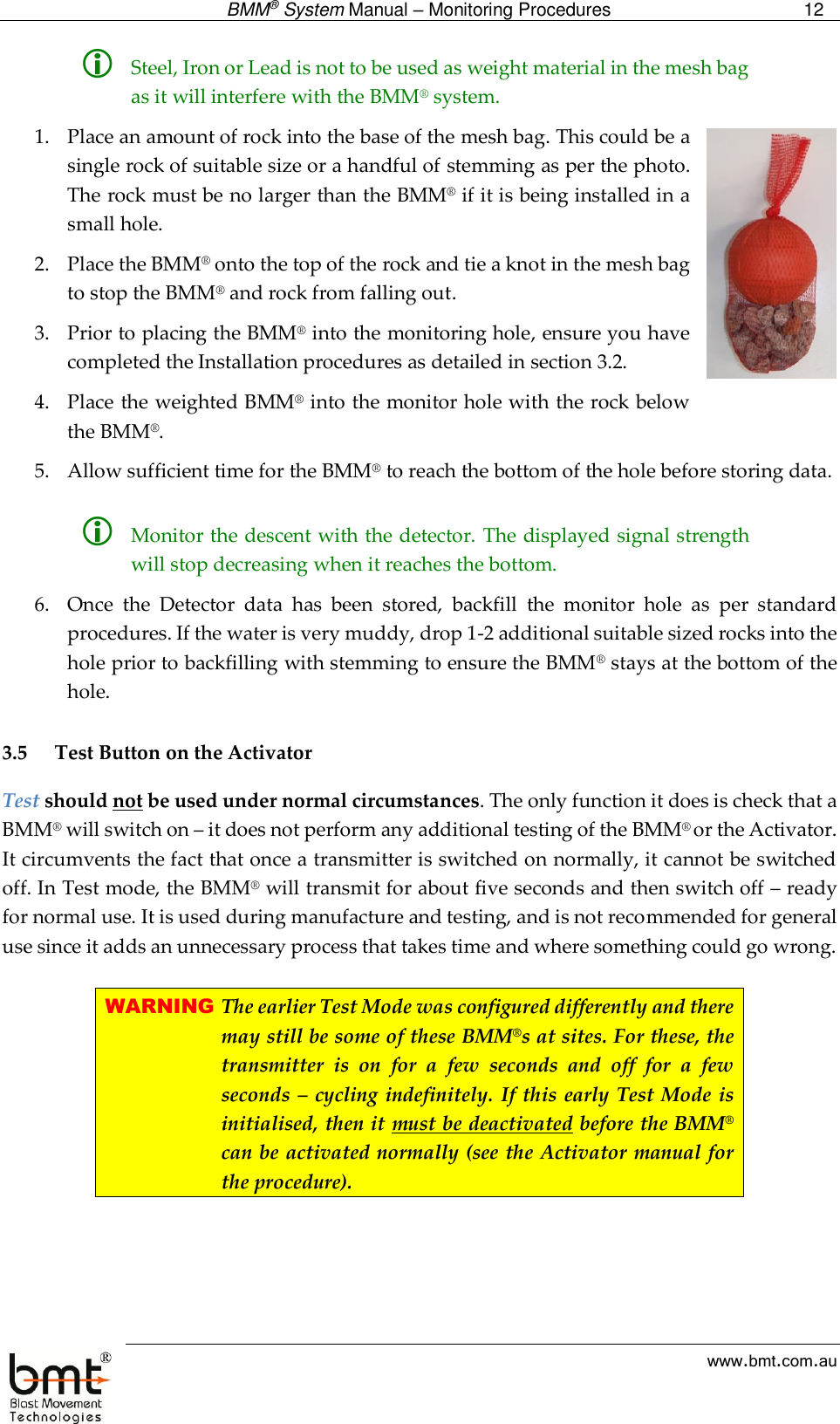
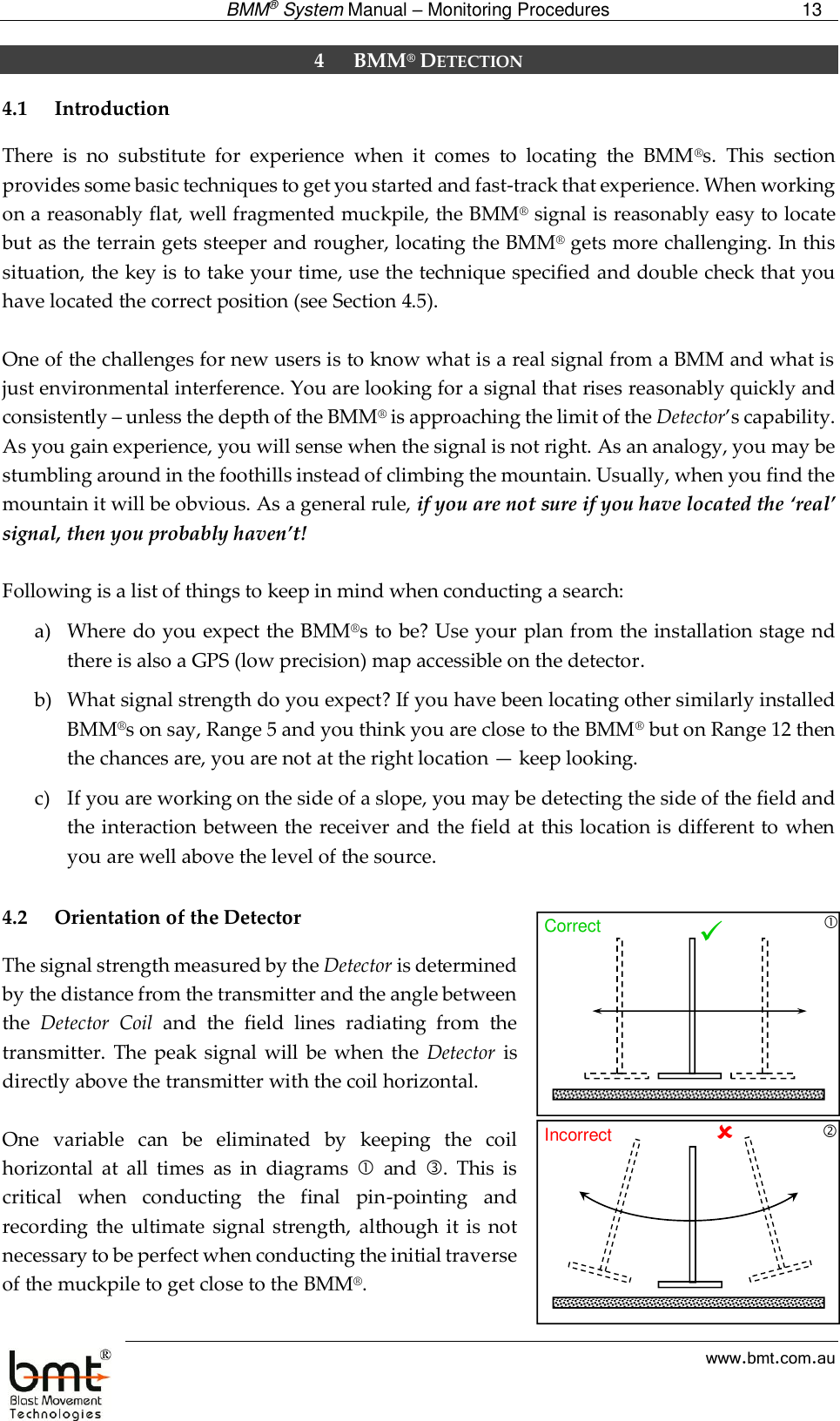
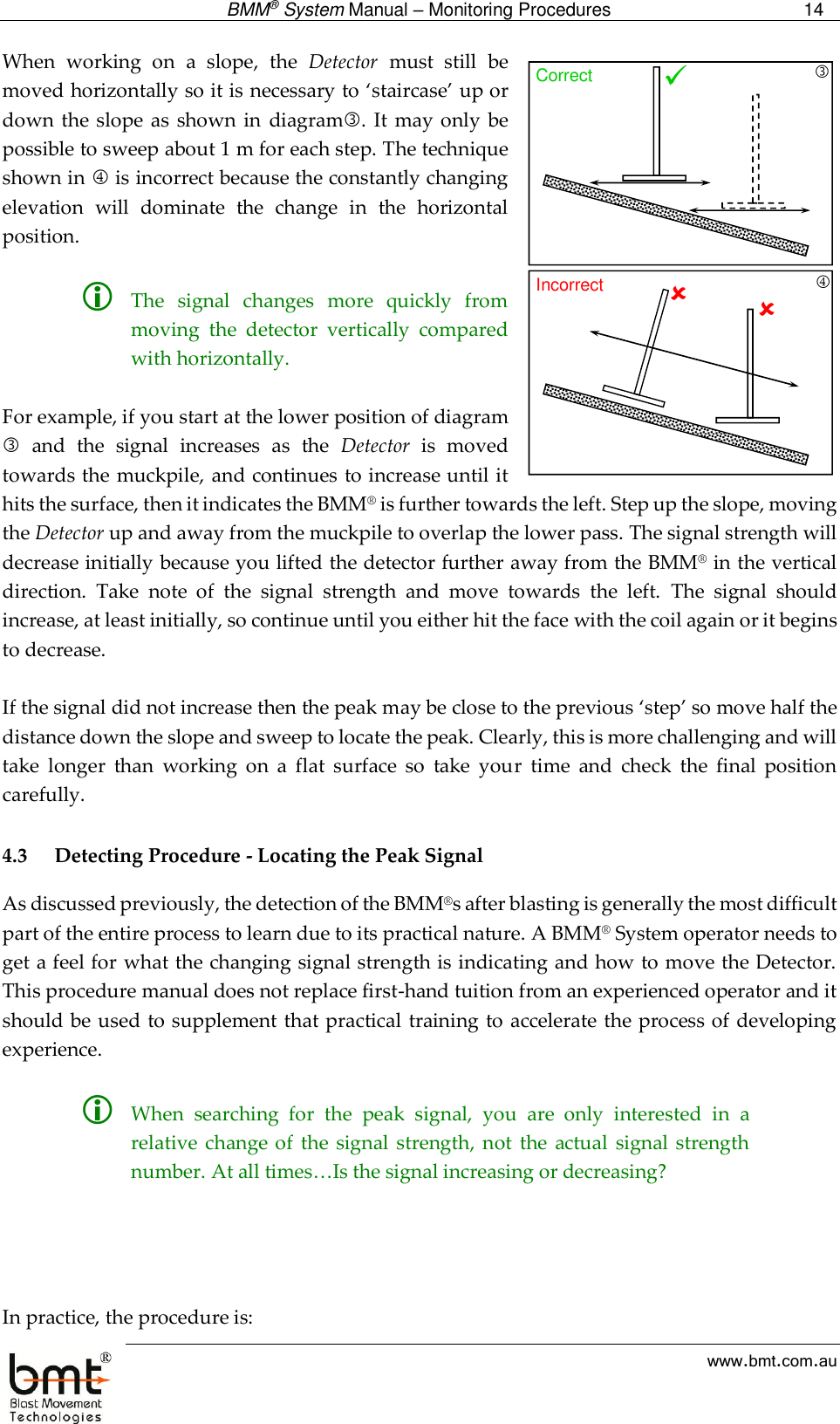
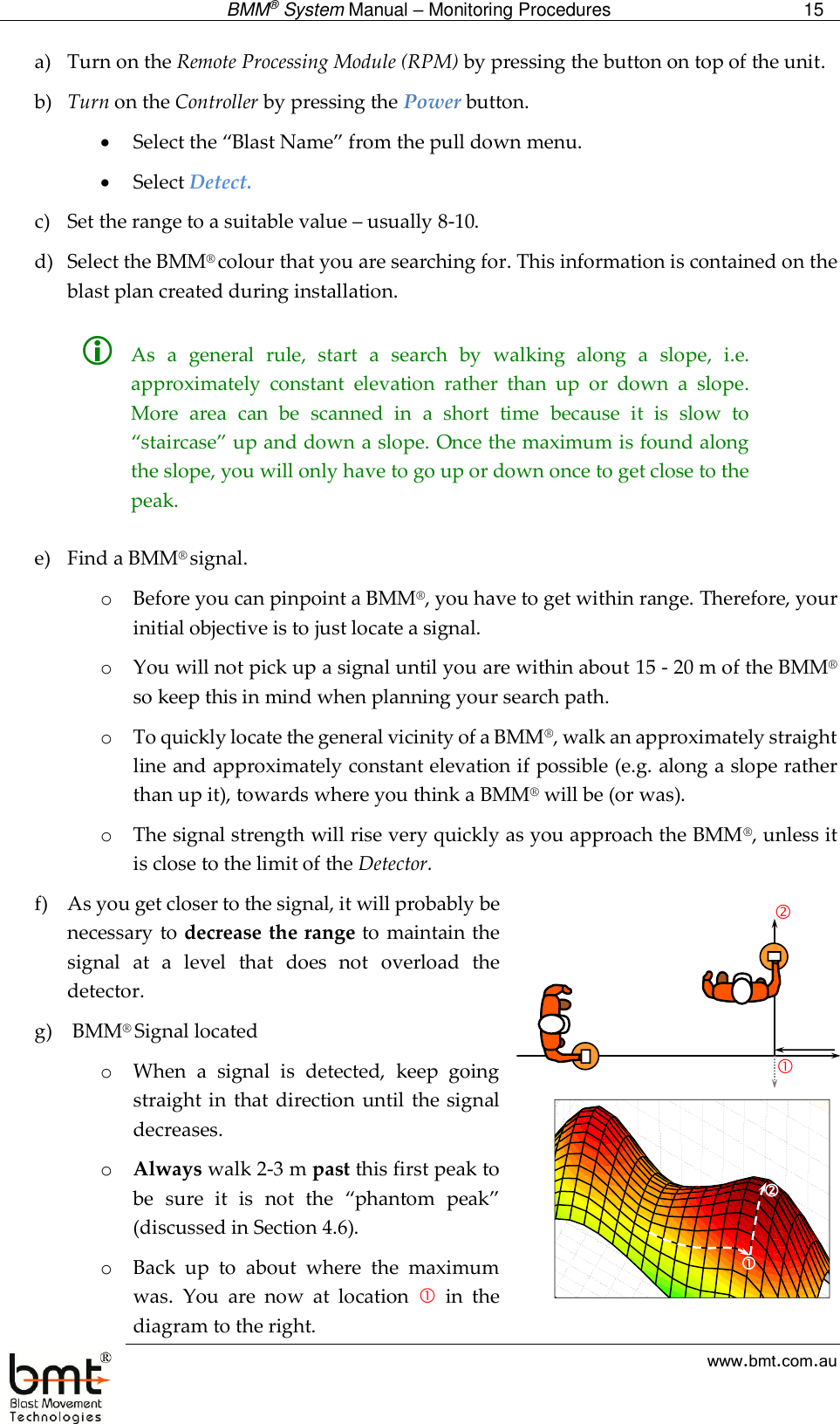
LADD IP atf BMT IP Discretionary Trust TRV5R2R Blast Movement Monitor - Red User Manual BMM System Manual
LADD IP Holdings Pty Ltd atf BMT IP Discretionary Trust Blast Movement Monitor - Red BMM System Manual
UserManual.wiki
>
LADD IP atf BMT IP Discretionary Trust
>
TRV5R2R User Manual
Users Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation