Physik Instrumente PI Data Sheet H 824
PI_DataSheet_H-824 H-824 6-Axis Hexapod
User Manual: Physik Instrumente H-824 6-Axis Hexapod
Open the PDF directly: View PDF ![]() .
.
Page Count: 4
Page 1 of 4
01.03.2016
11:19
R1
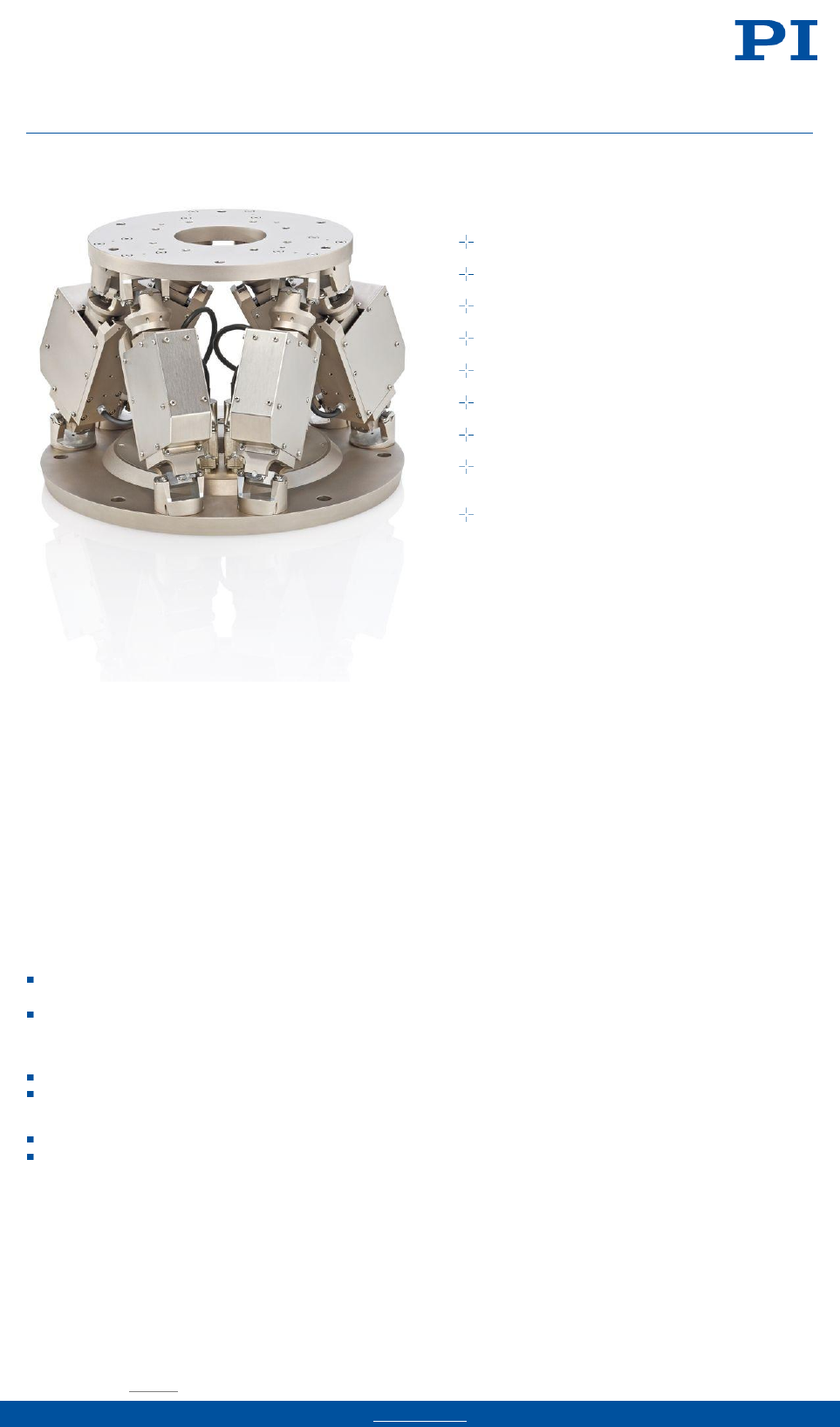
6- Axis Hexapod
LOW- PROFILE, PRECISION PARALLEL- KINEMATIC SYSTEM
Precision- class 6- axis positioning system
Parallel- kinematic design for six degrees of freedom making it significantly more compact and stiff than serial-
kinematic systems, higher dynamic range, no moved cables: Higher reliability, reduced friction. Vacuum-
compatible versions to 10-6 hPa are available
Compact due to folded drive design
H-824.Gxx with DC gear motors
H-824.Dxx with powerful DC motors for higher velocity
Powerful digital controller, open software architecture
User- defined, stable pivot point, software- selectable. Positions commanded in Cartesian coordinates. Macro
programming. Open source LabVIEW driver set. Work space simulation software. Virtual Hexapod machine
software. Optional: Collision avoidance software (external obstacles).
Hexapods are by default configured and delivered as a system including a controller
C-887.52 compact bench- top controller for a lower system price. Digital I/ O interfaces, e.g. for external
triggering
C-887.11 19" controller, comprises the control for two additional single axes with servo motors. Options: Control
of piezo axes, photometer cards for visible light or infrared light range
Upgrades for C-887.11 (order separately)
Analog interface/ photometer cards for visible light (F-206.VVU) or the infrared light range (F-206.iiU)
F-206.NCU fast piezo nano- alignment system for alignment with nanometer precision
Accessories
C-887.MC manual control unit for Hexapods, USB, 3 m cable
C-887.VM1 PIVeriMove software for collision checking
Fields of application
Research and industry, standard and vacuum environments. For micromanipulation, biotechnology,
semiconductor manufacturing
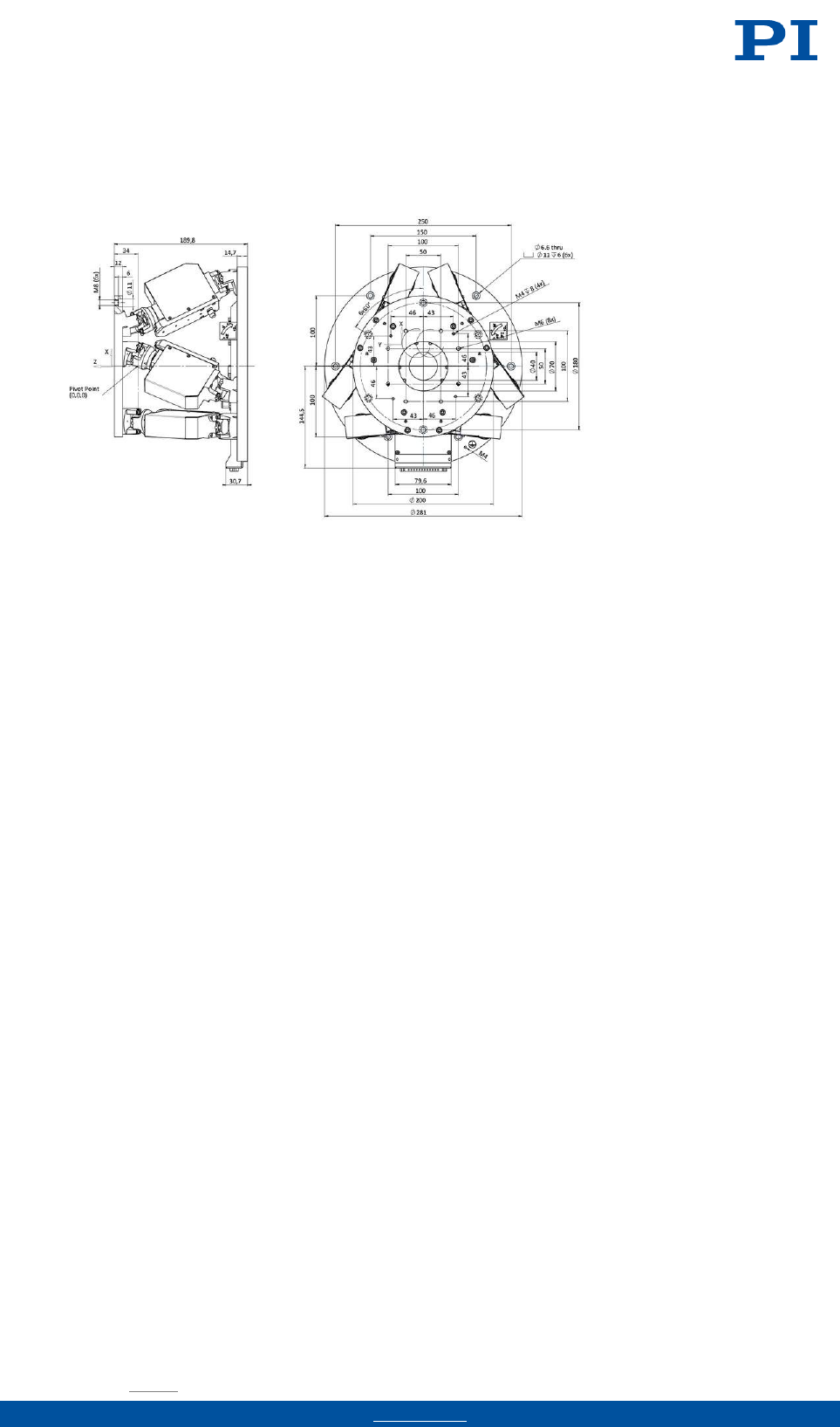
H-824
Load capacity to 10 kg, self- locking version
Travel ranges to 45 mm / 25°
Actuator resolution to 7 nm
Min. incremental motion to 0.3 µm
Repeatability to ±0.1 µm / ±2.5 µrad
Velocity to 25 mm/ s
Vacuum- compatible versions available
Sophisticated controller using vector algorithms,
virtual pivot point
Comprehensive software package
© Physik Instrumente (PI) GmbH und Co. KG 2014. Subject to change without notice.
Latest releases available at www.pi.ws
WWW.PI.WS
Page 2 of 4
01.03.2016
11:19
R1
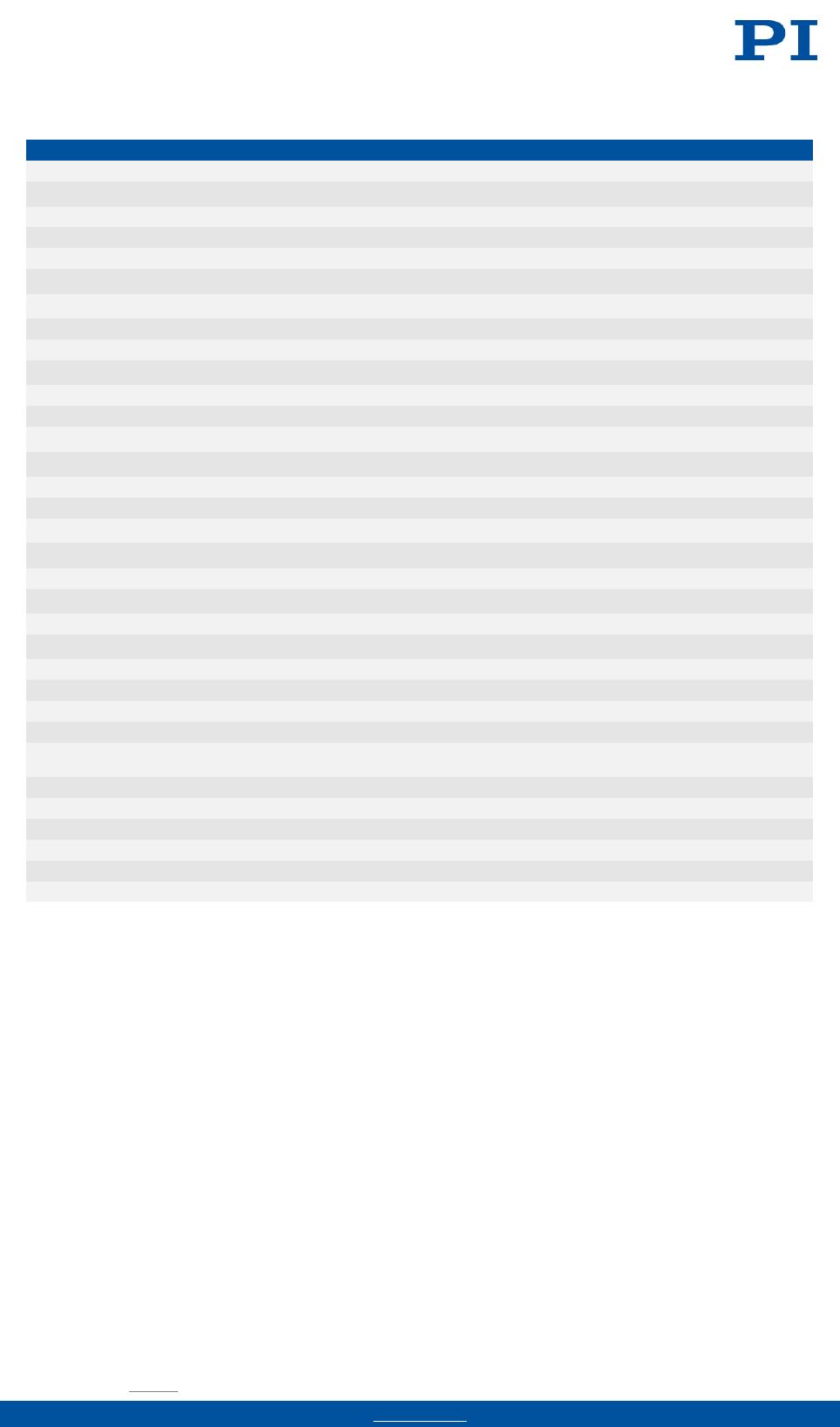
Specifications
H-824.Gxx H-824.Dxx Unit Tolerance
for higher resolution and load for higher velocity
Active axes X, Y, Z, θX, θY, θZX, Y, Z, θX, θY, θZ
Motion and positioning
Travel range* X, Y ±22.5 ±22.5 mm
Travel range* Z ±12.5 ±12.5 mm
Travel range* θX, θY±7.5 ±7.5 °
Travel range* θZ±12.5 ±12.5 °
Single- actuator design resolution 0.007 0.5 µm
Min. incremental motion X, Y, Z 0.3 1 µm typ.
Min. incremental motion θX, θY, θZ3.5 12 µrad typ.
Backlash X, Y 3 1 µm typ.
Backlash Z 1 1 µm typ.
Backlash θX, θY20 15 µrad typ.
Backlash θZ25 25 µrad typ.
Repeatability X, Y ±0.5 ±0.5 µm typ.
Repeatability Z ±0.1 ±0.1 µm typ.
Repeatability θX, θY±2 ±2 µrad typ.
Repeatability θZ±2.5 ±2.5 µrad typ.
Max. velocity X, Y, Z 1 25 mm/ s
Max. velocity θX, θY, θZ11 270 mrad/ s
Typ. Velocity X, Y, Z 0.5 10 mm/ s
Typ. Velocity θX, θY, θZ5.5 55 mrad/ s
Mechanical properties
Stiffness X, Y 1.7 1.7 N/ µm
Stiffness Z 7 7 N/ µm
Load (base plate horizontal / any orientation) 10 / 5 5 / 2.5 kg max.
Holding force, de- energized
(base plate horizontal / any orientation) 100 / 50 15 / 5 N max.
Motor type DC gear motor DC motor
Miscellaneous
Operating temperature range -10 to 50 -10 to 50 °C
Material Aluminum Aluminum
Mass 8 8 kg ±5 %
Cable length 3 3 m ±10 mm
Vacuum versions to 10-6 hPa are available under the following ordering number: H-824.xVx. Specifications for vacuum versions can differ.
Technical data specified at 20 ±3 °C.
Ask about custom designs!
* The travel ranges of the individual coordinates (X, Y, Z, θX, θY, θZ) are interdependent. The data for each axis in this table shows its maximum
travel, where all other axes are at their zero positions. If the other linear or rotational coordinates are not zero, the available travel may be less.
Order Information
© Physik Instrumente (PI) GmbH und Co. KG 2014. Subject to change without notice.
Latest releases available at www.pi.ws
WWW.PI.WS
Page 3 of 4
01.03.2016
11:19
R1
H-824.G2
Compact Hexapod Microrobot, DC Motor Gearhead, 1 mm/ s, 10 kg Load, Sub- D Connector, Cable Set 3 m
H-824.D2
Compact Hexapod Microrobot, Direct Drive, 25 mm/ s, 5 kg Load, Sub- D Connector, Cable Set 3 m
Vacuum versions
H-824.G2V
Compact Hexapod Microrobot, DC Motor Gearhead, 0.5 mm/ s, 5 kg Load, Vacuum- Compatible to 10-6 hPa, Sub- D Connector, 2 m Vacuum-
Side Cable, Feedthrough, 3 m Air- Side Cable
H-824.D2V
Compact Hexapod Microrobot, Direct Drive, 12.5 mm/ s, 2.5 kg Load, Vacuum- Compatible to 10-6 hPa, Sub- D Connector(s), 2 m Vacuum- Side
Cable, Feedthrough, 3 m Air- Side Cable
Recommended controller
C-887.52
6D Hexapod Controller, TCP/ IP, RS-232, Bench- Top Device, Control of Two Additional Servo- Motor Axes Included
Accessories
C-887.MC
Hexapod Control Unit, USB Connector, 3 m Cable
C-887.VM1
PIVeriMove Software for the Collision Check
Hexapod systems with fieldbus interface
H-824.D31
Compact Hexapod Microrobot, Direct Drive, 25 mm/ s, 5 kg Load, Cable Set 3 m, with 6- D Hexapod Controller, EtherCAT® Interface
Configuration options (to be ordered as a system)
H-824.G11
Compact Hexapod Microrobot, DC Motor Gearhead, 1 mm/ s, 10 kg Load, Cable Set 3 m, with 6- D Hexapod Controller, Control of 2 Additional
Servo- Motor Axes Included, TCP/ IP and RS-232 Interface, 19'' Chassis
H-824.D11
Compact Hexapod Microrobot, Direct Drive, 25 mm/ s, 5 kg Load, Cable Set 3 m, with 6- D Hexapod Controller, Control of 2 Additional Servo-
Motor Axes Included, TCP/ IP and RS-232 Interface, 19'' Chassis
Vacuum versions
H-824.GV1
Compact Hexapod Microrobot, DC Motor Gearhead, 0.5 mm/ s, 5 kg Load, Vacuum- Compatible to 10-6 hPa, 2 m Vacuum- Side Cable,
Feedthrough, 3 m Air- Side Cable, with 6- D Hexapod Controller, Control of 2 Additional Servo- Motor Axes Included, TCP/ IP and RS-232
Interface, 19'' Chassis
H-824.DV1
Compact Hexapod Microrobot, Direct Drive, 12.5 mm/ s, 2.5 kg Load, Vacuum- Compatible to 10-6 hPa, 2 m Vacuum- Side Cable, Feedthrough, 3
m Air- Side Cable, with 6- D Hexapod Controller, Control of 2 Additional Servo- Motor Axes Included, TCP/ IP and RS-232 Interface, 19'' Chassis
Upgrades (to be ordered separately)
F-206.NCU
Rapid 3- Axis Piezo Nanopositioning System for Use in Combination with Hexapod Systems. Consists of P-611.3SF NanoCube® XYZ
Nanopositioning System, 100 µm × 100 µm × 100 µm, Strain Gauge Sensors with Integrated Fiber Adapter Interface and E-760.3S0 NanoCube®
Piezo Controller Board, ISA Bus
F-206.iiU
Photometer Card, IR Range, 2 Channels
F-206.VVU
Photometer Card, Visible Range, 2 Channels
Ask about custom designs!
Controllers / Drivers / Amplifiers
C-887 Controller for Hexapod Positioning Systems
Related Products
P-587 6- Axis Precision Piezo Stage
H-206 6- Axis Precision Alignment System
H-810 6- Axis Miniature Hexapod
H-811 6- Axis Miniature Hexapod
H-840 6- Axis Hexapod
H-850 6- Axis Hexapod
H-820 6- Axis Positioner with Controller
Technology
Hexapod- Specific Software from PI | Due to their parallel kinematic structure, Hexapods necessitate a particularly
complex control system. Learn more ...
Hexapods – Parallel- Kinematics Positioning Systems | Hexapod platforms are used for precision positioning and
alignment of loads in all six degrees of freedom, three linear axes, and three rotational axes. Learn more ...
© Physik Instrumente (PI) GmbH und Co. KG 2014. Subject to change without notice.
Latest releases available at www.pi.ws
WWW.PI.WS