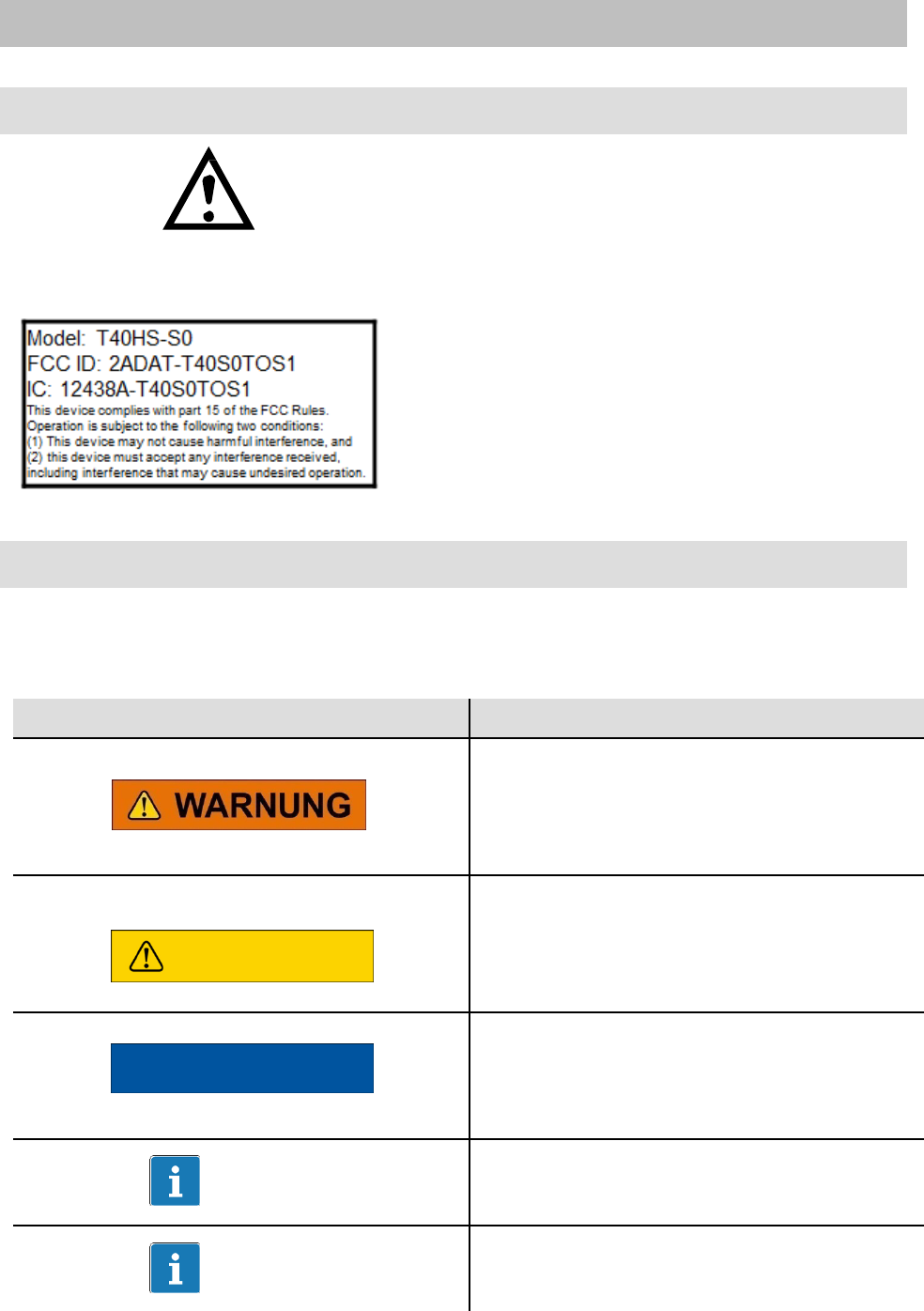
Label example with FCC ID and IC number
Label
Fig. 1.1 Location of the label on the stator of the device
Fig. 1.2 Example of the label
3
Industry Canada
This device complies with Industry Canada standard RSS210.
This device complies with Industry Canada license−exempt RSS standard(s).Operation is
subject to the following two conditions: (1) this device may not cause interference, and (2) this
device must accept any interference, including interference that may cause undesired
operation of the device.
Cet appareil est conforme aux norme RSS210 d’Industrie Canada.
Cet appareil est conforme aux normes d’exemption de licence RSS d’Industry Canada. Son
fonctionnement est soumis aux deux conditions suivantes : (1)cet appareil ne doit pas causer
d’interference et (2) cet appareil doit accepter toute interference, notamment les interferences
qui peuvent affecter son fonctionnement.
4
Intended use
The T40HS torque flange is used exclusively for torque, angle of rotation and power
measurement tasks within the load limits stipulated in the specifications. Any other use is
not the designated use.
Stator operation is only permitted when the rotor is installed.
The T40HS torque flange may only be installed by qualified personnel in compliance with
the specifications and with the safety requirements and regulations of these mounting
instructions. It is also essential to observe the applicable legal and safety regulations for the
application concerned. The same applies to the use of accessories.
The T40HS torque flange is not intended for use as a safety component. Please also refer
to the section "Additional safety precautions". Proper and safe operation requires proper
transportation, correct storage, siting and mounting, and careful operation.
Loading capacity limits
The data in the technical data sheets must be complied with when using the T40HS torque
flange. In particular, the respective maximum loads specified must never be exceeded. The
following limits set out in the specifications must not be exceeded, e.g.:
• Limit torque
• Longitudinal limit force, lateral limit force or bending limit moment
• Torque vibration bandwidth
• Breaking torque
• Temperature limits
• Limits of electrical loading capacity
Use as a
machine element
The T40HS torque flange can be used as a machine element. When used in this
manner, it must be noted that, to favor greater sensitivity, the transducer is not
designed with the safety factors usual in mechanical engineering. Please refer here to
the section "Loading capacity limits", and to the specifications.
5
Accident prevention
According to the prevailing accident prevention regulations, once the transducers have
been mounted, a covering agent or cladding has to be fitted as follows:
• The covering agent or cladding must not be free to rotate.
• The covering agent or cladding should prevent squeezing or shearing and
provide protection against parts that might come loose.
• Covers and cladding must be positioned at a suitable distance or be so arranged
that there is no access to any moving parts within.
• Covering agents and cladding must still be attached even if the moving parts of the
T40HS torque flange are installed outside peoples' movement and working range.
The only permitted exceptions to the above requirements are if the T40HS torque flange
is already fully protected by the design of the machine or by existing safety precautions.
Additional safety precautions
The T40HS torque flange cannot (as a passive transducer) implement any (safety-
relevant) cutoffs. This requires additional components and constructive measures for
which the installer and operator of the plant is responsible. The layout of the electronics
conditioning the measurement signal should be such that measurement signal failure does
not cause damage.
The scope of supply and performance of the transducer covers only a small area of torque
measurement technology. In addition, equipment planners, installers and operators should
plan, implement and respond to safety engineering considerations in such a way as to
minimize residual dangers. Pertinent national and local regulations must be complied with.
General
dangers of
failing
to follow the safety instructions
The T40HS torque flange is state of the art and reliable. Transducers can give rise to
residual dangers if they are incorrectly operated or inappropriately mounted, installed and
operated by untrained personnel. Every person involved with siting, starting-up, operating or
repairing a T40HS torque flange must have read and understood the mounting instructions
and in particular the technical safety instructions. The transducers can be damaged or
destroyed by non-designated use of the transducer or by non-compliance with the mounting
and operating instructions, these safety instructions or any other applicable safety
regulations (BG safety and accident prevention regulations) when using the transducers.
Transducers can break, particularly in the case of overloading. The breakage of a
transducer can also cause damage to property or injury to persons in the vicinity of the
transducer.
If the T40HS torque flange is not used according to the designated use, or if the safety
instructions or specifications in the mounting and operating instructions are ignored, it is
also possible that the transducer may fail or malfunction, with the result that persons or
property may be affected (due to the torques acting on or being monitored by the T40HS
torque flange).
Conversions and modifications
The transducer must not be modified from the design or safety engineering point of
view except with our express agreement. Any modification shall exclude all liability on
our part for any damage resulting therefrom.
6
Selling on
If the T40HS torque flange is sold on, these mounting instructions must be
included with the T40HS torque flange.
Qualified personnel
Qualified personnel means persons entrusted with siting, mounting, starting up and
operating the product, who possess the appropriate qualifications for their function.
This includes people who meet at least one of the three following requirements:
• Knowledge of the safety concepts of automation technology is a requirement and
as project personnel, you must be familiar with these concepts.
• As automation plant operating personnel, you have been instructed how to handle
the machinery. You are familiar with the operation of the equipment and
technologies described in this documentation.
• As commissioning engineers or service engineers, you have successfully completed
the training to qualify you to repair the automation systems. You are also authorized
to activate, ground and label circuits and equipment in accordance with safety
engineering standards.
7
1 Markings used
1.1
Symbols
on the
transducer
Symbol:
Meaning: Read and note the
data
in
this
manual
Label example
Label example with FCC ID and IC number.
Location of the label on the stator device.
1.2 The
markings
used in this
document
Important instructions for your safety are specifically identified. It is essential to follow
these instructions in order to prevent accidents and damage to property.
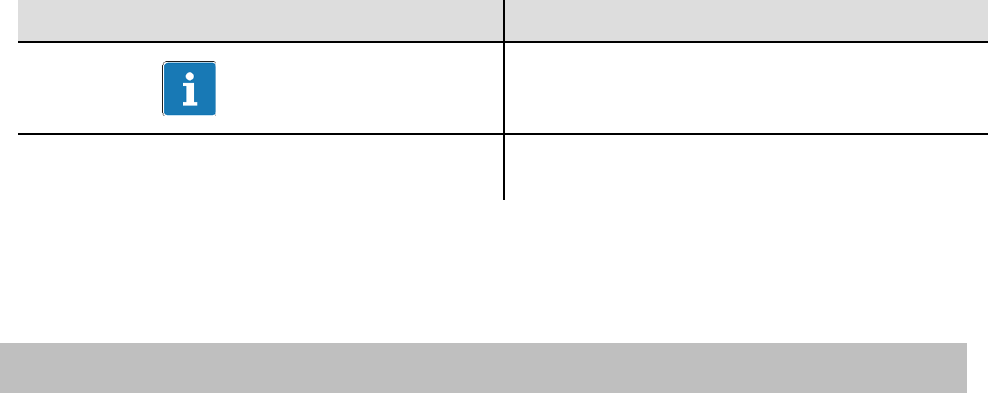
Symbol
Meaning
This marking warns of a potentially
dangerous situation in which failure to
comply with safety requirements could
result in death or serious physical injury.
CAUTION
This marki
ng warns of a potentially
dangerous situation in which failure to
comply with safety requirements can result
in slight or moderate physical injury.
NOTE
This marking draws your attention to a
situation in which failure
to
comply with
safety requirements could lead to
damage to property.
Important
This marking draws your attention to
information about the product or about
handling the product.
T
ip
This marking indicates application tips or
other information that is useful to you.
8
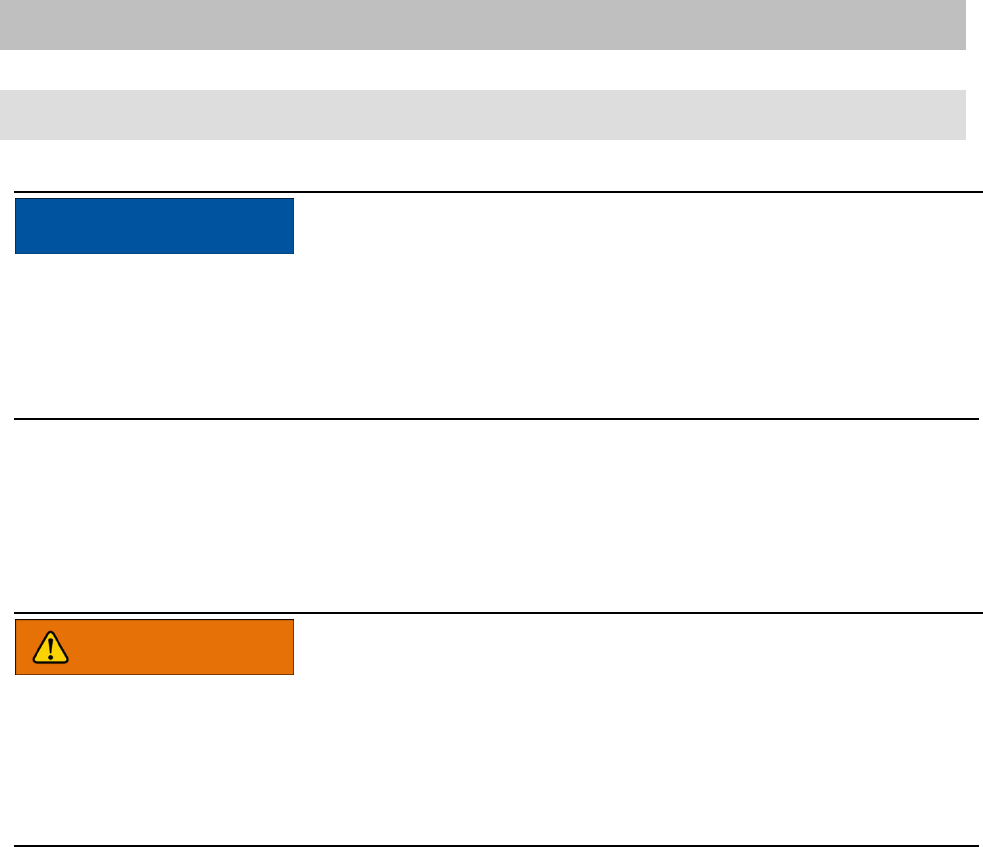
Symbol
Meaning
This marking draws your attention to
information about the product or about
handling the product.
Emphasis
Italics are used to emphasize and highlight
texts.
2
Application
The T40HS torque flange measures static and dynamic torques on stationary and rotating
shafts. Test beds can be extremely compact because of the short construction of the
transducer. This offers a very wide range of applications.
The T40HS torque flange is reliably protected against electromagnetic interference. It has
been constructed according to the relevant European standards (e.g. EMC behavior) and/or
complies with US and Canadian standards. The product carries the FCC label.

9
3 Structure and mode of operation
The T40HS torque flange consists of two separate parts: the rotor and the stator. The rotor
comprises the measuring body and the signal transmission elements.
Strain gauges (SGs) are installed on the measuring body. The rotor electronics for
transmitting the bridge excitation voltage and the measurement signal are located centrally
in the flange. The transmitter coils for contactless transmission of excitation voltage and
measurement signal are located on the measuring body's outer circumference. The signals
are sent and received by a separable antenna ring. The antenna ring is mounted on a
housing that includes the electronic system for voltage adaptation and signal conditioning.
Connectors for the torque and speed signals, the voltage supply and the digital output
are located on the stator. The antenna segments (ring) should be mounted more or less
concentrically around the rotor (see Chapter 4).
Antenna segments
Rotor
Connector plug
Connector plug
Identification plate Stator housing
Fig. 3.1: Possible mechanical construction without
speed measuring system
10
4
Mechanical installation
4.1 Important
precautions
during
installation
NOTE
A T40HS torque flange is a precision measurement element and therefore needs careful
handling. Dropping or knocking the transducer may cause permanent damage. Make
sure that the transducer cannot be overloaded, even while it is being mounted.
• Handle the transducer with care.
• Check the effect of bending moments, critical speeds and natural torsional
oscillations, to prevent the transducer being overloaded by increases in
resonance.
• Make sure that the transducer cannot be overloaded.
W
ARNING
There is a danger of the transducer breaking if it is overloaded. This can cause danger for
the
operating personnel
of the system in which the
transducer
is
installed
.
Implement appropriate safety measures to avoid overloads and to protect against resulting
dangers.
• Use a screw locking device (medium strength, e.g. LOCTITE No. 242) to glue the
screws into the counter thread to exclude prestressing loss due to screw
slackening, if alternating loads are to be expected.
• Comply with the mounting dimensions to enable correct operation.
An appropriate shaft flange enables the T40HS torque flange to be mounted directly. It is
also possible to mount a joint shaft or relevant compensating element directly on the rotor
(using an intermediate flange when required). Under no circumstances should the
permissible limits specified for bending moments, lateral and longitudinal forces be
exceeded. Due to the T40HS torque flange's high torsional stiffness, dynamic shaft train
changes are kept to a minimum.
11
Important
Even if the unit is installed correctly, the zero point adjustment made at the factory can shift
by up to approx. 2% of the sensitivity. If this value is exceeded, we advise you to check the
mounting conditions. If the residual zero offset when the unit is removed is greater than 1%
of the sensitivity, please send the transducer back to the Darmstadt factory for testing.
4.2 Conditions on site
The torque flange must be protected against coarse dirt particles, dust, oil, solvents and
humidity.
There is wide ranging compensation for the effects of temperature on the output and zero
signals of the transducer (see Chapter "Specifications"). If there are no static temperature
ratios, for example, because of the temperature differences between the measuring body
and the flange, the values given in the specifications can be exceeded. In this case, ensure
static temperature ratios by cooling or heating, depending on the application. As an
alternative, check if thermal decoupling is possible, e.g. by means of heat radiating
elements such as multiple disc couplings.
4.3
Mounting position
The T40HS torque flange can be mounted in any position.
With clockwise torque, the output frequency is, depending on the option, 60 - 90 kHz, 10 -
15 kHz or 240 - 360 kHz). With HBM amplifiers or with the voltage output option, a positive
output signal (0 V -+10 V) is present.
4.4 Installation options
For T40HS torque flange mounting you will have to dismantle the antenna ring. It is
essential in this case to comply with the notes on assembling the antenna segments (see
Chapter 4.4.1).
4.
12
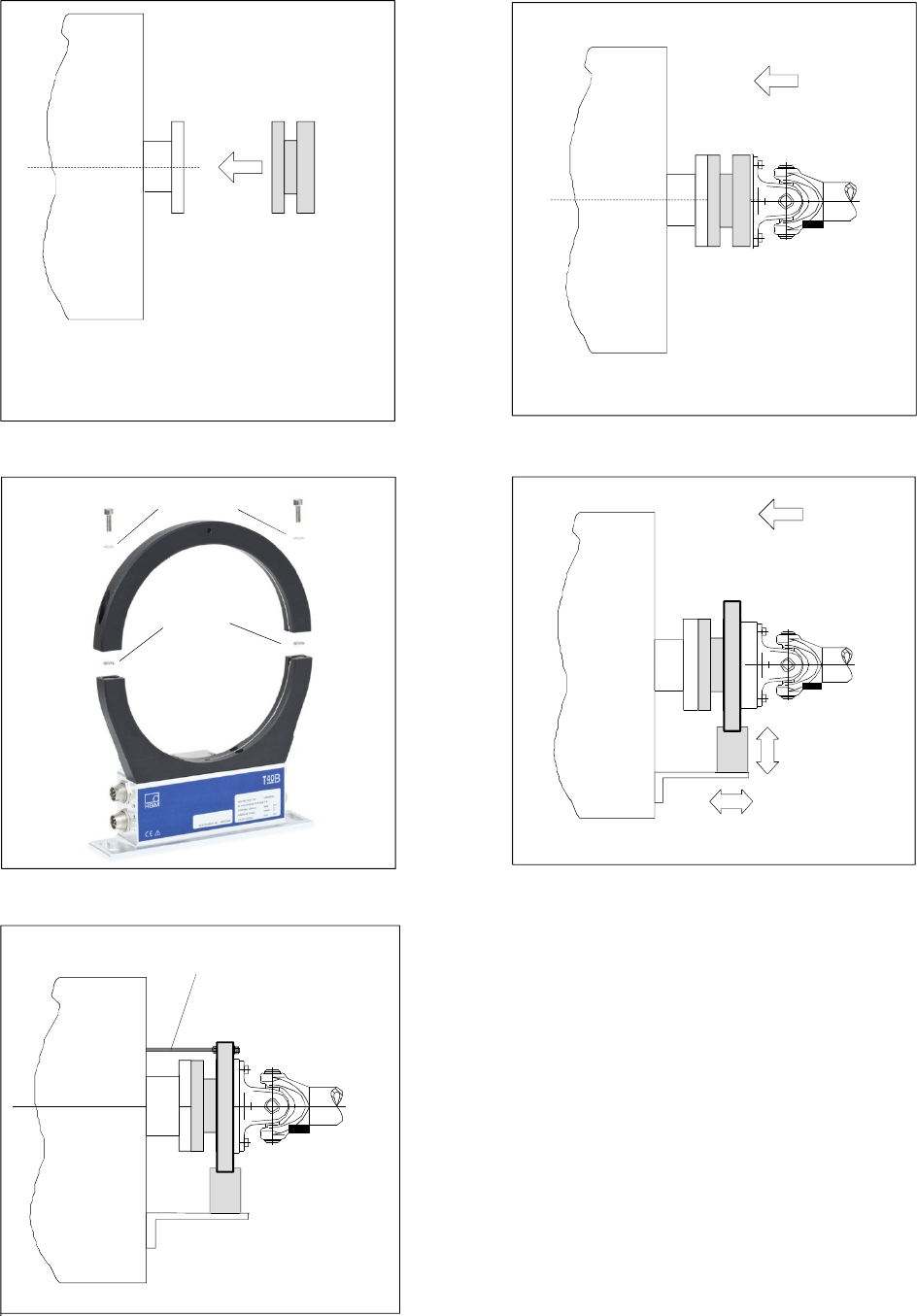
4.4.1 Installation with
subsequent
stator
mounting
1. Install rotor 2. Install shaft train
Washers
Fan-type lock
washers
3. Dismantle antenna segment 4. Install antenna segment
Support supplied by customer
4. Mount support
13
4.5 Mounting the rotor
T
ip
Usually the rotor identification plate is no longer visible after installation. This is why we
include with the rotor additional stickers with the important ratings, which you can attach to
the stator or any other relevant test-bench components. You can then refer to them
whenever there is anything you wish to know, such as the shunt signal.
1. Prior to installation, clean the plane surfaces of the transducer flange and the counter
flange.
For safe torque transfer, the surfaces must be clean and free from grease. Use a piece
of cloth or paper soaked in solvent. When cleaning, make sure that you do not damage
the transmitter winding or the speed measuring system.
2. For the bolted rotor connection (see Fig. 4.9), use DIN EN ISO 4762 hexagon socket
screws of the property class stated in Table 4.1, in a suitable length (dependent on the
connection geometry, see Table 4.1 on Page 14).
We recommend DIN EN ISO 4762 fillister head screws, blackened, smooth-headed,
permitted size and shape variance in accordance with DIN ISO 4759, Part 1, product
class A.
Important
Use a screw locking device (medium strength, e.g. LOCTITE No. 242) to glue the screws
into the counter thread to exclude pre-stressing loss due to screw slackening, if alternating
loads are to be expected.
3. Fasten all screws with the specified torque
(Table 4.1 on page 14).
4. There are tapped holes on the rotor for further mounting. Also use screws of property
class 10.9 or 12.9, and fasten with the torque specified in Table 4.1.
Important
Use a screw locking device (medium strength, e.g. LOCTITE No. 242) to glue the screws
into the counter thread to exclude pre-stressing loss due to screw slackening, if alternating
loads are to be expected.
14
Measuring range Fastening screws Prescribed
tightening moment
N·m Z 1) Property class N·m
500 8x M10 12.9 85
1k 8x M10 12.9 85
2k 16x M12 12.9 115
3k 16x M12 12.9 115
table 4.1:
Fastening screws
1) DIN EN ISO 4762; black/oiled/..tot.=0.125
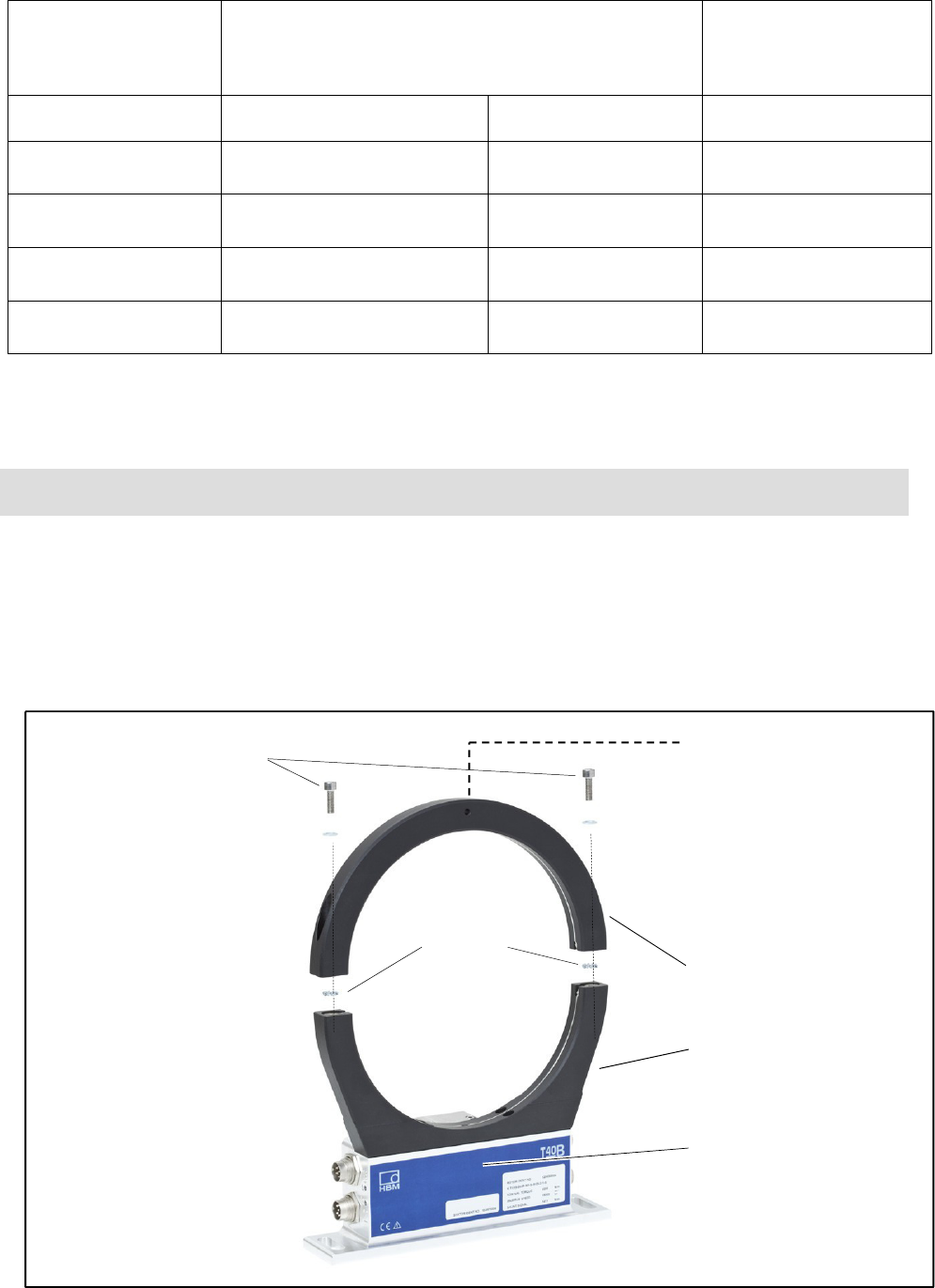
4.6 Mounting the stator
On delivery, the stator has already been installed and is ready for operation. The upper
antenna segment can be separated from the stator, for example, for maintenance or to
facilitate stator mounting.
If your application does not require the stator to be dismantled, proceed as described in
points 2., 5., and 6.
Antenna segment bolts
with washers (M5)
Fan-type lock
washers
Hole for fixing the
antenna segment,
diameter 4.2 mm
top
Antenna segments
bottom
Stator housing
Fig. 4.10: Bolted connection of the antenna segments on the
stator

15
1. Undo and remove the bolted connections (M5) on the upper antenna segment.
There are fan type lock washers between the antenna segments: Make sure that they do
not get lost.
2. Use an appropriate base plate to install the stator housing in the shaft train so that there
is sufficient opportunity for horizontal and vertical adjustments. Do not fully tighten the
bolts yet.
3. Then align the antenna to the rotor in such a way that the antenna encloses the rotor
more or less coaxially and the antenna wire in the axial direction shows the position and
the center of the transmitter winding on the rotor.
Please comply with the permissible alignment tolerances stated in the specifications.
4. Now use two hexagon socket screws to mount the upper antenna segment removed
in Point 1 on the lower antenna segment.
Make sure that the two fan type lock washers are inserted between the antenna
segments (these ensure that there is a defined contact resistance)!
Important
To make sure that they function perfectly, the fan-type lock washers (A5, 3-FST DIN 6798
ZN/galvanized) must be replaced after the bolted antenna connection has been loosened
three times.
5. Now tighten all antenna-segment bolted connections with a tightening torque of 5 Nm.
6. Now fully tighten the bolted stator housing connection.
Prevention
of
stator
axial
oscillation
Depending on the operating conditions, the stator may be excited to vibrate. This effect is
dependent on:
• The rotational speed
• The antenna diameter (depends on the measuring range)
• The design of the machine base
16
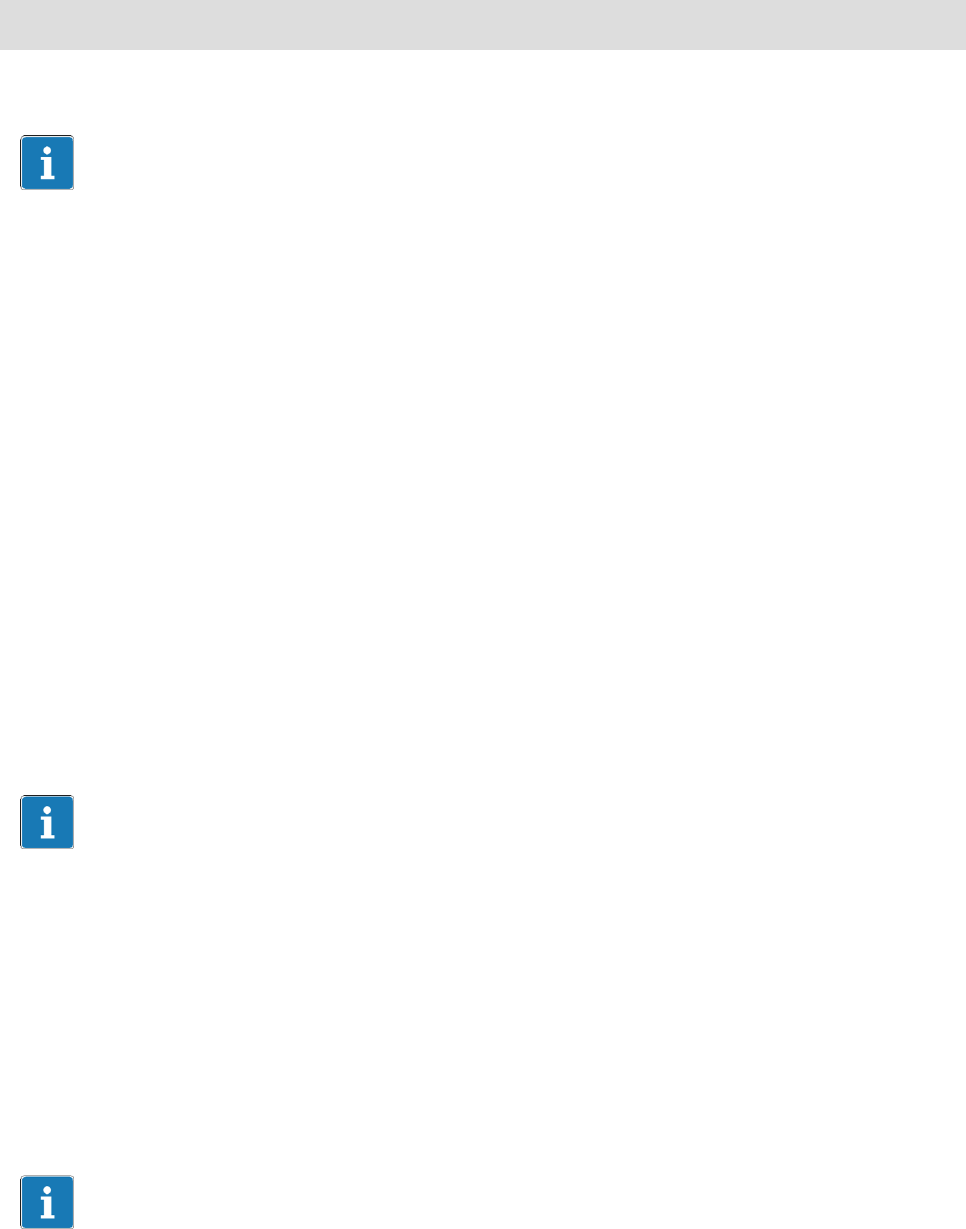
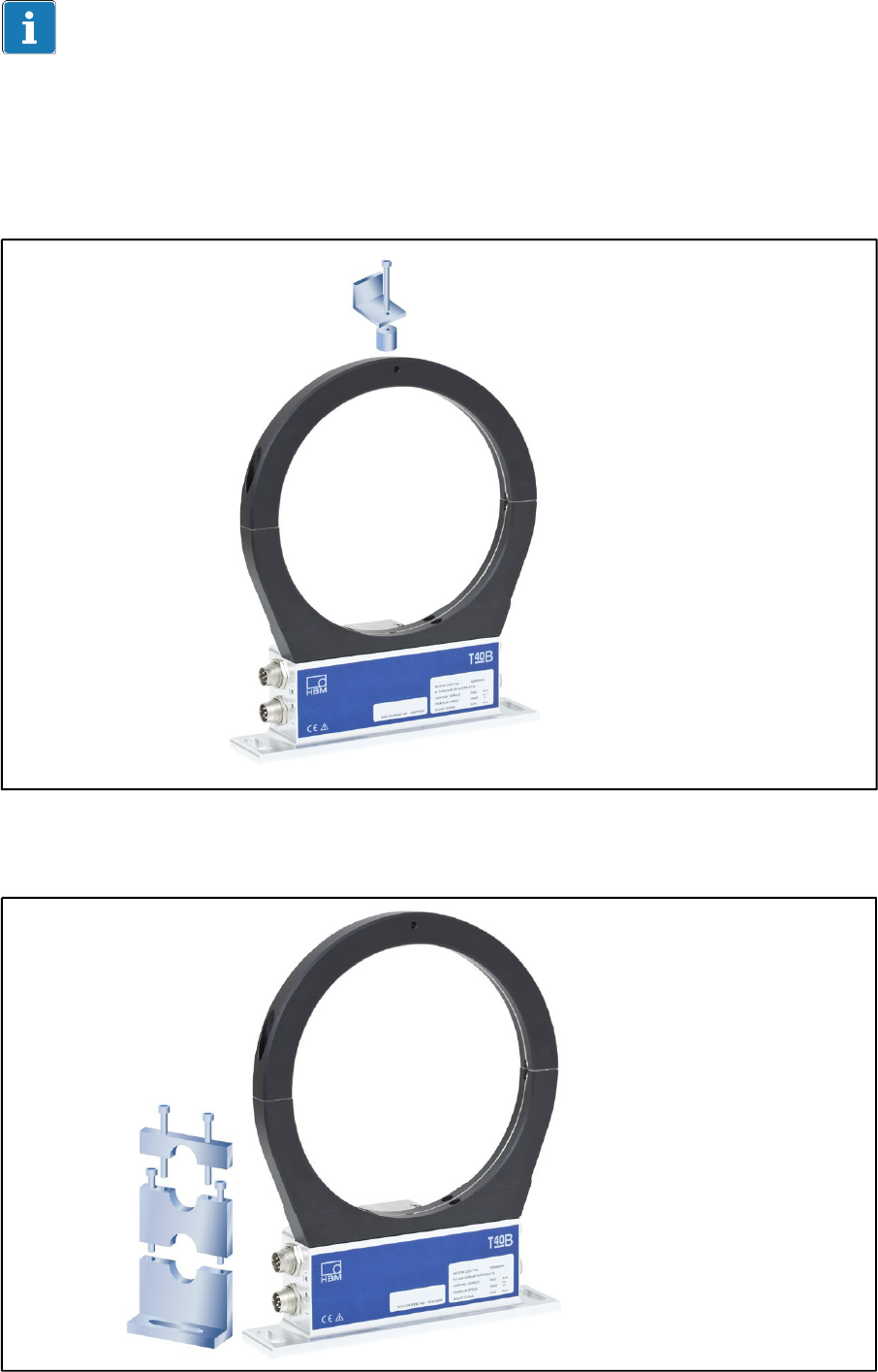
Important
To prevent this axial oscillation, the antenna ring requires additional support by the
customer. There is a hole on the upper antenna segment (with M5 internal thread), which
can be used to incorporate a clamping device (see Fig. 4.13).
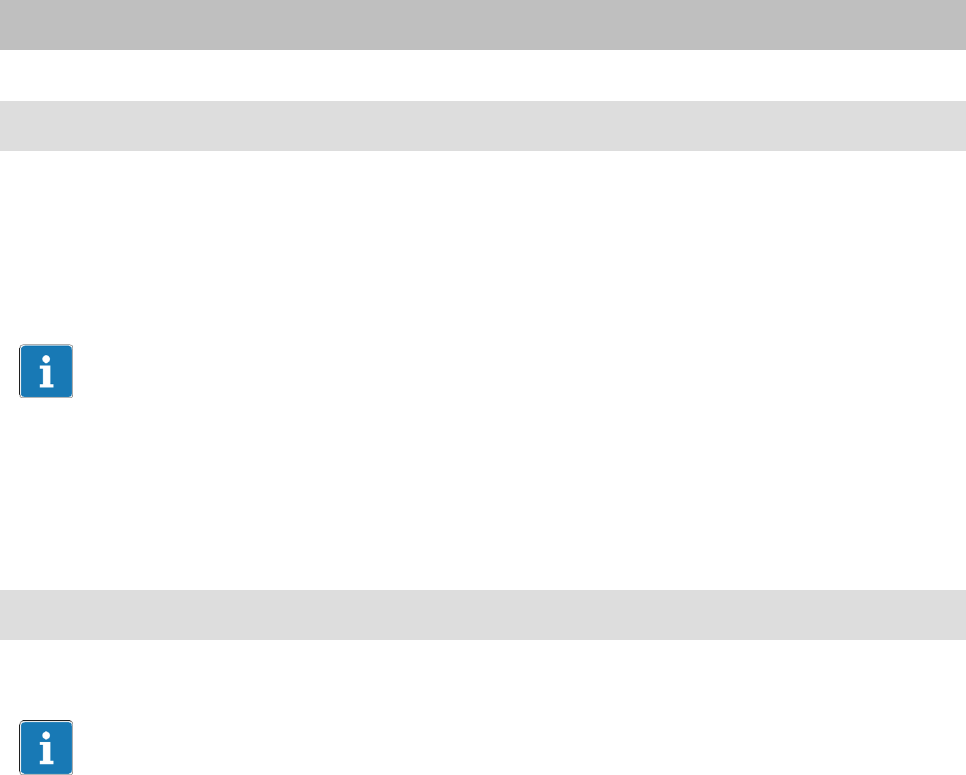
The cable plug also requires support in this case, a construction example is shown in Fig.
4.14.
Fig. 4.13: Construction example for supporting the
antenna ring
Fig. 4.14: Construction example for connector terminals (for two
connectors)
17
5
Electrical connection
5.1
General instructions
• With cable extensions, make sure that there is a proper connection
with minimum contact resistance and good insulation.
• All plug connections or swivel nuts must be fully tightened.
Important
Transducer connection cables from HBM with attached connectors are identified in
accordance with their intended purpose (Md or n). When cables are shortened, inserted into
cable ducts or installed in control cabinets, this identification can get lost or become
concealed. Mark the cables before laying them in this case.
5.2 EMC
protection
Important
The product offered here is a special module for stationary plants or a transducer for
installation by system integrators and plant engineers and is not intended for general sale.
This product does not need an EC Declaration of Conformity or CE marking in compliance
with EMVG1 §12 Paragraph 2 and directive 2004/1008/EC Article 13 Paragraph 1.
The product is exclusively manufactured and intended for further processing by companies
or persons with expertise in the sector of electromagnetic compatibility (EMC). Relevant
EMC protection aims are met with regards to the offered product when the following
instructions for installation are observed and implemented.
Special electronic coding methods are used to protect the purely digital signal
transmission between the transmitter head and the rotor from electromagnetic
interference.
18
The cable shield is connected with the transducer housing. This encloses the measurement
system (without the rotor) in a Faraday cage when the shield is laid flat at both ends of the
cable. With other connection techniques, an EMC-proof shield should be applied in the wire
area and this shielding should also be connected extensively (see also HBM Greenline
Information, brochure i1577).
Electrical and magnetic fields often induce interference voltages in the measuring circuit.
Therefore:
• Use shielded, low-capacitance measurement cables only (HBM cables fulfill both
conditions).
• Only use plugs that meet EMC guidelines.
• Do not route the measurement cables parallel to power lines and control circuits.
If this is not possible, protect the measurement cable with e.g. steel conduit.
• Avoid stray fields from transformers, motors and contact switches.
• Do not ground the transducer, amplifier and indicator more than once.
• Connect all devices in the measurement chain to the same grounded conductor.
• In the case of interference due to potential differences (compensating currents),
supply voltage zero and housing ground must be disconnected on the amplifier and a
potential equalization line established between the stator housing and the amplifier
housing (copper conductor, minimum 10 mm2 wire cross-section).
• Should differences in potential between the machine rotor and stator, because of
unchecked leakage, for example, cause interference, this can usually be overcome
by connecting the rotor definitively to ground, e.g. with a wire loop. The stator must
be connected to the same (ground) potential.
19
Device
connector
6 1
5 7 2
4 3
Top view
Plug
Pin
Assignment
Wire
color
D
‐
Sub
Plug
Pin
1 Measurement signal torque
(Frequency output; 5 V
1),2)
)
wh
13
2 Supply voltage 0 V; bk 5
3 Supply voltage 18 V - 30 V bu 6
4 Measurement signal torque
rd
12
5 Meas. signal 0 V; symmetrical gy 8
6 Shunt signal resolution 5 V … 30 V gn 14
7 Shunt signal 0 V; gy 8
Shielding connected to housing ground
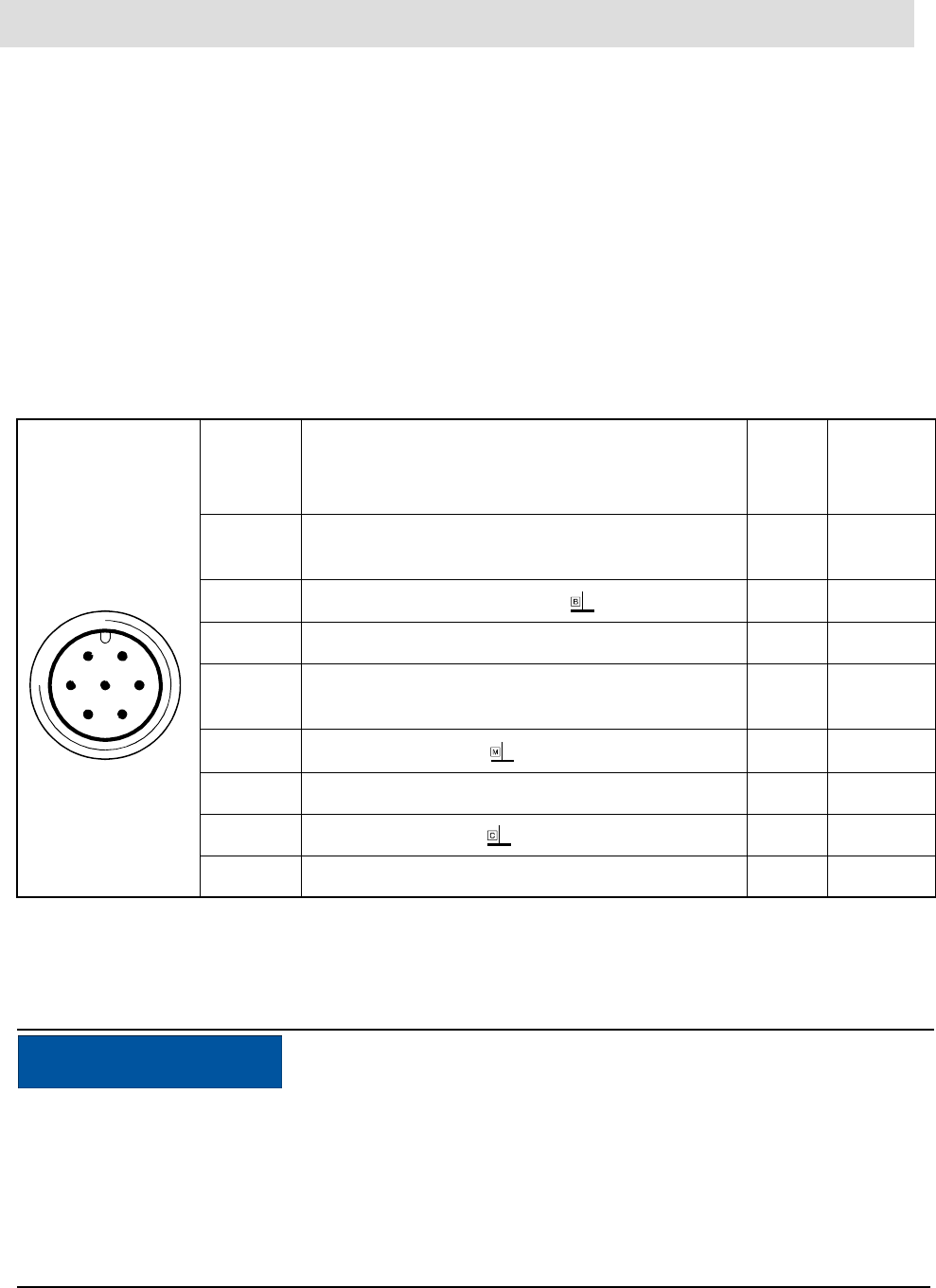
5.3 Connector pin assignment
The stator housing has two 7 pin connectors, an 8 pin connector and a 16 pin connector.
The supply voltage connections and shunt signal connections of connectors
1 and 3 are each electrically interconnected, but are protected against compensating
currents by diodes. There is also an automatically resetting fuse (multifuse) to protect the
supply connections against overload by the stator.
Assignment for connector
1:
Supply voltage and frequency output signal.
(Frequency output; 5 V
1),2)
)
1) RS-422 complementary signals; with cable lengths exceeding 10 m, we recommend
using a termination resistor R = 120 ohms between the (wh) and (rd) wires.
2) RS‐422: Pin 1 corresponds to A, Pin 4 corresponds to B.
NOTE
These T40HS torque flanges are only intended for operation with a DC supply voltage.
They must not be connected to older HBM amplifiers with square-wave excitation. This
could destroy the connection board resistances or cause other faults in the amplifiers.
20
Assignment for connector
2:
Speed output signal (optional).
Device
connector
2
5 4
3 8 1
7 6
Top view
Plug
Pin
Assignment
1
Measurement signal speed
1)
(pulse string, 5 V; 0°)
2
Not in use
3
Measurement signal speed
1)
(pulse string, 5 V; phase shifted by 90°)
4
Not in use
5
Not in use
6
Measurement signal speed
1)
(pulse string, 5 V; 0°)
7
Measurement signal speed
1)
(pulse string, 5 V; phase shifted by 90°)
8
Supply voltage zero
Shielding connected to housing ground
1) RS-422 complementary signals; with cable lengths exceeding 10 m, we recommend
using a termination resistor of R = 120 ohms.
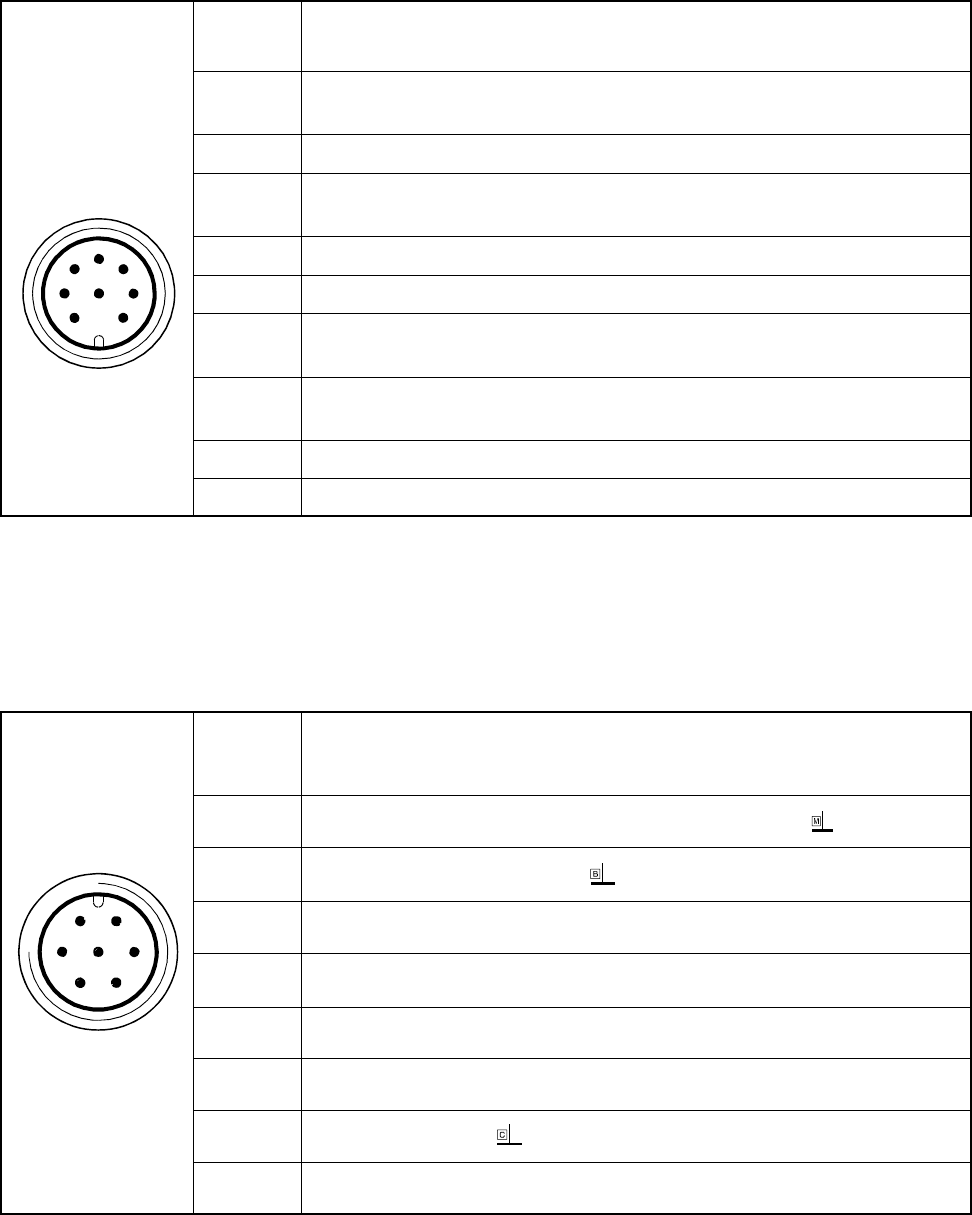
Assignment for connector
3:
Supply voltage and frequency output signal.
Device
connector
6 1
5 7 2
4 3
Top view
Plug
Pin
Assignment
1 Torque measurement signal (volt. output; 0 V )
2 Power supply 0 V;
3 Supply voltage 18 V - 30 V DC
4 Torque measurement signal (voltage output,
±10
V)
5 Not in use
6 Shunt signal resolution 5 V - 30 V
7 Shunt signal 0 V;
Shielding connected to housing ground
Assignment for connector
4:
TMC
-
only for connection to the TIM 40 Torque Interface Module
21
5.4 Supply voltage
The transducer is operated with a separated extra-low voltage (nominal (rated) supply
voltage 18 - 30 VDC). You can supply one or more T40HS torque flanges simultaneously
within a test bench. Should the device be operated on a DC voltage network1) , additional
precautions must be taken to discharge excess voltages.
The information in this Chapter relates to the standalone operation of the T40FM without
HBM system solutions.
The supply voltage is electrically isolated from signal outputs and shunt signal inputs.
Connect a separated extra-low voltage of 18 V - 30 V to pin 3 (+) and pin 2 (-)
of plug 1 or 3. We recommend that you use HBM cable KAB 8/00-2/2/2 and appropriate
sockets (see Accessories). The cable can be up to 50 m long for voltages 24 V,
otherwise it can be up to 20 m long.
If the permissible cable length is exceeded, you can supply the voltage in parallel over two
connection cables (connectors 1 and 3). This enables you to double the permissible length.
Alternatively, install a power supply on site.
Important
At the instant of power-up, a current of up to 4 A may flow, which could switch off power
packs with electronic current limiters.
1) Distribution system for electrical energy with greater physical dilatation (over several test benches, for
example) that may possibly also supply consumers with high nominal (rated) currents.
22
6
Shunt signal
Triggering
the
shunt signal
Applying a separated extra-low voltage of 5 - 30 V to pins 6 (+) and 7 (-) at connector 1
or 3 triggers the shunt signal.
The nominal (rated) voltage for triggering the shunt signal is 5 V (triggering at U > 2.5 V),
but when voltages are less than 0.7 V, the transducer is in measuring mode. The
maximum permissible voltage is 30 V, current consumption at nominal (rated) voltage is
approx. 2 mA and at maximum voltage, approx. 18 mA. The trigger voltage for the shunt
signal is electrically isolated from the supply voltage and the measurement voltage.
The transducer should not be under load when the shunt signal is being measured, since the
shunt signal is mixed additively.
The T40HS torque flange delivers an electrical shunt signal that in measuring chains with
HBM components, can be activated from the amplifier. The transducer generates a shunt
signal of about 50% of the nominal (rated) torque, the precise value is specified on the
type plate. After activation, adjust the amplifier output signal to the shunt signal supplied
by the connected transducer to adapt the amplifier to the transducer.
T
ip
The shunt signal can be triggered by the amplifier or via the operating software in HBM
system solutions.
23
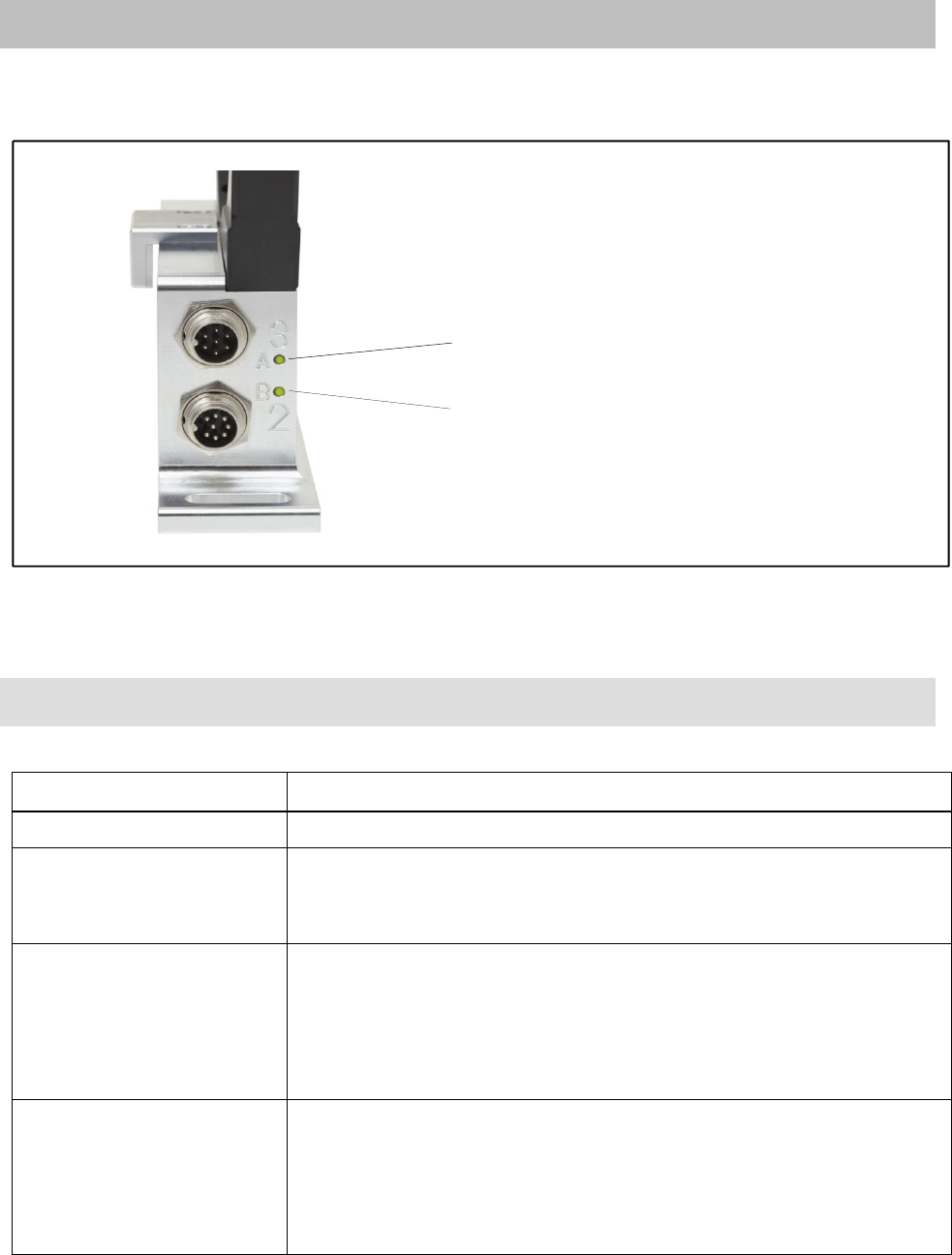
7 Functionality testing
You can check the
functionality
of the rotor and the
stator
from the LEDs on the stator.
LED A rotor status
LED B stator status
Fig. 7.1: LEDs on the
stator housing
7.1 Rotor status, LED A (upper
LED)
Color
Meaning
Green (pulsating) Internal rotor voltage values OK
Flashing orange Rotor and stator mismatched (an increasing flashing frequency
indicates the
degree of misalignment)
=> Correct the rotor/stator alignment.
Pulsating orange
Rotor status cannot be defined
=> Correct the rotor/stator alignment.
If the LED still pulsates orange, it is possible that there is a hardware
defect. The measurement signals reflect the level of the defect status.
Red (pulsating)
Rotor voltage values NOK.
=> Correct the rotor/stator alignment.
If the LED still pulsates red, it is possible that there is a hardware defect.
The measurement signals reflect the level of the defect status.
Pulsating means that the LED goes dark for about 20 ms every second (sign of life); making
it possible to detect that the transducer is functioning.
24
7.2 Stator status, LED B (lower LED)
Color
Meaning
Green
(permanently lit)
Measurement signal transmission and internal stator voltages OK
Green, intermittently orange.
For many synchronization
errors:
Constant orange
Orange until end of defective transmission if ≥5 incorrect measured values
in sequence are transmitted. The measurement signals reflect the level of
the defect status for the duration of the transmission defect + approx.
another 3.3 ms.
Orange
(permanently lit)
Permanently disrupted transmission, th
e measurement signals reflect the
level of the defect status. (fout = 0 Hz, Uout = defect level).
=> Correct the rotor/stator alignment.
Red
(permanently lit)
Internal stator defect, the measurement signals reflect the level of the
defect
status (fout = 0 Hz, Uout = defect level).
25
8
Loading capacity
Nominal torque can be exceeded statically up to the limit torque. If the nominal torque is
exceeded, additional irregular loading is not permissible. This includes longitudinal forces,
lateral forces and bending moments. Limit values can be found in the chapter
"Specifications" (Chapter 13, Page 34).
Measuring
dynamic torque
The T40HS torque flange can be used to measure static and dynamic torques. The
following rule applies to the measurement of dynamic torque:
• The transducer calibration performed for static measurements is also valid for
dynamic torque measurements.
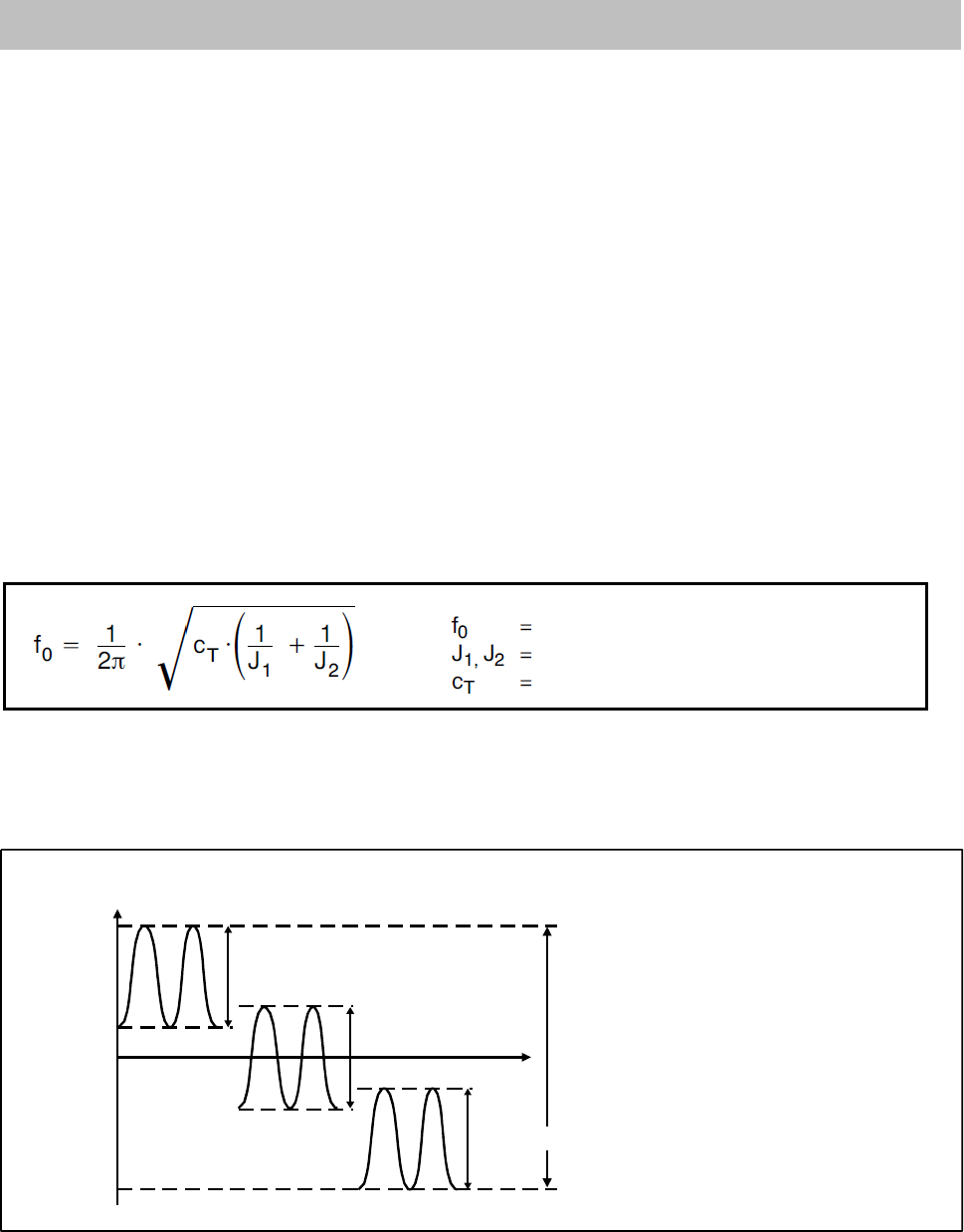
• The natural frequency f0 of the mechanical measurement setup depends on the
moments of inertia J1 and J2 of the connected rotating masses, and the torsional
stiffness of the transducer.
Use the equation below to approximately determine the natural frequency f0 of the
mechanical measuring arrangement:
• The permissible mechanical vibration bandwidth (peak-peak) can also be
found in the specifications.
Nominal (rated) torque Mnom in %
+ Mnom
Oscillation width
Oscillation width
0 time
t
200% oscillation width
-
Mnom
Oscillation width
Fig. 8.1: Permissible dynamic
loading
Natural frequency in Hz
Mass moment of inertia in
Torsional stiffness in N m/rad

26
9 M
aintenance
The T40HS torque flanges are maintenance-free.
10
Waste disposal
and
environmental protection
All electrical and electronic products must be disposed of as hazardous waste. The
correct disposal of old equipment prevents ecological damage and health hazards.
Symbol:
Meaning: Statutory
waste disposal mark
The electrical and electronic devices that bear this symbol are subject to the European
waste electrical and electronic equipment directive 2002/96/EC. The symbol indicates that,
in accordance with national and local environmental protection and material recovery and
recycling regulations, old devices that can no longer be used must be disposed of
separately and not with normal household garbage.
As waste disposal regulations may differ from country to country, we ask that you contact
your supplier to determine what type of disposal or recycling is legally applicable in your
country.
P
ackaging
The original packaging of HBM devices is made from recyclable material and can be sent
for recycling. Store the packaging for at least the duration of the warranty. In the case of
complaints, the T40HS torque flange must be returned in the original packaging.
For ecological reasons, empty packaging should not be returned to us.
27
11
Dimensions
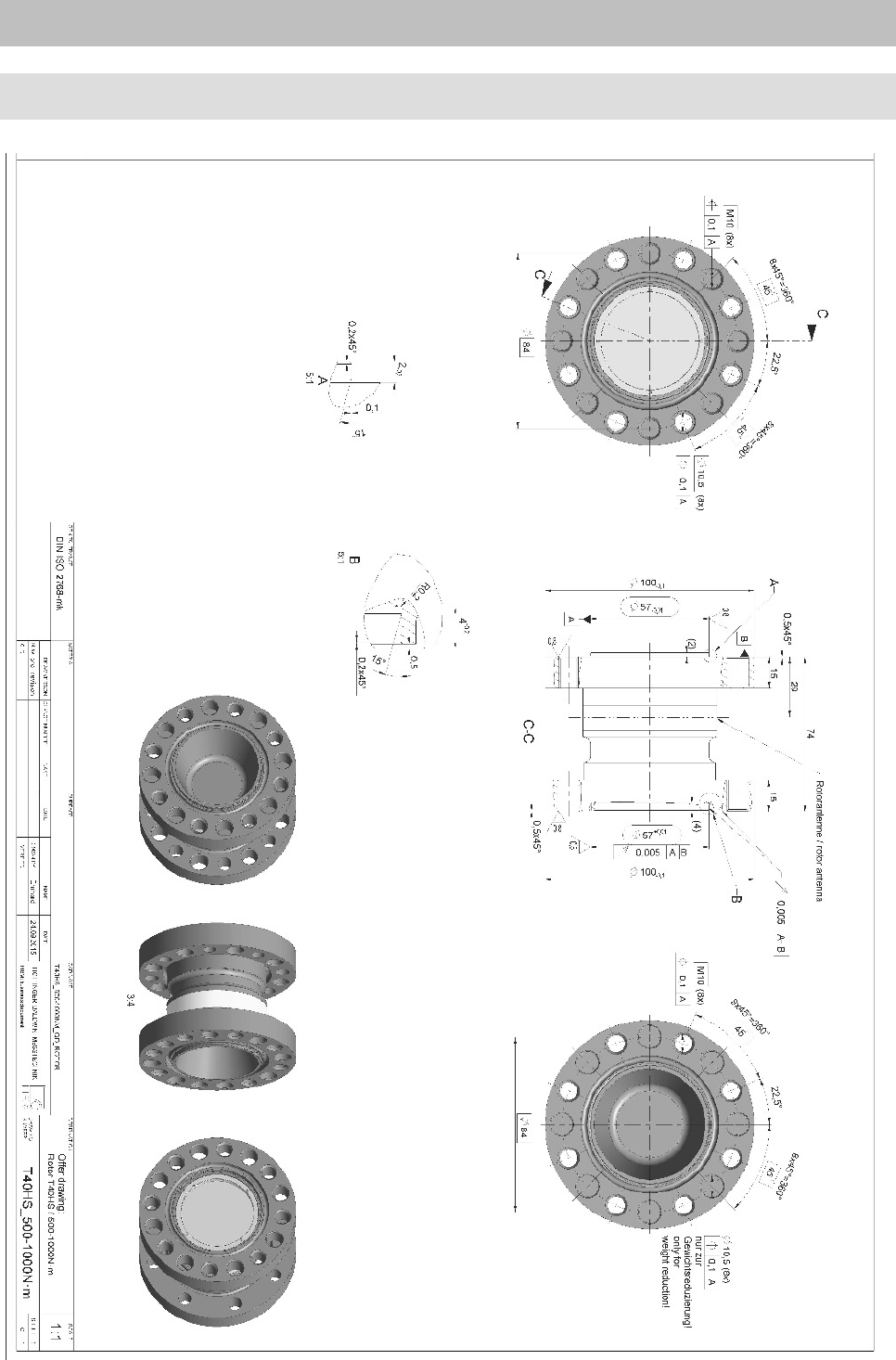
11.1 Dimensions Rotor 500N·m – 1kN·m
28
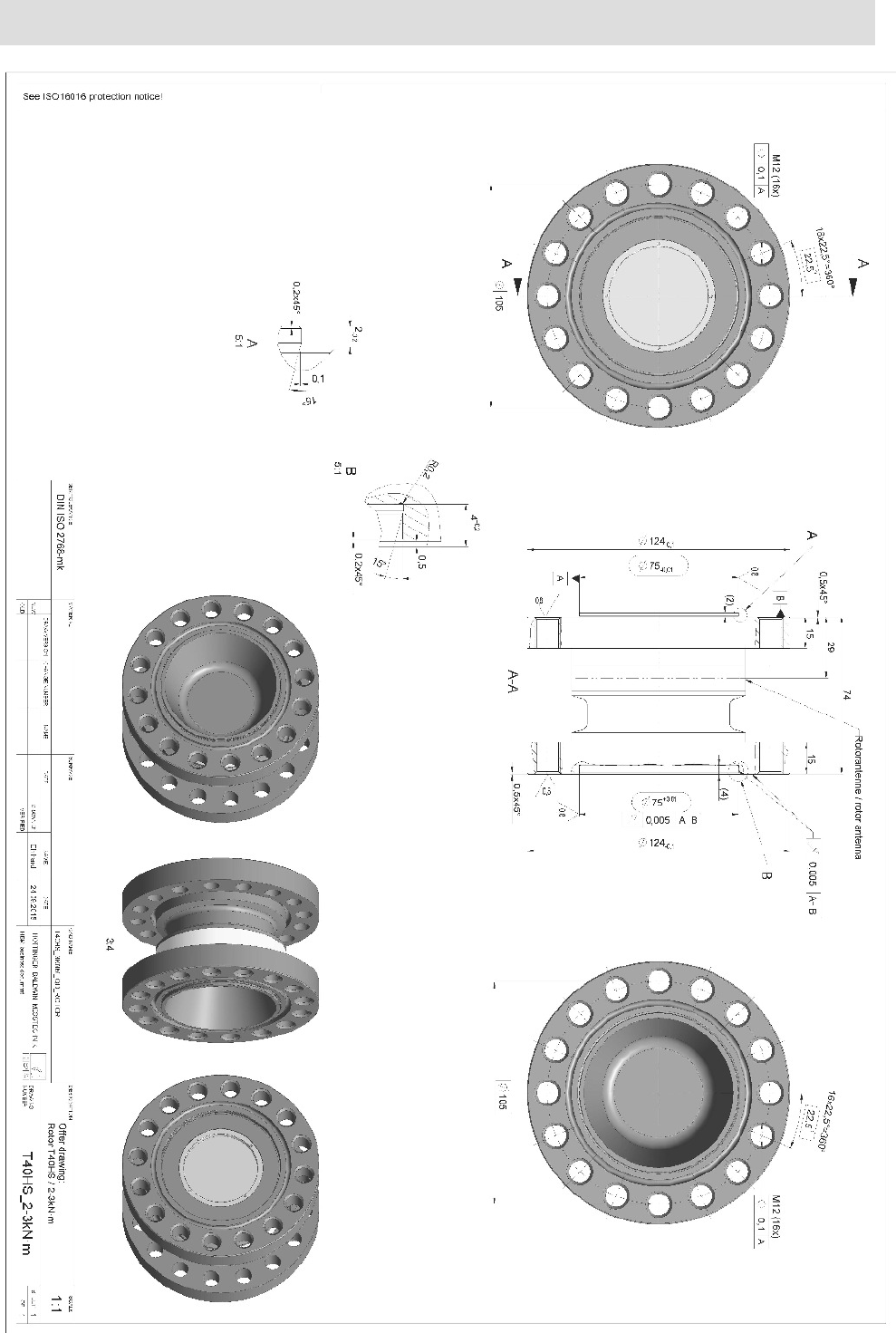
11.2 Dimensions Rotor 2 – 3kN·m
29
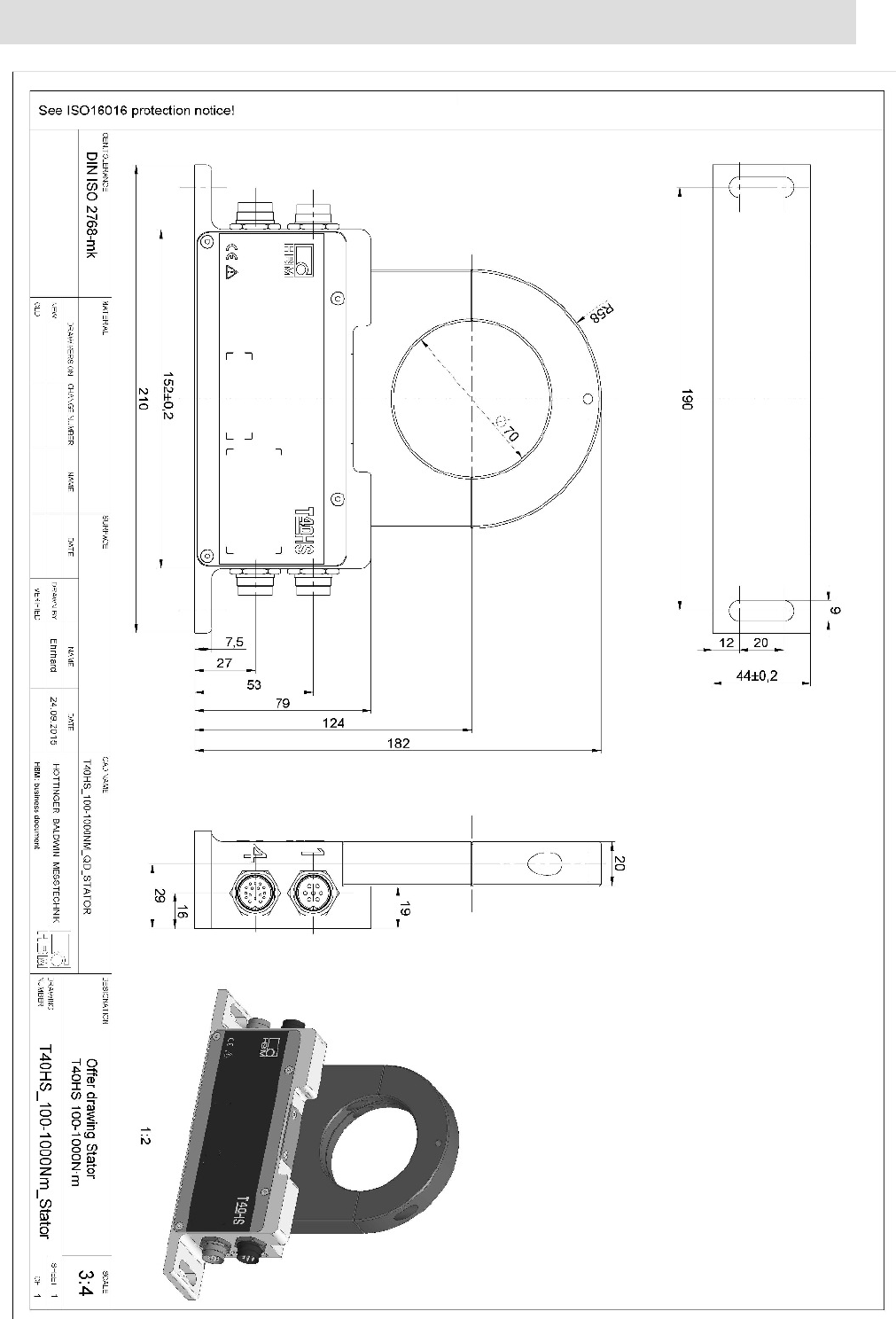
11.3
Dimensions Stator:
100N·m – 1kN·m
30
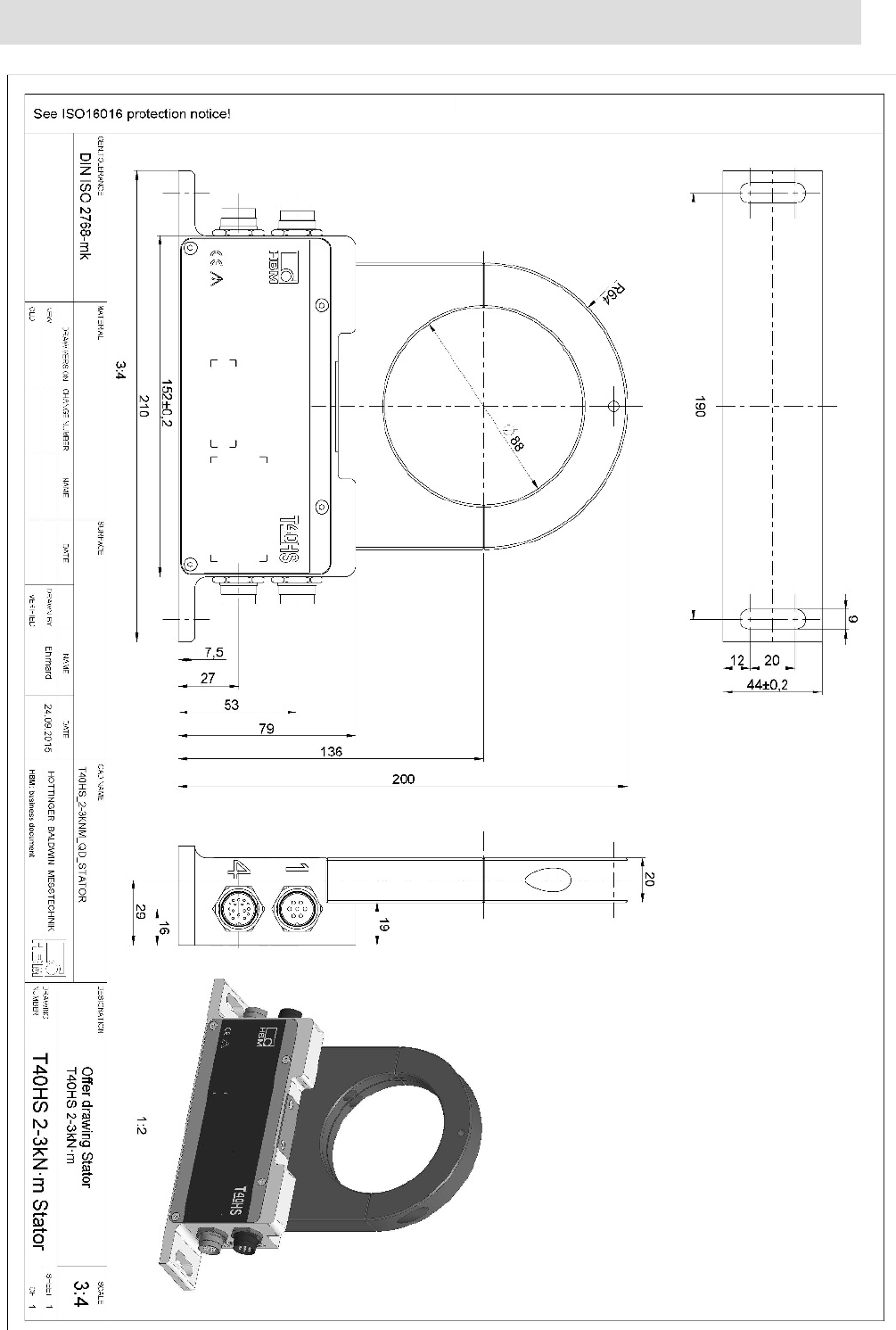
11.4 Dimensions Stator: 2– 3kN·m
31
12 Order numbers, accessories
Accessories,
to
be ordered
separately
Article
Order No.
Connection cable,
set
Torque connec
tion cable, Binder 423
-
D
-
Sub 15P, 6 m
1
-
KAB149
-
6
Torque connection cable, Binder 423
-
free ends, 6 m
1
-
KAB153
-
6
Speed connection cable, Binder 423
-
8 pin, free ends, 6 m
1
-
KAB154
-
6
Speed connection cable, Binder 423
-
8 pin, D
‐
Sub, free ends, 6 m
1
-
KAB163
-
6
TMC connection cable, Binder 423
-
16 pin, free ends, 6 m
1
-
KAB174
-
6
Cable sockets
423G
-
7S, 7 pin (straight)
3
-
3101.0247
423W
-
7S, 7 pin (angle)
3
-
3312.0281
423G
-
8S, 8
-
pin (straight)
3
-
3312.0120
423W
-
8S, 8 pin (angle)
3
-
3312.0282
Connection
cable,
by the meter
(minimum order quantity:
10 m, price per
meter)
Kab8/00
-
2/2/2
4
-
3301.0071
32
13
Specifications
Type
T40HS
Accuracy class
0.05
Torque measuring system
Nominal (rated) torque Mnom N
⋅
m 500 1000 2000 3000
Nominal (rated) sensitivity
(range between
torque = zero and nominal (rated) torque)
Frequency output 10/ 60 / 240 kHz kHz 5 1) / 30 2) / 120 3)
Voltage output V 10
Sensitivity tolerance (deviation of the actual
output quantity at Mnom from the nominal
sensitivity)
%
± 0.1
Output signal at torque = zero
Frequency output kHz 10
1)
/ 60
2
)
/ 240
3
)
Voltage output V 0
Output signal at torque = zero
Frequency output
with positive nominal (rated) torque
with negativ nominal (rated) torque
Voltage output
with positive nominal (rated) torque
kHz
kHz
V
151) / 902) / 3603) ( 5V symmetrical 4) )
51) / 302) / 1203) ( 5V symmetrical 4) )
+10…+12
with negative nominal (rated) torque V -10…-12
Load resistance
Frequency output k
Ω
≥
2
Voltage output k
Ω
≥
10
Long
-
term drift over 48 h
Frequency output % <
±
0.03
Voltage output % <
±
0.03
Measurement frequency range
(
-
3dB )
1
1)
/ 3
2
)
/ 6
3
)
Group delay
µs < 400
1)
/ < 220
2
)
/ < 150
3
)
Residual ripple
Voltage output
5
)
mV < 40
Effect of t
emperature per 10 K in the
nominal (rated) temperature range
on the output signal,
related to the actual
value of signal span
Frequency output % <
±
0.05
Voltage output % <
±
0.2
on the
zero signal, related to the nominal
(rated) sensitivity
Frequency output % <
±
0.05
Voltage output % <
±
0.1
1) Option 5, 10 ± 5kHz ( Code SU2 )
2) Option 5, 60 ± 30kHz ( Code DU2 )
3) Option 5, 240 ±120kHz ( Code HU2 )
4) RS-422 complementary signals, observe terminating resistance
5) Signal frequency range 0.1 to 10 kHz
33
Specifications (Continued)
Nominal (rated) torque Mnom N⋅m 500 1000 2000 3000
Max.
modulation
range
6
)
Frequency output kHz 2.5 … 17.5
1)
/ 15 … 105
2
)
/ 60 … 420
3
)
Voltage output V -12 -12
Power supply
Nominal supply voltage (protective low voltage) V 18 ... 30; asymmetric
Current consumption in measuring mode A < 1 (typ.0.5)
Current consumption in start-up mode A < 4 (50 µs)
Nominal (rated) power consumption W < 10
Maximum cable length m 50
Non
-
Linearity including hysteresi
s,
relativ to the nominal (rated) sensitivity
Frequency output % <
±
0.05
Voltage output % <
±
0.05
Relativ
standard
deviation of
repeatability
per DIN1319, relativ to the vari. of output signal
Frequency output
%
< ±0.03
Voltage output % <
±
0.03
Shunt signal
approx. 50 % of Mnom; value given to the identification plate
Tolerance of calibration signal related to Mnom % <
±
0.05
General data
EMC
Emission
(per EN 61326-1, EN 61326-2-3)
Radiated emmissions (according to EN 55011) -
Interference immunity
(per EN61326-2-3)
Electromagnetic field AM
Magnetic field
V/m
A/m
Electrostatic discharge (ESD)
Contact discharge kV
Air discharge
Rapid transients (burst)
Impulse voltages (surge)
Conducted interference (AM)
kV
kV
kV
V
Degree of protection according to EN 60529
IP 54
Weight,
Rotor approx. kg 0,83 0,85 1,51 1,55
Stator approx. kg 1,1 1,1 1,1 1,1
Reference temperature °C [°F] +23 [+73,4]
Nominal temperature range °C [°F] +10...+70 [+50...+158]
Service temperature range °C [°F] -10...+70 [+14...+158]
Storage temperature range °C [°F] -20...+85 [-4...+185]
6) Output signal range with a repeatable interrelationship between torque and output signal.
34
Specifications (Continued)
Nominal (rated) torque Mnom N⋅m 500 1000 2000 3000
Ultra High speed version rpm 45000 45000 35000 35000
Load limits 7 )
Limit torque, related to M
nom
8
)
% 150 150 150 150
Breaking torque,
related to M
nom
8
)
% >250 >250 >250 >250
Axial limit force
9 )
kN 15 15 25 25
Lateral limit force
9 )
kN 5 5 9 9
Bending limit moment
9 )
N
⋅
m 220 220 400 400
Oscillation width per DIN 50100
(peak-peak)
10
)
kN
⋅
m 750 1500 3000 4500
Mechanical values
Torsional stiffness cT kN·m/
rad 400 518 1124 1369
Torsion angle at M
nom degree 0,072 0,111 0,102 0,126
Axial stiffness ca kN/mm
878 1048 800 989
Radial stiffness c
r kN/mm
290 347 835 880
Stiffness with bending moment about a radial
axis cb
kN
⋅
m/
degree
5,8 7,4
10,3 13,5
Maximum excursion at axial limit force mm <0,04
<0,02
<0,04
Additiona
l
max. concentricity error
at lateral
limit force
mm
Additional plane
-
parallel deviation
at bending
limit moment
mm
Balance quality-level to DIN ISO 1940 G 2.5
Max. limits for relative shaft vibration
(peak-to-
peak)7)
µ
m
n
S4500
max = (n in 1/min)
Mass moment of inertia of the rotor
IV (about axis of rotation) kg
⋅
m
2
0,0012 0,0012 0,0029 0,0030
Max. permissible static eccentricity of the
rotor (radially)
mm
± 1
Permissible axial displacement
between rotor
and stator
mm
± 1
7) Each type of irregular stress can only be permitted with its given static load limit (bending moment, lateral or axial load, exceeding the nominal (rated)
torque) if none of the others can occur. Otherwise the limit values must be reduced. If for instance 30 % of the bending limit moment and also 30 % of the
lateral limit force are present, only 40 % of the axial limit force are permitted, provided that the nominal (rated) torque is not exceeded. With the permitted
bending moments, axial, and lateral limit forces, measuring errors of about 0.3 % of the nominal (rated) torque can occur.
8) With static loading
9) Static and dynamic
10) The nominal rated) torque must be exceeded
Notes:
• Extremely high dynamic vibration, velocity, accelerations and running at shaft resonance
have to be avoided, otherwise measuring can be wrong or transducer can be damaged
(rotational acceleration max. 30000rpm/s)!
35
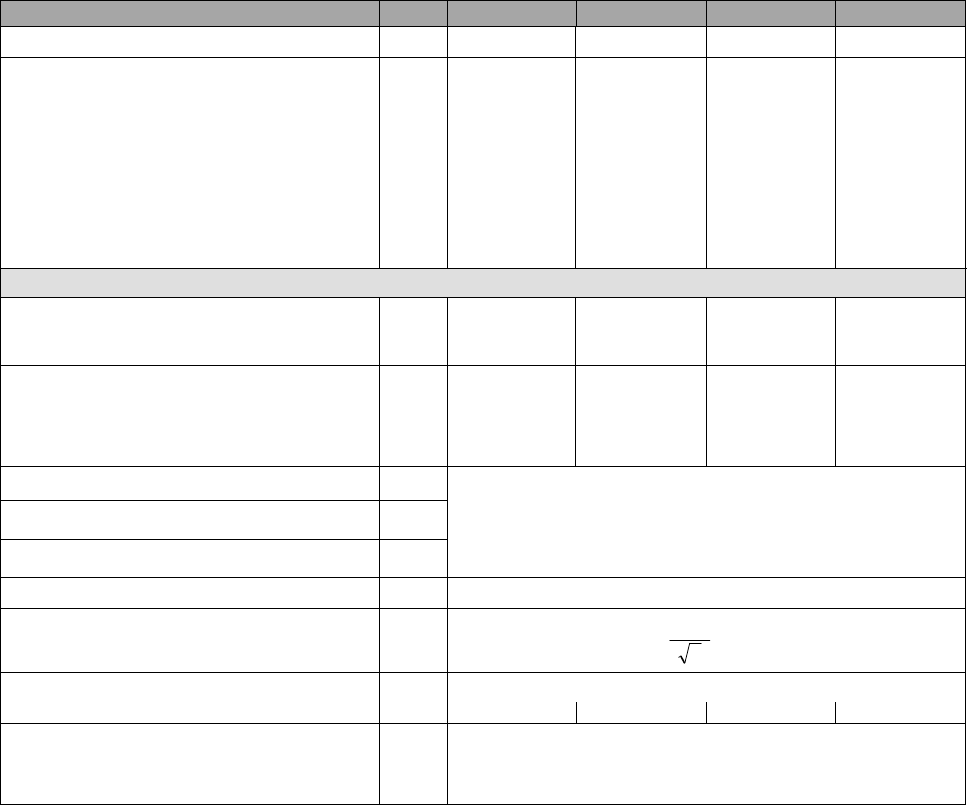
14 Supplementary technical information
T
o
ensure that the T40HS torque flange retains its characteristics once it is installed, we
recommend that the customer also chooses the specified form and position tolerances,
surface quality and hardness for the connections provided.
Measuring range (N·m)
Axial run$out
tolerance (mm)
Radial run
$
out tolerance
(mm)
500
–
3
k
0.005
0.005
Axial and radial run
-
out tolerances
Axial and radial run
-
out tolerances
Axial run-out AB
radial run
-
out AB
Inner centering
Hardness 46 … 54 HRC
Surface quality of axial and radial
run-out surfaces (a, B and AB)

36
© Hottinger Baldwin Messtechnik GmbH.
All rights reserved.
All details describe our products in general form only.
They are not to be understood as express warranty and do
not constitute any liability whatsoever.
Änderungen vorbehalten.
Alle Angaben beschreiben unsere Produkte in allgemeiner
Form. Sie stellen keine Beschaffenheits- oder
Haltbarkeits-
garantie im Sinne des §443 BGB dar und begründen keine
Haftung.
Hottinger Baldwin Messtechnik GmbH
Im Tiefen See 45 • 64293 Darmstadt •
Germany
Tel. +49 6151 803-0 • Fax: +49 6151
803-9100
Email: info@hbm.com •
www.hbm.com