Physik Instrumente SMC Hydra CM TT RM
SMC-Hydra_CM_TT_RM SMC Hydra Motion Controller
User Manual: Physik Instrumente SMC Hydra Motion Controller
Open the PDF directly: View PDF ![]() .
.
Page Count: 27
- 1. Content
- 2. How to Connect
- 3. RS-232 Interface Configuration
- 4. Ethernet Interface Configuration
- 5. IP-Address change
- 6. RS-232 Baudrate change
- 7. Connectors
- 7.1. RS-232-Connector
- 7.2. Ethernet-Connector
- 7.3. Power-Connector
- 7.4. Motor Connector Axis 1
- 7.5. Motor Connector Axis 2
- 7.6. Digital IO Connector
- 7.7. Digital Inputs
- 7.8. Actual IO- Termination
- 7.9. Digital Inputs / Termination Schematic
- 7.10. Additional IO-sensor connection
- 7.11. Delta-Star Encoder Interface (optional)
- Safety / Hardware Enable
- 7.13. Service CAN
- 8. Power-Supply:
- 9. Venus-3 interpreter language
- 10. JS_Terminal.exe
- 11. First Steps

SMC hydra
version TT
version CM
version RM
Autor
J.Oberfell
Ausgabedatum
27.03.2015
Copyright
© 2008
Alle Rechte, auch die des Nachdrucks, der Vervielfältigung von Teilen
der hier vorliegenden Beschreibung und die der Übersetzung bleiben
dem Herausgeber vorbehalten. Ohne schriftliche Genehmigung des
Herausgebers darf kein Teil dieser
Beschreibung in irgendeiner Form reproduziert oder mit Hilfe
elektronischer
Vervielfältigungssysteme kopiert werden.
Technische Änderungen im Zuge der Weiterentwicklung vorbehalten.
Document
SMC-Hydra CM TT.doc
Version
3.3
PI-miCos GmbH
Freiburger Strasse 30
79427 Eschbach
Phone: 07634-5057-230
Fax: 07634-5057-293
eMail: info@pimicos.com
web:
www.pimicos.com

SMC-Hydra CM TT.doc 3
1. Content
1. Content ................................................................................................................................ 3
2. How to Connect ................................................................................................................... 4
2.1. Hydra TT ...................................................................................................................... 4
2.2. Hydra CM..................................................................................................................... 5
2.3. Hydra-RM ................................................................................................................... 6
3. RS-232 Interface Configuration............................................................................................ 7
4. Ethernet Interface Configuration .......................................................................................... 7
5. IP-Address change .............................................................................................................. 8
6. RS-232 Baudrate change .................................................................................................... 8
7. Connectors .......................................................................................................................... 9
7.1. RS-232-Connector ....................................................................................................... 9
7.2. Ethernet-Connector ...................................................................................................... 9
7.3. Power-Connector ....................................................................................................... 10
7.3.1. Mating Connector: .............................................................................................. 10
7.4. Motor Connector Axis 1 .............................................................................................. 11
7.5. Motor Connector Axis 2 .............................................................................................. 11
7.6. Digital IO Connector ................................................................................................... 12
7.7. Digital Inputs .............................................................................................................. 12
7.8. Actual IO- Termination ............................................................................................... 13
7.9. Digital Inputs / Termination Schematic ....................................................................... 13
7.10. Additional IO-sensor connection ................................................................................ 14
7.11. Delta-Star Encoder Interface (optional) ...................................................................... 15
7.11.1. Encoder Interface Connector .............................................................................. 16
7.11.2. Delta-Star Trigger Interface (optional) ................................................................ 16
7.12. Safety / Hardware Enable .......................................................................................... 17
7.12.1. Hydra TT ............................................................................................................ 17
7.12.2. Hydra CM / RM .................................................................................................. 17
7.12.3. Analog Outputs .................................................................................................. 17
7.12.4. Input Configuration Safety / Hardware Enable .................................................... 18
7.12.5. Emergency / Safety Schematic........................................................................... 19
7.13. Service CAN .............................................................................................................. 20
8. Power-Supply: ................................................................................................................... 21
8.1. Hydra TT .................................................................................................................... 21
8.2. Hydra CM................................................................................................................... 21
9. Venus-3 interpreter language ............................................................................................ 23
9.1. Blocking and non blocking commands ....................................................................... 23
9.2. Command Overview .................................................................................................. 24
10. JS_Terminal.exe ............................................................................................................ 26
11. First Steps ..................................................................................................................... 27
SMC-Hydra CM TT.doc 4
2. How to Connect
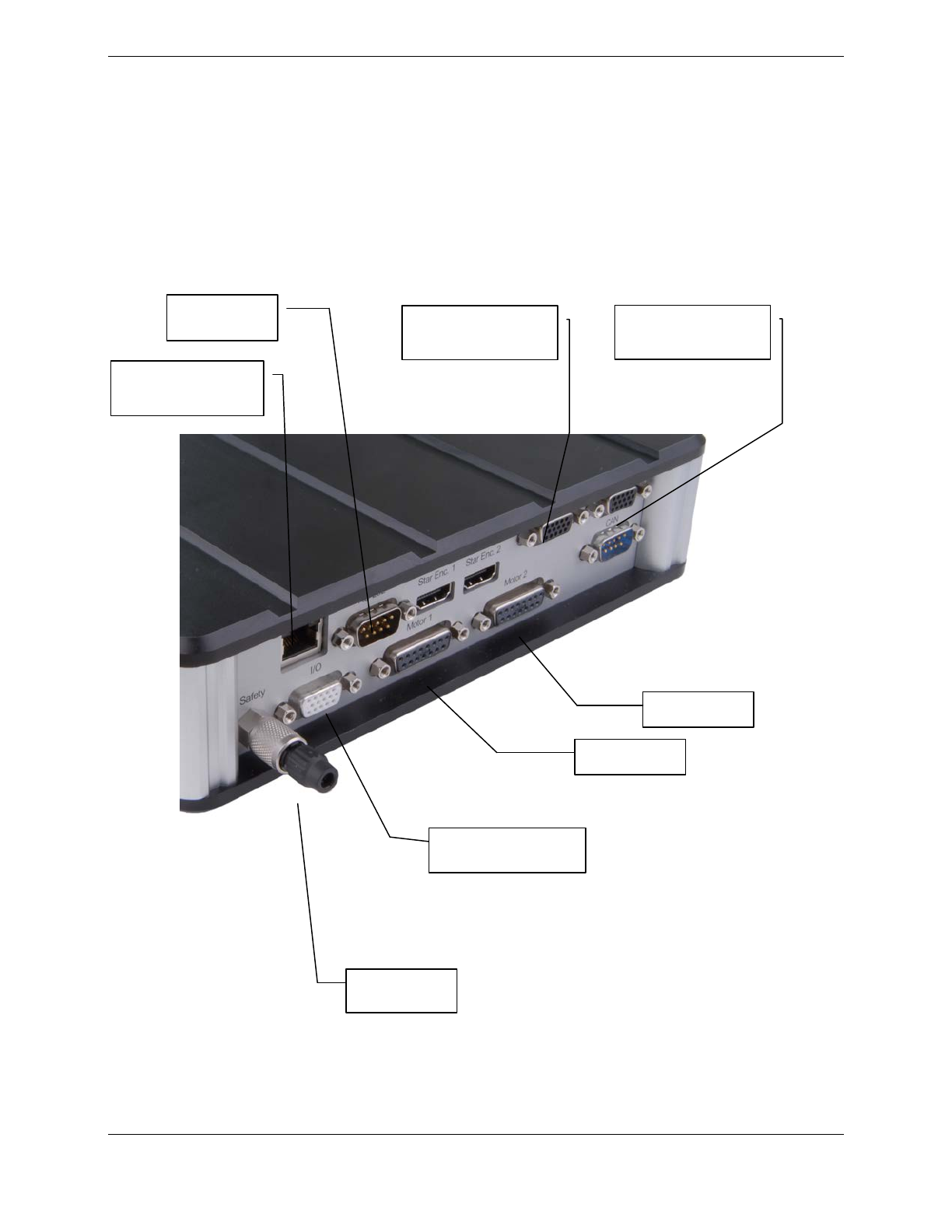
2.1. Hydra TT
Safety
I/O termination
Motor 1
Motor 2
RS-232
Ethernet
10/100TCP/IP
Encoder 1Vpp
Axis 1 (Option)
Encoder 1Vpp
Axis 2 (Option)

SMC-Hydra CM TT.doc 5
2.2. Hydra CM
Safety
I/O termination
Encoder 1Vpp
Axis 1 (Option)
Encoder 1Vpp
Axis 2 (Option)
RS-232
Ethernet
10/100TCP/IP
Absolute Encoder Interface
Motor 1
Motor 2
24VDC or
48VDC please
verify
SMC-Hydra CM TT.doc 6
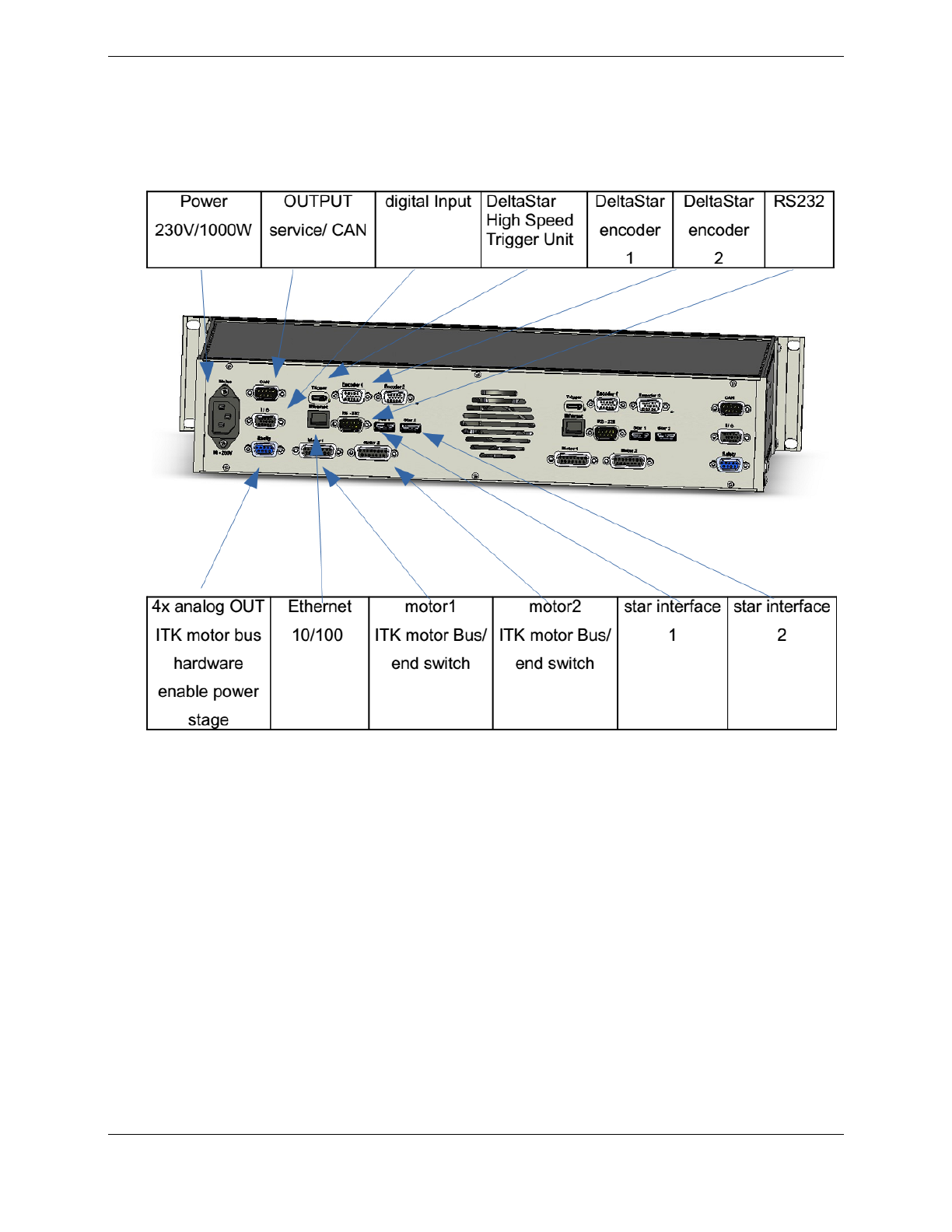
2.3. Hydra-RM
According the previous pages, please connect the stages to the controller. The
controller is completely configured for the system.
After connecting all components, you can power-up your computer.
The Hydra controller supports Ethernet and RS-232 communication. Daisy-Chain
of RS232 is not supported, so each Hydra Controller needs own RS-232 interface.
For multi-controller applications the Ethernet interface is the preferable interface!
The interfaces are actually configured as follows:
SMC-Hydra CM TT.doc 7
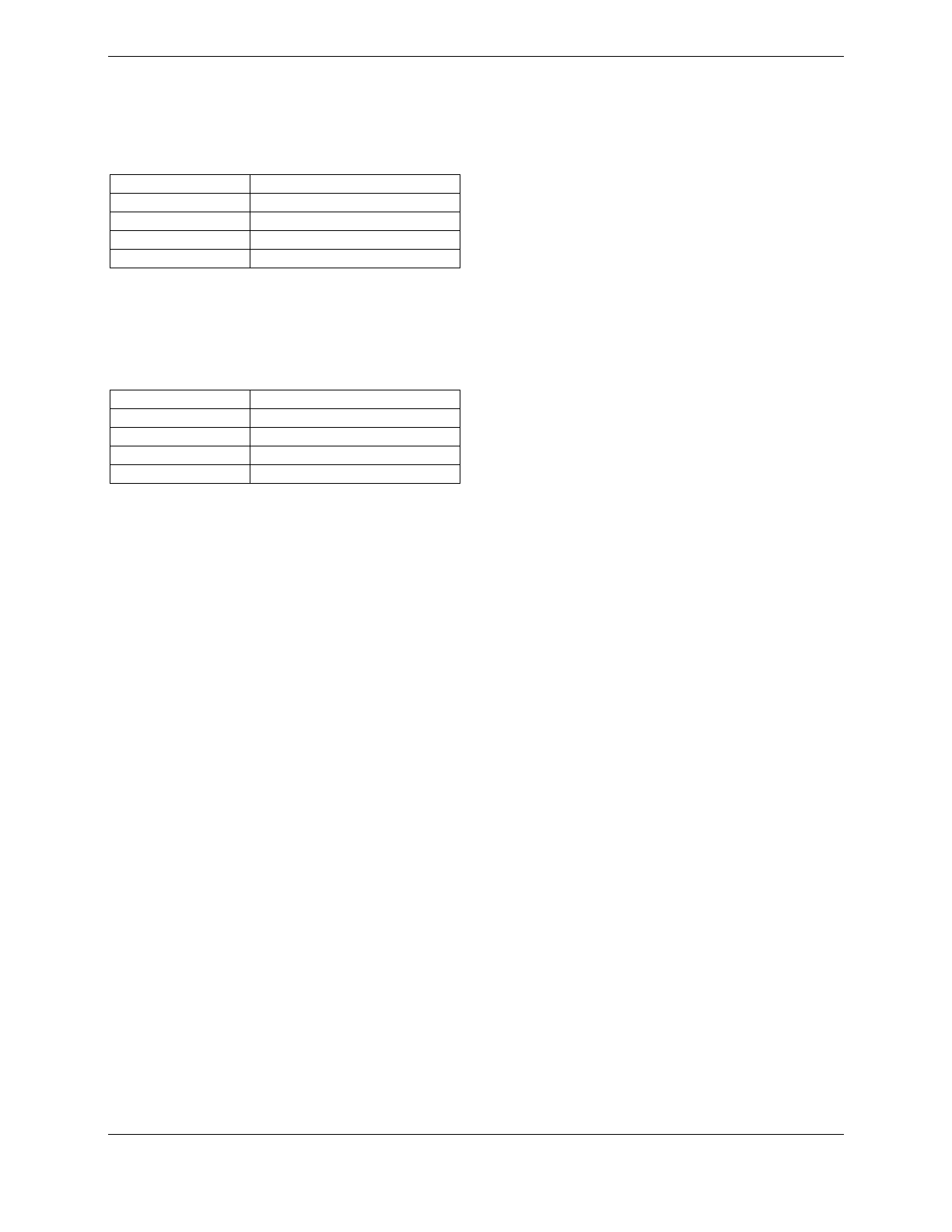
3. RS-232 Interface Configuration
Data bits
8
Stop bits
1
Parity
no
Handshake
no
Baudrate
115200 Baud
4. Ethernet Interface Configuration
IP Address
172.20.5.xxx
Port
400 (max.5 handles)
Subnet Mask
255.255.0.0
SMC-Hydra CM TT.doc 8
5. IP-Address change
Please use the RS-232 interface. Send following command-string with any terminal
program:
Query Address: 0 getnetpara
Reply “192.168.129.200”
Query Subnet: 1 getnetpara
Reply “255.255.0.0”
New IP address: 172.20.5.202
“172.20.5.202” 0 setnetpara
“255.255.255.0” 1 setnetpara
csave
reset
The new TCP/IP settings are valid after reboot, so the reboot (reset command) is necessary!
6. RS-232 Baudrate change
Send following command-string with any terminal program for example the basic
communication tool on CD, JS-terminal.exe and connect with the actual baudrate.
Query : 1 getbaudrate
Reply 115200
New Baudrate: 57600
Set: 57600 1 setbaudrate
The baud-rate will immediately be changed, so please close the connection and
reconnect with the new baud-rate and store to flash-memory.
csave
Available Baudrates:
9600
19200
38400
57600
115200
SMC-Hydra CM TT.doc 9
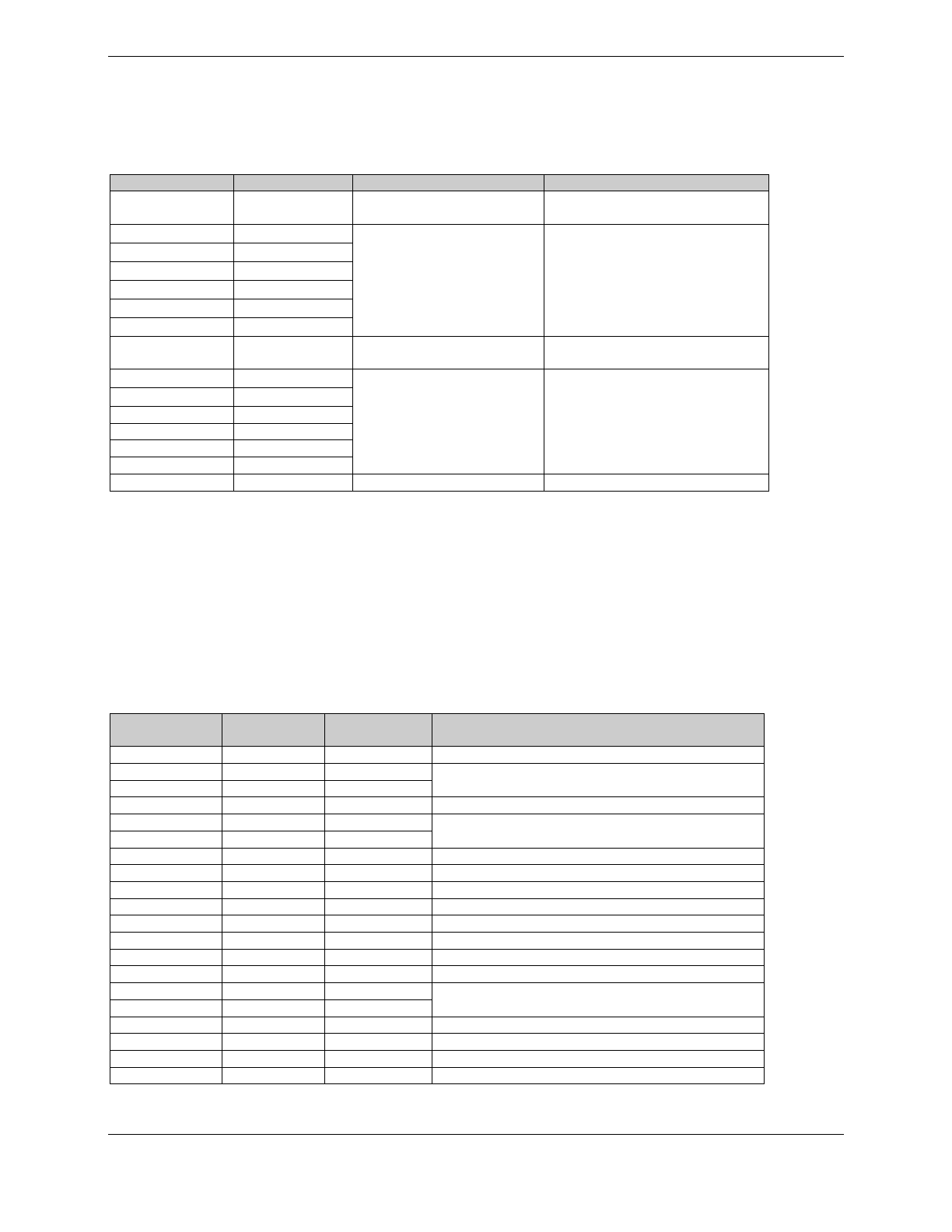
7. Connectors
7.1. RS-232-Connector
DB9 male
Function
1
DCD
bridge to DTR&DSR
2
RxD
Data Input
3
TxD
Data Output
4
DTR
bridge to DCD&DSR
5
GND
Ground
6
DSR
DTR&DCD
7
RTS
bridge to CTS
8
CTS
bridge to RTS
9
5V
optional
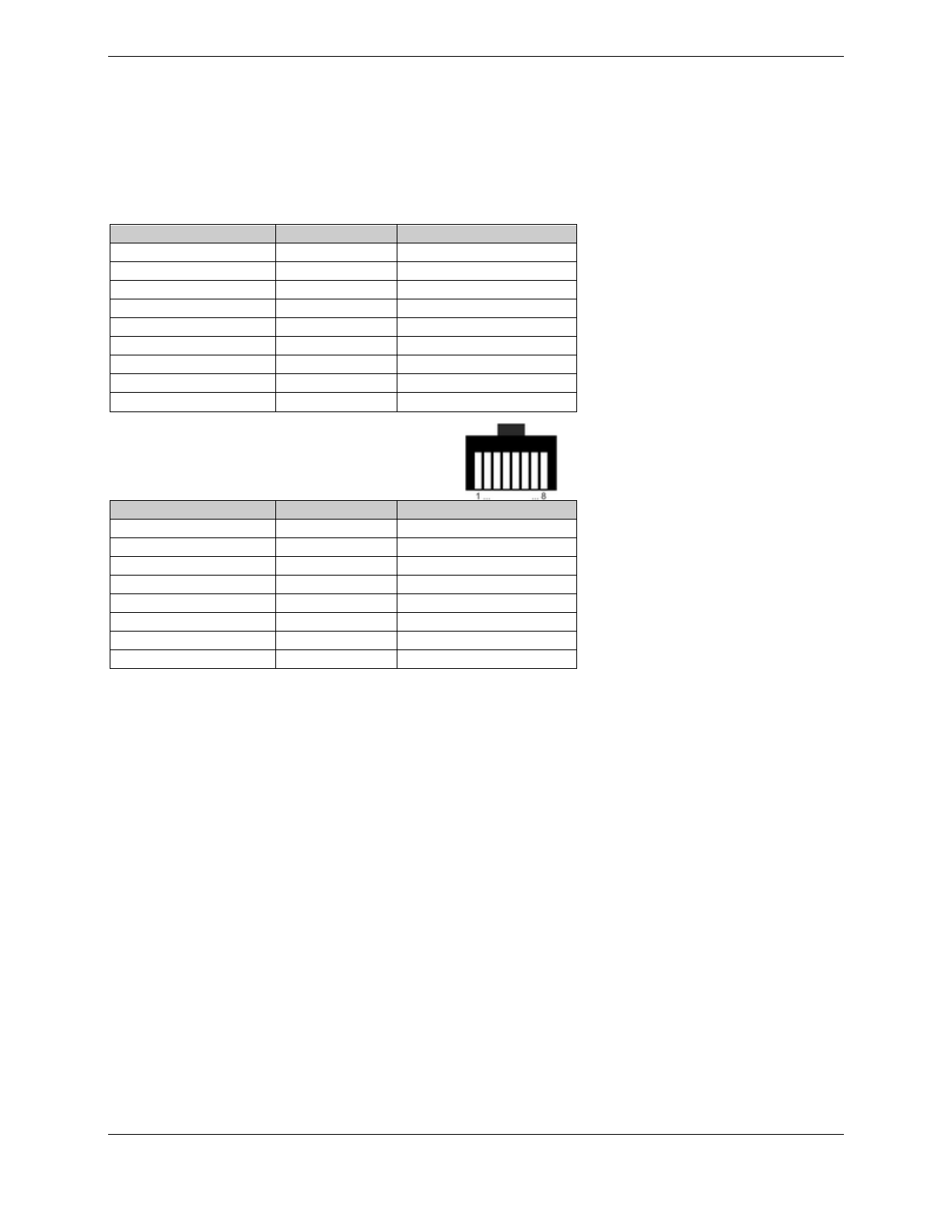
7.2. Ethernet-Connector
RJ45 8 pin
Function
1
TX+
2
TX-
3
RX+
4
5
6
RX-
7
8
LED Function :
green traffic
yellow 10/100 ( lightened if 100Base connected)
SMC-Hydra CM TT.doc 10
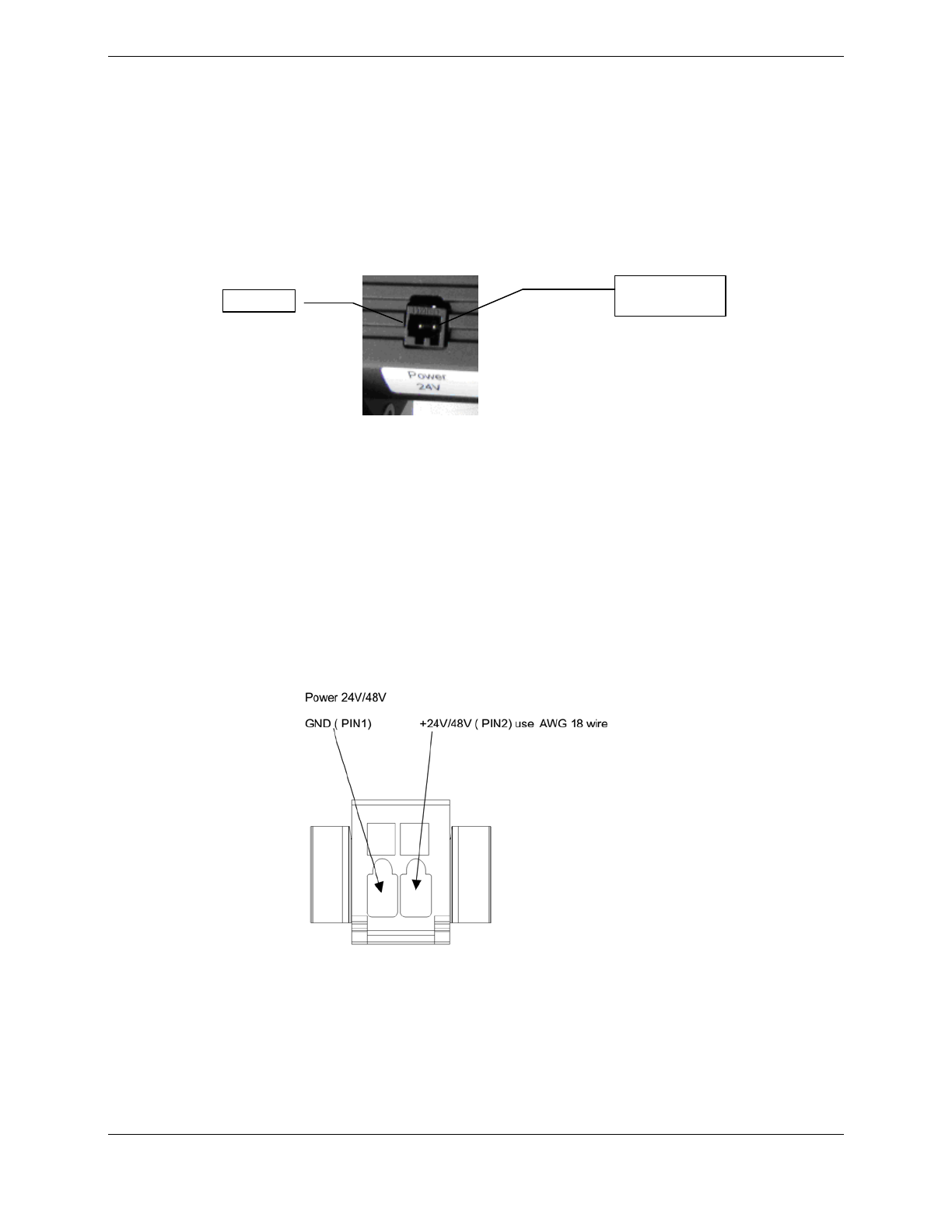
7.3. Power-Connector
7.3.1. Mating Connector:
Female Wago Mini , coded 2 pin
VCC+ (24 V)
GND
SMC-Hydra CM TT.doc 11
7.4. Motor Connector Axis 1
DB15 female
Function
2 Phase Motor
3 Phase Motor
1+9
A+
Motorphase 1+ (A+)
Phase 1 (U)
2+10
A-
Motorphase 1- (A-)
Phase 3 (W)
3+11
B+
Motorphase 2+ (B+)
4+12
B-
Motorphase 2- (B-)
Phase 2 (V)
6
5V
fused 5V max. 400mA @ 50°C (self resetting polyfuse)
7 12V fused12V max. 100mA @ 50°C (self resetting polyfuse)
8 PGnd Reference for 12 V Supply, (same as Main-Supply) do not
connect to GND otherwise we loose the GND separation
between power and logic.
13
E1 (cal)
Input 5 Limit switch reverse (cal )
14
E2 (rm)
Input 6 Limit switch forward (rm)
15
GND
Reference for 5 V
7.5. Motor Connector Axis 2
DB15 female
Function
2 Phase Motor
3 Phase Motor
1+9
A+
Motorphase 1+ (A+)
Phase 1 (U)
2+10
A-
Motorphase 1- (A-)
Phase 3 (W)
3+11
B+
Motorphase 2+ (B+)
4+12
B-
Motorphase 2- (B-)
Phase 2 (V)
6
5V
fused 5V max. 400mA @ 50°C (self resetting polyfuse)
7 12V fused12V max. 100mA @ 50°C (self resetting polyfuse)
8
PGnd
Reference for 12 V Supply, (same as Main-Supply) do not
connect to GND otherwise we loose the GND separation
between power and logic.
13
E1 (cal)
Input 2 Limit switch reverse (cal )
14 E2 (rm) Input 3 Limit switch forward (rm)
15
GND
Reference for 5 V
The Limit switch-inputs are also connected to the Digital-IO-Connector!
We mainly connect the limit-switches to the motor-connector.
Please do not try to connect a additional switch via IO connector, this will not
work with normally closed switches!
SMC-Hydra CM TT.doc 12
7.6. Digital IO Connector
HB15 female
Function
Definition
Hints
1
5V
fused 5V max. 400mA @ 50°C (self resetting
polyfuse)
2
PGnd
Reference for 12 V Supply, (same as Main-Supply)
do not connect to GND otherwise we loose the GND
separation between power and logic.
3
Input 1
free
5-24 V
4
Input 2
CAL Axis 2
5-24 V (connected internally to Motor 1-Connector )
5
Input 3
RM Axis 2
5-24 V (connected internally to Motor-1-Connector )
6
Input 4
free
5-24 V
7
Input 5
CAL Axis 1
5-24 V(connected internally to Motor-2-Connector )
8
Input 6
RM Axis 1
5-24 V(connected internally to Motor-2-Connector )
9
Input 1A
free
fixed potential Input 1 (termination)
10
Input 2A
CAL Axis 2
fixed potential Input 2 (termination)
11
Input 3A
RM Axis 2
fixed potential Input 3 (termination)
12
Input 4A
fixed potential Input 4 (termination)
13
Input 5A
CAL Axis 1
fixed potential Input 5 (termination)
14
Input 6A
RM Axis 1
fixed potential Input 6 (termination)
15
GND
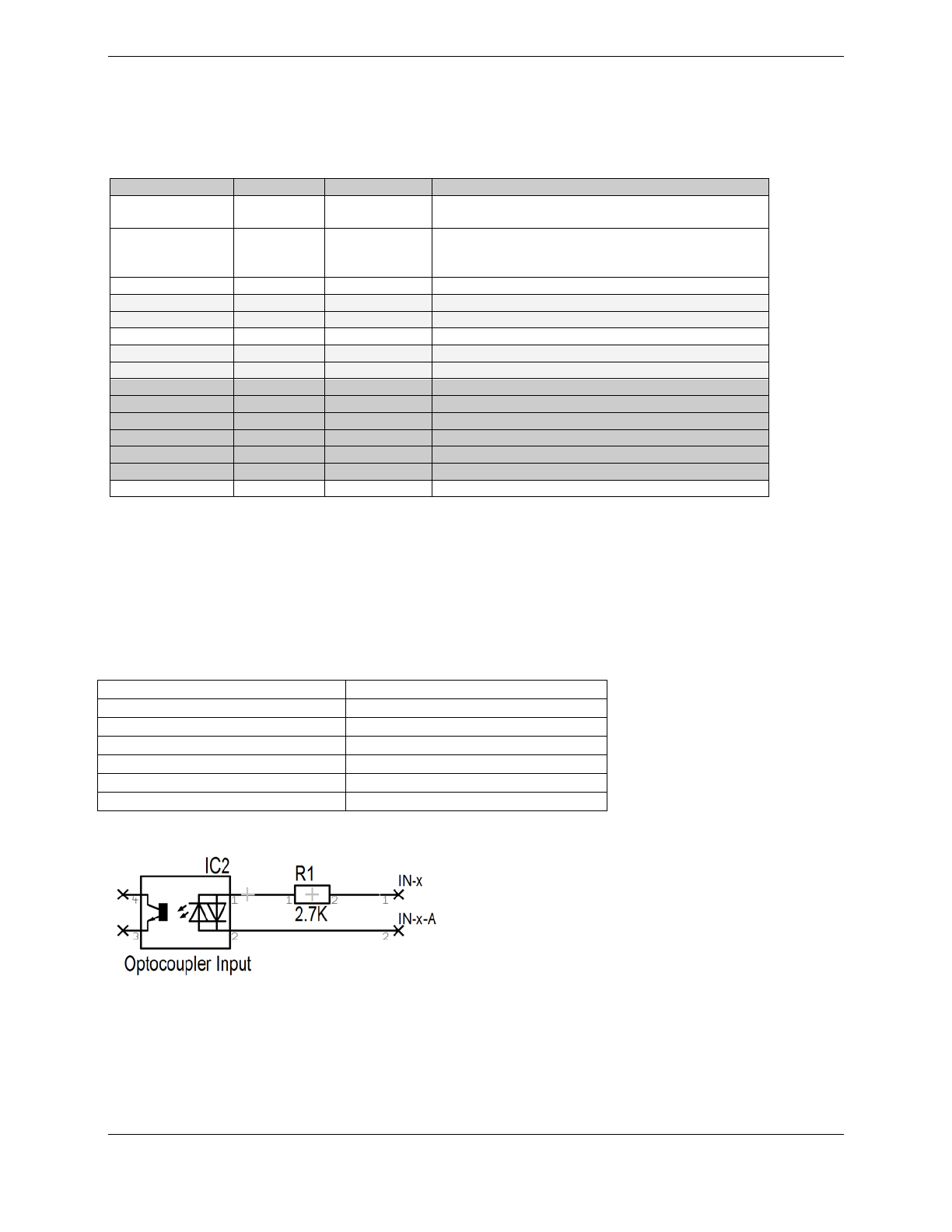
7.7. Digital Inputs
The input configuration can be easily adapted to any sensor, all inputs are fitted with bi-
directional opto-couplers. The fixed resistance (2.7 kOhm) is designed to work with 5 to
24 VDC signal, minimum High Level 4,25V/1,5mA, maximum High Level 24V/10mA.
IN-xA termination
Active Sensor 5 V npn
5V
Mechanical Sensor npn
5V
Active Sensor 5 V pnp
GND
Mechanical Sensor pnp
GND
Active sensor 5 < Ub<=24 pnp
PGND
Venus-3-Command : getevtst
InputId groupindex getevtst inputId = 1 to 6, groupindex = 1 (controller-IO)
returns : 0 = off 1 = on
SMC-Hydra CM TT.doc 13
7.8. Actual IO- Termination
The IO-Termination for the system is documented in the appendix Configuration.
The IO-Termination is part of any controller-delivery.
The exact type depends on the stages we deliver with the controller.
If we deliver a controller without stages, the default configuration is NPN.
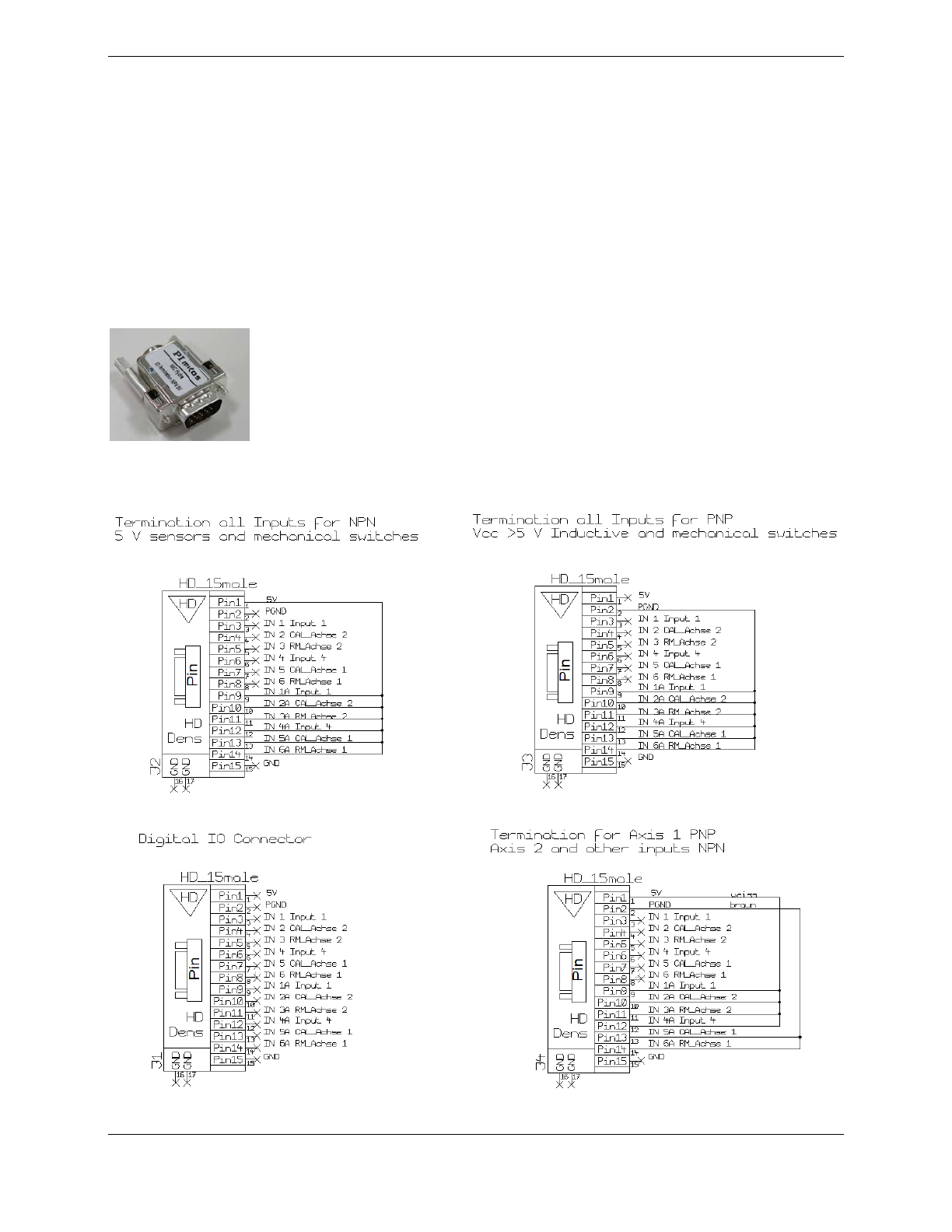
7.9. Digital Inputs / Termination Schematic
SMC-Hydra CM TT.doc 14
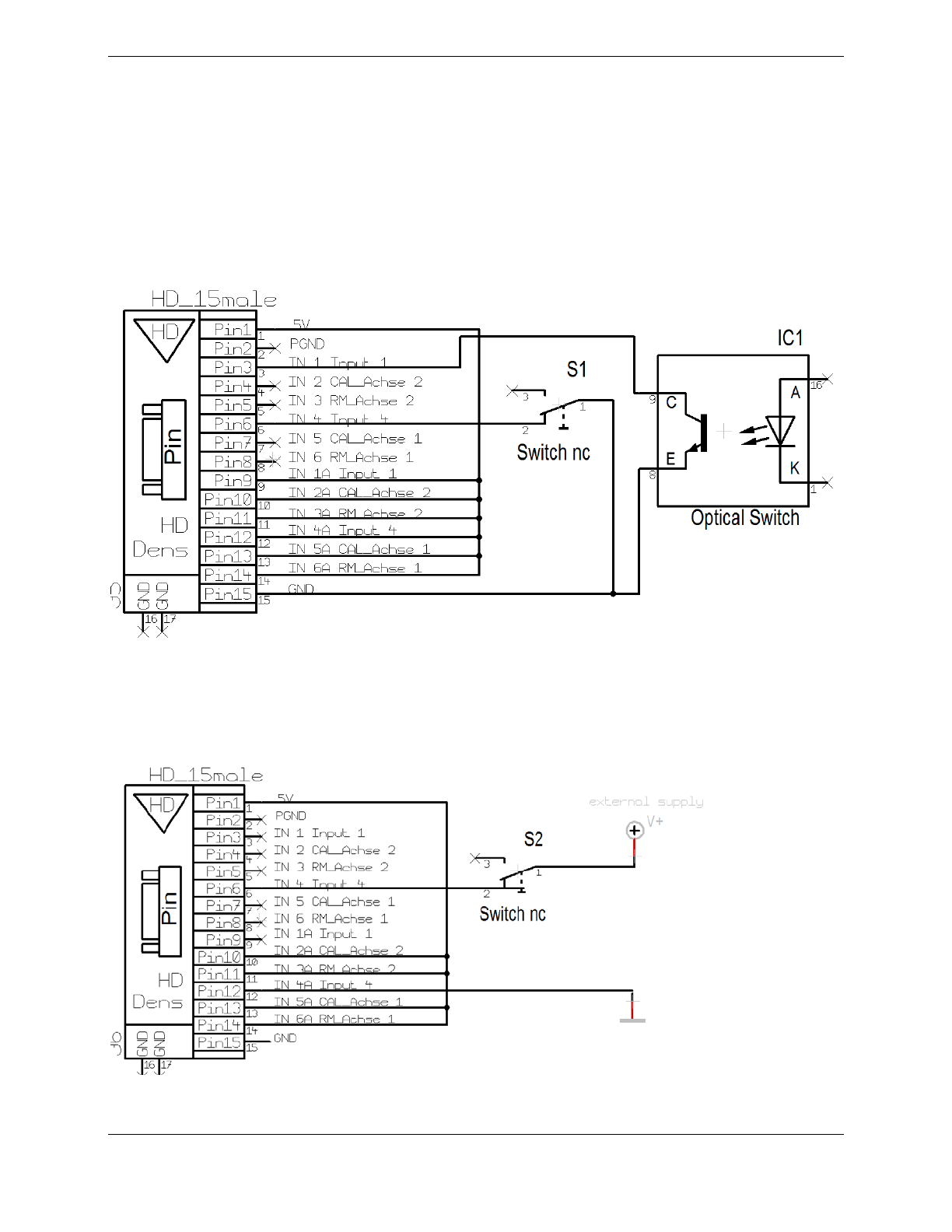
7.10. Additional IO-sensor connection
Example:
The IO termination connector is prepared for npn-Sensors 5 V.
The example shows how to connect two different switch types (npn) to the free inputs.
If the external sensor is a different type or should be galvanically isolated, we need to
disconnect the reference Pins IN-1A and IN-4A and do a new connection to the
reference-voltage of the external supply.
SMC-Hydra CM TT.doc 15
7.11. Delta-Star Encoder Interface (optional)
For all stages with encoder we need a Delta-Star or Delta-Star-eco interface, without
interface the controller is limited to drive only stepper-motors open-loop.!
Delta-Star-eco does not support the FPGA-trigger-interface! All other specs are
identical!
• 12Bit A/D converter for optical signal Sin/Cos/Ref 1Vss differential, max.
frequency 150 kHz (UA, UB,UREF)
• Converter for TTL signal DIN66259 (RS422, A,B,REF), quadrature
encoded, max. frequency 4MHz (16 MHz quad-counts)
• High-speed position trigger unit. Pure hardware implementation of position
calculation, interpolation, and compare for highest performance
• Two differential position trigger outputs (TRIG_OUT1_A, TRIG_OUT2_A,
RS422 signals)
• Equidistant or arbitrary position trigger definitions possible
• Maximum output trigger frequency: 400kHz, depending on pulse width(s)
• Temporal accuracy: 2μs or better (plus analogue path delays where
applicable)
• Differential position capture inputs (TRIG_IN_A, RS422 signal)
• Maximum input trigger frequency: 4 kHz, min. 2.5 μs pulse width
• Programmable pulse widths and delays (0.5μs resolution)
• Programmable signal polarities
• Variety of special functions, for details please refer to software manual
• Trigger units can be associated to each position measurement channel,
restrictions are described in the software manual
SMC-Hydra CM TT.doc 16
7.11.1. Encoder Interface Connector
HD-15 female
Function
1
5V
Sensor V+
fused 5V max. 100mA @ 50°C
(self resetting polyfuse)
2
A+
Encoder Signals RS422
quadrature
interpolated quadrature inputs
RS-422 standard (differential)
3
A-
4
B+
5
B-
6
REF+ (index+)
7
REF-(index-)
8
EN*
Input Select
enables TTL Encoder input if
wired to GND (15)
9
Ref+
(index+)
Encoder Signals 1Vpp
sin cos
1 Vpp differential inputs for
highest interpolation
10
Ref- (index-)
11
A+
12
A-
13
B+
14
B-
15
GND
Sensor GND
Supply GND
*Input Select, tie to GND for quadrature inputs, leave open for 1Vpp
7.11.2. Delta-Star Trigger Interface (optional)
Actually supported is Trigger-Out1_A , Trigger-Out2_A and Trigger-In A
Controller fitted with a Mini-HDMI (Type-C)
Mini-HDMI
(controller)
Function
HDMI-Pin
Hint
1
GND
2
2
+Trig-Out1_A
1
differential RS-422 output
3
-Trig-Out1_A
3
4
GND
5
5
+Trig-Out2_A
4
differential RS-422 output
6
-Trig-Out2_A
6
7
8
9
10
11
12
13
14
15
-Trig_In_A
15
differential RS-422 input
16
+Trig_In_A
16
17
GND
14
18
5V
18
5 V Output imax = 50 mA
19
SMC-Hydra CM TT.doc 17
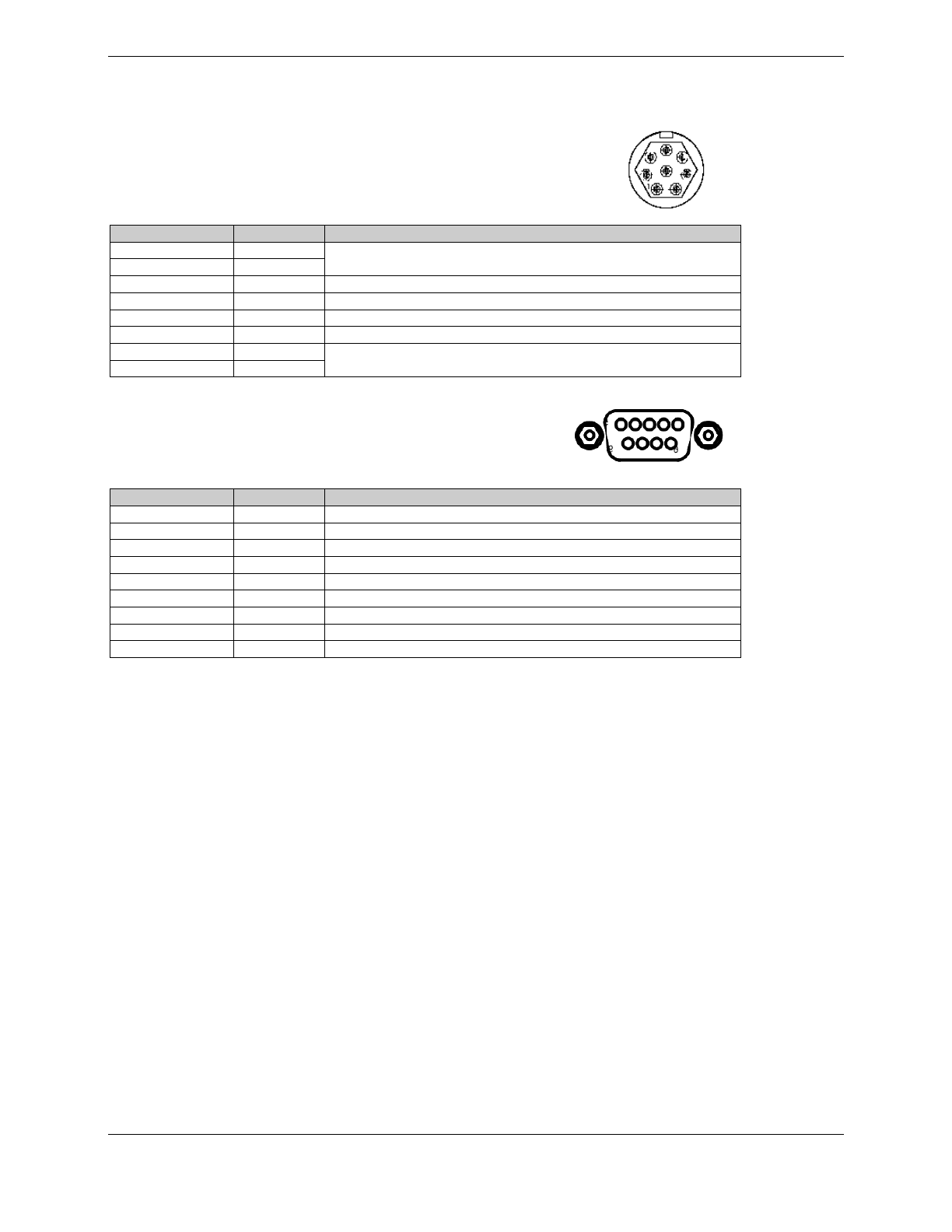
7.12. Safety / Hardware Enable
7.12.1. Hydra TT
Binder 711
Function
1
5V
fused 5V max. 500mA @ 50°C (self resetting polyfuse)
2
5V
3
4
5
EN
Hardware Enable
6
EN A
Hardware Enable potential
7
GND
Reference for +5 Volt
8
GND
7.12.2. Hydra CM / RM
DB9 female
Funktion
1
5V
fused 5V max. 500mA @ 50°C (self resetting polyfuse)
2
RXTX
single wire CAN Bus
3
Dac Out 1
Analog OUT (supported since FW3)
4
Dac Out 2
Analog OUT (supported since FW3)
5
Dac Out 3
Analog OUT (supported since FW3)
6
Dac Out 4
Analog OUT (supported since FW3)
7
EN
Hardware Enable
8
ENA
Hardware Enable potential
9
GND
Reference for DAC , RXTX and +5 Volt
7.12.3. Analog Outputs
The analog outputs are supported since since firmware 3.0
• 0-3V analog output (1024 values)
• Resolution 10 Bits
• relative Accuracy ±4 LSB
• differential non linearity ±0.5 LSB
• Output Voltage Settling Time=9 µs
SMC-Hydra CM TT.doc 18
7.12.4. Input Configuration Safety / Hardware Enable
As the digital inputs, the Hardware-Enable Input can be easily adapted to any sensor or
switch which supports a normally closed-contact.
The input is fitted with bi-directional opto-coupler. The fixed resistance is designed to
work with 5 to 24 VDC signal.
ENA, Hardware Enable potential
Active Sensor 5 V npn
5V
Mechanical Sensor npn
5V
Active Sensor 5 V pnp
GND
Mechanical Sensor pnp
GND
Active sensor 5 < Ub<=24 pnp
PGND
To query the actual setting : getemsw 0= deactive | 1 = active
To get the information about the actual status of the input query the status(st or axisid
nst).
Bit 7 : indicates that the system was stopped by emergency input 1= stopped | 0 = ok
Bit 8 : shows the main result, the motor is off 1 = motor off | 1 = on
Bit 9 : shows the actual status of the input , 1 = the input is openhardware disabled
To re-enable the system, close first the emergency button, after this, send the
commands 1 init to enable axis 1 and 2 init to enable axis 2.
The power amplifier is active if current flows through the opto-coupler! So
please use a opener contact switch!
By default the emergency input is deactivated (Hydra CM)! To enable the
input please use command 1 setemsw (see manual) and command
csave
The input "Hardware enable" is not an emergency stop circuit in
accordance with the requirements of the professional associations
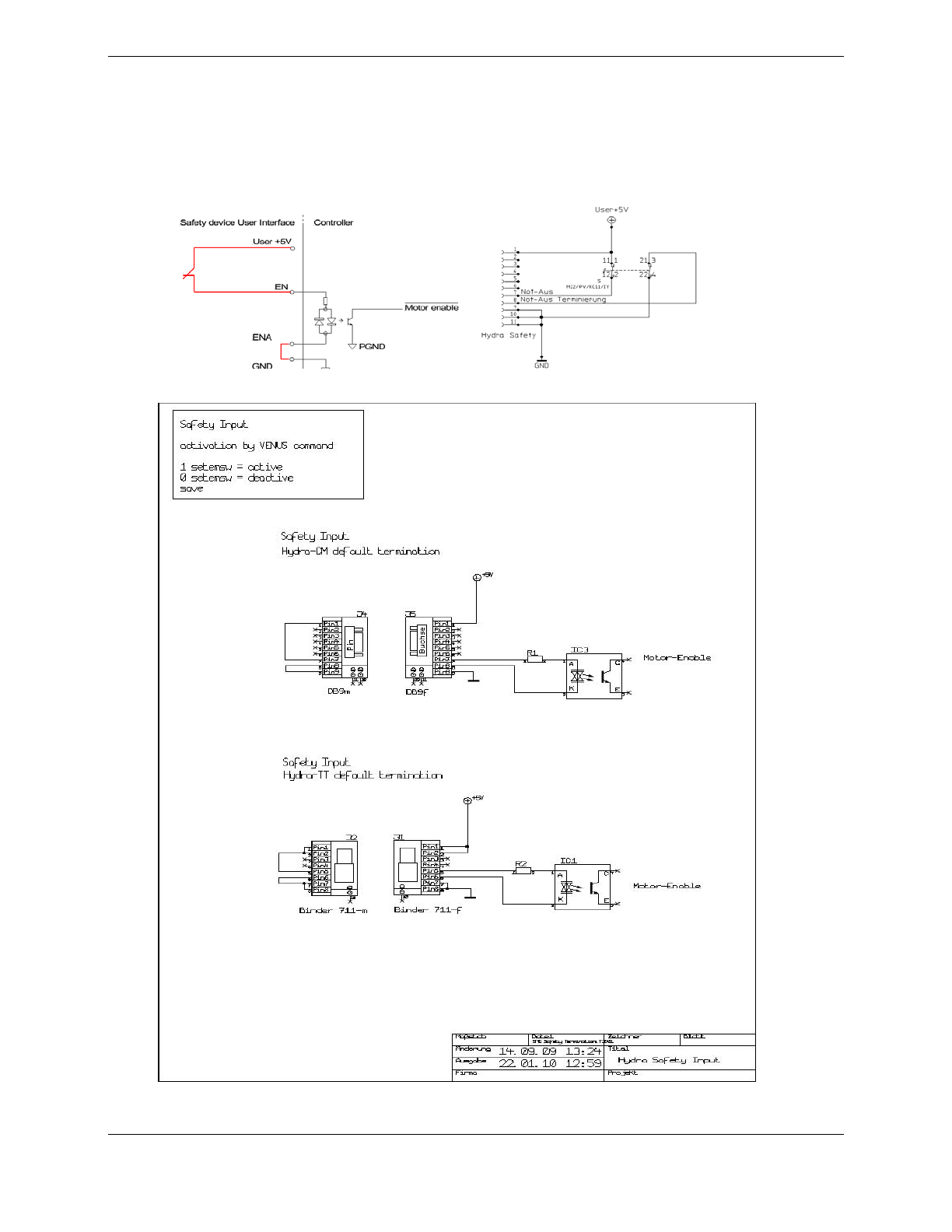
SMC-Hydra CM TT.doc 19
7.12.5. Emergency / Safety Schematic
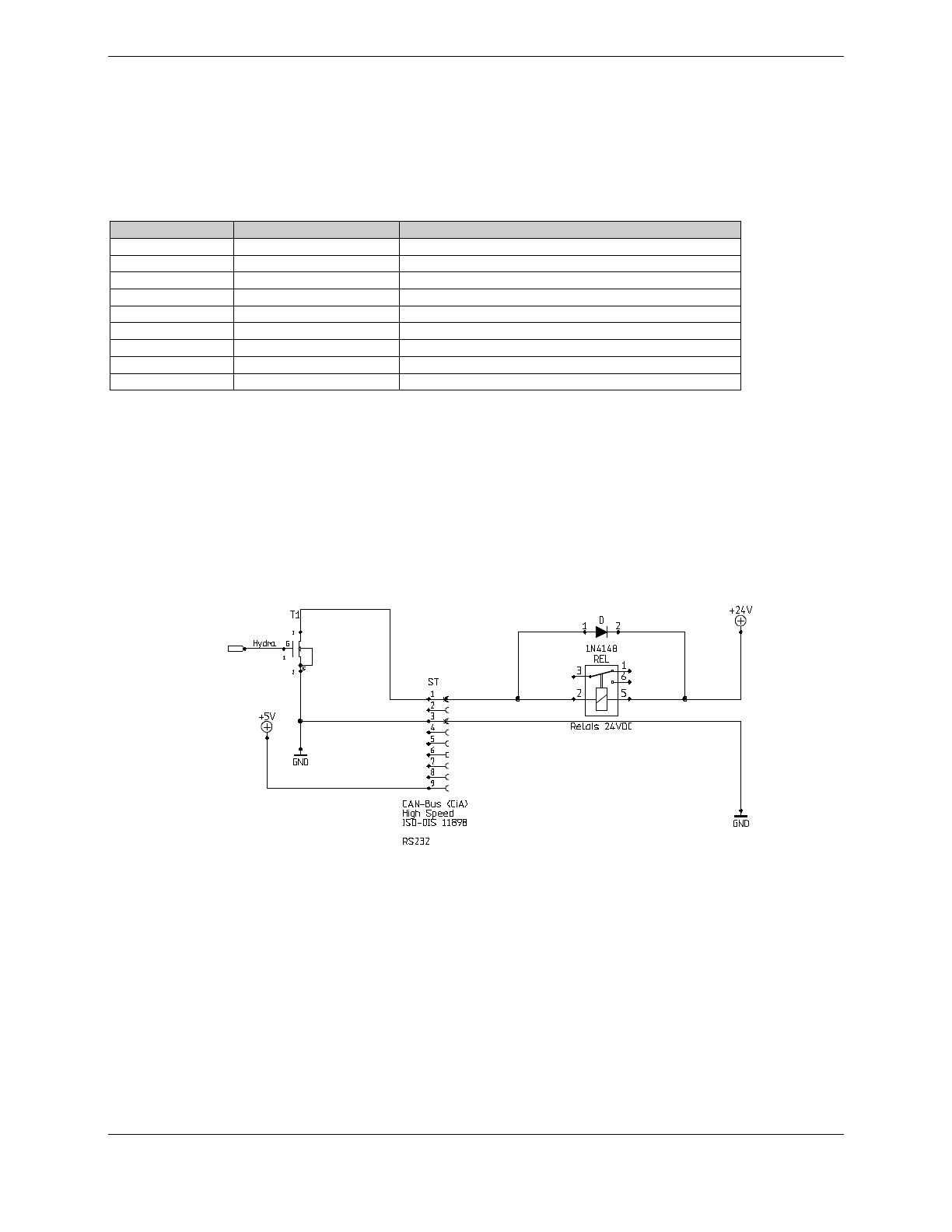
SMC-Hydra CM TT.doc 20
7.13. Service CAN
DB9 male
Funktion
1
OUT Open Drain
Open Drain Output (Software Index=3)
2
CAN-Bus L
Can Low
3
GND
Ground
4
RxD
Service RS232 RxD
5
Out 1
Out TTL 1 (Software Index=4)
6
Out 2
Out TTL 2 (Software Index=5)
7
CAN-Bus H
CAN High
8
TXD
Service RS232 TxD
9
User 5V
Fused power 5 V/400mA
Output Open Drain: loads max. 24 V 100 mA
TTL-Output: TTL 3.3 V
Example for Open Drain Output:
SMC-Hydra CM TT.doc 21
8. Power-Supply:
8.1. Hydra TT
internal power supply with 2 different bus voltages (must be defined by order)
Voltage
100-250 VAC
Power
300 W
Bus Voltage
24 VDC
48 VDC
Using a 48 V supply with a 24V version will cause damage of the controller!
Using a 24 V supply with a 48V version will cause bad performance of the system, but
does not cause any damage.
8.2. Hydra CM
External power supply, available in different power and bus-voltage dependant to
application.
Version 1: good for standard stepper motors upto NEMA 23 size
and for smaller direct drives (consult factory)
desktop size
7160-9-626
7160-9-625
Input Voltage
90-264 AC
Frequency
47-63 Hz
Output Voltage
24 VDC
48 VDC
Power
120 W
120 W
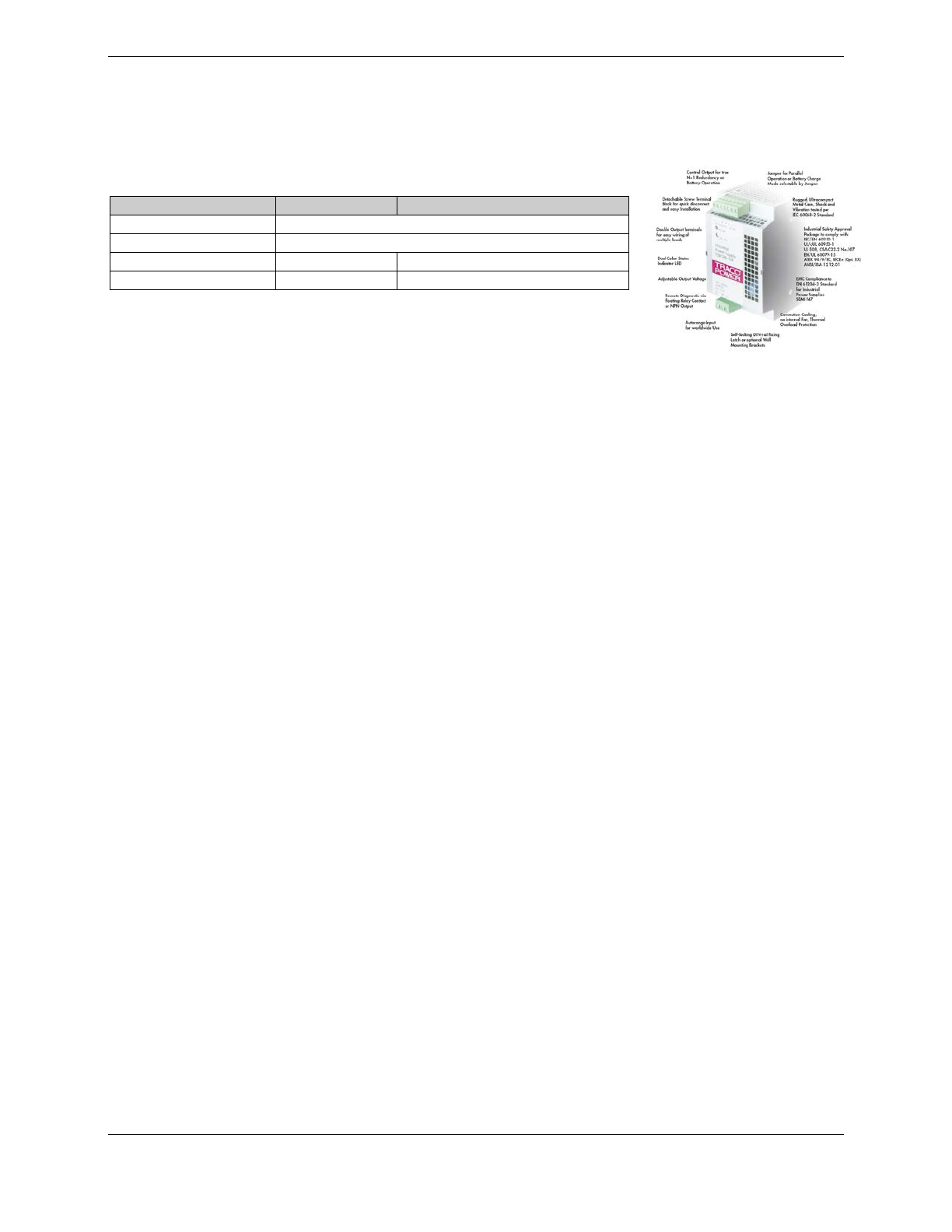
Version 2: good for standard stepper motors upto NEMA 23 size
but higher current and medium size direct drives (consult factory)
DIN-rail
Input Voltage
85–132 / 187–264 VAC autom. selection
Frequency
47-63 Hz
Output Voltage
24 VDC
48 VDC
Power
180 W
192 W
SMC-Hydra CM TT.doc 22
Version 3: good for standard stepper motors upto NEMA 23 size
but higher current and medium to large size direct drives (consult factory)
DIN-rail
7160-9-621
7160-9-623
Input Voltage
85–132 / 187–264 VAC autom. selection
Frequency
47-63 Hz
Output Voltage
24 VDC
48 VDC
Power
360 W
360 W

SMC-Hydra CM TT.doc 23
9. Venus-3 interpreter language
Venus-3 is an interpreter language and combines the languages Venus-1 and Venus-2
Venus-3 commands consist of ASCII-characters which are interpreted in the controller
and immediately executed. A software development surrounding to produce the control
programs is not needed. The commands can be produced by any host and whatever
programming language you are using, on condition that there is an access to the RS-
232 interface or Ethernet interface.
In the simplest way the commands are directly transmitted to the controller via an ASCII
terminal.
9.1. Blocking and non blocking commands
Hydra has no more blocking commands. All commands are executed immediately are
not waiting that the previously
executed command has finished.
One of the consequences is that the target of motion can be changed on the fly!
For more info please refer to the Manual Hydra-Handbook xxx.pdf
SMC-Hydra CM TT.doc 24
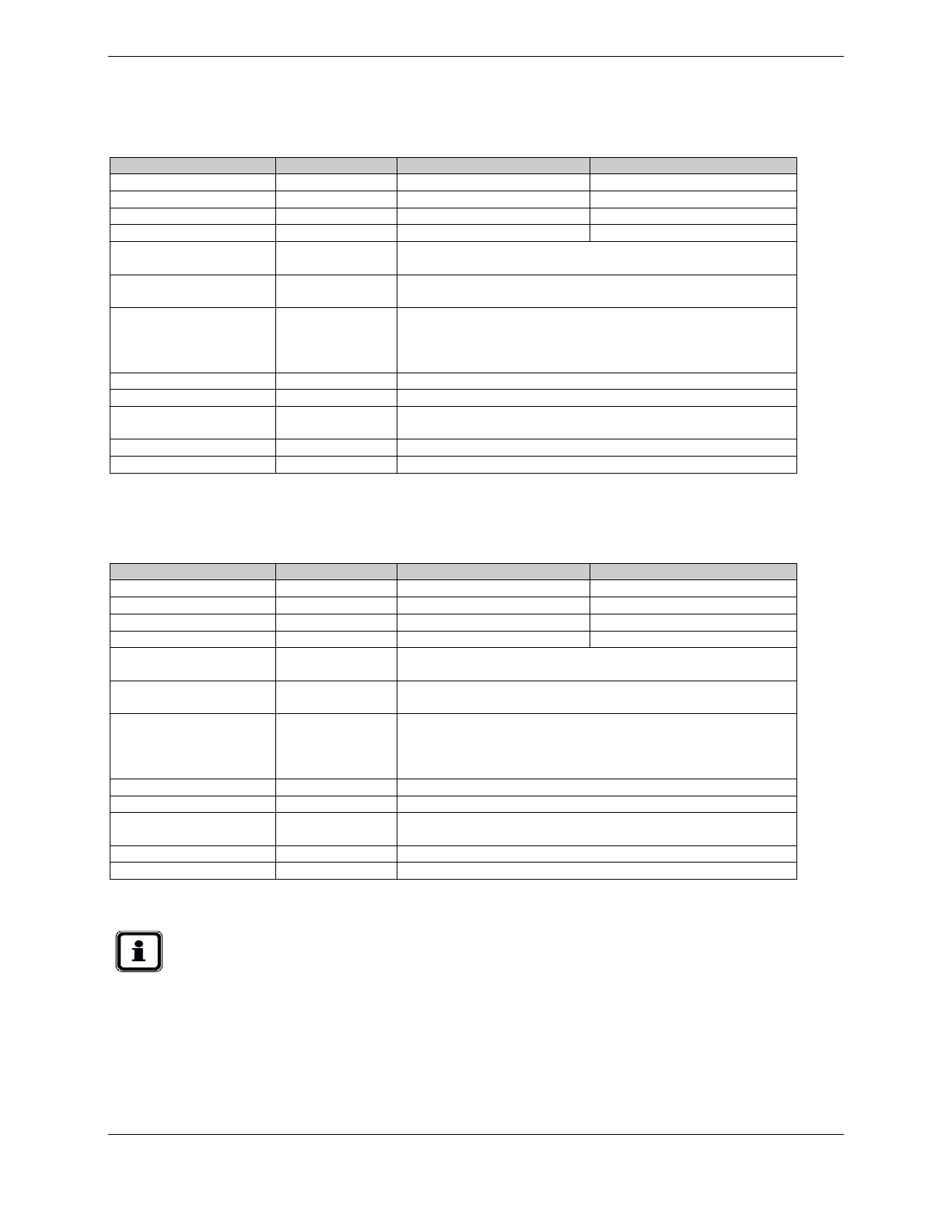
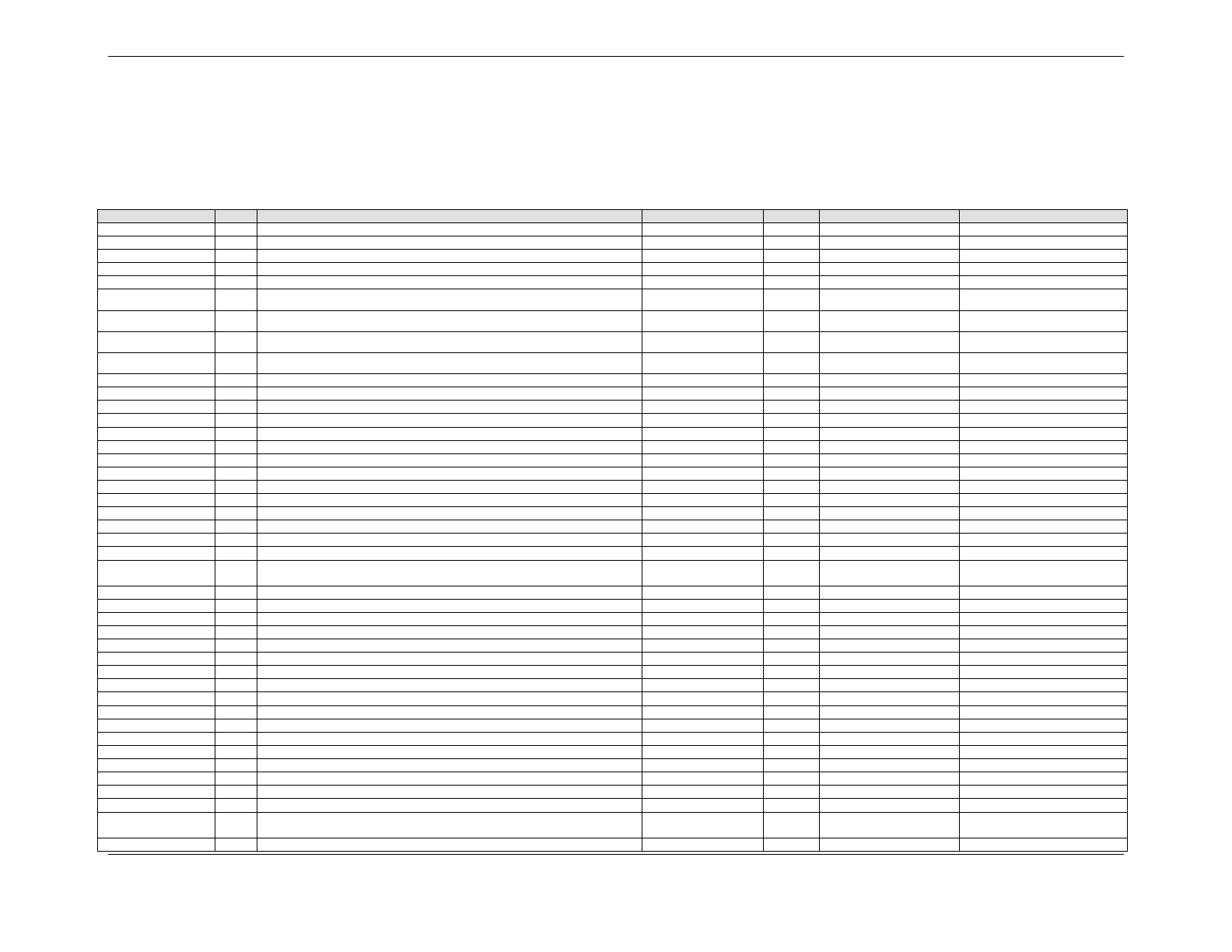
9.2. Command Overview
Following commands are actually supported. Detailed description in main-manual Hydra_Venus_xx.pdf
Command
Page
Description
Parameters
R/W
Range
Example
nrmove (nr)
move relative, without query status
relpos axisid
w
+/- 1nm .. +-200 m
1.0 1 nr
nmove (nm)
move absolute without query status
abspos axisid
w
+/- 1nm .. +-200 m
5.1 1 nm
m
move absolute interpolated
pos1 pos2 m
w
+/- 1nm .. +-200 m
12.0 9.0 m
r
move relative interpolated
pos1 pos2 r
w
+/- 1nm .. +-200 m
1 1 r
np
returns actual position
axisid
r
+/- 1nm .. +-200 m
1 np
p
returns actual position axis 1 & 2
-
r
p
init motor restart after failure axisId w 1 init
setnpos
Defines location of position origin relative to its initial location.
newpos axisid
w
0.0 1 setnpos
getnpos
Returns current Position origin
axisid
r
1 getnpos
nstatus (nst)
returns actual status
axisid
r
1 nst
ge
returns actual error number, see table page
-
r
ge
errordecode
returns the error description of the code in a string
number
r
2000 errordecode
gme
returns actual error number, see table page 29
-
merrordecode
returns the error description of the code in a string
number
12 merrordecode
nabort
stops a move
axisid
w
1 nabort
<CtrlC>
stops move of all connected axes
w
<CTRL-C> hex 3
ncalibrate (ncal)
homing (search limit reverse)
axisid
w
1 ncal
nrangemeasure (nrm) rangemeasure (search limit forward) axisid w 1 nrm
nrefmove
search index of encoder
distance axisid
w
20 1 nrefmove
version
returns the firmware-version
r
version
identify
returns the controller identification
r
identify
getswst
returns the status of limit-inputs
axisid
r
1 getswst
getsw
returns the setting of limit-inputs
axisid
r
1 getsw
setsw
defines the limit-switch-status
status 0 axisid
status 1 axisid
w
0..2
1 0 1 setsw
1 1 1 setsw
getncalswdist
returns the calswitch-distance
axisid
r
1 getncalswdist
setncalswdist
defines the calswitch-distance
distance axisid
w
0..1000.0
0.5 1 setncalswdist
getpitch returns the pitch of the stage axisid r 1 getpitch
setpitch
defines the pitch of the stage
pitch axisid
w
0.001...1000
1.0 1 setpitch
getpolepairs
returns the number of polepairs
axisid
r
1 getpolepairs
setpolepairs
defines the number of polepairs
number axisid
w
1..100
1 1 setpolepairs
getnvel (gnv)
returns the velocity for move
vel axisid
r
1 gnv
setnvel (snv)
defines the velocity for move
axisid
w
10 nm/s ..10 m/s
12.0 1 snv
getnaccel (gna)
returns the acceleration for move
axisid
r
1 gna
setnaccel (sna)
defines the acceleration for move
acc axisid
w
1 µm/s2 ... 500 m/s2
120.0 1 sna
getvel (gv)
returns the vector velocity
-
r
gv
getaccel (ga)
returns the vector acceleration
r
ga
setvel (sv)
defines the vector velocity
-
w
10 nm/s ..10 m/s
1.0 sv
setaccel(sa)
defines the vector acceleration
w
1 µm/s2 ... 500 m/s2
10 sa
setstopdecel (ssd)
defines the deceleration for a commanded stop or limit-switch activation
acc axisid
w
1 µm/s2 ... 500 m/s2
20.0 1 ssd
getstopdecel (gsd)
returns the deceleration for a commanded stop or limit-switch activation
getncalvel
returns the speed for cal-move
axisid
r
1 getncalvel
setncalvel
defines the speed for cal-move
value 1 axisid
value 2 axisid
w
10 nm/s ..10 m/s
5.0 1 1 setncalvel
0.1 2 1 setncalvel
getnrefvel
returns the speed for ref-move (encoder index search )
axisid
r
1 getrefvel
SMC-Hydra CM TT.doc 25
setnrefvel
defines the speed for ref-move (encoder index search )
value axisid
w
10 nm/s ..10 m/s
1.0 1 setrefvel
getref returns the setting for index search axisid r 1 getref
setref
Defines the mode of operation for encoder index search
value axisid
w
0..2
0 1 setref (default)
getrefst
returns the status of the encoder index search
axisId
r
1 getrefst
getnrmvel
returns the speed for rm-move
axisid
r
1 getnrmvel
setnrmvel
defines the speed for rm-move
value 1 axisid
value 2 axisid
w
50 1 1 setnrmvel
0.1 2 1 setnrmvel
getumotmin
returns the motor-umotmin
axisid
r
1 getumotmin
setumotmin
defines the motor-umotmin (*)
value axisid
w
see table
2.5 1 setumotmin
getumotgrad
returns the motor-umotgrad
axisid
r
1 getumotgrad
setumotgrad
defines the motor-umotgrad (*)
value axisid
w
see table
0.2 1 setumotgrad
gi
returns the absolute motor current in Amp
axisId
r
1 gi
gc
returns the motor current per phase in Amp
axisid
r
1 gc
getnlimit
returns the travel-limits
axisid
r
1 getnlimit
setnlimit
defines the travel-limits
low high axisid
w
+/- 1nm .. +-200 m
0.0 100.0 1 setnlimit
nsave
save axis parameters in flash-memory
axisid
w
1 nsave
save
save controller parameters in flash-memory
-
w
save
gsp
returns the stack-counter
-
r
gsp
clear clear controllers internal stack - w clear
reset
resets the controller
-
w
reset
getbaudrate
returns the actual baudrate of the serial interface RS232
index
r
1 getbaudrate
setbaudrate
defines the baudrate of the serial interface RS232
rate index
w
57600 1 setbaudrate
getnetpara
returns the actual settings of the Ethernet interface
index
r
0 getnetpara
setnetpara
defines the settings of the Ethernet interface
string index
w
“10.0.10.82” 0 setnetpara
SMC-Hydra CM TT.doc 26
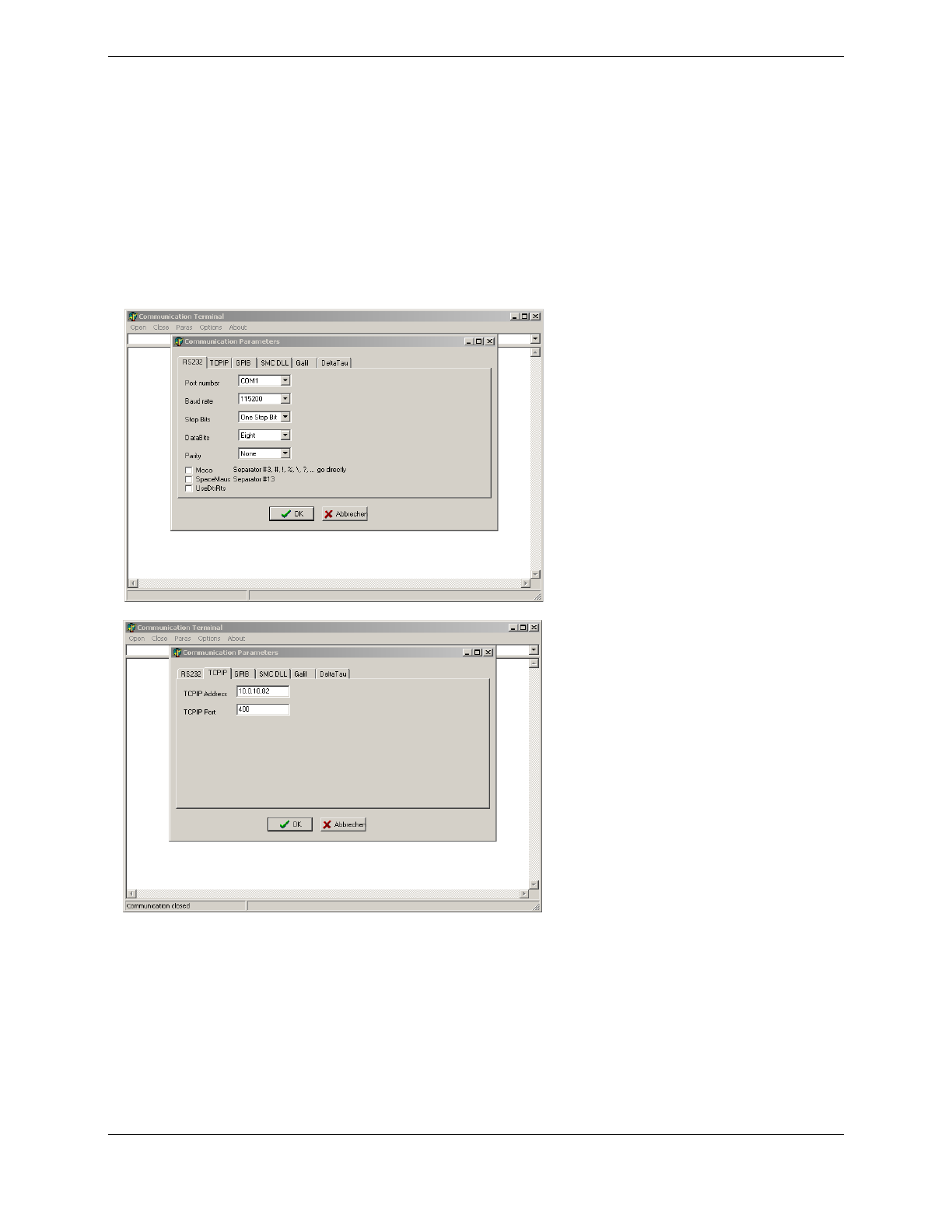
10. JS_Terminal.exe
This program allows communication with any devices via RS232 or Ethernet, It’s like
Hyperterminal, but supports
a editable command-line.
Menu Paras : Configuration of the interface
SMC-Hydra CM TT.doc 27
11. First Steps
Now we play a little with the system, please run the program JS_Terminal.exe or any
other terminal-program.
Connect with RS232 or Ethernet.
After power-up the controller the stage jumps with low energy into a full-step
position of the linear-motor. Please do not touch the stage in this phase. After
some seconds the stage is in closed-loop.
The system is completely configured for the stage. The settings of the controller are
documented in the file appendix Configuration.
Command
Reply
Comment
1 np
the actual position
1 ncal
-
search the home-switch (limit
reverse)
after this position = 0.00000
10 1 nr
-
stage moves 10 mm relative
-2 1 nr
stage moves –2 mm relative
46 1 nm
stage moves to absolute 46
mm
10 1 nrefmove
searches the index of the
encoder
1 np
the actual position
the position at Index
1 nst
the actual status
I
1 gnv
the actual velocity
10 1 snv
change speed to 10 mm/s
1 gna
the actual acc/deceleration
50 1 sna
change acc to 50 mm/s/s
0 1 nm
Move to 0-position
0 0 m
Vector move absolute
12 12 r
Vector move relative
gv
the actual vector speed
ga
the actual vector acceleration
p
the actual vector position
