C 887.52x Datasheet
User Manual: Pdf C-887.52x Hexapod Motion Controller
Open the PDF directly: View PDF ![]() .
.
Page Count: 4

20.04.2018
Compact Bench-Top Device for Controlling 6-Axis Systems
Digital controller for 6-axis parallel kinematics
High-performance digital controller for hexapods (6-axis parallel-kinematics) with DC motors. Additional control for two
further single axes with integrated ActiveDrive.
Functions
Position input via Cartesian coordinates, coordinate transformation handled by the controller. To simplify integration of the
hexapod, the reference system (Work, Tool) can be quickly and easily changed. The real-time operating system prevents jitter
and therefore guarantees constantly low response times. Stable, virtual pivot point can be freely defined in space. Data
recorder for recording of operating data such as motor control, velocity, position or position errors. Macro programming. An
autostart macro allows stand-alone operation. The controller supports motor brakes and absolute-measuring sensors with
BiSS interface.
Interfaces
TCP/IP for remote control and remote maintenance. RS-232. USB connection for external input devices (HID).
Additional interfaces (depending on version):
Motion stop: The supply voltage of the hexapod drive can be switched off using the external switch connected to the
controller. The sensor technology remains active so that position information continues to be available and a
reference move is not necessary when the drive is reactivated.
Analog inputs
Optional
Control via manual control unit
Collision checking for restricted space with PIVeriMove software
C-887.52x
Hexapod Motion Controller
Sophisticated controller using vector
algorithms
Commanding in Cartesian coordinates
Easy customization of coordinate systems
by command
Analog interfaces and motion stop
optional
Extensive software package
20.04.2018
Extensive software support
PIMikroMove user software. Common command set for all PI positioning systems. Full set of drivers for use with NI LabVIEW.
GUI input interfaces, configuration software, and graphically displayed scan routines.
Scope of Delivery
The order is made together with suitable hexapod mechanics. The scope of delivery includes the hexapod, controller with
software package, cable set, and power adapter.
Specifications
C-887.52 / C-887.521 / C-887.522 / C-887.523
Function
6-axis controller for hexapods, incl. control of two additional single axes
Compact benchtop device
Extending the functionality of C-887.52:
C-887.521: Additional analog inputs
C-887.522: Additional motion stop
C-887.523: Additional motion stop and analog inputs
Drive type Servo motors (hexapod and single axes)
Motion and control C-887.52 / C-887.521 / C-887.522 / C-887.523
Controller type 32-bit PID controller
Trajectory profiles Jerk-controlled generation of dynamics profile with linear interpolation
Processor Intel Atom dual core (1.8 GHz)
Servo cycle time 100 µs
Encoder input AB (quadrature) differential TTL signal, 50 MHz
BiSS
Stall detection Servo off, triggered by position error
Reference point switch TTL
Electrical properties C-887.52 / C-887.521 / C-887.522 / C-887.523
Hexapod control 12-bit PWM signal, TTL, 24 kHz
Hexapod power supply 24 V
Maximum output current 7 A
Interfaces and operation C-887.52 / C-887.521 / C-887.522 / C-887.523
Communication interfaces
TCP/IP, RS-232
USB (HID, manual control unit)
Hexapod connection
HD Sub-D 78 (f) for data transmission
M12 4 (f) for power supply
Connectors for single axes Sub-D 15 (f)
I/O lines
HD Sub-D 26 (f):
4 × analog input (-10 to 10 V, via 12-bit A/D converter)
4 × digital input (TTL)
4 × digital output (TTL)
Analog inputs
C-887.521 and C-887.523 only:
2 × BNC, -5 V to 5 V, via 16-bit A/D converter, 5 kHz bandwidth
Input for motion stop
C-887.522 and C-887.523 only:
M12 8 (f)
Command set PI General Command Set (GCS)
User software PIMikroMove
Application programming interfaces API for C / C++ / C# / VB.NET / MATLAB / Python, drivers for NI LabVIEW
Manual control Optional: C-887.MC manual control unit for hexapods
20.04.2018
Miscellaneous C-887.52 / C-887.521 / C-887.522 / C-887.523
Operating voltage 24 V (external power adapter for 100 to 240 V AC, 50 / 60 Hz in the scope of delivery)
Maximum current consumption 8 A
Operating temperature range 5 to 40 °C
Mass 2.8 kg
Dimensions
280 (320) mm × 150 mm × 103 mm
Power adapter: 170 mm × 85 mm × 42.5 mm
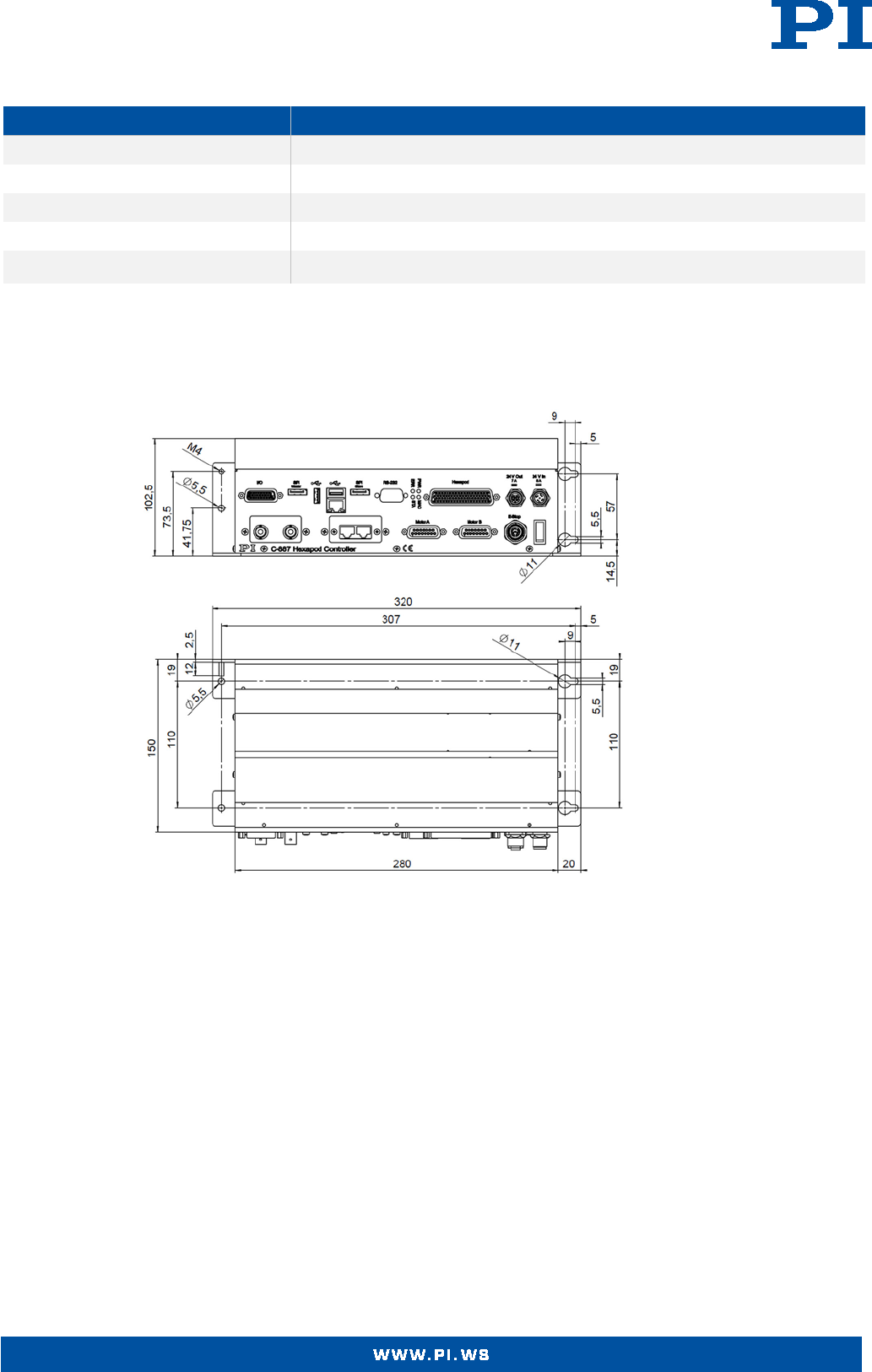
Drawings / Images
C-887.5xx, dimensions in mm. Version-dependent interfaces
Ordering Information
C-887.52
6-axis controller for hexapods TCP/IP, RS-232, benchtop device, incl. control for two additional servo axes
C-887.521
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, analog inputs
C-887.522
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, motion stop
C-887.523
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, motion stop, analog
inputs

20.04.2018
Accessories
C-887.MC
Manual control unit for hexapods, USB connector, 3 m cable
C-887.VM1
PIVeriMove Hexapod software for collision checking
