LADD IP atf BMT IP Discretionary Trust TRV5R2R Blast Movement Monitor - Red User Manual BMM System Manual
LADD IP Holdings Pty Ltd atf BMT IP Discretionary Trust Blast Movement Monitor - Red BMM System Manual
Users Manual

BMM® System Manual
Monitoring Procedures
Solutions to Reduce Ore Loss and
Dilution

BMM® System Manual – Monitoring Procedures i
Monitoring Procedure-Manual_WIP_FCC August 2012
TABLE OF CONTENTS
BMM® System Manual _____________________________________________________________ 1
Monitoring Procedures _____________________________________________________________ 1
1 Introduction _________________________________________________________________ 1
2 Planning the Location of BMM®s _______________________________________________ 2
2.1 Introduction ...................................................................................................................... 2
2.2 BMM® Separation ............................................................................................................. 2
2.3 BMM® Location for Grade Control ................................................................................. 3
2.4 BMM® Location for Blast Dynamics ............................................................................... 4
2.5 Monitoring Holes ............................................................................................................. 6
2.6 Monitoring Hole Diameter .............................................................................................. 7
3 BMM® Installation ___________________________________________________________ 7
3.1 Introduction ...................................................................................................................... 7
3.2 Installation Procedure...................................................................................................... 8
3.3 Delayed Start .................................................................................................................. 10
3.4 Wet Holes ....................................................................................................................... 11
3.5 Test Button on the Activator ......................................................................................... 12
4 BMM® Detection ____________________________________________________________ 13
4.1 Introduction .................................................................................................................... 13
4.2 Orientation of the Detector............................................................................................ 13
4.3 Detecting Procedure - Locating the Peak Signal .......................................................... 14
4.4 Graphical Display .......................................................................................................... 16
4.5 Validating the Peak ........................................................................................................ 17
4.6 Sample Field Shapes ...................................................................................................... 18
4.7 Procedures to Improve Efficiency................................................................................. 19
4.8 Common Mistakes by New Users ................................................................................ 19
5 Depth Calibration ___________________________________________________________ 20
5.1 Overview ........................................................................................................................ 20
5.2 Procedure........................................................................................................................ 20
5.3 Using the Data ................................................................................................................ 21
6 Potential Hazards ___________________________________________________________ 21
BMM® System Manual – Monitoring Procedures
1
www.bmt.com.au
1 INTRODUCTION
The Blast Movement Monitor (BMM®) System consists of directional transmitters placed within
the blast volume prior to blasting, which are then located after the blast with a special detector.
The data is then processed with purpose-designed software. The system is applicable to all open
cut mines and is easy to use — designed for routine use by site personnel.
Each BMM® is activated, programmed
and installed before blasting.
A special detector is used to locate each
BMM® after the blast. Data is
downloaded to accompanying software
that calculates the movement vectors
and then summarises and archives the
results.
Ore boundaries can then be redefined to
reflect the measured movement of the
blast and therefore enable accurate ore
control.
Detection of the BMM®s after blasting is
generally the most difficult part of the entire
process to learn due to its practical nature. Good tuition and experience are the greatest assets
for any practical activities. For example, it would be very difficult to learn to ride a bicycle by
reading a manual because there is no sensory experience. Similarly, a new BMM® System
operator needs to get a feel for what the changing signal strength is indicating and how to move
the Detector. This can only be obtained by actually doing it. This manual does not replace first-
hand tuition from an experienced operator and it should be used to supplement that practical
training to accelerate the process of developing experience. It includes:
Planning the monitoring locations
BMM® installation procedure
The correct technique for locating BMM®s
Depth calibration procedure
Potential hazards.
This manual covers how to use the BMM® System as a whole. The detailed description of the
Detector and Activator are covered by the respective equipment manuals.
There are Quick Reference Guides available for download from the
VIP-Zone on the BMT website. These are step-by-step procedures for
monitoring a blast and processing the data. New users should print
and refer to them regularly until the procedures are familiar.

BMM® System Manual – Monitoring Procedures
2
www.bmt.com.au
2 PLANNING THE LOCATION OF BMM®S
2.1 Introduction
The two main reasons for monitoring blast movement are to improve grade control and to
understand blast movement dynamics. In practice, the objective of many blasts will be a
combination of both. The data requirement of each is different so the decision process of where
to install the BMM®s will also be different. Regardless of the main reason for monitoring, there
are operational constraints that must always be followed. The objective of this section is to
provide guidelines to help with this decision process to maximise the value of using the BMM®
System.
As with any new activity, the best advice to new users is to commence conservatively. Plan the
BMM® locations to make detection easier until experience is gained. This can be achieved by
selecting appropriate depths, Multi-ID BMM®s (colours), separation distances and locations
within the pattern. For example, the BMM®’s signal gets weaker as the depth increases and
therefore is harder to locate and requires greater separation from BMM®s of the same colour.
Concentrate at about mid-bench to begin with before investigating the movement in other parts
of the bench. The exception to this is for multi-pass (flitch) mining where it is important to
monitor different levels.
The number of BMM®s installed depends on many factors but the primary question is, “If a
BMM is placed at a certain location, will it lead to a more accurate post-blast delineation of an ore
boundary and therefore more ore?” The decision factors include:
Grade
Price of mineral
Cost of monitoring
Ore/waste boundary condition – structural vs. disseminated
Movement variation
Size and shape of ore polygons
Orientation of ore polygons
Isolated vs. contiguous ore polygons
Bench height
2.2 BMM® Separation
There are four Multi-ID BMM®s available, each identified by a colour; orange, yellow, red, and
green. Each Multi-ID BMM® emits a different signal and therefore can be identified separately
by the Detector. Therefore, it is possible to install more than one BMM® per hole and/or place
BMM®s close together – assuming they are of a different colour. If there is inadequate separation
BMM® System Manual – Monitoring Procedures
3
www.bmt.com.au
between adjacent BMM®s of the same colour, they may be impossible to locate. There are a few
simple rules that should be followed when designing separation distances between BMM®s of
the same colour.
If they are installed at similar depths, the separation should be a factor of 2–3 times
the depth. Deeper BMM®s require greater separation.
If there is a large difference in depths of the BMM®s, the separation must be 3-4 times
the depth of the deepest BMM® (maximum 30 m). For example, an orange BMM® that
is 2 m deep should be at least 25 m away from an orange BMM® that is 8 m deep.
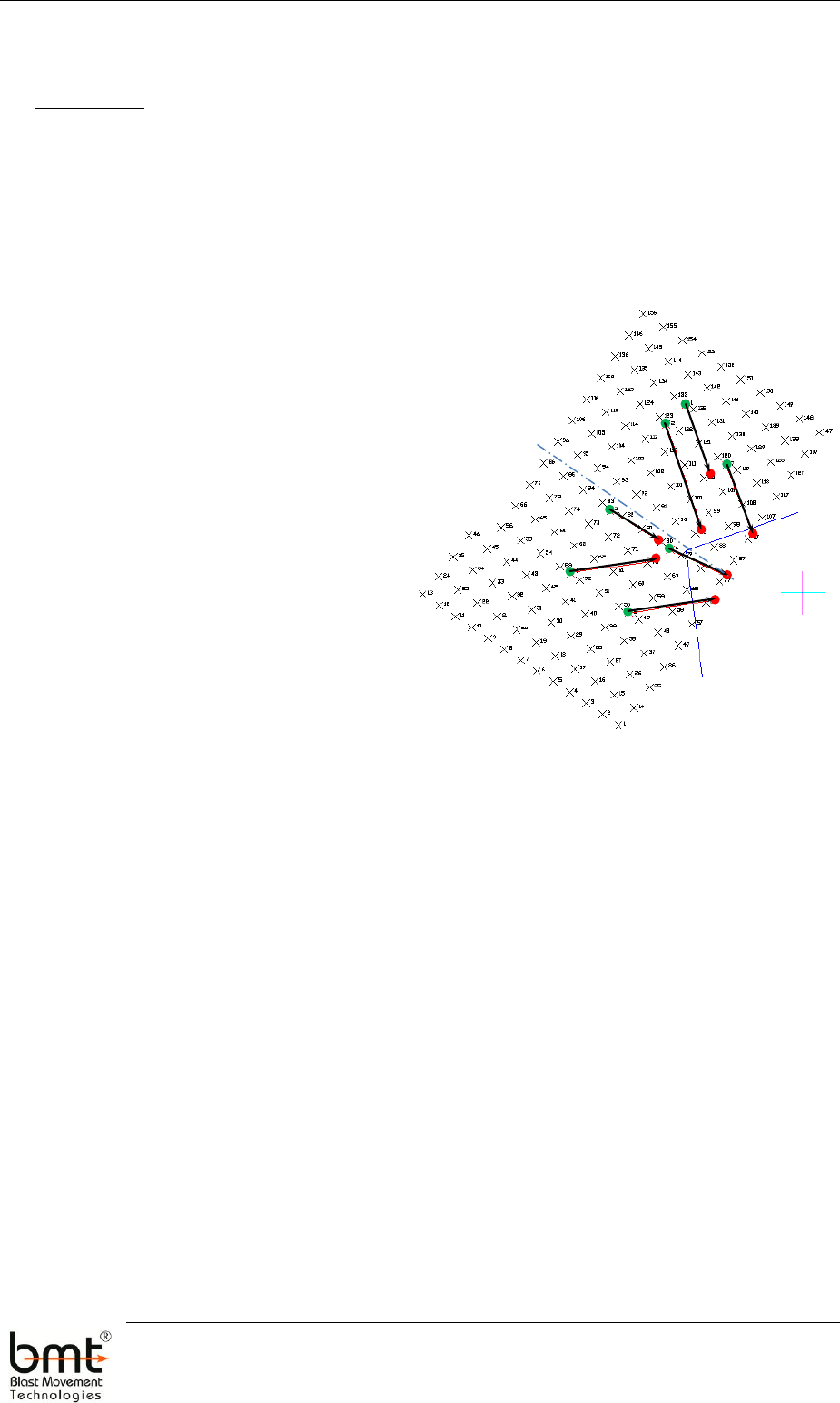
When planning BMM® locations
and installation depths, remember
to take into account the planned
movement direction and distance
within the blast. BMM®s with
adequate separation at the
installation stage, may actually
move towards each other and end
up too close after the blast. The
blast plan shown is an actual blast
where this occurred and several
BMM®s could not be located after
the blast. The green and red dots
are the pre and (expected) post-
blast BMM® locations respectively.
2.3 BMM® Location for Grade Control
When planning the location of BMM®s specifically for the purposes of grade control, think
ahead to what will be critical for translating the ore polygons. The main aim is to locate the
BMM®s as close as possible to the ore boundaries to reduce the error associated with
interpolating the ore is translated away from the measured vector. This therefore reduces the
overall ore loss and dilution. To achieve the best result, planning BMM® locations should take
into account the following factors.
1. High grade ore – ore loss and dilution will have a greater economic impact on higher
value zones, therefore definition of the correct boundary of high grade polygons will
have a higher priority than lower grade polygons.
2. Ore boundary conditions – the worst case is high grade adjacent to waste and the
mineralisation is structurally controlled, i.e. sharp cut-off.
3. Proximity to other BMM®s of the same colour after the blast – consider the expected
movement distance and direction (use the planned initiation timing contours) to ensure
BMM®s don’t end up within the minimum separation distance if they move towards
each other (refer to Section 2.2).

BMM® System Manual – Monitoring Procedures
4
www.bmt.com.au
4. Depth – Horizontal displacement varies with depth and is typically D-shaped with the
maximum occurring adjacent to the explosive column, i.e. in the lower half of the bench.
Ore loss is more costly than dilution so it is important to maximise the recovery of the
mineral, especially for high-grade ore polygons.
a) For single-pass excavation, it is recommended to install the BMM®s below the
top of the explosive column because this region is typically most representative
of the majority of the bench height. This is typically close to the mid-bench level
but could be adjusted under certain circumstances. Contact a BMT consultant if
you want to know more.
b) For multi-pass (flitch) mining, the movement of different flitches are likely to be
different. Therefore plan to have BMM®s in each flitch. It may be feasible to
combine movement vectors from different flitches under certain circumstances
but contact a BMT consultant to discuss this.
5. Close to ore polygon vertices – during the ore translation process, it is the vertices of
the polygons that are going to be moved.
6. Small, isolated ore polygons (surrounded by waste) – these have the potential for the
greatest percentage of ore loss and dilution (up to 100%). If the polygon is very small
and a single BMM is planned to be near it, install a BMM® inside the ore polygon so all
edges are similar distance from that vector.
7. Polygon boundaries that are oblique to expected movement are more important than
parallel boundaries.
8. Concentrate most of the BMM®s in the body of the blast, away from edge-effects, unless
there is an important ore boundary close to an edge.
9. Survivability of the BMM®s – Install halfway between blast holes to maximise the
distance between BMM®s and any explosive. See Section 2.5.
10. Impact on drill and blast operations – for ease of drilling monitor holes and explosive
truck access, holes drilled within the rows of blast holes will have the least impact on
drill and blast operations. See Section 2.5.
11. It is important for the person responsible for defining the post-blast ore polygons to
understand the 3-dimensional movement in various regions of the blast. Therefore,
while most BMM®s will be installed specifically to adjust ore boundaries, it is
recommended that some should also be used to gain an understanding of movement in
all regions of the blast. This is important because it is not practical to measure
movement everywhere, so this knowledge will often be used to supplement the
measured movement.
2.4 BMM® Location for Blast Dynamics
BMM®s can be installed in certain locations specifically to understand blast dynamics. The
movement data can still be used to translate ore polygons for ore control, but this may be a
lesser priority when deciding where to install the BMM®s. Outcomes of these results include:
BMM® System Manual – Monitoring Procedures
5
www.bmt.com.au
Determining optimum flitch digging heights for a multi-pass mining operation
The relationship between powder factor and horizontal movement
Quantify the variability of movement
Quantifying the movement profile
Understanding the movement dynamics in different zones.
Optimising blast designs, such as sub-drill and timing.
It is important to recognise that there are a number of zones within a blast pattern where the
movement is known to be different to other zones. These include close to all edges (within 2-3
blast holes from any edge, including the initiation centreline) and the body (away from edge-
effects). It is only valid to compare similar data, and depending on the specific objectives,
BMM®s may be concentrated in the body or distributed through all zones. The body zone
represents the greatest volume of most blasts so it is generally more important to understand
and monitor this zone, but the edges are arguably more interesting and provide unique
challenges for grade control. Regardless, the data will need to be filtered to compare like with
like.
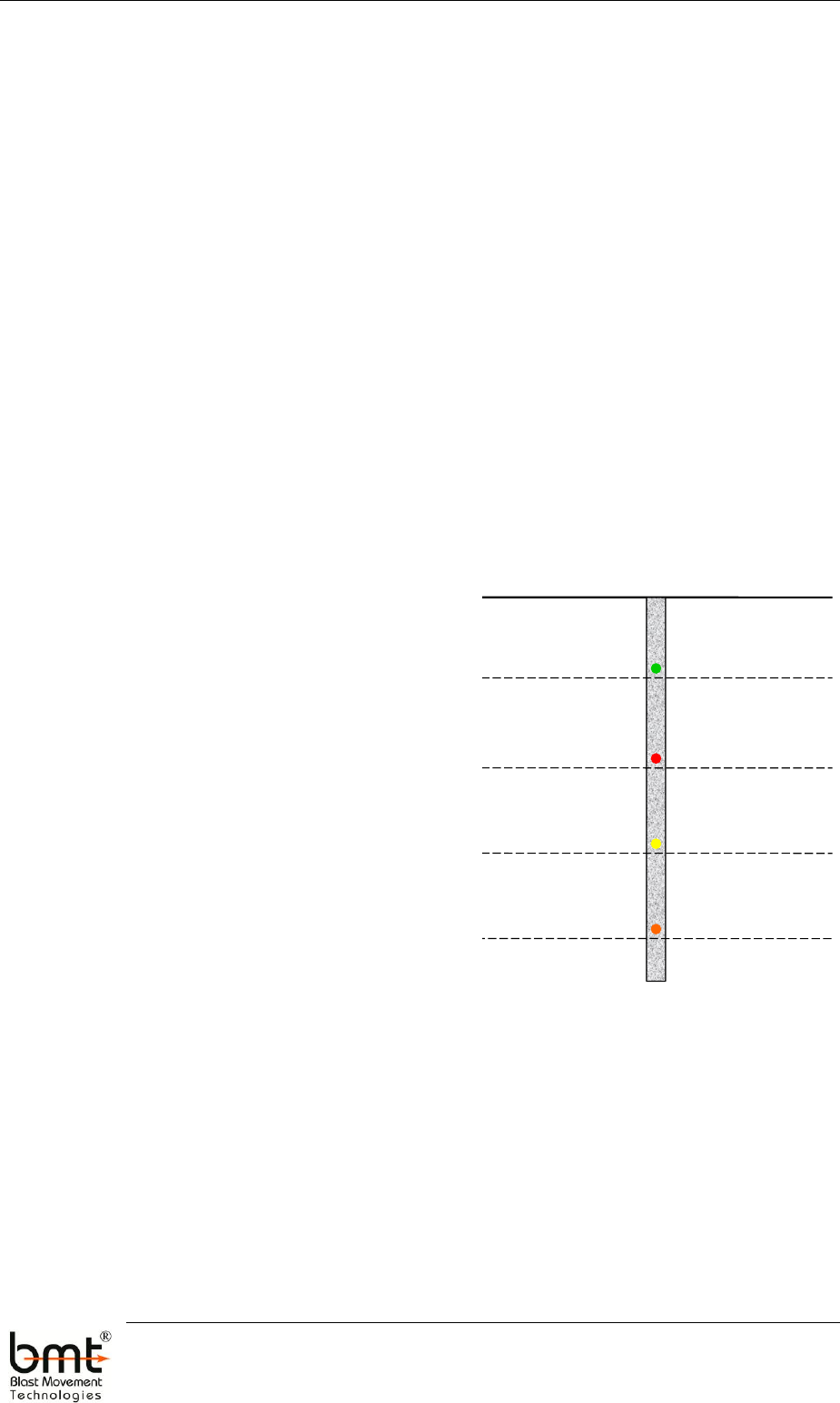
The horizontal and vertical components of the 3D
movement are both important to ore loss and
dilution, but to varying degrees depending on the
orebody. It is therefore important to gather a good
spread of data throughout the depth of the bench to
gain an understanding of the horizontal movement
profile, i.e. the shape in section. For multi-pass
(flitch) mining operations, this information will
enable a determination of the optimum flitch digging
levels. The diagram on the right shows an example
of installing multiple BMM® at the base of each flitch
for a four-pass mining operation (the dashed lines
represent the pre-blast flitch levels). Several holes in
a blast could have BMM®s installed in this way, but
the separation rule must still be applied to BMM®s of
the same colour.
Concentrate on the body of the blast.
Ideally, select blast(s) with similar rock along the entire length.
Ensure the same initiation timing for all locations. If the blast has to be initiated with a
V, then the centreline of the V must be more than 3 rows from any BMM® and the same
timing on each side of the centreline.
Select the depths to give a complete coverage of the bench height, including sub-drill.

BMM® System Manual – Monitoring Procedures
6
www.bmt.com.au
Since blast movement is quite variable, one of the most important criteria when planning a
project to gain an understanding of blast dynamics, is to control the variables. For example, the
size and shape of patterns (bigger is better), initiation timing (delays and tie-up), rockmass,
explosive, hole diameter, and front face condition. This will minimise the variation and enable
more specific conclusions to be drawn from the results. Although we can plan for predictability
within a blast, there are also several factors that are difficult to control or out of the blast
designer’s control. These factors could include:
Change in material characteristics — rock type, structures, oxidation state
Inconsistent mass of explosive being loaded into each hole
Variation between batches of explosive
Variability of explosive delays.
Therefore it is valuable to quantify and understand the variability when interpreting results
and tests can be configured specifically to investigate this. To understand the amount of
variability within a blast, the following guidelines are recommended.
All monitoring holes within the body of the blast.
Install the BMM®s at the same depths in every hole – use multiple BMM®s per hole as
required.
Conduct a number of blasts to quantify variability at different depths — at least one in
the stemming and explosive zones respectively. Depending on the scope of the study, it
may be advantageous to either do these blasts with the same depth as used in the 3D
movement tests or to select different depths.
2.5 Monitoring Holes
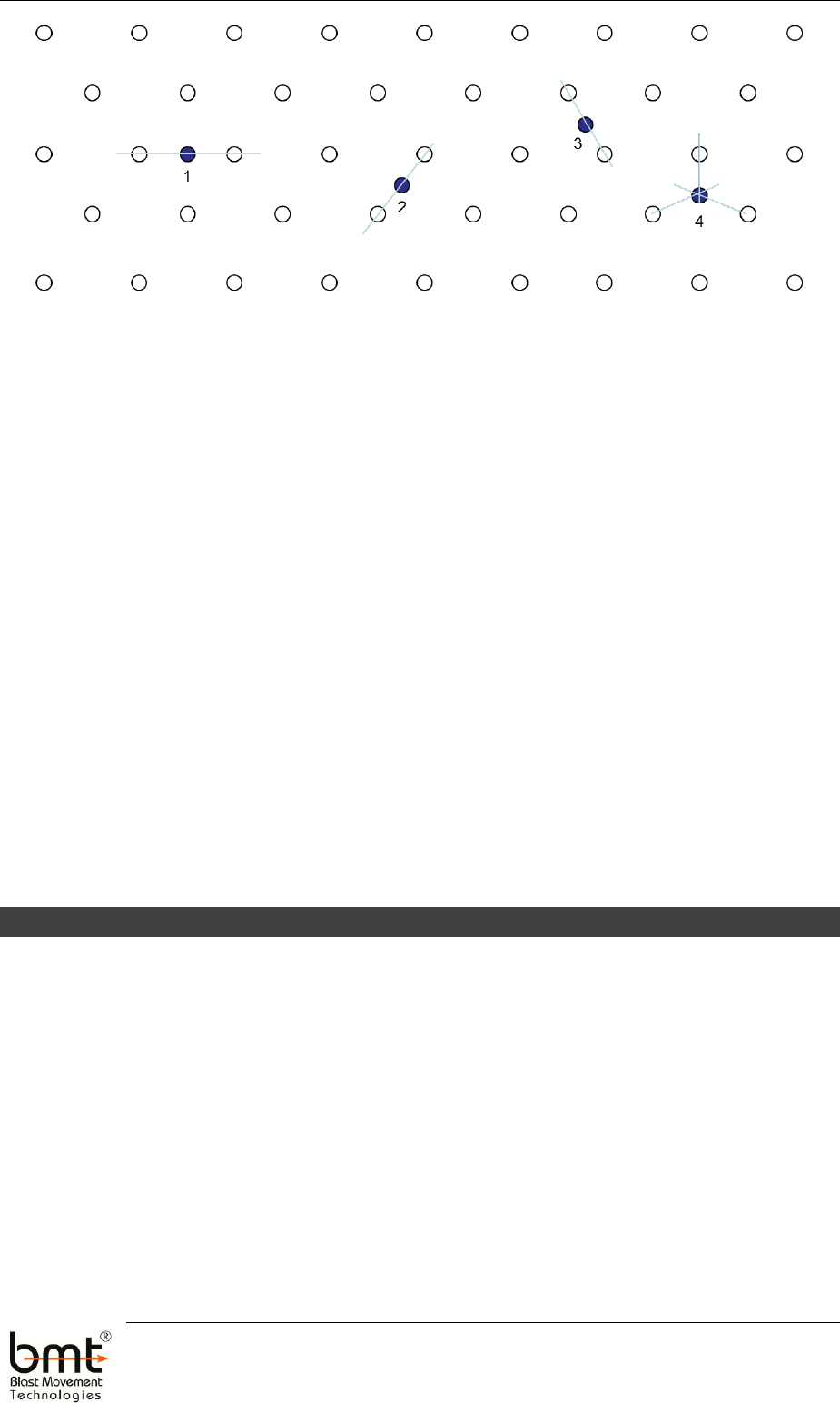
When deciding the location and depth of a monitoring hole in the blast pattern, consideration
needs to be given to its position to ensure the BMM® has the greatest chance of survival.
To minimise the chance of BMMs being destroyed, it is very important to get them as far from
a blasthole as possible. The maximum distance from a blast hole is shown at position 4 in the
diagram below (equidistant between blast holes). However, this location can be less convenient
to drill and may suffer cave-in due to equipment driving through the drilled pattern. Positions
1-3 may be better from a production perspective (half way between blast holes). Whichever
position you choose, it is important to get it close to mid-way between blast holes.
BMM® System Manual – Monitoring Procedures
7
www.bmt.com.au
Below are some further suggestions relating to monitor hole placement and hole depth.
There is no need to drill monitor holes to the same depth as blast holes. Only drill to just
below where you want to install the deepest BMM® in that hole (if more than one). Holes
that are deeper than necessary waste drilling resources plus it takes time and effort to
back-fill them before installing the BMM®s.
It is often a good idea to put something in the hole collars to prevent them from filling
or collapsing as equipment moves around the bench. Gasbags are best but traffic cones
can also be effective.
Communication with the shot crew is important. Ensure monitor holes are clearly
marked so that the hole is not stemmed or loaded with explosive accidently. Drill and
Blast should be aware of the importance of correct placement of the monitoring holes
within the blast pattern.
2.6 Monitoring Hole Diameter
The BMM®s are 98 mm diameter so it is possible to get them into a 102 mm (4”) hole but only if
the ground is competent and the hole is clean. The minimum recommended hole diameter for
effective installation is 115 mm (4.5″).
3 BMM® INSTALLATION
3.1 Introduction
Installation of the BMM®s is arguably the easiest of the monitoring tasks and with good
planning and communication with the drillers and blasters, it can be done very efficiently, with
little impact on existing workloads.
The BMM®s have a limited transmission time so it is critical to know the blast time. The signal
from each BMM® is constant for about 10–12 hours and then begins to decrease and finally stops
after about 36 hours. The signal strength is used to calculate the depth, so the depth, and hence
the vertical displacement, will only be accurate if it is located within the 10–12 hour window.
To provide more flexibility, there is the ability to program the BMM®s to start transmitting up
to 36 hours in the future. See Section 3.3 for more information on this topic.
BMM® System Manual – Monitoring Procedures
8
www.bmt.com.au
The limited transmission time and the fact that a BMM® can’t be switch off once activated,
means planning and communication with the drill and blast department is critical. One must
be reasonably certain of the blast time before installing BMM®s into a blast. Installing the
BMM®s as close as possible to the scheduled blast time minimises the chance that the blast will
be delayed.
3.2 Installation Procedure
Installation of the BMM®s consists of five basic steps:
i. Measure the depth of the hole
ii. Activate the BMM®
iii. Drop the BMM® into the hole
iv. Read the signal strength and record the BMM®s details on the blast plan
v. Backfill the hole.
WARNING The BMM® cannot be switched off once activated with the
BMM On button.
The Detector will be affected by electromagnetic interference from
certain equipment and vehicles. This usually manifests as unusually
erratic signal strength (‘noisy’) and/or elevated signal strength on the
Detector. There is a usually little interference once in the pit, unless a
source is close to the Detector. Known sources in the pit include: survey
GPS controller (if very close to the LCD), some vehicles (a few metres)
and electric shovel power cable (~10 m). There are no issues with
mobile/cell phones.
Make sure you have all required equipment before departing to the pit.
Detector and Activator
BMM®s — take 1-2 extra
Tape measure with weight suitable for measuring the depth of the monitor holes
Map of blast pattern and planned BMM® locations
Pencil or pen — to write on map
BMM® Mesh Bags — if wet holes are expected (see Section 3.4)
Shovels — to backfill holes if required
BMM® System Manual – Monitoring Procedures
9
www.bmt.com.au
The easiest way to carry the BMM®s and ancillary equipment around
the pattern is with a bucket, tool-carry or similar container with a
handle.
Below is the BMM® installation procedure. For detailed information about using the Activator
or Detector, refer to the respective user manuals.
a) Locate the first monitoring hole and check depth.
If the hole is deeper than the planned depth then backfill to the required depth.
If the hole is wet, refer to the wet hole procedures in Section 3.4.
b) Turn on the Remote Processing Module (RPM) by pressing the button on top of the unit.
c) Turn on the Controller by pressing the Power button.
Enter the “Blast Name”.
Select Install.
d) Choose the correct BMM® colour you are going to install in the monitor hole.
e) Record the following details onto the blast plan.
BMM® number (as per the Controller)
Colour of the BMM® to be placed in the hole
Measured depth
f) Turn on the BMM® Activator by pressing the Power button.
If no Delay time (delayed start-up) is required, leave display zero.
If delayed start-up is required, please consult the applicable BMM® Activator
Manual for instructions.
If the delayed start-up is selected, when the BMM® is turned on it will
transmit for 15 minutes, before going to ‘sleep’, giving enough time to
take a signal reading (and a Depth Calibration if required).
g) Hold the Activator close to the BMM® and press the BMM On button to start the BMM®
transmitting.
WARNING Any BMM®s within range of the Activator will turn on
(safe distance is 2 m). Once a BMM® is on, it cannot be
turned off.
h) The red LED on the Activator will flash when the BMM® is transmitting close to the
Activator. As a double check, move the BMM® out of range and then back into range of
the Activator. If the BMM® is not transmitting, try a different activator angle and press
BMM On button again. Try several times if necessary. If the BMM® will not activate,
identify with marking pen, and use another BMM®.

BMM® System Manual – Monitoring Procedures
10
www.bmt.com.au
i) Drop the BMM® into the hole.
j) On the Controller, select the colour of the BMM® and check that the BMM® number is
correct. If not, use the ‘▼’ and ‘▲‘ keys to correct the BMM® ID number and select the
correct BMM® colour by cycling through BMM® colour button.
k) Enter the measured hole depth into the Controller.
l) Place the Detector’s receiver disc directly over the hole at bench level and use the bubble
level get it horizontal.
It is important that the level at which the reading is taken is
approximately the same level that the surveyors will pick up. If
accurate depth is important and it is not possible to get the receiver to
bench level due to drill cuttings, then ensure the hole depth is
measured from the level of the receiver and also remember to adjust
the surveyed elevation accordingly.
m) Press Store Reading on the touch screen to take a reading. Make sure the Detector is kept
still while Please wait..... message is displayed.
Before taking the signal reading, get into the habit of reviewing the
displayed data – Range, BMM® number, colour, and signal. With
experience, you will know approximately what the range should be at
various depths. For example, if the hole is 8 m deep and the display is
showing Range 3 then the BMM® is not at the bottom of the hole or a
BMM® in the bucket is transmitting. If the display is static on Range 1,
then the Controller and/or RPM may be locked and need to be reset. If
it is displaying Range 12, then the BMM® is probably not transmitting
(unless it is a very deep hole).
n) It is recommended that inexperienced operators write the displayed range and signal
strength on the plan. Experienced operators should review the display and record any
unusual behaviour.
o) Repeat all steps for all BMM®s.
p) Once all BMMs have been installed, exit the installation mode on the controller then
switch off the Controller and RPM. The data is stored for later downloading.
3.3 Delayed Start
The delayed start extends the 12-hour time window that the BMM®s must be detected to obtain
accurate depth. There are several situations where the delayed start will be used to program the
BMMs to switch on some time in the near future. For example:
Cannot access the muckpile immediately after the blast due to a regulated safe settling
period when blasting through underground workings.
Late afternoon blast means end of shift and/or fading light.
BMM® System Manual – Monitoring Procedures
11
www.bmt.com.au
The shot-firer wants to limit access to a loaded and/or tied-up pattern
Under normal circumstances, it is recommended that the BMM®s be installed and located the
same day to minimise the chance of blast delays after the BMM®s have been installed and in
this case, the delayed start-up is not required. Installation the day prior to blasting is possible
but once activated, the delay cannot be cancelled nor changed. It is another opportunity for
error that should only be used if necessary.
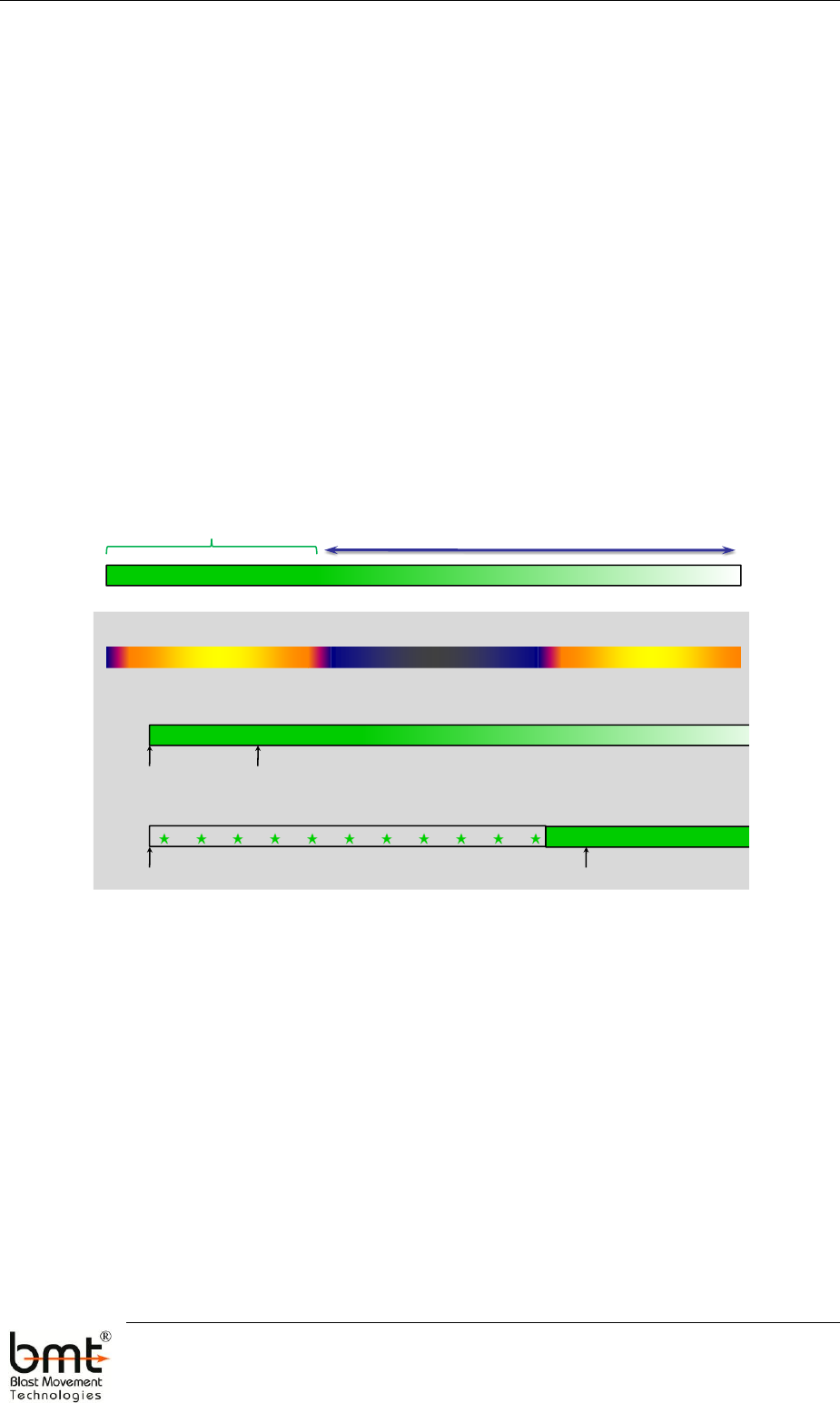
The diagram below shows an example of how the delayed start could be used. The top strip
represents the signal from the BMM® – it is constant for 10–12 hours and then decreases. The
second strip represents a time line starting at 06:00. The common procedure is to install in the
morning for a lunchtime blast and then find the BMM®s soon after the blast. With the delayed
start-up, the BMM®s can be installed on the morning of the blast with an appropriate delay to
wake up the following morning when they can be located. This scenario would be used if there
are underground workings that must settle for a period before accessing the muckpile.
3.4 Wet Holes
Some special procedures are required when installing BMM®s into wet holes to ensure the
BMM® sinks to the desired depth and stays there. The bulk density of the BMM® is about 1.2
g/cm3 which could be less than the water that is in the holes. If the density of the water is greater
than the density of the BMM®, then it will float. This could be caused by a high concentration
of suspended solids (very muddy water) or hyper-saline water.
The easiest way to sink the BMM® into the wet hole is to use a small amount of rock to increase
its weight and density. BMT supplies mesh bags to make this process quick and easy and the
procedure is set out below.
Signal
Accurate Depth
12 hrs
Normal Install/Detect
Install Detect
Delayed Start-up Example
Install Detect
Potentially Detectable (signal decreasing)
06:00 12:00 00:0018:00 06:00 12:00
BMM® System Manual – Monitoring Procedures
12
www.bmt.com.au
Steel, Iron or Lead is not to be used as weight material in the mesh bag
as it will interfere with the BMM® system.
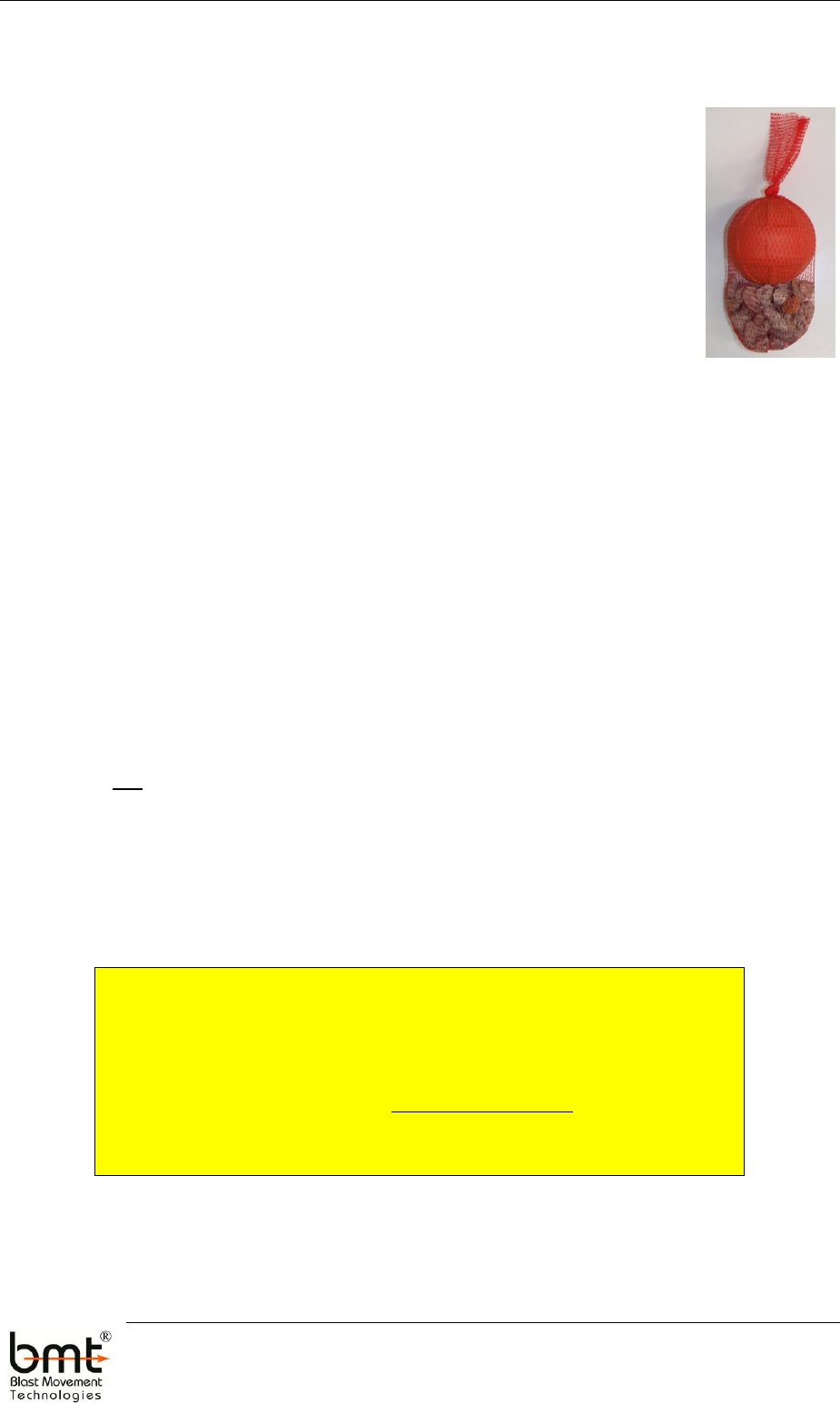
1. Place an amount of rock into the base of the mesh bag. This could be a
single rock of suitable size or a handful of stemming as per the photo.
The rock must be no larger than the BMM® if it is being installed in a
small hole.
2. Place the BMM® onto the top of the rock and tie a knot in the mesh bag
to stop the BMM® and rock from falling out.
3. Prior to placing the BMM® into the monitoring hole, ensure you have
completed the Installation procedures as detailed in section 3.2.
4. Place the weighted BMM® into the monitor hole with the rock below
the BMM®.
5. Allow sufficient time for the BMM® to reach the bottom of the hole before storing data.
Monitor the descent with the detector. The displayed signal strength
will stop decreasing when it reaches the bottom.
6. Once the Detector data has been stored, backfill the monitor hole as per standard
procedures. If the water is very muddy, drop 1-2 additional suitable sized rocks into the
hole prior to backfilling with stemming to ensure the BMM® stays at the bottom of the
hole.
3.5 Test Button on the Activator
Test should not be used under normal circumstances. The only function it does is check that a
BMM® will switch on – it does not perform any additional testing of the BMM® or the Activator.
It circumvents the fact that once a transmitter is switched on normally, it cannot be switched
off. In Test mode, the BMM® will transmit for about five seconds and then switch off – ready
for normal use. It is used during manufacture and testing, and is not recommended for general
use since it adds an unnecessary process that takes time and where something could go wrong.
WARNING The earlier Test Mode was configured differently and there
may still be some of these BMM®s at sites. For these, the
transmitter is on for a few seconds and off for a few
seconds – cycling indefinitely. If this early Test Mode is
initialised, then it must be deactivated before the BMM®
can be activated normally (see the Activator manual for
the procedure).
BMM® System Manual – Monitoring Procedures
13
www.bmt.com.au
4 BMM® DETECTION
4.1 Introduction
There is no substitute for experience when it comes to locating the BMM®s. This section
provides some basic techniques to get you started and fast-track that experience. When working
on a reasonably flat, well fragmented muckpile, the BMM® signal is reasonably easy to locate
but as the terrain gets steeper and rougher, locating the BMM® gets more challenging. In this
situation, the key is to take your time, use the technique specified and double check that you
have located the correct position (see Section 4.5).
One of the challenges for new users is to know what is a real signal from a BMM and what is
just environmental interference. You are looking for a signal that rises reasonably quickly and
consistently – unless the depth of the BMM® is approaching the limit of the Detector’s capability.
As you gain experience, you will sense when the signal is not right. As an analogy, you may be
stumbling around in the foothills instead of climbing the mountain. Usually, when you find the
mountain it will be obvious. As a general rule, if you are not sure if you have located the ‘real’
signal, then you probably haven’t!
Following is a list of things to keep in mind when conducting a search:
a) Where do you expect the BMM®s to be? Use your plan from the installation stage nd
there is also a GPS (low precision) map accessible on the detector.
b) What signal strength do you expect? If you have been locating other similarly installed
BMM®s on say, Range 5 and you think you are close to the BMM® but on Range 12 then
the chances are, you are not at the right location — keep looking.
c) If you are working on the side of a slope, you may be detecting the side of the field and
the interaction between the receiver and the field at this location is different to when
you are well above the level of the source.
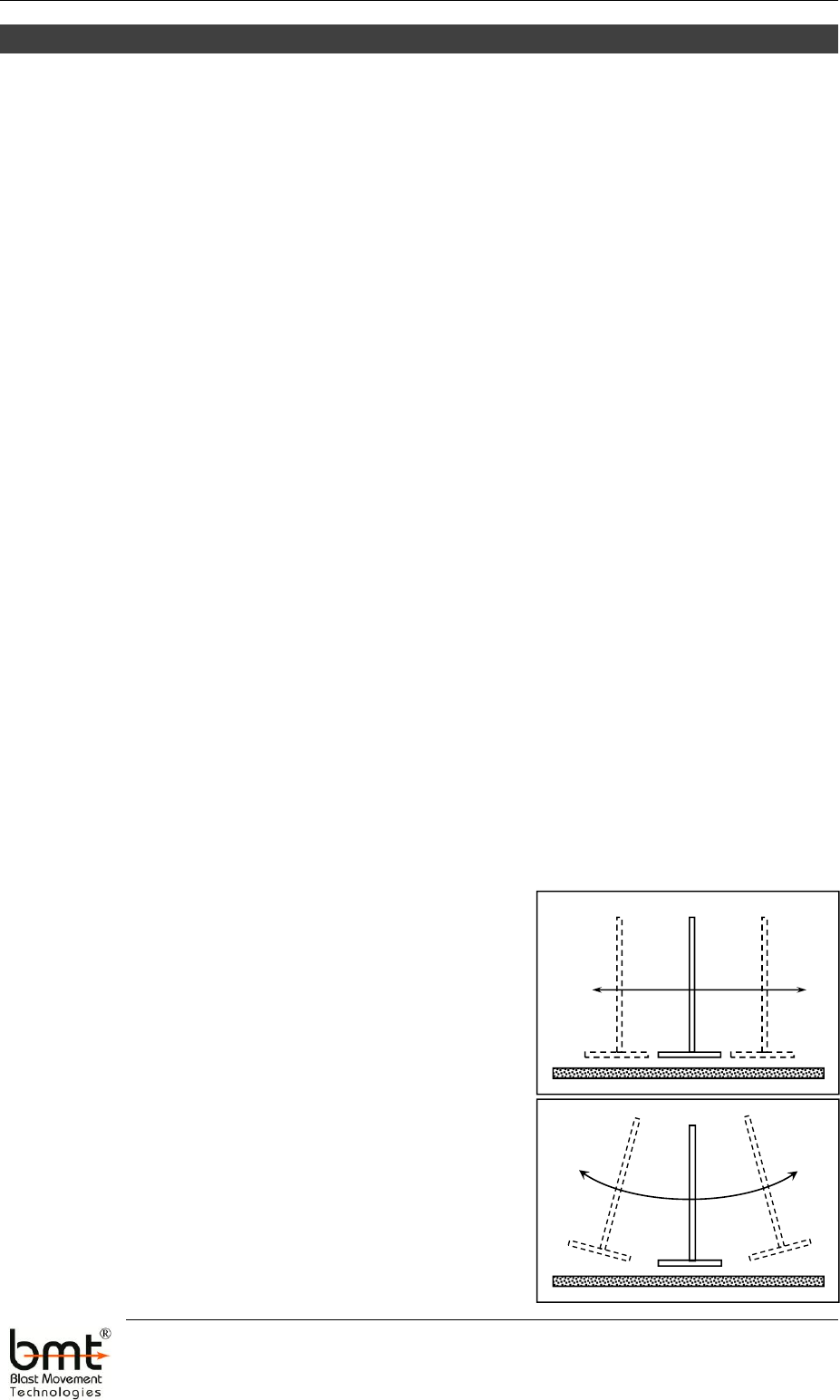
4.2 Orientation of the Detector
The signal strength measured by the Detector is determined
by the distance from the transmitter and the angle between
the Detector Coil and the field lines radiating from the
transmitter. The peak signal will be when the Detector is
directly above the transmitter with the coil horizontal.
One variable can be eliminated by keeping the coil
horizontal at all times as in diagrams and . This is
critical when conducting the final pin-pointing and
recording the ultimate signal strength, although it is not
necessary to be perfect when conducting the initial traverse
of the muckpile to get close to the BMM®.
Correct
Incorrect
BMM® System Manual – Monitoring Procedures
14
www.bmt.com.au
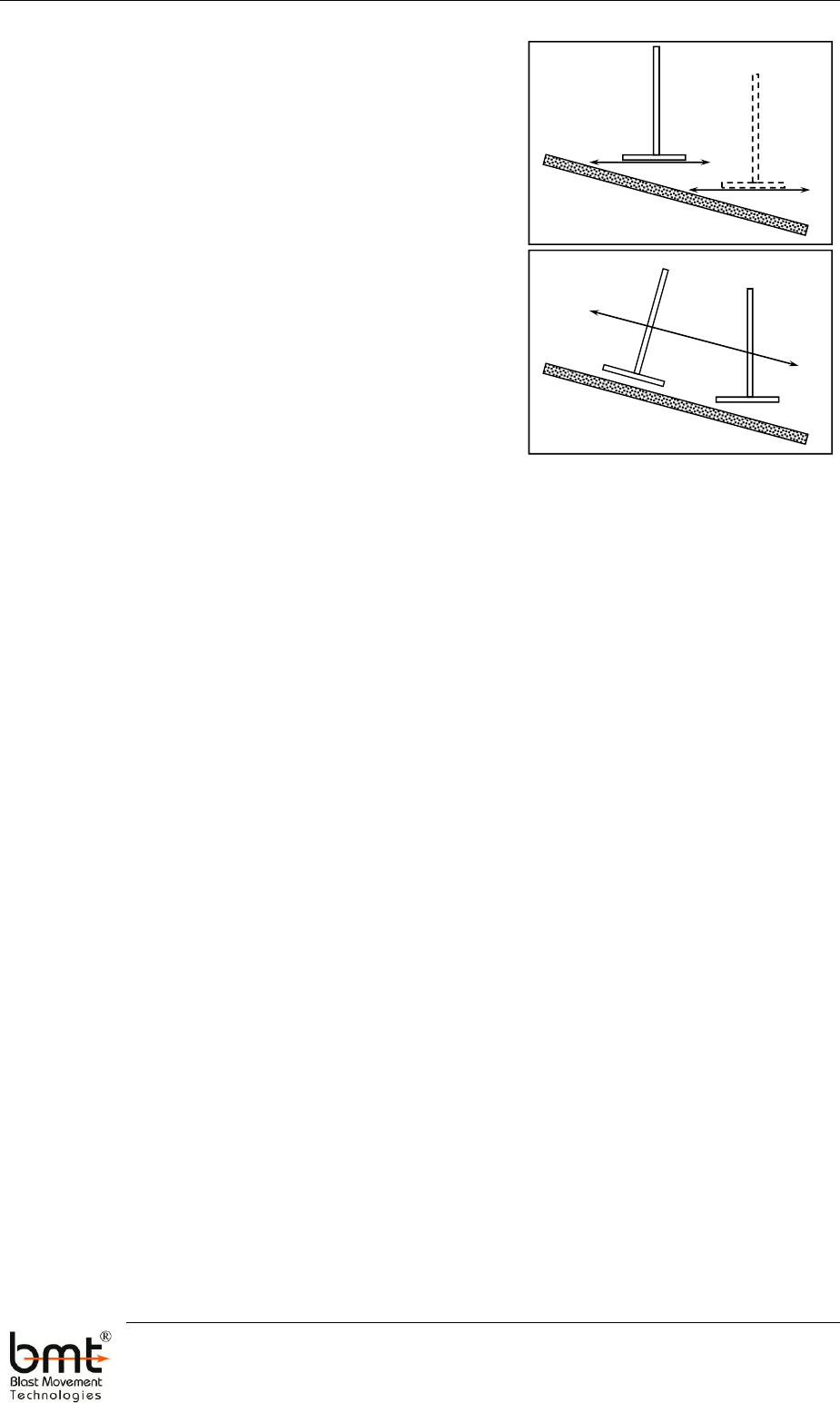
When working on a slope, the Detector must still be
moved horizontally so it is necessary to ‘staircase’ up or
down the slope as shown in diagram. It may only be
possible to sweep about 1 m for each step. The technique
shown in is incorrect because the constantly changing
elevation will dominate the change in the horizontal
position.
The signal changes more quickly from
moving the detector vertically compared
with horizontally.
For example, if you start at the lower position of diagram
and the signal increases as the Detector is moved
towards the muckpile, and continues to increase until it
hits the surface, then it indicates the BMM® is further towards the left. Step up the slope, moving
the Detector up and away from the muckpile to overlap the lower pass. The signal strength will
decrease initially because you lifted the detector further away from the BMM® in the vertical
direction. Take note of the signal strength and move towards the left. The signal should
increase, at least initially, so continue until you either hit the face with the coil again or it begins
to decrease.
If the signal did not increase then the peak may be close to the previous ‘step’ so move half the
distance down the slope and sweep to locate the peak. Clearly, this is more challenging and will
take longer than working on a flat surface so take your time and check the final position
carefully.
4.3 Detecting Procedure - Locating the Peak Signal
As discussed previously, the detection of the BMM®s after blasting is generally the most difficult
part of the entire process to learn due to its practical nature. A BMM® System operator needs to
get a feel for what the changing signal strength is indicating and how to move the Detector.
This procedure manual does not replace first-hand tuition from an experienced operator and it
should be used to supplement that practical training to accelerate the process of developing
experience.
When searching for the peak signal, you are only interested in a
relative change of the signal strength, not the actual signal strength
number. At all times…Is the signal increasing or decreasing?
In practice, the procedure is:
Correct
Incorrect
BMM® System Manual – Monitoring Procedures
15
www.bmt.com.au
a) Turn on the Remote Processing Module (RPM) by pressing the button on top of the unit.
b) Turn on the Controller by pressing the Power button.
Select the “Blast Name” from the pull down menu.
Select Detect.
c) Set the range to a suitable value – usually 8-10.
d) Select the BMM® colour that you are searching for. This information is contained on the
blast plan created during installation.
As a general rule, start a search by walking along a slope, i.e.
approximately constant elevation rather than up or down a slope.
More area can be scanned in a short time because it is slow to
“staircase” up and down a slope. Once the maximum is found along
the slope, you will only have to go up or down once to get close to the
peak.
e) Find a BMM® signal.
o Before you can pinpoint a BMM®, you have to get within range. Therefore, your
initial objective is to just locate a signal.
o You will not pick up a signal until you are within about 15 - 20 m of the BMM®
so keep this in mind when planning your search path.
o To quickly locate the general vicinity of a BMM®, walk an approximately straight
line and approximately constant elevation if possible (e.g. along a slope rather
than up it), towards where you think a BMM® will be (or was).
o The signal strength will rise very quickly as you approach the BMM®, unless it
is close to the limit of the Detector.
f) As you get closer to the signal, it will probably be
necessary to decrease the range to maintain the
signal at a level that does not overload the
detector.
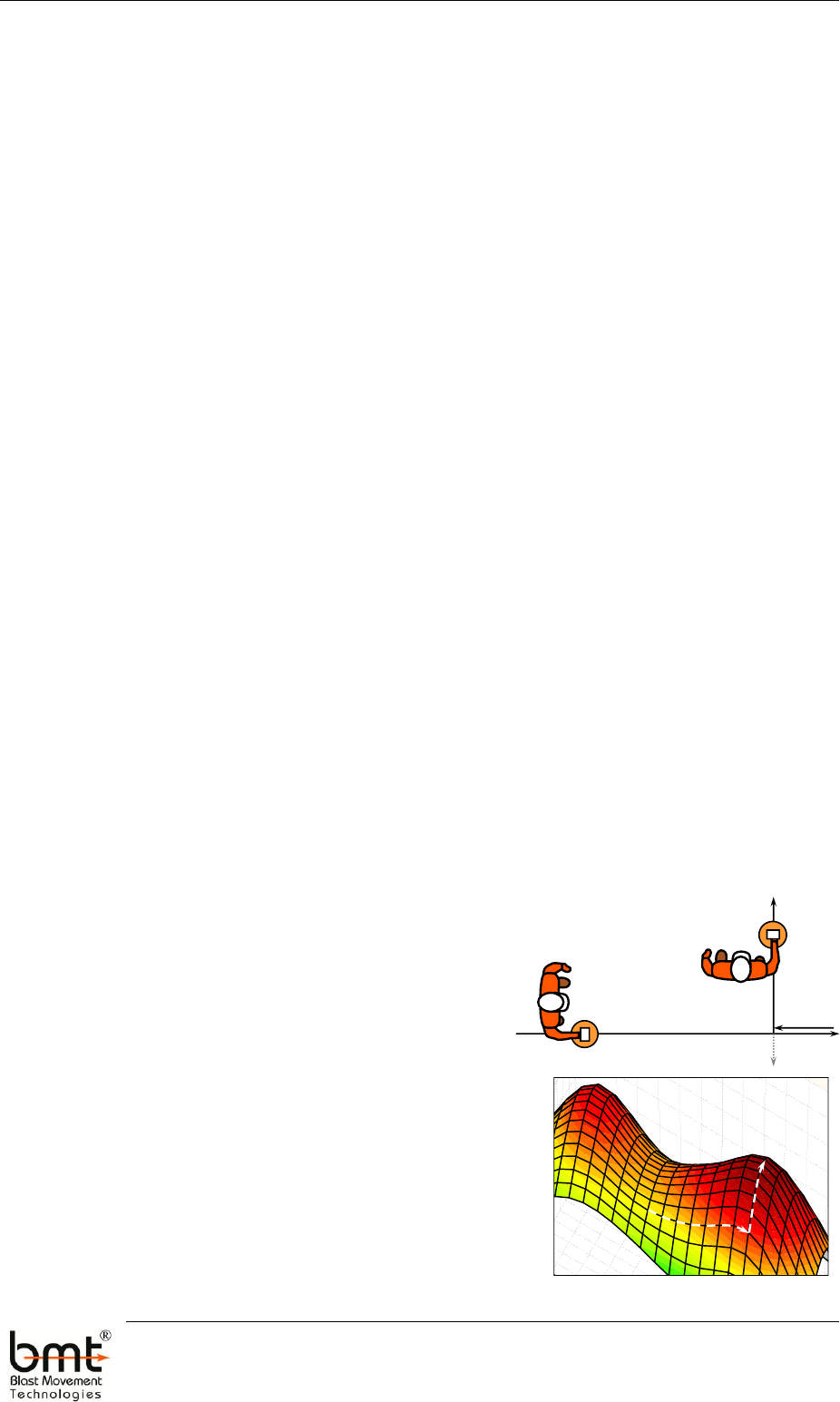
g) BMM® Signal located
o When a signal is detected, keep going
straight in that direction until the signal
decreases.
o Always walk 2-3 m past this first peak to
be sure it is not the “phantom peak”
(discussed in Section 4.6).
o Back up to about where the maximum
was. You are now at location in the
diagram to the right.
3D Surface Plot (Survey Points in Results - Survey Both.stw 4v*98c)
mV = Distance Weighted Least Squares
250
200
150
100
50
0
-50
BMM® System Manual – Monitoring Procedures
16
www.bmt.com.au
o Don’t spend too much time getting the precise location of this peak. At this stage
you are just trying to find the approximate location of the peak, so 1 m is good
enough.
o Turn 90 and move the Detector. If the signal decreases you are going the wrong
way so walk in the opposite direction, towards the increasing signal strength.
Walk forward until the signal starts to decrease. Return to the peak (location ).
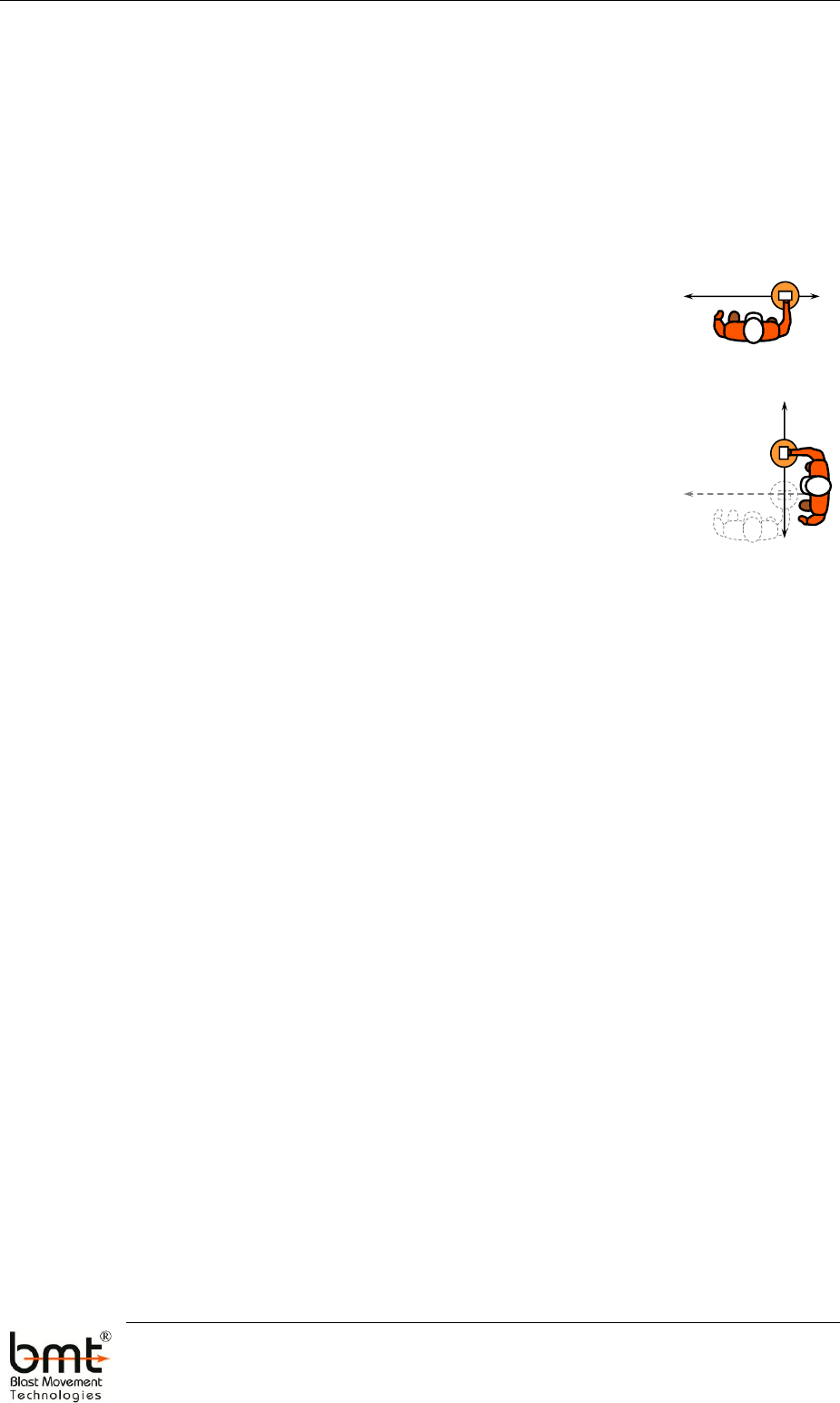
o You are now close to the BMM® and it is time to pinpoint the location.
h) Stand still and move the Detector across your body in a straight line
at constant elevation (refer to Section 4.2) to locate a maximum
value (location ).
i) Turn 90 and repeat the scan technique to locate the maximum
signal strength in that direction (location ).
j) Repeat steps (d) and (e) until you are confident that you have
located the peak.
k) Place the receiver coil level on the ground, at the location of the
peak signal. Review the display – Is the Range realistic for the
expected depth? Is the BMM letter correct? Is the peak validated? (see Section 4.5) If
satisfied, press Store Reading to record the signal. Hold it still while the Detector displays
Please wait... A different tone will sound when complete.
l) Mark the location with a suitable marker (stake, flag, paint, etc.) and write the BMM
letter (from the Detector), on the marker. This letter must be recorded when the point
is surveyed.
m) Repeat until all transmitting BMM®s have been located – one or more may fail during
the blast.
n) Switch the Controller and RPM off when complete – the data is stored for later
downloading.
4.4 Graphical Display
The graphical representation of the signal strength on the Controller is designed to be more
intuitive and easier to use than looking at a 4-digit number that is constantly changing. This is
because all of our senses are analogue – we don’t process digital data as efficiently as analogue
information. If the signal was perfectly stable then it wouldn’t be too bad but environmental
interference means that there will constantly be some random fluctuation of the signal and the
more it fluctuates, the more difficult it is for an operator to “process” the numeric data to
determine whether that average is going up or down.
The most efficient search procedure, set out in this manual, is based on simply knowing whether
the signal is increasing or decreasing, and indeed, looking for the point where it changes from
increasing to decreasing. The graphical display clearly shows these humps, even if the signal is
BMM® System Manual – Monitoring Procedures
17
www.bmt.com.au
very “noisy” with a lot of random interference from the environment. Below is an introduction
to the graphical display.
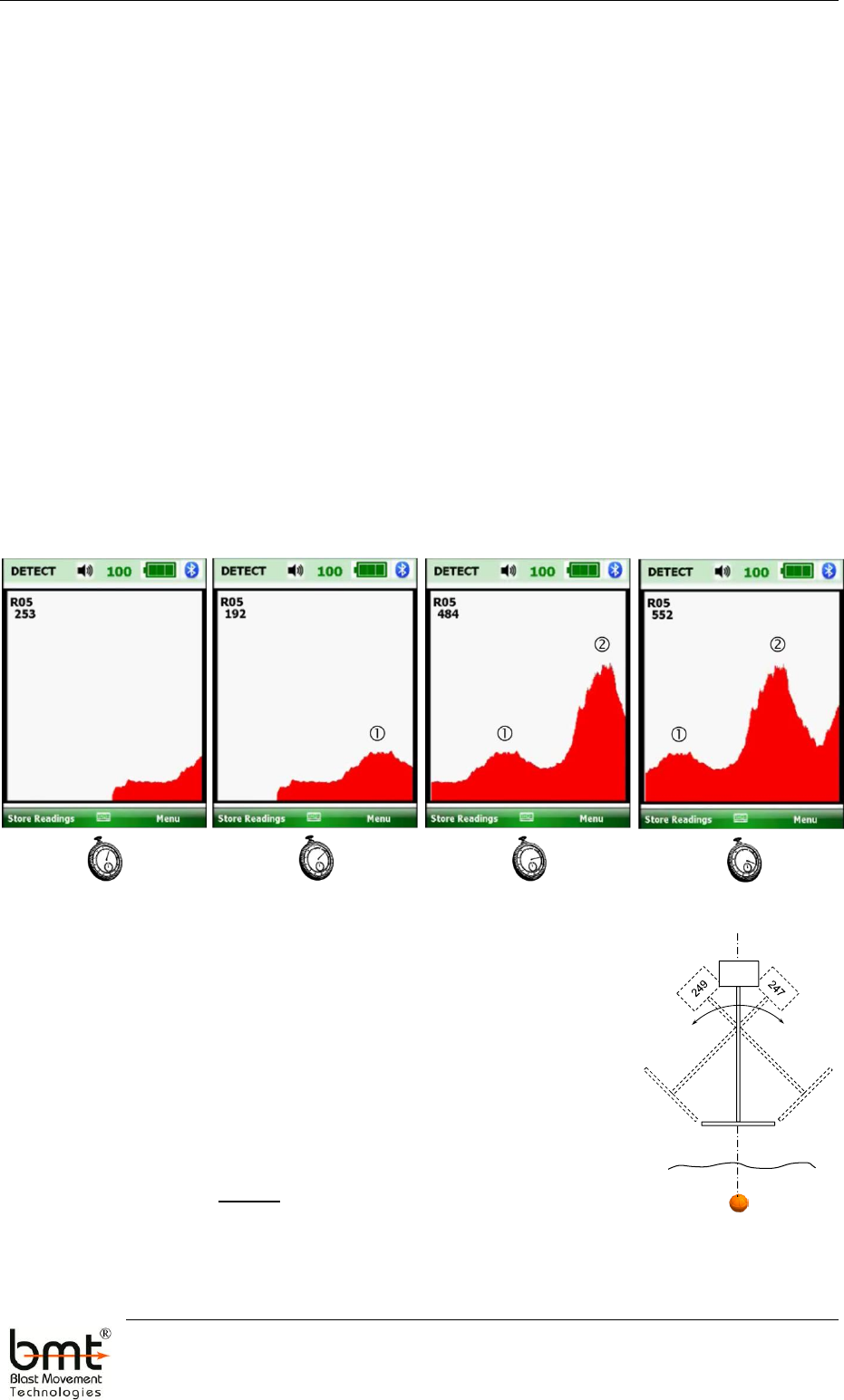
New signal data constantly enters at the right edge of the screen and old data gets
pushed left. It shows a brief history of the signal so the peaks and troughs are clearly
evident. The image below is four snapshots of the screen at different time, with the most
recent screen on the right.
The height of the red area is proportional to the signal strength.
Points and in the diagram below could be what you might see at and in the
diagram in Section 4.3.
There are a number of steps that can be taken to increase the vertical resolution of the
graph and hence make the peaks more obvious. This will be necessary for deeper
BMM®s (weaker signals).
o Set the graph to be full-screen (shown here) by touching the graph.
o Zoom into the top of the red “signal”. There are four zoom levels accessed by
pressing “5” on the keypad. The Range # will be highlighted while zoomed. Press
“0” on the keypad to return to normal.
4.5 Validating the Peak
As stated previously, the maximum signal strength is when the
Detector’s receiver is directly above the BMM® and horizontal.
Therefore, when you believe you have located this point, it can be
validated by slowly rotating the Detector about the vertical axis. If you
are indeed directly above the BMM®, the signal will decrease in every
direction and it will be symmetrical (within reason). If it increases at all
in any direction, then you are not directly above the BMM®, so keep
looking. This procedure should be carried out for each BMM®.
600
BMM® System Manual – Monitoring Procedures
18
www.bmt.com.au
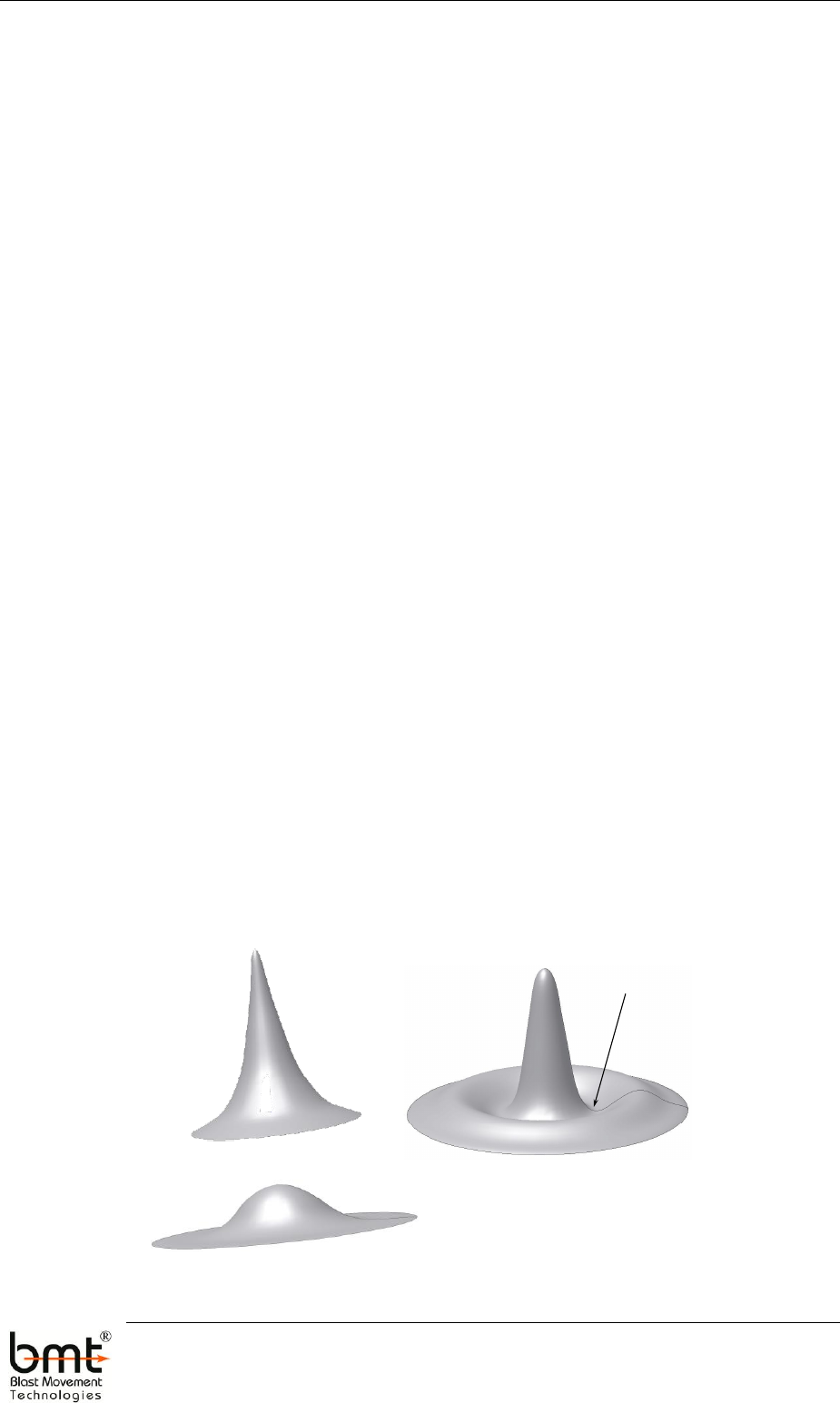
4.6 Sample Field Shapes
The diagrams below are representations of the signal strength (z-axis) measured on a horizontal
surface above a BMM®, where the BMM® is directly below the peak in each case. Three sample
shapes are provided for discussion.
When a BMM® is relatively close to the surface, the signal will be strong (top-left). There
is no mistaking this signal when it is encountered and the peak can be determined very
accurately (in the order of centimetres).
The shape of the signal gets broader (flatter) as the depth of the BMM® increases
(bottom-left) such that the signal changes less as the detector moves, i.e. have to move
it further to see a significant change in the signal. These can be more challenging to locate
and less accurate.
The shape on the right occurs when the BMM is less than about 5 m below the surface
and the detector is on a reasonably high range. It is easy to mistake the low “phantom
peak” for the real one and it is important for new users to be able to know when they
on the “phantom peak” rather than the real peak because it can waste a lot of time and
potentially mark the BMM® in the wrong location. With experience, it is relatively easy
to identify this scenario but will catch inexperienced operators, particularly if the
muckpile is steep and/or rough. The “phantom peak” is characterised by the following
features:
o It is not symmetrical. As you move towards the centre, it decreases faster than it
increases.
o The signal strength is several orders of magnitude less than the real one, i.e. a
couple of ranges higher on the detector.
o It drops to a null (background noise only) between the peaks.
o The signal rises very quickly from the null point.
o While standing at the phantom peak, if you rotate the Detector to validate the
location (Section 4.5), the signal will rise for at least one direction.
o The distance from the phantom peak to the base of the real peak is about 5 m so
if in doubt, take another few steps in the original direction (the null is about one
step away).
Strong Signal
Weak Signal
Stronger
(with null and phantom peak)
Null
BMM® System Manual – Monitoring Procedures
19
www.bmt.com.au
4.7 Procedures to Improve Efficiency
This section is aimed at the user that is comfortable with the basic techniques covered by the
previous section of the manual. It summarises a few techniques that have been established from
experienced users so that the BMM® detection process can be completed efficiently and
maximise the benefits from using the BMM® System.
When arriving at the muckpile, take a moment to review the terrain with respect to the expected
location of the BMM®s and plan an efficient search route. It is time well spent because it will
minimise the time spent looking for the BMM®s. Below are some general guidelines.
Always traverse perpendicular straight lines to minimise the detection time. Start by
walking at a safe pace while periodically glancing at the signal strength or listening to
the beeper, to check whether it is increasing. By following the simple procedure set out
in section 4.2, two perpendicular lines are usually sufficient to get within 1-2 m of the
BMM®. Now stand and sweep the Detector across one’s body to pinpoint the BMM®.
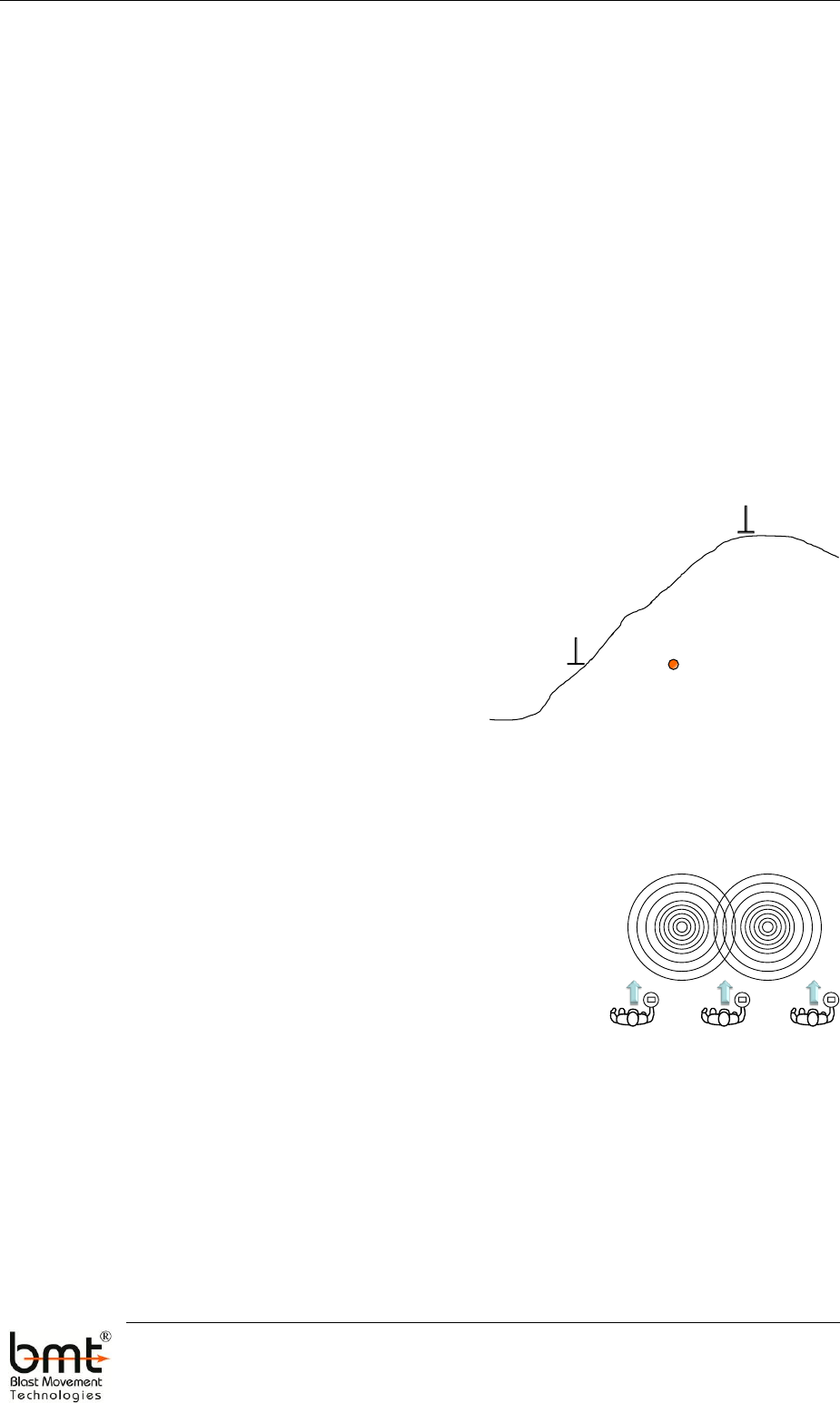
When working on slopes, start the search by
walking along the slope at approximately
constant elevation and the first maximum
signal will determine where to begin going up
or down the slope, which is slow due to the
staircase technique (Section 4.2). If feasible, be
above the BMM® (see diagram at right)
because the signal can be unusual when at a
similar elevation as the BMM®.
Start searching for a new BMM® with the Detector set to a range that is to 2–3 ranges
above what is expected to be the final range. For example, if the Detector was on range 7
when the BMM® was installed, then begin searching on range 9 or 10. Similarly, if the
BMM® was installed close to the surface and the installation range was 2, then begin
detection on range 5 or 6. Adjust with experience.
If the same coloured BMM®s are close such that the signals
are likely to overlap significantly, try and approach from the
outside of the target BMM®.
Start at an end of a blast pattern, especially for long, narrow
blasts.
4.8 Common Mistakes by New Users
When doing the initial walk looking for a signal, even though there is no signal evident,
they frequently stop and move the Detector to each side or rotate the Detector looking for
a signal. If you have just walked 10 m and seen no signal increase, then moving it a metre
to the right is unlikely to help – keep walking.
BMM® System Manual – Monitoring Procedures
20
www.bmt.com.au
Walking in a random path searching for a signal. Always walk approximately straight
lines.
If the signal increases when the Detector is rotated, it does not necessarily point at the
BMM®.
When doing the final accurate location – within a metre:
o Move the Detector across the body from side to side, not away from the body
(you can’t move it far enough).
o Move the Detector in a straight line across the body, not an arc.
o Keep feet firmly on the ground. If you take a step (or shuffle) to reach further, it
is likely that your elevation of the detector will change.
o Always turn your body 90 and stand firm, to scan the perpendicular direction.
The objective is to scan a ‘’ not a ‘’.
5 DEPTH CALIBRATION
5.1 Overview
The received signal strength decreases as the distance from the transmitter increases. This
relationship is used to calculate the post-blast depth of the BMM® from the measured signal
strength. The measured signal strength will be affected primarily by:
Detector
Transmitter
Rock type — the difference between rock types at a site is usually relatively small except
if there are iron-rich minerals.
Electromagnetic interference – normally not a problem on the blast (see Section 3.2).
A depth calibration should be conducted for each site to provide a site-specific relationship and
then repeated if any of the above items change significantly. BMT will notify users if equipment
changes require a new calibration.
5.2 Procedure
While it is possible to do this with one person, it is much more efficient with two – one to hold
the measuring tape and the second to use the Detector. The following procedure can be used as
a guide.
a) Locate a suitable hole — ideally, at least as deep as the maximum depth that will be
monitored (including swell).
BMM® System Manual – Monitoring Procedures
21
www.bmt.com.au
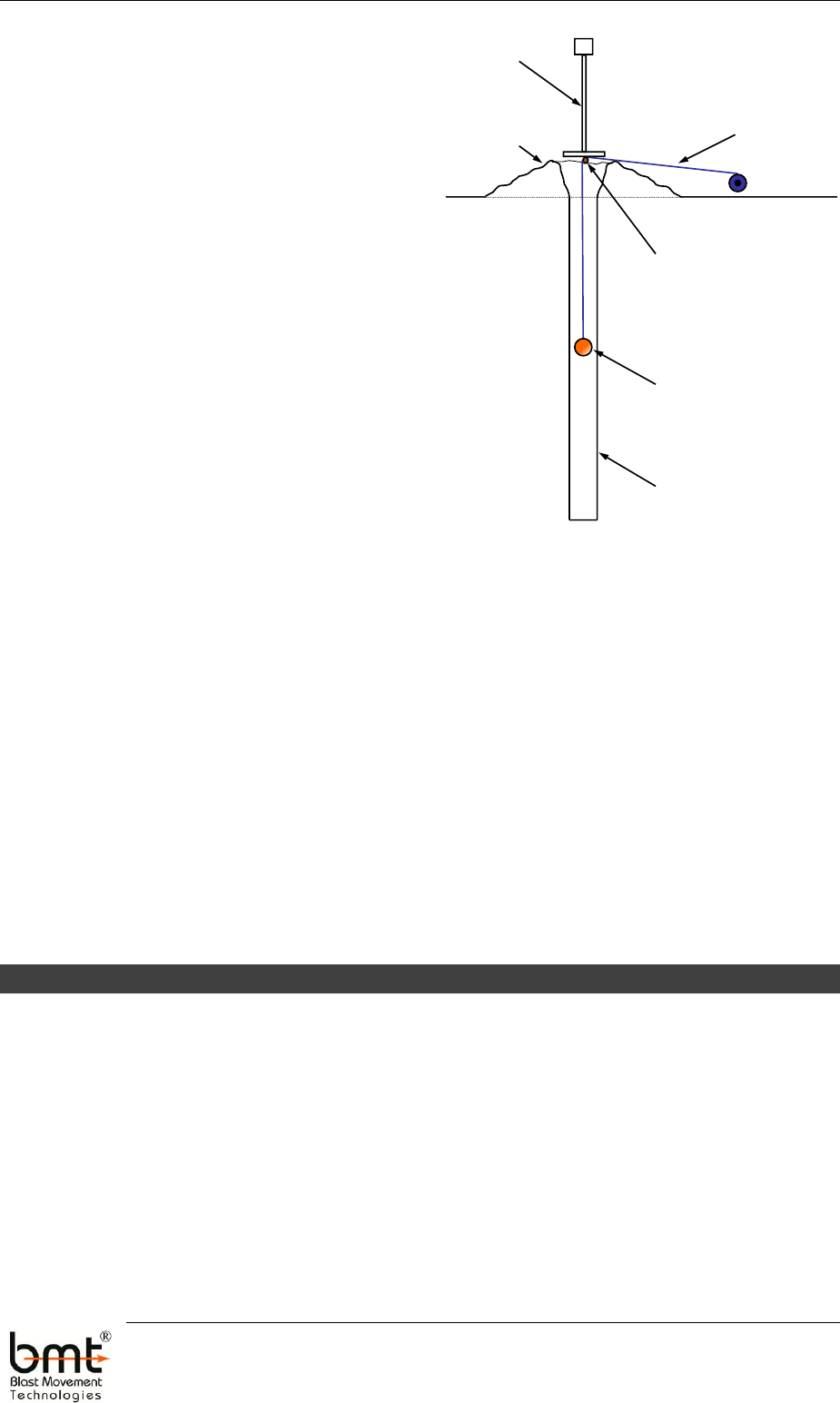
b) Place a non-metallic pole across the
centre of the hole to form a stable
reference point to take measurements,
e.g. shovel handle or stake.
c) Attach the end of a measuring tape to a
BMM®, e.g. self-tapping screw or tape.
d) Start the detector and on the
Controller’s home screen, select Menu
> Depth Calibration.
e) Type the name, initial depth and
increment into the relevant boxes and
press OK. Suitable increments are 1 m
for higher benches or 0.5 m for lower
benches.
f) Lower the BMM® into the hole to the
starting depth, typically 1 m.
g) Select Store Reading on the Controller to record data.
h) Lower BMM® by increment amount and record data. Repeat until the bottom of the hole.
If there is no holes deep enough to cover the expected maximum,
including heave, the depth can still be calculated, albeit with a very
small decrease in the accuracy. The Depth Calculation algorithm can
project beyond the measured calibration set or another, larger
calibration set can be used.
5.3 Using the Data
The Depth Calibration data is used in the BMM Explorer software to calculate the post-blast
depth of each BMM®. Refer to the software manual for more information.
6 POTENTIAL HAZARDS
Monitoring blast movement with the BMM® System can be conducted safely if the correct
procedures are followed. Each operation is unique and a Job Safety Analysis (JSA/JSEA) should
be conducted to establish safe operating procedures for your operation.
The following items can be used to guide this process:
A blasted muckpile is likely to have unstable slopes, loose rocks of various sizes, uneven
ground and cavities. There is a risk of personal injury due to falling, tripping and rock
impact.
Tape Measure
Detector
BMM
Suitable non-metal support
(eg. stake)
Blast hole
Drill Cuttings
BMM® System Manual – Monitoring Procedures
22
www.bmt.com.au
Move slowly and look where you are going. It is not necessary to concentrate on
the Detector screen while moving. While doing the initial pass across the
muckpile, move at a safe pace while listening to the beeper and periodically
glancing at the signal strength on the display, stopping to adjust the range as
necessary, until you get close to the location of the BMM® and begin to ‘pin-point’
it. At this stage you should be standing still (or at least moving very slowly) so
the hazard is managed. Using the BMM® Detector is no more hazardous than
surveying or marking out ore polygons.
Be aware of your surroundings at all times.
Take care when working below potentially unstable rocks.
Be careful stepping on rocks that may be unstable and roll under-foot — test it if
in doubt.
Maintain a safe distance from pit edges — it is better to lose a BMM® than lose
your life!
Always wear appropriate Personal Protective Equipment when installing or locating the
BMM®s. Lace-up safety boots with good ankle support is especially important when
walking on the post-blast muckpile. Drills or other noisy equipment will often be nearby
so hearing protection may also be required.
Follow the site procedures for accessing a blast pattern, especially if explosive loading
has commenced.
If the monitoring holes are backfilled manually, use correct shovelling technique to
avoid back injury.
View the blast from a safe location as directed by the blast controller.
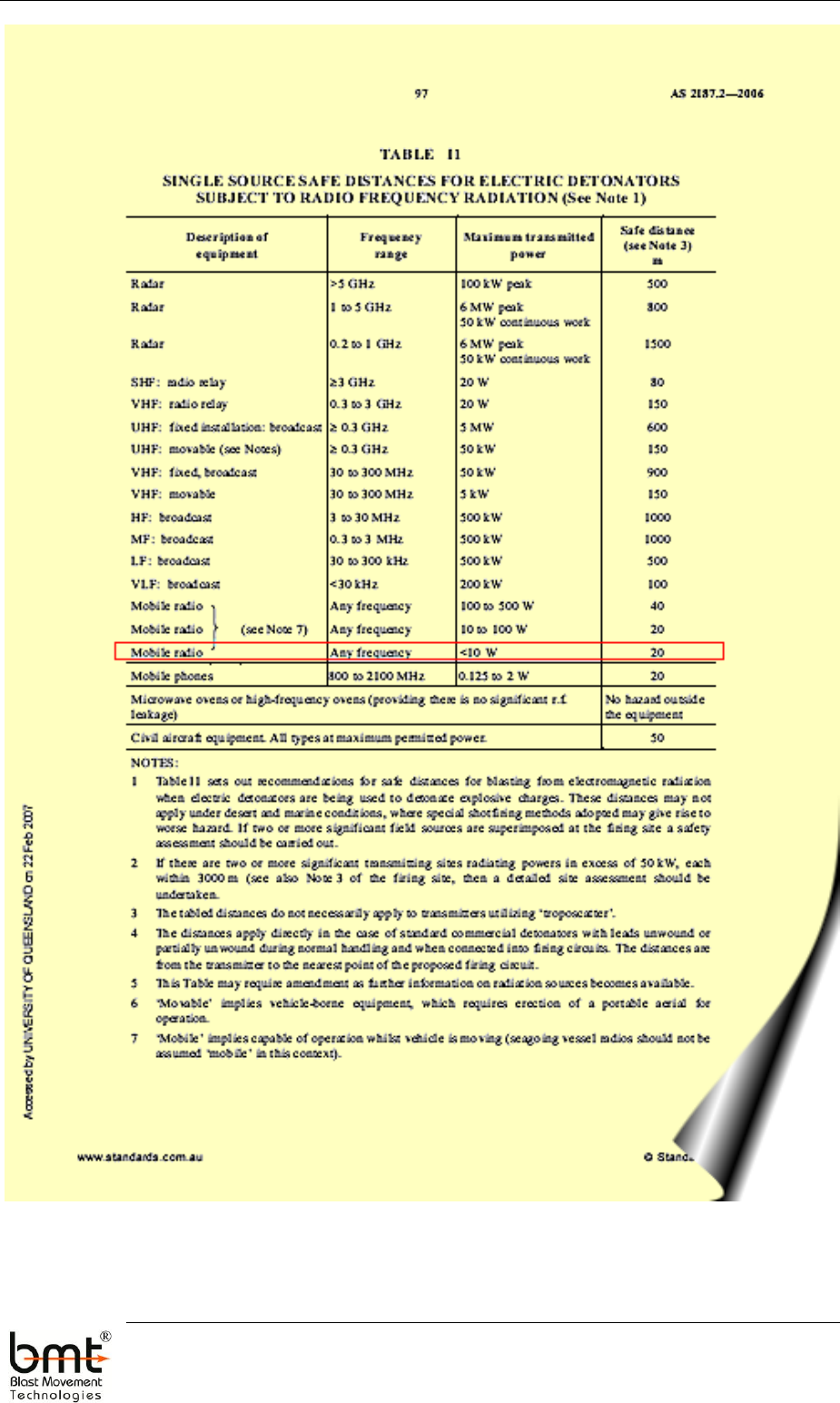
Using BMM®s Near Electric Detonators
Electric detonators are potentially susceptible to initiation from radio frequency radiation so
there are regulations to ensure their safe use. The measured output power of the BMM®’s
transmitter is calculated to be approximately 0.003 watt or 3 mW (EIRP). They must be used in
accordance with the relevant regulations in the jurisdiction where they are being used. For
example, according to Australian Standard, AS 2187.2--2006, “Explosives--Storage and Use, Part
2: Use of Explosives”, the safe distance to maintain between a BMM® and an electric detonator is
20 m (see relevant table below).
Note: This does not include electronic detonators since they are intrinsically safe from
electro-magnetic fields.
BMM® System Manual – Monitoring Procedures
23
www.bmt.com.au
Copyright 2005-2012 Blast Movement Technologies
All rights reserved.
This document contains proprietary information that is protected by copyright. Apart from
any use as permitted under the Copyright Act 1968, no part may be reproduced by any
process without written permission from Blast Movement Technologies, PO Box 73,
Bellbowrie, Queensland, Australia.
The BMT logo and BMM® are the registered trademarks of Blast Movement Technologies,
ABN 57 105 683 470.
All BMM®s comply with part 15 of the FCC rules. Operation is subject to the following two
conditions: (1) These devices may not cause harmful interference, and (2) These devices
must accept any interference received, including interference that may cause undesired
operation.
Changes or modifications not expressly approved by the manufacturer could void the
user’s authority to operate the equipment.
DISCLAIMER
Every effort has been made to ensure the procedures set out in this manual will ensure the
best possible results from the Blast Movement Monitoring System. However Blast Movement
Technologies makes no guarantee that all BMM®s will be located after a blast because this is
influenced by many factors beyond our control.
Please read all relevant operating manuals prior to using the BMM® System.

Blast Movement Technologies
PO Box 73
Bellbowrie Qld 4070
AUSTRALIA
CONTACT DETAILS:
www.bmt.com.au
Phone: +61 (0)7 3202 9499
Fax: +61 (0)7 3202 9472
Email: office@bmt.com.au