Sensors and Software NOGGIN500 NOGGIN 500 User Manual SmartSystemsV11
Sensors & Software Inc. NOGGIN 500 SmartSystemsV11
Contents
- 1. Users Manual Pages 1 to 40
- 2. Users Manual Pages 41 to 80
- 3. Users Manual Pages 801 to end
- 4. Revsied Users Manual
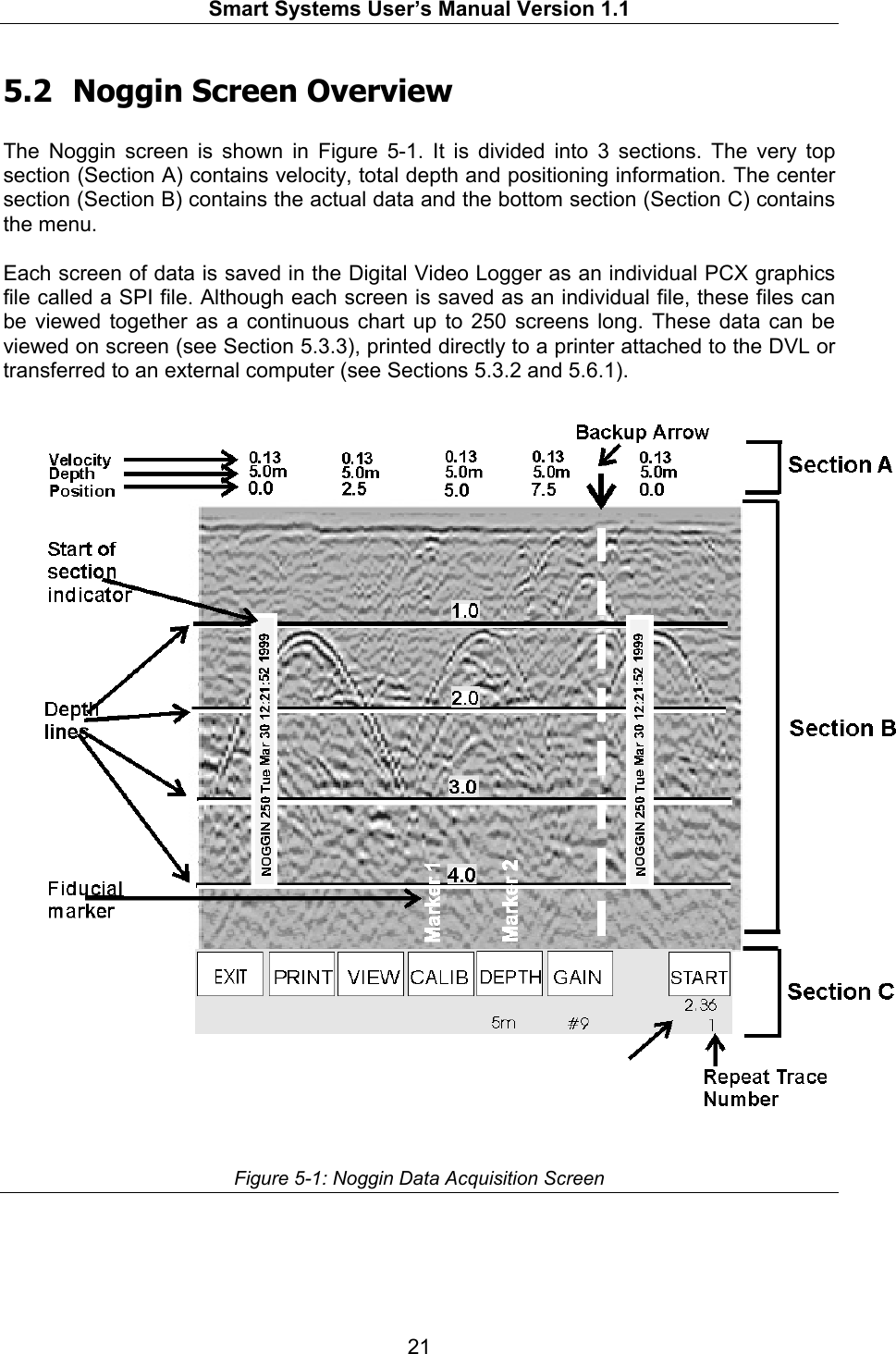
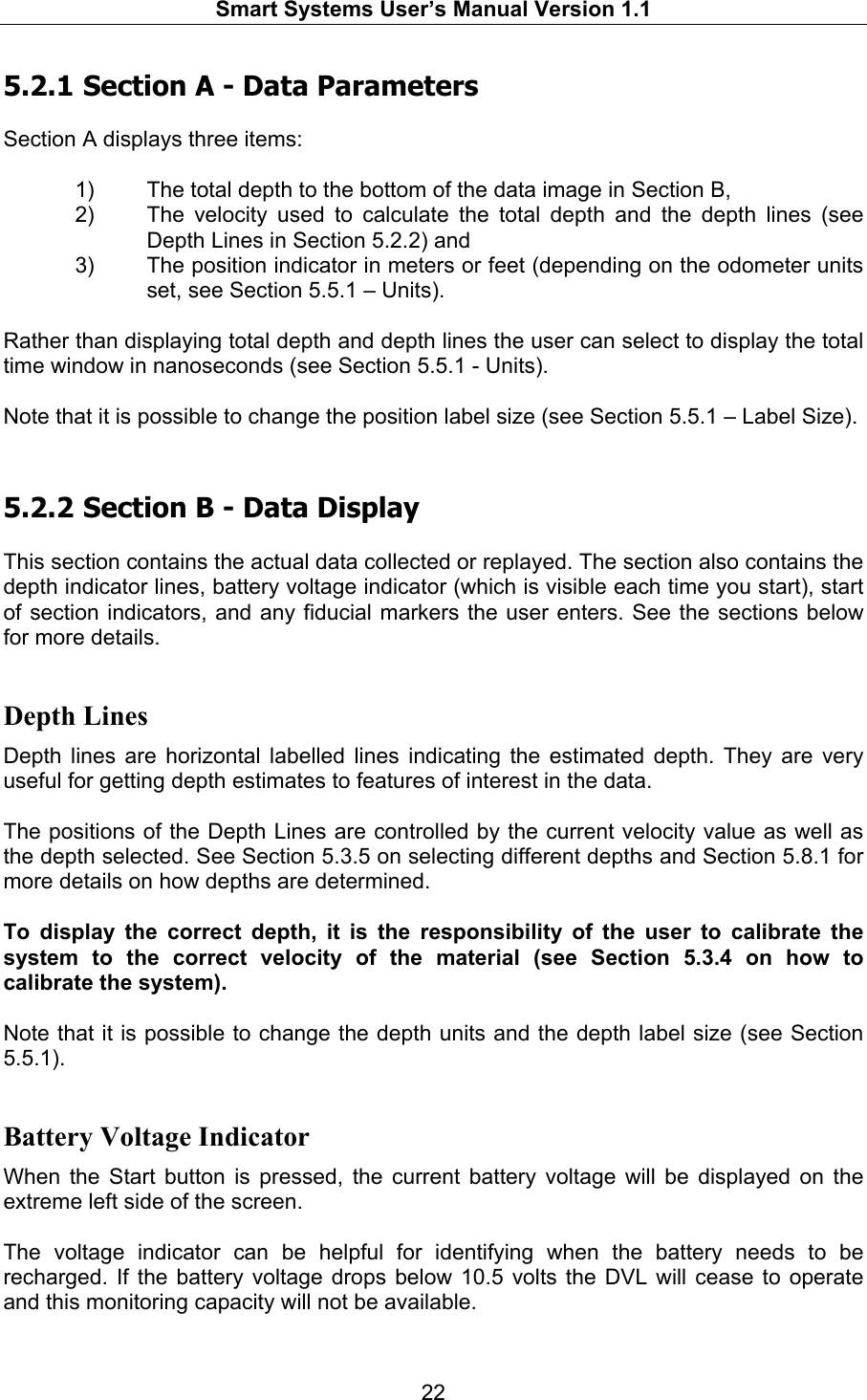
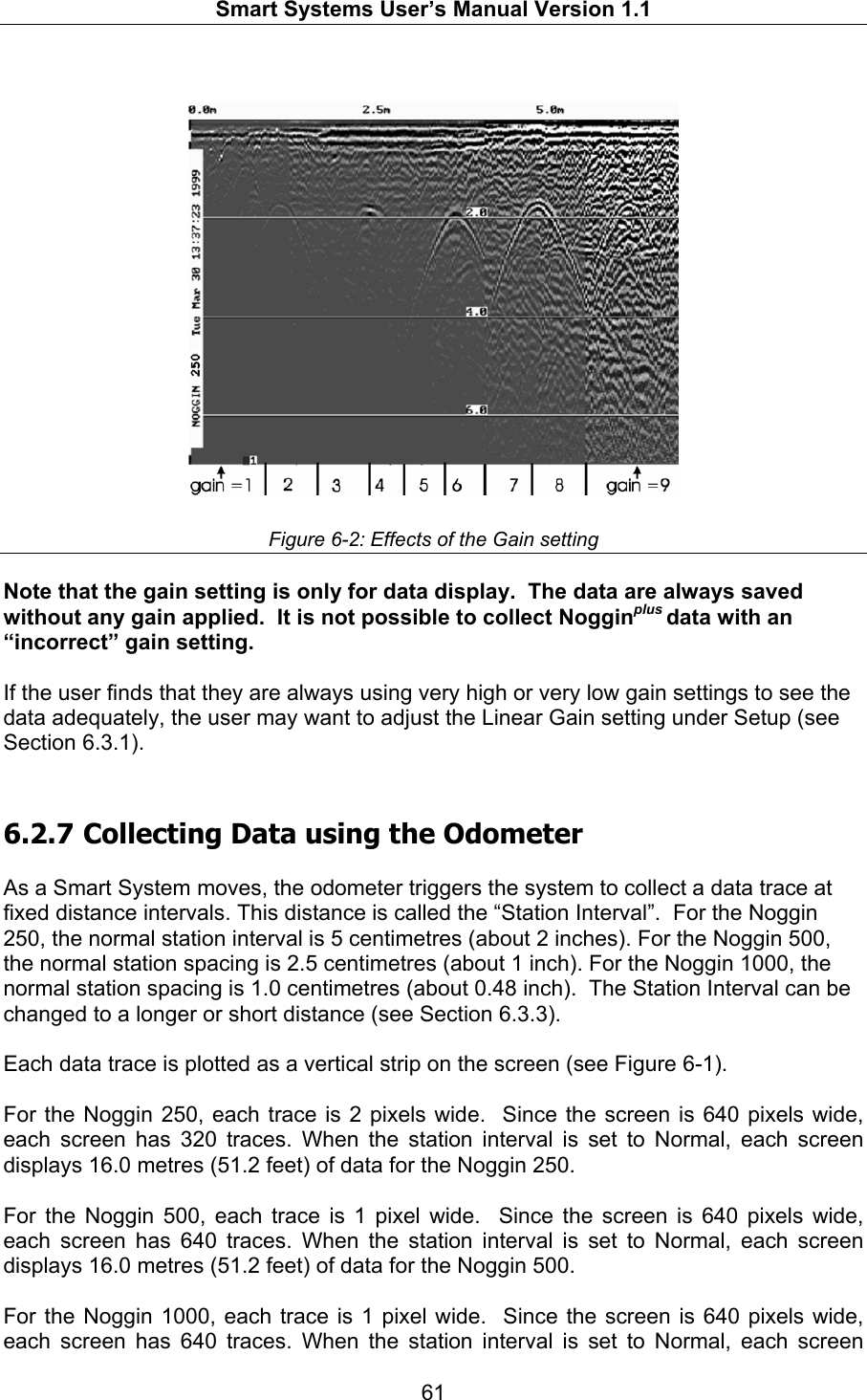
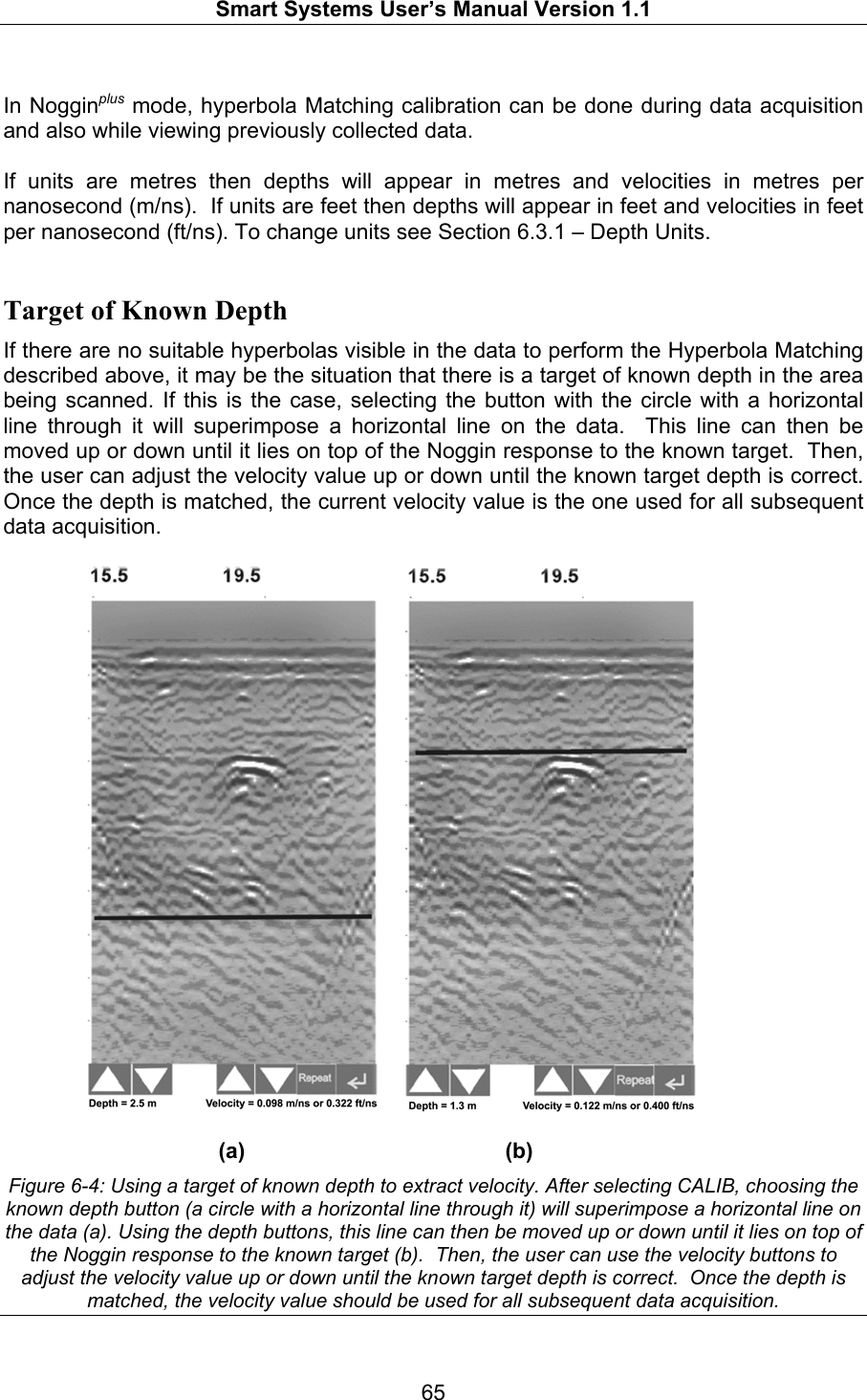
Revsied Users Manual






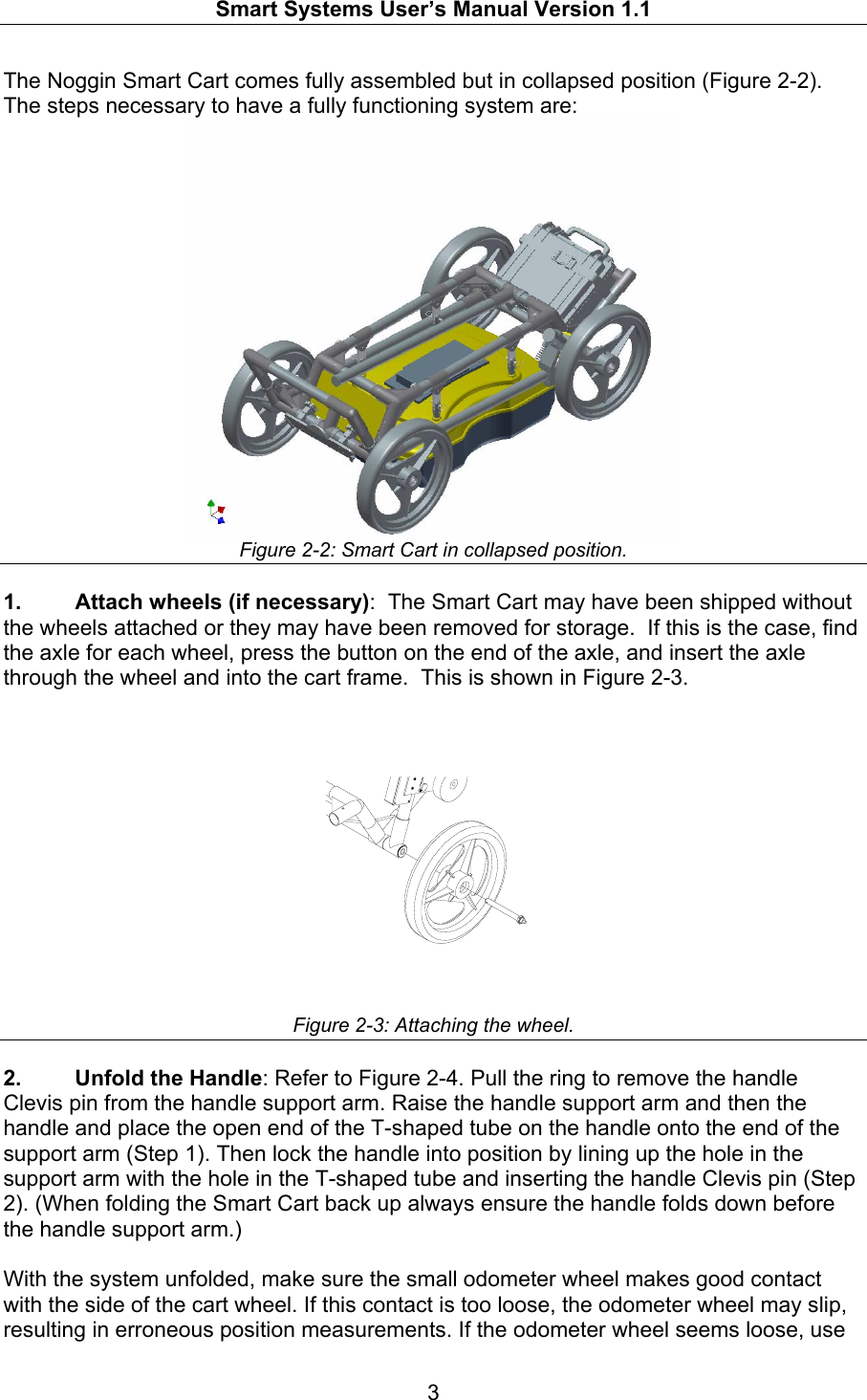
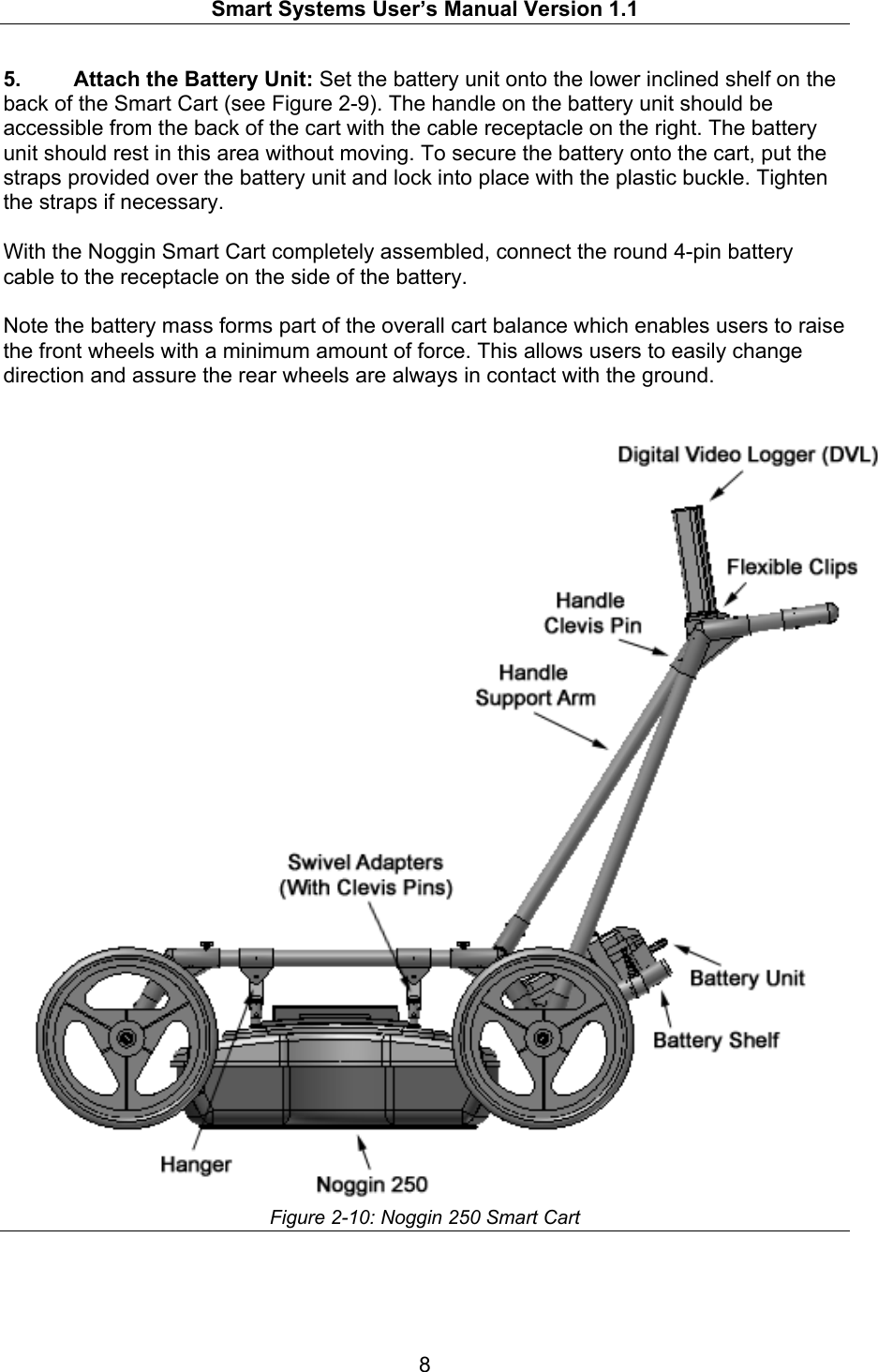

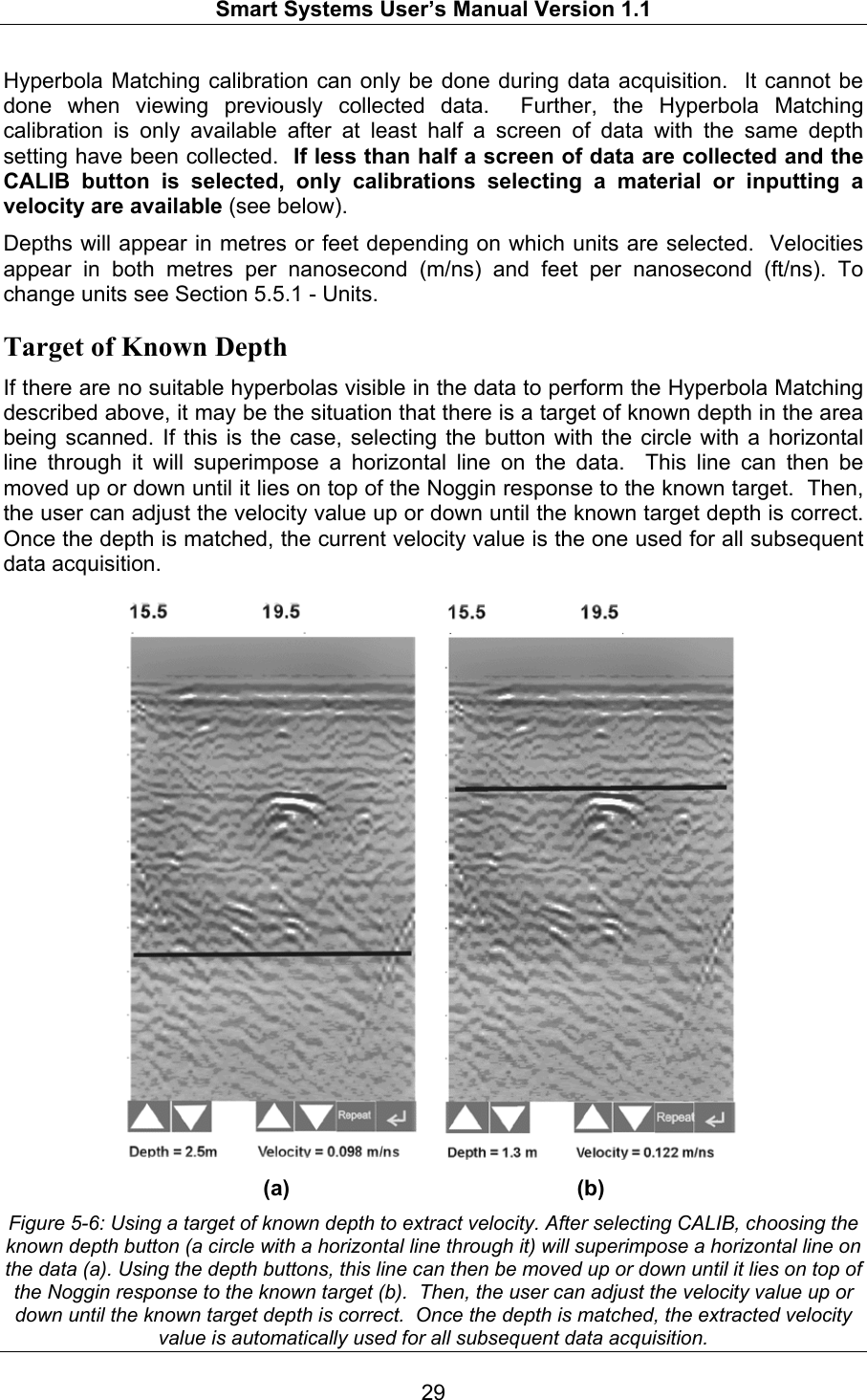
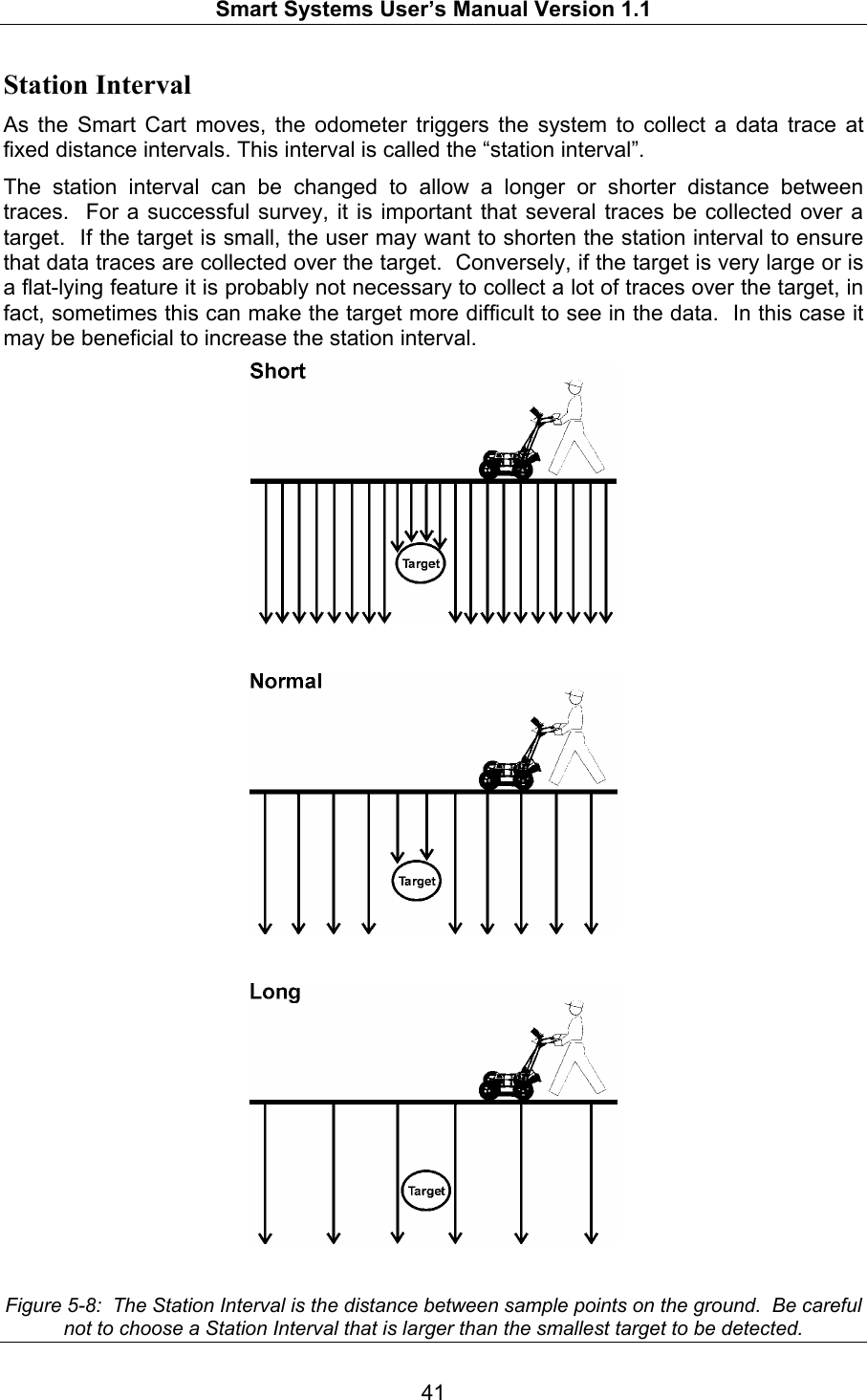


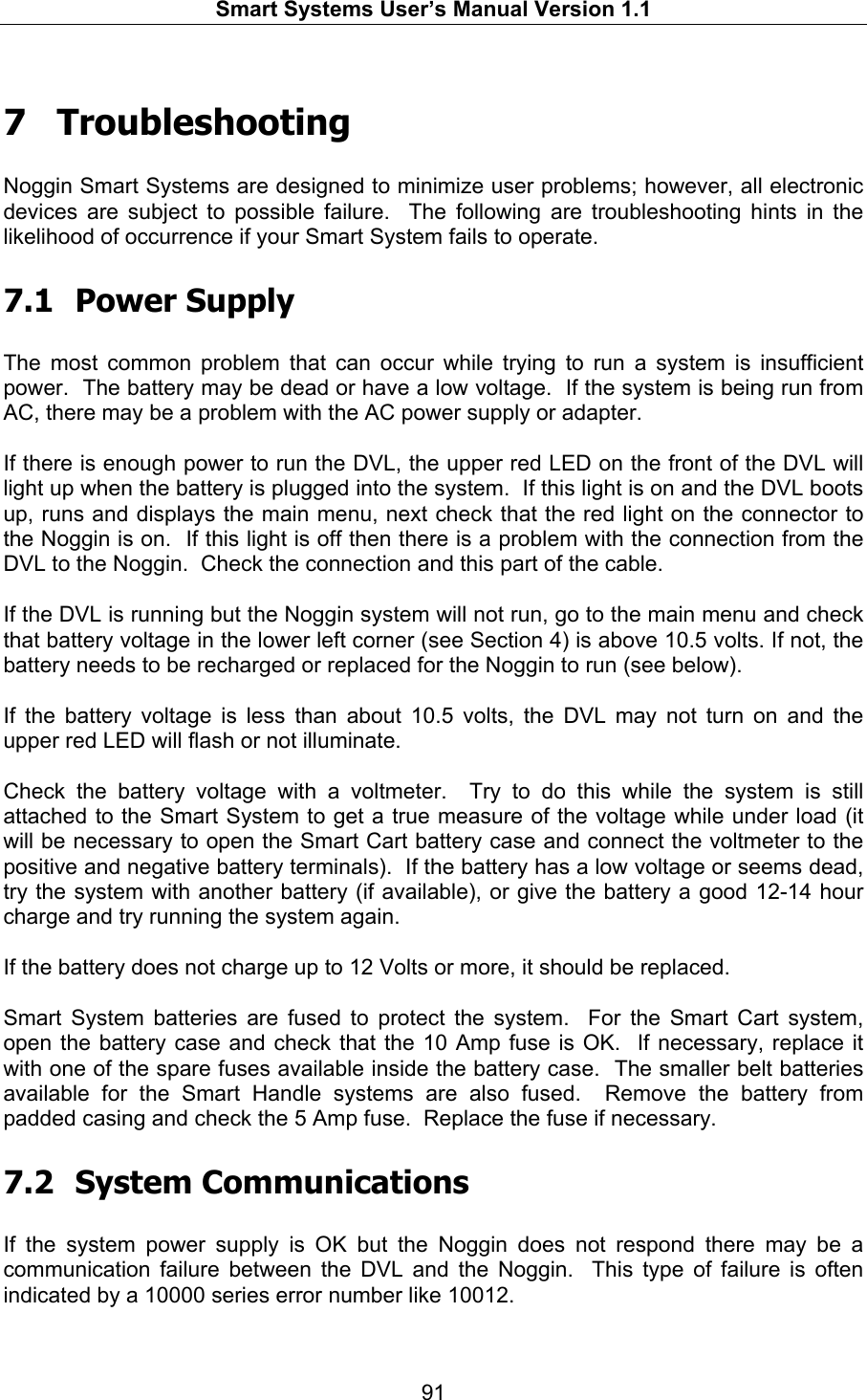
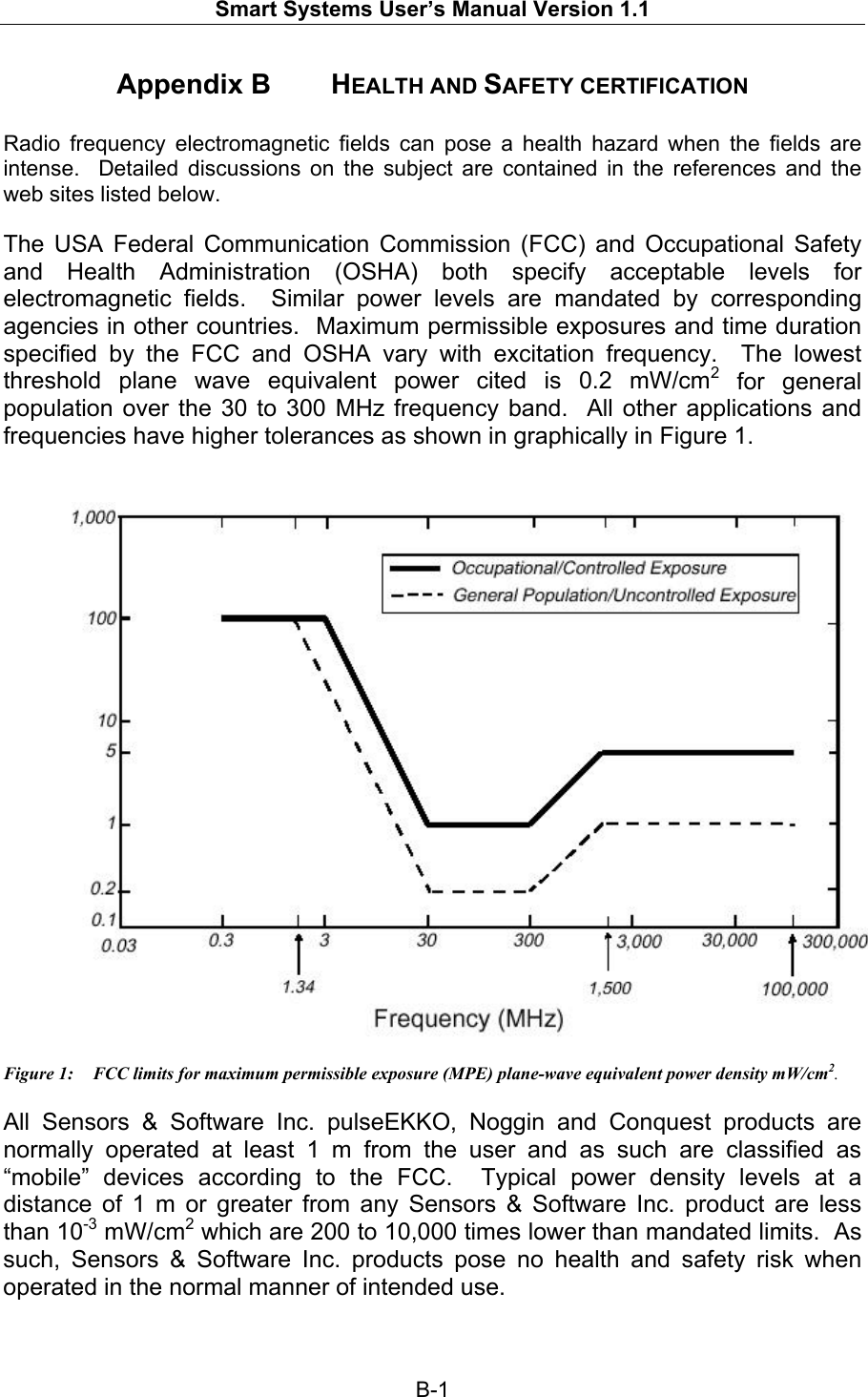
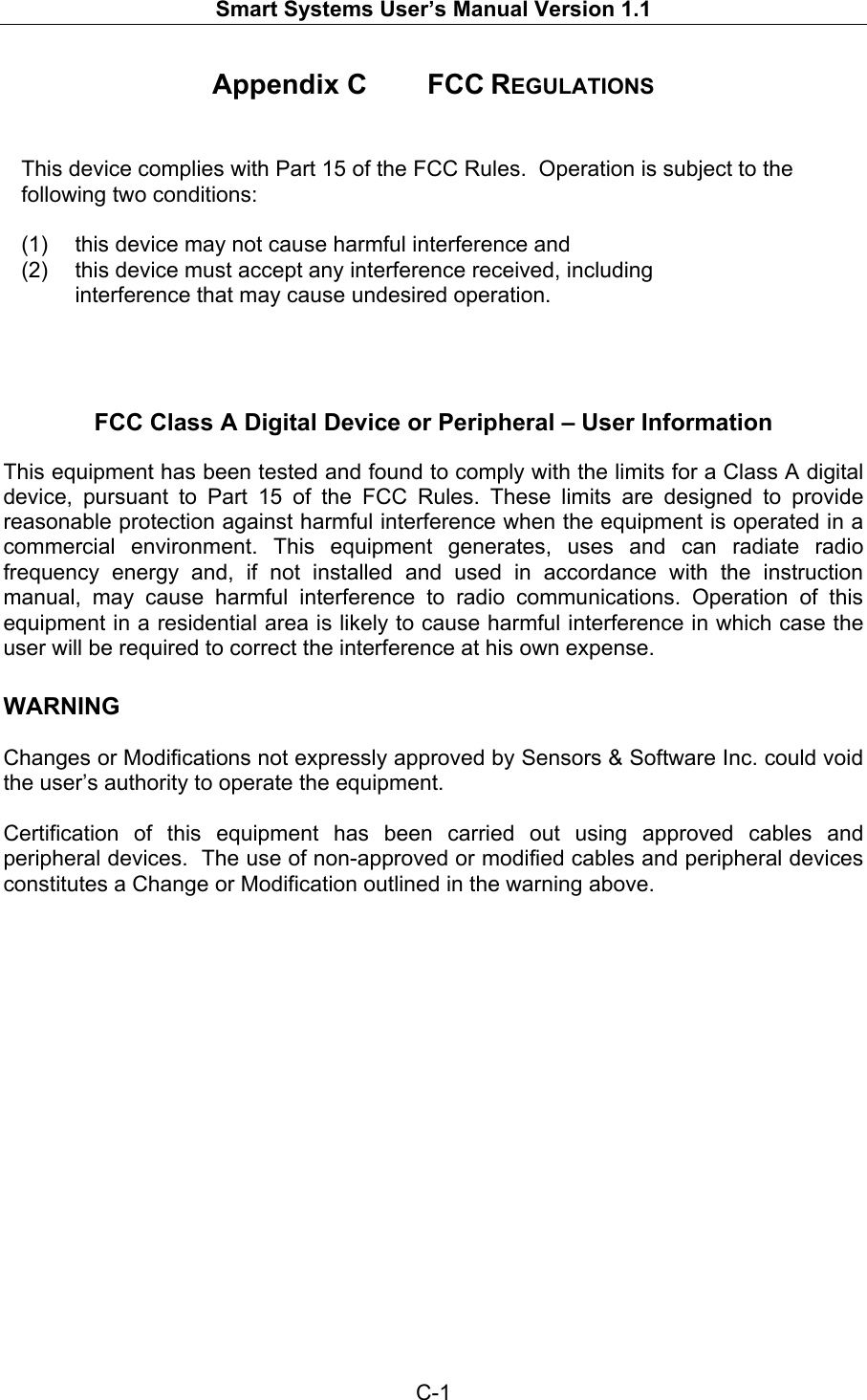
![Smart Systems User’s Manual Version 1.1 C-4 GROUND PENETRATING RADAR COORDINATION NOTICE NAME: ADDRESS: CONTACT INFORMATION [contact name and phone number]: AREA OF OPERATION [counties, states or larger areas]: FCC ID: [e.g. QJQ-NOGGIN250 for Noggin 250 system)] EQUIPMENT NOMENCLATURE: [ e.g. Noggin 250] Send the information to: Frequency Coordination Branch., OET Federal Communications Commission 445 12th Street, SW Washington, D.C. 20554 ATTN: UWB Coordination Fax: 202-418-1944 INFORMATION PROVIDED IS DEEMED CONFIDENTIAL](https://usermanual.wiki/Sensors-and-Software/NOGGIN500.Revsied-Users-Manual/User-Guide-281544-Page-116.png)