Siemens Network Card 200 Users Manual MultiRanger 100/200
200 to the manual e879afde-8df8-4938-81e8-aafd74db20fd
2015-02-05
: Siemens Siemens-Network-Card-200-Users-Manual-410341 siemens-network-card-200-users-manual-410341 siemens pdf
Open the PDF directly: View PDF ![]() .
.
Page Count: 282 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- The MultiRanger 100 and 200
- Specifications
- Installation
- Wiring
- Operating the MultiRanger
- RUN Mode
- Readings in RUN Mode
- Status Parameters
- Controlling the Display
- PROGRAM Mode
- Starting PROGRAM Mode
- Dolphin Plus
- SIMATIC Process Device Manager (PDM)
- Activating the MultiRanger
- Security
- Using Units or Percent (%)
- Parameters Types
- Parameter Reset
- Display Readout
- Primary and Secondary Indexes
- Starting Measurement
- Relays
- Backup Level Override
- Discrete Inputs
- mA I/O
- Volume [MR 200]
- Alarms
- Pump Control
- Setting a Pump Down Group
- Setting a Pump Up (Reservoir) Group
- Other Pump Control Algorithms
- Optional Pump Controls
- Starting Pumps by Rate of Level Change [MR 200]
- Rotating Pumps by Service Ratio [MR 200]
- Totalizing Pumped Volume [MR 200]
- Setting Independent Failsafe Controls
- Setting a Pump to Run On [MR 200]
- Setting the Pump Start Delays [MR 200]
- Reducing Wall Cling [MR 200]
- Grouping Pumps [MR 200]
- Setting a Flush Valve [MR 200]
- Relay Controlled by Communications
- Tracking Pump Usage
- Rake (Screen) Control [MR 200]
- External Totalizers and Flow Samplers [MR 200]
- Open Channel Monitoring (OCM) [MR 200]
- Testing the Configuration
- MultiRanger Communications
- Communications Installation
- Modbus Register Map
- Word Order (R40,062)
- Map ID (R40,063)
- Product ID (R40,064)
- Point Data (R41,010 – R41,031)
- Totalizer (R41,040 – R41,043)
- Input/Output (R41,070 – R41,143)
- Discrete Inputs (R41,070)
- Relay Outputs (R41,080)
- mA Input (R41,090) [MR 200]
- mA Output (R41,110-41,111)
- Pump Control (R41,400 – R41,474)
- Pump ON Setpoint (R41,420 – R41,425)
- Pump OFF Setpoint (R41,430 – R41,435)
- Pumped Volume (R41,440 – R41,443) [MR 200]
- Pump Hours (R41,450 – R41,461)
- Pump Starts (R41,470 – R41,475)
- Parameter Access (R43,998 – R46,999)
- Parameter Indexing
- Reading Parameters
- Writing Parameters
- Format Words (R46,000 to R46,999)
- Data Types
- Error Handling
- Communication Troubleshooting
- Communication Appendix A: Single Parameter Access (SPA)
- Parameter Reference
- MultiRanger 100 and MultiRanger 200
- Helpful Hints
- Index types
- Quick Start (P001 to P007)
- Volume (P050 to P055) [MR 200]
- Display and Reading (P060 to P062)
- Backup Level Override
- Failsafe (P070 to P072)
- Relays (P100 to P119)
- Pump Setpoint Modifiers (P121 and P122) [MR 200]
- Independent Relay Failsafe (P129)
- Advanced Pump Control Modifiers (P130 to P137) [MR 200]
- Flush Systems (P170 to P173) [MR 200]
- mA Output (P200 to P219)
- Independent mA Setpoints (P210 and P211)
- mA Output Limits (P212 and P213)
- mA Output Trim (P214 to P215)
- mA Output Failsafe (P219) [MR 200]
- mA Input (P250 to P260) [MR 200]
- Discrete Input Functions (P270 to P275)
- Standard Data Logging (P300 to P321)
- Record Temperatures (P300 to P303)
- Record Readings (P304 and P305)
- Pump Records (P309 to P312)
- Flow Records (P320 and P321) [MR 200]
- LCD Totalizer (P322 and P323) [MR 200]
- Profile Records (P330 to P337)
- Auto Record ON and OFF Setpoints (P334 to P337)
- Installation Records (P340 to P342)
- Open Channel Monitoring (P600 to P621) [MR 200]
- Pumped Volume Totalizer (P622) [MR 200]
- Totalizer (P630 to P645) [MR 200]
- Range Calibration (P650 to P654)
- Temperature Compensation (P660 to P664)
- Rate (P700 to P708)
- Measurement Verification (P710 to P713)
- Transducer Scanning (P726 to P729)
- Display (P730 to P739)
- SmartLinx Reserved (P750 to P769)
- Communications (P770 to P782)
- SmartLinx Hardware Testing (P790 to P795)
- Echo Processing (P800 to P807)
- Advanced Echo Processing (P815 to P825)
- Advanced TVT Adjustment (P830 to P835)
- Advanced Shot Adjustment (P840 to P852)
- Test (P900 to P913)
- Measurement (P920 to P927)
- Master Reset (P999)
- Appendix A: Index Types
- Appendix B: Technical Reference
- Appendix C: Troubleshooting
- Appendix D: Pump Control Reference
- Pump Control Options
- Pump Control Algorithms
- Fixed Duty Assist (P111 = 50)
- Fixed Duty Backup (P111 = 51) [MR 200]
- Alternate Duty Assist (P111 = 52)
- Alternate Duty Backup (P111 = 53) [MR 200]
- Service Ratio Duty Assist (P111 = 54) [MR 200]
- Service Ratio Duty Backup (P111 = 55) [MR 200]
- First In First Out (FIFO) (P111 = 56) [MR 200]
- Pump by Rate (P121) [MR 200]
- Other Pump Controls [MR 200]
- Appendix E: Updating Software
- Appendix F: Upgrading
- Appendix G: Conduit Entry for Class 1, Div 2 Applications
- Appendix H: Software Revision History
- Programming Charts
- Index
Instruction Manual July 2009
100/200
multiranger
© Siemens Milltronics Process Instruments Inc. 2009
Safety Guidelines: Warning notices must be observed to ensure personal safety as well as that of
others, and to protect the product and the connected equipment. These warning notices are
accompanied by a clarification of the level of caution to be observed.
Qualified Personnel: This device/system may only be set up and operated in conjunction with this
manual. Qualified personnel are only authorized to install and operate this equipment in accordance with
established safety practices and standards.
Unit Repair and Excluded Liability:
• The user is responsible for all changes and repairs made to the device by the user or the user’s
agent.
• All new components are to be provided by Siemens Milltronics Process Instruments Inc.
• Restrict repair to faulty components only.
• Do not reuse faulty components.
Warning: Cardboard shipping package provides limited humidity and moisture protection. This product
can only function properly and safely if it is correctly transported, stored, installed, set up, operated, and
maintained.
This product is intended for use in industrial areas. Operation of this equipment in a residential area
may cause interference to several frequency based communications.
Note: Always use product in accordance with specifications.
Copyright Siemens Milltronics Process
Instruments Inc. 2009. All Rights Reserved
Disclaimer of Liability
This document is available in bound version and in
electronic version. We encourage users to purchase
authorized bound manuals, or to view electronic versions
as designed and authored by Siemens Milltronics Process
Instruments Inc. Siemens Milltronics Process Instruments
Inc. will not be responsible for the contents of partial or
whole reproductions of either bound or electronic
versions.
While we have verified the contents of this
manual for agreement with the
instrumentation described, variations
remain possible. Thus we cannot
guarantee full agreement. The contents of
this manual are regularly reviewed and
corrections are included in subsequent
editions. We welcome all suggestions for
improvement.
Technical data subject to change.
MILLTRONICS®is a registered trademark of Siemens Milltronics Process Instruments Inc.
Contact SMPI Technical Publications European Authorized Representative
at the following address:
Technical Publications Siemens AG
Siemens Milltronics Process Instruments Inc. Industry Sector
1954 Technology Drive, P.O. Box 4225 76181 Karlsruhe
Peterborough, Ontario, Canada, K9J 7B1 Deutschland
Email: techpubs.smpi@siemens.com
• For a selection of Siemens Milltronics level measurement manuals, go to:
www. siemens.com/processautomation. Under Process Instrumentation, select
Level
Measurement
and then go to the manual archive listed under the product family.
• For a selection of Siemens Milltronics weighing manuals, go to:
www. siemens.com/processautomation. Under Weighing Technology, select
Continuous
Weighing Systems
and then go to the manual archive listed under the product family.
i
mmmmm
Table of Contents
Table of Contents
The MultiRanger 100 and 200 ...............................................................................................................1
MultiRanger 100 ............................................................................................................................1
MultiRanger 200 ............................................................................................................................1
The Manual ...............................................................................................................................................1
Manual Symbols ............................................................................................................................2
Configuration Examples ...............................................................................................................2
Specifications ...............................................................................................................................................3
Installation ......................................................................................................................................................8
Mounting ...................................................................................................................................................8
Mounting Locations ......................................................................................................................8
Mounting Instructions ..................................................................................................................9
Wall Mount ........................................................................................................................... 9
Cable routed through a conduit:.................................................................................... 10
Panel Mount ....................................................................................................................... 11
Mounting the Enclosure .................................................................................................. 12
MultiRanger Board .....................................................................................................................13
Installing the Battery ..................................................................................................................13
Installing SmartLinx Card ..........................................................................................................14
Wiring ..............................................................................................................................................................15
Terminal Board .......................................................................................................................................16
Cables .......................................................................................................................................................16
Transducers ............................................................................................................................................17
Relays .......................................................................................................................................................17
Temperature Sensor .............................................................................................................................18
mA Input [MR 200 only] .......................................................................................................................18
mA Output ...............................................................................................................................................18
Level System Synchronization ...........................................................................................................19
Power .......................................................................................................................................................19
Digital Communications .......................................................................................................................20
RS-232 Serial Connection ..........................................................................................................20
RS-485 Serial Connection ..........................................................................................................20
Discrete Inputs................................................................................................................... 21
Operating the MultiRanger ..................................................................................................................22
RUN Mode ..............................................................................................................................................22
Readings in RUN Mode .......................................................................................................................23
Status Parameters ................................................................................................................................24
Controlling the Display .........................................................................................................................25
Adjusting the primary reading for four-digit LCD readout:...................................... 25
Auxiliary Reading ........................................................................................................................25
Multiple Readings [MR 200 only] ............................................................................................26
PROGRAM Mode ..................................................................................................................................27
Starting PROGRAM Mode ..................................................................................................................27
ii
mmmmm
Table of Contents
Hand Programmer .......................................................................................................................27
Programmer Keys ........................................................................................................................28
Dolphin Plus ............................................................................................................................................29
Dolphin Plus Toolbar Buttons ...................................................................................................30
SIMATIC Process Device Manager (PDM) .....................................................................................31
Device Description ......................................................................................................................31
Activating the MultiRanger .................................................................................................................32
Changing Parameters .................................................................................................................32
Security ....................................................................................................................................................33
Using Units or Percent (%) ..................................................................................................................33
Parameters Types ..................................................................................................................................33
Parameter Reset ....................................................................................................................................34
Display Readout .....................................................................................................................................34
Changing Parameters(Dolphin Plus) .......................................................................................35
Parameter Indexing ....................................................................................................................36
Primary and Secondary Indexes .......................................................................................................37
Primary Index ..................................................................................................................... 37
Secondary Index................................................................................................................ 37
Starting Measurement ........................................................................................................................38
Single Point Models ....................................................................................................................38
Average or Differential [MR 200 only].......................................................................... 39
Dual Point Models .......................................................................................................................39
Average or Differential [MR 200 only].......................................................................... 40
Measurement Conditions ..........................................................................................................40
Response Rate................................................................................................................... 40
Dimensions [MR 200 only]............................................................................................... 40
Failsafe................................................................................................................................. 40
Relays ...............................................................................................................................................................41
General Introduction ...................................................................................................................41
Relay Function ............................................................................................................................41
Alarm.................................................................................................................................... 41
Pump..................................................................................................................................... 42
Miscellaneous.................................................................................................................... 42
Relay Status – Non Run Modes .................................................................................... 43
Relay States ..................................................................................................................................43
Relay Related Parameters ........................................................................................................43
Relay Wiring Test.............................................................................................................. 44
Relay Activation ...........................................................................................................................44
Relay Failsafe ...............................................................................................................................45
Preset Applications ...............................................................................................................................46
Backup Level Override ...........................................................................................................................47
Backup Level Override Parameters ..................................................................................................47
Discrete Inputs ...........................................................................................................................................48
Wiring the Discrete Inputs ..................................................................................................................48
Programming the Discrete Input Logic ............................................................................................48
iii
mmmmm
Table of Contents
mA I/O ..............................................................................................................................................................49
mA Input [MR 200] ................................................................................................................................49
mA Output ...............................................................................................................................................49
Volume [MR 200] ........................................................................................................................................51
Readings ..................................................................................................................................................51
Tank Shape and Dimensions ..............................................................................................................51
Characterization Chart [MR 200] .......................................................................................................52
Example Chart ..............................................................................................................................52
MultiRanger 200 only .................................................................................................................53
Alarms .............................................................................................................................................................54
Level ..........................................................................................................................................................54
Setting Simple Level Alarms .....................................................................................................55
Rate [MR 200] .........................................................................................................................................55
In Bounds/ Out of Bounds Range [MR 200] ....................................................................................56
Cable Fault ..............................................................................................................................................56
Temperature [MR 200] ..........................................................................................................................56
Loss of Echo (LOE) .................................................................................................................................57
Pump Control ...............................................................................................................................................58
Setting a Pump Down Group ..............................................................................................................58
Setting a Pump Up (Reservoir) Group ..............................................................................................59
Other Pump Control Algorithms .........................................................................................................61
Set Relays to ALTERNATE DUTY BACKUP [MR 200] ..........................................................61
Set Relays to FIXED DUTY ASSIST ........................................................................................61
Set Relays to FIXED DUTY BACKUP [MR 200] .....................................................................62
Set Relays to ALTERNATE DUTY SERVICE [MR 200] ..........................................................62
Set Relays to FIRST IN FIRST OUT (FIFO) ASSIST [MR 200] ............................................63
Optional Pump Controls .......................................................................................................................63
Starting Pumps by Rate of Level Change [MR 200] ............................................................63
Rotating Pumps by Service Ratio [MR 200] ..........................................................................64
Totalizing Pumped Volume [MR 200] ......................................................................................65
Setting Independent Failsafe Controls ...................................................................................65
Setting a Pump to Run On [MR 200] .......................................................................................66
Setting the Pump Start Delays [MR 200] ...............................................................................66
Reducing Wall Cling [MR 200] ..................................................................................................66
Grouping Pumps [MR 200] ........................................................................................................67
Setting a Flush Valve [MR 200] ................................................................................................67
Relay Controlled by Communications ....................................................................................68
Tracking Pump Usage ..........................................................................................................................68
Rake (Screen) Control [MR 200] ........................................................................................................69
Setting a Rake Control .........................................................................................................................69
iv
mmmmm
Table of Contents
Setting the Common Parameters ............................................................................................70
Set Relay 1 (Operate Rake) .......................................................................................................70
Set Relays 2 to 4 (Level Alarms) ..............................................................................................70
External Totalizers and Flow Samplers [MR 200] ....................................................................71
Relay Contacts .......................................................................................................................................71
Totalizer ....................................................................................................................................................71
Flow Sampler ..........................................................................................................................................72
Based on Volume and Time ......................................................................................................72
Open Channel Monitoring (OCM)
[MR 200] ..........................................................................................................................................................73
Common Parameters ............................................................................................................................73
Setting Zero Head .......................................................................................................................74
Setting Totalized Volume .....................................................................................................................75
Applications Supported by MultiRanger 200 .................................................................................75
BS-3680 / ISO 1438/1 Thin plate V notch weir ............................................................ 75
BS-3680 / ISO 4359 Rectangular Flume........................................................................ 76
Palmer Bowlus Flume ...................................................................................................... 77
H Flume................................................................................................................................ 78
PMDs with Exponential Flow to Head Function ............................................................................79
Applicable Weir Profiles ............................................................................................................79
Non-Applicable Weir Profiles ..................................................................................................80
Parshall Flume ..............................................................................................................................80
Leopold Lagco Flume ..................................................................................................................81
Cut Throat Flume .........................................................................................................................82
Universal Calculation Support ...........................................................................................................83
Typical Flow Characterization ..................................................................................................83
Example Flumes ...........................................................................................................................84
Example Weirs .............................................................................................................................84
Testing the Configuration ......................................................................................................................85
Simulation ...............................................................................................................................................85
Simulating a Single Measurement ...................................................................................................85
Simulating a Level Cycle ......................................................................................................................85
Checking Volume Characterization [MR 200] .................................................................................86
Checking OCM Flow Characterization [MR 200] ...........................................................................86
I/O Checkout ...........................................................................................................................................87
Application Test .....................................................................................................................................87
MultiRanger Communications ...........................................................................................................89
MultiRanger Communication Systems ............................................................................................89
Optional SmartLinx®Cards ................................................................................................................89
Communication Systems .....................................................................................................................90
Communication Ports ...........................................................................................................................90
Modbus ..........................................................................................................................................90
SmartLinx ................................................................................................................................................91
Dolphin Plus ............................................................................................................................................91
v
mmmmm
Table of Contents
Communications Installation .............................................................................................................92
Wiring Guidelines ..................................................................................................................................92
Ports 1 and 2 .................................................................................................................................92
Ports 1 and 2: RS-232 RJ-11 Jack and RS-485 Locations ..................................................92
Port 1: RS-232 RJ-11 Jack ..........................................................................................................93
Port 2: RS-485 ...............................................................................................................................93
Configuring Communication Ports (Parameters) ...........................................................................94
Modbus Register Map ............................................................................................................................97
Word Order (R40,062) ..........................................................................................................................98
Map ID (R40,063) ....................................................................................................................................98
Product ID (R40,064) ..............................................................................................................................99
Point Data (R41,010 – R41,031) ............................................................................................................99
Totalizer (R41,040 – R41,043) ................................................................................................................99
Input/Output (R41,070 – R41,143) .........................................................................................................99
Discrete Inputs (R41,070) ....................................................................................................... 100
Relay Outputs (R41,080) ........................................................................................................... 100
mA Input (R41,090) [MR 200] .................................................................................................. 100
mA Output (R41,110-41,111) ..................................................................................................... 100
Pump Control (R41,400 – R41,474) ......................................................................................... 100
Pump ON Setpoint (R41,420 – R41,425) ................................................................................ 100
Pump OFF Setpoint (R41,430 – R41,435) ...............................................................................101
Pumped Volume (R41,440 – R41,443) [MR 200] ...................................................................101
Pump Hours (R41,450 – R41,461) ...........................................................................................101
Pump Starts (R41,470 – R41,475) ............................................................................................101
Parameter Access (R43,998 – R46,999) ............................................................................... 102
Parameter Indexing ................................................................................................................. 102
Indexing the Parameter Access Area....................................................................... 102
Reading Parameters ................................................................................................................ 103
Global Index Method (P782 = 0).................................................................................. 103
Parameter Specific Index Method (P782 = 1) ......................................................... 103
Writing Parameters .................................................................................................................. 104
Global Index Method (P782 = 0).................................................................................. 104
Parameter Specific Index Method (P782 = 1).......................................................... 104
Format Words (R46,000 to R46,999) ............................................................................................... 105
Global Index Method (P782 = 0) ............................................................................................ 105
Parameter-Specific Index Method (P782 = 1) .................................................................... 105
Format Registers ...................................................................................................................... 105
Data Types .................................................................................................................................................. 107
Numeric Values .................................................................................................................................. 107
Bit Values .............................................................................................................................................. 107
Unsigned Double Precision Integer (UINT32) ............................................................................ 107
Split Values .......................................................................................................................................... 108
Text Messages .................................................................................................................................... 109
Relay Function Codes (P111 Only) ..................................................................................................110
Error Handling ...........................................................................................................................................111
Modbus Responses ............................................................................................................................111
vi
mmmmm
Table of Contents
Error Handling ......................................................................................................................................111
Communication Troubleshooting ...................................................................................................113
Generally ...............................................................................................................................................113
Specifically ............................................................................................................................................113
Communication Appendix A: Single Parameter Access (SPA) .....................................114
Mapping .................................................................................................................................................114
Reading Parameters ...........................................................................................................................114
Writing Parameters .............................................................................................................................115
Format Register ...................................................................................................................................115
Error Codes ...........................................................................................................................................116
Parameter Reference ............................................................................................................................117
MultiRanger 100 and MultiRanger 200 ..........................................................................................117
Helpful Hints .........................................................................................................................................117
Index types ............................................................................................................................................118
Quick Start (P001 to P007) .................................................................................................................119
For DPD and DPA Programming [MR 200]............................................................... 120
Volume (P050 to P055) [MR 200] ......................................................................................................123
Display and Reading (P060 to P062) ..............................................................................................127
Backup Level Override .......................................................................................................................129
Failsafe (P070 to P072) ......................................................................................................................131
Relays (P100 to P119) .........................................................................................................................132
MultiRanger 200.............................................................................................................. 134
Pump Setpoint Modifiers (P121 and P122) [MR 200] ..................................................................139
Independent Relay Failsafe (P129) .................................................................................................140
Advanced Pump Control Modifiers (P130 to P137) [MR 200] ...................................................141
Flush Systems (P170 to P173) [MR 200] .........................................................................................144
mA Output (P200 to P219) ..................................................................................................................146
Independent mA Setpoints (P210 and P211) .................................................................................149
mA Output Limits (P212 and P213) ...................................................................................................149
mA Output Trim (P214 to P215) .........................................................................................................150
mA Output Failsafe (P219) [MR 200] ...............................................................................................151
mA Input (P250 to P260) [MR 200] ...................................................................................................151
Discrete Input Functions (P270 to P275) .......................................................................................153
Standard Data Logging (P300 to P321) .........................................................................................154
Record Temperatures (P300 to P303) ............................................................................................154
Record Readings (P304 and P305) .................................................................................................156
Pump Records (P309 to P312) ...........................................................................................................156
Flow Records (P320 and P321) [MR 200] .......................................................................................158
LCD Totalizer (P322 and P323) [MR 200] ........................................................................................158
Profile Records (P330 to P337) ........................................................................................................159
Auto Record ON and OFF Setpoints (P334 to P337) ....................................................................162
Installation Records (P340 to P342) ...............................................................................................164
Open Channel Monitoring (P600 to P621) [MR 200] ...................................................................165
Example Exponents........................................................................................................ 167
Pumped Volume Totalizer (P622) [MR 200] ...................................................................................174
Totalizer (P630 to P645) [MR 200] ....................................................................................................175
Range Calibration (P650 to P654) ....................................................................................................178
vii
mmmmm
Table of Contents
Temperature Compensation (P660 to P664) ..................................................................................181
Rate (P700 to P708) ............................................................................................................................183
Measurement Verification (P710 to P713) ....................................................................................187
Transducer Scanning (P726 to P729) .............................................................................................190
Display (P730 to P739) .......................................................................................................................191
SmartLinx Reserved (P750 to P769) ...............................................................................................194
Communications (P770 to P782) .....................................................................................................194
SmartLinx Hardware Testing (P790 to P795) ................................................................................197
Echo Processing (P800 to P807) ......................................................................................................199
Advanced Echo Processing (P815 to P825) ................................................................................. 203
Advanced TVT Adjustment (P830 to P835) .................................................................................. 207
Advanced Shot Adjustment (P840 to P852) ..................................................................................212
Test (P900 to P913) ..............................................................................................................................215
Measurement (P920 to P927) ...........................................................................................................218
Master Reset (P999) ......................................................................................................................... 221
Appendix A: Index Types .................................................................................................................... 223
Index types ........................................................................................................................................... 223
Appendix B: Technical Reference ................................................................................................ 224
Transmit Pulse ..................................................................................................................................... 224
Echo Processing ................................................................................................................................. 224
TVT (Time Varying Threshold) curves ........................................................................................... 225
Auto False-Echo Suppression ............................................................................................... 225
Distance Calculation ......................................................................................................................... 226
Sound Velocity .................................................................................................................................... 226
Scanning ............................................................................................................................................... 227
Volume Calculation [MR 200] .......................................................................................................... 227
Universal, Curved [MR 200] ................................................................................................... 228
Flow Calculation ................................................................................................................................. 228
Universal, Linear [MR 200] .....................................................................................................229
Universal, Curved [MR 200] ................................................................................................... 229
Maximum Process Speed ................................................................................................................ 230
Appendix C: Troubleshooting ........................................................................................................... 231
Common Problems Chart ................................................................................................................. 231
Noise Problems ................................................................................................................................... 232
Determine the Noise Source ................................................................................................. 232
Non-Transducer Noise Sources ........................................................................................... 233
Common Wiring Problems ..................................................................................................... 233
Reducing Electrical Noise ......................................................................................................233
Reducing Acoustical Noise .................................................................................................... 233
Measurement Difficulties ................................................................................................................. 234
Flashing LOE Display ............................................................................................................... 234
Adjust Transducer Aiming ........................................................................................... 234
Increase Failsafe Timer Value .................................................................................... 235
Install a Transducer with a Narrower Beam........................................................... 235
Use Dolphin Plus to Debug Echo................................................................................ 235
Fixed Reading ...................................................................................................................................... 235
viii
mmmmm
Table of Contents
Obstructions in the Sound Beam ......................................................................................... 235
Nozzle Mountings .................................................................................................................... 235
Set the MultiRanger to Ignore the Bad Echo .................................................................... 236
Wrong Reading ................................................................................................................................... 236
Types of Wrong Readings ...................................................................................................... 236
Liquid Splashing ........................................................................................................................ 236
Adjust the Echo Algorithm ..................................................................................................... 236
Transducer Ringing ............................................................................................................................ 237
Unit Repair and Excluded Liability ....................................................................................... 238
Appendix D: Pump Control Reference ........................................................................................ 239
Pump Control Options ....................................................................................................................... 239
Pump Groups ............................................................................................................................. 239
Pump by Rate [MR 200] ..........................................................................................................239
Pump Control Algorithms ................................................................................................................. 239
Fixed Duty Assist (P111 = 50) ................................................................................................. 240
Fixed Duty Backup (P111 = 51) [MR 200] ............................................................................ 240
Alternate Duty Assist (P111 = 52) ........................................................................................ 241
Alternate Duty Backup (P111 = 53) [MR 200] ..................................................................... 241
Service Ratio Duty Assist (P111 = 54) [MR 200] ................................................................ 242
Service Ratio Duty Backup (P111 = 55) [MR 200] ............................................................. 243
First In First Out (FIFO) (P111 = 56) [MR 200] ...................................................................... 243
Pump by Rate (P121) [MR 200] .............................................................................................. 243
Other Pump Controls [MR 200] ....................................................................................................... 243
Appendix E: Updating Software ..................................................................................................... 245
Updating Software ............................................................................................................................. 245
Appendix F: Upgrading ........................................................................................................................ 246
Mounting a MultiRanger 100/200 ......................................................................................... 246
Connecting the Transducer ................................................................................................... 246
Coaxial Transducer Extention ..................................................................................... 246
Connecting a transducer with RG62 coaxial extension cable............................. 247
MultiRanger Plus to MultiRanger 100/200 Parameters .................................................. 248
Appendix G: Conduit Entry for Class 1, Div 2 Applications ............................................. 249
Appendix H: Software Revision History .................................................................................... 251
MultiRanger 100 ................................................................................................................................. 251
MultiRanger 200 ................................................................................................................................. 254
Programming Charts ............................................................................................................................. 257

7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 1
mmmmm
MultiRanger 100/200
The MultiRanger 100 and 200
The MultiRanger is available in two models, MultiRanger 100 and MultiRanger 200, and is
designed for a variety of applications:
• water and wastewater
• storage tanks, for measuring liquids, slurries, and solids
• hoppers, ore bunkers, flotation cells
MultiRanger 100
The MultiRanger 100 is a single or dual-point level, one, three, or six relay measurement
device. It is equipped with digital communications and offers the latest in echo
processing technology and diagnostic features.
MultiRanger 200
The MultiRanger 200 is a single or dual-point, three or six relay device that offers both
level and volume measurement. It has Open Channel Monitoring capabilities, a larger
number of advanced pump control algorithms, and is equipped with digital
communications. It offers the latest in echo processing technology and diagnostic
features.
The Manual
The manual provides instruction for both MultiRanger 100 and MultiRanger 200 models.
For your convenience, the manual uses MultiRanger 100 features as its standard content.
Additional MultiRanger 200 features are clearly marked.
The manual is designed to help you get the most out of your MultiRanger, and it provides
information on the following:
• How to program the unit
• Example applications
• Principles of operation
• Parameter values
• Parameter uses
• Outline diagrams
• Wiring diagrams
• Installation requirements
•Modbus®
1 register mapping
• Modem configuration
1. Modbus is a registered trademark of Schneider Electric.
Notes:
• This product is intended for use in industrial areas. Operation of this equipment
in a residential area may cause interference to several frequency based
communications.
• Please follow the installation and operating procedures for a quick, trouble-free
installation and to ensure the maximum accuracy and reliability of your
MultiRanger.
Page 2 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
MultiRanger 100/200
If you have any questions, comments, or suggestions about the manual contents, please
email us at techpubs.smpi@siemens.com.
For the complete library of Siemens Milltronics manuals, go to
www.siemens.com/processautomation.
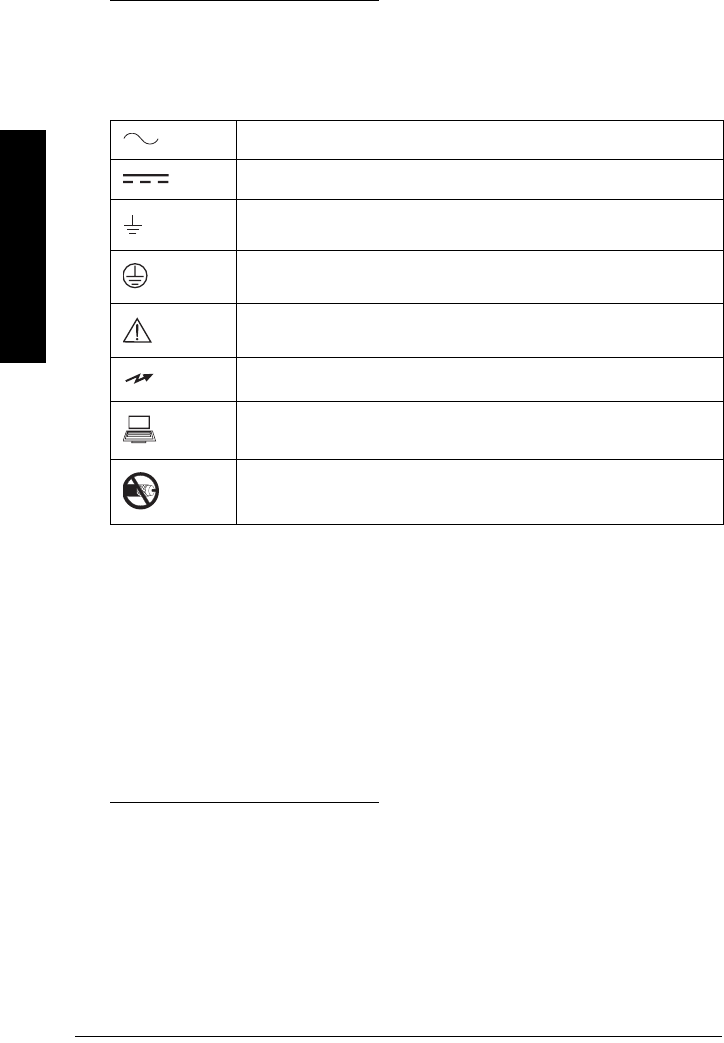
Manual Symbols
Please note their use carefully.
Configuration Examples
The configuration examples used in this manual illustrate the versatility of the
MultiRanger. Because there is often a range of ways to approach an application, other
configurations may also apply.
In all examples, substitute your own application details. If the examples do not apply to
your application, check the applicable parameter reference for the available options.
Should you require more information, please contact your Siemens Milltronics
representative. For a complete list of Siemens Milltronics representatives, go to
www.siemens.com/processautomation.
Alternating Current
Direct Current
Earth (ground) Terminal
Protective Conductor Terminal
Caution (refer to instructions)
Infra-red communication port on front of instrument
RJ-11 communications port
No co-axial cable connections
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 3
mmmmm
Specifications
Specifications
Power
AC version
• 100-230 V AC ± 15%, 50 / 60 Hz, 36 VA (17W)1
• fuse: F3: 2 AG, Slow Blow, 0.375A, 250V
DC version
• 12-30 V DC, 20W1
• fuse: F3: 2 AG, Slow Blow, 2A, 250V
Transmitter fuse
• F1: Belling Lee, L754, 4000A HRC, ceramic type, 100mA, 250V
Temperature Sensor fuse
• F2: Belling Lee, L754, 4000A HRC, ceramic type, 50mA, 250V
Mounting
Location
• indoor / outdoor
Altitude
• 2000 m max.
Ambient temperature
• -20 to 50 °C (-5 to 122 °F)
Relative humidity
• Wall Mount: suitable for outdoors (Type 4X / Nema 4X, IP65 Enclosure)
• Panel Mount: suitable for outdoors (Type 3 / Nema 3, IP54 Enclosure)
Installation category
•II
Pollution degree
•4
1. Power consumption is listed at maximum.
Page 4 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Specifications
Range
• 0.3 m (1 ft) to 15 m (50 ft), dependent on transducer
Accuracy
• 0.25% of maximum range or 6 mm (0.24”), whichever is greater
Resolution
• 0.1% of program range1 or 2 mm (0.08”), whichever is greater
Memory
• 1 MB static RAM with battery backup
• 512 kB flash EPROM
Programming
Primary
• handheld programmer
Secondary
• PC running SIMATIC PDM
• PC running Dolphin Plus software
Display
• back lit LCD
Temperature Compensation
• Range: -50 to 150 °C (-58 to 302 °F)
Source
• integral transducer sensor
• TS-3 temperature sensor
• programmable fixed temperature
Temperature Error
Sensor
• 0.09 % of range
1. Program range is defined as the empty distance from the face of the transducer
(P006) plus any range extension (P801).
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 5
mmmmm
Specifications
Fixed
• 0.17 % per °C deviation from programmed value
Outputs
Transducer drive
•315 V peak
mA Analog
MultiRanger 100/200:
Single or Dual point versions include two mA outputs
• 0-20 mA
• 4-20 mA
• 750 ohm maximum
• Resolution of 0.1%
•Isolated
Relays1
•One:
•1 control
•Three:
•2 control
• 1 alarm control
•Six:
•4 control
• 2 alarm control
• All relays rated 5A at 250 V AC, non-inductive
Control Relays
• 1, 2 or 4 Form A, NO relays (numbers 1, 2, 4, 5)
Alarm Relay
• 0, 1 or 2 Form C, NO, or NC relay (numbers 3, 6)
Communication
• RS-232 running Modbus RTU and ASCII via RJ-11 connector
• RS-485 running Modbus RTU and ASCII via terminal blocks
Optional
• SmartLinx® compatible
1. All relays are certified only for use with equipment that fails in a state at or
under the rated maximums of the relays.
Page 6 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Specifications
Inputs
mA (analog) (1) [MR 200 only]
• 0-20 or 4-20 mA, from alternate device, scalable
Discrete (2)
• 10-50 V DC switching level
• logical 0 = < 0.5 V DC
• logical 1 = 10 to 50 V DC
• 3 mA maximum draw
Enclosure
Wall Mount
• 240 mm (9.5") x 175 mm (6.9"). Width dimension includes hinges.
• Type 4X / NEMA 4X / IP 651
• Polycarbonate
Panel Mount
• 278 mm (10.93") x 198 mm (7.8") Width dimension includes flange.
• Type 3 / Nema 3 / IP54
• Polycarbonate
Weight
• Wall mount: 1.37 kg (3.02 lb)
• Panel mount: 1.5 kg (3.3 lb)
Approvals
• See product nameplate
Compatible Transducers
• Echomax series and STH series
Transducer Frequency
•44 kHz
1. For watertight applications, use only approved, suitable size hubs in the
enclosure’s conduit holes.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 7
mmmmm
Specifications
Cable
• Do not use coaxial cable for transducer (see General Appendix F: Upgrading on
page 246 for more information)
• transducer and mA output signal to be 2 copper conductors, twisted with shield/drain
wire, 300 Vrms, 0.324 - 0.823 mm2 (22 - 18 AWG), nominal capacitance between
adjacent conductors @ 1kHz = 62.3 pF/m (19 pF/ft). Nominal capacitance between
conductor and shield @ 1kHz = 108.3 pF/m (33 pF/ft) (Belden®1 8760 is acceptable)
• 365 m maximum
1. Belden is a registered trademark of Belden Wire & Cable Company.
Note: The MultiRanger is to be used only in the manner outlined in this instruction
manual or protection provided by the equipment may be impaired.
Page 8 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Installation
Installation
Mounting
Mounting Locations
Recommended
• Ambient temperature is always within -20 to 50 °C (-5 to 122 °F)
• MultiRanger display window is at shoulder level, unless most interaction is through
a SCADA system
• Easy access for hand programmer is provided
• Cable length requirements are minimal
• Mounting surface is free from vibration
• Leave is sufficient room to swing unit lid open and have clear access.
• A place for a laptop computer is provided for on-site Dolphin Plus configuration
Avoid
• Exposure to direct sunlight. (Provide a sun shield to avoid direct sunlight.)
• Proximity to high voltage/current runs, contacts, SCR or variable frequency motor
speed controllers
Notes:
• Installation must only be performed by qualified personnel, and in accordance
with local governing regulations.
• This product is susceptible to electrostatic shock. Follow proper grounding
procedures.
All field wiring must have insulation suitable for at least 250 V.
Hazardous voltage present on transducer terminals during operation.
DC terminals shall be supplied from an SELV source in accordance with IEC
1010-1 Annex H.
• The non-metallic enclosure does not provide grounding between conduit
connections. Use grounding type bushings and jumpers.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 9
mmmmm
Installation
Mounting Instructions
The wall mount and panel mount units install differently. Please follow the specific
instructions for your unit.
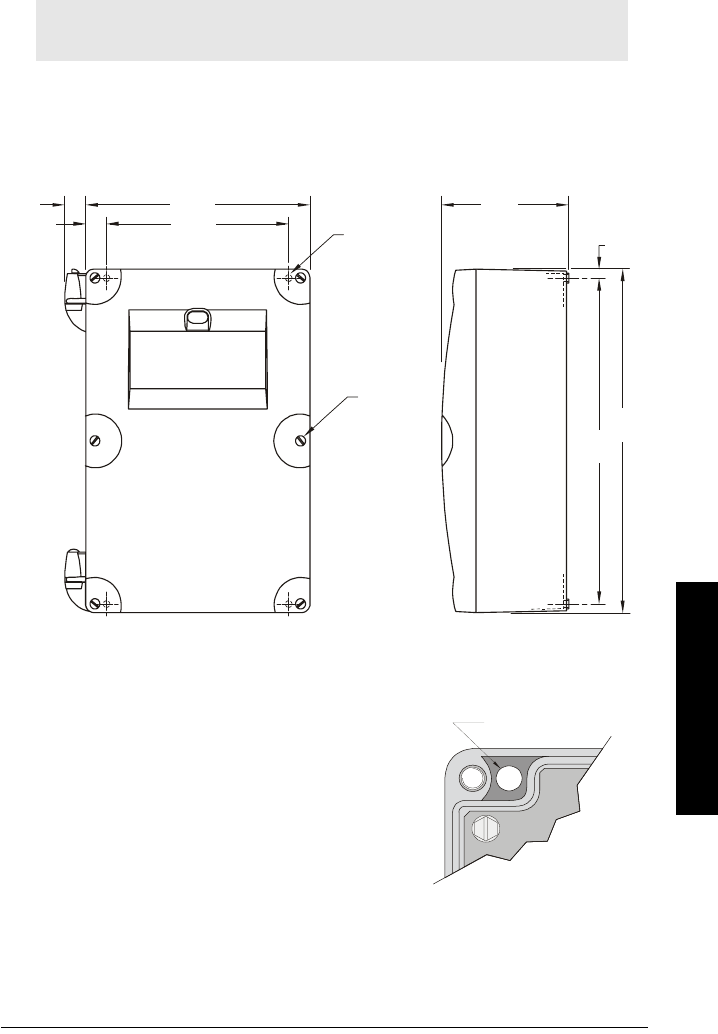
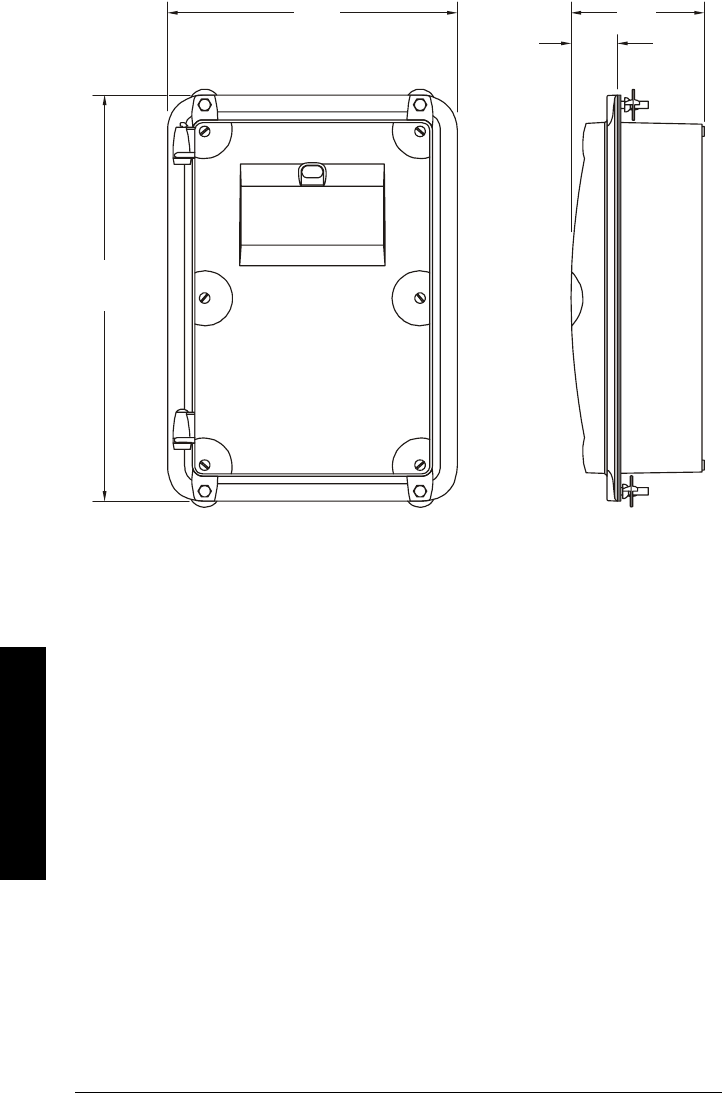
Wall Mount
Enclosure Dimensions
Mounting the Enclosure
1. Remove the lid screws and open the lid to reveal the mounting screw holes.
2. Mark and drill four holes in the mounting
surface for the four screws (customer supplied).
3. Fasten with a long screwdriver.
Please note:
• Recommended mounting: directly to wall or to
electrical cabinet back panel
• Recommended mounting screws: #6
• If alternate mounting surface is used, it MUST
be able to support four times the weight of the
unit.
Note: When routing cable through a conduit, please follow the Cable Routing
instructions on page 10 before mounting the MultiRanger.
160.3 mm
(6.325")
130 mm
(5.125")
91 mm
(3.58")
6.6 mm
(0.26")
240 mm
(9.45")
227 mm
(8.93")
4.3 mm dia.
(0.17")
four mounting
holes
14.9 mm
(0.58")
15.2 mm
(0.6")
lid screws
(6)
mounting screw holes
Page 10 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Installation
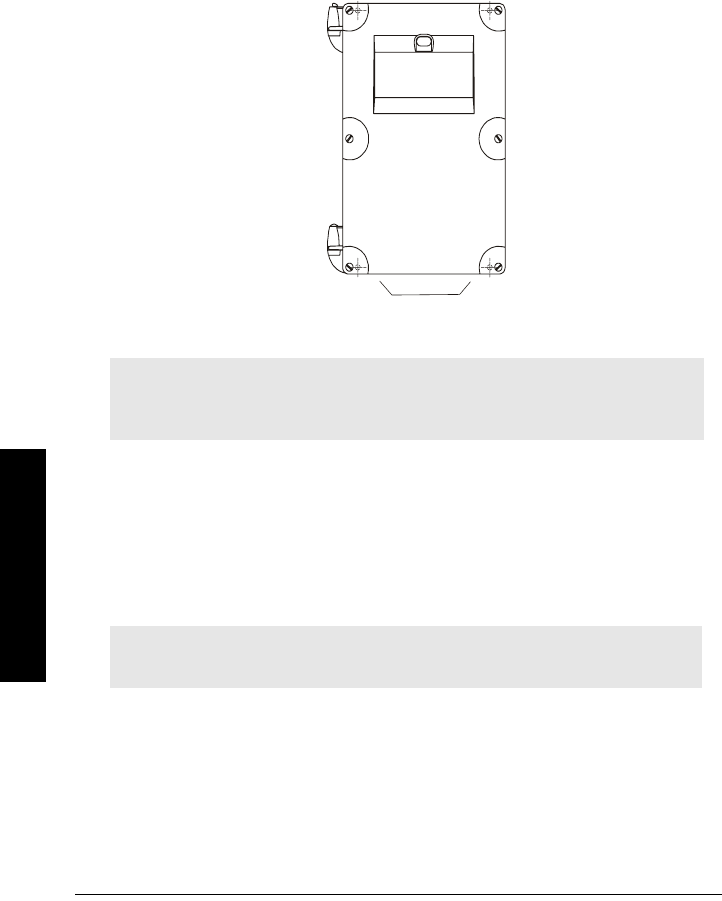
Cable routed through a conduit:
1. Remove the four mounting screws holding the motherboard to the enclosure.
2. Be careful not to damage the electronics with static electricity. Remove the
motherboard from the enclosure by pulling the board straight out.
3. Drill the required cable entry holes. Make sure conduit holes do not interfere with
the lower areas on the terminal block, circuit board, or SmartLinx card.
4. Attach the conduit to the enclosure using only approved suitable size hubs for
watertight application.
5. Reinstall the motherboard with the mounting screws.
.
Cable exposed and entering through the cable glands:
1. Unscrew the glands and attach them loosely to the enclosure.
2. Thread the cables through the glands. Ensure the power cable is kept separated
from the signal cables and then wire the cables to the terminal blocks.
3. Tighten the glands to form a good seal.
Note: For conduit locations and assembly for hazardous mounting in Class 1 Div 2
applications, please see Drawing 23650314 in
Appendix G: Conduit Entry for Class
1, Div 2 Applications
on page 249.
Note: Where more holes are required than are supplied in the enclosure, follow
the
Cable routed through a conduit
steps.
suitable location for conduit entrances
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 11
mmmmm
Installation
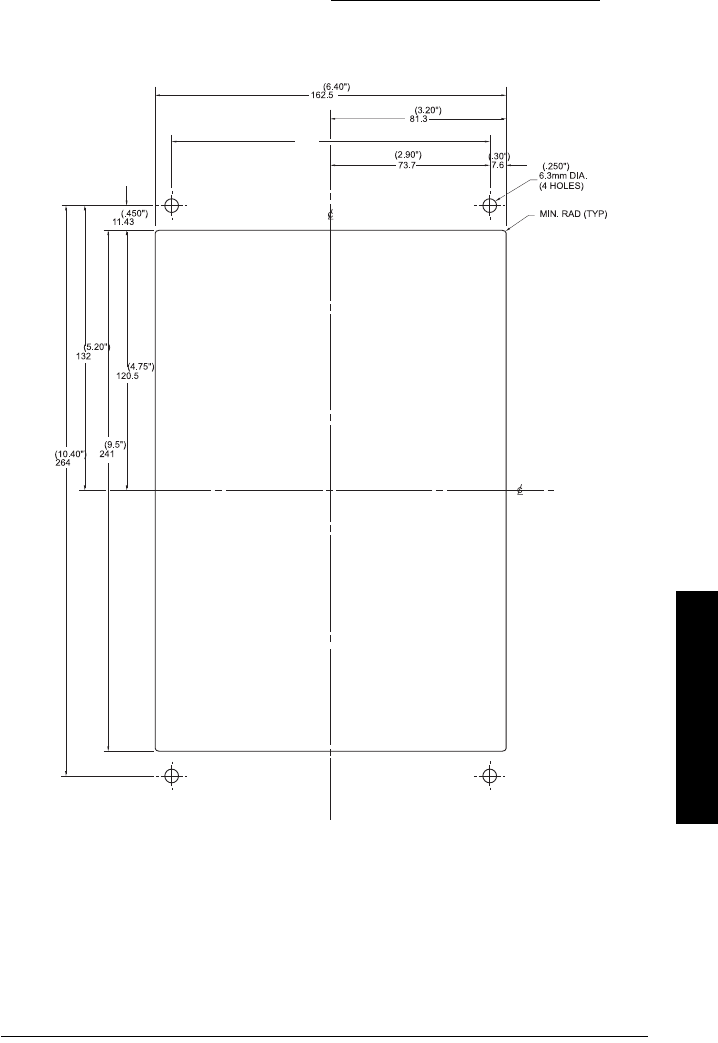
Panel Mount
Installing the panel mount unit requires making a cutout in the panel. The dimensions for
the cutout are provided in the illustration below. A full size cutout template is provided
with your unit or may be downloaded from www.siemens.com/processautomation.
Cutout Dimensions
Cutout Instructions
1. Select a place for the unit and fasten the template onto the panel (use tape or
tacks).
2. Drill the four fastener holes.
3. Make the cutout using the appropriate tools.
4. Mount unit according to the instructions in this manual.
Page 12 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Installation
Panel Mount Dimensions
Mounting the Enclosure
Once cutout is complete and mounting holes are drilled, follow these steps:
1. Remove lid from unit by undoing the six lid screws and lifting it off its hinges.
2. Remove the four screws holding the motherboard to the enclosure.
3. Be careful not to damage the electronics with static electricity. Remove the
motherboard from the enclosure by pulling the board straight out.
4. Drill the required cable entry holes. Be sure to compensate for panel door
dimensions and make sure conduit holes do not interfere with the lower areas on
the terminal block, circuit board, or SmartLinx card.
5. Replace board and fasten the four screws.
6. Place the unit into the panel and insert hexagonal fasteners through bevel slots and
predrilled panel holes.
7. Fasten with wingnuts and hand tighten.
8. Add conduit or glands and wire as required, then replace the lid.
Helpful hint:
• Use tape to hold hexagonal heads in slots while attaching wingnuts.
198 mm
(7.80")
278 mm
(10.93")
36 mm
(1.40")
97 mm
(3.82")
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 13
mmmmm
Installation
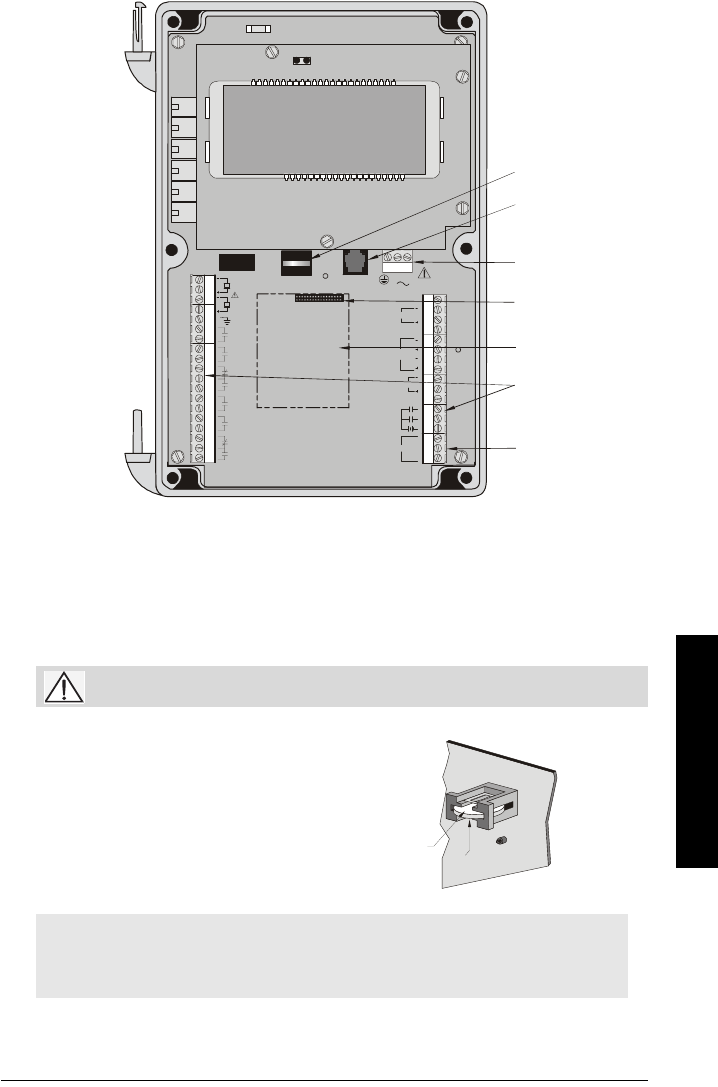
MultiRanger Board
Installing the Battery
The battery (Rayovac BR2032) has a ten-year life expectancy. Please note the life
expectancy may be reduced by ambient temperature. If the unit loses external and
battery power, a capacitor will power the RAM for about ten minutes.
Installation Steps
1. Open the enclosure lid.
2. Slide the battery into the holder. Be sure to
align the + and – terminals correctly.
3. Close and secure enclosure lid.
Note: All parameter values are written to the EEPROM once every hour. The
battery is used to backup Standard Data Logging parameters (P300-P321)
between writes, in case of power failure.
L2/N L1
TB1
TB3
TB2
RELAY 1
RELAY 2
RELAY 3
RELAY 4
RELAY 5
RELAY 6
2
1
mA INPUT
SHIELD
SYNC
1
2
4 - 20 mA
OUTPUT S
TS-3
SHIELD
1
2
DISCRETE
INPUTS
RS485
B
A
COM
Battery
RS-232 RJ-11
Connector
Power Supply
Female Connector
for SmartLinx Card
SmartLinx Card
Ter m in a ls
RS-485
Connections
Disconnect power before replacing the battery.
Battery
+

Page 14 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Installation
Installing SmartLinx Card
SmartLinx cards are generally pre-installed. If unit does not have a SmartLinx card, follow
these steps to install one.
1. Align card with the two mounting posts and then press-fit with the female
connector.
2. Use the screws supplied with the card to attach it to the mounting posts.
3. Wire in the SmartLinx card according to SmartLinx Manual.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 15
mmmmm
Wiring
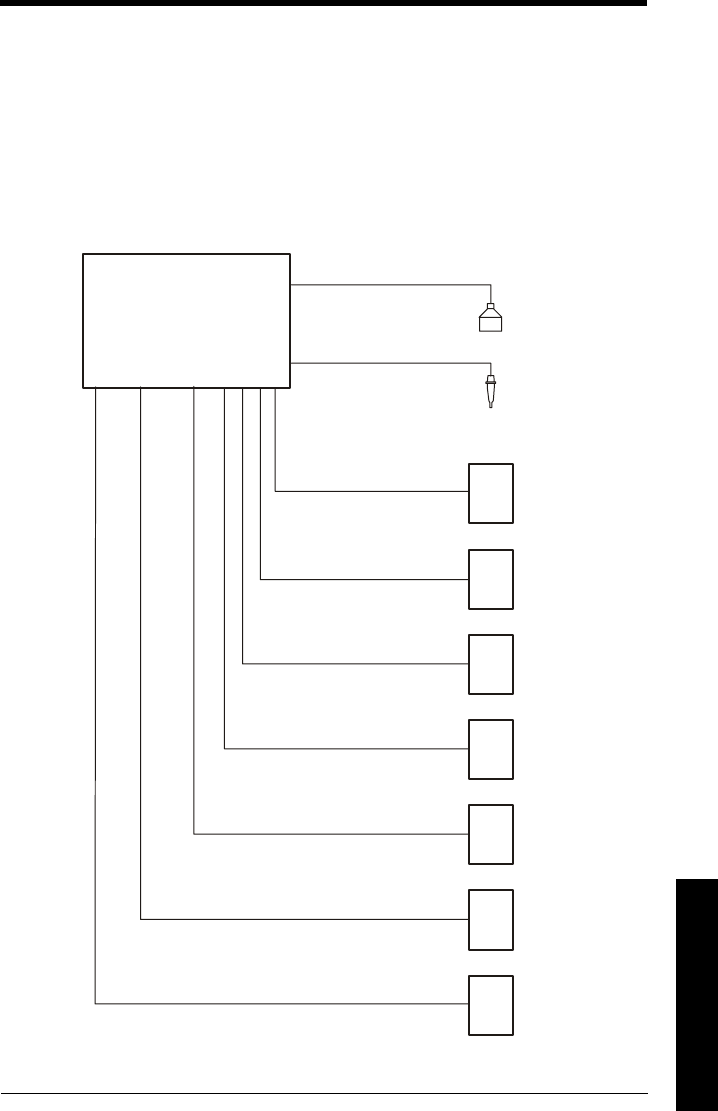
Wiring
Please note:
• Verify that all system components are installed in accordance with instructions.
• Connect all cable shields to the MultiRanger Shield Terminals. Avoid differential
ground potentials by not connecting cable shields to ground (earth) anywhere.
• Keep exposed conductors on shielded cables as short as possible to reduce noise
on the line caused by stray transmissions and noise pickup.
Siemens Milltronics
Transducer(s)
Laptop running
Dolphin Plus
Customer Alarm,
Pump, or Control
Device
Siemens Milltronics
TS-3 Temperature
Sensor
Customer Device,
digital output
Customer Device,
analog output
Customer Network or
Modem
SmartLinx Card
Display, PLC, Chart
recorder, or other
Control Device
MultiRanger
Page 16 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
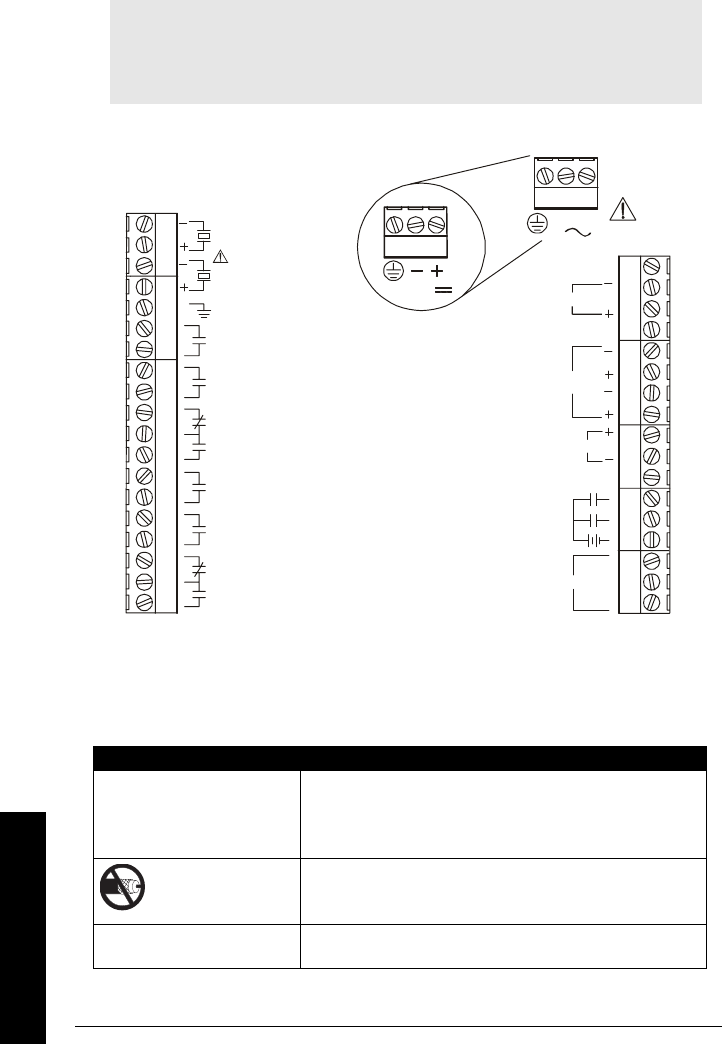
Wiring
Terminal Board
The terminal board on the MultiRanger allows all inputs and outputs to be connected
simultaneously.
Cables
The MultiRanger transceiver requires a shielded two-wire connection to the transducer.
Note: Recommended torque on terminal clamping screws.
• 0.56 - 0.79 Nm
• 5 - 7 in.lbs
Please do not overtighten the screws.
Connection Cable Type
mA input and mA output
sync, Temperature sensor,
discrete input, dc input
Transducer
2 copper conductors, twisted, with shield1/drain wire,
300V 0.324 - 0.823 mm2 (22 - 18 AWG)
Maximum length: 365 m
1. Preferred shielding is braided screen.
Do not use a coaxial transducer cable extension with the
MultiRanger. Electrical noise interference affects
performance.
Relay output
AC input
Relay to be copper conductors per local requirements to
meet 250 V 5A contact rating.
L2/N L1
TB1
TB3
TB2
RELAY 1
RELAY 2
RELAY 3
RELAY 4
RELAY 5
RELAY 6
2
1
mA INPUT
SHIELD
SYNC
1
2
4 - 20 m A
OUTPUTS
TS-3
SHIELD
1
2
DISCRETE
INPUTS
RS485
B
A
COM
12-30 V
TB1
DC Version
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 17
mmmmm
Wiring
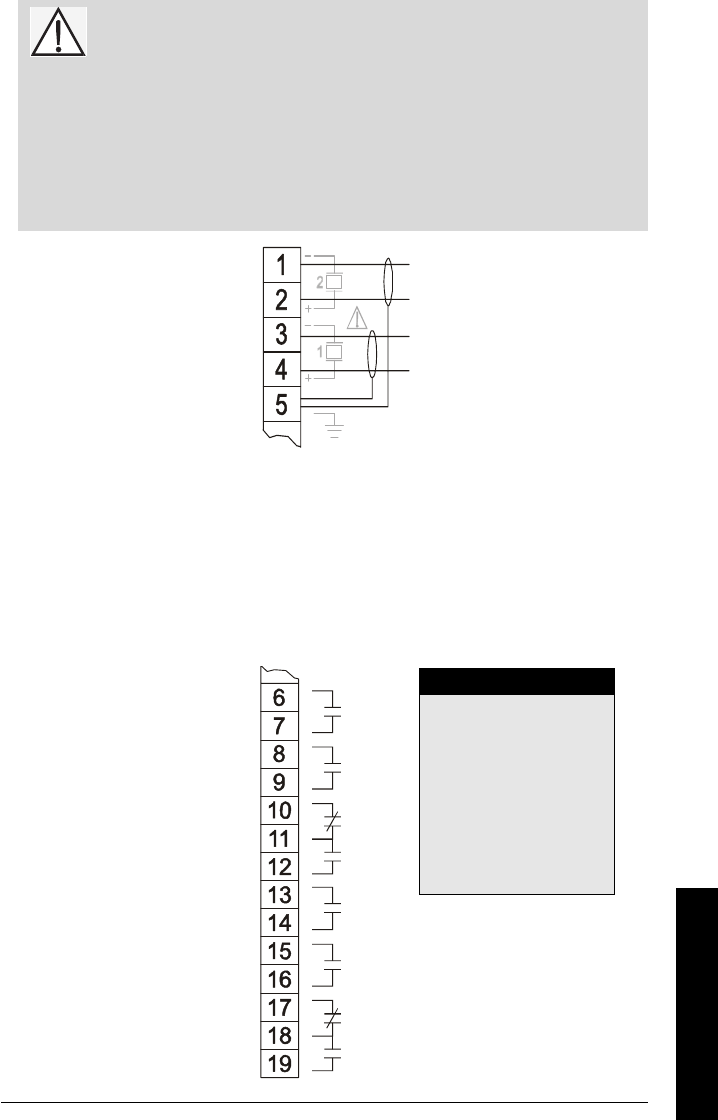
Transducers
A 0.1 µF (100V or greater) capacitor is included with the MultiRanger for retrofitting old
MultiRanger Plus installations. Please see
MultiRanger 100/200 Installation (for
retrofitting MultiRanger Plus Installations)
on page 247.
Relays
Relay contacts are shown in the de-energized position. All relays are handled identically
and can be configured as positive or negative logic using P118.
Warning: Hazardous voltage present on transducer terminals during
operation.
Run the transducer cable in a grounded metal conduit, separate from other
wiring (except TS-3 temperature sensor wiring, if applicable).
Notes:
• Do not use coaxial cable because of electrical noise interference
• Do not connect the shield and white transducer wires together; wire to separate
terminals
• Disregard older transducer manuals that recommend these practices
TRANSDUCER TWO
TRANSDUCER ONE
black
white
white
black
RELAY 1
RELAY 2
RELAY 3
RELAY 4
RELAY 5
RELAY 6
Relay Ratings
• four Form A, NO
relays(1,2,4,5)
• two Form C, NO or
NC relays (3,6)
• 5A at 250Vac, non-
inductive
Power Failure
Relays 1, 2, 4, and 5 are
normally open and will fail
in the normal state.
Relays 3 and 6 can be
wired either normally open
or normally closed, and
will fail in their de-
energized states.
Page 18 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Wiring
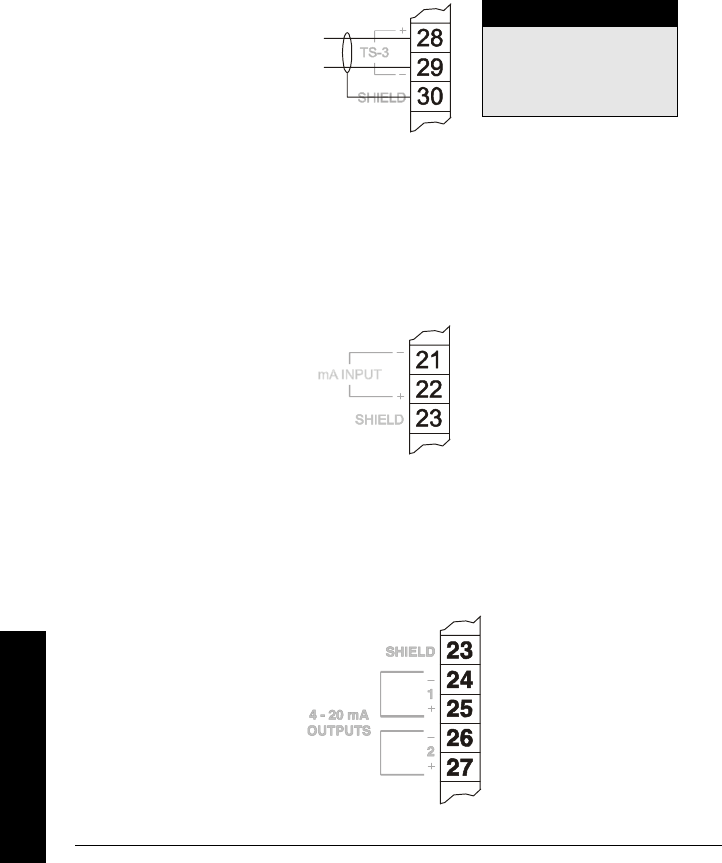
Temperature Sensor
Accurate temperature readings are critical to accurate level measurements because the
speed of sound changes, depending on air temperature, and all Siemens Milltronics
Echomax and ST-H transducers have an internal temperature sensor.
If the following conditions apply, a separate TS-3 temperature sensor will ensure
optimum accuracy:
• the transducer is exposed to direct sunlight (or other radiant heat source)
• the transducer face and monitored surface temperature differs
• faster response to temperature changes is required
mA Input [MR 200 only]
For more information, consult the Transducer (P004) and mA Input Parameters (P250,
P251, and P252) in the parameter reference section.
mA Output
For more information, consult the mA output parameters (P200 to P219) in the parameter
reference section.
TEMPERATURE SENSOR
Note
Use a T-S3 Temperature
Sensor only. Leave
terminals open (unused) if
TS-3 is not deployed.
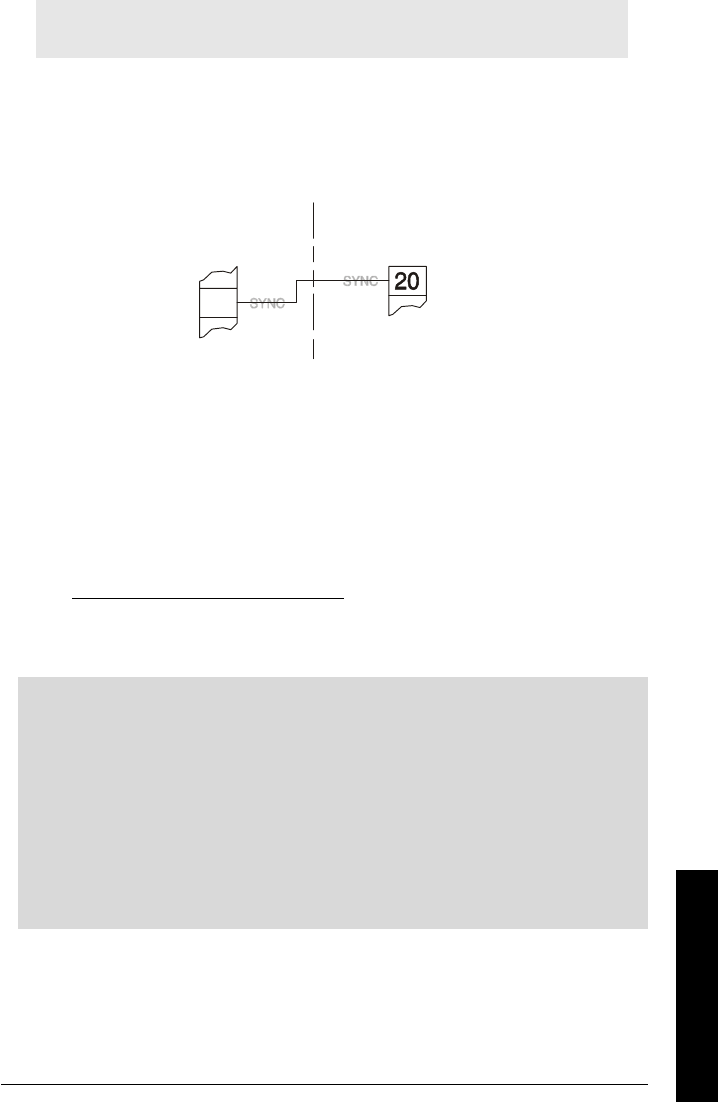
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 19
mmmmm
Wiring
Level System Synchronization
When using multiple ultrasonic level monitors, be sure to run the transducer cables in
separate grounded metal conduits.
When separate conduits are not possible, synchronize the level monitors so that no unit
transmits while another is waiting for echo reception.
Synchronizing with another MultiRanger 100/200, or other Siemens Milltron-
ics instruments (DPL+, SPL, XPL+, LU01, LU02, LU10, LUC500, Hydro+,
EnviroRanger, MiniRanger):
• Mount the level monitors together in one cabinet
• Use a common power (mains) supply and ground (earth) for all units
• Interconnect the SYNC terminals of all level monitors
•Set parameter
P726 Level System Sync
on page 190.
• Contact Siemens Milltronics or your local distributor. Go to
www.siemens.com/processautomation.
Power
Note: The MultiRanger 100/200 CANNOT be synchronized with the MultiRanger
Plus or the HydroRanger.
MultiRanger
Other Siemens
Milltronics Transceiver
Important!
Before applying power to the MultiRanger for the first time, ensure any connected
alarm/control equipment is disabled until satisfactory system operation and
performance is verified.
Notes for AC power connections
• The equipment must be protected by a 15 A fuse, or circuit breaker in the
building installation.
• A circuit breaker or switch in the building installation, marked as the disconnect
switch, must be in close proximity to the equipment and within easy reach of the
operator.
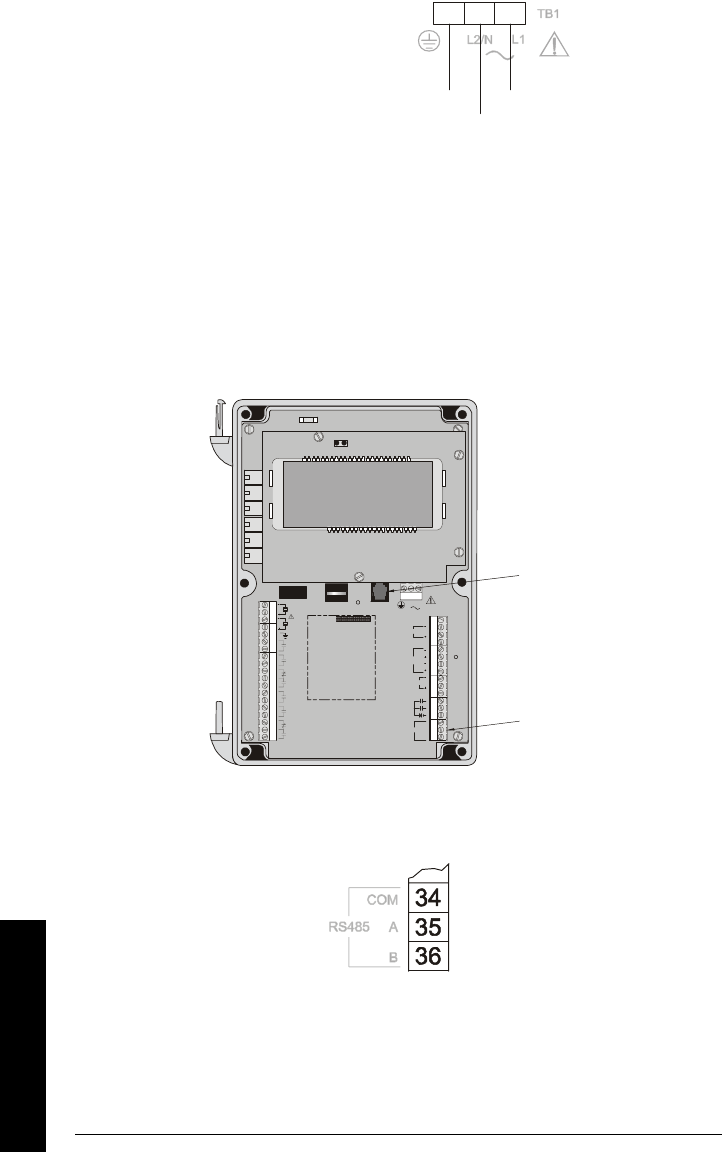
Page 20 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Wiring
Digital Communications
Wiring the MultiRanger for communications allows it to be integrated into a full SCADA
system or an industrial LAN.
The MultiRanger can also be directly connected to a computer running Dolphin Plus.
RS-232 Serial Connection
RS-485 Serial Connection
L1
L2/N
GND
Note: Make sure unit is
connected to a
reliable ground.
Ground
L2/N L1
TB1
TB3
TB2
RELAY 1
RELAY 2
RELAY 3
RELAY 4
RELAY 5
RELAY 6
2
1
mA INPUT
SHIELD
SYNC
1
2
4 - 20 mA
OUTPUT S
TS-3
SHIELD
1
2
DISCRETE
INPUTS
RS485
B
A
COM
RS-232 RJ-11
Connector
RS-485
Connection
(see below)
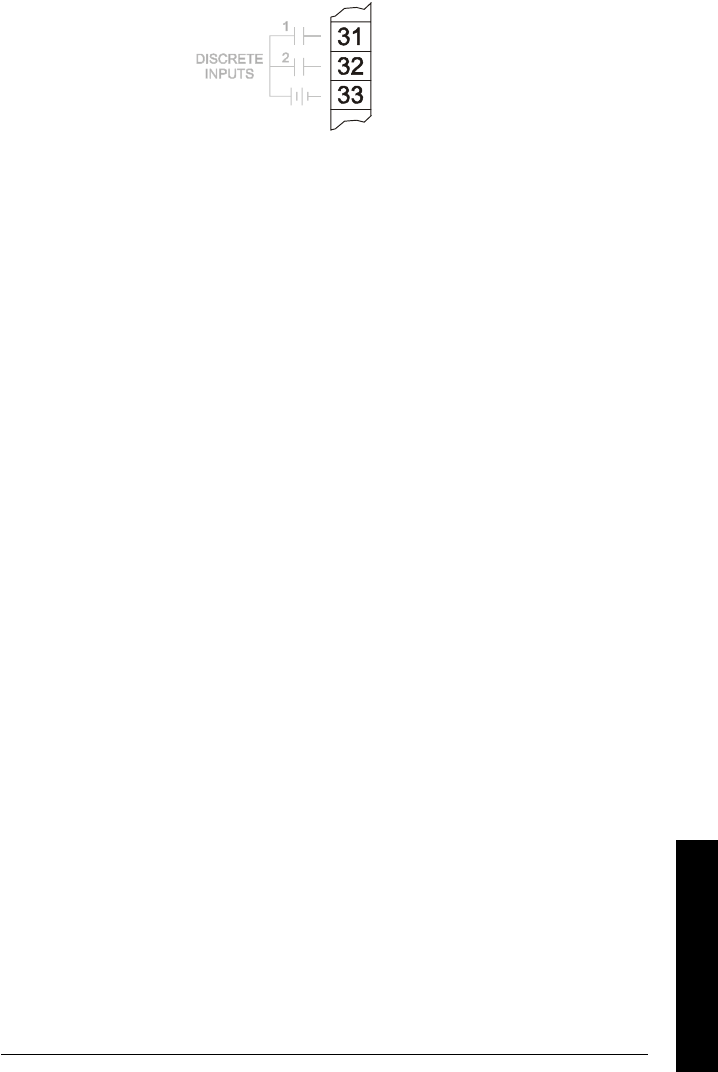
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 21
mmmmm
Wiring
Discrete Inputs
Discrete inputs have a positive and negative terminal. Requires an external power supply.
Discrete Input (post.) 1
Discrete Input (pos.) 2
Common (neg.) for Discrete Input
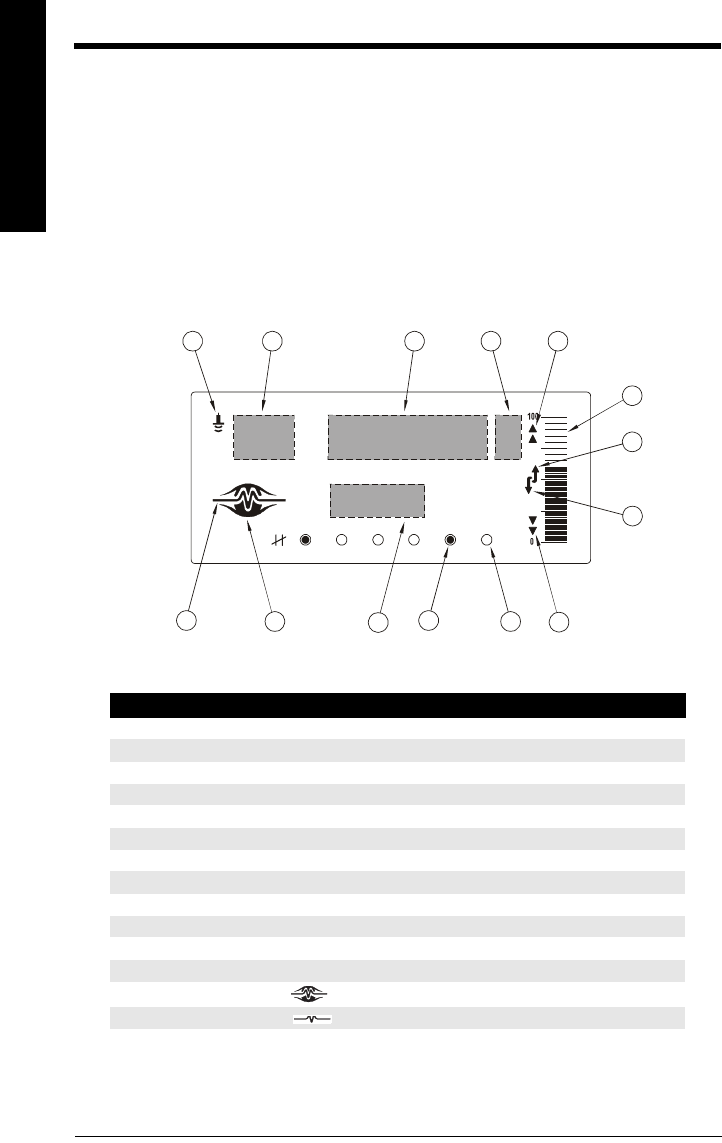
Page 22 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Operating the MultiRanger
The MultiRanger has two modes of operation: RUN and PROGRAM.
RUN Mode
In RUN mode, the MultiRanger detects material level and provides control functions. The
MultiRanger automatically starts in RUN mode when power is applied.
System status is shown on the unit’s LCD, or on a remote communications terminal.
Display
Indicator Functions
RUN Mode PROGRAM Mode
1 index type (see below) index type (see next table)
2index index
3 primary reading parameter value
4units units
5 hi and hi hi alarm designation auxiliary function
6level display n/a
7 filling display scroll access tag
8emptying display scroll access tag
9 lo and lo lo alarm designation n/a
10 relay # programmed relay # programmed
11 relay # activated relay # activated
12 auxiliary reading parameter number
13 normal operation: n/a
14 failsafe operation: n/a
1234 65
?
12 34
5
6
7
8
9
10
1112
13
14
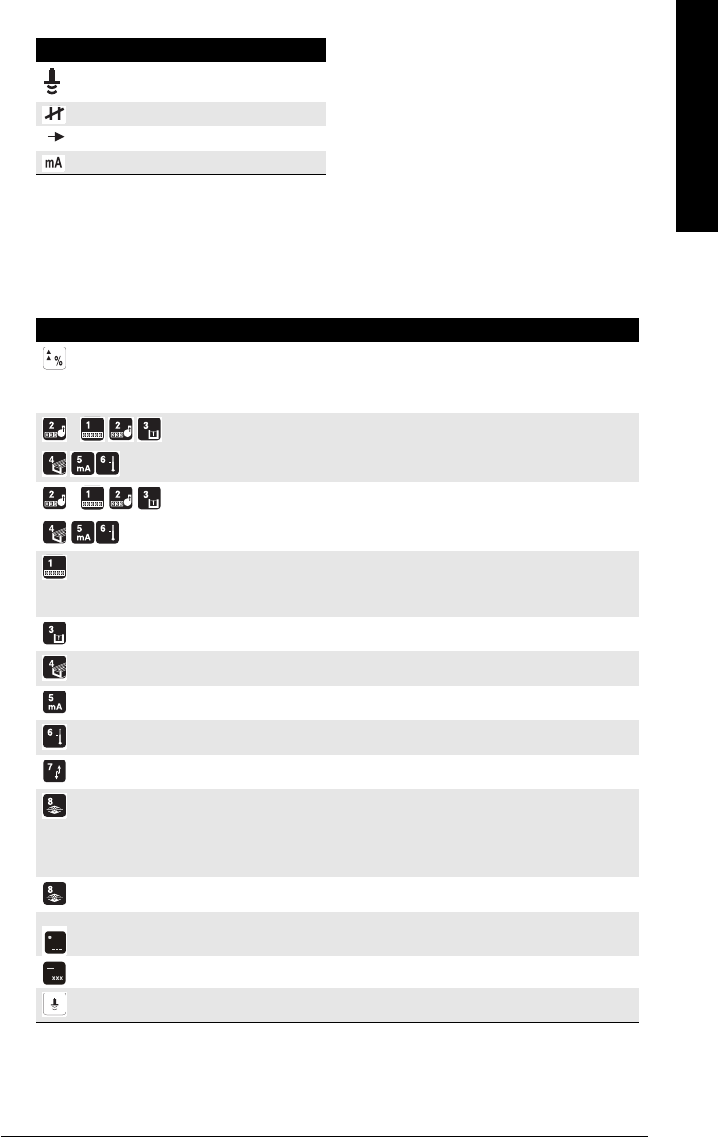
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 23
mmmmm
Operation
Icons indicating index type (Item 1) edited in PROGRAM mode:
Readings in RUN Mode
Change the displayed values with the keys on the hand programmer. All readings are
shown in the Auxiliary field, except for the totalizer and P920.
Icon Index Type
measurement point or transducer
relay
secondary index
mA input or output
Key Function P#
Toggle Readings between percent and units:
• Level: 0 – 100%
• Space or Distance:1 100% – 0
1. Distances less than 0.3 m (1 ft) from the transducer face cannot be measured
reliably. Therefore, a 0% reading is not possible during Distance operation.
P920
+
Accumulated pump running hours2 for numbered pump.
2. If the associated relay is programmed for pump control.
P310
+
Hold number key for five seconds to display the number of
accumulated pump starts2 for numbered pump.
P311
[MR 200 only] Eight-digit totalizer, uses index and reading areas, press
again to toggle, P737 sets default.
Used for OCM and Pumped Volume.
P322
P323
P920
[MR200 only] Head measurement P926
[MR 200 only] Instantaneous flow based on head (OCM) P925
mA Output value P203
Temperature P664
Rate of level change P707
Failsafe Time Left (in %). When the Reading is updated,
this value (Auxiliary Reading) resets to 100 and begins to
decrease until the next valid measurement is made. If the
Failsafe Time Left reaches 0, LOE flashes in the display.
Hold for four seconds to show echo confidence P805
+ ### Display the value of the entered parameter which is global
or indexed by transducer
Auxiliary reading displays parameter specified in P731 P731
Distance P923
P
P

Page 24 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Status Parameters
Status parameters give the operating status of the MultiRanger. You can access
parameters with the hand programmer (see page 32) or with Dolphin Plus (see page 27).
Remote SCADA system access is also possible.
Parameter Values
P203 mA Output Value 0 to 22 – Current mA output
P254
[MR 200 only]
Scaled mA Input Value 0 to 9999 – Current mA input after scaling
P275 Scaled Discrete Input Value Shows current value of discrete input,
values vary by DI function
P322
[MR 200 only]
LCD Total Low The last four digits of the totalizer
P323
[MR 200 only]
LCD Total High The first four digits of the totalizer
P341 Run Time The number of days the MultiRanger has
been operating
P342 Start Ups The number of times power has been
cycled
P664 Temperature Current temperature measured by
transducer
P707 Rate Value Current rate of material level change
P708
[MR 200 only]
Volume Rate Display Current rate of material volume change
P729 Scan Time Seconds since last level scan
P806 Echo Strength Strength of primary echo
P920 Reading Measurement Current primary reading
P921 Material Measurement Current level from P007–Span
P922 Space Measurement Empty space above the material level
P924
[MR 200 only]
Volume Measurement Current volume value, if programmed
P925
[MR 200 only]
Flow Measurement (OCM) Current flow value, if OCM programmed
P926
[MR 200 only]
Head Measurement (OCM) Current level, if OCM programmed
P927 Distance Measurement Distance from transducer face to material
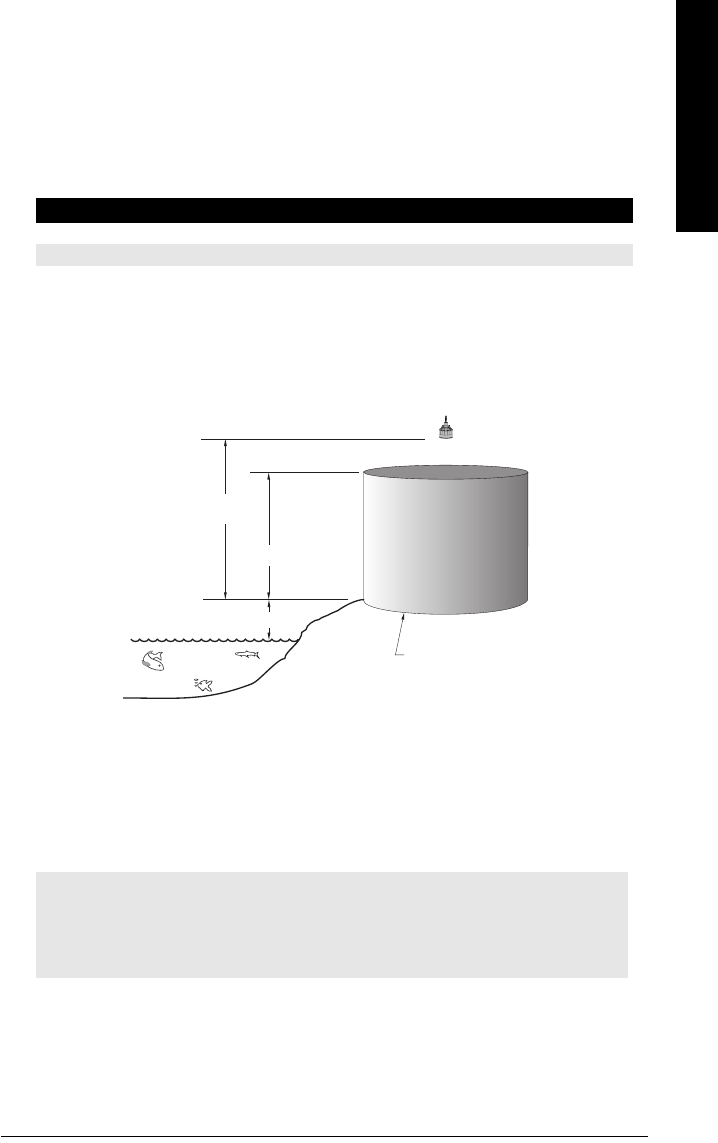
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 25
mmmmm
Operation
Controlling the Display
RUN mode provides numerous parameters and variables that you can track on the
display (see
Display
on page 22).
The LCD displays EEEE if a value is too long.
Adjusting the primary reading for four-digit LCD readout:
Example
To reference the displayed level to sea level, enter the distance in Units (P005), between
Empty (P006) and sea level. (Enter a negative value if Empty is below sea level.)
P062 is the distance between sea level and Empty.
Auxiliary Reading
The Auxiliary Reading area of the LCD displays parameter values while leaving the
primary reading on screen.
Parameter Action
P060 Decimal Position Sets maximum number of decimals
P061 Convert Reading Scales the reading to fit
P062 Offset Reading Shifts the reading up or down by a fixed amount
Note: The parameters shown in the auxiliary reading field are indexed as follows:
•global
•by transducer
• by level
P007
P006
Reservoir
P062
Sea Level
Page 26 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Setting the Default Auxiliary Reading
To maintain a constant variable display in the auxiliary reading area, set the default.
Example:
To leave the level reading on the screen and view the echo confidence in the auxiliary
reading field, set the following parameter:
Setting a Specific Auxiliary Reading
To display a second auxiliary reading, press in RUN mode.
Example: To set to display current temperature, go to P731:
Multiple Readings [MR 200 only]
During differential or average operation (P001 = 4 /5), the display scrolls sequentially
through Point Numbers 1, 2, and 3. Point 3 is the difference between (or average of) Points
1 and 2.
Changing Number Scrolling Speed
See
Parameter Indexing
on page 37. All the instructions in the following procedures apply
to the hand programmer and assume that the MultiRanger is activated.
Parameter Index Value Description
P730 G 805 Auxiliary field defaults to P805
Parameter Index Value Description
P731 G 912 Shows P912–Transducer Temperature
Parameter Index Value Description
P732 G 5 Hold each value for 5 seconds
P
P
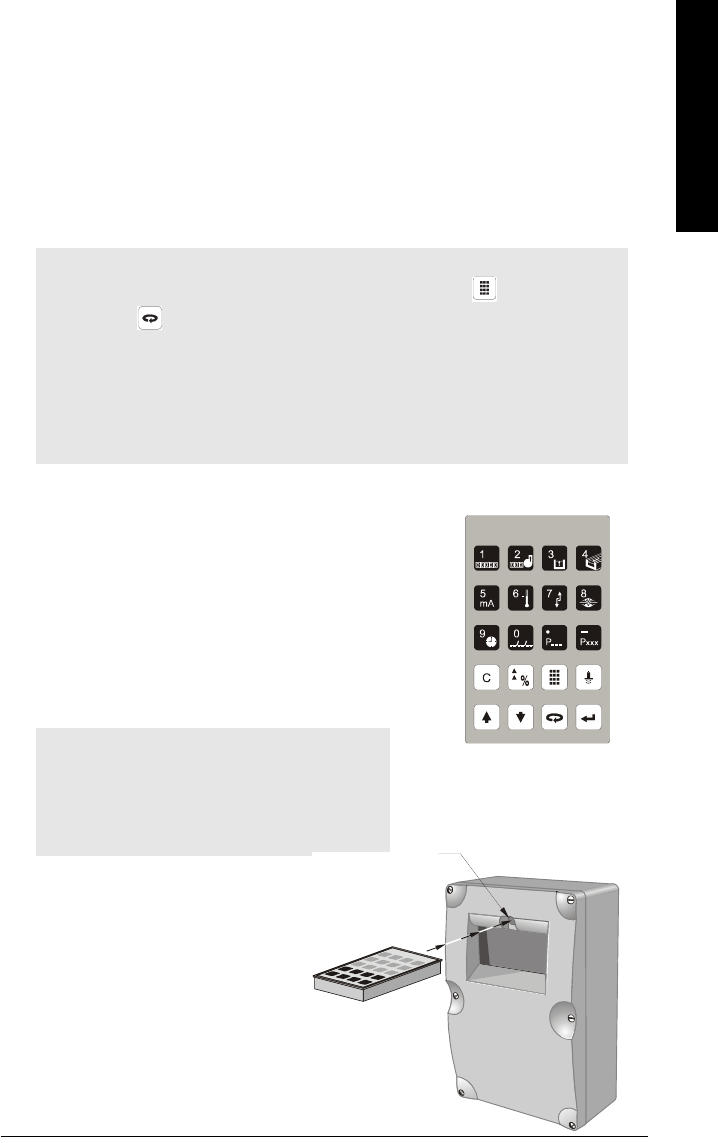
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 27
mmmmm
Operation
PROGRAM Mode
The MultiRanger is programmed by setting its parameters to match your specific
application. Most parameters are indexed, allowing you to set the parameter to specific
conditions and to more than one input or output. When the MultiRanger is in PROGRAM
mode, you can change these parameter values and set operating conditions.
Please refer to the
Parameter Reference
section on page 117 for a full listing and
explanations of parameter values.
The MultiRanger’s primary programming is by the hand programmer. Other access is
available through Dolphin Plus software (purchased separately).
Starting PROGRAM Mode
Hand Programmer
The hand programmer gives you direct access to
the MultiRanger.
Aim the hand programmer and press PROGRAM
key.
For your convenience, the
programmer has a magnetic mounting
strip on the back. Keep programmer
nearby for easy access.
Point the programmer at the IR port
above the display and press the keys.
Unless otherwise noted, each valid
key press should produce a change in
the LCD. Verify when programming the
unit.
Notes
• To activate PROGRAM from RUN mode, press PROGRAM and then
DISPLAY
• The display briefly reads ---- while the measurement reading is verified.
Reading level and other data is displayed and programmed relays are
operated.
• Placing a programmed unit that is in normal operation into PROGRAM mode
de-energizes all control relay outputs. Be sure to bypass the MultiRanger while
programming it.
Notes:
• The battery in the programmer is not
replacable.
• The hand programmer is ordered
separately from Siemens Milltronics Infrared
Port
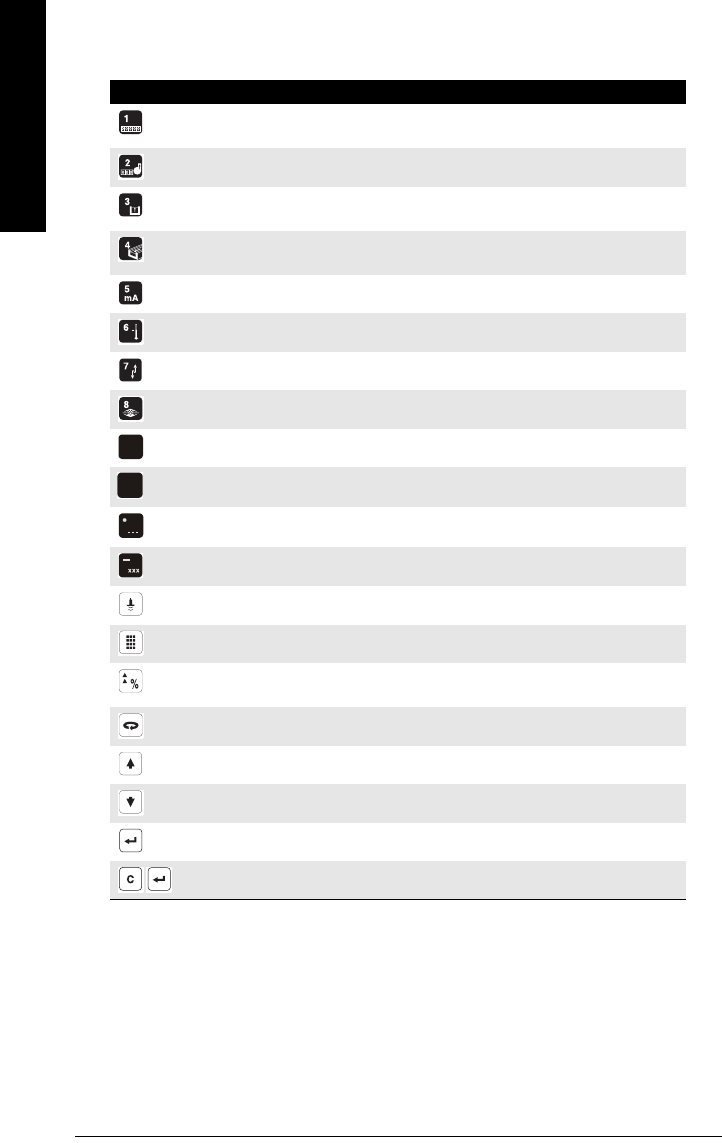
Page 28 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Programmer Keys
Keys Programming Mode Run Mode
1 8-digit Totalizer (toggle)
[MR 200 only]
2Pump Running Time
3Head
[MR 200 only]
4Flow based on Head
[MR 200]
5 mA Output
6Temperature
7 Rate of Change
8Failsafe Time Left
9N/A
0N/A
Decimal Point (TVT left) Parameter Value
Negative Value (TVT right) Material Level (P731)
Fire Transducer Distance
Run Mode Program Mode (Key 1)
Units or % Units or % (Program Mode)
(Key 2)
Next Display Field Pause Display Toggle
Increase Value Next Index
Decrease Value Previous Index
Enter Value
Clear to Preset
9
0
P
P
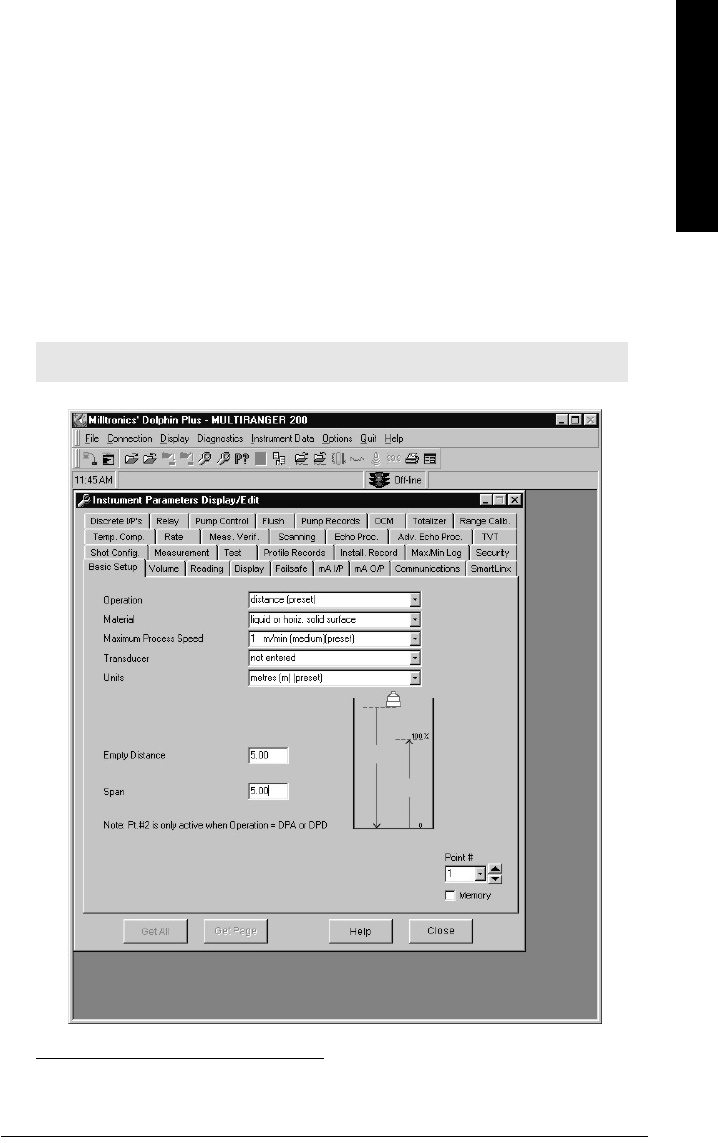
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 29
mmmmm
Operation
Dolphin Plus
(compatible with product software versions 1.06 and earlier)1
Use Dolphin Plus software to configure, monitor, tune, and diagnose the MultiRanger
from a PC or directly in the field with a laptop.
Dolphin Plus is easy to install and easy to use. Just load the software from the CD onto a
desktop PC or Laptop and then set up or modify complete parameter configurations in a
Windows®2environment.
After configuration, you can edit parameters, upload and download parameter sets to
and from disk, and use parameter sets saved from other instruments. You can also work
with echo profiles for fine tuning without the need for special instruments. Built-in Quick
Start features and Help files guide you through the entire process.
1. See P900 for Software Revision Number.
2. Windows is a registered trademark of Microsoft Corporation.
Note: Dolphin Plus is ordered separately from Siemens Milltronics.

Page 30 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Dolphin Plus Toolbar Buttons
The toolbar buttons provide quick access to Dolphin Plus features.
Button Action
communicate with instrument–toggle online versus offline
monitor communications
send parameter set to instrument
save parameter set to file
open the quick start wizard
open the tabbed parameters window
find a parameter in the tabbed parameters window
toggle PROGRAM mode and RUN mode
open the reporting windows
load an echo profile from a file
save the current echo profile to a file
open the vertical echo profile and tank mimic window
open the horizontal echo profile window
take a measurement with the current transducer
open the reading values (distance measurement) window
print current echo profile
open the Echo Info Editor window
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 31
mmmmm
Operation
SIMATIC Process Device Manager (PDM)
(compatible with product software versions 1.07 and later)1
SIMATIC PDM is a software package for parameterizing, commissioning, diagnosing and
maintaining process devices. For the MultiRanger 100/200, SIMATIC PDM connects
directly to the device using Modbus over Port 1 or Port 2.
The MultiRanger 100/200 comes with Port 1 set for communications to SIMATIC PDM.
SIMATIC PDM contains a simple process monitor of the process values, alarms and
status signals of the device. Using SIMATIC PDM you can
•display,
• set,
• change,
•compare,
• check the plausibility of,
• manage, and
• simulate
process device data.
More information about SIMATIC PDM is available at
www.siemens.com/processinstrumentation: go to Products & Solutions > Products &
Systems > Communication and Software > Process Device Manager. Please consult the
operating instructions or online help for details on using SIMATIC PDM. An Application
Guide on using MultiRanger 100/200 with PDM and Modbus is available on our website:
www.siemens.com/processautomation.
Device Description
To use Process Device Manager (PDM) with MultiRanger 100/200, you need the Device
Description for MultiRanger 100/200, which will be included with new versions of PDM.
You can locate the Device Description in Device Catalog, under Sensors/Level/ Echo/
Siemens Milltronics. If you do not see MultiRanger 100/200 under Siemens Milltronics,
you can download it from our website: www.siemens.com/processautomation. Go to the
MultiRanger product page and click Downloads. After downloading the DD file, you need
to execute DeviceInstall.
1. See P900 for Software Revision Number.
Page 32 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Activating the MultiRanger
All the instructions in the following procedures apply to the hand programmer and
assume that the MultiRanger is activated.
1. Power the MultiRanger.
2. Point the programmer at the unit and press PROGRAM .
3. Press DISPLAY .
Changing Parameters
1. Starting in RUN mode, press PROGRAM and then press DISPLAY to put the
unit into PROGRAM mode.
2. Press DISPLAY to select the Parameter Number field.
3. Enter the Parameter Number (e.g. 110). After the third digit is entered, the parameter
value is shown.
4. Enter the new value, and press ENTER . The MultiRanger interprets the value,
either accepting or replacing it with a valid value.
Helpful Hints
• For parameters P001 to P009, press a single digit (1–9) and then press DISPLAY
to show that parameter.
• The ? icon indicates that the MultiRanger has accepted the value but that it conflicts
with other values entered. Double-check your programming.
• By default, the SCROLL arrows show only the Quick Start parameters and
any that have been changed.
• P733 sets all parameters to be scroll-accessed.
Note: Power up display
• Single Point Model
• preset to display distance from the face of the transducer to the
material
• transducer selection is preset for the XPS-10
• empty distance is preset to 5 m
•Dual Point Model
• starts in an OFF state and does not take level measurements
• to set up measurement, the quick start parameters must be
configured
• See Quick Start parameters on page 119
Note: If Parameter Value alteration is not permitted, access the Lock parameter
(P000) and enter the security code, (see Security below).
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 33
mmmmm
Operation
Security
The Lock parameter P000 secures the MultiRanger against parameter changes via the
handheld programmer. The unit can still be put into PROGRAM mode when locked, and
parameter values can be viewed, but no parameter values can be changed.
When P000 is set to 1954, programming is enabled. To disable programming, enter
another value.
P000 (1954) is a fixed value password. Therefore, you should use other means to secure
the MultiRanger if security is a concern.
Simulation
P000 Lock also controls how simulations affect control relays. By default, control relays
are unaffected by simulation levels. But if P000 is set to –1, they react to the simulated
level. See
Parameters P925–P927
on page 220 for running a simulation.
Using Units or Percent (%)
Many parameters can be viewed either in measurement units (P005) or as a percentage.
View the parameter and then press MODE to toggle between units and percentage.
The LCD shows the selected measurement type, either units (m, ft) or percentage (%).
MR 200 only:
Percentage is also available when showing flow and volume with 100%, based on the
parameter that defines the maximum.
Parameters Types
View Only Parameters
Parameter values indicating status only. They cannot be altered.
Global Values
Parameter values common to all inputs and outputs on the MultiRanger.
When a global parameter is accessed, the index display automatically disappears. When
a non-global parameter is accessed, the index display reappears showing the last index
number.
Measurement Maximum
Volume P051
Flow P604
Page 34 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Default Values
Parameter default values are indicated with an * in the parameter tables.
P000 Lock
The asterix identifies 1954 as the default value.
Parameter Reset
Returning a parameter to factory default.
1. Display the appropriate parameter number.
2. Display the appropriate index value (if required).
3. Press CLEAR .
4. Press ENTER .
Master Reset (P999)
Returns all parameters to original values.
Use Conditions:
• before initial system installation
• following a software upgrade
If complete reprogramming is required, use Dolphin Plus to store and retrieve parameters.
When the dual point option is enabled, P999 is indexed by transducer. Use index 00 to
reset the entire MultiRanger.
Display Readout
The following readouts are shown when the MultiRanger cannot display a number.
Primary Index Global
Value
1954 *OFF: programming permitted
-1 Simulation Controls (relays energize based on
simulated level)
other ON: Lock activated and programming not permitted
via the handheld programmer
Display Definition
Parameter has not been set
All values not same when viewing index 0
Value too large for four-digit display
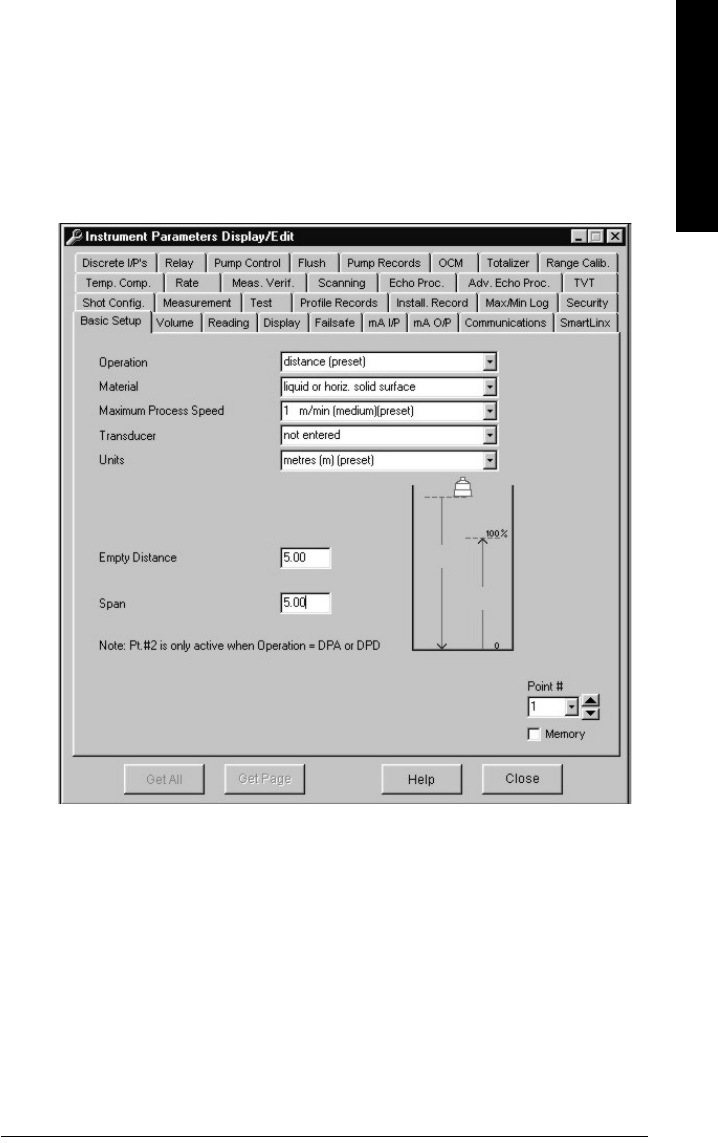
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 35
mmmmm
Operation
Changing Parameters(Dolphin Plus)
The other method for changing parameter values is with Dolphin Plus software. It lets you
access the MultiRanger from a PC or on site with a laptop and change MultiRanger
parameters.
Most examples in this manual use the icons from the hand programmer but nearly all
functions are also available through Dolphin Plus.
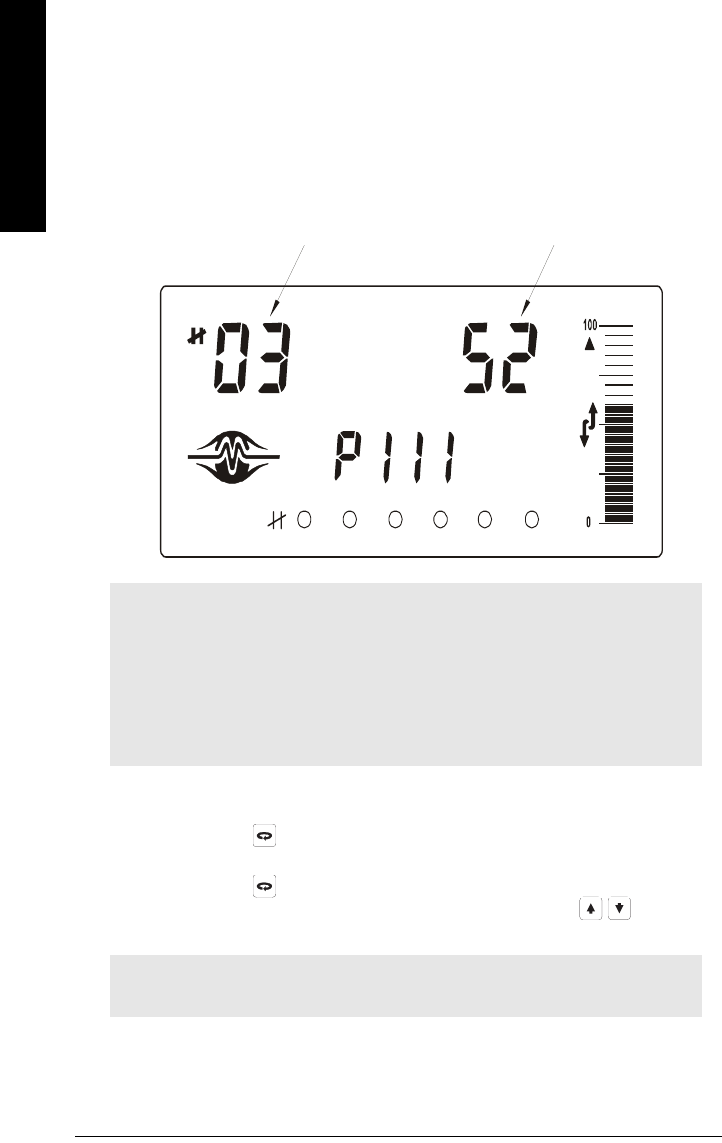
Page 36 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Parameter Indexing
Parameters are indexed when they apply to more than one input or output. The index
value defines the input/output for that parameter. Indexed parameters contain a value for
each index, even if that index is not used.
MultiRanger Display
The index number and the index values are displayed above the parameter indicator on
the LCD.
Accessing a Parameter Index
1. Press DISPLAY once to clear current parameter field.
2. Enter the new parameter number.
3. Press DISPLAY twice.
4. Press the number of the required index. Or press ARROW keys to scroll
through the available values.
Notes
• Transducers are always indexed when the dual point option is enabled.
• An indexed transducer is commonly referred to as a Point (short for
’Measurement Point’). Point Number refers to indexed transducers.
• To set all indexed values for a parameter to the same value, use index 0.
•MR 200 only: Transducer parameters are indexed only if Operation (P001) is set
to Difference (value=4) or Average (value=5) on a single point MultiRanger.
Note: For optimum performance, set values accurately for indexed parameters.
Ensure that the correct index value is being changed for each parameter value.
1234 65
Index Value
Index Number
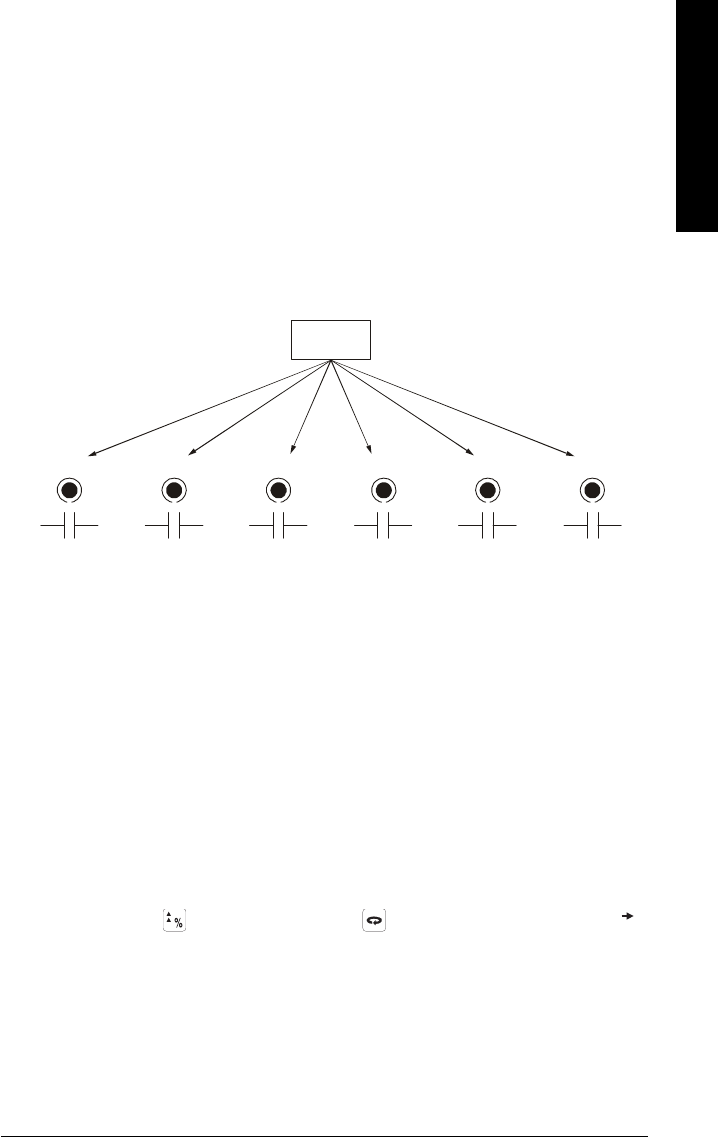
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 37
mmmmm
Operation
Primary and Secondary Indexes
Primary Index: relates to direct input or output and can refer to relays, communications
ports, and other parameters. In parameters that allow secondary indexes, the primary
index is often referred to as a point.
Secondary Index: relates to previously indexed parameters where the parameter
requires a second index, permitting multiple values on an indexed input or output.
Primary Index
Example Setting: P111[3] = 52
• P111 sets the Relay Control Function
• P111(3) = 52 sets Relay #3 to a value of 52.
Secondary Index
Parameters with a secondary index permit multiple values for a primary index (point). For
example, a volume calculation based on vessel characterization breakpoints requires a
distinct set of breakpoints for each measured point.
Thus the primary index refers to the measurement point, and each secondary index refers
to a characterization breakpoint value.
Accessing a Secondary Index
1. Press MODE and then press DISPLAY to activate secondary index. The
icon appears under the index field.
2. Enter the secondary index, and then enter the values to set the secondary index.
P111
345621
52
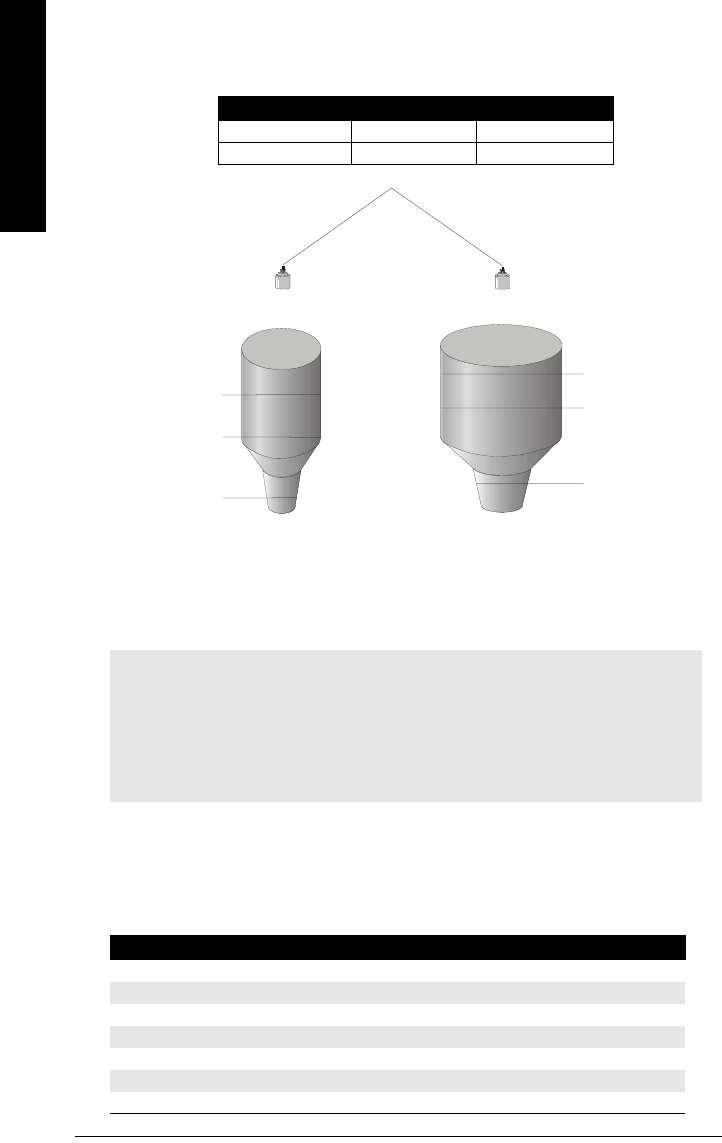
Page 38 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Example [MR 200 only]
P054 provides up to 32 breakpoint levels used with P055 (Volume Breakpoint) for universal
volume calculation. The illustration indicates how you can set secondary indexes to
specific functions.
•
P054 [1,1]
=
.75m
sets breakpoint 1 on transducer 1 to .75m.
• P054 [2,1] = 8m
sets breakpoint 1 on transducer 2 to 2.75m.
Starting Measurement
The MultiRanger startup varies between single and dual point models.
Single Point Models
The MultiRanger starts in DISTANCE mode with the transducer preset for the XPS-10 and
an empty distance of 5 meters. Change the following parameters to reflect your
application parameters.
A B C
P054 [1,6] = 2m P054 [1,3] = 1.5m P054 [1,1] = .75m
P054 [2,6] = 8m P054 [2,3] = 5.5m P054 [2,1] = 2.75m
Note: The number of points is an order option and is set by the factory. On a
single point model, the index for P001 is global (G). On a dual point model the index
for P001 is 1 or 2. To check the model in use, enter P001 on handheld programmer.
For a single point device, parameter P001 will not show an entry for index number
on the LCD. (See
MultiRanger Display
on page 36 for location of index number on
the LCD.) Parameter P001 will display an index number for a dual point model.
Parameter Index Value Description
P001 G 1 Operation = level
P002 G 1 Material = liquid
P003 G 2 Maximum Process Speed = medium
P004 G104 Transducer = XPS-15
P005 G 1 Units = meters
P006 G12 Empty = 12m
P007 G 10 Span = 10m
A
C
B
12
P054
[6 = 2m]
[3 = 1.5m]
[1 = 0.75m]
[1 = 2.75m]
[3 = 5.5m]
[6 = 8m]
A
B
C
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 39
mmmmm
Operation
3
Average or Differential [MR 200 only]
For differential or average operation with a single-point MultiRanger, set P001 to 4
(differential) or 5 (average) and connect two
transducers of the same type. All of the relevant
parameters then become indexed by the correct
transducer:
Dual Point Models
The MultiRanger starts in an OFF state and does not take level measurements. For
measurement setup, configure these basic parameters:
If the application uses two measurement points, provide the basic information for each
measurement point separately:
Index Description
2 indexed by Transducer One or Two
3indexed by level measurement
1 = Transducer One
2 = Transducer Two
3 = Calculated Level (average or difference)
Parameter Index Value Description
P001 1 1 Operation = level
2 3 Operation = distance
P002 1 1 Material = Liquid
2 1
P003 1 2 Max. Process Speed = medium
2 3 Max. Process Speed = fast
P004 1104 Transducer = XPS - 15
2102 Transducer = XPS - 10
P005 G 1 Units = meters
P006 112 Empty = 12m
2 4 Empty = 4m
P007 111Span = 11m
2 3.5 Span = 3.5m
Relay Number
Ring indicates
relay is configured
Dot indicates relay
is energized/de-
energized
Page 40 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Operation
Average or Differential [MR 200 only]
For differential or average operation dual-point MultiRanger, set P001 to 4 (differential) or
5 (average) and connect two transducers of the same type.
All the relevant parameters are then indexed by the correct number:
Measurement Conditions
The following information will help you configure your MultiRanger for optimal
performance and reliability.
Response Rate
The response rate of the device influences the measurement reliability. Use the slowest
rate possible with the application requirements.
The response rate is also important to functions connected to the filling or emptying
indicators.
Dimensions [MR 200 only]
The dimensions of the vessel, wet well, or reservoir (except empty and span) are only
important if you require volume.
Volume is required to report the level value in terms of volume. The pumped volume
function can also report pumped volume or pump efficiencies.
Failsafe
The failsafe parameters ensure that the devices controlled by the MultiRanger default to
an appropriate state when a valid level reading is not available.
• P070 – Failsafe Timer activates if an error condition is detected. Upon expiration of
the timer, relay status defaults to values based on P071.
• P071 – Failsafe Material Level determines the level reading if the Failsafe Timer
expires and the unit is still in an error condition.
• P129 – Relay Failsafe controls the reaction of each relay. See
Relay Failsafe
on page
45 for more information.
If Failsafe Operation activates frequently, see the
Troubleshooting Appendix
on page 231.
Index Description
2 indexed by Transducer One or Two
3 indexed by level measurement
1 = Transducer One
2 = Transducer Two
3 = Calculated Level (average or difference)
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 41
mmmmm
Relays
Relays
Relays are the primary controls of external devices such as pumps or alarms.
The MultiRanger comes with extensive control and alarm functions.
General Introduction
Depending on the model, up to six onboard multi-purpose relays are provided on the
MultiRanger. Each relay may be independently assigned to one function and has a
corresponding status icon on the LCD.
The relay functions fall under three modes of operation:
Relay Function
Alarm
Level
In high alarm, the function goes on when the level rises to the ON setpoint and goes off
when the level lowers to the OFF setpoint. In low alarm, the function goes on when the
level lowers to the ON setpoint and goes off when the level rises to the OFF setpoint.
In Bounds [MR 200]
The relay will be in alarm if the level is inside the zone between the setpoints.
Out of Bounds [MR 200]
The relay will be in alarm if the level is outside the zone between the setpoints.
Rate of Change [MR 200]
In filling alarm, the function goes on when the rate of filling increases to the ON setpoint
and goes off when the rate of filling drops to the OFF setpoint. In emptying alarm, the
function goes on when the rate of emptying increases to the ON setpoint and goes OFF
when the rate of emptying drops to the OFF setpoint. For emptying alarm, the setpoints
must be entered as negative values.
Mode Function
alarm alarm ON = LCD Icon ON = relay coil de-energized
pump pump ON = LCD Icon ON = relay coil energized
miscellaneous contact closed = LCD Icon ON = relay coil energized
Note: The MultiRanger 100 or 200 can be programmed with relays. The number of
relays installed depends on the model. To determine the number of available
relays that can be utilized in your MultiRanger 100 or 200, open the lid and count
the large white relays to the left of the display. It is important to count the number
of on-board relays as the software will allow programming of up to six relays
whether they are installed or not.
Page 42 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Relays
Temperature [MR 200]
In high alarm, the function goes on when the temperature rises to the ON setpoint and
goes off when the temperature lowers to the OFF setpoint. In low alarm, the function
goes on when the temperature lowers to the ON setpoint and goes off when the
temperature rises to the OFF setpoint.
Loss of Echo
The function goes on when the fail-safe timer expires. The function goes OFF when a
valid echo is received (fail-safe timer is reset).
Pump
Level
In pump down, the function goes on when the level rises to the ON setpoint and goes off
when the level lowers to the OFF setpoint. In pump up, the function goes on when the
level lowers to the ON setpoint and goes off when the level rises to the OFF setpoint.
Miscellaneous
Totalizer and Samplers [MR 200]
Refer to
Totalizing Pumped Volume
on page 65. Relays are normally de-energized, contact
closure is approximately 200 mSec duration.
Setpoint - ON / OFF
If the ON setpoint is higher than the OFF setpoint, the relay operates as:
• high alarm
• pump down control
If the ON setpoint is lower than the OFF setpoint, the relay operates as:
• low alarm
• pump up control
The ON and OFF setpoints can not be the same on an individual relay but may be common
to other relays. The dead band or hysteresis is the difference between the ON and OFF
setpoints. For in and out of bounds level alarms, the hysteresis is set at ± 2 % of span
from either boundary.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 43
mmmmm
Relays
Relay Status – Non Run Modes
When the fail-safe timer expires, pump control relays respond as previously described.
However, alarm relays will respond in the following manner:
Upon entering the program mode, all pump control relays will be turned OFF. Alarm relays
will hold their prior status.
Relay States
The relays on the MultiRanger are completely programmable, allowing for any control
scheme.
Relay Related Parameters
Some parameters affect how relays react during normal conditions:
P100–Preset Applications [MR 200 only]
Sets the MultiRanger to a preset application. These preset applications quickly set up the
MultiRanger with a minimum number of parameters.
P111–Relay Control Function
Sets the default state differently, depending on whether the relay is programmed as an
alarm or a control.
P111–Alarm Functions
The alarm function de-energizes the relay coils. During normal operation (no alarms), the
relay coils are energized.
Fail-Safe Mode Relay Status
High Alarm Low Alarm
Fail-Safe High ON OFF
Fail-Safe Low OFF ON
Fail- Safe Hold HOLD HOLD
Cautions:
• If the relay status can affect plant operation or personnel safety, it is advisable
to override the relay functions or disconnect the relay wiring during calibration
or simulation.
• Keep power disconnected at main breaker when MultiRanger cover is opened.
Relay Types
Relay 1,2,4,5 – NO (Form A)
Relay 3,6 – NO / NC (Form C)
Page 44 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Relays
P111–Control Functions
The control function energizes the relay coils. When the instrument is at rest (no controls
operating) the relay coils are de- energized.
P112–Relay ON Setpoint
Sets the process point at which the relay is tripped.
P113–Relay OFF Setpoint
Sets the process point at which the relay is reset.
P118–Relay Output Logic
Affects relay reaction. Reverses the logic (normally-open to normally-closed or vice
versa).
P129–Relay Failsafe
Changes how individual relays react to a failsafe condition on the instrument.
Relay Wiring Test
P119–Relay Logic Test
Checks the application wiring by forcing a relay control function, such as a level alarm or
pump control setpoint. Ensure all the relay programming and wiring works properly.
Please verify that ON and OFF respond correctly. Use P119 as a final test once all of the
relay programming is done.
Relay Activation
The flexibility of the relay functions ensures that the MultiRanger can support relay
wiring for different systems and applications. Use the following as a guide to the most
common parameters.
Relay Setpoints and Functionality
[MR 100]: When a setpoint is reached, the corresponding action is taken. The setpoint
can be an ON or OFF setpoint related to a process variable.
[MR 200]: The setpoint can be an ON or OFF setpoint related to a process variable, or a
timed setpoint based on interval and duration.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 45
mmmmm
Relays
[MR 100]: Functions affected by setpoint are configured by parameters that determine the
application requirements such as timing.
P111 Pump and Control functions
(see page 134)
sets the functions requirements.
[MR 200]: Functions affected by setpoint are configured by parameters that determine the
application requirements such as timing.
P111 Pump and Control functions
(see page 134
sets the function requirements. Other function parameters:
• P132–Pump Start Delay
• P133–Pump Power Resumption Delay
• P645–Relay Duration
Relay Logic is Modified
Normal operating conditions means that alarms are off and pumps are on. This can be
reversed using P118–Relay Output Logic.
Relay Failsafe
P129–Relay Failsafe
Adjusts how individual relays react to a failsafe condition. Relays can be set to:
• OFF Control is by P071–Failsafe Material Level
• HOLd Keeps the relay in the current state
• dE De-energizes the relay (default for pump controls)
• En Energizes the relay
Page 46 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Relays
Preset Applications
Preset applications set up the relay parameters to predetermined values shown below:
Value #Parameters Affected
Off 0 All relays set to OFF
Wet Well 1
1
Pump down with the following settings:
Parameter Relay #
123456
P111 52 52 1(H) 1(L) 0 0
P112 70% 80% 90% 10% – –
P113 20% 20% 85% 15% – –
Wet Well 2
2
Pump down with the following level and rate settings:
Parameter Relay #
123456
P111 52 52 1(H) 1(L) 0 0
P112 70% 80% 90% 10% – –
P113 20% 20% 85% 15% – –
P121 1
P121 sets the pump relays to accept control by rate of level change once
the first ON setpoint is reached. Because the pumps are started by rate,
you must change P703 to desired empty rate.
Reservoir 1
3
Pump up with the following level settings:
Parameter Relay #
123456
P111 52 52 1(H) 1(L) 0 0
P112 30% 20% 90% 10% – –
P113 80% 80% 85% 15% – –
Reservoir 2
4
Pump up with the following level and rate settings:
Parameter Relay #
123456
P111 52 52 1(H) 1(L) 0 0
P112 20% 20% 90% 10% – –
P113 80% 80% 85% 15% – –
P121 1
P121 sets the pump relays to accept control by rate of level change once
the first ON setpoint is reached. Because the pumps are started by rate
you must change P702 to desired fill rate.
Screen
5
Differential control of a screen or rake:
Parameter Relay #
123456
P110 312300
P111 50 1(H) 1(L) 1(H) – –
P112 80% 90% 10% 90% – –
P113 20% 85% 15% 10% – –
Alarms
6
General alarms at four setpoints:
Parameter Relay #
123456
P111 1(H) 1(L) 1(HH) 1(LL) 0 0
P112 80% 20% 90% 10% – –
P113 75% 25% 85% 15% – –
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 47
mmmmm
Backup Level Override
Backup Level Override
Backup level override provides the option of overriding the ultrasonic input with another
contacting point level device, for example, the Pointek CLS200. The ultrasonic reading is
fixed at the programmed switch level until the discrete input is released and the
ultrasonic device makes its decisions based on the override value.
Backup Level Override Parameters
P064: Reading Override Enable
Sets the discrete input as the source of a level reading override.
P065: Reading Override Value
Substitutes value for current reading when the discrete input (P064) is enabled. Value is
added in current units and is valid only for the following:
•level
•space
•distance
•difference
• average modes of operation
• head level in OCM mode
Example:
A high level backup switch is connected to Digital Input Two in the same application as
Transducer One at level value 4.3 m.
Settings
When the level rises to 4.3 m and the switch is activated, the reading is forced to 4.3 m
where it stays until the switch is de-activated.
P066: Override Time Delay
Sets the time (in seconds) used to calm the override condition input.
Parameter Index Value
P064 1 2
P064 2 0
P065 1 4.3
P065 2 –
Page 48 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Discrete Inputs
Discrete Inputs
Wiring the Discrete Inputs
Normal state is standard operation, with the MultiRanger sensing the material level and
controlling the pumps.
The discrete input contacts are either normally-open or normally-closed when the
system state is normal.
Example:
Normal state for a backup high level switch is open, and the contacts on the discrete
input are wired as normally-open.
See
Discrete Inputs
on page 21 for complete details on wiring the discrete inputs. To
override a level using a discrete input, see
Backup Level Override
on page 47.
Programming the Discrete Input Logic
The P270 series of parameters permits control over the discrete input.
The current value of the discrete input is reported in P275:
DI State P270 Setting
Normally Open
Normally Closed
P270 = 2
P270 = 3
P275 Setting MultiRanger State
0
1
Normal State
Exception State
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 49
mmmmm
mA I/O
mA I/O
To integrate the MultiRanger with other equipment, use the mA input and outputs.
The mA input can be used as a level measurement or can be passed on to a SCADA
system.
mA Input [MR 200]
Level Reading Parameters
To pass the mA input on to a SCADA system, read the value from the appropriate
communication registers. For more information, go to the
MultiRanger Communications
section on page 89.
mA Output
The MultiRanger has two mA outputs, used to send measurements to other devices.
Configuring the mA output to send a 4 to 20 mA signal scaled from 10% to 90% of span of
the second transducer:
Note: When a mA input parameter is accessed, a mA symbol appears in the
upper left corner of the LCD display.
Parameter Index Value Description
P004 1 250 Transducer = mA input 1
P250 1 2 Scale = 4 to 20 mA
P251 1 0 4 mA = 0% of span
P252 1100 20 mA = 100% of span
P253 1 0 Do not damp the input signal
Parameter Index Value Description
P200 1 2 set to 4 to 20 range
P201 1 1 send mA proportional to level reading
P202 1 2 base mA on level point 2
P210 110 set 4 mA at 10% of span1
1. If the level reading drops below 10% of span, the mA output drops below
4 mA.
P211 1 90 set 20 mA at 90% of span2
2. If the level reading rises above 90% of span, the mA output rises above
20 mA.
P219 1 0 set failsafe action as 0 mA
Page 50 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
mA LI/O
Calibrating 4 mA Output
1. Connect the mA receiving device to the MultiRanger.
2. Put the MultiRanger into PROGRAM mode.
3. Set P911–mA Output Value to 4.0.
4. View the mA level on the receiving device.
5. If there is a discrepancy,
a.Attach ammeter to MultiRanger mA output.
b.Access P214, Index 1 (for mA output 1) or 2 (for mA output 2). Press CLEAR and
ENTER . The ammeter should show a value near 4 mA.
c.Enter the exact value displayed on the ammeter into P214 (Index 1 or 2).
d.The ammeter should then read exactly 4.00 mA.
The unit is now calibrated for 4 mA for the receiving device.
Calibrating 20 mA Output
1. Connect the mA receiving device to the MultiRanger.
2. Put the MultiRanger into PROGRAM mode.
3. Set P911–mA Output Value to 20.0.
4. View the mA level on the receiving device.
5. If there is a discrepancy,
a.Attach ammeter to MultiRanger mA output.
b.Access P215, Index 1 (for mA output 1) or 2 (for mA output 2). Press CLEAR and
ENTER . The ammeter should show a value near 20 mA.
c.Enter the exact value displayed on the ammeter into P215 (Index 1 or 2).
d.The ammeter should then read exactly 20.00 mA.
The unit is now calibrated for 20 mA for the receiving device.
Verifying the mA Range
Checks that the external device can track the entire 4 to 20 mA range sent by the
MultiRanger.
1. Use P920 to put the MultiRanger into Simulation mode (see page 85).
2. Run the simulation through one complete fill / empty cycle.
3. View P911–mA Output Value to verify that it tracks to the simulation.
4. View the mA value reported on the external equipment to verify that it also tracks to
the simulation.
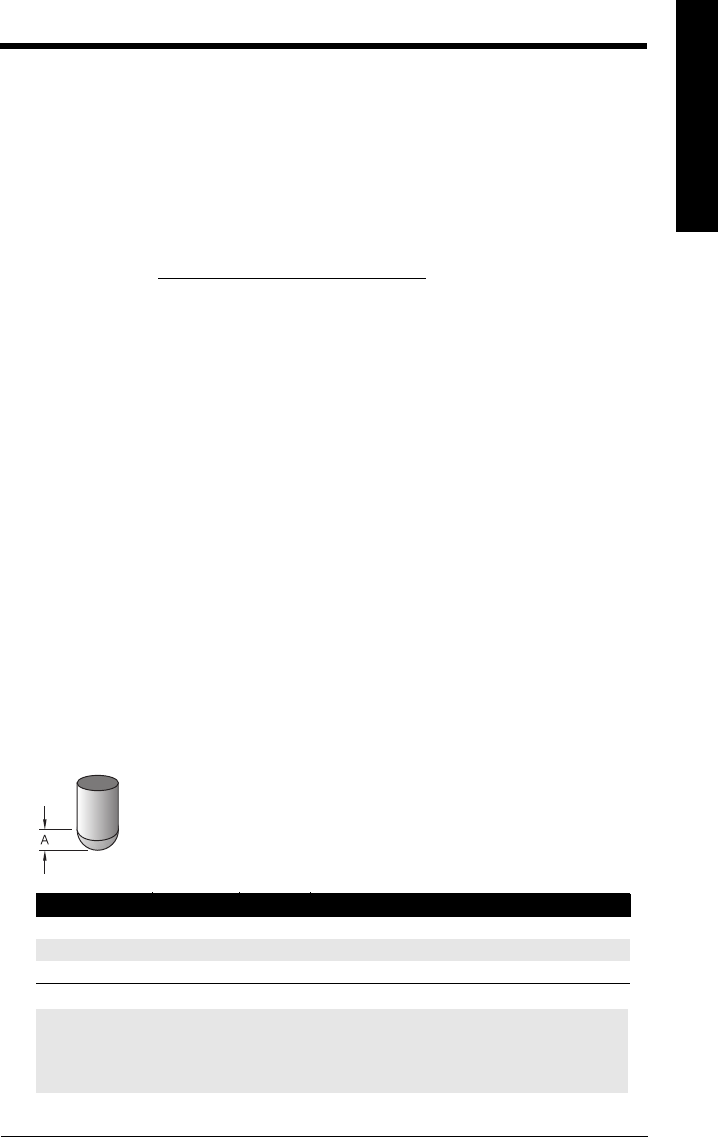
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 51
mmmmm
Volume
Volume [MR 200]
Volume is a feature of the MultiRanger 200 only. Volume is used in two situations:
1. Calculate and display volume instead of level. For programming all setpoint
parameters in terms of volume units rather than level units.
2. Calculate pumped volume to accomplish the following:
• Totalize the volume of material that is pumped out of the wet well
• Set an alarm on pump efficiency
If you require this functionality, please contact your local Siemens Milltronics
representative at www.siemens.com/processautomation .
Readings
When using volume, readings are given in arbitrary units specified in P051.
The default is 100, which gives a reading in percent of total. Use whatever units you want
here. If the value is too large for the four-digit LCD, use a larger unit.
Example
If a wet well has a maximum capacity of 250,000 liters, use the value 250.0 for P051 and
set the reading in 1000s of liters.
Tank Shape and Dimensions
There are many common tank shapes to select from. (See P050. If possible, use one of
these.) Each tank shape uses the Empty distance (P006) in its calculations of volume.
Some tank shapes also require extra dimensions to calculate the volumes. Do not
estimate these values. They must be correct to ensure the accuracy of your volume
calculations.
To configure volume for a tank with a half-sphere bottom, set the
following:
Parameter Index Value Description
P050 1 4 selects the correct tank shape
P051 1100 sets maximum volume at 100 (percent)
P052 1 1.3 sets A to 1.3m
Notes:
• The default reading changes to a range from 0 to 100 (the value in P051)
• Empty (P006) is still measured to the bottom of the tank, not the top of A.
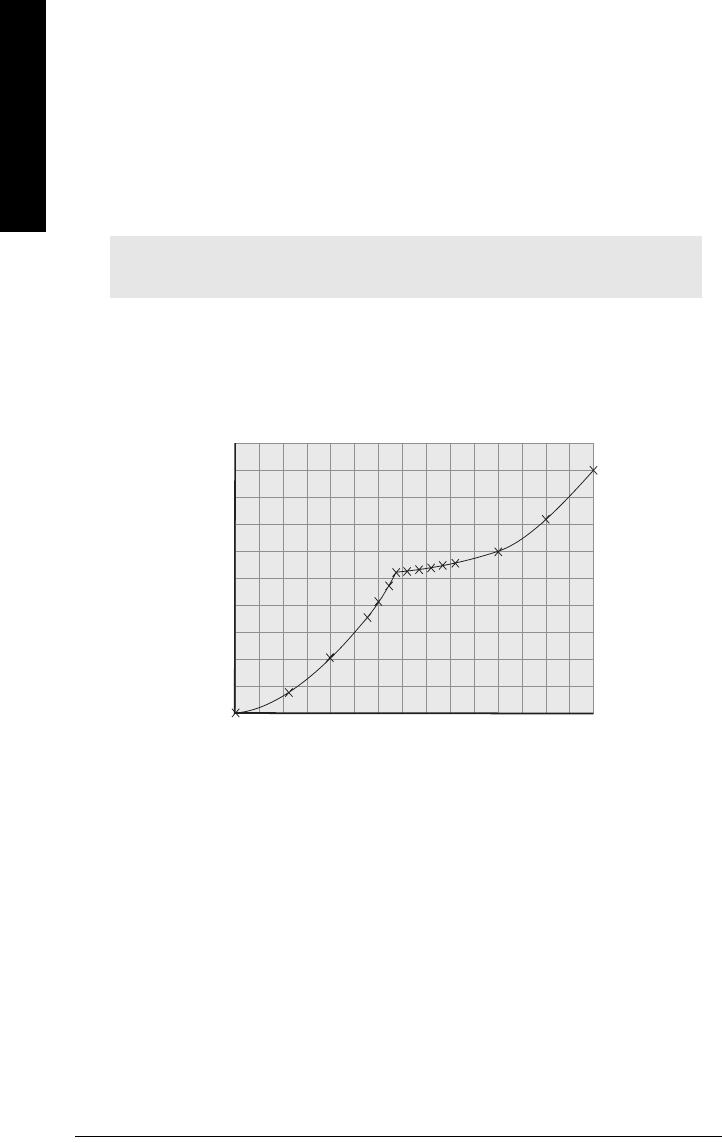
Page 52 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Volume
Characterization Chart [MR 200]
If you cannot use a pre-defined tank, then use one of the universal tank shapes and
program the characterization curve.
1. Plot a volume to height chart. Usually a tank supplier will provide this chart.
However, if you have a custom-built wet well then you will need access to complete
drawings of the well or accurate measurements.
2. Enter the curve values from this chart into P054 and P055.
3. Ensure extra points are added around sharp transitions in the wet well volume (e.g:
as steps in the well wall).
Example Chart
Note: The end points in the curve are 0,0 (fixed) and the point defined by P007–
Span and P051–Maximum Volume.
FLOW
LEVEL (P054)
0,0
VOLUME (P055)
MAX VOLUME
P051
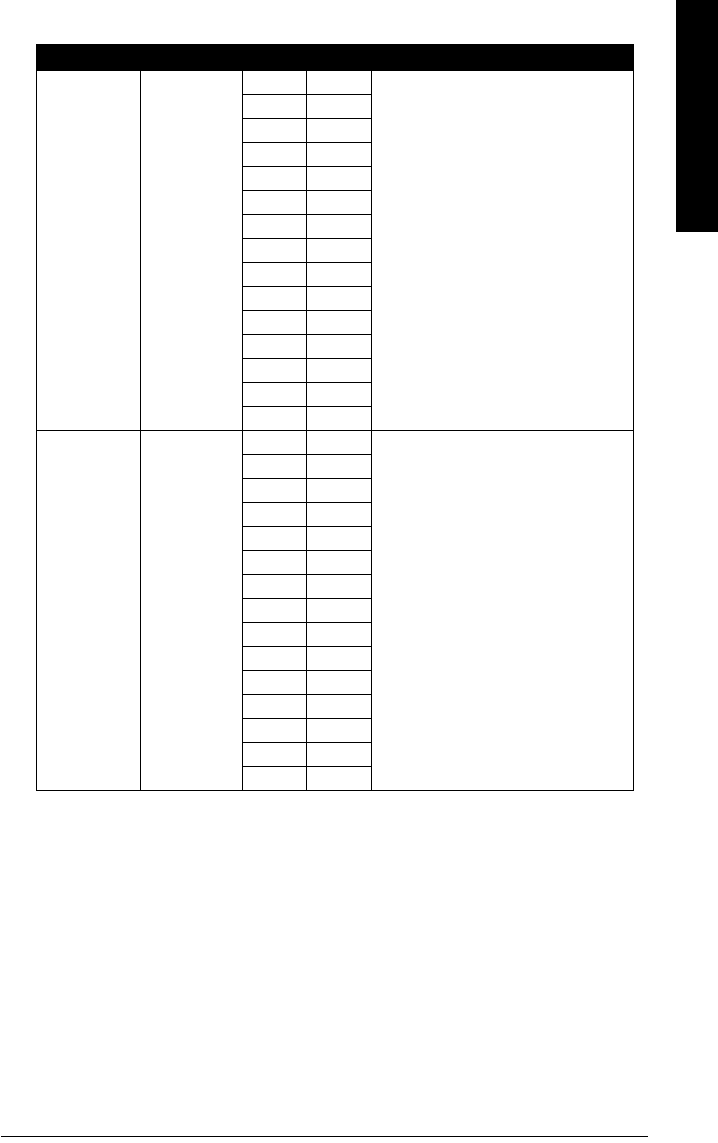
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 53
mmmmm
Volume
MultiRanger 200 only
Parameter Transducer Index Value Description
P054 1
10.0
Determines the Level breakpoints at
which the volumes are known.
20.8
32.0
43.5
54.1
64.7
75.1
85.2
95.3
10 5.4
11 5.5
12 5.6
13 6.0
14 7.2
15 9.0
P055 1
10.0
Determines the volumes which
correspond to the level breakpoints.
The universal calculations interpret
between the breakpoints to produce
an accurate model of the volume at
all level readings.
Settings
P050 = 9 for linear approximation
P050 = 10 for curved approximation
Linear approximation uses a linear
algorithm; curved approximation
uses a cubic spline algorithm.
22.1
34.0
45.6
55.9
66.3
76.7
87.1
97.8
10 8.2
11 8.8
12 9.2
13 10.9
14 13.0
15 15.0
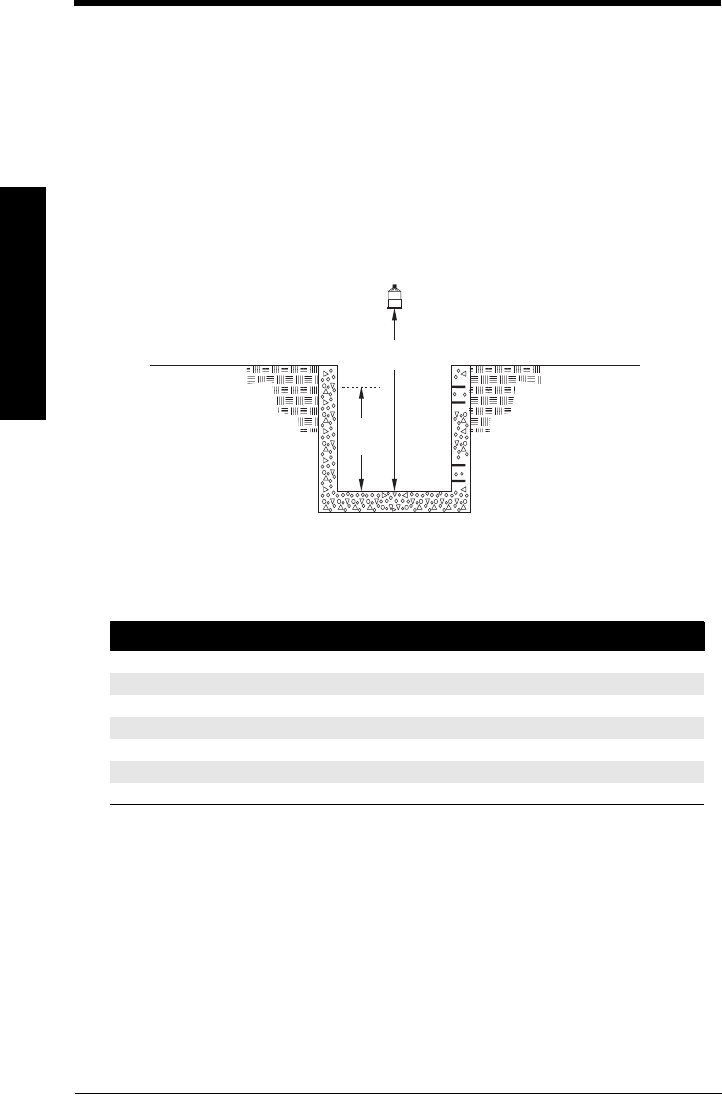
Page 54 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Alarms
Alarms
Level
The level alarm is the most common. Use this alarm to warn you when your process is in
danger of being upset due to high or low levels.
Generally, the four alarms used are Hi, Hi Hi, Lo, and Lo Lo.
Set the Common Parameters
Prerequisite: You must know the details of your application and substitute the values for
the sample values provided. If you are bench testing the unit, then set your test values to
be the same as the sample values.
Parameter Index1
1. This example assumes a base, single measurement unit. If your unit has
optional dual point software installed then some parameters are indexed by
two.
Value Description
P001 G 1 Operation = level
P002 G 1 Material = liquid
P003 G 2 Maximum Process Speed = medium
P004 G102 Transducer = XPS-10
P005 G 1 Units = meters
P006 G1.8 Empty = 1.8m
P007 G 1.4 Span = 1.4m
P007
P006
lo lo
lo
hi
hi hi
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 55
mmmmm
Alarms
Setting Simple Level Alarms
To set Relay Five to a standard level alarm (Hi Hi, Hi, Lo, Lo Lo) do the following:
Available designations:
Rate [MR 200]
Rate alarms can trigger an alarm if the vessel is filling/emptying too quickly.
Setting a Filling Rate Alarm
Setting an Emptying Rate Alarm
Parameter Index Value Description
P110 5 1 • Set P110, indexed to relay, to the value 1 for
Transducer One
P111 5 1 • Set P111, indexed to relay, to the value 1 for level
alarm
• Press UNIT to display the Auxiliary Function
symbol.
• Press ARROW keys as required to scroll
to the alarm designation (L, LL, H, or HH).
• Press ENTER to enter the value.
P112 51.2m • Set the ON setpoint
P113 5 1.15m • Set the OFF setpoint
Alarm Designation
Hi Hi HH
Hi H
Lo L
Lo Lo LL
Parameter Index Value Description
P111 5 4 These settings trip the alarm when the
reservoir is filling faster than 1 m per minute
and reset it at 0.9m per minute.
P112 51m
P113 5 0.9m
Parameter Index Value Description
P111 5 4 These settings trip the alarm when the
reservoir is emptying faster than 10% of span
per minute and reset the alarm when
emptying falls to 5%.
P112 5-10%
P113 5 -5%
Page 56 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Alarms
In Bounds/ Out of Bounds Range [MR 200]
Use the bounded range alarms to detect when the level is inside or outside of the range.
By using a bounded range alarm, you can effectively put two level alarms (high and low)
on one relay.
Setting an Out of Bounds Alarm
Results:
• Trips alarm above 1.35 m and below 0.25m
• Resets alarm below 1.25 m and above 0.35m
Setting an In Bounds Alarm
Results:
• Trips alarm below 1.25 m and above 0.35 m
• Resets alarm above 1.35 m and below 0.25 m
Cable Fault
Activates an alarm if transducer cable circuit enters a shorted or opened state.
Temperature [MR 200]
Use the temperature alarm to activate an alarm when the temperature reaches the ON
setpoint (P112). This alarm uses the same setpoint parameters as the level alarms (P112
and P113).
Parameter Index Value
P111 5 3
P112 51.3
P113 5 0.3
P116 50.05
Parameter Index Value
P111 5 2
P112 51.3
P113 5 0.3
P116 50.05
Parameter Index Value Description
P111 5 7 Alarm on transducer cable fault
P110 5 1 Alarm on Transducer One
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 57
mmmmm
Alarms
With P112 and P113, you can set a high alarm (P112 > P113) or a low alarm (P112 < P113).
This shows a high alarm:
The temperature source can be the temperature sensor built into the transducer or an
external TS-3, as set by P660.
Loss of Echo (LOE)
Parameter Index Value Description
P111 5 5 Alarm on temperature
P112 545 ON setpoint at 45 °C
P113 5 43 OFF setpoint at 43 °C
P110 5 1 Take the temperature reading from
Transducer One
Parameter Index Value Description
P110 5 1 Alarm on LOE for Transducer One
P111 5 6 Alarm on LOE
P070 G 0.5 Trip alarm when 0.5 minutes (30 seconds)
pass without detecting a valid echo.
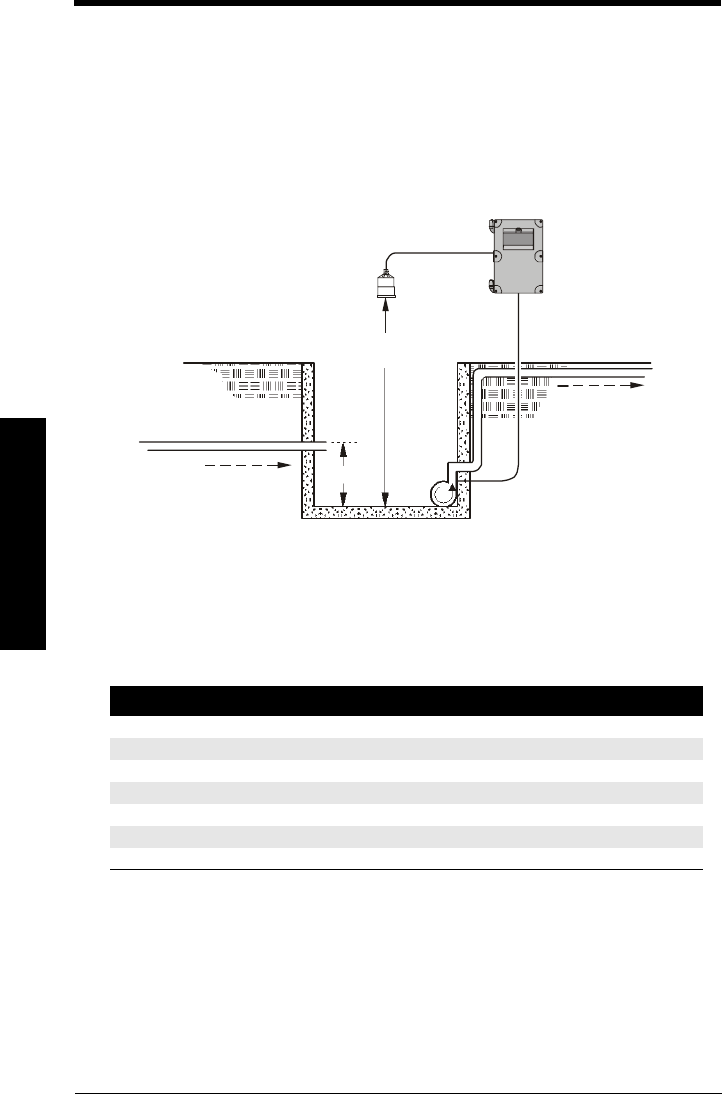
Page 58 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
Pump Control
Setting a Pump Down Group
Example: Sewage Wet Well
Setting a group of three pumps to pump down a wet well.
Set the Common Parameters
Prerequisite: Substitute the details of your application in place of the sample values
provided. If you are bench testing the unit, set your test values to be the same as the
sample values.
Parameter Index1
1. Example assumes a single measurement unit. If your MultiRanger has
dual point software installed then some parameters are indexed by two.
Value Description
P001 G 1 Operation = level
P002 G 1 Material = liquid
P003 G 2 Maximum Process Speed = medium
P004 G102 Transducer = XPS-10
P005 G 1 Units = meters
P006 G1.8 Empty = 1.8m
P007 G 1.4 Span = 1.4m
MultiRanger
P006
P007
Inflow
Outflow
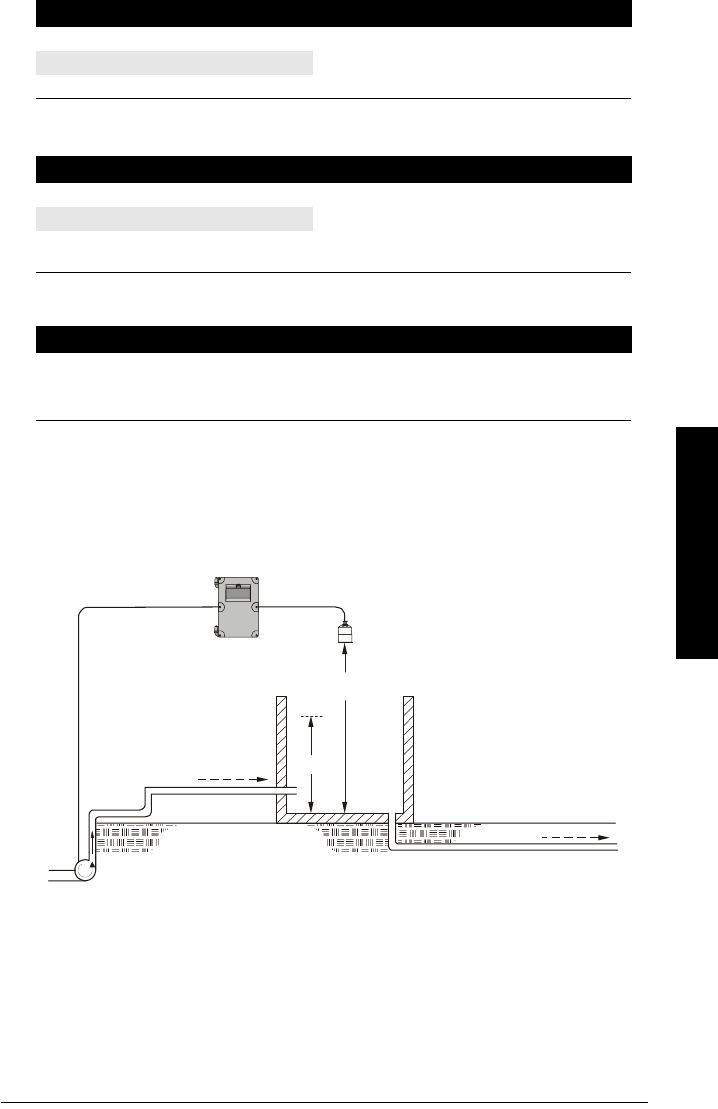
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 59
mmmmm
Pump Control
Set Relays to ALTERNATE DUTY ASSIST
Set the ON Setpoints
Set the OFF Setpoints
Setting a Pump Up (Reservoir) Group
Sets a group of three pumps to pump up a reservoir.
Parameter Index Value Description
P111 1 52 Sets the pump relays (index 1, 2, and 3) to
ALTERNATE DUTY ASSIST.
P111 252
P111 3 52
Parameter Index Value Description
P112 1 1.0m Sets the three setpoints for the pump relays.
The first cycle will use these setpoints.
Subsequent cycles rotate the setpoints
among the pumps.
P112 21.1m
P112 3 1.2m
Parameter Index Value Description
P113 0 0.5m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
P006
P007
Inflow
Outflow
MultiRanger
Page 60 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
Set the Common Parameters
Prerequisite: Substitute the details of your application in place of the sample values
provided. If you are bench testing the unit, set your test values to be the same as the
sample values.
Set Relays to ALTERNATE DUTY ASSIST
Set the Relay ON Setpoints
Set the Relay OFF Setpoints
For more information, see
Appendix D: Pump Control Reference
on page 239.
Parameter Index1
1. Example assumes a single measurement unit. If your MultiRanger has
dual point software installed, some parameters are indexed by two.
Value Description
P001 G 1 Operation = level
P002 G 1 Material = liquid
P003 G 2 Maximum Process Speed = medium
P004 G102 Transducer = XPS-10
P005 G 1 Units = meters
P006 G1.8 Empty = 1.8m
P007 G 1.4 Span = 1.4m
Parameter Index Value Description
P111 1 52 Sets the pump relays (index 1, 2, and 3) to
ALTERNATE DUTY ASSIST.
P111 252
P111 3 52
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The first cycle will use these setpoints.
Subsequent cycles rotate the setpoints
among the pumps.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 61
mmmmm
Pump Control
Other Pump Control Algorithms
Set Relays to ALTERNATE DUTY BACKUP [MR 200]
Set the Relay ON Setpoints [MR 200]
Set the Relay OFF Setpoints [MR 200]
Set Relays to FIXED DUTY ASSIST
Set the Relay ON Setpoints
Set the Relay OFF Setpoints
Parameter Index Value Description
P111 1 53 Sets the pump relays (index 1, 2, and 3) to
ALTERNATE DUTY BACKUP.
P111 253
P111 3 53
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The first cycle will use these setpoints.
Subsequent cycles rotate the setpoints
among the pumps.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
Parameter Index Value Description
P111 1 50 Sets the pump relays (index 1, 2, and 3) to
FIXED DUTY ASSIST. Multiple pumps can run
simultaneously.
P111 250
P111 3 50
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The setpoints remain attached to the pump
relays.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
Page 62 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
Set Relays to FIXED DUTY BACKUP [MR 200]
Set the Relay ON Setpoints [MR 200]
Set the Relay OFF Setpoints [MR 200]
Set Relays to ALTERNATE DUTY SERVICE [MR 200]
Set the Relay ON Setpoints [MR 200]
Set the Relay OFF Setpoints [MR 200]
Parameter Index Value Description
P111 1 51 Sets the pump relays (index 1, 2, and 3) to
FIXED DUTY BACKUP. Only one pump will
ever run at one time.
P111 251
P111 3 51
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The setpoints remain attached to the pump
relays.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
Parameter Index Value Description
P111 1 54 Sets the pump relays (index 1, 2, and 3) to
SERVICE RATIO DUTY ASSIST
P111 254
P111 3 54
P122 125 Sets the ratio to: 25% – Pump One
50% – Pump Two
25% – Pump Three
P122 2 50
P122 325
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The first cycle will use these setpoints.
Subsequent cycles rotate the setpoints
among the pumps.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 63
mmmmm
Pump Control
Set Relays to FIRST IN FIRST OUT (FIFO) ASSIST [MR 200]
Set the Relay ON Setpoints [MR 200]
Set the Relay OFF Setpoints [MR 200]
Optional Pump Controls
Starting Pumps by Rate of Level Change [MR 200]
Use this function when multiple pumps will be controlled by rate of level change rather
than setpoints. Pumping costs can be reduced because only the highest ON setpoint
needs to be programmed. This results in a lower difference in head to the next wet well
which, in turn, results in less energy being used to pump out the well.
Parameter Index Value Description
P111 1 56 Sets the pump relays (index 1, 2, and 3) to
FIFO DUTY ASSIST.
P111 256
P111 3 56
Parameter Index Value Description
P112 1 0.4m Sets the three setpoints for the pump relays.
The first cycle will use these setpoints.
Subsequent cycles rotate the setpoints
among the pumps.
P112 20.3m
P112 3 0.2m
Parameter Index Value Description
P113 0 1.3m By using index 0 all six relays are set at the
same time, including any alarm relays. Use
with caution.
Parameter Index Value Description
P112 1 1.35 Starting pumps by rate allows all setpoints to
be set higher to save money by pumping from
the highest safe level of the wet well.
Notice that all indexed relays for both P112
and P113 are set to the same levels.
The pumps will start on 20 second intervals
until the rate set in P703 is met.
P112 21.35
P112 3 1.35
P113 10.5m
P113 2 0.5m
P113 30.5m
P121 1 1
P121 2 1
P121 3 1
P132 G20.0
Page 64 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
When the first ON setpoint is reached, the pumps will start, one by one, until the material
level rate of change is set at the same value or greater than the value in:
• P703 – Emptying Indicator (pump down applications)
• P702 – Filling Indicator (pump up applications)
Set delay between pump starts using P132 – Pump Start Delay.
Single and Dual Point [MR 200]
• Single Point Mode: one pump by rate control available that affects all pumps.
• Dual Point Mode: a single pump by rate control can be set up for each of the three
available level points. Set Operation for difference or average (P001 = 4 or 5).
Rotating Pumps by Service Ratio [MR 200]
Prerequisite: Set pump relays to a service ratio value (P111 = 54 or 55).
When more than one pump is assigned a Pump Service Ratio value (in any time units) and a
pump start is required (P112 Relay Setpoint ON), the pump with the fewest running hours (with
respect to the assigned ratio values) starts.
Conversely, when a pump stop is required (113 Relay Setpoint OFF), the pump with the
most running hours (as compared to the assigned ratio values) stops.
Notes:
• Set all pump control relay ON and OFF setpoints to the same value
• If the level is within 5% of Span (P007) of the OFF setpoint, then the next pump
is not started
Parameter Index Value Description
P122 1 1 These values will start Pump Two 50% of the
time and Pumps One and Three each 25% of
the time.
P122 2 2
P122 3 1
Notes:
• The MultiRanger will not sacrifice other pumping strategies to ensure that the
ratio is held true
• If the pump relays are set to the same value, then the ratio equals 1:1 and all
pumps are used equally (preset)
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 65
mmmmm
Pump Control
Totalizing Pumped Volume [MR 200]
Prerequisite: the volume of the vessel must be known.
Set in RUN Mode
1. Press PROGRAM for RUN mode.
2. Press TOGGLE to display pumped volume on the totalizer.
3. Press AUXILIARY to display current level in the auxiliary reading area.
Setting Independent Failsafe Controls
Independent failsafe controls allow you to vary an individual relay from the global failsafe
controls programmed in P070 to P072.
Example:
The global failsafe controls are set to hold and Relay Five is set to trigger an alarm bell.
Parameter Index Value Description
P001 G 7 Operation = pumped volume
P002 G 1
These parameters are as shown above.
P003 G 2
P004 G 102
P005 G 1
P006 G 1.8
P007 G 1.4
P050 G 1 Tank shape is Flat Bottom.
P051 G 17.6 Max volume is 17.6m3 or 17,600 liters.
P111 152 Sets relays 1, 2, and 3 as a pump group using
ALTERNATE DUTY ASSIST CONTROL.
P111 252
P111 352
P112 1 1.0 Sets the ON setpoints for the pump group.
P112 2 1.2
P112 3 1.4
P113 00.2 Sets the OFF setpoints for the pump group.
Parameter Index Value Description
P071 G HOLd Keep level at last known value.
P129 5dE De-energize Relay Five, and trigger alarm.
P

Page 66 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
Setting a Pump to Run On [MR 200]
When you need to pump below the normal OFF setpoint, use P130 (Pump Run-On Interval)
and P131 (Pump Run-On Duration) to control this event.
Example:
The pump connected to Relay Three is set to pump for an extra 60 seconds every 5 hours.
Setting the Pump Start Delays [MR 200]
The pump start delay ensures that all of the pumps do not start at once to avoid power
surges. There are two parameters used here: P132–Pump Start Delay and P133–Pump
Power Resumption Delay. The default is 10 seconds but you can increase this if your
pumps take longer to spin up.
Example:
The delay between pumps is set to 20 seconds and the delay of the first pump is set to 30
seconds.
Reducing Wall Cling [MR 200]
Use the Wall Cling parameter to randomly alter the ON and OFF setpoints over a range.
This eliminates the ridge of material that builds up at the setpoint that can give false
echoes.
This setting may increase the number of days between trips to clean the wet well.
Wall cling reduction is set by P136. The relay setpoints ON and OFF are randomly varied
inside a range so the material level does not stop at the same point.
Parameter Index Value Description
P130 3 5 Time in hours of run-on interval.
P131 360 Run-on for 60 seconds.
Note: P130 counts when the indexed relay is tripped, not the number of pump
cycles. If the indexed relay only trips once every four pump cycles then the actual
interval of the run-on will be 20 pump cycles, or five cycles of Relay Three.
Parameter Index Value Description
P132 G 20 Wait at least 20 seconds between pump
starts.
P133 G30 Wait for 30 seconds when power is restored.
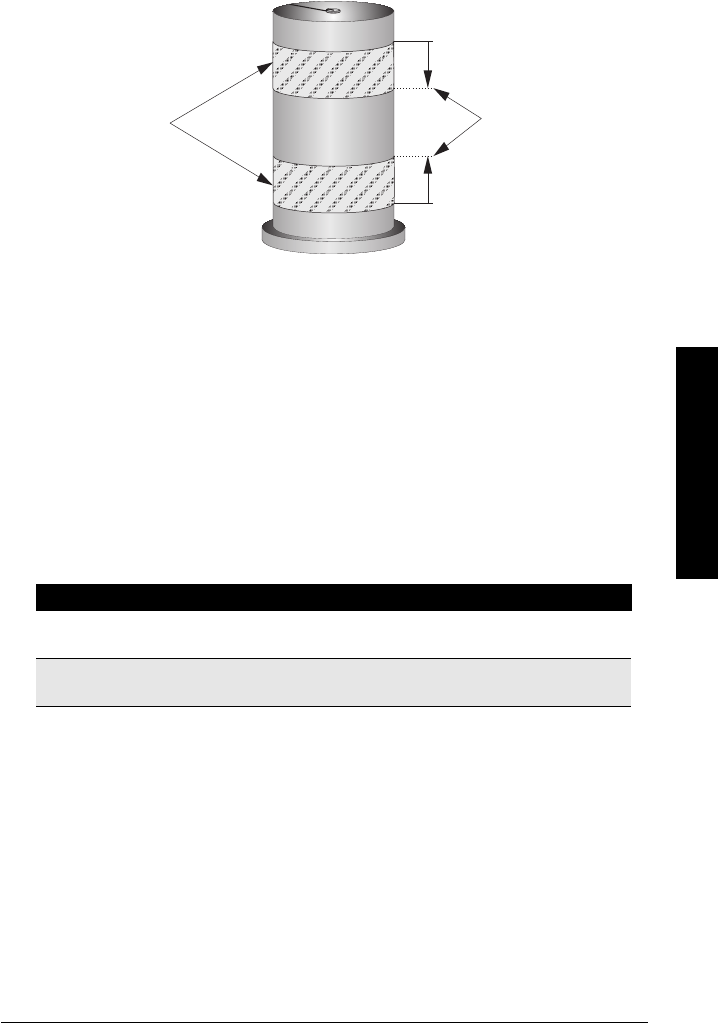
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 67
mmmmm
Pump Control
Example [MR 200]:
A range of 0.5 meters is used to vary the setpoint. The randomly-selected setpoints are
always inside the ON and OFF setpoints.
Grouping Pumps [MR 200]
You can group pumps and use the same pumping algorithm separately on each group. If
you specify different pumping algorithms then the pumps are already grouped by
algorithm and you do not need to use this parameter.
Group pumps only when four pumps are using the same algorithm and you want to split
them into two groups.
Example:
Pumps One and Two can operate as a group and Pumps Three and Four can operate as
another group.
Setting a Flush Valve [MR 200]
A flush valve stirs up the sediment on the bottom of the well during pumping so that it
doesn’t accumulate. These parameters will control any relays set with P111 = 64 (Flush
Valve).
Most sets of parameters will work with only one or two changes; however, for these
parameters to work, all of them must be set to a value.
Parameter Index Value Description
P137 1 1 Groups Pumps One and Two
P137 2 1
P137 3 2 Groups Pumps Three and Four
P137 4 2
Random Setpoint
Range
Level Setpoint ON
Wall Cling Value
Level Setpoint OFF

Page 68 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Pump Control
Example:
The flush valve connects to Relay Four and the watched pump is on Relay One.
Relay Controlled by Communications
A relay can be controlled directly by a remote system through communications. No other
control schemes can then be used with a relay configured this way. Communications can
be used to force status of some control relays, such as pumps.
Settings:
Tracking Pump Usage
You can find out how much an individual pump has been used by viewing the pump
records parameters.
Parameter Index Value Description
P170 G 1 Watch Relay One to count pump cycles.
P171 G 3 Open the flush valve for 3 cycles.
P172 G 10 Use the flush value every 10 cycles.
P173 G120 Open the flush valve for 120 seconds.
Parameter Index Value Description
P111 5 65 Sets Relay Five to communications control.
Information Available Parameter Access
Current RUN time P309
Total pump hours P310
Total pump starts P311
Total pump RUN on occurrences P312 [MR 200 ONLY]
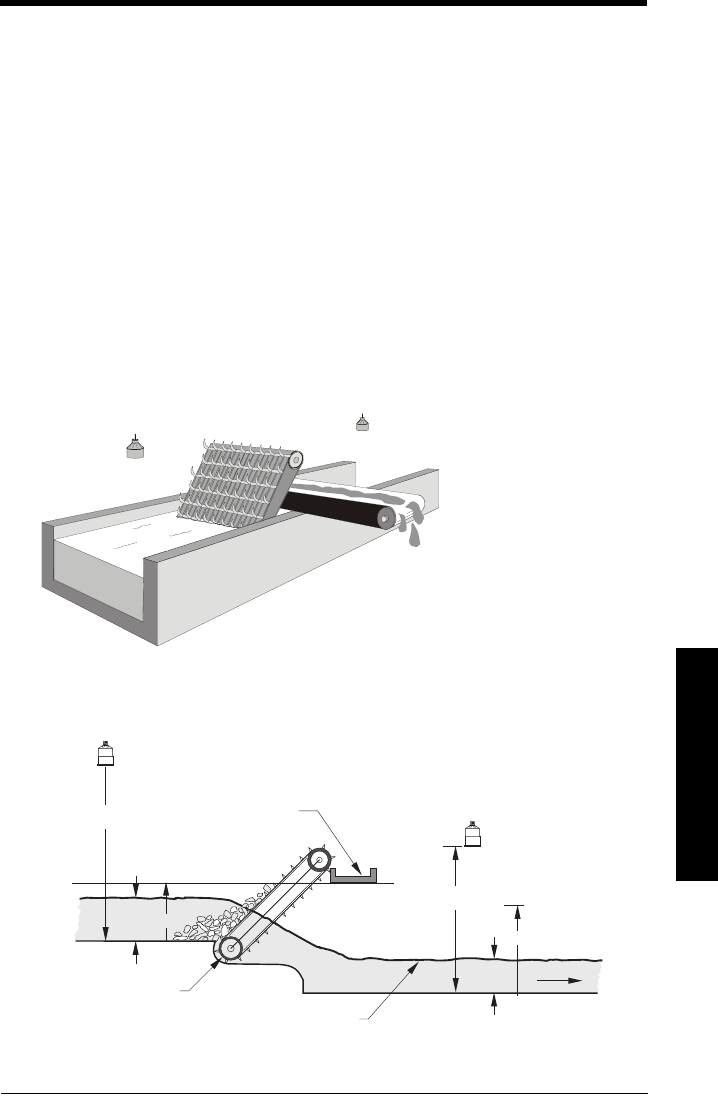
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 69
mmmmm
Rake (Screen) Control
MR 200
Rake (Screen) Control [MR 200]
This feature is only available on the MultiRanger 200.
Screens or rakes are mounted on the inflow channel of the wastewater treatment plant
to prevent debris from clogging the equipment.
When material builds up on the screen, a level differential is created, and the water level
is higher in front of the screen than behind it. When this differential reaches the
programmed setpoint, the MultiRanger activates a relay to operate mechanical rakes that
clean the screen and ensure a steady flow.
Setting a Rake Control
Transducer
Two
Transducer
One Rake
P007 (3)
Max differential
between Point 1 and
Point 2 reading also
sets 100% scale for
bargraph and mA
output.
Transducer[1]
P006[1]
h[1]
Rake
Debris Conveyer Transducer[2]
P006[2]
P007[2]
Water Level h[2]
P007[1]
Flow
Point Three: Level Distance = h[1] –h[2]
Note: transducers may be mounted at variant heights.
Page 70 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
Rake (Screen) Control
MR 200
Setting the Common Parameters
Prerequisite: Substitute the details of your application in place of the sample values
provided. If you are bench testing the unit, set your test values to be the same as the
sample values.
Set Relay 1 (Operate Rake)
Set Relays 2 to 4 (Level Alarms)
Parameter Index Value Description
P001 G 4 Operation = Differential
P002 G 1 Material = liquid
P003 1,2 2 Max. Process Speed = medium
P004 1,2 102 Transducer = XPS-10
P005 G 1 Units = meters
P006 1
2
1.8
2.2
Empty
Empty
= 1.8m
= 2.2m
P007 1
2
3
1.4
1.4
1.4
Span
Span
Max Differential
= 1.4m
= 1.4m
= 1.4m
Parameter Index Value Description
P110 1 3 Starts the rake when the difference between the
two levels rises above 0.4m and stop the rake
when the difference falls below 0.1m.
P111 150
P112 1 0.4
P113 10.1
P110 2 1 Description
P110 2 1 Sets Relay Two as a high level alarm for
Transducer One with an ON setpoint of 1.3m
and an OFF setpoint of 1.2m.
P111 2 1
P112 2 1.3
P113 21.2
P110 3 2 Sets Relay Three as a low level alarm for
Transducer Two with an ON setpoint of 0.2m
and an OFF setpoint of 0.4m.
P111 3 1
P112 3 0.2
P113 30.4
P110 4 3 Sets Relay Four as a rake failure alarm as it
uses the differential level point (3) with an
ON setpoint of 1.0m and an OFF setpoint of
0.9m.
P111 4 1
P112 4 1.0
P113 40.9
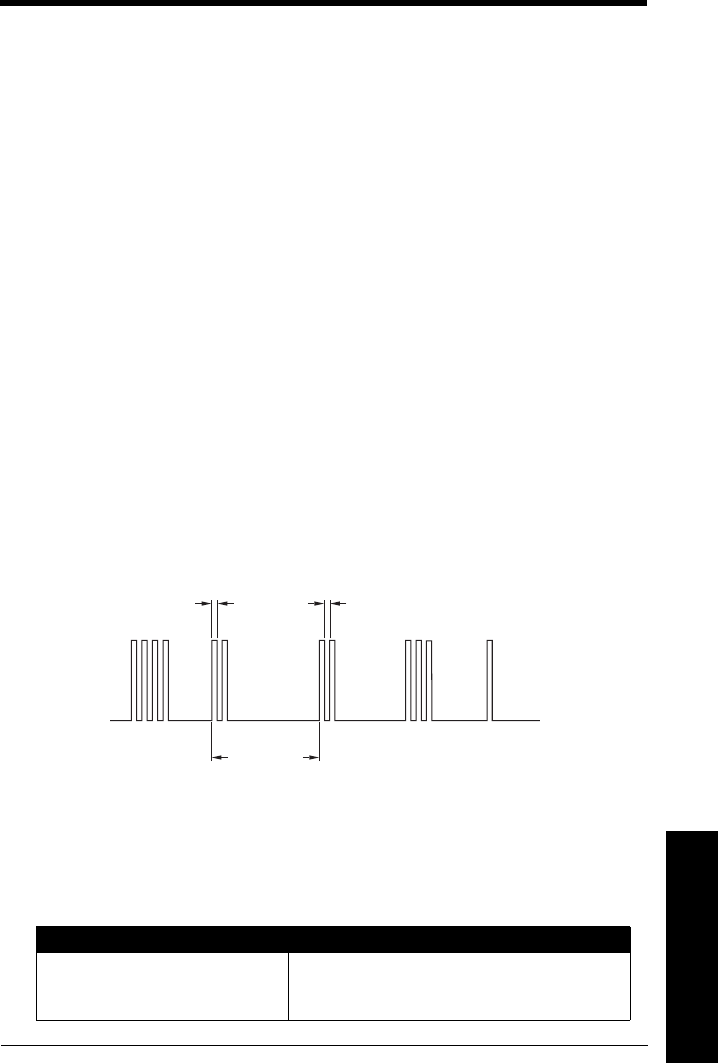
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 71
mmmmm
External Totalizers and
Flow Samplers – MR 200
External Totalizers and Flow Samplers
[MR 200]
This feature is only available on the MultiRanger 200.
External totalizers are simple counters which count the number of relay clicks produced
by the MultiRanger. This is generally used to keep track of OCM or pumped volume totals.
Note that both of these values are also stored in the MultiRanger and are available
through communications.
Flow samplers are devices which take a sample of liquid when triggered by a relay click.
These samples are used to monitor water quality over time. Flow samplers can be driven
by OCM volume or by relay click volume settings depending on the application
requirements.
Relay Contacts
Pumped volume is calculated at the end of the pump cycle. Totalized volume given
through a relay set up for totalizer (P111[r]=40) will be given in bursts at this time.
Both the open and closed times for the relay contact are provided by P645 and are preset
to 0.2 seconds. Partial units are added to the next pump cycle.
Example:
Shows a relay set up to make one contact for every cubic metre (m3) of liquid.
Totalizer
To set the totalizer to provide relay contact to an external counter, use the following:
Counter Formula
1 Contact per 10P640 units P640 is preset to 0 so the default number of
contacts for a pumped volume cycle is
equivalent to the number of volume units.
P645 P645
4m32m32m33m31m3
Pump Cycle
Page 72 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
External Totalizers and
Flow Samplers – MR 200
The source of units depends on the operation:
Flow Sampler
Based on Volume and Time
To trigger a flow sampler relay based on flow, use P111[r]=41 and set the other
parameters:
By using a mantissa (P641) and an exponent (P642), the relay contacts can be based on a
volume other than a multiple of ten.
During the periods of low flow, the sampler may be idle for lengths of time. Program P115
to a time interval in hours to drive the sampler. The sampler will operate based on the
volume of flow or the time interval, whichever comes first.
Operation Units Source Parameter
OCM (P001=6) P604–Maximum Flow, or P608–Flowrate Units
Pumped Volume (P001=7) P051–Max Volume
Counter Formula
1 Contact per P641 x 10P642 units
Operation Units Source Parameter
OCM (P001=6) P604 – Maximum Flow, or P608 – Flowrate Units
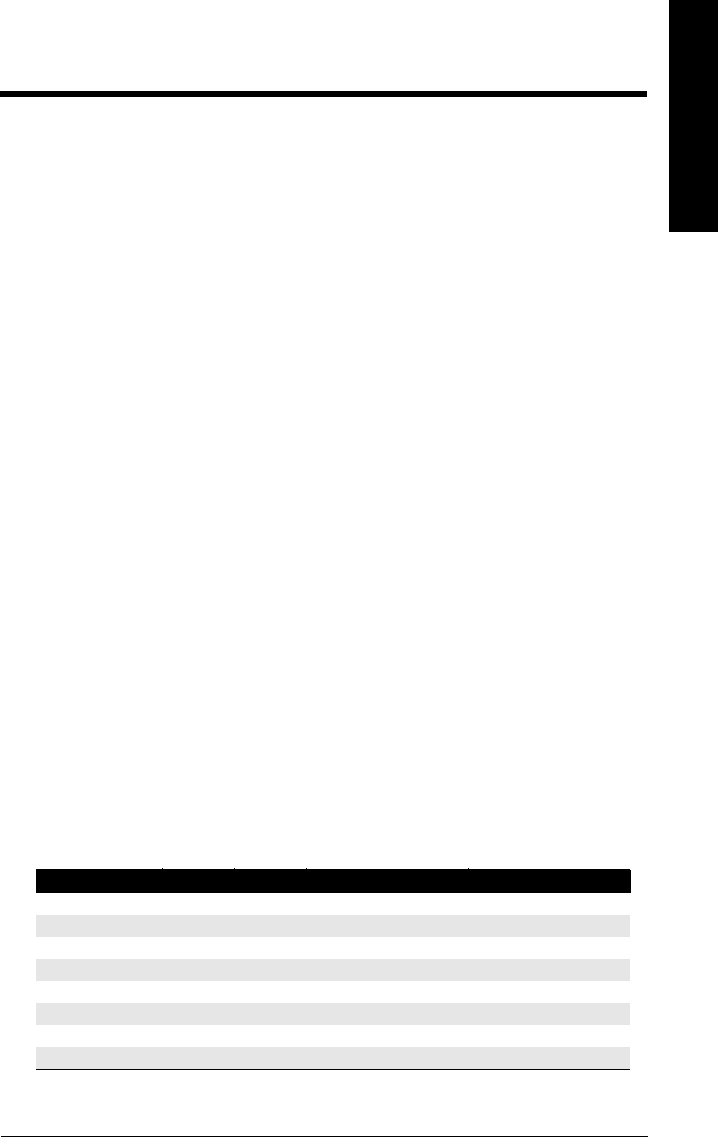
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 73
mmmmm
Open Channel Monitoring
MR 200
Open Channel Monitoring (OCM)
[MR 200]
An OCM installation is defined one of three ways, based on the Primary Measuring
Device (PMD):
1. Dimensional (P600 = 2,3,6,7)
For some common weir and flume types. PMD dimensions (P602) are entered directly.
• BS-3680 / ISO 1438/1 Thin plate V notch weir on page 75
• BS-3680 / ISO 4359 Rectangular Flume on page 76
• Palmer Bowlus Flume on page 77
• H Flume on page 78
2. Exponential (P600 = 1)
For most other weir and flume types. PMD exponents provided by the manufacturer are
entered. Flow is calculated using the exponent (P601) and the maximum values (P603 and
P604).
• Standard Weirs on page 79
• Parshall Flume on page 80
• Leoplod Lagco on page 81
• Cut Throat Flume on page 82
3. Universal (P600 = 4,5)
For all other PMDs, the head-to-flow curve can be plotted based on known breakpoints,
usually supplied by the PMD manufacturer.
• Typical Flow Characterization on page 83
• Example Flumes on page 84
• Example Weirs on page 84
Common Parameters
These Quick Start parameters are required for all installations.
Parameter Index Value Description
P001 G 6 Operation = OCM
P002 G 1 Material = liquid
P003 G 2 Max. Process Speed = medium
P004 G102 Transducer = XPS-10
P005 G 1 Units = meters
P006 G1.8 Empty = 1.8m
P007 G 1.0 Span = 1.4m
P801 G0.8 Range Extension to avoid LOE
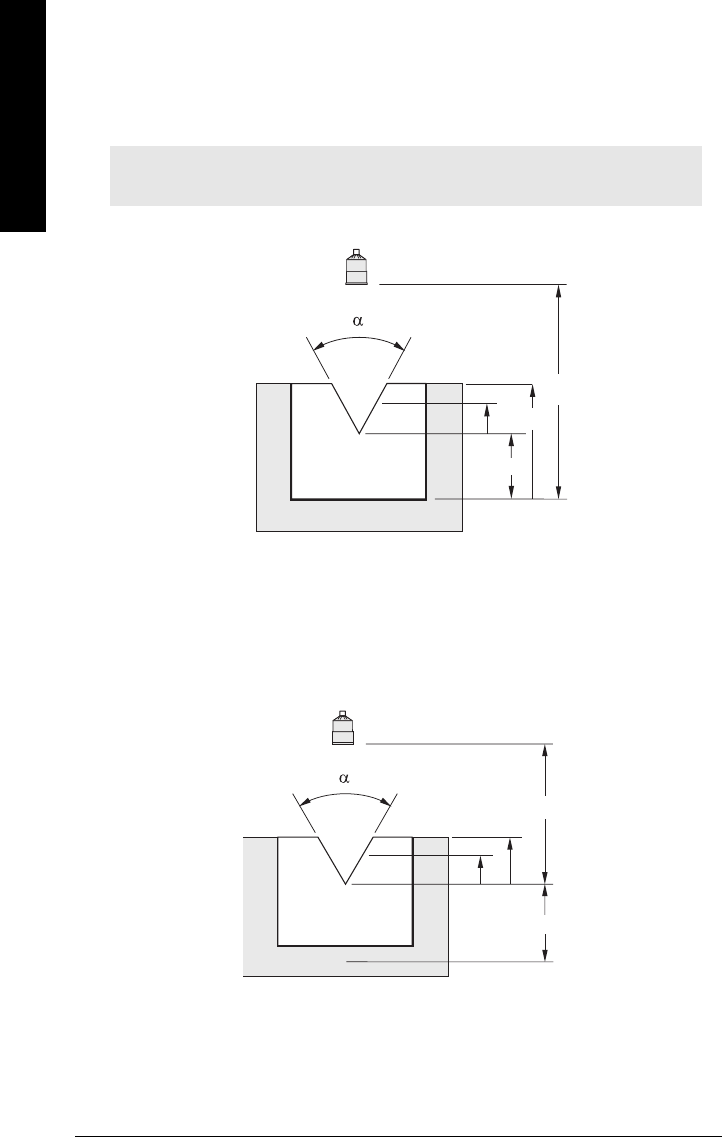
Page 74 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
Setting Zero Head
Many PMDs start flowing higher than the traditional empty distance of the application.
You can account for the flow in one of two ways:
1. Use P605 (Zero Head) to have OCM calculations ignore levels below that value.
Possible head = P007 minus P605.
2. Use P801 Range Extension where the Empty level is set to the bottom of the weir,
and above the bottom of the channel. It should be used if the surface monitored can
fall past the Empty (P006) level in normal operation without reporting an LOE. The
value is added to Empty (P006) and can be greater than the range of the transducer.
The examples on the following pages show both methods.
Note: P603 (Max. Head) is preset to P007 and is not updated when P605 is used.
Make sure you set P603 to the correct value when using P605.
P006
P007
P605
P603
P006
P801
P007
P603
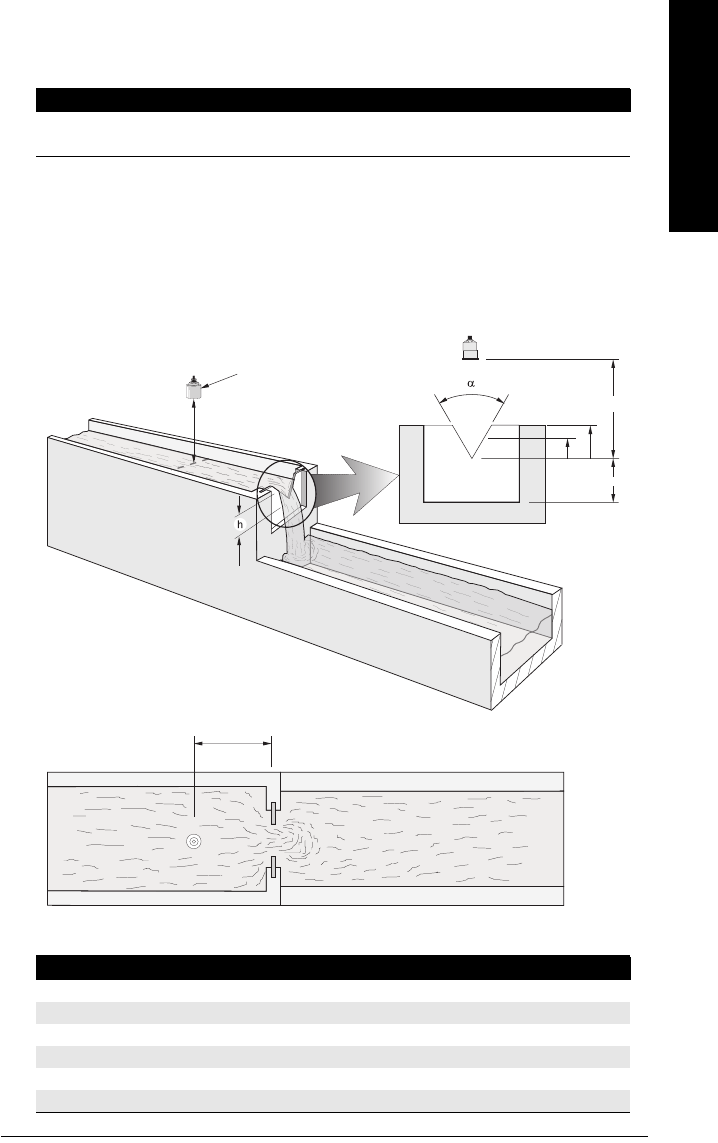
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 75
mmmmm
Open Channel Monitoring
MR 200
Setting Totalized Volume
To display the totalized volume on the LCD use the following parameters:
Applications Supported by MultiRanger 200
BS-3680 / ISO 1438/1 Thin plate V notch weir
Parameter Index Value Description
P737 G 2 Show the eight digit totalizer in the primary
display
Parameter Index Value
P600 G 7–ISO 1438/1 V Notch Weir
P602 1Notch angle
(view only) 2 Discharge coefficient (Ce)
P603 GMaximum Head (preset to P007)
P801 G Range Extension
P608 GFlowrate Units
P801
P006
Transducer
4 to 5 x hmax (hmax = P007)
Plan View
Side View
Front View
P602
notch angle
P603
P007
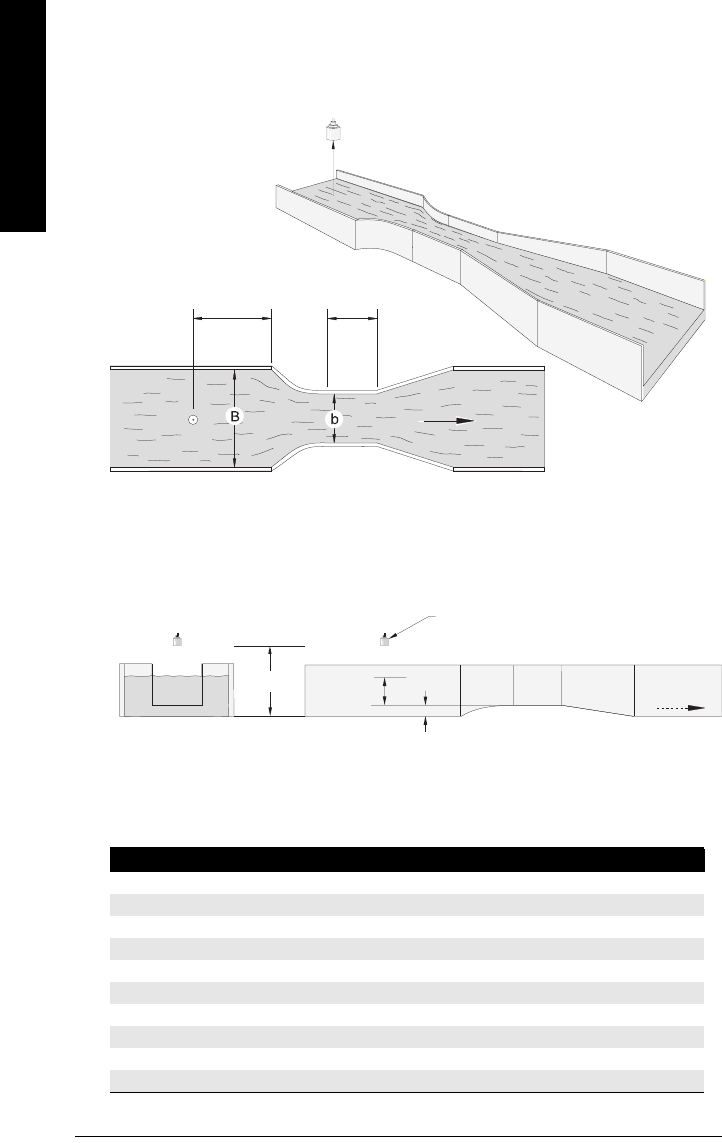
Page 76 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
BS-3680 / ISO 4359 Rectangular Flume
Parameter Index Value
P600 G 6–ISO 4359 Rectangular Flume
P602 1Approach width (B)
2 Throat width (b)
3Hump Height (p)
4 Throat length (L)
(view only) 5Velocity coefficient (Cv)
(view only) 6 Discharge coefficient (Cd)
(view only) 7Cross sectional area
P605 G Zero Head
P608 GFlowrate Units
hDiagonal View
Plan View 4 to 5 x hmax (hmax = P007)
L
Flow
Transducer
P006
h
P605 (p)
Flow
Front View Side View
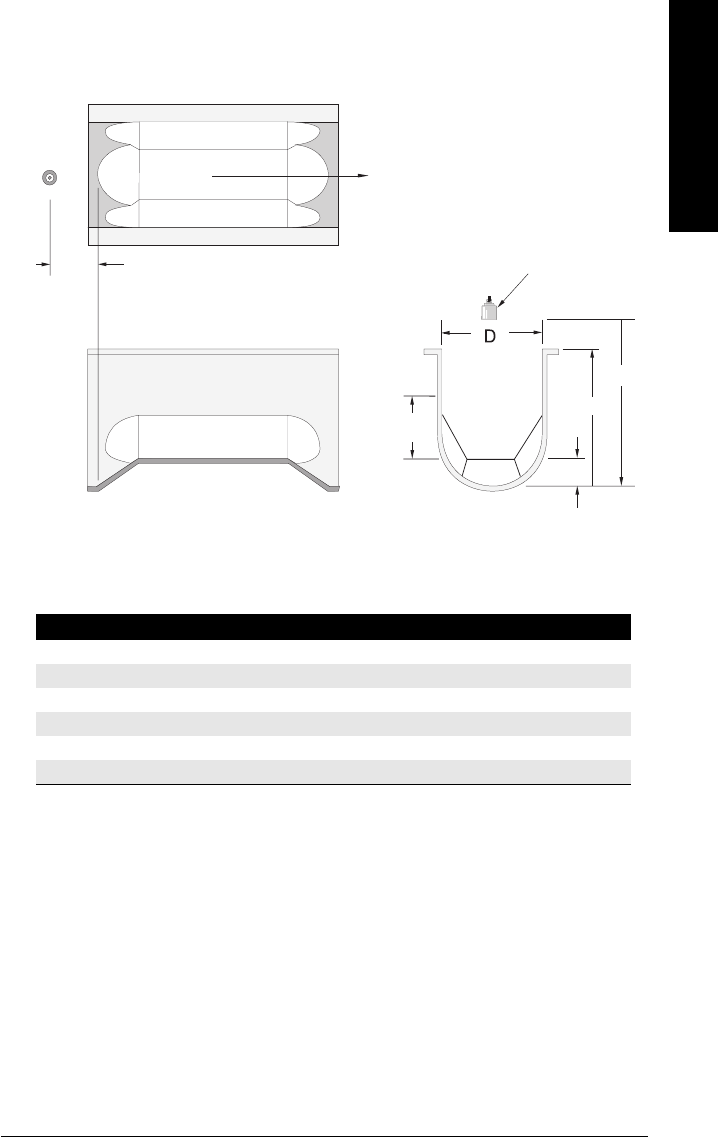
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 77
mmmmm
Open Channel Monitoring
MR 200
Palmer Bowlus Flume
Application Information
• Sized by pipe diameter D
• Flume relief is trapezoidal
• Designed to install directly into pipelines and manholes
• Head is referenced to bottom of the throat, not bottom of the pipe
• For rated flows under free flow conditions, the head is measured at a distance of
D/2 upstream from the beginning of the converging section
Parameter Index Value
P600 G 2–Palmer Bowlus Flume
P602 1Flume width (D)
P603 G Maximum Head (preset = P007)
P604 GMaximum Flow
P605 G Zero Head
P606 GTime Units
P006
P007
P605
P603
Transducer
D/2, point of
measurement
Flow
Plan View
Front View
Side View
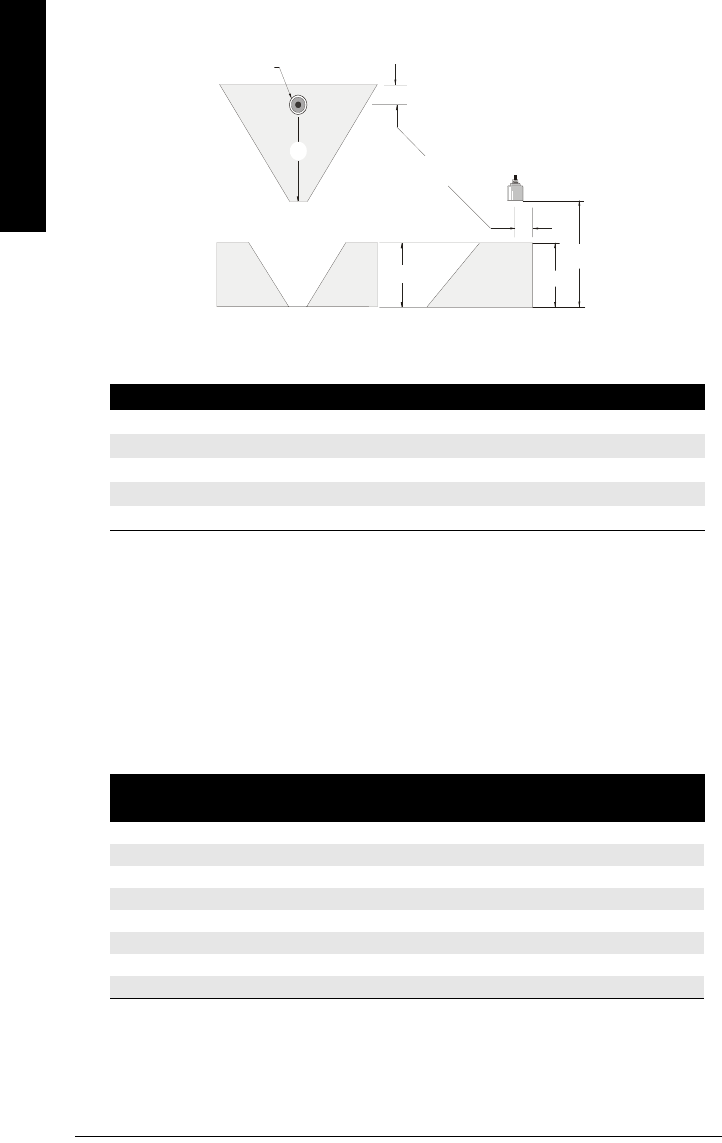
Page 78 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
H Flume
• Sized by maximum depth of flume
• Approach is preferably rectangular, matching width and depth for distance 3 to 5
times the depth of the flume
• May be installed in channels under partial submergence (ratio of downstream level
to head). Typical errors are:
• 1% @ 30% submergence
• 3% @ 50% submergence
• For rated flows under free flow conditions, the head is measured at a point
downstream from the flume entrance
• H flumes come with a flat or sloping floor. The same flow table can be used because
error is less than 1%.
Parameter Index Value
P600 G 3–H Flume
P602 1Flume height (D)
P603 G Maximum Head (preset = P007)
P604 GMaximum Flow
P606 G Time Units
Flume Size
(Diameter in feet)
Point of Measurement
cm inches
0.5 5 1¾
0.75 72¾
1.0 9 3¾
1.5 14 5½
2.0 18 7¼
2.5 23 9
3.0 28 10¾
4.5 41 16¼
Flow
D
Front View Side View
Point of Measurement
Transducer
P006
P007
Plan View
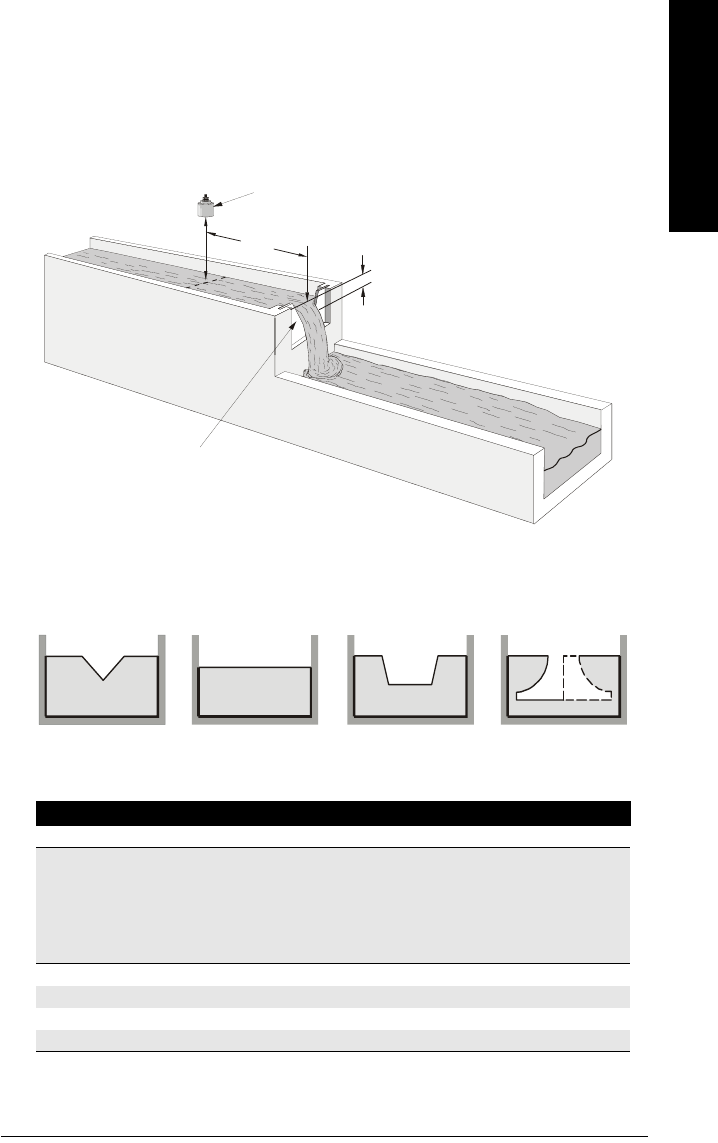
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 79
mmmmm
Open Channel Monitoring
MR 200
PMDs with Exponential Flow to Head Function
For Primary Measuring Devices (PMDs) that measure flow by an exponential equation,
use these parameters. Ensure that you use the correct exponent for your PMD; the values
below are samples only.
Standard Weirs
Applicable Weir Profiles
Parameter Index Value
P600 G 1 - Exponential Function
P601 GWeir Type Value1
1. Values are samples only. Consult weir manufacturer’s documentation for
correct flow exponent.
V-notch
Suppressed rectangular
Cipolletti or trapezoidal
Sutro or proportional
2.50
1.50
1.50
1.0 0
P603 G Maximum Head
P604 GMaximum Flow
P606 G Time Units
P801 GRange Extension
h
3 to 4
hmax
Weir Profile
Transducer
V-notch or
triangular
suppressed
rectangular
cipolleti or
trapezoidal
sutro or
proportional
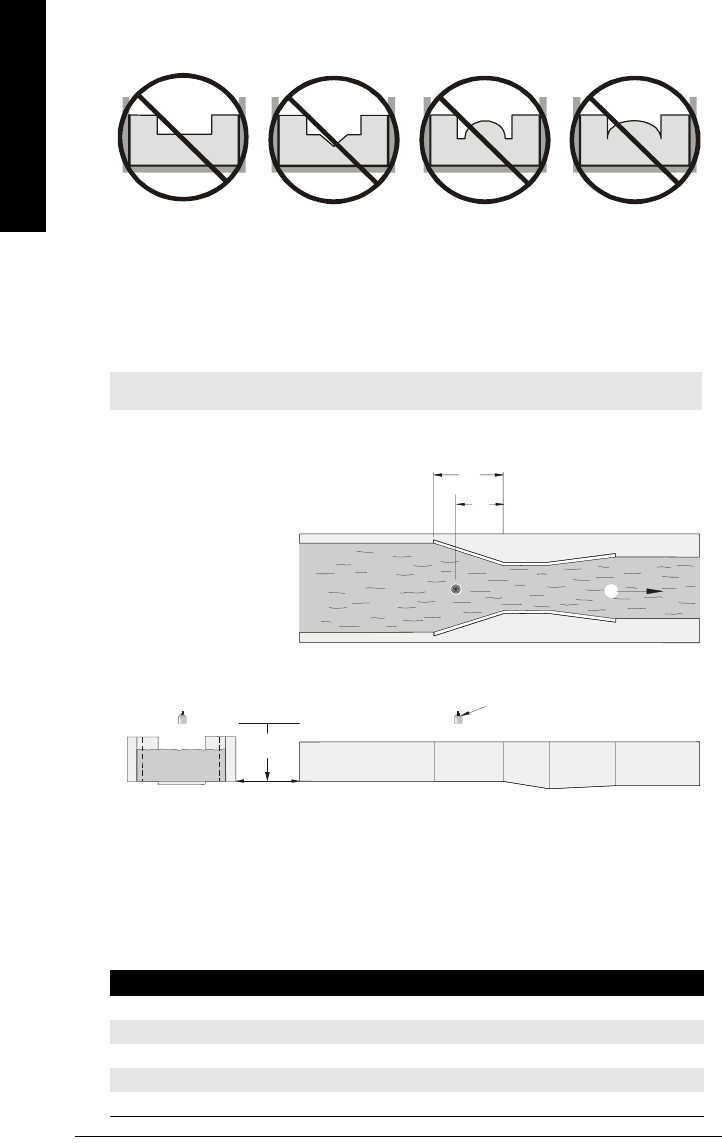
Page 80 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
Non-Applicable Weir Profiles
Flows through these weirs can be measured using the Universal Flow Calculation P600 =
4 or 5. See
Universal Calculation Support
on page 83.
Parshall Flume
Application Information
• Sized by throat width
• Set on solid foundation
• For rated flows under free flow conditions, the head is measured at 2/3 the length of
the converging section from the beginning of the throat section
Note: C = Converging Dimension.
Parameter Index Value
P600 G 1–Parshall Flume
P601 G1.22–1.607 (consult your flume documentation)
P603 G Maximum Head
P604 GMaximum Flow (Q)
P606 G Time Units
contracted
rectangular
compound Poebing approximate
exponential
Flow
C
2/3 C
P006
Front View
Plan View
Transducer
Side View
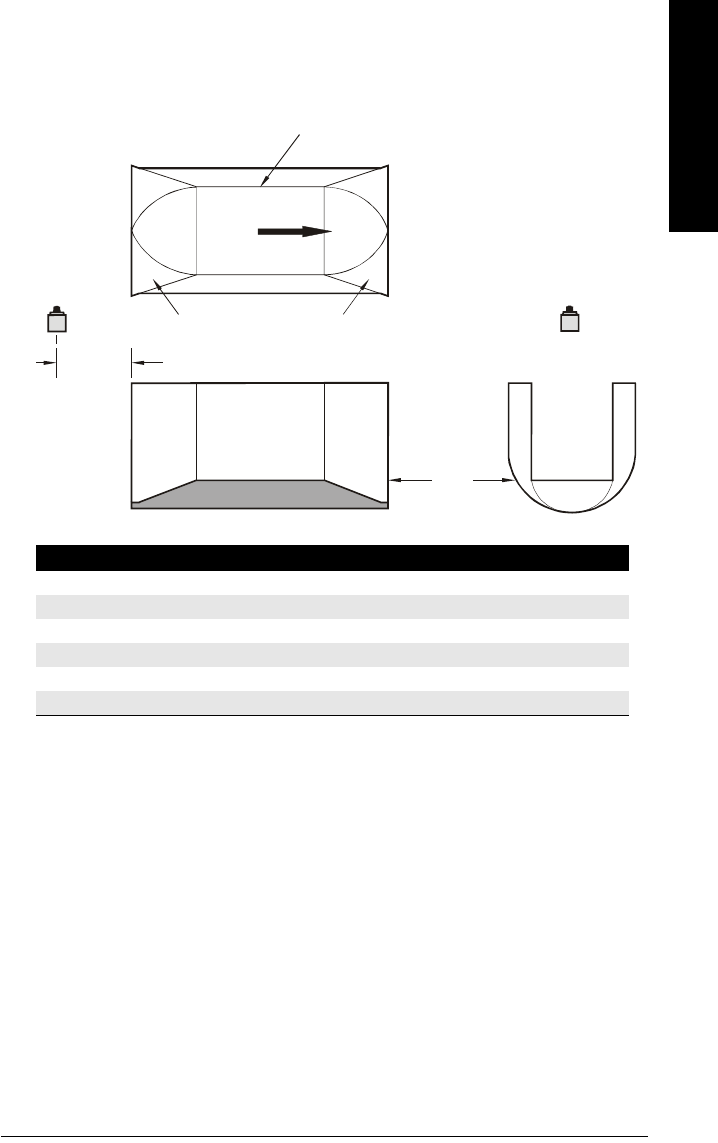
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 81
mmmmm
Open Channel Monitoring
MR 200
Leopold Lagco Flume
Application Information
• Designed to be installed directly into pipelines and manholes
• Leopold Lagco may be classed as a rectangular Palmer-Bowlus flume
• Sized by pipe (sewer) diameter
• For rated flows under free flow conditions, the head is measured at a point
upstream referenced to the beginning of the converging section. Refer to the
following table:
Parameter Index Value
P600 G 1–Leopold Lagco Flume
P601 G1.55
P603 G Maximum Head (preset P007)
P604 GMaximum Flow
P605 G Zero Head
P606 GTime Units
Point of Measurement
Diverging
Converging
Front View
0
Head
Plan View
Side View
Transducer
Throat
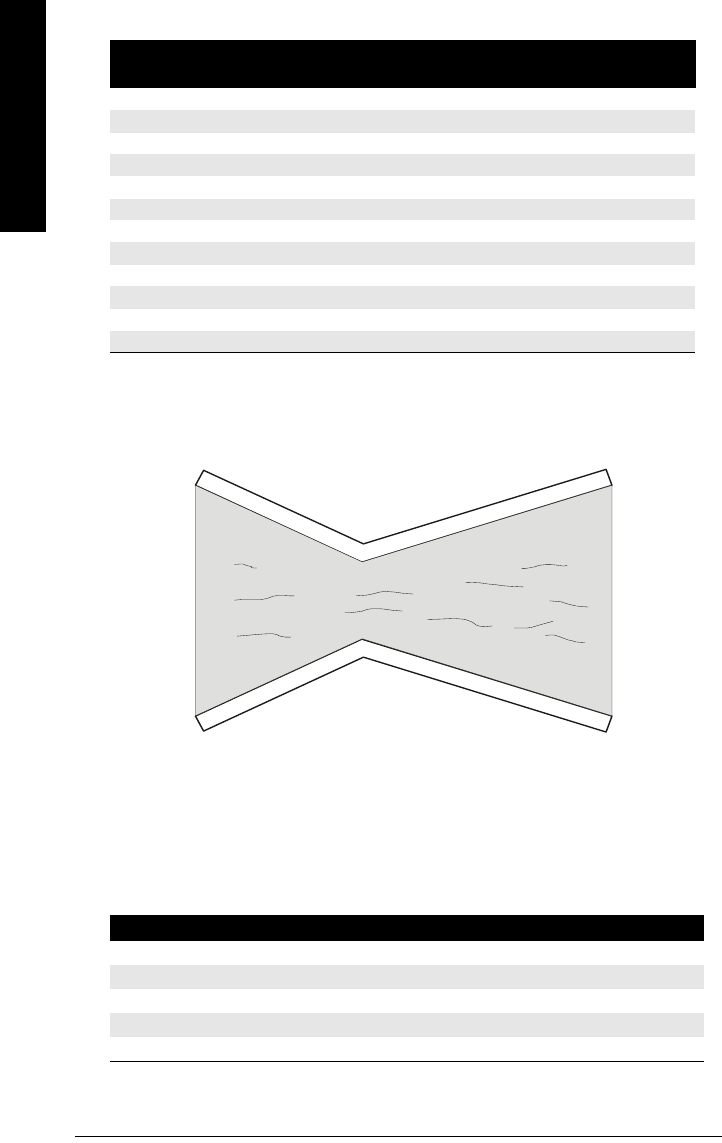
Page 82 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
Cut Throat Flume
Application Information
• Similar to Parshall flume except that the floor is flat bottomed and throat has no
virtual length.
• Refer to manufacturer’s specifications for flow equation and point of head
measurement.
Flume Size
(pipe diameter in inches)
Point of Measurement
cm inches
4-12 2.5 1
15 3.2 1¼
18 4.4 1¾
21 5.1 2
24 6.4 2½
30 7.6 3
42 8.9 3½
48 10.2 4
54 11.4 4½
60 12.7 5
66 14.0 5½
72 15.2 6
Parameter Index Value
P600 G 1–Cut Throat Flume
P601 G1.55
P603 G Maximum Head (preset P007)
P604 GMaximum Flow
P606 G Time Units
Plan View
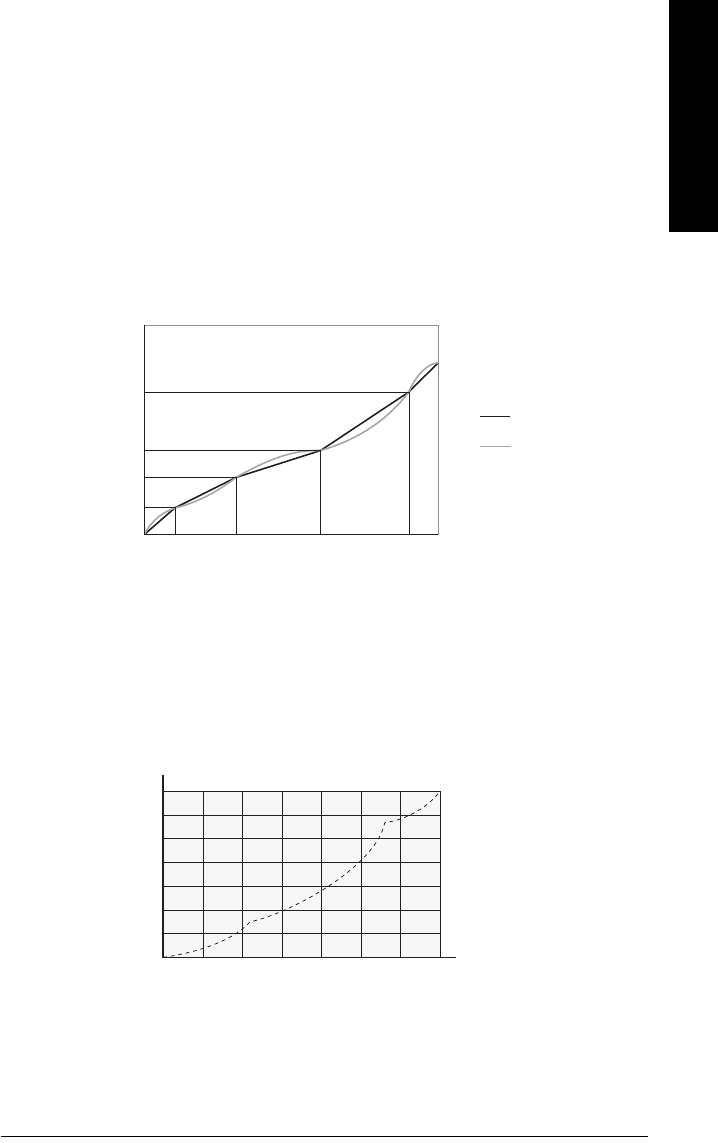
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 83
mmmmm
Open Channel Monitoring
MR 200
Universal Calculation Support
When the primary measuring device (PMD) doesn’t fit one of the standard types, it can
be programmed using a universal characterization. When Universal is selected as the
PMD type (P600), then both P610 and P611 must be entered to define the flow.
Two curve types are supported:
• P600 = 4–linear (piece wise linear)
• P600 = 5–curved (cubic spline)
Both are shown in the following chart.
Typical Flow Characterization
Characterization is achieved by entering the head (P610) and corresponding flow (P611),
either from empirical measurement or from the manufacturer's specification. Increasing
the number of defined breakpoints will increase the accuracy of the flow measurement.
Breakpoints should be concentrated in areas exhibiting the higher degrees of non linear
flow. A maximum of 32 breakpoints can be defined. The curve’s end point is always
specified by the parameters Maximum Head (P603) and Maximum Flow (P604) for a
maximum total of 33 breakpoints.
Use as many breakpoints as required by the complexity of your PMD.
See
Volume
on page 51 for more information and parameters P610 and P611 for
characterization.
Maximums (P603, P604)
Linear
Curved
Head (P610)
Flow (P611)
Max. Flow
Zero Flow
Zero Head
Max. Head
Head Breakpoints
Flow Breakpoints
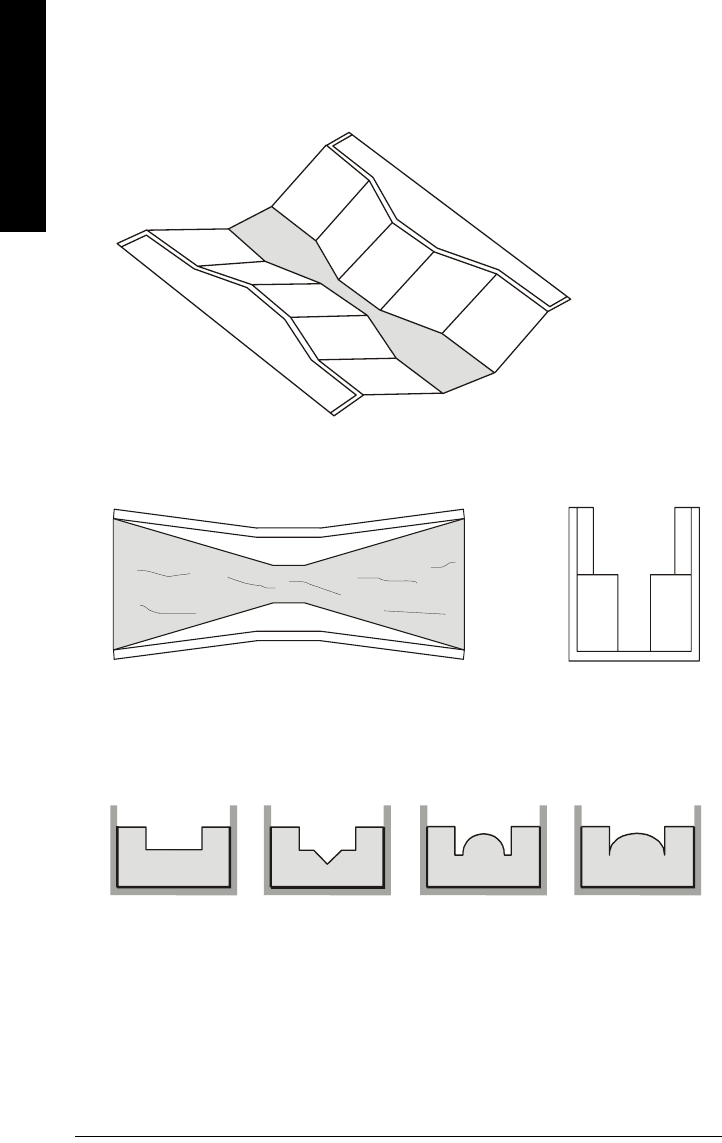
Page 84 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmm
m
Open Channel Monitoring
MR 200
Example Flumes
These example flumes would both require a universal calculation.
Trapezoidal
Dual Range (nested) Parshall
Example Weirs
These weirs could require universal calculation.
contracted
rectangular
compound Poebing approximate
exponential
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 85
mmmmm
Testing the Configuration
Testing the Configuration
After programming the unit, you must test the device to ensure that it performs to your
specifications. This test can be run in simulation mode or by varying the level in the
application. The latter is preferred as it more accurately represents running conditions.
However, if it is not possible to do a physical test, a simulation will ensure that control
programming is correct.
Simulation
In simulation mode, the LCD display reacts to the simulated level changes. Alarm relays
will also react to the simulation, but any pump or control relays will not react.
To allow pump or control relays to operate on the simulated level, set P000 to –1.
Simulating a Single Measurement
Access the appropriate parameter: (press PROGRAM and then key in the parameter
number). Press TRANSDUCER five times to overcome Echo Lock (P711) if applicable:
the associated Reading is displayed in the Parameter Value field, and any alarm relays
are set accordingly.
To verify Reading calculations (P920 to P926)
1. Go to the parameter to be simulated (P920, P921, P922, P923, P924, P925, or P926),
and key in a material level in Units (Units defined in P005), or % of Span (% of Span
defined in P007).
2. Press ENTER to display the calculated Reading. [Regardless of setting for P001,
the parameter value being simulated will display as the primary reading. The
auxiliary reading will always display the level value (P921). See “Display” on page 22
for positions of the primary and auxiliary readings on the LCD.]
3. Verify the calculated Reading. (At this point, the simulation is in Stop state. The
effect of the ARROW key is based on this state. See chart on page 86.)
Simulating a Level Cycle
Starting a (P920, P921, P922, or P923) simulation when level = 0:
1. Go to the parameter to be simulated (P920, P921, P922, or P923).
2. Press ENTER to simulate level rise and fall. At the start of a simulation, the
default rate is 1% of Span / second.
Note: When you set P001 = 3 (Distance), span (P007) is preset to empty (P006),
therefore the primary and auxiliary readings may display the same value when
Space (P922) is being simulated.
Page 86 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Testing the Configuration
3. Press the ARROW or to adjust the simulated rate of rise or fall, based on the
chart on page 86. The maximum rate is 4% of Span / second.
The effect of the ARROW key is determined by the state (rate of rise or fall) immediately
before the key is pressed.
When the level rises to 100% or falls to 0%, it reverses direction at the same rate.
Checking Volume Characterization [MR 200]
To confirm universal volume calculations (P050 = 9, 10) are correct:
1. Go to P920.
2. Key in a level associated with a known volume.
3. Press ENTER .
4. Check the returned volume against the manufacturer’s chart.
5. Change parameters P054 and P055, as required.
6. Repeat steps 2 to 5 until the volume curve is verified.
Checking OCM Flow Characterization [MR 200]
To confirm universal flow calculations (P600 = 4, 5) are accurate:
1. Go to P925.
2. Enter a level with a known flow.
3. Press ENTER .
4. Check the returned flow against the manufacturer’s chart.
Action State (prior to pressing key) Effect
Press
Stop Rise at 1% of Span / second
Rise at 1% of Span / second Rise at 4% of Span / second (max.)
Rise at 4% of Span / second (max.) No effect
Fall at 1% of Span / second Stop
Fall at 4% of Span / second Fall at 1% of Span / second
Press
Stop Fall at 1% of Span / second
Rise at 1% of Span / second Stop
Rise at 4% of Span / second (max.) Rise at 1% of Span / second
Fall at 1% of Span / second Fall at 4% of Span / second (max.)
Fall at 4% of Span / second (max.) No effect
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 87
mmmmm
Testing the Configuration
5. Change parameters P610 and P611, as required.
6. Repeat steps 2 to 5 until the flow curve is verified.
I/O Checkout
After the unit is installed, test to verify the wiring.
Relays
Use P119 to force a state change and verify that the results are as expected (pump starts,
alarm sounds, etc.).
Discrete Inputs
Use P270 to force the input value and verify that the results are as expected.
1. Go to P270 [DI] where DI = the discrete input to be tested
2. Set P270 to 0 (forced OFF)
3. Go to P275 [DI] to verify that the value is forced
4. Check the state of outputs to ensure that they respond as expected
5. Go to P270 [DI]
6. Set P270 to 1 (forced ON)
7. Go to P275 [DI] to verify that the value is forced
8. Check the state of outputs to ensure that they respond as expected
For further information see
Discrete Inputs
section on page 48.
mA Input [MR 200]
Use P254 to test the mA input value against a true level. Use a trusted external mA source
to generate the signal required for testing, and verify the incoming signal with P260.
Check that the system responds as expected when the mA level is changed.
mA Output
Use an external device to test the mA output against the measured level. Check that the
mA value changes to reflect the changes in the measured level.
Application Test
If you are testing the application by varying the material level (the preferred test method)
make sure that none of the control devices is connected (or at least that no power is
available to them).
If you are testing the application in simulation mode (and P000 is not –1), then control
relays are not energized and the control devices can remain connected.
While the level is being cycled, check the results of the discrete inputs either by closing
the circuit externally (preferred) or by using P270 Discrete Input Function to force the
input ON or OFF. Try all possible combinations to thoroughly test the setup. For each
combination, run a complete cycle to verify that the relays operate as expected.

Page 88 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Testing the Configuration
Monitor system performance carefully, under all anticipated operating conditions.
1. When the MultiRanger performs exactly as required, programming is complete.
2. If alternate Reading units, Failsafe action, or relay operation is desired, update the
parameters for the new functionality.
3. If the system performance experiences problems, see
General Appendix C:
Troubleshooting
, on page 231.
If you cannot observe all possible operating conditions during the System Performance
Evaluation, use the level simulation (see page 85) to verify programming.
When a simulation is run, alarm relays will react to the simulated level changes, but
control relays will not react. You can set P000 to value –1 to trigger the control relays
based on the simulated level.
Retest the system every time you adjust any control parameters.
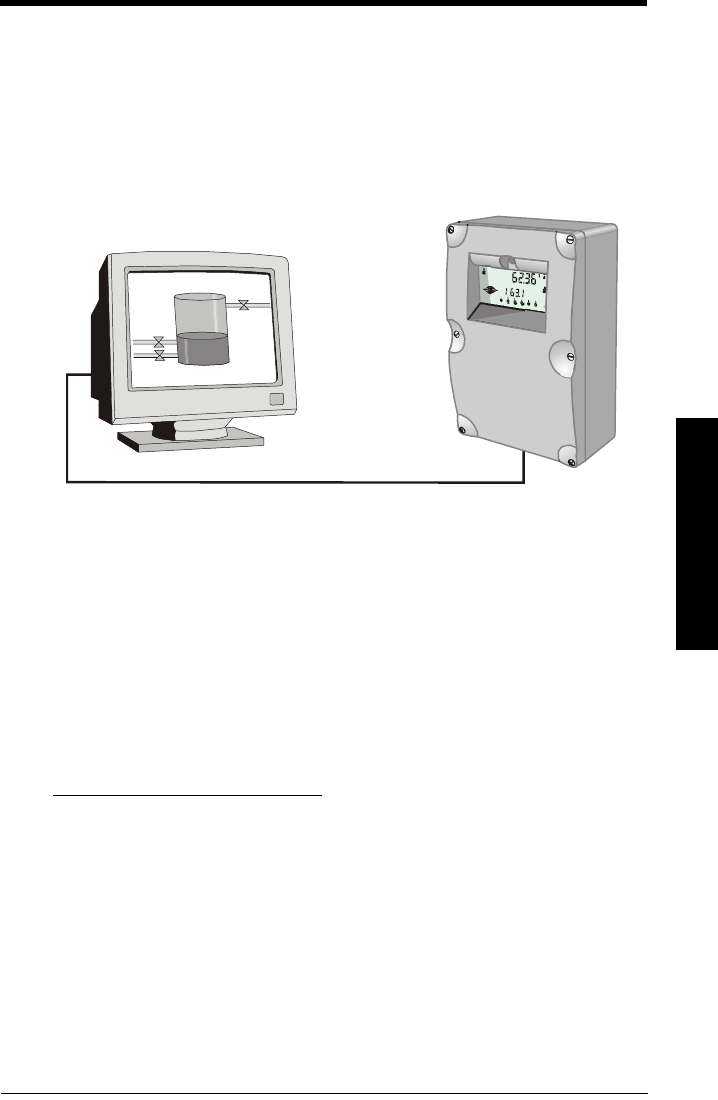
7ML19981FB06 MultiRanger 100/200 - INSTRUCTION MANUAL Page 89
mmmmm
Communications
MultiRanger Communications
MultiRanger Communication Systems
The MultiRanger is an integrated level controller capable of communicating process
information to a Supervisory Control and Data Acquisition (SCADA) system, via a serial
device such as a radio modem, leased line, or dial-up modem.
The standard MultiRanger supports the following two communication protocols:
Modbus
Modbus is an industry standard protocol used by SCADA and HMI systems. The
MultiRanger uses Modbus to communicate via the RS-485 port. For a description of the
Modbus protocol, contact your local Schneider representative.
Dolphin
Dolphin is a proprietary Siemens Milltronics protocol designed to be used with Dolphin
Plus. For more information on Dolphin Plus or to obtain a copy of the software, please go
to www.siemens.com/processautomation to contact your Siemens Milltronics
representative.
Optional SmartLinx®Cards
The standard MultiRanger unit may also be enhanced with Siemens Milltronics
SmartLinx® communication modules that provide an interface to popular industrial
communication systems.
This manual only describes the built-in communications. For more information on
SmartLinx, please consult the appropriate SmartLinx manual.
MultiRanger
Connection via radio modem, dial-up modem, or leased line modem
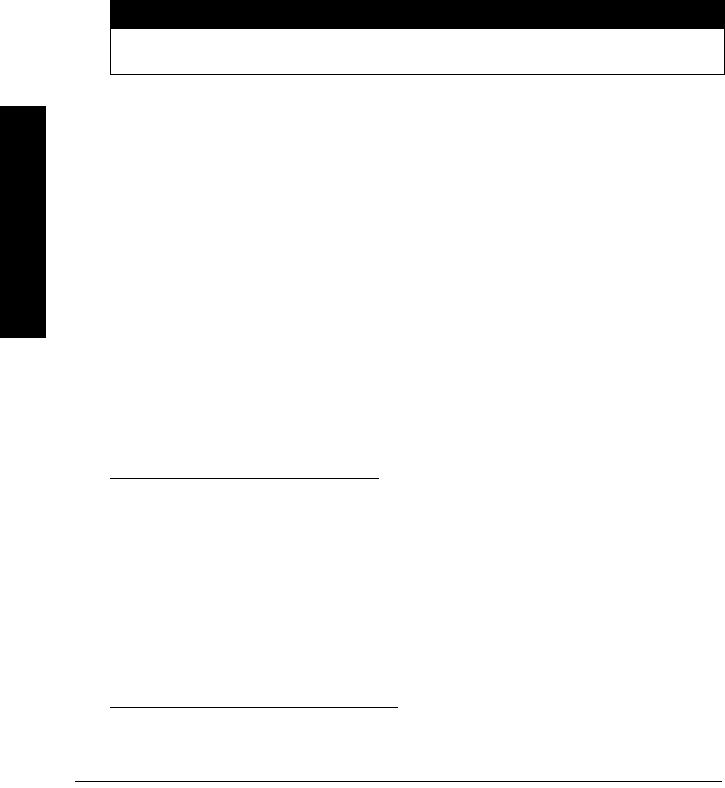
Page 90 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Communications
Communication Systems
The MultiRanger is capable of communicating with most SCADA systems, PLCs, and PCs.
The supported protocols are:
• Modbus RTU/ASCII – base unit on RS-232 or RS-485 transport
• PROFIBUS DP – optional SmartLinx® module
•Allen-Bradley®
1 Remote I/O – optional SmartLinx module
• DeviceNet® – optional SmartLinx module
Communication Ports
The MultiRanger comes with two communication ports on the base unit.
RS-232
The RJ-11 jack connects to a laptop computer for the following:
•initial setup
• configuration
• troubleshooting
• periodic maintenance
RS-485
The RS-485 port on the terminal blocks connects into industrial communications wiring
and has the following advantages:
• runs communications cable farther
• allows multiple slave units on the network, addressed by P771 – Network Address
To communicate with equipment requiring RS-485 capability, Siemens Milltronics offers
the RS-485 External Modem Kit. For more information, go to
www.siemens.com/processautomation.
Modbus
The Modbus protocol is supported in the base unit and can be configured using the
Communications parameters P770 to P782.
To set up communications with a Modbus RTU master device on port 2 using RS-485, set
the following parameters:
1. Allen-Bradley is a registered trademark of Rockwell Automation.
DeviceNet is a registered trademark of Open DeviceNet Vendor Association.
Port Connection Location Interface
1 RJ-11 connector inside enclosure on main board RS-232
2 terminal block terminal block RS-485
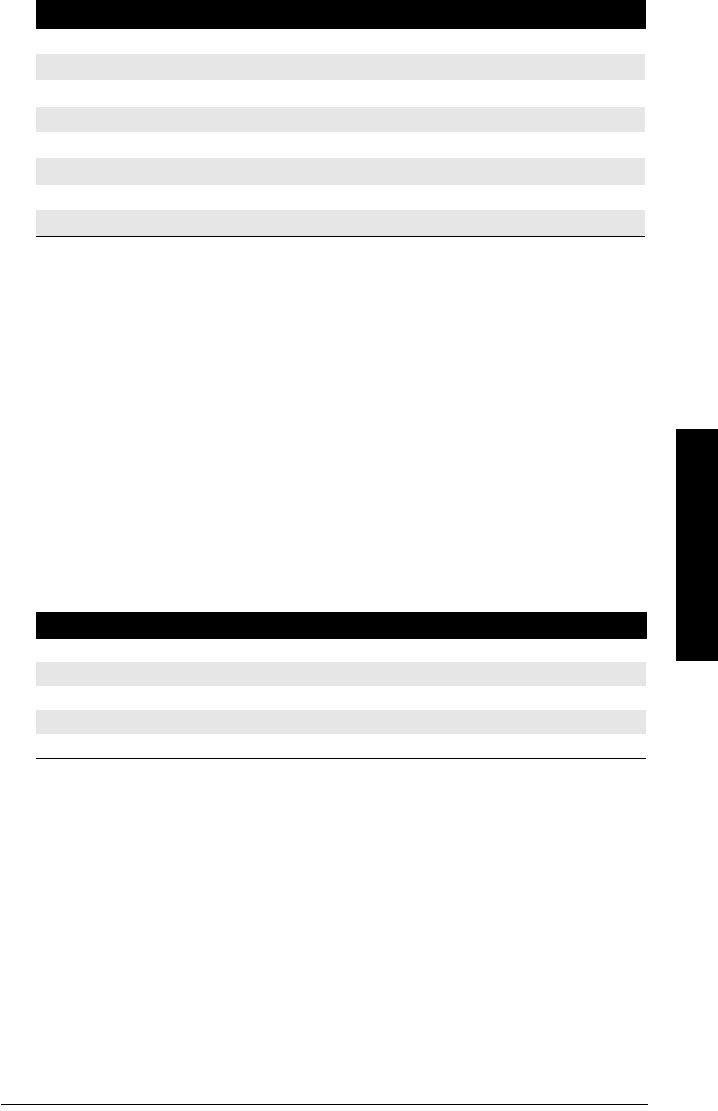
7ML19981FB06 MultiRanger 100/200 - INSTRUCTION MANUAL Page 91
mmmmm
Communications
SmartLinx
Other protocols are available through optional SmartLinx communications modules.
Details on how to install and program these modules are contained in the SmartLinx
documentation.
Dolphin Plus
Dolphin Plus software makes it easy to record and compare parameter sets for all the
MultiRangers in your company. Dolphin Plus uses a proprietary protocol called
Dolphin
to
communicate with Siemens Milltronics instruments. This protocol is set when P770 = 1.
By default the settings for port 1 (RJ-11 connection) and Dolphin Plus match. These
settings are:
Parameter Index Value Description
P770 23
Modbus RTU slave
P771 2 1 Network address, only used for RS-485
P772 29.6
Data rate of 9600 baud
P773 2 0 No parity, common setting
P774 28
8 data bits, common setting
P775 2 1 1 stop bit, common setting
P778 20
No modem connected
P782 2 0 Index parameter values globally
Parameter Index Value Description
P770 1 1 Dolphin
P772 1115.2 Data rate of 115.2 Kilo baud
P773 1 0 No parity, common setting
P774 1 8 8 data bits, common setting
P775 1 1 1 stop bit, common setting

Page 92 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Comms Installation
Communications Installation
Wiring Guidelines
• the RJ-11 cable maximum length is 3 meters
• RS-485 maximum length is 1,200 meters (4,000 feet)
• use 24 AWG (minimum)
• use good quality communication grade (shielded twisted pairs) cable that is
recommended for RS-485 for port 2 (Belden 9842)
• run the communication cable separately from power and control cables (do not tie
wrap your RS-232 or RS-485 cable to the power cable or have them in the same
conduit)
• use shielded cable and connect to ground at one end only
• follow proper grounding guidelines for all devices on the bus
Ports 1 and 2
Ports 1 and 2: RS-232 RJ-11 Jack and RS-485 Locations
The RJ-11 jack and the RS-485 port are inside the enclosure of the unit.
Note: Improper wiring and incorrect choice of cables are two of the most
common causes of communication problems.
Port Wall Mount
1 RS-232 port (RJ-11 modular telephone jack) is on the motherboard and
is generally used with a laptop computer or modem.
2 Connections for the RS-485 port are on the terminal block.
L2/N L1
TB1
TB3
TB2
RELAY 1
RELAY 2
RELAY 3
RELAY 4
RELAY 5
RELAY 6
2
1
mA INPUT
SHIELD
SYNC
1
2
4 - 20 mA
OUTPUTS
TS-3
SHIELD
1
2
DISCRETE
INPUTS
RS485
B
A
COM
RJ-11 Jack
RS-485 Port
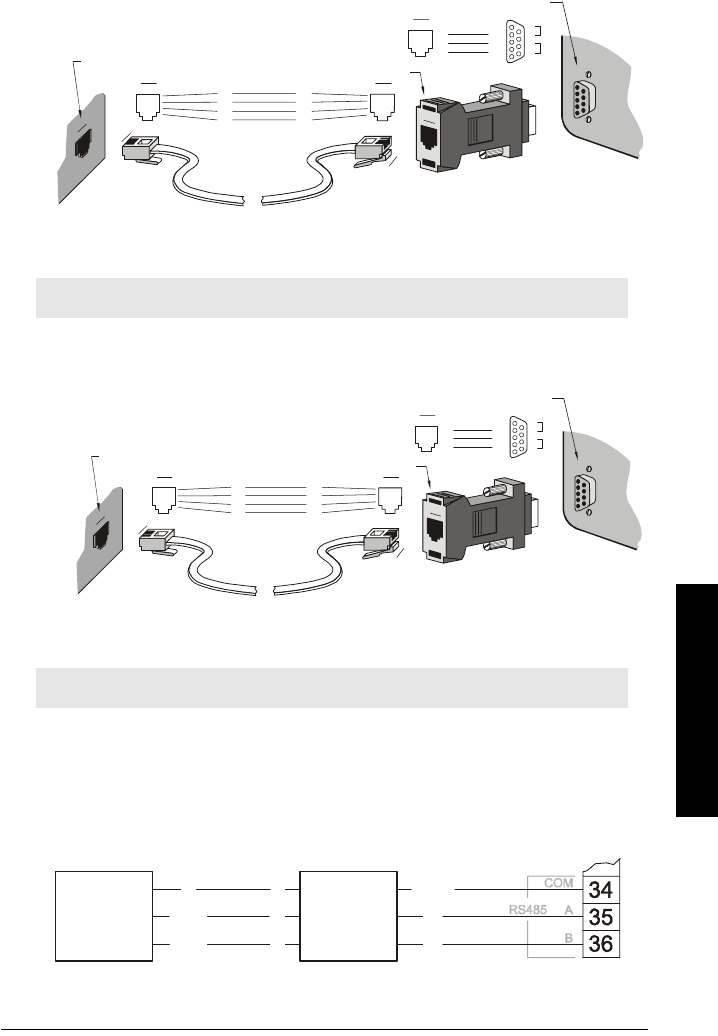
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 93
mmmmm
Comms Installation
Port 1: RS-232 RJ-11 Jack
To connect the unit to a PC using an RS-232 jack, use the cable as shown:
To connect the unit to a modem using an RS-232 jack:
Port 2: RS-485
To connect the unit to an RS-232 modem:
Note: Jumper pins 4-6 and 7-8 at the DB-9.
Note: Jumper pins 4-6 and 7-8 at the DB-9.
6
1
1
1
6
6
2
3
4
Tx
Rx
SG
Rx
Tx
SG
2
3
5
4
6
7
8
5
4
3
2
2
3
4
5
16 16
16
6
1
Computer DB-9 (male)
RJ-11 jack
RJ-11 on
MultiRanger
Modular cable with RJ-11 plug
RJ-11 to DB 9 converter
6
1
1
1
6
6
2
3
4
Tx
Rx
SG
Rx
Tx
SG
3
2
5
4
6
7
8
5
4
3
2
2
3
4
5
16 16
16
6
1
RS-232 Modem
RJ-11 jack
RJ-11 on
MultiRanger
Modular cable with RJ-11 plug
RJ-11 to DB 9 converter
B23 Tx
A32 Rx
COM55
RS-232
Modem
Converter:
RS-232 to
RS-485
MultiRanger
Terminal Block
DB 9DB 9
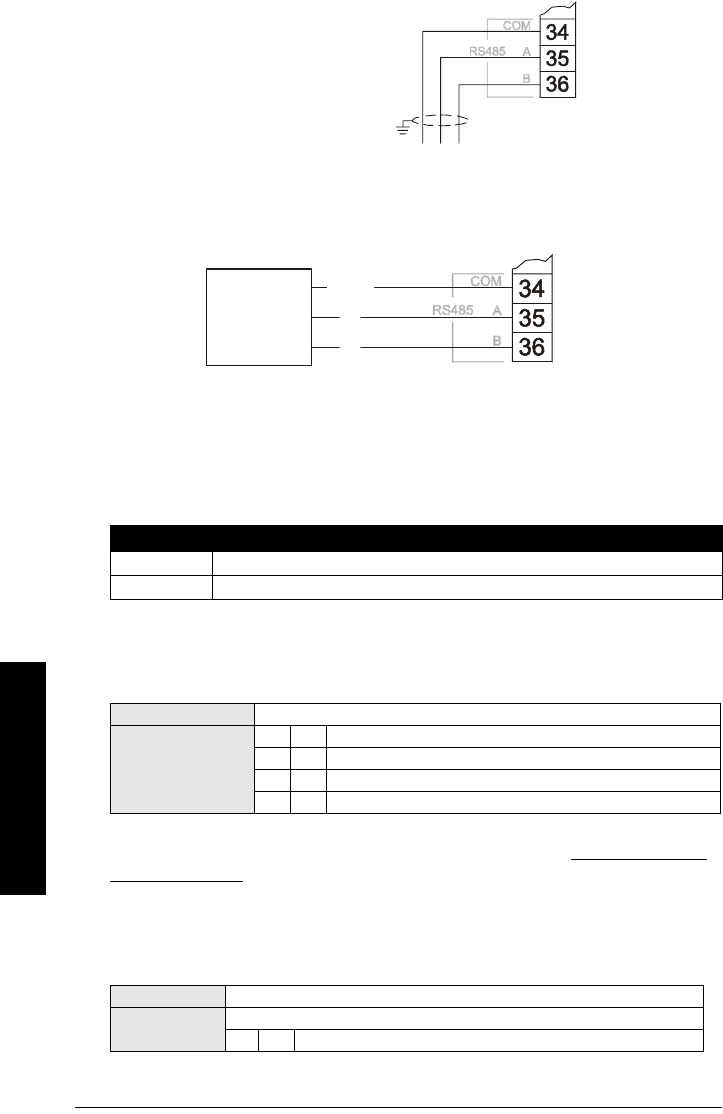
Page 94 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Comms Installation
To connect the unit to a modem using an RS-485 port:
Configuring Communication Ports (Parameters)
The 11 parameters listed are indexed to the two communication ports, unless otherwise
noted: An asterisk (*) identifies the preset value.
P770 Port Protocol
The communications protocol used between the MultiRanger and other devices.
The MultiRanger supports the Siemens Milltronics Dolphin format (www.siemens.com/
processautomation), and the internationally recognized Modbus standard in both ASCII
and RTU formats. Other protocols are available with optional SmartLinx cards.
P771 Network Address
The unique identifier of the MultiRanger on the network.
Port Description
1 RS-232 port (RJ-11 modular telephone)
2The RS-485 port is on the terminal blocks
Primary Index Communications Port
Values
0 Communications port disabled
1 * Siemens Milltronics Dolphin protocol (preset for port 1)
2 Modbus ASCII slave serial protocol
3 * Modbus RTU slave serial protocol (preset for port 2)
Primary Index Communications Port
Values Range: 0 to 9999
1 * Preset
BA
C
O
M
(Shield to be grounded at one end)
MultiRanger
Terminal Block
B
A
COM
MultiRanger
Terminal Block
RS-485
Modem
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 95
mmmmm
Comms Installation
For devices connected with the Siemens Milltronics protocol, this parameter is ignored.
For devices connected with a serial Modbus slave protocol, this parameter is a number
from 1-247. The network administrator must ensure that all devices on the network have
unique addresses. Do not use the value 0 for Modbus communications as this is the
broadcast address and is inappropriate for a slave device.
P772 Baud Rate
The communication rate with the master device.
This specifies the rate of communication in Kbaud. Any value may be entered, but the
only values supported are those shown above. The baud rate should reflect the speed of
the connected hardware and protocol used.
P773 Parity
The serial port parity.
Ensure that the communications parameters are identical between the MultiRanger and
all connected devices, as many modems default to N-8-1.
P774 Data Bits
The number of data bits per character.
P775 Stop Bits
The number of bits between the data bits.
Primary Index Communications Port
Values
4.8 4800 baud
9.6 9600 baud
19.2 * 19,200 baud (preset for port 2)
115.2 * 115,200 baud (preset for port 1)
Primary Index Communications Port
Values
0*No Parity
1Odd Parity
2Even Parity
Primary Index Communications Port
Values
Range: 5 to 8
8*Modbus RTU
7 or 8 Modbus ASCII
7 or 8 Dolphin Plus
Primary Index Communications Port
Values Range: 1 or 2
1 * Preset
Page 96 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Comms Installation
P778 Modem Available
Sets the MultiRanger to use an external modem.
P779 Modem Inactivity Timeout
Sets the time that the unit will keep the modem connected with no activity.
To use this parameter, ensure that P778 (Modem Available) =1. Ensure that the value is
low enough to avoid unnecessary delays when an unexpected disconnect occurs but
long enough to avoid timeout while you are still legitimately connected. This parameter
value is ignored by the Modbus Master Drivers as they automatically disconnect when
done communicating.
Hanging Up
If the line is idle and the P779 Modem Inactivity Timeout expires, then the modem is
directed to hang up the line. Ensure that P779 is set longer than the standard polling time
of the connected master device. Set P779 to 0 to disable the inactivity timer.
P782 Parameter Index Location
Determines where index information is stored for the parameter access area for the
Modbus register map.
For more on Parameter Index Location, see
Parameter Access
on page 102.
Primary Index Communications Port
Values
0 * No modem connected
1 Answer only
Primary Index Communications Port
Values Range: 0-9999 seconds
0*No timeout
Primary Index Global
Values 0 * Global
1 Parameter-Specific
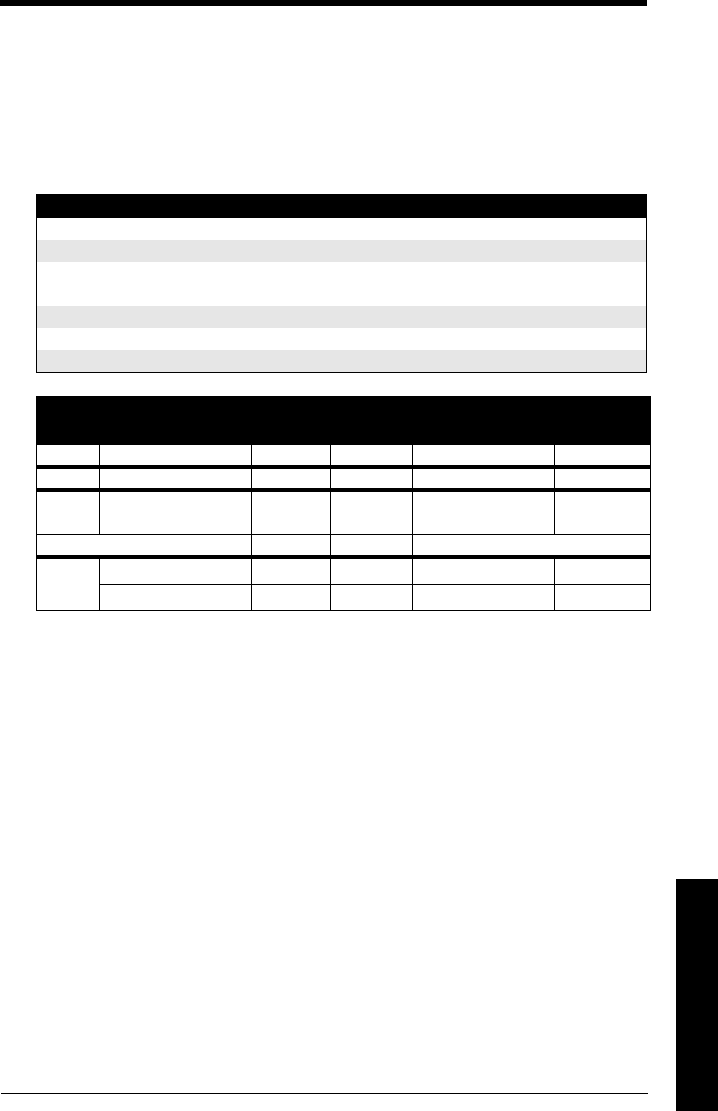
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 97
mmmmm
Modbus Register Types
Modbus Register Map
Features affecting
volume
,
mA input
, and
Average or Difference
readings apply to the
MultiRanger 200 only. They are clearly marked.
The memory map of the MultiRanger occupies the Modbus holding registers (R40,001 and
up). This map is used when the protocol is Modbus RTU slave or Modbus ASCII slave.
Register Map for Most Common Data
Legend
Type The type of data held in the group of registers.
Start The first register to hold the referenced data.
Data Type The possible values of the data in the register. See
Data Types
on page
107 for more information.
Description The type of data held in the individual registers.
#R The number of registers used for the referenced data.
Read/Write Indicates whether the register is readable, writeable or both.
Type Description Start #R 1
1. Maximum registers shown; fewer may be used depending on options installed.
Data Type Read/
Write
Word Order 40,062 0/1 R/W
Map ID Register Map Type 40,063 1 0/1 = P782 R/W
ID Siemens Milltronics
Product Code
40,064 1 4 = Model 200
6 = Model 100
R
Single Parameter Access (SPA) R40,090 7 see
Appendix A
on page 114
Point
Data
Reading (3)2
2. Varies according to model.
MR 100: Available as reading 1 and reading 2 when in either Single or Dual Point
Mode. In Dual Point Mode, reading 1 and reading 2 are always available.
MR 200: Available as reading 1, reading 2, and Average or Difference when in either
Single or Dual Point Mode. In Single Point Mode, point 2 and 3 are only available if
P001 = Average or Difference. In Dual Point Mode, reading 1 and reading 2 are always
available. Point 3 is only available if P001[3]= Average or Difference.
41,010 2 -20,000 to 20,000 R
Volume (2)3[MR 200]
3. 2nd volume available in Dual Point Mode only.
41,020 2 -20,000 to 20,000 R
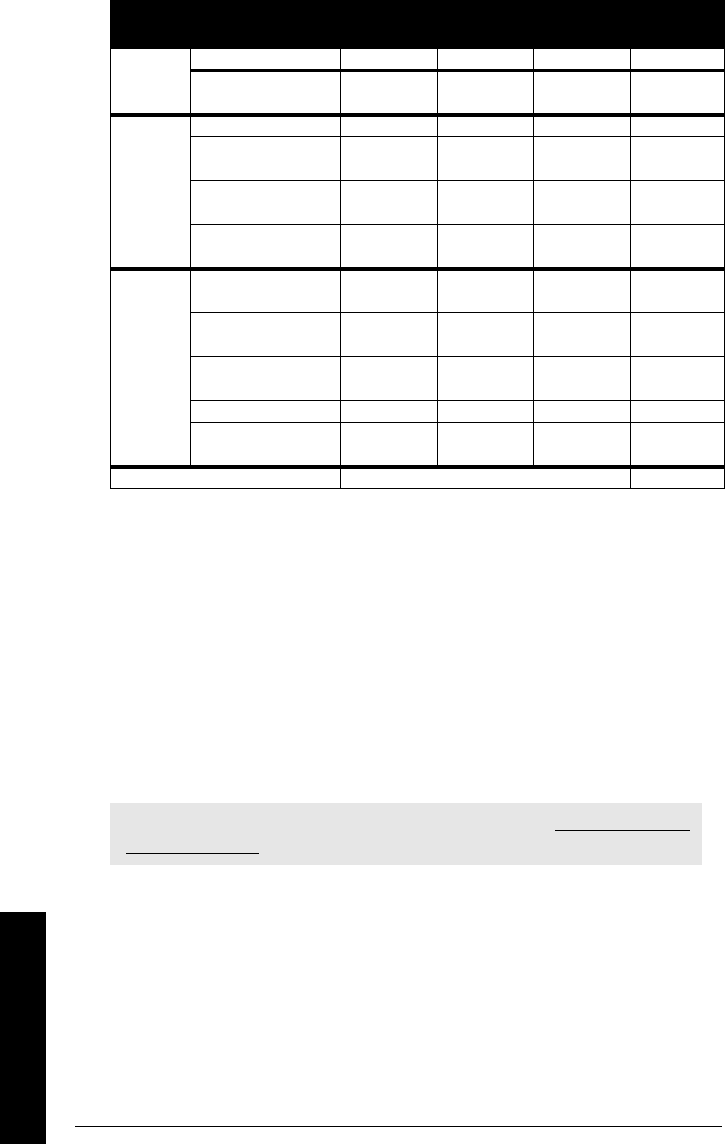
Page 98 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Modbus Register Types
The MultiRanger was designed to make it easy for master devices to get useful
information via Modbus. This chart gives an overview of the different sections. A more
detailed explanation of each section follows below.
Word Order (R40,062)
This determines the format of unsigned, double-register integers (UINT32).
•0 indicates that the most significant word (MSW) is given first
•1 indicates that the least significant word (LSW) is given first
See
Unsigned Double Precision Integer (UINT32)
on page 107 for more information.
Map ID (R40,063)
This value identifies the register map used by the MultiRanger. See
P782 Parameter Index
Location
on page 96.
See also
Parameter Access (R43,998 – R46,999)
on page 102 for details.
Type Description Start #R 1
1. Maximum registers shown; fewer may be used depending on options installed.
Data Type Read/
Write
Point
Data
Temperature (2) 41,030 2–50 to 150 R
Totalizer for points 1
and 2 [MR 200]
41,040 4UINT32 R/W
I/O
Discrete Inputs (2) 41,070 1Bit Mapped R
Relay Outputs (3 or
6)
41,080 1Bit Mapped R/W
mA Input (1)
[MR 200]
41,090 10000 to
20,000
R
mA Output (2) 41,110 20000 to
20,000
R/W
Pump
Control
Pump on Setpoint (3
or 6)
41,420 60000 to
10,000
R/W
Pump off Setpoint (3
or 6)
41,430 60000 to
10,000
R/W
Pumped Volume (2)
[MR 200]
41,440 4UINT32 R
Pump Hours (3 or 6) 41,450 12 UINT32 R
Pump Starts (3 or 6) 41,470 60000 to
10,000
R
Parameter Access 43,998 to 46999 R/W
Note: Additional information is available from our Web site at www.siemens.com/
processautomation
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 99
mmmmm
Modbus Register Types
Product ID (R40,064)
This value identifies the Siemens device type:
Point Data (R41,010 – R41,031)
Measurement point data contain the current instrument readings. These are the values
shown for the reading measurement for each measurement point. The reading is based
on the setting for P001 (operation). P001 can be set to level, distance, OCM flow, or
volume. See
Parameter Reference
section on page 117 for details.
The measurement registers are 41,010 to 41,012. The MultiRanger uses 41,010 when
configured with a single transducer and 41,010 to 41,012 when configured with two
transducers (P111=4 or 5 only). Two transducers can create three readings because they
can generate an average or differential reading (R41,012) as well as the two level
readings (R41,010 and R41,011).
Available registers:
The reading is expressed as a percentage of full scale, multiplied by 100:
Totalizer (R41,040 – R41,043)
The totalizers are stored as 32 bit integers using two registers. The totalizers can be read
with R41,040 and R41,041 as totalizer for Point 1, and R41,042 and R41,043 as totalizer for
Point 2. The totalizer values can be reset to any value by writing that value to the
registers. The values can be cleared by writing zero (0) to the registers.
Input/Output (R41,070 – R41,143)
The MultiRanger has discrete inputs, mA inputs, mA outputs and relay outputs. See
below for details for each I/O type.
Device Type Value
MultiRanger 100 6
MultiRanger 200 4
Data Registers Parameter
Reading 41,010 to 41,012 P920
Volume [MR 200] 41,020, 41,021 P924
Temperature 41,030 and 41,031 P912
Reading Value
00.00%
5000 50.00%
7564 75.64%
20,000 200.00%
Page 100 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Modbus Register Types
Discrete Inputs (R41,070)
This table shows the current status of the discrete inputs. Only register 41,070 is used.
Relay Outputs (R41,080)
This table shows the current status of the relays. A reading of 0 means that the relay
function is not asserted and a 1 means that it is asserted. For example, a 1 for a pump
relay means that the pump is running.
Values are written to control a relay only if the Relay Control Function (P111) is set to
communications (65). See
Relay Function Codes (P111 Only)
on page 110.
mA Input (R41,090) [MR 200]
The mA input is scaled from 0 to 2,000 (0 to 20 mA multiplied by 100). P254 displays the
value of the input. This parameter is indexed by the input number.
mA Output (R41,110-41,111)
The mA output is scaled from 0 to 2,000 (0 to 20 mA multiplied by 100). This is displayed in
P911.
Pump Control (R41,400 – R41,474)
Only relays set for pump control (P111 = 50 to 52) are available. These registers have no
effect on relays programmed for other uses.
Pump ON Setpoint (R41,420 – R41,425)
The ON setpoint level (P112) for the referenced pump relay.
The setpoint is scaled from 0 to 10,000 (0 to 100% of span multiplied by 100). So 54.02% is
shown in the register as 5402.
Discrete Input Data Address
1 41,070, bit 1
241,070, bit 2
Relay Data Address
141,080, bit 1
241,080, bit 2
341,080, bit 3
441,080, bit 4
541,080, bit 5
641,080, bit 6
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 101
mmmmm
Modbus Register Types
Pump OFF Setpoint (R41,430 – R41,435)
The OFF setpoint level (P113) for the referenced pump relay.
The setpoint is scaled from 0 to 10,000 (0 to 100% of span multiplied by 100). So 54.02% is
shown in the register as 5402.
Pumped Volume (R41,440 – R41,443) [MR 200]
The pumped volume registers hold the current total for all of the pumps associated
with a level point. These registers are available only if operation is set to pumped
volume (P001 = 7).
These volumes can become very large. Therefore, two registers are used to hold the
value. See
Unsigned Double Precision Integer (UINT32)
on page 107 for more information.
The value in the registers is given as an integer value but must be interpreted as having
the number of decimals set in P633 (LCD Totalized Decimal Position): this number can be 0
to 3. Ensure that your software accounts for these decimal places before you report the
pumped volume totals.
Pump Hours (R41,450 – R41,461)
The number of running hours for the referenced pump relay. The hours are given to three
decimal places, so the integer must be divided by 1000 to get the correct value. For
example 12,340 represents 12.34 hours.
This value comes from parameter P310. See page 157
of the
Parameter Reference
section
for details.
Pump Starts (R41,470 – R41,475)
The number of pump starts for the referenced pump relay.
This value comes from parameter P311. See page 157 of the
Parameter Reference
section
for details.
Page 102 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Modbus Register Types
Parameter Access (R43,998 – R46,999)
Parameter values are given as integers in the range of registers from R44,000 to R44,999.
The last three numbers of the register correspond to the parameter number.
Usually, the parameters are all read / write.
Each parameter register has a corresponding format register that holds the format
information required to interpret the value. See
Format Words (R46,000 to R46,999)
on
page 105.
Parameter Indexing
Many parameters are indexed. There are two possible indexes: a primary index and a
secondary index. A secondary index is a sub-address of the primary index. Some indexed
parameters affect multiple I/O devices.
The following is an example of a primary index:
P111 is the Relay Control Function. This parameter determines how a relay is controlled
by the MultiRanger (used as an alarm, for pump control, etc.). Because there are up to six
relays on the MultiRanger, P111 is indexed by six to allow each relay to be programmed
independently.
A few parameters also have a secondary index. While a secondary index is important for
setting up the MultiRanger, it is almost never needed through remote communications.
Indexing the Parameter Access Area
Each parameter communicates its value to only one register. You must know the index(es)
for the parameter in order to interpret the information in the register correctly.
For example, to make use of the value returned in register R44,111 you must know which
relay it is referring to. See
Relay Function Codes (P111 Only)
on page 110 for details on
P111 values.
To determine the index values, the primary and secondary index must be read or write.
The two possible methods of handling these index values are described in the following
paragraphs:
Global Index Method
and
Parameter Specific Index Method
.
Parameter Register # Format Register # Parameter #
44,000 46,000 P000
44,001 46,001 P001
44,002 46002 P002
… … …
44,999 46,999 P999
Note:
• Parameters P000 and P999 are read only. If P000 is set to lock activated then
all of the parameters are read only via the handheld programmer
• Parameter P999 (Master Reset) cannot be used via Modbus
•See
Data Types
on page 107 for a description of the different types of data
associated with different parameters
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 103
mmmmm
Modbus Register Types
Reading Parameters
To read parameter values, follow the steps listed in either the Global or the Parameter
Specific Index Method that follow. You must be able to program your HMI or SCADA
system before completing these methods.
Global Index Method (P782 = 0)
Global format method sets index values for all parameters simultaneously. Use this
method to read multiple values set to the same index values.
1. Write the primary index value into R43,999.
This is a value between 0 and 40 which specifies the input or output indexed by the
parameter.
Examples are:
• Transducer 1 is index 1
• Discrete input 2 is index 2
• Relay 5 is index 5
2. Write the secondary index value into R43,998.
This is a value between 0 and 40 that specifies the secondary index on the
parameter. This value is usually 0.
3. Write the desired format value into the appropriate format register. Because the
primary and secondary indexes are already specified, these portions of the format
word are ignored and only the last digit is significant.
See
Format Registers
on page 115 for details.
4. Read the value from the appropriate parameter register.
Types of values are:
•
Numeric Values
, on page 107
•
Bit Values
, on page 107
•
Split Values
, on page 108
•
Text Messages
, on page 109
•
Relay Function Codes (P111 Only)
, on page 110
A value of 22,222 indicates that an error has occurred. Specify a different format
type and try again.
Parameter Specific Index Method (P782 = 1)
The Parameter Specific index method sets the index values for each parameter
independently. Use this method to read multiple parameters with different index values.
1. Write the primary index, secondary index, and data format values into the
appropriate format register.
For example, to read the following information:
• measured level (P921)
• in units with three decimal places
Page 104 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Modbus Register Types
•from Transducer One
Send the integer value 01008 to register 46,921.
2. Read the value from the appropriate parameter register (the example uses 44,921).
Types of values are:
•
Numeric Values
on page 107
•
Bit Values
on page 107
•
Split Values
on page 108
•
Text Messages
on page 109
•
Relay Function Codes (P111 Only)
on page 110
A value of 22,222 indicates that an error occurred. Specify a different format type
and try again.
Writing Parameters
The method of writing parameters is similar to the method of reading them. Become
familiar with
Reading Parameters
, page 103, before attempting to write any parameters.
To write parameter values to the MultiRanger, follow these steps:
Global Index Method (P782 = 0)
1. Write the primary index value into R43,999.
2. Write the secondary index value into R43,998.
3. Write the desired format value into the appropriate format register.
4. Write the value to the appropriate parameter register.
Parameter Specific Index Method (P782 = 1)
1. Write the primary index, secondary index, and data format values into the
appropriate format register.
2. Write the value to the appropriate parameter register.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 105
mmmmm
Modbus Register Types
Format Words (R46,000 to R46,999)
Format words are unsigned integers that contain up to three values (described below).
The number of values used in the format words depends on the Parameter Index Location
(P782) that is used.
Parameter P782 Parameter Index Location
, described on page 96, determines which of
two methods is used to access the format words: Global Index Method or Parameter
Specific Index Method.
Global Index Method (P782 = 0)
Only the final digit of the format word determines the decimal offset (below).
Parameter-Specific Index Method (P782 = 1)
All three decimal fields are used to determine the parameter value’s primary index,
secondary index, and decimal offset.
Format Registers
Each format register is made up of three decimal fields:
• decimal offset
• secondary index
• primary index
The primary and secondary indices correspond to those that are used by the parameter.
primary index (00-64)
secondary index (00-99)
decimal offset (0-9)
Page 106 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Modbus Register Types
The decimal offset indicates how the remote system must interpret the integer value that
is stored in the parameter access register. The following table shows how different
parameter values can be shown based on a register value (integer) of 1234.
Examples of using the format word for both the index values and the decimal offset value
are shown below:
To write these values you can use a decimal offset as follows: format word = (primary
index x 1000) + (secondary index x 10) + (decimal).
Decimal Offset Example
00 1,234
1 –1 12,340
2 –2 123,400
3 –3 1,234,000
4 –4 12,340,000
5 –5 123,400,000
6 +1 123.4
7+2 12.34
8+3 1.234
9Percent 12.34%
Format Primary Index Secondary Index Decimal
00000 00 00 0
01003 01 00 3 right
02038 02 03 3 left
05159 05 15 percent
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 107
mmmmm
Data Types
Data Types
The MultiRanger parameters do not always use integers to hold values. For the
convenience of the programmer, those values are converted to and from a 16-bit integer
number. This section describes the conversion process. The sections that follow describe
where those values are in the discrete I/O and block transfer addresses, and how to get
the parameters you need.
Numeric Values
Numeric parameter values are the most common. For example, parameter P920
(Reading) returns a number that represents the current reading (either level or volume,
depending on the MultiRanger configuration).
Numeric values are requested or set in units or percent of span, and may be specified
with a number of decimal places.
Numeric values must be in the range –20,000 to +20,000 to be valid. If a parameter is
requested and its value is more than +20,000, the number 32,767 is returned; if it is less
than –20,000, the number –32,768 is returned. If this overflow happens, decrease the
number of decimal places.
If a parameter cannot be expressed in terms of percent of span, or has no meaningful
value, the number 22,222 is returned. Try requesting the parameter in units, or refer to
P005 in the
Parameter Reference
section on page 122.
Bit Values
Bits are packed into registers in groups of 16 bits (1 word). In this manual, the bits are
numbered from 1 to 16, with bit 1 as the least significant bit (LSB) and bit 16 as the most
significant bit (MSB).
Unsigned Double Precision Integer (UINT32)
Large numbers are put into unsigned 32 bit integers. By default, they are set up so that
the first word (register) is the most significant word (MSW) and the second word
(register) is the least significant word (LSW).
16 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01
MSB LSB
Page 108 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Data Types
For example, if R41,442 is read as a UINT32, the 32 bits would look like this:
The two registers are read as a 32-bit integer.
The most significant word (MSW) and least significant word (LSW) can be reversed to
accommodate some Modbus drivers. See
Word Order (R40,062)
on page 98 for details.
The position of the decimal place is dependent on the register. For more details see the
description of the register.
Split Values
Certain parameters are actually a pair of numbers separated by a colon, using this
format: xx:yy.
One example is P807, Transducer Noise, where:
xx = the average noise value in dB
yy = the peak noise in dB
The number which corresponds to xx:yy, either for reading or setting a parameter, is
determined by the following formula:
For storing to the device:
value = (xx + 128) x 256 + (yy + 128)
For reading from the device:
xx = (value / 256) – 128
yy = (value % 256) – 128
where % is the modulus operator.
The modulus can be computed by following these steps:
value1 = value / 256
value2 = remainder of value1
value3 = value2 x 256
yy = value3 – 128
It may simplify Parameter to notice:
xx = (most significant byte of value) – 128
yy = (least significant byte of value) – 128
R41,442 R41,443
16 MSW 1 16 LSW 1
32 32-bit integer value (UINT32) 1
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 109
mmmmm
Data Types
Text Messages
If a device parameter returns a text message, that message is converted to an integer
and provided in the register. The numbers are shown in the following table:
Number Text Message as displayed on LCD
22222 Invalid value
30000 Off
30001 On
30002 ≡ ≡ ≡ ≡
30003 (parameter does not exist)
30004 Err
30005 Err1
30006 Open
30007 Short
30008 Pass
30009 Fail
30010 Hold
30011 Lo
30012 Hi
30013 De
30014 En
30015 ---- (parameter has not been set)
-32768 Value is less than –20,000
32767 Value is greater than 20,000
Page 110 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Data Types
Relay Function Codes (P111 Only)
Please note that the MultiRanger 200 offers more function codes.
If a device parameter returns a relay function code, that message is converted to a
number and is then provided in the register. The numbers are shown in the following
table:
MultiRanger 100
MultiRanger 200
See P111 on page 134 of the
Parameter Reference
section.
Control Relay Function Code Number P111
General OFF, relay not used 0 0
Undesignated Level Alarm 1 1
Low-Low Level Alarm 2 1 – LL
Low Level Alarm 31 – L
High Level Alarm 4 1 – H
High-High Level Alarm 51 – HH
Loss of Echo (LOE) Alarm 20 6
Transducer Cable Fault Alarm 16 7
Pump Fixed Duty Assist 25 50
Alternate Duty Assist 30 52
Control Communication 66 65
Control Relay Function Code Number P111
General OFF, relay not used 0 0
Undesignated Level Alarm 1 1
Low-Low Level Alarm 2 1 – LL
Low Level Alarm 31 – L
High Level Alarm 4 1 – H
High-High Level Alarm 51 – HH
In Bounds Alarm 6 2
Out of Bounds Alarm 9 3
Rate of Level Change Alarm 12 4
Temperature Alarm 15 5
Loss of Echo (LOE) Alarm 20 6
Transducer Cable Fault Alarm 16 7
Pump Totalizer 22 40
Flow Sampler 23 41
Fixed Duty Assist 25 50
Fixed Duty Backup 26 51
Alternate Duty Assist 30 52
Pump
(con’t)
Alternate Duty Backup 31 53
Service Ratio Duty Assist 35 54
Service Ratio Duty Backup 36 55
First In First Out (FIFO) 40 56
Control Flush Valve 65 64
Communication 66 65
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 111
mmmmm
Error Handling
Error Handling
Modbus Responses
When polled by a Modbus Master, a slave device will do one of the following:
1. Not reply. This means that something went wrong with the transmission of the
message.
2. Echo back the command with the correct response (see the Modbus specification
for more details). This is the normal response.
3. Return an Exception Code. This reflects an error in the message.
MultiRanger uses the following exception codes:
Error Handling
Errors can be traced to two general sources:
1. There is an error in transmission.
OR
2. The host tries to do something that is not a valid action.
In the first case, the MultiRanger does not respond and the master waits for a response
time out error, which causes the master to re-send the message.
In the second case, the response depends on what the host tries to do. In general,
MultiRanger will not give an error to the host request. Various actions and the expected
outcome are as follows:
• If the host reads an invalid register, the host will get an undetermined value back.
• If the host writes an invalid register (a non-existing parameter or a read only
parameter), the value will be ignored and no error response will be made. However,
the current value will not reflect the desired new value.
• If the host writes a read only register, then the value will be ignored and no error
response will be made. However, the current value will not reflect the desired new
value.
• If P000 is activated, then the value will be ignored and no error response will be
made. However, the current value will not reflect the desired new value.
Code Name Meaning
01 Illegal Function The function code received in the query is
not an allowable action for the slave.
02 Illegal Data Address The data address received in the query is
not an allowable address for the slave.
03 Illegal Data Value A value contained in the query data field
is not an allowable value for the slave.
Page 112 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Error Handling
• If the host attempts to write one or more registers that are out of range, an
exception response code 2 or 3 is generated, depending if the start address is valid.
• If the host used an unsupported function code, an exception response code of 01
should be generated. However, this is not guaranteed and there may be no
response.
7ML19981FB06 MultiRanger 100/200 - INSTRUCTION MANUAL Page 113
mmmmm
Communications
Communication Troubleshooting
Generally
1. Check the following:
• There is power at the unit
• The LCD is showing the relevant data
• The device can be programmed using the hand programmer
2. Check the wiring pin outs and verify that the connection is correct.
3. Verify that values in the set-up parameters (P770 to P779) match the settings in the
computer used to communicate with the unit.
4. Check that the port on the computer is correct. Sometimes trying a different Modbus
driver will solve the problem. An easy stand-alone driver called ModScan32 is
available from Win-Tech at www.win-tech.com. This driver is helpful for testing
communications.
Specifically
1. The MultiRanger is set to communicate via a modem but no communication is
returning to the master.
• Check that the parameters are set up correctly and that the correct port is
configured
• Verify the wiring diagram. Note that there is a difference between wiring directly
to a computer and wiring to a modem.
• Verify that the modem is set up correctly. Siemens Milltronics has a series of
Application Guides that may help. Please contact your local Siemens Milltronics
representative for more information on Application Guides.
2. A MultiRanger parameter is set via remote communications, but the parameter
remains unchanged.
• Some parameters can only be changed when the device is not scanning. Try
putting the device in program mode, using the operating mode function.
• Try setting the parameter from the keypad. If it can not be set using the keypad,
check the lock parameter and set it to 1954.
Page 114 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Communication Appendix A
Communication Appendix A: Single
Parameter Access (SPA)
This Appendix is intended to provide someone with advanced communications
knowledge the ability to access any parameter value in any available format.
Built into MultiRanger is an advanced handshaking area that can be used to read and
write single registers to the MultiRanger. This section performs a similar function to the
Parameter access section. The differences are:
1. Advanced section is more powerful and harder to program.
2. Advanced section only gives you access to one parameter at a time.
Mapping
Parameter Read and Write (40,090 – 40,097) is a series of eight registers used for reading
and writing parameter values to and from the MultiRanger. The first three registers are
always unsigned integers representing parameters and index values. The second five
registers are the format and value(s) of the parameter.
All parameters normally accessed through the hand-held programmer are available
through these registers.
Reading Parameters
To read parameters through Modbus do the following steps:
1. Send the parameter, its primary index, and its secondary index (usually 0), and
format to registers 40,090 to 40,093.
2. Wait until you can read the written values from the registers (40,090 to 40,093) to
confirm that the operation is complete.
3. Read the value from registers 40,094 and 40,095.
Address Description
40,090 Parameter (integer)
40,091 Primary Index (integer)
40,092 Secondary Index (integer)
40,093 Format word (bit mapped)
40,094 Read value, word 1
40,095 Read value, word 2
40,096 Write value, word 1
40,097 Write value, word 2
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 115
mmmmm
Communication Appendix A
Writing Parameters
To set parameters through Modbus do the following steps:
1. Send the parameter, its primary index, and its secondary index (usually 0) to
registers 40,090, 40,091, and 40,092.
2. Write the value to registers 40,096 and 40,097.
3. Write the desired format word to register 40,093 to enable the MultiRanger to
interpret the value correctly.
Format Register
For example, to format the level reading so that it is shown in percent with two decimal
places shifted left, the format bits would look like this:
The value sent to the MultiRanger is 0001001000000000 binary or 512 decimal. The value
512 is sent as an integer to register 40,093 to format the output words 40,094 and 40,095
accordingly.
If the numeric data type is set for integer and the value contains decimal places, they are
ignored. In this situation, use the decimal offset to ensure that you have an integer value
and then write your code to recognize and handle the decimal offset.
Bits Values Description
1-8 0-2 Error Code
9-11 0-7 3-bit number representing decimal offset
12 0/1 direction of offset (0 = right, 1 = left)
13 0/1 Numeric format: Fixed (0) or Float (1)
14 0/1 Read or Write of data, Read (0), Write (1)
15 0/1 Word order: Most Significant Word first (0), Least
Significant Word first (1)
16 Reserved
Bit
Numbers 16 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01
Bit Values0000001000000000
reserved
most significant first
read
fixed format
offset direction to right
decimal offset of 2
no error code

Page 116 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Communication Appendix A
Error Codes
The error codes returned in the format area are 8-bit integers found in the lowest eight
bits of the format word. This allows for 256 potential error codes.
Currently the MultiRanger has two error codes available.
Values Description
0No error
1Data not available as percent (available as units)
2-255 Reserved
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 117
mmmmm
Parameters
Parameter Reference
The MultiRanger is configured through its parameters, and the application determines
the parameter values which are entered into the unit.
Please check your value entries carefully before operating the MultiRanger to ensure
optimum performance.
MultiRanger 100 and MultiRanger 200
All MultiRanger 100 and MultiRanger 200 parameters are listed in this section.
MultiRanger 200 parameters are identified separately. The parameter title includes this
marking [MR 200], indicating that parameter applies to the MultiRanger 200 only.
As a general rule, parameters affecting volume apply only to the MultiRanger 200.
Helpful Hints
Please note the following:
•Default values are always indicated with an asterix (*)
•Global values are common for all inputs and outputs on the unit
•Indexed parameters can apply to more than one input or output
•Primary index relates to an input or output
•Secondary index allows for multiple values on an indexed point
Accessing a Secondary Index
1. Press MODE , and then press DISPLAY to activate secondary index.
The icon appears under the index field.
2. Enter the secondary index, and then enter the values to set the secondary index.
Page 118 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Index types
Name Description # of indexes
Global This parameter applies to the entire unit n/a
View only This parameter can not be set, only viewed n/a
Breakpoint Indexed by breakpoint Parameter
dependent
Dimension Indexed by PMD dimension up to 7
Discrete Input Indexed by discrete input 2
Echo Profile Indexed by stored echo profile 10
Level1
1. MultiRanger 100: The two level points are: Transducer One and Trans-
ducer Two.
Level point typically has 1 index in Single Point Mode (standard), and 2
indexes in Dual Point Mode (optional).
MultiRanger 200: The three level points are: transducer 1, transducer 2,
and the calculated point which can be difference (P001=4) or average
(P001=5).
Level point typically has 1 index in Single Point Mode (standard), and 2
indexes in Dual Point Mode (optional). A third index is available in both
modes when Operation (P001) is set for DPD (P001=4) or DPA (P001=5).
Indexed by level point 1, 2 or 3
mA input1Indexed by mA input 1
mA output1Indexed by mA output 0 or 2
Comm. Port Indexed by communications port 2
Relay Indexed by relay 3 or 6
Transducer2
2. MultiRanger 200: The number of indexes available in Single Point Mode
(standard) is typically 1, but can be expanded to 2 if Operation (P001) is
set for DPD (P001=4) or DPA (P001=5).
In Dual Point Mode (optional), the number of available indexes is
always 2.
Indexed by transducer 1 or 2
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 119
mmmmm
Parameters
P000 Lock
Secures the MultiRanger from changes via the handheld programmer.
Access this parameter directly (type 000) and enter any value (except 1954) to secure
programming lock. To unlock the MultiRanger, access this parameter and enter 1954.
Quick Start (P001 to P007)
P001 Operation
Sets the type of measurement required for the application.
Notes:
• This lock only applies to the handheld programmer: it does not lock access
through communications.
• A remote master can change configuration if P799 is set to allow this.
Primary Index Global
Values
1954 * OFF (programming permitted)
-1 Simulation Controls (relays energize based on simu-
lated level)
other lock activated (programming secured)
Related • Simulation on page 85
WARNING:
Use this lock as backup security only. It uses a fixed value which can
be discovered by unauthorized personnel.
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
0Out-of-service
1 Level – how full the vessel is (MR 200: volume – P050)
2 Space – how empty the vessel is (MR 200: ullage – P050)
3 * Distance – distance from transducer to material
4 DPD – dual point difference [MR 200]
5 DPA – dual point average [MR 200]
6 OCM – flow rate in an open channel [MR 200]
7 Pump Totalizer – total pumped volume [MR 200]
Alters • P600 Primary Measuring Device
Page 120 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
For DPD and DPA Programming [MR 200]
Please note that this feature is only available on the MultiRanger 200.
Single Point Model Use
For Dual Point Difference (DPD) or Dual Point Average (DPA), the unit requires either two
transducers of the same type, or one transducer and one mA input. If two transducers are
used, all transducer parameters become indexed, and a third level point is calculated.
• DPD (difference) = Point 1 - Point 2
• DPA (average) = (Point 1 + Point 2) / 2. The calculated DPD or DPA is always based
on level measurements of points 1 and 2.
For these operations any of three level points (transducer 1, transducer 2, or the
calculated point) can be used to trigger relays (see
P110 Level Source
on page 134).
The points must be globally set to either 4 or 5 (as required). Point 3 becomes the
calculated value as shown above. See
Rake Control
example on page 69.
Dual Point Model Use
To set a dual point MultiRanger for DPA or DPD functions, Point 3 must be set to either 4
or 5 (as required). Points 1 and 2 cannot be set to 4 or 5, but these points are used to
calculate the value in point 3.
This table shows the available functions:
P002 Material
Specifies material type.
Operation [index] Available Values
P001 [1] 1, 2, 3, 6, 7
P001 [2] 1, 2, 3, 6, 7
P001 [3] 4,5
Primary Index Single Point Model Dual Point Model
Global Transducer
Values 1 * Liquid or horizontal solid surface
2 Solid or angled surface
Alters • P830 TVT Type
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 121
mmmmm
Parameters
P003 Maximum Process Speed
Determines level change reaction.
Use a setting just fast enough to keep up with your process. Slower settings provide
higher accuracy. Faster settings allow for more level fluctuations.
P004 Transducer
Specifies the Siemens Milltronics transducer connected to the unit.
Primary Index Transducer
Values
1 Slow (0.1 m/min)
2 * Medium (1 m/min)
3 Fast (10 m/min)
Alters
• P070 Failsafe Timer
• P700 Max Fill Rate
• P701 Max Empty Rate
• P702 Filling Indicator
• P703 Emptying Indicator
• P704 Rate Filter
• P710 Fuzz Filter
• P713 Echo Lock Window
• P727 Scan Delay
• P841 Long Shot Number
Related
• Failsafe (P070 to P072)
•P121 Pump by Rate
• Rate (P700 to P708)
• Measurement Verification (P710 to P713)
• Transducer Scanning (P726 to P729)
• P905 Transmit Pulse
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
0 * No transducer attached (preset for Dual Point)
1ST-25
2ST-50
100 STH
101 XCT-8
102 * XPS-10 (preset for Single Point Model)
103 XCT-12
104 XPS-15
112 XRS-5
250 mA input [MR 200]
(chart con’t next page)
Page 122 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P005 Units
Specifies measurement units used for dimensional values.
Changing this value automatically changes the units displayed for many parameters.
Existing values are converted and do not have to be re-entered.
P006 Empty
Enter distance in units (P005) from the face of the transducer to the process empty point.
Setting this value also sets Span (P007) unless Span was already set to another value.
For distance operation (P001=3), Span is preset to Empty.
Related
(chart cont’d from
previous page)
• P203 mA Output Value/Transducer
• mA Input (P250 to P260) (related only to Value 250)
• P800 Near Blanking
• P823 Reform Echo
• P832 TVT Shaper Adjust
• P840 Short Shot Number
• P841 Long Shot Number
• P842 Short Shot Frequency
• P843 Long Shot Frequency
• P844 Short Shot Width
• P845 Long Shot Width
• P852 Short Shot Range
Primary Index Global
Values
1*Meters
2 Centimeters
3 Millimeters
4Feet
5 Inches
Alters
•P006 Empty
•P007 Span
• P603 Maximum Head
• P605 Zero Head
• P620 Low Flow Cutoff
• P921 Material Measurement
• P926 Head Measurement
• P927 Distance Measurement
Primary Index Transducer
Values Range: 0.000 to 99.000 m (or equivalent depending on units)
Preset: 5.000 m (or equivalent depending on units)
Alters •P007 Span
Altered By •P005 Units
Related
• P800 Near Blanking
• P921 material Measurement
• P927 Distance Measurement
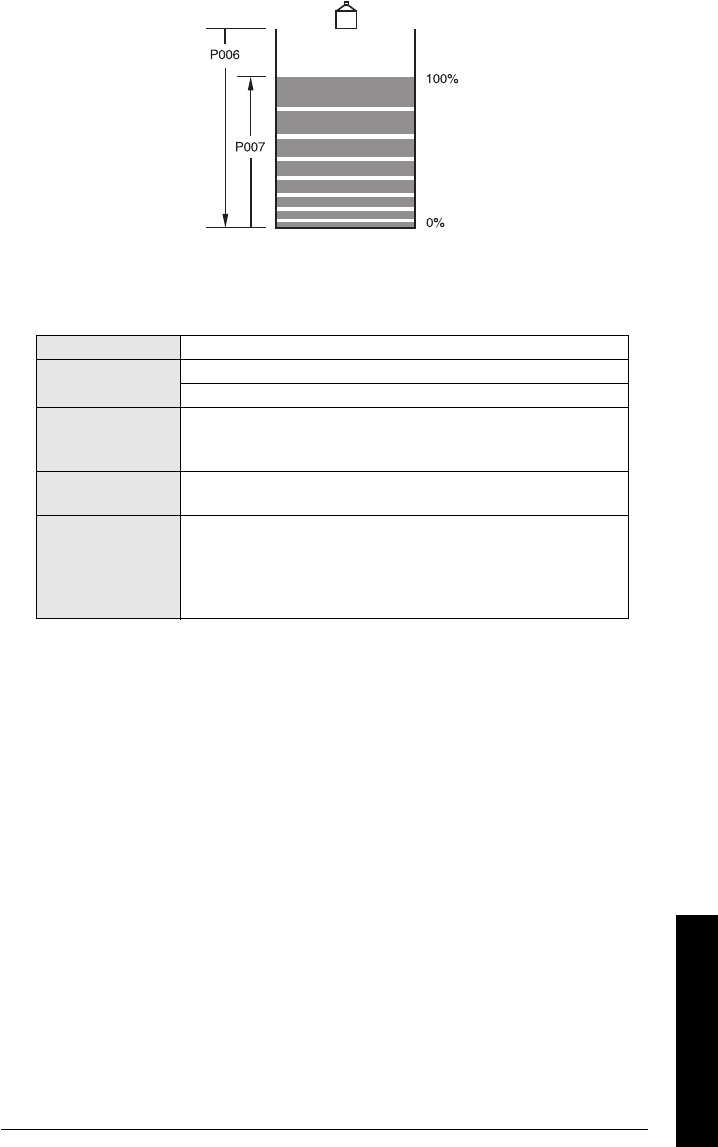
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 123
mmmmm
Parameters
P007 Span
Sets the range levels to be measured.
Span is preset for a value close to the maximum available. Enter a value reflecting
maximum application range.
Always prevent the monitored surface from approaching within 0.3 m (1 ft) of the
transducer face as this is the minimum blanking for most Siemens Milltronics transducers
(some require more blanking – see your transducer manual).
Many other parameters are set as a percentage of span (even if they are entered in
units). The values of these other parameters may change if the span is altered after
installation and the other parameters are measured using a level determined upward
from the Empty level toward the transducer face.
MultiRanger 200
All volumes are based on span so it should be set for the maximum volume point if
volume calculations are needed.
Volume (P050 to P055) [MR 200]
Please note that the volume parameters apply only to the MultiRanger 200.
Use these parameters to enable the MultiRanger to show readings based on vessel or
wet well volume (rather than level)..
Primary Index Level
Values Range: 0.000 to 99.000 m (or equivalent depending on units)
Preset: based on Empty (P006)
Alters
• P605 Zero Head
• P112 Relay ON Setpoint
• P113 Relay OFF Setpoint
Altered By •P005 Units
•P006 Empty
Related
• Volume (P050 to P055)
• P800 Near Blanking
• P921 Material Measurement
• P922 Space Measurement
• P926 Head Measurement
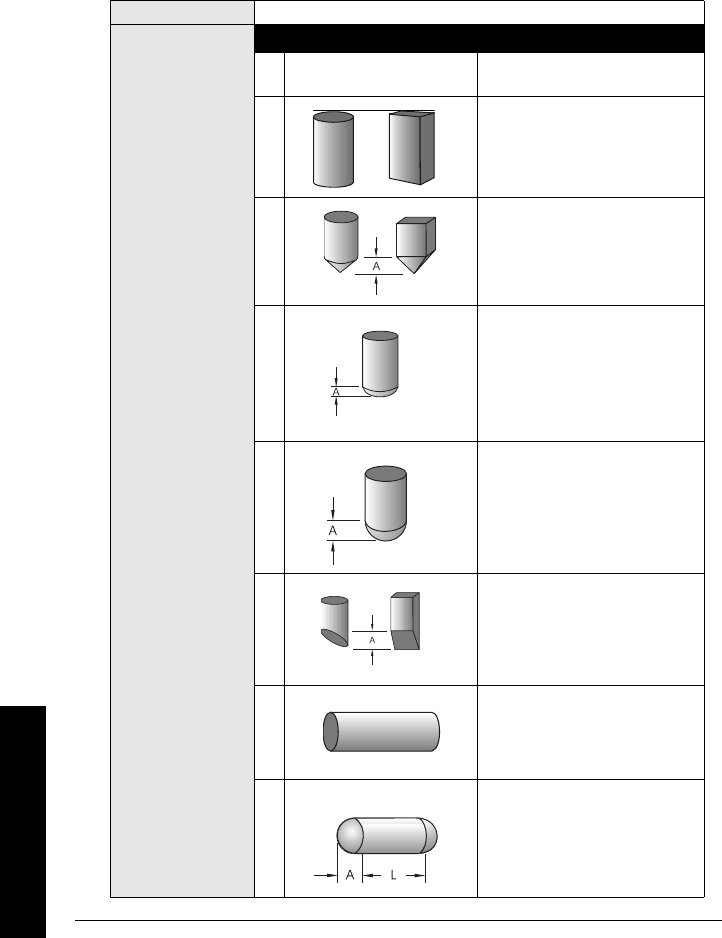
Page 124 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P050 Tank Shape [MR 200]
Enter the Tank Shape value matching the monitored vessel or wet well.
When Operation is LEVEL (P001 = 1), liquid (material) volume is calculated.
Alternatively, when Operation is SPACE (P001 = 2), remaining vessel capacity is
calculated. In RUN mode, readings are displayed in percent of maximum volume. To
convert readings to volumetric units, see
Maximum Volume (P051)
.
Primary Index Level
Values
#Shape Description
0*
volume calculation not required
(preset)
1 Flat Level Bottom
2 Cone/Pyramid Bottom
3 Parabola Bottom
4 Half Sphere Bottom
5 Flat Sloped Bottom
6Flat Ends
7 Parabola Ends
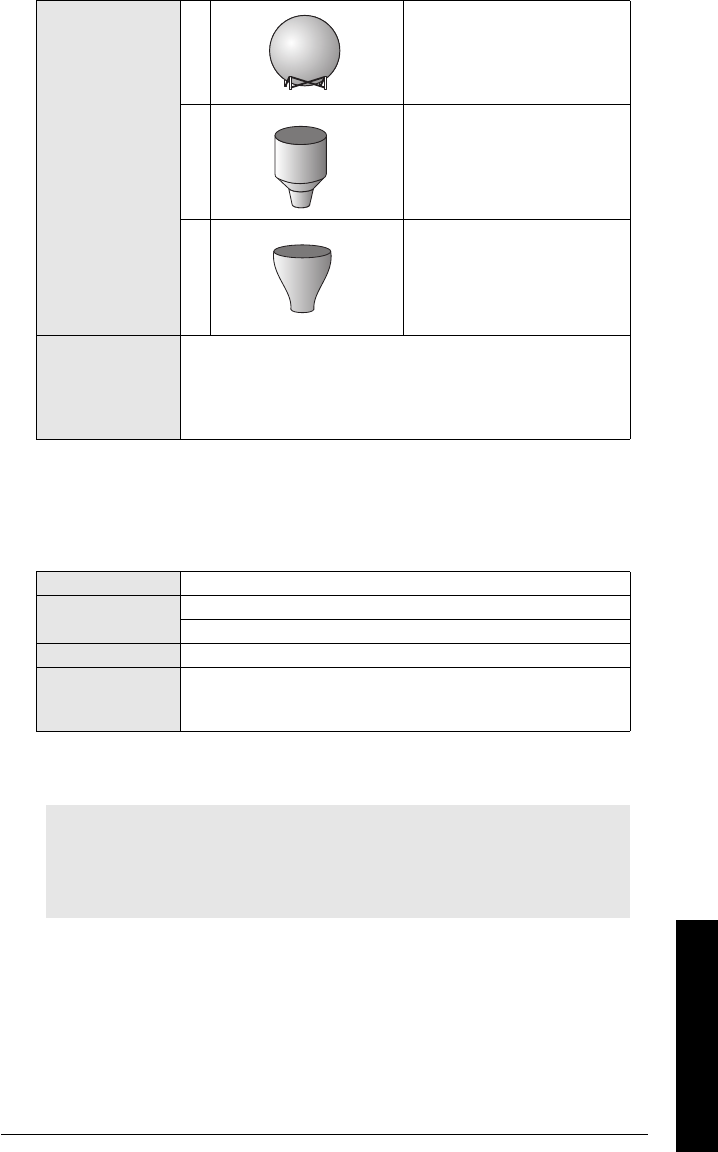
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 125
mmmmm
Parameters
P051 Maximum Volume [MR 200]
For Readings in volumetric units (rather than percent), enter the equivalent vessel volume
for Span (P007).
Any volume units can be chosen because volume is calculated from empty to maximum
span and is scaled according to the Tank Shape (P050) value.
Values
8 Sphere
9 Universal Linear
10 Universal Curved
Alters
•P001 Operation
• P051 Maximum Volume
• Pump Efficiency (P180-P186)
• Pumped Volume Totalizer (P622-P623)
• P920 Reading Measurement
Primary Index Level
Values Range: 0.000 to 99999
Preset: 100.0
Alters P060 Decimal Position
Related
•P006 Empty
•P007 Span
• P924 Volume Measurement
Note: Make sure selected chosen units allow LCD volume display.
Examples:
• If max. volume = 3650 m3, enter 3650
• If max. volume = 267500 gallons, enter 267.5 (thousands of gallons)
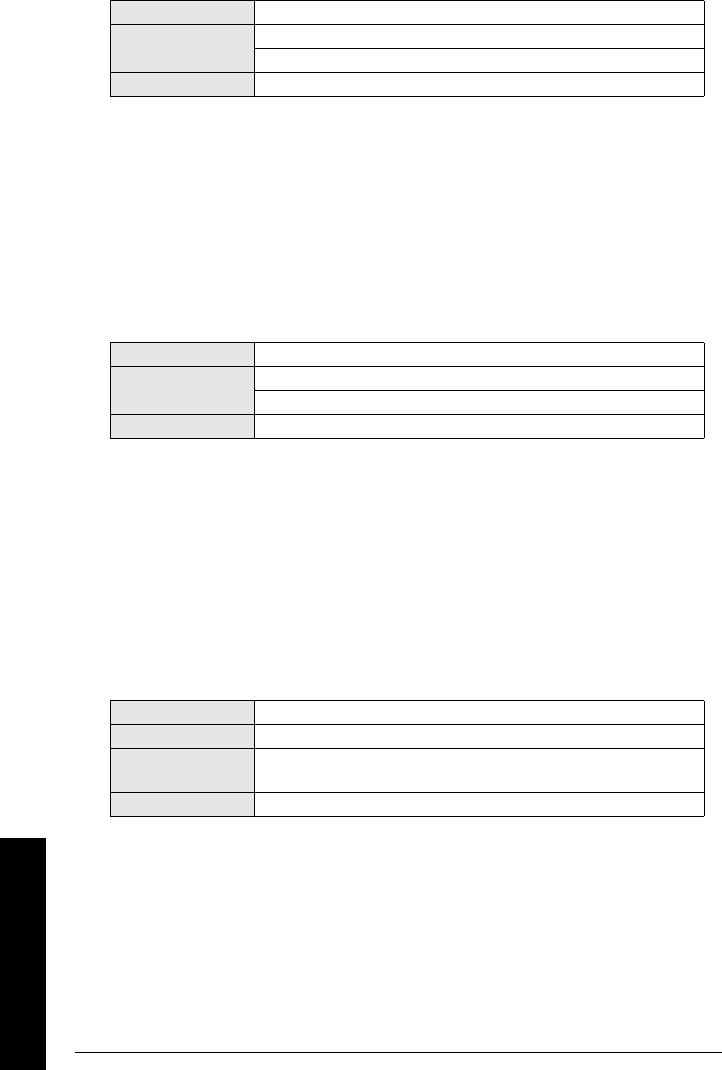
Page 126 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P052 Tank Dimension A [MR 200]
Dimension A as used in P050 Tank Shape.
Enter one of the following:
• height of the tank bottom if P050 = 2,3,4, or 5
OR
• length of one end section of the tank if P050 = 7, in Units (P005)
P053 Tank Dimension L [MR 200]
Dimension L as used in P050 Tank Shape.
Enter the following:
• tank length (excluding both end sections) if P050 = 7
P054 Level Breakpoints (Universal Volume Calculation)
[MR 200]
When the tank shape is too complex for any of the preconfigured shapes, you can specify
the volume based on segments. See “Accessing a Secondary Index” on page 117
for
more information.
Enter the following:
• up to 32 level breakpoints (where volume is known) if P050 = 9 or 10
Entering a Level Breakpoint
1. Go to Parameter P054.
2. For each index enter a breakpoint in measurement units.
3. Ensure that each breakpoint corresponds to the same index for P055.
Primary Index Level
Values Range: 0.0 to 99.00 m (or equivalent depending on units)
Preset: 0.000
Related • P050 Tank Shape
Primary Index Level
Values Range: 0.0 to 99.00 m (or equivalent depending on units)
Preset: 0.000
Related • P050 Tank Shape
Primary Index Level
Secondary Index Breakpoint
Values Range: 0.0 to 99.00 m or Max. volume (P051) (or equivalent depending on
units)
Related • P055 Volume Breakpoints
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 127
mmmmm
Parameters
P055 Volume Breakpoints and Characterization
(Universal Volume Calculation) [MR 200]
Each segment defined by the level breakpoints (P055) requires a volume so that the
MultiRanger can make the level-to-volume calculations.
Typical volume calculations
Entering a Volume Breakpoint
1. Go to Parameter P055.
2. For each index enter a volume.
3. Ensure that each volume corresponds to the same index for P054.
For more on
Volume Characterization
, go to page 52.
Display and Reading (P060 to P062)
These parameters are used to:
• Change the number of decimal places displayed
• Convert the Reading to alternate units
• Reference measurements to other than Empty (P006) or Span (P007)
P060 Decimal Position
Defines the maximum number of decimal places used on the LCD.
Primary Index Level
Secondary Index Breakpoint
Values Range: 0.0 to 99999
Related • P054 Breakpoints Levels (Universal Volume Calculation)
Cone Cylinder
V = (1/3)πr2hV = πr2h
Primary Index Level
Values
0 No digits after the decimal point
1 1 digit after the decimal point
2*2 digits after the decimal point
3 3 digits after the decimal point (limited by device resolution)
Page 128 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
In RUN mode, the decimal position adjusts to prevent the number of digits from exceeding
the display capabilities. To keep the decimal place from shifting, reduce the number of
decimal places to that shown at 100%.
Example:
If 100% is 15m, use two decimal places for sample readings of 15.00 or 12.15.
P061 Convert Reading [MR 200]
Multiplies the current value by the specified amount to allow for scaling.
Examples:
• If the measured value is in feet, enter 0.3333 to display the number of yards
• For simple linear, volume conversions set POO5 to 1 (meters) and then enter the
volume measurement per unit to get the correct conversion. For example, if the
reservoir contains 100 litres per vertical meter, use 100 to get the reading in litres.
P062 Offset Reading
Adds the specified value to the level reading, usually to reference the reading to sea level
or another datum level.
The operation of the device is not affected by the Offset Reading. This value is used for
display purposes only. All control measurements are still referenced to Empty.
Alters • P607 Flowrate Decimal
Altered by • P051 Maximum volume
Related • P920 Reading Measurement
Primary Index Level
Values Range: -999 to 9999
Preset: 1.000
Related • P920 Reading Measurement
Notes:
• This method does not calculate volume. It must not be used in place of the
volume parameters if any volume dependent features (such as pump
efficiency) are used. To calculate true volumes see
Volume
(P050 to P055).
• Avoid entering a value that, when multiplied by the maximum current
Reading, exceeds the display capabilities. If value exceeds four digits, EEEE is
shown.
Primary Index Level
Values Range: -999 to 9999
Preset: 0.000
Related • P920 Reading Measurement
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 129
mmmmm
Parameters
Backup Level Override
Use this feature to override the ultrasonic reading by a discrete input such as a
contacting point device. The ultrasonic reading will be fixed at the programmed switch
level until the discrete input is released.
The ultrasonic device makes decisions based on the override values.
P064 Reading Override Enable
Sets the discrete input to act as the source for a level reading override.
P065 Reading Override Value
This value is substituted for the current reading when the selected discrete input is
enabled and activated.
Primary Index Transducer
Values 0*OFF: No override.
1-2 ON: Number = discrete input of override signal
Related • P065 Reading Override Value
• P270 Discrete Input Function
Primary Index Transducer
Values Range: 0.0 to 99.00 m (or equivalent depending on units)
Preset: 0.00
Alters Current reading
Related
•P001 Operation
•P005 Units
•P006 Empty
•P007 Span
• P064 Override Enable
Page 130 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Please note the following:
• enter value in current units (as selected in P005)
• valid for level, space, and distance
• volume is calculated based on the Backup level
Example:
Transducer One is configured for a level measurement. Digital Input 2 is connected to a Hi
Level Backup switch located a level of 4.3m.
When the level rises to 4.3m, and the switch is activated, the reading is forced to 4.3m.
The reading stays at 4.3m until the switch is de-activated.
P066 Override Time Delay
Defines the time used to calm (debounce) the override condition input. Set in seconds.
P069 Password
Holds the current password for P000. Select by typing in 069. You cannot scroll to this
parameter.
This parameter is write-only, and can only be selected by entering 069. To change the
password, unlock the device by entering the current password into P000. Then enter the
new password into P069. To lock the device, enter a password other than the correct one
in P000. While the device is unlocked, the password is visible in P000.
Parameter Index Value
P064 12
P065 14.3
Primary Index Transducer
Values Range: 0.0 to 9999
Preset: 5.0
Related
• P064 Override Enable
• P065 Reading Override Value
• P270 Discrete Input Function
Note: Activation of the Level Override is subject to the measurement cycle. This
can add up to four seconds to the overall response time depending on operating
conditions and programming.
Primary Index Global
Values Range: 0 to 9999
Default: 1954
Related • P000 Lock
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 131
mmmmm
Parameters
Failsafe (P070 to P072)
P070 Failsafe Timer
The time for invalid measurements to elapse before Failsafe State activates.
Once activated, the Failsafe State initiates the following:
1. The material level is reported based on P071 Failsafe Material Level.
• The unit responds to the new level as programmed (control and alarm relays
activate as defined by the programming).
• Individual relays can have independent failsafe responses. See
P129 Relay
Failsafe
.
2. The appropriate error is displayed:
•LOE for loss of echo from the transducer
•Short for a shorted transducer cable
•Open for a cut transducer cable
•Error for all other problems
When modifying the preset value, set it short enough to protect the process but long
enough to avoid false alarms. Only use No Delay (0.0 Minutes) for testing.
P071 Failsafe Material Level
The material level reported when a Failsafe State is initiated.
Select the Failsafe Material Level based upon the relay operation required during failsafe
operation.
Primary Index Single Point Model Dual Point Model
Global Transducer
Values Range: 0 to 15 minutes
Preset 10.00 minutes
Altered by • P003 Maximum Process Speed
Related •P129 Relay Failsafe
Primary Index Level
Values
Range: -4999
to 9999
Value in units or % (-50% to 150% of span)
HI Level goes to maximum span
LO Level goes to 0 span (Empty)
HOLd * Level remains at last reading
Related
•P001 Operation
•P006 Empty
•P007 Span
• P111 Relay Control Function
• P112 Relay ON Setpoint
• P113 relay OFF Setpoint
•P129 Relay Failsafe
Page 132 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Selecting HI, LO, or HOLd
1. Press FUNCTION to display the Auxiliary Function symbol.
2. Press ARROWS to scroll to the desired option.
3. Press ENTER to set the value.
Entering a Measurement
To enter a specific Failsafe Material Level within -50 to 150% of Span (P007), in Units
(P005).
Relay reaction
The way in which relay programming reacts to the failsafe level depends on P129 Relay
Failsafe (page 140). By default:
• Alarm relays have P129 = OFF and so react to the Failsafe Material Level.
• Control relays have P129 = dE and so de-energize the relay when the unit enters
Failsafe mode regardless of the Failsafe Material Level.
P072 Failsafe Level Advance
Sets the speed the MultiRanger advances to and returns from the Failsafe Material Level.
Relays (P100 to P119)
The MultiRanger has three or six relays (or digital outputs) used to control devices and
alarms. While the number of devices is limited by the relays, all control functions are
accessible through software and each parameter is indexed to the three or six relays.
See the
Relay
section on page 41.
Preset Applications (P100)
The MultiRanger makes standard applications easier to program by providing an
extensive list of presets.
Primary Index Level
Values
1*Restricted Advances to/from Failsafe Material Level as set by
P003, P700 and P701.
2 Immediate Failsafe Material Level assumed right away
3Fast Back
Failsafe Level Advance is restricted, return is
immediate
Related
• P003 Maximum Process Speed
• P070 Failsafe Timer
• P071 Failsafe Material Level
• P700 Max Fill rate
• P701 Max Empty rate
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 133
mmmmm
Parameters
Control Functions (P111)
Each relay can be configured independently to take advantage of the MultiRanger’s
advanced features and flexibility. Start with a preset application and then change the
required parameters to make the task more efficient.
Setpoints (P112, P113)
Each relay is triggered by one or more setpoints. The setpoints can be based on absolute
level (P112, P113) or rate of change (P702, P703). Each control function specifies which
setpoints are required.
P100 Preset Applications [MR 200]
Six preset applications to configure or bench test the unit.
Select an application that is similar to yours and change the parameters required. If none
suit, then refer to P111 Relay Control Function on page 134.
Primary Index Global
Values
0*OFF
1Wet Well 1
2Wet Well 2
3 Reservoir 1
4 Reservoir 2
5Screen
6Alarms
Alters
• P110 Level Source
• P111 Relay Control Function
• P112 Relay On Setpoint
• P113 Relay OFF Setpoint
•P121 Pump by Rate
Related •P001 Operation
Note: Programming the relays independently is the most common method used.
Page 134 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P110 Level Source
Sets the level source on which the indexed relay is assigned to a measurement point.
Please note that Difference and Average settings are MultiRanger 200 features
.
MultiRanger 200
Please note that these features are only available on the MultiRanger 200.
In Single Point Mode (standard):
Points 2 and 3 are available only if Operation is set for difference or average
(P001 = 4 or 5).
In Dual Point Mode (optional):
Point 2 is always available, and Point 3 is available only if Operation is set for difference or
average (P001 = 4 or 5).
P111 Relay Control Function
Sets the control algorithm used to trip the relay.
Please note that parameter P111 values vary between the MultiRanger 100 and the
MultiRanger 200.
Use zero 0 (preset) to disable control of the indexed relay.
Primary Index Relay
Values
Range: 1 to 3
1*Point # 1 = Transducer One
2 Point # 2 = Transducer Two
3
[MR 200]
Point # 3 = Difference (P001=4) or Average (P001=5)
[MR 200]
Altered by:
• P003 Maximum Process Speed
• P700 Max Fill rate
• P701 Max Empty rate
• P070 Failsafe Timer
• P071 Failsafe Material Level
Primary Index Relay
Values See chart below
Altered by • P100 Preset Applications
Note: All relay ON/OFF points must be referenced from Empty (P006), regardless
of Operation Mode selection (POO1).
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 135
mmmmm
Parameters
MultiRanger 100
MultiRanger 200
Values For P111
Control Type #1
1. When reading and setting this parameter through Modbus or SmartLinx
communications the parameter values are mapped to different numbers.
See
MultiRanger Communications
on page 89 for Modbus information or
the relevant SmartLinx®manual.
Relay Control
General
OFF 0*Relay set off, no action (preset)
Level 1 Based on level setpoints ON and OFF
Loss of Echo (LOE) 6 When echo is lost
Cable Fault 7 When the circuit to a transducer is opened
Pump Fixed Duty Assist 50 At fixed ON and OFF setpoints and allows multiple
pumps to run
Alternate Duty
Assist 52 At rotating ON and OFF setpoints and allows multiple
pumps to run
Communication 65
Based on input from external communications. See
Communications
section on page 89 for further refer-
ence.
Values For P111
Control Type #1Relay Control
General
Off 0*Relay set off, no action (preset)
Level 1 Based on level setpoints ON and OFF
In Bounds 2 When level enters the range between ON and OFF
setpoints
Out of Bounds 3 When level exits the range between ON and OFF set-
points
Rate of Change 4 Based on rate setpoints ON and OFF
Temperature 5 Based on temperature setpoints ON and OFF
Loss of Echo (LOE) 6 When echo is lost
Cable Fault 7 When the circuit to a transducer is opened
Flow Tot a l izer 40 Every 1 0 y units (P641-P645)
Flow Sampler 41 Every y x 102 units (P641-P645) or time duration (P115)
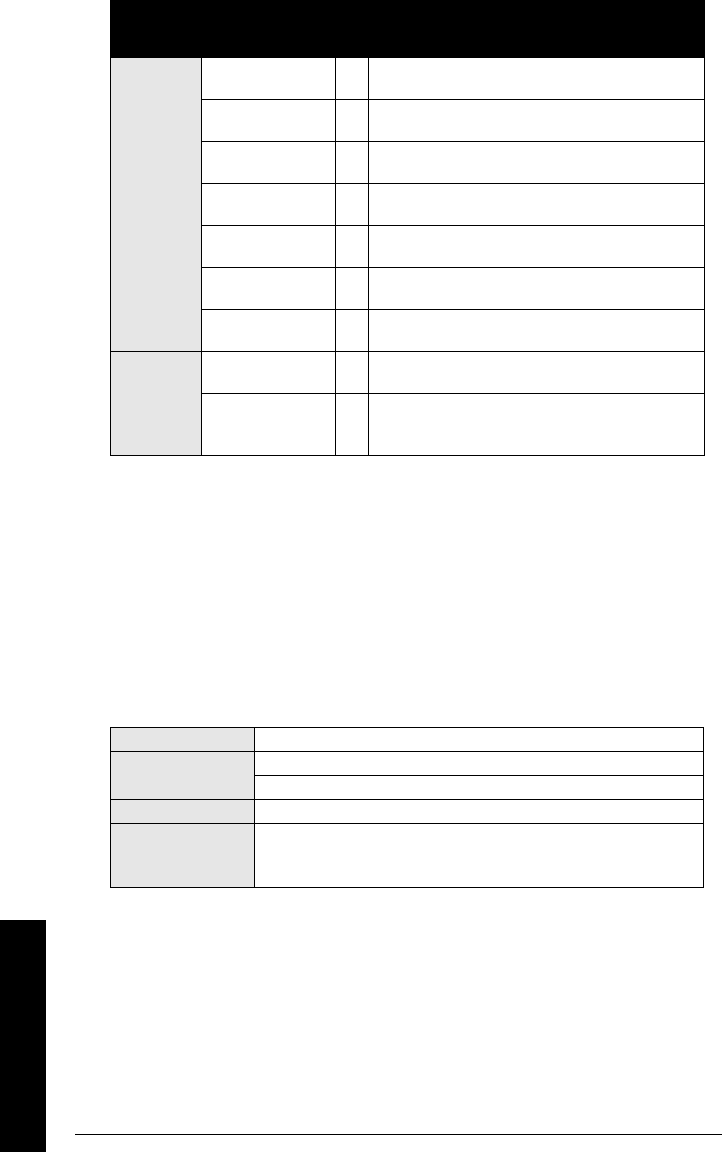
Page 136 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P112 Relay ON Setpoint
Sets the process point at which the relay changes from its NORMAL state.
For most applications, the relay is tripped at this point. For IN-BOUNDS and OUT-OF-
BOUNDS alarms, it is the high point in the specified range. This parameter is set
according to Span (P007) even when another reading, such as volume, is shown on
the LCD.
Pump
Fixed Duty Assist 50 At fixed ON and OFF setpoints and allows multiple
pumps to run or for rake control
Fixed Duty Backup 51 At fixed ON and OFF setpoints and allows only one
pump to run
Alternate Duty
Assist 52 At rotating ON and OFF setpoints and allows multiple
pumps to run
Alternate Duty
Backup 53 At rotating ON and OFF setpoints and allows only one
pump to run
Service Ratio Duty
Assist 54 On service ratio at ON and OFF setpoints and allows
multiple pumps to run
Service Ratio Duty
Backup 55 On service ratio at ON and OFF setpoints and allows
only one pump to run
First In First Out
(FIFO) 56 As Alternate Duty Assist, resets the relay from stag-
gered OFF setpoints
Control
Flush Valve 64 Used to control a pump flushing device based on
Flush Systems (P170 to P173)
Communication 65
Based on input from external communications. See
Communications
section on page 89 for further refer-
ence.
1. When reading and setting this parameter through Modbus or SmartLinx
communications the parameter values are mapped to different numbers.
See the
MultiRanger Communications
section
on page 89 for Modbus
information or the relevant SmartLinx® manual.
Primary Index Relay
Values Range: -999 to 9999
Preset: ----
Altered by •P007 Span
Related
• P100 Preset Applications
• P111 Relay Control Function
• P113 Relay OFF Setpoint
Values For P111
Control Type #1Relay Control
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 137
mmmmm
Parameters
P113 Relay OFF Setpoint
Sets the process point at which the relay returns to its NORMAL state.
For most applications, the relay is reset at this point. For IN-BOUNDS and OUT-OF-
BOUNDS alarms, it is the low point in the specified range. This parameter is set to Span
(P007), even when another reading, such as volume, is shown on the LCD.
P115 Relay Interval Setpoint [MR 200]
The length of time in hours between starts.
P116 Dead Band [MR 200]
The distance above and below the bound alarm setpoints.
Primary Index Relay
Values Range: -999 to 9999
Preset: ----
Altered by •P007 Span
Related
• P100 Preset Applications
• P111 Relay Control Function
• P112 Relay ON Setpoint
Primary Index Relay
Values Range: 0 to 9000 hours
Preset: 0.000
Altered by • P100 Preset Applications
Related • P111 Relay Control Function
Primary Index Relay
Values Range: 0.000 to Span Value (P007), or equivalent depending on units
Preset: 2% of span
Related
• P111 Relay Control Function
• P112 Relay ON Setpoint
• P113 Relay OFF Setpoint
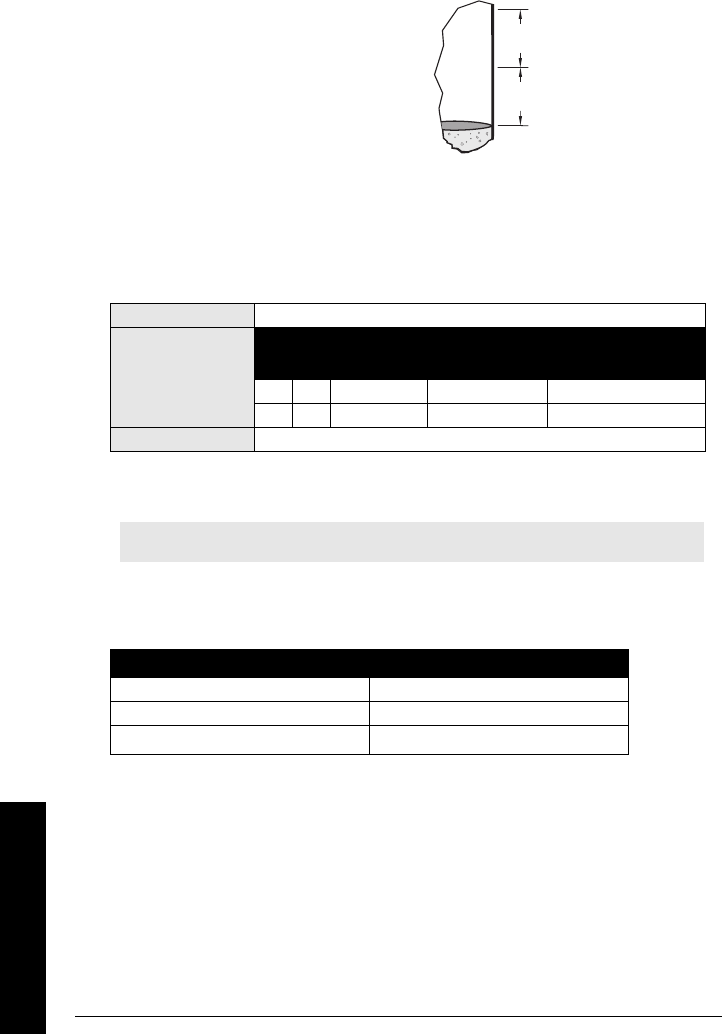
Page 138 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
For IN-BOUNDS and OUT-OF-BOUNDS Relay Functions (P111 = 2 and 3 respectively), a
dead band prevents relay chatter due to material level fluctuations at both the upper and
lower setpoints.
P118 Relay Output Logic
The logic applied to relays to determine the contact open or closed state.
The relay contact operation is NORMALLY CLOSED for alarms and NORMALLY OPEN for
controls. See P111
Relay Control Function
for more information.
Power Failure
When power is cut to the MultiRanger, its relays fail to the following states:
To use relays 3 or 6 as general alarm indicators, set P118 to 3 – negative logic and wire
the alarm for normally open operation. When an alarm event occurs (see below) or when
power is cut, the circuit closes and the alarm activates.
Enter the dead band in either percent
of span or units of measure (P005).
The dead band value is applied both
above and below the upper and lower
bound setpoints as shown in the fig-
ure.
Primary Index Relay
Values
Value Logic Alarm
Contact
Pump or Control
Contact
2*Positive Normally Closed Normally Open
3 Negative Normally Open Normally Closed
Related • P111 Relay Control Function
Note: P118 is not reset by a master reset (P999).
Relay States
Relay Fail State
1,2,4,5 Open
3,6 Open or Closed1
1. Relays 3 and 6 are Form C types, so you can wire it either
NORMALLY OPEN or NORMALLY CLOSED. Check the wiring
before programming.
Actual ON or OFF setpoint
Actual OFF or ON setpoint
P116
P116
Setpoint set in P112 or P113
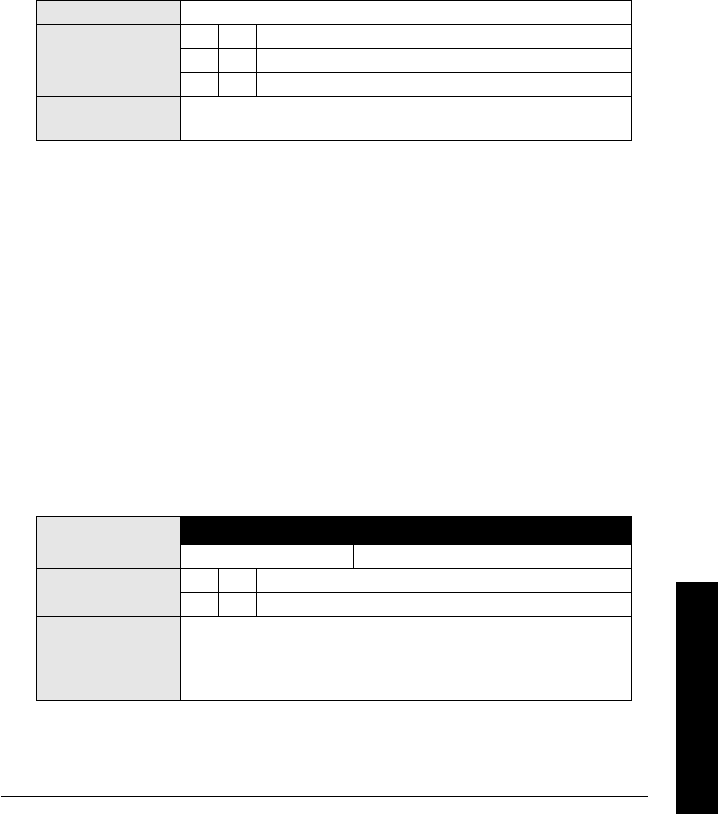
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 139
mmmmm
Parameters
Positive Logic
In software, all relays are programmed the same way, with ON setpoints indicating when
to change the relay contact state (open or closed). This parameter allows the reversal of
the operation so that relay contacts can be NORMALLY CLOSED or NORMALLY OPEN.
P118 is preset to 2 which is positive logic.
Negative Logic
When P118 = 3 (negative logic), the operation for the indexed relay is reversed from
normal.
P119 Relay Logic Test
Forces the relay control logic into an ACTIVATED or DE-ACTIVATED state.
This parameter tests site wiring and control logic programming. Forcing the relay to an
activated or de-activated state is similar to the MultiRanger detecting an event and
responding to it. Helpful in testing new installations and diagnosing control problems.
Pump Setpoint Modifiers (P121 and P122) [MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
These parameters provide alternate ways of starting the pumps in the pump group. See
the
Pump Control
section on page 58 for descriptions of the pump control algorithms.
P121 Pump by Rate [MR 200]
Sets the pump relays to accept control by rate of level change once the first ON setpoint
is reached.
Use this function when multiple pumps are to be controlled by rate of level change rather
than by setpoints.
Primary Index Relay
Values
0 * OFF - Control from MultiRanger algorithms
1 Activate relay control
2 De-activate relay control
Related • P111 Relay Control Function
• P910 Toggle Relays
Primary Index Single Point Model Dual Point Model
Transducer Level
Values 0 * OFF (pump by level)
1ON (pump by rate)
Related
•P007 Span
• P111 Relay Control Function
•P132 Pump Start Delay
• Rate (P700 to P708)
Page 140 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
The delay between pump starts is set by P132 Pump Start Delay.
This only applies to any relays set to pump control (P111 = 50 to 56).
P122 Pump Service Ratio [MR 200]
Selects pump usage based on the RUN time ratio rather than last used.
This parameter only relates to relays with P111 = 54 or 55.
To make this parameter useful, assign it to all of the pump relays. The number assigned to
each pump relay represents the ratio applied to decide the next pump to start or stop.
Independent Relay Failsafe (P129)
P129 Relay Failsafe
Sets how individual relays react to a failsafe condition, to allow for more flexible
programming.
Use this for operations independent of the Failsafe Material Level (P071).
Primary Index Relay
Values Range: 0.000 to 9999
Preset: 20.00
Related • P111 Relay Control Function
Primary Index Relay
Values
OFF * Response governed by P071 Failsafe Material Level
HOLd For LAST KNOWN relay state retention
dE To have the relay de-energize immediately on failsafe
En To have the relay energize immediately on failsafe
Altered by • P071 Failsafe Material Level
• P070 Failsafe Timer
• P111 Relay Control Function
Notes:
• All pump control relay ON and OFF setpoints must be the same value
• If the level is within 5% of Span (P007) of the OFF setpoint, the next pump is not
started
Notes:
• The MultiRanger will not sacrifice other pumping strategies to ensure that the ratio
is held true
• If the pump relays are set to the same value then the ratio equals 1:1 and all pumps
are used equally (preset)
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 141
mmmmm
Parameters
Relay Failsafe is only available for the following relay functions (P111) and is not used for
any other relay control function.
To select an independent Relay Failsafe value:
1. Press FUNCTION to display the Auxiliary Function symbol.
2. Press ARROWS to scroll through the failsafe options.
3. Select option and press ENTER .
Advanced Pump Control Modifiers (P130 to P137)
[MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
These parameters only affect relays set to pump operation (P111 = 50 to 56).
P130 Pump Run-On Interval [MR 200]
Sets the number of hours between pump run-on occurrences.
To clear sediment in a pump-down wet well, run the pump after the normal OFF setpoint
is reached to force some solid material through. This parameter sets the time between
such events. Only the last pump running can run-on.
Relay Function (P111) Preset (P129)
1 – level alarm
OFF
2 – in bounds alarm
3 – out of bounds alarm
4 – rate of change alarm
5 – temperature alarm
50 to 56 – all pump controls dE
Primary Index Global
Values Range: 0.000 to 1000
Preset: 0.000
Related • Advanced Pump Control Modifiers (P130 to P136)
Page 142 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P131 Pump Run-On Duration [MR 200]
Sets the number of seconds that the pump runs on.
Your pump capacity determines the amount of material that can be removed. Choose a
value long enough to clean out the vessel bottom, yet short enough not to run the pump
dry. Also be sure that this value does not overlap with P130 (Interval). The timing should
look something like this:
P132 Pump Start Delay [MR 200]
Sets the minimum delay (in seconds) between pump starts.
Use this feature to reduce a power surge from all pumps starting at the same time. This
delay determines when the next pump is permitted to start.
P133 Pump Power Resumption Delay [MR 200]
Sets the minimum delay before the first pump restarts after power failure.
This reduces the surge from the first pump starting immediately on power resumption.
When this delay expires, other pumps will start as per P132.
Primary Index Relay
Values
Range: 0.0 to 9999
Preset: 0.000
Related • Advanced Pump Control Modifiers (P130 to P136)
Primary Index Global
Values
Range: 0.0 to 9999
Preset: 10 seconds
Value is divided by 10 in simulation mode.
Related • Advanced Pump Control Modifiers (P130 to P136)
• P121 Pump by Rate
Primary Index Global
Values
Range: 0.000 to 9999
Preset: 10 seconds
Related • Advanced Pump Control Modifiers (P130 to P136)
• P132 Pump Start Delay
P131 P132
P130 (Pump Run-On)
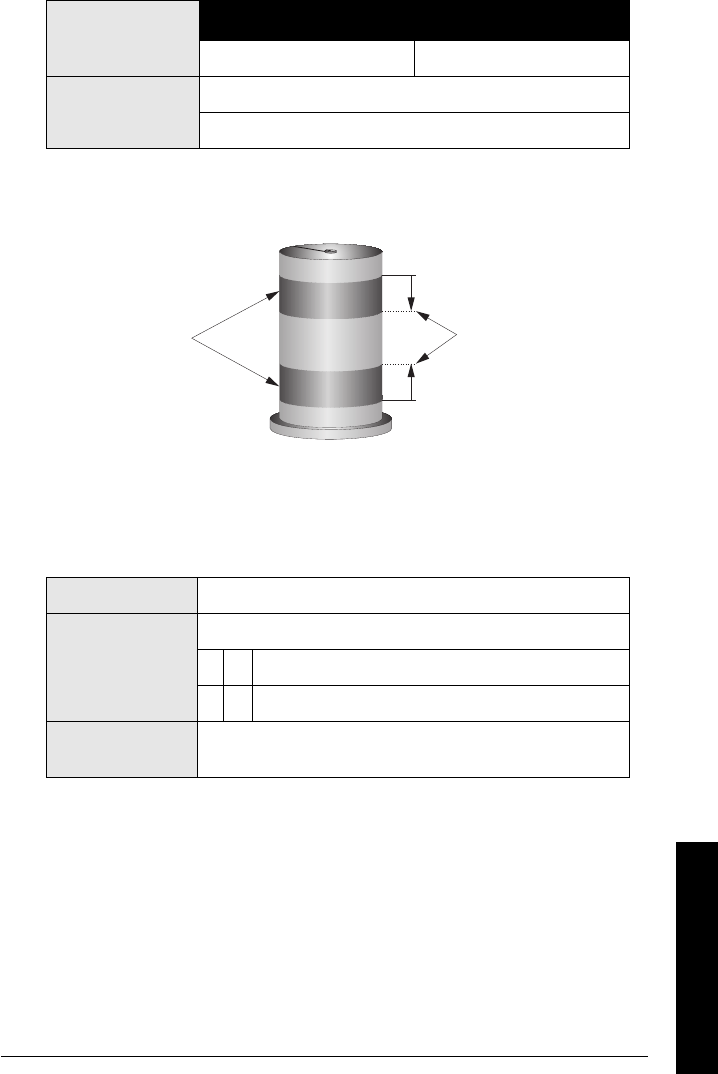
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 143
mmmmm
Parameters
P136 Wall Cling Reduction [MR 200]
Varies the upper and lower setpoints to reduce material buildup on the walls.
This value is the range in which the setpoints are allowed to deviate in percent or units.
The Relay Setpoints ON and OFF values are randomly varied inside the range to ensure
that the material level does not consistently stop at the same point.
P137 Pump Group [MR 200]
Puts pumps into groups for multiple pump rotations on one transducer.
This feature groups pumps (relay points 1 - 6) into groups 1 or 2. It is applied to pump
rotation and occurs independently within each group.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.000 to 9999
Preset: 0.000
Primary Index Relay
Values
Range: 1 to 2
1 * group 1
2group 2
Alters • P111 Relay Control Function when P111=52 (Alternate duty
assist) or 53 (Alternate duty backup)
Random Setpoint Range
Level Setpoint ON
Wall Cling Value
Level Setpoint OFF
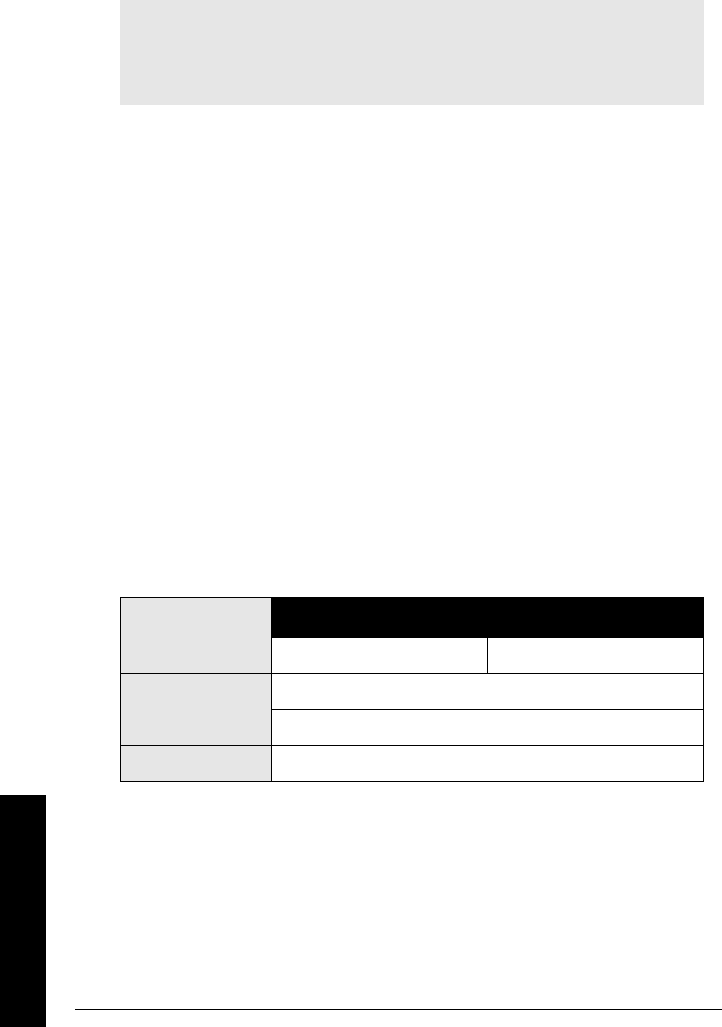
Page 144 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Flush Systems (P170 to P173) [MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
Use this feature to control an electrically operated flush valve on a pump to divert some
pump output back into the wet well to stir up sediment.
Single Point Mode
Enter the MultiRanger relay number of the pump with the flush valve. The activation of
this pump relay drives the usage of the flush system. Both P172 Flush Interval and P171
Flush Cycles are based on the operation of this relay and control any relay set to P111 =
64, Flush Valve.
Dual Point Mode
The indexed relay is the one that controls the flush device. The value is the pump relay
that is watched by the flush system. Enter the pump relay value into the parameter at the
flush relay index.
Example
If you need to watch pump Relay One to control a flush valve on Relay Two you would set
P170[2]=1.
P170 Flush Pump [MR 200]
Picks the number of the pump relay which triggers the flushing device.
Enter the MultiRanger relay number of the pump with the flush valve. The activation of
this pump relay drives the usage of the flush system. Both P172 Flush Interval [MR 200]
and P171 Flush Cycles [MR 200] are based on the operation of this relay and controls any
relay set to P111 = 64, Flush Valve.
Notes:
• If any of the following parameters are set to 0, this feature will not work.
• In Dual Point mode, a flush valve can be set up for each of the three available
level inputs (P001 = 4 or 5).
Primary Index
Single Point Model Dual Point Model
Global Relay
Values
Range: 0 to 6
Preset: 0
Related • P111 = 64, Flush Valve
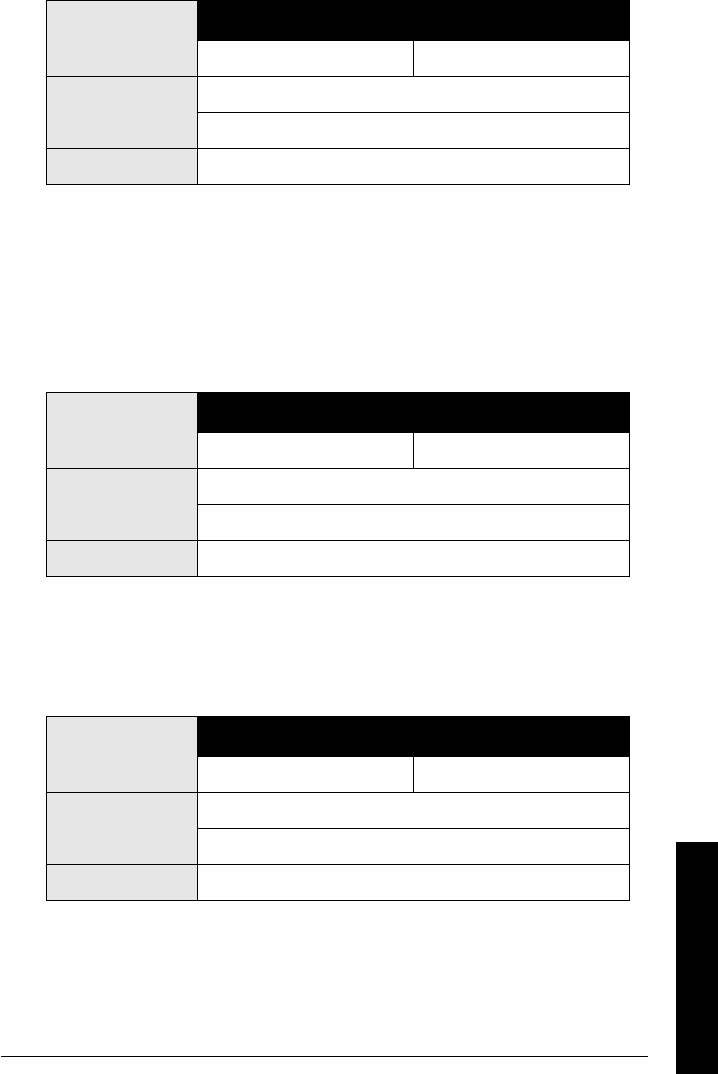
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 145
mmmmm
Parameters
P171 Flush Cycles [MR 200]
Sets the number of pump cycles requiring flush control.
If three flush cycles are required after every ten pump cycles then:
P172 (Flush Interval) = 10
P171 (Flush Cycles) = 3
P172 Flush Interval [MR 200]
Sets the number of pump cycles before flush control is enabled.
To start a new flush cycle every ten times the pumps are run, set this to 10.
P173 Flush Duration [MR 200]
The length of time for each flush cycle that the flush control is active.
Primary Index
Single Point Model Dual Point Model
Global Relay
Values
Range: 0 to 9999
Preset: 0
Related • P111 = 64, Flush Valve
Primary Index
Single Point Model Dual Point Model
Global Relay
Values
Range: 0 to 9999
Preset: 0
Related • P111 = 64, Flush Valve
Primary Index
Single Point Model Dual Point Model
Global Relay
Values
Range: 0.000 to 9999 s
Preset: 0.000
Related • P111 = 64, Flush Valve
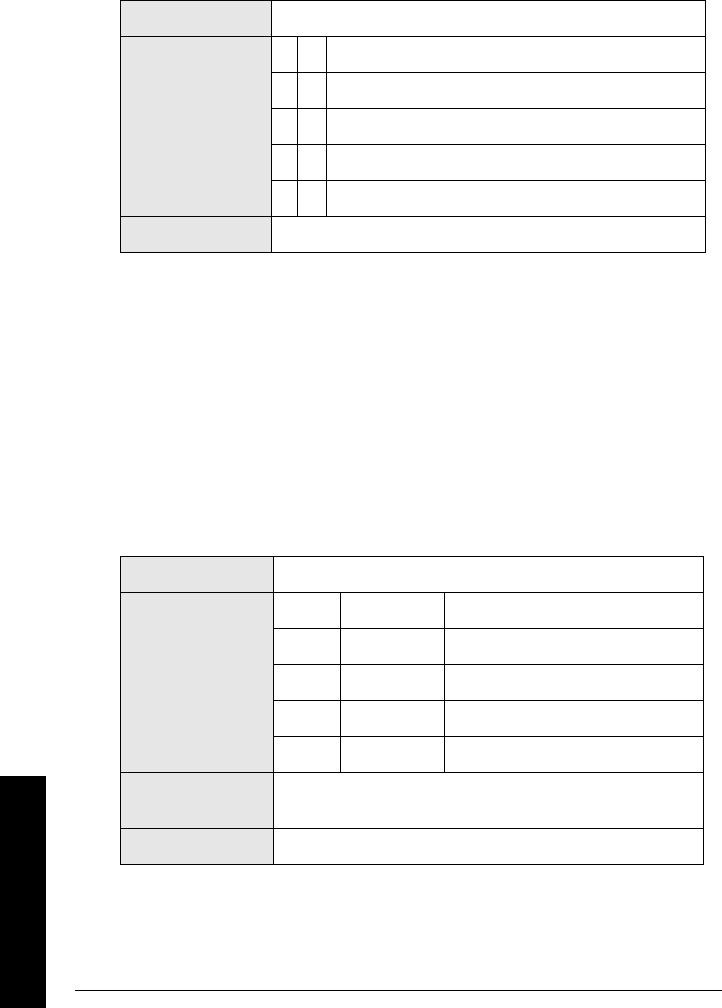
Page 146 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
mA Output (P200 to P219)
P200 mA Output Range
Determines the mA output range.
If either 1 or 2 is selected, the mA output is directly proportional to the mA Function. If
either 3 or 4 is selected, then the output is inversely proportional. After setting P200,
verify that P212 has a valid entry for mA Output Min Limit, as P212 is not changed
automatically by a change to P200.
P201 mA Output Function
Alters the mA output/measurement relationship.
Please note that parameter P201 values vary between the MultiRanger 100 and the
MultiRanger 200.
MultiRanger 100
Primary Index mA output
Values
0off
1 0 to 20 mA
2* 4 to 20 mA
3 20 to 0 mA
4 20 to 4 mA
Related • P911 mA Output Value
Primary Index mA output
Values
value mA function Operation (P001)
0OFF
1level level
2space space
3 distance distance
Related • P202 mA Output Allocation
•P911 mA Output Value
Altered By •P001 Operation
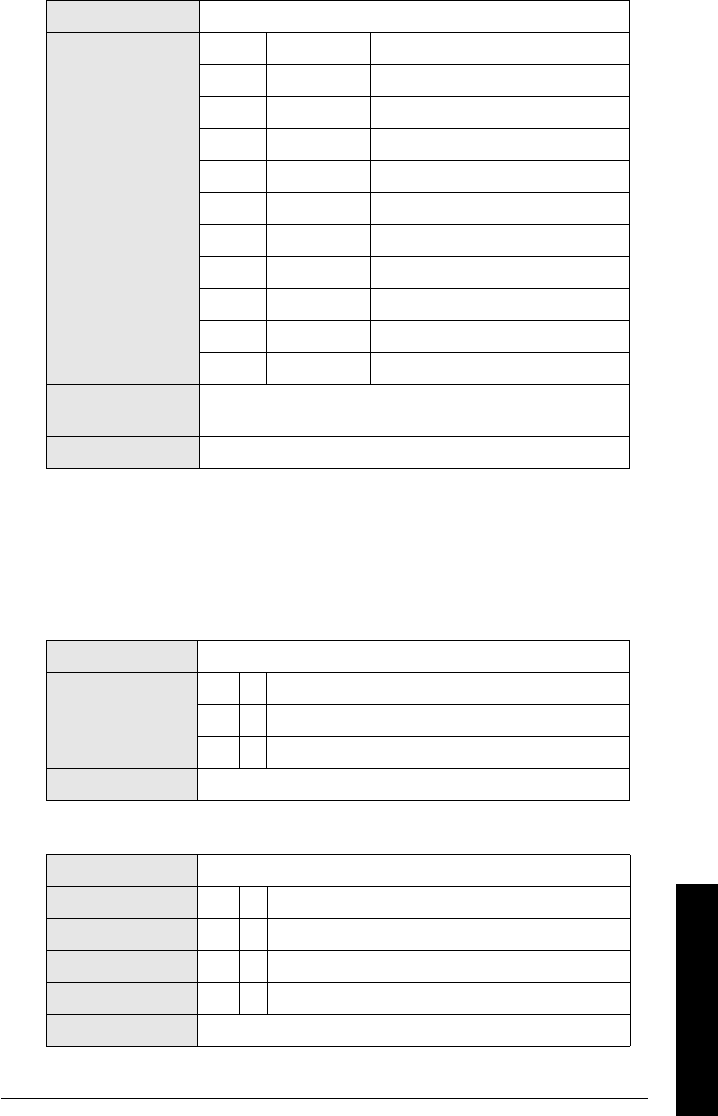
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 147
mmmmm
Parameters
MultiRanger 200
P202 mA Output Allocation
Sets the input source from which the mA output is calculated.
Please note that parameter P202 values vary between the MultiRanger 100 and the
MultiRanger 200.
MultiRanger 100
MultiRanger 200
Primary Index mA output
Values
value mA function Operation (P001)
0OFF
1 level level, differential, or average
2space space
3 distance distance
4 volume level or space
5flow OCM
6head
7 volume rate
8mA input
9 comms input
Related • P202 mA Output Allocation
•P911 mA Output Value
Altered By •P001 Operation
Primary Index mA output
Values
1*Point 1
2 Point 2
1:2 Average of readings from Point 1 and Point 2
Related • P201 mA Output Function
Primary Index mA output
Values 1*Point 1
2 Point 2
1:2 Average of readings from Point 1 and Point 2
3 Point 3
Related • P201 mA Output Function
Page 148 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Enter the Point Number the mA output is based on. This value depends on whether mA
function (P201) is set as transducer or mA input.
For a single point device, if P201 uses a transducer, parameter P202 can only be altered if
P001 (Operation) is set for DPD or DPA.
P202 can be set to a particular point or range of points. When set to a range of points, the
mA output will be the average of the readings from all in service transducers in the range.
Out of service transducers will be ignored.
If P202 mA Output Allocation End contains the value 0, then only 1 transducer has been
assigned to the mA output.
P203 mA Output Value / Transducer
Displays current mA output value for the Point Number.
This displays as an Auxiliary Reading when key is pressed in the RUN mode and
does not include adjustments made using Trim features (P214 / P215).
P203 holds the mA value associated with a transducer. This value is used for run mode
display of the mA output. When only one mA output is associated with a transducer, this
parameter holds the value of that mA output. When more than one transducer is
associated with a mA output (set via P202), P203 holds the mA output calculated from the
resulting average of the associated transducer readings. When more than one mA output
is associated with a transducer, P203 holds the value of the first mA output associated
with the transducer.
Primary Index Level
Values Range: 0.000 to 22.00 (view only)
Note: This parameter is applicable only if any mA output has the transducer
Point Number as its input source (see P201 and P202).
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 149
mmmmm
Parameters
Independent mA Setpoints (P210 and P211)
Use these features to reference the minimum and/or maximum mA output to any point in
the measurement range.
P210 0/4 mA Output Setpoint
Sets the process level corresponding to the 0 or 4mA value.
Enter the value (in applicable units or %) to correspond to 0 or 4 mA.
P211 20 mA Output Setpoint
Sets the process level that corresponds to the 20 mA value.
Enter the value (in applicable units or %) to correspond to 20 mA.
mA Output Limits (P212 and P213)
Use these features to adjust the minimum and/or maximum mA output values, which
should suit the input limit requirements of the external device.
P201—mA Function
Settings Action
Level, Space, or Distance Enter the material level in Units (P005) or percent of
Span (P007) as referenced to Empty (P006).
Volume [MR 200] Enter the volume in Max Volume (P051) units or as a per-
cent of Max Volume.
Flow [MR 200] Enter the flowrate in OCM Max Flow (P604) units or as a
percent of OCM Max Flow.
Head [MR 200] Enter the head in level units (P005) or percent of Max
Head (P603).
Volume Rate [MR 200] Enter the volume rate in volume/min. Ensure the % sym-
bol is displayed before attempting to enter a % value.
mA input or
Communications Input Not Applicable
Primary Index mA output
Values Range: -999 to 9999
Related • P211 20 mA Output Setpoint
Primary Index mA output
Values Range: -999 to 9999
Related • P210 0/4 mA Output Setpoint
Page 150 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P212 mA Output Min Limit
Sets the minimum mA output value (in mA) to be produced.
P213 mA Output Max Limit
Sets the maximum mA output value (in mA) to be produced.
mA Output Trim (P214 to P215)
This does not affect the P203 value shown, and is used when recalibration of an external
device is impractical.
To adjust the value so that the device correctly indicates 4.00 (when P214 is accessed) or
20.00 mA (when P215 is accessed):
1. Attach ammeter to MultiRanger 4 to 20 mA output.
2. Access P214, Index 1 (for mA output 1) or 2 (for mA output 2). Press CLEAR and
ENTER . The ammeter should show a value near 4 mA.
3. Enter the exact value displayed on the ammeter into P214 (Index 1 or 2).
4. The ammeter should then read exactly 4.00 mA.
5. Repeat steps 1 to 4 to set P215, using 20 mA as the desired value.
P214 4 mA Output Trim
Calibrates the 4 mA output.
Adjust this value so the device indicates 4.000 mA when P214 is accessed.
Primary Index mA output
Values
Range: 0.000 to 22.00
Preset: 3.8
Related • P200 mA Output Range
• P213 mA Output Max Limit
Primary Index mA output
Values
Range: 0.000 to 22.00
Preset: 20.2 mA
Related • P200 mA Output Range / P212 mA Output Min LImit
Primary Index mA output
Values Preset: 4.00
Related • P215 20 mA Output Trim
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 151
mmmmm
Parameters
P215 20 mA Output Trim
Calibrates the 20 mA output.
Adjust this value so the device indicates 20.00 mA when P215 is accessed.
mA Output Failsafe (P219) [MR 200]
Please note that this parameter applies to the MultiRanger 200 only.
P219 mA Output Failsafe [MR 200]
Use for failsafe operation, independent of the Failsafe Material Level (P071).
Selecting an independent mA Failsafe option:
1. Press MODE to display the Auxiliary Function symbol.
2. Press ARROWS to scroll access the failsafe options.
3. Press ENTER when the desired option displayed.
Or, to produce an mA output at a specific value, enter the value required. This is used only
if mA output is allocated to a transducer (P201 = 1 to 7).
mA Input (P250 to P260) [MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
Primary Index mA output
Values Preset: 20.00
Related • P214 4mA Output Trim
Primary Index mA output
Values
Range: 0.000 to 22.00
OFF * mA output responds to Failsafe Material Level (P071).
HOLd last known value is held until normal operation
resumes
LO produce the Empty mA output immediately
HI produce the Span mA output immediately
Related • P201 mA Output Function
Page 152 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P250 mA Input Range [MR 200]
Shows the mA input range of the connected mA device.
Ensure this range corresponds to the output range of the external device. All level
measurements will equate % of Span with the % of the mA range.
P251 0 or 4 mA Input Level [MR 200]
Shows the process level corresponding to the 0 or 4 mA value.
When using an external mA signal to determine level, the input range must be scaled to
give accurate results.
P252 20 mA Input Level [MR 200]
Shows the process level corresponding to the 20 mA value.
Input range is scaled for accuracy if an external mA signal calculates level.
Primary Index Global
Values
1 0 to 20 mA
2*4 to 20 mA
Primary Index Global
Values
Range: -999 to 9999%
Preset: 0%
Related • P006 Empty
• P007 Span
Primary Index Global
Values
Range: -999 to 9999%
Preset: 100%
Related • P006 Empty
• P007 Span
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 153
mmmmm
Parameters
P253 Input Filter Time Constant [MR 200]
Shows the time constant used in the mA input filter to dampen signal fluctuations.
This number in seconds is used in the damping calculations. Larger values damp more
than smaller values and 0 disables the signal filter.
P254 Scaled mA Input Value [MR 200]
Shows the resulting level value after scaling.
This parameter is calculated from the input mA signal.
P260 mA Raw Input [MR 200]
Shows the raw mA input supplied by the external device.
Discrete Input Functions (P270 to P275)
Discrete inputs can be used for the following:
• Passing other information to a remote system through communications
• Backup level override
Use the parameters listed above to have discrete inputs modify the unit’s operation.
Use the following parameters to configure the discrete input itself.
See also the
Pump Control
section on page 58 for a description of the MultiRanger’s
pump control algorithms, including how the discrete inputs alter its operation.
Primary Index Global
Values
Range: 0 to 9999
Preset: 1
Primary Index Global
Values
Range: -999 to 9999% (view only)
Preset: calculated from the input mA signal
Primary Index mA input
Values Range: 0.000 to 20.00 (view only)
Page 154 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P270 Discrete Input Function
Sets how discrete signals are interpreted by the MultiRanger.
P275 Scaled Discrete Input Value
Shows the current value of the discrete input after any scaling is applied.
Readings are updated continuously even in PROGRAM mode. The value signals a level
override event.
Standard Data Logging (P300 to P321)
All records can be reset by pressing the CLEAR keys.
Record Temperatures (P300 to P303)
These features display the high and/or low temperatures in °C. When a parameter
relating to a TS-3 Temperature Sensor is accessed, the Point Type display changes to the
TS-3 symbol .
If the unit is powered up without a temperature sensor connected, the value –50°C is
displayed. This information can help trace problems with both built in and external
temperature sensors.
Primary Index Discrete input
Values
0Forced OFF
1Forced ON
2 * Normally Open – 0 (DI open), 1 (DI closed)
3 Normally Closed – 0 (DI closed), 1 (DI open)
Related • Pump Control section
Primary Index Discrete input
Values
Display: view only
Values: dependent on the function of the discrete input
Range of Values Function (P270)
1Forced ON
0Forced OFF
0 (DI open), 1 (DI closed) Normally Open
0 (DI closed), 1 (DI open) Normally Closed
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 155
mmmmm
Parameters
P300 Temperature, Transducer Maximum
Shows the highest temperature encountered, as measured by the temperature sensor in
the transducer (if applicable).
Press CLEAR keys to reset the log after a short circuit on the transducer wiring.
P301 Temperature, Transducer Minimum
View the lowest temperature encountered, as measured by the temperature sensor in
the transducer (if applicable).
Press CLEAR keys to reset the log after an open circuit on the transducer wiring.
P302 Temperature, Sensor Maximum
View the highest temperature encountered, as measured by the TS-3 Temperature
Sensor (if applicable).
Press CLEAR keys to reset the log after a short circuit on the transducer wiring.
Primary Index Transducer
Values
Range: - 50 to 150°C (view only)
Preset: - 50°C
Related • P301 Temperature, Transducer Min
Primary Index Transducer
Values
Range: - 50 to 150°C (view only)
Preset: 150°C
Related • P300 Temperature, Transducer Max
Primary Index Global
Values
Range: - 50 to 150°C (view only)
Preset: - 50°C
Related • P303 Temperature, Sensor Min
Page 156 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P303 Temperature, Sensor Minimum
Shows the lowest temperature encountered, as measured by the TS-3 Temperature
Sensor (if applicable).
Press CLEAR keys to reset the log after an open circuit on the transducer wiring.
Record Readings (P304 and P305)
This identifies the occurrence of the record high and low level readings. Press CLEAR
keys to reset these values once the installation is working correctly.
P304 Reading Max
Shows the highest Reading calculated (in normal Reading units or %).
P305 Reading Min
Shows the lowest Reading calculated (in normal Reading units or %).
Pump Records (P309 to P312)
These features to identify pump usage and if the associated Relay Function (P111) is set
for any pump control feature. The value is that of the pump connected to the associated
terminals.
Enter a value to set the current record to that value. Use this if a pump is added with a
known number of hours logged, or the value can be reset to zero 0 after maintenance.
Primary Index Global
Values
Range: - 50 to 150°C (view only)
Preset: 150°C
Related • P302 Temperature, Sensor Max
Primary Index Level
Values Range: -999 to 9999 (view only)
Related • P305 Reading Min
Primary Index Level
Values Range: -999 to 9999 (view only)
Related • P304 Reading Max
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 157
mmmmm
Parameters
P309 Pump RUN Time
Displays the amount of time in minutes since a relay was last activated.
Parameter measures the length of time since a relay was asserted, most often to
determine how long a pump has been running. Alternatively, it can monitor a relay to
show how long it has been in a state of alarm. It resets every time the relay is activated.
P310 Pump Hours
View or reset the accumulate ON time for the displayed Relay Number.
Value is displayed with a floating decimal point (the more figures displayed before the
decimal, the fewer displayed after). It is the value displayed when key is pressed in
the RUN mode.
P311 Pump Starts
View or reset the accumulated number of times the Relay Number has been ON.
This value is displayed when key is pressed and held for five seconds in RUN mode.
P312 Pump Run Ons [MR 200]
View or reset the accumulated number of times the displayed Relay Number has been
held ON via Run On Interval (P130).
Please note that this parameter applies to the MultiRanger 200 only.
Primary Index Relay
Values Range: 0 to 9999 minutes (view only)
Related • Relay Function (P111) set for any pump control feature
Primary Index Relay
Values Range: 0.000 to 9999
Related • Relay Function (P111) set for any pump control feature
Primary Index Relay
Values Range: 0 to 9999
Related • Relay Function (P111) set for any pump control feature
Primary Index Relay
Values Range: 0 to 9999
Related • Relay Function (P111) set for any pump control feature
Page 158 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Flow Records (P320 and P321) [MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
These features are enabled if Operation is set for OCM (P001 = 6), or an OCM device is
defined (P600 ≠ 0). Use them to identify the occurrence of the record high and low flow
rates as displayed in OCM Max Flow (P604) units, or as a percent of OCM Max Flow.
Press CLEAR keys to reset values once the installation is working correctly.
P320 Flow Max [MR 200]
View the highest flow rate calculated (in units or %).
P321 Flow Min [MR 200]
View the lowest flow rate calculated (in units or %).
LCD Totalizer (P322 and P323) [MR 200]
Please note that these parameters apply to the MultiRanger 200 only.
Use these features to view, reset, or preset the eight-digit display totalizer when
Operation is set for OCM or Pumped Volume (P001 = 6 or 7). The eight-digit totalizer is
divided into two groups of four digits. The four least significant totalizer digits are stored
in P322, and the four most significant digits are stored in P323. Adjust these values
separately to set a new total.
Example
P323 = 0017
P322 = 6.294
Totalizer Display = 00176.294
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999 (view only)
Related • P604 Maximum Flow
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999 (view only)
Related • P604 Maximum Flow
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 159
mmmmm
Parameters
Totalizer units are dependent upon programming. Enter zero 0 (if required) to reset the
totalizer to zero. Alternatively, enter any other (applicable) value, to preset the totalizer to
the necessary value.
P322 LCD Total Low [MR 200]
View and/or alter the four least significant digits of the totalizer value.
P323 LCD Total High [MR 200]
View and/or alter the four most significant digits of the totalizer value.
Profile Records (P330 to P337)
These features can record up to ten Echo profiles, initiated manually (P330), or
automatically (P331 et al). If ten Profiles are already saved, addresses 1 through 10 are
filled, the oldest automatically initiated record is overwritten. Manually initiated records
are not automatically overwritten. All records are automatically deleted in the event of a
power interruption.
When a record is displayed, results are based on current programming (which may have
been altered since the record was saved). This permits the effect on the echo profile to be
observed when changing an echo parameter.
Note: A second point is available only if the Dual Point Feature is enabled.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 9999
Related
• P630 LCD Totalized Multiplier
• P633 LCD Totalized Decimal Position
• P737 Primary Reading
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 9999
Related
• P630 LCD Totalized Multiplier
• P633 LCD Totalized Decimal Position
• P737 Primary Reading
WARNING:
These parameters are for authorized service personnel or technicians familiar
with Siemens Milltronics echo processing techniques.
Page 160 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P330 Profile Record
Records profiles for later viewing.
In addition to being a profile records library, this provides two functions:
• manually records and saves echo profiles
• displays an echo profile, recorded manually or automatically
To select a record address
1. Enter PROGRAM mode and press DISPLAY twice to highlight the index field.
The field shows two underscores _ _.
2. Type the index number. The profile record information is shown.
3. Use ARROWS to scroll through the records.
To manually record a profile
Press TRANSDUCER to fire the transducer and record the echo profile into the
internal buffer for display.
MultiRanger 100 and MultiRanger 200 Features
To save a manual record
Press ENTER to copy the echo profile record in the buffer and save it in the selected
address in the record library. The parameter value field displays the new record
information.
To display a record
Press key to enter display auxiliary mode and then:
• Press TRANSDUCER to copy the current echo profile into the buffer for display
on Dolphin Plus
To delete a record
Press CLEAR and then ENTER to delete the echo profile record in the selected
address. The value returns to - - - -.
Primary Index Echo profile
Values
Code Description
---- no record
A1 automatically recorded profile from Transducer One
A2 automatically recorded profile from Transducer Two
U1 manually recorded profile from Transducer One
U2 manually recorded profile from Transducer Two
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 161
mmmmm
Parameters
P331 Auto Record Enable
Use to enable/disable the Auto Profile Record function.
P332 Auto Record Transducer
Specifies the Transducer Point Number for which Auto Profile Records are saved.
Please note that Differential and Average operation is a MultiRanger 200 feature.
MultiRanger 200
This feature is preset to Point Number 1. (Alteration is only required if differential or
average Operation [P001 = 4 or 5] is selected.)
P333 Auto Record Interval
Enter the time to elapse after an Auto Profile Record is saved before another Auto Profile
Record can be saved (subject to all other restrictions).
Primary Index Global
Values
Range: 0 to 1
0* Off
1On
Primary Index Global
Values
Range: 0 to 2
0 Any transducer
1* Transducer One
2Transducer Two
Altered By • P001 Operation = 4 or 5
Primary Index Global
Values
Range: 0.0 to 166.6 (minutes)
Preset: 120
Page 162 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Auto Record ON and OFF Setpoints (P334 to P337)
Use Auto Record ON Setpoint (P334) and Auto Record OFF Setpoint (P335) to define the
boundaries within which the level must be, for the resultant Echo Profile to be considered
for an Auto Profile Record.
If ---- is displayed for either P334 or P335, Auto Profile Records are saved regardless of
current level (subject to all other restrictions).
Enter the level value in Units (P005) or percent of Span (P007) as referenced to
Empty (P006).
P334 Auto Record ON Setpoint
Enter the critical level which, in conjunction with Auto Record OFF Setpoint, defines the
boundaries for Auto Profile Records to be saved.
P335 Auto Record OFF Setpoint
Enter the critical level which, in conjunction with Auto Record ON Setpoint, defines the
boundaries for Auto Profile Records to be saved.
Primary Index Global
Values Range: -999 to 9999
Related
• P335 Auto Record OFF Setpoint
• P336 Auto Record Filling / Emptying
• P337 Auto Record LOE Time
Primary Index Global
Values Range: -999 to 9999
Related
• P334 Auto Record ON Setpoint
• P336 Auto Record Filling / Emptying
• P337 Auto Record LOE Time
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 163
mmmmm
Parameters
P336 Auto Record Filling / Emptying
Use this feature to restrict Auto Profile Records from being saved unless the level is
rising, falling or either.
If the level changes at a rate in excess of the corresponding Filling / Emptying Indicator
(P702 / P703) values, the Echo Profile is saved subject to this and other Auto Profile
Record restrictions.
P337 Auto Record LOE Time
Limits Auto Profile Records from being saved unless extended LOE occurs.
If the LOE condition exceeds the period entered, the Echo Profile is saved. When set for 0
LOE is not required for an Auto Profile Record to be saved.
Primary Index Global
Values
0 * Auto Profile Record on filling or emptying
1 Auto Profile Record on filling only
2 Auto Profile Record on emptying only
Related
• P334 Auto Record ON Setpoint
• P335 Auto Record OFF Setpoint
• P337 Auto Record LOE Time
• P702 Filling Indicator
• P703 Emptying Indicator
Primary Index Global
Values
Range: 0.0 to 9999 (seconds)
Preset: 0.0
Related
• P334 Auto Record ON Setpoint
• P335 Auto Record OFF Setpoint
• P336 Auto Record Filling / Emptying
Page 164 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Installation Records (P340 to P342)
P340 Date of Manufacture
View the date of manufacture of this MultiRanger unit.
P341 RUN Time
View the number of days this MultiRanger has been in operation.
The RUN Time value is updated once a day, and cannot be reset. However, in the event of
a power interruption, the counter won’t advance. Therefore, a unit that is powered down
on a regular basis will not have an accurate value.
P342 Start Ups
The number of times power has been applied since the Date Of Manufacture.
Primary Index Global
Values Format: YY:MM:DD (view only)
Related • P340 Date of Manufacture
• P342 Start Ups
Primary Index Global
Values Range: 0.000 to 9999 (view only)
Related • P340 Date of Manufacture
• P342 Start Ups
Primary Index Global
Values Range: 1 to 9999 (view only)
Related • P340 Date of Manufacture
• P342 Run Time
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 165
mmmmm
Parameters
Open Channel Monitoring (P600 to P621) [MR 200]
Open Channel Monitoring (OCM) operation is a MultiRanger 200 feature only.
If the MultiRanger is used to monitor open channel flow, alter the following parameters
as required and run a calibration as described in P621.
The MultiRanger measures head as referenced to Empty (P006) or OCM Zero Offset
(P605), when Operation is set for OCM (P001 = 6). Flowrate, based on head (at the point of
measure specified by the Primary Measuring Device fabricator) is also calculated and
displayed on the LCD.
Some Primary Measuring Devices require a longer Range Extension (P801) to avoid
entering the LOE failure state if the water level falls below the zero point of the Primary
Measuring Device. See
P801 Range Extension
on page 200 for more information.
P600 Primary Measuring Device [MR 200]
The type of primary measuring device (PMD) used.
Note: See
Open Channel Monitoring
(OCM) on page 73 for application examples
involving common weirs and flumes.
Primary Index
Single Point Model Dual
Global Transducer
Values
0 * off (no calculation)
1 Exponential (see P601)
2 Palmer-Bowlus Flume (see P602)
3 H-Flume (see P602)
4 Universal Linear Flow Calculation (see P610, P611)
5 Universal Curved Flow Calculation (see P610, P611)
6 BS-3680/ISO 4359 Rectangular Flume (see P602)
7 BS-3680/ISO 1438/1 Thin Plate V-Notch Weir (see P602)
Alters
• P601 Flow Exponent
• P602 Primary Measuring Device Dimensions
• P608 Flowrate Units
Altered By •P001 Operation
Related
• P603 Maximum Head
• P604 Maximum Flow
• P605 Zero Head
• P610 Head Breakpoints
• P611 Breakpoint
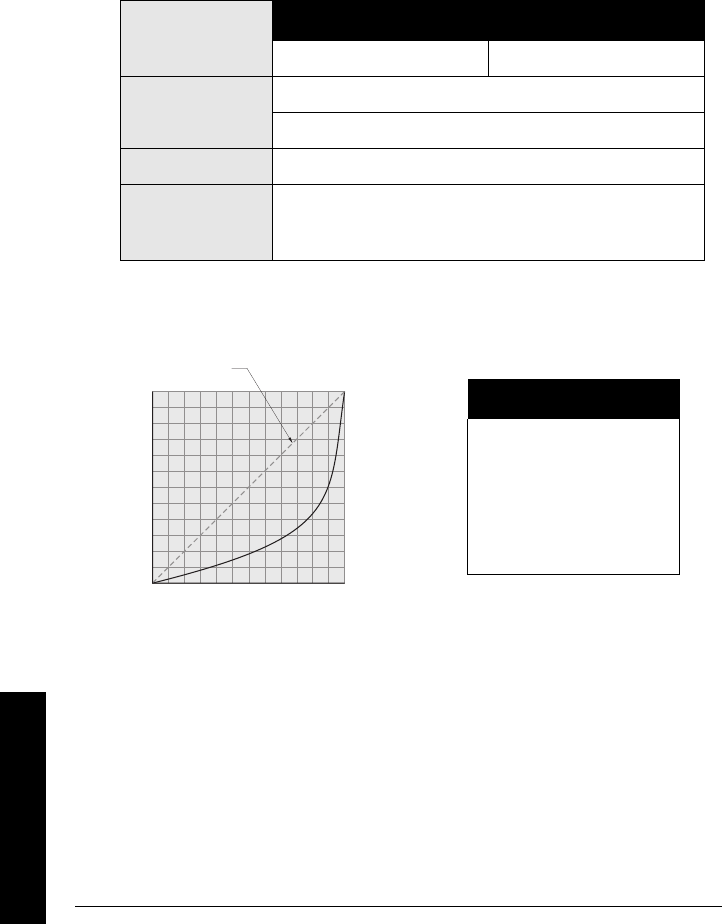
Page 166 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
The MultiRanger is pre-programmed for common PMD flow calculations. If your PMD is
not listed, select the appropriate Universal Flow Calculation.
Associated parameters Max Head (P603), Max Flow (P604), and Min Head (P605) may be
scroll accessed. If Operation is not set for OCM (P001 = 6), this value is preset to 0. If
Operation is set for OCM, it is preset to 1.
P601 Flow Exponent [MR 200]
The Exponent for the flow calculation formula.
Use this parameter if the Primary Measuring Device (P600) is set to 1 (exponential). It
creates an exponential curve with end points set by Max Head (P603) and Zero Head
(P604) and with the curve based on the specified exponent.
Use the exponent specified by the PMD manufacturer, if available, or the sample value
given below.
Primary Index
Single Point Model Dual
Global Transducer
Values
Range: -999 to 9999
Preset: 1.55
Altered By • P600 Primary Measuring Device
Related
• P603 Maximum Head
• P604 Maximum Flow
• P605 Zero Head
Max. Flow
(P604)
Zero Flow
Zero Head
Max. Head
(P603)
If P601 = 1, the flow characteristic is a straight line
A Word on Exponents
The exponential equation is
Q = KHP601
Where:
Q = flow
K = internal constant
H = head
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 167
mmmmm
Parameters
Example Exponents
P602 Primary Measuring Device Dimensions [MR 200]
The dimensions of the Primary Measuring Device (PMD).
Use this parameter if the Primary Measuring Device is directly supported (P600=2,3,6,7).
The dimensions required for each PMD vary.
For more information on PMD, see page 73.
PMD Type Exponent (sample only)
Suppressed Rectangular Weir 1.50
Cipolletti Weir 1.50
Venturi Flume 1.50
Parshall Flume 1.22 to 1.607
Leopold Lagco 1.547
V-Notch Weir 2.50
Primary Index
Single Point Model Dual Point Model
Global Transducer and Dimension
Secondary Index Dimension
Index Values for
Supported PMDs
ISO 1438/1
1Notch Angle
2 Discharge Coefficient
ISO 4359
1Approach width
2Throat width
3Hump Height
4 Throat Length
5 Velocity coefficient
6 Discharge coefficient
Palmer Bowlus
1Flume width
H Flume
1 Flume height
Altered By • P600 Primary Measuring Device
Page 168 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P603 Maximum Head [MR 200]
The level value associated with Maximum Flow, in Units (P005).
This represents the highest head level supported by the PMD and works in conjunction
with Maximum Flow (P604) to define the highest point in the exponential curve. Use it
when the Primary Measuring Device (PMD) requires a maximum head and flow
reference point. This would include Exponential, Palmer Bowlus Flume, H-Flume, and
Universal breakpoints.
P604 Maximum Flow [MR 200]
The maximum flowrate associated with Maximum Head (P603).
This represents the flow at the highest head level supported by the PMD. and works in
conjunction with Maximum Head (P603) to define the highest point in the exponential
curve. Use it when the Primary Measuring Device (PMD) requires a maximum head and
flow reference point. This would include Exponential, Palmer Bowlus Flume, H-Flume,
and Universal breakpoints.
Also use this parameter with Time Units (P606) to define the flowrate units. The limitation
of four digits is for the LCD only, and the flowrate value is available with greater precision
through communications.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: -999 to 9999
Preset: Span (P007) value
Altered By • P005 Units
• P600 Primary Measuring Device
Related • P604 Maximum Flow
• P605 Zero Head
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: -999 to 9999
Preset: 1000
Altered By • P600 Primary Measuring Device
Related
• P603 Maximum Head
• P606 Time Units
• P925 Flow Measurement
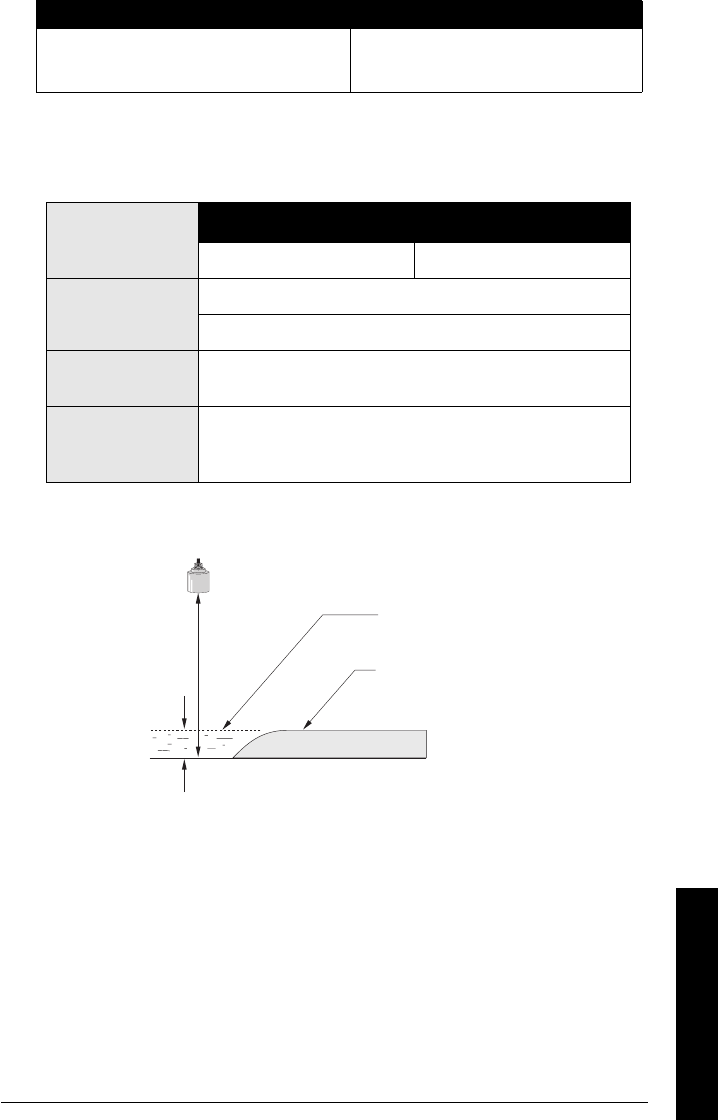
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 169
mmmmm
Parameters
Example
P605 Zero Head [MR 200]
The distance above Empty (P006) in Units (P005) representing zero head (and zero flow).
This feature can be used for most weirs and some flumes (e.g. Palmer Bowlus) where the
zero reference is at a higher elevation than the channel bottom.
Conditions Enter
• Flowrate display: millions of gallons/day,
• Maximum flowrate is 376,500,000 gallons/
day
•376.5 for Maximum Flow (P604)
•and 4 for Time Units (P606).
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: -999 to 9999
Preset: 0.000
Altered By • P005 Units
• P007 Span
Related
• P006 Empty
• P801 Range Extension
• P926 Head Measurement
Zero Head (P605)
Empty (P006)
Transducer
Material level at zero flow
PMD base
Page 170 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P606 Time Units [MR 200]
Determines the units used to display current flow and logging flow values.
This is used when the Primary Measuring Device is Ratiometric (P608=0).
Example
P607 Flowrate Decimal [MR 200]
The maximum number of decimal places to be displayed.
In RUN mode, the number of decimal places displayed is automatically adjusted (if
necessary) to prevent the number of Flowrate digits from exceeding display capabilities.
The maximum number of head decimal places is controlled by Decimal Position (P060).
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
1seconds
2minutes
3hours
4* days
Alters •
Altered By • P608 Flowrate Units
Conditions Enter
• Flowrate display: millions of gallons/day,
• Maximum flowrate is 376,500,000 gallons/day
•376.5 for Maximum Flow (P604)
•and 4 for Time Units (P606).
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0 no digits after the decimal point
1 1 digit after the decimal point
2 2 digits after the decimal point
3 3 digits after the decimal point
Altered By • P060 Decimal Position
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 171
mmmmm
Parameters
P608 Flowrate Units [MR 200]
The volume units used to display total flow.
This parameter is enabled only if the primary measuring device (PMD) supports absolute
calculations (P600=6,7). For absolute PMDs (P600=6,7) volume units can be specified
using this parameter. If needed, absolute PMDs can still use ratiometric (P608=0) to
accommodate other units.
Note: Set this parameter only when using BS-3680/ISO 4359 Rectangular Flume
or BS-3680/ISO 1438/1 Thin Plate V-Notch Weir (P600 = 6 or 7). Use the default
value of 0 for P608 when P600 = 1 to 5.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Ratiometric (P600=all)
0 * Ratiometric calculation (units defined by P604)
Absolute (P600=6,7 only)
1 litres / second
2cubic metres / hour
3cubic metres / day
4 cubic feet / second
5 gallons / minute – Imperial
6 million gallons / day – Imperial
Values
7 gallons / minute – U.S.
8 million gallons / day – U.S.
Alters • P606 Time Units
Altered By • P600 Primary Measuring Device
Related • P608 Flowrate Units
Page 172 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P610 Head Breakpoints [MR 200]
The head breakpoints for which flowrate is known. See “Accessing a Secondary Index”
on page 117 for more information..
The values in the Span for which flowrates are known. See
Universal Calculation Support
on page 83 for how to specify universal flows.
P611 Breakpoint Flowrates [MR 200]
The flowrate corresponding to each Head Breakpoint entered.
These are the flowrates for the related breakpoints. See
Universal Calculation Support
on
page 83 for how to specify universal flows.
Head vs. Flowrate (P610 and P611)
Primary Index
Single Point Model Dual Point Model
Global Transducer
Secondary Index Breakpoint
Values Range: 0.000 to 9999
Related • P611 Breakpoint Flowrates
Primary Index
Single Point Model Dual Point Model
Global Transducer
Secondary Index Breakpoint
Values Range: 0.000 to 9999
Related • P610 Head Breakpoints
Max. Flow
Zero Flow
Zero Head
Max. Head
Head Breakpoints
Flow Breakpoints
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 173
mmmmm
Parameters
P620 Low Flow Cutoff [MR 200]
Eliminates totalizer activity for flows at or below the cutoff value.
Use this to enter the minimum head in units (P005) or as a percent of span.
P621 Auto Zero Head [MR 200]
Calibrates Zero Head (P605) based on actual head measurements.
Use this parameter when the reported head is consistently high or low by a fixed amount.
Before using this feature, verify the following parameters are correct:
•Empty (P006)
• Temperature (P664)
• Offset Reading (P062=0)
• Zero Head Offset (P605)
Procedure, with “head” steady
1. Press TRANSDUCER to display the calculated head.
2. Repeat step ONE at least FIVE times to verify repeatability.
3. Measure the actual head (with a tape measure or solid rule).
4. Enter the actual head value.
The deviation between the entered Empty (P006) value and the calibrated Empty value is
stored in Offset Correction (P652). Alternatively, the Empty parameter (P006) can be
corrected directly.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.000 to 9999
Preset = 5.000 %, or equivalent units
Altered By • P005 Units
Related • P007 Span
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999
Related
• P006 Empty
• P062 Offset Reading
• P605 Zero Head
• P664 Temperature
Page 174 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Pumped Volume Totalizer (P622) [MR 200]
The Pumped Volume Totalizer is a MultiRanger 200 feature only.
If the eight-digit totalizer display or a remote totalizer contact closure are desired, alter
the following parameters.
P622 Inflow / Discharge Adjust [MR 200]
The method used to calculate the volume pumped, for pumped total Operation (P001 = 7).
* or discharge
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
1 = inflow * / pump cycle
When the pump is off, the MultiRanger estimates the volume of inflow
by recording the rate at which the liquid level changes. When the
pump is operating, the estimated inflow volume is added to the
pumped volume total. When the pump stops, the pumped volume of
the previous pump cycle is added to the total volume pumped in the
totalizer.
2 = inflow * ignored
Inflow is assumed to be 0 while pumps are running.
3 = inflow * / rate (preset)
Volume pumped is adjusted for inflow. Inflow rate is estimated by
assuming that the rate calculated (P708) just prior to the start of the
pump cycle remained constant during the pump cycle. Inflow rate is
averaged using rate filter (P704), rate update time (P705) and rate
update distance (P706) to control how the average rate is calculated.
Related
•P001 Operation
• P704 Rate Filter
• P705 Rate Update Time
• P706 Rate Update Distance
• P708 Volume Rate Display
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 175
mmmmm
Parameters
Totalizer (P630 to P645) [MR 200]
The Totalizer features apply to MultiRanger 200 only.
P630 LCD Totalized Multiplier [MR 200]
Use this feature if the LCD Total increments by too large (or too small) an amount.
Enter the factor (powers of 10 only) by which actual volume is divided, prior to display on
the LCD. Use a value such that the eight-digit totalizer doesn’t roll over between readings.
Example:
For an LCD Total display in 1000s of volume units, enter 3.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
-3 .001
-2 .01
-1 .1
0*1
110
2100
3 1000
Values
4 10,000
5 100,000
6 1,000,000
7 10,000,000
Related • LCD Totalizer (P322 and P323)
Page 176 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P633 LCD Totalized Decimal Position [MR 200]
Enter the maximum number of decimal places to be displayed.
In RUN mode, the number of decimal places displayed is not automatically adjusted.
When the LCD Total value is so large as to exceed display capabilities, the total rolls over
to 0 and continues incrementing.
P640 Remote Totalized Multiplier [MR 200]
Use this feature if the remote totalizer (device connected to the relay set for totalizer
operation [relay Function, P111 = 40]), updates too slowly or rapidly.
Parameter is relevant only if Operation is set to OCM or Pumped Volume (P001 = 6 or 7).
The relays on the MultiRanger have a maximum frequency of 2.5 Hz.
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
0 no digits after the decimal point
1 1 digit after the decimal point
2*2 digits after the decimal point
3 3 digits after the decimal point
Related • LCD Totalizer (P322 and P323)
Note: Set the decimal position during initial commissioning of the MultiRanger
200. If the position is changed later, the totalizer data in P322 and P323 will be
incorrect and must be reset according to the new decimal value.
Primary Index Single Point Model Dual Point Model
Global Transducer
Values
-3 .001
-2 .01
-1 .1
0*1
Values
110
2100
3 1000
4 10,000
5 100,000
6 1,000,000
7 10,000,000
Related
•P001 Operation
• P111 Relay Control Function
• P114 Relay Duration Setpoint
• P115 Relay Interval Setpoint
• P645 Relay Duration
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 177
mmmmm
Parameters
Enter the factor (powers of 10 only) by which actual volume is divided, prior to Remote
Totalizer count increment.
Example:
For a Remote Totalizer update by 1000s of volume units, enter 3.
P641 Flow Sampler Mantissa [MR 200]
Use this feature in conjunction with Flow Sampler Exponent (P642) to establish the
number of flow units required to increment the Flow Sampler (device connected to the
MultiRanger relay set for the flow sampler operation Relay Function, P111 = 41).
This parameter is relevant only if Operation is set to OCM (P001 = 6).
Enter the mantissa (Y) for the exponent (Z) in the formula:
Flow Sampler Increment = Y x 10Z Flow units.
Example: To count once every 4310 (4.31 x 103) flow units:
• set P641 to 4.31 and P642 to 3
P642 Flow Sampler Exponent [MR 200]
Use this feature in conjunction with Flow Sampler Mantissa (P641) to establish the
number of flow units required to increment the Flow Sampler (device connected to the
MultiRanger relay set for the flow sampler operation Relay Function, P111 = 41).
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.001 to 9999
Preset = 1.000
Related
•P001 Operation
• P111 Relay Control Function
• OCM (P600 to P621)
• P642 Flow Sampler Exponent
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: -3 to +7 (integers only)
Preset = 0
Related
•P001 Operation
• P111 Relay Control Function
• OCM (P600 to P621)
• P641 Flow Sampler Mantissa
Page 178 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
This parameter is relevant only if Operation is set to OCM (P001 = 6).
Enter the exponent (Z) for the mantissa (Y) in the formula:
Flow Sampler Increment = Y x 10Z Flow units.
P645 Relay Duration [MR 200]
Use this feature (if desired) to adjust the minimum contact closure duration of a relay set
as a totalizer, flow sampler, time (control), or aeration (P111 = 40, 41, 60 or 62)
Enter minimum contact closure duration (in seconds) required by the device connected.
For the flow sampler function this value is used for both the ON time of the relay and the
OFF time between contacts.
Range Calibration (P650 to P654)
There are two types of calibration possible:
Offset: Adjusts the measurements by a fixed amount.
Sound Velocity: Adjusts speed of sound and changes the measurement calculations.
Do Offset calibration at any steady level unless a Sound Velocity calibration is also done.
If both calibrations are done then do Offset at a known high level and Sound Velocity at a
known low level.
Primary Index Global
Values
Range: 0.1 to 1024
Preset = 0.2 (sec)
Related • P111 Relay Control Function
P645 OFF timeP645 on time
relay contact closed
relay contact open
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 179
mmmmm
Parameters
P650 Offset Calibration
Calibrates Empty (P006) if the reported level is consistently high or low by a fixed amount.
Before using this feature, verify the following parameters are correct:
•Empty (P006)
• Temperature (P664)
• Offset Reading (P062)
• Zero Head Offset (P605), if using OCM
Offset Calibration
Begin with a steady level.
1. Press TRANSDUCER to display the calculated reading.
2. Repeat Step One at least five times to verify repeatability.
3. Measure the actual reading (use tape measure).
4. Enter the actual value.
The deviation between the entered Empty (P006) value and the calibrated Empty value is
stored in Offset Correction (P652).
P651 Sound Velocity Calibration
Changes the speed of sound constant.
Condition for use of this feature
• The acoustic beam atmosphere is other than air
• The acoustic beam atmosphere temperature is unknown
• The Reading accuracy is acceptable at higher material levels only
For best results, calibrate with the level at a known value near empty.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999
Related
• P006 Empty
• P062 Offset Reading
• P605 Zero Head
• P652 Offset Correction
• P664 Temperature
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999
Related • P653 Velocity
• P654 Velocity at 20°C
Page 180 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Using Sound Velocity Calibration
Ensure a steady level at some low value (P653 and P654 adjusted accordingly)
1. Allow sufficient time for the vapor concentration to stabilize.
2. Press TRANSDUCER to display the calculated reading.
3. Repeat Step Two at least five times to verify repeatability.
4. Measure the actual reading (e.g. with a tape measure).
5. Enter the actual value.
Repeat this procedure if the atmosphere type, concentration, or temperature conditions
are different from when the last sound velocity calibration was performed.
P652 Offset Correction
The value altered when an Offset Calibration is performed.
Alternatively, if the amount of Offset Correction required is known, enter the amount to be
added to the Reading before display.
P653 Velocity
The value adjusted based on the Sound Velocity at 20 °C (P654) vs. Temperature (P664)
characteristics of air.
Alternatively, enter the current sound velocity (if known), or perform a Sound Velocity
Calibration (P651). The units used are m/s if P005 = 1, 2, or 3 (ft/s if P005 = 4 or 5).
Note: In gasses other than air, the temperature variation may not correspond
with the speed of sound variation. Turn off temperature sensor and use a fixed
temperature.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 999.0
Related • P650 Offset Calibration
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 50.3 to 20011.9 m/s (165 to 6601 ft/s)
Related • P651 Sound Velocity Calibration
• P654 Velocity at 20°C
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 181
mmmmm
Parameters
P654 Velocity at 20°C
This value is used to automatically calculate Sound Velocity (P653).
After performing a Sound Velocity Calibration, check this value to verify the acoustic
beam atmosphere is air (344.1 m/s or 1129 ft/s).
Alternatively, if the acoustic beam atmosphere sound velocity at 20°C (68 °F) is known,
and the sound velocity vs. temperature characteristics are similar to that of air, enter the
sound velocity.
The units used are m/s if P005 = 1, 2, or 3 (or ft/s if P005 = 4 or 5).
Temperature Compensation (P660 to P664)
P660 Temp Source
Source of the temperature reading used to adjust the speed of sound.
The MultiRanger uses the TS-3 temperature sensor assigned to the transducer. If one is
not connected, the ultrasonic/temperature transducer is used. If the transducer does not
have an internal temperature sensor, the Temp Fixed (P661) value is used.
If the acoustic beam atmosphere temperature varies with distance from the transducer,
connect a TS-3 Temperature Sensor and ultrasonic / temperature transducers, and select
average.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 50.0 to 2000.0 m/s (164 to 6562 ft/s)
Related
• P005 Units
• P651 Sound Velocity Calibration
• P653 Velocity
Primary Index Transducer
Values
1*AUTO
2Temp Fixed
3 Ultrasonic/Temperature Transducer
4 TS-3 Temperature Sensor
5 Average (TS-3 and transducer)
Alters • P664 Temperature
Related
• P651 Sound Velocity
• P653 Velocity
• P654 Velocity at 20°C
• P661 Temp Fixed
Page 182 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
In gasses other than air, the temperature variation may not correspond with the speed of
sound variation. In these cases turn off the temperature sensor and use a fixed
temperature.
P661 Temp Fixed
Use this feature if a temperature sensing device is not used.
Enter the temperature (in °C) of the atmosphere within the transducer acoustic beam. If
the temperature varies with distance from the transducer, enter the average temperature.
P663 Temperature Transducer Allocation
This feature may only be used for differential or average Operation (P001 = 4 or 5).
As preset, the temperature measurements of Ultrasonic / Temperature Transducer One
and Two are allocated to Points 1 and 2 respectively.
Use this feature if the temperature measurement from both transducers should be
identical, but one is located close to a radiant heat source. Allocate the temperature
measurement of the other transducer to both transducer Point Numbers.
Enter the number of the Transducer whose temperature measurement will be used for
the distance calculation of the Point Number displayed. When both transducers are
allocated to a Point Number, the temperature measurements from each are averaged.
Primary Index Transducer
Values Range: -199 to 199 (preset = 20 °C)
Related
• P651 Sound Velocity Calibration
• P653 Velocity
• P654 Velocity at 20°C
• P660 Temp Source
Primary Index Transducer
Values
1*Transducer One
2Transducer Two
1:2 Transducer One and Two average [MR200]
Related
• P651 Sound Velocity Calibration
• P653 Velocity
• P654 Velocity at 20°C
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 183
mmmmm
Parameters
P664 Temperature
View the transducer temperature in °C.
Value is displayed when is pressed in RUN mode (see
Readings in Run Mode
on
page 23).
If Temp Source (P660) is set to any value other than Fixed Temp, the value displayed is the
temperature measured. If Temp Source is set to Fixed Temp, the P661 value is displayed.
Rate (P700 to P708)
These parameters determine how material level changes are reported.
P700 Max Fill Rate
Adjusts the MultiRanger response to increases in the actual material level (or advance to
a higher Failsafe Material Level, P071).
Enter a value slightly greater than the maximum vessel filling rate. This value, in Units
(P005) or % of Span (P007) per minute, is automatically altered when Maximum Process
Speed (P003) is altered.
Primary Index Transducer
Values Range: -50 to 150 (view only)
Altered By • P660 Temp Source
Related
• P651 Sound Velocity Calibration
• P653 Velocity
• P654 Velocity at 20°C
• P661 Temp Fixed
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 99.00 m (or equivalent depending on units)
Altered by • P003 Maximum Process Speed
Related
•P005 Units
•P007 Span
• P071 Failsafe Material Level
P003 Value Meters/Minute
10.1
2 1
310
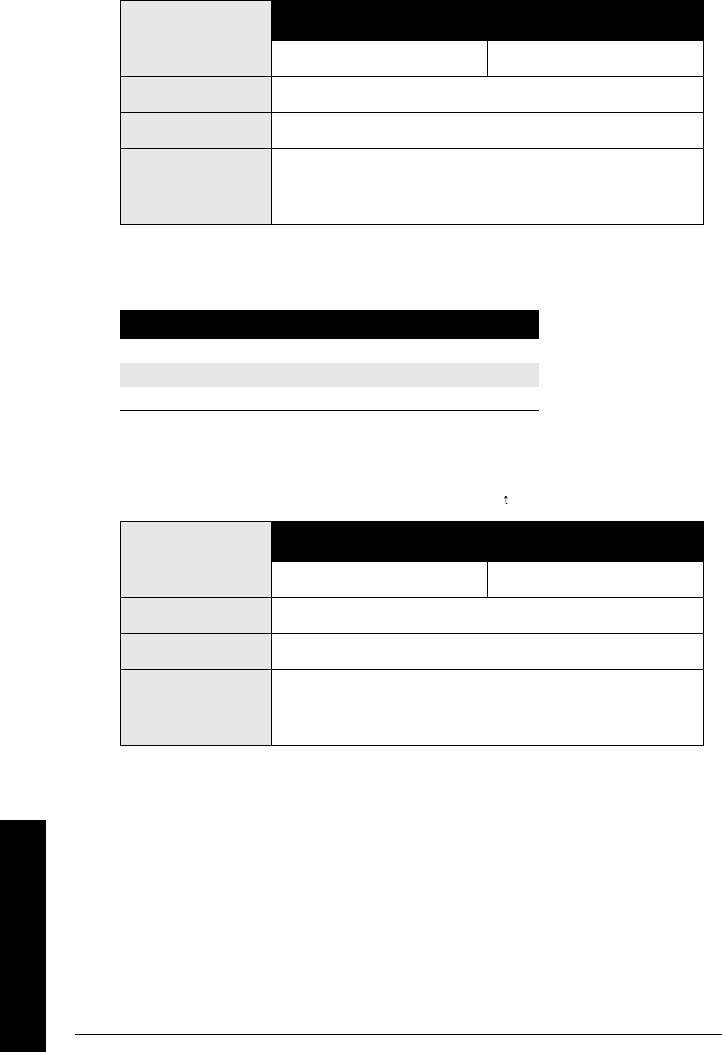
Page 184 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P701 Max Empty Rate
Adjusts the MultiRanger response to decreases in the actual material level (or advance
to a lower Failsafe Material Level, P071).
Enter a value slightly greater than the maximum vessel emptying rate. This value, in Units
(P005) or % of Span (P007) per minute, is automatically altered when Maximum Process
Speed (P003) is altered.
P702 Filling Indicator
The fill rate required to activate the LCD Filling indicator ( ).
This value (in Units (P005) or % of Span (P007) per minute) is automatically set to 1/10 of
the Max Fill Rate (P700).
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 99.00 m (or equivalent depending on units)
Altered by • P003 Maximum Process Speed
Related
• P005 Units
• P007 Span
• P071 Failsafe Material Level
P003 Value Meters / Minute
10.1
2 1
310
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 99.00 m (or equivalent depending on units)
Altered by • P003 Maximum Process Speed
Related
• P005 Units
• P007 Span
• P700 Max Fill Rate
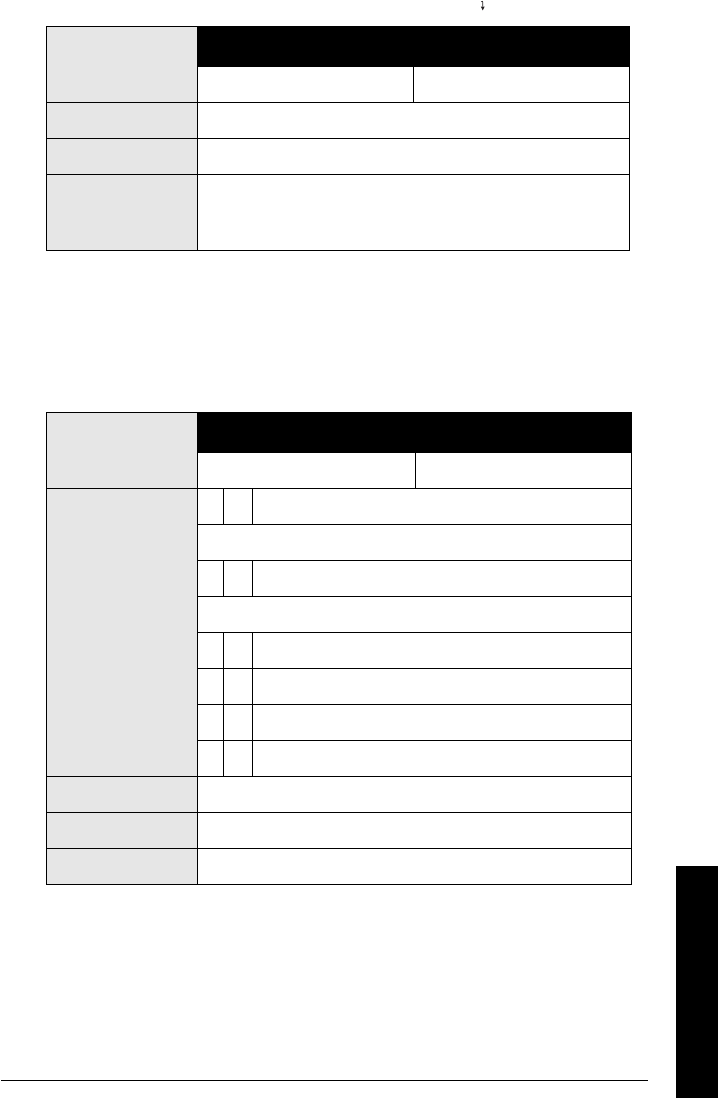
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 185
mmmmm
Parameters
P703 Emptying Indicator
The empty rate required to activate the LCD Emptying indicator ( ).
This value (in Units (P005) or % of Span (P007) per minute) is automatically set to 1/10 of
the Max Empty Rate (P701).
P704 Rate Filter
Damps Rate Value (P707) fluctuations.
Enter the time or distance interval over which the Rate Value is to be calculated before
the display updates.
This is automatically altered along with Maximum Process Speed (P003).
This value automatically alters the Rate Update Time (P705) and / or Rate Update
Distance (P706). Alternatively, these parameter values may be altered independently.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 99.00 m (or equivalent depending on units)
Altered by • P003 Maximum Process Speed
Related
• P005 Units
• P007 Span
• P701 Max Empty Rate
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0 Rate display not required
Filtered Output
1 Continuously filtered and updated
Interval Output
2 1 minute or 50 mm (2 in)
3 5 minutes or 100 mm (3.9 in)
4 10 minutes or 300 mm (11.8 in)
5 10 minutes or 1000 mm (39.4 in)
Alters • P707 Rate Value
Altered by • P003 Maximum Process Speed
Related • P705 Rate Update Time/ P706 Rate Update Distance
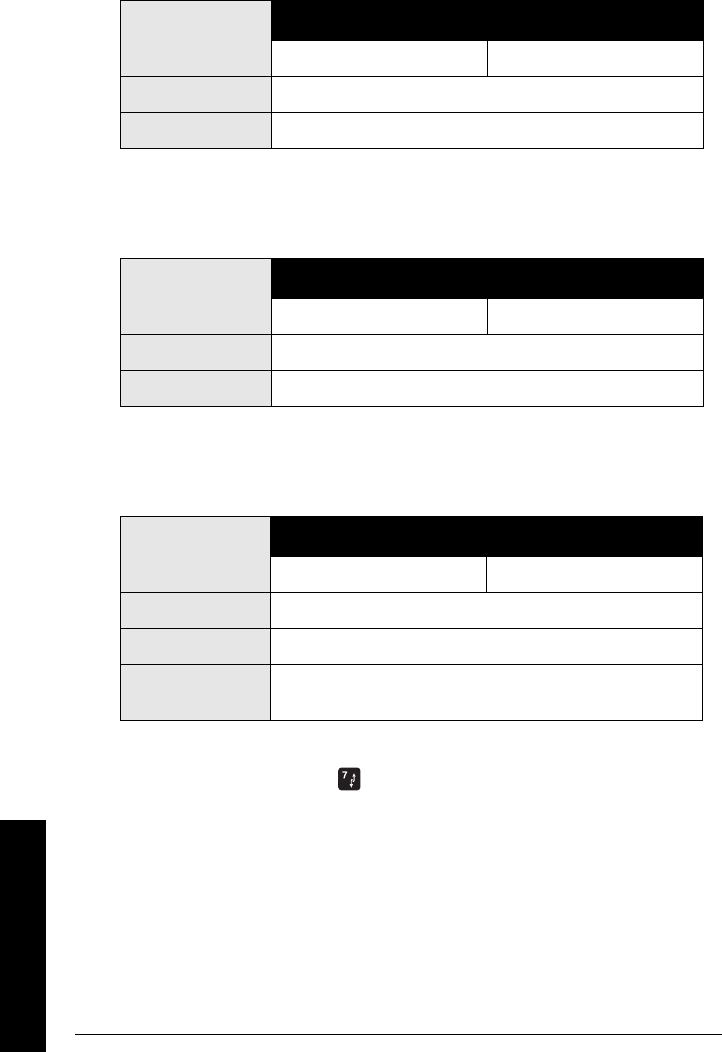
Page 186 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P705 Rate Update Time
The time period (in seconds) over which the material level rate of change is averaged
before Rate Value update.
P706 Rate Update Distance
The material level change (in metres) to initiate a Rate Value update.
P707 Rate Value
The rate of material level change (in Units (P005) or % of Span (P007) per minute).
A negative rate indicates the vessel is emptying.
This is the value displayed when is pressed in the RUN mode as described in the
Readings in RUN Mode
chart on page 23.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 9999
Related • P707 Rate Value
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 9999
Related • P707 Rate Value
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999 (view only)
Altered By • P704 Rate Filter
Related •P005 Units
•P007 Span
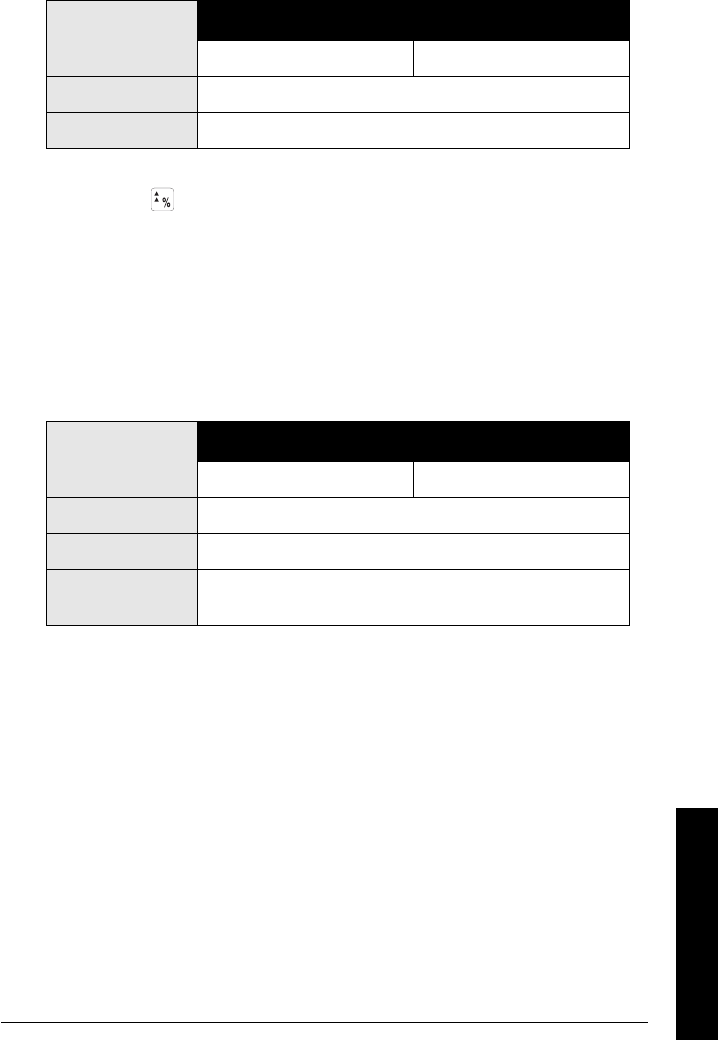
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 187
mmmmm
Parameters
P708 Volume Rate Display [MR 200]
The rate of change of volume in percent of maximum volume per minute.
Please note that this feature applies to the MultiRanger 200 only.
This value is used internally to calculate inflow in pumped volume applications (P622=3).
Press READING to toggle between percent and volume.
Measurement Verification (P710 to P713)
P710 Fuzz Filter
Use this to stabilize the reported level, due to level fluctuations (such as a rippling or
splashing liquid surface) within the Echo Lock Window (P713).
This value (in % of Span, P007) is automatically altered when Maximum Process Speed
(P003) is altered. The higher the value entered, the greater the fluctuation stabilized.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999 (view only)
Related • P622 Inflow / Discharge Adjust
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0 to 100 (0 = off)
Altered by • P003 Maximum Process Speed
Related • P007 Span
• P713 Echo Lock Window
Page 188 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P711 Echo Lock
Use this feature to select the measurement verification process.
If a material agitator (mixer) is used in the vessel monitored, set Echo Lock for maximum
verification or material agitator to avoid agitator blade detection. Ensure the agitator is
always ON while the MultiRanger is monitoring the vessel to avoid stationary blade
detection.
When set for max verification or material agitator, a new measurement outside of the
Echo Lock Window (P713) must meet the sampling criterion (P712).
For total lock, Echo Lock Window (P713) is preset to zero 0. The MultiRanger continuously
searches for the best echo according to the algorithm chosen (P820). If the selected echo
is within the window, the window is then centered about the echo. If not, the window
widens with each successive shot until the selected echo is within the window. The
window then returns to its normal width.
When Echo Lock is OFF , the MultiRanger responds immediately to a new measurement
as restricted by the Max Fill / Empty Rate (P700 / P701); however, measurement reliability
is affected.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0Off
1 Maximum verification
2 * Material agitator
3Total lock
Related
• P700 Max Fill Rate
• P701 Max Empty Rate
• P712 Echo Lock Sampling
• P713 Echo Lock Window
• P820 Algorithm
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 189
mmmmm
Parameters
P712 Echo Lock Sampling
The sampling criterion sets the number of consecutive echoes appearing above or below
the echo currently locked onto, that must occur before the measurements are validated
as the new reading (for Echo Lock P711 values: 1 or 2).
Example:
Setting
• P711 = 2, material agitator
• P712 = 5:2
Result
• a new reading will not be validated unlessfive consecutive measurements higher or
two consecutive measurements lower than the current reading occur
• Resetting P711 returns P712 to the respective preset values
P713 Echo Lock Window
Adjusts the size of the Echo Lock Window.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 1:1 to 50:50
Format: x:y
x = the number of above echoes
y = the number of below echoes
Related • P711 Echo Lock
P711 value P712 preset value
1, max verification 5:5
2, material agitator 5:2
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.000 to 99.00 m (or equivalent depending on units), nearest
acceptable value is returned
Preset: 0.000
Altered by • P003 Maximum Process Speed
Related • P005 Units
• P711 Echo Lock
Page 190 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
The Echo Lock Window is a distance window (units P005) centred on the echo and used
to derive the Reading. When a new measurement is in the window, it is re-centred and
the new Reading calculated. Otherwise, the new measurement is verified by Echo Lock
(P711) before the reading is updated.
When 0 is entered the window is automatically calculated after each measurement. For
slower P003 Maximum Process Speed values the window is narrow, for faster P003
values the window becomes wider.
Transducer Scanning (P726 to P729)
P726 Level System Sync
Enables the System Sync on the terminal block.
Use this if another level measurement system is mounted nearby, and they are wired
together on the Sync terminal.
P727 Scan Delay
The delay, in seconds, between measurements from transducer points (dual point model
only).
This feature may only be used to adjust the delay before the next point is scanned. Enter
the amount of delay in seconds. This value is automatically altered when Maximum
Process Speed (P003) is altered.
Primary Index Global
Values
0not required
1 * synchronize level monitors
Primary Index Global
Values
Range: 0 to 60 seconds
Preset: 5.0
Altered by • P003 Maximum Process Speed
Related •P001 Operation
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 191
mmmmm
Parameters
P728 Shot Delay
The delay, in seconds, between transducer shots.
Use this if transient acoustic noise within the vessel is causing measurement difficulties
due to echoes from one shot being received on the next. If more than one ultrasonic unit
is installed for redundancy, this value should be 0.
P729 Scan Time
View the elapsed time (in seconds) since the point displayed was last scanned.
This may be viewed as an Auxiliary Reading in the RUN mode.
Display (P730 to P739)
P730 Auxiliary Reading
Use this feature to display operator selected Auxiliary Readings temporarily or
indefinitely (as desired).
Select OFF to display Auxiliary Readings temporarily. Select HOLd to display Auxiliary
Readings until another Auxiliary Reading is selected or programming mode is entered.
See the
Hand Programmer
section on page 27 for RUN mode auxiliary readings.
Selecting the Auxiliary Reading operation
1. Press READING to display the Auxiliary Function symbol.
2. Press ARROWS to access the OFF or HOLd option desired.
3. Press ENTER
Primary Index Transducer
Values
Range: 0.1 to 4.0
Preset: 0.5
Primary Index Level
Values Range: 0.000 to 9999 (view only)
Related • P001 Operation
Primary Index Global
Values
Range: 000 to 999
Display: OFF, HOLd
Page 192 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
If necessary, enter the Parameter Number to default in the Auxiliary Reading display. That
value will show in the auxiliary reading area by default. Other values are available but will
reset to the parameter defined here.
P731 Auxiliary Reading Key
Enter the Parameter Number whose value is to be displayed in the Auxiliary Reading field
is pressed in the RUN mode. See the
Hand Programmer
section on page 27 for RUN
mode auxiliary readings.
P732 Display Delay
Adjusts the Point Number display scroll speed.
Use this feature to adjust the delay before the display advances to the next Point Number.
Display scrolling is independent from transducer scanning.
P733 Scroll Access
Use this feature to select the parameter scroll access option desired.
Press READING and to tag / untag any accessed parameter. is displayed to
indicate the parameter accessed is tagged.
Primary Index Global
Values
Range: 000 to 999
Preset: Material Reading, P921
Primary Index Global
Values
Range: 0.5 to 10
Preset: 1.5 seconds
Related •P001 Operation
• P737 Primary Reading
Primary Index Global
Values
0 Off to scroll to all parameters (P001 to P999)
1 * Smart for Quick Start, altered, and tagged parameters
2 Tagged to scroll to operator tagged parameters only
Note: Quick Start parameters (P001 – P007) and those changed from factory
default settings cannot be untagged.
P
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 193
mmmmm
Parameters
P735 Backlight
Controls the LCD backlighting.
The backlight can be forced on or off, or be controlled by a programmer, in which case it
will turn OFF 30 seconds after the last key is pressed.
P737 Primary Reading [MR 200]
The reading shown on the primary reading display when in RUN mode.
When this value indicates TOGGLE, then both readings (default and totalizer) are shown
in the time specified in display delay (P732).
P741 Communications Timeout
The maximum time allowed between receiving a request and transmitting the response.
If the maximum time is exceeded, no response will be transmitted, and the action
required may not be completed.
Primary Index Global
Values
0Off
1* On
2 Keypad activated
Primary Index Global
Values
Range: 0 to 3
1 * Default reading (P920) based on operation (P001)
2 LCD totalizer (P322, P323)
3 Automatically toggle between 1 and 2
Related
• LCD Totalizer (P322 and P323)
• P732 Display Delay
• P920 Reading Measurement
Primary Index Port
Values
Range: 0 to 60 000 milliseconds
Preset: 5 000 ms
Page 194 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
SmartLinx Reserved (P750 to P769)
These parameters are reserved for optional SmartLinx communications cards and vary by
card. Refer to the SmartLinx documentation to determine if any of them are used.
Communications (P770 to P782)
The MultiRanger communication ports are configured by a series of parameters that are
indexed by port. See the
Communications
section on page 89 for a complete description
of communications set-up.
Communication parameters are indexed to these communication ports, unless otherwise
noted:
P770 Port Protocol
The communications protocol used between the MultiRanger and other devices.
The MultiRanger supports the internationally recognized Modbus standard in both ASCII
and RTU formats. Other protocols are available with optional SmartLinx cards.
P771 Network Address
The unique identifier of the MultiRanger on the network.
For devices connected with the Siemens Milltronics protocol this parameter is ignored.
For devices connected with a serial Modbus slave protocol, this parameter is a number
from 1-247. The network administrator must ensure that all devices on the network have
unique addresses. Do not use the value 0 for Modbus communications as this is the
broadcast address and is inappropriate for a slave device.
Port Description
1 RS-232 port (RJ-11 modular telephone)
2RS 485 port on terminal block
Primary Index Communications Port
Values
0 Communications port disabled
1 Siemens Milltronics Dolphin protocol
2 Modbus ASCII slave serial protocol
3 * Modbus RTU slave serial protocol (preset for ports 1 and 2)
Primary Index Communications Port
Values
Range: 0 to 9999
1* Preset:
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 195
mmmmm
Parameters
P772 Baud Rate
The communication rate with the master device.
This specifies the rate of communication in Kbaud. Any value may be entered but only the
values shown above are supported. The baud rate should reflect the speed of the
connected hardware and protocol used.
P773 Parity
The serial port parity.
Ensure that the communications parameters are identical between the MultiRanger and
all connected devices. For example, many modems default to N-8-1 which is No parity, 8
data bits, and 1 stop bit.
P774 Data Bits
The number of data bits per character.
Primary Index Communications Port
Values
4.8 4800 baud
9.6 9600 baud
19.2 * 19,200 baud (preset for port 2)
115.2 * 115,200 baud (preset for port 1)
Primary Index Communications Port
Values
0*No Parity
1 Odd Parity
2Even Parity
Primary Index Communications Port
Values
Range: 5 to 8
8*Modbus RTU
7 or 8 Modbus ASCII
7 or 8 Dolphin Plus
Page 196 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P775 Stop Bits
The number of bits between the data bits.
P778 Modem Available
Sets the MultiRanger to use an external modem..
P779 Modem Inactivity Timeout
Sets the time that the unit will keep the modem connected with no activity.
To use this parameter, ensure that P778 (Modem Available) = 1. Ensure that the value is
low enough to avoid unnecessary delays when an unexpected disconnect occurs but
long enough to avoid timeout while you are still legitimately connected. This parameter
value is ignored by the Modbus Master Drivers, as they automatically disconnect when
done.
Hanging Up
If the line is idle and the P779 Modem Inactivity Timeout expires, then the modem is
directed to hang up the line. Ensure that P779 is set longer than the standard polling time
of the connected master device. 0 disables the inactivity timer.
Primary Index Communications Port
Values
Range: 1 or 2
1 * Preset:
Primary Index Communications Port
Values
0 * No modem connected
1Answer only
Primary Index Communications Port
Values
Range: 0-9999 seconds
0 * No timeout
Related • P778 Modem Available
• P779 Modem Inactivity Timeout
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 197
mmmmm
Parameters
P782 Parameter Index Location
Determines where index information is stored for the parameter access area.
Global (0)
The primary and secondary index values are global (they affect all of the parameter
access area at once) and stored in:
• primary index – R43,999
• secondary index – R43,998
Parameter-Specific (1)
The primary and secondary index values are encoded into the format words found
between R46,000 and R46,999. Each format work corresponds with the R44,000 series
number in the parameter access map. For example, the format register R46,111
corresponds to the parameter P111 and the value is stored in R44,111. If the Modbus
protocol (P770 = 2 or 3) is not used this parameter is ignored.
SmartLinx Hardware Testing (P790 to P795)
P790 Hardware Error
The results of ongoing hardware tests in the communications circuitry.
If FAIL or ERR1 is displayed in P790 (Hardware Error), go to P791 (Hardware Error Code)
and P792 (Hardware Error Count) for information about the error.
Primary Index Global
Values
0 * Global
1 Parameter-Specific
Altered By • P770 Port Protocol
Note: These parameters are used to test and debug a SmartLinx card (if
installed). Disregard these parameters if you do not have a SmartLinx card
installed.
Primary Index Global
Values
PASS * N o errors
FAIL Error occurred communicating with card; commu-
nications should resume.
ERR1 No module installed, or module not supported;
SmartLinx communications have been disabled
Related • P791 Hardware Error Code
• P792 Hardware Error Count
Page 198 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P791 Hardware Error Code
Indicates the precise cause of Fail or ERR1 condition from P790.
P792 Hardware Error Count
A count that increments by 1 each time Fail is reported in P790 (Hardware Error).
P794 SmartLinx Module Type
This parameter is used to identify the module type when SmartLinx is used. If you are not
using SmartLinx, this parameter is not functional. Please see the associated SmartLinx
instruction manual for a full description of this parameter.
P795 SmartLinx Protocol
This parameter is used to identify the protocol when SmartLinx is used. If you are not
using SmartLinx, this parameter is not functional. Please see the associated SmartLinx
instruction manual for a full description of this parameter.
Primary Index Global
Values
0*No error
8 No SmartLinx card installed
Any
other
value
Error code; provide this code to your Siemens
Milltronics representative for troubleshooting
Related • P790 Hardware Error
Primary Index Global
Values
Range: 0 to 9999
Error count; provide this number to your Siemens Milltronics repre-
sentative for troubleshooting.
Related • P790 Hardware Error
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 199
mmmmm
Parameters
P799 Communications Control
Enables the read/write access to parameters via remote communications.
Echo Processing (P800 to P807)
P800 Near Blanking
The space near the transducer face which cannot be measured.
Use this feature if the surface is reported to be near the transducer face but is in fact
much further away. Extend this value when changing transducer location, mounting, or
aiming.
Please note that changing the Near Blanking cannot correct measurement problems.
Ensure that Span (P007) < Empty (P006) minus Near Blanking (P800)
Primary Index
Protocol
(Index 1 controls the Modbus Master (RS-485 or RS-232); Index 2
controls the Fieldbus Master (PROFIBUS DP, DeviceNet, or Allen
Bradley Remote I/O)
Values
0Read Only
1*Read/Write
2Restricted Access – read only except for P799 which is
read/write
Notes:
• P799 controls the lock access via communications.
• P000 controls the lock access via the Siemens handheld programmer.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.000 to 99.00 m (or equivalent depending on units)
Preset: 0.300m (Most transducers)
0.450m (XCT-8, XCT-12)
Related
• P006 Empty
• P007 Span
• P833 TVT Start Min
Page 200 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P801 Range Extension
Allows the material level to fall below the Empty setting without reporting LOE.
This feature is useful in OCM applications where the Empty level is set to the bottom of
the weir, and above the bottom of the channel, and should be used if the surface
monitored can fall past the Empty (P006) level in normal operation. The value is added to
Empty (P006) and can be greater than the range of the transducer. If the surface
monitored can extend beyond Empty (P006), increase Range Extension (in Units (P005) or
% of Span) such that Empty plus Range Extension is greater than the transducer face to
furthest surface to be monitored distance. This is often the case with OCM when using
weirs and some flumes.
P802 Transducer with Submergence Shield
Used when the transducer is expected to be submerged on occasion.
When a transducer with a submergence shield is submerged, the shield traps an air
pocket that creates a special echo. The MultiRanger recognizes the echo and advances
the reading to the highest level and operates displays and outputs accordingly. This
feature is effective for when power is returned while the transducer is submerged.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0.000 to 99.00 m, or max. span (P007), or equivalent
depending on units
Preset: 20% of Span (P007)
Related
• P005 Units
• P006 Empty
• P007 Span
• P004 Transducer
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0*Off
1 Submergence transducer
Related
• P006 Empty
• P071 Failsafe Material Level
•Relays
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 201
mmmmm
Parameters
P803 Shot / Pulse Mode
Determines what type of ultrasonic shots are fired.
Increases MultiRanger response when the monitored surface is close to the transducer
face. Select short and long to have short and long acoustic shots fired for each
measurement, regardless of the transducer to surface distance. Select short to have only
short shots fired if the Echo Confidence (P805) produced by a short shot exceeds the
short Confidence Threshold (P804) and the monitored surface is always within the Short
Shot Range (P852).
P804 Confidence Threshold
Determines which echoes are evaluated by software.
The short and long shot Confidence Thresholds are preset to 10 and 5 respectively. When
Echo Confidence (P805) exceeds the Confidence Threshold, the echo is evaluated by
Sonic Intelligence®. Values are entered as two numbers separated by a decimal point.
The first number is the short shot confidence and the second number is the long shot
confidence.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
1Short
2 * Short and long
Related
• P006 Empty
• P805 Echo Confidence
• P804 Confidence Threshold
• P852 Short Shot Range
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0 to 99:0 to 99
Preset: 10:5
Related • P805 Echo Confidence
Note: The decimal point is replaced with a colon (:) on the display.
Page 202 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P805 Echo Confidence
Displays the echo confidence of the measurement echo from the last shot.
Use this feature to monitor the effect of transducer aiming, location, and mechanical
transducer / mounting isolation.
Both short and long shot Echo Confidence is displayed. (To display this value in the
auxiliary display while the unit is running, press for 4 seconds.)
P806 Echo Strength
Displays the strength (in dB above 1 uV RMS) of the echo which was selected as the
measurement echo.
P807 Noise
Displays the average and peak ambient noise (in dB above 1 uV RMS) being processed.
The noise level is a combination of transient acoustic noise and electrical noise (induced
into the transducer cable or receiving circuitry). See
Noise Problems
in the
Troubleshooting
Section on page 232.
Primary Index Transducer
Values
Format: x:y (view only)
x = short (0 to 99)
y = long (0 to 99)
Related • P804 Confidence Threshold
• P830 TVT Type
Display Description
x:-- short shot confidence value, (long shot not used).
--:y long shot confidence value, (short shot not used).
x:y short and long shot confidence values (both used).
Etransducer cable is open or short circuited.
--:-- no shots were processed for Sonic Intelligence® evaluation.
Primary Index Transducer
Values Format: 0 to 99 (view only)
Primary Index Transducer
Values
Format: x:y (view only)
x = average (-99 to 99)
y = peak (-99 to 99)
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 203
mmmmm
Parameters
Advanced Echo Processing (P815 to P825)
The following parameters are for authorized Siemens Milltronics Service personnel or
technicians familiar with Siemens Milltronics echo processing techniques.
P815 Echo Time Filtered
The time (in ms) from the transmission of the pulse, to when it is processed.
P816 Echo Time Raw
The time (in ms) from the transmit pulse to the processed echo.
Primary Index Transducer
Values Range: 0.0 to 9999 (view only)
Related • P816 Echo Time Raw
Primary Index Transducer
Values Range: 0.0 to 9999 (view only)
Related • P815 Echo Time Filtered
Page 204 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P820 Algorithm
Chooses the algorithm to generate the measured value from the profile.
Use this to select the algorithm(s) the Sonic Intelligence® echo selection is based on.
Use P805 Echo Confidence (page 202) to determine which algorithm gives the highest
confidence under all level conditions. If the wrong echo is processed, observe the echo
processing displays and select an alternate algorithm, either by entering the numeric
value desired, or as below:
1. Press MEASURE to display the Auxiliary Function symbol.
2. Press ARROWS to access the desired Reading display symbols.
3. Press ENTER when the required algorithm is displayed.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values 1 ALF = flat Area, Largest, and First average
2 A = flat Area only
3 L = flat Largest only
4F = flat First only
5 AL = flat Area and Largest average
6 AF = flat Area and First average
7 LF = flat Largest and First average
8 * bLF = smooth Largest or First
9 bL = smooth Largest only
10 bF = smooth First only
12 tF = true First only
Related
• P805 Echo Confidence
• P821 Spike Filter
• P822 Narrow Echo Filter
• P823 Reform Echo
• P825 Echo Marker Trigger
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 205
mmmmm
Parameters
P821 Spike Filter
Dampens spikes in the echo profile to reduce false readings.
Use P821 if interference spikes are on the long shot Echo Profile display.
P822 Narrow Echo Filter
Filters out echoes of a specific width.
Use this for transducer acoustic beam interference (e.g. ladder rungs). Enter the width of
false echoes (in ms) to be removed from the long shot Echo Profile. When a value is keyed
in, the nearest acceptable value is entered.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0Off
1*On
Related
• P820 Algorithm
• P822 Narrow Echo Filter
• P823 Reform Echo
• P825 Echo Marker Trigger
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0 = OFF (preset), nearest acceptable value returned
greater = wider
Related
• P820 Algorithm
• P821 Spike Filter
• P823 Reform Echo
• P825 Echo Marker Trigger
Page 206 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P823 Reform Echo
Smoothes jagged peaks in the echo profile.
Use this feature, when monitoring solids (P002 = 2), if the reported level fluctuates
slightly, though the monitored surface is still. Enter the amount (in ms) of long shot Echo
Profile smoothing required. When a value is keyed in, the nearest acceptable value is
entered.
P825 Echo Marker Trigger
The point on the primary echo on which the measured value is based.
Use this feature if the reported material level fluctuates slightly, due to a variable rise in
the leading edge of the true echo on the Echo Profile.
Enter the value (in percent of echo height) to ensure the Echo Lock Window intersects the
Echo Profile at the sharpest rising portion of the Echo Profile representing the true echo.
This value is preset to 50%.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0 = OFF (preset)
greater = wider, nearest acceptable value returned
Related
• P002 Material
• P820 Algorithm
• P821 Spike Filter
• P822 Narrow Echo Filter
• P825 Echo Marker Trigger
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 5 to 95%
Preset: 50%
Related
• P820 Algorithm
• P821 Spike Filter
• P822 Narrow Echo Filter
• P823 Reform Echo
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 207
mmmmm
Parameters
Advanced TVT Adjustment (P830 to P835)
The following parameters are for authorized Siemens Milltronics Service personnel or
technicians familiar with Siemens Milltronics echo processing techniques.
Advanced TVT control applies to long shots only.
P830 TVT Type
Selects the TVT Curve used.
Select the TVT type which gives the highest confidence (P805) under all level conditions.
Use this parameter with caution, and do not use TVT Slopes with the bF or bLF Algorithm
(P820).
P831 TVT Shaper
Turns the TVT Shaper ON or OFF.
Turn the TVT Shaper ON before using P832 and afterwards. Turn the TVT Shaper ON and
OFF while monitoring the effect to pick up the true echo.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
1*TVT Short Curved
2 TVT Short Flat
3TVT Long Flat
4 TVT Long Smooth Front
5 TVT Long Smooth
6TVT Slopes
Altered By •P002 Material
Related • P805 Echo Confidence
• P835 TVT Slope Min
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
0*Off
1On
Related • P832 TVT Shaper Adjust
Page 208 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P832 TVT Shaper Adjust
Allows manual adjustment of the TVT curve. Use this parameter in conjunction with
Dolphin Plus PC Software.
Use this feature to bias the shape of the TVT curve to avoid selecting false echoes from
fixed objects.
Adjustment to this parameter is best done while viewing the echo profile with Dolphin
Plus. Refer to the Dolphin Plus online help for details.
The TVT curve is divided into 40 breakpoints, accessible by enabling the point number as
the breakpoint index field. Each breakpoint is normalized to a value of 0, as displayed in
the parameter value field. By changing the breakpoint value, up or down, the intensity of
the bias applied to that breakpoint of the curve is respectively changed. By changing the
value of adjacent breakpoints, the effective bias to the shaper can be broadened to suit
the desired correction. In the case of multiple false echoes, shaping can be applied along
different points of the curve. Shaping should be applied sparingly in order to avoid
missing the true echo.
P833 TVT Start Min
Use this feature to adjust the TVT Curve height to ignore false echoes (or pick up true
echoes) near the start of the Echo Profile.
Enter the minimum TVT Curve start point (in dB above 1 uV RMS).
This feature should only be used if increased Near Blanking (P800) would extend farther
than desired into the measurement range.
Primary Index
Single Point Model Dual Point Model
Breakpoint Transducer and Breakpoint
Values
Range: -50 to 50
Preset: 0
Related • P831 TVT Shaper
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: -30 to 225
Preset: 50
Related • P800 Near Blanking
• P834 TVT Start Duration
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 209
mmmmm
Parameters
P834 TVT Start Duration
Use this feature in conjunction with TVT Start Min (P833) to ignore false echoes (or pick
up true echoes) near the start of the Echo Profile.
Enter the time (in ms) for the TVT Curve to decrease from the TVT Start Min (P833) point
to the TVT Curve baseline.
P835 TVT Slope Min
Enter the minimum slope (in dB/s) for the middle of the TVT Curve.
Use this feature to adjust the slope declination, and use it in conjunction with TVT Start
Duration (when a long flat TVT Type is selected) to ensure the TVT Curve remains above
the false echoes in the middle of the Echo Profile. Alternatively, if TVT Type is set for TVT
Slopes (P830 = 6), preset is 2000.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0 to 9999
Preset: 30
Related • P833 TVT Start Min
• P835 TVT Slope Min
Primary Index Single Point Model Dual Point Model
Global Transducer
Values Range: 0 to 9999
Preset: 200
Related • P830 TVT Type
• P834 TVT Start Duration
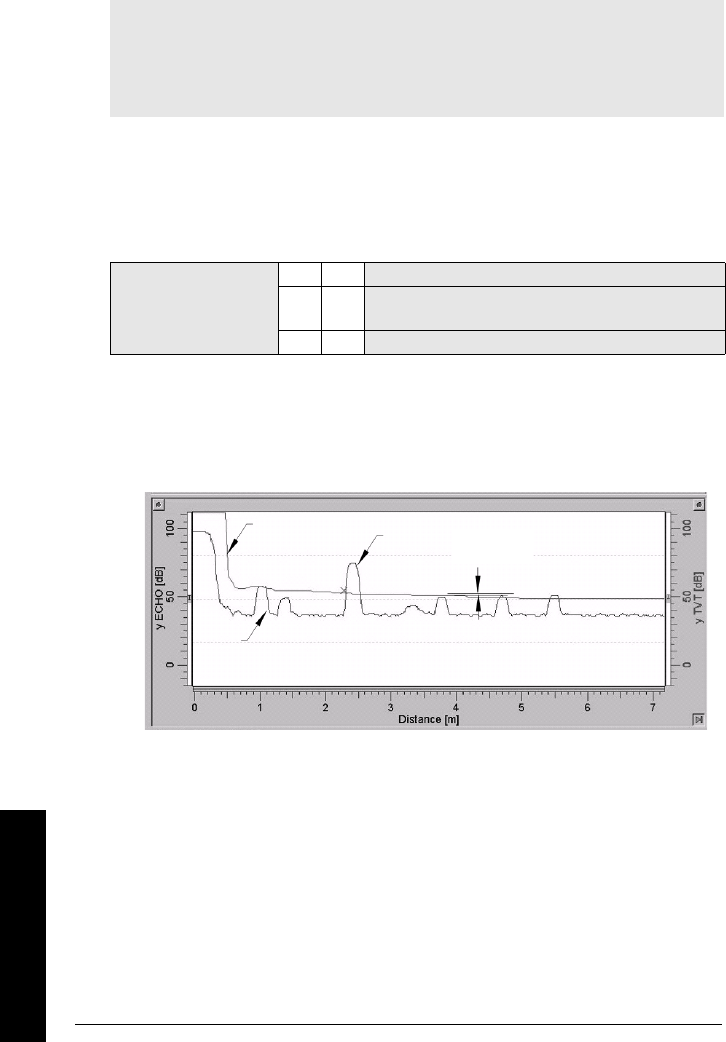
Page 210 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P837 Auto False-Echo Suppression
Use P837 and P838 together, to set MultiRanger 100/200 to ignore false echoes. Use P838
to set the Auto TVT distance first.
If MultiRanger 100/200 displays a full level, or if the reading fluctuates between a false
high level and a correct level, set P837 to elevate the TVT in this region and to de-
sensitize the receiver from any ‘base noise’ caused by internal transducer reflections,
nozzle echoes, or other vessel false echoes. Set P838 and then P837 (detailed instructions
follow P838).
Notes:
• This function works best when the vessel is empty or nearly empty: use it only if
there is a minimum distance of 2 meters from the transducer face to the material.
• Set P837 and P838 during start up, if possible.
• If the vessel contains an agitator, the agitator should be running.
Values
0*Off
1Use ’learned’ TVT. (See ’learned TVT curve’ in Display
after Auto False Echo Suppression on page 211.)
2Learn
Display before Auto False Echo Suppression
(or when P837 = 0)
default TVT P839
Hover Level
false
echo
true
echo
Distance (meters)
Level (db)
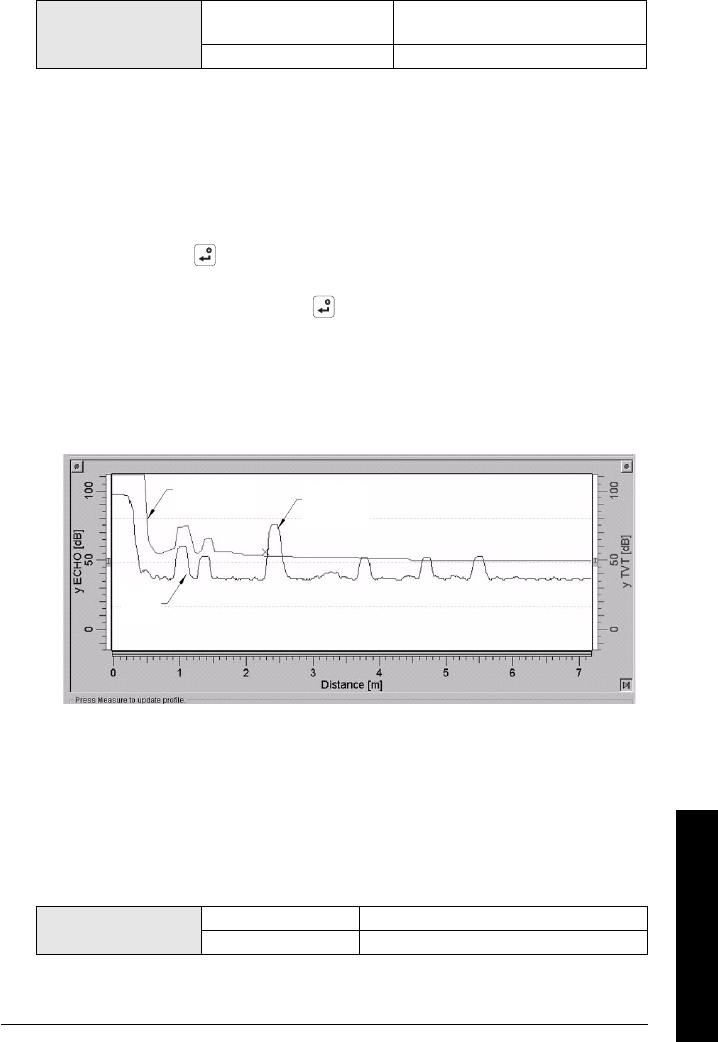
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 211
mmmmm
Parameters
P838 Auto False-Echo Suppression Distance
Defines the range of Auto False-Echo Suppression (P837) to use for ignoring false
echoes. (Units are defined in P005.)
Determine the actual distance from the transducer face to the material surface. Subtract
0.5 m from this distance, and enter the result.
Set Up:
1. Perform this function when the vessel is empty or nearly empty.
2. Determine actual distance from transducer face to material level.
3. Select P838 and key in [distance to material level minus 0.5 m].
4. Press ENTER .
5. Select P837.
6. Press 2 and then press ENTER . P837 will revert to 1 (use Learned TVT)
automatically after a few seconds.
P839 TVT Hover Level
Defines (in percent) how high the TVT curve is placed above the profile, relative to the
largest echo. When MultiRanger 100/200 is located in the center of the vessel, lower this
parameter to prevent multiple echo detections.
Values
Range
(depends on model)
Maximum range:
0.000 to 15 m (50 ft)
Default 1.000 m (3.28 ft)
Values Range 0 to 100%
Default 33 (%)
Display after Auto False Echo Suppression
TVT curve
(learned) material
level
false
echo
Distance (meters)
Level (db)
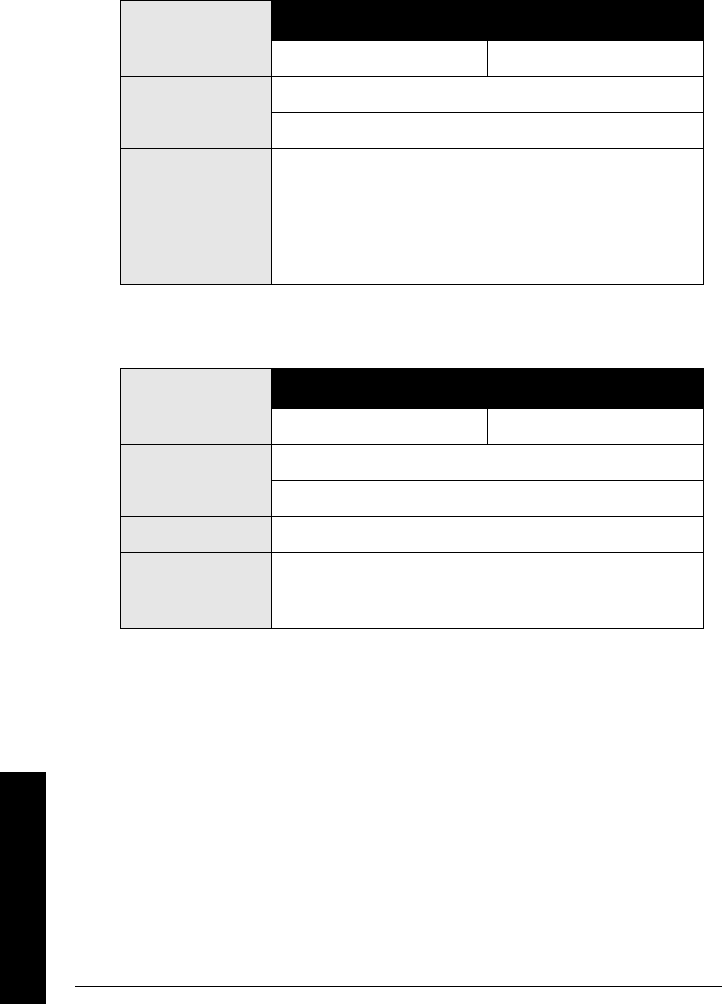
Page 212 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Advanced Shot Adjustment (P840 to P852)
These parameters are for Siemens Milltronics service personnel only.
P840 Short Shot Number
The number of short shots to be fired (and results averaged) per transmit pulse.
P841 Long Shot Number
Enter the number of long shots to be fired (and results averaged) per transmit pulse.
This value is automatically altered by Maximum Process Speed (P003).
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0 to 100
Preset: 1
Related
• P841 Long Shot Number
• P842 Short Shot Frequency
• P844 Short Shot Width
• P850 Short Shot Bias
• P851 Short Shot Floor
• P852 Short Shot Range
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0 to 200
Preset: 5
Altered By • P003 Maximum Process Speed
Related
• P840 Short Shot Number
• P843 Long Shot Frequency
• P845 Long Shot Width
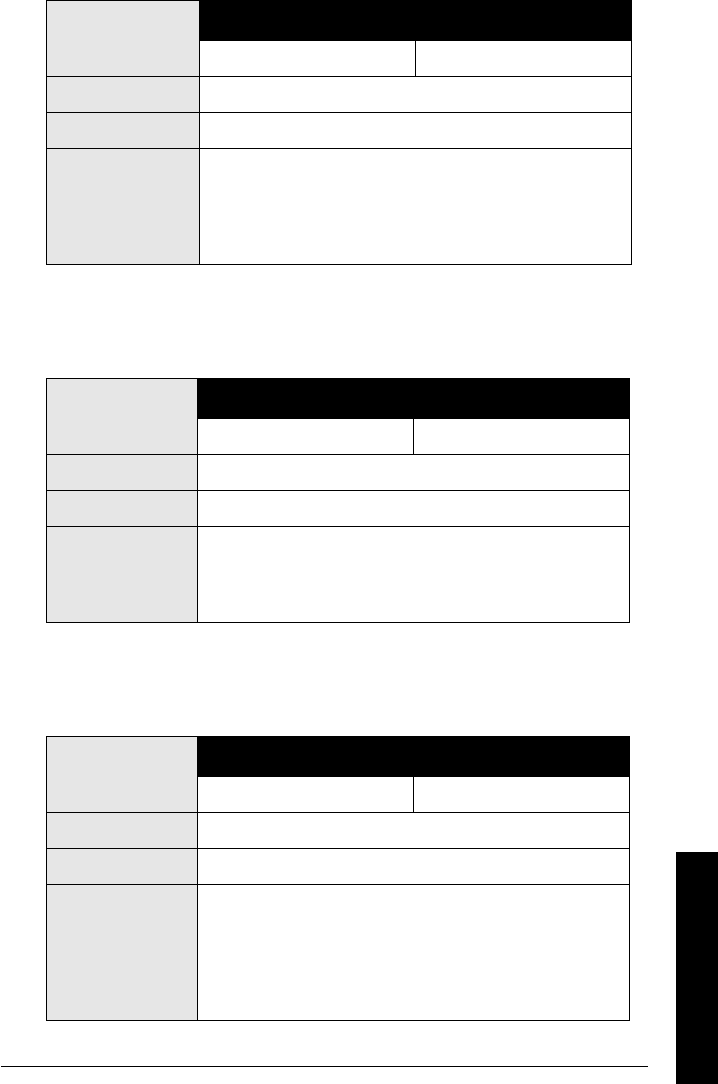
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 213
mmmmm
Parameters
P842 Short Shot Frequency
Adjust the short shot transmit pulse frequency (in kHz).
This feature is automatically altered when Transducer (P004) is altered.
P843 Long Shot Frequency
Adjust the long shot transmit pulse frequency (in kHz).
This feature is automatically altered when Transducer (P004) is altered.
P844 Short Shot Width
Adjust the width (in ms) of the short shot transmit pulse.
This feature is automatically altered when Transducer (P004) is altered.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 41 to 46 kHz, nearest acceptable value is returned
Altered By •P004 Transducer
Related
• P840 Short Shot Number
• P844 Short Shot Width
• P850 Short Shot Bias
• P851 Short Shot Floor
• P852 Short Shot Range
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 41 to 46 kHz, nearest acceptable value is returned
Altered By • P004 Transducer
Related
• P841 Long Shot Number
• P842 Short Shot Frequency
• P843 Long Shot Frequency
• P845 Long Shot Width
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 5.000
Altered By • P004 Transducer
Related
• P840 Short Shot Number
• P842 Short Shot Frequency
• P845 Long Shot Width
• P850 Short Shot Bias
• P851 Short Shot Floor
• P852 Short Shot Range
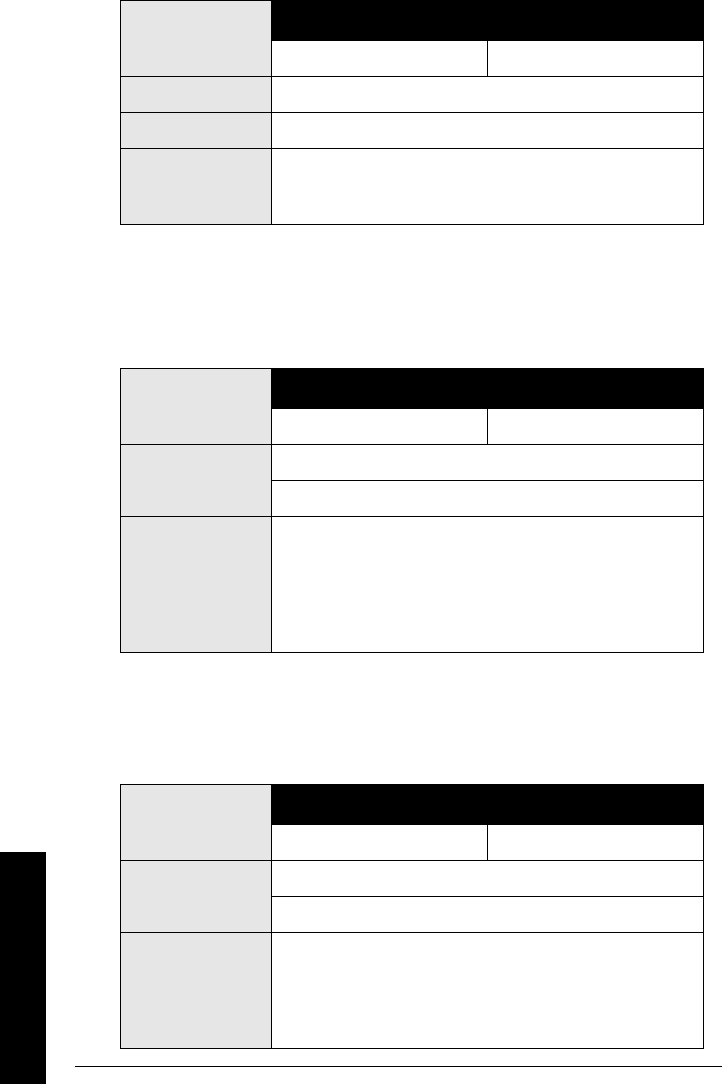
Page 214 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P845 Long Shot Width
Adjust the width (in ms) of the long shot transmit pulse.
This feature is automatically altered when Transducer (P004) is altered.
P850 Short Shot Bias
Use this feature to slant the echo evaluation in favour of the short shot echo when both
short and long shots are evaluated (see Shot Mode, P803).
P851 Short Shot Floor
Enter the minimum echo strength (in dB above 1 uV) derived from a short shot to be
considered for evaluation.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 5.000
Altered By • P004 Transducer
Related
• P841 Long Shot Number
• P844 Short Shot Width
• P843 Long Shot Frequency
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 0 to 100
Preset: 20
Related
• P803 Shot / Pulse Mode
• P840 Short Shot Number
• P842 Short Shot Frequency
• P844 Short Shot Width
• P851 Short Shot Floor
• P852 Short Shot Range
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values
Range: 30 to 100
Preset: 50
Related
• P840 Short Shot Number
• P842 Short Shot Frequency
• P844 Short Shot Width
• P850 Short Shot Bias
• P852 Short Shot Range
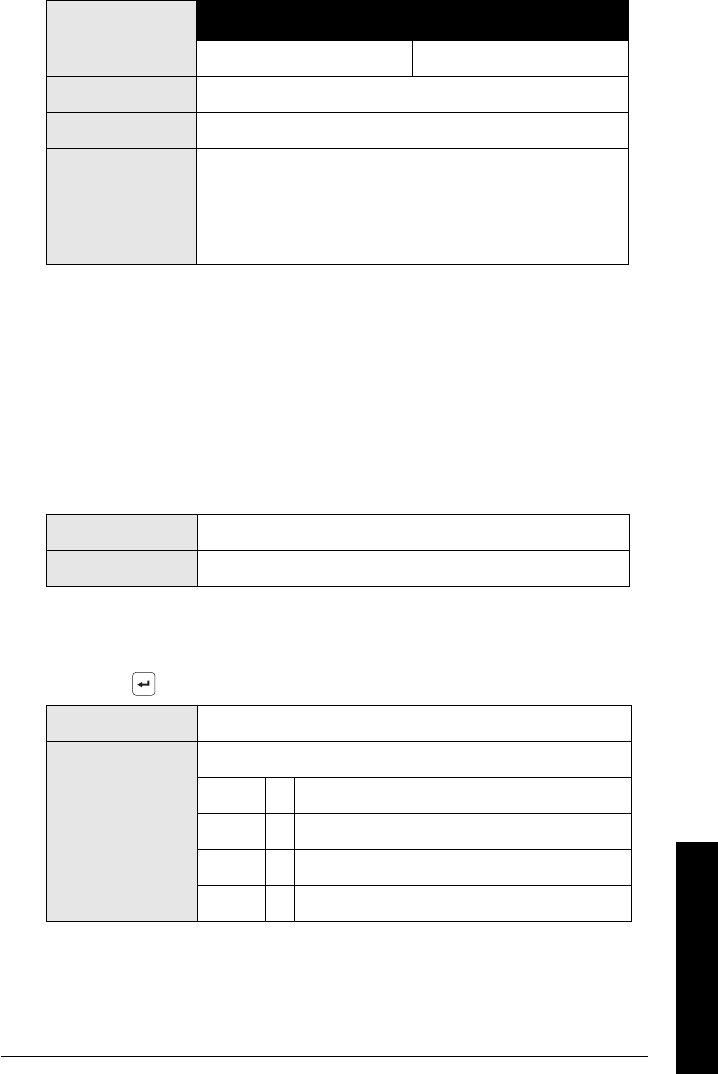
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 215
mmmmm
Parameters
P852 Short Shot Range
Enter the maximum distance in Units (P005) to be measured using short shot echoes.
This feature is automatically altered when Transducer (P004) is altered.
Test (P90 0 to P913)
Test Parameters are intended for use by Siemens Milltronics Service personnel.
P900 Software Revision Number
View the EPROM Rev. #.
P901 Memory
Press ENTER to activate the MultiRanger memory test.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0 to 10 m, or equivalent depending on units
Altered By •P004 Transducer
Related
• P840 Short Shot Number
• P842 Short Shot Frequency
• P844 Short Shot Width
• P850 Short Shot Bias
• P851 Short Shot Floor
Primary Index Global
Values Range: 00.00 to 99.99 (view only)
Primary Index Global
Values
Display: view only
PASS (memory test successful)
F1 RAM
F3 FLASH data
F4 FLASH code
Page 216 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P902 Watchdog
Press ENTER to put the CPU into an infinite loop to test the watchdog timer.
On successful completion (10 seconds) the RUN mode is entered and the MultiRanger is
reset. Programming is kept and the unit responds as if there had been a power failure.
P903 Display
Press ENTER to activate the display test.
All LCD segments and symbols are temporarily displayed.
P904 Keypad
Press ENTER , then press each keypad key in the following sequence:
As each key is pressed, the associated keypad number is displayed. On successful test
completion, PASS is displayed. FAIL is displayed if a key is pressed out of sequence or the
programmer keypad malfunctions.
P905 Transmit Pulse
Press ENTER to supply repeated transmit pulses, at the frequency entered, to the
transducer and / or view the transducer operating frequency (automatically altered by
P004 Transducer) for the Point Number displayed.
P906 RS-232 Port
Press ENTER
to test the RS-232 port on the RJ-11.
An external device must be connected to the RS-232 port for this test. On successful
completion, PASS is displayed, otherwise it is FAIL.
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 42kH to 46KH (view only)
Altered By • P004 Transducer
P
P
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 217
mmmmm
Parameters
P908 Scanner
Press ENTER to cycle the scanner relay while firing the transmitter.
Use this parameter to ensure that both transducers are being stimulated.
P910 Toggle Relays
Used to energize and de-energize relays directly.
Enter the relay number and then toggle between
energized
and
de-energized
, as
required. Enter 0 to toggle all relays at once.
Applies only to relays with P119 = 0 (algorithm control). Use this parameter to confirm that
relay contacts are opening and closing.
This feature is helpful when P119 does not give expected results even though
programming was verified.
P911 mA Output Value
Access this parameter to display the current value of the mA output.
Additionally, this feature may be used to enter a desired value. The mA output
immediately assumes the value entered regardless of any restrictions programmed.
P912 Transducer Temperature
Use this feature to display the temperature in °C (as monitored by the connected
transducer).
Err is displayed if the transducer is not equipped with an internal temperature sensor.
Primary Index Global
Values 0 to 6
Related • P119 mA Relay Logic Test
Primary Index mA output
Values Range: 0.10 to 25.00
Related • P200 mA Output Range
• P201 mA Output Function
Primary Index Transducer
Values Range: -50 to 150
Page 218 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P913 Sensor Temperature
Access this parameter to display the temperature in °C (as monitored by the TS-3).
OPEn is displayed if a TS-3 is not connected.
P914 mA Input [MR 200]
Use this feature to display the mA input value (in mA).
Measurement (P920 to P927)
All of these parameters are available in RUN mode and used to verify programming. See
Readings in RUN Mode
on page 23.
The range and values shown for each of these parameters depends on the Operation
(P001) chosen. The readings for each operation are listed below.
To Access in RUN Mode
1. Ensure the device is in RUN mode.
2. Press .The Auxiliary Reading field becomes underscores P_ _ _
3. Type the parameter number. The field changes to the value of the specified
parameter.
These parameters are also available in simulation mode. See the
Testing the
Configuration
section page 85 for instructions on how to control the simulation direction
and rate.
P920 Reading Measurement
Corresponds to the final reading after all programming is applied.
Please note that the following features apply only to the MultiRanger 200: Difference,
Average, OCM, and Pump Totalizer.
In general this means that: P920 = (Reading x P061) + P062.
Primary Index Global
Values Range: -50 to 150
Primary Index mA input
Values Range: 0.000 to 24.00
Primary Index Level
Values Range: -999 to 9999
P
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 219
mmmmm
Parameters
Reading Measurements by Operation
P921 Material Measurement
The distance in Units (P005) or % of Span (P007) between Empty (P006) and the
monitored surface.
P922 Space Measurement
The distance between the monitored surface and Span (P007).
P923 Distance Measurement
The distance between the monitored surface and the transducer face.
P001 P050 = 0 P050 ≠ 0
0 – OFF - - - - - - - -
1 – Level P921 P924
2 – Space P922 100% - P924
3 – Distance P927 P927
4 – Difference [MR 200] P921 (indexed) P921 (indexed)
5 – Average [MR 200] P921 (indexed) P921 (indexed)
6 – OCM [MR 200] P925 P925
7 – Pump Totalizer [MR 200] P924 P924
Primary Index Level
Values Range: -999 to 9999 (view only)
Related
• P005 Units
• P006 Empty
• P007 Span
Primary Index Transducer
Values Range: 0.000 to 9999 (view only)
Related • P007 Span
Primary Index Transducer
Values Range: 0.000 to 9999 (view only)
Page 220 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
P924 Volume Measurement [MR 200]
The calculated vessel capacity in Max Volume (P051) or % of Max Volume.
Please note that Volume Measurement is a MultiRanger 200 feature only.
P925 Flow Measurement [MR 200]
The calculated flowrate in Max Flow (P604) units or % of Max Flow.
Please note that Flow Measurement is a MultiRanger 200 feature only.
P926 Head Measurement [MR 200]
Corresponds to Head (the distance from Zero Head (P605) to the monitored surface in
Units (P005) or % of Span (P007).
Please note that Head Measurement is a MultiRanger 200 feature only.
Primary Index Level
Values Range: 0.000 to 9999 (view only)
Related • P051 Maximum Volume
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: 0.000 to 9999 (view only)
Related • P604 Maximum Flow
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values Range: -999 to 9999 (view only)
Related
•P005 Units
•P007 Span
• P605 Zero Head
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 221
mmmmm
Parameters
P927 Distance Measurement
The distance between the surface and the transducer face (displays only as % of Empty).
Use P923 unless the distance information is required in percent.
Master Reset (P999)
This feature resets all parameters to original values.
Use this feature prior to initial programming if arbitrary Parameter Values were used
during a bench test, or after upgrading the software. Following a Master Reset, complete
reprogramming is required.
To perform a Master Reset, access P999 and press CLEAR . C.ALL displays until
the reset is complete.
In dual point units, both points can be reset at the same time by setting the index to 00
and pressing the CLEAR keys.
CAUTION: be careful when using this feature. All data for all points will be reset. For
convenience, be sure to record the values you want to re-enter.
Primary Index Transducer
Values Range: 0.000 to 9999% (Displays as % of Empty) (view only)
Related • P005 Units
• P006 Empty
Primary Index
Single Point Model Dual Point Model
Global Transducer
Values See below.
Page 222 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameters
Notes:
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 223
mmmmm
Appendix A: Index Types
Appendix A: Index Types
Index types
Name Description # of indexes
Global This parameter applies to the entire unit n/a
View only This parameter can not be set, only viewed n/a
Breakpoint Indexed by breakpoint Parameter depen-
dent
Dimension Indexed by PMD dimension up to 7
Discrete Input Indexed by discrete input 2
Echo Profile Indexed by stored echo profile 10
Level Point1
1. MultiRanger 100: The two level points are: Transducer One and Trans-
ducer Two.
Level point typically has 1 index in Single Point Mode (standard), and 2
indexes in Dual Point Mode (optional).
MultiRanger 200: The three level points are: transducer 1, transducer 2,
and the calculated point which can be difference (P001=4) or average
(P001=5).
Level point typically has 1 index in Single Point Mode (standard), and 2
indexes in Dual Point Mode (optional). A third index is available in both
modes when Operation (P001) is set for DPD (P001=4) or DPA (P001=5).
Indexed by level point 1, 2 or 3
mA input1Indexed by mA input 1
mA output1Indexed by mA output 0 or 2
Comm. Port Indexed by communications port 2
Relay Indexed by relay 3 or 6
Transducer2
2. MultiRanger 200: The number of indexes available in Single Point Mode
(standard) is typically 1, but can be expanded to 2 if Operation (P001) is
set for DPD (P001=4) or DPA (P001=5).
In Dual Point Mode (optional), the number of available indexes is
always 2.
Indexed by transducer 1 or 2
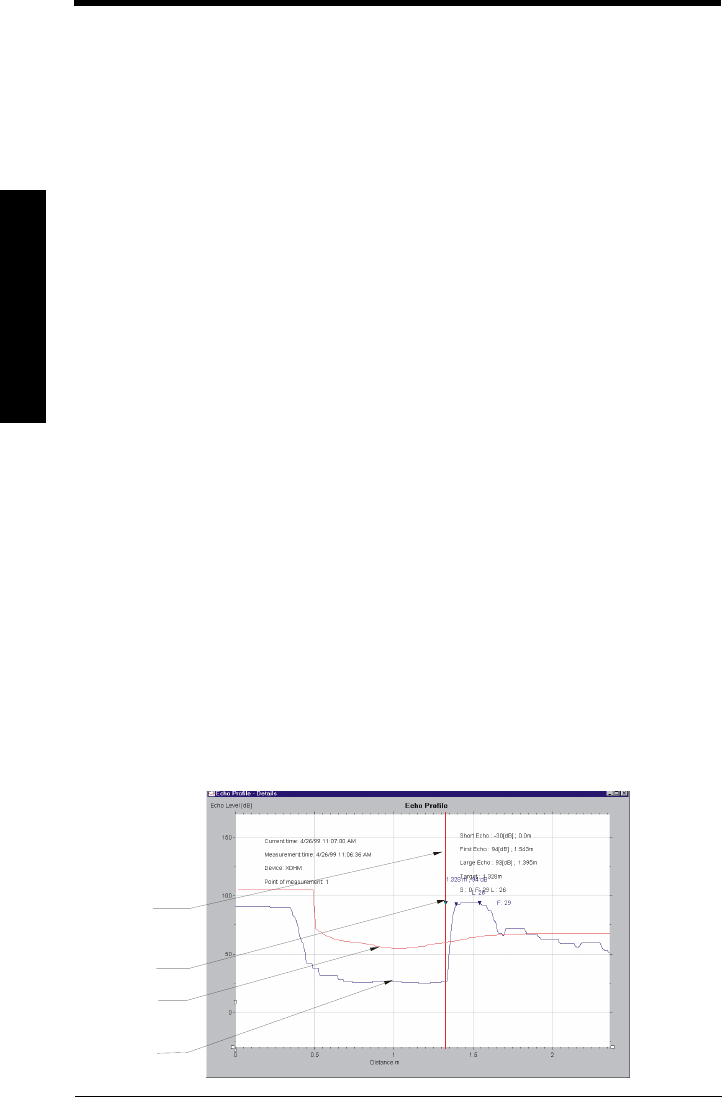
Page 224 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix B: Tech Reference
Appendix B: Technical Reference
Transmit Pulse
The transmit pulse consists of one or more electrical “shot” pulses, which are supplied to
the transducer connected to the MultiRanger terminals. The transducer fires an acoustic
“shot” for each electrical pulse supplied. After each shot is fired, sufficient time is
provided for echo (shot reflection) reception before the next (if applicable) shot is fired.
After all shots of the transmit pulse are fired, the resultant echoes are processed. The
transmit pulse shot number, frequency, duration, delay, and associated measurement
range are defined by parameters P803 and P840 to P852.
Echo Processing
Echo processing consists of echo enhancement, true echo selection, and selected echo
verification.
Echo Enhancement is achieved by filtering (P821 and P822) and reforming (P823) the echo
profile. The true echo (echo reflected by the intended target) is selected when that
portion of the echo profile meets the evaluation criteria of Sonic Intelligence®.
Insignificant portions of the echo profile outside of the measurement range (Span P006 +
Range Extension P801), below the TVT Curve (P830, and P832 to P835), and less than the
Confidence Threshold (P804) and Short Shot Floor (P851) are automatically disregarded.
The remaining portions of the Echo Profile are evaluated using the Algorithm (P820) and
Short Shot Bias (P850). The Echo Profile portion providing the best Echo Confidence
(P805) is selected.
True echo verification is automatic. The position (relation in time after transmit) of the
new echo is compared to that of the previously accepted echo. When the new echo is
within the Echo Lock Window (P713), it is accepted and displays, outputs, and relays are
updated per the Fuzz Filter (P710) and Rate Parameters (P700 to P703). If the new echo is
outside of the Window, it is not accepted until Echo Lock (P711) requirements are
satisfied.
Dolphin Plus Display
Cursor
Echo Marker
TVT Curve
Echo Profile
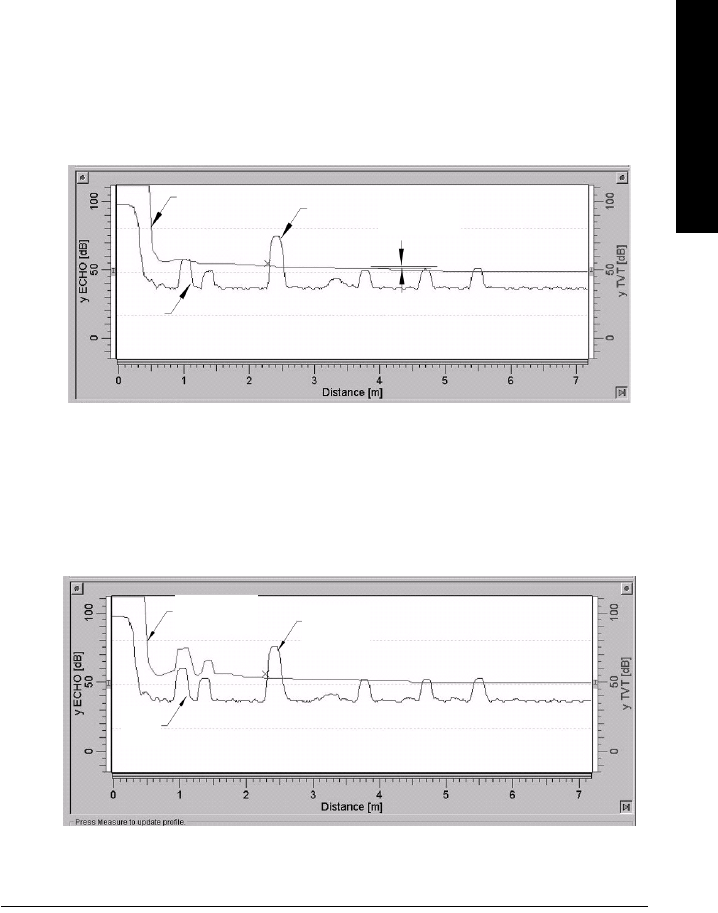
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 225
mmmmm
Appendix B: Tech Reference
TVT (Time Varying Threshold) curves
A TVT curve describes a threshold below which any echoes will be ignored. The default
TVT curve is used, until P837 and P838 are used to create a new ’learned TVT curve’.
Auto False-Echo Suppression
False echoes can be caused by an obstruction in the beam path (pipes, ladders, chains,
and such). Such false echoes may rise above the default TVT curve.
P838 allows you to set a distance, and P837 then instructs the MultiRanger to ’learn’
where the obstructions/false echoes are within that distance. The new TVT curve is set
above the false echoes, screening them out.
Display before Auto False Echo Suppression
(or when P837 = 0)
default TVT P839
Hover Level
false
echo
true
echo
Distance (meters)
Level (db)
Display after Auto False Echo Suppression
TVT curve
(learned) material
level
false
echo
Distance (meters)
Level (db)
Page 226 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix B: Tech Reference
Distance Calculation
To calculate the transducer to material level (object) distance, the transmission medium
(atmosphere) sound velocity (P653) is multiplied by the acoustic transmission to reception
time period. This result is divided by 2 to calculate the one way distance.
Distance = Sound Velocity x Time / 2
The Reading displayed is the result of performing any additional modification to the
calculated distance (as determined by Operation P001, Units P005, Volume Conversion,
P050 to P054, Reading, P060 to P063, OCM, P600 to P611, and/or Totalizer P622 to P633
parameters).
Sound Velocity
The sound velocity of the transmission medium is affected by the type, temperature, and
vapor pressure of the gas or vapor present. As preset, the MultiRanger assumes the
vessel atmosphere is air at 20°C (68°F). Unless altered, the sound velocity used for the
distance calculation is 344.1 m / s (1129 ft / s).
Variable air temperature is automatically compensated when a Siemens Milltronics
ultrasonic / temperature transducer is used. If the transducer is exposed to direct
sunlight, use a sunshield or a separate TS-3 temperature sensor.
Also, if the temperature varies between the transducer face and the liquid monitored, use
a TS-3 temperature sensor (submerged in the liquid) in combination with an ultrasonic /
temperature transducer. Set Temp Source (P660) for both, to average the transducer and
TS-3 measurements.
Atmosphere composition other than air can pose a challenge for ultrasonic level
measurement. However, excellent results may be obtained by performing a Sound
Velocity Calibration (P651) if the atmosphere is homogeneous (well mixed), at a fixed
temperature, and under consistent vapor pressure.
The MultiRanger automatic temperature compensation is based on the sound velocity /
temperature characteristics of “air” and may not be suitable for the atmosphere present.
If the atmosphere temperature is variable, perform frequent Sound Velocity Calibrations
to optimize measurement accuracy.
Sound Velocity calibration frequency may be determined with experience. If the sound
velocity in two or more vessels is always similar, future calibrations may be performed on
one vessel and the resultant Velocity (P653) entered directly for the other vessel(s).
If the sound velocity of a vessel atmosphere is found to be repeatable at specific
temperatures, a chart or curve may be developed. Then, rather than performing a Sound
Velocity Calibration each time the vessel temperature changes significantly, the
anticipated Velocity (P653) may be entered directly.
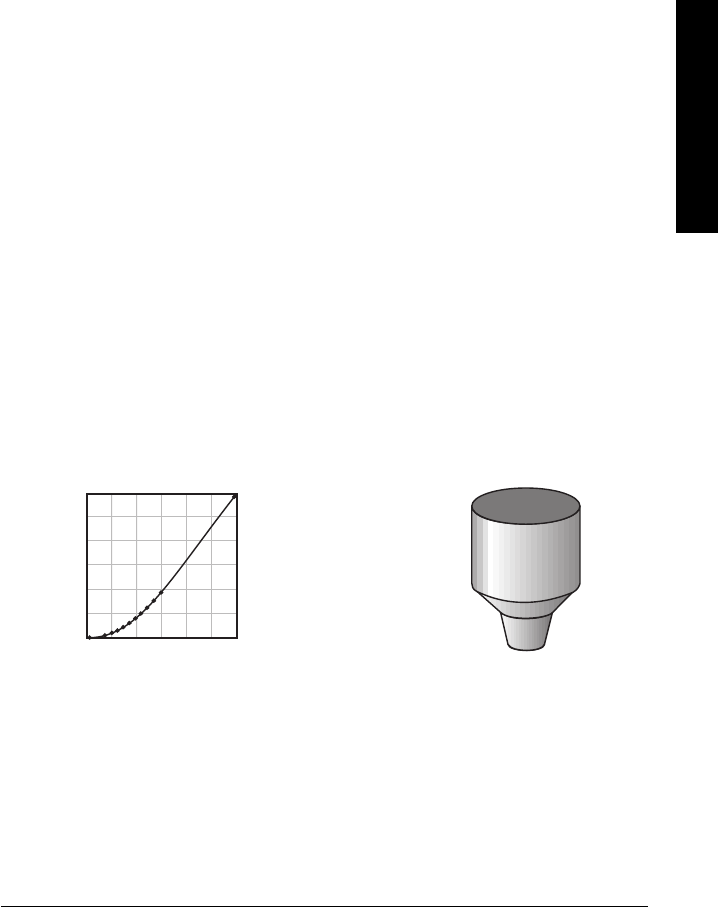
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 227
mmmmm
Appendix B: Tech Reference
Scanning
MultiRanger 100/200
When echo processing is complete (if more than 1 vessel is monitored) the scanning relay
changes state to supply the transmit pulse to the other transducer after the Scan Delay
(P727).
Scan Delay is automatically set by Maximum Process Speed (P003). When high speed
scanning is required (sometimes the case for equipment position monitoring), the Scan
Delay may be reduced. Reduce the Scan Delay only as required, otherwise premature
scanning relay fatigue could occur.
MultiRanger 200
When two transducers are connected and configured in a dual point unit, the
MultiRanger will scan each in turn via the scanner relay. When a single point
MultiRanger is programmed for differential or average level Operation (P001 = 4 or 5), two
transducers of the same type must be used.
Volume Calculation [MR 200]
Please note that the Volume Calculation feature is only available on the MultiRanger 200.
The unit provides a variety of volume calculation features (P050 to P055).
If the vessel does not match any of the eight preset Tank Shape calculations, a Universal
Volume calculation may be used. Use the level/volume graph or chart provided by the
vessel fabricator (or create one based on the vessel dimensions). Based on the graph,
choose the Universal Volume calculation, and select the level vs. volume breakpoints to
be entered (32 max). Generally, the more breakpoints entered, the greater the accuracy.
Universal, Linear (P050 = 9)
This volume calculation creates a piece-wise linear approximation of the level/volume
curve. This option provides best results if the curve has sharp angles joining relatively
linear sections.
Enter a Level Breakpoint at each point where the level/volume curve bends sharply (2
minimum).
For combination curves (mostly linear but include one or more arcs), enter numerous
breakpoints along the arc, for best volume calculation accuracy.

Page 228 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix B: Tech Reference
Universal, Curved [MR 200]
Please note that the Universal, Curved feature is only available on the MultiRanger 200.
Set P050 = 10
This calculation creates a cubic spline approximation of the level/volume curve, providing
best results if the curve is non-linear, and there are no sharp angles.
Select at least enough breakpoints from the curve to satisfy the following:
• two breakpoints very near the minimum level
• one breakpoint at the tangent points of each arc
• one breakpoint at each arc apex
• two breakpoints very near the maximum level
For combination curves, enter at least two breakpoints immediately before and after any
sharp angle (as well as one breakpoint exactly at the angle) on the curve.
Flow Calculation
Please note that the Flow Calculation feature is only available on the MultiRanger 200.
The MultiRanger provides numerous OCM flow calculation features (P600 to P611).
If the PMD (primary measuring device) does not match any of the eight preset PMD
calculations, or if a PMD is not used, select a Universal Volume calculation. Use the head/
flow graph or chart provided by the PMD fabricator (or create one based on the PMD or
channel dimensions).
Based on the graph, choose the Universal Flow calculation, and select the head versus
flow breakpoints to be entered (32 max). Generally, the more breakpoints entered, the
greater the flow calculation accuracy.
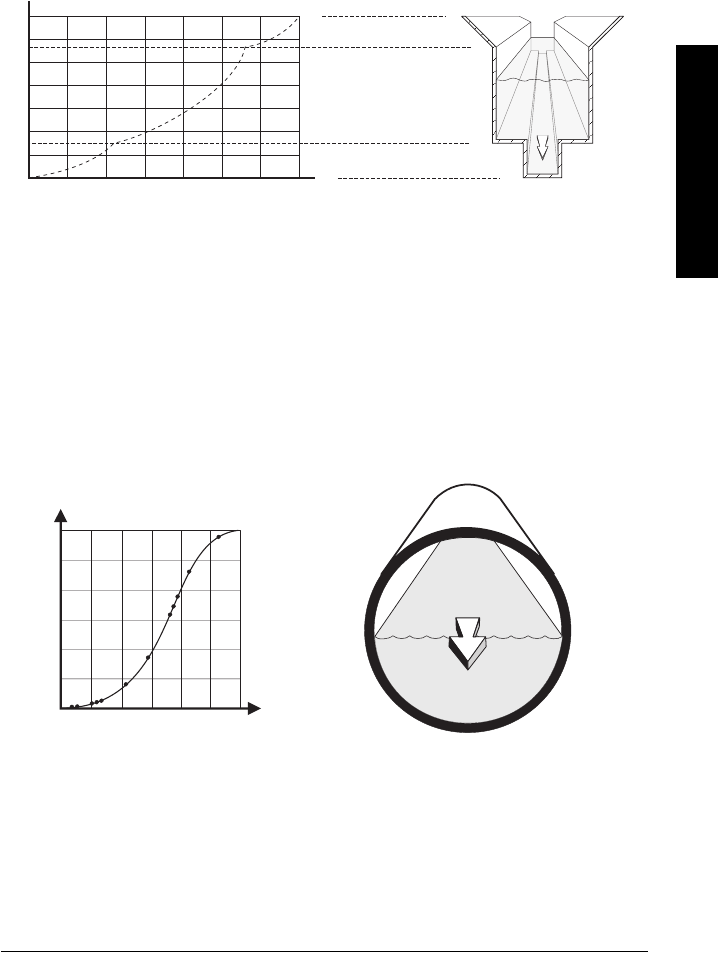
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 229
mmmmm
Appendix B: Tech Reference
Universal, Linear [MR 200]
Please note that the Universal, Linear feature is only available on the MultiRanger 200.
Set P600 = 4.
This flow calculation creates a piece-wise linear approximation of the head/flow curve.
This option provides best results if the curve has sharp angles joining relatively linear
sections.
Enter a Head Breakpoint at each point where the head/flow curve bends sharply (2
minimum). For combination curves (mostly linear but include 1 or more arcs), enter
numerous breakpoints along the arc, for best flow calculation accuracy.
See also
Typical Flow Characterization
on page 83.
Universal, Curved [MR 200]
Please note that the Universal, Curved feature is only available on the MultiRanger 200.
This calculation creates a cubic spline approximation of the head/flow curve, providing
best results if the curve is non-linear, and there are no sharp angles.
Select at least enough breakpoints from the curve to satisfy the following:
• two breakpoints very near the minimum head
• one breakpoint at the tangent points of each arc
• one breakpoint at each arc apex
• two breakpoints very near the maximum head
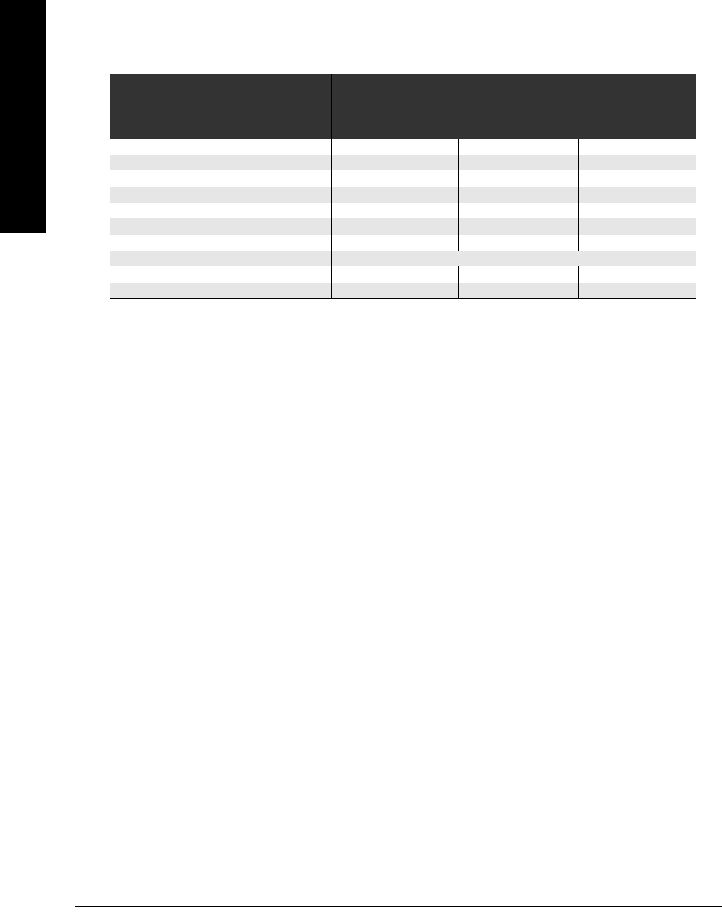
Page 230 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix B: Tech Reference
For combination curves, enter at least 2 breakpoints immediately before and after any
sharp angle (as well as 1 breakpoint exactly at the angle) on the curve. For more
information, go to
Typical Flow Characterization
on page 83.
Maximum Process Speed
The MultiRanger’s ability to respond to material level changes is designed to exceed even
the most demanding installation requirements.
The Maximum Process Speed setting automatically presets various parameters affecting
the MultiRanger response to material level changes as follows:
If any of these parameters are independently altered, a Maximum Process Speed (P003)
parameter alteration automatically resets the independently altered value.
Slower Maximum Process Speed (P003) provides greater measurement reliability. Faster,
independently set Max Fill (P700) and Max Empty (P701). Rates may be impeded by Echo
Lock (P711), Scan Delay (P727), and Shot Delay (P728) values.
Parameter Values Dependent on Maximum Process
Speed (P003)
(units) 1 (slow) 2 (medium) 3 (fast)
P070 Failsafe Timer (min) 100 10 1
P700 Max Fill Rate (m/min) 0.1 110
P701 Max Empty Rate (m/min) 0.1 1 10
P702 Filling Indicator (m/min) 0.01 0.1 1
P703 Emptying Indicator (m/min) 0.01 0.1 1
P704 Rate Filter (option) 4 2 2
P710 Fuzz Filter (% of Span) 100 50 10
P713 Echo Lock Window (per P701 / P702 and time since last valid measurement)
P727 Scan Delay (seconds) 5 5 3
P841 Long Shot Number 10 5 2
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 231
mmmmm
Appendix C: Troubleshooting
Appendix C: Troubleshooting
If the setup becomes too confusing use P999 to reset and start again.
Common Problems Chart
Note: Many of the parameters and techniques described here require extensive
knowledge of ultrasonic technologies and Siemens Milltronics echo processing
software. Use this information with caution.
Symptom Cause Action
Display blank, transducer
not pulsing. No power. Check power supply, wiring, or
power fuse.
No response to program-
mer.
Obstructed infrared interface,
defective programmer.
Check programmer usage:
15 cm (6”) from faceplate
pointed at upper target.
Displays Short and tb:(#).
Short circuited transducer cable,
or defective transducer at indi-
cated terminal block number.
Repair or replace as necessary.
Displays Open and tb:(#).
Transducer not connected or con-
nection reversed.
Check connection to displayed ter-
minal blocks.
Open circuited transducer cable,
or defective transducer at indi-
cated terminal block number.
Repair or replace as necessary.
Displays LOE. Weak or non-existent echo.
Relocate and/or re-aim transducer
at material.
Proceed to Measurement Difficul-
ties.
Displays Error and tb:(#).
Wrong transducer selected
(P004).
Verify transducer type and re-enter
value.
Transducer connected in “two
wire” method.
Do not tie white and shield together.
Use all three terminal blocks.
Transducer connected back-
wards.
Reverse black and white wires on
terminal block.
Displays EEEE Value too large to display in 4 or 5
characters.
Select larger Units (P005), or lower
Convert Reading (P061).
Reading fluctuates while
material level is still (or
vice versa).
Incorrect measurement stabiliza-
tion.
Alter Maximum Process Speed
(P003) or damping (P704) accord-
ingly. See
Maximum Process Speed
.
Reading is fixed, regard-
less of the actual mate-
rial level.
Transducer acoustic beam
obstructed, standpipe too nar-
row, or transducer ringing (reads
over 100%).
Relocate and / or re-aim transducer
at material level or object.
Proceed to Measurement Difficul-
ties below.
See also:
Transducer Ringing
.
Material level reported is
always incorrect by the
same amount.
Incorrect Empty (zero) reference
for level operation
(P001 = 1).
See Empty (P006), Reading Offset
(P063), Offset Calibration (P650), &
Offset Correction (P652).
Measurement accuracy
improves as level nears
transducer.
Incorrect Sound Velocity used for
distance calculation.
Use a transducer with a built-in tem-
perature sensor or a TS-3 tempera-
ture sensor.
See
Sound Velocity
.
Reading is erratic, with
little or no relation to
material level.
True echo too weak or wrong
echo being processed.
Relocate and / or re-aim transducer
at material.
Check noise parameters. See
Noise
Problems
.
Page 232 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix C: Troubleshooting
Noise Problems
Incorrect readings can be the result of noise problems, either acoustic or electrical, in the
application.
The noise present at the input to the ultrasonic receiver can be determined by viewing
parameter P807. The display reads ##:##, where the first number is the average noise and
the second is the peak noise. In general, the most useful value is the average noise.
With no transducer attached the noise is under 5 dB. This is often called the noise floor. If
the value with a transducer attached is greater than 5 dB, then signal processing
problems can occur. High noise decreases the maximum distance that can be measured.
The exact relationship between noise and maximum distance is dependent on the
transducer type and the material being measured. Any average noise level greater than
20 dB is probably cause for concern unless the distance is much shorter than the
maximum for the transducer.
Determine the Noise Source
Disconnect the transducer from the MultiRanger. If the measured noise is below 5 dB,
then continue here. If the measured noise is above 5 dB go to
Non-Transducer Noise
Sources
below.
1. Connect only the shield wire of the transducer to the MultiRanger. If the measured
noise is below 5 dB, continue with the next step. If the noise is above 5 dB, go to
Common Wiring Problems.
2. Connect the white and black transducer wires to the MultiRanger. Record the
average noise.
3. Remove the positive wire of the transducer. Record the average noise.
4. Re-connect the positive wire and remove the negative wire. Record the average
noise.
Using the table below, determine the appropriate next step. The terms higher, lower and
unchanged refer to the noise recorded in the previous steps.
These are guidelines only. If the suggested solution does not solve the problem, try the
other options also.
Acoustical Noise
To confirm that the problem is acoustical, place several layers of cardboard over the face
of the transducer. If the noise is reduced, the noise is definitely acoustical.
- removed + removed Go to:
noise
higher
higher Reducing Electrical Noise
unchanged Common Wiring Problems
lower Reducing Acoustical Noise
unchanged
higher Reducing Electrical Noise
unchanged Contact Siemens Milltronics
lower Reducing Acoustical Noise
lower
higher Common Wiring Problems
unchanged Common Wiring Problems
lower Reducing Acoustical Noise
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 233
mmmmm
Appendix C: Troubleshooting
Non-Transducer Noise Sources
Remove all input and output cables from the MultiRanger individually while monitoring
the noise. If removing a cable reduces the noise, that cable may be picking up noise from
adjacent electrical equipment. Check that low voltage cables are not being run adjacent
to high voltage cables or near to electrical noise generators such as variable speed
drives.
Filtering cables is an option but is not recommended unless all other options have been
exhausted.
The MultiRanger is designed to work near heavy industrial equipment such as variable
speed drives. Even so, it should not be located near high voltage wires or switch gear.
Try moving the electronics to a different location. Often moving the electronics a few
meters farther from the source of noise will fix the problem. Shielding the electronics is
also an option, but it should be a last resort. Proper shielding is expensive and is difficult
to install properly–the shielding box must enclose the MultiRanger electronics
completely, and all wires must be brought to the box through grounded metal conduit.
Common Wiring Problems
• Make sure that the transducer shield wire is connected at the electronics end only.
Do not ground it at any other location.
• Do not connect the transducer shield wire to the white wire.
• The exposed transducer shield wire must be as short as possible.
• Connections between the wire supplied with the transducer, and any customer
installed extension wire should be done in grounded metal junction boxes.
On Siemens Milltronics transducers the white wire is negative and the black wire is
positive. If the extension wire is colored differently, make sure that it is wired consistently.
Extension wire must be shielded twisted pair. Older MultiRanger products may have
included recommendations to use co-axial cable for noise reduction purposes. This is no
longer the case. Use shielded twisted pair. See the installation section for specifications.
Reducing Electrical Noise
• Ensure that the transducer cable does not run parallel to other cables carrying high
voltage or current.
• Move the transducer cable away from noise generators like variable speed drives.
• Put the transducer cable in grounded metal conduit.
• Filter the noise source.
Reducing Acoustical Noise
• Move the transducer away from the noise source.
• Use a stilling well.
• Install a rubber or foam bushing or gasket between the transducer and the
mounting surface.
• Relocate or insulate the noise source.
• Change the frequency of the noise. The MultiRanger is only sensitive to noise
between 25 KHz and 65 KHz.
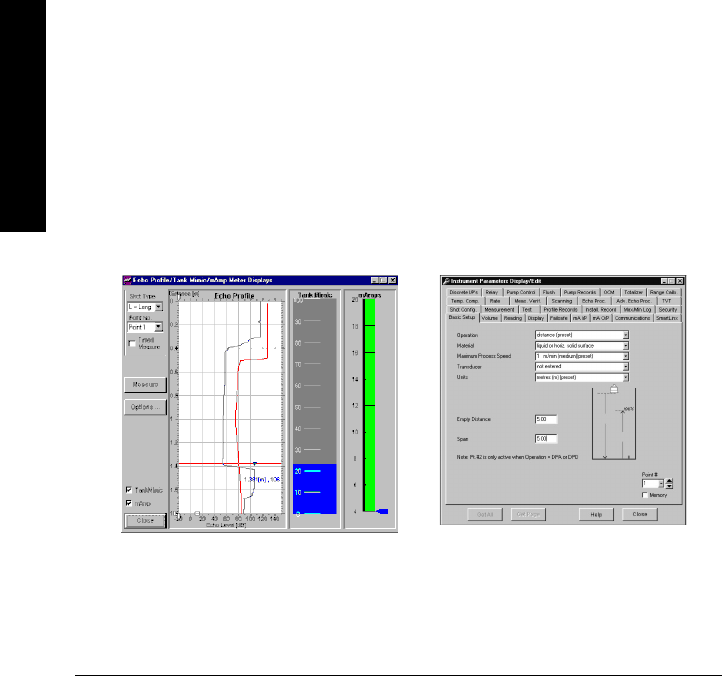
Page 234 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix C: Troubleshooting
Measurement Difficulties
If the Failsafe Timer (P070) expires due to a measurement difficulty, LOE flashes
alternately with the last known Reading. In rare cases, the MultiRanger may lock on to a
false echo and report a fixed or wrong reading.
Flashing LOE Display
The loss of echo (LOE) display appears when the echo confidence is below the threshold
value set in P805 Echo Confidence.
LOE occurs when:
• The echo is lost and no echo is shown above the ambient noise. See low echo
confidence (P805) and low echo strength (P806).
• Two echoes are too similar to differentiate. See low echo confidence (P805) and low
echo strength (P806).
If LOE is displayed, check the following:
• Surface monitored is within the transducer maximum range
• Transducer model (P004) matches the transducer used
• Transducer is located and aimed properly
• Transducer is not submerged without a submergence shield
Adjust Transducer Aiming
See the transducer manual for range, mounting, and aiming details. For optimum
performance, adjust transducer aiming to provide the best Echo Confidence (P805) and
Echo Strength (P806) for all material levels within the measurement range.
The most efficient method of checking echoes is with Siemens Milltronics Dolphin Plus
software.
Displaying Echoes
Use Dolphin Plus to graphically display
the echo profile at the installation.
Interpret the echo profile and change
relevant parameters.
Editing Parameters
Edit the parameter values. Use F1
to get online help at any time.

7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 235
mmmmm
Appendix C: Troubleshooting
To display Echo Confidence in the RUN mode
Press and hold for four seconds (Failsafe Time Left changes to the Short:Long
Confidence display).
To display Echo Confidence in the program mode, access the Echo Confidence (P805)
parameter.
To update the value displayed after each aiming adjustment..
Press (five times or more to verify stability and overcome any echo lock P711).
Increase Failsafe Timer Value
Increase the Failsafe Timer (P070) value, if failsafe operation will not be compromised by
the larger value.
Try this only if LOE shows for short periods of time.
Install a Transducer with a Narrower Beam
Sometimes the interference echoes from the sides of a vessel can cause the MultiRanger
to lock onto a consistent, incorrect level. Try installing a longer range (narrower beam)
transducer, enter the new transducer model (P004), and (if necessary) optimize aiming
and frequency again.
Always contact your Siemens Milltronics service personnel before selecting a transducer
to solve this type of problem.
Use Dolphin Plus to Debug Echo
If a narrower beam transducer is not available, use Dolphin Plus to view live sonic
profiles and make adjustments to the Advanced Echo Processing parameters.
Fixed Reading
If the Reading is a fixed value, regardless of the transducer to material surface distance,
ensure the:
1. Transducer acoustic beam is free from obstruction.
2. Transducer is properly aimed
3. Transducer is not in contact with any metal object.
4. Material mixer (if used) is operating while the MultiRanger is operating. If it is
stopped, ensure that the mixer blade is not stopped under the transducer.
Obstructions in the Sound Beam
Check for (and remove if present) any acoustic beam obstruction, or relocate the
transducer.
If an obstruction cannot be removed or avoided, adjust the Time Varying Threshold (TVT)
Curve to reduce the Echo Confidence derived from the sound reflected by the obstruction.
Use Dolphin Plus to adjust the TVT curve. (See
P832: TVT Shaper.
)
Nozzle Mountings
If the transducer is mounted on or in a nozzle, grind smooth any burrs or welds on the
inside or open end (the end that opens into the vessel). If the problem persists, install a
Page 236 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix C: Troubleshooting
larger diameter or shorter length nozzle, bevel the inside of the bottom end, or cut the
open end of the nozzle at a 45° angle.
See the transducer manual for complete mounting instructions.
For ST-series and XPS-10 transducers use the plastic conduit / flange adapter supplied
with the unit.
If the mounting hardware is over tightened, loosen it. Over tightening changes the
resonance characteristics of the transducer and can cause problems.
Set the MultiRanger to Ignore the Bad Echo
If the preceding remedies have not fixed the problem, the false echo has to be ignored.
If the Echo is Close to the Transducer
If there is a static, incorrect, high level reading from the MultiRanger there is probably
something reflecting a strong echo back to the transducer. If the material level never
reaches that point extend the Near Blanking (P800) to a distance to just past the
obstruction.
Adjust the TVT to Ignore the Echo
Use Auto False Echo Suppression (P837-P839) to automatically shape around false
echoes.
Wrong Reading
If the Reading is erratic, or jumps to some incorrect value periodically, ensure the:
1. Surface monitored is not beyond the MultiRanger’s programmed range or the
transducer’s maximum range.
2. Material is not falling into the transducer’s acoustic beam.
3. Material is not inside the blanking distance of the transducer.
Types of Wrong Readings
If a periodic wrong Reading is always the same value, see
Fixed Reading
.
If the wrong Reading is random, ensure the material surface to transducer distance is
less than the Empty value entered plus 20%. If the material/object monitored is outside
this distance, increase Range Extension (P801) as required. This error is most common in
OCM applications using weirs.
Liquid Splashing
If the material monitored is a liquid, check for splashing in the vessel. Enter a lower
Maximum Process Speed (P003) value to stabilize the Reading, or install a stilling well.
(Contact Siemens Milltronics or your local distributor.)
Adjust the Echo Algorithm
Use Dolphin Plus to view live sonic profiles and make adjustments to the P820 Algorithm
parameter. See P820 on page 204 for details.
If the “Area” algorithm is used and narrow noise spikes are evident on the (long shot)
Echo Profile, turn the Spike Filter (P821) on and/or widen the Narrow Echo Filter (P822).
Also, if the true echo has jagged peaks, use Reform Echo (P823).
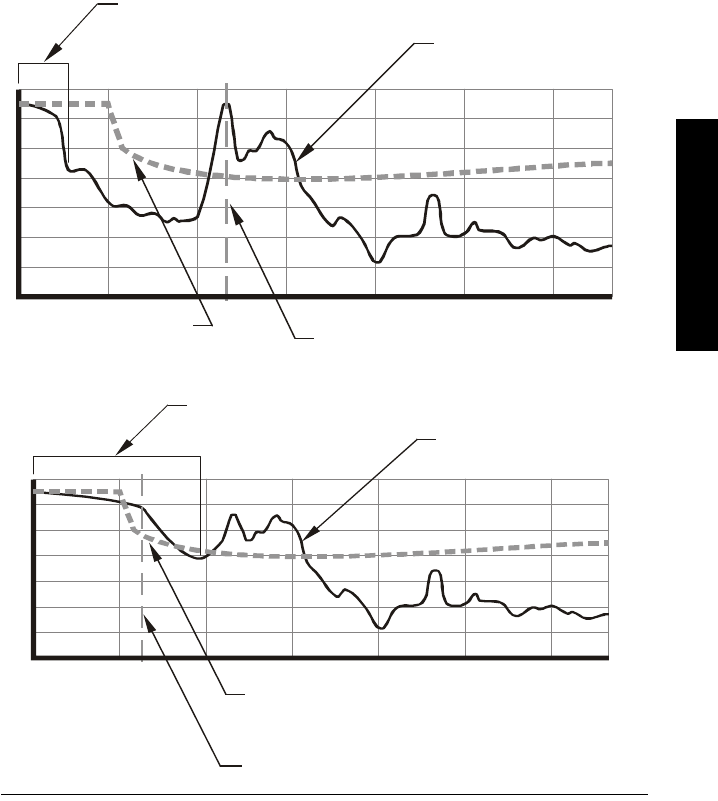
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 237
mmmmm
Appendix C: Troubleshooting
If multiple echoes appear on the Echo Profile, typical of a flat material profile (especially if
the vessel top is domed), use the “first” Algorithm.
If the Echo Profile repeatedly switches from short to long, adjust the Short Shot Range
(P852) to stabilize the “shot” mode used for the echo evaluation. Also, adjust the Short
Shot Bias to increase (or decrease the amount of preference given to short shot echoes
over long shot echoes.
Should a stable measurement still not be attainable, contact Siemens Milltronics or your
local distributor.
Transducer Ringing
If the transducer is mounted too tightly, or if it is mounted so that its side touches
something, its resonance characteristics change and this can cause problems.
Normal Ring Down
Poor Ring Down
Ring Down
Echo Profile
TVT curve Time of Correct Echo
Ring Down
Echo Profile
TVT Curve
Time of false echo from ringing
Page 238 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix C: Troubleshooting
Ring down times that extend past the near blanking area can be interpreted by the
MultiRanger as the material level and are characterized by a steady high level being
reported.
Unit Repair and Excluded Liability
All changes and repairs must be done by qualified personnel and applicable safety
regulations must be followed. Please note the following:
• The user is responsible for all changes and repairs made to the device.
• All new components must be provided by Siemens Milltronics Process
Instruments Inc.
• Restrict repair to faulty components only
• Do not re-use faulty components.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 239
mmmmm
Appendix D: Pump Control
Appendix D: Pump Control Reference
Please note that some pump control features apply to the MultiRanger 200 only.
The MultiRanger has the pump control strategies to solve nearly any water / wastewater
application. This section details these strategies for engineers requiring in-depth
knowledge of the system and how it operates.
Pump Control Options
The various methods of pump control are made up of a combination of two control
variables:
Pump Duty
The pump duty indicates in what sequence pumps are started.
Pump Start Method
The start method indicates whether new pumps start and run with any currently running
pumps (most common) or whether new pumps start and shut off currently running
pumps.
Pump Groups
The MultiRanger groups pumps that use identical pumping strategies based on the value
of Relay Control Function (P111). Generally, one group of pumps corresponds to one wet
well or reservoir.
Pump by Rate [MR 200]
Please note that this feature applies to the MultiRanger 200 only.
To trigger pump starts by the rate of change in material level use P121–Pump by Rate
(P121). New pumps are started, one at a time, until the rate setpoint (Filling Indicator
(P702), or Emptying Indicator(P703)) is reached.
Pump Control Algorithms
Please note that the MultiRanger 100 and the MultiRanger 200 use this feature
differently.
MultiRanger 100
All of these algorithms can be used to start multiple pumps (assist).
MultiRanger 200
Page 240 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix D: Pump Control
All of these algorithms can be used to start multiple pumps (assist) or one pump at a time
(backup).
The MultiRanger 100 and MultiRanger 200 have three main methods of pump
control:
Fixed
Starts pumps based on individual setpoints and always starts the same pumps in the
same sequence.
Alternate
Starts pumps based on the duty schedule and always leads with a new pump.
Service Ratio
Starts pumps based on user-defined ratio of running time.
Fixed Duty Assist (P111 = 50)
Ties the indexed pump relay directly to the indexed setpoint.
Relay Operation (for P118 = 2)
The relay contact closes at the ON setpoint and opens at the OFF setpoint. Multiple relay
contacts in the pump group can be closed at the same time.
Relay Table
The following table shows relay status when each setpoint is reached.
Fixed Duty Backup (P111 = 51) [MR 200]
Ties the indexed pump relay directly to the indexed setpoint.
Please note that this feature applies to the MultiRanger 200 only.
Relay Operation (for P118 = 2)
The relay contact closes at the ON setpoint and opens at the OFF setpoint. When a new
relay trips the previously closed relay contact opens to shut down the running pump.
Only one relay contact in the pump group can be closed at any one time.
Relay Table
Relays
Setpoints
Index 123
On 3 On On On
On 2 On On Off
On 1 On Off Off
Off 0 Off Off Off
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 241
mmmmm
Appendix D: Pump Control
The following table shows relay status when each setpoint is reached.
Alternate Duty Assist (P111 = 52)
Alternates the lead pump each time the material level cycles and runs all pumps together.
Relay Operation (for P118 = 2)
The setpoints associated with the relays are grouped so that they can be rotated.
Setpoint one does not relate directly to relay one. The pumping algorithm manages the
mapping of setpoints to relays.
When pumps are run, they RUN in parallel.
Relay Table
Alternate Duty Backup (P111 = 53) [MR 200]
Alternates the lead pump each time the material level cycles.
Please note that this feature applies to the MultiRanger 200 only.
Relay Operation (for P118 = 2)
The setpoints associated with the relays are grouped so that they can be rotated.
Setpoint one does not relate directly to relay one. The pumping algorithm manages the
mapping of setpoints to relays. When pumps are run, they can RUN only one at a time.
Relays
Setpoints
Index 123
On 3 Off Off On
On 2 Off On Off
On 1 On Off Off
Off 0 Off Off Off
Cycle 1 Relays
123
Setpoints
On 3 On On On
On 2 On On Off
On 1 On Off Off
Off 0 Off Off Off
Cycle 2 Relays
123
Setpoints
On 3 On On On
On 2 Off On On
On 1 Off On Off
Off 0 Off Off Off
Cycle 3 Relays
123
Setpoints
On 3 On On On
On 2 On Off On
On 1 Off Off On
Off 0 Off Off Off
Page 242 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix D: Pump Control
Relay Table
Service Ratio Duty Assist (P111 = 54) [MR 200]
Selects the lead pump based on number of hours each pump has run and the specified
ratios that each pump requires. Multiple pumps can run at one time.
Please note that this feature applies to the MultiRanger 200 only.
Relay Operation (for P118 = 2) [MR 200]
Please note that this feature applies to the MultiRanger 200 only.
The setpoints associated with the relays are grouped so they can be redistributed based
on pump RUN time ratios. The next pump to start or stop is the one with the required time
to actual time ratio.
Over time the number of hours demanded of each pump will conform to the ratios
specified. Usually, the ratios are specified in percent values.
To create a grouping of pumps where two pumps make up 50% of the run time and the
third pump makes up the other 50%.
P122 is set to these values:
Cycle 1 Relays
123
Setpoints
On 3 Off Off On
On 2 Off On Off
On 1 On Off Off
0ff 0 Off Off Off
Cycle 2 Relays
12 3
Setpoints
On 3 On Off Off
On 2 Off Off On
On 1 Off On Off
Off 0 Off Off Off
Cycle 3 Relays
123
Setpoints
On 3 Off On Off
On 2 On Off Off
On 1 Off Off On
Off 0 Off Off Off
P122 Index Value
125
225
350

7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 243
mmmmm
Appendix D: Pump Control
Service Ratio Duty Backup (P111 = 55) [MR 200]
Selects the lead pump based on number of hours each pump has RUN and the specified
ratios that each pump requires. Only one pump can RUN at a time.
Please note that this feature applies to the MultiRanger 200 only.
This algorithm is the same as Service Ratio Duty Assist except that it will only RUN one
pump at a time. When the next pump in the sequence starts, the previous pump stops.
First In First Out (FIFO) (P111 = 56) [MR 200]
Selects the lead pump based on the Alternate duty but uses staggered off setpoints and
shuts down pumps based on the first in, first out rule.
Please note that this feature applies to the MultiRanger 200 only.
This algorithm starts pumps in the same way as Alternate Duty Assist but uses staggered
OFF setpoints to shut the pumps down. When the first OFF setpoint is reached the FIFO
rule shuts down the first pump started. If the pumps started in sequence 2,3,1 then they
would be shut down in sequence 2,3,1.
Pump by Rate (P121) [MR 200]
Starts pumps until the level is changing at the rate specified in P702 or P703.
Please note that this feature applies to the MultiRanger 200 only.
Pumping costs can be less because only the highest ON setpoint needs to be
programmed and this results in a lower difference in head to the next wet well which, in
turn, results in less energy being used to pump out the well.
Other Pump Controls [MR 200]
Please note that these features apply to the MultiRanger 200 only.
There are a number of other controls available to modify pump behaviour.
Pump Run-On (P130, P131)
Extends the RUN period for a pump based on a set time interval. This allows for the wet
well to be pumped lower than usual and reduces sludge build-up on the well bottom.
Wall Cling Reduction (P136)
Varies the ON and OFF setpoints to keep a fat ring from forming around the walls of the
wet well.
Pump Group (P137)
Allows for two different Alternate Duty Assist or Alternate Duty Backup pump groups in
the same application.
Page 244 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix D: Pump Control
Flush Device (P170 to P173)
Operates a flush valve or special flush device based on the number of pump starts,
usually to aerate wet well wastewater.

7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 245
Appendix E: Updating Software
Appendix E: Updating Software
Updating Software
To update the software in the MultiRanger, please contact your Siemens Milltronics
representative to obtain the software. For a complete list of representatives, go to
www.siemens.com/processautomation.
To install the software, please complete the following:
1. Connect your PC or laptop to the MultiRanger RJ-11 RS-232 port.
2. Run the .exe Downloader program in the software. Use this to set the RS-232
settings to match your MultiRanger. Please note that the software default settings
will already match the default settings of the unit. Changes are only necessary if the
RS-232 settings in the unit have been changed.
3. Complete the Downloader program steps.
4. Verify that Downloader confirms a succesful upgrade before exiting.
5. Complete a Master Reset (P999) after a successful upgrade, before re-entering
parameters.
WARNINGS:
1. All parameter values will be lost during software upgrade.
Record your current parameters manually or using Dolphin Plus or
SIMATIC PDM before upgrade.
2. Disable all pumps and alarms before updating software, as
relays can change state during the software update causing pumps
to turn on or off .
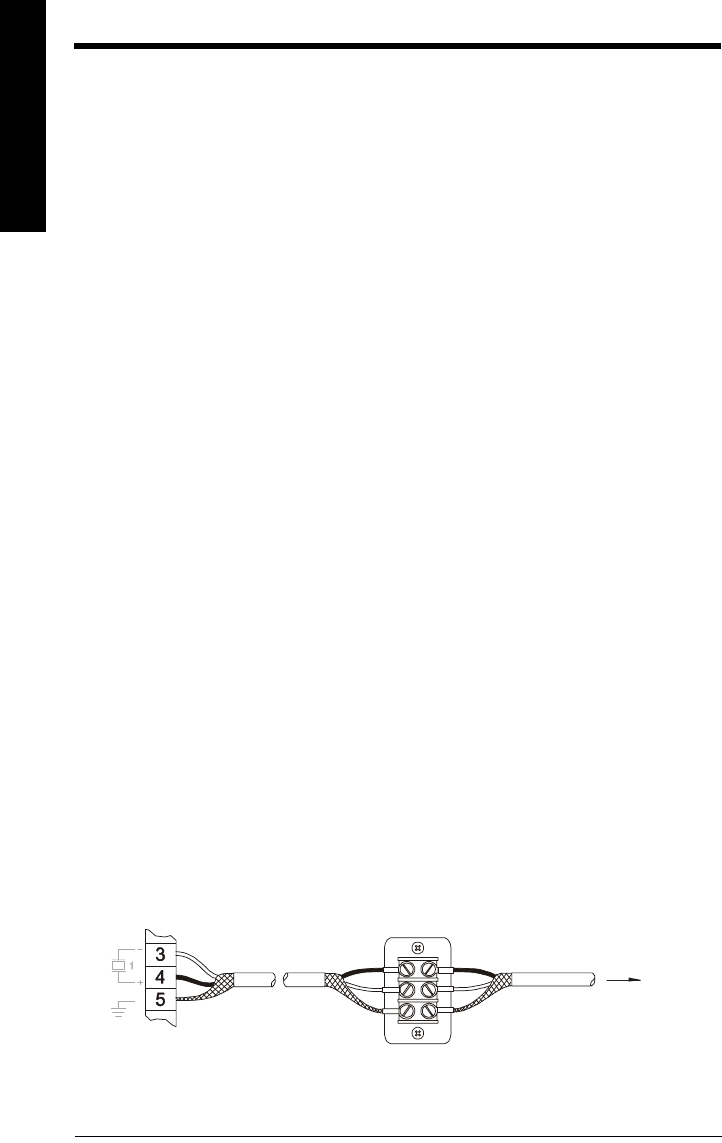
Page 246 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix F: Upgrading
Appendix F: Upgrading
The following procedure will assist you if you are upgrading from a MultiRanger Plus to a
MultiRanger 100 or MultiRanger 200.
If the application is unchanged, copy down the parameters in the MultiRanger Plus
before de-commissioning the unit.
Mounting a MultiRanger 100/200
Please read the MultiRanger
Installation
section on page 8 before mounting the new
MultiRanger 100/200.
Make sure the power is OFF to the unit before following these steps:
1. Remove the old MultiRanger Plus.
2. Mount the new MultiRanger 100/200 using the same mounting holes.
Connecting the Transducer
Important: Unlike the MultiRanger Plus, coaxial cable is not recommended for use with
the MultiRanger 100/200 for transducer cable extensions. The MultiRanger 100/200
circuit is designed to use shielded twisted pair cable. Ideally, the coaxial cable should be
replaced with twisted pair.
If this is not practical, please refer to the Coaxial Transducer Extension section below.
Coaxial Transducer Extention
The MultiRanger 100/200 uses a new differential input receiver that works either directly
connected to the transducer lead or with a screened twisted pair extension cable via a
field junction box. This arrangement, using two conductors and a screen, gives
considerably better electrical noise immunity than the previous coaxial arrangement (up
to 20dB) and will give reliable operation in applications where the proximity of power
cables, variable speed drives etc. would have caused problems.
If you are installing a new MultiRanger system we strongly recommend that you use a
good quality screened, twisted pair cable if an extension is required. If the integral
transducer cable is used you need only connect to the MultiRanger and benefit from the
superior performance.
Transducer
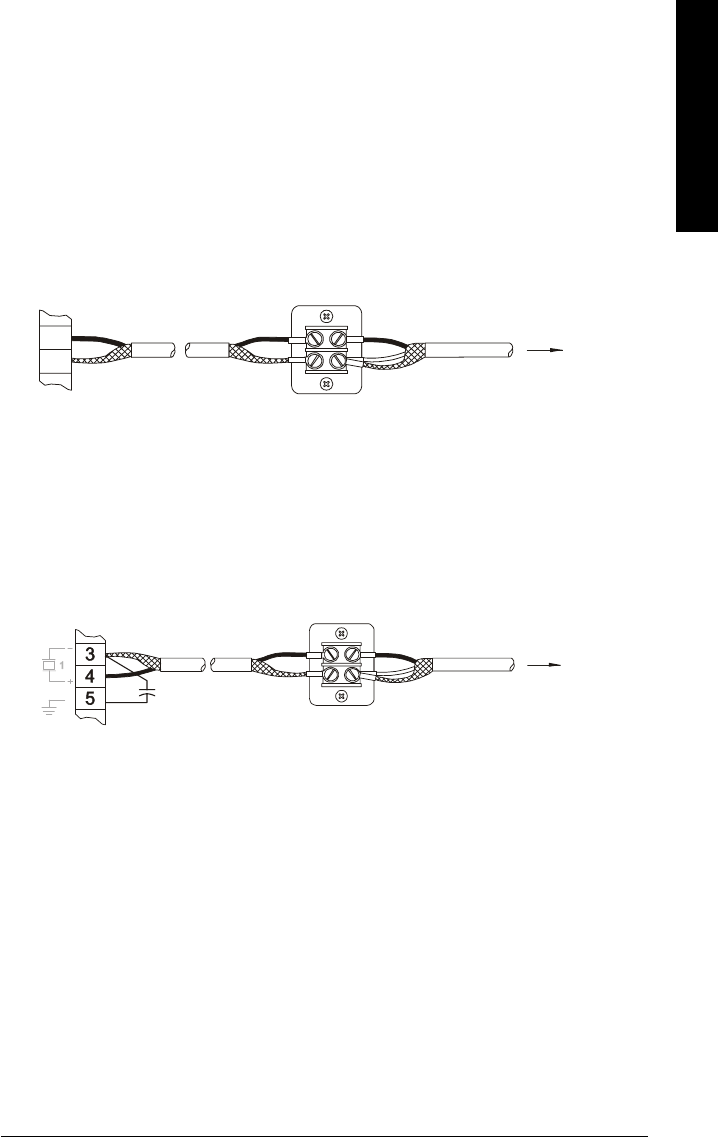
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 247
mmmmm
Appendix F: Upgrading
Connecting a transducer with RG62 coaxial extension cable
If you are replacing an older Siemens Milltronics Ultrasonic Level Controller with a new
MultiRanger where an RG62 coaxial extension is fitted and you are unable to replace the
extension with a new cable, please refer to connection diagram below. Please note that
the noise immunity performance will be similar to our older model ultrasonic level
controllers if you use coaxial cable.
Existing installation
RG62 coaxial cable has been used to make the extension. The level controller might be a
MultiRanger Plus, HydroRanger, HydroRanger Plus or one of our other level controllers.
MultiRanger 100/200 Installation (for retrofitting MultiRanger Plus
Installations)
Connect with a 0.1µF (100v or greater) capacitor (included with MultiRanger) between the
shield and negative terminals. Connect centre core of the coaxial to the positive terminal
and the screen to the negative terminal.
Transducer
Transducer
Page 248 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix F: Upgrading
MultiRanger Plus to MultiRanger 100/200 Parameters
The MultiRanger 100/200 uses the current Siemens Milltronics standard parameter set
which is different than the parameter numbers used in the MultiRanger Plus.
The MultiRanger Plus parameters numbers are sequential (P-0 to P-99). The MultiRanger
100/200 parameters number are also sequential; however, some of the parameters are
indexed.
Parameters are indexed when they apply to more than one input or output. The index
value defines the input/output for that parameter. Indexed parameters contain a value for
each index, even if that index is not used.
Example
In the MultiRanger Plus each relay had a dedicated parameter number for its function,
ON and OFF points.
MultiRanger Plus Relay One
• P-8: Function
• P-9 : ON setpoint
• P-10: OFF setpoint
MultiRanger 100/200 uses P111 for all relays and indexes these parameters.
• P-111: Function
•P-112: ON
• P-113: OFF
The following tables show the differences between the MultiRanger Plus and the
MultiRanger 100/200. They each show one relay programmed as a high alarm, and two
relays programmed for pump control with alternating pump starts:
MultiRanger Plus
Relay Parameter Value
1P- 8 ( r e l a y f u n c t i o n ) 1 (alarm)
1P-9 (ON setpoint) 4 m
1P10 (OFF setpoint) 3.5 m
2P- 11 ( r e l a y f u n c t i o n ) 9
2P-12 (ON setpoint) 3.2 m
2P-13 (OFF setpoint) 0.5 m
3P- 1 4 ( r e l a y f u n c t i o n ) 9
3P-15 (ON setpoint) 3.4 m
3 P-16 (OFF setpoint) 0.6 m
MultiRanger 100/200
Relay Parameter Value
1P111 [1] (relay function) 1
1P112 [1] (ON setpoint) 4 m
1P113[1] (OFF setpoint) 3.5 m
2P111[2] (relay function) 52
2P112[2] (ON setpoint) 3.2 m
2P113[2] (OFF setpoint) 0.5 m
3P111[3] (relay function) 52
3P112[3] (ON setpoint) 3.4 m
3P113[3] (OFF setpoint) 0.6 m
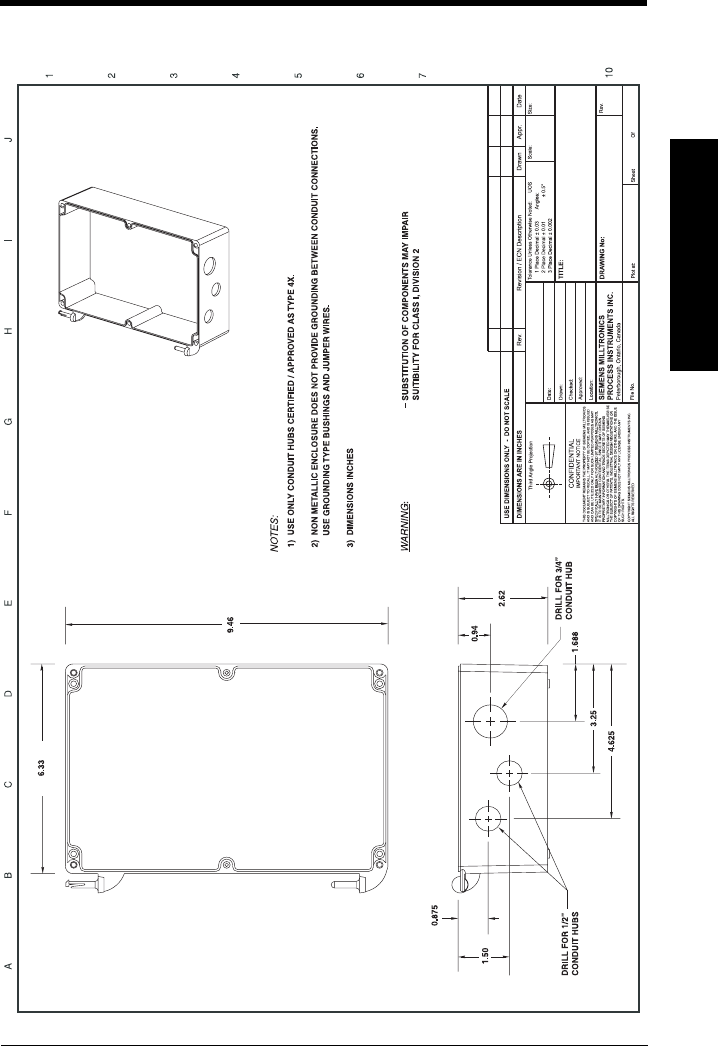
7ML19981FBO6 MultiRanger 100/200 – INSTRUCTION MANUAL Page 249
Appendix G
Appendix G: Conduit Entry for Class 1,
Div 2 Applications
Product Group
2365031400
S. NGUYEN
PETERBOROUGH
14/ AUG / 02
ULTRASONICS
FOR CONSTRUCTION
0
T. ADAM
R. CLYSDALE
1:1
12
NONE
B
HINGED6X9ENCLOSUREWITH
CONDUIT ENTREES & ASSEMBLE
FOR CLASS 1 DIV 2 APPLICATIONS
23650314 0
RPC SN
AUG
14/02
EXPLOSION HAZARD
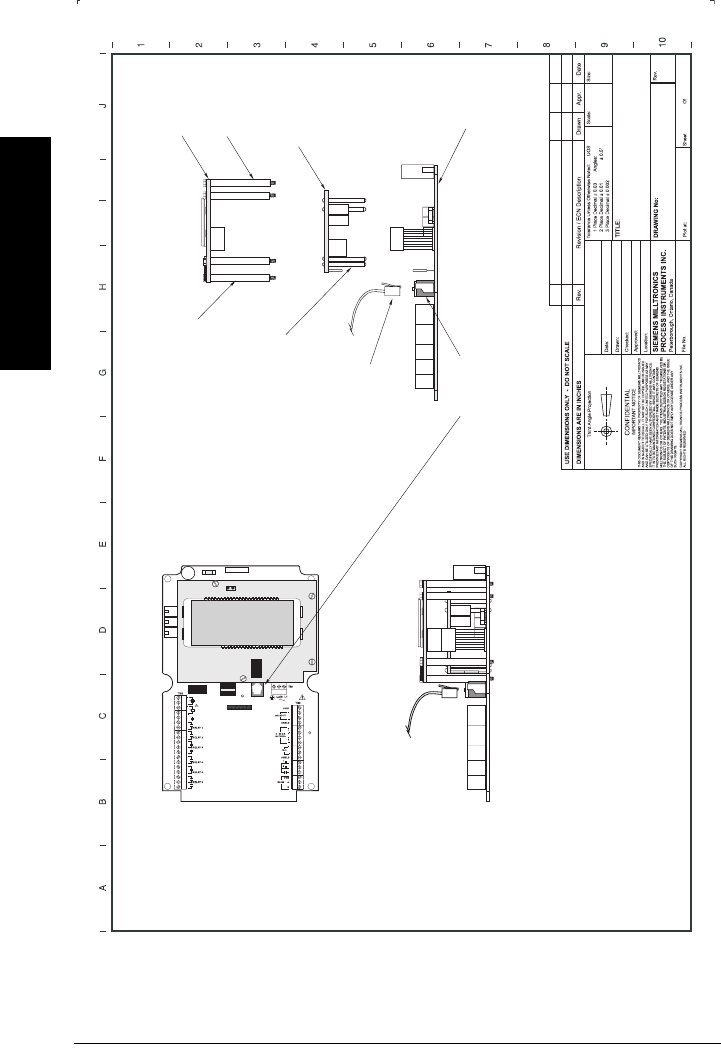
Page 250 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FBO6
Appendix G
Product Group
2365031400
S. NGUYEN
PETERBOROUGH
14/ AUG / 02
ULTRASONICS
FOR CONSTRUCTION
0
T. ADAM
R. CLYSDALE
1:1 22
NONE
B
HINGED6X9ENCLOSURE WITH
CONDUIT ENTREES & ASSEMBLE
FOR CLASS 1 DIV 2 APPLICATIONS
23650314 0
RPC SN
AUG
14/02
DISCRETE
INPUTS
1.75”, 6-32
NYLON
STANDOFF
CERTIFIED
TYCO ELECTRONICS
MODULAR PLUG
5-641335
(SUPPLIED BY
CUSTOMER)
CERTIFIED
TYCO ELECTRONICS
MODULAR JACK
520425-2
(INSTALLED BY
SIEMENS MILLTRONICS)
POWER
SUPPLY
BOARD
MAIN
BOARD
1.12” RICHCO
DUAL LOCKING
MINI NYLON
STANDOFF
(4 PLACES)
1.75” , 6-32
BRASS
STANDOFF
(3 PLACES)
DISPLAY
BOARD
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 251
mmmmm
Appendix H: Software Rev.
Appendix H: Software Revision History
MultiRanger 100
Soft-
ware
Rev.
Date Changes
1.00 Aug. 15, 2005 • Pilot Release.
1.01 Sept. 21, 2005 • Internal Release.
1.02 Dec. 12, 2001 • Initial Release.
1.03 Aug. 27, 2002 • Clarified return message for factory RS232
test.
• Prevent entering of strings with invalid fields
in Dolphin Plus.
• Properly convert ft/sec to m/sec in P654.
• Eliminated rogue watchdog resets from
repeatedly pressing hand programmer enter
while in P901-P90.
• Allow 32 bit read/write as seconds.
• Factory mode lock is written to flash.
• Cleaned up compiler errors and Lint
warnings.
• Modified handling of non-quick start
parameters.
• Modifications for Production Testing.
• Users may now configure the SmartLinx
memory map.
Page 252 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix H: Software Rev.
1.04
1.05
Feb. 11, 2003
Feb. 23, 2003
• Product enhancements to eliminate relay
chatter on software download.
• Improved functionality of receiver saturation
during calibration.
• Added relay functionality through P118 to
coincide with manual.
• Improved product security with addition of
P069.
• Backup level override behaviour
improvement.
• Improved mA control with P210 - P213.
• Improved temperature calibration in factory
mode.
• Improved Production Testing support.
• Improved reset behaviour.
• Changed default mA trim values.
• Improved functionality of downloading
breakpoints in Dolphin Plus.
1.06 May 27, 2004 • RCVR offset limits are no longer handled in
the code.
1.07 Aug. 30, 2004 • P060, P005 Dependancy removed.
• Split Values - Parameters with the "xx:yy"
format now being limited properly.
• Temperature Spike - Temperature readings
now being protected from other units’
transmit pulse.
• TVT Shift - A rounding error in the number of
samples, caused the TVT position to shift.
• Auto False Echo Suppression - Device learns
the shape of an empty tank to automatically
suppress false echos.
• SIMATIC PDM Compatability - Device uses
Modbus to communicate with SIMATIC PDM.
DDs required.
Soft-
ware
Rev.
Date Changes
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 253
mmmmm
Appendix H: Software Rev.
1.08 Nov. 11, 2004 • Improvements made as a result of Siemens
systems testing:
• SIMATIC PDM related: TVT display
improvement to prevent it from going
negative. MLFB number includes SMPI as
well as Siemens numbering. Change of some
enumerations in the Device Description.
• Device related: mA output no longer resets
when PAR_MA_FUNCTION (P201) is written
to. mA trims (P214, P215) now have the
property no Reset.
• Enhancement: Device Identification
command allows Tag, Description, Message,
and Date.
1.09 Nov. 28, 2005 • Correction for manual Shaper TVT shift due
to change in velocity.
• Resolved issue of reading some floats as
decimal shifted integers.
• The submergence algorithm now
implemented with the thresholds defined.
• Changes to support single DUART.
1.10 not released
1.11 Apr. 20, 2006 • Software modified to support replacement
component.
• Supports SIMATIC PDM version 6.02.
• Added support for true First echo processing
algorithm
• Support for 3rd Point Volume has been added
on P001 = DPA or DPD.
1.12 Aug. 15, 2008 • Many parameter ranges improved to match
product function and SIMATIC PDM.
• P110 = OFF removed from SIMATIC PDM
• Improved text labels for P770
Soft-
ware
Rev.
Date Changes
Page 254 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix H: Software Rev.
MultiRanger 200
Soft-
ware
Rev.
Date Changes
1.00 Nov. 09, 2001 • Pilot Release.
1.01 Dec. 02, 2001 • Initial Release.
1.02 Aug. 20, 2002 • P602 functions reduced point limit from 10 to
6.
• Changed P132 to global.
• P640 now accepts negative values.
• Changed access mode of dialer parameters
so they cannot be scrolled.
• Clarified return message for factory RS232
test.
• Prevent entering strings with invalid fields in
Dolphin Plus.
• Properly convert ft/sec to m/sec in P654.
• Eliminated rogue watchdog resets when
repeatedly pressing hand programmer enter
while in P901-P903.
• Allow 32 bit read/write as seconds.
• Factory mode lock is written to flash.
• Cleaned up compiler errors and Lint
warnings.
• Modified handling of non-quick start
parameters.
• Modifications for Production Testing.
• Users may now configure the SmartLinx
memory map.
• Improved Preset Application values.
1.03 Sept. 25, 2002 • Allow files to be downloaded to the product
using Dolphin+.
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 255
mmmmm
Appendix H: Software Rev.
1.04
1.05
Feb. 11, 2003
Feb. 21, 2003
• Product enhancements to eliminate relay
chatter on software download.
• Improved functionality of receiver saturation
during calibration.
• Added relay functionality thru P118 to
coincide with manual.
• Improved product security with addition of
P069.
• Backup level override behaviour
improvement.
• Improved mA control with P210 - P213.
• Improved temperature calibration in factory
mode.
• Improved Production Testing support.
• Improved reset behaviour.
• Changed default mA trim values.
• Improved functionality of downloading
downloading in Dolphin +.
1.06 May 27, 2004 • RCVR offset limits are no longer handled in
the code.
1.07 Aug. 30, 2004 • OCM Time Units improvement.
• Totalizer enhancement to prevent a rounding
error puting the totalizer into an unstable
"mode."
• Totalizer - Access to totalizer in OCM mode
from Modbus map (reg 41040).
• P060, P005 Dependancy removed.
• Split Values - Parameters with the "xx:yy"
format now being limited properly.
• Temperature Spike - Temperature readings
now being protected from other units’
transmit pulse.
• TVT Shift - A rounding error in the number of
samples caused the TVT to shift position.
• Auto False Echo Suppression - Device learns
the shape of an empty tank to automatically
suppress false echos.
• SIMATIC PDM Compatability - Device uses
Modbus to communicate with SIMATIC PDM.
DDs required.
Soft-
ware
Rev.
Date Changes
Page 256 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Appendix H: Software Rev.
1.08 Aug. 30, 2004 •Improvements made as a result of Siemens
systems testing:
• SIMATIC PDM related: TVT display
improvement to prevent it from going
negative. MLFB number includes SMPI as
well as Siemens numbering. Change of some
enumerations in the Device Description.
• Device related: mA output no longer resets
when PAR_MA_FUNCTION (P201) is written
to. mA trims (P214, P215) now have the
property noReset.
• Enhancement: Device Identification
command allows Tag, Description, Message,
and Date.
1.09 Nov. 28, 2005 • Correction for manual Shaper TVT shift due
to change in velocity.
• Reading some floats as decimal shifted
integers would return a value off by 1 in some
cases.
• The submergence algorithm now
implemented with the thresholds defined.
• Changes to support single DUART.
1.10 not released
1.11 Apr. 20, 2006 • Software modified to support replacement
component.
• Supports SIMATIC PDM version 6.02.
• Added support for true First echo processing
algorithm
• Support for 3rd Point Volume has been added
on P001 = DPA or DPD.
1.12 Aug. 01, 2006 • Internal Release.
1.13 Aug. 15, 2008 • Many parameter ranges improved to match
product function and SIMATIC PDM.
• P110 = OFF removed from SIMATIC PDM
• Improved volume calculation for 3rd point
volume
• Improved text labels for P770
Soft-
ware
Rev.
Date Changes
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 257
mmmmm
Parameter Charts
Programming Charts
Parameter Altered Values for Indices/Point Numbers
#Name 123
Security
P000 Lock (G)
Quickstart
P001 Operation
P002 Material
P003 Max. Process Speed
P004 Transducer
P005 Units (G)
P006 Empty
P007 Span
Volume
P050 Tank Shape
P051 Max Volume
P052 Tank Dimension A
P053 Tank Dimension L
P054 Level Breakpoints record values on a separate sheet.
P055 Volume Breakpoints record values on a separate sheet.
Reading Value
P060 Decimal Position
P061 Convert Reading
P062 Offset Reading
P064 Reading Override Enable
P065 Reading Override Value
P066 Override Time Delay
P069 Password
Failsafe
P070 Failsafe Timer
P071 Failsafe Material Level
P072 Failsafe Level Advance
Relays
P100 Preset Applications [MR200]
P110 Level Source
P111 Relay Control Function
P112 Relay ON Setpoint
Page 258 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameter Charts
P113 Relay OFF Setpoint
P115 Relay Interval Setpoint [MR 200]
P116 Deadband
P118 Relay Output Logic
P119 Relay Logic Test
Pump Setpoint Modifiers
P121 Pump by Rate [MR 200]
P122 Pump Service Ratio [MR 200]
Independent Relay Failsafe
P129 Relay Failsafe
Advanced Pump Control Modifiers
P130 Pump Run-On Interval [MR 200]
P131 Pump Run-On Duration [MR 200]
P132 Pump Start Delay [MR 200]
P133 Pump Power Resumption Delay
[MR 200]
P136 Wall Cling Reduction [MR 200]
P137 Pump Group [MR 200]
Flush Systems
P170 Flush Pump [MR 200]
P171 Flush Cycles [MR 200]
P172 Flush Interval [MR 200]
P173 Flush Duration [MR 200]
mA Output
P200 mA Output Range
P201 mA Output Function
P202 mA Output Allocation
P203 mA Output Value / Transducer
Independent mA Setpoints
P210 0/4 mA Output Setpoint
P211 20 mA Output Setpoint
mA Output Limits
P212 mA Output Min Limit
P213 mA Output Max limit
mA Output Trim
P214 4 mA Output Trim
P215 20 mA Output Trim
Parameter Altered Values for Indices/Point Numbers
#Name 123
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 259
mmmmm
Parameter Charts
P219 mA Output Failsafe[MR 200]
mA Input
P250 mA Input Range [MR 200]
P251 0 to 4 mA Input Level [MR 200]
P252 20 mA Input Level [MR 200]
P253 Input Filter Time Constant
[MR 200]
P254 Scaled mA Input Value[MR 200]
P260 mA Raw Input [MR 200]
Discrete Input Functions
P270 Discrete Input Function
P275 Scaled Discrete Input Value
Record Temperatures
P300 Temp, Transducer max
P301 Temp, Transducer min
P302 Temperature, Sensor max
P303 Temperature, Sensor min
Record Readings
P304 Reading Max
P305 Reading Min
Pump Records
P309 Pump RUN Time
P310 Pump Hours
P311 Pump Starts
P312 Pump Run Ons [MR 200]
Flow Records
P320 Flow Max [MR 200]
P321 Flow Min [MR 200]
LCD Totalizer
P322 LCD Total Low [MR 200]
P323 LCD Total High [MR 200]
Profile Records
P330 Profile Record
P331 Auto Record Enable
P332 Auto Record Transducer
P333 Auto Record Interval
Auto Record ON and OFF Setpoints
Parameter Altered Values for Indices/Point Numbers
#Name 123
Page 260 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameter Charts
P334 Auto Record ON Setpoint
P335 Auto Record OFF Setpoint
P336 Auto Record Filling/Emptying
P337 Auto Record LOE Time
Installation Records
P340 Date of Manufacture
P341 RUN Time
P342 Start Ups
Open Channel Monitoring
P600 Primary Measuring Device
[MR 200]
P601 Flow Exponent [MR 200]
P602 Primary Measuring Device
Dimensions [MR200]
P603 Maximum Head [MR 200]
P604 Maximum Flow [MR 200]
P605 Zero Head [MR 200]
P606 Time Units [MR 200]
P607 Flowrate Decimal [MR 200]
P608 Flowrate Units [MR 200]
P610 Head Breakpoints [MR 200]
P611 Breakpoint Flowrates [MR 200]
P620 Low Flow Cutoff [MR 200]
P621 Auto Zero Head [MR 200]
Pumped Volume Totalizer
P622 Inflow / Discharge Adjust
[MR 200]
Tota lizer
P630 LCD Totalized Multiplier
[MR 200]
P633 LCD Totalized Decimal Postion
[MR 200]
P640 Remote Totalized Multiplier
[MR 200]
P641 Flow Sampler Mantissa
[MR 200]
P642 Flow Sampler Exponent
[MR 200]
P645 Relay Duration [MR 200]
Parameter Altered Values for Indices/Point Numbers
#Name 123
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 261
mmmmm
Parameter Charts
Range Calibration
P650 Offset Calibration
P651 Sound Velocity Calibration
P652 Offset Correction
P653 Velocity
P654 Velocity @ 20° C
Temperature Compensation
P660 Temp Source
P661 Temp Fixed
P663 Temp Transducer Allocation
P664 Temperature
Rate
P700 Max Fill Rate
P701 Max Empty Rate
P702 Filling Indicator
P703 Emptying Indicator
P704 Rate Filter
P705 Rate Update Time
P706 Rate Update Distance
P707 Rate Value
P708 Volume Rate Display [MR 200]
Measurement Verification
P710 Fuzz Filter
P711 Echo Lock
P712 Echo Lock Sampling
P713 Echo Lock Window
Transducer Scanning
P726 Level System Sync
P727 Scan Delay
P728 Shot Delay
P729 Scan Time
Display
P730 Auxiliary Reading
P731 Auxiliary Reading Key
P732 Display Delay
P733 Scroll Access
P735 Backlight
Parameter Altered Values for Indices/Point Numbers
#Name 123
Page 262 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameter Charts
P737 Primary Reading [MR 200]
P741 Communications Timeout
SmartLinx Reserved
Communications
P770 Port Protocol
P771 Network Address
P772 Baud Rate
P773 Parity
P774 Data Bits
P775 Stop Bits
P778 Modem Available
P779 Modem Inactivity Timeout
P782 Parameter Index Location
SmartLinx Hardware Testing
P790 Hardware Error
P791 Hardware Error Code
P792 Hardware Error Count
P794 SmartLinx Module Type
P795 SmartLinx Protocol
P799 Communications Control
Echo Processing
P800 Near Blanking
P801 Range Extension
P802 Transducer with Submergence
Shield
P803 Shot / Pulse Mode
P804 Confidence Threshold
P805 Echo Confidence
P806 Echo Strength
P807 Noise
Advanced Echo Processing
P815 Echo Time Filtered
P816 Echo Time Raw
P820 Algorithm
P821 Spike Filter
P822 Narrow Echo Filter
P823 Reform Echo
Parameter Altered Values for Indices/Point Numbers
#Name 123
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 263
mmmmm
Parameter Charts
P824 (reserved)
P825 Echo Marker Trigger
Advanced TVT Adjustment
P830 TVT Type
P831 TVT Shaper
P832 TVT Shaper Adjust
P833 TVT Start Min
P834 TVT Start Duration
P835 TVT Slope Min
P837 Auto-False Echo Suppression
P838 Auto-False Echo Suppression-
Distance
P839 TVT Hover Level
Advanced Shot Adjustment
P840 Short Shot Number
P841 Long Shot Number
P842 Short Shot Frequency
P843 Long Shot Frequency
P844 Short Shot Width
P845 Long Shot Width
P850 Short Shot Bias
P851 Short Shot Floor
P852 Short Shot Range
P900 Software Revision Number
P901 Memory
P902 Watchdog
P903 Display
P904 Keypad
P905 Transmit Pulse
P906 RS-232 Port
P908 Scanner
P910 Toggle Relays
P911 mA Output Value
P912 Transducer Temperature
P913 Sensor Temperature
P914 mA Input [MR 200]
Measurement
Parameter Altered Values for Indices/Point Numbers
#Name 123
Page 264 MultiRanger 100/200– INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Parameter Charts
P920 Reading Measurement
P921 Material Measurement
P922 Space Measurement
P923 Distance Measurement
P924 Volume Measurement [MR 200]
P925 Flow Measurement [MR 200]
P926 Head Measurement [MR 200]
P927 Distance Measurement
P999 Master Reset
Parameter Altered Values for Indices/Point Numbers
#Name 123
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 265
mmmmm
Index
Index
A
accuracy .............................................................4
adding new functions ................................. 245
alarm ................................................................ 54
bounded ................................................. 56
cable fault .............................................. 56
common parameters .......................... 54
emptying rate ....................................... 55
filling rate ............................................... 55
level ......................................................... 54
loss of echo ........................................... 57
rate .......................................................... 55
temperature .......................................... 56
alternate duty assist ................................... 241
alternate duty backup ..........59, 60, 61, 241
alternate duty service .................................. 62
application
test .......................................................... 87
applications
preset ..................................................... 46
testing ..................................................... 85
approvals ............................................................6
auxiliary reading ............................................ 25
B
backup level override ................................... 47
battery .............................................................. 13
bit values ....................................................... 107
blanking
troubleshooting .................................. 236
with Span ............................................ 123
board ................................................................ 13
C
cable ................................................................. 16
routing .......................................................9
cabling guidelines ......................................... 92
calibration
mA output .............................................. 49
characterization chart .................................. 52
communication ports
configuring ............................................ 94
communications ............................................ 89
communications installation ....................... 92
configuration .....................................................2
control
rake ......................................................... 69
controlling the display .................................. 25
D
data types ......................................................107
bit values ..............................................107
default auxiliary reading ...............................26
dimensions ................................................ 9, 40
discrete inputs ...................................... 48, 100
indexing ..................................................36
logic .........................................................48
wiring ......................................................48
display .................................................................4
auxiliary ..................................................25
controlling ..............................................25
distance ..................................................23
echo confidence ...................................23
failsafe time left ....................................23
head (OCM) ............................................23
multiple readings ..................................26
pump hours ............................................23
rate of change .......................................23
temperature ...........................................23
display readout ...............................................34
distance calculation ....................................226
Dolphin Plus .....................................29, 35, 89
changing parameters ..........................35
communication settings .....................91
updating software ..............................245
E
echo confidence, run mode .........................23
echo processing ...........................................224
enabling new functions ..............................245
enclosure ...........................................................6
error codes ............................................ 34, 116
error handling ...............................................111
exponential flow .............................................79
external totalizers ..........................................71
F
failsafe ..............................................................40
by relay ...................................................45
fat ring ...............................................................66
first in first out (FIFO) ........................... 62, 243
fixed duty assist ..............................................61
flash update ...................................................245
flow calculation ............................................228
flow sampler ....................................................72
flume
cut throat ................................................82
H flume ....................................................78
Page 266 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Index
Leopold Lagco ...................................... 81
Palmer Bowlus ..................................... 77
Parshall ...........................................80, 84
rectangular ............................................ 76
universal trapezoidal .......................... 84
flush valve ....................................................... 67
format words ................................................ 105
Frequency Input ........................................... 153
G
global index method ................................... 103
group pumps ................................................... 67
H
H flume ........................................................... 165
hand programmer ......................................... 27
head measurement ....................................... 23
head vs. flowrate breakpoints ................. 172
I
in bounds ......................................................... 56
independent failsafe ..................................... 65
index method
global .................................................... 103
parameter specific ............................ 103
index types ...........................................118, 223
indexed parameters ..................................... 37
indexing
parameters ............................................ 36
points ...................................................... 36
input / output .................................................. 99
inputs ...................................................................6
installation ..........................................................8
L
LCD controlling ............................................... 25
level alarms .................................................... 54
LOE .................................................................... 57
loss of echo (LOE) ......................................... 40
alarm ....................................................... 57
M
mA
calibrating .............................................. 49
input ........................................................ 49
loops ....................................................... 49
output .............................................. 49, 50
map ID .............................................................. 98
maximum process speed .......................... 230
maximum separation .................................... 92
measurement
difficulties ............................................ 234
dual point ............................................... 39
set up ...................................................... 38
setting up ............................................... 38
single point ............................................38
starting ....................................................38
Modbus ............................................................90
register map ..........................................97
responses ............................................111
mode
program ..................................................27
run ............................................................22
mounting
instructions ..............................................9
location .....................................................8
wall mount ...............................................9
multiple readings ............................................26
N
near blanking
troubleshooting ...................................236
with span ..............................................123
noise problems .............................................232
noise sources ................................................233
O
OCM (open channel monitoring) ................73
common parameters ...........................73
cut throat ................................................82
flow characterization chart ...............83
flow exponent support ........................79
H flume ....................................................78
Leopold Lagco flume ...........................81
Palmer Bowlus flume ..........................77
Parshall flume .......................................80
rectangular flume .................................76
testing flow values ...............................86
totalized volume ....................................75
universal calculation ...........................83
universal Parshall flume .....................84
universal trapezoidal flume ...............84
V notch weir ..........................................75
weirs ........................................................79
zero head ................................................74
operation
dual point ................................................39
single point ............................................38
options, adding .............................................245
out of bounds ..................................................56
outputs ................................................................5
P
parameter
relays .......................................................43
parameter access
data types .............................................107
format words .......................................105
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 267
mmmmm
Index
overview .............................................. 102
reading ................................................. 103
writing .................................................. 104
parameter indexing ..............................36, 102
parameters
advanced echo processing ............. 203
advanced shot adjustment .............. 212
advanced TVT adjustment .............. 207
auto record setpoints ....................... 162
backup level override ....................... 129
calibration ........................................... 178
communications ................................ 194
data logging ........................................ 154
discrete input functions ................... 153
display .................................................. 191
display and reading ........................... 127
echo processing ................................ 199
failsafe .................................................. 131
flow records ........................................ 158
flush systems ...................................... 144
global ...................................................... 33
independent mA setpoints .............. 149
independent relay failsafe ............... 140
installation records ........................... 164
LCD totalizer ........................................ 158
mA input ............................................... 151
mA output ............................................ 146
mA output failsafe ............................. 151
mA output limits ................................. 149
mA output trim .................................... 150
master reset ........................................ 221
measurement ..................................... 218
measurement verification ............... 187
open channel monitoring (OCM) ... 165
profile records .................................... 159
pump control modifiers .................... 141
pump records ..................................... 156
pump setpoint modifiers .................. 139
pumped volume totalizer ................. 174
quick start ............................................ 119
rate ........................................................ 183
record readings ................................. 156
record temperatures ......................... 154
relays .................................................... 132
scrolling ................................................. 32
SmartLinx hardware testing ........... 197
SmartLinx reserved ........................... 194
special .................................................... 33
status ...................................................... 24
temperature compensation ............ 181
test ........................................................ 215
totalizer .................................................175
transducer scanning .........................190
view only ................................................33
volume ..................................................123
volume measurement .......................220
points
indexing ..................................................36
ports, communication ...................................90
power ................................................................19
preprogrammed applications ......................46
program mode ................................................27
programming .....................................................4
alarms .....................................................54
by hand ...................................................27
relays .......................................................41
pump
alternate duty backup ................. 59, 60
by rate .....................................................63
hours .......................................................23
off setpoint ..............................59, 60, 61
on setpoints ............................59, 60, 61
other controls ........................................61
pump down ............................................58
pump up ..................................................59
reservoir .................................................59
run-on ......................................................66
service ratio ...........................................64
start delay ..............................................66
start method ........................................239
totalizing volume ...................................65
usage .......................................................68
wet well ..................................................58
pump by rate .................................................243
pump control .................................................100
algorithms .................................... 58, 239
options ..................................................239
other ......................................................243
reference ..............................................239
pump flush valve ............................................67
pump hours ....................................................101
pump starts ....................................................101
Q
quick start ........................................................38
R
rake control .....................................................69
randomize setpoints ......................................66
range ...................................................................4
reading
volume ....................................................51
recording profiles .........................................160
Page 268 MultiRanger 100/200 – INSTRUCTION MANUAL 7ML19981FB06
mmmmm
Index
register map ................................................... 97
discrete inputs .................................... 100
input/output ........................................... 99
mA output ............................................ 100
map ID .................................................... 98
parameter access ............................. 102
parameter format words ................. 105
point data ............................................... 99
product ID .............................................. 99
pump control ....................................... 100
pump hours ......................................... 101
pump setpoint ............................100, 101
pump starts ......................................... 101
pumped volume ................................. 101
relay outputs ....................................... 100
UINT32 Order ........................................ 98
relay .................................................................. 17
activation ............................................... 44
failsafe .................................................... 45
flow sampler ......................................... 72
function codes .................................... 110
indexing .................................................. 36
modifiers ................................................ 43
modify logic ........................................... 45
outputs ................................................. 100
parameters ............................................ 43
programming ........................................ 41
totalizer .................................................. 71
wiring test .............................................. 44
resolution ...........................................................4
response rate ................................................. 40
RS-232 .............................................................. 20
RS-485 .............................................................. 20
run mode ......................................................... 22
run-on ............................................................... 66
S
samplers .......................................................... 71
SCADA ............................................................. 89
scrolling parameters .................................... 32
scum ring See wall cling ............................. 66
security ............................................................ 33
service ratio
applications ........................................... 64
duty assist ........................................... 242
duty backup ........................................ 243
simulation ........................................................ 85
level cycle .............................................. 85
OCM flow characterization ............... 86
single measurement ........................... 85
volume characterization .................... 86
single parameter access ............................114
single point ......................................................38
SmartLinx .........................................................91
installation ..............................................14
Installation in Wall mount ..................14
software update ...........................................245
sound velocity ...............................................226
special parameters ........................................33
specific auxiliary reading .............................26
specifications ....................................................3
standard applications ...................................46
start delay ........................................................66
starting measurement ..................................38
status parameters ..........................................24
synchronization ..............................................19
T
tank shape .......................................................51
temperature
alarm .......................................................56
compensation .........................................4
error ...........................................................4
run mode ................................................23
sensor .....................................................18
terminal board ................................................16
testing
application .............................................87
configuration .........................................85
text messages ...............................................109
totalizer .............................................................71
transducers ............................................... 6, 17
indexing ..................................................36
transmit pulse ...............................................224
troubleshooting
common problems .............................231
communication ...................................113
noise problems ...................................232
TS-3 ...................................................................18
U
UINT32 ............................................................107
units or percent ..............................................33
universal
example ..................................................52
volume ....................................................52
unsigned double precision integer ..........107
updating software ........................................245
V
verify
mA output ...............................................50
volume ..............................................................51
calculation ............................................227
7ML19981FB06 MultiRanger 100/200 – INSTRUCTION MANUAL Page 269
mmmmm
Index
characterization chart ........................ 52
dimensions ............................................ 40
readings ................................................. 51
tank shape ............................................. 51
universal example ............................... 52
W
wall cling ......................................................... 66
weight .................................................................6
weir
Cipolletti ............................................... 167
standard ................................................. 79
V notch ................................................... 75
wet well ........................................................... 58
wiring ............................................................... 15
communication .................................... 92
problems .............................................. 233
test .......................................................... 44
writing parameters ..................................... 104
wrong reading .............................................. 236

Notes
Notes.fm Page 1 Thursday, October 11, 2001 8:48 AM
IQ300IX.fm Page 5 Tuesday, October 2, 2001 1:43 PM

*7ml19981FB06* Rev. 6.1
www.siemens.com/processautomation
Siemens Milltronics Process Instruments Inc.
1954Technology Drive, P.O. Box 4225
Peterborough, ON, Canada K9J 7B1
Tel: (705) 745-2431 Fax: (705) 741-0466
Email: techpubs.smpi@siemens.com
Siemens Milltronics Process Instruments Inc. 2009
Subject to change without prior notice
Printed in Canada
