TB6600 Stepper Motor Driver SKU DRI0043 DFRobot Electronic Product Wiki And Tutorial Arduino Robot
2017-06-24
: Pdf Tb6600 Stepper Motor Driver Sku Dri0043 - Dfrobot Electronic Product Wiki And Tutorial Arduino And Robot Wiki-Dfrobot TB6600 Stepper Motor Driver SKU_ DRI0043 - DFRobot Electronic Product Wiki and Tutorial_ Arduino and Robot Wiki-DFRobot 2569-92-4273 aftab
Open the PDF directly: View PDF ![]() .
.
Page Count: 3
6/24/2017 TB6600StepperMotorDriverSKU:DRI0043DFRobotElectronicProductWikiandTutorial:ArduinoandRobotWikiDFRobot.com
https://www.dfrobot.com/wiki/index.php/TB6600_Stepper_Motor_Driver_SKU:_DRI0043 1/3
(https://www.dfrobot.com/product1547.html)
TB6600StepperMotorDriver
(https://www.dfrobot.com/product1547.html)
TB6600StepperMotorDriverSKU:DRI0043
Contents
1 Introduction
2 Features
3 Specification
4 QuickStart
4.1 Rquirements
4.2 ConnectionDiagram
4.3 SampleCode
4.4 Result
4.5 Comments
5 FAQ
6 MoreDocuments
Introduction
TB6600arduinoStepperMotorDriver(https://www.dfrobot.com/product1547.html)isaneasytouse
professionalsteppermotordriver(https://www.dfrobot.com/category106.html),whichcouldcontrolatwo
phasesteppingmotor.ItiscompatiblewithArduinoandothermicrocontrollersthatcanoutputa5Vdigital
pulsesignal.TB6600arduinosteppermotordriver(https://www.dfrobot.com/category106.html)hasawide
rangepowerinput,9~42VDCpowersupply.Anditisabletooutput4Apeakcurrent,whichisenoughforthe
mostofsteppermotors.
Thestepperdriversupportsspeedanddirectioncontrol.Youcansetitsmicrostepandoutputcurrentwith6DIPswitch.Thereare7kindsofmicrosteps(1,2/
A,2/B,4,8,16,32)and8kindsofcurrentcontrol(0.5A,1A,1.5A,2A,2.5A,2.8A,3.0A,3.5A)inall.Andallsignalterminalsadopthighspeedoptocoupler
isolation,enhancingitsantihighfrequencyinterferenceability.
Asaprofessionaldevice,itisabletodrive57,42typetwophase,fourphase,hybridsteppermotor.
Note:thisisaupgradeversionofTB6600StepperMotorDriver.
Features
Support8kindsofcurrentcontrol
Support7kindsofmicrostepsadjustable
Theinterfaceadoptshighspeedoptocouplerisolation
Automaticsemiflowtoreduceheat
Largeareaheatsink
Antihighfrequencyinterferenceability
Inputantireverseprotection
Overheat,overcurrentandshortcircuitprotection
Specification
InputCurrent: 0~5A
OutputCurrent:0.5~4.0A
Power(MAX): 160W
MicroStep: 1,2/A,2/B,4,8,16,32
Temperature: 10~45℃
Humidity: NoCondensation
Weight: 0.2kg
Dimension: 96*71*37mm
QuickStart
Inthissection,we'llshowyouhowtouseTB6600arduinomotordriverquickly.MoredetailcouldbefoundontheUserGuide
(https://github.com/Arduinolibrary/TB6600_Stepper_Motor_Driver/raw/master/TB6600%20User%20Guide%20V1.2.pdf).
Rquirements
Hardware
1xDFRduinoUNOR3(https://www.dfrobot.com/product838.html)
1xTB6600StepperMotorDriver(https://www.dfrobot.com/product1547.html)
1xSteppermotor(https://www.dfrobot.com/product1082.html)
Software
ArduinoIDEDownloadArduinoIDE(https://www.arduino.cc/en/Main/Software)
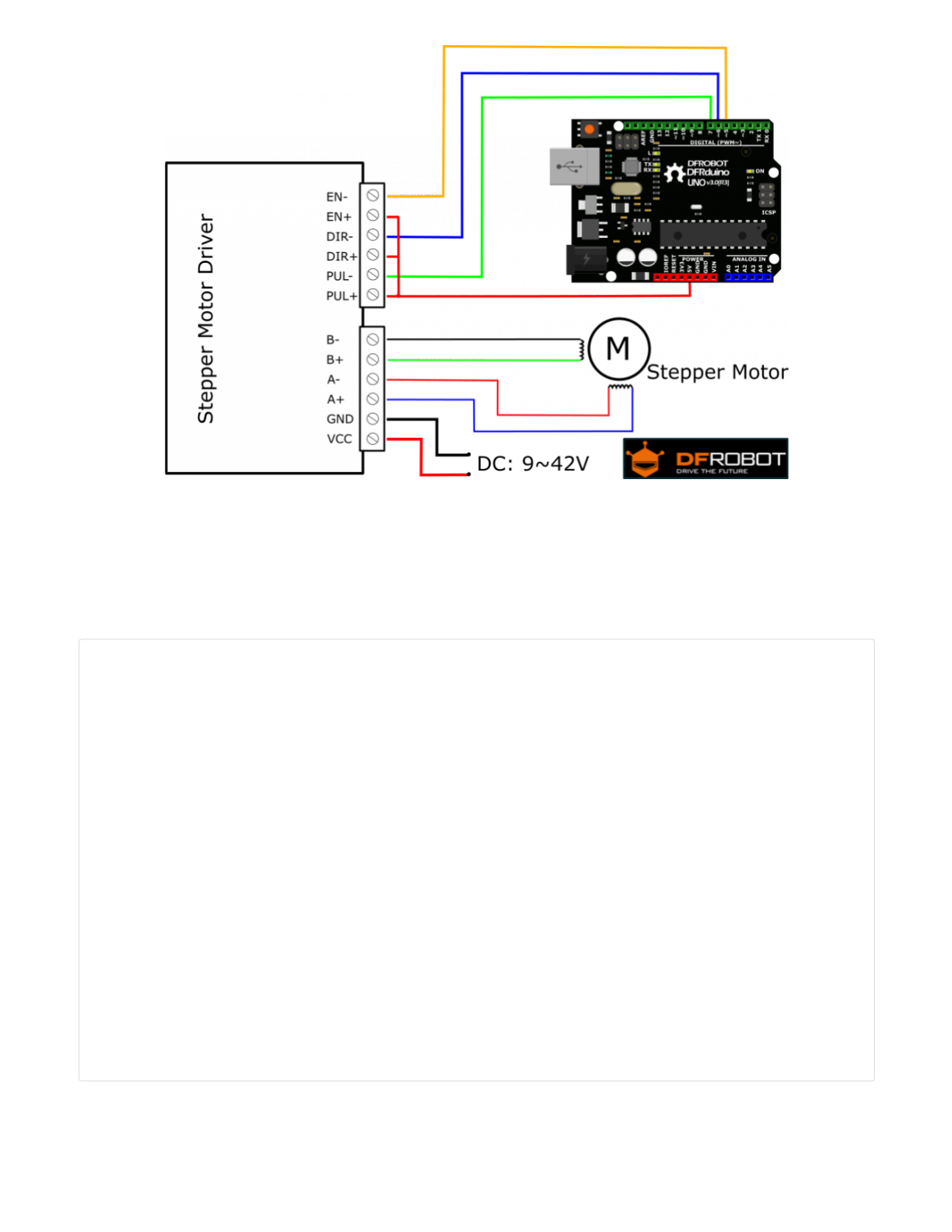
ConnectionDiagram
6/24/2017 TB6600StepperMotorDriverSKU:DRI0043DFRobotElectronicProductWikiandTutorial:ArduinoandRobotWikiDFRobot.com
https://www.dfrobot.com/wiki/index.php/TB6600_Stepper_Motor_Driver_SKU:_DRI0043 2/3
(/wiki/index.php/File:DRI0043_Connection.png)
1.Inthistutorial,we'lluseabipolarsteppermotor,1.8stepangle,1.7A
2.Setcurrent:1.7A
3.SetMicroStep:32
4.Connecta9~42VDCpowersupply
Up:OFF;Down:"ON"
SampleCode
intPUL=7;//definePulsepin
intDIR=6;//defineDirectionpin
intENA=5;//defineEnablePin
voidsetup(){
pinMode(PUL,OUTPUT);
pinMode(DIR,OUTPUT);
pinMode(ENA,OUTPUT);
}
voidloop(){
for(inti=0;i<6400;i++)//Forward5000steps
{
digitalWrite(DIR,LOW);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
for(inti=0;i<6400;i++)//Backward5000steps
{
digitalWrite(DIR,HIGH);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
}
Result
Thesteppermotorrotates6400steps(acycle),andreverses6400steps(acycle).
Comments
{kind=link}
6/24/2017 TB6600StepperMotorDriverSKU:DRI0043DFRobotElectronicProductWikiandTutorial:ArduinoandRobotWikiDFRobot.com
https://www.dfrobot.com/wiki/index.php/TB6600_Stepper_Motor_Driver_SKU:_DRI0043 3/3
Comments
When“EN”isLow,themotorisinafreestates(Offlinemode).Inthismode,youcanadjustthemotorshaftpositionmanually;when“EN”isHigh(Vacant),
themotorwillbeinanautomaticcontrolmode.
"Direction"isthemotordirectionsignalpin,
"PULSE"isthemotorpulsesignalpin.Oncethedrivergetapulse,themotormoveastep.
FAQ
Foranyquestions,adviceorcoolideastoshare,pleasevisittheDFRobotForum(http://www.dfrobot.com/forum/).
MoreDocuments
UserGuideV1.2(https://github.com/Arduinolibrary/TB6600_Stepper_Motor_Driver/raw/master/TB6600%20User%20Guide%20V1.2.pdf)
(http://www.dfrobot.com/)ShoppingfromTB6600ArduinoStepperMotorDriver(https://www.dfrobot.com/product1547.html)
DFRobotDistributor.(http://www.dfrobot.com/index.php?route=information/distributorslogo)
Category:DFRobot(https://www.dfrobot.com/)>Sensors&Modules(https://www.dfrobot.com/category156.html)>StepperMotorDrivers
(https://www.dfrobot.com/category106.html)
Thispagewaslastmodifiedon31May2017,at06:26.
ContentisavailableunderGNUFreeDocumentationLicense1.3orlater(https://www.gnu.org/copyleft/fdl.html)unlessotherwisenoted.
(https://www.gnu.org/copyleft/fdl.html) (//www.mediawiki.org/)
