Users Manual
SYMEO LPR®
Product Documentation
Product: LPR® -1D

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 2 of 97
CONTENT
1 OVERVIEW ...................................................................................................... 7
1.1 Safety Instructions ................................................................................................... 8
1.2 Installation ................................................................................................................ 8
1.3 Repairs ...................................................................................................................... 9
1.4 Transport and Storage ............................................................................................. 9
1.5 Power Supply ............................................................................................................ 9
1.6 Setup and Operation ................................................................................................ 9
1.7 System Extensions and Accessories .................................................................... 10
1.8 Additional Instructions regarding Compact Type and Integral Type Units ........ 10
2 SYSTEM DESCRIPTION ............................................................................... 11
2.1 System architecture ............................................................................................... 11
2.2 Technical Data ........................................................................................................ 11
2.3 System Configuration ............................................................................................ 12
2.4 System Design ........................................................................................................ 13
2.4.1 Station-ID (SID) ........................................................................................................ 13
2.4.2 Group-ID (GID) ......................................................................................................... 14
2.4.3 FSK Channel (FSK) .................................................................................................. 14
2.5 Mode of Operation of the System .......................................................................... 15
2.6 Application Examples ............................................................................................ 15
2.6.1 Redundant arrangement (2 x LPR-1DX) ................................................................... 15
2.6.2 Positioning of Crane Crab (LPR® 1DP2) ................................................................... 17
2.6.3 Positioning of 2 Cranes on two Runways (LPR® 1DP) .............................................. 18
3 HARDWARE .................................................................................................. 19
3.1.1 Casing ...................................................................................................................... 19
3.1.2 General internal connections .................................................................................... 21
3.2 LPR® - 1D unit with TCP/IP interface ..................................................................... 23
3.2.1 Front elements .......................................................................................................... 23
3.2.2 Overview internal connectors .................................................................................... 23
3.2.3 Mode of operation ..................................................................................................... 24
3.3 LPR® - 1D unit with Profibus interface .................................................................. 24
3.3.1 Front elements .......................................................................................................... 24

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 3 of 97
3.3.2 Overview internal connectors .................................................................................... 26
3.3.3 Connection to Profibus ............................................................................................. 26
3.3.4 Connection of service port with serial interface ......................................................... 27
3.3.5 Termination of Profibus ............................................................................................. 28
3.3.6 Addressing the Profibus ............................................................................................ 29
3.3.7 Measurement frequency ........................................................................................... 30
3.3.8 Mode of operation ..................................................................................................... 30
3.4 LPR® - 1D unit with RS232 interface ...................................................................... 30
3.4.1 Front elements .......................................................................................................... 30
3.4.2 Overview internal connectors .................................................................................... 31
3.4.3 Connection of service and data port with serial interface .......................................... 32
3.4.4 Mode of operation ..................................................................................................... 33
3.5 LPR® Antenna Types .............................................................................................. 34
3.5.1 Adapter for different LPR® Antennas ......................................................................... 36
4 INSTALLATION ............................................................................................. 37
4.1 Installation of LPR® Unit Design Compact Unit .................................................... 37
4.1.1 Important Instructions for Installation ........................................................................ 37
4.1.2 Installation ................................................................................................................ 38
4.2 Installation of LPR® Antennas ............................................................................... 38
4.2.1 Connecting and Wiring up the Antenna and Cable ................................................... 38
4.2.2 Installing the Antenna(s) ........................................................................................... 39
4.2.3 Fresnel zone ............................................................................................................. 40
4.2.4 Installation of Planar Antennas ................................................................................. 40
5 COMMISSIONING .......................................................................................... 41
5.1 Requirements .......................................................................................................... 41
5.1.1 General ..................................................................................................................... 41
5.2 Connection to LPR® Unit with TCP/IP Interface .................................................... 42
5.3 Connection to LPR® Unit with serial RS232 interface or Profibus interface ....... 44
5.4 Commissioning Tool – LPR® 1D Wizard ................................................................ 45
5.4.1 Installation ................................................................................................................ 45
5.4.2 Utilization of LPR® 1D Wizard ................................................................................... 45
6 WEB SERVER ................................................................................................ 58
6.1 Open Web Server .................................................................................................... 58
6.2 Settings ................................................................................................................... 59
6.2.1 ................................................................................................................ 60
6.2.2 ......................................................................................................... 60
6.2.3 l-to- ........................................................................................... 61
6.2.4 .............................................................................................. 63

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 4 of 97
6.2.5 ................................................................................................ 64
6.2.6 .......................................................................................... 64
6.2.7 Accept settings / System Reboot .............................................................................. 64
6.3 System Status ......................................................................................................... 66
6.4 Diagnostics ............................................................................................................. 67
6.5 Update Firmware .................................................................................................... 68
6.5.1 Step 1 File system ................................................................................................. 69
6.5.2 Step 2 Linux Kernel ............................................................................................... 71
6.5.3 Step 3 Optional: Userspace ................................................................................... 73
6.5.4 Step 4 Restart ........................................................................................................ 73
6.6 System Log ............................................................................................................. 74
7 PROTOCOL DESCRIPTION BINARY XP (1D MESSAGES) ........................ 76
7.1 General Description ................................................................................................ 76
7.1.1 Direction of Data ....................................................................................................... 76
7.1.2 Structure of Data Packet ........................................................................................... 76
7.1.3 Byte Stuffing ............................................................................................................. 77
7.1.4 CRC ......................................................................................................................... 77
7.2 Data Types .............................................................................................................. 78
7.2.1 Type 0x00 Distance Data ....................................................................................... 78
7.2.2 Type 0x01 User Data ............................................................................................. 79
7.2.3 Type 0x02 Send Request ...................................................................................... 80
7.2.4 Type 0x03 Relays Switching Command ................................................................. 80
7.3 TCP/IP option: Fixed Frame Protocol .................................................................... 81
7.3.1 Detailed description TCP Fixed-Frame Protocol ....................................................... 81
7.3.2 Detailed description UDP Fixed-Frame Protocol ....................................................... 81
7.4 Remarks .................................................................................................................. 82
7.4.1 LPR® 1D Address ..................................................................................................... 82
7.4.2 Distance Error codes ................................................................................................ 82
8 PROTOCOL DESCRIPTION FOR PROFIBUS INTERFACE......................... 83
8.1 Profibus data structure .......................................................................................... 83
8.2 Error messages ...................................................................................................... 84
9 TROUBLE SHOOTING .................................................................................. 85
9.1 Programs ................................................................................................................. 85
9.1.1 Terminal Program ..................................................................................................... 85
9.1.2 Command Window (only for LPR unit with TCP/IP interface) .................................... 85
9.1.3 Telnet (only for LPR unit with TCP/IP interface) ........................................................ 85
9.1.4 Browser (only for LPR unit with TCP/IP interface) ..................................................... 85
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 5 of 97
9.1.5 Network Scanner (only for LPR unit with TCP/IP interface) ....................................... 85
9.2 Hardware ................................................................................................................. 85
9.3 Connection to LPR units with RS232 or Profibus interface ................................. 85
9.3.1 RealTerm (for service port) ....................................................................................... 87
9.4 Connection to the LPR unit with TCP/IP interface ................................................ 87
9.4.1 LAN Settings of your PC ........................................................................................... 88
9.4.2 Check TCP/IP connection ......................................................................................... 88
9.4.3 RealTerm (for service port) ....................................................................................... 89
9.4.4 Web Interface ........................................................................................................... 90
9.5 No Measurements ................................................................................................... 92
10 APPENDIX A: AGENCY CERTIFICATIONS ................................................. 94
United States (FCC) and Canada (Industry Canada) ....................................................... 94
United States (FCC) ........................................................................................................... 94
Canada (Industry Canada) ................................................................................................. 96
11 APPENDIX B: TABLE OF COUNTRIES AND REGULATIONS .................... 97
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 6 of 97
The documentation for the LPR® 1D product is published by:
SYMEO GmbH
Prof.-Messerschmitt-Str. 3
D-85579 Neubiberg
www.symeo.com
If you have any questions or suggestions, please contact:
Email: info@symeo.com
phone: +49 89 660 7796 0
Copyright Symeo GmbH 2007
All rights reserved
HISTORY
Overview
3.17
14.12.2008
New Layout
3.18
11.02.2009
Added all single documents to one master document
3.19
30.03.2009
Added notes for FCC/IC conformity
3.20
13.07.2010
Corrections FCC notes
3.21
14.03.2012
Merge of all versions, new release Wizard 4.x
SYMBOLS USED
The following symbols are used throughout the documentation:
This symbol appears before instructions that must be followed at all times.
Failure to comply with these instructions will result in personal injury.
This symbol appears before instructions that must be followed at all times.
Failure to comply with these instructions will result in damage to equipment.
This symbol appears before information of particular importance.
All rights reserved, particularly those relating to the translation, reprinting, and reproduction
by photocopying or similar processes of all or part of the documentation.
All rights reserved, particularly for purposes of the award of patents or submission of utility
models.
Patent pending 10/496,886
Patent pending 11/578,094
Delivery options and technical changes reserved.
Published by SYMEO GmbH
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 7 of 97
1 Overview
SYMEO Industrial LPR® is a system for contactless, real-time determination of distances and
positions.
LPR® 1D is a distance measurement system which is particularly well suited for use in very
harsh, industrial environments, in which other systems such as mechanical rotary encoders
or lasers cannot function for long periods.
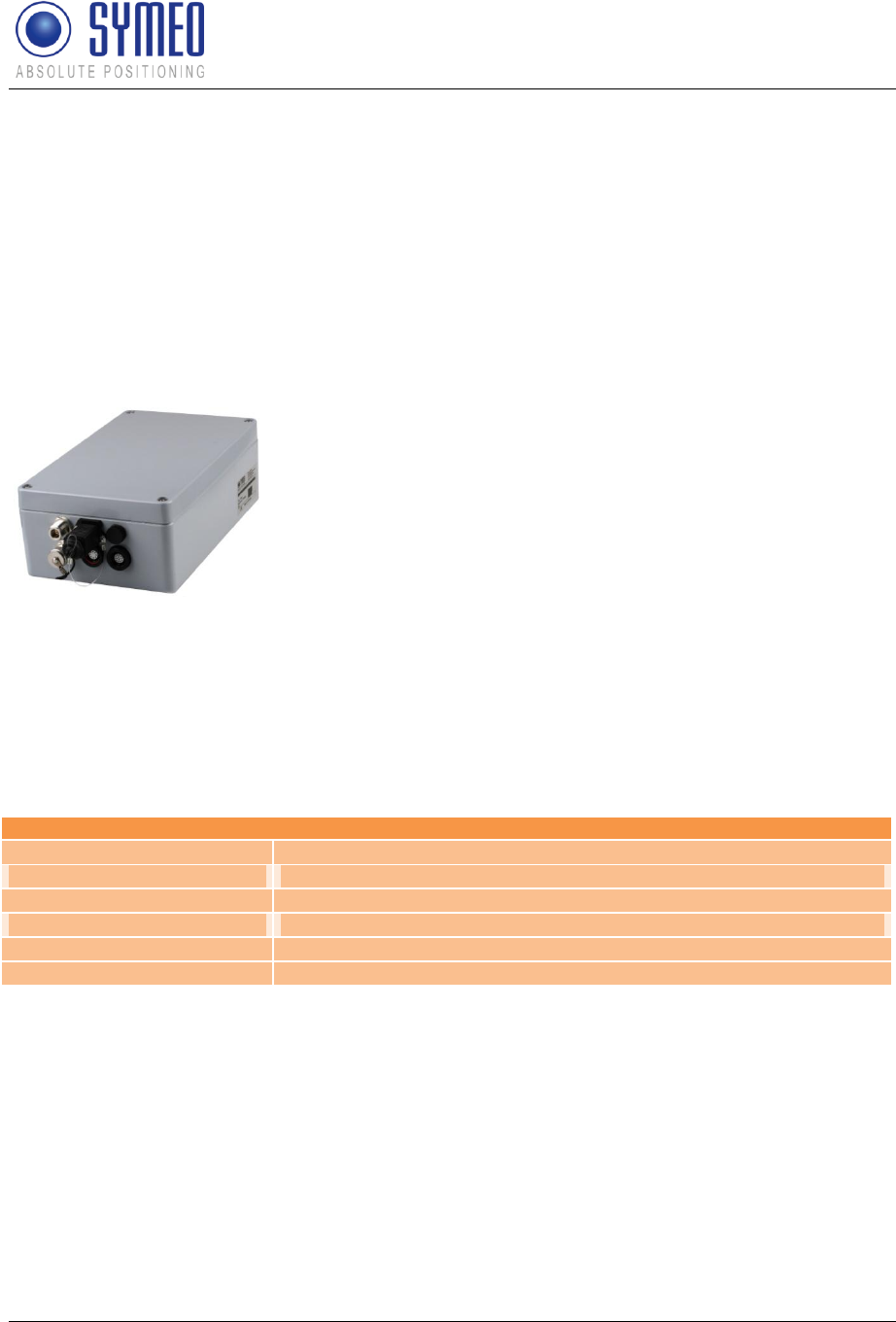
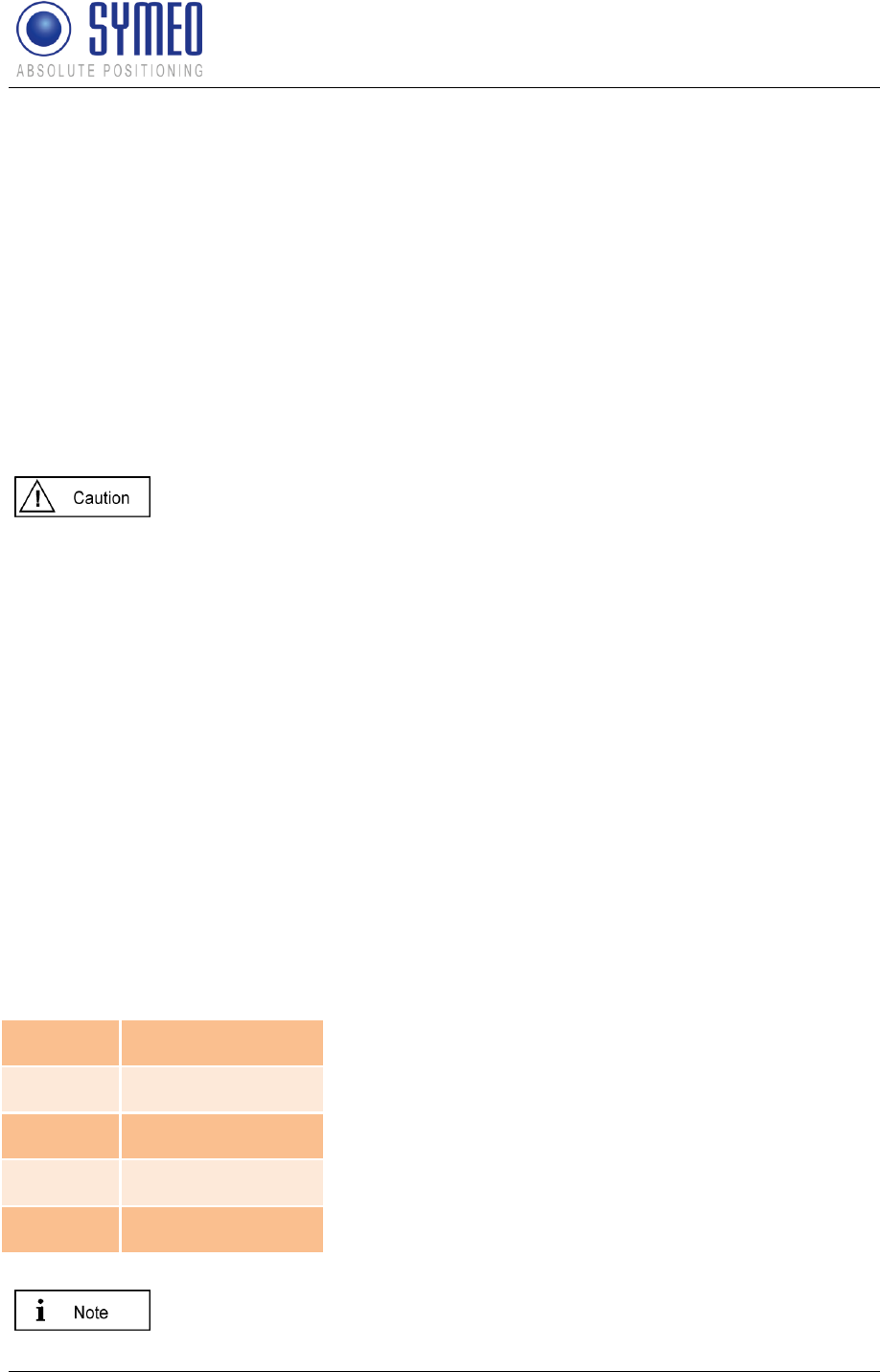
The Local Positioning Radar System LPR® 1D consists of equal components, which are
LPR® Slave Unit or LPR® Group Master Unit
Figure 1 – LPR® hardware: Group Master Unit or Slave Unit in the design “Compact Unit”
The difference between a LPR® 1D Group Master Unit and a LPR® 1D Slave Unit is only the
configuration but not the hardware. A LPR® 1D system consist exactly of one component
Group Master Unit. And it consists furthermore of one to four LPR® 1D components Slave
Unit, subsequent named slave unit 1, 2, 3, 4.
® 1D hardware has different interfaces. The
unit in the design Compact Unit has IP65 protection.
Overview interfaces
Antenna ports
2 or 4
Power Supply
10-36 Volt DC
RS232
Configuration and Data Interface
TCP/IP
Optional: Configuration and Data Interface
Profibus
Data Interface
Relay
Optional: 7 Dry Contacts
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 8 of 97
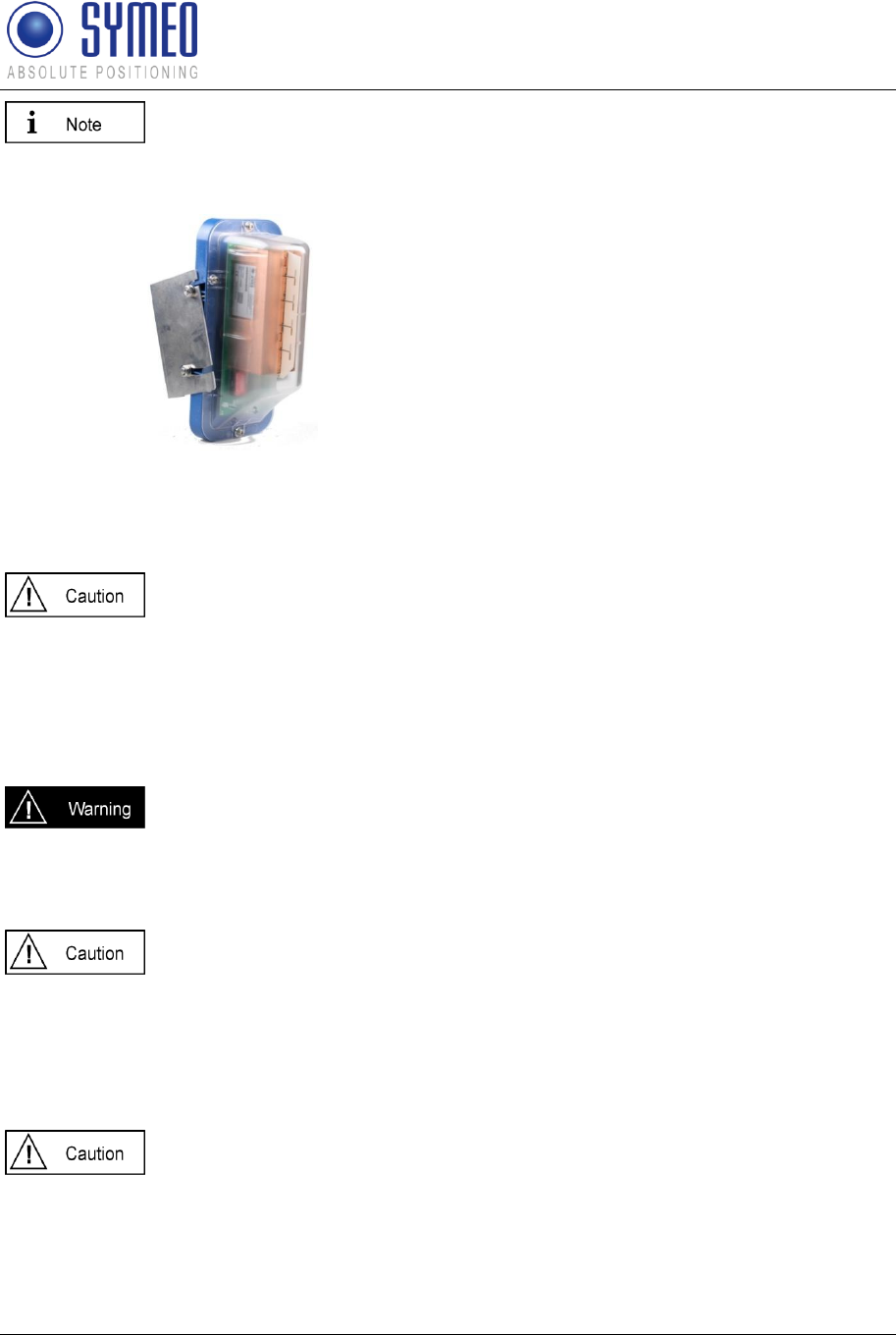
In special application cases it is also possible to get a LPR® unit with an
integrated antenna. This hardware is called LPR® Unit
compared to the hardware LPR® Compact Unit
Figure 2 – LPR® Hardware – Special Case: Group Master Unit or Slave Unit with integrated
antenna in the design “Integral Unit”
The LPR® 1D unit with an integrated antenna is available in a plastic housing. An installation
description is delivered separately to this document.
This antenna is not approved to be in compliance with part 15 of FCC rules
and with RSS-210 of Industry Canada. Usage of these antennas may void
the FCC/ IC authorization to operate this equipment.
Further information is found in the Appendix.
1.1 Safety Instructions
LPR®-1D systems are purely tracking and assistance systems. They
therefore do not satisfy special requirements for personal safety, e.g.
performance level c.
Follow the safety instructions in the operating instructions for the device
and the additional documentation!
Keep these safety instructions and other documents together with the device.
1.2 Installation
All installation, repair and servicing work must be carried out by qualified
and trained technicians!

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 9 of 97
1.3 Repairs
Repairs to the device must be carried out by authorized technicians.
Unauthorized opening and incorrect repairs could result in severe danger to
the user (danger of electric shock, radiated energy, fire hazard).
1.4 Transport and Storage
Use the original packaging or other suitable packaging for returns and
whenever the system is to be transported. This ensures protection from
crushing, impacts, moisture and electrostatic discharge.
During setup and before operation, refer to the instructions for
environmental conditions included in the operating instructions for the
device.
Route the wires in such a way that they do not cause a hazard and are not
damaged. When connecting the wires, refer to the corresponding
instructions in the operating instructions for the device.
Do not drop the device and do not expose it to strong vibrations.
1.5 Power Supply
A safety-inspected power cable that satisfies the regulations of the country
of use is required for the device. Devices with metal housings must only be
connected to a grounded, shock proof socket.
The device must not be operated unless the nominal voltage of the device
matches the local supply voltage. Check the supply voltage of the device in
stationary devices.
Connecting and disconnecting wires refer to the instructions in the
operating instructions for the device.
Do not use any damaged wires (damaged insulation, exposed wires). A
faulty wire poses a risk of electric shock or fire hazard.
1.6 Setup and Operation
During installation, make sure that no objects or fluids get inside the device
(risk of electric shock, short circuit).
In emergencies (e. g. if there is damage to the housing, control elements or
the mains cable, if fluids or foreign bodies have infiltrated the equipment),
switch off the power supply to the device immediately and notify your
SYMEO Service.

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Overview
Copyright © Symeo GmbH 2012
Page 10 of 97
Protect the contacts of all of the device's sockets and plugs from static
electricity. Do not touch the contacts. If it is ever necessary to touch the
contacts, take the following precautionary measures: Touch a grounded
object or carry a ground strap before touching the contacts. This will divert
static charges.
Proper operation (in accordance with IEC60950/EN60950) of the device is
only assured if the housing and integral covers for mounting slots are fully
installed (electric shock, cooling, fire protection, noise suppression). If
necessary, refer to the corresponding instructions in the operating
instructions for the device.
In the case of high outside temperatures and intense, direct solar radiation
or other radiant heat, it may be necessary to provide a sun or heat shield.
1.7 System Extensions and Accessories
Data links to peripheral devices must be provided with adequate shielding.
For LAN cabling, the requirements in accordance with EN 50173 and EN
50174-1/2 apply. Use of either a Category 5 shielded cable for 10/100
Ethernet or Category 5e shielded cable for gigabit Ethernet is a minimum
requirement. The specifications of standard ISO/IEC 11801 must be
complied with.
The warranty shall be voided if you cause defects to the device by installing
or exchanging system extensions.
1.8 Additional Instructions regarding Compact Type and Integral
Type Units
The Compact type LPR® unit must not be opened except for installation.
The Compact Unit contains no serviceable components.
When opening, ensure that no fluid gets into the housing. When sealing the
unit, ensure that the seal is included in the cover and that the Compact Unit
is completely closed. Otherwise, moisture can penetrate the unit and
damage it.
In order to install the Integral type LPR® unit, the hood must be detached
from the serviceable components. Refer also to the instructions on
installing the Group Master Unit.
Please take note of the safety and operating instructions in the operating
instructions for the system in which you want to install the component.

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 11 of 97
2 System Description
2.1 System architecture
SYMEO Industrial LPR® is a system for contactless, real-time determination of distances and
positions.
LPR® 1D is a distance measurement system which is particularly well suited for use in very
harsh, industrial environments, in which other systems such as mechanical rotary encoders
or lasers cannot function for long periods.
All devices have a unique identifier, via which they are actuated. In order to measure the
signal transit time and thus also a corresponding distance, the two devices involved are
time-synchronized (with accuracy in the picoseconds range).
LPR® units use the same frequency band and the same hardware for communicating as for
measuring distance. This means that no external WLAN or cable networks are needed for
transmitting measurement values and other reference data.
2.2 Technical Data
Overview: Technical Data
Power supply
10 - 36 V DC
Power consumption
max. 8W
Housing dimensions
(LxWxH)
260 x 160 x 91 mm
Weight
2.5 kg
Connections
Power-Supply: Terminal block
Antenna: N-connector
Ethernet: Plugged connection
Relays (optional): Terminal block
Profibus/RS232: Terminal block
Antennas
Up to 4 independent antennas, N-Connector
Hardware interface
Serial RS232, TCP/IP (optional), Profibus (optional)
7x dry contacts (optional, rating: max. 60 VDC, max. 2 A)
Data interface
Data port (Symeo binary protocol), Service port (ASCII protocol)
Profibus (optional)
User data transfer rate
8 bytes/cycle, up to 800 byte/s
Frequency range
5.725 - 5.875 GHz, ISM-band
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 12 of 97
Transmitted power *1
Output power is adjustable
Max. 0.025 W EIRP
Measuring distance *2
Max. 1800 m
Measurement accuracy *2
Max. ±5 cm
Measurement frequency *3
Max. 30 Hz
Ambient temperature *4
-40 °C to +75 °C
Protection class
IP 65 with appropriate cable and connectors
Compliance
CE mark, part 15 FCC *5, RSS-210 *5
*1 Transmitted power/ field strength can be adjusted to assure that emission limits at the
antenna are within legal limits, e.g. 25 mW EIRP in the EU and 50 mV/m at a distance of 3 m
in the US and Canada. For FCC /IC authorization the maximum field strength is limited by
firmware (FCC labeled units only).
*2 Depending on the antenna type, mounting position and environment
*3 For FCC/IC authorization a maximum measurement frequency of 10 Hz is allowed (FCC
labeled units only).
*4 Temperature inside the housing can range from -40 °C to 85 °C.
*5 FCC labeled units only.
2.3 System Configuration
The LPR® 1D system consists of two, three, four or five LPR® units. Each of these units can
be configured either as a Group Master Unit or as a Slave Unit. A system consists of exactly
one LPR® unit configured as a Group Master Unit and between one and four LPR® units
configured as Slave Units.
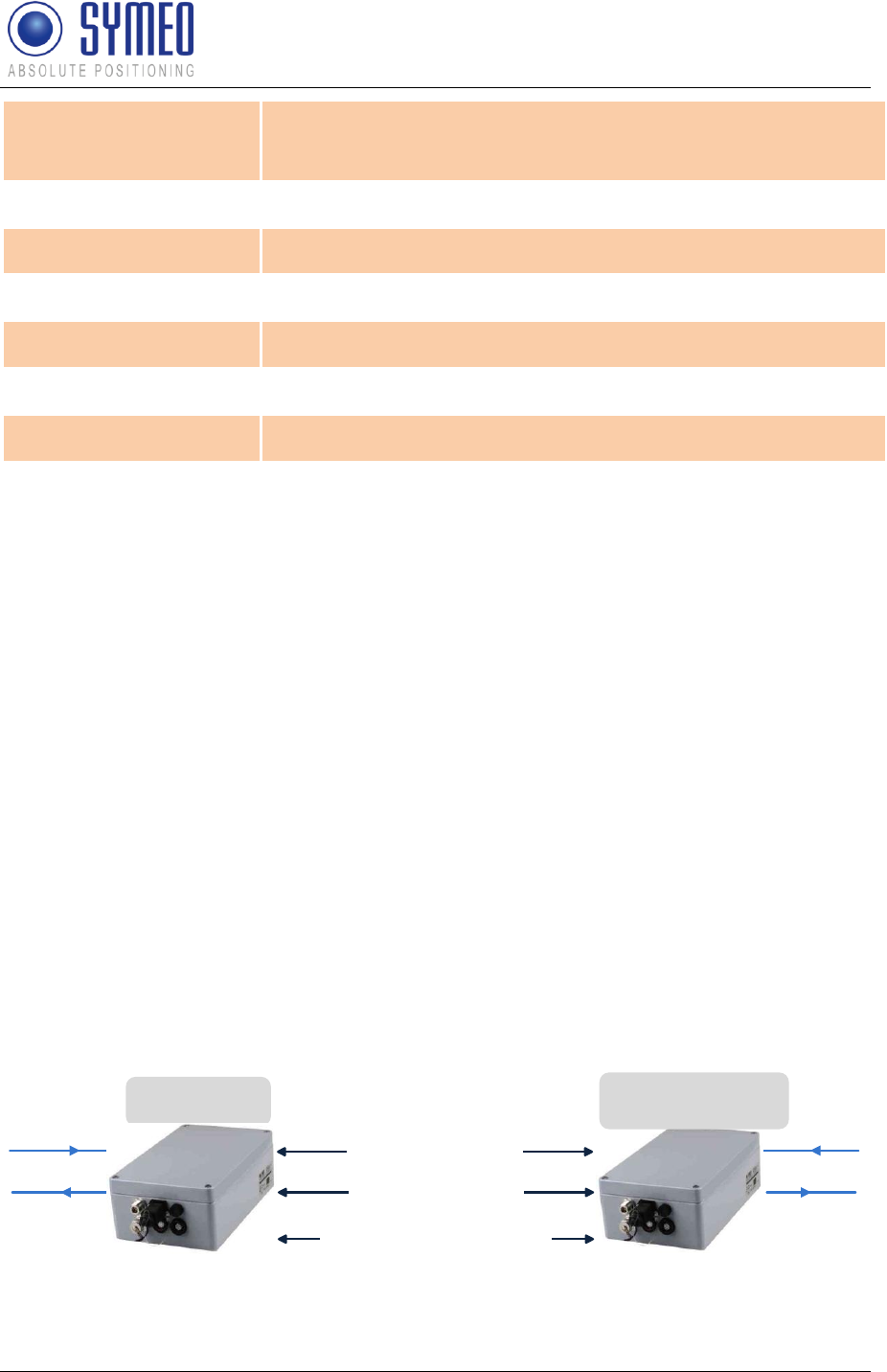
For pure 1D distance measurement two units are required and are arranged as shown in
Figure 3. The distance information is available at both units.
Slave Unit 1
Distance Measurement
Data Transmission (Distances,
User data, etc.)
Data out, i.e.
PC or PLC
Data in
Data in
LPR 1DX System Group Master Unit
Data out, i.e.
PC or PLC
Allocate a Time Slot for
Distance Measurement
Figure 3: 1D system
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 13 of 97
Besides the distance information, smaller volumes of user data can also be passed between
the units. These are fed in on the serial port of a unit and output in corresponding manner on
the other side.
Each unit consists of a basic unit, corresponding antenna cable, antenna, as well as power
supply and ports.
Further options for arranging LPR® units are described in the section 2.6 "Application
Examples".
2.4 System Design
Each LPR® 1D unit has parameters to provide an explicit allocation to a system and also to
ensure the functionality of a system. These parameters are explained in the following:
Parameters may only be set with the commissioning tool Symeo Wizard as
described in chapter 5.4. Do not change parameters manually in the
configuration files.
2.4.1 Station-ID (SID)
Each unit has an explicit Identification Number in one system. If using more than one LPR®
1D systems in your environment same station numbers could be used. BUT: In one system
all station numbers are different.
A system consists at least of 2 units, at most of 5 units. The first unit has the station number
1 (SID 1), the second unit has the station number 2 (SID 2), etc.
Unit 1 (SID 1) is the LPR® Group Master Unit, as a coordinator of the system. Units 2 5
(SID 2 5) are LPR® Slave Units. A Group Master Unit (SID 1) can only measure with a
Slave Unit (SID 2 SID 5) and vice versa, but NEVER with another Group Master Unit or a
Slave Unit with another Slave Unit. But the Group Master Unit (coordinator) can measure
with up to 4 Slave Units.
Keep in mind:
SID 1
Group Master Unit
SID 2
Slave Unit 1
SID 3
Slave Unit 2
SID 4
Slave Unit 3
SID 5
Slave Unit 4
There is no difference in the hardware of a Group Master Unit and a Slave
Unit. The only difference is the configuration software. The Group Master
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 14 of 97
Unit organizes the measurements. It allocates time slots to the Slave Units
to identify when these units are allowed to start with a measurement.
2.4.2 Group-ID (GID)
A system is identified clearly by its group number. All units in one system have the same
group number. If there is used a second, a third or more systems in your environment, all
additional systems must have a different group number (see Figure 5).
2.4.3 FSK Channel (FSK)
The measurement of the round trip of flight (RTOF) happens in a frequency band width of
5,725 to 5,875 GHz. In this band width the LPR® system gets a frequency channel. 30
frequency channels are available. All units in one LPR® systems have the same frequency
channel.
If there are more LPR® systems in your environment each further LPR®
system has another frequency channel (see Figure 5).
If you commission the system with the LPR® commissioning tool LPR® 1D
Wizard, the frequency channel is linked to a group ID. Therefore it is really
important to use different group IDs for different LPR® systems.
System Number 1
Group-ID: 1
System Number 2
Group-ID: 2
Station 1
Station-ID: 1
Station 2
Station-ID: 2
Station 3
Station-ID: 3
Station 4
Station-ID: 4
Station 1
Station-ID: 1
Station 2
Station-ID: 2
System Number 3
Group-ID: 3
System Number 4
Group-ID: 4
Station 1
Station-ID: 1
Station 2
Station-ID: 2
Station 3
Station-ID: 3
Station 1
Station-ID: 1
Station 2
Station-ID: 2
Figure 4 – Example of the relation Station-ID and Group-ID
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 15 of 97
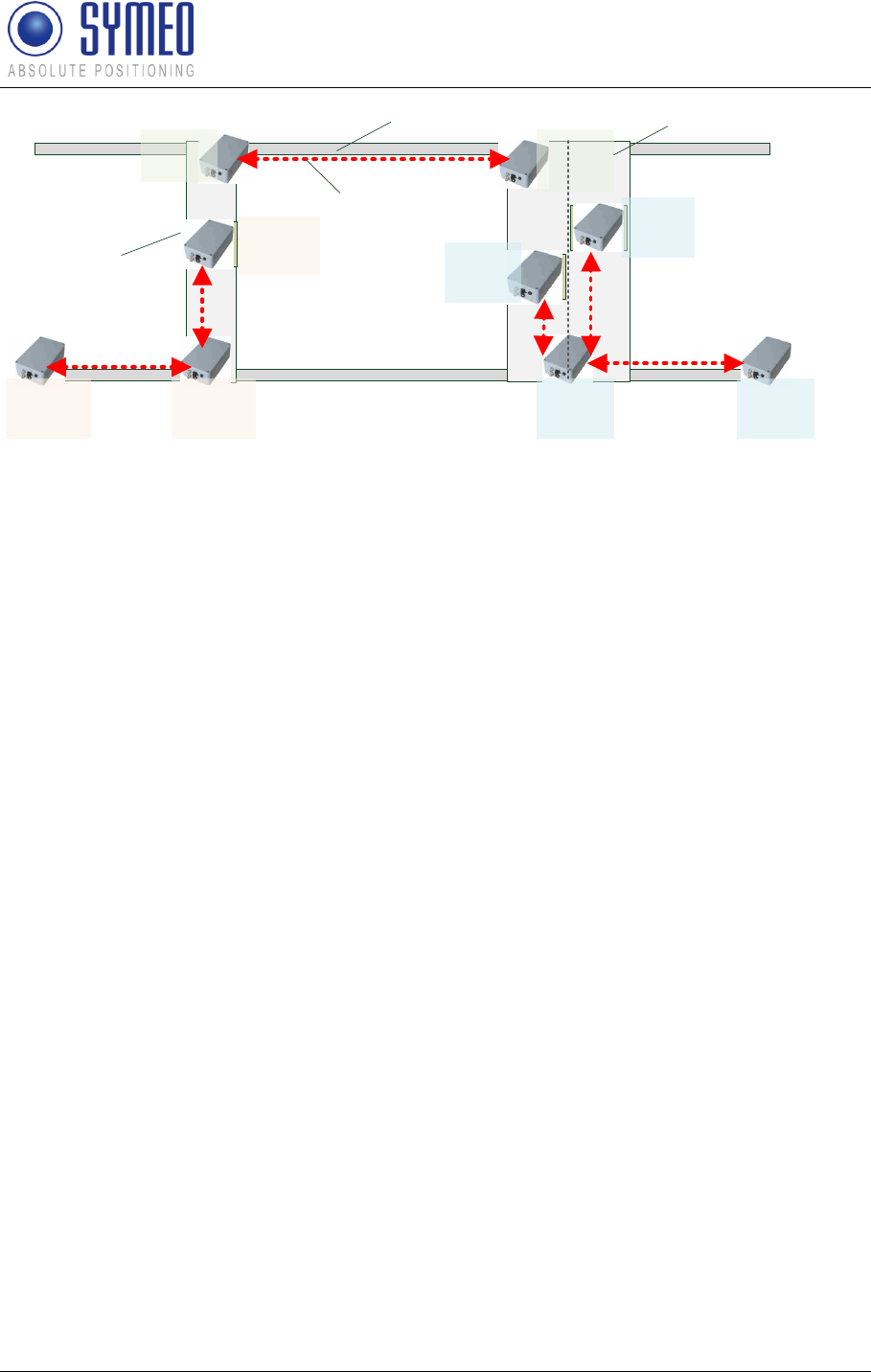
SID: 2
GID: 3 SID: 1
GID: 3
SID: 3
GID: 3
SID: 1
GID: 1
SID: 2
GID: 1
SID: 1
GID: 2 SID: 2
GID: 2
Crane Rail
Crane Crab
Radio Path
Crane Bridge
SID: 4
GID: 2
SID: 3
GID: 2
Figure 5 – Example of multiple LPR®-systems in one crane environment
2.5 Mode of Operation of the System
The distance is determined by measuring the transit time of radio signals. For this, the Group
Master Unit first sends a communication packet to the Slave Unit to start the measurement.
The unit that is addressed in this way sends a response sequence and a special, wideband
response signal which is ideal for making distance measurements. The Group Master Unit
synchronizes itself with this signal and after a precisely known time replies in highly
synchronized manner with exactly the same signal. The Slave Unit receives this signal and
uses the signal transit time to determine its distance from the Group Master Unit.
The distance can be output after the measurement by any of the units participating. As an
option, if the distance falls below a given value, a switch (dry contact) can be actuated to
trigger a warning signal, for example.
Besides distance measurement, the system's communication can be used for transmitting
user data in the intervals between measurements. Transmission is asynchronous, i.e. the
data is requested and transmitted when the measurement has been completed. To transmit
data over the system, first a send data request is sent by the LPR® unit to the user. Then the
user data is received and transmitted to the second LPR® unit. The data channel has a
channel capacity of 8 byte/measurement cycle. This means, the overall capacity depends on
the chosen measurement frequency. I.e. if a measurement frequency of 10 Hz is chosen, the
capacity is 80 byte/s
2.6 Application Examples
Figure 3 shows the simplest arrangement of LPR® units (LPR® 1DX). This is used for
measuring the distance between two LPR® units. The abbreviation 1DX means distance
measurement without positioning.
Some more complex arrangements are illustrated in the following description.
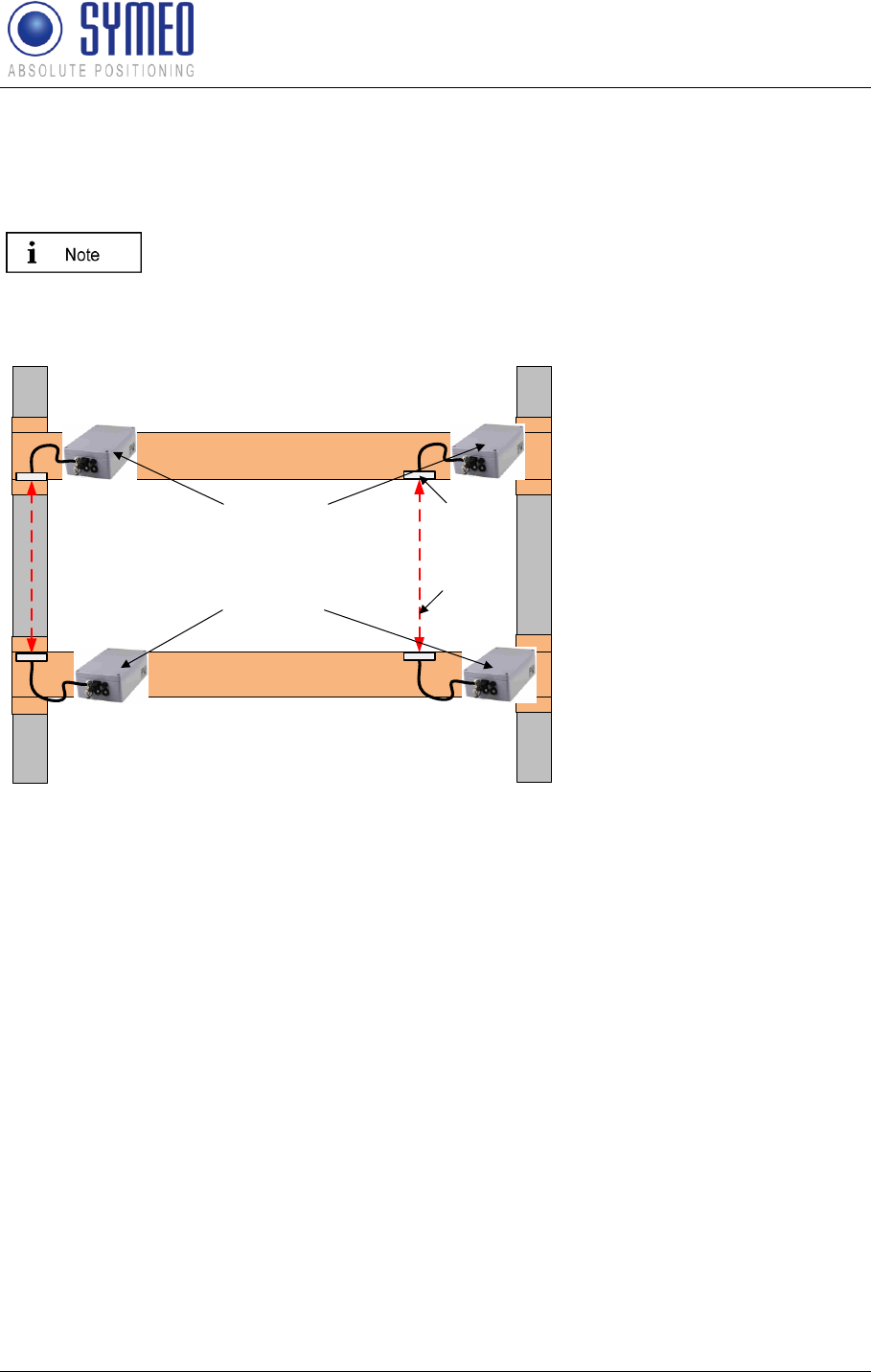
2.6.1 Redundant arrangement (2 x LPR-1DX)
For reasons of operational safety, it may be necessary to combine two systems in a
redundant arrangement. Figure 4 shows two Slave Units and two Group Master Units
installed in a redundant arrangement on two crane bridges. Each Slave Unit communicates
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 16 of 97
with the opposite Group Master Unit. Both systems measure independently from each other.
After the measurement, the distance from the respective partner can be output at each of the
participating units. Optionally, a switching contact may also be actuated depending on the
distance, e.g., to trigger a warning signal for example if the crane bridges come too close to
one another and there is a danger that they may collide.
If more than one LPR® system is used, each system has its own group ID
and its own frequency channel. So both systems do not disturb each other.
2 x LPR 1DX
(Plan View)
Crane Bridge 1
Crane Bridge 2
Antenna
Radio Path
LPR Slave
unit
LPR Group
Master unit
Figure 6: LPR® 1DX Redundant arrangement
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 17 of 97
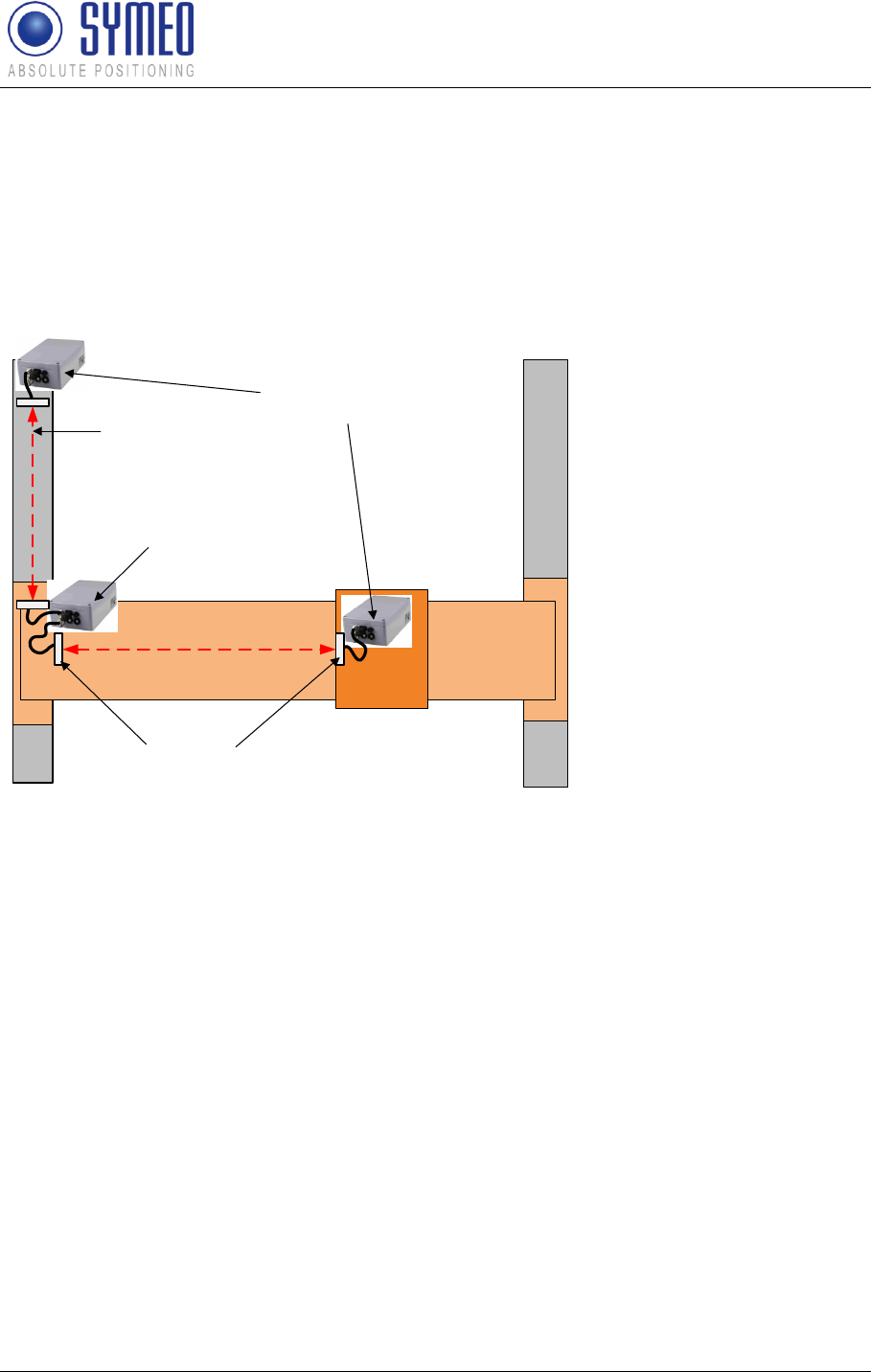
2.6.2 Positioning of Crane Crab (LPR® 1DP2)
In order to determine positions in two dimensions (x-y coordinates), three LPR® units can be
arranged in an L-shape (see Figure 7). In this case, the unit that is configured as the Group
Master Unit (unit 1) is equipped with 2 antennas. This unit measures against the first Slave
Unit (unit 2) with the first antenna, and against the second Slave Unit (unit 3) with the other
antenna, for example. In this way, the position of a crane crab can be determined.
Crane Bridge Crane Crab
LPR 1DP2
(Plan View)
Antenna
LPR Slave
Units
LPR Group
Master Unit
Radio Path
Figure 7: LPR® 1DP2 L-shaped arrangement
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
System Description
Copyright © Symeo GmbH 2012
Page 18 of 97
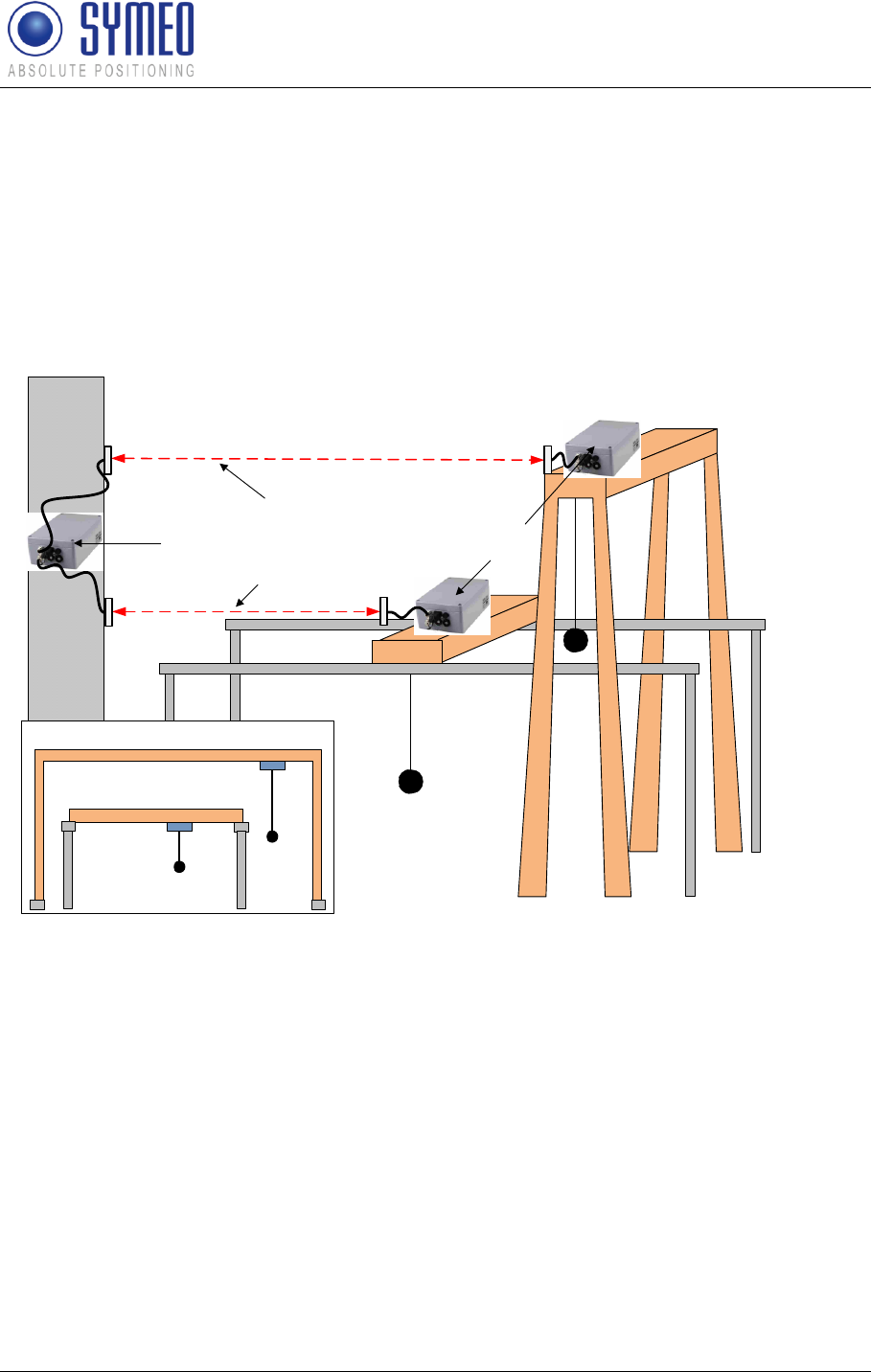
2.6.3 Positioning of 2 Cranes on two Runways (LPR® 1DP)
The Y-shaped arrangement can be used to determine the position of two cranes on different
crane runways, for example. In the arrangement shown in Figure 8, the Group Master Unit
(unit 1) is equipped with two antennas. A Slave Unit (unit 2 and unit 3) is installed on each of
the two cranes. The two antennas are mounted at the wall at the same height as the
respective Slave Units installed on the cranes. In this way, the distance of both cranes from
the wall can be calculated. By comparing these two distances, a warning may be output
Wall
Kran 1
Crane 2
Antenna 1
Antenna 2
Crane 1
Side View
Crane 2
Crane 1
LPR 1DP System
LPR Slave
Unit
LPR Group
Master Unit
Radio Path 1
Radio Path 2
Figure 8: LPR® 1DP Y-shaped arrangement

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 19 of 97
3 Hardware
All corresponding installation, repair and servicing work must be carried out
by qualified and trained technicians. LPR® - 1D unit (Design Compact Unit)
The compact type LPR® - 1D unit is available with different interface options:
Interfaces for data output : TCP/IP or Profibus or RS232
Optional: switching outputs for up to 7 relays
2 or optional 4 antenna ports
The option for additional relay outputs is not provided with 4 antenna
outputs.
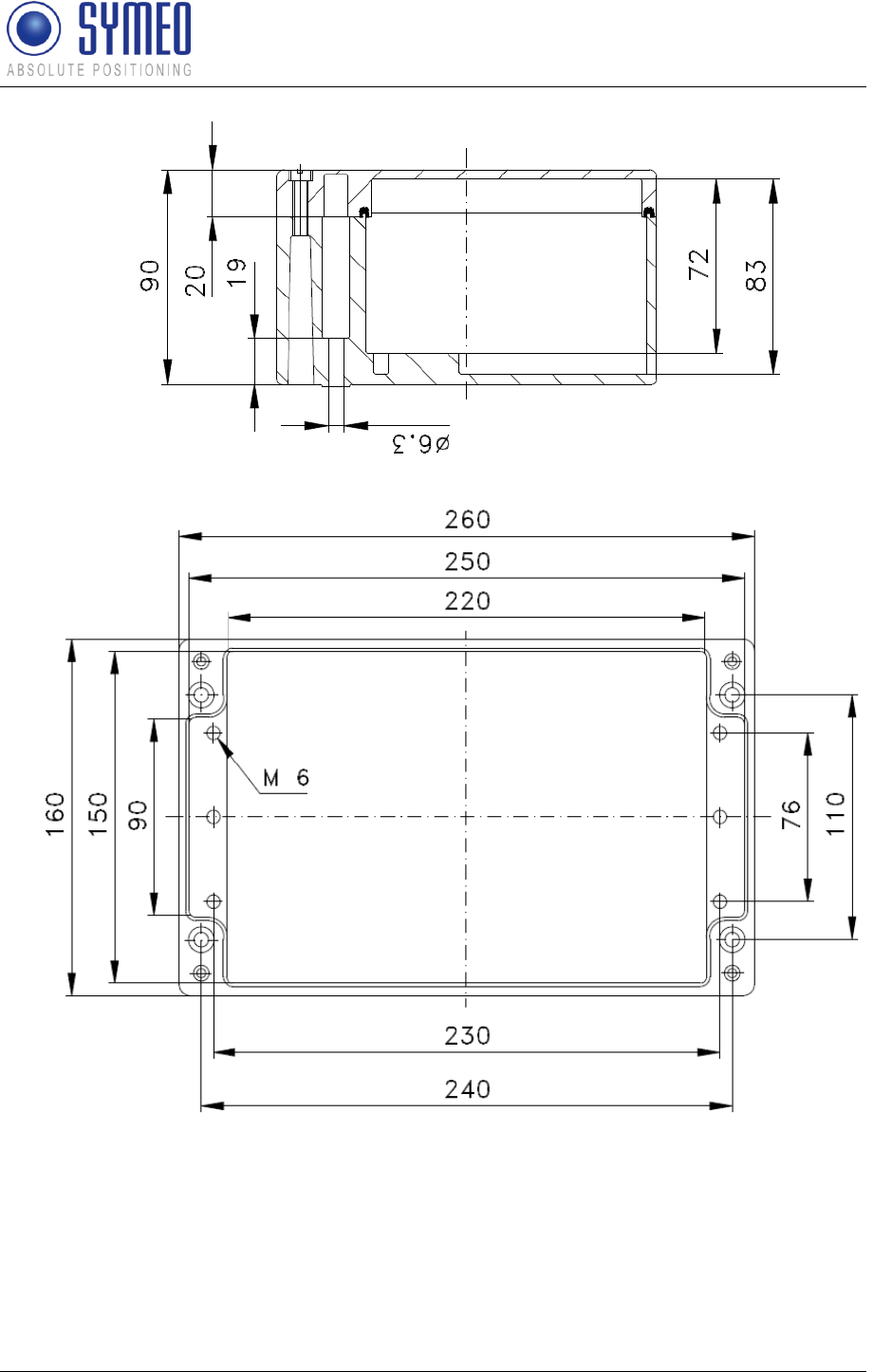
3.1.1 Casing
LPR® - 1D units are provided in die-cast aluminum housings.
91
260
160
Figure 9: LPR®-1D unit front and side view
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 20 of 97
Figure 10: Dimensions in mm of the LPR®-1D unit
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 21 of 97
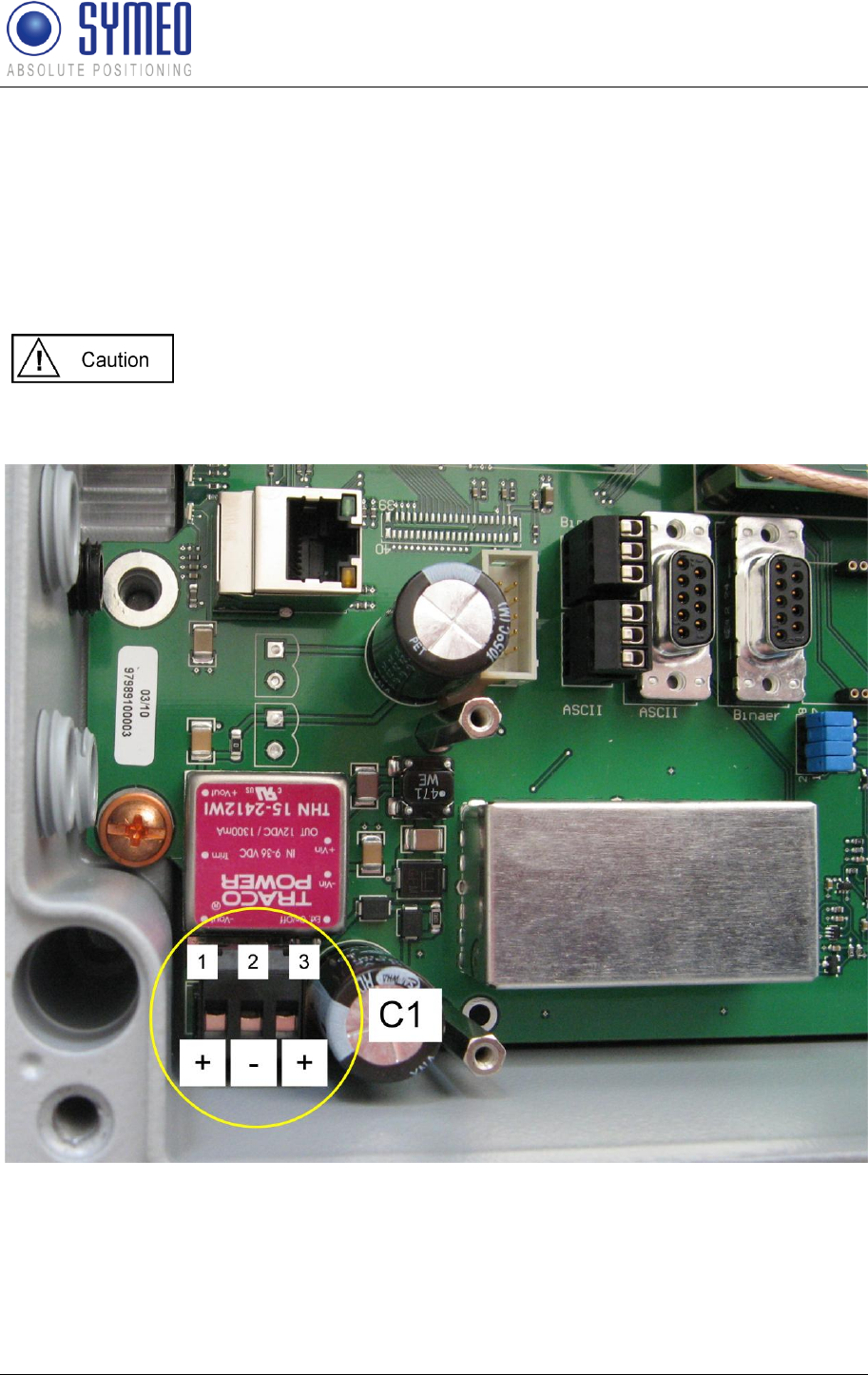
3.1.2 General internal connections
Power supply
Power supply (10 - 36 VDC) is connected using the power supply terminal (C1) Figure 11
depicts the pin assignment. Positve voltage can be connected either at pin 1 or 3, the
negative or ground voltage is connected to pin 2.
Polarity reversal or otherwise faulty connection can damage the LPR®
unit. In that case the unit must be send to the SYMEO service.
Figure 11 Pin assignment power supply
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 22 of 97
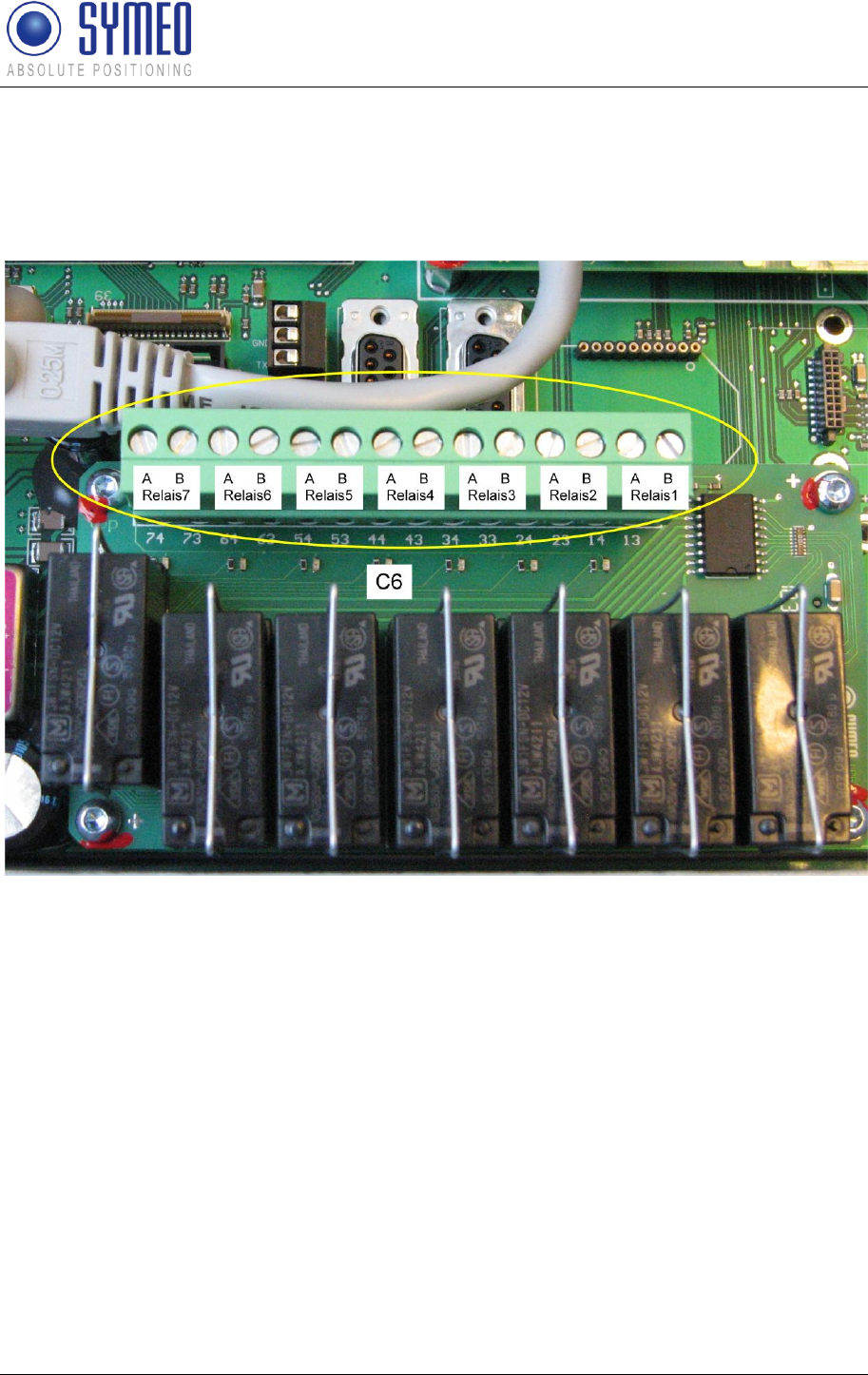
Relay connections (optional)
Relays are connected using the relay terminal block (C6). Figure 12 shows the pin
assignment for the seven switch relays with dry contacts.
Figure 12 Relay terminal block (C6)
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 23 of 97
3.2 LPR® - 1D unit with TCP/IP interface
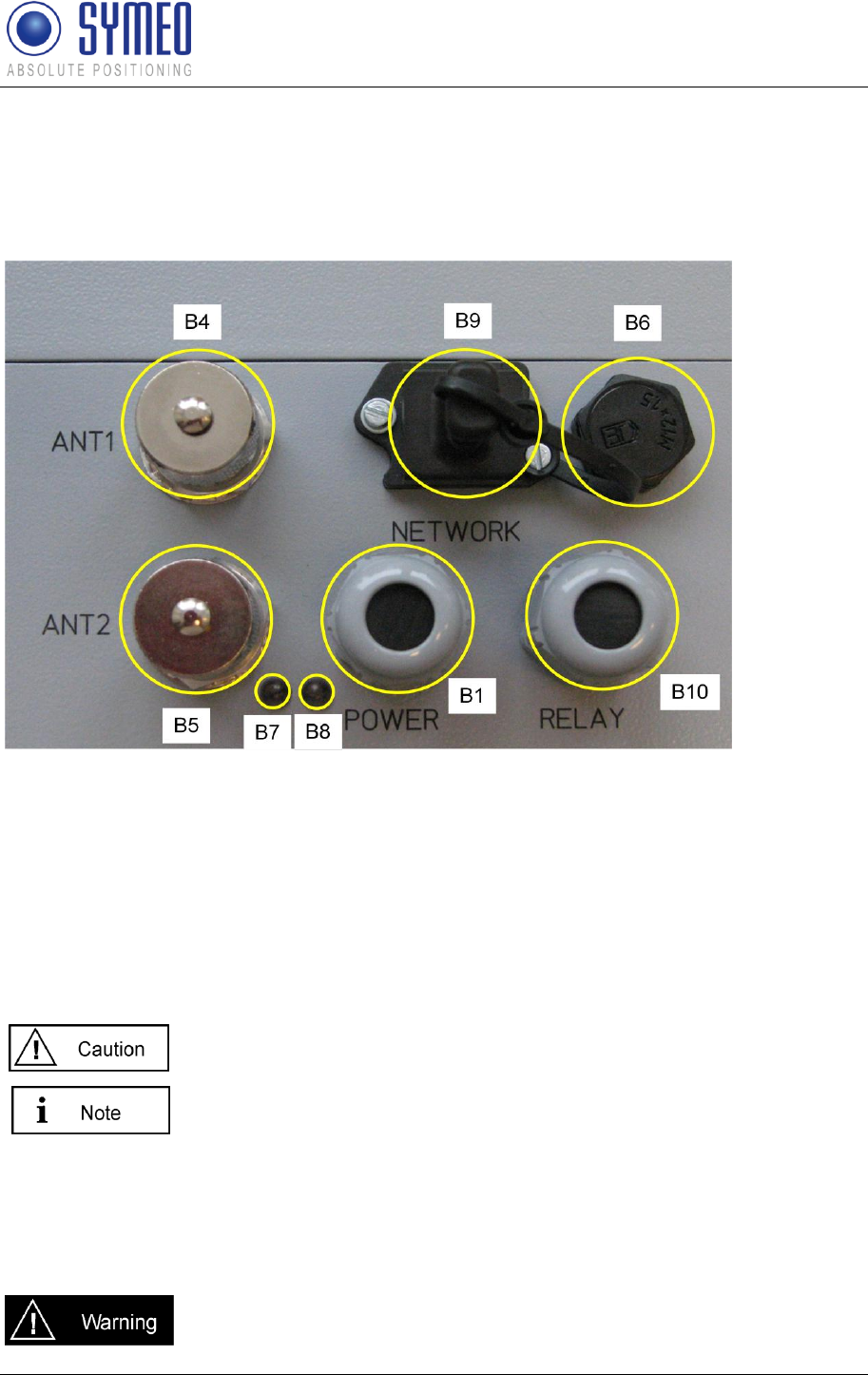
3.2.1 Front elements
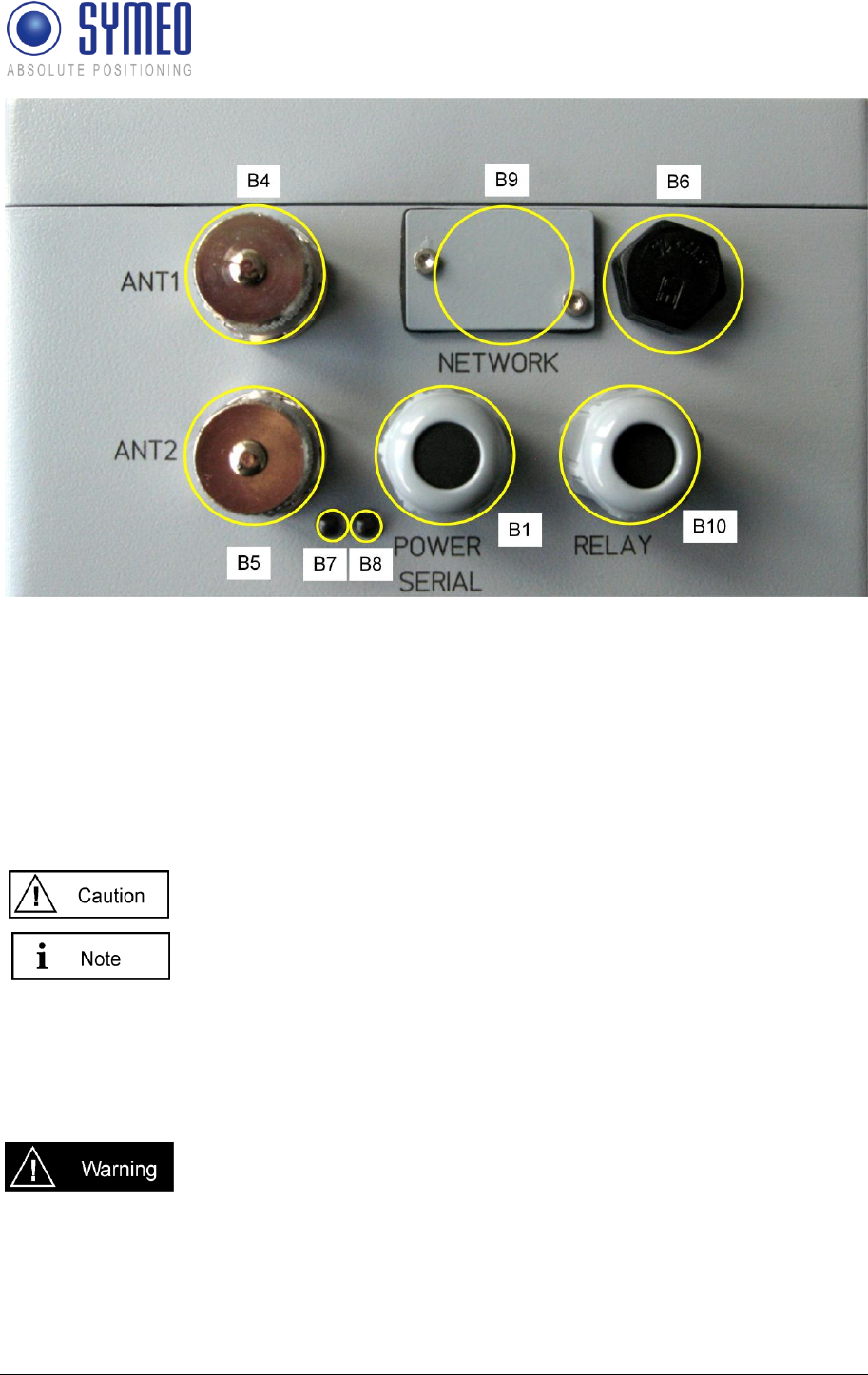
The casing has cable glands for power cable (B1) and for the relays connection (B10). Figure
13 shows the front of the LPR®-1D casing in detail.
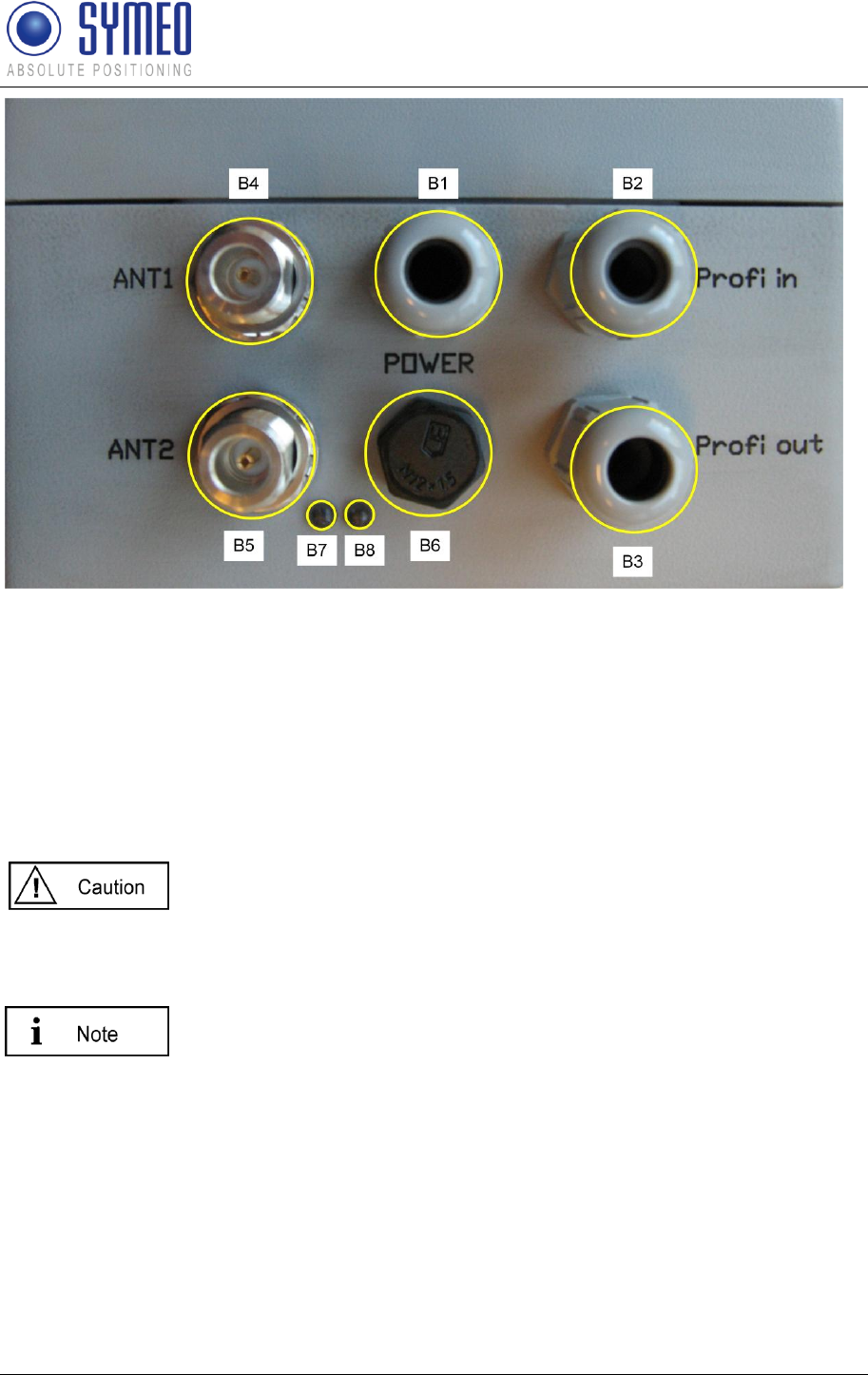
Figure 13: Connections of the LPR unit with TCP/IP interface and optional relays
B1: cable gland for power cable
B4: antenna port 1
B5: antenna port 2
B6: pressure equalization membrane
B7: two-colored LED, green = Ethernet connected / red = data transfer
B8: two-colored LED, red = power supply / green = measurement activity
B9 Ethernet connector
B10 cable gland for relay connection cable
Power supply and relay cable diameter must be within 4,5 to
10 mm, and a round cross-section.
Power on is indicated with the red LED B8.
Valid measurements are indicated with the green LED B8 blinking
provided that the units are configured properly with the
parameterization software Symeo-Wizard (see chapter 5)
3.2.2 Overview internal connectors
All installation, repair and servicing work must be carried out by
qualified and trained technicians!
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 24 of 97
Avoid entry of foreign objects or liquids into the unit.
Careful mounting of the system is required. It is important that the
seal remains clean and is not damaged, otherwise the protection
class cannot be guaranteed.
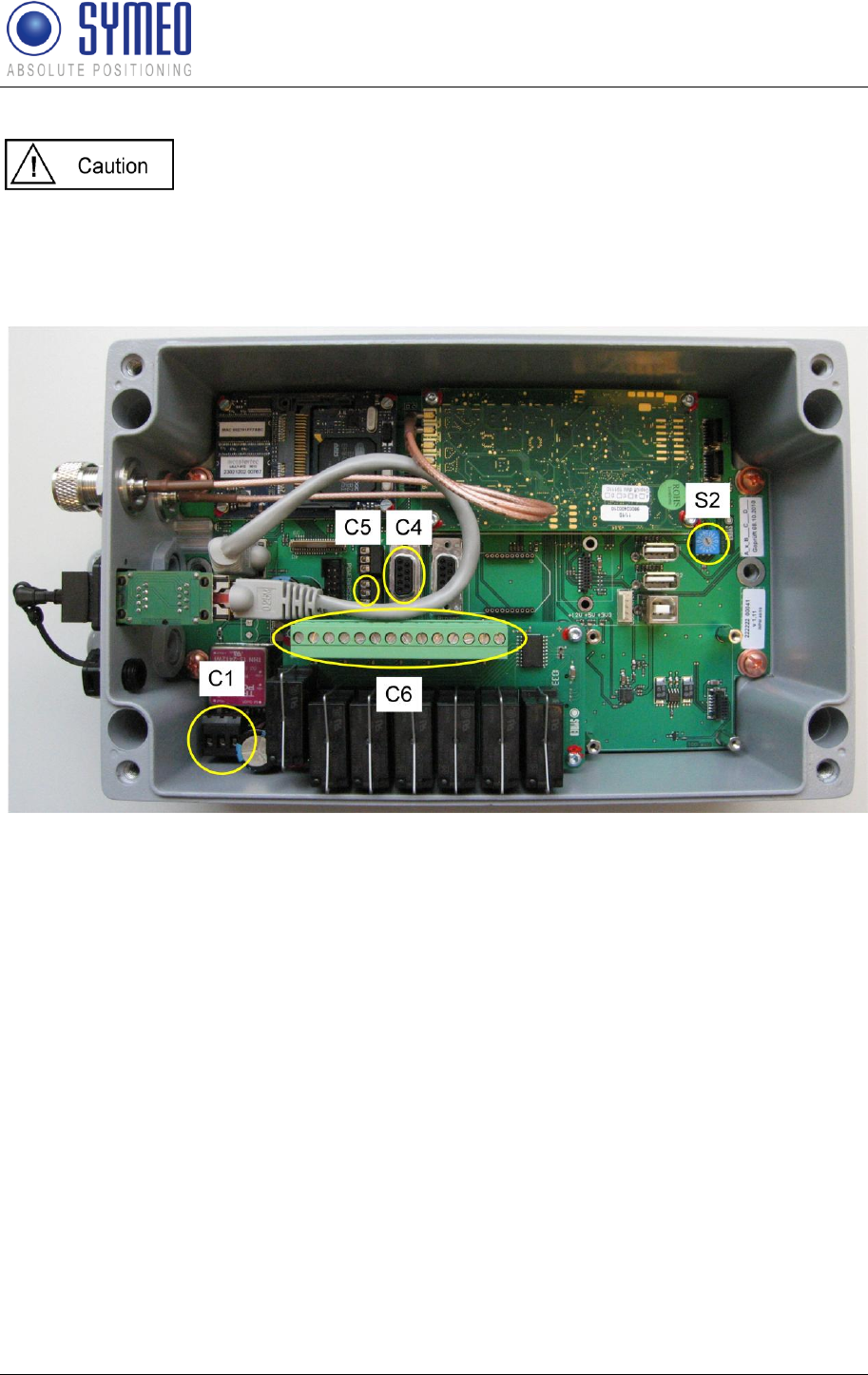
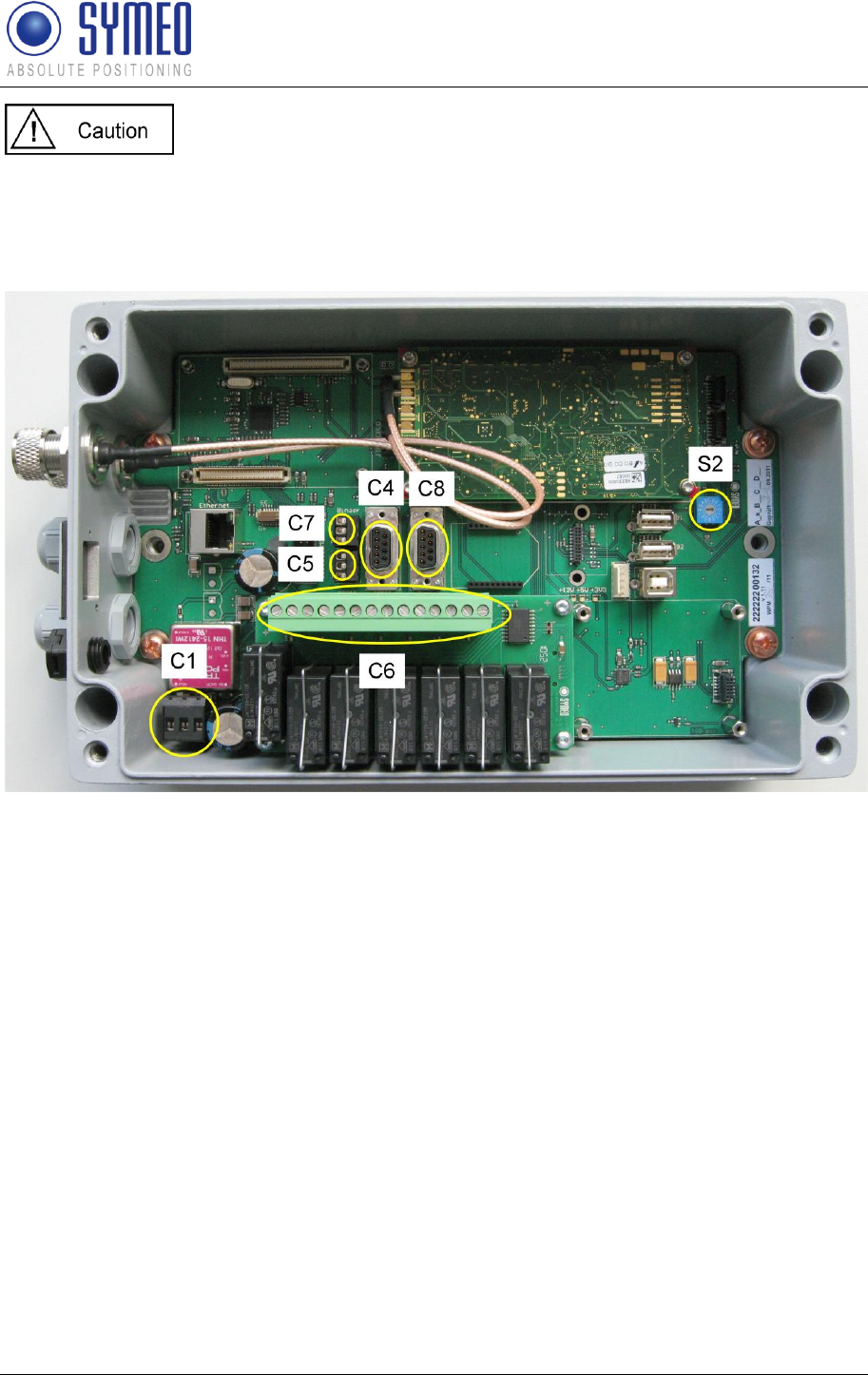
Figure 14 shows the electrical connections and switches of the LPR® unit, version TCP/IP.
Figure 14 Overview electrical connections and switches
C1: terminal block for power supply (10 - 36 VDC)
C4: D-sub-socket for RS232 service port (not used in TCP/IP units !)
C5: terminal block for RS232 service port (not used in TCP/IP units !)
C6: terminal block for connection of relays
S2: rotary switch for mode of operation
3.2.3 Mode of operation
For standard operation of LPR® units with TCP/IP interface the rotary switch (S2) has to be
(see Figure 14)
3.3 LPR® - 1D unit with Profibus interface
3.3.1 Front elements
The casing has cable glands for power cable (B1) and for the Profibus (B2, B3). Figure 15
shows the front of the LPR®-1D casing in detail.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 25 of 97
Figure 15: Connections of the LPR® unit with Profibus interface
B1: cable gland for power cable
B2: cable gland for Profibus In
B3: cable gland for Profibus Out
B4: antenna port 1
B5: antenna port 2
B6: pressure equalization membrane
B7: LED blue = Profibus error
B8: two colored LED, red = power supply / green=measurement activity
Power supply cable diameter must be within 4,5 to 10 mm, and a
round cross-section.
If the LPR unit is at the end of a Profibus, the not used cable gland
has to be closed.
For LPR units with Profibus interface and optional relays please use
one cable for relay wiring with additional wires for power supply
Figure 15.
Power on is indicated with the red LED B8.
Valid measurements are indicated with the green LED B8 blinking
provided that the units are configured properly with the
parameterization software Symeo-Wizard (see chapter 5)
An error in the Profibus interface is indicated with the blue LED B7
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 26 of 97
3.3.2 Overview internal connectors
All installation, repair and servicing work must be carried out by
qualified and trained technicians!
Avoid entry of foreign objects or liquids into the unit.
Careful mounting of the system is required. It is important that the
seal remains clean and is not damaged, otherwise the protection
class cannot be guaranteed.
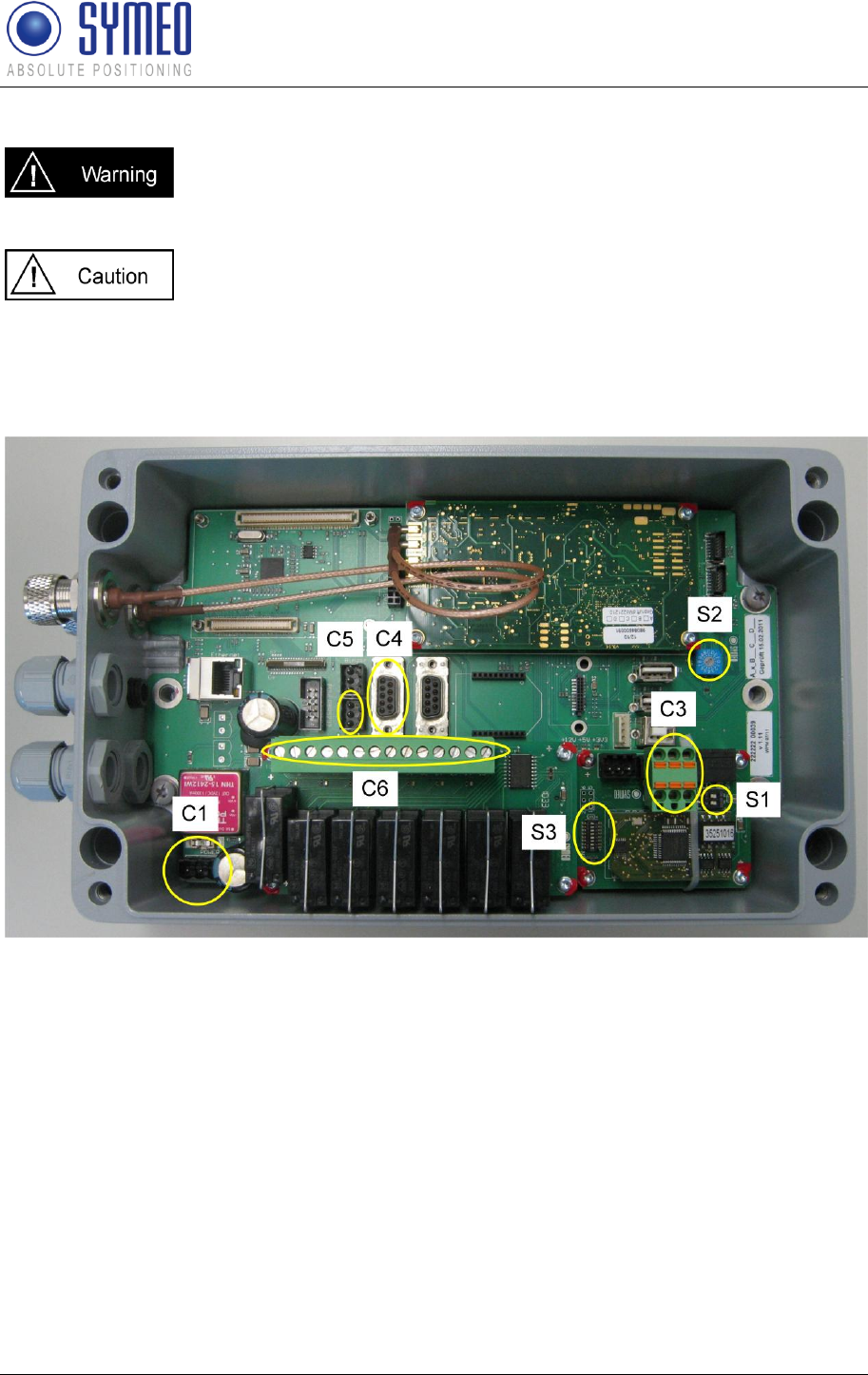
Figure 16 shows the electrical connections and switches of the LPR unit, version Profibus.
Figure 16 Overview electrical connections and switches
C1: terminal block for power supply (10 - 36 VDC)
C3: terminal block for connection of Profibus
C4: D-sub-socket for RS232 service port
C5: terminal block for connection of RS232 service port
C6: terminal block for connection of relays (optional)
S1: DIP-switch for termination of Profibus
S2: rotary switch for mode of operation
S3: DIP-switch for addressing of Profibus
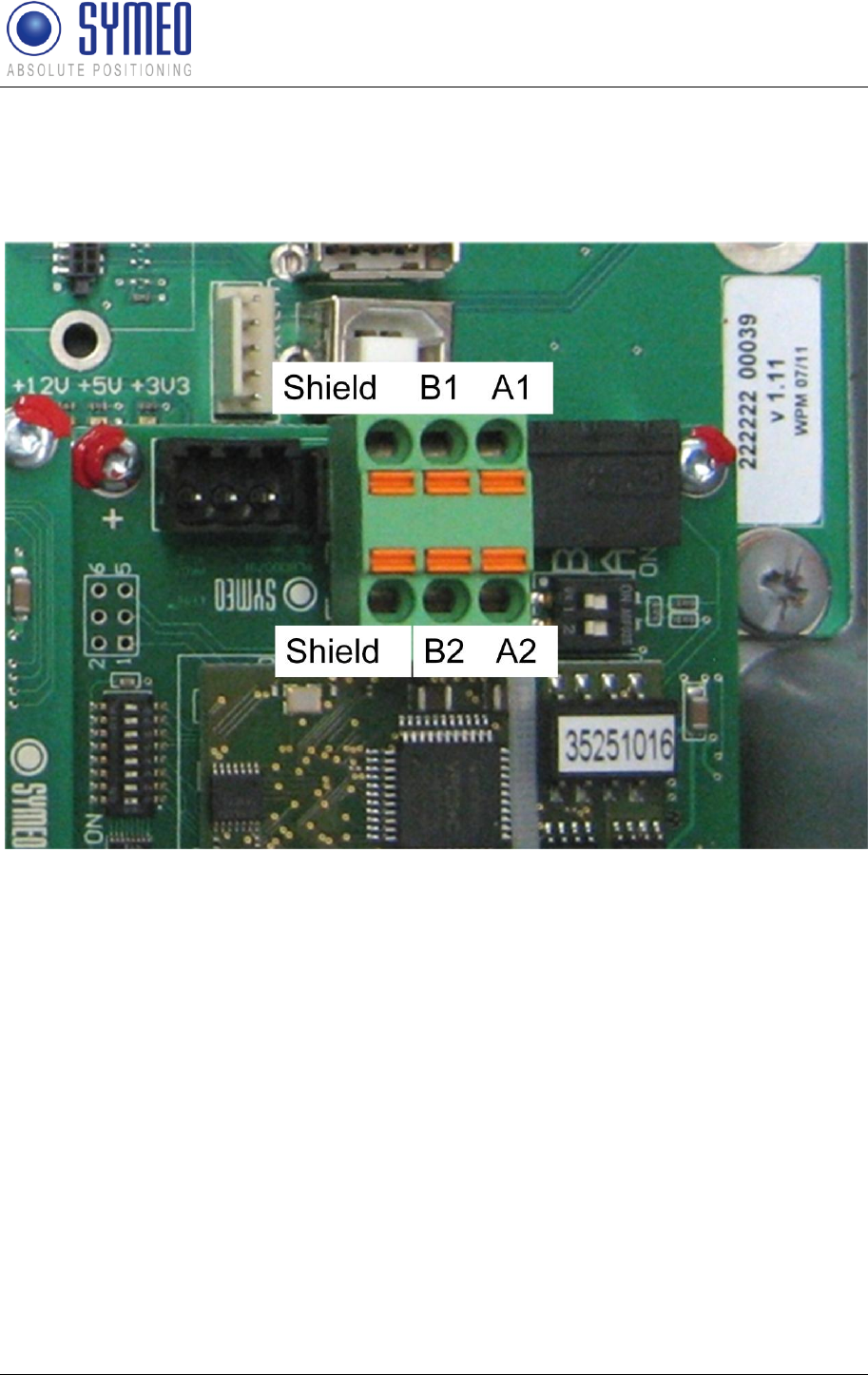
3.3.3 Connection to Profibus
The LPR®-Profibus interface is connected using the terminal block (C3).
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 27 of 97
Figure 17 shows the pin assignment for the terminal block (C3). Port
In case of a removed terminal block
the remaining Profibus system is still operative. The shield of the Profibus cable has to be
Figure 17 Profbus interface via terminal block
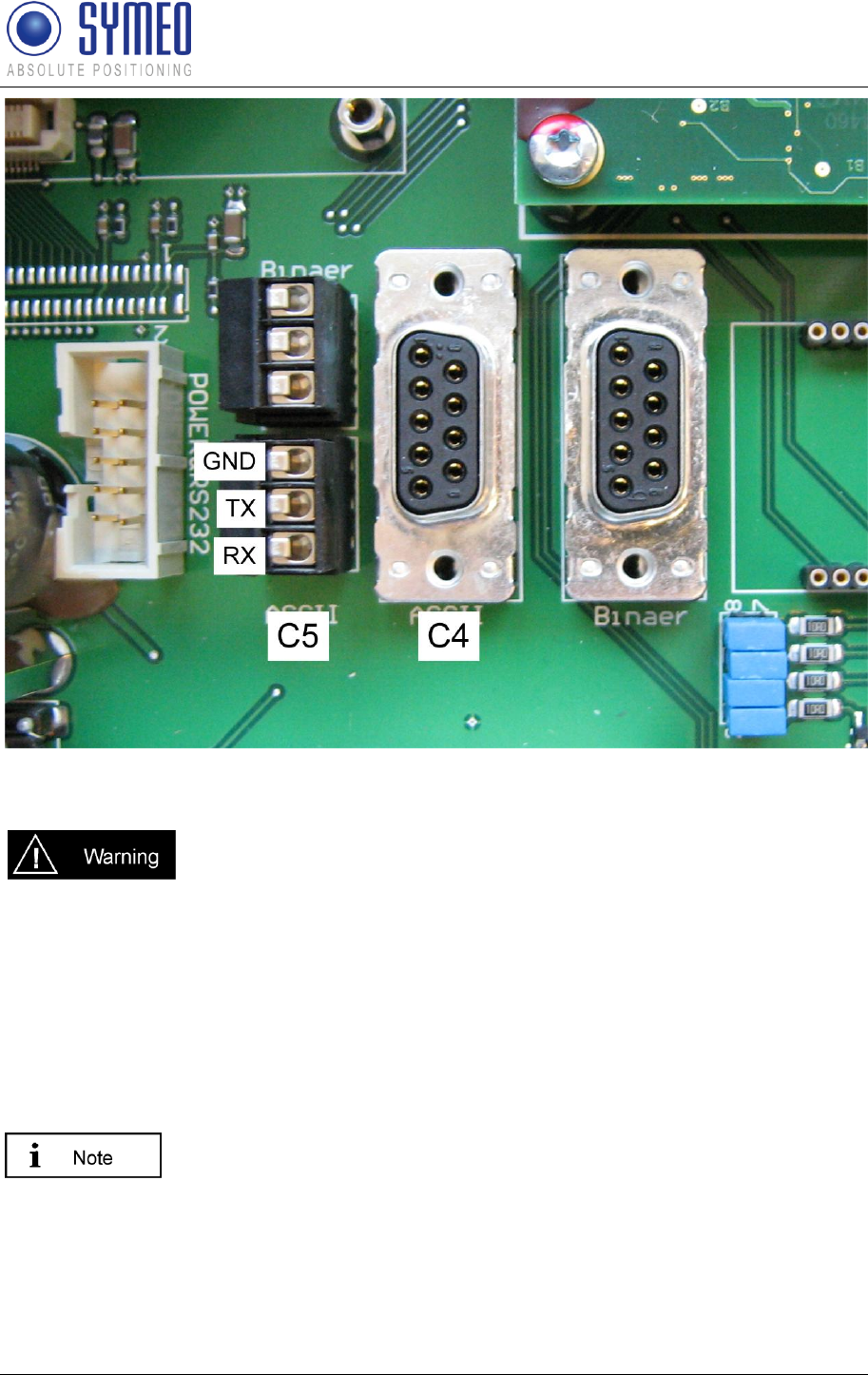
3.3.4 Connection of service port with serial interface
For configuration of the LPR®-1D station the service port (C4) or (C5) is provided (RS232).
For connecting to the D-sub socket (C4) please use a standard RS232 (1:1) cable with a
maximum length of 2 meters.
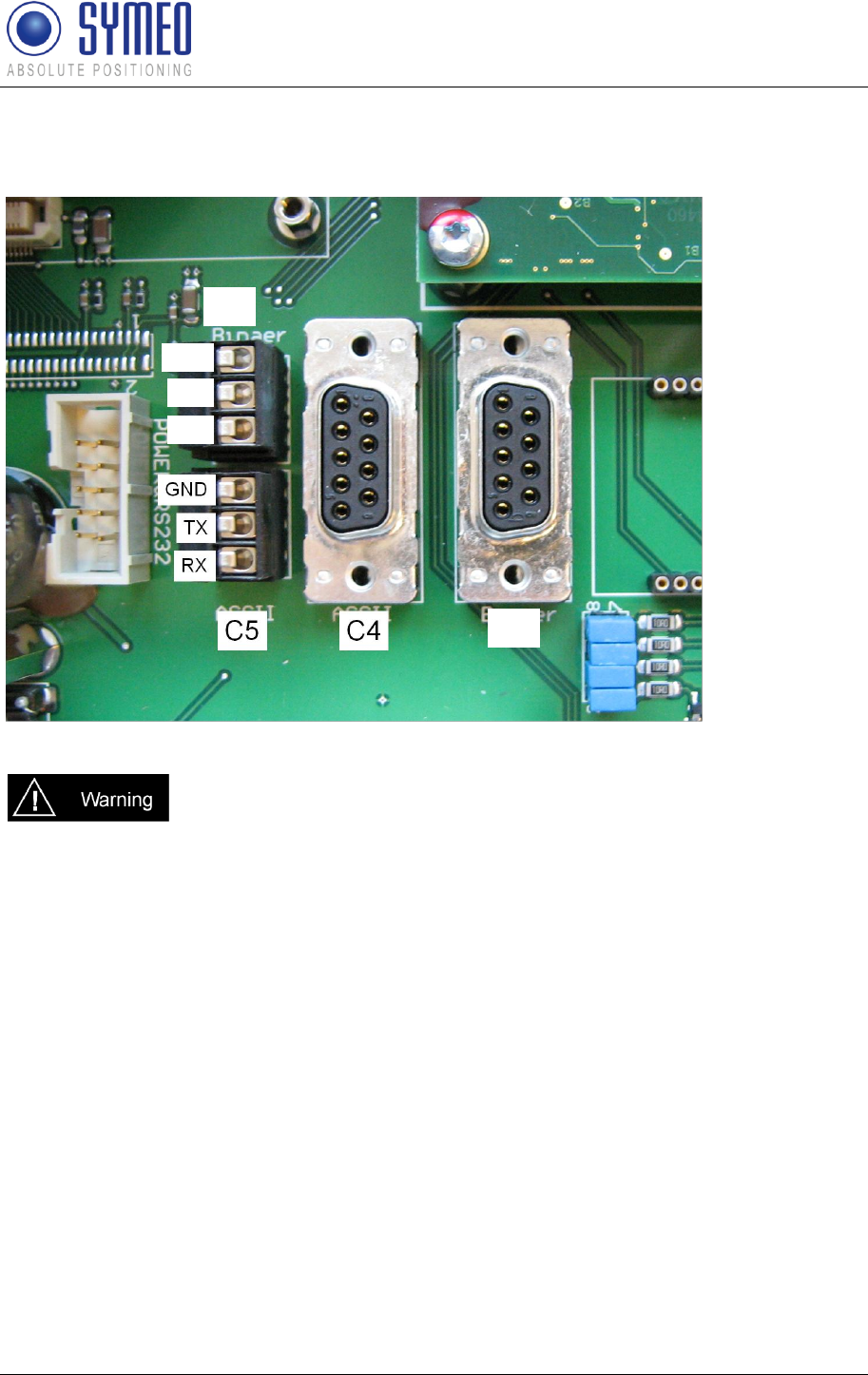
Optional the RS232 connection can be established via the terminal block (C5). The pin
assignment is shown in Figure 18.
The configuration of the LPR®-1D station is described in chapter 5.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 28 of 97
Figure 18 Internal serial configuration port (RS232)
Using the internal serial interface it is important to avoid moisture, dust
or any particles into the housing during the process.
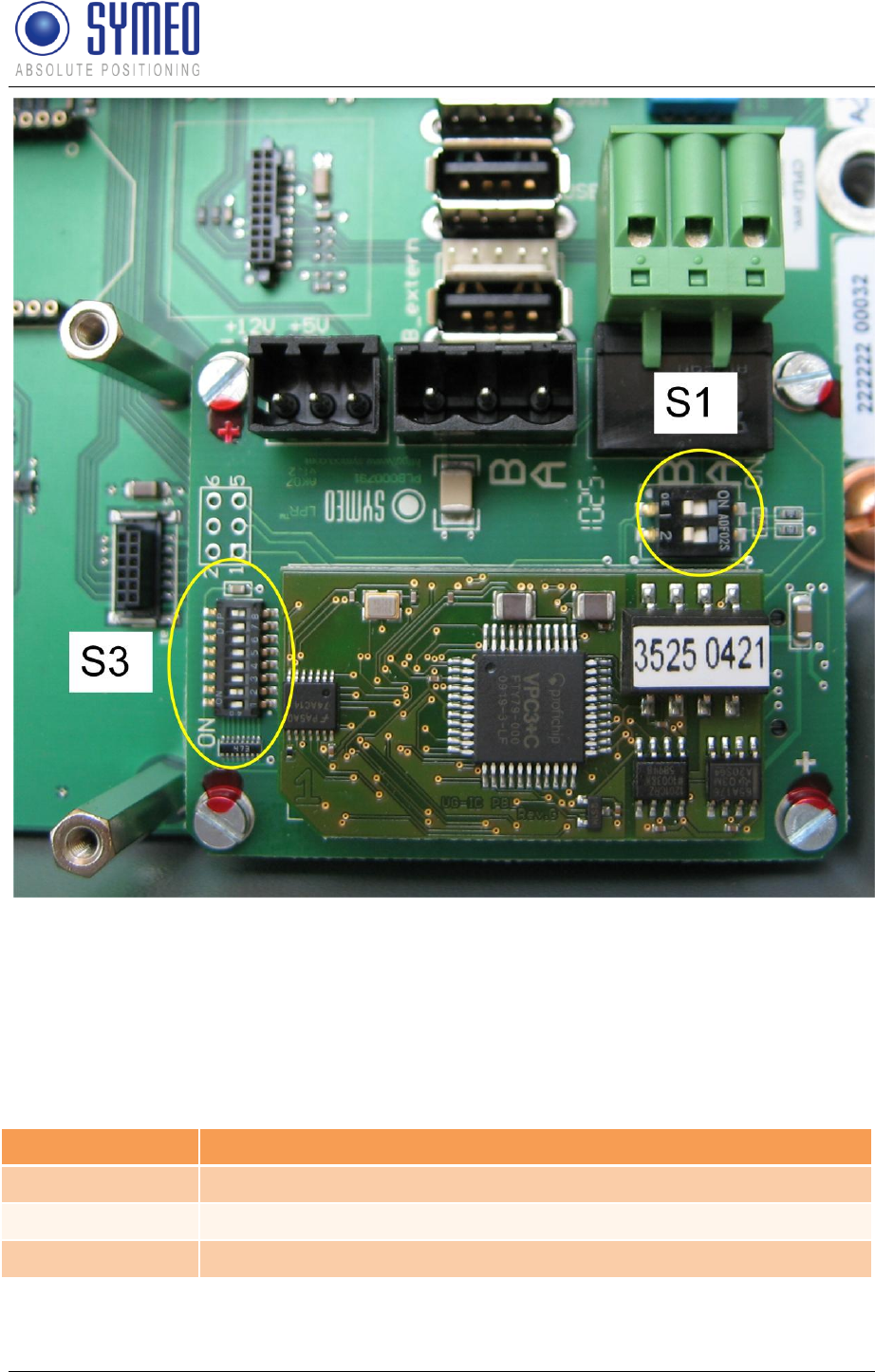
3.3.5 Termination of Profibus
The Profibus system has to be terminated at the last device on the bus. DIP switch (S1)
terminates the Profibus (see Figure 19) for
termination.
A termination applies only with connected terminal block on C3, using the
on board termination with DIP switch S1.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 29 of 97
Figure 19 DIP-switch for termination (S1) und addressing (S3)
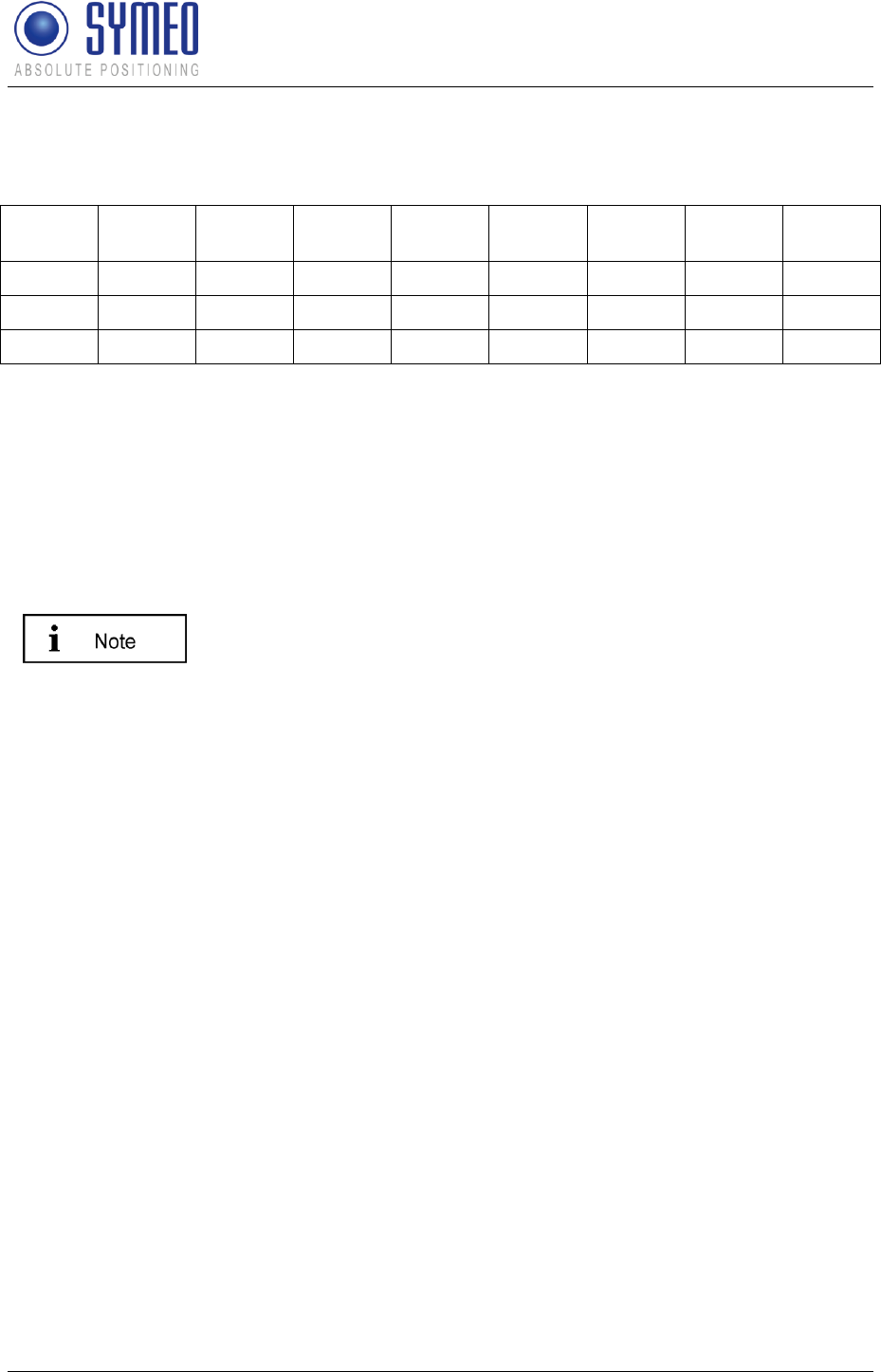
3.3.6 Addressing the Profibus
The address of the Profibus module is set with DIP switch (S3), see Figure 19 DIP-switch for
termination (S1) und addressing (S3).
DIP-switch
Content
1 to 8
Binary PROFIBUS address
8
Least significant bit (20)
1
Most significant bit (27)
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 30 of 97
Example for addressing
Address
decimal
Switch 1
Switch 2
Switch 3
Switch 4
Switch 5
Switch 6
Switch 7
Switch 8
1
off
off
off
off
off
off
off
on
5
off
off
off
off
off
on
off
on
21
off
off
off
on
off
on
off
on
3.3.7 Measurement frequency
The maximum possible measurement frequency of 30 Hz is only available for a system with
2 stations (one distance measurement).
For a system with 3 stations (two distance measurements) the maximum possible
measurement frequency is 10 Hz per station.
For a system with 3 stations the measurement cycle has to be
configured accordingly. With the parameterization software Symeo-
Wizard (see chapter 5) the value for the measurement cycle has to
be set to minimal 100ms. The setting is s
.
The baud rate for the data port is set by default within the
parameterization software Symeo-Wizard (see chapter 5) to a value
of 19200 baud for units with Profibus interface.
3.3.8 Mode of operation
For standard operation of LPR units with Profibus interface the rotary switch (S2) has to be
(see Figure 16).
3.4 LPR® - 1D unit with RS232 interface
3.4.1 Front elements
The casing has cable glands for power cable (B1) and for the relays connection (B10). Figure
20 shows the front of the LPR-1D casing in detail.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 31 of 97
Figure 20 Connections of the LPR-1D unit with RS232 interface and optional relays
B1: cable gland for power cable and serial data port (RS232)
B4: antenna port 1
B5: antenna port 2
B6: pressure equalization membrane
B7: not used for LPR-1D units with RS232 interface
B8: two-colored LED red=power supply / green=measurement activity
B9 not used for RS232 version
B10 cable gland for relay connection cable
Power supply and relay cable diameter must be within 4,5 to
10 mm, and a round cross-section.
Power on is indicated with the red LED B8.
Valid measurements are indicated with the green LED B8 blinking
provided that the units are configured properly with the
parameterization software Symeo-Wizard (see chapter 5)
3.4.2 Overview internal connectors
All installation, repair and servicing work must be carried out by
qualified and trained technicians!
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 32 of 97
Avoid entry of foreign objects or liquids into the unit.
Careful mounting of the system is required. It is important that the
seal remains clean and is not damaged, otherwise the protection
class cannot be guaranteed.
Figure 21 shows the electrical connections and switches of the LPR unit, version RS232.
Figure 21 Overview electrical connections and switches
C1: terminal block for power supply (10 - 36 VDC)
C4: D-sub-socket for RS232 service port
C5: terminal block for connection of RS232 service port
C6: terminal block for connection of relays (optional)
S2: rotary switch for mode of operation
C7: terminal block for connection of RS232 data port
C8: D-sub-socket for RS232 data port
3.4.3 Connection of service and data port with serial interface
For configuration of LPR-1D units with RS232 interface the service port (C4) or (C5) is
provided (RS232).
For connecting to the D-sub socket (C4) please use a standard RS232 (1:1) cable with a
maximum length of 2 meters.
Optional the RS232 connection can be established via the terminal block (C5) for
configuration with a maximum cable length of 2 meters. The pin assignment is shown in
Figure 22.
The configuration of the LPR-1D station is described in chapter 5 Commissioning.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 33 of 97
Distance data are available on the RS232 data port (C7) or (C8). The pin assignment for
(C7) is shown in Figure 22.
C8
C7
RX
TX
GND
Figure 22 Internal serial service port and data port (RS232)
Using the internal serial interface it is important to avoid moisture, dust
or any particles into the housing during the process.
Consider the dependency of the maximum baud rate for the data port
according to the cable length:
15 m: 19.200 baud
5 m: 57.600 baud
< 2 m: 115.200 baud
According to the cable length the baud rate for the data port at the units has to be adjusted
as described in chapter 5 Commissioning.
3.4.4 Mode of operation
For standard operation of LPR units with RS232 interface the rotary switch (S2) has to be set
(see Figure 21)
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 34 of 97
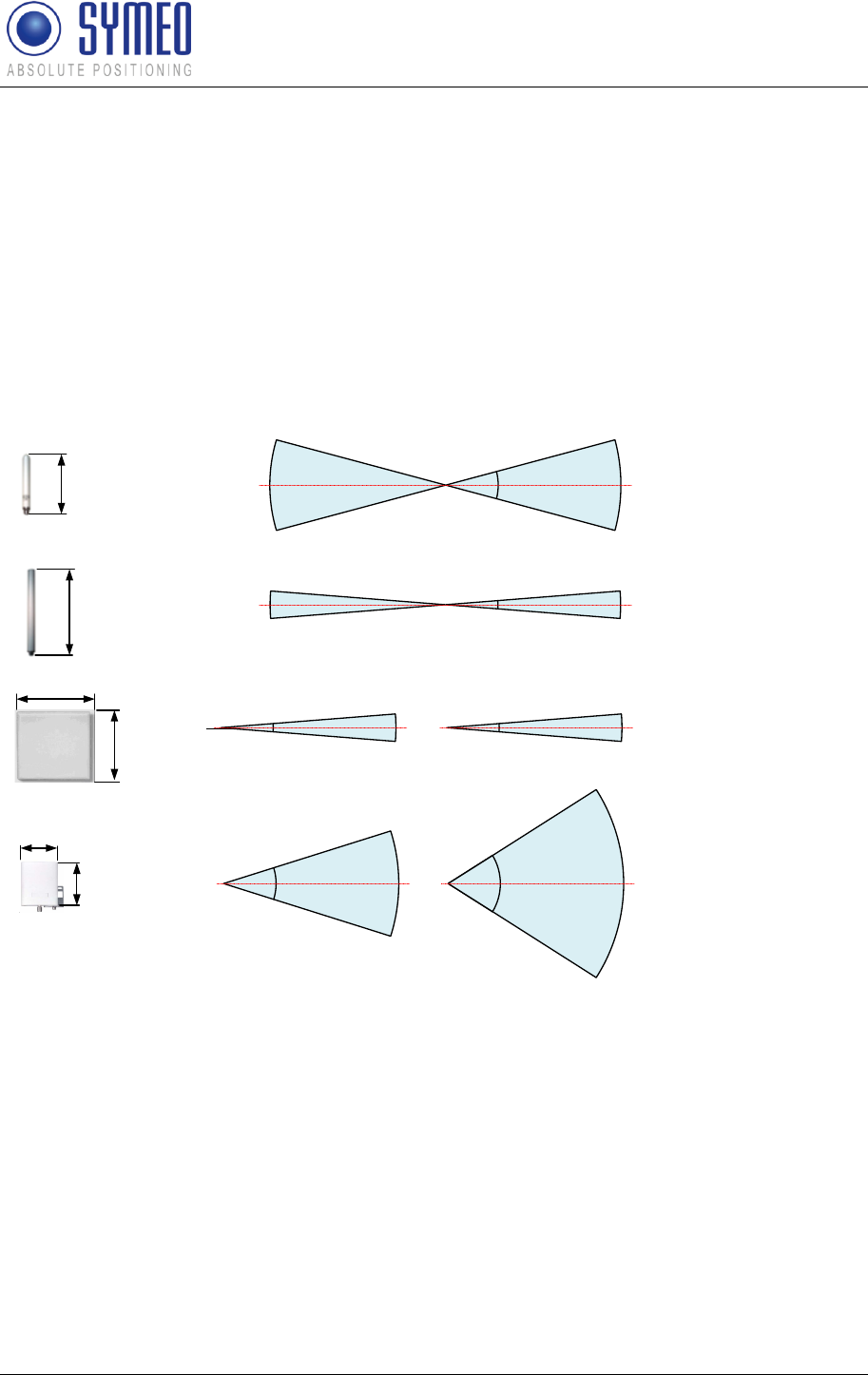
3.5 LPR® Antenna Types
There are different antennas that can be installed depending on the required directional
characteristic.
Figure 23 shows the typical LPR® antennas, which are applied in an LPR® System.
For standard applications the 23dBi planar antenna is used.
6 dBi Omnidirectional Antenna
10 dBi Omnidirectional Antenna
23 dBi Planar Antenna
12 dBi Planar Antenna (*)
8,5°
vertical
-3 dB
0 dB
-3 dB
vertical
9° -3 dB
0 dB
-3 dB
35°
vertical -3 dB
0 dB
-3 dB
horizontal -3 dB
0 dB
-3 dB
65°
horizontal
9° -3 dB
0 dB
-3 dB
30°
vertical -3 dB
0 dB
-3 dB
A
A
A
A = 190mm
d = 20mm
A = 440mm
d = 20mm
B
A = 305mm
B = 305mm
d = 25mm
A
B
A = 101mm
B = 80mm
d = 20mm
Antenna Connector Type N
Antenna Connector Type N
Antenna Connector Type N
Antenna Connector Type SMA
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 35 of 97
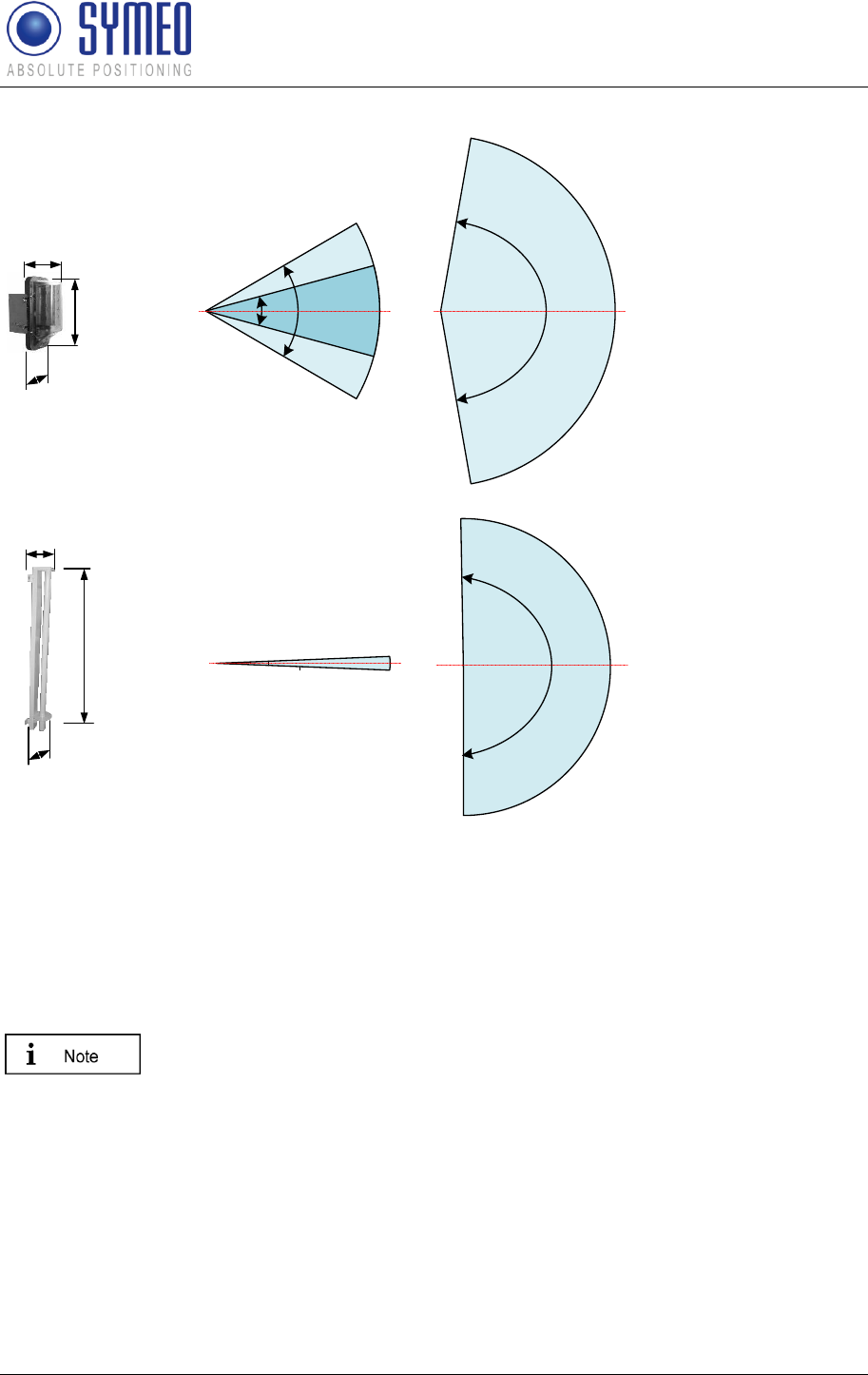
10 dBi Sector Antenna (*)
vertical
60°
30° (optional)
-3 dB
0 dB
-3 dB
horizontal
160°
-3 dB
0 dB
-3 dB
A
d
B
A = 280mm
B = 125mm
d = 150mm
Antenna Connector Type N
13 dBi Sector Antenna
horizontal
180°
-3 dB
0 dB
-3 dB
A
d
B
A = 500mm
B = 90mm
d = 80mm vertical
5° -3 dB
0 dB
-3 dB
Antenna Connector Type N
Figure 23: Example of directional characteristic of typical LPR® antennas
(*) These antennas are NOT approved to be in compliance with part 15 of FCC rules and
with RSS-210 of Industry Canada. Usage of these antennas may void the FCC/IC
authorization to operate this equipment. Further information is found in the Appendix.
Installation and exchange of antenna or antenna cables must be carried out
by qualified and trained technicians!
Usage of antennas or antenna cables which are not listed to be in
compliance with FCC and IC rules is strictly prohibited!
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Hardware
Copyright © Symeo GmbH 2012
Page 36 of 97
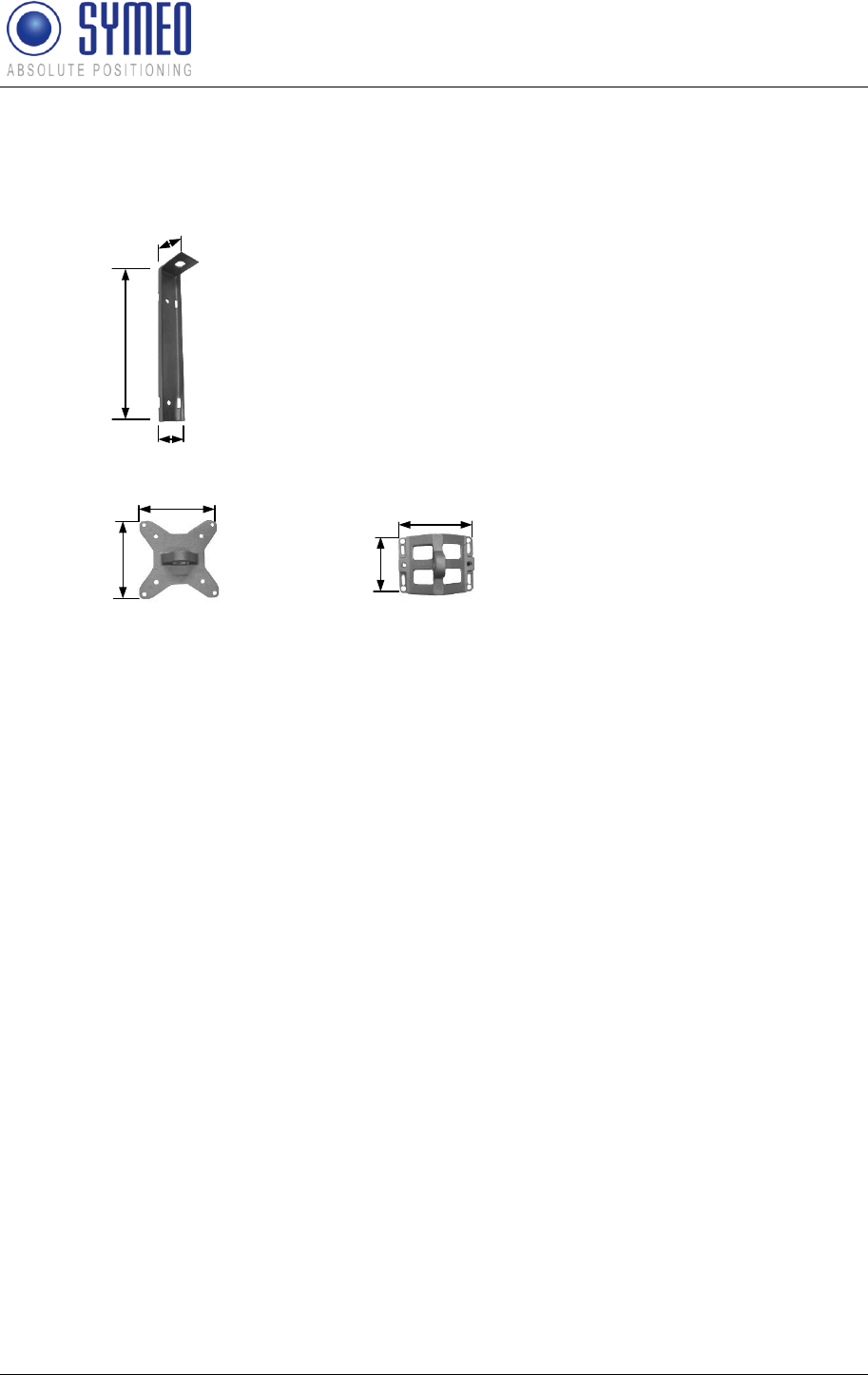
3.5.1 Adapter for different LPR® Antennas
Depending on the required antenna, different mounting brackets are available
6 dBi and 10 dBi Omnidirectional Antenna
23 dBi Planar Antenna
A
A
A = 228mm
B = 38mm
d = 50mm
B
A = 115mm
B = 115mm
B
d
applicable for wall and pole mounting
Part 1: mounting at antenna Part 2: applicable for wall and
pole mounting
A = 80mm
B = 110mm
d = 70mm
applicable for pole diameter
of 25mm-76mm
A
B
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Installation
Copyright © Symeo GmbH 2012
Page 37 of 97
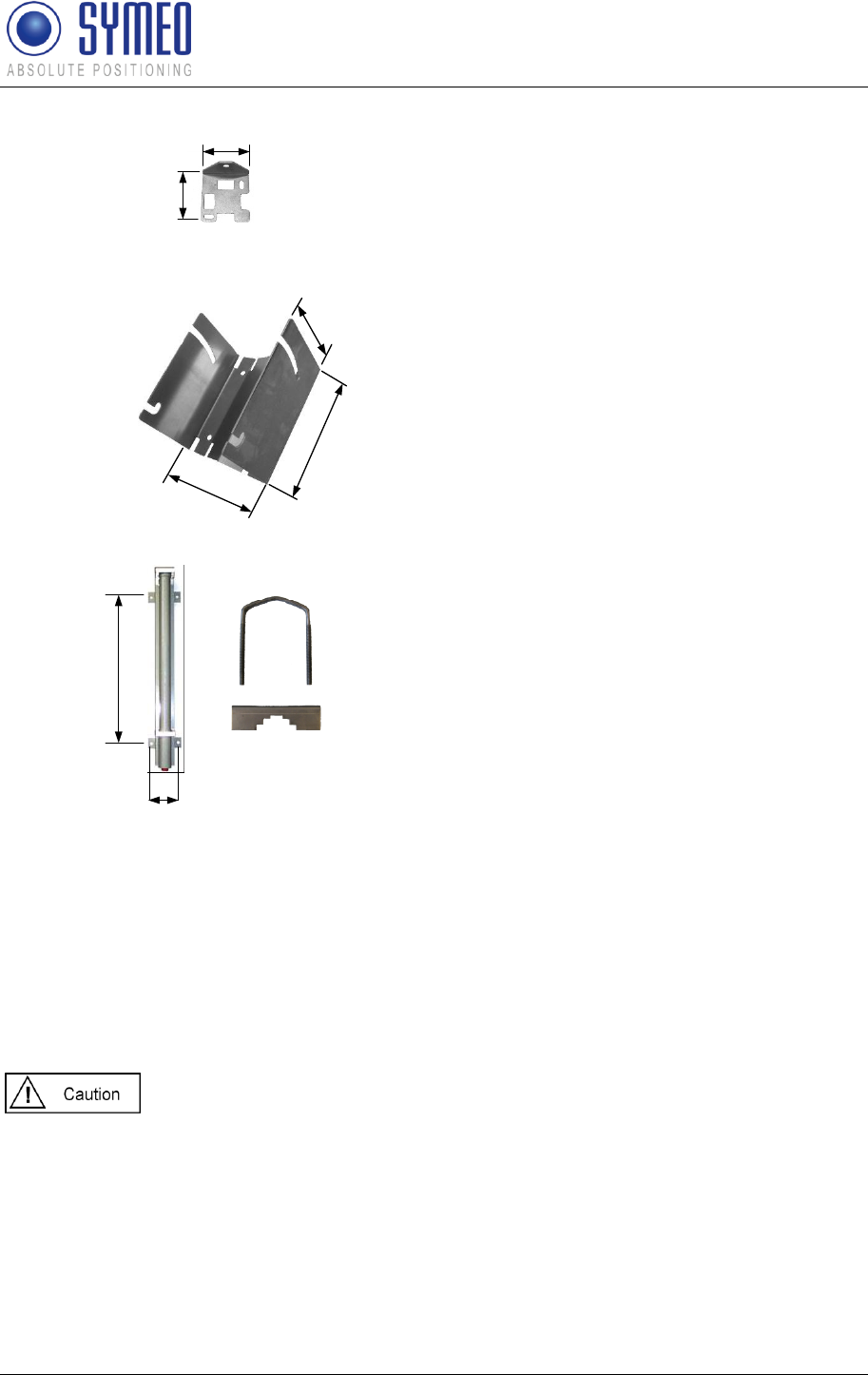
10 dBi Sector Antenna
12 dBi Planar Antenna
A
B
A = 50mm
B = 44mm
d = 22mm
A
d
B
A = 150mm
B = 128mm
d = 100mm
applicable for wall and pole mounting
applicable for wall mounting
14 dBi Sektor Antenna
A = 410mm
B = 70mm
applicable for wall and pole mounting
(pole diameter 30mm -60mm)
A
B
Figure 24: Available Adapters for different Antenna Types
4 Installation
4.1 Installation of LPR® Unit Design Compact Unit
4.1.1 Important Instructions for Installation
During Installation, the Compact Unit has to be opened. Therefore it is
important to avoid ingress of moisture, dust or any particles into the
housing during the installation process. Make sure that there is enough
room for the connectors, and particularly that the antenna cable is
accessible; pay attention to the permitted bending radius (center of radius
to cable core) for standard cables of 10,5cm (for multiple bending under
mechanical load) and 4cm (unloaded and static bending).
The Compact Unit should preferably be installed so that the connecting
sockets point downwards. In this way, the connections are protected from
rain and dust.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Installation
Copyright © Symeo GmbH 2012
Page 38 of 97
4.1.2 Installation
To install the Compact Unit, you require
4 round head M6 x 30 screws (at least).
Check the position of the unit on the device on which the Compact Unit is to be installed
(e.g. a crane bridge). Bear in mind the installation instructions listed above.
Drill holes in the device on which the Compact Unit is to be installed. Drill-hole distances:
11 cm wide, 24 cm high (see Figure 10).
Open the Compact Unit: With a Phillips screwdriver (Size 0), loosen the top four screws
of the Compact Unit lid.
Screw the Compact Unit tightly to the device. The installation holes shown in Figure 10
are provided for this purpose. Check that the unit is mounted securely.
Close the unit: Place the cover of the Compact Unit on top and fasten the cover with the
four screws. Make sure that the cover is securely attached to the housing.
Commission the Compact Unit (see chapter 5)
4.2 Installation of LPR® Antennas
4.2.1 Connecting and Wiring up the Antenna and Cable
Connect the antennas to the antenna port at the LPR® unit.
When using several antennas, ensure that they are connected to the
correct ports.
Group Master
Slave Unit 1
Slave Unit 2
Slave Unit 3
Slave Unit 4
Measured
Distance 1
Antenna
Port 1
Antenna
Port 1
x
x
x
Measured
Distance 2
(optional)
Antenna
Port 2
x
Antenna
Port 1
x
x
Measured
Distance 3
(optional)
Antenna
Port 3
x
x
Antenna
Port 1
x
Measured
Distance 4
(optional)
Antenna
Port 4
x
x
x
Antenna
Port 1
When installing the cable, ensure that electrostatic charging does not occur.
Make sure that the cable is not kinked or trapped during installation. The minimum
bending radius must always be maintained. With the standard antenna cables delivered,
the minimum bending radius (center of radius to cable core) for standard cables is

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Installation
Copyright © Symeo GmbH 2012
Page 39 of 97
10,5 cm (for multiple bending under mechanical load) and 4 cm (unloaded and static
bending). The cable must not be attached in a way that squeezes its cross-section. On
demand, cables with different flexibility characteristics are available.
The antenna plug must not be removed (e.g. for installation purposes) or repaired
because the specified electrical properties can only be achieved with mechanical
installation assistance.
When installing the antenna cable, ensure that the screw connection is seated properly
and not tilt. The antenna cable plugs should be finger-tightened before tightening with an
appropriate tool to no more than 1.3 Nm tightening torque.
4.2.2 Installing the Antenna(s)
The line of sight between the antennas on each unit must not be
obstructed. Therefore, when installing the antenna fixture, ensure that no
components are blocking the line of sight between the antennas. If
necessary, contact the SYMEO technical department.
Depending on the antenna type used, offsetting the corresponding
antennas (either vertically or horizontally) may degrade the signal strength
to the point that communication is lost. Accordingly, corresponding antenna
pairs should be installed with as little offset with respect to each other as
possible, and preferably none. If necessary, contact the SYMEO technical
department.
If you change the position of one antenna, this will affect the measurement
data.
For installation of the planar antennas, it is important to keep the same
orientation of polarization for corresponding antennas (see Figure 25).
Figure 25: Backside of 23 dBi planar antenna
Install the antenna bracket according to the accompanying operating instructions.
Secure the antenna in the bracket.
Connect the antenna to the antenna cable.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Installation
Copyright © Symeo GmbH 2012
Page 40 of 97
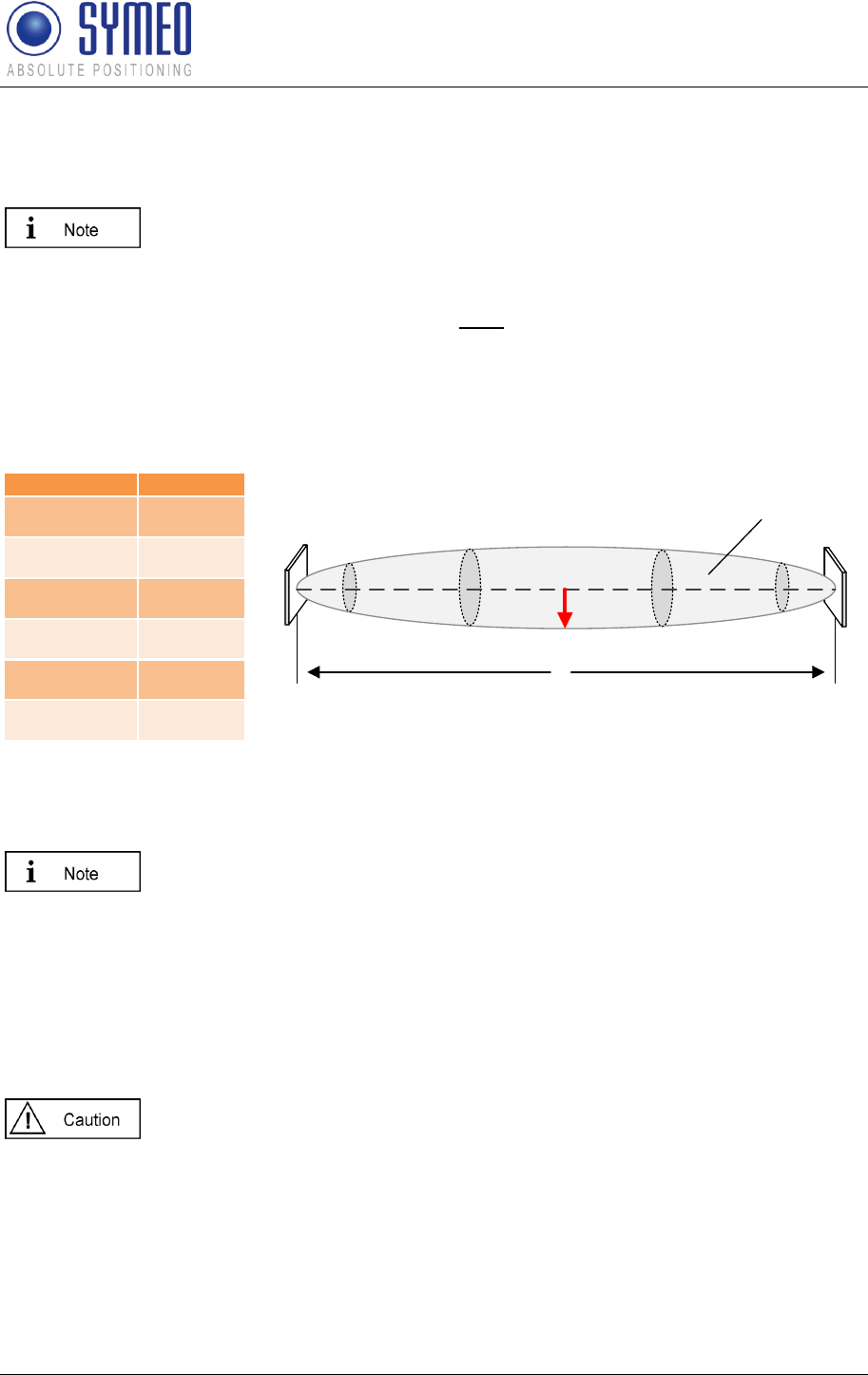
4.2.3 Fresnel zone
The area for radio transmission between two antennas is called Fresnel zone. The main part
of energy is concentrated in the first Fresnel zone.
This area has to be free of any obstacles otherwise the signal is interrupted
or attenuated.
The first Fresnel zone can be calculated as follows:
is the wave length and the distance between the two antennas. For a frequency of 5.8
GHz a wave length of approx. 0.05 m is calculated. The maximum radius between the two
antennas is indicated with . For different distances the maximum radius is given in Figure
26
distance d
radius b
10 m
0.36 m
50 m
0.80 m
100 m
1.14 m
250 m
1. 80 m
500 m
2.54 m
1000 m
3.60 m
d
b
Antenna 1 Antenna 2
Fresnel zone
Figure 26 Calculation and figure of Fresnel zone
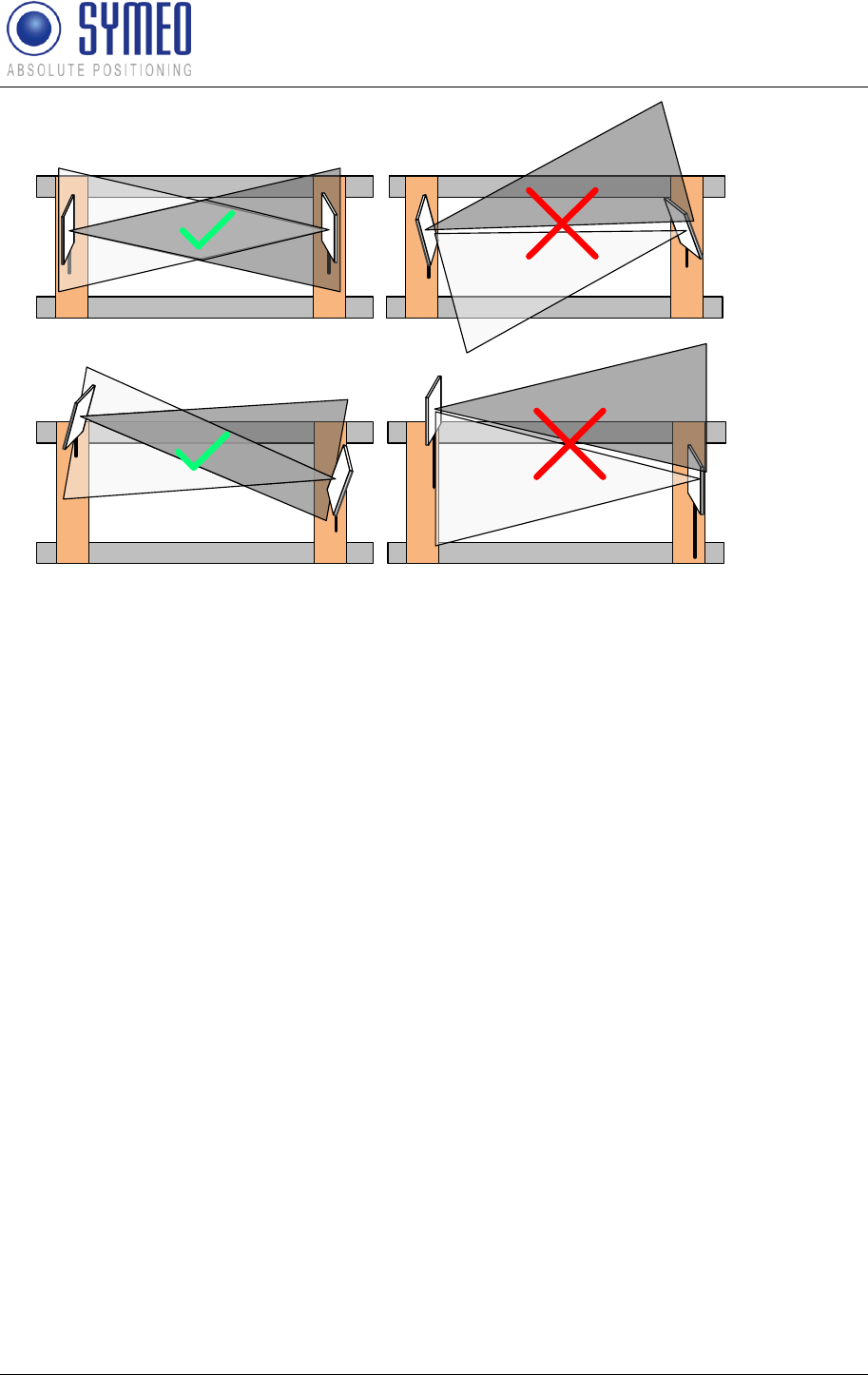
4.2.4 Installation of Planar Antennas
Each antenna type has its own opening angle. To communicate with the
opposite antenna the relative antennas has to be located in the opening
angles of the opposite antennas.
Antennas have to be mounted without any offset (no difference in height and no offset
sideways). Make sure that the opening angle is symmetric to the relative direction of motion
(compare picture 1 vs. picture 2 in Figure 27).
If an offset is not inevitable the antennas have to be tilted (compare picture 3 vs. picture 4 in
Figure 27).
Notice: If the distance goes below a fixed distance it is possible that no
measurements take place any longer in this configuration.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 41 of 97
Crane Rail
Crane Rail Crane Rail
Figure 1
No Offset of Antennas
Figure 3
Unavoidable Offset of Antennas
Figure 2
No Offset of Antennas
Crane Rail
Figure 4
Unavoidable Offset of Antennas
Figure 27 Antenna position with and without offset
5 Commissioning
5.1 Requirements
In order for a unit to be successfully commissioned, the LPR® components must have been
installed correctly:
The unit has been installed.
The unit has been connected to the power supply.
Antenna(s) and antenna cables for the unit have been installed.
Data link has been established via TCP/IP or RS232.
Once these prerequisites have been fulfilled you can connect the unit either serially to a PC
or as an option (TCP/IP option) to the network and commission the LPR® 1D system. How to
do this is explained in the following chapter.
5.1.1 General
Commissioning is carried out via the serial service port or the TCP/IP port depending on the
LPR® unit model you have:
Model with TCP/IP data interface: Configuration via TCP/IP
Models with Profibus or RS232 data interface: Configuration via service port C5 or C4
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 42 of 97
RS232 or TCP/IP
Service Port
Profibus, RS232 or
TCP/IP Data Port
PC, PLC
etc.
Service PC
LPR Unit
Figure 28: LPR® Unit with Interfaces for Parameterization at Service Port and Distance Data
Protocol (Binary data) at Data Port
In one LPR® system all distance data (binary data/ protocol) are available at each unit. Also
if you have several units in one system (crane bridge, crane crab, wall) you get the binary
distance data at each LPR® unit at the data port in this system.
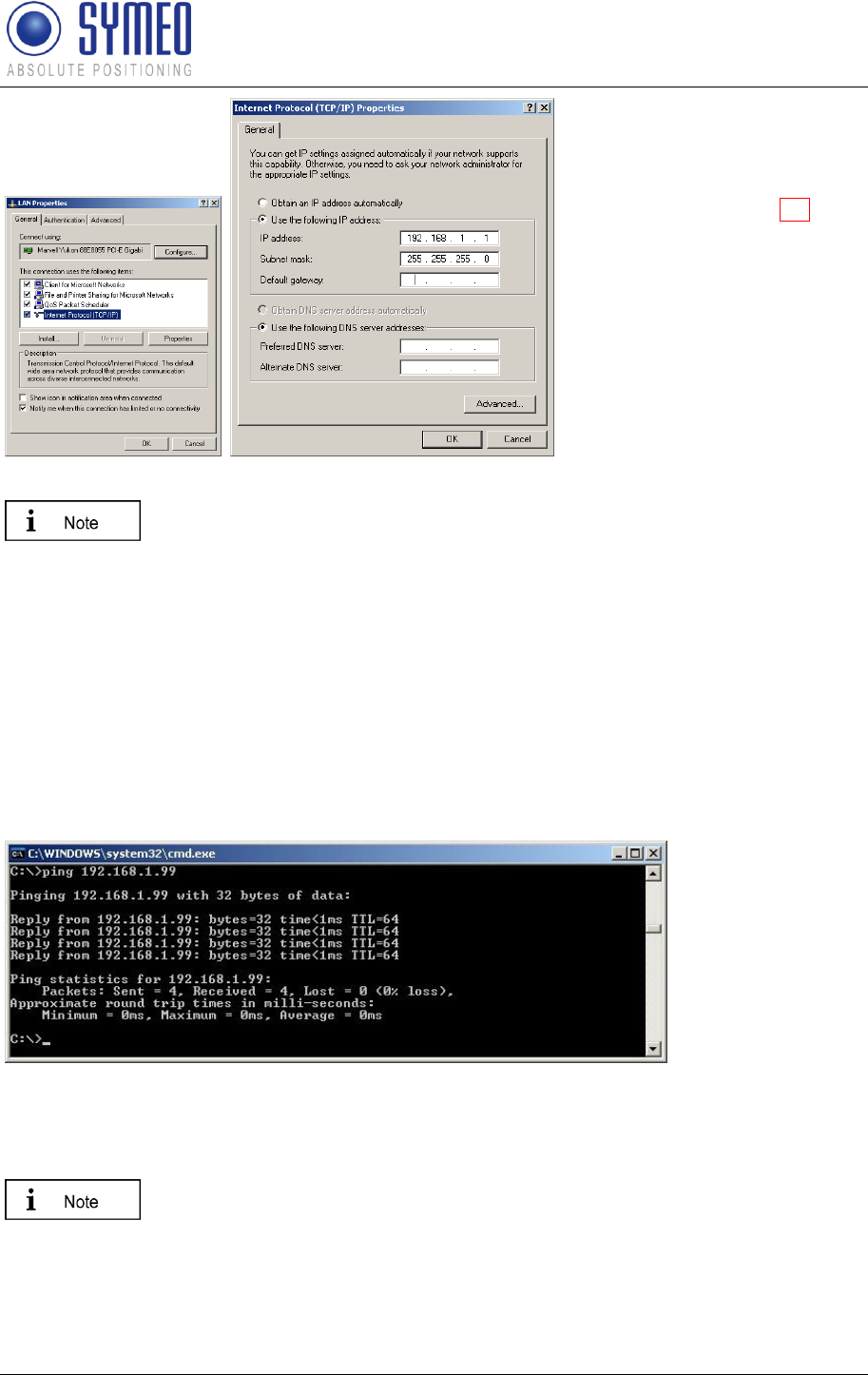
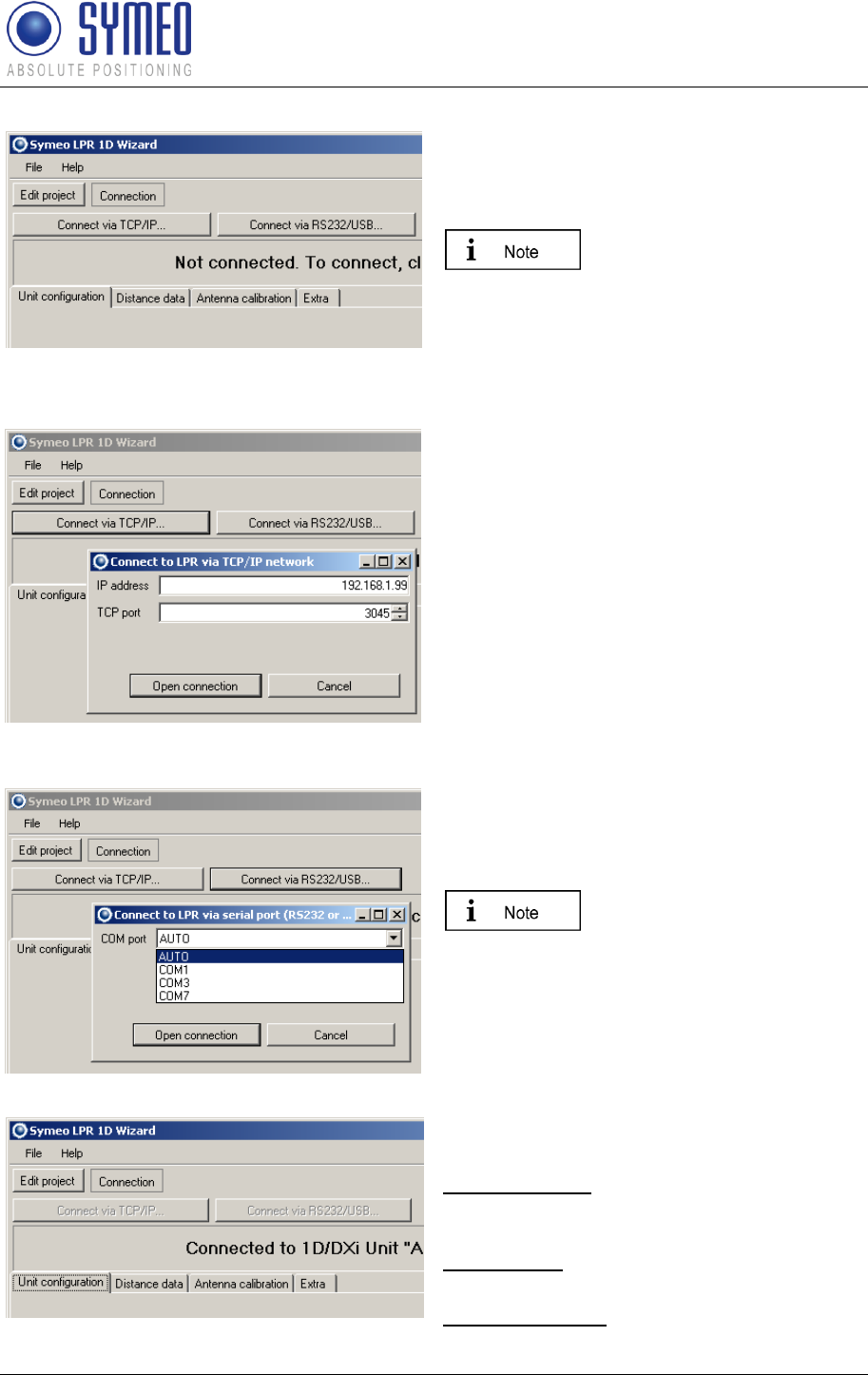
5.2 Connection to LPR® Unit with TCP/IP Interface
With delivery the LPR® units have the fixed IP-Address 192.168.1.99, if no
other IP-Address is labeled outside the LPR® unit.
You can change the IP-address of the LPR® Unit via the web interface of the LPR® Unit as
described in chapter 6.
To get a connection between your PC and the LPR® unit it is maybe
necessary to change the network parameters of your computer. Both units
must be located in the same network. That means in this example that the
first three numeric pads of both IP-addresses must be the same.
Disconnect your PC from the network. Connect the LPR® unit and the computer with a
network cable. Open your network settings of your computer.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 43 of 97
Figure 29 – Network Settings
Enter the following fixed IP-
Address i.e. 192.168.1.1. The
subnet mask should be set to
255.255.255.0.
Click in both windows OK.
If you firewall settings are too restrictive, you may not get access to the
LPR® unit. In this case deactivate temporarily the firewall under the tab
The LPR® Unit should be available via your PC now. You can check the connection with a
® unit:
Open the Command-Window:
Windows Start Button
Choose Run
Enter cmd and click OK
Enter in the cmd.exe window: ping 192.168.1.99 or the IP-address of the LPR® unit.
Figure 30 – Ping LPR® Unit
The LPR®
The network settings of LPR® units with TCP/IP Interface have to be set
before configuration and operation. The network settings are explained in
chapter 6.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 44 of 97
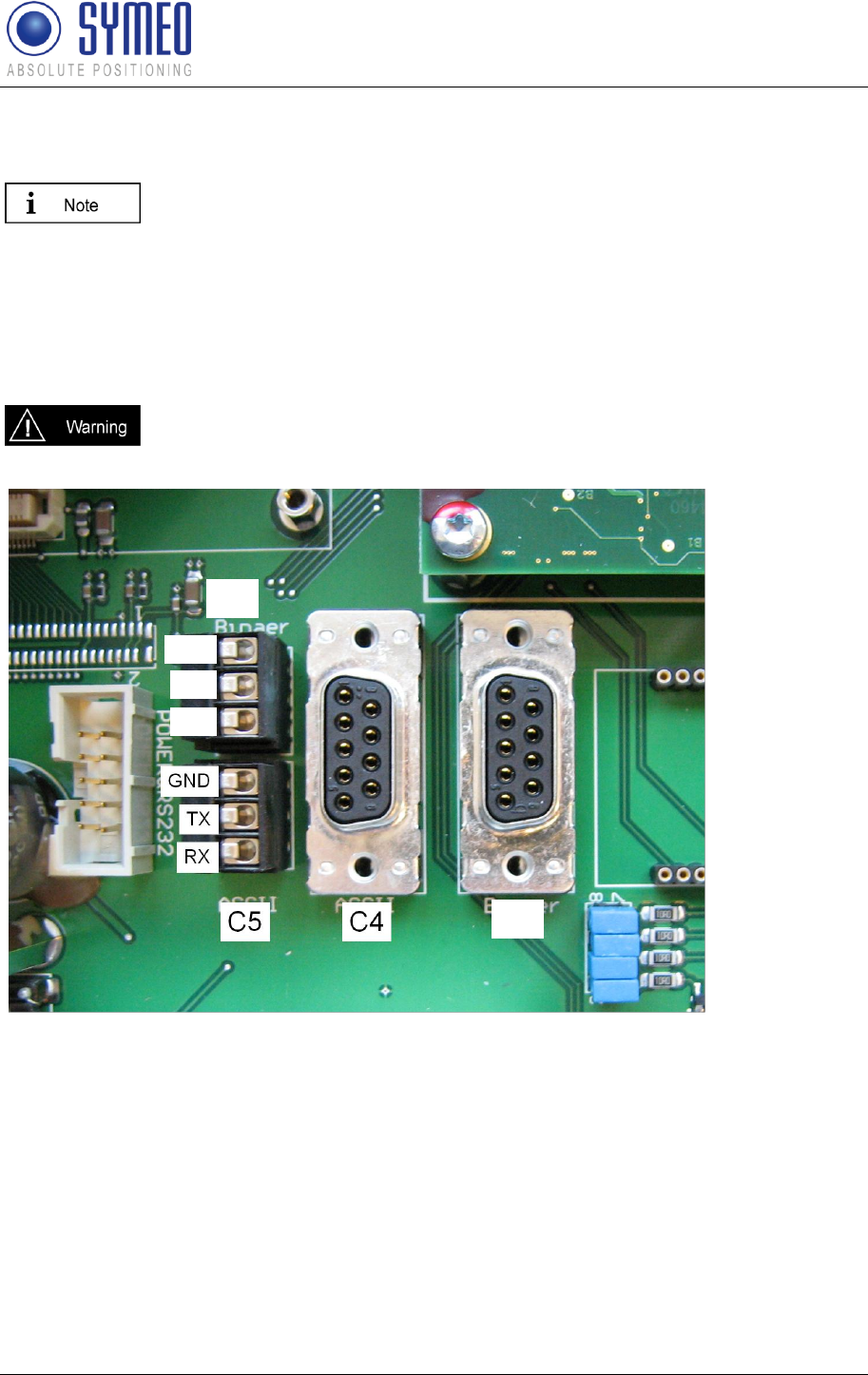
5.3 Connection to LPR® Unit with serial RS232 interface or
Profibus interface
The RS232 service port is only available for units with RS232 or Profibus
data interface.
The commissioning can be done via the serial interfaces C4 (D-sub-socket) and C5 (terminal
block); see Figure 31.
To commission the system via the internal serial interface you must use the internal service
port C5 / C4. A standard RS232 (1:1) cable of a maximum cable length of 2 m is required.
The standard RS232 cable can be plugged into the D-sub-socket of service port C4.
Using the internal serial interface it is important to avoid ingress of
moisture, dust or any particles into the housing during the process
Figure 31 Internal serial ports (RS232)
C4: D-sub-socket for RS232 service port
C5: terminal block for RS232 service port
C7: terminal block for RS232 data port
C8: D-sub-socket for RS232 data port
Connect one side of RS232 cable of a cable length of 2 m with your PC and the other side
with the LPR® unit (Service port C4 or C5). Check the right port of your COM-Port in the
device manager of your computer.
C8
C7
RX
TX
GND
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 45 of 97
5.4 Commissioning Tool – LPR® 1D Wizard
5.4.1 Installation
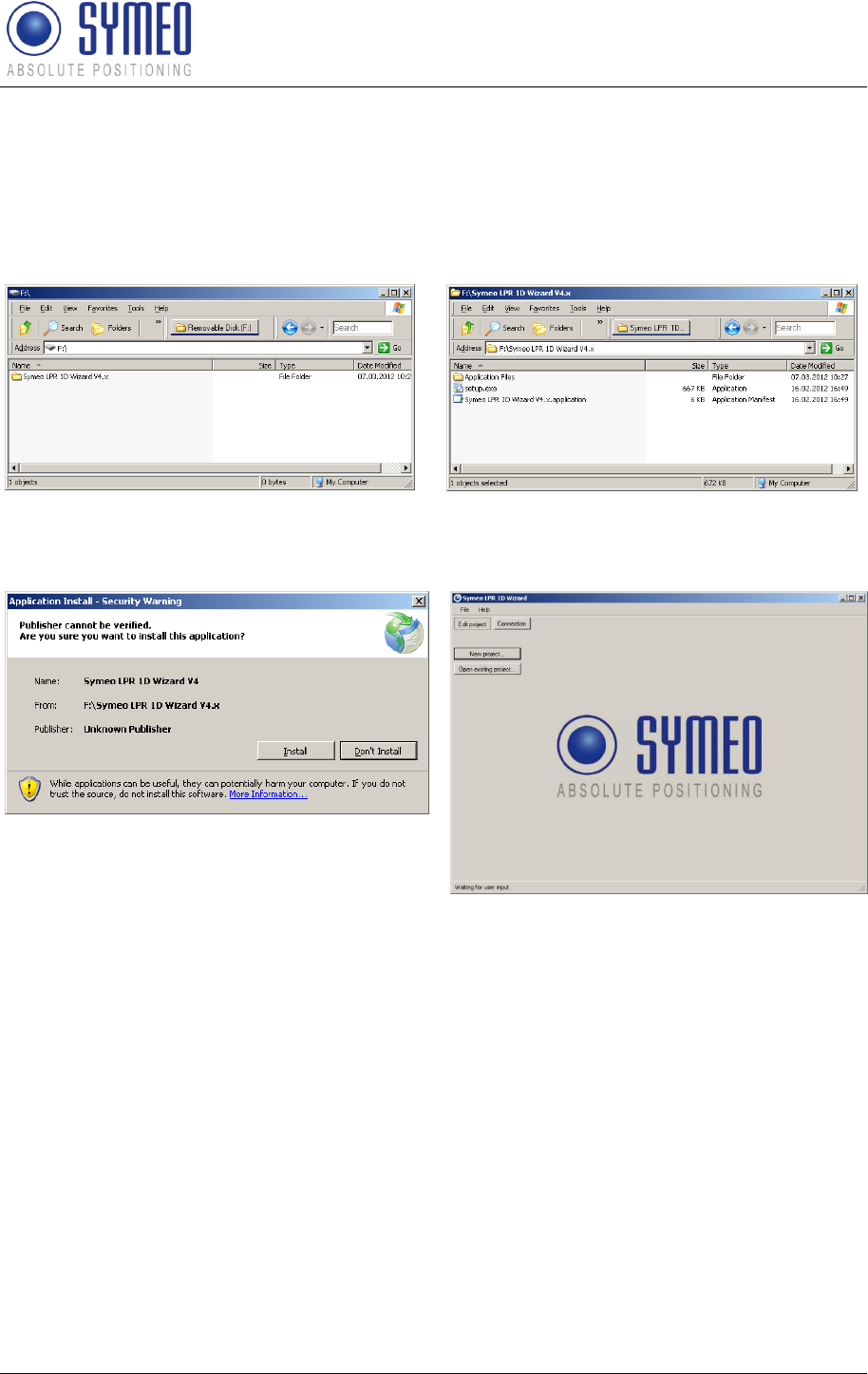
All files for the installation are provided on CD or USB-stick delivered together with your
LPR® - 1D units. Installation can be done directly from CD or USB-stick. The files are
Symeo LPR 1D Wizard V4.x”
Figure 32 – Installation directory for the LPR® 1D
Wizard
Figure 33 – Start “setup.exe” for installation of the
LPR® 1D Wizard
Figure 34 – Press “Install“ for installation of the
LPR® 1D Wizard
Figure 35 – LPR® 1D Wizard starts after
installation
After finishing the installation process the LPR®-1D Wizard starts automatically. A shortcut
was created on your desktop and you can find the Symeo LPR®-1D Wizard in your start
menu.
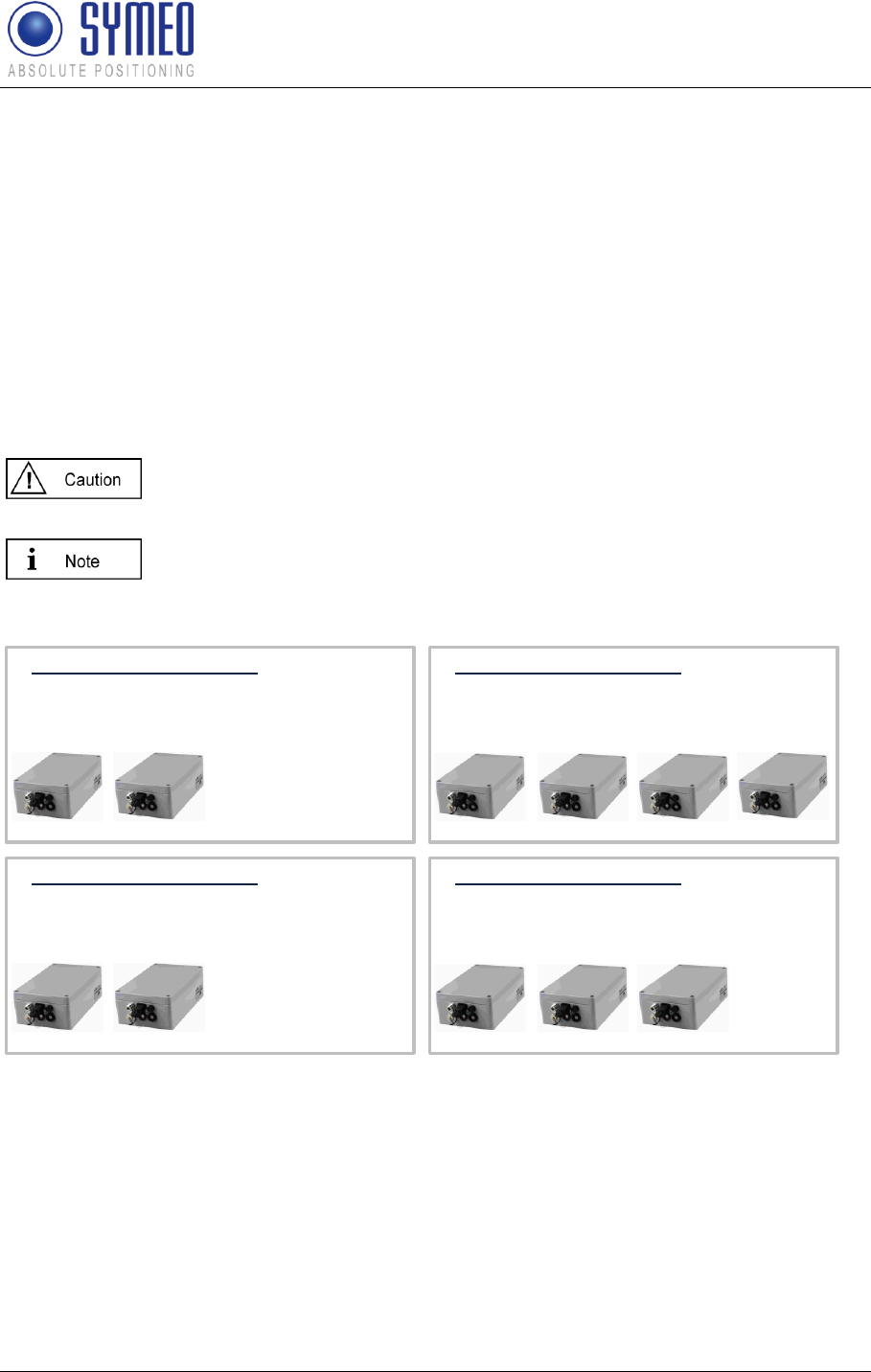
5.4.2 Utilization of LPR® 1D Wizard
The Symeo LPR®-1D Wizard provides the following functions for commissioning the LPR® -
1D system:
Selection of the desired application
Settings of parameters for selected application
General setting of LPR® 1D System (ID, Antenna and cable parameters, etc.)
Connection to LPR® Units
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 46 of 97
Antenna Calibration
Check distance data
Download of currently applied configuration files for service purposes
Upload of configuration files to the LPR® -1D units for service purposes
The network settings of LPR® units with TCP/IP Interface have to be set
before configuration and operation. The network settings are explained in
chapter 6.
With the Symeo LPR® 1D Wizard you can setup LPR® 1D systems with
maximal 3 units. For other applications please contact Symeo support.
Start the LPR® 1D Wizard. The following window appears:
Edit project
All parameters and configuration files for one LPR® 1D system are handled in one project file.
Figure 36 – Start LPR® 1D Wizard
Select this button to create a new project for
an LPR® 1D System
Select this button to open an already created
project for an LPR® 1D System
Moving the cursor above a
button or input field shows
a tool tip.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 47 of 97
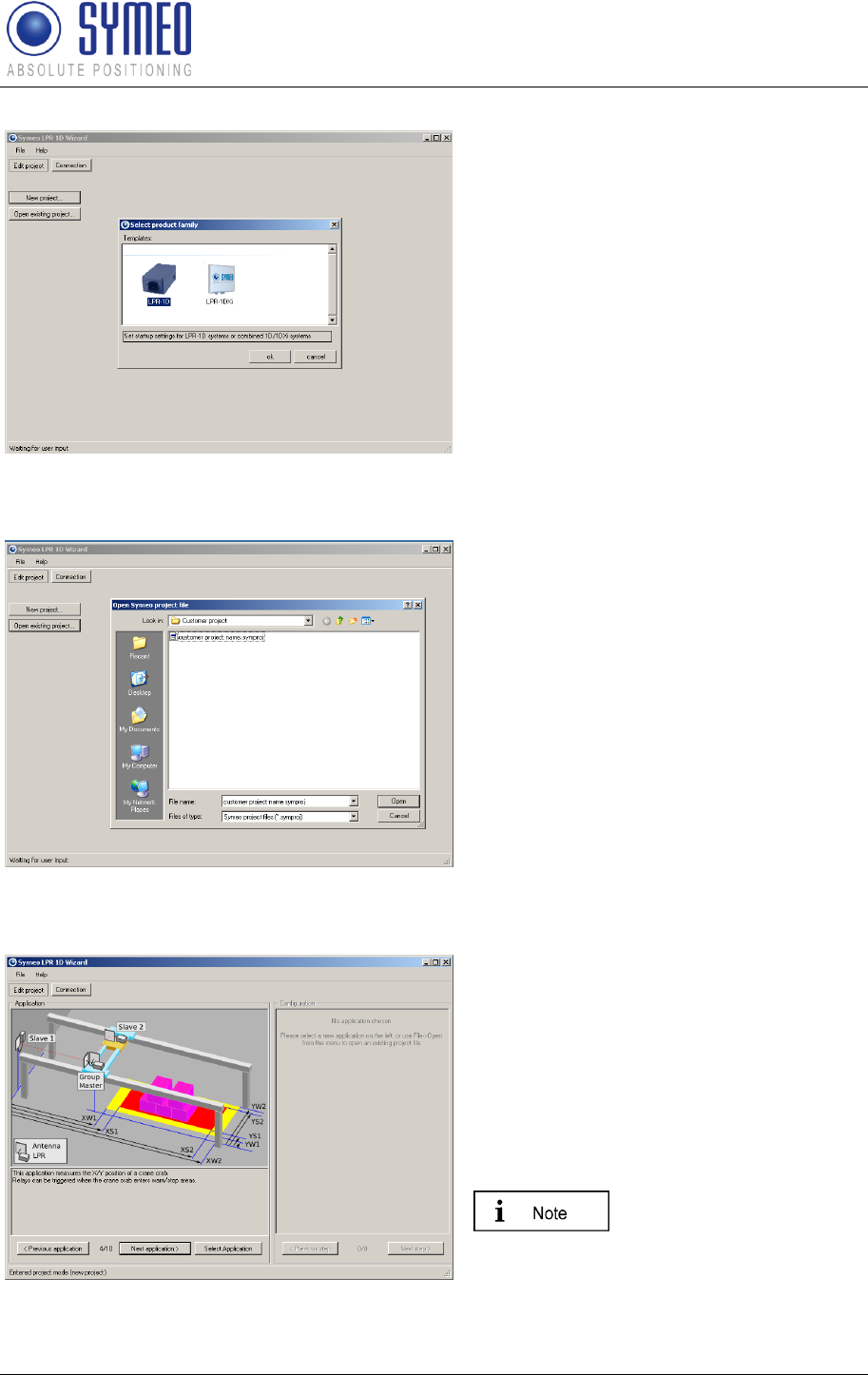
New project
Figure 37 – New project / Select product family
To start a new configuration
push
Select the product family of the system used
in your application.
Open existing project
Figure 38 – Open existing project
If you already saved a project file you can
open this project file for further settings.
Push
Select your already created project file and
push
Select application
Figure 39 – Select Application Selection of application
The first possible application is shown.
You can see other application with the
t application
of the window the first step to configure
the settings of the selected application
As long as no application is
selected, no step to
configure the settings can
be selected.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 48 of 97
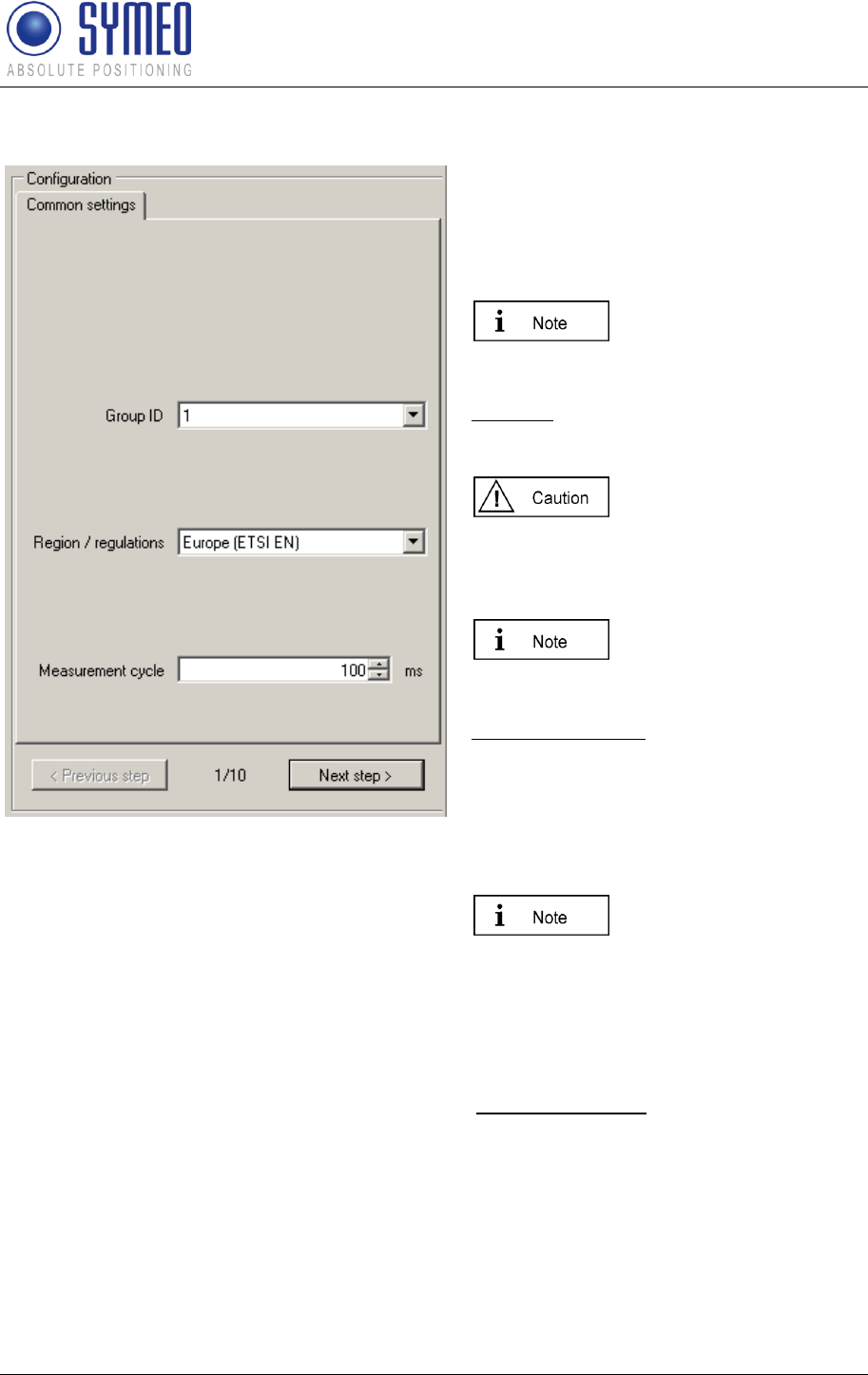
Settings of LPR® System Parameters
After selecting the application common settings of the LPR® system has to be entered.
Figure 40 – Common settings - Input fields of the
common settings of LPR® system
include settings for
the complete LPR® System.
Fill in the input fields on the right side of
the window. The fields depend on the
selected application.
Move the cursor above an
input field to see more
information about it.
Group ID: Unique ID of the LPR® system. All
units in one LPR® system have the same
group ID.
If more than one LPR®
system is used in your
environment you have to
use a different group ID
for each system.
The frequency channel is
linked to the group ID of
the system.
Region / regulations: Choose the
region/regulation where the system is
installed. This is important to calculate the
allowed transmission power, please see
Appendix B in this documentation for
assignment of countries and regulations.
For FCC labeled units
only use the setting
labeled units only use the
Measurement cycle: Adjust the desired
measurement cycle of the system.
Depending on the application you should
choose a minimum measurement cycle of
35 ms for 2 units or 70 ms for 3 units in one
system.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 49 of 97
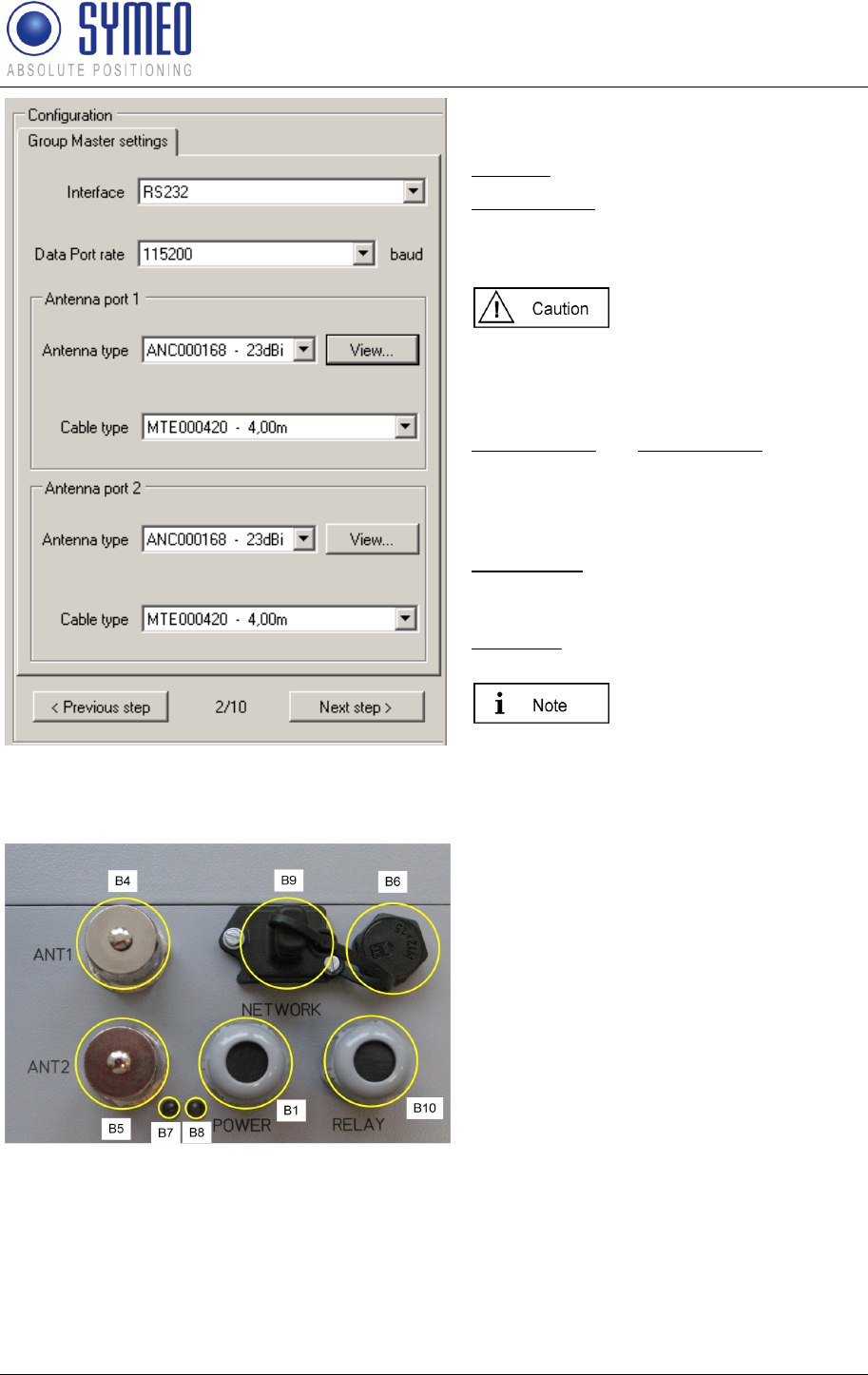
Figure 41 – Group Master setting - Input fields of the
Group Master settings of LPR® system
Figure 42 – Front view Antenna ports of LPR® Unit
B4: antenna port 1
B5: antenna port 2
Interface: type of data interface.
Data Port rate: Transmission rate of the
LPR® system on the data port. The data rate
for the data port can only be set for LPR®
units with RS 232 interface.
If you change the baud
rate to 9600 you should
also adjust the
measurement cycle of the
system to values >50ms.
Antenna port 1 and Antenna port 2: Settings
of the antenna parameters. This is important
to calculate the allowed transmission power.
The number of antenna ports depends on the
selected application.
Antenna type: Select the type of the antenna
you use. The View button displays a
selection of available antennas.
Cable type: Select the antenna cable
connected to the antenna ports.
Antenna port 1 is
assigned to the
measurement with slave
unit 1. Antenna port 2 is
assigned to the
measurement with slave
unit 2.
are displayed.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 50 of 97
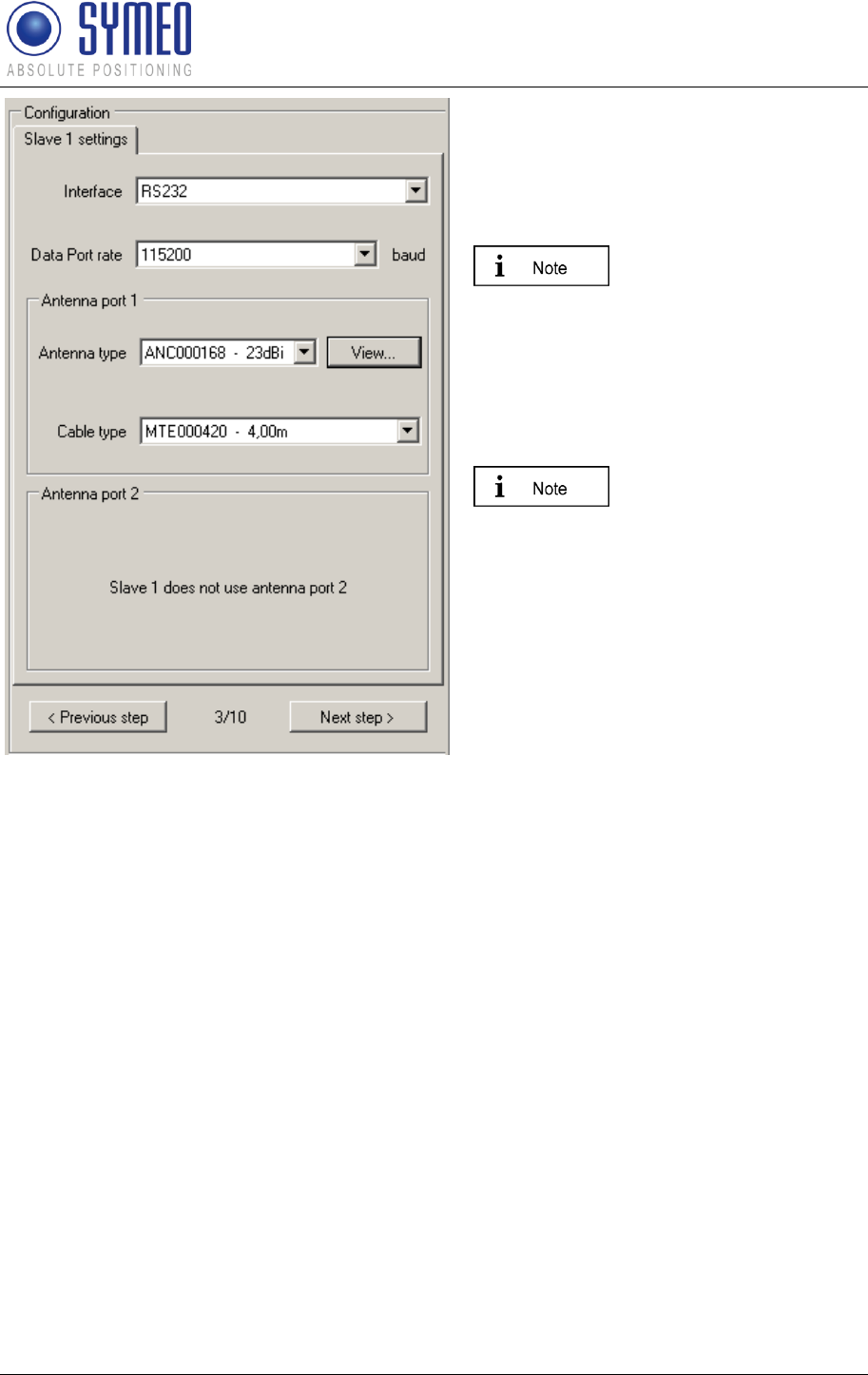
Figure 43 – Slave settings - Input fields of the ‚Slave
1 settings’ of LPR® system
as already described in the
For LPR® System with
three units the settings
has also be done for the
Slave 2 unit. After pushing
the button Next step the
Slave 2 settings are
displayed.
For Slave units only
antenna port 1 is used.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 51 of 97
Optional: Setting the X and Y dimensions for warning and stop areas
For LPR® units with optional relays you can set the distances for warning and stop areas in
this menu.
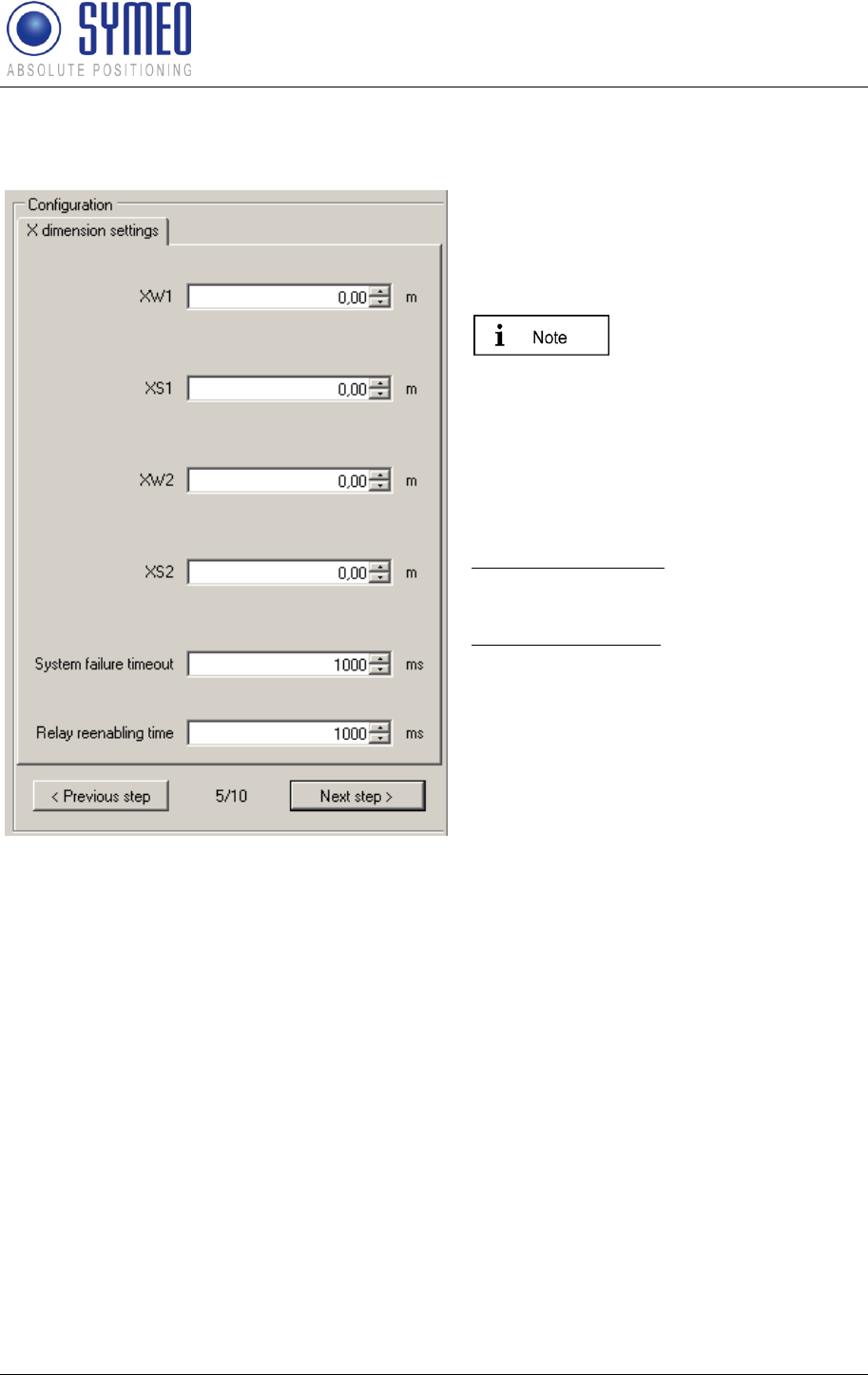
Figure 44 –Input fields of the ‚X dimension settings’
for warn and stop areas
Fill in the values of the warning and stop
distances for your application in meters.
Depending on your
selected application also
Y dimensions have to be
set within the next menu
Y dimensions setting
after selecting Next step.
System failure timeout: Length of time
without valid measurements before a system
failure is indicated.
Relay reenabling time: Use this value to
setup hysteresis. "Open relay" is always
done immediately."Close relay" can be
delayed to inhibit unwanted relay toggling.
This value sets the delay time. The relay will
only be closed if the "Close relay" condition
has been valid for this long.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 52 of 97
Optional: Usage of Relays
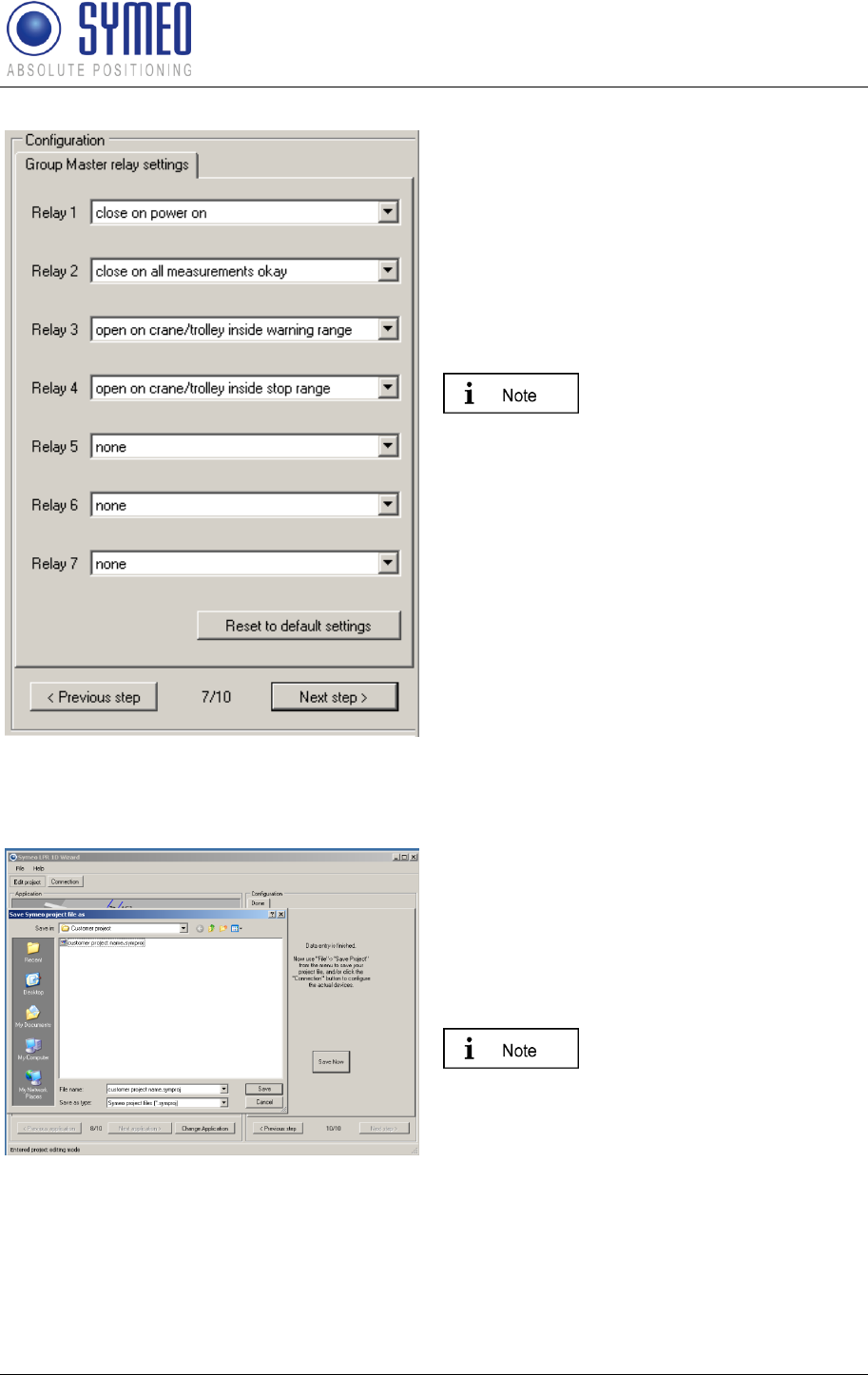
Figure 45 – Allocation of relays
If relays are used at one or more LPR® unit you
can allocate functionalities to each of the seven
relays in the LPR® unit. Each LPR® unit in one
system can have a different assignment of
relays.
You can choose between default settings,
customer settings and no relay assignment.
The possible functionalities of
the relays depend on the
application you have selected.
Save Project
Figure 46 – Save project
The last step of the menu Configuration is to
save all settings in one project file.
Press Save Now and define a file name for
your project.
All settings and parameters of
your LPR® system is stored in
this project file.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 53 of 97
Connection to LPR® Unit
Figure 47 – Connection to LPR® unit
Having established a connection to the LPR® unit
as described in chapter 5.2 and 5.3 the
connection can be opened by pushing the
If you are connected to the
LPR® unit with TCP/IP
interface, push ,Connect via
push ,Connect via
Figure 48 – TCP/IP connection to LPR® unit
Figure 49 –RS232/USB connection to LPR® unit
Connect via TCP/IP:
To open the TCP/IP connection you have to
enter the IP-address and the port number. The
service port is 3045 per default. The IP address
is 192.168.1.99. IP address and TCP port can be
changed in the web interface of the LPR® unit
(see chapter 6).
Connect via RS232/USB:
To open the serial connection, select the right
COM port of your computer. If you do not know
the COM port, select AUTO
You can control the COM port
number in the device
manager of your computer.
Figure 50 –Submenus if connection is established
Once the connection is established, the following
submenus appear:
Unit configuration:
Configure the connected unit as Group Master,
Slave 1 or Slave 2.
Distance Data:
View the measured distance(s)
Antenna calibration:
Calibrate the real measured distance
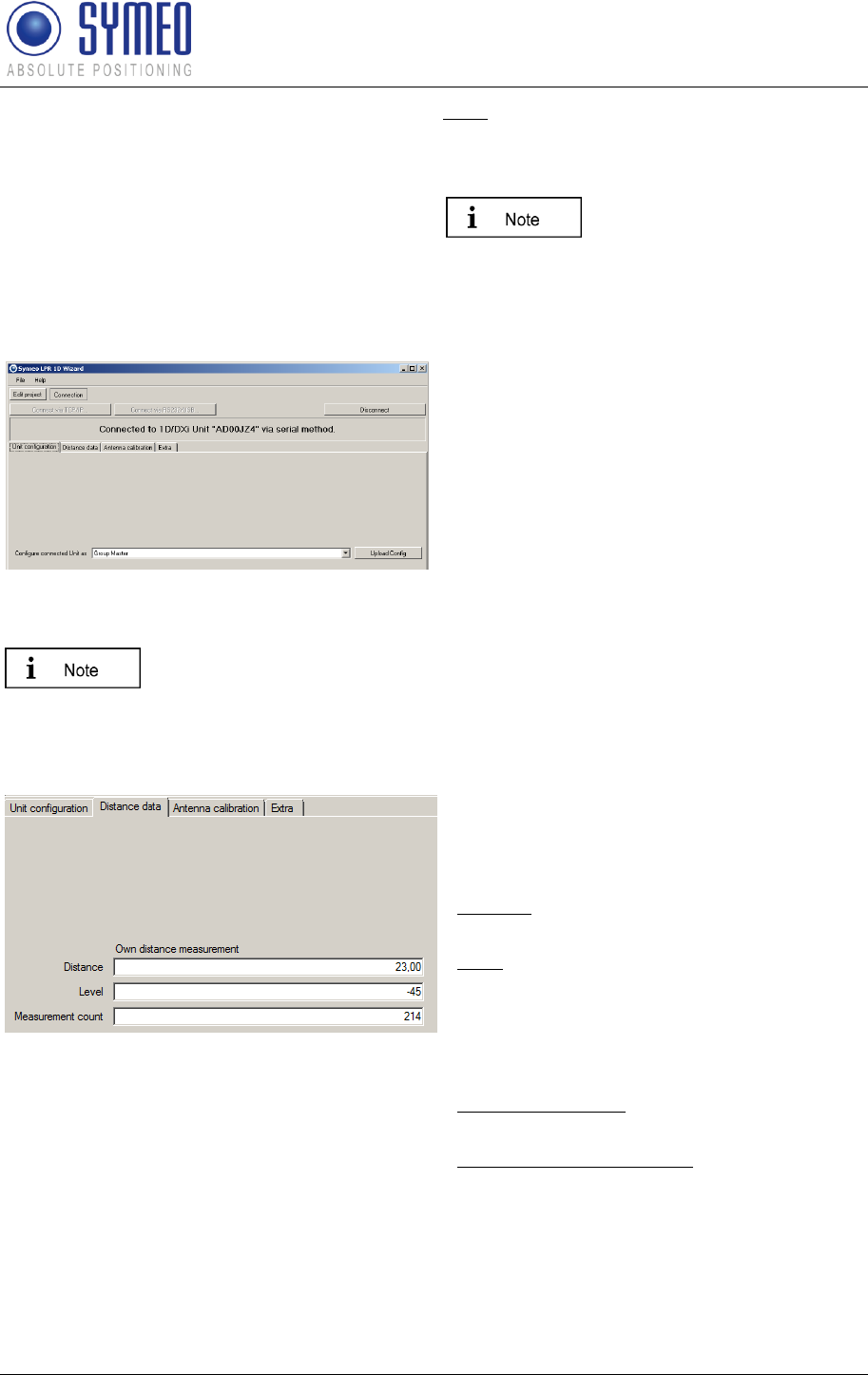
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 54 of 97
Extra:
Download the current raw configuration file,
upload an existing raw configuration file to the
unit or upgrade LPR-1DXi firmware.
The Extra menu is only
required for service issues.
Please contact Symeo service
for further instructions.
Unit configuration:
Figure 51 – Unit configuration
Push ,Unit
Select an entry from the ,Configure
connected unit -down list.
Push ,Upload Config
If a new application is selected or settings are changed, you have to make
an upload for each LPR® unit of one system.
Display of Distance Data
Figure 52 – Display of Distance Data
. The following
information is shown about the distance
between Group Master and Slave1 (and
optional between Group Master and Slave2):
Distance
The measured distance in meters.
Level
Receive Level of the radio signal in dBm. This
level depends on the distance of the two
antennas. The receive level for valid
measurements is in a range of -28dBm and
-85dm.
Measurement count
The number of performed measurements
Checkbox ,Distance filtering
Only the display of the distance data is filtered
for better reading. This does not affect the
measurement data.
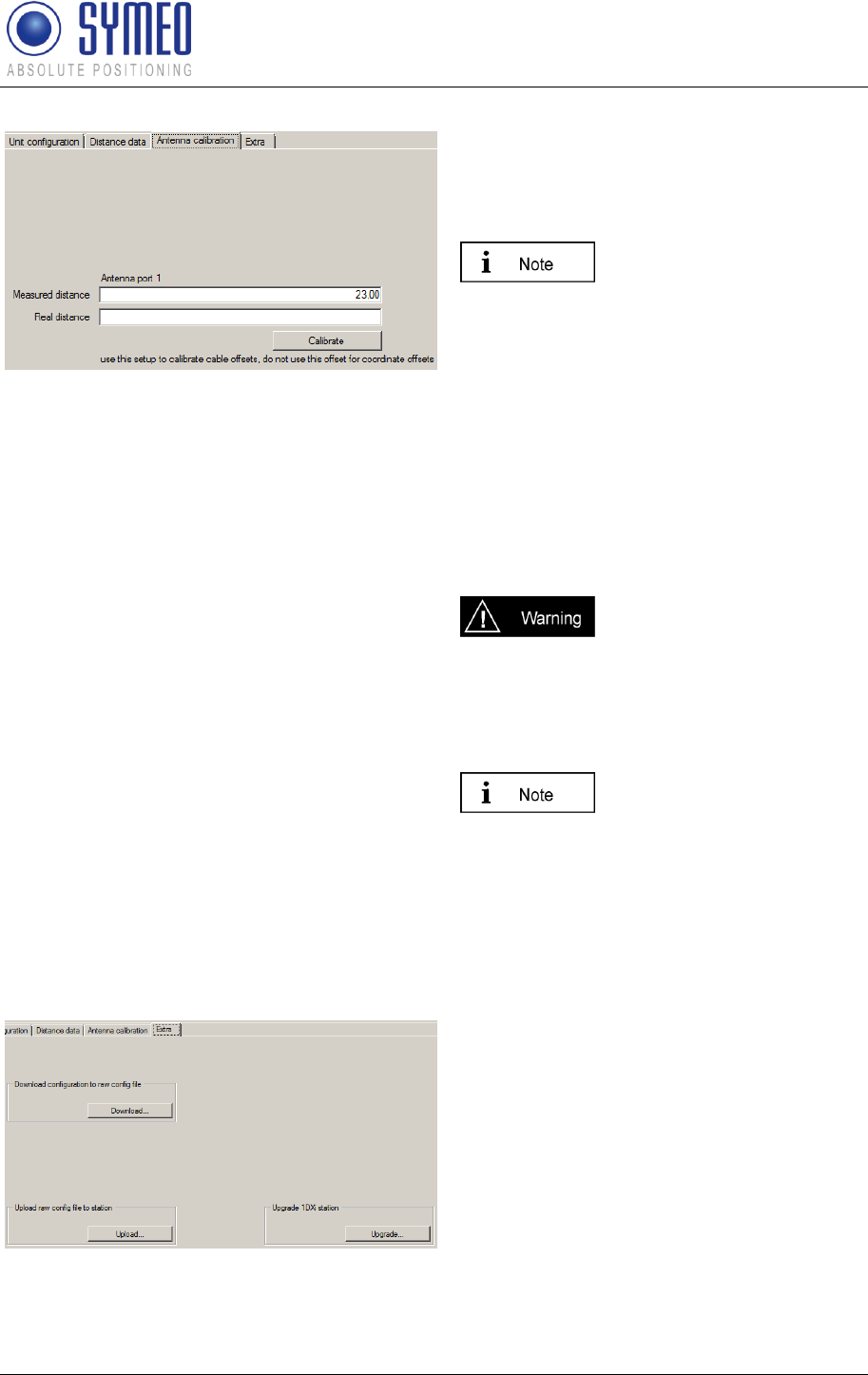
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 55 of 97
Antenna Calibration
Figure 53 – Antenna calibration
After uploading all configuration files to each
LPR® unit, you have to calibrate the measured
distance.
Push calibration
the measured
distance is displayed in
meters, which is different to
the real distance.
Enter the real distance value between the
Push
The ,Antenna port 1distance
between Group master and Slave unit 1. If you
have a system with three LPR® units with a
second distance measurement then you enter
the real distance value in ,Antenna p.
The crane is not allowed to
move during the calibration
process.
If the measured distance and the real distance
are not the same after the calibration you might
repeat the calibration.
During the calibration
process the antennas should
have a real distance to each
other of 5 to 20 m.
Download Configuration
Download and upload of raw configuration files is only required for service issues. All settings
are already saved in your project file as described above.
Figure 54 – Download configuration
Extra
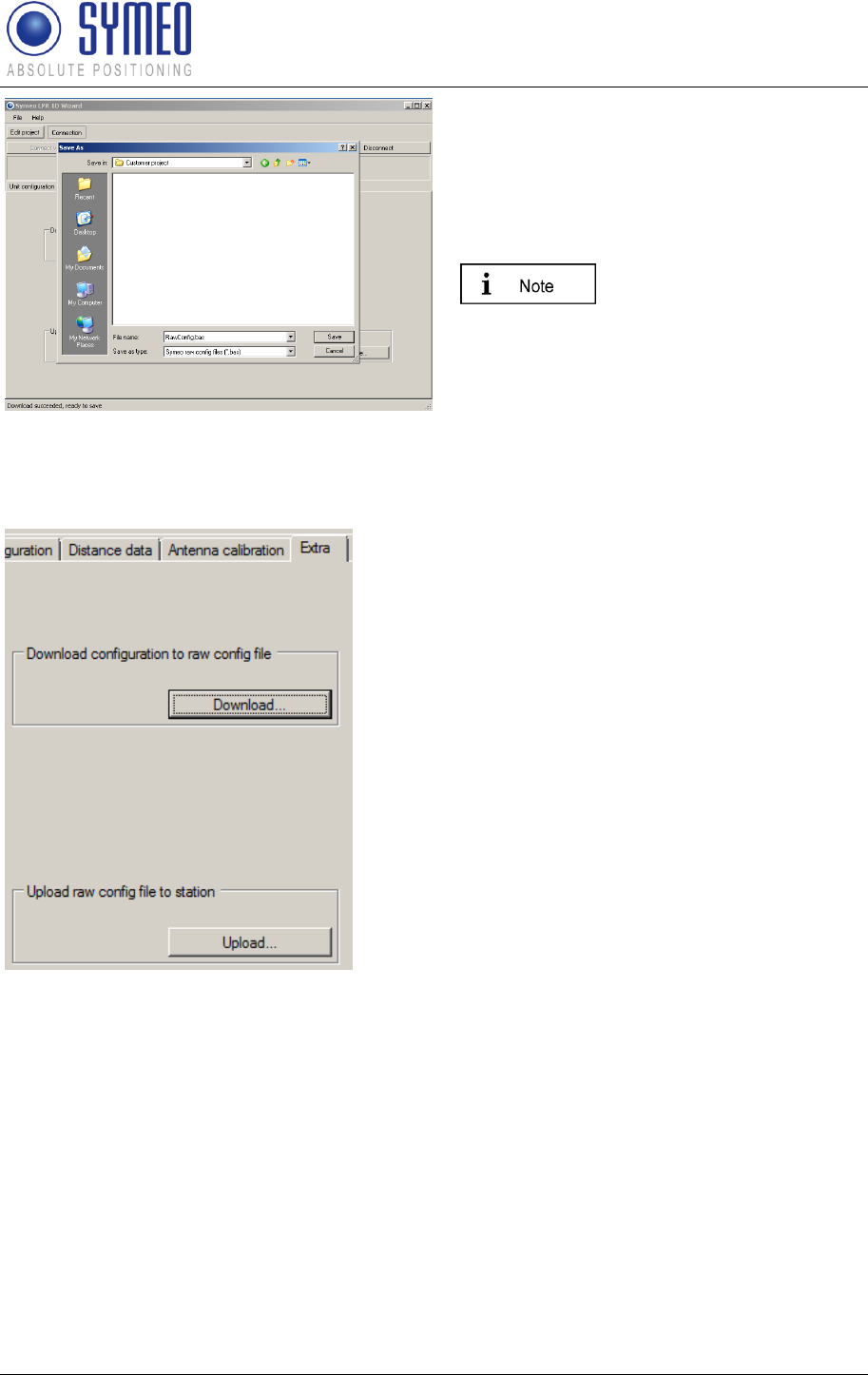
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 56 of 97
Figure 55 –Enter file name
Enter the desired file name for the raw
configuration file and save the file. The
format of this raw configuration file is
The download of raw
configuration files is only
required for service issues.
Please contact Symeo
service for further
instructions.
Upload Configuration
Figure 56 –Upload raw configuration file
a raw
configuration file can be uploaded to each
LPR® unit.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Commissioning
Copyright © Symeo GmbH 2012
Page 57 of 97
Figure 57 –Upload raw configuration file
Open-button. The selected raw
configuration file will be uploaded to the
connected LPR® unit.
The upload of raw
configuration files is only
required for service issues.
Please contact Symeo
service for further
instructions.
Upgrade 1DXi Firmware
This function is only applicable for LPR-LPR-1DXi product
documentation”.
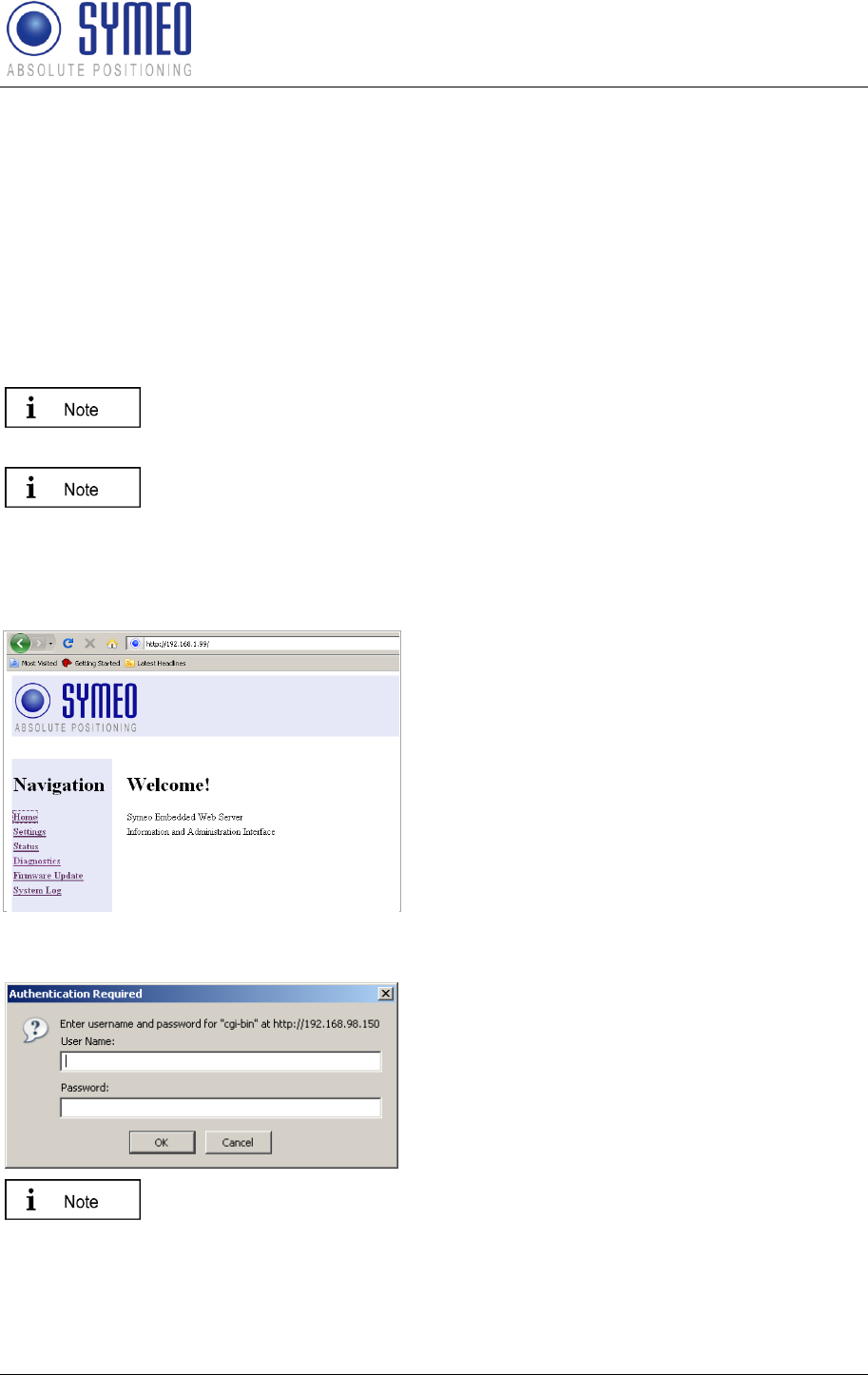
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 58 of 97
6 Web Server
The network settings for a LPR® unit with TCP/IP interface are described in this chapter.
Therefore it is necessary to open a TCP/IP connection between your computer and the LPR®
unit.
6.1 Open Web Server
Open your web browser. In the address bar of the web browser enter the IP-address of the
LPR® unit: http://192.168.1.99. Press Enter.
The IP-address of the LPR® unit is 192.168.1.99 per delivery status except
another IP-address is labeled outside the box.
You can establish a connection with your LPR® units Web server either via
HTTP or HTTPS if the unit has been configured for this (see section
"Settings", "HTTP" and "HTTPS" fields in the "Remote Access" area).
In HTTP connections, the data is transmitted unencrypted. In HTTPS connections, it is
encrypted for transmission (AES-256, 256-bit encryption).
A connection is established with your LPR®
unit.
In the case of an HTTPS connection, you may
see two dialog boxes. Confirm them both with
OK.
Then the Welcome page for the LPR® unit's
Web server will appear.
Click the function you want in the navigation bar. The individual functions are described in
the following sections.
You will be prompted to enter your information
for authentication.
Enter user name "symeo" and the
password, and click "OK". The password
has been set to "54all2u" by the
manufacturer.
In order to protect your system from being reconfigured by unauthorized
persons, you should change this to a company password that is only
provided for authorized personnel.
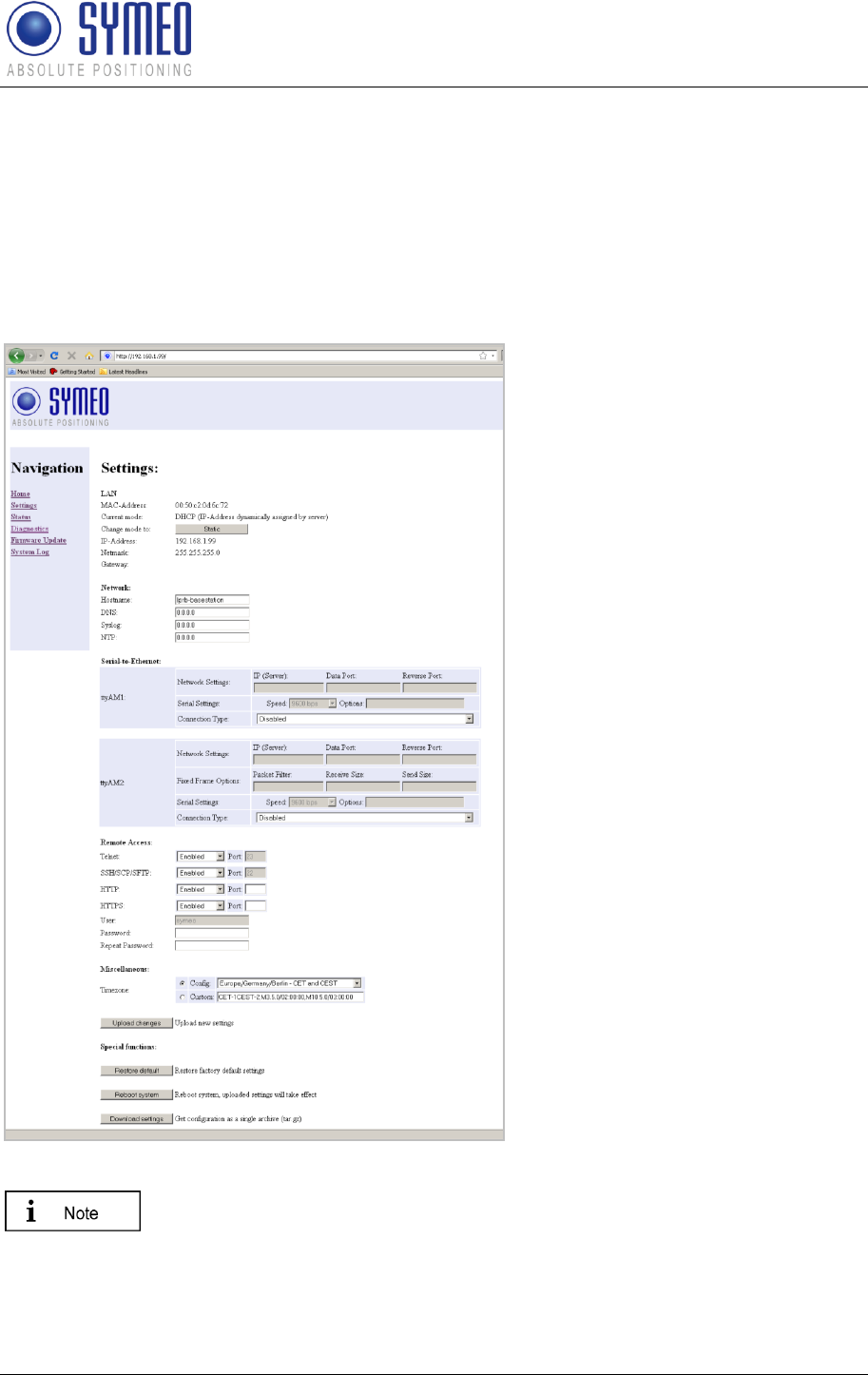
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 59 of 97
6.2 Settings
With this function you can define the network settings on your LPR® unit and the network
access settings and reboot the system.
Click "Settings" in the navigation bar.
If you have not yet provided authentication information you will be prompted to do so now
(see chapter 6.1).
The Settings page for the LPR® unit's Web server is displayed.
The following menu is displayed:
LAN:
Overview about LAN settings of
LPR® unit (static or dynamic IP
address) (see chapter 6.2.1)
Network:
Network settings (see chapter
6.2.2)
Serial-to-Ethernet:
Settings of service port (see
chapter 6.2.3)
Remote Access:
(See chapter 6.2.4)
Miscellaneous:
Setting of time zone (see chapter 0)
Special Functions:
(see chapter 6.2.6)
To accept the changings of the LPR® unit press button
® unit with the
new settings.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 60 of 97
6.2.1 „LAN“ area
MAC-
Address
Unique hardware address of the LPR® unit on the LAN (Ethernet ID)
(not editable)
Current
Mode
Shows the current mode:
"Static IP-Address" or "DHCP Active".
In "DHCP Active" mode, the LPR® unit receives a dynamic or reserved IP
address from the DHCP server. You can also ask your administrator or the
SYMEO technical department about this.
If the LPR®
reboot within 60 sec an IP-address from the DHCP server
the last applied fixed IP-address is used.
Change
Mode
A button is labeled "DHCP" or "Static" depending on the "Current mode"
field. Click this button to switch from "DHCP Active" mode to "Static IP-
Address" mode or vice versa.
IP-Address
IP address of the LPR® unit
Per default the IP-address is set to the static IP-address 192.168.1.99.
In "DHCP Active" mode, this address is assigned by the server and cannot
be edited.
In "Static IP-Address" mode you can assign a fixed (static) address here.
Netmask
Net mask of the LPR® unit
(default: 255.255.255.0)
In "DHCP Active" mode, the net mask is assigned by the server and cannot
be edited.
Gateway
IP address of the standard gateway
(default: 192.168.98.254)
Other LAN segments can be reached with the standard gateway.
In "DHCP Active" mode this address is assigned by the server and cannot
be edited.
6.2.2 „Network“ Area
Hostname
Hostname of the system (default: "lprb-basestation").
In "DHCP Active" mode, this hostname is also communicated to the
DHCP/DNS server.
A name that will be reserved on the DNS server can be entered here. You
can also ask your administrator or the SYMEO technical department about
this.
DNS
IP address of the DNS server:
The DNS server is able to translate hostnames into IP addresses.
In "DHCP Active" mode this address is assigned by the server and cannot
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 61 of 97
be edited.
Syslog
IP address of the Syslog server (default: 0.0.0.0, i.e. this service has been
disabled).
The Syslog server is a server on the network to which it is planned to have
system messages (system log) transmitted. Transmission is packet-based
(UDP) and unencrypted.
NTP
IP address of the NTP server (default: 0.0.0.0, i.e. this service has been
disabled).
The NTP server is a server on the network from which the system can
request the current time.
6.2.3 „Serial-to-Ethernet“ Area
ttyAM1
Port number of the TCP/IP port via which the data from serial port (ttyAM1)
is sent and received. ttyAM1 is the service port. (default: 3045)
ttyAM2
Port number of the TCP/IP port via which the data from serial port (ttyAM2)
is sent and received. ttyAM2 is the data port. (default: 3046)
Per default these two ports are not enabled. Choose the Connection Type
between the LPR® unit and your PC or PLC for each port. Depending on
the connection you select different masks are editable.
ttyAM1 / Service port
Network Settings Area:
IP (Server)
TCP – Connecting to Data Port
using Reserve Portere the IP-address of the
server, to which the connection should be established.
Data Port
Port-Number of TCP/IP Port. Data of serial interface (ttyAM1)
is sent and received. ttyAM1 is the service port. Default value
is 3045.
Reverse Port
If applying TCP – Connecting to Data Port
using Reverse Port
should use for the reverse channel.
Serial Settings Area
Speed
Baud rate of serial interface (ttyAM1). The baud rate of the
service port is set to 115200 baud per default.
Options
Settings of serial interface ttyAM1 for the data protocol.
These settings are not necessary to change and are set per
default to raw –echo –ixon (Raw data, no echo, no control
character).
Connection Type Area
Disabled
The port is disabled and not reachable via TCP/IP.
TCP Listening on Data
The LPR® unit is waiting for incoming connection on the
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 62 of 97
Port
“Data Port”. If the connection is opened successful you can
open the service port.
TCP Connection to
Data Port using Reserve
Port
The LPR® unit establishes the connection to the entered
server address. Setting “Random” means both
communication partners arrange the reverse channel
autonomously. If the connection is opened successful you
get access to the service port.
ttyAM2 / Data port
Network Settings Area:
IP (Server)
For all active Connection Types the IP-address of the server
is required to which the connection should be established.
Data Port
Port-Number of TCP/IP Port. Data of serial interface (ttyAM2)
is sent and received. ttyAM2 is the data port. Default value is
3046.
Reverse Port
For all active Connection Types a reverse channel for data
transmission is required.
Serial Settings Area:
Packet Filter
Fixed Frame
none”2,3
type 0x02 (Send request) and data type 0x03 (relay switching
command).
Receive Size
Fixed Frame
size of the received data packed. Example: For 1D-
application a frame size of 15 Byte is sufficient. A smaller
telegram must me filled with 0x00.
Send Size
Fixed Frame
size of the sent data packet. Example: For 1D-applicaiton a
frame size of 21 Byte is sufficient. A smaller telegram is filled
with 0x00 by the LPR® unit.
Connection Type Area:
Disabled
TCP Variable Frame
Listening on Data Port
The LPR® unit is waiting for incoming connection on the
“Data Port”. If the connection is opened successful you can
Variable Frame“ Byte
Stuffing
TCP Variable Frame
Connecting to Data Port
The LPR® unit establishes the connection to the entered
server IP-address. Setting “Random” means both
communication partners arrange the reverse channel
autonomously. If the connection is opened successful you
Variable Frame“ means
Byte Stuffing
TCP Fixed Frame
The LPR® unit is waiting for incoming connection on the
“Data Port”. If the connection is opened successful you can
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 63 of 97
Listening on Data Port
open the data port. Fixed Frame“ Byte
Stuffing
TCP Fixed Frame
Connecting to Data Port
The LPR® unit establishes the connection to the entered
server IP-address. Setting “Random” means both
communication partners arrange the reverse channel
autonomously. If the connection is opened successful you
get access to the data port. Fixed Frame“ means
Byte Stuffing
UDP Fixed Frame
Sending to Data Port
The LPR® unit sends and receives data (UDP) to and from
the entered server IP-address. The reverse channel uses
Fixed FrameByte
Stuffing
6.2.4 „Remote Access“ Area
Telnet
Click this checkbox to allow or prevent console accesses to port 23 via
Telnet (checked: accesses are allowed). The port number is not editable.
See also section "Extended system access".
SSH/SCP/SFTP
Click this checkbox to allow or prevent console accesses to port 22 via
SSH (Secure SHell and data transmission via SCP (Secure CoPy) or
SFTP (Secure File Transfer Protocol) (checked: accesses are allowed).
The port number is not editable. See also section "Extended system
access".
HTTP
Click this checkbox to permit or forbid accesses to the LPR® unit's Web
server via HTTP (unencrypted transmission) (checked: accesses are
allowed). You must also enter the corresponding port number as
appropriate. The port number is set to 80 (http protocol standard) by the
manufacturer.
HTTPS
Click this checkbox to permit or forbid accesses to the LPR® unit's Web
server via HTTPS (encrypted transmission) (checked: accesses are
allowed). You must also enter the corresponding port number as
appropriate. The port number is set to 443 (http protocol standard) by the
manufacturer.
User
User ID for access to the TCP/IP port. It has been set to "symeo" by the
manufacturer and cannot be changed.
Password
Enter the new password here if you want to change the password. The
password has been set to "54all2u" by the manufacturer.
Repeat
Password
Enter the new password again here if you want to change the password.
Remote Access
(Secure SHell), SCP (Secure CoPy) and via the serial port. This enables extended system
information to be retrieved and troubleshooting to be carried out. We recommend that you
disable all functions that are not required, see section "Settings".
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 64 of 97
In extended system access, the user "SYMEO" has 'ROOT' privileges, i.e.,
full access to the system. Depending on the settings made, the system can
also be damaged and such damage may or may not be reparable. If you
have any questions, please contact the SYMEO technical department.
The enormous range of functions that are available to console access means that only some
can be documented here. To find out more, please contact your IT administrator or Symeo
Support.
6.2.5 „Miscellaneous“ Area
Timezone
If a NTP-server is available and the IP-address of the NTP-server is entered
you can choose the time zone of the LPR® unit. It is also possible to enter
the time zone manually.
6.2.6 „Special Functions“ Area
Restore
default
Click this button to restore the settings made by the manufacturer.
Click the "Execute" button (Restore factory default settings) in the
"Special functions" area to cancel all changed settings and restore the
factory settings.
The settings made by manufacturer are activated first after a reboot of the
LPR® unit. This means that changes of the settings (i.e. IP-address) are
possible.
The settings affected will be deleted and populated directly
with the factory settings.
When the factory settings have been restored, it may be
necessary to proceed as if commissioning the system
again.
Reboot
system
To accept the settings the LPR® unit must be rebooted. Click this button to
reboot the system.
Before you reboot the system the settings must be loaded
to the LPR®
Download
settings
configuration as a backup.
6.2.7 Accept settings / System Reboot
As described in chapter 6.2 it is necessary to transmit the changes to the LPR® unit and
afterwards reboot the unit.
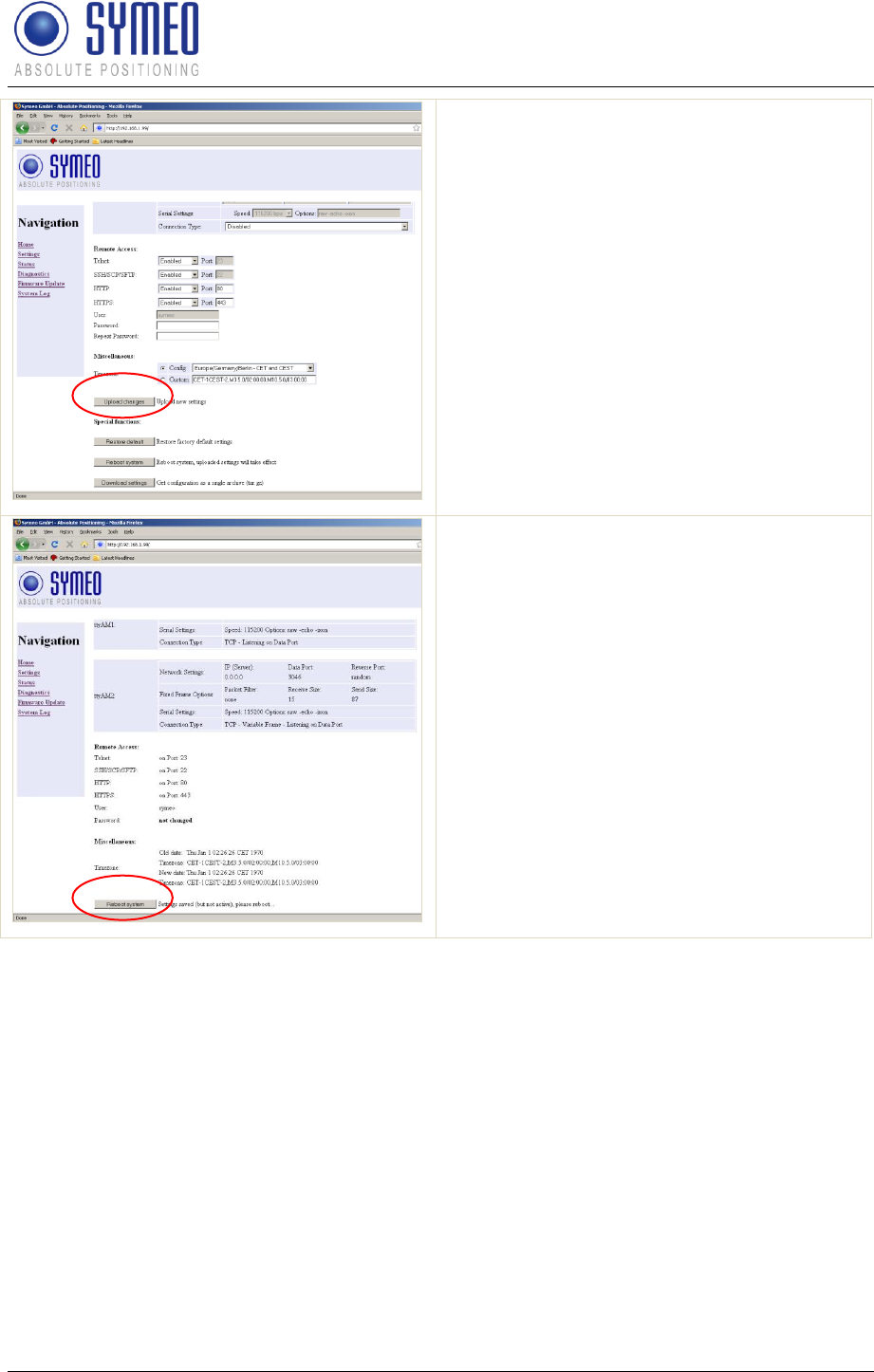
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 65 of 97
the changes.
Scroll down to the end of the page and
LPR® unit.
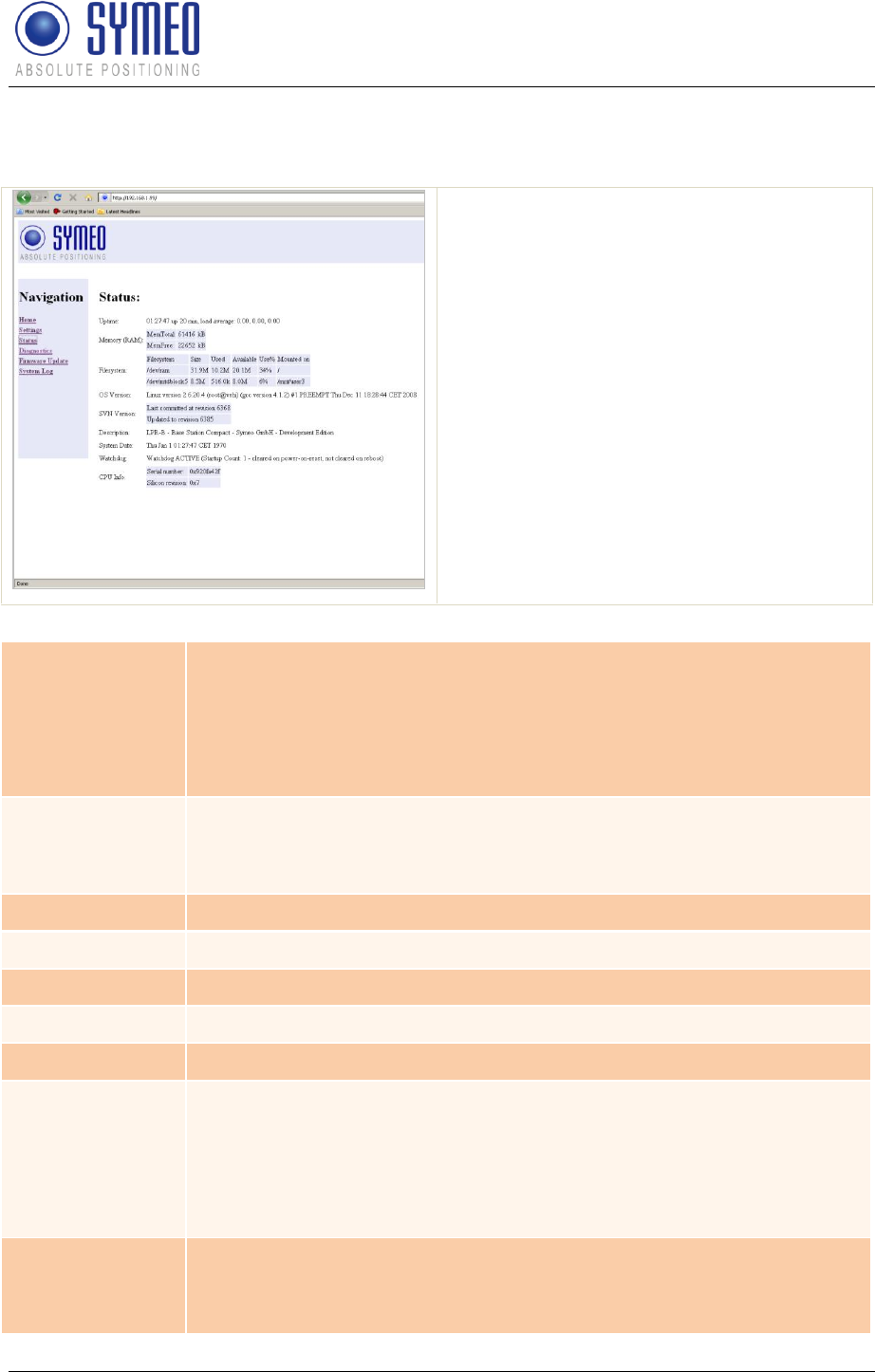
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 66 of 97
6.3 System Status
With this function, you can display the current system status.
Click "Status" in the navigation bar.
If you have not yet provided
authentication information, you will be
prompted to do so now (see section
"Starting and using the Web server").
The Status page for the LPR® unit's Web
server is displayed.
The fields have the following meanings:
Uptime
01:27:47 Current system time
up 20 min Time since the last system start
load average: 0.00, 0.00, 0.00 Average system load for the last 1, 5
and 15 minutes. The load indicates how many processes are waiting to
receive computing time
Memory (RAM)
MemTotal: Total usable working memory (physical RAM less a number
of reserved bits and the kernel code)
MemFree: Free working memory
Filesystem
Details about the active file systems and associated statistics.
OS Version
Operating system, kernel, compiler and compiling date
SVN Version
Current version of software
Description
Description of the system
System Date
Current system time
Watchdog
Status of the hardware watchdog, including counter of start operations
since the last switch-on (connection of the power supply). A value
between 2 and 127 means that the watchdog has triggered that number
of system restarts. The counter is reset at 'power-on-reset' (connection
of the power supply) and 'user-rest' (jumper on motherboard). In a
reboot (e.g. from the Web page), the current counter status is not reset.
CPU Info
Serial Number: Globally unique identification number of the processor
used (applied to each chip individually with a laser during production).
Silicon Revision: Version of the processor used
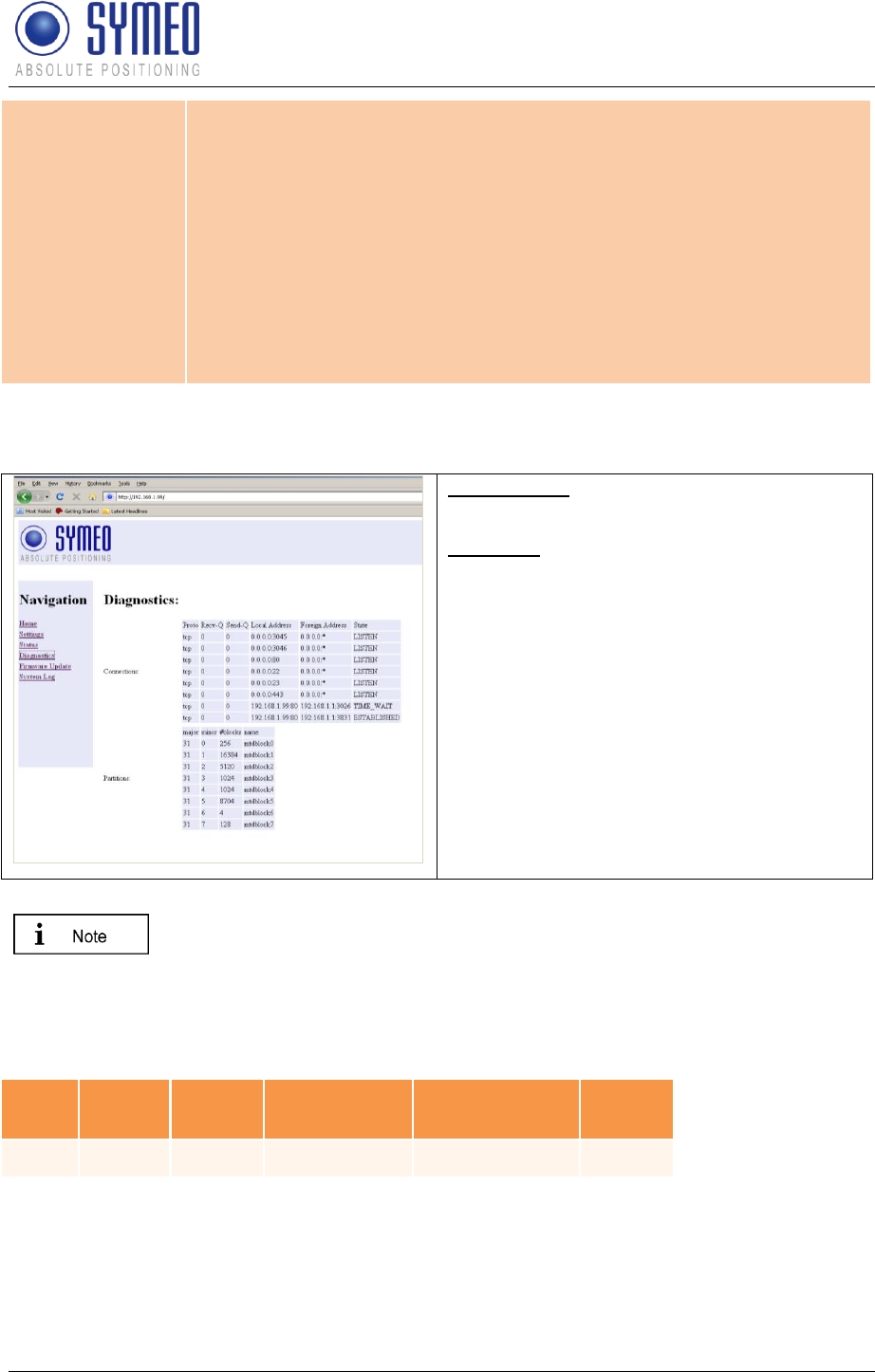
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 67 of 97
0x0 Rev. A
0x1 Rev. B
0x2 Rev. C
0x3 Rev. D0
0x4 Rev. D1
0x5 Rev. E0
0x6 Rev. E1
0x7 Rev. E2
6.4 Diagnostics
Connections: State of the active and inactive
connection to the LPR® unit
Partitions: Size and name of available
partition of non-volatile memory.
The size of receive buffer (Recv-Q) and send buffer (Send-Q) should be
zero if possible. A long lasting value grater zero means problems when
receiving or sending data. This happens if the data cannot be readout fast
enough.
Example 1 waiting for incoming connection:
Proto
Recv-
Q
Send-
Q
Local-
Address
Foreign
Address
State
tcp
0
0
0.0.0.0:3045
0.0.0.0:*
LISTEN
-
further connection information.
Proto: Protocol (TCP, UDP)
Recv-Q: Number of buffered Bytes, which are received from the LPR® unit
Send-Q: Number of buffered Bytes, which the LPR® unit should send
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 68 of 97
Local-Address: LPR® Interface address (0.0.0.0 listening to all interfaces)
Foreign Address: IP-address of opposite unit
State: Status of connection
Example 2: - successful established connection
Proto
Recv-
Q
Send-
Q
Local-Address
Foreign
Address
State
tcp
0
1
192.168.1.99:3045
192.168.1.1:1333
ESTABLISHED
-
further connection information.
Proto: Protocol (TCP, UDP)
Recv-Q: Number of buffered Bytes, which are received from the LPR® unit
Send-Q: Number of buffered Bytes, which the LPR® unit should send
Local-Address: LPR® Interface address (192.168.1.99) with port (3045)
Foreign Address: IP-address of opposite unit (192.168.1.1) with port (1333)
State: Status of connection
6.5 Update Firmware
With this function you can update the firmware.
The firmware can be updated for example when a firmware with improved functional scope is
available for the LPR® system.
But the system can also be irreparably damaged by a firmware update.
Please make absolutely sure that the files are correct (file names and the
version has been released by SYMEO), and proceed carefully and
methodically. If the firmware update has not been carried out properly, or if
problems arise of the system can no longer be accessed, contact Symeo
Support.
For FCC/IC authorization: Only firmware delivered for the U.S./ Candian
market is allowed to install. Other firmware may violate the FCC/IC
authorization.
Click "Firmware Update" in the navigation bar.
If you have not yet provided authentication information, you will be prompted to do so
now.
The Firmware Update for the LPR® unit's Web server is displayed.
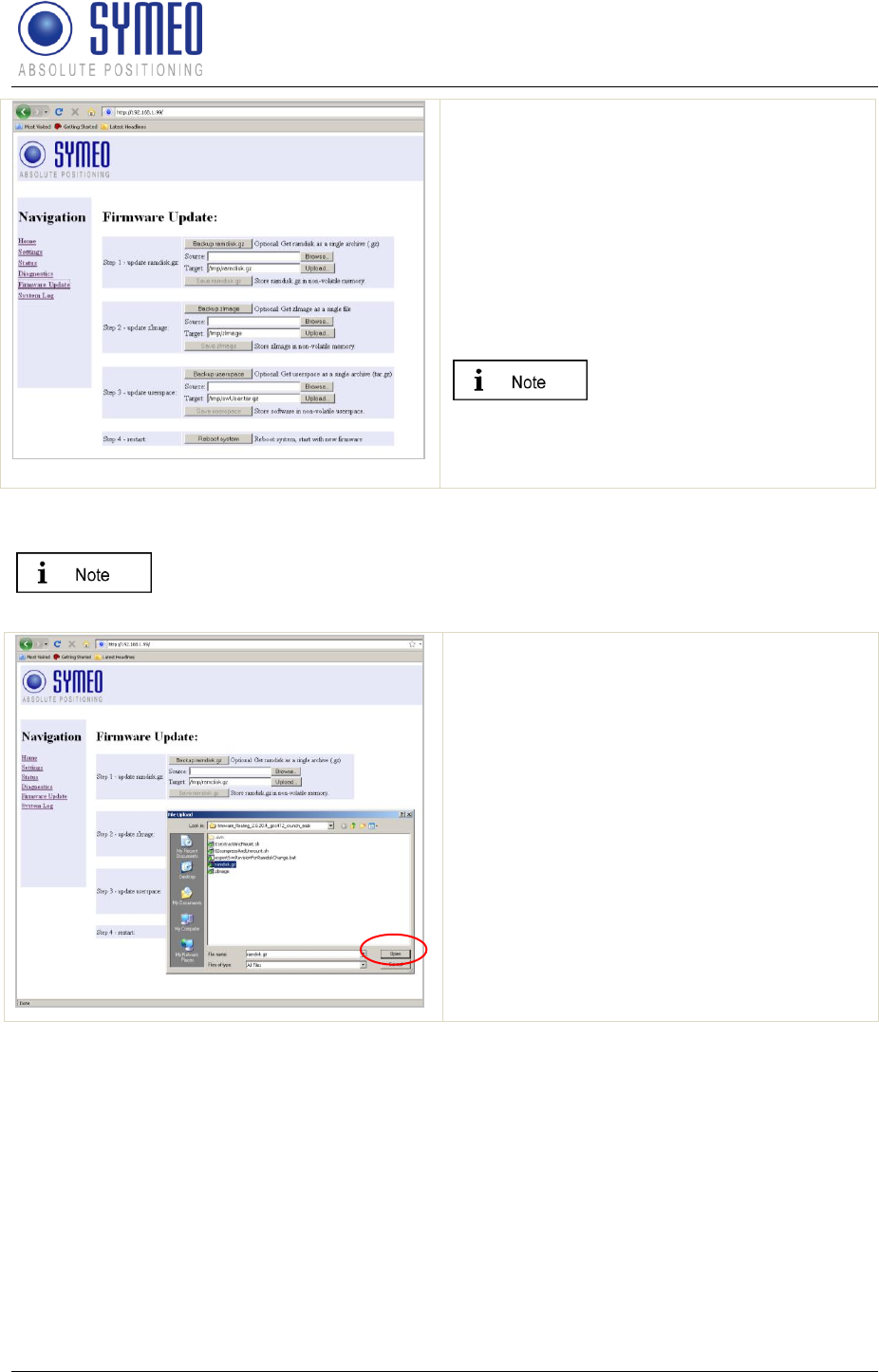
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 69 of 97
The page Firmware Update of the Web-
Servers of the LPR® unit is displayed.
A firmware update is performed in several
steps:
Step 1: File system
Step 2: Linux-Kernel
Step 3: Optional (2D Application)
Step 4: Restart
Step 3 is exclusively for an
update for 2D application.
Otherwise this part can be
skipped.
6.5.1 Step 1 – File system
It is possible to make a copy of the actual firmware by downloading the
firmware from the LPR® unit
Click the "Browse" button in the "Step 1
flash ramdisk.gz" area.
A file browser window will open.
Navigate to the file you want and click
"Open".
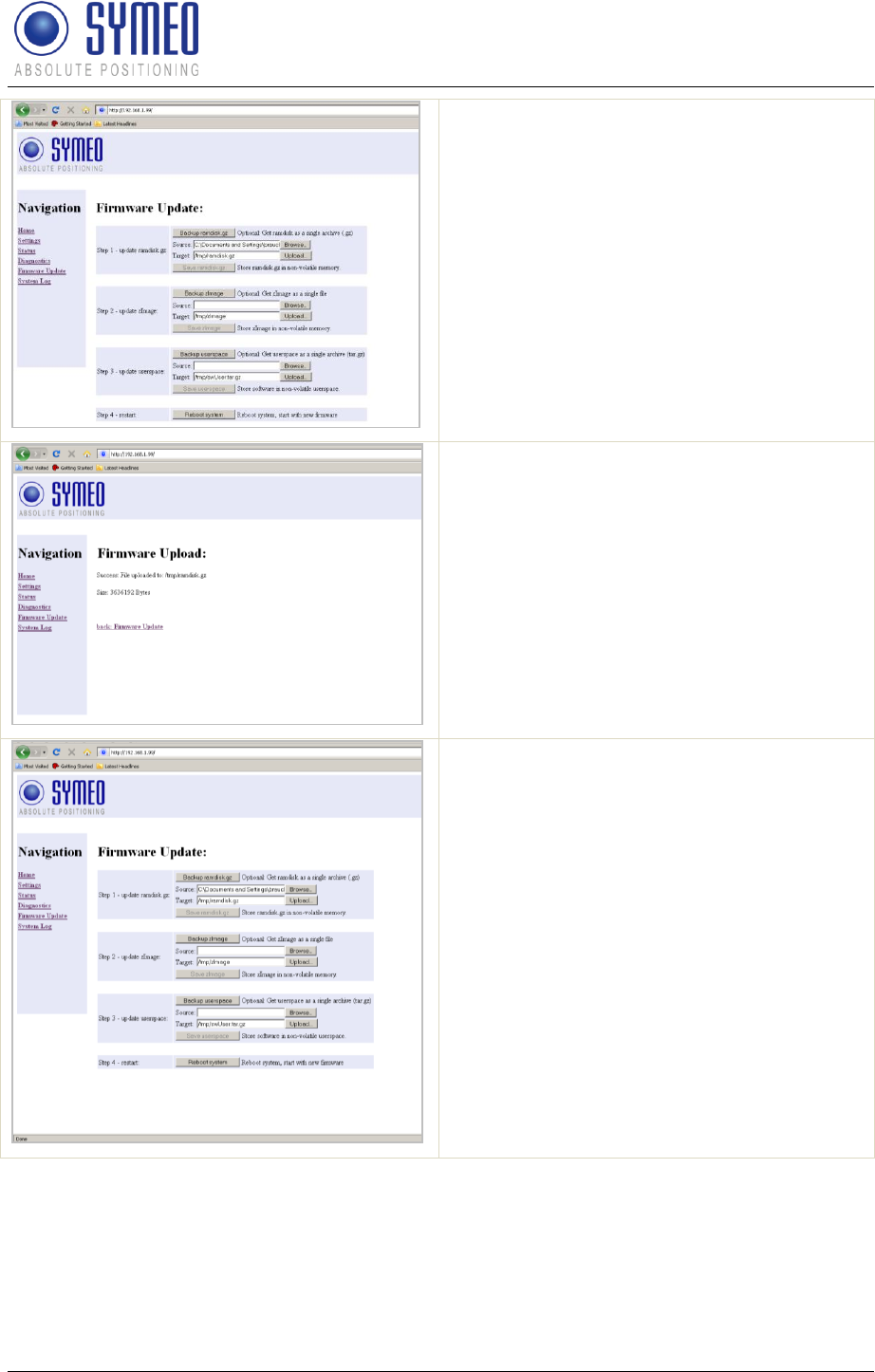
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 70 of 97
Click the "Upload" button in the "Step 1
flash ramdisk.gz" area.
The file has been transferred.
Click the "back: Firmware Update" link.
Click the "Execute" button in the "Step 1
flash ramdisk.gz" area to transfer the
file to the non-volatile memory.
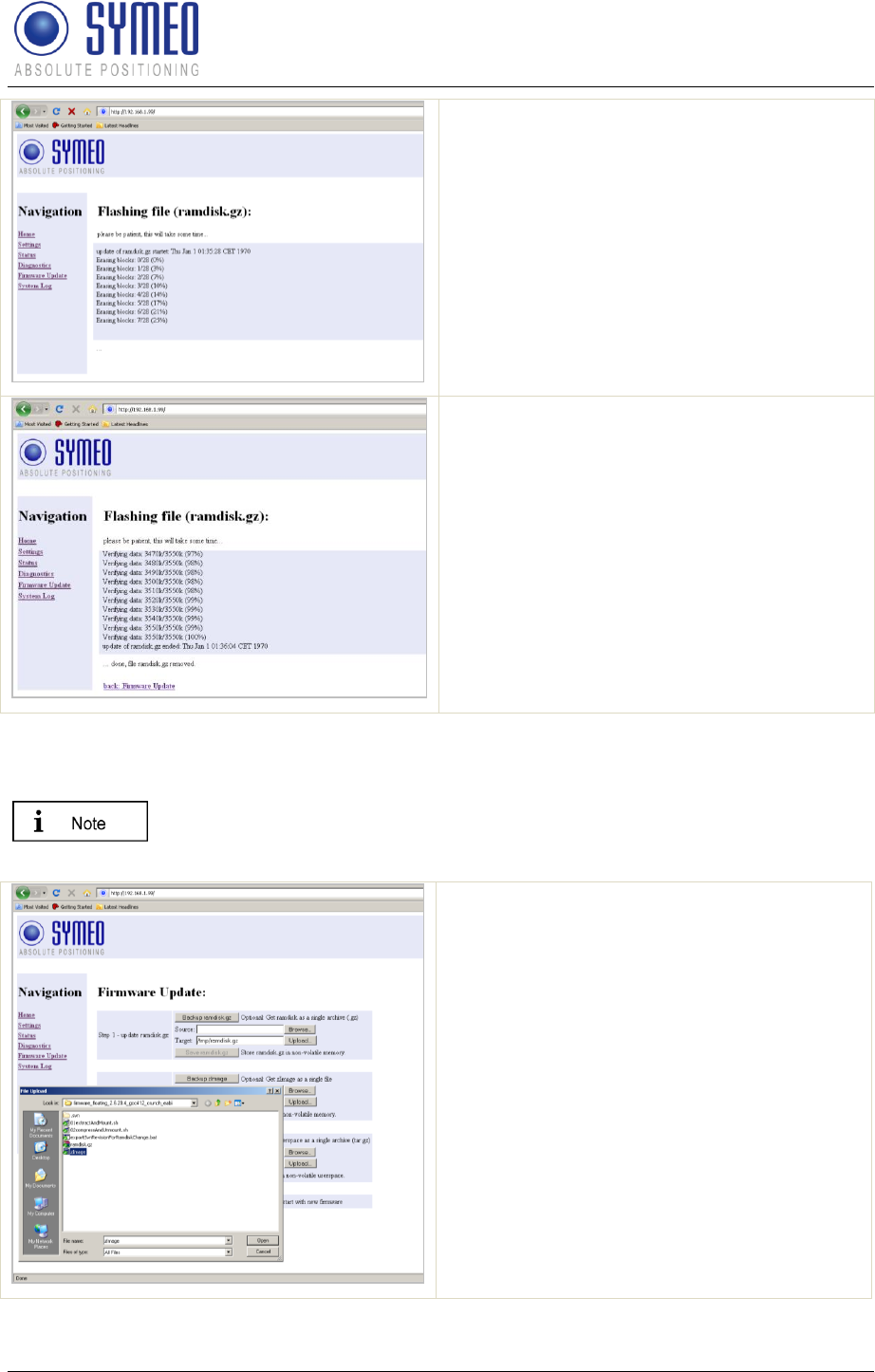
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 71 of 97
Transfer progress is displayed in a
message window.
You will know when this operation is
complete because a message: "... done,
file ramdisk.gz removed" will be output
and a link "back: Firmware Update" is
provided
Click the "back: Firmware Update" link.
6.5.2 Step 2 – Linux Kernel
It is possible to make a copy of the actual firmware by downloading the
firmware from the LPR® unit.
Click the "Browse" button in the "Step 2
flash zImage" area.
A file browser window will open.
Navigate to the file you want and click
"Open".
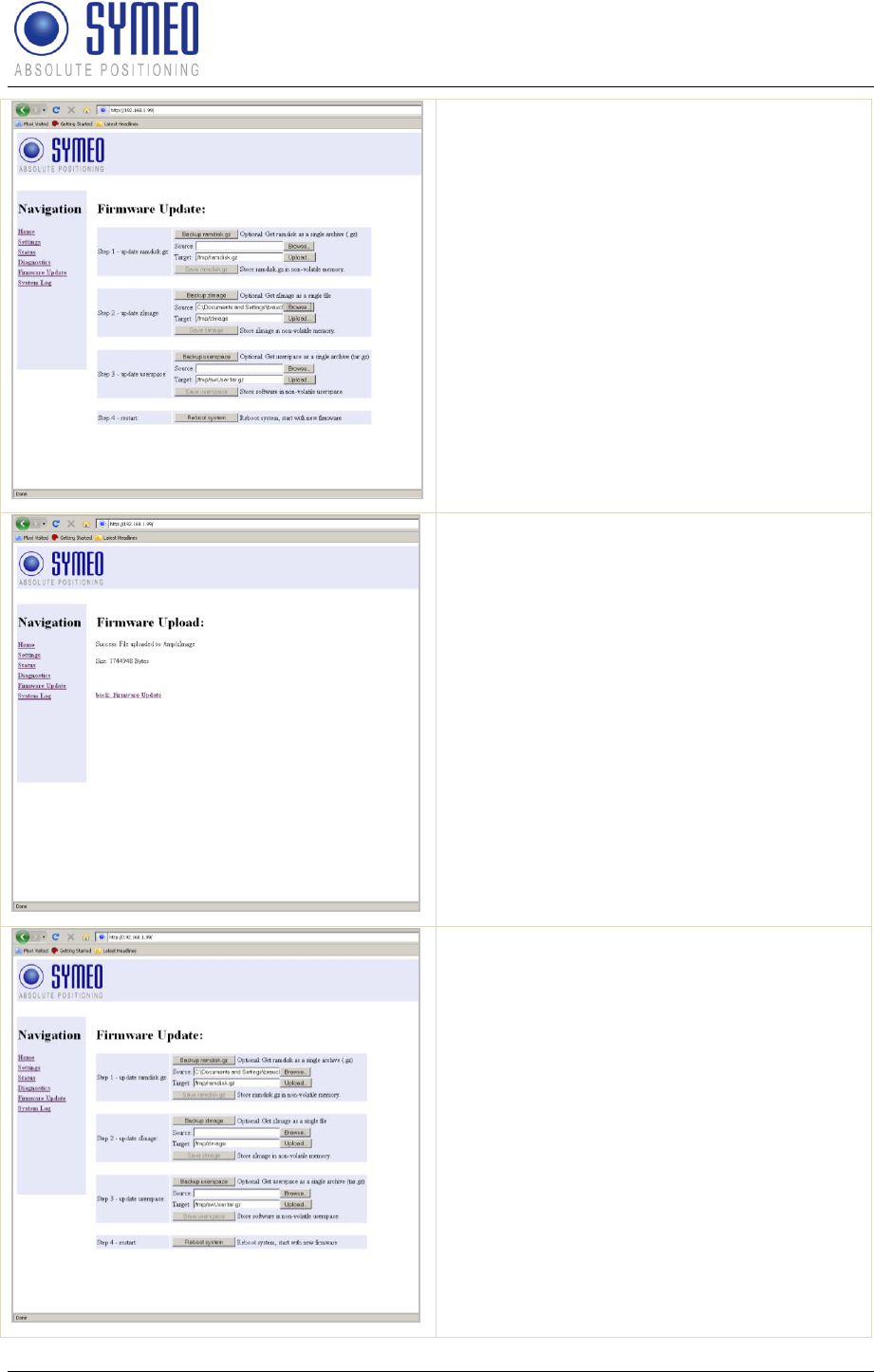
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 72 of 97
Click the "Upload" button in the "Step 2
flash zImage" area.
The file has been transferred.
Click the "back: Firmware Update" link.
Click the "Execute" button in the "Step 2
flash zImage" area to transfer the file
to the non-volatile memory.
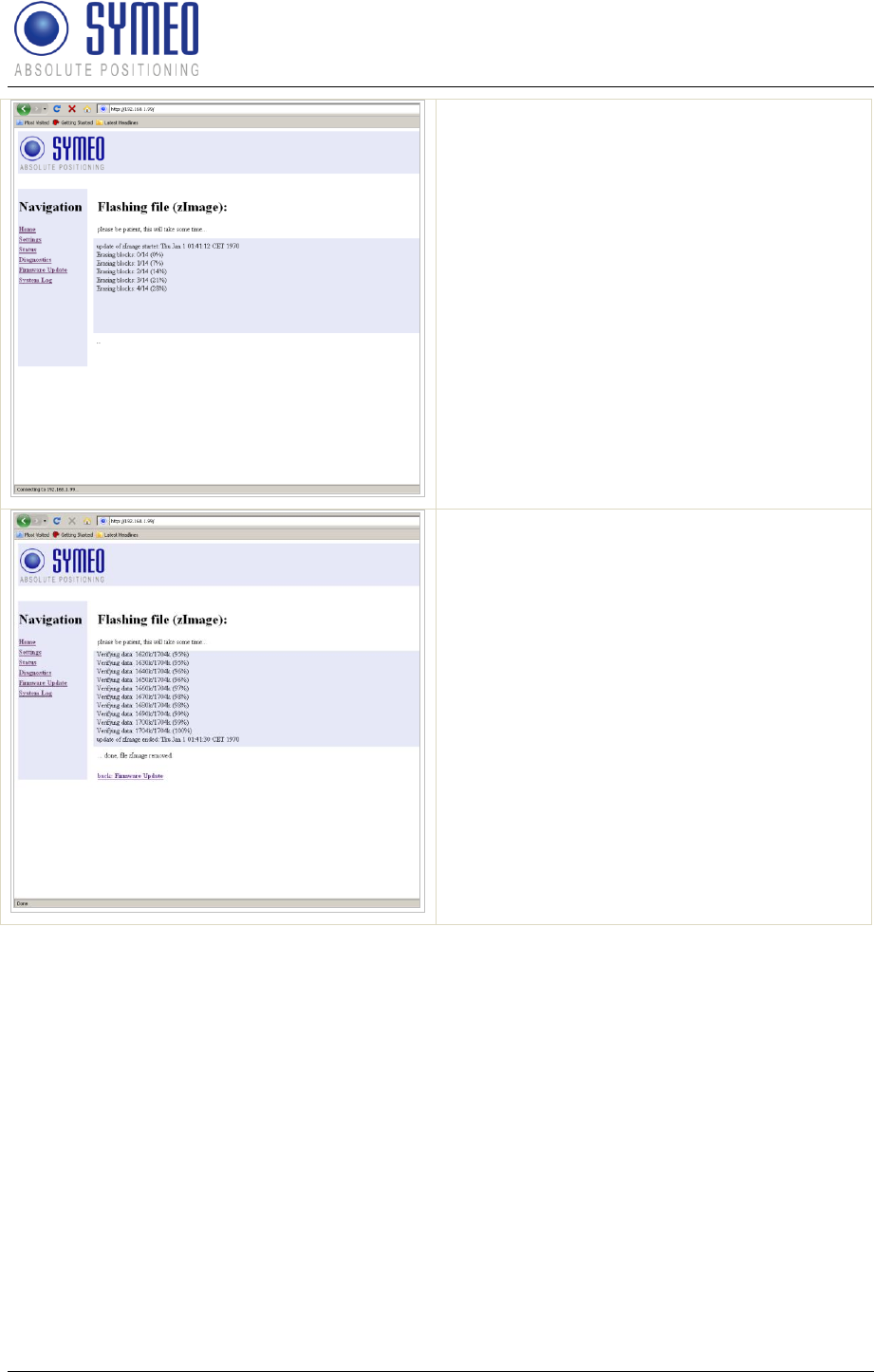
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 73 of 97
Transfer progress is displayed in a message
window.
You will know when this operation is
complete because a message: "... done, file
zImage removed" will be output and a link
"back: Firmware Update" is provided
Click the "back: Firmware Update" link.
6.5.3 Step 3 – Optional: Userspace
This step is exclusively for 2D-applications necessary and is executed the same way as
described before.
6.5.4 Step 4 – Restart
To complete the firmware update, you must restart the system.
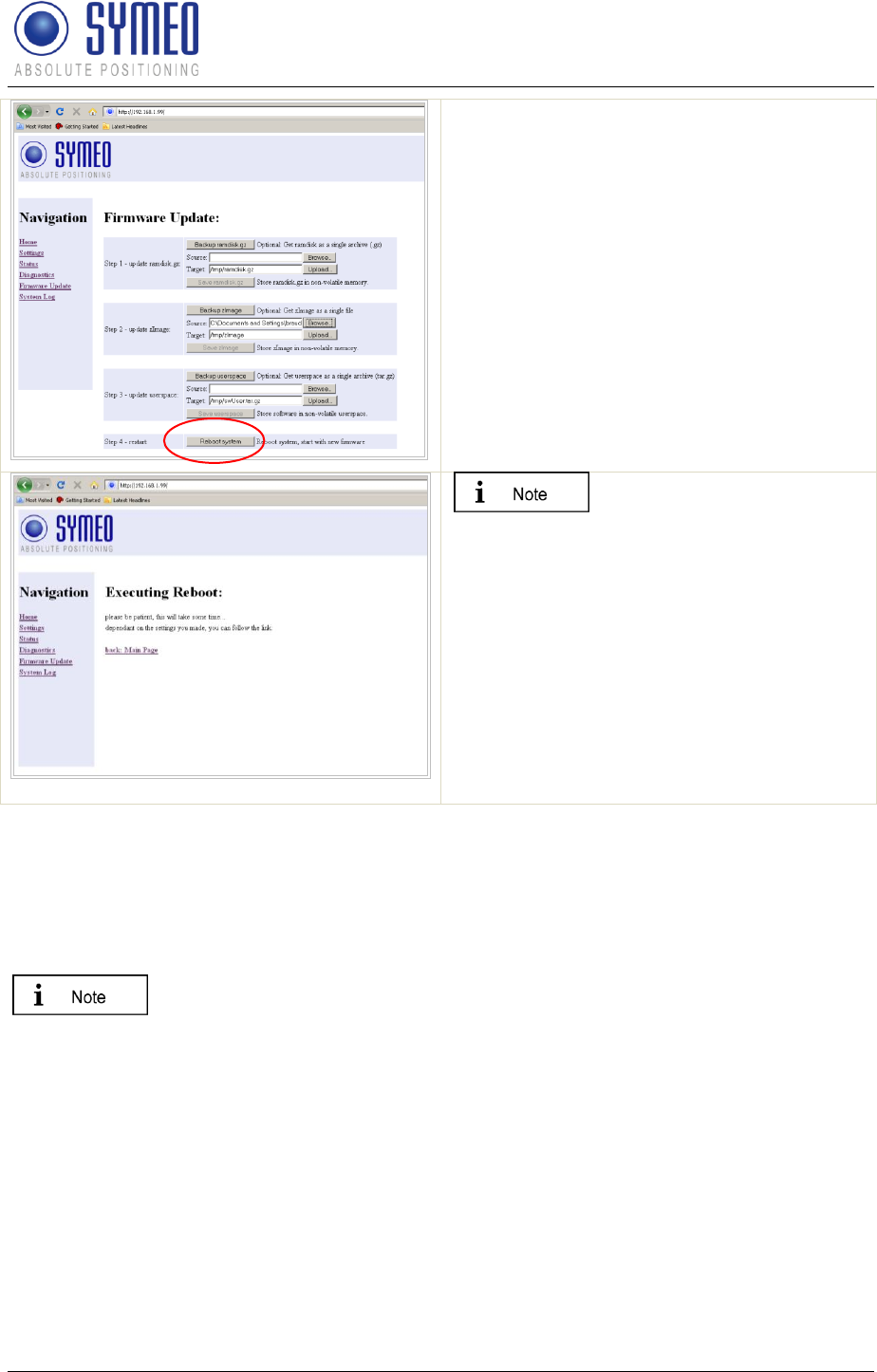
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 74 of 97
To do this, click the "Execute" button in
the "Step 3 Restart" button.
The system will be restarted.
If the new firmware
contains additional
configuration files the
settings you made are set
to factory settings. This
would be also applied for
the IP-address which is et
the tot he default value
192.168.1.99.
Symeo recommends restoring the factory
settings after a firmware update and reenter
the customer settings.
6.6 System Log
With this function, you can display the system messages (system log). The system
messages are written to a 200KB capacity memory. When the memory is full, the oldest
messages are overwritten. All messages are deleted upon restart.
The system messages can also be transmitted to a server on the network
at the same time, see the "Syslog" field in the "Network" area in section
"Settings".
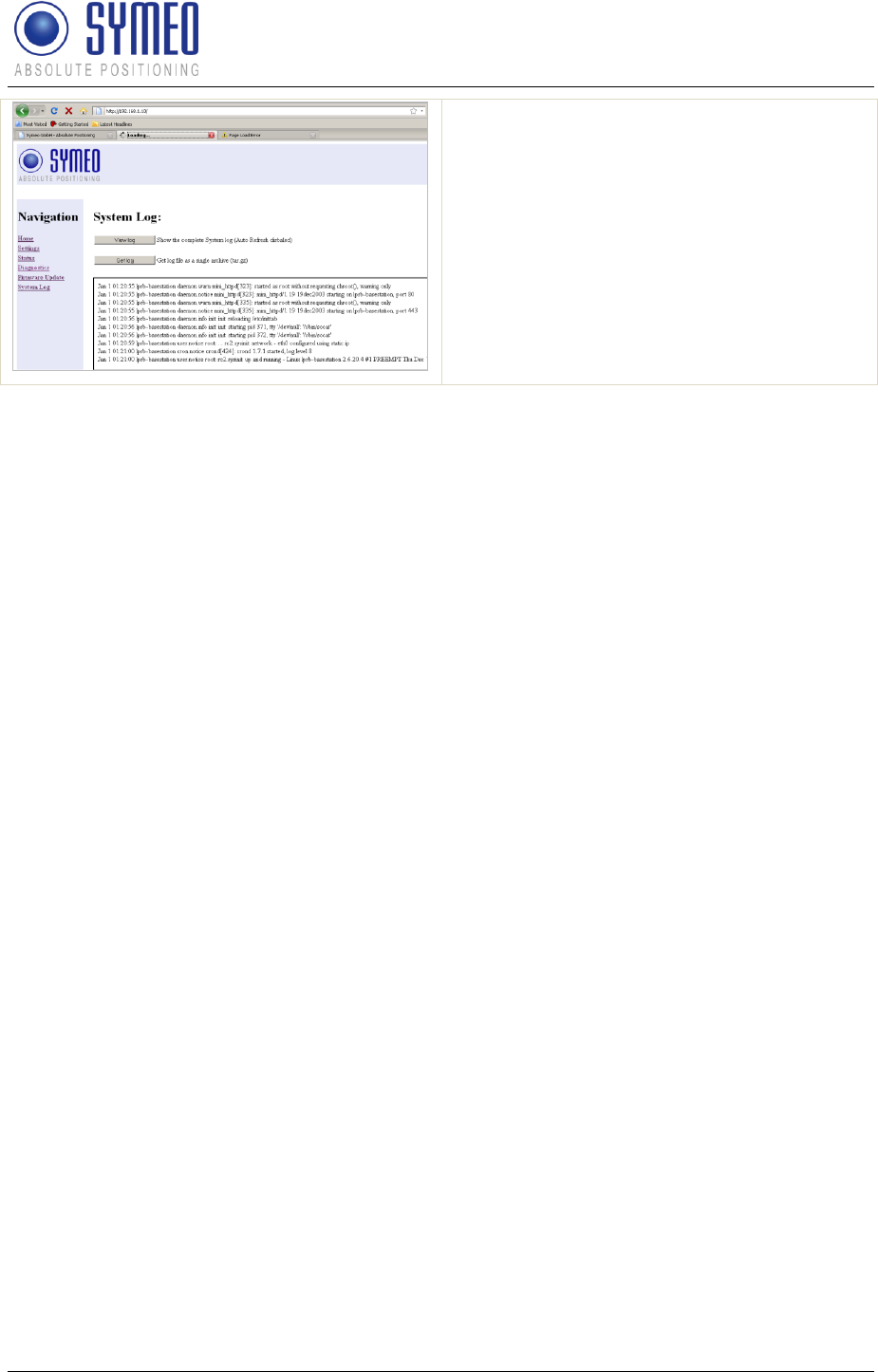
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Web Server
Copyright © Symeo GmbH 2012
Page 75 of 97
Click "System Log" in the navigation bar.
If you have not yet provided
authentication information, you will be
prompted to do so now (see chapter
6.1).
The last 10 system messages will be
displayed. The message window is updated
about once per second.

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 76 of 97
7 Protocol Description Binary XP (1D messages)
7.1 General Description
This protocol describes the interface between a LPR® 1D unit and the user. The binary
protocol XP protocol provides information in high density. Its structure ensures a simple
implementation. The transfer is done in single data frames.
The interface for the binary protocol XP can either be a serial (RS232) interface or a TCP/IP
or UDP interface. The baud rate of the serial interface must be set to 115200 baud.
7.1.1 Direction of Data
The interface can be applied bidirectional. However, certain data types are defined for one
direction. Furthermore it is only allowed to send data to a LPR® 1D unit after the LPR® 1D
unit has sent a send request (type 0x02). Table 1 shows an overview which data packets can
be applied in which direction.
Data Type
direction
from LPR® 1D
to LPR® 1D
0x00 Distance Data
+
0x01 User Data
+
+
0x02 Send Request
+
0x03 Relay Switching Command
+
Tab. 1: direction of data
Sending data to the LPR® 1D unit is only possible after receiving a send request (Type
0x02-to-LPR® 1D unit.
The LPR® 1D can only handle one data packet from one user.
If nevertheless data is sent to the LPR® 1D unit without a previous send request, it can result
in a reboot of the LPR® 1D unit.
Per one send request the user can send only one data set to the LPR® 1D unit.
7.1.2 Structure of Data Packet
To apply the protocol on a RS232 interface each data packet starts and ends with a reserved
symbol. This reserved symbol cannot appear in the data stream.
Figure 58 shows the general structure of the data packet.
TYPE DATA
START
0x7e
1 byte 1 byte 1 byte
CRC
2 byte
END
0x7f
Figure 58: Structure of data packet
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 77 of 97
The START and the STOP-field is in each data packet the reserved symbol 0x7e and 0x7f.
TYPE indicates the type of the data packet. There can be defined up to 256 different types.
The TYPE-field is following the DATA-field. The DATA field contains the real data of the
packet of the type TYPE. The CRC-field contains a check sum. The check sum is applied to
all previous data fields except the START data field.
All multi byte integers (e.g. CRC field) are encoded in Network-Byte-Order (Big Endian). All
signed integers are encoded in two's complement representation.
7.1.3 Byte Stuffing
The two symbols 0x7E and 0x7F are unique for START and STOP-fields. If those symbols
occurs within any other field (TYPE, DATA or CRC), they must be replaced by the following
order:
original symbol
replaced by
0x7D
0x7D 0x5D
0x7E
0x7D 0x5E
0x7F
0x7D 0x5F
This byte stuffing scheme ensures that the receiver of the protocol can identify definitely the
START-field within a flow of data, even if the symbol of the start field occurs within the
DATA-field.
Example: If the symbol 0x7d is read, it must be cancelled. The following symbol must be
XOR combined with 0x20 to recreate the original symbol.
Remark: Byte stuffing is deactivated for the fixed frame protocol (compare chapter 7.3).
7.1.4 CRC
The CRC-16-IBM with polynomial x16+x15+x2+1 is used for the checksum CRC. The CRC is
calculated over all data fields (TYPE and DATA), but not for the START and END field.
The CRC-calculation is only applied to the original symbols. The appropriate calculation for
coding must applied before byte stuffing. If receiving the data from the LPR® 1D system the
byte stuffing must be reserved to get the original symbol. Then the CRC is updated with the
original symbol.

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 78 of 97
7.2 Data Types
The second byte in each data packet specifies the data type.
7.2.1 Type 0x00 – Distance Data
Direction: LPR® 1D
Content
Length
Data type
Value
START
1
unsigned integer
0x7E
TYPE
1
unsigned integer
0x00
Source1 (LPR® address)
2
see chapter 7.4.1
0x####
Destination1 (LPR® address)
2
see chapter 7.4.1
0x####
Antenna number2
1
unsigned integer
0x##
Distance [mm]
4
signed integer
0x#### ####
Velocity [mm/s]
4
signed integer
0x#### ####
Level [dB]
1
signed integer
0x##
Distance Error
1
see chapter 7.4.2
0x##
Status3
1
unsigned integer
0x00
CRC
2
unsigned integer
0x####
END
1
unsigned integer
0x7F
Total length without byte stuffing: 21 byte
1) Any measurement is always executed by a LPR® 1D Slave Unit, this means, the Slave Unit
measures its distance etc. towards a Group Master Unit. The source field always contains the address
of the LPR® 1D Slave Unit. The destination field contains the address of the measured Group Master
Unit. Even if the data set is transferred further on to another unit (e.g. another Group Master Unit), the
value of the source and destination field is maintained.
2) The field antenna contains the antenna number of the Slave Unit as well as the antenna number of
the measured Group Master Unit. The 4 lower bits represent the antenna number of the Slave Unit
Group Master Unit
3) reserved for future application. Currently set to 0.
Example of Distance Data
7E 02 C1 81 7F
7E 00 10 03 08 02 11 00 00 10 62 00 00 00 7A E6 00 00 AF C4 7F
Figure 59 - Protocol for a single 1D measurement: request data and following distance data
This protocol shows a simple example for 1D measurement. A distance data set (or also 2
distance data sets) alternate with a send request. The Send Request indicates that the LPR®
unit is listening to a data set from the user (for example relays external commands). The
Distance Data sends the data to the user (i.e. to a PLC or to a PC/software).

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 79 of 97
Send request:
7E 02 C1 81 7F
7E hex START byte
02 hex TYPE (02; Send Request)
C1 81 hex CRC
7F hex END byte
Distance data:
7E 00 10 03 08 02 11 00 00 10 62 00 00 00 7A E6 00 00 AF C4 7F
7E hex START byte
00 hex TYPE (00: Distance Data)
10 03 hex = 00010|0000000001|1 bin Source LPR® 1D address: SID: 2; GID: 1; BBt: 1 (Slave
Unit)
08 02 hex = 00001|0000000001|0 bin Destination LPR® 1D address: SID: 1; GID: 1; BBt: 0
(Group Master Unit)
11 hex = 0001|0001 bin Antenna port Slave Unit: 1 antenna port Group
Master Unit: 1
00 00 10 62 hex = 4194 dec Distance: 4194 mm
00 00 00 7A hex = 122 dec Velocity: 122 mm/s
E6 hex = 230 dec Level: 230 – 256 = -26 dB
00 hex Error status: 0 means no error; unequal 0 means
error (see chapter 7.4.2)
00 hex Status
AF C4 hex CRC
7F hex END byte
7.2.2 Type 0x01 – User Data
User Data can be integrated at a LPR® 1D unit via the serial interface and then transmitted to
another LPR® 1D unit via the frequency channel. There the user data can be readout.
Direction: LPR® 1D
Content
Length
Data type
Value
START
1
unsigned integer
0x7E
TYPE
1
unsigned integer
0x01
Source (LPR® 1D address)
2
see chapter 7.4.1
0x####
User Data
8
depends on
application
0x#### #### ####
####
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 80 of 97
CRC
2
unsigned integer
0x####
END
1
unsigned integer
0x7F
Total length without byte stuffing: 15 byte
7.2.3 Type 0x02 – Send Request
Direction: LPR® 1D
Content
Length
Data type
Value
START
1
unsigned integer
0x7E
TYPE
1
unsigned integer
0x02
CRC
2
unsigned integer
0xC181
END
1
unsigned integer
0x7F
Total length without byte stuffing: 5 byte
This packet is sent from the LPR® 1D unit continuously. It informs the user that the LPR® 1D
unit is able to receive data from the user. The user may only send one single data frame after
receiving a send request.
7.2.4 Type 0x03 – Relays Switching Command
LPR® 1D
Content
Length
Data type
Value
START
1
unsigned integer
0x7E
TYPE
1
unsigned integer
0x03
Destination (LPR® 1D address)
2
see chapter 7.4.1
0x####
Relay Selection (Bitmask)
(bit 1..7 relay 1..7)
1
unsigned integer
0x##
Relay Switch (Bitmask)
1
unsigned integer
0x##
CRC
2
unsigned integer
0x####
END
1
unsigned integer
0x7F
Total length without byte stuffing: 9 byte
With the relay selection (bitmask) relays are selected which can be controlled. The relays that are
chosen within the Relay Selection bitmask will be switched according to the Relay Switch bitmask
Example: A Relay Selection value = 0x14hex = 00010100bin and a Relay Switch value = 0xFFhex =
11111111bin will switch relays 2 and 4 ON - the state of the other relays remains unchanged.
No acknowledgment of the relay switch command will be sent because this data frame can be
forwarded to other LPR® 1D units and thus no reception on the destination unit is guaranteed. In case
of faulty data frame (e.g. invalid relays chosen or unknown destination address) the LPR® 1D unit will
print an error message.

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 81 of 97
7.3 TCP/IP option: Fixed Frame Protocol
If the LPR® unit has a TCP/IP interface two options are available for the protocol. Either you
use the protocol as it is sent from the serial interface (with different data type lengths, byte
stuffing) or you use a fixed frame protocol.
In the first case the data symbols 0x7e und 0x7f (which are reserved for the START and
END field) are replaced (see chapter 7.1.3). Byte stuffing causes a different protocol length.
For the fixed frame protocol each LPR® data packet is filled up with zero bytes to a fixed
length of bytes (i.e. 87 bytes) before the data packet is sent. Byte stuffing does not occur.
The START and the END byte are still used but not clear anymore due to not applying byte
stuffing. The fixed length of the data packets can be set on the web-interface of the LPR®
unit.
For the fixed frame protocol the data packets which are sent to a LPR® unit has to be filled up
to a fixed length (i.e. 15 bytes). The START- and the END byte have to be occurred as well
and byte stuffing does not occur anymore. It is recommended to fill up the data packet with
zero bytes to facilitate a troubleshooting.
If TCP/IP is used the transmitted data have already a checksum. Therefore the checksum in
the protocol is not as important as for the serial interface. Two options for the fixed frame are
allowed by the protocol inverter for receiving data in a fixed frame. Either 0x0000 is sent as
the check sum to the LPR® unit. Then the protocol inverter is calculating the check sum itself.
Or another value (differing to 0x0000) is sent as the check sum. Then this check sum is
assumed to be the correct check sum. Otherwise the data packet is rejected.
7.3.1 Detailed description TCP Fixed-Frame Protocol
If a TCP fixed-frame protocol is used, a working TCP connection between the PC and the
LPR® unit has to be guaranteed. Depending on the configuration of the LPR® protocol
inverter either the connection to a port on the LPR® unit has to be initialized from the PC or
the LPR® unit is establishing a connection to a PC.
If the connection is established, the PC has to read the data from the LPR® unit in fixed data
length (i.e. 87 bytes). The first byte is always the START-byte and the second byte is always
the TYPE-byte. The relevance of the following data is depending on the data type. Because
no byte stuffing occurs the content for a special data type is always constant. For example
the measured velocity of the distance data (type 0x00) is always written in the 12.-15 data
byte.
Sending data from the PC to LPR® unit, a fixed data length has to be chosen (i.e. 15 byte).
The first byte (START byte: 0x7e) follow the TYPE-byte. The following data depends on the
chosen type, following by the CRC (correct CRC or 0x0000), following by the STOP byte
(0x7f). The data packed has to be filled up with zeros.
7.3.2 Detailed description UDP Fixed-Frame Protocol
If a UDP fixed frame protocol is used, the IP and the UDP port of the PC has to be
configured in the LPR® protocol inverter. The converter sends each data packet as a UDP
packet of a fixed length (87 byte) to the PC. Compared to the TCP fixed frame option the
UDP fixed frame does not verify if the data packed arrived.
The content is the same as for the TCP fixed frame protocol.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description Binary XP (1D messages)
Copyright © Symeo GmbH 2012
Page 82 of 97
If data is sent to the LPR® unit the data has to be packed in a fixed data length (i.e. 15 bytes
as for TCP fixed frame option). This data packet is sent as UDP packet to the LPR® unit. The
port number of the receiver is the same as for the PC.
In general bidirectional data communication is not recommended for UDP due to loosing
singular data packets.
7.4 Remarks
7.4.1 LPR® 1D Address
LPR® 1D unit addresses are completely defined by a 16 bit value:
15 11 10 1 0
group ID BBstation ID
BB Slave Unit Bit:
Indicates, if the LPR® 1D unit is defined as a Slave Unit or
as a Group Master Unit (1=Slave Unit, 0=Group Master Unit)
group ID:
group ID of the unit (1..1022)
station ID:
station ID of the unit (0..30)
In multi cell applications, group ID is the cell ID of the cell.
7.4.2 Distance Error codes
The distance data contains an error field which indicates the status of the distance
measurement. The following errors can occur:
Value
Content
Source
Description
0x00
no error
Measurement valid
0x01
no peak detected
Slave Unit
No measurement signal
0x02
peak too low
Slave Unit
Measurement signal is imprecise
0x03
nothing received
Group Master Unit
No measurement data received
0x04
implausible speed
Slave Unit
Velocity is to high
0x05
measurement botched
Slave Unit
Measurement is not feasible.
0x06
no occupying received
Group Master Unit
Measurement channel is not
reserved
0x07
no results received
Group Master Unit
No measurement data received
0x08
trigger
Group Master Unit
Unit did not attend the
measurement
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description for PROFIBUS Interface
Copyright © Symeo GmbH 2012
Page 83 of 97
8 Protocol Description for PROFIBUS Interface
8.1 Profibus data structure
The total length of one data set is 48 bytes. The first 24 bytes presents the data for the slave
unit 1 with station ID 2, the second 24 bytes presents the data for the slave unit 2 with station
ID 3.
Content
Length
Value
Content
Station ID
Distance [mm]
4
0x#### ####
signed integer
2
Velocity [mm/s] 3)
4
0x#### ####
signed integer
2
Level [dB]
1
0x##
signed integer
2
Error (siehe Kapitel 8.2)
1
0x##
unsigned integer
2
Status
1
0x00
unsigned integer
2
not used
1
0x##
unsigned integer
2
Update counter distance1)
2
0x####
unsigned integer
2
Update counter user data2)
2
0x####
unsigned integer
2
User data
8
2
Distance [mm]
4
0x#### ####
signed integer
3
Velocity [mm/s] 3)
4
0x#### ####
signed integer
3
Level [dB]
1
0x##
signed integer
3
Error (siehe Kapitel 8.2)
1
0x##
unsigned integer
3
Status
1
0x00
unsigned integer
3
not used
1
0x##
unsigned integer
3
Update counter distance1)
2
0x####
unsigned integer
3
Update counter user data2)
2
0x####
unsigned integer
3
User data
8
3
1) This counter is incremented when the Profibus-interface receives new data from the LPR®-
1D unit. In error-free operation this value is not steady.
2) This counter is incremented when the Profibus-interface receives new user data from the
LPR®-1D unit.
3) The values for velocity are raw data. Velocity data are not smoothed and should only be
used with following filtering.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Protocol Description for PROFIBUS Interface
Copyright © Symeo GmbH 2011
Page 84 of 97
8.2 Error messages
The data packet contains an error field which indicates the status of the message. Following
errors can occur:
Content
Source
Description
Value
no error
Measurement valid
0x00
no peak detected
Slave unit
No Measurement signal
0x01
peak too low
Slave unit
Measurement signal is imprecise
0x02
implausible speed
Slave unit
Velocity is to high
0x04
measurement botched
Slave unit
Measurement is not feasible
0x05
no valid data
Profibus-Interface
Profibus-Interface receives no data
from LPR-1DHP unit
0xff

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 85 of 97
9 Trouble Shooting
This chapter will assist you for troubleshooting. For debugging circumstances it might be
helpful to install a terminal program to analyze the system.
9.1 Programs
9.1.1 Terminal Program
A terminal program is useful for analyzing the system. The recommended terminal program
is RealTerm. It is Open Source Software and can be downloaded from the webpage
http://sourceforge.net/projects/realterm. Install the program on your PC.
9.1.2 Command Window (only for LPR unit with TCP/IP interface)
The easiest way to check a connection between a LPR unit with TCP/IP interface and your
PC/network is the command window. The command window is preinstalled in the operating
system Windows. Click on the window button Start Enter cmd and click on OK.
9.1.3 Telnet (only for LPR unit with TCP/IP interface)
A short way to check the functionality of the LPR unit with TCP/IP interface is Telnet. Telnet
is preinstalled in the operating system Windows. Click on the window button Start
Enter telnet IP-address Port and click on OK. E.g. enter telnet 192.168.1.99 3045
to open the service port of the LPR unit with IP-address 192.168.1.99 and the port 3045.
9.1.4 Browser (only for LPR unit with TCP/IP interface)
A web browser is necessary to make all settings of the LPR unit with TCP/IP interface. You
can make network settings as well as settings for the protocol.
9.1.5 Network Scanner (only for LPR unit with TCP/IP interface)
A network scanner like the program SoftPerfect
(http://www.softperfect.com/products/networkscanner/) is useful for analyzing your network.
9.2 Hardware
The following additional hardware is useful:
Serial Cable (1:1) less than 2 meters (for a LPR unit without TCP/IP interface )
LAN-cable (for a LPR unit with TCP/IP interface)
USB -RS232 converter (if there is no RS232 serial port available at your computer)
9.3 Connection to LPR units with RS232 or Profibus interface
If you have a station without TCP/IP interface connect your PC via the RS232 interface to the
LPR 1D unit. For this connection you need a RS232 cable (1:1) which should be less than 2
meters long. A longer cable cannot guarantee a trouble-free transmission of data between
the LPR unit and the PC.
For configuration of the LPR-1D unit the service port (C4) or (C5) is provided (RS232).
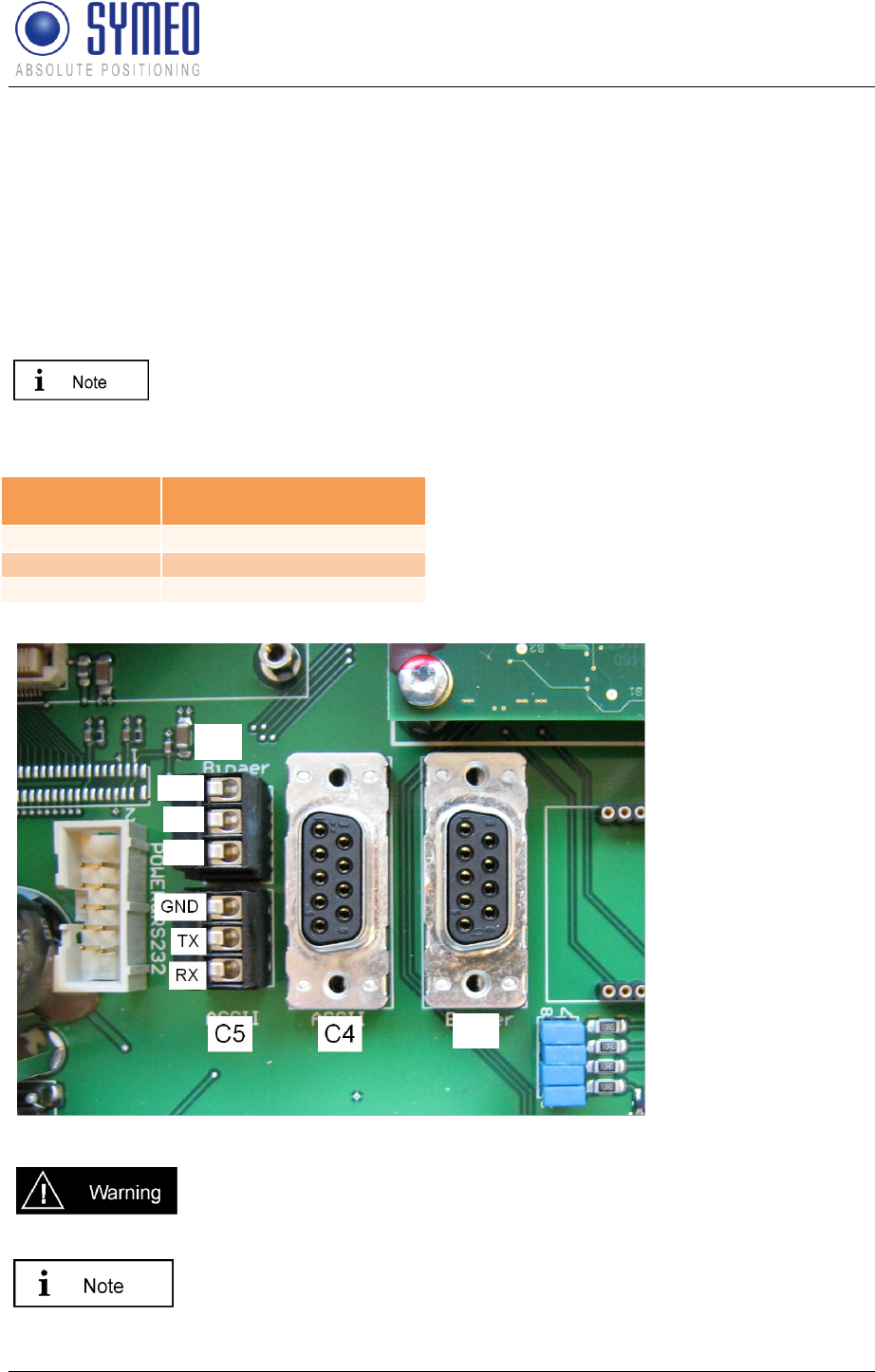
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 86 of 97
For connecting to the D-sub socket (C4) please use a standard RS232 cable (1:1) with a
maximum length of 2 meters.
Optional the RS232 connection can be established via the terminal block (C5). The pin
assignment is shown in Figure 60.
The configuration of the LPR-1D unit is described in chapter 5 Commissioning.
The data port with binary protocol output for units without TCP/IP interface is available on D-
sub socket (C8) please use a standard RS232 cable (1:1) with a maximum length of 2
meters or optional the RS232 connection can be established via the terminal block (C7). The
pin assignment is shown in Figure 60.
If you want to use a longer serial cable for the data port you have to reduce
the baud rate of the LPR unit, as described in chapter 5.
Typical values for the data rate for different length of the serial cables are:
Max. baud
rate
Max. Length of RS232
cable
19.200
15 m
57.600
5 m
115.200
<2 m
Figure 60 Internal serial service port C4/C5 and data port C8/C7 (RS232)
Using the internal serial interface it is important to avoid moisture, dust
or any particles into the housing during the process.
If you use a USB-RS232 converter make sure that all necessary drivers
are installed for this hardware.
C8
C7
RX
TX
GND
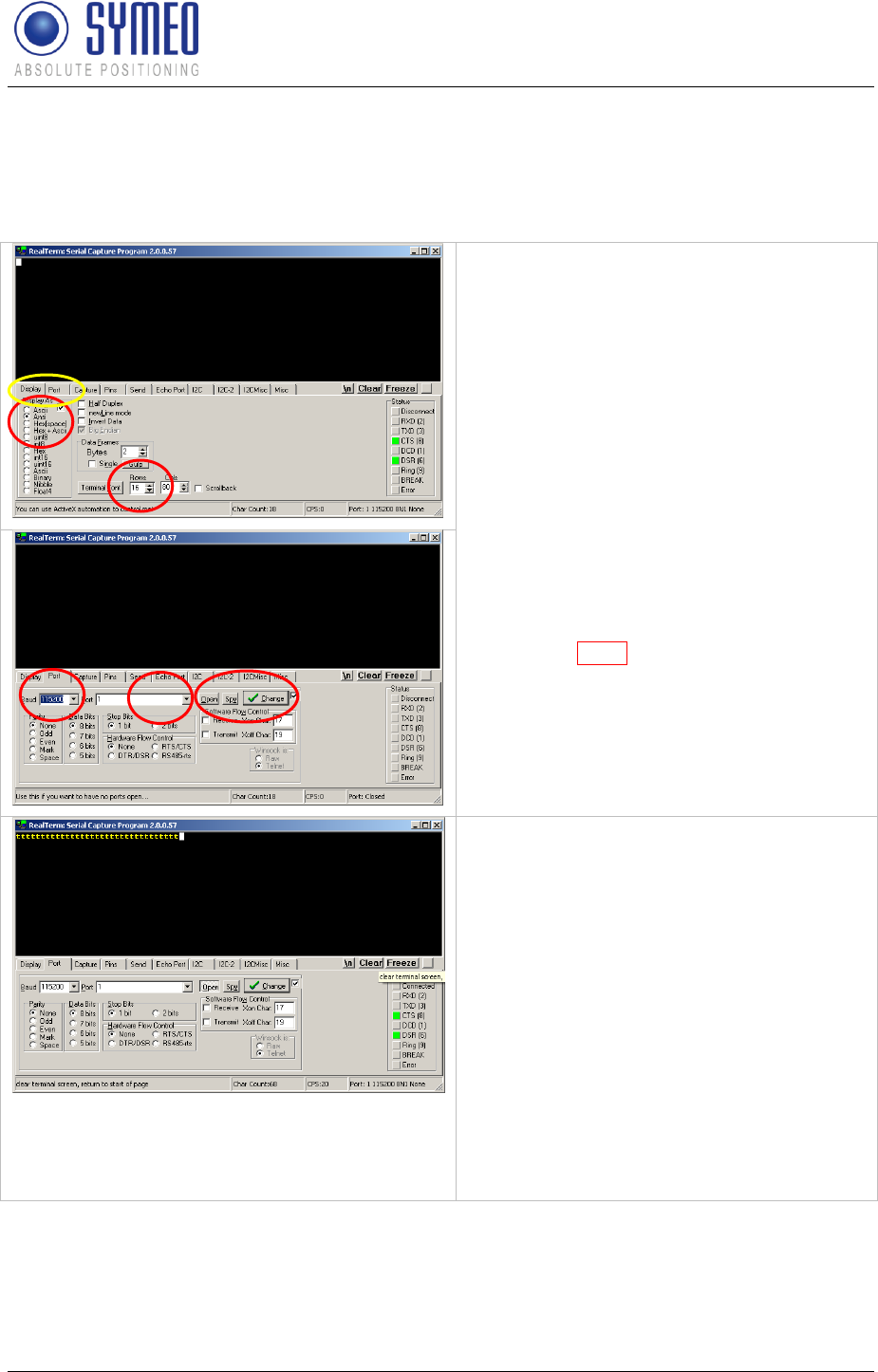
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 87 of 97
9.3.1 RealTerm (for service port)
With a terminal program like RealTerm you can perform more detailed analyzing of the
system. Restart the LPR-1D unit before using a terminal program (power off-on)
Open now the program RealTerm.
In two tabs you have to change the settings:
Tab Display:
- Choose Display As Ansi
- Extend the Rows from 16 to 30
Tab Port:
- Change the Baud to 115.200
- Choose the right COM port
- Click On Open
Depending if you are connected to a Group
Master unit or a Slave unit characters appear in
the window.
If you are connected to a Group Master unit a
in case of a failure.
This happens because the Group Master unit
tries to make a measurement, but output a
failure because the opposite station is not
available or
measurement. A working system should output
measurement.
If you are connected to a Slave unit
characters are shown for a working system. In
case of a failure nothing is shown when
connected to a Slave unit.
9.4 Connection to the LPR unit with TCP/IP interface
If you have a station with TCP/IP interface you only can connect your PC via the TCP/IP
interface to the LPR unit. For the connection you need an Ethernet cable.
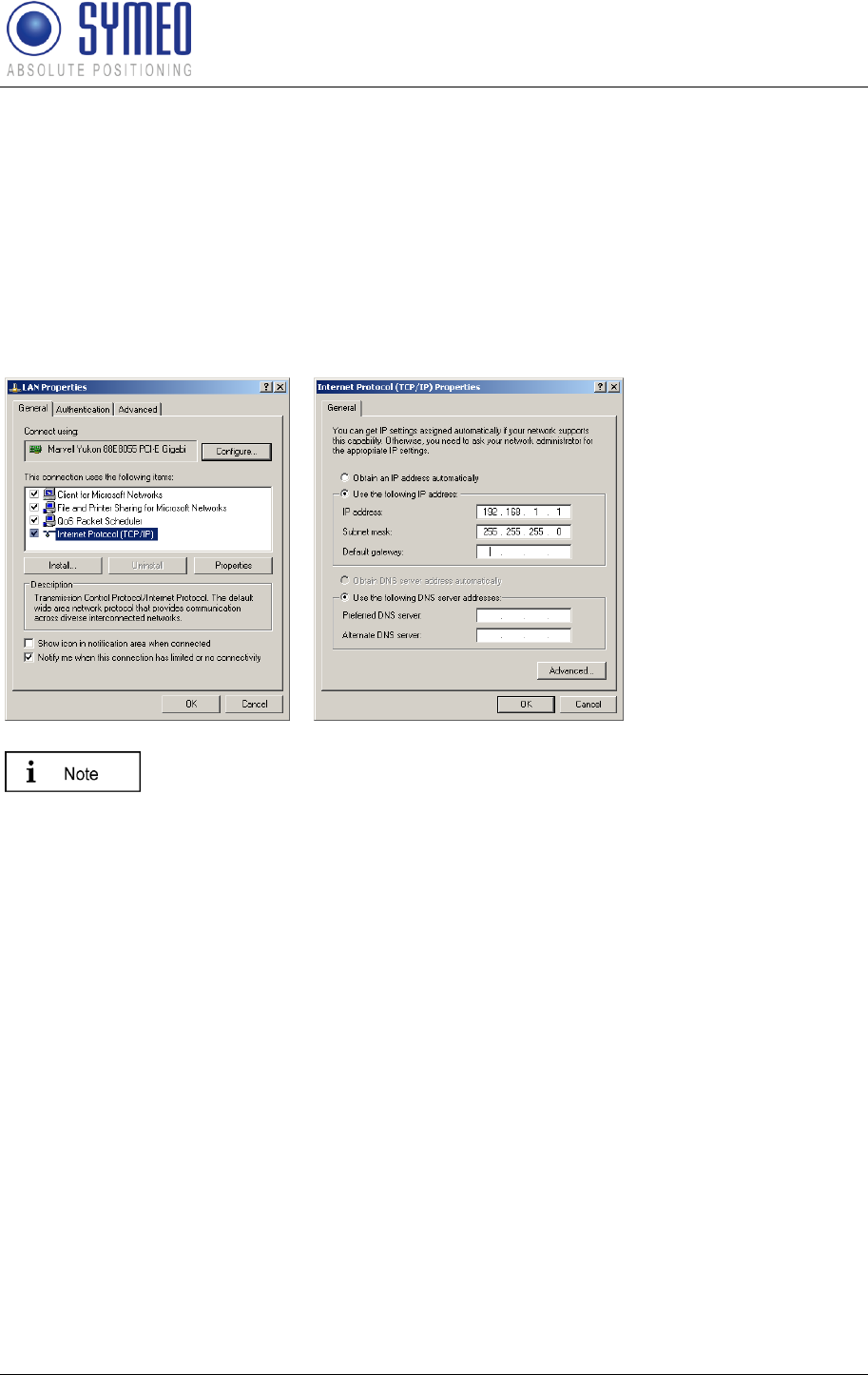
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 88 of 97
The IP-address is set to the fixed IP address 192.168.1.99 when delivering the system to the
customer.
To get access to the station you need to set your PC in the network as the LPR unit.
9.4.1 LAN Settings of your PC
First you need to disconnect your PC from your network to avoid trouble when changing the
IP address of your computer. Now you connect the LPR unit via an Ethernet cable with your
PC. If you are not in the same net as the LPR unit you have to change temporary the
network settings of your PC. Both IP-addresses must be in the same network, i.e. the first
three fields of the IP-address must match.
Open your network
connection and set a
fixed IP address to
your computer, i.e.
192.168.1.1. The
subnet mask should be
set to 255.255.255.0.
Click in both windows
OK.
If your firewall is enabled and set to restrictive, it might happen that you
cannot access the LPR unit. In this case disable the firewall settings
temporary in the tab Advanced in the window Network properties.
9.4.2 Check TCP/IP connection
The first way to check the IP-connection from your computer to the LPR unit
LPR unit. Open the command window (Window button Start Run Enter cmd and click
on OK).
Enter in the window 192.168.1.99 –t and click Enter.
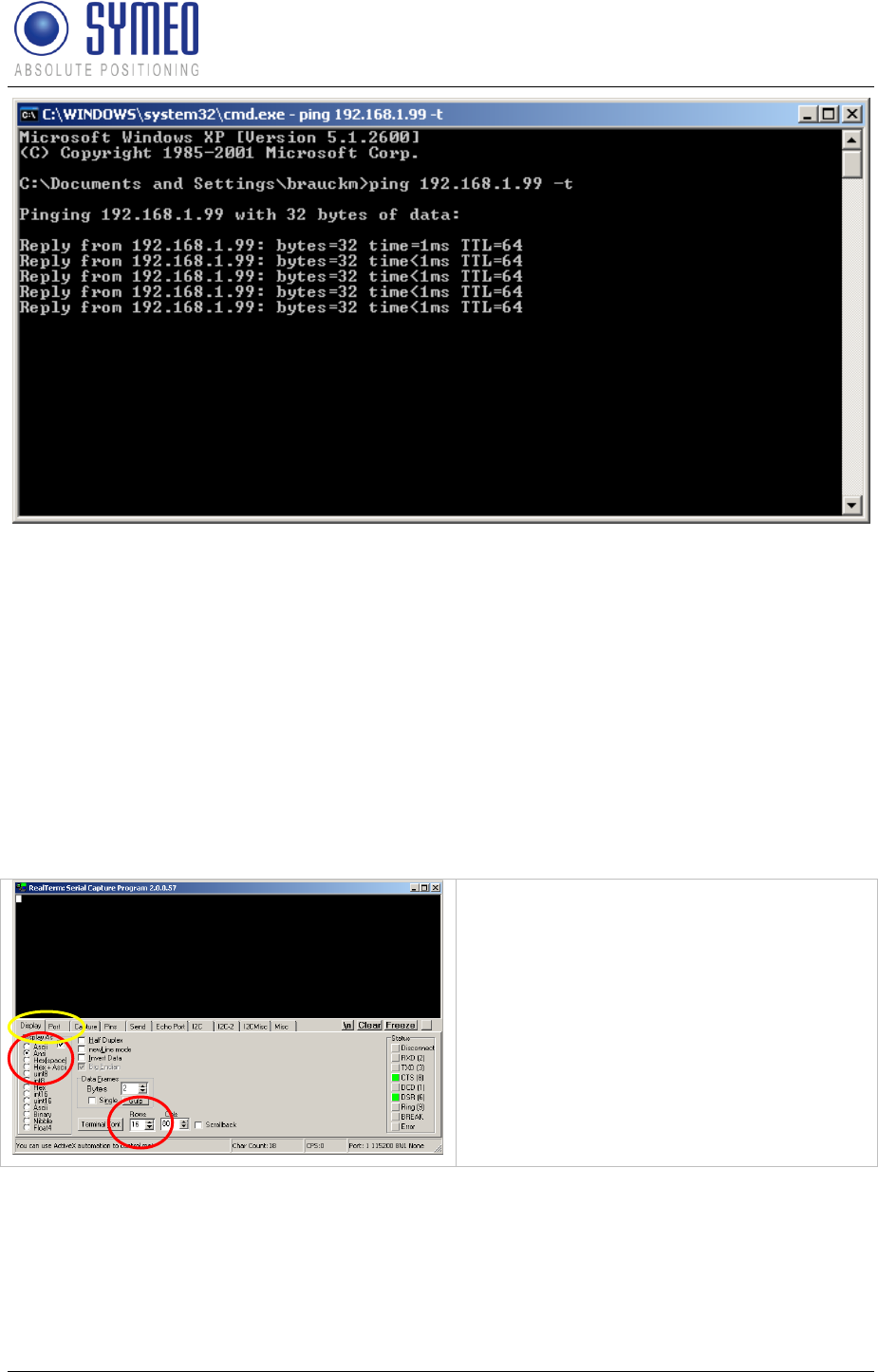
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 89 of 97
You should get a reply from the LPR unit with the fixed IP-address 192.168.1.99
If the connection failed probably your firewall settings of your PC are set to restrictive or the
IP-address of the LPR unit is probably not 192.168.1.99. Please check the settings. Compare
also the hint in chapter 9.4.1.
If you have changed the IP address without bearing in mind the IP address the IP-address
could be detected with the program NetworkScanner.
9.4.3 RealTerm (for service port)
With a terminal program like RealTerm you can perform more detailed analyzing of the
system. Restart the LPR-1D unit before using a terminal program (power off-on)
Open now the program RealTerm.
In two tabs you have to change the settings:
Tab Display:
- Choose Display As Ansi
- Extend the Rows from 16 to 30
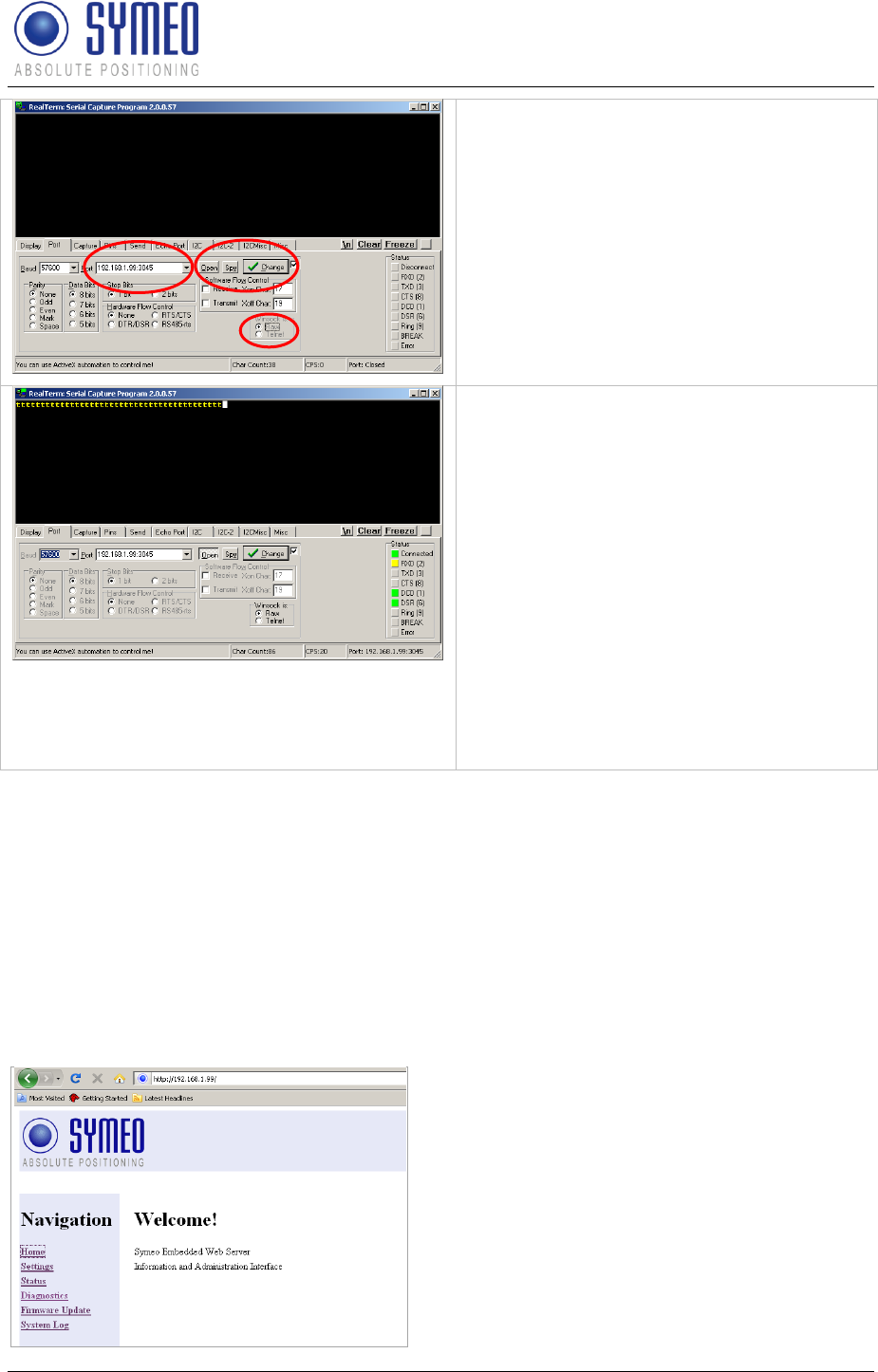
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 90 of 97
Tab Port:
- Enter the IP-address of the LPR unit and
the port: IP-address:port
- I.e.: 192.168.1.99:3045
- Click on WinSock is RAW
- Open the connection
Depending if you are connected to a Group
Master unit or a Slave unit characters appear in
the window.
If you are connected to a Group Master unit a
in case of a failure.
This happens because the Group Master unit
tries to make a measurement, but outputs a
failure because the opposite station is not
measurement. A working system should output
measurement.
If you are connected to a Slave unit
characters are shown for a working system. In
case of a failure nothing is shown when
connected to a Slave unit.
If you do not get access to the LPR unit check if the port is open. The port for the service port
is 3045 per default. But it might be possible that you have changed it or did not open it (see
chapter 9.4.4).
9.4.4 Web Interface
-address of the LPR unit but do not get data (either via the service
port or the data port or both ports) you have to check the settings on the web page of the
LPR unit.
Open a web browser and enter the IP-address of the LPR unit (i.e. http://192.168.1.99).
You get access to the LPR unit. If you are
connected via HTTPS-connection, it might
appear to dialogue boxes which you have to
confirm with OK.
You see the Start-page of the LPR unit.
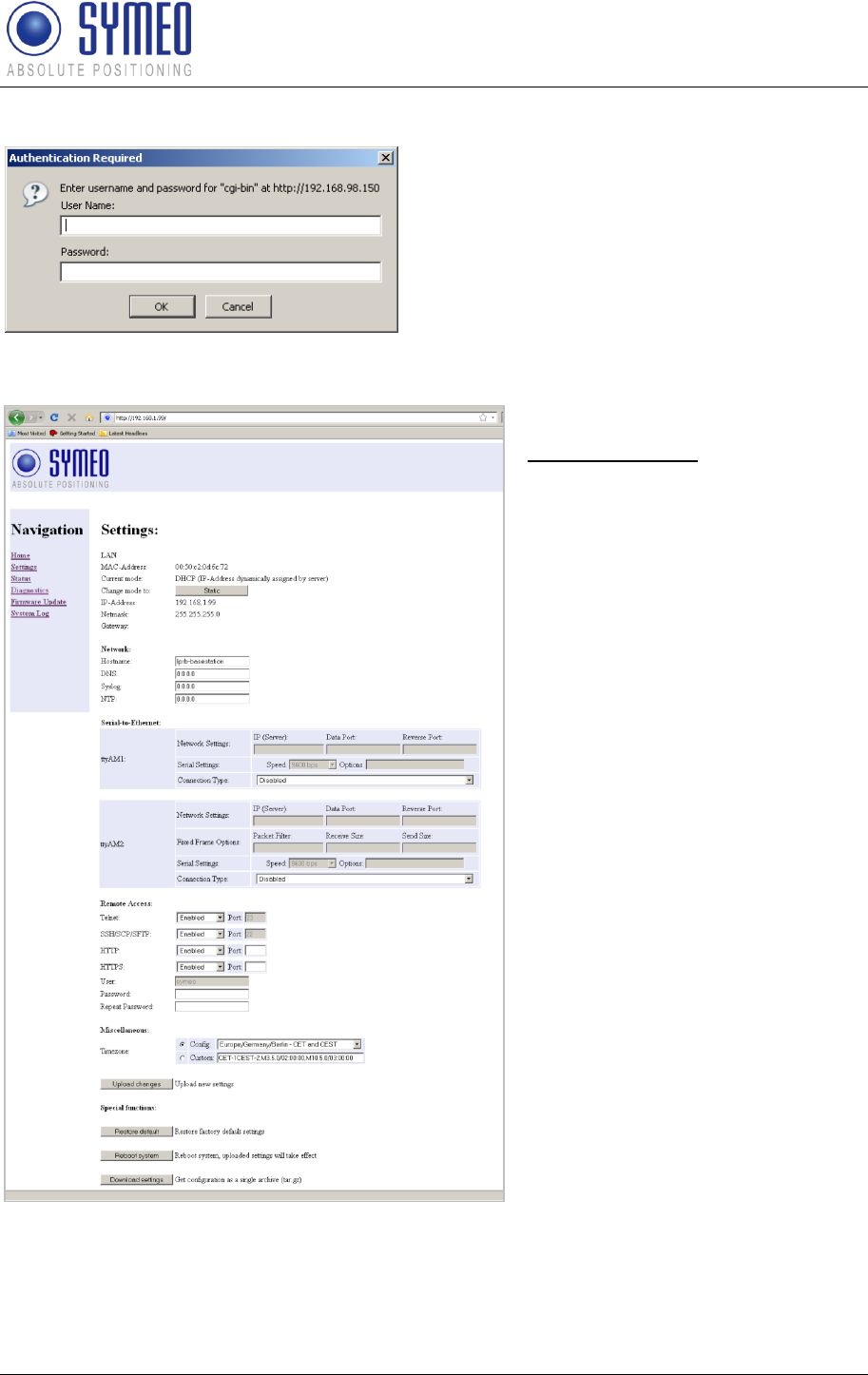
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 91 of 97
Click on Settings.
You have to authorize yourself.
symeothe
OK
54all2u
The Settings page of the Web-interface of the LPR unit looks like the following.
Scroll down to the section:
Serial-to-Ethernet:
Here you enter the connection type
for the service port (ttyAM1) and
the data port (ttyAM2).
Both ports should be not disabled.
Choose the right connection type
and enter the data port. The data
port is per default 3045 for the
service port and 3046 for the data
port.
If you have made changes click on
Upload changes
Reboot system
After the reboot try again to get access to the LPR unit as described in chapter 9.4.3.
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 92 of 97
9.5 No Measurements
With the configuration tool Symeo Wizard you can check the functionality of your system
when connected to the service port as described in chapter 5.
If this is working you also can check the data port output for LPR-1D units with TCP/IP or
RS232 interface using RealTerm to display. For LPR-1D units with TCP/IP or RS232
interface the data port provides the binary protocol as described in chapter 7.
Check List:
1) The antennas are connected to the right port of the LPR 1D unit.
Group Master unit
Slave unit 1
Slave unit 2
measurement 1
Antenna at Port 1
Antenna at Port 1
x
measurement 2
(optional)
Antenna at Port 2
x
Antenna at Port
1
2) If you use planar antennas the orientation of the antenna must be correct. A small
label on the backside of the antenna indicates the horizontal and vertical alignment.
3) For a distance measurement always two stations are involved. It has to be a Group
Master unit and a Slave unit. Make sure that never two Slave units or two Group
Master units are measuring with each other.
4) Units are powered with correct voltage and the LEDs on the front of the units lighting
as described in chapter 3
5) Check if the rotary switch S2 is set correctly:
0: RS232
6 Profibus
6) For LPR-1D units with TCP/IP interface all settings have been made in the WEB
server according to chapter 6.2.
7) Units are properly configured with Symeo Wizard as described in chapter 5.
8) Distance data are displayed in Symeo Wizard, see chapter 5.4.2. If not try to
overwrite the configuration with the program LPR 1D wizard for all stations again.
9) Check the data port is working. Open the program RealTerm. If connected to a LPR
unit with TCP/IP interface open the data port 3046: Enter 192.168.1.99:3046. The
display in RealTerm should be set to
LPR unit with RS232 interface connect the serial cable to the data port C8, see
Figure 60. An example of the binary protocol output at the data port is shown below.
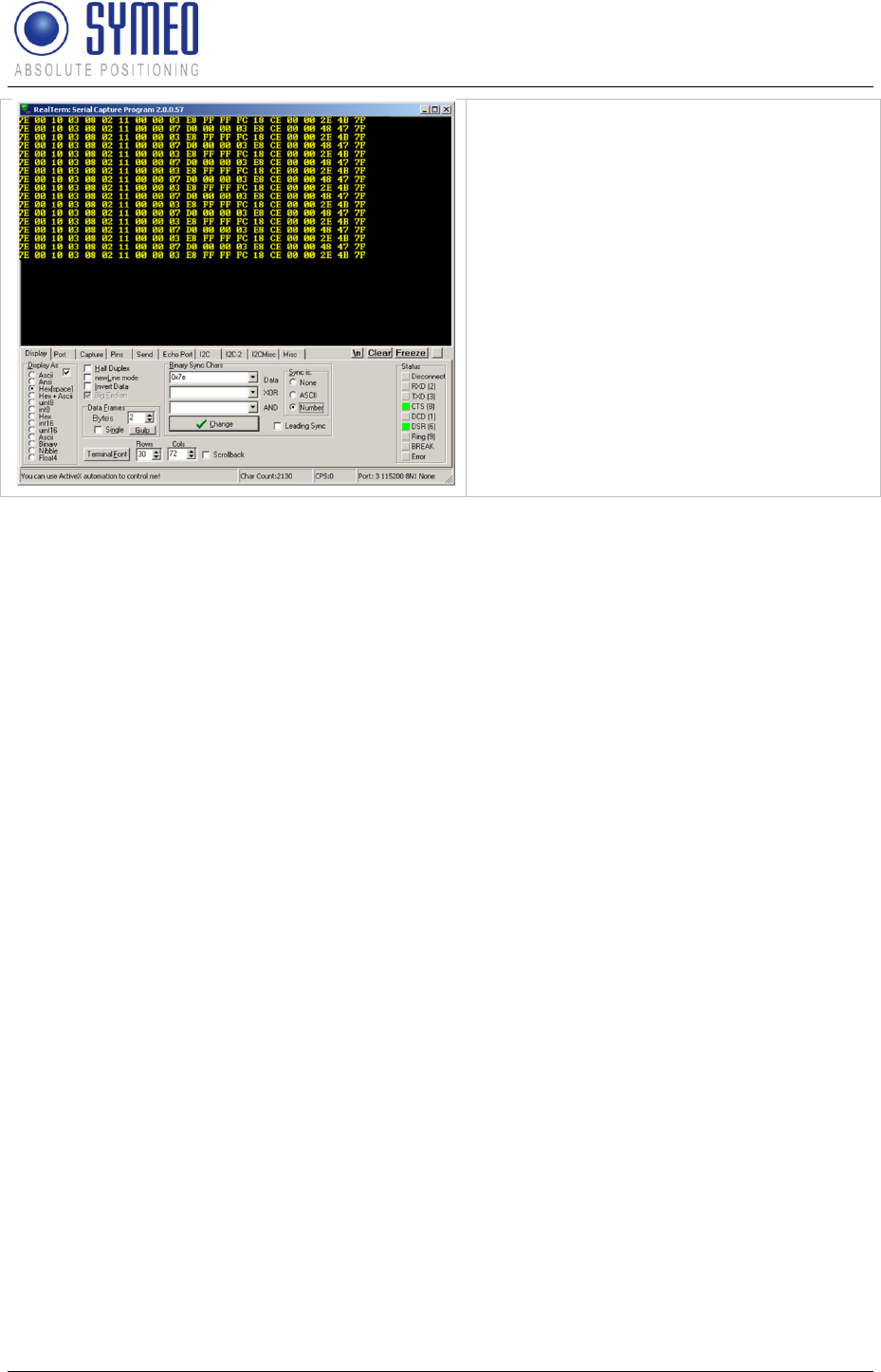
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Trouble Shooting
Copyright © Symeo GmbH 2011
Page 93 of 97
Example for a binary protocol output at the
data port

SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Appendix A: Agency certifications
Copyright © Symeo GmbH 2011
Page 94 of 97
10 Appendix A: Agency certifications
For FCC versions only!
United States (FCC) and Canada (Industry Canada)
Radiofrequency radiation exposure Information:
This equipment complies with FCC/IC radiation exposure limits set forth for an uncontrolled
environment. This equipment should be installed and operated with minimum distance of
20 cm between the radiator and your body.
This transmitter must not be co-located or operating in conjunction with any other antenna or
transmitter.
Changes or modifications made to this equipment not expressly approved
by SYMEO GmbH may void the FCC/IC authorization to operate this
equipment.
This device complies with Part 15 of the FCC Rules and with RSS-210 of
Industry Canada. Operation is subject to the following two conditions:
this device may not cause harmful interference, and
this device must accept any interference received, including interference
that may cause undesired operation.
A direct connection between the external power supply unit and AC power line is
strictly prohibited. A line filter (e.g. EPCOS B84113-C-B30 or similar
characteristics) shall be used to connect the power supply unit and AC power
line.
Installation:
All installation, repair and servicing work must be carried out by qualified
and trained technicians!
Repairs:
Repairs to the device must be carried out by authorized technicians.
Unauthorized opening and incorrect repairs could result in severe danger to
the user (danger of electric shock, radiated energy, fire hazard).
United States (FCC)
This equipment has been tested and found to comply with the limits for a
Class B digital device, pursuant to Part 15 of the FCC Rules. These limits
are designed to provide reasonable protection against harmful interference
in a residential installation. This equipment generates, uses and can radiate
radio frequency energy and, if not installed and used in accordance with the
instructions, may cause harmful interference to radio communications.
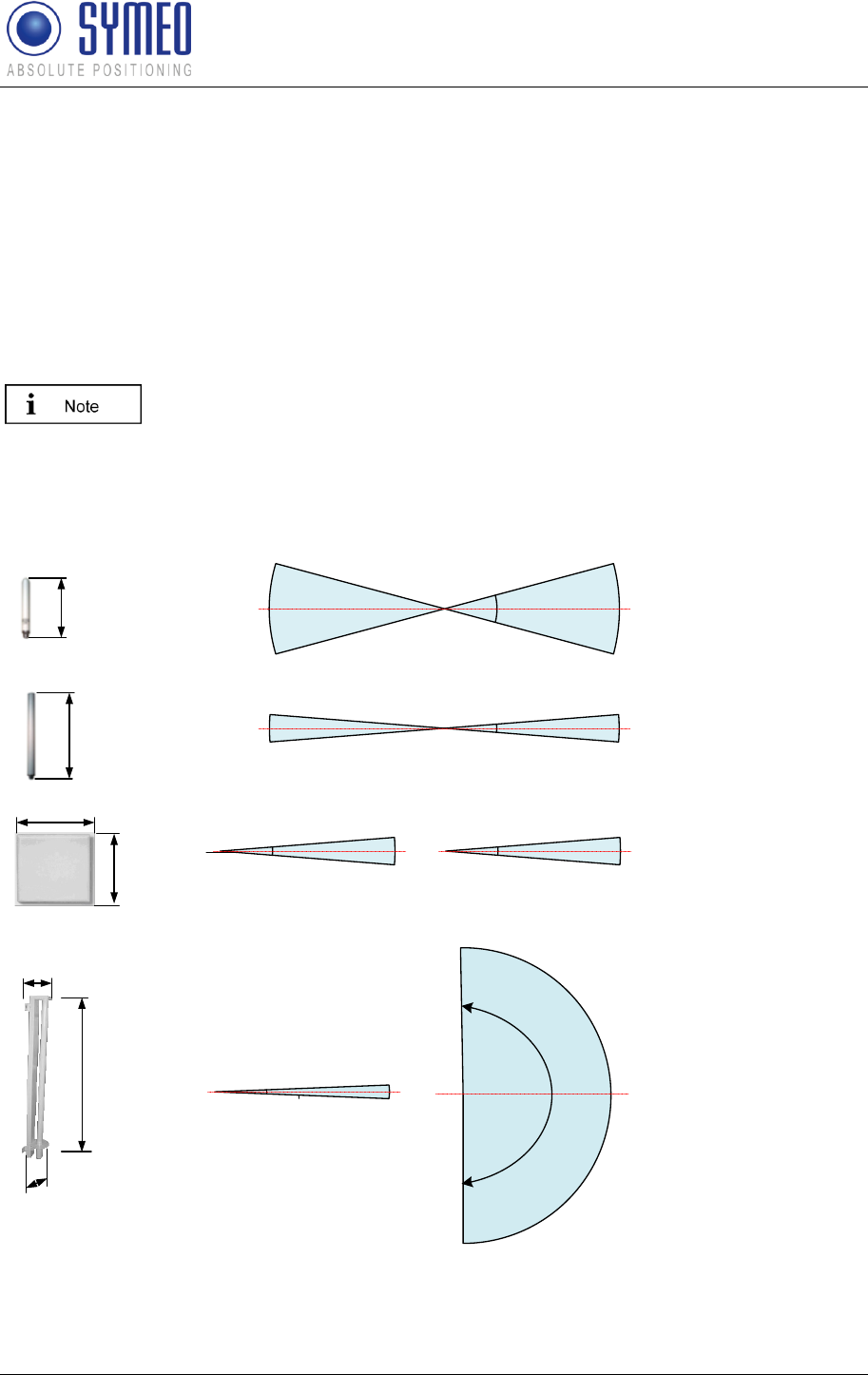
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Appendix A: Agency certifications
Copyright © Symeo GmbH 2012
Page 95 of 97
However, there is no guarantee that interference will not occur in a
particular installation. If this equipment does cause harmful interference to
radio or television reception, which can be determined by turning the
equipment off and on, the user is encouraged to try to correct the
interference by one or more of the following measures:
Reorient or relocate the receiving antenna.
Increase the separation between the equipment and receiver.
Connect the equipment into an outlet on a circuit different from that to
which the receiver is connected.
Consult the dealer or an experienced radio/TV technician for help
This device has been designed to operate with the antennas listed below.
Antennas not included in this list are strictly prohibited for use with this
device. Only antenna cables delivered by Symeo are allowed to use. Usage
of other antenna cables may void the FCC authorization to operate this
equipment.
6 dBi Omnidirectional Antenna
10 dBi Omnidirectional Antenna
23 dBi Planar Antenna
8,5°
vertical
-3 dB
0 dB
-3 dB
vertical
9° -3 dB
0 dB
-3 dB horizontal
9° -3 dB
0 dB
-3 dB
30°
vertical -3 dB
0 dB
-3 dB
A
A
A
A = 190mm
d = 20mm
A = 440mm
d = 20mm
B
A = 305mm
B = 305mm
d = 25mm
Antenna Connector Type N
Antenna Connector Type N
Antenna Connector Type N
13 dBi Sector Antenna
horizontal
180°
-3 dB
0 dB
-3 dB
A
d
B
A = 500mm
B = 90mm
d = 80mm vertical
5° -3 dB
0 dB
-3 dB
Antenna Connector Type N
Figure 61: LPR® 1D antenna
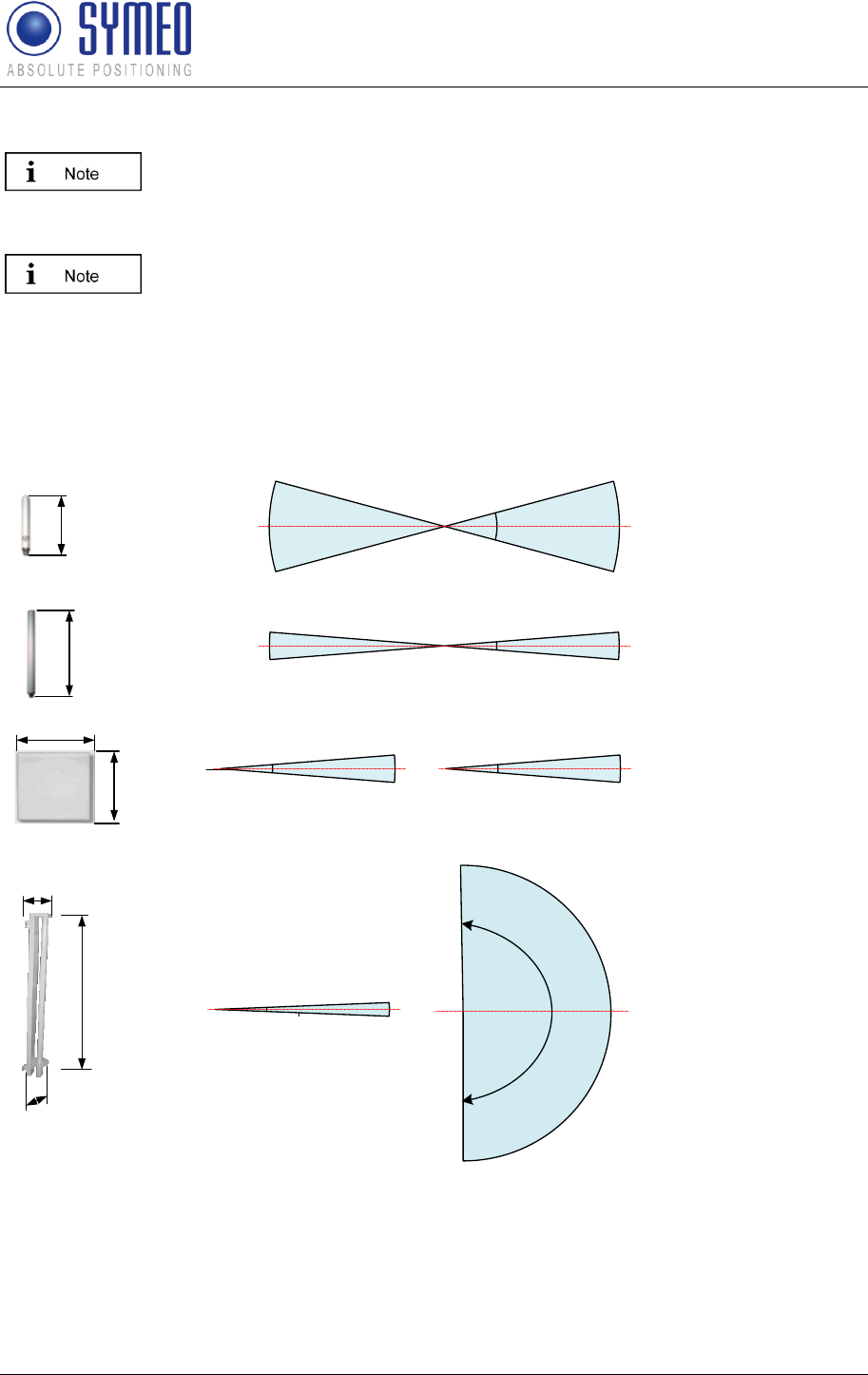
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Appendix A: Agency certifications
Copyright © Symeo GmbH 2012
Page 96 of 97
Canada (Industry Canada)
This Class [B] digital apparatus complies with Canadian ICES-003.
Cet appareil numérique de la classe [B] est conforme à la norme NMB-003
du Canada.
This device has been designed to operate with the antennas listed below
and having a maximum gain of 23 dBi. Antennas not included in this list or
having a gain greater than 23 dBi are strictly prohibited.
The required impedance for antenna and antenna cable is 50 ohms.
Only antenna cables delivered by Symeo are allowed to use. Usage of
other antenna cables may void the IC authorization to operate this
equipment.
6 dBi Omnidirectional Antenna
10 dBi Omnidirectional Antenna
23 dBi Planar Antenna
8,5°
vertical
-3 dB
0 dB
-3 dB
vertical
9° -3 dB
0 dB
-3 dB horizontal
9° -3 dB
0 dB
-3 dB
30°
vertical -3 dB
0 dB
-3 dB
A
A
A
A = 190mm
d = 20mm
A = 440mm
d = 20mm
B
A = 305mm
B = 305mm
d = 25mm
Antenna Connector Type N
Antenna Connector Type N
Antenna Connector Type N
13 dBi Sector Antenna
horizontal
180°
-3 dB
0 dB
-3 dB
A
d
B
A = 500mm
B = 90mm
d = 80mm vertical
5° -3 dB
0 dB
-3 dB
Antenna Connector Type N
Figure 62: LPR® 1D antenna
SYMEO Local Positioning Radar System
LPR®-1D
Product Documentation
Appendix B: Table of countries and regulations
Copyright © Symeo GmbH 2012
Page 97 of 97
11 Appendix B: Table of countries and regulations
Country
Regulation setting in Wizard
Australia/New Zealand
ETSI EN
Brazil
FCC
Canada
FCC
China
Setting for China(*)
Europe
ETSI EN
India
ETSI EN
Malaysia
ETSI EN
Republic of South Africa
ETSI EN
Russia
ETSI EN
Singapore
ETSI EN
Taiwan
ETSI EN
Turkey
ETSI EN
USA
FCC
(*) not yet implemented, will follow in next update of Symeo Wizard
For countries not listed above please contact Symeo for further information.
Observe the regional-specific regulations and mandatory permissions to
operate LPR-1D systems in the respective countries. Please contact
Symeo for further clarification.