Physik Instrumente Datasheet H 850KMLx Datenblatt
H-850KMLx_Datenblatt H-850KMLx High-Load Hexapod
User Manual: Physik Instrumente H-850KMLx High-Load Hexapod
Open the PDF directly: View PDF ![]() .
.
Page Count: 3
- H-850KMLx
- Hochlast-Hexapod
- Verwandte und kompatible Produkte
- Spezifikationen
- Zeichnungen und Bilder
- Bestellinformationen

23.11.2016
17:22
H-850KMLx
Hochlast-Hexapod
Hochpräzise und wiederholbare Positionierung
6-Achsen-System der Referenzklasse
Parallelkinematischer Aufbau für sechs Freiheitsgrade, dadurch wesentlich kompakter und steifer als
Seriellkinematik-Systeme, höhere Dynamik, keine bewegten Kabel: Höhere Zuverlässigkeit, reduzierte
Reibung.
Absolutencoder
Absolutencoder liefern eindeutige Lageinformationen, die eine sofortige Feststellung der Position
ermöglichen. Somit ist keine Referenzierung beim Einschalten erforderlich, Effizienz und Sicherheit im
Betrieb können gesteigert werden.
Einsatzgebiete
Industrie und Forschung. Hochlast-Positionierung z.B. im Maschinenbau oder in Testsystemen für Satelliten.
Verwandte und kompatible Produkte
Kompatible Controller / Treiber / Verstärker
C-887.52x Hexapod Motion Controller
C-887.53x Hexapod Motion Controller mit EtherCAT
Verwandte Mechaniken
H-845 Schwerlast-Hexapod
H-850 6-Achsen-Hexapod
Belastbarkeit bis 500 kg
Kleinste Schrittweite 0,5 µm in X und Y
und 0,2 µm in Z
Stellwege bis 100 mm, Rotationsbereich
bis 60°
Große Apertur
Auch mit Absolutencoder
23.11.2016
17:22
Spezifikationen
Vorläufige Daten
H-850KMLx
Einheit
Toleranz
Aktive Achsen
X, Y, Z, θ
X
, θ
Y
, θ
Z
Bewegung und Positionieren
Integrierter Sensor
H-850KMLA: Absolutencoder
H-850KMLD: Inkrementelle
Encoder
Stellweg in X, Y *
±50
mm
Stellweg in Z *
±25
mm
Stellweg in θX, θY *
±15
°
Stellweg in θZ *
±30
°
Kleinste Schrittweite in X, Y
0,5
µm
typ.
Kleinste Schrittweite in Z
0,2
µm
typ.
Umkehrspiel in X, Y
2,5
µm
typ.
Umkehrspiel in Z
0,5
µm
typ.
Umkehrspiel in θ
X
, θ
Y
10
µrad
typ.
Umkehrspiel in θ
Z
20
µrad
typ.
Wiederholgenauigkeit in X, Y
±1
µm
typ.
Wiederholgenauigkeit in Z
±0,2
µm
typ.
Wiederholgenauigkeit in θX, θY
±5
µrad
typ.
Wiederholgenauigkeit in θZ
±9
µrad
typ.
Max. Geschwindigkeit in X, Y, Z
0,5
mm/s
Max. Geschwindigkeit in θX, θY, θZ
6
mrad/s
Typ. Geschwindigkeit in X, Y, Z
0,3
mm/s
Typ. Geschwindigkeit in θX, θY, θZ
3
mrad/s
Mechanische Eigenschaften
Belastbarkeit (Grundplatte horizontal /
beliebig)
500 / 200
kg
max.
Haltekraft, unbestromt (Grundplatte
horizontal / beliebig)
4000 / 2000
N
max.
Motortyp
DC-Getriebemotor
Anschlüsse und Umgebung
Betriebstemperaturbereich
-10 bis 50
°C
Material
Aluminium
Masse
23,8
kg
Technische Daten werden bei 20±3 °C spezifiziert.
Sonderausführungen auf Anfrage.
* Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die
genannten Daten geben den maximalen Stellweg einzelner Achsen an, bei denen alle anderen Achsen und
der Pivotpunkt auf Referenzposition stehen.
23.11.2016
17:22
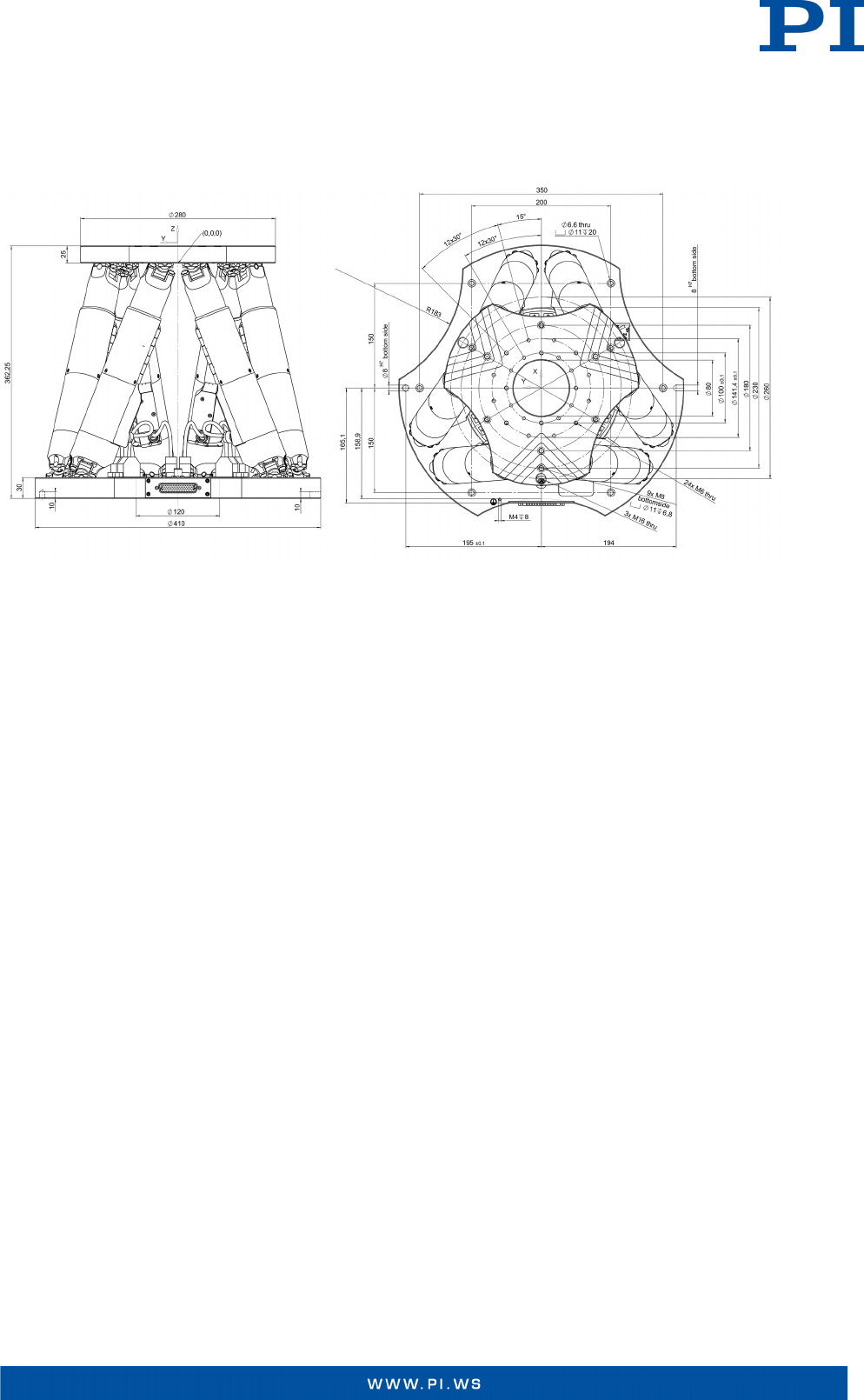
Zeichnungen und Bilder
H-850KMLx, Abmessungen in mm
Bestellinformationen
H-850KMLA
Hochlast-Hexapod-Mikroroboter mit hervorragender Wiederholgenauigkeit, Absolutencoder für
schnelle Inbetriebnahme, DC-Motor mit Getriebe, 500 kg Belastbarkeit, inkl. 3 m Kabelsatz
H-850KMLD
Hochlast-Hexapod-Mikroroboter mit hervorragender Wiederholgenauigkeit, 500 kg Belastbarkeit, DC-
Motor mit Getriebe, inkl. 3 m Kabelsatz
Sonderausführungen auf Anfrage.
