Nice S p A 433A04 Receiver User Manual Neomat 89 023 NMMT rev1
Nice S.p.A. Receiver Neomat 89 023 NMMT rev1
UserManual.wiki
>
Nice S p A
>
433A04 User Manual
>
User Manual
Contents
1.
Leaflet
2.
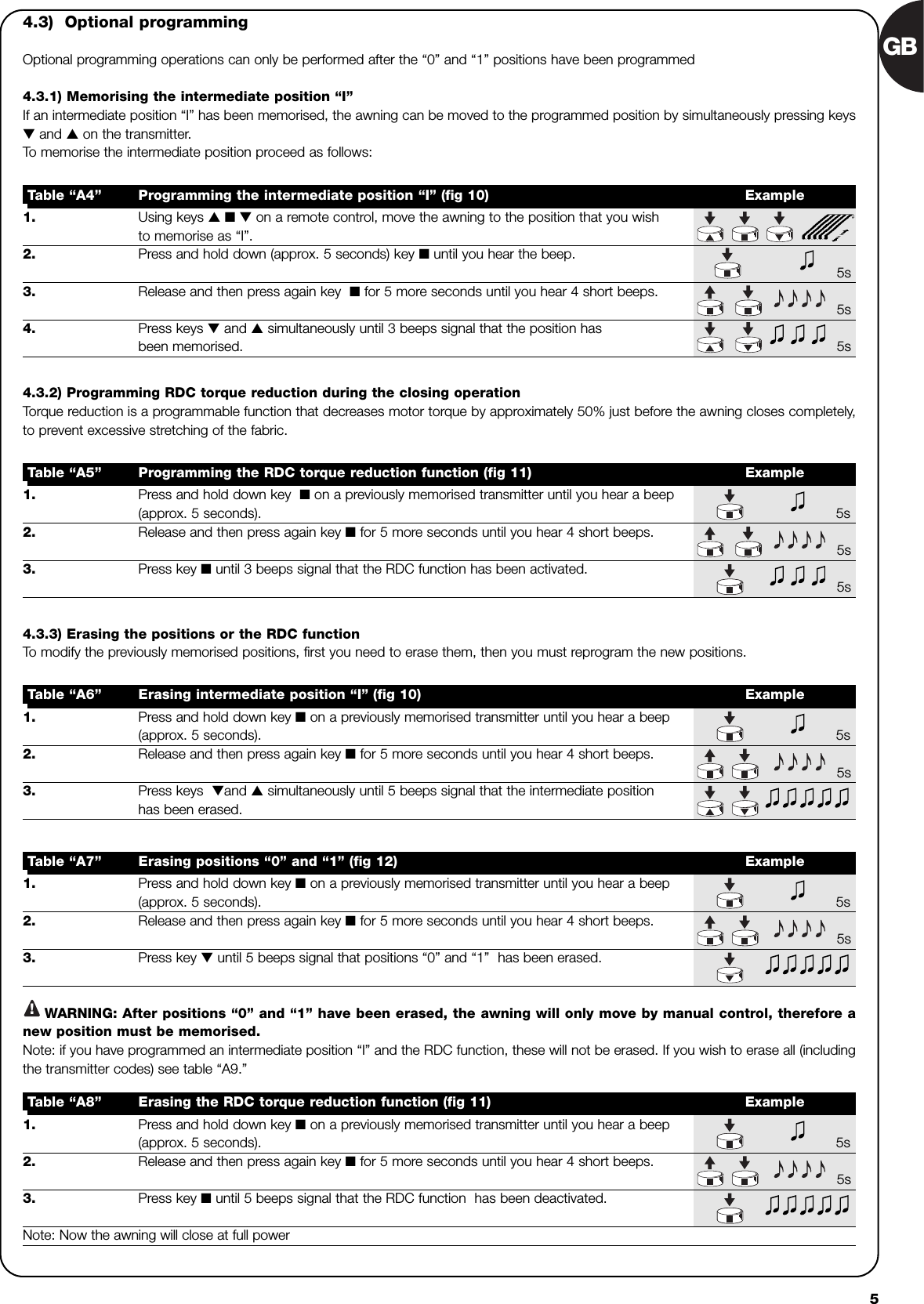
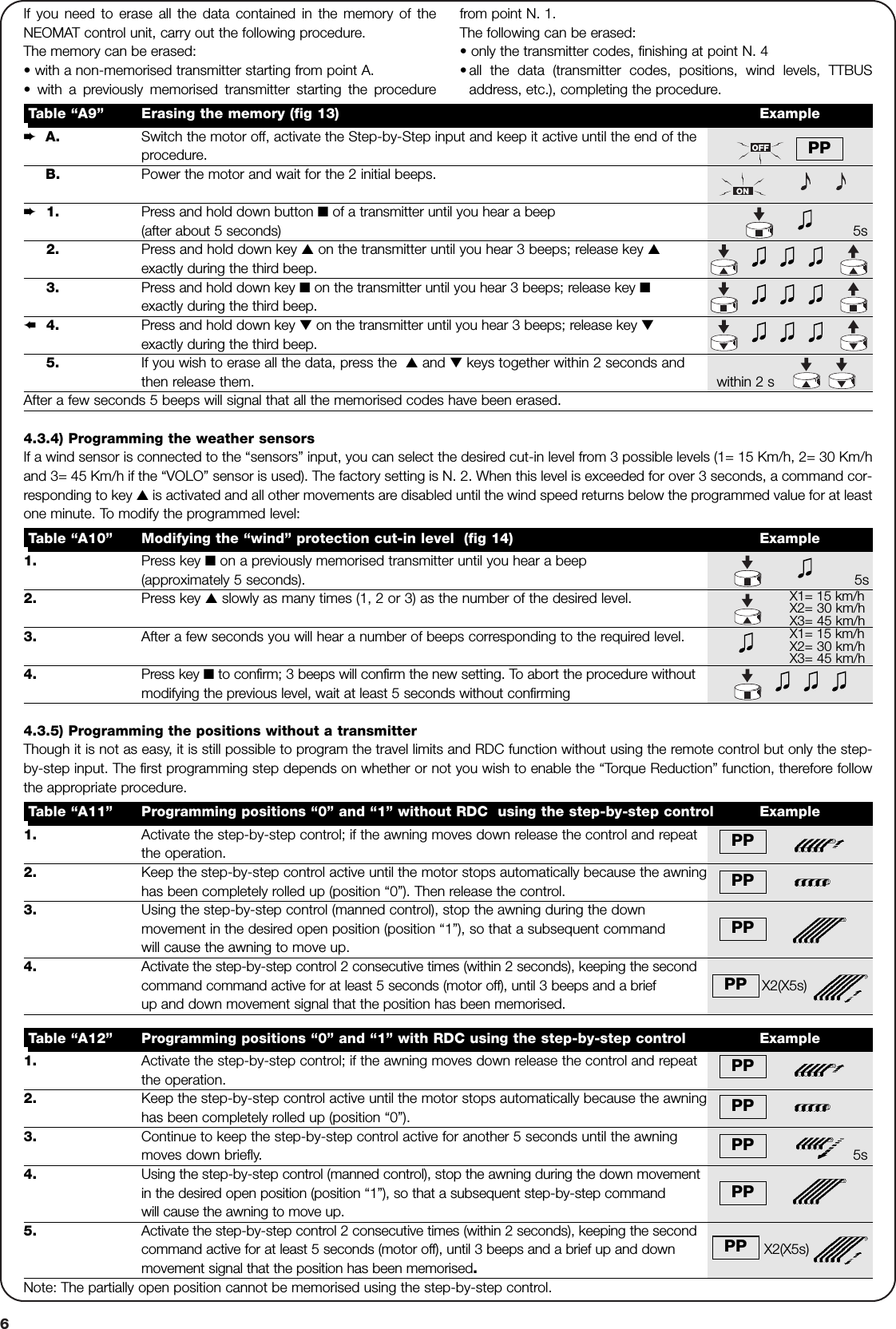
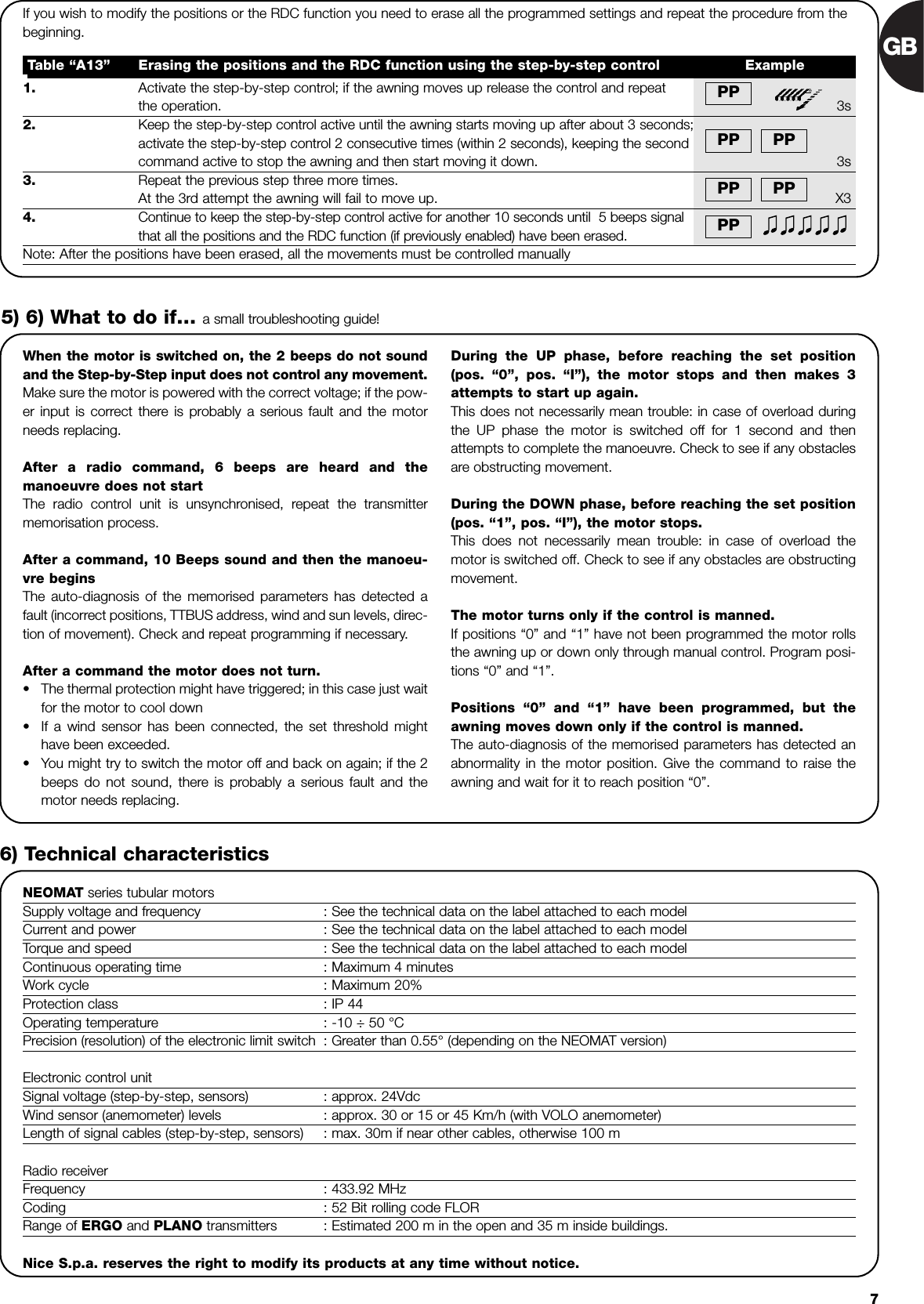
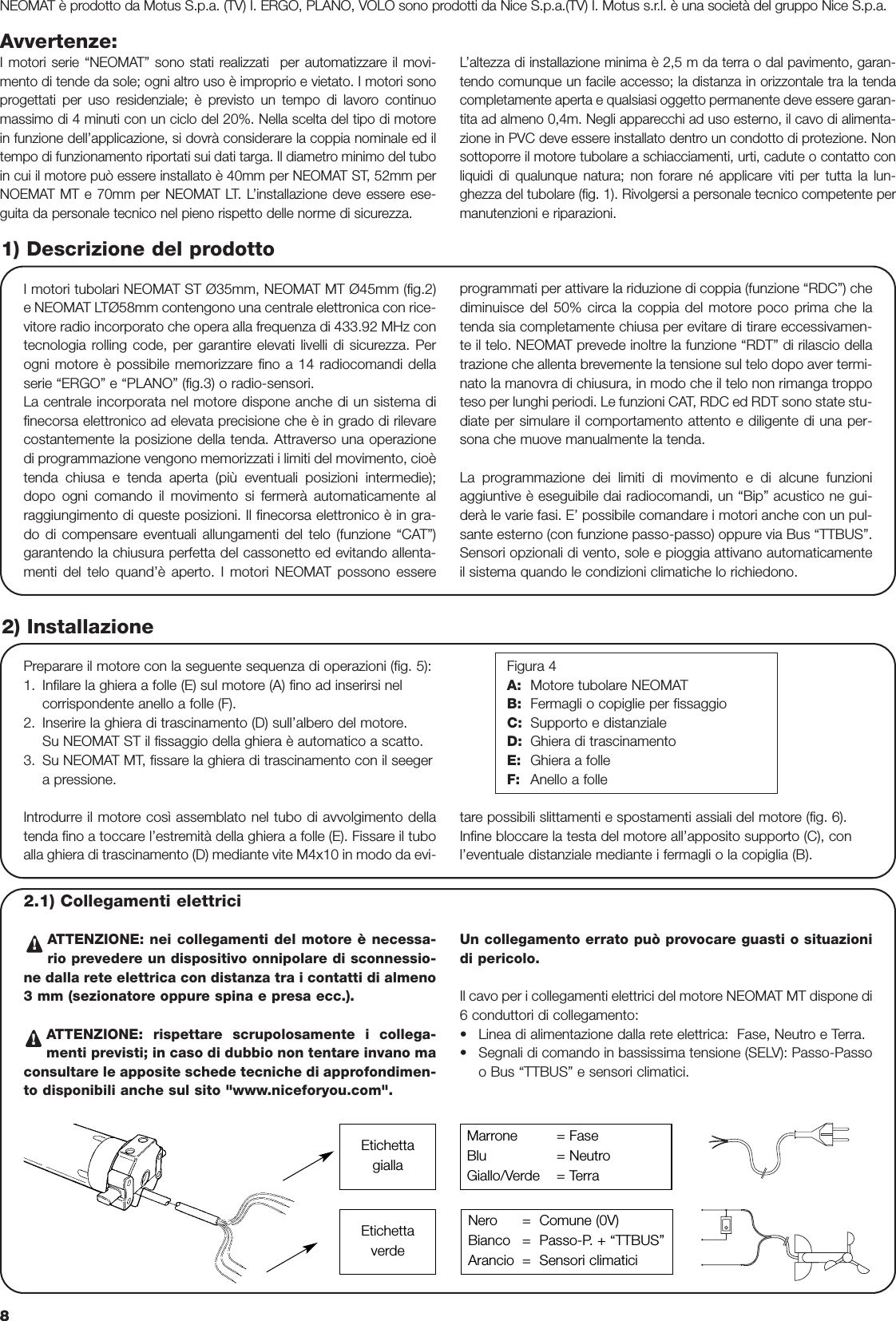
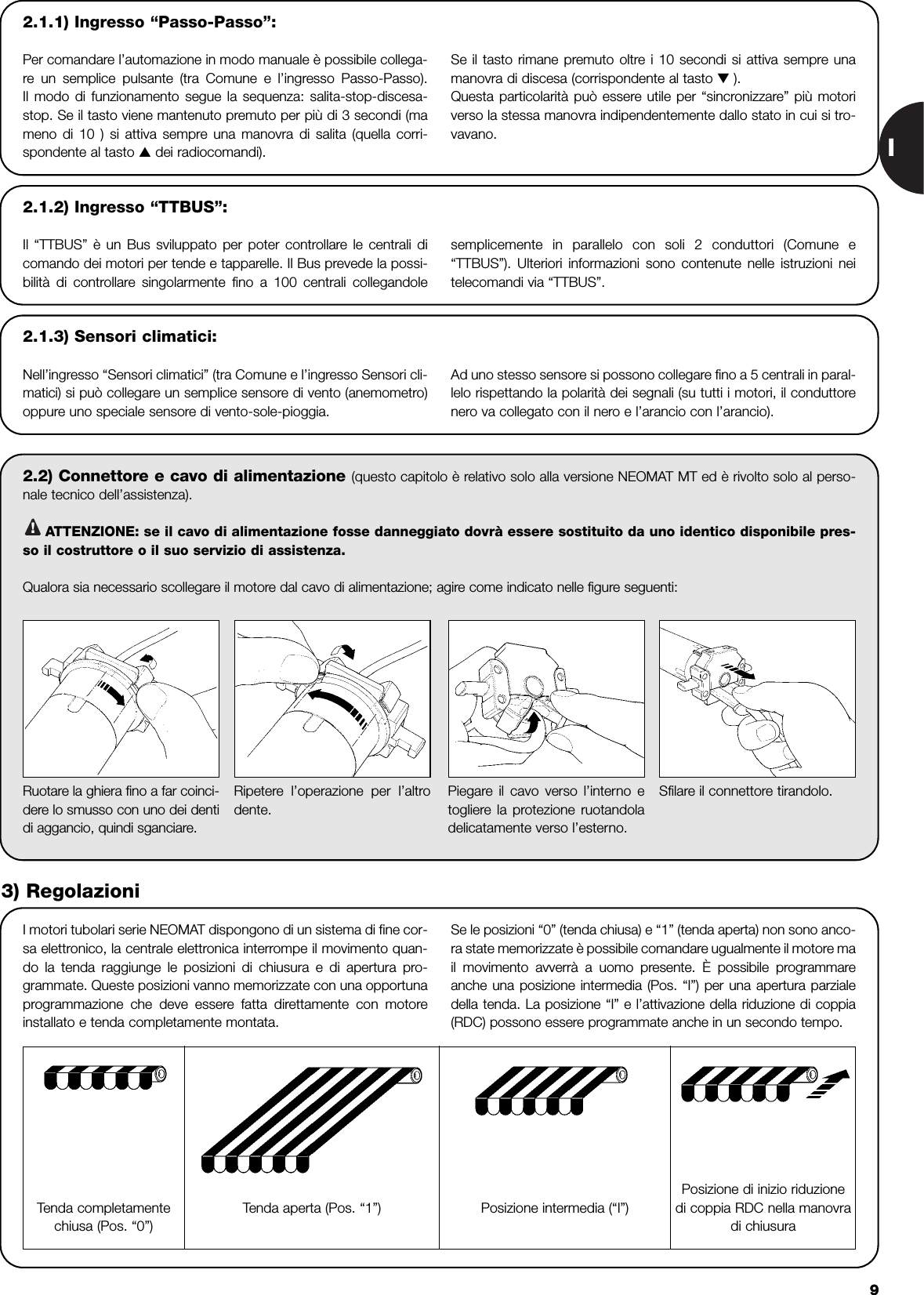
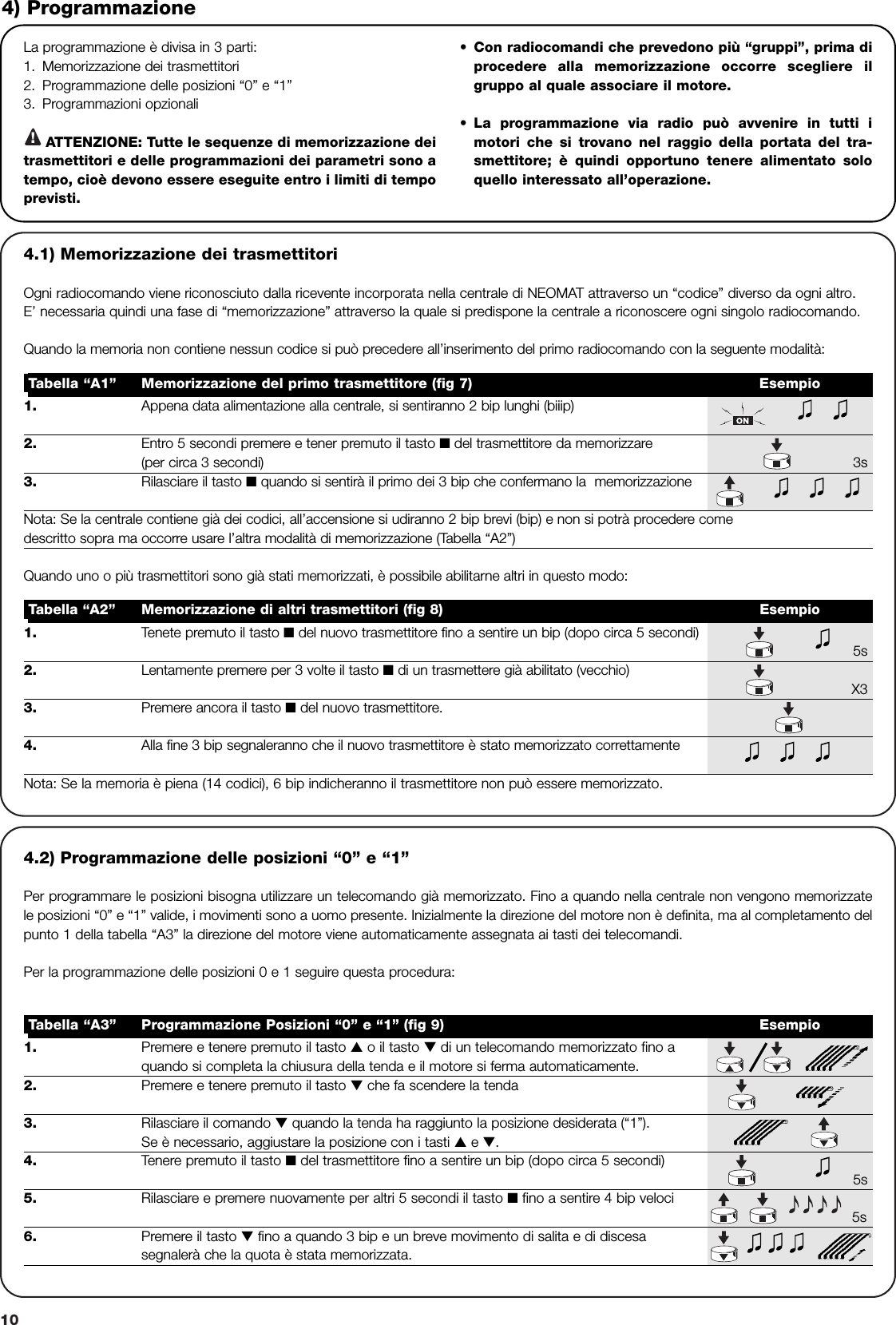
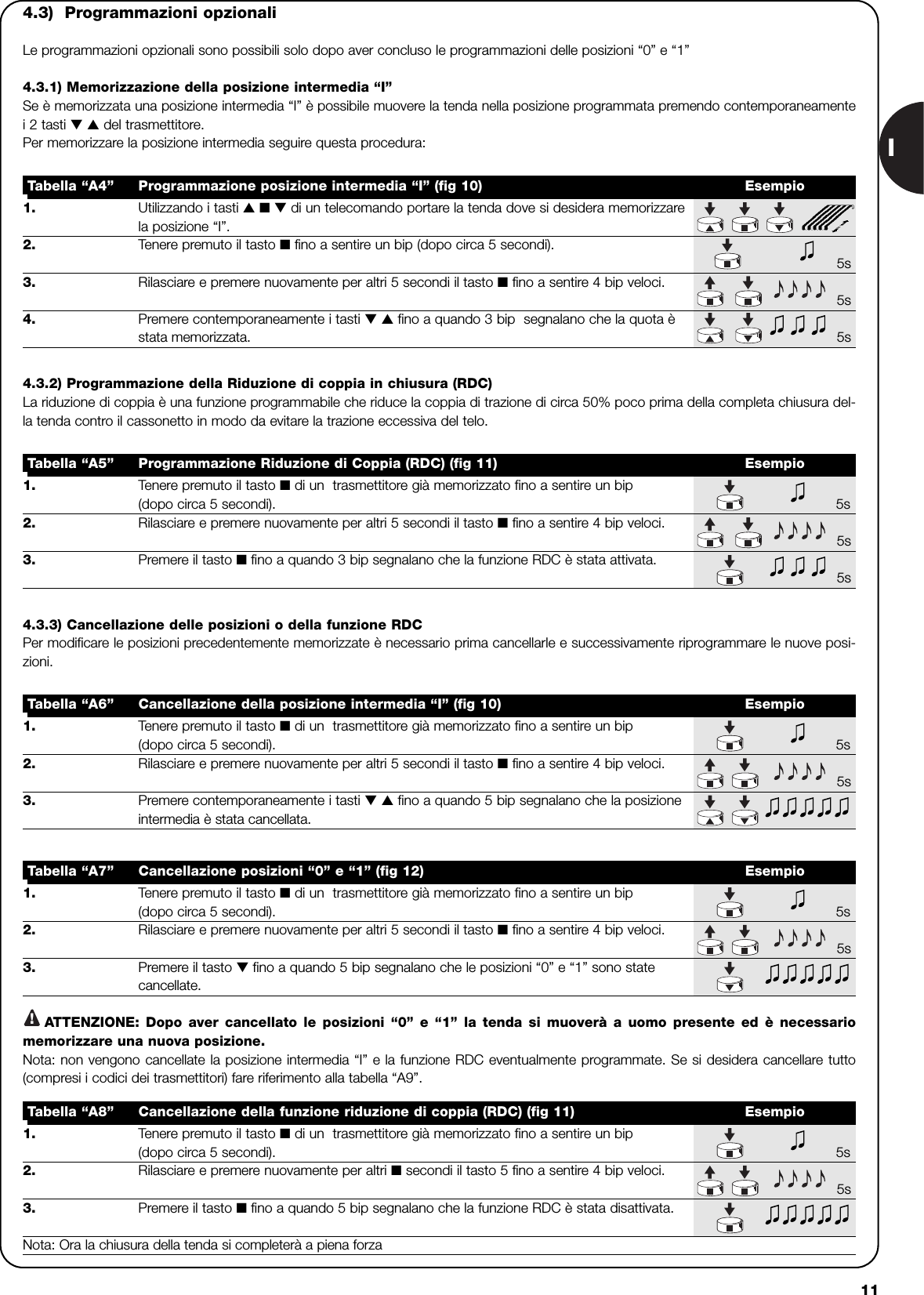
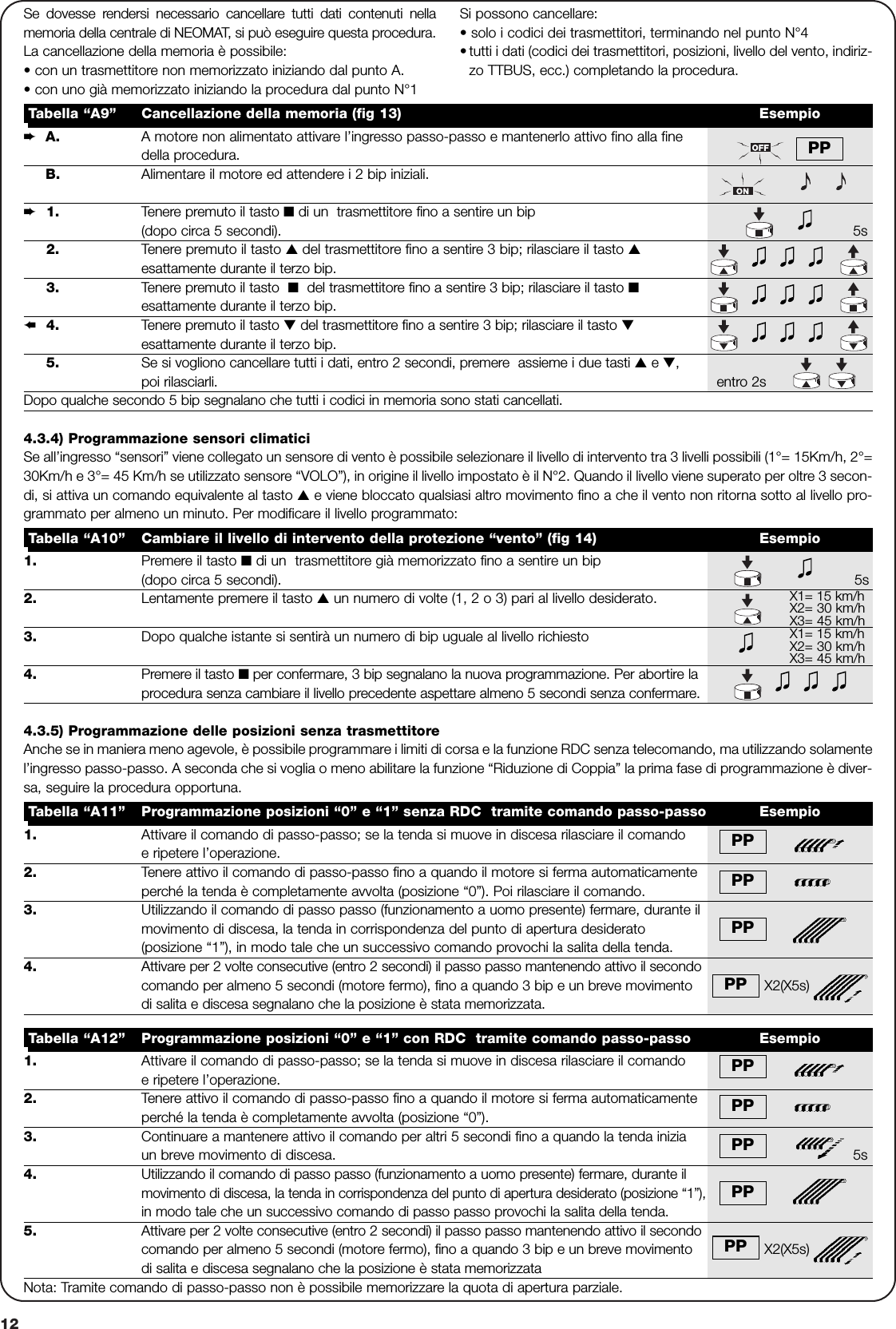
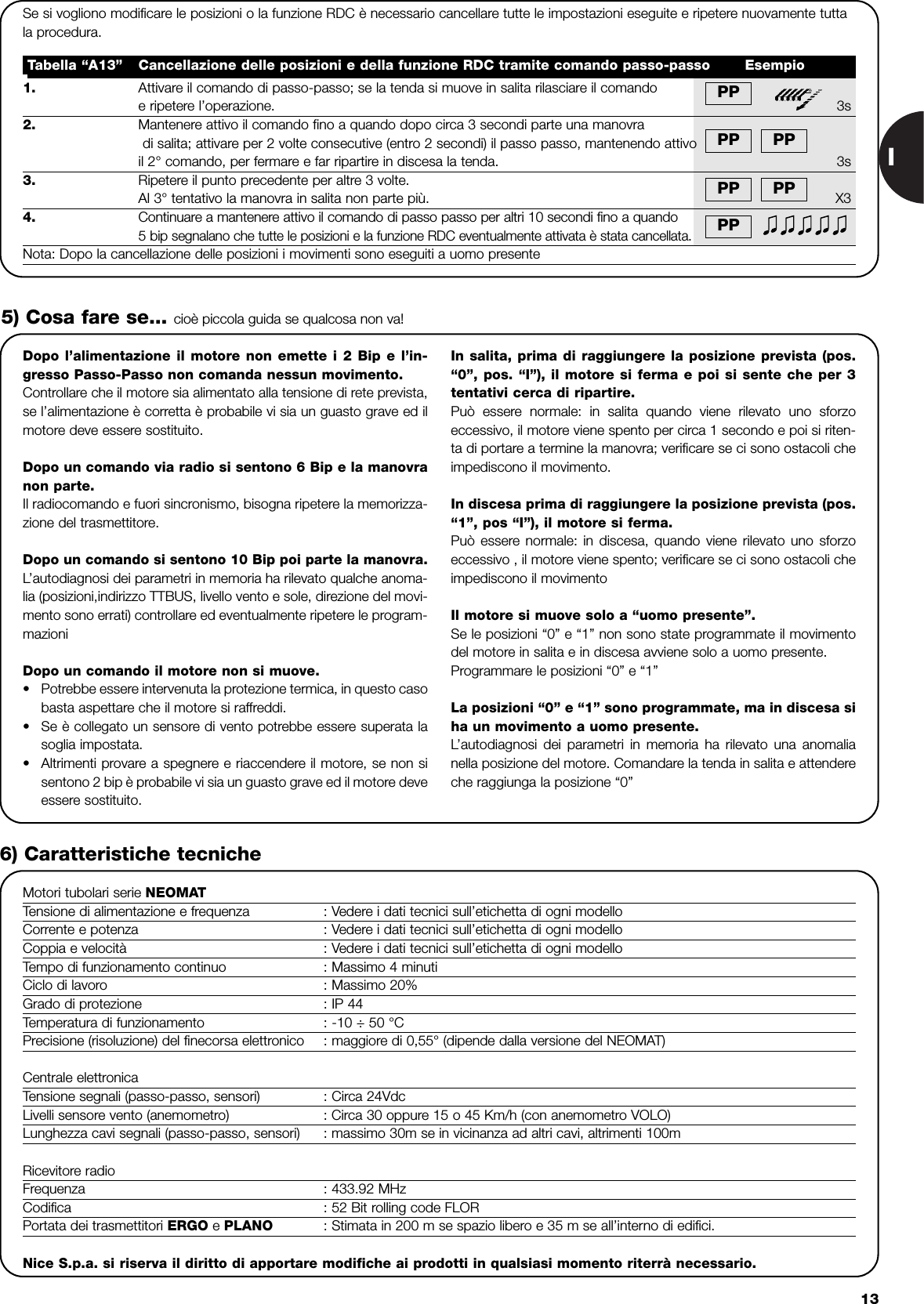
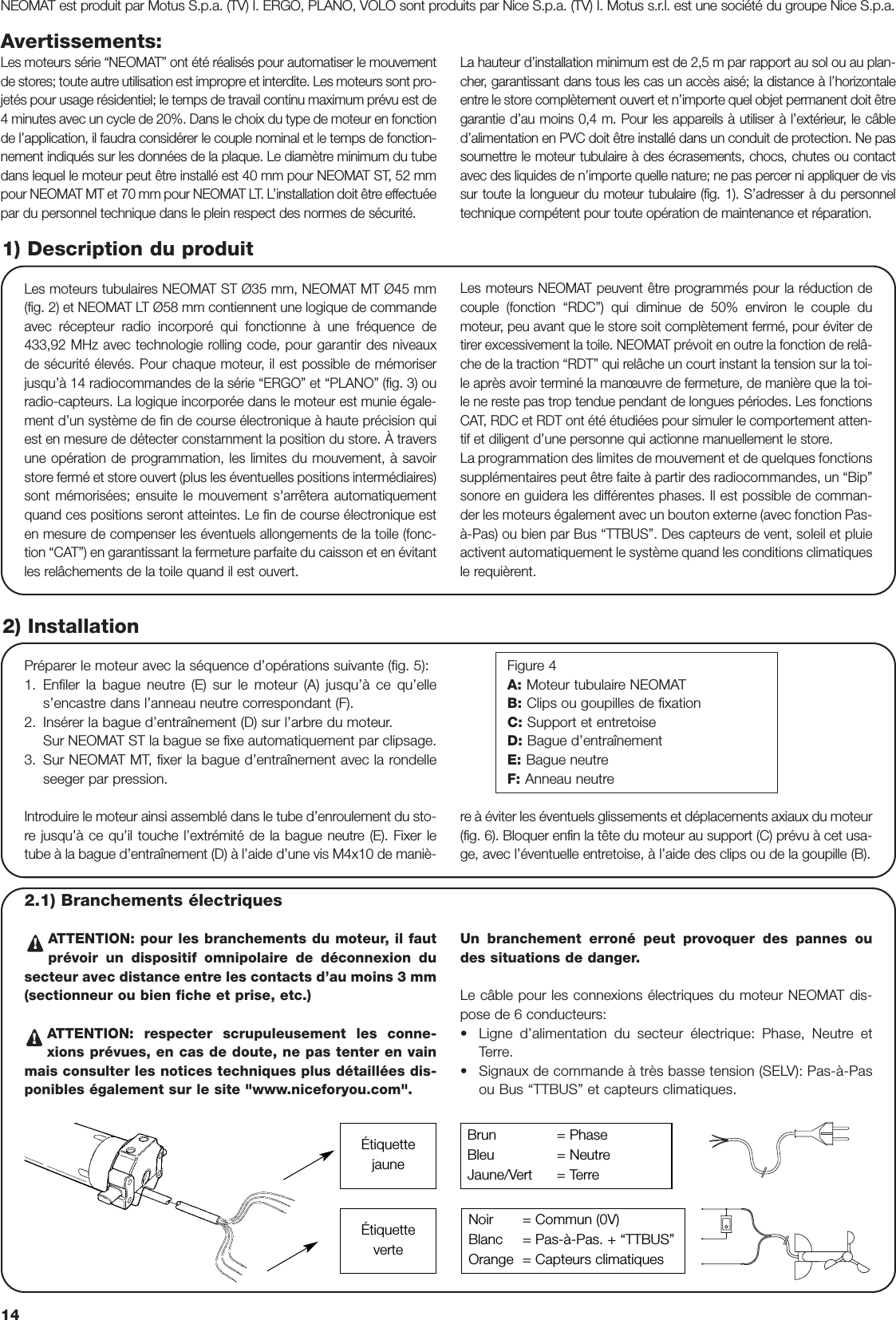
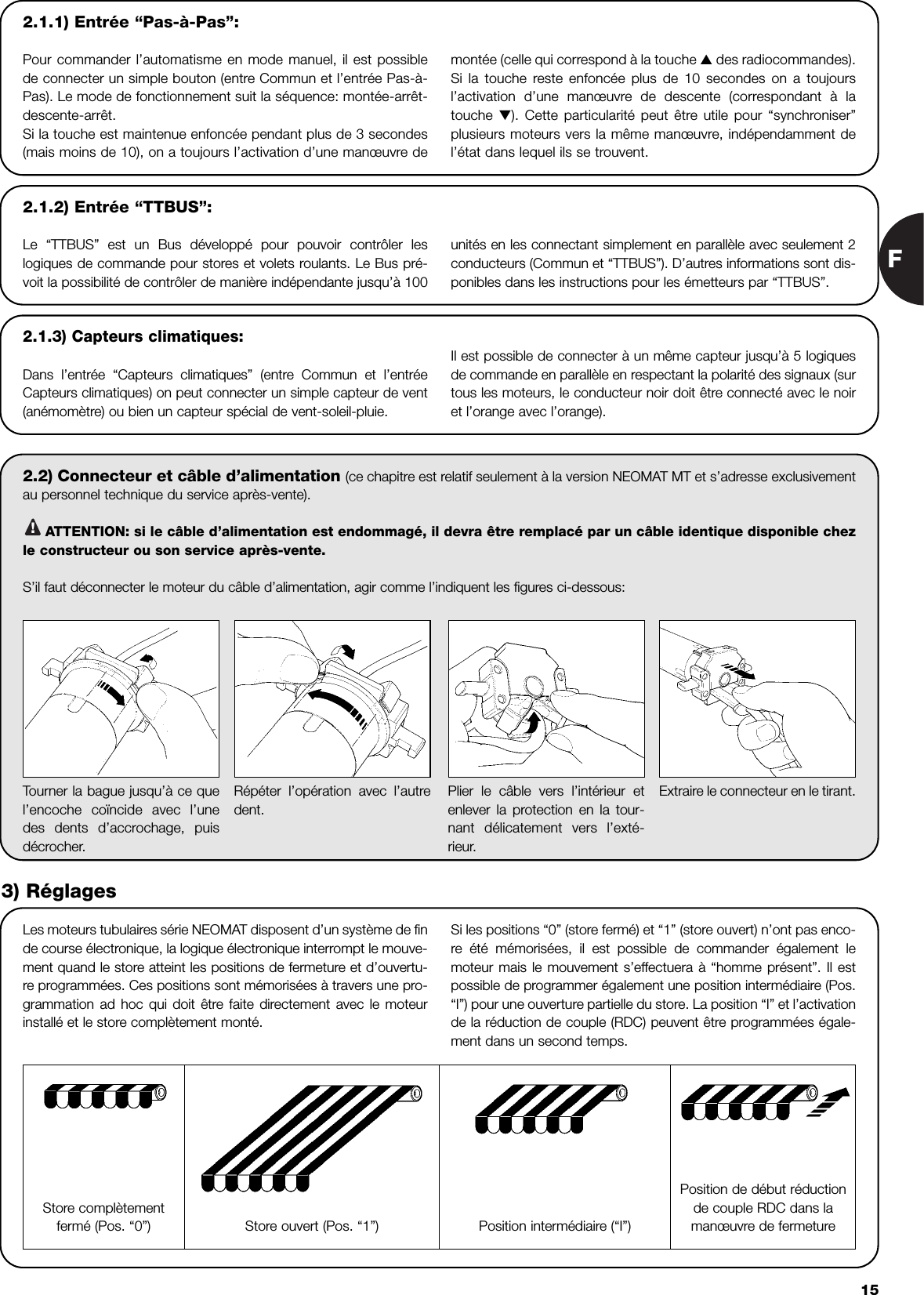
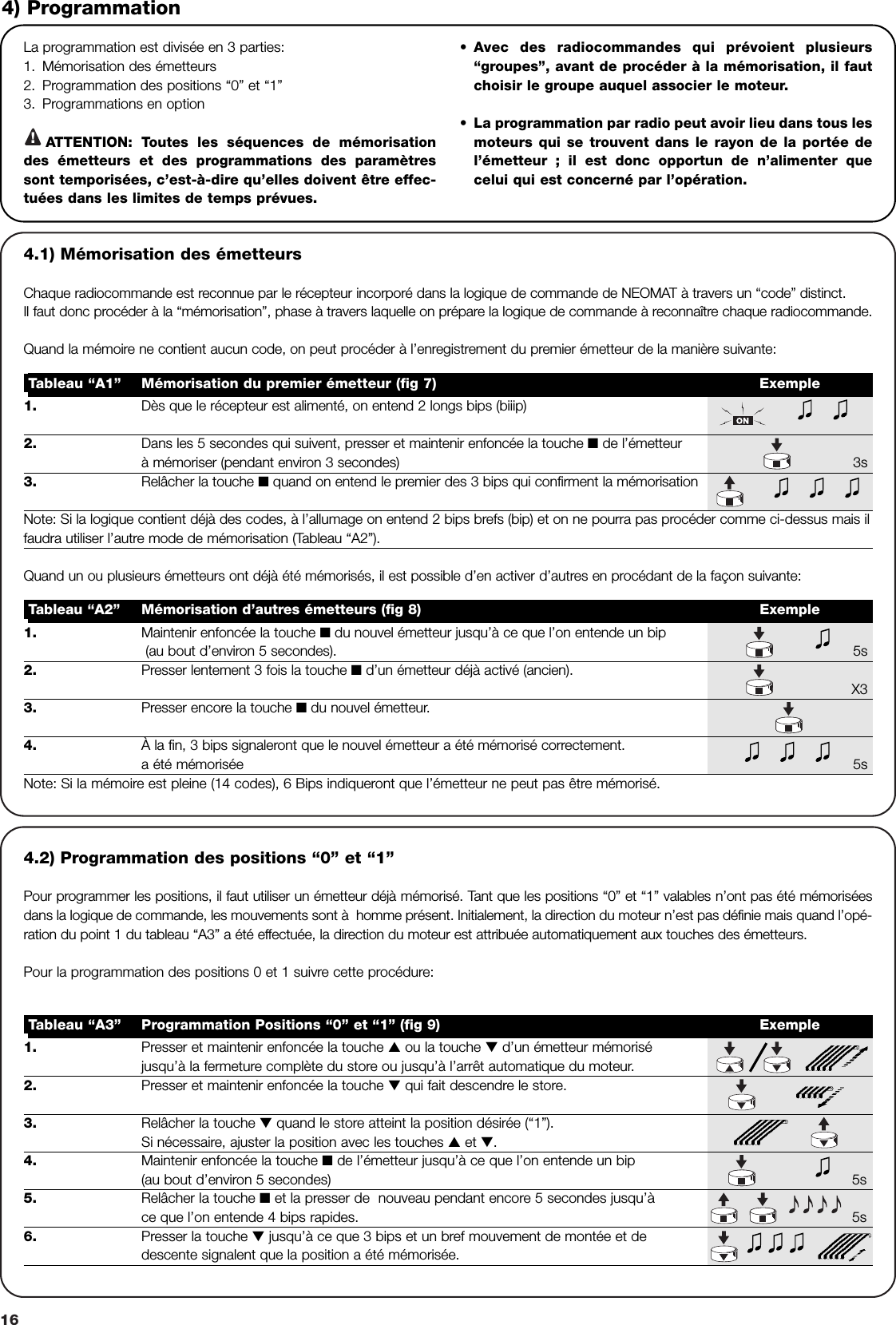
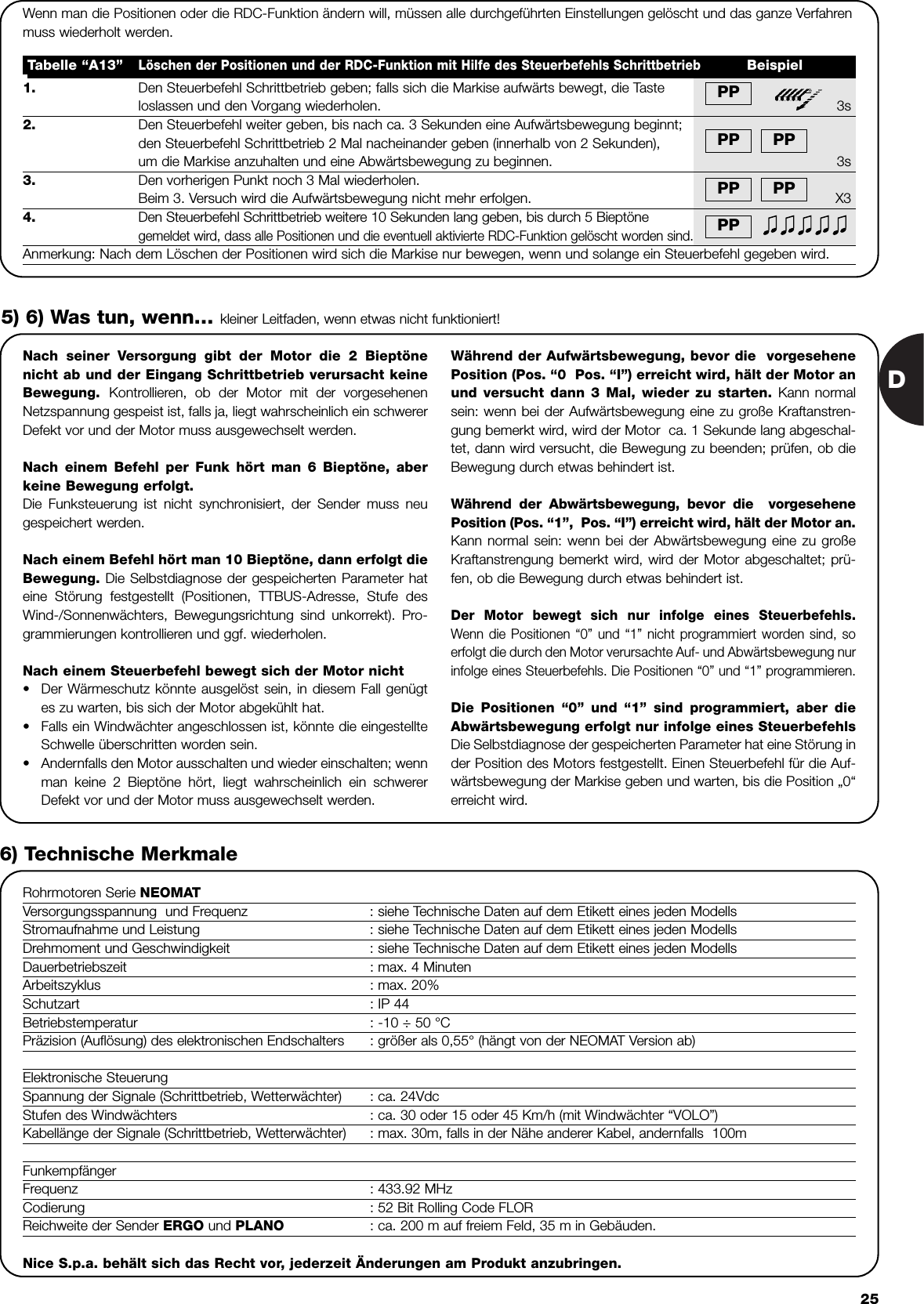
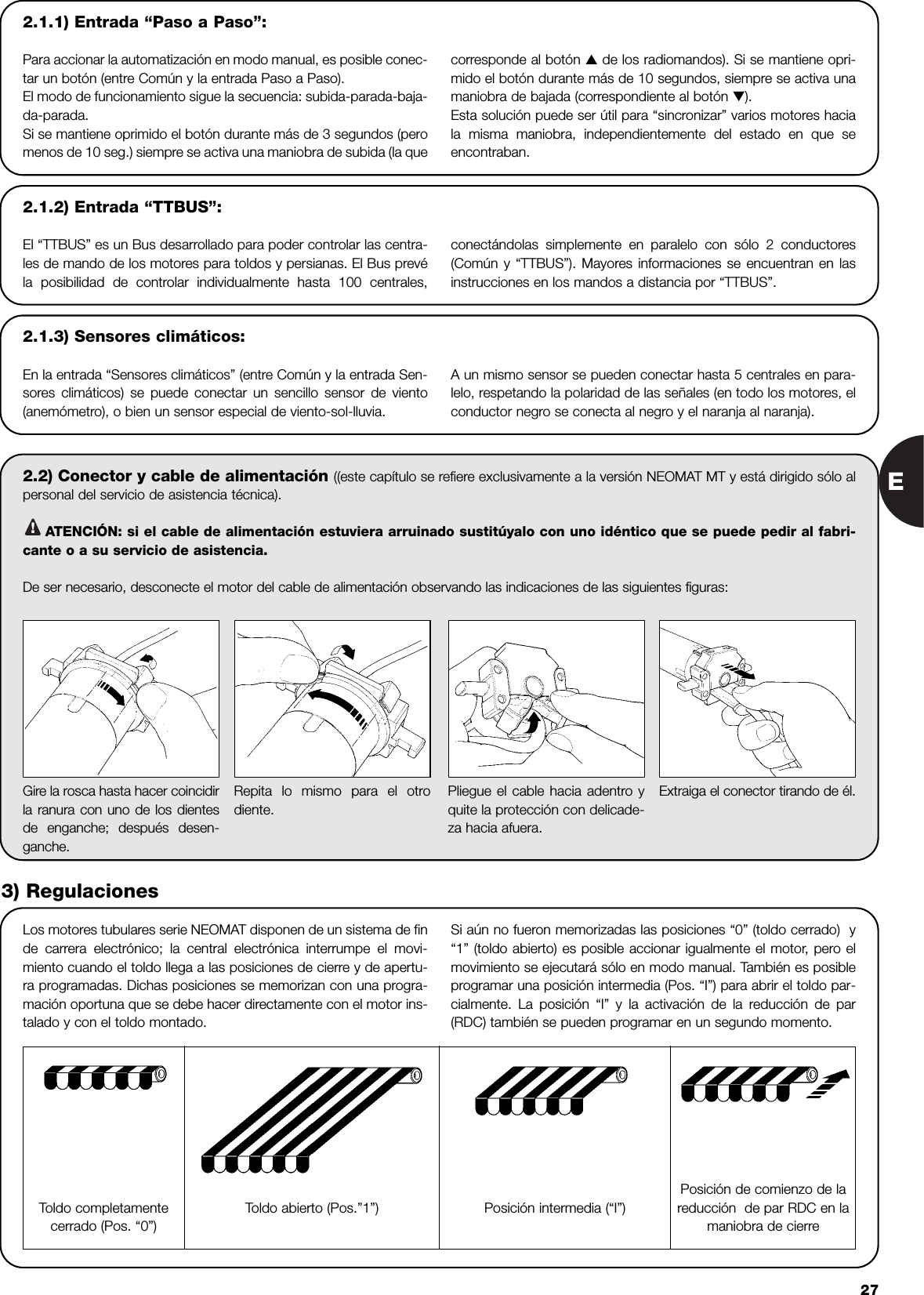
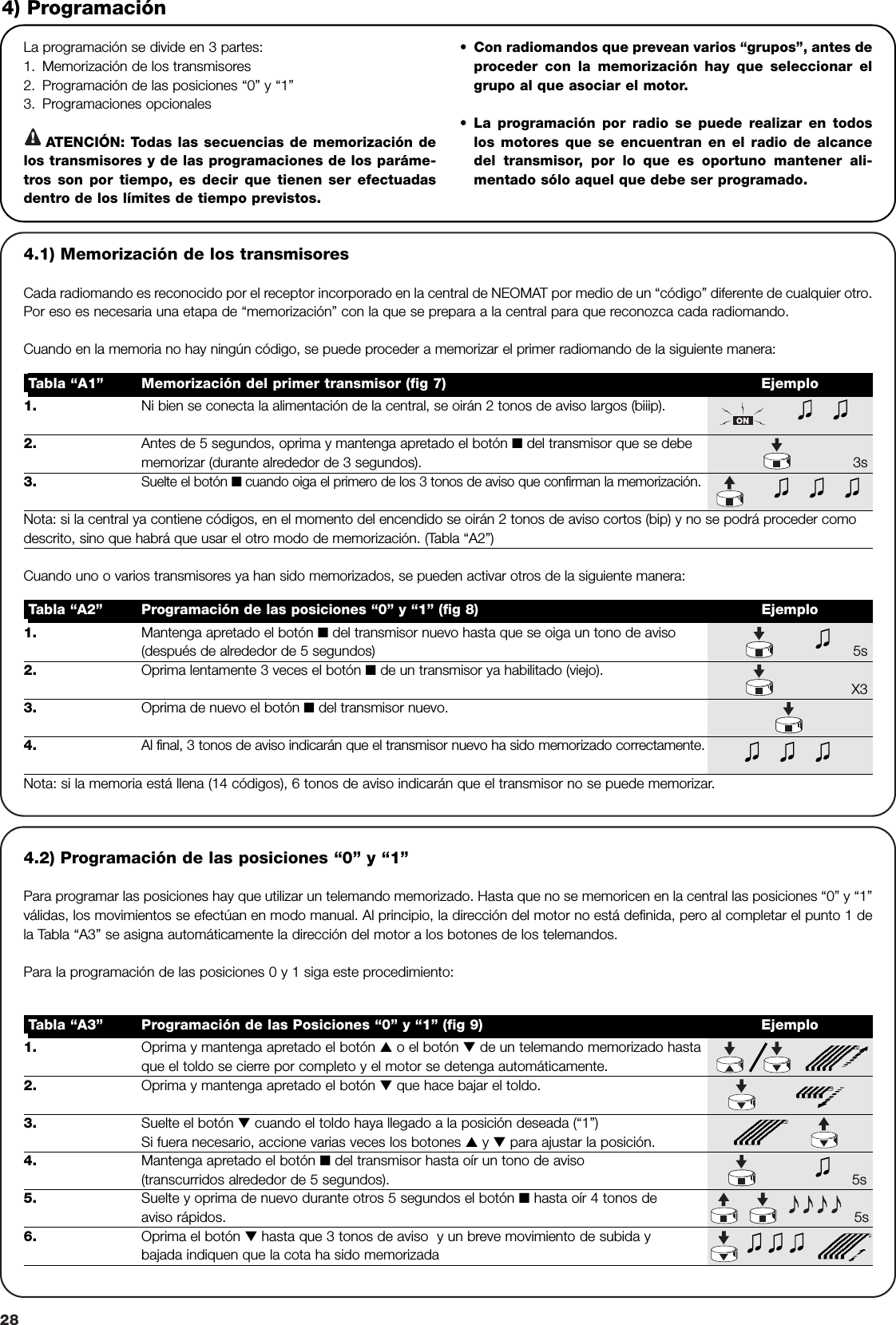
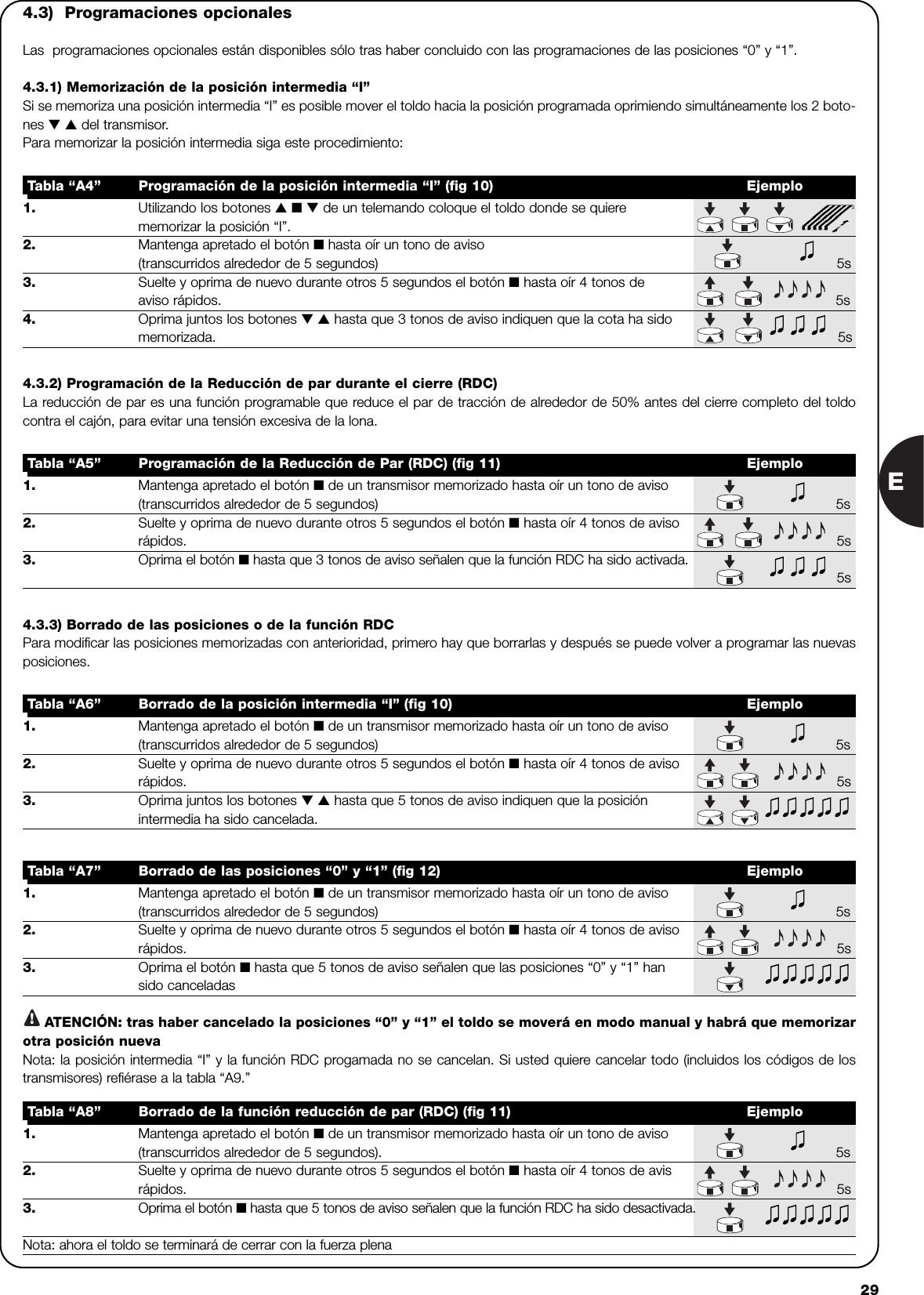
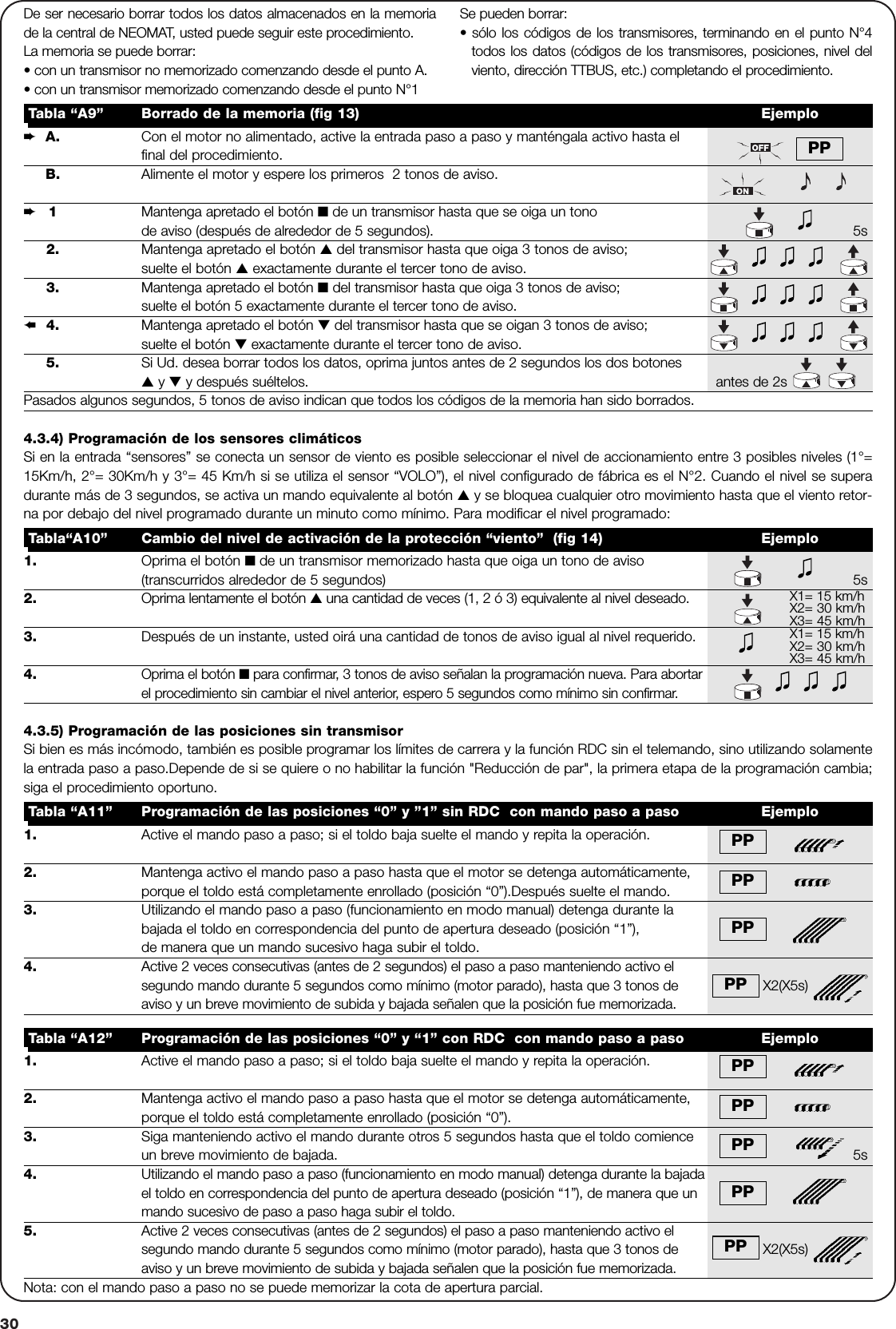
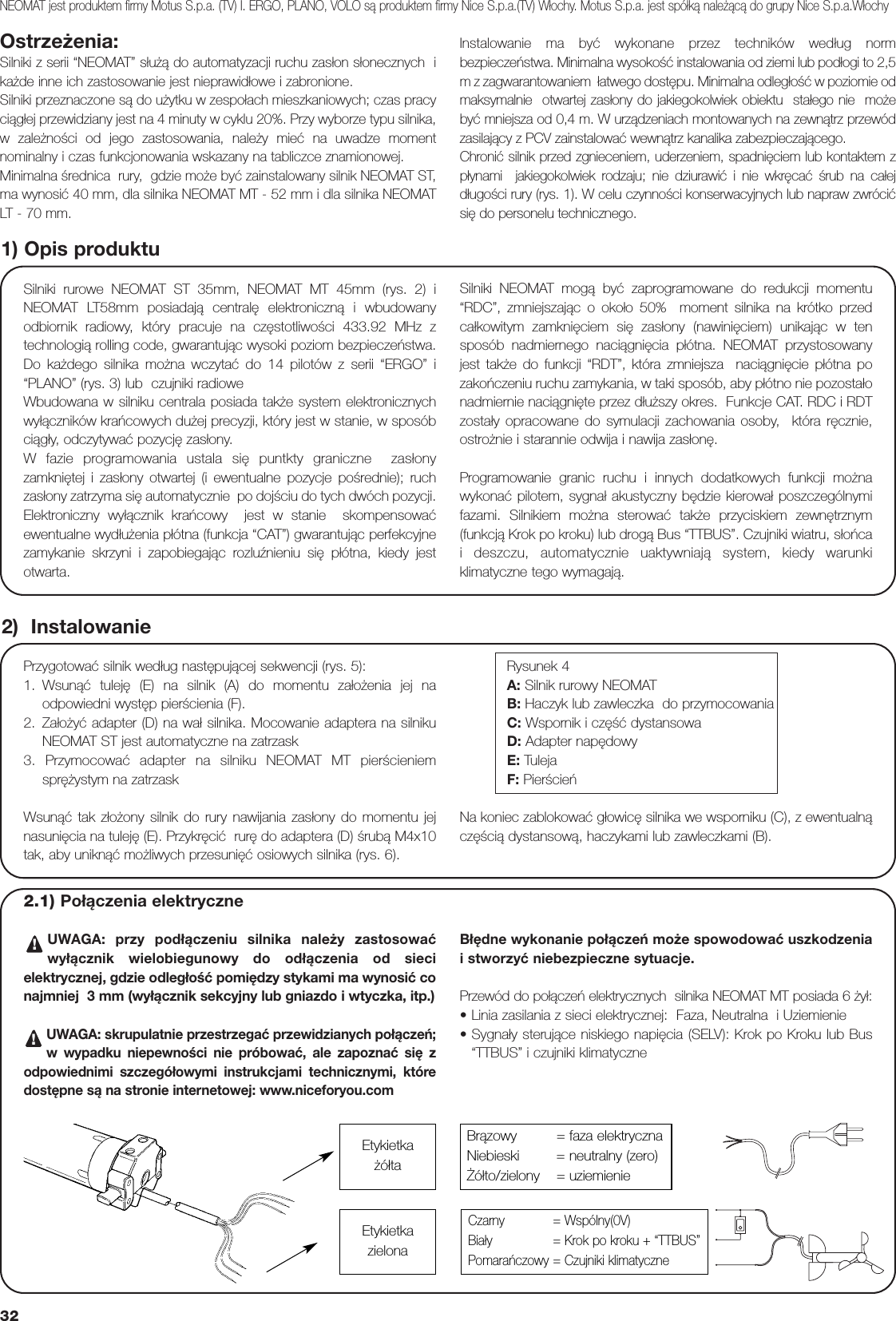
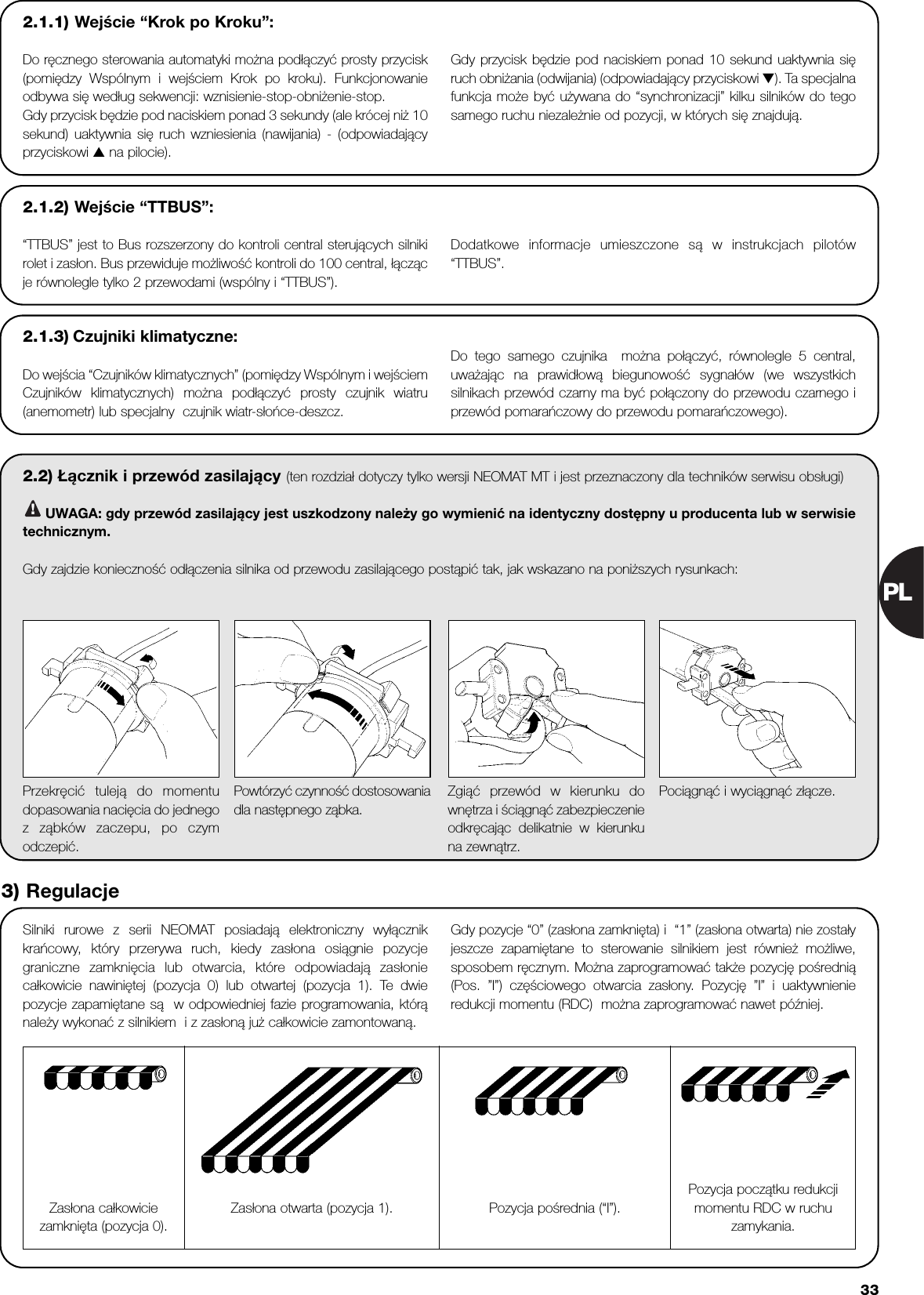
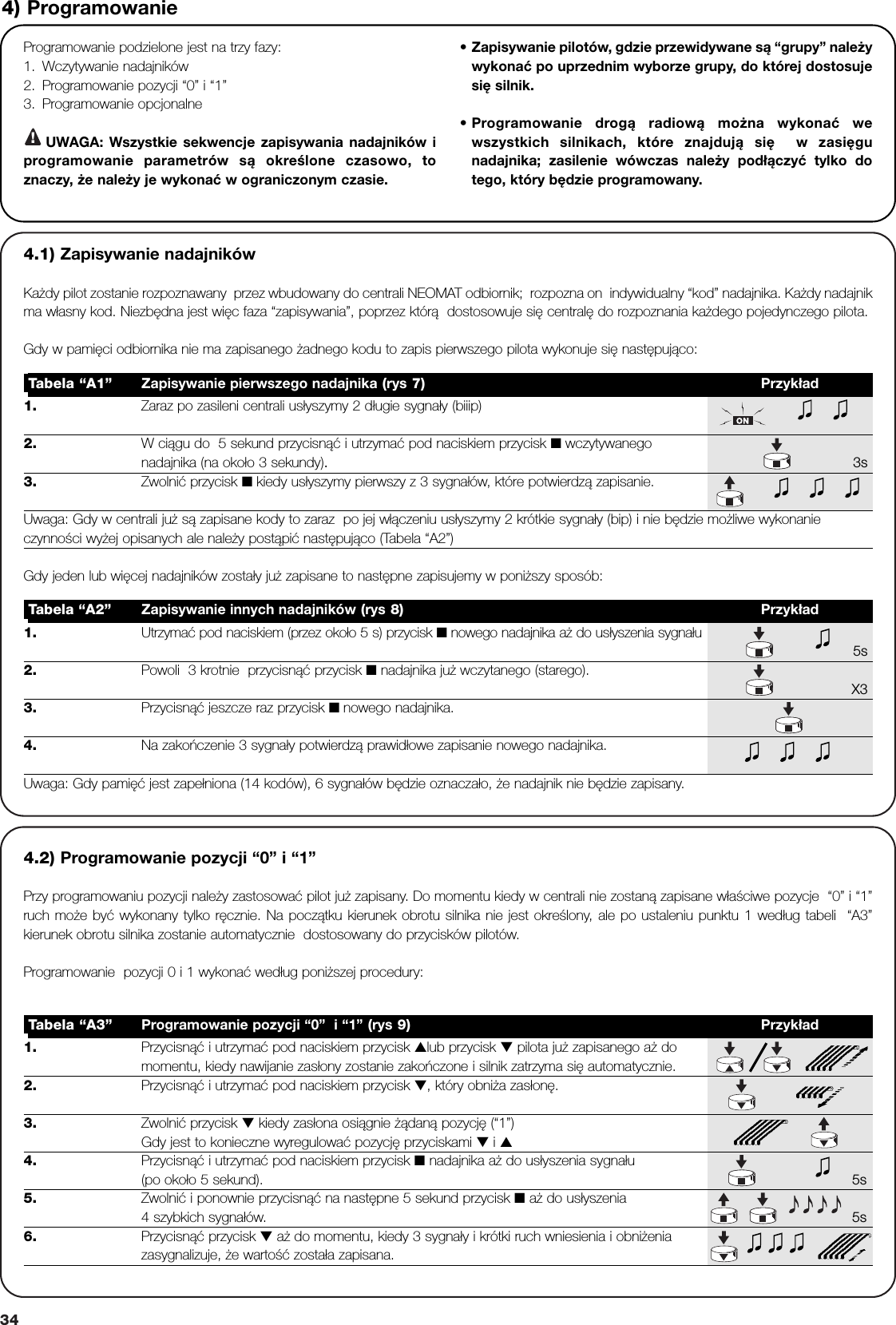
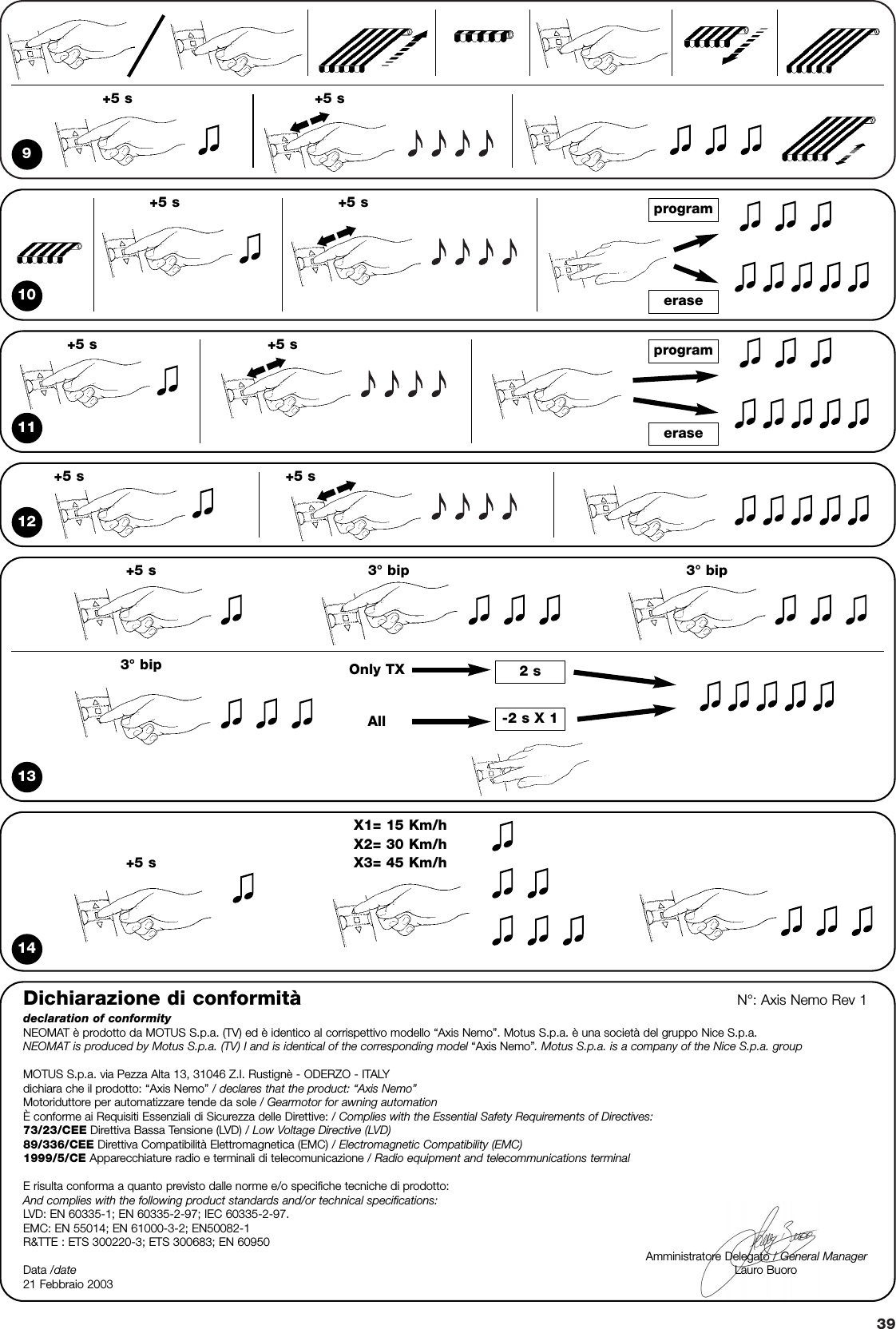
User Manual
User Manual
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation