Mitsubishi Electronics Digital Car Amplifier Mr J2M P8A Users Manual
MR-J2M-P8A to the manual 836d4606-1a30-4e7f-a709-db39fc7ef971
2015-02-09
: Mitsubishi-Electronics Mitsubishi-Electronics-Mitsubishi-Digital-Electronics-Car-Amplifier-Mr-J2M-P8A-Users-Manual-556526 mitsubishi-electronics-mitsubishi-digital-electronics-car-amplifier-mr-j2m-p8a-users-manual-556526 mitsubishi-electronics pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 272 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Safety Instructions
- About processing of waste
- COMPLIANCE WITH EC DIRECTIVES
- CONFORMANCE WITH UL/C-UL STANDARD
- About the manuals
- CONTENTS
- 1. FUNCTIONS AND CONFIGURATION
- 2. INSTALLATION AND START UP
- 3. SIGNALS AND WIRING
- 3.1 Control signal line connection example
- 3.2 I/O signals of interface unit
- 3.3 Signal and wiring for extension IO unit
- 3.4 Signals and wiring for base unit
- 3.5 Connection of drive unit and servo motor
- 3.6 Alarm occurrence timing chart
- 3.7 Servo motor with electromagnetic brake
- 3.8 Grounding
- 3.9 Instructions for the 3M connector
- 4. OPERATION AND DISPLAY
- 4.1 Display flowchart
- 4.2 Interface unit display
- 4.3 Drive unit display
- 4.3.1 Drive unit display sequence
- 4.3.2 Status display of drive unit
- 4.3.3 Diagnostic mode of drive unit
- 4.3.4 Alarm mode of drive unit
- 4.3.5 Drive unit parameter mode
- 4.3.6 Drive unit external input signal display
- 4.3.7 Drive unit external output signal display
- 4.3.8 Drive unit output signal (DO) forced output
- 5. PARAMETERS
- 6. GENERAL GAIN ADJUSTMENT
- 7. SPECIAL ADJUSTMENT FUNCTIONS
- 8. INSPECTION
- 9. TROUBLESHOOTING
- 10. OUTLINE DRAWINGS
- 11. CHARACTERISTICS
- 12. OPTIONS AND AUXILIARY EQUIPMENT
- 13. COMMUNICATION FUNCTIONS
- 13.1 Configuration
- 13.2 Communication specifications
- 13.3 Protocol
- 13.4 Character codes
- 13.5 Error codes
- 13.6 Checksum
- 13.7 Time-out operation
- 13.8 Retry operation
- 13.9 Initialization
- 13.10 Communication procedure example
- 13.11 Command and data No. list
- 13.12 Detailed explanations of commands
- 13.12.1 Data processing
- 13.12.2 Status display
- 13.12.3 Parameter
- 13.12.4 External I/O pin statuses (DIO diagnosis)
- 13.12.5 Disable/enable of external I/O signals (DIO)
- 13.12.6 External input signal ON/OFF (test operation)
- 13.12.7 Test operation mode
- 13.12.8 Output signal pin ON/OFF (output signal (DO) forced output)
- 13.12.9 Alarm history
- 13.12.10 Current alarm
- 13.12.11 Other commands
- 14. ABSOLUTE POSITION DETECTION SYSTEM
- APPENDIX
- REVISIONS
General-Purpose AC Servo
MODEL
MR-J2M-P8A
MR-J2M- DU
MR-J2M-BU
SERVO AMPLIFIER
INSTRUCTION MANUAL
General-Purpose Interface Compatible
J2M Series
E
A - 1
Safety Instructions
(Always read these instructions before using the equipment.)
Do not attempt to install, operate, maintain or inspect the units until you have read through this Instruction
Manual, Installation Guide, Servo Motor Instruction Manual and appended documents carefully and can use
the equipment properly. Do not use the units until you have a full knowledge of the equipment, safety
information and instructions.
In this Instruction Manual, the safety instruction levels are classified into "WARNING" and "CAUTION".
WARNING Indicates that incorrect handling may cause hazardous conditions,
resulting in death or severe injury.
CAUTION Indicates that incorrect handling may cause hazardous conditions,
resulting in medium or slight injury to personnel or may cause physical
damage.
Note that the CAUTION level may lead to a serious consequence according to conditions. Please follow the
instructions of both levels because they are important to personnel safety.
What must not be done and what must be done are indicated by the following diagrammatic symbols:
: Indicates what must not be done. For example, "No Fire" is indicated by .
: Indicates what must be done. For example, grounding is indicated by .
In this Instruction Manual, instructions at a lower level than the above, instructions for other functions, and so
on are classified into "POINT".
After reading this Instruction Manual, always keep it accessible to the operator.
A - 2
1. To prevent electric shock, note the following:
WARNING
Before wiring or inspection, switch power off and wait for more than 15 minutes. Then, confirm the voltage
is safe with voltage tester. Otherwise, you may get an electric shock.
Connect the base unit and servo motor to ground.
Any person who is involved in wiring and inspection should be fully competent to do the work.
Do not attempt to wire for each unit and the servo motor until they are installed. Otherwise, you can obtain
the electric shock.
Operate the switches with dry hand to prevent an electric shock.
The cables should not be damaged, stressed, loaded, or pinched. Otherwise, you may get an electric shock.
During power-on or operation, do not open the front cover of the servo amplifier. You may get an electric
shock.
Do not operate the servo amplifier with the front cover removed. High-voltage terminals and charging area
are exposed and you may get an electric shock.
Except for wiring or periodic inspection, do not remove the front cover even of the servo amplifier if the
power is off. The servo amplifier is charged and you may get an electric shock.
2. To prevent fire, note the following:
CAUTION
Do not install the base unit, servo motor and regenerative brake resistor on or near combustibles.
Otherwise a fire may cause.
When each unit has become faulty, switch off the main base unit power side. Continuous flow of a large
current may cause a fire.
When a regenerative brake resistor is used, use an alarm signal to switch main power off. Otherwise, a
regenerative brake transistor fault or the like may overheat the regenerative brake resistor, causing a fire.
3. To prevent injury, note the follow
CAUTION
Only the voltage specified in the Instruction Manual should be applied to each terminal. Otherwise, a burst,
damage, etc. may occur.
Connect the terminals correctly to prevent a burst, damage, etc.
Ensure that polarity ( , ) is correct. Otherwise, a burst, damage, etc. may occur.
Take safety measures, e.g. provide covers, to prevent accidental contact of hands and parts (cables, etc.)
with the servo amplifier heat sink, regenerative brake resistor, servo motor, etc.since they may be hot
while power is on or for some time after power-off. Their temperatures may be high and you may get burnt
or a parts may damaged.
During operation, never touch the rotating parts of the servo motor. Doing so can cause injury.
A - 3
4. Additional instructions
The following instructions should also be fully noted. Incorrect handling may cause a fault, injury, electric
shock, etc.
(1) Transportation and installation
CAUTION
Transport the products correctly according to their weights.
Stacking in excess of the specified number of products is not allowed.
Do not carry the servo motor by the cables, shaft or encoder.
Do not hold the front cover to transport each unit. Each unit may drop.
Install the each unit in a load-bearing place in accordance with the Instruction Manual.
Do not climb or stand on servo equipment. Do not put heavy objects on equipment.
The servo amplifier controller and servo motor must be installed in the specified direction.
Leave specified clearances between the base unit and control enclosure walls or other equipment.
Do not install or operate the unit and servo motor which has been damaged or has any parts missing.
Provide adequate protection to prevent screws and other conductive matter, oil and other combustible
matter from entering each unit and servo motor.
Do not drop or strike each unit or servo motor. Isolate from all impact loads.
When you keep or use it, please fulfill the following environmental conditions.
Conditions
Environment Each unit Servo motor
[] 0 to 55 (non-freezing) 0 to 40 (non-freezing)
During
operation [] 32 to 131 (non-freezing) 32 to 104 (non-freezing)
[ ] 20 to 65 (non-freezing) 15 to 70 (non-freezing)
Ambient
temperature In storage []4 to 149 (non-freezing) 5 to 158 (non-freezing)
During operation 90%RH or less (non-condensing) 80%RH or less (non-condensing)
Ambient
humidity In storage 90%RH or less (non-condensing)
Ambience Indoors (no direct sunlight) Free from corrosive gas, flammable gas, oil mist, dust and dirt
Altitude Max. 1000m (3280 ft) above sea level
[m/s2] 5.9 or less
HC-KFS Series
HC-MFS Series
HC-UFS13 to 43
XY : 49
(Note) Vibration
[ft/s2] 19.4 or less
HC-KFS Series
HC-MFS Series
HC-UFS13 to 43
XY : 161
Note. Except the servo motor with reduction gear.
Securely attach the servo motor to the machine. If attach insecurely, the servo motor may come off during
operation.
The servo motor with reduction gear must be installed in the specified direction to prevent oil leakage.
Take safety measures, e.g. provide covers, to prevent accidental access to the rotating parts of the servo
motor during operation.
Never hit the servo motor or shaft, especially when coupling the servo motor to the machine. The encoder
may become faulty.
Do not subject the servo motor shaft to more than the permissible load. Otherwise, the shaft may break.
When the equipment has been stored for an extended period of time, consult Mitsubishi.
A - 4
(2) Wiring
CAUTION
Wire the equipment correctly and securely. Otherwise, the servo motor may misoperate.
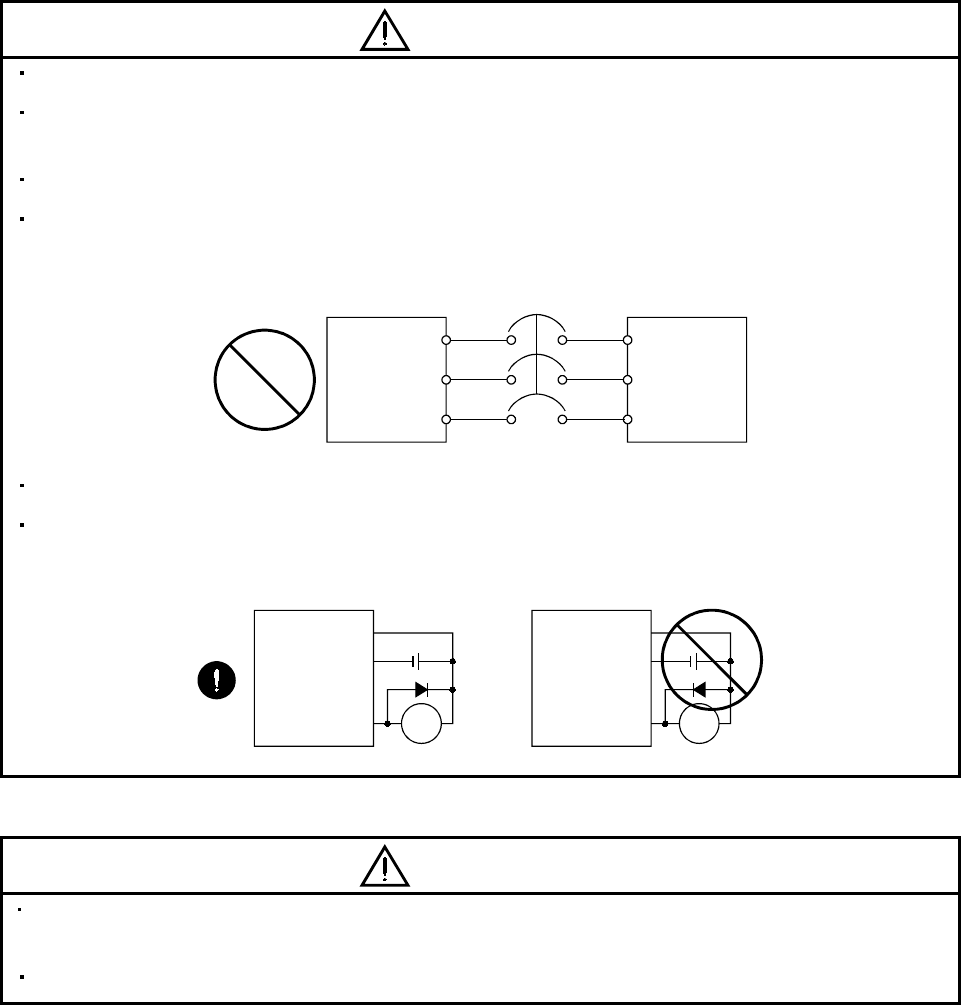
Do not install a power capacitor, surge absorber or radio noise filter (FR-BIF option) between the servo
motor and drive unit.
Connect the output terminals (U, V, W) correctly. Otherwise, the servo motor will operate improperly.
Connect the servo motor power terminal (U, V, W) to the servo motor power input terminal (U, V, W)
directly. Do not let a magnetic contactor, etc. intervene.
U
drive unit
V
W
U
V
W
Servo Motor
Do not connect AC power directly to the servo motor. Otherwise, a fault may occur.
The surge absorbing diode installed on the DC output signal relay of the servo amplifier must be wired in
the specified direction. Otherwise, the forced stop and other protective circuits may not operate.
Interface unit
Control output
signal
VIN
SG
VIN
SG
RARA
Interface unit
Control output
signal
(3) Test run adjustment
CAUTION
Before operation, check the parameter settings. Improper settings may cause some machines to perform
unexpected operation.
The parameter settings must not be changed excessively. Operation will be insatiable.
A - 5
(4) Usage
CAUTION
Provide an forced stop circuit to ensure that operation can be stopped and power switched off
immediately.
Any person who is involved in disassembly and repair should be fully competent to do the work.
Before resetting an alarm, make sure that the run signal of the servo amplifier is off to prevent an
accident. A sudden restart is made if an alarm is reset with the run signal on.
Do not modify the equipment.
Use a noise filter, etc. to minimize the influence of electromagnetic interference, which may be caused by
electronic equipment used near MELSERVO-J2M.
Burning or breaking each unit may cause a toxic gas. Do not burn or break each unit.
Use the drive unit with the specified servo motor.
The electromagnetic brake on the servo motor is designed to hold the motor shaft and should not be used
for ordinary braking.
For such reasons as service life and mechanical structure (e.g. where a ballscrew and the servo motor
are coupled via a timing belt), the electromagnetic brake may not hold the motor shaft. To ensure safety,
install a stopper on the machine side.
(5) Corrective actions
CAUTION
When it is assumed that a hazardous condition may take place at the occur due to a power failure or a
product fault, use a servo motor with electromagnetic brake or an external brake mechanism for the
purpose of prevention.
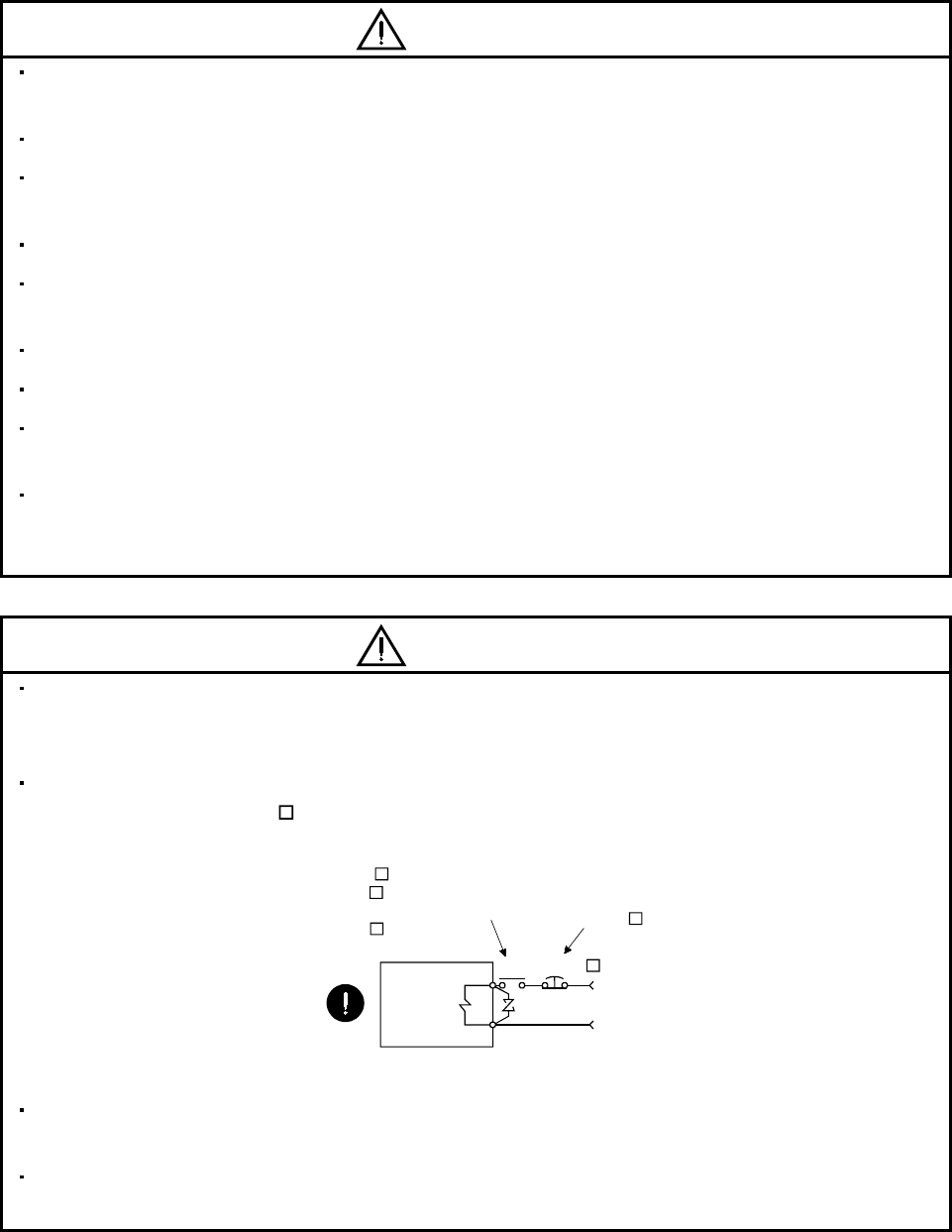
Configure the electromagnetic brake circuit so that it is activated not only by the interface unit signals but
also by a forced stop (EMG_ ).
EMG_
Contacts must be open when
servo-on (SON ) is off, when an
trouble (ALM_ ) is present and
w
hen an electromagnetic brake
interlock (MBR ).
Circuit must be
opened during
forced stop
(EMG_ ).
RA
24VDC
Electromagnetic brake
Servo motor
When any alarm has occurred, eliminate its cause, ensure safety, and deactivate the alarm before
restarting operation.
When power is restored after an instantaneous power failure, keep away from the machine because the
machine may be restarted suddenly (design the machine so that it is secured against hazard if restarted).
A - 6
(6) Maintenance, inspection and parts replacement
CAUTION
With age, the electrolytic capacitor of the drive unit will deteriorate. To prevent a secondary accident due
to a fault, it is recommended to replace the electrolytic capacitor every 10 years when used in general
environment.
Please consult our sales representative.
(7) General instruction
To illustrate details, the equipment in the diagrams of this Instruction Manual may have been drawn
without covers and safety guards. When the equipment is operated, the covers and safety guards must
be installed as specified. Operation must be performed in accordance with this Instruction Manual.
About processing of waste
When you discard servo amplifier, a battery (primary battery), and other option articles, please follow the law of
each country (area).
FOR MAXIMUM SAFETY
These products have been manufactured as a general-purpose part for general industries, and have not
been designed or manufactured to be incorporated in a device or system used in purposes related to
human life.
Before using the products for special purposes such as nuclear power, electric power, aerospace,
medicine, passenger movement vehicles or under water relays, contact Mitsubishi.
These products have been manufactured under strict quality control. However, when installing the product
where major accidents or losses could occur if the product fails, install appropriate backup or failsafe
functions in the system.
EEP-ROM life
The number of write times to the EEP-ROM, which stores parameter settings, etc., is limited to 100,000. If
the total number of the following operations exceeds 100,000, the servo amplifier and/or converter unit may
fail when the EEP-ROM reaches the end of its useful life.
Write to the EEP-ROM due to parameter setting changes
Home position setting in the absolute position detection system
Write to the EEP-ROM due to device changes
Precautions for Choosing the Products
Mitsubishi will not be held liable for damage caused by factors found not to be the cause of Mitsubishi;
machine damage or lost profits caused by faults in the Mitsubishi products; damage, secondary damage,
accident compensation caused by special factors unpredictable by Mitsubishi; damages to products other
than Mitsubishi products; and to other duties.
A - 7
COMPLIANCE WITH EC DIRECTIVES
1. WHAT ARE EC DIRECTIVES?
The EC directives were issued to standardize the regulations of the EU countries and ensure smooth
distribution of safety-guaranteed products. In the EU countries, the machinery directive (effective in
January, 1995), EMC directive (effective in January, 1996) and low voltage directive (effective in January,
1997) of the EC directives require that products to be sold should meet their fundamental safety
requirements and carry the CE marks (CE marking). CE marking applies to machines and equipment
into which servo (MELSERVO-J2M is contained) have been installed.
(1) EMC directive
The EMC directive applies not to the servo units alone but to servo-incorporated machines and
equipment. This requires the EMC filters to be used with the servo-incorporated machines and
equipment to comply with the EMC directive. For specific EMC directive conforming methods, refer to
the EMC Installation Guidelines (IB(NA)67310).
(2) Low voltage directive
The low voltage directive applies also to MELSERVO-J2M. Hence, they are designed to comply with
the low voltage directive.
MELSERVO-J2M is certified by TUV, third-party assessment organization, to comply with the low
voltage directive.
The MELSERVO-J2M complies with EN50178.
(3) Machine directive
Not being machines, MELSERVO-J2M need not comply with this directive.
2. PRECAUTIONS FOR COMPLIANCE
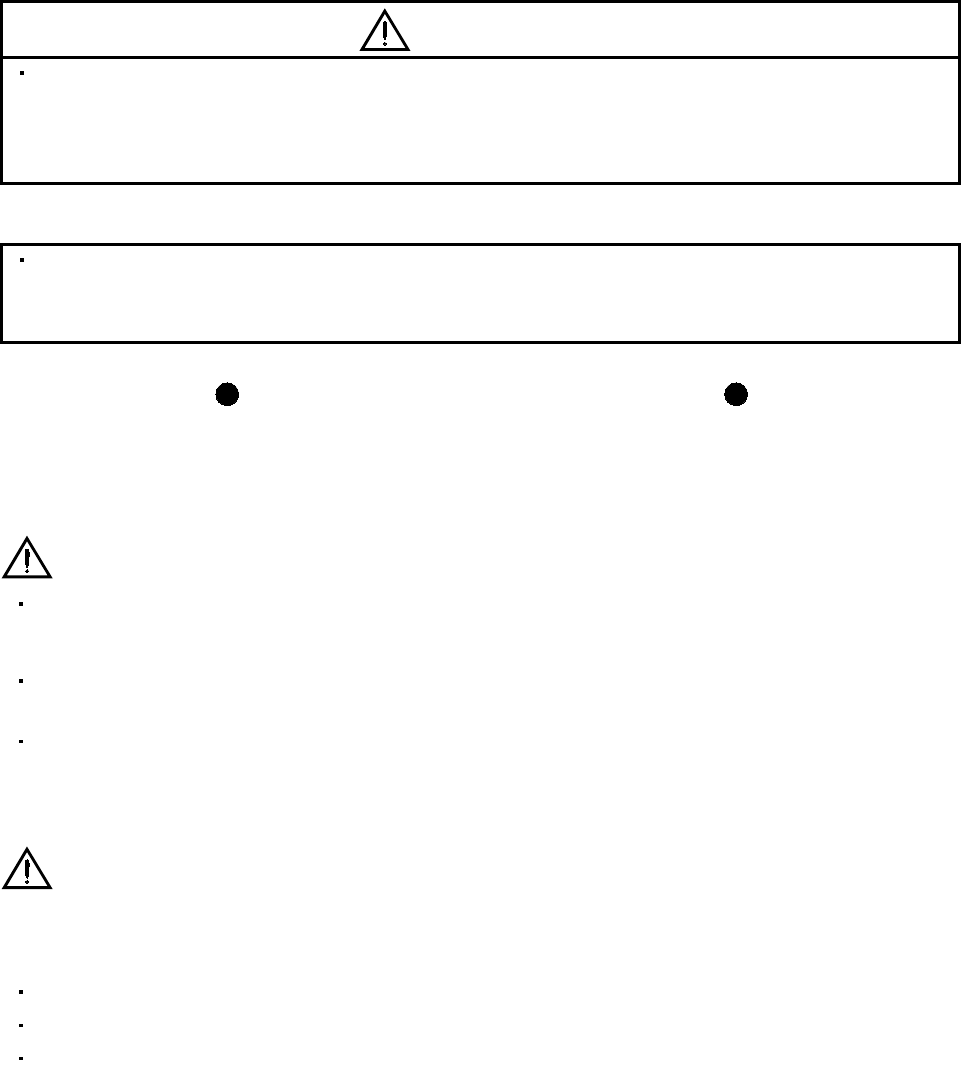
(1) Unit and servo motors used
Use each units and servo motors which comply with the standard model.
Interface unit :MR-J2M-P8A
Drive unit :MR-J2M- DU
Base unit :MR-J2M-BU
Servo motor :HC-KFS
HC-MFS
HC-UFS
(2) Configuration
Reinforced
insulating
transformer
NFB MC M
No-fuse
breaker
Magnetic
contactor
Reinforced
insulating type
24VDC
power
supply
MELSERVO-
J2M
Servo
motor
Control box
A - 8
(3) Environment
Operate MELSERVO-J2M at or above the contamination level 2 set forth in IEC60664-1 For this
purpose, install MELSERVO-J2M in a control box which is protected against water, oil, carbon, dust,
dirt, etc. (IP54).
(4) Power supply
(a) Operate MELSERVO-J2M to meet the requirements of the overvoltage category II set forth in
IEC60664-1 For this purpose, a reinforced insulating transformer conforming to the IEC or EN
standard should be used in the power input section.
(b) When supplying interface power from external, use a 24VDC power supply which has been
insulation-reinforced in I/O.
(5) Grounding
(a) To prevent an electric shock, always connect the protective earth (PE) terminals (marked ) of the
base unit to the protective earth (PE) of the control box.
(b) Do not connect two ground cables to the same protective earth (PE) terminal. Always connect the
cables to the terminals one-to-one.
(c) If a leakage current breaker is used to prevent an electric shock, the protective earth (PE) terminals
of the base unit must be connected to the corresponding earth terminals.
(d) The protective earth (PE) of the servo motor is connected to the protective earth of the base unit via
the screw which fastens the drive unit to the base unit. When fixing the drive unit to the base unit,
therefore, tighten the accessory screw securely.
(6) Auxiliary equipment and options
(a) The no-fuse breaker and magnetic contactor used should be the EN or IEC standard-compliant
products of the models described in Section 12.2.2.
(b) The sizes of the cables described in Section 12.2.1 meet the following requirements. To meet the
other requirements, follow Table 5 and Appendix C in EN60204-1.
Ambient temperature: 40 (104) [ ( )]
Sheath: PVC (polyvinyl chloride)
Installed on wall surface or open table tray
(c) Use the EMC filter for noise reduction.
(7) Performing EMC tests
When EMC tests are run on a machine/device into which MELSERVO-J2M has been installed, it must
conform to the electromagnetic compatibility (immunity/emission) standards after it has satisfied the
operating environment/electrical equipment specifications.
For the other EMC directive guidelines on MELSERVO-J2M, refer to the EMC Installation
Guidelines(IB(NA)67310).
A - 9
CONFORMANCE WITH UL/C-UL STANDARD
The MELSERVO-J2M complies with UL508C.
(1) Unit and servo motors used
Use the each units and servo motors which comply with the standard model.
Interface unit :MR-J2M-P8A
Drive unit :MR-J2M- DU
Base unit :MR-J2M-BU
Servo motor :HC-KFS
HC-MFS
HC-UFS
(2) Installation
Install a fan of 100CFM (2.8m3/min) air flow 4 [in] (10.16 [cm]) above the servo amplifier or provide
cooling of at least equivalent capability.
(3) Short circuit rating
MELSERVO-J2M conforms to the circuit whose peak current is limited to 5000A or less. Having been
subjected to the short-circuit tests of the UL in the alternating-current circuit, MELSERVO-J2M
conforms to the above circuit.
(4) Capacitor discharge time
The capacitor discharge time is as listed below. To ensure safety, do not touch the charging section for
15 minutes after power-off.
Base unit Discharge time [min]
MR-J2M-BU4 1
MR-J2M-BU6 1
MR-J2M-BU8 1
(5) Options and auxiliary equipment
Use UL/C-UL standard-compliant products.
(6) Attachment of a servo motor
For the flange size of the machine side where the servo motor is installed, refer to “CONFORMANCE
WITH UL/C-UL STANDARD” in the Servo Motor Instruction Manual.
(7) About wiring protection
For installation in United States, branch circuit protection must be provided, in accordance with the
National Electrical Code and any applicable local codes.
For installation in Canada, branch circuit protection must be provided, in accordance with the Canada
Electrical Code and any applicable provincial codes.
A - 10
<<About the manuals>>
This Instruction Manual and the MELSERVO Servo Motor Instruction Manual are required if you use
MELSERVO-J2M for the first time. Always purchase them and use the MELSERVO-J2M safely.
Also read the manual of the servo system controller.
Relevant manuals
Manual name Manual No.
MELSERVO-J2M Series To Use the AC Servo Safely
(Packed with the MR-J2M-P8A, MR-J2M- DU and MR-J2M-BU ) IB(NA)0300027
MELSERVO Servo Motor Instruction Manual SH(NA)3181
EMC Installation Guidelines IB(NA)67310
In this Instruction Manual, the drive unit, interface unit and base unit may be referred to as follows:
Drive unit : DRU
Interface unit : IFU
Base unit : BU
1
CONTENTS
1. FUNCTIONS AND CONFIGURATION 1- 1 to 1-10
1.1 Overview................................................................................................................................................... 1- 1
1.2 Function block diagram .......................................................................................................................... 1- 2
1.3 Unit standard specifications................................................................................................................... 1- 3
1.4 Function list ............................................................................................................................................. 1- 4
1.5 Model code definition .............................................................................................................................. 1- 5
1.6 Combination with servo motor............................................................................................................... 1- 6
1.7 Parts identification.................................................................................................................................. 1- 7
1.8 Servo system with auxiliary equipment................................................................................................ 1- 9
2. INSTALLATION AND START UP 2- 1 to 2-10
2.1 Environmental conditions....................................................................................................................... 2- 1
2.2 Installation direction and clearances .................................................................................................... 2- 2
2.3 Keep out foreign materials ..................................................................................................................... 2- 3
2.4 Cable stress .............................................................................................................................................. 2- 3
2.5 Mounting method .................................................................................................................................... 2- 4
2.6 When switching power on for the first time.......................................................................................... 2- 6
2.7 Start up..................................................................................................................................................... 2- 7
3. SIGNALS AND WIRING 3- 1 to 3-48
3.1 Control signal line connection example................................................................................................. 3- 2
3.2 I/O signals of interface unit .................................................................................................................... 3- 5
3.2.1 Connectors and signal arrangements............................................................................................. 3- 5
3.2.2 Signal explanations .......................................................................................................................... 3- 6
3.2.3 Detailed description of the signals................................................................................................. 3-11
3.2.4 Internal connection diagram .......................................................................................................... 3-15
3.2.5 Interface............................................................................................................................................ 3-16
3.3 Signal and wiring for extension IO unit............................................................................................... 3-20
3.3.1 Connection example ........................................................................................................................ 3-20
3.3.2 Connectors and signal configurations ........................................................................................... 3-22
3.3.3 Signal explanations ......................................................................................................................... 3-23
3.3.4 Device explanations......................................................................................................................... 3-26
3.3.5 Detailed description of the device .................................................................................................. 3-30
3.3.6 Device assignment method ............................................................................................................. 3-31
3.4 Signals and wiring for base unit ........................................................................................................... 3-35
3.4.1 Connection example for power line circuit.................................................................................... 3-35
3.4.2 Connectors and signal configurations ........................................................................................... 3-37
3.4.3 Terminals.......................................................................................................................................... 3-38
3.4.4 Power-on sequence........................................................................................................................... 3-38
3.5 Connection of drive unit and servo motor ............................................................................................ 3-39
3.5.1 Connection instructions .................................................................................................................. 3-39
3.5.2 Connection diagram ........................................................................................................................ 3-40
3.5.3 I/O terminals .................................................................................................................................... 3-41
3.6 Alarm occurrence timing chart ............................................................................................................. 3-42
2
3.7 Servo motor with electromagnetic brake ............................................................................................. 3-43
3.8 Grounding................................................................................................................................................ 3-46
3.9 Instructions for the 3M connector......................................................................................................... 3-47
4. OPERATION AND DISPLAY 4- 1 to 4-18
4.1 Display flowchart..................................................................................................................................... 4- 1
4.1.1 Normal indication ............................................................................................................................. 4- 2
4.1.2 If alarm/warning occurs ................................................................................................................... 4- 3
4.1.3 If test operation................................................................................................................................. 4- 4
4.2 Interface unit display .............................................................................................................................. 4- 5
4.2.1 Display flowchart of interface unit ................................................................................................. 4- 5
4.2.2 Status display of interface unit ....................................................................................................... 4- 6
4.2.3 Diagnostic mode of interface unit ................................................................................................... 4- 7
4.2.4 Alarm mode of interface unit........................................................................................................... 4- 8
4.2.5 Interface unit parameter mode ....................................................................................................... 4- 9
4.2.6 Interface unit output signal (DO) forced output...........................................................................4-10
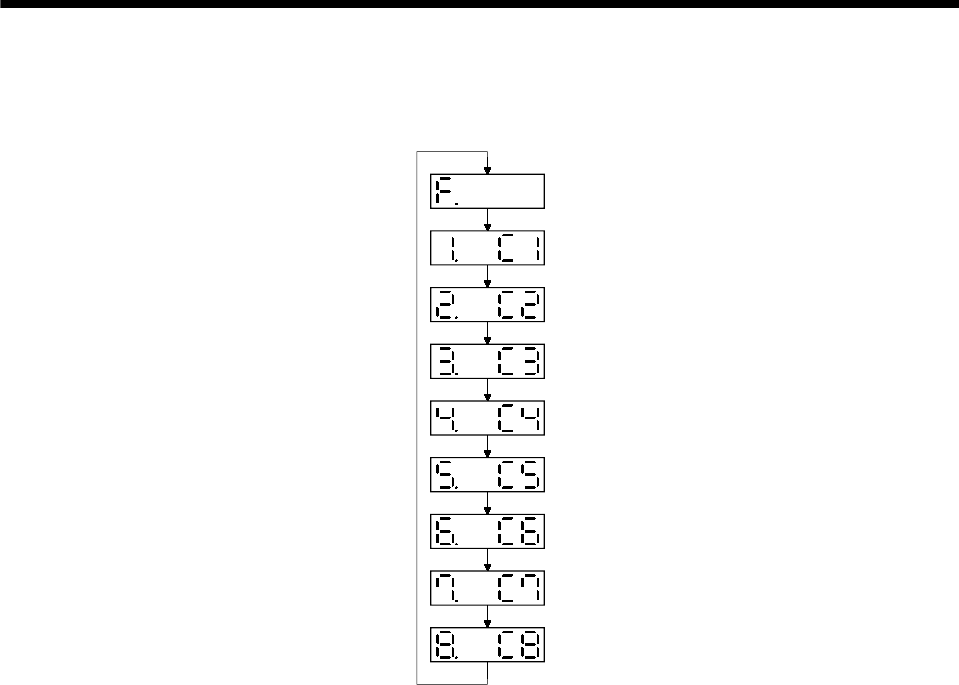
4.3 Drive unit display ................................................................................................................................... 4-11
4.3.1 Drive unit display sequence............................................................................................................ 4-11
4.3.2 Status display of drive unit............................................................................................................. 4-12
4.3.3 Diagnostic mode of drive unit......................................................................................................... 4-14
4.3.4 Alarm mode of drive unit ................................................................................................................ 4-15
4.3.5 Drive unit parameter mode ............................................................................................................ 4-16
4.3.6 Drive unit external input signal display ....................................................................................... 4-16
4.3.7 Drive unit external output signal display ..................................................................................... 4-17
4.3.8 Drive unit output signal (DO) forced output................................................................................. 4-18
5. PARAMETERS 5- 1 to 5-30
5.1 DRU parameter list................................................................................................................................. 5- 1
5.1.1 DRU parameter write inhibit.......................................................................................................... 5- 1
5.1.2 Lists.................................................................................................................................................... 5- 2
5.2 Interface unit .......................................................................................................................................... 5-14
5.2.1 IFU parameter write inhibit........................................................................................................... 5-14
5.2.2 Lists................................................................................................................................................... 5-14
5.3 Detailed description ............................................................................................................................... 5-21
5.3.1 Electronic gear ................................................................................................................................. 5-21
5.3.2 Analog monitor................................................................................................................................. 5-25
5.3.3 Using forward rotation stroke end (LSP )reverse rotation stroke end (LSN ) to change the
stopping pattern.............................................................................................................................. 5-28
5.3.4 Alarm history clear.......................................................................................................................... 5-28
5.3.5 Position smoothing .......................................................................................................................... 5-29
6. GENERAL GAIN ADJUSTMENT 6- 1 to 6-10
6.1 Different adjustment methods ............................................................................................................... 6- 1
6.1.1 Adjustment on a MELSERVO-J2M................................................................................................ 6- 1
6.1.2 Adjustment using MR Configurator (servo configuration software) ........................................... 6- 2
6.2 Auto tuning .............................................................................................................................................. 6- 3
6.2.1 Auto tuning mode ............................................................................................................................. 6- 3
3
6.2.2 Auto tuning mode operation............................................................................................................ 6- 4
6.2.3 Adjustment procedure by auto tuning............................................................................................ 6- 5
6.2.4 Response level setting in auto tuning mode .................................................................................. 6- 6
6.3 Manual mode 1 (simple manual adjustment)....................................................................................... 6- 7
6.3.1 Operation of manual mode 1 ........................................................................................................... 6- 7
6.3.2 Adjustment by manual mode 1 ....................................................................................................... 6- 7
6.4 Interpolation mode .................................................................................................................................. 6- 9
7. SPECIAL ADJUSTMENT FUNCTIONS 7- 1 to 7-10
7.1 Function block diagram .......................................................................................................................... 7- 1
7.2 Machine resonance suppression filter ................................................................................................... 7- 1
7.3 Adaptive vibration suppression control................................................................................................. 7- 3
7.4 Low-pass filter ......................................................................................................................................... 7- 4
7.5 Gain changing function........................................................................................................................... 7- 5
7.5.1 Applications....................................................................................................................................... 7- 5
7.5.2 Function block diagram ................................................................................................................... 7- 5
7.5.3 Parameters ........................................................................................................................................ 7- 6
7.5.4 Gain changing operation.................................................................................................................. 7- 8
8. INSPECTION 8- 1 to 8- 2
9. TROUBLESHOOTING 9- 1 to 9-14
9.1 Trouble at start-up .................................................................................................................................. 9- 1
9.2 Alarms and warning list ......................................................................................................................... 9- 4
9.3 Remedies for alarms................................................................................................................................ 9- 6
9.4 Remedies for warnings........................................................................................................................... 9-13
10. OUTLINE DRAWINGS 10- 1 to 10-10
10.1 MELSERVO-J2M configuration example.........................................................................................10- 1
10.2 Unit outline drawings ......................................................................................................................... 10- 2
10.2.1 Base unit (MR-J2M-BU ) ........................................................................................................... 10- 2
10.2.2 Interface unit (MR-J2M-P8A) ..................................................................................................... 10- 2
10.2.3 Drive unit (MR-J2M- DU)......................................................................................................... 10- 3
10.2.4 Extension IO unit (MR-J2M-D01) .............................................................................................. 10- 4
10.2.5 Battery unit (MR-J2M-BT).......................................................................................................... 10- 4
10.3 Connectors............................................................................................................................................ 10- 5
11. CHARACTERISTICS 11- 1 to 11- 6
11.1 Overload protection characteristics ................................................................................................... 11- 1
11.2 Power supply equipment capacity and generated loss .................................................................... 11- 2
11.3 Dynamic brake characteristics........................................................................................................... 11- 4
11.4 Encoder cable flexing life ....................................................................................................................11- 6
12. OPTIONS AND AUXILIARY EQUIPMENT 12- 1 to 12-36
12.1 Options.................................................................................................................................................. 12- 1

4
12.1.1 Regenerative brake options .........................................................................................................12- 1
12.1.2 Cables and connectors..................................................................................................................12- 8
12.1.3 Junction terminal block (MR-TB50) ..........................................................................................12-17
12.1.4 Junction terminal block (MR-TB20) ..........................................................................................12-19
12.1.5 Maintenance junction card (MR-J2CN3TM) ............................................................................12-21
12.1.6 MR Configurator (servo configurations software).................................................................... 12-23
12.2 Auxiliary equipment ..........................................................................................................................12-24
12.2.1 Recommended wires....................................................................................................................12-24
12.2.2 No-fuse breakers, fuses, magnetic contactors...........................................................................12-26
12.2.3 Power factor improving reactors ................................................................................................12-27
12.2.4 Relays............................................................................................................................................12-28
12.2.5 Surge absorbers ...........................................................................................................................12-28
12.2.6 Noise reduction techniques.........................................................................................................12-28
12.2.7 Leakage current breaker ............................................................................................................12-34
12.2.8 EMC filter.....................................................................................................................................12-35
13. COMMUNICATION FUNCTIONS 13- 1 to 13-32
13.1 Configuration .......................................................................................................................................13- 1
13.1.1 RS-422 configuration.................................................................................................................... 13- 1
13.1.2 RS-232C configuration ................................................................................................................. 13- 3
13.2 Communication specifications............................................................................................................13- 4
13.2.1 Communication overview ............................................................................................................ 13- 4
13.2.2 Parameter setting.........................................................................................................................13- 5
13.3 Protocol .................................................................................................................................................13- 6
13.4 Character codes ...................................................................................................................................13- 7
13.5 Error codes ........................................................................................................................................... 13- 8
13.6 Checksum ............................................................................................................................................. 13- 8
13.7 Time-out operation .............................................................................................................................. 13- 9
13.8 Retry operation .................................................................................................................................... 13- 9
13.9 Initialization........................................................................................................................................13-10
13.10 Communication procedure example ...............................................................................................13-10
13.11 Command and data No. list.............................................................................................................13-11
13.11.1 Read commands.........................................................................................................................13-11
13.11.2 Write commands........................................................................................................................13-13
13.12 Detailed explanations of commands...............................................................................................13-15
13.12.1 Data processing..........................................................................................................................13-15
13.12.2 Status display ............................................................................................................................13-17
13.12.3 Parameter...................................................................................................................................13-18
13.12.4 External I/O pin statuses (DIO diagnosis)..............................................................................13-20
13.12.5 Disable/enable of external I/O signals (DIO) .......................................................................... 13-23
13.12.6 External input signal ON/OFF (test operation) ..................................................................... 13-24
13.12.7 Test operation mode ..................................................................................................................13-25
13.12.8 Output signal pin ON/OFF (output signal (DO) forced output) ........................................... 13-28
13.12.9 Alarm history .............................................................................................................................13-29
13.12.10 Current alarm..........................................................................................................................13-30
13.12.11 Other commands......................................................................................................................13-31
5
14. ABSOLUTE POSITION DETECTION SYSTEM 14- 1 to 14-12
14.1 Outline.................................................................................................................................................. 14- 1
14.1.1 Features......................................................................................................................................... 14- 1
14.1.2 Restrictions.................................................................................................................................... 14- 1
14.2 Specifications .......................................................................................................................................14- 2
14.3 Signal explanation............................................................................................................................... 14- 3
14.4 Serial communication command........................................................................................................ 14- 3
14.5 Startup procedure................................................................................................................................ 14- 4
14.6 Absolute position data transfer protocol ........................................................................................... 14- 5
14.6.1 Data transfer procedure...............................................................................................................14- 5
14.6.2 Transfer method ...........................................................................................................................14- 6
14.6.3 Home position setting .................................................................................................................. 14- 9
14.6.4 How to process the absolute position data at detection of stroke end.................................... 14-10
14.7 Confirmation of absolute position detection data............................................................................14-11
APPENDIX App- 1 to App- 2
App 1. Status indication block diagram ................................................................................................. App- 1
6
Optional Servo Motor Instruction Manual CONTENTS
The rough table of contents of the optional MELSERVO Servo Motor Instruction Manual is introduced
here for your reference. Note that the contents of the Servo Motor Instruction Manual are not included in
this Instruction Manual.
1. INTRODUCTION
2. INSTALLATION
3. CONNECTORS USED FOR SERVO MOTOR WIRING
4. INSPECTION
5. SPECIFICATIONS
6. CHARACTERISTICS
7. OUTLINE DIMENSION DRAWINGS
8. CALCULATION METHODS FOR DESIGNING
1 - 1
1. FUNCTIONS AND CONFIGURATION
1. FUNCTIONS AND CONFIGURATION
1.1 Overview
The Mitsubishi general-purpose AC servo MELSERVO-J2M series is an AC servo which has realized
wiring-saving, energy-saving and space-saving in addition to the high performance and high functions of
the MELSERVO-J2-Super series.
The MELSERVO-J2M series consists of an interface unit (abbreviated to the IFU) to be connected with a
positioning unit, drive units (abbreviated to the DRU) for driving and controlling servo motors, and a base
unit (abbreviated to the BU) where these units are installed.
A torque limit is applied to the drive unit by the clamp circuit to protect the main circuit power
transistors from overcurrent caused by abrupt acceleration/deceleration or overload. In addition, the
torque limit value can be changed as desired using the parameter.
The interface unit has an RS-232C or RS-422 serial communication function to allow the parameter
setting, test operation, status indication monitoring, gain adjustment and others of all units to be
performed using a personal computer or like where the MR Configurator (servo configuration software) is
installed. By choosing the station number of the drive unit using the MR Configurator (servo
configuration software), you can select the unit to communicate with, without changing the cabling.
The real-time auto tuning function automatically adjusts the servo gains according to a machine.
A maximum 500kpps high-speed pulse train is used to control the speed and direction of a motor and
execute accurate positioning of 131072 pulses/rev resolution.
The position smoothing function has two different systems to allow you to select the appropriate system
for a machine, achieving a smoother start/stop in response to an abrupt position command.
The MELSERVO-J2M series supports as standard the absolute position encoders which have 131072
pulses/rev resolution, ensuring control as accurate as that of the MELSERVO-J2-Super series. Simply
adding the optional battery unit configures an absolute position detection system. Hence, merely setting a
home position once makes it unnecessary to perform a home position return at power-on, alarm
occurrence or like.
The MELSERVO-J2M series has a control circuit power supply in the interface unit and main circuit
converter and regenerative functions in the base unit to batch-wire the main circuit power input,
regenerative brake connection and control circuit power supply input, achieving wiring-saving.
In the MELSERVO-J2M series, main circuit converter sharing has improved the capacitor regeneration
capability dramatically. Except for the operation pattern where all axes slow down simultaneously, the
capacitor can be used for regeneration. You can save the energy which used to be consumed by the
regenerative brake resistor.
Input signal (Axes 1 to 4)
Regenerative
brake option
Control circuit power
supply input
Main circuit power input
Personal computer connection
Monitor output
Forced stop input
Electromagnetic brake interlock output
Servo motor power cable
Encoder pulse output
extension DIO (Axes 5 to 8)
Encoder cable
Encoder pulse output
extension DIO (Axes 1 to 4)
Extension IO unit
MR-J2M-D01
Input signal (Axes 5 to 8)
Forward rotation stroke end
Reverse rotation stroke end
Forced stop input
1 - 2
1. FUNCTIONS AND CONFIGURATION
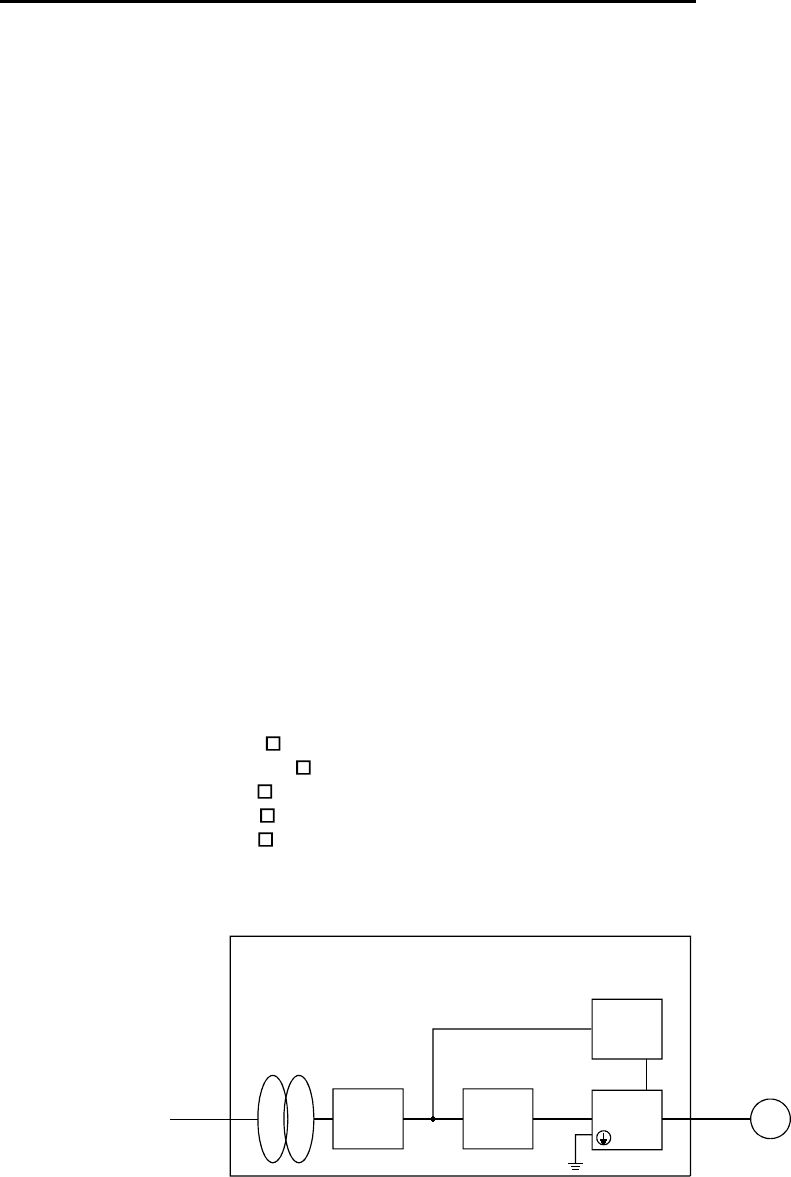
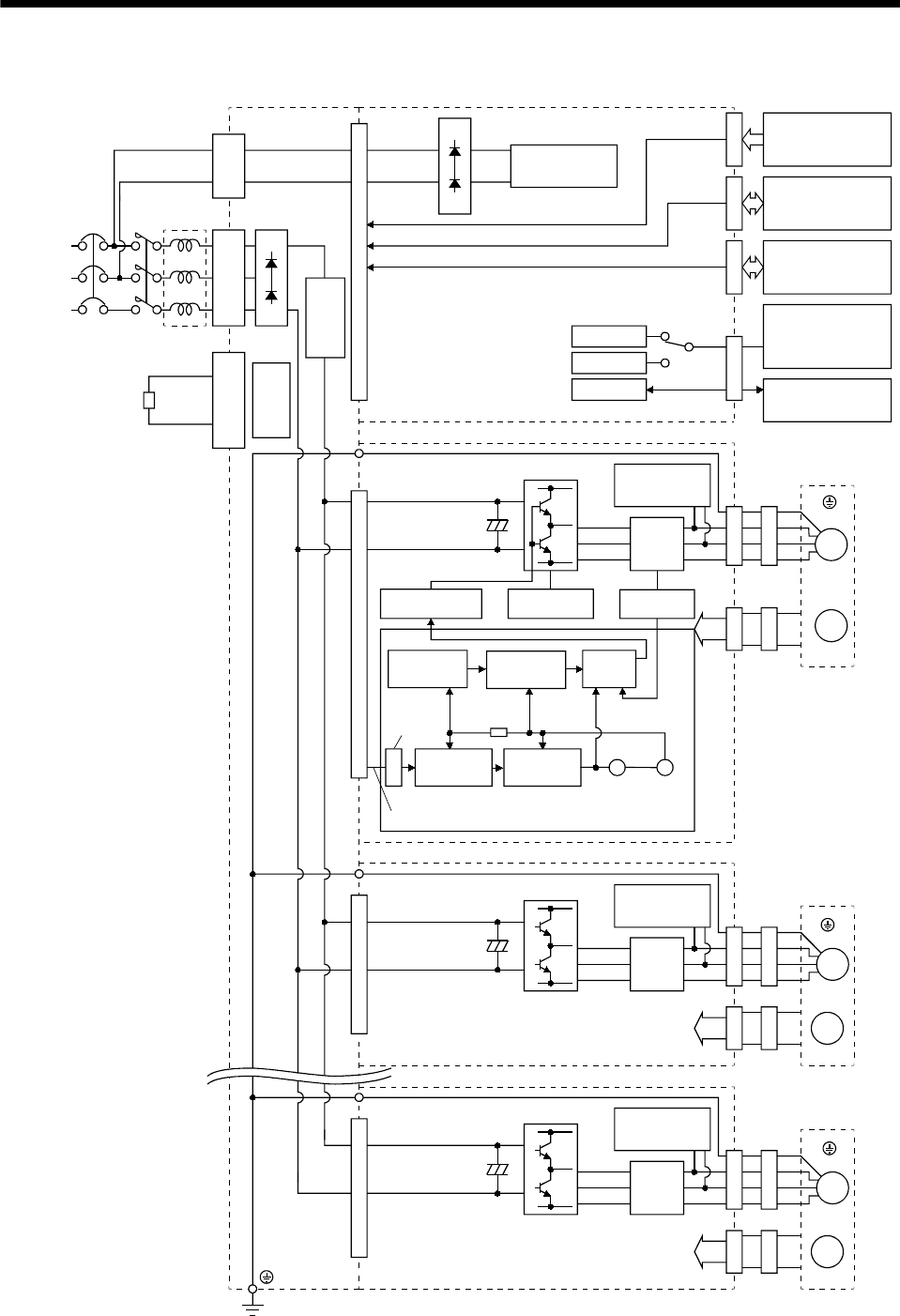
1.2 Function block diagram
W
RS-232C
D/A
NFB MC
W
V
U
L11
L21
L1
L2
L3
CNP3
CNP1B
P
N
C
CNP1A
U
VM
CN1ACN1BCN3CNP2CN2CNP2CN2
W
U
VM
CNP2CN2
FR-BAL
CN5
RS-422
CON3A-3H CON3A-3H CON3A-3H
Power
supply
3-phase
200 to
230VAC
(Note)
1-phase
200 to
230VAC
Base unit Interface unit
Analog monitor
(3 channels)
Regenerative brake option
Regener-
ative TR
Drive unit
Dynamic
brake
Servo motor
Inrush current
suppression
circuit
Current
detector
Actual position
control
Current
control
Model position
control
Model speed
control
Virtual
encoder
Virtual
servo
motor
Drive unit
Encoder
Drive unit
Dynamic
brake
Servo motor
Encoder
Current
detection
Dynamic
brake
Current
detection
Servo motor
Encoder
Model
position
Model
speed
Model
torque
Control circuit
power suppy
M
Overcurrent
protection
Current
detection
Base amplifier
Actual speed
control
Note. For 1-phase 200 to 230VAC, connect the power supply to L1, L2 and leave L3 open.
Pulse train position command
Pulse train position command
Input signal
Stroke end
Forced stop
I/O signals
for slots 1 to 4,
e.g. servo-on
I/O signals
for slots 5 to 8,
e.g. servo-on
Personal computer
or
other servo amplifier
Pulse train position command
Pulse
counter
(Earth)
(Earth)
(Earth)
1 - 3
1. FUNCTIONS AND CONFIGURATION
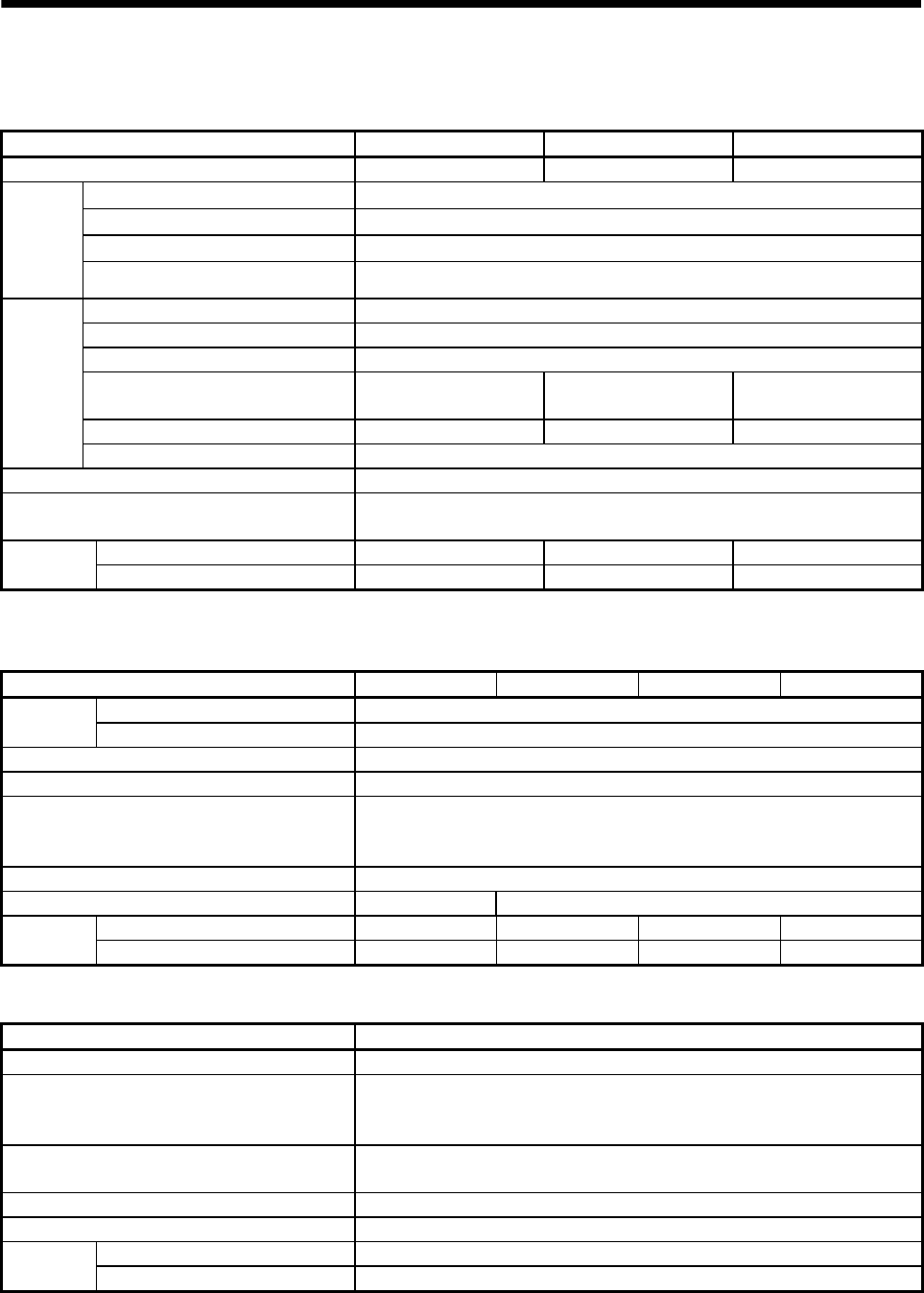
1.3 Unit standard specifications
(1) Base unit
Model MR-J2M-BU4 MR-J2M-BU6 MR-J2M-BU8
Number of slots 4 slots 6 slots 8 slots
Voltage/frequency 3-phase 200 to 230VAC or 1-phase 200 to 230VAC, 50/60Hz
Permissible voltage fluctuation 1-phase 170 to 253VAC
Permissible frequency fluctuation Within 5%
(Note)
Control
circuit
power
supply Inrush current 20A (5ms)
Voltage/frequency 3-phase 200 to 230VAC or 1-phase 200 to 230VAC, 50/60Hz
Permissible voltage fluctuation 3-phase 170 to 253VAC or 1-phase 170 to 253VAC, 50/60 Hz
Permissible frequency fluctuation Within 5%
Maximum servo motor connection
capacity [W] 1600 2400 3200
Continuous capacity [W] 1280 1920 2560
Main
circuit
power
supply
Inrush current 62.5A (15ms)
Function Converter function, regenerative control, rushing into current control function
Protective functions Regenerative overvoltage shut-off, regenerative fault protection,
undervoltage /instantaneous power failure protection
[kg] 1.1 1.3 1.5
Mass [lb] 2.4 2.9 3.3
Note. The control circuit power supply is recorded to the interface unit.
(2) Drive unit
Model MR-J2M-10DU MR-J2M-20DU MR-J2M-40DU MR-J2M-70DU
Voltage/frequency 270 to 311VDC
Power
supply Permissible voltage fluctuation 230 to 342VDC
Control system Sine-wave PWM control, current control system
Dynamic brake Built-in
Protective functions
Overcurrent shut-off, functions overload shut-off (electronic thermal relay), servo
motor overheat protection, encoder fault protection, overspeed protection,
excessive error protection
Structure Open (IP00)
Cooling method Self-cooled Force-cooling (With built-in fan unit)
[kg] 0.4 0.4 0.4 0.7
Mass [lb] 0.89 0.89 0.89 1.54
(3) Interface unit
Model MR-J2M-P8A
Control circuit power supply Power supply circuit for each unit(8 slots or less)
Interface
Pulse train interface 8 channels
RS-232C interface 1 channel
RS-422 interface 1 channel
DIO Forced stop input (2 points), alarm output (2 points), input signal (40 points),
output signal (16 points)
AIO Analog monitor 3channels
Structure Open (IP00)
[kg] 0.5
Mass [lb] 1.10
1 - 4
1. FUNCTIONS AND CONFIGURATION
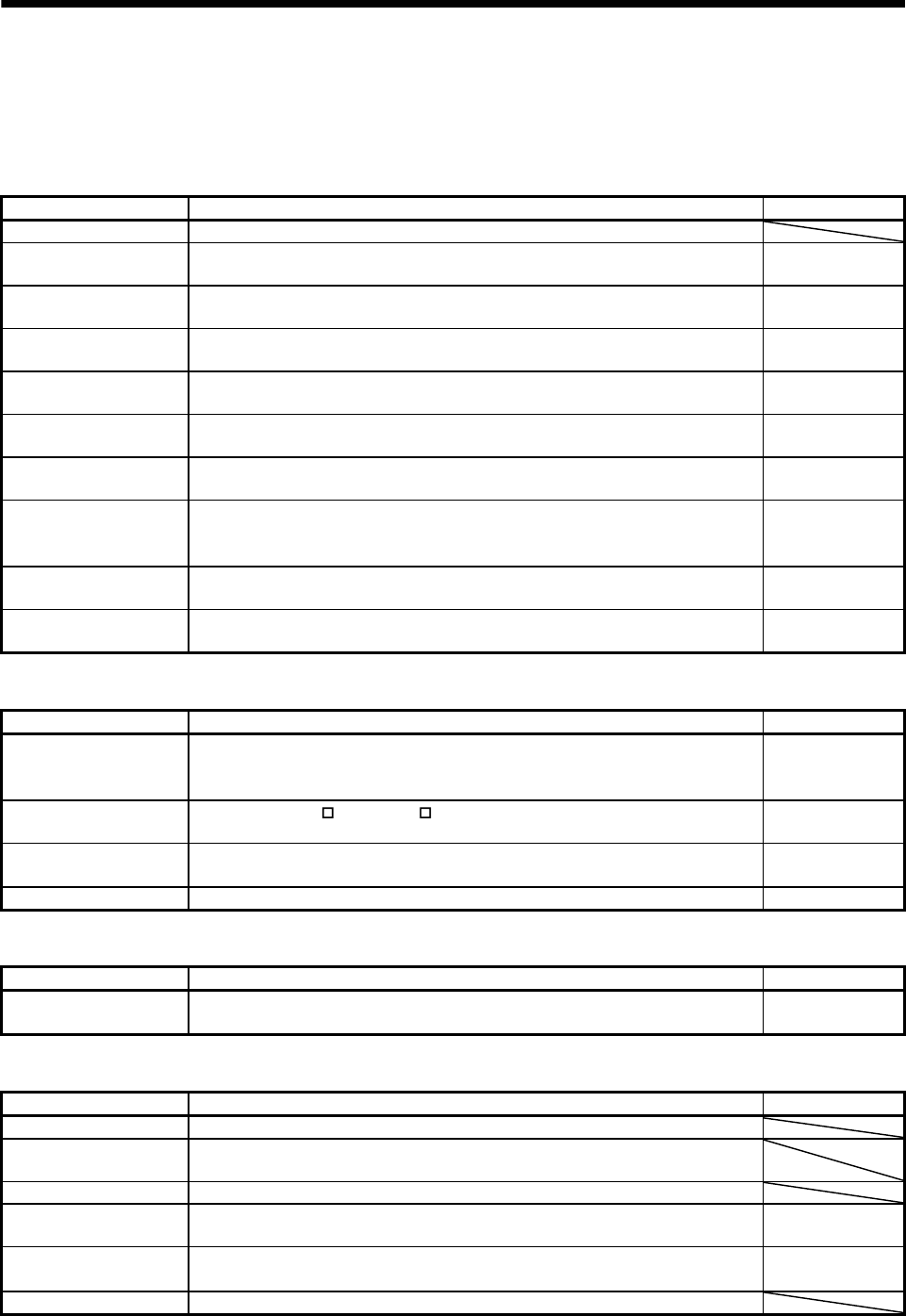
1.4 Function list
The following table lists the functions of this servo. For details of the functions, refer to the Reference
field.
(1) Drive unit (Abbreviation DRU)
Function Description Reference
High-resolution encoder High-resolution encoder of 131072 pulses/rev is used as a servo motor encoder.
Auto tuning Automatically adjusts the gain to optimum value if load applied to the servo motor
shaft varies. Chapter 7
Gain changing function You can switch between gains during rotation and gains during stop or use an
external signal to change gains during operation. Section 7.5.4
Adaptive vibration
suppression control
MELSERVO-J2M detects mechanical resonance and sets filter characteristics
automatically to suppress mechanical vibration. Section 7.3
Low-pass filter Suppresses high-frequency resonance which occurs as servo system response is
increased. Section 7.4
Position smoothing Speed can be increased smoothly in response to input pulse. DRU parameter
No. 7
Slight vibration
suppression control Suppresses vibration of 1 pulse produced at a servo motor stop. DRU parameter
No.20
Electronic gear Input pulses can be multiplied by 1/50 to 50.
DRU parameters
No. 3, 4, 69 to 71
Section 5.3.1
Torque limit Servo motor torque can be limited to any value. DRU parameters
No.28
Command pulse selection Command pulse train form can be selected from among four different types. DRU parameter
No. 21
(2) Interface unit (Abbreviation IFU)
Function Description Reference
Position control mode This servo is used as position control servo.
Section 2.7
Section 3.1.2
Section 3.1.5
I/O signal selection The servo-on (SON ), ready (RD ) and other input signals can be reassigned to
any other pins. Section 3.2.6
Status display Servo status is shown on the 5-digit, 7-segment LED display Section 4.2.2
Section 4.3.2
Analog monitor Servo status is output in terms of voltage in real time. Section 5.3.2
(3) Base unit (Abbreviation BU)
Function Description Reference
Regenerative brake option Used when the built-in regenerative brake resistor of the unit does not have
sufficient regenerative capability for the regenerative power generated. Section 12.1.1
(4) MR Configurator (servo configuration software)
Function Description Reference
Machine analyzer function Analyzes the frequency characteristic of the mechanical system.
Machine simulation Can simulate machine motions on a personal computer screen on the basis of the
machine analyzer results.
Gain search function Can simulate machine motions on the basis of the machine analyzer results.
External I/O signal
display ON/OFF statuses of external I/O signals are shown on the display. Section 4.3.7
Output signal (DO)
forced output
Output signal can be forced on/off independently of the servo status.
Use this function for output signal wiring check, etc.
Section 4.2.6
Section 4.3.8
Test operation mode JOG operation and positioning operation are possible.
1 - 5
1. FUNCTIONS AND CONFIGURATION
(5) Option unit
Function Description Reference
Absolute position
detection system
Merely setting a home position once makes home position return unnecessary at
every power-on.
Battery unit MR-J2M-BT (shortly correspondence schedule) is necessary.
Encoder pulse output
The encoder feedback is output from extension IO unit MR-J2M-D01 (shortly
correspondence schedule) by the A BZ phase pulse. The number of pulses
output by the parameter can be changed.
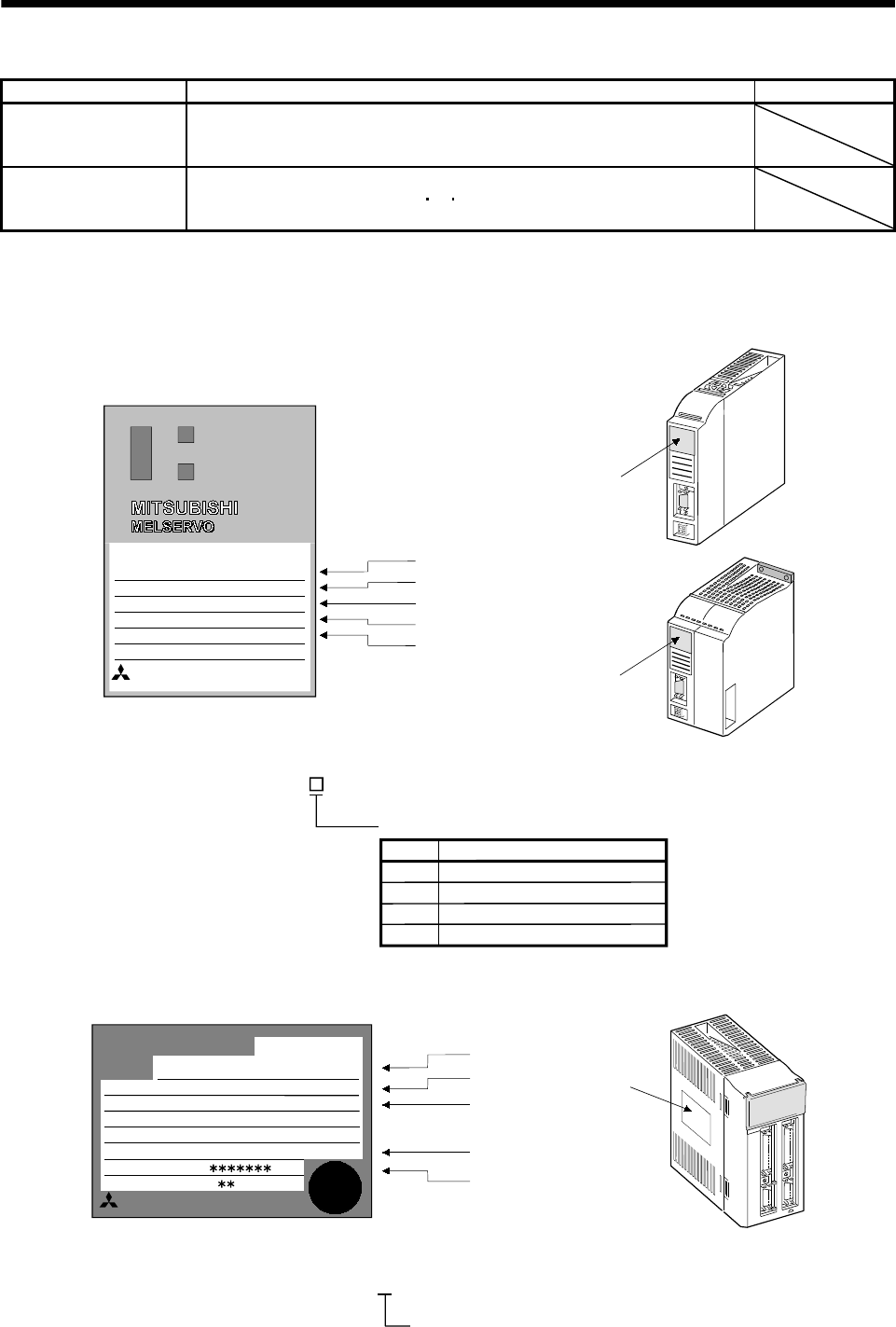
1.5 Model code definition
(1) Drive unit
(a) Rating plate
400W
DC270V-311V
170V 0-360Hz 2.3A
N9Z95046
MR-J2M-40DU
SON
ALM
MODEL
POWER
INPUT
OUTPUT
SERIAL
TC300A***G51
MITSUBISHI ELECTRIC
Model
Capacity
Applicable power supply
Rated output current
Serial number
Rating plate
Rating plate
(b) Model code
100
200
400
Rated output
10
20
40
MR-J2M- DU
Symbol Capacity of applied servo motor
70 750
(2) Interface unit
(a) Rating plate
Model
Input capacity
Applicable
power supply
Output voltage / current
Serial number
Rating
plate
POWER
MITSUBISHI AC SERVO
MADE IN JAPAN
MODEL MR-J2M-P8A
MITSUBISHI ELECTRIC CORPORATION
75W
2PH AC200-230V 50Hz
DC5/12/20 4.6A/1.2/0.7A
POWER :
AC INPUT:
OUTPUT :
SERIAL :
AC SERVO
PASSED
2PH AC200-230V 60Hz
A5
TC3 AAAAG52
(b) Model code
MR-J2M-P8A
Pulse train interface compatible
1 - 6
1. FUNCTIONS AND CONFIGURATION
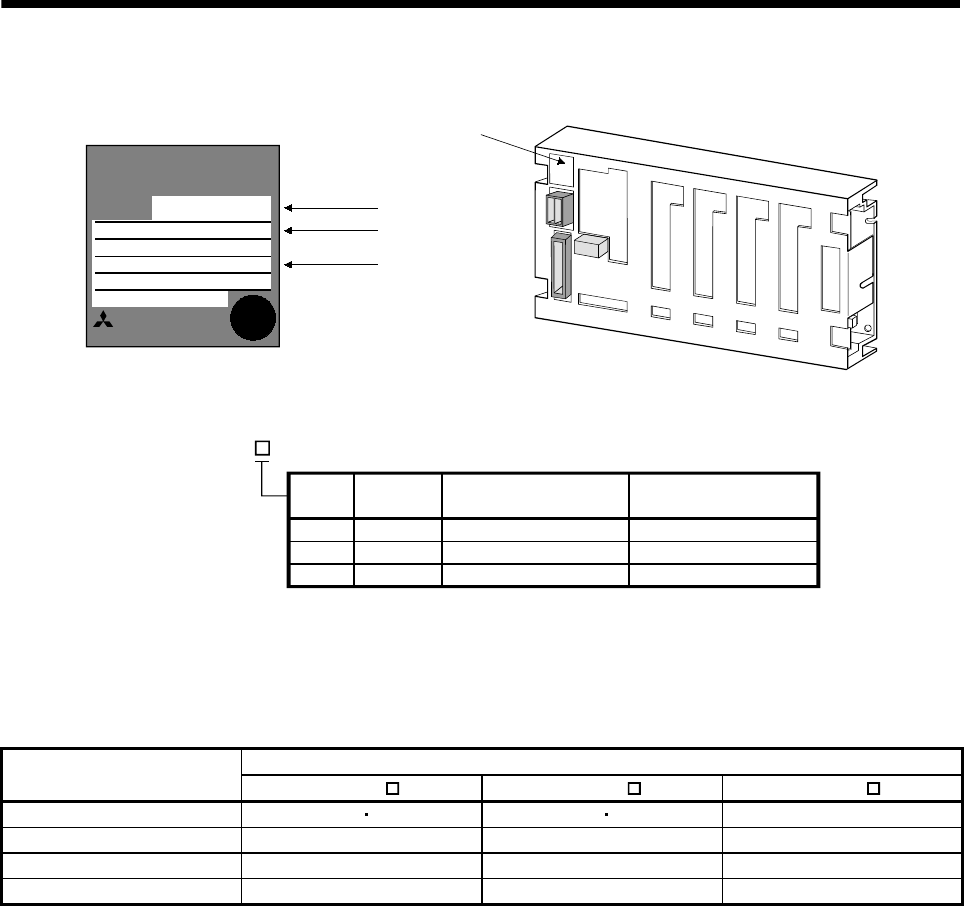
(3) Base unit
(a) Rating plate
MITSUBISHI
MADE IN JAPAN
MR-J2M-BU4
3PH 200-230
INPUT :
SERIAL:
14A 50/60Hz
N87B95046
BC336U246
MODEL
MITSUBISHI ELECTRIC PASSED
Model
Applicable power
supply
Serial number
Rating plate
(b) Model code
61920
4
8
1600
2400
3200
1280
2560
MR-J2M-BU
Symbol
4
6
8
Number of
slots
Maximum servo motor
connection capacity [W] Continuous capacity [W]
1.6 Combination with servo motor
The following table lists combinations of drive units and servo motors. The same combinations apply to
the models with electromagnetic brakes and the models with reduction gears.
Servo motor
Drive unit HC-KFS HC-MFS HC-UFS
MR-J2M-10DU 053 13 053 13 13
MR-J2M-20DU 23 23 23
MR-J2M-40DU 43 43 43
MR-J2M-70DU 73 73 73
1 - 7
1. FUNCTIONS AND CONFIGURATION
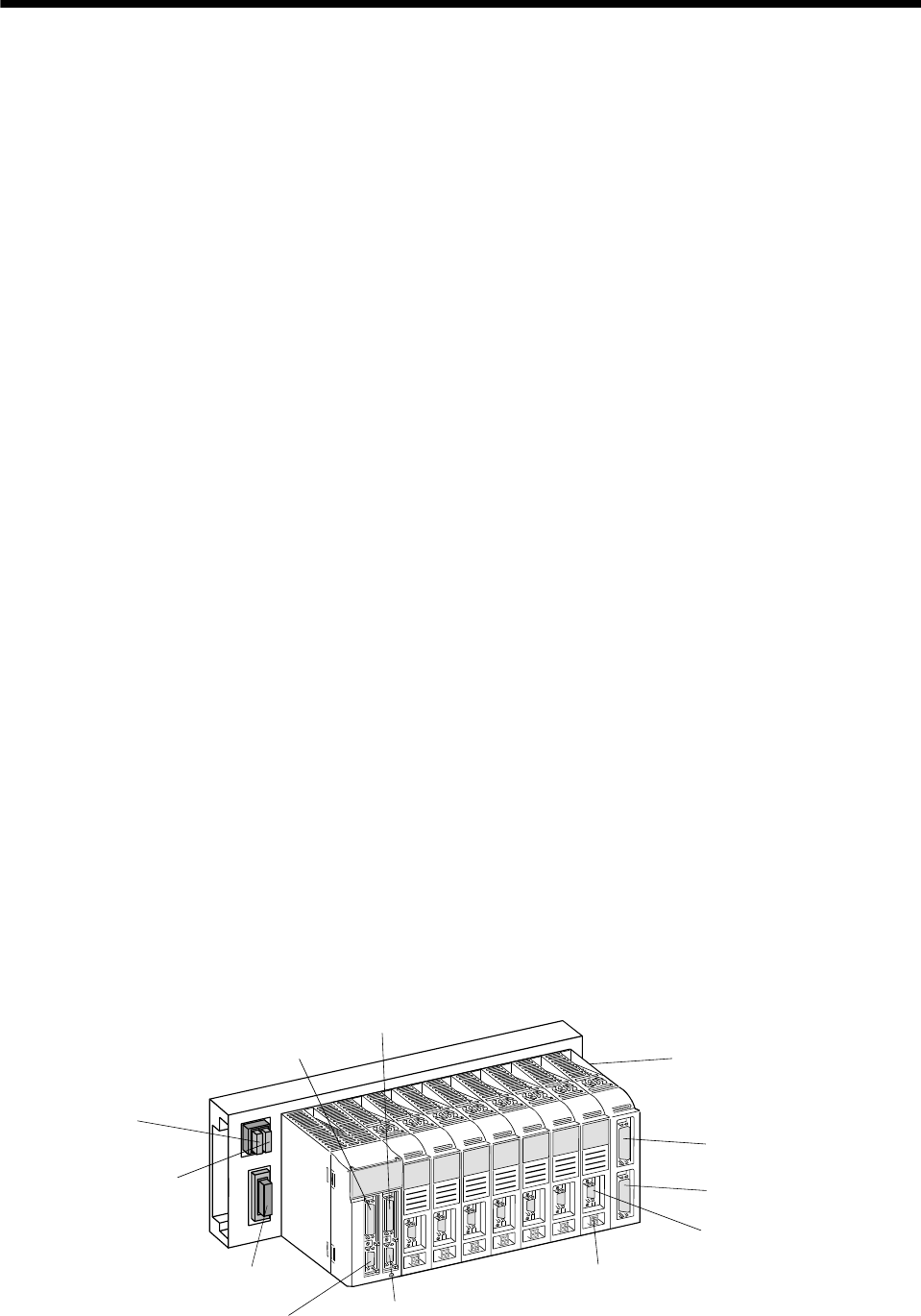
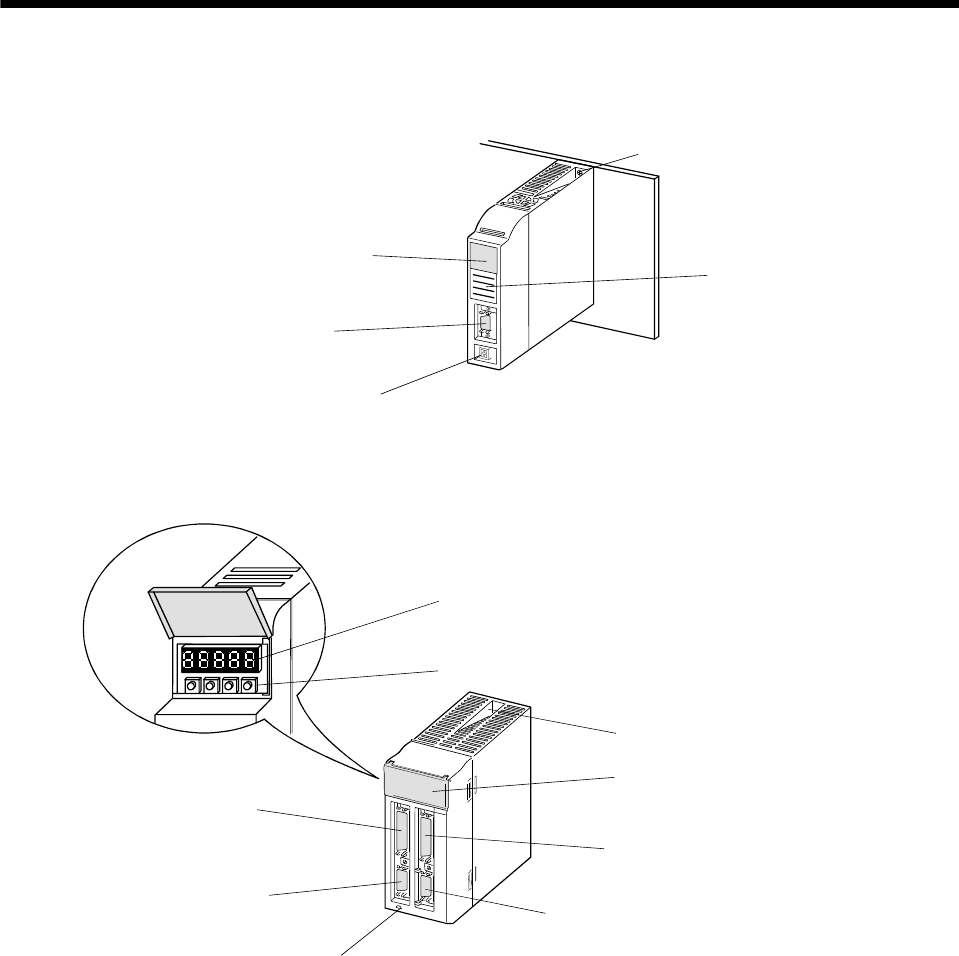
1.7 Parts identification
(1) Drive unit
Status indicator LED
Indicates the status of the drive unit.
Blinking green: Servo off status
Steady green: Servo on status
Blinking red: Warning status
Steady red: Alarm status
CN2
Encoder connector
Connect the
servo motor encoder
CNP2
Servo motor connector
For connection of servo
motor power line cable
Mounting screw
Rating plate
(2) Interface unit
Display
Indicates operating status or alarm.
CN1
A
I/O signal (For 1 to 4 slots)
CN3
For connection of personal computer (RS-232C).
Outputs analog monitor.
Pushbutton switches
Used to change status indication or set IFU parameters
and DRU parameters.
Mounting screw
Display/setting cover
CN1B
I/O signal (For 5 to 8 slots)
Charge lamp
Lit when main circuit capacitor carries electrical charge.
When this lamp is on, do not remove/reinstall any unit
from/to base unit and do not unplug/plug cable and
connector from/into any unit.
CN5
Forward rotation stroke end
Reverse rotation stroke end
Forced stop input
1 - 8
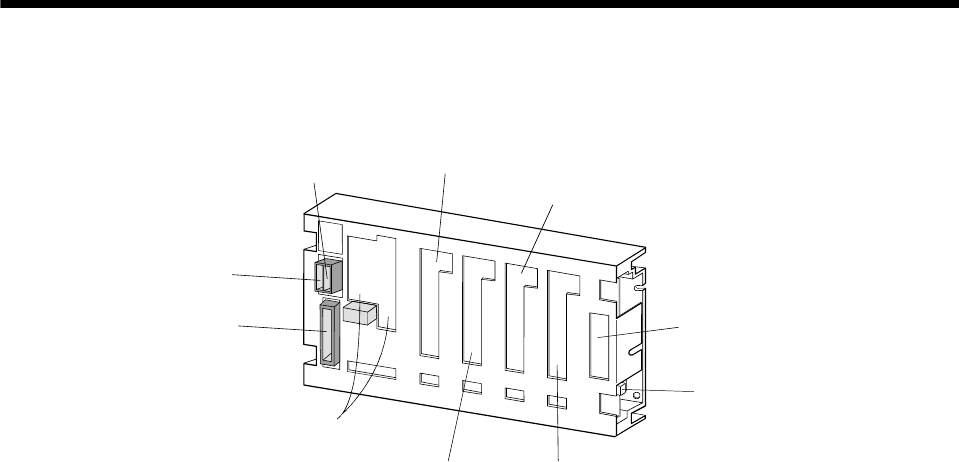
1. FUNCTIONS AND CONFIGURATION
(3) Base unit
The following shows the MR-J2M-BU4.
CNP1B
Control circuit power input connector
CNP1
A
Regenerative brake
option connecto
r
CNP3
Main circuit power
input connector
CON1,CON2
Interface unit connectors
CON3B
Second slot connector CON3D
Fourth slot connector
CON4
Option slot connector
CON5
Battery unit connecto
r
CON3C
Third slot connector
CON3A
First slot connector
1 - 9
1. FUNCTIONS AND CONFIGURATION
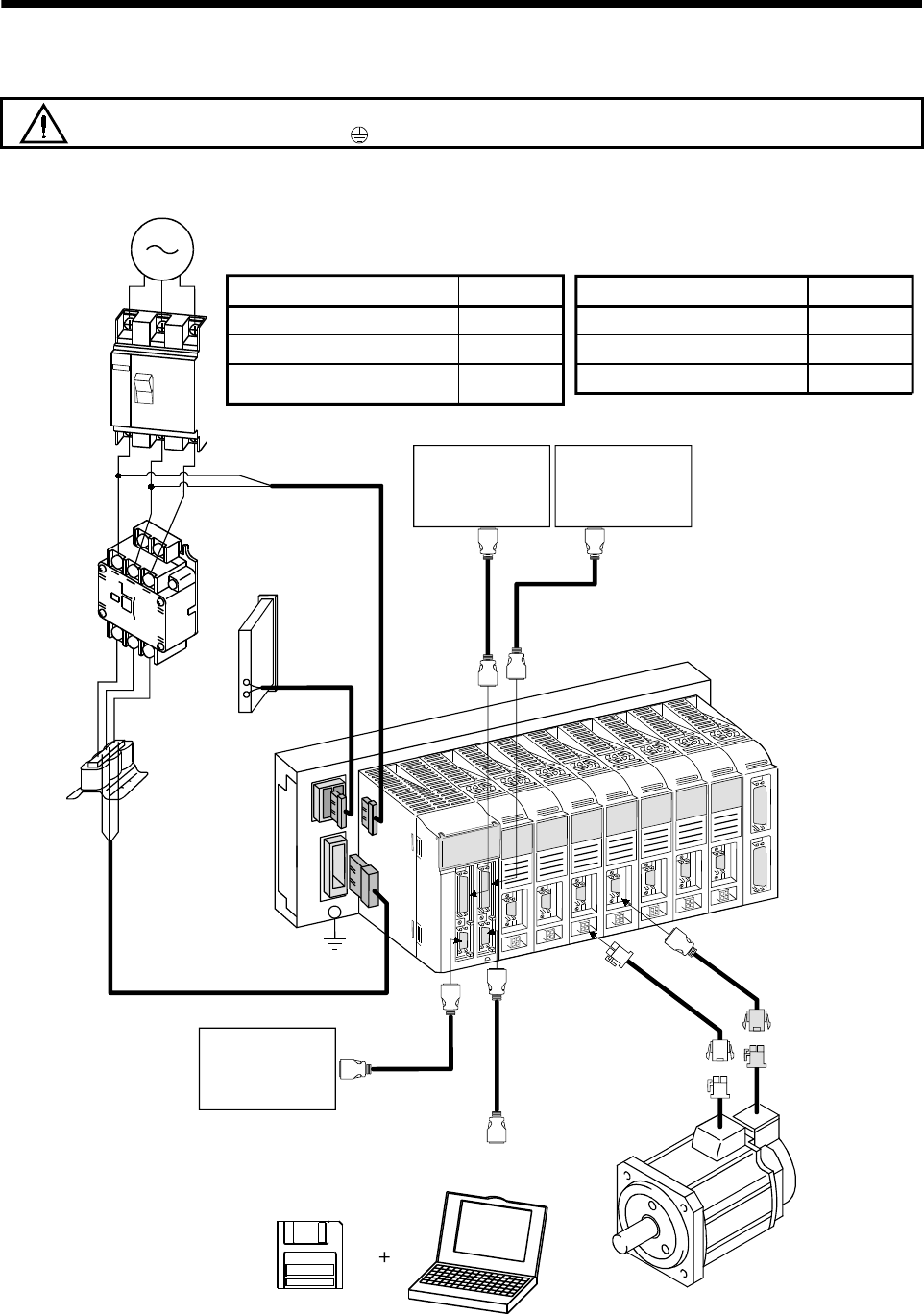
1.8 Servo system with auxiliary equipment
WARNING To prevent an electric shock, always connect the protective earth (PE) terminal
(terminal marked ) of the base unit to the protective earth (PE) of the control box.
C
P
L2
L1L3
Options and auxiliary equipment
No-fuse breaker
Magnetic contactor
MR Configurator
(servo configuration software)
Regenerative brake option
Reference
Section 12.2.2
Section 12.2.2
Section 12.1.4
Section 12.1.1
Options and auxiliary equipment Reference
Cables Section 12.2.1
Power factor improving reactor Section 12.2.3
3-phase 200V to 230VAC
power supply
(Note) 1-phase 200V to 230VAC
No-fuse
breaker
(NFB) or
fuse
Magnetic
contactor
(MC)
Powe
r
f
acto
r
improving
reacto
r
(FR-BAL)
MR Configurator
(servo configuration software
MRZJW3-SETUP151E or later)
Personal computer
Power supply lead
Encoder cable
Regenerative brake
option
L21
L11
Control circuit
power supply
To CNP1A To CNP1B
To CN1A To CN1B
Command device
(For 1 to 4 slots)
Command device
(For 5 to 8 slots)
To CNP3
To CN5
To CN3
Main circuit power supply
Note. For 1-phase 200 to 230VAC, connect the power supply to L1, L2 and leave L3 open.
Machine contact
1 - 10
1. FUNCTIONS AND CONFIGURATION
MEMO
2 - 1
2. INSTALLATION AND START UP
2. INSTALLATION AND START UP
CAUTION
Stacking in excess of the limited number of products is not allowed.
Install the equipment to incombustibles. Installing them directly or close to
combustibles will led to a fire.
Install the equipment in a load-bearing place in accordance with this Instruction
Manual.
Do not get on or put heavy load on the equipment to prevent injury.
Use the equipment within the specified environmental condition range.
Provide an adequate protection to prevent screws, metallic detritus and other
conductive matter or oil and other combustible matter from entering each unit.
Do not block the intake/exhaust ports of each unit. Otherwise, a fault may occur.
Do not subject each unit to drop impact or shock loads as they are precision
equipment.
Do not install or operate a faulty unit.
When the product has been stored for an extended period of time, consult
Mitsubishi.
When treating the servo amplifier, be careful about the edged parts such as the
corners of the servo amplifier.
2.1 Environmental conditions
The following environmental conditions are common to the drive unit, interface unit and base unit.
Environment Conditions
[]0 to 55 (non-freezing)
During
operation [] 32 to 131 (non-freezing)
[ ] 20 to 65 (non-freezing)
Ambient
temperature In storage []4 to 149 (non-freezing)
During operation
Ambient
humidity In storage 90%RH or less (non-condensing)
Ambience Indoors (no direct sunlight)
Free from corrosive gas, flammable gas, oil mist, dust and dirt
Altitude Max. 1000m (3280 ft) above sea level
[m/s2] 5.9 [m/s2] or less
Vibration [ft/s2] 19.4 [ft/s2] or less
2 - 2
2. INSTALLATION AND START UP
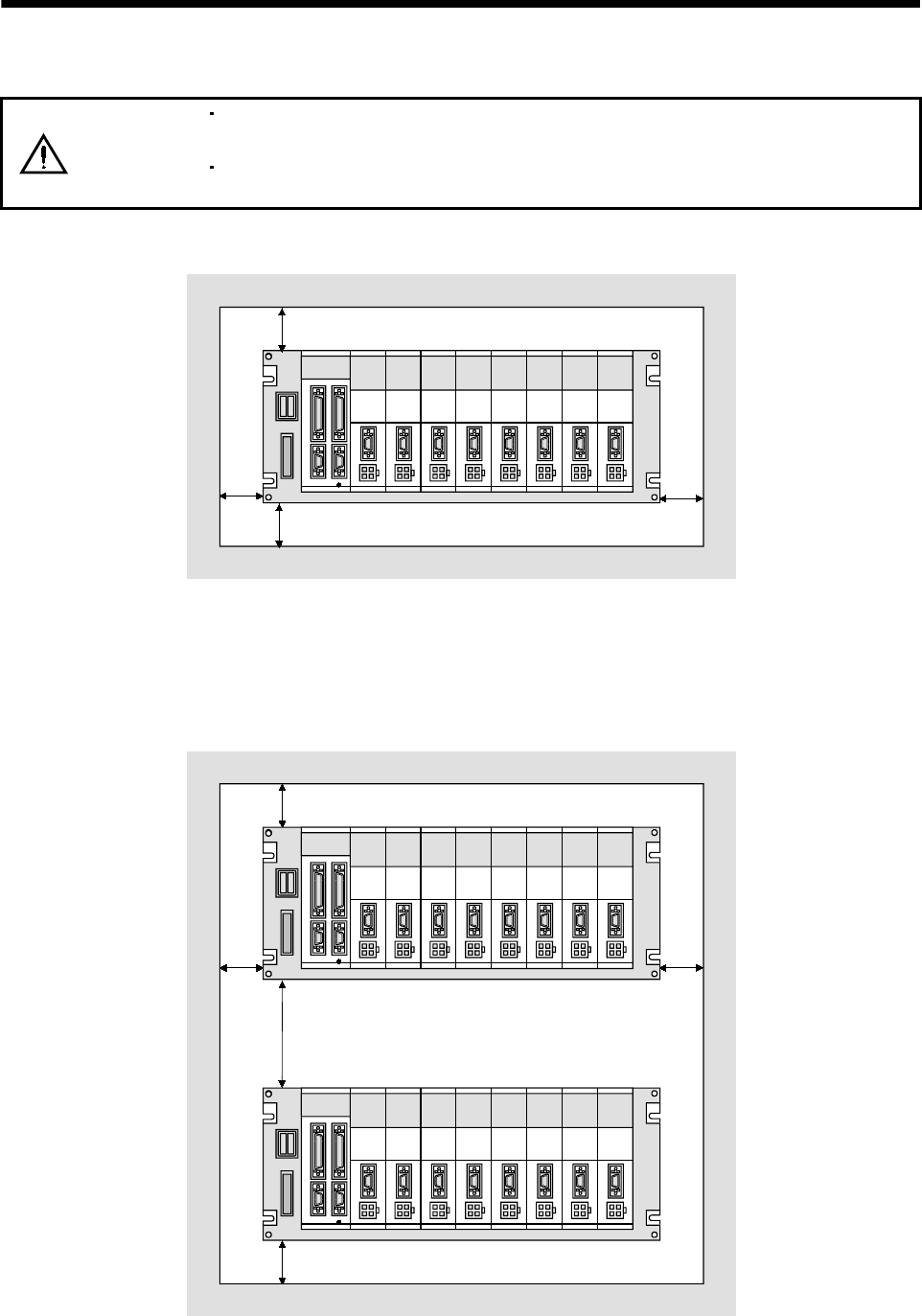
2.2 Installation direction and clearances
CAUTION
The equipment must be installed in the specified direction. Otherwise, a fault may
occur.
Leave specified clearances between each unit and control box inside walls or other
equipment.
(1) Installation of one MELSERVO-J2M
40mm(1.57inch) or more
40mm(1.57inch) or more
40mm(1.57inch) or more
40mm(1.57inch) or more
(2) Installation of two or more MELSERVO-J2M
When installing two units vertically, heat generated by the lower unit influences the ambient
temperature of the upper unit. Suppress temperature rises in the control box so that the temperature
between the upper and lower units satisfies the environmental conditions. Also provide adequate
clearances between the units or install a fan.
40mm(1.57inch) or more
Leave 100mm(3.94inch) or more
clearance or install fan for forced air cooling.
40mm(1.57inch) or more
40mm(1.57inch) or more
40mm(1.57inch) or more

2 - 3
2. INSTALLATION AND START UP
(3) Others
When using heat generating equipment such as the regenerative brake option, install them with full
consideration of heat generation so that MELSERVO-J2M is not affected.
Install MELSERVO-J2M on a perpendicular wall in the correct vertical direction.
2.3 Keep out foreign materials
(1) When installing the unit in a control box, prevent drill chips and wire fragments from entering each
unit.
(2) Prevent oil, water, metallic dust, etc. from entering each unit through openings in the control box or a
fan installed on the ceiling.
(3) When installing the control box in a place where there are much toxic gas, dirt and dust, conduct an
air purge (force clean air into the control box from outside to make the internal pressure higher than
the external pressure) to prevent such materials from entering the control box.
2.4 Cable stress
(1) The way of clamping the cable must be fully examined so that flexing stress and cable's own mass
stress are not applied to the cable connection.
(2) For use in any application where the servo motor moves, fix the cables (encoder, power supply, brake)
supplied with the servo motor, and flex the optional encoder cable or the power supply and brake
wiring cables. Use the optional encoder cable within the flexing life range. Use the power supply and
brake wiring cables within the flexing life of the cables.
(3) Avoid any probability that the cable sheath might be cut by sharp chips, rubbed by a machine corner
or stamped by workers or vehicles.
(4) For installation on a machine where the servo motor will move, the flexing radius should be made as
large as possible. Refer to section 11.4 for the flexing life.
2 - 4
2. INSTALLATION AND START UP
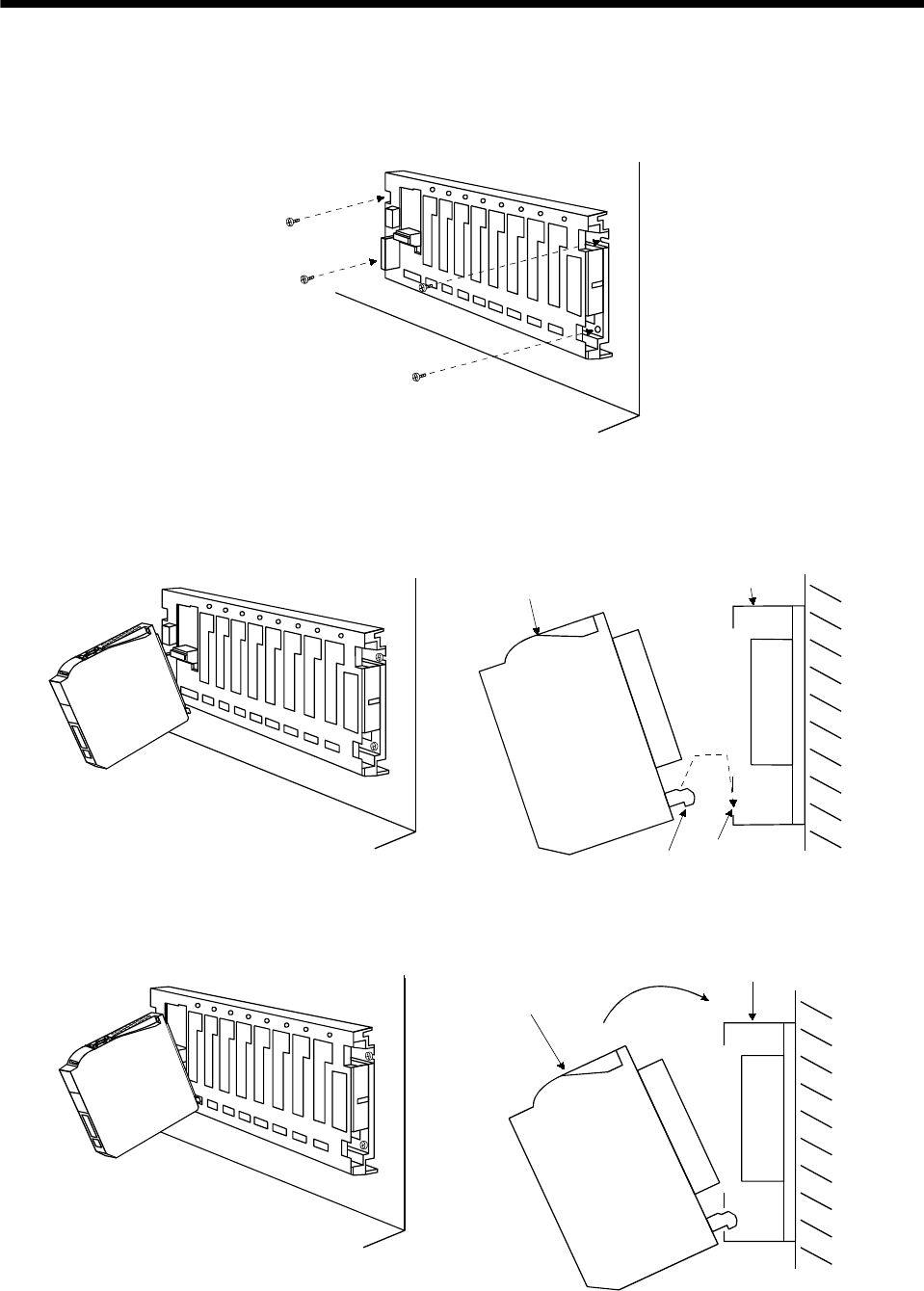
2.5 Mounting method
(1) Base unit
As shown below, mount the base unit on the wall of a control box or like with M5 screws.
Wall
(2) Interface unit/drive unit (MR-J2M-40DU or less)
The following example gives installation of the drive unit to the base unit. The same also applies to the
interface unit.
Sectional view
Drive unit Base unit
Wall
Catch Positioning hole
1)
1) Hook the catch of the drive unit in the positioning hole of the base unit.
Sectional view
2)
Drive unit
Base unit
Wall
2) Using the catch hooked in the positioning hole as a support, push the drive unit in.
2 - 5
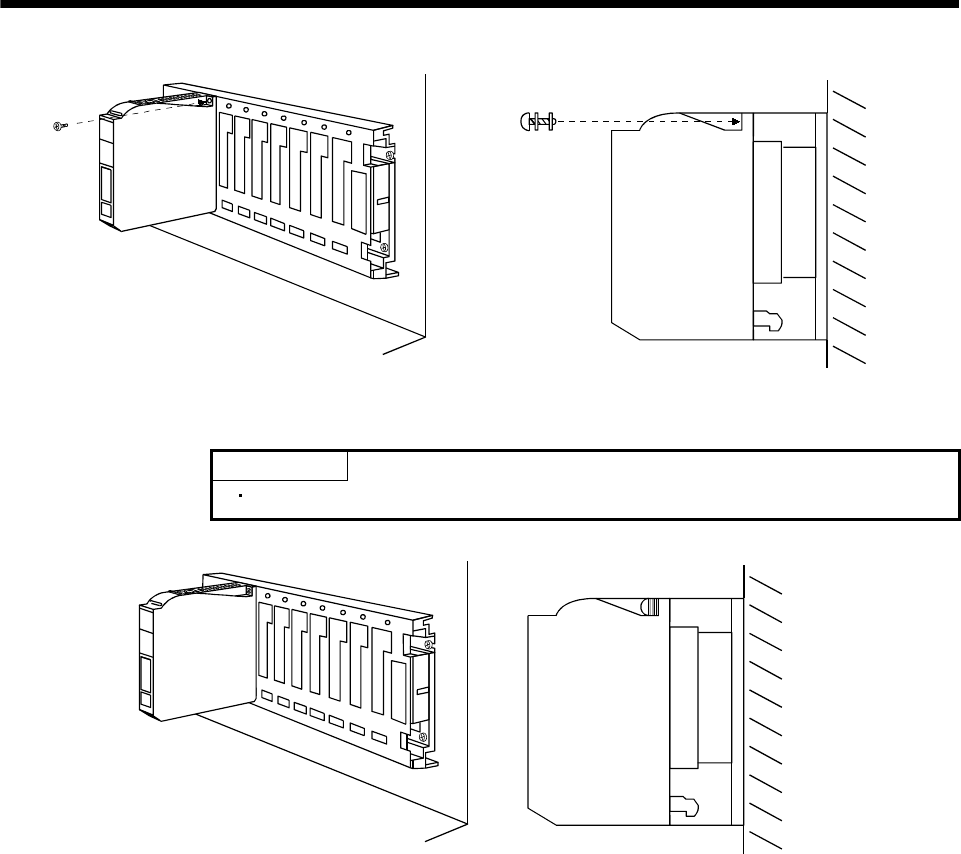
2. INSTALLATION AND START UP
3) 3)
Sectional view
Wall
3) Tighten the M4 screw supplied for the base unit to fasten the drive unit to the base unit.
POINT
Securely tighten the drive unit fixing screw.
Sectional view
Wall
(3) Drive unit (MR-J2M-70DU)
When using the MR-J2M-70DU, install it on two slots of the base unit. The slot number of this drive
unit is that of the left hand side slot of the two occupied slots, when they are viewed from the front of
the base unit.
2 - 6
2. INSTALLATION AND START UP
2.6 When switching power on for the first time
Before starting operation, check the following:
(1) Wiring
(a) Check that the control circuit power cable, main circuit power cable and servo motor power cable
are fabricated properly.
(b) Check that the control circuit power cable is connected to the CNP1B connector and the main
circuit power cable is connected to the CNP3 connector.
(c) Check that the servo motor power cable is connected to the drive unit CNP2 connector.
(d) Check that the base unit is earthed securely. Also check that the drive unit is screwed to the base
unit securely.
(e) When using the regenerative brake option, check that the cable using twisted wires is fabricated
properly and it is connected to the CNP1A connector properly.
(f) When the MR-J2M-70DU is used, it is wired to have the left-hand side slot number of the two slots.
(g) 24VDC or higher voltages are not applied to the pins of connector CN3.
(h) SD and SG of connector CN1A CN1B CN3 CN4A CN4B and CN5 are not shorted.
(i) The wiring cables are free from excessive force.
(j) Check that the encoder cable and servo motor power cable connected to the drive unit are connected
to the same servo motor properly.
(k) When stroke end limit switches are used, the signals across LSP -SG and LSN -SG are on
during operation.
(2) Parameters
(a) Check that the drive unit parameters are set to correct values using the servo system controller
screen or MR Configurator (servo configuration software).
(b) Check that the interface unit parameters are set to correct values using the interface unit display
or MR Configurator (servo configuration software).
(3) Environment
Signal cables and power cables are not shorted by wire offcuts, metallic dust or the like.
(4) Machine
(a) The screws in the servo motor installation part and shaft-to-machine connection are tight.
(b) The servo motor and the machine connected with the servo motor can be operated.
2 - 7
2. INSTALLATION AND START UP
2.7 Start up
WARNING
Do not operate the switches with wet hands. You may get an electric shock.
Do not operate the controller with the front cover removed. High-voltage terminals
and charging area exposed and you may get an electric shock.
During power-on or for some time after power-off, do not touch or close a parts
(cable etc.) to the regenerative brake resistor, servo motor, etc. Their temperatures
may be high and you may get burnt or a parts may damaged.
CAUTION
Before starting operation, check the parameters. Some machines may perform
unexpected operation.
Take safety measures, e.g. provide covers, to prevent accidental contact of hands
and parts (cables, etc.) with the servo amplifier heat sink, regenerative brake
resistor, servo motor, etc.since they may be hot while power is on or for some time
after power-off. Their temperatures may be high and you may get burnt or a parts
may damaged.
During operation, never touch the rotating parts of the servo motor. Doing so can
cause injury.
Connect the servo motor with a machine after confirming that the servo motor operates properly alone.
2 - 8
2. INSTALLATION AND START UP
(1) Power on
Switching on the main circuit power/control circuit power places the interface unit display in the scroll
status as shown below.
In the absolute position detection system, first power-on results in the absolute position lost (A.25)
alarm and the servo system cannot be switched on. This is not a failure and takes place due to the
uncharged capacitor in the encoder.
The alarm can be deactivated by keeping power on for a few minutes in the alarm status and then
switching power off once and on again.
Also in the absolute position detection system, if power is switched on at the servo motor speed of
500r/min or higher, position mismatch may occur due to external force or the like. Power must
therefore be switched on when the servo motor is at a stop.
(2) Test operation
Using JOG operation in the test operation mode, make sure that the servo motor operates. (Refer to
Section 6.8.2.)
(3) Parameter setting
Set the parameters according to the structure and specifications of the machine. Refer to Chapter 5 for
the parameter definitions.
After setting the parameters, switch power off once.
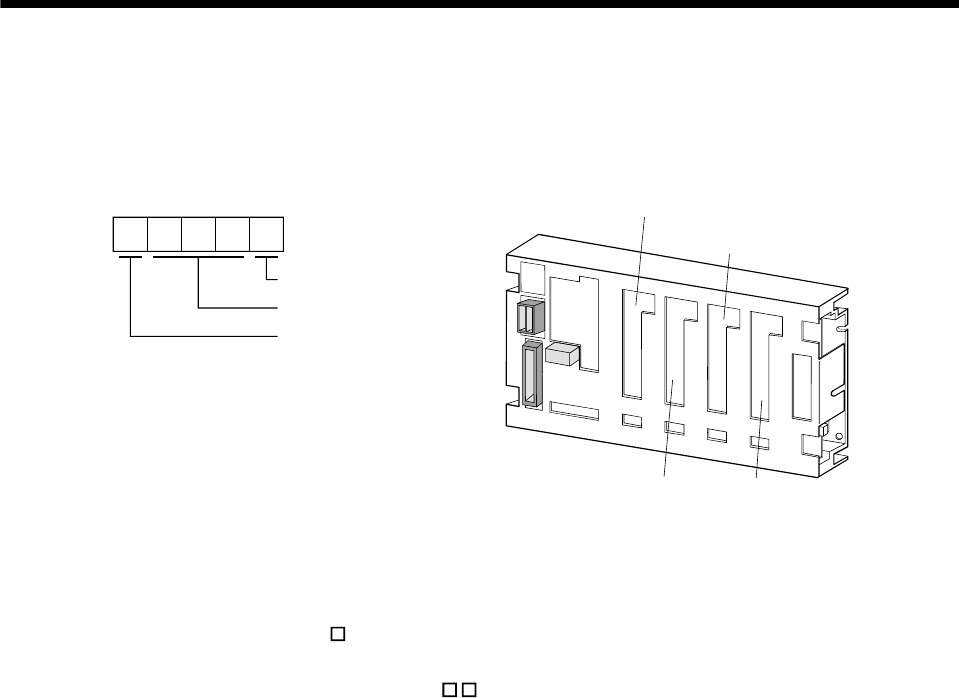
2 - 9
2. INSTALLATION AND START UP
(4) Slot number confirmation
Confirm the slot number in the interface unit display section of the installed drive unit.
Display
Slot number
Drive unit status
Slot number
For MR-J2M-BU4
First slot
Third slot
Second slot Fourth slot
(5) Servo-on
Switch the servo-on in the following procedure:
1) Switch on main circuit/control power supply.
2) Turn on the servo-on (SON ).
When the servo-on status is established, operation is enabled and the servo motor is locked. At
this time, the interface unit displays "@ d@". (@ represents the slot number.)
(6) Command pulse input
Entry of a pulse train from the positioning device rotates the servo motor. At first, run it at low speed
and check the rotation direction, etc. If it does not run in the intended direction, check the input
signal.
On the status display, check the speed, command pulse frequency, load factor, etc. of the servo motor.
When machine operation check is over, check automatic operation with the program of the positioning
device.
This servo amplifier has a real-time auto tuning function under model adaptive control. Performing
operation automatically adjusts gains. The optimum tuning results are provided by setting the
response level appropriate for the machine in DRU parameter No. 2. (Refer to chapter 7.)
(7) Home position return
Make home position return as required.
2 - 10
2. INSTALLATION AND START UP
(8) Stop
In any of the following statuses, the servo amplifier interrupts and stops the operation of the servo
motor:
Refer to Section 3.8, (2) for the servo motor equipped with electromagnetic brake. Note that the stop
pattern of forward rotation stroke end (LSP )reverse rotation stroke end (LSN ) OFF is as described
below.
(a) Servo-on (SON ) OFF
The base circuit is shut off and the servo motor coasts.
(b) Alarm occurrence
When an alarm occurs, the base circuit is shut off and the dynamic brake is operated to bring the
servo motor to a sudden stop.
(c) Forced stop (EMG_ ) OFF
The base circuit is shut off and the dynamic brake is operated to bring the servo motor to a sudden
stop. Servo forced stop warning (A.E6) occurs.
(d) Forward rotation stroke end (LSP )reverse rotation stroke end (LSN ) OFF
The droop pulse value is erased and the servo motor is stopped and servo-locked. It can be run in
the opposite direction.
POINT
A sudden stop indicates deceleration to a stop at the deceleration time
constant of zero.
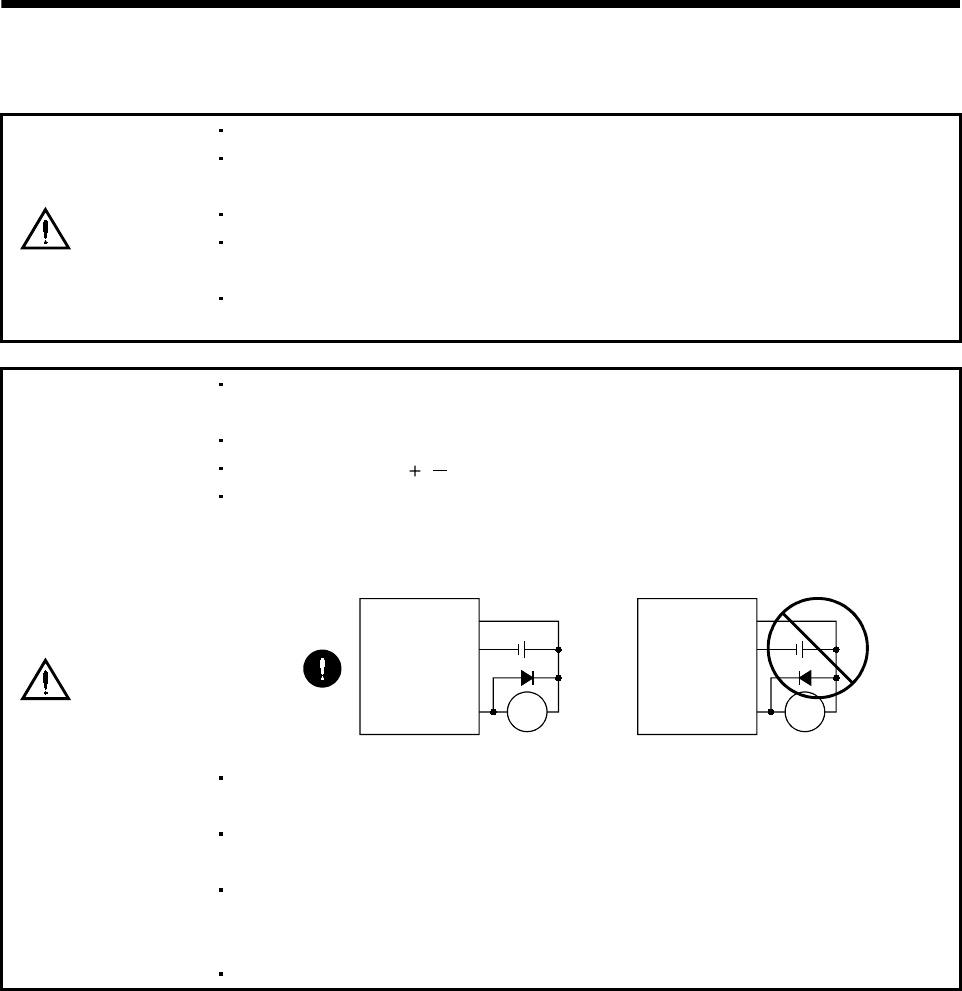
3 - 1
3. SIGNALS AND WIRING
3. SIGNALS AND WIRING
WARNING
Any person who is involved in wiring should be fully competent to do the work.
Before starting wiring, make sure that the voltage is safe in the tester more than 10
minutes after power-off. Otherwise, you may get an electric shock.
Ground the base unit and the servo motor securely.
Do not attempt to wire each unit and servo motor until they have been installed.
Otherwise, you may get an electric shock.
The cables should not be damaged, stressed excessively, loaded heavily, or
pinched. Otherwise, you may get an electric shock.
CAUTION
Wire the equipment correctly and securely. Otherwise, the servo motor may
misoperate, resulting in injury.
Connect cables to correct terminals to prevent a burst, fault, etc.
Ensure that polarity ( , ) is correct. Otherwise, a burst, damage, etc. may occur.
The surge absorbing diode installed to the DC relay designed for control output
should be fitted in the specified direction. Otherwise, the signal is not output due to
a fault, disabling the forced stop and other protective circuits.
Interface unit
Control output
signal
VIN
SG
VIN
SG
RARA
Interface unit
Control output
signal
Use a noise filter, etc. to minimize the influence of electromagnetic interference,
which may be given to electronic equipment used near each unit.
Do not install a power capacitor, surge suppressor or radio noise filter (FR-BIF
option) with the power line of the servo motor.
When using the regenerative brake resistor, switch power off with the alarm signal.
Otherwise, a transistor fault or the like may overheat the regenerative brake
resistor, causing a fire.
Do not modify the equipment.
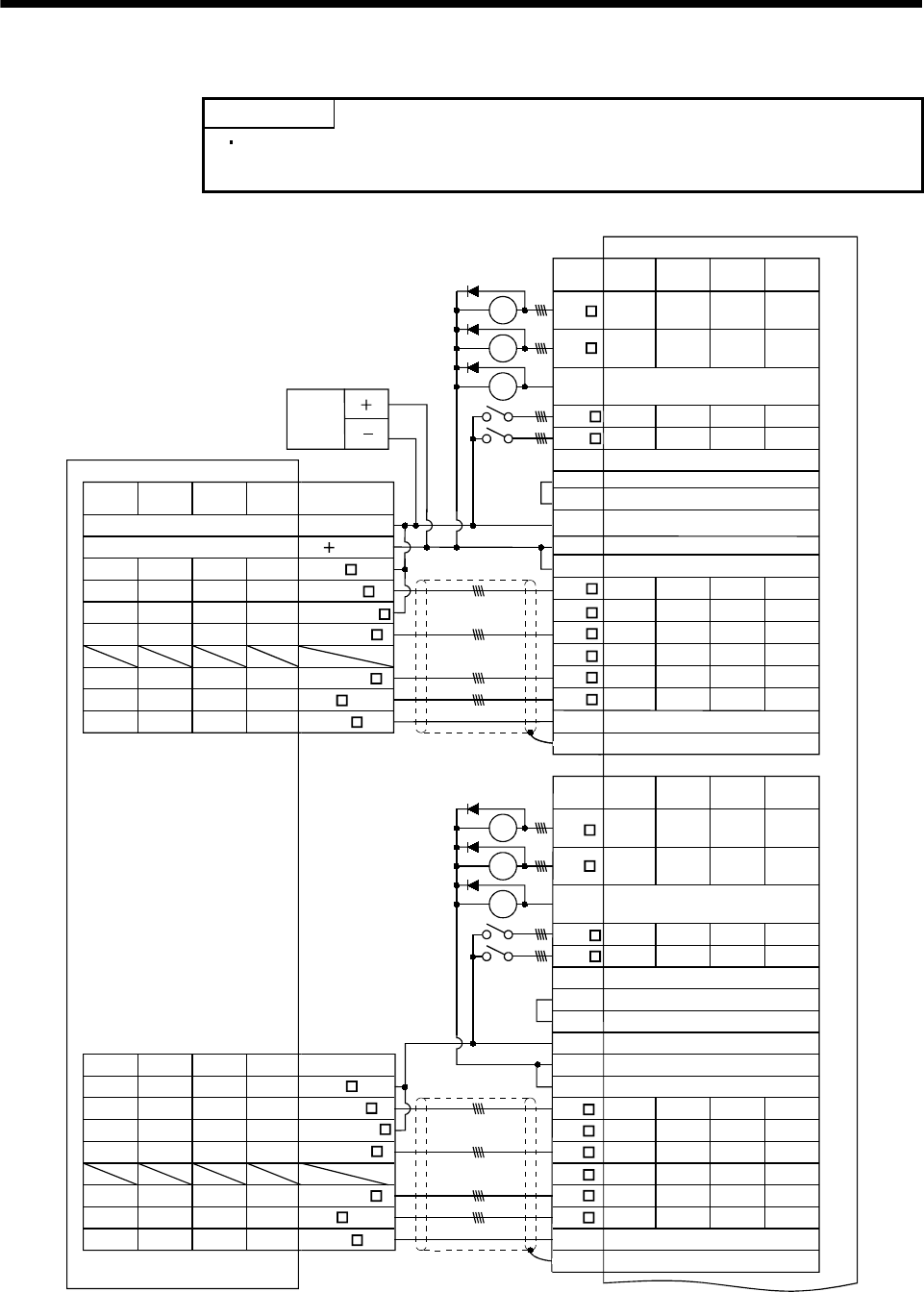
3 - 2
3. SIGNALS AND WIRING
3.1 Control signal line connection example
POINT
Refer to Section 3.4 for connection of the power supply line and to Section
3.5 for connection with servo motors.
SON
CR
RES
SG
VIN
OPC
RD
ALM_B
INP
LG
P5
OP_VIN
PG
PP
NP
NG
OP
SD
LG
SON
CR
RES
SG
VIN
OPC
P5
OP_VIN
PG
PP
NP
NG
OP
SD
37
36
PULSE F
24G
PULSE COM
29
4
CN1A(Note 4)
1
MR-J2M-P8A
37
12
10
34
9
32
7
31
5
36
26
2
11 33 6 28RD
358303
ALM_A
INP
27
49
47
48
3844 42 40
1319 17 15
1420 18 16
3945 43 41
2225 24 23
A7A4B7B4
A1
A15A13B15B13
B1
RA
RA
RA
A16A14B16B14
A6A3B6B3
29
4
1
12
10
34
9
32
7
31
5
26
2
11 33 6 28
358303
27
49
47
48
3844 42 40
1319 17 15
1420 18 16
3945 43 41
2225 24 23
A7 PULSE F
A4B7B4
A5 PULSE R
A2B5B2
A15 CLEAR
A13B15B13
A16 CLEAR COM
A14B16B14
PULSE COM
A6A3B6B3
RA
RA
RA
CON1
Positioning module
QD70
Slot 1 Slot 2 Slot 3 Slot 4
Slot 1 Slot 2 Slot 3 Slot 4
Slot 5 Slot 6 Slot 7 Slot 8
Slot 5 Slot 6 Slot 7 Slot 8
24VDC
power
supply
(Note 13)
Symbol
24V
CLEAR COM
CLEAR
Symbol
Plate
(Note 8)
(Note 7)
(Note 2)
(Note 13) CN1B(Note 4)
Symbol
Symbol
Plate
21, 46, 50
21, 46, 50
(Note 8)
(Note 7)
(Note 2)
(Note 13)
B18
B17 B19
B20 A18
A17 A19
PG COM
PG
A20
B18
B17 B19
B20 A18
A17 A19
PG COM
PG
A20
B2 B5 A2 A5 PULSE R
OP_COM
OP_COM
CON2 (Note 13)
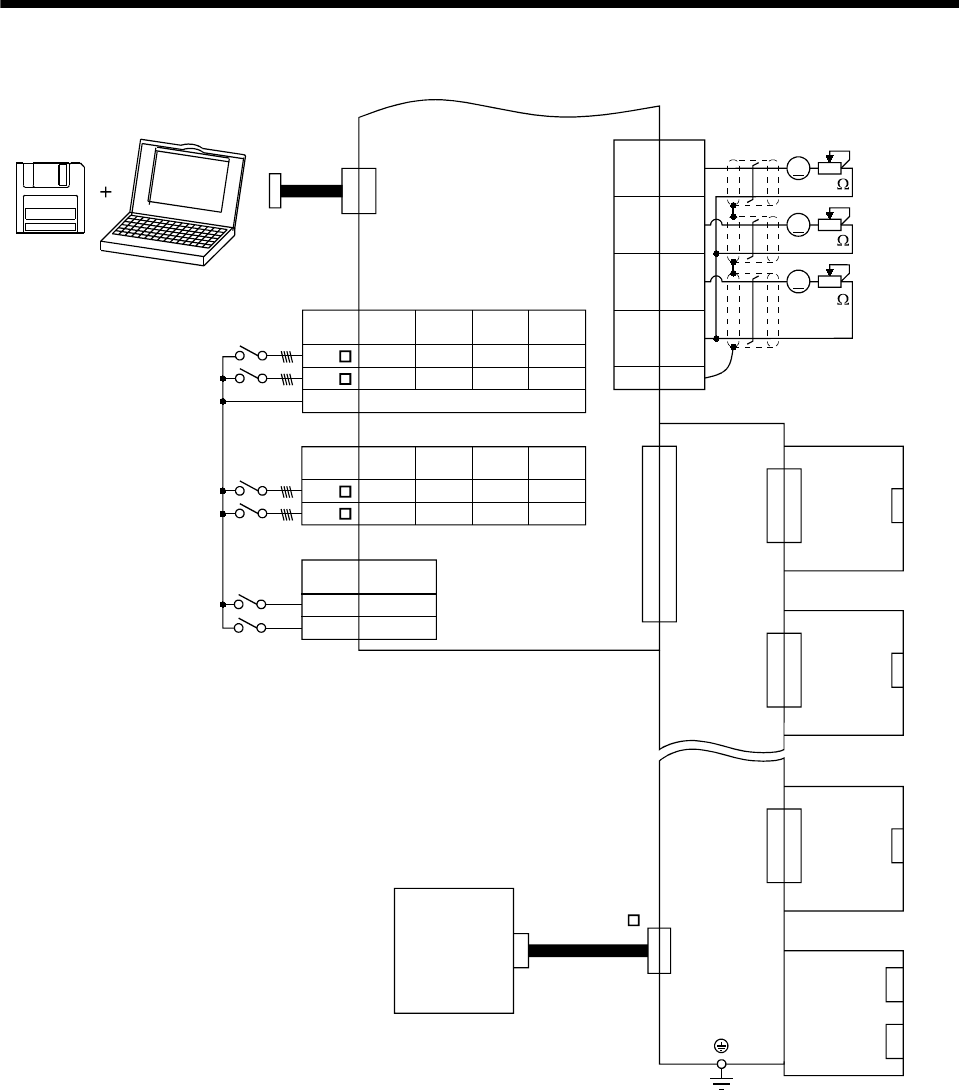
3 - 3
3. SIGNALS AND WIRING
LSP
LSN
LSP
LSN
SG
MR-J2M-BT
MR-J2MBTCBL M
CN5
CN5
11
12
13
14
15
16
17
18
4MO1
(Note 5)CN3
SD
14 MO2
7MO3
11 LG
A
A
A
CON3A
CON4 CN4A
CN4B
MR-J2M-P8A
CN3
CON3B
CON3H
8
1
2
3
4
5
6
7
10
(Note 9)
MR Configurator
(servo
configuration
software)
Personal computer
Communication
cable
(Note 12)
Monitor
output
Max. +1mA
meter
Zero-center
Base unit
Drive unit
Drive unit
Drive unit
(Note 11)
Battery unit
(Note 1)
(Note 10)MR-J2M-D01
(Note 5) CN2
(Slot 8)
(Note 5) CN2
(Slot 2)
(Slot 1) (Note 5) CN2
Plate
Symbol Slot 1 Slot 2 Slot 3 Slot 4
(Note 13)
(Note 6)
(Note 6)
(Note 13)
Symbol Slot 5 Slot 6 Slot 7 Slot 8
10k
10k
10k
EMG_B
EMG_A 20
19
Symbol Slot 1 to 8
CN5
(Note 3, 6)

3 - 4
3. SIGNALS AND WIRING
Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal (terminal marked ) of the base unit to the
protective earth (PE) of the control box.
2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will be faulty and will not output signals,
disabling the forced stop and other protective circuits.
3. The forced stop switch (normally closed contact) must be installed.
4. CN1A CN1B, CN4A CN4B have the same shape. Wrong connection of the connectors will lead to a fault.
5. CN2 and CN3 have the same shape. Wrong connection of the connectors can cause a fault.
6. When starting operation, always connect the forced stop (EMG_A) and forward/reverse rotation stroke end (LSN /LSP ) with
SG. (Normally closed contacts)
7. Trouble (ALM_ ) is connected with COM in normal alarm-free condition. When this signal is switched off (at occurrence of an
alarm), the output of the programmable controller should be stopped by the sequence program.
8. Always connect P5-OP_VIN when using the 5V output (P5). Keep them open when supplying external power.
9. Use MRZJW3-SETUP151E.
10. Refer to Section 3.3 for the MR-J2M-D01 extension IO unit.
11. The MR-J2M-BT battery unit is required to configure an absolute position detection system. Refer to Chapter 14 for details.
12. When connecting the personal computer together with monitor outputs 1, 2, use the maintenance junction card (MR-J2CN3TM).
(Refer to Section 12.1.2)
13. in Symbol indicates a slot number.
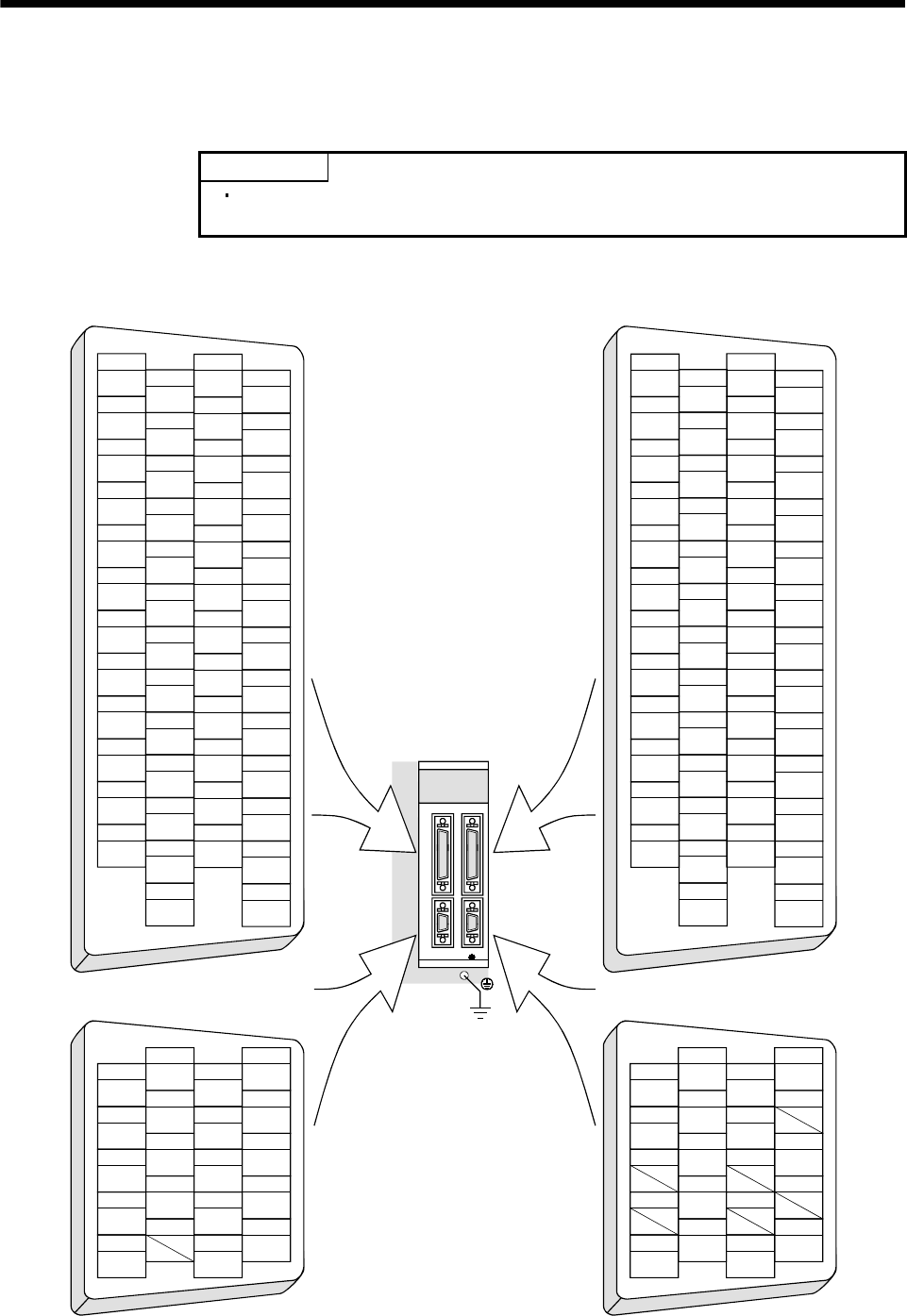
3 - 5
3. SIGNALS AND WIRING
3.2 I/O signals of interface unit
3.2.1 Connectors and signal arrangements
POINT
The connector pin-outs shown above are viewed from the cable connector
wiring section side.
(1) Signal arrangement
CN1BCN1A
CN5
LSN1
2
LSN2
4
LSN3
6
SG
8
LSN4
10
LSP1
1
LSP2
3
LSP3
5
LSP4
7
9
LSN5
12
LSN6
14
LSN7
16
LSN8
18
EMG_A
20
LSP5
11
LSP6
13
LSP7
15
LSP8
17
EMG_B
19
CN3
RXD
2
MO1
4
6
8
TRE
10
LG
1
LG
3
RDP
5
MO3
7
9
TXD
12
MO2
14
16
18
P5
20
LG
11
13
RDN
15
17
SDN
19
SDP
MR-J2M-P8A
The connector frames are
connected with the PE (earth)
terminal inside the servo amplifier.
SG
1
INP4
3
SON4
5
CR3
7
RES2
9
RD1
11
PP4
13
PP3
15
PP2
17
PP1
19
LG
21
OP3
23
OP1
25
OPC
2
RES4
4
RD3
6
INP2
8
SON2
10
CR1
12
NP4
14
NP3
16
NP2
18
NP1
20
OP4
22
OP2
24
VIN
26
RD4
28
INP3
30
SON3
32
CR2
34
RES1
36
PG4
38
PG3
40
PG2
42
PG1
44
LG
46
OP_COM
48
LG
50
ALM_A
27
CR4
29
RES3
31
RD2
33
INP1
35
SON1
37
NG4
39
NG3
41
NG2
43
NG1
45
47
P5
49
OP_VIN
SG
1
INP8
3
SON8
5
CR7
7
RES6
9
RD5
11
PP8
13
PP7
15
PP6
17
PP5
19
LG
21
OP7
23
OP5
25
OPC
2
RES8
4
RD7
6
INP6
8
SON6
10
CR5
12
NP8
14
NP7
16
NP6
18
NP5
20
OP8
22
OP6
24
VIN
26
RD8
28
INP7
30
SON7
32
CR6
34
RES5
36
PG8
38
PG7
40
PG6
42
PG5
44
LG
46
OP_COM
48
LG
50
ALM_B
27
CR8
29
RES7
31
RD6
33
INP5
35
SON5
37
NG8
39
NG7
41
NG6
43
NG5
45
47
P5
49
OP_VIN
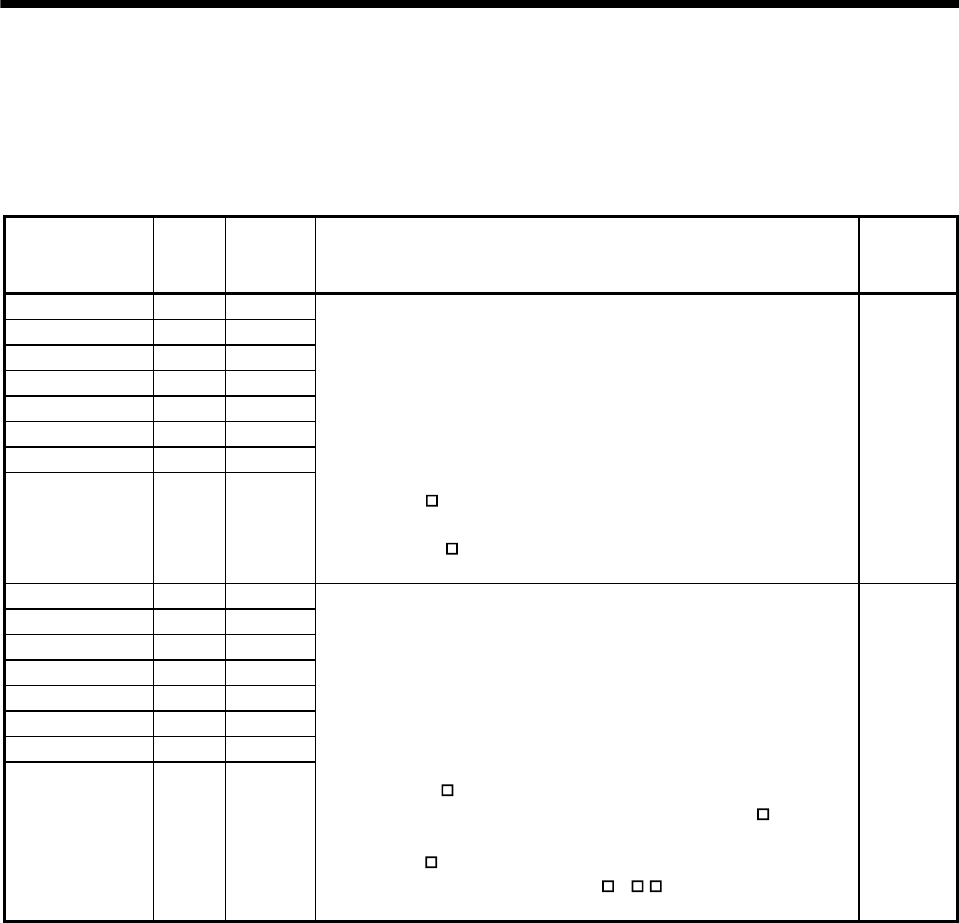
3 - 6
3. SIGNALS AND WIRING
3.2.2 Signal explanations
For the I/O interfaces (symbols in I/O column in the table), refer to Section 3.2.5.
The pin No.s in the connector pin No. column are those in the initial status.
(1) Input signals
Signal Symbol Connector
pin No. Functions/Applications I/O division
Servo-on 1 SON 1 CN1A-37
Servo-on 2 SON 2 CN1A-10
Servo-on 3 SON 3 CN1A-32
Servo-on 4 SON 4 CN1A-5
Servo-on 5 SON 5 CN1B-37
Servo-on 6 SON 6 CN1B-10
Servo-on 7 SON 7 CN1B-32
Servo-on 8 SON 8 CN1B-5
SON 1: Servo-on signal for slot 1
SON 2: Servo-on signal for slot 2
SON 3: Servo-on signal for slot 3
SON 4: Servo-on signal for slot 4
SON 5: Servo-on signal for slot 5
SON 6: Servo-on signal for slot 6
SON 7: Servo-on signal for slot 7
SON 8: Servo-on signal for slot 8
Connect SON -SG to switch on the base circuit and make the servo
amplifier ready to operate (servo-on).
Disconnect SON -SG to shut off the base circuit and coast the servo
motor (servo off).
DI-1
Reset 1 RES 1 CN1A-36
Reset 2 RES 2 CN1A-9
Reset 3 RES 3 CN1A-31
Reset 4 RES 4 CN1A-4
Reset 5 RES 5 CN1B-36
Reset 6 RES 6 CN1B-9
Reset 7 RES 7 CN1B-31
Reset 8 RES 8 CN1B-4
RES 1: Reset signal for slot 1
RES 2: Reset signal for slot 2
RES 3: Reset signal for slot 3
RES 4: Reset signal for slot 4
RES 5: Reset signal for slot 5
RES 6: Reset signal for slot 6
RES 7: Reset signal for slot 7
RES 8: Reset signal for slot 8
Disconnect RES -SG for more than 50ms to reset the alarm.
Some alarms cannot be deactivated by the reset (RES ). Refer to
Section 9.2.
Shorting RES -SG in an alarm-free status shuts off the base circuit.
The base circuit is not shut off when " 1 " is set in DRU
parameter No. 51 (Function selection 6).
DI-1
3 - 7
3. SIGNALS AND WIRING
Signal Symbol Connector
pin No. Functions/Applications I/O division
Forward rotation
stroke end 1
LSP 1 CN5-1
Forward rotation
stroke end 2
LSP 2 CN5-3
Forward rotation
stroke end 3
LSP 3 CN5-5
Forward rotation
stroke end 4
LSP 4 CN5-7
Forward rotation
stroke end 5
LSP 5 CN5-11
Forward rotation
stroke end 6
LSP 6 CN5-13
Forward rotation
stroke end 7
LSP 7 CN5-15
Forward rotation
stroke end 8
LSP 8 CN5-17
Reverse rotation
stroke end 1
LSN 1 CN5-2
Reverse rotation
stroke end 2
LSN 2 CN5-4
LSP 1: Forward rotation stroke end signal for slot 1
LSP 2: Forward rotation stroke end signal for slot 2
LSP 3: Forward rotation stroke end signal for slot 3
LSP 4: Forward rotation stroke end signal for slot 4
LSP 5: Forward rotation stroke end signal for slot 5
LSP 6: Forward rotation stroke end signal for slot 6
LSP 7: Forward rotation stroke end signal for slot 7
LSP 8: Forward rotation stroke end signal for slot 8
LSN 1: Reverse rotation stroke end signal for slot 1
LSN 2: Reverse rotation stroke end signal for slot 2
LSN 3: Reverse rotation stroke end signal for slot 3
LSN 4: Reverse rotation stroke end signal for slot 4
LSN 5: Reverse rotation stroke end signal for slot 5
LSN 6: Reverse rotation stroke end signal for slot 6
LSN 7: Reverse rotation stroke end signal for slot 7
LSN 8: Reverse rotation stroke end signal for slot 8
To start operation, short LSP -SG and/or LSN -SG. Open them to
bring the motor to a sudden stop and make it servo-locked.
Set " 1" in parameter No. 22 (Function selection 4) to make a
slow stop.
(Refer to Section 5.1.2.)
(Note) Input signals OperationReverse rotation
stroke end 3
LSN 3 CN5-6
LSP LSN CCW
direction
CW
direction
Reverse rotation
stroke end 4
LSN 4 CN5-10
11
01Reverse rotation
stroke end 5
LSN 5 CN5-12
10
00Reverse rotation
stroke end 6
LSN 6 CN5-14
Reverse rotation
stroke end 7
LSN 7 CN5-16
Reverse rotation
stroke end 8
LSN 8 CN5-18
Note. 0: LSP /LSN -SG off (open)
1: LSP /LSN -SG on (short)
DI-1
Forced stop A EMG_A CN5-20 EMG_A: Forced stop signal for slots 1 to 8
Forced stop B EMG_B CN5-19 EMG_B: Forced stop signal for slots 1 to 8
Disconnect EMG_ -SG to bring the servo motor to forced stop state, in
which the servo is switched off and the dynamic brake is operated.
Connect EMG_ -SG in the forced stop state to reset that state.
When either of EMG-A and EMG-B is to be used, short the unused
signal with SG.
DI-1
3 - 8
3. SIGNALS AND WIRING
Signal Symbol Connector
pin No. Functions/Applications I/O division
Clear 1 CR 1 CN1A-12
Clear 2 CR 2 CN1A-34
Clear 3 CR 3 CN1A-7
Clear 4 CR 4 CN1A-29
Clear 5 CR 5 CN1B-12
Clear 6 CR 6 CN1B-34
Clear 7 CR 7 CN1B-7
Clear 8 CR 8 CN1B-29
CR 1: Clear signal for slot 1
CR 2: Clear signal for slot 2
CR 3: Clear signal for slot 3
CR 4: Clear signal for slot 4
CR 5: Clear signal for slot 5
CR 6: Clear signal for slot 6
CR 7: Clear signal for slot 7
CR 8: Clear signal for slot 8
Connect CR -SG to clear the position control counter droop pulses on its
leading edge. The pulse width should be 10ms or more.
When the DRU parameter No.42 (Input signal selection 1) setting is " 1
", the pulses are always cleared while CR -SG are connected.
DI-1
Forward rotation
pulse train 1
Reverse rotation
pulse train 1
PP 1
NP 1
PG 1
NG 1
CN1A-19
CN1A-20
CN1A-44
CN1A-45
Forward rotation
pulse train 2
Reverse rotation
pulse train 2
PP 2
NP 2
PG 2
NG 2
CN1A-17
CN1A-18
CN1A-42
CN1A-43
Forward rotation
pulse train 3
Reverse rotation
pulse train 3
PP 3
NP 3
PG 3
NG 3
CN1A-15
CN1A-16
CN1A-40
CN1A-41
Forward rotation
pulse train 4
Reverse rotation
pulse train 4
PP 4
NP 4
PG 4
NG 4
CN1A-13
CN1A-14
CN1A-38
CN1A-39
Forward rotation
pulse train 5
Reverse rotation
pulse train 5
PP 5
NP 5
PG 5
NG 5
CN1B-19
CN1B-20
CN1B-44
CN1B-45
Forward rotation
pulse train 6
Reverse rotation
pulse train 6
PP 6
NP 6
PG 6
NG 6
CN1B-17
CN1B-18
CN1B-42
CN1B-43
Forward rotation
pulse train 7
Reverse rotation
pulse train 7
PP 7
NP 7
PG 7
NG 7
CN1B-15
CN1B-16
CN1B-40
CN1B-41
Forward rotation
pulse train 8
Reverse rotation
pulse train 8
PP 8
NP 8
PG 8
NG 8
CN1B-13
CN1B-14
CN1B-38
CN1B-39
PP 1 NP 1 PG 1 NG 1: Forward/reverse rotation pulse train for slot 1
PP 2 NP 2 PG 2 NG 2: Forward/reverse rotation pulse train for slot 2
PP 3 NP 3 PG 3 NG 3: Forward/reverse rotation pulse train for slot 3
PP 4 NP 4 PG 4 NG 4: Forward/reverse rotation pulse train for slot 4
PP 5 NP 5 PG 5 NG 5: Forward/reverse rotation pulse train for slot 5
PP 6 NP 6 PG 6 NG 6: Forward/reverse rotation pulse train for slot 6
PP 7 NP 7 PG 7 NG 7: Forward/reverse rotation pulse train for slot 7
PP 8 NP 8 PG 8 NG 8: Forward/reverse rotation pulse train for slot 8
Used to enter a command pulse train.
In the open collector system (max. input frequency 200kpps):
Forward rotation pulse train across PP -SG
Reverse rotation pulse train across NP -SG
In the differential receiver system (max. input frequency 500kpps):
Forward rotation pulse train across PG -PP
Reverse rotation pulse train across NG -NP
The command pulse train form can be changed using DRU parameter No.
21 (Function selection 3).
DI-2
3 - 9
3. SIGNALS AND WIRING
(2) Output signals
Signal Symbol Connector
pin No. Functions/Applications I/O division
Trouble A ALM_A CN1A-27
Trouble B ALM_B CN1B-27
ALM_A: Alarm signal for slot 1 to 4
ALM_B: Alarm signal for slot 5 to 8
ALM -SG are disconnected when power is switched off or the
protective circuit is activated to shut off the base circuit. Without
alarm, ALM -SG are connected within about 3s after power on.
DO-1
Ready 1 RD 1 CN1A-11
Ready 2 RD 2 CN1A-33
Ready 3 RD 3 CN1A-6
Ready 4 RD 4 CN1A-28
Ready 5 RD 5 CN1B-11
Ready 6 RD 6 CN1B-33
Ready 7 RD 7 CN1B-6
Ready 8 RD 8 CN1B-28
RD 1: Ready signal for slot 1
RD 2: Ready signal for slot 2
RD 3: Ready signal for slot 3
RD 4: Ready signal for slot 4
RD 5: Ready signal for slot 5
RD 6: Ready signal for slot 6
RD 7: Ready signal for slot 7
RD 8: Ready signal for slot 8
RD -SG are connected when the servo is switched on and the servo
amplifier is ready to operate.
DO-1
In position 1 INP 1 CN1A-35
In position 2 INP 2 CN1A-8
In position 3 INP 3 CN1A-30
In position 4 INP 4 CN1A-3
In position 5 INP 5 CN1B-35
In position 6 INP 6 CN1B-8
In position 7 INP 7 CN1B-30
In position 8 INP 8 CN1B-3
INP 1: In position signal for slot 1
INP 2: In position signal for slot 2
INP 3: In position signal for slot 3
INP 4: In position signal for slot 4
INP 5: In position signal for slot 5
INP 6: In position signal for slot 6
INP 7: In position signal for slot 7
INP 8: In position signal for slot 8
INP -SG are connected when the number of droop pulses is in the
preset in-position range. The in-position range can be changed using
DRU parameter No. 5.
When the in-position range is increased, INP -SG may be kept
connected during low-speed rotation.
DO-1
Encoder Z-phase
pulse 1
OP 1 CN1A-25
Encoder Z-phase
pulse 2
OP 2 CN1A-24
Encoder Z-phase
pulse 3
OP 3 CN1A-23
Encoder Z-phase
pulse 4
OP 4 CN1A-22
Encoder Z-phase
pulse 5
OP 5 CN1B-25
Encoder Z-phase
pulse 6
OP 6 CN1B-24
Encoder Z-phase
pulse 7
OP 7 CN1B-23
Encoder Z-phase
pulse 8
OP 8 CN1B-22
OP 1: Encoder Z-phase pulse signal for slot 1
OP 2: Encoder Z-phase pulse signal for slot 2
OP 3: Encoder Z-phase pulse signal for slot 3
OP 4: Encoder Z-phase pulse signal for slot 4
OP 5: Encoder Z-phase pulse signal for slot 5
OP 6: Encoder Z-phase pulse signal for slot 6
OP 7: Encoder Z-phase pulse signal for slot 7
OP 8: Encoder Z-phase pulse signal for slot 8
Outputs the zero-point signal of the encoder. One pulse is output per
servo motor revolution. OP and LG are connected when the zero-point
position is reached. (Negative logic)
The minimum pulse width is about 400 s. For home position return
using this pulse, set the creep speed to 100r/min. or less.
DO-2
Analog monitor 1 MO1 CN3-4 Used to output the data set in IFU parameter No.3 (Analog monitor 1
output) to across MO1-LG in terms of voltage. Resolution 10 bits
Analog
output
Analog monitor 2 MO2 CN3-14 Used to output the data set in IFU parameter No.4 (Analog monitor 2
output) to across MO2-LG in terms of voltage. Resolution 10 bits
Analog
output
Analog monitor 3 MO3 CN3-7 Used to output the data set in IFU parameter No.5 (Analog monitor 3
output) to across MO3-LG in terms of voltage. Resolution 10 bits
Analog
output
3 - 10
3. SIGNALS AND WIRING
(3) Communication
POINT
Refer to Chapter 13 for the communication function.
Signal Symbol Connector
pin No. Functions/Applications
RS-422 I/F SDP
SDN
RDP
RDN
CN3-9
CN3-19
CN3-5
CN3-15
RS-422 and RS-232C functions cannot be used together.
Choose either one in IFU parameter No. 16.
RS-422
termination
TRE CN3-10 Termination resistor connection terminal of RS-422 interface.
When the servo amplifier is the termination axis, connect this terminal to RDN
(CN3-15).
RS-232C I/F RXD
TXD
CN3-2
CN3-12
RS-422 and RS-232C functions cannot be used together.
Choose either one in IFU parameter No. 0.
(4) Power supply
Signal Symbol Connector
pin No. Functions/Applications
Digital I/F power
supply input
VIN CN1A-26
CN1B-26
Driver power input terminal for digital interface.
Input 24VDC (300mA or more) for input interface.
24VDC 10%
Digital I/F
common
SG CN1A-1
CN1B-1
CN5-8
Common terminal of VIN. Pins are connected internally.
Separated from LG.
5V output P5 CN1A-49
CN1B-49
CN3-20
Internal power supply for encoder Z-phase pulses. Connect P5-OP_VIN when using
this power supply as an encoder Z-phase pulse common.
5VDC 5%
Encoder Z-phase
pulse power
supply
OP_VIN CN1A-47
CN1B-47
Power input for encoder Z-phase pulse common. Connect P5-OP_VIN when using
the 5V output (P5) as an encoder Z-phase pulse common. Supply power to OP_VIN
when using an external power supply as an encoder Z-phase pulse common. At this
time, do not connect P5-OP_VIN.
Encoder Z-phase
pulse common OP_COM CN1A-48
CN1B-48
Common for encoder Z-phase pulses. Power input to OP_VIN is output from
OP_COM.
Control common LG CN1A-50
CN1A-46
CN1A-21
CN1B-50
CN1B-46
CN1B-21
CN3-1
CN3-3
CN3-11
CN3-13
Common terminal for MO1, MO2 and MO3.
Shield SD Plate Connect the external conductor of the shield cable.
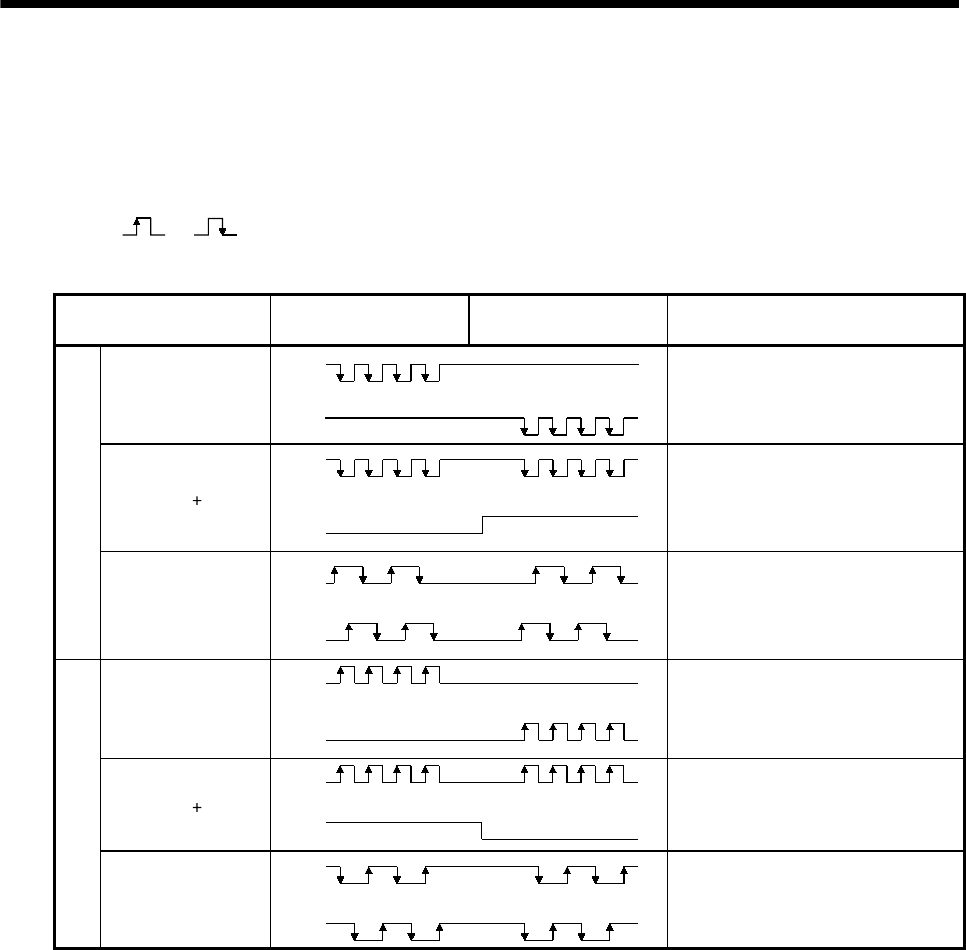
3 - 11
3. SIGNALS AND WIRING
3.2.3 Detailed description of the signals
(1) Pulse train input
(a) Input pulse waveform selection
Encoder pulses may be input in any of three different forms, for which positive or negative logic
can be chosen. Set the command pulse train form in DRU parameter No. 21.
Arrow or in the table indicates the timing of importing a pulse train.
A- and B-phase pulse trains are imported after they have been multiplied by 4.
Pulse train form Forward rotation
command
Reverse rotation
command
DRU parameter No. 21
(Command pulse train)
Forward rotation
pulse train
Reverse rotation
pulse train
PP
NP
0010
Pulse train sign
PP
NP LH
0011
Negative logic
A-phase pulse train
B-phase pulse train
PP
NP
0012
Forward rotation
pulse train
Reverse rotation
pulse train
PP
NP
0000
Pulse train sign
PP
NP HL
0001
Positive logic
A-phase pulse train
B-phase pulse train
PP
NP
0002
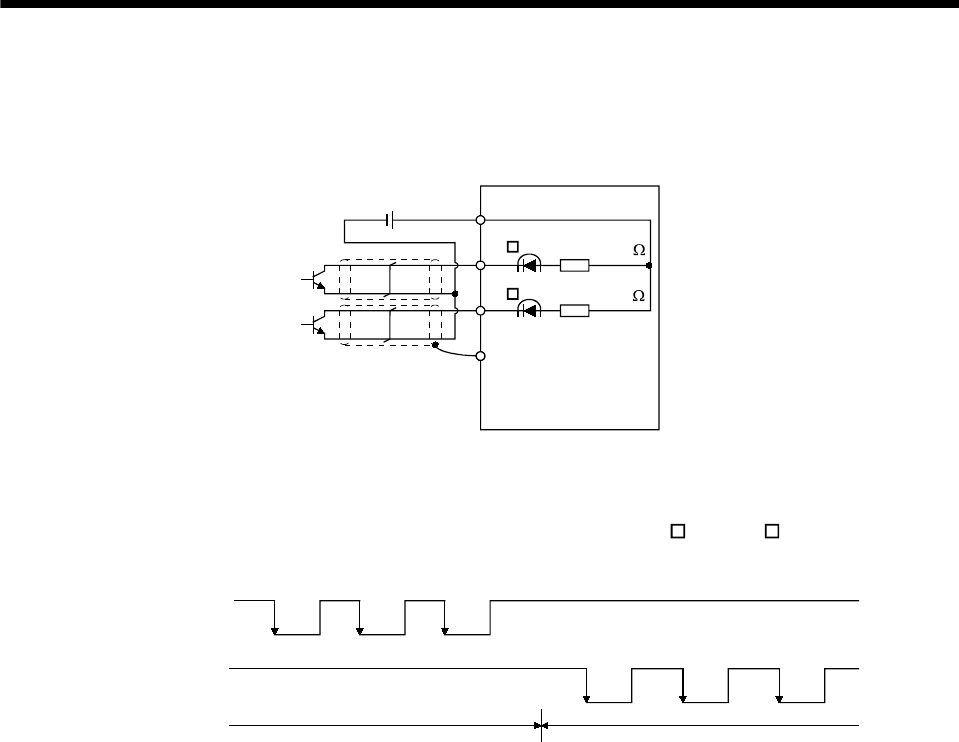
3 - 12
3. SIGNALS AND WIRING
(b) Connections and waveforms
1) Open collector system
Connect as shown below:
SD
OPC
24VDC
Servo amplifier
NP
PP Approx. 1.2k
Approx. 1.2k
The explanation assumes that the input waveform has been set to the negative logic and forward
and reverse rotation pulse trains (DRU parameter No.21 has been set to 0010). The waveforms
in the table in (a), (1) of this section are voltage waveforms of PP and NP based on SG. Their
relationships with transistor ON/OFF are as follows:
(ON)
(OFF) (ON)
(ON) (OFF) (ON) (OFF) (ON)(OFF)
(OFF)(ON)
Forward rotation
pulse train
(transistor)
Reverse rotation
pulse train
(transistor)
Forward rotation command Reverse rotation command
(OFF)
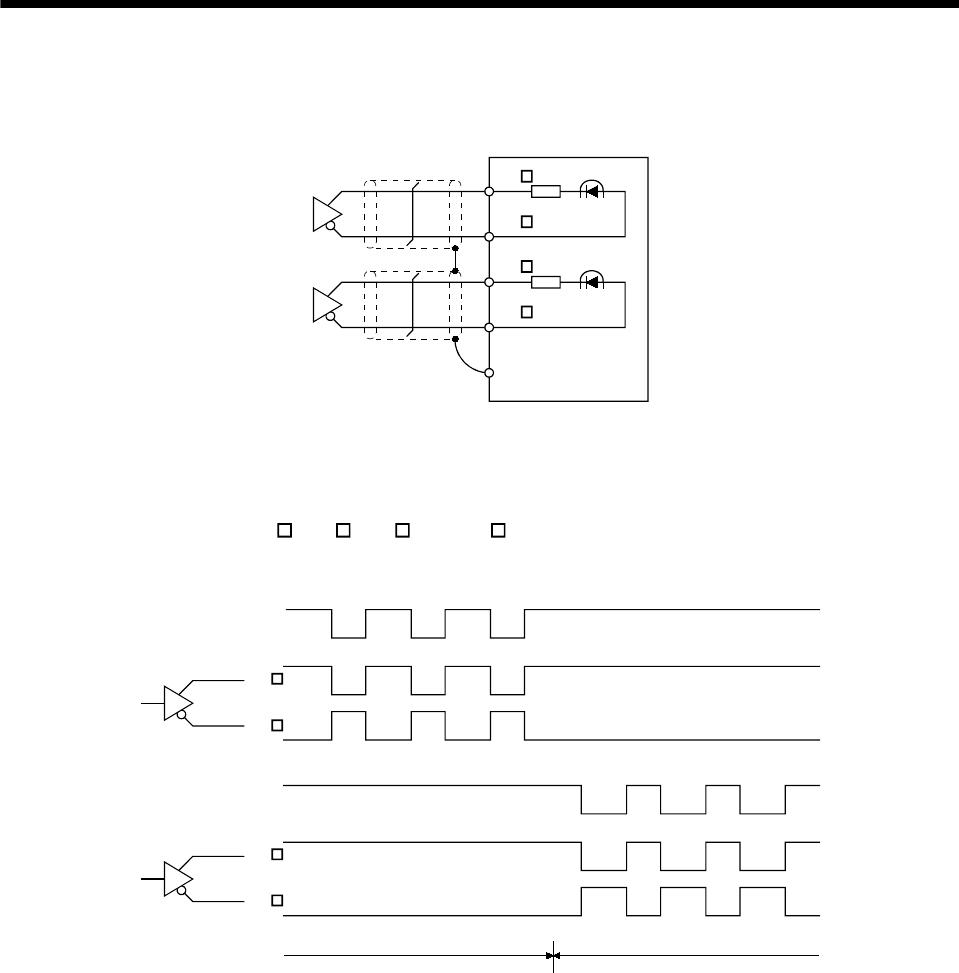
3 - 13
3. SIGNALS AND WIRING
2) Differential line driver system
Connect as shown below:
PP
NP
PG
NG
SD
Servo amplifier
The explanation assumes that the input waveform has been set to the negative logic and forward
and reverse rotation pulse trains (DRU parameter No.21 has been set to 0010).
For the differential line driver, the waveforms in the table in (a), (1) of this section are as follows.
The waveforms of PP , PG , NP and NG are based on that of the ground of the differential
line driver.
PP
PG
NP
NG
Forward rotation
pulse train
Reverse rotation
pulse train
Forward rotation command Reverse rotation command
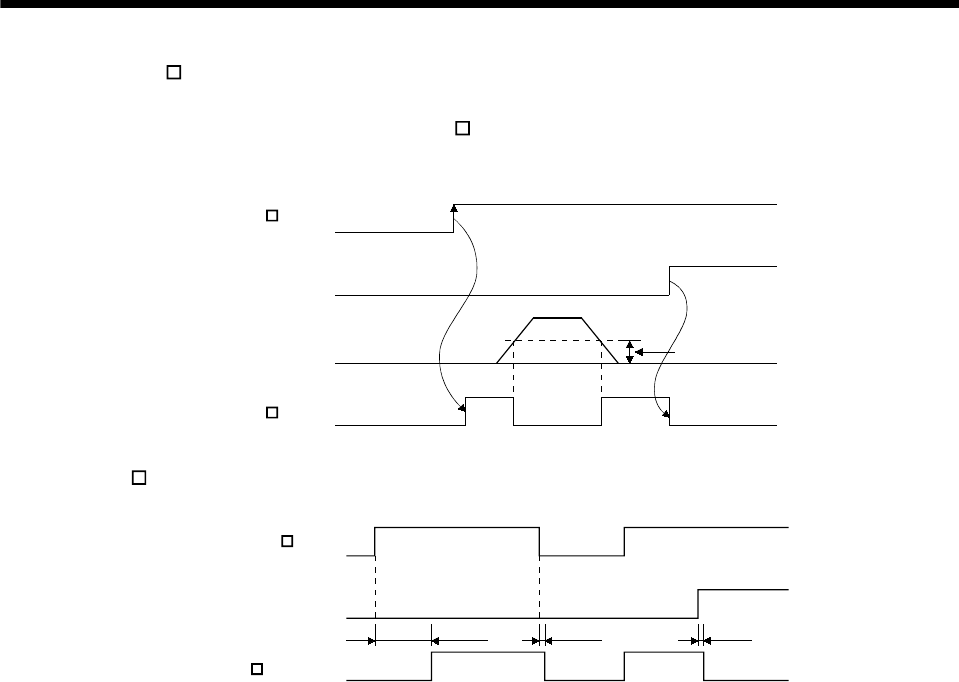
3 - 14
3. SIGNALS AND WIRING
(2) In-position (INP )
PF-SG are connected when the number of droop pulses in the deviation counter falls within the preset
in-position range (DRU parameter No. 5). INP -SG may remain connected when low-speed operation
is performed with a large value set as the in-position range.
ON
OFF
ON
OFF
Servo-on(SON )
A
larm
Droop pulses
In position(INP )
In-position range
Yes
No
(3) Ready (RD )
OFF
ON
OFF
ON
Servo-on(SON )
Alarm
Ready(RD )
Yes
No 100ms less 10ms less 10ms less
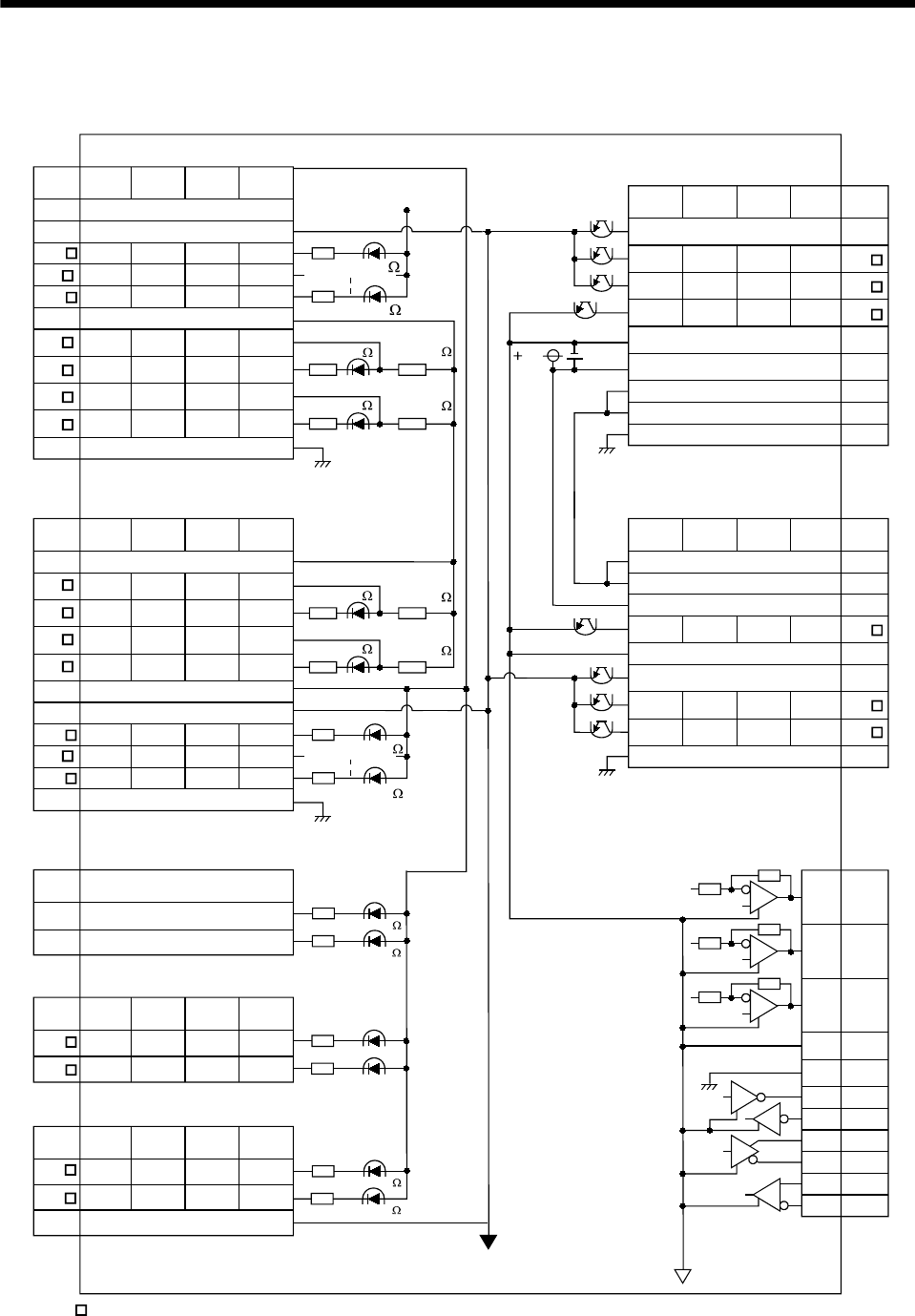
3 - 15
3. SIGNALS AND WIRING
3.2.4 Internal connection diagram
SG
SDN
RDP
RDN
TXD
29
4
1
26
37
12
10
34
9
32
7
31
5
SON
CR
RES
SG
VIN
36
38
13
39
14
44
19
45
20
42
17
43
18
40
15
41
16
PG
PP
NG
NP
SD
OPC 2
38
13
39
14
44
19
45
20
42
17
43
18
40
15
41
16
PG
NG
NP
37
12
10
34
9
32
7
CR
RES 36
29
4
5
31
2
OPC
CN1A
1
MR-J2M-P8A
SG
SD
5VDC
26
VIN
SON
PP P5
OP_COM
11
35
33
8
24
6
30 INP
OP
25
3
22
28
23
LG
SD
27 ALM_A
RD
OP_VIN
49
47
48
ALM_B
25
35
24
8
33
23
30 INP
RD
11
3
28
22
6
LG
SD
47 OP_VIN
OP
27
48 OP_COM
49 P5
MO1
MO2
MO3
LG
SD
RXD
SDP
5
12
2
9
19
15
11
7
14
4
CN1A
CN1BCN1B
CN3
(Note)
symbol slot 1 slot 2 slot 3 slot 4
symbol slot 5 slot 6 slot 7 slot 8
Plate Plate
Plate
Plate
21, 46, 50
21, 46, 50
slot 1 slot 2 slot 3 slot 4 symbol
Approx.6.8k
Approx.6.8k
Approx.1.2k
Approx.100
Approx.100 Approx.1.2k
(Note)
6
LSP
LSN
1357
24 10
CN5
symbol slot 1 slot 2 slot 3 slot 4
(Note)
LSP
LSN
11 13 15 17
12 14 16 18
8
CN5
symbol slot 5 slot 6 slot 7 slot 8
(Note)
Approx.100
Approx.100
Approx.1.2k
Approx.1.2k
Approx.6.8k
Approx.6.8k
Approx.6.8k
Approx.6.8k
Approx.6.8k
Approx.6.8k
(Note)
slot 5 slot 6 slot 7 slot 8 symbol
(Note)
5V
Plate
Note. in Symbol indicates the slot number.
CN5
EMG_A 20
19
symbol slot 1 to 8
EMG_B
Approx.6.8k
Approx.6.8k
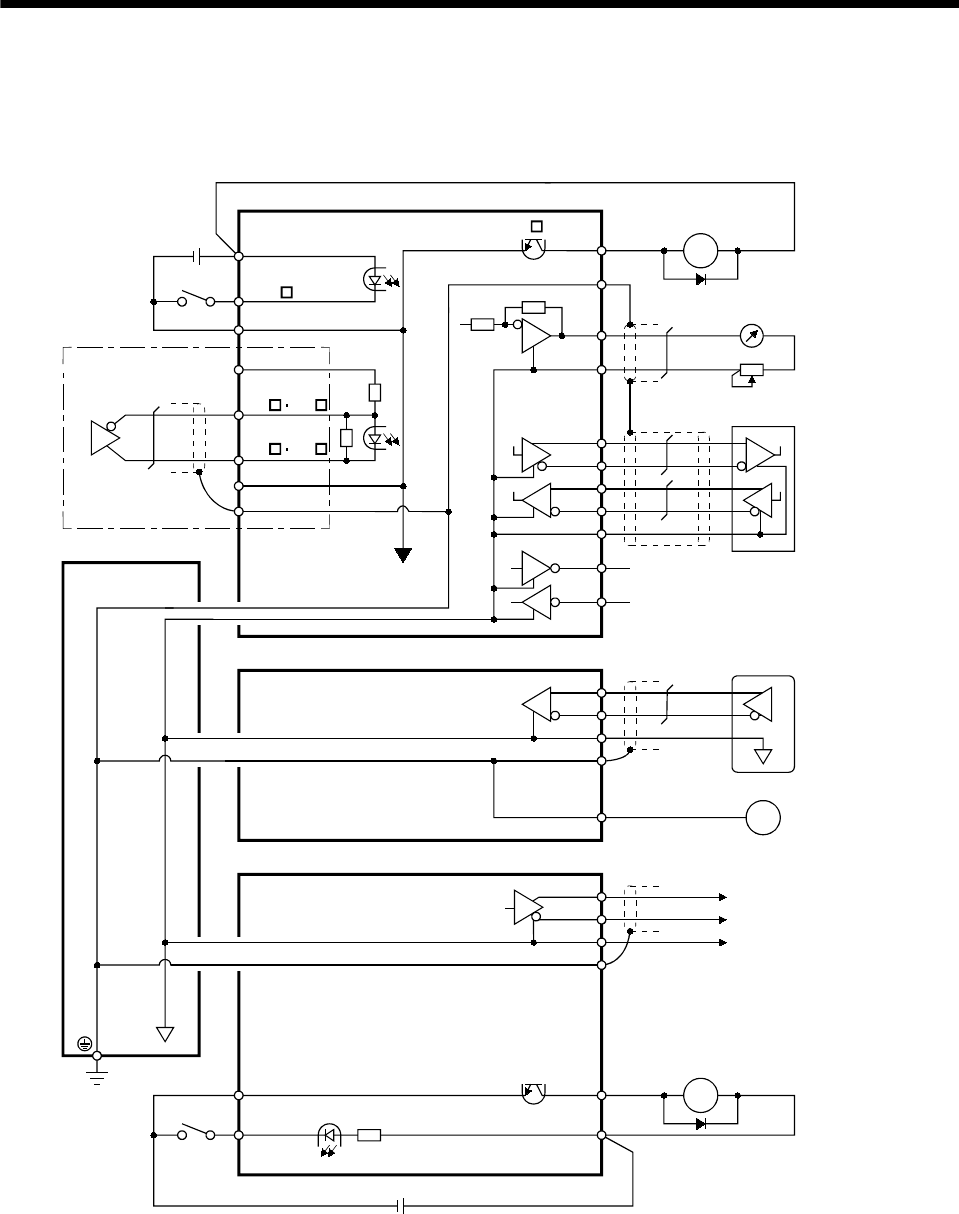
3 - 16
3. SIGNALS AND WIRING
3.2.5 Interface
(1) Common line
The following diagram shows the power supply and its common line.
PG NG
MR
OPC
SD
SG
LG
SD
SG
VIN
24VDC
DI-1
RA
SDP
SDN
RDP
RDN
LG
TXD
RXD RS-232C
MRR
LG
SD
M
E
LG
SD
SG
EM1
DI-1
RA
VIN
MBR
RS-422
24VDC
Interface unit
(Note)
Analog monitor output
INP , etc.
Base unit
Drive unit Servo motor encoder
Servo motor
Differential line driver outpu
t
Extension IO unit
Ground
SON , etc.
PG NP
MO3
MO1
MO2
LA, etc.
LAR, etc. 35mA max.
Note. Assumes a differential line driver pulse train input.
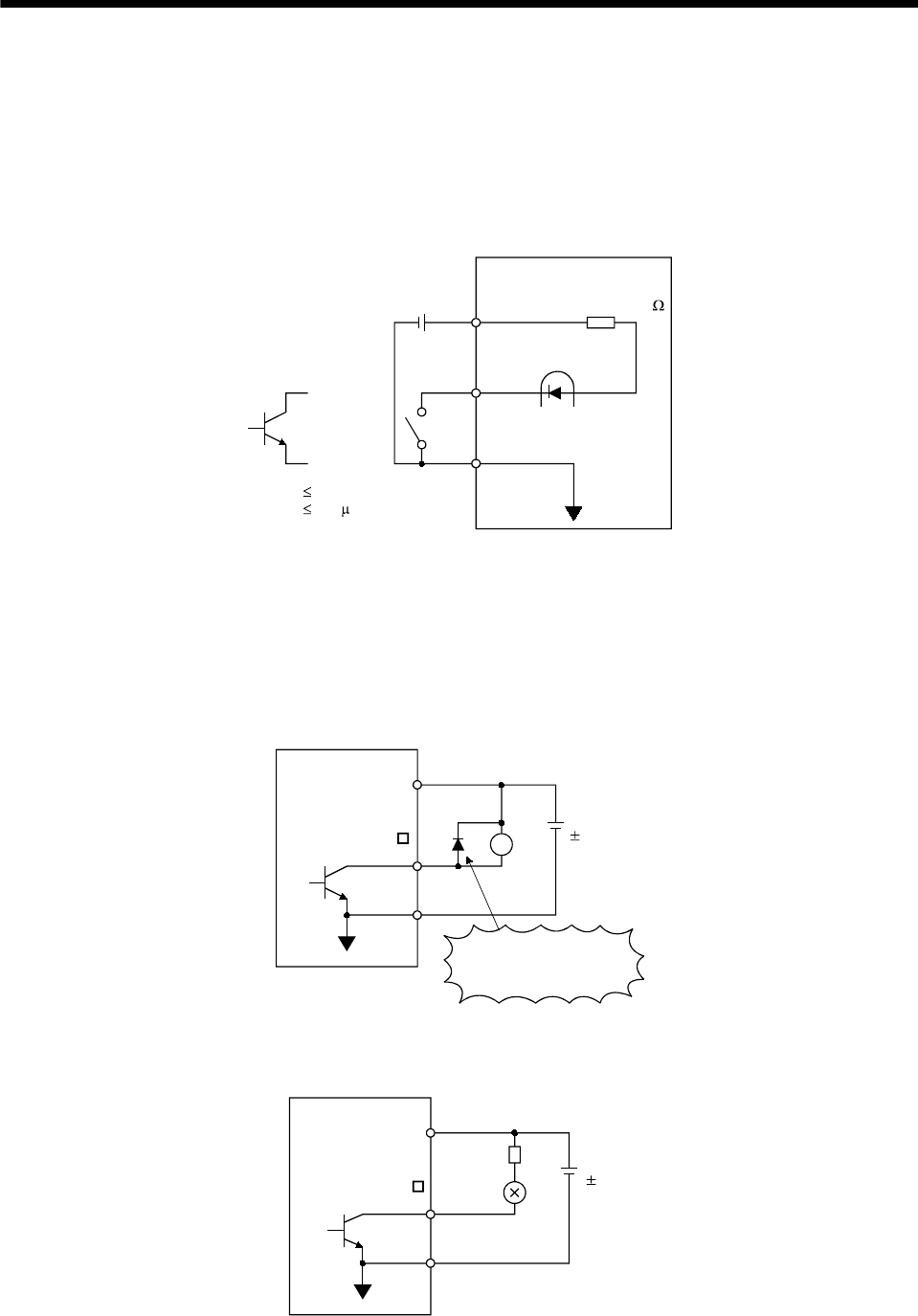
3 - 17
3. SIGNALS AND WIRING
(2) Detailed description of the interfaces
This section gives the details of the I/O signal interfaces (refer to I/O Division in the table) indicated in
Sections 3.2.2.
Refer to this section and connect the interfaces with the external equipment.
(a) Digital input interface DI-1
Give a signal with a relay or open collector transistor.
VCES 1.0V
I CE0 100 A
Interface unit
R: Approx. 4.7k
24VDC
300mA or more VIN
SON
etc.
SG
Switch
For transistor
Approx. 5mA
TR
(b) Digital output interface DO-1
A lamp, relay or photocoupler can be driven. Provide a diode (D) for an inductive load, or an inrush
current suppressing resister (R) for a lamp load. (Permissible current: 40mA or less, inrush
current: 100mA or less)
1) Inductive load
VIN
SG
24VDC
10%
Interface unit
Load
Opposite polarity of diode
will fail interface unit.
ALM_
etc.
2) Lamp load
VIN
R
SG
Interface unit
24VDC
10%
ALM_
etc.
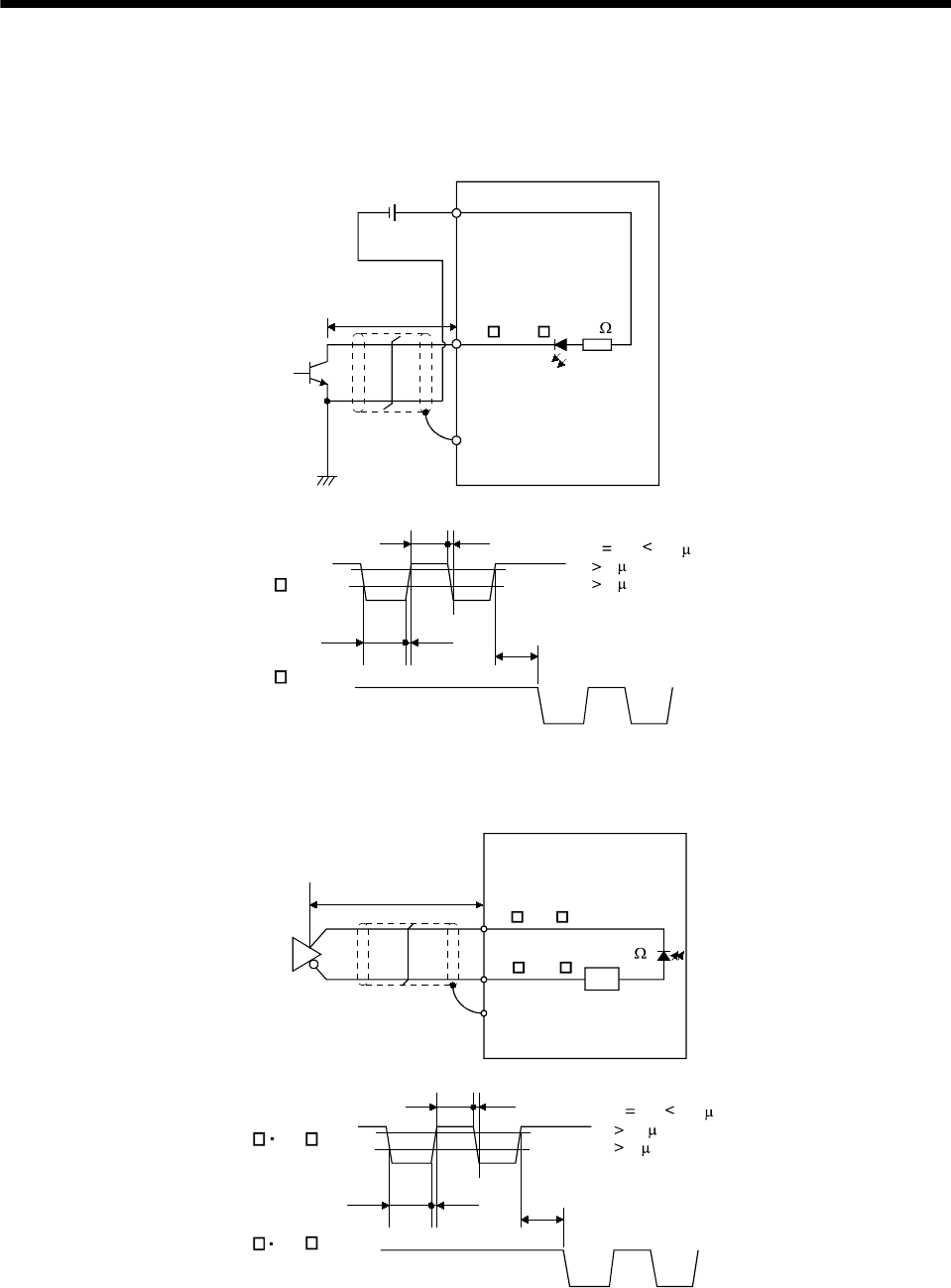
3 - 18
3. SIGNALS AND WIRING
(c) Pulse train input interface DI-2
Give a pulse train signal in an open collector or differential line driver system.
1) Open collector system
OPC
SD
24VDC
Interface unit
Max. input pulse
frequency 200kpps
Approx.
1.2k
PP , NP
2m(78.74in)
or less
tLH tHL 0.2 s
tc 2 s
tF 3 s
0.9
0.1
tc tHL
tc tLH tF
PP
NP
2) Differential line driver system
SD
Max. input pulse
frequency 500kpps
Interface unit
A
m26LS31 or equivalent
About 100
10m (393.70in) or less
PG (NG )
PP (NP )
tLH tHL 0.1 s
tc 0.7 s
tF 3 s
0.9
0.1
tc tHL
tc tLH tF
PP PG
NP NG
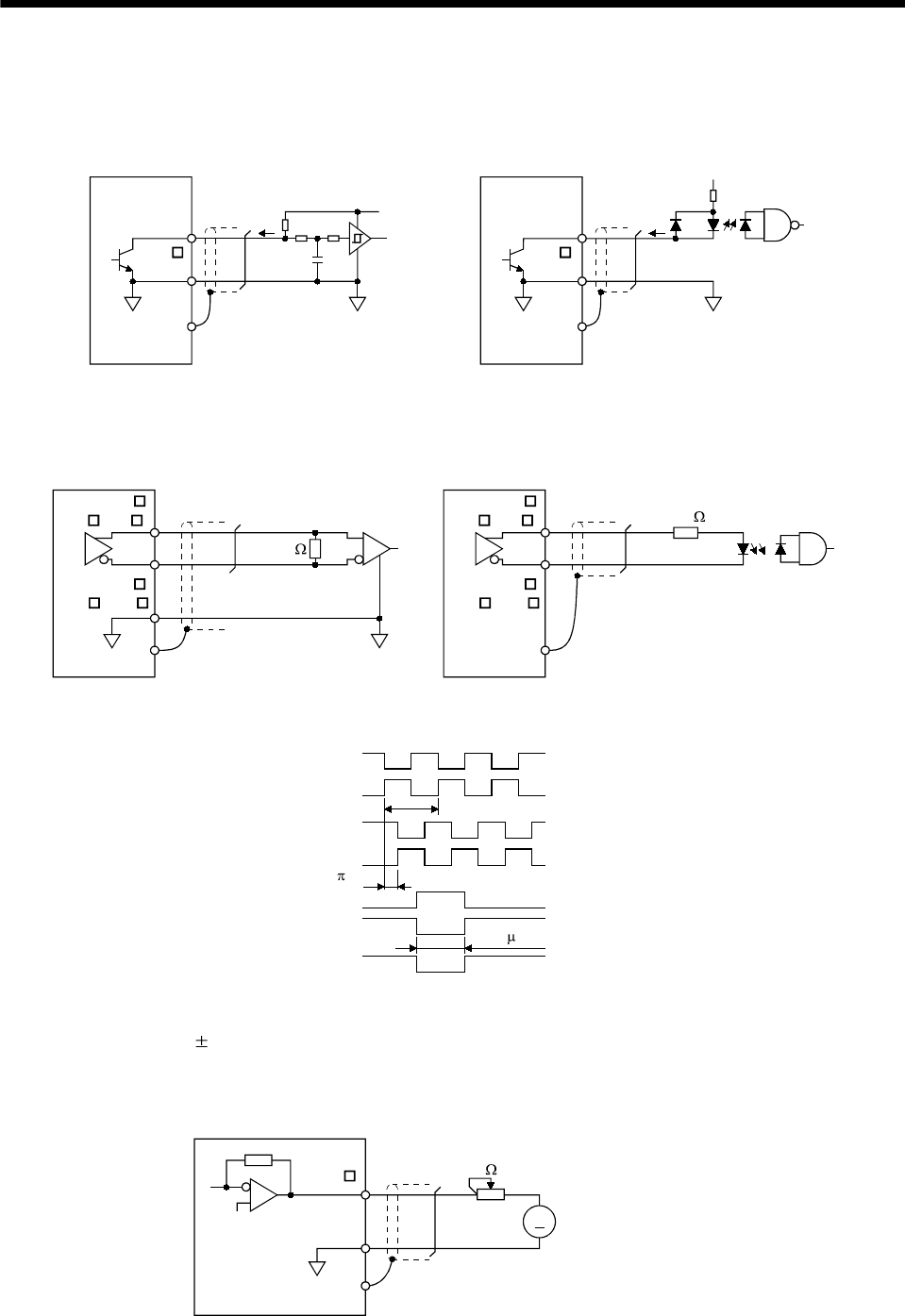
3 - 19
3. SIGNALS AND WIRING
(d) Encoder pulse output DO-2
1) Open collector system
Max. intake current 35mA
LG
SD
LG
SD
Interface unit Interface unit
OP OP Photocoupler
5 to 24VDC
2) Differential line driver system
Max. output current 35mA
LG
SD SD
extension IO unit extension IO unit
Am26LS32 or equivalent
LA
(LB , LZ )
LAR
(LBR , LZR )
150
100
LA
(LB , LZ )
LAR
(LBR , LZR )
High-speed
photocouple
r
LZR
LA
LAR
LB
LBR
OP
LZ
T
/2
400 s or more
Sarvo motor CCW rotation
(e) Analog output
Output voltage: 4V
Max. output current: 0.5mA
Resolution: 10bit
SD
LG
Interface unit
MO 10k
Reading in one or both
directions 1mA meter.
A
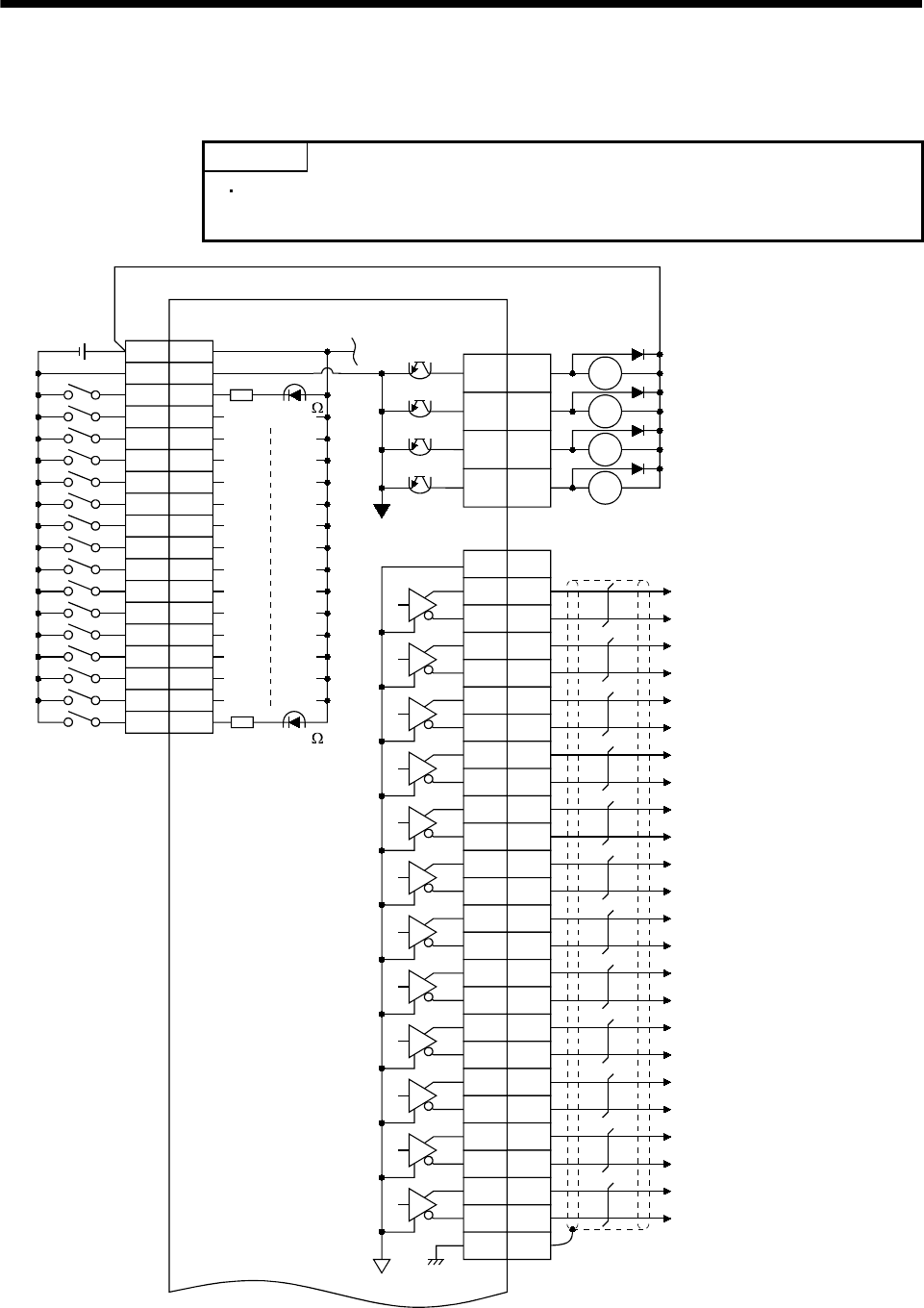
3 - 20
3. SIGNALS AND WIRING
3.3 Signal and wiring for extension IO unit
3.3.1 Connection example
POINT
The pins without symbols can be assigned any devices using the MR
Configurator (servo configuration software).
RA2
RA4
RA19
10
34
35
MR-J2M-D01
RA3
LA1
LG
LAR1
LB1
LBR1
LZ1
LZR1
LA2
LAR2
LB2
LBR2
LZ2
LZR2
LA3
LAR3
LB3
LBR3
LZ3
LZR3
LA4
LAR4
LB4
LBR4
39 LZ4
14 LZR4
SD
SG
1
2
3
4
5
6
7
8
26
27
28
29
30
31
32
33
VIN
50
25
49
24
48
23
47
22
46
21
45
20
44
19
43
18
42
17
41
16
40
15
CN4B-11
(Note 3)
24VDC
(Note 2)
CN4A
11, 36
12, 37
Approx. 6.8k
Approx. 6.8k
(Note 2)
CN4A (Note 1)
(Note 2)
CN4A
13, 38
plate
Encoder A-phase pulse 1
(Differential line driver system)
Encoder B-phase pulse 1
(Differential line driver system)
Encoder Z-phase pulse 1
(Differential line driver system)
Encoder A-phase pulse 2
(Differential line driver system)
Encoder B-phase pulse 2
(Differential line driver system)
Encoder Z-phase pulse 2
(Differential line driver system)
Encoder A-phase pulse 3
(Differential line driver system)
Encoder B-phase pulse 3
(Differential line driver system)
Encoder Z-phase pulse 3
(Differential line driver system)
Encoder A-phase pulse 4
(Differential line driver system)
Encoder B-phase pulse 4
(Differential line driver system)
Encoder Z-phase pulse 4
(Differential line driver system)
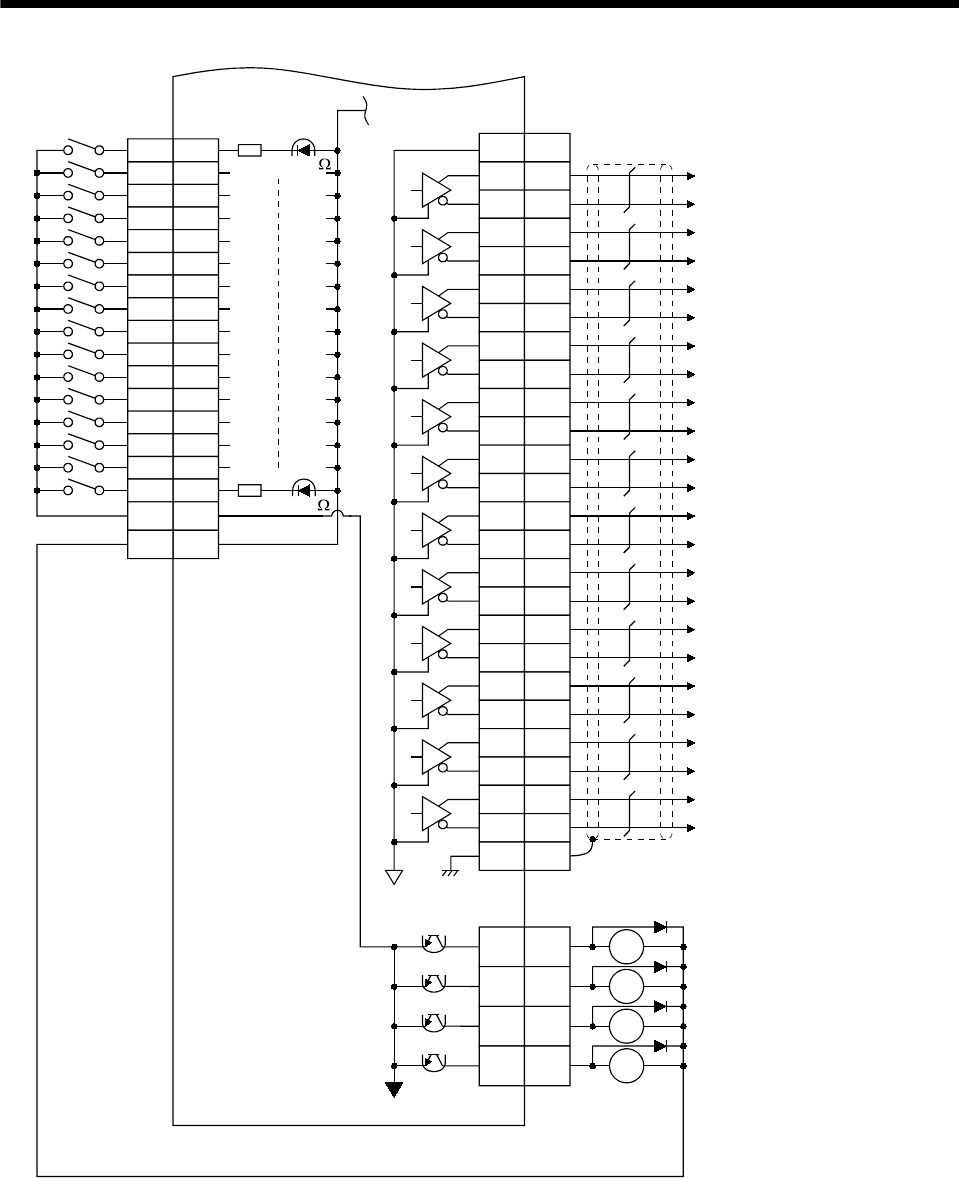
3 - 21
3. SIGNALS AND WIRING
RA8
RA10
RA7
9
10
34
35
MR-J2M-D01
RA9
50 LA5
LG
25 LAR5
49 LB5
24 LBR5
48 LZ5
23 LZR5
47 LA6
22 LAR6
46 LB6
21 LBR6
45 LZ6
20 LZR6
44 LA7
19 LAR7
43 LB7
18 LBR7
42 LZ7
17 LZR7
41 LA8
16 LAR8
40 LB8
15 LBR8
39 LZ8
14 LZR8
SD
1
2
3
4
5
6
7
8
26
27
28
29
30
31
32
33
SG
VIN
CN4A-11
(Note 2)
CN4B
(Note 2)
CN4B
plate
Encoder A-phase pulse 5
(Differential line driver system)
Approx. 6.8k
Approx. 6.8k
12, 37
11, 36
(Note 2)
CN4B (Note 1)
Encoder B-phase pulse 5
(Differential line driver system)
Encoder Z-phase pulse 5
(Differential line driver system)
Encoder A-phase pulse 6
(Differential line driver system)
Encoder B-phase pulse 6
(Differential line driver system)
Encoder Z-phase pulse 6
(Differential line driver system)
Encoder A-phase pulse 7
(Differential line driver system)
Encoder B-phase pulse 7
(Differential line driver system)
Encoder Z-phase pulse 7
(Differential line driver system)
Encoder A-phase pulse 8
(Differential line driver system)
Encoder B-phase pulse 8
(Differential line driver system)
Encoder Z-phase pulse 8
(Differential line driver system)
Note 1. Connect the diodes in the correct orientation. Opposite connection may cause the servo amplifier to be faulty and
disable the signals from being output, making the forced stop and other protective circuits inoperative.
2. The signals having the same name are connected to the inside of the servo amplifier.
3. Always connect 24VDC (200mA).
13, 38
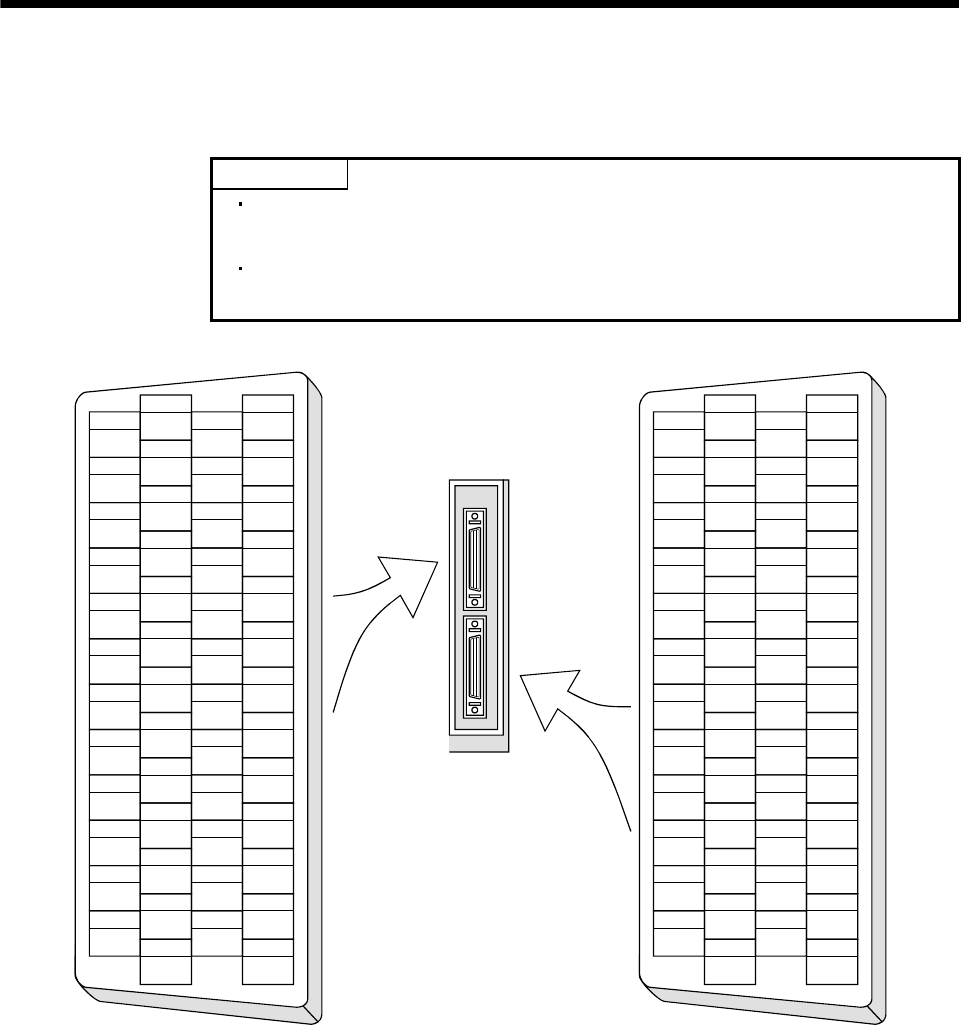
3 - 22
3. SIGNALS AND WIRING
3.3.2 Connectors and signal configurations
(1) Signal configurations
POINT
The pin configurations of the connectors are as viewed from the cable
connector wiring section.
The pins without symbols can be assigned any devices using the MR
Configurator (servo configuration software).
CN4A
LB1
49
LA2
47
LZ2
45
LB3
43
LA4
41
LZ4
39
SG
37
35
33
31
29
27
LA1
50
LZ1
48
LB2
46
LA3
44
LZ3
42
LB4
40
LG
38
VIN
36
34
32
30
28
26
LBR1
24
LAR2
22
LZR2
20
LBR3
18
LAR4
16
LZR4
14
SG
12
10
8
6
4
2
LAR1
25
LZR1
23
LBR2
21
LAR3
19
LZR3
17
LBR4
15
LG
13
VIN
11
9
7
5
3
1
CN4B
LB5
49
LA6
47
LZ6
45
LB7
43
LA8
41
LZ8
39
SG
37
35
33
31
29
27
LA5
50
LZ5
48
LB6
46
LA7
44
LZ7
42
LB8
40
LG
38
VIN
36
34
32
30
28
26
LBR5
24
LAR6
22
LZR6
20
LBR7
18
LAR8
16
LZR8
14
SG
12
10
8
6
4
2
LAR5
25
LZR5
23
LBR6
21
LAR7
19
LZR7
17
LBR8
15
LG
13
VIN
11
9
7
5
3
1
3 - 23
3. SIGNALS AND WIRING
3.3.3 Signal explanations
For the IO interfaces (system in I/O column in the table), refer to section 3.2.5.
(1) Input signal
Signal Symbol Connector
pin No. Functions/Applications I/O
division
CN4A-1
CN4A-2
CN4A-3
CN4A-4
No signals are factory-assigned to these pins. Using the MR Configurator
(servo configuration software), you can assign the input devices for
corresponding slots as signals. Refer to Section 3.3.4 for assignable devices.
CN4A-5 Device Name Symbol Device Name Symbol
CN4A-6 Servo-on SON Forward rotation stroke end LSP
CN4A-7 Reset RES Reverse rotation stroke end LSN
CN4A-8 Proportion control PC Clear CR
CN4A-26 Internal torque limit selection TL1 (Note) External torque limit TL
CN4A-27 Electronic gear selection 1 CM1 (Note) Speed selection 1 SP1
CN4A-28 Electronic gear selection 2 CM2 (Note) Speed selection 2 SP2
CN4A-29 Gain switching selection CDP (Note) Speed selection 3 SP3
CN4A-30
CN4A-31
CN4A-32
CN4A-33
CN4B-1
CN4B-2
CN4B-3
CN4B-4
CN4B-5
CN4B-6
CN4B-7
CN4B-8
CN4B-26
CN4B-27
CN4B-28
CN4B-29
CN4B-30
CN4B-31
CN4B-32
CN4B-33
Note. You cannot select these devices when using the MR-J2M-P8A interface
unit.
DI-1
(2) Output signal
Signal Symbol Connector
pin No. Functions/Applications I/O
division
No signals are factory-assigned to these pins. Using the MR Configurator
(servo configuration software), you can assign the input devices for
corresponding slots as signals. Refer to Section 3.3.4 for assignable devices.
DO-1
Device Name Symbol Device Name Symbol
Ready RD Limiting torque TLC
Electromagnetic brake interlock MBR (Note) Limiting speed VLC
In position INP Trouble ALM_
(Note) Up to speed SA Warning WNG
Zero speed detection ZSP Battery warning BWNG
CN4A-9
CN4A-10
CN4A-34
CN4A-35
CN4B-9
CN4B-10
CN4B-34
CN4B-35
Note. You cannot select these devices when using the MR-J2M-P8A interface
unit.
3 - 24
3. SIGNALS AND WIRING
Signal Symbol Connector
pin No. Functions/Applications I/O
division
LA1 CN4A-50 DO-2Encoder A-phase
pulse 1 LAR1 CN4A-25
LB1 CN4A-49Encoder B-phase
pulse 1 LBR1 CN4A-24
LZ1 CN4A-48
Encoder Z-phase
pulse 1 LZR1 CN4A-23
LA2 CN4A-47
Encoder A-phase
pulse 2 LAR2 CN4A-22
LB2 CN4A-46Encoder B-phase
pulse 2 LBR2 CN4A-21
LZ2 CN4A-45
As LA , LAR , LB and LBR , the pulses per servo motor revolution set
in the DRU parameter No. 27 (Encoder output pulses) of the corresponding
slots are output in the differential line driver system.
In CCW rotation of the servo motor, the encoder B-phase pulse lags the
encoder A-phase pulse by a phase angle of /2.
The relationships between rotation direction and phase difference of the A-
and B-phase pulses can be changed using DRU parameter No. 54 (Function
selection 9).
As LZ and LZR the zero-point signals of the encoders of the
corresponding slots are output. One pulse is output per servo motor
revolution. The same signals as OP are output in the differential line
driver system.
Encoder Z-phase
pulse 2 LZR2 CN4A-20 Encoder pulse outputs for slot 1
LA3 CN4A-44 Signal Symbol
Encoder A-phase
pulse 3 LAR3 CN4A-19 Encoder A-phase pulse 1 LA1 LAR1
LB3 CN4A-43 Encoder B-phase pulse 1 LB1 LBR1
Encoder B-phase
pulse 3 LBR3 CN4A-18 Encoder Z-phase pulse 1 LZ1 LZR1
LZ3 CN4A-42 Encoder pulse outputs for slot 2
Encoder Z-phase
pulse 3 LZR3 CN4A-17 Signal Symbol
LA4 CN4A-41 Encoder A-phase pulse 2 LA2 LAR2
Encoder A-phase
pulse 4 LAR4 CN4A-16 Encoder B-phase pulse 2 LB2 LBR2
LB4 CN4A-40 Encoder Z-phase pulse 2 LZ2 LZR2
Encoder B-phase
pulse 4 LBR4 CN4A-15 Encoder pulse outputs for slot 3
LZ4 CN4A-39 Signal Symbol
Encoder Z-phase
pulse 4 LZR4 CN4A-14 Encoder A-phase pulse 3 LA3 LAR3
LA5 CN4B-50 Encoder B-phase pulse 3 LB3 LBR3
Encoder A-phase
pulse 5 LAR5 CN4B-25 Encoder Z-phase pulse 3 LZ3 LZR3
LB5 CN4B-49 Encoder pulse outputs for slot 4
Encoder B-phase
pulse 5 LBR5 CN4B-24 Signal Symbol
LZ5 CN4B-48 Encoder A-phase pulse 4 LA4 LAR4
Encoder Z-phase
pulse 5 LZR5 CN4B-23 Encoder B-phase pulse 4 LB4 LBR4
LA6 CN4B-47 Encoder Z-phase pulse 4 LZ4 LZR4
Encoder A-phase
pulse 6 LAR6 CN4B-22 Encoder pulse outputs for slot 5
LB6 CN4B-46 Signal Symbol
Encoder B-phase
pulse 6 LBR6 CN4B-21 Encoder A-phase pulse 5 LA5 LAR5
LZ6 CN4B-45 Encoder B-phase pulse 5 LB5 LBR5
Encoder Z-phase
pulse 6 LZR6 CN4B-20 Encoder Z-phase pulse 5 LZ5 LZR5
LA7 CN4B-44 Encoder pulse outputs for slot 6
Encoder A-phase
pulse 7 LAR7 CN4B-19 Signal Symbol
LB7 CN4B-43 Encoder A-phase pulse 6 LA6 LAR6
Encoder B-phase
pulse 7 LBR7 CN4B-18 Encoder B-phase pulse 6 LB6 LBR6
LZ7 CN4B-42 Encoder Z-phase pulse 6 LZ6 LZR6
Encoder Z-phase
pulse 7 LZR7 CN4B-17 Encoder pulse outputs for slot 7
LA8 CN4B-41 Signal Symbol
Encoder A-phase
pulse 8 LAR8 CN4B-16 Encoder A-phase pulse 7 LA7 LAR7
LB8 CN4B-40 Encoder B-phase pulse 7 LB7 LBR7
Encoder B-phase
pulse 8 LBR8 CN4B-15 Encoder Z-phase pulse 7 LZ7 LZR7
LZ8 CN4B-39 Encoder pulse outputs for slot 8
Encoder Z-phase
pulse 8 LZR8 CN4B-14 Signal Symbol
Encoder A-phase pulse 8 LA8 LAR8
Encoder B-phase pulse 8 LB8 LBR8
Encoder Z-phase pulse 8 LZ8 LZR8
3 - 25
3. SIGNALS AND WIRING
(3) Power supply
Signal Symbol Connector
pin No. Functions/Applications
Power input for
digital interface
VIN CN4A-11
CN4A-36
CN4B-11
CN4B-36
Driver power input terminal for digital interface.
Used to input 24VDC (200mA or more) for input interface.
24VDC 10%
Not connected to VIN of the interface unit.
Common for
digital interface
SG CN4A-12
CN4A-37
CN4B-12
CN4B-37
Common terminal to VIN. Pins are connected internally.
Separated from LG.
Not connected to SG of the interface unit.
Control common LG CN4A-13
CN4A-38
CN4B-13
CN4B-38
Common terminal to MO1, MO2 and MO3.
Shield SD Plate Connect the external conductor of the shield cable.
3 - 26
3. SIGNALS AND WIRING
3.3.4 Device explanations
(1) Input device
Using the MR Configurator (servo configuration software), you can assign the devices given in this
section to the pins of connectors CN4A and CN4B of the MR-J2M-D01 extension IO unit.
Device name Symbol Functions/Applications
Internal torque limit selection 1 TL11
Internal torque limit selection 2 TL12
Internal torque limit selection 3 TL13
Internal torque limit selection 4 TL14
Internal torque limit selection 5 TL15
Internal torque limit selection 6 TL16
Internal torque limit selection 7 TL17
Internal torque limit selection 8 TL18
TL11: Internal torque limit selection device for slot 1
TL12: Internal torque limit selection device for slot 2
TL13: Internal torque limit selection device for slot 3
TL14: Internal torque limit selection device for slot 4
TL15: Internal torque limit selection device for slot 5
TL16: Internal torque limit selection device for slot 6
TL17: Internal torque limit selection device for slot 7
TL18: Internal torque limit selection device for slot 8
Refer to Section 3.3.5 (2) for details.
Proportion control 1 PC1
Proportion control 2 PC2
Proportion control 3 PC3
Proportion control 4 PC4
Proportion control 5 PC5
Proportion control 6 PC6
Proportion control 7 PC7
Proportion control 8 PC8
PC1: Proportion control device for slot 1
PC2: Proportion control device for slot 2
PC3: Proportion control device for slot 3
PC4: Proportion control device for slot 4
PC5: Proportion control device for slot 5
PC6: Proportion control device for slot 6
PC7: Proportion control device for slot 7
PC8: Proportion control device for slot 8
Short PC -SG to switch the speed amplifier from the proportional integral
type to the proportional type.
If the servo motor at a stop is rotated even one pulse due to any external
factor, it generates torque to compensate for a position shift. When the servo
motor shaft is to be locked mechanically after positioning completion (stop),
switching on the proportion control (PC ) upon positioning completion will
suppress the unnecessary torque generated to compensate for a position shift.
3 - 27
3. SIGNALS AND WIRING
Device name Symbol Functions/Applications
Electronic gear selection 11 CM11
Electronic gear selection 12 CM12
Electronic gear selection 13 CM13
Electronic gear selection 14 CM14
Electronic gear selection 15 CM15
Electronic gear selection 16 CM16
Electronic gear selection 17 CM17
Electronic gear selection 18 CM18
Electronic gear selection 21 CM21
Electronic gear selection 22 CM22
Electronic gear selection 23 CM23
Electronic gear selection 24 CM24
Electronic gear selection 25 CM25
Electronic gear selection 26 CM26
Electronic gear selection 27 CM27
CM11: Electronic gear selection 1 device for slot 1
CM12: Electronic gear selection 1 device for slot 2
CM13: Electronic gear selection 1 device for slot 3
CM14: Electronic gear selection 1 device for slot 4
CM15: Electronic gear selection 1 device for slot 5
CM16: Electronic gear selection 1 device for slot 6
CM17: Electronic gear selection 1 device for slot 7
CM18: Electronic gear selection 1 device for slot 8
CM21: Electronic gear selection 2 device for slot 1
CM22: Electronic gear selection 2 device for slot 2
CM23: Electronic gear selection 2 device for slot 3
CM24: Electronic gear selection 2 device for slot 4
CM25: Electronic gear selection 2 device for slot 5
CM26: Electronic gear selection 2 device for slot 6
CM27: Electronic gear selection 2 device for slot 7
CM28: Electronic gear selection 2 device for slot 8
The combination of CM1 -SG and CM2 -SG gives you a choice of four
different electronic gear numerators set in the DRU parameters.
CM1 and CM2 cannot be used in the absolute position detection system.
(Note) Input signal
CM2 CM1 Electronic gear numerator
0 0 DRU parameter No.3
0 1 DRU parameter No.69
1 0 DRU parameter No.70
1 1 DRU parameter No.71
Electronic gear selection 28 CM28
Note. 0: Off across terminal-SG (open)
1: On across terminal-SG (shorted)
Gain switching 1 CDP1
Gain switching 2 CDP2
Gain switching 3 CDP3
Gain switching 4 CDP4
Gain switching 5 CDP5
Gain switching 6 CDP6
Gain switching 7 CDP7
Gain switching 8 CDP8
CDP1: Gain switching device for slot 1
CDP2: Gain switching device for slot 2
CDP3: Gain switching device for slot 3
CDP4: Gain switching device for slot 4
CDP5: Gain switching device for slot 5
CDP6: Gain switching device for slot 6
CDP7: Gain switching device for slot 7
CDP8: Gain switching device for slot 8
Connect CDP -SG to change the load inertia moment ratio into the DRU
parameter No. 61 setting and the gain values into the values multiplied by the
DRU parameter No. 62 to 64 settings.
3 - 28
3. SIGNALS AND WIRING
(2) Output device
Device name Symbol Functions/Applications
Ready 1 RD1
Ready 2 RD2
Ready 3 RD3
Ready 4 RD4
Ready 5 RD5
Ready 6 RD6
Ready 7 RD7
Ready 8 RD8
RD1: Ready device for slot 1
RD2: Ready device for slot 2
RD3: Ready device for slot 3
RD4: Ready device for slot 4
RD5: Ready device for slot 5
RD6: Ready device for slot 6
RD7: Ready device for slot 7
RD8: Ready device for slot 8
RD -SG are connected when the servo is switched on and the servo amplifier
is ready to operate.
In position 1 INP1
In position 2 INP2
In position 3 INP3
In position 4 INP4
In position 5 INP5
In position 6 INP6
In position 7 INP7
In position 8 INP8
INP1: In position device for slot 1
INP2: In position device for slot 2
INP3: In position device for slot 3
INP4: In position device for slot 4
INP5: In position device for slot 5
INP6: In position device for slot 6
INP7: In position device for slot 7
INP8: In position device for slot 8
INP -SG are connected when the number of droop pulses is in the preset in-
position range. The in-position range can be changed using DRU parameter
No. 5.
When the in-position range is increased, INP -SG may be kept connected
during low-speed rotation.
Limiting torque 1 TLC1
Limiting torque 2 TLC2
Limiting torque 3 TLC3
Limiting torque 4 TLC4
Limiting torque 5 TLC5
Limiting torque 6 TLC6
Limiting torque 7 TLC7
Limiting torque 8 TLC8
TLC1: Limiting torque device for slot 1
TLC2: Limiting torque device for slot 2
TLC3: Limiting torque device for slot 3
TLC4: Limiting torque device for slot 4
TLC5: Limiting torque device for slot 5
TLC6: Limiting torque device for slot 6
TLC7: Limiting torque device for slot 7
TLC8: Limiting torque device for slot 8
TLC -SG are connected when the torque generated reaches the value set to
the internal torque limit 1 (DRU parameter No. 28) or internal torque limit
2(DRU parameter No. 76).
Zero speed detection 1 ZSP1
Zero speed detection 2 ZSP2
Zero speed detection 3 ZSP3
Zero speed detection 4 ZSP4
Zero speed detection 5 ZSP5
Zero speed detection 6 ZSP6
Zero speed detection 7 ZSP7
Zero speed detection 8 ZSP8
ZSP1: Zero speed detection device for slot 1
ZSP2: Zero speed detection device for slot 2
ZSP3: Zero speed detection device for slot 3
ZSP4: Zero speed detection device for slot 4
ZSP5: Zero speed detection device for slot 5
ZSP6: Zero speed detection device for slot 6
ZSP7: Zero speed detection device for slot 7
ZSP8: Zero speed detection device for slot 8
ZSP -SG are connected when the servo motor speed is zero speed (50r/min)
or less. Zero speed can be changed using DRU parameter No. 24.
Electromagnetic brake interlock 1 MBR1
Electromagnetic brake interlock 2 MBR2
Electromagnetic brake interlock 3 MBR3
Electromagnetic brake interlock 4 MBR4
Electromagnetic brake interlock 5 MBR5
Electromagnetic brake interlock 6 MBR6
Electromagnetic brake interlock 7 MBR7
Electromagnetic brake interlock 8 MBR8
MBR1: Electromagnetic brake interlock device for slot 1
MBR2: Electromagnetic brake interlock device for slot 2
MBR3: Electromagnetic brake interlock device for slot 3
MBR4: Electromagnetic brake interlock device for slot 4
MBR5: Electromagnetic brake interlock device for slot 5
MBR6: Electromagnetic brake interlock device for slot 6
MBR7: Electromagnetic brake interlock device for slot 7
MBR8: Electromagnetic brake interlock device for slot 8
In the servo-off or alarm status, MBR -SG are disconnected.

3 - 29
3. SIGNALS AND WIRING
Device name Symbol Functions/Applications
Warning 1 WNG1
Warning 2 WNG2
Warning 3 WNG3
Warning 4 WNG4
Warning 5 WNG5
Warning 6 WNG6
Warning 7 WNG7
Warning 8 WNG8
WNG1: Warning device for slot 1
WNG2: Warning device for slot 2
WNG3: Warning device for slot 3
WNG4: Warning device for slot 4
WNG5: Warning device for slot 5
WNG6: Warning device for slot 6
WNG7: Warning device for slot 7
WNG8: Warning device for slot 8
When warning has occurred, WNG -SG are connected.
When there is no warning, WNG -SG are disconnected within about 3 second
after power-on.
Battery warning 1 BWNG1
Battery warning 2 BWNG2
Battery warning 3 BWNG3
Battery warning 4 BWNG4
Battery warning 5 BWNG5
Battery warning 6 BWNG6
Battery warning 7 BWNG7
Battery warning 8 BWNG8
BWNG1: Battery warning device for slot 1
BWNG2: Battery warning device for slot 2
BWNG3: Battery warning device for slot 3
BWNG4: Battery warning device for slot 4
BWNG5: Battery warning device for slot 5
BWNG6: Battery warning device for slot 6
BWNG7: Battery warning device for slot 7
BWNG8: Battery warning device for slot 8
BWNG -SG are connected when battery cable breakage warning (A.92) or
battery warning (A.9F) has occurred.
When there is no battery warning, BWNG -SG are disconnected within
about 3 second after power-on
3 - 30
3. SIGNALS AND WIRING
3.3.5 Detailed description of the device
(1) Electronic gear switching
The combination of CM1 -SG and CM2 -SG gives you a choice of four different electronic gear
numerators set in the DRU parameters.
As soon as Electronic gear selection (CM1 ) / Electronic gear selection 2 (CM2 ) is turned ON or
OFF, the denominator of the electronic gear changes. Therefore, if any shock occurs at this change, use
position smoothing (DRU parameter No. 7) to relieve shock.
(Note) External input signal
CM2 CM1 Electronic gear numerator
0 0 DRU parameter No. 3
0 1 DRU parameter No. 69
1 0 DRU parameter No. 70
1 1 DRU parameter No. 71
Note. 0: CM1 /CM2 -SG off(open)
1: CM1 /CM2 -SG on(short)
(2) Torque limit
CAUTION Releasing the torque limit during servo lock may cause the servo motor to
suddenly rotate according to the position deviation from the instructed position.
(a) Torque limit and torque
By setting DRU parameter No. 28 (internal torque limit 1), and DRU parameter No. 76 (internal
torque limit 2), torque is always limited to the maximum value during operation. A relationship
between the limit value and servo motor torque is shown below.
00 100
Max. torque
Generated torque
Torque limit value [%]
(b) Torque limit value selection
By making internal torque limit selection (TL1 ) usable, you can select the torque limit value as
indicated below.
(Note 1) External input signals
TL1 (Note 2) Torque limit value made valid
0 Internal torque limit 1 (DRU parameter No. 28)
1DRU parameter No. 76 DRU parameter No. 28: DRU parameter No. 28
DRU parameter No. 76 DRU parameter No. 28: DRU parameter No. 76
Note 1. 0: TL1 -SG off (open)
1: TL1 -SG on (short)
2. Releasing the torque limit during servo lock may cause the servo motor to suddenly rotate according to the position
deviation from the instructed position.
(c) Limiting torque (TLC )
TLC-SG are connected when the torque by the servo motor reaches the torque set to internal
torque limit 1 or internal torque limit 2.
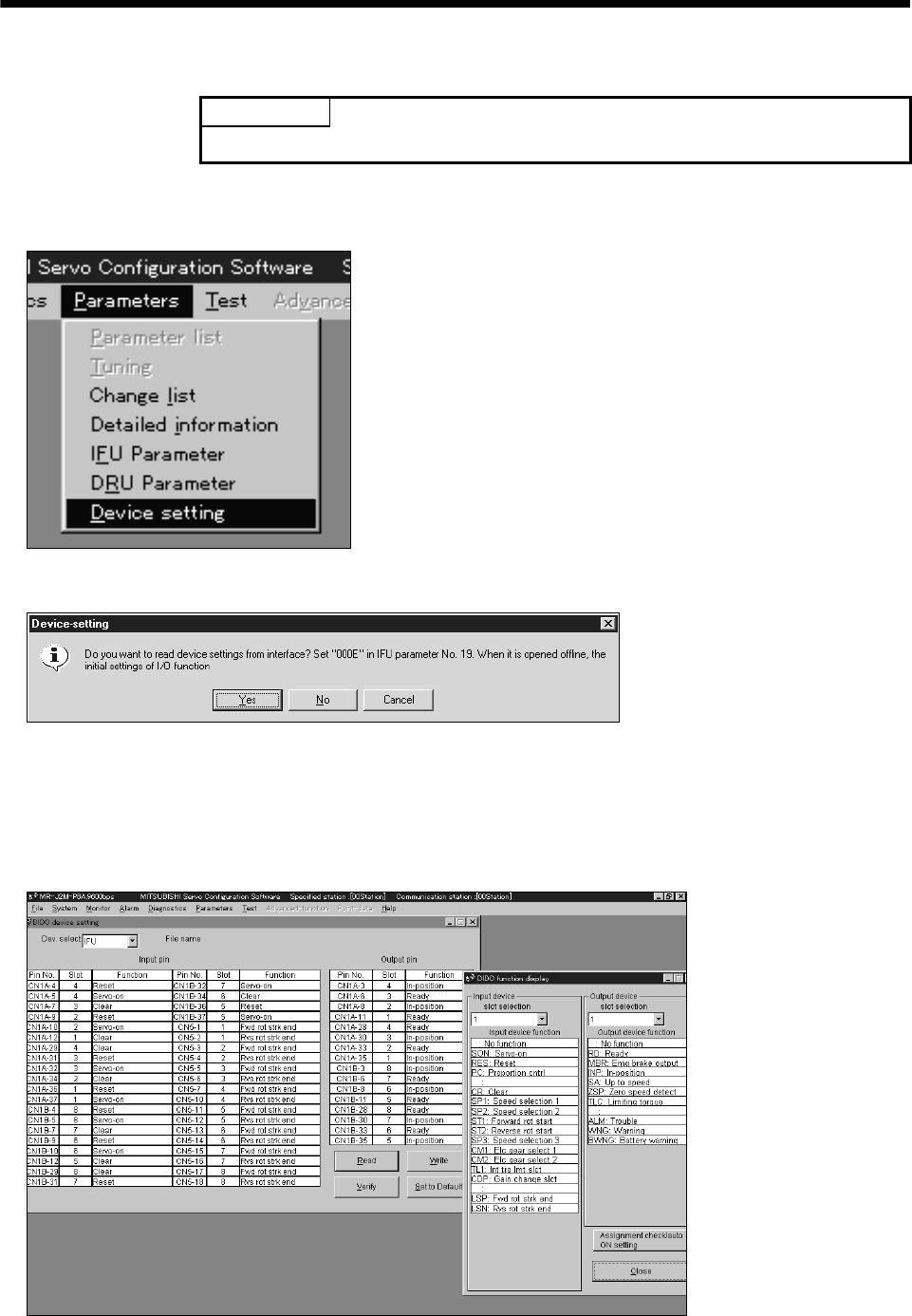
3 - 31
3. SIGNALS AND WIRING
3.3.6 Device assignment method
POINT
When using the device setting, preset "000E" in IFU parameter No. 19.
(1) How to open the setting screen
Click "Parameters" on the menu bar and click "Device setting" in the menu.
Making selection displays the following window.
Click "Yes" button reads and displays the function assigned to each pin from the interface unit and
extension IO unit.
Click "No" button displays the initial status of the interface unit and extension IO unit.
Click "Cancel" button terminates the processing.
Click "Yes" button or "No" button displays the following two windows.
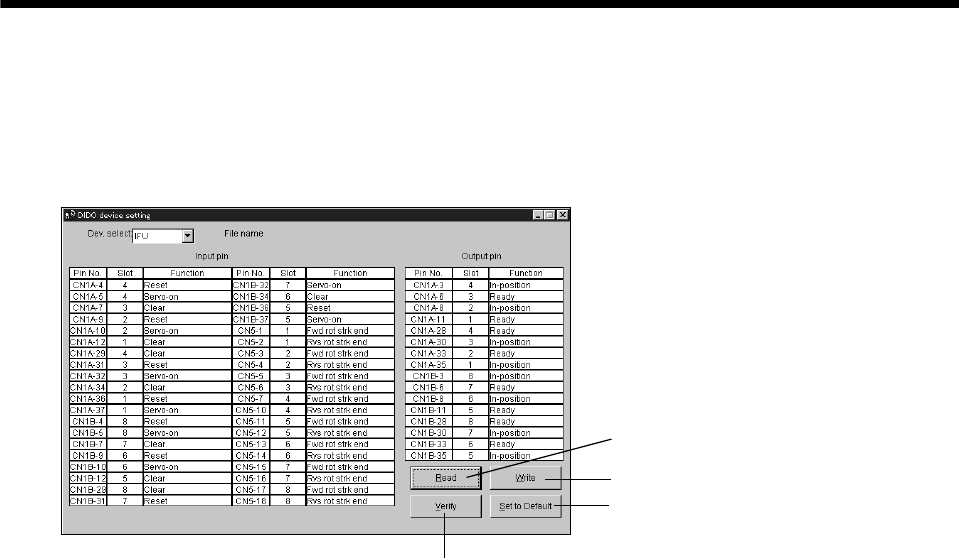
3 - 32
3. SIGNALS AND WIRING
(2) Screen explanation
(a) DIDO device setting window screen
This is the device assignment screen of the interface unit/option unit. In Dev. selection, choose the
IFU (interface unit) or D01 (extension IO unit). Making selection displays the pin assignment
status per unit.
a)
b)
d)
c)
1) Read of function assignment ( a))
Click the "Read" button reads and displays all functions assigned to the pins from the interface
unit and extension IO unit.
2) Write of function assignment ( b))
Click the "Write" button writes all pins that are assigned the functions to the interface unit and
extension IO unit.
3) Verify of function assignment ( c))
Click the "Verify" button verifies the function assignment in the interface unit and extension IO
unit with the device information on the screen.
4) Initial setting of function assignment ( d))
Click the "Set to Default" button initializes the function assignment.
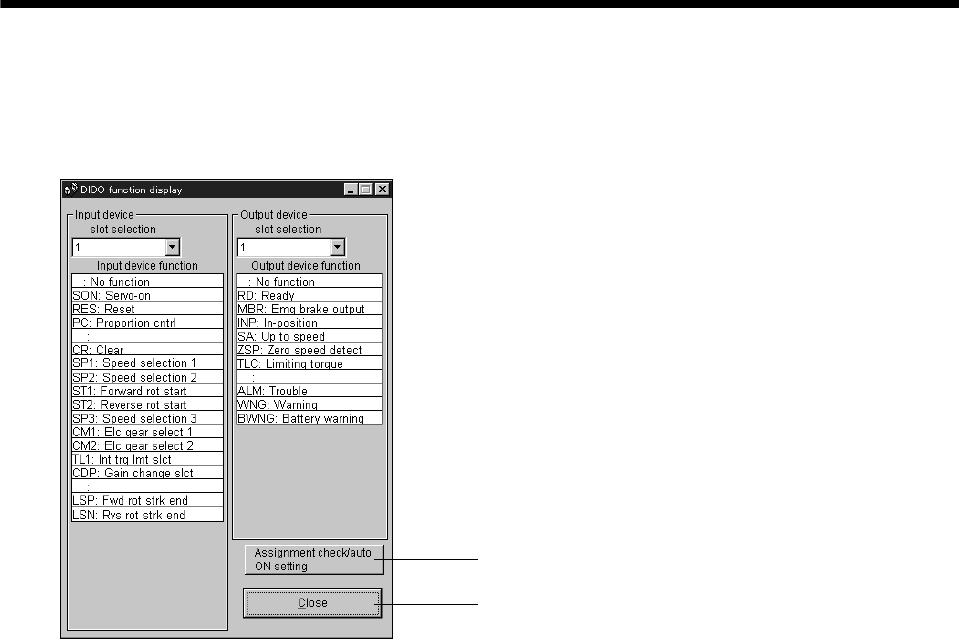
3 - 33
3. SIGNALS AND WIRING
(b) DIDO function display window screen
This screen is used to select the slot numbers and functions assigned to the pins.
Choose the slot numbers in Input device slot selection and Output device slot selection.
The functions displayed below Input device function and Output device function are assignable.
a)
b)
In the DIDO function display window, choose the slot numbers where you want to assign the
functions.
Move the pointer to the place of the function to be assigned. Drag and drop it as-is to the pin you
want to assign in the DIDO device setting window.
1) Assignment check/auto ON setting ( a))
Press this button to display the screen that shows the slot-by-slot assignment list and enables
auto ON setting.
Refer to this section (4) for more information.
2) Quitting
Click "Close" button to exit from the window. ( b))
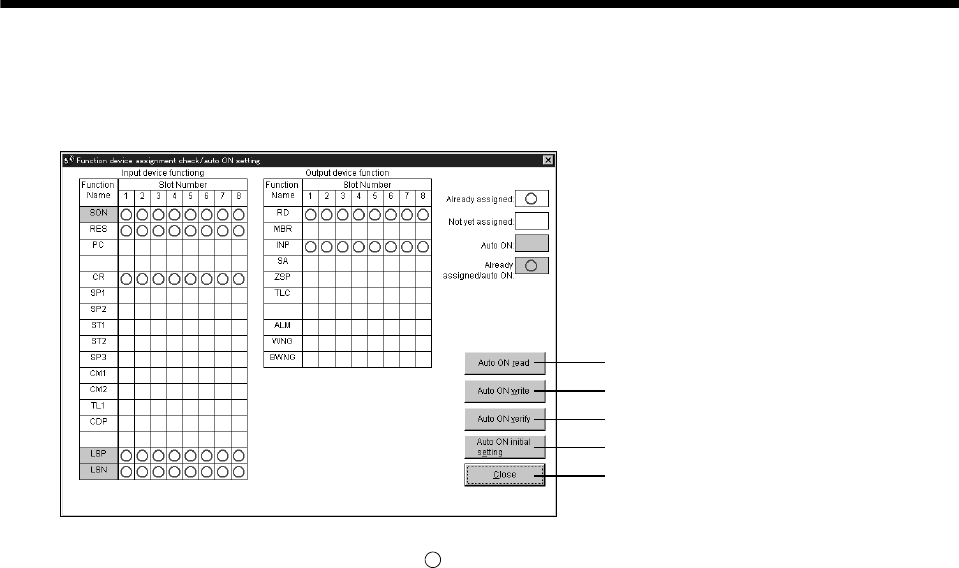
3 - 34
3. SIGNALS AND WIRING
(C) Function device assignment check/auto ON setting display
Click the "Function device assignment check/auto ON setting" button in the DIDO function display
window displays the following window.
a)
b)
c)
d)
e)
The assigned functions are indicated by .
The functions assigned by auto ON are grayed. When you want to set auto ON to the function that
is enabled for auto ON, click the corresponding cell. Clicking it again disables auto ON.
1) Auto ON read of function assignment ( a))
Click "Auto ON read" button reads the functions set for auto ON from the interface unit and
extension IO unit.
2) Auto ON write of function assignment ( b))
Click "Auto ON write" button writes the functions currently set for auto ON to the interface unit
and extension IO unit.
3) Auto ON verify of function assignment ( c))
Click "Auto ON verify" button verifies the current auto ON setting in the interface unit and
extension IO unit with the auto ON setting on the screen.
4) Auto ON initial setting of function assignment ( d))
Click "Auto ON initial setting" button initializes the auto ON setting.
5) Quitting the function device assignment checking/auto ON setting window ( e))
Click "Close" button exits from the window.
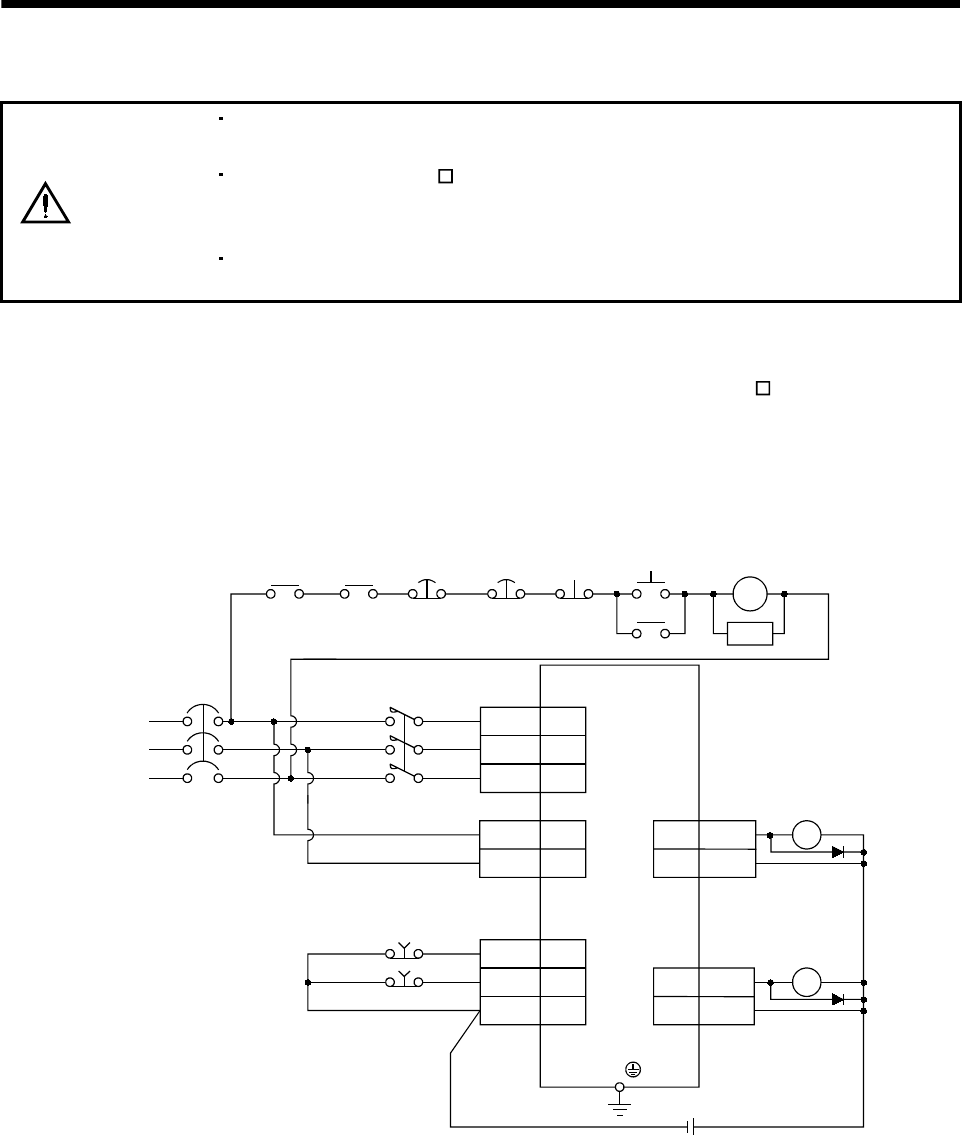
3 - 35
3. SIGNALS AND WIRING
3.4 Signals and wiring for base unit
CAUTION
When each unit has become faulty, switch power off on the servo amplifier power
side. Continuous flow of a large current may cause a fire.
Use the trouble (ALM_ ) to switch power off. Otherwise, a regenerative brake
transistor fault or the like may overheat the regenerative brake resistor, causing a
fire.
Fabricate the cables noting the shapes of the CNP1A housing (X type) and CNP1B
housing (Y type).
3.4.1 Connection example for power line circuit
Wire the power supply and main circuit as shown below so that the servo-on (SON ) turns off as soon as
alarm occurrence, or a servo forced stop is made valid is detected and power is shut off.
A no-fuse breaker (NFB) must be used with the input cables of the power supply.
(1) For 3-phase 200 to 230VAC power supply
RA1
SG
EMG_A
EMG_B
20
19
8
MC
OFF ON
MC
SK
MELSERVO-J2M
CNP3
CNP1B
RA2
MC
1
2
L11
L21
1
2
L1
L2
3L3
VIN
27
26
ALM_B
VIN
27
26
ALM_A
CN5
CN1A
CN1B
NFB
Power supply
3-phase
200 to 230VAC
Trouble A Trouble B Forced
stop A
Forced
stop B
RA1 Trouble
A
Trouble B
RA2
24VDC
Forced stop A
Forced stop B
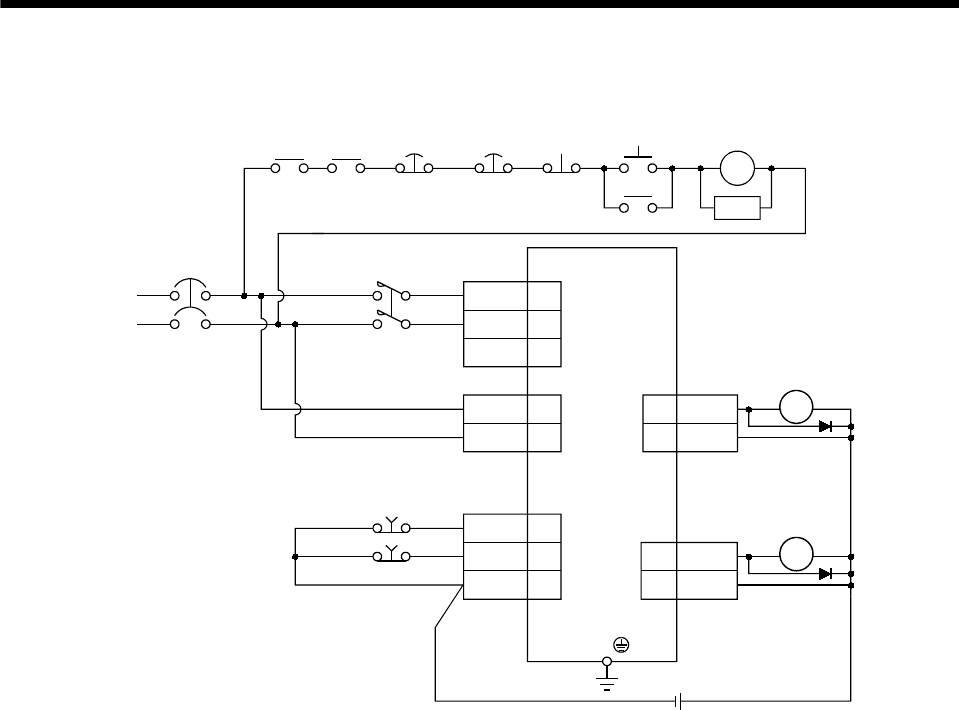
3 - 36
3. SIGNALS AND WIRING
(2) For 1-phase 200 to 230 VAC power supply
EMG_A
EMG_B
SG
20
8
MC
OFF ON
MC
SK
MELSERVO-J2M
CNP3
CNP1B
RA2RA1
MC
1
2
L11
L21
1
2
L1
L2
3
L3
VIN
27
26
CN5
CN1A
CN1B
NFB
Power supply
1-phase
200 to 230VAC
Trouble A Trouble B Forced
stop A
Forced
stop B
Trouble A
Trouble B
24VDC
Forced stop A
Forced stop B
RA1
RA2
VIN
27
26
ALM_A
ALM_B
19
Note. Connect a 1-phase 200 to 230VAC power supply to L1/L2 and keep L3 open.
(Note)
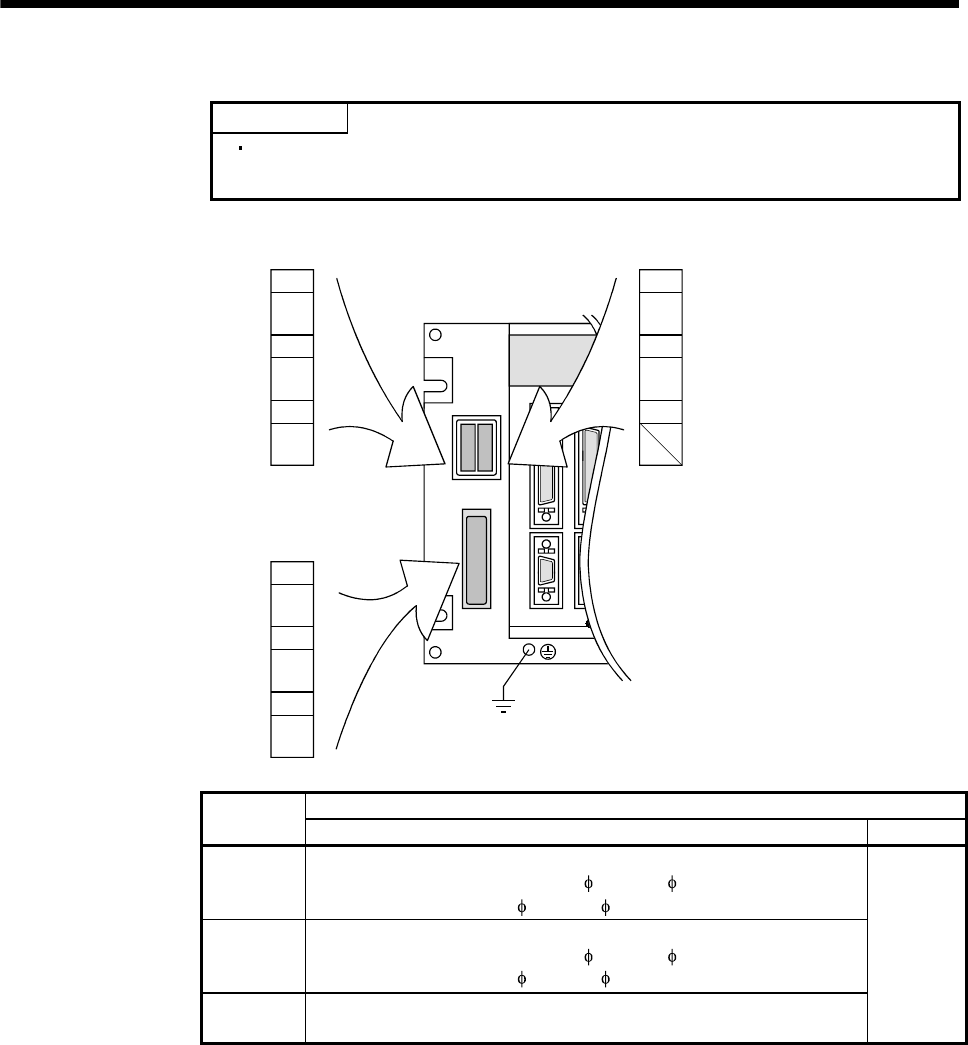
3 - 37
3. SIGNALS AND WIRING
3.4.2 Connectors and signal configurations
POINT
The pin configurations of the connectors are as viewed from the cable
connector wiring section.
1
3
2
2
3
1
N
P
C
L3
L2
L1
CNP3
1
2
3
L11
L21
CNP1A
Base unit
(X type) (Y type)
The connector frames are connected to
the PE (earth) terminal of the base unit.
CNP1B
Cable side connector
Connector Model Maker
CNP1A
Housing: 1-178128-3 (X type)
Contact: 917511-2 (max. sheath OD: 2.8[mm] ( 0.11[in]))
353717-2 (max. sheath OD: 3.4[mm] ( 0.13[in])) (Note)
CNP1B
Housing: 2-178128-3 (Y type)
Contact: 917511-2 (max. sheath OD: 2.8[mm] ( 0.11[in]))
353717-2 (max. sheath OD: 3.4[mm] ( 0.13[in])) (Note)
CNP3 Housing: 1-179958-3
Contact: 316041-2
Tyco
Electronics
Note. This contact is not included in the option (MR-J2MCNM).
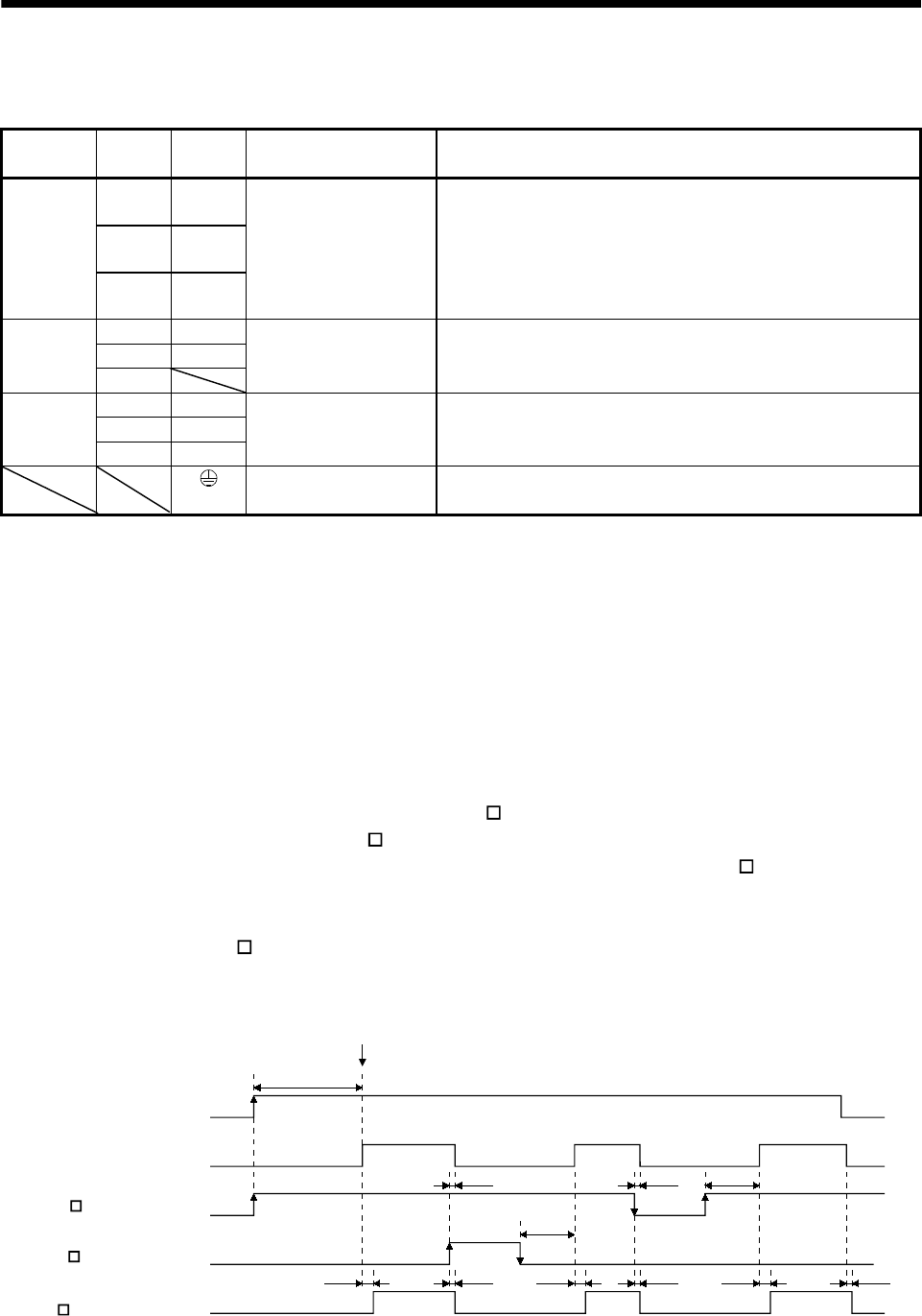
3 - 38
3. SIGNALS AND WIRING
3.4.3 Terminals
Refer to Section 10.2 for the layouts and signal configurations of the terminal blocks.
Connector Pin No. Code Connection target
(Application) Description
1L
1
2L
2
CNP3
3L
3
Main circuit power
(1) When using a three -phase power supply
Supply L1, L2 and L3 with three-phase, 200 to 230VAC, 50/60Hz
power.
(2) When using a signal -phase power supply
Supply L1 and L2 with signal-phase, 200 to 230VAC, 50/60Hz
power.
1L
11
2L
21
CNP1B
3
Control circuit power Supply L11 and L21 with single-phase, 200 to 230VAC, 50/60Hz
power.
1N
2P
CNP1A
3C
Regenerative brake
option
Connect the regenerative brake option across P-C.
Accidental connection of the regenerative brake option to P-N may
cause burning (Refer to Section 12.1.1)
(Earth) Protective earth (PE) Connect this terminal to the protective earth (PE) terminals of the
servo motor and control box for grounding.
3.4.4 Power-on sequence
(1) Power-on procedure
1) Always wire the power supply as shown in above Section 3.7.1 using the magnetic contactor with
the main circuit power supply (three-phase 200V: L1, L2, L3). Configure up an external sequence to
switch off the magnetic contactor as soon as an alarm occurs.
2) Switch on the control circuit power supply L11, L21 simultaneously with the main circuit power
supply or before switching on the main circuit power supply. If the main circuit power supply is not
on, the display shows the corresponding warning. However, by switching on the main circuit power
supply, the warning disappears and the servo amplifier will operate properly.
3) The servo amplifier can accept the servo-on (SON ) about 3s after the main circuit power supply is
switched on. Therefore, when SON is switched on simultaneously with the main circuit power
supply, the base circuit will switch on in about 1 to 2s, and the ready (RD ) will switch on in
further about 20ms, making the servo amplifier ready to operate. (Refer to paragraph (2) in this
section.)
4) When the reset (RES ) is switched on, the base circuit is shut off and the servo motor shaft coasts.
(2) Timing chart
100ms
100ms
OFF
ON
OFF
ON
ON
OFF
OFF
ON
OFF
ON
10ms20ms
10ms
10ms20ms
10ms
20ms 10ms
(3s)
SON accepted
Base circuit
Servo-on
(SON )
Reset
(RES )
Ready
(RD )
Main circui
t
control circuit power
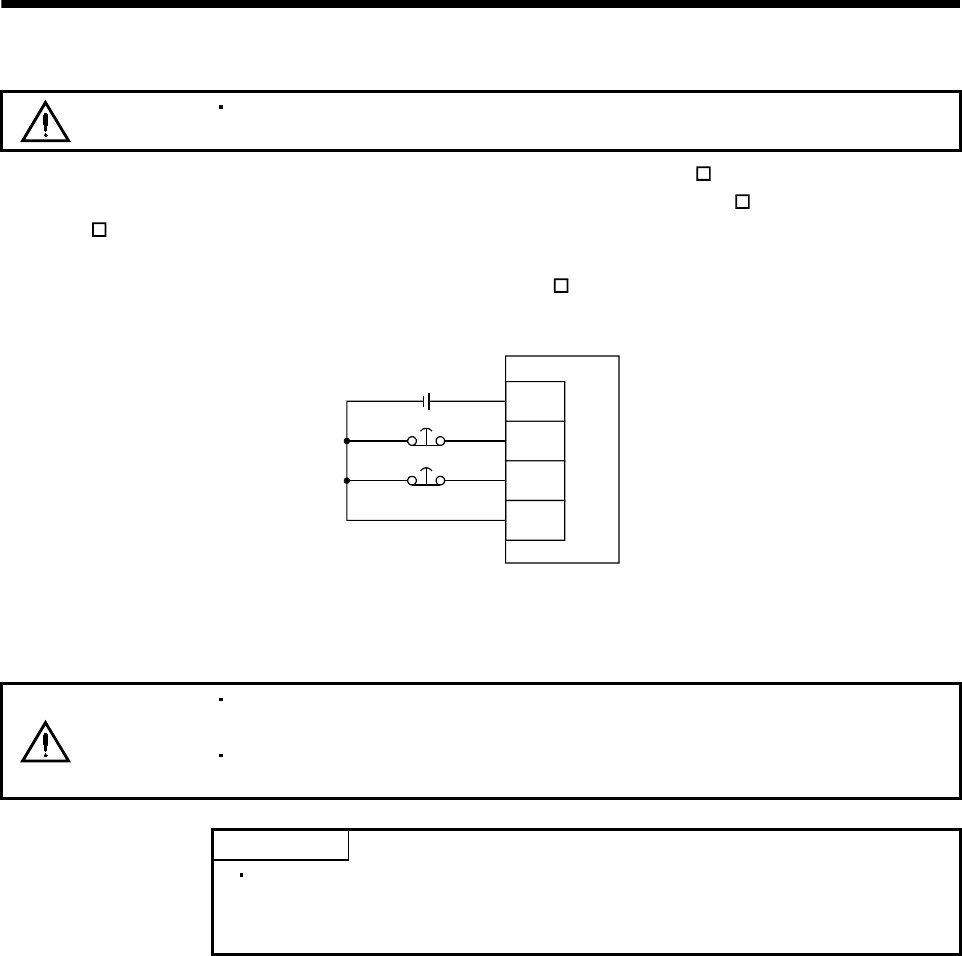
3 - 39
3. SIGNALS AND WIRING
(3) Forced stop
CAUTION Install an forced stop circuit externally to ensure that operation can be stopped and
power shut off immediately.
Make up a circuit which shuts off main circuit power as soon as EMG_ -SG are opened at a forced
stop. To ensure safety, always install a forced stop switch across EMG_ -SG. By disconnecting
EMG_ -SG, the dynamic brake is operated to bring the servo motor to a stop. At this time, the
display shows the servo forced stop warning (A.E6).
During ordinary operation, do not use forced stop (EMG_ ) to alternate stop and run. The service life
of each drive unit may be shortened.
VIN
EMG_A
EMG_B
SG
Interface unit
24VDC
3.5 Connection of drive unit and servo motor
3.5.1 Connection instructions
CAUTION
Connect the wires to the correct phase terminals (U, V, W) of the drive unit and
servo motor. Otherwise, the servo motor will operate improperly.
Do not connect AC power supply directly to the servo motor. Otherwise, a fault
may occur.
POINT
Do not apply the test lead bars or like of a tester directly to the pins of the
connectors supplied with the servo motor. Doing so will deform the pins,
causing poor contact.
The connection method differs according to the series and capacity of the servo motor and whether or not
the servo motor has the electromagnetic brake. Perform wiring in accordance with this section.
(1) The protective earth of the servo motor joins to the base unit via the drive unit mounting screw.
Connect the protective earth terminal of the base unit to the protective earth of the control box to
discharge electricity to the earth.
(2) The power supply for the electromagnetic brake should not be used as the 24VDC power supply for
interface. Always use the power supply for electromagnetic brake only.
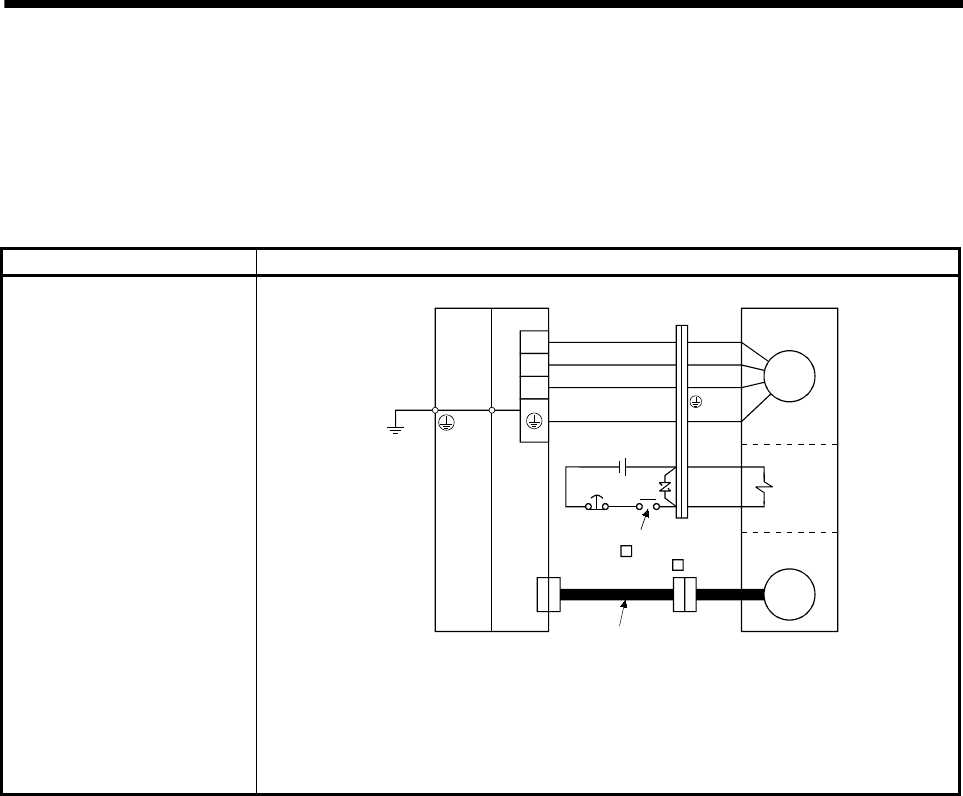
3 - 40
3. SIGNALS AND WIRING
3.5.2 Connection diagram
The following table lists wiring methods according to the servo motor types. Use the connection diagram
which conforms to the servo motor used. For cables required for wiring, refer to Section 12.2.1. For
encoder cable connection, refer to Section 12.1.2. For the signal layouts of the connectors, refer to Section
3.5.3.
For the servo motor connector, refer to Chapter 3 of the Servo Motor Instruction Manual.
Servo motor Connection diagram
HC-KFS053 (B) to 73 (B)
HC-MFS053 (B) to 73 (B)
HC-UFS13 (B) to 73 (B)
U
V
W
EM1
B1
B2
CNP2
CN2
24VDC
(Note 1)
Encoder
Electro-
magnetic
brake
To be shut off when servo-
on (SON ) switches off or
by trouble (ALM_ )
Encoder cable
Motor
Servo motor
(Note 2)
(Note 3)
U (Red)
V (White)
W (Black)
(Green)
Base unit Drive unit
(Earth)
Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal of the base
unit to the protective earth (PE) of the control box.
2. This circuit applies to the servo motor with electromagnetic brake.
3. The protective earth of the servo motor is connected to the base unit via the drive unit
mounting screw.
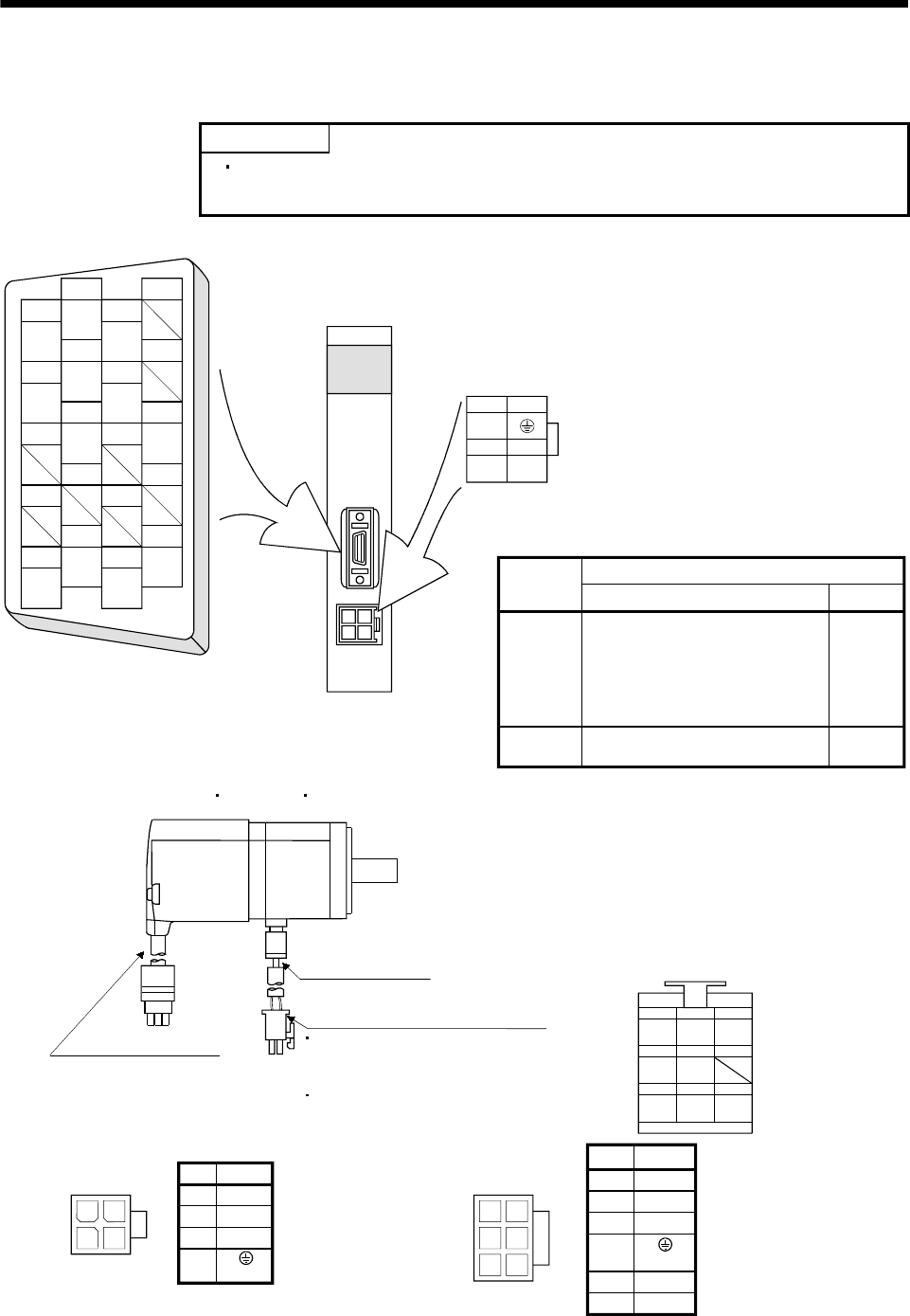
3 - 41
3. SIGNALS AND WIRING
3.5.3 I/O terminals
(1) Drive unit
POINT
The pin configurations of the connectors are as viewed from the cable
connector wiring section.
19
P5
20
P5
10
9
BAT
17
MRR
18
P5
8
7
MR
15
LG
16
MDR
6
MD
5
13
14 4
3
11
12
LG
2
1
LG
24
13
V
UW
CNP2
CN2 3M
molex
LG
CNP2
CN2
Drive unit
Connector Cable side connector
Model Maker
1. Soldering type
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
2. Insulation displacement type
Connector: 10120-6000EL
Shell kit: 10320-3210-000
Housing: 5557-04R-210
Terminal: 5556PBT3L
(2) Servo motor (HC-KFS HC-MFS HC-UFS3000r/min series)
24
13
Power supply connector (molex)
Without electromagnetic brake
5557-04R-210 (receptacle)
5556PBTL (Female terminal)
With electromagnetic brake
5557-06R-210 (receptacle)
5556PBTL (Female terminal)
Encoder cable 0.3m(0.98ft)
Power supply lead
4-AWG19 0.3m(0.98ft)
With connector 1-172169-9
(Tyco Electronics)
1
2
3
4
1
25
4
36
Power supply
connector
5557-04R-210 Pin Signal
(Earth)
U
V
W
Power supply
connector
5557-06R-210
MR
123
MRR BAT
MD
456
MDR
P5
789
LG SHD
Encoder connector signal arrangement
Pin Signal
(Earth)
U
V
W
B1
B2
(Note) 6
1
2
3
4
(Note) 5
Note. Supply electromagnetic brake power (24VDC).
There is no polarity.
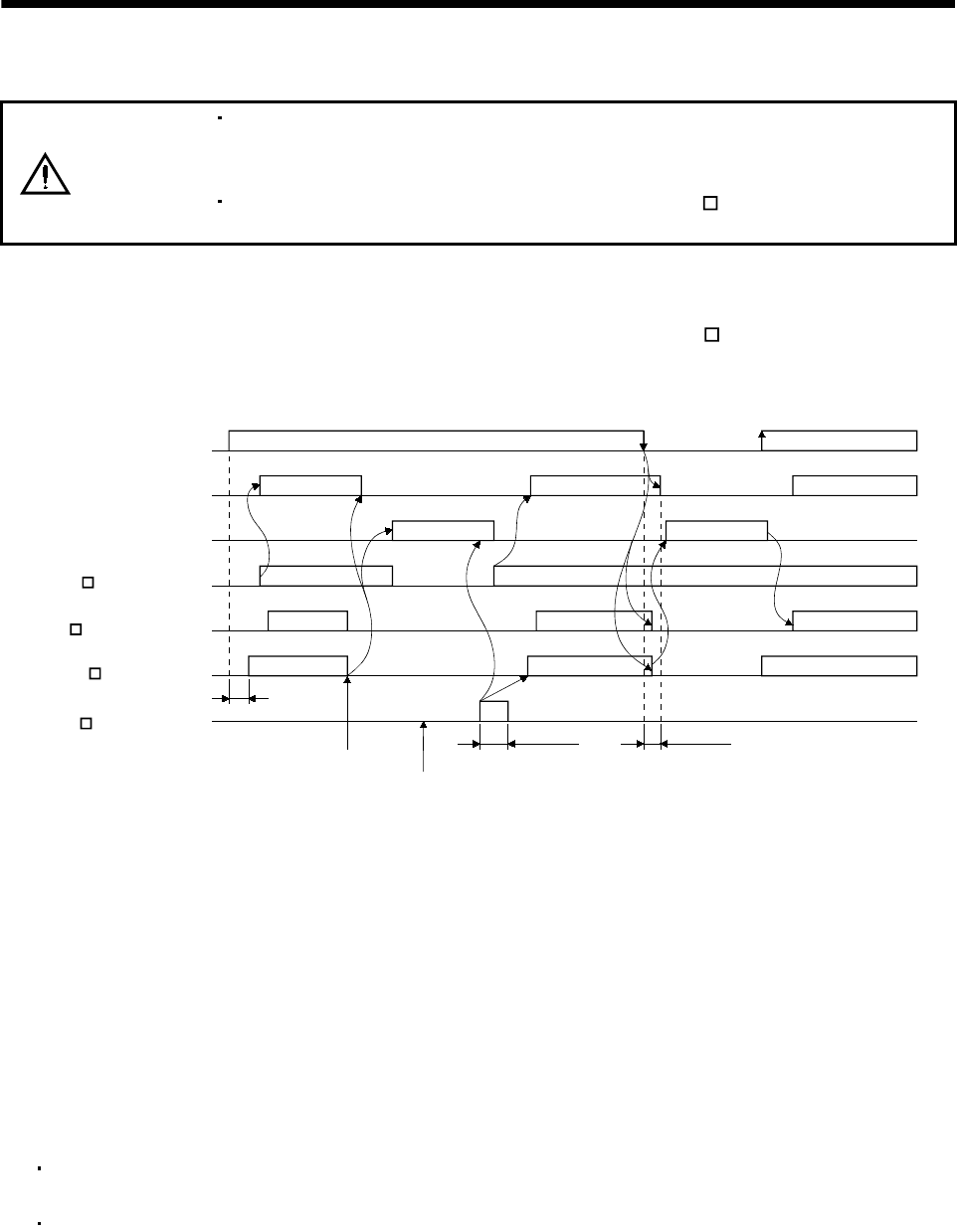
3 - 42
3. SIGNALS AND WIRING
3.6 Alarm occurrence timing chart
CAUTION
When an alarm has occurred, remove its cause, make sure that the operation
signal is not being input, ensure safety, and reset the alarm before restarting
operation.
As soon as an alarm occurs, turn off Servo-on (SON ) and power off the main
circuit.
When an alarm occurs in the MELSERVO-J2M, the base circuit is shut off and the servo motor is
coated to a stop. Switch off the main circuit power supply in the external sequence. To reset the alarm,
switch the control circuit power supply from off to on, or turn the reset (RES ) from off to on. However,
the alarm cannot be reset unless its cause is removed.
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
3s
Brake operation
50ms or more 30ms or more
Alarm occurs.
Remove cause of trouble.
Brake operation
Power off Power on
Valid
Invalid
(Note)
Main circuit
control circuit
power supply
Base circuit
Dynamic brake
Servo-on
(SON )
Reset
(RES )
Ready
(RD )
Trouble
(ALM_ )
Note. Switch off the main circuit power as soon as an alarm occurs.
(1) Overcurrent, overload 1 or overload 2
If operation is repeated by switching control circuit power off, then on to reset the overcurrent (A.32),
overload 1 (A.50) or overload 2 (A.51) alarm after its occurrence, without removing its cause, the servo
amplifier and servo motor may become faulty due to temperature rise. Securely remove the cause of
the alarm and also allow about 30 minutes for cooling before resuming operation.
(2) Regenerative alarm
If operation is repeated by switching control circuit power off, then on to reset the regenerative (A.30)
alarm after its occurrence, the external regenerative brake resistor will generate heat, resulting in an
accident.
(3) Instantaneous power failure
Undervoltage (A.10) occurs when the input power is in either of the following statuses.
A power failure of the control circuit power supply continues for 30ms or longer and the control
circuit is not completely off.
The bus voltage dropped to 200VDC or less.
(4) Incremental
When an alarm occurs, the home position is lost. When resuming operation after deactivating the
alarm, make a home position return.
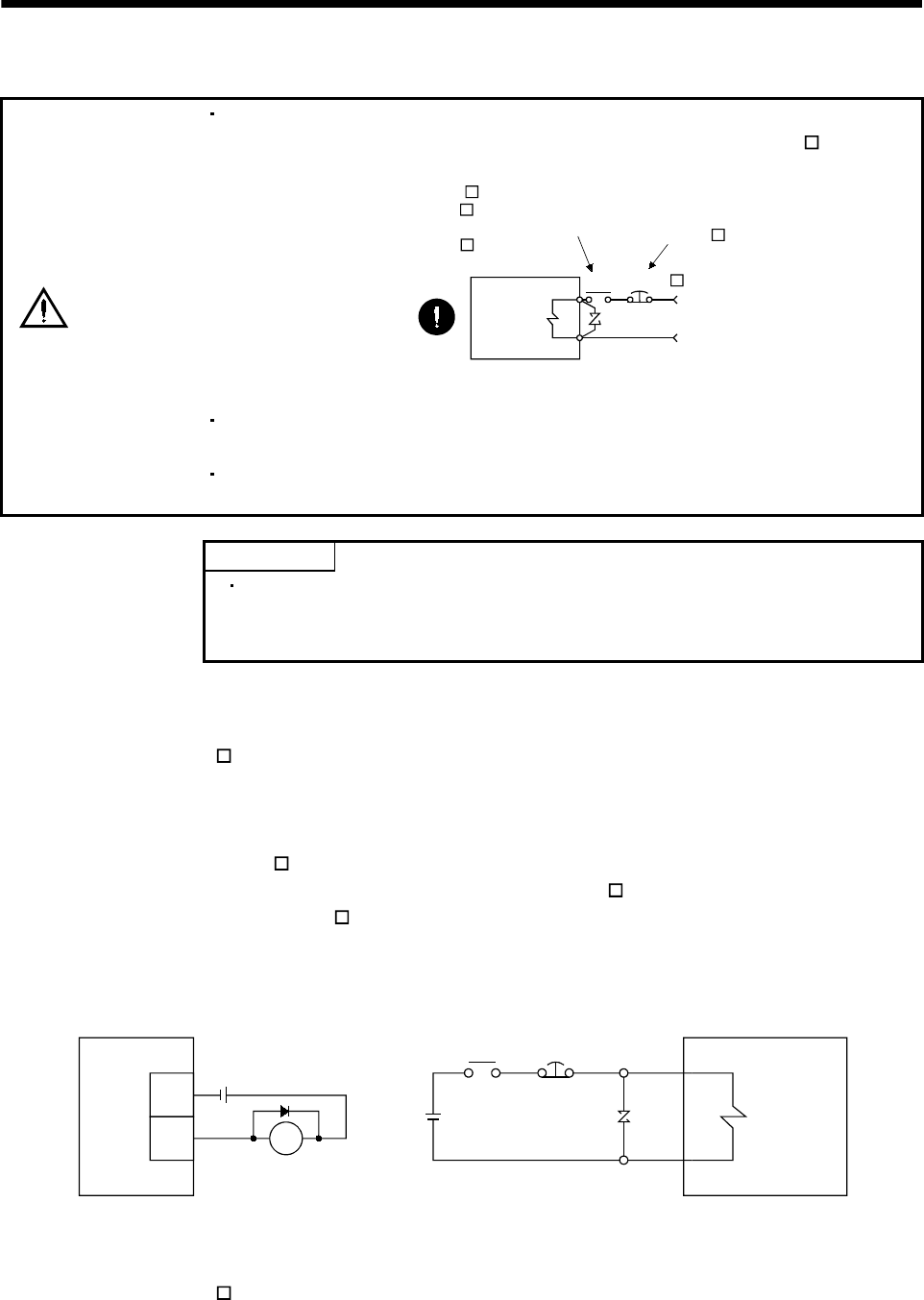
3 - 43
3. SIGNALS AND WIRING
3.7 Servo motor with electromagnetic brake
CAUTION
Configure the electromagnetic brake operation circuit so that it is activated not only
by the interface unit signals but also by an external forced stop (EMG_ ).
EMG_
Contacts must be open when
servo-on (SON ) is off, when an
trouble (ALM_ ) is present and
when an electromagnetic brake
interlock (MBR ).
Circuit must be
opened during
forced stop
(EMG_ ).
RA
24VDC
Electromagnetic brake
Servo motor
The electromagnetic brake is provided for holding purpose and must not be used
for ordinary braking.
Before performing the operation, be sure to confirm that the electromagnetic brake
operates properly.
POINT
Refer to the Servo Motor Instruction Manual for specifications such as the
power supply capacity and operation delay time of the electromagnetic
brake.
Note the following when the servo motor equipped with electromagnetic brake is used:
1) Using the MR Configurator (servo configuration software), make the electromagnetic brake
interlock (MBR ) valid.
2) Do not share the 24VDC interface power supply between the interface and electromagnetic
brake. Always use the power supply designed exclusively for the electromagnetic brake.
3) The brake will operate when the power (24VDC) switches off.
4) While the reset (RES ) is on, the base circuit is shut off. When using the servo motor with a
vertical shaft, use the electromagnetic brake interlock (MBR ).
5) Switch off the servo-on (SON ) command after the servo motor has stopped.
(1) Connection diagram
SG
RA
B2
B1
MBR
RA
Interface unit
or
extension IO unit
24VDC
Forced stop A
or
Forced stop B
24VDC
Servo motor
(2) Setting
1) Using the MR Configurator (servo configuration software), make the electromagnetic brake
interlock (MBR ) valid.
2) In DRU parameter No.33 (electromagnetic brake sequence output), set the delay time (Tb) from
electromagnetic brake operation to base circuit shut-off at a servo off time as in the timing chart
in (3) in this section.
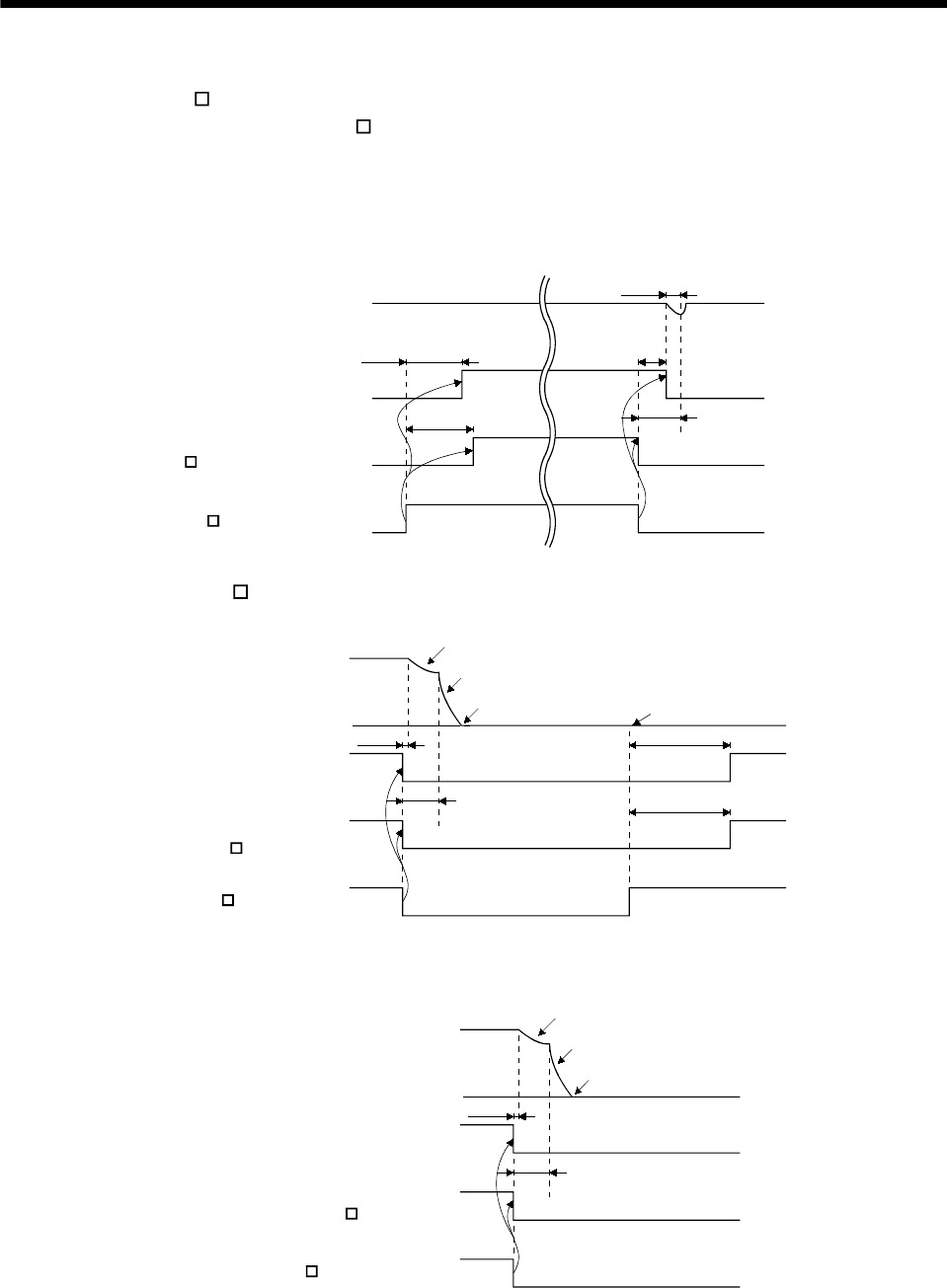
3 - 44
3. SIGNALS AND WIRING
(3) Timing charts
(a) Servo-on (SON ) command (from controller) ON/OFF
Tb [ms] after the servo-on (SON ) is switched off, the servo lock is released and the servo motor
coasts. If the electromagnetic brake is made valid in the servo lock status, the brake life may be
shorter. Therefore, when using the electromagnetic brake in a vertical lift application or the like,
set delay time (Tb) to about the same as the electromagnetic brake operation delay time to prevent
a drop.
(100ms)
(120ms)
Tb
ON
OFF
0 r/min
ON
OFF
Servo motor speed
Base circuit
Electromagnetic
brake(MBR )
Servo-on(SON )
Invalid(ON)
Valid(OFF)
Coasting
Electromagnetic brake
operation delay time
(b) Forced stop (EMG_ ) ON/OFF
ON
OFF
(10ms) (180ms)
(180ms)
Servo motor speed
Electromagnetic
brake interlock (MBR )
Base circuit
Invalid (ON)
Valid (OFF)
Forced stop (EMG_ )
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Invalid (ON)
Valid
(
OFF
)
Electromagnetic brake
operation delay time
Electromagnetic brake release
(c) Alarm occurrence
ON
OFF
(10ms)
Servo motor speed
Base circuit
Electromagnetic
brake interlock (MBR )
Invalid(ON)
Valid(OFF)
No(ON)
Yes(OFF)
Dynamic brake
Dynamic brake
Electromagnetic brake
operation delay time
Electromagnetic brake
Trouble (ALM_ )
Electromagnetic brake
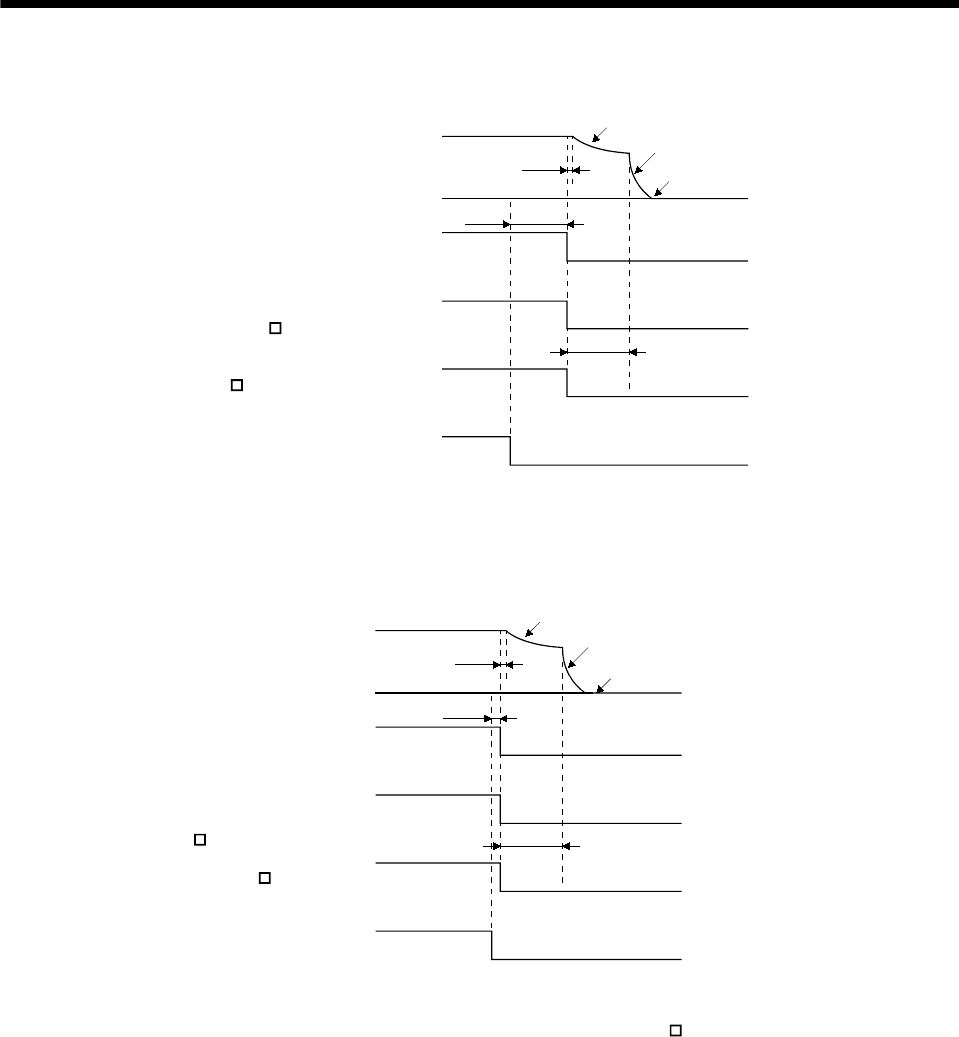
3 - 45
3. SIGNALS AND WIRING
(d) Both main and control circuit power supplies off
(10ms)
ON
OFF
ON
Servo motor speed
Base circuit
Electromagnetic
brake interlock(MBR )
Invalid(ON)
Valid(OFF)
Trouble (ALM_ )
No(ON)
Yes(OFF)
Main circuit
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Control circuit
(Note)15 to 100ms
Electromagnetic brake
operation delay time
Note. Changes with the operating status.
power
OFF
(e) Only main circuit power supply off (control circuit power supply remains on)
(10ms)
ON
OFF
Servo motor speed
Base circuit
Electromagnetic
brake interlock
(MBR )
Invalid(ON)
Valid(OFF)
Trouble (ALM_ )
No(ON)
Yes(OFF)
Main circuit power
supply
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Electromagnetic brake
operation delay time
(Note 2)
Note 1. Changes with the operating status.
2. When the main circuit power supply is off in a motor stop status,
the main circuit off warning (A.E9) occurs and the trouble (ALM_ ) does not turn off.
(Note 1)15ms or more
ON
OFF
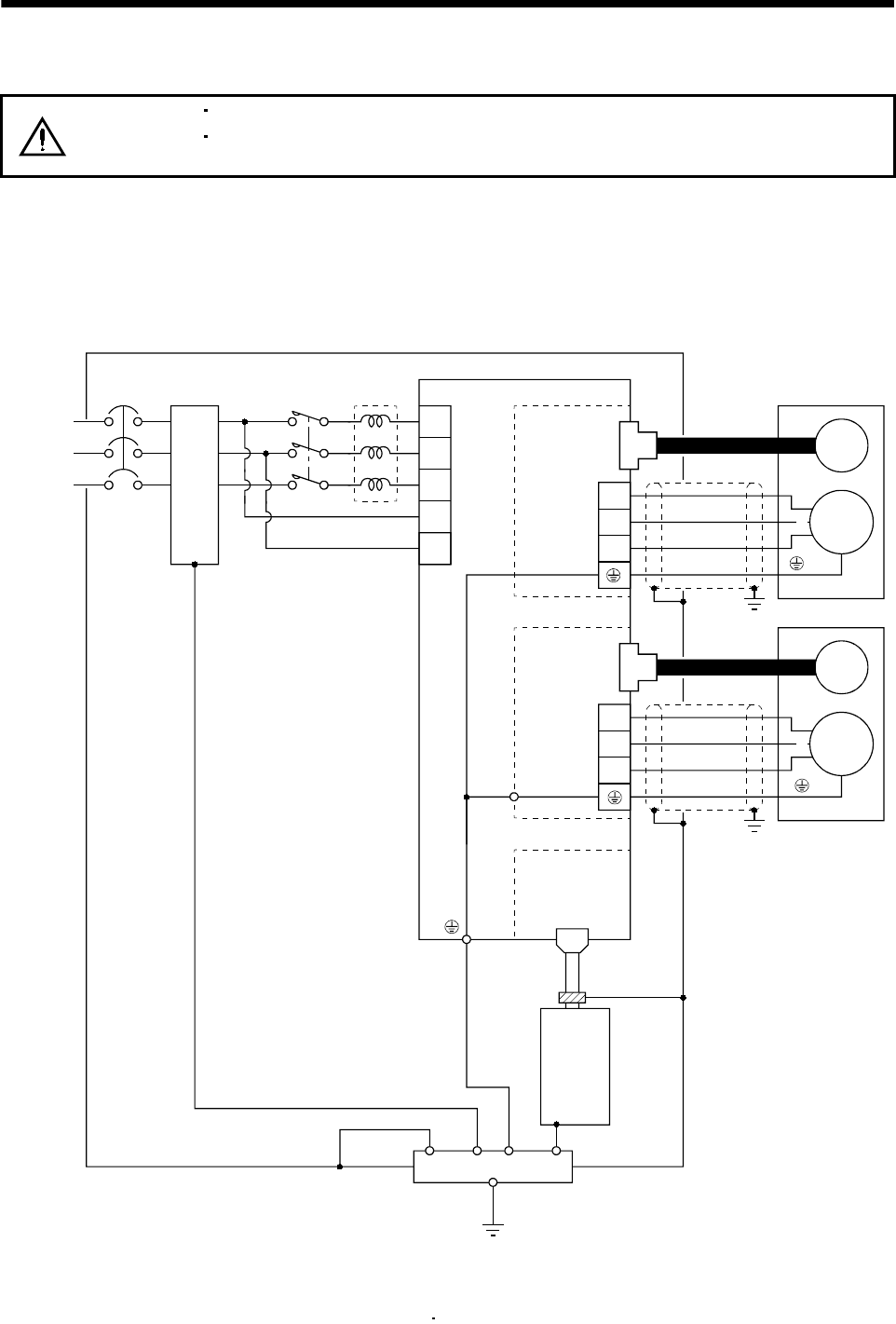
3 - 46
3. SIGNALS AND WIRING
3.8 Grounding
WARNING
Ground the base unit and servo motor securely.
To prevent an electric shock, always connect the protective earth (PE) terminal of
the base unit with the protective earth (PE) of the control box.
The base unit switches the power transistor on-off to supply power to the servo motor. Depending on the
wiring and ground cablerouting, MELSERVO-J2M may be affected by the switching noise (due to di/dt
and dv/dt) of the transistor. To prevent such a fault, refer to the following diagram and always ground.
To conform to the EMC Directive, refer to the EMC Installation Guidelines (IB(NA)67310).
W
U
U
W
CN2
M
V
L11
L21
L1
L2
L3
MC
CN1A
CN2
FR-BAL
CNP2
U
V
W
CNP2
U
V
W
M
V
NFB
Control box
Servo motor
Power
supply
3-phase
200 to
230VAC
(Note4)
1-phase
200 to
230VAC
Encoder
Servo motor
Base unit
Encoder
(Note 3)
(Note 3)
Drive unit
Drive unit
Interface unit
(Note 1)
Protective earth(PE)
Line filter
(Note 2)
(Note2)
Programmable
controller
Note 1. To reduce the influence of external noise, we recommend you to ground the bus cable near
the controller using a cable clamping fixture or to connect three or four data line filters in series.
2. The mounting screw of the drive unit is also used for PE connection of the servo motor.
3. Ensure to connect it to PE terminal of the drive unit. Do not connect it directly to the protective earth of the control panel.
4. For 1-phase 230VAC, connect the power supply to L1 L2 and leave L3 open.
(Earth)
(Earth)
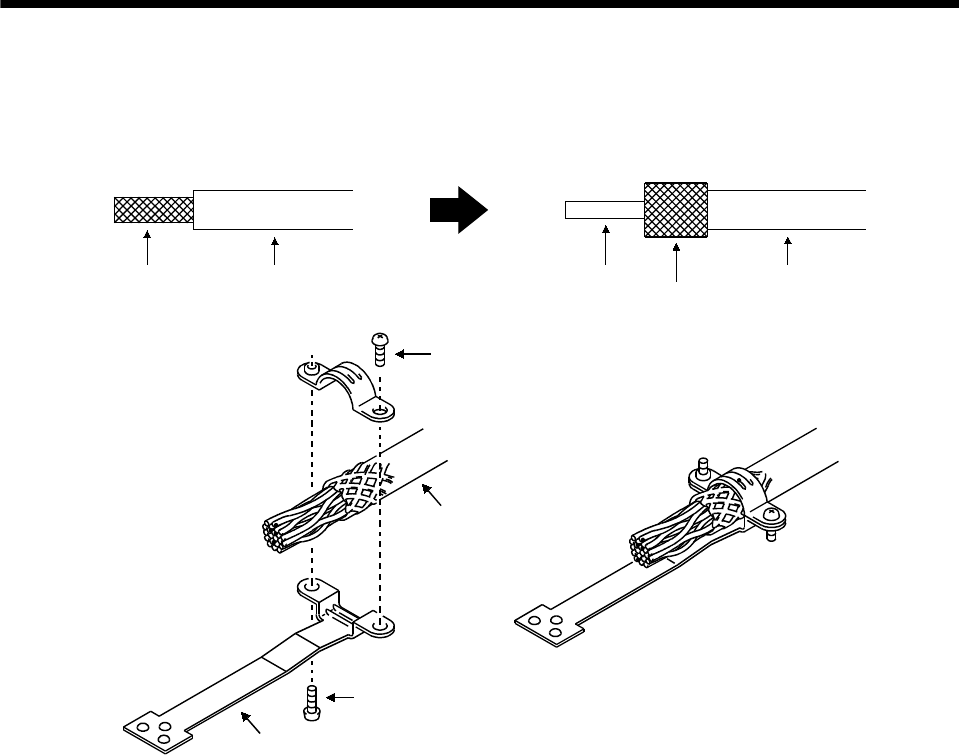
3 - 47
3. SIGNALS AND WIRING
3.9 Instructions for the 3M connector
When fabricating an encoder cable or the like, securely connect the shielded external conductor of the
cable to the ground plate as shown in this section and fix it to the connector shell.
External conductor Sheath
External conductor
Pull back the external conductor to cover the sheath
SheathCore
Strip the sheath.
Screw
Screw
Ground plate
Cable
3 - 48
3. SIGNALS AND WIRING
MEMO
4 - 1
4. OPERATION AND DISPLAY
4. OPERATION AND DISPLAY
On the interface unit display (5-digit, seven-segment display), check the status of communication with the
servo system controller at power-on, check the slot number, and diagnose a fault at occurrence of an
alarm.
4.1 Display flowchart
When powered on, the MELSERVO-J2M is placed in the automatic scroll mode in which the statuses of
the interface unit/drive units installed on the base unit appear at intervals of 2 seconds in due order. At
this time, open slot numbers do not appear.
In the initial status, the indication is in the automatic scroll mode. Pressing the "SET" button switches the
automatic scroll mode to the fixed mode. In the fixed mode, pressing the "UP" or "DOWN" button displays
the status of the subsequent-slot drive unit.
If an alarm/warning occurs in the interface unit/drive units, the alarm/warning number of the interface
unit/drive unit appears. (Refer to Section 4.1.2)
Automatic scroll
IFU status indication
(Slot 1)
DRU status indication DRU status indication DRU status indication DRU status indication
(Slot 2) (Slot 7) (Slot 8)
or
UP DOWN
button
In the automatic scroll mode, pressing the "MODE" button for 2s or more switches between the normal
indication and the corresponding unit-related display screen. (Refer to Section 4.2/ Section 4.3.)
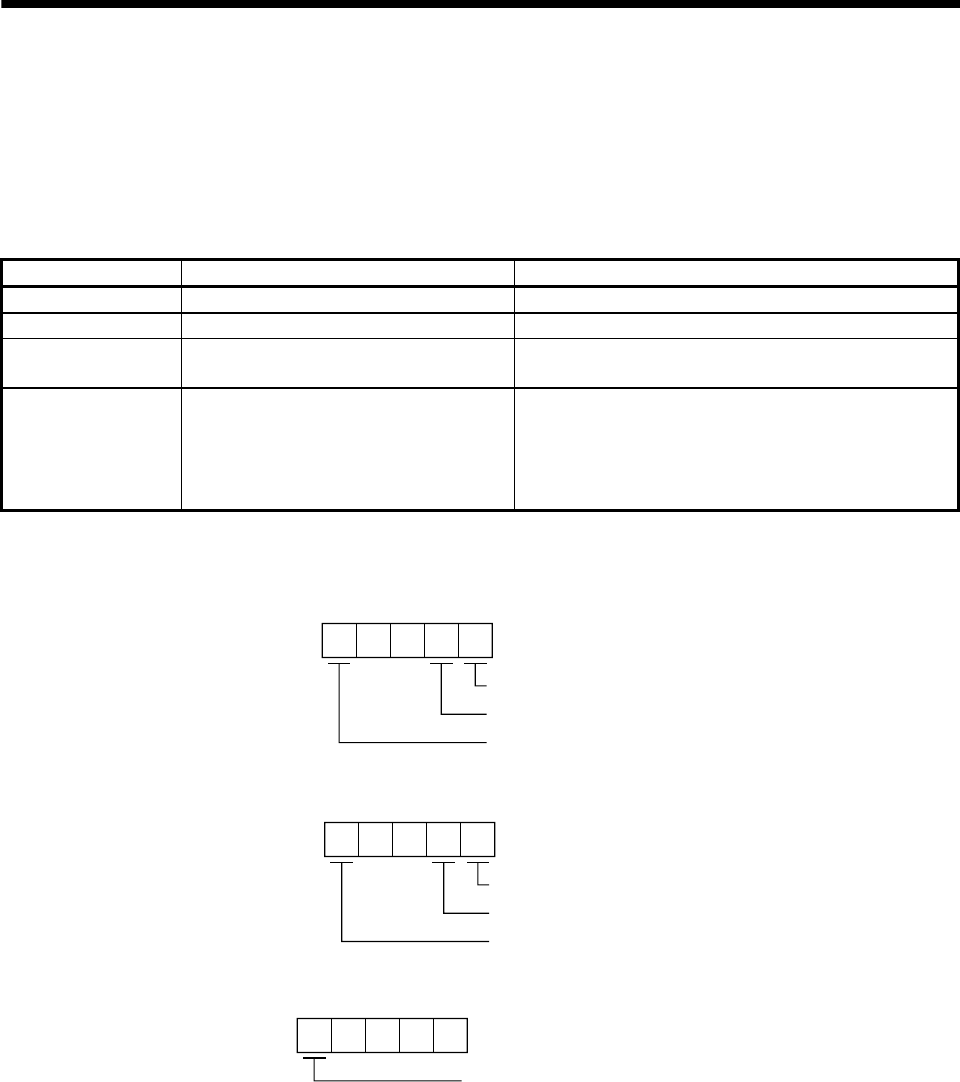
4 - 2
4. OPERATION AND DISPLAY
4.1.1 Normal indication
The normal indication shows the interface unit status or the slot number and current status (during servo
ON or during servo OFF) of the corresponding drive unit to allow you to diagnose faults at alarm
occurrence.
The following are the drive unit status display data in the normal indication.
(Note 1)Indication Status Description
@ C@ Servo off Servo off status.
@ d@ Servo-on Servo on status.
(Note 2) @A**@ Alarm/Warning The encountered alarm/warning number is displayed.
(Refer to Section 9.1.)
@T d@.
@T C@.
Test operation mode Test operation mode status using the MR Configurator
(servo configuration software).
Displayed for JOG operation, positioning operation,
motor-less operation or D0 forced output.
The indication varies with the current condition.
Note 1. @ denotes the slot number of the base unit.
2. ** indicates the warning/alarm No.
(1) When the drive unit is during servo off
1. C 1
Slot number
Slot number
Indicates servo OFF.
(2) When the drive unit is during servo on
1. d1
Slot number
Slot number
Indicates servo ON.
(3) When the interface unit is normal
F.
Indicates the interface unit.
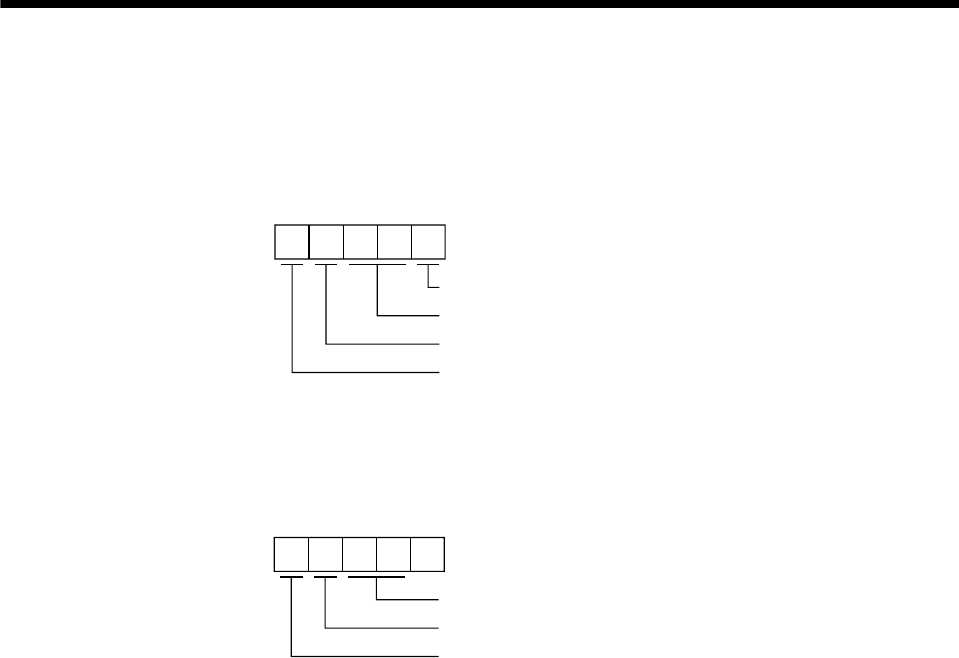
4 - 3
4. OPERATION AND DISPLAY
4.1.2 If alarm/warning occurs
(1) If alarm/warning occurs in drive unit
An alarm/warning which occurred in the drive unit is represented by the following indication.
The following indication example assumes that an encoder error (A.16) occurred in the drive unit of
installed on slot 1. During alarm occurrence digits flicker.
1. A 1 6. 1
Slot number
Slot number
Alarm/warning number
Denotes alarm/warning indication.
(2) If alarm/warning occurs in interface unit
An alarm/warning which occurred in the interface unit is represented by the following indication. The
following indication example assumes that interface unit undervoltage (A.10) occurred. During alarm
occurrence digits flicker.
F. A 1 0.
Alarm/warning number
Denotes alarm/warning indication.
Denotes interface unit.
4 - 4
4. OPERATION AND DISPLAY
4.1.3 If test operation
POINT
Test operation can be performed using the MR Configurator (servo
configuration software).
(1) When test operation is being performed
Test operation being performed is indicated as follows.
@. T@.
Denotes test operation indication.
Indicates the current status. Refer to the following table for below.
Slot number
C
Slot number. Test operation being performed is indicated as follows.
Indication Current Status
@T C@. Servo off status
@T d@. Servo on status
(2) When alarm occurs during test operation
Any alarm that occurred during test operation is indicated as follows.
@. A@.
Alarm display
Slot number
6.
Slot number. The decimal point is lit during test operation.
1
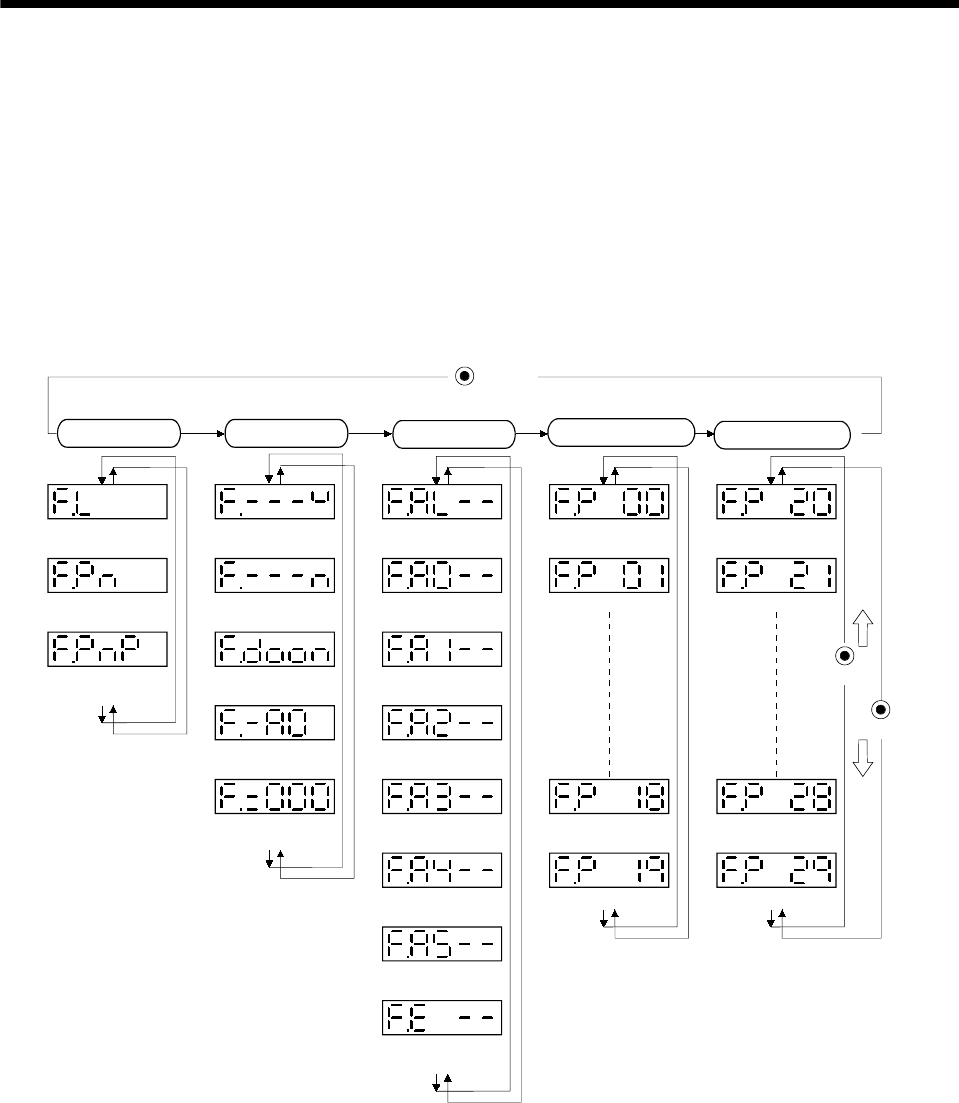
4 - 5
4. OPERATION AND DISPLAY
4.2 Interface unit display
4.2.1 Display flowchart of interface unit
Use the display (5-digit, 7-segment LED) on the front panel of the interface unit for status display,
parameter setting, etc. Set the parameters before operation, diagnose an alarm, confirm external
sequences, and/or confirm the operation status.
The automatic scroll mode is selected at power-on. Before starting use, therefore, press the "UP" or
"DOWN" button to change the fifth digit to "F" and press the "MODE" button for 2s or more to change the
indication.
Press the "MODE" "UP" or "DOWN" button once to move to the next screen.
UP
DOWN
MODE
button
Status display Diagnosis Alarm Basic IFU parameters
Regenerative load
ratio [%]
Current alarm IFU parameter No. 0 IFU parameter No. 20
Bus voltage [V] Last alarm
Second alarm in past
Third alarm in past
Fourth alarm in past
Fifth alarm in past
Sixth alarm in past
Parameter error No.
IFU parameter No. 19
IFU parameter No. 18
IFU parameter No. 1 IFU parameter No. 21
IFU parameter No. 28
IFU parameter No. 29
Software version
High
Software version
Low
Peak bus voltage
[V]
Interface unit
external input signal
Interface unit
external output signal
Expansion IFU
parameters
Interface unit output
signal (DO) forced output
Note. The parameter display range varies with the parameter write inhibit.
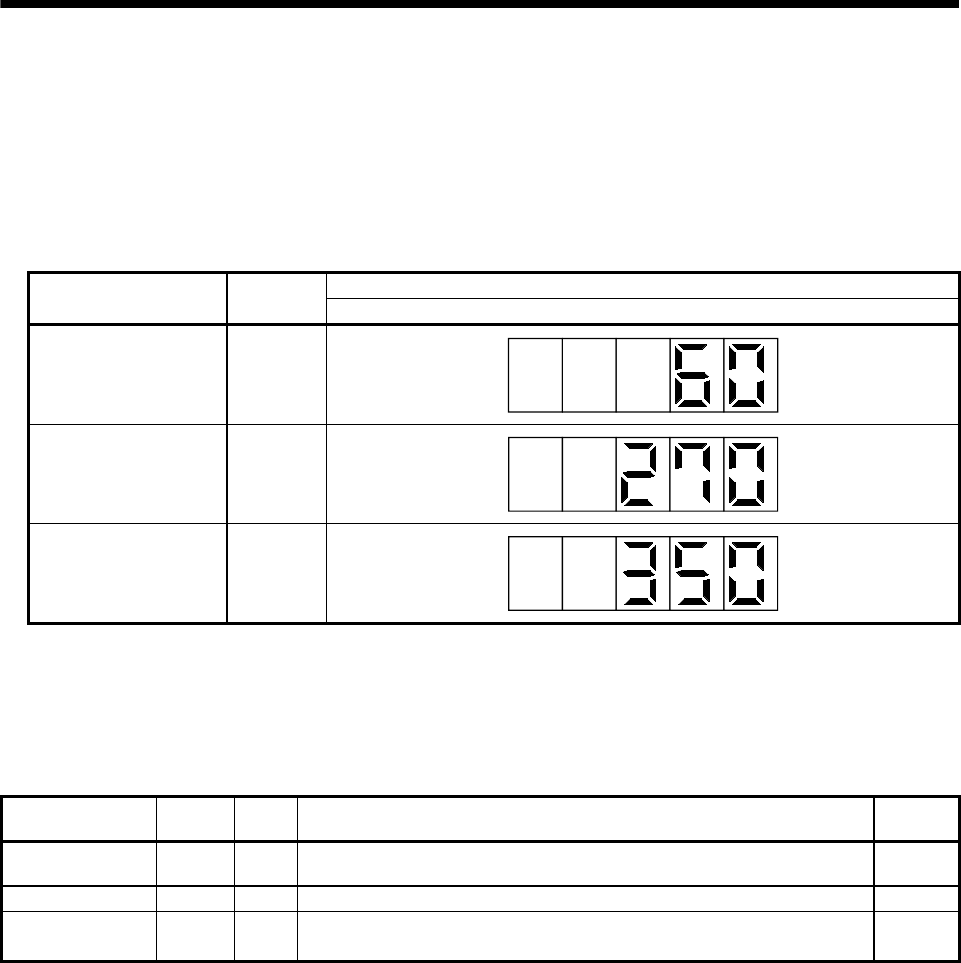
4 - 6
4. OPERATION AND DISPLAY
4.2.2 Status display of interface unit
MELSERVO-J2M status during operation is shown on the 5-digit, 7-segment LED display. Press the "UP"
or "DOWN" button to change display data as desired. When the required data is selected, the
corresponding symbol appears. Press the "SET" button to display its data.
(1) Display examples
The following table lists display examples:
Displayed data
Item Status Interface unit display
Regenerative load ratio 60%
Bus voltage 270V
Peak bus voltage 350V
(2) Interface unit status display list
The following table indicates the MELSERVO-J2M statuses that can be shown. After it has been
selected, each status display changes to a symbol display. Press the "SET" button to show the
definition of the status display. Refer to Appendix 1 for the measurement point.
Pressing the "MODE" button during a status definition display returns to a symbol display.
Name Symbol Unit Description Display
range
Regenerative load
ratio F.L % The ratio of regenerative power to permissible regenerative power is
displayed in %. 0 to 100
Bus voltage F.Pn V The voltage (across P-N) of the main circuit converter is displayed. 0 to 450
Peak bus voltage F.PnP V Shows the maximum voltage of the main circuit converter (across P-N).
The maximum value during past 15s is displayed. 0 to 450
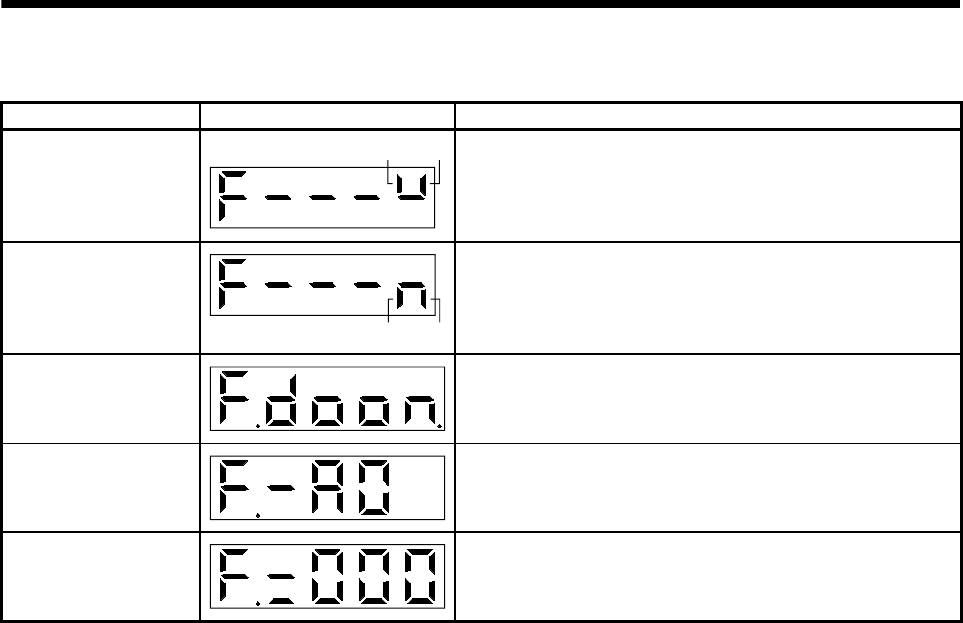
4 - 7
4. OPERATION AND DISPLAY
4.2.3 Diagnostic mode of interface unit
Name Display Description
Interface unit external
input signal
2) 1) Shows the ON/OFF states of the external input signals.
1) Forced stop A (EMG_A)
ON: On OFF: Off
2) Forced stop B (EMG_B)
ON: On OFF: Off
Interface unit external
output signal
2) 1)
Shows the ON/OFF states of the external output signals.
1) Trouble A (ALM_A)
ON: On OFF: Off
2) Trouble B (ALM_B)
ON: On OFF: Off
Interface unit output
signal (DO) forced
output
The digital output signal can be forced on/off. For more
information, refer to section 4.2.6.
During output signal (DO) forced output, the decimal point in the
first digit is lit.
Software version Low Indicates the version of the software.
Software version High Indicates the system number of the software.
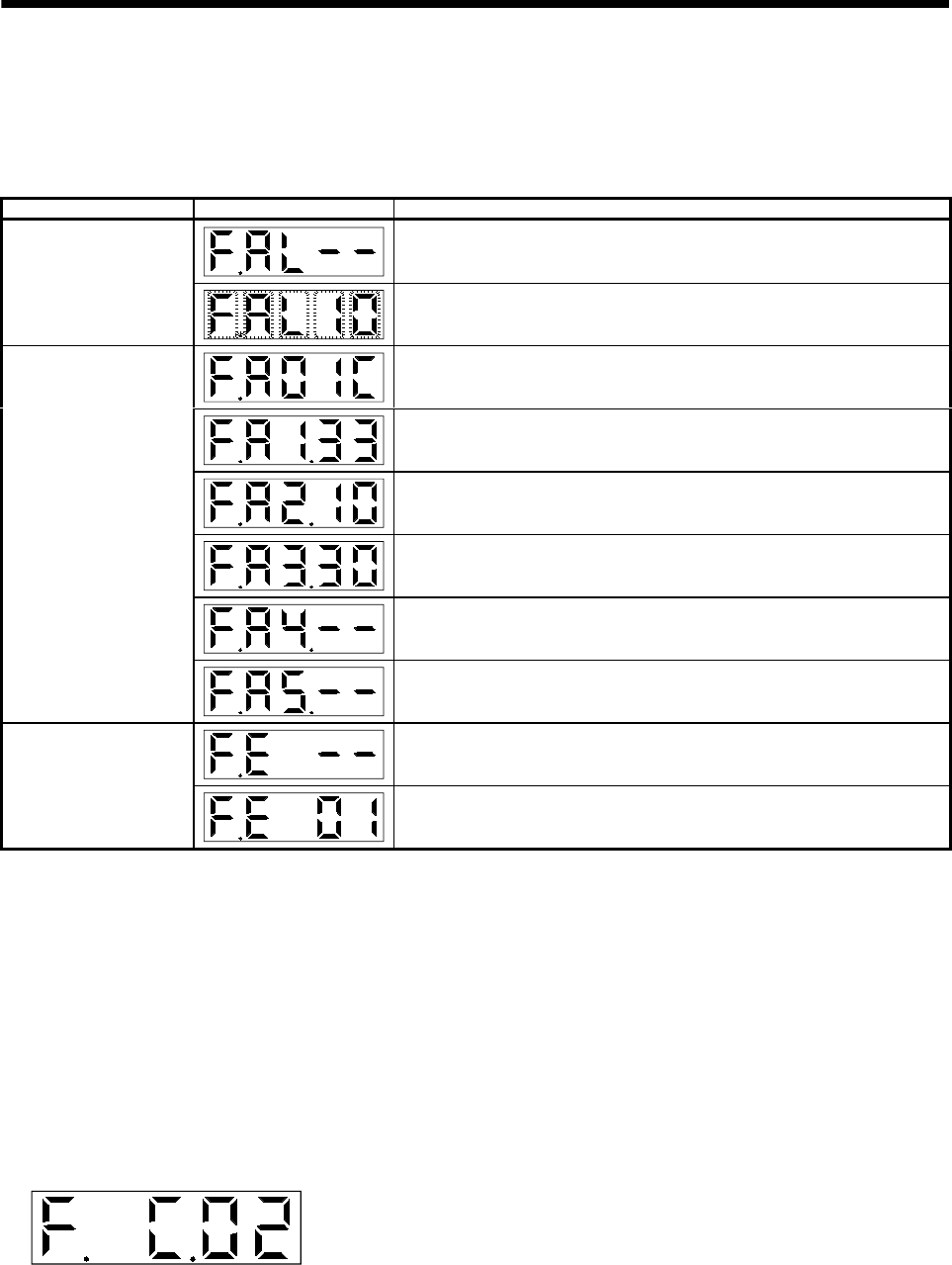
4 - 8
4. OPERATION AND DISPLAY
4.2.4 Alarm mode of interface unit
The current alarm, past alarm history and parameter error are displayed. The lower 2 digits on the
display indicate the alarm number that has occurred or the parameter number in error. Display examples
are shown below.
Name Display Description
Indicates no occurrence of an alarm in the interface unit.
Current alarm
Indicates the occurrence of overvoltage (A.10) in the interface unit.
Flickers at occurrence of the alarm.
Indicates that the last alarm is base unit error (A.1C) in the interface
unit.
Indicates that the second alarm in the past is overvoltage (A.33) in the
interface unit.
Indicates that the third alarm in the past is undervoltage (A.10) in the
interface unit.
Indicates that the fourth alarm in the past is over regenerative (A.30) in
the interface unit.
Indicates that there is no fifth alarm in the past of the interface unit.
Alarm history
Indicates that there is no sixth alarm in the past of the interface unit.
Indicates no occurrence of parameter error (A.37) of the interface unit.
Parameter error No.
Indicates that the data of parameter No. 1 is faulty of the interface unit.
Functions at occurrence of an alarm
(1) Any mode screen displays the current alarm.
(2) The other screen is visible during occurrence of an alarm. At this time, the decimal point in the fourth
digit flickers.
(3) For any alarm, remove its cause and clear it in any of the following: (for clearable alarms, refer to
Section 9.2)
(a) Switch power OFF, then ON.
(b) Press the "SET" button on the current alarm screen.
(4) Use IFU parameter No. 0 to clear the alarm history.
(5) Pressing "SET" button on the alarm history display screen for 2s or longer shows the following detailed
information display screen. Note that this is provided for maintenance by the manufacturer.
(6) Press "UP" or "DOWN" button to move to the next history.
(7) Pressing the "MODE" button on the alarm detail display screen returns to the alarm history display.
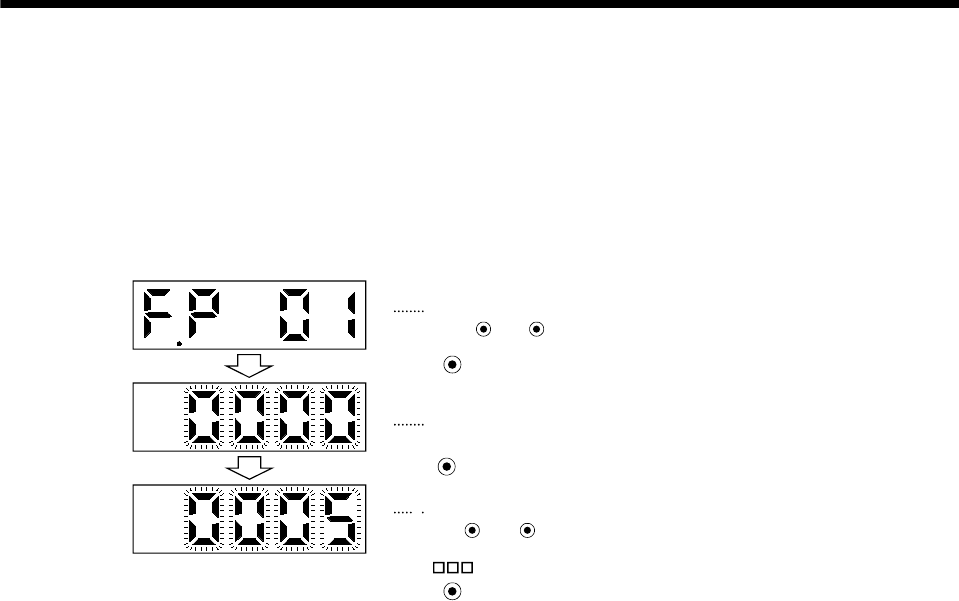
4 - 9
4. OPERATION AND DISPLAY
4.2.5 Interface unit parameter mode
The parameters whose abbreviations are marked* are made valid by changing the setting and then
switching power off once and switching it on again. Refer to Section 5.2.2.
The following example shows the operation procedure performed after power-on to change the
regenerative brake resistor (IFU parameter No. 1) to 0005 (MR-RB15).
Using the "MODE" button, show the basic parameter screen.
UP DOWN
The parameter number is displayed.
Press or button to change the number.
Press SET twice.
The set value of the specified parameter number flickers.
Press UP fifth.
During flickering, the set value can be changed.
Use or button .
Press SET to enter.
( 5: regenerative brake option MR-RB14)
UP DOWN
Pressing the "MODE" button during a parameter setting display or setting change display cancels the
processing and returns to a parameter number display.
To shift to the next parameter, press the "UP" or "DOWN" button.
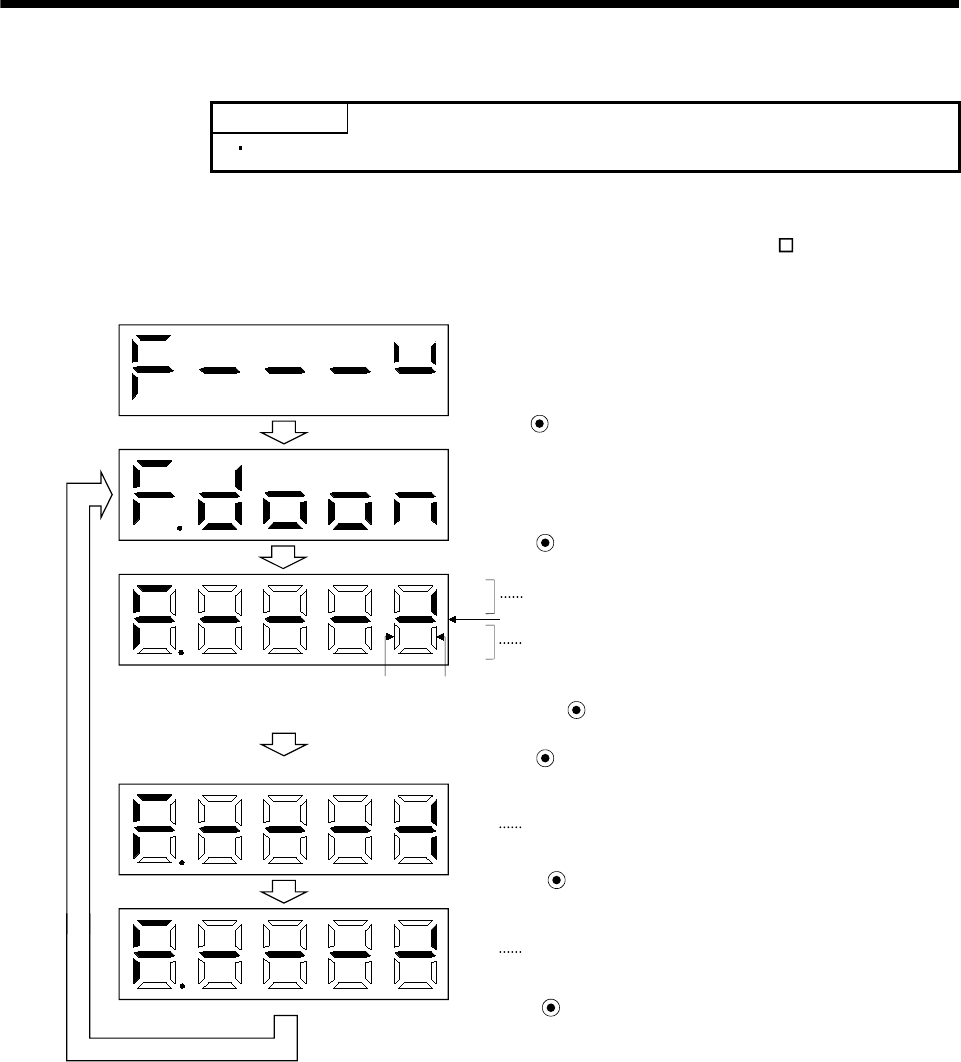
4 - 10
4. OPERATION AND DISPLAY
4.2.6 Interface unit output signal (DO) forced output
POINT
This function is available during test operation.
The output signal can be forced on/off independently of the servo status. This function is used for output
signal wiring check, etc. This operation must be performed in the servo off state (SON off).
Call the display screen shown after power-on. Using the "MODE" button, show the diagnostic screen.
Press UP button twice.
Press SET button for more than 2s.
Turns on/off the signal under the lit LED.
Always lit.
Indicates whether the output signal is ON or OFF.
The signals are the same as the external output
signals. (On: ON, Off: OFF)
Pressing MODE button once moves the lit LED to the left.
Press UP button once.
The ALM_A turns on.
(There will be continuity across ALM_A-SG.)
Press DOWN button once.
The ALM_A turns off.
Press SET button for more than 2s.
ALM_A ALM_B
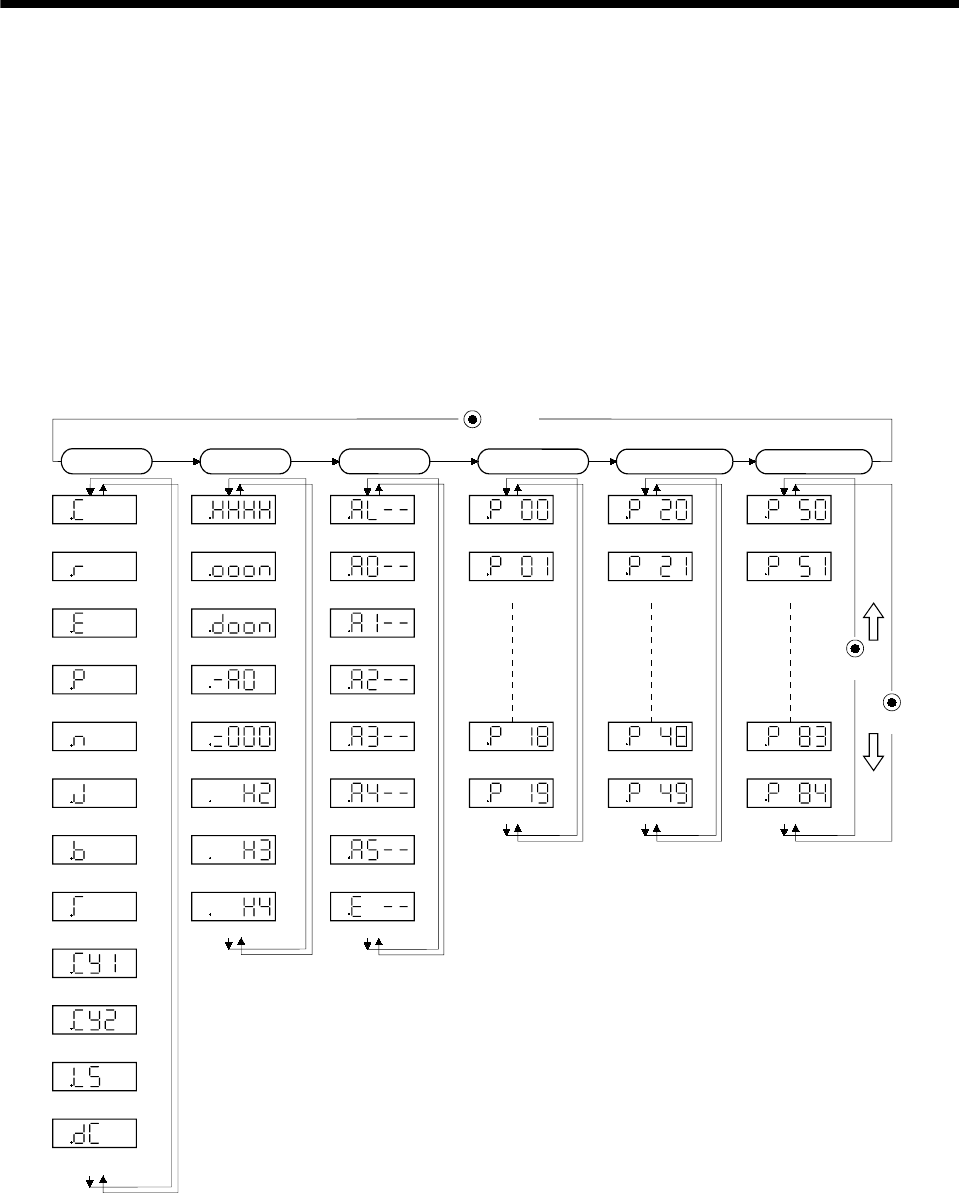
4 - 11
4. OPERATION AND DISPLAY
4.3 Drive unit display
4.3.1 Drive unit display sequence
Use the display (5-digit, 7-segment LED) on the front panel of the servo amplifier for status display,
parameter setting, etc. Set the parameters before operation, diagnose an alarm, confirm external
sequences, and/or confirm the operation status.
The automatic scroll mode is selected at power-on. Before starting use, therefore, press the "UP" or
"DOWN" button to change the fifth digit to the necessary slot number "1" to "8" and press the "MODE"
button for 2s or more to change the indication.
Press the "MODE" "UP" or "DOWN" button once to move to the next screen.
To refer to or set the expansion parameters, make them valid with DRU parameter No. 19 (parameter
write disable).
UP
DOWN
MODE
Status display Diagnosis Alarm Basic DRU
parameters Expansion DRU
parameters 1 Expansion DRU
parameters 2
Cumulative feedback
pulses [pulse]
Current alarm
Motor speed
[r/min]
Droop pulses
[pulse]
Cumulative command
pulses [pulse]
Command pulse
frequency [kpps]
Effective load ratio
[%]
Peak load ratio
[%]
Instantaneous torque
[%]
Within one-revolution
position low [pulse]
Within one-revolution
position, high [100 pulses]
ABS counter
[rev]
Load inertia moment
ratio [times]
Software version
Low
Software version
High
Motor series ID
Motor type ID
Encoder ID
Last alarm
Second alarm in past
Third alarm in past
Fourth alarm in past
Fifth alarm in past
Sixth alarm in past
Parameter error No.
Drive unit external
input signal
Drive unit external
output signal
Drive unit output signal
(DO) forced output
DRU parameter No. 1
DRU parameter No. 0 DRU parameter No. 20
DRU parameter No. 21
DRU parameter No. 50
DRU parameter No. 51
DRU parameter No. 18
DRU parameter No. 19
DRU parameter No. 48
DRU parameter No. 49
DRU parameter No. 83
DRU parameter No. 84
button
(Note)
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@@
@
@
@
Note 1. @ indicates the slot number.
2. The parameter display range varies with the parameter write inhibit.
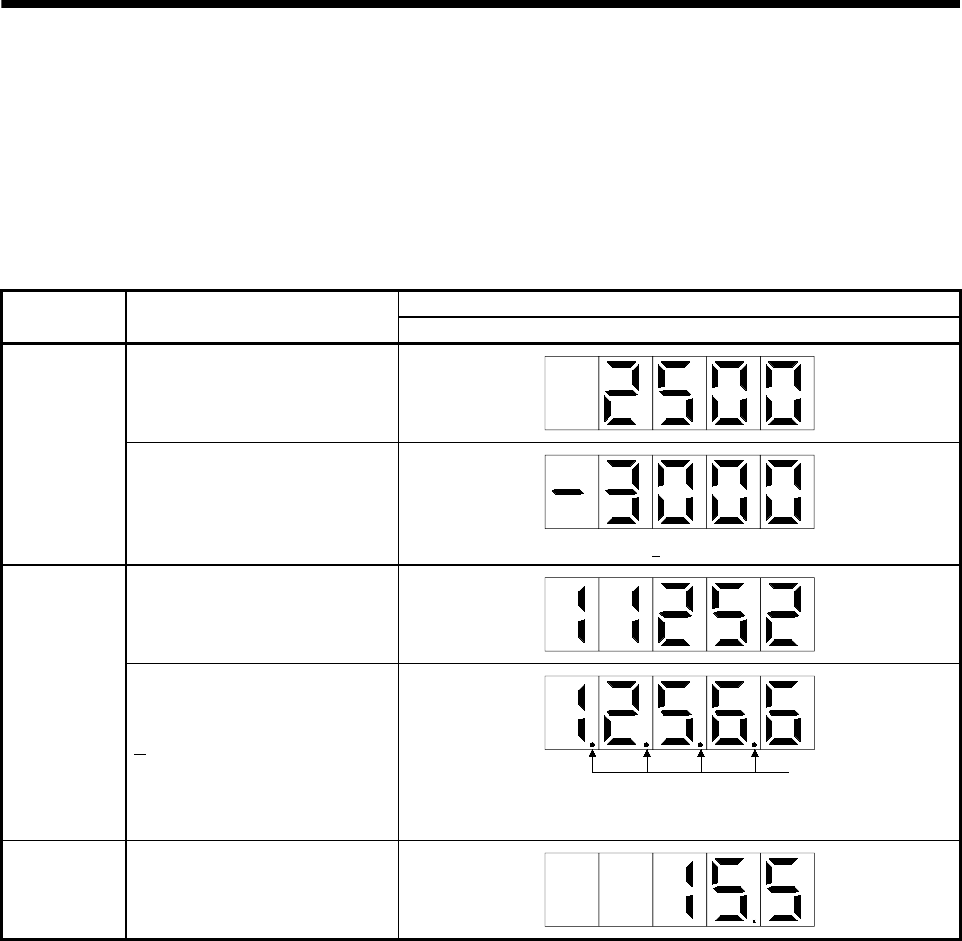
4 - 12
4. OPERATION AND DISPLAY
4.3.2 Status display of drive unit
The servo status during operation is shown on the 5-digit, 7-segment LED display. Press the "UP" or
"DOWN" button to change display data as desired. When the required data is selected, the corresponding
symbol appears. Press the "SET" button to display its data.
(1) Display examples
The following table lists display examples:
Displayed data
Item Status Servo amplifier display
Forward rotation at 3000r/min
Motor speed
Reverse rotation at 3000r/min
Reverse rotation is indicated by " ".
11252pulse
Multi-
revolution
counter
12566pulse
Lit
Negative value is indicated by the lit decimal points in the upper four
digits.
Load inertia
moment 15.5 times
4 - 13
4. OPERATION AND DISPLAY
(2) Drive unit status display list
The following table lists the servo statuses that may be shown:
Refer to Appendix 2 for the measurement point.
Name Symbol Unit Description Display
range
Cumulative feedback
pulses
@.C pulse Feedback pulses from the servo motor encoder are counted and
displayed. The value in excess of 99999 is counted, bus since the
interface display is five digits, it shows the lower five digits of the
actual value. Press the "SET" button to reset the display value to
zero.
Reverse rotation is indicated by the lit decimal points in the upper
four digits.
99999
to
99999
Servo motor speed @.r r/min The servo motor speed is displayed.
The value rounded off is displayed in 0.1r/min.
5400
to
5400
Droop pulses @.E pulse The number of droop pulses in the deviation counter is displayed.
When the servo motor is rotating in the reverse direction, the
decimal points in the upper four digits are lit.
Since the servo amplifier display is five digits, it shows the lower five
digits of the actual value.
The number of pulses displayed is not yet multiplied by the electronic
gear.
99999
to
99999
Cumulative command
pulses
@.P pulse The position command input pulses are counted and displayed.
As the value displayed is not yet multiplied by the electronic gear
(CMX/CDV), it may not match the indication of the cumulative
feedback pulses.
The value in excess of 99999 is counted, but since the interface
display is five digits, it shows the lower five digits of the actual value.
Press the "SET" button to reset the display value to zero. When the
servo motor is rotating in the reverse direction, the decimal points in
the upper four digits are lit.
99999
to
99999
Command pulse
frequency
@.n kpps The frequency of the position command input pulses is displayed.
The value displayed is not multiplied by the electronic gear
(CMX/CDV).
800
to
800
Effective load ratio @.J % The continuous effective load torque is displayed.
The effective value in the past 15 seconds is displayed relative to the
rated torque of 100%.
0
to
300
Peak load ratio @.b % The maximum torque generated during acceleration/deceleration, etc.
The highest value in the past 15 seconds is displayed relative to the
rated torque of 100%.
0
to
400
Instantaneous torque @.T % Torque that occurred instantaneously is displayed.
The value of the torque that occurred is displayed in real time
relative to the rate torque of 100%.
0
to
400
Within one-revolution
position Low
@.CY1 pulse Position within one revolution is displayed in encoder pulses.
The value returns to "0" when it exceeds the maximum number of
pulses.
The value is incremented in the "CCW" direction of rotation.
0
to
99999
Within one-revolution
position High
@.CY2 100
pulse
The within one-revolution position is displayed in 100 pulse
increments of the encoder.
The value returns to "0" when it exceeds the maximum number of
pulses.
The value is incremented in the "CCW" direction of rotation.
0
to
13107
ABS counter @.LS rev Travel value from the home position in the absolute position
detection systems is displayed in terms of the absolute position
detectors counter value.
32768
to
32768
Load inertia moment
ratio
@.dC 0.1
Times
The estimated ratio of the load inertia moment to the servo motor
shaft inertia moment is displayed.
0.0
to
300.0
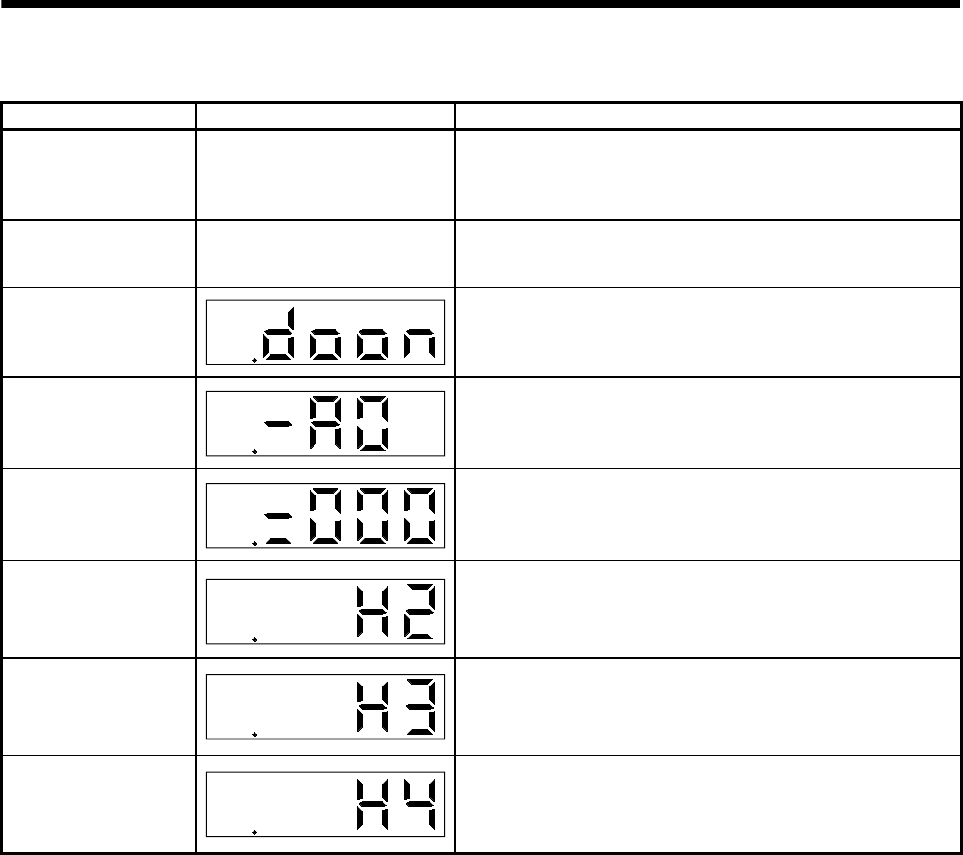
4 - 14
4. OPERATION AND DISPLAY
4.3.3 Diagnostic mode of drive unit
Name (Note) Display Description
Drive unit external
input signal Refer to section 4.3.6.
Shows the ON/OFF statuses of the external input signals.
Each signal corresponds to the function assignment. (The
corresponding segment is lit when the function-assigned signal
turns on.)
Drive unit external
output signal Refer to section 4.3.6.
Shows the ON/OFF statuses of the external output signals.
When the corresponding segment is lit, the output is provided to
the assigned signal.
Drive unit output
signal (DO) forced
output @The digital output signal can be forced on/off. For more
information, refer to section 4.3.8.
Software version Low @Indicates the version of the drive unit software.
Software version High @Indicates the system number of the drive unit software.
Motor series ID @
Press the "SET" button to show the motor series ID of the servo
motor currently connected.
For indication details, refer to the optional MELSERVO Servo
Motor Instruction Manual.
Motor type ID @
Press the "SET" button to show the motor type ID of the servo
motor currently connected.
For indication details, refer to the optional MELSERVO Servo
Motor Instruction Manual.
Encoder ID @
Press the "SET" button to show the encoder ID of the servo motor
currently connected.
For indication details, refer to the optional MELSERVO Servo
Motor Instruction Manual.
Note. @ indicates the slot number.
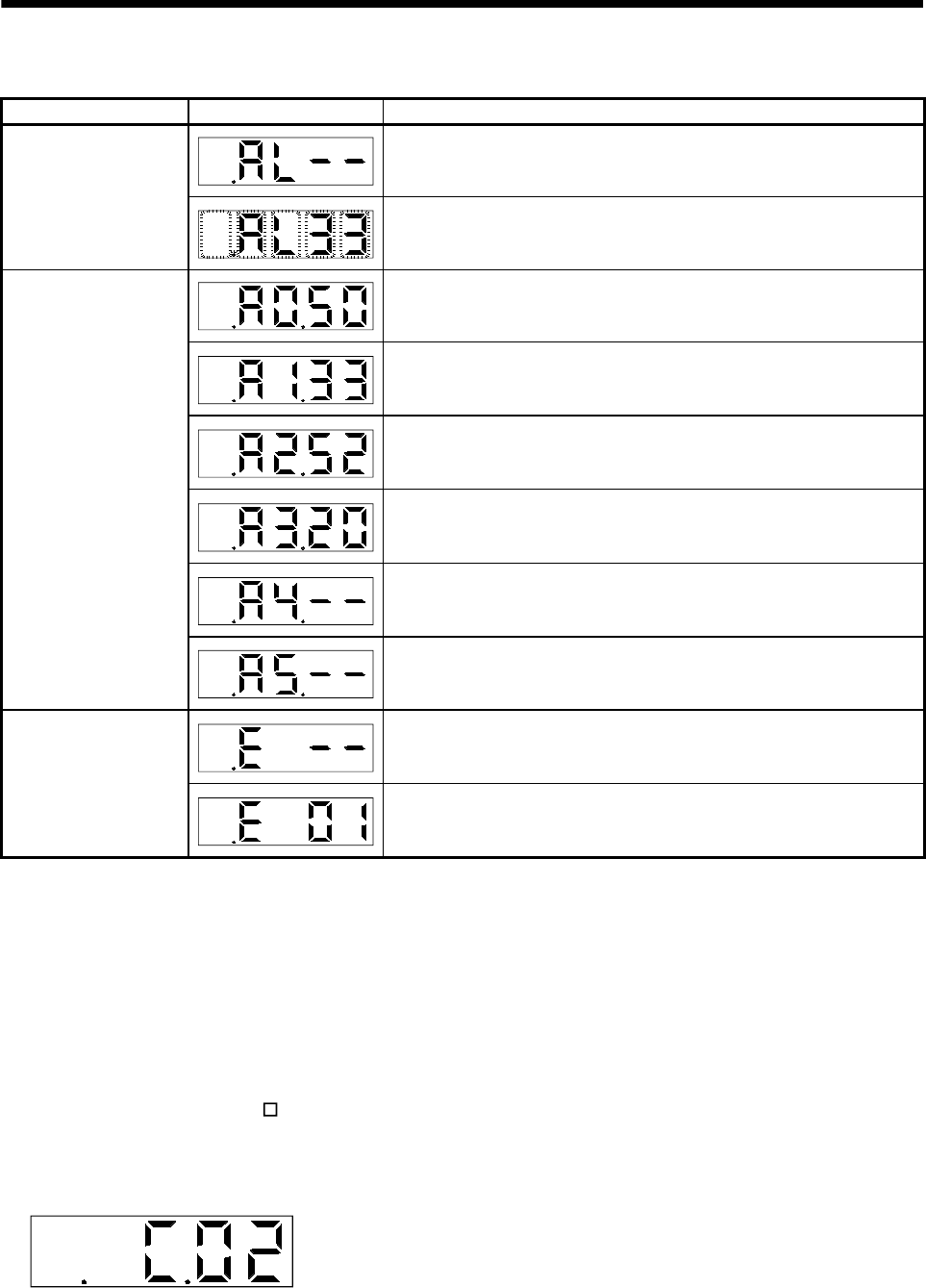
4 - 15
4. OPERATION AND DISPLAY
4.3.4 Alarm mode of drive unit
Name (Note) Display Description
@Indicates no occurrence of an alarm in the drive unit.
Current alarm
@Indicates the occurrence of overvoltage (A.33) in the drive unit.
Flickers at occurrence of the alarm.
@Indicates that the last alarm is overload 1 (A.50) in the drive unit.
@Indicates that the second alarm in the past is overvoltage (A.33) in the
drive unit.
@Indicates that the third alarm in the past is undervoltage (A.52) in the
drive unit.
@Indicates that the fourth alarm in the past is encoder error (A.20) in the
drive unit.
@Indicates that there is no fifth alarm in the past in the drive unit.
Alarm history
@Indicates that there is no sixth alarm in the past in the drive unit.
@Indicates no occurrence of parameter error (A.37) in the drive unit.
Parameter error No.
@Indicates that the data of parameter No. 1 is faulty in the drive unit.
Note. @ indicates the slot number.
Functions at occurrence of an alarm
(1) Any mode screen displays the current alarm.
(2) The other screen is visible during occurrence of an alarm. At this time, the decimal point in the fourth
digit flickers.
(3) For any alarm, remove its cause and clear it in any of the following methods: (for clearable alarms,
refer to Section 9.2)
(a) Switch power OFF, then ON.
(b) Turn on the reset (RES ).
(4) Use DRU parameter No. 16 to clear the alarm history.
(5) Pressing "SET" button on the alarm history display screen for 2s or longer shows the following detailed
information display screen. Note that this is provided for maintenance by the manufacturer.
@
(6) Press "UP" or "DOWN" button to move to the next history.
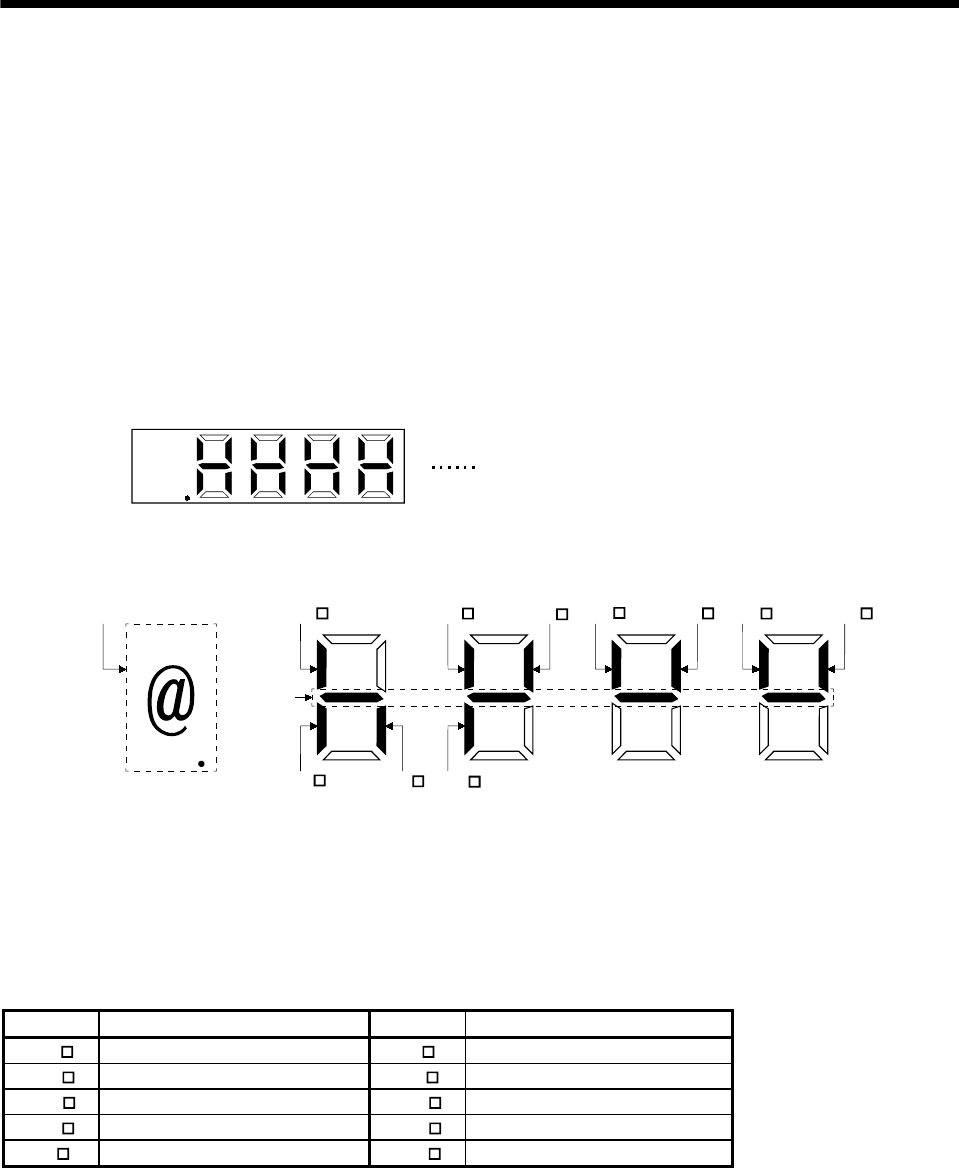
4 - 16
4. OPERATION AND DISPLAY
4.3.5 Drive unit parameter mode
The parameter setting of the drive unit is the same as that of the interface unit. Refer to Section 4.2.5.
To use the expansion parameters, change the setting of DRU parameter No. 19 (parameter write disable).
Refer to section 5.1.1.
4.3.6 Drive unit external input signal display
The ON/OFF states of the digital input signals connected to the servo amplifier can be confirmed.
(1) Operation
Call the display screen shown after power-on.
Using the "MODE" button, show the diagnostic screen.
@External input signal display screen
(2) Display definition
Corresponds to the signals of the seven-segment LED.
TL1 PC CR RES SON LSN LSP
CM2 CM1 CDP
Slot number
Always lit
Lit: ON
Extinguished: OFF
The 7-segment LED shown above indicates ON/OFF.
Each segment at top indicates the input signal and each segment at bottom indicates the output signal.
The following table indicates the signal names.
Signal Name List
Signal Signal Name Signal Signal Name
LSP Forward rotation stroke end PC Proportion control
LSN Reverse rotation stroke end TL1 Internal torque limit selection
SON Servo-on CM1 Electronic gear 1 selection
RES Reset CM2 Electronic gear 2 selection
CR Clear CDP Gain switch selection
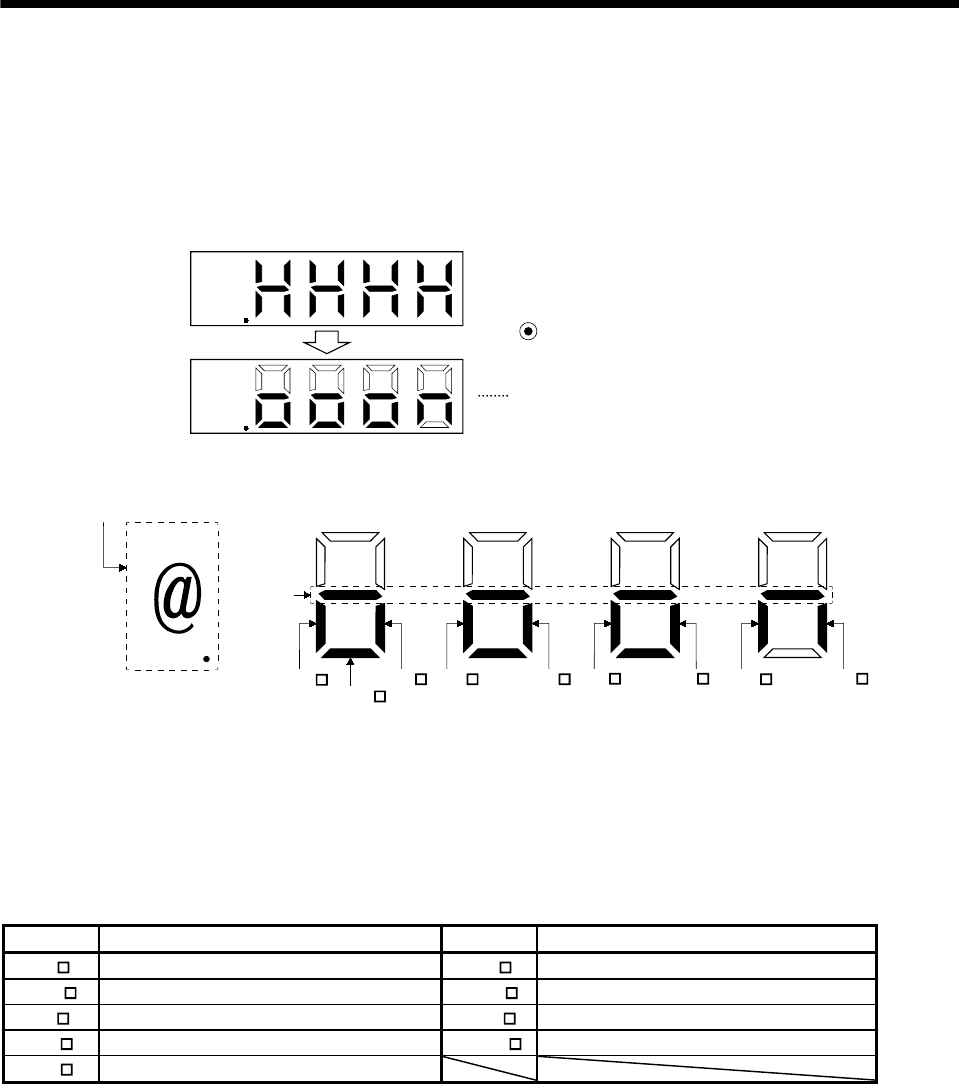
4 - 17
4. OPERATION AND DISPLAY
4.3.7 Drive unit external output signal display
The ON/OFF states of the digital output signals connected to the servo amplifier can be confirmed.
(1) Operation
Call the display screen shown after power-on.
Using the "MODE" button, show the diagnostic screen.
Press UP button once.
External output signal display screen
@
@
(2) Display definition
WNG ALM_ TLC ZSP OP RDINP MBR
BWNG
Slot number
Always lit
Lit: ON
Extinguished: OFF
The 7-segment LED shown above indicates ON/OFF.
Each segment at top indicates the input signal and each segment at bottom indicates the output signal.
The following table indicates the signal names.
Signal Name List
Signal Signal Name Signal Signal Name
RD Ready TLC Limiting torque
MBR Electromagnetic brake sequence output ALM_ Trouble
OP Encoder Z-phase pulse WNG Warning
INP In position BWNG Battery warning
ZSP Zero speed
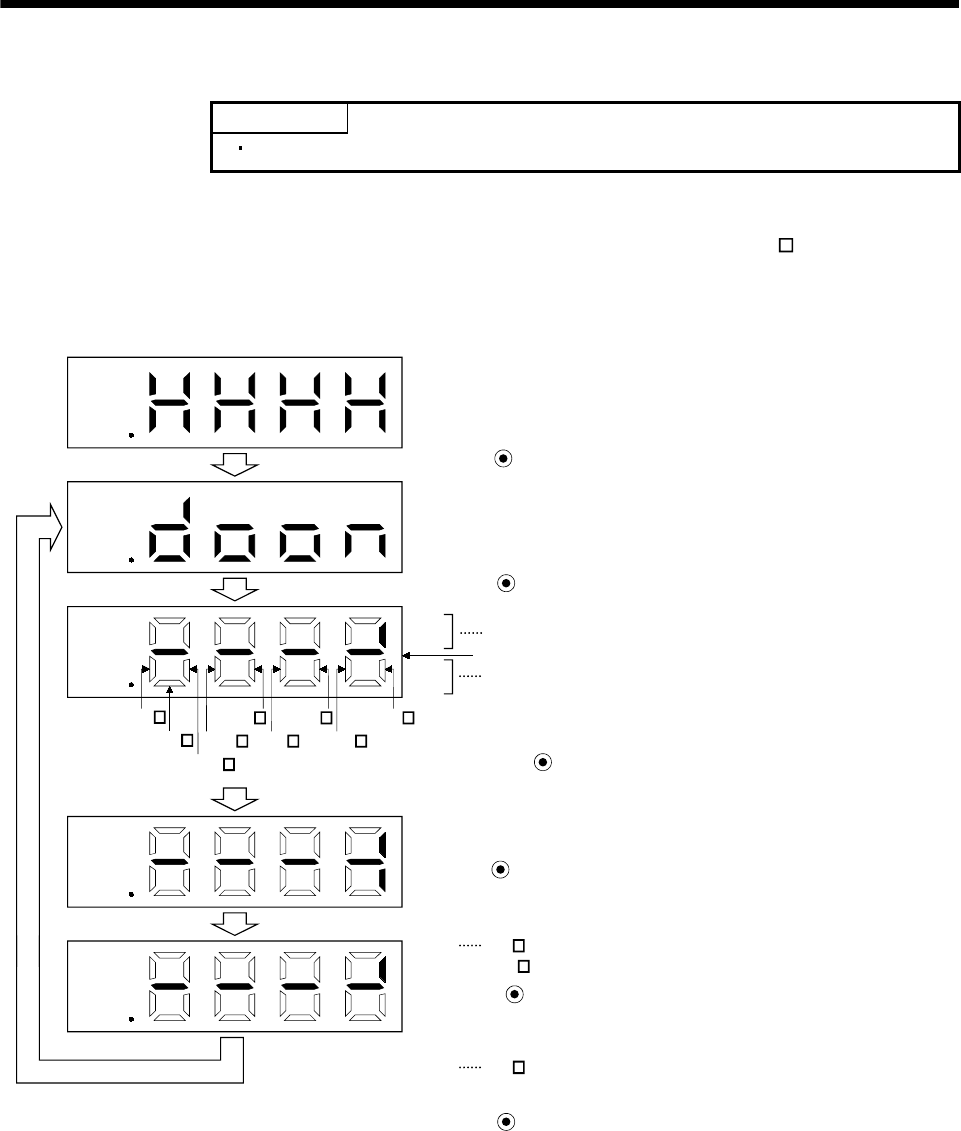
4 - 18
4. OPERATION AND DISPLAY
4.3.8 Drive unit output signal (DO) forced output
POINT
This function is usable during test operation only.
The output signal can be forced on/off independently of the servo status. This function is used for output
signal wiring check, etc. This operation must be performed in the servo off state (SON off).
Call the display screen shown after power-on.
Using the "MODE" button, show the diagnostic screen.
Press UP button twice.
Press SET button for more than 2 seconds.
Switch on/off the signal below the lit segment.
Indicates the ON/OFF of the output signal. The correspondences
between segments and signals are as in the external output
signal display.
(Lit: ON, extinguished: OFF)
Press UP button once.
RD is switched on.
(RD -SG conduct.)
Press DOWN button once.
RD is switched off.
Press SET button for more than 2 seconds.
Always lit
@
WNG
BWNG
ALM_
INP
ZSP
TLC MBR
OP RD
@
@
@
@
Press the MODE button once to shift the lit LED to the left.
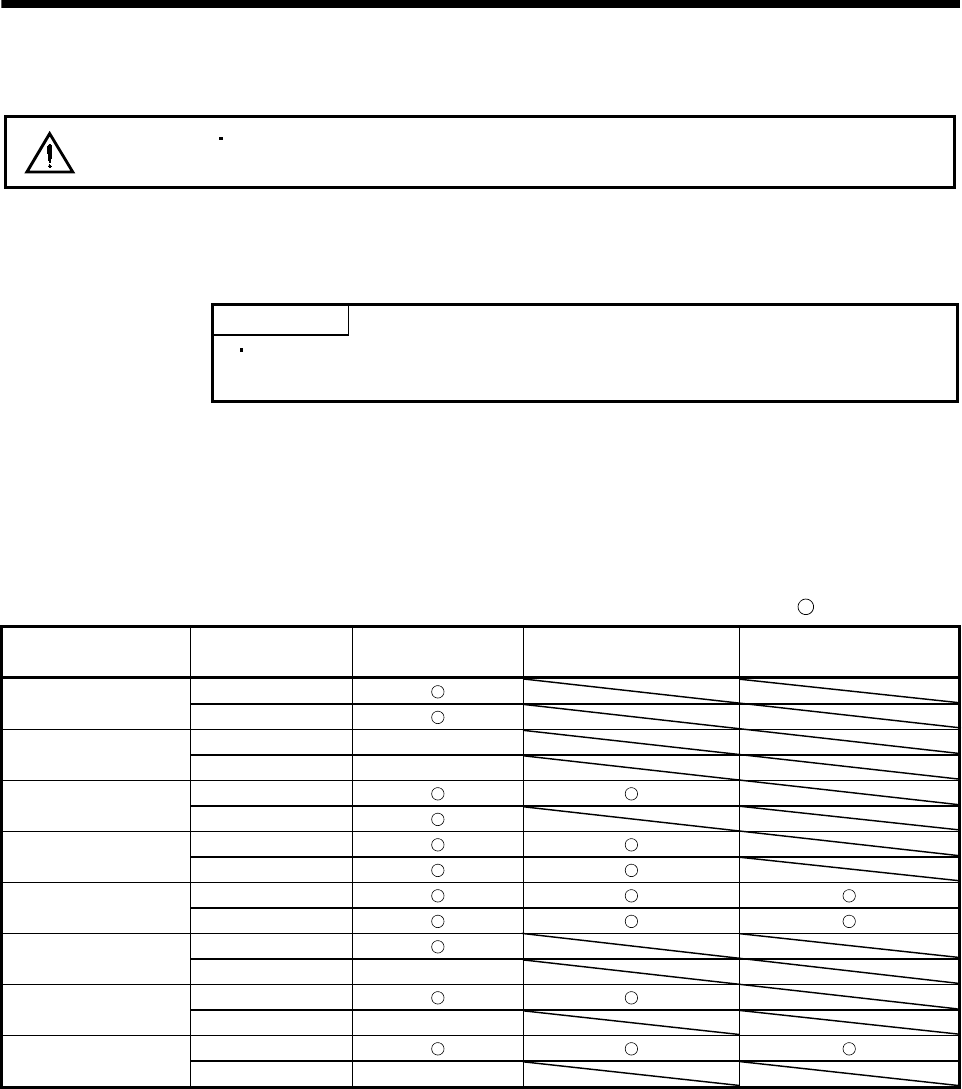
5 - 1
5. PARAMETERS
5. PARAMETERS
CAUTION Never adjust or change the parameter values extremely as it will make operation
instable.
5.1 DRU parameter list
5.1.1 DRU parameter write inhibit
POINT
After setting the DRU parameter No. 19 value, switch power off, then on
to make that setting valid.
In the MELSERVO-J2M servo amplifier, its parameters are classified into the DRU basic parameters
(No. 0 to 19), DRU expansion parameters 1 (No. 20 to 49) and DRU expansion parameters 2 (No.50 to
84) according to their safety aspects and frequencies of use. In the factory setting condition, the
customer can change the basic parameter values but cannot change the DRU expansion parameter
values. When fine adjustment, e.g. gain adjustment, is required, change the DRU parameter No. 19
setting to make the expansion parameters write-enabled.
The following table indicates the parameters which are enabled for reference and write by the setting of
DRU parameter No. 19. Operation can be performed for the DRU parameters marked .
DRU parameter
No. 19 setting Operation DRU basic parameters
No. 0 to 19
DRU expansion parameters 1
No. 20 to 49
DRU expansion parameters 2
No. 50 to 84
Reference
0000
(initial value) Write
Reference No. 19 only
000A Write No. 19 only
Reference
000B Write
Reference
000C Write
Reference
000E Write
Reference
100B Write No. 19 only
Reference
100C Write No. 19 only
Reference
100E Write No. 19 only
5 - 2
5. PARAMETERS
5.1.2 Lists
POINT
For any DRU parameter whose symbol is preceded by *, set the DRU
parameter value and switch power off once, then switch it on again to
make that DRU parameter setting valid.
(1) Item list
No. Symbol Name Initial value Unit Customer
setting
0 For manufacturer setting 0000
1 *OP1 Function selection 1 0000
2 ATU Auto tuning 0105
3CMX
Electronic gear numerator
(Command pulse multiplying factor numerator) 1
4CDV
Electronic gear denominator
(Command pulse multiplying factor denominator) 1
5 INP In-position range 100 pulse
6 PG1 Position loop gain 1 35 rad/s
7PST
Position command acceleration/deceleration time constant
(Position smoothing) 3ms
8100
9500
10 1000
11 0
12 0
13 0
14 0
15
For manufacturer setting
0
16 *BPS Alarm history clear 0000
17 0100
18
For manufacturer setting
0000
Basic DRU parameters
19 *BLK DRU parameter write inhibit 0000
5 - 3
5. PARAMETERS
No. Symbol Name Initial value Unit Customer
setting
20 *OP2 Function selection 2 0000
21 *OP3 Function selection 3 (Command pulse selection) 0000
22 *OP4 Function selection 4 0000
23 FFC Feed forward gain 0 %
24 ZSP Zero speed 50 r/min
25 0
26
For manufacturer setting
100
27 *ENR Encoder output pulses 4000 pulse
/rev
28 TL1 Internal torque limit 1 100 %
29 0
30 0
31 0
32
For manufacturer setting
0
33 MBR Electromagnetic brake sequence output 100 ms
34 GD2 Ratio of load inertia moment to servo motor inertia moment 70 0.1
times
35 PG2 Position loop gain 2 35 rad/s
36 VG1 Speed loop gain 1 177 rad/s
37 VG2 Speed loop gain 2 817 rad/s
38 VIC Speed integral compensation 48 ms
39 VDC Speed differential compensation 980
40 0
41 *DIA
For manufacturer setting
0000
42 *DI1 Input signal selection 1 0003
43 0000
44 0000
45 0000
46 0000
47 0000
48 0000
Expansion DRU parameters 1
49
For manufacturer setting
0000
5 - 4
5. PARAMETERS
No. Symbol Name Initial value Unit Customer
setting
50 For manufacturer setting 0000
51 *OP6 Function selection 6 0000
52 0000
53
For manufacturer setting
0000
54 *OP9 Function selection 9 0000
55 *OPA Function selection A 0000
56 0
57
For manufacturer setting
10
58 NH1 Machine resonance suppression filter 1 0000
59 NH2 Machine resonance suppression filter 2 0000
60 LPF Low-pass filter, adaptive vibration suppression control 0000
61 GD2B Ratio of load inertia moment to Servo motor inertia moment 2 70 0.1
times
62 PG2B Position control gain 2 changing ratio 100 %
63 VG2B Speed control gain 2 changing ratio 100 %
64 VICB Speed integral compensation changing ratio 100 %
65 *CDP Gain changing selection 0000
66 CDS Gain changing condition 10 (Note)
67 CDT Gain changing time constant 1 ms
68 For manufacturer setting 0
69 CMX2 Command pulse multiplying factor numerator 2 1
70 CMX3 Command pulse multiplying factor numerator 3 1
71 CMX4 Command pulse multiplying factor numerator 4 1
72 200
73 300
74 500
75
For manufacturer setting
800
76 TL2 Internal torque limit 2 100 %
77 100
78 10000
79 10
80 10
81 100
82 100
83 100
Expansion DRU parameters 2
84
For manufacturer setting
0
Note. Depends on the parameter No. 65 setting.
5 - 5
5. PARAMETERS
(2) Details list
Class No. Symbol Name and function Initial
value Unit Setting
range
0 For manufacturer setting
Do not change this value any means.
0000
1 *OP1 Function selection 1
Used to select the absolute position detection system.
Selection of absolute position detection system
(Refer to Chapter 15)
0: Used in incremental system
1: Used in absolute position detection system
0
(Serial communication)
00
0000 Refer to
Name
and
function
column.
Basic DRU parameters
2 ATU Auto tuning
Used to selection the response level, etc. for execution of auto tuning.
Refer to Chapter 6.
Auto tuning response level setting
If the machine hunts or generates
large gear sound, decrease the
set value.
To improve performance, e.g.
shorten the settling time, increase
the set value.
Set
value
Response
level
1Low
response
Middle
response
High
response
Gain adjustment mode selection
(For more information, refer to Section 6.1.1.)
Machine resonance
frequency guideline
15Hz
220Hz
325Hz
430Hz
535Hz
645Hz
755Hz
870Hz
985Hz
A105Hz
B 130Hz
C160Hz
D200Hz
E240Hz
F300Hz
Set
value Gain adjustment mode
0
Description
1
3 Simple manual adjustment.
4 Manual adjustment of all gains.
Interpolation mode Fixes position control gain 1
(DRU parameter No. 6).
Auto tuning mode 1
Fixes the load inertia moment
ratio set in DRU parameter
No. 34. Response level setting
can be changed.
Manual mode 1
Manual mode 2
2Auto tuning mode 2
Ordinary auto tuning.
0 0
0105 Refer to
Name
and
function
column.
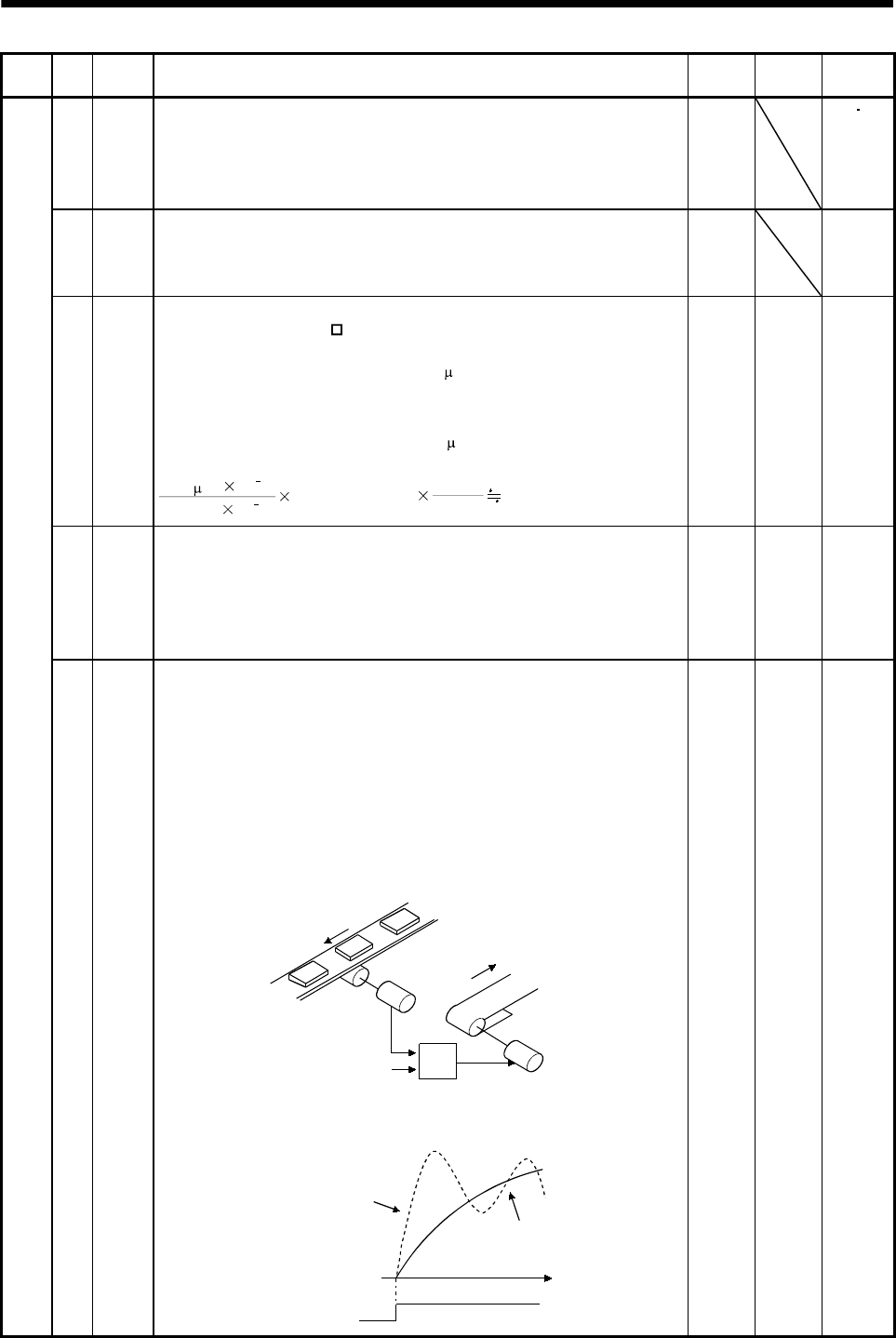
5 - 6
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
3 CMX Electronic gear numerator (Command pulse multiplying factor numerator)
Used to set the electronic gear numerator value.
For the setting, refer to Section 5.2.1.
Setting "0" automatically sets the resolution of the servo motor connected.
For the HC-MFS series, 131072 pulses are set for example.
10
1
to
65535
4 CDV Electronic gear denominator (Command pulse multiplying factor
denominator)
Used to set the electronic gear denominator value.
For the setting, refer to Section 5.2.1.
11
to
65535
5 INP In-position range
Set the in-position (INP ) output range in the command pulse unit that
was used before electronic gear calculation.
For example, when you want to set 100 m when the ballscrew is directly
coupled, the lead is 10mm, the feedback pulse count is 131072 pulses/rev,
and the electronic gear numerator (CMX)/electronic gear denominator
(CDV) is 16384/125 (setting in units of 10 m per pulse), set "10" as indicated
by the following expression.
100[ m] 10 6
10[mm] 10 3131072[pulse/rev] 16384
125 10
100 pulse 0
to
10000
6 PG1 Position loop gain 1
Used to set the gain of position loop.
Increase the gain to improve trackability in response to the position
command.
When auto turning mode 1,2 is selected, the result of auto turning is
automatically used.
35 red/s 4
to
2000
Basic DRU parameters
7 PST Position command acceleration/deceleration time constant
(position smoothing)
Used to set the time constant of a low pass filter in response to the position
command.
You can use DRU parameter No. 55 to choose the primary delay or linear
acceleration/deceleration control system. When you choose linear
acceleration/deceleration, the setting range is 0 to 10ms. Setting of longer
than 10ms is recognized as 10ms.
Example: When a command is given from a synchronizing detector,
synchronous operation can be started smoothly if started during
line operation.
Synchronizing
detector
Start
Servo amplifier
Servo motor
Without time
constant setting
Servo motor
speed
Start
With time
constant setting
ON
OFF
t
3ms 0
to
20000
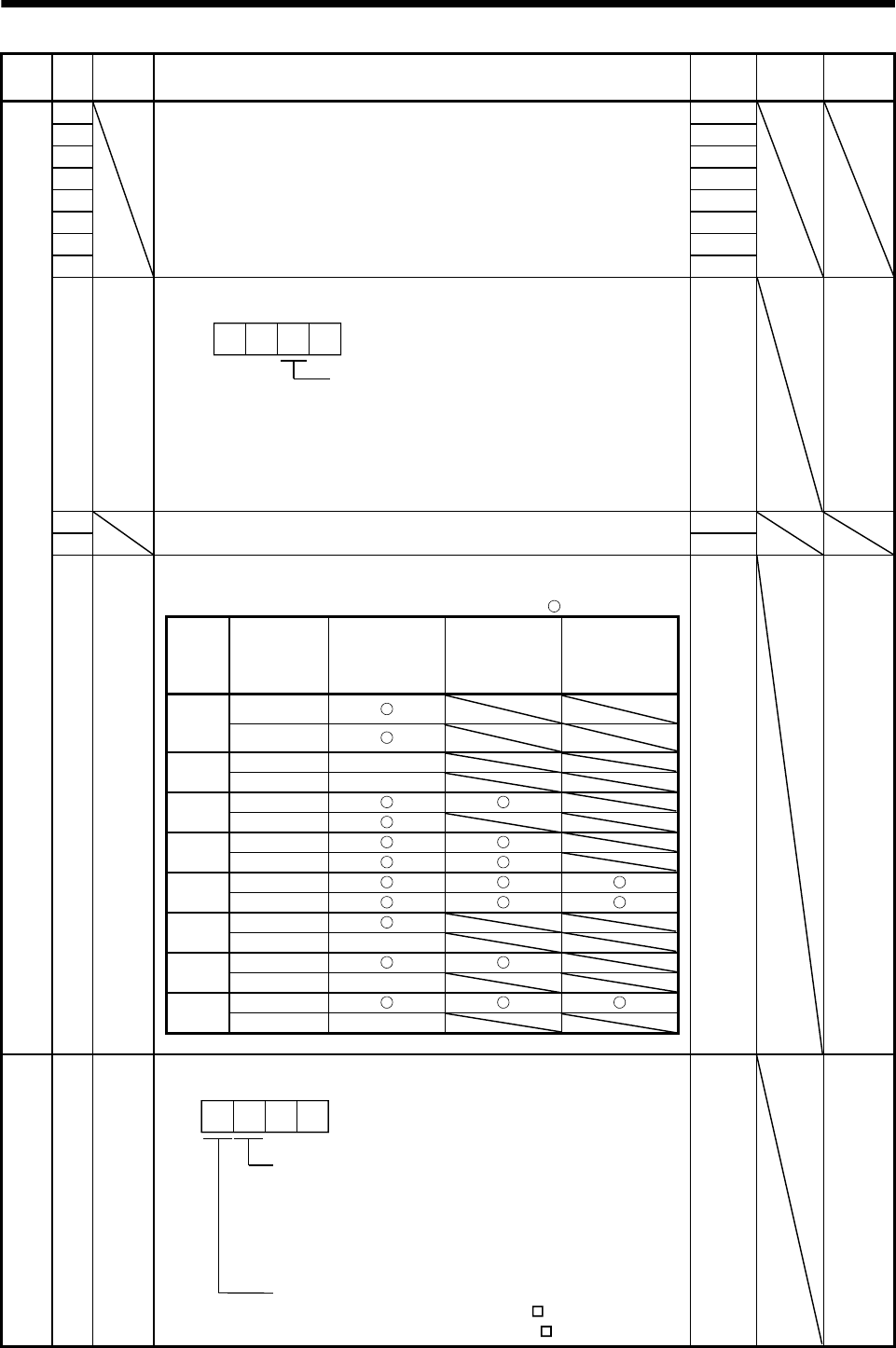
5 - 7
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
8100
9500
10 1000
11 0
12 0
13 0
14 0
15
For manufacturer setting
Do not change this value any means.
0
16 *BPS Alarm history clear
Clear the alarm history.
Alarm history clear
0: Invalid
1: Valid
When alarm history clear is made valid,
the alarm history is cleared at next power-on.
After the alarm history is cleared, the setting
is automatically made invalid (reset to 0).
000
0000 Refer to
Name
and
function
column.
17 0100
18
For manufacturer setting
Do not change this value any means. 0000
DRU parameter write inhibit
Used to select the reference and write ranges of the parameters.
Operation can be performed for the parameters marked .
Set
value Operation
Basic DRU
parameters
No. 0 to No. 19
Expansion DRU
parameters 1
No. 20 to No. 49
Expansion
DRU
parameters 2
No. 50 to No. 84
Reference
0000
(Initial
value) Write
Reference No. 19 only
000A Write No. 19 only
Reference
000B Write
Reference
000C Write
Reference
000E Write
Reference
100B Write No. 19 only
Reference
100C Write No. 19 only
Reference
100E Write No. 19 only
Basic DRU parameters
19 *BLK 0000 Refer to
Name
and
function
column.
Expansion DRU parameters 1
20 *OP2 Function selection 2
Used to select slight vibration suppression control.
Slight vibration suppression control
Made valid when auto tuning selection is
set to "0400" in DRU parameter No. 2.
Used to suppress vibration at a stop.
0: Invalid
1: Valid
00
Encoder cable selection
0: 2-wire type (when MR-JCCBL M-L/H is used)
1: 4-wire type (when MR-JC4CBL M-H is used)
0000 Refer to
Name
and
function
column.
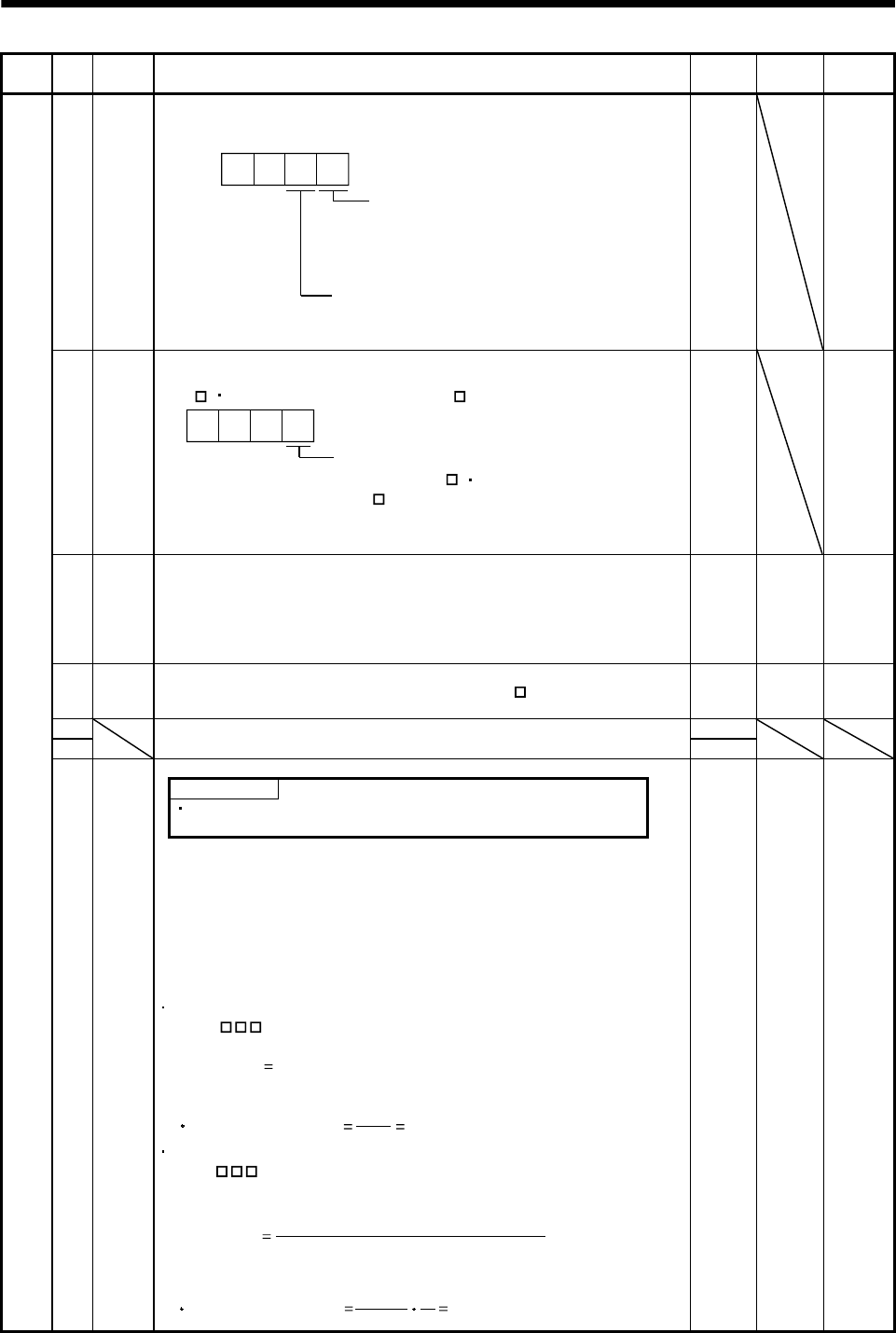
5 - 8
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
21 *OP3 Function selection 3 (Command pulse selection)
Used to select the input form of the pulse train input signal.
(Refer to Section 3.2.3.)
Command pulse train input form
0: Forward/reverse rotation pulse train
1: Signed pulse train
2: A/B phase pulse train
Pulse train logic selection
0: Positive logic
1: Negative logic
0 0
0000 Refer to
Name
and
function
column.
22 *OP4 Function selection 4
Used to select stop processing at the forward rotation stroke end
(LSP )reveres rotation stroke end (LSN ) off.
How to make a stop when the forward rotation
stroke end (LSP ) reveres rotation stroke end
(LSN ) is valid.
0: Sudden stop
1: Slow stop
00
0
0000 Refer to
Name
and
function
column.
23 FFC Feed forward gain
Set the feed forward gain. When the setting is 100%, the droop pulses
during operation at constant speed are nearly zero. However, sudden
acceleration/deceleration will increase the overshoot. As a guideline, when
the feed forward gain setting is 100%, set 1s or more as the
acceleration/deceleration time constant up to the rated speed.
0% 0
to
100
24 ZSP Zero speed
Used to set the output range of the zero speed (ZSP ).
50 r/min 0
to
10000
25 0
26
For manufacturer setting
Do not change this value any means. 100
Encoder output pulses
POINT
The MR-J2M-D01 extension IO unit is required to output the
encoder pulses (A phase, B phase, Z phase).
Expansion DRU parameters 1
27 *ENR
Used to set the encoder pulses (A-phase, B-phase) output by the servo
amplifier.
Set the value 4 times greater than the A-phase or B-phase pulses.
You can use DRU parameter No. 54 to choose the output pulse setting or
output division ratio setting.
The number of A/B-phase pulses actually output is 1/4 times greater than
the preset number of pulses.
The maximum output frequency is 1.3Mpps (after multiplication by 4). Use
this parameter within this range.
For output pulse designation
Set " 0 " (initial value) in DRU parameter No. 54.
Set the number of pulses per servo motor revolution.
Output pulse set value [pulses/rev]
At the setting of 5600, for example, the actually output A/B-phase pulses
are as indicated below:
4
5600
A B-phase output pulses 1400[pulse/rev]
For output division ratio setting
Set " 1 " in DRU parameter No. 54.
The number of pulses per servo motor revolution is divided by the set
value.
Output pulse [pulses/rev]
Resolution per servo motor revolution
Set value
At the setting of 8, for example, the actually output A/B-phase pulses are
as indicated below:
A B-phase output pulses 4096[pulse/rev]
8
131072
4
1
4000 pulse/
rev
1
to
65535
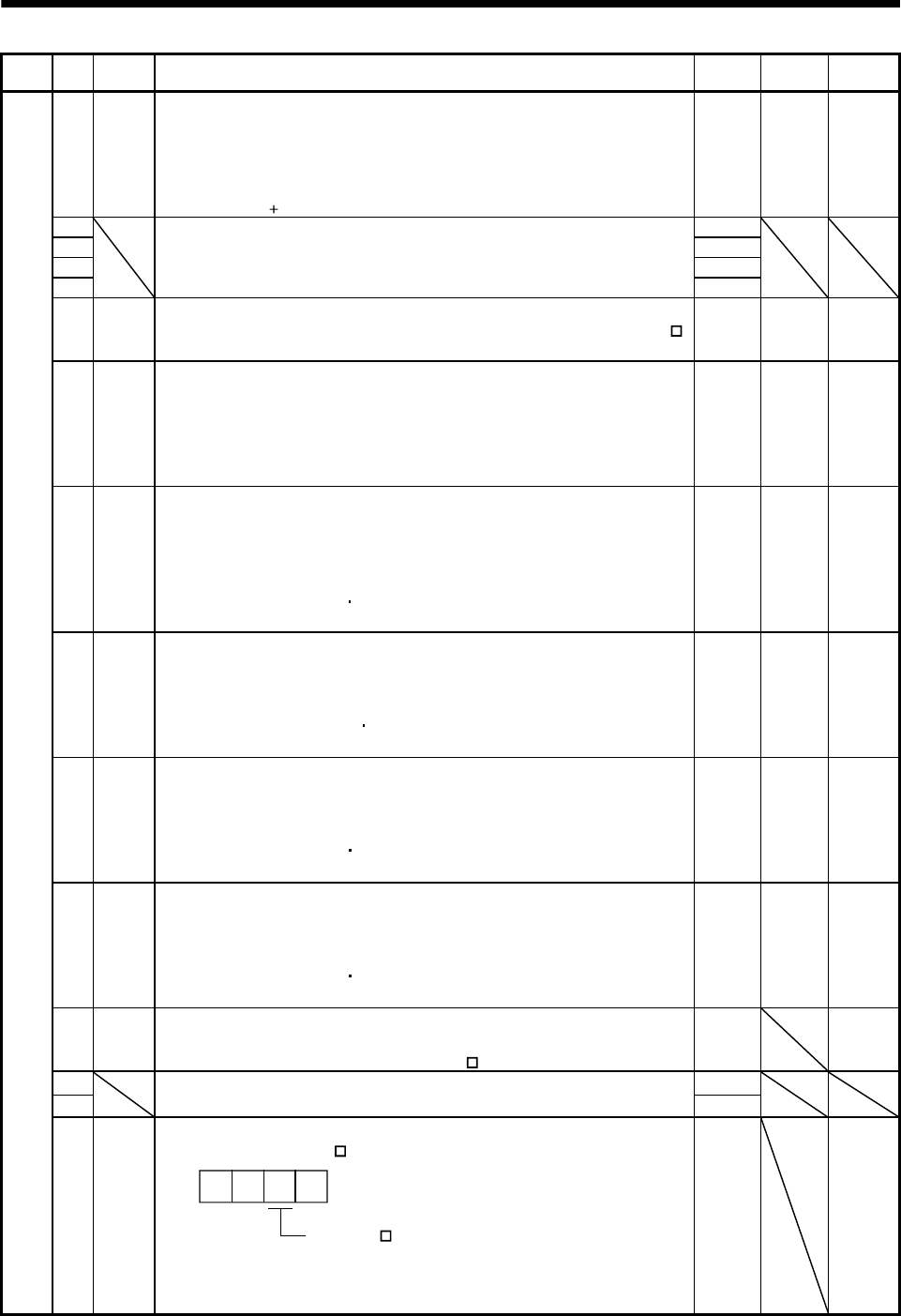
5 - 9
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
28 TL1 Internal torque limit 1
Set this parameter to limit servo motor torque on the assumption that the
maximum torque is 100[%].
When 0 is set, torque is not produced.
When torque is output in analog monitor, this set value is the maximum
output voltage ( 4V). (Refer to Section 3.3.5 (2))
100 % 0
to
100
29 0
30 0
31 0
32
For manufacturer setting
Do not change this value any means.
0
33 MBR Electromagnetic brake sequence output
Used to set the delay time (Tb) between electronic brake interlock (MBR )
and the base drive circuit is shut-off.
100 ms 0
to
1000
34 GD2 Ratio of load inertia moment to servo motor inertia moment
Used to set the ratio of the load inertia moment to the servo motor shaft
inertia moment. When auto tuning mode 1 and interpolation mode is
selected, the result of auto tuning is automatically used.
(Refer to section 6.2.1)
In this case, it varies between 0 and 1000.
70 0.1
times
0
to
3000
35 PG2 Position loop gain 2
Used to set the gain of the position loop.
Set this parameter to increase the position response to level load
disturbance. Higher setting increases the response level but is liable to
generate vibration and/or noise.
When auto tuning mode 1 2 and interpolation mode is selected, the result
of auto tuning is automatically used.
35 rad/s 1
to
1000
36 VG1 Speed loop gain 1
Normally this parameter setting need not be changed.
Higher setting increases the response level but is liable to generate
vibration and/or noise.
When auto tuning mode 1 2, manual mode and interpolation mode is
selected, the result of auto tuning is automatically used.
177 rad/s 20
to
8000
37 VG2 Speed loop gain 2
Set this parameter when vibration occurs on machines of low rigidity or
large backlash. Higher setting increases the response level but is liable to
generate vibration and/or noise.
When auto tuning mode 1 2 and interpolation mode is selected, the result
of auto tuning is automatically used.
817 rad/s 20
to
20000
38 VIC Speed integral compensation
Used to set the integral time constant of the speed loop.
Lower setting increases the response level but is liable to generate vibration
and/or noise.
When auto tuning mode 1 2 and interpolation mode is selected, the result
of auto tuning is automatically used.
48 ms 1
to
1000
39 VDC Speed differential compensation
Used to set the differential compensation.
Made valid when the proportion control (PC ) is switched on.
980 0
to
1000
40 0
41
For manufacturer setting
Do not change this value any means. 0000
Expansion DRU parameters 1
42 *DI1 Input signal selection 1
Used to set the clear (CR ).
0 0
Clear (CR ) selection
0: Droop pulses are cleared on the leading edge.
1: While on, droop pulses are always cleared.
3
0003 Refer to
Name
and
function
column.
5 - 10
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
43 0000
44 0000
45 0000
46 0000
47 0000
48 0000
49 0000
50
For manufacturer setting
Do not change this value any means.
0000
51 *OP6 Function selection 6
Used to select the operation to be performed when the reset (RES )
switches on.
000
Operation to be performed when the
reset (RES ) switches on
0: Base drive circuit is shut-off
1: Base drive circuit is not shut-off
0000 Refer to
Name
and
function
column.
52 0000
53
For manufacturer setting
Do not change this value any means. 0000
Expansion DRU parameters 2
54 *OP9 Function selection 9
Use to select the command pulse rotation direction, encoder output pulse
direction and encoder pulse output setting.
0
0
1
CCW
CW
CW
CCW
Servo motor rotation direction changing
Changes the servo motor rotation
direction for the input pulse train.
Set value
Servo motor rotation direction
At forward rotation
pulse input (Note)
At reverse rotation
pulse input (Note)
Note. Refer to Section 3.1.5 .
Encoder pulse output phase changing
Changes the phases of A B-phase encoder pulses output .
Encoder output pulse setting selection (refer to DRU parameter No. 27)
0: Output pulse designation
1: Division ratio setting
Servo motor rotation direction
Set value CCW CW
0
1
A phase
B phase
A phase
B phase
A phase
B phase
A phase
B phase
0000 Refer to
Name
and
function
column.
5 - 11
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
55 *OPA Function selection A
Used to select the position command acceleration/deceleration time
constant (DRU parameter No. 7) control system.
000
0: Primary delay
1: Linear acceleration/deceleration
Position command acceleration/deceleration
time constant control
0000 Refer to
Name
and
function
column.
56 0
57
For manufacturer setting
Do not change this value any means. 10
58 NH1 Machine resonance suppression filter 1
Used to selection the machine resonance suppression filter.
(Refer to Section 7.2.)
2
3
0
0
1
40dB
14dB
8dB
4dB
Notch frequency selection
Set "00" when you have set adaptive vibration
suppression control to be "valid" or "held"
(DRU parameter No. 60: 1 or 2 ).
00
01
02
03
04
05
06
07
Setting
value
Frequency
Invalid
4500
2250
1500
1125
900
750
642.9
08
09
0A
0B
0C
0D
0E
0F
562.5
500
450
409.1
375
346.2
321.4
300
Frequency
10
11
12
13
14
15
16
17
281.3
264.7
250
236.8
225
214.3
204.5
195.7
Frequency
18
19
1A
1B
1C
1D
1E
1F
187.5
180
173.1
166.7
160.1
155.2
150
145.2
Frequency
Notch depth selection
Setting
value
Depth Gain
Deep
Shallow
to
Setting
value
Setting
value
Setting
value
0000 Refer to
Name
and
function
column.
Expansion DRU parameters 2
59 NH2 Machine resonance suppression filter 2
Used to set the machine resonance suppression filter.
0
Notch frequency
Same setting as in DRU parameter No. 58
However, you need not set "00" if you have
set adaptive vibration suppression control to
be "valid" or "held".
Notch depth
Same setting as in DRU parameter No. 58
0000 Refer to
Name
and
function
column.
5 - 12
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
60 LPF Low-pass filter/adaptive vibration suppression control
Used to selection the low-pass filter and adaptive vibration suppression
control. (Refer to Chapter 7.)
0
Low-pass filter selection
0: Valid (Automatic adjustment)
1: Invalid
When you choose "valid", 2 (1 GD2 setting 0.1)
VG2 setting 10
bandwidth filter is set automatically.
Adaptive vibration suppression control selection
Choosing "valid" or "held" in adaptive vibration
suppression control selection makes the machine
resonance control filter 1 (DRU parameter No. 58) invalid.
0: Invalid
1: Valid
Machine resonance frequency is always detected
and the filter is generated in response to resonance to
suppress machine vibration.
2: Held
The characteristics of the filter generated so far are held,
and detection of machine resonance is stopped.
Adaptive vibration suppression control sensitivity selection
Used to set the sensitivity of machine resonance detection.
0: Normal
1: Large sensitivity
[Hz]
0000 Refer to
Name
and
function
column.
61 GD2B Ratio of load inertia moment to servo motor inertia moment 2
Used to set the ratio of load inertia moment to servo motor inertia moment
when gain changing is valid.
Made valid when auto tuning is invalid.
70 0.1
times
0
to
3000
62 PG2B Position control gain 2 changing ratio
Used to set the ratio of changing the position control gain 2 when gain
changing is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
63 VG2B Speed control gain 2 changing ratio
Used to set the ratio of changing the speed control gain 2 when gain
changing is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
64 VICB Speed integral compensation changing ratio
Used to set the ratio of changing the speed integral compensation when
gain changing is valid. Made valid when auto tuning is invalid.
100 % 50
to
1000
Expansion DRU parameters 2
65 *CDP Gain changing selection
Used to select the gain changing condition. (Refer to Section 7.5.)
000
Gain changing selection
Gains are changed in accordance with the settings
of DRU parameters No. 61 to 64 under any of the
following conditions:
0: Invalid
1: Gain changing (CDP ) is ON
2: Command frequency is equal to higher than
DRU parameter No. 66 setting
3: Droop pulse value is equal to higher than
DRU parameter No. 66 setting
4: Servo motor speed is equal to higher than
DRU parameter No. 66 setting
0000 Refer to
Name
and
function
column.
5 - 13
5. PARAMETERS
Class No. Symbol Name and function Initial
value Unit Setting
range
66 CDS Gain changing condition
Used to set the value of gain changing condition (command frequency, droop
pulses, servo motor speed) selected in parameter No. 65 (Gain changing
selection). The set value unit changes with the changing condition item.
(Refer to Section 7.5.)
10 kpps
pulse
r/min
10
to
9999
67 CDT Gain changing time constant
Used to set the time constant at which the gains will change in response to
the conditions set in parameters No. 65 and 66.
(Refer to Section 7.5.)
1ms 0
to
100
68 For manufacturer setting
Do not change this value any means.
0
69 CMX2 Command pulse multiplying factor numerator 2
Used to set the multiplier for the command pulse.
Setting "0" automatically sets the connected motor resolution.
10
1
to
65535
70 CMX3 Command pulse multiplying factor numerator 3
Used to set the multiplier for the command pulse.
Setting "0" automatically sets the connected motor resolution.
10
1
to
65535
71 CMX4 Command pulse multiplying factor numerator 4
Used to set the multiplier for the command pulse.
Setting "0" automatically sets the connected motor resolution.
10
1
to
65535
72 200
73 300
74 500
75
For manufacturer setting
Do not change this value any means.
800
76 TL2 Internal torque limit 2
Set this parameter to limit servo motor torque on the assumption that the
maximum torque is 100[%].
When 0 is set, torque is not produced.
When torque is output in analog monitor, this set value is the maximum
output voltage ( 4V). (Refer to Section 3.3.5 (2))
100 % 0
to
100
77 100
78 10000
79 10
80 10
81 100
82 100
83 100
Expansion DRU parameters 2
84
For manufacturer setting
Do not change this value any means.
0
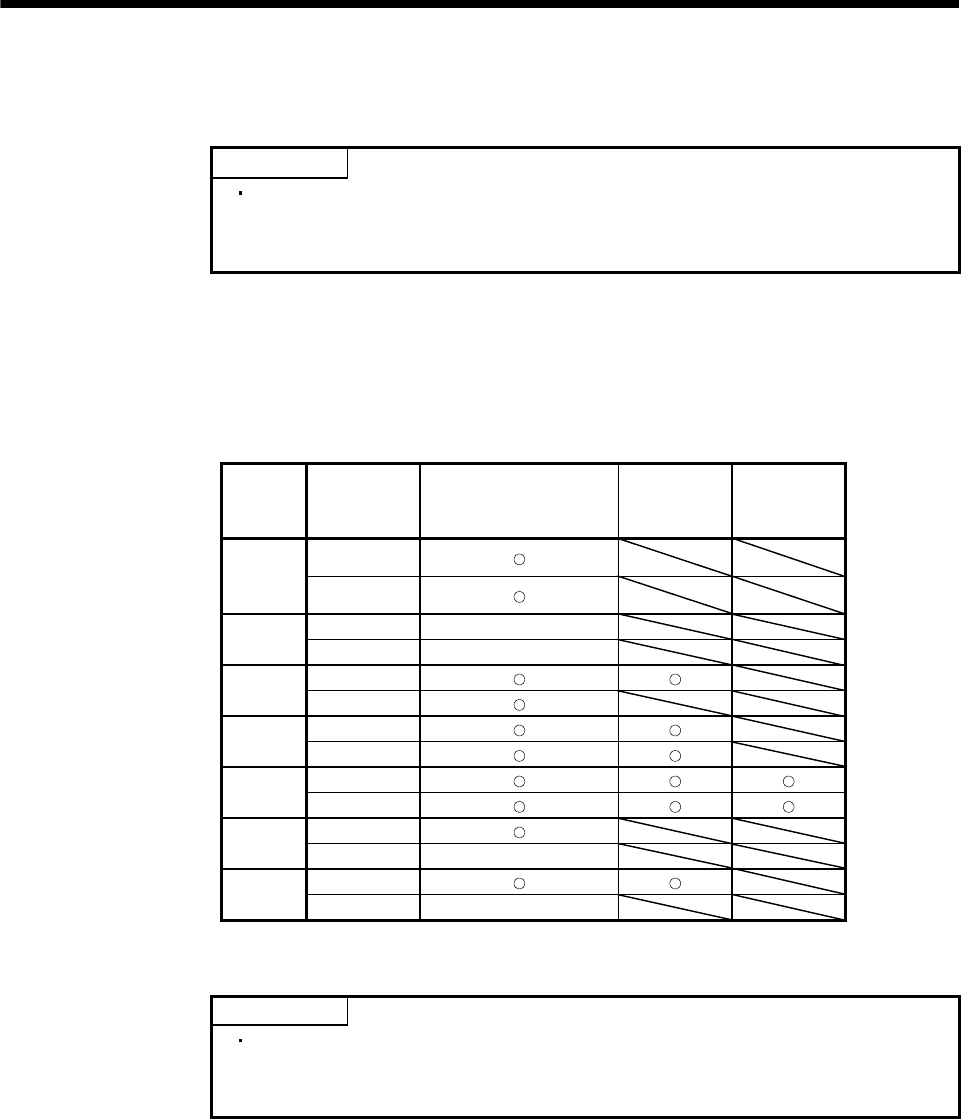
5 - 14
5. PARAMETERS
5.2 Interface unit
5.2.1 IFU parameter write inhibit
POINT
Use the unit operation section pushbutton switches or MR Configurator
(servo configuration software) to set the IFU parameters of the interface
unit.
Use the unit pushbutton switches or MR Configurator (servo configuration software) to set the interface
unit parameters.
When assigning the devices, change the setting to "000E".
The following table indicates the IFU parameters which are made valid for reference and write by setting
the IFU parameter No. 19.
Setting Setting
operation IFU basic parameter
Expansion
IFU
parameter
I/O
assignment
Reference
0000
(initial
value) Write
Reference IFU parameter No. 19
000A Write IFU parameter No. 19
Reference
000B Write
Reference
000C Write
Reference
000E Write
Reference
100B Write IFU parameter No. 19
Reference
100C Write IFU parameter No. 19
5.2.2 Lists
POINT
For any parameter whose symbol is preceded by *, set the IFU parameter
value and switch power off once, then switch it on again to make that
parameter setting valid.
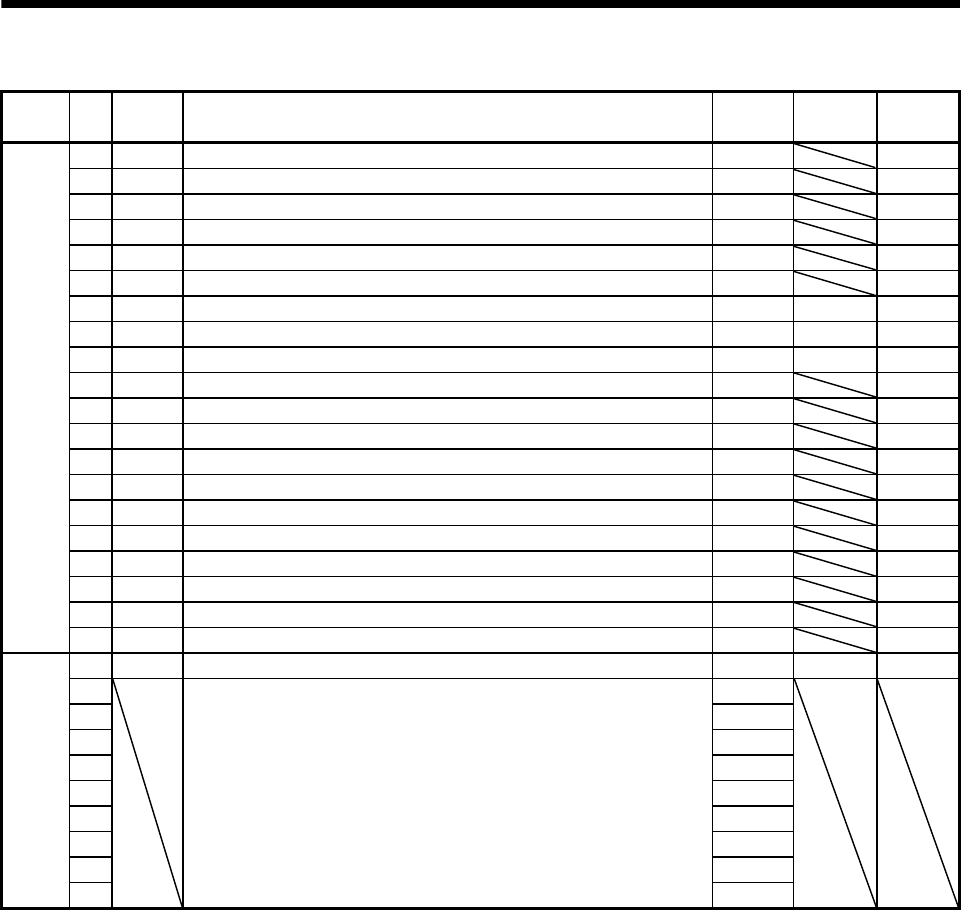
5 - 15
5. PARAMETERS
(1) Item list
Classifi-
cation No. Symbol Name Initial
Value Unit Customer
setting
0 *BPS Serial communication function selection, alarm history clear 0000
1 SIC Regenerative brake option selection 0
2 *OP1 Function selection 1 0000
3 MD1 Analog monitor 1 output 0000
4 MD2 Analog monitor 2 output 0000
5 MD3 Analog monitor 3 output 0000
6 MO1 Analog monitor 1 offset 0 mV
7 MO2 Analog monitor 2 offset 0 mV
8 MO3 Analog monitor 3 offset 0 mV
9 *OP2 Function selection 2 0020
10 *ISN Interface unit serial communication station number selection 0
11 *SL1 1 slot serial communication station number selection 0
12 *SL2 2 slot serial communication station number selection 1
13 *SL3 3 slot serial communication station number selection 2
14 *SL4 4 slot serial communication station number selection 3
15 *SL5 5 slot serial communication station number selection 4
16 *SL6 6 slot serial communication station number selection 5
17 *SL7 7 slot serial communication station number selection 6
18 *SL8 8 slot serial communication station number selection 7
Basic IFU parameters
19 *BLK IFU parameter write inhibit 0000
20 SIC Serial communication time-out selection 0 s
21 0
22 0
23 0
24 0
25 0
26 0
27 0
28 0
Expansion IFU parameter
29
For manufacturer setting
0
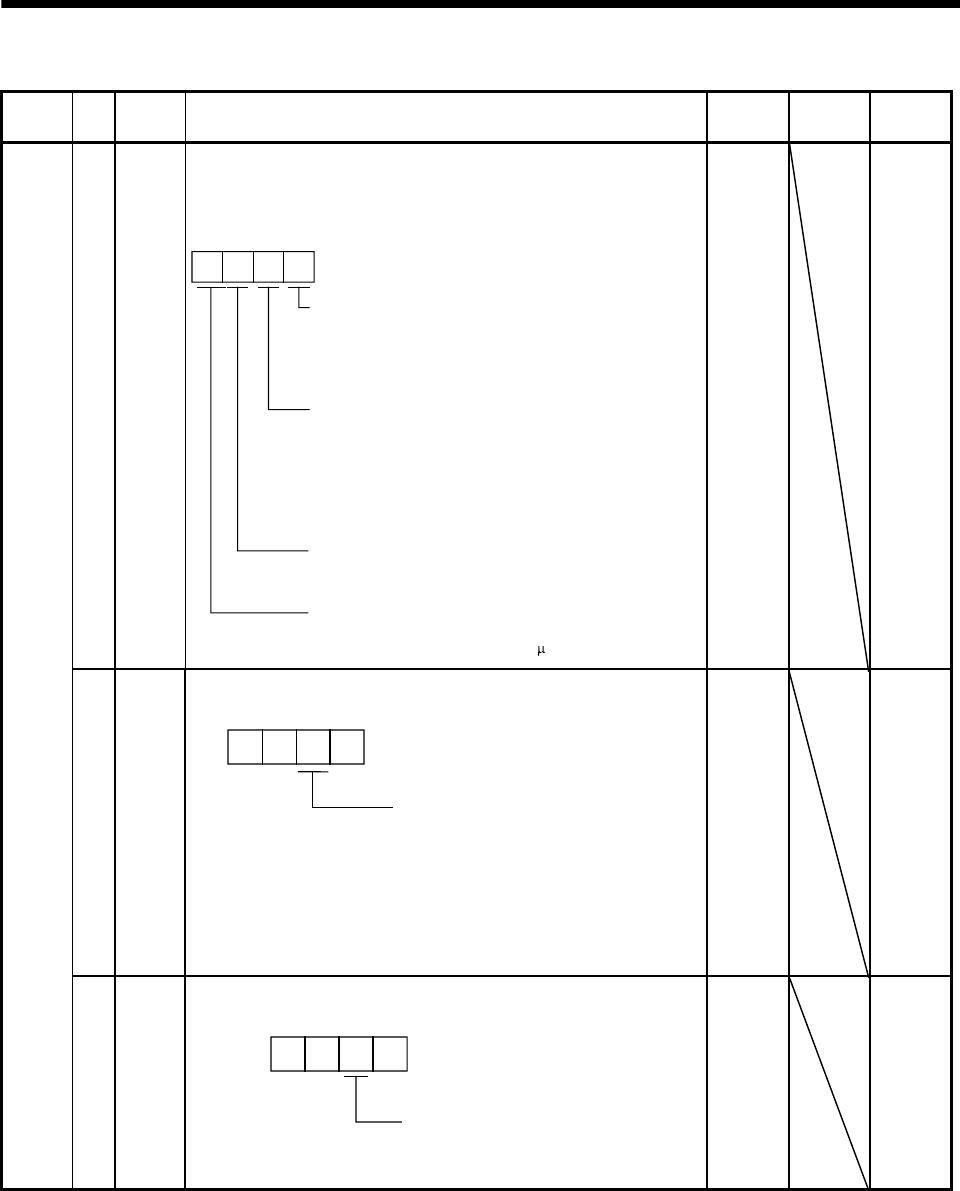
5 - 16
5. PARAMETERS
(2) Details list
Classifi-
cation No. Symbol Name and Function Initial
Value Unit Setting
Range
0 *BPS Serial communication function selection, alarm history clear
Used to select the serial communication baudrate function selection,
select various communication conditions, and clear the alarm
history.
Alarm history clear
0: Invalid
1: valid
When alarm history clear is made valid,
the alarm history is cleared at next power-on.
After the alarm history is cleared, the setting
is automatically made invalid (reset to 0).
Serial communication baudrate selection
0: 9600 [bps]
1: 19200[bps]
2: 38400[bps]
3: 57600[bps]
Serial communication I/F selection
0: RS-232C
1: RS-422
Communication response delay time selection
0: Invalid
1: valid, reply sent after time of 888 s or more
0000 Refer to
name
and
function
column.
1 *REG Regenerative brake option selection
Used to select the regenerative brake option.
00
Selection of regenerative brake option
00: Not used
01: Spare (do not set)
02: MR-RB032
05: MR-RB14
06: MR-RB34
07: MR-RB54
0000 Refer to
Name and
function
column.
Basic IFU parameters
2 *OP1 Function selection 1
Used to select the protocol of serial communication.
00
Protocol checksum selection
0: Yes (checksum added)
1: No (checksum not added)
0
0000 Refer to
name
and
function
column.
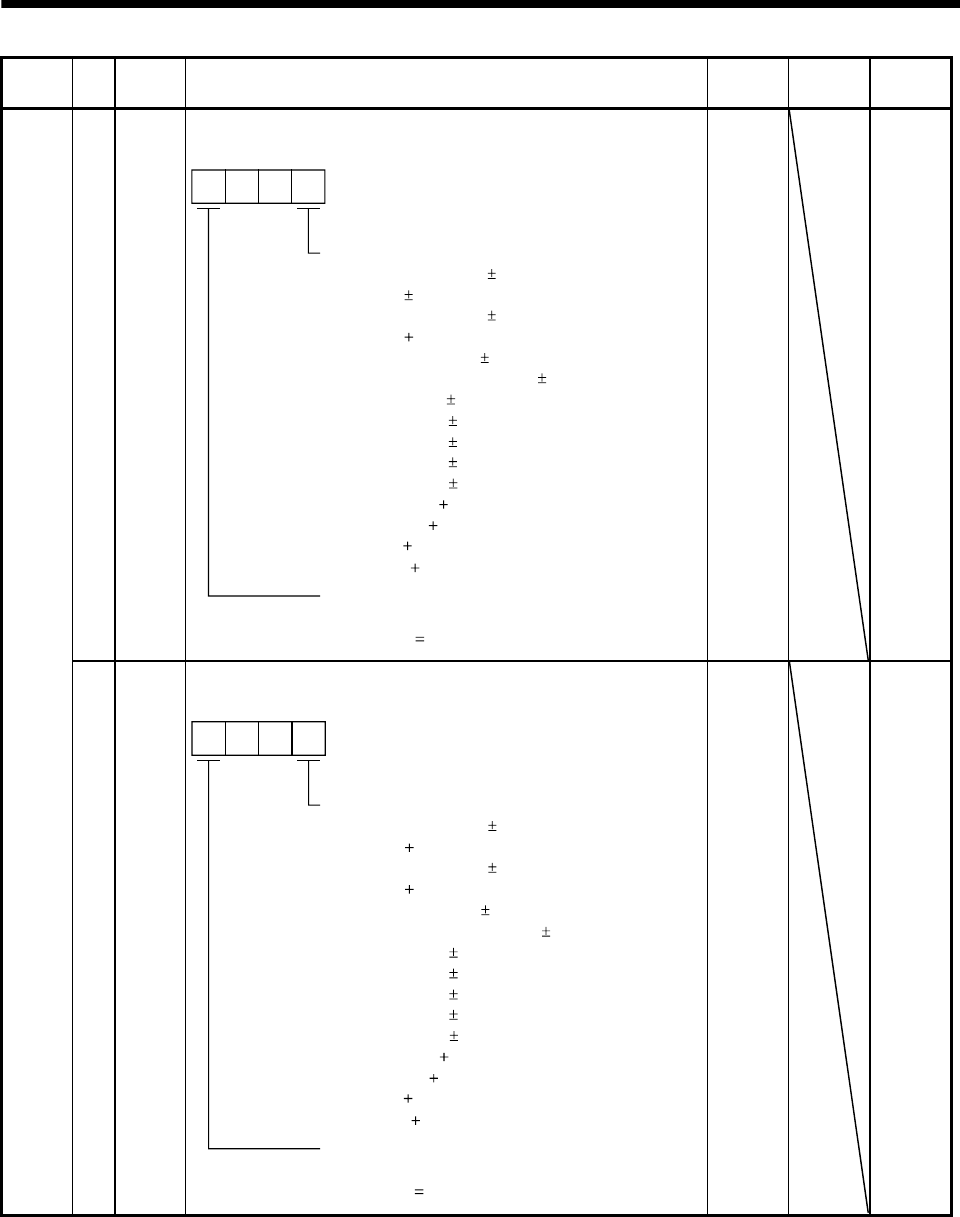
5 - 17
5. PARAMETERS
Classifi-
cation No. Symbol Name and Function Initial
Value Unit Setting
Range
3 MD1 Analog monitor 1 output
Choose the signal to be output to analog monitor 1.
00
Analog monitor 1 selection
0: Servo motor speed ( 4V/max. Servo motor speed)
1: Torque ( 4V/max. Torque)
2: Servo motor speed ( 4V/max. Servo motor speed)
3: Torque ( 4V/max. Torque)
4: Current command ( 4V/max. Current command)
5: Command pulse frequency( 4V/500kpps)
6: Droop pulses ( 4V/128pulse)
7: Droop pulses ( 4V/2048pulse)
8: Droop pulses ( 4V/8192pulse)
9: Droop pulses ( 4V/32768pulse)
A: Droop pulses ( 4V/131072pulse)
B: Bus voltage ( 4V/400V)
C: In position ( 4V/ON)
D: Ready ( 4V/ON)
E: Trouble ( 4V/ON)
Slot number of analog monitor 1
Choose the slot number output to analog monitor 1.
Slot number set value. Selecting "0" disables output.
0000 Refer to
name
and
function
column.
Basic IFU parameters
4 *MD2 Analog monitor 2 output
Choose the signal to be output to analog monitor 2.
00
Analog monitor 2 selection
0: Servo motor speed ( 4V/max. Servo motor speed)
1: Torque ( 4V/max. Torque)
2: Servo motor speed ( 4V/max. Servo motor speed)
3: Torque ( 4V/max. Torque)
4: Current command ( 4V/max. Current command)
5: Command pulse frequency ( 4V/500kpps)
6: Droop pulses ( 4V/128pulse)
7: Droop pulses ( 4V/2048pulse)
8: Droop pulses ( 4V/8192pulse)
9: Droop pulses ( 4V/32768pulse)
A: Droop pulses ( 4V/131072pulse)
B: Bus voltage ( 4V/400V)
C: In position ( 4V/ON)
D: Ready ( 4V/ON)
E: Trouble ( 4V/ON)
Slot number of analog monitor 2
Choose the slot number output to analog monitor 2.
Slot number set value. Selecting "0" disables output.
0000 Refer to
name
and
function
column.
5 - 18
5. PARAMETERS
Classifi-
cation No. Symbol Name and Function Initial
Value Unit Setting
Range
5 *MD3 Analog monitor 3 output
Choose the signal to be output to analog monitor 3.
00
Analog monitor 3 selection
0: Servo motor speed ( 4V/max. Servo motor speed)
1: Torque ( 4V/max. Torque)
2: Servo motor speed ( 4V/max. Servo motor speed)
3: Torque ( 4V/max. Torque)
4: Current command ( 4V/max. Current command)
5: Command pulse frequency ( 4V/500kpps)
6: Droop pulses ( 4V/128pulse)
7: Droop pulses ( 4V/2048pulse)
8: Droop pulses ( 4V/8192pulse)
9: Droop pulses ( 4V/32768pulse)
A: Droop pulses ( 4V/131072pulse)
B: Bus voltage ( 4V/400V)
C: In position ( 4V/ON)
D: Ready ( 4V/ON)
E: Trouble ( 4V/ON)
Slot number of analog monitor 3
Choose the slot number output to analog monitor 3.
Slot number set value. Selecting "0" disables output.
0000 Refer to
name
and
function
column.
6MO1 Analog monitor 1 offset
Used to set the offset voltage of the analog monitor 1 (MO1).
0mV999
to
999
7MO2 Analog monitor 2 offset
Used to set the offset voltage of the analog monitor 2 (MO2).
0mV999
to
999
8MO3 Analog monitor 3 offset
Used to set the offset voltage of the analog monitor 3 (MO2).
0mV999
to
999
Basic IFU parameters
9 *OP2 Function selection 2
Used to select the input signal filter.
Input signal filter
0 : None
1 : 1.777ms
2 : 3.555ms
02
00
0200 Refer to
name
and
function
column.
5 - 19
5. PARAMETERS
Classifi-
cation No. Symbol Name and Function Initial
Value Unit Setting
Range
10 *INS Interface unit serial communication
Choose the serial communication station number of the interface
unit.
When making selection, avoid setting the station number used by
any other unit.
00
to
31
11 *SL1 1 slot serial communication station number selection
Choose the station number of the drive unit connected to the first
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
10
to
31
12 *SL2 2 slot serial communication station number selection
Choose the station number of the drive unit connected to the second
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
20
to
31
13 *SL3 3 slot serial communication station number selection
Choose the station number of the drive unit connected to the third
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
30
to
31
14 *SL4 4 slot serial communication station number selection
Choose the station number of the drive unit connected to the fourth
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
40
to
31
Basic IFU parameters
15 *SL5 5 slot serial communication station number selection
Choose the station number of the drive unit connected to the fifth
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
50
to
31
5 - 20
5. PARAMETERS
Classifi-
cation No. Symbol Name and Function Initial
Value Unit Setting
Range
16 *SL6 6 slot serial communication station number selection
Choose the station number of the drive unit connected to the sixth
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
60
to
31
17 *SL7 7 slot serial communication station number selection
Choose the station number of the drive unit connected to the seventh
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
70
to
31
18 *SL8 8 slot serial communication station number selection
Choose the station number of the drive unit connected to the eighth
slot of the base unit.
When making selection, avoid setting the station number used by
any other unit.
80
to
31
Parameter write inhibit
Used to select reference and write ranges of the parameters.
Setting Setting
operation IFU basic parameter
Expansion
IFU
parameter
I/O
assignment
Reference
0000
(initial
value) Write
Reference IFU parameter No. 19
000A Write IFU parameter No. 19
Reference
000B Write
Reference
000C Write
Reference
000E Write
Reference
100B Write IFU parameter No. 19
Reference
100C Write IFU parameter No. 19
Basic IFU parameters
19 *BLK 0000 Refer to
name
and
function
column.
20 SIC Serial communication time-out selection
Set the time-out period of the communication protocol in the [s] unit.
Setting "0" disables time-out checking.
0s0
to
60
21 0
22
23
24
25
26
27
28
Expansion IFU parameter
29
For manufacturer setting
Do not change this value any means.
5 - 21
5. PARAMETERS
5.3 Detailed description
5.3.1 Electronic gear
CAUTION Wrong setting can lead to unexpected fast rotation, causing injury.
POINT
The guideline of the electronic gear setting range is 50
1
CDV
CMX 500.
If the set value is outside this range, noise may be generated during
acceleration/ deceleration or operation may not be performed at the preset
speed and/or acceleration/deceleration time constants.
The following specification symbols are required to calculate the electronic
gear.
(1) Concept of electronic gear
The machine can be moved at any multiplication factor to input pulses.
CDV
CMX
DRU parameter No.4
DRU parameter No.3
Electronic gear
Feedback pulse
CMX
CDV
Deviation
counter
Motor
Encode
r
Input pulse train
The following setting examples are used to explain how to calculate the electronic gear:
POINT
The following specification symbols are required to calculate the electronic
gear
Pb : Ballscrew lead [mm]
n : Reduction ratio
Pt : Servo motor resolution [pulses/rev]
0: Travel per command pulse [mm/pulse]
S: Travel per servo motor revolution [mm/rev]
: Angle per pulse [ /pulse]
: Angle per revolution [ /rev]
(a) For motion in increments of 10 m per pulse
Machine specifications
Ballscrew lead Pb 10 [mm]
Reduction ratio: n 1/2
Servo motor resolution: Pt 131072 [pulses/rev]
Servo motor
131072 [pulse/rev]
Pb 10[mm]
NM
n NL/NM 1/2
NL
n
CDV
CMX 0Pt
S0Pt
nPb 10 10 3
1/2 10
131072 262144
1000
32768
125
Hence, set 32768 to CMX and 125 to CDV.
5 - 22
5. PARAMETERS
(b) Conveyor setting example
For rotation in increments of 0.01 per pulse
Machine specifications
Table : 360 /rev
Reduction ratio: n 4/64
Servo motor resolution: Pt 131072 [pulses/rev]
Tabl
e
Timing belt : 4/64
Servo motor
131072 [pulse/rev]
CDV
CMX Pt 131072 65536
1125
0.01 4/64 360 ................................................................................. (5.1)
Since CMX is not within the setting range in this status, it must be reduced to the lowest term.
When CMX has been reduced to a value within the setting range, round off the value to the
nearest unit.
CDV
CMX 65536
1125
26214.4
450
26214
450
Hence, set 26214 to CMX and 450 to CDV.
POINT
When “0” is set to parameter No.3 (CMX), CMX is automatically set to the
servo motor resolution. Therefore, in the case of Expression (5.1), setting
0 to CMX and 2250 to CDX concludes in the following expression:
CMX/CDV=131072/2250, and electric gear can be set without the
necessity to reduce the fraction to the lowest term.
For unlimited one-way rotation, e.g. an index table, indexing positions will
be missed due to cumulative error produced by rounding off.
For example, entering a command of 36000 pulses in the above example
causes the table to rotate only:
26214
450
36000 1
131072
4
64 360 359.995
Therefore, indexing cannot be done in the same position on the table.
(2) Instructions for reduction
The calculated value before reduction must be as near as possible to the calculated value after
reduction.
In the case of (1), (b) in this section, an error will be smaller if reduction is made to provide no fraction
for CDV. The fraction of Expression (5.1) before reduction is calculated as follows.
CDV
CMX 65536
1125 58.25422 ................................................................................................................... (5.2)
The result of reduction to provide no fraction for CMX is as follows.
CDV
CMX 65536
1125
32768
562.5
32768
563 58.20249.................................................................................... (5.3)
The result of reduction to provide no fraction for CDV is as follows.
CDV
CMX 65536
1125
26214.4
450
26214
450 58.25333.................................................................................. (5.4)
As a result, it is understood that the value nearer to the calculation result of Expression (5.2) is the
result of Expression (5.4). Accordingly, the set values of (1), (b) in this section are CMX 26214,
CDV 450.
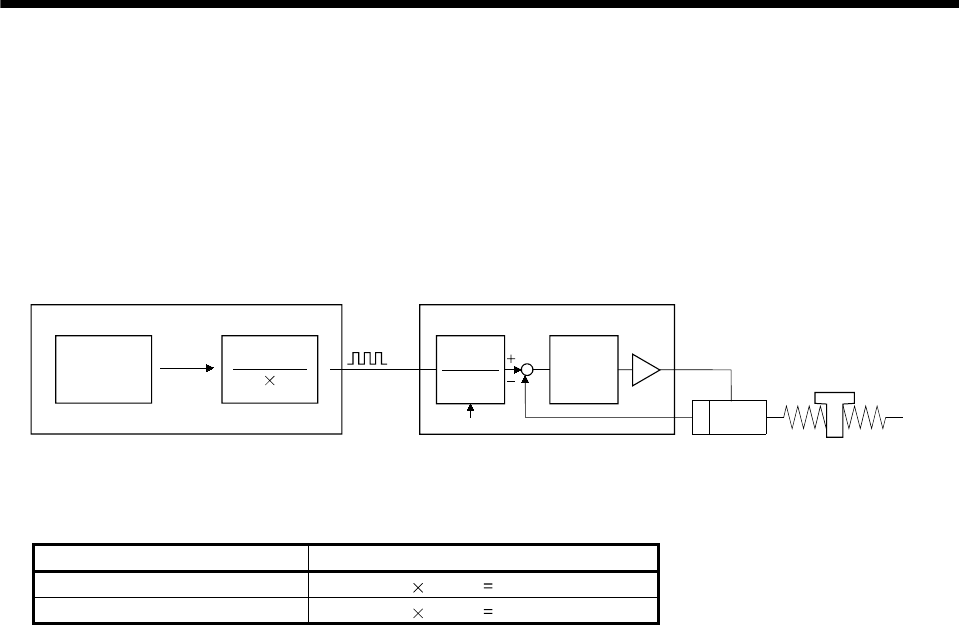
5 - 23
5. PARAMETERS
(3) Setting for use of AD75P
The AD75P also has the following electronic gear parameters. Normally, the servo amplifier side
electronic gear must also be set due to the restriction on the command pulse frequency (differential
400kpulse/s, open collector 200kpulse/s).
AP: Number of pulses per motor revolution
AL: Moving distance per motor revolution
AM: Unit scale factor
Command
value Control
unit
AP
AMAL
CMX
CDV
Deviation
counter
Electronic gear Feedback pulse
Command
pulse
Servo amplifierAP75P
Servo motor
Electronic gear
The resolution of the servo motor is 131072 pulses/rev. For example, the pulse command needed to
rotate the servo motor is as follows
Servo motor speed [r/min] Required pulse command
2000 131072 2000/60 4369066 pulse/s
3000 131072 3000/60 6553600 pulse/s
For the AD75P, the maximum value of the pulse command that may be output is 200kpulse/s in the
open collector system or 400kpulse/s in the differential line driver system. Hence, either of the servo
motor speeds exceeds the maximum output pulse command of the AD75P.
Use the electronic gear of the servo amplifier to run the servo motor under the maximum output pulse
command of the AD75P.
5 - 24
5. PARAMETERS
To rotate the servo motor at 3000r/min in the open collector system (200kpulse/s), set the electronic
gear as follows
CDV
CMX N0
f60 pt
f : Input pulses [pulse/s]
N0: Servo motor speed [r/min]
Pt : Servo motor resolution [pulse/rev]
200 CDV
CMX 3000
60 131072
CDV
CMX 3000
60
131072
200 60 200000
3000 131072 4096
125
103
3
The following table indicates the electronic gear setting example (ballscrew lead 10mm) when the
AD75P is used in this way.
Rated servo motor speed 3000r/min 2000r/min
Input system Open
collector
Differential
line driver
Open
collector
Differential
line driver
Max. input pulse frequency [kpulse/s] 200 500 200 500
Feedback pulse/revolution [pulse/rev] 131072 131072
Servo amplifier
Electronic gear (CMX/CDV) 4096/125 2048/125 8192/375 4096/375
Command pulse frequency [kpulse/s] (Note) 200 400 200 400
Number of pulses per servo motor revolution as
viewed from AD75P[pulse/rev] 4000 8000 6000 12000
AP1111
AL1111
Minimum command unit
1pulse AM1111
AP 4000 8000 6000 12000
AL 1000.0 [ m] 1000.0 [ m] 1000.0 [ m] 1000.0 [ m]
AD75P
Electronic gear
Minimum command unit
0.1 mAM 10 10 10 10
Note. Command pulse frequency at rated speed
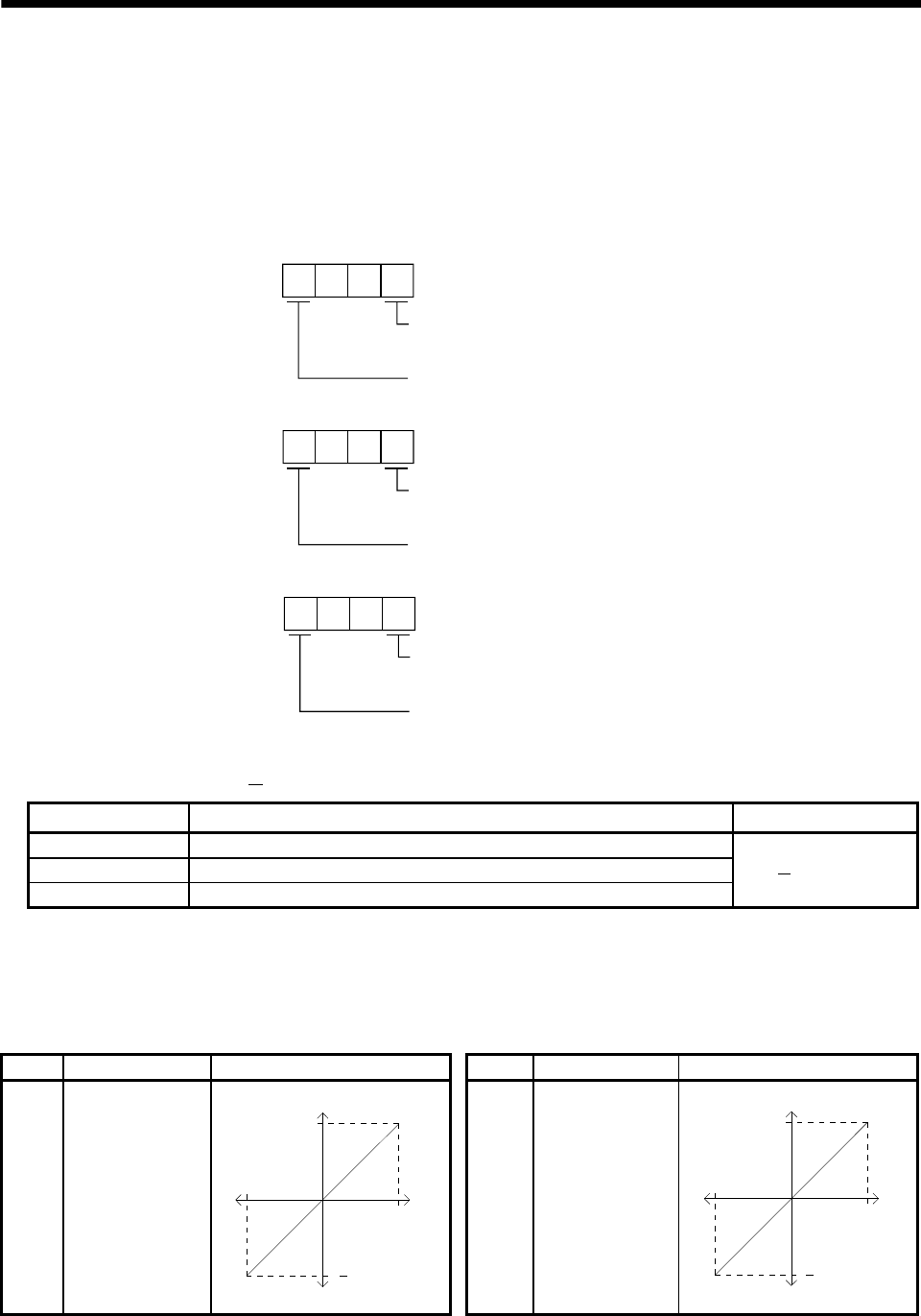
5 - 25
5. PARAMETERS
5.3.2 Analog monitor
The servo status can be output to 3 channels in terms of voltage. Using an ammeter enables monitoring
the servo status.
(1) Setting
Change the following digits of IFU parameter No.3 to 5:
IFU parameter No. 3
Analog monitor 1 selection
(Signal output to across MO1-LG)
Slot number of analog monitor 1
IFU parameter No. 4
Analog monitor 2 selection
(Signal output to across MO2-LG)
Slot number of analog monitor 2
IFU parameter No. 5
Analog monitor 3 selection
(Signal output to across MO3-LG)
Slot number of analog monitor 3
IFU parameters No.6 to 8 can be used to set the offset voltages to the analog output voltages. The
setting range is between 999 and 999mV.
IFU parameter No. Description Setting range [mV]
6 Used to set the offset voltage for the analog monitor 1.
7 Used to set the offset voltage for the analog monitor 2.
8 Used to set the offset voltage for the analog monitor 3.
999 to 999
(2) Settings
The three channels are all factory-set to output servo motor speeds. By changing the IFU parameter
No. 3 to 5 values, you can change the data as shown in the following tale.
Refer to (3) for measurement points.
Setting Output item Data Setting Output item Data
0 Servo motor speed
4[V]
0
4[V]
CCW direction
Max. speed
Max. speed
CW direction
1 Torque (Note)
4[V]
0
Driving in
CCW direction
Max. torque
Max. torque
Driving in
CW direction
4[V]
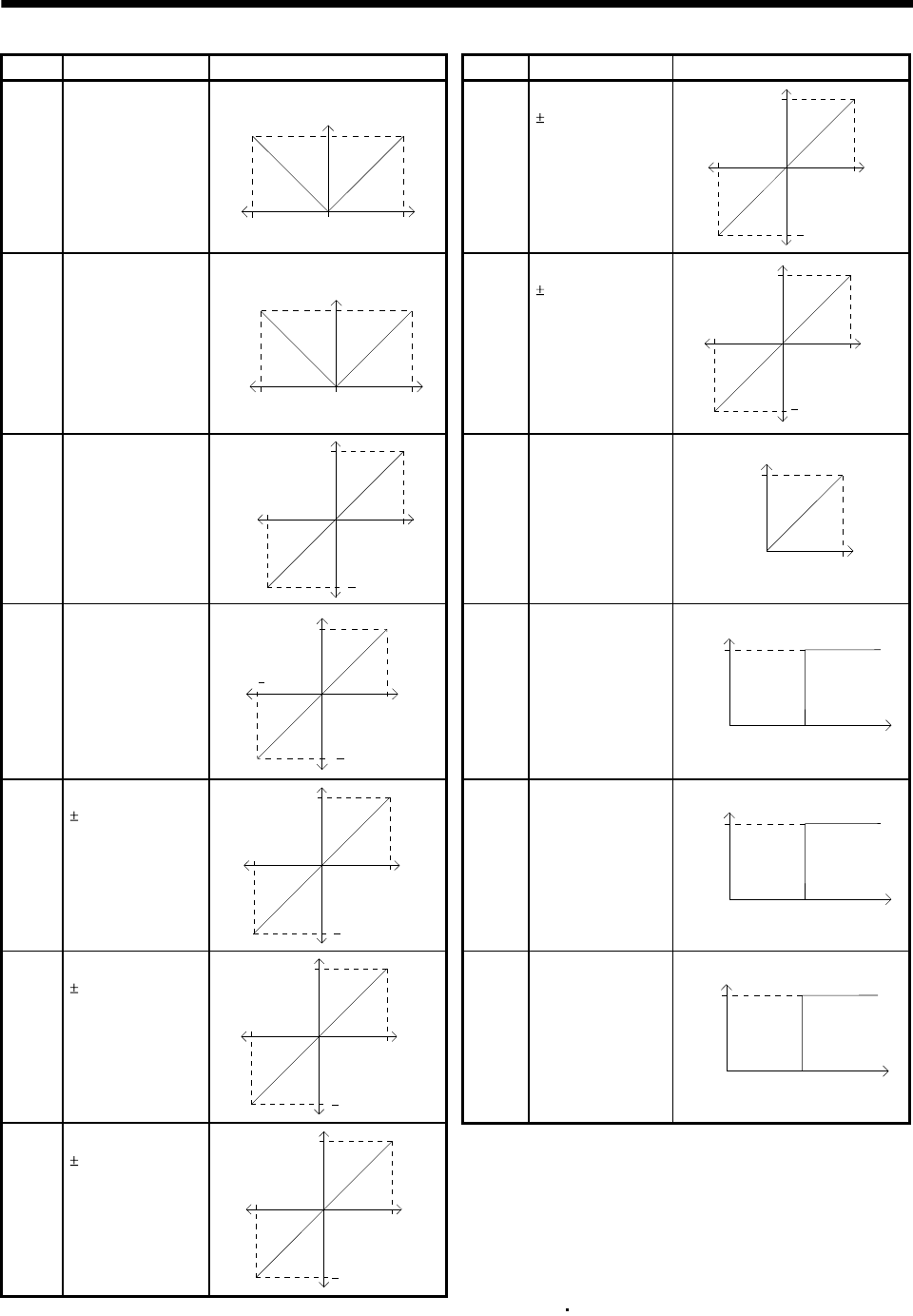
5 - 26
5. PARAMETERS
Setting Output item Data Setting Output item Data
2 Servo motor speed
4[V]
0
CW
direction
CCW
direction
Max. speed Max. speed
9 Droop pulses
(4V/32768pulse)
4[V]
32768[pulse]
0
4[V]
32768[pulse]
CCW direction
CW direction
3 Torque (Note)
4[V]
0
Driving in
CW direction
Driving in
CCW direction
Max. torque Max. torque
A Droop pulses
(4V/131072pulse) 4[V]
131072[pulse]
0
4[V]
131072[pulse]
CCW direction
CW direction
4 Current command 4[V]
0
4[V]
Max. current
command
Max. current
command
CCW direction
CW direction
BBus voltage
4[V]
0400[V]
5 Command pulse
frequency 4[V]
500[kpps]
0
4[V]
500[kpps]
CCW direction
CW direction
CIn-position
OFF
4[V]
0
ON
6 Droop pulses
(4V/128pulse)
4[V]
128[pulse]
0
4[V]
128[pulse]
CCW direction
CW direction
DReady
OFF
4[V]
0
ON
7 Droop pulses
(4V/2048pulse)
4[V]
2048[pulse]
0
4[V]
2048[pulse]
CCW direction
CW direction
E Failure
4[V]
0
Alarm
provided
Alarm
not provided
8 Droop pulses
(4V/8192pulse)
4[V]
8192[pulse]
0
4[V]
8192[pulse]
CCW direction
CW direction
Note. 4V is outputted at the maximum torque. However, when DRU parameter No. 28 76 are set to limit torque, 4V is outputted at the
torque highly limited.
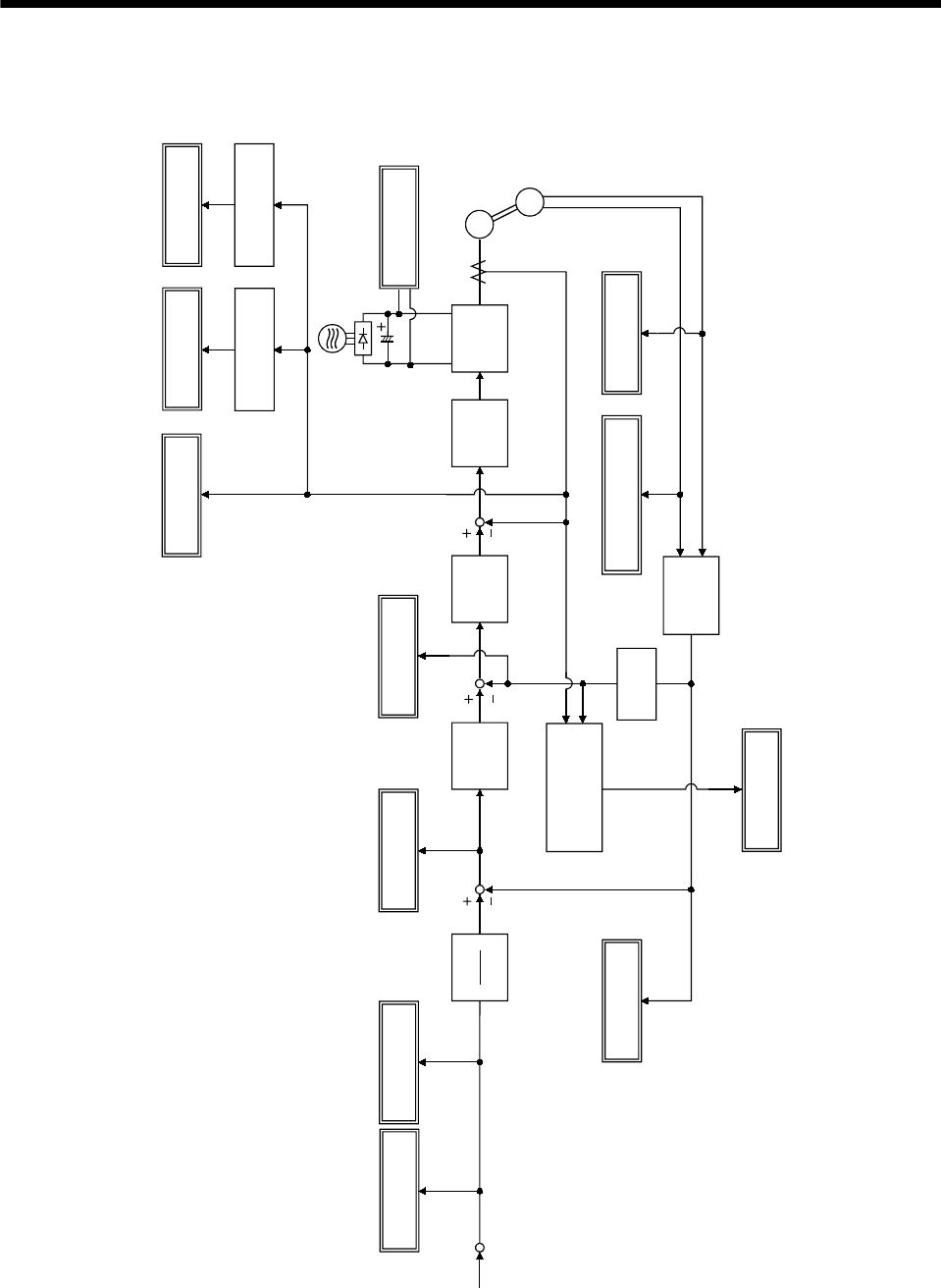
5 - 27
5. PARAMETERS
(3) Analog monitor block diagram
Peak load ratio
PWM M
Current
control
Droop pulse
ABS counter
Low
High
CMX
CDV
Electronic gear
Bus voltage
ABS counter
Servo motor
Position
control
Absolute
position
encoder
Speed feedback
Auto
tuning section
Current
position
calculation
Peak hold
Effective value
calculation
Effective load
torque
Instantaneously
occurring torque
Within one-
revolution position
Command pulse
frequency Cumulative
command pulse
Cumulative
feedback pulse
Load inertia
moment ratio
Differential
Speed
control
Servo motor
speed
Command
pulse
PP,NP
Within one-
revolution position
5 - 28
5. PARAMETERS
5.3.3 Using forward rotation stroke end (LSP )reverse rotation stroke end (LSN ) to change the stopping
pattern
The stopping pattern is factory-set to make a sudden stop when the forward rotation stroke end (LSP )
reverse rotation stroke end (LSN ) is made valid. A slow stop can be made by changing the DRU
parameter No. 22 (Function selection 2) value.
DRU parameter No.22 Setting Stopping method
0
(initial value)
Sudden stop
Motor stops with droop pulses cleared.
1
Slow stop
The motor is decelerated to a stop in accordance with the DRU parameter No. 7
value.
(Position command acceleration/deceleration time constant)
5.3.4 Alarm history clear
The servo amplifier stores one current alarm and five past alarms from when its power is switched on
first. To control alarms which will occur during operation, clear the alarm history using DRU parameter
No.16 or IFU parameter No.0 before starting operation.
These parameters are made valid when you switch power off, then on after setting their values. DRU
parameter No. 16 and IFU parameter No. 0 return to " 0 " automatically when the alarm history is
cleared.
Alarm history clea
r
0: Invalid
1: Valid
DRU parameter No.16
IFU parameter No.0
Alarm history clea
r
0: Invalid
1: Valid
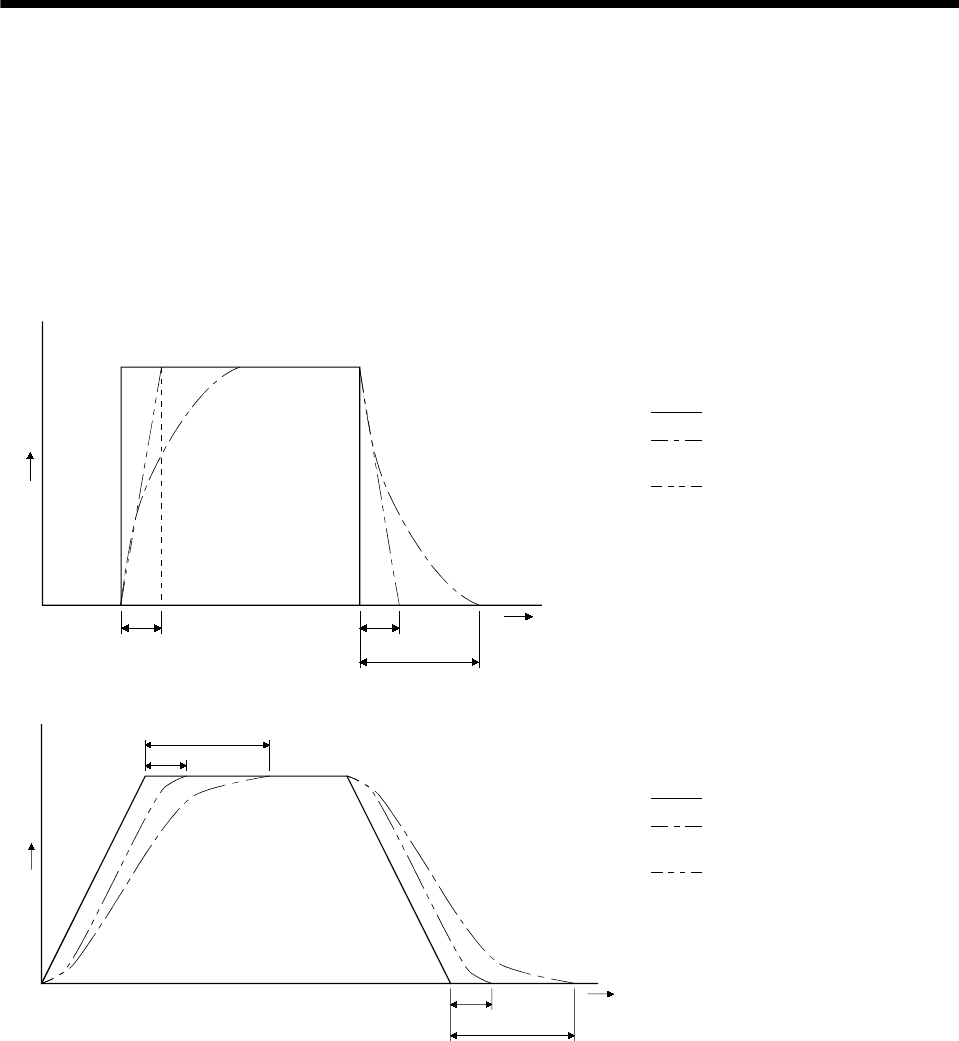
5 - 29
5. PARAMETERS
5.3.5 Position smoothing
By setting the position command acceleration/deceleration time constant (DRU parameter No.7), you can
run the servo motor smoothly in response to a sudden position command.
The following diagrams show the operation patterns of the servo motor in response to a position command
when you have set the position command acceleration/deceleration time constant.
Choose the primary delay or linear acceleration/deceleration in DRU parameter No. 55 according to the
machine used.
(1) For step input
Command
(3t)
tt
Time
t
: Input position command
: Position command after
filtering for primary delay
: Position command after filtering
for linear acceleration/deceleration
: Position command acceleration/
deceleration time constant
(DRU parameter No. 7)
(2) For trapezoidal input
Command
Time
t
(3t)
t
(3t)
t
: Input position command
: Position command after
filtering for primary delay
: Position command after filtering
for linear acceleration/deceleration
: Position command acceleration/
deceleration time constant
(DRU parameter No. 7)
5 - 30
5. PARAMETERS
MEMO
6 - 1
6. GENERAL GAIN ADJUSTMENT
6. GENERAL GAIN ADJUSTMENT
6.1 Different adjustment methods
6.1.1 Adjustment on a MELSERVO-J2M
The gain adjustment in this section can be made on the MELSERVO-J2M. For gain adjustment, first
execute auto tuning mode 1. If you are not satisfied with the results, execute auto tuning mode 2, manual
mode 1 and manual mode 2 in this order.
(1) Gain adjustment mode explanation
Gain adjustment
mode
DRU parameter
No. 2 setting
Estimation of load
inertia moment ratio
Automatically set
DRU parameters
Manually set
DRU parameters
Auto tuning mode 1
(initial value)
010 Always estimated PG1 (DRU parameter No. 6)
GD2 (DRU parameter No. 34)
PG2 (DRU parameter No. 35)
VG1 (DRU parameter No. 36)
VG2 (DRU parameter No. 37)
VIC (DRU parameter No. 38)
Response level setting of DRU
parameter No. 2
Auto tuning mode 2 020 PG1 (DRU parameter No. 6)
PG2 (DRU parameter No. 35)
VG1 (DRU parameter No. 36)
VG2 (DRU parameter No. 37)
VIC (DRU parameter No. 38)
GD2 (DRU parameter No. 34)
Response level setting of
parameter No. 2
Manual mode 1 030 PG2 (DRU parameter No. 35)
VG1 (DRU parameter No. 36)
PG1 (DRU parameter No. 6)
GD2 (DRU parameter No. 34)
VG2 (DRU parameter No. 37)
VIC (DRU parameter No. 38)
Manual mode 2 040
Fixed to parameter
No. 34 value
PG1 (DRU parameter No. 6)
GD2 (DRU parameter No. 34)
PG2 (DRU parameter No. 35)
VG1 (DRU parameter No. 36)
VG2 (DRU parameter No. 37)
VIC (DRU parameter No. 38)
Interpolation mode 000 Always estimated GD2 (DRU parameter No. 34)
PG2 (DRU parameter No. 35)
VG2 (DRU parameter No. 37)
VIC (DRU parameter No. 38)
PG1 (DRU parameter No. 6)
VG1 (DRU parameter No. 36)
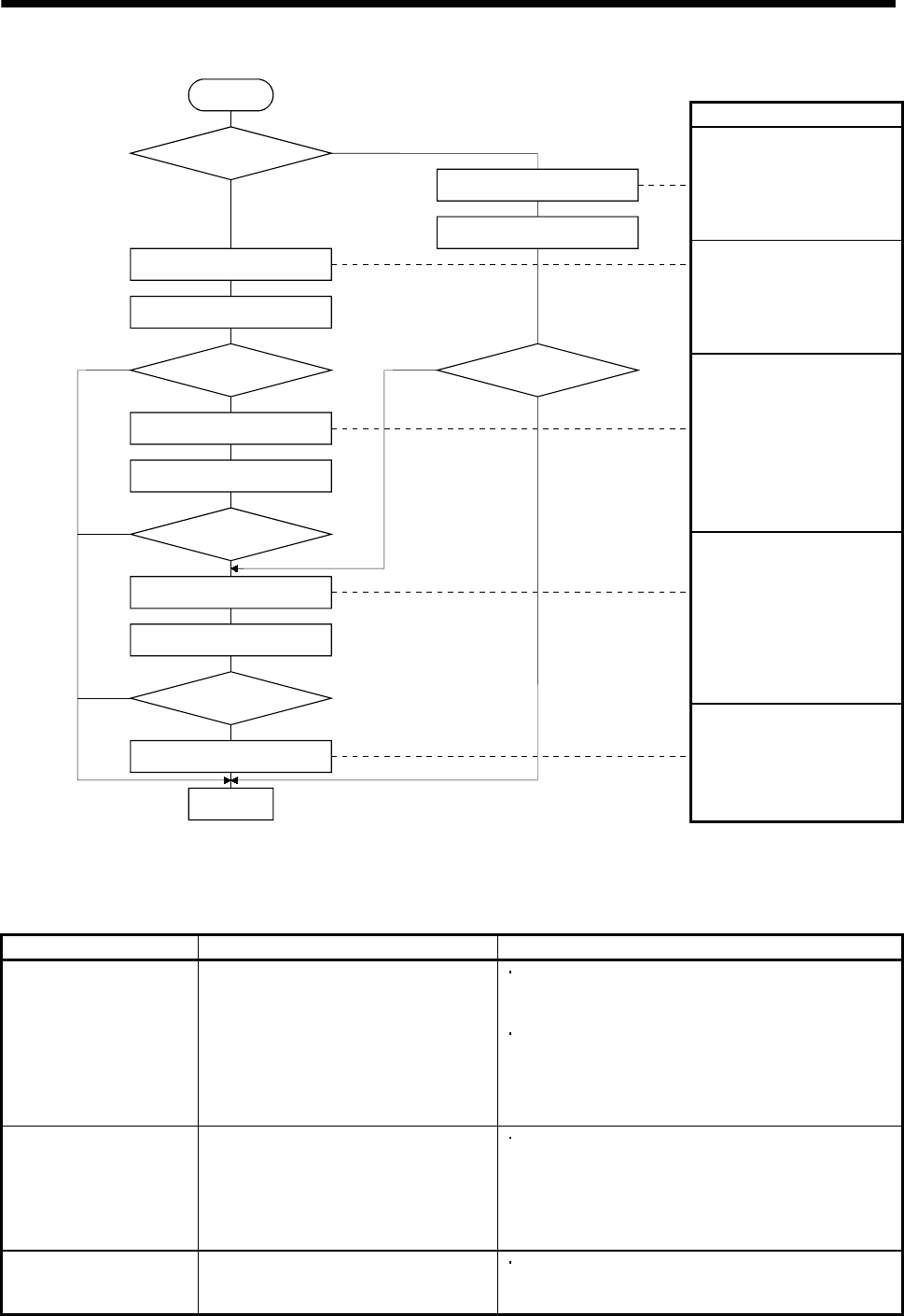
6 - 2
6. GENERAL GAIN ADJUSTMENT
(2) Adjustment sequence and mode usage
Usage
Used when you want to
match the position gain 1
(PG1) between 2 or more
axes. Normally not used for
other purposes.
Allows adjustment by
merely changing the
response level setting.
First use this mode to make
adjustment.
Used when the conditions of
auto tuning mode 1 are not
met and the load inertia
moment ratio could not be
estimated properly, for
example.
This mode permits
adjustment easily with three
gains if you were not
satisfied with auto tuning
results.
END
Interpolation
made for 2 or more
axes?
START
Operation
Auto tuning mode 2
OK?
Manual mode 1
OK?
Manual mode 2
OK?
OK?
No
No
Yes
No
Yes
No
Yes
No
Yes
Auto tuning mode 1
Operation
Interpolation mode
Operation
Operation
Yes
You can adjust all gains
manually when you want to
do fast settling or the like.
6.1.2 Adjustment using MR Configurator (servo configuration software)
This section gives the functions and adjustment that may be performed by using the servo amplifier with
the MR Configurator (servo configuration software) which operates on a personal computer.
Function Description Adjustment
Machine analyzer With the machine and servo motor
coupled, the characteristic of the
mechanical system can be measured by
giving a random vibration command from
the personal computer to the servo and
measuring the machine response.
You can grasp the machine resonance frequency and
determine the notch frequency of the machine
resonance suppression filter.
You can automatically set the optimum gains in
response to the machine characteristic. This simple
adjustment is suitable for a machine which has large
machine resonance and does not require much settling
time.
Gain search Executing gain search under to-and-fro
positioning command measures settling
characteristic while simultaneously
changing gains, and automatically
searches for gains which make settling
time shortest.
You can automatically set gains which make positioning
settling time shortest.
Machine simulation Response at positioning settling of a
machine can be simulated from machine
analyzer results on personal computer.
You can optimize gain adjustment and command
pattern on personal computer.
6 - 3
6. GENERAL GAIN ADJUSTMENT
6.2 Auto tuning
6.2.1 Auto tuning mode
The MELSERVO-J2M has a real-time auto tuning function which estimates the machine characteristic
(load inertia moment ratio) in real time and automatically sets the optimum gains according to that
value. This function permits ease of gain adjustment of the MELSERVO-J2M.
(1) Auto tuning mode 1
The MELSERVO-J2M is factory-set to the auto tuning mode 1.
In this mode, the load inertia moment ratio of a machine is always estimated to set the optimum gains
automatically.
The following DRU parameters are automatically adjusted in the auto tuning mode 1.
DRU parameter No. Abbreviation Name
6 PG1 Position control gain 1
34 GD2 Ratio of load inertia moment to servo motor inertia moment
35 PG2 Position control gain 2
36 VG1 Speed control gain 1
37 VG2 Speed control gain 2
38 VIC Speed integral compensation
POINT
The auto tuning mode 1 may not be performed properly if the following
conditions are not satisfied.
Time to reach 2000r/min is the acceleration/deceleration time constant of 5s or
less.
Speed is 150r/min or higher.
The ratio of load inertia moment to servo motor is not more than 100
times.
The acceleration/deceleration torque is 10% or more of the rated torque.
Under operating conditions which will impose sudden disturbance torque
during acceleration/deceleration or on a machine which is extremely loose,
auto tuning may not function properly, either. In such cases, use the auto
tuning mode 2 or manual mode 1 2 to make gain adjustment.
(2) Auto tuning mode 2
Use the auto tuning mode 2 when proper gain adjustment cannot be made by auto tuning mode 1.
Since the load inertia moment ratio is not estimated in this mode, set the value of a correct load
inertia moment ratio (DRU parameter No. 34).
The following DRU parameters are automatically adjusted in the auto tuning mode 2.
DRU parameter No. Abbreviation Name
6 PG1 Position control gain 1
35 PG2 Position control gain 2
36 VG1 Speed control gain 1
37 VG2 Speed control gain 2
38 VIC Speed integral compensation
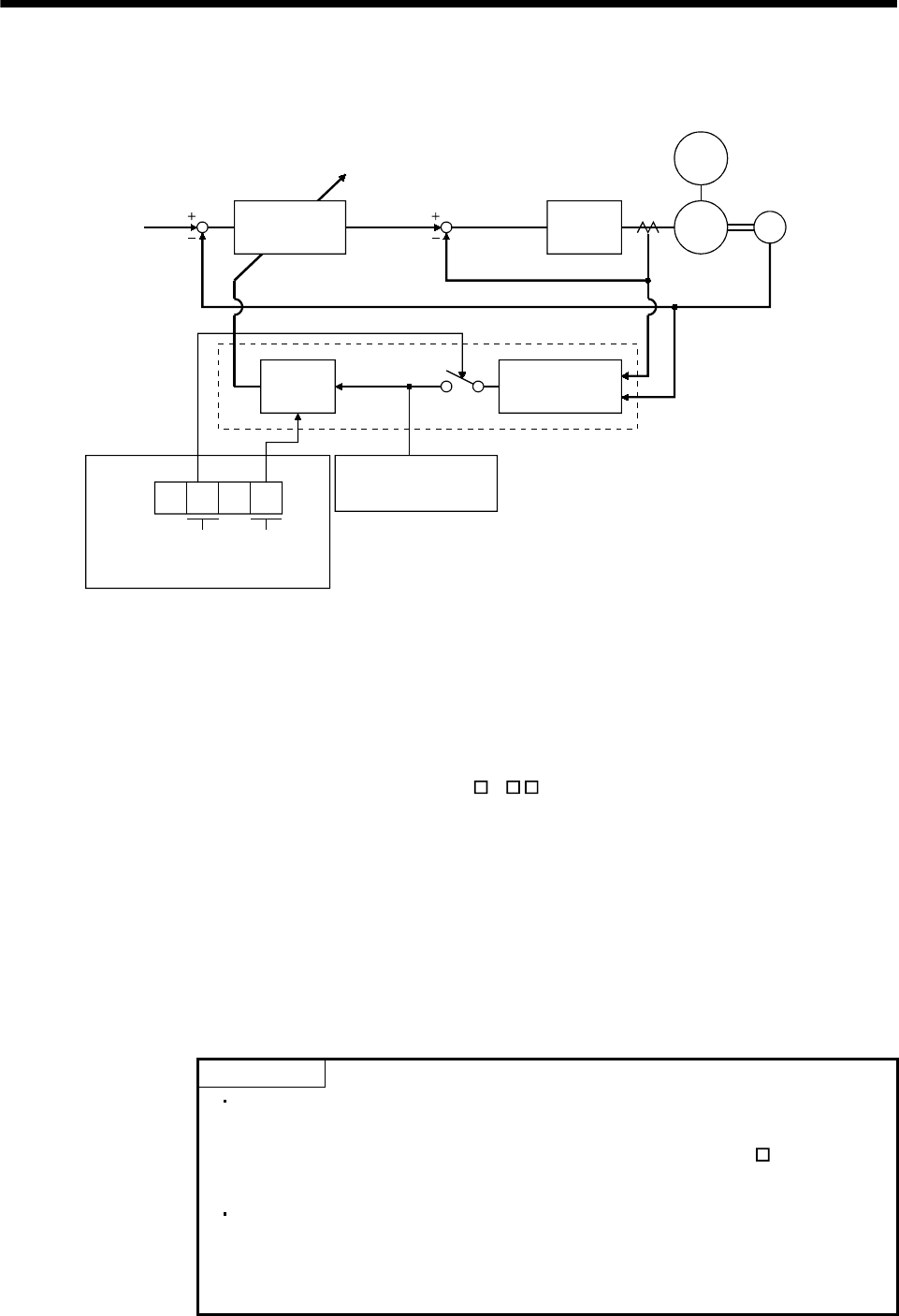
6 - 4
6. GENERAL GAIN ADJUSTMENT
6.2.2 Auto tuning mode operation
The block diagram of real-time auto tuning is shown below.
Servo
motor
Command
Automatic setting
Control gains
PG1,VG1
PG2,VG2,VIC
Current
control
Current feedback
Load inertia
moment
Encoder
Position/speed
feedback
Real-time auto
tuning section
Speed feedback
Load inertia
moment ratio
estimation section
Gain
table
DRU parameter
No. 2
Third digit
Auto tuning
selection
First digit
Response
level setting
DRU parameter No. 34
Load inertia moment
ratio estimation value
Set 0 or 1 to turn on.
Switch
When a servo motor is accelerated/decelerated, the load inertia moment ratio estimation section always
estimates the load inertia moment ratio from the current and speed of the servo motor. The results of
estimation are written to DRU parameter No. 34 (the ratio of load inertia moment to servo motor). These
results can be confirmed on the status display screen of the servo amplifier display section.
If the value of the load inertia moment ratio is already known or if estimation cannot be made properly,
chose the "auto tuning mode 2" (DRU parameter No.2: 2 ) to stop the estimation of the load inertia
moment ratio (Switch in above diagram turned off), and set the load inertia moment ratio (DRU
parameter No. 34) manually.
From the preset load inertia moment ratio (DRU parameter No. 34) value and response level (The first
digit of DRU parameter No. 2), the optimum control gains are automatically set on the basis of the
internal gain tale.
The auto tuning results are saved in the EEP-ROM of the servo amplifier every 60 minutes since power-
on. At power-on, auto tuning is performed with the value of each control gain saved in the EEP-ROM
being used as an initial value.
POINT
If sudden disturbance torque is imposed during operation, the estimation
of the inertia moment ratio may malfunction temporarily. In such a case,
choose the "auto tuning mode 2" (DRU parameter No. 2: 020 ) and set the
correct load inertia moment ratio in DRU parameter No. 34.
When any of the auto tuning mode 1, auto tuning mode 2 and manual
mode 1 settings is changed to the manual mode 2 setting, the current
control gains and load inertia moment ratio estimation value are saved in
the EEP-ROM.
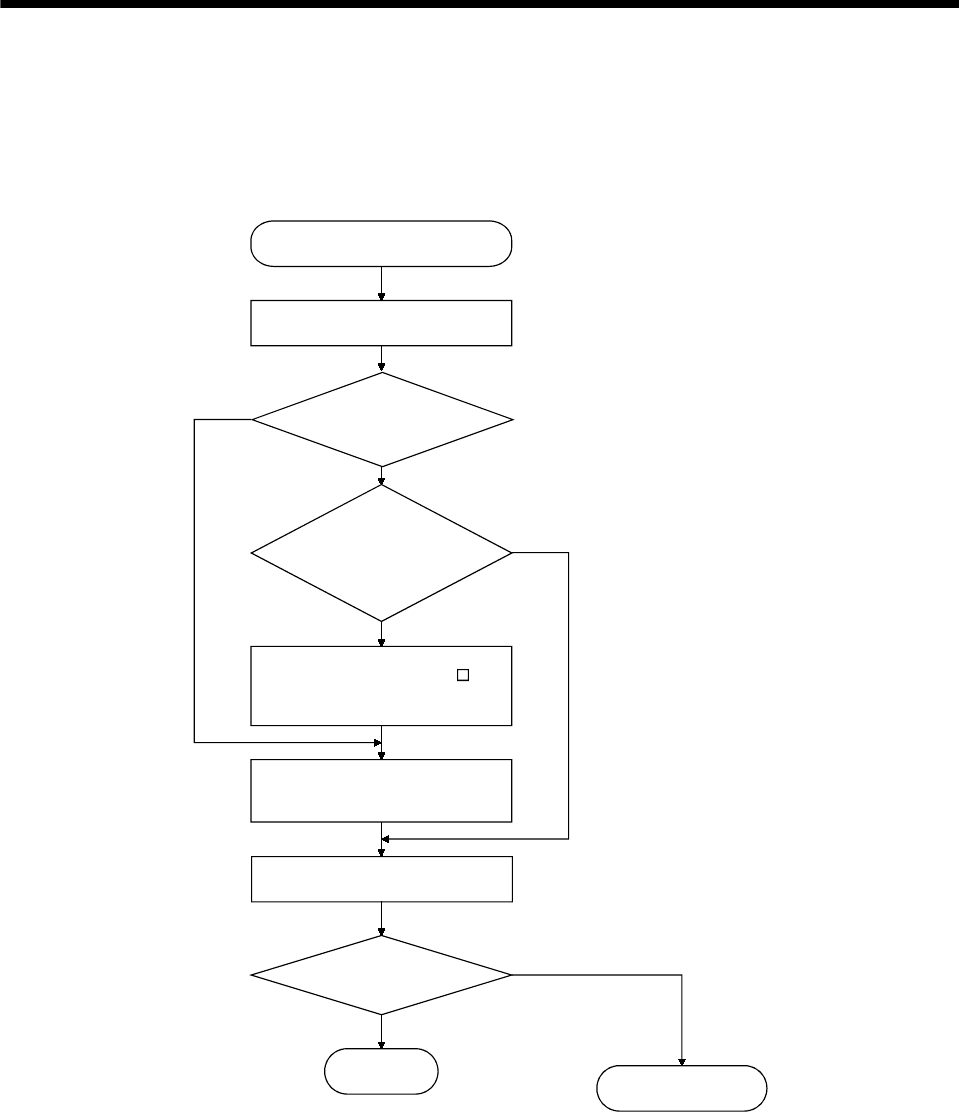
6 - 5
6. GENERAL GAIN ADJUSTMENT
6.2.3 Adjustment procedure by auto tuning
Since auto tuning is made valid before shipment from the factory, simply running the servo motor
automatically sets the optimum gains that match the machine. Merely changing the response level
setting value as required completes the adjustment. The adjustment procedure is as follows.
END
Yes
No
Yes
No
No
Yes
Auto tuning adjustment
Acceleration/deceleration repeated
Load inertia moment ratio
estimation value stable?
Auto tuning
conditions not satisfied.
(Estimation of load inertia
moment ratio is difficult)
Adjust response level setting
so that desired response level is
achieved on vibration-free level.
Acceleration/deceleration repeated
Requested
performance satisfied?
To manual mode
Choose the auto tuning mode 2
(DRU parameter No.2 : 020 )and
set the load inertia moment ratio
(DRU parameter No.34) manually.
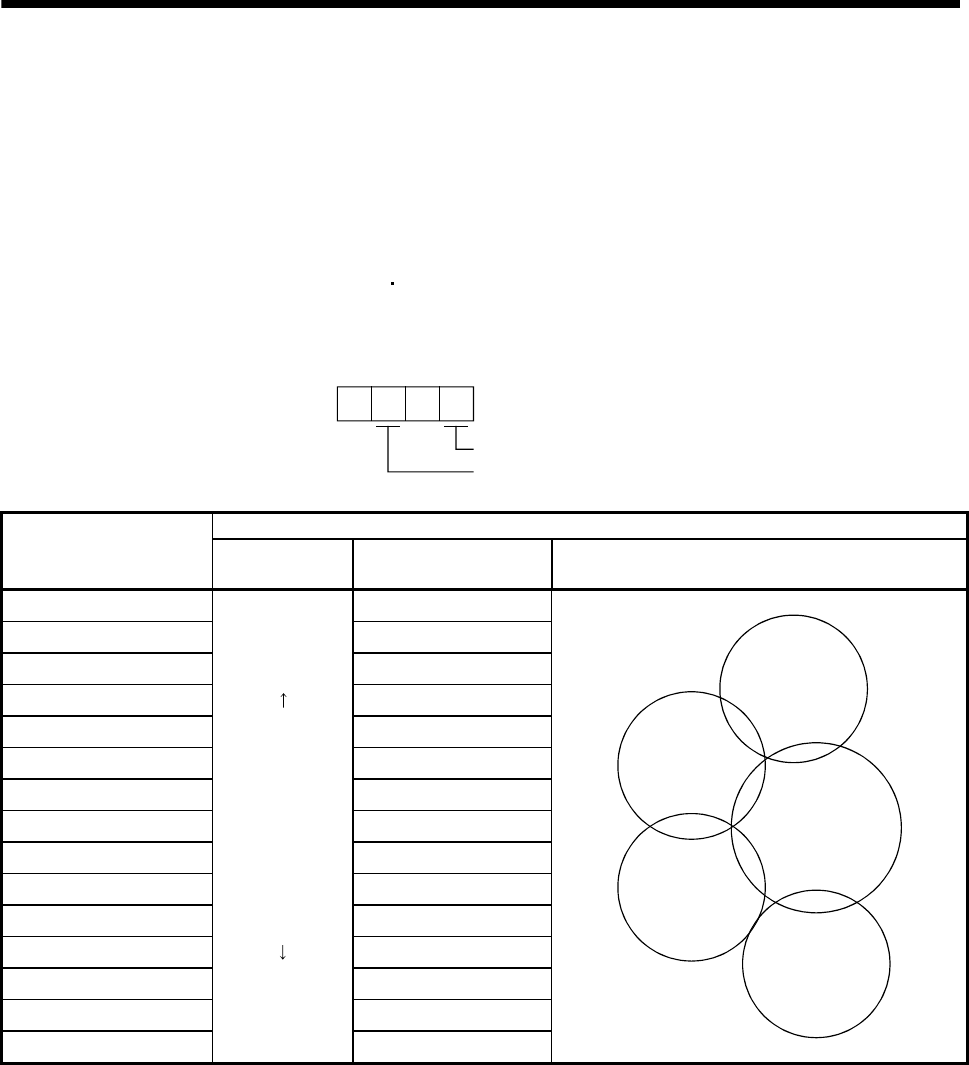
6 - 6
6. GENERAL GAIN ADJUSTMENT
6.2.4 Response level setting in auto tuning mode
Set the response (The first digit of DRU parameter No.2) of the whole servo system. As the response level
setting is increased, the trackability and settling time for a command decreases, but a too high response
level will generate vibration. Hence, make setting until desired response is obtained within the vibration-
free range.
If the response level setting cannot be increased up to the desired response because of machine resonance
beyond 100Hz, adaptive vibration suppression control (DRU parameter No. 60) or machine resonance
suppression filter (DRU parameter No. 58 59) may be used to suppress machine resonance. Suppressing
machine resonance may allow the response level setting to increase. Refer to Section 7.2 for adaptive
vibration suppression control and machine resonance suppression filter.
DRU parameter No. 2
Response level setting
Auto tuning selection
Machine characteristic
Response level setting Machine rigidity Machine resonance
frequency guideline Guideline of corresponding machine
1 Low 15Hz
2 20Hz
3 25Hz
430Hz
5 35Hz
6 45Hz
7 55Hz
8 Middle 70Hz
9 85Hz
A 105Hz
B 130Hz
C160Hz
D 200Hz
E 240Hz
F High 300Hz
Large conveyor
Arm robot
General machine
tool conveyor
Precision
working
machine
Inserter
Mounter
Bonder
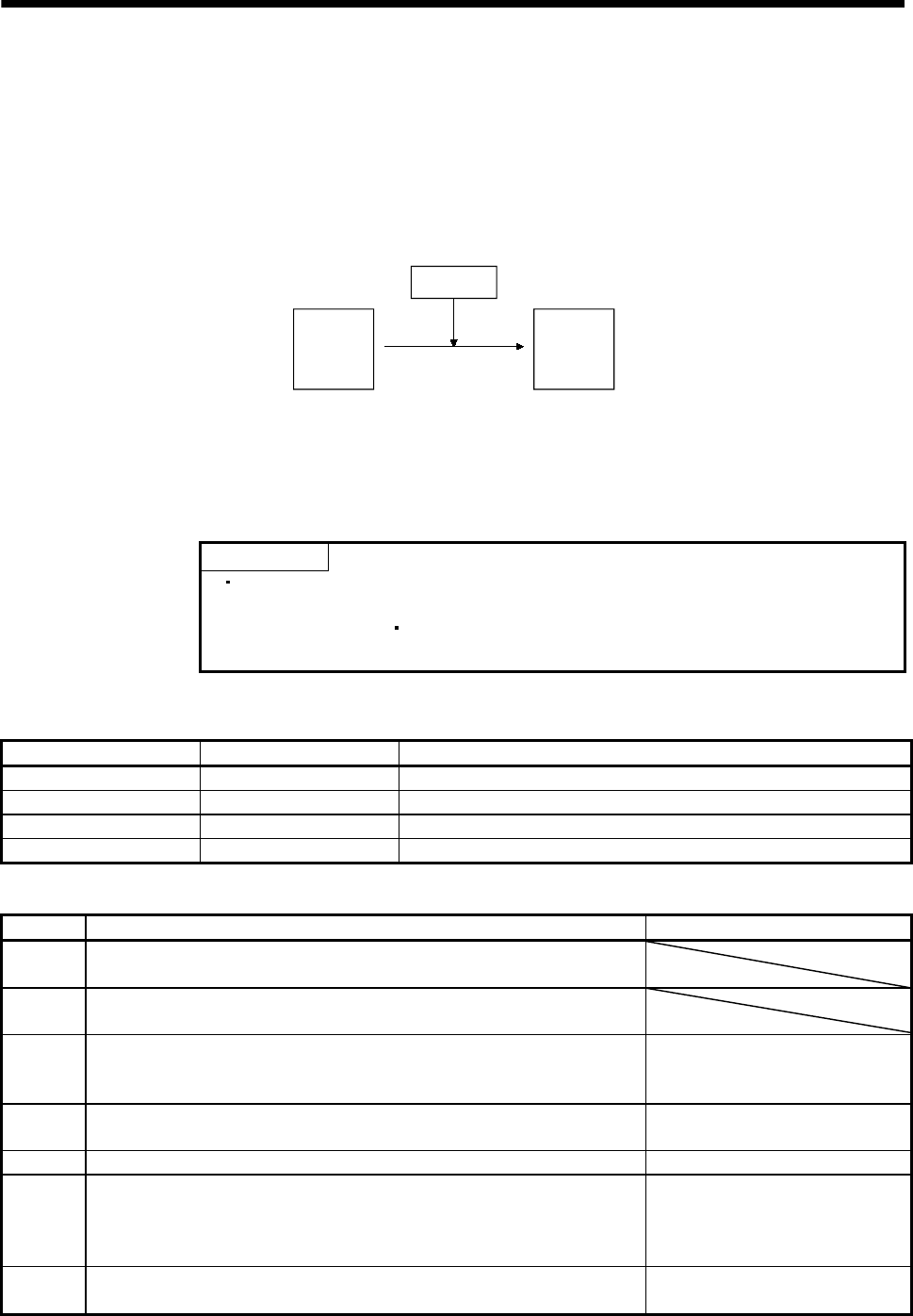
6 - 7
6. GENERAL GAIN ADJUSTMENT
6.3 Manual mode 1 (simple manual adjustment)
If you are not satisfied with the adjustment of auto tuning, you can make simple manual adjustment with
three DRU parameters.
6.3.1 Operation of manual mode 1
In this mode, setting the three gains of position control gain 1 (PG1), speed control gain 2 (VG2) and
speed integral compensation (VIC) automatically sets the other gains to the optimum values according to
these gains.
PG1
VG2
VIC
PG2
VG1
GD2
Automatic setting
User setting
Therefore, you can adjust the model adaptive control system in the same image as the general PI control
system (position gain, speed gain, speed integral time constant). Here, the position gain corresponds to
PG1, the speed gain to VG2 and the speed integral time constant to VIC. When making gain adjustment
in this mode, set the load inertia moment ratio (DRU parameter No. 34) correctly.
6.3.2 Adjustment by manual mode 1
POINT
If machine resonance occurs, adaptive vibration suppression control (DRU
parameter No. 60) or machine resonance suppression filter (DRU
parameter No. 58 59) may be used to suppress machine resonance. (Refer
to Section 7.1.)
(1) DRU parameters
The following parameters are used for gain adjustment:
DRU parameter No. Abbreviation Name
6 PG1 Position control gain 1
34 GD2 Ratio of load inertia moment to servo motor inertia moment
37 VG2 Speed control gain 2
38 VIC Speed integral compensation
(2) Adjustment procedure
Step Operation Description
1Set an estimated value to the ratio of load inertia moment to servo motor
inertia moment (DRU parameter No. 34).
2Set a slightly smaller value to the position control gain 1 (DRU parameter No.
6).
3
Increase the speed control gain 2 (DRU parameter No. 37) within the
vibration- and unusual noise-free range, and return slightly if vibration takes
place.
Increase the speed control gain.
4Decrease the speed integral compensation (DRU parameter No. 38) within the
vibration-free range, and return slightly if vibration takes place.
Decrease the time constant of the
speed integral compensation.
5 Increase the position control gain 1 (DRU parameter No. 6). Increase the position control gain.
6
If the gains cannot be increased due to mechanical system resonance or the
like and the desired response cannot be achieved, response may be increased
by suppressing resonance with adaptive vibration suppression control or
machine resonance suppression filter and then executing steps 3 to 5.
Suppression of machine resonance.
Refer to Section 7.1.
7While checking the settling characteristic and rotational status, fine-adjust
each gain.
Fine adjustment
6 - 8
6. GENERAL GAIN ADJUSTMENT
(3) Adjustment description
(a) Position control gain 1 (DRU parameter No. 6)
This parameter determines the response level of the position control loop. Increasing position
control gain 1 improves trackability to a position command but a too high value will make
overshooting liable to occur at the time of settling.
Position control
gain 1 guideline
Speed control gain 2 setting
(1 ratio of load inertia moment to servo motor inertia moment) ( to 1
5
1
3)
(b) Speed control gain 2 (VG2: DRU parameter No. 37)
This parameter determines the response level of the speed control loop. Increasing this value
enhances response but a too high value will make the mechanical system liable to vibrate. The
actual response frequency of the speed loop is as indicated in the following expression:
Speed loop response
frequency(Hz)
Speed control gain 2 setting
(1 ratio of load inertia moment to servo motor inertia moment) 2
(c) Speed integral compensation (DRU parameter No. 38)
To eliminate stationary deviation against a command, the speed control loop is under proportional
integral control. For the speed integral compensation, set the time constant of this integral control.
Increasing the setting lowers the response level. However, if the load inertia moment ratio is large
or the mechanical system has any vibratory element, the mechanical system is liable to vibrate
unless the setting is increased to some degree. The guideline is as indicated in the following
expression:
Speed integral compensation
setting(ms)
2000 to 3000
(1 ratio of load inertia moment to
servo motor inertia moment setting 0.1)
Speed control gain 2 setting/
6 - 9
6. GENERAL GAIN ADJUSTMENT
6.4 Interpolation mode
The interpolation mode is used to match the position control gains of the axes when performing the
interpolation operation of servo motors of two or more axes for an X-Y table or the like. In this mode, the
position control gain 2 and speed control gain 2 which determine command trackability are set manually
and the other parameter for gain adjustment are set automatically.
(1) Parameter
(a) Automatically adjusted parameters
The following parameters are automatically adjusted by auto tuning.
DRU parameter No. Abbreviation Name
34 GD2 Ratio of load inertia moment to servo motor inertia moment
35 PG2 Position control gain 2
37 VG2 Speed control gain 2
38 VIC Speed integral compensation
(b) Manually adjusted parameters
The following parameters are adjustable manually.
DRU parameter No. Abbreviation Name
6 PG1 Position control gain 1
36 VG1 Speed control gain 1
(2) Adjustment procedure
Step Operation Description
1Set 15Hz (DRU parameter No. 2: 010 ) as the machine resonance frequency of
response in the auto tuning mode 1. Select the auto tuning mode 1.
2During operation, increase the response level setting (DRU parameter No. 2),
and return the setting if vibration occurs.
Adjustment in auto tuning mode
1.
3Check the values of position control gain 1 (DRU parameter No. 6) and speed
control gain 1 (DRU parameter No. 36). Check the upper setting limits.
4 Set the interpolation mode (DRU parameter No. 2: 000 ). Select the interpolation mode.
5
Using the position control gain 1 value checked in step 3 as the guideline of the
upper limit, set in PG1 the value identical to the position loop gain of the axis to
be interpolated.
Set position control gain 1.
6
Using the speed control gain 1 value checked in step 3 as the guideline of the
upper limit, look at the rotation status and set in speed control gain 1 the value
three or more times greater than the position control gain 1 setting.
Set speed control gain 1.
7Looking at the interpolation characteristic and rotation status, fine-adjust the
gains and response level setting. Fine adjustment.
(3) Adjustment description
(a) Position control gain 1 (DRU parameter No.6)
This parameter determines the response level of the position control loop. Increasing position
control gain 1 improves trackability to a position command but a too high value will make
overshooting liable to occur at the time of settling. The droop pulse value is determined by the
following expression.
Droop pulse value (pulse) Position control gain set value
60
Rotation speed (r/min) 131072(pulse)
(b) Speed control gain 1 (DRU parameter No. 36)
Set the response level of the speed loop of the model. Make setting using the following expression
as a guideline.
Speed control gain 1 setting Position control gain 1 setting 3
6 - 10
6. GENERAL GAIN ADJUSTMENT
MEMO
7 - 1
7. SPECIAL ADJUSTMENT FUNCTIONS
7. SPECIAL ADJUSTMENT FUNCTIONS
POINT
The functions given in this chapter need not be used generally. Use them
if you are not satisfied with the machine status after making adjustment
in the methods in Chapter 6.
If a mechanical system has a natural resonance point, increasing the servo system response level may
cause the mechanical system to produce resonance (vibration or unusual noise) at that resonance
frequency.
Using the machine resonance suppression filter and adaptive vibration suppression control functions can
suppress the resonance of the mechanical system.
7.1 Function block diagram
Speed
control
Machine resonance
suppression filter 2
Encoder
Current
command
Low-pass
filter
DRU parameter
No.58
DRU parameter
No.60
DRU parameter
No.59
DRU parameter
No.60
Machine resonance
suppression filter 1
Adaptive vibration
suppression control
00
or1 2
000 0
1
00
except 00
except
Servo
motor
7.2 Machine resonance suppression filter
(1) Function
The machine resonance suppression filter is a filter function (notch filter) which decreases the gain of
the specific frequency to suppress the resonance of the mechanical system. You can set the gain
decreasing frequency (notch frequency) and gain decreasing depth.
Mechanical
s
ystem
response
level
Machine resonance point
Frequenc
y
Notch
depth
Notch frequency
Frequency
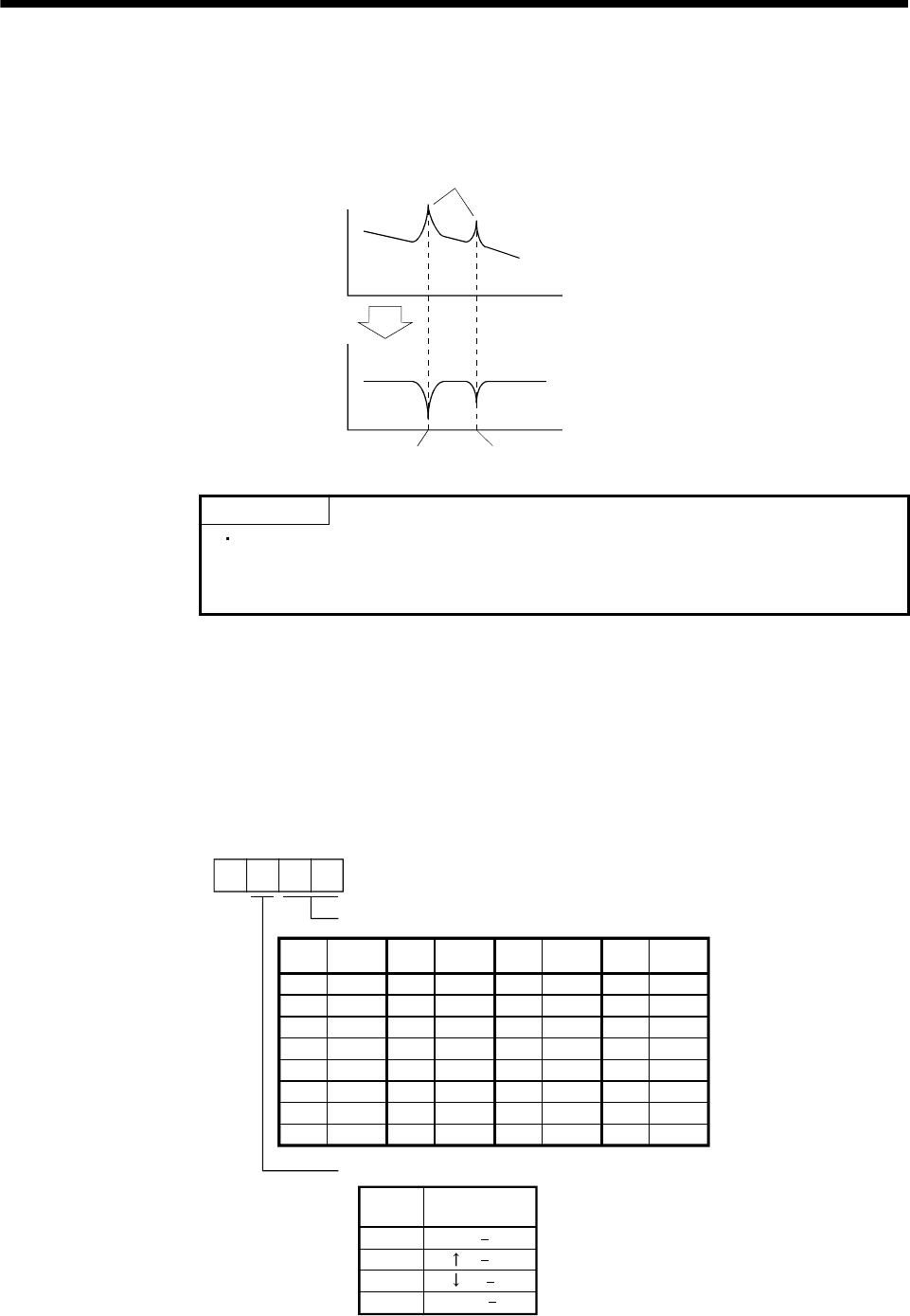
7 - 2
7. SPECIAL ADJUSTMENT FUNCTIONS
You can use the machine resonance suppression filter 1 (DRU parameter No. 58) and machine
resonance suppression filter 2 (DRU parameter No. 59) to suppress the vibration of two resonance
frequencies. Note that if adaptive vibration suppression control is made valid, the machine resonance
suppression filter 1 (DRU parameter No. 58) is made invalid.
Mechanical
s
ystem
response
level
Machine resonance point
Frequenc
y
Notch
depth
DRU parameter No. 58 DRU parameter No. 59
Frequenc
y
POINT
The machine resonance suppression filter is a delay factor for the servo
system. Hence, vibration may increase if you set a wrong resonance
frequency or a too deep notch.
(2) Parameters
(a) Machine resonance suppression filter 1 (DRU parameter No. 58)
Set the notch frequency and notch depth of the machine resonance suppression filter 1 (DRU
parameter No. 58)
When you have made adaptive vibration suppression control selection (DRU parameter No. 60)
"valid" or "held", make the machine resonance suppression filter 1 invalid (DRU parameter No. 58:
0000).
0
3
1
2
0
( 14dB)
( 8dB)
00
01
02
03
04
05
06
07
Invalid
4500
2250
08
09
0A
0B
0C
0D
0E
0F
10
11
12
13
14
15
16
17
18
19
1A
1B
1C
1D
1E
1F
1500
1125
900
750
642.9
500
450
409.1
375
346.2
321.4
300
562.5 281.3
264.7
250
236.8
225
214.3
204.5
195.7
187.5
180
173.1
166.7
160.1
155.2
150
145.2
Frequency
Setting
value Frequency Frequency Frequency
DRU parameter No. 58
Notch frequency
Notch depth
Setting
value Depth (Gain)
Deep ( 40dB)
Shallow( 4dB)
Setting
value
Setting
value
Setting
value
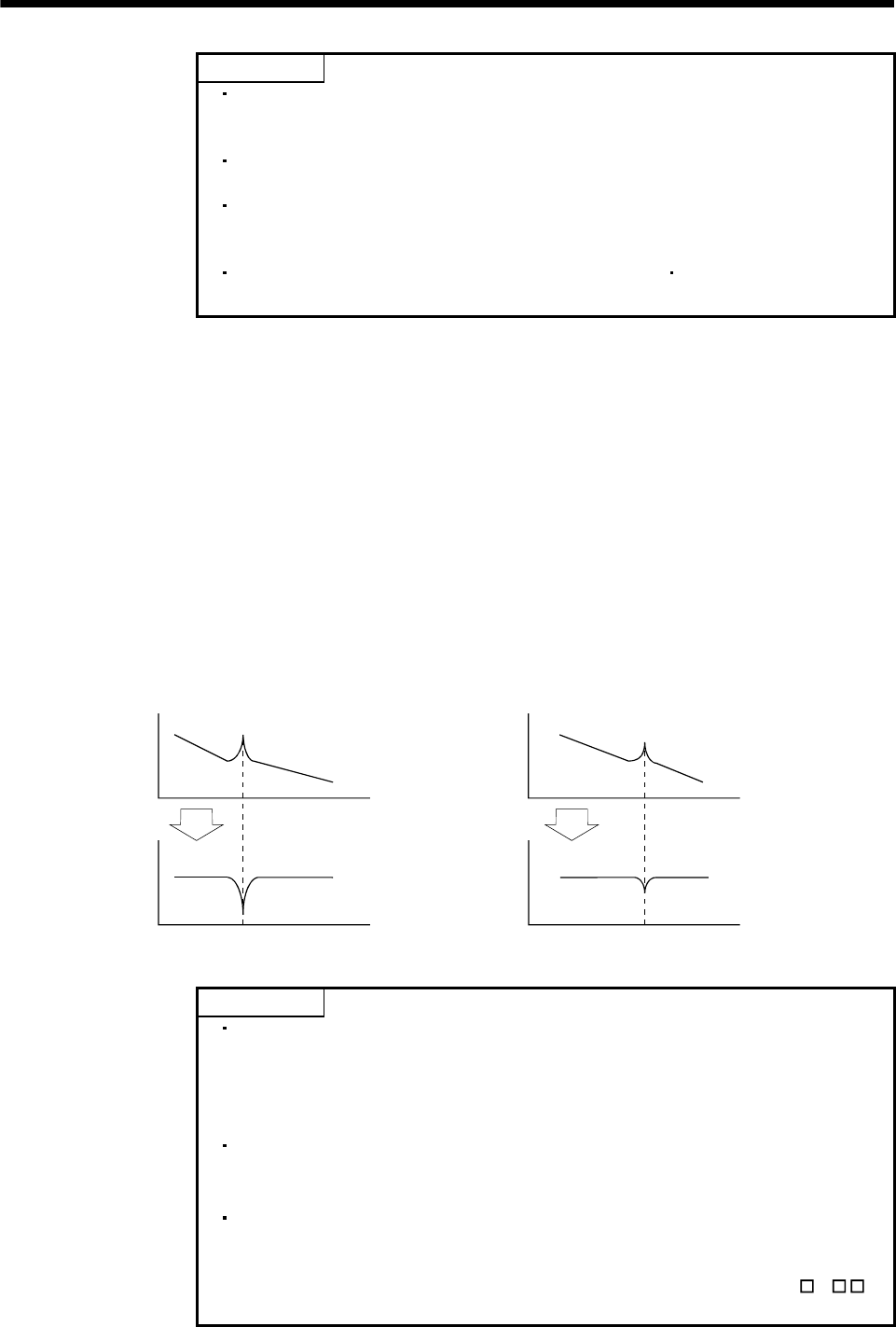
7 - 3
7. SPECIAL ADJUSTMENT FUNCTIONS
POINT
If the frequency of machine resonance is unknown, decrease the notch
frequency from higher to lower ones in order. The optimum notch
frequency is set at the point where vibration is minimal.
A deeper notch has a higher effect on machine resonance suppression but
increases a phase delay and may increase vibration.
The machine characteristic can be grasped beforehand by the machine
analyzer on the MR Configurator (servo configuration software). This
allows the required notch frequency and depth to be determined.
Resonance may occur if DRU parameter No. 58 59 is used to select a
close notch frequency and set a deep notch.
(b) Machine resonance suppression filter 2 (DRU parameter No. 59)
The setting method of machine resonance suppression filter 2 (DRU parameter No. 59) is the same
as that of machine resonance suppression filter 1 (DRU parameter No. 58). However, the machine
resonance suppression filter 2 can be set independently of whether adaptive vibration suppression
control is valid or invalid.
7.3 Adaptive vibration suppression control
(1) Function
Adaptive vibration suppression control is a function in which the drive unit detects machine resonance
and sets the filter characteristics automatically to suppress mechanical system vibration. Since the
filter characteristics (frequency, depth) are set automatically, you need not be conscious of the
resonance frequency of a mechanical system. Also, while adaptive vibration suppression control is
valid, the servo amplifier always detects machine resonance, and if the resonance frequency changes,
it changes the filter characteristics in response to that frequency.
Mechanical
system
response
level
Mechanical
system
response
level
Machine resonance point Machine resonance point
Frequency Frequenc
y
Notch
depth
Notch
depth
Notch frequency Notch frequency
Frequency Frequenc
y
When machine resonance is large and frequency is low When machine resonance is small and frequency is high
POINT
The machine resonance frequency which adaptive vibration suppression
control can respond to is about 150 to 500Hz. Adaptive vibration
suppression control has no effect on the resonance frequency outside this
range. Use the machine resonance suppression filter for the machine
resonance of such frequency.
Adaptive vibration suppression control may provide no effect on a
mechanical system which has complex resonance characteristics or which
has too large resonance.
Under operating conditions in which sudden disturbance torque is imposed
during operation, the detection of the resonance frequency may malfunction
temporarily, causing machine vibration. In such a case, set adaptive
vibration suppression control to be "held" (DRU parameter No. 60: 2 )
to fix the characteristics of the adaptive vibration suppression control filter.

7 - 4
7. SPECIAL ADJUSTMENT FUNCTIONS
(2) Parameters
The operation of adaptive vibration suppression control selection (DRU parameter No.60).
DRU parameter No. 60
Adaptive vibration suppression control selection
Choosing "valid" or "held" in adaptive vibration suppression
control selection makes the machine resonance suppression
filter 1 (DRU parameter No. 58) invalid.
0: Invalid
1: Valid
Machine resonance frequency is always detected to generate
the filter in response to resonance, suppressing machine vibration.
2: Held
Adaptive vibration suppression control sensitivity selection
Select the sensitivity at which machine resonance is detected.
0: Normal
1: Large sensitivity
Filter characteristics generated so far is held, and detection of
machine resonance is stopped.
POINT
Adaptive vibration suppression control is factory-set to be invalid (DRU
parameter No. 60: 0000).
The filter characteristics generated are saved in the EEP-ROM every 60
minutes since power-on. At next power-on, vibration suppression control is
performed with this data saved in the EEP-ROM being used as an initial
value.
Setting the adaptive vibration suppression control sensitivity can change
the sensitivity of detecting machine resonance. Setting of "large sensitivity"
detects smaller machine resonance and generates a filter to suppress
machine vibration. However, since a phase delay will also increase, the
response of the servo system may not increase.
7.4 Low-pass filter
(1) Function
When a ballscrew or the like is used, resonance of high frequency may occur as the response level of
the servo system is increased. To prevent this, the low-pass filter is factory-set to be valid for a torque
command. The filter frequency of this low-pass filter is automatically adjusted to the value in the
following expression:
Filter frequency(Hz) (1 Ratio of load inertia moment to servo motor inertia moment setting 0.1)
2
Speed control gain 2 setting 10
(2) Parameter
Set the operation of the low-pass filter (DRU parameter No. 60.)
DRU parameter No. 60
Low-pass filter selection
0: Valid (automatic adjustment) initial value
1: Invalid
POINT
In a mechanical system where rigidity is extremely high and resonance is
difficult to occur, setting the low-pass filter to be "invalid" may increase
the servo system response to shorten the settling time.
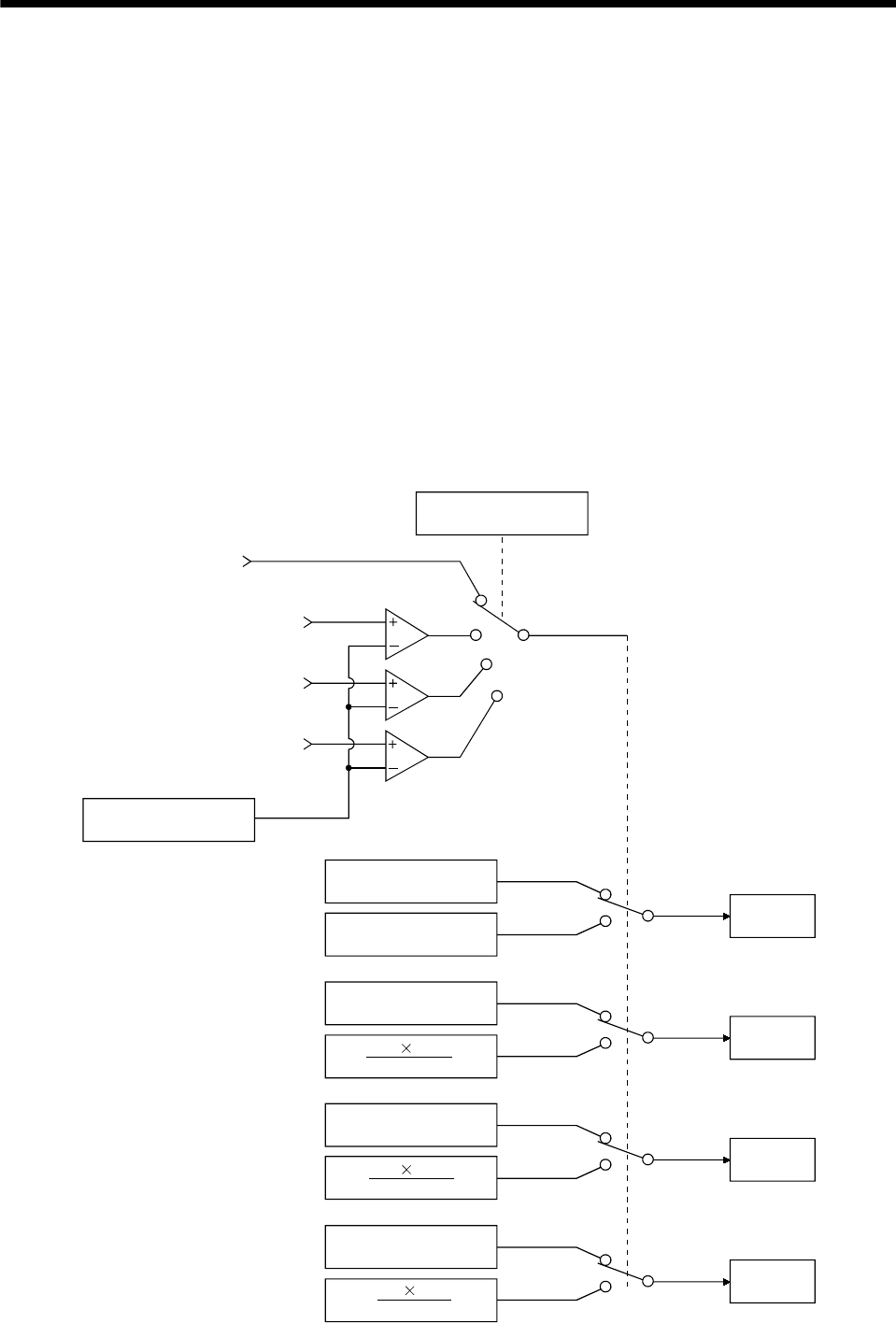
7 - 5
7. SPECIAL ADJUSTMENT FUNCTIONS
7.5 Gain changing function
This function can change the gains. You can change between gains during rotation and gains during stop
or can use an external signal to change gains during operation.
7.5.1 Applications
This function is used when:
(1) You want to increase the gains during servo lock but decrease the gains to reduce noise during
rotation.
(2) You want to increase the gains during settling to shorten the stop settling time.
(3) You want to change the gains using an external signal to ensure stability of the servo system since the
load inertia moment ratio varies greatly during a stop (e.g. a large load is mounted on a carrier).
7.5.2 Function block diagram
The valid control gains PG2, VG2, VIC and GD2 of the actual loop are changed according to the conditions
selected by gain changing selection (DRU parameter No. 65) and gain changing condition (DRU
parameter No. 66).
Valid
GD2 value
Command pulse
frequency
Droop pulses
Model speed
External signal
CDP
Comparator
Valid
PG2 value
Valid
VG2 value
Valid
VIC value
Changing
CDP
DRU parameter No.65
CDS
DRU parameter No.66
GD2
DRU parameter No.34
GD2B
DRU parameter No.61
PG2
DRU parameter No.35
PG2 PG2B
100
VG2
DRU parameter No.37
VG2 VG2B
100
VIC
DRU parameter No.38
VIC VICB
100
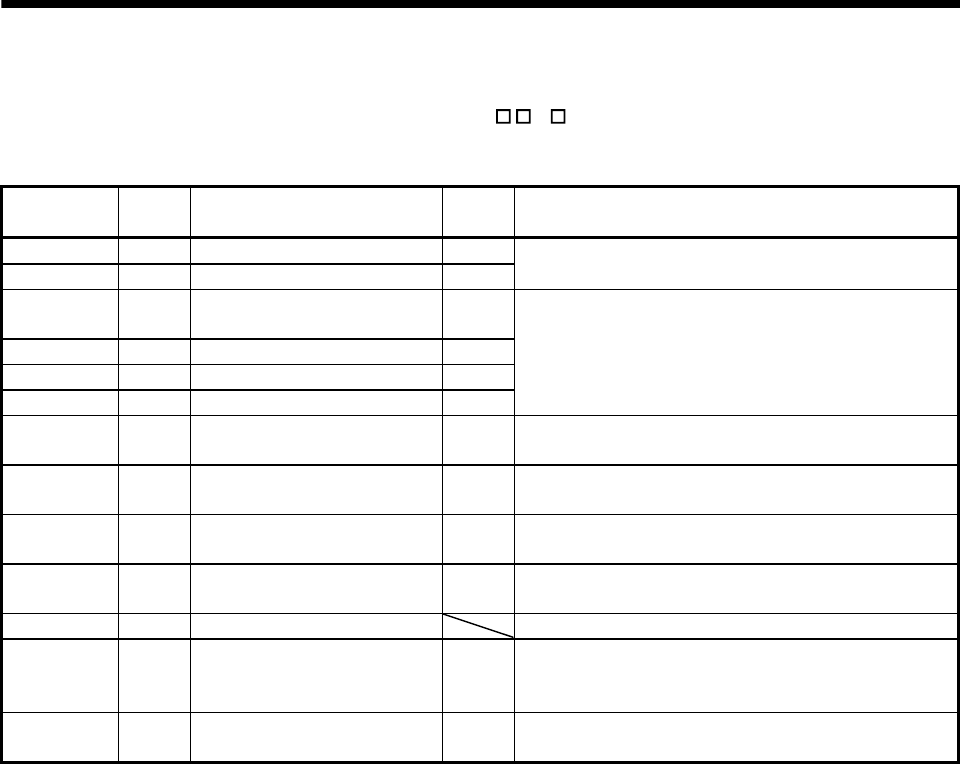
7 - 6
7. SPECIAL ADJUSTMENT FUNCTIONS
7.5.3 Parameters
When using the gain changing function, always set " 4 " in DRU parameter No.2 (auto tuning) to
choose the manual mode of the gain adjustment modes. The gain changing function cannot be used in the
auto tuning mode.
DRU
parameter No.
Abbrevi-
ation Name Unit Description
6 PG1 Position control gain 1 rad/s
36 VG1 Speed control gain 1 rad/s
Position and speed gains of a model used to set the
response level to a command. Always valid.
34 GD2 Ratio of load inertia moment to
servo motor inertia moment
0.1
times
35 PG2 Position control gain 2 rad/s
37 VG2 Speed control gain 2 rad/s
38 VIC Speed integral compensation ms
Control parameters before changing
61 GD2B Ratio of load inertia moment to
servo motor inertia moment 2
0.1
times
Used to set the ratio of load inertia moment to servo
motor inertia moment after changing.
62 PG2B Position control gain 2 changing
ratio %Used to set the ratio (%) of the after-changing position
control gain 2 to position control gain 2.
63 VG2B Speed control gain 2 changing
ratio %Used to set the ratio (%) of the after-changing speed
control gain 2 to speed control gain 2.
64 VICB Speed integral compensation
changing ratio %Used to set the ratio (%) of the after-changing speed
integral compensation to speed integral compensation.
65 CDP Gain changing selection Used to select the changing condition.
66 CDS Gain changing condition
kpps
pulse
r/min
Used to set the changing condition values.
67 CDT Gain changing time constant ms You can set the filter time constant for a gain change at
changing.
7 - 7
7. SPECIAL ADJUSTMENT FUNCTIONS
(1) DRU parameters No. 6 34 to 38
These parameters are the same as in ordinary manual adjustment. Gain changing allows the values of
ratio of load inertia moment to servo motor inertia moment, position control gain 2, speed control gain
2 and speed integral compensation to be changed.
(2) Ratio of load inertia moment to servo motor inertia moment 2 (GD2B: DRU parameter No. 61)
Set the ratio of load inertia moment to servo motor inertia moment after changing. If the load inertia
moment ratio does not change, set it to the same value as ratio of load inertia moment to servo motor
inertia moment (DRU parameter No. 34).
(3) Position control gain 2 changing ratio (DRU parameter No. 62), speed control gain 2 changing ratio (DRU
parameter No. 63), speed integral compensation changing ratio (DRU parameter No. 64)
Set the values of after-changing position control gain 2, speed control gain 2 and speed integral
compensation in ratio (%). 100% setting means no gain change.
For example, at the setting of position control gain 2 100, speed control gain 2 2000, speed integral
compensation 20 and position control gain 2 changing ratio 180%, speed control gain 2 changing
ratio 150% and speed integral compensation changing ratio 80%, the after-changing values are as
follows:
Position control gain 2 Position control gain 2 Position control gain 2 changing ratio /100 180rad/s
Speed control gain 2 Speed control gain 2 Speed control gain 2 changing ratio /100 3000rad/s
Speed integral compensation Speed integral compensation Speed integral compensation changing
ratio /100 16ms
(4) Gain changing selection (DRU parameter No. 65)
Used to set the gain changing condition. Choose the changing condition in the first digit. If you set "1"
here, you can use the gain changing (CDP ) external input signal for gain changing. The gain
changing (CDP ) can be assigned to the pins using DRU parameters No. 43 to 48.
DRU parameter No. 65
Gain changing (CDP ) selection
Gains are changed in accordance with the settings of
DRU parameters No. 61 to 64 under any of the following conditions:
0: Invalid
1: Gain changing (CDP ) is ON
2: Command frequency is equal to higher than DRU parameter No. 66 setting
3: Droop pulse value is equal to higher than DRU parameter No. 66 setting
4: Servo motor speed is equal to higher than DRU parameter No. 66 setting
(5) Gain changing condition (DRU parameter No. 66)
When you selected "command frequency", "droop pulses" or "servo motor speed" in gain changing
selection (DRU parameter No.65), set the gain changing level.
The setting unit is as follows:
Gain changing condition Unit
Command frequency kpps
Droop pulses pulse
Servo motor speed r/min
(6) Gain changing time constant (DRU parameter No. 67)
You can set the primary delay filter to each gain at gain changing. This parameter is used to suppress
shock given to the machine if the gain difference is large at gain changing, for example.
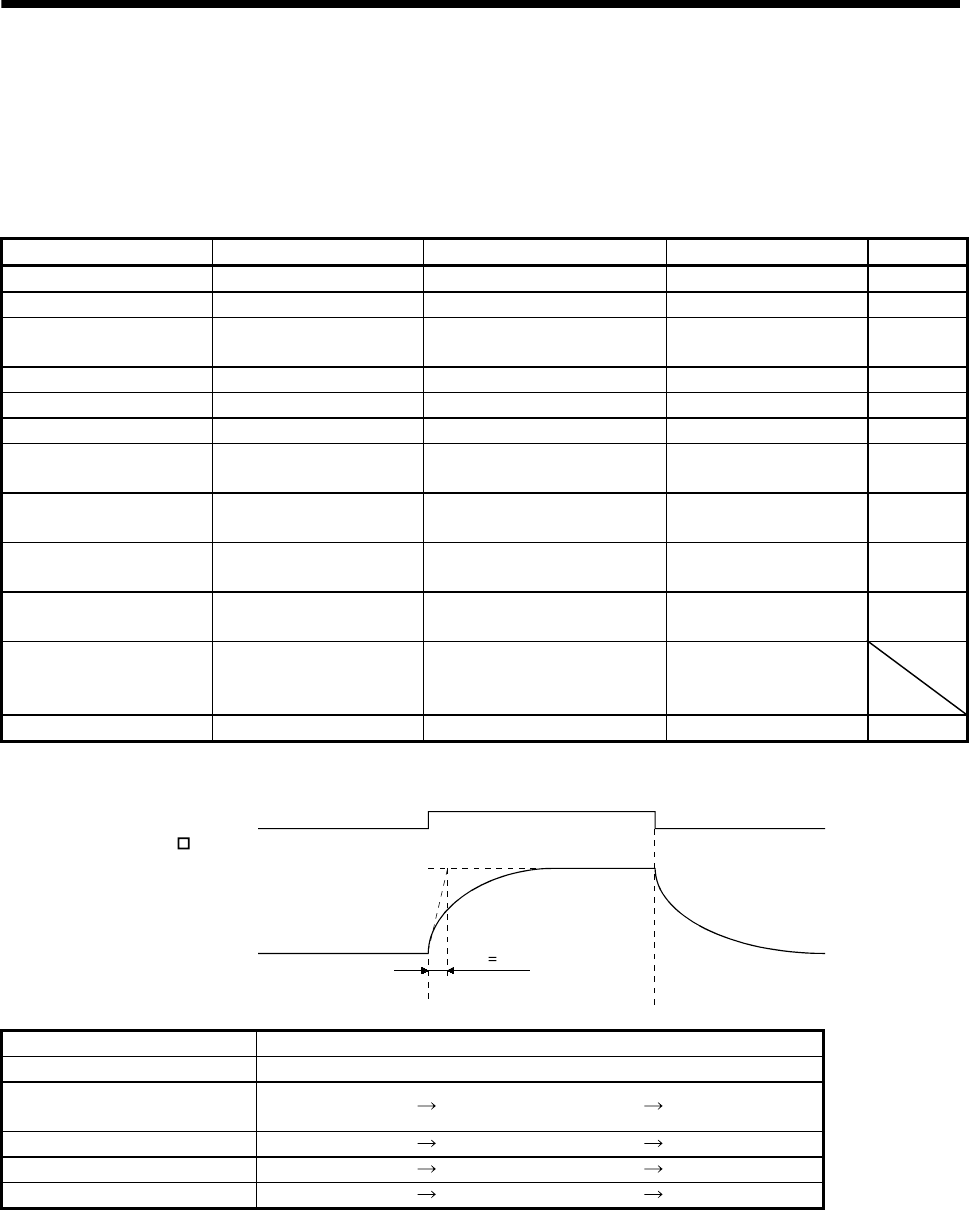
7 - 8
7. SPECIAL ADJUSTMENT FUNCTIONS
7.5.4 Gain changing operation
This operation will be described by way of setting examples.
(1) When you choose changing by external input
(a) Setting
DRU parameter No. Abbreviation Name Setting Unit
6 PG1 Position control gain 1 100 rad/s
36 VG1 Speed control gain 1 1000 rad/s
34 GD2 Ratio of load inertia moment to
servo motor inertia moment 4 0.1 times
35 PG2 Position control gain 2 120 rad/s
37 VG2 Speed control gain 2 3000 rad/s
38 VIC Speed integral compensation 20 ms
61 GD2B Ratio of load inertia moment to
servo motor inertia moment 2 100 0.1 times
62 PG2B Position control gain 2
changing ratio 70 %
63 VG2B Speed control gain 2 changing
ratio 133 %
64 VICB Speed integral compensation
changing ratio 250 %
65 CDP Gain changing selection
0001
(Changed by ON/OFF of
pin CN1A-8)
67 CDT Gain changing time constant 100 ms
(b) Changing operation
OFF ON OFF
Gain changing
(CDP )
Change of
each gain
Before-changing gain
After-changing gain
CDT 100ms
Position control gain 1 100
Speed control gain 1 1000
Ratio of load inertia moment
to servo motor inertia moment 4.0 10.0 4.0
Position control gain 2 120 84 120
Speed control gain 2 3000 4000 3000
Speed integral compensation 20 50 20
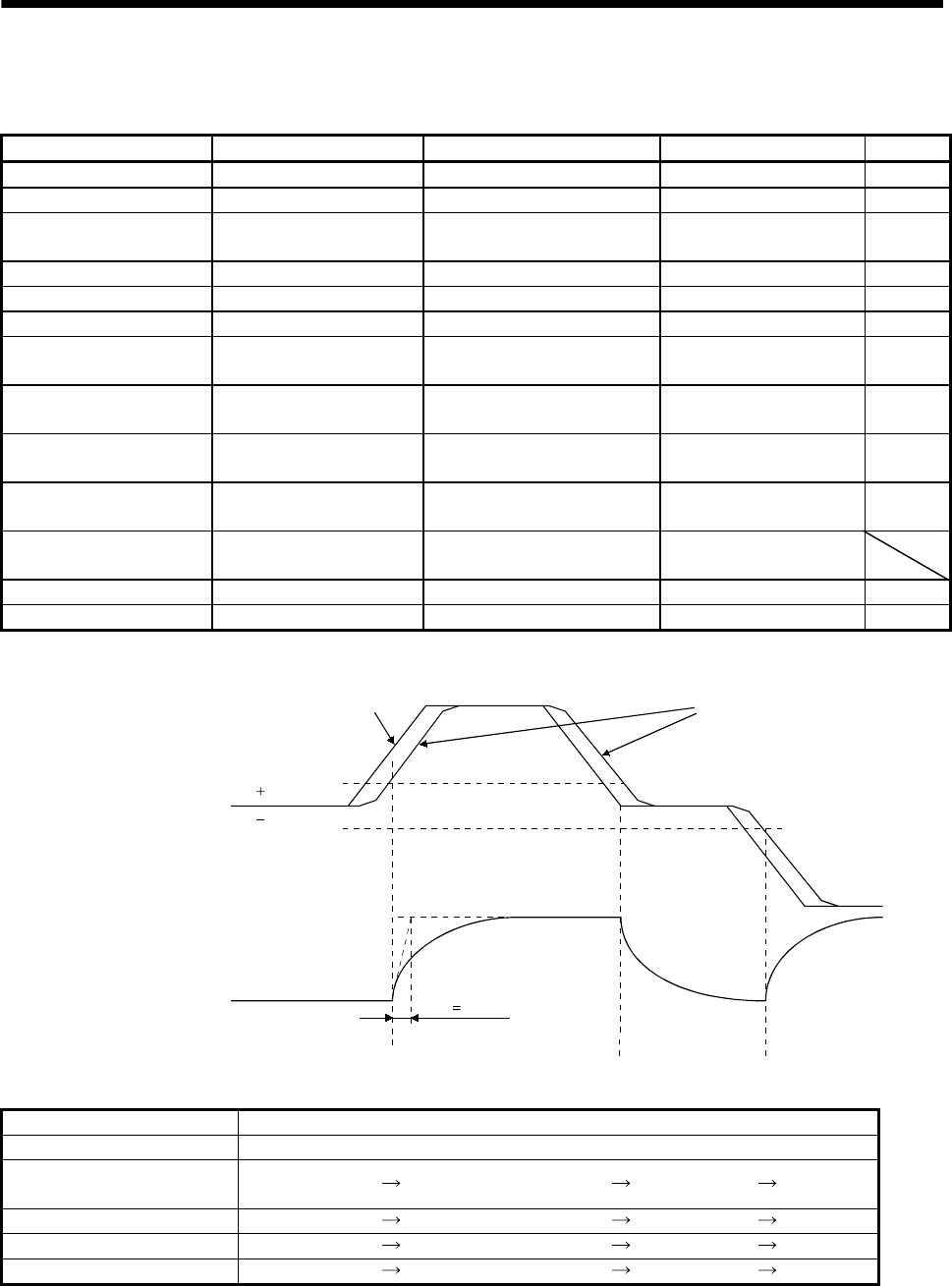
7 - 9
7. SPECIAL ADJUSTMENT FUNCTIONS
(2) When you choose changing by droop pulses
(a) Setting
DRU parameter No. Abbreviation Name Setting Unit
6 PG1 Position control gain 1 100 rad/s
36 VG1 Speed control gain 1 1000 rad/s
34 GD2 Ratio of load inertia moment to
servo motor inertia moment 40 0.1 times
35 PG2 Position control gain 2 120 rad/s
37 VG2 Speed control gain 2 3000 rad/s
38 VIC Speed integral compensation 20 ms
61 GD2B Ratio of load inertia moment to
servo motor inertia moment 2 100 0.1 times
62 PG2B Position control gain 2
changing ratio 70 %
63 VG2B Speed control gain 2 changing
ratio 133 %
64 VICB Speed integral compensation
changing ratio 250 %
65 CDP Gain changing selection 0003
(Changed by droop pulses)
66 CDS Gain changing condition 50 pulse
67 CDT Gain changing time constant 100 ms
(b) Changing operation
CDT 100ms
0
Droop pulses [pulses]
Change of each gain
CDS
CDS
Before-changing gain
After-changing gain
Command pulse Droop pulses
Position control gain 1 100
Speed control gain 1 1000
Ratio of load inertia moment
to servo motor inertia moment 4.0 10.0 4.0 10.0
Position control gain 2 120 84 120 84
Speed control gain 2 3000 4000 3000 4000
Speed integral compensation 20 50 20 50
7 - 10
7. SPECIAL ADJUSTMENT FUNCTIONS
MEMO
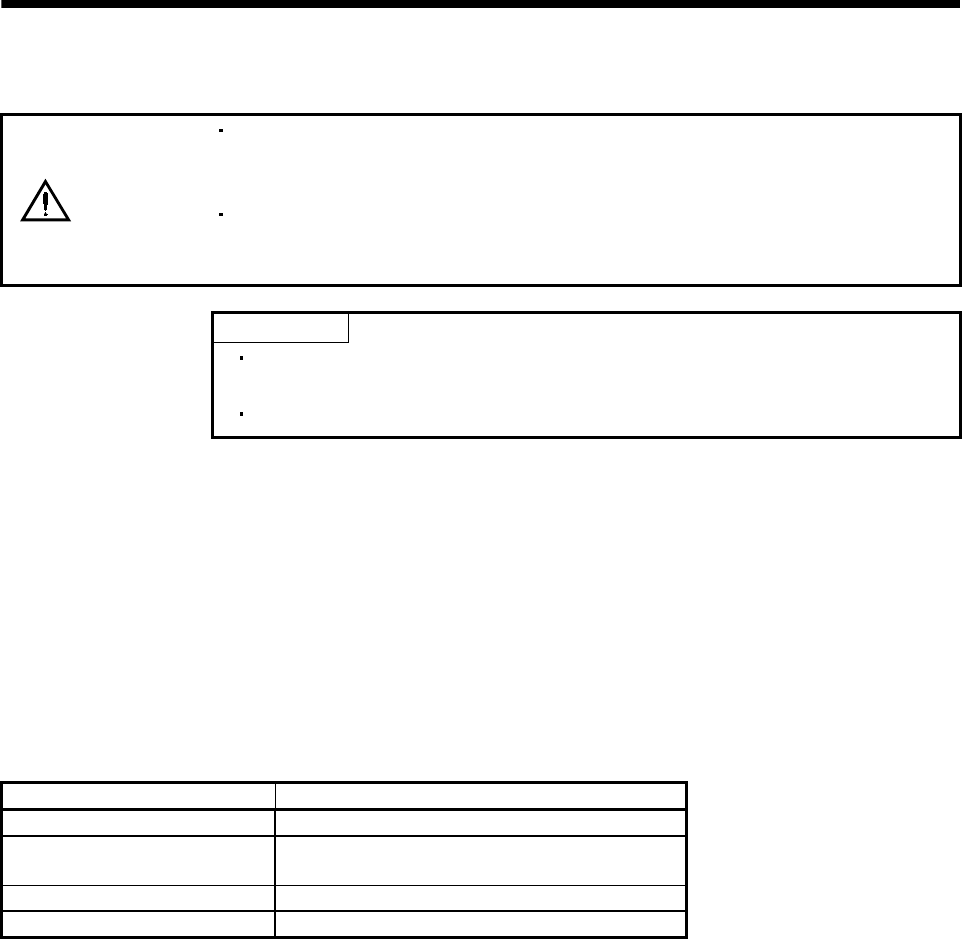
8 - 1
8. INSPECTION
8. INSPECTION
WARNING
Before starting maintenance and/or inspection, make sure that the charge lamp is
off more than 15 minutes after power-off. Then, confirm that the voltage is safe in
the tester or the like. Otherwise, you may get an electric shock.
Any person who is involved in inspection should be fully competent to do the work.
Otherwise, you may get an electric shock. For repair and parts replacement,
contact your safes representative.
POINT
Do not test MELSERVO-J2M with a megger (measure insulation
resistance), or it may become faulty.
Do not disassemble and/or repair the equipment on customer side.
(1) Inspection
It is recommended to make the following checks periodically:
(a) Check for loose terminal block screws. Retighten any loose screws.
(b) Check the cables and the like for scratches and cracks. Perform periodic inspection according to
operating conditions.
(2) Life
The following parts must be changed periodically as listed below. If any part is found faulty, it must be
changed immediately even when it has not yet reached the end of its life, which depends on the
operating method and environmental conditions. For parts replacement, please contact your sales
representative.
Part name Life guideline
Smoothing capacitor 10 years
Relay Number of power-on and number of forced
Stop times:100,000times.
Cooling fan 10,000 to 30,000hours (2 to 3 years)
Absolute position battery unit Refer to Section 13.2
(a) Smoothing capacitor
Affected by ripple currents, etc. and deteriorates in characteristic. The life of the capacitor greatly
depends on ambient temperature and operating conditions. The capacitor will reach the end of its
life in 10 years of continuous operation in normal air-conditioned environment.
(b) Relays
Their contacts will wear due to switching currents and contact faults occur. Relays reach the end of
their life when the cumulative number of power-on and forced stop times is 100,000, which depends
on the power supply capacity.
(c) Drive unit cooling fan
The cooling fan bearings reach the end of their life in 10,000 to 30,000 hours. Normally, therefore,
the fan must be changed in a few years of continuous operation as a guideline.
It must also be changed if unusual noise or vibration is found during inspection.
8 - 2
8. INSPECTION
MEMO
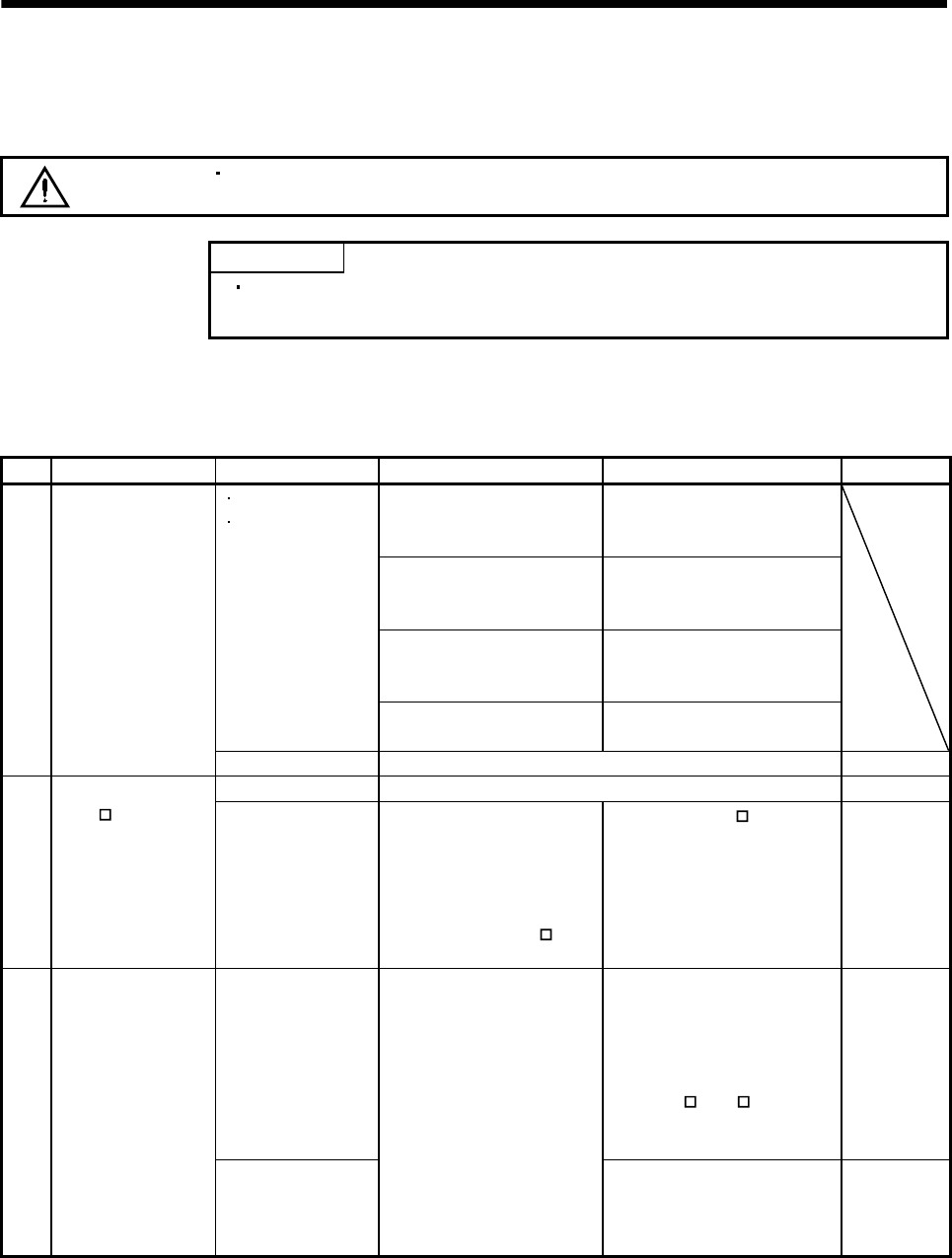
9 - 1
9. TROUBLESHOOTING
9. TROUBLESHOOTING
9.1 Trouble at start-up
CAUTION Excessive adjustment or change of parameter setting must not be made as it will
make operation instable.
POINT
Using the optional MR Configurator (servo configuration software), you can
refer to unrotated servo motor reasons, etc.
The following faults may occur at start-up. If any of such faults occurs, take the corresponding action.
(1) Troubleshooting
No. Start-up sequence Fault Investigation Possible cause Reference
Not improved if connectors
CN1A, CN1B, CN2 and CN3
are disconnected.
1. Power supply voltage fault
2. MELSERVO-J2M is faulty.
Improved when connectors
CN1A and CN1B are
disconnected.
Power supply of CNP1 cabling
is shorted.
Improved when connector
CN2 is disconnected.
1. Power supply of encoder
cabling is shorted.
2. Encoder is faulty.
LED is not lit.
LED flickers.
Improved when connector
CN3 is disconnected.
Power supply of CN3 cabling is
shorted.
1 Power on
Alarm occurs. Refer to Section 9.2 and remove cause. Section 9.2
Alarm occurs. Refer to Section 9.2 and remove cause. Section 9.22 Switch on servo-on
(SON ). Servo motor shaft is
not servo-locked
(is free).
1. Check the display to see if
the servo amplifier is
ready to operate.
2. Check the external I/O
signal indication to see if
the servo-on (SON ) is
ON.
1. Servo-on (SON ) is not
input. (Wiring mistake)
2. 24VDC power is not
supplied to VIN.
Section 4.3.6
Servo motor does
not rotate.
1. Wiring mistake
(a) For open collector pulse
train input, 24VDC
power is not supplied to
OPC.
(b) LSP /LSN -SG are not
connected.
2. No pulses is input.
Section 4.3.2
3Enter input
command.
(Test operation)
Servo motor run in
reverse direction.
Check cumulative command
pulses.
1. Mistake in wiring to
controller.
2. Mistake in setting of DRU
parameter No. 54.
Chapter 5
9 - 2
9. TROUBLESHOOTING
No. Start-up sequence Fault Investigation Possible cause Reference
Rotation ripples
(speed fluctuations)
are large at low
speed.
Make gain adjustment in the
following procedure:
1. Increase the auto tuning
response level.
2. Repeat acceleration and
deceleration several times
to complete auto tuning.
Gain adjustment fault Chapter 6
4 Gain adjustment
Large load inertia
moment causes the
servo motor shaft to
oscillate side to side.
If the servo motor may be
run with safety, repeat
acceleration and
deceleration several times to
complete auto tuning.
Gain adjustment fault Chapter 6
5 Cyclic operation Position shift occurs Confirm the cumulative
command pulses, cumulative
feedback pulses and actual
servo motor position.
Pulse counting error, etc.
due to noise.
(2) in this
section
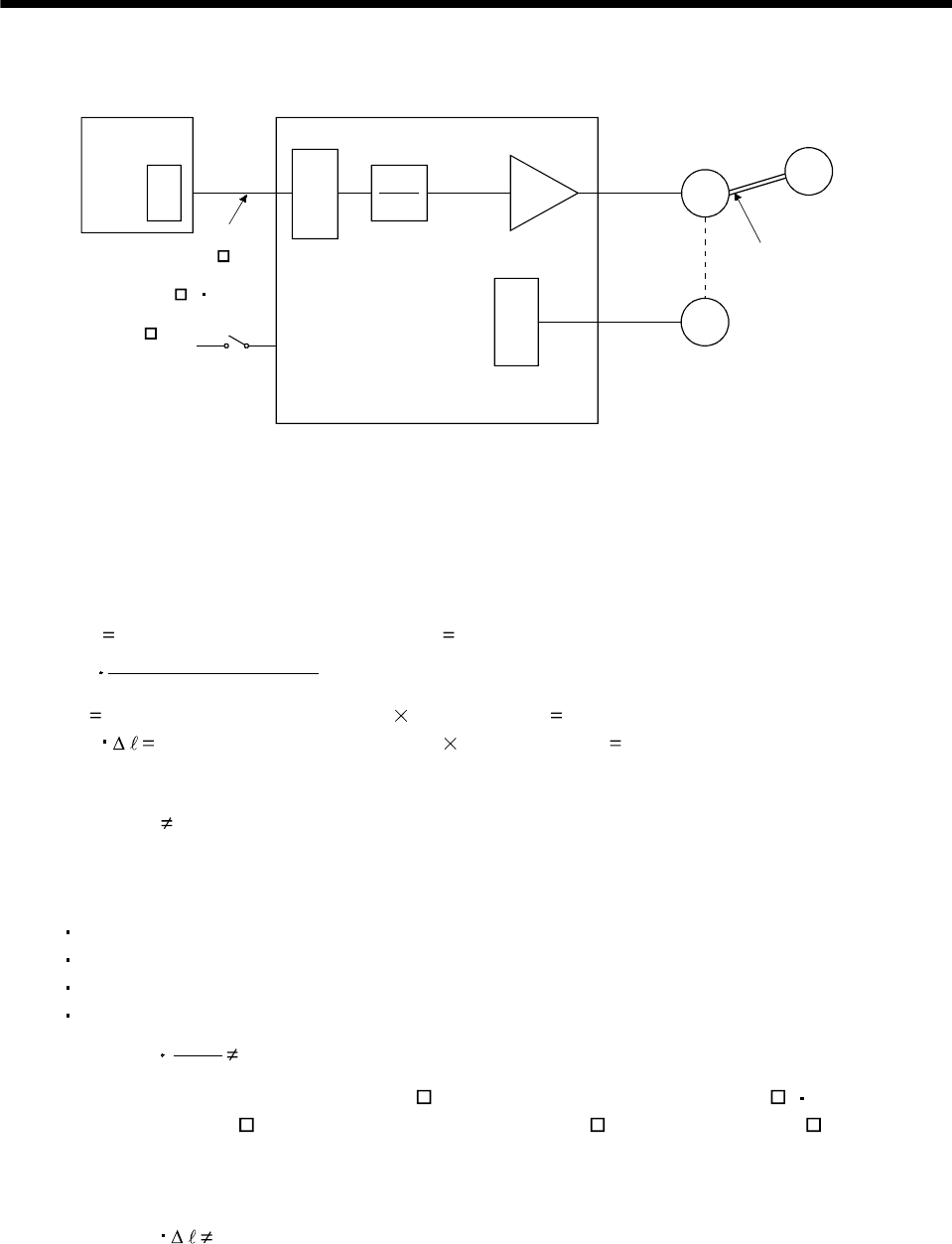
9 - 3
9. TROUBLESHOOTING
(2) How to find the cause of position shift
(C) Servo-on (SON ),
forward rotation stroke
end (LSP ) reverse
rotation stroke end
(LSD ) input
Positioning unit
(a) Output pulse
counter
Q
(A)
Servo motor
M
Encoder
L
Machine
(d) Machine stop
position M
(B)
PCMX
CDV
(b) Cumulative command
pulses
Electronic gear (DRU parameters No. 3, 4)
C
(c) Cumulative
feedback pulses
MELSERVO-J2M
When a position shift occurs, check (a) output pulse counter, (b) cumulative command pulse display, (c)
cumulative feedback pulse display, and (d) machine stop position in the above diagram.
(A), (B) and (C) indicate position shift causes. For example, (A) indicates that noise entered the wiring
between positioning unit and servo amplifier, causing pulses to be mis-counted.
In a normal status without position shift, there are the following relationships:
1) Q P (positioning unit's output counter servo amplifier's cumulative command pulses)
2) CMX(parameter No.3)
CDV(parameter No.4)
P
C (cumulative command pulses electronic gear cumulative feedback pulses)
3) C M (cumulative feedback pulses travel per pulse machine position)
Check for a position shift in the following sequence:
1) When Q P
Noise entered the pulse train signal wiring between positioning unit and servo amplifier,
causing pulses to be miss-counted. (Cause A)
Make the following check or take the following measures:
Check how the shielding is done.
Change the open collector system to the differential line driver system.
Run wiring away from the power circuit.
Install a data line filter. (Refer to (2)(a) Section 12.2.6.)
2) CMX
CDV
P C
When
During operation, the servo-on (SON ) or forward rotation stroke end (LSP )reverse rotation
stroke end (LSN ) was switched off or the clear (CR ) and the reset (RES ) switched on.
(Cause C)
If a malfunction may occur due to much noise, increase the input filter setting (DRU parameter
No. 1).
3) When C M
Mechanical slip occurred between the servo motor and machine. (Cause B)
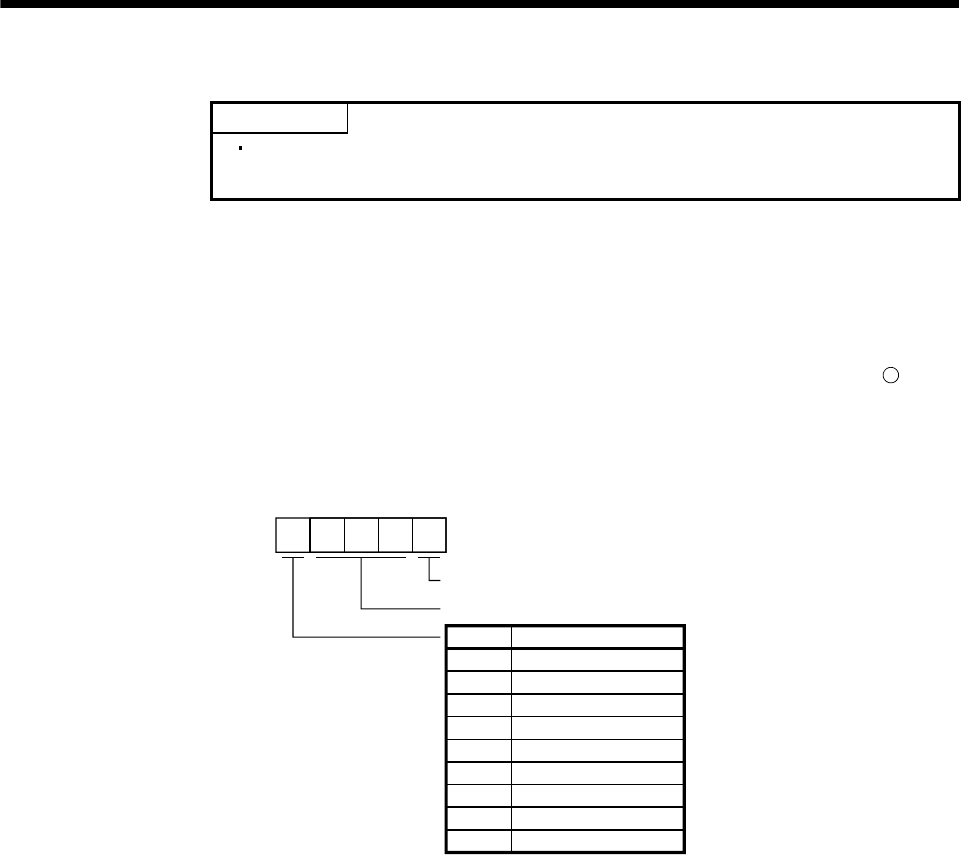
9 - 4
9. TROUBLESHOOTING
9.2 Alarms and warning list
POINT
The alarm/warning whose indication is not given does not exist in that
unit.
When a fault occurs during operation, the corresponding alarm or warning is displayed. If any alarm or
warning has occurred, refer to Section 9.3 or 9.4 and take the appropriate action.
When an alarm occurs in any of slots 1 to 4, ALM_A-SG open. When an alarm occurs in any of slots 5 to 8,
ALM_B-SG open.
The alarm can be canceled by turning the power OFF to ON.
After its cause has been removed, the alarm can be deactivated in any of the methods marked in the
alarm deactivation column.
When an alarm/warning occurs, the interface unit display shows the corresponding unit and alarm
number.
7
F
1
2
3
4
5
6
8
Interface unit display
Slot number
Alarm/warning number
Symbol Definition (Slot)
Interface unit
First slot
Second slot
Third slot
Fourth slot
Fifth slot
Sixth slot
Seventh slot
Eight slot
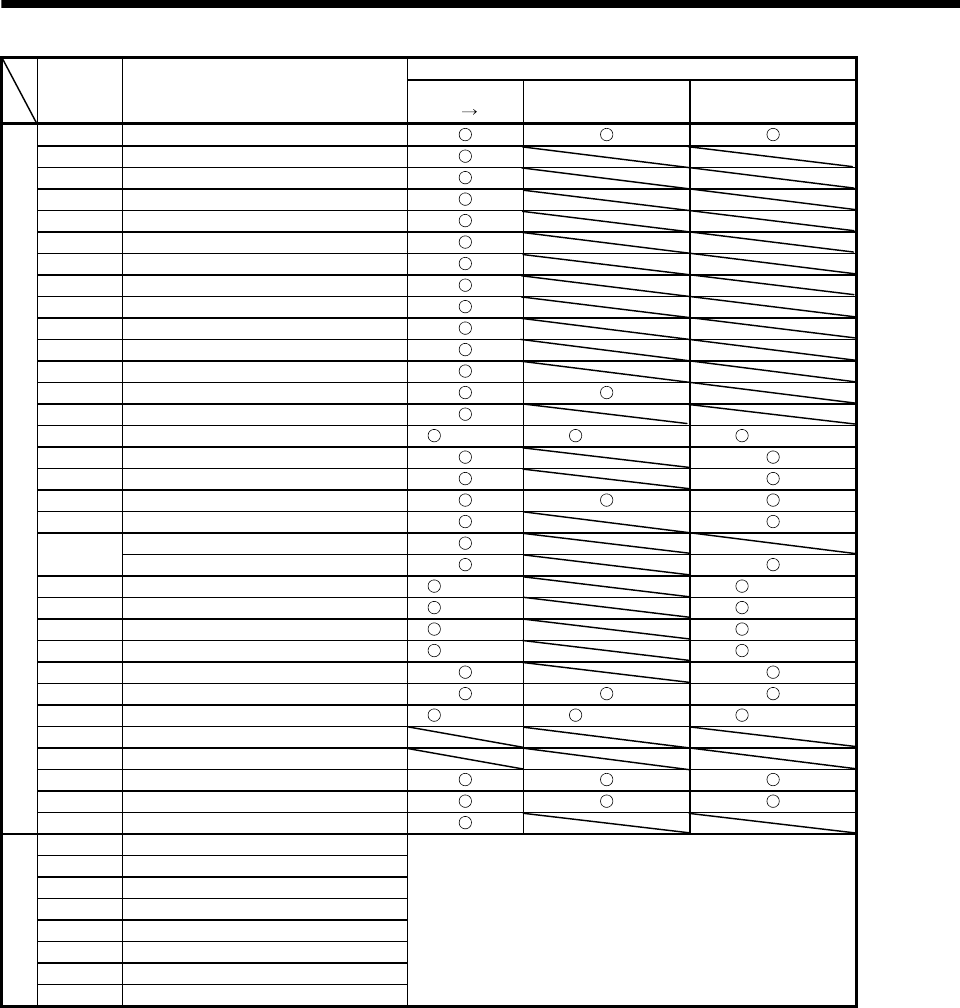
9 - 5
9. TROUBLESHOOTING
Alarm deactivation
Display Name Power
OFF ON
Press “SET” on
current alarm screen. Reset (RES)
A.10 Undervoltage
A.12 Memory error 1
A.13 Clock error
A.15 Memory error 2
A.16 Encoder error 1
A.17 Board error
A.19 Memory error 3
A.1A Servo motor combination error
A.1C Base unit bus error 1
A.1D Base unit bus error 2
A.1E Drive unit mounting error
A.20 Encoder error 2
A.24 Main circuit error
A.25 Absolute position erase
A.30 Regenerative error (Note 1) (Note 1) (Note 1)
A.31 Overspeed
A.32 Overcurrent
A.33 Overvoltage
A.35 Command pulse frequency error
IFU parameter error
A.37 DRU parameter error
A.45 Main circuit device overheat (Note 1) (Note 1)
A.46 Servo motor overheat (Note 1) (Note 1)
A.50 Overload 1 (Note 1) (Note 1)
A.51 Overload 2 (Note 1) (Note 1)
A.52 Error excessive
A.53 Multiple axis overload
A.54 Drive unit alarm (Note 2) (Note 2) (Note 2)
A.78 Option slot fault
A.79 Option slot loading error
A.8A Serial communication time-out
A.8E Serial communication error
Alarms
88888 Watchdog
A.92 Open battery cable warning
A.96 Home position setting warning
A.9F Battery warning
A.E0 Excessive regenerative warning
A.E1 Overload warning
A.E3 Absolute position counter warning
A.E6 Servo forced stop warning
Warnings
A.E9 Main circuit off warning
Removing the cause of occurrence
deactivates the alarm automatically.
Note 1. Deactivate the alarm about 30 minutes of cooling time after removing the cause of occurrence.
2. Automatically deactivated when the alarm of the drive unit is reset.
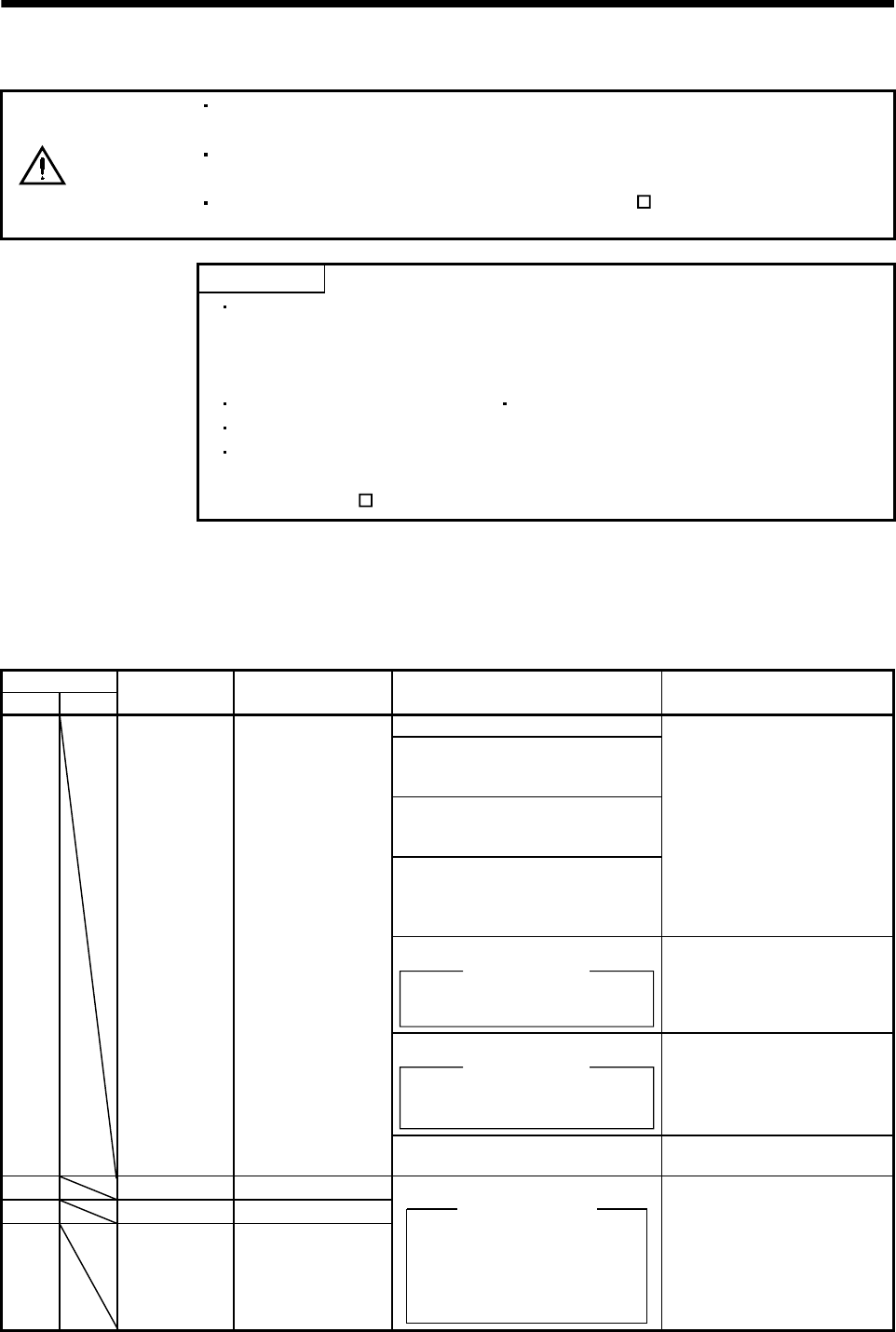
9 - 6
9. TROUBLESHOOTING
9.3 Remedies for alarms
CAUTION
When any alarm has occurred, eliminate its cause, ensure safety, then reset the
alarm, and restart operation. Otherwise, injury may occur.
If an absolute position erase (A.25) occurred, always make home position setting
again. Otherwise, misoperation may occur.
As soon as an alarm occurs, turn off Servo-on (SON ) and power off the main
circuit.
POINT
When any of the following alarms has occurred, always remove its cause
and allow about 30 minutes for cooling before resuming operation. If
operation is resumed by switching control circuit power off, then on to reset
the alarm, each unit and servo motor may become faulty.
Regenerative error (A.30) Overload 2 (A.51)
Overload 1 (A.50)
The alarm can be deactivated by switching power off, then on press the
“SET” button on the interface unit current alarm screen or by turning on
the reset (RES ). For details, refer to Section 9.2.
When an alarm occurs, the dynamic brake is operated to stop the servo motor. At this time, the display
indicates the alarm No. The servo motor comes to a stop. Remove the cause of the alarm in accordance
with this section. The optional MR Configurator (servo configuration software) may be used to refer to the
cause.
@ in the Indication field denotes the slot number of the base unit.
Display
IFU DRU Name Definition Cause Action
1. Power supply voltage is low.
2. There was an instantaneous control
circuit power failure of 30ms or
longer.
3. Shortage of power supply capacity
caused the power supply voltage to
drop at start, etc.
4. Power was restored after the bus
voltage had dropped to 200VDC.
(Main circuit power switched on
within 5s after it had switched off.)
Review the power supply.
5. Faulty parts in the base unit.
Checking method
Alarm (A.10) occurs if interface unit
is changed.
Change the base unit.
6. Faulty parts in interface unit.
Checking method
Alarm (A.10) occurs if base unit is
changed.
Change the interface unit.
FA.10 Undervoltage Power supply voltage
fell to or below
160VAC.
7. CNP3 or CNP1B connector
unplugged.
Connect properly.
FA.12 Memory error 1 RAM, memory fault
FA.13 Clock error Printed board fault.
FA.15 Memory error 2 EEP-ROM fault
Faulty parts in the interface unit.
Checking method
Alarm (any of A.11 and 13)
occurs if power is switched on
after disconnection of all cables
but the control circuit power
supply cables.
Change the interface unit.
9 - 7
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
@A.12@ Memory error 1 RAM, memory fault
@A.13@ Clock error Printed board fault.
@A.15@ Memory error 2 EEP-ROM fault
1. Faulty parts in the drive unit
Checking method
Alarm (A.15)
occurs if power is switched on
after disconnection of all cables
but the control circuit power
supply cables.
Change the drive unit.
2. The number of write times to EEP-
ROM exceeded 100,000.
1. Encoder connector (CN2)
disconnected.
Connect correctly.
2. Encoder fault. Change the servo motor.
@A.16@ Encoder error 1 Communication error
occurred between
encoder and servo
amplifier. 3. Encoder cable faulty.
(Wire breakage or shorted)
Repair or change cable.
CPU/parts fault 1. Faulty parts in the drive unit.
Checking method
Alarm (A.17) occurs if power is
switched on after disconnection of all
cables but the control circuit power
supply cables.
Change the drive unit.@A.17@ Board error 2
The output terminals
U, V, W of the drive
unit and the input
terminals U, V, W of
the servo motor are
not connected.
2. The wiring of U, V, W is
disconnected or not connected.
Correctly connect the output
terminals U, V, W of the drive
unit and the input terminals U,
V, W of the servo motor.
FA.19 @A.19@ Memory error 3 ROM memory fault Faulty parts in the interface unit or
drive unit.
Checking method
Alarm (A.19) occurs if power is
switched on after disconnection of all
cables but the control circuit power
supply cables.
Change the interface unit or
drive unit.
@A.1A@ Servo motor
combination
error
Wrong combination of
drive unit and servo
motor.
Wrong combination of drive unit and
servo motor connected.
Use correct combination.
1. Interface unit connection fault. Connect the interface unit to the
base unit properly.
2. Interface unit failure. Change the interface unit.
FA.1C Base unit bus
error 1
There is error in
communication
between interface unit
and drive unit. 3. Base unit failure. Change the base unit.
1. Drive unit connection fault. Connect the drive unit to the
base unit properly.
2. Drive unit failure. Change the drive unit.
FA.1D Base unit bus
error 2
There is error in
communication
between interface unit
and drive unit. 3. Base unit failure. Change the base unit.
1. Drive unit connection fault. Connect the drive unit to the
base unit properly.
2. Base unit failure. Change the base unit.
FA.1E Drive unit
mounting error
Drive unit came off
the base unit after
initialization.
3. Faulty parts in drive unit.
Checking method
Alarm (A.1E) occurs if power is
switched on after disconnection of
the U, V, W power cables.
Change the drive unit.
1. Encoder connector (CN2) disconnected. Connect correctly.
2. Encoder fault. Change the servo motor.
@A.20@ Encoder error 2 Communication error
occurred between
encoder and drive
unit.
3. Encoder cable faulty.
(Wire breakage or shorted)
Repair or change cable.
9 - 8
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
1. Power input wires and servo motor
output wires are in contact at CNP2.
Connect correctly.
2. Sheathes of servo motor power
cables deteriorated, resulting in
ground fault.
Change the cable.
@A.24@ Main circuit
error
Ground fault occurred
at the servo motor
outputs (U,V and W
phases) of the drive
unit.
3. Main circuit of drive unit failed.
Checking method
Alarm (A.24) occurs if power is
switched on after disconnection of
the U, V, W power cables.
Change the drive unit.
1. Battery voltage low.Absolute position data
in error. 2. Battery cable or battery is faulty.
Change battery.
Always make home position
setting again.
@A.25@ Absolute
position erase
Power was switched
on for the first time in
the absolute position
detection system.
3. Super capacitor of the absolute
position encoder is not charged.
After leaving the alarm occurring
for a few minutes, switch power
off, then on again. Always make
home position setting again.
1. Mismatch between used
regenerative brake option and IFU
parameter No. 1 setting.
Set correctly.
2. Regenerative brake option is not
connected.
Connect correctly.
3. High-duty operation or continuous
regenerative operation caused the
permissible regenerative power of
the regenerative brake option to be
exceeded.
Checking method
Call the status display and check
the regenerative load ratio.
1. Reduce the frequency of
positioning.
2. Use the regenerative brake
option of larger capacity.
3. Reduce the load.
4. Power supply voltage rose to or
above 260VAC.
Review power supply.
Permissible
regenerative power of
the regenerative brake
option is exceeded.
5. Regenerative brake option faulty. Change regenerative brake
option.
FA.30 Regenerative
alarm
Regenerative
transistor fault
6. Regenerative transistor faulty.
Checking method
1) The regenerative brake option
has overheated abnormally.
2) The alarm occurs even after
removal of the built-in
regenerative brake resistor or
regenerative brake option.
Change the drive unit.
9 - 9
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
1. Input command pulse frequency is
too high.
Set the command pulse correctly.
2. Small acceleration/deceleration time
constant caused overshoot to be
large.
Increase acceleration/
deceleration time constant.
3. Servo system is instable to cause
overshoot.
1. Reset servo gain to proper
value.
2. If servo gain cannot be set to
proper value:
1) Reduce load inertia moment
ratio; or
2) Reexamine acceleration/
deceleration time constant.
4. Electronic gear ratio is large.
(DRU parameter No. 3 4)
Set correctly.
@A.31@ Overspeed Speed has exceeded
the instantaneous
permissible speed.
5. Encoder faulty. Change the servo motor.
1. Short occurred in drive unit output
phases U, V and W.
Correct the wiring.
2. Transistor of the servo drive unit
faulty.
Checking method
Alarm (A.32) occurs if power is
switched on after disconnection of
the U, V, W power cables.
Change the drive unit.
3. Ground fault occurred in servo
amplifier output phases U, V and W.
Correct the wiring.
@A.32@ Overcurrent Current that flew is
higher than the
permissible current of
the drive unit.
4. External noise caused the
overcurrent detection circuit to
misoperate.
Take noise suppression
measures.
1. Regenerative brake option is not
used.
Use the regenerative brake
option.
2. Though the regenerative brake
option is used, the IFU parameter
No. 1 setting is " 00 (not used)".
Make correct setting.
3. Regenerative brake option is open or
disconnected.
1. Change lead.
2. Connect correctly.
4. Regenerative transistor faulty. Change drive unit.
5. Wire breakage of regenerative brake
option.
For wire breakage of regenerative
brake option, change regenerative
brake option.
FA.33 Overvoltage Converter bus voltage
exceeded 400VDC.
6. Power supply voltage high. Review the power supply.
1. Command given is greater than the
maximum speed of the servo motor.
Review operation program.
2. Noise entered bus cable. Take action against noise.
@A.35@ Command pulse
frequency error
Input frequency of
command pulse is too
high.
3. Servo system controller failure. Change the servo system
controller.
9 - 10
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
FA.37 IFU parameter
error
IFU parameter
setting is wrong.
1. Interface unit fault caused the IFU
parameter setting to be rewritten.
Change the interface unit.
2. The number of write times to EEP-
ROM exceeded 100,000 due to
parameter write, program write,
etc.
Change the interface unit
@A.37@ DRU parameter
error
DRU parameter
setting is wrong.
1. Drive unit fault caused the DRU
parameter setting to be rewritten.
Change the drive unit.
2. The number of write times to EEP-
ROM exceeded 100,000 due to
parameter write, program write,
etc.
Change the drive unit.
1. Drive unit faulty. Change the drive unit.
2. The power supply was turned on
and off continuously by overloaded
status.
The drive method is reviewed.
@A.45@ Main circuit
device overheat
Main circuit device
overheat.
3. Air cooling fan of drive unit stops. 1. Change the drive unit or
cooling fan.
2. Reduce ambient temperature.
1. Ambient temperature of servo motor
is over 40 .
Review environment so that
ambient temperature is 0 to
40 .
2. Servo motor is overloaded. 1. Reduce load.
2. Review operation pattern.
3. Use servo motor that provides
larger output.
@A.46@ Servo motor
overheat
Servo motor
temperature rise
actuated the thermal
sensor.
3. Thermal sensor in encoder is faulty. Change servo motor.
1. Drive unit is used in excess of its
continuous output current.
1. Reduce load.
2. Review operation pattern.
3. Use servo motor that provides
larger output.
2. Servo system is instable and
hunting.
1. Repeat acceleration/
deceleration to execute auto
tuning.
2. Change auto tuning response
level setting.
3. Set auto tuning to OFF and
make gain adjustment
manually.
3. Machine struck something. 1. Review operation pattern.
2. Install limit switches.
4. Wrong connection of servo motor.
Drive unit's output U, V, W do not
match servo motor's input U, V, W.
Connect correctly.
@A.50@ Overload 1 Load exceeded
overload protection
characteristic of servo
amplifier.
5. Encoder faulty.
Checking method
When the servo motor shaft is
rotated with the servo off, the
cumulative feedback pulses do
not vary in proportion to the
rotary angle of the shaft but the
indication skips or returns midway.
Change the servo motor.
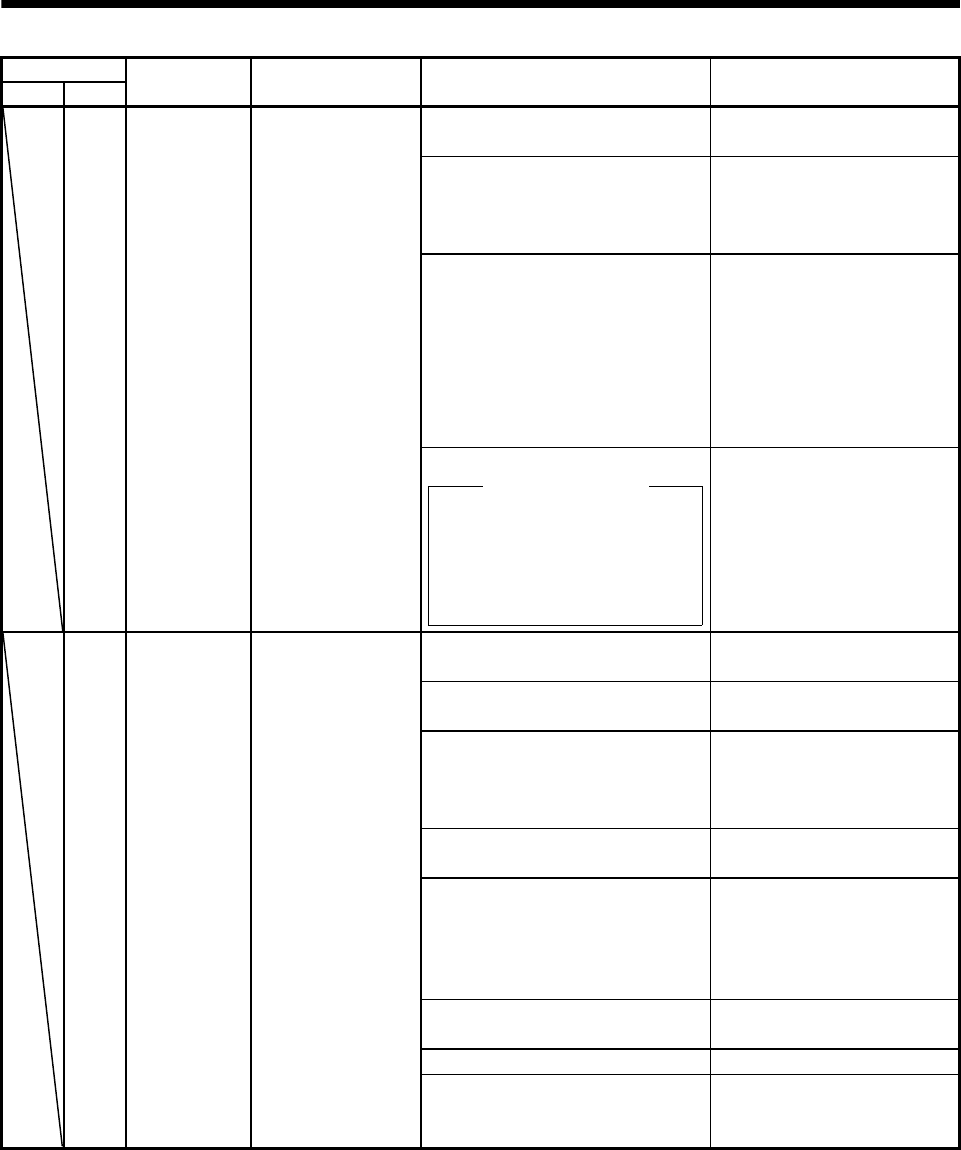
9 - 11
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
1. Machine struck something. 1. Review operation pattern.
2. Install limit switches.
2. Wrong connection of servo motor.
Drive unit's output terminals U, V,
W do not match servo motor's input
terminals U, V, W.
Connect correctly.
3. Servo system is instable and
hunting.
1. Repeat acceleration/
deceleration to execute auto
tuning.
2. Change auto tuning response
setting.
3. Set auto tuning to OFF and
make gain adjustment
manually.
@A.51@ Overload 2 Machine collision or
the like caused max.
output current to flow
successively for
several seconds.
Servo motor locked:
0.3s or more
During rotation:
2.5s or more
4. Encoder faulty.
Checking method
When the servo motor shaft is
rotated with the servo off, the
cumulative feedback pulses do
not vary in proportion to the
rotary angle of the shaft but the
indication skips or returns midway.
Change the servo motor.
1. Acceleration/deceleration time
constant is too small.
Increase the acceleration/
deceleration time constant.
2. Torque limit value (DRU parameter
No.28) is too small.
Increase the torque limit value.
3. Motor cannot be started due to
torque shortage caused by power
supply voltage drop.
1. Review the power supply
capacity.
2. Use servo motor which
provides larger output.
4. Position control gain 1 (DRU
parameter No.36) value is small.
Increase set value and adjust to
ensure proper operation.
5. Servo motor shaft was rotated by
external force.
1. When torque is limited,
increase the limit value.
2. Reduce load.
3. Use servo motor that provides
larger output.
6. Machine struck something. 1. Review operation pattern.
2. Install limit switches.
7. Encoder faulty. Change the servo motor.
@A.52@ Error excessive The difference
between the model
position and the
actual servo motor
position exceeds 2.5
rotations. (Refer to
the function block
diagram in Section
1.2)
8. Wrong connection of servo motor.
Drive unit's output U, V, W do not
match servo motor's input U, V, W.
Connect correctly.
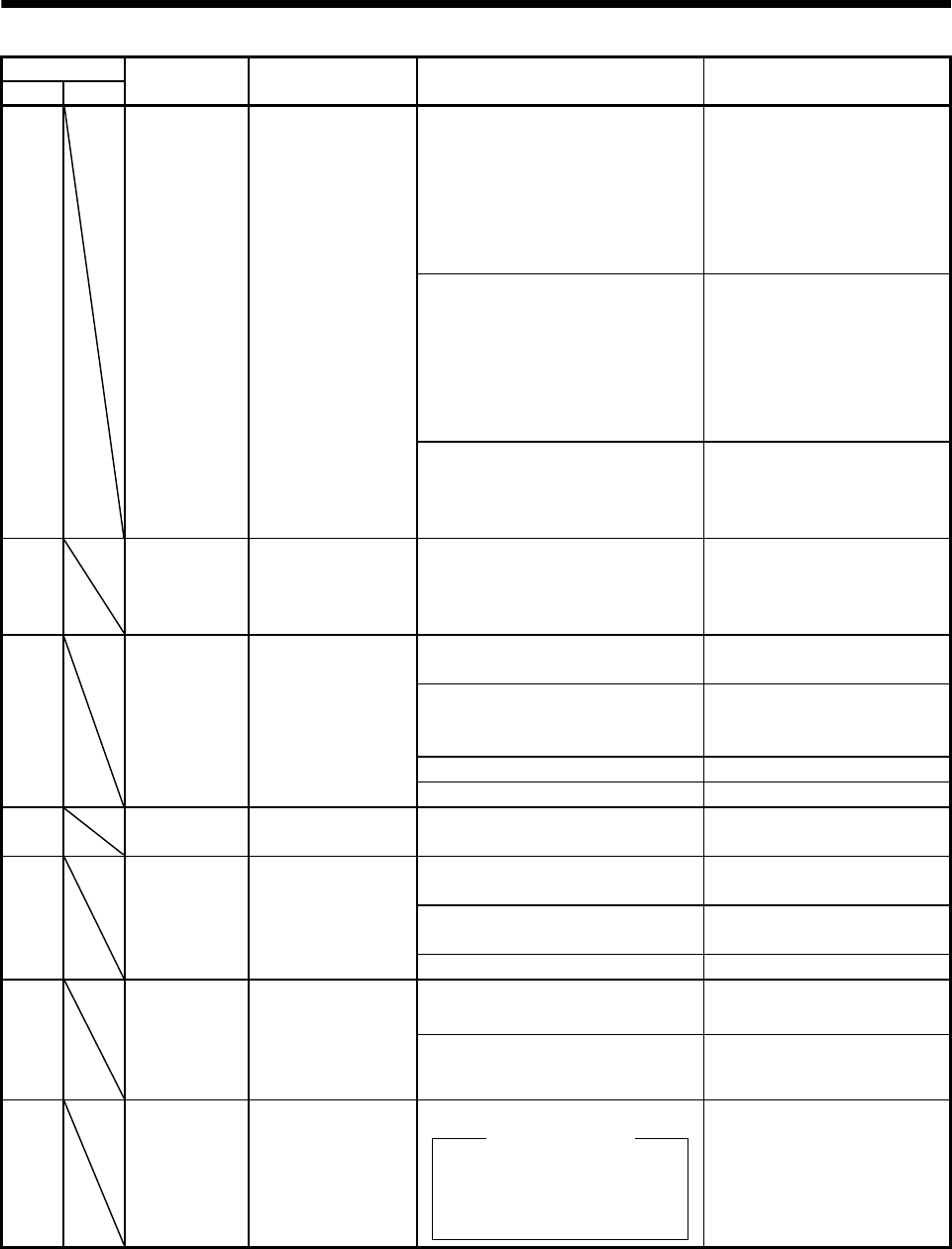
9 - 12
9. TROUBLESHOOTING
Display
IFU DRU Name Definition Cause Action
1. Drive unit having large load is
adjacent.
1. Change the slot of the drive
unit whose load is large.
2. Reduce the load.
3. Reexamine the operation
pattern.
4. Use a servo motor whose
output is large.
2. Servo system is instable and
hunting.
1. Repeat acceleration/
deceleration and perform auto
tuning.
2. Change the response setting of
auto tuning.
3. Turn off auto tuning and make
gain adjustment manually.
FA.53 Multiple axis
overload
Drive unit whose
effective load factor is
85% or more is
adjacent.
3. Encoder cable and power cable (U,
V, W) coming out of one drive unit
are connected to the incorrect servo
motor.
Make correct connection.
FA.54 Drive unit
alarm
Alarm occurred in one
or more axes of drive
units installed to the
base unit.
Alarm occurred in one or more axes of
drive units installed to the base unit.
Remove the alarm causes of all
drive units where alarm has
occurred.
1. Extension IO unit is not inserted
properly.
Insert correctly.
2. Incompatibility with the extension
IO unit.
Change the interface unit for the
one compatible with the
extension IO unit.
3. Extension IO unit is faulty. Change the extension IO unit.
FA.78 Option slot fault Extension IO unit is
faulty.
4. Base unit is faulty. Change the base unit.
FA.79 Option slot
loading error
Extension IO unit is
connected improperly.
Extension IO unit is disconnected. Switch power off and reinsert the
extension IO unit.
1. Communication cable fault.
(Wire break or short circuit)
Repair or change the cable.
2. Communication cycle is longer than
the IFU parameter No.20 setting.
Set the IFU parameter value
correctly.
FA.8A Serial
communication
time-out
Serial communication
stopped for longer
than the time set in
IFU parameter No.20.
3. Protocol is incorrect. Correct the protocol.
1. Communication cable fault.
(Open cable or short circuit)
Repair or change the cable.FA.8E Serial
communication
error
Serial communication
error occurred
between interface unit
and communication
device (e.g. personal
computer).
2. Communication device (e.g. personal
computer) faulty.
Change the communication
device (e.g. personal computer).
88888 Watchdog CPU, parts faulty Fault of parts in interface unit.
Checking method
Alarm (8888) occurs if power is
switched on after disconnection
of all cables but the control
circuit power supply cables.
Change interface unit.
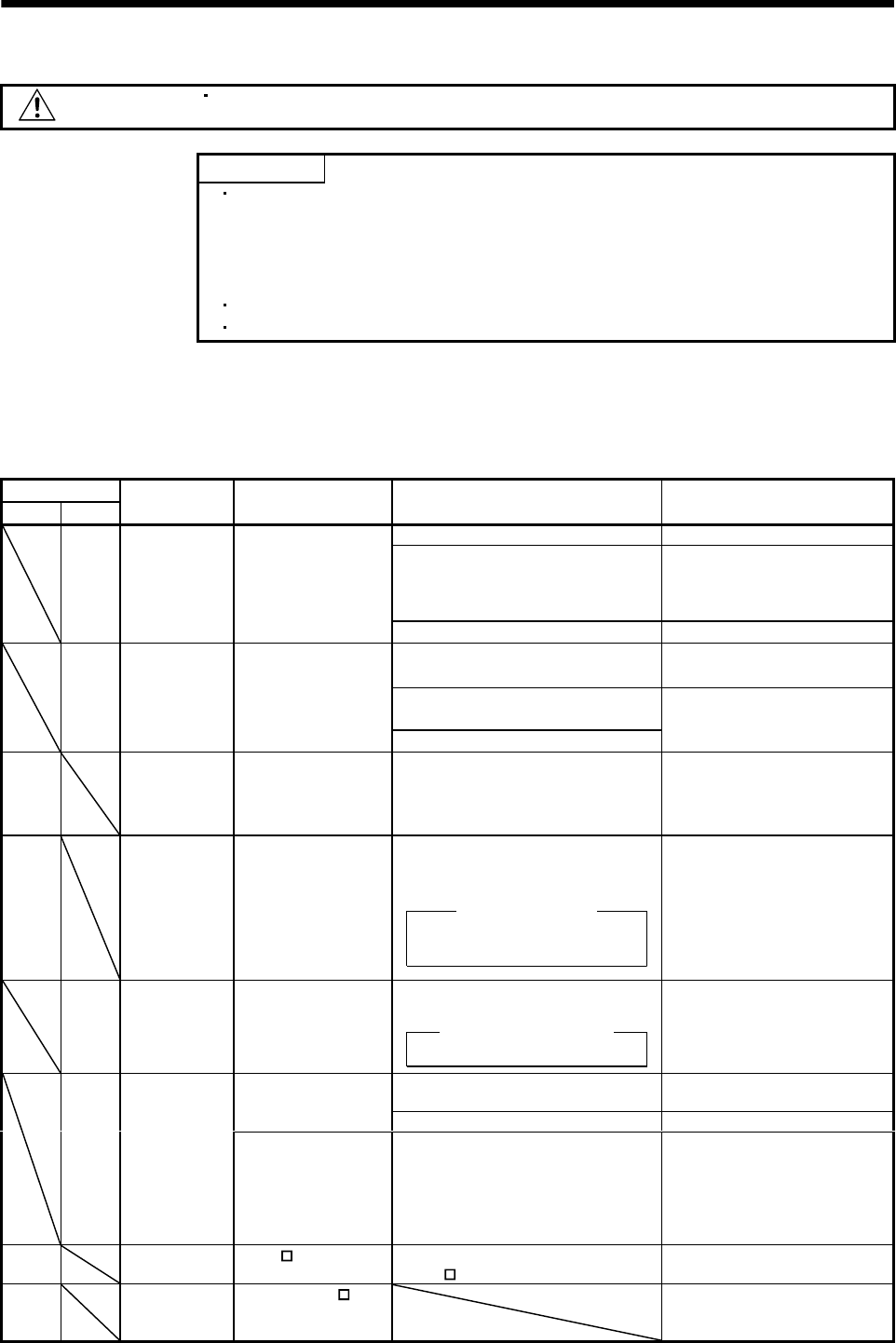
9 - 13
9. TROUBLESHOOTING
9.4 Remedies for warnings
CAUTION If an absolute position counter warning (A.E3) occurred, always make home
position setting again. Otherwise, misoperation may occur.
POINT
When any of the following alarms has occurred, do not resume operation by
switching power of the servo amplifier OFF/ON repeatedly. The servo
amplifier and servo motor may become faulty. If the power of the servo
amplifier is switched OFF/ON during the alarms, allow more than 30
minutes for cooling before resuming operation.
Excessive regenerative warning (A.E0)
Overload warning 1 (A.E1)
If servo forced stop warning (A.E6) or main circuit off warning (A.E9) occurs, the servo off status is
established. If any other warning occurs, operation can be continued but an alarm may take place or
proper operation may not be performed. Eliminate the cause of the warning according to this section. Use
the optional MR Configurator (servo configuration software) to refer to the cause of warning.
@ in the Indication field denotes the slot number of the base unit.
Display
IFU DRU Name Definition Cause Action
1. Battery cable is open. Repair cable or changed.
2. Battery voltage supplied from the
battery unit to the encoder fell to
about 3.2V or less.
(Detected with the encoder)
Change battery unit.
@A.92@ Open battery
cable warning
Absolute position
detection system
battery voltage is low.
3. Encoder cable is open. Change the encoder cable.
1. Droop pulses remaining are greater
than the in-position range setting.
Remove the cause of droop pulse
occurrence.
2. Home position return was executed
during operation command.
@A.96@ Home position
setting warning
Home position return
could not be made in
the precise position.
3. Creep speed high.
Reduce creep speed.
FA.9F Battery
warning
Voltage of battery for
absolute position
detection system
reduced.
Battery voltage fell to 3.2V or less.
(Detected with the servo amplifier)
Change the battery unit.
FA.E0 Excessive
regenerative
warning
There is a possibility
that regenerative
power may exceed
permissible
regenerative power of
regenerative brake
option.
Regenerative power increased to 85%
or more of permissible regenerative
power of regenerative brake option.
Checking method
Call the status display and check
regenerative load ratio.
1. Reduce frequency of
positioning.
2. Change regenerative brake
option for the one with larger
capacity.
3. Reduce load.
@A.E1@ Overload
warning
There is a possibility
that overload alarm 1
or 2 may occur.
Load increased to 85% or more of
overload alarm 1 or 2 occurrence level.
Cause, checking method
Refer to A.50, A.51.
Refer to A.50, A.51.
1. Noise entered the encoder. Take noise suppression
measures.
Absolute position
encoder pulses faulty.
2. Encoder faulty. Change servo motor.
@A.E3@ Absolute
position counter
warning
The multi-revolution
counter value of the
absolute position
encoder exceeded the
maximum revolution
range.
3. The movement amount from the
home position exceeded a 32767
rotation or -37268 rotation in
succession.
Make home position setting
again.
FA.E6 Servo forced
stop warning
EMG_ -SG are open. External forced stop was made valid.
(EMG_ -SG opened.)
Ensure safety and deactivate
forced stop.
FA.E9 Main circuit off
warning
Servo-on (SON ) was
turned on with main
circuit power off.
Switch on main circuit power.
9 - 14
9. TROUBLESHOOTING
MEMO
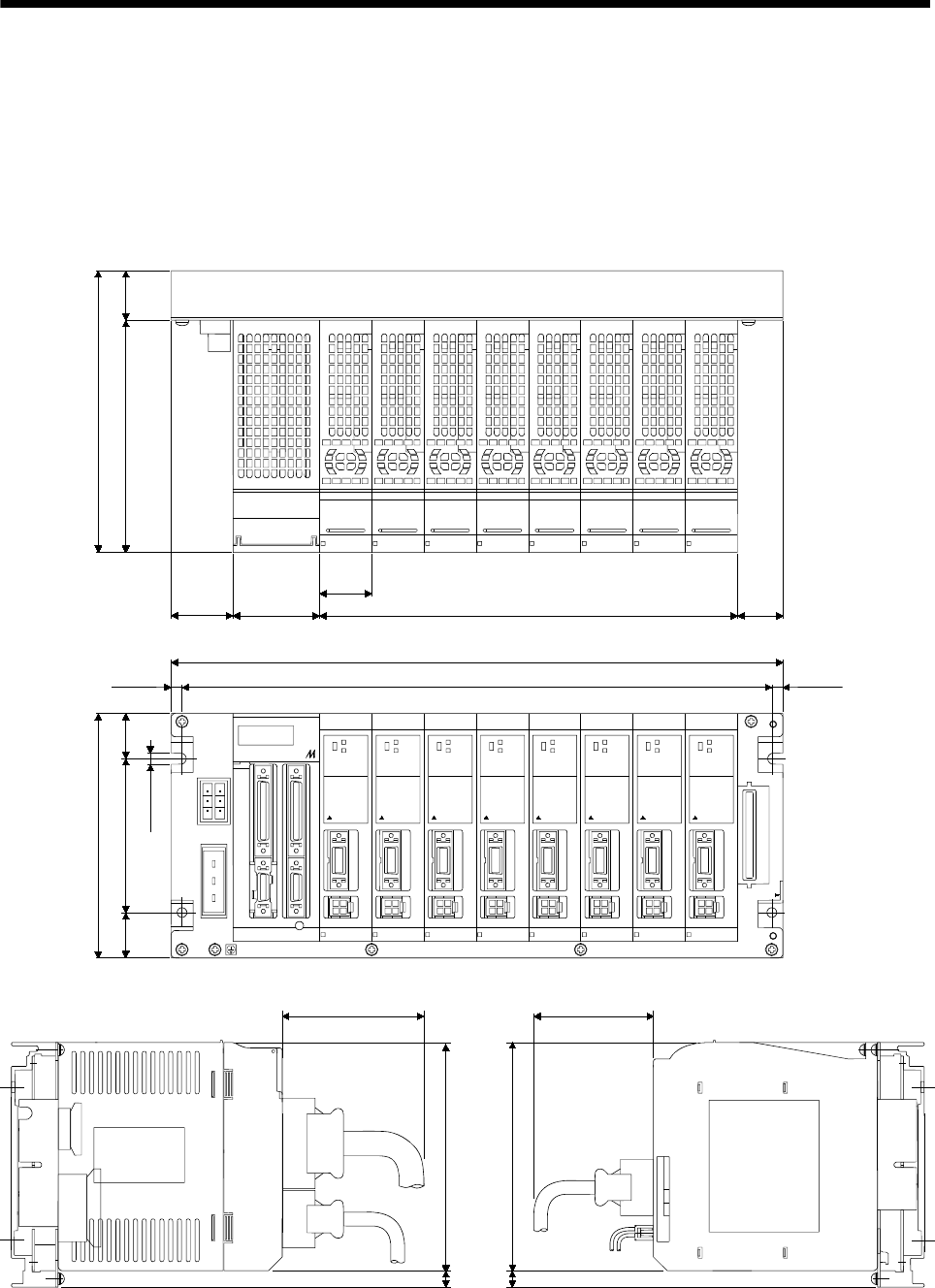
10 - 1
10. OUTLINE DRAWINGS
10. OUTLINE DRAWINGS
10.1 MELSERVO-J2M configuration example
The following diagram shows the MR-J2M-BU8 base unit where one interface unit and eight drive units
are installed.
CHARGE
CON5
C
N
P
1
AMITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
MITSUBISHI ELECTRIC
C
N
P
2
C
N
2
MELSERVO
ALM
SON
C
N
1
B
C
N
1
A
C
N
3
C
N
P
1
B
C
N
P
3
27
(1.06)
86 (3.39)
140 (5.51)
CON4
6 (0.24) 338 (13.31)
350 (13.78)
6 (0.24)
C
N
5
6 (0.24)
240 (9.45)
130 (5.12)
50 (1.67)
35
(1.38)
30
(1.12)
158 (6.22)
28
(1.10)
25
(0.98)
MITSUBISHI
MELSERVO
MR-J2M-J2M
27
(1.06)
[Unit: mm]
([Unit: in])
NAME
PLATE
130 (5.12)
10
(0.39)
(70 (2.76))
NAME
PLATE
(80 (3.15))
10
(0.39) 130 (5.12)
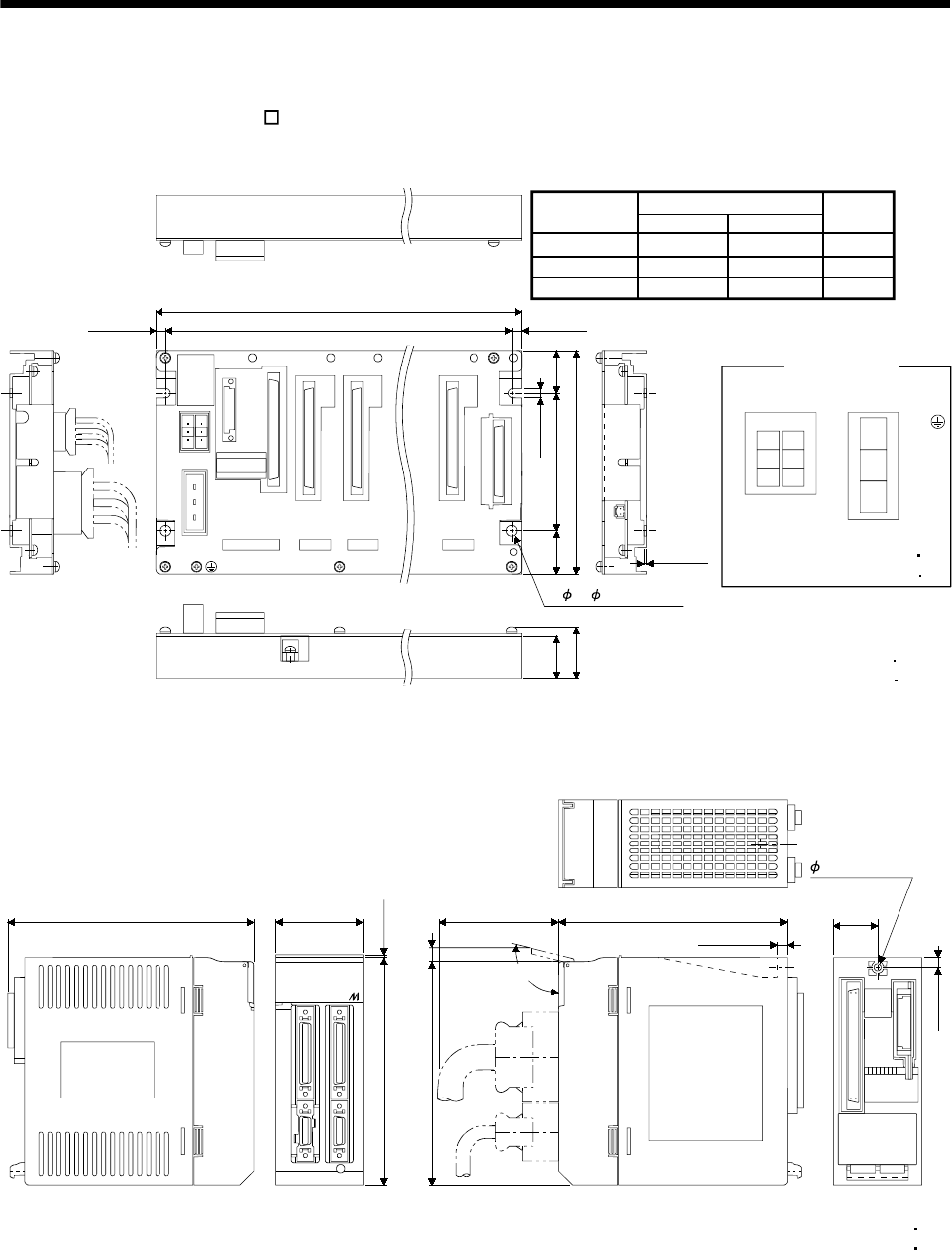
10 - 2
10. OUTLINE DRAWINGS
10.2 Unit outline drawings
10.2.1 Base unit (MR-J2M-BU )
L3
A
B
C
N
P
3
C
N
P
1
B
C
N
P
1
A
B
CNP3
L21
N
A
P
C
1
2
3
3
L2
2
L1
1
L11
[Unit: mm]
([Unit: in])
Base Unit
MR-J2M-BU4 230 (9.06)
Variable Dimensions Mass
[kg]([lb])
1.1 (2.43)
A B
218 (8.58)
MR-J2M-BU6 290 (11.42) 1.3 (2.87)
278 (10.95)
MR-J2M-BU8 350 (13.78) 1.5 (3.31)
338 (13.307)
PE
NAME
PLATE
6 (0.24) 6 (0.24)
6 (0.24)
27
(1.06)
86 (3.39)
140 (5.51)
27
(1.06)
28
(1.10)
32
(1.26)
2- 6 ( 0.24) mounting hole
Connector layout
CNP1A, CNP1B
2 (0.08)
Terminal screw : M4
Tightening torque : 3.24 [N m]
(28.7 [lb in])
Mounting screw : M5
Tightening torque : 3.24 [N m]
(28.7 [lb in])
10.2.2 Interface unit (MR-J2M-P8A)
130 (5.12)
50 (1.97)
MITSUBISHI
MELSERVO
MR-J2M -J2M
8.5 (0.34)
128 (5.04)
139 (5.47)
5 (0.20)
Approx.80 (3.15) 130 (5.12)
6.5 (0.26)
25
(0.98)
C
N
1
B
C
N
1
A
C
N
3
CHARG
C
N
5
1(0.04)
NAME PLATE
5 (0.2)
mounting hole
Display/setting
cover
NAME PLATE
Mass: 0.5kg (1.10lb)
[Unit: mm]
([Unit: in])
Mounting screw : M4
Tightening torque : 1.5 [N m]
(13.3 [lb in])
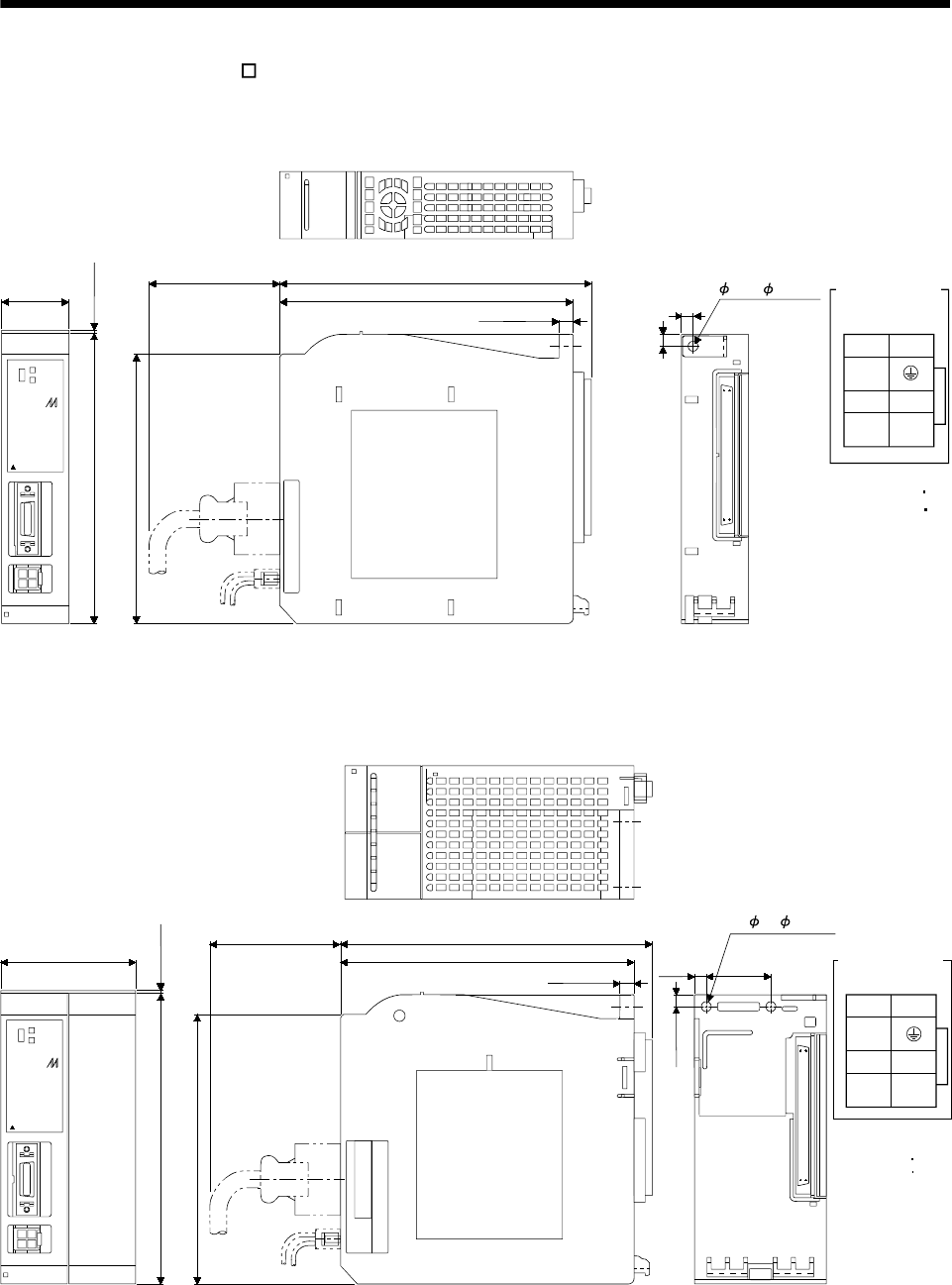
10 - 3
10. OUTLINE DRAWINGS
10.2.3 Drive unit (MR-J2M- DU)
(1) MR-J2M-10DU to MR-J2M-40DU
MITSUBISHI
C
N
2
C
N
P
2
MITSUBISHI
MELSERVO
SON
ALM
CNP2
2 4
V
13
UW
(1 (0.04))
Approx.70 (2.76) 138.5 (5.45)
130 (4.72)
6.5 (0.26)
5
(0.20)
Connector layout
5
(0.20) 4.5 ( 0.18)
mounting hole
30
(1.18)
130 (5.12)
120 (4.72)
Mass: 0.4kg (0.88lb)
NAME PLATE
NAME
PLATE
[Unit: mm]
([Unit: in])
Mounting screw : M4
Tightening torque : 1.5 [N m]
(13.3 [lb in])
(2) MR-J2M-70DU
MITSUBISHI
C
N
2
C
N
P
2
130 (5.12) 1 (0.04)
MITSUBISHI
MELSERVO
SON
ALM
NAME
PLATE
5 (0.20)
Approx.70 (2.76)
130 (4.72)
6.5 (0.26)
120 (4.72)
138.5 (5.47)
NAME PLATE
60 (2.36)
5 (0.20)
CNP2
2 4
V
13
U
Connector layout
W
mounting hole
2- 5 ( 0.2)
[Unit: mm]
([Unit: in])
Mass: 0.7kg (1.54lb)
30 (1.18)
Mounting screw : M4
Tightening
torque : 1.5 [N m]
(13.3 [lb in])
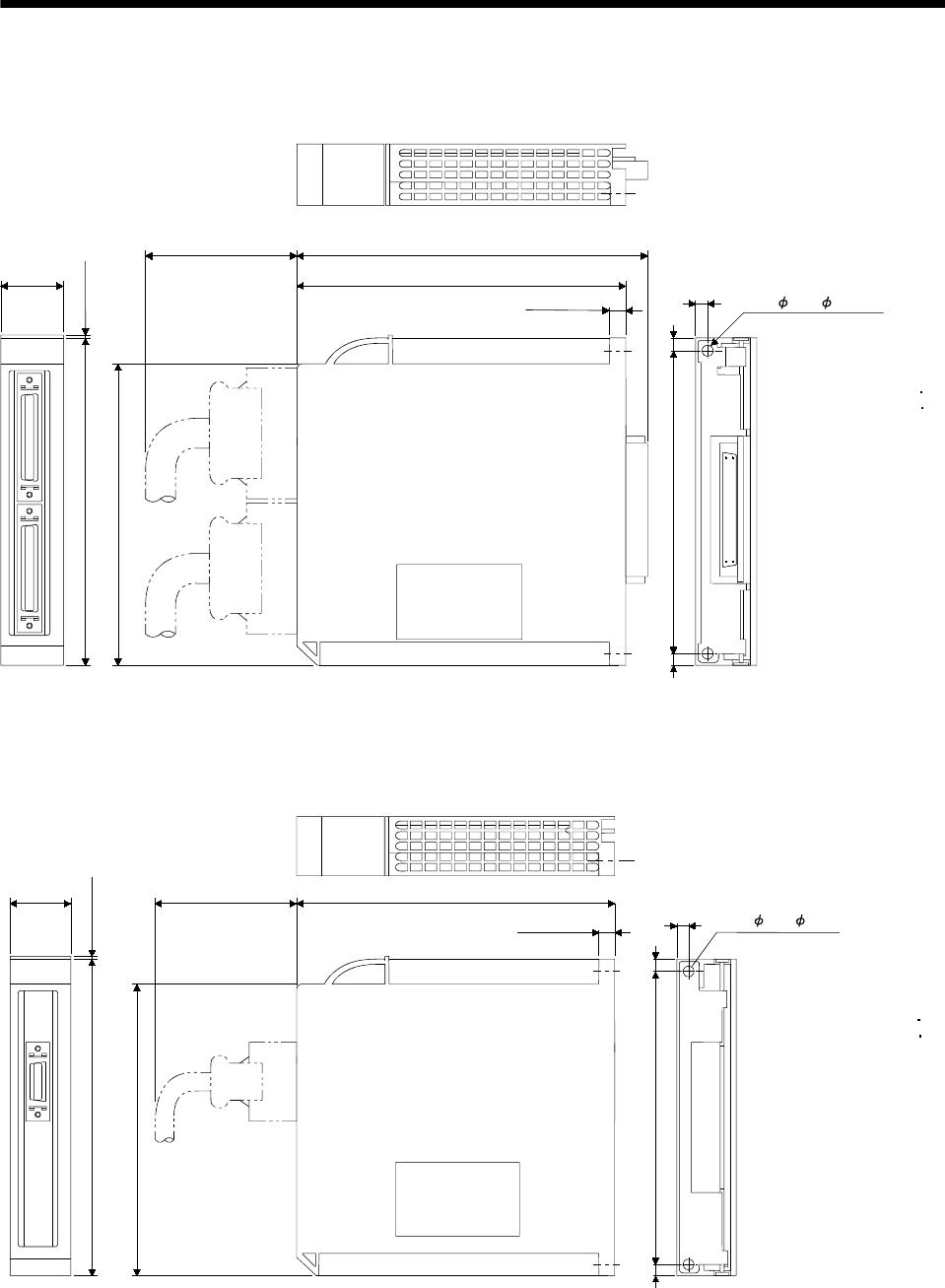
10 - 4
10. OUTLINE DRAWINGS
10.2.4 Extension IO unit (MR-J2M-D01)
120 (4.72)
130 (5.12) (1 (0.04))
25
(0.89)
C
N
4
B
C
N
4
A
Approx.80 (3.15)
130 (4.72)
6.5 (0.26)
138.5 (5.45)
5 (0.20)
5 (0.20) 5 (0.20)
NAME PLATE
120 (4.72)
2- 4.5 ( 0.18)
mounting hole
[Unit: mm]
([Unit: in])
Mass: 0.2k
g
(
1.10lb
)
Mounting screw : M4
Tightening torque : 1.5 [N m]
(13.3 [lb in])
10.2.5 Battery unit (MR-J2M-BT)
120 (4.72)
130 (5.12) (1 (0.04))
25(0.89) Approx.70 (2.76) 130 (5.45)
6.5 (0.26)
NAME PLATE
5 (0.20)
5 (0.20) 5 (0.20)
120 (4.72)
C
N
1
C
2- 4.5 ( 0.18)
mounting hole
Mass: 0.3kg (0.66lb)
[Unit: mm]
([Unit: in])
Mounting screw : M4
Tightening torque : 1.5 [N m]
(13.3 [lb in]
)
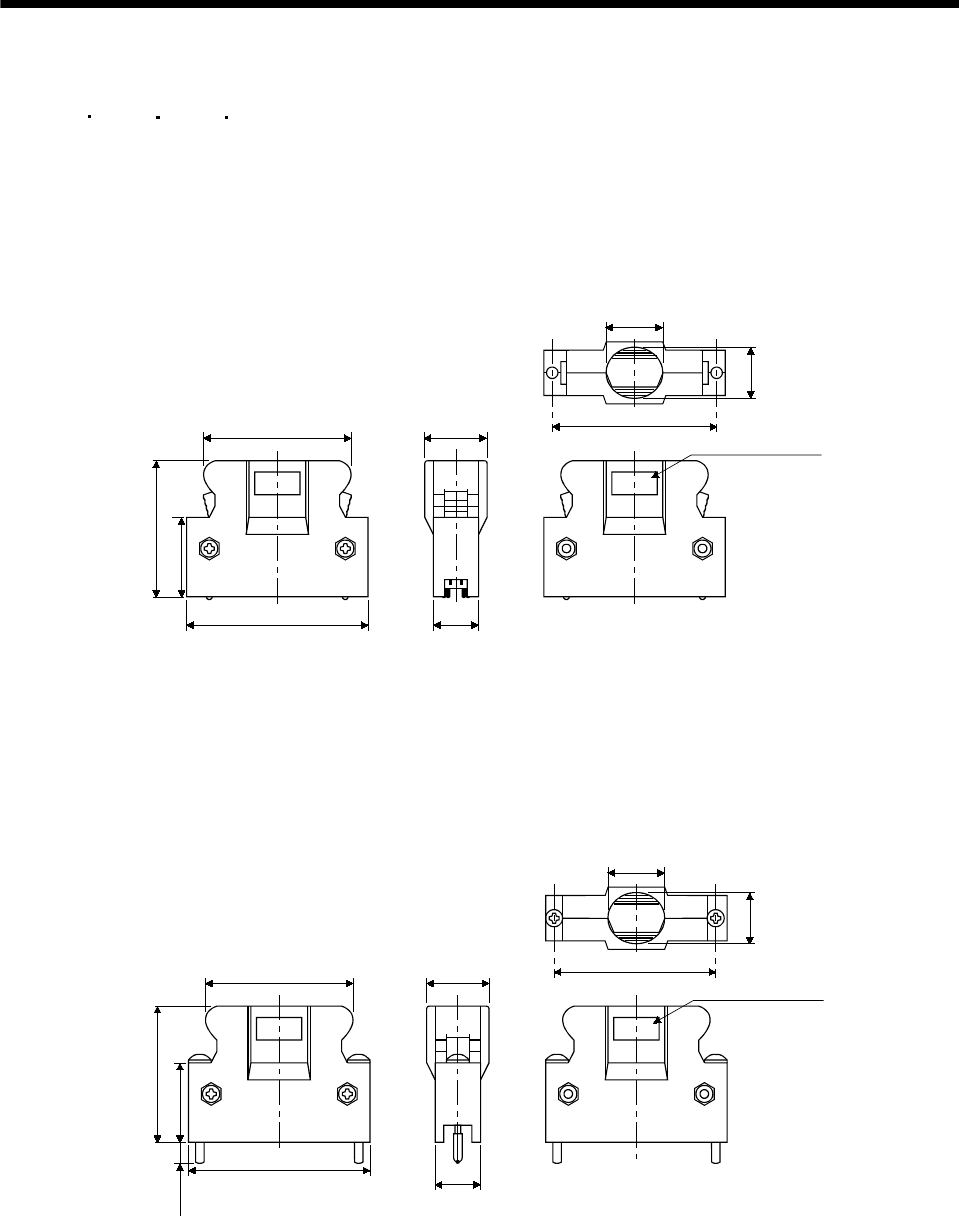
10 - 5
10. OUTLINE DRAWINGS
10.3 Connectors
(1) CN1A CN1B CN4A CN4B connector
<3M>
(a) Soldered type
Model Connector : 10150-3000VE
Shell kit : 10350-52F0-008
14.0
(0.55)
41.1 (1.62)
39.0 (1.54)
23.8 (0.94)
18.0 (0.71)
52.4 (2.06) 12.7
(0.50)
46.5 (1.83)
17.0 (0.67)
Logo, etc. are
indicated here.
[Unit: mm]
([Unit: in])
(b) Threaded type
Model Connector : 10150-3000VE
Shell kit : 10350-52A0-008
Note. This is not available as option and should be user-prepared.
14.0
(0.55)
41.1 (1.62)
39.0 (1.54)
23.8 ( 0.94)
18.0 (0.71)
52.4 (2.06) 12.7
(0.50)
46.5 (1.83)
17.0 (0.67)
5.2 (0.21)
[Unit: mm]
([Unit: in])
Logo, etc. are
indicated here.
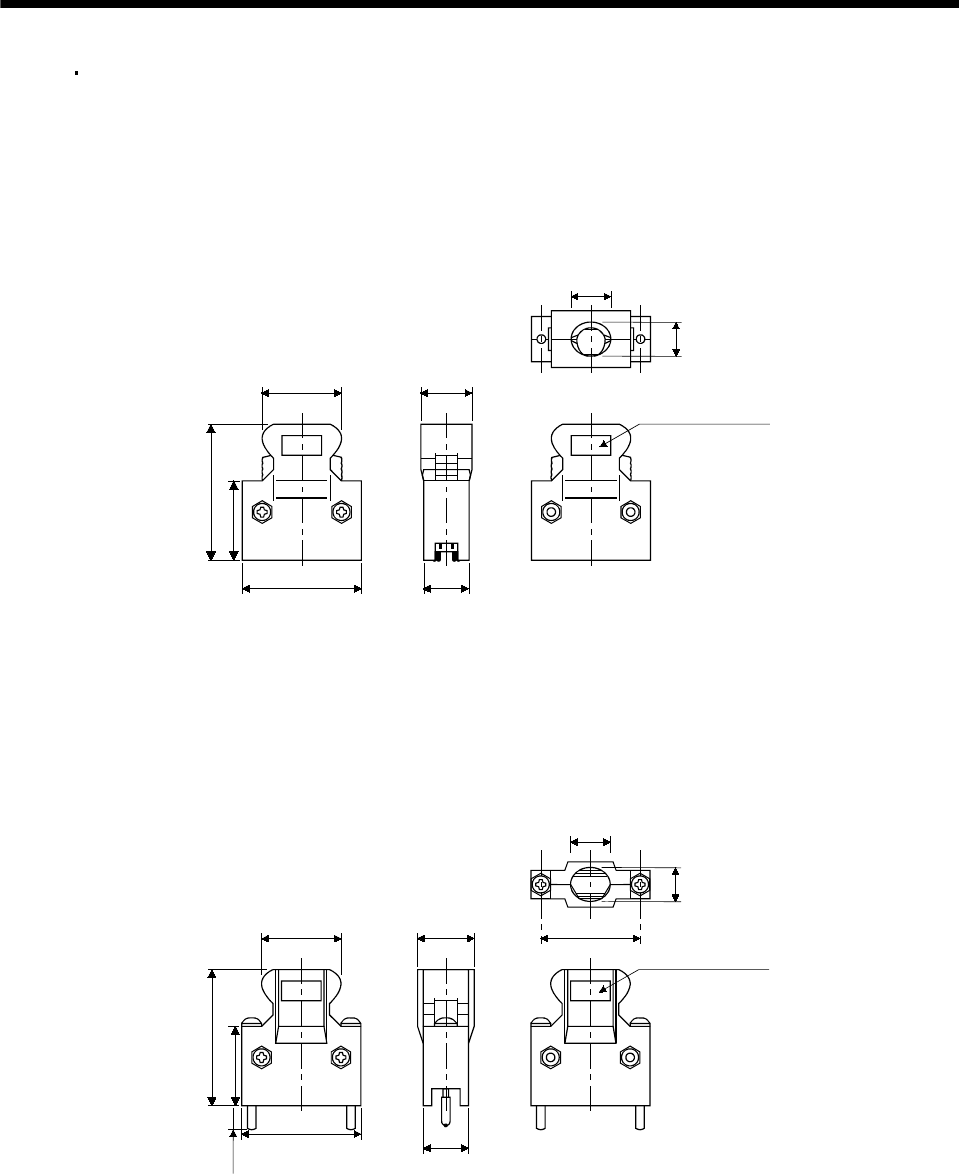
10 - 6
10. OUTLINE DRAWINGS
(2) CN2 CN3 connector
<3M>
(a) Soldered type
Model Connector : 10120-3000VE
Shell kit : 10320-52F0-008
14.0 (0.55)
12.7
(0.50)
23.8 (0.98)
12.0 (0.47)
33.3 (1.31)
22.0 (0.87)
39.0 (1.54)
10.0
(0.39)
[Unit: mm]
([Unit: in])
Logo, etc. are
indicated here.
(b) Threaded type
Model Connector : 10120-3000VE
Shell kit : 10320-52A0-008
Note. This is not available as option and should be user-prepared.
22.0 (0.87)
23.8 (0.94)
39.0 (1.54)
33.3
(1.31) 12.7
(0.50)
14.0 (0.55)
10.0
(0.39)
12.0 (0.47)
5.7 (0.22)
27.4
(1.08) Logo, etc. are
indicated here.
[Unit: mm]
([Unit: in])
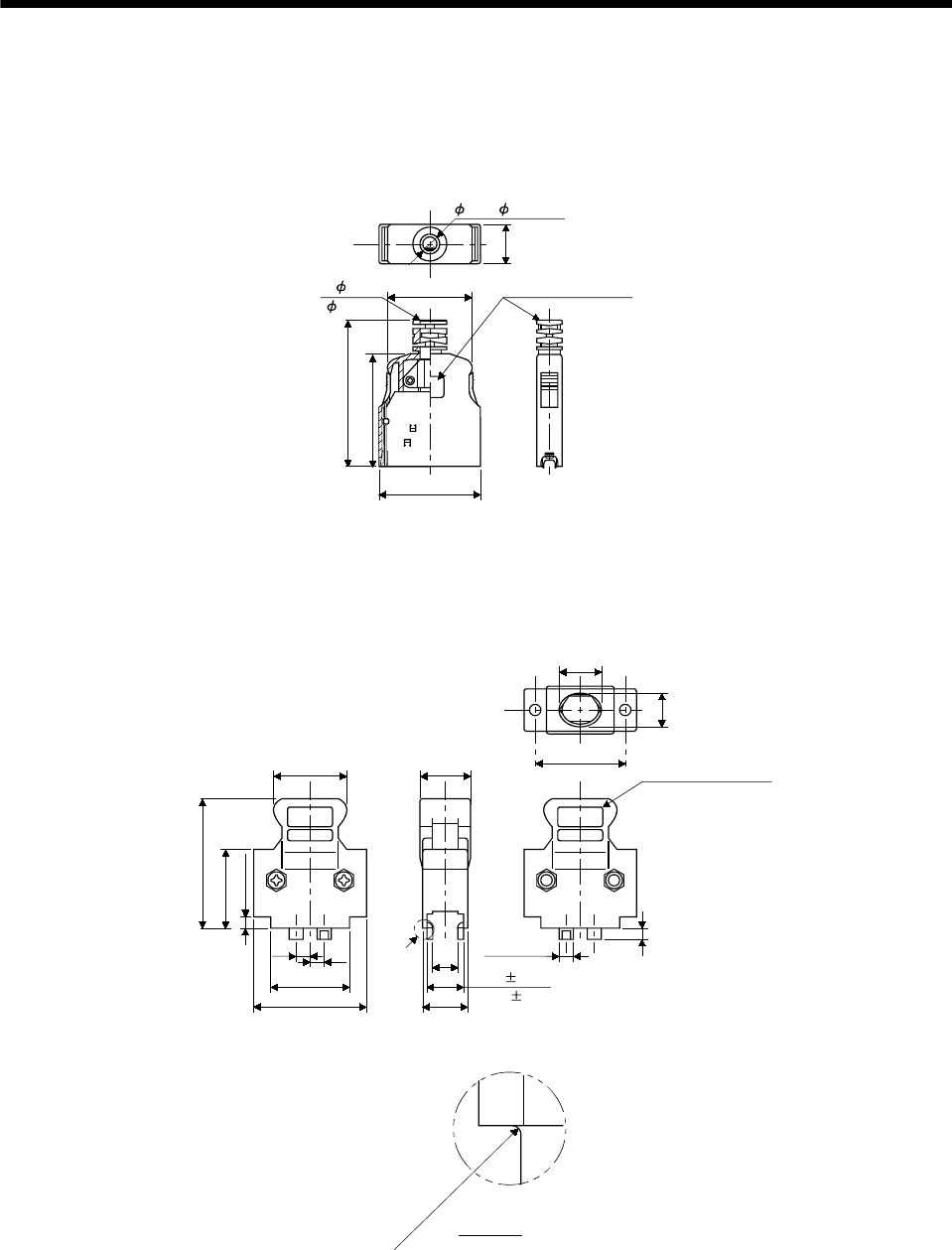
10 - 7
10. OUTLINE DRAWINGS
(c) Insulation displacement type
Model Connector : 10120-6000EL
Shell kit : 10320-3210-000
2- 0.5
( 0.02)
33.0 (1.3)
42.0 (1.65)
29.7
(1.17)
20.9 (0.82)
11.5
6.7 ( 0.26)
[Unit: mm]
([Unit: in])
Logo, etc. are
indicated here.
(0.45)
(3) CN5 connector
<3M>
23.35 (0.92)
33.3 (1.31)
4.0
(0.16)
12.7
(0.50)
22.0 (0.87)
3.0 (0.12)
R
38.0 (1.5)
22.8 (0.9)
7.6
(0.3) 10.7 0.2
4.0 (0.16)
27.4
(1.08)
12.0 (0.47)
10.0
(0.39)
14.0 (0.55)
3.0 (0.12)
R
A
4.0
(0.16)
(0.42 0.08)
Logo, etc. are
indicated here.
[Unit: mm]
([Unit: in])
Details A
MAX. R 0.3
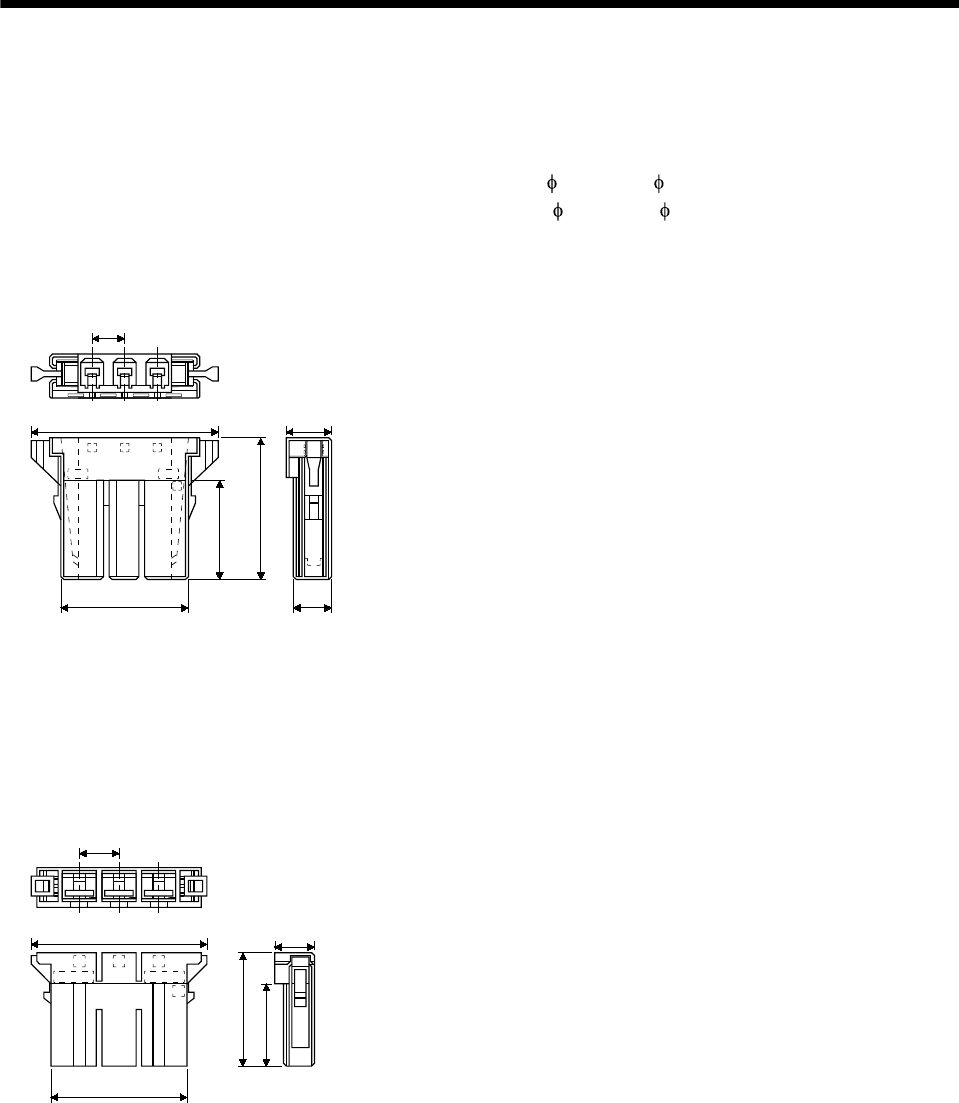
10 - 8
10. OUTLINE DRAWINGS
(4) CNP1A/CNP1B connector
<Tyco Electronics>
Model CNP1A housing : 1-178128-3
CNP1B housing : 2-178128-3
Contact : 917511-2 (max. sheath OD: 2.8 [mm] ( 0.11 [in]))
353717-2 (max. sheath OD: 3.4 [mm] ( 0.13 [in]))
Applicable tool : 91560-1 (for 917511-2)
937315-1 (for 353717-2)
AMP
0-3
321
X
5.08 (0.2)
29.7 (0.12) 7.15 (0.28)
16.3 (0.06)
22.8 (0.90)
6.55
(0.26)
19.24 (0.76)
[Unit: mm]
([Unit: in])
(5) CNP3 connector
<AMP>
Model Housing : 1-179958-3
Contact : 316041-2
Applicable tool : 234171-1
1
0-5
Y
32
AMP
10.16 (0.4)
45.29 (1.79)
33.92 (1.33)
9.8 (0.39)
29 (1.14)
21.2 (0.84)
[Unit: mm]
([Unit: in)
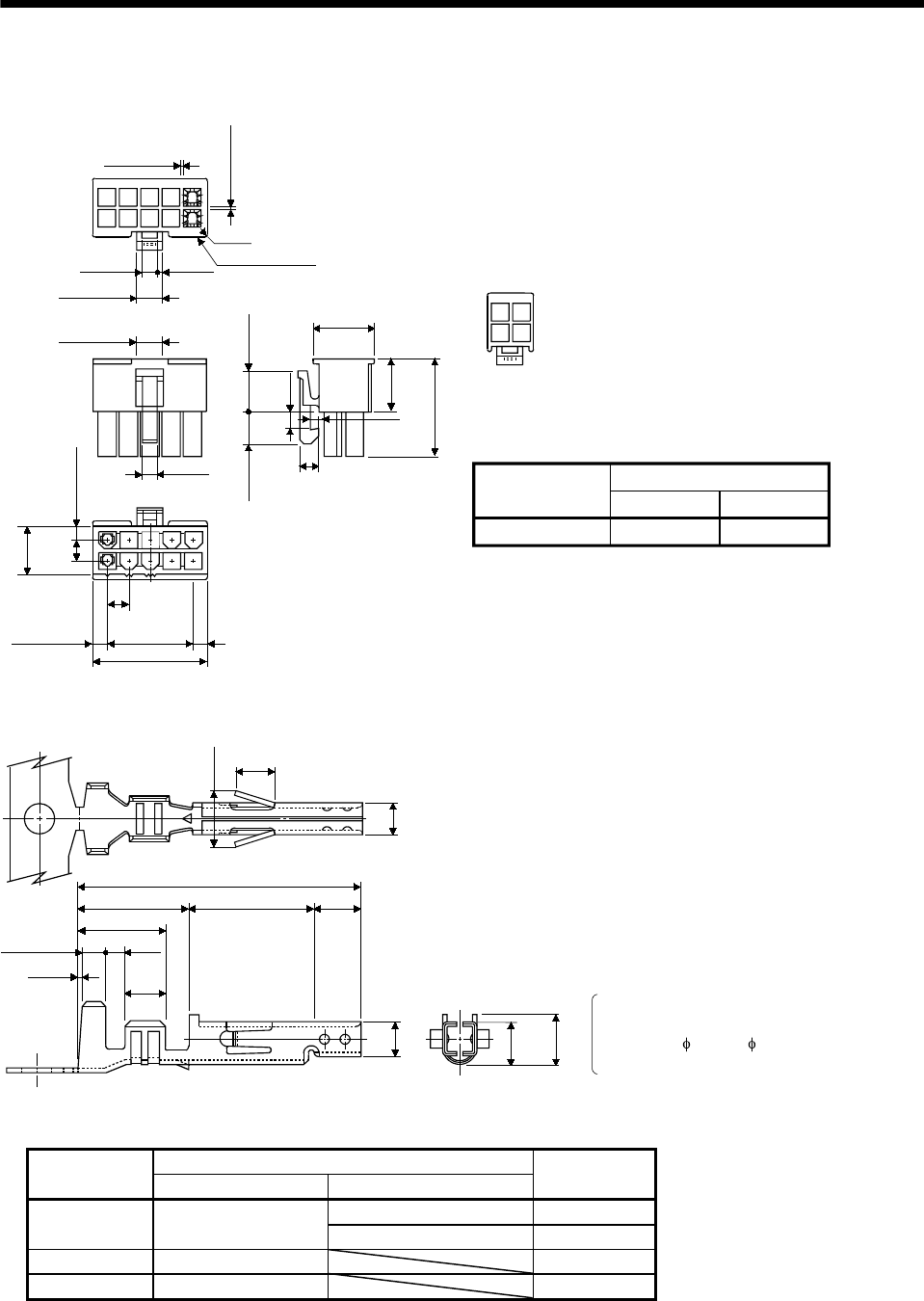
10 - 9
10. OUTLINE DRAWINGS
(6) Connectors for CNP2
11.6
3.5
(0.138)
3
9.6 (0.378)
2.7 (0.106) A
B
4.2
4.2
(0.165)2.5 (0.098)
8.5
6.3
3.3
(0.13)
10.7
19.6
1
2
3
4
5
6
7
9
10
0.6 (0.024)
0.6 (0.024)
R0.3
1.2
5.4 (0.213)
12
34
Model Variable Dimensions
A
9.6 (0.378)5557-04R 4.2 (0.165)
B
(0.047)
5.4 (0.213)
3 (0.118)
(0.335)
(0.248)
(0.421)
(0.772)
(0.457)
(0.118)
2.7 (0.106)
(0.165)
[Unit: mm]
([Unit: in])
1.5
(0.059)
<molex>
Circuit number
(Pitch)
Layout diagrams classified by the number of poles
4 poles
2.15
2.9
1.9 (0.075)
1.7
2.55
1.7
2.6
1
6.6 (0.26)
14.7 (0.579)
5.5 (0.217)
4.3 (0.169)
2
(0.114)
(0.067)
(0.102)
(0.079)
(0.039)
(0.067)
(0.1)
(0.085)
Applicable wire
Core size : AWG#18 to #24 (5556-PBTL)
AWG28 (5556-PBT2L)
Sheath OD: 3.1mm ( 0.122 in) max.
Strip length: 3.0 to 3.5 [mm] (0.118 to 0.138 [in])
Terminal
Model: 5556
OMIN
1.2 (0.047)
[Unit: mm]
([Unit: in])
Exclusive tools
Wire specifications
Terminal Core size Sheath OD [mm(inch)] Tool number
1.5 to 2.2 (0.06 to 0.09) 57026-5000
5556-PBL AWG18 to AWG24 2.3 to 3.1 (0.06 to 0.12) 57027-5000
5556-PBT2L AWG28 57064-5000
5556-PBT3L AWG16 57022-5300
10 - 10
10. OUTLINE DRAWINGS
MEMO
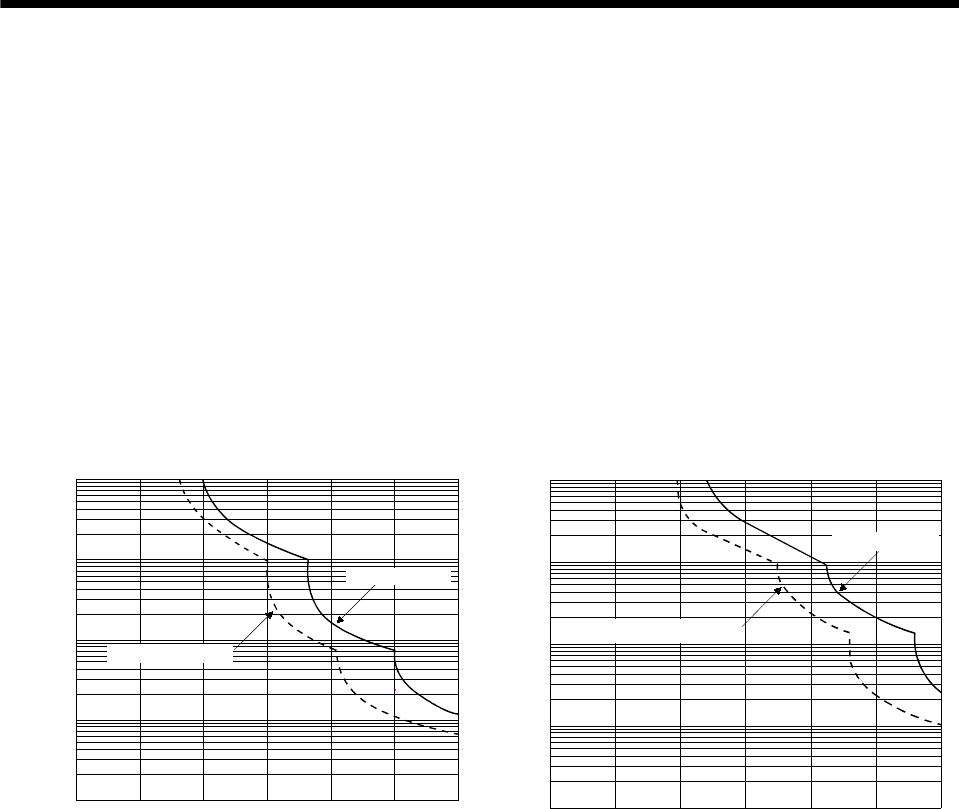
11 - 1
11. CHARACTERISTICS
11. CHARACTERISTICS
11.1 Overload protection characteristics
An electronic thermal relay is built in the drive unit to protect the servo motor and drive unit from
overloads.
Overload 1 alarm (A.50) occurs if overload operation performed is above the electronic thermal relay
protection curve shown in any of Figs 11.1. Overload 2 alarm (A.51) occurs if the maximum current flows
continuously for several seconds due to machine collision, etc. Use the equipment on the left-hand side
area of the continuous or broken line in the graph.
In a machine like the one for vertical lift application where unbalanced torque will be produced, it is
recommended to use the machine so that the unbalanced torque is 70% or less of the rated torque.
The overload protection characteristic is about 20% lower than that of the MELSERVO-J2-Super series.
However, operation at the 100% continuous rating can be performed.
1000
100
10
1
0.1
0 50 150 200 250 300
Operation time [s]
100
During servo lock
During rotation
Load ratio [%]
a. MR-J2M-10DU to MR-J2M-40DU
1000
100
10
1
0.1
0 50 150 200 250 300
100
Operation time [s]
During servo lock
During rotation
Load ratio [%]
b. MR-J2M-70DU
Fig 11.1 Electronic thermal relay protection characteristics
Note. If operation that generates torque more than 100% of the rating is performed with an abnormally high frequency in a servo motor stop
status (servo lock status) or in a 30r/min or less low-speed operation status, the servo amplifier may fail even when the electronic
thermal relay protection is not activated.
11 - 2
11. CHARACTERISTICS
11.2 Power supply equipment capacity and generated loss
(1) Amount of heat generated by the drive unit
Table 11.1 indicates drive unit's power supply capacities and losses generated under rated load. For
thermal design of an enclosure, use the values in Table 11.1 in consideration for the worst operating
conditions. The actual amount of generated heat will be intermediate between values at rated torque
and servo off according to the duty used during operation. When the servo motor is run at less than
the maximum speed, the power supply capacity will be smaller than the value in the table, but the
drive unit's generated heat will not change.
Table 11.1 Power supply capacity and generated heat at rated output
(Note 2)
Generated heat[W] Area required for heat dissipation
Unit Servo motor
(Note 1)
Power supply
capacity[kVA] At rated torque At servo off [m2] [ft2]
HC-KFS053 13 0.3 11 6 0.2 2.16
HC-MFS053 13 0.3 11 6 0.2 2.16
MR-J2M-10DU
HC-UFS13 0.3 11 6 0.2 2.16
HC-KFS23 0.5 14 6 0.3 3.24
HC-MFS23 0.5 14 6 0.3 3.24MR-J2M-20DU
HC-UFS23 0.5 14 6 0.3 3.24
HC-KFS43 0.9 20 6 0.4 4.32
MR-J2M-40DU HC-MFS43 0.9 20 6 0.4 4.32
HC-KFS73 1.3 40 6 0.7 7.54
HC-MFS73 1.3 40 6 0.7 7.54
MR-J2M-70DU
HC-UFS73 1.3 40 6 0.7 7.54
MR-J2M-P8A 0.1 9 9 0.2 2.16
MR-J2M-BU4 0 4 4 0.1 1.08
MR-J2M-BU6 0 4 4 0.1 1.08
MR-J2M-BU8 0 4 4 0.1 1.08
Note 1. Note that the power supply capacity will vary according to the power supply impedance.
This value applies to the case where the power factor improving reactor is not used.
2. Heat generated during regeneration is not included in the drive unit-generated heat. To calculate heat generated by the
regenerative brake option, use Equation 12.1 in Section 12.1.1.
11 - 3
11. CHARACTERISTICS
(2) Heat dissipation area for enclosed drive unit
The enclosed control box (hereafter called the control box) which will contain the drive unit should be
designed to ensure that its temperature rise is within 10 (50 ) at the ambient temperature of
40 . (With a 5 (41 ) safety margin, the system should operate within a maximum 55 (131 )
limit.) The necessary enclosure heat dissipation area can be calculated by Equation 11.1:
P
A
KT
............................................................................................................................................. (11.1)
where, A : Heat dissipation area [m2]
P : Loss generated in the control box [W]
T : Difference between internal and ambient temperatures [ ]
K : Heat dissipation coefficient [5 to 6]
When calculating the heat dissipation area with Equation 11.1, assume that P is the sum of all losses
generated in the enclosure. Refer to Table 11.1 for heat generated by the drive unit. "A" indicates the
effective area for heat dissipation, but if the enclosure is directly installed on an insulated wall, that
extra amount must be added to the enclosure's surface area.
The required heat dissipation area will vary wit the conditions in the enclosure. If convection in the
enclosure is poor and heat builds up, effective heat dissipation will not be possible. Therefore,
arrangement of the equipment in the enclosure and the use of a fan should be considered.
Table 11.1 lists the enclosure dissipation area for each drive unit when the drive unit is operated at
the ambient temperature of 40 (104 ) under rated load.
(Outside) (Inside)
Air flow
Fig. 11.2 Temperature distribution in enclosure
When air flows along the outer wall of the enclosure, effective heat exchange will be possible, because
the temperature slope inside and outside the enclosure will be steeper.
11 - 4
11. CHARACTERISTICS
11.3 Dynamic brake characteristics
Fig. 11.4 shows the pattern in which the servo motor comes to a stop when the dynamic brake is operated.
Use Equation 11.2 to calculate an approximate coasting distance to a stop. The dynamic brake time
constant varies with the servo motor and machine operation speeds. (Refer to Fig. 11.4)
V0
Time constant
Forced stop(EMG_ ) OFF
ON
Machine speed
teTime
Fig. 11.3 Dynamic brake operation diagram
Lmax 60
V0JL
JM
te1....................................................................................................................... (11.2)
Lmax : Maximum coasting distance .................................................................................................[mm][in]
Vo : Machine rapid feedrate ......................................................................................... [mm/min][in/min]
JM: Servo motor inertial moment.................................................................................[kg cm2][oz in2]
JL: Load inertia moment converted into equivalent value on servo motor shaft.....[kg cm2][oz in2]
: Brake time constant........................................................................................................................ [s]
te: Delay time of control section .......................................................................................................... [s]
(There is internal relay delay time of about 30ms.)
11 - 5
11. CHARACTERISTICS
0
14
16
2
4
8
10
6
12
0 500 1000 1500 2000 2500 3000
13
73
23
43
053
Speed [r/min]
Time constant [ms]
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
0 500 1000 1500 2000 2500 3000
13
43
23
053 73
Speed [r/min]
Time constant [s]
a. HC-KFS series b. HC-MFS series
Speed [r/min]
Time constant [s]
0
0.01
0.02
0.03
0.04
0.05
0.06
50 500 1000 1500 2000 2500 3000
0
43
23
0.07
13
73
c. HC-UFS3000r/min series
Fig. 11.4 Dynamic brake time constant
Use the dynamic brake at the load inertia moment indicated in the following table. If the load inertia
moment is higher than this value, the built-in dynamic brake may burn. If there is a possibility that the
load inertia moment may exceed the value, contact Mitsubishi.
Drive unit Load inertia moment ratio [times]
MR-J2M-10DU
MR-J2M-20DU
MR-J2M-40DU
MR-J2M-70DU
30
11 - 6
11. CHARACTERISTICS
11.4 Encoder cable flexing life
The flexing life of the cables is shown below. This graph calculated values. Since they are not guaranteed
values, provide a little allowance for these values.
1 107
5 107
1 108
5 106
1 106
5 105
1 105
5 104
1 104
5 103
1 103
a
b
Flexing life [times]
4 7 10 20 40 70 100 200
Flexing radius [mm]
a : Long flexing-life encoder cable
MR-JCCBL M-H
MR-JC4CBL M-H
b : Standard encoder cable
MR-JCCBL M-L
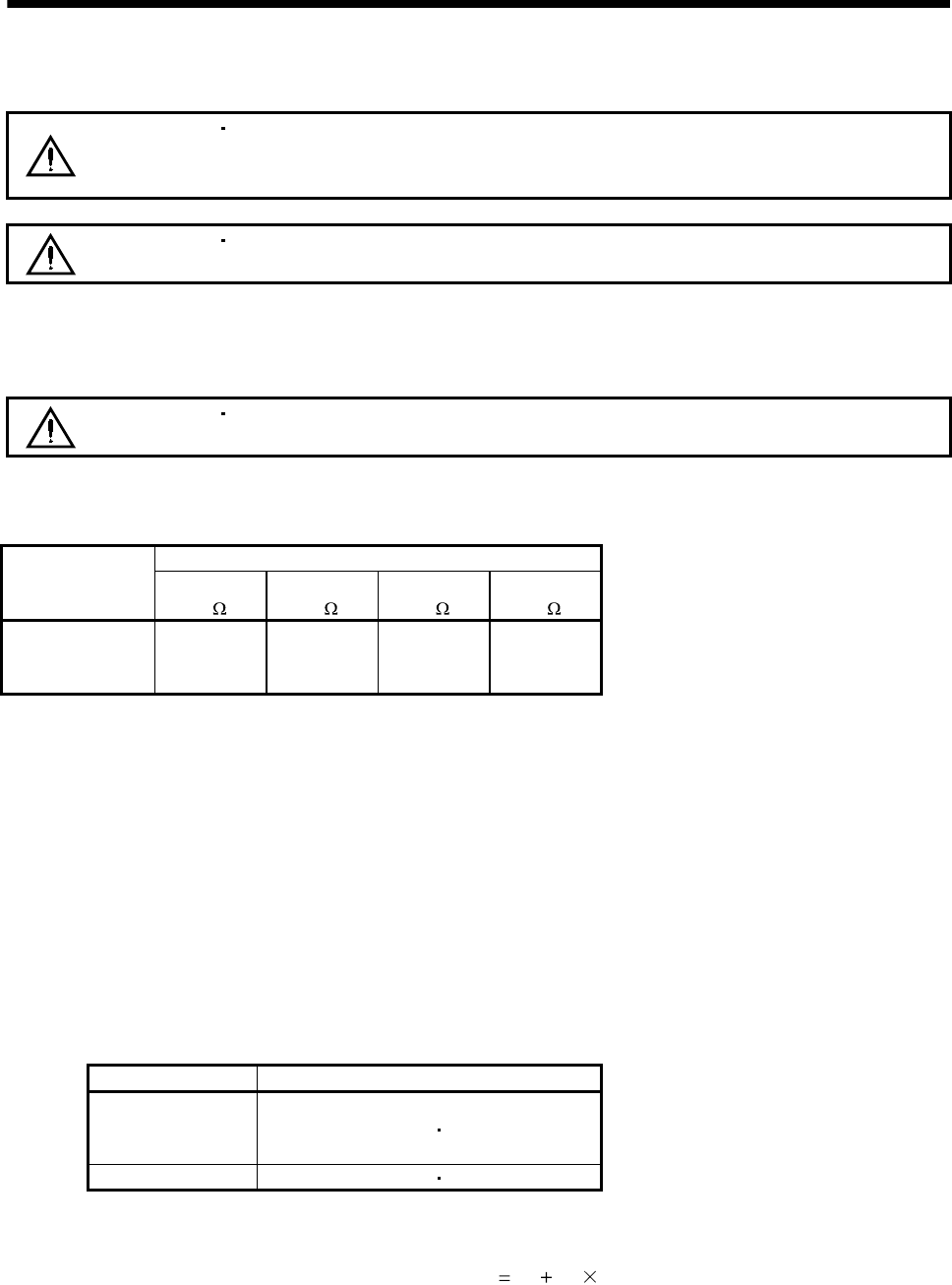
12 - 1
12. OPTIONS AND AUXILIARY EQUIPMENT
12. OPTIONS AND AUXILIARY EQUIPMENT
WARNING
Before connecting any option or auxiliary equipment, make sure that the charge
lamp is off more than 15 minutes after power-off, then confirm the voltage with a
tester or the like. Otherwise, you may get an electric shock.
CAUTION Use the specified auxiliary equipment and options. Unspecified ones may lead to a
fault or fire.
12.1 Options
12.1.1 Regenerative brake options
CAUTION The specified combinations of regenerative brake options and base units may only
be used. Otherwise, a fire may occur.
(1) Combinations and regenerative powers
The power values in the table are resistor-generated powers and not rated powers.
Regenerative power [W]
Base unit MR-RB032
[40 ]
MR-RB14
[26 ]
MR-RB34
[26 ]
MR-RB54
[26 ]
MR-J2M-BU4
MR-J2M-BU6
MR-J2M-BU8
30 100 300 500
(2) Selection of regenerative brake option
(a) Simple judgment of regenerative brake option necessity
The MELSERVO-J2M series does not contain a regenerative brake resistor. Check whether the
regenerative brake option is needed or not in the following method.
1) Requirements
The drive units mounted to the same base unit are all horizontal axes.
The operation pattern is clear and the load inertia moments of the axes to be decelerated
simultaneously are clear.
2) Checking method
The following table gives the permissible load inertia moment that does not require the
regenerative brake option when speed is reduced from 3000r/min.
Drive unit Permissible Load Inertia Moment
MR-J2M-10DU
MR-J2M-20DU
MR-J2M-40DU
1.42kg cm2
MR-J2M-70DU 4.94kg cm2
Calculate the 3000r/min-equivalent inertia moment of each drive unit.
(Load inertia moment equivalent for 3000r/min) (JLJM)(running speed/3000)2
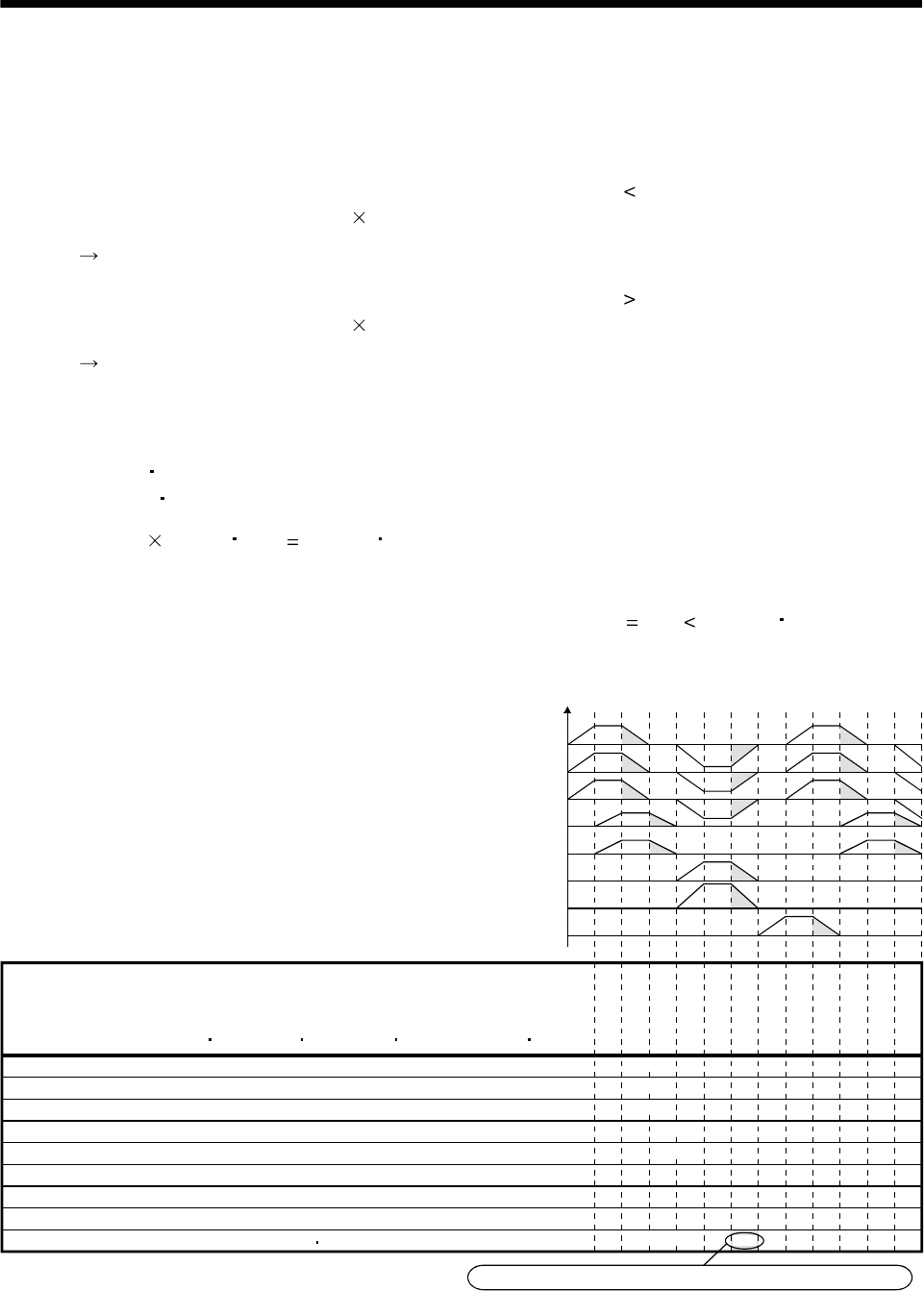
12 - 2
12. OPTIONS AND AUXILIARY EQUIPMENT
Calculate the total of the 3000r/min-equivalent inertia moments of the axes to be decelerated
simultaneously, and find the maximum total of 3000r/min-equivalent inertia moments.
Also find the sum total of permissible load inertia moments of the drive units installed on the
same base unit.
(Maximum total of 3000r/min-equivalent inertia moments) (Sum total of permissible load
inertia moments of drive units) 1.42
Regenerative brake option is unnecessary.
(Maximum total of 3000r/min-equivalent inertia moments) (Sum total of permissible load
inertia moments of drive units) 1.42
Regenerative brake option is necessary.
3) Confirmation example
In the following 8-axis system, the total 3000r/min-equivalent inertia moment is maximum
(9.75kg cm2) at the timing of 7). The permissible inertia moment of this 8-axis system is
11.36[kg cm2] as indicated by the following expression.
8 [axes] 1.42[kg cm2] 11.36[kg cm2]
Hence,
(Maximum total of 3000r/min-equivalent load inertia moments 9.75) 11.36[kg cm2]
The regenerative brake option is unnecessary.
2.67
6.5 6.57 1.26
0.61
0.65
2.52
1.38
2.59
0.59
2.52
2.67
1.38
6.5
HC-KFS13
HC-KFS23
HC-KFS43
HC-KFS13
HC-MFS13
HC-MFS23
HC-KFS13
HC-KFS43
0.084
0.42
0.67
0.084
0.03
0.088
0.084
0.67
1.3
2.1
2.0
0.8
0.9
2.5
0.4
5.83
1.384
2.52
2.67
0.884
0.93
2.588
0.484
6.5
1.38
2.52
2.67
0.61
0.65
2.59
0.59
6.5
3000
3000
3000
2500
2500
3000
3300
3000
1.38
1.266.57 9.75
2.52
2.67
0.61
0.65
First slot
Speed
Second slot
Third slot
Fourth slot
Fifth slot
Sixth slot
Seventh slot
Eighth slot
1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13)
Axis
No.
Servo
Motor
Model
Servo
Motor
Inertia
Moment
kg cm2
Load Inertia
Moment
(Servo motor
shaft equivalent)
Total
inertia
moment
kg cm2
Running
speed
3000r/min-
equivalent
Total Inertia
Moment
kg cm2
r/min
3000r/min-equivalent total inertia moment
First slot
Second slot
Third slot
Fourth slot
Fifth slot
Sixth slot
Seventh slot
Eighth slot
Simultaneous deceleration total inertia moment maximum value
kg cm2
Operation pattern
kg cm2
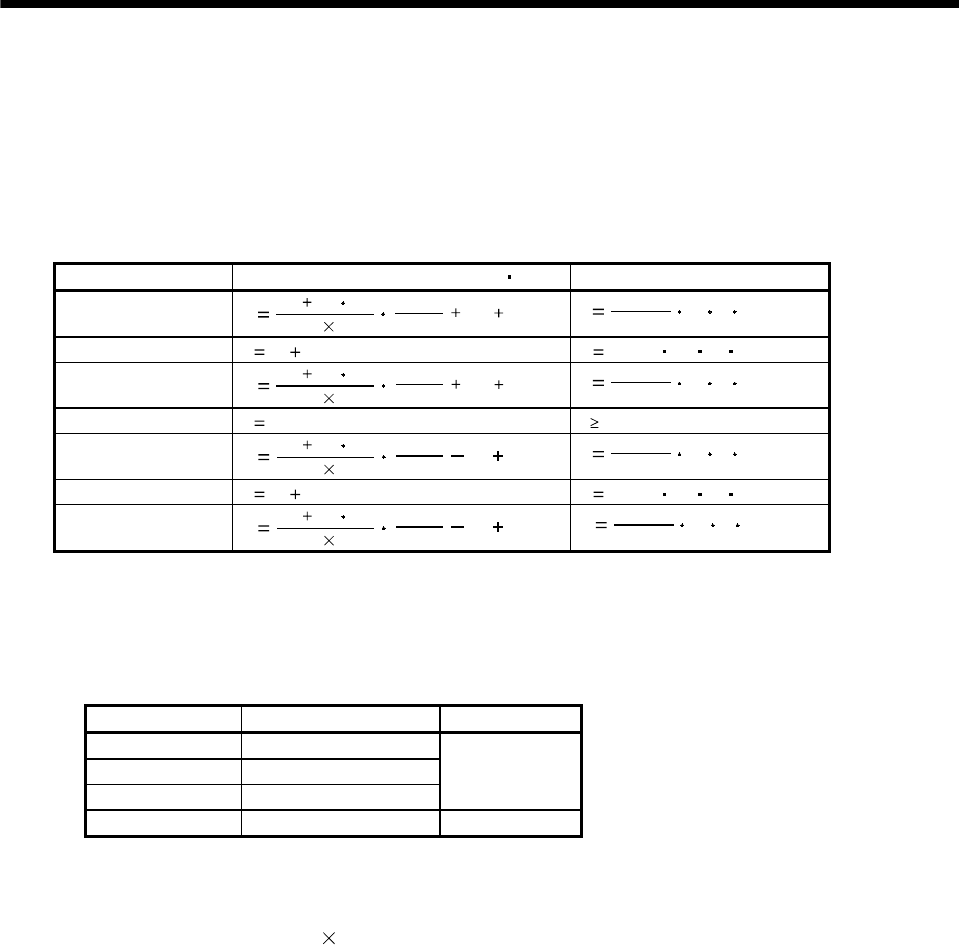
12 - 3
12. OPTIONS AND AUXILIARY EQUIPMENT
(b) To make selection according to regenerative energy
Use the following method when regeneration occurs continuously in vertical motion applications or
when it is desired to make an in-depth selection of the regenerative brake option:
1) Regenerative energy calculation
Use the following table to calculate the regenerative energy.
Formulas for calculating torque and energy in operation
Regenerative power Torque applied to servo motor [N m] Energy [J]
1) T1(JL JM)
9.55 104
No 1
Tpsa1 TUTFE12
0.1047 No T1Tpsa1
2) T2 TU TFE2 0.1047 No T2t1
3) T3(JL JM)
9.55 104
No 1
Tpsd1 TUTFE32
0.1047 No T3Tpsd1
4), 8) T4 TUE40 (No regeneration)
5) T5(JL JM)
9.55 104
No 1
Tpsa2 TUTFE52
0.1047 No T5Tpsa2
6) T6 TU TFE6 0.1047 No T6t3
7) T7(JL JM)
9.55 104
No 1
Tpsd2 TUTFE72
0.1047 No T7Tpsd2
From the calculation results in 1) to 8), find the absolute value (Es) of the sum total of negative
energies.
2) Losses of servo motor and drive unit in regenerative mode
The following table lists the efficiencies and other data of the servo motor and drive unit in the
regenerative mode.
Drive unit Inverse efficiency [%] C charging [J]
MR-J2M-10DU 55
MR-J2M-20DU 70
MR-J2M-40DU 85
5.5
MR-J2M-70DU 80 18
Using the following expression, find the total of C charging [J] of the MELSERVO-J2M.
Number of drive unit axes 5.5J
Then, find the energy at each timing in a single-cycle operation pattern. The energy is positive in
the driving mode and negative in the regenerative mode. Enter signed driving/regenerative
energy values into the following calculation table. The shaded areas indicate negative values.

12 - 4
12. OPTIONS AND AUXILIARY EQUIPMENT
<Entry example>
Timing 1) 2) 3) 4) 5) 6) 7) 8)
First slot E1 E2 E3 E4 E1 E2 E3 E4
Second slot E1 E2 E3 E4 E1 E2 E3 E4
Third slot E1 E2 E3 E4 E5 E6 E7 E8
Fourth slot E4 E4 E1 E2 E3 E4 E4 E4
Fifth slot E4 E4 E4 E4 E4 E1 E2 E3
Sixth slot E1 E2 E2 E3 E4 E4 E1 E2
Seventh slot E1 E2 E2 E3 E4 E4 E1 E2
Eighth slot E1 E2 E2 E3 E4 E4 E1 E2
Total E 1) E 2) E 3) E 4) E 5) E 6) E 7) E 8)
Regenerative ES ES 3) ES 4)
|ES|-EC ER ER
PR(W) ER/tf
Calculate the total of energies at each timing. Only when the total is negative (timings 3, 4 in
the example), use the following expression for calculation.
Energy total ER regenerative energy ES (absolute value) C charging total (EC)
If the subtraction results are negative at all timings, the regenerative brake option is not
needed. From the total of ER's whose subtraction results are positive and a single-cycle period,
the power consumption of the regenerative brake option can be calculated with the following
expression.
Power consumption PR [W] (total of positive ER's)/1-cycle operation period (tf)
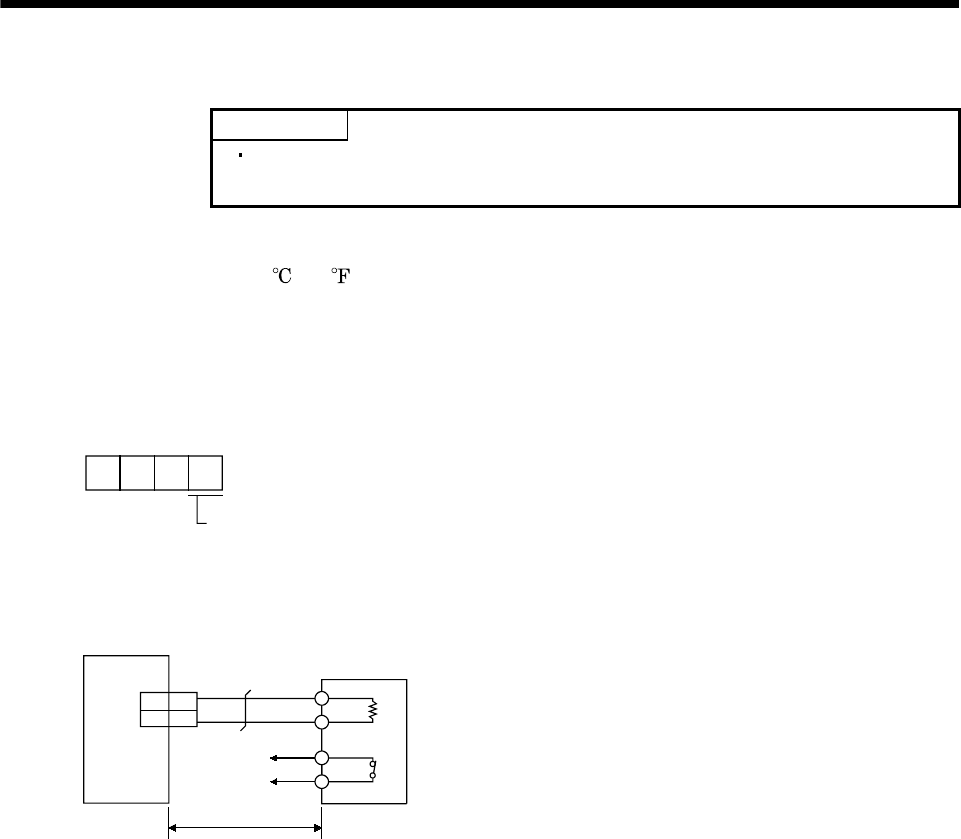
12 - 5
12. OPTIONS AND AUXILIARY EQUIPMENT
(3) Connection of the regenerative brake option
POINT
When using the MR-RB54, cooling by a fan is required. Please obtain a
cooling fan at your discretion.
Set IFU parameter No.1 according to the option to be used. The regenerative brake option will
generate heat of about 100 (212 ). Fully examine heat dissipation, installation position, used cables,
etc. before installing the option. For wiring, use flame-resistant cables and keep them clear of the
regenerative brake option body. Always use twisted cables of max. 5m(16.4ft) length for connection
with the base unit.
The G3 and G4 terminals act as a thermal sensor. G3-G4 are disconnected when the regenerative
brake option overheats abnormally.
DRU parameter No.2
Selection of regenerativ
e
0: Not used.
2: MR-RB032
5: MR-RB14
6: MR-RB34
7: MR-RB54
3
P
C
G3
G4
2P
C
Base unit
Regenerative brake option
Note. Make up a sequence which will switch off the magnetic contactor (MC) when abnormal heating occurs.
G3-G4 contact specifications
Maximum voltage: 120V AC/DC
Maximum current: 0.5V/4.8VDC
Maximum capacity: 2.4V
A
5m (16.4 ft) max.
(Note)
CNP1A
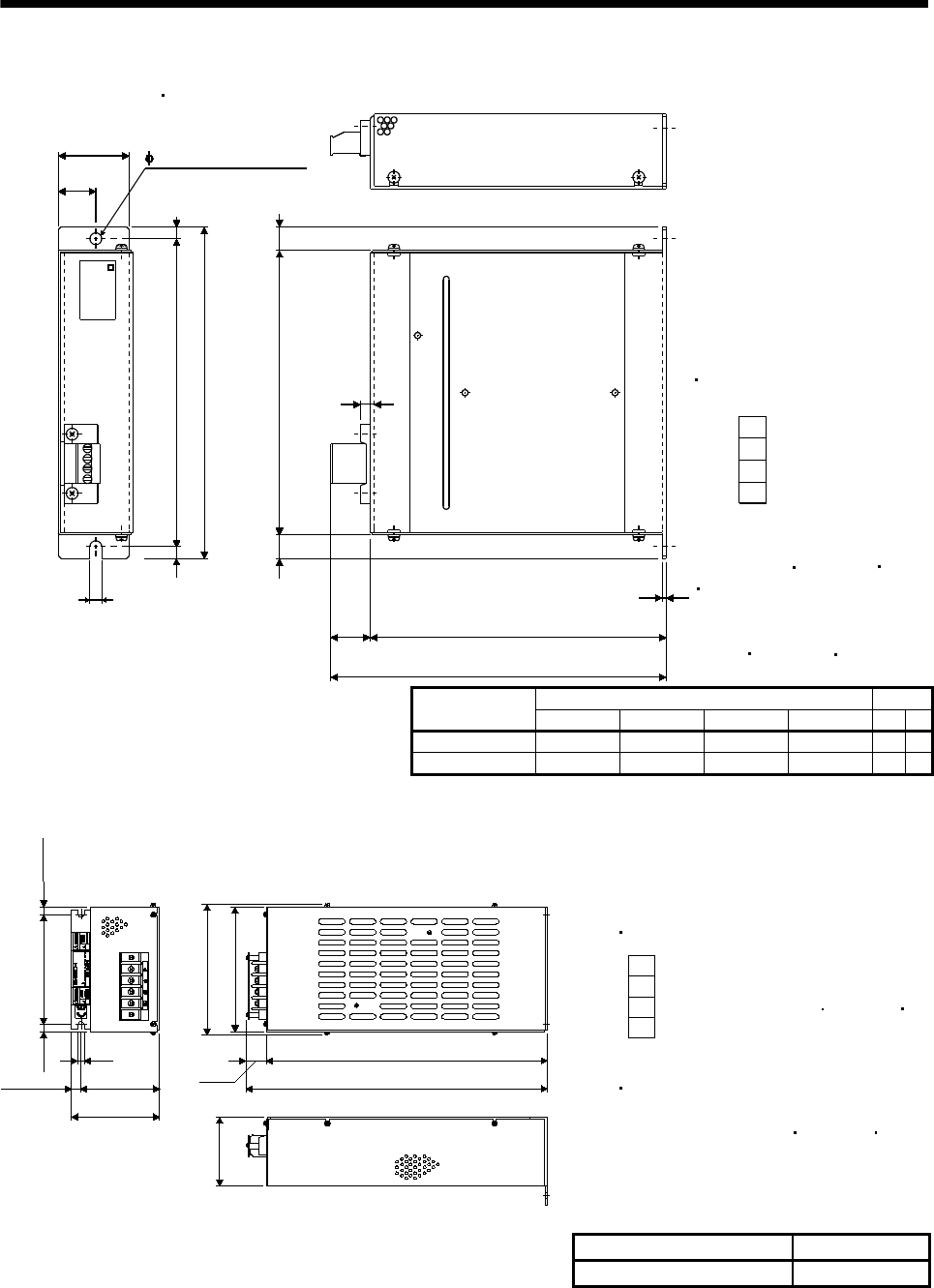
12 - 6
12. OPTIONS AND AUXILIARY EQUIPMENT
(4) Outline drawing
(a) MR-RB032 MR-RB14
LA
5 (0.20)
LB
TE1
6 (0.23)
6 (0.23)156 (6.14)
168 (6.61)
144 (5.67)
12 (0.47)
6 (0.23)
12 (0.47)
20
(0.79) LD
1.6 (0.06)
LC
G3
G4
P
C
[Unit: mm (in)]
6 (0.24) mounting hole
MR-RB
TE1
Terminal block
G4
G3
C
P
Terminal screw: M3
Tightening torque:
3.2 [N m](28.32 [lb in])
Mounting screw
Screw size: M5
Tightening torque:
0.5 to 0.6 [N m](4 to 5 [lb in])
Variable dimensions Mass
Regenerative
brake option LA LB LC LD [kg] [lb]
MR-RB032 30 (1.18) 15 (0.59) 119 (4.69) 99 (3.9) 0.5 1.1
MR-RB14 40 (1.57) 15 (0.59) 169 (6.69) 149 (5.87) 1.1 2.4
(b) MR-RB34
Mounting screw
G4
G3
C
P
Terminal screw: M4
Tightening torque: 1.2 [N m] (10.6 [lb in])
100 (3.94)
90 (3.54)
10 (0.39)
7(0.28)
8.5
(0.34)
8.5 (0.34)
125 (4.92)
150 (5.91)
142 (5.59)
17
(0.67)
318 (12.52)
335 (13.19)
79 (7.05)
G4 G3 C P
[Unit: mm (in)]
Terminal block
Tightening torque: 5.4 [N m](47.79 [lb in])
Screw : M6
Regenerative Brake Option Mass [kg(lb)]
MR-RB34 2.9 (6.393)
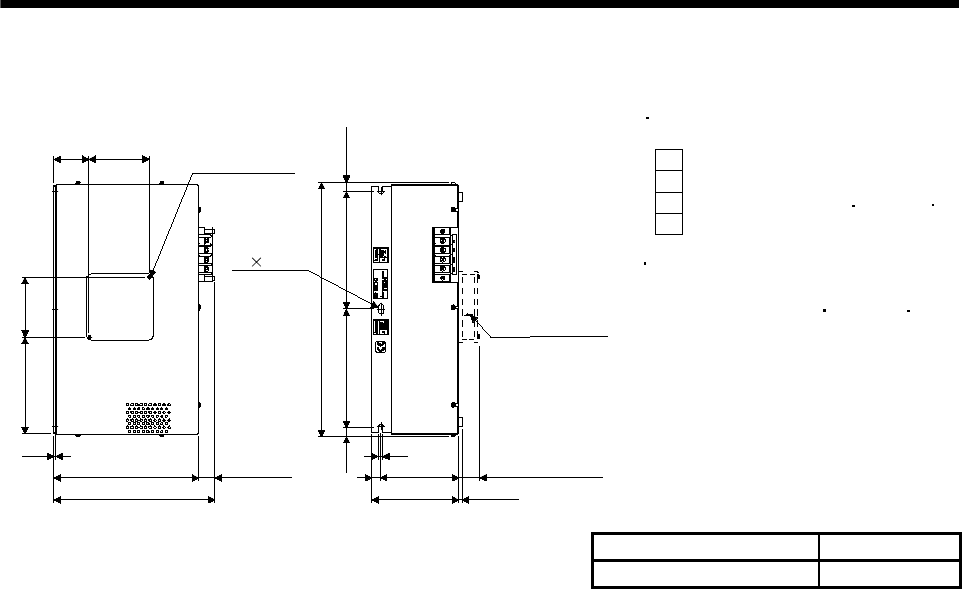
12 - 7
12. OPTIONS AND AUXILIARY EQUIPMENT
(c) MR-RB54
Tightening torque: 5.4 [N m](47.79 [lb in])
Terminal block
G4
G3
C
P
Terminal screw: M4
Tightening torque: 1.2 [N m](10.6 [lb in])
[Unit: mm (in)]
49
(1.93)
82.5
(3.25)
200 (7.87)
223 (8.78)
2.3
(0.09) 108 (4.25)
120 (4.73)
12
(0.47)
7 (0.28)
Approx.30 (1.18)
8 (0.32)
12.5
(0.49)
350 (13.78)
162.5(6.39)
133
(5.24)
82.5
(3.25)
162.5 (6.39)
7 14 slot
Fan mounting screw
(2-M3 screw)
On opposite side
12.5
(0.49)
17 (0.67)
Wind blows in the
arrow direction.
G4 G3 C P
Mounting screw
Screw : M6
Regenerative Brake Option Mass [kg(lb)]
MR-RB54 5.6 (12.346)
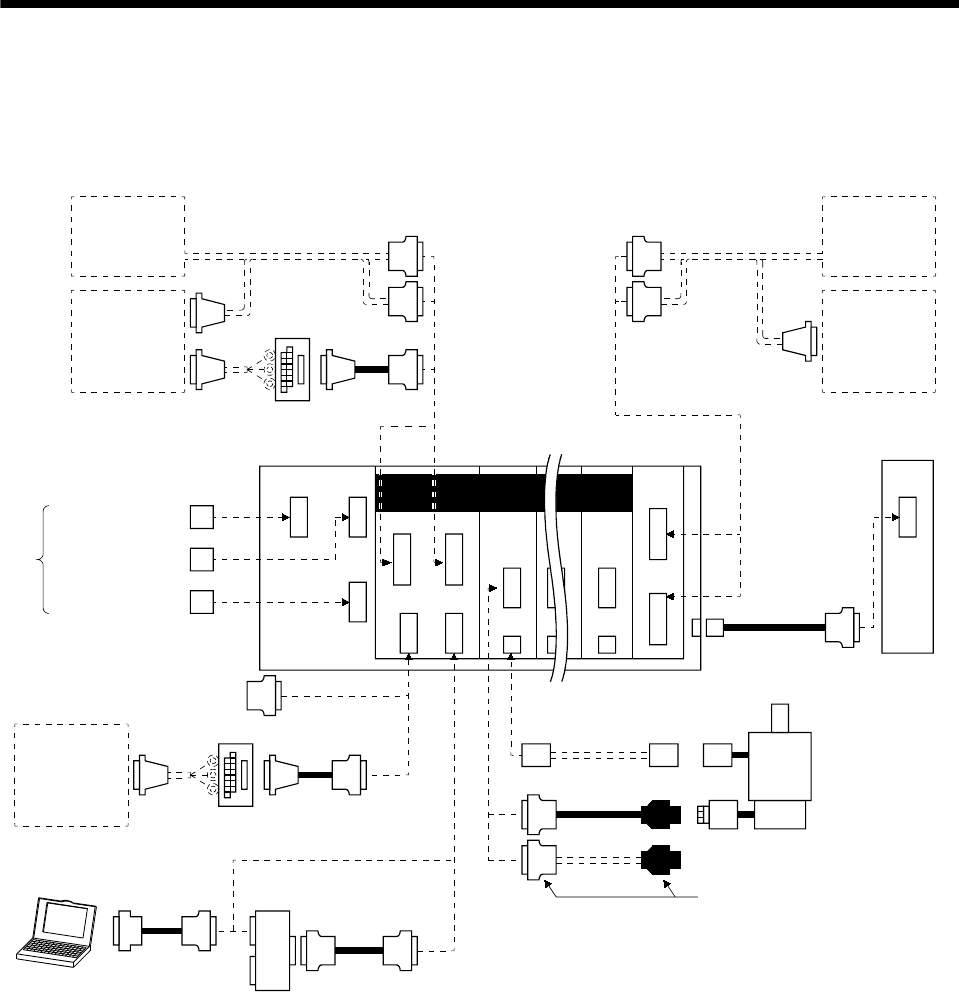
12 - 8
12. OPTIONS AND AUXILIARY EQUIPMENT
12.1.2 Cables and connectors
(1) Cable make-up
The following cables are used for connection with the servo motor and other models.
The broken line areas in the diagram are not options.
HC-KFS
HC-MFS
HC-UFS 3000r/min
CN3
CN1A CN1B
CN3
CN2
CNP2
CN2
CNP2
CN4A
CN4B
BU IFU DRUDRU
CON5
CN5
‡N
‡L
Operation
panel
Programmable
controller
Operation
panel
Programmable
controller
To regenerative
brake option
To control circuit
power supply
To main circuit
power supply
Personal
computer
CN1C
CNP1A CNP1B
Supplied with interface unit
Programmable
controller
5) 5)
14)
16)
12)
13)
10) 9) 10)
1) 2)
4)
6)
7)
8)
15)
17)
Battery unit
MR-J2M-BT
Inhancin IO unit
MR-J2M-D01
3)
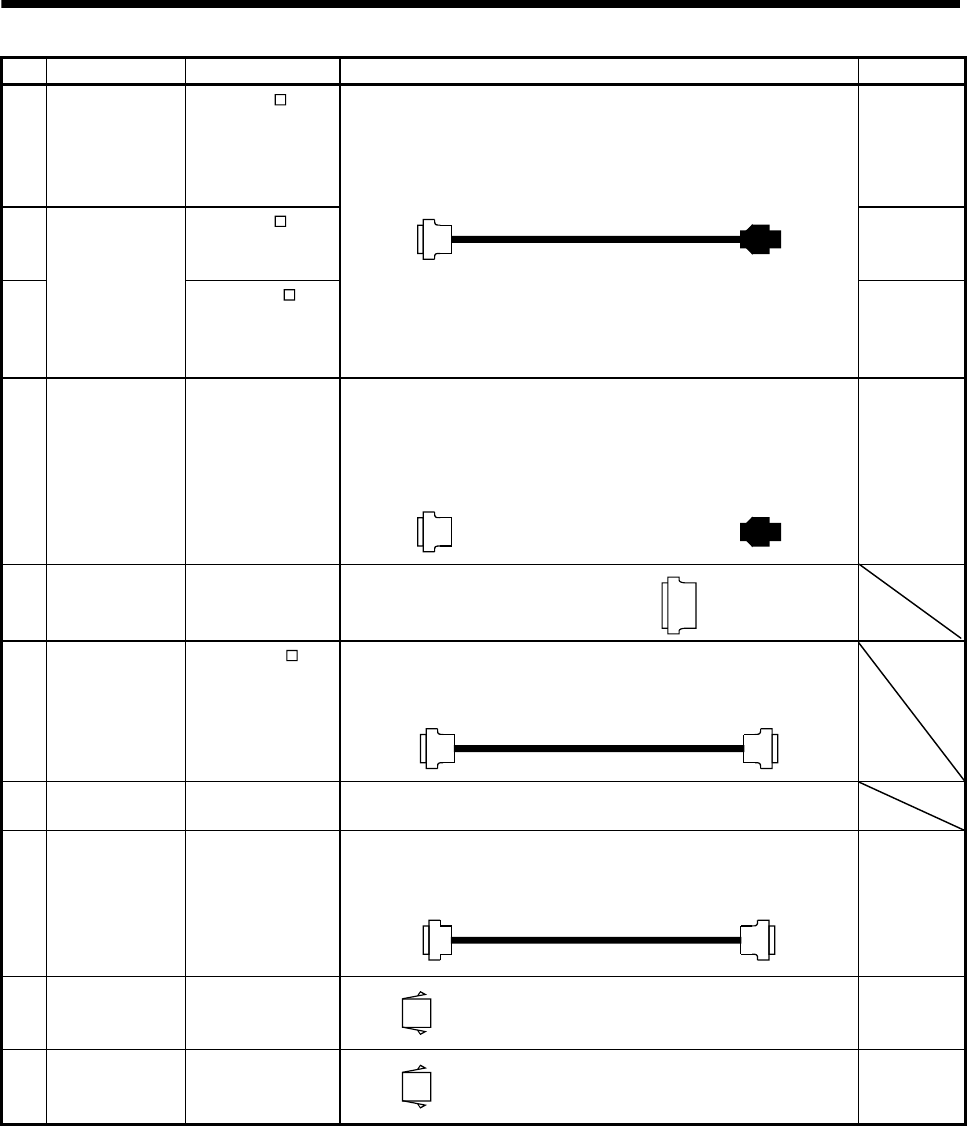
12 - 9
12. OPTIONS AND AUXILIARY EQUIPMENT
No. Product Model Description Application
1) Standard encoder
cable
MR-JCCBL M-L
Refer to (2) (a) in
this section.
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
(3M or equivalent)
Housing: 1-172161-9
Pin: 170359-1
(Tyco Electronics or equivalent)
Cable clamp: MTI-0002
(Toa Electric Industry)
Standard
flexing life
IP20
2) MR-JCCBL M-H
Refer to (2) (a) in
this section.
Long flexing
life
IP20
3)
Long flexing life
encoder cable
MR-JC4CBL M-H
Refer to (2) (b) in
this section.
4 line type
Long flexing
life
IP20
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
(3M or equivalent)
Housing: 1-172161-9
Pin: 170359-1
(Tyco Electronics or equivalent)
Cable clamp: MTI-0002
(Toa Electric Industry)
4) Encoder
connector set
MR-J2CNM IP20
5) Connector set MR-J2MCN1 Connector: 10150-3000VE
Shell kit: 10350-52F0-008
(3M or equivalent) Qty: 2 each
Connector: 10120-6000EL
Shell kit: 10320-3210-000
(3M or equivalent)
Connector: 10120-6000EL
Shell kit: 10320-3210-000
(3M or equivalent)
6) Bus cable MR-J2HBUS M
Refer to section
12.1.4 (4).
7) Maintenance
junction card
MR-J2CN3TM Refer to Section 12.1.4.
Connector: DE-9SF-N
Case: DE-C1-J6-S6
(Japan Aviation Electronics)
Connector: 10120-6000EL
Shell kit: 10320-3210-000
(3M or equivalent)
8) Communication
cable
MR-CPCATCBL3M
Refer to (3) in this
section.
For
connection
with PC-AT-
compatible
personal
computer
9) Power supply
connector set
MR-PWCNK1 Plug: 5559-04P-210
Terminal: 5558PBT3L (For AWG16)(6 pcs.)
(Molex)
IP20
10) Power supply
connector set
MR-PWCNK2 Plug: 5559-06P-210
Terminal: 5558PBT3L (For AWG16)(8 pcs.)
(Molex)
For motor
with brake
IP20
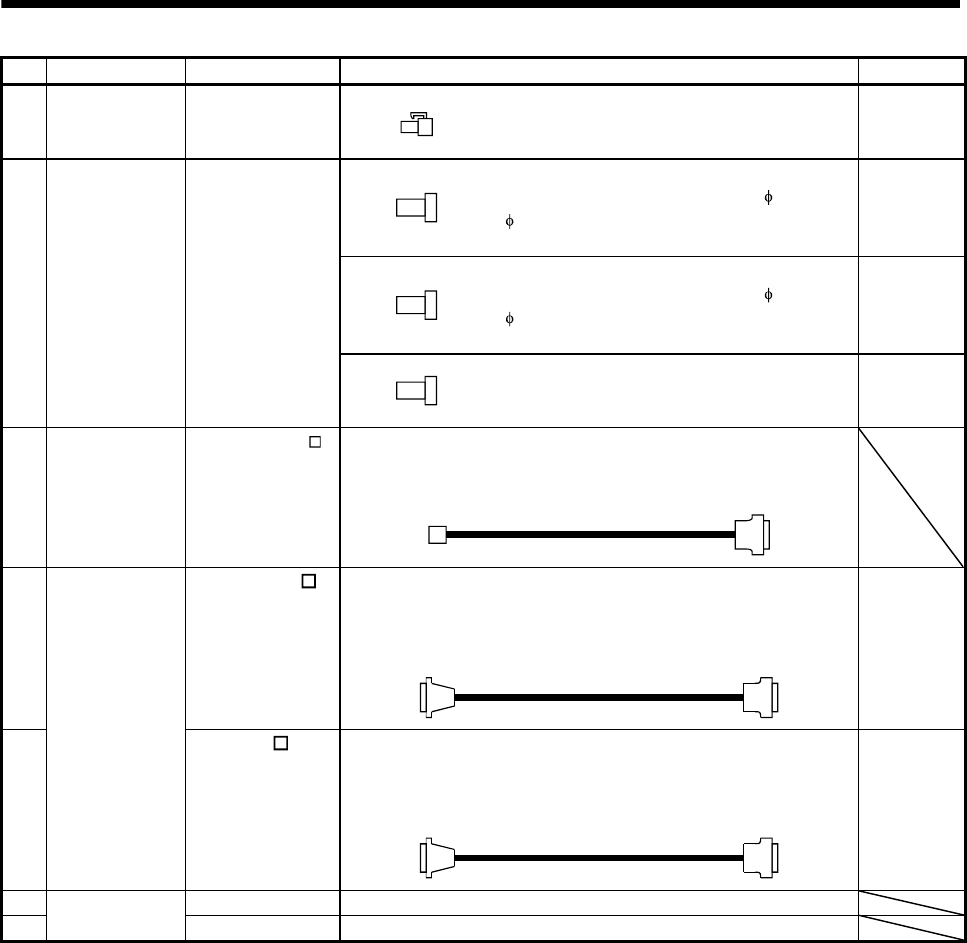
12 - 10
12. OPTIONS AND AUXILIARY EQUIPMENT
No. Product Model Description Application
11) Power supply
connector
MR-PWCNK3 Plug: 5557-04R-210
Terminal: 5556PBT3L (for AWG16) (6 pcs.)
(Molex)
Servo motor
power cable
Y
Housing: 2-178128-3 (5 pcs.)
Contact: 917511-2 (max. sheath OD 2.8 [mm]
( 0.11[in]) 15 pcs.)
(Tyco Electronics)
For CNP1B
X
Housing: 1-178128-3 (5 pcs.)
Contact: 917511-2 (max. sheath OD 2.8 [mm]
( 0.11[in]) 15 pcs.)
(Tyco Electronics)
For CNP1A
12) Base unit
connector set
MR-J2MCNM
Housing: 1-179958-3 (5 pcs.)
Contact: 316041-2 (20 pcs.)
(Tyco Electronics)
For CNP3
Housing: 51030-0230
Terminal: 50083-8160
(molex)
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
(3M or equivalent)
13) Battery cable MR-J2MBTCBL M
Junction terminal block connector
(3M)
D7950-B500FL (connector)
Interface unit connector
(3M or equivalent)
10150-6000EL(connector)
10350-3210-000(shell kit)
14) MR-J2M-CN1TBL M
Cable length
0.5, 1m
(1.64, 3.28ft)
For MR-TB50
Junction terminal block connector
(3M)
D7920-B500FL (connector)
Interface unit connector
(3M or equivalent)
10120-6000EL(connector)
10320-52F0-F08-M1A(shell kit)
15)
Junction terminal
block cable
MR-J2TBL M-1A
Cable length
0.5, 1m
(1.64, 3.28ft)
For MR-TB20
16) MR-TB50 Refer to Section 12.1.3
17)
Junction terminal
MR-TB20 Refer to Section 12.1.4
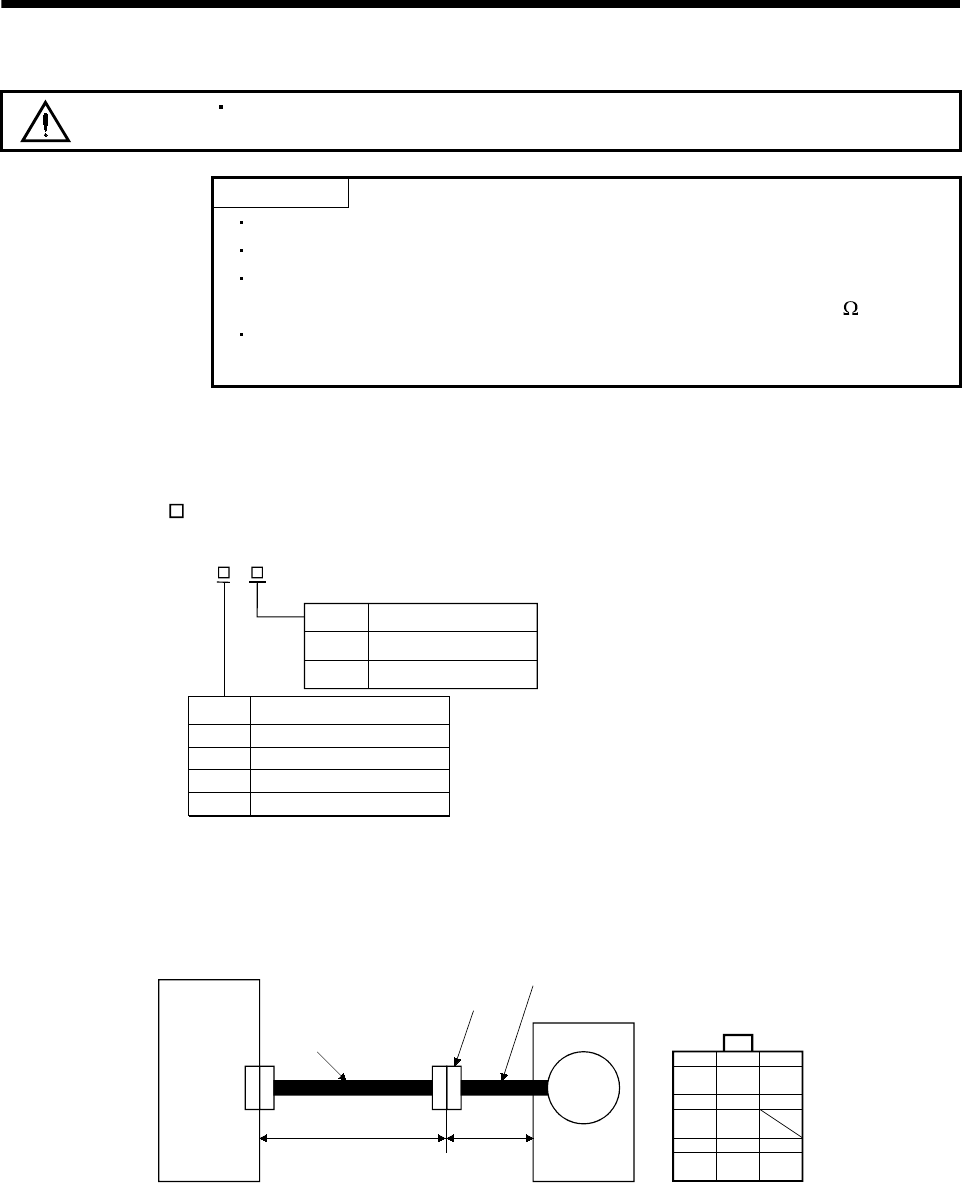
12 - 11
12. OPTIONS AND AUXILIARY EQUIPMENT
(2) Encoder cable
CAUTION If you have fabricated the encoder cable, connect it correctly.
Otherwise, misoperation or explosion may occur.
POINT
The encoder cable is not oil resistant.
Refer to Section 11.4 for the flexing life of the encoder cable.
When the encoder cable is used, the sum of the resistance values of the
cable used for P5 and the cable used for LG should be within 2.4 .
When soldering the wire to the connector pin, insulate and protect the
connection portion using heat-shrinkable tubing.
Generally use the encoder cable available as our options. If the required length is not found in the
options, fabricate the cable on the customer side.
(a) MR-JCCBL M-L/H
1) Model explanation
L
H
2
5
10
20
2 (6.56)
5 (16.4)
10 (32.8)
20 (65.6)
Symbol Specifications
Standard flexing life
Long flexing life
Symbol Cable length [m(ft)]
Model: MR-JCCBL M-
2) Connection diagram
The signal assignment of the encoder connector is as viewed from the pin side. For the pin
assignment on the drive unit side, refer to Section 3.5.3
CN2
30cm
(0.98ft)
Drive unit
Encoder connector
Encoder cable
supplied to servo motor
Servo motor
Encoder
Encoder cable
(option or fabricated)
123
456
789
MR MRR BAT
MD MDR
P5 LG SHD
Encoder connecto
r
1-172169-9
(Tyco Electronics)
Less than 30m(98ft)
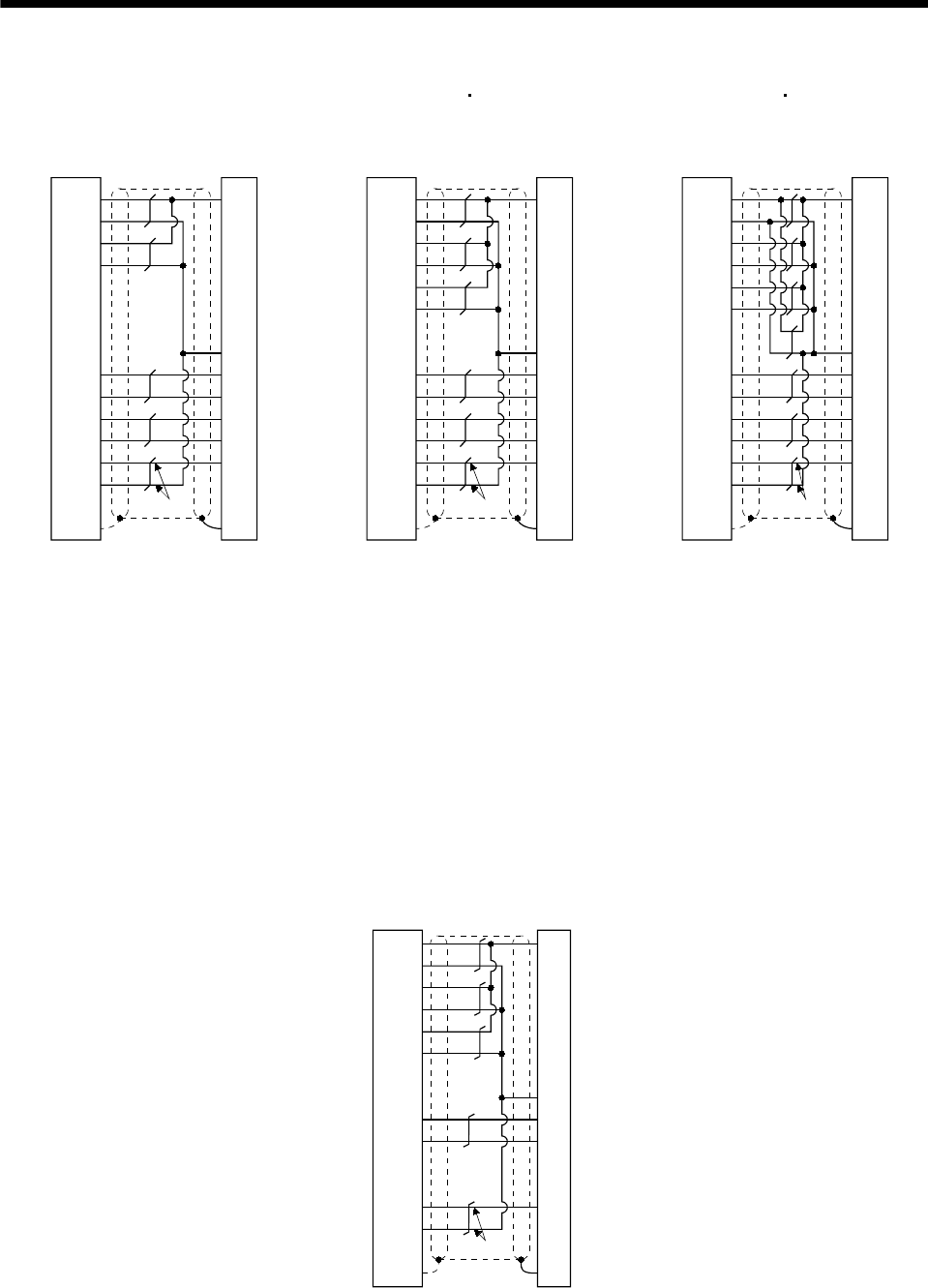
12 - 12
12. OPTIONS AND AUXILIARY EQUIPMENT
P5
LG
P5
LG
19
11
20
12
2
MR
MRR
7
17
MDR 16 5
3
7
4
18P5
LG
MD 6
LG 1
BAT 9
SD
1
2
8
9
P5
LG
P5
LG
19
11
20
12
2
MR
MRR
7
17
MDR 16 5
3
7
4
MR-JCCBL2M-L
MR-JCCBL5M-L
MR-JCCBL2M-H
MR-JCCBL5M-H
18
P5
LG
MD 6
LG 1
BAT 9
SD
1
2
8
9
P5
LG
P5
LG
19
11
20
12
2
MR
MRR
7
17
MDR 16 5
3
7
4
18P5
LG
MD 6
LG 1
BAT 9
SD
1
2
8
9
Drive unit side Encoder side
Plate
Drive unit side Encoder side
Plate
Drive unit side Encoder side
Plate
(Note) (Note) (Note)
Note. Always make connection for use in an absolute position detection system.
This wiring is not needed for use in an incremental system.
MR-JCCBL10M-L
MR-JCCBL20M-L
MR-JCCBL10M-H
MR-JCCBL20M-H
When fabricating an encoder cable, use the recommended wires given in Section 12.2.1 and the
MR-J2CNM connector set for encoder cable fabrication, and fabricate an encoder cable as shown
in the following wiring diagram. Referring to this wiring diagram, you can fabricate an encoder
cable of less than 30m(98ft) length including the length of the encoder cable supplied to the servo
motor.
When the encoder cable is to be fabricated by the customer, the wiring of MD and MDR is not
required.
Refer to Chapter 3 of the servo motor instruction manual and choose the encode side connector
according to the servo motor installation environment.
Note. Always make connection for use in an absolute position detection system.
This wiring is not needed for use in an incremental system.
19
11
20
12
18
2
P5
LG
P5
LG
P5
LG
7
17
9
1
MR
MRR
BAT
LG
SD
8
1
2
3
7
9
For use of AWG22
Drive unit side Encoder side
Plate
(Note)
(3M)
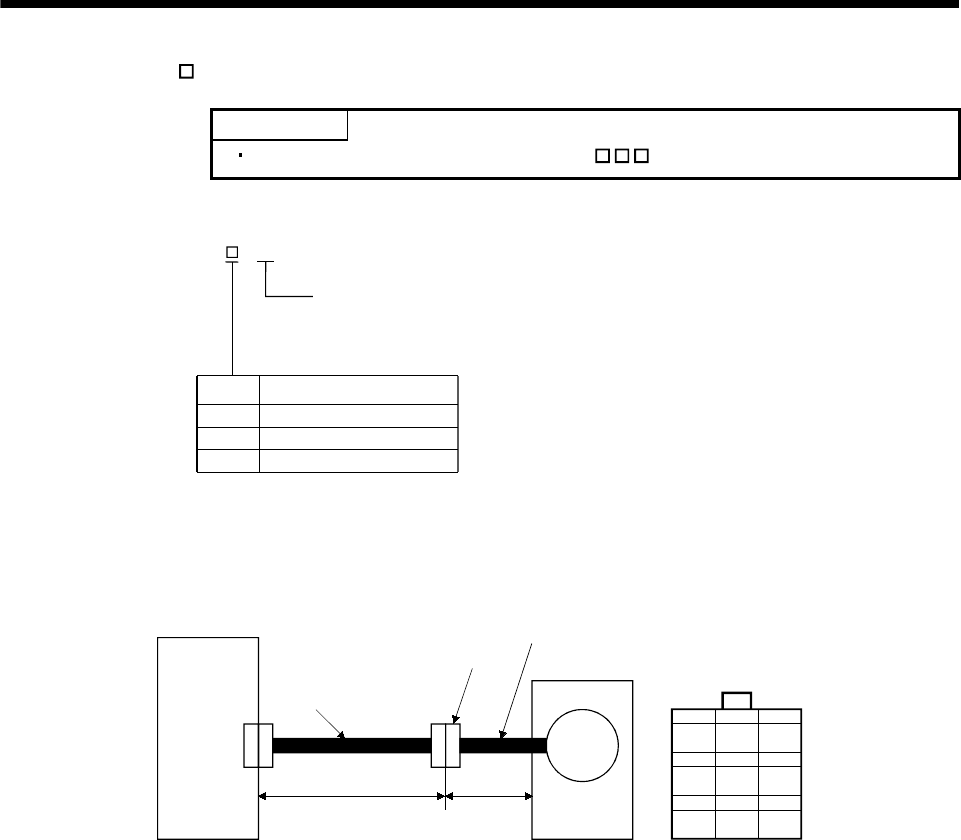
12 - 13
12. OPTIONS AND AUXILIARY EQUIPMENT
(b) MR-JC4CBL M-H
POINT
When using this encoder cable, set "1 " in DRU parameter No. 20.
1) Model explanation
Model: MR-JC4CBL M- H
30 30 (98.4)
40
50
40 (131.2)
50 (164.0)
Long flexing life
Symbol Cable length [m(ft)]
2) Connection diagram
The signal assignment of the encoder connector is as viewed from the pin side. For the pin
assignment on the drive unit side, refer to Section 3.5.3.
CN2
30cm
(0.98ft)
Drive unit
Encoder connector
Encoder cable
supplied to servo motor
Servo motor
Encoder
Encoder cable
(option or fabricated)
123
456
789
MR MRR BAT
MD MDR
P5 LG SHD
Encoder connector
1-172169-9
(Tyco Electronics)
50m(164ft) max. CNT

12 - 14
12. OPTIONS AND AUXILIARY EQUIPMENT
Note. Always make connection for use in an absolute position detection system.
This wiring is not needed for use in an incremental system.
P5
LG
P5
LG
19
11
20
12
2
MR
MRR
7
17
MDR 16 5
3
7
4
18P5
LG
MD 6
LG 1
BAT 9
SD
1
2
8
9
Drive unit side Encoder side
Plate
(Note)
MR-JC4CBL30M-H
to
MR-JC4CBL50M-H
When fabricating an encoder cable, use the recommended wires given in Section 12.2.1 and the
MR-J2CNM connector set for encoder cable fabrication, and fabricate an encoder cable as shown
in the following wiring diagram. Referring to this wiring diagram, you can fabricate an encoder
cable of up to 50m(164.0ft) length.
When the encoder cable is to be fabricated by the customer, the wiring of MD and MDR is not
required.
Refer to Chapter 3 of the servo motor instruction manual and choose the encode side connector
according to the servo motor installation environment.
Note. Always make connection for use in an absolute position detection system.
This wiring is not needed for use in an incremental system.
19
11
20
12
18
2
P5
LG
P5
LG
P5
LG
7
17
9
1
MR
MRR
BAT
LG
SD
8
1
2
3
7
9
For use of AWG22
Drive unit side Encoder side
Plate
(Note)
(3M)
6
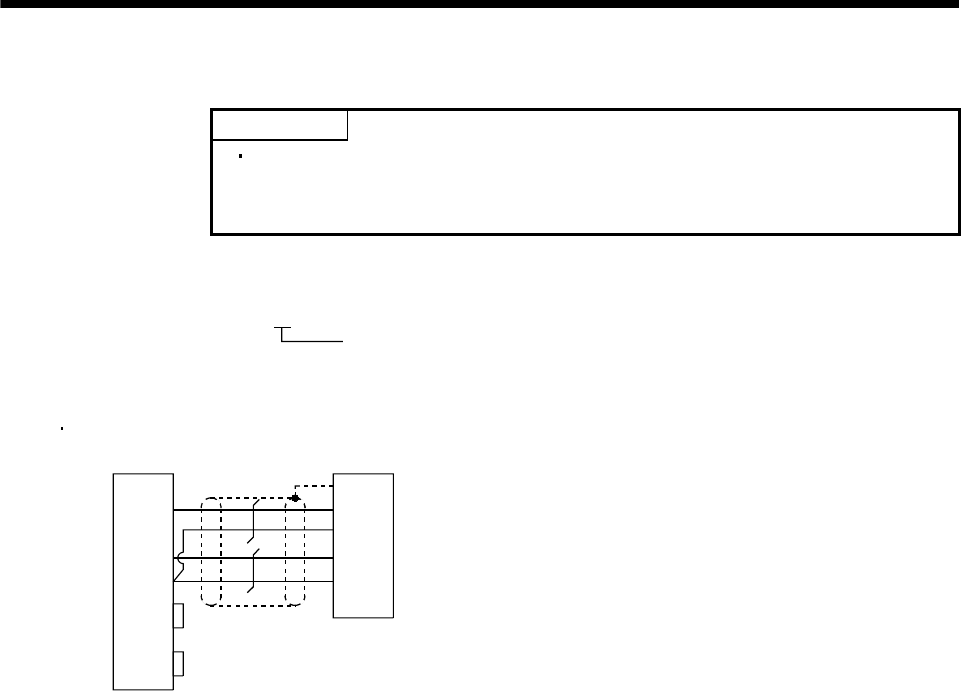
12 - 15
12. OPTIONS AND AUXILIARY EQUIPMENT
(3) Communication cable
POINT
This cable may not be used with some personal computers. After fully
examining the signals of the RS-232C connector, refer to this section and
fabricate the cable.
(a) Model definition
Model : MR-CPCATCBL3M
Cable length 3[m](10[ft])
(b) Connection diagram
Half-pitch 20 pins
D-SUB9 pins
3
2
5
7
8
6
4
TXD
RXD
GND
RTS
CTS
DSR
DTR
FG
RXD
LG
TXD
LG
Interface unit side
Plate
2
1
12
11
Personal computer side
MR-CPCATCBL3M
When fabricating the cable, refer to the connection diagram in this section.
The following must be observed in fabrication:
1) Always use a shielded, multi-core cable and connect the shield with FG securely.
2) The optional communication cable is 3m(10ft) long. When the cable is fabricated, its maximum
length is 15m(49ft) in offices of good environment with minimal noise.
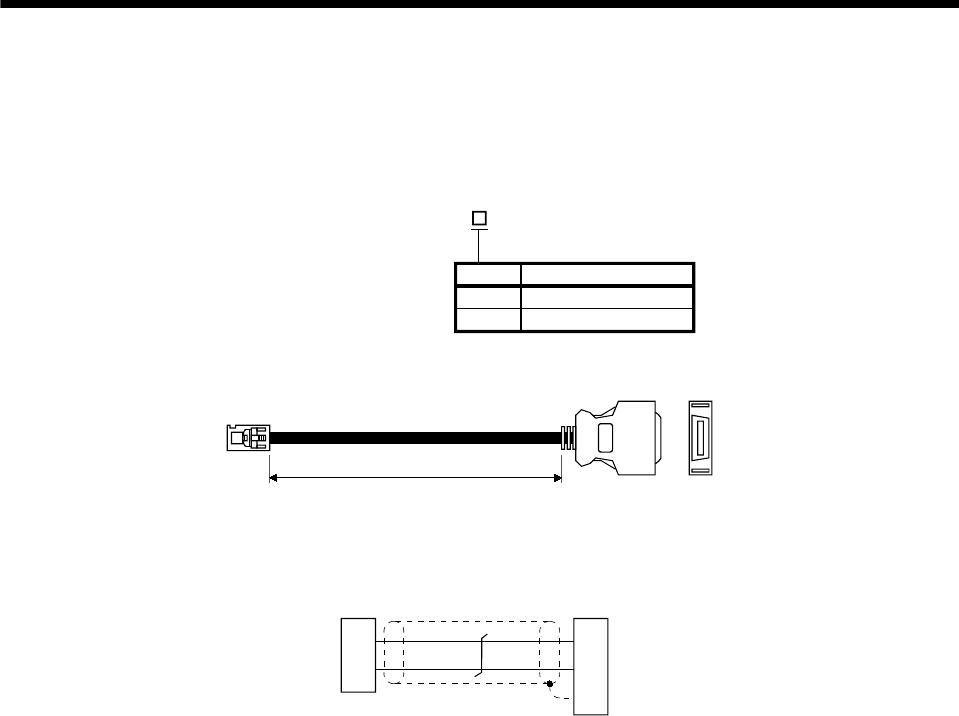
12 - 16
12. OPTIONS AND AUXILIARY EQUIPMENT
(4) Battery cable
When fabricating, use the recommended wire given in Section 12.2.1 and fabricate as in the
connection diagram shown in this section.
(a) Definition of model
Model: MR-J2MBTCBL M
Symbol Cable Length L [m(ft)]
0.3 (0.1)
1 (3.28)
03
1
(b) Outline drawing
L
110
2011
(c) Connection diagram
11
2
LG
BAT
LG
BAT
SD
Base unit side
Housing: 51030-0230
Terminal: 50083-8160
Battery unit side
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
Plate
9
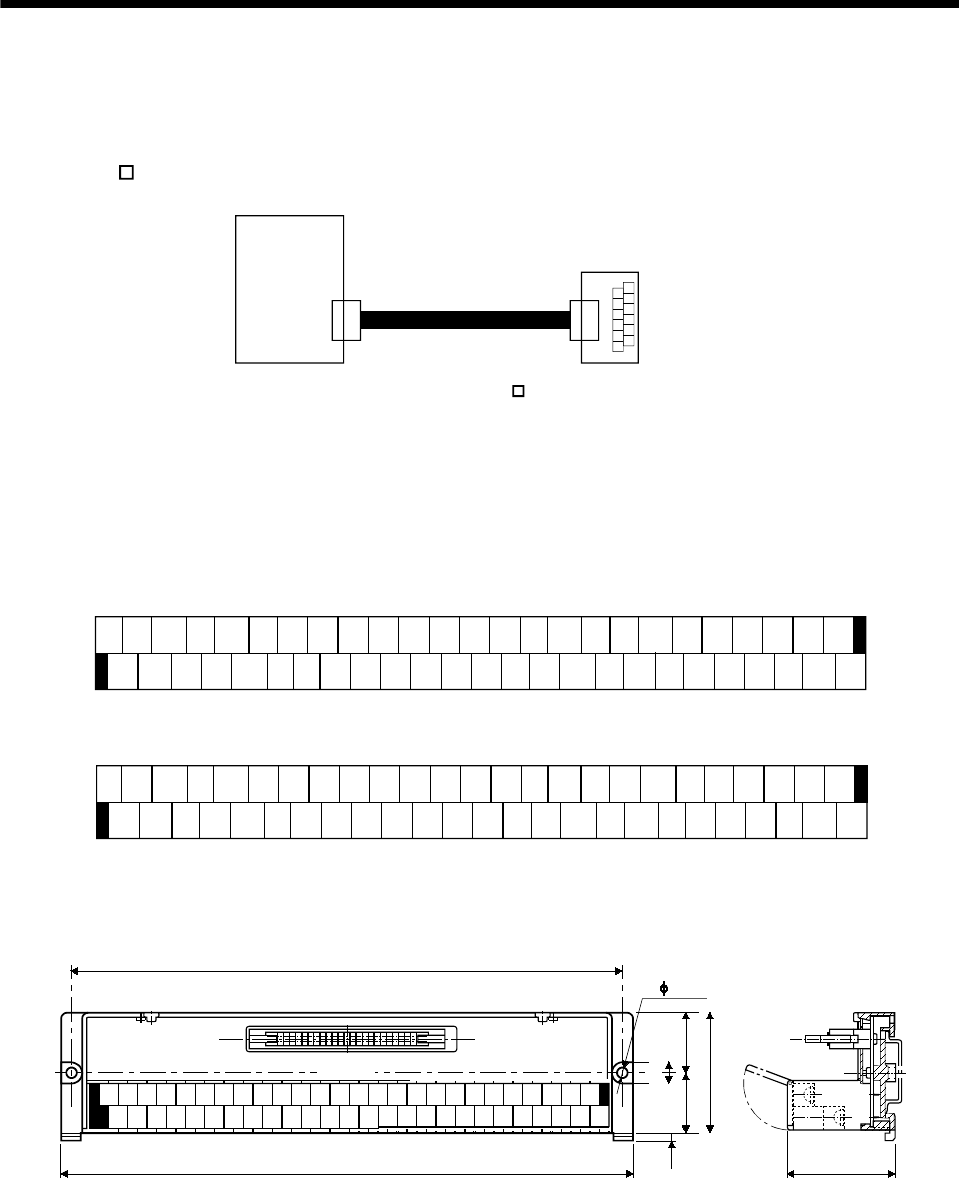
12 - 17
12. OPTIONS AND AUXILIARY EQUIPMENT
12.1.3 Junction terminal block (MR-TB50)
(1) How to use the junction terminal block
Always use the junction terminal block (MR-TB50) with the junction terminal block cable (MR-J2M-
CN1TBL M) as a set. A connection example is shown below:
CN1A
or
CN1B
Junction terminal bloc
k
MR-TB50
Junction terminal
block cable
(MR-J2M-CN1TBL M)
Interface unit
Ground the junction terminal block cable on the junction terminal block side with the standard
accessory cable clamp fitting (AERSBAN-ESET). For the use of the cable clamp fitting, refer to Section
12.2.6, (2)(c).
(2) Terminal labels
Use the following junction terminal block labels.
(a) For CN1A
INP4
SG SON4 OP_
VIN
CR3 RES2 RD1 PP4 PP3 PP2 PP1 LG OP3 OP1 CR4 RES3 RD2 NG2 NG1
ALM
_A P5
INP1SON1 NG4 NG3
OPC RES4 RD3 SON2INP2 CR1 NP4 NP3 NP2 OP4NP1 OP2 VIN RD4 SON3 CR2
INP3 RES1 PG4 PG3 PG2 LG OP_
COM
PG1
(b) For CN1B
OPC
SG INP8 CR7 RES6 RD5 PP8 PP7 PP6 PP5 LG OP7 OP5 ALM
_B CR8 RES7 RD6 INP5 SON5 NG8 NG7 NG6 NG5 OP_
VIN P5
RES8 RD7 INP6 SON6 CR5 NP8 NP7 NP6 NP5 OP8 OP6 VIN RD8 INP7 SON7 CR6 RES5 PG8 PG7 PG6 PG5 LG OP_
COM
SON8
(3) Outline drawing
235(9.25)
9
2
1
50
49
MITSUBISHI
MR-TB50
244(9.61)
2.5
50
25 (25)
46.5(1.83)
Terminal screw: M3.5
Applicable cable: 2mm
Crimping terminal width: 7.2mm (0.283 in) max.
2
(0.35)
(1.97)
(0.98)(0.98)
(0.09)
[Unit: mm]
([Unit: in.])
2- 4.5(0.18)
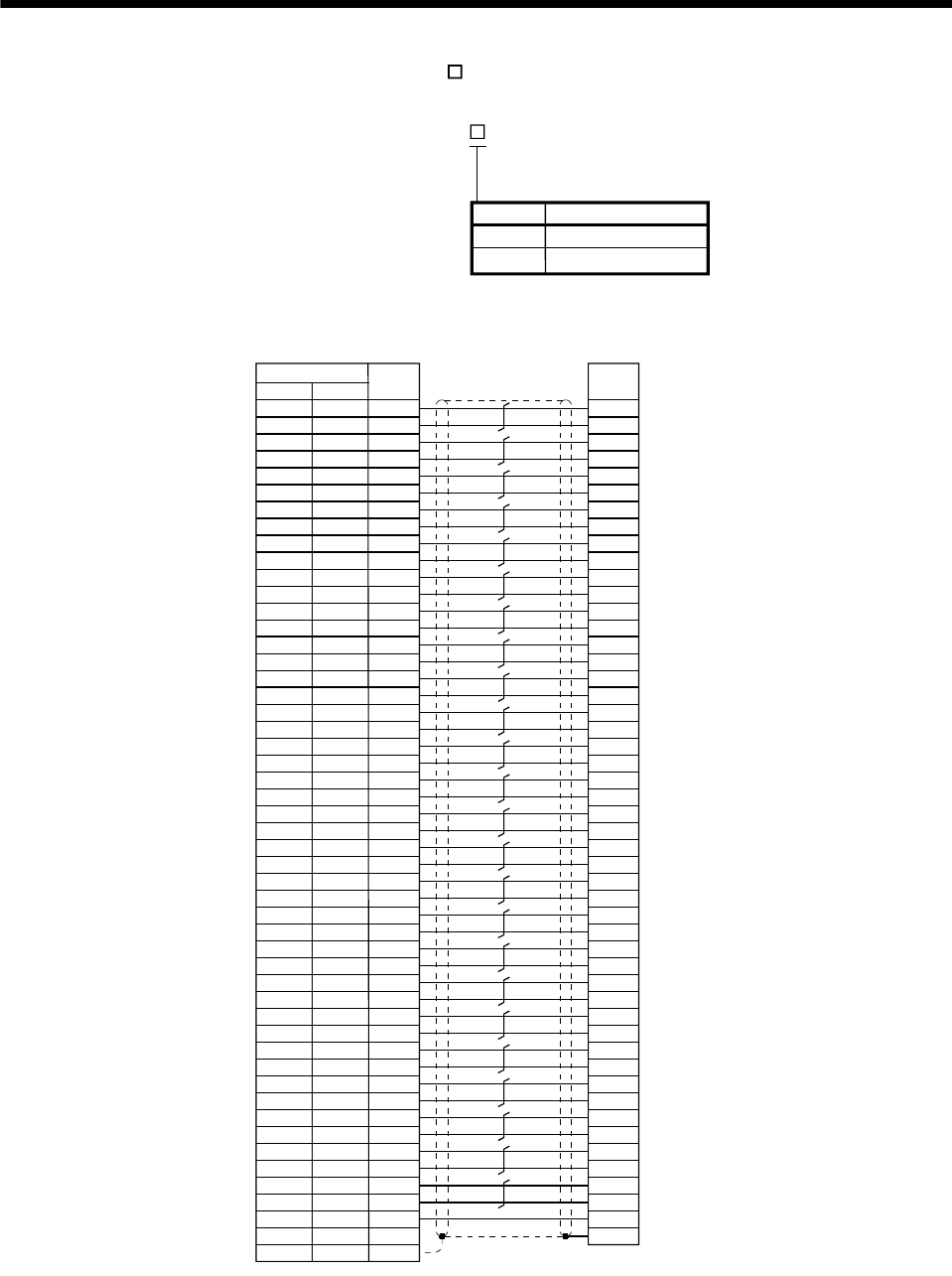
12 - 18
12. OPTIONS AND AUXILIARY EQUIPMENT
(4) Junction terminal block cable (MR-J2M-CN1TBL M)
(a) Model explanation
Cable length[m(ft)]Symbol
05
1
0.5 (1.64)
1 (3.28)
Model: MR-J2M-CN1TBL M
(b) Connection diagram
SDSD
CN1A CN1B
SGSG 1
OPCOPC 2
INP8INP4 3
RES8RES4 4
SON8SON4 5
RD7RD3 6
CR7CR3 7
INP6INP2 8
RES6RES2 9
SON6SON2 10
RD5RD1 11
CR5CR1 12
PP8PP4 13
NP8NP4 14
PP7PP3 15
NP7NP3 16
PP6PP2 17
NP6NP2 18
PP5PP1 19
NP5NP1 20
LGLG
OP8OP4
OP7OP3
OP6OP2
OP5OP1
VINVIN
ALM_BALM_A
RD8RD4
CR8CR4
INP7INP3
RES7RES3
SON7SON3
RD6RD2
CR6CR2
INP5INP1
RES5RES1
SON5SON1
PG8PG4
NG8NG4
PG7PG3
NG7NG3
PG6PG2
NG6NG2
PG5PG1
NG5NG1
LGLG
P5P5
LGLG
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
PCR-S50FS(Servo amplifier side) JE1S-501(Junction terminal side)
Symbol Pin No. Pin No.
plate
OP_VIN OP_VIN
OP_COM OP_COM
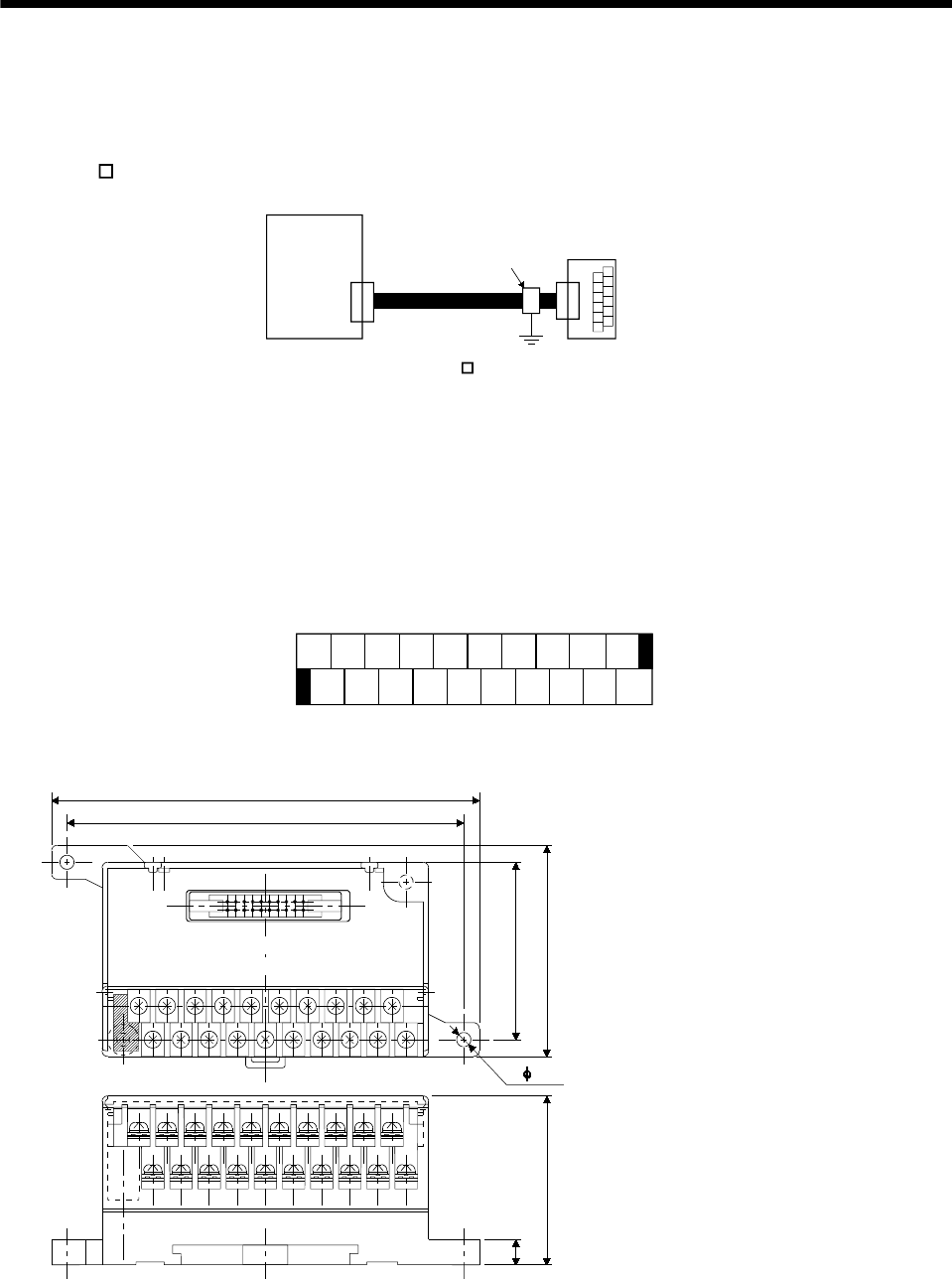
12 - 19
12. OPTIONS AND AUXILIARY EQUIPMENT
12.1.4 Junction terminal block (MR-TB20)
(1) How to use the junction terminal block
Always use the junction terminal block (MR-TB20) with the junction terminal block cable (MR-
J2TBL M-1A) as a set. A connection example is shown below:
CN5
Servo amplifier
Junction terminal bloc
k
MR-TB20
Cable clamp
(AERSBAN-ESET)
Junction terminal
block cable
(MR-J2TBL M-1A)
Ground the junction terminal block cable on the junction terminal block side with the standard
accessory cable clamp fitting (AERSBAN-ESET). For the use of the cable clamp fitting, refer to Section
13.2.6, (2)(c).
(2) Terminal labels
Use the following junction terminal block label designed for CN5. When changing the input signals in
parameters No. 43 to 48, refer to (4) in this section and Section 3.2.1 and apply the accessory signal
seals to the labels.
LSP1 LSP3LSP2 LSP4 LSN4 LSN5 LSN6 LSN7 LSN8
10
11
12
13
14
15
16
17
18
19
LSN1 LSN2 SG LSP5 LSP6 LSP7 EMG_B SDLSN3
0
1
2
3
4
5
6
7
8
9
LSP8
EMG_A
(3) Outline drawing
60(2.36)
50(1.97)
117(4.61)
126(4.96)
46.2(1.82)
7
MITSUBISHI
MR-TB20
[Unit: mm]
([Unit: in.])
Terminal screw: M3.5
Applicable cable: Max. 2mm
(Crimping terminal width: 7.2mm (0.283 in) max.)
2
2- 4.5(0.18)
(0.28)
10 19
09
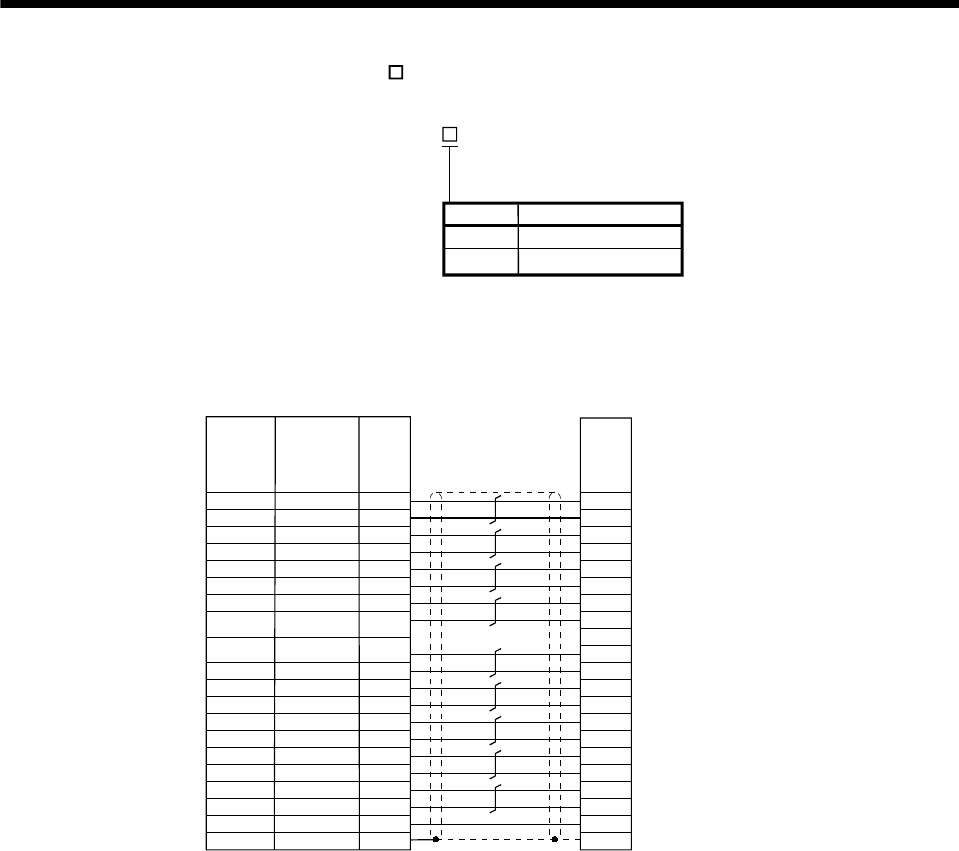
12 - 20
12. OPTIONS AND AUXILIARY EQUIPMENT
(4) Junction terminal block cable (MR-J2TBL M-1A)
(a) Model explanation
Cable length[m(ft)]Symbol
05
1
0.5 (1.64)
1 (3.28)
Model: MR-J2TBL M-1A
(b) Connection diagram
20
LSP1 0 1
LSN1 10 2
LSP2 1 3
LSN2 11 4
LSP3 2 5
LSN3 12 6
LSP4 3 7
SG 13 8
LSN4 4 9
LSP5 14 10
LSN5 5 11
LSP6 12
LSN6 13
LSP7 14
LSN7 15
LSP8 16
LSN8 17
EMG_B 18
EMG_A 19
SD 19
15
6
16
7
17
8
18
9
19
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
20
Junction terminal block side connector(3M)
D7920-B500FL(Connector)
Servo amplifierside(CN5)connector(3M
)
10120-6000EL(Connector)
10320-52F0-R08-M1A(Shell kit)
plate
Pin No.
Pin No.
Symbol
CN5
Junction
Terminal
Block No.
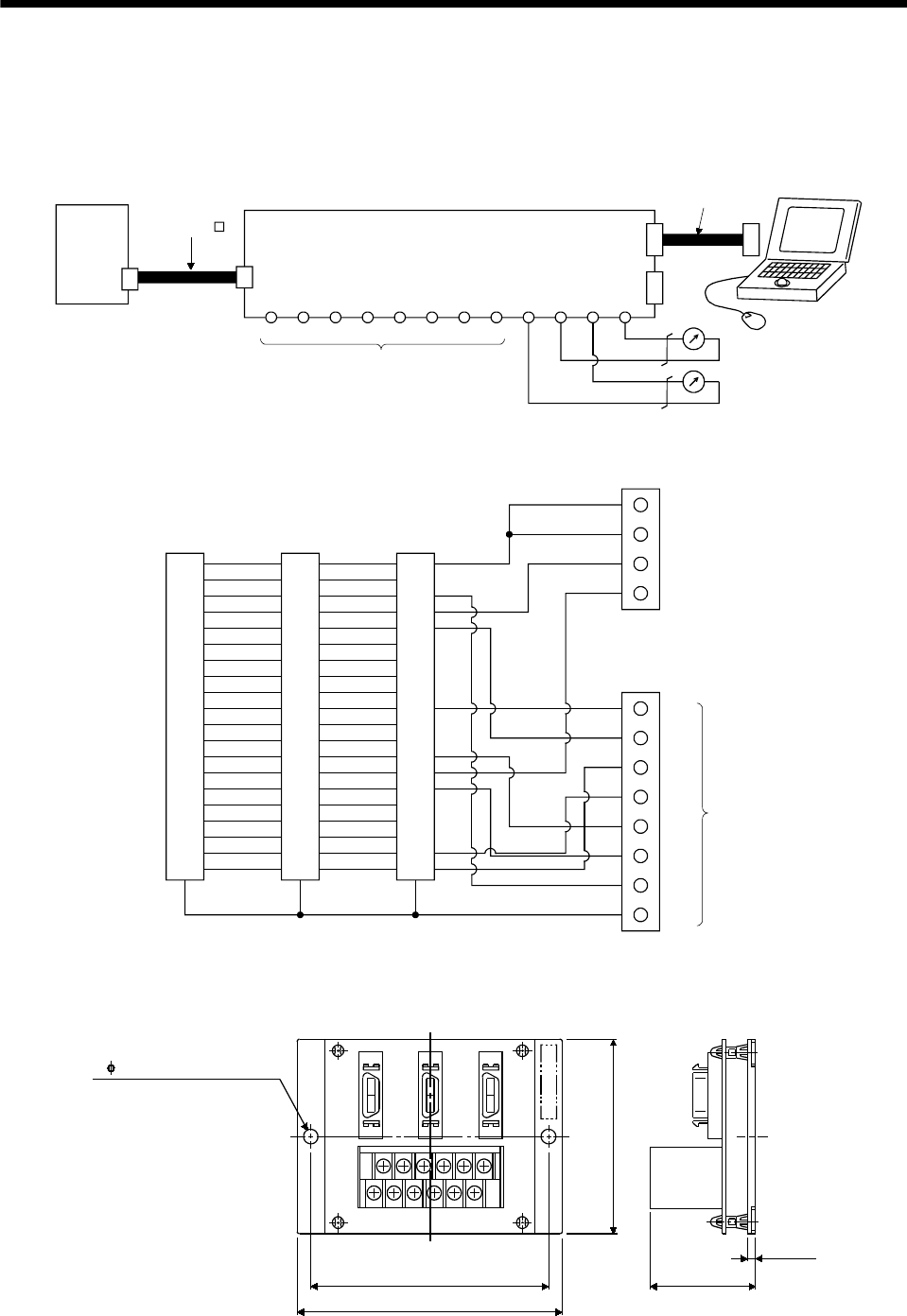
12 - 21
12. OPTIONS AND AUXILIARY EQUIPMENT
12.1.5 Maintenance junction card (MR-J2CN3TM)
(1) Usage
The maintenance junction card (MR-J2CN3TM) is designed for use when a personal computer and
analog monitor are used at the same time.
TRE
CN3B
CN3C
CN3A
CN3
P5 PELG
A1 A2 A3 A4 B4 B3 B2 B1 B5 B6 A5 A6
LG LG MO1 MO2
RDP SDN LG
Interface unit
Bus cable
MR-J2HBUS M
Maintenance junction card (MR-J2CN3TM) Communication cable
Analog monitor 2
Analog monitor 1
Not used.
(2) Connection diagram
2
20
1
3
4
5
6
7
8
9
10
12
11
13
14
15
16
17
18
19
20
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
2
1
3
4
5
6
7
8
9
10
12
11
13
14
15
16
17
18
20
1
3
4
5
10
13
14
15
19
20
B5
B6
A5
A6
A1
A2
A3
A4
B4
B3
B2
B1
19
CN3BCN3A CN3C
LG
LG
MO1
MO2
LG
LG
PE
TE1
LG
RXD
LG
MO3
SDP
LG
TXD
LG
MO2
P5
P5
MO1
RDP
TRE
SDN
TRE
RDP
SDN
Not used.
Shell Shell Shell
(3) Outline drawing
3 (0.12)
41.5 (1.63)
75 (2.95)
88 (3.47)
100 (3.94)
MR-J2CN3TM
CN3A CN3B CN3C
A1
B1
A6
B6
TE1
[Unit: mm]
([Unit: in.])
Mass: 110g (0.24lb)
2- 5.3(0.21)(mounting hole)
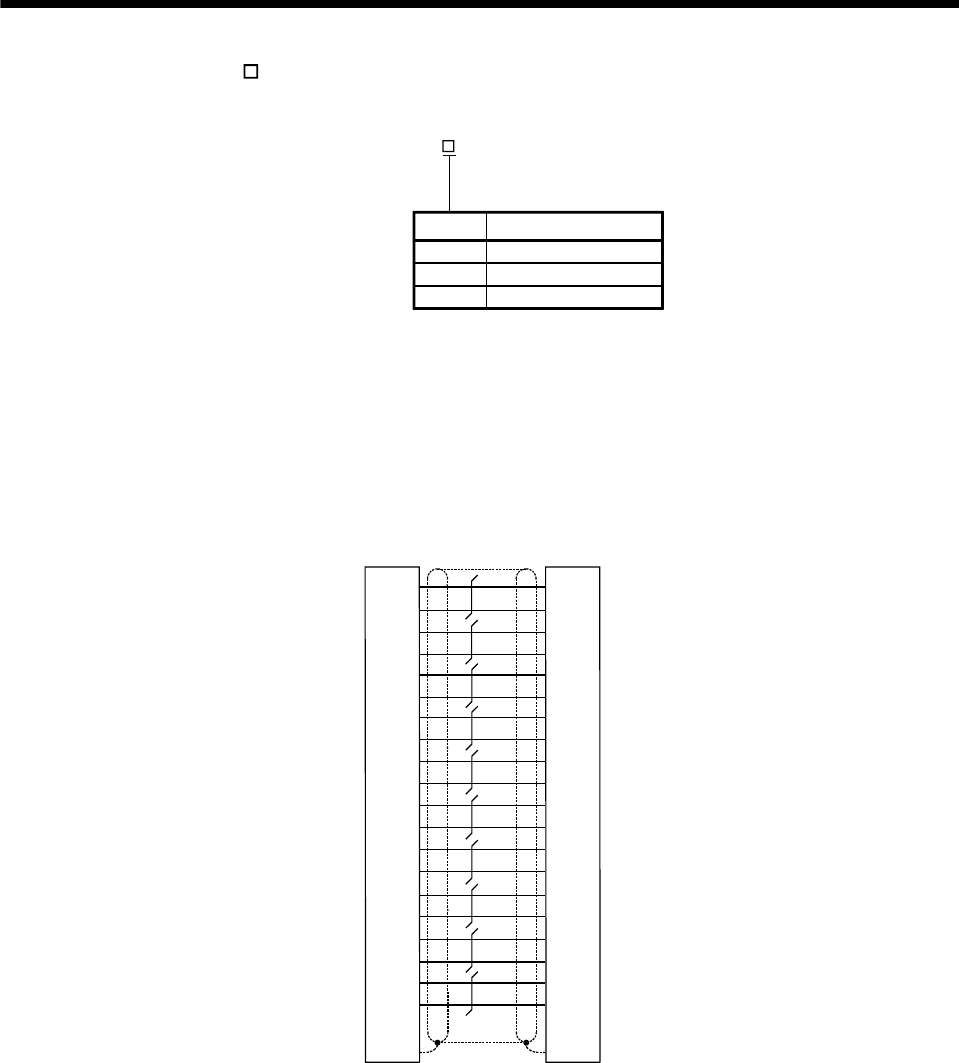
12 - 22
12. OPTIONS AND AUXILIARY EQUIPMENT
(4) Bus cable (MR-J2HBUS M)
(a) Model explanation
05
1
5
0.5 (1.64)
1 (3.28)
5 (16.4)
Symbol Cable length [m(ft)]
Model: MR-J2HBUS M
(b) Connection diagram
10120-6000EL (connector)
10320-3210-000 (shell kit)
1
11
2
12
3
13
4
14
5
15
6
16
7
17
8
18
9
19
10
20
1
11
2
12
3
13
4
14
5
15
6
16
7
17
8
18
9
19
10
20
10120-6000EL (connector)
10320-3210-000 (shell kit)
Plate
Plate
MR-J2HBUS05M
MR-J2HBUS1M
MR-J2HBUS5M
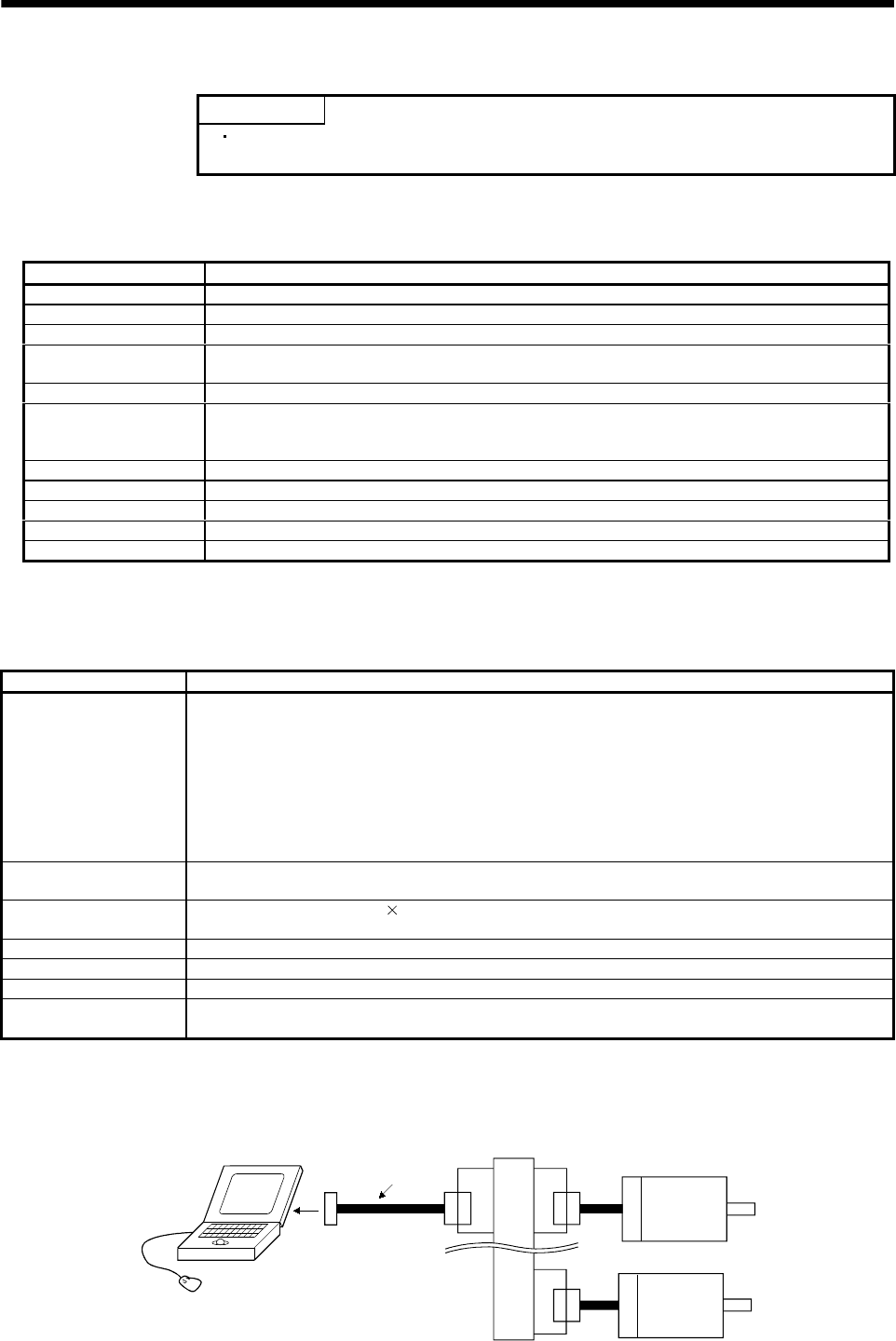
12 - 23
12. OPTIONS AND AUXILIARY EQUIPMENT
12.1.6 MR Configurator (servo configurations software)
POINT
Required to assign devices to the pins of CN4A and CN4B of the MR-
J2M-D01 extension IO unit.
The MR Configurator (servo configuration software) uses the communication function of the interface unit
to perform parameter setting changes, graph display, test operation, etc. on a personal computer.
(1) Specifications
Item Description
Communication signal Conforms to RS-232C.
Baudrate [bps] 57600, 38400, 19200, 9600
System Station selection, automatic demo
Monitor Display, high speed monitor, trend graph
Minimum resolution changes with the processing speed of the personal computer.
Alarm Display, history, amplifier data
Diagnostic
Digital I/O, function device display no motor rotation, total power-on time, amplifier version info,
motor information, tuning data, absolute encoder data, Axis name setting, unit composition
listing.
Parameters Turning, change list, detailed information, IFU parameter, DRU parameter, device setting.
Test operation Jog operation, positioning operation, operation w/o motor, forced output, demo mode.
Advanced function Machine analyzer, gain search, machine simulation.
File operation Data read, save, print
Others Automatic demo, help display
(2) System configuration
(a) Components
To use this software, the following components are required in addition to MELSERVO-J2M and
servo motor:
Model (Note 1) Description
(Note 2)
Personal computer
IBM PC-AT compatible where the English version of Windows® 95, Windows® 98, Windows® Me,
Windows NT® Workstation 4.0 or Windows® 2000 Professional operates
Processor: Pentium® 133MHz or more (Windows® 95, Windows® 98, Windows NT® Workstation 4.0,
Windows® 2000 Professional)
Pentium® 150MHz or more (Windows® Me)
Memory: 16MB or more (Windows® 95), 24MB or more (Windows® 98)
32MB or more (Windows® Me, Windows NT® Workstation 4.0, Windows® 2000 Professional)
Free hard disk space: 60MB or more
Serial port used
OS Windows® 95, Windows® 98, Windows® Me, Windows NT® Workstation 4.0, Windows® 2000
Professional (English version)
Display One whose resolution is 800 600 or more and that can provide a high color (16 bit) display.
Connectable with the above personal computer.
Keyboard Connectable with the above personal computer.
Mouse Connectable with the above personal computer. Note that a serial mouse is not used.
Printer Connectable with the above personal computer.
Communication cable MR-CPCATCBL3M
When this cannot be used, refer to (3) Section 12.1.2 and fabricate.
Note 1. Windows and Windows NT are the registered trademarks of Microsoft Corporation in the United State and other countries.
Pentium is the registered trademarks of Intel Corporation.
2. On some personal computers, this software may not run properly.
(b) Configuration diagram
Personal computer
CN3 CN2
To RS-232C
connector
Communication cable
Servo motor
DRU (First slot)
DRU (Eighth slot)
CN2
IFU BU
Servo motor
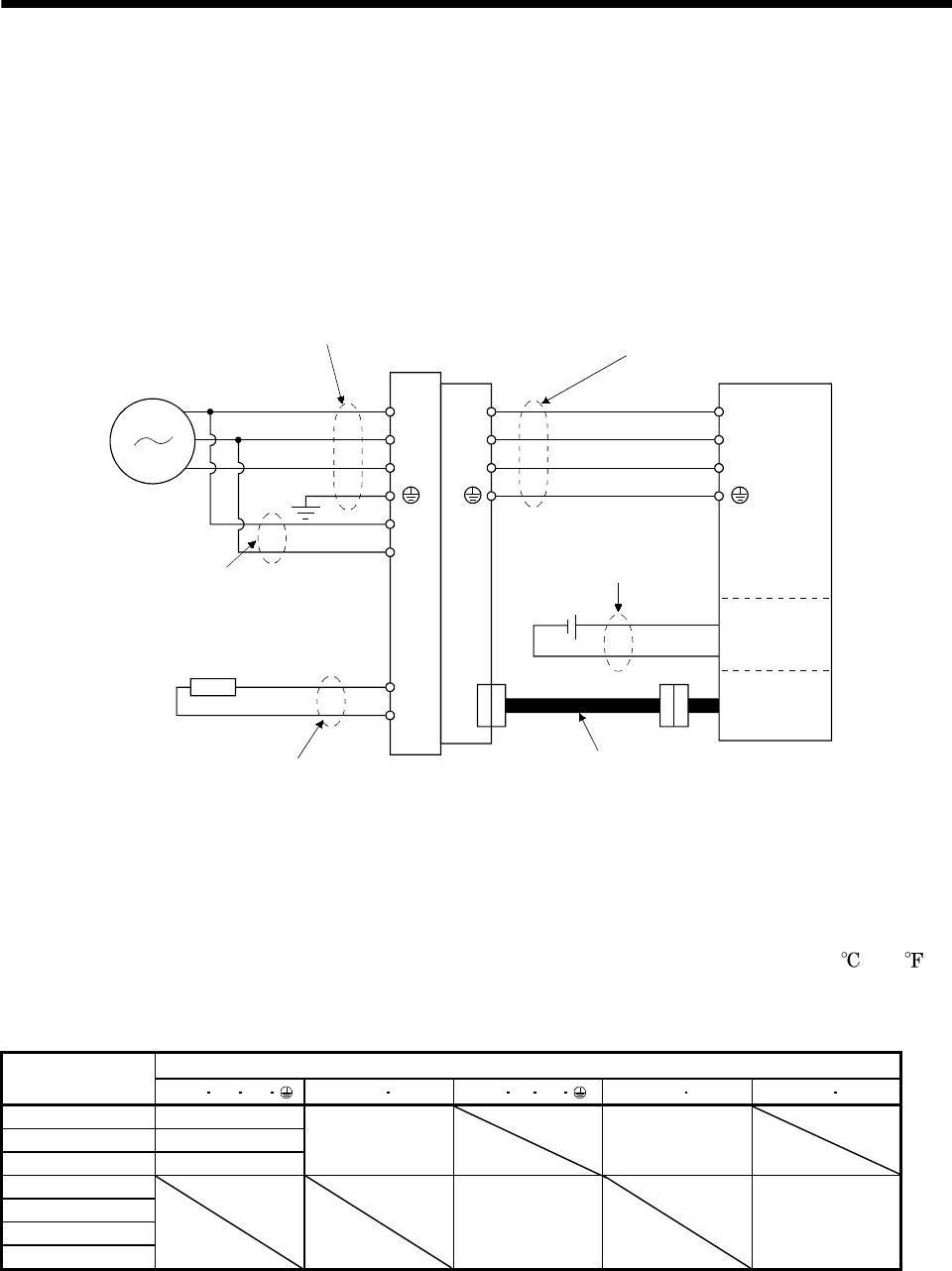
12 - 24
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2 Auxiliary equipment
Always use the devices indicated in this section or equivalent. To comply with the EN Standard or UL/C-
UL (CSA) Standard, use the products which conform to the corresponding standard.
12.2.1 Recommended wires
(1) Wires for power supply wiring
The following diagram shows the wires used for wiring. Use the wires given in this section or
equivalent.
C
P
U
V
W
L11
L21
B1
B2
U
V
W
L1
L2
L3
CN2
1) Main circuit power supply lead
Power supply
3) Motor power supply lead
Servo motor
Encoder cable (refer to Section 12.1.2(2))
4) Regenerative brake option lead
5) Electromagnetic
brake lead
2) Control circuit power supply lead
Regenerative brake option
Motor
Electro-
magnetic
brake
Encoder
Base unit Drive unit
(Earth)
The following table lists wire sizes. The wires used assume that they are 600V vinyl wires and the
wiring distance is 30m(98.4ft) max. If the wiring distance is over 30m(98.4ft), choose the wire size in
consideration of voltage drop.
The servo motor side connection method depends on the type and capacity of the servo motor. Refer to
Section 3.5.3.
To comply with the UL/C-UL (CSA) Standard, use UL-recognized copper wires rated at 60 (140 ) or
more for wiring.
Table 12.1 Recommended wires
Wires [mm2]
Unit 1) L1L2L32) L11 L21 3) U V W 4) P C5) B1B2
MR-J2M-BU4 2 (AWG14)
MR-J2M-BU6 3.5 (AWG12)
MR-J2M-BU8 5.5 (AWG10)
2 (AWG14) 2 (AWG14)
MR-J2M-10DU
MR-J2M-20DU
MR-J2M-40DU
MR-J2M-70DU
1.25 (AWG16) 1.25 (AWG16)
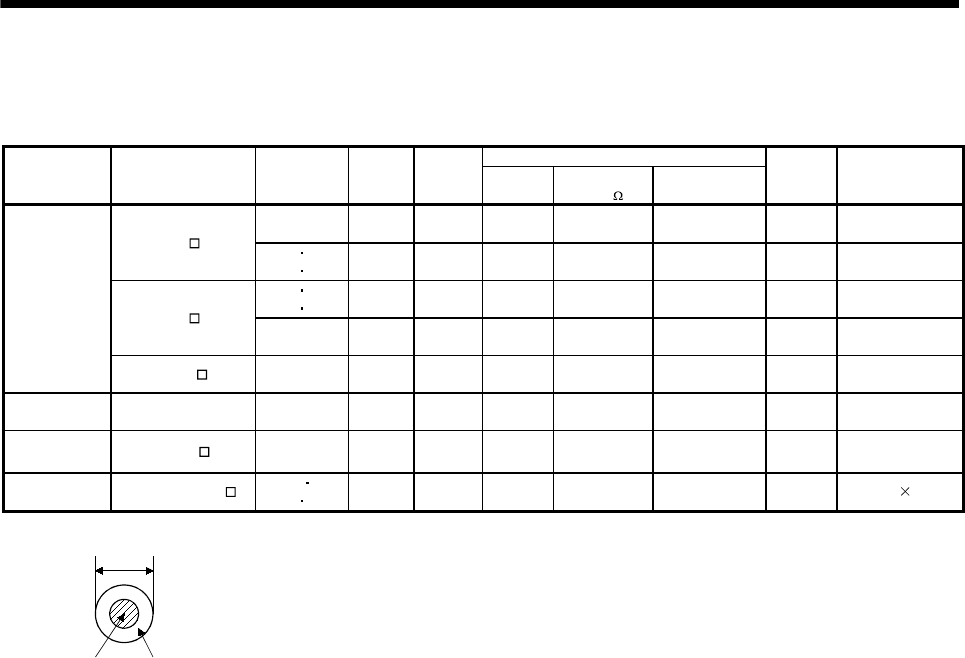
12 - 25
12. OPTIONS AND AUXILIARY EQUIPMENT
(2) Wires for cables
When fabricating a cable, use the wire models given in the following table or equivalent:
Table 12.2 Wires for option cables
Characteristics of one core
Type Model Length
[m(ft)]
Core size
[mm2]
Number
of Cores Structure
[Wires/mm]
Conductor
resistance[ /mm]
Insulation coating
ODd[mm] (Note 1)
(Note 3)
Finishing
OD [mm]
Wire model
2 to 10
(6.56 to 32.8) 0.08 12
(6 pairs) 7/0.127 222 0.38 5.6 UL20276 AWG#28
6pair (BLACK)
MR-JCCBL M-L 20 30
(65.6 98.4) 0.3 12
(6 pairs) 12/0.18 62 1.2 8.2 UL20276 AWG#22
6pair (BLACK)
2 5
(6.56 16.4) 0.2 12
(6 pairs) 40/0.08 105 0.88 7.2 (Note 2)
A14B2343 6P
MR-JCCBL M-H 10 to 20
(32.8 to 65.6) 0.2 14
(7 pairs) 40/0.08 105 0.88 8.0 (Note 2)
A14B0238 7P
Encoder cable
MR-JC4CBL M-H 30 to 50
(98.4 to 164) 0.2 14
(7 pairs) 40/0.08 105 0.88 8.0 (Note 2)
A14B0238 7P
Communication
cable MR-CPCATCBL3M 3 (9.84) 0.08 6
(3 pairs) 7/0.127 222 0.38 4.6 UL20276 AWG#28
3pair (BLACK)
Bus cable MR-J2HBUS M 0.5 to 5
(1.64 to 16.4) 0.08 20
(10 pairs) 7/0.127 222 0.38 6.1 UL20276 AWG#28
10pair (CREAM)
Battery unit
cable MR-J2MBATCBL M 0.3 1
(0.98 3.28) 0.3 2
(1 pairs) 12/0.18 63 1.5 5.1 MVVS IP 0.3mm2
Note 1. d is as shown below:
d
Conductor Insulation sheath
2. Purchased from Toa Electric Industry
3. Standard OD. Max. OD is about 10% greater.
12 - 26
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2.2 No-fuse breakers, fuses, magnetic contactors
Always use one no-fuse breaker and one magnetic contactor with one drive unit. Make selection as
indicated below according to the total output value of the servo motors connected to one base unit. When
using a fuse instead of the no-fuse breaker, use the one having the specifications given in this section.
(1) No-fuse breaker
Servo motor output total No-fuse breaker Rated current [A]
550W max. 30A frame 5A 5
More than 550W to 1100W max. 30A frame 10A 10
More than 1100W to 1650W max. 30A frame 15A 15
More than 1650W to 2200W max. 30A frame 20A 20
More than 2200W to 3300W max. 30A frame 30A 30
(2) Fuse
Fuse
Servo motor output total Class Current [A] Voltage [V]
800W max. K5 15 AC250
More than 800W to 1100W max. K5 20 AC250
More than 1100W to 1650W max. K5 30 AC250
More than 1650W to 2200W max. K5 40 AC250
More than 2200W to 3300W max. K5 70 AC250
(3) Magnetic contactor
Servo motor output total Magnetic contactor
1700W max. S-N10
More than 1700W to 2800W max. S-N18
More than 2800W to 3300W max. S-N20
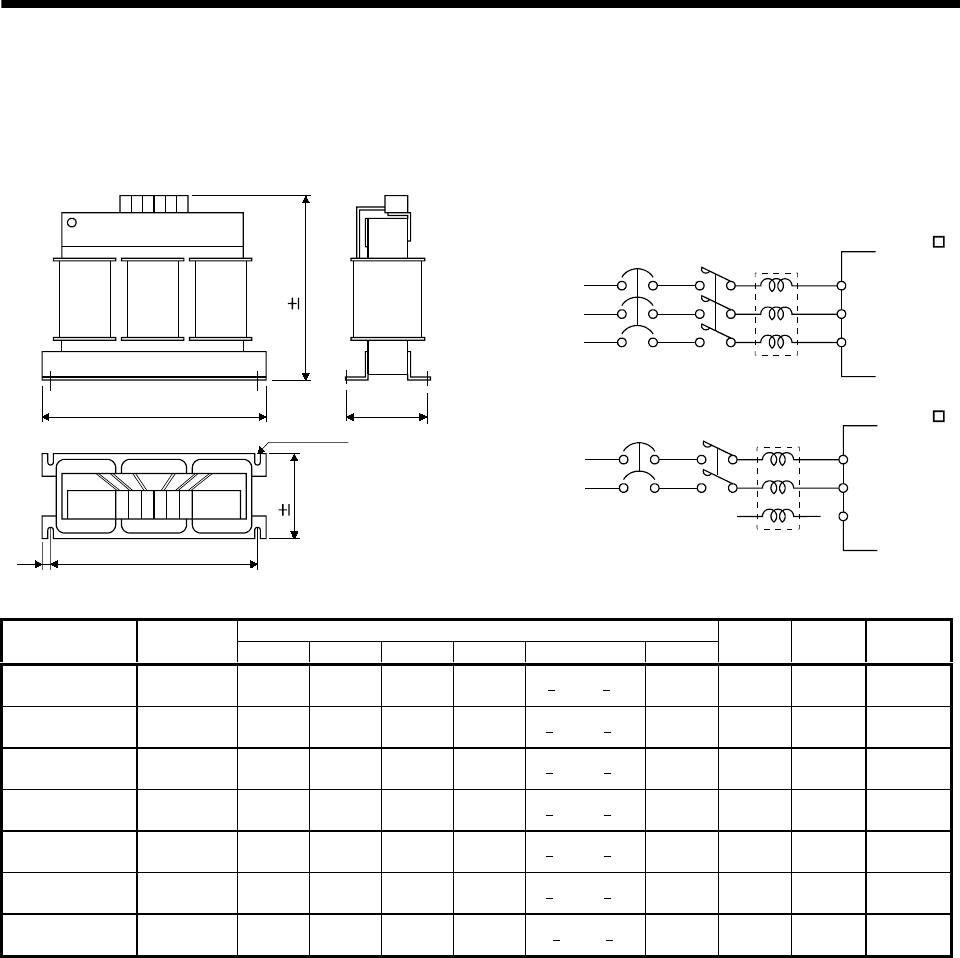
12 - 27
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2.3 Power factor improving reactors
The input power factor is improved to be about 90%. Make selection as described below according to the
sum of the outputs of the servo motors connected to one base unit.
W
W1C
RXSYTZ
H 5(0.2)
D1
Installation screw
D 5(0.2)
[Unit : mm]
FR-BAL
L1
L2
L3
MC
R
S
T
X
Y
Z
(Note)
1-plase
200 to 230VAC
NFB
([Unit : in])
FR-BAL
L1
L2
L3
MC
R
S
T
X
Y
Z
NFB
3-phase
200 to 230VAC
Base unit
MR-J2M-BU
Base unit
MR-J2M-BU
Note. Connect a 1-phase 200 to 230VAC power supply to L1/L2 and keep L3 open.
Dimensions [mm (in) ]
Servo motor
output total Model WW1H D D1 C
Mounting
screw size
Terminal
screw size
Mass
[kg (lb)]
300W max. FR-BAL-0.4K 135 (5.31) 120 (4.72) 115 (4.53) 59 (2.32) 45 (1.77
2.5
0
0.098
0)7.5 (0.29) M4 M3.5 2.0 (4.4)
More than 300W to
450W max. FR-BAL-0.75K 135 (5.31) 120 (4.72) 115 (4.53) 69 (2.72) 57 (2.24
2.5
0
0.098
0)7.5 (0.29) M4 M3.5 2.8 (6.17)
More than 450W to
750W max. FR-BAL-1.5K 160 (6.30) 145 (5.71) 140 (5.51) 71 (2.79) 55 (2.17
2.5
0
0.098
0)7.5 (0.29) M4 M3.5 3.7 (8.16)
More than 750W to
1100W max. FR-BAL-2.2K 160 (6.30) 145 (5.71) 140 (5.51) 91 (3.58) 75 (2.95
2.5
0
0.098
0)7.5 (0.29) M4 M3.5 5.6 (12.35)
More than 1100W to
1900W max. FR-BAL-3.7K 220 (8.66) 200 (7.87) 192 (7.56) 90 (3.54) 70 (2.76
2.5
0
0.098
0)10 (0.39) M5 M4 8.5 (18.74)
More than 1900W to
2500W max. FR-BAL-5.5K 220 (8.66) 200 (7.87) 192 (7.56) 96 (3.78) 75 (2.95
2.5
0
0.098
0)10 (0.39) M5 M4 9.5 (20.94)
More than 2500W to
3800W max. FR-BAL-7.5K 220 (8.66) 200 (7.87) 194 (7.64) 120 (4.72) 100 (3.94 )
2.5
0
0.098
010 (0.39) M5 M5 14.5 (32.0)
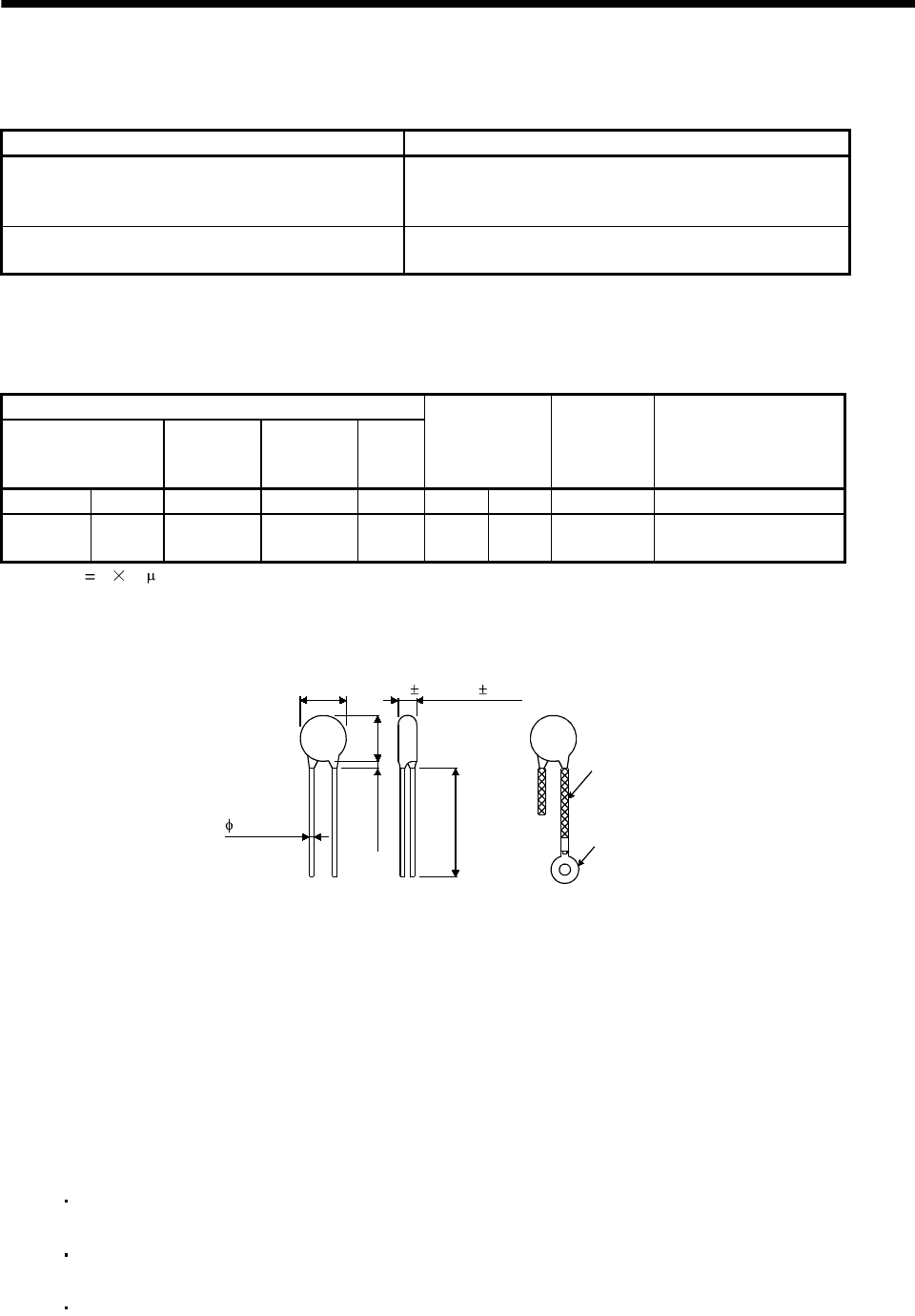
12 - 28
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2.4 Relays
The following relays should be used with the interfaces:
Interface Selection example
Relay used for digital input signals (interface DI-1) To prevent defective contacts , use a relay for small signal
(twin contacts).
(Ex.) Omron : type G2A , MY
Relay used for digital output signals (interface DO-1) Small relay with 12VDC or 24VDC of 40mA or less
(Ex.) Omron : type MY
12.2.5 Surge absorbers
A surge absorber is required for the electromagnetic brake. Use the following surge absorber or equivalent.
Insulate the wiring as shown in the diagram.
Maximum rating
Permissible circuit
voltage
Surge
immunity
Energy
immunity
Rated
power
Maximum
limit voltage
Static
capacity
(reference
value)
Varistor voltage
rating (range) V1mA
AC[Vma] DC[V] [A] [J] [W] [A] [V] [pF] [V]
140 180 (Note)
500/time 5 0.4 25 360 300 220
(198 to 242)
Note. 1 time 8 20 s
13.5 (0.53)
16.5
(0.65)
Vinyl tube
Crimping terminal
for M4 screw
30.0 (1.18)
or more
3.0 (0.12)
or less
0.8 (0.03)
4.7 1.0 (0.19 0.04)
(Example) ERZV10D221 (Matsushita Electric Industry)
TNR-10V221K (Nippon Chemi-con)
Outline drawing [mm] ( [in] ) (ERZ-C10DK221)
12.2.6 Noise reduction techniques
Noises are classified into external noises which enter MELSERVO-J2M to cause it to malfunction and
those radiated by MELSERVO-J2M to cause peripheral devices to malfunction. Since MELSERVO-J2M
is an electronic device which handles small signals, the following general noise reduction techniques are
required.
Also, the drive unit can be a source of noise as its outputs are chopped by high carrier frequencies. If
peripheral devices malfunction due to noises produced by the drive unit, noise suppression measures
must be taken. The measures will vary slightly with the routes of noise transmission.
(1) Noise reduction techniques
(a) General reduction techniques
Avoid laying power lines (input cables) and signal cables side by side or do not bundle them
together. Separate power lines from signal cables.
Use shielded, twisted pair cables for connection with the encoder and for control signal
transmission, and connect the shield to the SD terminal.
Ground the base unit, servo motor, etc. together at one point (refer to Section 3.8).
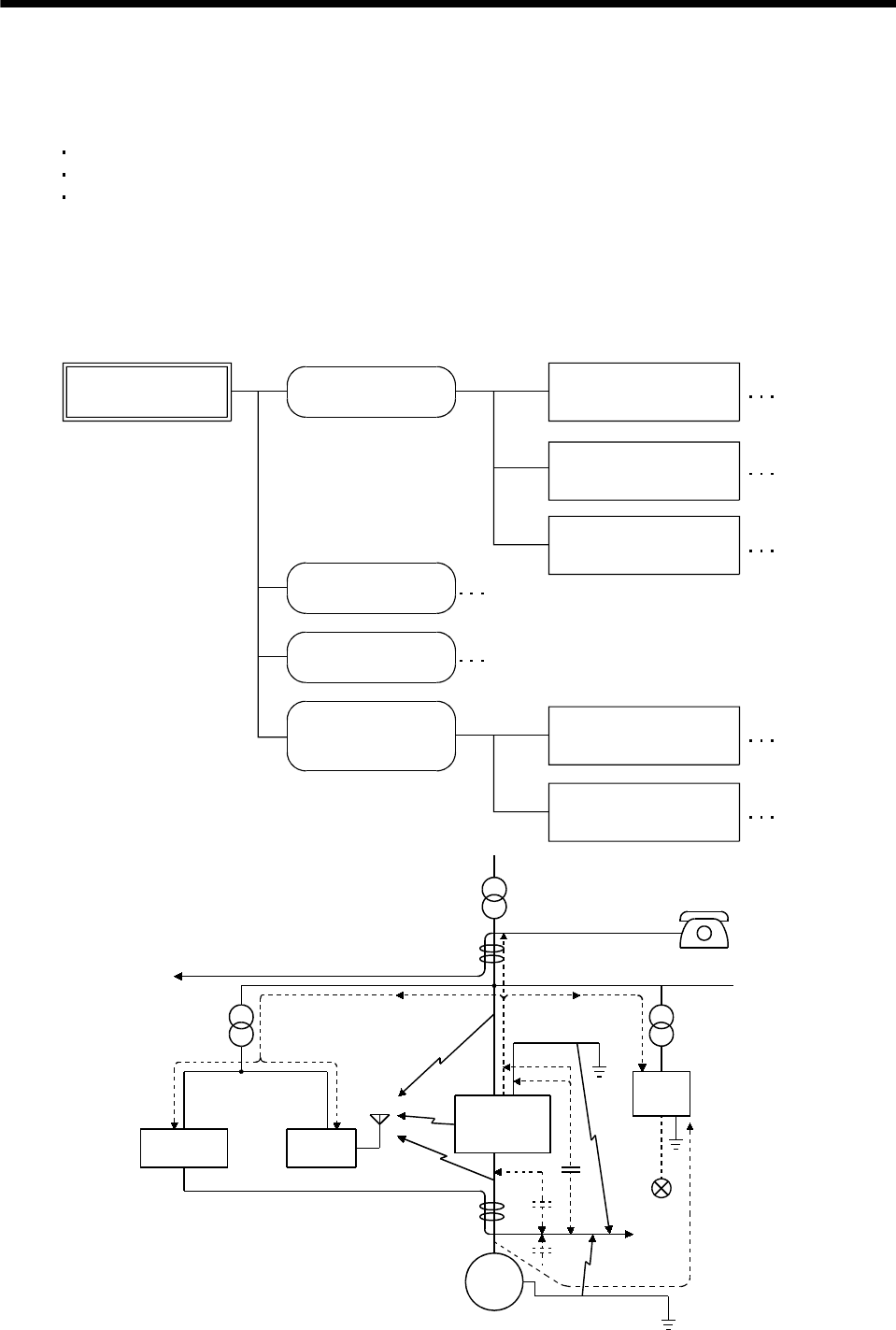
12 - 29
12. OPTIONS AND AUXILIARY EQUIPMENT
(b) Reduction techniques for external noises that cause MELSERVO-J2M to malfunction
If there are noise sources (such as a magnetic contactor, an electromagnetic brake, and many
relays which make a large amount of noise) near MELSERVO-J2M and MELSERVO-J2M may
malfunction, the following countermeasures are required.
Provide surge absorbers on the noise sources to suppress noises.
Attach data line filters to the signal cables.
Ground the shields of the encoder connecting cable and the control signal cables with cable clamp
fittings.
(c) Techniques for noises radiated by MELSERVO-J2M that cause peripheral devices to malfunction
Noises produced by MELSERVO-J2M are classified into those radiated from the cables connected
to MELSERVO-J2M and its main circuits (input and output circuits), those induced
electromagnetically or statically by the signal cables of the peripheral devices located near the
main circuit cables, and those transmitted through the power supply cables.
Noises produced
by MELSERVO-J2M
Noises transmitted
in the air
Noise radiated directly
from MELSERVO-J2M
Magnetic induction
noise
Static induction
noise
Noises transmitted
through electric
channels
Noise radiated from the
power supply cable
Noise radiated from
servo motor cable
Noise transmitted through
power supply cable
Noise sneaking from
grounding cable due to
leakage current
Routes 4) and 5)
Route 1)
Route 2)
Route 3)
Route 7)
Route 8)
Route 6)
Instrument Receiver
MELSERVO-
J2M
Servo motor M
2)
2)
8)
1)
7)
7) 7)
5)
3)
4)
6)
3)
Sensor
power
supply
Sensor
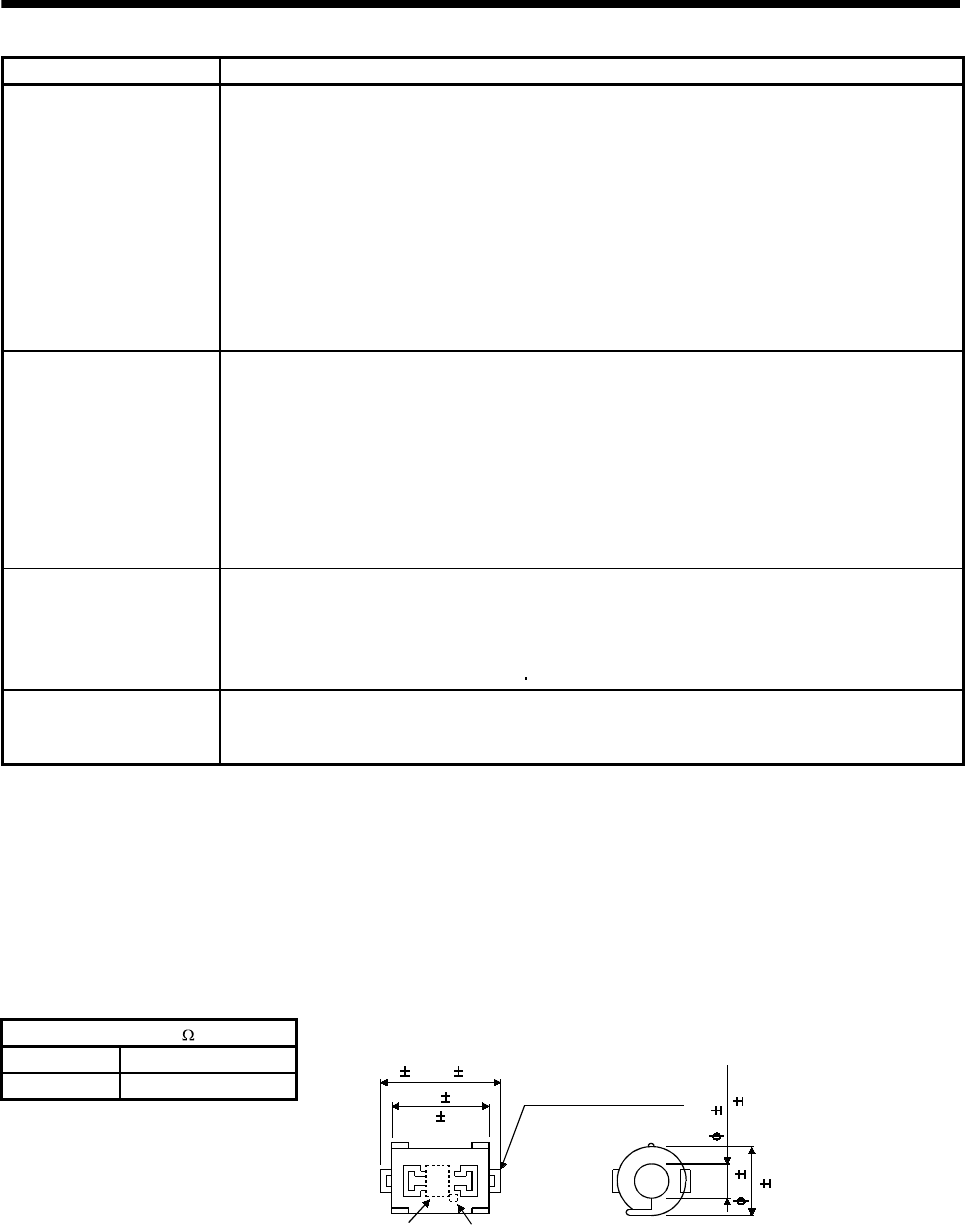
12 - 30
12. OPTIONS AND AUXILIARY EQUIPMENT
Noise transmission route Suppression techniques
1) 2) 3)
When measuring instruments, receivers, sensors, etc. which handle weak signals and may
malfunction due to noise and/or their signal cables are contained in a control box together with the
MELSERVO-J2M or run near MELSERVO-J2M, such devices may malfunction due to noises
transmitted through the air. The following techniques are required.
1. Provide maximum clearance between easily affected devices and MELSERVO-J2M.
2. Provide maximum clearance between easily affected signal cables and the I/O cables of
MELSERVO-J2M.
3. Avoid laying the power lines (I/O cables of MELSERVO-J2M) and signal cables side by side or
bundling them together.
4. Insert a line noise filter to the I/O cables or a radio noise filter on the input line.
5. Use shielded wires for signal and power cables or put cables in separate metal conduits.
4) 5) 6)
When the power lines and the signal cables are laid side by side or bundled together, magnetic
induction noise and static induction noise will be transmitted through the signal cables and
malfunction may occur. The following techniques are required.
1. Provide maximum clearance between easily affected devices and MELSERVO-J2M.
2. Provide maximum clearance between easily affected signal cables and the I/O cables of
MELSERVO-J2M.
3. Avoid laying the power lines (I/O cables of MELSERVO-J2M) and signal cables side by side or
bundling them together.
4. Use shielded wires for signal and power cables or put the cables in separate metal conduits.
7)
When the power supply of peripheral devices is connected to the power supply of MELSERVO-J2M
system, noises produced by MELSERVO-J2M may be transmitted back through the power supply
cable and the devices may malfunction. The following techniques are required.
1. Insert the radio noise filter (FR-BIF) on the power cables (input cables) of MELSERVO-J2M.
2. Insert the line noise filter (FR-BSF01 FR-BLF) on the power cables of MELSERVO-J2M.
8)
When the cables of peripheral devices are connected to MELSERVO-J2M to make a closed loop
circuit, leakage current may flow to malfunction the peripheral devices. If so, malfunction may be
prevented by disconnecting the grounding cable of the peripheral device.
(2) Noise reduction products
(a) Data line filter
Noise can be prevented by installing a data line filter onto the encoder cable, etc.
For example, the ZCAT3035-1330 of TDK and the ESD-SR-25 of NEC TOKIN are available as data
line filters.
As a reference example, the impedance specifications of the ZCAT3035-1330 (TDK) are indicated
below.
This impedances are reference values and not guaranteed values.
Impedance[ ]
10 to 100MHZ 100 to 500MHZ
80 150
Outline drawing (ZCAT3035-1330)
[Unit: mm]([Unit: in.]
)
Loop for fixing the
cable band
Lot number
Product name
TDK
39 1(1.54 0.04)
34 1
(1.34 0.04)
13 1
(0.51 0.04)
30 1
(1.18 0.04)
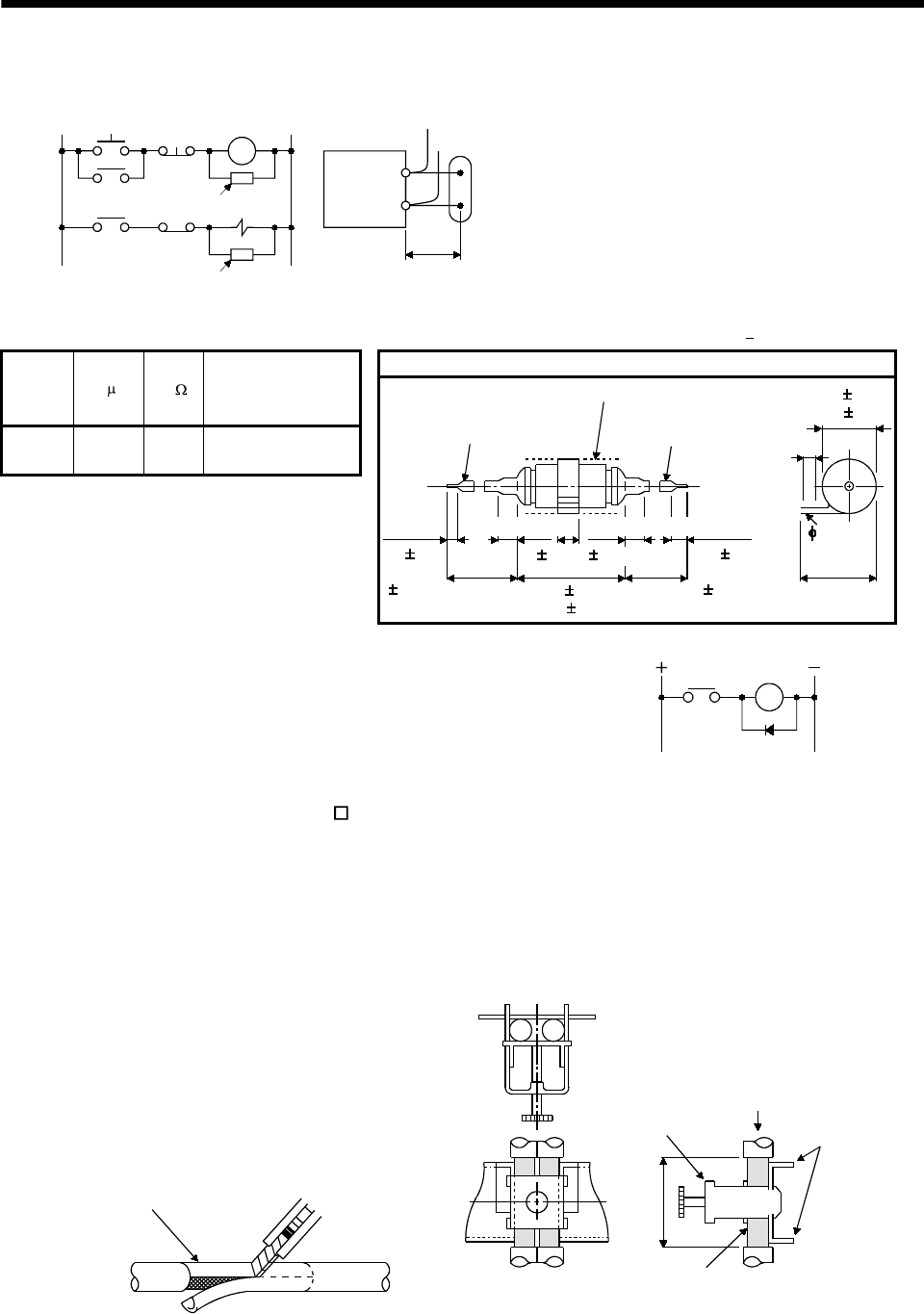
12 - 31
12. OPTIONS AND AUXILIARY EQUIPMENT
(b) Surge suppressor
The recommended surge suppressor for installation to an AC relay, AC valve, AC electromagnetic
brake or the like near MELSERVO-J2M is shown below. Use this product or equivalent.
Surge suppressor
MC
Surge suppressor
Relay
Surge suppresso
r
This distance should be short
(within 20cm(0.79 in.)).
(Ex.) 972A.2003 50411
(Matsuo Electric Co.,Ltd. 200VAC rating)
Outline drawing [Unit: mm] ([Unit: in.])
Rated
voltage
AC[V]
C [ F] R [ ] Test voltage AC[V]
200 0.5 50
(1W)
Across
T-C 1000(1 to 5s)
Blue vinyl cord Red vinyl cord
Vinyl sheath
200(7.87)
or more
200(7.87)
or more
6(0.24)
31(1.22)
10(0.39)or less 10(0.39)or less
15 1(0.59 0.04)
48 1.5
(1.89 0.06)
10 3
(0.39
0.15)
10 3
(0.39
0.12)
4(0.16)
18 1.5
(0.71 0.06)
Note that a diode should be installed to a DC relay, DC valve or
the like.
Maximum voltage: Not less than 4 times the drive voltage of
the relay or the like
Maximum current: Not less than twice the drive current of
the relay or the like
Diode
RA
(c) Cable clamp fitting (AERSBAN -SET)
Generally, the earth of the shielded cable may only be connected to the connector's SD terminal.
However, the effect can be increased by directly connecting the cable to an earth plate as shown
below.
Install the earth plate near the drive unit for the encoder cable. Peel part of the cable sheath to
expose the external conductor, and press that part against the earth plate with the cable clamp. If
the cable is thin, clamp several cables in a bunch.
The clamp comes as a set with the earth plate.
Strip the cable sheath of
t
he clamped area. cutter
cable
Cable clamp
(A,B)
Cable
Earth plate
External conductor
Clamp section diagram
40(1.57)
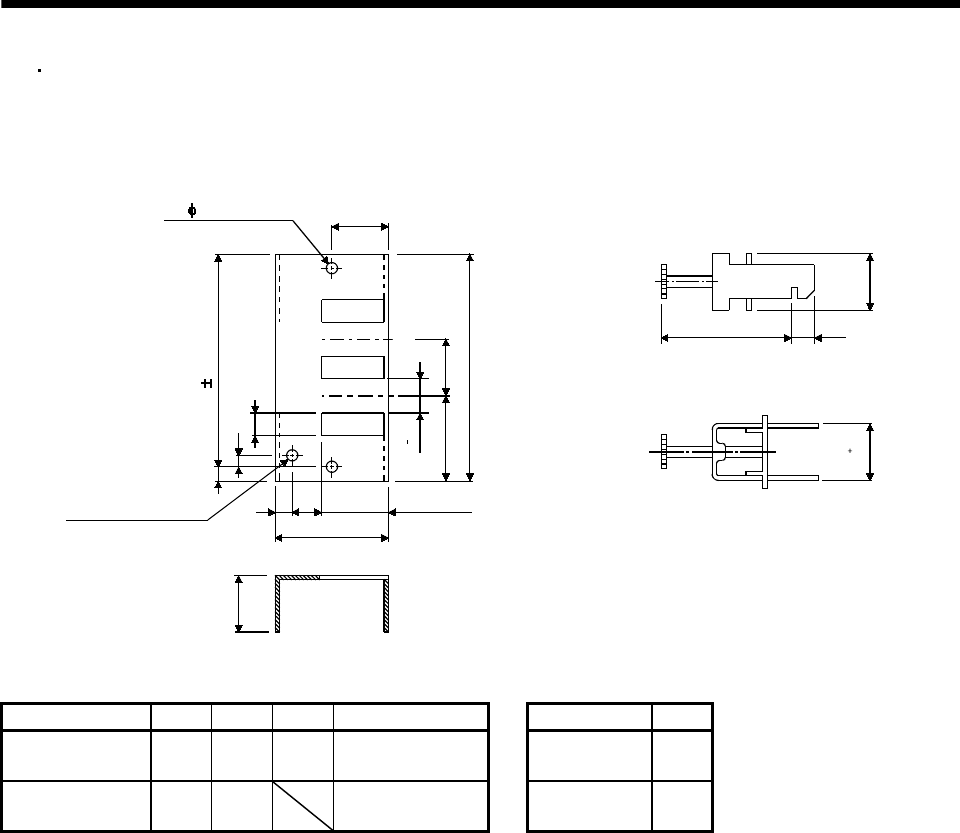
12 - 32
12. OPTIONS AND AUXILIARY EQUIPMENT
Outline drawing
Earth plate Clamp section diagram
(Note) M4 screw
11(0.43)3 (0.12)
6 (0.24)
C
A
622(0.87)
17.5(0.69)
35(1.38)
35 (1.38)
L or less 10(0.39)
30
(
1.18
)
7 (0.28)
24
0
0.2
Note. Screw hole for grounding. Connect it to the earth plate of the control box.
(0.24)
24
0.3
0
(
0.940
)
(0.940)
[Unit: mm]
([Unit: in])
B 0.3(0.01)
2- 5(0.20) hole
installation hole
Type A B C Accessory fittings Clamp fitting L
AERSBAN-DSET 100
(3.94)
86
(3.39)
30
(1.18) clamp A: 2pcs. A 70
(2.76)
AERSBAN-ESET 70
(2.76)
56
(2.20) clamp B: 1pc. B 45
(1.77)
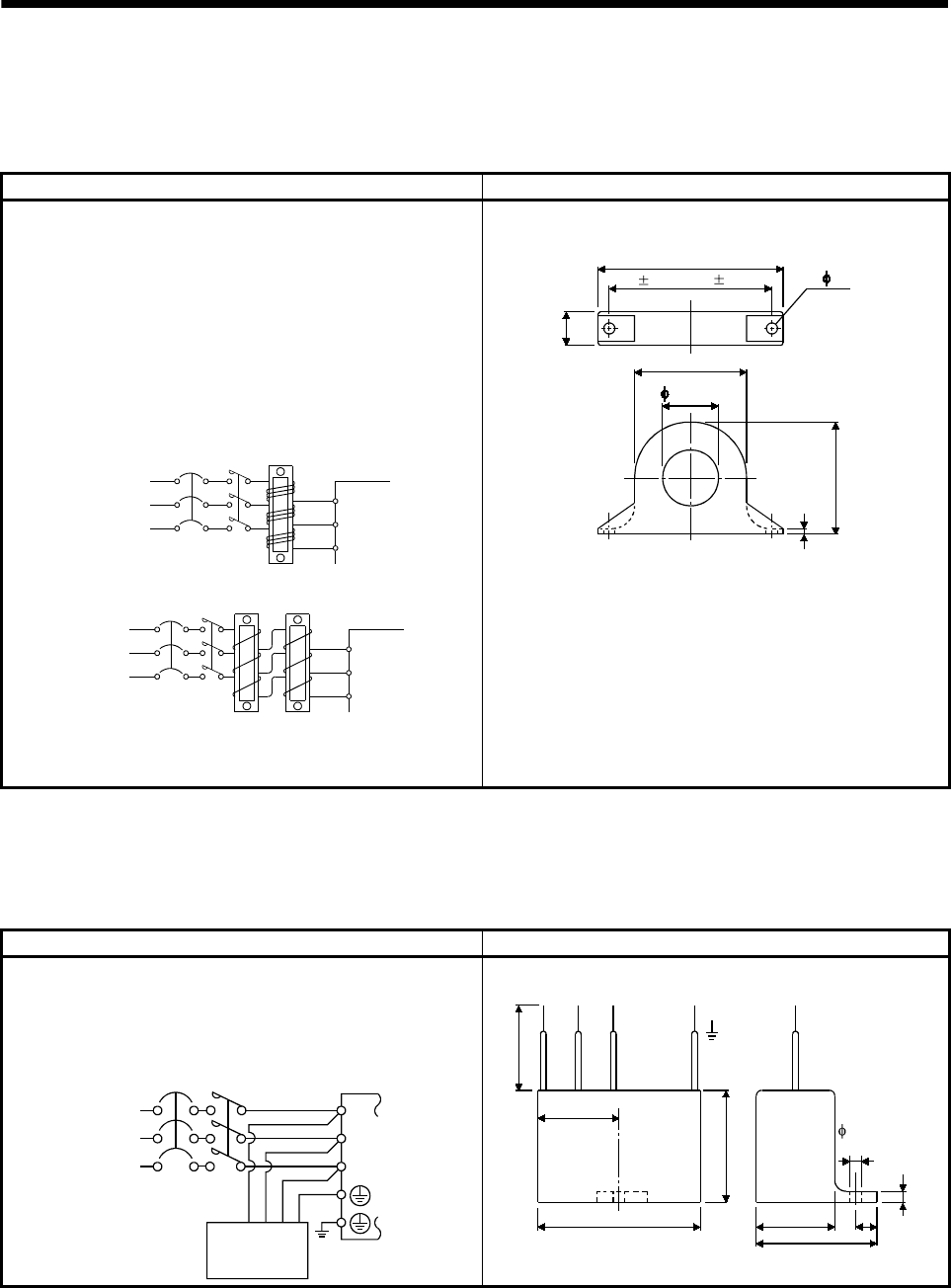
12 - 33
12. OPTIONS AND AUXILIARY EQUIPMENT
(d) Line noise filter (FR-BLF, FR-BSF01)
This filter is effective in suppressing noises radiated from the power supply side and output side of
MELSERVO-J2M and also in suppressing high-frequency leakage current side (zero-phase
current) especially within 0.5MHz to 5MHz band.
Connection diagram Outline drawing [Unit: mm] ([Unit: in])
Wind the 3-phase wires by the equal number of times in the
same direction, and connect the filter to the power supply side
and output side of the base unit.
The effect of the filter on the power supply side is higher as the
number of winds is larger. The number of turns is generally four.
If the wires are too thick to be wound, use two or more filters
and make the total number of turns as mentioned above.
On the output side, the number of turns must be four or less.
Do not wind the grounding wire together with the 3-phase wires.
The filter effect will decrease. Use a separate wire for grounding.
Example 2
Two filters are used
(Total number of turns: 4)
Power
supply
Base unit
Line noise
filter
NFB
L3
L1
L2
Example 1
(Number of turns: 4)
Power
supply L1
L2
L3
Base unit
Line noise
filter
MC
NFB MC
FR-BSF01
4.5 (0.18)
110 (4.33)
95 0.5 (3.74 0.02)
22.5 (0.89)
65 (2.56)
65 (2.56)
33 (1.3)
2- 5 (0.20)
(e) Radio noise filter (FR-BIF)...for the input side only
This filter is effective in suppressing noises radiated from the power supply side of MELSERVO-
J2M especially in 10MHz and lower radio frequency bands. The FR-BIF is designed for the input
only.
Connection diagram Outline drawing (Unit: mm) ([Unit: in])
Make the connection cables as short as possible.
Grounding is always required.
When using the FR-BIF with a single-phase wire,
always insulate the wires that are not used for wiring.
NFB MC
Power
supply
Radio noise
filter FR-BIF
L1
L2
L3
Base uni
t
Leakage current: 4mA
29 (1.14)
58 (2.28)
42 (1.65)
4 (0.16)
Red BlueWhite Green
44 (1.73)
29 (1.14) 7 (0.28)
hole
About 300(11.81)
5 (0.20)
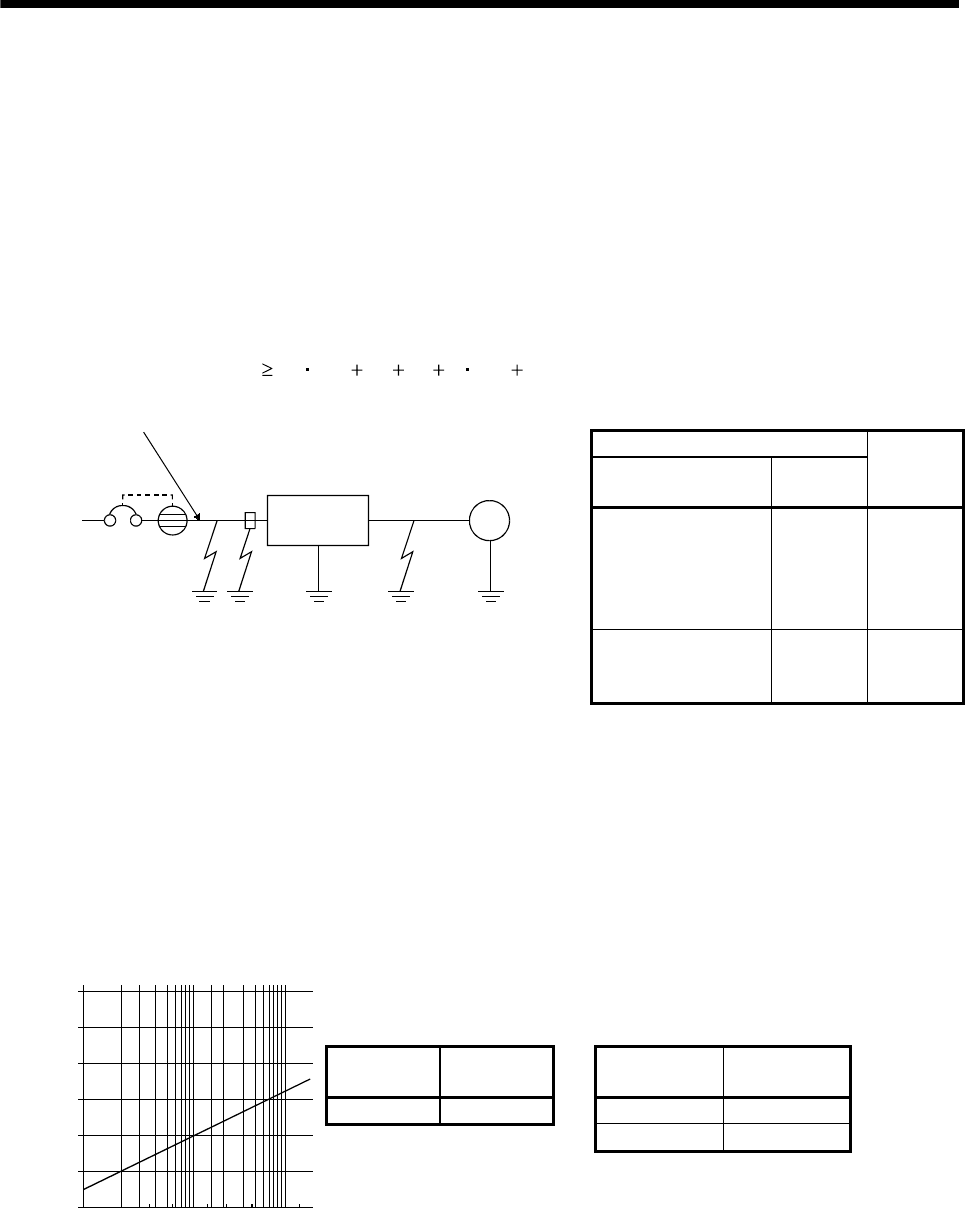
12 - 34
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2.7 Leakage current breaker
(1) Selection method
High-frequency chopper currents controlled by pulse width modulation flow in the AC servo circuits.
Leakage currents containing harmonic contents are larger than those of the motor which is run with a
commercial power supply.
Select a leakage current breaker according to the following formula, and ground the base unit, servo
motor, etc. securely.
Make the input and output cables as short as possible, and also make the grounding cable as long as
possible (about 30cm (11.8 in)) to minimize leakage currents.
Rated sensitivity current 10 {Ig1 Ign Iga K(Ig2 Igm)} [mA] ..........(12.1)
K: Constant considering the harmonic contents
Leakage current breaker
Type Mitsubishi
products
K
Models provided with
harmonic and surge
reduction techniques
NV-SP
NV-SW
NV-CP
NV-CW
NV-HW
1
General models
BV-C1
NFB
NV-L
3
M
MELSERVO
-J2M
Noise
filter
NV
Ig1 Ign Iga Ig2 Igm
Cable
Cable
Ig1: Leakage current on the electric channel from the leakage current breaker to the input terminals
of the base unit (Found from Fig. 12.1.)
Ig2: Leakage current on the electric channel from the output terminals of the drive unit to the
servo motor (Found from Fig. 12.1.)
Ign: Leakage current when a filter is connected to the input side (4.4mA per one FR-BIF)
Iga: Leakage current of the drive unit (Found from Table 12.4.)
Igm: Leakage current of the servo motor (Found from Table 12.3.)
Table 12.3 Servo motor's
leakage current
example (Igm)
Table 12.4 Drive unit's
leakage current
example (Iga)
Servo motor
output [kW]
Leakage
current [mA]
Drive unit
capacity [kW]
Leakage current
[mA]
0.05 to 0.4 0.1 0.1 to 0.4 0.3
0.75 0.6
120
100
80
60
40
20
023.5
5.5
814223880150
30 60 100
Fig. 12.1 Leakage current example
(Ig1, Ig2) for CV cable run
in metal conduit
Cable size[mm2]
[mA]
Leakage current
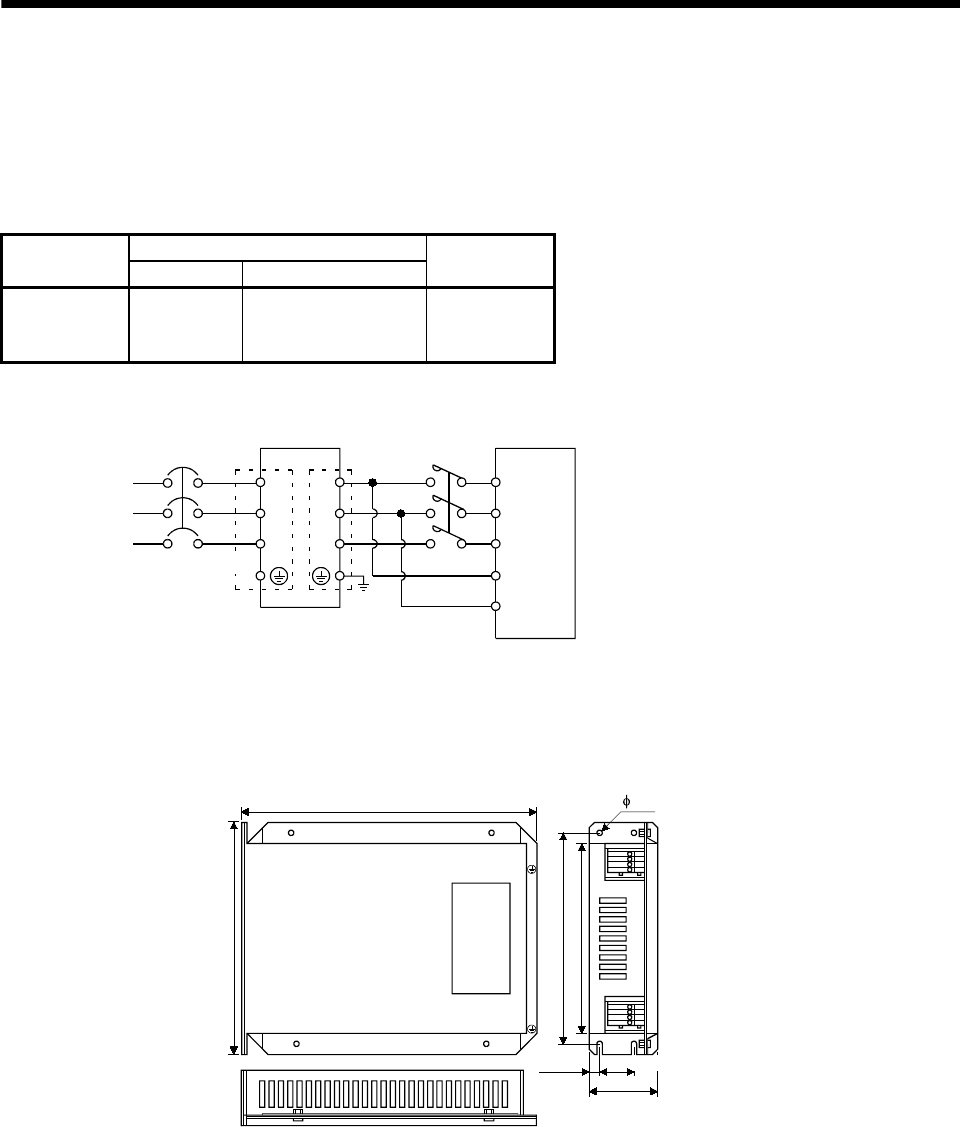
12 - 35
12. OPTIONS AND AUXILIARY EQUIPMENT
12.2.8 EMC filter
For compliance with the EMC directive of the EN standard, it is recommended to use the following filter:
Some EMC filters are large in leakage current.:
(1) Combination with the base unit
Recommended filter
Base unit Model Leakage current [mA] Mass [kg(lb)]
MR-J2M-BU4
MR-J2M-BU6
MR-J2M-BU8
SF1253 57 1.37 (3.02)
(2) Connection example
NFB
L1
L2
L3
L11
L21
L1
L2
L3
LINE LOAD
EMC filter Base unit
(Note 2)
Power supply
(Note 1)
Note 1. Connect when the power supply has earth.
2. Connect a 1-phase 200 to 230VAC power supply to L1/L2 and keep L3 open.
L1
L2
L3
MC
(3) Outline drawing
23.0(0.906)
LABEL
LINELOAD
168.0(6.614)
L1'
L2'
L3'
L1
L2
L3
209.5(8.248)
LINE
(input side)
LOAD
(output side)
140.0(5.512)
156.0(6.142)
49.0
8.5
SF1253
[Unit: mm(in)]
(0.335)
(1.929)
6.0(0.236)
12 - 36
12. OPTIONS AND AUXILIARY EQUIPMENT
MEMO
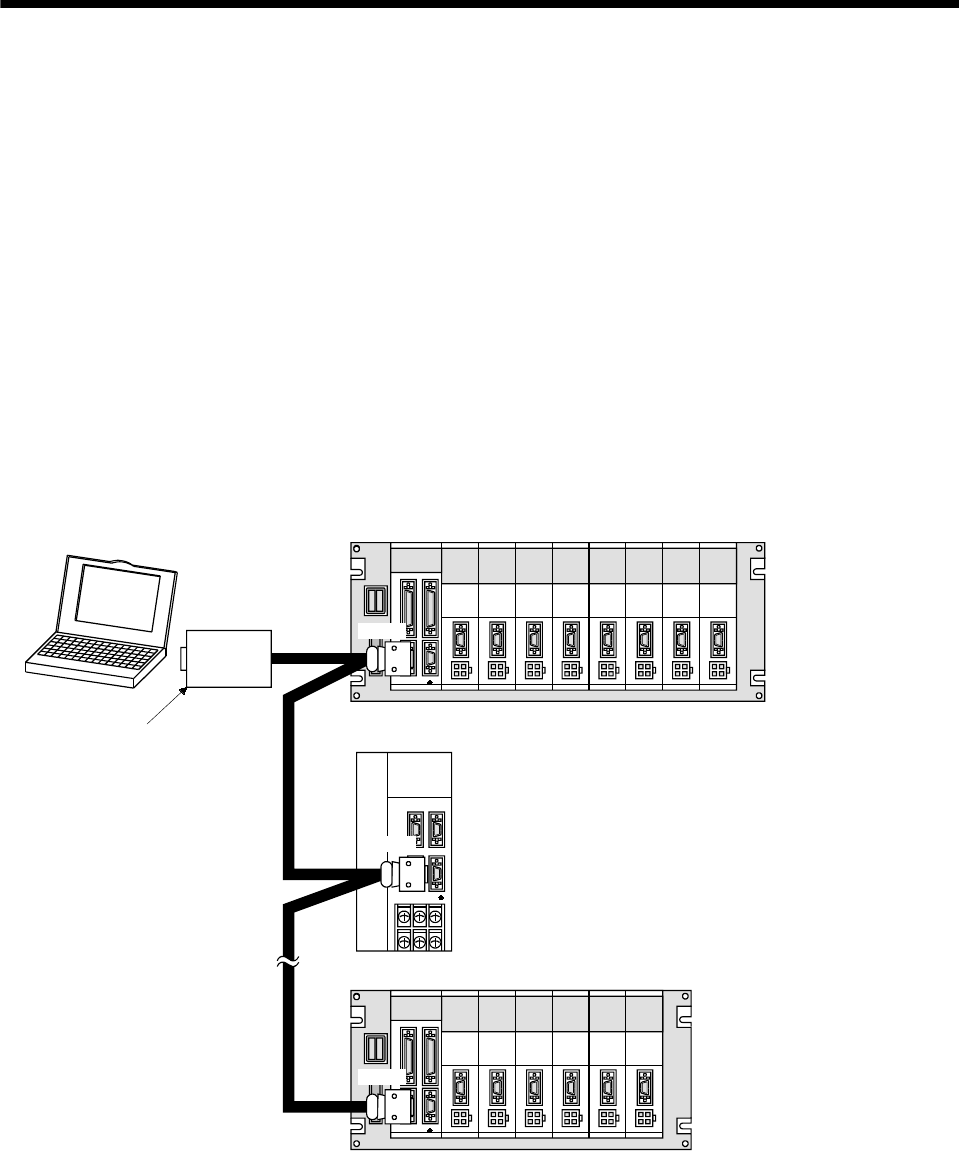
13 - 1
13. COMMUNICATION FUNCTIONS
13. COMMUNICATION FUNCTIONS
MELSERVO-J2M has the RS-422 and RS-232C serial communication functions. These functions can be
used to perform servo operation, parameter changing, monitor function, etc.
However, the RS-422 and RS-232C communication functions cannot be used together. Select between RS-
422 and RS-232C with IFU parameter No.0. (Refer to Section 13.2.2.)
13.1 Configuration
13.1.1 RS-422 configuration
(1) Outline (Example)
The interface unit and drive units of stations 0 to 31 can be run/operated on the same bus.
Similarly, any servo amplifiers that enable station number setting can be connected on the same bus.
It should be noted that the commands/data should be handled without mistakes since they are specific
to each servo amplifier.
CHARGE
RS-422
RS-422
RS-422
MELSERVO-J2S-A
MITSUBISHI
Controller such as
personal computer
RS-232C/
RS-422
converter
Unavailable as option.
To be prepared by customer.
Station
0
Station
1
Station
2
Station
3
Station
4
Station
5
Station
6
Station
7
Station
8
Station
11
Station
12
Station
13
Station
14
Station
15
Station
16
Station
10
MELSERVO-J2M
(General-purpose interface type)
MELSERVO-J2M
(General-purpose interface type)
Station
9
To CN3
To CN3
To CN3
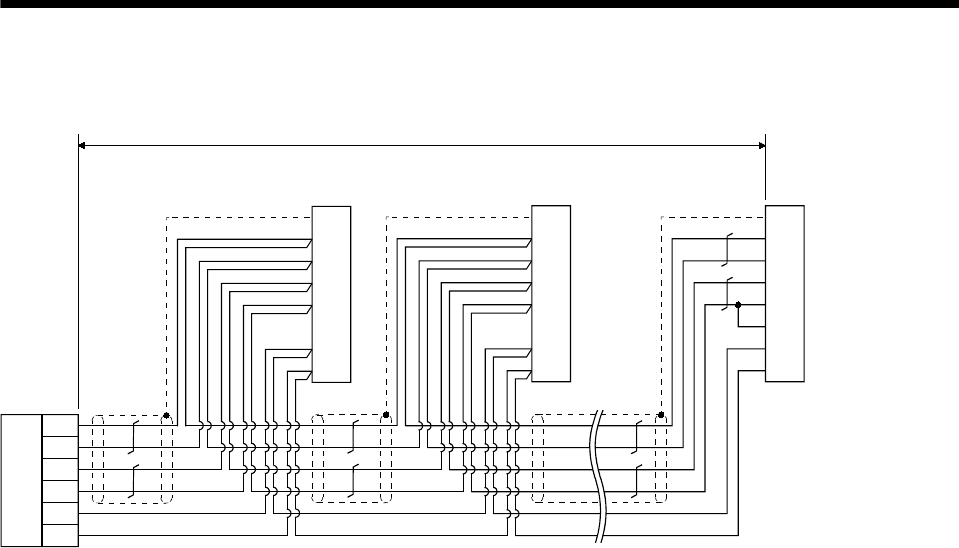
13 - 2
13. COMMUNICATION FUNCTIONS
(2) Cable connection diagram
Wire as shown below:
RDP
RDN
SDP
SDN
GND
GND
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
(Note 3) 30m(98.4ft) max.
Plate
(Note 1)
Interface unit or Servo amplifier
CN3 connector
Plate Plate
(Note 2)
RS-422
output unit
(Note 1)
Interface unit or Servo amplifier
CN3 connector
(Note 1)
Interface unit or Servo amplifie
r
CN3 connector
Note 1. Connector set MR-J2CN1 (3M or equivalent)
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
2. In the last axis, connect TRE and RDN.
3. 30m (98.4ft) max. in environment of little noise.
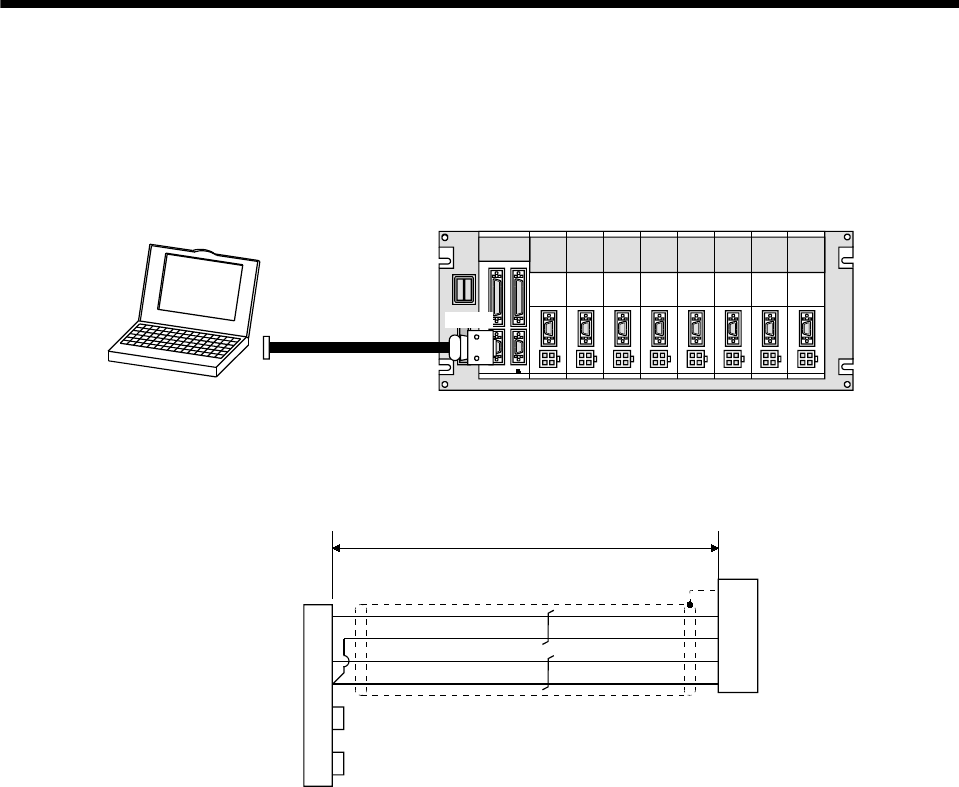
13 - 3
13. COMMUNICATION FUNCTIONS
13.1.2 RS-232C configuration
(1) Outline (Example)
Run/operate.
MELSERVO-J2M
Controller such as
personal computer
To CN3
Station
0
Station
1
Station
2
Station
3
Station
4
Station
5
Station
6
Station
7
Station
8
(2) Cable connection diagram
Wire as shown below. The communication cable for connection with the personal computer (MR-
CPCATCBL3M) is available. (Refer to Section 12.1.2 (3))
TXD
RXD
GND
RTS
CTS
12
11
2
1
TXD
GND
RXD
GND
FG
3
2
5
7
8
Personal computer
connector D-SUB9 (socket)
(Note 2) 15m(49.2ft) max. (Note 1)
Interface unit
CN3 connecto
r
Plate
DSR
DTR
6
4
Note 1. For CN3 connector (3M)
Connector: 10120-6000EL
Shell kit: 10320-3210-000
2. 15m(49.2ft) max. in environment of little noise. However, this distance should be 3m(9.84ft) max. for use at
38400bps or more baudrate.
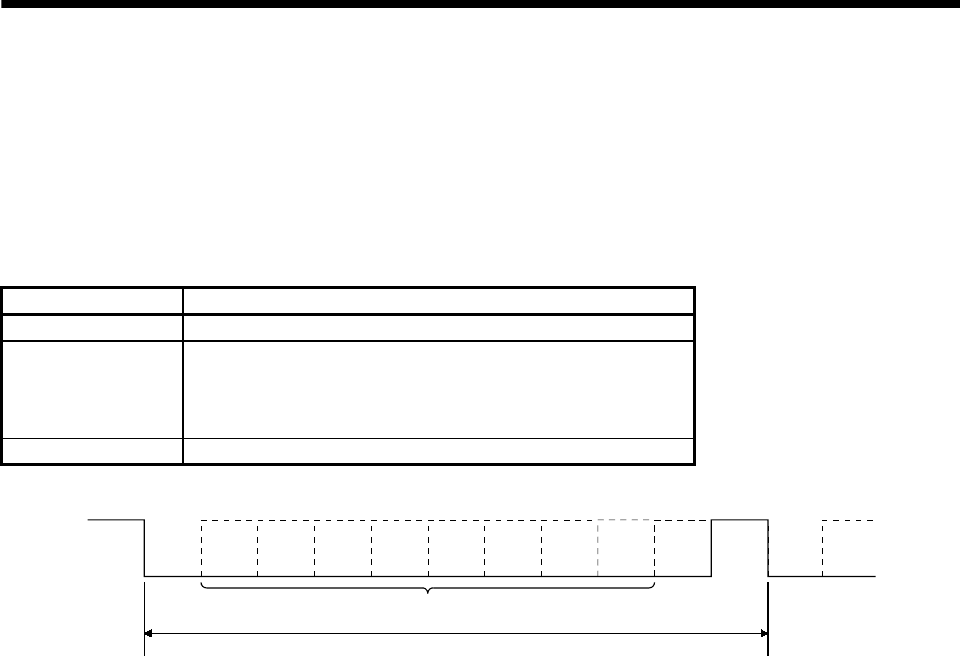
13 - 4
13. COMMUNICATION FUNCTIONS
13.2 Communication specifications
13.2.1 Communication overview
This servo amplifier is designed to send a reply on receipt of an instruction. The device which gives this
instruction (e.g. personal computer) is called a master station and the device which sends a reply in
response to the instruction (drive unit) is called a slave station. When fetching data successively, the
master station repeatedly commands the slave station to send data.
Item Description
Baudrate 9600/19200/38400/57600 asynchronous system
Transfer code
Start bit : 1 bit
Data bit : 8 bits
Parity bit: 1 bit (even)
Stop bit : 1 bit
Transfer protocol Character system, half-duplex communication system
1 frame (11bits)
Data
01234567
(LSB) (MSB)
Start Parity Stop
Next
start
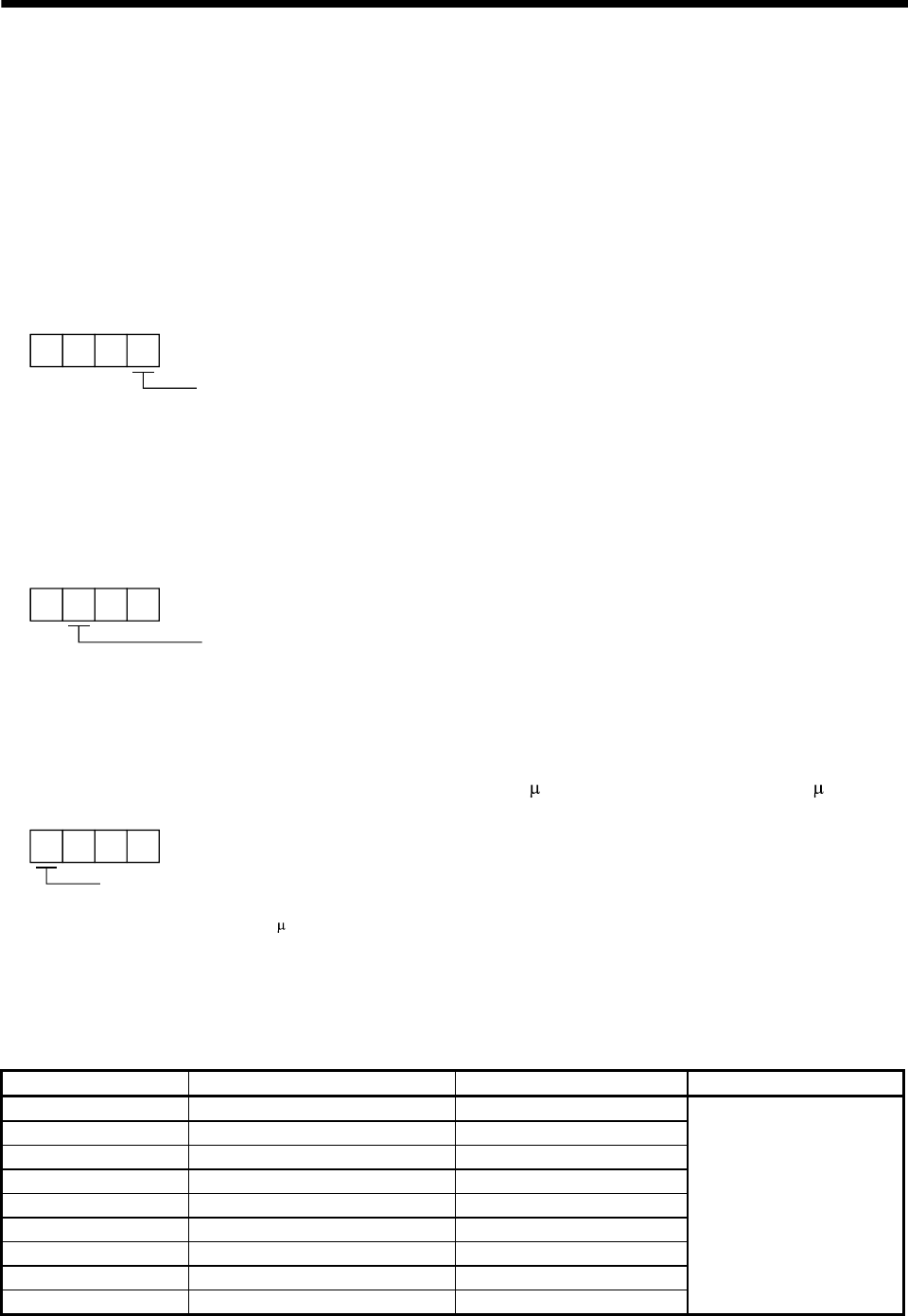
13 - 5
13. COMMUNICATION FUNCTIONS
13.2.2 Parameter setting
When the RS-422/RS-232C communication function is used to operate the servo, set the communication
specifications of the servo amplifier in the corresponding parameters.
After setting the values of these parameters, they are made valid by switching power off once, then on
again.
(1) Serial communication baudrate
Choose the communication speed. Match this value to the communication speed of the sending end
(master station).
Communication baudrate selection
0: 9600[bps]
1: 19200[bps]
2: 38400[bps]
3: 57600[bps]
IFU parameter No. 0
(2) Serial communication selection
Select the RS-422 or RS-232C communication standard. RS-422 and RS-232C cannot be used together.
Serial communication standard selection
0: RS-232C used
1: RS-422 used
IFU parameter No. 0
(3) Serial communication response delay time
Set the time from when the servo amplifier (slave station) receives communication data to when it
sends back data. Set "0" to send back data in less than 800 s or "1" to send back data in 800 s or more.
Serial communication response delay time selection
0: Invalid
1: Valid, reply sent in 800 s or more
IFU parameter No. 0
(4) Station number setting
In IFU parameter No. 10 to 18, set the station numbers of the units connected to the slots. Do not use
the station numbers used by the other units.
IFU parameter No. Slot Whose Station Number Is Set Default Station Number Usable Station Numbers
10 Interface unit slot 0
11 Slot 1 1
12 Slot 2 2
13 Slot 3 3
14 Slot 4 4
15 Slot 5 5
16 Slot 6 6
17 Slot 7 7
18 Slot 8 8
0 to 31
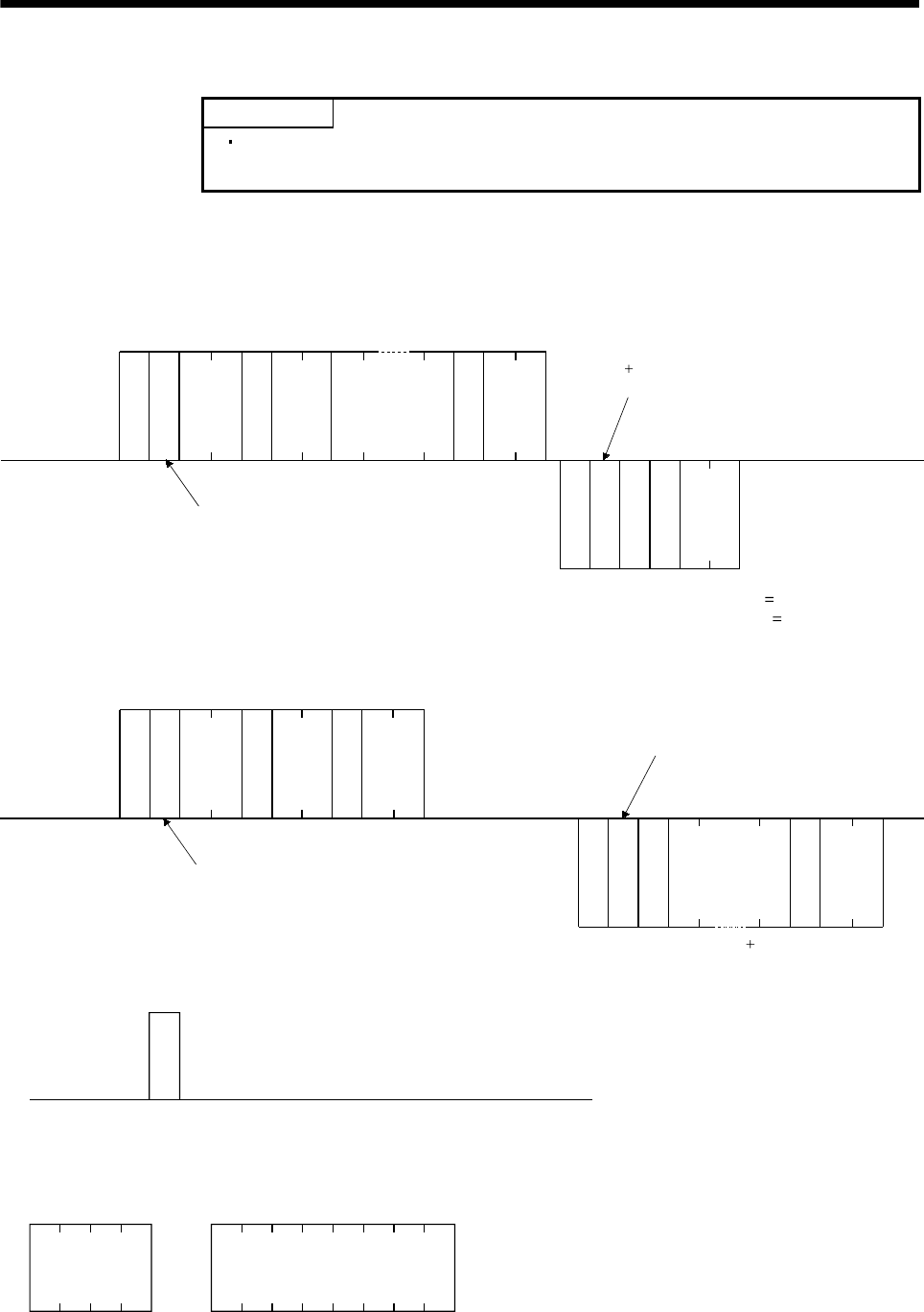
13 - 6
13. COMMUNICATION FUNCTIONS
13.3 Protocol
POINT
Whether station number setting will be made or not must be selected if
the RS-232C communication function is used.
Since up to 32 axes may be connected to the bus, add a station number to the command, data No., etc. to
determine the destination unit of data communication. Set the station number per unit using the IFU
parameters. Send data are valid for the unit of the specified station number.
(1) Transmission of data from the controller to the servo
S
O
H
S
T
X
E
T
X
S
T
X
E
T
X
Data
No. Data* Check
sum
10 frames (data)
Station number
Error code
Check
sum
6 frames
Positive response: Error code A
Negative response: Error code other than A
Slave station
Master station
Command
Station number
(2) Transmission of data request from the controller to the servo
S
O
H
S
T
X
E
T
X
S
T
X
E
T
X
Master station
Slave station
10 frames
Command
Data
No.
Check
sum
Error code
Data* Check
sum
6 frames (data)
Station number
Station number
(3) Recovery of communication status by time-out
E
O
T
Master station
Slave station
EOT causes the servo to return to
the receive neutral status.
(4) Data frames
The data length depends on the command.
or
Data
4 frames
Data
8 frames
or 12 frames or 16 frames
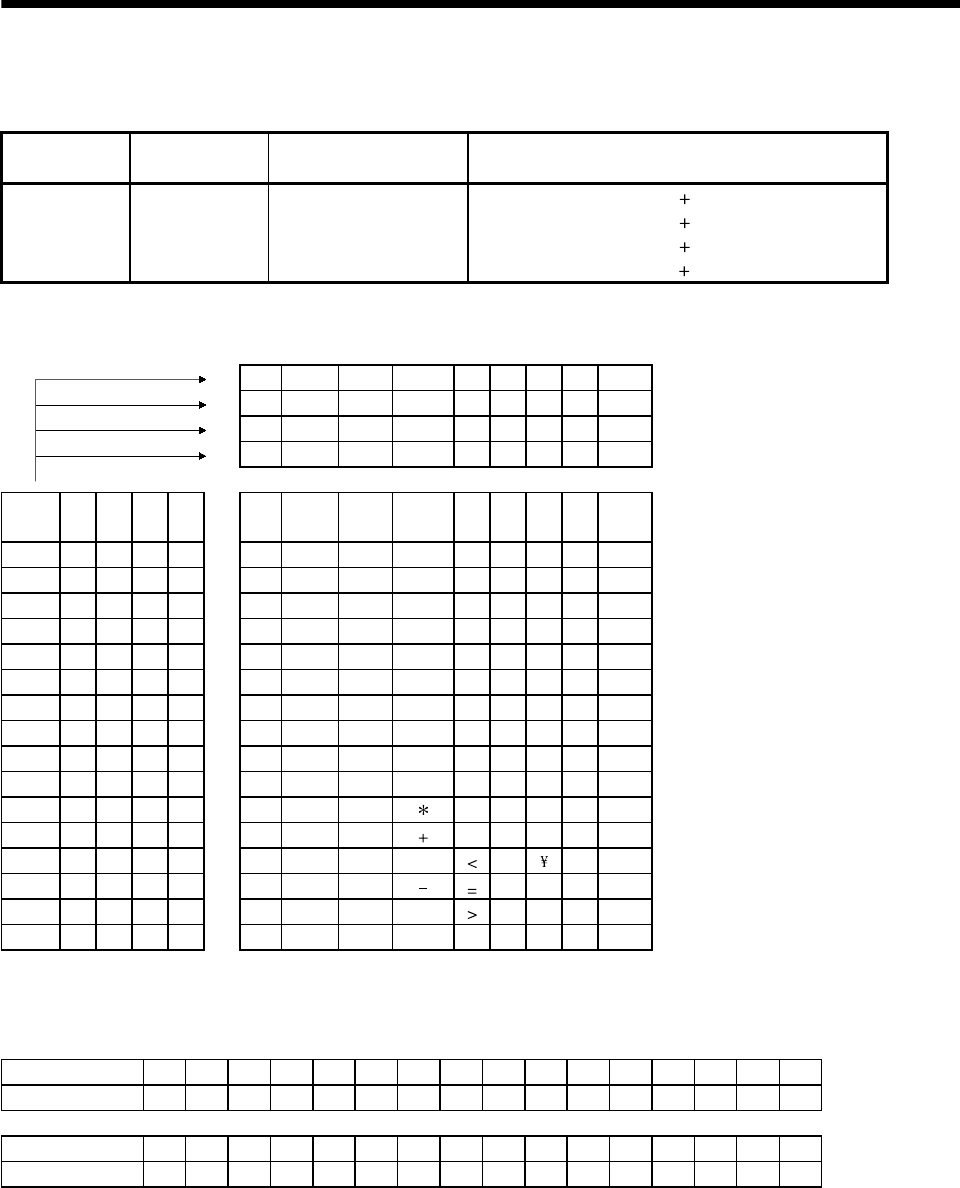
13 - 7
13. COMMUNICATION FUNCTIONS
13.4 Character codes
(1) Control codes
Code name Hexadecimal
(ASCII code) Description Personal computer terminal key operation
(General)
SOH
STX
ETX
EOT
01H
02H
03H
04H
start of head
start of text
end of text
end of transmission
ctrl A
ctrl B
ctrl C
ctrl D
(2) Codes for data
ASCII unit codes are used.
b80 0 0 0000 0
b70 0 0 0111 1
b60 0 1 1001 1
b50 1 0 1010 1
b8 to
b5
b4b3b2b1
C
R0 1 2 3456 7
0000 0NULDLESpace0@P` p
0001 1SOHDC
1!1AQaq
0010 2STXDC
2“2BRbr
0011 3ETXDC
3#3CScs
0100 4 $ 4DTd t
0101 5 % 5EUe u
0110 6 & 6FVf v
0111 7 ‘ 7GWg w
1000 8 ( 8HXh x
1001 9 ) 9IYi y
1010 10 :JZj z
1011 11 ;K[k {
1100 12 , Ll|
1101 13 M]m }
1110 14 . N^n
1111 15 / ?O_oDEL
(3) Station numbers
You may set 32 station numbers from station 0 to station 31 and the ASCII unit codes are used to
specify the stations.
Station number 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
ASCII code 0123456789ABCDEF
Station number 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
ASCII code GHI J KLMNOPQRS T UV
For example, "30H" is transmitted in hexadecimal for the station number of "0".
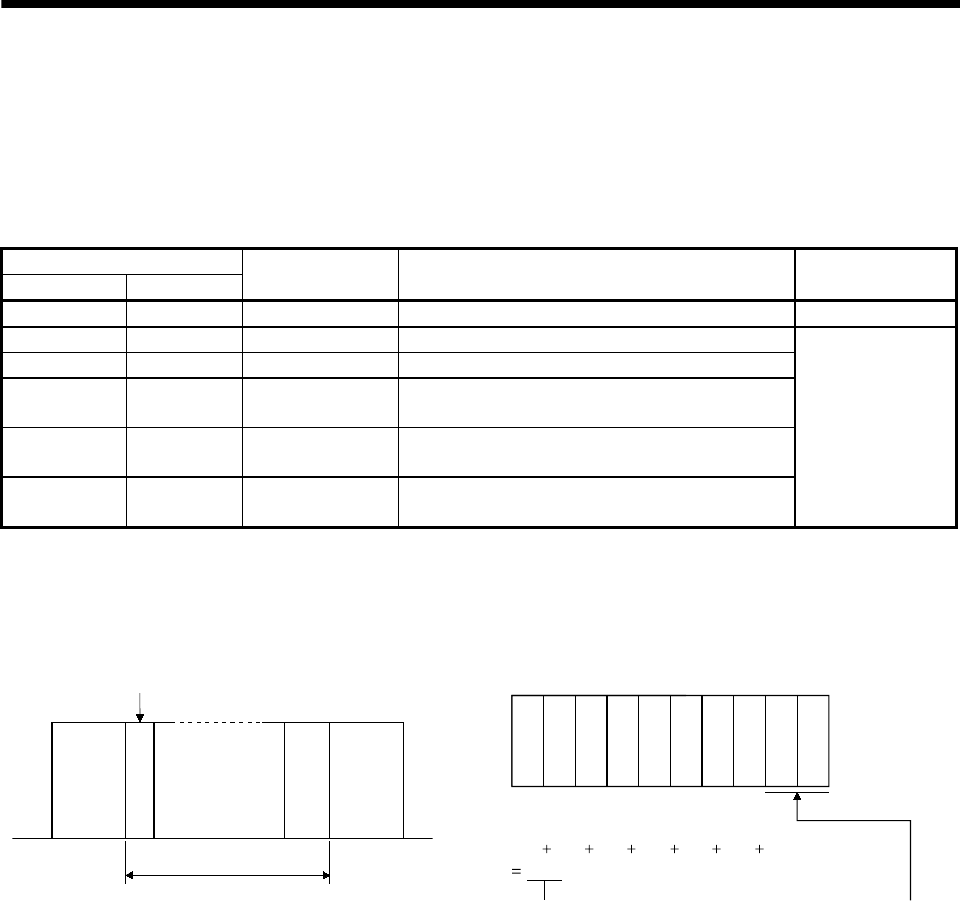
13 - 8
13. COMMUNICATION FUNCTIONS
13.5 Error codes
Error codes are used in the following cases and an error code of single-code length is transmitted.
On receipt of data from the master station, the slave station sends the error code corresponding to that
data to the master station.
The error code sent in upper case indicates that the MELSERVO-J2M is normal and the one in lower case
indicates that an alarm occurred.
Error code
Servo normal Servo alarm Error name Description Remarks
[A] [a] Normal operation Data transmitted was processed properly. Positive response
[B] [b] Parity error Parity error occurred in the transmitted data.
[C] [c] Checksum error Checksum error occurred in the transmitted data.
[D] [d] Character error Character not existing in the specifications was
transmitted.
[E] [e] Command error Command not existing in the specifications was
transmitted.
[F] [f] Data No. error Data No. not existing in the specifications was
transmitted.
Negative response
13.6 Checksum
The check sum is a ASCII-coded hexadecimal representing the lower two digits of the sum of ASCII-coded
hexadecimal numbers up to ETX, with the exception of the first control code (STX or S0H).
Check
Checksum range
ETXSTX or
SOH
Station number
S
T
X
02H
[0]
30H
[A]
41H
[1]
31H
[2]
32H
[5]
35H
[F]
46H
E
T
X
[5] [2]
03H
30H 41H 31H 32H 35H 46H 03H
152H
(Example)
Lower 2 digits 52 is sent after conversion into ASCII code [5][2].
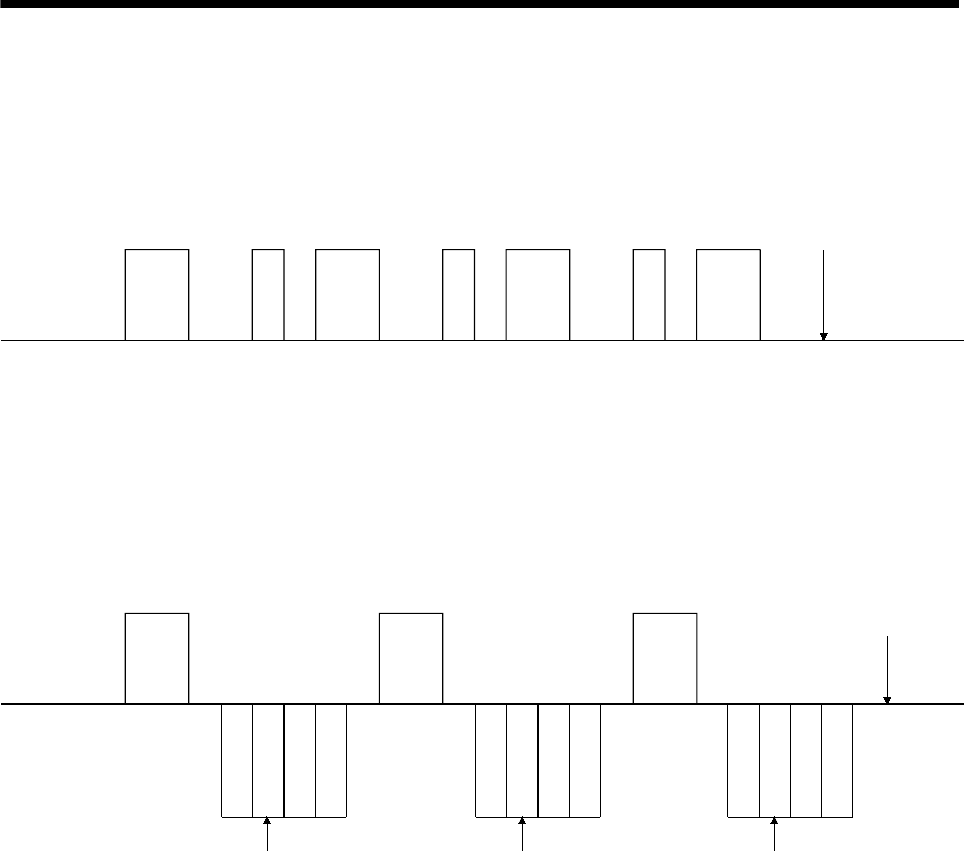
13 - 9
13. COMMUNICATION FUNCTIONS
13.7 Time-out operation
The master station transmits EOT when the slave station does not start reply operation (STX is not
received) 300[ms] after the master station has ended communication operation. 100[ms] after that, the
master station retransmits the message. Time-out occurs if the slave station does not answer after the
master station has performed the above operation three times. (Communication error)
E
O
T
300ms
100ms
E
O
T
300ms
100ms
E
O
T
300ms
100ms
300ms
Message
Message
Message
Message
*Time-out
Master station
Slave station
13.8 Retry operation
When a fault occurs in communication between the master and slave stations, the error code in the
response data from the slave station is a negative response code ([B] to [F], [b] to [f]). In this case, the
master station retransmits the message which was sent at the occurrence of the fault (Retry operation). A
communication error occurs if the above operation is repeated and results in the error three or more
consecutive times.
Message
Message
Message
*Communication error
Master station
Slave station S
T
X
S
T
X
S
T
X
Station number Station number Station number
Similarly, when the master station detects a fault (e.g. checksum, parity) in the response data from the
slave station, the master station retransmits the message which was sent at the occurrence of the fault. A
communication error occurs if the retry operation is performed three times.
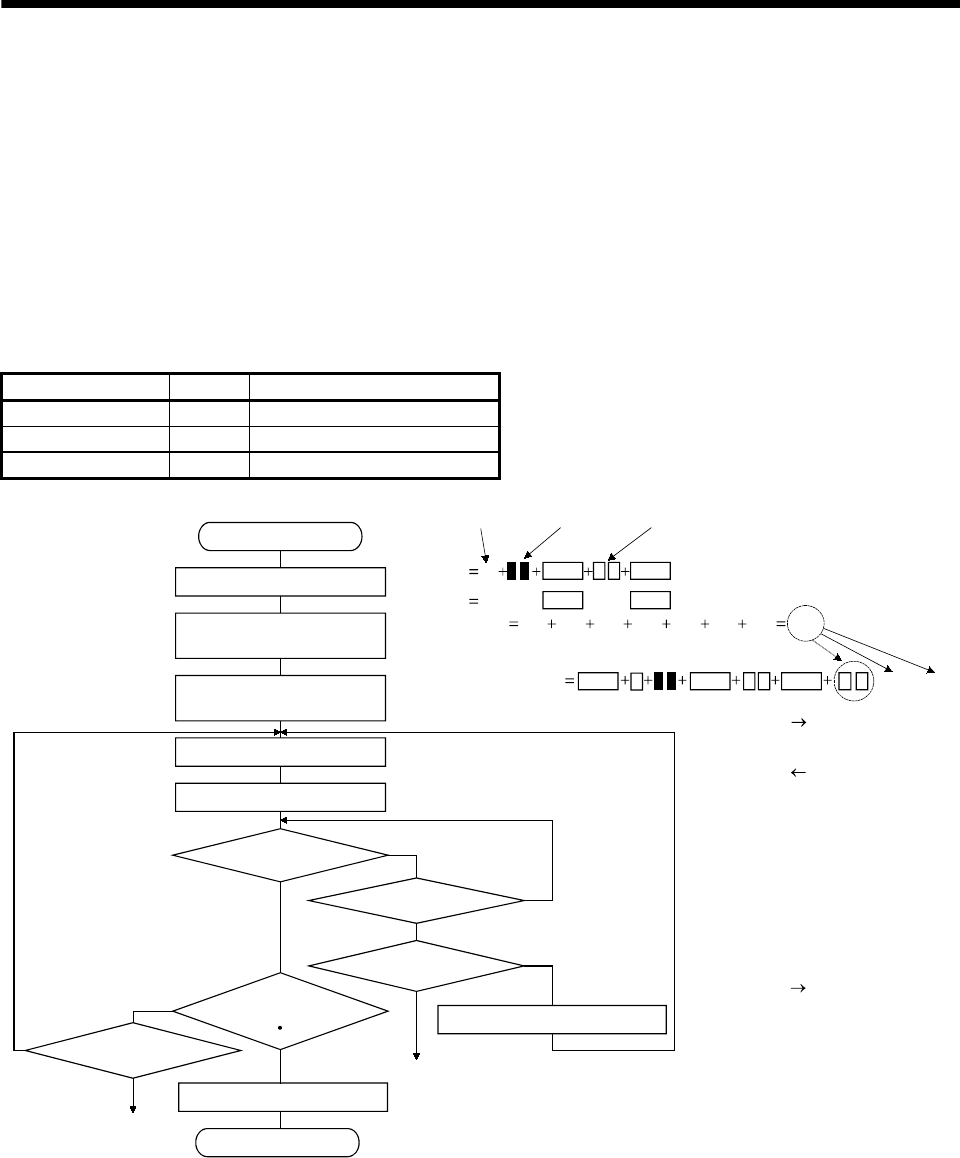
13 - 10
13. COMMUNICATION FUNCTIONS
13.9 Initialization
After the slave station is switched on, it cannot reply to communication until the internal initialization
processing terminates. Hence, at power-on, ordinary communication should be started after:
(1) 1s or more time has elapsed after the slave station is switched on; and
(2) Making sure that normal communication can be made by reading the parameter or other data which
does not pose any safety problems.
13.10 Communication procedure example
The following example reads the set value of DRU parameter No.2 "function selection 1" from the drive
unit of station 0:
Data item Value Description
Station number 0 Interface unit station 0
Command 05 Read command
Data No. 02 DRU parameter No.2
Checksum 30H 30H 35H 02H 30H 32H 03H FCH
02STX ETX
5
0
Yes
No
Yes
No
No
No
Yes
Yes
Yes
No
[0][0][5] [0][2]
[0]
Axis No. Command Data No.
Data
Start
Data make-up
Checksum calculation and
addition
Addition of SOH to make
up transmission data
Data transmission
Data receive
Is there receive data?
3 consecutive times?
Error processing
Other than error code
[A] [a]?
Receive data analysis
End
300ms elapsed?
3 consecutive times?
Error processing
100ms after EOT transmission
STX ETX
46H 43H
SOH FCTransmission data 5
0STX 02ETX
Master station slave station
Master station slave station
Master station slave station
0
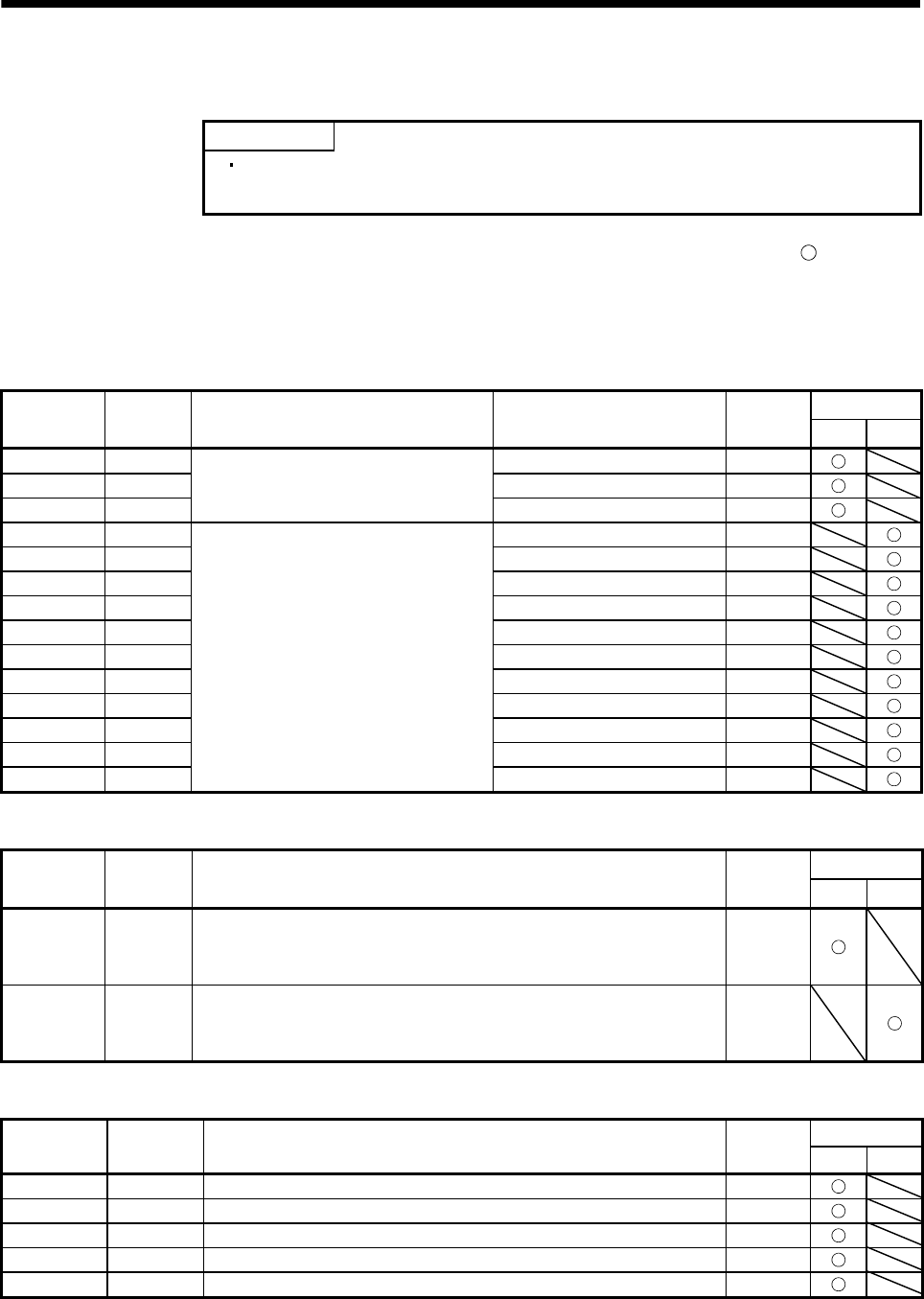
13 - 11
13. COMMUNICATION FUNCTIONS
13.11 Command and data No. list
POINT
If the command/data No. is the same, its data may be different from the
interface and drive units and other servo amplifiers.
The commands/data No. of the respective interface unit and drive units are those marked in the Unit
field.
13.11.1 Read commands
(1) Status display (Command [0][1])
Unit
Command Data No. Description Display item Frame
length IFU DRU
[0][1] [8][0] regenerative load ratio 12
[0][1] [8][1] Bus voltage 12
[0][1] [8][2]
Status display data value and
processing information
Peak Bus voltage 12
[0][1] [8][0] cumulative feedback pulses 12
[0][1] [8][1] Servo motor speed 12
[0][1] [8][2] droop pulses 12
[0][1] [8][3] cumulative command pulses 12
[0][1] [8][4] command pulse frequency 12
[0][1] [8][5] effective load ratio 12
[0][1] [8][6] peak load ratio 12
[0][1] [8][7] Instantaneous torque 12
[0][1] [8][8] within one-revolution position 12
[0][1] [8][9] ABS counter 12
[0][1] [8][A]
Status display data value and
processing information
load inertia moment ratio 12
(2) Parameter (Command [0][5])
Unit
Command Data No. Description Frame
length IFU DRU
[0][5] [0][0]
to
[1][D]
Current value of each parameter
The decimal equivalent of the data No. value (hexadecimal) corresponds
to the parameter number.
8
[0][5] [0][0]
to
[5][4]
Current value of each parameter
The decimal equivalent of the data No. value (hexadecimal) corresponds
to the parameter number.
8
(3) External I/O signals (Command [1][2])
Unit
Command Data No. Description Frame
length IFU DRU
[1][2] [4][0] External input pin statuses 8
[1][2] [4][1] External input pin statuses 8
[1][2] [4][3] External input pin statuses 8
[1][2] [C][0] External output pin statuses 8
[1][2] [C][1] External output pin statuses 8
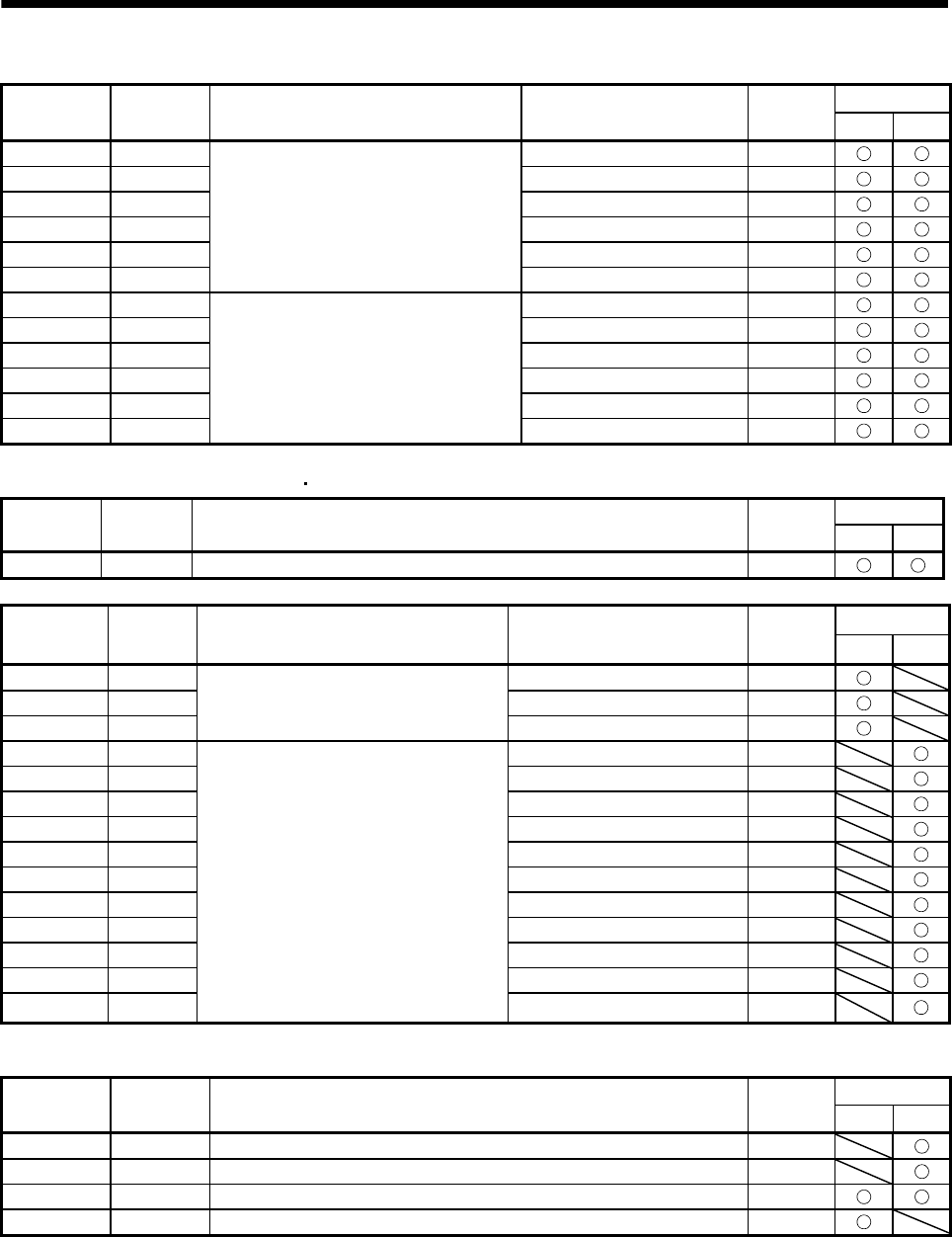
13 - 12
13. COMMUNICATION FUNCTIONS
(4) Alarm history (Command [3][3])
Unit
Command Data No. Description Alarm occurrence sequence Frame
length IFU DRU
[3][3] [1][0] most recent alarm 4
[3][3] [1][1] first alarm in past 4
[3][3] [1][2] second alarm in past 4
[3][3] [1][3] third alarm in past 4
[3][3] [1][4] fourth alarm in past 4
[3][3] [1][5]
Alarm number in alarm history
fifth alarm in past 4
[3][3] [2][0] most recent alarm 4
[3][3] [2][1] first alarm in past 4
[3][3] [2][2] second alarm in past 4
[3][3] [2][3] third alarm in past 4
[3][3] [2][4] fourth alarm in past 4
[3][3] [2][5]
Alarm occurrence time in alarm history
fifth alarm in past 4
(5) Current alarm (Command [0][2] [3][5])
Unit
Command Data No. Description Frame
length IFU DRU
[0][2] [0][0] Current alarm number 4
Unit
Command Data No. Description Display item Frame
length IFU DRU
[3][5] [8][0] regenerative load ratio 12
[3][5] [8][1] Bus voltage 12
[3][5] [8][2]
Status display data value and processing
information at alarm occurrence
Peak Bus voltage 12
[3][5] [8][0] cumulative feedback pulses 12
[3][5] [8][1] Servo motor speed 12
[3][5] [8][2] droop pulses 12
[3][5] [8][3] cumulative command pulses 12
[3][5] [8][4] command pulse frequency 12
[3][5] [8][5] effective load ratio 12
[3][5] [8][6] peak load ratio 12
[3][5] [8][7] Instantaneous torque 12
[3][5] [8][8] within one-revolution position 12
[3][5] [8][9] ABS counter 12
[3][5] [8][A]
Status display data value and processing
information at alarm occurrence
load inertia moment ratio 12
(6) Others
Unit
Command Data No. Description Frame
length IFU DRU
[0][2] [9][0] Servo motor end pulse unit absolute position 8
[0][2] [9][1] Command unit absolute position 8
[0][2] [7][0] Software version 16
[0][0] [8][0] Read of slot connection status 8
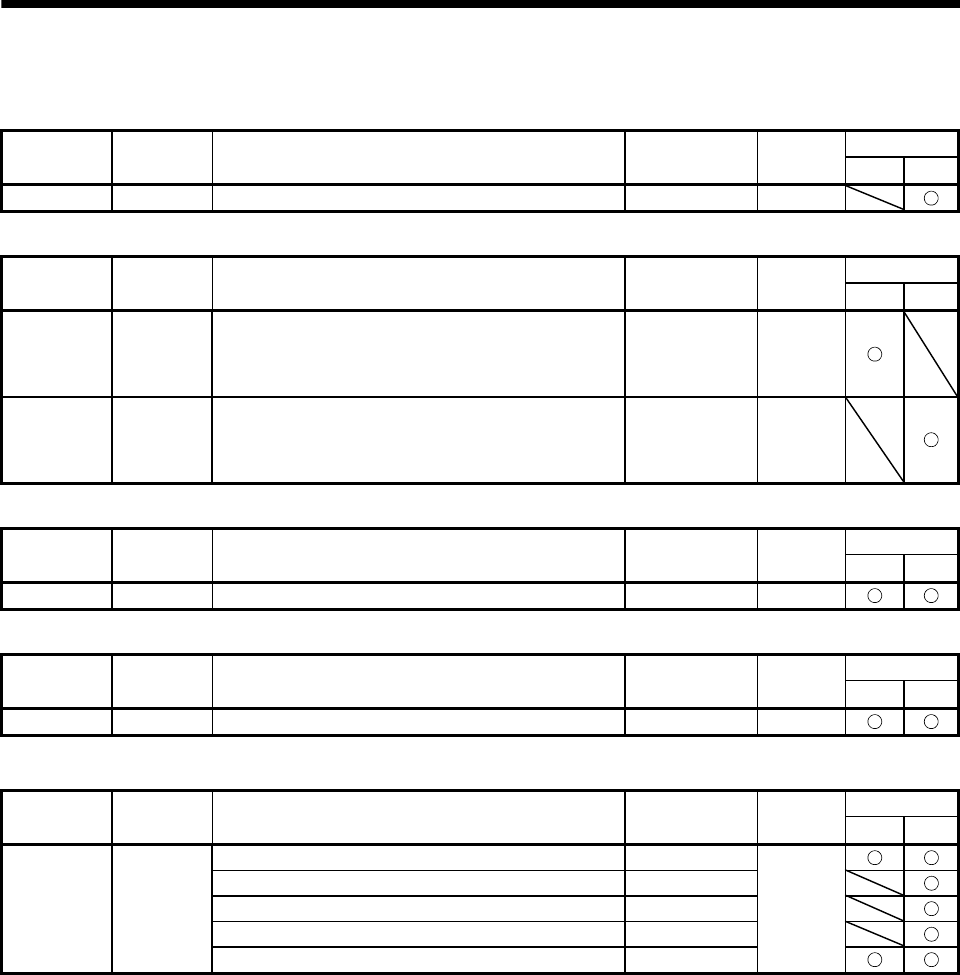
13 - 13
13. COMMUNICATION FUNCTIONS
13.11.2 Write commands
(1) Status display (Command [8][1])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[8][1] [0][0] Status display data clear 1EA5 4
(2) Parameter (Command [8][4])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[8][4] [0][0]
to
[1][D]
Each parameter write
The decimal equivalent of the data No. value
(hexadecimal) corresponds to the parameter number.
Depends on the
parameter. 8
[8][4] [0][0]
to
[5][4]
Each parameter write
The decimal equivalent of the data No. value
(hexadecimal) corresponds to the parameter number.
Depends on the
parameter. 8
(3) Alarm history (Command [8][2])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[8][2] [2][0] Alarm history clear 1EA5 4
(4) Current alarm (Command [8][2])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[8][2] [0][0] Alarm reset 1EA5 4
(5) Operation mode selection (Command [8][B])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
Exit from test operation mode 0000
Jog operation 0001
Positioning operation 0002
Motor-less operation 0003
[8][B] [0][0]
Output signal (DO) forced output 0004
4
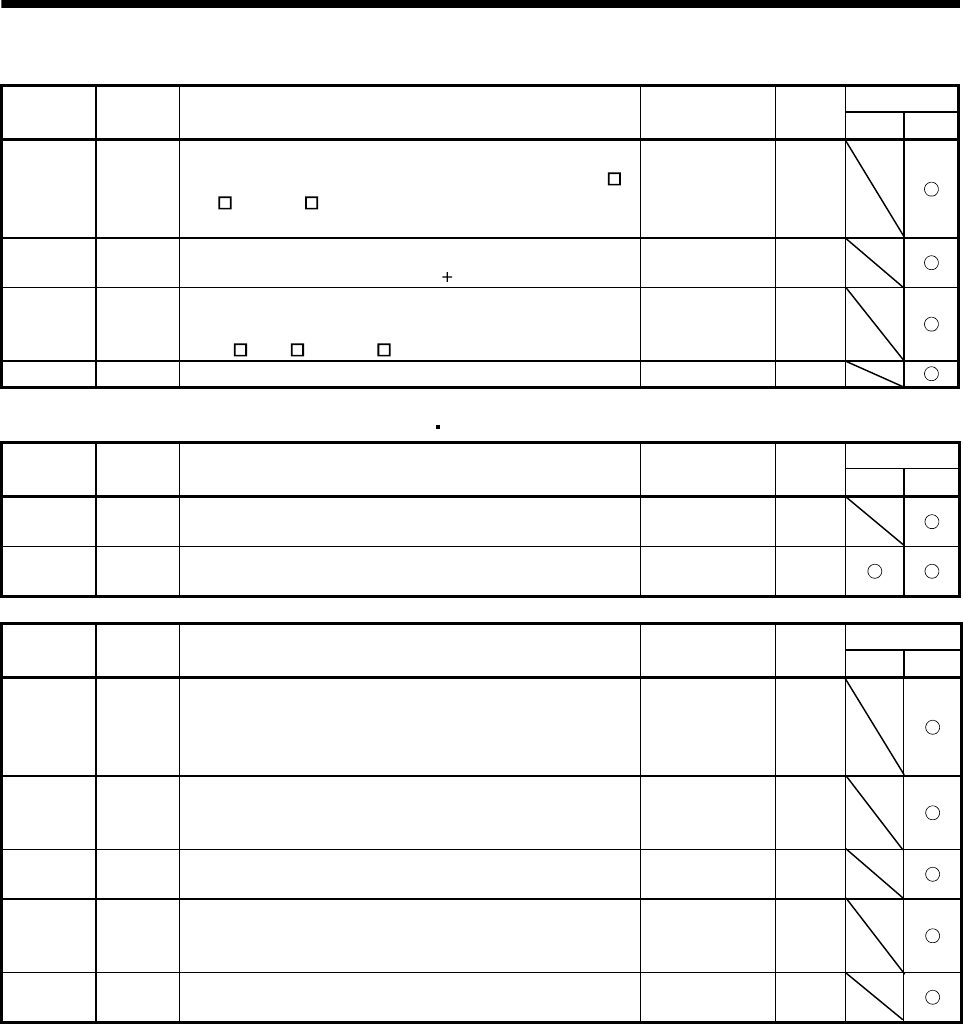
13 - 14
13. COMMUNICATION FUNCTIONS
(6) External input signal disable (Command [9][0])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[9][0] [0][0] Turns off the external input signals (DI), external input
signals and pulse train inputs with the exception of EMG_ ,
LSP and LSN , independently of the external ON/OFF
statuses.
1EA5 4
[9][0] [0][3] Changes the external output signals (DO) into the value of
command [8][B] or command [A][0] data No. [0][1]. 1EA5 4
[9][0] [1][0] Enables the disabled external input signals (DI), external
input signals and pulse train inputs with the exception of
EMG_ , LSP and LSN .
1EA5 4
[9][0] [1][3] Enables the disabled external output signals (DO). 1EA5 4
(7) Data for test operation mode (Command [9][2] [A][0])
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[9][2] [0][0] Input signal for test operation Refer to section
13.12.6 8
[9][2] [A][0] Forced output from signal pin Refer to section
13.12.8 8
Unit
Command Data No. Description Setting range Frame
length IFU DRU
[A][0] [1][0] Writes the speed of the test operation mode (jog operation,
positioning operation).
0000 to
Permissible
instantaneous
speed
4
[A][0] [1][1] Writes the acceleration/deceleration time constant of the
test operation mode (jog operation, positioning operation).
00000000
to
20000
8
[A][0] [1][2] Clears the acceleration/deceleration time constant of the test
operation mode (jog operation, positioning operation). 1EA5 4
[A][0] [1][3] Writes the moving distance (in pulses) of the test operation
mode (jog operation, positioning operation).
80000000
to
7FFFFFFF
8
[A][0] [1][5] Temporary stop command of the test operation mode (jog
operation, positioning operation) 1EA5 4
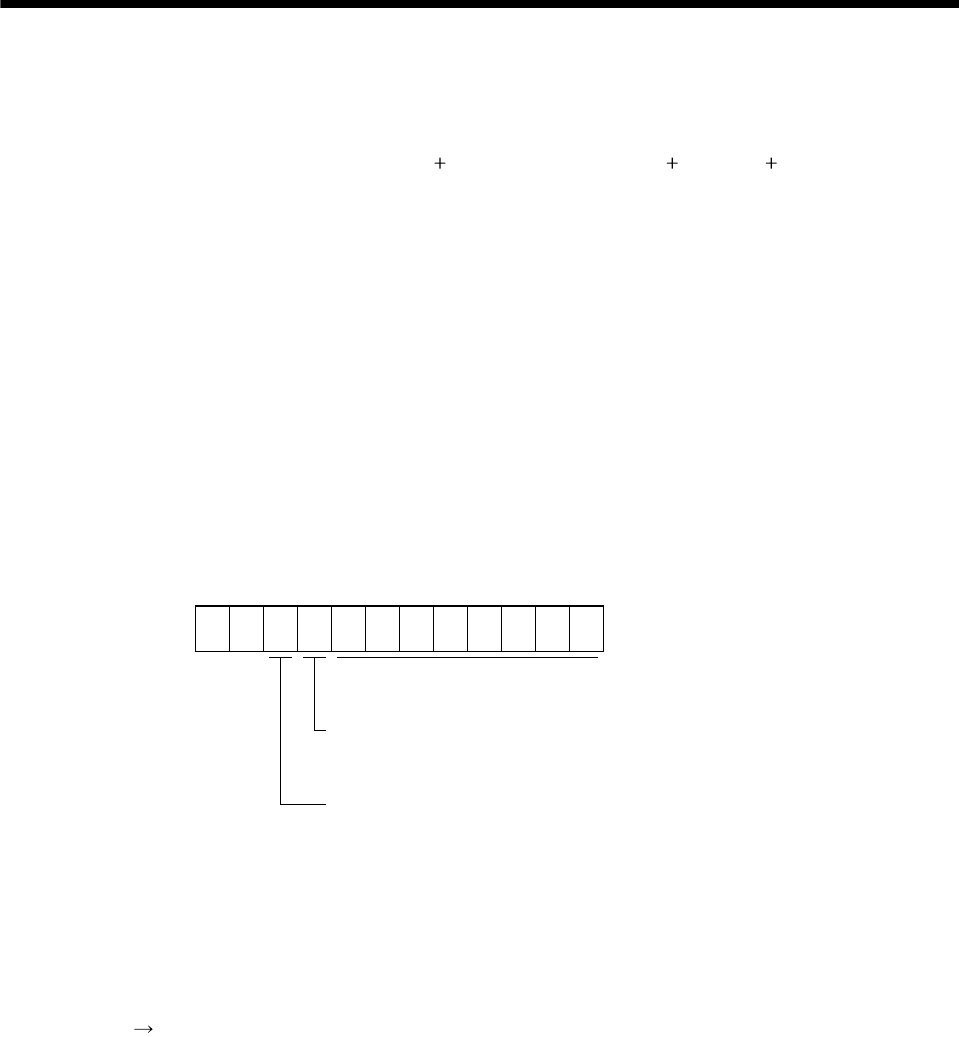
13 - 15
13. COMMUNICATION FUNCTIONS
13.12 Detailed explanations of commands
13.12.1 Data processing
When the master station transmits a command data No. or a command data No. data to a slave
station, a reply or data is returned from the slave station according to the purpose.
When numerical values are represented in these send data and receive data, they are represented in
decimal, hexadecimal, etc.
Therefore, data must be processed according to the application.
Since whether data must be processed or not and how to process data depend on the monitoring,
parameters, etc., follow the detailed explanation of the corresponding command.
The following methods are how to process send and receive data when reading and writing data.
(1) Processing the read data
When the display type is 0, the eight-character data is converted from hexadecimal to decimal and a
decimal point is placed according to the decimal point position information.
When the display type is 1, the eight-character data is used unchanged.
The following example indicates how to process the receive data "003000000929" given to show.
The receive data is as follows.
00
Data 32-bit length (hexadecimal representation)
(Data conversion is required as indicated in the display type
)
Display type
0: Data must be converted into decimal.
1: Data is used unchanged in hexadecimal.
Decimal point position
0: No decimal point
1: First least significant digit (normally not used)
2: Second least significant digit
3: Third least significant digit
4: Forth least significant digit
5: Fifth least significant digit
6: Sixth least significant digit
3000000929
Since the display type is "0" in this case, the hexadecimal data is converted into decimal.
00000929H 2345
As the decimal point position is "3", a decimal point is placed in the third least significant digit.
Hence, "23.45" is displayed.
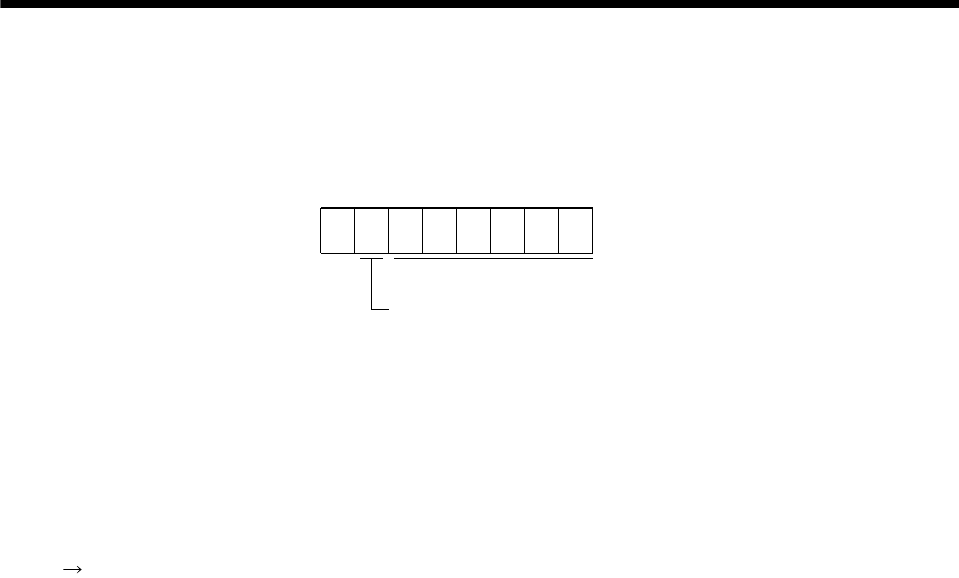
13 - 16
13. COMMUNICATION FUNCTIONS
(2) Writing the processed data
When the data to be written is handled as decimal, the decimal point position must be specified. If it is
not specified, the data cannot be written. When the data is handled as hexadecimal, specify "0" as the
decimal point position.
The data to be sent is the following value.
0
Data is transferred in hexadecimal.
Decimal point position
0: No decimal point
1: First least significant digit
2: Second least significant digit
3: Third least significant digit
4: Forth least significant digit
5: Fifth least significant digit
By way of example, here is described how to process the set data when a value of "15.5" is sent. Since
the decimal point position is the second digit, the decimal point position data is "2".As the data to be
sent is hexadecimal, the decimal data is converted into hexadecimal.
155 9B
Hence, "0200009B" is transmitted.
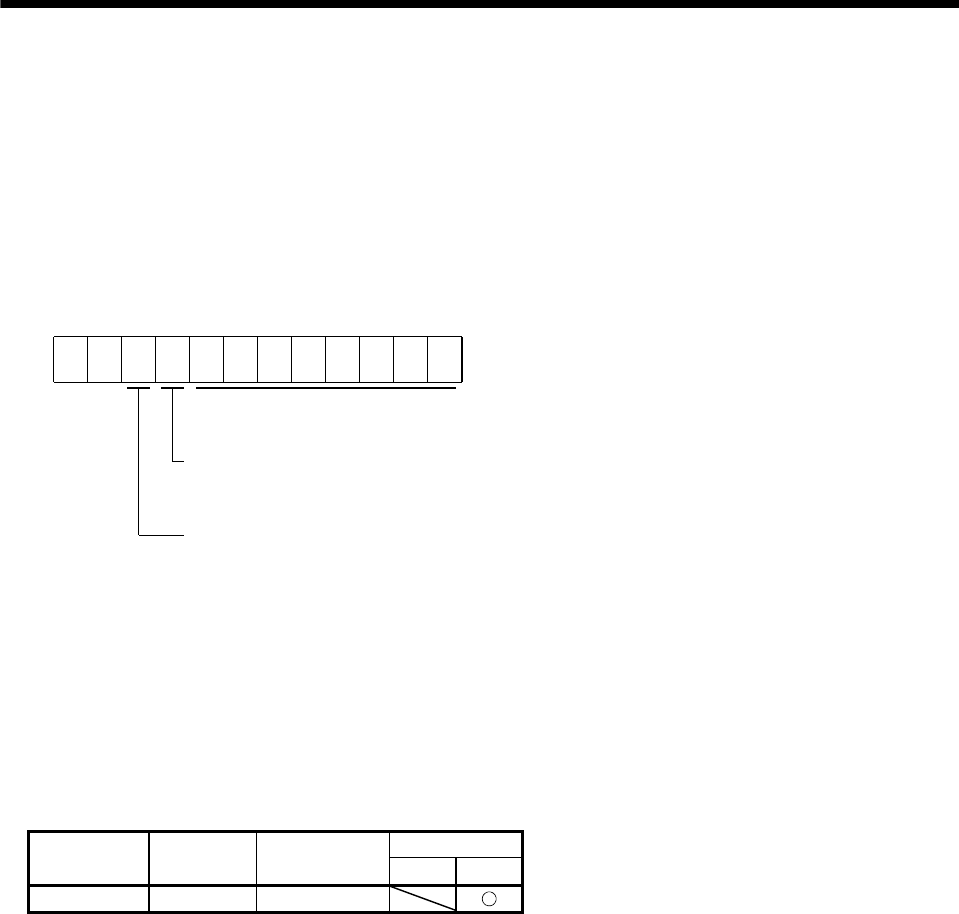
13 - 17
13. COMMUNICATION FUNCTIONS
13.12.2 Status display
(1) Status display data read
When the master station transmits the data No. (refer to the following table for assignment) to the
slave station, the slave station sends back the data value and data processing information.
1) Transmission
Transmit command [0][1] and the data No. corresponding to the status display item to be read.
Refer to Section 13.11.1.
2) Reply
The slave station sends back the status display data requested.
00
Data 32 bits long (represented in hexadecimal)
(Data conversion into display type is required)
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Decimal point position
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(2) Status display data clear
The cumulative feedback pulse data of the status display is cleared. Send this command immediately
after reading the status display item. The data of the status display item transmitted is cleared to
zero.
Unit
Command Data No. Data IFU DRU
[8][1] [0][0] 1EA5
For example, after sending command [0][1] and data No. [8][0] and receiving the status display data,
send command [8][1], data No. [0][0] and data [1EA5] to clear the cumulative feedback pulse value to
zero.
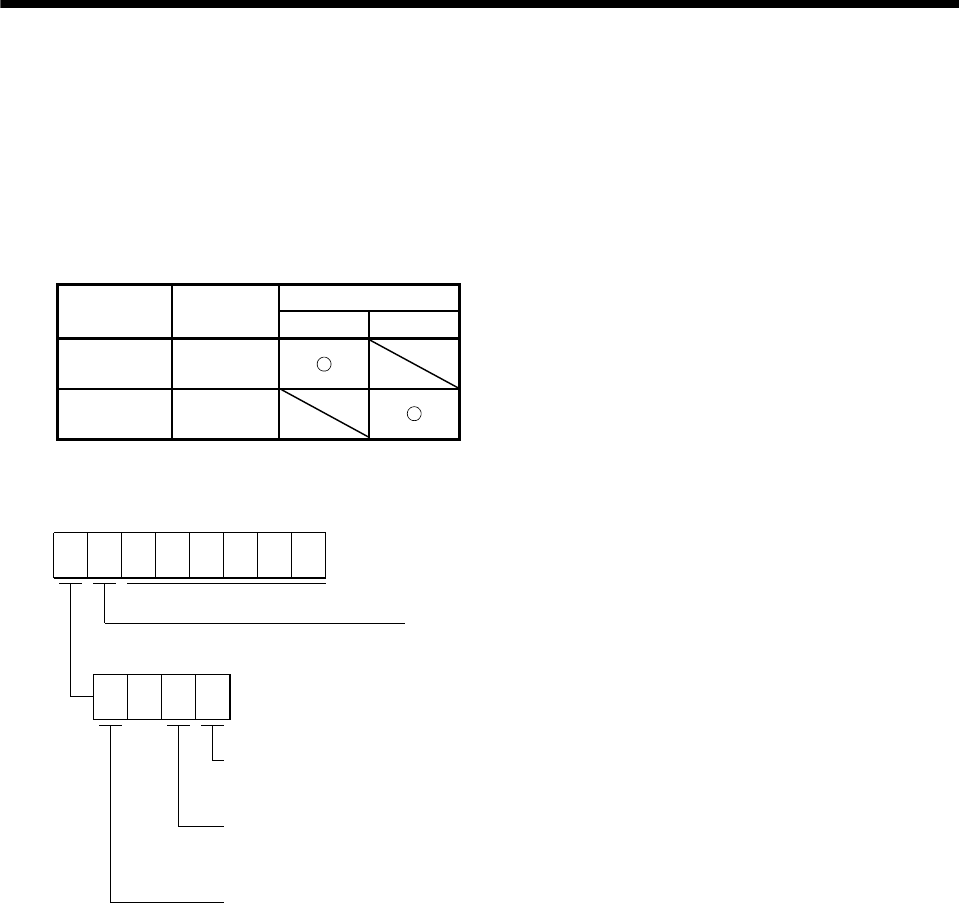
13 - 18
13. COMMUNICATION FUNCTIONS
13.12.3 Parameter
(1) Parameter read
Read the parameter setting.
1) Transmission
Transmit command [0][5] and the data No. corresponding to the parameter No.
The data No. is expressed in hexadecimal equivalent of the data No. value corresponds to the
parameter number.
Unit
Command Data No. IFU DRU
[0][5] [0][0] to
[1][D]
[0][5] [0][0] to
[5][4]
2) Reply
The slave station sends back the data and processing information of the requested parameter No.
Data is transferred in hexadecimal.
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after writ
e
Read enable/disable
0: Read enable
1: Read disable
0
Enable/disable information changes according to the setting of parameter No.19 "parameter
write inhibit". When the enable/disable setting is read disable, ignore the parameter data part
and process it as unreadable.
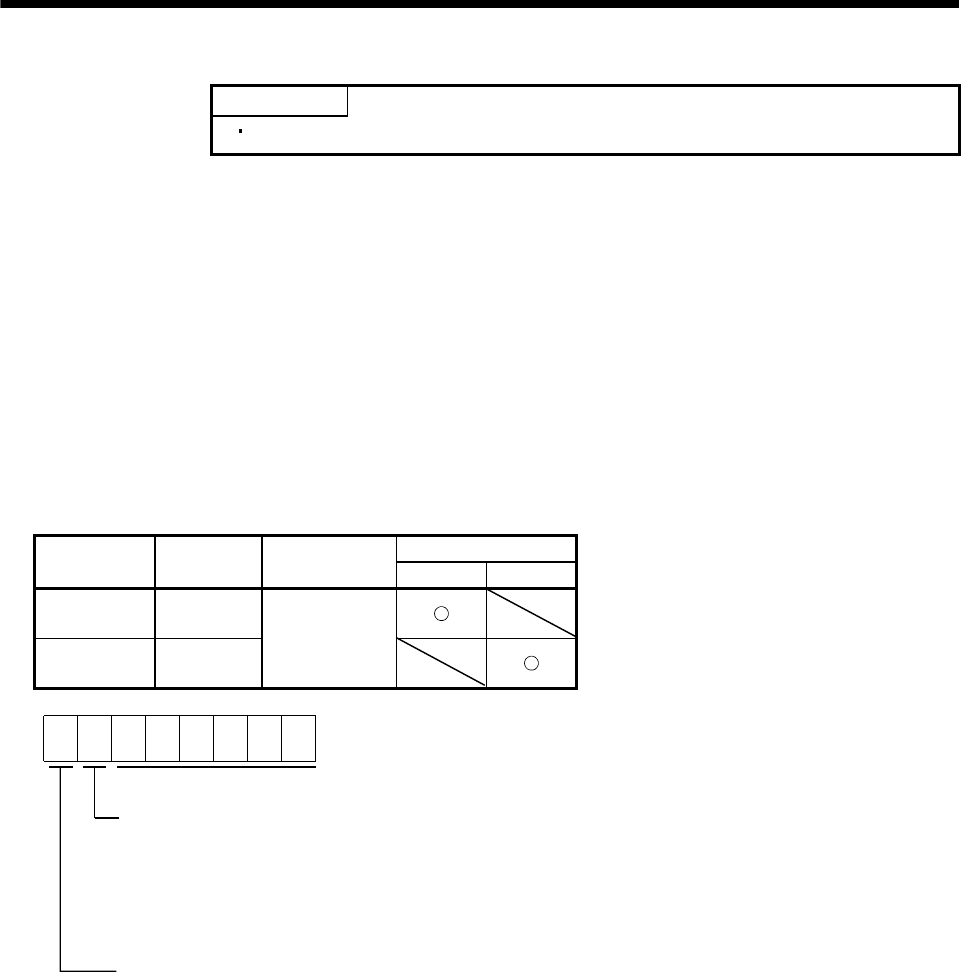
13 - 19
13. COMMUNICATION FUNCTIONS
(2) Parameter write
POINT
The number of write times to the EEP-ROM is limited to 100,000.
Write the parameter setting.
Write the value within the setting range. Refer to Section 5.1 for the setting range.
Transmit command [8][4], the data No., and the set data.
The data No. is expressed in hexadecimal. The decimal equivalent of the data No. value corresponds to
the parameter number.
When the data to be written is handled as decimal, the decimal point position must be specified. If it
is not specified, data cannot be written. When the data is handled as hexadecimal, specify "0" as the
decimal point position.
Write the data after making sure that it is within the upper/lower limit value range given in Section
5.1.2. Read the parameter data to be written, confirm the decimal point position, and create
transmission data to prevent error occurrence. On completion of write, read the same parameter
data to verify that data has been written correctly.
Unit
Command Data No. Set data IFU DRU
[8][4] [0][0] to
[1][D]
[8][4] [0][0] to
[5][4]
See below.
Data is transferred in hexadecimal.
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lower forth digit
5: Lower fifth digit
Write mode
0: Write to EEP-ROM
3: Write to RAM
When the parameter data is changed frequently through communication,
set "3" to the write mode to change only the RAM data in the servo amplifier.
When changing data frequently (once or more within one hour),
do not write it to the EEP-ROM.
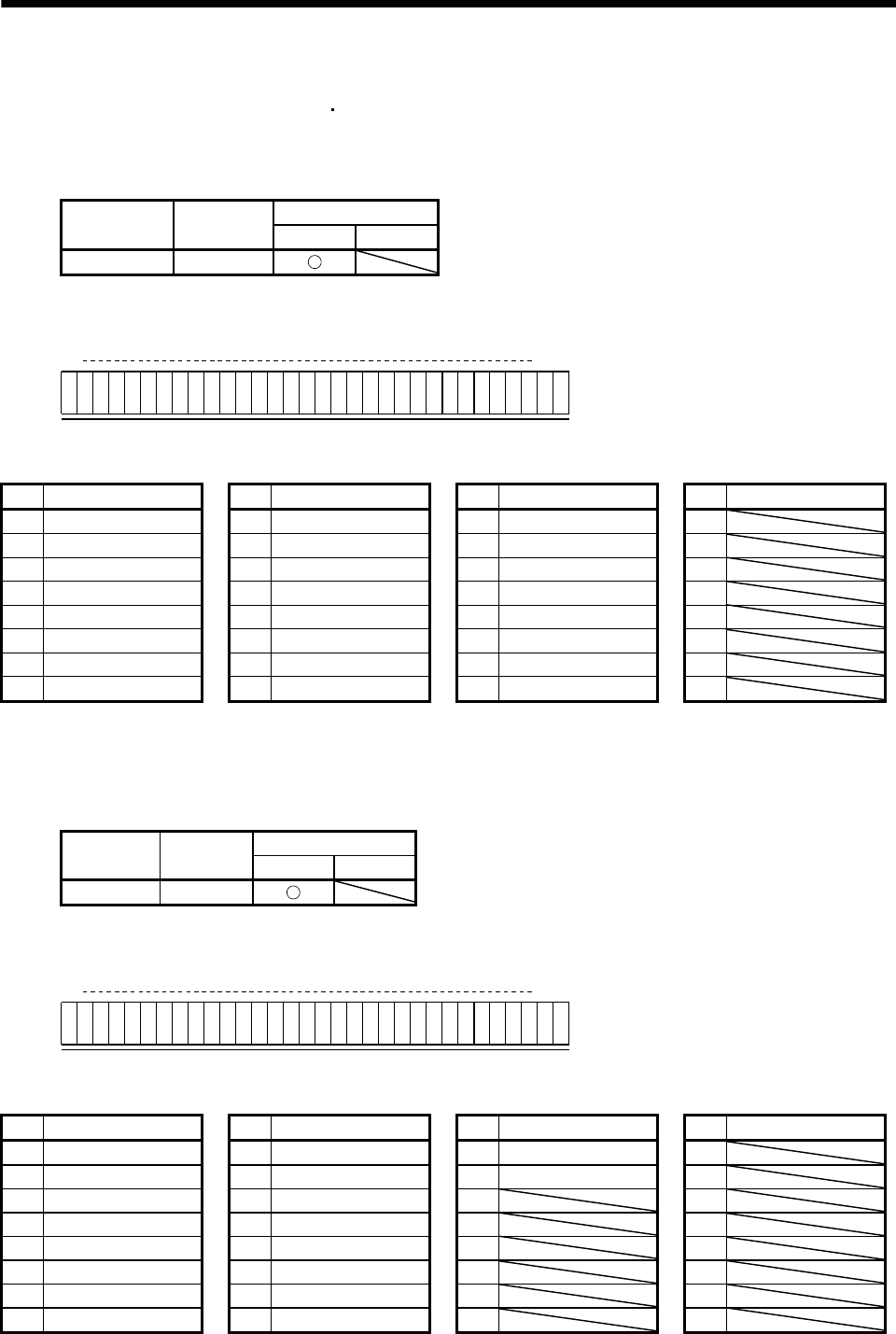
13 - 20
13. COMMUNICATION FUNCTIONS
13.12.4 External I/O pin statuses (DIO diagnosis)
(1) External input pin status read (CN1A CN1B)
Read the ON/OFF statuses of the external input pins.
(a) Transmission
Transmit command [1][2] and data No. [4][0].
Unit
Command Data No. IFU DRU
[1][2] [4][0]
(b) Reply
The ON/OFF statuses of the input pins are sent back.
b31 b0
0: OFF
1: ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit External input pin bit External input pin bit External input pin bit External input pin
0 CN1A-4 8 CN1A-32 16 CN1B-10 24
1 CN1A-5 9 CN1A-34 17 CN1B-12 25
2 CN1A-7 10 CN1A-36 18 CN1B-29 26
3 CN1A-9 11 CN1A-37 19 CN1B-31 27
4 CN1A-10 12 CN1B-4 20 CN1B-32 28
5 CN1A-12 13 CN1B-5 21 CN1B-34 29
6 CN1A-29 14 CN1B-7 22 CN1B-36 30
7 CN1A-31 15 CN1B-9 23 CN1B-37 31
(2) External input pin status read (CN5)
Read the ON/OFF statuses of the external output pins.
(a) Transmission
Transmit command [1][2] and data No. [4][1].
Unit
Command Data No. IFU DRU
[1][2] [4][1]
(b) Reply
The slave station sends back the ON/OFF statuses of the output pins.
b31 b0
0: OFF
1: ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit External input pin bit External input pin bit External input pin bit External input pin
0 CN5-1 8 CN5-11 16 CN5-20 24
1 CN5-2 9 CN5-12 17 CN5-19 25
2 CN5-3 10 CN5-13 18 26
3 CN5-4 11 CN5-14 19 27
4 CN5-5 12 CN5-15 20 28
5 CN5-6 13 CN5-16 21 29
6 CN5-7 14 CN5-17 22 30
7 CN5-10 15 CN5-18 23 31
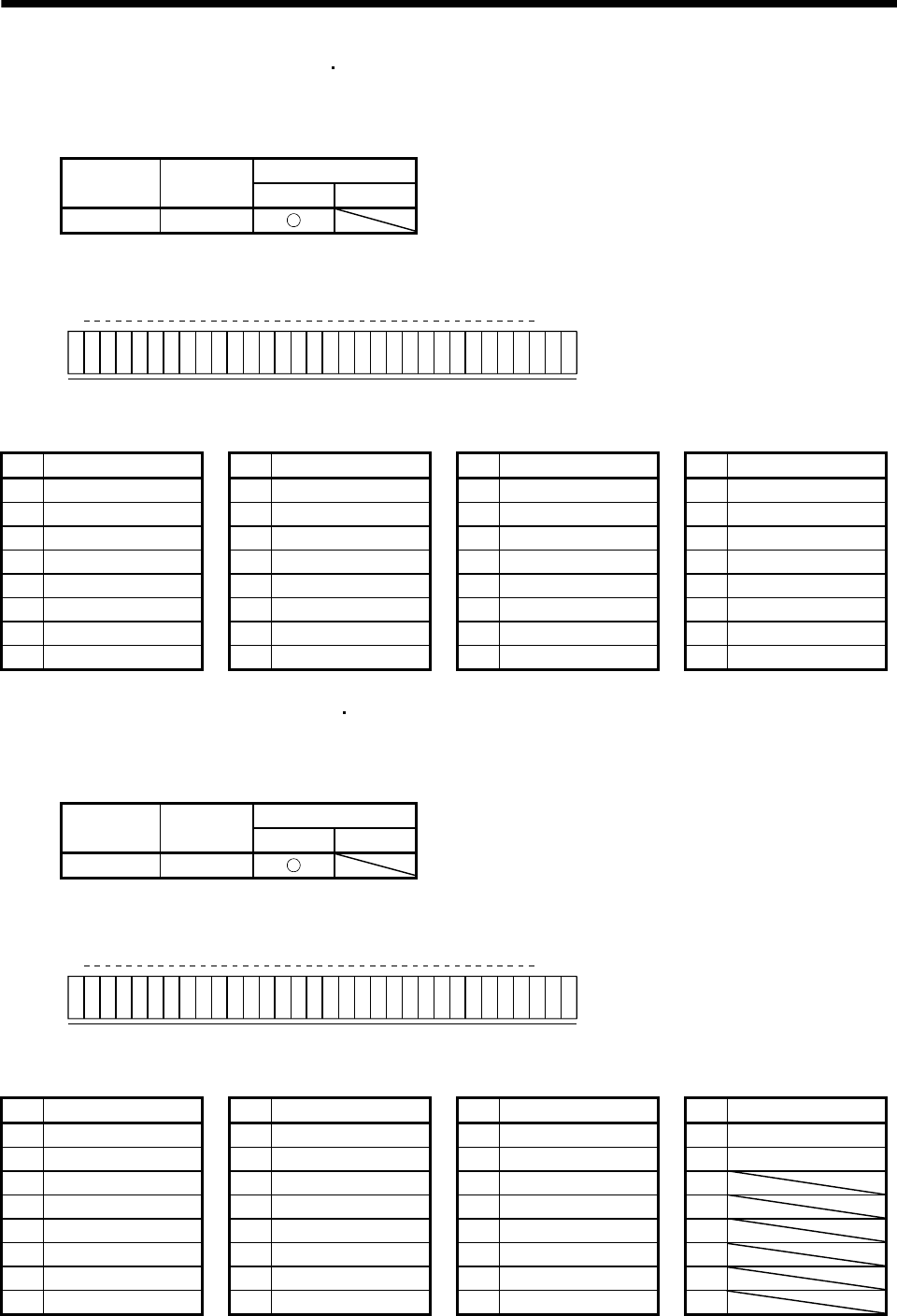
13 - 21
13. COMMUNICATION FUNCTIONS
(3) External input pin status read (CN4A CN4B)
Read the ON/OFF statuses of the external input pins.
(a) Transmission
Transmit command [1][2] and data No. [4][3].
Unit
Command Data No. IFU DRU
[1][2] [4][3]
(b) Reply
The slave station sends back the ON/OFF statuses of the output pins.
b31 b1b0
1: ON
0: OFF
Command of each bit is transmitted to the master
station as hexadecimal date.
bit External input pin bit External input pin bit External input pin bit External input pin
0 CN4A-1 8 CN4A-26 16 CN4B-1 24 CN4B-26
1 CN4A-2 9 CN4A-27 17 CN4B-2 25 CN4B-27
2 CN4A-3 10 CN4A-28 18 CN4B-3 26 CN4B-28
3 CN4A-4 11 CN4A-29 19 CN4B-4 27 CN4B-29
4 CN4A-5 12 CN4A-30 20 CN4B-5 28 CN4B-30
5 CN4A-6 13 CN4A-31 21 CN4B-6 29 CN4B-31
6 CN4A-7 14 CN4A-32 22 CN4B-7 30 CN4B-32
7 CN4A-8 15 CN4A-33 23 CN4B-8 31 CN4B-33
(4) External output pin status read (CN1A CN1B)
Read the ON/OFF statuses of the external output pins.
(a) Transmission
Transmit command [1][2] and data No. [C][0].
Unit
Command Data No. IFU DRU
[1][2] [C][0]
(b) Reply
The slave station sends back the ON/OFF statuses of the output pins.
b31 b1b0
1: ON
0: OFF
Command of each bit is transmitted to the master
station as hexadecimal date.
bit External output pin bit External output pin bit External output pin bit External output pin
0 CN1A-3 8 CN1B-6 16 CN1A-27 24 CN1B-23
1 CN1A-6 9 CN1B-8 17 CN1B-27 25 CN1B-22
2 CN1A-8 10 CN1B-11 18 CN1A-25 26
3 CN1A-11 11 CN1A-11 19 CN1A-24 27
4 CN1A-28 12 CN1A-28 20 CN1A-23 28
5 CN1A-30 13 CN1A-30 21 CN1A-22 29
6 CN1A-33 14 CN1A-32 22 CN1B-25 30
7 CN1B-3 15 CN1A-35 23 CN1B-24 31
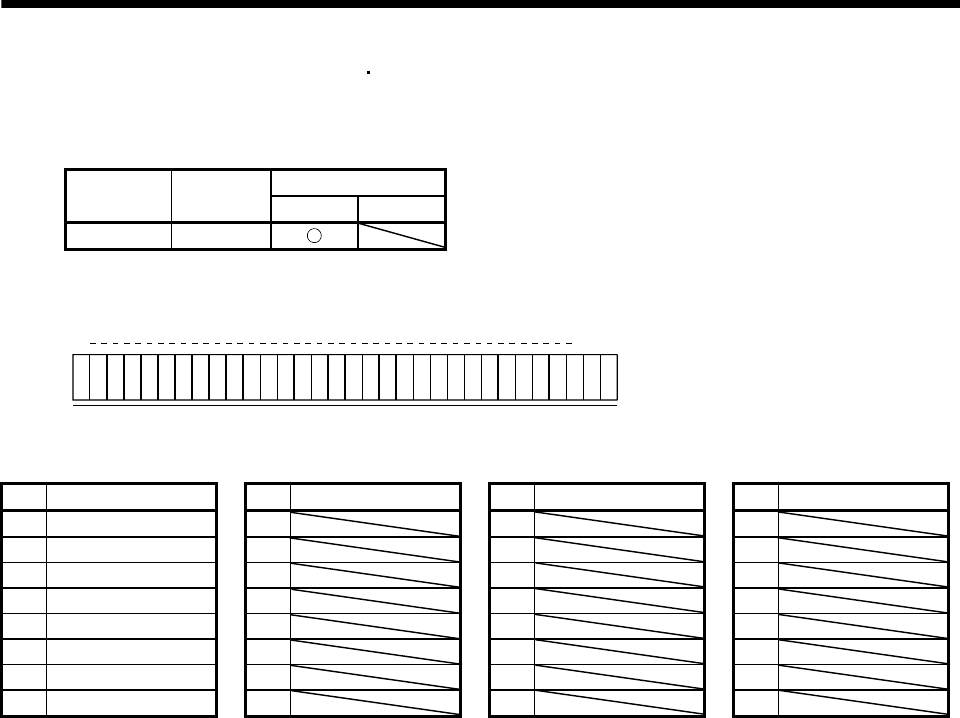
13 - 22
13. COMMUNICATION FUNCTIONS
(5) External output pin status read (CN4A CN4B)
Read the ON/OFF statuses of the external output pins.
(a) Transmission
Transmit command [1][2] and data No. [C][1].
Unit
Command Data No. IFU DRU
[1][2] [C][1]
(b) Reply
The slave station sends back the statuses of the output pins.
b31 b1b0
1: ON
0: OFF
Command of each bit is transmitted to the master
station as hexadecimal date.
bit External output pin bit External output pin bit External output pin bit External output pin
0 CN4A-9 8 16 24
1CN4A-10 9 17 25
2 CN4A-34 10 18 26
3 CN4A-35 11 19 27
4CN4B-9 12 20 28
5 CN4B-10 13 21 29
6 CN4B-34 14 22 30
7 CN4B-35 15 23 31
13 - 23
13. COMMUNICATION FUNCTIONS
13.12.5 Disable/enable of external I/O signals (DIO)
Inputs can be disabled independently of the external I/O signal ON/OFF. When inputs are disabled, the
input signals are recognized as follows. Among the external input signals, forced stop (EMG_ ), forward
rotation stroke end (LSP ) and reverse rotation stroke end (LSN ) cannot be disabled.
Signal Status
External input signals (DI) OFF
Pulse train inputs None
(1) Disabling/enabling the external input signals (DI), external analog input signals and pulse train
inputs with the exception of forced stop (EMG_ ), forward rotation stroke end (LSP ) and reverse
rotation stroke end (LSN ).
Transmit the following communication commands:
(a) Disable
Unit
Command Data No. Data IFU DRU
[9][0] [0][0] 1EA5
(b) Enable
Unit
Command Data No. Data IFU DRU
[9][0] [1][0] 1EA5
(2) Disabling/enabling the external output signals (DO)
Transmit the following communication commands:
(a) Disable
Unit
Command Data No. Data IFU DRU
[9][0] [0][3] 1EA5
(b) Enable
Unit
Command Data No. Data IFU DRU
[9][0] [1][3] 1EA5
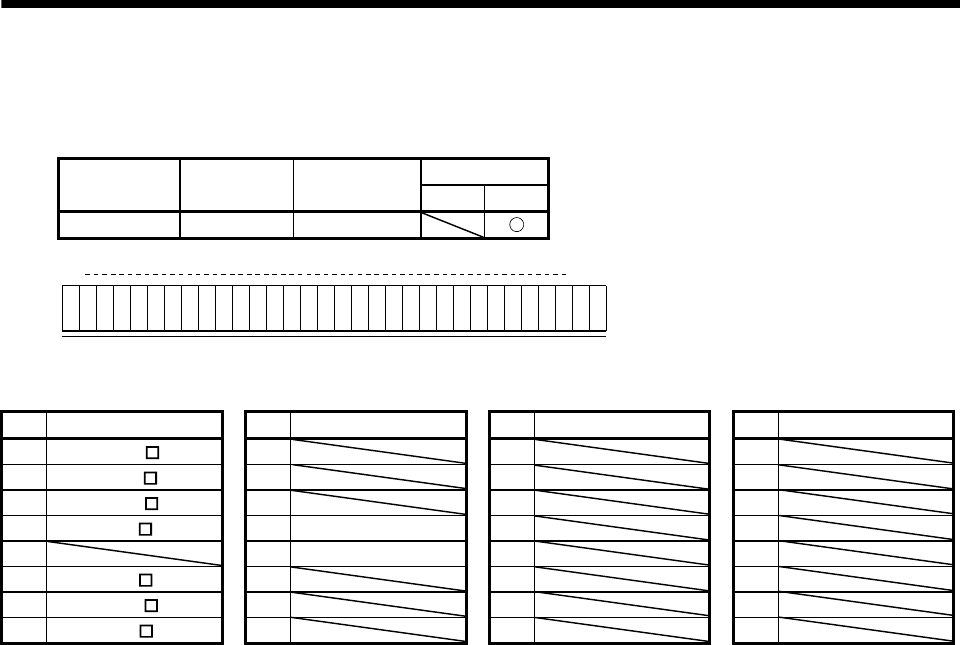
13 - 24
13. COMMUNICATION FUNCTIONS
13.12.6 External input signal ON/OFF (test operation)
Each input signal can be turned on/off for test operation. Turn off the external input signals.
Send command [9] [2], data No. [0] [0] and data.
Unit
Command Data No. Data IFU DRU
[9][2] [0][0] See below
b31 b0
0: OFF
1: ON
b1
Command of each bit is transmitted to the slave
station as hexadecimal data.
bit Signal abbreviation bit Signal abbreviation bit Signal abbreviation bit Signal abbreviation
0SON 81624
1LSP 91725
2LSN 10 18 26
3TL 11 ST1 19 27
4 12 ST2 20 28
5PC 13 21 29
6 RES 14 22 30
7CR 15 23 31
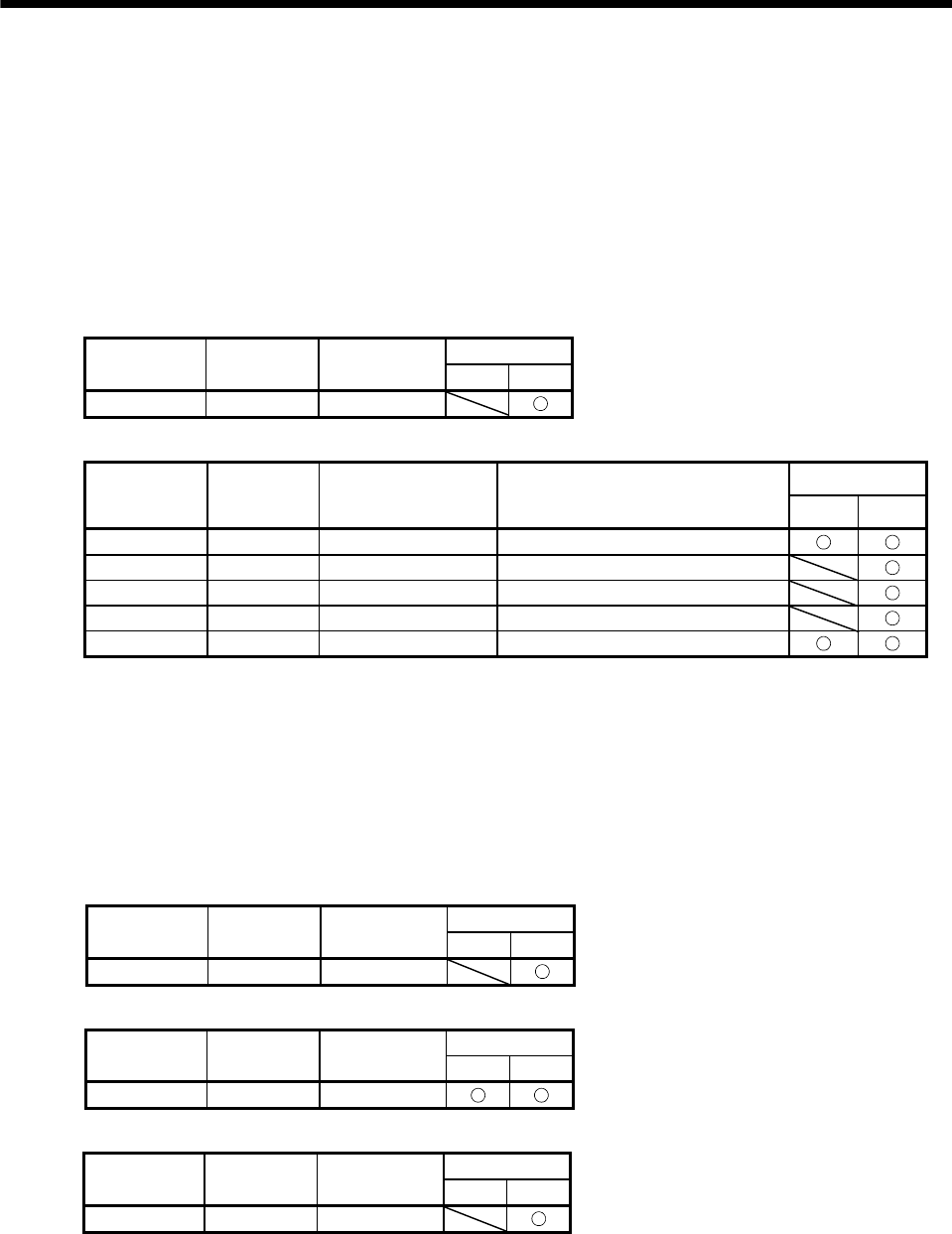
13 - 25
13. COMMUNICATION FUNCTIONS
13.12.7 Test operation mode
(1) Instructions for test operation mode
The test operation mode must be executed in the following procedure. If communication is interrupted
for longer than 0.5s during test operation, the servo amplifier causes the motor to be decelerated to a
stop and servo-locked. To prevent this, continue communication without a break, e.g. monitor the
status display.
(a) Execution of test operation
1) Turn off all external input signals.
2) Disable the external input signals.
Unit
Command Data No. Data IFU DRU
[9][2] [0][0] 1EA5
3) Choose the test operation mode.
Unit
Command Data No. Transmission data Selection of test operation mode IFU DRU
[8][B] [0][0] 0000 Test operation mode cancel
[8][B] [0][0] 0001 Jog operation
[8][B] [0][0] 0002 Positioning operation
[8][B] [0][0] 0003 Motor-less operation
[8][B] [0][0] 0004 DO forced output
4) Set the data needed for test operation.
5) Start.
6) Continue communication using the status display or other command.
(b) Termination of test operation
To terminate the test operation mode, complete the corresponding operation and:
1) Clear the test operation acceleration/deceleration time constant.
Unit
Command Data No. Data IFU DRU
[A][0] [1][2] 1EA5
2) Cancel the test operation mode.
Unit
Command Data No. Data IFU DRU
[8][B] [0][0] 0000
3) Enable the disabled external input signals.
Unit
Command Data No. Data IFU DRU
[9][0] [1][0] 1EA5
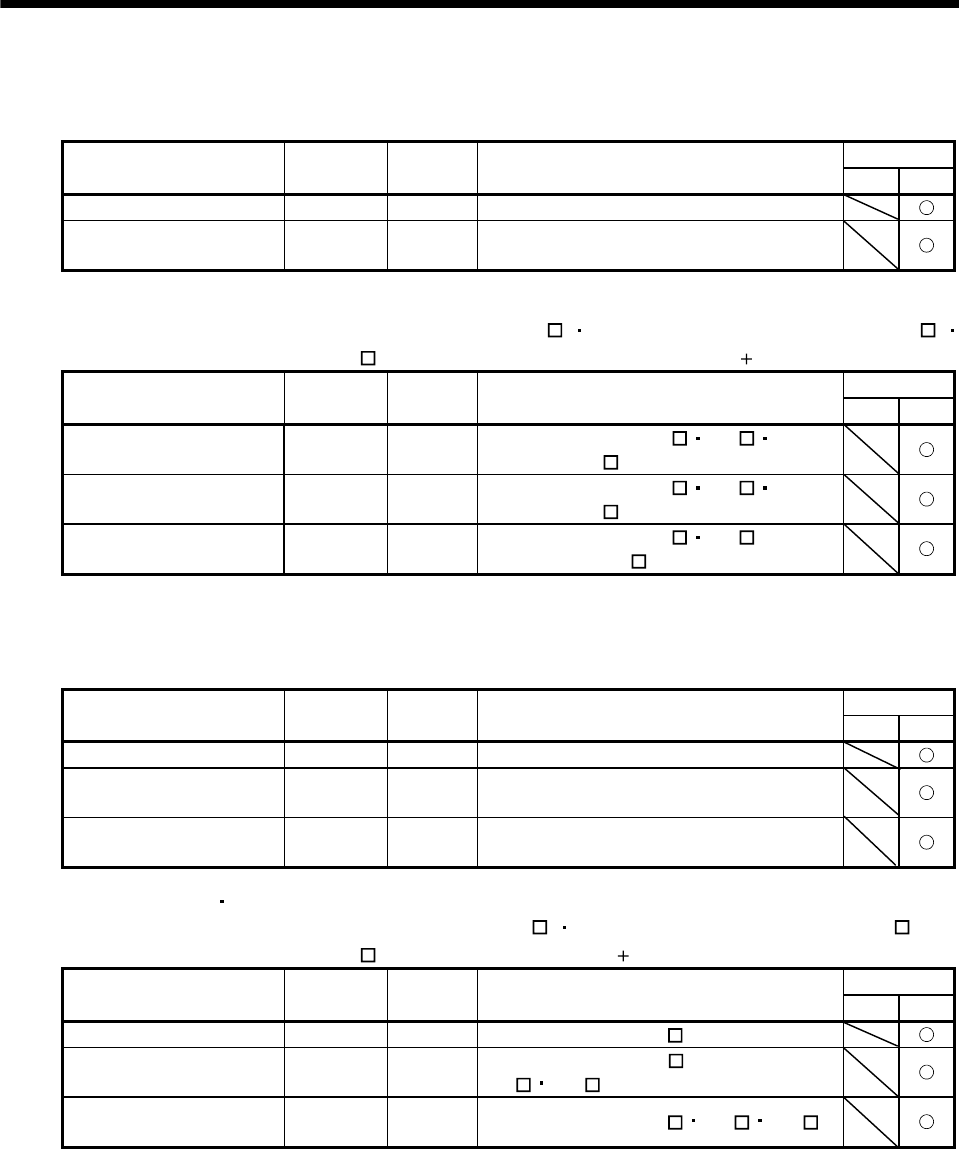
13 - 26
13. COMMUNICATION FUNCTIONS
(2) Jog operation
Transmit the following communication commands:
(a) Setting of jog operation data
Unit
Item Command Data No. Data IFU DRU
Speed [A][0] [1][0] Write the speed [r/min] in hexadecimal.
Acceleration/deceleration
time constant
[A][0] [1][1] Write the acceleration/deceleration time constant
[ms] in hexadecimal.
(b) Start
Turn on the external input signals servo-on (SON ) forward rotation stroke end (LSP )
reverse rotation stroke end (LSN ) and ST1/ST2 by using command [9][2] data No. [0][0].
Unit
Item Command Data No. Data IFU DRU
Forward rotation start [9][2] [0][0] 00000807: Turns on SON LSP
LSN and ST1.
Reverse rotation start [9][2] [0][0] 00001007: Turns on SON LSP
LSN and ST2.
Stop [9][2] [0][0] 00000007: Turns on SON LSP
and LSN .
(3) Positioning operation
Transmit the following communication commands:
(a) Setting of positioning operation data
Unit
Item Command Data No. Data IFU DRU
Speed [A][0] [1][0] Write the speed [r/min] in hexadecimal.
Acceleration/decelera-tion
time constant
[A][0] [1][1] Write the acceleration/deceleration time constant
[ms] in hexadecimal.
Moving distance [A][0] [1][3] Write the moving distance [pulse] in
hexadecimal.
(b) Input of servo-on stroke end
Turn on the external input signals servo-on (SON ) forward rotation stroke end (LSP ) and
reverse rotation stroke end (LSN ) by using command [9][2] data No. [0][0].
Unit
Item Command Data No. Data IFU DRU
Servo-on [9][2] [0][0] 00000001: Turns on SON
Servo OFF
Stroke end ON [9][2] [0][0] 00000006: Turns off SON and turns on
LSP LSN .
Servo-on
Stroke end ON [9][2] [0][0] 00000007: Turns on SON LSP LSN .
13 - 27
13. COMMUNICATION FUNCTIONS
(c) Start of positioning operation
Transmit the speed and acceleration/deceleration time constant, turn on the servo-on (SON ) and
forward rotation stroke end (LSP )reverse rotation stroke end (LSN ), and then send the
moving distance to start positioning operation. After that, positioning operation will start every
time the moving distance is transmitted. To start opposite rotation, send the moving distance of a
negative value.
When the servo-on (SON ) and forward rotation stroke end (LSP )reverse rotation stroke end
(LSN ) are off, the transmission of the moving distance is invalid. Therefore, positioning operation
will not start if the servo-on (SON ) and forward rotation stroke end (LSP )reverse rotation
stroke end (LSN ) are turned on after the setting of the moving distance.
(d) Temporary stop
A temporary stop can be made during positioning operation.
Unit
Command Data No. Data IFU DRU
[A][0] [1][5] 1EA5
Retransmit the same communication commands as at the start time to resume operation.
To stop positioning operation after a temporary stop, retransmit the temporary stop communication
command. The remaining moving distance is then cleared.
13 - 28
13. COMMUNICATION FUNCTIONS
13.12.8 Output signal pin ON/OFF (output signal (DO) forced output)
In the test operation mode, the output signal pins can be turned on/off independently of the servo status.
Using command [9][0], disable the output signals in advance.
(1) Choosing DO forced output in test operation mode
Transmit command [8][B] data No. [0][0] data "0004" to choose DO forced output.
00
Selection of test operation mode
4: DO forced output (output signal forced output
)
04
(2) External output signal ON/OFF
Transmit the following communication commands:
Command Data No. Setting data
[9][2] [A][0] See below.
Command of each bit is sent to the slave station in hexadecimal.
b31 b0
0: OFF
1: ON
b1
bit External output pin bit External output pin bit External output pin bit External output pin
0CN1A-19 8 16 24
1CN1A-18 9 17 25
2 CN1B-19 10 18 26
3CN1B-6 11 19 27
4CN1B-4 12 20 28
5 CN1B-18 13 21 29
6 CN1A-14 14 22 30
7152331
13 - 29
13. COMMUNICATION FUNCTIONS
13.12.9 Alarm history
(1) Alarm No. read
Read the alarm No. which occurred in the past. The alarm numbers and occurrence times of No. 0 (last
alarm) to No. 5 (sixth alarm in the past) are read.
(a) Transmission
Send command [3][3] and data No. [1][0] to [1][5]. Refer to Section 13.11.1(4).
(b) Reply
The alarm No. corresponding to the data No. is provided.
00
Alarm No. is transferred in decimal.
For example, “0032” means A.32 and “00FF” means A._ (no alarm).
(2) Alarm occurrence time read
Read the occurrence time of alarm which occurred in the past.
The alarm occurrence time corresponding to the data No. is provided in terms of the total time
beginning with operation start, with the minute unit omitted.
(a) Transmission
Send command [3][3] and data No. [2][0] to [2][5].
Refer to Section 13.11.1(4).
(b) Reply
The alarm occurrence time is transferred in decimal.
Hexadecimal must be converted into decimal.
For example, data “01F5” means that the alarm occurred in 501 hours after start of operation.
(3) Alarm history clear
Erase the alarm history.
Send command [8][2] and data No. [2][0].
Unit
Command Data No. Data IDU DRU
[8][2] [2][0] 1EA5
13 - 30
13. COMMUNICATION FUNCTIONS
13.12.10 Current alarm
(1) Current alarm read
Read the alarm No. which is occurring currently.
(a) Transmission
Send command [0][2] and data No. [0][0].
Unit
Command Data No. IFU DRU
[0][2] [0][0]
(b) Reply
The slave station sends back the alarm currently occurring.
00
Alarm No. is transferred in decimal.
For example, “0032” means A.32 and “00FF” means A._ (no alarm).
(2) Read of the status display at alarm occurrence
Read the status display data at alarm occurrence. When the data No. corresponding to the status
display item is transmitted, the data value and data processing information are sent back.
(a) Transmission
Send command [3][5] and any of data No. [8][0] to [8][A] corresponding to the status display item to
be read. Refer to Section 13.11.1 (5).
(b) Reply
The slave station sends back the requested status display data at alarm occurrence.
00
Data 32 bits long (represented in hexadecimal)
(Data conversion into display type is required)
Display type
0: Conversion into decimal required
1: Used unchanged in hexadecimal
Decimal point position
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(3) Current alarm clear
As by the entry of the reset (RES ), reset the servo amplifier alarm to make the servo amplifier ready
to operate. After removing the cause of the alarm, reset the alarm with no command entered.
Unit
Command Data No. Data IFU DRU
[8][2] [0][0] 1EA5
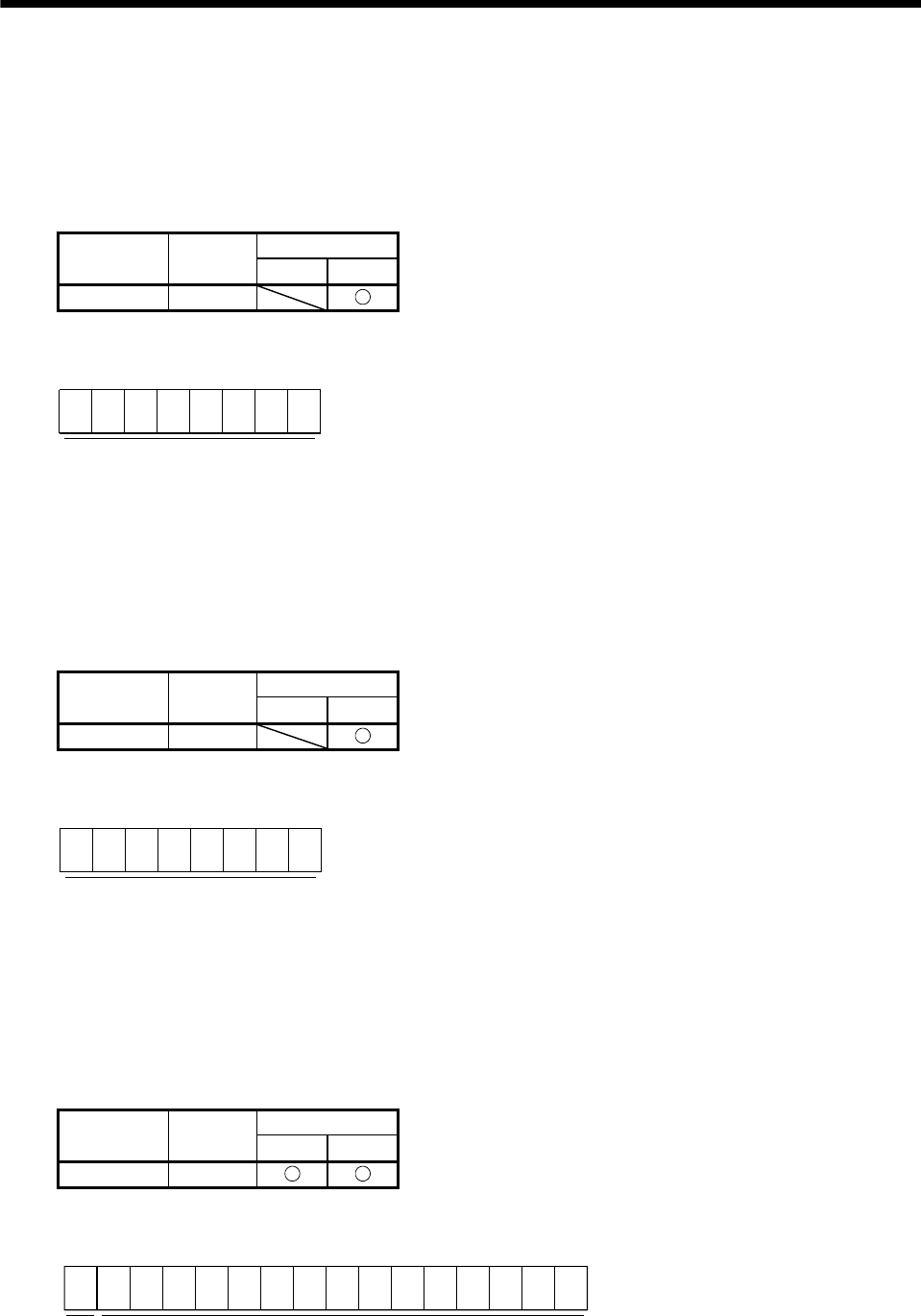
13 - 31
13. COMMUNICATION FUNCTIONS
13.12.11 Other commands
(1) Servo motor end pulse unit absolute position
Read the absolute position in the servo motor end pulse unit.
Note that overflow will occur in the position of 16384 or more revolutions from the home position.
(a) Transmission
Send command [0][2] and data No. [9][0].
Unit
Command Data No. IFU DRU
[0][2] [9][0]
(b) Reply
The slave station sends back the requested servo motor end pulses.
Absolute value is sent back in hexadecimal in
the servo motor end pulse unit.
(Must be converted into decimal)
For example, data "000186A0" is 100000 [pulse] in the motor end pulse unit.
(2) Command unit absolute position
Read the absolute position in the command unit.
(a) Transmission
Send command [0][2] and data No. [9][1].
Unit
Command Data No. IFU DRU
[0][2] [9][1]
(b) Reply
The slave station sends back the requested command pulses.
Absolute value is sent back in hexadecimal in the
command unit.
(Must be converted into decimal)
For example, data "000186A0" is 100000 [pulse] in the command unit.
(3) Software version
Reads the software version of the servo amplifier.
(a) Transmission
Send command [0][2] and data No.[7][0].
Unit
Command Data No. IFU DRU
[0][2] [7][0]
(b) Reply
The slave station returns the software version requested.
Software version (15 digits)Space
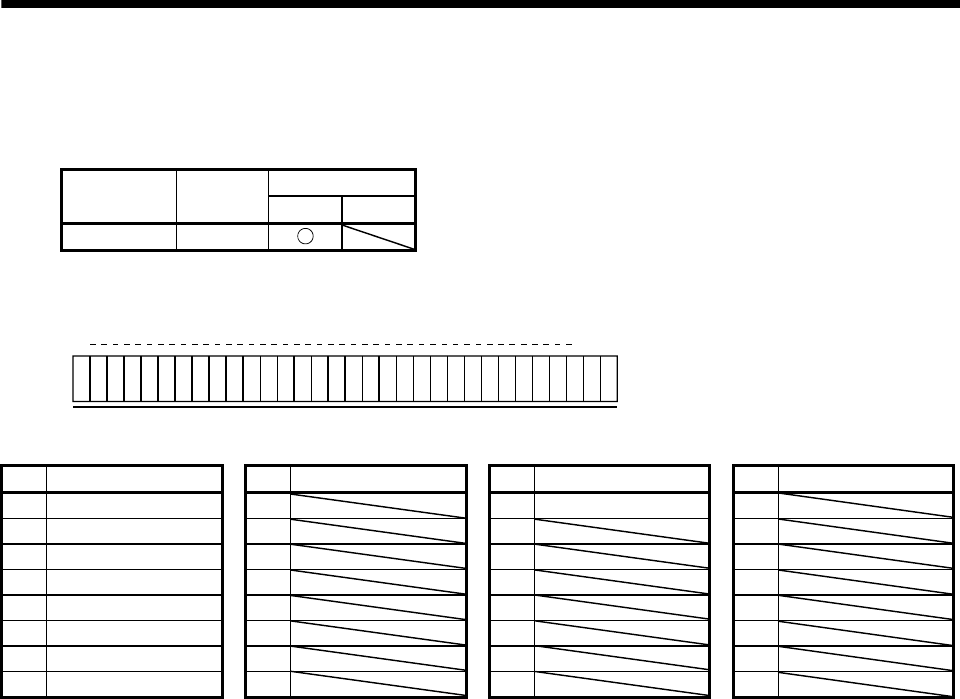
13 - 32
13. COMMUNICATION FUNCTIONS
(4) Read of slot connection status
Read the absolute position in the command unit.
(a) Transmission
Send command [0][0] and data No.[8][0].
Unit
Command Data No. IFU DRU
[0][0] [8][0]
(b) Reply
The slave stations send back the statuses of the units connected to the slots.
b31 b1b0
Command of each bit is sent to the slave station in hexadecimal.
1: Connected
0: Not connected
bit Slot bit Slot bit Slot bit Slot
01 8 16Option24
12 9 17 25
2 3 10 18 26
3 4 11 19 27
4 5 12 20 28
5 6 13 21 29
6 7 14 22 30
7 8 15 23 31
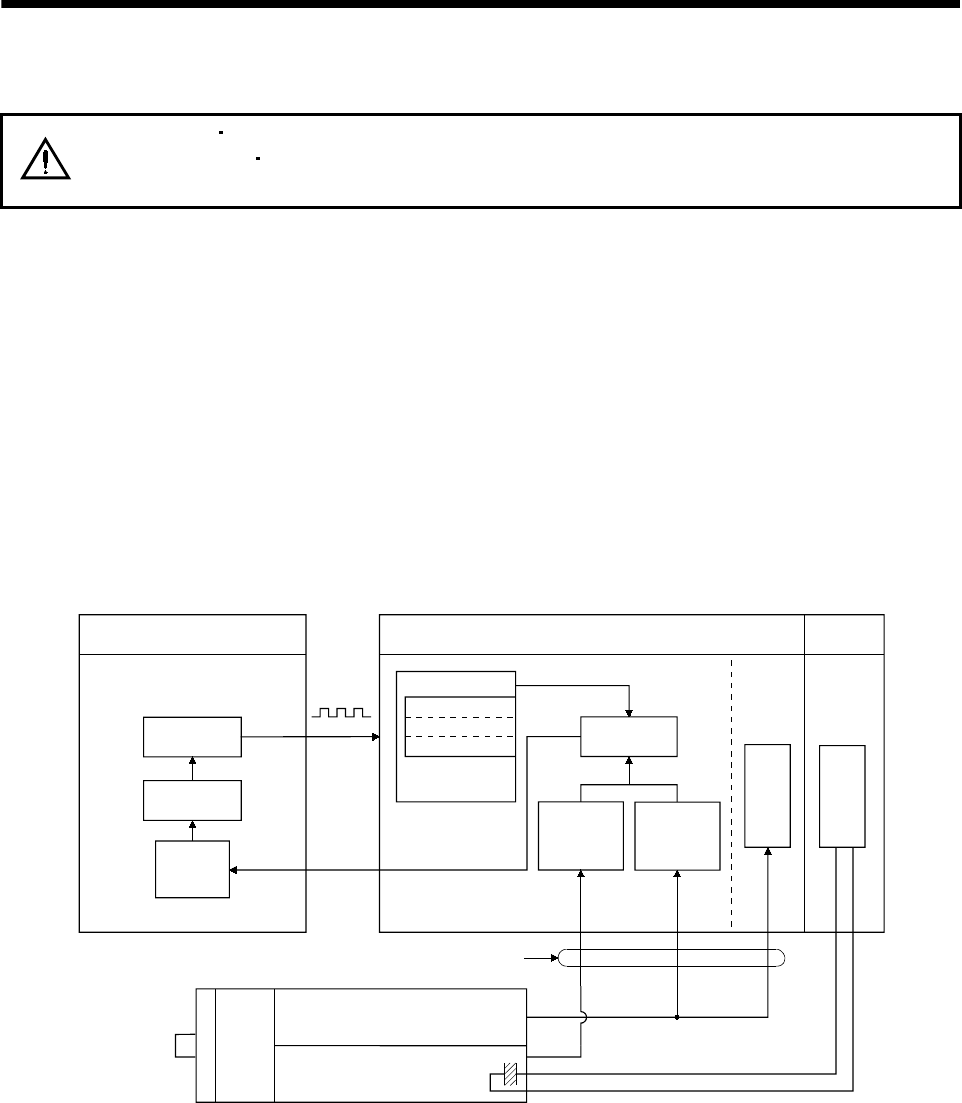
14 - 1
14. ABSOLUTE POSITION DETECTION SYSTEM
14. ABSOLUTE POSITION DETECTION SYSTEM
CAUTION
If an absolute position erase (A.25) or an absolute position counter warning
(A E3) has occurred, always perform home position setting again. Not doing so
can cause runaway.
14.1 Outline
14.1.1 Features
For normal operation, as shown below, the encoder consists of a detector designed to detect a position
within one revolution and a cumulative revolution counter designed to detect the number of revolutions.
The absolute position detection system always detects the absolute position of the machine and keeps it
battery-backed, independently of whether the controller power is on or off. Therefore, once the home
position is defined at the time of machine installation, home position return is not needed when power is
switched on thereafter.
If a power failure or a fault occurs, restoration is easy.
Also, the absolute position data, which is battery-backed by the super capacitor in the encoder, can be
retained within the specified period (cumulative revolution counter value retaining time) if the cable is
unplugged or broken.
LS
EEP-ROM memory
LSO
1XO
Controller
1X
Pulse train
command
Drive unit
Home position data
Backed up
in the case of
power failure
Serial
communication
High speed serial communication
Servo motor
Super capacitor
1pulse/rev Accumulative
revolution counter
Detecting the
number of
revolutions
Detecting the
position within
one revolutions
Position control
Speed control
Battery
Battery unit
Current
position data
RS-422/
RS-232C
Changing the
current position
data
Current
position data
Within-one-revolution counter
14.1.2 Restrictions
The absolute position detection system cannot be configured under the following conditions. Test
operation cannot be performed in the absolute position detection system, either. To perform test
operation, choose incremental in DRU parameter No.1.
(1) Stroke-less coordinate system, e.g. rotary shaft, infinitely long positioning.
(2) Changing of electronic gear after home position setting.
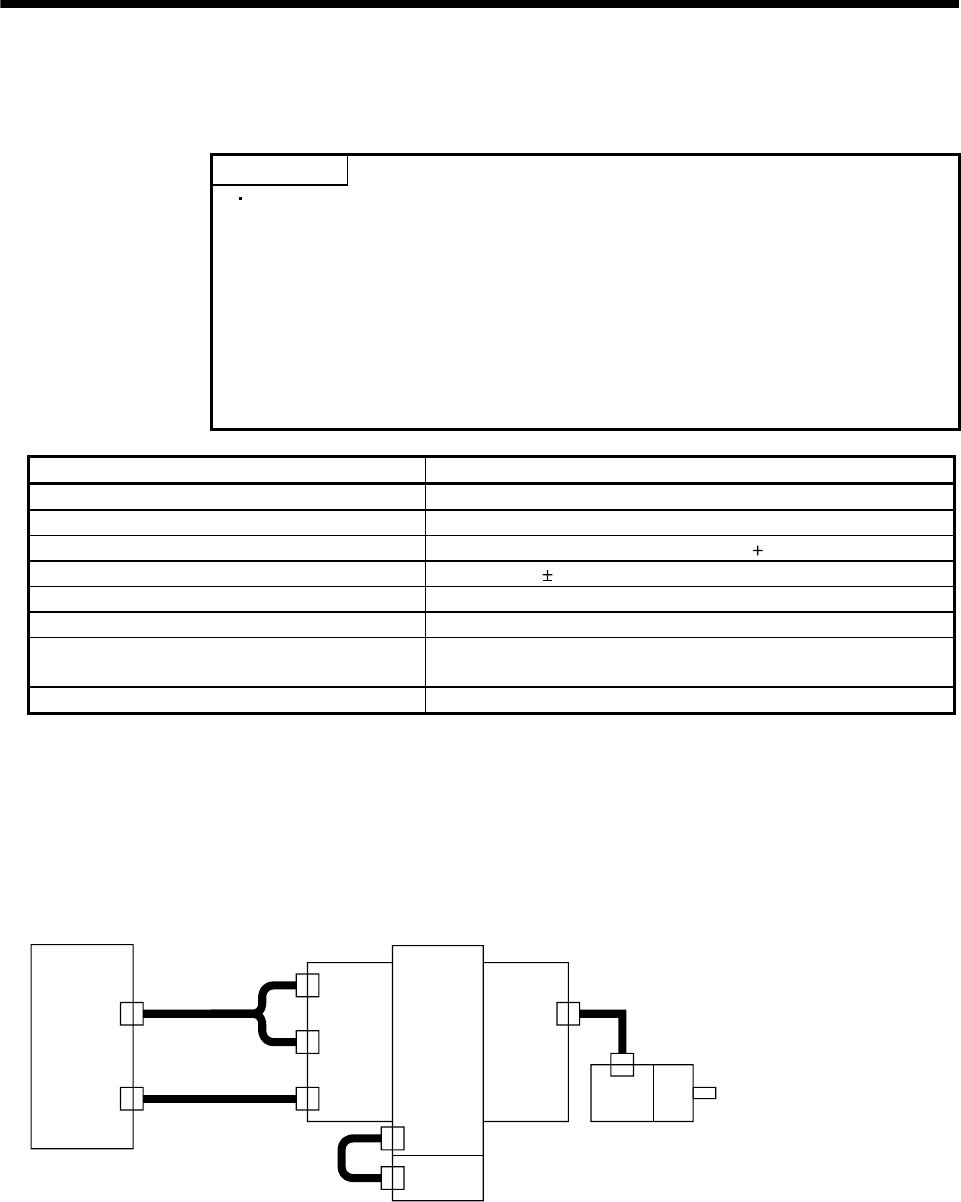
14 - 2
14. ABSOLUTE POSITION DETECTION SYSTEM
14.2 Specifications
(1) Specification of battery unit MR-J2M-BT
POINT
The revision (Edition 44) of the Dangerous Goods Rule of the
International Air Transport Association (IATA) went into effect on
January 1, 2003 and was enforced immediately. In this rule, "provisions of
the lithium and lithium ion batteries" were revised to tighten the
restrictions on the air transportation of batteries. However, since this
battery is dangerous goods (Class 9), requires packing compliant with the
Packing Standard 903. When a self-certificate is necessary for battery
safety tests, contact our branch or representative. For more information,
consult our branch or representative. (As of October, 2005).
Item Description
Model MR-J2M-BT
System Electronic battery backup system
Battery unit Lithium battery (primary battery, nominal 3.6V)
Maximum revolution range Home position 32767 rev.
(Note 1) Maximum speed at power failure 500r/min
(Note 2) Battery backup time Approx. 10,000 hours (battery life with power off)
(Note 3) Data holding time during battery
replacement 2 hours at delivery, 1 hour in 5 years after delivery
Battery storage period 5 years from date of manufacture
Note 1. Maximum speed available when the shaft is rotated by external force at the time of power failure or the like.
2. Time to hold data by a battery with power off. It is recommended to replace the battery in three years
independently of whether power is kept on or off.
3. Period during which data can be held by the super capacitor in the encoder after power-off, with the battery
voltage low or the battery removed, or during which data can be held with the encoder cable disconnected.
Battery replacement should be finished within this period.
(2) Configuration
CN1A
CN1B
CN3
RS-422
/RS-232C
Pulse train
command IO
Controller
Interface
unit Base unit Drive unit
Servo motor
Battery
unit
14 - 3
14. ABSOLUTE POSITION DETECTION SYSTEM
(3) DRU parameter setting
Set " 1 " in DRU parameter No.1 to make the absolute position detection system valid.
Selection of absolute position detection system
0: Used in incremental system
1: Used in absolute position detection system
DRU parameter No. 1
14.3 Signal explanation
The following is the signal used in an absolute position detection system. For the I/O interfaces (symbols
in the I/O category column in the table), refer to section 3.2.5.
Signal name Code Functions/Applications I/O category
Clear
(home position setting)
CR Shorting CR -SG clears the position control counter and stores the
home position data into the non-volatile memory (backup memory).
DI-1
14.4 Serial communication command
The following commands are available for reading absolute position data using the serial communication
function. When reading data, take care to specify the correct station number of the drive unit from where
the data will be read.
When the master station sends the data No. to the slave station (drive unit), the slave station returns the
data value to the master station.
(1) Transmission
Transmit command [0][2] and data No. [9][1].
(2) Reply
The absolute position data in the command pulse unit is returned in hexadecimal.
Data 32-bit length (hexadecimal representation)
14 - 4
14. ABSOLUTE POSITION DETECTION SYSTEM
14.5 Startup procedure
(1) Connection of a battery unit
(2) Parameter setting
Set "1 "in DRU parameter No. 1 of the servo amplifier and switch power off, then on.
(3) Resetting of absolute position erase (A.25)
After connecting the encoder cable, the absolute position erase (A.25) occurs at first power-on. Leave
the alarm as it is for a few minutes, then switch power off, then on to reset the alarm.
(4) Confirmation of absolute position data transfer
After making sure that the ready (RD ) output after the servo-on (SON ) had turned on has turned
on, read the absolute value data with the serial communication function.
(5) Home position setting
The home position must be set if:
(a) System setup is performed;
(b) When the drive unit or interface unit is replaced;
(c) The servo motor has been changed; or
(d) The absolute position erase (A.25) occurred.
In the absolute position system, the absolute position coordinates are made up by making home
position setting at the time of system setup.
The motor shaft may misoperate if positioning operation is performed without home position setting.
Always make home position setting before starting operation.
For the home position setting method and types, refer to Section 14.6.3.
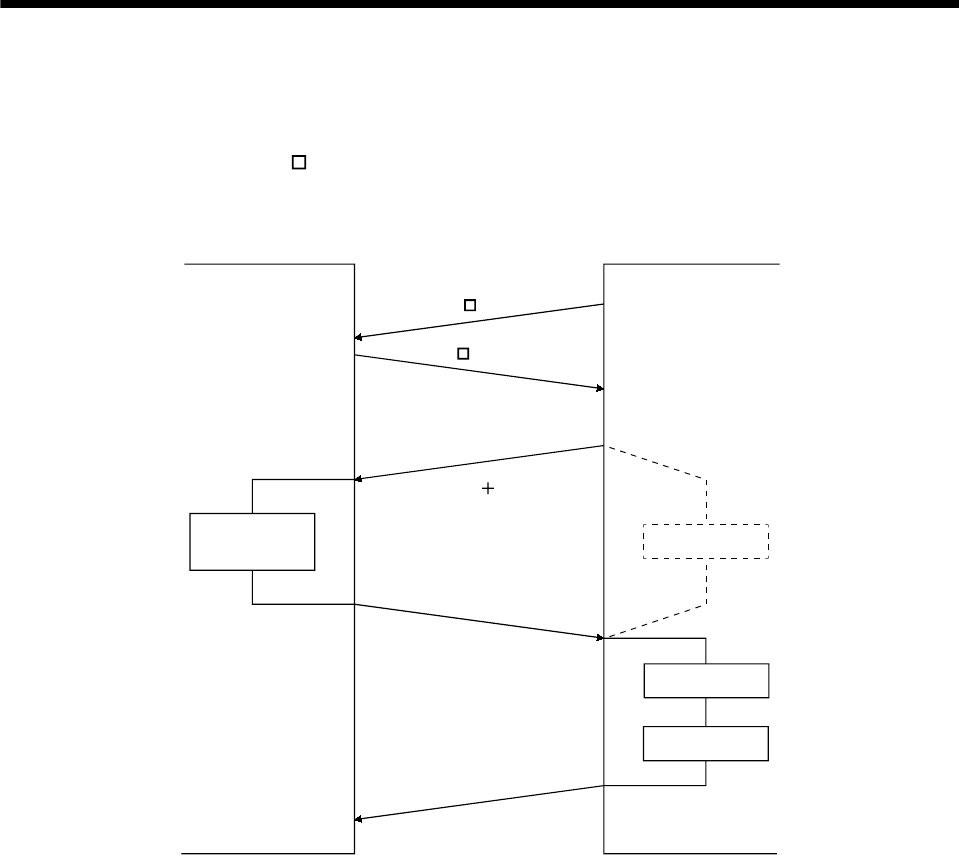
14 - 5
14. ABSOLUTE POSITION DETECTION SYSTEM
14.6 Absolute position data transfer protocol
14.6.1 Data transfer procedure
Every time the servo-on (SON ) turns on at power-on or like, the controller must read the current
position data in the drive unit. Not performing this operation will cause a position shift.
Time-out monitoring is performed by the controller.
MELSERVO-J2M Controller
Watch dog timer
Absolute position
data acquisition
SON ON
RD ON
Absolute position data
command transmission
Command [0][2] data No.[9][1]
Absolute position data return
Position command start
Current position
acquisition
Current value
change
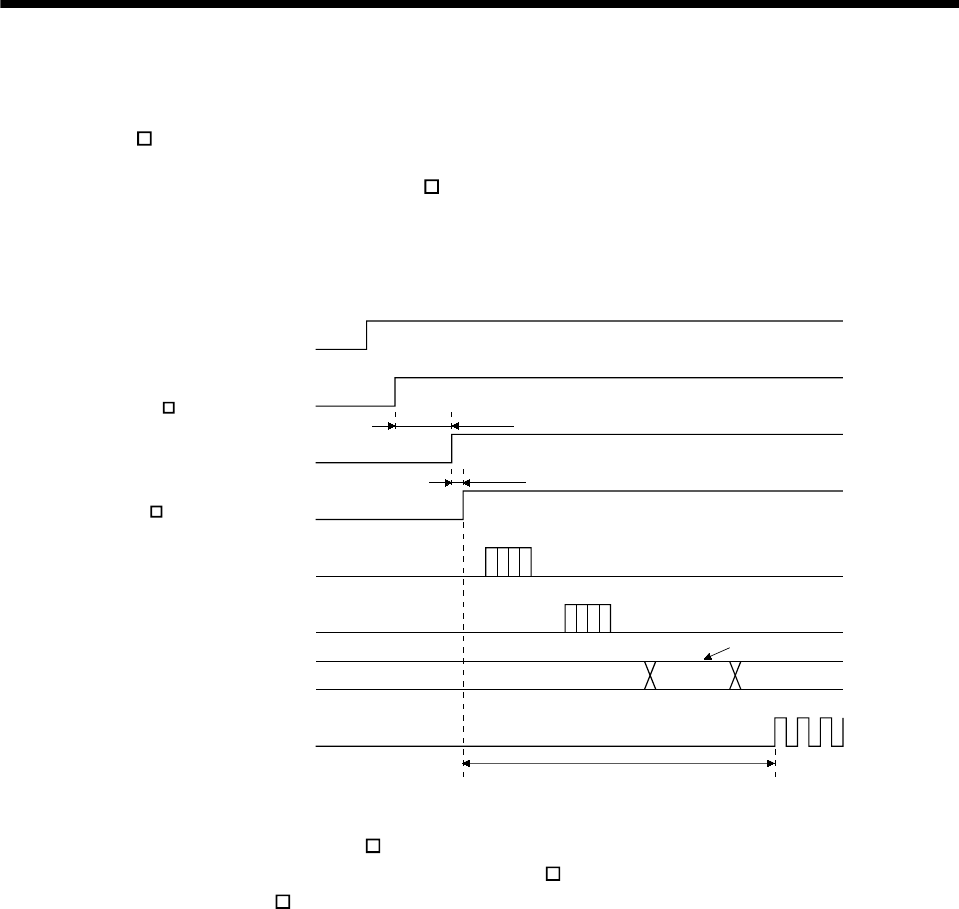
14 - 6
14. ABSOLUTE POSITION DETECTION SYSTEM
14.6.2 Transfer method
The sequence in which the base circuit is turned ON (servo-on) when it is in the OFF state due to the
servo-on (SON ) going OFF, a forced stop, or alarm, is explained below. In the absolute position
detection system, always give the serial communication command to read the current position in the drive
unit to the controller every time the ready (RD ) turns on. The drive unit sends the current position to
the controller on receipt of the command. At the same time, this data is set as a position command value
in the drive unit.
(1) Sequence processing at power-on
OFF
100ms
ON
OFF
ON
OFF
ON
OFF
ON
20ms
ABS data
Power
supply
Base
circuit
Absolute position data
command transmission
Absolute position data
receive
Current position
Pulse train command
Current position change
During this period, get absolute position data.
Servo-on
(SON )
Ready
(RD )
1) 100ms after the servo-on (SON ) has turned on, the base circuit turns on.
2) After the base circuit has turned on, the ready (RD ) turns on.
3) After the ready (RD ) turned on and the controller acquired the absolute position data, give
command pulses to the drive unit. Providing command pulses before the acquisition of the
absolute position data can cause a position shift.
(2) Communication error
If a communication error occurs between the controller and MELSERVO-J2M, the MELSERVO-J2M
sends the error code. The definition of the error code is the same as that of the communication
function. Refer to Section 13.5 for details.
If a communication error has occurred, perform retry operation. If several retries do not result in a
normal termination, perform error processing.
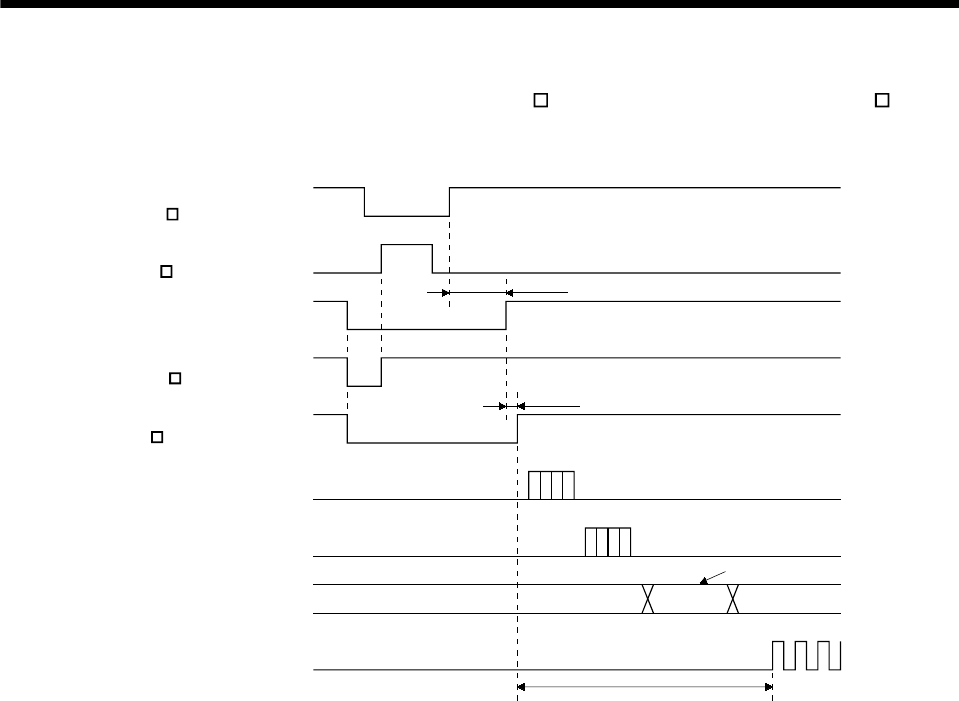
14 - 7
14. ABSOLUTE POSITION DETECTION SYSTEM
(3) At the time of alarm reset
If an alarm has occurred, detect the trouble (ALM_ ) and turn off the servo-on (SON ). After
removing the alarm occurrence factor and deactivating the alarm, get the absolute position data again
from the drive unit in accordance with the procedure in (1) of this section.
ON
100ms
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ABS data
20ms
Base circuit
Absolute position data
command transmission
Absolute position
data receive
Current position
Pulse train command
During this period, get absolute position data.
Current position change
Servo-on
(SON )
Reset
(RES )
Trouble
(ALM_ )
Ready
(RD )
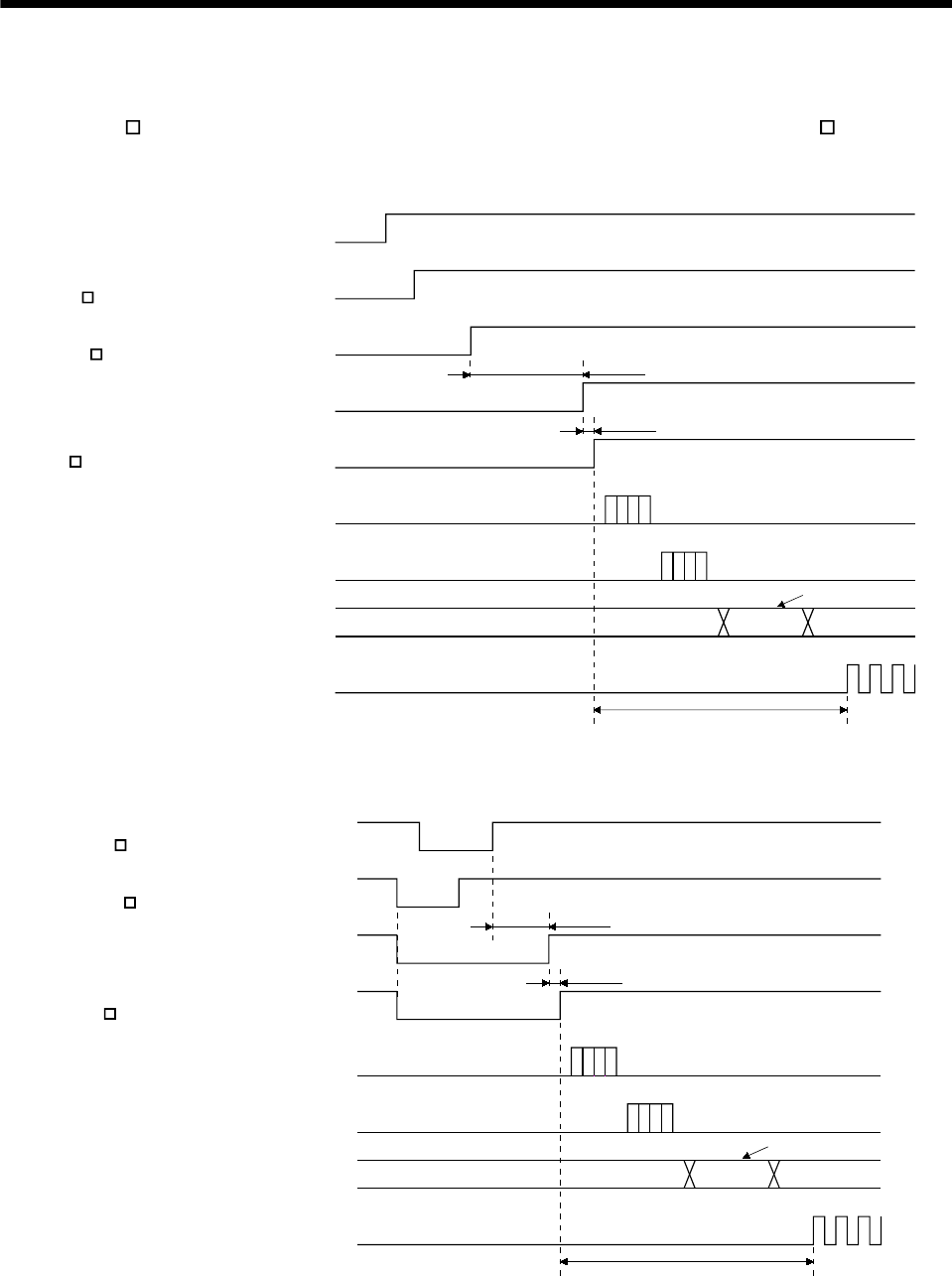
14 - 8
14. ABSOLUTE POSITION DETECTION SYSTEM
(4) At the time of forced stop reset
200ms after the forced stop is deactivated, the base circuit turns on, and further 20ms after that, the
ready (RD ) turns on. Always get the current position data from when the ready (RD ) is triggered
until before the position command is issued.
(a) When power is switched on in a forced stop status
OFF
200ms
ON
OFF
ON
OFF(Invalied)
ON(Valid)
OFF
ON
OFF
ON
20ms
ABS data
During this period, get absolute position data.
Current position change
Power
supply
Base circuit
Pulse train command
Current position
Absolute position
data receive
Absolute position data
command transmission
Servo-on
(SON )
Forced stop
(EMG_ )
Ready
(RD )
(b) When a forced stop is activated during servo on
100ms
ON
OFF
ON(Valid)
OFF(Invalid)
ON
OFF
ON
OFF
20ms
ABS data
Pulse train command
Current position
Absolute position
data receive
Absolute position data
command transmission
Current position change
During this period, get absolute position data.
Base circuit
Servo-on
(SON )
Forced stop
(EMG_ )
Ready
(RD )
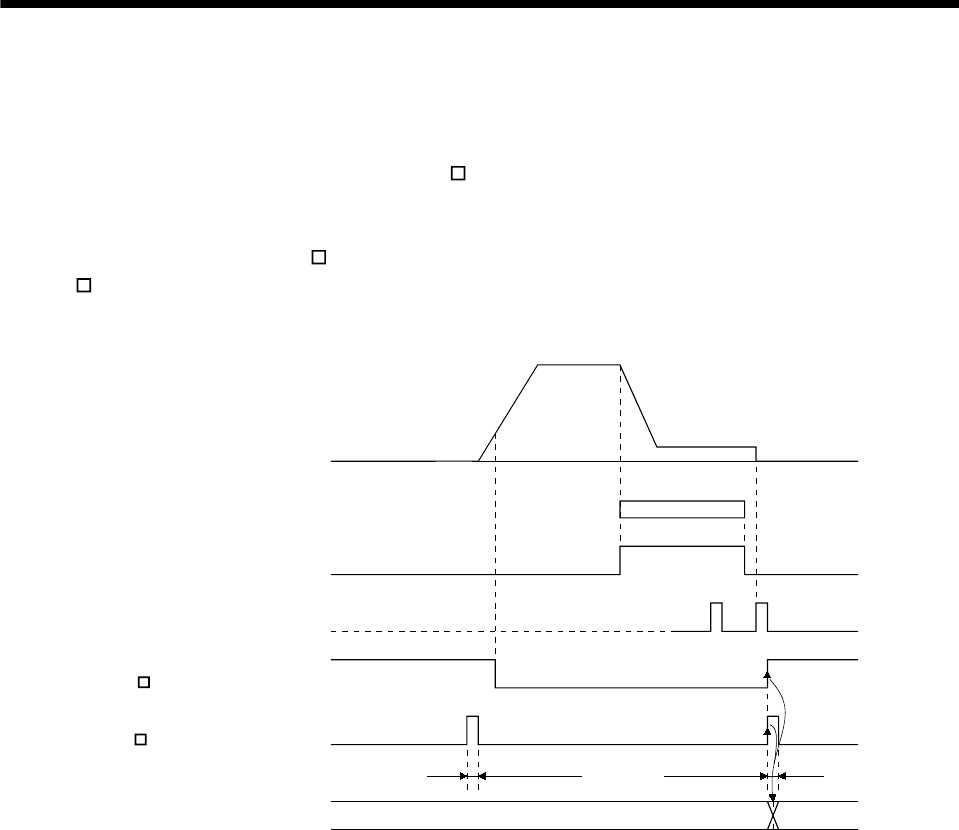
14 - 9
14. ABSOLUTE POSITION DETECTION SYSTEM
14.6.3 Home position setting
(1) Dog type home position return
Preset a home position return creep speed at which the machine will not be given impact. On detection
of a zero pulse, the home position setting (CR ) is turned from off to on. At the same time, the servo
amplifier clears the droop pulses, comes to a sudden stop, and stores the stop position into the non-
volatile memory as the home position ABS data.
The home position setting (CR ) should be turned on after it has been confirmed that the in-position
(INP ) is on. If this condition is not satisfied, the home position setting warning (A.96) will occur, but
that warning will be reset automatically by making home position return correctly.
The number of home position setting times is limited to 100,000 times.
20ms or more
ON
OFF
ON
OFF
ON
OFF
20ms or more
Zero pulse signal
Home position
ABS data
Dog signal
Servo motor
Near-zero point dog
Update
Home position setting
(CR )
Completion of positioning
(INP )
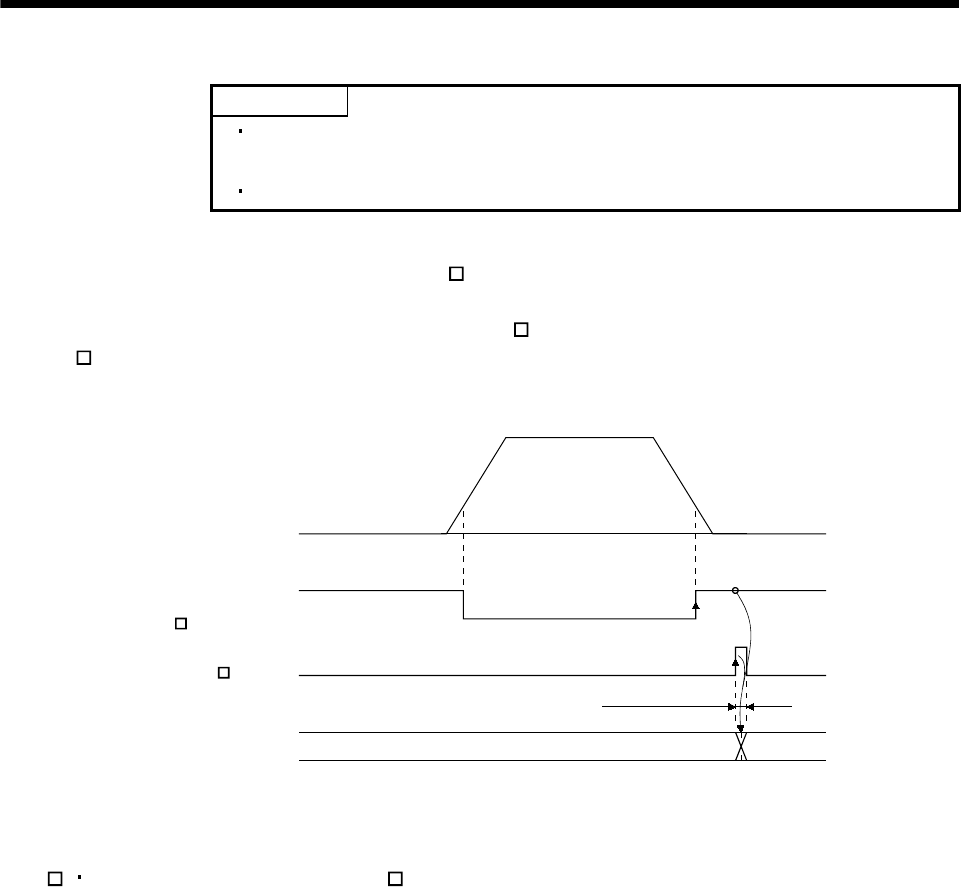
14 - 10
14. ABSOLUTE POSITION DETECTION SYSTEM
(2) Data set type home position return
POINT
Never make home position setting during command operation or servo motor
rotation. It may cause home position sift.
It is possible to execute data set type home position return when the servo off.
Perform manual operation such as JOG operation to move to the position where the home position is
to be set. When the home position setting (CR ) is on for longer than 20ms, the stop position is stored
into the non-volatile memory as the home position ABS data.
When the servo on, set home position setting (CR ) to ON after confirming that the in-position
(INP ) is ON. If this condition is not satisfied, the home position setting warning (A.96) will occur,
but that warning will be reset automatically by making home position return correctly.
The number of home position setting times is limited to 100,000 times.
ON
OFF
ON
OFF
Servo Motor
Completion of
positioning
( INP )
Home position
setting (CR )
Home position
A
BS data
Manual feed (JOG, etc.)
(more than 1 revolution
of the motor shaft)
20 [ms] or more
Update
14.6.4 How to process the absolute position data at detection of stroke end
The drive unit stops the acceptance of the command pulse when forward rotation stroke end
(LSP )reverse rotation stroke end (LSN ) is detected, clears the droop pulses to 0 at the same time,
and stops the servo motor rapidly.
At this time, the controller keeps outputting the command pulse. Since this causes a discrepancy between
the absolute position data of the servo amplifier and the controller, a difference will occur between the
position data of the servo amplifier and that of the controller.
When the stroke end is detected, therefore, perform JOG operation or like to return to the position where
stroke end detection can be deactivated, and read the current position data in the drive unit again.
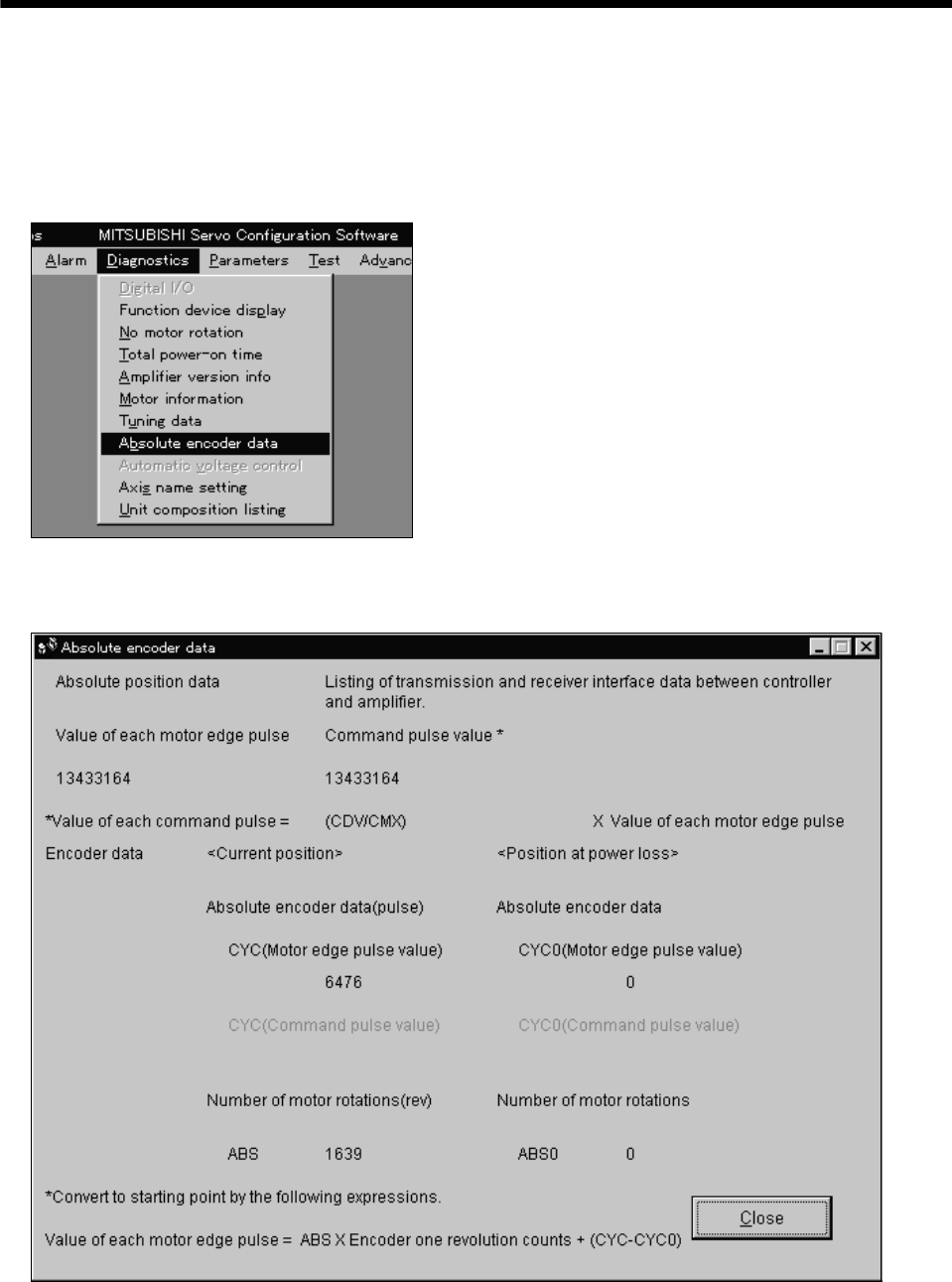
14 - 11
14. ABSOLUTE POSITION DETECTION SYSTEM
14.7 Confirmation of absolute position detection data
You can confirm the absolute position data with MR Configurator (servo configuration software MRZJW3-
SETUP151E).
Clicking "Diagnostics" on the menu bar and click "Absolute encoder data" in the menu.
(1)
(2) By clicking "Absolute encoder data" in the sub-menu, the absolute encoder data display window
appears.
(3) Click the "Close" button to close the absolute encoder data display window.
14 - 12
14. ABSOLUTE POSITION DETECTION SYSTEM
MEMO
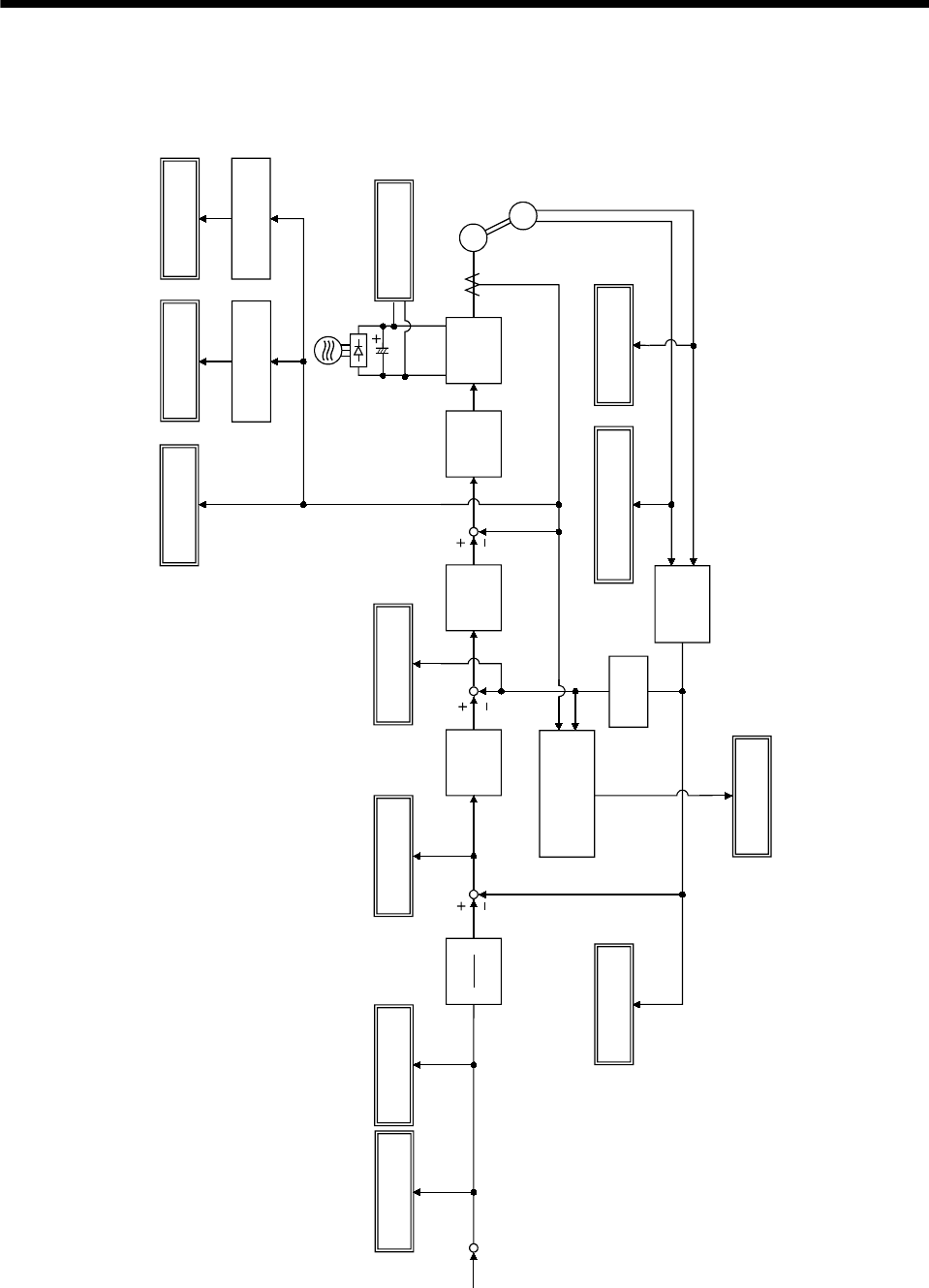
App - 1
A
PPENDIX
App 1. Status indication block diagram
Peak load ratio
PWM M
Current
control
Droop pulse
ABS counter
Low
High
CMX
CDV
Electronic gear
Bus voltage
ABS counter
Servo motor
Position
control
Absolute
position
encoder
Speed feedback
Auto
tuning section
Current
position
calculation
Peak hold
Effective value
calculation
Effective load
torque
Instantaneously
occurring torque
Within one-
revolution position
Command pulse
frequency Cumulative
command pulse
Cumulative
feedback pulse
Load inertia
moment ratio
Differential
Speed
control
Servo motor
speed
Command
pulse
PP,NP
Within one-
revolution position
App - 2
APPENDIX
MEMO
REVISIONS
*The manual number is given on the bottom left of the back cover.
Print Data *Manual Number Revision
Jan., 2002 SH(NA)030014-A First edition
Sep., 2002 SH(NA)030014-B Safety Instructions: Addition of Note to 4. (1)
Deletion of (7) in 4. Additional instructions
Addition of About processing of waste
Addition of EEP-ROM life
Section 1.5 (2) (a): Partial change of rating plate
Section 2.7: Partial change of CAUTION sentences
Section 2.7 (8): Change of POINT
Section 3.1: Partial change of drawing
Section 3.2.1: Partial change of drawing
Section 3.2.2: Addition of forced stop B text
Section 3.2.4: Partial change of drawing
Section 3.3.1: Partial change of drawing
Section 3.4.2: Change of table
Section 3.5.1: Addition of POINT
Section 3.6: Addition of NOTE
Section 5.1.2: Partial change of DRU parameter No. 20 data
Section 5.2.1: Partial addition of text, change of table
Section 6.2.2: Addition of POINT sentences
Section 6.4 (3) (a): Change of expression
Section 9.2: Deletion of A. 7A
Section 9.3: Deletion of 4. in A. 16A
Deletion of A. 7A
Section 10.3 (4): Partial addition of contacts and applicable tools
Section 11.1: Reexamination
Section 11.2: Partial addition of NOTE sentences
Section 11.4: Addition of MR-JC4CBL M-H
Section 12.1.1 (1): Addition of text
Section 12.1.2: Addition of cable
Section 12.1.2 (2): Addition of POINT sentences
Section 12.1.2 (2) (a): Addition and change of items, partial change of drawing
Section 12.1.2 (2) (b): Addition of item
Section 12.1.3 (2): Change of text
Section 12.1.4: Deletion of POINT
Section 12.1.4 (2): Change of terminal label sketch
Section 12.1.4 (4) (b): Partial change of connection diagram
Section 12.1.6 (1): Reexamination of table
Section 12.1.6 (2): Partial change of contents
Section 12.2.1 (2): Addition of cable
Section 12.2.8: Partial addition of text
Section 13.10: Partial addition of drawing
Section 13.12.3 (2): Partial change of drawing
Section 14.7: Partial reexamination of text
Mar., 2004 SH(NA)030014-C Reexamination of description on configuration software
Safety Instructions 1. To prevent electric shock: Addition of sentence
Print Data *Manual Number Revision
Mar., 2004 SH(NA)030014-C 3. To prevent injury: Reexamination of sentence
4. Additional instructions (1): Addition of Note/Reexamination of
sentence
(5): Reexamination of wiring drawing
COMPLIANCE WITH EC DIRECTIVES 2. PRECAUTIONS FOR
COMPLIANCE: IEC664-1 is modified to IEC60664-1 in (3) and (4).
CONFORMANCE WITH UL/C-UL STANDARD (2): Reexamination of sentence
Section 1.3 (1): Addition of “Inrush current”
Section 2.4 (2): Reexamination of sentence
Section 2.7: Reexamination and addition of NOTE sentence
Section 2.7 (8): Addition of POINT
Section 3.1: The following modification is made to the diagram:
CLEARCOMPULSECOM of positioning module QD70 is
connected to SG (24G).
Section 3.2.5 (1): Reexamination of diagram
Section 3.2.5 (2) (c) 2): Reexamination of diagram
Section 3.3.5 (2): Addition of NOTE
Section 3.7 (3) (a): Partial change of diagram
Section 5.3.1 (1) (b): Addition of POINT sentence
Section 9.2: Reexamination of sentence
Section 9.3: A.12 to 15: Reexamination of occurrence cause
A.37: Addition of occurrence cause
A.51: “Rotation: 2.5s or more” is added.
A.52: Change of content
Section 12.1.1 (4): Addition of terminal block and mounting screw
Section 12.1.6 (2) (a): Reexamination of Windows trademark
Section 12.1.6 (2) (b): Change of FR-BSF01 outline drawing
Section 14.2 (1): Addition of POINT
Section 14.6.2 (4): Reexamination of forced stop
Feb., 2005 SH(NA)030014-D Section 14.2 (1): Error in writing correction of POINT
Oct., 2005 SH(NA)030014-E Reexamination of description on configuration software
Safety Instructions: 1. To prevent electric shock: Change of description from 10
minutes to 15 minutes
4. Additional instructions (2), (4): Addition of instructions
COMPLIANCE WITH EC DIRECTIVES: Partial change of sentence
CONFORMANCE WITH UL/C-UL STANDARD (4): Partial change of sentence
Chapter 2: Addition of CAUTION sentence
Chapter 3: Partial change of WARNING sentences
Section 3.2.2 (4): Deletion of open collector power input
Section 3.2.5 (2) (d) 2): Modification of servo motor CCW rotation
Section 3.3.4 (2): Limiting torque: Partial change of sentences
Warning Battery warning: Modification of description from
within 3 seconds to after approximately 3 seconds
Section 3.6: Addition of CAUTION sentences
Section 3.6 (3): Change of sentences
Section 3.7: Addition of CAUTION sentences
Change of sentences
Section 3.7(3): Modification of drawing (d), (e)
Print Data *Manual Number Revision
Oct., 2005 SH(NA)030014-E Section 5.1.2 (2): Correction of DRU parameter No.38
Section 5.3.2: Partial reexamination of sentences
Section 5.3.2 (2): Addition of Note in table
Chapter 8: Partial change of WARNING sentences
Section 9.2: Alarm code No.A. 45 A.46: Addition of Note in table
Section 9.3: Addition of CAUTION sentence
DRU parameter No.@A.17@: Addition of contents
Section 9.4: Addition of CAUTION sentence
Addition of POINT
DRU parameter No.@A.92@: Reexamination of Cause 2
IFU parameter No.FA.9F: Partial addition of Cause
IFU parameter No.@A.E3@: Addition of contents
Section 10.2: Addition of Mounting screw Tightening torque
Section 11.1: Partial change of CAUTION sentences
Chapter 12: Partial change of WARNING sentences
Section 12.1.1 (3): Addition of POINT
Section 12.1.1 (4): Reexamination of Outline drawing (b), (c)
Section 12.1.6 (2) (a): Partial reexamination of table and Note
Section 12.2.3: Correction of Dimensions for D1 in table
Section 12.2.6 (2) (d): Reexamination of Outline drawing for FR-BSF01
Section 12.2.6 (2) (e): Addition of sentences
Section 13.12.7 (3) (b): Correction in table
Chapter 14: Reexamination of CAUTION sentences
MEMO
HEAD OFFICE:TOKYO BLDG MARUNOUCHI TOKYO 100-8310
SH (NA) 030014-E (0510) MEE Printed in Japan Specifications subject to change without notice.
This Instruction Manual uses recycled paper.
MODEL
MODEL
CODE
