Microchip Technology RN41N Class 1 Bluetooth 2.1 module User Manual rn 41 ds v3 3rx
Microchip Technology Inc Class 1 Bluetooth 2.1 module rn 41 ds v3 3rx
Users Manual
www.rovingnetworks.com
Version 3.3r 10/9/2012 1
RN-41-DS
RN-41/RN-41-N Class 1 Bluetooth Module
Features
• Fully qualified Bluetooth® version 2.1 module, supports version 2.1 +
Enhanced Data Rate (EDR)
• Backwards-compatible with Bluetooth version 2.0, 1.2, and 1.1
• Postage stamp sized form factor, 13.4 mm x 25.8 mm x 2 mm
• Low power (30 mA connected, < 10 mA sniff mode)
• UART (SPP or HCI) and USB (HCI only) data connection interfaces
• Sustained SPP data rates: 240 Kbps (slave), 300 Kbps (master)
• HCI data rates: 1.5 Mbps sustained, 3.0 Mbps burst in HCI mode
• Embedded Bluetooth stack profiles included (requires no host stack):
GAP, SDP, RFCOMM, and L2CAP protocols, with SPP and DUN profile
support
• Bluetooth SIG qualified, end product listing
• Castellated SMT pads for easy and reliable PCB mounting
• Class 1 high power amplifier with on board ceramic RF chip antenna
(RN-41) or without antenna (RN-41-N)
• Certifications: FCC, ICS, CE
• Environmentally friendly, RoHS compliant
Applications
• Cable replacement
• Barcode scanners
• Measurement and monitoring systems
• Industrial sensors and controls
• Medical devices
• Asset tracking
Description
The RN-41 module is a small form factor, low power, class 1 Bluetooth radio
that is ideal for designers who want to add wireless capability to their
products without spending significant time and money developing Bluetooth-
specific hardware and software. The RN-41 supports multiple interface
protocols, is simple to design in, and is fully certified, making it a complete
embedded Bluetooth solution. With its high-performance, on-chip antenna
and support for Bluetooth EDR, the RN-41 delivers up to a 3-Mbps data rate
for distances up to 100 meters. The RN-41 is also available without an
antenna (RN-41-N).
Figure 1. RN-41 Block Diagram
www.rovingnetworks.com
Version 3.3r 10/3/2012 2
RN-41-DS
OVERVIEW
• Baud rate speeds: 1,200 bps up to 921 Kbps, non-standard baud rates can be programmed
• Class 1 radio, 330’ (100 m) range, 15 dBm output transmitter, -80 dBm typical receive sensitivity
• Frequency 2,402 ~ 2,480 MHz
• FHSS/GFSK modulation, 79 channels at 1-MHz intervals
• Secure communication, 128-bit encryption
• Error correction for guaranteed packet delivery
• Configuration via the local UART and over-the-air RF
• Auto-discovery/pairing does not require software configuration (supports instant cable replacement)
• Auto-connect master, I/O pin (DTR), and character-based trigger modes
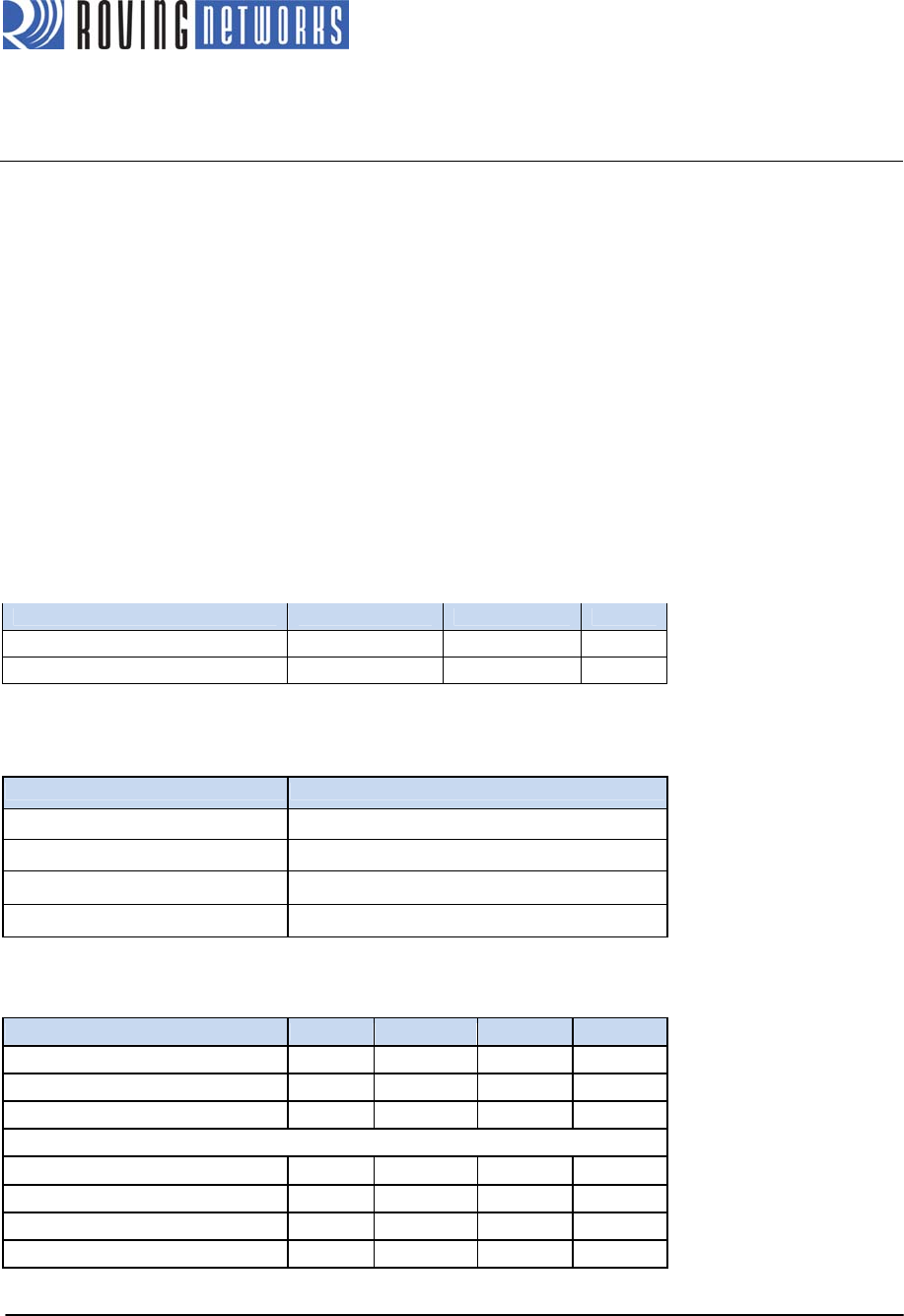
The module’s moisture sensitivity level (MSL) is 1. Table 1 shows the module’s size and weight.
Table 1. Module Size & Weight
Parameter RN-41 RN-41-N Units
Size 13.4 x 25.8 x 2 13.4 x 19 x 2 mm
Weight 0.055 0.020 Oz.
Tables 2 through 5 provide detailed specifications for the module.
Table 2. Environmental Conditions
Parameter Value
Temperature Range (Operating) -40o C ~ 85o C
Temperature Range (Storage) -40o C ~ 85o C
Relative Humidity (Operating) 90%
Relative Humidity (Storage) 90%
Table 3. Electrical Characteristics
Parameter Min. Typ. Max. Units
Supply Voltage (DC) 3.0 3.3 3.6 V
RX Supply Current 35 60 mA
TX Supply Current 65 100 mA
Average Power Consumption
Standby/Idle (Default Settings) 25 mA
Connected (Normal Mode) 30 mA
Connected (Low-Power Sniff) 8 mA
Standby/Idle (Deep Sleep Enabled) 250 2.5 mA
www.rovingnetworks.com
Version 3.3r 10/3/2012 3
RN-41-DS
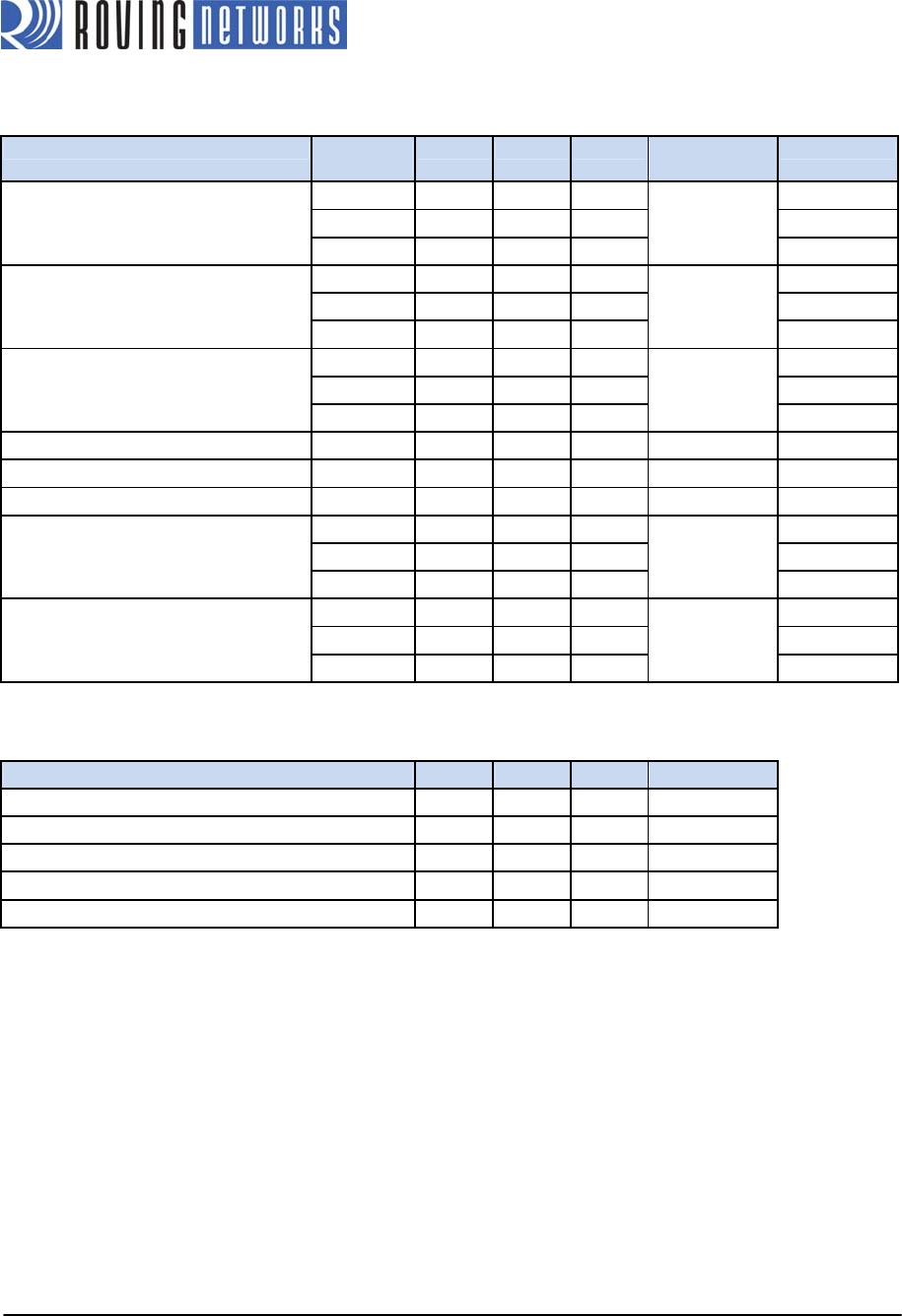
Table 4. Radio Characteristics
Parameter Frequency
(GHz)
Min. Typ. Max. Bluetooth
Specification
Units
2.402 - -80 -86 dBm
2.441 - -80 -86 dBm
Sensitivity at 0.1% BER
2.480 - -80 -86
≤ -70
dBm
2.402 15.0 16.0 dBm
2.441 15.0 16.0 dBm
RF Transmit Power
2.480 15.0 16.0
≤ 20
dBm
2.402 - 5 75 kHz
2.441 - 5 75 kHz
Initial Carrier Frequency Tolerance
2.480 - 5 75
75
kHz
20-dB Bandwidth for Modulated Carrier - 900 1000 ≤ 1000 kHz
Drift (Five Slots Packet) - 15 - 40 kHz
Drift Rate - 13 - 20 kHz
2.402 140 165 175 kHz
2.441 140 165 175 kHz
∆f1avg Maximum Modulation
2.480 140 165 175
> 140
kHz
2.402 140 190 - kHz
2.441 140 190 - kHz
∆f2avg Minimum Modulation
2.480 140 190 -
115
kHz
Table 5. Digital I/O Characteristics
3.0 V ≤ VDD ≤ 3.3 V Min. Typ. Max. Units
Input Logic Level Low -0.4 - +0.8 V
Input Logic Level High 0.7 VDD - VDD + 0.4 V
Output Logic Level Low - - 0.2 V
Output Logic Level High VDD - 0.2 - - V
All I/O pins (Except reset) Default to Weak Pull Down +0.2 +1.0 +5.0 uA
www.rovingnetworks.com
Version 3.3r 10/3/2012 4
RN-41-DS
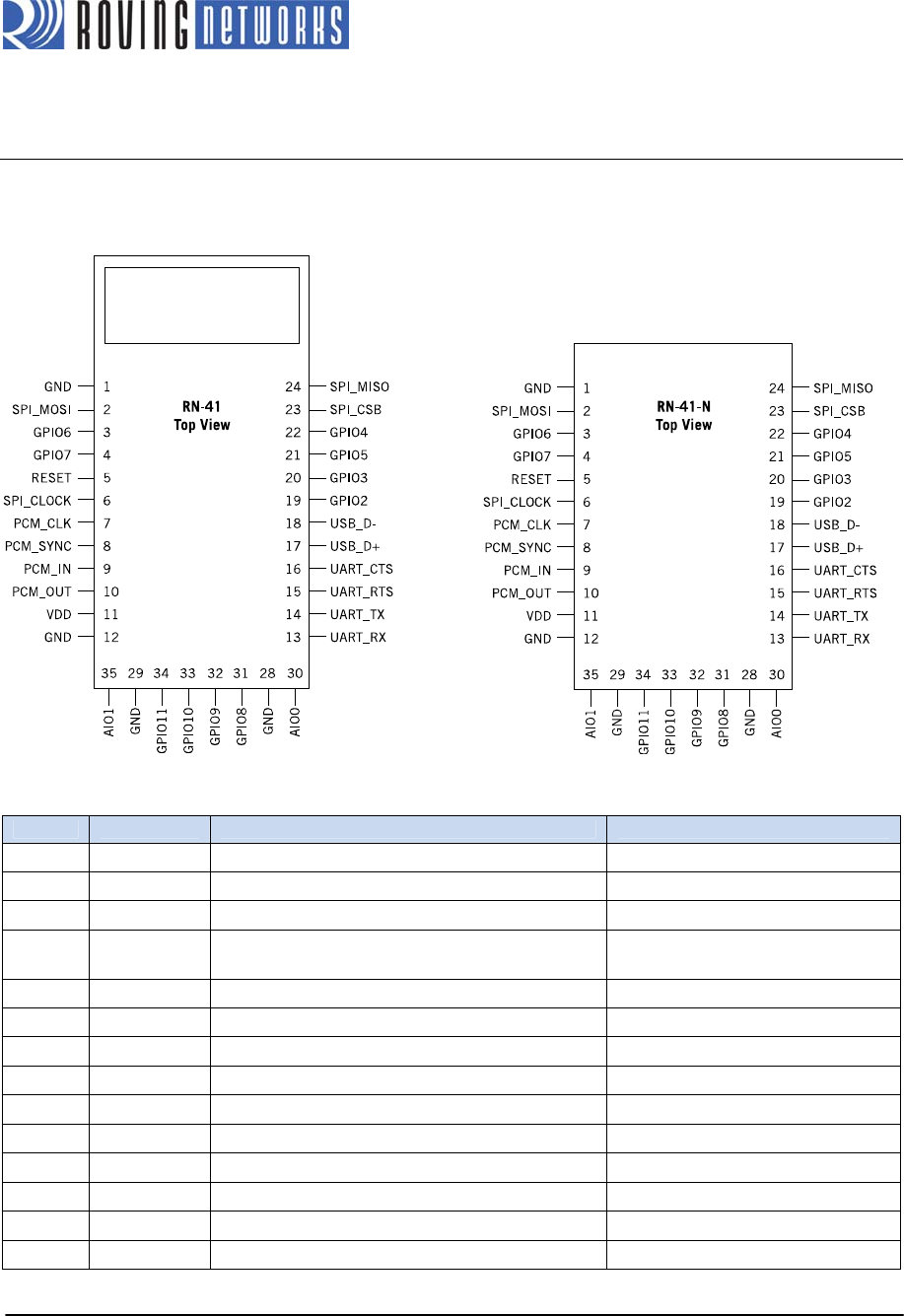
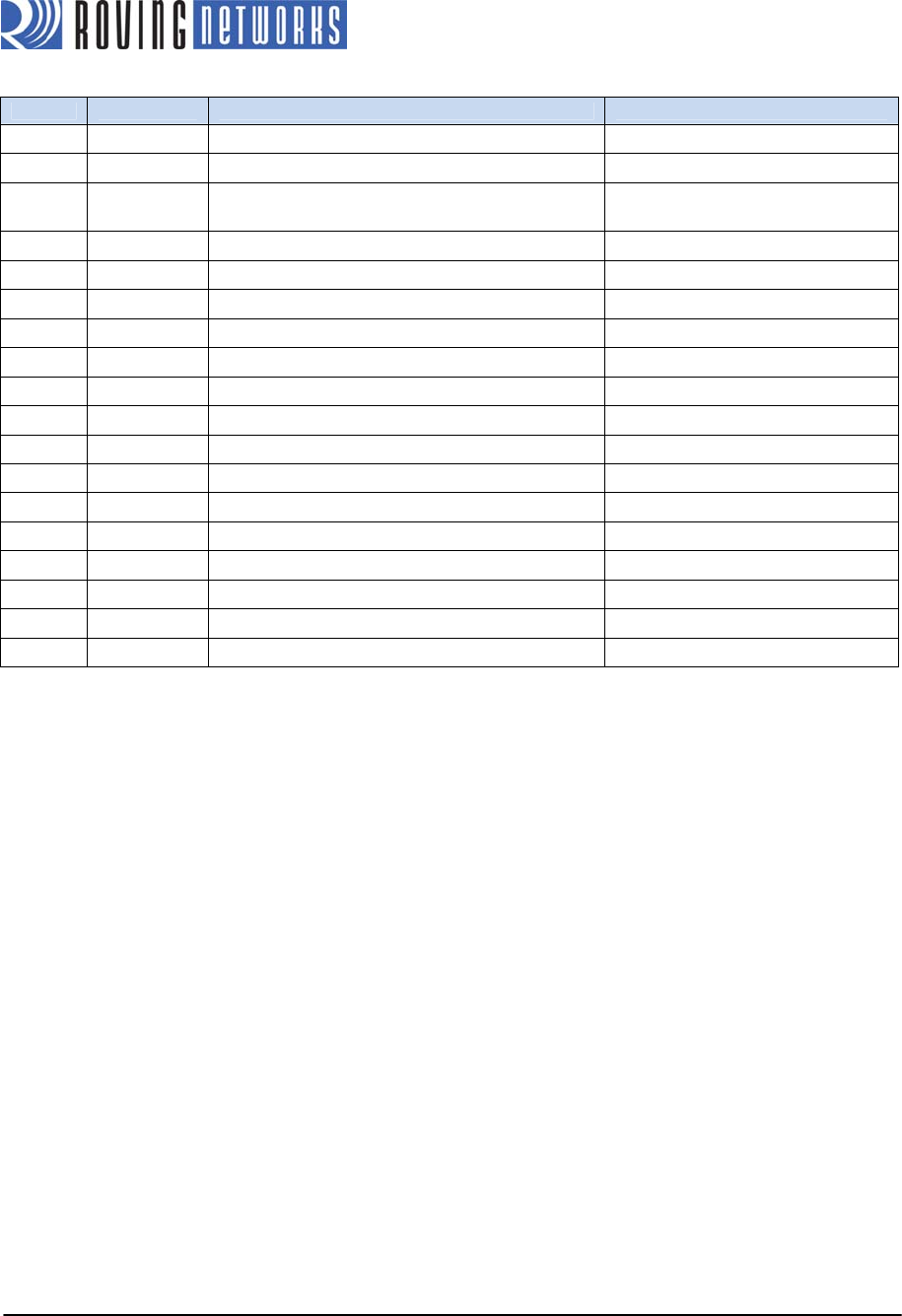
Figure 2 shows the pinout and Table 6 describes the pins.
Figure 2. RN-41/RN-41-N Pinout
Table 6. Pin Description
Pin Name Description Default
1 GND Ground –
2 SPI_MOSI Programming only No connect
3 GPIO6 Set Bluetooth master (high = auto-master mode) Input to RN-41with weak pulldown
4 GPIO7 Set baud rate (high = force 9,600, low = 115 K
or firmware setting)
Input to RN-41 with weak pulldown
5 RESET Active-low reset Input to RN-41 with 1K pullup
6 SPI_CLK Programming only No Connect
7 PCM_CLK PCM interface No Connect
8 PCM_SYNC PCM interface No Connect
9 PCM_IN PCM interface No Connect
10 PCM_OUT PCM interface No Connect
11 VDD 3.3-V regulated power input –
12 GND Ground –
13 UART_RX UART receive input Input to RN-41
14 UART_TX UART transmit output High level output from RN-41
www.rovingnetworks.com
Version 3.3r 10/3/2012 5
RN-41-DS
Pin Name Description Default
15 UART_RTS UART RTS, goes high to disable host transmitter Low level output from RN-41
16 UART_CTS UART CTS, if set high, it disables transmitter Low level input to RN-41
17 USB_D+ USB port 1.5 K pullup activated when USB
port is ready (~500 ms after reset)
18 USB_D- USB port –
19 GPIO2 Status, high when connected, low otherwise Output from RN-41
20 GPIO3 Auto discovery = high Input to RN-41 with weak pulldown
21 GPIO5 Status, toggles based on state, low on connect Output from RN-41
22 GPIO4 Set factory defaults Input to RN-41 with weak pulldown
23 SPI_CSB Programming only No connect
24 SPI_MISO Programming only No connect
25 - 27 NC RF pad, keep all traces and planes clear –
28 - 29 GND Ground –
30 AIO0 Optional analog input Not used
31 GPIO8 Status (RF data RX/TX) Output from RN-41
32 GPIO9 I/O Input to RN-41 with weak pulldown
33 GPIO10 I/O (remote DTR signal) Input to RN-41 with weak pulldown
34 GPIO11 I/O (remote RTS signal) Input to RN-41 with weak pulldown
35 AIO1 Optional analog input Not Used
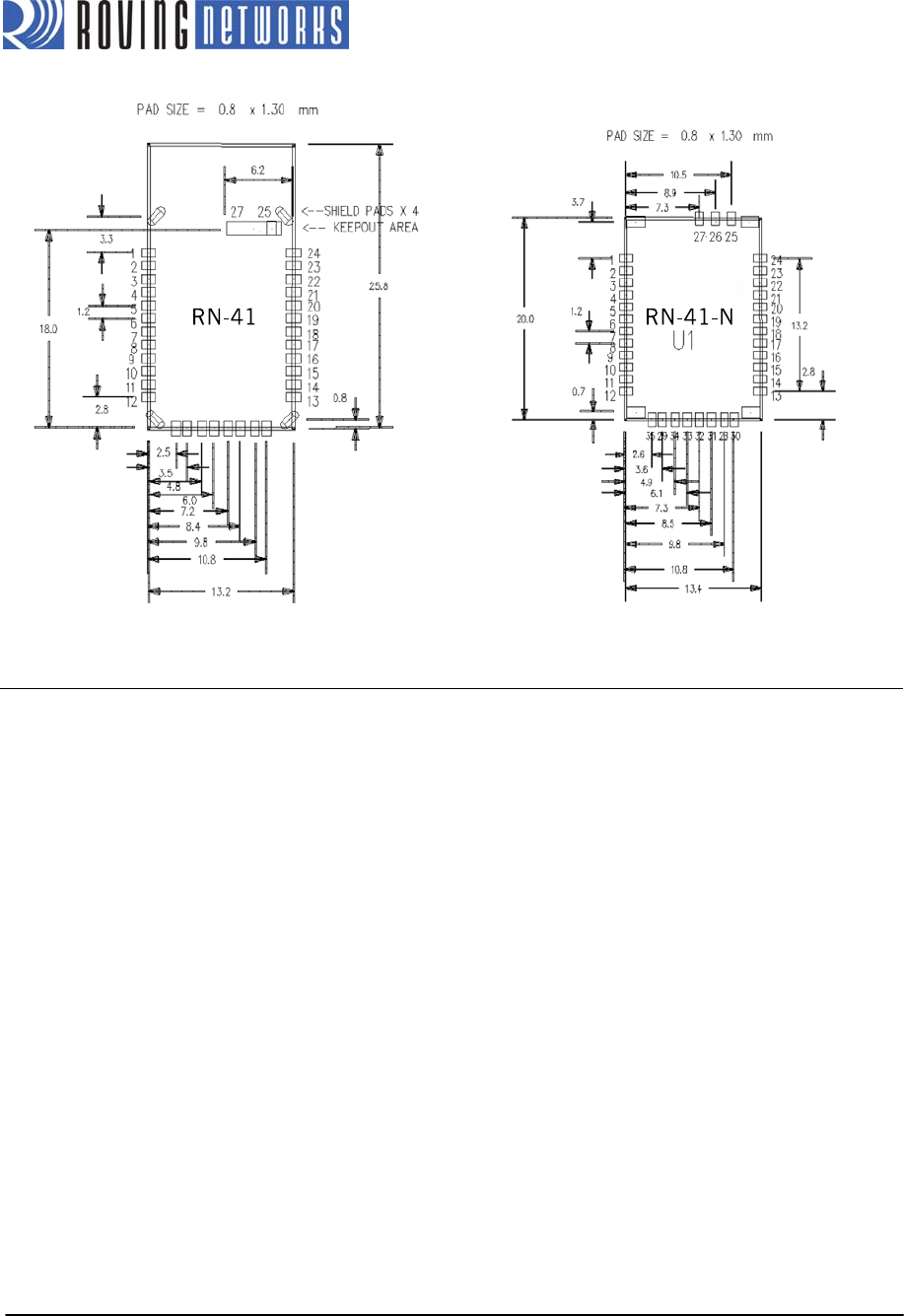
Figure 3 shows the module’s physical dimensions.
Figure 3. RN-41/RN-41-N Physical Dimensions
www.rovingnetworks.com
Version 3.3r 10/3/2012 6
RN-41-DS
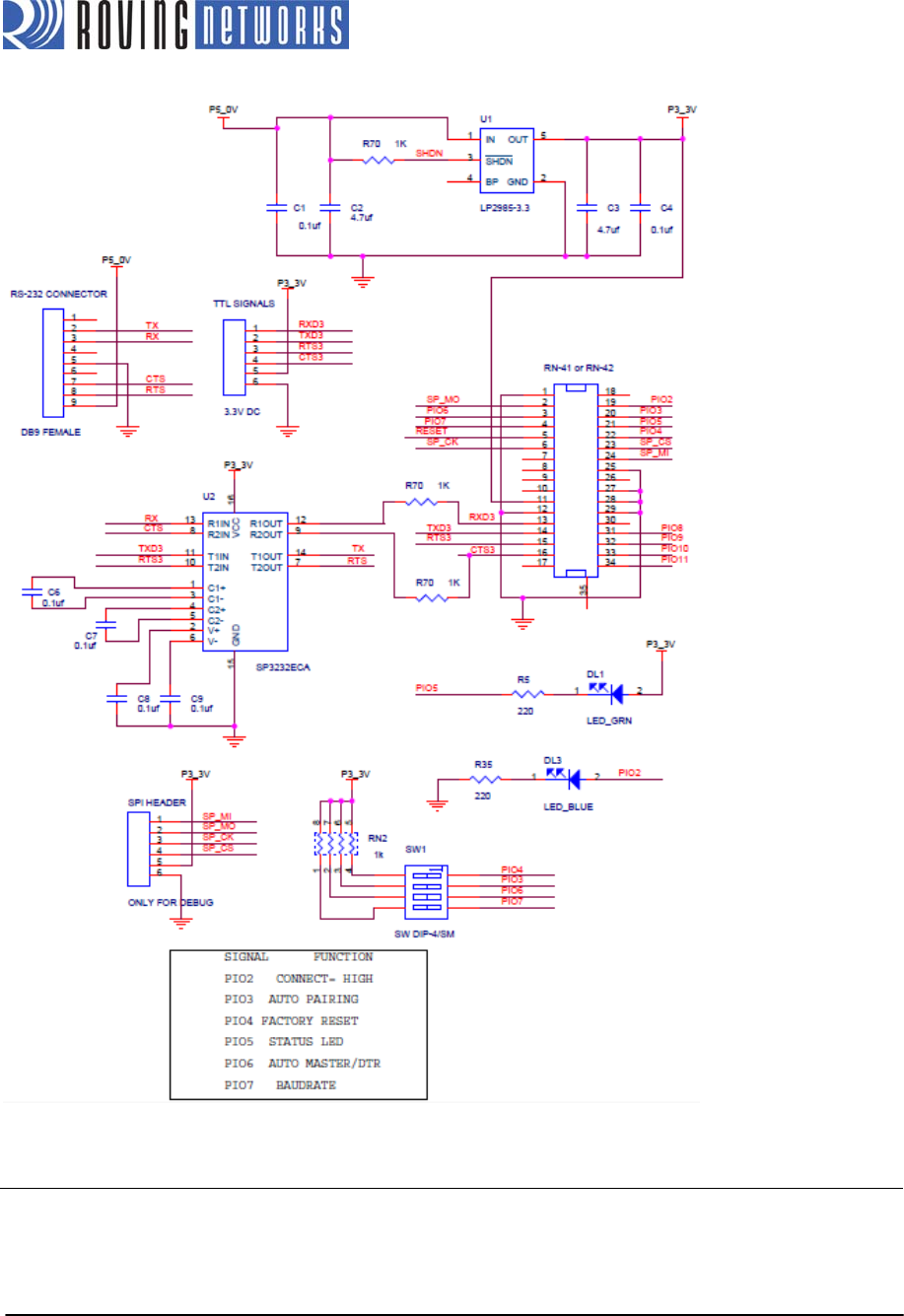
TYPICAL APPLICATION SCHEMATIC
Figure 4 shows a typical application schematic.
Figure 4. Application Schematic
www.rovingnetworks.com
Version 3.3r 10/3/2012 7
RN-41-DS
DESIGN CONCERNS
The following sections provide information on designing with the RN-41 module, including radio interference, factory reset, solder reflow profile, connection status,
etc.
www.rovingnetworks.com
Version 3.3r 10/3/2012 8
RN-41-DS
Reset Circuit
The RN-41 contains a 1k pullup to VCC, and the reset polarity is active low. The module’s reset pin has an optional power-on-reset circuit with a delay, which should
only be required if the input power supply has a very slow ramp or tends to bounce or have instability on power up. Often a microcontroller or embedded CPU I/O is
available to generate the reset once power is stable. If not, designers can use one of the many low-cost power supervisor chips currently available, such as the
MCP809, MCP102/121, and Torex XC61F.
Factory Reset Using GPIO4
Roving Networks recommends that designers connect the GPIO4 pin to a switch, jumper, or resistor so it can be accessed. This pin can be used to reset the module
to its factory default settings, which is critical in situations where the module has been misconfigured. To reset the module to the factory defaults, GPIO4 should be
high on power-up and then toggle low, high, low, high with a 1 second wait between the transitions.
Connection Status
GPIO5 is available to drive an LED, and it blinks at various speeds to indicate status (see Table 7). GPIO2 is an output that directly reflects the connection state as
shown in Table 8.
Table 7. GPIO5 Status
GPIO5 Status Description
Toggle at 1 Hz The module is discoverable and waiting for a connection.
Toggle at 10 Hz The module is in command mode.
High The module is connected to another device over Bluetooth.
Table 8. GPIO2 Status
GPIO2 Status Description
High The module is connected to another device over Bluetooth.
Low The module is not connected over Bluetooth.
HCI Mode
Roving Networks offers the Host Controller Interface (HCI) mode in addition to the standard operational mode of its Bluetooth modules (standard mode refers to the
on-board stack running on the module).
In HCI mode, the on-board stack is bypassed and the module is put in a state that runs the Bluetooth baseband. The HCI provides a command reference interface to
the baseband controller and the link manager, and provides access to the hardware status and control registers. This interface provides a uniform method for
accessing the Bluetooth baseband capabilities.
In this mode, the Bluetooth stack is no longer on-board the module. It is offloaded to the interfacing host processor. The Bluetooth module is used as a radio,
performing the lower level MAC functionalities, while the application stack runs on the host processor.
Using the module in HCI mode allows designers to implement profiles that are not natively supported on the Bluetooth module.
NOTE: HCI mode requires a separate firmware build that must be loaded into the module’s flash at the factory. Is not upgradeable in the field.
Roving Networks offers HCI mode in two hardware interfaces:
• HCI over UART
• HCI over USB
www.rovingnetworks.com
Version 3.3r 10/3/2012 9
RN-41-DS
HCI over UART
In this mode, the hardware interface between the host processor and the Bluetooth module is the UART. You must interface the flow control signals between the host
processor and the Bluetooth module for the HCI interface to work. Failure to do so can cause the host processor and the Bluetooth module to become out of sync
and break the Bluetooth link.
HCI over USB
In this mode, the hardware interface between the host processor and the Bluetooth module is the USB. In this architecture, the Bluetooth module is the USB slave
and the host processor is the USB host.
Using the USB interface offers the advantage of a faster data link between the Bluetooth module and the host processor. With this architecture, it is possible to
achieve Bluetooth’s theoretical maximum throughput of 3 Mpbs.
Using the SPI Bus to Upgrade the Flash Memory
While not required, this bus is very useful for configuring the Bluetooth modules’ advanced parameters. The bus is required when upgrading the module’s firmware.
The typical application schematic shown in Figure 4 shows a 6-pin header that can be implemented to gain access to this bus. A minimum-mode version might simply
use the SPI signals (4 pins) and obtain ground and VCC from elsewhere in the design.
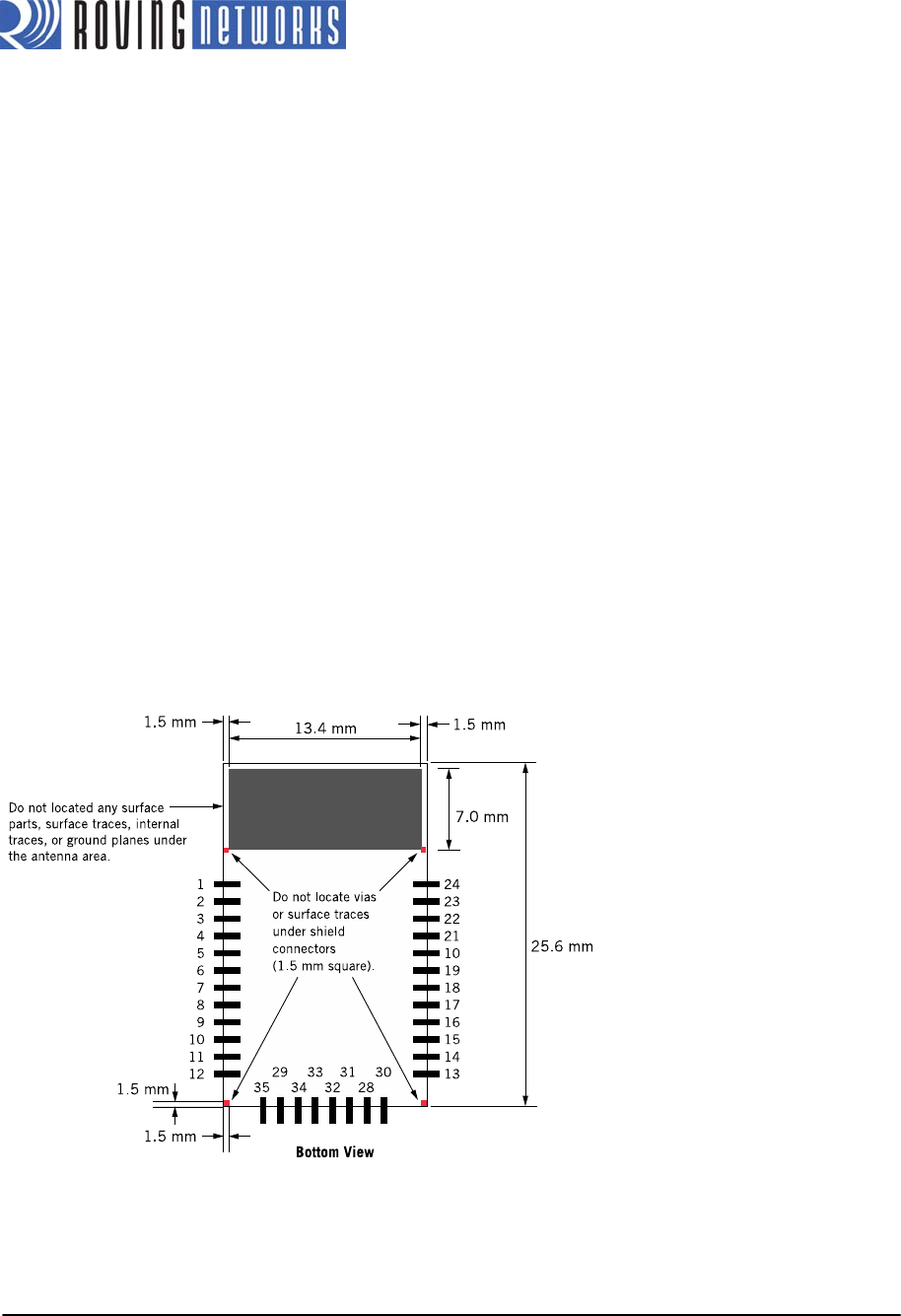
Minimizing Radio Interference
When laying out the carrier board for the RN-41 module, the areas under the antenna and shielding connections should not have surface traces, ground planes, or
exposed vias (see Figure 5). For optimal radio performance, the RN-41 module’s antenna end should protrude at least 5 mm beyond any metal enclosure.
Figure 5. Minimizing Radio Interference
Because the RN-41-N does not contain an antenna, it does not carry regulatory approvals.

www.rovingnetworks.com
Version 3.3r 10/3/2012 10
RN-41-DS
If designers use Roving Networks recommended design, they can file for a permissible antenna change and use Roving Networks’ regulatory approvals. Roving
Networks recommends the Yageo chip antenna for the RN-41-N module. For detailed information on this antenna, refer to the Yageo chip antenna data sheet on the
Support page of the Roving Networks website at http://www.rovingnetworks.com/Support_Overview.
If designers choose to use another antenna, they must go through the regulatory approval process.
Solder Reflow Profile
The lead-free solder reflow temperature and times are:
•
Temperature
—230° C, 30 - 40 seconds, peak 250° C maximum
•
Preheat temperature
—165° ± 15° C, 90 to 120 seconds
•
Time
—Single pass, one time
www.rovingnetworks.com
Version 3.3r 10/3/2012 11
RN-41-DS
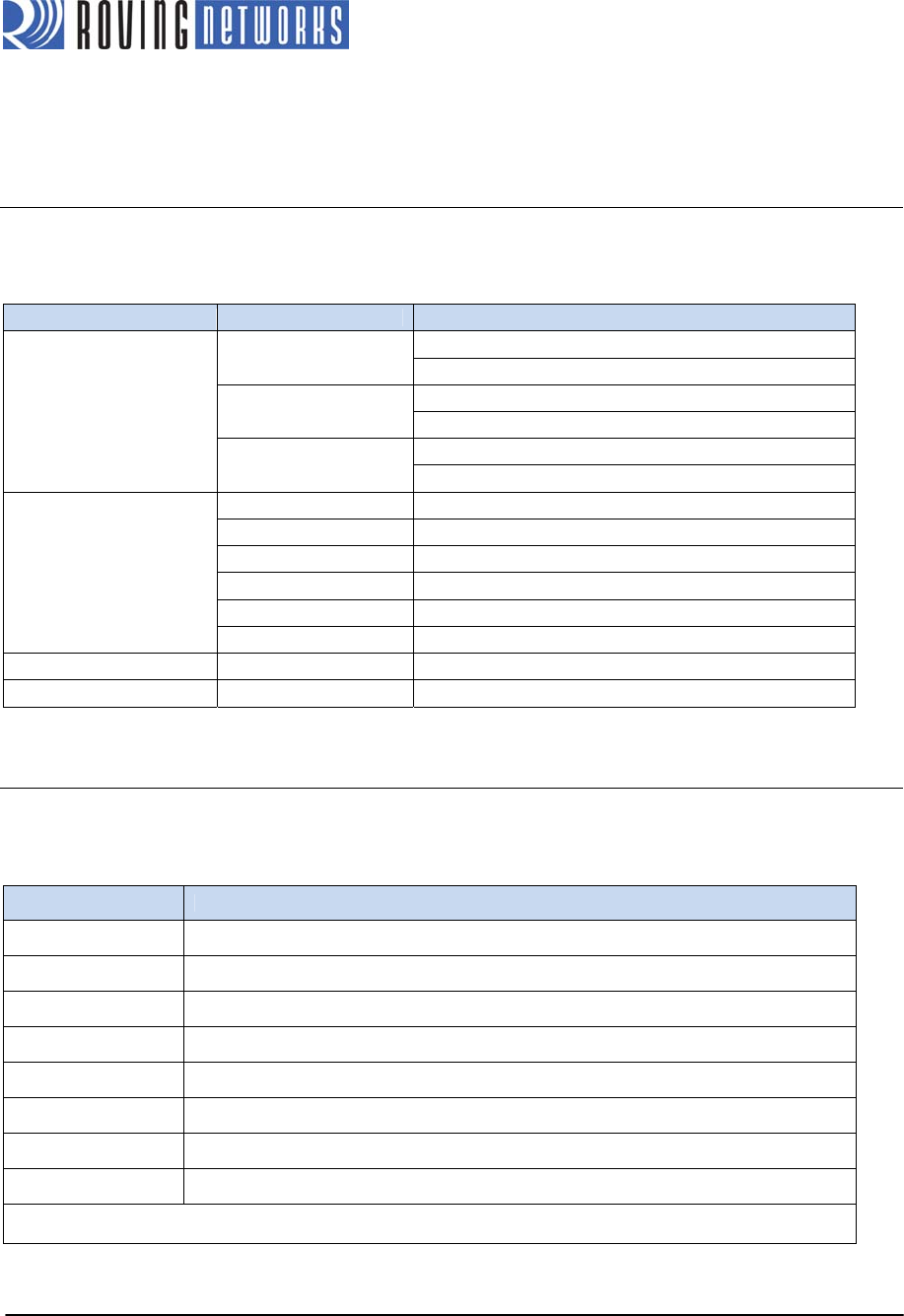
COMPLIANCE INFORMATION
Table 9 describes the module’s compliance information.
Table 9. Compliance Information (RN-41 Only)
Category Country Standard
FCC CFR47 Part 15 C, para 15.247 USA
FCC ID: T9J-R41-1
EN 300 328-1 Europe
EN 300 328-2 2.4GHz
IC RSS-210 low power comm. device
Radio
Canada
IC Canada ID: 6514A-RN411
USA FCC CFR47 Part 15 subclass B
Europe EN 55022 Class B radiated
EN61000-4-2 ESD immunity
EN61000-4-3 radiated field
EN61000-4-6 RF immunity
EMC
EN61000-4-8 power magnetic immunity
Bluetooth LISTED B013180
Environmental RoHS RoHS compliant
ORDERING INFORMATION
Table 10 provides ordering information.
Table 10. Ordering Information
Part Number Description
RN-41 Standard Application firmware (SPP/DUN Master and Slave).
RN-41-HCI HCI firmware (HCI over H4 UART).
RN-41-USB USB firmware (HCI over USB port, slave device at 12-Mbps rate).
RN-41-HID HID firmware supporting HID device and SPP profiles.
RN-41-N Standard application firmware (SPP and DUN) without antenna.
RN-41-N-HCI HCI firmware (HCI over H4 UART) without antenna.
RN-41-N-USB USB firmware (HCI over USB port, slave device at 12-Mbps rate) without antenna.
RN-41-N-HID HID firmware supporting HID device and SPP profiles without antenna.
For other configurations, contact Roving Networks directly.

www.rovingnetworks.com
Version 3.3r 10/3/2012 12
RN-41-DS
Go to http://www.rovingnetworks.com for current pricing and a list of distributors carrying Roving Networks products.

www.rovingnetworks.com
Version 3.3r 10/3/2012 13
RN-41-DS
Federal Communication Commission Interference Statement
This equipment has been tested and found to comply with the limits for a Class B digital device,
pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable
protection against harmful interference in a residential installation.
This equipment generates, uses and can radiate radio frequency energy and, if not installed and
used in accordance with the instructions, may cause harmful interference to radio
communications. However, there is no guarantee that interference will not occur in a particular
installation. If this equipment does cause harmful interference to radio or television reception,
which can be determined by turning the equipment off and on, the user is encouraged to try to
correct the interference by one of the following measures:
. Reorient or relocate the receiving antenna.
. Increase the separation between the equipment and receiver.
. Connect the equipment into an outlet on a circuit different from that to which the receiver is
connected.
. Consult the dealer or an experienced radio/TV technician for help.
FCC Caution: To assure continued compliance, any changes or modifications not expressly
approved by the party responsible for compliance could void the user's authority to operate this
equipment. (Example - use only shielded interface cables when connecting to computer or
peripheral devices).
End Product Labeling
This transmitter module is authorized only for use in devices where the antenna may be installed
such that 20 cm may be maintained between the antenna and users. The final end product must
be labeled in visible area with the following: “Contains FCC ID: _OA3-RA41N_”
”
End Product Manual Information
The user manual for end users must include the following information in a prominent location
“IMPORTANT NOTE: To comply with FCC RF exposure compliance requirements, the antenna
used for this transmitter must be installed to provide a separation distance of at least 20cm from
all persons and must not be colocated or operating in conjunction with any other antenna or
transmitter.” This device complies with part 15 of the FCC rules. Operation is subject to the
following two conditions (1) This device may not cause harmful interference and (2) This
device must accept any interference received, including interference that may cause undesired
operation.

www.rovingnetworks.com
Version 3.3r 10/3/2012 14
RN-41-DS
IMPORTANT NOTE: In the event that these conditions can not be met (for example certain
laptop configurations or colocation with another transmitter), then the FCC authorization is no
longer considered valid and the FCC ID can not be used on the final product. In these
circumstances, the OEM integrator will be responsible for reevaluating the end product
(including the transmitter) and obtaining a separate FCC authorization. This device is intended
only for OEM integrators under the following conditions: The antenna must be installed such
that 20 cm is maintained between the antenna and users. As long as a condition above is met,
further transmitter test will not be required. However, the OEM integrator is still responsible for
testing their end product for any additional compliance requirements required with this module
installed (for example, digital device emissions, PC peripheral requirements, etc.).
This device complies with Part 15 of the FCC Rules and Canada licence-exempt RSS-210
standard. Operation is subject to the following two conditions:
OPERATIONS IS SUBJECT TO THE FOLLOWING TWO CONDITIONS:
(1) THIS DEVICE MAY NOT CAUSE HARMFUL INTERFERENCE
(2) THIS DEVICE MUST ACCEPT ANY INTERFERENCE RECEIVED, INCLUDING INTERFEERENCE
THAT MAY UNDESIRED OPERATION.
www.rovingnetworks.com
Version 3.3r 10/3/2012 15
RN-41-DS
Roving Networks, Inc.
102 Cooper Court
Los Gatos, CA 95032
+1 (408) 395-5300
www.rovingnetworks.com
Copyright © 2012 Roving Networks. All rights reserved. Roving Networks is a registered trademark of Roving
Networks. Apple Inc., iPhone, iPad, iTunes, Made for iPhone are registered trademarks of Apple Computer.
Roving Networks reserves the right to make corrections, modifications, and other changes to its products,
documentation and services at any time. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete.
Roving Networks assumes no liability for applications assistance or customer’s product design. Customers are
responsible for their products and applications which use Roving Networks components. To minimize customer
product risks, customers should provide adequate design and operating safeguards.
Roving Networks products are not authorized for use in safety-critical applications (such as life support) where
a failure of the Roving Networks product would reasonably be expected to cause severe personal injury or
death, unless officers of the parties have executed an agreement specifically governing such use.