Millennial Net URM-M-2400 MeshNode User Manual
Millennial Net MeshNode
User manual

Document Number: DOC-0063
Revision: 02
Released: December 2005
MeshScape™
Commercial- and Industrial-class
Wireless Sensor Networks
RK-5424-5 Reference Kit
for 2.4 GHz MeshScape Systems
User’s Guide

COPYRIGHT
This manual is produced and copyrighted by Millennial Net, Inc. Any use or reproduction of the contents of this
manual without the prior written consent of Millennial Net, Inc. is strictly prohibited.
NOTICE
All title and copyrights to this document are owned by Millennial Net, Inc. No part of the contents of this document
may be reproduced or transmitted in any form or by any means without the written permission of Millennial Net, Inc.
Millennial Net, Inc. shall not be liable for errors contained herein. Millennial Net, Inc. shall not be liable for any
damages whatsoever, including, without limitation, damages for loss of business profits, business interruption, loss
of business information, or other pecuniary loss arising out of the use of this documentation even if Millennial Net,
Inc. has been made aware of the possibility of such damages.
Information contained in this document is subject to change without notice. While every effort is made to ensure
that the information is accurate as of the publication date, users are reminded to update their use of this document
with documents published by Millennial Net, Inc. subsequent to this date.
Third-party product information is for informational purposes only, and constitutes neither an endorsement nor a
recommendation. Millennial Net, Inc. expressly disclaims any responsibility with respect to the performance of the
third-party products.
Copyright © 2000 - 2005 by Millennial Net, Inc.
ALL RIGHTS RESERVED
Printed in U.S.A.
Millennial Net, Inc.
2 Fourth Avenue
Burlington, MA 01803-3304 USA
+1 781.222.1030

RK-5424-5 Reference Kit User’s Guide v
CAUTION
Initialization of the product should be performed only by a qualified systems administrator.
Compliance Statements
FCC Compliance
FCC compliance for Millennial Net’s RK-5424-5 Reference Kit (2.4GHz, 5-3-1) consisting of the following
models/components:
• EN-5424 end node
• MN-5424 mesh node
• MG-5424 MeshGate gateway
Compliance Statement (Part 15.19)
The Millennial Net RK-5424-5 Reference Kit complies with Part 15 of the FCC Rules and with RSS-210 of
Industry Canada.
Operation is subject to the following two conditions:
(1) This device may not cause harmful interference, and
(2) This device must accept any interference received, including interference that may cause undesired
operation.
Warning (Part 15.21)
Changes or modifications not expressly approved by the party responsible for compliance could void the
user's authority to operate the equipment.
Note (Part 15.105(b))
This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to
part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful
interference in a residential installation. This equipment generates, uses and can radiate radio frequency
energy and, if not installed and used in accordance with the instructions, may cause harmful interference to
radio communications. However, there is no guarantee that interference will not occur in a particular
installation. If this equipment does cause harmful interference to radio or television reception, which can be
determined by turning the equipment off and on, the user is encouraged to try to correct the interference by
one or more of the following measures:
• Reorient or relocate the receiving antenna.
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is
connected.
• Consult the dealer or an experienced radio/TV technician for help.
vi Millennial Net
Unlicensed Modular Approval (for OEMs)
The URM-G-2400 and URM-M-2400 comply with the FCC's 47CFR Part 15 rules and regulations as well as
Part 15 Unlicensed Modular Approval as outlined in DA 00-1407. Compliance with the Modular Approval
rules allows an OEM to integrate the URM-G-2400 and URM-M-2400 into other products without further
FCC certification of the intentional radiator, but an OEM must still test their final product to comply with
unintentional radiator requirements of 47CFCR Part 15.
Under the Modular Approval rules, an OEM must comply with the following when integrating the
URM-G-2400 and URM-M-2400 into an end product:
1. The OEM must ensure that FCC labeling requirements are met. This shall include a clearly visible label on
the exterior of the end product with the following nomenclature:
Contains FCC ID: R8N-URM-G-2400 or R8N-URM-M-2400
2. The OEM must only use the reverse polarity-SMA (RP-SMA) antennas listed below when integrating the
device into an end product. These antennas have been tested and approved for use with the
URM-G-2400 and URM-M-2400. Integrating the module using any other antenna will require testing to
ensure compliance with FCC rules and regulations.
Centurion ½ wave Antenna Part Number: WCR2400SMRP
3. The OEM must use the same cable type and of the same length or longer than that defined below. Use
of another cable type or of a shorter length will require testing to ensure compliance with FCC rules and
regulations.
RF Cable type: RG174
RF Cable Length: 5.9" +/- 0.13”
Millennial Net Cable P/N: CBL-0018-01
Industry Canada Compliance Statement
This device has been designed to operate with an antenna having a maximum gain of 2.65 dB. Antenna
having a higher gain is strictly prohibited per regulations of Industry Canada. The required antenna
impedance is 50 Ohms.
To reduce potential radio interference to other users, the antenna type and its gain should be so chosen that
the equivalent isotropically radiated power (EIRP) is not more than that required for successful
communication.
OEM Integration
The modules have the same requirements for integration into an OEM product for Industry Canada as it
does for FCC. The only difference being the labeling nomenclature required on the exterior of the OEM
product. The following must be clearly visible on the exterior of the OEM product:
Contains IC: 5172A-URMG2400 or 5172A-URMM2400

RK-5424-5 Reference Kit User’s Guide vii
For countries not covered by FCC Part 15, Industry Canada RSSS-210, or CE
The RK-5424 -5 Reference Kits are to be used solely by professional engineers for the purpose of evaluating
the feasibility of low-power wireless data communications applications. The user's evaluation must be
limited to use of an assembled Kit within a laboratory setting which provides for adequate shielding of RF
emission which might be caused by operation of the Kit following assembly. In field testing, the assembled
device must not be operated in a residential area or any area where radio devices might be subject to
harmful electrical interference. Distribution and sale of the Kit is intended solely for use in future
development of devices which may be subject to FCC regulation, or other authorities governing radio
emission. This Kit may not be resold by users for any purpose. Accordingly, operation of the Kit in the
development of future devices is deemed within the discretion of the user and the user shall have all
responsibility for any compliance with any authority governing radio emission of such development or use,
including without limitation reducing electrical interference to legally acceptable levels. All products
developed by user must be approved by the authority governing radio emission prior to marketing or sale of
such products and user bears all responsibility for obtaining the approval as needed from any other authority
governing radio emission. If user has obtained the Kit for any purpose not identified above, including all
conditions of assembly and use, user should return Kit to Millennial Net, Inc. immediately.
Trademarks
© 2000 - 2005 Millennial Net, Inc. All rights reserved. Millennial Net™, MeshScape™, and Persistent Dynamic
Routing™ are trademarks of Millennial Net, Inc. All other trademarks are the property of their respective
owners.
Information subject to change.

viii Millennial Net

RK-5424-5 Reference Kit User’s Guide ix
Contents
About This Guide
Audience ....................................................................................................................xvi
Using This Guide .........................................................................................................xvi
Symbols and Conventions ..........................................................................................xvii
Contacting Millennial Net ......................................................................................... xviii
World Wide Web................................................................................................ xviii
Customer Support .............................................................................................. xviii
Technical Publications......................................................................................... xviii
Additional Resources .......................................................................................... xviii
1Introduction
Wireless Sensor Networking Overview.........................................................................1-2
Defining Wireless Sensors Networks ................................................................... 1-2
Wireless Sensor Network Components ............................................................... 1-3
MeshScape System Overview ......................................................................................1-6
Core Elements of MeshScape System.................................................................. 1-6
Data Models....................................................................................................... 1-7
Low-Power Configuration................................................................................... 1-9
The MeshScape RK-5424-5 Reference Kit..................................................................1-10
Major Features ................................................................................................. 1-11
Reference Kit Contents..................................................................................... 1-11
Host PC Requirements ...................................................................................... 1-12
2Installing the MeshScape System
Installing the MeshScape Wireless Sensor Network......................................................2-2
Installing the Hardware ...............................................................................................2-3
MeshGate Setup (MG-5424)............................................................................... 2-3
Mesh Node Setup (MN-5424) ............................................................................. 2-8
End Node Setup (EN-5424) ............................................................................... 2-12
Installing MeshScape Network Monitor ....................................................................2-15
Installing Contents of Millennial Net’s RK-5424 CD-ROM.................................. 2-15
Launching MeshScape Network Monitor Using Windows ................................. 2-16
3Running MeshScape Network Monitor
MeshScape Network Monitor Overview ......................................................................3-2
Menu Bar ........................................................................................................... 3-3
MeshGate .......................................................................................................... 3-4
Device Counts .................................................................................................... 3-4
Sensor Node Details............................................................................................ 3-4
Configuring a Node’s Operation .................................................................................3-6
Configuring the Sample Interval of a Single Node ............................................... 3-8
Configuring the Sample Interval of all Network Nodes ........................................ 3-9
Configuring Digital I/O Operation ....................................................................... 3-9
Configuring UART Operation............................................................................ 3-12

xMillennial Net
Configuring AD (analog-to-digital) Converter Operation.................................... 3-14
Using Watch Function to Display Configuration Information.............................. 3-16
Labeling an End Node or Mesh Node ........................................................................3-18
Configuring Persistence Attributes ............................................................................3-19
Selecting a Com Port on the Host PC ........................................................................3-20
Configuring Serial and ADC Data Formats ................................................................3-21
Turning Event Tracking On/Off..................................................................................3-22
Broadcasting Data to All Nodes.................................................................................3-23
Creating an Event Log File ........................................................................................3-25
Viewing the Contents of an Event Log File ................................................................3-26
Viewing MeshScape Statistics ...................................................................................3-28
4Using the MeshScape API
Using the MeshScape API ...........................................................................................4-2
MeshScape API Directory Structure .............................................................................4-3
MeshScape API Functions Overview ............................................................................4-5
iBeanAPI.h ..................................................................................................................4-7
Data Structures ................................................................................................... 4-7
Functions .......................................................................................................... 4-15
iBeanAPI_IO.h...........................................................................................................4-25
Data Structures ................................................................................................. 4-25
Functions .......................................................................................................... 4-27
iBeanAPI_Utils.h........................................................................................................4-35
Functions .......................................................................................................... 4-35
iBeanAPI_LPR.h.........................................................................................................4-39
Functions .......................................................................................................... 4-39
iBeanAPI_performance.h...........................................................................................4-42
Data Structures ................................................................................................. 4-42
Functions .......................................................................................................... 4-44
Example API Code ....................................................................................................4-45
ARunning the Demo Application
Running the MeshScape Demo Program .................................................................... A-2
Running the Temperature Sensor Demo..................................................................... A-3
BUsing MeshScape Programmer
Getting Started with MeshScape Programmer.............................................................B-2
Connecting the Target Device to Your Computer ................................................ B-2
Launching MeshScape Programmer Using Windows............................................ B-5
Performing MeshScape Programmer Operations .........................................................B-6
Upgrading Firmware on the Target Device........................................................... B-6
Unlocking Features on the Target Device ............................................................. B-7
Reprogramming the Group and Device IDs on the Target Device ......................... B-8
Reprogramming the Target Device’s Radio Configuration .................................... B-9
Glossary
Index

RK-5424-5 Reference Kit User’s Guide xi
Figures
Figure 1-1. Untethered, mobile ad hoc network nodes................................................... 1-2
Figure 1-2. Basic wireless sensor network components................................................... 1-4
Figure 1-3. Adding a mesh node module ....................................................................... 1-4
Figure 1-4. MeshScape system core elements................................................................. 1-6
Figure 2-5. MeshGate components ................................................................................ 2-3
Figure 2-6. Mounting the MeshGate to a DIN rail........................................................... 2-6
Figure 2-7. Mesh node components............................................................................... 2-8
Figure 2-8. End node and terminal board (top and bottom views) ................................ 2-12
Figure 2-9. Using Windows Start menu to launch MeshScape Network Monitor .......... 2-16
Figure 3-10. Sample MeshScape Network Monitor window ............................................. 3-2
Figure 3-11. MeshScape Network Monitor’s Device window ............................................ 3-6
Figure 3-12. Configuring sample interval of single node................................................... 3-8
Figure 3-13. Configuring sample interval of all nodes....................................................... 3-9
Figure 3-14. Configuring End Node or mesh node for digital I/O .................................... 3-11
Figure 3-15. Configuring End Node or mesh node for UART operation .......................... 3-13
Figure 3-16. Configuring End Node/Mesh Node for analog I/O....................................... 3-15
Figure 3-17. Displaying I/O information using Watch function........................................ 3-16
Figure 3-18. Labeling an End Node or Mesh Node ......................................................... 3-18
Figure 3-19. Configuring node persistence attributes ..................................................... 3-19
Figure 3-20. Selecting com port on host PC ................................................................... 3-20
Figure 3-21. Configuring serial and ADC data formats ................................................... 3-21
Figure 3-22. Turning device event tracking on/off .......................................................... 3-22
Figure 3-23. Broadcasting data to all nodes ................................................................... 3-24
Figure 3-24. Configure an event log file......................................................................... 3-25
Figure 3-25. View contents of event log file ................................................................... 3-26
Figure 3-26. Viewing MeshScape statistics ..................................................................... 3-29
Figure 4-1. Using the MeshScape API............................................................................. 4-2
Figure 4-2. MeshScape API directories............................................................................ 4-3
Figure A-1. MeshScape Demo main window .................................................................. A-2
Figure A-2. End node terminal board with kele temperature sensor................................ A-3
Figure B-1. Connecting MeshGate programming cable to a mesh node ......................... B-3
Figure B-2. Connecting MeshGate programming cable to an end node.......................... B-3
Figure B-3. Module programming terminal board .......................................................... B-4
Figure B-4. The MeshScape Programmer main window.................................................. B-6

xii Millennial Net

RK-5424-5 Reference Kit User’s Guide xiii
Tables
Table 2-1. MeshGate terminal block pin assignments..................................................... 2-4
Table 2-2. MeshGate status LEDs ................................................................................... 2-6
Table 2-3. MeshGate default Settings ............................................................................ 2-7
Table 2-4. Mesh Node terminal block pin assignments ................................................... 2-8
Table 2-5. Mesh node status LEDs................................................................................ 2-10
Table 2-6. MeshScape mesh node default settings ....................................................... 2-10
Table 2-7. MeshScape end node default settings ......................................................... 2-13
Table 3-8. Device window functions .............................................................................. 3-6
Table 3-9. Watch window functions ............................................................................ 3-17
Table 3-10. Event log key definitions.............................................................................. 3-27
Table 4-1. MeshScape API functions.............................................................................. 4-5

xiv Millennial Net

xvi Millennial Net
Audience
This guide is intended for the following qualified service personnel who are responsible for
installing, operating, and developing software to interface with the RK-5424-5 MeshScape
Wireless Sensor Network Reference Kit:
• System installer
• Hardware technician
• System operator
• System administrator
• Software developer
Using This Guide
The sections of this guide provide the following information:
Section Provides
Chapter 1, “Introduction” General overview of wireless sensor networking and the
MeshScape™ system.
Chapter 2, “Installing the MeshScape
System”
Instructions for installing the components of the
RK-5424-5 MeshScape Wireless Sensor Network
Reference Kit (MeshGate, Mesh Nodes, End Nodes) and
MeshScape Network Monitor (GUI).
Chapter 3, “Running MeshScape
Network Monitor”
Procedures for using MeshScape Network Monitor
software to configure the MeshScape system nodes. Also
includes information for attaching external I/O devices to
an End Node or Mesh Node.
Chapter 4, “Using the MeshScape API” Information on the MeshScape API functions.
Appendix A, “Running the Demo
Application”
Procedure for running the sample application provided
with the reference kit.
Appendix B, “Using MeshScape
Programmer”
Instructions for using the MeshScape Programmer
application to upgrade the firmware on MeshScape
devices, reprogram the group and device IDs, and select
the channel on which the devices operate.
Glossary Defines terminology associated with wireless sensor
networking and the MeshScape system.
Index An alphabetical index of topics described in this manual.
RK-5424-5 Reference Kit User’s Guide xvii
Symbols and Conventions
This guide uses the following symbols and conventions to emphasize certain information.
Italics - Indicate the first occurrence of a new term, book title, and emphasized text.
1. Numbered list - Where the order of the items is important.
• Bulleted list - Where the items are of equal importance and their order is unimportant.
Note: A note is used to highlight important information relating to the topic being
discussed.
Caution
A caution means that a specific action could cause harm to the equipment or
to the data.
Warning
A warning describes an action that could result in physical injury, or
destruction of property.
Hazard
A hazard is a particular form of warning related expressly to electric shock.

xviii Millennial Net
Contacting Millennial Net
World Wide Web
Millennial Net maintains a site on the World Wide Web where information on the company and
its products can be found. The URL is:
www.millennialnet.com
Customer Support
For answers to your technical questions, Millennial Net’s Customer Service department can be
reached at:
phone:
+1 781.222.1030
e-mail:
support@millennialnet.com
Technical Publications
Millennial Net is committed to providing you with quality technical documentation. Your
feedback is valuable and appreciated. Please send comments, suggestions, and enhancements
regarding this guide or any Millennial Net documentation to:
support@millennialnet.com
Please include the document title, number, and version in your email.
Additional Resources
To obtain additional resources and information about wireless sensor networking and the
development and deployment of MeshScape-based applications, visit the resources page on our
Web site at:
www.millennialnet.com/resources
There you will find links to:
• Application notes
• Articles
• Brochures and data sheets
• Case studies
• Industry notes
• Source book
• White papers

RK-5424-5 Reference Kit User’s Guide 1-1
1
Introduction
This chapter provides an overview of the MeshScape system and Reference Kit. In this chapter
you will find:
•’Wireless Sensor Networking Overview’ on page 1-2
•’MeshScape System Overview’ on page 1-6
•’The MeshScape RK-5424-5 Reference Kit’ on page 1-10
1-2 Millennial Net
Introduction
Wireless Sensor Networking Overview
This section provides you with a basic understanding of wireless sensor network concepts and
components.
Defining Wireless Sensors Networks
Until recently, networks designed for monitoring and controlling sensors or actuators on a
network were limited in application and scope due to a major network design
consideration—the cables required to connect the various sensors and actuators to a
centralized collection point. In addition to the costs associated with installing and maintaining
communication cables (fiber optic or copper), this type of network infrastructure prevents
sensor mobility and severely limits the feasible applications of such a network.
Thanks to significant advances in low-power radio and digital circuit design, self-organizing
wireless sensor networks are now a reality. Sensors of all types (temperature, motion,
occupancy, vibration, etc.) can now be wirelessly enabled and deployed inexpensively and
quickly.
Wireless sensor networks fundamentally change the economics of deploying and operating a
sensor network, unlocking opportunities to achieve new efficiencies in applications such as
production processes, building control, or monitoring. Wireless sensor networks also enable the
development of a brand new class of applications and services not previously possible with
wired sensor networks.
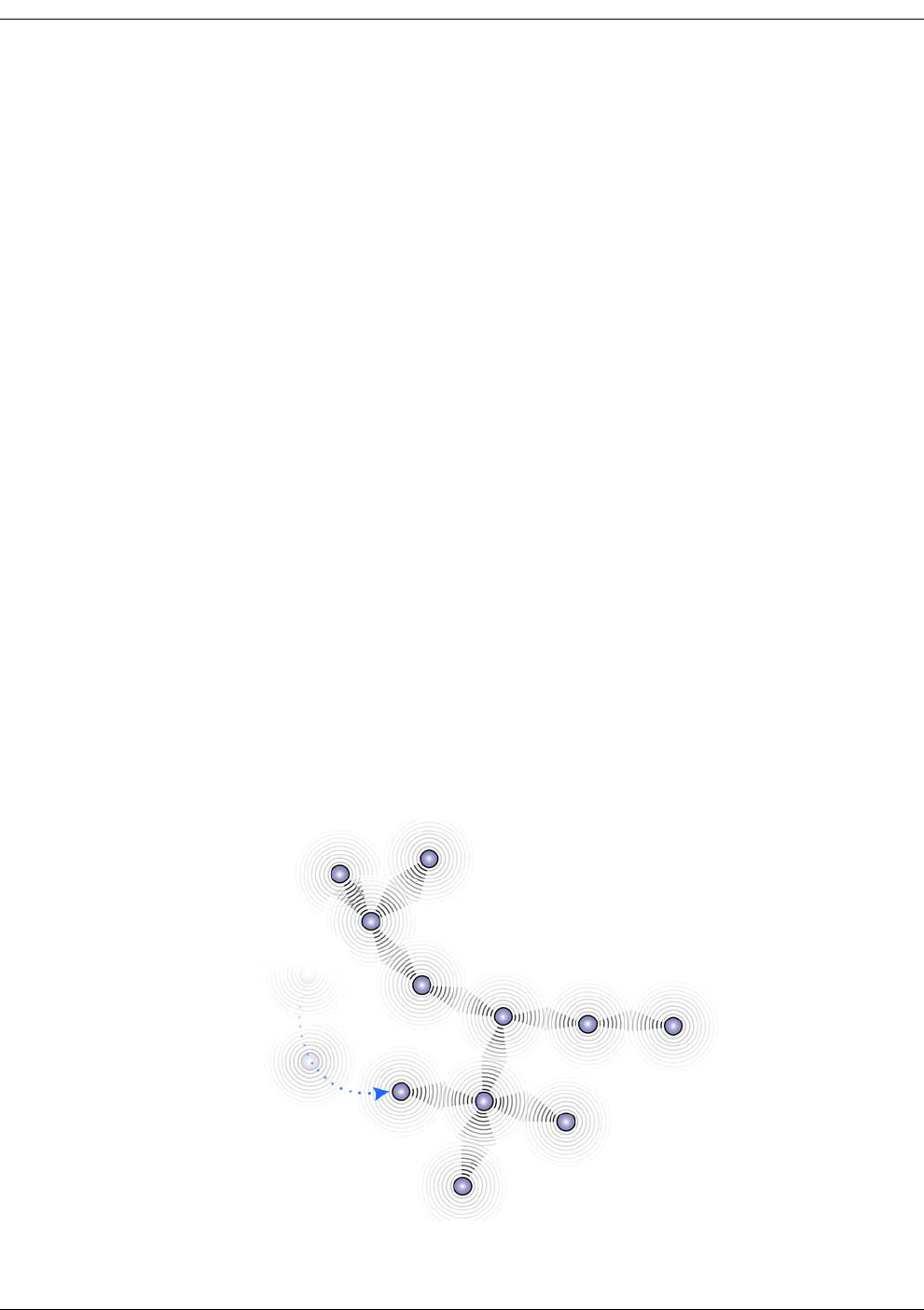
As illustrated in Figure 1-1, wireless sensor networks form what is called a wireless ad hoc
network, which refers to a network’s ability to self-organize and self-heal. This means there are
no administrative duties associated with establishing and maintaining a wireless sensor
network. By comparison, a wired infrastructure network, such as the LAN found in most office
environments, requires a significant amount of overhead to install and maintain in terms of
cabling and administrative time.
Figure 1-1. Untethered, mobile ad hoc network nodes
Mobile network node

RK-5424-5 Reference Kit User’s Guide 1-3
Wireless Sensor Networking Overview
In an ad hoc network, sensor nodes consisting of a sensor attached to a wireless module can be
randomly placed and moved as needed. If the network needs to scale up, additional sensor
nodes are easily added. The new sensor nodes and surrounding network will do the work of
discovering each other and establishing communication paths through single- and multi-hop
paths. All this is made possible through the use of robust, efficient network protocols
developed specifically for wireless sensor networks.
Wireless Sensor Network Components
This section describes the software and hardware that comprise a wireless sensor network.
System Software
The software required to integrate and operate a wireless sensor network resides as firmware in
the system modules and in the application platform as a set of API functions or network
monitoring system (NMS).
Module Firmware
Module firmware is a small, efficient piece of code that incorporates the module into a larger ad
hoc network. It “drives” the module's operation as part of the larger ad hoc network.
The firmware is also responsible for packaging the analog and digital sensor data into digital
packets and delivering them across the wireless sensor network.Firmware is pre-programmed
onto every MeshScape component. However, you have the opportunity to modify certain
network parameters for each component. See Appendix B for more information.
API
An API, or application programming interface, is a set of commonly used functions for
streamlining application development. Used by application developers, an API provides hooks to
integrate the application platforms with the modules on the wireless sensor network.
API functions are grouped into “libraries.” In wireless sensor networks, there are two different
API libraries:
• High-level library: These functions are used to integrate the application with the gateway
module.
• Low-level library: These functions are used to integrate the sensor/actuator with the end
node module.
Network Monitoring System
A network monitoring system (NMS) is software used to interface with a particular wireless
sensor network, eliminating the need for any programming. Through the NMS’s graphical user
interface (GUI), network operators are able to see the various nodes of their wireless sensor
network. Depending on the type of network, control commands can also be issued through the
NMS. For example, a pin on a digital interface between an end node and an actuator can be set
to high to change the state of the actuator.
1-4 Millennial Net
Introduction
System Modules
The modules of a wireless sensor network enable wireless connectivity within the network,
connecting an application platform at one end of the network with one or more sensor or
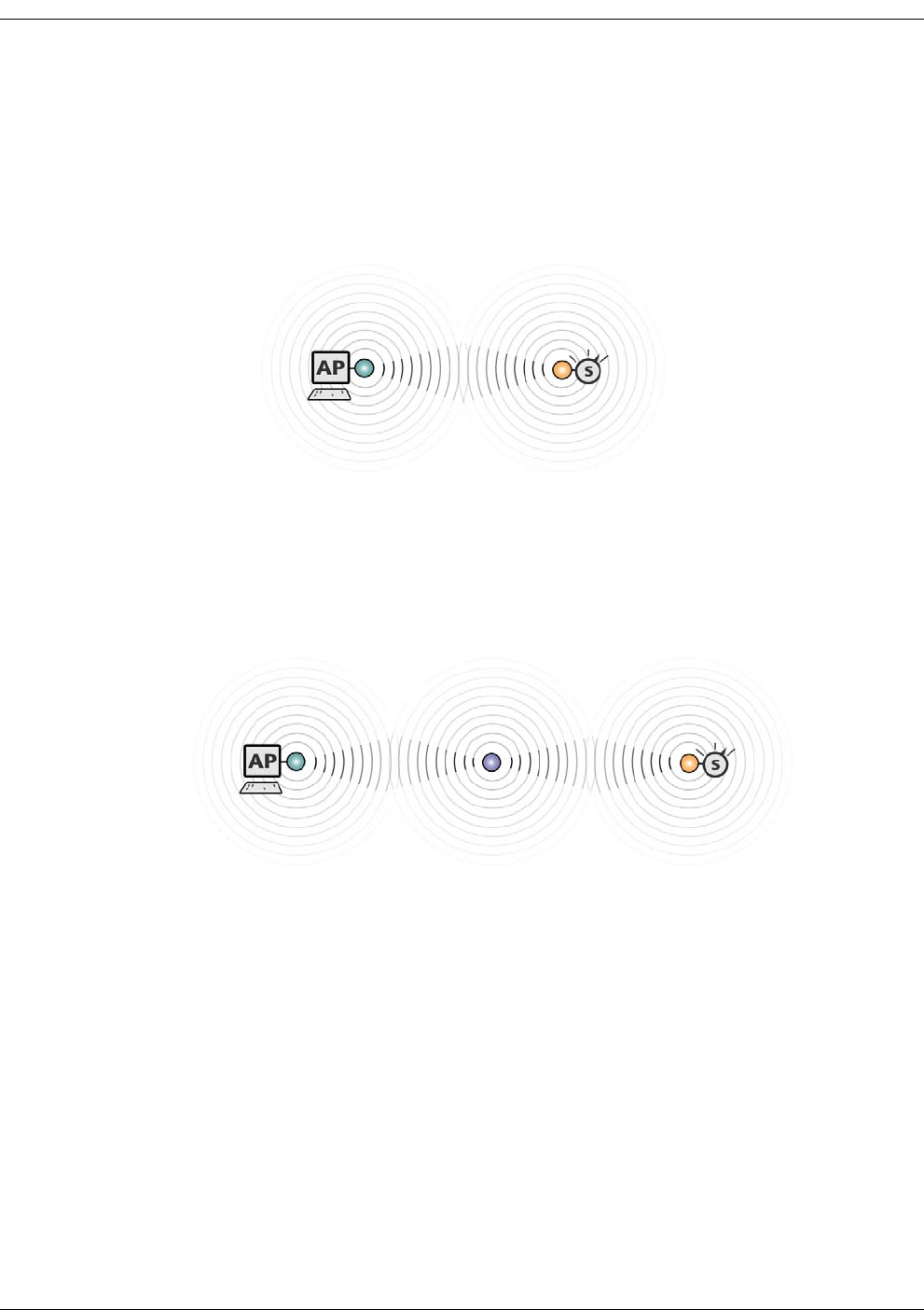
actuator devices at the other end. As shown in Figure 1-2, the gateway and end node modules
create a transparent, wireless data path between the application platform and sensor.
Figure 1-2. Basic wireless sensor network components
Exchange of analog or digital information between an application platform and one or more
sensor nodes takes place in a wireless fashion. In this example, the data path between the
gateway and end node is referred to as a single-hop network link.
To extend the range of a network or circumvent an obstacle, a wireless mesh node module can
be added between a gateway and an end node as shown in Figure 1-3.
Figure 1-3. Adding a mesh node module
This particular example represents a multi-hop data path, in which data packets are handed off
from one module to the next before reaching their destination (gateway-to-mesh node-to-end
node and vice versa).
More elaborate network layouts are discussed later in Network Topologies,” but for now, we’ll
take a closer look at each of the network components shown in Figure 1-3.
Application Platform
This is the network device (network controller, PC, handheld, etc.) used to monitor and control
the actions of the various sensors and actuators that are connected to the wireless sensor
network. The application platform is capable of making decisions based on the information it
gathers from the network. Typically, the wireless sensor network will come with an API and/or a
GUI used to interface with the wireless modules.

RK-5424-5 Reference Kit User’s Guide 1-5
Wireless Sensor Networking Overview
Gateway
The gateway is the interface between the application platform and the wireless nodes on the
network. The gateway can be a discrete module, or it can be integrated onto a Flash card form
factor for use in, for example, a handheld device. All information received from the various
network nodes is aggregated by the gateway and forwarded on to the application platform. In
the reverse direction, when a command is issued by the application program to a network
node, the gateway relays the information to the wireless sensor network. The gateway can also
perform protocol conversion to enable the wireless network to work with other
industry-standard network protocols.
Mesh Node Module
Considered full-function devices (FFD), mesh node modules (sometimes called routers) are used
to extend network coverage area, route around obstacles, and provide back-up routes in case
of network congestion or device failure. In some cases, mesh nodes may also be connected via
analog and digital interfaces to sensors and actuators, providing the same I/O functionality of
an end node module. Mesh nodes can be battery powered or line powered.
End Node Module
Considered reduced-function devices (RFD), end nodes (sometimes called endpoints) provide
the physical interface between the wireless sensor network and the sensor or actuator to which
it is wired. End nodes will usually have one or more I/O connections for connecting to and
communicating with analog or digital sensor or actuator devices. End nodes are typically battery
powered.
Sensor/Actuator
These are the devices you ultimately wish to monitor and/or control. An example is a sensor
monitoring the pressure in an oil pipeline.
1-6 Millennial Net
Introduction
MeshScape System Overview
In order to realize benefits wireless sensor networking promises, the technology must be able to
address several critical requirements: reliability of data transmission, responsiveness to adapt to
dynamic environments, power efficiency, and scalability. The MeshScape™ wireless sensor
networking system from Millennial Net delivers on all of these requirements. The MeshScape
ready-to-embed hardware modules and assemblies support fast and cost-effective application
development.
Core Elements of MeshScape System
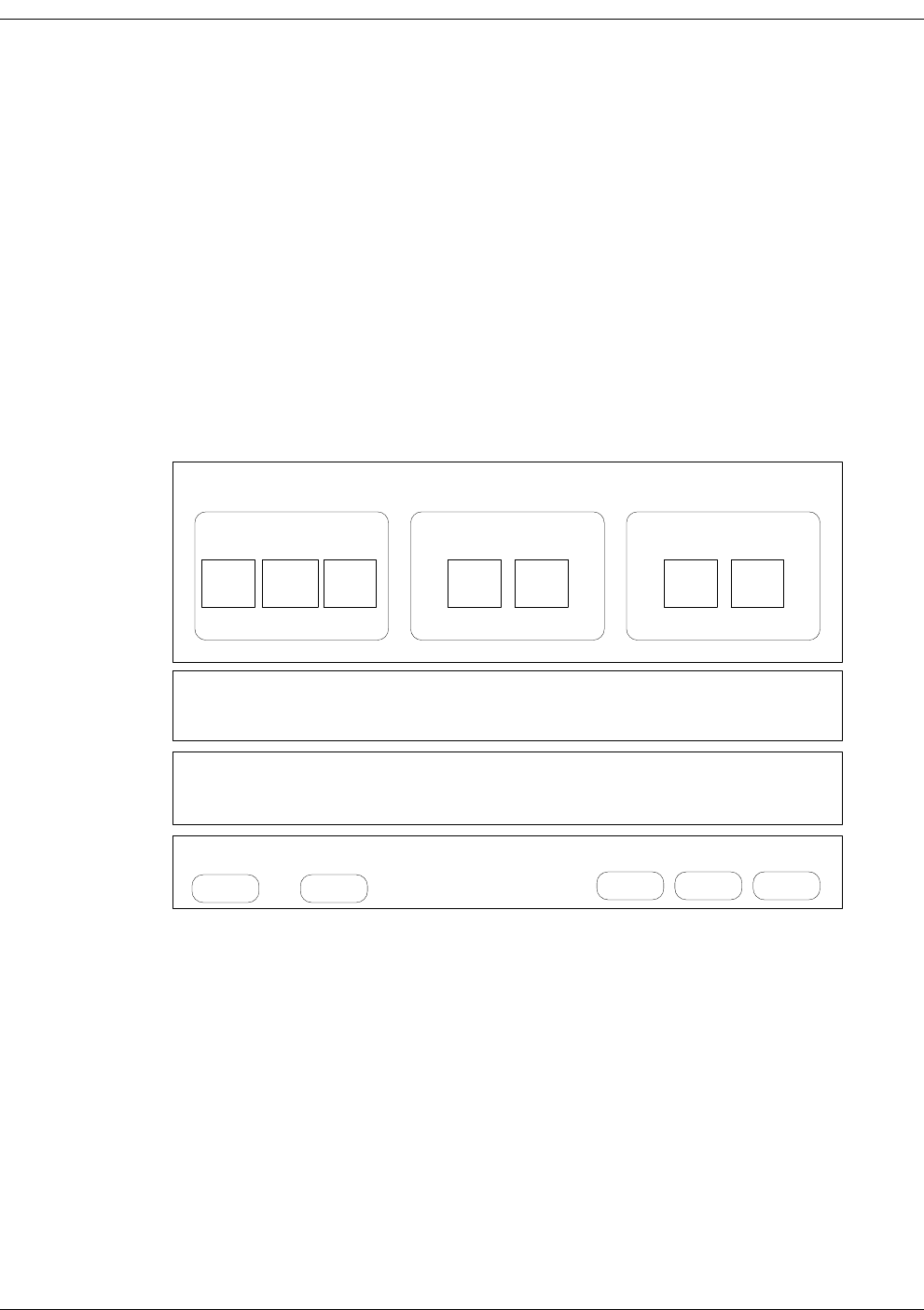
The core elements of the MeshScape wireless sensor networking system are depicted in
Figure 1-4 below.
Figure 1-4. MeshScape system core elements
MeshScape Networking Software
The ultra-efficient, highly scalable, self-organizing networking software is based on Persistent
Dynamic Routing™ techniques. The networking software is delivered on the hardware modules
described in this section. For volume applications, the MeshScape system software can also be
licensed and integrated directly onto your sensor assembly.
Millennial Net has developed and optimized its protocol to address the unique characteristics
and challenges associated with wireless sensor networking. The end result is a networking
system and associated protocol that is highly scalable, ultra-efficient, and extremely responsive
and resilient in dynamic environments. The MeshScape protocol for wireless sensor networks
provides the industry's longest battery life at sensor nodes while delivering data over
fault-tolerant links with end-to-end redundancy. The Millennial Net protocol is based on a set of
Data Models
Collect Broadcast Dialogue
Event
Driven Periodic
Sampling Store &
Forward Burst Stream Polling On
Demand
Network Monitor Application APIs
MeshScape Networking Software
w/ Persistent Dynamic Routing™
Hardware
ISM Bands
916 MHz. 2.4 Ghz
Modules
End Nodes Mesh
Nodes Gateways

RK-5424-5 Reference Kit User’s Guide 1-7
MeshScape System Overview
techniques including, Persistent Dynamic Routing for reliable and scalable wireless sensor
networks. When forming an ad hoc sensor network, Persistent Dynamic Routing requires
minimal overhead for requesting and establishing connectivity without relying on the
bandwidth-consuming flooding technique.
MeshScape Network Monitor and Application APIs
The MeshScape system delivers the tools to view and control network dynamics. The
MeshScape Network Monitor provides functions for monitoring and managing the network.
Application APIs streamline development by providing input/output functions for sensor and
application integration.
Hardware
The MeshScape system includes field-proven, “integratable” modules for fastest time to
market. These ready-to-integrate end nodes, mesh nodes, and gateways support numerous
application requirements and support various ISM bands for license-free operation around the
world.
Data Models
The MeshScape system provides built-in support for data movement profiles to speed
development including:
• data collection models
• bi-directional dialogue models
•broadcast models
These data models optimize the network for an application’s specific data requirements and
support a variety of classes for collection and bi-directional dialogue data models.
Data Collection Models
Data collection models describe monitoring applications where the data flows primarily from
the sensor node to the gateway. The MeshScape system supports the data collection models
described in this section.
Periodic Sampling
For applications where certain conditions or processes need to be monitored constantly, such as
the temperature in a conditioned space or pressure in a process pipeline, sensor data is acquired
from a number of remote sensor nodes and forwarded to the gateway or data collection center
on a periodic basis.
The sampling period mainly depends on how fast the condition or process varies and what
intrinsic characteristics need to be captured. In many cases, the dynamics of the condition or
process to be monitored can slow down or speed up from time to time. Therefore, if the sensor
node can adapt its sampling rate to the changing dynamics of the condition or process,
over-sampling can be minimized and power efficiency of the overall network system can be
further improved.
1-8 Millennial Net
Introduction
Another critical design issue associated with periodic sampling applications is the phase relation
among multiple sensor nodes. If two sensor nodes operate with identical or similar sampling
rates, collisions between packets from the two nodes is likely to happen repeatedly. It is
essential that sensor nodes can detect this repeated collision and introduce a phase shift
between the two transmission sequences in order to avoid further collisions resulting in optimal
network operation and minimized power usage.
Event Driven
There are many cases that require monitoring one or more crucial variables immediately
following a specific event or condition. Common examples include fire alarms, door and
window sensors, or instruments that are user activated. To support event-driven operations
with adequate power efficiency and speed of response, the sensor node must be designed such
that its power consumption is minimal in the absence of any triggering event, and the wake-up
time is relatively short when the specific event or condition occurs. Many applications require a
combination of event driven data collection and periodic sampling.
Store and Forward
In many applications, data can be captured and stored or even processed by a sensor node
before it is transmitted to the gateway or base station. Instead of immediately transmitting
every data unit as it is acquired, aggregating and processing data by remote sensor nodes can
potentially improve overall network performance in both power consumption and bandwidth
efficiency. One example of a store-and-forward application is cold-chain management where
the temperature in a freight container carrying produce or pharmaceuticals, for instance, is
captured and stored; when the shipment is received, the temperature readings from the trip are
downloaded and viewed to ensure that the temperature and humidity stayed within the desired
range.
Bi-Directional Dialogue Data Models
Bi-directional dialogue data models are characterized by a need for two-way communication
between the sensor/actuator nodes and gateway/application. The MeshScape system supports
the bi-directional dialogue data models described in this section.
Polling
Controller-based applications, such as those found in building automation systems, use a
polling data model. In this model, there is an initial device discovery process that associates a
device ID with each physical device in the network. The controller then polls each device on the
network successively, typically by sending a serial query message and waiting for a response to
that message. For example, an energy management application would use a polling data model
to enable the application controllers to poll thermostats, variable air volume sensors, and other
devices for temperature and other readings.
On-Demand
The on-demand data model supports highly mobile nodes in the network where a gateway
device enters the network, automatically binds to that network and gathers data, then leaves
the network. With this model, one mobile gateway can bind to multiple networks and multiple
mobile gateways can bind to a given network. An example of an application using the

RK-5424-5 Reference Kit User’s Guide 1-9
MeshScape System Overview
on-demand data model is a medical monitoring application where patients in a hospital wear
sensors to monitor vital signs and doctors access that data via a PDA that is a mobile gateway. A
doctor enters a room and the mobile PDA automatically binds with the network associated with
that patient and downloads vital sensor data. When the doctor enters a second patient's room,
the PDA automatically binds with that network and downloads the second patient's data.
Broadcast Data Models
Broadcast data models are characterized by a need for one-to-many communication between
the gateway/application and sensor/actuator nodes. The MeshScape system supports the
broadcast data models described in this section.
Burst
The burst data model is characterized by an uneven pattern of data transmission from the
gateway/application to all sensor/actuator nodes on the wireless sensor network. The burst data
model has been used with industrial lighting applications.
Stream
In the stream data model, the gateway/application sends data in a continuous stream to all
sensor/actuator nodes on the wireless sensor network. The transport service guarantees that all
data is delivered to the other end in the same order as sent and without duplicates. The stream
data model is used when performing network upgrades.
Low-Power Configuration
Many sensors are dispersed over a wide area and must rely on batteries or solar cells for their
power source. Consider the example of sensors taking measurements on a gas pad, it would be
prohibitively expensive to network these sensors using cables, so a wireless sensor network is
the perfect solution. However, to be useful in such an environment, the wireless sensor network
must posses the following characteristics:
• Power: Low power consumption—sensor and node must be able to operate 10+ years on
a singe battery
• Scalability: End nodes must be able to scale as sensor node counts increase.
• Data Rate: Application/gateway must support a configurable sample rate.
• Range: End nodes must be able to communicate over distances of 60 to 80 feet (18 to 24
meters) and Mesh nodes must be able to communicate at distances up to 100 feet (30
meters).
• Integration: The end nodes must be integrated with the sensor.
The MeshScape system possesses all of theses characteristics and uses configurable sleep and
duty cycle intervals to minimize power consumption.

1-10 Millennial Net
Introduction
The MeshScape RK-5424-5 Reference Kit
Millennial Net's RK-5424-5 Reference Kit contains everything you need to set up a
self-organizing, wireless star-mesh network. Once installed, you are able to observe the
performance and operation of the network components and prototype your application.
The RK-5424-5 Reference Kit hardware includes:
• one MeshGate Gateway
• three mesh nodes
• five end nodes
• connecting cables
Reference kit software includes:
• MeshScape Network Monitor - the MeshScape system network monitoring tool and
graphical user interface (GUI)
• MeshScape Programmer application - enables you to upgrade the firmware on MeshGate
gateways, mesh nodes, and end nodes, and modify the group and device IDs of deployed
mesh nodes and end nodes (see Appendix B, “Using MeshScape Programmer”)
• Application Program Interface (API) library - A complete API library is provided to
streamline development using MS Visual C++.NET on a PC. For applications where the
MeshGate connects to a third-party controller, Millennial Net also provides libraries
(pre-compiled Windows API library and Linux API library source), as well as source code
examples.
The kit also includes:
• temperature sensor assembly - enables you to run a sample application
(see Appendix A, “Running the Demo Application”).
Documentation for the reference kit includes:
• this user’s guide - which describes how to set up the MeshScape network, including
connections to the host computer, power supplies, sensors, and other devices
• MeshScape Product Family Sheet
• technical specifications for MeshGate gateway, mesh node, and end node
For complete details on the contents of the reference kit, refer to ’Reference Kit Contents’ on
page 1-11.
MeshScape Network Monitor runs on MS Windows XP and allows you to set network and
device operating parameters, and monitor the status of the MeshScape components and their
inputs/outputs. The API software runs on Windows and Linux systems and can be easily
incorporated into user application programs written in C++.

RK-5424-5 Reference Kit User’s Guide 1-11
The MeshScape RK-5424-5 Reference Kit
Major Features
Major features of the MeshScape RK-5424-5 Reference Kit include the following:
• frequency band: 2.4 GHz
• bi-directional/multiple-access communication
• MeshScape Network Monitor graphical user interface (GUI) for configuring the
MeshScape system and evaluating its performance
• Application Programming Interface (API)
• end node and mesh node-specific features include:
– configurable sampling interval
– digital I/O - 4 channels
– ADC input - 4 channels
– UART input/output
Reference Kit Contents
The MeshScape RK-5424-5 Reference Kit contains the following components:
• (4) EN-5424 end nodes; each end node is mounted to a terminal board equipped with a
battery.
• (1) EN-5424 end node mounted to a terminal board equipped with a battery and a Kele
temperature sensor for use with the supplied sample MeshScape application.
• (3) MN-5424 Mesh Nodes (enclosed) with AC power adapters.
• (1) MG-5424 MeshGate gateway (enclosed) with an AC power adapter.
• (4) antennas; one 1/2-wave antenna for each Mesh Node and one for the MeshGate.
• (1) RS-232 serial cable for connecting the MeshGate serial port to the host PC. This is a
DB-9, male-to-female, straight-through cable.
• (1) RS-232 serial cable for connecting the MeshGate console port to the host PC. This is a
DB-9-to-mini-connector cable.
• (1) MeshGate programming cable
• (1) MeshGate-to-end node programming adapter
• (4) International power outlet adapter kits for supplied power adapters
• (1) CD-ROM containing support documentation and application software, including the
MeshScape Network Monitor program, MeshScape Programmer application, and API
software.
1-12 Millennial Net
Introduction
Host PC Requirements
The reference kit requires a personal computer (PC) to run the supplied application software.
The host PC must have the following minimal configuration:
• Microsoft Windows XP
• Processor: 1.0 GHz
•512 MB RAM
• RS-232 serial port
• CD-ROM drive for loading software
• Display with SVGA (800 x 600) resolution
• 10 MB free disk space
Although the above platform is required to run MeshScape Network Monitor and other
supplied applications, the supplied API library files are supported on both Windows and Linux
platforms.
Microsoft Visual C++ .NET is recommended for development purposes on Windows platforms.
Warning
These electronic products are sensitive to electrostatic discharge (ESD).
Permanent damage to these devices can result if subjected to high energy
electrostatic discharges.
Proper precautions are recommended to avoid performance degradation
or loss of functionality.
RK-5424-5 Reference Kit User’s Guide 2-1
2
Installing the MeshScape
System
This chapter provides the following MeshScape system installation information:
•’Installing the MeshScape Wireless Sensor Network’ on page 2-2
•’Installing the Hardware’ on page 2-3
•’Installing MeshScape Network Monitor’ on page 2-15

2-2 Millennial Net
Installing the MeshScape System
Installing the MeshScape Wireless Sensor
Network
This section of the user’s guide describes how to install the reference kit’s hardware and
software components. Installation should be performed in the following order:
1. MeshGate (see ’MeshGate Setup (MG-5424)’ on page 2-3)
2. Mesh Nodes (see ’Mesh Node Setup (MN-5424)’ on page 2-8)
3. End Nodes (see ’End Node Setup (EN-5424)’ on page 2-12)
4. MeshScape Network Monitor (see ’Installing Contents of Millennial Net’s RK-5424
CD-ROM’ on page 2-15)
Once the hardware is set up and the MeshScape Network Monitor software installed, launch
MeshScape Network Monitor to verify that all hardware is detected and displayed.
RK-5424-5 Reference Kit User’s Guide 2-3
Installing the Hardware
Installing the Hardware
The following procedures describe in order, how to install the various hardware components of
the reference kit. When initially setting up the hardware, it is recommended that the MeshGate,
Mesh Nodes, and End Nodes be placed close to the host PC. This will make verifying proper
network installation and operation easier when first establishing a session with MeshScape
Network Monitor. The devices can then be moved away from the host PC as needed.
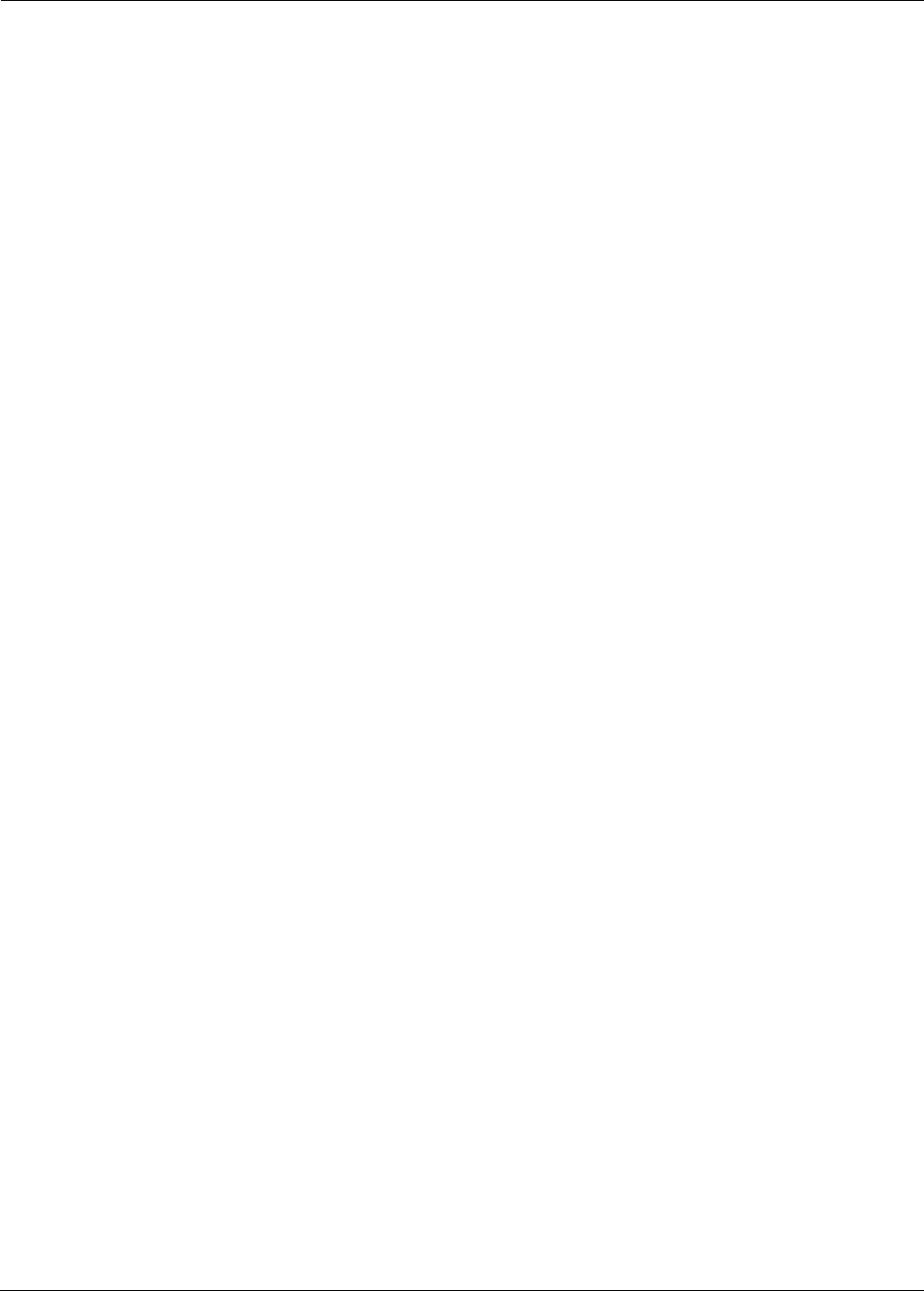
MeshGate Setup (MG-5424)
The MeshGate, model number MG-5424 (label with model number on bottom), is shipped
enclosed in a case that provides access to the antenna connector, RS-232 data port, console
port, and power connectors as shown in Figure 2-5. Additionally, a lift-off connector panel
access cover on the case provides access to a 12-pin terminal block connector, a reset button,
an on/off switch, and a 6-pin external programming port.
Figure 2-5. MeshGate components
The pin-out for the MeshGate terminal block is as follows:
RS-485 PWR
OUT
RS-232 PWR
IN
RTN A B 3.3V GND RTS CTS RX TX GND +
RP-SMA Antenna Connector
Power Adapter
Connector
External
Programming
Port
Power LED
RF Activity LED
Status LED
RS-232 Port
Terminal Block
Product Label with:
- Model Number
- GroupID
- Device ID
Console Port
Connector Panel
Access Cover
Reset Button
On/Off Switch
Terminal Block
2-4 Millennial Net
Installing the MeshScape System
The function of each MeshGate terminal block pin is described as follows:
During the setup procedure, refer to Figure 2-5 for location of the various MeshGate
components.
To set up the MeshGate:
1. Attach one of the four included 1/2-wave antennas to the RP-SMA antenna connector.
The antenna screws onto the connector.
2. Connect the RS-232 cable between the MeshGate’s RS-232 Port and the host PC’s serial
port.
3. Plug the supplied AC adapter into the MeshGate power connector and then into a
110/220 VAC power source.
4. Remove the connector panel access cover and slide the on/off switch to the ON position.
5. Replace the connector panel access cover.
The MeshGate is ready to interface with the host PC and surrounding network nodes
(Mesh Nodes and End Nodes). For information on the behavior of the status LEDs, see
Table 2-2.
Table 2-1. MeshGate terminal block pin assignments
Pin Label Input/Output Function
1RTN Reference Reference connection for RS-485
2 A I/O RS-485 signal +
3 B I/O RS-485 signal -
43.3V Output Power 3.3V output power
5GND Power Digital ground
6RTS Input RS-232 Request to Send
7CTS Output RS-232 Clear to Send
8RX Output RS-232 Receive Data
9 TX Input RS-232 Transmit Data
10 N/A N/A Not used
11 GND Power Digital Ground
12 +Power Input power (4.5V to 30V)
Caution
When attaching the antenna, only hand-tighten the antenna to the
connector. Using excessive force may damage the connector.

RK-5424-5 Reference Kit User’s Guide 2-5
Installing the Hardware
Mounting options
There are three mounting options for the MeshGate:
• desktop
• wall
• DIN rail
Mounting the MeshGate on a Desktop
1. Choose a level, stable surface on which to rest the MeshGate.
2. Install one of the four supplied self-adhesive rubber feet in the round depression located
in each corner on the bottom of the MeshGate chassis.
Mounting the MeshGate on a Wall
When mounting the MeshGate to a wall, we recommend that you secure the MeshGate in
place using two #6 screws and screw anchors (not supplied) of the appropriate type for the
mounting surface.
1. Place the MeshGate against the wall in the desired mounting location.
2. Mark the location of the two chassis screw holes on the wall.
3. Drill two screw holes in to the wall at the marked locations.
4. Mount the MeshGate to the wall using two #6 screws (not supplied).
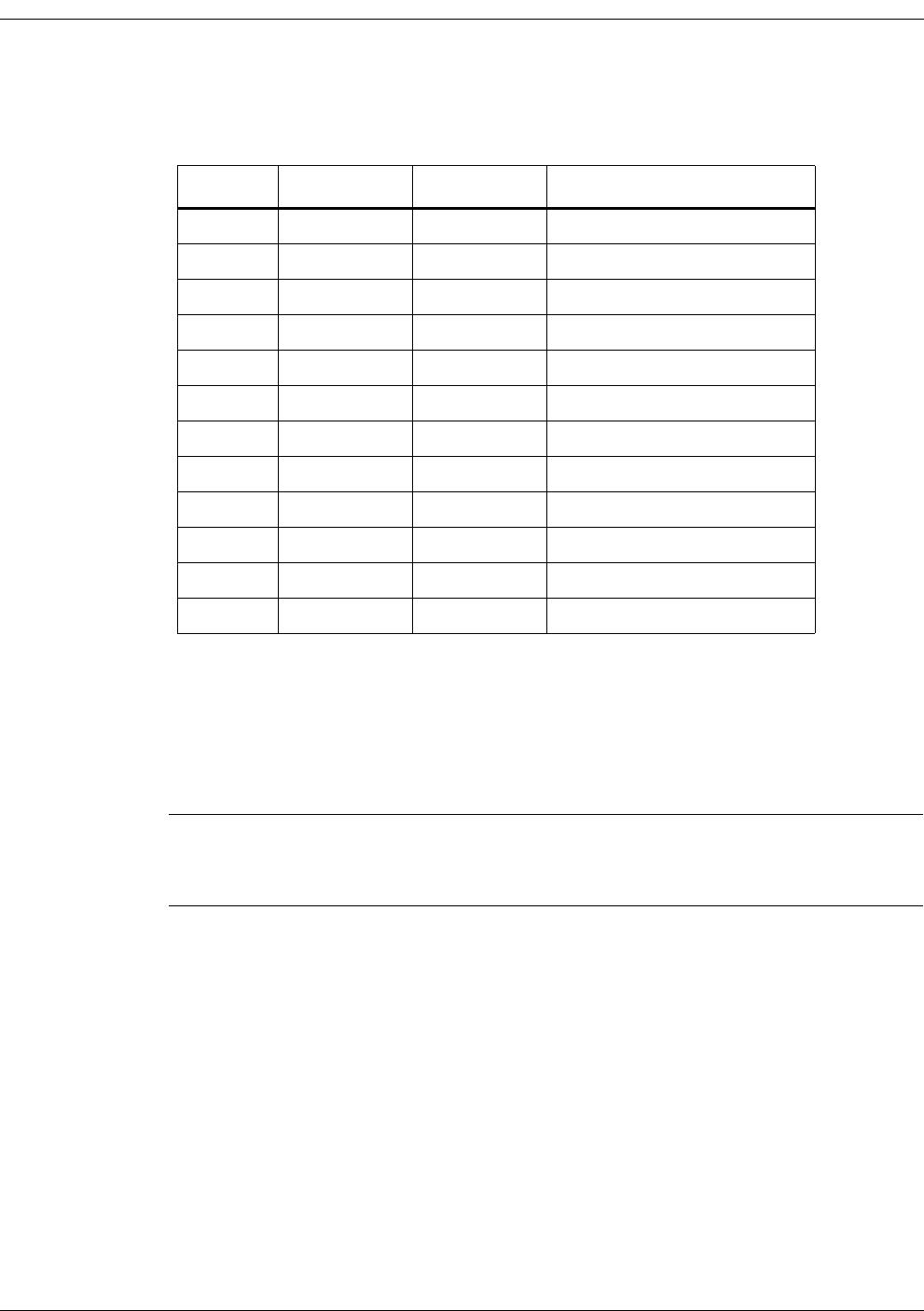
Mounting the MeshGate to a DIN Rail
Millennial Net offers an optional DIN rail mounting kit (MG-DIN) to enable you to mount the
MeshGate to a standard DIN rail easily and quickly.
To mount the MeshGate to a DIN rail using the supplied DIN rail mounting bracket and
hardware, refer to Figure 2-6 and complete the following steps:
2-6 Millennial Net
Installing the MeshScape System
Figure 2-6. Mounting the MeshGate to a DIN rail
1. Using two of the supplied screws, secure the MeshGate chassis to the mounting bracket.
2. Mount the adapter bracket onto the DIN rail. Slide the adapter bracket’s clamp up and
then tighten its two screws to secure the adapter bracket in place on the DIN rail.
3. Using two of the supplied screws, secure the mounting bracket to the adapter bracket.
MeshGate status LED operation
Table 2-2 describes how the status LEDs on the MeshGate behave.
Table 2-2. MeshGate status LEDs
LED Led State Status
PWR On Connection with host device detected.
Blinking No host device detected or MeshScape Network Monitor not
running.
Off Power has been removed.
ACT Flashing Gateway detects RF activity. The Activity LED will flash when
detecting valid packets (packets destined for device) and may also
flash when detecting invalid packets (packets destined for other
devices) or environmental noise. Only valid packets are processed
by the device.
Off No RF activity detected.
STS (Reserved for future use.)
Adapter Bracket
DIN Rail
Mounting Bracket
RK-5424-5 Reference Kit User’s Guide 2-7
Installing the Hardware
MeshGate default settings
Table 2-3 lists the default settings for the MeshGate gateway.
* Persisted indicates value is retained after power cycle.
Table 2-3. MeshGate default Settings
Variable
Description Default Value Persisted?*
RS-232 Data Port Configuration RS232
115,200 baud
No parity
No hardware flow control
Yes
Console Port RS232
115,200 baud
No parity
No hardware flow control
Yes
2-8 Millennial Net
Installing the MeshScape System
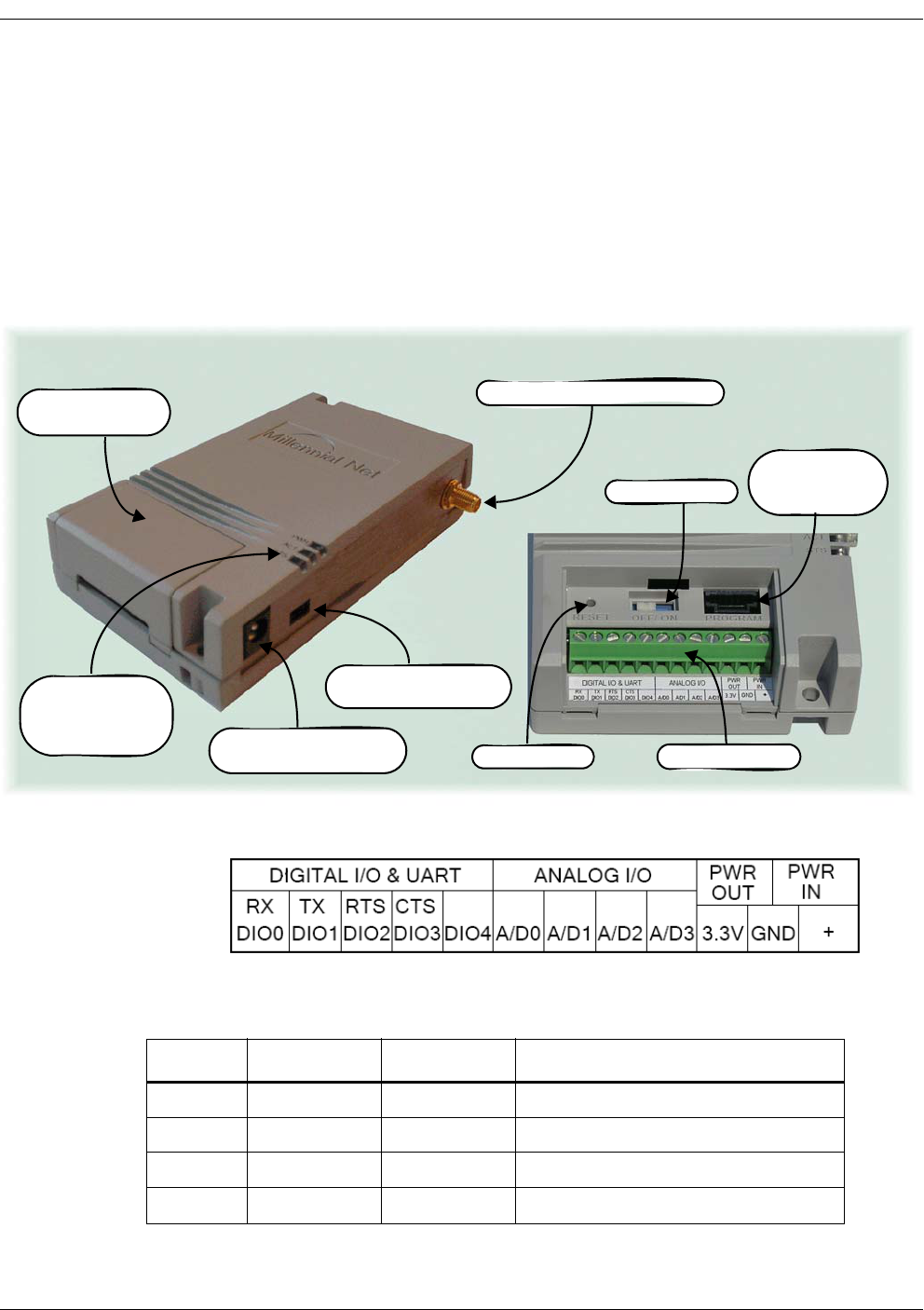
Mesh Node Setup (MN-5424)
The Mesh Nodes, model number MN-5424 (label with model number on bottom), are shipped
enclosed in cases that provide: RP-SMA antenna connector, three-position external power
source switch, and a connector for the supplied power adapter as shown in Figure 2-7.
Additionally, a lift-off connector panel access cover on the case provides access to a 12-pin
terminal block connector, a reset button, an on/off switch, and a six-pin external programming
port.
Figure 2-7. Mesh node components
The pin-out for the Mesh Node terminal block is as follows:
The function of each Mesh Node terminal block pin is described as follows:
Table 2-4. Mesh Node terminal block pin assignments
Pin Label Input/Output Function
1DIO0/RxD I/O or Output Digital Input/Output 0 or UART RX
2DIO1/TxD I/O or Input Digital Input/Output 1 or UART TX
3DIO2/RTS I/O or Input Digital Input/Output 2or UART RTS (in)
4DIO3/CTS I/O or Output Digital Input/Output 3 or UART CTS (out)
Connector Panel
Access Cover
RP-SMA Antenna Connector
External
Power Source Switch
External
Programming
Port
Power LED
RF Activity LED
Status LED Power Adapter
Connector Reset Button
On/Off Switch
Terminal Block
RK-5424-5 Reference Kit User’s Guide 2-9
Installing the Hardware
Installing the antenna and applying power
To install a Mesh Node:
1. Attach one of the four supplied 1/2-wave antennas to the RP-SMA antenna connector.
The antenna screws onto the connector.
2. Ensure that the Mesh Node External Power Source Switch is in the DC Ext position.
3. Plug the supplied AC adapter into the MeshGate power connector and then into a
110/220 VAC power source.
4. Remove the connector panel access cover and slide the on/off switch to the ON position.
Replace the connector panel access cover.
The Mesh Node is ready to operate as a router device (see note below). For information
on the behavior of the status LEDs, see Table 2-5.
5. Repeat Steps 1 to 4 for each Mesh Node in the kit.
Mounting options
You may operate the mesh node while it is resting on a desktop or mounted to a wall. When
mounting the mesh node to a wall, we recommend that you secure the mesh node in place
using two #6 screws and screw anchors (not supplied) of the appropriate type for the mounting
surface.
5DIO4 I/O Not used.
6AD0 Input Analog Input 0
7AD1 Input Analog Input 1
8AD2 Input Analog Input 2
9AD3 Input Analog Input 3
10 3.3V Output Power 3.3V output power
11 GND Power Digital ground
12 +Power Input power (4.5V to 30V)
Caution
When attaching the antenna, only hand-tighten the antenna to the connector.
Using excessive force may damage the connector.
Table 2-4. Mesh Node terminal block pin assignments
Pin Label Input/Output Function
2-10 Millennial Net
Installing the MeshScape System
Mesh node status LED operation
Table 2-5 describes how the status LEDs on the Mesh Node behave.
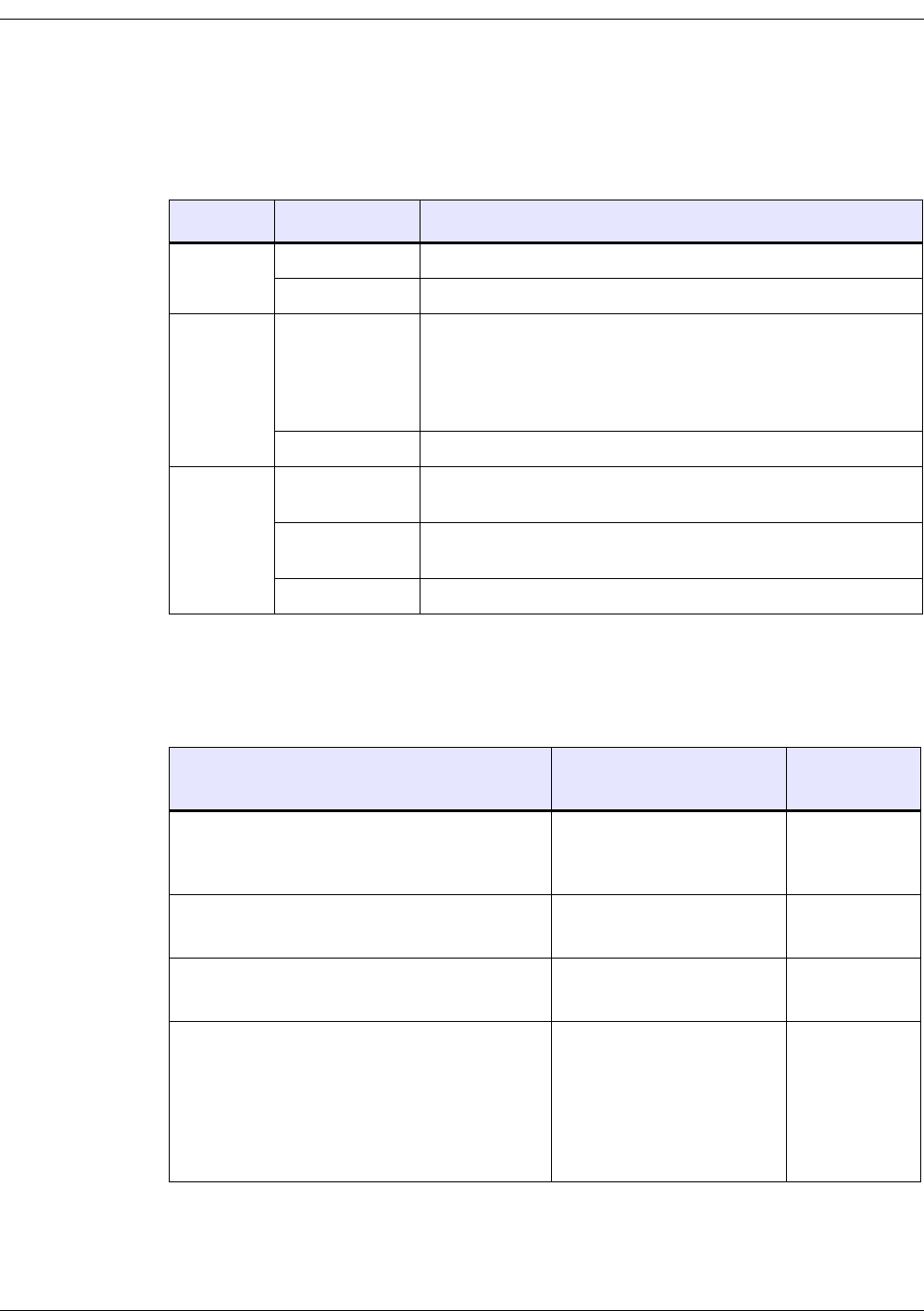
Mesh node default settings
Table 2-6 lists the default settings for the MeshScape mesh node.
Table 2-5. Mesh node status LEDs
LED Led State Status
PWR On Power on.
Off No power.
RF Activity Flashing Mesh Node detects RF activity. The RF Activity LED will flash
when detecting valid packets (packets destined for device)
and may also flash when detecting invalid packets (packets
destined for other devices) or environmental noise. Only
valid packets are processed by the device.
Off No RF activity detected.
STS On The Mesh Node has established two northbound pathways to the
MeshGate.
Blinking The Mesh Node has established a single northbound pathway to
the MeshGate.
Off The Mesh Node is not on the MeshScape network.
Table 2-6. MeshScape mesh node default settings
Variable
Description Default Value Persisted?*
Sampling Interval
Defines the time interval between successive
sensor samples sent from mesh node to MeshGate
300 Seconds No
A/D Converter Setup
Defines state of A/D converter sensor inputs
Channels 0-3 disabled Yes
DIO Setup
Defines state of digital I/O lines
DIO<0:3> configured as
inputs
Yes
Serial Data configuration
Defines configuration of serial data sensor input,
options are:
Off - DIO<0:3> configured as I/O lines
Digital UART - DIO<0:3> configured as digital
UART signals
Off - DIO<0:3> defined as I/O
lines
Yes
RK-5424-5 Reference Kit User’s Guide 2-11
Installing the Hardware
* Persisted indicates value is retained after power cycle.
Label
Text label used by Network Monitor to describe
sensor
<blank> Yes
(on Network
Monitor host)
Group ID
Network ID used to identify members of the same
wireless network
Pre-programmed
User re-programmable
Yes
Device ID
Device ID used to uniquely identify each node in a
wireless network
Pre-programmed
User re-programmable
Yes
Table 2-6. MeshScape mesh node default settings (continued)
Variable
Description Default Value Persisted?*
2-12 Millennial Net
Installing the MeshScape System
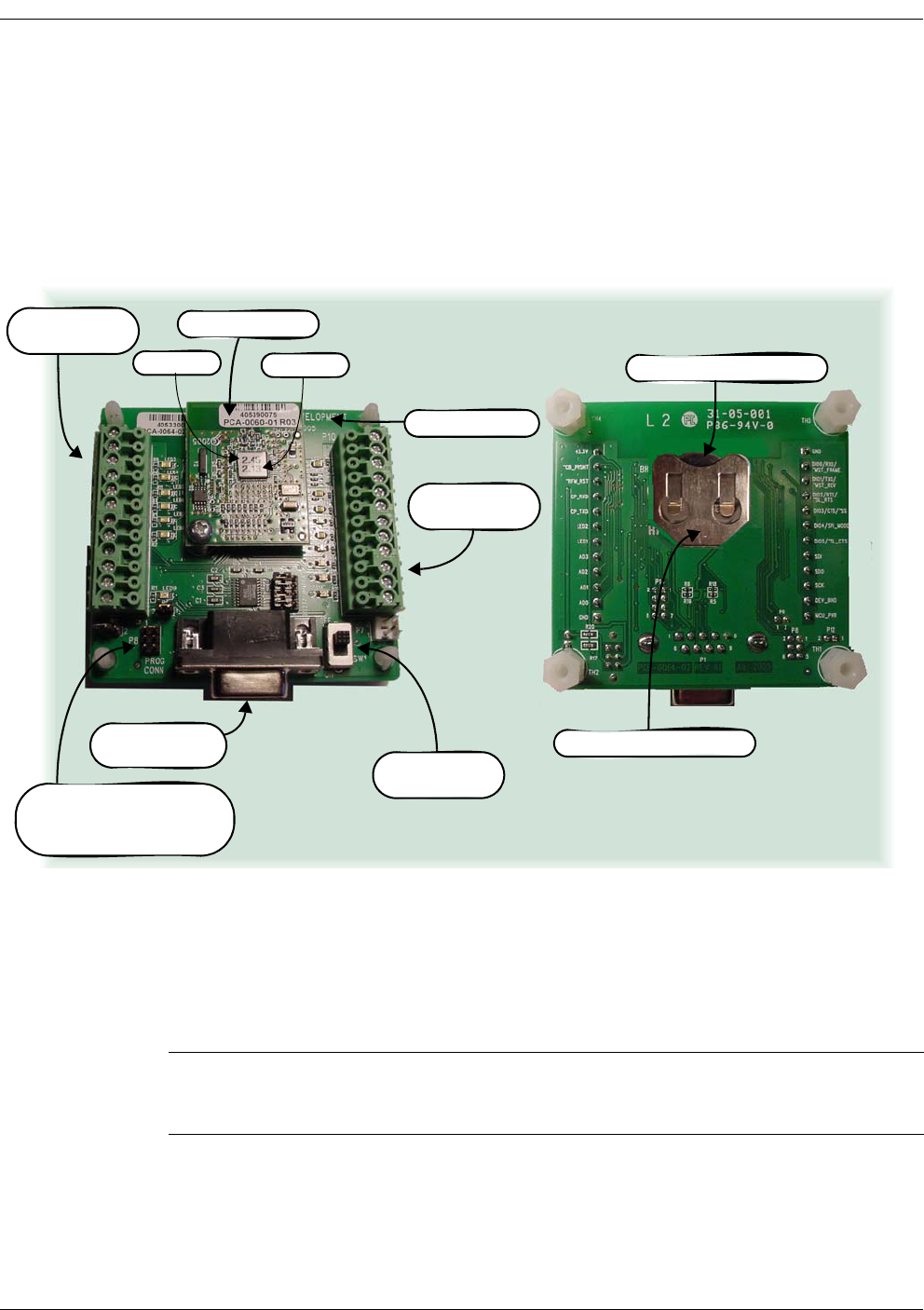
End Node Setup (EN-5424)
The End Nodes, model number EN-5424, are mounted to terminal boards as shown in Figure
2-8. A terminal board provides easy access to I/O connections and the power switch. The
terminal board also contains a battery holder and battery for supplying power to the End Node.
The label on top of the End Node contains the device and group IDs assigned to the End Node.
Figure 2-8. End node and terminal board (top and bottom views)
To provide power to the End Node, a 3 VDC lithium coin cell (CR2450 type) is provided and
already installed in the battery holder on the back of the terminal board.
To activate an end node:
• Turn the terminal board's power switch ON (refer to Figure 2-8). The End Node is ready to
communicate directly or indirectly (through an Mesh Node) with the MeshGate. Repeat
this step for each End Node.
Note:
C
Configuring and connecting an End Node or Mesh Node to external devices via their
digital or analog I/O connectors is discussed in Chapter 3, “Running MeshScape
Network Monitor”.
End Node
Terminal Board
Digital I/O
Terminals
RS-232/RS-485
Connector On/Off
Switch
Group ID Device ID
Lithium Coin Cell Holder
3VDC Lithium Coin Cell
Analog I/O
Ter m in als
P8 Programming Port
Used with MeshScape
Programmer Application
RK-5424-5 Reference Kit User’s Guide 2-13
Installing the Hardware
Jumper settings
Note the following jumper settings on the end node terminal board:
• P6 - Install a jumper across P6 to enable the terminal board’s LEDs as follows:
– LED1 indicates power on/off.
– LED12 indicates the end node has a primary parent.
– LED2 indicates the end node has a secondary parent.
– LED3 – 6 & 10,11,13,14 indicate the state of their respective port (For example, if
the end node is configured in UART mode, LED4 will be active when receiving data
(RX line).
• P14 is used to connect the RS-232 transceiver’s I/O pins to the end node’s UART. Jumpers
must be engaged to use the end node’s RS-232 interface. To use the RS-232 transceiver, it
must be enabled by populating R6 with a 1K resistor and depopulating R19.
Default settings
Table 2-7 lists the default settings for the MeshScape end node.
Table 2-7. MeshScape end node default settings
Variable
Description Default Value Persisted?*
Sampling Interval
Defines the time interval between successive
sensor samples sent from end node to MeshGate
10 Seconds No
A/D Converter setup
Defines state of A/D converter sensor inputs
Channels 0-3 disabled Yes
DIO Setup
Defines state of digital I/O lines
DIO<0:3> configured as
inputs
Yes
Serial Data configuration
Defines configuration of serial data sensor input,
options are:
Off - DIO<0:3> configured as I/O lines
Digital UART - DIO<0:3> configured as digital
UART signals
Off - DIO<0:3> defined as I/O
lines
Yes
Label
Text label used to describe sensor
<blank> Yes
(on Network
Monitor host)
Group ID
Network ID used to identify members of the same
wireless network
Pre-programmed
User re-programmable
Yes
2-14 Millennial Net
Installing the MeshScape System
* Persisted indicates value is retained after power cycle.
Device ID
Device ID used to uniquely identify each node in a
wireless network
Pre-programmed
User re-programmable
Yes
Table 2-7. MeshScape end node default settings (continued)
Variable
Description Default Value Persisted?*

RK-5424-5 Reference Kit User’s Guide 2-15
Installing MeshScape Network Monitor
Installing MeshScape Network Monitor
The procedures in this section describe how to do the following:
1. Use the CD-ROM shipped with the reference kit to install the following Millennial Net
items onto the host PC:
– MeshScape Network Monitor
– MeshScape Programmer
–API software
– EN-5424 End Node Tech Sheet
– MG-5424 MeshGate Tech Sheet
– MN-5424 Mesh Node Tech Sheet
– RK-5424 MeshScape Users Guide
– RK-5424-5 Kit Contents
– IK-5424 Kit Contents
– Reference Kits Tech Sheet
– 5424 Family Product Sheet
– 5424 MeshScape Release Notes
2. Open a MeshScape Network Monitor session.
The software installation procedure utilizes an InstallShield Wizard that will guide you through
the installation process. When the process is complete, shortcut icons for MeshScape Network
Monitor and MeshScape Programmer are also added to the host PC’s desktop.
Installing Contents of Millennial Net’s RK-5424 CD-ROM
To install the software contained on the CD-ROM:
Insert the RK-5424 Reference Kit CD into the host PC’s CD-ROM drive. The Autorun
feature launches the InstallShield Wizard. Follow the prompts to install the contents of
the CD onto the host PC.
If Autorun is not enabled, drill down to the contents of the kit CD and double-click on
setup.exe. The InstallShield Wizard is launched. Follow the prompts to install the
contents of the CD onto the host PC.
Proceed to ’Launching MeshScape Network Monitor Using Windows’ on page 2-16.
Note: If a version of MeshScape Network Monitor already exists on the host PC, it will be
detected during the installation process. A special prompt screen is then displayed,
allowing you to remove the existing files. You must select Remove to unistall the
existing version before running the installation program again to install the newer
version contained on the CD.
2-16 Millennial Net
Installing the MeshScape System
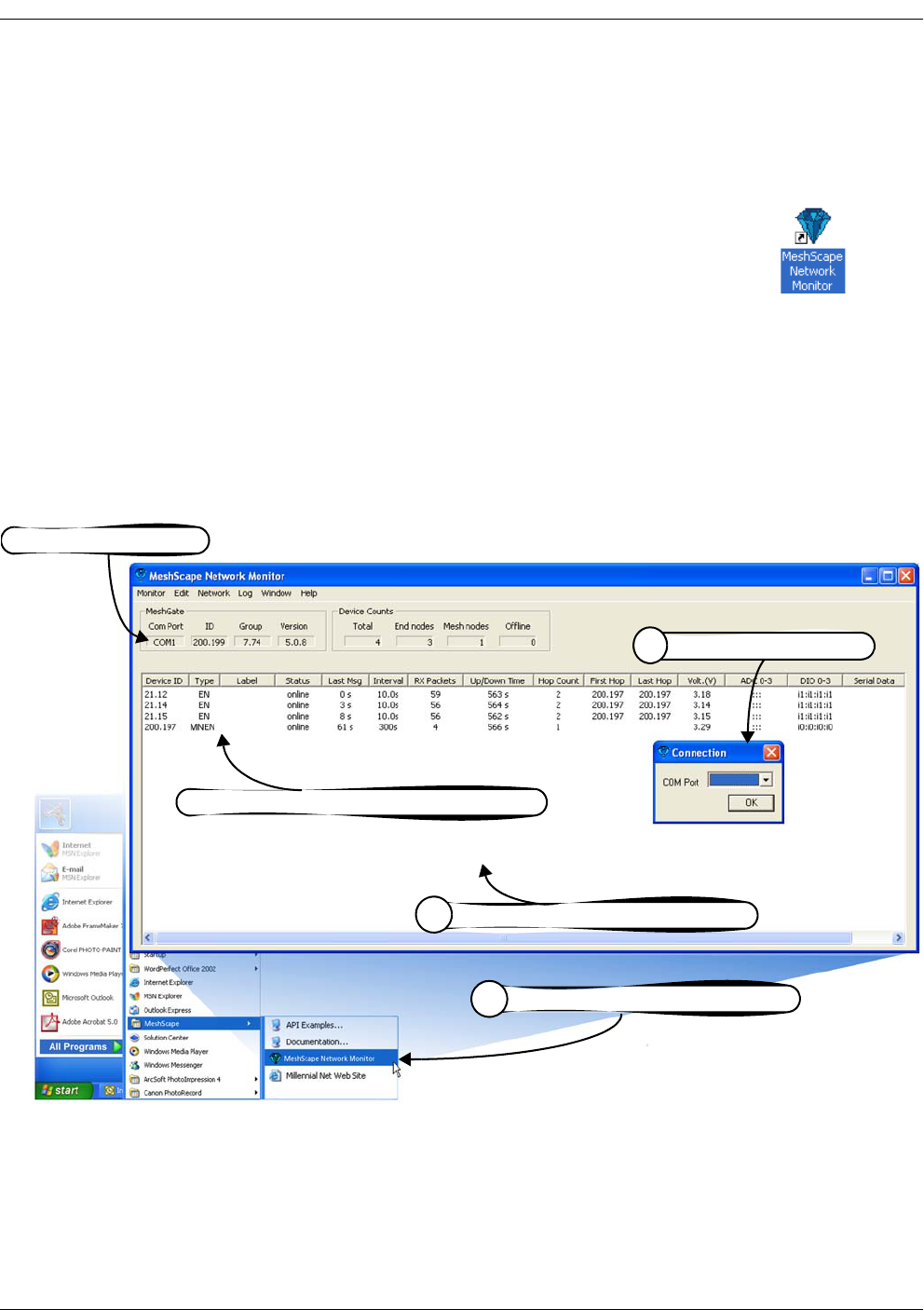
Launching MeshScape Network Monitor Using Windows
Using the standard application launching methods of Windows, the following procedure
describes how to launch MeshScape Network Monitor and verify proper communication with
the network nodes (see Figure 2-9):
1. To launch MeshScape Network Monitor, do one of the following:
– Double-click on the desktop’s MeshScape Network Monitor icon.
– From the Windows taskbar, select:
Start>All Programs>MeshScape>MeshScape Network Monitor.
2. Enter the COM port on which the host PC is to communicate with the connected
MeshScape.
3. Verify that all network nodes are discovered and displayed by MeshScape Network
Monitor.
Figure 2-9. Using Windows Start menu to launch MeshScape Network
Monitor
Once proper operation of the MeshScape system has been verified, proceed to Chapter 3,
“Running MeshScape Network Monitor” for an overview of the GUI and details on how to use
it to configure the operation of your MeshScape system.
Select MeshScape Network Monitor
1
Verify all network nodes are discovered
3
Discovered MeshGate
Discovered End Nodes (EN) & Mesh Nodes (MNEN)
2Specify host PC COM Port

RK-5424-5 Reference Kit User’s Guide 3-1
3
Running MeshScape Network
Monitor
This chapter provides the following MeshScape Network Monitor information:
•’MeshScape Network Monitor Overview’ on page 3-2
•’Configuring a Node’s Operation’ on page 3-6
•’Labeling an End Node or Mesh Node’ on page 3-18
•’Configuring Persistence Attributes’ on page 3-19
•’Selecting a Com Port on the Host PC’ on page 3-20
•’Configuring Serial and ADC Data Formats’ on page 3-21
•’Turning Event Tracking On/Off’ on page 3-22
•’Broadcasting Data to All Nodes.’ on page 3-23
•’Creating an Event Log File’ on page 3-25
•’Viewing the Contents of an Event Log File’ on page 3-26
3-2 Millennial Net
Running MeshScape Network Monitor
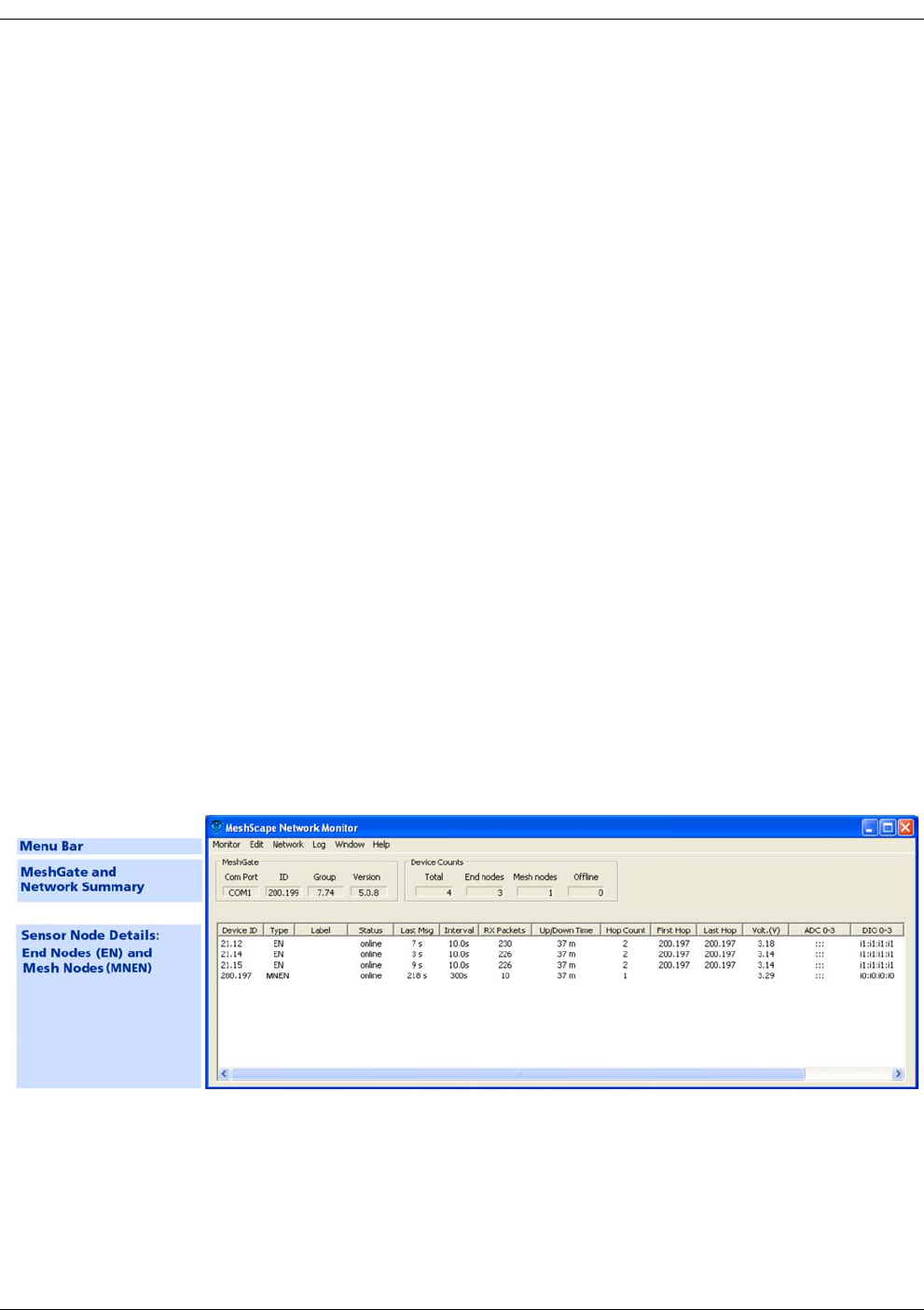
MeshScape Network Monitor Overview
Millennial Net’s MeshScape Network Monitor is a monitoring and management system for
MeshScape networks. This management tool will discover and display active Mesh Nodes and
End Nodes in range of the MeshGate as shown in Figure 3-10. MeshScape Network Monitor
displays the Group ID and Device ID of the MeshGate and will display only End Nodes and Mesh
Nodes that have the same group ID as the MeshGate. (For information on opening a
MeshScape Network Monitor session, see ’Launching MeshScape Network Monitor Using
Windows’ on page 2-16.)
Using MeshScape Network Monitor, a number of the monitoring features may be observed:
•Any of the Mesh Nodes can be moved, and as long as they are within the range
of a Mesh Node or the MeshGate, connectivity will be maintained seamlessly. Any
of the Mesh Nodes and even the MeshGate can be moved while operating within range,
and all routes will automatically adapt to their new locations.
•The MeshScape system Persistent Dynamic Routing™ routing protocol always
seeks to route data using the most reliable RF links with the fewest hops. The
network protocol will change the route when an RF link in the route is deemed unreliable.
This can be seen in the MeshScape Network Monitor. For example, the Mesh Node IDs
used for the first and last hops may change from time to time even when the End Node is
stationary, due to environmental interference.
•If any of the Mesh Nodes runs out of battery power or is turned off, all routes
that went through that Mesh Node will be reconfigured—all End Nodes
communicating with that Mesh Node will still be connected to other Mesh Nodes
without any disruption or loss of packets. However, if an End Node exceeds the range
of the network due to the loss of an Mesh Node, then the End Node will be displayed as
Offline.
Figure 3-10. Sample MeshScape Network Monitor window
As shown in Figure 3-10, the main window is divided into the following sections:

RK-5424-5 Reference Kit User’s Guide 3-3
MeshScape Network Monitor Overview
Menu Bar
From the menu bar, system users access the following:
• Monitor
This menu option provides access to the following functions:
–Exit: Ends the session and closes MeshScape Network Monitor.
•Edit
– Labels: Assign user-defined names to End Nodes and Mesh Nodes on the network.
For details, see ’Labeling an End Node or Mesh Node’ on page 3-18.
– Persistence: Toggle monitoring/displaying offline End Nodes and Mesh Nodes. For
details, see ’Configuring Persistence Attributes’ on page 3-19
–Data Format: Configure the following I/O data formats:
•Serial Data Format: Define format of displayed serial data (ASCII/Hex/Decimal)
•ADC Data Format: Define format of displayed ADC data (Voltage/Raw Data)
For details, see ’Configuring Serial and ADC Data Formats’ on page 3-21.
• Network
–Connection: Select serial port on Host PC to use for MeshGate connection. For
details, see ’Selecting a Com Port on the Host PC’ on page 3-20.
–All Sampling Intervals: Configure all network nodes with the same sampling
interval time. For details, see ’Configuring the Sample Interval of all Network Nodes’
on page 3-9.
–Events: Turn event tracking on or off. Tracked events are included in the Event log
file. For details, see ’Turning Event Tracking On/Off’ on page 3-22.
–Broadcast: Broadcast data to all nodes on your MeshScape system including the
time to which all nodes will synchronize their clocks and Ultra Low Power (ULP)
settings defining wakeup interval and duty cycle for all nodes. For details, see
’Broadcasting Data to All Nodes.’ on page 3-23. The broadcast feature is not
supported in this release of the RK-5424-5 Reference Kit but will be supported in
future releases.
•Log
–Attributes: Create a log file of reported network events, such as reported up/down
events and changes to voltages or routes. For details, see ’Creating an Event Log File’
on page 3-25.
–View: Display contents of log file. For details, see ’Viewing the Contents of an Event
Log File’ on page 3-26.
•Window
–Watch: Display the current status information relating to a node’s interfaces. For
details, see ’Using Watch Function to Display Configuration Information’ on page
3-16.
– Statistics: Open Monitor Statistics window, displaying RX/TX packet and byte
information.
•Help
–About: Displays MeshScape Network Monitor revision level information.
3-4 Millennial Net
Running MeshScape Network Monitor
MeshGate
This section displays the following information on the MeshGate connected to the host PC’s
RS-232 port:
•Com Port: Host PC’s RS-232 port connected to MeshGate.
•ID: Device identifier assigned to the MeshGate. The ID consists of two octets (A.B), where
each octet’s value = 160 to 255.
•Group: Group identifier assigned to the MeshGate. All Mesh Nodes and End Nodes with
the same Group identifier will communicate with the displayed MeshGate.
•Version: Version of firmware loaded on the MeshGate.
Device Counts
This section displays the following information on the discovered network nodes:
•Total: Total combined number of discovered End Nodes and Mesh Nodes.
• End nodes: Total number of End Nodes currently online.
• Mesh nodes: Total number of discovered Mesh Nodes currently online.
•Offline: Total number of discovered end nodes and mesh nodes currently offline.
Sensor Node Details
This section displays the following information related to the End Nodes and Mesh Nodes on
the network:
•Device ID: Unique identifier assigned each node. The identifier consists of two octets
(A.B), where each octet contains a value between 001 and 255.
•Type : This column lists all nodes discovered on the network that are assigned the same
group ID as the displayed MeshGate. Nodes displayed here include End Nodes (EN) and
Mesh Nodes (MNEN) or (MN) for Mesh Nodes without I/O capabilities.
•Label: User-defined name assigned to node via MeshScape Network Monitor application.
•Status: Current status of the device:
–Online: The node is communicating with the MeshGate.
–Offline: The MeshGate can no longer communicate with the node.
–Refresh: The node is being updated with a new operating state.
•Last Msg: Time elapsed since last packet was received from or transmitted to the node.
Time is displayed in seconds (s).
•Interval: Time of the last message generated by a node. This value is synchronized with
the sampling interval of the node. Time is displayed in either seconds (s) or minutes (m).

RK-5424-5 Reference Kit User’s Guide 3-5
MeshScape Network Monitor Overview
•RX Packets: Number of packets successfully delivered to MeshScape Network Monitor
from a node since the node was detected by the MeshGate. The counter is reset if the
MeshScape Network Monitor program is restarted.
• Up/Down Time: Total time since the node was last detected on/off by the MeshGate.
•Hop Count: Number of network node hops taken by a packet delivered from a node to
the MeshGate. For example: End Node—MeshGate = 1 hop,
End Node—Mesh Node—MeshGate = 2 hops (each additional Mesh Node will add
another hop).
•First Hop: Device ID of the first Mesh Node on the path used by a packet to get to the
MeshGate. If no Mesh Node was used, then the field is blank, indicating the device is
communicating directly with the MeshGate.
•Last Hop: Device ID of the last Mesh Node on the path used by a packet to get to the
MeshGate. If no Mesh Node was used, then the field is blank, indicating the device is
communicating directly with the MeshGate.
•Volt: DC voltage level of the node’s power source in volts.
•ADC 0-3 Data: Input voltages on pins used for analog-to-digital conversion operation.
•DIO 0-3 Data: Digital information on pins used for digital I/O operation.
•Serial Data: Input serial data information when configured for serial operation.
•Version: Version of firmware loaded on the node.
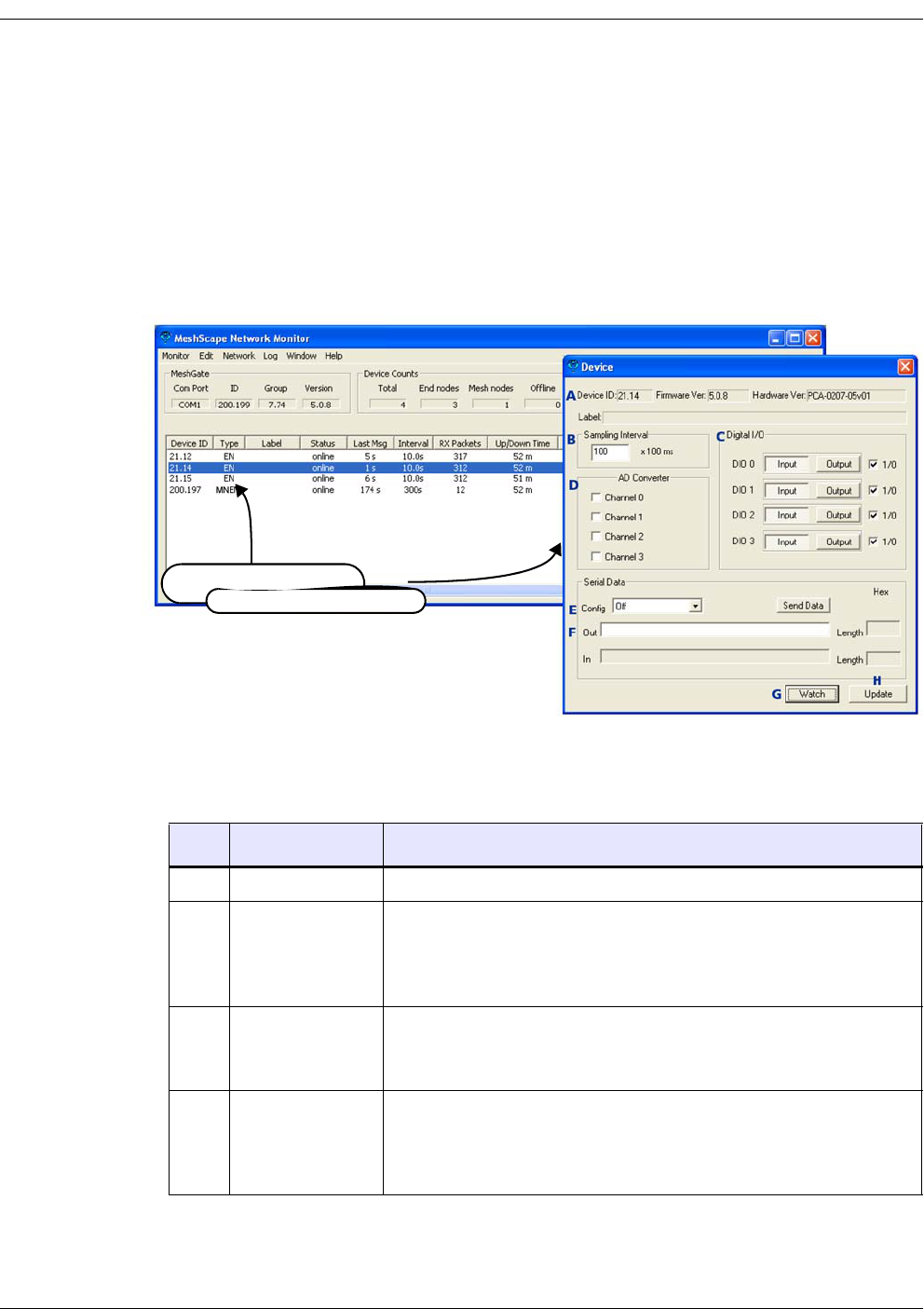
3-6 Millennial Net
Running MeshScape Network Monitor
Configuring a Node’s Operation
To configure the operation of an End Node or Mesh Node, double-click on the desired
device from the list of discovered sensor nodes in the main display. The Device window is
displayed, showing the current configuration of the selected device (see Figure 3-11).
The Device window is a modeless dialog that may be left open while you interact with
other MeshScape Network Monitor features, windows, and dialogs.
Figure 3-11. MeshScape Network Monitor’s Device window
Table 3-8 describes the functions of the various sections of the window as shown in Figure
3-11.
Table 3-8. Device window functions
Item Description Function
ADevice ID This is the device ID of the node currently selected for configuring.
BSampling Interval This setting configures how often the node transmits a ‘heart beat’ data
packet or any other data.
For details, see ’Configuring the Sample Interval of a Single Node’ on
page 3-8.
CDigital I/O This panel is used to control the states of the I/O pins associated with
digital I/O channels D0–D3. 1 = High; 0 = LOW.
For details, see ’Configuring Digital I/O Operation’ on page 3-9
DAD Converter This panel is used to control the states of the AD (Analog-to-Digital)
Converter channels.
For details, see ’Configuring AD (analog-to-digital) Converter Operation’
on page 3-14.
Double-click on device . . .
to open Device window
RK-5424-5 Reference Kit User’s Guide 3-7
Configuring a Node’s Operation
ESerial Data
Config
This panel is used to select a serial I/O operation for a device: Off, Digital
UART, RS-232 (not supported), or RS-485 (not supported). Selecting
serial operation disables digital I/O functionality because these
operations share the same pins.
For details, see the following:
•’Configuring UART Operation’ on page 3-12
FSerial Data
Out
This panel, which is only used if the node is configured for serial
operation, is used to send serial data to the node.
For details, see the following:
•’Configuring UART Operation’ on page 3-12
GWatch This option opens a new window that displays information relating to
the node’s various interfaces, including analog and digital I/O
configuration states and packets received/sent.
Use this window to observe when configured changes have actually
occurred on the device.
For details, see ’Using Watch Function to Display Configuration
Information’ on page 3-16
HUpdate Updates the selected device with any changes made to its configuration.
Updating a device will reset the “last message” count.
Table 3-8. Device window functions (continued)
Item Description Function
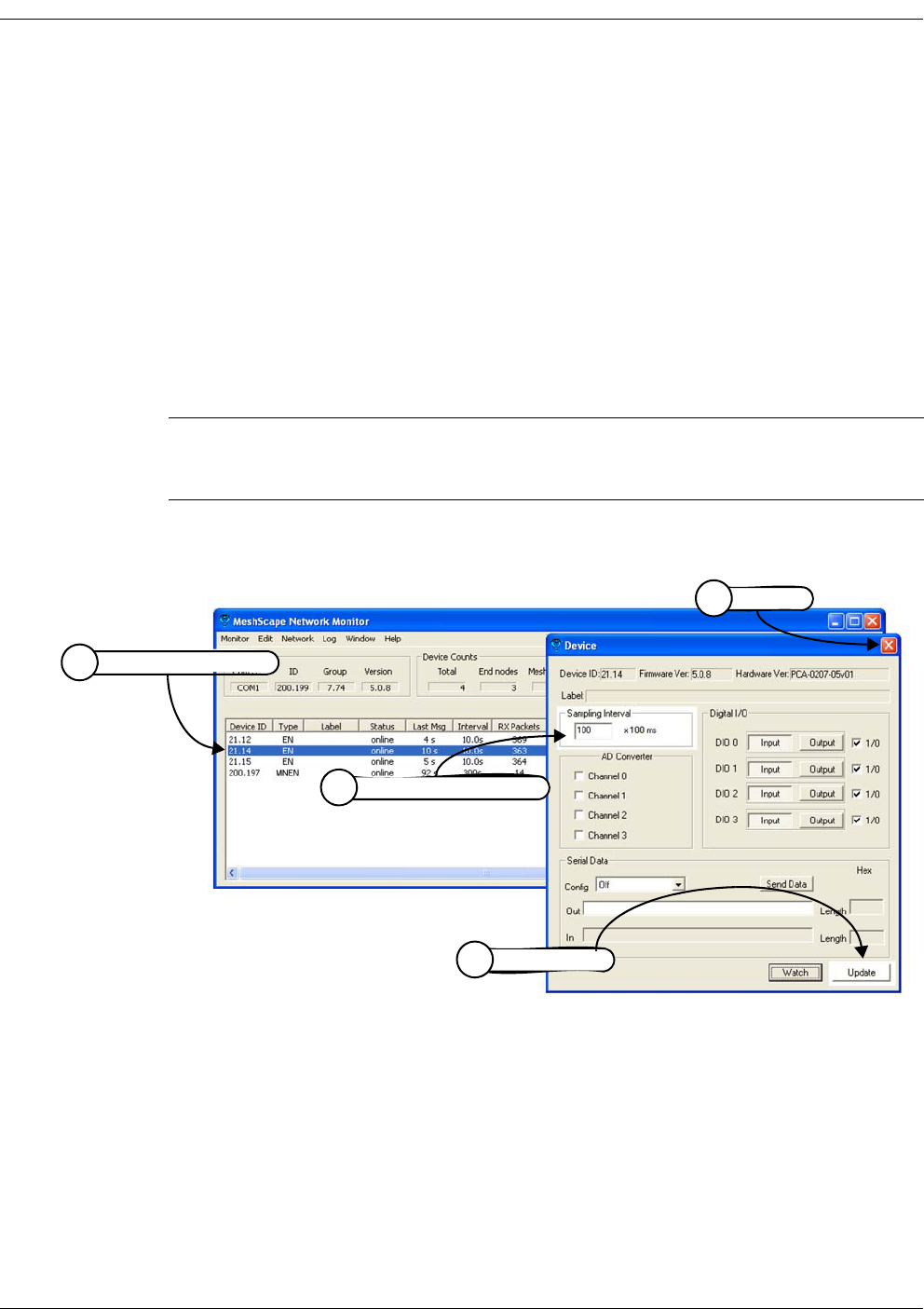
3-8 Millennial Net
Running MeshScape Network Monitor
Configuring the Sample Interval of a Single Node
To configure the time interval between data packets transmitted by a node (see Figure 3-12):
1. Double-click on the desired device from the list of discovered sensor nodes. The Device
window is opened, displaying the device’s current configuration.
2. Using the Sampling Interval panel, enter the interval sampling rate as a multiple of 100
milliseconds. For example, to configure a sampling interval rate of 10 seconds, enter a
value of 100.
minimum value: 1 (0.1 sec)
maximum value: 65535 (109 minutes)
3. Select Update. The device’s configuration is updated.
4. Select X to exit the Device window.
Figure 3-12. Configuring sample interval of single node
Note: After you click Update, the MeshScape Network Monitor will display the ‘Refresh’
state for the device. Changes to the device configuration will show up after one
sampling interval. You can use the Watch window to track configuration changes.
Double-click on device
1
Configure interval time
2
Select Update
3
Select X
4
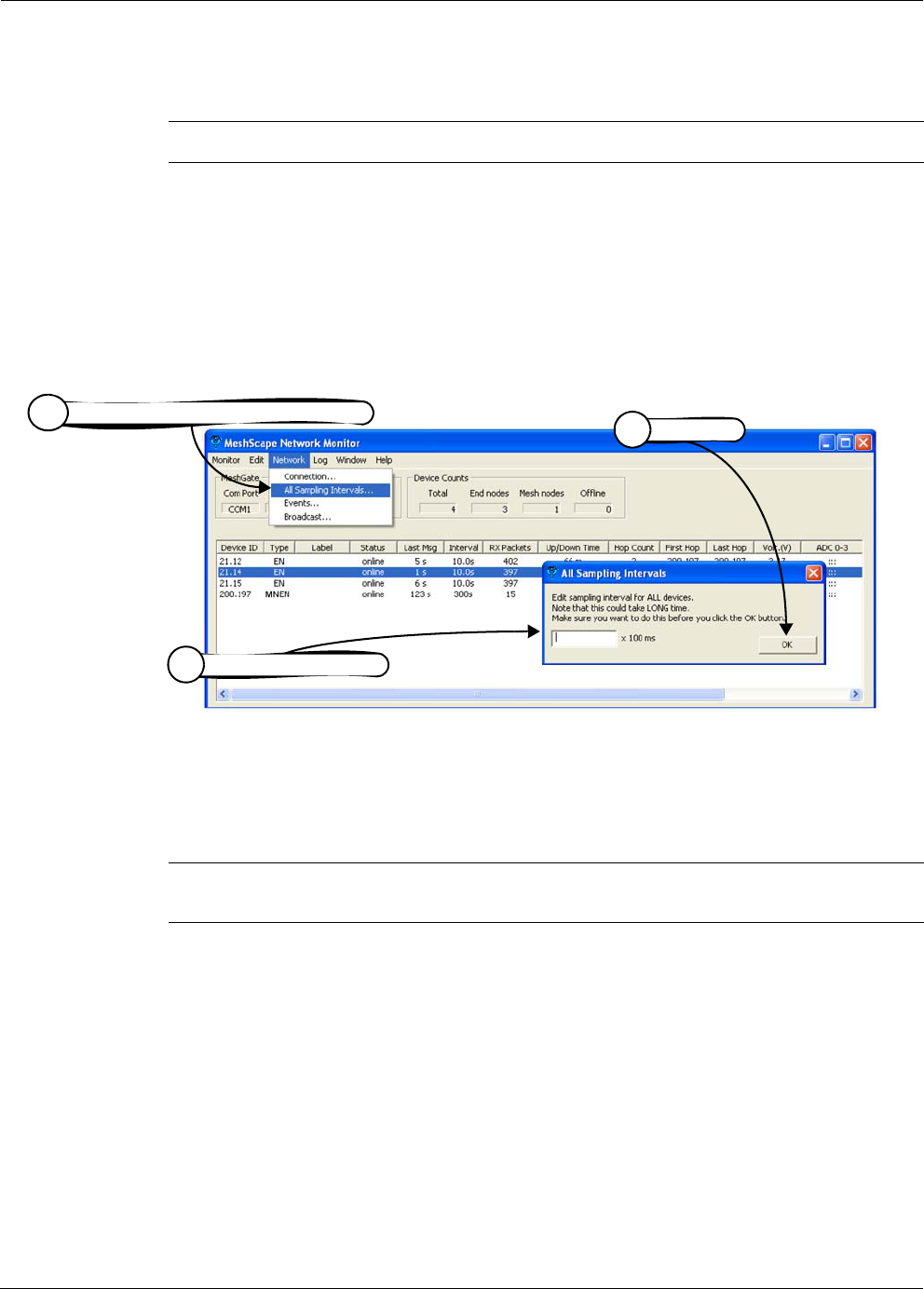
RK-5424-5 Reference Kit User’s Guide 3-9
Configuring a Node’s Operation
Configuring the Sample Interval of all Network Nodes
To configure all the network nodes with the same sampling interval rate (see Figure 3-13):
1. Select Network>All Sampling Intervals. The Edit Sampling Interval window is opened.
2. Enter the interval rate as a multiple of 100 milliseconds. For example, to configure a
sampling interval rate of 20 seconds, enter a value of 200.
3. Select OK. All nodes on the network are configured with the sampling interval rate
entered.
Figure 3-13. Configuring sample interval of all nodes
Configuring Digital I/O Operation
The following procedure describes the steps that need to be taken to set up the hardware and
configure an End Node or Mesh Node for digital I/O operation (see Figure 3-14).
Digital Input Setup
1. Connect the digital source signals to the connectors (DIO 0–DIO 3) and Ground (GND) of:
– End Node’s digital terminal block (P9 located on terminal board).
– Mesh Node’s terminal block pins.
See Figure 3-14 on page 3-11 for connector locations.
2. From MeshScape Network Monitor, double-click on the desired device from the list of
discovered sensor nodes. The Device window is opened, displaying the device’s current
configuration.
Note: It can take a long time to change the sampling interval for all network nodes.
Note: All Digital I/O contain on-board pull-up resistors. To optimize current consumption,
be sure to take into account the pullups when setting I/O values.
Select Network>All Sampling Intervals
1
Configure interval time
2
Select OK
3
3-10 Millennial Net
Running MeshScape Network Monitor
3. From the Digital I/O panel, select Input on each of the desired digital channels to use as
inputs (DIO 0—DIO 3), then select Update.
MeshScape Network Monitor displays the digital information for the node in the Digital
I/O Data column, where On = output channel and In = input channel (n = 1 or 0).
Digital Output Setup
1. Connect the digital signal destination devices to the connectors (DIO 0–DIO 3) and
ground (GND) of the following:
– End Node’s terminal block (P9 located on terminal board).
Pin 1 - Gnd
Pin 2 - DIO 0 RXD (Output)
Pin 3 - DIO 1 TXD (Input)
Pin 4 - DIO 2 RTS (Input)
Pin 5 - DIO 3 CTS (Output)
– Mesh Node’s terminal block connector.
See Figure 3-14 on page 3-11 for connector locations.
2. From MeshScape Network Monitor, double-click on the desired device from the list of
discovered sensor nodes. The Device window is opened, displaying the device’s current
configuration.
3. From the Digital I/O panel, select Output on each of the desired digital channels to use
as outputs (DIO 0—DIO 3).
4. Set the output signal high or low using the 1/0 box located next to the desired Output
button:
– Selected = 1 (output is set high)
– Not selected = 0 (output is set low)
5. Select Update.
MeshScape Network Monitor displays the digital information for the node in the Digital
I/O Data column, where On = output channel and In = input channel (n = 1 or 0).
Note: Input signals should not be applied when the end node is switched off. Since the
node is an extremely low power device, it’s possible that the input signal voltages
will keep the microcontroller active, preventing it from resetting properly when
switched back on. Also, when switched off, the terminal board will ground certain
pins, which can cause excessive current drain for the external peripheral connected
to it.
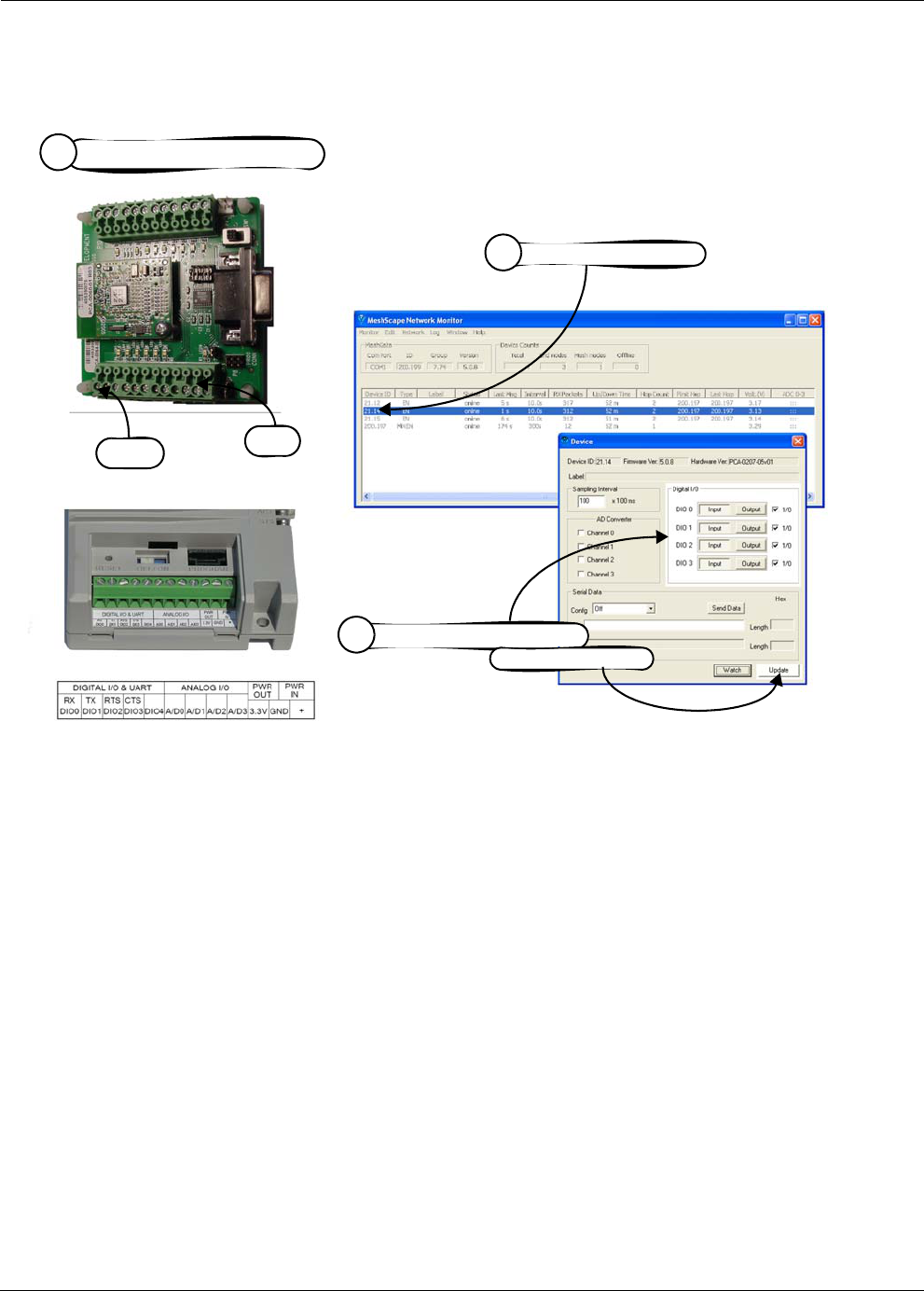
RK-5424-5 Reference Kit User’s Guide 3-11
Configuring a Node’s Operation
Figure 3-14. Configuring End Node or mesh node for digital I/O
Connect external digital device
1
Configure digital channels,
3
then select Update
Double-click on device
2
P9
Pin 1
3-12 Millennial Net
Running MeshScape Network Monitor
Configuring UART Operation
The following procedures describes how to use the End Node’s digital I/O connections or the
Mesh Node’s UART connector for serial/UART communications (see Figure 3-15). Refer to the
technical specification sheets for the End Node and Mesh Node for additional information
required when using the device for serial communications.
1. Connect to the following:
– End Node’s P9 terminal block (pins DIO 0–DIO 3, GND).
Pin 1 - Gnd
Pin 2 - DIO 0 RXD (Output)
Pin 3 - DIO 1 TXD (Input)
Pin 4 - DIO 2 RTS (Input)
Pin 5 - DIO 3 CTS (Output)
– Mesh Node’s terminal block connector (pins DIO 0-DIO 3, GND).
2. From MeshScape Network Monitor, double-click on the desired device from the list of
discovered sensor nodes. The Device window is opened, displaying the device’s current
configuration.
3. From the Config panel, select Serial Data: Digital UART, then Update. The UART
terminal block is ready for UART operation (digital I/O function is disabled).
4. (optional) To send serial data (HEX, DEC, or ASCII) to the node, enter the data in the Out
panel, then select Send Data.
Note: The End Node supports the following serial communication parameters:
9600 bps, 8 data bits, no parity, 1 stop bits
The mesh node supports the following serial communication parameters:
9600 bps, 8 data bits, no parity, 2 stop bits
Serial data and digital I/O are mutually exclusive operations for end nodes.
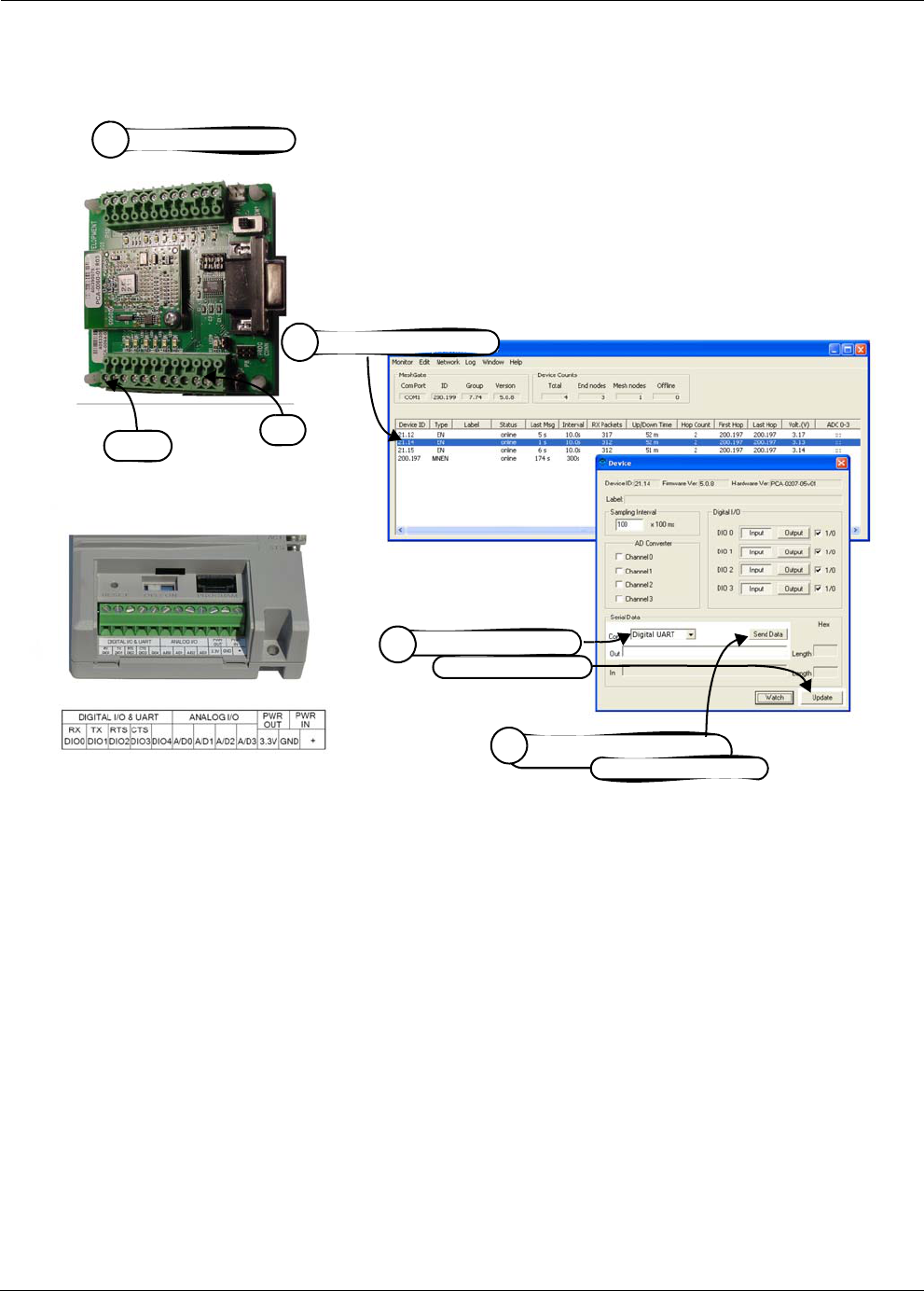
RK-5424-5 Reference Kit User’s Guide 3-13
Configuring a Node’s Operation
Figure 3-15. Configuring End Node or mesh node for UART operation
Connect serial I/O’s
1
(optional) Enter serial data,
4
then select Send Data
Select Digital UART,
3
then select Update
Double-click on device
2
Pin 1 P9
3-14 Millennial Net
Running MeshScape Network Monitor
Configuring AD (analog-to-digital) Converter Operation
The following procedure describes the steps that need to be taken to set up the hardware and
configure an End Node or Mesh Node for AD Converter operation (see Figure 3-16):
1. Connect 0–3 VDC signals to the following A/D Converter connectors:
– End Node: Connect signal source ground to GND_CPU (pin 1 on terminal block P10).
Pin 1 - Gnd
Pin 2 - AD0 (Input)
Pin 3 - AD1 (Input)
Pin 4 - AD2 (Input)
Pin 5 - AD3 (Input)
– Mesh Node: Connect signal source ground to terminal block connector Pin 11
(Ground).
Use any or all of the A/D Converter channels (AD0–AD3) for connecting analog signal
sources.
2. From MeshScape Network Monitor, double-click on the desired device from the list of
discovered sensor nodes. The Device window is opened, displaying the device’s current
configuration.
3. From the AD Converter panel, select the AD Converter channels to which the external
analog signals have been connected, then select Update.
MeshScape Network Monitor displays the analog information for the node in the
ADC0-3 column.
Note: The input range of the analog inputs is 0 to VDD (power supply voltage).
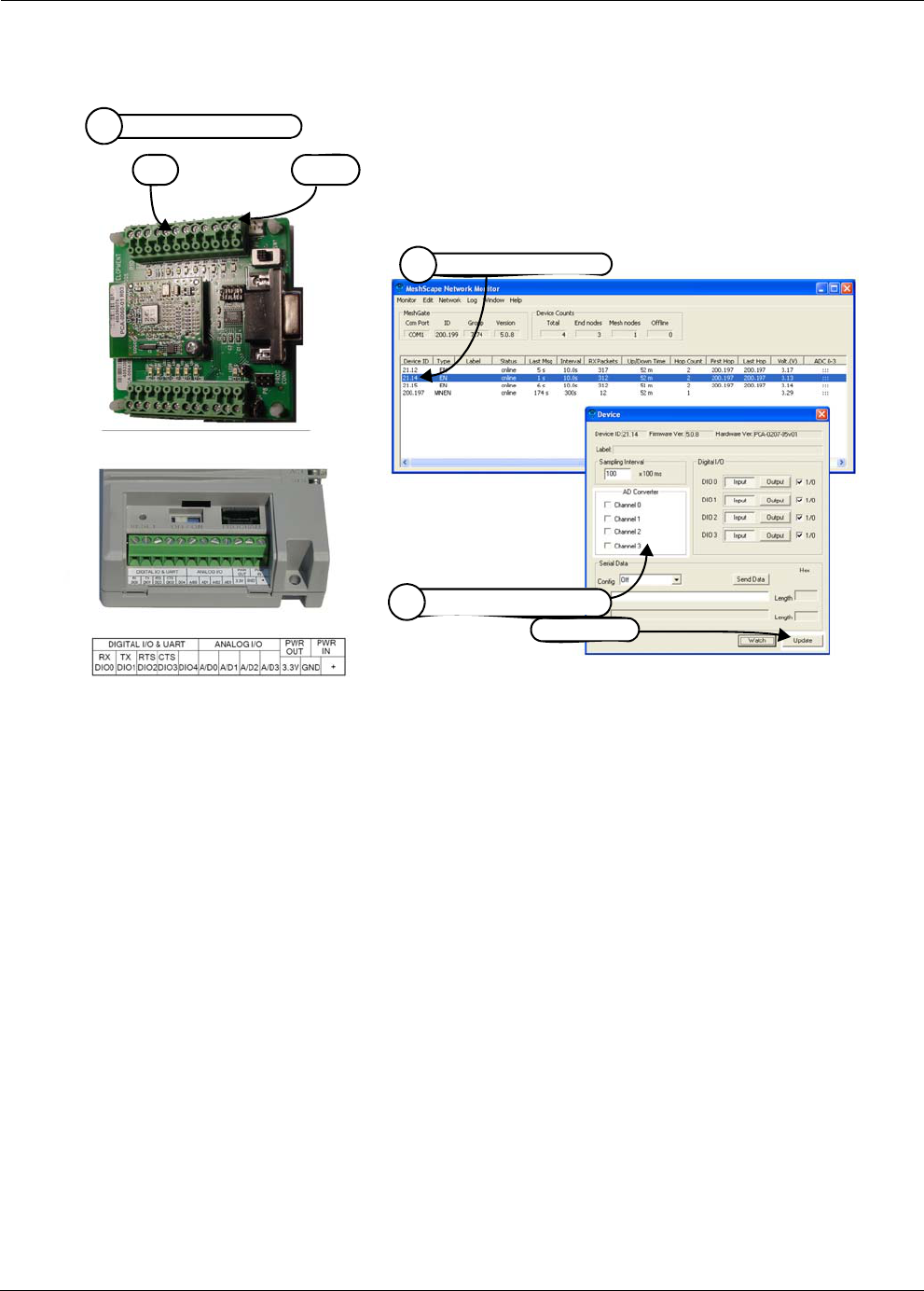
RK-5424-5 Reference Kit User’s Guide 3-15
Configuring a Node’s Operation
Figure 3-16. Configuring End Node/Mesh Node for analog I/O
Connect 0–3 V signals
1
Select analog channels,
3
then Update
Double-click on device
2
Pin 1
P10
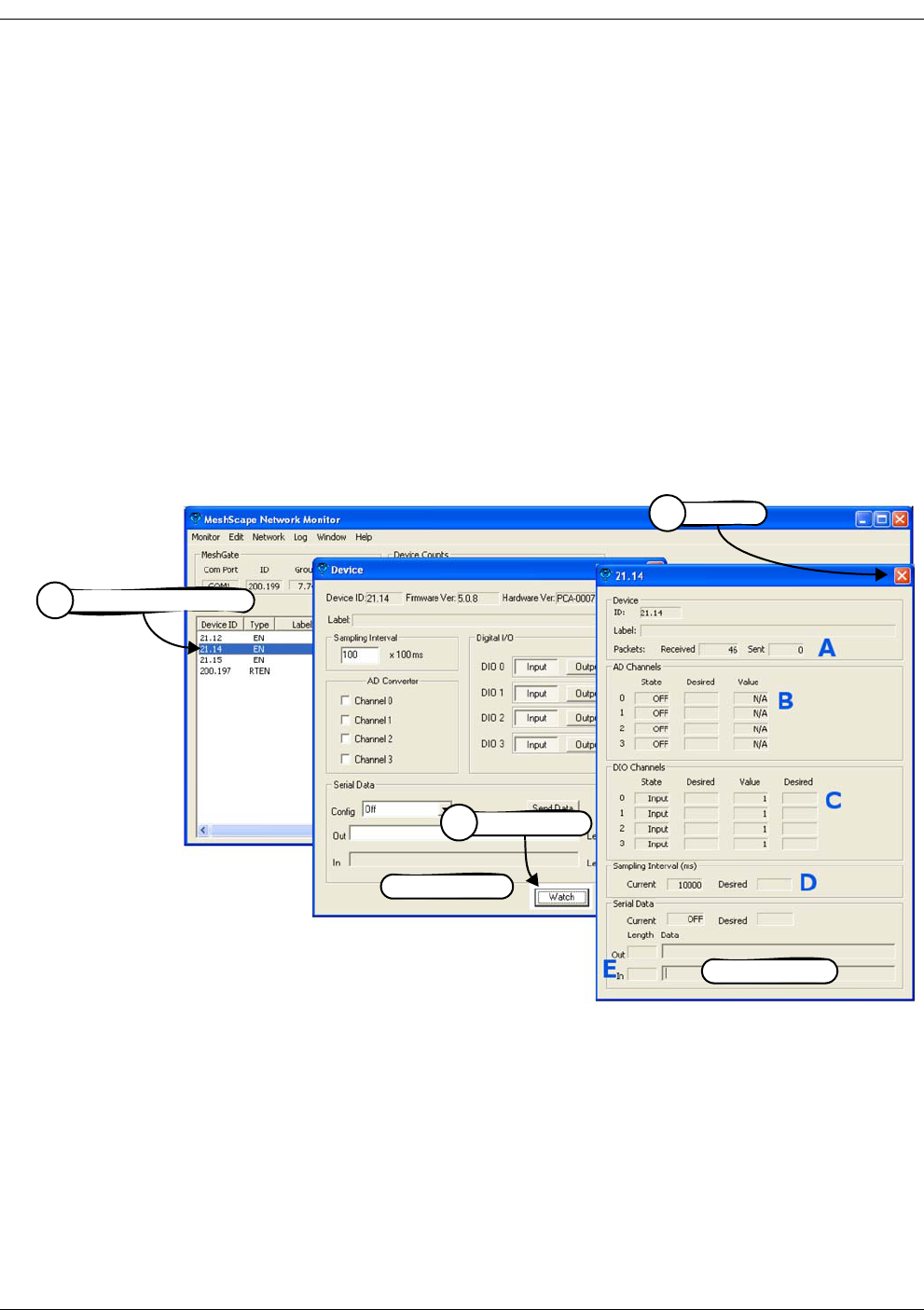
3-16 Millennial Net
Running MeshScape Network Monitor
Using Watch Function to Display Configuration Information
Use the Watch window to track changes to a device’s configuration.
You may open multiple instances of the Watch window. The selected device’s ID and label (if
configured) are displayed in the Watch window title bar.
To display the current and desired configuration for a device (see Figure 3-17):
1. Double-click on the desired device from the list of discovered sensor nodes. The Device
window is opened, displaying the device’s current configuration.
2. Select Watch. The Watch window is opened, displaying the selected device’s current and
desired configuration information.
3. Select X to exit the Watch window.
Alternatively, click once on a device and then select Window>Watch to open the Watch
window for that device.
Figure 3-17. Displaying I/O information using Watch function
Table 3-9 describes the functions of the various sections of the Watch window as shown in
Figure 3-17.
Watch window
Select Watch
2
Device window
Double-click on device
1
Select X
3
RK-5424-5 Reference Kit User’s Guide 3-17
Configuring a Node’s Operation
Table 3-9. Watch window functions
Item Description Function
APackets
Received/Sent
Total packets received from or transmitted to the node.
BA-D Channels This panel displays the following information for each analog-to-digital
channel (0–3):
•State: Current on/off state of the channel
•Desired: Desired on/off state of channel, which can be changed
using the Device window.
•Value: Numeric values of the channel.
CDIO Channels This panel displays the following information for each digital channel
(0–3):
•State: Current input/output state of the channel
•Desired: Desired input/output state of channel, which can be
changed using the Device window.
•Value: I/O values of the channel (1 or 0).
•Desired: Desired I/O value of channel.
DSampling Interval This panel displays the following sampling interval information:
•Current: Currently configured setting.
•Desired: Desired setting, which can be changed using the Device
window (see ’Configuring the Sample Interval of a Single Node’ on
page 3-8).
ESerial Data This panel displays the following serial data information of data received
from the node (In) or transmitted to the node (Out):
•Current: Currently configured setting (Off, RS-232, RS-485)
•Desired: Desired setting
•Length: Length of string received/transmitted.
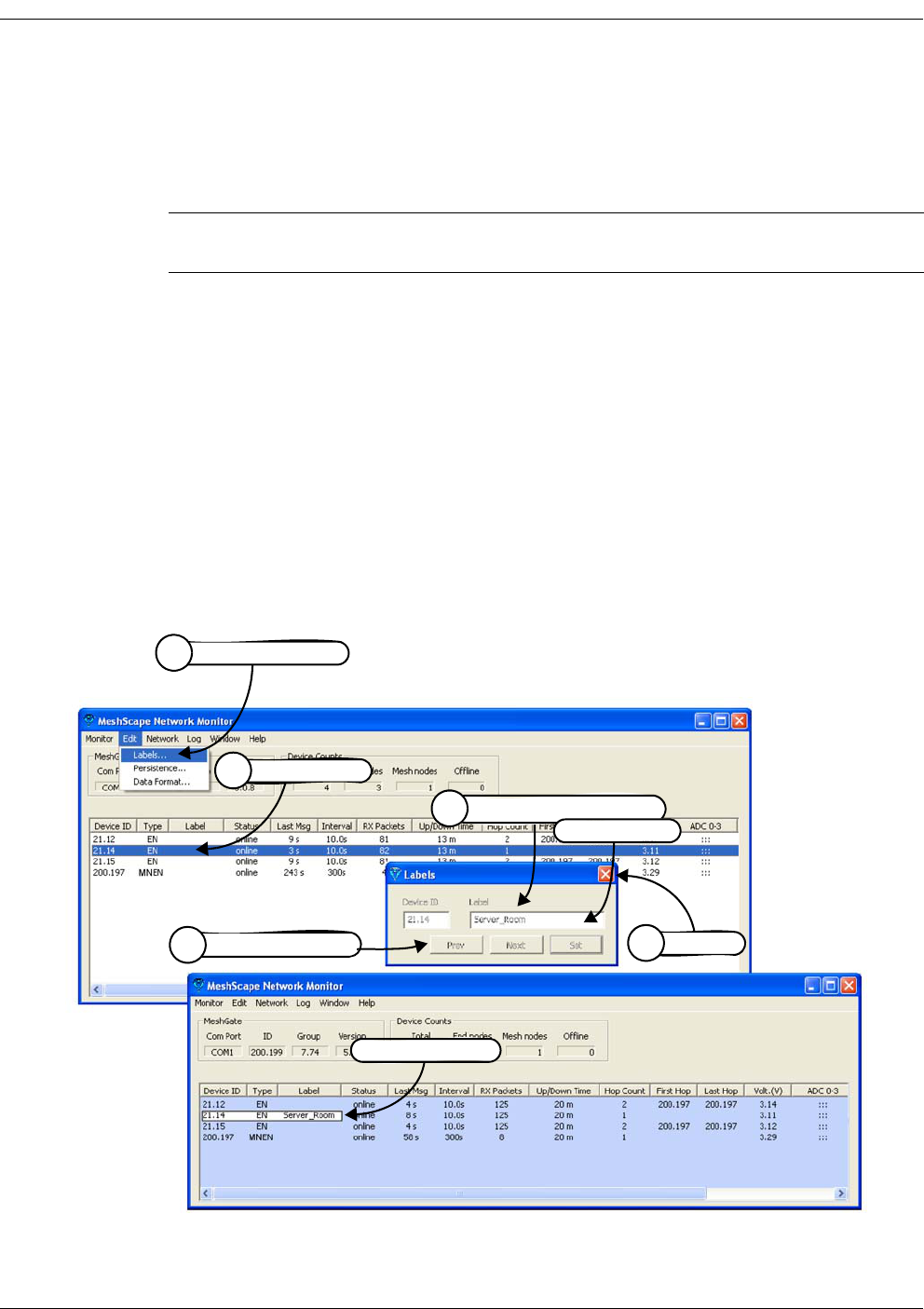
3-18 Millennial Net
Running MeshScape Network Monitor
Labeling an End Node or Mesh Node
Labels are meaningful, persistent text strings used to identify network nodes beyond their
group and device IDs.
The following procedure describes the steps required to assign a label to an End Node or Mesh
Node (see Figure 3-18):
1. From MeshScape Network Monitor, click on the desired device from the list of discovered
sensor nodes.
2. From MeshScape Network Monitor, select Edit>Labels. The Edit Labels window is
opened.
3. Enter the label to be applied to the node, then select Set. MeshScape Network Monitor
displays the label in the Label column of the selected node.
4. Click Prev or Next to apply labels to other discovered sensor nodes.
5. Select X to exit the Edit Label window.
Figure 3-18. Labeling an End Node or Mesh Node
Note: Labels are only accessible through the MeshScape Network Monitor program.
Custom Applications using the API will not be able to access labels.
Enter label information,
3
then select Set
Select X
5
Click Device
1
Node label added
Select Prev or Next
4
Select Edit>Labels
2
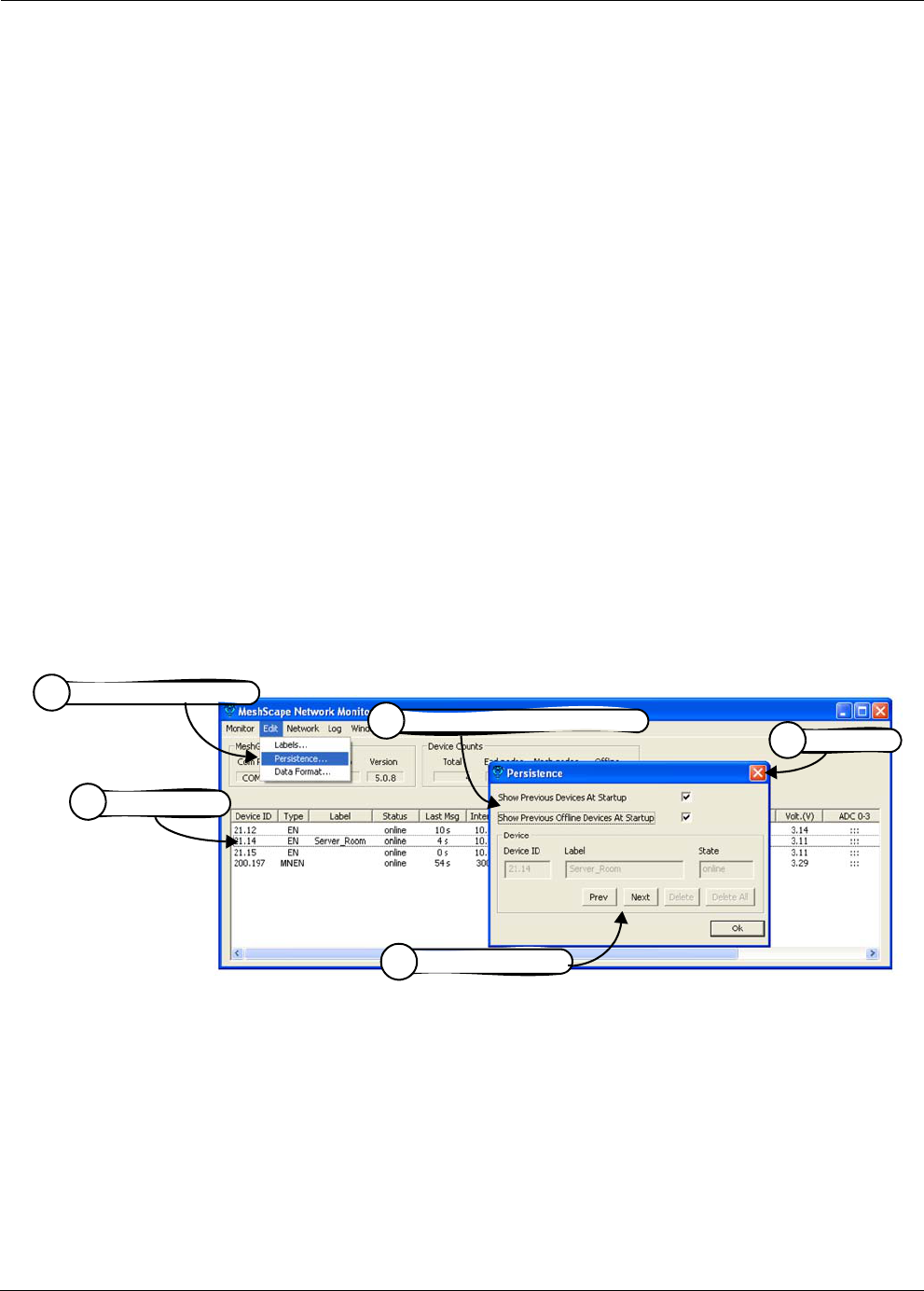
RK-5424-5 Reference Kit User’s Guide 3-19
Configuring Persistence Attributes
Configuring Persistence Attributes
The following procedure describes how to configure the persistence setting of the network’s
End Nodes and Mesh Nodes (see Figure 3-19):
1. From MeshScape Network Monitor, click on the desired device from the list of discovered
sensor nodes.
2. From MeshScape Network Monitor, select Edit>Persistence. The Edit Persistence
window is opened.
3. Configure the following global persistence attributes:
–Show previous devices at startup: If selected, all online nodes will be displayed
when MeshScape Network Monitor is restarted.
–Show previous offline devices at startup: If selected, all online and offline nodes
will be displayed when MeshScape Network Monitor is restarted.
4. Click Prev or Next to display MeshScape devices and their states. You can manually
delete devices that are offline as follows:
–Delete: Select the delete button to stop displaying the selected Offline node.
–Delete all: Select this delete button to stop displaying all nodes with a status of
Offline.
5. Select X to exit the Edit Persistence window.
Figure 3-19. Configuring node persistence attributes
Select Edit>Persistence
2
Select X
5
Configure persistence attributes
3
Click Device
1
Select Prev or Next
4
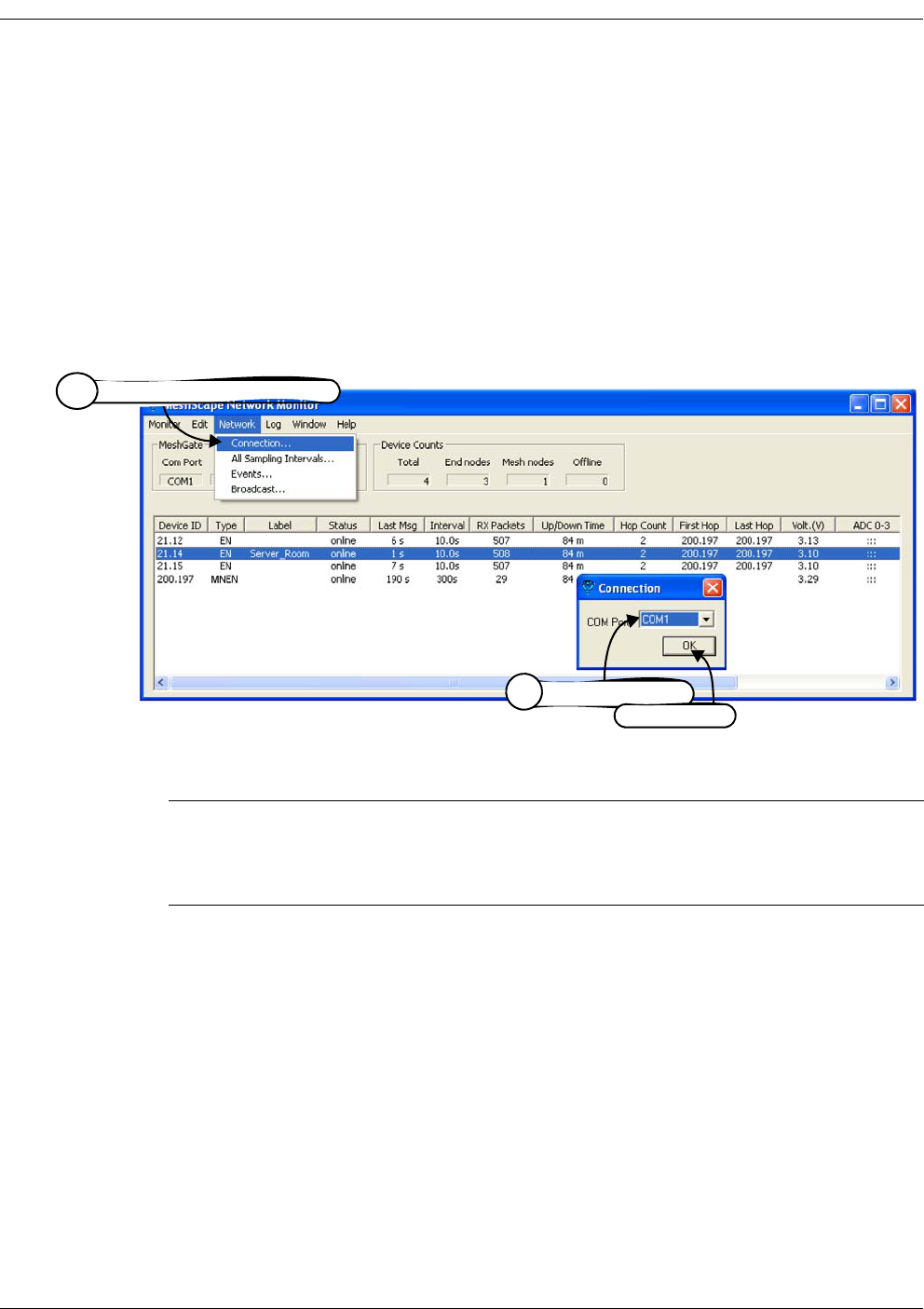
3-20 Millennial Net
Running MeshScape Network Monitor
Selecting a Com Port on the Host PC
The following procedure describes how to select the RS-232 com port for MeshScape Network
Monitor to use to communicate with the MeshGate (see Figure 3-20):
1. From MeshScape Network Monitor, select Network>Connection. The Connection
window is opened.
2. Select the RS-232 com port to use from the drop down list of available ports, then select
OK. MeshScape Network Monitor communicates with the MeshGate connected to the
selected port.
Figure 3-20. Selecting com port on host PC
Note: If the serial link to the MeshGate from the host PC is lost and then re-established,
you must reset the MeshScape Network Monitor com port connection to the
MeshGate using the Connection dialog, or alternatively, you can exit and then
restart the MeshScape Network Monitor application.
Select Network>Connection
1
Select port to use,
2
then select OK
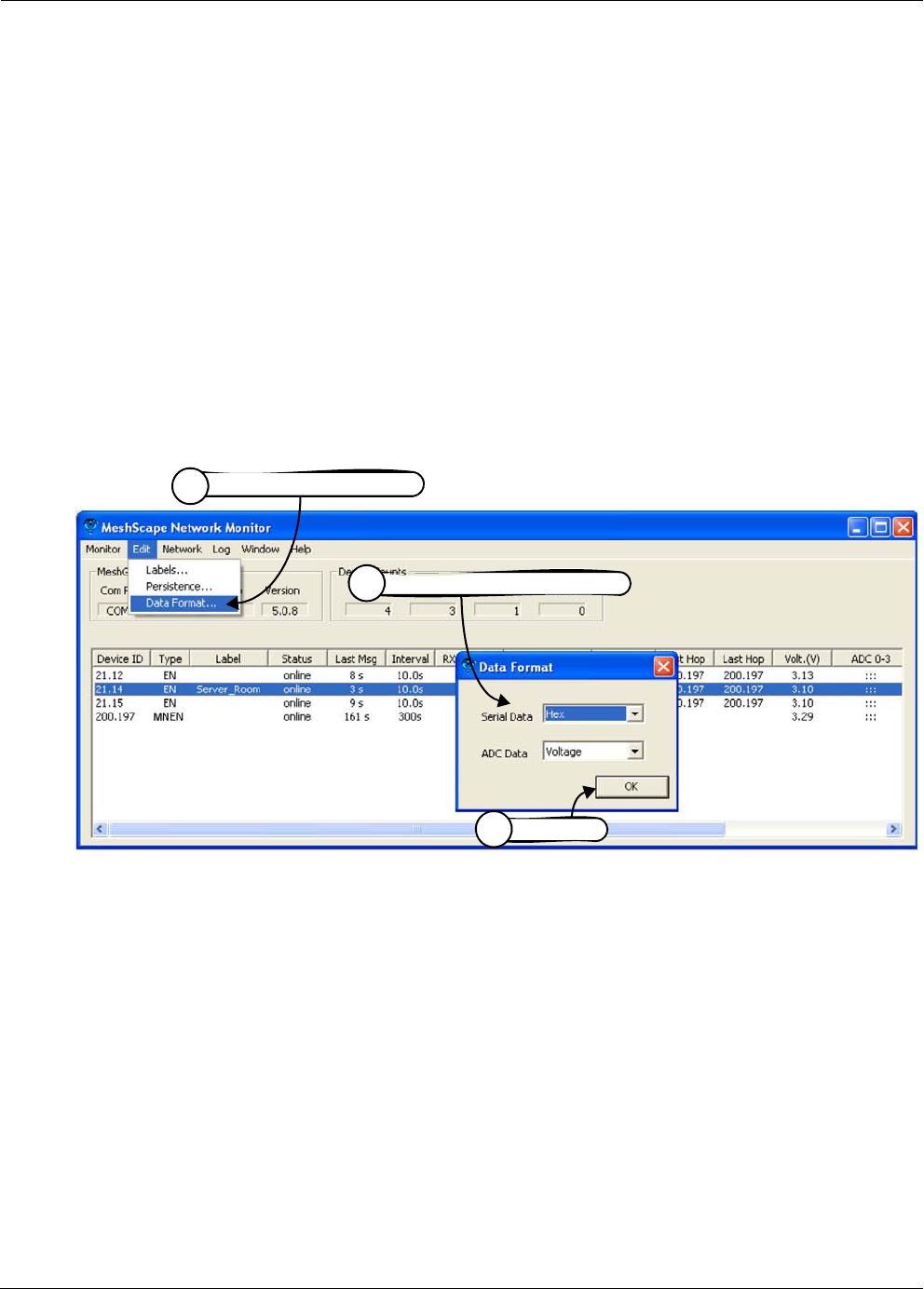
RK-5424-5 Reference Kit User’s Guide 3-21
Configuring Serial and ADC Data Formats
Configuring Serial and ADC Data Formats
The following procedure describes how to configure the format of displayed serial and ADC
information (see Figure 3-21):
1. From MeshScape Network Monitor, select Edit>Data format. The Edit Data Format
window is opened.
2. Configure the following network attributes:
–Serial data format: Select the desired format for displaying serial data
(ASCII/Hex/Decimal).
–ADC data format: Select the desired format for displaying ADC data
(Voltage/Raw Data).
3. Select OK to save the settings and exit the Edit Network window.
Figure 3-21. Configuring serial and ADC data formats
Select Edit>Data Format
1
Select OK
3
Configure data format attributes
2
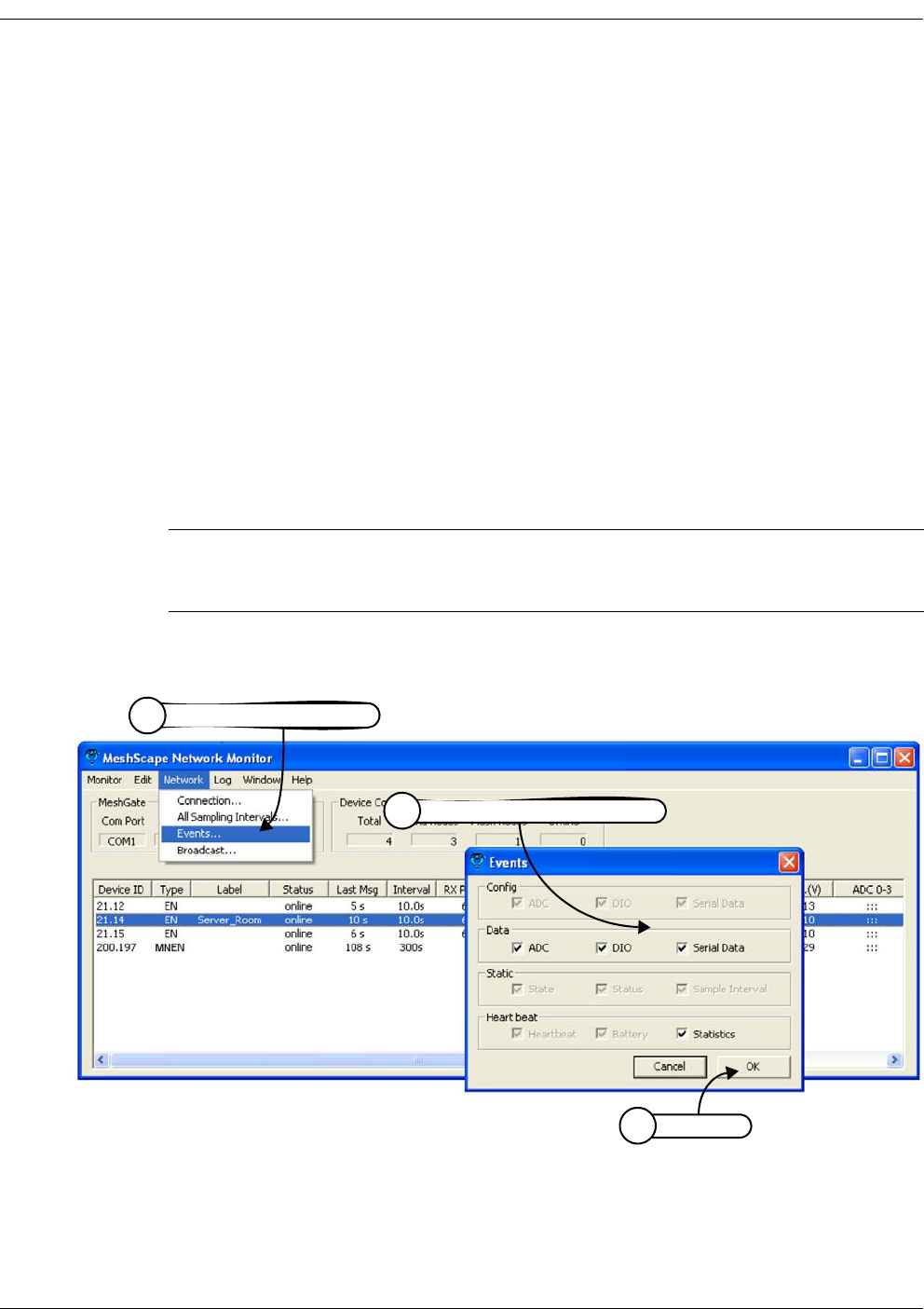
3-22 Millennial Net
Running MeshScape Network Monitor
Turning Event Tracking On/Off
The following procedure describes how to turn event tracking on or off. Tracked events are
recorded in the Event log file (see Figure 3-22):
1. From MeshScape Network Monitor, select Network>Events. The Events window is
opened.
2. Configure the following event tracking settings:
–Configuration Events: Display event tracking status for Analog-to-digital
Converter, Digital Input/Output, and Serial configuration events.
–Data Events: Turn event tracking on/off for Analog-to-digital Converter, Digital
Input/Output, and Serial data events.
–Static Events: Display event tracking status for device State, Status, and Sampling
Interval events.
–Heartbeat: Display event tracking status for device Heartbeat and Battery Level
events. Display event tracking status for Statistical events.
3. Select OK to save the settings and exit the Events window.
Figure 3-22. Turning device event tracking on/off
Note: Events for which tracking cannot be turned off appear grayed out in the Events
window. These events are critical to proper functioning of the Network Monitor
application.
Select Network>Events
1
Select OK
3
Turn on/off event tracking
2
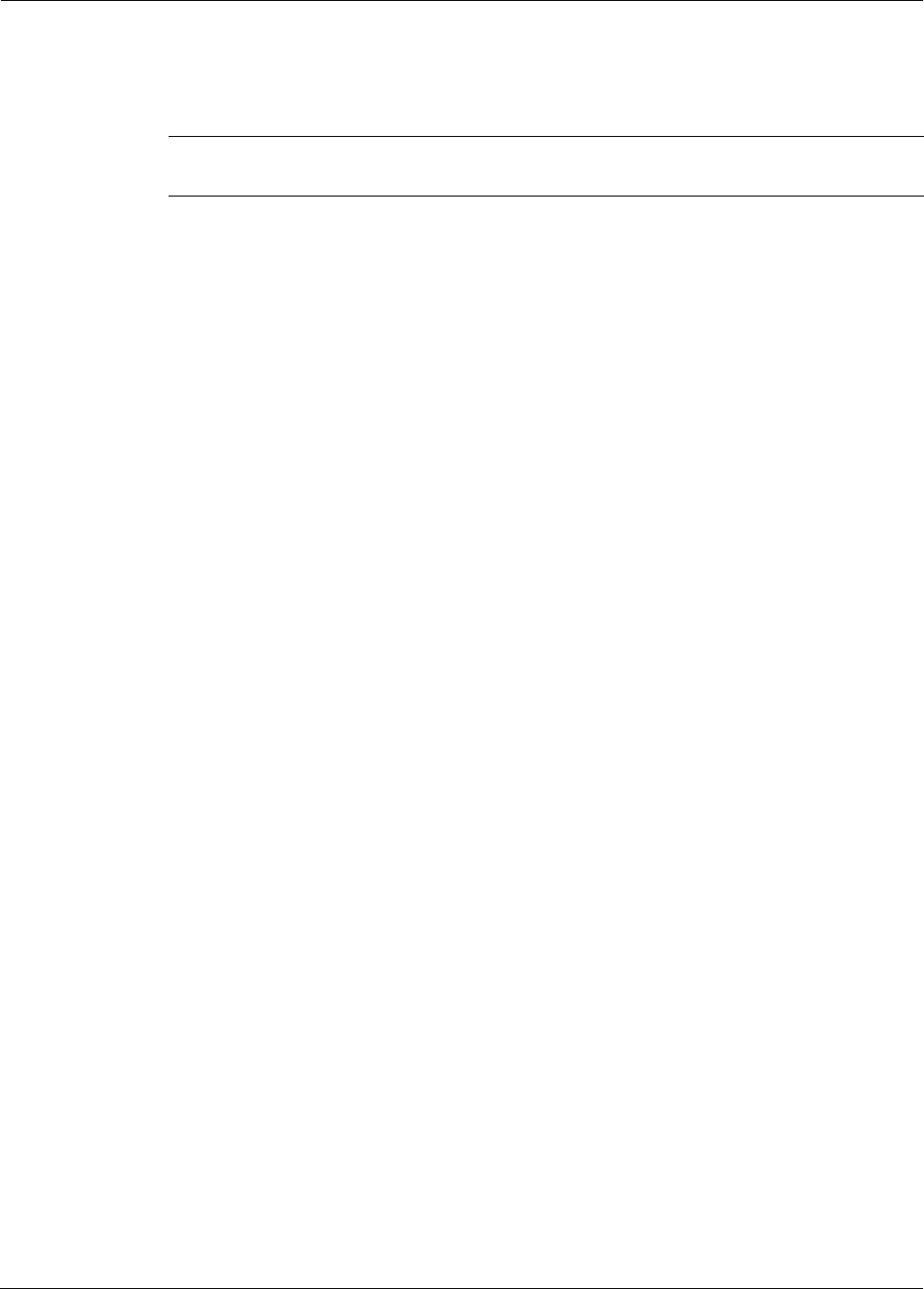
RK-5424-5 Reference Kit User’s Guide 3-23
Broadcasting Data to All Nodes.
Broadcasting Data to All Nodes.
You can broadcast the following data to all nodes on your MeshScape system:
• The time to which all nodes will synchronize their clocks
• Ultra Low Power (ULP) settings defining wakeup interval and duty cycle for all nodes
The following procedure describes how to broadcast data to all nodes (see Figure 3-22):
1. From MeshScape Network Monitor, select Network>Broadcast. The Broadcast window
is opened.
2. Configure the following broadcast settings:
–Synchronize device clock: Set the time with which the node clocks are to
synchronize. Mark the Use host clock check box to broadcast the time set on the
host PC on which the MeshScape Network Monitor is running, or alternatively, enter
the date and time to broadcast.
–Wakeup interval: The wakeup interval determines the Mesh Node wakeup cycle.
Minimum value for the wakeup interval is 60000 milliseconds, and the maximum
value is 6540000 milliseconds.
–Duty ratio: The duty ratio determines how long the Mesh Node stays awake and
how long it sleeps during each wakeup interval. The duty ratio is defined as
100*(awake time)/(wakeup interval). Note that the wakeup interval = awake time +
sleep time. The duty ratio has no unit.
The units for specifying the duty cycle is tenths of a percent. The recommended
Minimum value for the duty ratio is 5 (represent 0.5%), and the Maximum value is
1000 (represents 100.0%) set in increments of 5.
3. Select Validate to verify your ULP settings are valid and within range.
4. Select OK to save the settings and exit the Broadcast window.
Note: The broadcast feature is not supported in this release of the RK-5424-5 Reference
Kit but will be supported in future releases.
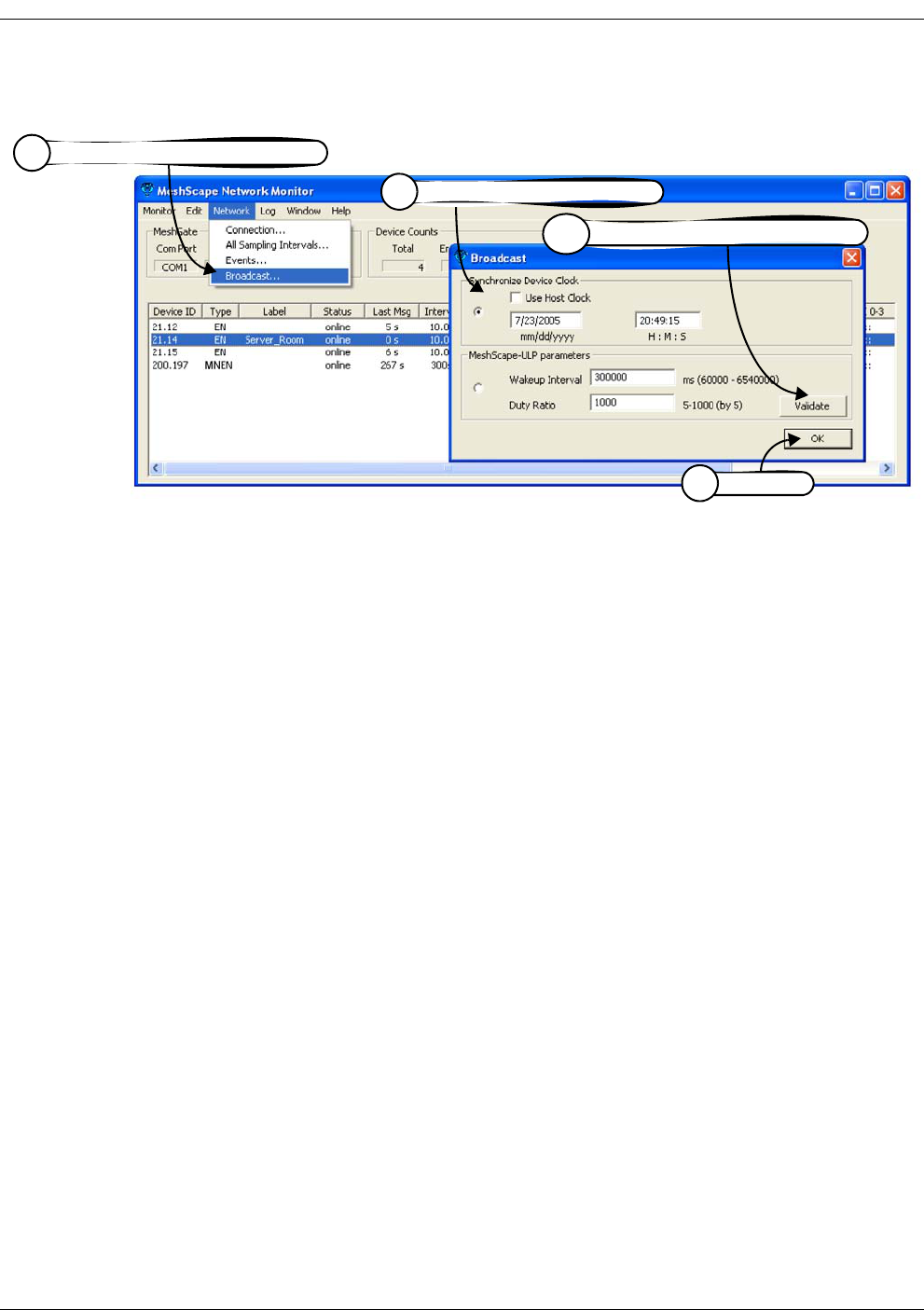
3-24 Millennial Net
Running MeshScape Network Monitor
Figure 3-23. Broadcasting data to all nodes
Select Network>Broadcast
1
Select OK
4
Define broadcast settings
2
3Select Validate to verify ULP settings
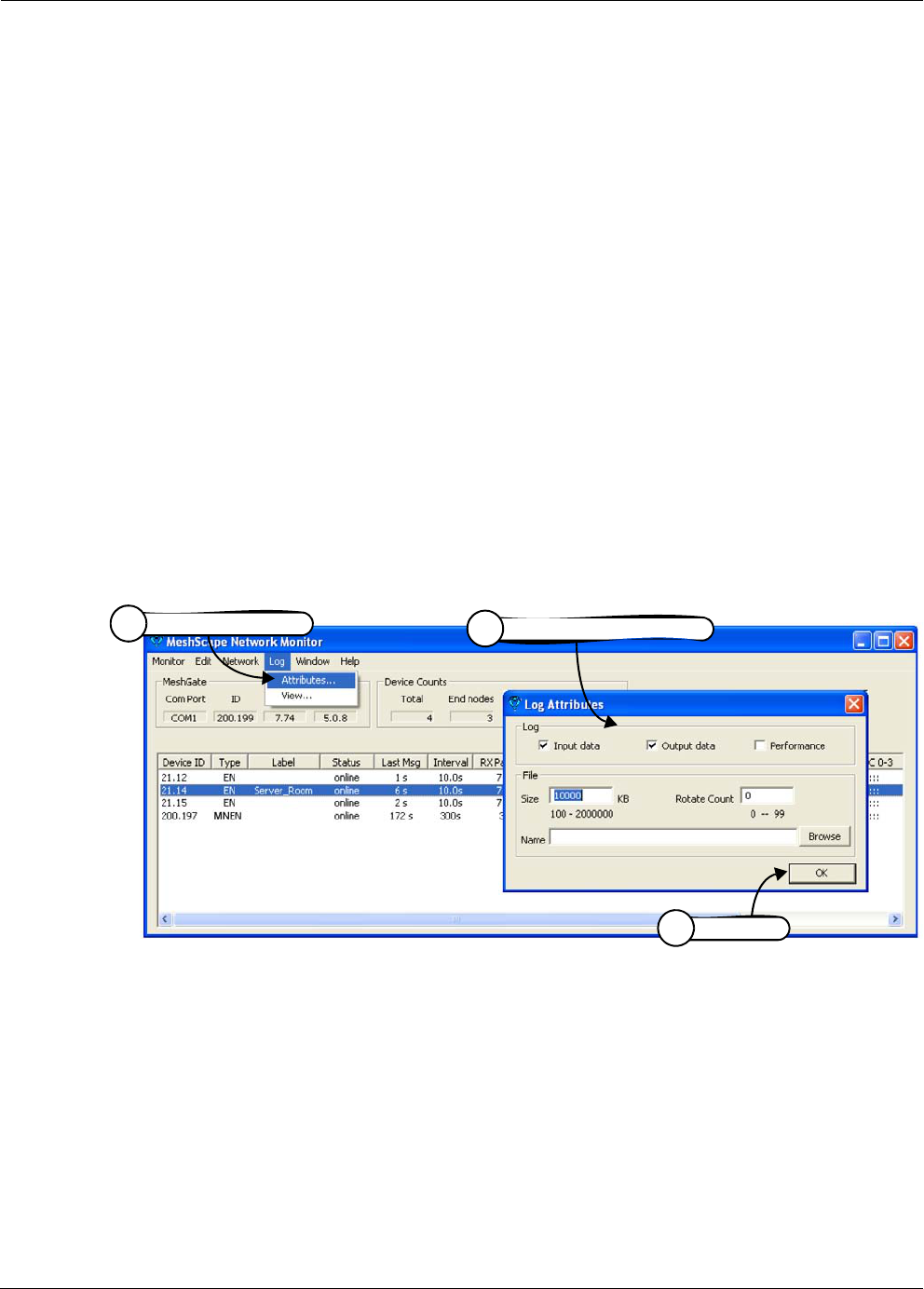
RK-5424-5 Reference Kit User’s Guide 3-25
Creating an Event Log File
Creating an Event Log File
The following procedure describes the steps required to have MeshScape Network Monitor
record reported network events to a log file (see Figure 3-24):
1. From MeshScape Network Monitor, select Log>Attributes. The Edit Logging Attributes
window is opened.
2. Configure the following Mesh Node and End Node log file attributes:
–Log data: Record input/output/performance data.
–File size n KB: Clear the log file and begin the recording process again when it
reaches the designated file size and rotate count number.
–Rotate Count n: Number of history log files to maintain (not including active log
file). Once this value is reached, files are written over.
–Name: Assign a name to the log file and define where the file is saved.If the field is
left blank or filled with an invalid pathname, logging is disabled.
3. Select OK to activate the logging process.
To view the contents of the log file, see ’Viewing the Contents of an Event Log File’ on page
3-26.
Figure 3-24. Configure an event log file
Select OK
3
Configure log file attributes
2
Select Log>Attributes
1
3-26 Millennial Net
Running MeshScape Network Monitor
Viewing the Contents of an Event Log File
The following procedure describes how to view the network event log file generated by
MeshScape Network Monitor, which records node-generated events (see Figure 3-25):
1. From MeshScape Network Monitor, select Log>View. The log file window is opened,
displaying the user-defined event log information (see also ’Creating an Event Log File’ on
page 3-25).
2. Select one of the following:
–Stop/Restart: Select this toggle option to stop and restart display of the log file.
–Clear: Select this option to clear the information currently displayed and start a new
recording session. Clearing the window will not erase a log file from the hard disk.
The log file window displays 2056 lines of log file data.
You can copy and paste event log data to the Windows clipboard.
To configure the events to track and include in the log file, see ’Turning Event Tracking On/Off’
on page 3-22.
To configure the attributes of the log file that get recorded and displayed, see ’Creating an
Event Log File’ on page 3-25.
Figure 3-25. View contents of event log file
Table 3-10 describes the event keys (see example) displayed in the log file.
example: 04/22 11:00:42, Type=EN, RCV=100, PSEQ=28, ID=021.015,
Event=|HB|DIO|PFM, D0=In:1, D1=In:1, D2=In:1, D3=In:1
Select Log>View
1
Select Stop/Restart or Clear
2
Click X to close the log file display
3
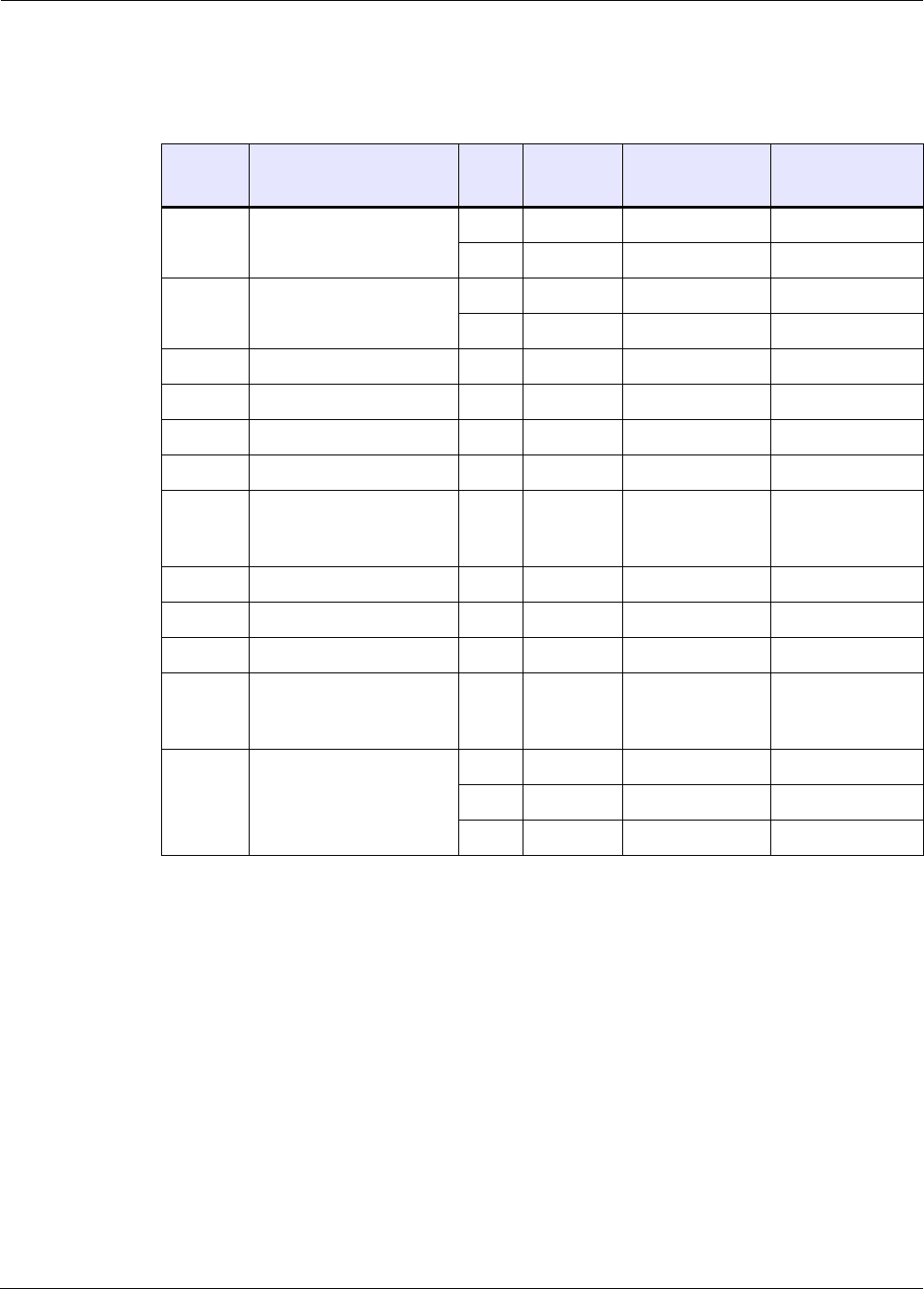
RK-5424-5 Reference Kit User’s Guide 3-27
Viewing the Contents of an Event Log File
Table 3-10.Event log key definitions
Key Key Meaning
Sub-
Key
Sub-Key
Meaning
Output to
device example
Input to device
example
A0 ... A3 ADC Channel 0 ... 3 En Enabled A0=En A0=2.12
Dis Disabled A1=Dis
D0 ... D3 Digital I/O Channel 0 ... 3 In Input D0=In D0=In:1
Out Output D1=Out:1
EP Endpoint N/A N/A EP=001.001 EP=001.002
FH First Hop Mesh Node N/A N/A N/A FH=201.002
HC Hop Count N/A N/A N/A HC=3
LH Last Hop Mesh Node N/A N/A N/A LH=202.003
RCV Receive N/A N/A N/A RCV=200
(sequence
number)
MNEN Mesh Node N/A N/A RT=200.001 RT=200.001
SER Serial Interface N/A N/A SER=12 34 56 13 SER=12 34 56 13
SI Sampling Interval N/A N/A SI=100.0 SI=200.0
SND Send N/A N/A SND=100
(sequence
number)
N/A
ST State On Online ST=On
Off Offline
Ref Refreshing
3-28 Millennial Net
Running MeshScape Network Monitor
Viewing MeshScape Statistics
The following procedure describes how to view the network statistics recorded by MeshScape
Network Monitor, which provides information on the packets received and transmitted by the
network nodes (see Figure 3-26):
1. From MeshScape Network Monitor, select Window>Statistics. The Statistics window is
opened, displaying the following information:
– Sample Time: Current date and time.
–Start Time: Date/time statistics recording session began.
–Elapsed Time: Total recording time.
–Count Down: Seconds before next sample is taken and window is refreshed.
–RX Bytes: Total bytes received.
–RX Packets: Total packets received.
–End Node Packets: Packets received from End Nodes.
–Mesh Node Packets: Packets received from Mesh Nodes.
–MeshGate Packets: Packets received from MeshGate.
–Notify Packets: Packets sent from MeshGate to MeshScape Network Monitor for
notification events.
–TX Bytes: Total bytes transmitted.
–TX Packets: Total packets transmitted.
2. (optional) Select Reset to clear the information currently displayed and begin a new
recording session.
Caution
Selecting Reset will remove all statistics collection history.
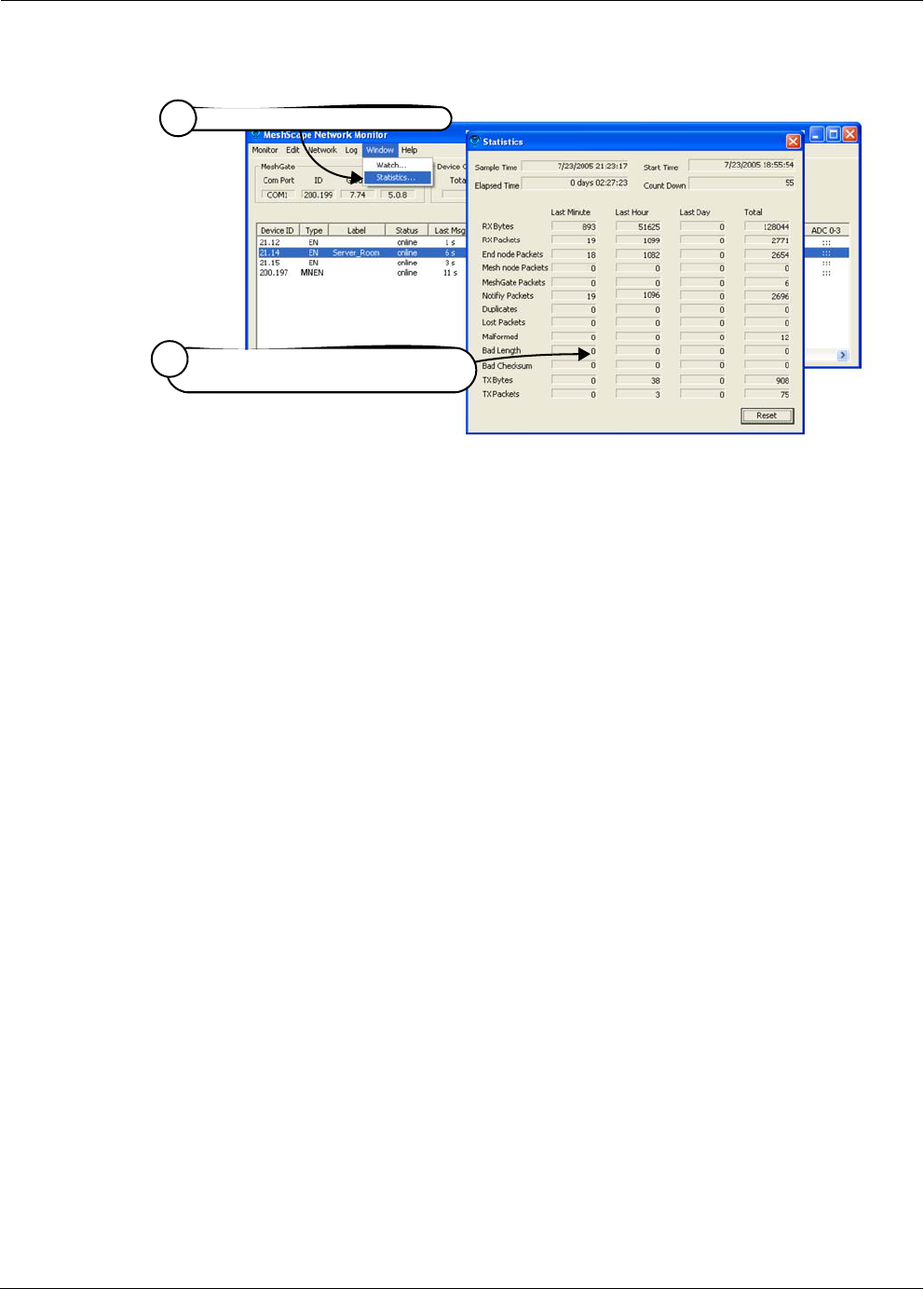
RK-5424-5 Reference Kit User’s Guide 3-29
Viewing MeshScape Statistics
Figure 3-26. Viewing MeshScape statistics
Select Window>Statistics
1
(optional) Select Reset to clear display
and start new recording session
2

3-30 Millennial Net
Running MeshScape Network Monitor

RK-5424-5 Reference Kit User’s Guide 4-1
4
Using the MeshScape API
This chapter describes the following API functions:
•’Using the MeshScape API’ on page 4-2
•’MeshScape API Functions Overview’ on page 4-5
•’iBeanAPI.h’ on page 4-7
•’iBeanAPI_IO.h’ on page 4-25
•’iBeanAPI_Utils.h’ on page 4-35
•’iBeanAPI_LPR.h’ on page 4-39
•’iBeanAPI_performance.h’ on page 4-42
•’Example API Code’ on page 4-45
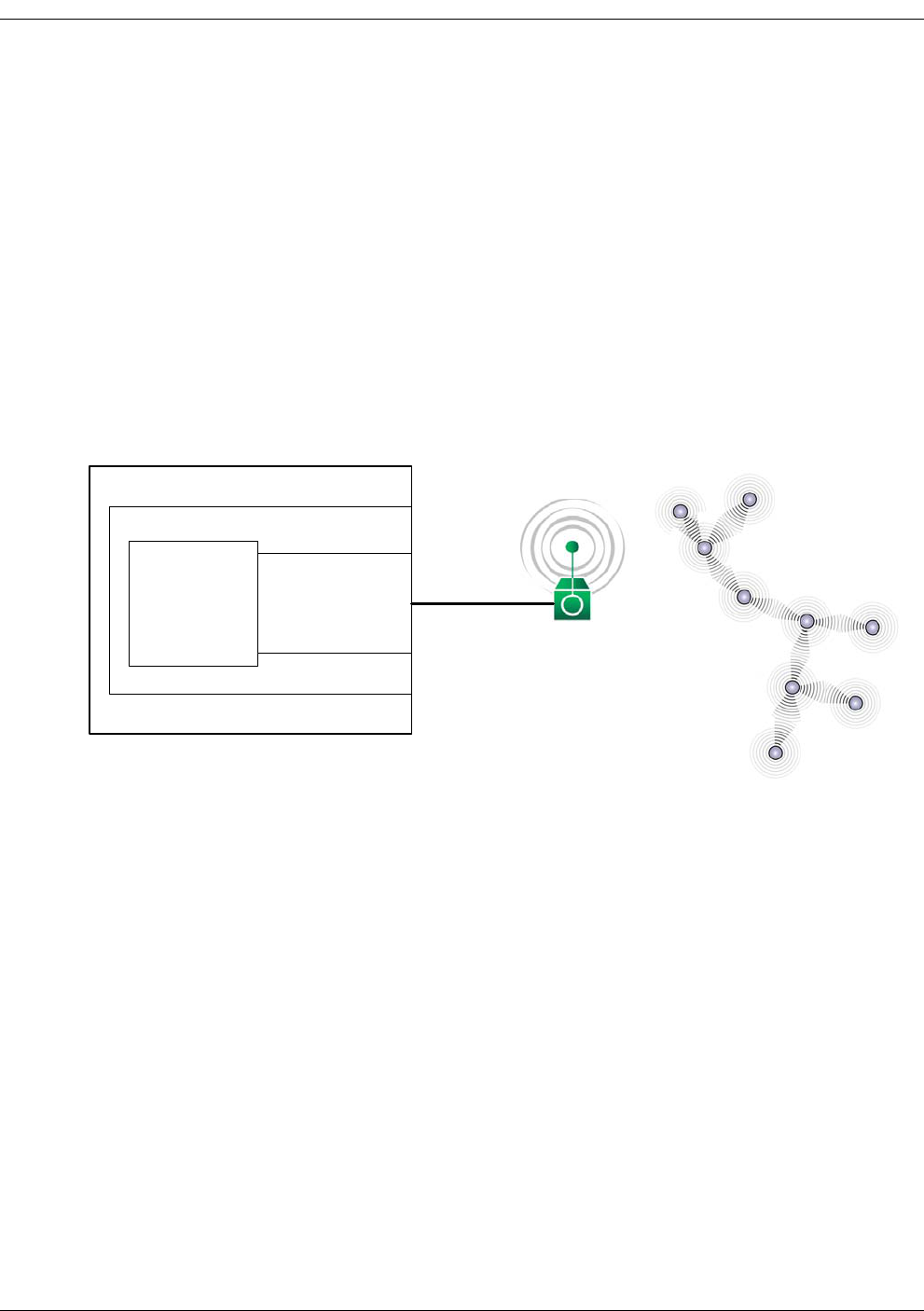
4-2 Millennial Net
Using the MeshScape API
Using the MeshScape API
Millennial Net’s MeshScape™ API enables you to effectively use the features provided by
Millennial Net’s MeshScape wireless sensor network. You can develop custom applications that
utilize the MeshScape API library on Windows- or Linux-based platforms such as Network
Controllers, PCs, or PDAs.
The Millennial API provides a serial command set that enables a MeshScape MeshGate
standalone gateway to communicate with user applications via a serial interface. The serial
interface transports a byte stream-based protocol that provides MeshScape API equivalent
functionality. The commands operate in both a query/response and an autonomous event
notification manner.
Figure 4-1. Using the MeshScape API
Network Controller
Serial
Interface
Application MeshScape API
Linux/Windows OS
MeshGate
Gateway
MeshScape
Wireless Sensor Network
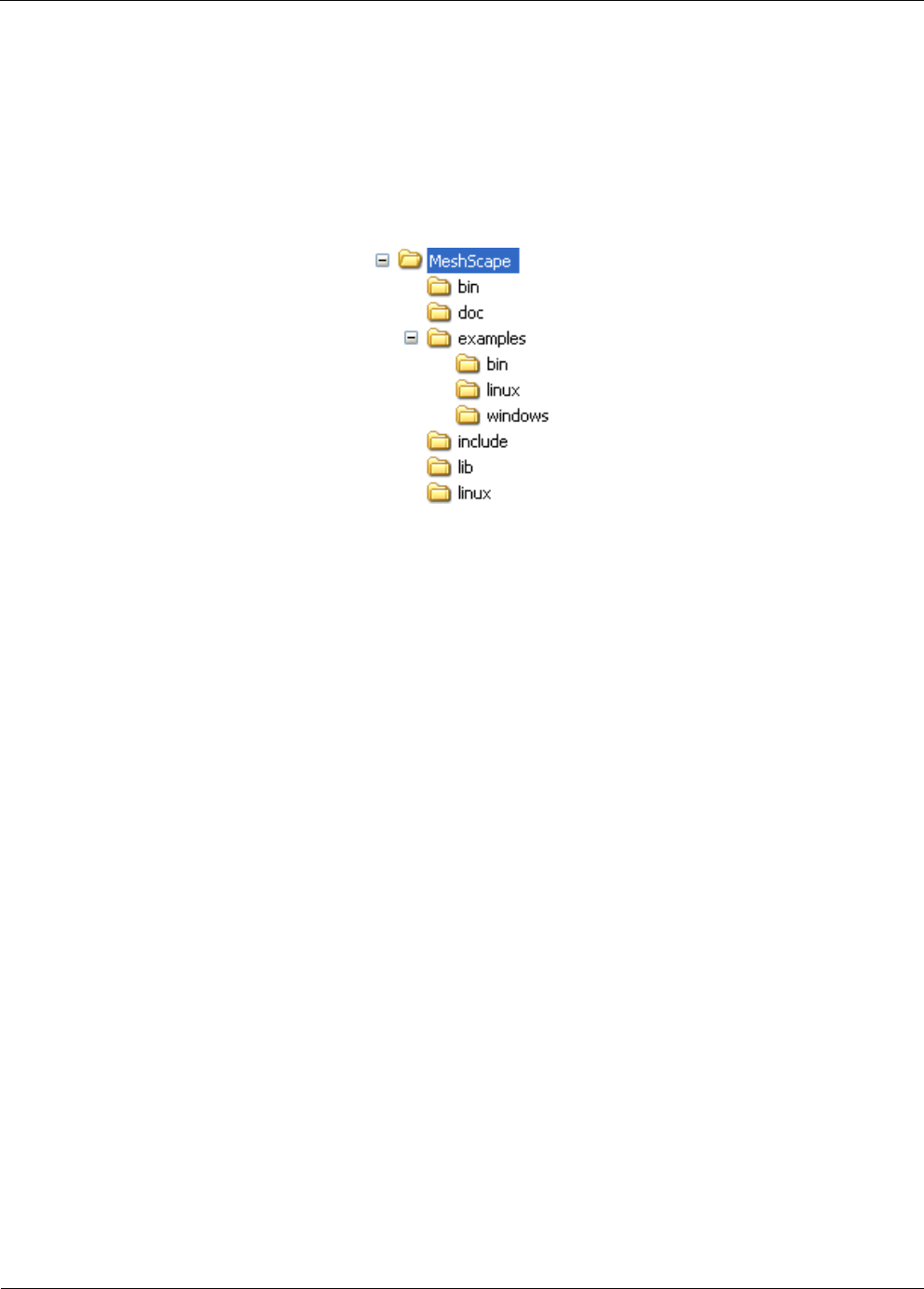
RK-5424-5 Reference Kit User’s Guide 4-3
MeshScape API Directory Structure
MeshScape API Directory Structure
The MeshScape API sub-directory contains five sub-directories which hold the API related files,
including header files, dll and library files, and various compiled examples along with their
source code listings. Figure 4-2 is a representation of the directory structure.
Figure 4-2. MeshScape API directories
The contents of each directory is described below.
bin Directory:
This directory contains the iBeanAPI.dll file required for running API related applications.
This dll file is compiled with Microsoft’s Visual Studio .Net edition and therefore only
supports Microsoft Visual C++ programming conventions. The directory also contains the
MeshScape Programmer (MNstall.exe) and MeshScape Network Monitor (sagMon.exe)
executables.
doc Directory:
This directory contains the MeshScape system user documentation in Adobe Acrobat (.pdf)
format including:
– RK-5424-5 Reference Kit User’s Guide (i.e., this guide)
– RK-5424-5 2.4 GHz MeshScape™ Reference Kit Contents & Getting Started Guide
– MeshScape Product Family Sheet
– Technical specifications for MeshGate gateway, mesh node, and end node
– Release notes
examples Directory:
This directory contains three sub-directories:
–bin - This sub-directory contains the demo.exe and application.dll files required to
run the demonstration applications expressly developed to demonstrate the
capabilities of MeshScape. Running the temperature sensor demonstration
application is described in Appendix A. The Model3_temp.txt file in the directory is
required for the temperature sensor demo and should not be moved or deleted.

4-4 Millennial Net
Using the MeshScape API
–linux - The source code for sample applications to be compiled under Linux:
ListDevices.c: This is a console based application that lists current online devices. For a detailed
look at this example and its code, see ’Example API Code’ on page 4-45.
ReadSerial.c: This is a console based application that reads serial data received from any online
device on the network that has serial interface enabled.
SetSampling.c: This is a console based application that changes the sampling interval of the
online devices.
–windows - The source code for sample applications to be compiled under Windows.
ListDevices.c: This is a console based application that lists current online devices. For a detailed
look at this example and its code, see ’Example API Code’ on page 4-45.
ReadSerial.c: This is a console based application that reads serial data received from any online
device on the network that has serial interface enabled.
SetSampling.c: This is a console based application that changes the sampling interval of the
online devices.
include Directory:
This directory contains the MeshScape API header files required to build any API-based
application under Windows. These header files are documented in this chapter.
lib Directory:
This directory contains the iBeanAPI.lib file required to compile any API-based application
under Windows.
linux Directory:
This directory contains a single compressed tar file that provides the MeshScape API header
files and shared object files required to build an API-based application under Linux.
RK-5424-5 Reference Kit User’s Guide 4-5
MeshScape API Functions Overview
MeshScape API Functions Overview
Table 4-1 provides a list of API functions associated with MeshScape system products.
Table 4-1. MeshScape API functions
iBeanAPI.h Core API functions
ibApi_Open()
ibApi_Close()
ibApi_GetApiVersion()
Session Management
ibApi_GetNetworkList()
ibApi_GetDeviceList()
Enumeration of network devices
ibApi_GetDeviceInfo()
ibApi_GetDeviceStatus()
Static and dynamic device attributes
iBApi_GetDeviceState()
ibApi_SetSamplingInterval()
ibApi_GetSamplingInterval()
Universally supported device
properties
ibApi_WaitForDeviceEvent()
ibApi_WaitForDeviceEvents()
ibApi_SetEventMask()
ibApi_GetEventMask()
ibApi_GetDevicePacketSequenceNumber()
ibApi_Block()
ibApi_UnBlock()
ibApi_RegisterEvent()
Event Notification
iBeanAPI_IO.h Standard I/O peripherals
ibApi_IO_GetDeviceCaps() Static device attributes
ibApi_IO_SetADCConfig()
ibApi_IO_GetADCConfig()
ibApi_IO_ReadADC()
ibApi_IO_ReadRawADC()
Analog-to-Digital conversion
ibApi_IO_SetDIOConfig()
ibApi_IO_GetDIOConfig()
ibApi_IO_WriteDIO()
ibApi_IO_ReadDIO()
Digital input/output
4-6 Millennial Net
Using the MeshScape API
ibApi_IO_SetSerialConfig()
ibApi_IO_GetSerialConfig()
ibApi_IO_GetSerialBufferStatus()
ibApi_IO_WriteSerial()
ibApi_IO_ReadSerial()
ibApi_IO_SetDeviceConfigAndData()
Serial data interface (UART)
iBeanAPI_Utils.h Supplementary functions
ibApi_Utils_GetErrorDescription() Obtain text descriptions for error
codes
ibApi_Utils_ConvertGroupIdToText()
ibApi_Utils_ConvertTextToGroupId()
ibApi_Utils_ConvertDeviceIdToText()
ibApi_Utils_ConvertTextToDeviceId()
ibApi_Utils_ConvertRawBatteryReadingToVoltage()
ibApi_Utils_ConvertRawAdcReadingToVoltage()
Convert between ID structures and
text representation
iBeanAPI_LPR.h Ultra-Low Power Functions
ibApi_LPR_SetClock() Set the Coordinated Universal Time
(UTC) clock for all devices
ibApi_LPR_GetClock() Retrieves the UTC clock value used
for all devices
ibApi_LPR_SetWakeupAndDutyRatio() Sets the low power mesh node
wakeup interval and duty ratio for
all devices
ibApi_LPR_GetWakeupAndDutyRatio() Retrieves the wakeup interval and
duty ratio for all devices
iBeanAPI_performance.h Performance Statistics
ibApi_GetStatisticData() Retrieve statistical data for a given
device.
Table 4-1. MeshScape API functions (continued)
RK-5424-5 Reference Kit User’s Guide 4-7
iBeanAPI.h
iBeanAPI.h
Data Structures
1. ibApi_APIHANDLE
typedef ibApi_INT32 ibApi_APIHANDLE;
This handle represents an API session. It is created by ibApi_Open() and used by most of
the other API functions.
2. ibApi_RESULT
typedef ibApi_INT32 ibApi_RESULT;
The API functions are standardized to return the value ibApi_RESULT, which is a signed 32-bit
integer. If the integer is negative, then it is an error code such as
ibApi_RESULT_ERR_INVALIDHANDLE or ibApi_RESULT_ERR_NOTPERMITTED. (See iBeanAPI.h
for a full listing of error codes.) Otherwise, the result can be ibApi_RESULT_SUCCESS or a
non-negative value specific to the particular function.
3. ibApi_GROUPID
struct ibApi_GROUPID_s {
ibApi_UINT8 words[ibApi_GROUPID_SIZE];
};
typedef struct ibApi_GROUPID_s ibApi_GROUPID;
The group ID is a 32-bit address that is used to identify a specific network of i-Bean devices
and is shared by all the devices within the network. (In the current implementation, each
MeshScape system group can only have one MeshGate.)
The API functions are standardized to return the value ibApi_RESULT, which is a signed 32-bit
integer. If the integer is negative, then it is an error code such as
ibApi_RESULT_ERR_INVALIDHANDLE or ibApi_RESULT_ERR_NOTPERMITTED. (See iBeanAPI.h
for a full listing of error codes.) Otherwise, the result can be ibApi_RESULT_SUCCESS or a
non-negative value specific to the particular function.
4. ibApi_DEVICEID
struct ibApi_DEVICEID_s {
ibApi_UINT8 words[ibApi_DEVICEID_SIZE];
};
typedef struct ibApi_DEVICEID_s ibApi_DEVICEID;
The device ID is a 64-bit address that uniquely identifies an i-Bean network component such
as end node, mesh node, or gateway.
4-8 Millennial Net
Using the MeshScape API
5. ibApi_COMPARISON
enum ibApi_COMPARISON_e {
ibApi_COMPARISON_EQUAL = (1<<0),
ibApi_COMPARISON_LESSTHAN = (1<<1),
ibApi_COMPARISON_GREATERTHAN = (1<<2),
ibApi_COMPARISON_NOTEQUAL =
ibApi_COMPARISON_LESSTHAN|ibApi_COMPARISON_GREATERTHAN,
ibApi_COMPARISON_NOTLESSTHAN =
ibApi_COMPARISON_EQUAL|ibApi_COMPARISON_GREATERTHAN,
ibApi_COMPARISON_NOTGREATERTHAN =
ibApi_COMPARISON_EQUAL|ibApi_COMPARISON_LESSTHAN,
ibApi_COMPARISON_BITMASK = 0xf
};
typedef ibApi_UINT16 ibApi_COMPARISON;
This enum is used for the return value of functions that compare things. Note that these
values are non-negative to enable casting as ibApi_RESULT.
6. ibApi_IOMODE
enum ibApi_IOMODE_e {
ibApi_IOMODE_OUTPUT=0,
ibApi_IOMODE_INPUT=1
};
typedef enum ibApi_IOMODE_e ibApi_IOMODE;
This is used by functions such as ibApi_IO_SetDIOConfig() for configuring channels
for input or output.
7. ibApi_DEVICETYPE
enum ibApi_DEVICETYPE_e {
ibApi_DEVICETYPE_ENDPOINT = (1<<0),
ibApi_DEVICETYPE_ROUTER = (1<<1),
ibApi_DEVICETYPE_ROUTERBEAN = (1<<2),
ibApi_DEVICETYPE_GATEWAY = (1<<3),
ibApi_DEVICETYPE_ANY = 0x3f /* used with filter */
};
typedef ibApi_UINT32 ibApi_DEVICETYPE;
This is used to identify the device type. The ibApi_DEVICETYPE_ENDPOINT and
ibApi_DEVICETYPE_ROUTERBEAN implement various I/O interfaces, whereas
ibApi_DEVICETYPE_ROUTER and ibApi_DEVICETYPE_GATEWAY do not.
RK-5424-5 Reference Kit User’s Guide 4-9
iBeanAPI.h
8. ibApi_DEVICEINFO
#define ibApi_MAX_VERSION_STRLEN 32
struct ibApi_DEVICEINFO_s {
ibApi_UINT16 struct_size;
ibApi_DEVICETYPE device_type;
ibApi_CHAR hardware_version[ibApi_MAX_VERSION_STRLEN];
ibApi_CHAR firmware_version[ibApi_MAX_VERSION_STRLEN];
};
typedef struct ibApi_DEVICEINFO_s ibApi_DEVICEINFO;
This data structure is used by ibApi_GetDeviceInfo() to report static device attributes
that are fixed at manufacturing time.
Structure Fields:
struct_size The value sizeof (ibApi_DEVICEINFO) should be assigned to this
field prior to calling ibApi_GetDeviceInfo(). This allows future versions of the API to
extend the struct without breaking binary compatibility.
device_type The type of the device (end node, mesh node, etc.).
hardware_version These two fields report the firmware and hardware version strings for
firmware_version various network devices, which are useful for diagnostic purposes. An
empty string may be assigned if the device does not support version
reporting.
9. ibApi_DEVICESTATE
enum ibApi_DEVICESTATE_e {
ibApi_DEVICESTATE_OFFLINE,
ibApi_DEVICESTATE_ONLINE,
ibApi_DEVICESTATE_REFRESHING,
};
typedef ibApi_UINT16 ibApi_DEVICESTATE;
These functions are used with ibApi_GetDeviceState(). When a command is issued to
modify a network device, a series of network communications must occur before the change
will take effect. During this time period the said to be “refreshing”, and the actual device
state may be different from values visible to the API. The refresh time depends on many
factors such as sampling interval, traffic level, network topology, etc.
4-10 Millennial Net
Using the MeshScape API
10. ibApi_DEVICESTATUS
struct ibApi_DEVICESTATUS_s {
ibApi_UINT16 struct_size;
ibApi_UINT16 hop_count;
ibApi_DEVICEID first_hop_router;
ibApi_DEVICEID last_hop_router;
ibApi_FLOAT battery_level;
ibApi_UINT16 battery_level_raw
ibApi_UINT16 seq_num;
ibApi_GROUPID group_id;
};
typedef struct ibApi_DEVICESTATUS_s ibApi_DEVICESTATUS;
This struct is used by ibApi_FUNC ibApi_GetDeviceStatus() to report read-only
device properties that change with time.
Structure Fields:
struct_size The value size of (ibApi_DEVICESTATUS) should be assigned to this
field prior to calling ibApi_GetDeviceStatus(). This allows future versions of the API
to extend the struct without breaking binary compatibility.
hop_count The hop count measures a device's topological distance from the
gateway. If the device talking directly to the gateway (i.e., no mesh
nodes), then the hop count is 1.
first_hop_router These fields store the device ID of the first and last mesh node that the
device's packets passed through on their way to the gateway. If the
hop count is 1, then these fields are NULL.
last_hop_router These fields store the device ID of the first and last mesh node that the
device's packets passed through on their way to the gateway. If the
hop count is 1, then these fields are NULL.
battery_level This reports the device battery level voltage.
If battery information is unavailable, the value is 0.
battery_level_raw This reports the device battery level measured in raw data, not voltage.
If battery information is unavailable, the value is 0.
Application can use ibApi_Utils_ConvertRawBatteryReadingToVoltage()
to convert raw data to voltage.
seq_num The sequence number increments whenever an update occurs.
group_id This reports the group ID currently assigned to the device.
RK-5424-5 Reference Kit User’s Guide 4-11
iBeanAPI.h
11. ibApi_EVENTMASK
typedef ibApi_UINT32 ibApi_EVENTMASK;
#define ibApi_MAX_SERIAL_DATA_SIZE 255
#define ibApi_MAX_ADC_DATA_CHANNELS 4
#define ibApi_MAX_DIO_DATA_CHANNELS 4
#define ibApi_UNDEFINED_FIELD_VALUE 0xFF
#define ibApi_Serial_Receive_EVENT_DATA_TYPE 0x11
#define ibApi_ADC_EVENT_DATA_TYPE 0x22
#define ibApi_DIO_EVENT_DATA_TYPE 0x33
#define ibApi_Device_State_EVENT_DATA_TYPE 0x44
#define ibApi_Sampling_Interval_EVENT_DATA_TYPE 0x55
#define ibApi_Battery_Level_EVENT_DATA_TYPE 0x66
#define ibApi_Network_EVENT_DATA_TYPE 0x77
#define ibApi_Heartbeat_EVENT_DATA_TYPE 0x88
Use this structure to identify events passed to event callbacks.
12. ibApi_CALLBACK_DATA
typedef ibApi_UINT8 ibApi_CALLBACK_DATA;
ibApi_CALLBACK_DATA is a pointer which must be cast to one of the data types that are
described in the following sections.
13. ibApi_ADC_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 status; // 1=enabled, 0=disabled, 0xFF=undefined
ibApi_DEVICEID deviceID;
ibApi_UINT8 channelMask; // 0 = no data
ibApi_UINT8 reserved; // for alignment
ibApi_FLOAT channelData[8];
}
This data structure will be passed to event callbacks to convey information about ADC
events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
4-12 Millennial Net
Using the MeshScape API
14. ibApi_DIO_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 direction; // 1=input, 0=output, 0xFF=undefined
ibApi_DEVICEID deviceID;
ibApi_UINT8 channelMask; // 0 = no data
ibApi_UINT8 channelData;
}
This data structure will be passed to event callbacks to convey information about DIO events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
15. ibApi_Device_State_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 reserved; // for alignment
ibApi_DEVICEID deviceID;
ibApi_DEVICESTATE state;
}
This data structure will be passed to event callbacks to convey information about device state
events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
16. ibApi_Sampling_Interval_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 reserved; // for alignement
ibApi_DEVICEID deviceID;
ibApi_UINT32 samplingInterval; // in milliseconds
}
This data structure will be passed to event callbacks to convey information about sampling
interval events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
RK-5424-5 Reference Kit User’s Guide 4-13
iBeanAPI.h
17. ibApi_Serial_Receive_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 serialState; // 0xFF=undefined
ibApi_DEVICEID deviceID;
ibApi_UINT8 serialDataSize;
ibApi_UINT8 serialSequence;
ibApi_UINT8 serialData[ibApi_MAX_SERIAL_DATA_SIZE];
}
This data structure will be passed to event callbacks to convey information about serial
receive events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
18. ibApi_Battery_Level_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 reserved; // for alignement
ibApi_DEVICEID deviceID;
ibApi_FLOAT batteryLevel;
}
This data structure will be passed to event callbacks to convey information about battery
level events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
19. ibApi_Network_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_UINT8 hopCount;
ibApi_DEVICEID deviceID;
ibApi_DEVICEID firstHopRouter;
ibApi_DEVICEID lastHopRouter;
}
This data structure will be passed to event callbacks to convey information about network
events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
4-14 Millennial Net
Using the MeshScape API
20. ibApi_Heatbeat_EVENT_DATA
typedef struct {
ibApi_UINT8 dataType; // Must be first!
ibApi_BOOL heartBeat; // Will always be set to
ibApi_TRUE
ibApi_DEVICEID deviceID;
}
This data structure will be passed to event callbacks to convey information about heart beat
events.
Use the first argument ibApi_EVENTMASK to determine how to cast the callback data.
21. ibApi_VERSION
typedef ibApi_UINT32 ibApi_VERSION;
#define ibApi_MAKE_VERSION(MAJOR,MINOR,RELEASE)
((ibApi_VERSION)((MAJOR<<16)|(MINOR<<8)|RELEASE))
#define ibApi_GET_VERSION_MAJOR(VER) ((VER>>16) & 0xff)
#define ibApi_GET_VERSION_MINOR(VER) ((VER>>8) & 0xff)
#define ibApi_GET_VERSION_RELEASE(VER) (VER & 0xff)
These macros encode API version numbers as a 32-bit integer. Binary compatibility is only
guaranteed when the major and minor components are the same. Note that this is a
non-negative number to enable casting as ibApi_RESULT.
22. ibApi_EXPECTED_VERSION
#define ibApi_EXPECTED_MASC_VERSION
ibApi_MAKE_VERSION(N,N,N)
This macro encodes the API version number that the application was compiled with. It is
passed to ibApi_Open() as a safeguard to ensure that the correct DLL file is being loaded
by the application. Note that N, N, N above represents the API version number, for example,
5.0.13.
RK-5424-5 Reference Kit User’s Guide 4-15
iBeanAPI.h
Functions
1. ibApi_Open
ibApi_FUNC ibApi_Open(
ibApi_VERSION expected_version,
ibApi_CONST ibApi_CHAR *server_type,
ibApi_CONST ibApi_CHAR * connection_str
);
ibApi_Open( ) should be called to initialize the API before any other function is called.
The "server_type" parameter specifies the type of connection, and connection_str contains
various connection parameters that vary according to server type.
Notes: For the current release, the server_type should always be "local", and the default
connection string is"". These text strings are case-sensitive.
You can change the default COM port and Baud rate using the "connection_str"
parameters. The string format is “-p[n]|-B[baud rate]”, where n = (COM port number – 1).
For example, to select COM port 2 with a baud rate of 115200, you should supply the
connection_str “-p1 –B115200”. By default, the COM port is COM1 and the baud rate is
115200.
Notes: The connection baud rate needs to be consistent between the host and the
MeshGate gateway. The default baud rate on the gateway is 115200, so if ibApi_Open()
changes the baud rate to a different number, the baud rate on the gateway also needs to be
updated.
To access the COM port setting on Linux platforms, you need to either have root permission
or change the COM port permission to current user.
Parameters:
expected_version: (input) Should always be ibApi_EXPECTED_VERSION.
server_type: (input) "local" (Only valid setting for this release).
connection_str: (input) "" (NULL string to set to default values).
Return Value:
An ibApi_APIHANDLE value if successful, or an error code (<0) if not.
2. ibApi_Close
ibApi_FUNC ibApi_Close(
ibApi_APIHANDLE api_hdl
);
This disconnects from the server and releases the API resources. This should be called before
your application exits to avoid resource leaks.
Parameter:
api_hdl: (input) API handle returned from ibApi_Open()
Return Value:
An ibApi_RESULT_SUCCESS if successful, error code (<0) if not.

4-16 Millennial Net
Using the MeshScape API
3. ibApi_GetApiVersion()
ibApi_FUNC ibApi_GetApiVersion ();
This function returns the actual software version for the API, which can differ from
ibApi_EXPECTED_VERSION if DLL’s are mixed.
Return Value:
An IbApi_VERSION value if successful, error code (<0) if not.
4. ibApi_GetNetworkList()
ibApi_FUNC ibApi_GetNetworkList(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID networks[],
ibApi_UINT32 networks_size
);
This retrieves a list of group ID’s for the networks managed by the server.
Parameters:
param api_hdl: (input) API handle returned from ibApi_Open()
networks: (output) array of group ID’s that is managed by the server
networks_size: (input) ibApi_INT32, maximum size for the network[]
Return Value:
The actual number of networks (which can exceed networks_size if the written data was
truncated), or an error code (<0) if unsuccessful.
RK-5424-5 Reference Kit User’s Guide 4-17
iBeanAPI.h
5. ibApi_GetDeviceList()
ibApi_FUNC ibApi_GetDeviceList(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID network,
ibApi_DEVICETYPE device_type
ibApi_DEVICEID devices[],
ibAPI_UINT32 devices_size
);
This function retrieves the ID’s of the devices in the network. The device_type parameter is a
bitwise OR of the ibApi_DEVICETYPE constants that filters the result. (To retrieve all devices,
use ibApi_DEVICETYPE_ANY.)
Parameters:
param api_hdl: (input) API handle returned from ibApi_Open().
network: (input) Group ID of the network.
device_type: (input) Device type filter.
devices: (output) Pointer to an array of device IDs.
devices_size: (input) Maximum number of device IDs that the devices array can hold.
Return Value:
The actual number of devices (which can exceed devices_size if the written data was
truncated), or an error code (<0) if unsuccessful.
6. ibApi_GetDeviceInfo()
ibApi_FUNC ibApi_GetDeviceInfo(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_DEVICEINFO * device_info
);
This function retrieves various static device attributes that are predetermined at
manufacturing time. Thus, these values only need to be queried once for a particular device.
See ibApi_DEVICEINFO above for details.
Note: To avoid memory corruption, the size of (ibApi_DECVICEINFO) must be allocated
to the “struct_size” field prior to calling this function.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of device to be accessed.
device_info: (output) Pointer to variable storing the result.
Return Value:
An ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
4-18 Millennial Net
Using the MeshScape API
7. ibApi_GetDeviceStatus()
ibApi_FUNC ibApi_GetDeviceStatus(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_DEVICESTATUS *device_status
);
This function retrieves various read-only device properties whose values can change with
time. See ibApi_DEVICE STATUS above for details.
Note: To avoid memory corruption, size of (ibApi_DECVICESTATUS) must be assigned to
the “struct_size” field prior to calling this function.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of device to be accessed.
device_status: (output) Pointer to variable storing the result.
Return Value:
An ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
8. ibApi_GetDeviceState()
ibApi_FUNC ibApi_GetDeviceState(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
);
This function queries the current state of a device in the network. See the
ibApi_DEVICESTATE notes above for details.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of device to be accessed.
Return Value:
An ibApi_DEVICESTATE if successful, error code (<0) if not.
RK-5424-5 Reference Kit User’s Guide 4-19
iBeanAPI.h
9. ibApi_SetSamplingInterval()
ibApi_FUNC ibApi_SetSamplingInterval(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UNIT32 sampling_interval_ms
);
This function sets the sampling interval for the device. The sampling interval determines how
frequently updates occur; lower values mean quicker response times, at the price of higher
bandwidth and power consumption. Typically the current interval must elapse before the
new interval will be programmed. When the update has completed, the device state will
return from ibApi_DEVISESTATE_REFRESHING to ibApi_DEVICESTATE_ONLINE.
Note: The assigned value will be quantized to the nearest legal value
supported by the device, which is typically a multiple of 100 ms larger than 300 ms.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of device to be accessed.
sampling_interval_ms: (input) New sampling interval (in ms).
Return Value:
An ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
10. ibApi_GetSamplingInterval()
ibApi_FUNC ibApi_GetSamplingInterval(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
);
This retrieves the sampling interval for the given device, measured in milliseconds. See
ibApi_SetSamplingInterval() above.
Return Value:
Sampling interval if successful, error code (<0) if not.
4-20 Millennial Net
Using the MeshScape API
Notes on Event Notification and Event Masks - It is important to note that there are two
techniques for receiving event notification: either by registering a callback which will be called
when the event(s) occur or by waiting (blocking) until the desired event(s) occur.
When using the callback mechanism the event mask must be registered by using
ibApi_SetEventMask(). This API will register a global event mask for all devices in the network.
When any of the events specified in the mask occur for any device in the network, the callback
registered via ibApi_RegisterEvent() will be called. If there is data associated with the event, it will
be passed to the callback function.
When using the wait (blocking) mechanism an event mask is specified as an argument to the wait
call (see api definitions below). NOTE that if a global event mask is in place (set with
ibApi_SetEventMask()) ONLY THE EVENTS that occur in the INTERSECTION of the two event
masks will be received while waiting. This allows you to specify a general event mask for your
entire network, and to filter on a very specific subset of events specified in the global mask. Also
note that when using the wait mechanism that an additional call is required to retreive the data (if
any) associated with the event.
11. ibApi_WaitForDeviceEvent()
ibApi_FUNC ibApi_WaitForDeviceEvent(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEEVENTTYPEevent_types,
ibApi_INT32 timeout ms,
ibApi_DEVICEID * device_id
);
Note: This function is now obsolete and only retained for backward
compatibility. Please use ibApi_WaitForDeviceEvents() instead.
This function implements the simplest form of event notification using the application thread
content: It causes the calling thread to sleep until a network packet has arrived (i.e., the
sequence number has incremented), and then returns the ID of the device that was updated.
If multiple devices have changed since the last call, ibApi_WaitForDeviceEvent() will
return their ID’s in sequential round-robin order. If time timeout expires and nothing has
changed, the return value ibApi_RESULT_ERR_TIMEOUT.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
event_types: (input) This parameter is reserved for a future feature allowing the wait
condition to be restricted to a subset of the possible event types.
timeout_ms: Number of milliseconds to wait before giving up (use -1 to wait indefinitely).
device_id: (output) ID of the device that changed.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed, ibApi_RESULT_ERR_TIMEOUT if not, or an
error code (<0) if unsuccessful.

RK-5424-5 Reference Kit User’s Guide 4-21
iBeanAPI.h
12. ibApi_WaitForDeviceEvents()
ibApi_FUNC ibApi_WaitForDeviceEvents(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEEVENTTYPE events_interested,
ibApi_INT32 timeout_ms,
ibApi_DEVICEID * device_id,
ibApi_DEVICEEVENTTYPE * events_happened
);
This function implements the simplest form of event notification using the application thread
context. It causes the calling thread to sleep until a network packet has arrived (i.e. the
sequence number has incremented), and then returns the ID of the device that was updated
along with the event(s) that woke the sleeping thread up. If multiple devices have changed
since the last call, ibApi_WaitForDeviceEvent() will return their IDs in a sequential “round
robin” order. If time timeout expires and nothing has changed, the return value is
ibApi_RESULT_ERR_TIMEOUT.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
events_interested: (input) This parameter allows the wait condition to be restricted to a
subset of the possible event types.
timeout_ms: Number of milliseconds to wait before giving up (use -1 to wait indefinitely) A
valid of zero means the thread will check for new events since the last call but will not wait.
device_id: (output) Pointer to ID of the device that changed.
events_happened: (output) The returned value is the subset of the events_interested. It
indicates the event(s) that actually happened.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed, ibApi_RESULT_ERR_TIMEOUT if not, or an
error code (<0) if unsuccessful.
4-22 Millennial Net
Using the MeshScape API
13. ibApi_SetEventMask()
ibApi_SetEventMask(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEEVENTTYPE event,
ibApi_DEVICEID device_id
);
This function sets the event mask for the triggering of asynchronous events. Before calling
ibApi_SetEventMask(), you must set the device_id to 0.0.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
event: (input) The event mask.
device_id: (input) ID of the device that changed.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed or an error code (<0) if unsuccessful.
14. ibApi_GetEventMask()
ibApi_FUNC ibApi_GetEventMask(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEEVENTTYPE * event,
ibApi_DEVICEID device_id
);
This function gets the event mask for the triggering of asynchronous events.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
event: (output) The event mask storage location.
device_id: (input) ID of the device that changed.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed or an error code (<0) if unsuccessful.
RK-5424-5 Reference Kit User’s Guide 4-23
iBeanAPI.h
15. ibApi_RegisterEvent()
ibApi_RegisterEvent(
ibApi_APIHANDLE api_hdl,
ibApi_CALLBACK_FUNCTIONapi_callback
);
Registers a callback function to be called upon receipt of the specified asynchronous event.
See “Notes on Event Notification abd Event Masks” on page 4-20.
A pointer to a function which implements this type must be passed to ibApi_RegisterEvent( ).
Each event processed will result in a call to this callback. The event mask will contain a single
event indicator (ibApi_DEVICEEVENTTYPE). Use the indicator to determine how to cast
ibApi_CALLBACK_DATA*.
@param ibApi_EVENTMASK (input) event mask, set to only one event type
@param ibApi_CALLBACK_DATA* (input) event data
typedef void (*ibApi_CALLBACK_FUNCTION)(ibApi_EVENTMASK, ibApi_CALLBACK_DATA *);
Parameters:
api_hdl: (input) API handle returned from @link ibApi_Open().
api_callback: (input) Callback function to register for asynchronous events as defined by
prior call to ibApi_SetEventMask().
Return Value:
An ibApi_RESULT_SUCCESS if successful or an error code (<0) if unsuccessful.
16. ibApi_GetDevicePacketSequenceNumber()
ibApi_FUNC ibApi_GetDevicePacketSequenceNumber(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id
);
This function Gets a device packet sequence number that is carried by a upstream packet
sent from the device.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) The device id.
Return Value:
A 0 - 255 sequence number if successful, or an error code (<0) if failed.
4-24 Millennial Net
Using the MeshScape API
17. ibApi_Block (void)
ibApi_FUNC ibApi_Block(void);
This function provides locking of shared data areas from within the application event
callback. This function is to be called prior to accessing the data record returned to the
callback function.
Parameters:
None.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed or an error code (<0) if unsuccessful.
18. ibApi_UnBlock (void)
ibApi_FUNC ibApi_UnBlock(void);
This function releases lock of shared data area from within the application event callback
function. This must be called prior to exiting the application event callback if the ibApi_Block
function was previously invoked.
Parameters:
None.
Return Value:
An ibApi_RESULT_SUCCESS if a device changed or an error code (<0) if unsuccessful.
RK-5424-5 Reference Kit User’s Guide 4-25
iBeanAPI_IO.h
iBeanAPI_IO.h
Data Structures
1. ibApi_IO_SERIALMODE
enum ibApi_IO_SERIALMODE_e {
ibApi_IO_SERIALMODE_DISABLED = 0,
ibApi_IO_SERIALMODE_UART,
ibApi_IO_SERIALMODE_RS232,
ibApi_IO_SERIALMODE_RS485
};
typedef ibApi_UINT16 ibApi_IO_SERIALMODE;
This is used by ibApi_IO_SERIALCONFIG to select the serial interface.
2. ibApi_IO_SERIALCONFIG
struct ibApi_IO_SERIALCONFIG_s {
ibApi_UINT16 struct_size;
ibApi_IO_SERIALMODE mode;
};
typedef struct ibApi_IO_SERIALCONFIG_s ibApi_IO_SERIALCONFIG;
Structure Fields:
struct_size The value size of (ibApi_IO_SERIALCONFIG) should be assigned to
this field prior to calling ibApi_IO_SetSerialConfig(). This allows future versions of
the API to extend the struct without breaking binary compatibility.
mode See ibApi_IO_SERIALMODE comments above.
4-26 Millennial Net
Using the MeshScape API
3. ibApi_IO_DEVICECAPS
struct ibApi_IO_DEVICECAPS_s {
ibApi_UINT16 struct_size;
ibApi_UINT8 num_dio_channels;
ibApi_UINT8 num_adc_channels;
ibApi_UINT8 adc_resolution_bits;
ibApi_UINT8 serial_input_buffer_depth:
ibApi_UINT8 serial_output_buffer_depth
};
typedef struct ibApi_IO_DEVICECAPS_s ibApi_IO_DEVICECAPS;
This structure is used by ibApi_IO_GetDeviceCaps() to return various static device
attributes that are predetermined at manufacturing time.
Structure Fields:
struct_size The value size of (ibApi_IO_DEVICECAPS) should be assigned to
this field prior to calling ibApi_IO_GetDeviceCaps(). This allows future versions of the
API to extend the struct without breaking binary compatibility.
num_dio_channels This is the number of DIO channels (i.e., the channel index passed to
ibApi_IO_ReadDIO() must be less than this).
num_adc_channels This is the number of DIO channels (i.e., the channel index passed to
ibApi_IO_ReadADC() must be less than this).
adc_resolution_bits This is the number of bits of resolution supported by the A/D
converter, i.e. the maximum value for the raw data will be (1<<adc_rsolution_bits)-1.
serial_input_buffer_depthThis is the number of input data packets slots for which packets
can be pending to be read by the API-based application.
serial_output_buffer_depthThis is the number of output data packet slots for which packets
can be pending to be send by the monitor.

RK-5424-5 Reference Kit User’s Guide 4-27
iBeanAPI_IO.h
Functions
1. ibApi_IO_GetDeviceCaps()
ibApi_FUNC ibApi_IO_GetDeviceCaps (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_IO_DEVICECAPS *device_caps
);
This function retrieves various static device attributes that are predetermined at
manufacturing time. Thus, these values only need to be queried once for a particular device.
See ibApi_IO_DEVICECAPS above for details.
Note: To avoid memory corruption, size of (ibApi_IO_DEVICECAPS) must
be assigned to the “struct_size” field prior to calling this function.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
device_caps: (output) Pointer to variable storing the result.
Return Value:
An ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
2. ibApi_IO_SetADCConfig()
ibApi_FUNC ibApi_IO_SetADCConfig (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
ibApi_BOOL enabled
);
This sets whether the specified ADC channel is enabled or disabled. The channel must be
enabled before calling ibApi_IO_ReadADC().
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
enabled: (input) ibApi_TRUE to enable the channel.
Return Value:
An ibApi_RESULT_SUCCESS if successful, or an error code (<0) if not.
4-28 Millennial Net
Using the MeshScape API
3. ibApi_IO_GetADCConfig()
ibApi_FUNC ibApi_IO_GetADCConfig (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index
);
This queries whether the specified ADCchannel is enabled or disabled.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
Return Value:
An ibApi_TRUE if enabled, ibApi_FALSE if disabled, or an error code (<0) if not.
4. ibApi_IO_ReadADC()
ibApi_FUNC ibApi_IO_ReadADC (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
ibApi_FLOAT * adc_value
);
This retrieves the value of the specified ADC channel as a float voltage value.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
adc_value: (output) ADC channel voltage.
Return Value:
An ibApi_RESULT_SUCCESSFUL if successful, or an error code (<0) if not.

RK-5424-5 Reference Kit User’s Guide 4-29
iBeanAPI_IO.h
5. ibApi_IO_ReadRawADC()
ibApi_FUNC ibApi_IO_ReadRawADC(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
ibApi_UINT16* adc_value
);
This retrieves the value of the specified ADC channel in raw format. Use this call only if a raw
value is explicitly required, otherwise use ibApi_IO_ReadADC() which returns a float value
voltage. The raw return value may be converted to a voltage using
ibApi_Utils_ConvertRawAdcReadingToVoltage() found in iBeanAPI_Utils.h.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
adc_value: (output) Result of the ADC reading in raw data, not voltage. Application can use
ibApi_Utils_ConvertRawBatteryReadingToVoltage() to convert to voltage.
Return Value:
An ibApi_RESULT_SUCCESSFUL if successful, or an error code (<0) if not.
6. ibApi_IO_SetDIOConfig()
ibApi_FUNC ibApi_IO_SetDIOConfig (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
ibApi_IOMODE io_mode
);
This sets whether the specified DIO channel is configured for input or output, which governs
the interpretation of ibApi_IO_ReadDIO() and ibApi_IO_WriteDIO().
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
io_mode: (input) Input/output mode.
Return Value:
An ibApi_RESULT_SUCCESSFUL if successful, or an error code (<0) if not.
4-30 Millennial Net
Using the MeshScape API
7. ibApi_IO_GetDIOConfig()
ibApi_FUNC ibApi_IO_SetDIOConfig(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
);
This queries whether the specified DIO channel is configured for input or output, which
governs the interpretation of ibApi_IO_ReadDIO().
* and ibApi_IO_WriteDIO()
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
io_mode: (input) the new input/output mode
Return Value:
An ibApi_IOMODE value if successful, or an error code (<0) if not.
8. ibApi_IO_WriteDIO()
ibApi_FUNC ibApi_IO_WriteDIO (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index,
ibApi_UINT8 dio_value
);
This sets the value of the specified DIO channel. Note that an error will result if the channel is
not configured for output.
Note: In some product models, the DIO pins are shared with the serial data
interface and will be disabled when it is active.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
dio_value: (input) New output level (0 or 1).
Return Value:
An ibApi_RESULT_SUCCESS if successful, or an error code (<0) if not.
RK-5424-5 Reference Kit User’s Guide 4-31
iBeanAPI_IO.h
9. ibApi_IO_ReadDIO()
ibApi_FUNC ibApi_IO_ReadDIO (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 channel_index
);
This reads the value of the specified DIO channel. If the channel is configured for output, it
reads the current output value.
Note: In some product models, the DIO pins are shared with the serial data
interface and will be disabled when it is active.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
channel_index: (input) Channel index to access.
Return Value:
Digital 0 or 1, or an error code (<0).
10. ibApi_IO_SetSerialConfig()
ibApi_FUNC ibApi_IO_SetSerialConfig (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_IO_SERIALCONFIG *serial_config
);
This configures the serial “user data” interface. If these pins are shared with the DIO pins,
the DIO will be disabled.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
serial_config: (input) New configuration.
Return Value:
An ibApi_RESULT_SUCCESS if successful, or an error code (<0) if not.

4-32 Millennial Net
Using the MeshScape API
11. ibApi_IO_GetSerialConfig()
ibApi_FUNC ibApi_IO_GetSerialConfig (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_IO_SERIALCONFIG *serial_config
);
This retrieves the configuration for the serial “user data” interface.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
serial_config: (output) Variable to store the result.
Return Value:
An ibApi_RESULT_SUCCESS if successful, or an error code (<0) if not.
12. ibApi_IO_GetSerialBufferStatus()
ibApi_FUNC ibApi_IO_GetSerialBufferStatus (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_IOMODE io_mode
);
For the given device, this function retrieves the status of the out going serial data buffer. The
return value gives the number of empty packet slots in the buffer. A negative return value
denotes an error and a zero return value means there is currently no out going empty packet
slots.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
io_mode: (input) Data direction to be accessed.
Return Value:
The number of empty out going packet slots if successful, or an error code (<0) if not.

RK-5424-5 Reference Kit User’s Guide 4-33
iBeanAPI_IO.h
13. ibApi_IO_WriteSerial()
ibApi_FUNC ibApi_IO_WriteSerial (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 buffer[],
ibApi_UINT16 buffer_size
);
This function writes buffer_size bytes pointed to by the buffer pointer to the specified device
handle. Prior to use, the ibApi_FIELDID_USERDATAMODE field must have been configured
for serial operation. The specific contents of the user data block and its maximum size are
application defined but must be equal to or smaller than that the maximum payload size
supported. Maximum payload size supported is returned when the function
ibApi_WriteSerialData() is called with buffer_size=0.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
buffer: (input) Pointer to packet to transmit.
buffer_size: (input) Number of bytes in user data packet to transmit.
Return Value:
Bytes sent if successful, or an error code (<0) if not.
4-34 Millennial Net
Using the MeshScape API
14. ibApi_IO_ReadSerial()
ibApi_FUNC ibApi_IO_ReadSerial (
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_UINT8 buffer[],
ibApi_UINT16 buffer_size,
ibApi_UINT8 *seq_num
);
For the given device, this retrieves the user data packet that arrived most recently. The
ibApi_IO_SERIALMODE setting must have been previously something other than
ibApi_IO_SERIALMODE_DISABLED. The input buffer holds a single packet (i.e., an
arriving packet overwrites the previous one). Lost packets can be detected by gaps in the
sequence numbers, which increment whenever a packet is received. If no new data is
available, then the return value is 0.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) ID of the device to be accessed.
buffer[ ]: (output) Buffer to store the incoming user data packet.
buffer_size: (input) Maximum size for buffer[ ].
seq_num: (output) Pointer to sequence number identifying this packet, or NULL if this
information is not needed.
Return Value:
Error code or the actual size of the result (which could exceed buffer_size if the written data
was truncated)
15. ibApi_IO_SetDeviceConfigAndData()
ibApi_FUNC ibApi_IO_SetDeviceConfigAndData(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_deviceSetConfigAndData *config_data
);
This function is used to make several configuration and data requests to a device at one
time.
Parameters:
api_hdl: (input) API handle returned from @link ibApi_Open()
device_id: (input) the ID of the device to be accessed
config_data: (input) User requested configuration.
RK-5424-5 Reference Kit User’s Guide 4-35
iBeanAPI_Utils.h
iBeanAPI_Utils.h
Functions
1. ibApi_Utils_GetErrorDescription()
ibApi_FUNC ibApi_Utils_GetErrorDescription(
ibApi_RESULT error_code,
ibApi_CHAR * description,
ibApi_UINT32 description_size
);
This function returns an English language interpretation for an API error code.
Parameters:
error_code: (input) ibApi_RESULT to be interpreted.
description: (output) Pointer to buffer storing the text.
description_size: (input) Maximum size of buffer.
Return Value:
Error code, or the actual size of the result including the terminating NULL (which could
exceed description_size if the written data was truncated).
2. ibApi_Utils_ConvertGroupIdToText()
ibApi_FUNC ibApi_Utils_ConvertGroupIdToText(
ibApi_CONST ibApi_GROUPIDgroup_id,
ibApi_CHAR * group_id_text,
ibApi_UINT32 group_id_text_size,
ibApi_UINT32 min_words
);
This renders a group ID as a text string, such as “1.2.3.4”. If the “min_words” parameter is
less than 4, leading zeros will be omitted for brevity. For example, if min_words is 3, then
“1.2.3.4” would be rendered as “2.3.4”.
Parameters:
group_id: (input) Group ID to convert.
group_id_text: (output) Pointer to buffer storing the text.
group_id_text_size: (input) Maximum size of buffer.
min_words: (input) Minimum number of digit groups.
Return Value:
Error code, or the actual size of the result including the terminating NULL (which could
exceed group_id_text_size if the written data was truncated).
4-36 Millennial Net
Using the MeshScape API
3. ibApi_Utils_ConvertTextToGroupId()
ibApi_FUNC ibApi_Utils_ConvertTextToGroupId(
ibApi_CONST ibApi_CHAR *group_id_text,
ibApi_GROUPID * group_id
);
This parses a text string such as “1.2.3.4” and stores the result in the group_id structure. If
fewer than 4 digit groups are provided, the result is left-padded with 0’s.
Parameters:
group_id_text: (input) Buffer to be parsed.
group_id: (output) Structure to store the result.
Return Value:
ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
4. ibApi_Utils_ConvertDeviceIdToText()
ibApi_FUNC ibApi_Utils_ConvertDeviceIdToText(
ibApi_DEVICEID device_id,
ibApi_CHAR * device_id_text,
ibApi_UINT32 device_id_text_size,
ibApi_UINT32 min_words
);
This renders a device ID as a text string such as “1.2.3.4.5.6.7.8”. If the “min_words”
parameter is less than 8, leading zeros will be omitted for brevity. For example, if min_words
is 4, then “1.2.3.4.5.6.7.8” would be rendered as “5.6.7.8”.
Parameters:
device_id: (input) Device ID to convert.
device_id_text: (output) Buffer to store the text.
device_id_text_size: (input) Maximum size of the buffer.
min_words: (input) Minimum number of digit groups.
Return Value:
Error code, or the actual size of the result including the terminating NULL (which could
exceed device_id_text_size if the written data was truncated).
RK-5424-5 Reference Kit User’s Guide 4-37
iBeanAPI_Utils.h
5. ibApi_Utils_ConvertTextToDeviceId()
ibApi_FUNC ibApi_Utils_ConvertTextToDeviceId(
ibApi_CONST ibApi_CHAR *device_id_text,
ibApi_DEVICEID * device_id
);
This function parses a text string such as “1.2.3.4.5.6.7.8” and stores the result in the
device_id structure. If fewer than 8 digit groups are provided, the result is left-padded with
0’s.
Parameters:
device_id_text: (input) Buffer to be parsed.
device_id: (output) Structure to store the result.
Return Value:
ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
6. ibApi_Utils_ConvertRawBatteryReadingToVoltage()
ibApi_FUNC ibApi_Utils_ConvertRawBatteryReadingToVoltage(
ibApi_DEVICEID device_id,
ibApi_UINT16 blRaw,
ibApi_FLOAT *blFloat
);
This function converts a device’s battery level reading from raw data to voltage.
Parameters:
device_id: (input) Device information.
blRaw: (input) Battery level reading in raw data.
blFloat: (output) Structure to store the battery level reading as a voltage.
Return Value:
ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
4-38 Millennial Net
Using the MeshScape API
7. ibApi_Utils_ConvertRawAdcReadingToVoltage()
ibApi_FUNC ibApi_Utils_ConvertAdcReadingToVoltage(
ibApi_DEVICEID device_id,
ibApi_UINT16 adcRaw,
ibApi_FLOAT *adcFloat
);
This function converts a device’s battery level reading from raw data to voltage.
Parameters:
device_id: (input) Device information.
adcRaw: (input) ADC reading in raw data.
adcFloat: (output) Structure to store the ADC reading as a voltage.
Return Value:
ibApi_RESULT_SUCCESS if successful, error code (<0) if not.
RK-5424-5 Reference Kit User’s Guide 4-39
iBeanAPI_LPR.h
iBeanAPI_LPR.h
Functions
1. ibApi_LPR_SetClock()
ibApi_FUNC ibApi_LPR_SetClock(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID network,
ibApi_UINT32 utc_sec
);
This function sets the UTC clock for all devices. The UTC clock is used for the time
synchronization purposes. The gateway will synchronize each device's clock through time
synchronization process. The clock setting is a global attribute that applies to all devices in
the network.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
network: (input) Group ID of the network.
utc_sec: (input) The UTC value in seconds, system clock is used if the value is zero.
Return Value:
ibApi_RESULT_SUCCESS if successful, or error code (<0) if not.
2. ibApi_LPR_GetClock()
ibApi_FUNC ibApi_LPR_GetClock(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID network,
ibApi_UINT32 * utc_sec
)
This function retrieves the UTC clock value (in seconds) used for all devices.
Note: After setting the network-wide clock by the method
ibApi_LPR_SetClock(), it is necessary to wait at least 1 second before calling this function to
allow the system to take on the new value.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
network: (input) Group ID of the network.
utc_sec: (output) UTC value in seconds.
Return Value:
The wakeup interval in ms if successful, or error code (<0) if not.

4-40 Millennial Net
Using the MeshScape API
3. ibApi_LPR_SetWakeupAndDutyRatio()
ibApi_FUNC ibApi_LPR_SetWakeupAndDutyRatio(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID network,
ibApi_UINT32 wakeup_interval,
ibApi_UINT32 duty_ratio
)
This function sets the low power router wakeup interval and duty ratio for all devices. The
wakeup interval and duty ratio are global attributes that applies to all devices in the network.
Changing of wakeup interval and duty ratio may have impact on the network stability,
however, the worst case is to cause the network to reestablish itself entirely. Minimum value
for wakeup interval is 60 seconds, maximum value is 6540 seconds (109 minutes).
Wakeup interval should be expressed in milliseconds. If too many digits of precision are used
round off error can occur. Use ranges of 100's, 1000's, 10000's or 100000's of milliseconds
rounded up to the nearest second to prevent round off error.
Minimum value for duty radio depends on minimum wakeup interval, and network size,
radius (number of hops), currently it set to be 10%, maximum value is 100%. The 100%
duty ratio means the mesh node is no longer asleep.
Duty ratio can be set in 0.5% increments using the integer range 5-1000, with increments of
5. If (DutyRatio MOD 5) != 0, an error will be returned.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
network: (input) Group ID of the network.
wakeup_interval: (input) Wakeup interval in milliseconds.
duty_ratio: (input) the duty ratio (5 - 1000), in increments of 5.
Return Value:
Wakeup interval in ms if successful, error code (<0) if not.
RK-5424-5 Reference Kit User’s Guide 4-41
iBeanAPI_LPR.h
4. ibApi_LPR_GetWakeupAndDutyRatio)
ibApi_FUNC ibApi_LPR_GetWakeupAndDutyRatio(
ibApi_APIHANDLE api_hdl,
ibApi_GROUPID network,
ibApi_UINT32 * wakeup_interval,
ibApi_UINT32 * sleep_interval,
ibApi_UINT32 * duty_ratio
);
This function retrieves the low power router wakeup interval and duty ratio for all devices.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
network: (input) Group ID of the network.
wakeup_interval: (output) Wakeup interval in milliseconds.
sleep_interval: (output) Sleep time in milliseconds.
duty_ratio: (output) the duty ratio (5 - 1000), in increments of 5.
Return Value:
ibApi_RESULT_SUCCESS if successful, ibApi_RESULT_ROUNDOFF if round off error detected
or other error code (<0) upon failure.
4-42 Millennial Net
Using the MeshScape API
iBeanAPI_performance.h
Data Structures
1. ibApi_PFM_PacketStats_s
struct ibApi_PFM_PacketStats_s {
ibApi_UINT8 ctrlcode;
ibApi_UINT16 packetTxCount;
ibApi_UINT16 packetSearchCount;
};
Structure Fields:
ctrlcode Control code.
packetTxCount Number of transmissions and acks for this packet.
packetSearchCount Number of search packets and responses caused by this packet.
2. ibApi_PFM_NodeStats_s
struct ibApi_PFM_NodeStats_s {
ibApi_UINT8 ctrlcode;
ibApi_UINT8 reportingFrequency;
ibApi_UINT16 packetSearchCount;
ibApi_UINT8 searchPacketTxCount;
ibApi_UINT16 searchResponseRxCount;
ibApi_UINT16 searchPacketRxCount;
ibApi_UINT16 searchResponseTxCount;
ibApi_UINT16 rejectedPacketCount;
ibApi_UINT16 acceptedPacketCount;
ibApi_UINT16 transmittedPacketCount;
ibApi_UINT16 transmissionsCount;
ibApi_UINT16 validInterrupts;
ibApi_UINT32 totalInterrupts; //2 -> 4
ibApi_UINT8 numberOfAssociations;
};
RK-5424-5 Reference Kit User’s Guide 4-43
iBeanAPI_performance.h
Structure Fields:
ctrlcode Control code.
reportingFrequency
packetSearchCount Number of search packets and responses caused by this
packet.
searchPacketTxCount Number of search packets transmitted.
searchResponseRxCount Number of search packets received.
searchPacketRxCount Number of search packets received.
searchResponseTxCount Number of search responses transmitted.
rejectedPacketCount Number of upstream packets rejected.
acceptedPacketCount Number of upstream packets accepted.
transmittedPacketCount Number of unique upstream packets.
transmissionsCount Number of transmissions (excluding search packets
and responses).
validInterrupts
totalInterrupts 2 - 4
numberOfAssociations
3. ibApi_PFM_Stats_s
struct ibApi_PFM_Stats_s {
struct ibApi_PFM_PacketStats_s packetStats;
struct ibApi_PFM_NodeStats_s nodeStats;
};
This structure is used by ibApi_IO_GetDeviceCaps() to return various static device
attributes that are predetermined at manufacturing time.
Structure Fields:
packetStats Packet statistics.
nodeStats Node statistics.
4-44 Millennial Net
Using the MeshScape API
Functions
1. ibApi_GetStatisticData
ibApi_FUNC ibApi_GetStatisticData(
ibApi_APIHANDLE api_hdl,
ibApi_DEVICEID device_id,
ibApi_PFM_STATS *statisticData);
This function retrieves the statistical data for the given device.
Parameters:
api_hdl: (input) API handle returned from ibApi_Open().
device_id: (input) the ID of the device to be accessed.
device_id: (output) the statistic data of the device.
Return Value:
An ibApi_RESULT_SUCCESS if successful, or an error code (<0) if not.

RK-5424-5 Reference Kit User’s Guide 4-45
Example API Code
Example API Code
Millennial Net provides as part of the reference kit, several sample API applications to be
compiled under Windows and Linux. This section lists the source code for one of the API
examples, ListDevices. ListDevicesprovides a list of all detected network nodes (MeshGate, Mesh
Node(s), and End Node(s)).
The C file containing the code shown here can be found in the Programs directory:
C:\Program Files\MeshScape\examples\windows\ListDevices.c
/*
* ListDevices.c
*
* Copyright (c) 2000-2005 Millennial Net, Inc. All Rights Reserved.
* Reproduction or modification is strictly prohibited without express
* written consent of Millennial Net.
*
* This example illustrates the basic operations of connecting to the i-Bean
* API and obtaining basic information about the devices in the network.
* It prints out the list of gateways, routers, and endpoints currently
* participating in the network, along with some information about each
* device.
*
* This project was built using Microsoft Visual C++ version 7.1, but should
* be compatible with other similar compiler versions.
*/
#include <iBeanAPI.h>
#include <iBeanAPI_IO.h>
#include <iBeanAPI_Utils.h>
#include <stdio.h>
#include <stdlib.h>
#ifndef __GNUC__
#include <conio.h>
#else
#include <mingw/conio.h>
/* #include <mingw/conio.h> */
#endif
/*
* This is the number of "words" in a network address. For example, the
* address "127.0.1" contains three words. The i-Bean protocol supports
* up to 8 words (64-bits), but the actual maximum is reduced in some

4-46 Millennial Net
Using the MeshScape API
* product releases to optimize the packet size.
*/
#define MIN_DEVICEID_WORDS 3
/***************************************************************************/
void WaitForKey(void) {
printf("\r\nPress any key to close...");
_getch();
printf("\r\n");
}
/****************************************************************************
* This is a simple wrapper for detecting and reporting API error return
* values. In C++, this function could throw an exception object.
*/
ibApi_RESULT CheckResult(ibApi_RESULT result) {
char error_text[256];
/*
* Error codes always have a negative value.
*/
if (result >= 0) return result;
/*
* For the purposes of this example, ibApi_RESULT_ERR_TIMEOUT is not a
* fatal error.
*/
if (result == ibApi_RESULT_ERR_TIMEOUT) return result;
/*
* This interprets the error code, writing the result to the error_text
* variable
*/
ibApi_Utils_GetErrorDescription(result,error_text,sizeof(error_text));
printf("\r\nERROR: %s\r\n",error_text);
/*
* Technically, ibApi_Close() should be called before exiting, e.g. via
* an atexit() handler. (This is omitted in the example for simplicity.)
*/
WaitForKey();
exit(1);

RK-5424-5 Reference Kit User’s Guide 4-47
Example API Code
return 0;
}
/***************************************************************************/
void ListDevices(ibApi_APIHANDLE api_hdl) {
#define DEVICEIDS_MAX 100
ibApi_GROUPID groupid;
ibApi_DEVICEID deviceids[DEVICEIDS_MAX];
int deviceids_count;
char deviceid_text[256];
int sampling_interval;
int i;
ibApi_DEVICEINFO deviceinfo;
ibApi_DEVICESTATUS devicestatus;
/*
* The ibApi_GetNetworkList() function returns a list of the groups
* currently managed by the network. If the gateway is not properly
* connected to the monitor, then this list will be empty.
*/
if (CheckResult(ibApi_GetNetworkList(api_hdl,&groupid,1) < 1)) {
printf("The network is empty\r\n");
return;
}
/*
* List the gateways in the group, which typically should be
* only one.
*/
printf("\r\nGATEWAYS\r\n");
deviceids_count = CheckResult(ibApi_GetDeviceList(api_hdl, groupid,
ibApi_DEVICETYPE_GATEWAY, deviceids,DEVICEIDS_MAX));
/*
* If the buffer limit was exceeded, then display partial results
*/
if (deviceids_count > DEVICEIDS_MAX)
deviceids_count = DEVICEIDS_MAX;
for (i=0; i<deviceids_count; ++i) {
/*
* Note that the struct_size must be assigned BEFORE calling

4-48 Millennial Net
Using the MeshScape API
* ibApi_GetDeviceInfo(). This allows compatibility with future API
* versions that implement additional fields.
*/
deviceinfo.struct_size = sizeof(deviceinfo);
CheckResult(ibApi_GetDeviceInfo(api_hdl,deviceids[i],&deviceinfo));
CheckResult(ibApi_Utils_ConvertDeviceIdToText(deviceids[i],
deviceid_text,sizeof(deviceid_text),MIN_DEVICEID_WORDS));
printf(" %10s fw=\"%s\" hw=\"%s\"\r\n", deviceid_text,
deviceinfo.firmware_version,deviceinfo.hardware_version);
}
/*
* List the routers.
*/
printf("\r\nROUTERS\r\n");
deviceids_count = CheckResult(ibApi_GetDeviceList(api_hdl, groupid,
ibApi_DEVICETYPE_ROUTER|ibApi_DEVICETYPE_ROUTERBEAN, deviceids,DEVICEIDS_MAX));
if (deviceids_count > DEVICEIDS_MAX)
deviceids_count = DEVICEIDS_MAX;
for (i=0; i<deviceids_count; ++i) {
/*
* Note that the struct_size must be assigned BEFORE calling
* ibApi_GetDeviceStatus().
*/
devicestatus.struct_size = sizeof(devicestatus);
CheckResult(ibApi_GetDeviceStatus(api_hdl,deviceids[i],&devicestatus));
CheckResult(ibApi_Utils_ConvertDeviceIdToText(deviceids[i],
deviceid_text,sizeof(deviceid_text),MIN_DEVICEID_WORDS));
printf(" %10s (%i hops)\r\n", deviceid_text, devicestatus.hop_count);
}
/*
* List the endpoints.
*/
printf("\r\nENDPOINTS\r\n");
deviceids_count = CheckResult(ibApi_GetDeviceList(api_hdl, groupid,
ibApi_DEVICETYPE_ENDPOINT, deviceids,DEVICEIDS_MAX));

RK-5424-5 Reference Kit User’s Guide 4-49
Example API Code
if (deviceids_count > DEVICEIDS_MAX)
deviceids_count = DEVICEIDS_MAX;
for (i=0; i<deviceids_count; ++i) {
CheckResult(ibApi_Utils_ConvertDeviceIdToText(deviceids[i],
deviceid_text,sizeof(deviceid_text),MIN_DEVICEID_WORDS));
sampling_interval = CheckResult(ibApi_GetSamplingInterval(api_hdl,deviceids[i]));
printf(" %10s (%i ms)\r\n", deviceid_text, sampling_interval);
}
}
/***************************************************************************/
int main() {
/*
* This handle represents the current API session.
*/
ibApi_APIHANDLE api_hdl;
ibApi_VERSION api_version;
api_version = ibApi_GetApiVersion();
printf("\r\nInitializing API Version %i.%i.%i\r\n\r\n",
ibApi_GET_VERSION_MAJOR(api_version),
ibApi_GET_VERSION_MINOR(api_version),
ibApi_GET_VERSION_RELEASE(api_version)
);
/*
* ibApi_Open() is called to begin the session. Your application
* should ensure that ibApi_Close() is called to release the handle
* before exiting.
*/
api_hdl = CheckResult(ibApi_Open(ibApi_EXPECTED_VERSION,"local",""));
ListDevices(api_hdl);
CheckResult(ibApi_Close(api_hdl));
WaitForKey();
return 0;
}

4-50 Millennial Net
Using the MeshScape API

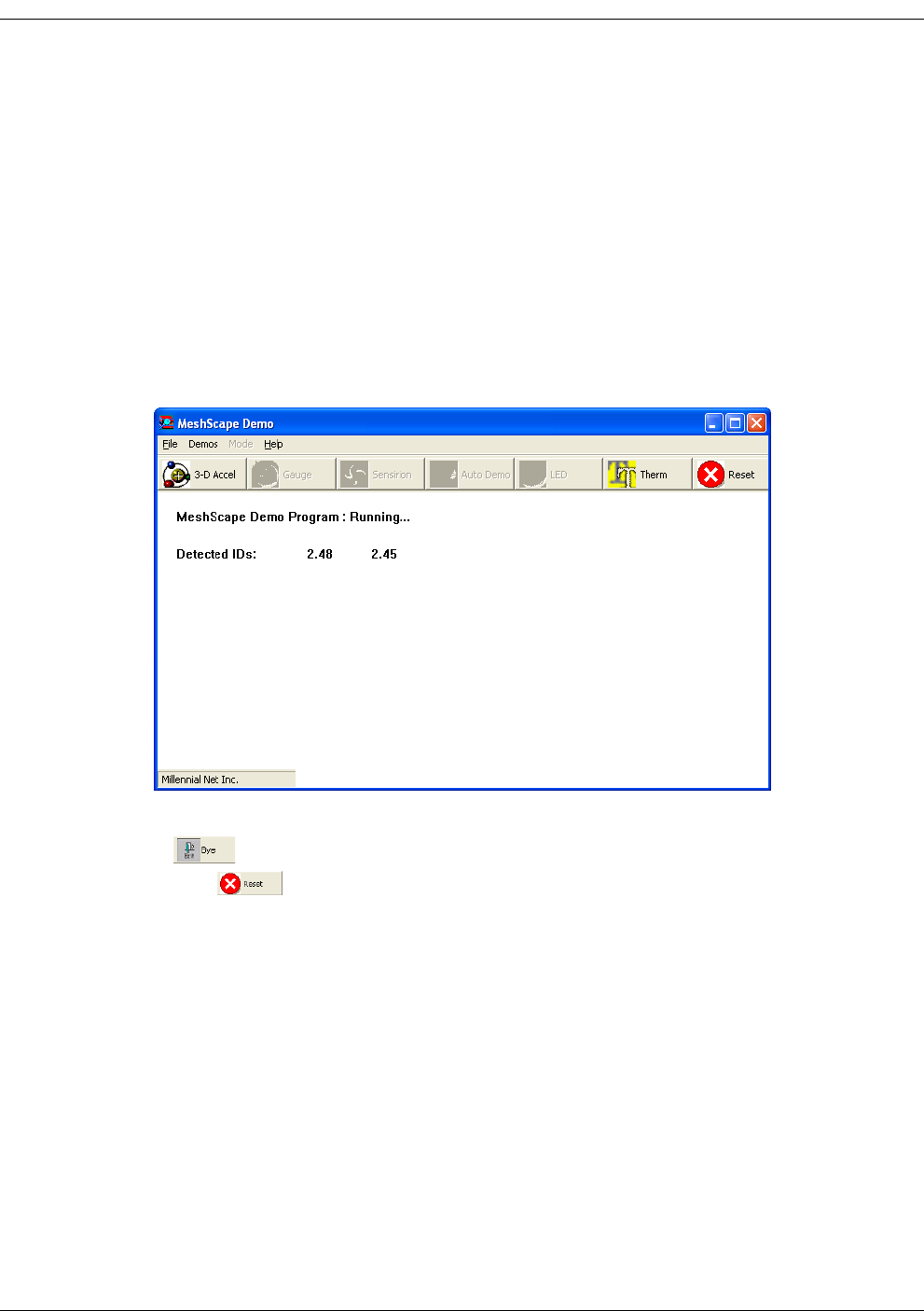
A-2 Millennial Net
Running the MeshScape Demo Program
Your RK-5424-5 Reference Kit includes the MeshScape Demonstration program that enables
you to run a temperature sensor demo program that demonstrate the features and benefits of
the MeshScape system.
To launch the MeshScape Demo program:
• From the Windows taskbar, select:
Start>All Programs>MeshScape>API Examples, then open the bin folder and
double-click Demo.exe to run the executable.
The MeshScape Demo main window appears as shown in Figure A-1.
Figure A-1. MeshScape Demo main window
You can close the MeshScape Demo program by selecting File>Exit or by clicking the
icon on the main window.
Click to close a demonstration application that was launched from within the main
window.
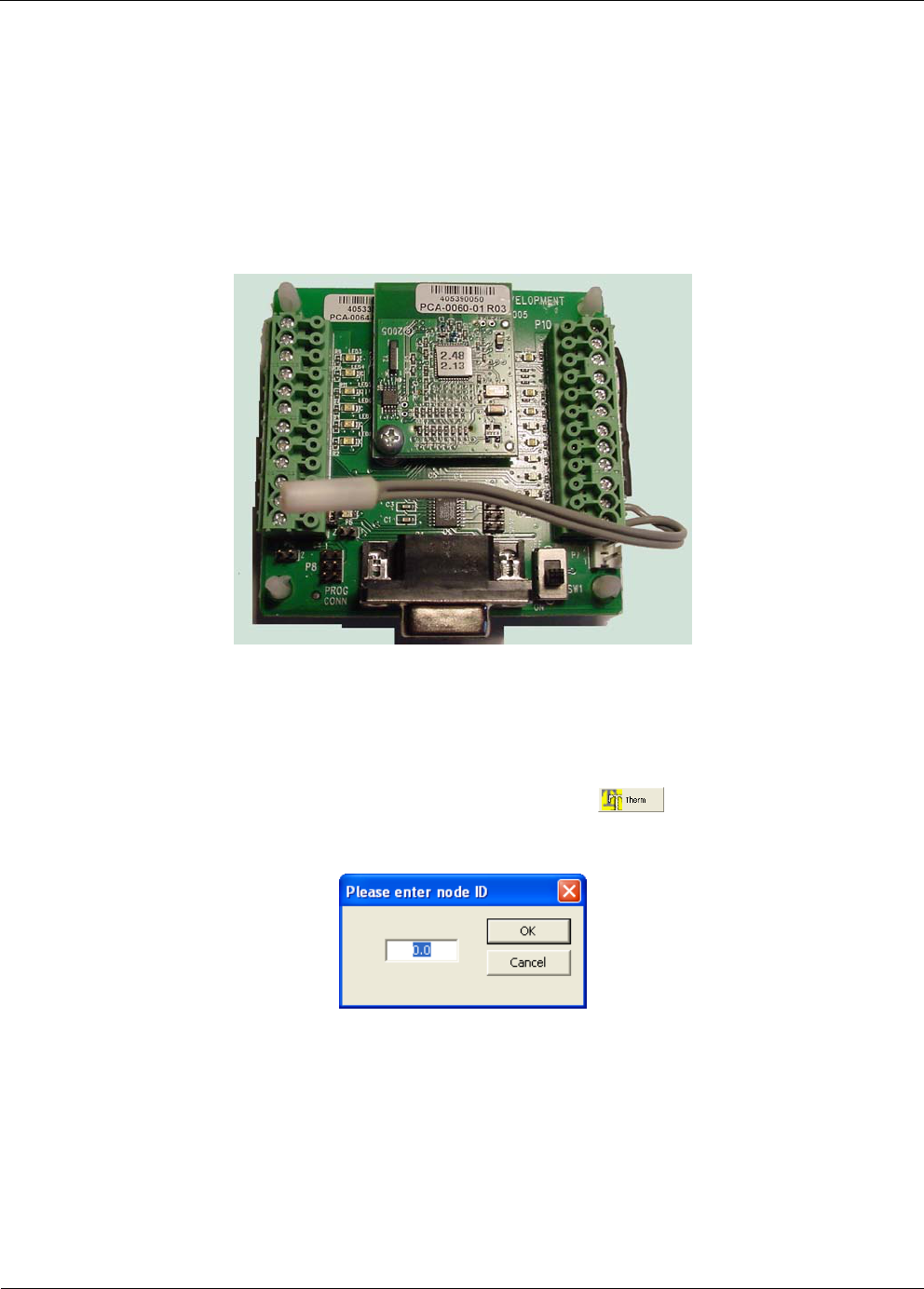
RK-5424-5 Reference Kit User’s Guide A-3
Running the Temperature Sensor Demo
Running the Temperature Sensor Demo
The temperature sensor demo allows you to view a graphical display of a temperature reading
from a kele sensor installed on an end node terminal board. Your RK-5424-5 Reference Kit
includes an end node terminal board equipped with a kele temperature sensor as shown in
Figure A-2.
Figure A-2. End node terminal board with kele temperature sensor
Before launching the temperature sensor demo, turn on the end node device equipped with
the sensor, and verify that its Device ID appears in the Detected IDs list in the MeshScape Demo
main window.
To launch the Temperature Sensor demo:
1. Select Demos>Thermistor>Start, or click the icon.
2. When prompted, enter the Device ID of the node on which the temperature sensor is
installed, and then click OK.
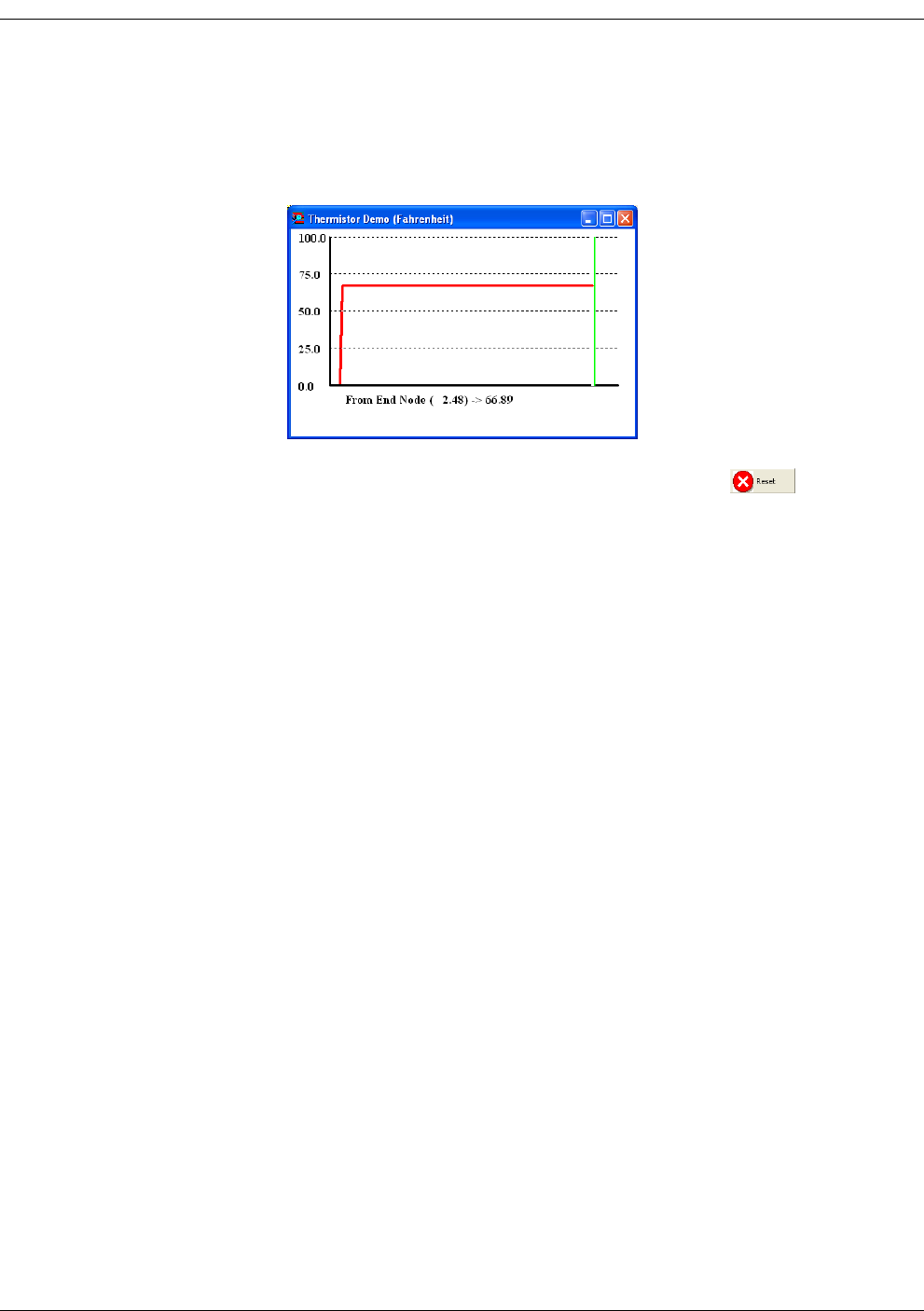
A-4 Millennial Net
A window appears displaying a graphic representation of the temperature reading
from the node on which you installed the temperature sensor. It may take up to 20
seconds for the node to update its configuration and start to display its temperature
reading in the graphical window.
3. To exit the demo, select Demos>Thermistor>end, or click the icon.

RK-5424-5 Reference Kit User’s Guide B-1
B
Using MeshScape Programmer
The MeshScape Programmer application supplied with your RK-5424-5 Reference Kit enables
you to upgrade the firmware and re-configure the group and device IDs on all of your
MeshScape devices. This chapter contains information on how to use the MeshScape
Programmer application and includes:
•’Getting Started with MeshScape Programmer’ on page B-2
•’Performing MeshScape Programmer Operations’ on page B-6

B-2 Millennial Net
Getting Started with MeshScape
Programmer
MeshScape Programmer is a feature-rich application that enables you to upgrade your
MeshScape system by:
• re-programming the device flash memory
• unlocking firmware feature upgrades
• re-programming group and device IDs
• re-programming the device radio configuration
To use MeshScape Programmer, you will need to:
• connect the MeshGate to your computer
• connect the target device that you wish to upgrade to your computer
• run the MeshScape Programmer application on your computer
Connecting the Target Device to Your Computer
Follow the procedures below to connect the target MeshScape device to your computer for
programming.
Connecting a MeshGate for Programming
The MeshGate provides a console port equipped with a mini-connector to facilitate firmware
upgrades.
Using the mini-connector-to-nine-pin serial connector cable supplied in your RK-5424-5
Reference Kit, connect the MeshGate console port to the serial port on your computer.
Connecting a Mesh Node for Programming
1. Connect a MeshGate to your computer as described above.
2. Remove the connector panel access cover from the MeshGate connected to the
computer and remove the connector panel access cover from the target mesh node.
3. Referring to Figure B-1 and using the supplied MeshGate programming cable, connect
the external programming port on the MeshGate to the external programming
port on the mesh node.
4. Replace the MeshGate and mesh node connector panel access covers, and disconnect
the programming cable after the firmware update is complete.
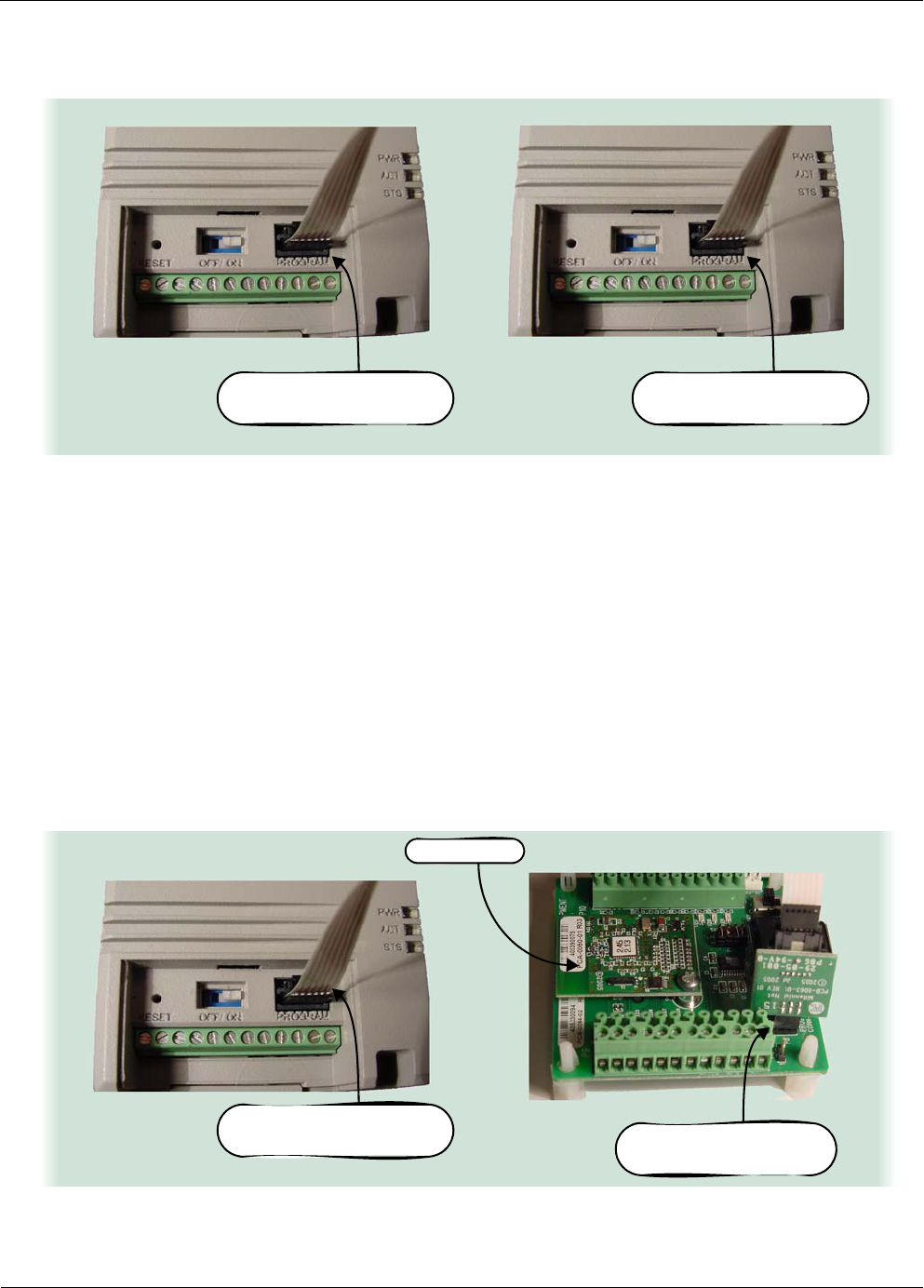
RK-5424-5 Reference Kit User’s Guide B-3
Getting Started with MeshScape Programmer
Figure B-1.Connecting MeshGate programming cable to a mesh node
Connecting an End Node for Programming
1. Connect a MeshGate to your computer as described on page B-2.
2. Remove the connector panel access cover from the MeshGate connected to the
computer.
3. Referring to Figure B-2 and using the supplied MeshGate programming cable and
MeshGate-to-end node adapter, connect the external programming port on the
MeshGate to port P8 on the end node terminal board.
Ensure that Pin 1 on the MeshGate-to-end node adapter mates with Pin1 on connector
P8 when making this connection.
4. Replace the MeshGate connector panel access cover, and disconnect the programming
cable after the firmware update is complete.
Figure B-2.Connecting MeshGate programming cable to an end node
External Programming Port
on MeshGate
External Programming Port
on Mesh Node
External Programming Port
on MeshGate Port P8 on the End Node
Terminal Board
End Node
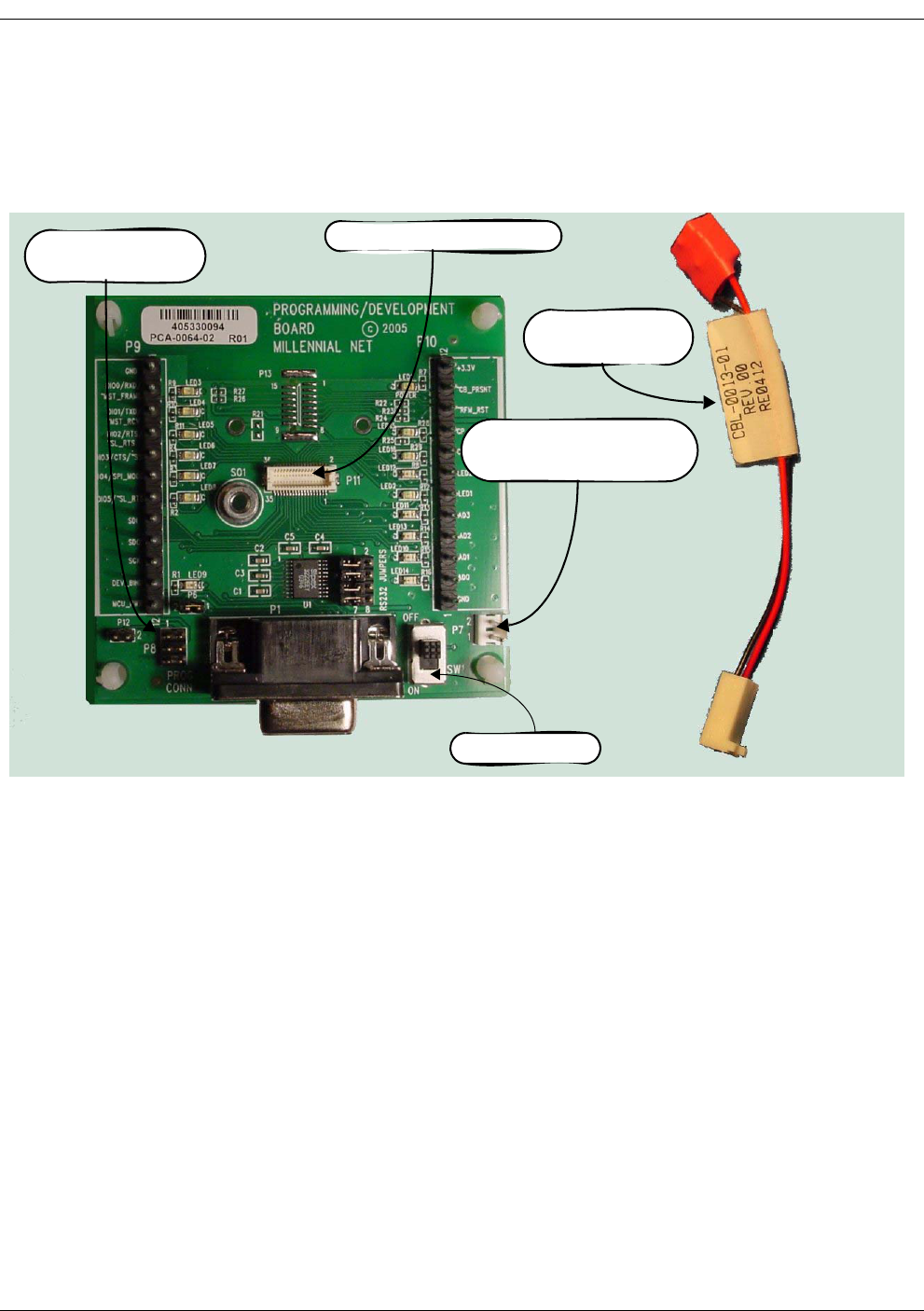
B-4 Millennial Net
Using the Module Programming Terminal Board
A terminal board is included in your Installation Kit for programming end node or mesh node
modules. This module programming terminal board is shown in Figure B-3.
Figure B-3.Module programming terminal board
To program an end node or mesh node module using this terminal board:
1. With switch SW1 in the Off position, connect the end node or mesh node module to
connector P11 on the module programming terminal board.
2. Referring to Figure B-2 and using the supplied MeshGate programming cable and
MeshGate-to-end node adapter, connect the external programming port on the
MeshGate to port P8 on the module programming terminal board.
Ensure that Pin 1 on the MeshGate-to-end node adapter mates with Pin1 on connector
P8 when making this connection.
3. Remove the 3.3v lithium battery on the back side of the module programming terminal
board.
4. Connect the external power adapter cable supplied in your Installation Kit to connector
P7 on the module programming terminal board.
5. Connect the supplied AC adapter to the external power adapter cable, and then plug the
AC adapter into a 110/220 VAC power source.
6. Move switch SW1 to the On position.
Connect Node to P11
On/Off Switch
Connect External Power
Adapter Cable to P7
P8
Programming Port
External Power
Adapter Cable

RK-5424-5 Reference Kit User’s Guide B-5
Getting Started with MeshScape Programmer
7. Run the MeshScape Programmer application as described in the next section.
8. Move switch SW1 on the terminal board to the Off position.
9. Remove the programmed node from the terminal board.
10. Repeat steps 1 to 8 until all nodes have been configured as desired.
Launching MeshScape Programmer Using Windows
To launch MeshScape Programmer, do one of the following:
– Double-click on the desktop’s MeshScape Programmer icon.
– From the Windows taskbar, select:
Start>All Programs>MeshScape>MeshScape Programmer.
MeshScape Programmer runs as described in the next section.
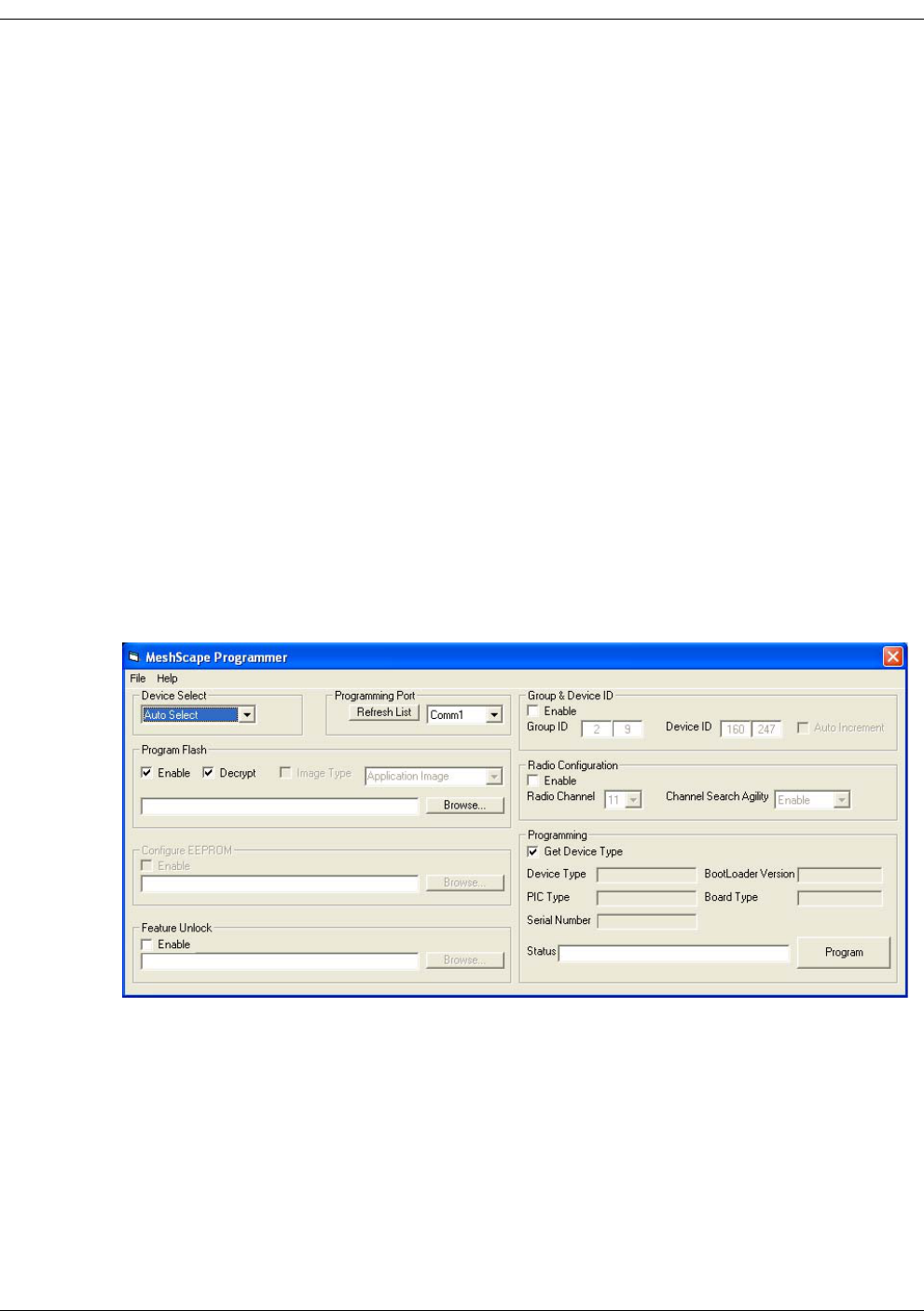
B-6 Millennial Net
Performing MeshScape Programmer
Operations
You may use MeshScape Programmer to:
• upgrade the firmware image on the target device
• unlock features on the target device
• re-program the device and group IDs on the target device
• re-program the radio configuration on the target device
Upgrading Firmware on the Target Device
To upgrade the firmware on a MeshGate, mesh node, or end node using the MeshScape
Programmer application:
1. Connect the target device to your computer and launch the MeshScape Programmer
application as described in the previous section.
The MeshScape Programmer main window appears as shown in Figure B-4.
Figure B-4.The MeshScape Programmer main window
2. Select the target device to program by selecting an option from the Device Select
drop-down menu:
– Auto-Select - Allow MeshScape Programmer to determine the connected device type
(default).
– MeshGate Application - Upgrade the firmware on the MeshGate’s main application terminal
board.
– MeshGate RF - Upgrade the firmware on the MeshGate’s RF daughter board.
– External Device - Upgrade a mesh node or end node connected to the MeshGate.

RK-5424-5 Reference Kit User’s Guide B-7
Performing MeshScape Programmer Operations
3. Select the PC serial port to use when communicating with the connected MeshGate from
the Programming Port drop-down menu.
If a required Comm port is being used by another application, close the application and
then click Refresh List to make the Comm port available for use by MeshScape
Programmer.
4. Select the firmware image file to load on the target device.
a. Mark the Enable checkbox to enable the program flash operation.
b. Mark the Decrypt checkbox to decrypt an encrypted image file. Encrypted image
files are denoted by a .enc file extension.
c. Click the Browse button, and select the firmware image file supplied to you from
Millennial Net.
5. Upload the new image file to the target device.
a. Mark the Get Device Type checkbox to display information about the target
device in the Device Type field as the upgrade progresses.
b. Click Program to initiate the firmware upgrade.
As the firmware upgrade progresses, you will see status messages posted to the Status field.
Once the upgrade is completed, the status will be reported as Programming Complete.
Unlocking Features on the Target Device
To unlock features on a MeshGate, mesh node, or end node using the MeshScape Programmer
application:
1. Connect the target device to computer and launch the MeshScape Programmer
application as described on page B-2.
The MeshScape Programmer main window appears as shown in Figure B-4.
2. Select the target device to program by selecting an option from the Device Select
drop-down menu:
– Auto-Select - Allow MeshScape Programmer to determine the connected device type
(default).
– MeshGate Application - Upgrade the firmware on the MeshGate’s main application terminal
board.
– MeshGate RF - Upgrade the firmware on the MeshGate’s RF daughter board.
– External Device - Upgrade a mesh node or end node connected to the MeshGate.
3. Select the PC serial port to use when communicating with the connected MeshGate from
the Programming Port drop-down menu.
If a required Comm port is being used by another application, close the application and
then click Refresh List to make the Comm port available for use by MeshScape
Programmer.
4. De-select (i.e., uncheck) the Enable and Decrypt program flash options.
B-8 Millennial Net
5. Select the feature unlock file to load on the target device.
a. Mark the Enable checkbox to enable the feature unlock operation.
b. Click the Browse button, and select the feature unlock file supplied to you from
Millennial Net.
6. Upload the feature unlock file to the target device.
a. Mark the Get Device Type checkbox to display information about the target
device in the Device Type field as the upgrade progresses.
b. Click Program to initiate upload of the feature unlock file to the target device.
As the feature unlock file upload progresses, you will see status messages posted to the Status
field. Once the update is completed, the status will be reported as Programming Complete.
Reprogramming the Group and Device IDs on the Target Device
To reprogram the group and device IDs on a MeshGate, mesh node, or end node using the
MeshScape Programmer application:
1. Connect the target device to computer and launch the MeshScape Programmer
application as described on page B-2.
The MeshScape Programmer main window appears as shown in Figure B-4.
2. Select the target device to program by selecting an option from the Device Select
drop-down menu:
– Auto-Select - Allow MeshScape Programmer to determine the connected device type
(default).
– MeshGate Application - Upgrade the firmware on the MeshGate’s main application terminal
board.
– MeshGate RF - Upgrade the firmware on the MeshGate’s RF daughter board.
– External Device - Upgrade a mesh node or end node connected to the MeshGate.
3. Select the PC serial port to use when communicating with the connected MeshGate from
the Programming Port drop-down menu.
If a required Comm port is being used by another application, close the application and
then click Refresh List to make the Comm port available for use by MeshScape
Programmer.
4. De-select (i.e., uncheck) the Enable and Decrypt program flash options.
5. Enter the group and device IDs to set on the target device.
a. Mark the Enable checkbox to enable the ID reprogramming.
b. Enter the new IDs in the Group ID and Device ID fields.
c. Optional. Mark the Auto Increment checkbox if you will be reprogramming the
group and device IDs on multiple devices and wish to do so in sequence.
6. Upload the new group and device IDs to the target device.

RK-5424-5 Reference Kit User’s Guide B-9
Performing MeshScape Programmer Operations
a. Mark the Get Device Type checkbox to display information about the target
device in the Device Type field as the upgrade progresses.
b. Click Program to initiate upload of the new IDS to the target device.
As the group and device ID reprogramming progresses, you will see status messages posted to
the Status field. Once the update is completed, the status will be reported as Programming
Complete.
Reprogramming the Target Device’s Radio Configuration
To reprogram the radio configuration on a MeshGate, mesh node, or end node using the
MeshScape Programmer application:
1. Connect the target device to computer and launch the MeshScape Programmer
application as described on page B-2.
The MeshScape Programmer main window appears as shown in Figure B-4.
2. Select the target device to program by selecting an option from the Device Select
drop-down menu:
– Auto-Select - Allow MeshScape Programmer to determine the connected device type
(default).
– MeshGate Application - Upgrade the firmware on the MeshGate’s main application terminal
board.
– MeshGate RF - Upgrade the firmware on the MeshGate’s RF daughter board.
– External Device - Upgrade a mesh node or end node connected to the MeshGate.
3. Select the PC serial port to use when communicating with the connected MeshGate from
the Programming Port drop-down menu.
If a required Comm port is being used by another application, close the application and
then click Refresh List to make the Comm port available for use by MeshScape
Programmer.
4. De-select (i.e., uncheck) the Enable and Decrypt program flash options.
5. Define the radio configuration on the target device.
a. Mark the Enable checkbox to enable radio configuration reprogramming.
b. Select the radio channel on which the device is to communicate within the
MeshScape from the Radio Channel drop-down menu. Valid channel selections
are 11 to 26. Ensure that all devices in the MeshScape are communicating on the
same channel.
Optional. Select Enable from the Channel Search Agility drop-down
menu to enable the channel search agility feature.
Channel search agility is a means by which a MeshScape device can
detect when the MeshGate’s communication channel is changed or
lost, and then search for a new channel on which to re-establish
communication with the MeshGate.

B-10 Millennial Net
6. Upload the new radio configuration to the target device.
a. Mark the Get Device Type checkbox to display information about the target
device in the Device Type field as the upgrade progresses.
b. Click Program to initiate upload of the new radio configuration to the target
device.
As the radio configuration reprogramming progresses, you will see status messages posted to
the Status field. Once the update is completed, the status will be reported as Programming
Complete.

RK-5424-5 Reference Kit User’s Guide Glossary-1
Glossary
API Application Programming Interface: A set of definitions of the ways in which
one piece of computer software communicates with another. It is a method of
achieving abstraction, usually (but not necessarily) between lower-level and
higher-level software. One of the primary purposes of an API is to provide a set
of commonly used functions-for example, to poll a wireless network for active
network nodes (mesh nodes and end nodes). Programmers can then take
advantage of the API by making use of its functionality, saving them the task of
programming everything from scratch. APIs themselves are abstract: software
that provides a certain API is often called the implementation of that API.
ad hoc network A group of wireless sensors connected as an independent wireless network,
communicating directly with each other without the use of a mesh node.
bandwidth The amount of data that can be transmitted in a fixed amount of time. For
digital devices, the bandwidth is usually expressed in bits per second (bps) or
bytes per second. For analog devices, the bandwidth is expressed in cycles per
second, or Hertz (Hz).
data model As it pertains to wireless sensor networks, the data model characterizes and
describes the way in which data flows through and is used in the network.
Common data model categories include data collection models (periodic
sampling, event driven, and store and forward) and bi-directional dialogue data
models (polling and on demand).
DSSS Direct Sequence Spread Spectrum: Spread spectrum method of spreading a
narrow band signal. This method uses special pseudo noise codes to expand the
narrow band signal out across a broad portion of the radio band. (See also FHSS
and spread spectrum.)
duty cycle The duty cycle of a module refers to the percentage of time the module is active
versus inactive.
end node The network module that provides the physical interface between the wireless
sensor network and the sensor or actuator that it is wired to. Sometimes called a
Reduced Function Device (see RFD).
endpoint See end node.
FFD Full Function Device: A term referring to a device that can act as an intermediate
mesh node, passing data from other devices. (See also RFD.)

Glossary
Glossary-2 Millennial Net
FHSS Frequency Hopping Sequence Spread Spectrum: Spread spectrum method of
spreading a narrow band signal out across a broad portion of the radio band.
This method “hops” the signal as a function of time. (See also DSSS and spread
spectrum.)
gateway The network module that provides the interface between the application
platform and the modules on the wireless sensor network.
IEEE Institute of Electrical and Electronics Engineers: Organization of engineers,
scientists, and students that is known for developing standards for the computer
and electronics industry.
IEEE 802.15.4 Standard developed by IEEE that defines the lower protocol layers (PHY and
MAC) for low-data-rate wireless Personal Area Networks (PANs).
ISM The industrial, scientific, and medical (ISM) radio bands were originally reserved
internationally for non-commercial use of RF electromagnetic fields for
industrial, scientific and medical purposes. They are now also used for
license-free error-tolerant wireless communications applications in the 900 MHz
and 2.4 GHz bands.
latency In networking, the amount of time it takes a packet to travel from source to
destination. Together, latency and bandwidth define the speed and capacity of a
network.
mesh node The module on the wireless sensor network used to extend network coverage
area, route around obstacles, and provide back-up routes in case of network
congestion or device failure. The mesh node can also provide a direct physical
interface to a sensor or actuator. Sometimes called a Full Function Device (see
FFD).
mesh topology A wireless sensor networking architecture consisting of a gateway and mesh
nodes that provides extended area coverage, routing around obstacles, and
back-up data paths.
narrowband Radio signal that contains all of its power within a very narrow portion of the
radio frequency band.
OSI Open System Interconnection: An ISO standard for worldwide communications
that defines a networking framework for implementing protocols in seven
layers. Control is passed from one layer to the next, starting at the application
layer in one station, proceeding to the bottom layer, over the channel to the next
station and back up the hierarchy.
packet A piece of a message transmitted over a packet-switching network. One of the
key features of a packet is that it contains the destination address in addition to
the data.

Glossary
RK-5424-5 Reference Kit User’s Guide Glossary-3
personal area
network
A personal area network (PAN) is the interconnection of information technology
devices within the range of an individual person, typically within a range of 10
meters.
protocol The protocol defines a common set of rules and signals that devices (nodes) on
the network use to communicate.
protocol stack A set of network protocol layers that work together. The OSI reference model
that defines seven protocol layers is often called a stack.
RFD Reduced Function Device: A term referring to a device that is just smart enough
to talk to the network (see also FFD).
router See mesh node.
sensor node A wireless sensor network node consisting of a sensor or actuator device
attached to a wireless module. The wireless module provides the interface
between the sensor device and the wireless network.
SNR Signal-to-noise ratio: the ratio of the amplitude of a desired analog or digital
data signal to the amplitude of noise in a transmission channel at a specific point
in time. SNR is typically expressed logarithmically in decibels (dB). SNR measures
the quality of a transmission channel or an audio signal over a network channel.
The greater the ratio, the easier it is to identify and subsequently isolate and
eliminate the source of noise. A SNR of zero indicates that the desired signal is
virtually indistinguishable from the unwanted noise.
spread spectrum
(wideband)
Technique for taking a narrowband signal and spreading it across a broader
portion of the radio frequency band. Spread-spectrum signals are more resistant
to interference than narrow band signals. The two basic methods for spreading
a narrowband are direct sequence and frequency hopping. (See also DSSS and
FHSS.)
star topology A wireless sensor networking architecture consisting of a gateway and end
nodes that is extremely power efficient for short-range networks.
star-mesh hybrid
topology
A wireless sensor networking architecture consisting of a gateway, mesh nodes,
and end nodes that optimizes range and power efficiency of the network.
topology As it pertains to wireless sensor networks, the geometric arrangement of the
modules (gateway, mesh nodes, and end nodes) within a network. Common
topologies include star, mesh, and star-mesh hybrid.

Glossary
Glossary-4 Millennial Net

RK-5424-5 Reference Kit User’s Guide Index-1
Index
A
AD converter
configuring 3-14
API code, example 4-45
API directory structure 4-3
API functions, overview of 4-5
API, using the MeshScape 4-2
audience for this document xvi
B
bin directory 4-3
burst, data model 1-9
C
com port
selecting on host PC 3-20
compliance statement, FCC and RSS-210 v
configuring
ADC 3-14
digital I/O 3-9
sample interval 3-8, 3-9
UART operation 3-12
customer support, contacting xviii
D
data format
configuring (serial and ADC) 3-21
data models, supported by MeshScape 1-7
default settings
end node 2-13
mesh node 2-10
MeshGate 2-7
Device window 3-6
digital I/O
configuring 3-9
digital input setup 3-9
digital output setup 3-10
DIN rail, mounting MeshGate to 2-5
doc directory 4-3
E
e-mail address for support xviii
end node, function of 1-5
ESD warning 1-12
event driven, data model 1-8
event log file
creating 3-25
viewing 3-26
examples directory 4-3
F
FCC compliance statement v
firmware, upgrading B-1
frequency band 1-11
functions, MeshScape API 4-5
G
gateway, function of 1-5
H
hardware installation 2-3
host PC requirements 1-12
I
iBeanAPI.h 4-7
iBeanAPI_IO.h 4-25
iBeanAPI_LPR.h 4-39
iBeanAPI_performance.h 4-42
iBeanAPI_Utils.h 4-35
include directory 4-4
install
end node 2-12
mesh node 2-8
MeshGate gateway 2-3
MeshScape Network Monitor 2-15
L
labeling nodes 3-18
lib directory 4-4
Low power configuration 1-9
M
major features of MeshScape 1-11
mesh node, function of 1-5
MeshScape demo program, running A-2
MeshScape Network Monitor
configuring node’s operation 3-6
counts 3-4
install software 2-15
menu bar 3-3
MeshGate gateway details 3-4
monitoring features 3-2
overview 3-2
sensor node details 3-4
MeshScape programmer application B-1
MeshScape system overview 1-6
Millennial Net, contacting xviii
monitoring statistics 3-28

Index
Index-2 Millennial Net
N
node status 3-4
O
on-demand, data model 1-8
organization of this document xvi
P
periodic sampling, data model 1-7
persistence
configuring 3-19
persistent dynamic routing™ technology 1-6
polling, data model 1-8
Programming MeshScape nodes B-2
R
reference kit
contents 1-11
RSS-210 compliance statement v
S
sample interval
all nodes 3-9
single node 3-8
serial communication parameters 3-12
store and forward, data model 1-8
stream, data model 1-9
symbols and conventions xvii
system software, MeshScape 1-3
T
temperature sensor assembly
overview A-2, A-3
temperature sensor demonstration application, running A-3
U
UART
configuring 3-12
upgrading firmware B-1
W
Watch
function 3-16
window 3-17
wireless sensor network resources, additional xviii
wireless sensor networks
compondents of 1-3
overview of 1-2
world-wide-web address xviii