Sensors and Software PE-PRO-HF250 Ground Penetrating Radar User Manual pEPROLF Manual
Sensors & Software Inc. Ground Penetrating Radar pEPROLF Manual
Contents
- 1. Users Manual 1 of 2
- 2. Users Manual 2 of 2
Users Manual 1 of 2

USER’S GUIDE
Copyright 2005 Sensors & Software Inc. 2005-00040-01
pulseEKKO PRO

SENSORS & SOFTWARE INC. PRODUCT LICENCE, COPYRIGHT, LIABILITY AND WARRANTY INFORMATION
Important
Please read this document carefully before removing the SOFTWARE PRODUCT storage media from their protective cover
or assembling the HARDWARE PRODUCT. By removing the storage media or assembling the hardware, you are agreeing
to be bound by the terms of this agreement. If you do not agree to the terms of this agreement, promptly contact Sen-
sors & Software, Inc. at the address indicated at the end of this document.
Definition
The word PRODUCT as used herein defines any tangible item sold by Sensors & Software, Inc. and may be comprised
of HARDWARE PRODUCT which consists of physical objects and SOFTWARE PRODUCT which means computer programs,
codes and related support materials.
Software Product Licence Agreement
In order to preserve and protect its rights under the applicable laws, Sensors & Software, Inc. (hereafter SSI) does not
sell any rights to its Software product. Rather, SSI grants the right to use its software, diskettes (or other storage
media) and documentation (hereafter collectively called SOFTWARE PRODUCT) by means of a SOFTWARE PRODUCT
licence. You acknowledge and agree that SSI retains worldwide title and rights to all its software and that the SOFTWARE
PRODUCT contains proprietary materials protected under copyright, trademark and trade secret laws.
Grant of Software Product Licence
In consideration of payment of the licence fee which is the price you pay for the SOFTWARE PRODUCT and your agree-
ment to abide by the terms and conditions of this Licence Agreement, SSI grants to you, the Licensee, a non-exclusive
right to use the SOFTWARE PRODUCT under the following conditions:
You may:
• use the SOFTWARE PRODUCT on a single workstation owned, leased or otherwise controlled by you
• copy the SOFTWARE PRODUCT for backup purposes in support of your use of the product on a single workstation
You may not:
• copy, distribute or sell copies of the SOFTWARE PRODUCT or accompanying written materials, including modified or
merged SOFTWARE PRODUCT to others
• sell, licence, sublicence, assign or otherwise transfer this licence to anyone without the prior written consent of
SSI
• modify, adapt, translate, decompile, disassemble or create derivative works based on the SOFTWARE PRODUCT
Termination
This licence is effective until terminated. You may terminate the licence at any time by returning the SOFTWARE PROD-
UCT and all copies to SSI. The licence will automatically terminate without notice by SSI if you fail to comply with any
terms or conditions of this agreement. Upon termination, you agree to return all copies of the SOFTWARE PRODUCT to
SSI.
Update Policy
SSI may create, from time to time, updated versions of its SOFTWARE PRODUCT. At its option, SSI will make such
updates available to licencees who have paid the update fee.
Product Warranty, Limited Remedy and Limited Liability
SSI warrants the PRODUCT to be free from defect in material and workmanship under normal use for a period of one
year (365 days) from the date of shipment. Any third party computer systems or other items not manufactured directly
by SSI purchased with any PRODUCT or independently from SSI are subject to the original manufacturer's warranty and
not the responsibility of SSI.
SSI makes no other warranties including, but not limited to, any implied warranty of merchantability or fitness for a par-
ticular purpose. If this product is defective within the warranty period stated above, your exclusive remedy shall be, at
SSI’s option to replace or repair the SSI product or refund the purchase price of the SSI product. Except where prohib-
ited by law, SSI will not be liable for any loss or damage arising from this SSI product, whether direct, indirect, special,
incidental or consequential regardless of the legal theory asserted.

All statements, technical information, and recommendations related to SSI products are based on information believed
to be reliable, but the accuracy or completeness is not guaranteed. Before using this product, you must evaluate it and
determine if it is suitable for your intended application. You assume all risks and liability associated with such use. Any
statements related to the product which are not contained in SSI current publications, or any contrary statements con-
tained on your purchase order shall have not force or effect unless expressly agreed upon, in writing, by an authorized
officer of SSI.
SSI warrants the diskettes or other storage media on which the SOFTWARE PRODUCT is furnished to be free from defects
in material and workmanship under normal use for a period of ninety (90) days from the date of purchase as evidenced
by a copy of your invoice.
Except as specified above, any SOFTWARE PRODUCT is provided "as is" without warranty of any kind, either expressed
or implied, including, but not limited to, the use or result of use of the product in terms of correctness, accuracy, reliabil-
ity, currentness or otherwise. The entire risk as to the results and performance of the PRODUCT is assumed by you. If
the PRODUCT is defective or used improperly, you, and not SSI or its dealers, distributors, agents, or employees,
assume the entire cost of all necessary servicing, repair or correction.
SSI's entire liability and your exclusive remedy for SOFTWARE PRODUCT shall be, at SSI's option, either
• the replacement of any diskette or hardware components which do not meet SSI's Limited Warranty and which are
returned to SSI postage prepaid with a copy of the receipt, or
• if SSI is unable to deliver a replacement diskette which is free of defects in material or workmanship, Licensee
may terminate this agreement and have the licence fee refunded by returning all copies of the SOFTWARE PRODUCT
postage prepaid with a copy of the receipt.
If failure of any PRODUCT resulted from accident, abuse or misapplication, SSI shall have no responsibility to replace
the SOFTWARE PRODUCT, refund the licence fee, or replace or repair the HARDWARE PRODUCT.
Do not tamper with any PRODUCT. PRODUCT contains no user serviceable parts. If tampering is evident in SSI’s
opinion, warranty is void and null.
No oral or written information or advice given by SSI, its dealers, distributors, agents or employees shall create a war-
ranty or in any way increase the scope of this warranty and you may not rely on any such information or advice.
Neither SSI nor anyone else who has been involved in the creation, production or delivery of the PRODUCT shall be lia-
ble for any direct, indirect, special, exemplary, incidental or consequential damages, claims or actions including lost
information, lost profits, or other damages arising out of the use or inability to use this PRODUCT even if SSI has been
advised of the possibility of such damages.
This warranty gives you specific rights. You may have other rights which vary from province to province, territory to ter-
ritory and certain limitations contained in this limited warranty may not apply to you.
General
pulseEKKO®, Noggin®, SpiView®, Conquest® and SnowScan® are registered trademarks of SSI. No right, licence, or
interest to such trademarks is granted hereunder with the purchase of the PRODUCT or the SOFTWARE PRODUCT licence.
Governing Law
In the event of any conflict between any provision in this licence agreement and limited warranty and any applicable
provincial legislation, the applicable provincial legislation takes precedence over the contravening provision. This
agreement shall be governed and construed in accordance with the laws of the Province of Ontario, Canada.
Serviceability
Should any term of this agreement be declared void or not enforceable by any court of competent jurisdiction, the
remaining terms shall remain in full effect.
Waiver
Failure of either party to enforce any of its rights in this agreement or take action against any other party in the event of
a breach of this agreement shall not be considered a waiver of the right to subsequent enforcement of its rights or
actions in the event of subsequent breaches by the other party.

Acknowledgement
You acknowledge that you have read this agreement, understand it and agree to be bound by its terms and conditions.
You further agree that this agreement is the complete and exclusive statement of agreement between the parties and
supersedes all proposals or prior agreements oral or written between the parties relating to the subject matter of this
agreement.
Should you have any questions concerning this agreement, please contact in writing:
Sensors & Software Inc.
1040 Stacey Court
Mississauga, Ontario
Canada L4W 2X8
Tel:(905) 624-8909
Fax:(905) 624-9365
E-mail: radar@sensoft.ca
pulseEKKO, Noggin, SpiView, SnowScan, Conquest, SmartCart, SmartHandle, Conquest for Windows, Win_EKKO, EKKO_Mapper,
EKKO_3D and EKKO_Pointer are Trademarks of Sensors & Software Inc

pulseEKKO PRO Table of Contents
i
Table of Contents
1 Overview ............................................................................................................1
2 System Assembly and Startup .............................................................2
2.1 System Configurations.................................................................................2
2.1.1 Low Frequency Hand Held ..............................................................2
2.1.2 High Frequency Hand Towed..........................................................3
2.2 DVL and Control Module .............................................................................4
2.2.1 Attaching the Control Module to the DVL........................................4
2.2.2 Attaching the Fibre Optic Converters for Low frequency Antennas5
2.3 Low Frequency Transmitter, Receiver and Antenna Assembly..................6
2.3.1 Low Frequency Antennas................................................................6
2.3.2 Attaching the Sockets to the Transmitter and Receiver..................7
2.3.3 Inserting Pins into the Antennas......................................................7
2.3.4 Attaching the Mounting Blocks to the Antennas .............................8
2.3.5 Latching the Transmitter and Receiver to the Mounting Blocks .....9
2.3.6 Inserting Batteries into the Transmitter and Receiver...................10
2.3.7 Attaching Handles..........................................................................11
2.3.7.1 Attaching the Adjustable Handles ..........................................11
2.3.8 Connecting the Fibre Optic Cables ...............................................12
2.4 High Frequency Transducer Assembly .....................................................14
2.4.1 High Frequency Transducers ........................................................14
2.4.2 Mounting Transducers to the Skid Plate .......................................15
2.4.3 High Frequency Hand-Towed System ..........................................16
2.4.3.1 Attaching the Adjustable Tow Handle.....................................16
2.4.3.2 Attaching the Big Wheel Odometer ........................................17
2.4.3.3 Connecting the Odometer Cable to the Control Module...........18
2.4.3.4 Connecting the Transducer Cables ........................................19
2.5 Adding Accessories ...................................................................................20
2.5.1 Electrical Beeper/Trigger Unit........................................................20
2.5.2 Fibre Optic Beeper/Trigger Unit.....................................................20
2.5.3 DVL Carrier ....................................................................................23
2.5.4 Odometers .....................................................................................23
2.5.5 GPS................................................................................................24
2.6 Starting the pulseEKKO PRO System.......................................................25

Table of Contents pulseEKKO PRO
ii
2.6.1 Powering the DVL and Control Module.........................................25
2.6.2 Powering the Low Frequency Transmitter and Receiver..............26
2.6.3 Digital Video Logger ......................................................................26
2.6.4 Main Menu .....................................................................................27
2.6.5 Using the Software Menus ............................................................30
3 System Setup Parameters .....................................................................31
3.1 System Parameters for a Quick Start to Data Collection..........................32
3.2 GPR Parameters........................................................................................33
3.2.1 Antenna Frequency .......................................................................34
3.2.2 Time Window .................................................................................35
3.2.2.1 How Depth is Determined .....................................................35
3.2.3 Temporal Sampling Interval...........................................................36
3.2.3.1 Determining the Number of Points per Trace ..........................36
3.2.4 Antenna Separation .......................................................................37
3.2.5 Antenna Step Size .........................................................................38
3.2.6 Radar Velocity................................................................................39
3.2.7 System Stacking ............................................................................40
3.2.8 Pulser Setting.................................................................................41
3.3 Acquisition Control.....................................................................................42
3.3.1 Trigger Method...............................................................................42
3.3.1.1 Triggers ...............................................................................43
3.3.1.2 Odometer.............................................................................43
3.3.1.3 Free Run..............................................................................43
3.3.2 Beeper Activated............................................................................43
3.3.3 Free Run Trace Delay ...................................................................44
3.3.4 GPS Parameter Menu ...................................................................44
3.3.4.1 GPS Recording Mode ...........................................................45
3.3.4.2 Baud Rate............................................................................47
3.3.4.3 Stop Bits ..............................................................................47
3.3.4.4 Data Bits ..............................................................................47
3.3.4.5 Parity ...................................................................................47
3.3.4.6 Last NMEA String .................................................................47
3.3.4.7 Test GPS with Listing............................................................48
3.3.4.8 Test GPS with Plotting ..........................................................48
3.3.5 Odometer Setup Menu ..................................................................48
3.3.5.1 Odometer Calibration............................................................48

pulseEKKO PRO Table of Contents
iii
3.3.5.2 Set Odometer Manually ........................................................49
3.3.5.3 Odometer Direction...............................................................49
3.3.6 Fibre Optic Testing.........................................................................49
3.4 Survey Parameters ....................................................................................50
3.4.1 Start Position..................................................................................50
3.4.2 Antenna Step Size .........................................................................50
3.4.3 Positional Units ..............................................................................50
3.4.4 Data Directory Number ..................................................................51
3.4.5 Survey Type...................................................................................51
3.4.6 GPR Grid Type ..............................................................................51
3.4.7 X Line Spacing...............................................................................55
3.4.8 Y Line Spacing...............................................................................55
3.5 Display Parameters....................................................................................56
3.5.1 Trace Plotting Type........................................................................56
3.5.2 Gain Type Applied and Gain Applied ............................................58
3.5.2.1 AGC Gain ............................................................................58
3.5.2.2 SEC Gain.............................................................................60
3.5.2.3 Constant Gain ......................................................................61
3.6 DVL Setup Menu........................................................................................63
3.6.1 Set DVL Time and Date.................................................................63
3.6.2 Set DVL Transfer Mode.................................................................63
3.6.3 Set DVL into Upgrade Mode..........................................................63
3.6.4 Select Display Info Mode...............................................................64
3.7 View Complete Setup ................................................................................64
3.8 Return ........................................................................................................64
4 Running in Scope Mode .........................................................................65
4.1 Scope Screen ............................................................................................66
4.1.1 Adjusting Timezero (Offset)...........................................................66
5 Data Collection Mode ...............................................................................69
5.1 Data Directory ............................................................................................69
5.2 Select Line Number ...................................................................................69
5.3 Data Collection...........................................................................................70
5.4 Fiducial Markers.........................................................................................72
5.4.1 Fiducial Markers for Rubberbanding .............................................73

Table of Contents pulseEKKO PRO
iv
5.4.2 Fiducial Markers for GPS...............................................................73
5.5 Data Collection Pause Menu .....................................................................73
5.5.1 Exit .................................................................................................73
5.5.2 Continue.........................................................................................73
5.5.3 Scale ..............................................................................................73
5.5.4 Calib - Velocity Calibration.............................................................75
5.5.4.1 Hyperbola Matching..............................................................75
5.5.4.2 Identifying Air Reflections......................................................77
5.5.4.3 Target of Known Depth .........................................................78
5.6 Collect Grid Data........................................................................................79
5.6.1 Select Line Direction......................................................................79
5.6.2 Select Grid Line Number ...............................................................79
5.7 View Previously Collected Lines................................................................80
5.8 Collect Data (No Save) ..............................................................................81
6 Surveying Techniques .............................................................................82
6.1 Low Frequency Reflection (Profiling) Mode ..............................................82
6.1.1 Two Person Operation...................................................................82
6.1.2 One Person Operation...................................................................83
6.1.3 Strain Relief for Fibre Optic Cables...............................................84
6.1.4 Maintaining Proper Antenna Separation .......................................84
6.1.5 Antenna Movement........................................................................85
6.2 High Frequency Reflection (Profiling) Mode .............................................85
6.2.1 Tow Mode Operation .....................................................................85
6.3 Antenna Orientation...................................................................................86
6.4 Triggers ......................................................................................................87
6.5 Free Run ....................................................................................................87
6.6 Odometer Data Acquisition........................................................................88
6.6.1 Skipping Traces .............................................................................88
6.6.2 Backing up to Pinpoint Target Positions........................................89
6.7 Signal Polarity ............................................................................................89
6.8 Spatially Aliasing the Data.........................................................................89
6.9 Creating a Test Line for Data Quality ........................................................90
6.10 Adding GPS for Positioning .......................................................................90
6.11 Common Mid-Point (CMP) Survey ............................................................91
6.12 Transillumination Surveys..........................................................................93

pulseEKKO PRO Table of Contents
v
6.12.1 Borehole GPR................................................................................93
6.12.2 Walls, Pillars and Monument Surveys...........................................94
7 Troubleshooting ..........................................................................................95
7.1 Power Supply.............................................................................................96
7.1.1 DVL and Control Module Power Requirements ............................96
7.1.2 Transducer Power Requirements..................................................97
7.1.3 Transmitter and Receiver Power Requirements ...........................97
7.1.4 Testing Transmitter and Receiver Batteries..................................98
7.2 Testing Fibre Optic Cables ........................................................................99
7.3 Control Module Related Errors ................................................................101
7.4 Receiver Related Errors ..........................................................................101
7.5 Transmitter Problem: No Signal on Screen.............................................101
7.6 System Overheating ................................................................................102
7.7 DVL Problem............................................................................................102
7.8 Timezero Jitter .........................................................................................102
7.9 System Runs But Data Does Not Look Right..........................................103
7.10 Contacting Sensors & Software Inc.........................................................103
8 File Management .......................................................................................104
8.1 Connecting the DVL to a PC ...................................................................105
8.2 Installing and Running the WinPXFER Software on a PC......................106
8.3 Transfer Directory ....................................................................................106
8.4 Transfer File.............................................................................................107
8.5 Delete Directory .......................................................................................108
8.6 Delete File ................................................................................................109
8.7 View Disk Space......................................................................................110
8.8 Viewing Data Files on the External PC ...................................................110
9 Care and Maintenance ...........................................................................111
9.1 General ....................................................................................................111
9.2 Electronic Spares.....................................................................................111
9.3 Radar Unit................................................................................................112
9.4 Antenna Electronics Connection Pins .....................................................112
9.5 Fibre Optics Cables .................................................................................112
9.6 Fibre Optics Cable Repair .......................................................................113

Table of Contents pulseEKKO PRO
vi
10 Helpful Hints ................................................................................................117
10.1 Batteries ...................................................................................................117
10.2 Measuring Position ..................................................................................117
10.3 Data Files .................................................................................................117
10.4 Spares......................................................................................................117
Appendix A: Data File Formats.................................................................. A-1
Appendix B: GPR Signal Processing Artifacts ...................................... B-1
Appendix C: Excerpts from the HP Fiber Optic Handbook................ C-1
Appendix D: Health & Safety Certification .............................................D-1
Appendix E: FCC Regulations .................................................................. E-1
Appendix F: Instrument Interference ....................................................... F-1
Appendix G: Safety Around Explosive Devices ....................................G-1

pulseEKKO PRO 1-Overview
1
1 Overview
This manual describes how to set up and run a pulseEKKO PRO LF (low frequency) Ground Penetrating
Radar (GPR) system connected to a Digital Video Logger (DVL) for data display and storage.
System Assembly Section 2 System Assembly and Startup on page 2 details the
& Startup: step by step procedure for assembling the pulseEKKO PRO system. It also
describes how to start up the DVL and navigate around the menus.
Setting Data Collection Section 3 System Setup Parameters on page 31 covers the procedure for
Parameters: selecting appropriate data collection parameters. Although every effort has
been made to make the software as transparent and user friendly as possible,
this section explains in greater detail each of the options and menu items in
the data collection program.
To get up and running quickly see Section 3.1 System Parameters for a Quick
Start to Data Collection on page 32.
Scope Mode: Section 4 Running in Scope Mode on page 65 describes how to set timezero
to ensure the system is ready for data collection.
Data Collection: Section 5 Data Collection Mode on page 69 describes running the radar sys-
tem and collecting data.
Surveying Techniques: Section 6 Surveying Techniques on page 82 describes system configurations
and offers hints for properly collecting data in field conditions.
Troubleshooting: Section 7 Troubleshooting on page 95 presents some simple steps the user
should go through when things do not work as they should.
File Management: Section 8 File Management on page 104 describes how to transfer data from
the DVL to a PC and how to delete files and directories from the DVL.
Care and Maintenance: Section 9 Care and Maintenance on page 111 discusses procedures for the
care and maintenance of your pulseEKKO PRO system.
Helpful Hints: Section 10 Helpful Hints on page 117 lists some helpful hints, based on years
of experience, to help make data collection and field operations run as
smooth as possible.
2-System Assembly and Startup pulseEKKO PRO
2
2 System Assembly and Startup
2.1 System Configurations
The modular design of the pulseEKKO PRO GPR makes the system very flexible and readily field-portable
in a number of configurations. This section details the steps for assembling the Low Frequency Hand Held
(Figure 2-1) and High Frequency Hand Towed (Figure 2-2) configurations.
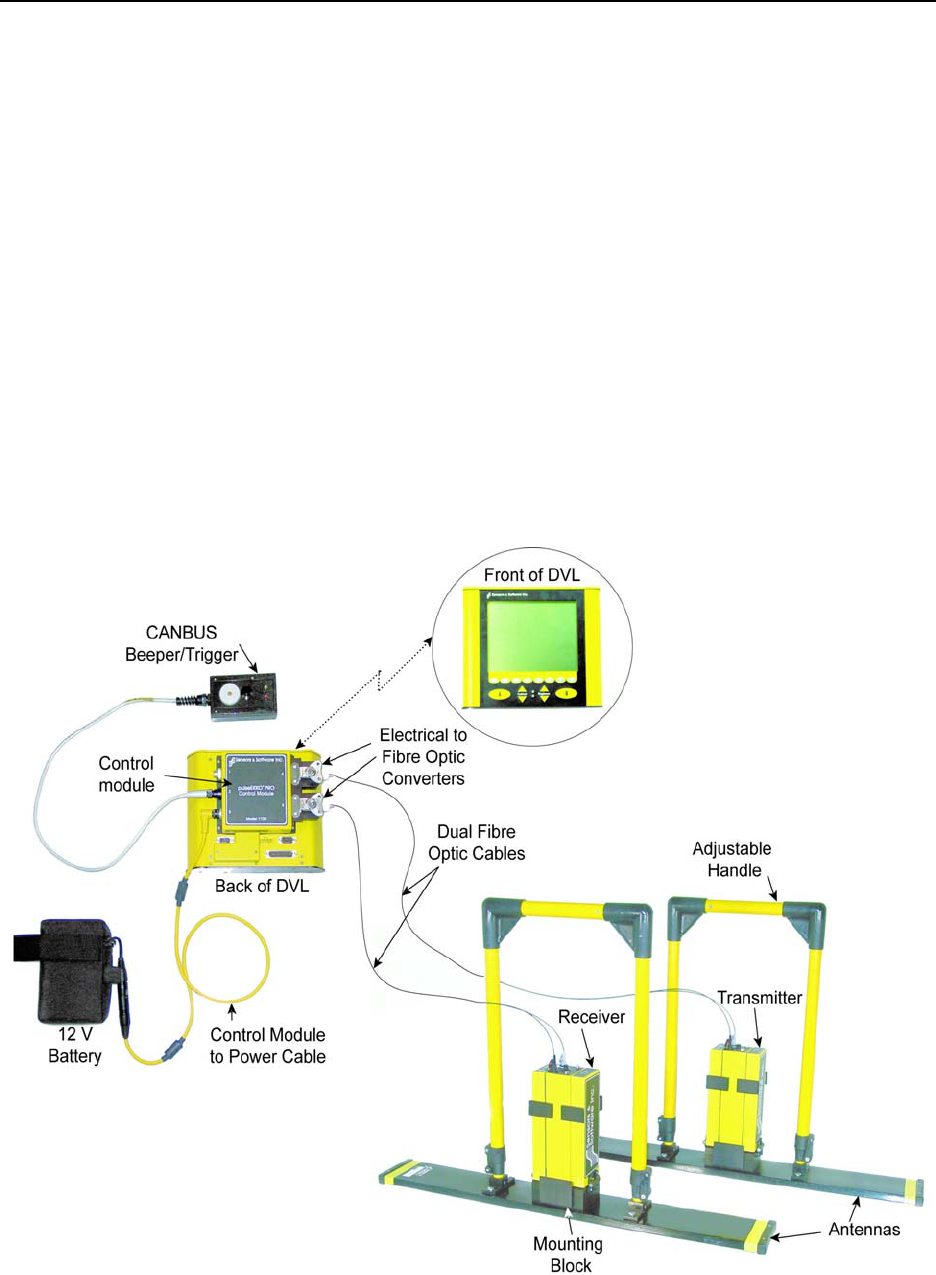
2.1.1 Low Frequency Hand Held
There are four essential components to the low frequency radar system: the Digital Video Logger (DVL),
the control module, the transmitter assembly and the receiver assembly. The control module is attached to
the back of the DVL. The transmitter and receiver assemblies are connected to the control module via
appropriate fibre optics cables (Figure 2-1).
Complete system configurations for data acquisition are shown later (Section 6.1: P82).
Figure 2-1: The complete low frequency pulseEKKO PRO hand held Assembly
pulseEKKO PRO 2-System Assembly and Startup
3
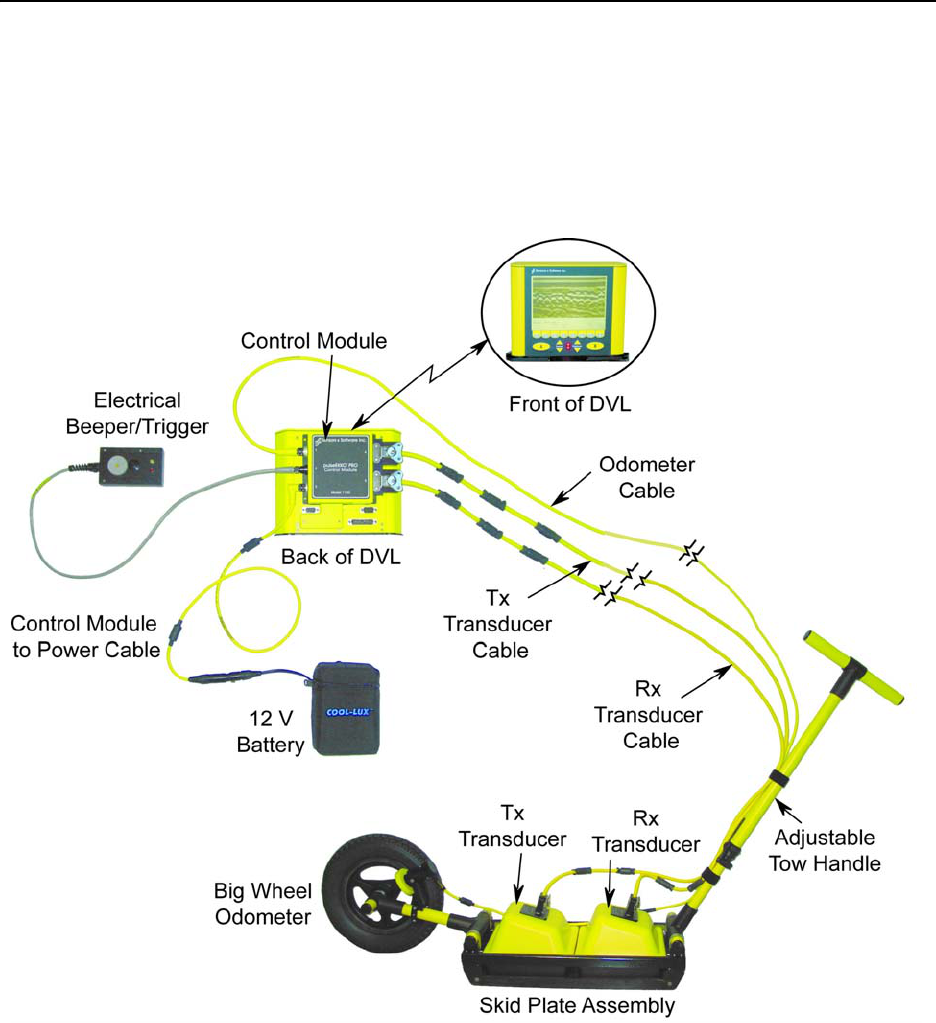
2.1.2 High Frequency Hand Towed
There are four essential components to the high frequency radar system: the Digital Video Logger (DVL),
the control module, the transmitting transducer and the receiving transducer. The control module is
attached to the back of the DVL. The transducers are connected to the control module via the transducer
cables (Figure 2-2).
Figure 2-2: The complete high frequency pulseEKKO PRO tow mode assembly.

2-System Assembly and Startup pulseEKKO PRO
4
2.2 DVL and Control Module
The DVL and Control Module are common to all configurations.
2.2.1 Attaching the Control Module to the DVL
The control module unit must be attached to the back of the DVL (Figure 2-3). This may already have been
done at the factory. Proceed to the next section, if this is the case.
Figure 2-3: The DVL with the control module attached to the back.
Figure 2-4: Remove the 4 yellow caps and the 4 screws from the back of the DVL (left) and place the control module on the back
of the DVL (right). Make sure that the 37 pin connector is aligned properly with the 37 socket connector on the control module.

pulseEKKO PRO 2-System Assembly and Startup
5
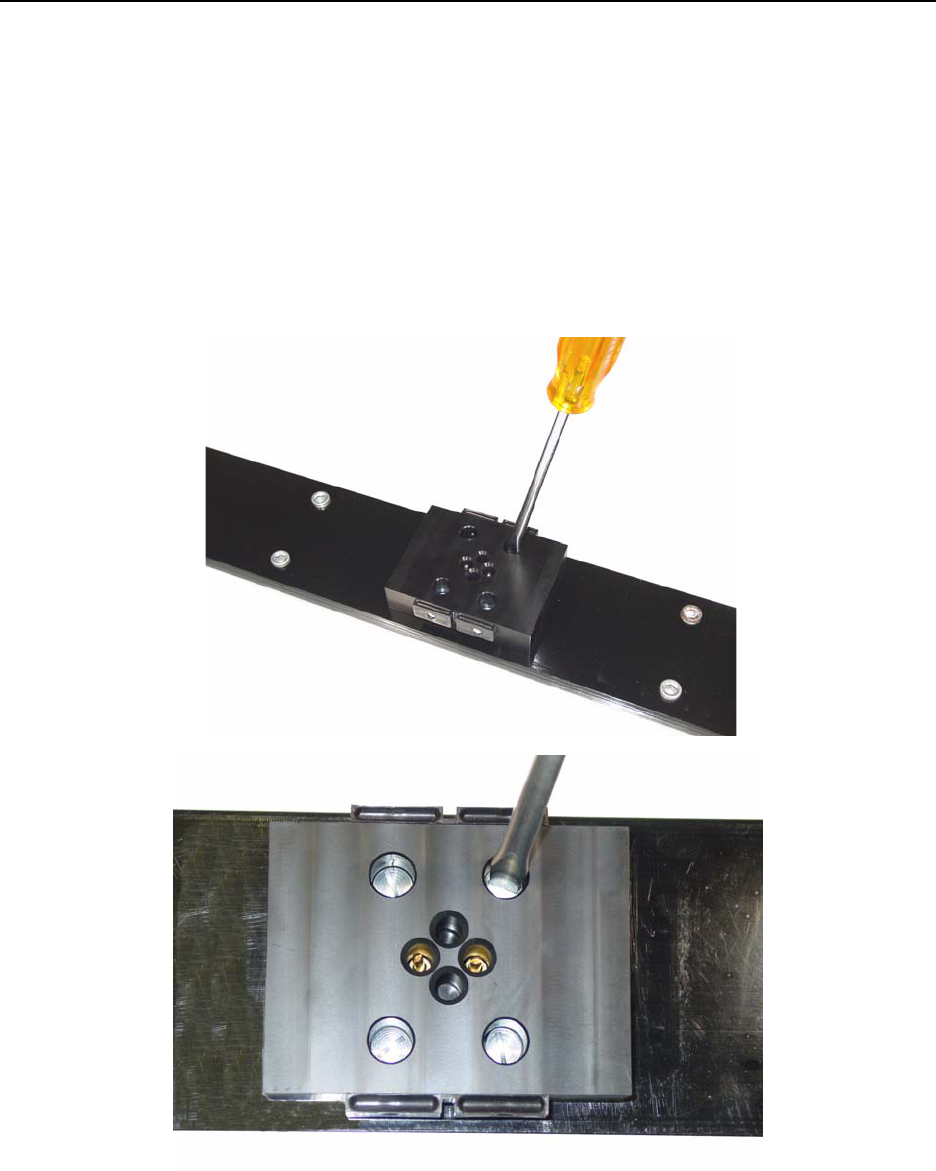
Figure 2-5: Attach the control module to the DVL using the 4 screws supplied (left) and a Phillips screwdriver (not supplied).
Tighten the 37 pin connectors into place (right) with a small slotted screwdriver (not supplied).
2.2.2 Attaching the Fibre Optic Converters for Low frequency Antennas
Low frequency, unshielded antennas in the frequency range from 12.5 to 200 MHz require fibre optic
cables to connect the transmitter and receiver to the control module. Higher frequency, shielded antennas
use electrical cables to connect the transmitter and receiver to the control module. The control module is
designed to accept both types of cables.
For low frequency antennas, the Electronic to Fibre Optic Converters must be attached to the control
module and secured using the latches (Figure 2-6).
Figure 2-6: Low frequency antennas (12.5 to 200 MHz) require the electrical to fibre optic converters to be attached to the con-
trol module and secured using the latches.
2-System Assembly and Startup pulseEKKO PRO
6
2.3 Low Frequency Transmitter, Receiver and Antenna Assembly
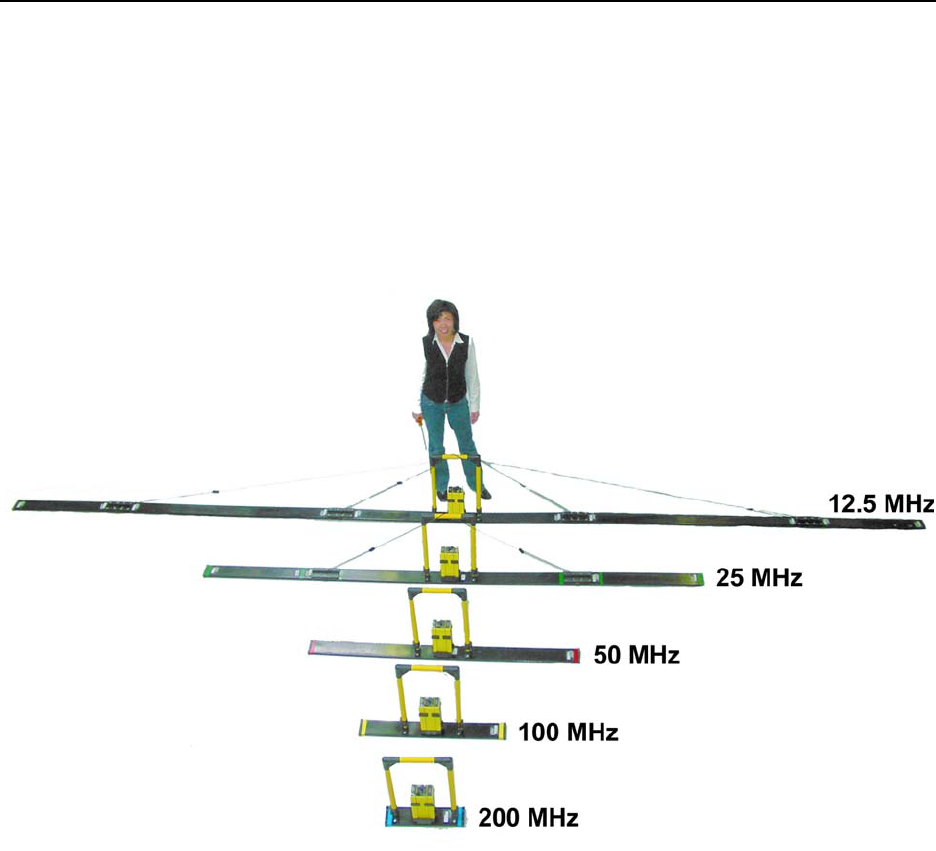
2.3.1 Low Frequency Antennas
The pulseEKKO PRO can be used with many different antennas. There are 5 low frequency, unshielded,
bistatic antennas available: 12.5, 25, 50, 100 and 200 MHz (Figure 2-7). The best frequency of antenna to
use on a survey depends on the survey objectives (Section 3.2.1: P34).
Figure 2-7: Low frequency, unshielded, bistatic antennas available for the pulseEKKO PRO. The antennas come in pairs; one
transmitting antenna and one receiving antenna. The shortest antennas, the 200 MHz, are 0.5 metres long while the longest, the
12.5 MHz are 8 metres long.
The procedure for attaching the transmitter and receiver to any low frequency antenna is outlined below.
pulseEKKO PRO 2-System Assembly and Startup
7
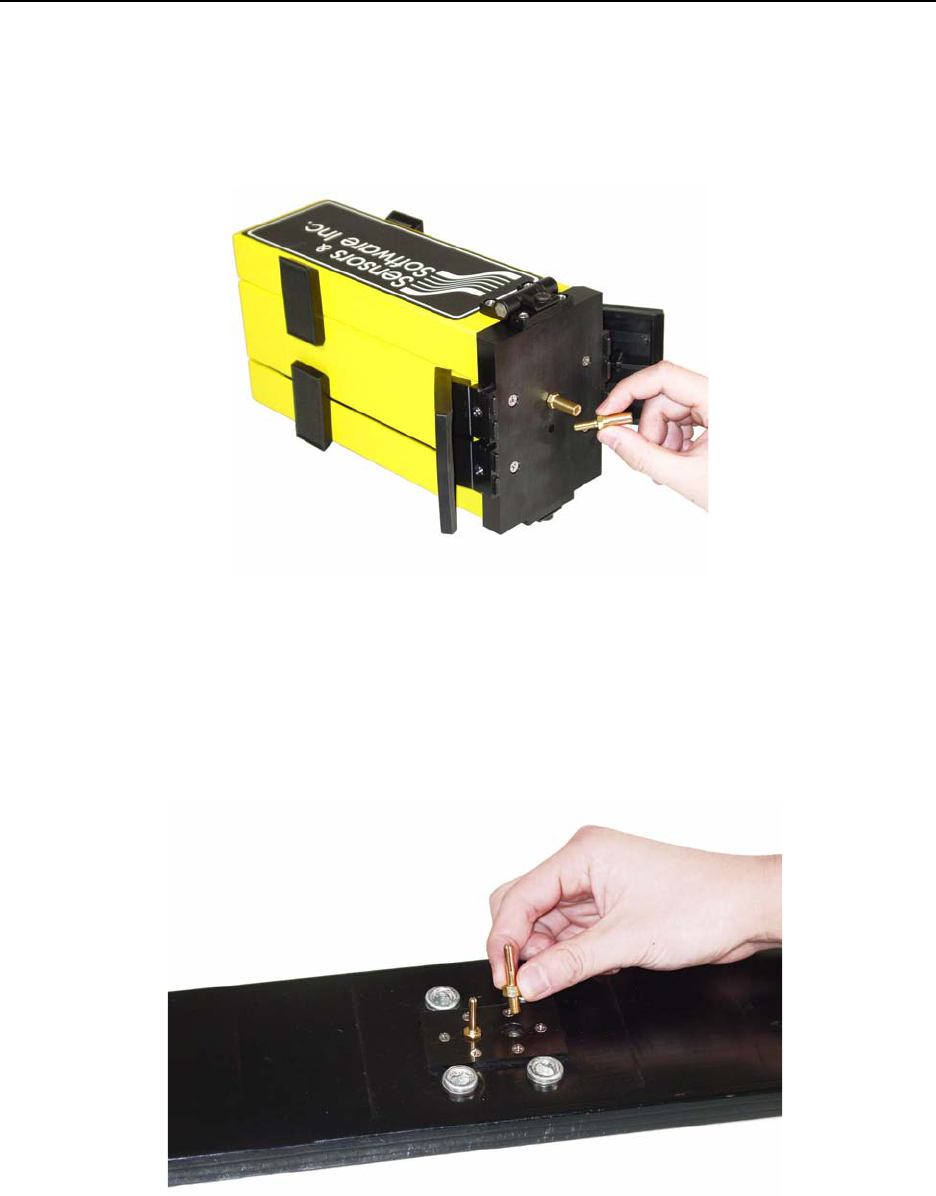
2.3.2 Attaching the Sockets to the Transmitter and Receiver
Insert and tighten the two female brass antenna sockets into the bottom of the transmitter and receiver
electronic boxes (Figure 2-8). Tighten the sockets finger-tight. DO NOT APPLY UNDUE FORCE!
Figure 2-8: Hand tighten the brass sockets into the bottom of the transmitter and receiver.
2.3.3 Inserting Pins into the Antennas
Insert the two male brass antenna pins into the two threaded holes in the center of the antennas. Tighten
the pins finger-tight (Figure 2-9). DO NOT APPLY UNDUE FORCE!
Figure 2-9: Insert the male brass antenna pins into the holes on the top of the antenna and finger-tighten.
2-System Assembly and Startup pulseEKKO PRO
8
2.3.4 Attaching the Mounting Blocks to the Antennas
Attach the antenna mounting blocks to the antennas by using the flathead screwdriver to tighten the 4
(four) quarter-turn fasteners, ensuring that the male brass antenna pins protrude up the center holes of the
mounting blocks (Figure 2-10). Quarter-turn fasteners work by aligning the screw in the socket and then
pressing downward and tightening a quarter of a turn. DO NOT APPLY UNDUE FORCE. It is usually best
to have all four of the quarter-turn fasteners properly aligned in their sockets before tightening them. To do
this, put slight pressure on the quarter-turn fastener and rotate it until you feel it drop into the socket. Then
align the other three quarter-turn fasteners in the same manner. Once complete, go back and tighten all of
them.
Figure 2-10: Attach the mounting blocks to the top of the antenna using the 4 quarter-turn fasteners. Before doing so, make sure
that the 2 male brass antenna pins have been screwed into the top of the antenna first.

pulseEKKO PRO 2-System Assembly and Startup
9
2.3.5 Latching the Transmitter and Receiver to the Mounting Blocks
Carefully place the transmitter and receiver electronic boxes down onto the mounting blocks such that both
brass pins fully connect (Figure 2-11 Left). Then use the 2 plastic draw latch connectors to hold the
electronics boxes onto the mounting block (Figure 2-11 Right).
Figure 2-11: Attaching the Transmitter and Receiver to the antennas.
2-System Assembly and Startup pulseEKKO PRO
10
2.3.6 Inserting Batteries into the Transmitter and Receiver
With the transmitter and receiver power switched OFF, unlatch the 2 battery covers on the sides of the
electronics and open (Figure 2-12). Place one 12-volt battery on each side on the electronics boxes
making sure the positive (+) terminal faces inward toward the electronics (Figure 2-13). The battery is
“keyed” with a notch in one side so it only fits properly in this orientation. Close and latch the battery
covers.
Figure 2-12: Opening the battery compartment doors.
Figure 2-13: Insert the 12 Volt battery into the battery compartment making sure that battery polarity is correct. The positive (+)
terminal faces inward. The battery is “keyed” so it will only seat properly in the compartment if it is in the correct orientation.

pulseEKKO PRO 2-System Assembly and Startup
11
2.3.7 Attaching Handles
2.3.7.1 Attaching the Adjustable Handles
Attach the adjustable handle to the antenna using the flat head screwdriver to tighten the 4 quarter-turn
fasteners as with the mounting block (Figure 2-14).
This handle can then be adjusted for height by loosening the 2 levers by hand, moving the handle to the
desired height and retightening the levers (Figure 2-15).
Figure 2-14: Attach the adjustable handles to the antennas by tightening the 4 quarter-turn fasteners. Adjust the height of the
handle by loosening the levers at the base of the handles (right) and pulling the handles up to the correct height.
Figure 2-15: Once the handles have been adjusted to the correct height, lock them into place by tightening the levers as shown on
the right.

2-System Assembly and Startup pulseEKKO PRO
12
2.3.8 Connecting the Fibre Optic Cables
The next step is to connect the transmitter and receiver to the control module.
a) The pulseEKKO PRO low frequency system uses 2 dual fibre optic cables like the one shown
in Figure 2-16. These cables should be tested periodically (Section 7.2: P99) and inspected for
kinks or signs of damage and repaired if necessary (Section 9.6: P113).
Figure 2-16: Dual fibre optic cable used with the transmitter and receiver. The black and grey strain reliefs on the end of the
cable (left) plug into the same coloured fibre optic receptacles on the top of the transmitter and receiver (see Figure 2-17). The
connection on the other end of the cable (right) connects to either fibre optic receptacle on the control module (see Figure 2-18).
b) To connect the pulseEKKO PRO in the standard configuration shown in Figure 2-1, plug the
dual fibre optics cable into the transmitter making sure the colour on the strain relief jacket
matches the colour of the receptacle door, black to black and grey to grey (Figure 2-17).
Confirm that the fibre optic connection is seated properly by pushing down gently until the
connection “clicks” into place.
c) The pulseEKKO PRO system can be used with a pulseEKKO 100 transmitter (Section 3.2.8:
P41). If the transmitter is a pulseEKKO 100 transmitter, the fibre optic Output connection on
the transmitter should NOT be connected.
Figure 2-17: Attaching the fibre optic cables to the transmitter and receiver. Make sure to match the connector colour to the door
colour (grey to grey and black to black). Push the fibre optic cable down until you can feel it “click” into place.
pulseEKKO PRO 2-System Assembly and Startup
13
d) After attaching the dual fibre optic cables to the transmitter and receiver, the other end of the
fibre optic cables are attached to the fibre optic converters on the control module (Figure 2-
18). The fibre optic cable from the transmitter connects to the fibre optic converter labelled 4.
The fibre optic cable from the receiver connects to the fibre optic converter labelled 5. Note
that the fibre optic connection at the control module is keyed and will only attach properly in
one orientation.
Figure 2-18: The dual fibre optic cable from the transmitter and receiver attaches to the electrical to fibre optic converters on the
control module. The fibre optic cable from the transmitter connects to the control module receptacle labelled 4 while the fibre optic
cable from the receiver connects to the control module receptacle labelled 5. This connection is keyed so it will only attach when
the fibre optic cable is in the orientation shown.
2-System Assembly and Startup pulseEKKO PRO
14
2.4 High Frequency Transducer Assembly
2.4.1 High Frequency Transducers
The pulseEKKO PRO can be used with many different antennas.
Low frequency antennas in the range from 12.5 to 200 MHz were shown earlier (see Figure 2-7).
There are also 3 high frequency, shielded, bistatic antennas available: 250, 500 and 1000 MHz (Figure 2-
19). Each antenna box is really a “transducer” because it consists of both an antenna and the electronics.
The transmitting transducer is indicated with a “T” on the label, e.g. T500, while the receiving transducer is
indicated with an “R” on the label, e.g. R500.
The best frequency of antenna to use on a survey depends on the survey objectives (see Antenna
Frequency, Section 3.2.1: P34)
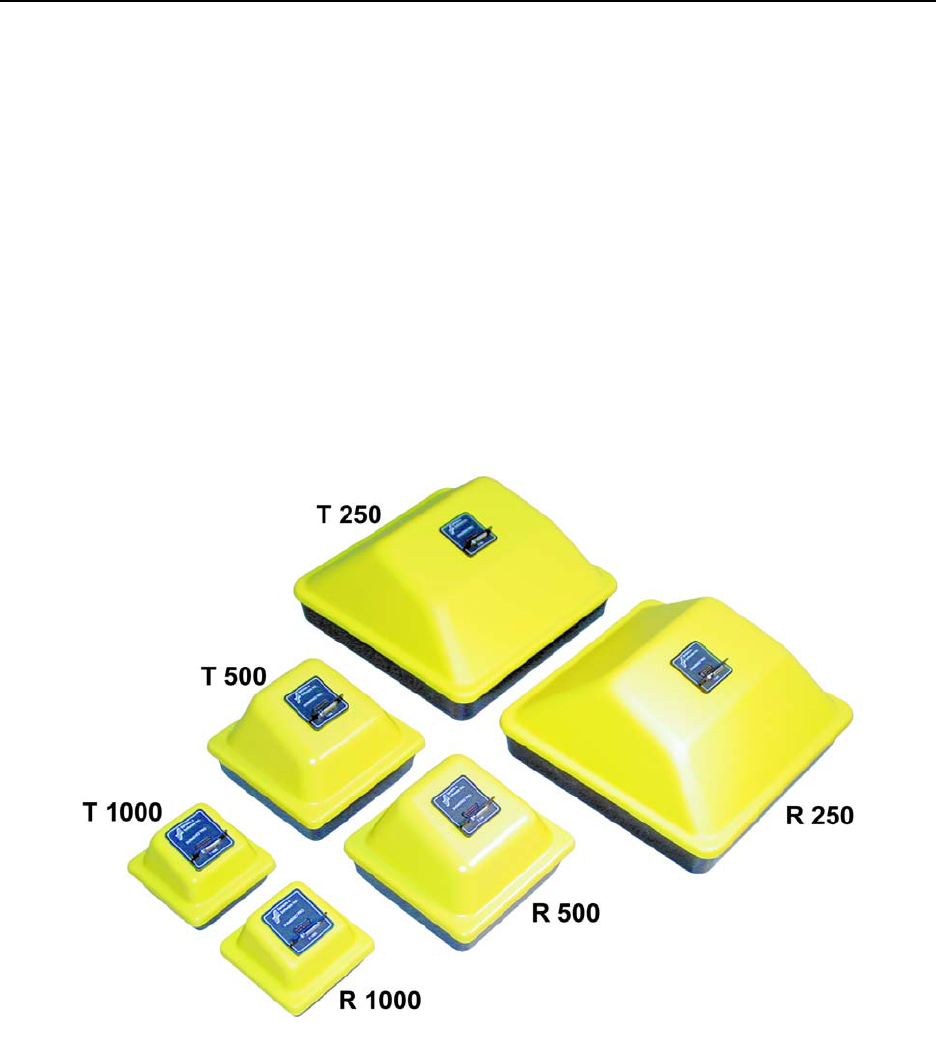
Figure 2-19: High frequency, shielded, bistatic antennas available for the pulseEKKO PRO. The antennas come in pairs, one
transmitting transducer and one receiving transducer. These are indicated by an “T” and “R” on the labels. The 1000 MHz trans-
ducers are 14.5 cm (6 in) across, the 500 MHz transducers are 22.5 cm (9 in) across and the 250 MHz transducers are 38 cm (15
in) across and all are square.
The procedure for attaching the transducers to the skid plate and attaching to the adjustable tow handle is
described below.
pulseEKKO PRO 2-System Assembly and Startup
15
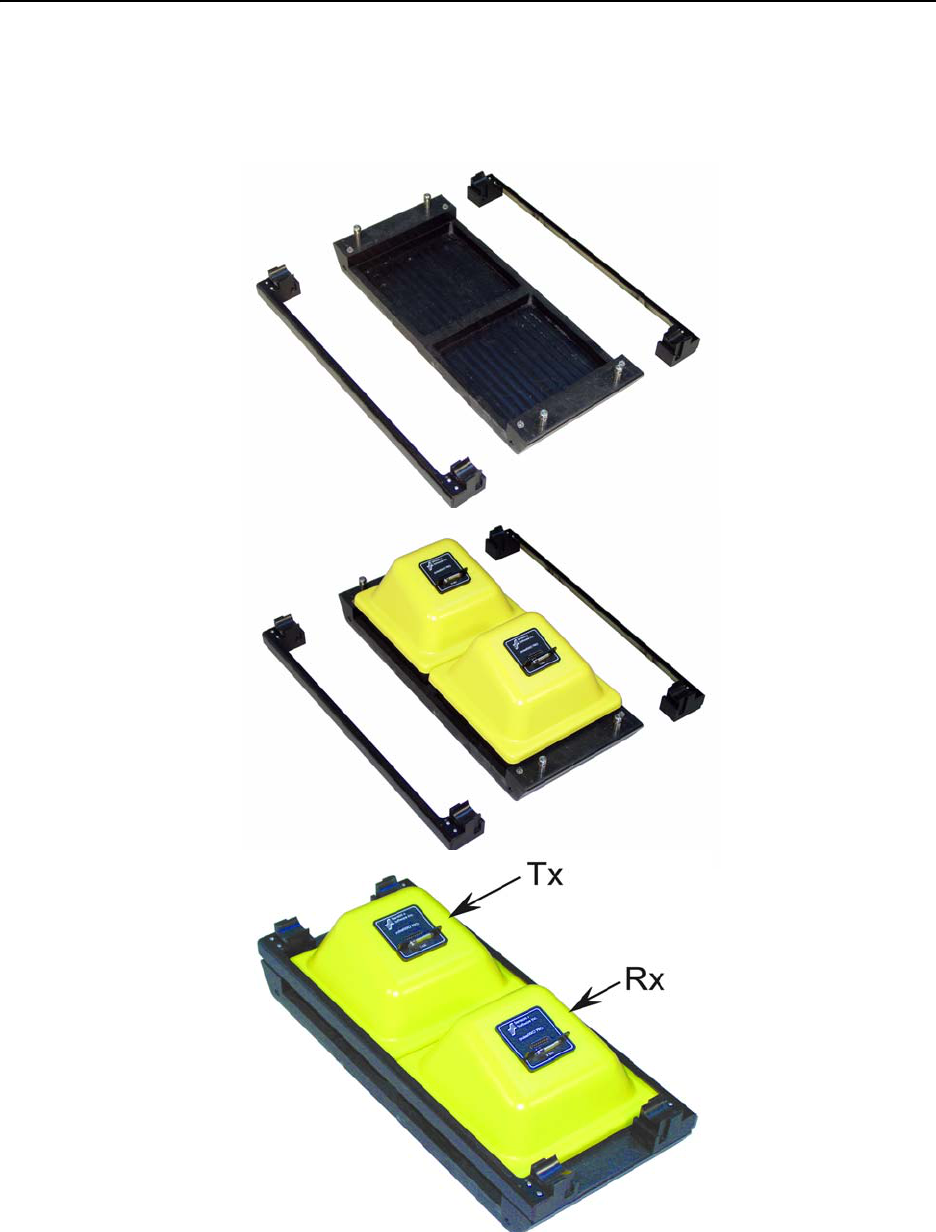
2.4.2 Mounting Transducers to the Skid Plate
Skid plates are sized to fit a pair of transducers positioned side by side.
Figure 2-20: Mounting the transducers onto the skid plate. The skid plate assembly consists of the bottom piece and two side
flanges (top). The transducers are placed onto the bottom skid plate with the labels facing the same direction (middle) with the
receiving transducer (R500) in front of the transmitting transducer (T500). The transducers are held onto the skid plate by placing
the two flanges over the mounting posts. The above images show the assembly of the 500 MHz transducers onto the 500 MHz skid
plate. The procedure for the 250 and 1000 MHz transducers onto their skid plates is exactly the same.

2-System Assembly and Startup pulseEKKO PRO
16
2.4.3 High Frequency Hand-Towed System
One method of deploying the high frequency antennas is the Hand-towed configuration that includes the
adjustable tow handle and an odometer. This section details the assembly of this configuration.
2.4.3.1 Attaching the Adjustable Tow Handle
Figure 2-21: To attach the adjustable tow handle to the skid plate assembly, place the T end of the handle into the trough on the
end of the skid plate assembly where the receiving transducer label is facing. The T end of the handle is attached to the skid plate
assembly by placing the U-bracket over the top and into the vertical slots. The handle is secured into place by inserting the metal
pins into the holes at the bottom of the U bracket.

pulseEKKO PRO 2-System Assembly and Startup
17
2.4.3.2 Attaching the Big Wheel Odometer
Figure 2-22: The big wheel odometer. Ensure that the small yellow odometer is tightly pressed against the rim of the wheel so that
it spins when the big wheel is rotated.
Figure 2-23: The big wheel odometer attaches to the skid plate assembly exactly the same way as the adjustable tow handle is
attached. Place the T end of the odometer into the trough on the end of the skid plate assembly. The labels on the transmitting
transducer should be facing away from this end. The T end of the odometer is attached to the skid plate assembly by placing the U-
bracket over the top and into the vertical slots. The odometer is secured into place by inserting the metal pins into the holes at the
bottom of the U bracket.

2-System Assembly and Startup pulseEKKO PRO
18
2.4.3.3 Connecting the Odometer Cable to the Control Module
The Big Wheel Odometer comes with a long cable that extension to allow it to connect to receptacle 1 on
the control module (Figure 2-24). The Big Wheel Odometer and odometer cable can be seen in the
complete system configuration (See Figure 2-2 on page 3).
Figure 2-24: The Big Wheel Odometer uses a long extension cable (not shown) to attach to receptacle 1 on the control module.
To acquire data with an odometer, the Trigger Method must be set to Odometer (Section 3.3.1.2: P43).
pulseEKKO PRO 2-System Assembly and Startup
19
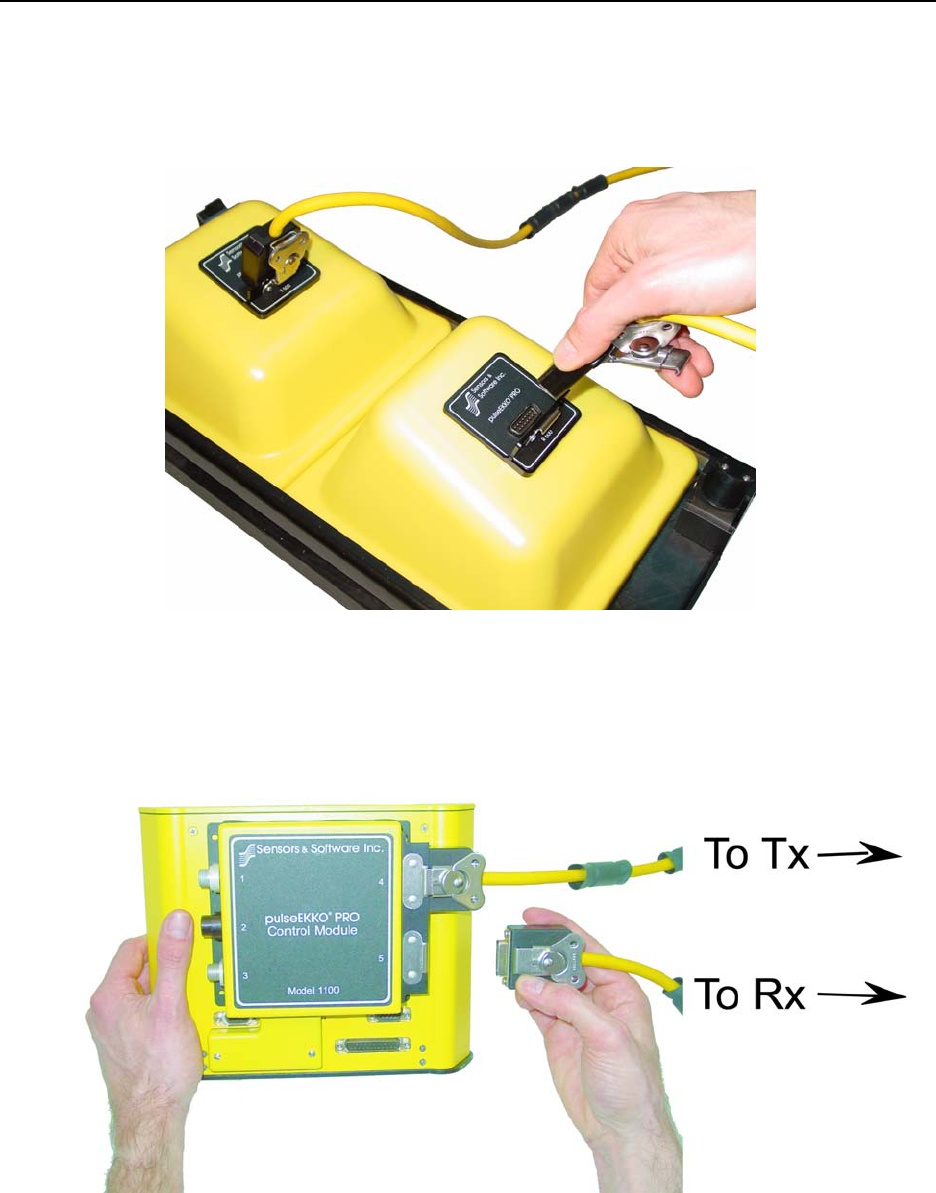
2.4.3.4 Connecting the Transducer Cables
The next step is to connect the transducers to the control module.
Figure 2-25: Connecting the transducer cables to the transducers. The connections are secured with latches.
Figure 2-26: Connecting the transducer cables to the Control Module. The transducer cable from the transmitting transducer
connects to the control module receptacle labelled 4 while the transducer cable from the receiving transducer connects to the con-
trol module receptacle labelled 5. The cable attachments are secured with latches.
2-System Assembly and Startup pulseEKKO PRO
20
2.5 Adding Accessories
There are several accessories that can be connected to the pulseEKKO PRO system. These include two
types of beeper/triggers, odometers, GPS and the DVL Carrier. These are described below.
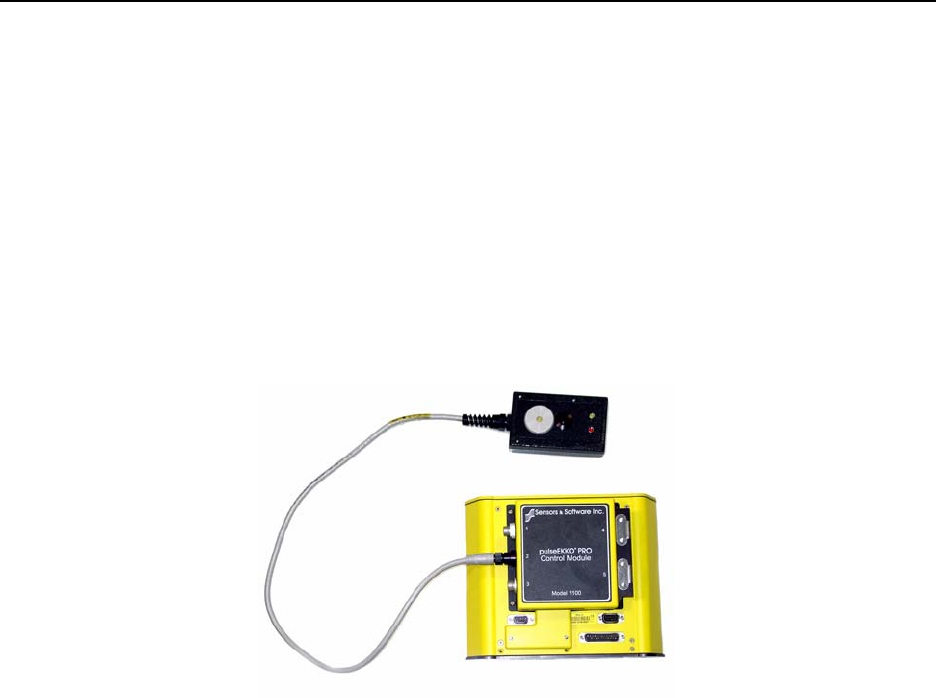
2.5.1 Electrical Beeper/Trigger Unit
The Electrical Beeper/Trigger comes as a standard accessory with the pulseEKKO PRO system.
To connect the electrical beeper/trigger unit, attach it to receptacle 2 on the control module (Figure 2-27).
This connector will only attach to the number 2 receptacle on the control so there is no chance of error.
Figure 2-27: Attach the electrical Remote Beeper/ Trigger unit to the control module receptacle labelled 2.
When the radar system is run with the Trigger Method set to CANBUS (Section 3.3.1.1: P43), data
acquisition can be controlled using the button on the electrical beeper/trigger unit.
As well, during data acquisition, the beeper will emit a sound as data are being collected, as long as the
Beeper Activated option (Section 3.3.2: P43) is set to CANBUS.
Another method of triggering the system is to set the Trigger Method to DVL button (Section 3.3.1.1: P43)
and the Beeper Activated option to CANBUS (Section 3.3.2: P43). Pressing the B button the DVL will
trigger the system to acquire a data trace and an audible beep from the electrical beeper/trigger unit will
indicate when data are being collected.
If the DVL carrier is included as part of the system (see Section 2.5.3 DVL Carrier on page 23), the user
may find it convenient to attach the electrical Beeper/Trigger to the frame of the DVL carrier.
2.5.2 Fibre Optic Beeper/Trigger Unit
The Fibre Optic Beeper/Trigger unit is an optional component for triggering the low frequency system to
collect data. It serves the same function as the standard Electrical Beeper and Trigger (Figure 2-27) unit
but can attach to the handle of the transmitting antenna so that the antenna operator can control the data
collection.
To attach the Fibre Optic unit to the pulseEKKO PRO handles, insert the end of the hand screw through the
hole in the adjustable handle attached to the transmitting antenna and tighten it into the unit (Figure 2-28).

pulseEKKO PRO 2-System Assembly and Startup
21
Figure 2-28: Attaching the Fibre Optic Remote Beeper/Trigger unit to the transmitter handle.
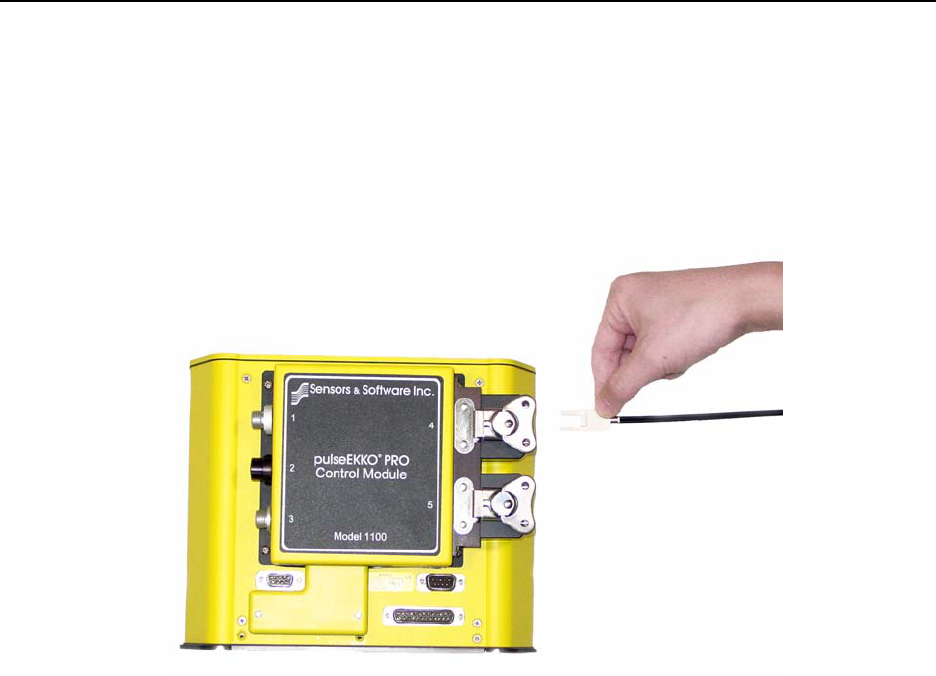
To connect the fibre optic remote beeper/trigger unit you should have the dual fibre optic cable for the
control module to transmitter connection plus a short single fibre optic cable (Figure 2-29). One of the two
cables on the dual fibre optic cable should already be connected to the Input (black) receptacle on the
transmitter.
Figure 2-29 illustrates the proper connection of the Fibre Optic Remote Beeper/Trigger unit. Ensure that:
1) The second fibre optic cable of the dual cable connects to the Output (grey) fibre optic
connector on the remote trigger and beeper unit. This connection enables the trigger part of the
remote beeper/trigger unit to work.
2) The short single fibre optic cable connects from the Input (black) fibre optic connector on the
remote trigger and beeper unit to the Output (grey) receptacle on the transmitter. This
connection enables the beeper part of the remote beeper/trigger unit to work.
Note that if you have a pulseEKKO 100 transmitter (Section 3.2.8: P41) you cannot use the
pulseEKKO PRO fibre optic beeper/trigger.
2-System Assembly and Startup pulseEKKO PRO
22
Figure 2-29: Fibre optic cabling details for the Fibre Optic Remote Beeper/Trigger unit.
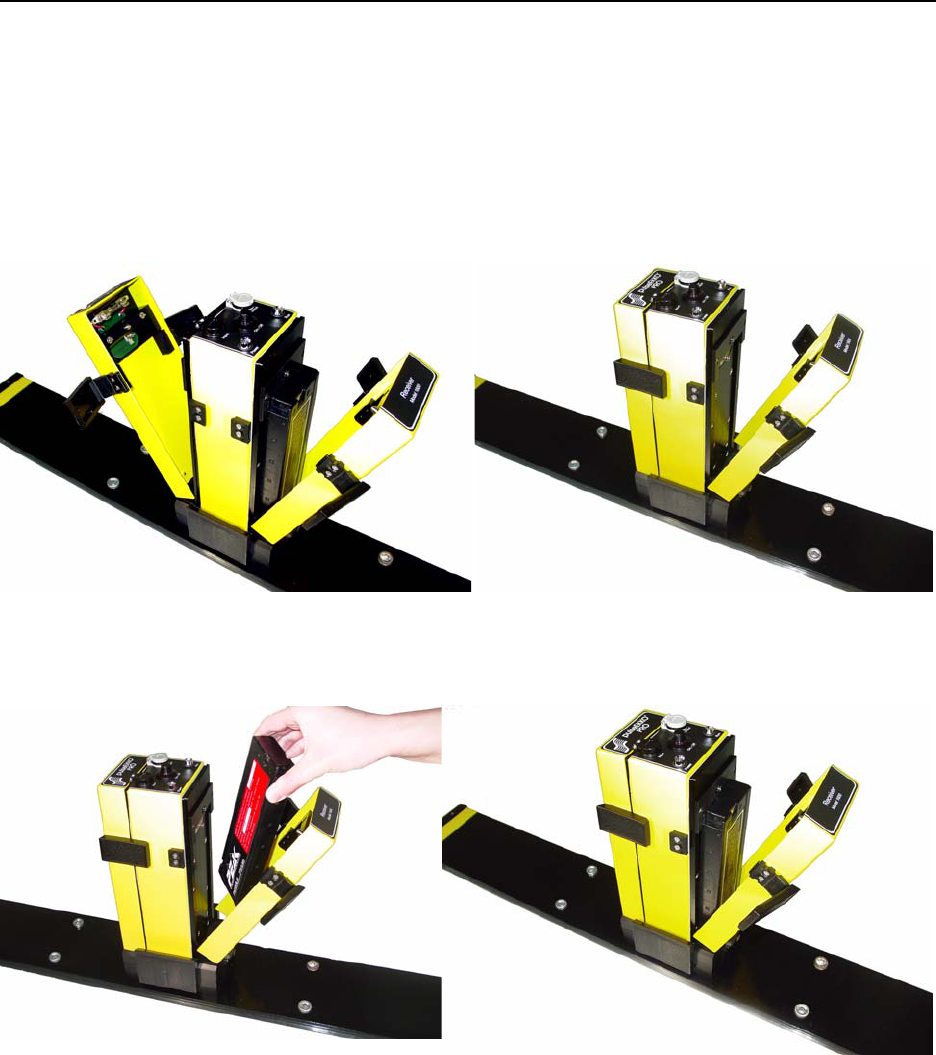
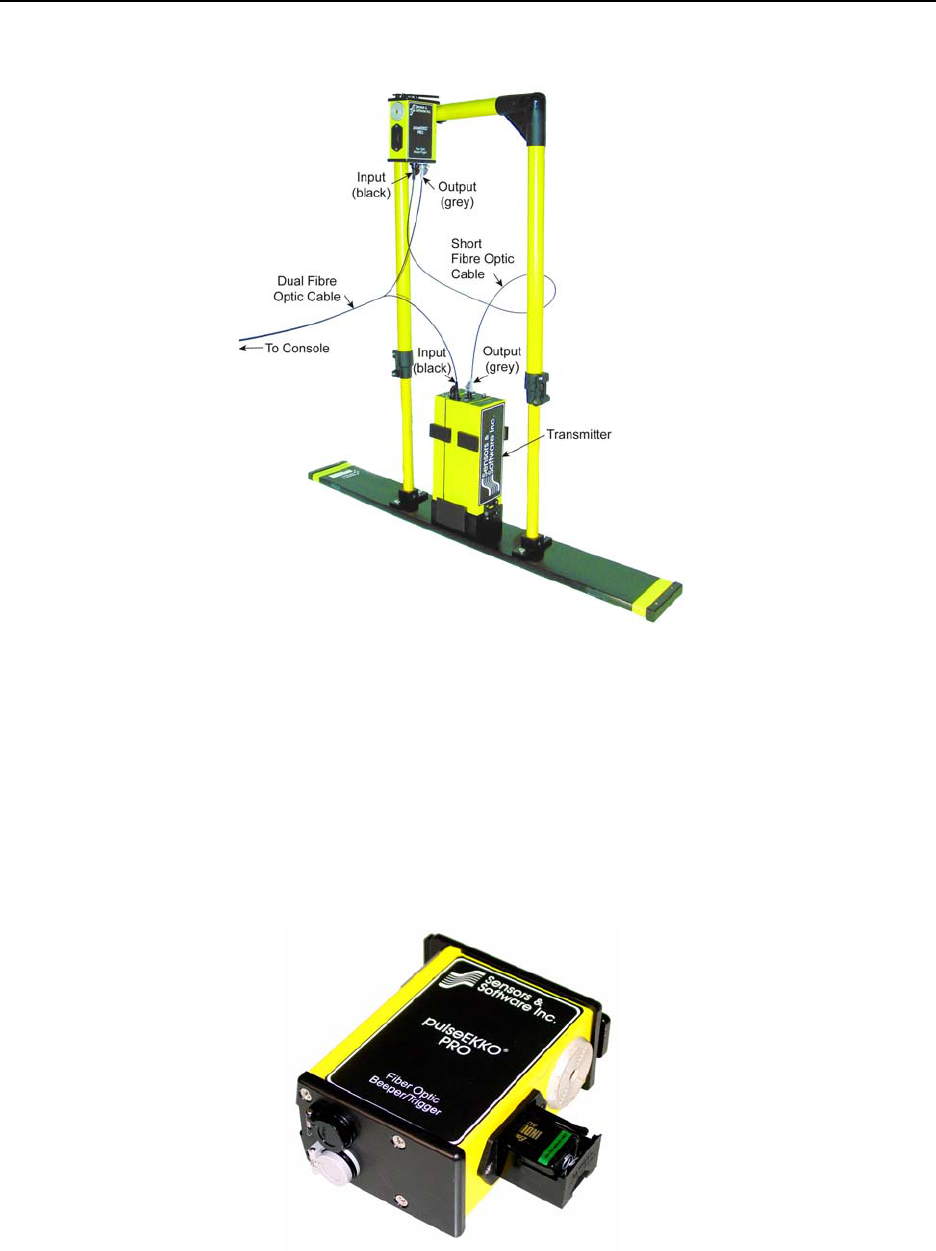
The Fibre Optic Remote Beeper/Trigger unit is powered by one 9 Volt battery that slides into the battery
compartment (Figure 2-30). Please note the proper polarity of the battery. An alkaline 9V battery will
normally power the unit for 3-5 hours of heavy use so it is a good idea to have spare 9 Volt batteries
available. Lithium 9V batteries are also available that will power the unit for approximately 20 hours. When
the voltage from the battery is gets too low, the red light on the top of the Fibre Optic Remote (not visible in
the figures) will start to flash. This indicates that the battery should be replaced within approximately 30
minutes.
Figure 2-30: The Fibre Optic Remote Beeper/Trigger unit operates with a 9 Volt battery that can be accessed by opening the bat-
tery compartment on the side of the unit.

pulseEKKO PRO 2-System Assembly and Startup
23
To turn the Fibre Optic Remote Beeper/Trigger unit on, depress the thumb lever on the top of the unit and
hold it down for 3 seconds. The red light will come on and start to flash. After 3 seconds the unit will beep 3
times and the red light will stop flashing and stay on. This indicates that the unit is ready for data collection.
To turn the Fibre Optic Remote Beeper and Trigger unit off, depress the thumb lever and hold it down for 3
seconds. After 3 seconds the unit will beep once and the red light will go out.
The fibre optic beeper/trigger will automatically turn off after 7 minutes of non-use.
When the radar system is run with the Trigger Method set to Fibre Optic (Section 3.3.1.1: P43), data
acquisition can be controlled using the thumb lever on the remote beeper/trigger unit.
During data acquisition, the beeper will emit a beep as data are being collected, as long as the Beeper
Activated (Section 3.3.2: P43) is set to Fibre Optic.
2.5.3 DVL Carrier
For convenience during data acquisition, the DVL and control module can be carried using the optional
DVL Carrier shown in Figure 2-31.
Figure 2-31: The DVL and control module can be attached to the optional DVL Carrier for hands-free operation. The DVL can
be adjusted to optimize the view angle.
2.5.4 Odometers
The pulseEKKO PRO system can accept an odometer input to trigger the system to acquire data at equal
distance intervals (Step Sizes). An odometer eliminates the necessity of using a tape measure or survey
makers.

2-System Assembly and Startup pulseEKKO PRO
24
The pulseEKKO PRO is designed to work with a number of different odometers. This includes the Big
Wheel Odometer (See Figure 2-23 on page 17), the SmartCart odometer (Figure 2-32 below) as well as
vehicle odometers available from Sensors & Software.
The odometer has an electrical connection to receptacle 1 on the control module (Figure 2-32).
Figure 2-32: The pulseEKKO PRO accepts input from various odometers including the wheel odometer shown in the figure,
which is typically used with the SmartCart. Odometers attach to receptacle 1 on the control module.
When the radar system is run with the Trigger Method set to Odometer (Section 3.3.1.2: P43), data
acquisition is controlled by the odometer.
2.5.5 GPS
The DVL has a serial port on the back for attaching a GPS receiver. This port will accommodate any GPS
receiver that has a standard NMEA string output through the serial port.
The DVL settings will need to be changed to accommodate the input of GPS data (Section 3.3.4: P44).
Figure 2-33: Attaching a GPS to the serial port on the back of the DVL.
pulseEKKO PRO 2-System Assembly and Startup
25
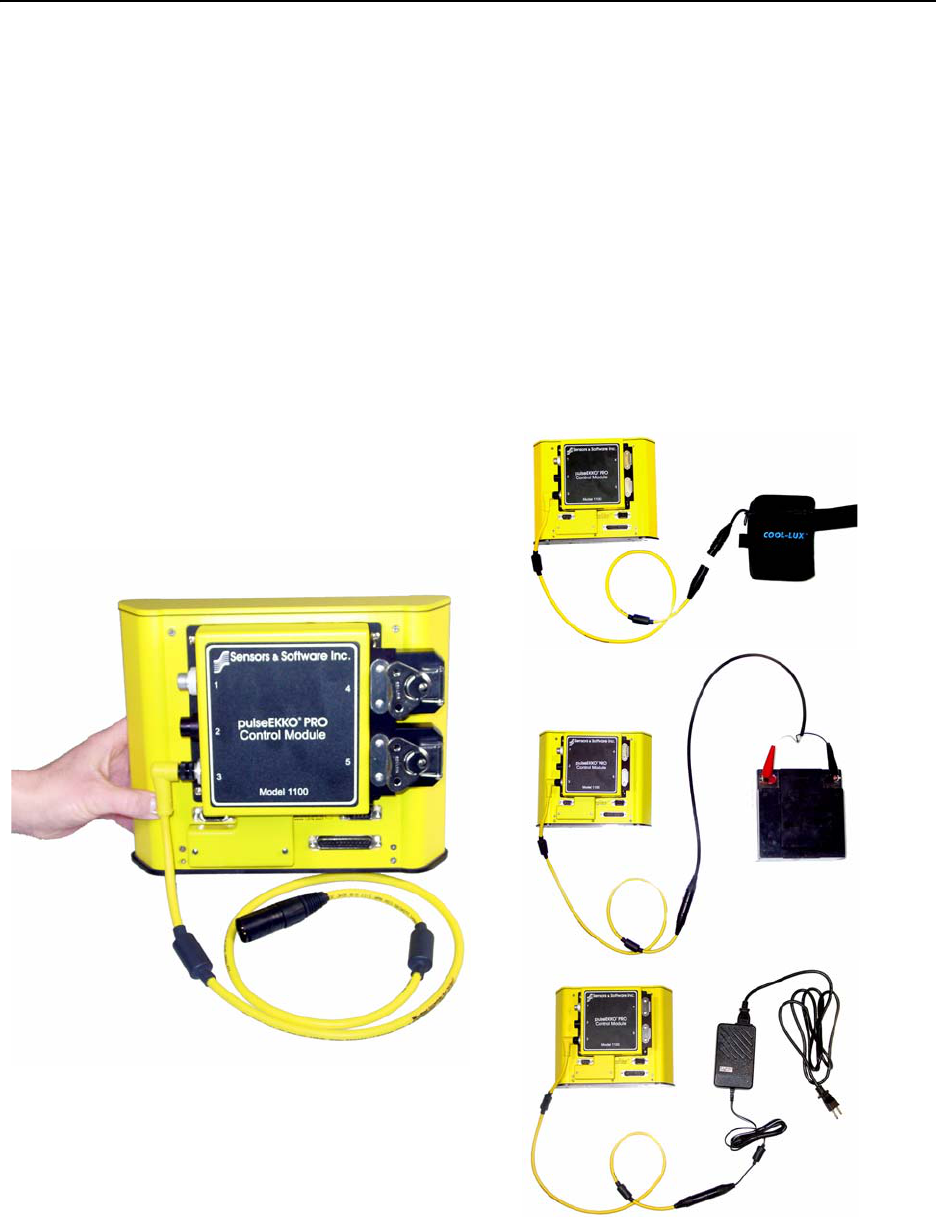
2.6 Starting the pulseEKKO PRO System
2.6.1 Powering the DVL and Control Module
Connect the Control Module to Power Supply Cable to the receptacle labelled 3 on the control module
(Figure 2-34) This cable will only fit on the number 3 receptacle. Note that the other end of this cable has
an XLR connector. Power can be supplied to the DVL by using a battery (normally supplied by Sensors &
Software) with the mating XLR connector.
If powering the DVL with a user-supplied standard 12 Volt battery, connect the optional Power Cable
Extension with Alligator Clips to the end of the Control Module to Power Supply Cable (Figure 2-34). The
alligator clips can then be connected to a 12 Volt battery. Make sure that the black clip is attached to the
negative (-) and the red clip is attached to the positive (+) battery terminals. If the alligator clips are
connected to the wrong terminals of the battery, the DVL will not be powered. When the DVL is receiving
power the upper red light on the front of the DVL will be illuminated.
Figure 2-34: Attach the Control Module to Power Supply Cable to receptacle 3 on the control module (left). The DVL and control
module can then be powered using the battery with the XLR connector supplied by Sensors & Software (top right). This battery
may be a belt battery (shown) or a larger SmartCart battery. Using the optional alligator clip cable, the DVL and control module
can also be powered using any standard 12 Volt battery (middle right). The DVL and control module can also be powered using the
supplied AC mains (bottom right). This last option is used when powering the DVL in the office to download data.

2-System Assembly and Startup pulseEKKO PRO
26
2.6.2 Powering the Low Frequency Transmitter and Receiver
Turn the transmitter and receiver ON by pressing the button on the top of each unit. The red Power LED on
the top of the unit will flash 5 times and then stay on to indicate the unit is ready for operation. If not, check
that the batteries inside the Transmitter and Receiver are fully charged and have been inserted the right
way.
When not collecting data, the transmitter and receiver should be turned OFF to increase the life of the
batteries.
2.6.3 Digital Video Logger
Once all the cable connections are made between the control module, transmitter, receiver, the Digital
Video Logger (DVL) and the battery, the upper red LED light on the DVL panel should be lit. If the battery
voltage is too low, the LED light will flash for about 30 seconds and go out. If the light flashes or does not
appear, check the connections and make sure the battery is fully charged.
The low voltage indicator can be helpful for identifying when the battery needs to be recharged. If the
battery voltage drops too low the DVL will cease to operate.
The front of the DVL is shown in Figure 2-35. To start the system, press any button on the front panel. The
DVL will begin to beep indicating it is booting up. The lower red LED on the front panel should illuminate.
Figure 2-35: Digital Video Logger (DVL) face
The water-resistant membrane keypad has a number of buttons that can be pressed to perform various
tasks.
Menu Buttons: The buttons labelled 1 to 8 correspond to menu choices that appear listed on the screen or
along the bottom of the screen when the Digital Video Logger is turned on.
In addition, there are two general-purpose buttons labelled A and B. All buttons are DVL software
application dependent and roles change. The operation will be self-explanatory from the display screen.
Screen: The DVL screen is a grey scale LCD selected for its wide temperature range and visibility in
sunlight. Visibility can be a major problem with viewing GPR data displays outdoors and considerable effort
has been expended on getting a readily visible outdoor display.
pulseEKKO PRO 2-System Assembly and Startup
27
Brightness: The yellow Brightness control arrows are used to increase and decrease the screen
brightness. Increasing the Brightness setting may improve the visibility of the screen in dark conditions.
Contrast: The yellow Contrast control arrows are used to increase and decrease the screen contrast.
Increasing the Contrast setting may improve the visibility of the screen on a bright, sunny day.
Temperature sensors within the DVL automatically compensate the screen setting so that manual
adjustments of Brightness and Contrast should seldom be needed after initial setup.
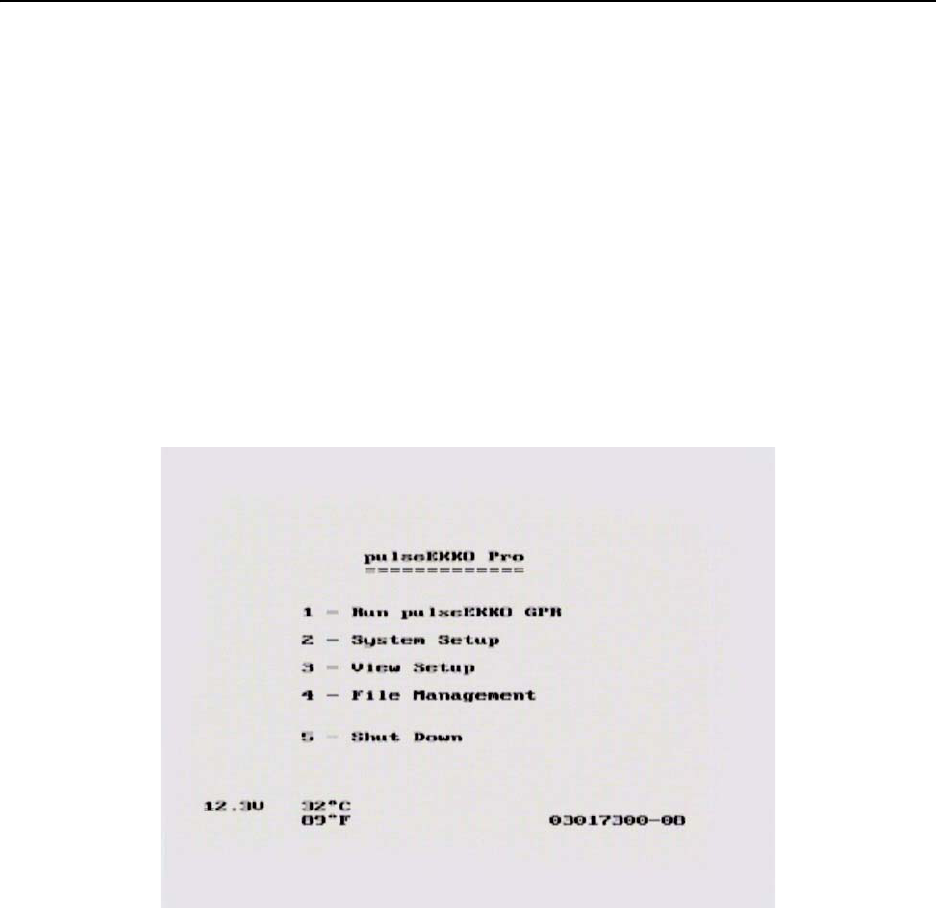
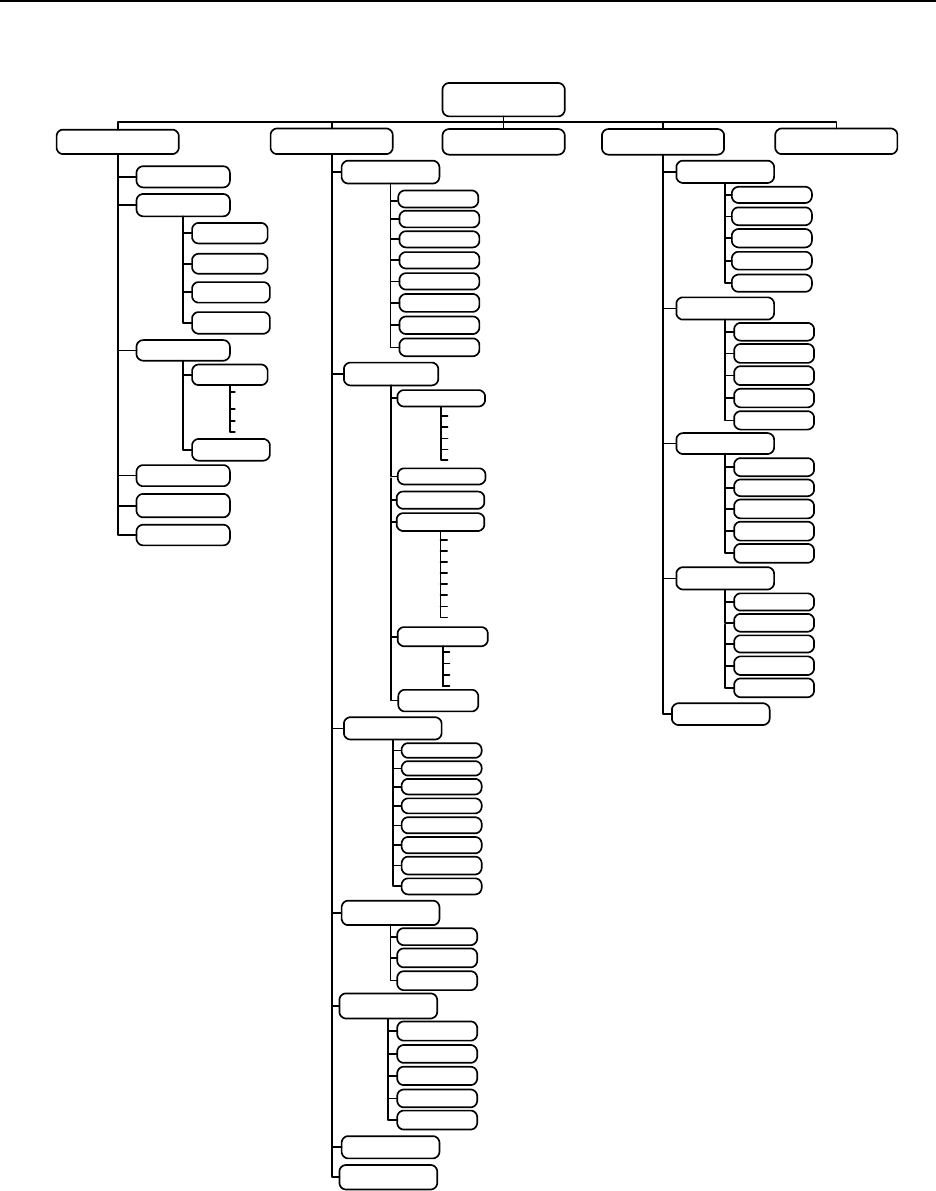
2.6.4 Main Menu
Once all components are properly connected, the radar is ready to operate under DVL control. Turn the
DVL on by pressing any button on the front. After the DVL boots up the main menu is displayed (Figure 2-
36). There is also a flow chart of the complete menu system on the DVL shown in Figure 2-37.
Figure 2-36: pulseEKKO PRO main menu screen on the DVL.
To begin acquiring data, press button number 1 for Run pulseEKKO GPR. Details about data collection
are given in Section 4 on page 65.
To setup data collection parameters, press button number 2 for System Setup. Details about setting data
collection parameters are given in Section 3 System Setup Parameters on page 31.
The current system setup parameters can be viewed by pressing button number 3 for View Setup.
Data files collected can be transferred to an external PC and deleted from the DVL using the File
Management menu item. File Management can be selected by pressing button 4 from the main menu.
Details about using File Management are given in Section 8 on page 104.

2-System Assembly and Startup pulseEKKO PRO
28
The DVL can be shut down by pressing button number 5. Exit also serves an important function. Before
exiting, the program saves all the current parameters. This process enables the system to start up with the
same settings as before it was last powered off. Therefore, the user should NOT shut off the DVL by only
removing the power.
The two numbers displayed in the lower left corner of the main menu are the internal temperature of the
DVL in Celsius and Fahrenheit and the voltage of the power supply running the DVL. When the DVL
voltage drops to 10.2 Volts or less, the DVL will shut down. If this occurs in the middle of a data file, that file
will be lost.
pulseEKKO PRO 2-System Assembly and Startup
29
Figure 2-37: Flow chart of the complete pulseEKKO PRO DVL menu system.
1 Run pulseEKKO GPR 2 System Setup 5 Shut Down
A-B Select Data
Folder Number
1 Collect Line Data
2 Setup Menu
(shortcut)
1 Run
A-B Select Line
Number
8 Return
6 View Complete
Setup
8 Return
5 View Disk Space
MAIN MENU
2 Collect Grid Data
A-B X or Y Grid
(if GPR Grid Type is set to XY)
8 Return
A-B Select X or Y Line
Number
1 Run
2 Setup Menu (shortcut)
8 Setup Menu
3 Collect Data
(No Save)
4 Scope Mode
8 Return
Odometer Setup Menu
1 Odometer Calibration
3 Odometer Direction
2 Acquisition Control
Free Run Trace Delay
Fibre Optic Testing
Trigger Method
Beeper Activated
Test GPS with Plotting
2 Set Calibration Manually
8 Return
GPS Parameter
Menu
GPS Recording Mode
GPS Transfer Baud Rate
GPS Transfer Parity
GPS Transfer Stop Bits
GPS Transfer Data Bits
GPS Last NMEA String
Test GPS with Listing
1 GPR Parameters
Sampling Interval
Time Window
Antenna Frequency
Antenna Separation
Antenna Step Size
Radar Velocity
System Stacking
Pulser Setting
3 Survey Parameters
Positional Units
Antenna Step Size
Start Position
Data Directory No.
Survey Type
GPR Grid Type
X Line Spacing
Y Line Spacing
4 Display Parameters
Gain Applied
Gain Type Applied
Trace Plotting Type
5 DVL Setup Menu
3 Set DVl into
Upgrade Mode
2 Set DVL Transfer
Mode
1 Set DVL Time &
Date
4 Select Display Info
Mode
8 Return
3 View Setup 4 File Management
4 Delete File
A Prev Directory
2 Delete Line
1 Next Line
B Next Directory
8 Exit
Free Run
CANBUS
DVL Key (B)
Odometer
Fibre Optic
2 Transfer File
A Prev Directory
2 Transfer Line
1 Next Line
B Next Directory
8 Exit
1 Transfer Directory
1 Tag
B Down
A Up
2 Send
8 Exit
3 Delete Directory
1 Tag
B Down
A Up
2 Delete
8 Exit

2-System Assembly and Startup pulseEKKO PRO
30
2.6.5 Using the Software Menus
Menu items can be selected in one of two ways:
1) If the menu item has a number listed beside it, that item can be selected by pressing the
corresponding button number on the DVL. For example, in the above menu (See Figure 2-36
on page 27), pressing the number 1 will select the option for running a pulseEKKO GPR
system.
2) On a menu with items that are not numbered, one of the menu items will be flashing to indicate
that it is currently selected. Pressing the button immediately below the word “Up” or “Down” to
choose another option. Once the menu item is flashing, it can be changed to preset values by
pressing the A or B buttons. Pressing the button under Return will take the user up to the
previous menu level.
The above explanation may sound complicated but having used it a few times, the whole procedure will
become intuitive after a few usages.
pulseEKKO PRO 3-System Setup Parameters
31
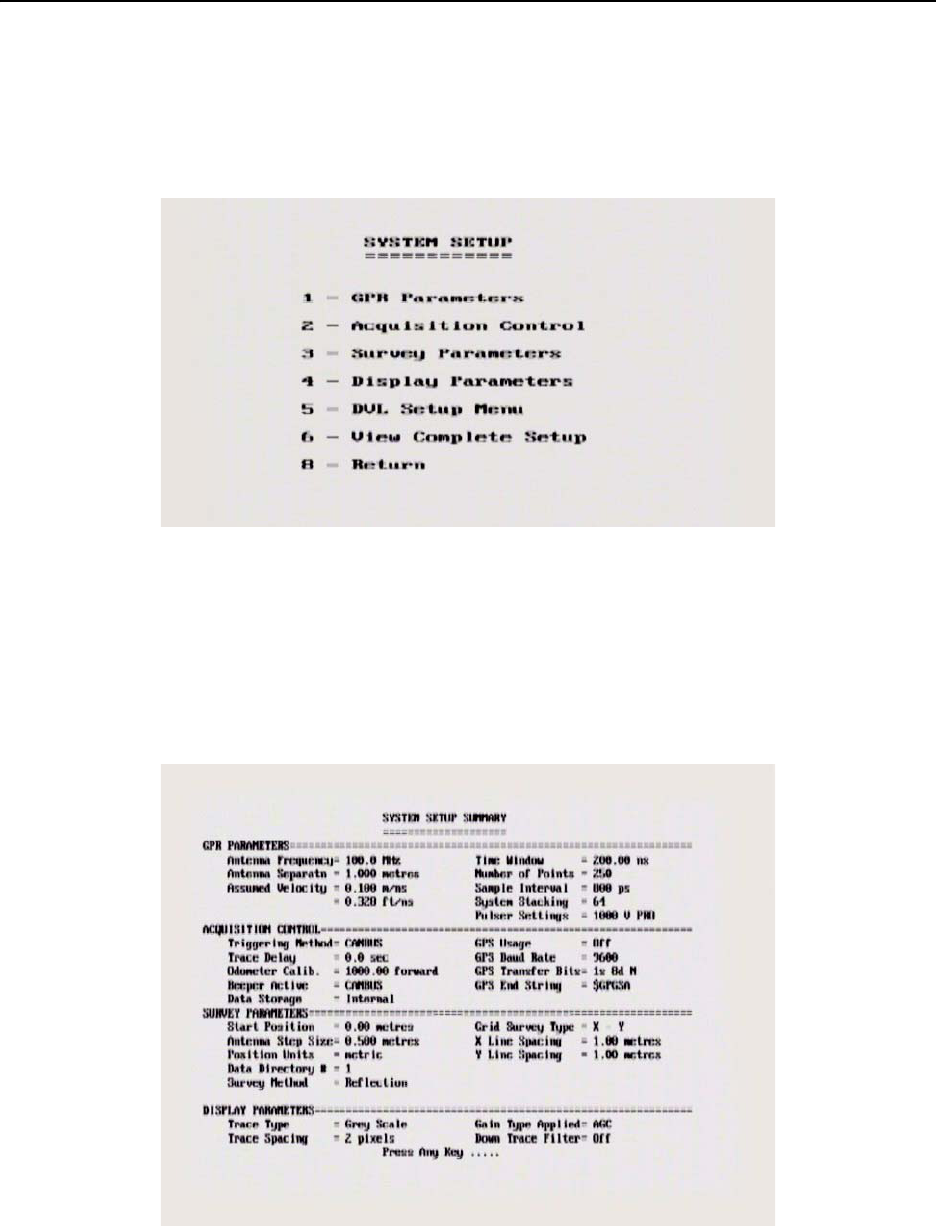
3 System Setup Parameters
The System Setup option from the main menu (See Figure 2-36 on page 27) is used to set up the data
collection parameters.
Figure 3-1: The System Setup main menu is used to access and change any parameter used for data collection. Related parame-
ters are grouped under different menu headings, for example, GPR Parameters list the variables specific to the GPR system. Select
View Complete Setup from this menu to quickly locate the desired parameter and the heading it is listed under.
Selecting View Complete Setup from this menu or View Setup from the main menu (See Figure 2-36 on
page 27) displays all the current parameter settings for the pulseEKKO PRO system. A screen display
similar to the one in Figure 3-2 will be seen:
Figure 3-2: The View Setup option displays all the current settings and indicates which System Setup headings to select to change
individual parameters. For example, select Acquisition Control to change the Triggering Method.

3-System Setup Parameters pulseEKKO PRO
32
Figure 3-2 illustrates how many parameters must be set before data collection can start. While intimidating,
many of the parameters can use the default values while many others are rarely changed at all.
3.1 System Parameters for a Quick Start to Data Collection
All the system parameters are detailed in this section but for a quick start to data collection, the most
important parameters to consider before proceeding to the next section, Running in Scope Mode, and
starting data collection are:
1) Frequency (Section 3.2.1: P34)
2) Time Window (Section 3.2.2: P35)
3) Sampling Interval (Section 3.2.3: P36)
4) Antenna Separation (Section 3.2.4: P37)
5) Antenna Step Size (Section 3.2.5: P38)
6) System Stacking (Section 3.2.7: P40)
7) Trigger Method (Section 3.3.1: P42)
pulseEKKO PRO 3-System Setup Parameters
33
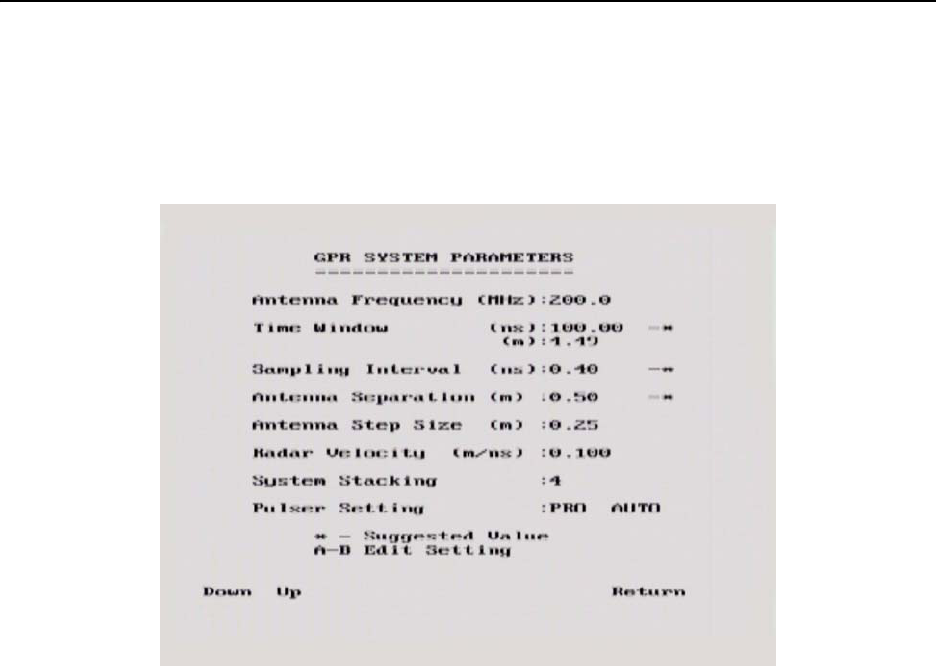
3.2 GPR Parameters
Selecting the GPR Parameters menu option will display a screen similar to Figure 3-3. This section
describes, in detail, each parameter listed in this menu.
Figure 3-3: The GPR System Parameters menu. Use the Up and Down buttons to move to the desired parameter and edit the
value by pressing the A and B buttons. Several of the parameters have suggested values, indicated by an asterisk (*), but these val-
ues can still be changed by the user.
3-System Setup Parameters pulseEKKO PRO
34
3.2.1 Antenna Frequency
Deciding which antenna frequency to use for a survey depends on the objectives of the survey. As
frequency decreases the depth of investigation generally increases but spatial resolution decreases.
Therefore, the ideal survey will be one that uses the highest frequency that adequately penetrates to the
target depth. This is not always easy to determine and often field experimentation with several different
frequencies is necessary.
This parameter is set under System Setup - GPR Parameters - Antenna Frequency.
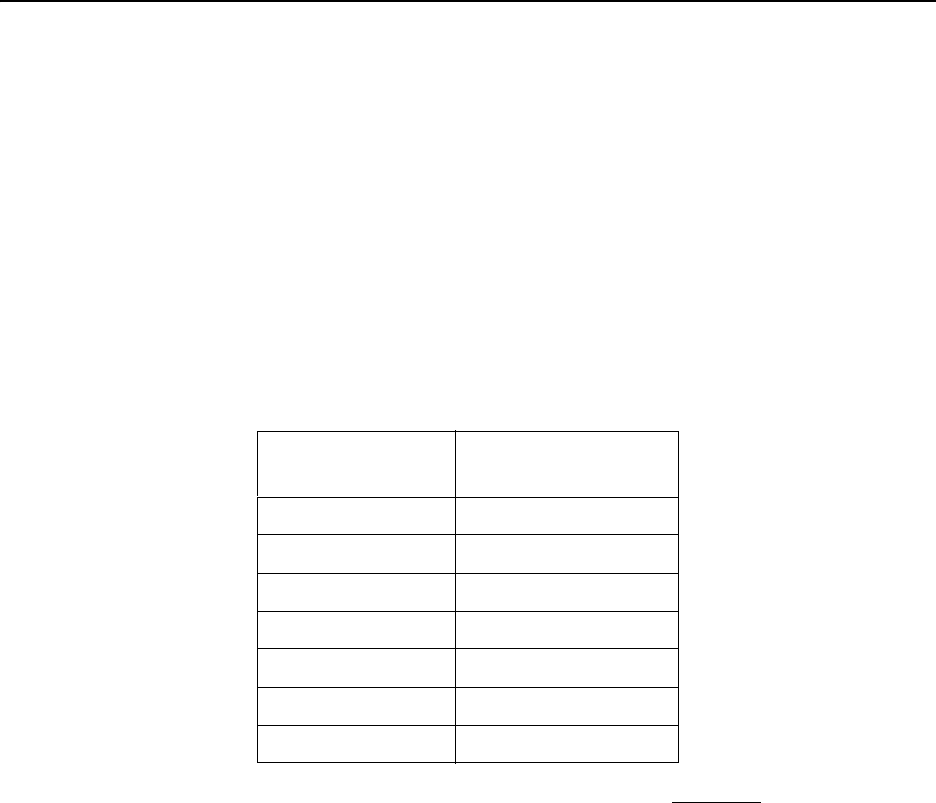
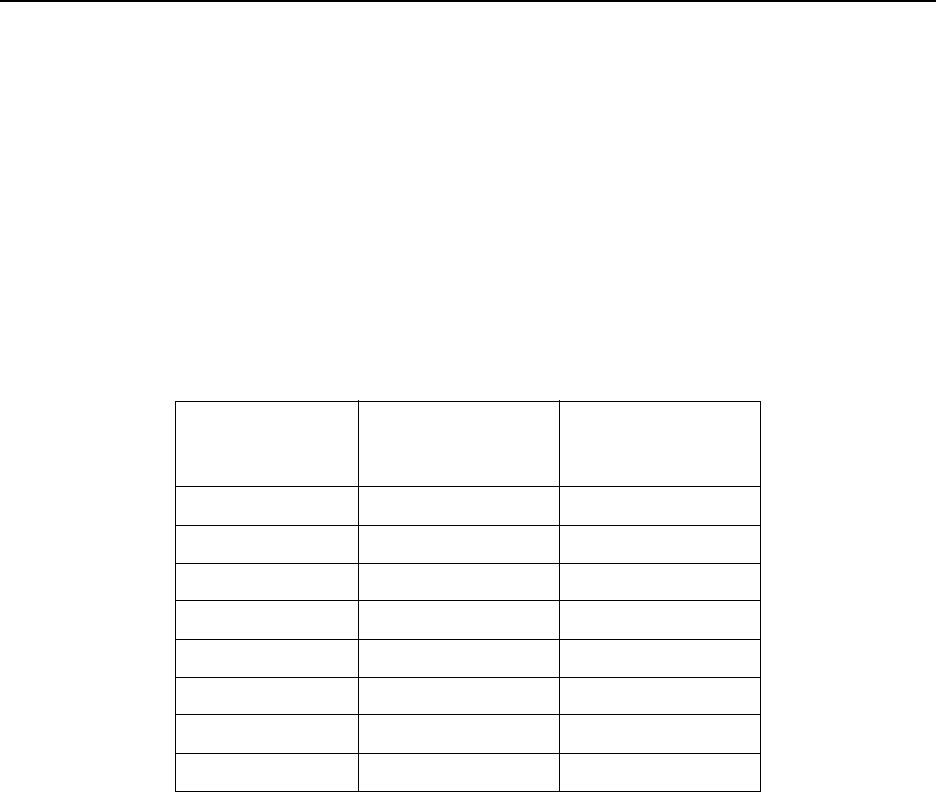
The following table offers a guide to frequency selection. It is based on the assumption that spatial
resolution of the target is about 25% of the target depth. The values are based on practical experience and
should be used as a quick guide only.
Note that the hardware cannot determine which antenna is attached. The user must correctly enter this
parameter.
It is important that the correct frequency be entered since this value is used in many computations
including pulse width, used in the DEWOW correction (Appendix B: GPR Signal Processing Artifacts), and
for several default settings such as sampling interval (Section 3.2.3: P36).
Depth
(m)
Center Frequency
(MHz)
0.5 1000
1.0 500
2.0 200
5.0 100
10 50
30 25
50 10
pulseEKKO PRO 3-System Setup Parameters
35
3.2.2 Time Window
The Time Window setting determines how long (and therefore how deep) the radar system will probe the
subsurface. It is important that it is set to a value appropriate for the depth of the survey target. An entire
survey could fail if the window is not sufficiently long enough to sample to the depth of the target.
Conversely, too long a time window increases the data volume and decreases productivity.
This parameter is set under System Setup - GPR Parameters - Time Window.
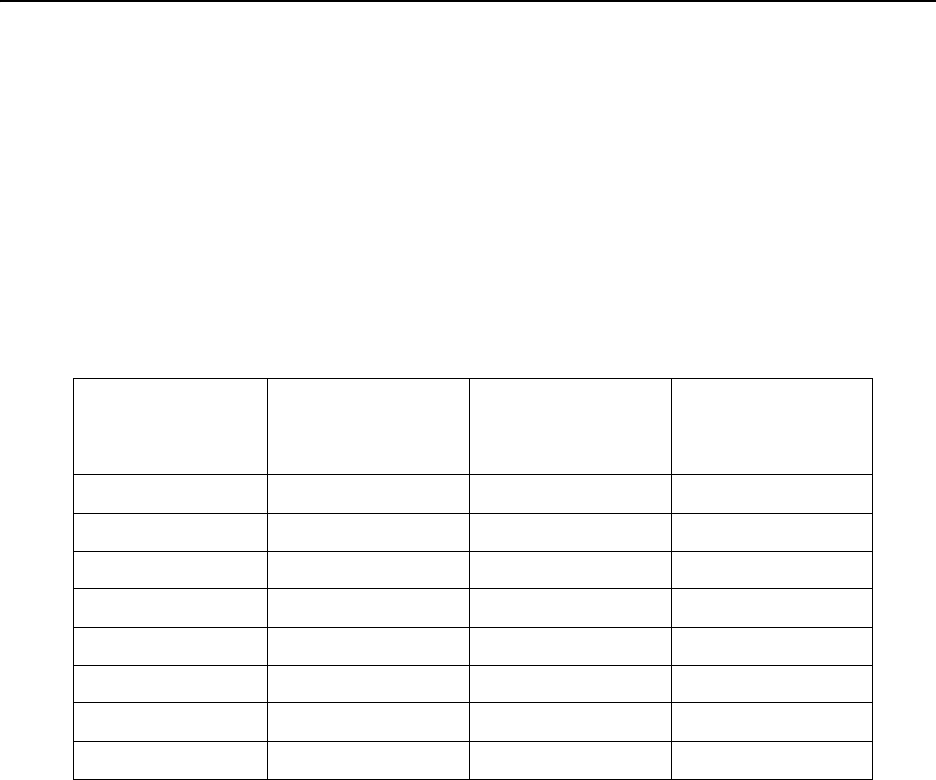
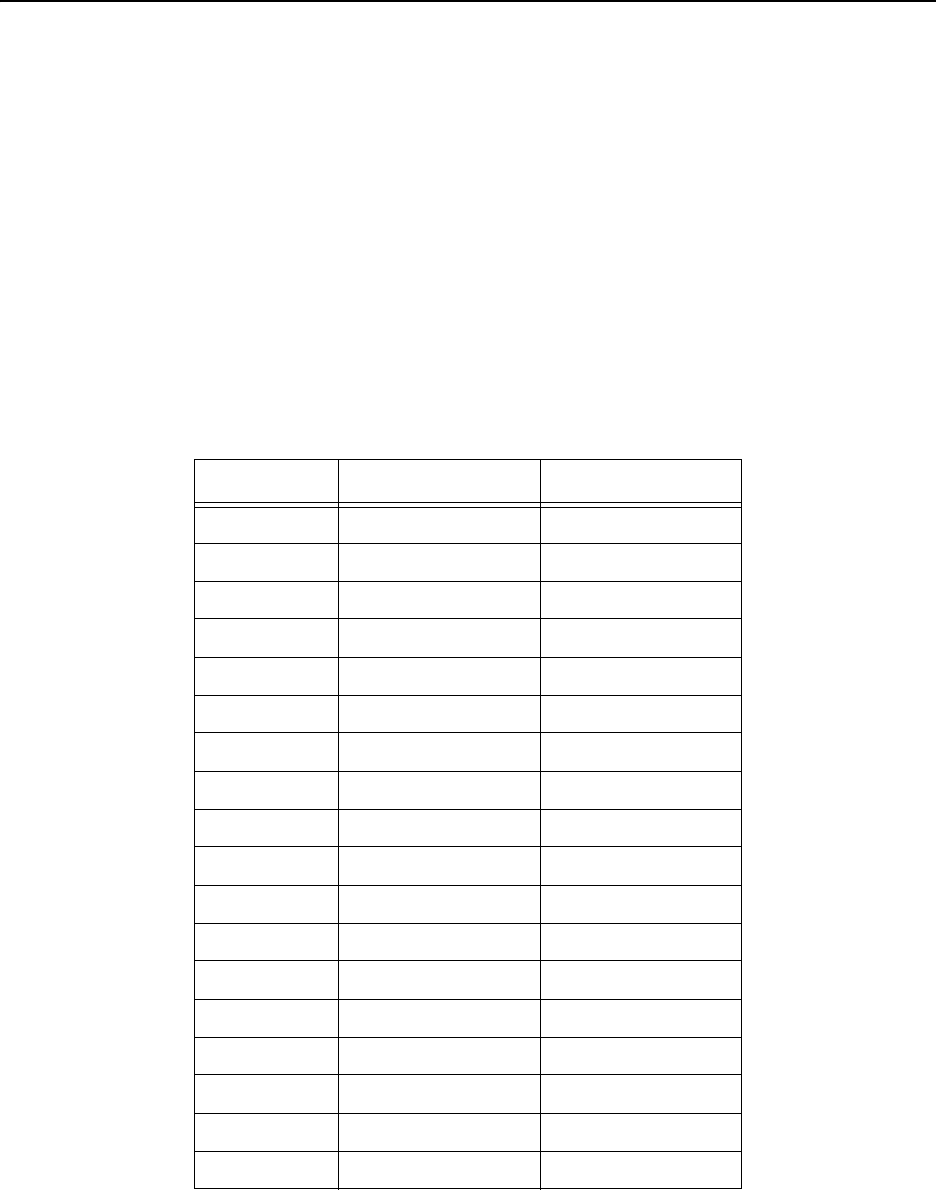
The Time Window value will be set to a default value based on the antenna frequency selected (Section
3.2.1: P34) as shown in the table below.
Note: The default Time Window value may not be appropriate for the survey at hand. If not, the value can
be changed by the user.
Since the radar system really measures time, and survey targets are at a specific depth, an estimate of
velocity can be used to relate depth to time to obtain a good time window value. The DVL automatically
calculates and displays a depth value based on the Time Window value and the current Radar Velocity
value (Section 3.2.6: P39).
3.2.2.1 How Depth is Determined
Ground penetrating radar systems record the time for a radio wave to travel to a target and back. The
depth to that target is calculated based on the velocity at which the wave travels to the target. In ideal
reflection operation, depth is calculated as:
D = V x T/2
Where D is Depth (m)
V is Velocity (m/ns)
T is Two-way travel time (ns)
Frequency (MHz) Default Time
Window (ns)
Approximate
Depth (m) with
V=0.1m/ns
Approximate
Depth (ft) with
V=0.328ft/ns
12.5 1600 80 262
25 800 40 131
50 400 20 66
100 200 10 33
200 100 516
250 100 516
500 50 2.5 8
1000 25 1.25 4
3-System Setup Parameters pulseEKKO PRO
36
The wave velocity depends on the properties of the material. The Noggin software allows the user to input
different velocities, which changes the total depth range displayed on the screen. A value of 0.1 m/ns (or 0.
33 ft/ns) is a good average value for geologic materials; a table of the velocities of common geologic
materials is listed below (Section 3.2.6: P39).
3.2.3 Temporal Sampling Interval
The pulseEKKO PRO system samples the GPR signals returning to the receiver. The resulting GPR data
is a series of numbers that represent signal amplitude at equally spaced time intervals. The time interval
between points on the trace is called the Temporal Sampling Interval.
The sampling interval is dependent on the frequency of the antennas being used. Higher frequencies
need to be sampled at a finer time sampling interval than lower frequencies.
This parameter is set under System Setup - GPR Parameters - Sampling Interval.
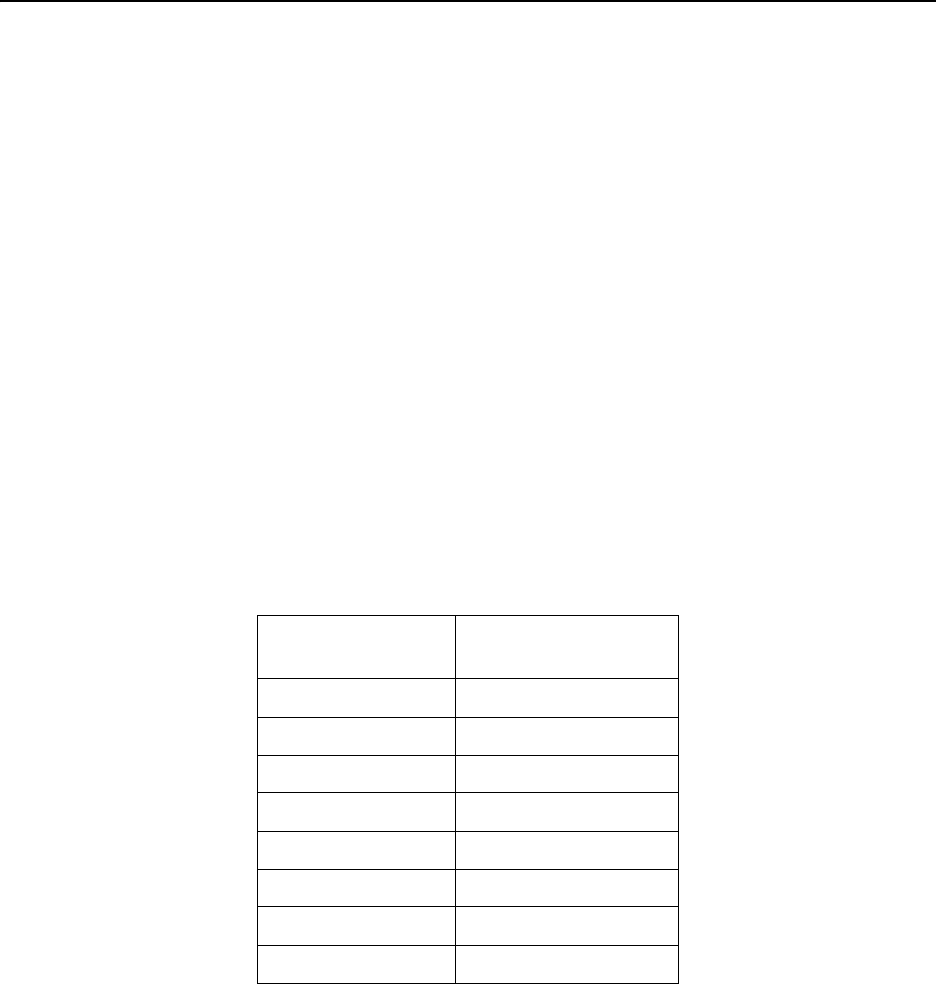
The Sampling Interval value will be set to a default value based on the antenna frequency selected
(Section 3.2.1: P34) as shown in the table below. It can, however, be changed. In general, the default
Sampling Interval should NOT be changed by the user.
The recommended temporal sampling interval versus antenna frequency is reproduced below:
It is important not to choose a sampling interval that is too large for a particular frequency otherwise the
data may be aliased (undersampled and thus not very representative of the real signal). Choosing a
sampling interval too small will increase the data volume unnecessarily and may slow down the data
collection process.
3.2.3.1 Determining the Number of Points per Trace
The number of points per trace is displayed in the View Setup screen (See Figure 3-2 on page 31). Points
are calculated based on the time window length and the sampling interval. For example, using a time
window of 300 ns and a sampling interval of 0.8 ns, the number of points is calculated as follows:
points = time window/sampling interval
= 300 ns / 0.8 ns
= 375
Center Frequency
(MHz)
Recommended Sampling
Interval (ns)
12.5 6.4
25 3.2
50 1.6
100 0.8
200 0.4
250 0.4
500 0.2
1000 0.1

pulseEKKO PRO 3-System Setup Parameters
37
3.2.4 Antenna Separation
As the transmitting and receiving antennas are moved along a survey line, it is important that a separation
be maintained between them. When the antennas are mounted on a cart the antenna separation is fixed,
but when the antennas are not fixed in position, it is common to use a rope or measuring tape to maintain
the proper separation (See Figure 6-4 on page 84).
This parameter is set under System Setup - GPR Parameters - Antenna Separation.
The Antenna Separation value will be set to a default value based on the antenna frequency selected
(Section 3.2.1: P34) as shown in the table below.
The rule of thumb is that the minimum antenna separation should equal the antenna length. For example,
100 MHz antennas are 1 metre long and should be kept about 1 metre apart during a survey. If the
antenna spacing is too small, receiver electronics may be overloaded by the transmit signal resulting in
data clipping (see Appendix B: GPR Signal Processing Artifacts for a discussion of this problem).
Note that this parameter has no meaning for any mode of operation where the antenna separation
changes such as when collecting a CMP/WARR profile.
Frequency
(MHz)
Minimum Antenna
Separation
(metres)
Minimum Antenna
Separation
(feet)
12.5 8 26
25 4 13
50 2 6
100 1 3
110 1 3
200 0.5 1.5
250 0.38 1.25 (15 in)
500 0.225 0.75 (9 in)
1000 0.15 0.5 (6 in)
3-System Setup Parameters pulseEKKO PRO
38
3.2.5 Antenna Step Size
This specifies the distance the antenna pair will be moved each time to collect a new trace during a
Reflection mode survey (Section 3.4.5: P51).
To properly resolve subsurface targets spatially, it is important that a proper Antenna Step Size be
selected. Too coarse a Step Size may result in missed subsurface targets while too fine a Step Size will
result in large data volumes and slow survey productivity.
This parameter is set under System Setup - GPR Parameters - Antenna Step Size.
The Antenna Step Size value will be set to a default value based on the antenna frequency selected
(Section 3.2.1: P34) as shown in the table below.
Note that the default values can be overridden by changing the Step Size value directly.
When using an odometer to collect data, make sure that odometer has been properly calibrated (Section
3.3.5.1: P48), otherwise positional information will be incorrect.
In CMP mode (Section 6.11: P91), the step size is interpreted to be the total increment in separation
between each trace. Therefore, if each antenna is moved 0.25 metres then the Step Size is 0.5 metres.
Frequency
(MHz)
Recommended
Antenna Step Size
(metres)
Recommended
Antenna Step Size
(feet)
12.5 2 6
25 1 3
50 0.5 1.5
100 0.25 1
200 0.1 0.33 (4 in)
250 0.05 0.166 (2 in)
500 0.025 0.0833 (1 in)
1000 0.01 0.042 (0.5 in)
pulseEKKO PRO 3-System Setup Parameters
39
3.2.6 Radar Velocity
If an accurate depth axis on the real-time display is desired, or the user wishes to see the approximate
depth of penetration while setting the time window value (Section 3.2.2: P35), the user should supply the
program with the average radar wave propagation velocity (in m/ns or ft/ns).
The best way to determine the radar velocity of the survey area is to extract the velocity using the
Hyperbola Curve Fitting routine (Section 5.5.4.1: P75) or a Common Mid Point (CMP) survey (Section
6.11: P91).
Note that having an incorrect radar velocity value does NOT affect the quality of the GPR data collected. It
will only affect the depth scale on the display. This can be changed later.
If it is not possible to determine the radar velocity directly, refer to the chart below which lists the radar
velocities of various materials.
A velocity of 0.1 m/s or 0.33 ft/ns is a good value to use when uncertain about the velocity of the material
being surveyed.
Material Velocity (m/ns) Velocity (ft/ns)
Air 0.30 0.98
Ice 0.16-0.17 0.52
Dry Soil 0.15 0.49
Dry Sand 0.15 0.49
Granite 0.13 0.43
Dry Salt 0.13 0.43
Dry Rock 0.12 0.39
Limestone 0.12 0.39
Wet Rock 0.10 0.33
Concrete 0.08-0.12 0.26-0.39
Pavement 0.10 0.33
Shales 0.09 0.30
Silts 0.07 0.23
Wet Soil 0.06 0.20
Wet Sand 0.06 0.20
Clays 0.06 0.20
Fresh Water 0.033 0.11
Sea Water 0.033 0.11
3-System Setup Parameters pulseEKKO PRO
40
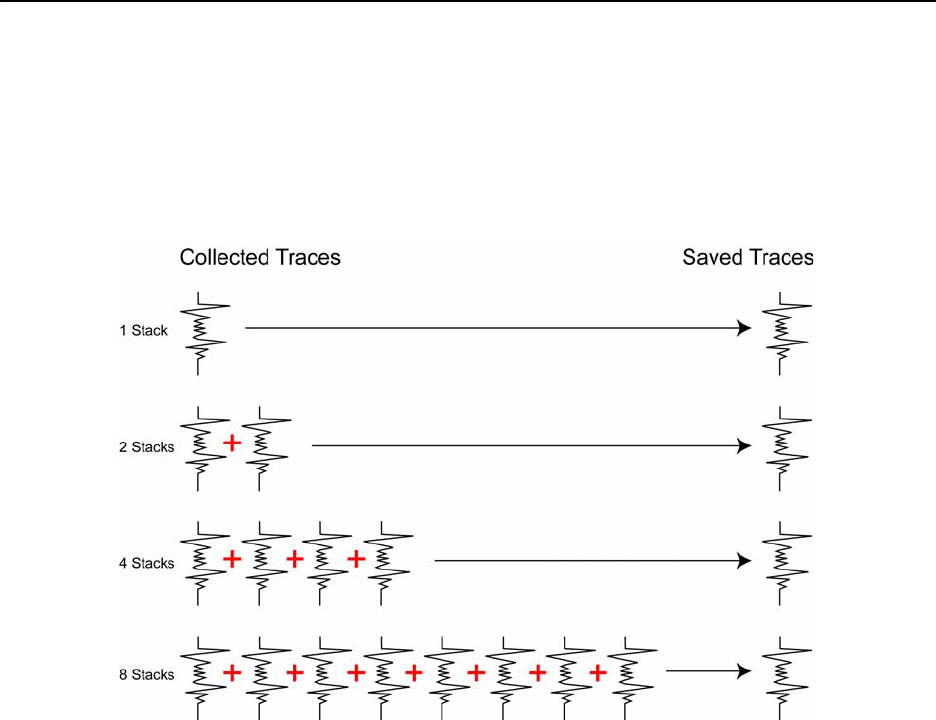
3.2.7 System Stacking
In noisy environments, one way of improving signal to noise is to collect more than one trace at each
survey position, averaging them and recording the averaged trace. This is known as “trace stacking” or
“stacking”. Data quality improves because the noise, which is usually a random addition to the trace, tends
to zero when averaged while the GPR signal is constant, thus increasing the “signal-to-noise ratio”.
Figure 3-4: The concept of “stacking” data. At each data collection point, the trace is collected multiple times. These traces are
averaged together to calculate the data trace that is actually saved. Stacking improves the data quality by improving the signal-to-
noise ratio.
While stacking improves data quality, it may slow down survey production. The more stacks, the longer it
takes to collect data at each survey position. Therefore, it is important to find the optimum number of
stacks that still reveal the target adequately.
This parameter is set under System Setup - GPR Parameters - System Stacking.
While stacks can be set from 1 to 32767, for most surveys, stacking 4 to 64 times is suitable.
Stacking is normally reduced when: 1) the survey objective is looking for very strong responses or 2)
production speed is vital, such as measurements made from a rapidly moving vehicle.
When the system is run in Free Run mode (Section 3.3.1.3: P43), the user can control the speed the
system collects data by increasing or decreasing the number of stacks. Increasing the number of Stacks
has the effect of slowing down the data collection speed of the Noggin system. Decreasing the number of
Stacks has the effect of speeding up the data collection speed of the Noggin system.

pulseEKKO PRO 3-System Setup Parameters
41
3.2.8 Pulser Setting
This setting allows the user to specify which transmitter (or pulser) is being used for data collection.
Several different transmitters can be used with a pulseEKKO PRO system.
In general, if you have a pulseEKKO PRO transmitter, set Pulser Setting to PRO Auto. This will
automatically set the transmitter to the highest voltage available for that transmitter. For example, a 400
Volt transmitter will be set to 400 Volts and a 1000 Volt transmitter will be set to 1000 Volts.
The only time that PRO Auto is not the correct setting for a pulseEKKO PRO transmitter is if you have a
400 to 1000 variable voltage transmitter and you want to set the pulser voltage to a value lower than 1000
Volts. As mentioned above, using the PRO Auto setting for this transmitter will result in the voltage being
set to the highest value, in this case 1000 volts. To set the transmitter to a different value, say 500 volts, it
is necessary to edit the Pulser Setting until PRO 500V is displayed.
Note that if you have a 400 volt or 1000 volt transmitter and you try to set it to a voltage other than the
correct one, an error will occur when you try to collect data.
The 1000 volt pulser is recommended when using 12.5 to 100 MHz antennas, while the 400 volt pulser is
recommended for 50 to 200 MHz antennas. Both pulsers can, however, be used for all antennas.
The pulseEKKO PRO can also be run using pulseEKKO 100 transmitters. The three options are PE100
400 for the 400 volt transmitter, PE100 1K for the 1000 volt transmitter and PE100 5K for the 5000 volt
transmitter.
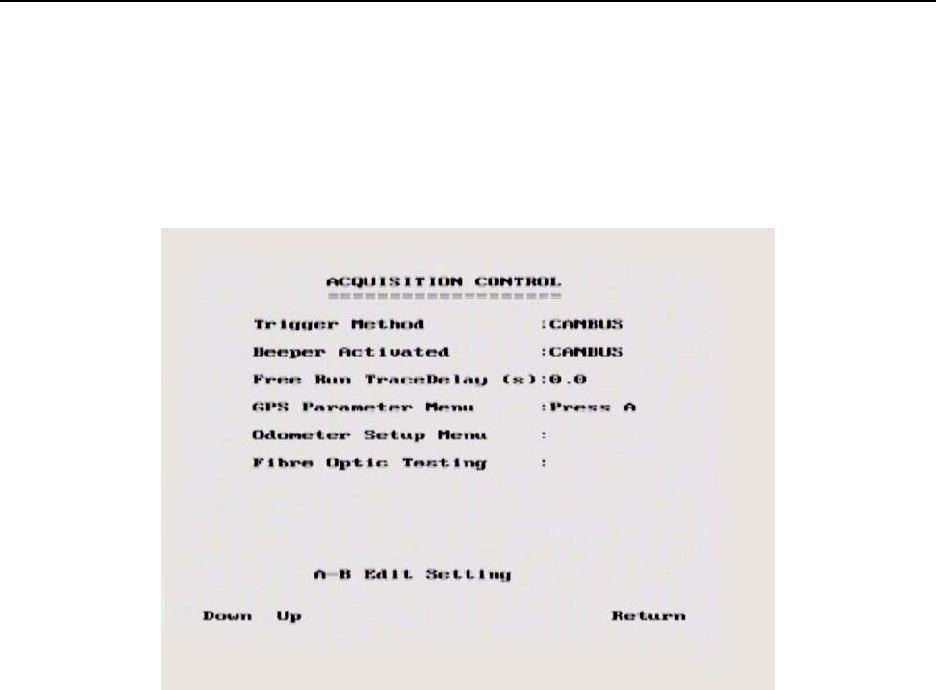
3-System Setup Parameters pulseEKKO PRO
42
3.3 Acquisition Control
Selecting the Acquisition Control parameters menu option from the System Setup main menu (See Figure
3-1 on page 31), will display a screen similar to Figure 3-5. This section details each parameter listed in
this menu.
Figure 3-5: The Acquisition Control menu. Use the Up and Down buttons to move to the desired parameter and edit the value by
pressing the A and B buttons. Selecting any of the last three options opens sub-menus to edit these parameters.
3.3.1 Trigger Method
The Trigger Method determines what device is going to trigger the transmitter to fire and collect a data
trace.
This parameter is set under System Setup - Acquisition Control - Trigger Method.
There are 5 ways to trigger the transmitter to fire:
1) DVL B Button
2) Electrical Trigger
3) Fibre Optic Trigger
4) Odometer
5) Free Run
The Trigger Method to use is best determined by the user after examination of the site to assess the ease
with which the radar can be moved from position to position.

pulseEKKO PRO 3-System Setup Parameters
43
3.3.1.1 Triggers
Triggering the system with an electrical, Fibre Optic or DVL B Button trigger (options 1 -3) is best for
surveying in difficult terrain where antennas cannot be moved easily or at regular time intervals. For the
position of each measurement point, the system assumes the operator has moved the antennas one step
size along the survey line. This is also the mode to select when an odometer is used to trigger the system
at specific distance intervals.
In Trigger mode, the user presses the B button on the DVL screen or an external trigger button to collect
the next trace. The user is prompted with “READY” or "HIT TRIGGER" on the DVL screen to indicate the
system is ready to collect the next trace.
Note that when data are collected with the electrical or the fibre optic trigger, the device may emit a
beeping sound after the button is pressed, indicating data collection is taking place. The beeping sound will
only occur if the corresponding Beeper Activated option is selected (Section 3.3.2: P43).
3.3.1.2 Odometer
Selecting this option means that the system will be triggered to collect data using the input from the
odometer (Section 2.5.4: P23). See Section 6.6 Odometer Data Acquisition on page 88 for more details
about data acquisition with an odometer.
3.3.1.3 Free Run
Selecting this option means that the system is not triggered by a particular device but runs continuously in
time.
The system automatically collects data at regular, user-determined time intervals. This is called “Free
Run” mode and is best for surveys in flat, unobstructed terrain where antennas can be moved easily. For
the position of each measurement point, the system assumes the operator has moved the antennas one
step size along the survey line. True position can also be controlled by the user adding markers at known
positions along the survey line and Rubberbanding the data in post-processing.
When Free Run operation is used, it is necessary to slow the data collection down by increasing the
number of stacks (Section 3.2.7: P40) and the time delay between data traces (Section 3.3.3: P44). These
options allow the user to control the speed of the data acquisition.
The number of stacks and time delay should be set to values that, when combined with speed the system
is moving at, provide an appropriate Step Size interval. This may take a little experimenting to determine
the optimal values for stacks, time delay and the actual speed that the system is moving.
3.3.2 Beeper Activated
The Electrical and Fibre Optic Beeper/Trigger units are designed to emit a beeping sound as a trace of
GPR data is being collected. However, they will only beep if they have been activated to do so with this
menu.
The available settings in this menu are: CANBUS, Fibre Optic, Both or None.
Selecting None means that even if a Beeper/Trigger is present and is the Trigger Method being used
(Section 3.3.1: P42), it will not beep.
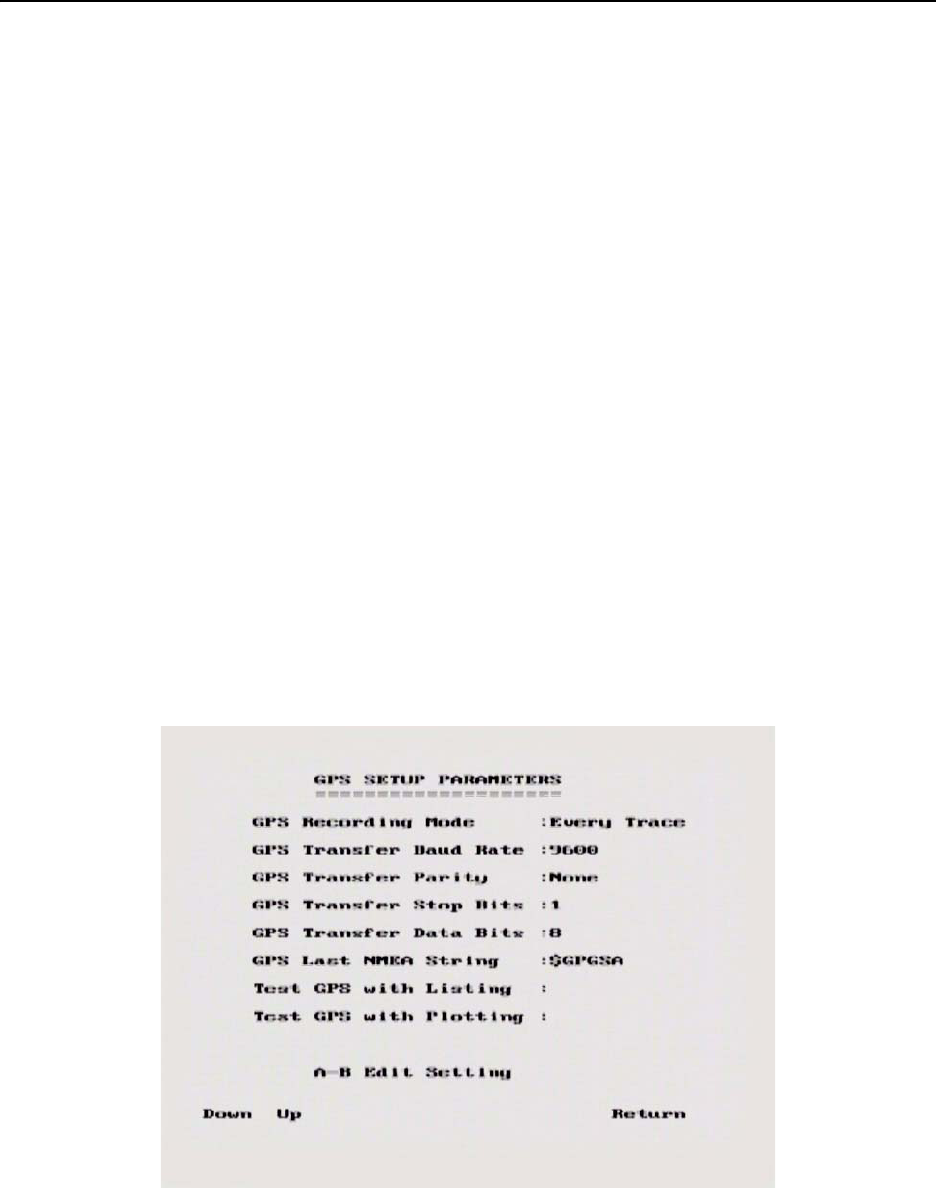
3-System Setup Parameters pulseEKKO PRO
44
3.3.3 Free Run Trace Delay
When the system is run in Free-Run mode (Section 3.3.1.3: P43), this option allows the user can specify a
time delay (in seconds) between traces. This delay allows time for the user to set up the antennas at the
new position. The computer automatically collects the next trace after the elapsed time has passed.
The Trace Delay is input in tenths of seconds, between each data collection point. To run the system as
quickly as possible, set this value to 0.0 seconds. For a longer time delay, use the buttons to set the value.
Factors as the radar site, operator experience, weather, etc. will determine how long the delay time should
be. Trial and error will decide the appropriate setting.
3.3.4 GPS Parameter Menu
The Global Positioning System (GPS) uses special satellites around the Earth to determine the position of
a GPS receiver located anywhere on the surface of the Earth. GPS receivers can be purchased from a
number of manufacturers.
The DVL has a serial port on the back for attaching a GPS receiver (Section 2.5.5: P24). This port will
accommodate any GPS receiver that has a standard NMEA string output through the serial port.
The GPS receiver can be set up to send one or more types of data strings. These strings are called
NMEA-0183 strings and each contains positional or other information in specific formats. Each type of
string is specified by a 5-character prefix. Note that Sensors & Software GPR data can only be integrated
with GPS data if at least one of the NMEA strings output by the GPS are GPGGA, GPRMC or GPGLL.
These are the only strings that have the positional information required.
Figure 3-6: The GPS Setup Parameter screen.
This feature allows GPS information to be recorded while collecting GPR data. The GPS information may
be useful for mapping where GPR surveys have been performed (see Reading Every X Traces below) or
determining where a specific target of interest is located in GPS co-ordinates (see Tagging mode below).

pulseEKKO PRO 3-System Setup Parameters
45
The DVL can be set up to read and log GPS information collected during data acquisition with the GPR
system. GPS information can be logged in two different ways:
1) For every trace collected by the GPR system, or
2) Every time the user adds a fiducial to the data by pressing the Fiducial button or the A button
(Section 5.4: P72).
This feature provides a means of capturing GPS information to an independent file. Note that the GPS
information is NOT automatically integrated with the GPR data. After data acquisition is complete, the data
can be downloaded to a PC and the EKKO_View Deluxe software can be used to integrate the GPS data
with the GPR data.
In order for the DVL to read the GPS data string, the GPS settings for the specific GPS receiver must be
input into this menu. There are 4 important items that must be input correctly for the DVL to display the
GPS strings: Baud Rate, Stop Bits, Data Bits and Parity. These are discussed in more detail below. The
default values listed below are the values that are typically used. Read the GPS Receiver User’s Guide or
experiment with the settings to find the correct ones.
Once these 4 items are set correctly you should be able to run Test GPS with Listing and have GPS
information written to the screen.
When the logging of GPS information is enabled, during data acquisition, a message will appear in the
bottom left-hand corner of the DVL screen indicating whether GPS data is successfully being received.
3.3.4.1 GPS Recording Mode
There are three GPS Recording Modes available:
Off mode means that a GPS receiver is not connected to the DVL so no GPS information is being logged.
This should be the setting if you do not have a GPS receiver.
Reading every x traces mode means that every time the GPR collects 1, 5, 10, 20 or 50 traces of GPR
data, a data string of GPS information will be added to a file. This file has the same name as the data file
i.e. LINE6, but with a GPS extension. This file can be accessed after transferring the GPR data files to an
external PC (Section 8.3: P106).
For example, if the number of traces is set to 1, the LINE6.GPS may look like this:
Trace #1
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Trace #2
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Trace #3
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Trace #4
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Note that when the Reading per Trace option is on, it is still possible to add fiducial markers to the GPS file.
These will appear as F1, F2 etc. between the trace numbers. For example, a portion of LINE6.GPS may
look like this:

3-System Setup Parameters pulseEKKO PRO
46
Trace #85
$GPGGA,134850.00,4338.204868,N,07938.429003,W,2,06,2.1,152.60,M,-35.09,M,4.2,0118*74
$GPVTG,152.6,T,,,002.3,N,004.3,K,D*43
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.7*37
F1
$GPGGA,134850.00,4338.204868,N,07938.429003,W,2,06,2.1,152.60,M,-35.09,M,4.2,0118*74
$GPVTG,152.6,T,,,002.3,N,004.3,K,D*43
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.7*37
Trace #86
$GPGGA,134851.00,4338.204362,N,07938.428362,W,2,06,2.1,152.40,M,-35.09,M,5.2,0118*72
$GPVTG,136.9,T,,,002.8,N,005.2,K,D*45
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.7*37
On a Tag mode means that whenever a fiducial marker (F1, F2 etc.) is added to the data by pressing the
Fiducial button or the A button on the DVL (Section 5.4: P72), a data string of GPS information will be
added to a file. This file has the same name as the data file i.e. LINE6, but with a GPS extension. This file
can be accessed after transferring the GPR data files to an external PC.
For example, LINE6.GPS may look like this:
F1
$GPGGA,134218.00,4338.190204,N,07938.438411,W,2,05,2.6,154.60,M,-35.09,M,4.0,0118*7B
$GPVTG,356.8,T,,,000.2,N,000.4,K,D*4B
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F2
$GPGGA,134219.00,4338.190294,N,07938.438409,W,2,05,2.6,154.45,M,-35.09,M,5.0,0118*7C
$GPVTG,1.3,T,,,000.4,N,000.7,K,D*44
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F3
$GPGGA,134221.00,4338.190261,N,07938.438285,W,2,05,2.6,154.05,M,-35.09,M,5.2,0118*79
$GPVTG,10.0,T,,,000.2,N,000.4,K,D*72
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F4
$GPGGA,134222.00,4338.190397,N,07938.438255,W,2,05,2.6,153.95,M,-35.09,M,5.0,0118*73
$GPVTG,9.8,T,,,000.3,N,000.5,K,D*42
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
If the GPS mode is set to Reading per Trace or Fiducial Tagging AND the GPR is Run Without Saving Data
(Section 5.8: P81), it is still possible to log GPS data strings. Every time a fiducial marker is added to the
data by pressing the Fiducial button or the A button on the DVL (Section 5.4: P72), a data string of GPS
information is added to a file. This file is called TAGGED.GPS and can be exported using the File
Management option (Section 8: P104).
An example of a TAGGED.GPS file is shown below.
New File 09-18-2000 13:53:38
F1
$GPGGA,134227.00,4338.190520,N,07938.438280,W,2,05,2.6,153.98,M,-35.09,M,4.6,0118*7E
$GPVTG,347.7,T,,,000.3,N,000.5,K,D*44
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F2
$GPGGA,134228.00,4338.190238,N,07938.438286,W,2,05,2.6,153.87,M,-35.09,M,4.4,0118*75
$GPVTG,5.4,T,,,000.2,N,000.4,K,D*42
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F3
$GPGGA,134229.00,4338.190277,N,07938.438273,W,2,05,2.6,153.76,M,-35.09,M,5.4,0118*7A
$GPVTG,23.4,T,,,000.1,N,000.2,K,D*73
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
F4
$GPGGA,134231.00,4338.190127,N,07938.438362,W,2,05,2.6,154.59,M,-35.09,M,5.0,0118*7A
$GPVTG,20.2,T,,,000.2,N,000.3,K,D*74
$GPGSA,A,3,30,10,13,24,06,,,,,,,,4.3,2.6,3.4*36
********************************************************************************
New File 09-18-2000 13:55:36
F1
$GPGGA,134259.00,4338.192453,N,07938.449096,W,2,06,2.4,153.14,M,-35.09,M,5.4,0118*75
$GPVTG,310.9,T,,,000.5,N,001.0,K,D*4A

pulseEKKO PRO 3-System Setup Parameters
47
$GPGSA,A,3,04,30,10,13,24,06,,,,,,,3.2,2.4,2.1*32
F2
$GPGGA,134301.00,4338.192559,N,07938.449176,W,2,06,2.4,153.17,M,-35.09,M,5.0,0118*7A
$GPVTG,314.4,T,,,000.6,N,001.1,K,D*41
$GPGSA,A,3,04,30,10,13,24,06,,,,,,,3.2,2.4,2.1*32
F3
3.3.4.2 Baud Rate
The baud rate is the speed that data is sent from the GPS receiver to the serial port of the DVL. The
available options are: 2400, 4800, 9600 (default) or 19200. Often, the baud rate for GPS units is 4800. If
you are having a problem getting the GPS to work with the DVL, the Baud Rate is the most likely problem.
3.3.4.3 Stop Bits
The available settings for Stop Bits are: 1 (default) or 2.
3.3.4.4 Data Bits
The available settings for Data Bits are: 7 or 8 (default).
3.3.4.5 Parity
The available settings for Parity are: none (default), odd or even.
3.3.4.6 Last NMEA String
The GPS receiver can be set up to send one or more types of data strings. These strings are called
NMEA-0183 strings and each contains positional or other information in specific formats. Each type of
string is specified by a 5-character prefix. There are numerous NMEA strings but examples of three
different NMEA strings (GPGGA, GPVTG and GPGSA) are shown below.
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Before using the GPS with the GPR, the DVL software needs to know the prefix of the LAST string being
sent in each group. In the example above, three strings are being sent each time (GPGGA, GPVTG and
GPGSA). Since GPGSA is the last one being sent in each group, the End String needs to be specified as
GPGSA.
To see what the End String is for your particular GPS, run Test GPS with Listing and note the first 5
characters on the last line after each series of strings is written to the screen. These are the 5 characters
that need to be filled in under Last NMEA String.
The Last NMEA String option allows the user to fill in the necessary 5 character GPS prefix. Use the
numbered buttons to change the letters forward in the alphabet. Use the Change Direction button make
the letters go backward in the alphabet.
See the GPS Receiver User’s Guide for details on how to set up the receiver to output specific NMEA
strings or groups of NMEA strings.
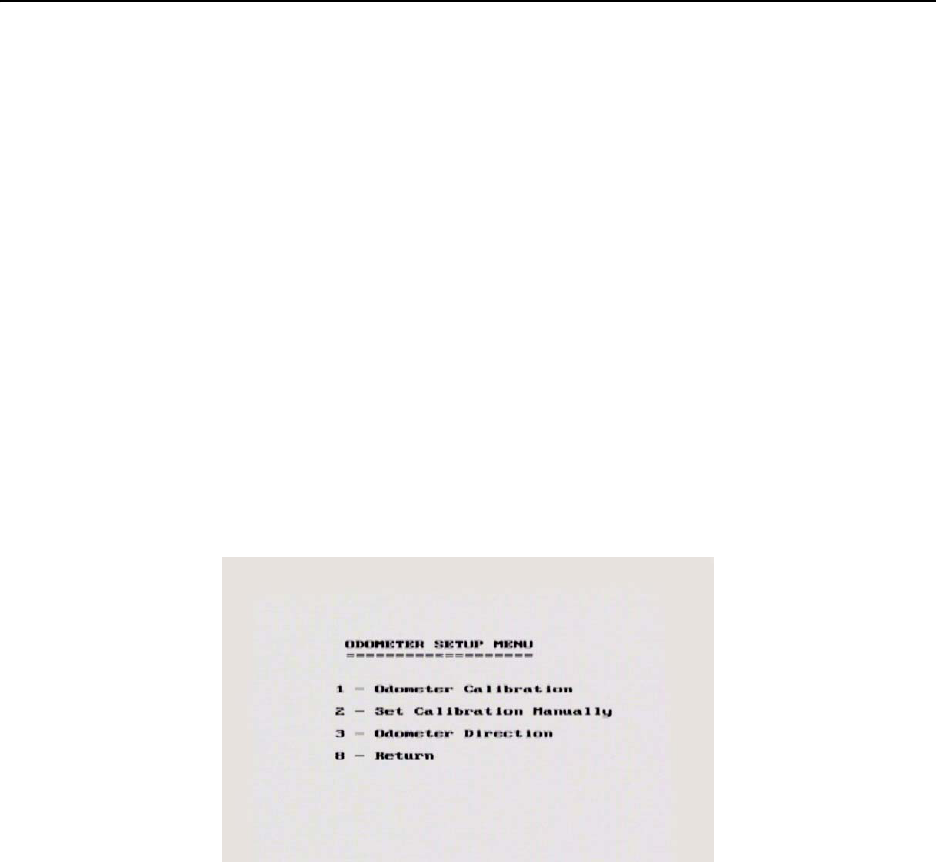
3-System Setup Parameters pulseEKKO PRO
48
3.3.4.7 Test GPS with Listing
After all the settings above have been input and the GPS receiver is attached to the serial port on the DVL,
the test option allows the user to check that the DVL is receiving the GPS output.
If the NMEA strings are successfully being read by the DVL they will appear on the DVL screen. This is a
good time to note the prefix of the last NMEA string in the list and input it in the End String setting above.
If the NMEA strings do not appear, check that the port settings are correct. It is also possible that a
crossover cable is required between the output cable of the GPS receiver and the serial port on the DVL.
3.3.4.8 Test GPS with Plotting
Once the GPS system is running successfully, selecting Test GPS with Plotting can be used to graphically
display the GPS data. This screen displays the GPS Time, Latitude, Longitude and Altitude as well as
other values indicating the accuracy of the GPS reading. The GPS position is also displayed in a square
that can be Zoomed from 2 metres square to 16384 metres square.
3.3.5 Odometer Setup Menu
Figure 3-7: Odometer Setup Menu.
3.3.5.1 Odometer Calibration
The odometer should be calibrated periodically to ensure accuracy.
When Odometer Calibration is selected, the user is prompted to select the length of the line to calibrate on.
There are 8 different choices in metres and 8 choices in feet. To toggle the units between metres and feet,
press the B button. Pressing the A button on this screen gives the additional option to select a user
defined value. The user-defined value can range from 0.01 to 5000 metres or 0.01 to 26400 feet.
When the calibration distance has been selected follow the directions on the screen:
Set the system at zero and press A
Move the system the selected distance and press B
Press A to exit.
Odometer calibration values for the SmartCart odometer should be around 1080.

pulseEKKO PRO 3-System Setup Parameters
49
3.3.5.2 Set Odometer Manually
When Odometer Calibration is selected, the user is prompted to manually enter the odometer calibration
factor. In general, this method of odometer calibration is not recommended because it will not be as
accurate as calibrating the odometer over a known distance.
3.3.5.3 Odometer Direction
This setting determines whether data are collected as the system is rolled forward or reverse. The back up
arrow (Section 6.6.2: P89) will work in the direction opposite to this setting. The available options are:
Forward and Reverse.
3.3.6 Fibre Optic Testing
As part of troubleshooting a problem with the system, the fibre optic cables can be tested for damage
(Section 7.2: P99).
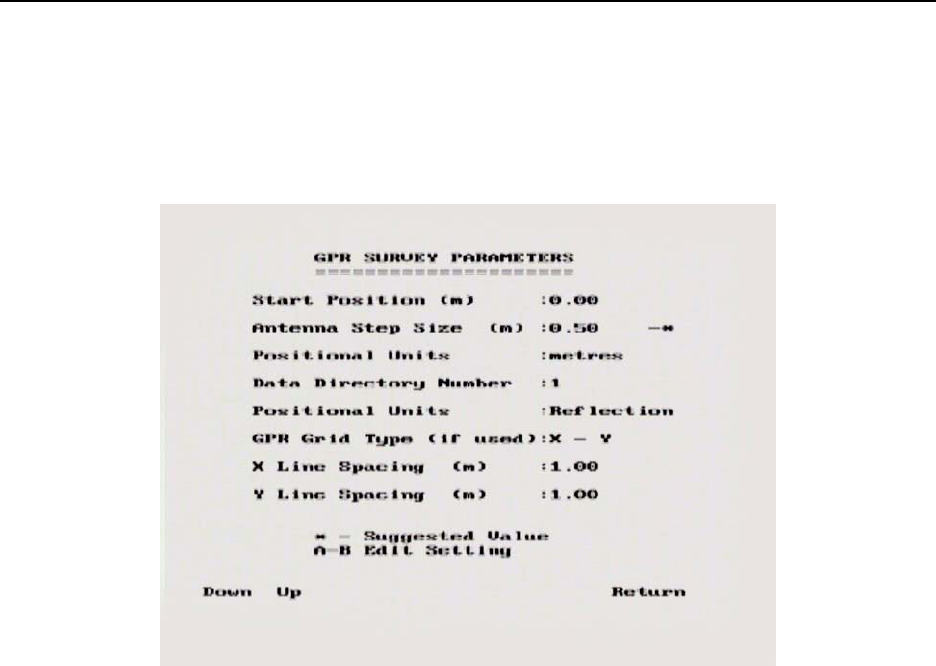
3-System Setup Parameters pulseEKKO PRO
50
3.4 Survey Parameters
Selecting the Survey Parameters menu option from the System Setup main menu (See Figure 3-1 on page
31), will display a screen similar to Figure 3-8. This section details each parameter listed in this menu.
Figure 3-8: The GPR Survey Parameters menu. Use the Up and Down buttons to move to the desired parameter and edit the
value by pressing the A and B buttons.
3.4.1 Start Position
This is the starting position for the first trace. Normally, most lines start at position zero (0.0) and the
position of each trace increments by the Antenna Step Size (Section 3.2.5: P38). The Start Position value
can be changed to a non-zero and even a negative value if necessary.
It is assumed that the units for all position and distance quantities are the units specified under Positional
Units (Section 3.4.3: P50).
For a CMP/WARR measurement, the start position is the initial antenna separation.
3.4.2 Antenna Step Size
The Antenna Step Size can be changed in this menu as well as the menu under System Setup - GPR
Parameters (Section 3.2.5: P38).
3.4.3 Positional Units
Two distance units are available: metres or feet. This information is stored in the header file and is used in
plotting scales. All distance parameters in the other menus will be interpreted based on the setting of this
item.

pulseEKKO PRO 3-System Setup Parameters
51
3.4.4 Data Directory Number
This option is used to determine the directory that the data files will be saved to. The idea is that related
data files are saved in the same directory.
The Data Directory Number can be changed in this menu or under the Run pulseEKKO menu (Section 5.1:
P69).
The user has access to 20 different directories for data storage.
3.4.5 Survey Type
Ground penetrating radar has been used in many different survey modes to gather information. Three of
the more common modes are:
a) Reflection mode, which is by far the most common mode used to map underlying stratigraphy,
(See Figure 6-1 on page 82).
b) CMP (Common Mid Point) or WARR (Wide Angle Reflection and Refraction), useful in
deducing information on wave propagation velocity versus depth (Section 6.11: P91) and
c) Transillumination where the transmitting and receiving antennas are situated at opposite sides
of a partition to study the transmission properties of the dividing material (Section 6.12: P93).
The options available here are Trans., Trans - ZOP, Trans - MOG and Trans - VRP. Calibration
files are also related to Transillumination surveys.
3.4.6 GPR Grid Type
The grid parameter settings in the Survey Parameters menu allow the user to modify settings specific to
collecting data in organized grids. This includes the grid type and line spacing.
Data are normally collected on a grid if the user is interested in displaying the data as a 3D volume (using
the EKKO_3D software) or as a plan map (using the EKKO_Mapper software). Producing accurate 3D
volumes or plan maps is easier if the field survey is properly designed and data are collected correctly.
Positional accuracy of each line is vital if the user wants to be able to relocate targets of interest after the
data have been processed.
For linear targets like pipes and utilities, the best GPR response occurs when the GPR survey line crosses
the target at right angles. If possible, it is always best to run GPR survey lines perpendicular to the
direction of linear targets.
Sensors & Software’s EasyGrid makes laying out an accurate, square grid simple. Contact Sensors &
Software for more details.
The Grid Type determines the way that the area of the grid is to be covered by the survey lines. Survey
lines can be either a set of parallel lines in the X axis direction (Figure 3-9), a set of parallel lines in the Y
axis direction (Figure 3-10), or, for complete coverage, parallel lines in both the X and Y direction (Figure 3-
11).
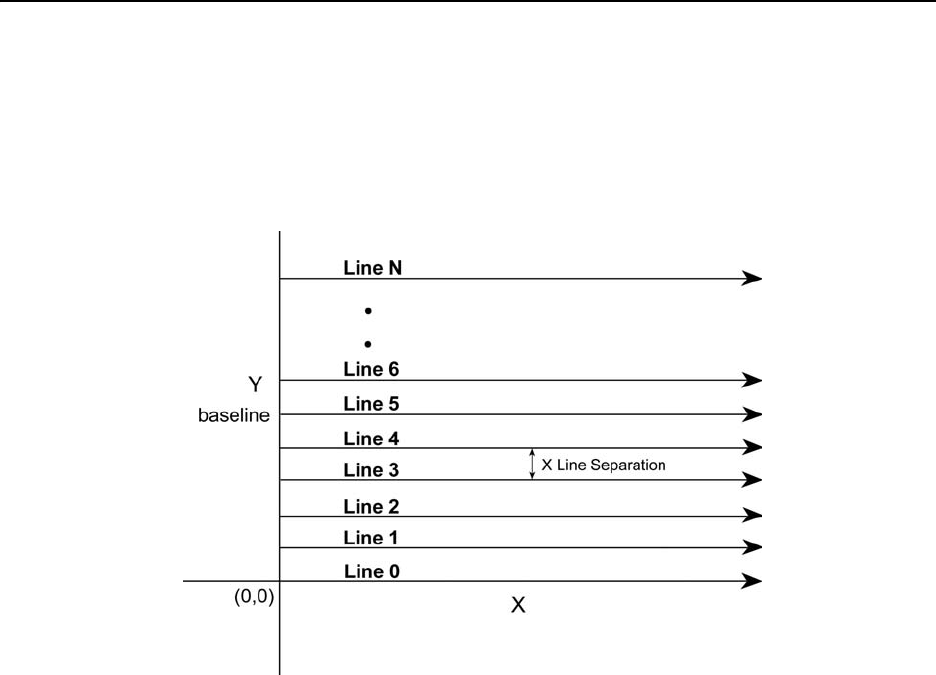
3-System Setup Parameters pulseEKKO PRO
52
X Lines Only
Set up a first-quadrant XY grid. Data lines run in the X direction, distance increasing from the Y axis
baseline. Line numbers increase in the positive Y direction (see Figure 3-9). Lines must be equally
spaced. It is not critical that all the lines are the same length. However, it does make processing easier if
all the lines start at the same baseline position (usually defined as zero (0.0)).
Figure 3-9: The line configuration for lines collected in X Lines Only mode. The convention is that X lines are parallel to the X
axis. For seamless integration into data processing software like EKKO_Mapper, note that the lines are assumed to be collected
with X positions increasing as the line moves away from the Y baseline. Line numbers start at line 0 and increment as the lines
move away from the X axis. The Line Spacing distance needs to be specified in the grid settings and lines should be equally spaced.
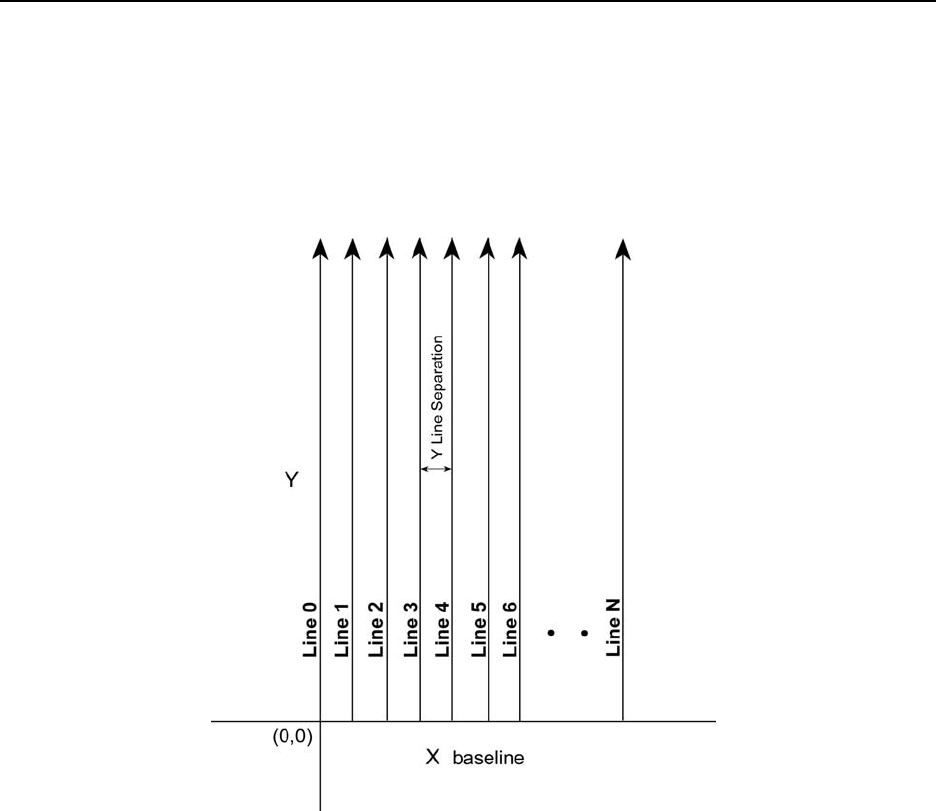
pulseEKKO PRO 3-System Setup Parameters
53
Y Lines Only
Set up a first-quadrant XY grid. Data lines run in the Y direction, distance increasing from the X axis
baseline. Line numbers increase in the positive X direction (see Figure 3-10). Lines must be equally
spaced. It is not critical that all the lines are the same length. However, it does make processing easier if
all the lines start at the same baseline position (usually defined as zero (0.0)).
Figure 3-10: The line configuration for lines collected in Y Lines Only mode. The convention is that Y lines are parallel to the Y
axis. For seamless integration into data processing software like EKKO_Mapper, note that the lines are assumed to be collected
with Y positions increasing as the line moves away from the X baseline. Line numbers start at line 0 and increment as the lines
move away from the Y axis. The Line Spacing distance needs to be specified in the grid settings and lines should be equally spaced.
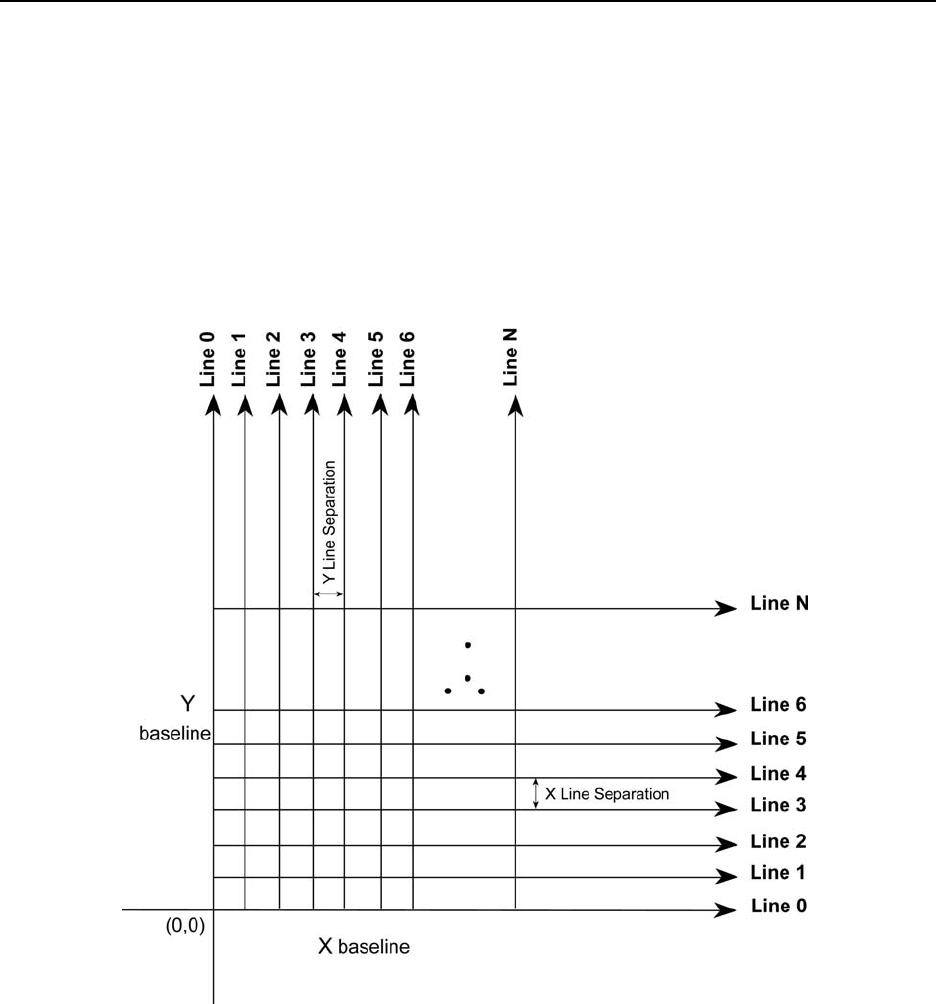
3-System Setup Parameters pulseEKKO PRO
54
X and Y Lines
Set up a first-quadrant XY grid. X data lines run in the X direction, distance increasing from the Y axis
baseline. Line numbers increase in the positive Y direction (see Figure 3-11). Lines must be equally
spaced. Y data lines run in the Y direction, distance increasing from the X axis baseline. Line numbers
increase in the positive X direction. Lines should be equally spaced. The line spacing of the X lines and Y
lines can be different.
It is not critical that all the lines are the same lengths. However, it does make processing easier if all the
lines start at the same baseline position (usually defined as zero (0.0)).
Figure 3-11: The line configuration for lines collected in XY Lines mode. The convention is that X lines are parallel to the X axis
and Y lines are parallel to the Y axis. For seamless integration into data processing software like EKKO_Mapper, note that the
lines are assumed to be collected with X positions increasing away from the Y baseline and the Y positions increasing away from
the X baseline. Line numbers start at line 0 and increment as the lines move away from the axes. The Line Spacing distances needs
to be specified in the grid settings and lines should be equally space, although the X line spacing and Y line spacing can be differ-
ent.

pulseEKKO PRO 3-System Setup Parameters
55
3.4.7 X Line Spacing
For X Only or XY grid data acquisition, the distance between the X survey lines needs to be specified in
this menu (Figure 3-9 and Figure 3-11). The distance units are assumed to be the same as those specified
in Positional Units (Section 3.4.3: P50)
If an XY grid is being collected, note that the line spacing of the X lines and Y lines can be different.
3.4.8 Y Line Spacing
For Y Only or XY grid data acquisition, the distance between the Y survey lines needs to be specified in
this menu (Figure 3-10 and Figure 3-11). The distance units are assumed to be the same as those
specified in Positional Units (Section 3.4.3: P50)
If an XY grid is being collected, note that the line spacing of the X lines and Y lines can be different.
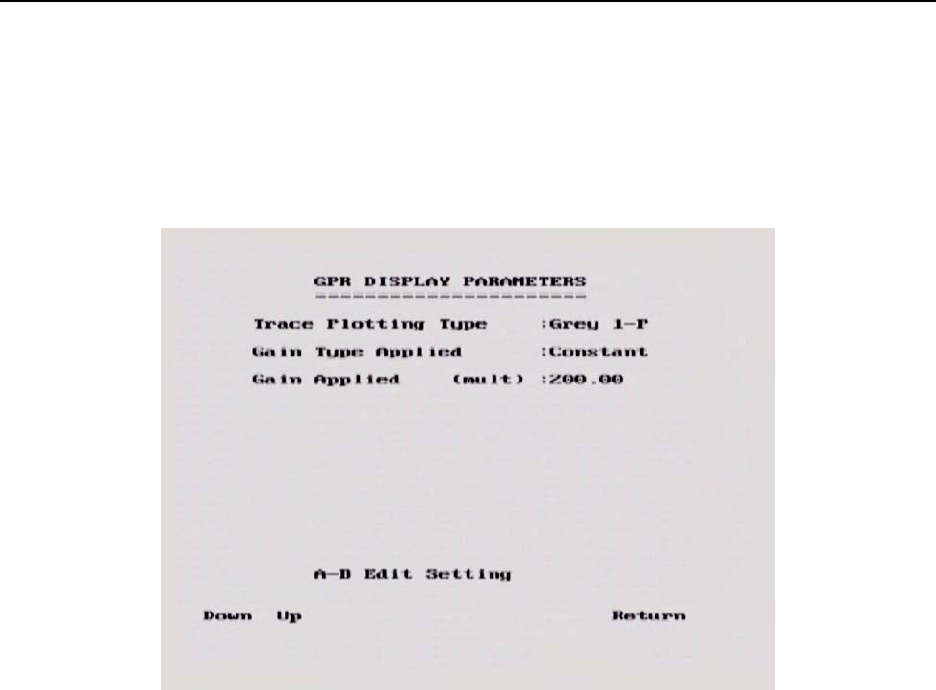
3-System Setup Parameters pulseEKKO PRO
56
3.5 Display Parameters
Selecting the Display Parameters menu option from the System Setup main menu (See Figure 3-1 on
page 31), will display a screen similar to Figure 3-12. This section details each parameter listed in this
menu.
Figure 3-12: The Display Parameters menu. Use the Up and Down buttons to move to the desired parameter and edit the value by
pressing the A and B buttons.
3.5.1 Trace Plotting Type
The data traces can be plotted in two ways: Grey scale or Wiggle.
Grey means each data point is plotted as a grey strip based on its amplitude (Figure 3-13).
If traces are plotted in grey scale, the trace width, in pixels, can also be specified. The choices are 1, 2, 4
or 8 pixels with 2 or 1 pixels being the usual setting. For example, the VGA screen on the DVL with a
resolution width of 640 pixels can display:
80 traces 8 pixels wide
160 traces 4 pixels wide
320 traces 2 pixels wide
640 traces 1 pixel wide
The narrower the trace width, the more data that can be displayed on one screen.
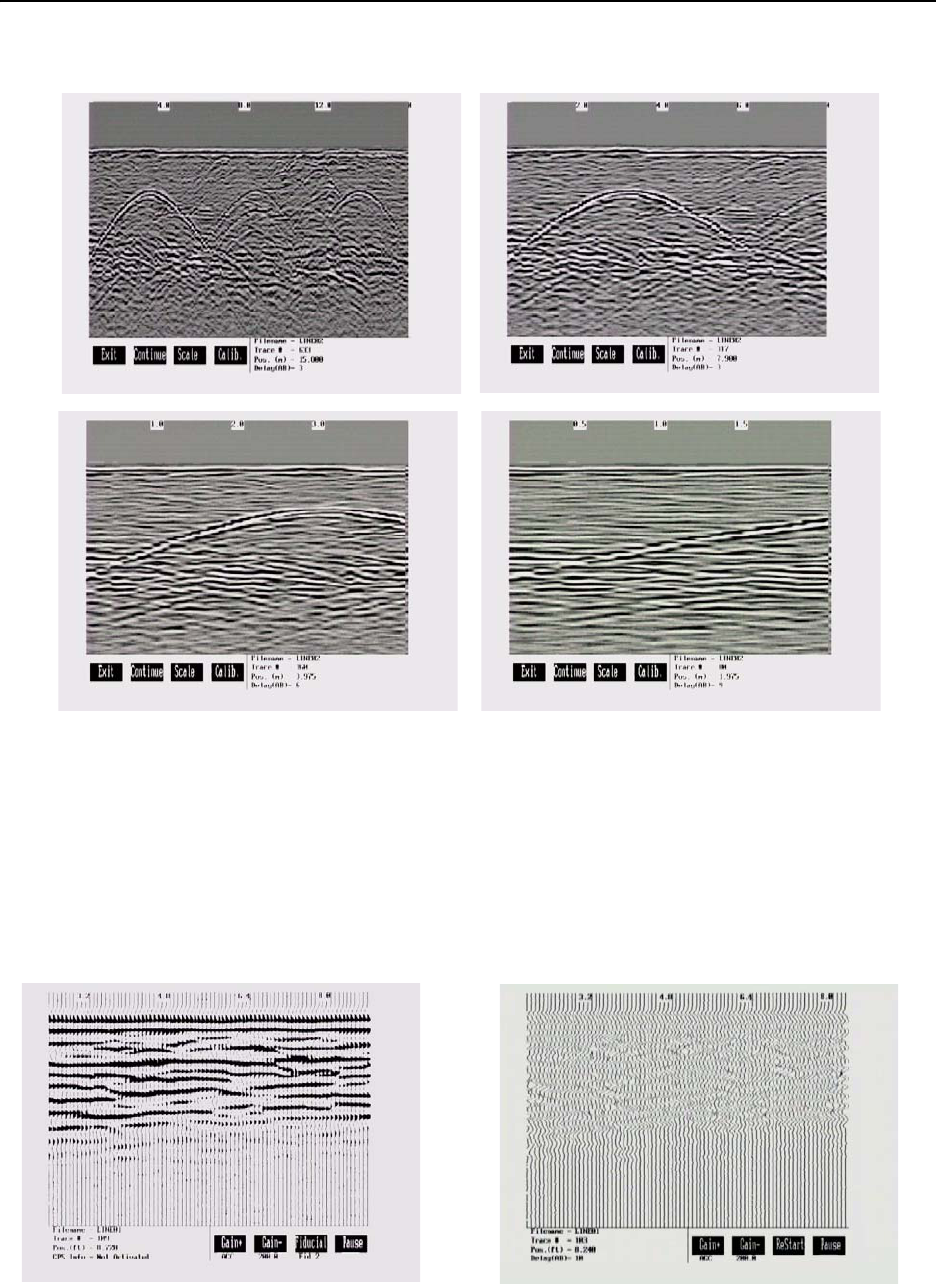
pulseEKKO PRO 3-System Setup Parameters
57
Figure 3-13: Grey scale traces depict the signal amplitude as shades of grey from white to black. Data traces can be plotted to the
screen with a width of 1 pixel (top left), 2 pixels (top right), 4 pixels (bottom left) or 8 pixels (bottom right). The narrower the trace
width, the more data that can be plotted on one screen. In this example, plotting the data 1 pixel wide results in 16 metres of data
displayed on one screen while 2 pixels results in 8 metres of data, 4 pixels results in 4 metres of data and 8 pixels results in 2 metres
of data.
Wiggle means the traces will be plotted as a curved line with the amplitude determining the size of the
curve (Figure 3-14). The wiggle traces can be plotted with shading on the Left side or negative amplitude
side of the trace (Wiggle - L), the Right side or positive amplitude side of the trace (Wiggle - R) or with no
shading (Wiggle - N). The normal default is to shade on the right (positive amplitude) side.
Figure 3-14: Wiggle trace plots show signal strength with a curved line. The left (or negative) side of the curve or the right (or
positive) side of the curve can be shaded (left image). The right image shows the wiggle traces with no shading.
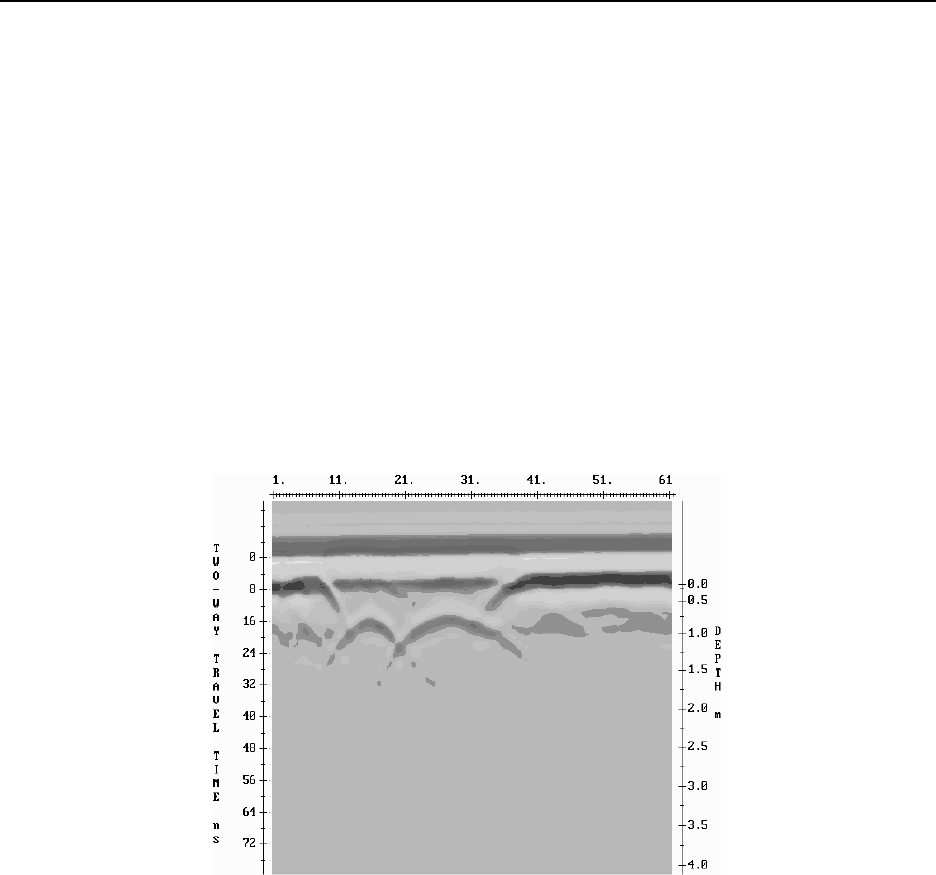
3-System Setup Parameters pulseEKKO PRO
58
3.5.2 Gain Type Applied and Gain Applied
Since the radar signal strength normally decreases with increasing time, it is usually necessary to apply
some sort of gain function to boost the weaker signals at later times.
The raw, ungained data shows little signal except for the strong near-surface reflectors (Figure 3-15). No
gain may be useful in areas where the radar signal is very strong or in areas where the targets are very
shallow.
Four gains are available: AGC, SEC, Constant, and None. These are each described below.
No matter which gain function has been selected, the data are ALWAYS stored WITHOUT any gain
applied. Gain is only applied for real-time display purposes.
For data collection in the field, AGC and constant gains are often the most practical to show that the
system is working properly and to show a range of reflectors in the material. Other more sophisticated
gains, like SEC functions, can be applied later when plotting the data in the office.
Figure 3-15: Display of a data section over buried tanks. No gain was applied before plotting.
Note that none of the gain functions are permitted to boost a data point value to greater than 32767 or less
than -32767. Values where this occurs are trapped and forced to 32767 or -32767.
3.5.2.1 AGC Gain
The AGC (Automatic Gain Control) gain attempts to equalize all signals by applying a gain which is
inversely proportional to the signal strength (Figure 3-16). This type of gain is most useful for defining
continuity of reflecting events. The user should realize that AGC does not preserve relative amplitude
information. Hence once the data have been AGC'ed, the user can no longer make reliable deductions
concerning the strength of any particular reflector relative to other reflectors (Figure 3-17).
Since the AGC gain is inversely proportional to the signal strength, very small signals can produce very
large gains. Therefore some type of gain limiting scheme must be applied. The user enters the maximum
gain which can be applied to the data. This maximum gain is then fixed for the whole data set.
Note that if a data point multiplied by the gain exceeds 32767, the absolute value of the new data point
value becomes 32767 or -32767.
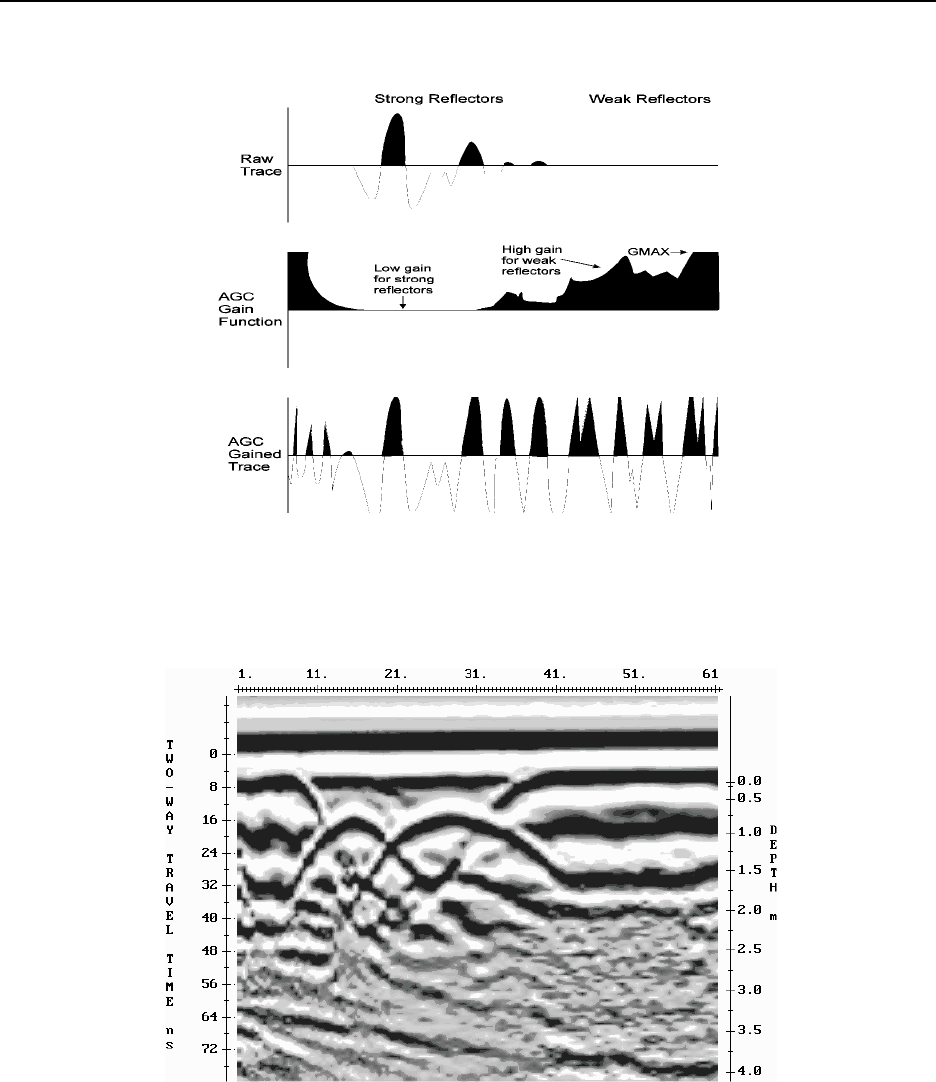
pulseEKKO PRO 3-System Setup Parameters
59
Figure 3-16: Shows how the AGC function (middle) is inversely related to reflector strength of the raw trace (top). The AGC
gained trace (bottom) is a result of multiplying each point in the raw trace with the equivalent point in the AGC function.
Figure 3-17: Display of a data section over buried tanks. An AGC gain was applied before plotting.
The only user variable for the AGC gain is the Max Gain Applied value. This is a number between 1 and
32767 which determines the maximum gain that can be applied to any data point. This maximum gain is
fixed for the whole data set. A typical value would be 50 - 2000 depending on the noise and average signal
levels.
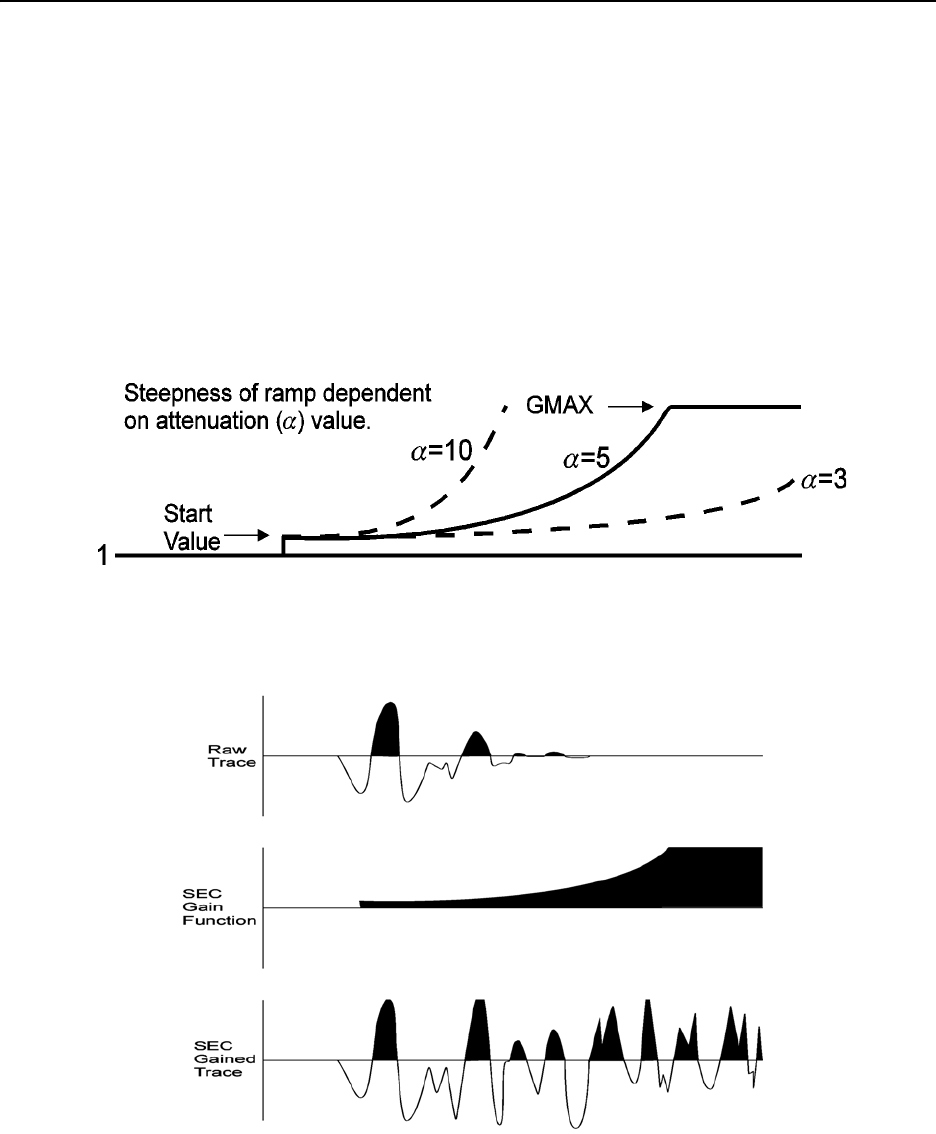
3-System Setup Parameters pulseEKKO PRO
60
3.5.2.2 SEC Gain
The SEC (Spreading & Exponential Compensation) gain is a composite of a linear time gain and an
exponential time gain. This gain compensates for the spherical spreading losses and the exponential
dissipation of energy in the data being collected. Since radar data is attenuated exponentially and the SEC
is an exponential gain (Figure 3-18), it tends to be the gain closest to physical reality. Therefore, unlike the
AGC gain, reflections can be compared for relative signal strength (Figure 3-19 and Figure 3-20).
This gain is essentially an exponential function. This exponential function could, in fact, go to infinity.
Therefore, as with the AGC gain some gain limiting factor must be applied. This gain limiting factor is
identical to the one used in the AGC gain (see AGC above).
Figure 3-18: The SEC function has one parameters that must be specified. GMAX is a limiting value on the function. The Atten-
uation (alpha) value determines the steepness of the ramp. When data are collected in areas with high attenuation, a higher Atten-
uation (alpha) value may be necessary to reveal weaker signals.
Figure 3-19: Shows the exponential nature of the SEC function (middle). The SEC gained trace (bottom) is a result of multiplying
each point in the raw trace (top) with the equivalent point in the SEC function.
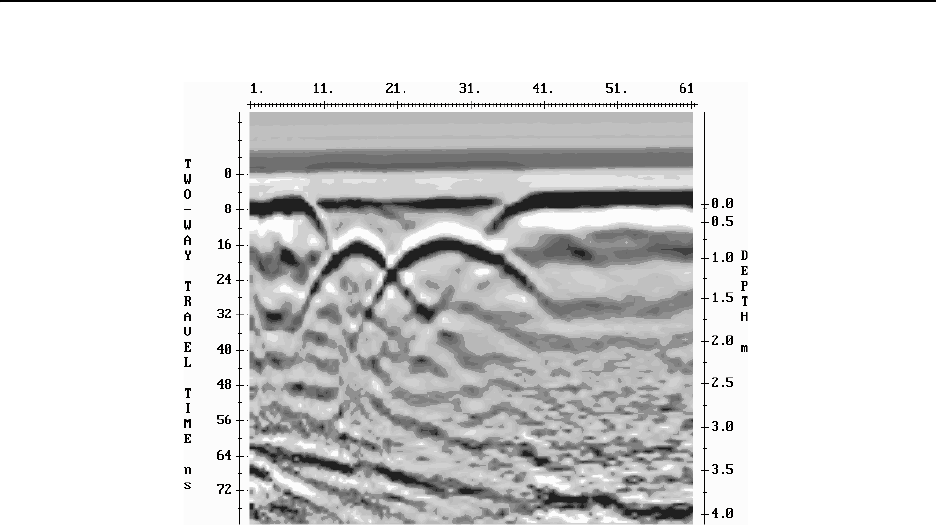
pulseEKKO PRO 3-System Setup Parameters
61
Figure 3-20: Display of a data section over buried tanks. An SEC gain was applied before plotting.
The only user variable for the SEC gain is the Alpha Gain Applied value. This quantity represents the
radar wave attenuation given in decibels/metre. A typical value is 0.5 to 5.
3.5.2.3 Constant Gain
This routine will apply a constant gain factor to the input data set. The only parameter required is the
constant factor to multiply all data points by. Thus if the user enters the number 10, all data points will be
multiplied by a factor of 10. This will gain strong signals and weak signals equally and result in the clipping
of strong signals.
The advantage of a constant gain is that it is easy to understand how the amplification works. The
disadvantage of a constant gain is that it tends to over-gain the strong signals at the beginning of the trace
Figure 3-21.
The parameter needed for the Constant gain function is the Constant Multiplier. Typical values for the
Constant gain are in the range from 5 to 1000.
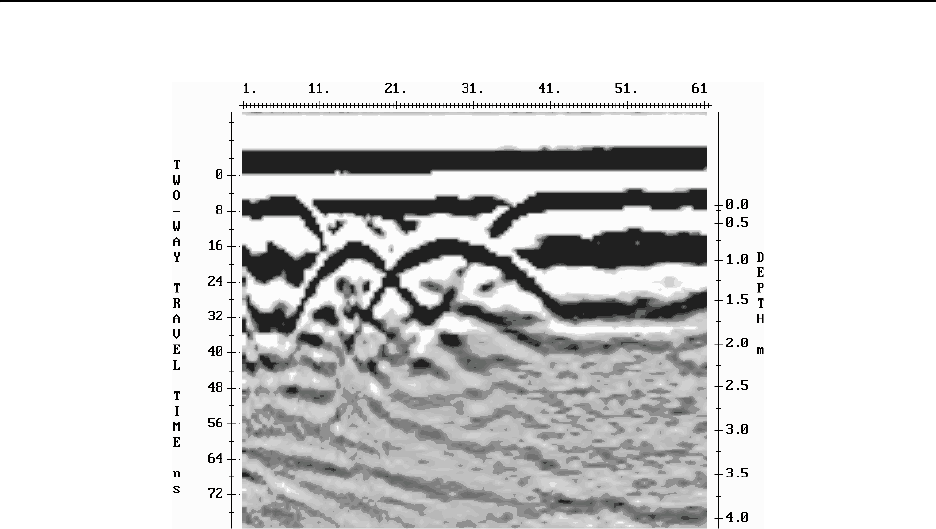
3-System Setup Parameters pulseEKKO PRO
62
Figure 3-21: Display of a data section over buried tanks. A Constant gain was applied before plotting.
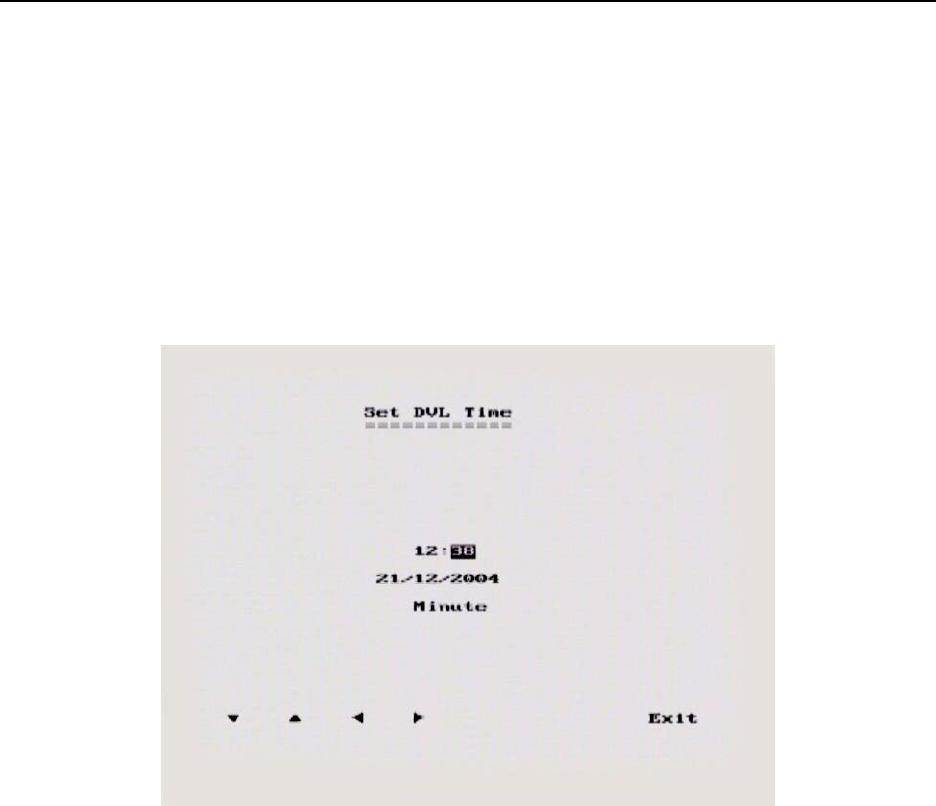
pulseEKKO PRO 3-System Setup Parameters
63
3.6 DVL Setup Menu
3.6.1 Set DVL Time and Date
The date and time are saved with the data files. The DVL date and time setting can be changed by moving
to one or more of the appropriate fields and editing the current setting. The LEFT and RIGHT arrows are
used to move between fields. To change any of the numbers or months, use the UP and DOWN arrows to
increase or decrease the value. When the desired date and time are set, press ENTER to save the
changes.
Figure 3-22: DVL set time and date screen.
3.6.2 Set DVL Transfer Mode
When transferring data from the DVL to a PC (Section 8.1: P105), two different types of PXFER cable are
available, Normal and Turbo. For the data transfer to be successful, the DVL Transfer Mode specified in
this menu must be set to the correct cable. Normal PXFER cables have black bands near the ends while
the Turbo PXFER cables have pink bands near the ends.
3.6.3 Set DVL into Upgrade Mode
This option is used to upgrade the software on the DVL. DO NOT press this button until told to do so in the
instructions accompanying the software upgrade. If you do accidentally enter this menu item, the only way
to exit is to disconnect the power to the DVL.

3-System Setup Parameters pulseEKKO PRO
64
3.6.4 Select Display Info Mode
The Display Info Mode refers to the messages written to the screen at the start of data collection. When the
user presses the Start button to acquire a line of data, the system must set up communications between
the various system components and initialize them. During this process, messages are written to the
screen. The Display Info mode determines the level of message detail.
There are two options available under Display Info Mode: Normal and Display Info.
In normal mode, a minimal number of messages are written. In Display Info mode, detailed messages
about every system interaction are written to the screen.
In general, it is best to use Normal mode unless you are trying to troubleshoot a system problem (Section
7: P95).
3.7 View Complete Setup
The View Complete Setup option displays a listing of the current setup parameters for the pulseEKKO
PRO (See Figure 3-2 on page 31).
3.8 Return
Selecting Return will exit the System Setup menus and return the user to the pulseEKKO PRO main menu
screen (see Section 2.6.4 on page 27). Exit also serves an important function. Before exiting, the program
saves all the current data collection parameters. This process enables the user to continue with the same
settings when the system is restarted.
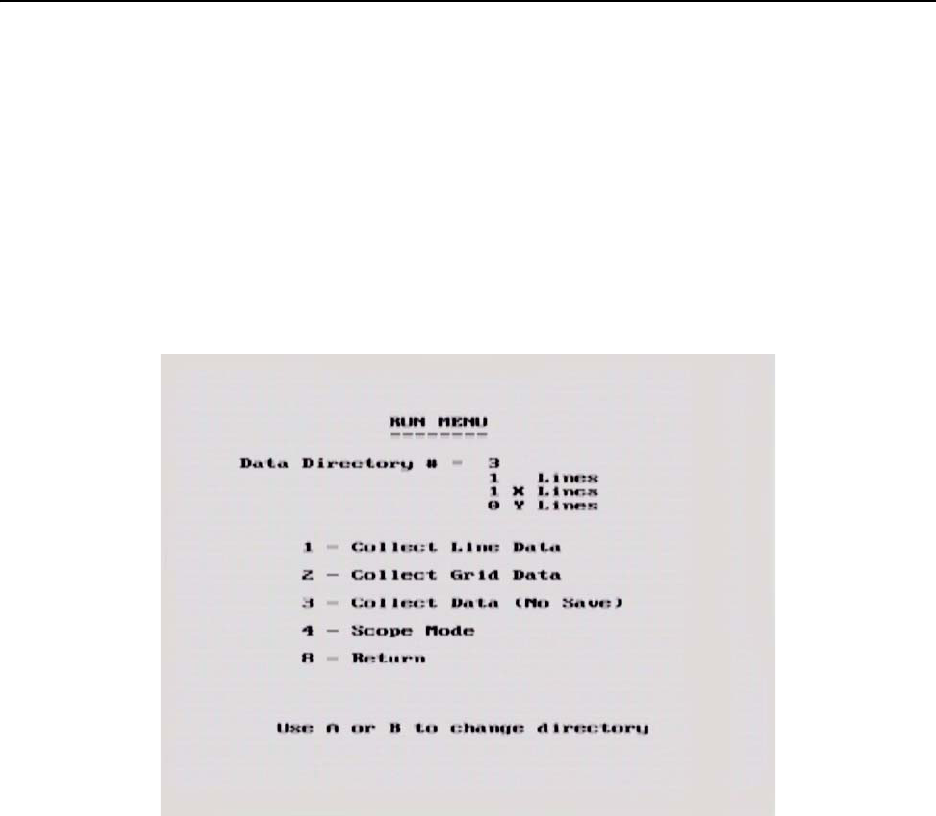
pulseEKKO PRO 4-Running in Scope Mode
65
4 Running in Scope Mode
Once the System Setup parameters have been set, data collection can begin by selecting 1 - Run
pulseEKKO GPR from the main menu. The screen shown in Figure 4-1 will be visible.
Turn on the transmitter and receiver and ensure that they are fully powered and initialized by checking that
the Power LED on the top of the unit has stopped flashing.
Scope Mode (described in this section) is used to check that the system is running correctly before
starting to collect and save survey data in Collect Line Data or Collect Grid Data mode (Section 5: P69).
Figure 4-1: The Run menu allows the operator to find the pulse and set up timezero in Scope mode, collect Line data, grid data or
collect data without saving. If data are to be saved, the data directory number is selected using the A and B buttons.
Scope mode is used to make sure that connections are correct, all parameters are properly set and valid
data are being collected. Scope mode displays the radar trace in the traditional oscilloscope scan format
(see Figure 4-2). Scope mode should normally be run first, prior to data collection and storage. Data
cannot be saved in Scope mode. Once the user is satisfied that everything is working, they can switch to
Collect mode to begin data collection.
Scope mode serves two main functions:
a) to ensure that valid data are being collected properly, and
b) to set the location of the transmit pulse (which is the reference timezero or the first break).
Selecting Scope Mode from the main menu displays a screen with EXIT, SCALE and START.
START begins data collection. EXIT returns the user to the Run menu shown in Figure 4-1. SCALE allows
the user to modify the maximum amplitude displayed on the graph scale. This parameter may take on any
value between 1 and 50 millivolts. The default value of 50 is rarely changed.
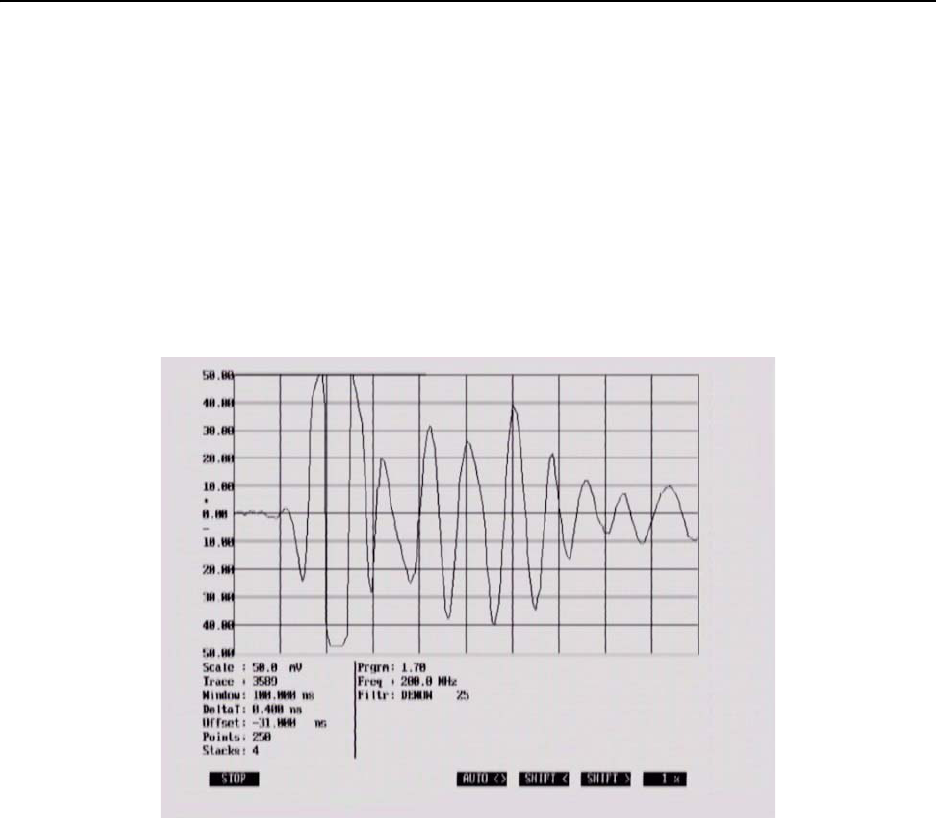
4-Running in Scope Mode pulseEKKO PRO
66
4.1 Scope Screen
A sample of a screen data plot while in Scope mode is shown in Figure 4-2. The radar amplitude (in
millivolts) is plotted in the vertical axis while the time axis is plotted in the horizontal axis. The length of the
time axis depends on the Time Window value. Each division in the time axis is 10% of the length of the
Time Window. In the case shown in Figure 4-2, the Time Window is 100 ns so each division is 10 ns wide.
Below the plot, the vertical amplitude scale, trace number, time window, sampling interval (DeltaT),
timezero offset, number of points, stacks and frequency are listed. It also indicates that the data trace is
being filtered with a 25 point DEWOW filter (see Appendix B: GPR Signal Processing Artifacts).
Pressing the START button begins data collection. The STOP pauses acquisition and displays a menu
with further options.
Figure 4-2: A sample of a screen data plot while using Scope mode. The parameters below the graph, the trace number, time win-
dow, sampling interval (DeltaT), points, stacks and frequency are listed (Section 3: P31). The Offset parameter listed is explained
below.
The Offset is the value used to adjust the first break to the ideal region. The value has no importance to
the radar data; it is only used for the adjustment of the initial radar pulse to the desired position within the
time window. It compensates for changes in cables and differences in electronic components.
4.1.1 Adjusting Timezero (Offset)
Assuming that data are coming in, the first step is to ensure ‘timezero’ is in the correct location. Timezero,
for our purposes, is defined as the first arrival of the radar wave; it is used as a convenient reference
starting point for the trace, hence the name: timezero.
Timezero should be located near the beginning of the second vertical division on the screen (Figure 4-2).
Locating timezero to the right (further in time) of the second division has no ill effect on the data, it just
means possible reflectors may be lost off the bottom of your recording window. Locating timezero to the
left of the second division should be avoided.
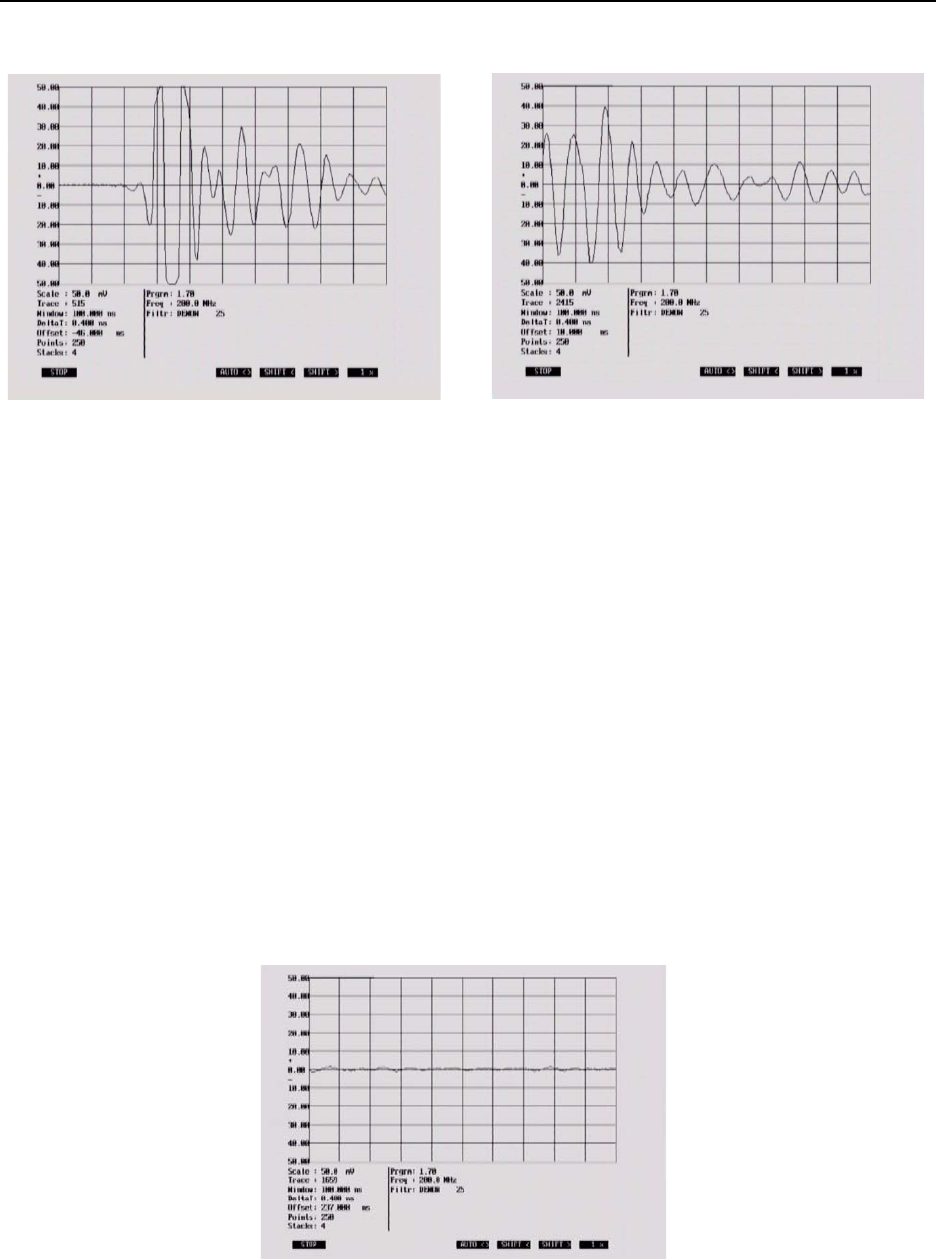
pulseEKKO PRO 4-Running in Scope Mode
67
Figure 4-3: Timezero or the first break is the first large deflection in the trace. Ideally, timezero needs to be shifted to the start of
the second vertical division as shown in Figure 4-2. Use the Auto <> button to try and automatically locate timezero and set it to
the correct position. The Shift > and Shift < buttons can be used to move timezero to the right and left respectively. When a Shift
button has been pressed, it changes to reverse video and timezero will keep moving in that direction until Shift is turned off by
pressing it again. The percentage button indicates the percentage of the shift in each step, a larger percentage indicating a larger
shift. Locating timezero further to the right reduces the amount of data collected from the subsurface (left). Locating timezero fur-
ther left affects the data collected and should be avoided.
The location of timezero is affected by a number of factors. These include: various system hardware
components, length of fibre optic cables, separation of transmitter and receiver antennas, and the total
time window.
To set 'timezero', the transmit and receive antennas should be set to the antenna separation being used for
the survey (Section 3.2.4: P37). This assures a large first arrival with minimal propagation delay. The start
of the second division represents the ‘ideal’ location for timezero (see Figure 4-2). The purpose is to adjust
the ‘timezero’ location so that it falls near the start of the second division. There are 4 menu options along
the bottom of the screen to assist with adjusting timezero: Auto <>, Shift <, Shift > and a percentage.
Pressing Auto <> initiates an automatic search and adjust to bring the timezero location within the ideal
region. The automatic search and adjust, while not perfect, should work get timezero close to the ideal
region most of the time. It is based on the assumption that the first break (first signal to arrive) is strong
compared to the surrounding background noise. If antennas are at a large separation, or there is a large
amount of external noise then this automatic adjustment may not function correctly.
Figure 4-4: If the transmit pulse is not visible on the Scope screen, use Auto <> to shift the pulse closer to the ideal region shown
in Figure 4-2.

4-Running in Scope Mode pulseEKKO PRO
68
Shift > and Shift < are used if the transmit pulse is visible on the screen but needs to be moved into the
ideal region (Figure 4-3). The Shift button will change to reverse video when selected and the pulse will
step across the screen in the direction indicated. Pressing the Shift button again will deactivate the shift
and stop the pulse. The percentage value (1%, 5%, 10% and 25%) determine the amount that the pulse is
shifted in each step. Generally, 1% or 5% work well. The higher values tend to shift the pulse in large steps
and it is easy for the pulse to shift a long way very quickly.
In general, timezero should be found near an Offset value (listed on the scope screen) of around zero ns.
If no transmit pulse is found then there is a problem with the transmitter (Section 7.5: P101).
Once the user is happy that everything is working properly and all parameters are correctly set, pressing
the STOP and EXIT button exits Scope mode and returns the user to the main Run menu. At this point, the
user can select Collect to begin data collection.