Summation Research ST326-4-I TELEMETRY Transmitter User Manual SUMMATION RESEARCH INCORPORATED
Summation Research Inc TELEMETRY Transmitter SUMMATION RESEARCH INCORPORATED
UserManual.wiki
>
Summation Research
>
ST326 4 I User Manual
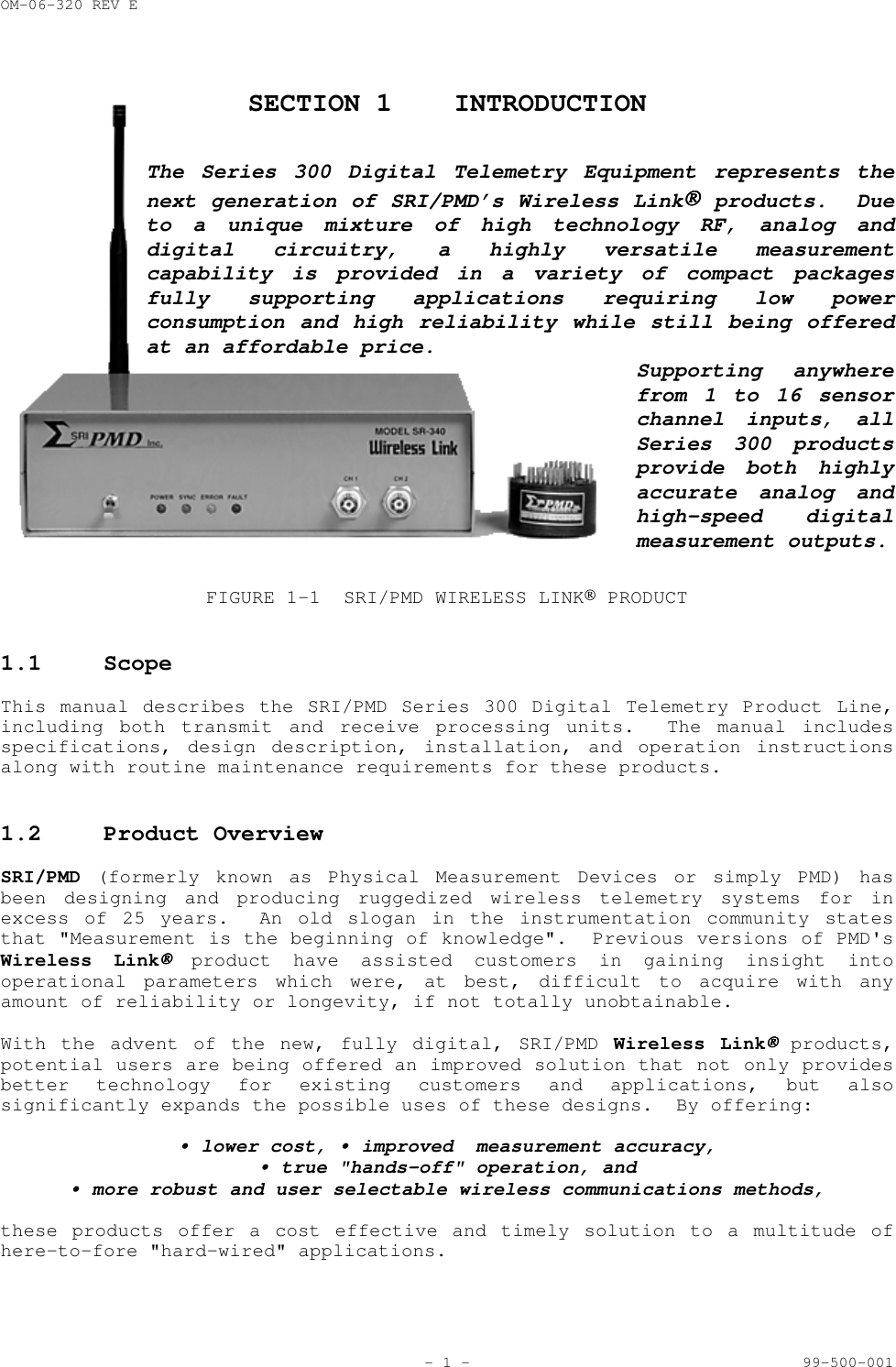
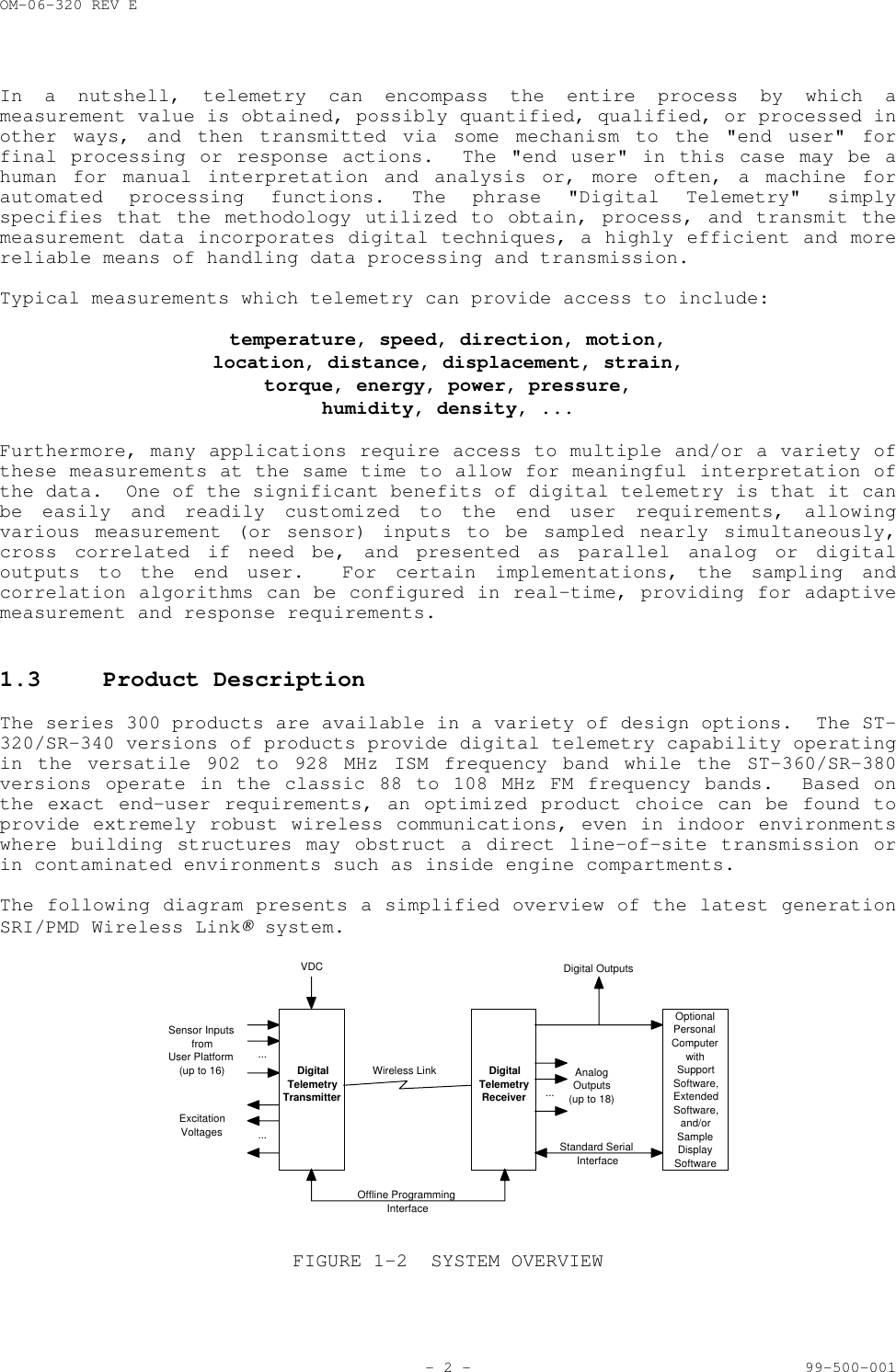
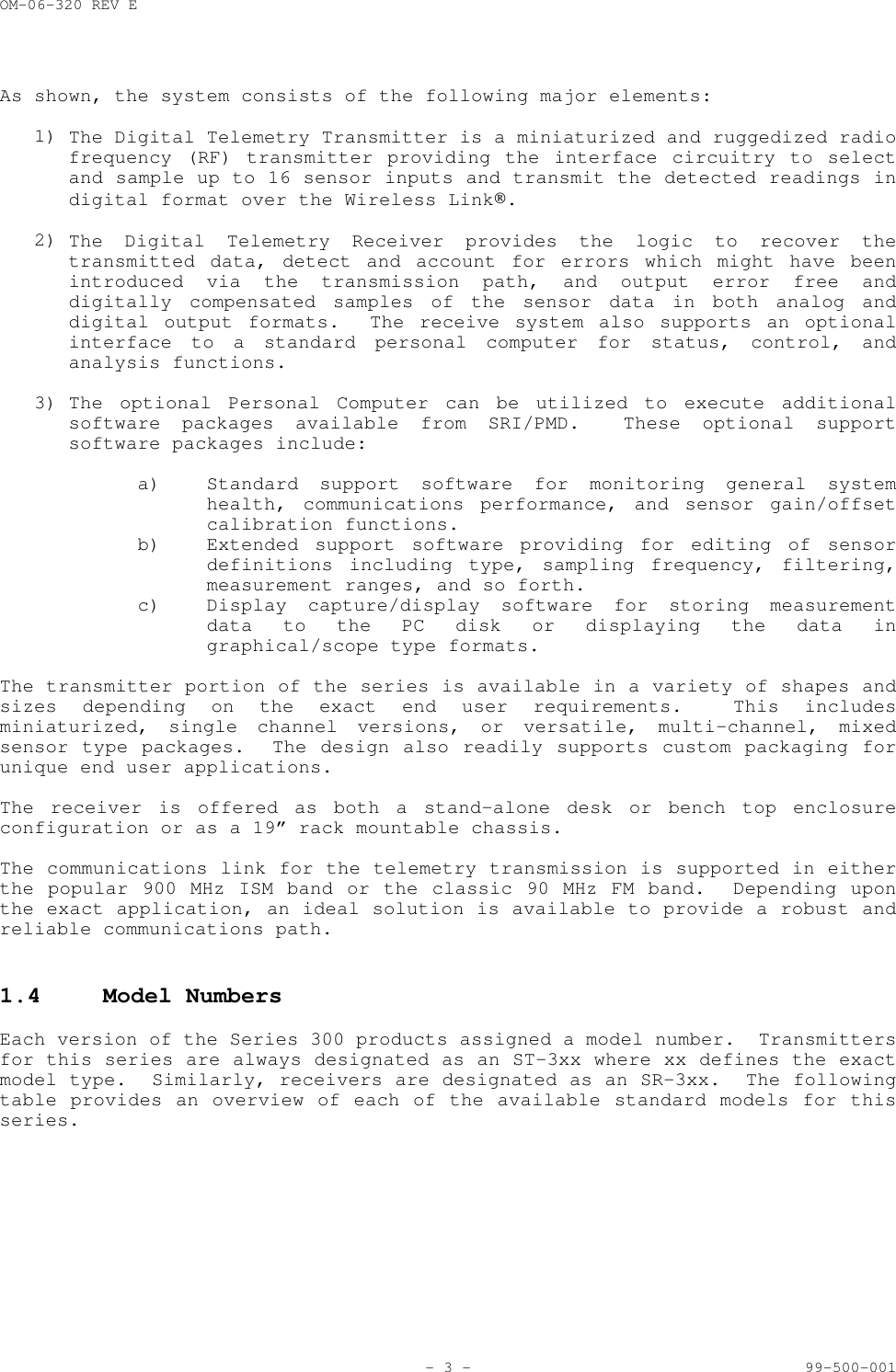
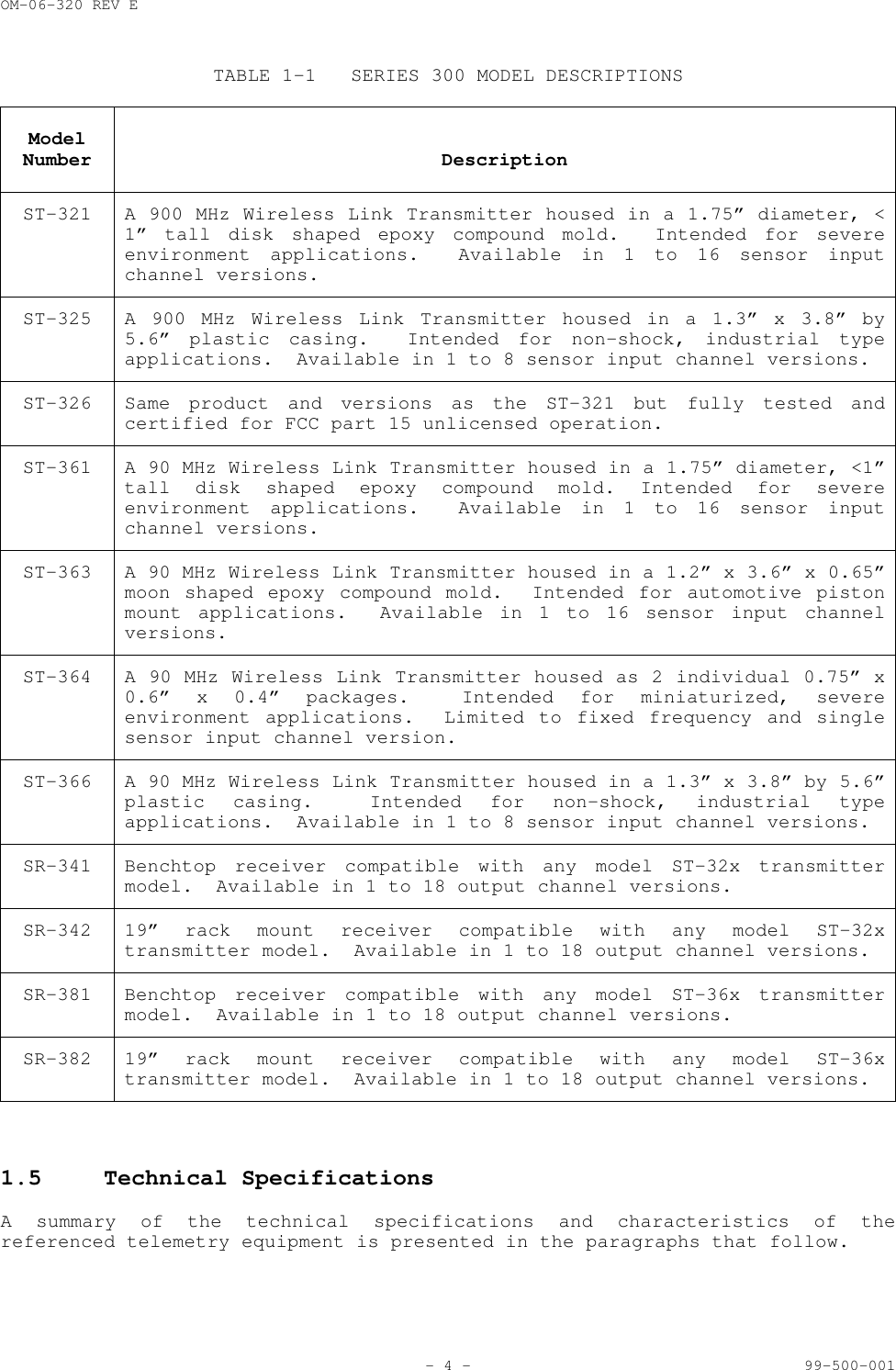
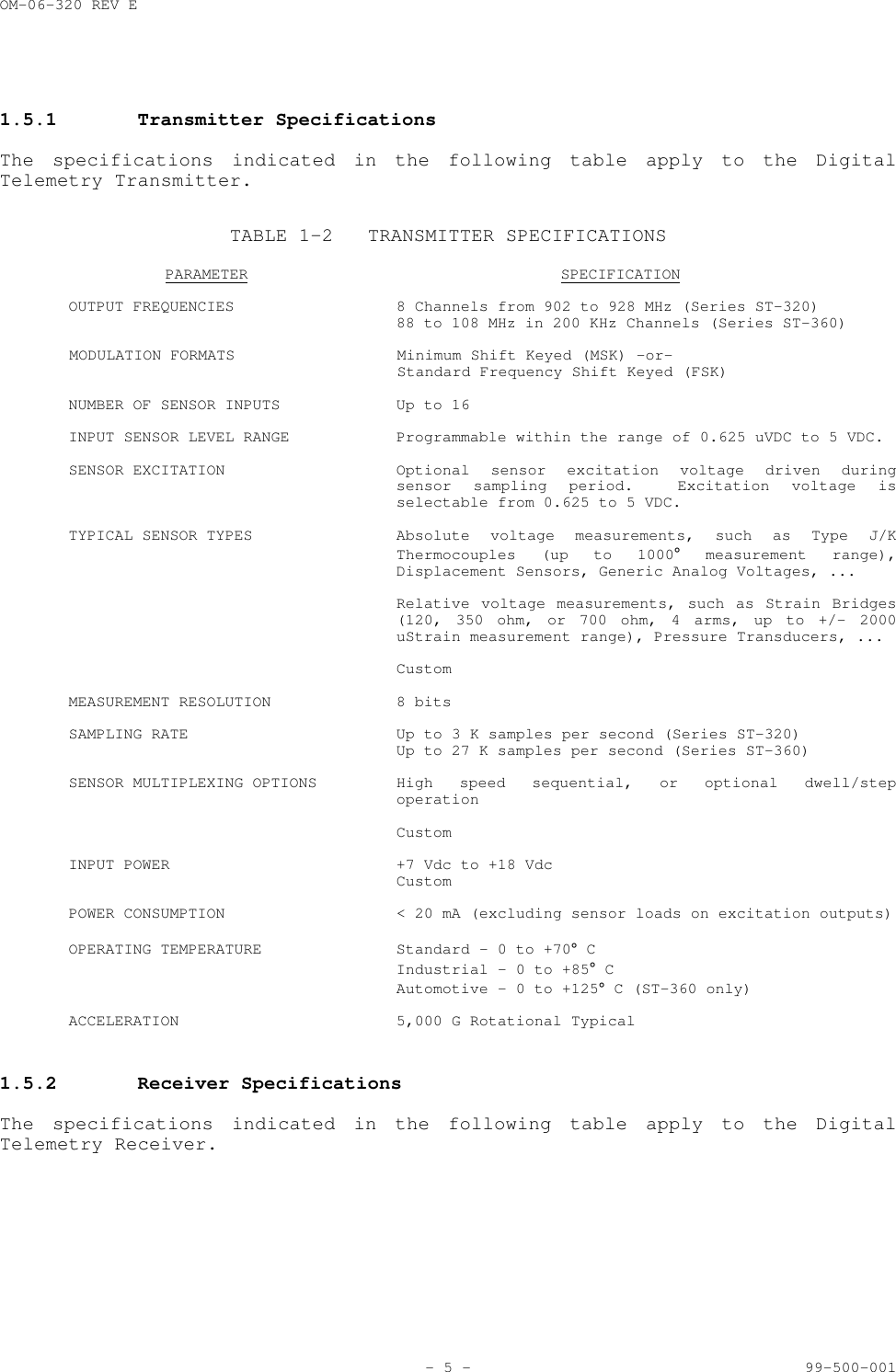
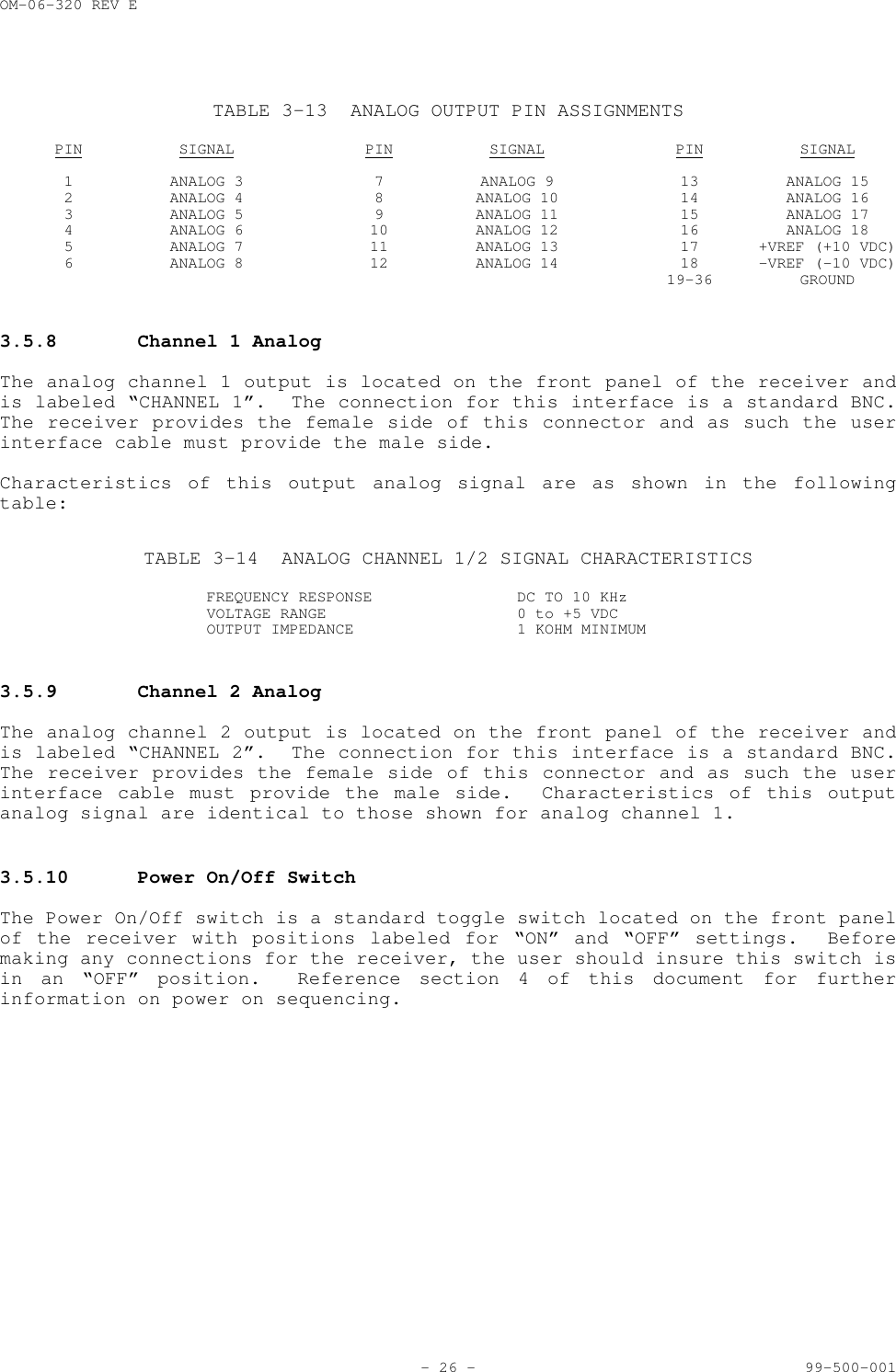
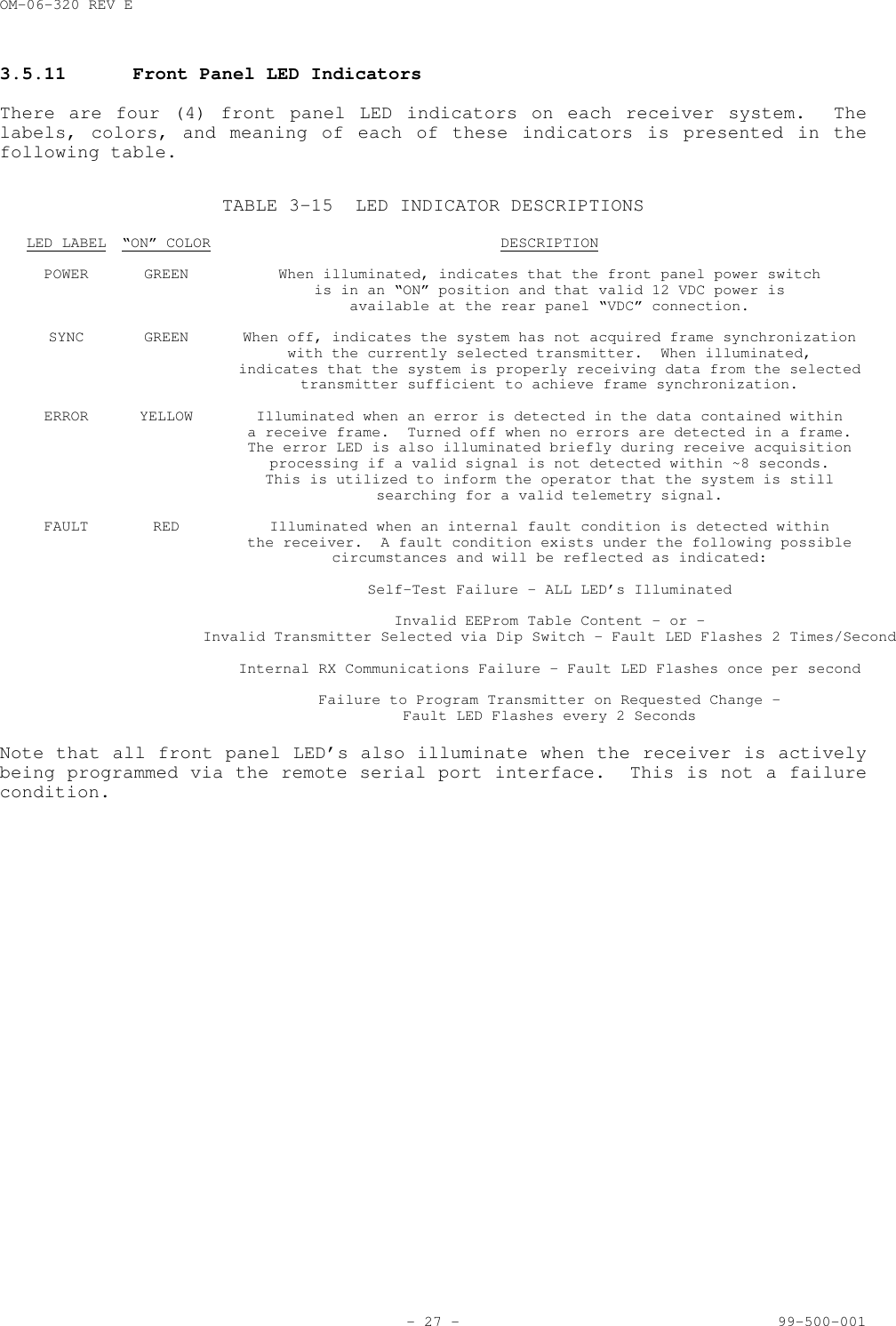
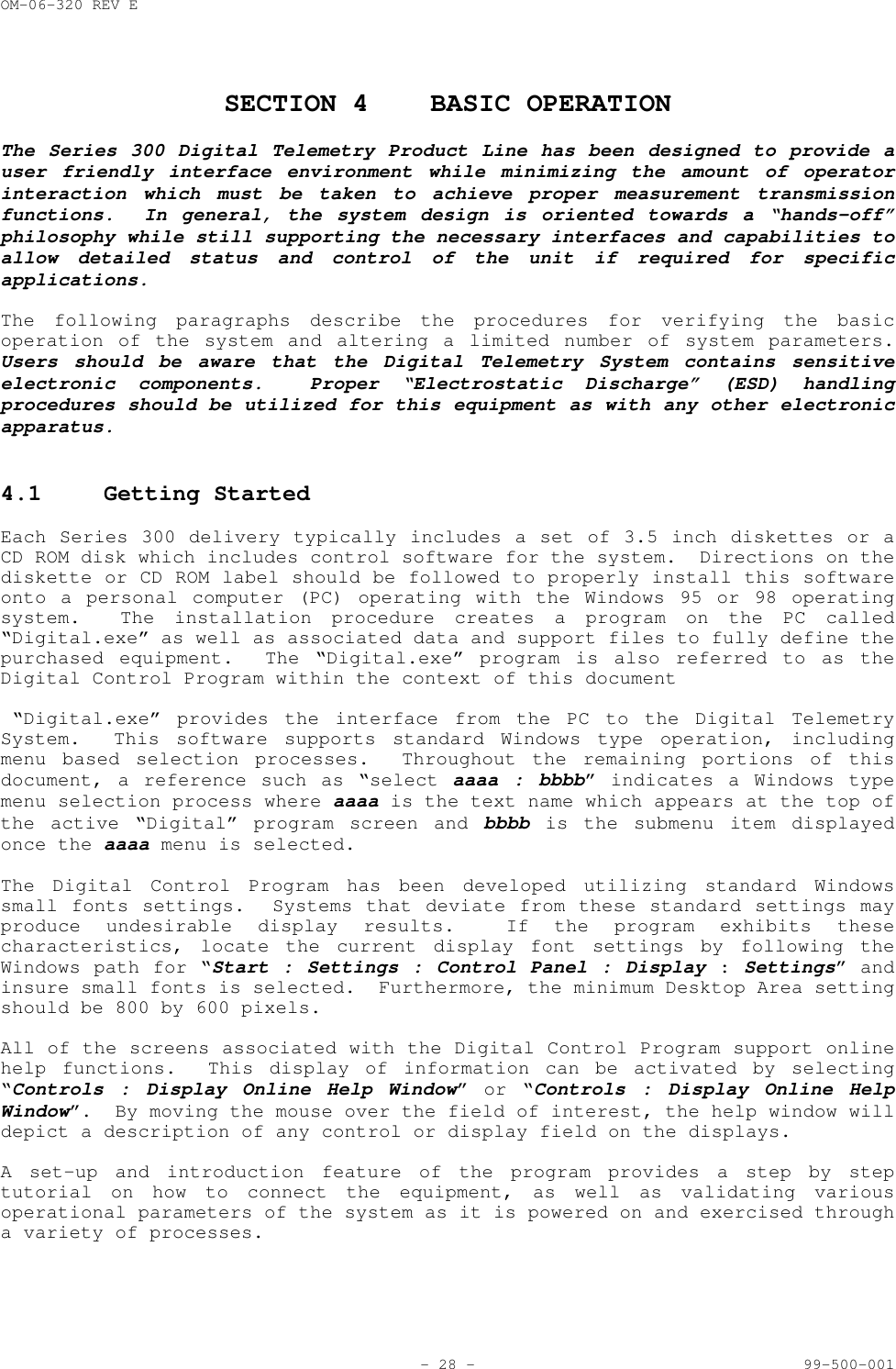
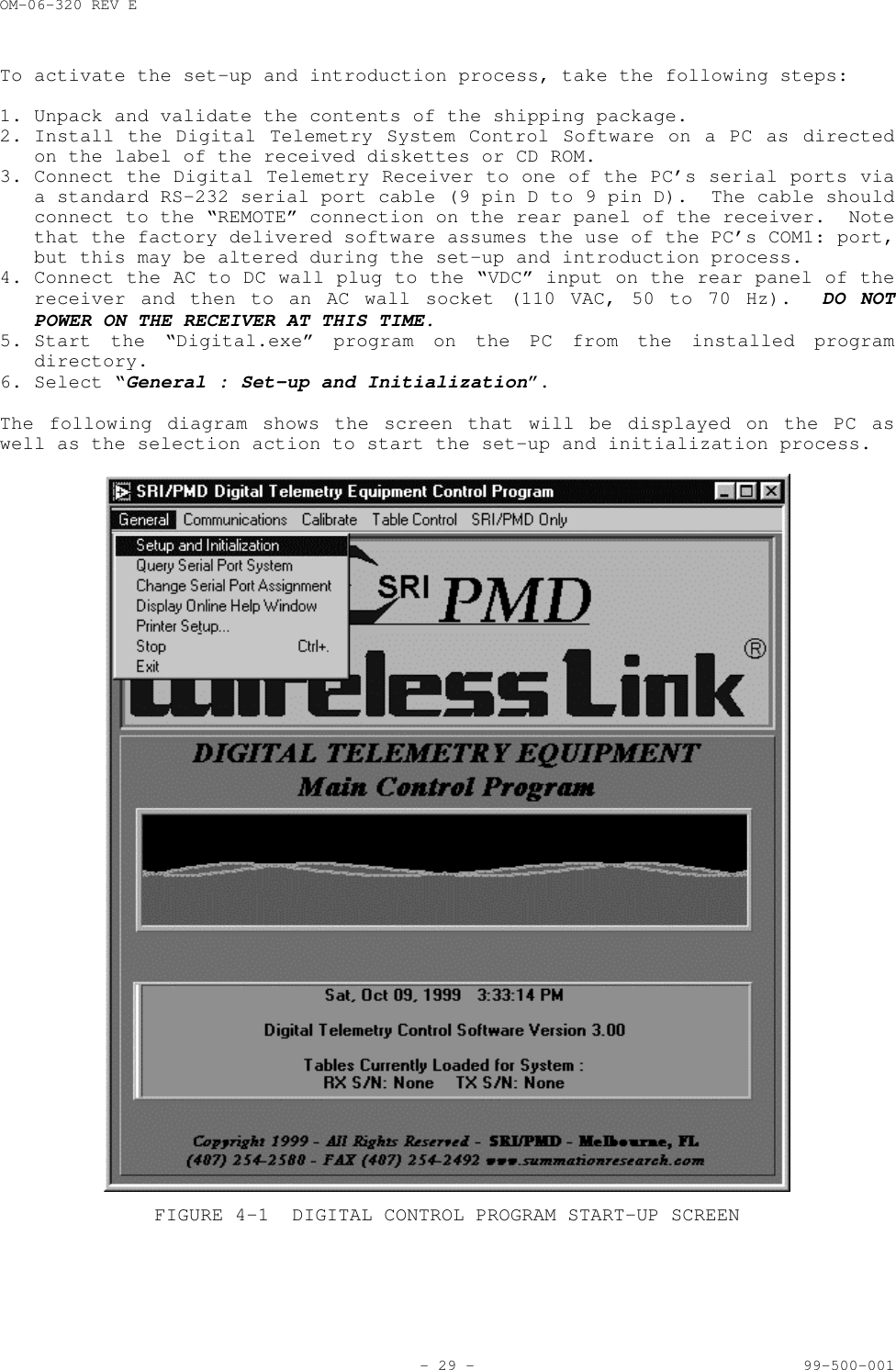
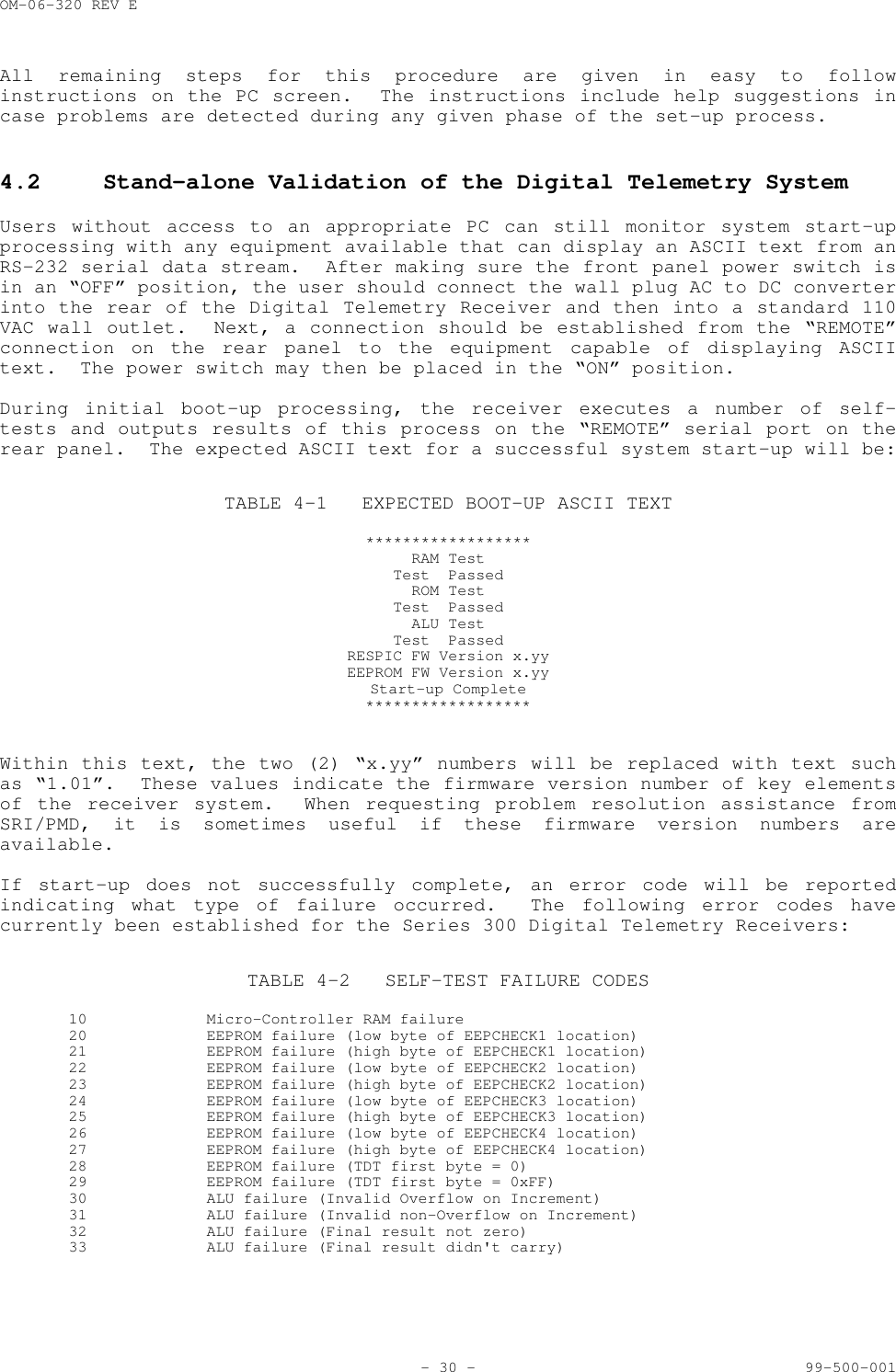
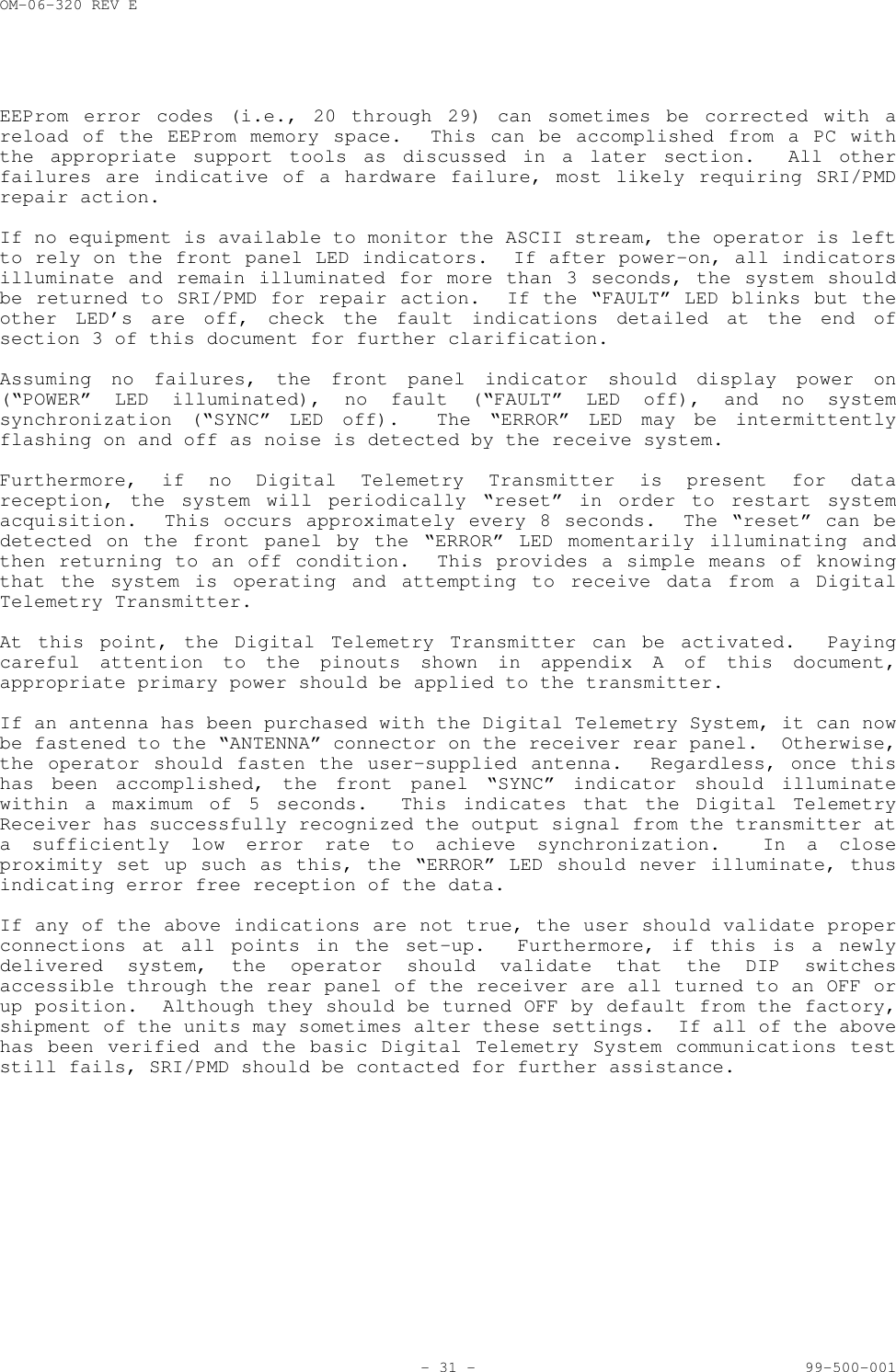
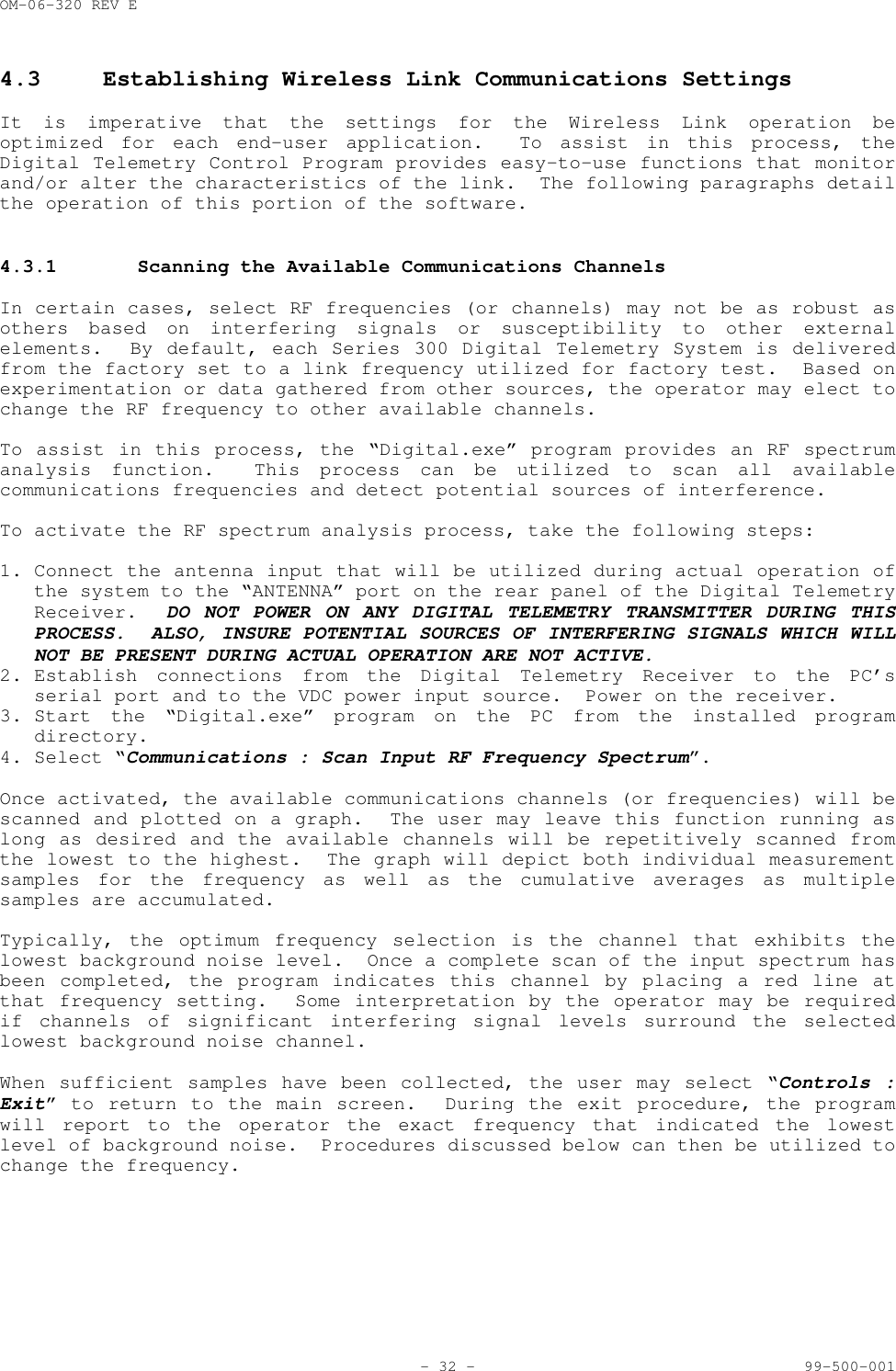
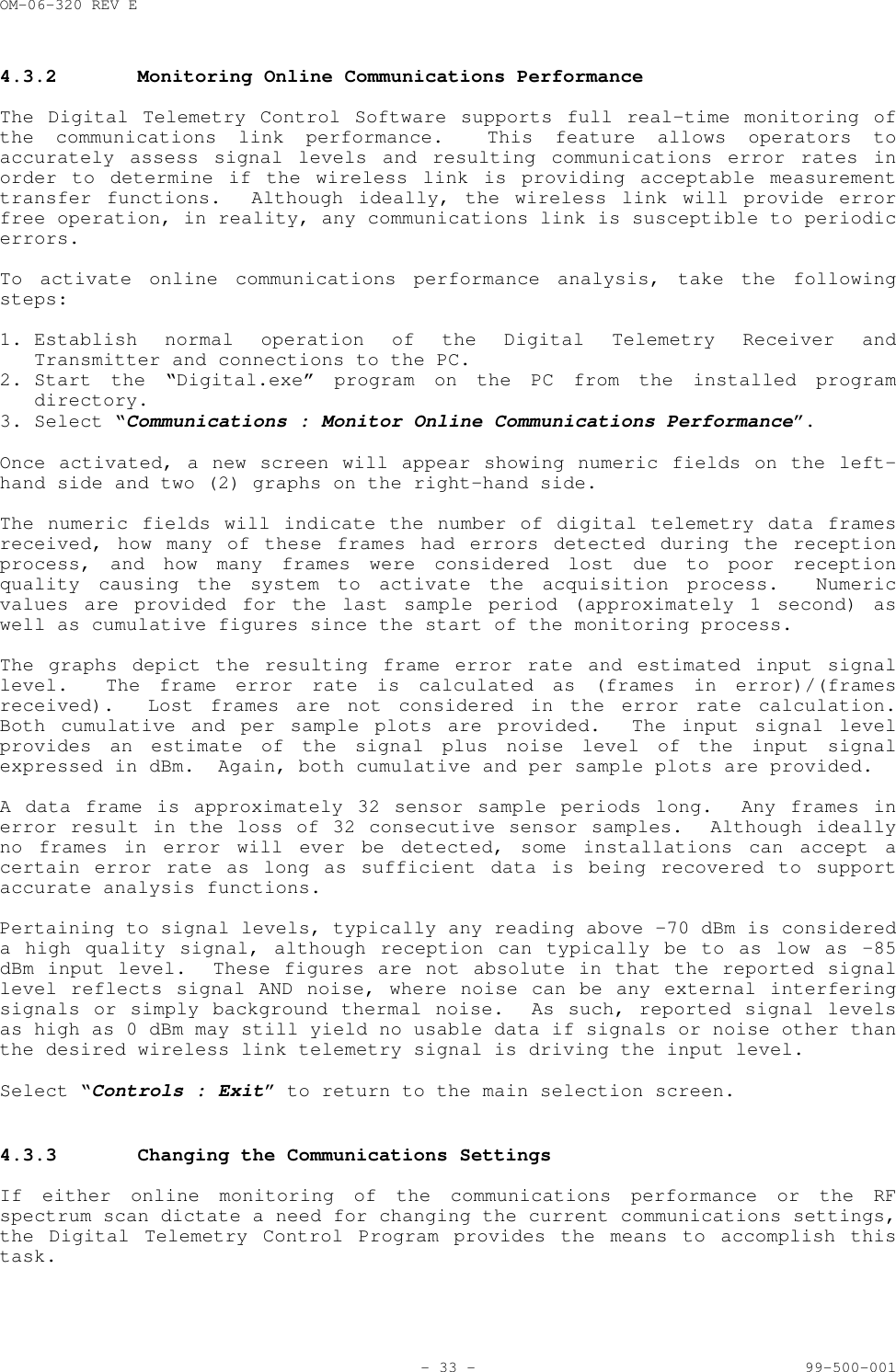
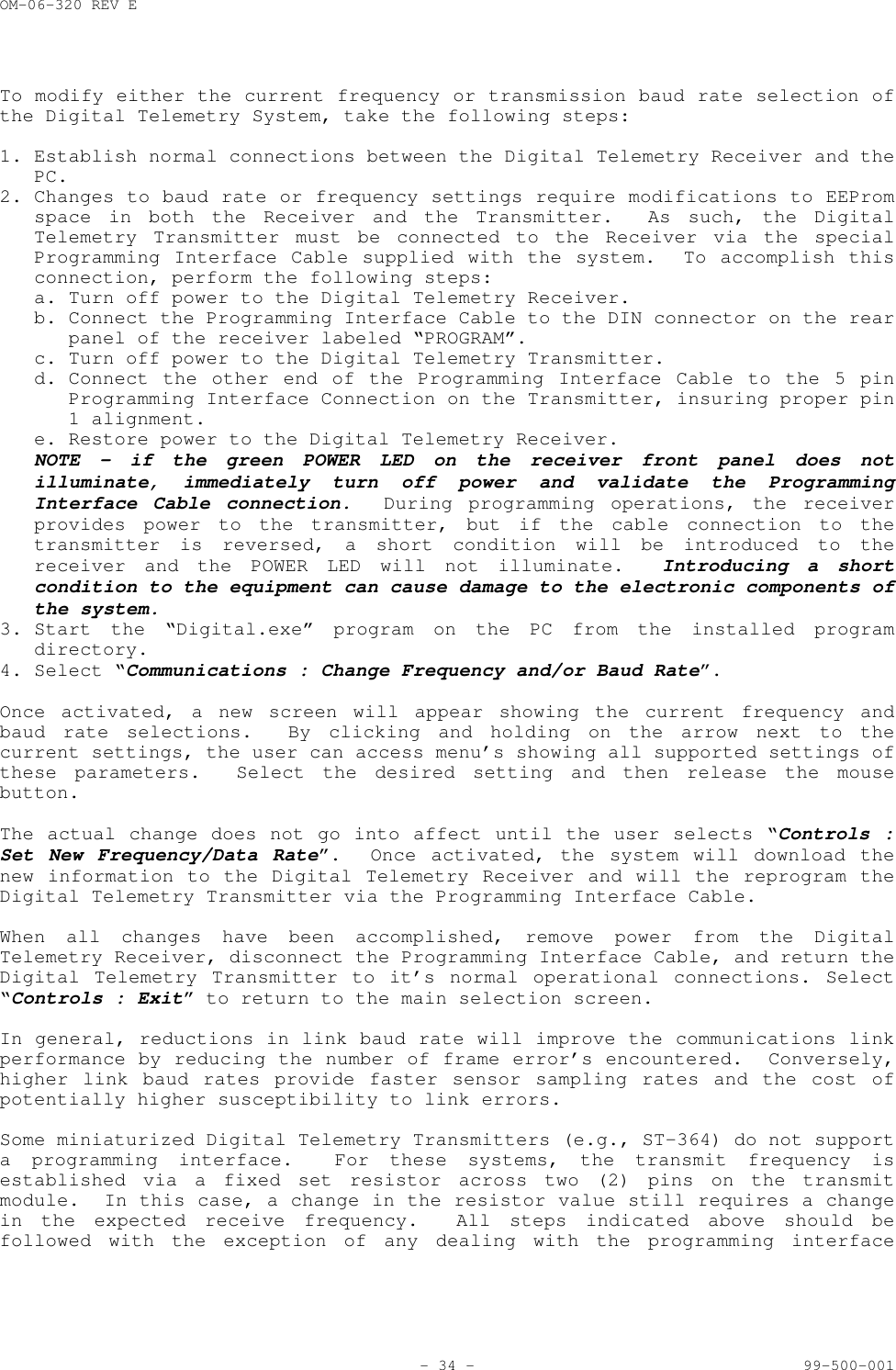
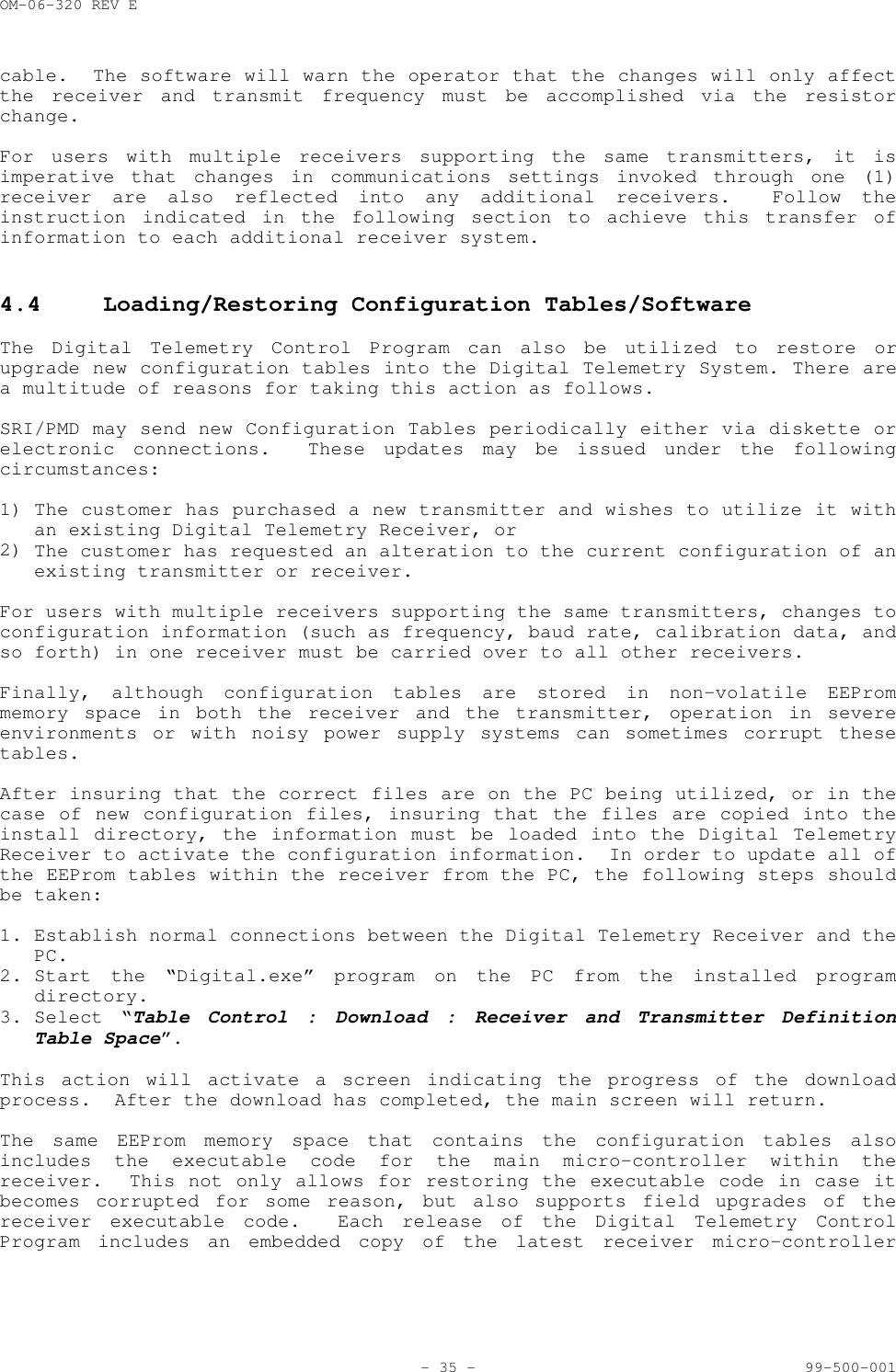
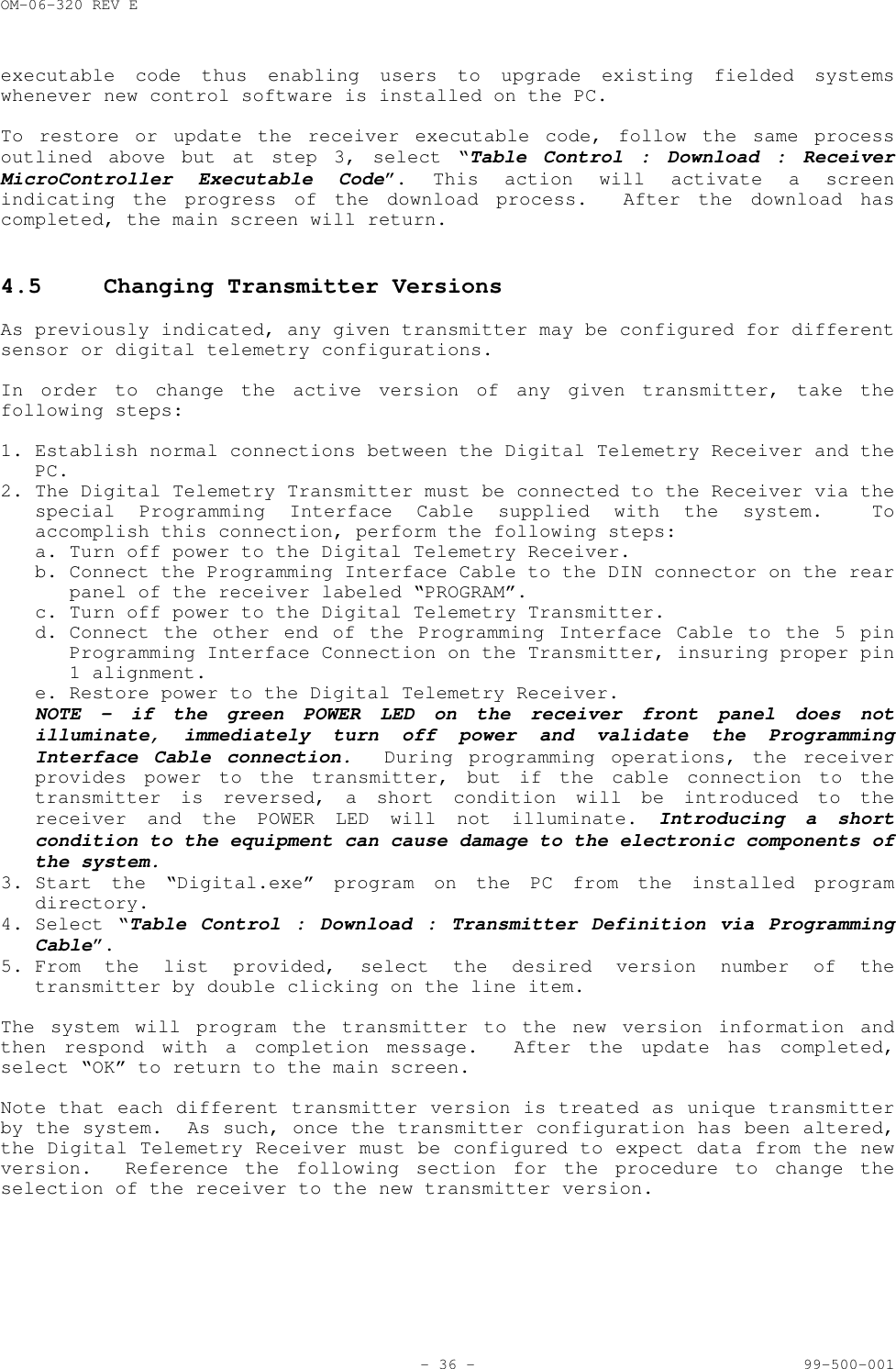
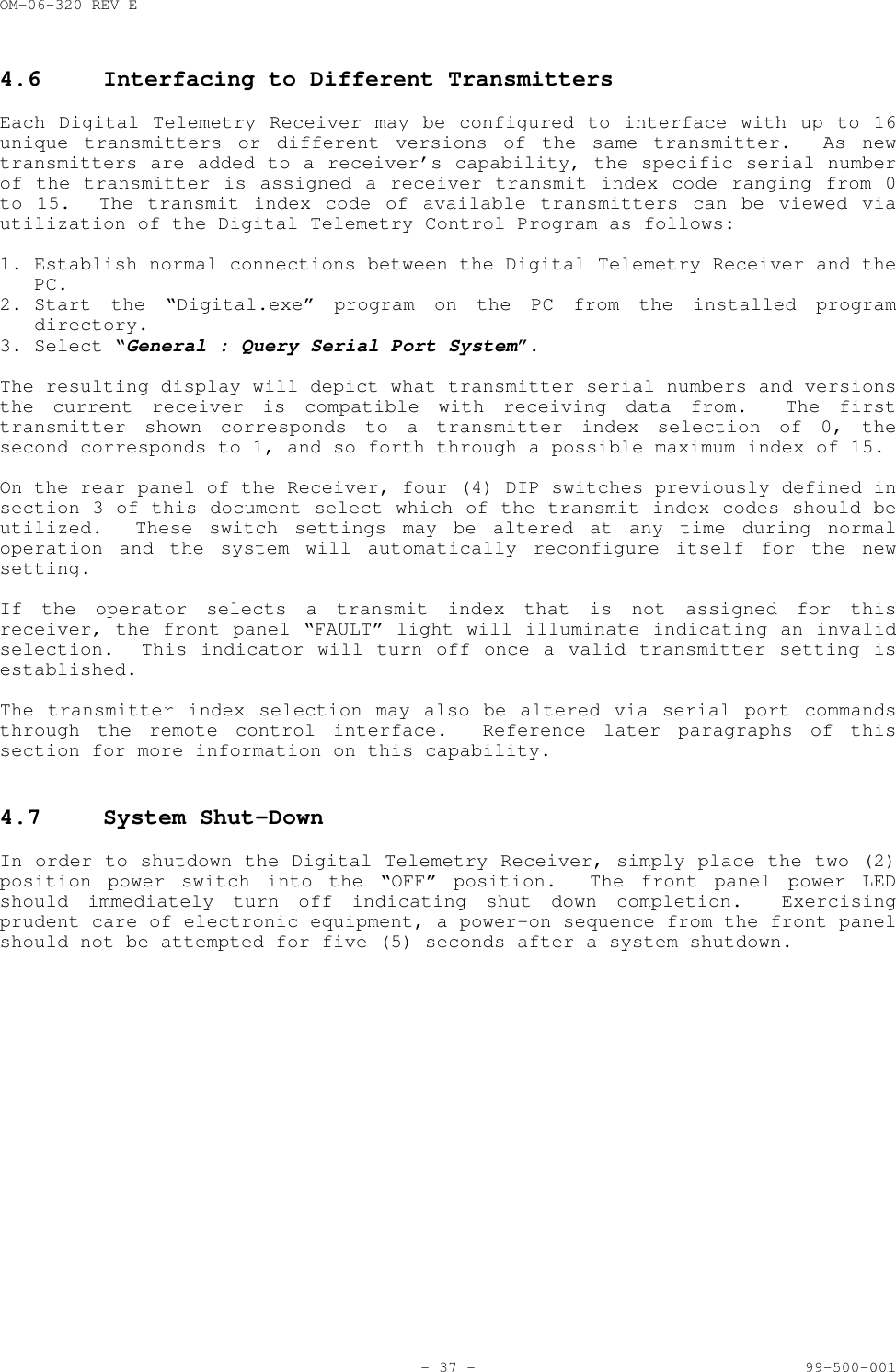
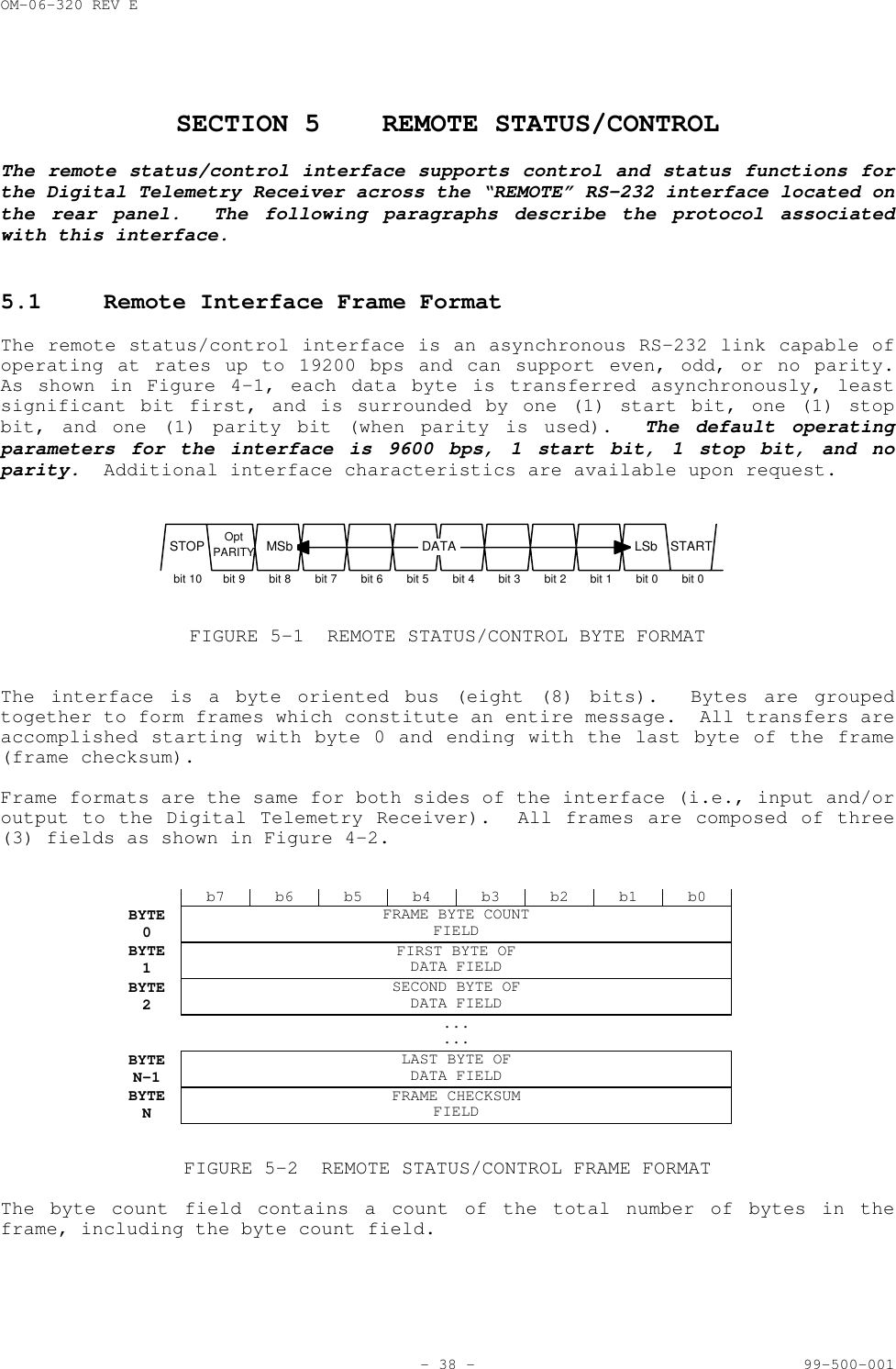
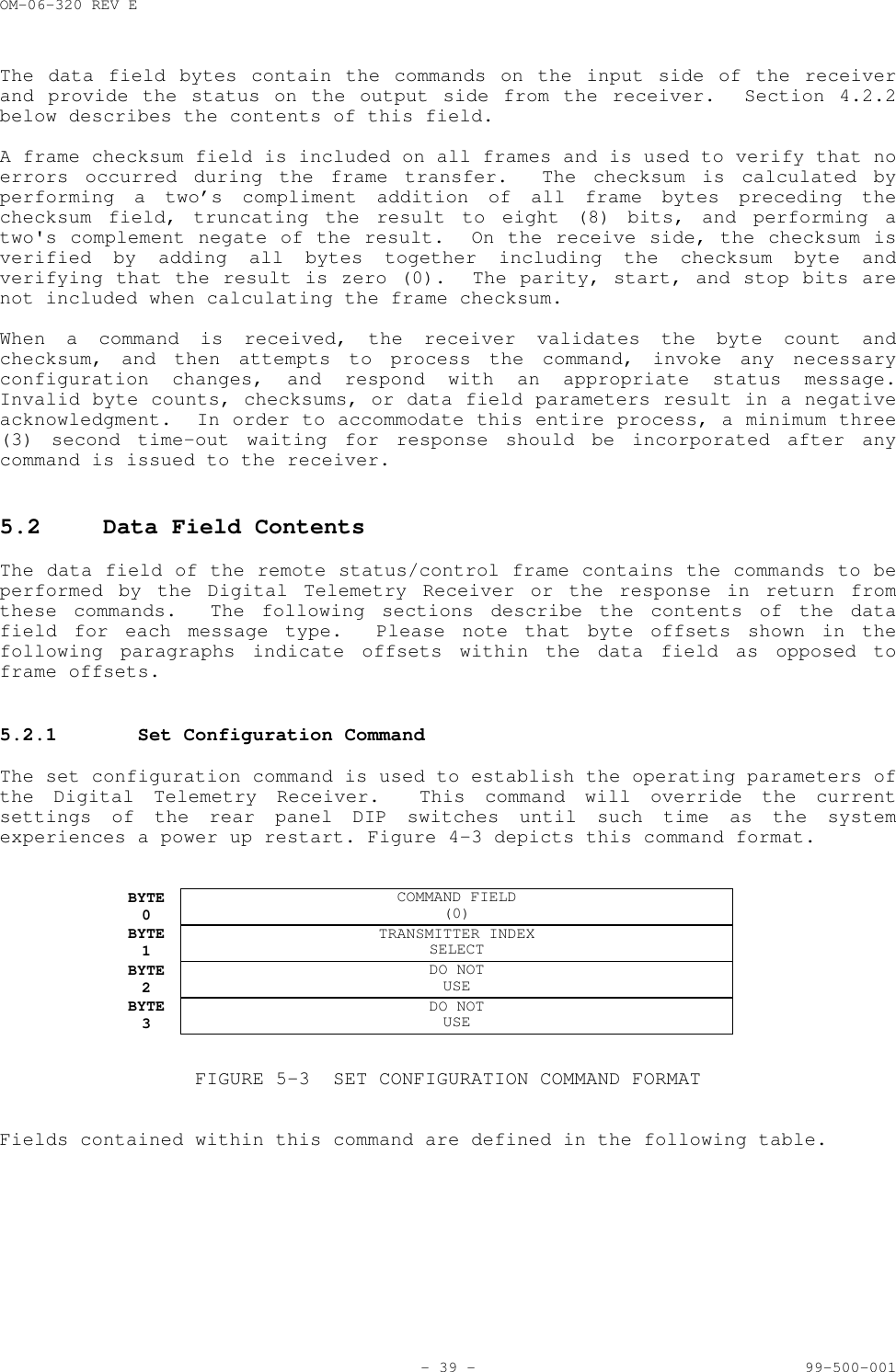
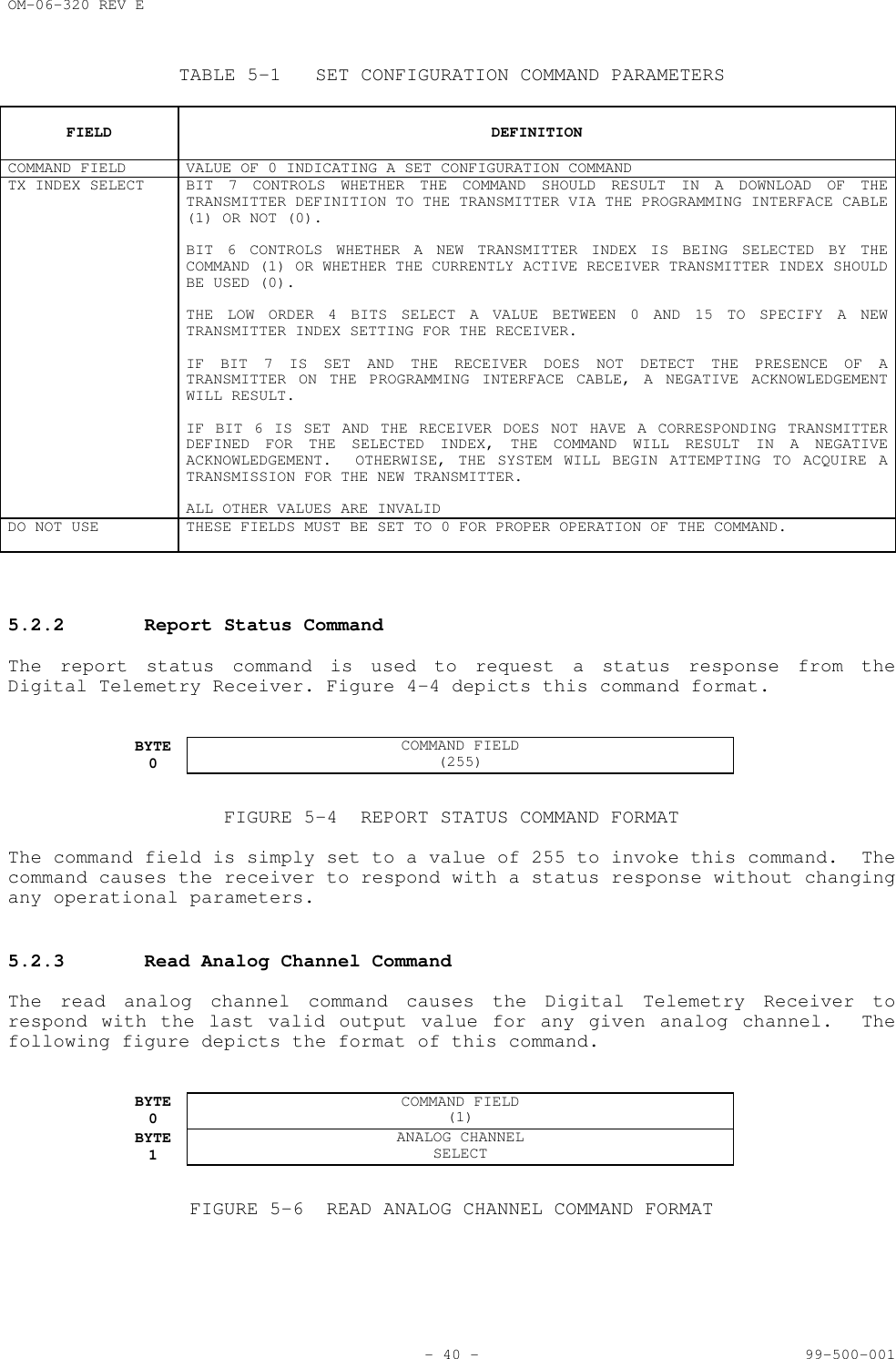
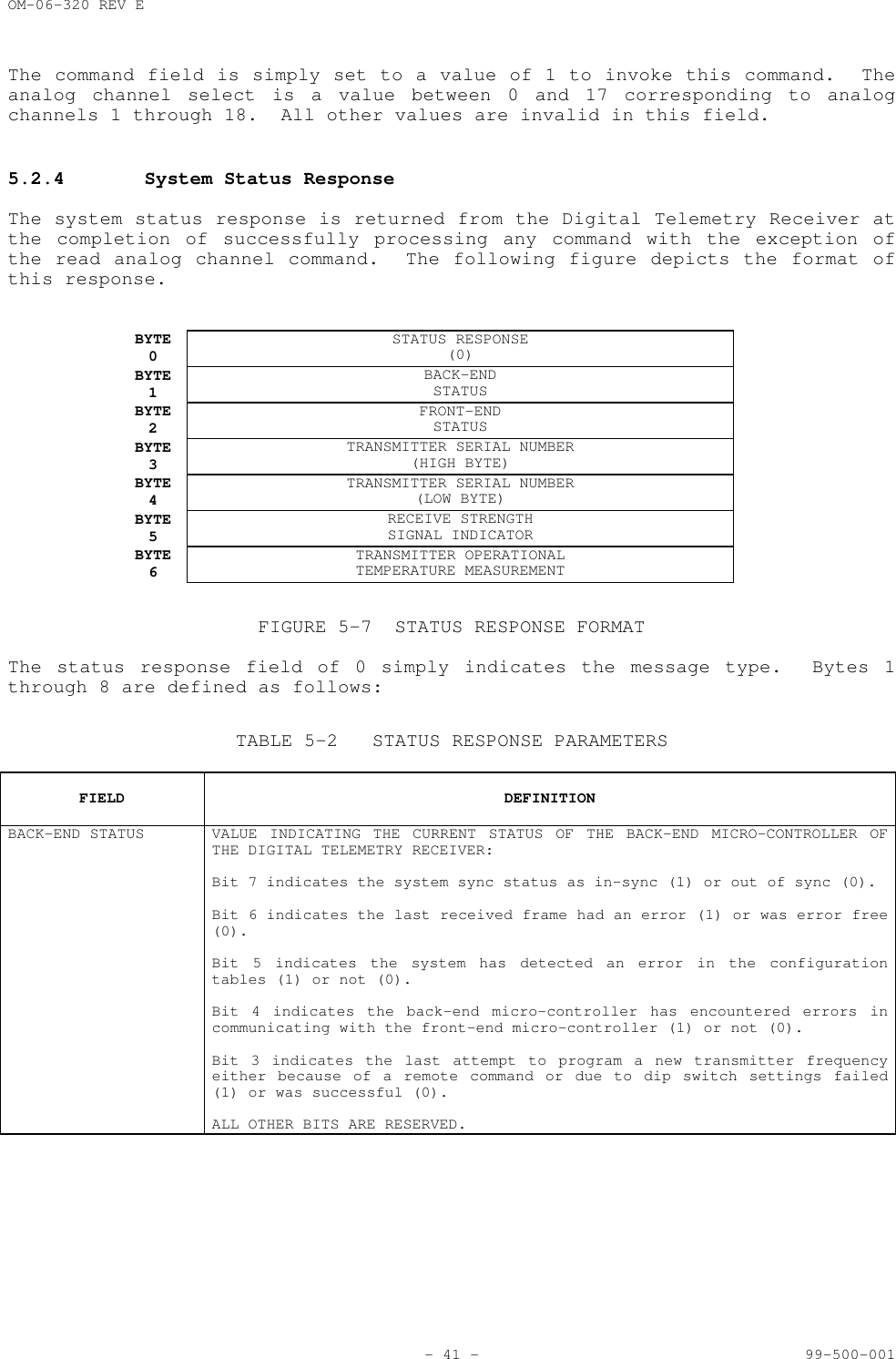
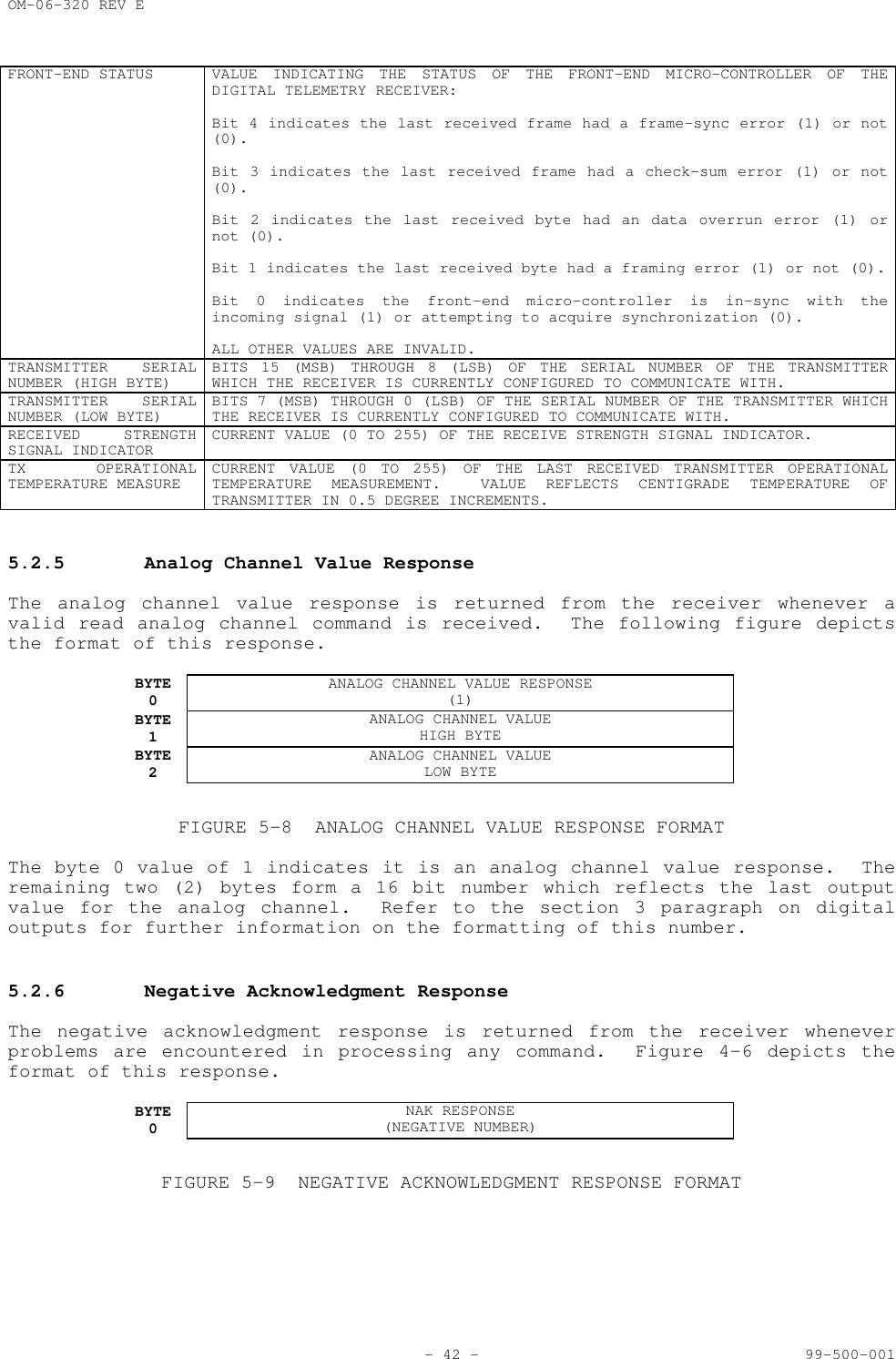
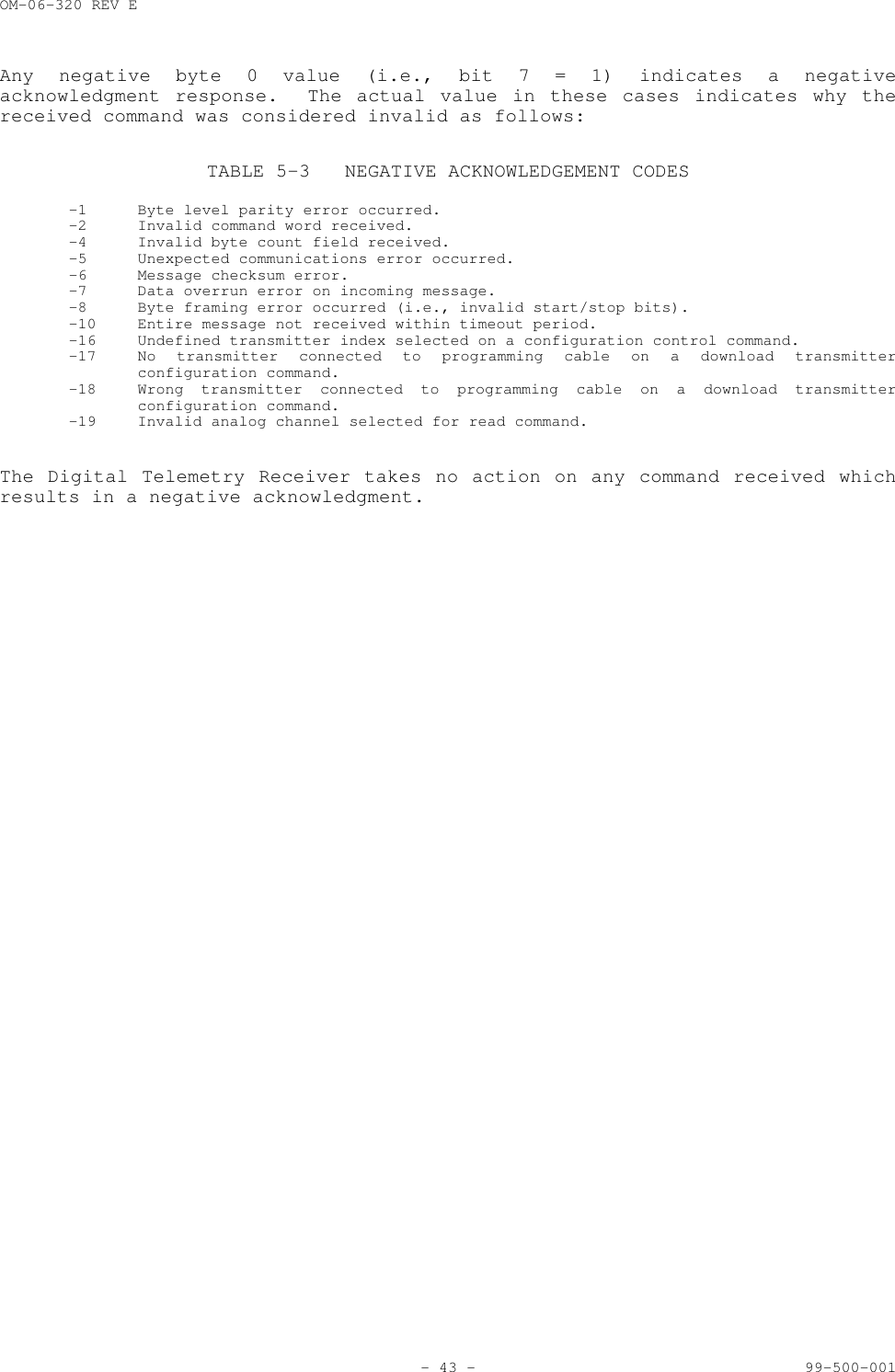
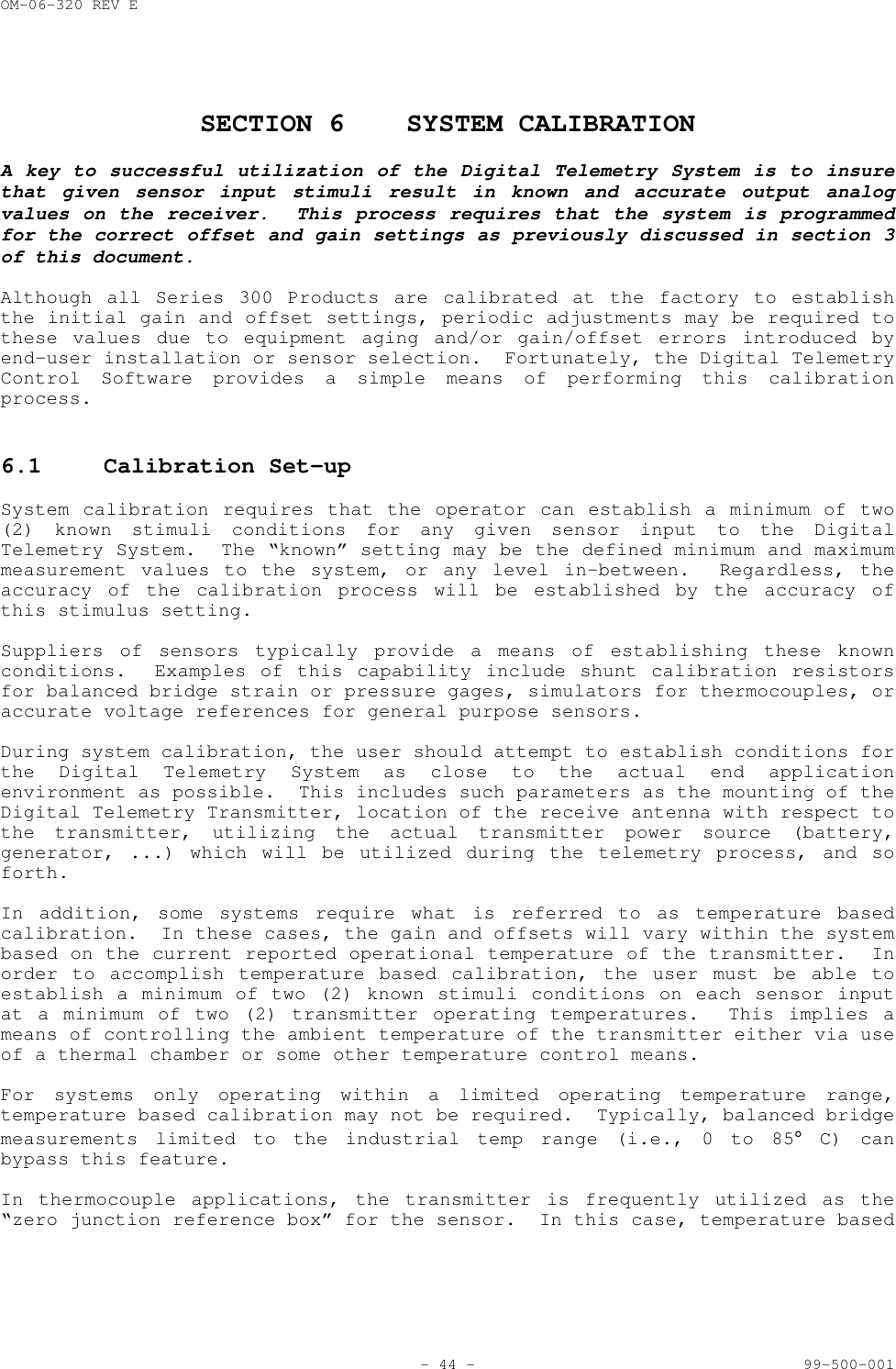
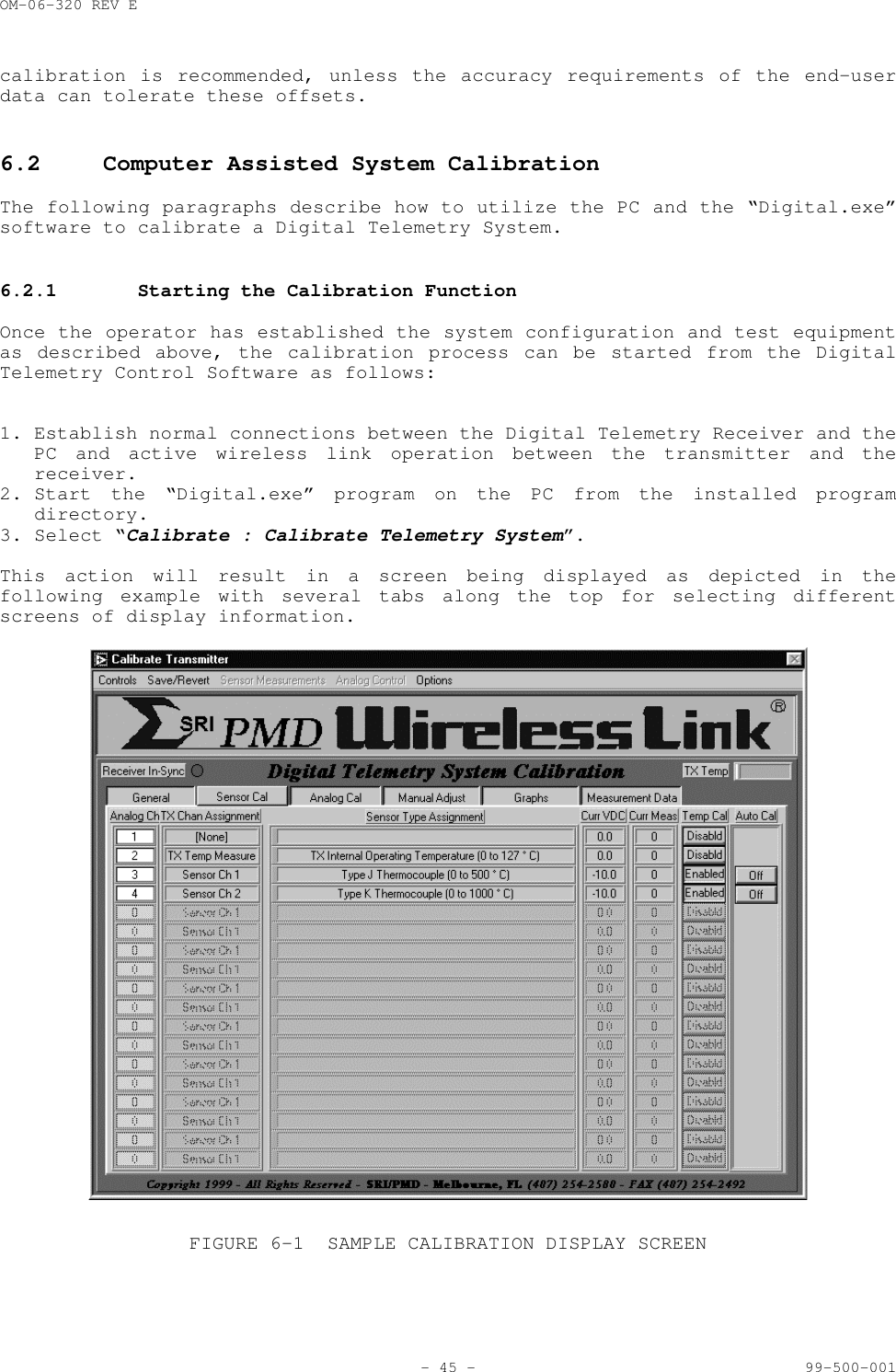
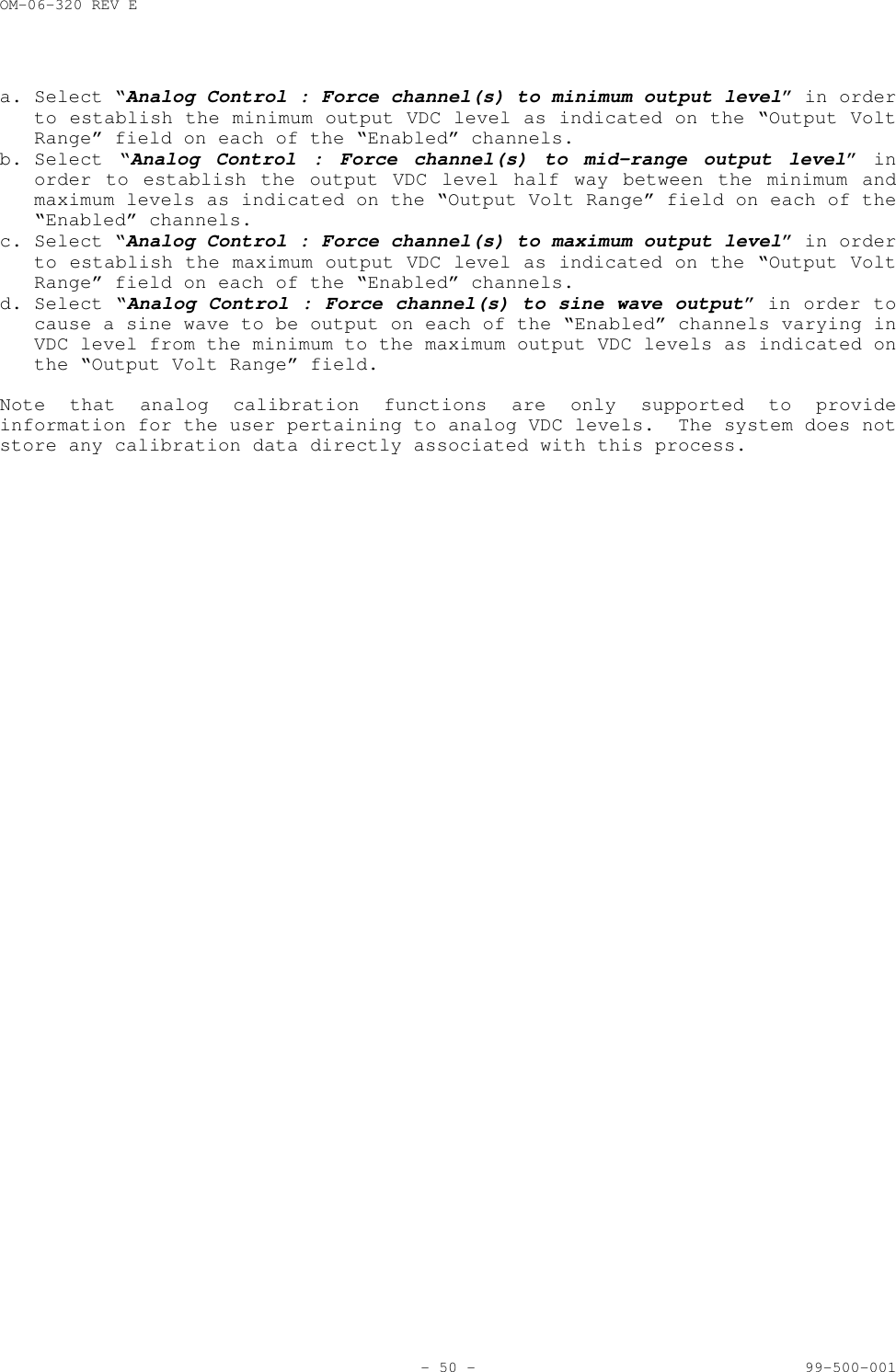
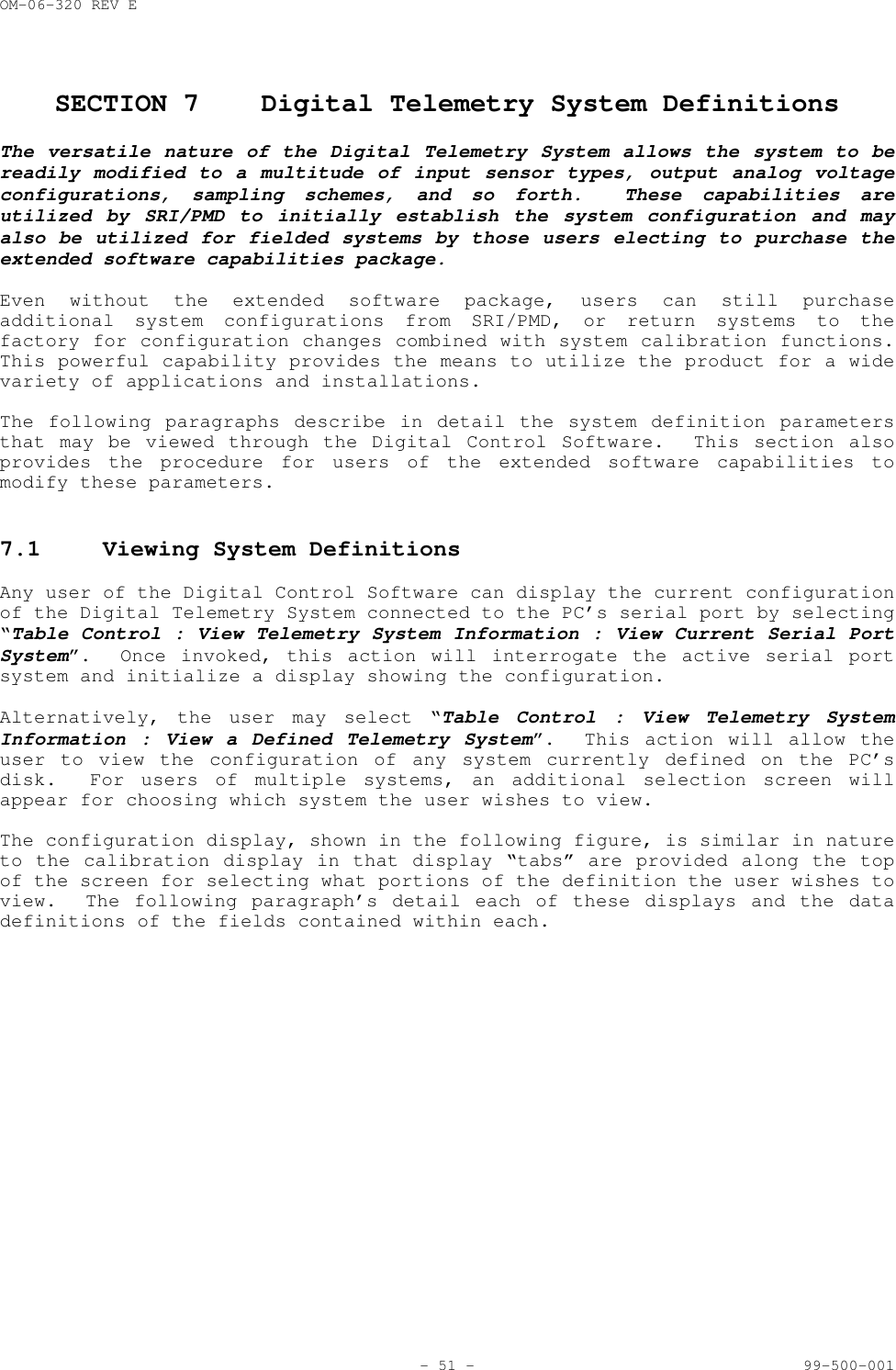
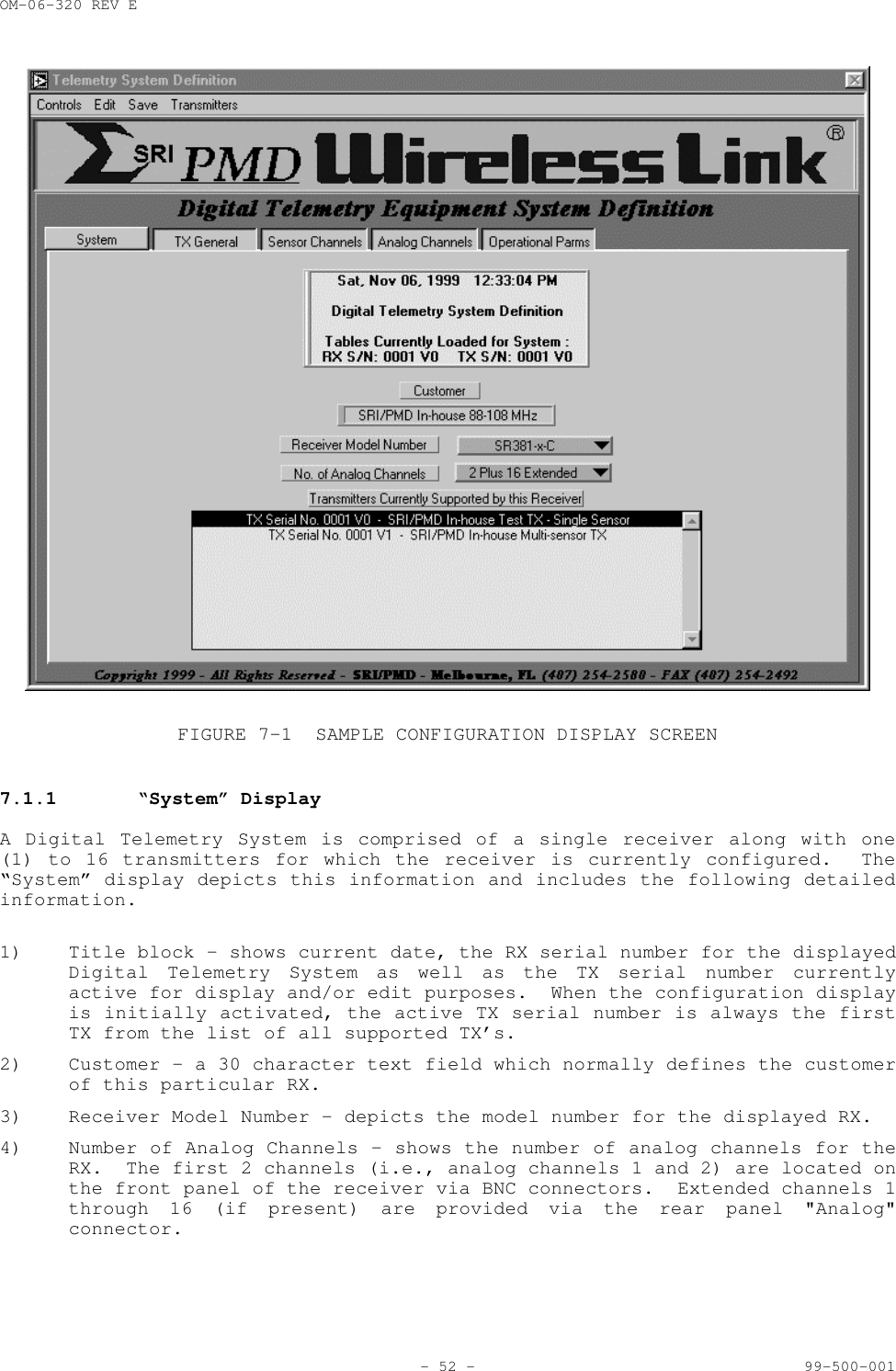
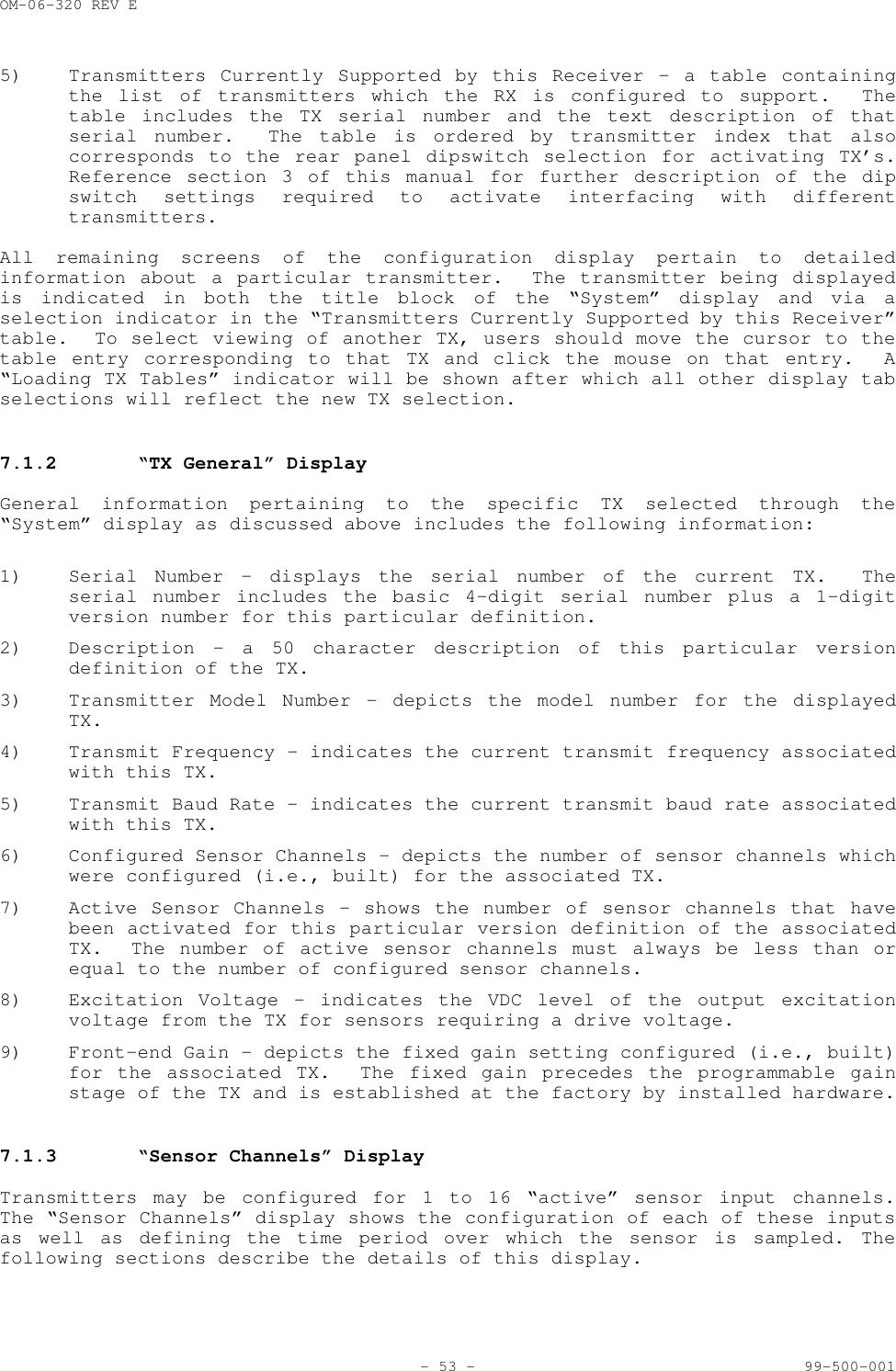
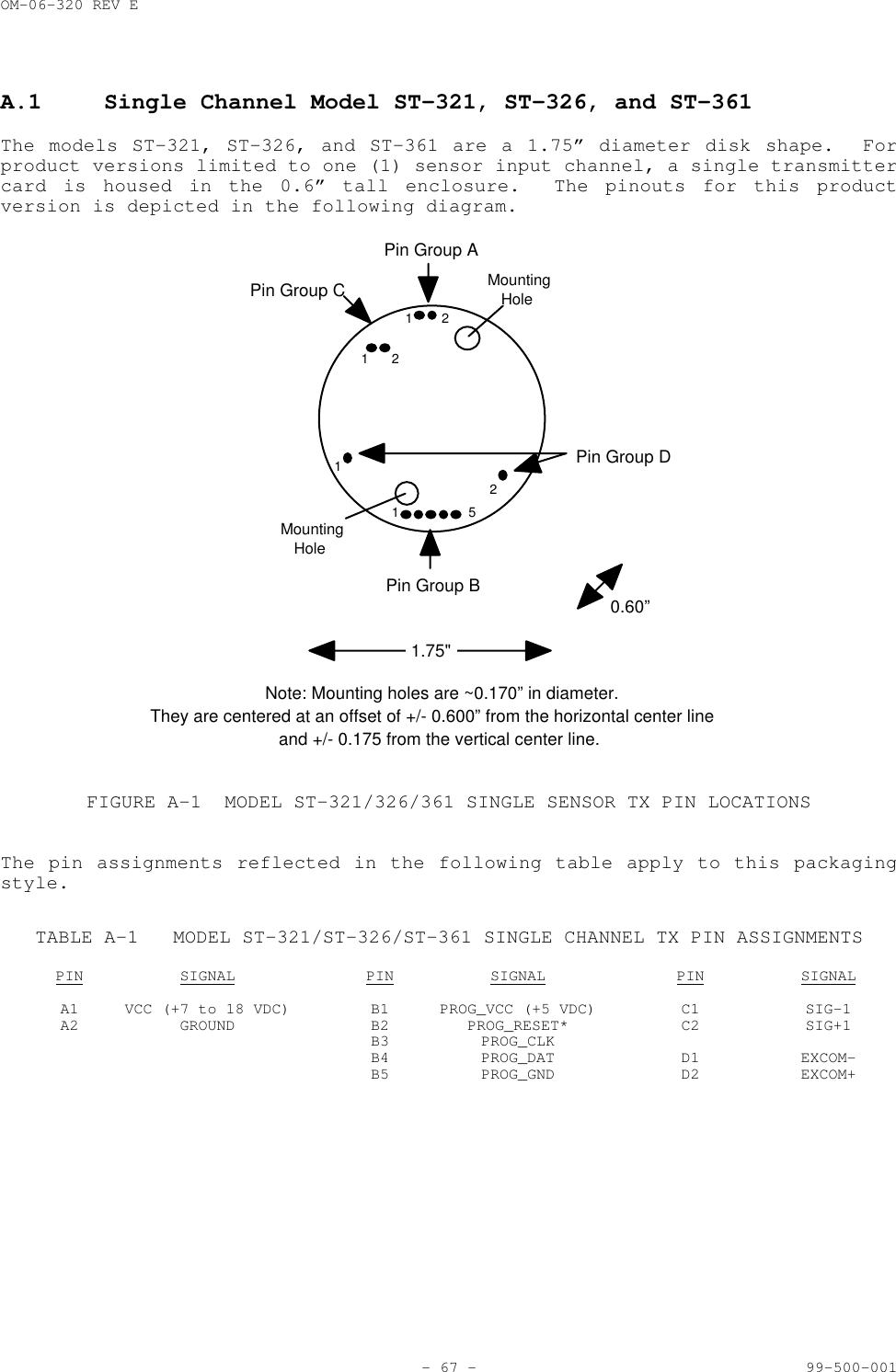
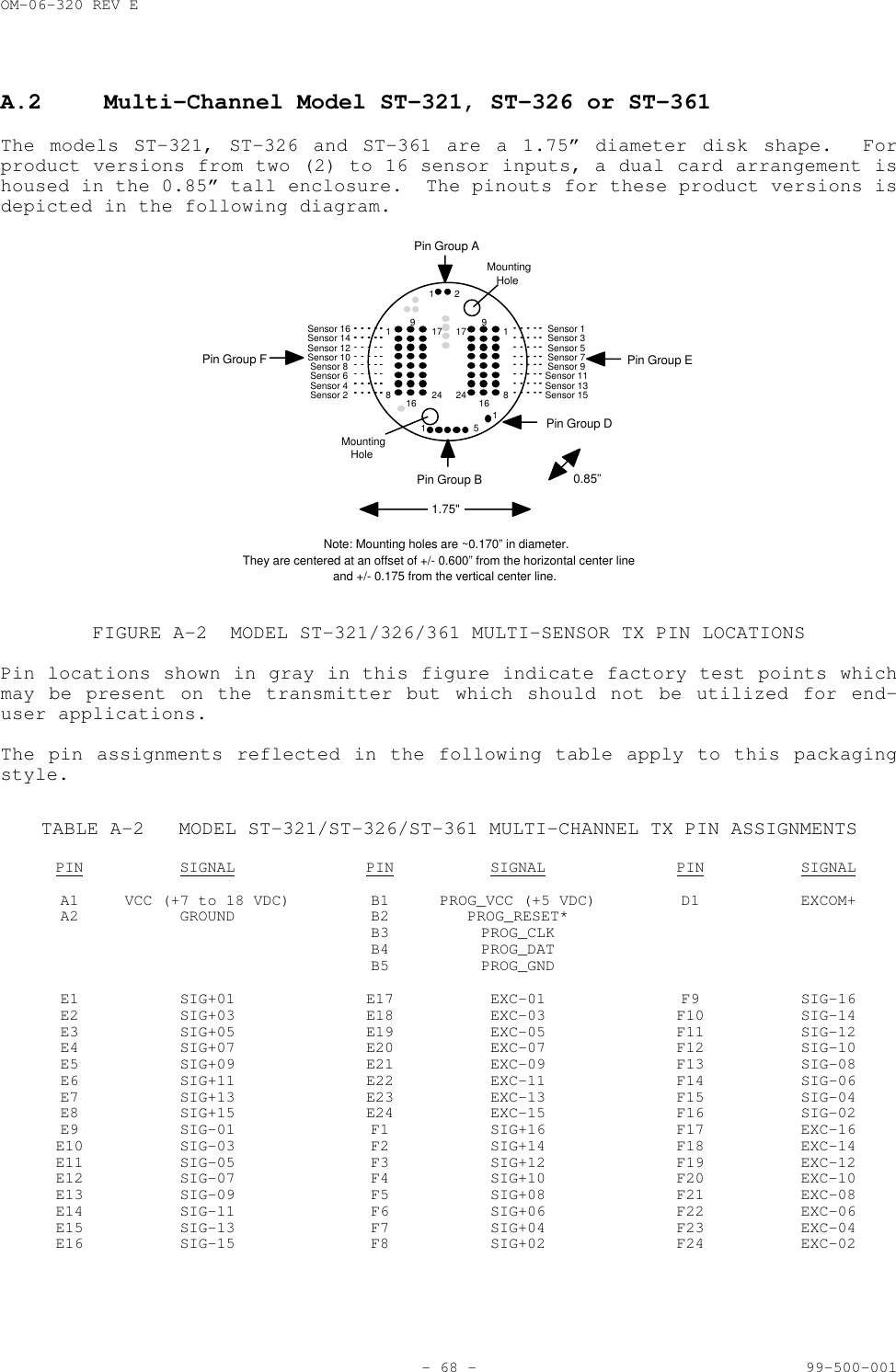
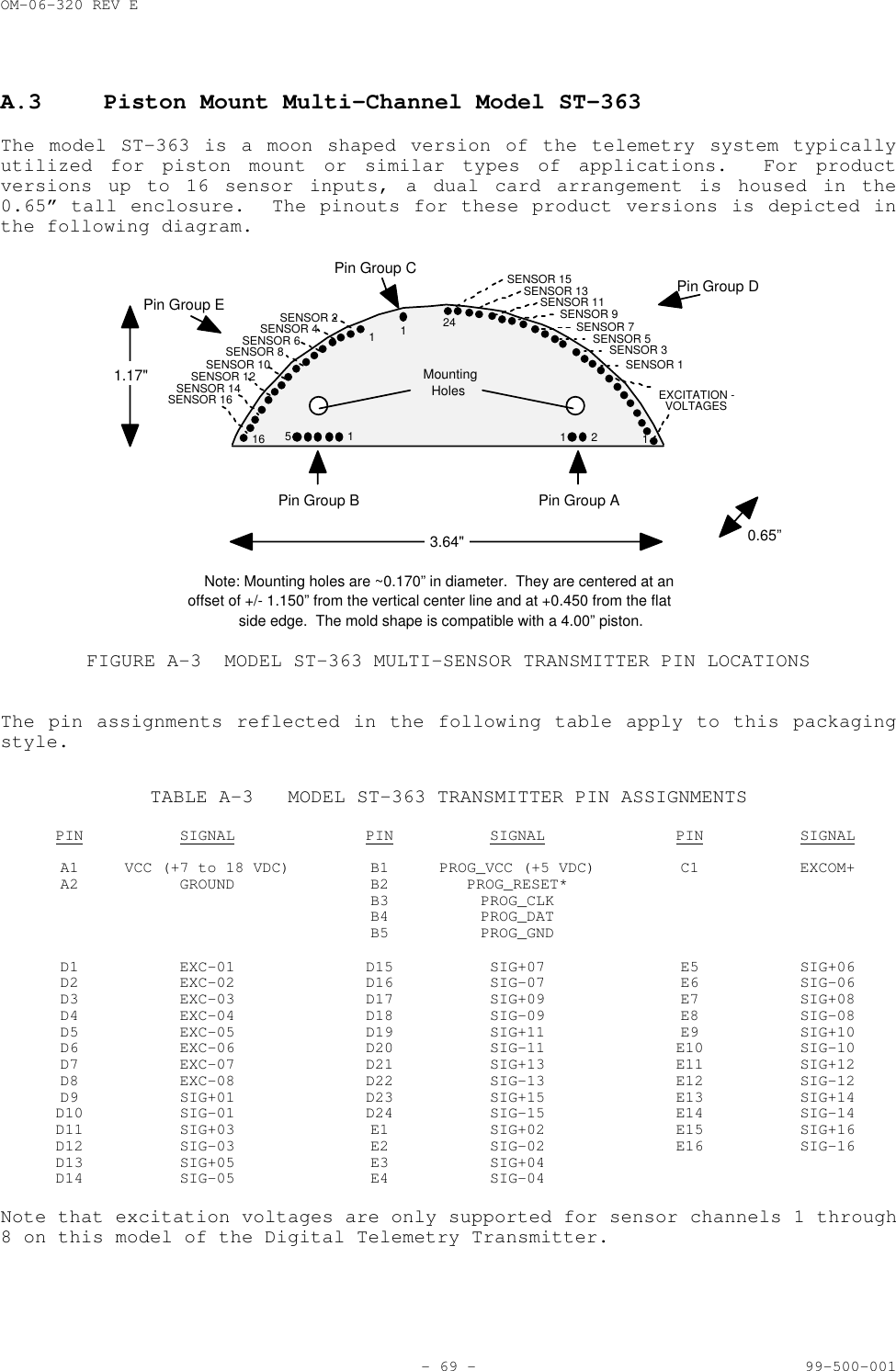
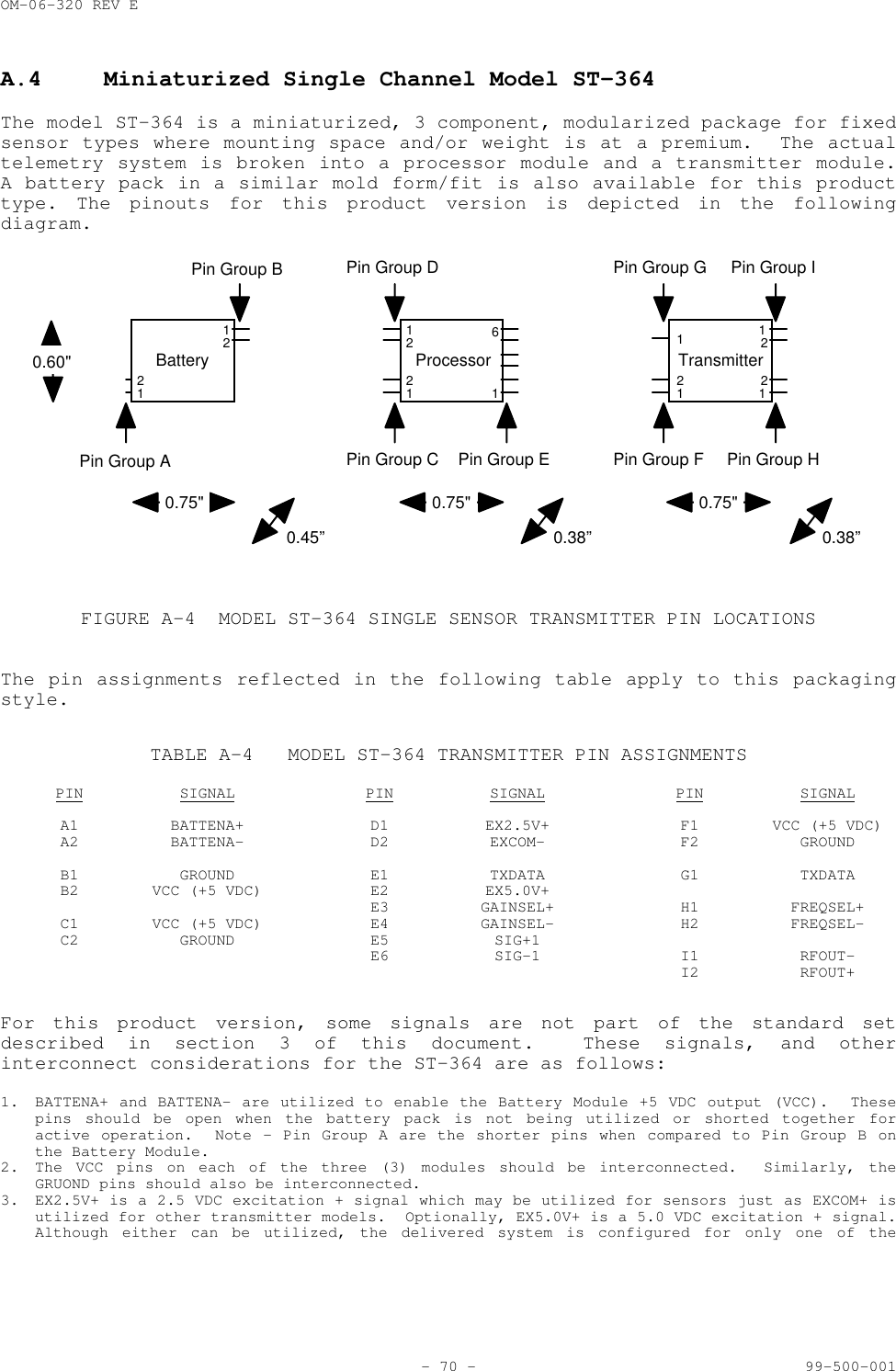
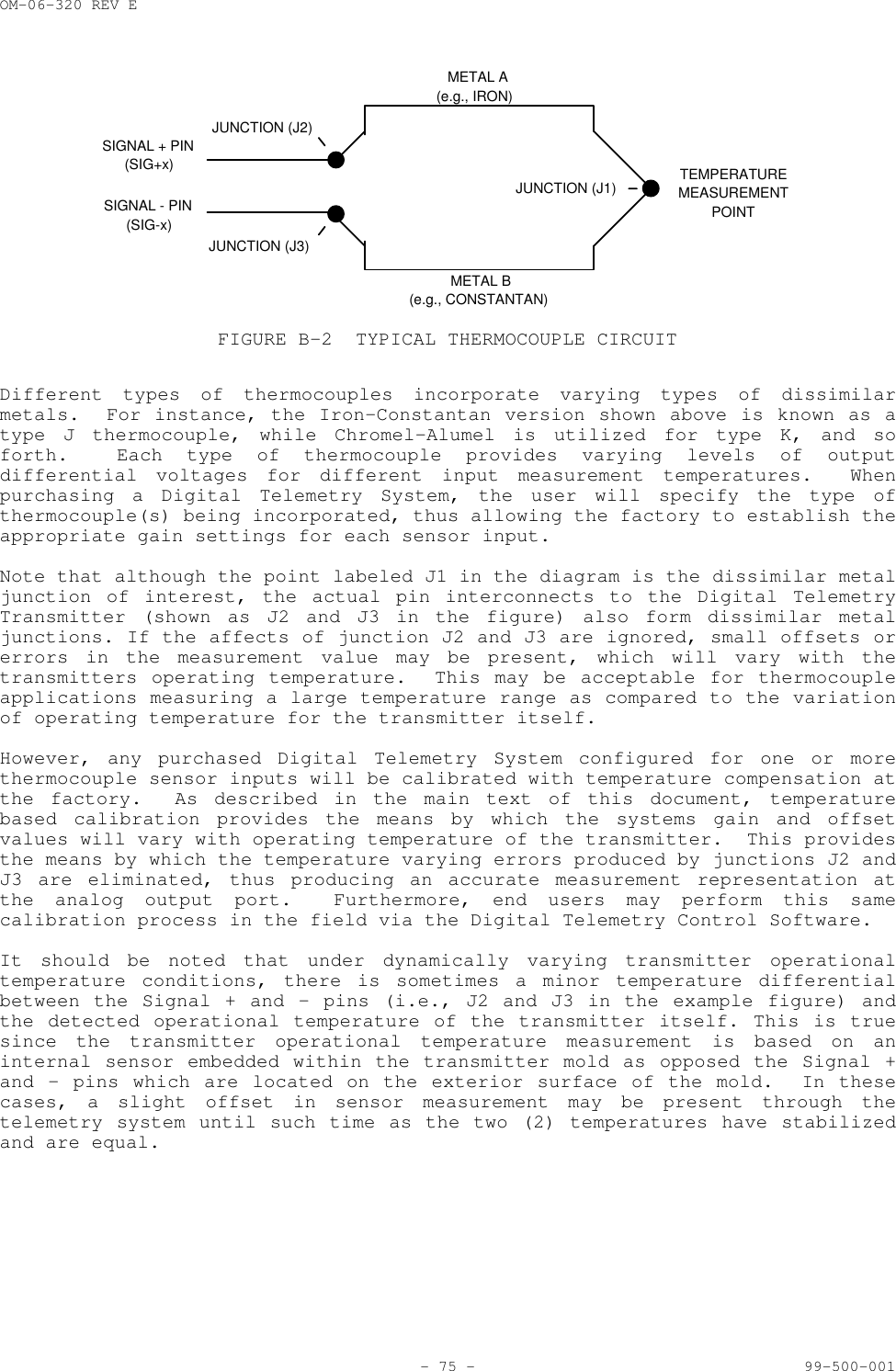
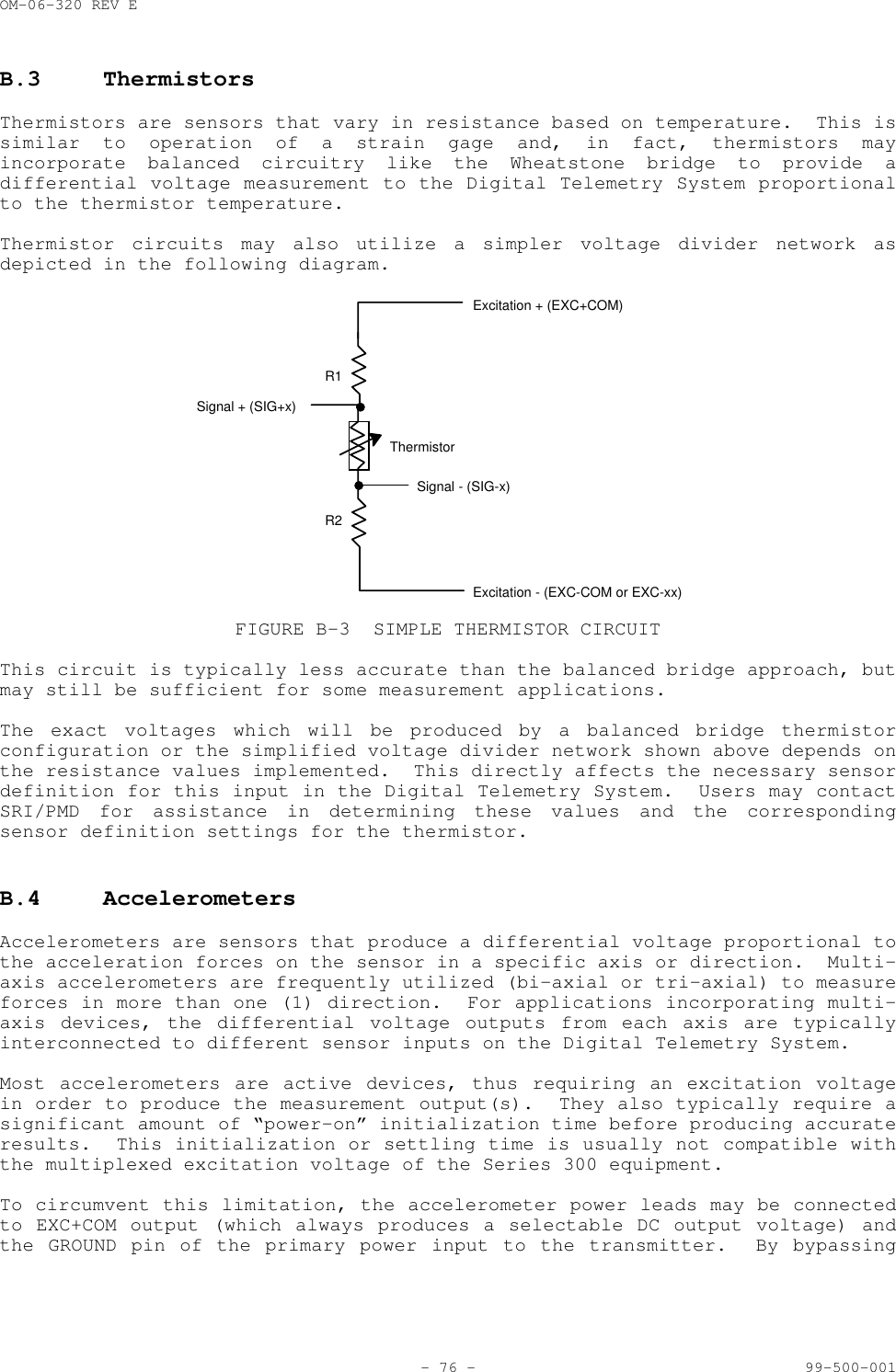
O and M Manual for Series 300 Equipment including ST326 and SR346
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation