THAMES and KOSMOS 620141 Kosmobits / Code Gamer User Manual 1620141 KosmoBits Manual Cover indd
THAMES & KOSMOS, LLC. Kosmobits / Code Gamer 1620141 KosmoBits Manual Cover indd
Contents
- 1. Users Manual
- 2. Users Manual - German version
Users Manual - German version
Art.-Nr.: 716032
Franckh-Kosmos Verlags-GmbH & Co. KG · Pfizerstraße 5 – 7 · 70184 Stuttgart · Telefon +49 (0) 711 2191-343
Anleitung
EXPERIMENTIERKASTEN
Spielend Programmieren lernen
Impressum
1. Auflage 2016
0718021 AN 300416
© 2016 Franckh-Kosmos Verlags-GmbH & Co. KG • Pfizerstraße 5–7 • 70184 Stuttgart
Das Werk einschließlich aller seiner Teile ist urheberrechtlich geschützt. Jede Verwertung außerhalb der engen Grenzen des Ur-
heberrechtsgesetzes ist ohne Zustimmung des Verlages unzulässig und strafbar. Das gilt insbesondere für Vervielfältigungen,
Übersetzungen, Mikroverfilmungen und die Einspeicherung und Verarbeitung in elektronischen Systemen, Netzen und Medien.
Wir übernehmen keine Garantie, dass alle Angaben in diesem Werk frei von Schutzrechten sind.
Projektleitung: Jonathan Felder, Marc Gänssler, Sebastian Martin
Text und Versuche: Felix Homann
Produktentwicklung: Steffen Rothweiler
Gestaltungskonzept Anleitung: Atelier Bea Klenk, Berlin
Layout und Satz: Michael Schlegel, komuniki, Würzburg
Illustrationen: Michael Schlegel, komuniki, Würzburg
Fotos Anleitung: picsfive (alle Pinn-Nadeln); askaja (alle Büroklammern); Jaimie Duplass (alle Klebestreifen) (alle vorigen © fotolia.com);
8vFanl (S. 61 ur); hopsalka (S. 61 o); krista (S. 2 ul, S. 21 ur); tepic (S. 20 u) (alle vorigen © iStockphoto.com); Designua (S. 38 u)
(© shutter stock.com); leejeongsoo (S. 35 u); theSOARnet (S. 38 o); Petr Kratochvil (S. 33 o) (alle vorigen © pixabay.com); Johannes
(S. 2 mr, S. 21 or); Willi Heidelbach (S 27) (alle vorigen veröffentlicht unter CC BY-SA 2.5 einzusehen unter https://creativecommons.
org/licenses/by-sa/2.5/deed.de); Philip Steffan (S. 60 alle, © Make Magazin); Alle Screenshots des Arduino-Programms © Arduino;
Andreas Resch, argfx, St. Ulrich am Waasen (U1, S. 1 Rendering Gamepad, S. 1 und S. 32 SensorBots); Michael Flaig, proStudios,
Stuttgart (S. 1 Zusatzmaterial); Matthias Kaiser, Stuttgart (alle anderen Fotos)
Gestaltungskonzept, Layout und Satz Verpackung: Michael Schlegel, komuniki, Würzburg
Fotos Verpackung: Andreas Resch, argfx, St. Ulrich am Waasen (alle Renderings); Michael Flaig, pro-studios, Stuttgart (Materialfoto)
Der Verlag hat sich bemüht, für alle verwendeten Fotos die Inhaber der Bildrechte ausfindig zu machen. Sollte in einzelnen
Fällen ein Bildrechtinhaber nicht berücksichtigt worden sein, wird er gebeten, seine Bildrechtinhaberschaft gegenüber dem
Verlag nachzuweisen, so dass ihm ein branchenübliches Bildhonorar gezahlt werden kann.
Technische Änderungen vorbehalten. Printed in China / Imprimé en Chine
Sicherheit und Qualität:
KOSMOS Experimentierkästen werden von unserem erfahrenen Team mit
größter Sorgfalt entwickelt und in allen Entwicklungs- und Produktions-
schritten geprüft.
Im Hinblick auf die Produktsicherheit entsprechen unsere Experimentier-
kästen den europäischen Spielzeugrichtlinien und unseren eigenen durch lang-
jährige Erfahrung entstandenen Standards. Um höchste Sicherheit zu gewährleisten, arbeiten wir
bei unseren
chemischen Experimentierkästen mit zertifizierten Prüfstellen zusammen.
Durch die enge Zusammenarbeit mit unseren Partnern in der Produktion sind wir in der Lage, alle
Arbeitsschritte der Fertigung zu kontrollieren. Traditionell stellen wir die Mehrzahl unserer Pro-
dukte in Deutschland her, aber auch bei Experimentierkästen, die im Ausland produziert werden,
gewährleisten wir damit die Einhaltung aller geforderten Standards.
› › › SICHERHEITSHINWEISE
ACHTUNG! Nur für die Benutzung durch Kinder ab
10 Jahren oder älter. Anweisungen für Eltern oder
andere verantwortliche Personen sind enthalten und
müssen beachtet werden. Verpackung und Anleitung
aufbewahren, da sie wichtige Informationen
enthalten!
ACHTUNG! Nicht für Kinder unter 3 Jahren geeignet.
Erstickungsgefahr, da kleine Teile verschluckt oder
eingeatmet werden können.
Sicherheitshinweise
Hinweise zum Umgang mit dem Akku
››› Für die Experimente wird ein Lithium-Polymer- Akku
verwendet. Bitte ausschließlich den mitge lieferten
Akku verwenden!
››› Der Akku darf nur unter Aufsicht von Erwachsenen
geladen werden.
››› Keine Experimente mit den Steckdosen des Lichtnetzes
durchführen! Keine Drähte oder Bauteile in
Steckdosen
einführen! Die Netzspannung (230 Volt!)
ist
lebensgefährlich!
››› Beim Experimentieren einen Kurzschluss des Akkus
vermeiden, er könnte überhitzen und explodieren!
››› Anschlüsse des Akkus dürfen nicht kurzgeschlossen
werden!
››› Der Akku muss mit der richtigen Polarität eingelegt
werden.
››› Verformungen des Akkus vermeiden.
››› Bei Defekt des Akkus muss dieser aus dem Spielzeug
herausgenommen werden.
››› Bewahre das Set außerhalb der Reichweite von klei-
nen Kindern auf.
››› Der Zusammenbau des Geräts und das Einsetzen des
Akkus, muss entsprechend den Anweisungen
in dieser Anleitung erfolgen, um die Zerstörung
von Bauteilen zu vermeiden.
Liebe Eltern,
dieser Experimentierkasten macht Ihr Kind auf spiele-
rische Weise in spannenden Experimenten mit der
Welt des Programmierens vertraut.
Bitte stehen Sie Ihrem Kind bei den Experimenten
mit Rat und Tat zur Seite, unterstützen und begleiten
Sie es.
Natürlich stellen Sie die Frage nach der Sicherheit.
Dieser Kasten entspricht den Europäischen
Sicherheitsnormen. Diese Normen enthalten Aufla-
gen für den Hersteller, sehen aber auch vor,
dass die Eltern ihren Kindern bei den Experimenten
mit Rat und Tat zur Seite stehen.
Sagen Sie Ihrem Kind ausdrücklich, dass es alle
relevanten Anweisungen und Sicherheitshinweise
lesen und nachschlagebereit halten soll. Machen
Sie es auch darauf aufmerksam, dass es die Hinweise
und Regeln beim Experimentieren unbedingt ein-
halten muss.
Wir wünschen Ihrem Kind und natürlich auch Ihnen
viel Spaß und Gewinn beim Experimentieren!
kosmos.de
Für neugierige Forscher
Entdecken, verstehen, Spaß haben!
Mondkrater, Galaxien, Planeten und Gas-
nebel – all das rückt zum Greifen nah, wenn
du mit dem Linsenteleskop auf Entdeckungs-
reise gehst. Durch die hohe optische und
technische Qualität macht das Beobachten
besonders viel Spaß. Auch Vögel oder Wald-
tiere lassen sich mit der beiliegenden Bildum-
kehrlinse hervorragend beobachten.
ab 12 Jahren
Mit dem KOSMOS-Qualitätsmikroskop
kannst du nicht nur klassische mikroskopische
Präparate wie das Zwiebelhäutchen im Durch-
licht, sondern auch fl ache Objekte wie Blä er
oder Münzen im Aufl icht betrachten. Die hohe
Qualität der optischen und mechanischen Teile
ermöglichen dir spannende Untersuchungen
in der Welt der kleinen Dinge. Mit vier Dauer-
präparaten, umfangreichem Präparierzube-
hör sowie umfassender Anleitung mit vielen
praktischen Tipps.
ab 12 Jahren
Kosmobit.indd 1 12.04.16 11:54
Hinweise zum Unweltschutz
Die elektronischen Teile dieses Produkts sind wiederver-
wertbar und dürfen zum Schutz der Umwelt am Ende ihrer
Verwendung nicht über den Haushaltsabfall entsorgt
werden. Sie müssen an einem Sammelpunkt für Elektro-
schrott abgegeben werden. Dieses Symbol
weist darauf hin:
Bitte erfragen Sie bei Ihrer Gemeindever-
waltung die zuständige Entsorgungsstelle.
Entsorgung des Akkus
Der Akku gehört nicht in den Hausmüll!
Jeder Verbraucher der EG ist gesetzlich
verpflichtet Batterien und Akkus bei einer
Sammelstelle seiner Gemeinde oder im
Handel abzugeben. Der Akku wird dadurch einer umwelt-
schonenden
Entsorgung zugeführt. Batterien und
Akkus,
die Schadstoffe enthalten, sind durch dieses Zeichen oder
durch chemische Symbole gekennzeichnet (Cd = Cadmi-
um, Hg = Quecksilber, Pb = Blei).
Vereinfachte EU-Konformitätserklärung
Hiermit erklärt die Franckh-Kosmos Verlags-GmbH & Co.
KG, dass der Funkanlagentyp 620141 KosmoBits der
Richtlinie 2014/53/EU entspricht.
Der vollständige Text der EU-Konformitätserklärung ist
unter der folgenden Internetadresse verfügbar:
http://www.kosmos.de/content-943-943/
entsorgung_und_sicherheit/
Hinweise zum Umgang mit den elektronischen Bauteilen
››› Den Kontakt mit metallischen Gegenständen und
Flüssigkeiten aller Art vermeiden!
››› Nach dem Experimentieren alle empfindlichen Bau-
teile in die vorgesehenen Tüten verpacken und zusam-
men mit den anderen Teilen im Experimentkasten
aufbewahren.
››› Sollte die KosmoBits-Hardware längere Zeit nicht
benutzt werden, bitte das Anschlusskabel des Akkus
vom Interaction Board lösen.
››› Das Spielzeug darf nur an Geräte der
Schutzklasse II angeschlossen werden,
die das folgende Bildzeichen tragen:
1000 1001
1101 101 00
100 10
1010
0

Was in deinem Experimentierkasten steckt:
Checkliste: Suchen – Anschauen – Abhaken
Nr. Bezeichnung Anzahl Art.-Nr.
1 KosmoDuino 1 717 982
2 Interaction Board 1 717 981
3 Gamepad Gehäuse-Oberseite rechts 1 718 006
4 Gamepad Gehäuse-Oberseite links 1 718 007
5 Gamepad Gehäuse-Unterseite 1 718 005
6 Rad mit Rückstellfeder 1 718 008
718 009
7 Knöpfe mit Gummistempel 1 718 010
718 011
8 Lichtsensor 1 717 985
9 Schallsensor 1 717 986
10 Temperatursensor 1 717 984
11 Bewegungssensor 1 717 983
12 Gehäuse für Schallsensor 1 718 000
718 004
13 Gehäuse für Lichtsensor 1 717 999
718 003
14 Gehäuse für Temperatursensor 1 717 997
718 001
Nr. Bezeichnung Anzahl Art.-Nr.
15 Gehäuse für Bewegungssensor 1 717 998
718 002
16 Breadboard 1 717 996
17 Jumperkabel 10 717 990
männlich-weiblich
18 Jumperkabel 10 717 989
männlich-männlich
19 Widerstände: 330 Ohm 5 717 991
20 LEDs: gelb je 1 717 994
grün 717 993
blau 717 995
rot 717 992
21 Kabel: USB zu Micro-USB 1 717 988
22 Lithium-Polymer-Akku 800 mAh, 3,7 V 1 717 987
(ohne Bild)
Was du zusätzlich brauchst:
Smartphone/Tablet mit Android (ab 4.3) oder iOS (ab Version 7),
das Gerät muss Bluetooth 4 oder höher unterstützen. PC mit
Internetzugang
10
6
11
15
8
2
14
9
13
7
17
16
18 19
20
21 12
5
4
13
GUT ZU WISSEN ! Die Teile des
Kastens kannst du natürlich nach-
bestellen. Lade dir dazu einfach
einen Bestellschein unter kosmos.de
herunter.
KosmoBits
› › › AUSSTATTUNG

Sicherheitshinweise ............................. Vordere Umschlaginnenseite
Ausstattung ..............................................................................................
Inhalt ..........................................................................................................
So startest du mit KosmoBits ..................................................................
Das Gamepad und die Sensoren zusammenbauen
Die App
Die Welt der Mikrocontroller ....................................................................
Vorbereitung .................................................................................................
Installation der Arduino-Software
Projekt : Blink! ..................................................................................................
Ein Programm auf deinen KosmoDuino hochladen
Projekt : Ausschalter .....................................................................................
Projekt : Einschalter ......................................................................................
Das Interaction Board .....................................................................................
Projekt : Buntes Licht ......................................................................
Projekt : Auf Tastendruck ...............................................................
Projekt : Blink-Würfel ......................................................................
Projekt : Der serielle Monitor ...........................................................
Die for-Schleife .....................................................................................
Sensoren ..................................................................................................
Projekt : Thermometer ........................................................................
Projekt : Finger-Disko .........................................................................
Projekt : Piep! ......................................................................................
Projekt : Zufallstöne! .........................................................................
Projekt : Sirene ...................................................................................
Projekt : Tonleiter .............................................................................
Projekt : Sensor-Orgel .....................................................................
Projekt : Der serielle Plotter ..........................................................
Projekt : Der Klatschschalter .......................................................
Projekt : Der Schubladenwächter ...............................................
Projekt : In den Kühlschrank geschaut .....................................
Projekt : Geisteraugen ..................................................................
Häufige Fehlermeldungen .............................................................................
Notizen ...............................................................................................................
Impressum ........................................................Hintere Umschlagaußenseite
TIPP !
Zusätzliches Wissen findest du auf den
»Nachgehakt«-Seiten 21, 59 – 61 und
den »Wissen Kompakt«-Seiten 24 – 25,
35, 41 – 42 und 58.
› › › INHALT
1000 1001
1101 101 00
100 10
1010
0

1
2
3
4
So startest du mit KosmoBits
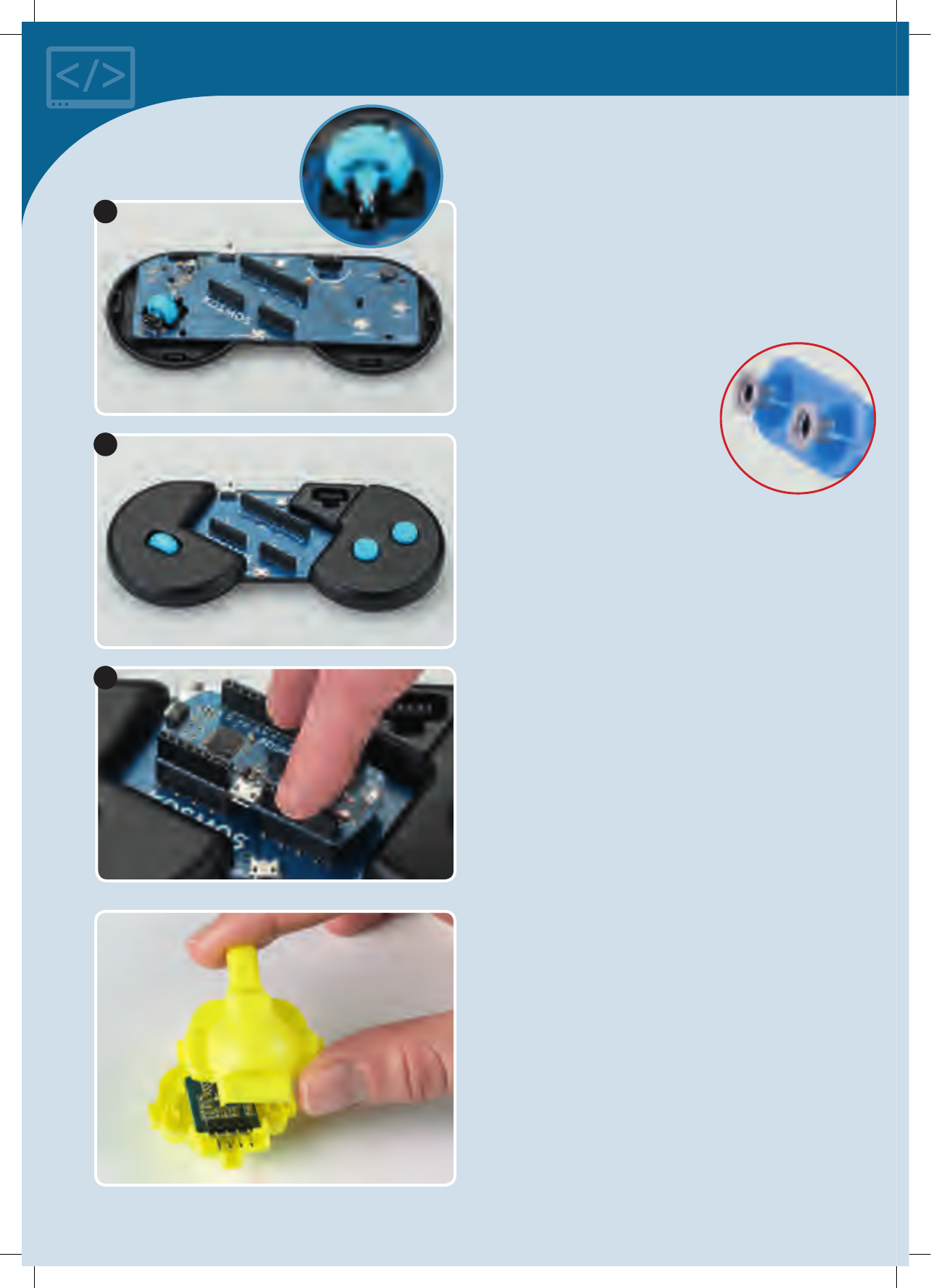
DAS GAMEPAD ZUSAMMENBAUEN
1. Zuallererst musst du die kleine Metall-Feder in die
richtige Stelle im linken Teil der Gehäuse-Unterseite
stecken. Die Feder hält später das Rad und sorgt dafür,
dass es immer wieder in seine ursprüngliche Position
zurückspringt.
2. Als nächstes musst du den dünnen Stift des Rades in
das Loch des Dreh-Encoders stecken. Pass dabei auf,
dass der Stift nicht abbricht. Der Dreh-Encoder ist
auf dem Interaction Board befestigt und dort auch
beschriftet.
3. Verbinde den Akku mit dem Interaction Board. Der An-
schluss befindet sich auf der Unterseite. Der Stecker des
Akkus ist so geformt, dass er sich nur mit der richtigen
Polung verbinden lässt. Wende beim Verbinden keine
Gewalt an!
4. Der Akku hat seinen festen Platz in der Gehäuse-Unter-
seite. Lege ihn so hinein, dass er fest sitzt und nicht
wackelt.
KosmoBits
LOS GEHT’S
5
6
7
DIE SENSORBOTS ZUSAMMENBAUEN
1.
Nimm einen der Sensoren und suche dir das entsprechen-
de
Gehäuse mit der richtigen Farbe (Bewegungssensor –
blau; Temperatursensor – rot; Lichtsensor – lila; Schall-
sensor – gelbgrün. Siehe S. 1 »Ausstattung«). Stecke den
Sensor mit der Vorderseite voran in die Gehäusehälfte
mit den aufgedruckten Augen. Die »Füßchen« der Senso-
ren sind immer auf der Rückseite befestigt. Achte beim
Temperatursensor darauf, dass der kleine schwarze
Knubbel leicht aus dem Loch im Gehäuse ragt.
2. Jetzt musst du nur noch die Gehäuse-Rückseite mit der
Gehäuse-Vorderseite verbinden. Drücke sie dafür fest
zusammen.
5. Jetzt kannst du das Interaction Board in das Gehäuse
einsetzen. Achte darauf, dass das Rad richtig in der
Feder sitzt (siehe rundes Bild).
6. Die Knöpfe müssen auf der Unter-
seite mit den grauen Gummistempeln
bestückt werden. Diese einfach mit
der dünneren Seite in die Aussparungen
auf der Unterseite der Knöpfe einstecken. Dann kannst
du die Knöpfe von unten in die rechte Gehäuse-Oberseite
einfügen.
Anschließend musst du noch die restlichen Gehäuseteile
aufstecken. Achte auf die richtige Positionierung der
Knöpfe. Die Knöpfe sitzen richtig, wenn du beim Drücken
einen klaren Druckpunkt spürst.
7. Dein Gamepad ist jetzt eigentlich fertig, es fehlt nur
noch die »Schaltzentrale«, der KosmoDuino.
Diesen kannst du einfach auf das Interaction Board auf-
stecken. Achte darauf, dass alle Pins passen und sich
beim Einstecken nicht verbiegen. Drücke den Kosmo-
Duino so weit rein, dass seine »Füßchen« nicht mehr zu
sehen sind.

◀▲Verschiedene Screenshots der KosmoBits-App
DIE APP
Um dir den Einstieg in die Welt des Programmierens zu
erleichtern, haben wir eine App entwickelt, mit der du
erste Erfahrungen zu dem Thema sammeln kannst.
Kern der App ist ein Spiel, in dem du immer mal wieder kleine
Programmier-Rätsel lösen musst. Aber keine Angst – diese
sind nicht schwer, sodass du sie bestimmt alle knacken
kannst. Der Schlüssel zum Lösen der Rätsel sind die Code-
monster, die du in jedem Level findest. Sammle alle ein, denn
du brauchst sie an den Computerterminals. Die Computer-
terminals enthalten lückenhaften Code. Diese Lücken füllst
du, indem du das richtige Codemonster in die passende Lücke
ziehst. Um mehr über die Monster zu erfahren, kannst du sie
in deinem Inventar einfach oder doppelt antippen - so verra-
ten sie, welche Lücke im Code sie ausfüllen können.
Um die Figuren im Spiel zu steuern, kannst du dein Game-
pad verwenden. Dafür muss Bluetooth auf deinem Tablet
oder Smartphone aktiviert sein. Starte einfach die App und
schalte dein Gamepad ein, indem du den Schalter am obe-
ren Rand auf die Position »ON« schiebst. Die Verbindung
erfolgt dann automatisch. Ist die Verbindung aktiv, ver-
schwinden die Steuerelemente auf dem Bildschirm und du
kannst die App nur noch mit dem Gamepad steuern. Schal-
test du dein Gamepad aus, erscheinen die Steuerelemente
wieder. Ohne das Gamepad macht das Spiel aber nur halb
so viel Spaß!
KosmoBits
SYSTEMVORAUSSETZUNGEN:
KosmoBits unterstützt Geräte ab
den Betriebssystemen Android 4.3
und iOS 7 und neuer. Das Gerät
muss Bluetooth 4 oder höher
unterstützen.

▲KosmoBits-Controller
!
SO LÄDST DU DIE KOSTENLOSE APP HERUNTER:
Für das Installieren einer App benötigst du Zugang zu Google Play oder zum Apple App
Store. Bitte deine Eltern um Unterstützung beim Installieren der App.
Wenn du ein Gerät mit Android hast, öffne Google Play, mit einem IPhone musst du den
App Store öffnen. Gib einfach den Suchbegriff KosmoBits ein und installiere die App.
Für das Spiel benötigst du deine vier SensorBots. Die sind
sehr nützlich und helfen dir, Hindernisse im Spiel aus dem
Weg zu räumen. Du kannst sie einfach in dein Gamepad
einstecken (siehe Bild). Sobald du einen Sensor eingesteckt
hast, verwandelt sich dein Spiele-Charakter in einen der
vier Bots. Jeder von ihnen hat seine ganz eigenen Fähigkei-
ten. Hast du z.B. den blauen Bot "Newton" eingesteckt,
musst du dein Gamepad kräftig nach vorne und hinten
schütteln, damit seine Fähigkeiten aktiviert werden. Du
findest bestimmt selbst heraus, wie du bei den anderen
Sensorbots die Spezialfähigkeiten aktivierst.
Spiel das Spiel in Ruhe durch und schau dir auch die an-
deren Inhalte der App im Hauptmenü an. Dort erfährst
du schon eine Menge zu deinem Experimentierkasten und
zum Thema Programmieren.
Viel Spaß dabei!
Die Welt der
Mikrocontroller
Willkommen in der Welt der Mikrocontroller! Sie sieht dei-
ner eigenen Welt erstaunlich ähnlich. Genauer gesagt: Sie
sieht haargenau so aus wie deine! Überall in deiner Umge-
bung verstecken sich unzählige Mikrocontroller und ver-
richten unbemerkt ihre Arbeit. Kaum ein elektrisches Gerät
funktioniert noch ohne einen Mikrocontroller: Die elektri-
sche Zahnbürste, die Fernbedienung des Fernsehers, das
Gamepad, das Digitalthermometer, die sprechende Puppe,
der bellende Spielzeughund, die Waschmaschine, der
Rauchmelder, der Toaster, und und und …
!
WAS BEDEUTET EIGENTLICH ARDUINO?
In dieser Anleitung wird dir immer wieder das Wort »Arduino«
begegnen. Das ist der Name für eine weit verbreitete Mikrocon-
troller-Plattform, also Platinen und dazugehörige Entwick-
lungsumgebung, von der der KosmoDuino abgeleitet wurde.
Lange Zeit war die Mikrocontroller-Programmierung nur etwas
für Spezialisten. Die Begründer des Arduino-Projektes haben es
sich im Jahr 2005 deshalb zur Aufgabe gemacht, die Programmie-
rung und Nutzung einfacher Mikrocontroller so simpel wie möglich
zu gestalten. Kunststudenten, die nie zuvor etwas mit Programmierung zu tun hatten, sollten damit in der Lage sein,
Mikrocontroller in ihrer Arbeit zu verwenden.
Rund um die Arduino-Plattform hat sich mittlerweile eine große Community gebildet, die unzählige interessanter
Projekte entwickelt hat. Viele davon kannst du mit deinem KosmoDuino nachbauen: Er ist mit einem Arduino Uno
Board kompatibel.
Mehr zum Arduino-Projekt erfährst du auf www.arduino.cc. Allerdings ist die Seite englischsprachig.
ABER WAS IST EIN
MIKROCONTROLLER?
Ein Mikrocontroller ist ein ziemlich kleiner (»Mikro«) Com-
puter. Er unterscheidet sich allerdings grundlegend von
den Computern, mit denen du normalerweise zu tun hast:
Er hat keine Tastatur, keine Maus, auch einen Bildschirm
findest du nicht.
Stattdessen besitzt er eine Menge kleiner Füßchen. Die
werden Pins genannt. Ein Pin ist so etwas wie die Verbin-
dung des Mikrocontrollers zur Außenwelt. Einige der Pins
haben festgelegte Funktionen. Die meisten sind allerdings
sogenannte GPIO-Pins. Das ist eine Abkürzung für
»Allzweckeingabe/-ausgabe« (engl. General Purpose In-
put / Output). Diese GPIO-Pins können zur Ein/- oder Aus-
gabe benutzt werden. So, wie du es gerade brauchst.
. EINGABE:
Du kannst einen Eingabe-Pin zum Beispiel mit einem Sen-
sor verbinden. Dieser überwacht die Außenwelt und
schickt über wechselnd hohe elektrische Spannung Infor-
mationen über die Umgebung, wie Temperatur oder Hellig-
keit an den Prozessor. Bei deinem Gamepad registriert ein
Eingabe-Pin auch, wenn du eine Taste drückst.
. AUSGABE:
Der Prozessor kann je nach Programmierung auf diese In-
formationen reagieren. Dafür brauchst du Ausgabe-Pins,
die die Verbindung zu LEDs oder zum Soundmodul herstel-
len, welche durch die Höhe der weitergeleiteten elektri-
schen Spannung mit verschiedenen Tönen und Farben
reagieren.
Richtig spannend wird es dann, wenn du mehrere Pins
gleichzeitig benutzt. So kann der Mikrocontroller selbst-
ständig auf die Sensoren reagieren, also beispielsweise
Alarm schlagen, wenn es ihm zu warm wird.
Was dein Mikrocontroller mit einem normalen Computer
gemein hat, ist der Hauptprozessor, das Gehirn eines jeden
Computers. Das ist das kleine schwarze Viereck oben links
auf dem Mikrocontroller. In der Mitte befindet sich ein klei-
nerer Prozessor. Dieser ist für die Kommunikation zwischen
Micocontroller und PC verantwortlich. Rechts sitzt der
Bluetooth-Chip, der eine drahtlose Verbindung ermöglicht.
KosmoBits

▲Downloadseite auf www.arduino.cc
Vorbereitung
Um deinen KosmoDuino zu programmieren, benötigst
du einen normalen PC oder einen Laptop mit der
Arduino-Software. Die Software wird auch Programmier-
Umgebung genannt, da sie eine Vielzahl von Hilfsmitteln
zusammenfasst, die du zum Programmieren brauchst.
INSTALLATION DER KOSTENLOSEN
ARDUINOSOFTWARE
Die Arduino-Software lädtst du von der Seite
https://www.arduino.cc/en/Main/Software herunter.
Dort findest du verschiedene Versionen für die gängigsten
Betriebssysteme. Für Windows-Betriebssyteme wählst du
»Windows Installer« aus.
Nach dem Download führst du die heruntergeladene Datei
aus. Da die Arduino-Software ständig überarbeitet wird,
gibt es immer wieder neue Versionen. Zu dem Zeitpunkt,
als diese Anleitung entstanden ist, war die Version 1.6.6
aktuell, die Datei hieß arduino-1.6.6-windows.exe.
Wir empfehlen aber das Arbeiten mit der Version 1.6.5, da
diese von uns ausgiebig getestet wurde. Ältere Versionen
findest du auf der Seite unter »PREVIOUS RELEASES«.
Nach dem Start der Datei folgst du den Anweisungen des
Installationsprogramms.
INSTALLATION DER KOSMOBITS
BIBLIOTHEKEN UND BEISPIELE
In einer sogenannten Software-Bibliothek werden nützli-
che und wieder verwendbare Funktionen zur Verfügung
gestellt, die dir das Programmieren erleichtern. Wir haben
die KosmoBits-Bibliotheken entwickelt. Sie enthalten auch
sämtliche Programmier-Beispiele, die du in dieser Anlei-
tung findest.
Die KosmoBits-Bibliotheken kannst du auf der Seite
www.kosmobits.de/downloads herunterladen. Die Datei
heißt KosmoBits_Archiv.zip.
Es handelt sich um eine .zip-Datei, die du in den Arduino-
Ordner entpacken musst.
Auf der folgenden Seite wirst du um eine Spende gebeten.
Das Arduino-Projekt, das die Entwicklung der Arduino-
Software vorantreibt, finanziert sich zu einem großen Teil
aus solchen Spenden. Du kannst die Software aber auch
ohne Spende kostenlos herunterladen, indem du auf »Just
Download« klickst.
1. Öffne den Explorer.
2. Gehe in den Downloads-Ordner.
3. Öffne die Datei KosmoBits_Archiv.zip mit einem
Doppelklick.
4. Markiere alle in dem Archiv vorhandenen Dateien und
Ordner, indem du gleichzeitig die Tasten »Strg« und
»A« drückst.
5. Drücke dann die Tasten »Strg« und »C«, um die aus-
gewählten Dateien zu kopieren.
6. Gehe in den Ordner Dokumente ➜ Arduino ➜ libraries.
7. Drücke nun gleichzeitig die Tasten »Strg« und »V«, um
die Dateien und Ordner einzufügen.
Prima, jetzt kannst du mit dem Programmieren beginnen.
Du brauchst nur noch die Arduino-Software zu starten,
und schon kann es losgehen!
DER KOSMOBITSCONTROLLER
Mit deinem KosmoBits-Controller hältst du nun deinen
eigenen Mikrocontroller in den Händen. Wir haben ihn
KosmoDuino genannt, da er vom Arduino-Mikrocontroller
abgeleitet wurde. Was er genau macht, ist deine Entschei-
dung. Denn damit er überhaupt etwas macht, muss er von
dir programmiert werden.
Wie das geht, erfährst du in dieser Anleitung.
Um dein erstes Programm zu schreiben, startest du am PC
die Arduino-Umgebung. Es öffnet sich ein Fenster, in das
du deinen Programm-Code eingeben kannst. Ein paar Zei-
len sind bereits für dich vorgefertigt worden:
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
int ledPin = 13;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
}
s e t u p ()
l o o p()
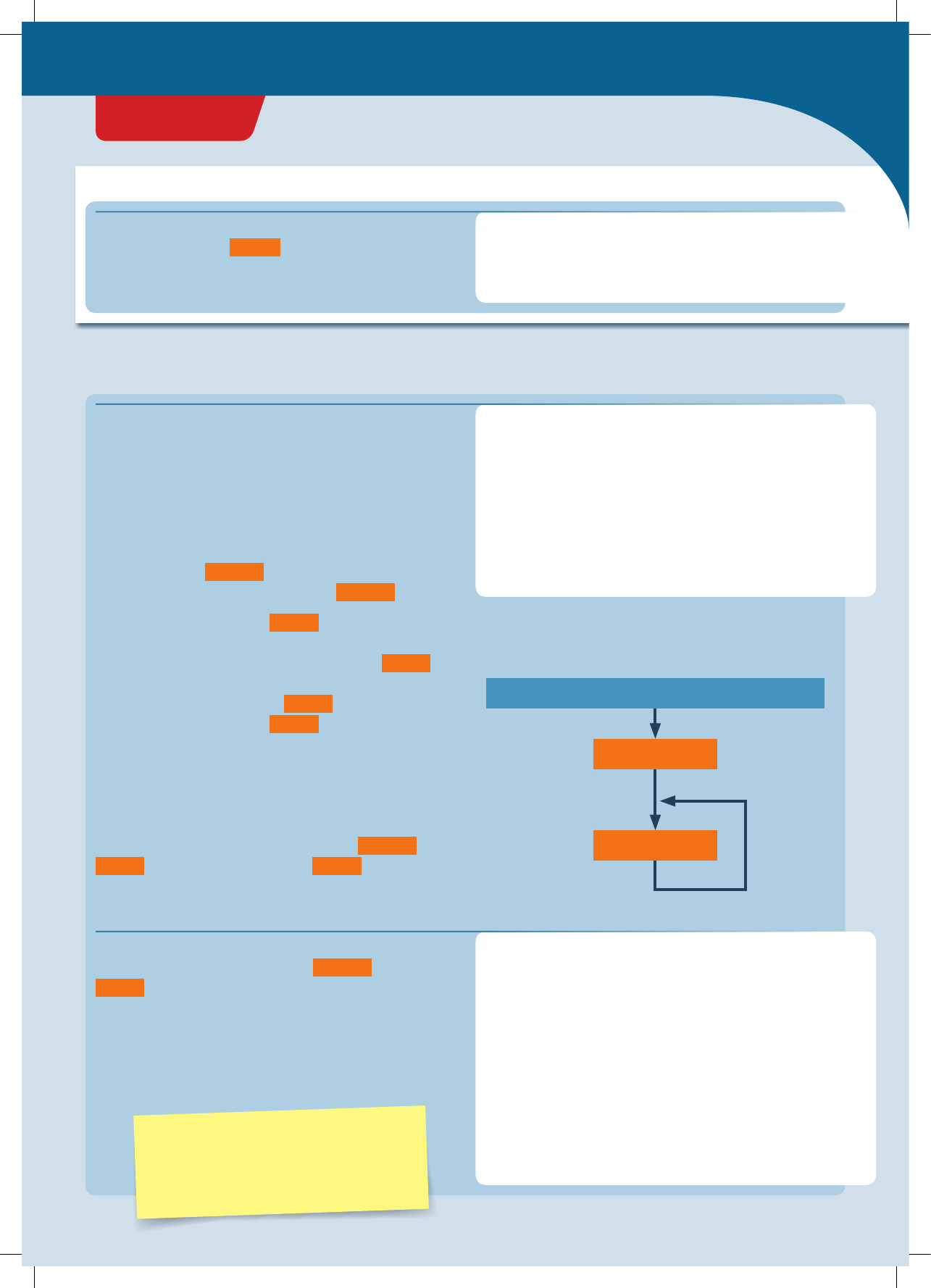
ARDUINO WIRD EINGESCHALTET
Das ist das Grundgerüst eines jeden Arduino-Programms:
1. Dein KosmoDuino arbeitet zunächst alle Anweisungen
in der Funktion s e t u p () ab, also alle Anweisungen, die
in den geschweiften Klammern nach s e t u p () stehen.
2. Danach wird die Funktion lo o p () aufgerufen. Das
heißt, dein Mikrocontroller arbeitet alle Anweisungen
innerhalb der geschweiften Klammern nach l o o p() ab.
Wenn die letzte Anweisung abgearbeitet wurde, ruft
dein Controller die Funktion lo o p() erneut auf. Das
heißt, die Anweisungen in lo o p () werden in einer End-
losschleife immer und immer wieder aufgerufen. Daher
auch der Name: loop ist Englisch und bedeutet Schleife.
Das kann man sich gut mit einem sogenannten Flussdia-
gramm veranschaulichen: Das Programm folgt dabei im-
mer der Pfeilrichtung: Vom Einschalten, zu s e t u p () , zu
l o o p() und dann immer wieder zu lo o p () zurück.
Du könntest das bereits als Programm auf deinen Kosmo-
Duino hochladen. Da aber weder in s e t u p() noch in
l o o p() irgendwelche Anweisungen stehen, würde das
Programm eben auch nichts machen.
Deshalb gibst du deinem KosmoDuino jetzt etwas zu tun!
Ändere dazu den Programm-Code folgendermaßen ab:
▲Flussdiagramm
Im Bereich der Arduino-Programmmierung
wird für ein Programm auch oft der Begriff
»Sketch« verwendet. In dieser Anleitung
werden beide Begriffe benutzt.
Hier steht die Erklärung zum Programm-Code. Teile aus
dem Code sind immer orange hinterlegt.
ERKLÄRUNGEN ZUM PROGRAMMCODE:
Hier steht der Programm-Code
// Kommentare zum Code sind immer grau.
// Dieser Text gehört nicht zum Code, sondern
// dient der Erklärung und der Übersichtlichkeit
Dein erstes Programm: Blink!
</>
!
KosmoBits
PROJEKT 1
</>
Um einen Sketch auf deinen KosmoDuino hochzuladen,
gehst du wie folgt vor:
1. Schließe den KosmoDuino mit dem USB-Kabel an deinen
Computer an. Das Interaction Board benötigst du nicht.
2. Speichere deinen Programm-Code wenn nötig ab. Klicke
dazu auf das »Speichern«-Symbol in der
Arduino-Umgebung.
3. Stelle sicher, dass die richtige Platine ausgewählt ist:
Werkzeuge ➜ Platine ➜ »Arduino/Genuino Uno«.
4. Stelle sicher, dass du den richtigen Port ausgewählt
hast:
Werkzeuge ➜ Port ➜ z.B. »COM3« (Arduino/Genuino
Uno).
5. Klicke jetzt in der Arduino-Umgebung auf das
»Hochladen«-Symbol.
Lass dich von den englischen Begriffen und unterschiedlichen Klammern nicht abschrecken! Wir gehen das Programm
gleich Schritt für Schritt durch. Dann wirst du sehen, dass es gar nicht so schwer zu verstehen ist!
Vorher wollen wir uns aber ansehen, was das Programm eigentlich macht. Du musst es also auf deinen KosmoDuino laden.
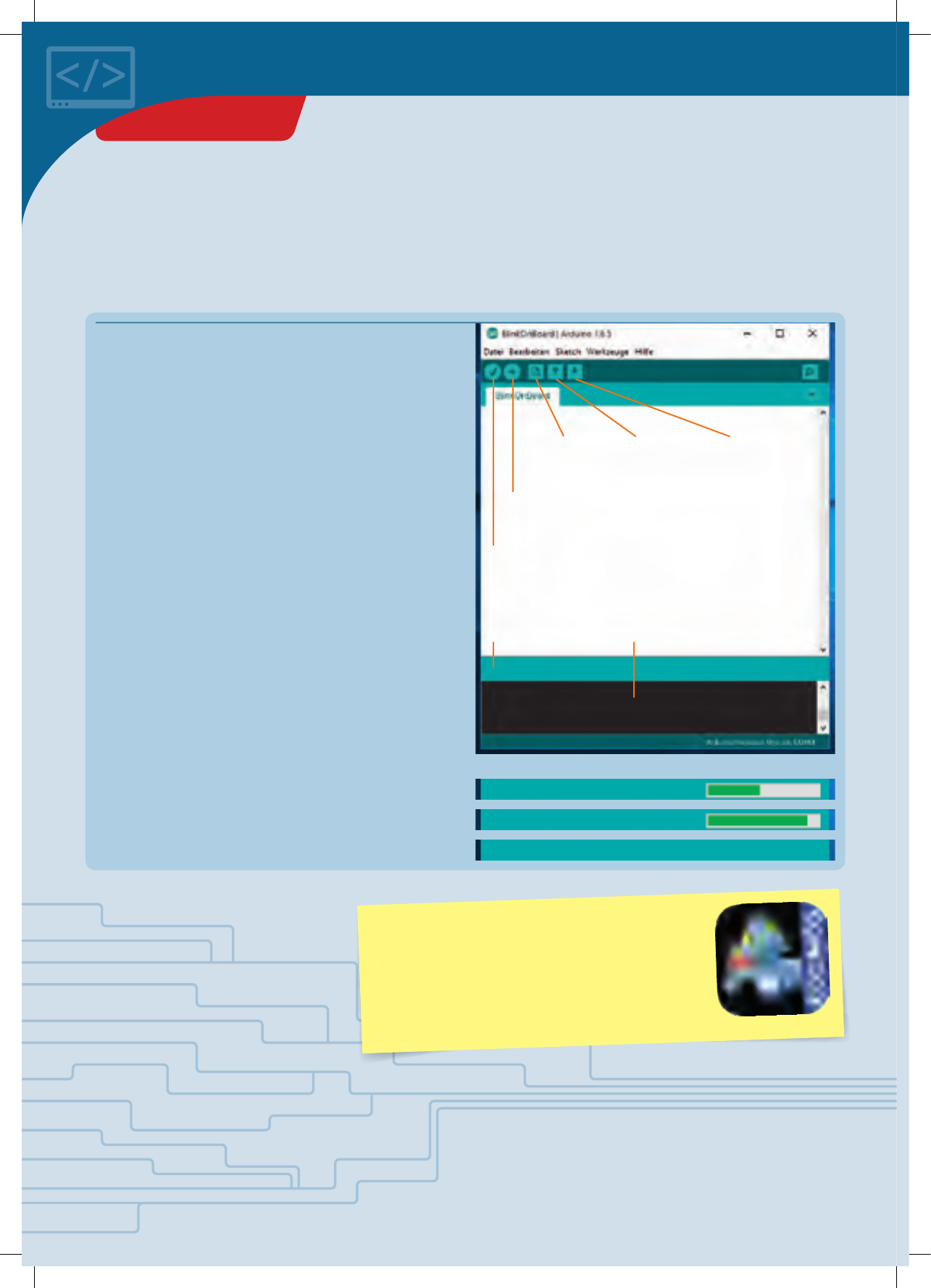
Neu Öffnen
Hochladen
Speichern
Statuszeile Fenster für nähere
Erläuterungen
Verifizieren
Wenn du alles richtig gemacht hast, sollten in der Status-
zeile der Arduino-Umgebung nacheinander die folgenden
Meldungen erscheinen:
1. Sketch wird kompiliert …
2. Hochladen …
3. Hochladen abgeschlossen.
Sketch wird kompiliert
…
Hochladen
…
Hochladen abgeschlossen.
EIN PROGRAMM AUF DEN KOSMODUINO HOCHLADEN
Du kannst immer nur ein Programm gleichzeitig auf
deinen KosmoDuino hochladen. Wenn du mit dem
GamePad das KosmoBits-Spiel spielen möchtest,
musst du die Datei KosmoBits_App.ino aufspielen.
Diese Datei ist auch bei Auslieferung des Kastens auf
dem KosmoDuino vorinstalliert.
PROJEKT 1
!
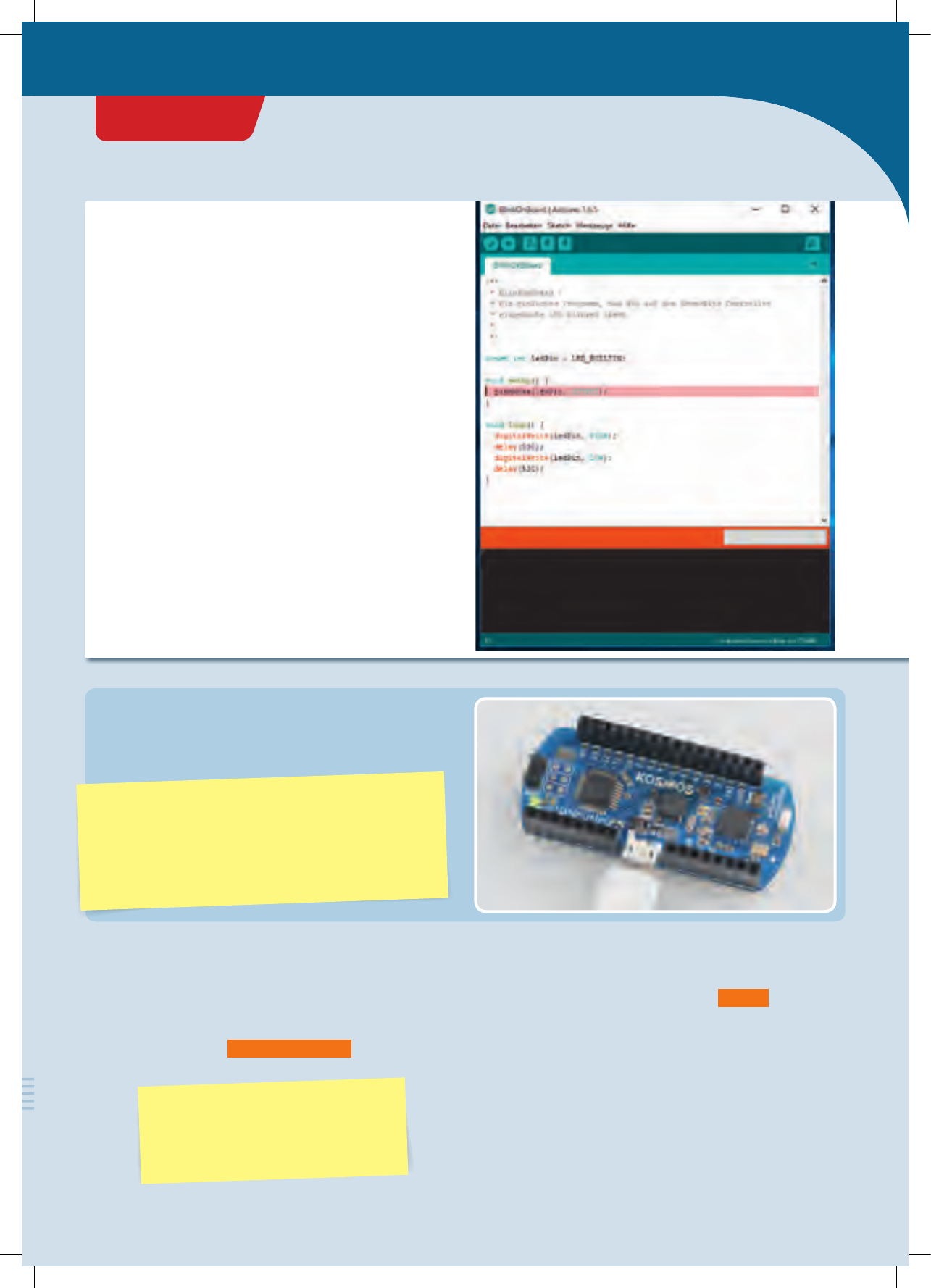
FEHLERMELDUNG?
Solltest du eine Fehlermeldung sehen, schaue dir deinen
Text noch einmal genau an. Hast du vielleicht etwas
falsch geschrieben? Die Stelle, an der ein Fehler im Pro-
grammtext zu Problemen führt, wird in der Arduino-Um-
gebung rot markiert, siehe Abbildung. Allerdings ist der
wirkliche Fehler oft schon vorher zu suchen. Schon kleine
Tippfehler führen in der Regel zu Fehlermeldungen!
Solltest du keinen Fehler finden, dann schau dir den
gelben Kasten weiter unten an. Dort wird unter »Beispiel-
Programme öffnen«
erklärt, wie du die in der Anleitung
beschriebenen Beispiele
nutzen kannst, ohne sie selbst
eintippen zu müssen.
Tippfehler: »pinnMode« statt »pinMode«!
Die Fehlerstelle ist rot hinterlegt. ▶
BlinkOnBoard.ino: In function 'void setup()':
BlinkOnBoard:11: error: 'pinnMode' was not declared in this scope
'pinnMode' was not declared in this scope
'pinnMode' was not declared in this scope Fehlermeldungen kopieren
Hat alles geklappt? Prima! Dann solltest du jetzt sehen,
dass auf dem KosmoDuino eine kleine, grüne LED –
die so-
genannte »Onboard-LED« – regelmäßig blinkt.
Beispiel-Programme öffnen
Alle Programmbeispiele kannst du auch direkt öffnen.
Du findest sie in der Arduino-Umgebung unter
»Datei« ➜ »Beispiele« ➜ »KosmoBits«.
ERKLÄRUNG
Jetzt wird es aber Zeit, das Programm zu verstehen.
Schauen wir es uns doch einmal genauer an.
Die erste Zeile lautet: int ledPin = 13;
Anweisungen müssen in der Arduino-
Programmiersprache mit einem
Semikolon (Strichpunkt) abgeschlossen
werden.
Hier wird eine Variable mit dem Namen ledPin definiert.
Variablen sind wichtige Bestandteile eines jeden Pro-
gramms. In Variablen kannst du nämlich Werte speichern –
also Zahlen, Buchstaben oder ganze Wörter. Jede Variable
hat einen Namen. Unter dem Namen kannst du den gespei-
cherten Wert wieder abrufen.
Wenn du einen Wert in einer Variablen speichern möchtest,
benutzt du das Gleichheitszeichen »=«: Auf die linke Seite
des Gleichheitszeichens kommt die Variable, auf die rechte
PROJEKT 1
KosmoBits
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
}
Hier wird eine Funktion definiert. Sie heißt
s e t u p ()
. Wenn
eine Funktion im Programm-Code aufgerufen wird, werden
alle in ihr enthaltenen Anweisungen Schritt für Schritt ab-
gearbeitet. Das sind alle Anweisungen, die zwischen den
geschweiften Klammern stehen. Eine Funktion kannst du
dir also als ein kleines Unterprogramm vorstellen.
Die Funktion s e t u p () ist übrigens eine spezielle Funktion.
Sie wird bei jedem Start deines KosmoDuinos automatisch
als erstes aufgerufen.
Was aber macht die Funktion s e t u p() ? Sie ruft eine ande-
re Funktion auf: p in M o d e() . Mit dieser Funktion legst du
fest, in welcher Betriebsart ein Pin arbeiten soll. In diesem
Fall soll der Pin ledPin (Pin Nummer 13), als OUTPUT ,
also als Ausgabe-Pin, arbeiten.
Ein Ausgabe-Pin funktioniert wie ein Schalter, den du
programmgesteuert ein- oder ausschaltest. Die anderen
möglichen Betriebsarten lernst du in späteren Projekten
kennen.
Wenn die Anweisungen in s e t u p () von deinem Kosmo-
Duino abgearbeitet worden sind, wird als nächstes die
Funktion lo o p () aufgerufen. Schauen wir uns an, was
diese Funktion beinhaltet:
!
FUNKTIONEN
Mit Funktionen kannst du deine Programme in kleinere Blöcke aufteilen. Das hilft, den Überblick zu behalten, und für
Ordnung im Programm zu sorgen. Außerdem kannst du häufig benutzte Abfolgen von Anweisungen in eine Funktion ver-
packen. Statt jedesmal den gleichen Text im Programm-Code zu wiederholen, kannst du dann einfach die entsprechende
Funktion aufrufen.
Ähnlich wie bei der Definition einer Variablen, muss man auch bei der Definition einer Funktion zunächst einen Typ ange-
ben. In diesem Fall void .
Das ist der sogenannte Rückgabetyp. Eine Funktion kann nämlich am Ende einen Wert an das aufrufende Programm zu-
rück geben. Hier ist der Rückgabetyp void . Das ist Englisch und bedeutet »leer«. Mit anderen Worten: Diese Funktion
liefert keinen Wert zurück! Ein Beispiel für die Rückgabe eines Wertes ist die Temperatur, die vom Sensor gemessen wurde.
Wichtig: Gib deinen Funktionen immer einen Namen, der bereits ausdrückt, was die Funktion macht. Das hilft dabei,
ein Programm zu verstehen, wenn man es liest.
der Wert. int ledPin = 13 bedeutet also, dass der Wert
13 in der Variablen ledPin gespeichert wird. Man sagt:
»Der Variablen ledPin wird der Wert 13 zugewiesen.«
Wo immer du in deinem Programm die Zahl 13 benutzen
möchtest, kannst du nun statt »13« auch »ledPin«
schreiben.
WAS ABER BEDEUTET int ?
In der Arduino-Programmiersprache kann eine Variable
nicht beliebige Werte aufnehmen. Die Werte müssen von
einem bestimmten Typ sein, den man festlegen muss.
In diesem Fall ist der Typ int . Das bedeutet, dass die
Variable sogenannte Integer-Werte aufnehmen kann.
Das sind für deinen KosmoDuino die ganzen Zahlen von
-32768 bis 32767.
PROJEKT 1
Was passiert, wenn lo o p () aufgerufen wird? Die erste
Anweisung in l o o p() ist:
digitalWrite(ledPin, HIGH);
Mit digitalWrite() (engl. für »digital Schreiben«) kannst
du steuern, ob an einem Ausgabe-Pin eine Spannung an-
liegt oder nicht. Beim Aufruf musst du dafür der Funktion
digitalWrite() zwei Dinge mitteilen:
1. Welcher Pin ist gemeint?
2. Soll die Spannung am Pin ein- ( HIGH ) oder aus- ( LOW )
geschaltet werden?
In diesem Fall wird also die Spannung an Pin Nummer 13
(ledPin ) eingeschaltet: Die LED leuchtet!
Wenn du einen anderen Pin einschalten möchtest, also
z. B. Pin Nummer 9, dann schreibst du
digitalWrite(9, HIGH); .
Die nächste Anweisung ist:
delay(500); .
»Delay« ist Englisch und bedeutet »Verzögern«. Mit der
d el a y() Anweisung kannst du den Programmablauf für
eine bestimmte Zeit verzögern, also einfach warten. Wie
lange, das wird durch die Zahl bestimmt, die du beim Auf-
ruf von d el a y() übergibst, hier 500 . Die Zeit wird in Milli-
sekunden (Tausendstelsekunden) angegeben. 500 Millise-
kunden sind eine halbe Sekunde. Das Programm wartet
eine halbe Sekunde lang und macht nichts.
Danach folgt die Anweisung
digitalWrite(ledPin, LOW); .
Das kannst du vielleicht jetzt schon alleine verstehen.
Richtig: Die LED wird wieder ausgeschaltet!
Danach wartet der KosmoDuino wieder eine halbe Sekun-
de: d elay(500); .
Und dann?
Dann geht das Ganze wieder von vorne los! lo o p () ist
nämlich eine besondere Funktion in der Arduino-Program-
mierung. Sie wird endlos wiederholt! Alle Befehle in
l o o p() werden wie in einer Endlosschleife immer und im-
mer wieder ausgeführt. Man nennt das die Hauptschleife.
l o o p() ist somit die wichtigste Funktion in jedem Kosmo-
Bits-Programm. Hier wird gesteuert, was der KosmoDuino
tatsächlich macht, während s e t u p () die nötigen Vorar-
beiten erledigt.
Was hier passiert, wenn die Hauptschleife wiederholt wird,
hast du bereits gesehen: Im regelmäßigen Abstand von
einer halben Sekunde wird die LED auf dem KosmoDuino
ein- und wieder ausgeschaltet, und wieder ein und wieder
aus, usw. Mit anderen Worten: Die LED blinkt.
!
TYPEN Einige geläufige Typen und ihre Bedeutung
TYP BEDEUTUNG WERTE
int Ganze Zahlen oder HIGH / LOW (an / aus) -32768 bis 32767
long Ganze Zahlen, groß -2 147 483 648 bis 2 147 483 647
float
Gleitkommazahlen: »Zahlen mit Komma«
z.B. 1.5; 3.141; 2.678 (engl. Schreibweise: Punkt statt Komma!)
double Wie float aber mit doppelter Genauigkeit z.B. 3.141964; 21.45873
char Einzelne Buchstaben z.B. a; A; c; C
const Nicht veränderbare Größe Kann alle Werte annehmen
PROJEKT 1
KosmoBits
Ausschalter
In deinem ersten Sketch »Blink« hast du gelernt, wie du
mit einem Programm eine LED auf dem KosmoDuino blin-
ken lassen kannst. Dazu hast du einen Pin des Controllers
als Ausgabe-Pin benutzt, und damit die LED ein- und
ausgeschaltet.
Du kannst einen Pin aber auch als Eingabe-Pin benutzen.
Es wird an dem Pin dann keine Spannung ein- oder ausge-
schaltet. Stattdessen kannst du in deinem Programm fest-
stellen, ob gerade eine elektrische Spannung an den Pin
angelegt ist.
Das kannst du nutzen, um die LED mit einem einfachen
Schalter ein- und auszuschalten.
DU BRAUCHST
›
KosmoDuino
›
Jumperkabel männlich-männlich (Erklärung, siehe S. )
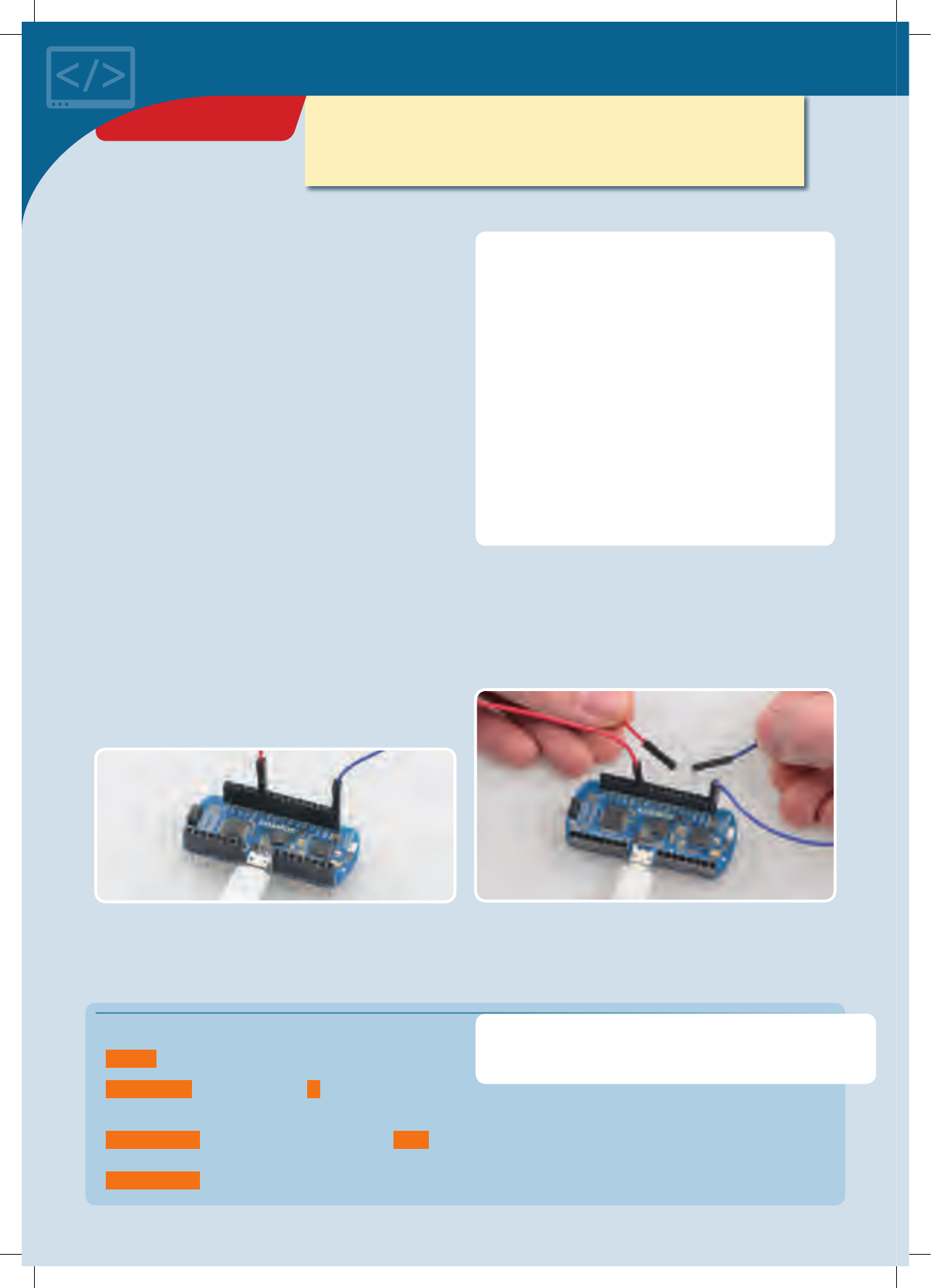
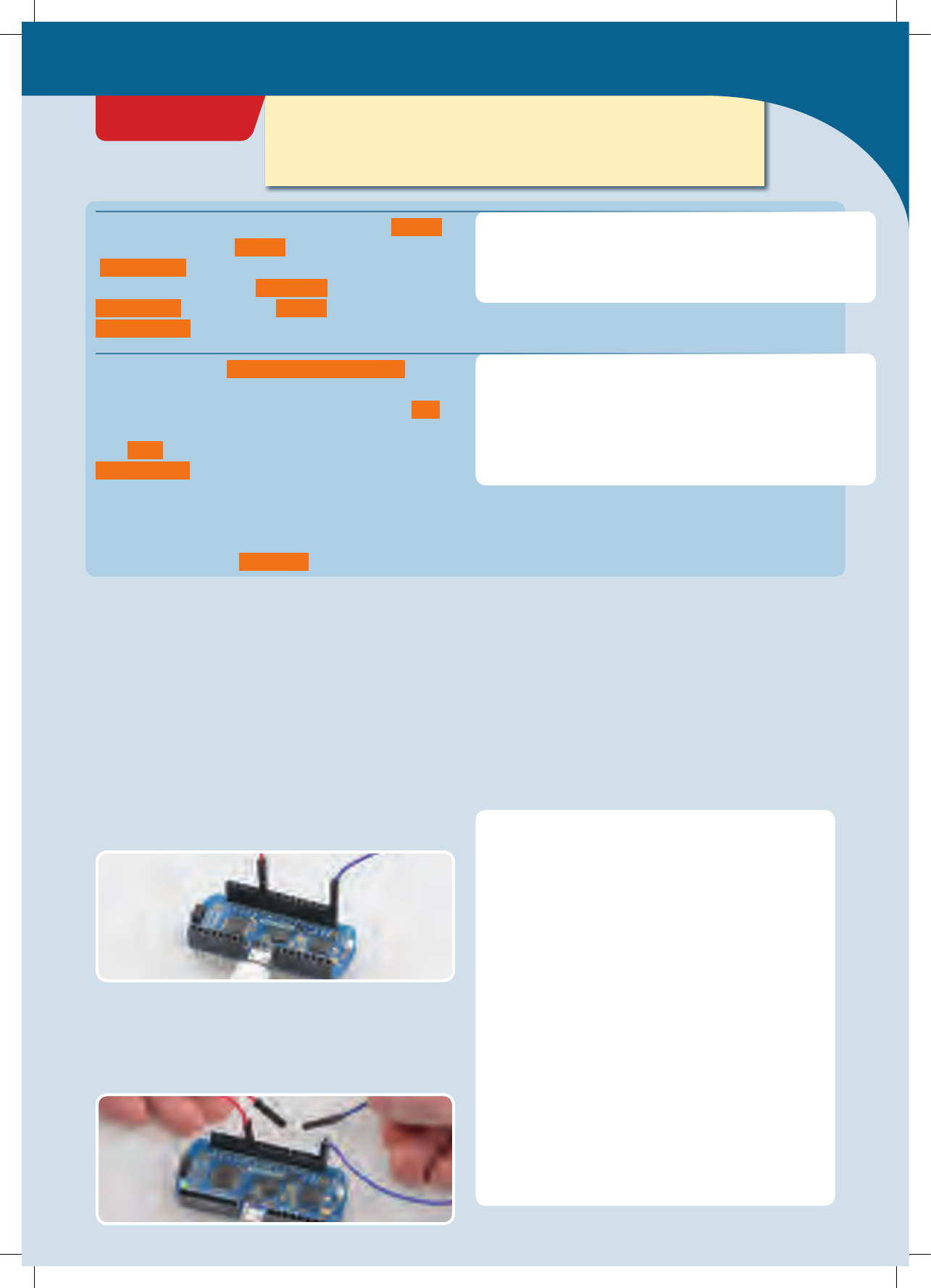
VORBEREITUNG
Stecke das eine Jumperkabel auf Pin 9, das andere
auf einen der Gnd-Pins. Gnd steht für Ground (engl. für
Erdung). Diese Pins haben keine eigentliche Funktion,
sondern leiten nur Strom ab.
int ledPin = 13;
int schalterPin = 9;
int schalterWert = HIGH;
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(schalterPin, INPUT_PULLUP);
}
void loop() {
schalterWert = digitalRead(schalterPin);
digitalWrite(ledPin, schalterWert);
delay(50);
}
DER PLAN
Lade den Sketch wie auf Seite 10 beschrieben auf deinen
KosmoDuino. Nach dem Hochladen beginnt die LED zu
leuchten. Wenn du jetzt die freien Kontakte der beiden
Jumperkabel zusammenführst, so dass sie sich berühren,
hört sie auf zu leuchten.
DAS PROGRAMM
Was also macht das Programm?
int ledPin = 13;
int schalterPin = 9;
int schalterWert = HIGH;
Du definierst zunächst einmal drei Variablen:
• ledPin für den Pin, an dem die LED angeschlossen ist.
• schalterPin weist du den Wert 9 zu, denn du schließt
deinen »Schalter« an Pin 9 an.
• schalterWert bekommt erst einmal den Wert HIGH . Du
wirst später Pin 9 »auslesen« und den gelesenen Wert in
schalterWert speichern.
!
ACHTUNG! Nicht geeignet für Kinder unter 10 Jahren. Falls ein inkor-
rekter Kurzschluss durch unterschiedliche Polaritäten verursacht,
oder der Kondensator unter falschen Bedingungen verwendet wird,
können heiße Oberflächen durch Bauteile auf der Platine entstehen.
PROJEKT 2
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(schalterPin, INPUT_PULLUP);
}
void loop() {
schalterWert = digitalRead(schalterPin);
digitalWrite(ledPin, schalterWert);
delay(50);
}
</>
Das ist fast wie in deinem ersten Programm. Der ledPin
wird als Ausgabe-Pin ( OUTPUT ) betrieben. Pin 9
(schalterPin ) wird allerdings als Eingabe-Pin betrieben.
Deshalb benutzt du in der p in M o d e() -Anweisung für
schalterPin nicht den Wert OUTPUT , sondern
INPUT_PULLUP .
Zunächst liest du mit digitalRead(schalterPin) den
aktuellen Zustand von Pin 9 aus. Ist der Pin elektrisch mit
einem »Gnd« Pin verbunden, so ergibt das den Wert LOW .
Das bedeutet es liegt keine Spannung an. Andernfalls den
Wert HIGH . Diesen Wert speicherst du in der Variablen
schalterWert .
Anschließend schreibst du diesen Wert in den LED Pin.
Wenn Pin 9 also mit dem Gnd-Pin verbunden ist, schaltest
du die LED aus. Andernfalls schaltest du sie ein.
Danach wartest du mit d elay(50) kurz, bevor das Ganze wiederholt wird.
Einschalter
DU BRAUCHST
›
KosmoDuino
› Jumperkabel männlich-männlich
VORBEREITUNG
Stecke das eine Jumperkabel auf Pin 9, das andere auf
einen der Gnd-Pins. int ledPin = 13;
int schalterPin = 9;
int schalterWert = HIGH;
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(schalterPin, INPUT_PULLUP);
}
void loop() {
schalterWert = digitalRead(schalterPin);
if(schalterWert == LOW) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
delay(50);
}
DAS PROGRAMM
Lade den Sketch wie auf Seite 10 beschrieben, auf deinen
KosmoDuino. Jetzt bleibt die LED nach dem Hochladen
dunkel. Nur wenn sich die beiden freien Kontakte der
Jumperkabel berühren, leuchtet sie.
DER PLAN
Im vorherigen Projekt hast du gelernt, wie du eine LED mit
Hilfe eines einfachen »Schalters« ausschalten kannst. Was
aber machst du, wenn es genau umgekehrt funktionieren
soll, die LED also erst angeht, wenn der Kontakt geschlos-
sen wird? Du änderst das Programm!
!
ACHTUNG! Nicht geeignet für Kinder unter 10 Jahren. Falls ein inkor-
rekter Kurzschluss durch unterschiedliche Polaritäten verursacht,
oder der Kondensator unter falschen Bedingungen verwendet wird,
können heiße Oberflächen durch Bauteile auf der Platine entstehen.
PROJEKT 3
KosmoBits

ERKLÄRUNG
Wir schauen uns nur die
l o o p()
-Funktion an, denn nur dort
hat sich im Vergleich zum
»
Ausschalter
«
etwas geändert.
void loop() {
schalterWert = digitalRead(schalterPin);
if(schalterWert == LOW) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
delay(50);
}
Genau wie beim »Ausschalter« liest du als erstes den
schalterPin aus und speicherst den aktuellen Wert, also
HIGH oder LOW in der Variablen schalterWert ab.
Du möchtest jetzt aber nicht den gelesenen Wert in den
LED-Pin schreiben, sondern den genau umgekehrten:
Wenn schalterWert den Wert LOW hat, möchtest du
die LED einschalten ( digitalWrite(ledPin, HIGH) ),
sonst möchtest du die LED ausschalten
(digitalWrite(ledPin, LOW) ).
Das drückst du in deinem Programmtext mit
if(...){...} el s e {...} aus. »if« ist Englisch für »wenn«
und »else« bedeutet »sonst«. Du ahnst es schon: Damit
kannst du im Programm auf Bedingungen reagieren.
Die Bedingung, auf die hier reagiert wird, ist
schalterWert == LOW . Das kannst du als Frage
verstehen: »Ist schalterWert gleich LOW?« Die Antwort
darauf wertest du mit der if() Anweisung aus:
Wenn schalterWert gleich LOW ist
(if(schalterWert == LOW) ), wird der Programm-Code
in der ersten geschweiften Klammer ausgeführt:
digitalWrite(ledPin, HIGH) . Die LED wird
eingeschaltet.
Sonst ( else ) wird der Teil in der geschweiften Klammer
ausgeführt: digitalWrite(ledPin, LOW) . Die LED wird
ausgeschaltet.
Schließlich wartest du mit del ay(50) kurz, bevor das
Ganze wiederholt wird.
</>
!
JUMPERKABEL
Jumperkabel werden benutzt, um auf einfache Weise elek-
tronische Bauteile miteinander zu verbinden. In diesem Ex-
perimentierkasten findest du zwei verschiedene Ausfüh-
rungen: männlich-männlich und männlich-weiblich. Das
heißt wirklich so! »männlich-männlich« bedeutet, dass
sich an beiden Seiten ein Stecker befindet. Bei »männlich-
weiblich« befindet sich hingegen an einer Seite ein Stecker
und an der anderen eine Buchse. Jumperkabel werden oft
auch als Patchkabel bezeichnet.
»Weibliches Ende« »Männliches Ende«
PROJEKT 3
Das Interaction Board
Zugegeben, die kleine LED, die du bislang zum Leuchten
gebracht hast, ist nicht sehr aufregend. Trotzdem war sie
hilfreich, um dir einen schnellen Einstieg in die Program-
mierung deines KosmoDuino zu ermöglichen.
Damit du ebenso schnell auch spannendere Dinge mit dei-
nem Mikrocontroller machen kannst, haben wir das Inter-
action Board entwickelt. Du hast es vermutlich schon im
Spielemodus kennen gelernt. Darauf befinden sich einige
praktische elektronische Bauteile, die du in vielen Projekt-
ideen einsetzen kannst:
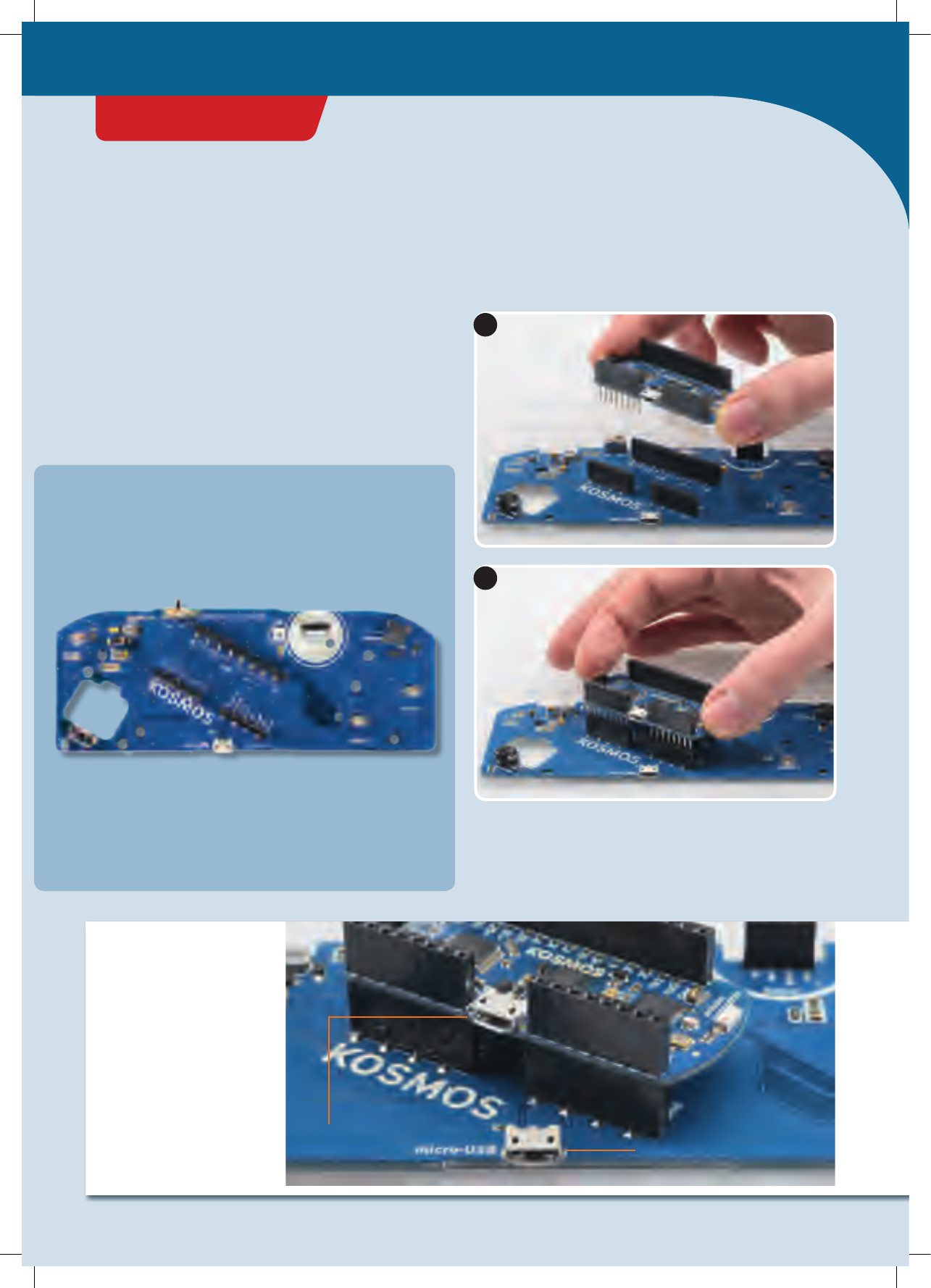
Um mit dem Interaction Board zu arbeiten, musst du zu-
nächst deinen KosmoDuino in die Sockel auf dem Interac-
tion Board stecken, siehe Abbildung.
!
ACHTUNG!
Um ein Programm auf den
Mikrocontroller hochzu-
laden musst du das USB-
Kabel in die USB-Buchse
des KosmoDuinos stecken.
Der USB-Anschluss des
Interaction Boards ist nur
zum Laden des Akkus
geeignet.
1
2
Programm
hochladen Akku laden
• Zwei Taster (»Button 1« und »Button 2«)
• Eine mehrfarbige LED (»NeoPixel«)
• Ein Drehrad (»Drehencoder«)
• Ein Lautsprecher (»Buzzer«)
Und ganz wichtig:
• Eine Buchse zum Anschluss der KosmoBits-Senso-
ren (Temperatur, Bewegung, Helligkeit, Lautstärke)
• Ein Akku, damit du deinen KosmoDuino auch ohne
angeschlossenen Computer benutzen kannst.
Dann kann es auch schon direkt los gehen! In den folgen-
den Projekten wirst du zunächst die Möglichkeiten des In-
teraction Boards erkunden, bevor es dann mit aufwendige-
ren Projekten weitergeht.
KosmoBits
INTERACTION BOARD
Buntes Licht
DU BRAUCHST
› KosmoDuino im Interaction Board
DER PLAN
Auf dem Interaction Board findest du eine mehrfarbige
LED, NeoPixel genannt. Damit kannst du die Farbe und die
Bislang hast du nur Variablen kennen gelernt, die als Be-
hälter für Zahlenwerte dienen. Die Variable pixel , die du
hier definierst, ist anders: Sie nimmt keine Zahlen auf, son-
dern dient als Behälter für ein Objekt vom Typ KosmoBits_
Pixel. Das klingt schwieriger, als es ist. Objekte können nur
etwas mehr als einfache Werte wie int .
Sie haben nämlich nicht nur einen Wert, sondern bringen
auch noch eigene Funktionen mit. Die werden auch als Me-
thoden bezeichnet. Dein pixel zum Beispiel ist ein Ob-
jekt, mit dem du den NeoPixel auf dem Interaction Board
ansteuern kannst. Dafür besitzt er eine Methode namens
setColor() , mit der du Farbe und Helligkeit des NeoPi-
xels einstellen kannst. Wie du sie benutzt, lernst du gleich
in der Hauptschleife.
Um Farbe und Helligkeit deines NeoPixels einzustellen,
benötigst du vier Zahlenwerte. Einen für die Helligkeit
und drei für die Grundfarben rot, grün und blau. Die Wer-
te speicherst du in den entsprechenden Variablen rot ,
gruen , blau und helligkeit .
Die unterschiedlichen Farben werden nämlich durch Mi-
schen dieser drei Grundfarben erzeugt. Wie stark die je-
weilige Farbe in dieser Mischung vertreten sein soll,
stellst du mit dem zugehörigen Zahlenwert ein. Du kannst
Werte von 0 bis 255 benutzen. 0 bedeutet, dass die jewei-
lige Farbe gar nicht leuchtet. Bei dem Wert 255 leuchtet
die jeweilige Farbe mit höchstmöglicher Helligkeit.
KosmoBits_Pixel pixel;
#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
int rot = 0;
int gruen = 0;
int blau = 0;
int helligkeit = 0;
Das ist neu für dich. Mit einer
#include
-Anweisung, kannst
du Programm-Code aus anderen Dateien in dein Programm
einbinden. Hier wird der Inhalt aus den Dateien »Adafruit_
NeoPixel.h« und »KosmoBits_Pixel.h« eingebunden.
Diese beiden Zeilen musst du immer dann am Anfang dei-
nes Programms einfügen, wenn du den NeoPixel benutzen
möchtest!
Mehrfarbige LED NeoPixel
DAS PROGRAMM
Helligkeit der LED selbst bestimmen. Wie das geht, lernst
du in diesem kleinen Projekt, mit dem du den NeoPixel in
unterschiedlichen Farben leuchten lässt.
</>
PROJEKT 4
void setup() {
// Hier ist nichts zu tun.
}
void loop() {
// 50 ist ein guter Helligkeitswert.
// Die höchste Helligkeitsstufe ist 255.
// Das blendet aber schon sehr!
helligkeit = 50;
// r o t
rot = 255;
gruen = 0;
blau = 0;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
// g r ü n
rot = 0;
gruen = 255;
blau = 0;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
// blau
rot = 0;
gruen = 0;
blau = 255;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
// lila
rot = 255;
gruen = 0;
blau = 255;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
// t ür k i s
rot = 0;
gruen = 255;
blau = 255;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
// g elb
rot = 255;
gruen = 255;
blau = 0;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
</>
In s e t u p () ist diesmal nichts zu tun, da das Programm,
das du mit der #include -Anweisung eingebunden hast,
das schon für dich erledigt.
In der Hauptschleife wird zunächst der Helligkeitswert ge-
setzt: helligkeit = 50; . Die höchste Helligkeit wird mit
dem Wert 255 erzielt, bei 0 bleibt der NeoPixel dunkel.
Danach werden der Reihe nach verschiedene Farben er-
zeugt. Dazu werden jeweils den Variablen rot , gruen
und blau unterschiedliche Werte zugewiesen.
Entscheidend ist für jede Farbe die Zeile
pixel.setColor(rot, gruen, blau, helligkeit); . Erst
damit wird dem NeoPixel nämlich mitgeteilt, dass er eine
neue Farbe darstellen soll! setColor() ist dabei eine so-
genannte Methode des Objekts pixel . Um eine Methode
eines Objekts aufzurufen, wird der Methodenname mit ei-
nem Punkt getrennt an den Namen des Objekts angehängt.
Mit delay(500); lässt du deinen KosmoDuino jeweils eine
halbe Sekunde warten, bevor er die nächste Farbe
einstellt.
NeoPixel
leuchtet in
unterschiedlichen
Farben▶
KosmoBits

// w ei ß
rot = 255;
gruen = 255;
blau = 255;
pixel.setColor(rot, gruen, blau, helligkeit);
delay(500);
}
</>
!
SOFTWAREBIBLIOTHEKEN
Damit man nicht in jedem Programm das Rad wieder neu
erfinden muss, gibt es sogenannte Software-Bibliothe-
ken. In denen werden keine Bücher gesammelt, sondern
wieder verwendbare Programmfunktionen und Definiti-
onen. Es gibt Bibliotheken, die mathematische Funktio-
nen zur Verfügung stellen, andere kümmern sich darum,
dass man bestimmte Hardware, also zum Beispiel Sen-
soren oder auch den NeoPixel, komfortabel benutzen
kann. Damit man die Mittel, die einem durch eine solche
Bibliothek zur Verfügung gestellt werden, auch nutzen
kann, muss man die jeweilige Bibliothek in das eigene
Programm einbinden.
Das geschieht mit Hilfe der #include -Anweisung:
#include <KosmoBits_Pixel.h> bindet zum Beispiel
die KosmoBits_Pixel-Bibliothek ein. Manche Bibliothek
verwendet aber auch Funktionen aus anderen Biblio-
theken. Die muss man dann zusätzlich einbinden, wie
im Beispiel der KosmoBits_Pixel-Bibliothek. Die benötigt
nämlich zum Funktionieren die Adafruit_NeoPixel Bib-
liothek, die durch #include <Adafruit_NeoPixel.h>
eingebunden wird.
▲Bibliothek
PROJEKT 4

Additive
Farbmischung
Was du als weißes Licht kennst, ist in Wirklichkeit eine Mischung aus
Licht unterschiedlicher Farben. Aus welchen Farben es tatsächlich besteht, kannst du an einem
Regenbogen ablesen. Ein Regenbogen entsteht nämlich dadurch, dass das Licht der Sonne durch
die Regentropfen in der Luft in seine Einzelfarben aufgespalten wird.
Umgekehrt kannst du aber auch Licht unterschiedlicher Farben zusammen mischen. Das Ergebnis
ist eine andere Farbe. Jeder Farbbildschirm nutzt dieses Prinzip: Der Fernseher, dein Computer, dein
Smartphone oder Tablet. Bei all diesen Geräten besteht jeder einzelne Bildpunkt (»Pixel«) aus drei
einfarbigen Bildpunkten in den Farben Rot, Grün und Blau. Weil sie so dicht beieinander liegen,
kannst du sie aus der normalen Entfernung nicht einzeln wahrnehmen. Erst wenn du ganz dicht
herangehst, oder eine Lupe benutzt, kannst du die einzelnen Farbpunkte erkennen.
Wenn du dir den NeoPixel auf dem Interaction Board genau anschaust, kannst du, solange er nicht
leuchtet, drei verschiedene Bereiche erkennen. Jeder Bereich kann nur eine einzige Farbe erzeugen.
Eben Rot, Grün oder Blau. Mit Hilfe der Methode
s e t C ol o r ()
sagst du dem NeoPixel, wie hell die
einzelnen Bereiche leuchten sollen.
Versuche doch mal weitere Farben zusammen zu mischen,
indem du die einzelnen Farbwerte variierst. Einen Anhalts-
punkt, welche Mischungen welche Farben ergeben, liefert dir
das Bild neben der Tabelle. Deine Ergebnisse kannst du in die
folgende Tabelle eintragen:
Beschreibung
der Farbe Wert Rot Wert Grün Wert Blau
Rot 255 0 0
Grün 0 255 0
Blau 0 0 255
NACHGEHAKT
KosmoBits
Vergrößerte Aufnahme eines Bildschirms, bei dem
die einzelnen Farbpunkte zu erkennen sind.
In der Nahaufnahme sind die drei einzelnen
LEDs des NeoPixels gut zu erkennen. ▶
▲In einem
Regenbogen
kannst du die
einzelnen
Farben
des Sonnen-
lichts erkennen.

Auf Tastendruck
In diesem Projekt wirst du lernen, wie du die Tasten auf
dem Interaction Board benutzen kannst, um den NeoPixel
des Interaction Boards in verschiedenen Farben leuchten
zu lassen.
DU BRAUCHST
› KosmoDuino im Interaction Board #include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
#include <KosmoBits_Pins.h>
Hier definierst du zwei Konstanten für die Pins, an die die
beiden Taster des Interaction Boards angeschlossen sind.
Diese werden mit const abgekürzt. Dieses Schlüsselwort
teilt dem Programm mit, dass ein Objekt oder eine Variable
nicht veränderbar ist.
Wie im vorigen Programm speicherst du die verschiede-
nen Farbwerte und die Helligkeit in entsprechenden Vari-
ablen, die du hier definierst.
Um den NeoPixel auf dem Interaction Board steuern zu
können, brauchst du wieder ein KosmoBits_Pixel Objekt.
Das definierst du hier.
const int taste1 = KOSMOBITS_TASTE_1_PIN;
const int taste2 = KOSMOBITS_TASTE_2_PIN;
int rot = 0;
int gruen = 0;
int blau = 0;
const int helligkeit = 50;
KosmoBits_Pixel pixel;
DER PLAN
Der NeoPixel soll zunächst dunkel bleiben. Drückst du
Taste 1 leuchtet der NeoPixel rot, drückst du Taste 2 leuch-
tet er blau. Wenn du beide Taste gleichzeitig drückst,
leuchtet er lila.
DAS PROGRAMM
Wie man Bibliotheken und den Code aus anderen Dateien
in ein Projekt einbindet, hast du bereits im letzten Projekt
gelernt. Neu ist hier
KosmoBits_Pins.h
. Darin sind Namen
für die verschiedenen vom Interaction Board genutzten
Pins deines KosmoDuinos definiert. Die KosmoBits-Bibilio-
theken werden wir uns später noch genauer anschauen.
▲Finger drückt auf rechte Taste – NeoPixel leuchtet rot
▲Finger drückt auf linke Taste – NeoPixel leuchtet blau ▲Zwei Finger drücken auf beide Tasten – NeoPixel leuchtet lila
PROJEKT 5
</>
In
s e t u p ()
stellst du mittels
pi n M o d e()
den Betriebs-
modus für die Taster-Pins ein. Da die Taster über einen
Widerstand an die Pins angeschlossen sind, benutzt du
die Betriebsart
INPUT
.
In der ersten
if
-Anweisung wird mittels
digitalRead()
der Pin ausgelesen, an den Taste 1 angeschlossen ist.
Wenn die Taste gedrückt ist, ergibt das den Wert
LOW
:
rot
wird der Wert
255
zugewiesen, also der größtmög-
liche Rotwert.
Wird die Taste nicht gedrückt, wird
rot
auf
0
gesetzt.
Das Ganze wird dann für Taste 2 in der zweiten
if
-An-
weisung wiederholt. Nur, dass dort der Wert für
blau
ge-
ändert wird.
Mit
pixel.setColor(rot, gruen, blau, helligkeit);
wird schließlich der neue Farbwert des NeoPixels
eingestellt.
Am Ende der Hauptschleife lässt du den Controller noch
50 Millisekunden warten.
void setup() {
pin M o de(taste1, IN PU T);
pinMode(taste2, INPUT);
}
void loop() {
if (digitalRead(taste1) == LOW) {
rot = 255;
} else {
rot = 0;
}
if (digitalRead(taste2) == LOW) {
blau = 255;
} else {
blau = 0;
}
pixel.setColor(rot, gruen, blau, helligkeit);
delay(50);
}
!
WAS PASSIERT EIGENTLICH BEIM HOCHLADEN?
Wenn du ein Programm auf deinen KosmoDuino hochlädst, passiert tatsächlich eine ganze Menge. So wie du es ge-
schrieben hast, versteht der Mikrocontroller das Programm nämlich nicht: Er spricht die Programmiersprache einfach
nicht. Deshalb muss das Programm erst in Maschinensprache übersetzt werden. Das macht ein sogenannter Compiler
(gesprochen: »Kompeiler«).
Die Programmiersprache, die du benutzt, ist also nur eine Zwischensprache, die du recht einfach verstehen und schreiben
kannst, die aber vor allem der Compiler leicht in Maschinensprache übersetzen kann.
KosmoBits

Nur unter einer Bedingung:
Die if-Anweisung
Im Programm-Code hast du die
if
- (englisch für
»wenn«) Anweisung bereits benutzt. Hier wollen wir
sie uns noch etwas genauer anschauen. Mit Hilfe der
if
-Anweisung kannst du Teile deines Programms
nur dann ausführen lassen, wenn eine bestimmte
Bedingung erfüllt ist:
// Einfache if-Anweisung
if (Bedingung) {
/
/ Wird nur ausgeführt, wenn die
/
/ Bedingung erfüllt ist.
Anweisung1;
Anweisung2;
...
}
OPERATOR BEDEUTUNG BEISPIEL
true
(WAHR)
== gleich a == b wenn a gleich b ist
< kleiner als a < b wenn a kleiner als b ist
> größer als a > b wenn a größer als b ist
!= ungleich a != b wenn a ungleich b ist
<= kleiner/gleich a <= b wenn a kleiner oder gleich b ist
>= größer/gleich a >= b wenn a größer oder gleich b ist
!
ACHTUNG!
Ein häufiger und nicht immer leicht zu findender Fehler
ist, in einer
if
-Anweisung, statt des doppelten Gleich-
heitszeichens, das einfache zu verwenden, also zum
Beispiel statt
if (a == b)
die falsche Anweisung
if (a = b)
.
In dem Fall wird in der
if
-Anweisung
a
der Wert von
b
zugewiesen. Wenn dieser größer als Null ist, gilt das
als wahr (
true
), und der Block in den geschweiften
Klammern wird ausgeführt.
Die Programmteile in den geschweiften Klammern
werden nur dann ausgeführt, wenn die Bedingung
erfüllt ist. Andernfalls wird der gesamte Block in den
gescheiften Klammern einfach übersprungen.
Die Bedingung muss einen Wahrheitswert zurück
liefern:
true
(wahr) oder
false
(falsch). Meistens
vergleicht man zwei Zahlenwerte. Dazu gibt es die
Vergleichsoperatoren, die dir zumindest so ähnlich
aus dem Mathematikunterricht bekannt sind:
if
ANWEISUNG 1
ANWEISUNG 2
Die Wahrheitswerte werden auch
boolesche Typen genannt, abge-
kürzt mit bool .
Dieser kann lediglich die Werte true
oder false annehmen.
WISSEN KOMPAKT
Du kannst eine
if
-Anweisung auch um einen
else
-Block erweitern. "Else" ist Englisch und bedeutet
"sonst". Der
else
-Block wird also dann, und nur dann,
ausgeführt, wenn die Bedingung nicht erfüllt ist.
// if-Anweisung mit else-Block
if (Bedingung) {
/
/ Wird nur ausgeführt, wenn die
/
/ Bedingung erfüllt ist.
Anweisung1;
Anweisung2;
...
} else {
/
/ Dieser Block wird ausgeführt, wenn
/
/ die Bedingung nicht erfüllt ist.
Anweisung3;
Anweisung4;
}
Schließlich kannst du mit
else if
(engl. »sonst,
wenn«) noch einen Block einbauen, der eine zweite Be-
dingung überprüft, wenn die erste nicht erfüllt wurde.
// if-Anweisung mit else-Block
if (Bedingung1) {
/
/ Wird nur ausgeführt, wenn die
/
/ Bedingung erfüllt ist.
Anweisung1;
Anweisung2;
...
} else if (Bedingung2){
/
/ Dieser Block wird ausgeführt, wenn
/
/ die Bedingung nicht erfüllt ist.
Anweisung3;
Anweisung4;
} else {
/
/ Dieser Block wird ausgeführt, wenn
/
/ keine der vorher geprüften
/
/ Bedingungen erfüllt wird.
Anweisung5;
...
}
Den abschließenden
else
-Block kannst du dabei
auch weg lassen. Auch kannst du beliebig viele
else if
-Blöcke aneinander reihen.
KosmoBits
Blink-Würfel
Mit diesem Projekt machst du deinen KosmoDuino zu ei-
nem einfachen Würfel. Auf Tastendruck ermittelt er eine
Zufallszahl von 1 bis 6 und signalisiert dir das Ergebnis
durch Blinken des NeoPixels.
DU BRAUCHST
› KosmoDuino im Interaction Board
#include <KosmoBits_Pins.h>
#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
KosmoBits_Pixel pixel;
const int tasterPin = KOSMOBITS_TASTE_1_PIN;
const int blinkDauer = 500; // M illi s e k u n d e n
const int blinkPause = 250; // M illi s e k u n d e n
const int helligkeit = 50;
In s e t u p () bereitest du wie üblich deinen Controller auf
die kommenden Aufgaben vor:
Mit pinMode(tasterPin, INPUT) stellst du den Pin, an
den Taster 1 angeschlossen ist, als Input-Pin ein.
Später wirst du eine Zufallszahl erzeugen lassen. Das
macht ein Zufallsgenerator, der aber einen möglichst zu-
fälligen Startwert benötigt. Um den zu bekommen, liest du
mit analogRead(12) Pin 12 aus. Da dort nichts ange-
schlossen ist, sind die Werte, die du so erhältst schon sehr
zufällig. Die Funktion analogRead() wirst du später noch
genauer kennenlernen. Mit r a n d o m S e e d (...) wird der
ausgelesene Wert dann dem eigentlichen Zufallsgenerator
als Startwert übergeben (»random« bedeutet übersetzt
zufällig).
Schließlich lässt du den NeoPixel mit
pixel.setColor(0, 0, 255, helligkeit);
blau leuchten.
void setup() {
pinMode(tasterPin, INPUT);
randomSeed(analogRead(12)); // Startwert für
// Zufallsgenerator
pixel.setColor(0, 0, 255, helligkeit); // Blau
// signalisiert Betriebsbereitschaft
}
void loop() {
if (digitalRead(tasterPin) == LOW) {
w u er fel n();
}
}
Du bindest zunächst wieder die bekannten Bibliotheken ein
und legst ein KosmoBits_Pixel an, damit du den NeoPixel
auf dem Interaction Board ansprechen kannst.
Danach legst du ein paar Konstanten an, die den Code les-
barer machen.
DER PLAN:
• Ist der Controller bereit, so leuchtet der NeoPixel blau.
• Drückst du auf Taste 1, beginnt der NeoPixel entspre-
chend des Würfelergebnisses grün zu blinken, also ein-
mal, wenn eine Eins gewürfelt wurde, zweimal, wenn
eine Zwei gewürfelt wurde, usw.
• Nach einer kurzen Pause leuchtet der NeoPixel wieder
blau. Das bedeutet, er ist bereit erneut zu würfeln.
In der Hauptschleife
l o o p()
liest du mit
digitalRead()
den
tasterPin
aus. Wird er gedrückt, dann ist das Ergebnis
LOW
. Mit Hilfe der
if
-Anweisung wird dann die Funktion
w u e r f el n ()
aufgerufen, in der das Würfelergebnis ermittelt
und ausgegeben wird. Andernfalls macht
l o o p()
nichts.
</>
DAS PROGRAMM
Dies ist eine verkürzte Version der Schreibweise, wie du
sie in Projekt 4 kennengelernt hast. Die Zahlen in den
Klammern steuern den RGB-Wert (Rot/Grün/Blau).
PROJEKT 6
</>
Hier definierst du dir eine eigene Funktion namens
w u e r f el n ()
. Darin wird eine Zufallszahl im Bereich von
1 bis 6 ermittelt und anschließend ausgegeben. Gehen
wir sie Schritt für Schritt durch:
Zunächst (1) machst du das Licht des NeoPixels aus und
wartest kurz. Die entsprechenden Befehle kannst du mitt-
lerweile sicherlich erkennen.
Jetzt geht es um das eigentliche Würfeln. Da dein Kosmo-
Duino nicht wirklich würfeln kann, musst du anders an
das Würfelergebnis kommen: Du befragst einen
Zufallsgenerator.
Das machst du mit
random(1, 7)
(2). Damit fragst du den
Zufallsgenerator nach einer zufällig ausgewählten Zahl.
Der erste Parameter, hier 1, gibt an, dass die kleinste mögli-
che Zahl 1 sein soll. Der zweite Parameter, hier 7, bedeutet,
dass die zufällig ausgewählte Zahl kleiner als 7 sein soll.
Wichtig: Der zweite Parameter muss also immer um 1
größer sein, als die größtmögliche Zahl, die vom Zufalls-
generator erzeugt werden soll. Das ist vielleicht etwas
verwirrend, ist aber leider so. Die so erzeugte Zufallszahl
wird in der Variablen
zahl
gespeichert.
Jetzt soll die Zufallszahl durch Blinken ausgegeben wer-
den (3). Dazu bedienst du dich einer sogenannten
for
-
Schleife. Den Aufbau der
for
-Schleife wirst du auf den
folgenden Seiten ausführlich kennen lernen. An dieser
Stelle ist erst einmal nur wichtig, dass der Code in den ge-
schweiften Klammern genau
zahl
-mal ausgeführt wird.
Wenn
zahl
den Wert 1 hat, 1 mal. Wenn
zahl
den Wert
2 hat, 2 mal usw.
Was geschieht in den geschweiften Klammern? Genau:
Der NeoPixel leuchtet einmal für die Dauer
blinkDauer
grün, und wird dann für die Dauer
blinkPause
ausge-
schaltet. Kurz: Der NeoPixel blinkt einmal grün. Da die
for
-Schleife aber
zahl
-mal durchlaufen wird, blinkt
der NeoPixel insgesamt eben
zahl
-mal. Es wird also das
Würfelergebnis durch Blinken ausgegeben.
Schließlich (4) wird nach einer weiteren kurzen Pause
(
delay(blinkDauer)
)
der NeoPixel wieder auf blau ge-
stellt, um anzuzeigen, dass wieder gewürfelt werden kann.
Da w u e r f el n () in deinem Programm nur aus der Haupt-
schleife lo o p () heraus aufgerufen wird, geht es an-
schließend zurück in die Hauptschleife. Als nächstes
wird daher in l o o p() wieder geprüft, ob die Taste ge-
drückt ist oder nicht.
Viel Spaß beim Würfeln!
Mehr Infos über die
for
-Schleife bekommst du auf den
Seiten 30/31.
void wuerfeln() {
// (1)
// Erst einmal Licht aus, um zu zeigen, dass
// auf den Tastendruck reagiert wird.
pixel.setColor(0, 0, 0, 0); // Licht aus
delay(500);
// (2) Erzeuge Zufallszahl
int zahl = random(1, 7);
// (3) Blinke zahl-mal
for (int i = 0; i < zahl; ++i) {
pixel.setColor(0, 255, 0, helligkeit); // G r ü n
delay(blinkDauer);
pixel.setColor(0, 0, 0, 0); // Licht aus
delay(blinkPause);
}
// (4) Abschluss des Würfelns signalisieren.
delay(blinkDauer); // Pause am Ende etwas
// länger
pixel.setColor(0, 0, 255, helligkeit); // Blau
// signalisiert Betriebsbereitschaft
}
PROJEKT 6
KosmoBits

Füge in s e tu p () die Zeile Serial.begin(115200); ein.
Wann immer du etwas auf den seriellen Monitor ausgeben
möchtest, kannst du das nun mit Hilfe der Befehle
Serial.print() und Serial.println() tun. Der Unter-
schied zwischen den beiden Varianten ist, dass
Serial.println() noch einen Zeilenumbruch einfügt.
Die nächste Ausgabe beginnt also in einer neuen Zeile.
Schauen wir uns das mit einem kleinen Beispiel an:
void setup() {
Serial.begin(115200);
}
void loop() {
Serial.print("Hallo!");
delay(500);
}
Lade das Programm auf deinen KosmoDuino hoch. Schein-
bar geschieht überhaupt nichts. Klicke jetzt auf das Lupen-
symbol oben rechts in der Arduino-Umgebung. Es öffnet
sich ein neues Fenster, der serielle Monitor.
Vermutlich siehst du zunächst nur komische Zeichen. Das
kannst du aber schnell ändern, indem du die richtige Über-
tragungsgeschwindigkeit einstellst. Unten rechts im seri-
ellen Monitor findest du eine Auswahlliste, in der du
»115200 Baud« auswählen musst. Dann solltest du sehen,
wie ein »Hallo!« nach dem anderen in das Fenster ge-
schrieben wird.
▲Mit einem Klick auf die Lupe oben rechts in der Arduino-Umgebung
startest du den seriellen Monitor.
▲Wenn die falsche Übertragungsrate, hier 9600 Baud, eingestellt ist,
siehst du nur wirre Zeichen.
▲Ist die richtige Übertragungsgeschwindigkeit eingestellt, kannst du im
seriellen Monitor »Botschaften« vom KosmoDuino empfangen.
</>
÷ôôõôõõõôõôõõôõõôõõõôõõúúúôôõõõõõôô
Hallo!Hallo!Hallo!
115200 Baud
9600 Baud
Senden
Senden
Kein Zeilenende
Kein Zeilenende
Der serielle Monitor
DU BRAUCHST
› KosmoDuino
› Computer
› USB-Kabel
DER PLAN
Mit Hilfe des seriellen Monitors kannst du dir von deinem
KosmoDuino kleine Botschaften auf den Bildschirm deines
Computers schicken.
Um den seriellen Monitor nutzen zu können, gehst du
folgendermaßen vor:
DAS PROGRAMM
PROJEKT 7
Schließe jetzt den seriellen Monitor. Ersetze in der Haupt-
schleife den Aufruf Serial.print("Hallo!"); durch
Serial.println("Hallo!"); :
void loop() {
Serial.println("Hallo!");
delay(500);
}
Lade das geänderte Programm auf den Controller und
starte den seriellen Monitor erneut. Jedes »Hallo!« be-
kommt nun eine eigene Zeile.
Mit Serial.println() kannst du aber nicht nur vorher
festgelegte Texte ausgeben, sondern auch gerade erst
ermittelte Messwerte. Das wirst du im nächsten Projekt,
»Thermometer« auf Seite 33 kennen lernen.
▲Im Gegensatz zu Serial.print() folgt nach der Ausgabe mit
Serial.println() immer eine neue Zeile.
</>
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
Hallo!
115200 Baud
Senden
Kein Zeilenende
!
ACHTUNG!
Wenn du versuchst, ein Programm auf den KosmoDuino zu laden, während der serielle Monitor geöffnet ist, kommt
es manchmal zu einer Fehlermeldung. Schließe dann den seriellen Monitor und versuche, das Programm erneut
hochzuladen.
KosmoBits
PROJEKT 7
Die for-Schleife
Wenn Programmteile wiederholt ausgeführt werden,
spricht man von einer Schleife. Eine wichtige Schleife
hast du bereits kennengelernt: Die Hauptschleife l o o p() .
Darin erledigt dein KosmoDuino die wichtigsten Aufgaben
deiner Programme. Er liest Eingabe-Pins aus, verarbeitet
die Messdaten und reagiert schließlich darauf. Immer und
immer wieder von vorne.
Oftmals möchtest du aber nicht in einer Endlosschleife
gefangen sein, sondern wünschst dir nur eine bestimmte
Anzahl von Wiederholungen. Dafür kannst du eine for -
Schleife verwenden. Du wirst sie meistens in der folgenden
Weise als sogenannte Zählschleife verwenden:
i < 20; :
Das ist die Testbedingung: Vor jedem Durchlauf der Schlei-
fe wird diese Bedingung geprüft. Ist die Bedingung erfüllt,
wird die Schleife durchlaufen, also der gesamte Pro-
grammcode in den geschweiften Klammern ausgeführt.
Ist die Bedingung nicht erfüllt, wird die Schleife verlassen:
Der Programmcode in den geschweiften Klammern wird
kein weiteres Mal ausgeführt. Stattdessen wird das Pro-
gramm mit der nächsten Anweisung nach der Schleife
fortgesetzt.
++i :
Das ist zunächst einmal eine Kurzform für i = i + 1 . Der
Wert der Zählvariablen i wird also um 1 erhöht. Aber
wann? Nach jedem Schleifendurchlauf!
Sofern im Schleifenrumpf der Wert der Zählvariablen i
nicht verändert wird, passiert also folgendes:
Vor dem ersten Durchlauf hat i den Wert 0. Das ist kleiner
als 20. Die Testbedingung ist also erfüllt, und die Schleife
wird durchlaufen. Nachdem die Anweisungen im Schlei-
fenrumpf ausgeführt wurden, wird nun der Wert der Zähl-
variablen um 1 erhöht. Der Wert von i ist jetzt 1. Die Be-
dingung ist immer noch erfüllt, der Schleifenrumpf wird
ausgeführt, i wieder um 1 erhöht und so weiter und so
weiter. Wenn i schließlich den Wert 19 hat, wird noch ein-
mal der Schleifenrumpf ausgeführt und danach i auf den
Wert 20 erhöht. Die Testbedingung ist dann nicht mehr er-
füllt, die Schleife wird verlassen.
Wie oft ist der Schleifenrumpf jetzt ausgeführt worden? Er
ist ausgeführt worden für die folgenden Werte der Zählva-
riablen i: 0, 1, 2, 3, ..., 19. Die Zahlen 1 bis 19 ergeben 19
Druchläufe, dazu kommt noch ein Durchlauf für den Wert
0. Es sind also insgesamt 20 Durchläufe!
Die Zählvariable ist übrigens nicht allein zum Zählen da.
Ihren aktuellen Wert kannst du auch jederzeit im Schlei-
fenrumpf verwenden. Wenn du zum Beispiel alle Zahlen
von 1 bis 42 auf dem seriellen Monitor ausgeben möchtest,
kannst du das so machen:
for (int i = 0; i < 20; ++i) {
Anweisung1;
Anweisung2;
...
}
Was bedeutet das? Mit dem Wort for wird die Schleife
eingeleitet. Die Anweisungen, die wiederholt ausgeführt
werden, stehen in dem Block in den geschweiften Klam-
mern. Man nennt diesen Block mit den zu wiederholenden
Anweisungen auch den Schleifenrumpf. Damit die Schleife
aber auch weiß, wie oft diese Anweisungen wiederholt
werden sollen, braucht die for -Schleife noch ein paar
Angaben, die du in den runden Klammern finden kannst.
Schauen wir uns die einmal genauer an:
int i = 0; :
Das ist die sogenannte Initialisierung der Schleife. Bevor
die Schleife das erste Mal durchlaufen wird, legst du hier
die Zählvariable i an und gibst ihr den Wert 0. Du kannst
der Zählvariablen einen beliebigen Namen und Anfangs-
wert geben. Solange die Zählvariable keine besondere Be-
deutung hat, benutzt man meist die Buchstaben i, j und
k als Namen. In aller Regel startet man mit dem Anfangs-
wert 0.
// Gibt die Zahlen 1, 2, 3,..., 42 aus:
for (int i = 1 ; i <= 42; ++i) {
Serial.println(i); // Gibt den aktuellen
// Wert von i aus
}
DIE FORSCHLEIFE
Hier startet die Schleife bei 2 und nach jedem Schleifen-
durchlauf wird die Zählvariable mit i = i + 2 gleich um
2 erhöht.
Hier startet die Schleife mit dem Anfangswert 1. Getestet
wird diesmal nicht, ob i kleiner als 42 ist, sondern ob i
kleiner oder gleich 42 ist. Das heißt, dass die Schleife auch
für den Wert 42 noch einmal durchlaufen wird.
Es geht aber auch in umgekehrter Reihenfolge:
// Gibt die Zahlen 42, 41, 40, ..., 1 aus:
for (int i = 42; i >= 1; --i) {
Serial.println(i);
}
Die Schleife startet mit dem Anfangswert 42. Sie wird so-
lange durchlaufen, wie i einen Wert hat, der größer oder
gleich 1 ist. Mit --i wird diesmal i nach jedem Schlei-
fendurchlauf um 1 verringert, also rückwärts gezählt.
// Gibt die Zahlen 2, 4, 6, ..., 42 aus.
for (int i = 2; i <= 42; i = i + 2) {
Serial.println(i);
}
Tatsächlich kannst du anstelle von ++i oder --i beliebi-
ge Anweisungen verwenden. Du kannst zum Beispiel nur
die geraden Zahlen ausgeben:
DIE FORSCHLEIFE
KosmoBits
Temperatursensor
Bewegungssensor
Schallsensor
Lichtsensor
Sensoren
Bislang hast du gelernt, wie
dein KosmoDuino auf einen Tas-
tendruck reagieren kann. In
diesem Experimentier-
kasten findest du aber
auch eine Menge
Sensoren, mit de-
nen dein Mikro-
controller auf sei-
ne Umwelt
reagieren kann: Die
KosmoBits-Module!
Mit dem Temperatursensor
kann dein Controller die Tem-
peratur überwachen, mit dem
Lichtsensor die Helligkeit. Der Be-
wegungssensor erlaubt es dir, auch
leichteste Bewegungen des KosmoDui-
nos zu registrieren, und mit dem Schall-
sensor kannst du auf Geräusche warten.
Aber wie kommt der KosmoDuino an die Daten
der Sensoren? Wie erfährt er, wie warm es ist,
oder wie hell?
Ganz einfach: Die Sensoren geben ihre Messwerte in
Form einer elektrischen Spannung an den Mikrocontrol-
ler weiter. Der kann diese Spannung dann an einem Pin
auslesen. Viele der Pins können nämlich nicht nur »an«
und »aus« unterscheiden, sondern auch unterschiedliche
Spannungen messen. Dazu dient der Befehl
analogRead()
,
mit dem du die elektrische Spannung an einem Pin bestim-
men kannst. Das Ergebnis ist ein Zahlenwert von 0 bis
1023. Je höher die elektrische Spannung ist, die an dem Pin
anliegt, umso höher ist der Wert. Bei 0 liegt gar keine
Spannung an, bei 1023 sind es 5 Volt. Natürlich musst du analogRead() auch sagen, welcher
Pin ausgelesen werden soll. In der Regel wird das der Pin
KOSMOBITS_SENSOR_PIN sein, der in der Datei
KosmoBits_Pins.h definiert wird. Diese Datei solltest du
also immer mit #include <KosmoBits_Pins.h> einbin-
den, wenn du auf die Sensoren der KosmoBits-Module zu-
greifen möchtest.
Den seriellen Monitor hast du bereits kennen gelernt.
Das ist ein wichtiges Werkzeug, wenn du mit den Sensoren
arbeiten möchtest. Warum, erfährst du in den nächsten
Projekten.
SENSOREN

Thermometer
DU BRAUCHST
› KosmoDuino im Interaction Board
› Temperatursensor
VORBEREITUNG
Stecke den Temperatursensor in das Interaction Board.
DER PLAN
In diesem Projekt wirst du deinen KosmoDuino zu einem
Thermometer machen. Die Temperatur wird dabei mit Hilfe
des Temperatursensors gemessen. Die Ausgabe der Tempe-
ratur erfolgt über den seriellen Monitor.
Das Programm ist schnell erklärt. Mit analogRead() wird
in der Hauptschleife wiederholt die Spannung am
sensorPin ausgelesen. Der Messwert wird dann über den
seriellen Monitor ausgegeben. Du wirst dieses Programm
immer wieder benutzen, wenn du einen neuen Sensor
kennenlernen möchtest.
Öffne also den seriellen Monitor und schau dir die Mess-
werte an. Lege einen Finger auf den schwarzen Punkt, der
aus dem Gehäuse des Sensors heraus schaut. Du solltest
sehen, dass sich die gemessenen Werte verändern. Nach ei-
ner Temperatur sieht das aber noch nicht aus. Du musst
also noch die Messwerte in eine Temperatur umrechnen.
Dabei hilft dir die KosmoBits-Bibliothek. Darin findest du
nämlich eine Funktion, die genau das macht. Sie heißt
thermistor_messwert_in_celsius() .
Um sie nutzen zu können, musst du zuvor die Datei
KosmoBits_Thermistor.h einbinden.
#include <KosmoBits_Pins.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
void setup() {
pinMode(sensorPin, INPUT);
Serial.begin(115200);
}
void loop() {
int wert = analogRead(sensorPin);
Serial.print("Messwert: ");
Serial.println(wert);
delay(1000);
}
</>
DAS PROGRAMM
Schreibe jetzt den folgenden Code und lade ihn auf den Controller:
◀Board mit Temperatursensor
KosmoBits
PROJEKT 8

ÄNDERE ALSO DEIN PROGRAMM SO AB:
Schließe den seriellen Monitor, lade das Programm hoch
und öffne wieder den seriellen Monitor. Du siehst, dass nun
in regelmäßigen Abständen die aktuelle Temperatur aus-
gegeben wird.
#include <KosmoBits_Pins.h>
#include <KosmoBits_Thermistor.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
void setup() {
pinMode(sensorPin, INPUT);
Serial.begin(115200); // Ausgabe über seriellen
// Monitor ermöglichen.
}
void loop() {
int messwert = analogRead(sensorPin);
float celsius = thermistor_messwert_in_
celsius(messwert); // Messwert in Grad Celsius
// u m r e c h n e n.
Serial.print(celsius); // Wert von celsius wird
// ausgegeben.
Serial.println("Grad Celsius"); // Ausgabe von
// "Grad Celsius" und Zeilenumbruch.
delay(1000);
}
</>
PROJEKT 8
Zahlen und Variable, die Zahlen aufnehmen können,
hast du bereits kennen gelernt. Die nützen dir aber
nicht viel, wenn du mit ihnen nicht rechnen kannst.
Denn in aller Regel wirst du mit deinem KosmoDuino
einen Zahlenwert aus einem Sensor auslesen, und da-
mit dann etwas anderes steuern. Dazu musst du aus
dem Messwert einen anderen Zahlenwert errechnen.
In der Arduino-Programmiersprache stehen dir dafür
alle Grundrechenarten zur Verfügung. Für Plus- und
Minusrechnung werden dabei die üblichen Symbole
»+« und »-« benutzt. Für die Multiplikation benutzt
man einen Stern »*«, für die Division den einfachen
Schrägstrich »/«.
Du kannst übrigens auch den bisherigen Wert einer Va-
riablen benutzen, um daraus den neuen zu berechnen:
Für den häufig genutzten Rechenschritt
i = i + 1;
gibt es sogar eine Kurzform:
RECHNEN IM PROGRAMM:
// Addition (plus)
int x; // x ist eine ganze Zahl.
x = 1 + 4; // x hat den Wert 5.
// Subtraktion (minus)
x = 5 - 3; // x hat den Wert 2.
// M ultiplikation (mal)
x = 3 * 4; // x hat den Wert 12.
// Division (geteilt durch)
x = 12 / 6; // x hat den Wert 2.
// Punktrechnung vor Strichrechnung
x = 4 * 3 + 2; // x hat den Wert 14.
int x = 4;
x = x + 2; // x hat jetzt den Wert 6.
x = 2 * x; // x hat jetzt den Wert 12.
int i = 0;
i++; // entspricht x = x + 1.
++i; // entspricht ebenfalls x = x + 1.
WISSEN KOMPAKT
KosmoBits
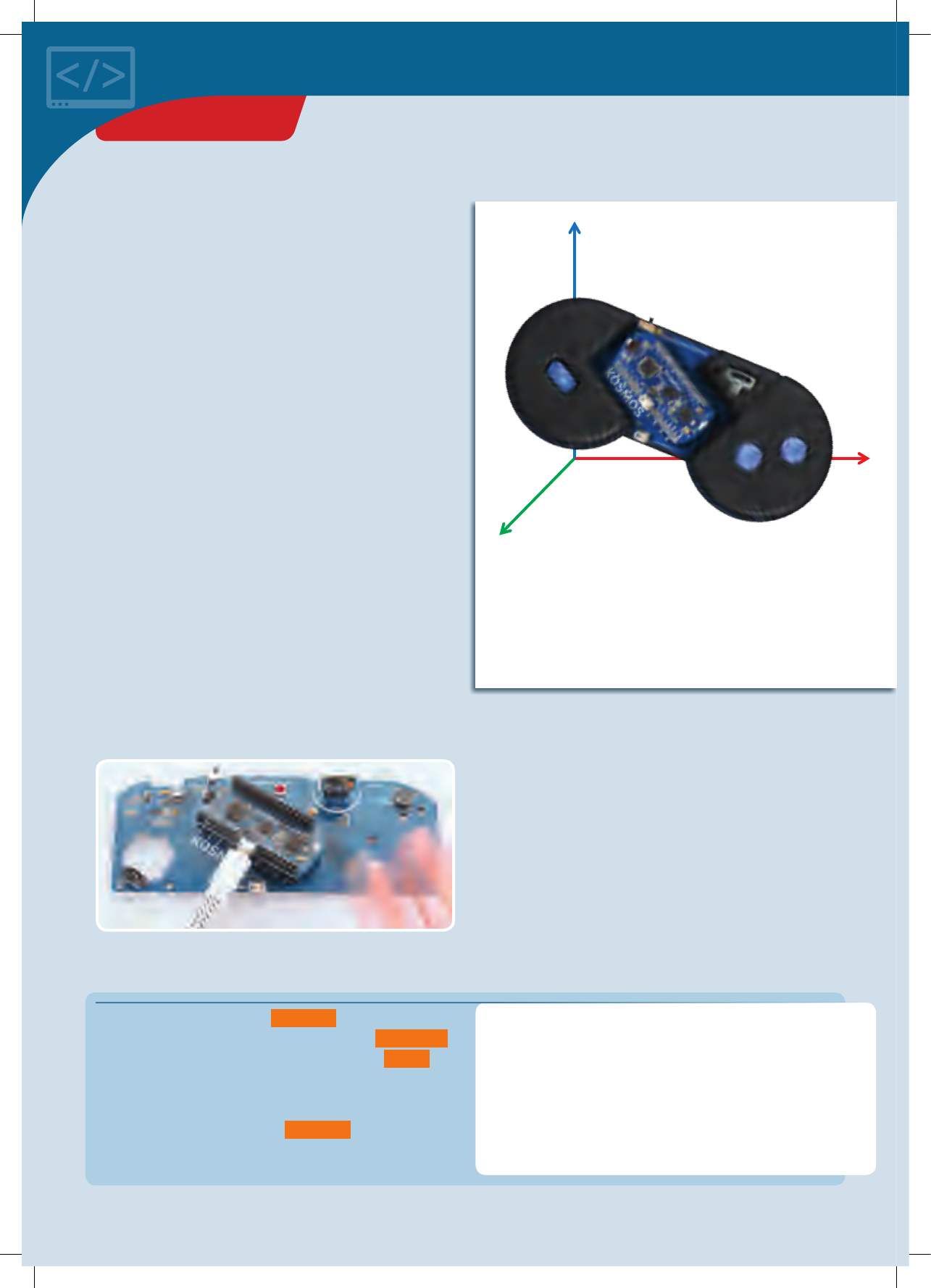
X
Y
Z
DAS PROGRAMM
Finger-Disko
DU BRAUCHST
›
KosmoDuino im
Interaction Board
› Bewegungssensor
VORBEREITUNG
Mit dem Bewegungssensor kann dein KosmoDuino auch
kleinste Bewegungen registrieren. Um ein Gefühl dafür zu
entwicklen, steckst du zunächst den Bewegungssensor ins
Interaction Board. Lade dann den Sketch »SensorLesen« auf
deinen KosmoDuino.
Im seriellen Monitor kannst du nun die Messwerte des Bewe-
gungssensors beobachten. Solange du den Controller nicht
bewegst, schwankt der Messwert leicht um einen Mittelwert.
Bewege den Controller nun in verschiedene Richtungen,
drehe und kippe ihn. Du wirst feststellen, dass es Bewe-
gungs- und Drehrichtungen gibt, die eine starke Verände-
rung des Messwertes verursachen. In andere Richtungen
änderst sich der Wert kaum.
Trommel jetzt erst vorsichtig, dann etwas kräftiger mit den
Fingern auf das Gehäuse des Interaction Boards. Obwohl
die Erschütterungen, die deine Finger auslösen, nur sehr
Zunächst bindest du mit den #include -Anweisungen wie-
der die benötigten Bibliotheken ein, definierst sensorPin ,
um die Sensorwerte auslesen zu können, sowie pixel ,
um den NeoPixel ansteuern zu können.
Um Abweichungen vom Ruhezustand erkennen zu können,
definierst du noch die Variable ruhewert . Darin wird spä-
ter der Mittelwert in Ruhe gespeichert.
#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pins.h>
#include <KosmoBits_Pixel.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
KosmoBits_Pixel pixel;
int ruhewert = 0;
Tatsächlich misst der Sensor lediglich die Beschleunigung
des Sensors längs der sogenannten z-Achse, also der
»Vor-Zurück-Achse«. Deshalb verändert sich der Wert,
wenn du den Controller nach vorne oder zu dir hin be-
wegst. Bei Bewegungen nach oben oder unten verändert
sich der Wert dagegen nicht.
▲Finger trommeln auf Platine, NeoPixel blinkt.
klein sind, werden sie vom Sensor erkannt. Wenn du den
Controller auf den Tisch legst, reicht es meist sogar, nur auf
den Tisch zu trommeln. Auch das wird vom Sensor bemerkt.
Das machen wir uns nun zu Nutze, um deinen KosmoDuino
in eine Finger-Trommel-Disko-Beleuchtung zu verwandeln.
Dazu benutzt du das folgende Programm:
DER PLAN
Bunte Lichter tanzen im Rhythmus deiner Finger. Mit
diesem Projekt verwandelst du deinen KosmoDuino in
eine Finger-Disko.
PROJEKT 9
X
Y
Z
int bestimmeRuhewert() {
const int N = 20; // Zahl der Messwerte
float mittelwert = 0;
for (int i = 0; i < 20; ++i) {
mittelwert = mittelwert +
analogRead(sensorPin);
delay(10);
}
mittelwert = mittelwert / N;
return mittelwert;
}
void setup() {
pinMode(sensorPin, INPUT);
ruhewert = bestimmeRuhewert();
}
void loop() {
int wert = analogRead(sensorPin);
int differenz;
if (wert > ruhewert) {
differenz = wert - ruhewert;
} else {
differenz = ruhewert - wert;
}
pixel.setColor(2 * differenz, 100 - 2 * diffe-
renz, 0, differenz); // RGB-Wert und Helligkeit
// ei n s telle n.
delay(10);
}
</>
Um den Ruhewert zu bestimmen, soll der Mittelwert aus
20 Messwerten berechnet werden. Die Zahl der Messwerte
wird in der Konstanten N gespeichert, so dass man sie
leicht ändern kann. Der Mittelwert wird in der Variablen
mittelwert gespeichert.
Die for -Schleife ist dir mittlerweile geläufig. Sie wird N-
mal, hier also 20-mal, durchlaufen.
In jedem Durchlauf wird dem aktuellen mittelwert ein
weiterer Messwert hinzu addiert. Vor der nächsten Mes-
sung wird 10 Millisekunden lang gewartet.
Wenn die Schleife verlassen wird, ist in der Variablen
mittelwert die Summe der 20 Messwerte gespeichert.
Um daraus den Mittelwert zu berechnen, muss die Summe
noch durch die Zahl der Messwerte geteilt werden. Das ge-
schieht in der Zeile mittelwert = mittelwert / N; .
Schließlich wird mit return mittelwert; der berechnete
Mittelwert zurückgegeben.
Das ist einfach: Mit pinMode(sensorPin, INPUT); wird
der sensorPin als Input-Pin gesetzt. Schließlich wird der
Ruhewert bestimmt und in der Variablen ruhewert
gespeichert.
In der Hauptschleife wird zunächst ein aktueller Sensor-
wert gelesen und in wert abgespeichert. Jetzt soll die Ab-
weichung vom Mittelwert bestimmt und in der Variablen
differenz gespeichert werden. Die Abweichung soll im-
mer positiv sein. Da du nicht weißt, ob der aktuelle Sensor-
wert größer oder kleiner als ruhewert ist, wird mit Hilfe
der if -Anweisung zwischen zwei Fällen unterschieden:
Ist wert größer als ruhewert , so wird differenz als
wert - ruhewert berechnet, sonst als
ruhewert - wert .
Mit pixel.setColor() wird nun abhängig vom
differenz -Wert die Farbe des NeoPixels eingestellt: Je
größer die Differenz, umso höher wird der Rotanteil, und
umso geringer der Grünanteil.
Hast du eigene Ideen, wie die Farbe
des NeoPixels auf die Abweichung
vom
Ruhewert reagieren soll?
Probiere es aus! Dir fallen bestimmt
viele interessante Varianten ein.
PROJEKT 9
KosmoBits

</>
Piep!
Mit dem Interaction Board kannst du auch Töne erzeugen.
Wie das geht, erfährst du in diesem kleinen Projekt.
DU BRAUCHST
› KosmoDuino
im Interaction Board
DER PLAN
Der KosmoDuino piept in regelmäßigen Abständen. Keine
Sorge, später lernst du auch noch, wie man eine Sirene
oder gar ein Musikinstrument aus ihm macht.
DAS PROGRAMM
Zunächst bindest du die Datei KosmoBits_Pins.h ein, und
definierst dir dann die Konstante buzzerPin , um den Pin
anzusprechen, an den der »Buzzer«, also der Miniaturlaut-
sprecher, angeschlossen ist.
#include <KosmoBits_Pins.h>
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
void setup() {
// Nichts zu tun.
}
void loop() {
tone(buzzerPin, 440);
delay(500);
noTone(buzzerPin);
delay(500);
}
In s e t u p () ist diesmal nichts zu tun.
Der Aufbau der Hauptschleife lo o p() kommt dir vermut-
lich bekannt vor. Er entspricht dem Programm »Blink«,
das du als allererstes Programm auf deinen KosmoDuino
geladen hast. Anstatt aber eine LED blinken zu lassen,
machst du diesmal Töne. Dazu dienen zwei Befehle:
tone(buzzerPin, 440); erzeugt einen Ton mit der Fre-
quenz 440 Hz. Das ist der Kammerton A. Der Ton bleibt so-
lange eingeschaltet, bis du ihn mit noTone(buzzerPin);
wieder ausschaltest. Damit der Ton regelmäßig ein- und
ausgeschaltet wird, hängst du an jeden dieser Befehle mit
delay(500); eine Pause von einer halben Sekunde Länge.
P
i
e
p
!
P
i
e
p
!
PROJEKT 10
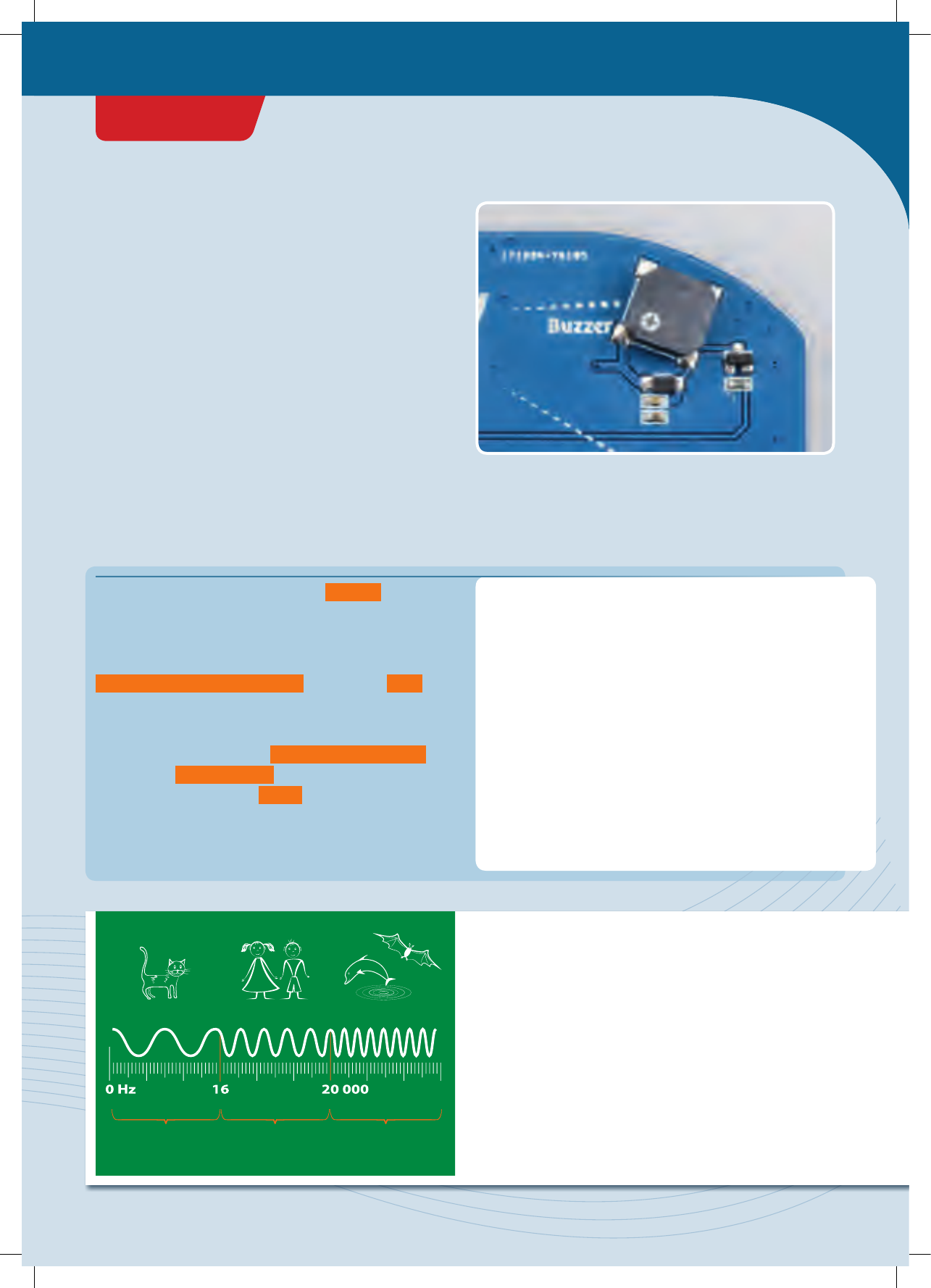
Infraschall Hörbare
Frequenzen
Ultraschall
</>
Zufallstöne!
Wie du deinen KosmoDuino zum Piepen bringst, hast du
gerade im Projekt »Piep!« gelernt. Aber immer wieder der
selbe Ton, das ist auf Dauer doch etwas langweilig. Hier
lernst du, wie du dem Controller Zufallstöne entlocken
kannst.
DU BRAUCHST
› KosmoDuino
im Interaction Board
DER PLAN
Sowohl Tonhöhe als auch die Dauer des jeweiligen Tones
werden vom Zufallsgenerator bestimmt.
DAS PROGRAMM
Das Programm ist ziemlich simpel. In s e t u p() übergibst
du dem Zufallsgenerator einen Startwert, wie du es schon
beim Würfel-Projekt getan hast.
In der Hauptschleife wird dann zunächst mit
int freq = random(110,1000); die Frequenz freq des
nächsten Tons zufällig festgelegt, danach auf gleiche Wei-
se die Dauer.
Schließlich wird der Ton mit tone(buzzerPin,freq);
ausgegeben. d elay(da u er); am Ende sorgt dafür, dass
der Ton für eben die Dauer dauer gespielt wird.
#include <KosmoBits_Pins.h>
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
void setup() {
randomSeed(analogRead(12));
}
void loop() {
int freq = random(110, 1000);
int dauer = random(10, 150);
tone(buzzerPin, freq);
delay(dau er);
}
!
SCHALL
Wenn die Luft, die auf unsere Trommelfelle drückt, hin und
her schwingt, nehmen wir das als Ton wahr. Je schneller
die Luft dabei schwingt, umso höher klingt der Ton.
Physiker messen das als »Schwingungen pro Sekunde«,
genannt Frequenz. Die Einheit dafür heißt Hertz, abge-
kürzt Hz. Ein Hertz bedeutet, dass die Luft pro Sekunde
eine ganze Schwingung vollendet. Je höher die Frequenz
eines Tons, umso höher klingt auch der Ton. Der Mensch
kann Töne mit Frequenzen zwischen 16 und 20.000 Hertz
wahrnehmen. Viele Tiere sind aber auch in der Lage Töne
im Infra- und Ultraschallbereich wahrzunehmen.
KosmoBits
PROJEKT 11
</>
Sirene
Jetzt bringst du etwas Ordnung in das akustische Chaos:
Mit diesem Projekt lässt du deinen KosmoDuino wie eine
Sirene aufheulen.
DU BRAUCHST
› KosmoDuino
im Interaction Board
Hier legst du die Frequenzen fest, innerhalb derer sich die
Tonhöhen bewegen sollen. FREQ_MIN entspricht dem
tiefsten Ton der Sirene, FREQ_MAX dem höchsten. Du
kannst mit diesen Parametern auch experimentieren,
indem du die Werte änderst und so den Klang der Sirene
deinem Geschmack anpasst.
DELAY bestimmt, wie lange ein einzelner Ton gehalten
werden soll.
Die Variable freq schließlich speichert die aktuelle Fre-
quenz. Gestartet wird bei FREQ_MIN .
#include <KosmoBits_Pins.h>
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
const int FREQ_MIN = 440;
const int FREQ_MAX = 660;
const int DELAY = 4;
int freq = FREQ_MIN; // Frequenz des Tones, der
// ausgegeben wird.
void setup() {
// Nichts zu tun.
}
void loop() {
tone(buzzerPin, freq); // (1)
delay(DEL AY);
++freq; // Kurz für: freq = freq + 1;
if (freq > FREQ_MAX) {
freq = FREQ_MIN;
}
}
In s e t u p () ist diesmal nichts zu tun.
In der Hauptschleife wird zunächst ein Ton mit der Fre-
quenz freq ausgegeben (1). Nach einer Pause der Länge
DELAY wird dann die Frequenz freq mit ++freq; um den
Wert 1 erhöht. In der if -Anweisung wird dann überprüft,
ob die maximale Frequenz schon überschritten wurde.
Wenn ja, wird die Frequenz freq wieder auf den Startwert
FREQ_MIN zurückgesetzt.
Im nächsten Projekt wirst du eine ganze Tonleiter erklin-
gen lassen. Aber vorher musst du noch ein wichtiges Hilfs-
mittel der Programmierung kennenlernen: Arrays.
DER PLAN
Bei jedem Durchlauf der Hauptschleife wird ein neuer Ton
ausgegeben. Dabei wird die Tonhöhe jedesmal etwas er-
höht. Ist eine bestimmte Frequenz, also Tonhöhe, erreicht,
springt die Tonhöhe wieder zum Anfangswert. Das Ganze
beginnt dann von vorne.
DAS PROGRAMM
PROJEKT 12
Arrays
Wenn du viele Werte vom gleichen Typ speichern möch-
test, zum Beispiel die letzten 100 Messwerte, wird es
mit einfachen Variablen schnell unübersichtlich und
aufwendig zu tippen. Du müsstest schließlich für jeden
einzelnen Wert eine eigene Variable anlegen, also zum
Beispiel:
int wert1;
int wert2;
int wert3;
...u s w...
int wert 100;
Viel einfacher ist es, stattdessen ein sogenanntes Array
(gesprochen »Ärräj« mit weichem, englischem »r«) zu
benutzen.
In einem Array kannst du nämlich gleich mehrere Wer-
te speichern. Damit du auf die verschiedenen Werte zu-
greifen kannst, werden sie im Array durchnummeriert.
Du kannst dir ein Array also als eine Art Tabelle vor-
stellen, in der die einzelnen Werte in nummerierte Spal-
ten eingetragen werden. Die Nummerierung der Spal-
ten beginnt allerdings nicht mit 1, sondern mit 0:
INDEX 0 1 2 3 … n
WERTE Wert 0 Wert 1 Wert 2 Wert 3 …Wert n
Ein Array legst du allgemein folgendermaßen an:
typ arrayName[länge];
Du kannst einem Array auch gleich bei der Definition
Werte zuweisen, indem du die einzelnen Werte in ge-
schweiften Klammern angibst:
Der Typ legt fest, welche Art von Daten in dem Array
gespeichert werden können (int, float, usw.). Die Anzahl
der Werte, die in einem Array gespeichert werden kön-
nen, wird als Länge bezeichnet.
int meinArray[10]; // Ein Array, das 10
// int Werte aufnehmen kann
int meinArray[4] = {0, 4, 2, 3};
In dem Fall brauchst du nicht unbedingt anzugeben,
wie viele Werte es sind. Du kannst also auch so
schreiben:
int meinArray[] = {0, 4, 2, 3};
Um also zum Beispiel ein Array anzulegen, das 10 Inte-
gerwerte aufnehmen kann, gehst du so vor:
WISSEN KOMPAKT
Ein Array wird im Deutschen manchmal
auch Feld oder Datenfeld genannt.
Allerdings ist die englische Bezeichnung
auch im Deutschen sehr viel gängiger.
KosmoBits
Häufig möchtest du, dass alle einzelnen Werte auf Null
gesetzt werden. Das kannst du kurz so schreiben:
int meinArray[10] = {}; // Array der
// Länge 10. Alle Werte werden auf 0
// gesetzt.
Um auf die einzelnen Werte eines Arrays zuzugreifen,
gibst du in eckigen Klammern den Index des Wertes an,
auf den du zugreifen möchtest. Wenn du dir das Array
also als Tabelle vorstellst, entspricht der Index der
Nummer der Spalte.
int meinArray[100] = {}; // Array der
// Länge 100; alle Werte 0.
meinArray[2] = 42; // Der Wert an Index-
// Position 2 ist jetzt 42.
int x = meinArray[2]; // x erhält den in
// meinArray an Index-Position 2
// gespeicherten Wert, hier also 42.
Häufig möchtest du aus den einzelnen Werten einen
neuen berechnen, zum Beispiel die Summe aller Einzel-
werte. Da du die einzelnen Werte über ihren Index an-
sprechen kannst, geht das nun mit einer
for
-Schleife
sehr einfach:
// werte ist ein Array der Länge 100.
int summe = 0;
for (int index = 0; index < 100;
++index) {
summe = summe + werte[index];
}
Beim ersten Durchlauf der Schleife wird der Wert
werte[0]
zu
summe
hinzu addiert. Danach wird
index
um 1 erhöht, und der nächste Wert addiert. Das
wird solange wiederholt, bis der letzte Wert, also
werte[99]
, addiert wurde.
Im nächsten Projekt wirst du ein Array benutzen, um
eine Tonleiter abzuspielen.
!
ACHTUNG!
Da der Index für den ersten Wert nicht 1 ist, sondern 0, ist
der höchstmögliche Index für ein Array der Länge N nicht
N, sondern N - 1. Bei einem Array der Länge 100, wäre
also der höchstmögliche Index 99. Benutzt du einen hö-
heren Index, kommt es zu einem Fehler im Programmab-
lauf: Was dann passiert lässt sich nicht vorhersagen.
Achte also darauf, dass du nur gültige Werte für den In-
dex benutzt.
WISSEN KOMPAKT
</>
Tonleiter
DU BRAUCHST
› KosmoDuino
im Interaction Board
DER PLAN
Dein KosmoDuino spielt eine Tonleiter.
DAS PROGRAMM
Zunächst bindest die Datei KosmoBits_Pins.h ein und
definierst dir die Konstanten buzzerPin und
freqGrundton . Schließlich legst du noch das Array
tonleiter[] an, in dem die Frequenzverhältnisse der
Töne einer Dur-Tonleiter abgelegt werden. Um die Fre-
quenz eines Tones zu ermitteln, musst du den entsprechen-
den Wert mit der Frequenz des Grundtones multiplizieren.
#include <KosmoBits_Pins.h>
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
const int freqGrundton = 220; // Das ist der
// Ton A (eine Oktave tiefer als der Kammer-
// ton A aus Projekt 10).
float tonleiter[] = {1.f, 9.f/8, 5.f/4, 4.f/3,
3.f/2, 5.f/3, 1 5.f/8, 2.f};
void setup() {
for (int i = 0; i < 8; ++i) {
tone(buzzerPin, tonleiter[i] * freqGrundton);
delay(500);
}
noTone(buzzerPin);
}
void loop() {
// Hier wird nichts gemacht.
}
Diesmal passiert alles bereits in s e tu p () . In der for -
Schleife wird die Variable i von 0 bis 7 hochgezählt.
Für jeden Wert von i wird dann mit
tone(buzzerPin, tonleiter[i] * freqGrundton); der
i-te Ton der Tonleiter ausgegeben. Wie oben bereits be-
schrieben, wird zur Ermittlung der richtigen Frequenz die
Frequenz des Grundtons freqGrundton mit dem entspre-
chenden Frequenzverhältnis to nleiter[i] multipliziert.
Nach einer Pause wird die for -Schleife erneut durchlau-
fen, bis der höchste Ton der Tonleiter erreicht wurde. Da-
nach ist Stille: noTone(buzzerPin);
In der Hauptschleife wird diesmal nichts gemacht. Die
Tonleiter wird also nur ein einziges Mal abgespielt. Um die
Tonleiter nochmal abzuspielen, kannst du die Reset-Taste
auf dem KosmoDuino drücken. Dadurch wird der Code zu-
rückgesetzt und von Neuem ausgeführt.
PROJEKT 13
KosmoBits
Sensor-Orgel
Nachdem du nun gelernt hast, wie man Tonleitern spielt,
kannst du in diesem Projekt ein richtiges Musikinstrument
programmieren.
DU BRAUCHST
› KosmoDuino im Interaction Board
› Bewegungssensor
#include <KosmoBits_Pins.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
const int tasterPin = KOSMOBITS_TASTE_2_PIN;
const float tonleiter[] = {1.f, 9.f/8, 5.f/4,
4.f/3, 3.f/2, 5.f/3, 15.f/8, 2.f};
const int freqGrundton = 220; // Das ist der
// Ton A.
const int messwertMin = 300;
const int messwertMax = 400;
const int skalierung = (messwertMax - messwert
Min) / 9;
const int N = 10; // Anzahl der Werte, die
// gemittelt werden.
int werte[N] = {}; // Hier werden die letzten
// 10 Werte gespeichert.
int index = 0;
Hier werden nur die jeweiligen Pin-Modi eingestellt. void setup() {
pinMode(sensorPin, INPUT);
pinMode(tasterPin, INPUT);
}
void loop() {
// Lese einen neuen Wert vom Sensor und
// speichere ihn in werte[].
werte[index] = analogRead(sensorPin);
Zunächst definierst du ein paar Konstanten für Sensor-,
Buzzer- und Taster-Pin. Danach legst du wie im vorigen
Projekt ein Array für die Tonleiter, sowie eine Konstante für
den Grundton, an.
Mit den Konstanten messwertMin und messwertMax
stellst du ein, wie weit der Controller gekippt werden
muss, um den höchsten bzw. den tiefsten Ton zu spielen.
Du kannst diese Werte später für dich anpassen. Die
Kon stante skalierung benutzt du später, um aus einem
Messwert die Tonhöhe zu bestimmen. Du teilst damit quasi
den gesamten Messbereich in 9 Bereiche ein.
Der Bewegungssensor ist recht empfindlich. Deshalb
schwanken die Messwerte ein wenig. Damit die Tonhöhe
dadurch nicht zu wackelig wird, nimmst du nicht direkt
den letzten Messwert, um daraus die Tonhöhe zu berech-
nen, sondern bestimmst den Mittelwert von 10 Messungen.
Die letzten 10 Messwerte werden dazu in dem Array
w e rt e[] gespeichert. Durch int werte[N] = {};
werden alle Werte darin zunächst auf 0 gesetzt.
Mit der Variablen index wird das Array durchlaufen.
Gestartet wird wie üblich bei 0.
DER PLAN
Per Tastendruck erzeugst du Töne. Die Tonhöhe kannst du
verändern, indem du das Interaction Board bewegst. Mit
ein wenig Übung kannst du so richtige Melodien spielen.
</>
DAS PROGRAMM
Zunächst liest du einen neuen Messwert und speicherst ihn
im Array werte an Index-Position index . Damit der
nächste Messwert an der darauffolgenden Position gespei-
chert wird, wird mit ++index; die Variable index um 1
erhöht. Wird dabei der Wert N erreicht, stellt die
PROJEKT 14
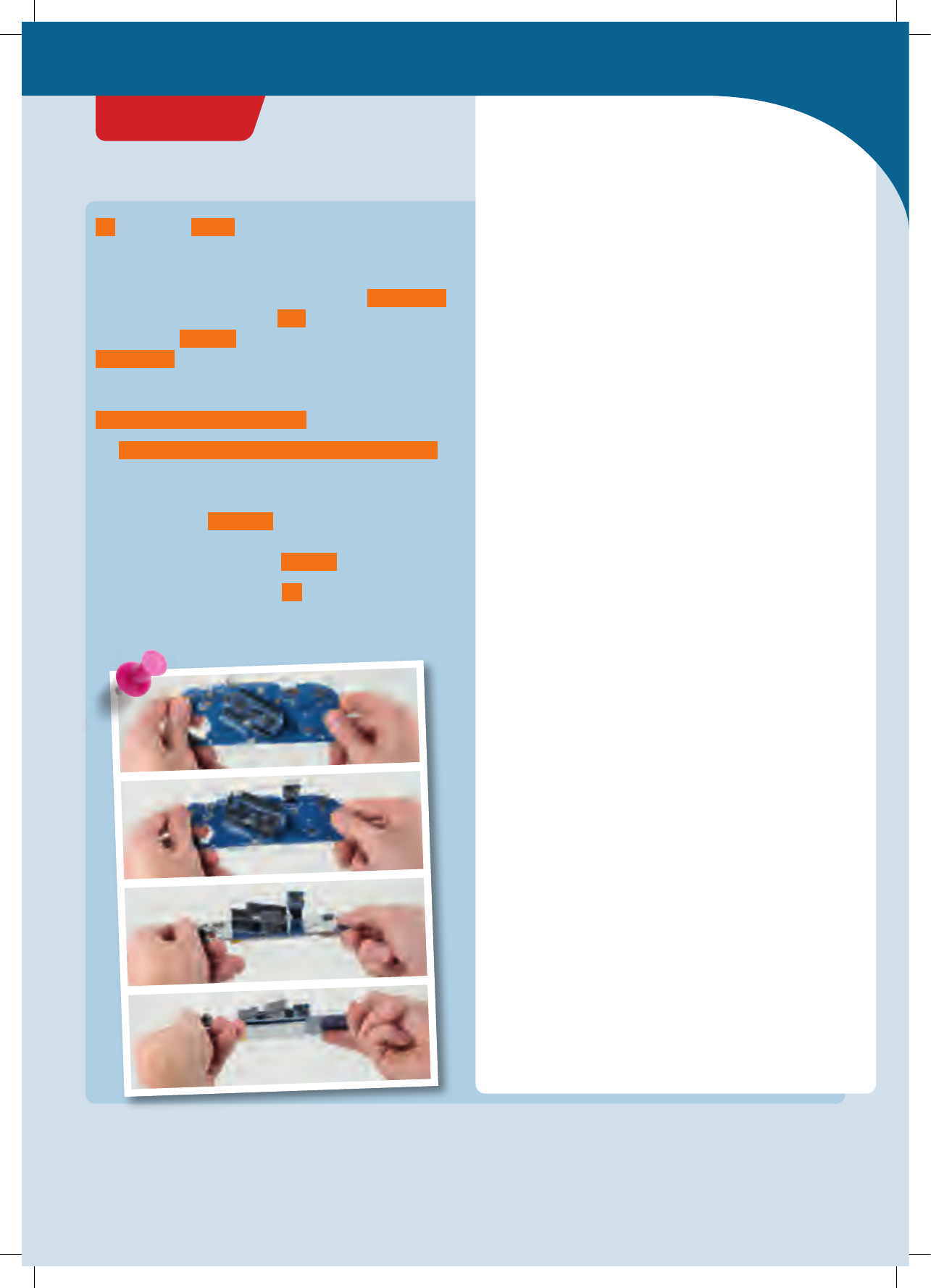
Zugegeben: Das war schon etwas umfangreicher.
Das Ergebnis lohnt sich aber!
// Erhöhe den Index um 1, damit der nächste
// Wert an der nächsten Stelle
// im Feld werte[] gespeichert werden kann.
++index;
// Wenn index == N ist, ist das Feld voll
// beschrieben.
// index wird dann auf 0 gesetzt, damit im
// nächsten Durchlauf
// der älteste Wert überschrieben wird.
if (index == N) {
index = 0;
}
// Jetzt wird der Mittelwert der letzten N
// Messwerte berechnet.
int mittelwert = 0; // Starte mit dem Wert 0
// Summiere die letzten 10 gemessenen Werte.
for (int i = 0; i < N; ++i) {
mittelwert = mittelwert + werte[i];
}
// Teile die Summe durch die Zahl der Werte.
mittelwert = mittelwert / N;
int tonIndex = (mittelwert - messwertMin) /
skalierung;
// tonIndex darf nicht kleiner 0 und nicht
// größer 7 sein:
if (tonIndex < 0) {
tonIndex = 0;
} else if (tonIndex > 7) {
tonIndex = 7;
}
// Ton ausgeben
if (digitalRead(tasterPin) == LOW) {
tone(buzzerPin, tonleiter[tonIndex] * freq-
Grundton);
delay(10);
} else {
noTone(buzzerPin);
delay(1);
}
}
</>
if -Anweisung index auf 0 zurück. Das Array wird wie-
der von vorne befüllt.
Danach geht es daran, den Mittelwert der letzten 10 Mess-
werte zu bestimmen. Dazu wird die Variable mittelwert
zunächst auf 0 gesetzt. In der for -Schleife werden dann
alle im Array w e rte[] gespeicherten Messwerte zu
mittelwert hinzu addiert. Um daraus dann den Mittel-
wert zu bestimmen, muss das Ergebnis noch durch die Zahl
der Werte geteilt werden:
mittelwert = mittelwert / N; .
Mit int tonIndex = (mittelwert - messwertMin) / skalierung;
ermittelst du den »Tonindex«: Der wievielte Ton der Tonlei-
ter soll gespielt werden?
Es kann sein, dass tonIndex einen ungültigen Wert hat,
also kleiner als 0 oder größer als 7 ist. Deshalb korrigierst
du das im Zweifelsfall mit der if-else -Anweisung.
Schließlich wird in der letzten if -Abfrage getestet, ob der
Taster gedrückt ist. Wenn ja, wird der entsprechende Ton
ausgegeben. Wenn nicht, wird kein Ton ausgegeben.
KosmoBits
PROJEKT 14
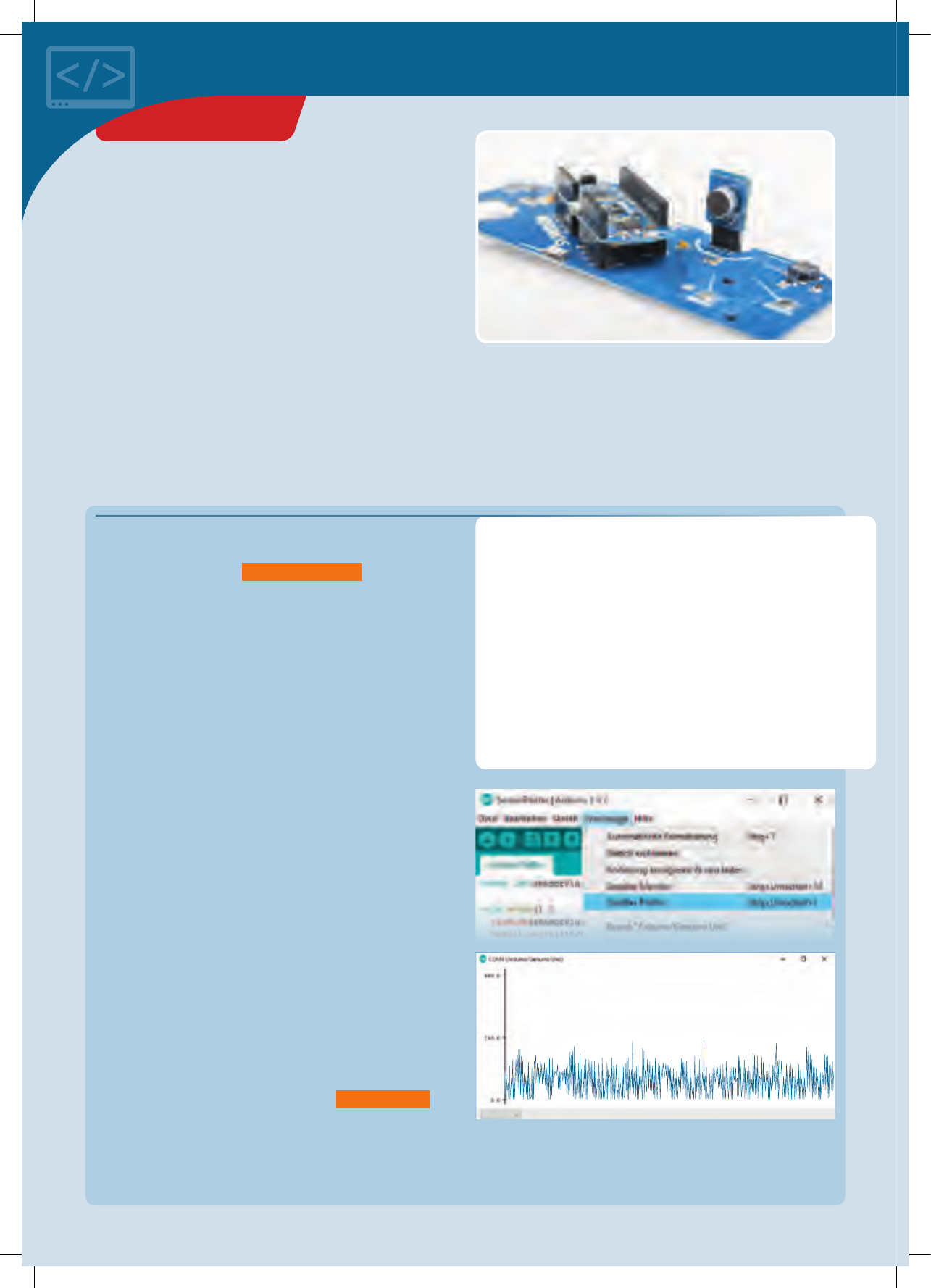
Besonders viel macht der Code nicht. Bei jedem Durchlauf
der Hauptschleife wird lediglich ein neuer Wert vom Sen-
sor-Pin gelesen und mit Serial.println() ausgegeben.
#include <KosmoBits_Pins.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
void setup() {
pinMode(sensorPin, INPUT);
Serial.begin(115200);
}
void loop() {
Serial.println(analogRead(sensorPin));
}
Der serielle Plotter
DU BRAUCHST
› KosmoDuino im Interaction Board
› Schallsensor
DER PLAN
Bei dem Schallsensor handelt es sich im Grunde um ein
kleines Mikrofon, das du über den Sensor-Pin auslesen
115200 Baud
Starte jetzt aus dem Menü »Werkzeuge« den Seriellen
Plotter.
Es öffnet sich ein neues Fenster, in dem es ganz schön wild
zu geht.
Versuche jetzt einmal verschiedene Geräusche zu machen,
zu pfeifen oder zu singen. Du wirst sehen, wie sich das Bild
im seriellen Plotter verändert.
An der Skala auf der linken Seite kannst du leicht ablesen,
wie groß die Werte sind, die der Sensor liefert. Im hier ab-
gebildeten Beispiel siehst du, dass 0 der niedrigste Wert ist.
Das ist auch klar, etwas kleineres kann analogRead()
nicht liefern. Der größte gemessene Wert ist ungefähr 250.
Wenn du aber in die Hände klatschst, können die gemesse-
nen Werte auch mal auf 800 ansteigen.
Das kannst du im folgenden Projekt prima ausnutzen!
</>
DAS PROGRAMM
Stecke den Schallsensor in das Interaction Board und lade dann das folgende kleine Programm auf deinen KosmoDuino:
kannst. Um zu verstehen, wie er sich verhält, benutzt du
am besten ein weiteres tolles Werkzeug der Arduino-Um-
gebung, nämlich den seriellen Plotter.
PROJEKT 15
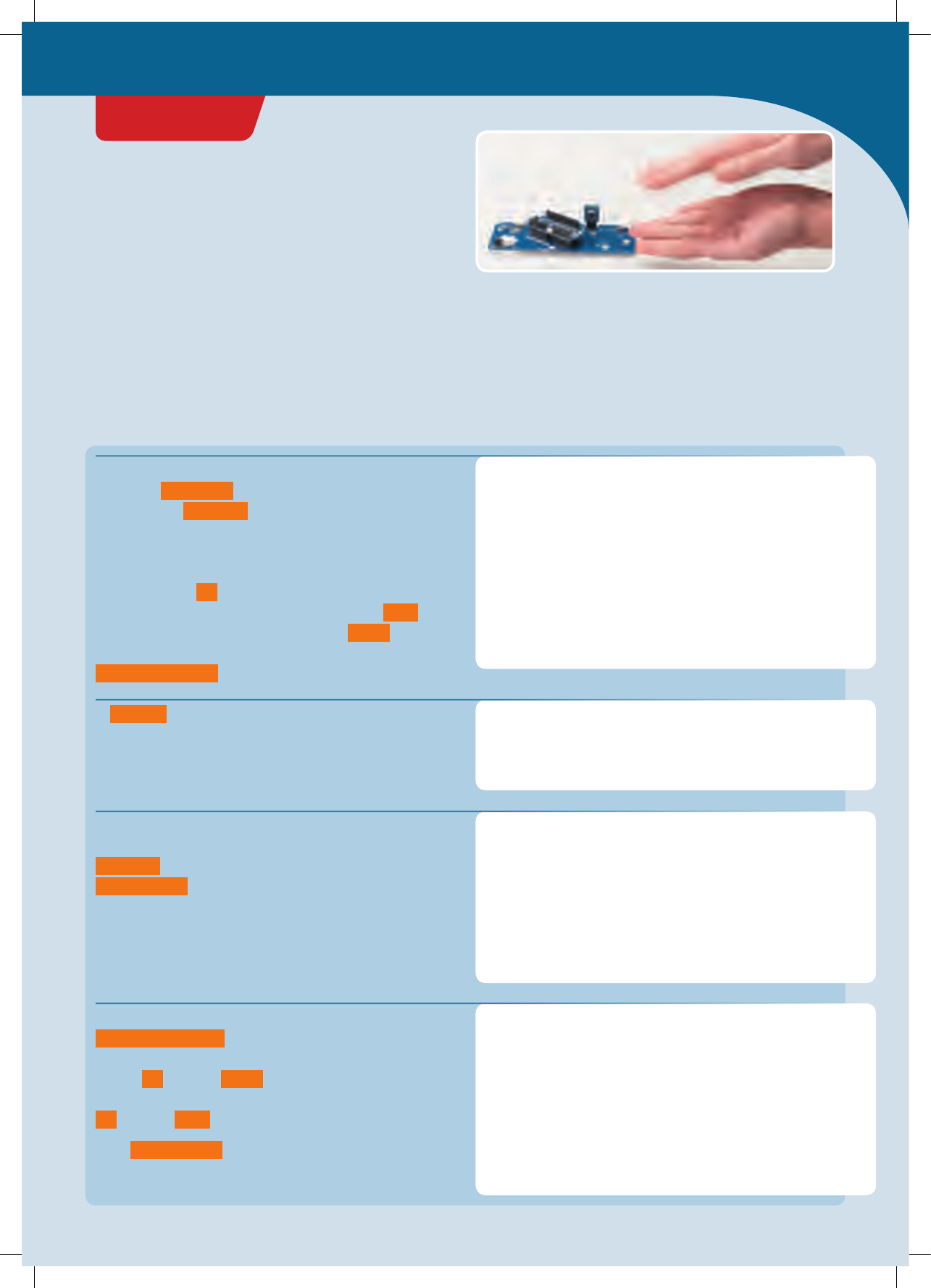
Der Klatschschalter
Wäre es nicht cool, wenn dein KosmoDuino auf Klatschen
reagieren würde? Mit Hilfe des Schallsensors kannst du
das leicht programmieren.
DU BRAUCHST
› KosmoDuino im Interaction Board
› Schallsensor
#include <KosmoBits_Pins.h>
#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
const int schwelle = 500;
KosmoBits_Pixel pixel;
bool an = false;
In s e t u p () wird der Pin-Modus des Sensor-Pins einge-
stellt und der NeoPixel ausgeschaltet.
void setup() {
pinMode(sensorPin, INPUT);
pixel.setColor(0, 0, 0, 0);
}
void loop() {
int sensorWert = analogRead(sensorPin);
Serial.println(sensorWert);
if (sensorWert > schwelle) {
u m sc h alt e n ();
delay(200);
}
}
void umschalten() {
if (an) {
pixel.setColor(0, 0, 0, 0);
an = false;
} else {
pixel.setColor(255, 0, 0, 30);
an = true;
}
}
Es werden die üblichen Dateien eingebunden sowie die
Konstante sensorPin für den Sensor-Pin definiert.
Die Konstante schwelle regelt die Empfindlichkeit deines
Klatschschalters. Wird der hier eingestellte Wert vom
Messwert überschritten, so schaltet der Schalter um. Ent-
weder von »an« auf »aus«, oder eben umgekehrt.
In der Variablen an speicherst du den aktuellen Zustand
des NeoPixels ab. Ist er an, so wird ihr der Wert true
(wahr) zugewiesen, andernfalls der Wert false (falsch).
Zu Beginn des Programms ist der NeoPixel aus:
bool an = false; .
</>
DAS PROGRAMM
In der Hauptschleife wird fortwährend der Schallsensor
ausgelesen. Ist der gemessene Wert größer als der in
schwelle eingestellte Wert, so wird die Funktion
umschalten() aufgerufen und anschließend kurz
gewartet.
Hier schreibst du dir deine eigene Funktion
void umschalten() . Es wird dort abgefragt, ob der Neo-
Pixel derzeit an ist. Wenn ja, wird der NeoPixel ausgeschal-
tet und an der Wert false zugewiesen.
Andernfalls (»else«) wird der NeoPixel eingeschaltet und
an der Wert true (wahr) zugewiesen.
Kurz: umschalten() macht genau das, was der Name ver-
muten lässt. Es wird zwischen "ein" und "aus" hin und her
geschaltet.
DER PLAN
Wenn du einmal klatschst, soll der NeoPixel auf dem Inter-
action Board eingeschaltet werden. Wenn du dann noch
einmal klatschst, geht er wieder aus.
DAS PROGRAMM
Stecke den Schallsensor in das Interaction Board und lade dann das folgende kleine Programm auf deinen KosmoDuino:
PROJEKT 16
KosmoBits

Der Schubladenwächter
Hattest du schon immer den Verdacht, dass dein Bruder
oder deine Schwester heimlich deine Schublade durch-
wühlt, wenn du nicht zu Hause bist? Mit dem Schubladen-
wächter Projekt kannst du ihn überführen! Das Gute daran:
Der Täter merkt nicht einmal, dass die Schublade über-
wacht wird: Es gibt keinen Alarm, nichts weist den Täter
darauf hin, dass seine Tat bemerkt wurde. Erst, wenn du
den KosmoDuino befragst, zeigt er dir an, ob sich jemand
an deinen Geheimnissen zu schaffen gemacht hat!
DU BRAUCHST
› KosmoDuino
im I
nteraction Board
› Lichtsensor
DER PLAN
In einer geschlossenen Schublade ist es dunkel, in einer of-
fenen nicht. Mit dem Lichtsensor kannst du also feststel-
len, ob deine Schublade geöffnet wurde oder nicht.
Du wirst deinen KosmoDuino so programmieren, dass er
folgendes für dich macht:
1. Nach dem Einschalten wartet er darauf, durch einen
Druck auf Taste 1 »scharf« gestellt zu werden.
2. Ist der Schubladenwächter scharf geschaltet, wartet er,
bis die Schublade geschlossen wurde. Erst dann beginnt
er mit der Überwachung der Schublade.
3. Wird die Schublade dann wieder geöffnet, gibt es zwei
Möglichkeiten, wie es weitergeht:
a) Wird die Schublade wieder geschlossen, so wird dies
als »Schublade wurde geöffnet« gezählt.
b) Drückst du auf Taste 2, so wird dir durch den NeoPixel
angezeigt, wie oft die Schublade geöffnet wurde.
VORBEREITUNG: SENSORWERTE
MESSEN
Um zu bemerken, ob die Schublade geöffnet wurde, be-
nutzt du den Lichtsensor. Er misst die Helligkeit des Lichts,
das auf ihn fällt. Solange sich dein KosmoDuino in der
dunklen Schublade befindet, wird er einen niedrigen Wert
messen. Wird die Schublade aber geöffnet, erhöht sich der
gemessene Wert. Leider ist es nicht in jeder geschlossenen
Schublade immer vollständig dunkel. Ab welchem Hellig-
keitswert ist die Schublade aber geöffnet? Das probierst
du nun aus! Stecke dazu als Erstes den Lichtsensor in das
Interaction Board. Jetzt musst du herausfinden, wie hell es
im Hellen ist. Das machst du, indem du den Sensor ausliest
und den Messwert über den seriellen Monitor ausgibst.
Das machst du wie immer mit dem Sketch SensorLesen.
Notiere dir, welche Messwerte der Sketch ausgibt, wenn du
den Lichtsensor
• dem Tageslicht aussetzt,
• der Dämmerung aussetzt,
• mit der Hand abdeckst,
• mit einer Taschenlampe bestrahlst.
LICHT MESSWERT
Tageslicht
Dämmerung
abgedunkelt
Taschenlampe
Du wirst diese Werte später benötigen, wenn du dir
überlegst, wann die Schublade als geschlossen gewertet
werden soll.
PROJEKT 17
DAS GRUNDGERÜST
Wir benutzen in diesem Projekt den NeoPixel und die bei-
den Tasten. Deshalb werden hier die benötigten Bibliothe-
ken eingebunden.
#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pins.h>
#include <KosmoBits_Pixel.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
const int taste1Pin = KOSMOBITS_TASTE_1_PIN;
const int taste2Pin = KOSMOBITS_TASTE_2_PIN;
int taste1 = HIGH;
int taste2 = HIGH;
int sensorWert = 0;
enum Modus {LEERLAUF, COUNTDOWN, WARTE_BIS_
DUNKEL, GESCHLOSSEN, OFFEN};
Modus modus = LEERLAUF;
const int DUNKEL_WERT = 5;
unsigned long zaehler = 0;
KosmoBits_Pixel pixel;
void reset() {
pixel.setColor(0, 0, 0, 0); // Pixel aus
modus = LEERLAUF;
zaehler = 0;
Serial.println("Reset!");
}
</>
Wir definieren drei Konstanten, um den Sensor und die Tas-
ten auszulesen, sowie die drei Variablen taste1 , taste2
und sensorWert , in dem die aktuellen Messwerte gespei-
chert werden.
Damit der Programm-Code übersichtlich bleibt, hilft es,
sich das Programm als eine Maschine vorzustellen, die in
unterschiedlichen Betriebsarten (Modi) betrieben werden
kann. Je nach Modus wird in der Hauptschleife etwas an-
deres gemacht.
Dazu definieren wir mit dem Wort enum Modus einen so-
genannten Aufzählungstypen: Eine Variable des Typs
Modus kann nur die Werte annehmen, die in den ge-
schweiften Klammern stehen, also LEERLAUF ,
COUNTDOWN usw.
Anschließend definieren wir die Variable modus in der der
aktuelle Betriebsmodus gespeichert wird. Wir beginnen im
Modus LEERLAUF .
Die Konstante DUNKEL_WERT legt fest, ab welchem Mess-
wert des Lichtsensors die Schublade als geschlossen ge-
wertet wird. Manche Schubladen lassen immer noch ein
wenig Licht hinein. Passe den Wert also so an, dass er für
deine Schublade passend ist. Die Werte, die du zur Vorbe-
reitung gemessen hast, helfen dir dabei!
In der Variablen zaehler wird gespeichert, wie oft die
Schublade geöffnet wurde. Schließlich verschaffen wir
uns mit pixel noch Zugriff auf den NeoPixel.
Wenn die Überwachung beendet wurde, möchten wir wie-
der in den Ausgangszustand zurückkehren. Also so, als ob
wir den KosmoDuino gerade erst eingeschaltet hätten. Da-
für führen wir die Funktion r e s e t () ein. Der NeoPixel wird
ausgeschaltet, modus auf LEERLAUF und zaehler zu-
rück auf 0 gesetzt. Zur Kontrolle wird über die serielle
Schnittstelle »Reset!« ausgegeben.
PROJEKT 17
KosmoBits
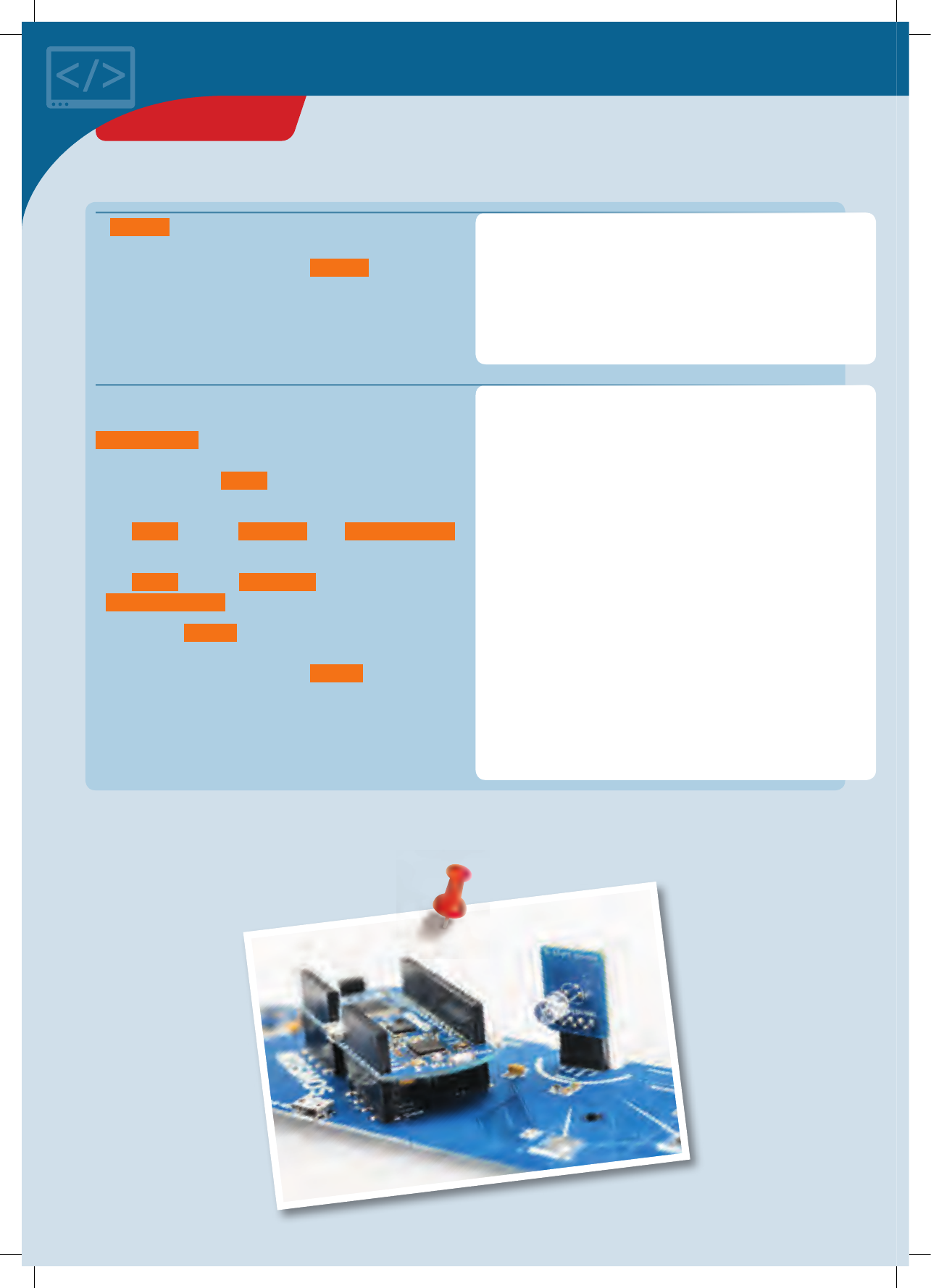
void setup() {
pinMode(sensorPin, INPUT);
pinMode(taste1Pin, INPUT);
pinMode(taste2Pin, INPUT);
Serial.begin(115200);
reset();
}
void loop() {
switch(modus) {
case LEERLAUF:
lo o p L e e rl a u f();
break;
case COUNTDOWN:
loopCountdown();
break;
case WARTE_BIS_DUNKEL:
loopWarteBisDunkel();
break;
case GESCHLOSSEN:
loopGeschlossen();
break;
case OFFEN:
lo o p O f f e n ();
break;
}
}
</>
In s e t u p () legen wir, wie üblich, die Betriebsarten der
benutzten Pins fest und initialisieren die Ausgabe über die
serielle Schnittstelle. Danach wird r e s e t() aufgerufen,
um den Schubladenwächter in den Ausgangszustand zu
versetzen.
In der Hauptschleife werden je nach Betriebsart verschie-
dene loop-Funktionen aufgerufen. Dazu dient die
s w itc h(m o d u s) -Anweisung. Damit wird eine Fallunter-
scheidung eingeleitet. Für jeden Fall (engl. case), also
möglichen Wert von modus , wird eine andere Funktion
aufgerufen:
• Hat modus den Wert LEERLAUF , wird loopLeerlauf()
aufgerufen.
• Hat modus den Wert COUNTDOWN , wird
loopCountdown() aufgerufen, usw.
Wichtig ist die break; -Anweisung (engl. abbrechen), um
die Behandlung eines Falles abzuschließen und die Fallun-
terscheidung zu beenden. Ohne die break; Anweisung
würde der Code des nächsten Falles auch ausgeführt
werden.
Damit haben wir das Grundgerüst unseres Programms
fertig. Jetzt müssen wir uns nur noch überlegen, was
genau der Schubladenwächter in den unterschiedlichen
Betriebsarten machen soll.
◀Board mit Lichtsensor
PROJEKT 17
void loopLeerlauf() {
Serial.println("Leerlauf");
bool gedrueckt = false;
while(digitalRead(taste1Pin) == LOW) {
// Taste 1 wurde gedrückt.
// Warte, bis sie wieder losgelassen wird.
pixel.setColor(0, 255, 0, 25);
gedrueckt = true;
delay(50);
}
if (gedrueckt) {
modus = COUNTDOWN;
}
}
void loopCountdown() {
const int COUNTDOWN_ZAHL = 5;
Serial.println("Countdown");
pixel.setColor(0, 0, 0, 0); // Pixel aus
delay(500);
// Der eigentliche Countdown: Wie Blink.
for (int i = 0; i < COUNTDOWN_ZAHL; ++i) {
pixel.setColor(0, 255, 0, 25); // G r ü n
delay(500);
pixel.setColor(0, 0, 0, 0); // Pixel aus
delay(500);
}
pixel.setColor(255, 0, 0, 25); // R o t
delay(1000);
pixel.setColor(0, 0, 0, 0); // Pixel aus
modus = WARTE_BIS_DUNKEL;
}
</>
Den Code verstehst du mittlerweile wahrscheinlich schon
ohne Probleme. In der Variablen gedrueckt wird gespei-
chert, ob die Taste gedrückt wurde. Wird Taste 1 gedrückt,
wird die w hil e() -Schleife durchlaufen: Der NeoPixel leu-
chet grün, und die Variable gedrueckt wird auf den Wert
true gesetzt. Wenn Taste 1 losgelassen wird, wird die
w hil e() -Schleife verlassen. Am Ende wird mit der if() -
Anweisung getestet, ob die Taste gedrückt worden ist.
Falls ja, wird der Modus auf COUNTDOWN gesetzt. Andern-
falls wird loopLeerlauf() verlassen und wieder die
Hauptschleife aufgerufen. Die ruft dann erneut
loopLeerlauf() auf, weil sich der Modus ja nicht geän-
dert hat.
IM LEERLAUF
Im Leerlauf wartet der Schubladenwächter darauf, dass
Taste 1 gedrückt wird, um die Überwachung zu starten. Da-
für verantwortlich ist die Funktion
loopLeerlauf()
, die im
Modus
LEERLAUF
aus der Hauptschleife aufgerufen wird.
COUNTDOWN
Auch hier dürfte dir das meiste bekannt vorkommen. Zu-
nächst wird in der Konstanten COUNTDOWN_ZAHL festge-
legt, wie viele Sekunden der Countdown dauern soll:
5 Sekunden. Der NeoPixel wird ausgeschaltet und nach
500 Millisekunden der eigentliche Countdown in der
fo r() -schleife gestartet: 5-mal »An - Warten - Aus«. Da-
nach wird der NeoPixel eine Sekunde (1000 Millisekunden)
lang auf »rot« gesetzt. Schließlich wird der Modus auf
WARTE_BIS_DUNKEL gesetzt und loopCountdown()
verlassen.
void loopBisDunkel() {
Serial.println("Warte bis dunkel");
while (analogRead(sensorPin) > DUNKEL_WERT) {
delay(10);
}
modus = GESCHLOSSEN;
delay(1000);
}
WARTEN BIS ES DUNKEL IST
Das ist einfach: Es wird so lange die while -Schleife durch-
laufen, bis es dunkel ist. Gemessen wird alle 10 Millise-
kunden. Wenn die w hil e() -Schleife verlassen wurde, wird
der Modus auf GESCHLOSSEN gesetzt und
loopBisDunkel() verlassen.
PROJEKT 17
KosmoBits
void loopGeschlossen() {
Serial.println("Im Dunkeln");
sensorWert = analogRead(sensorPin);
if (sensorWert < DUNKEL_WERT) { // Es ist
// noch dunkel.
delay(1000); // Warte 1 Sekunde, loop() ruft
// diese Funktion dann wieder auf.
} else {
// Es ist hell! Kontrolliere nach
// 0,5 Sekunden noch einmal.
delay(500);
if (analogRead(sensorPin) >= DUNKEL_WERT) {
// Es ist hell:Schublade geöffnet!
modus = OFFEN;
}
}
}
void loopOffen() {
Serial.println("geöffnet");
delay(50);
taste2 = digitalRead(taste2Pin);
sensorWert = analogRead(sensorPin);
if (taste2 == LOW) {
ausgabe();
} else if (sensorWert < DUNKEL_WERT) {
// Schublade wieder zu.
++zaehler;
modus = GESCHLOSSEN;
}
}
</>
ÜBERWACHEN (GESCHLOSSEN)
Die eigentliche Überwachung der Schublade geschieht im
Modus GESCHLOSSEN , also in loopGeschlossen() . Zu-
nächst wird die aktuelle Helligkeit gemessen. Ist es dun-
kel, wird eine Sekunde (1000 Millisekunden) lang gewar-
tet. loopGeschlossen() wird dann aus der Hauptschleife
erneut aufgerufen.
Ist es hell, so wird nach 0,5 Sekunden noch einmal gemes-
sen. Ist es immer noch hell, werten wir das, als »Schubla-
de ist offen«. Der Modus wird auf OFFEN gesetzt: Im
nächsten Durchlauf der Hauptschleife wird dann
loopOffen() aufgerufen.
EINDRINGLINGE (OFFEN)?
Ist die Schublade geöffnet worden, muss der Schubladen-
wächter noch herausfinden, ob es sich um einen Eindringling
handelt. Vielleicht hast du die Schublade ja selbst geöffnet.
Das erledigt
loopOffen()
. Diese Funktion wird aus der
Hauptschleife immer dann aufgerufen, wenn
modus
den
Wert
OFFEN
hat. Wir kontrollieren zunächst Taste 2: Wird sie
gedrückt, dann wird das Ergebnis der Überwachung ausge-
geben, indem die Funktion
a u sg a b e ()
aufgerufen wird.
Wird Taste 2 nicht gedrückt, so wird im else if -Teil die
Helligkeit kontrolliert: Ist es jetzt dunkel, ist die Schublade
wieder geschlossen worden. zaehler wird dann mit
++zaehler um den Wert 1 erhöht.
Ist weder Taste 2 gedrückt, noch die Schublade wieder ge-
schlossen worden, wird die Funktion verlassen und von
der Hauptschleife erneut aufgerufen.
void ausgabe() {
Serial.print("Die Schublade wurde ");
Serial.print(zaehler);
Serial.print("-mal geöffnet!\n");
if (zaehler > 0) {
pixel.setColor(255, 0, 0, 25);
} else {
pixel.setColor(0, 255, 0, 25);
}
delay(2000);
reset();
}
AUSGABE
Um die Ausgabe des Überwachungsergebnisses kümmert
sich die Funktion a u s g a b e() . Zunächst wird das genaue
Ergebnis über die serielle Schnittstelle ausgegeben. Für die
schnelle Kontrolle, ohne angeschlossenen Computer, wird
das Ergebnis aber auch über den NeoPixel ausgegeben: Ist
die Schublade geöffnet und wieder geschlossen worden
(also zaehler > 0 ), so leuchtet der NeoPixel für 2 Sekun-
den lang rot. Andernfalls leuchtet er grün. Danach wird
der Schubladenwächter mit r e s e t () wieder in den Aus-
gangszustand zurückgesetzt.
PROJEKT 17
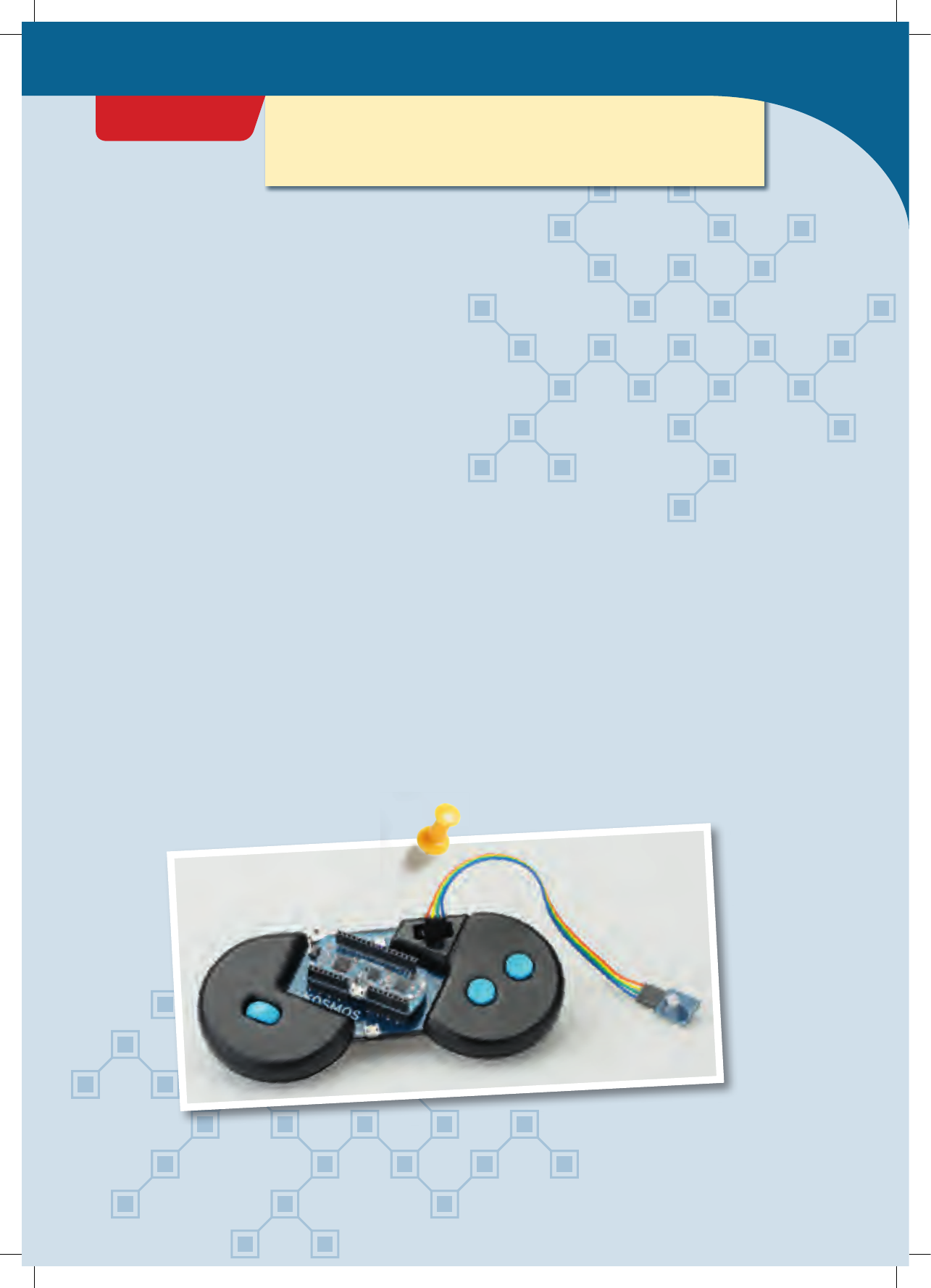
In den Kühlschrank
geschaut
Wie kann man eigentlich feststellen, ob das Licht im
Kühlschrank wirklich aus geht, wenn du die Kühlschrank-
tür schließt? Nachsehen kannst du ja nicht ohne weiteres.
Schließlich müsstest du dazu die Tür wieder öffnen und
dann ginge das Licht wieder an.
Mit deinem KosmoDuino allerdings, ist das kein Problem!
DU BRAUCHST
› KosmoDuino im Interaction Board
› Lichtsensor
› Jumperkabel männlich-weiblich
VORBEREITUNG
Löse von dem Strang mit den männlich-weiblichen
Jumperkabeln einen Strang mit 4 Kabeln ab. Die Stecker-
enden steckst du in die Buchsen, in die du sonst die
KosmoBits-Sensor-Module hineinsteckst.
In die Buchsenenden der Kabel steckst du dann den
Lichtsensor. Achte unbedingt darauf, dass jeder Pin des
Lichtsensor über die Jumperkabel mit genau der Buchse
verbunden ist, in der er normalerweise stecken würde.
Die Kabel dürfen sich also nicht überkreuzen.
DER PLAN
Mit dem Lichtsensor misst du die Helligkeit im Kühl-
schrank. Den NeoPixel auf dem Interaction Board lässt du
entsprechend der gemessenen Helligkeit aufleuchten.
Aber wie kannst du dir außerhalb des Kühlschranks anzei-
gen lassen, wie hell es in seinem Inneren ist? Ganz einfach:
Du benutzt »Verlängerungskabel«, um den Sensor anzu-
schließen! Den Sensor hältst du dann mit Hilfe der Kabel
in den Kühlschrank, während der KosmoDuino mit dem
Interaction Board draußen bleibt.
Die Kabel sind so dünn, dass du die Kühlschranktür
trotzdem schließen kannst!
!
ACHTUNG! Nicht geeignet für Kinder unter 10 Jahren. Falls ein inkor-
rekter Kurzschluss durch unterschiedliche Polaritäten verursacht,
oder der Kondensator unter falschen Bedingungen verwendet wird,
können heiße Oberflächen durch Bauteile auf der Platine entstehen.
PROJEKT 18
KosmoBits

#include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
#include <KosmoBits_Pins.h>
const int sensorPin = KOSMOBITS_SENSOR_PIN;
KosmoBits_Pixel pixel;
void setup() {
pinMode(sensorPin, INPUT);
pixel.setColor(255, 255, 255, 0);
}
void loop() {
int helligkeit = analogRead(sensorPin);
if (helligkeit > 255) {
helligkeit = 255;
}
pixel.setColor(255, 255, 255, helligkeit);
delay(10);
}
Das Programm verstehst du bestimmt schon ganz alleine.
Trotzdem ganz kurz: In s e t u p() stellst du den Pin-Modus
des Sensor-Pins ein und schaltest den NeoPixel aus.
In der Hauptschleife misst du über den Licht-Sensor
die Helligkeit und speicherst den Messwert in der
Variablen helligkeit . Da der Helligkeitswert bei
pixel.setColor() nicht größer als 255 sein darf, be-
grenzt du den Wert von helligkeit mit Hilfe der if -An-
weisung auf 255.
Jetzt brauchst du nur noch den Sensor in den Kühlschrank
zu halten und die Tür zu schließen. Und? Geht das Licht
aus?
</>
DAS PROGRAMM
▲Jumperkabel in Kühlschrank
PROJEKT 18
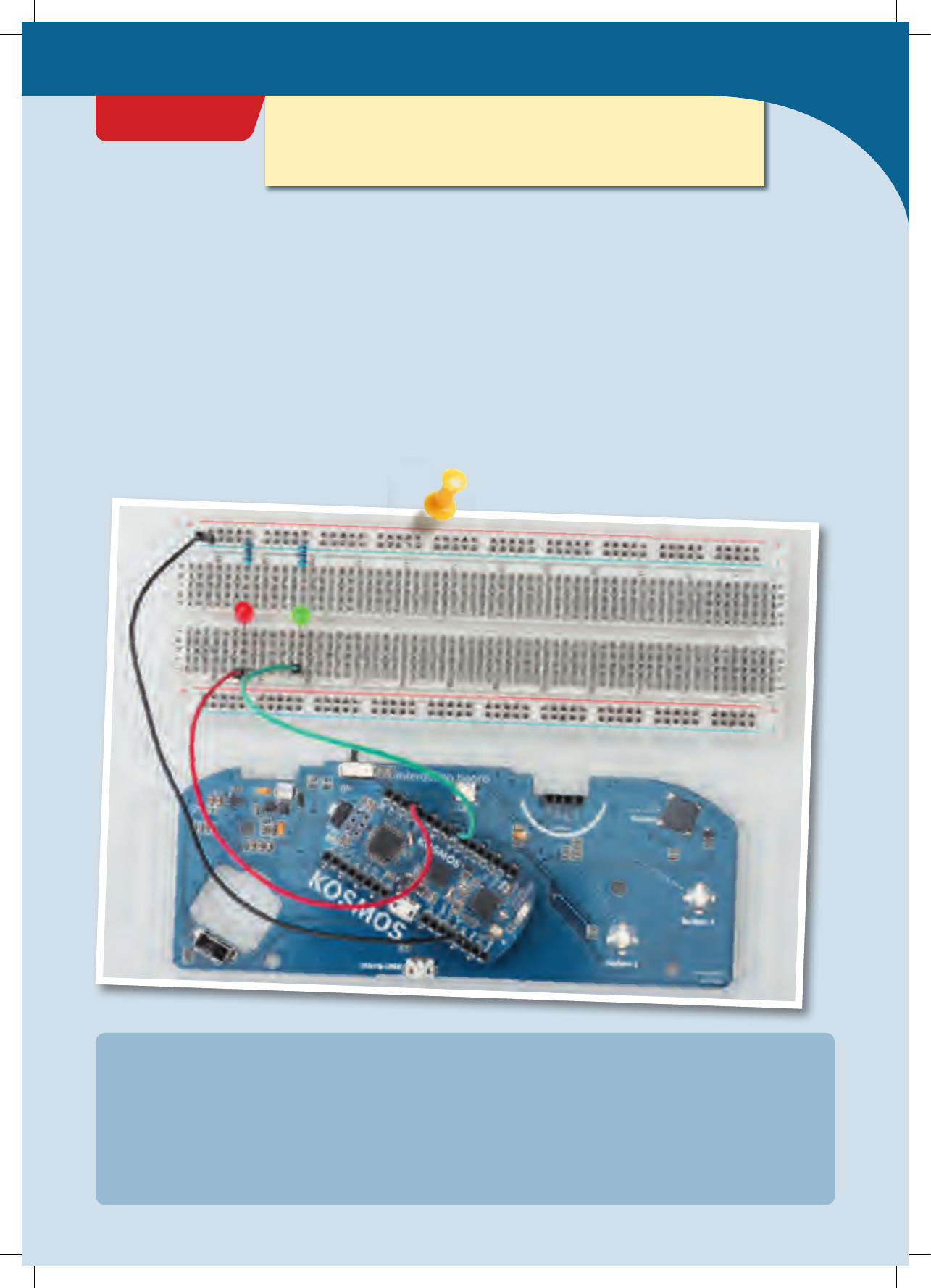
Geisteraugen
Wie wäre es damit, zu Halloween den Kürbis noch etwas
unheimlicher zu machen? Mit deinem KosmoDuino kannst
du ihm Geisteraugen basteln.
DU BRAUCHST
› KosmoDuino im Interaction Board
› Widerstände
› grüne LED
› rote LED
› Jumperkabel männlich-männlich
› Jumperkabel männlich-weiblich
› Breadboard
DER PLAN
Lass die Augen deines Kürbis zufällig bunt blinken. Dazu
ertönt in unregelmäßigen Abständen ein gruseliges
Rauschen.
VORBEREITUNG
Diesmal braucht es etwas mehr als nur das Interaction
Board, denn du musst eine kleine elektronische Schaltung
aufbauen. Die baust du aus den links genannten Teilen
nach der Abbildung zusammen.
Achte dabei auf die richtige Polung der LEDs.
!
ACHTUNG! Nicht geeignet für Kinder unter 10 Jahren. Falls ein inkor-
rekter Kurzschluss durch unterschiedliche Polaritäten verursacht,
oder der Kondensator unter falschen Bedingungen verwendet wird,
können heiße Oberflächen durch Bauteile auf der Platine entstehen.
• Ein Jumperkabel verbindet einen Gnd-Pin mit der
(-)-Leiste des Breadboards.
• Ein Jumperkabel verbindet Pin 11 des KosmoDuinos
mit Feld j 57 auf dem Breadboard.
• Ein Jumperkabel verbindet Pin 6 des KosmoDuinos
mit Feld j 51 auf dem Breadboard.
• Die Widerstände verbinden die (-)-Leiste und Feld a 57
sowie (-)-Leiste und Feld a 51.
• Das lange Beinchen der roten LED steckt in Feld f 57,
das kurze in e 57. Bei der grünen LED verhält es sich
entsprechend mit Reihe 51.
• Um die LEDs vom Breadboard zu den Kürbisaugen
zu führen, verwendest du die 4 männlich-weiblich
Jumperkabel um die LEDs an den entsprechenden
Stellen mit dem Breadboard zu verbinden.
IN DIESEM BEISPIEL IST DER AUFBAU FOLGENDERMASSEN:
KosmoBits
PROJEKT 19

#include <KosmoBits_Pins.h>
const int buzzerPin = KOSMOBITS_BUZZER_PIN;
const int rotPin = 11;
const int gruenPin = 6;
void setup() {
randomSeed(analogRead(3));
pinMode(rotPin, OUTPUT);
pinMode(gruenPin, OUTPUT);
}
void loop() {
// Bli n ke n
analogWrite(rotPin, random(0, 256));
analogWrite(gruenPin, random(0, 256));
delay(200);
// Rauschen
if (random(0, 1000) > 900) {
for (int i = 0; i < 3000; ++i) {
analogWrite(buzzerPin, random(0, 256));
}
}
}
Das Programm ist äußerst einfach. Zuerst werden Kon-
stanten für die benutzten Pins definiert. In s e t u p() geben
wir dem Zufalssgenerator einen Startwert.
In der Hauptschleife wird zunächst mit a n a l o g W r it e ()
die Helligkeit der jeweiligen LED auf einen zufälligen Wert,
random(0, 256) , eingestellt. Das bewirkt das Flackern
der Geisteraugen.
Um das Rauschen zu erzeugen, erzeugst du dann in der
if -Anweisung mit ran d o m(0, 1000) wieder eine Zufalls-
zahl. Diesmal zwischen 0 (kleister möglicher Wert) und
999 (größter möglicher Wert).
Ist die Zufallszahl größer als 900, dann schreibst du in der
anschließenden for -Schleife mit
analogWrite(buzzerPin, random(0, 256)); 3000 Zu-
fallswerte in den buzzerPin . Das ergibt das Rauschen
im Lautsprecher.
Die Zufallszahlen, die mit Hilfe der random() -Funktion
erzeugt werden, sind gleich verteilt. Das bedeutet, dass
jede mögliche Zahl über lange Zeit betrachtet gleich häu-
fig erzeugt wird. Das Rauschen wird aber nur in den Fällen
ausgegeben, in denen die Zufallszahl größer ist als 900.
Das passiert in ungefähr einem Zehntel der Fälle. Möchtest
du, dass das Rauschen seltener auftritt, musst du statt der
900 eine größere Zahl wählen.
Du kannst diese blinkenden und flackernden Geisteraugen
nun in einen Kürbis oder in ein selbst gebasteltes Gespenst
einbauen.
Die Geisteraugen lassen sich auch prima mit anderen Ideen
kombinieren. Wie wäre es zum Beispiel mit einer Sirene,
die aufheult, wenn du den Kürbis mit einer Taschenlampe
anstrahlst? Sicherlich weißt du mittlerweile, wie du das
machen kannst, und hast noch viel mehr tolle Ideen!
</>
DAS PROGRAMM
▲Geisteraugen
PROJEKT 19
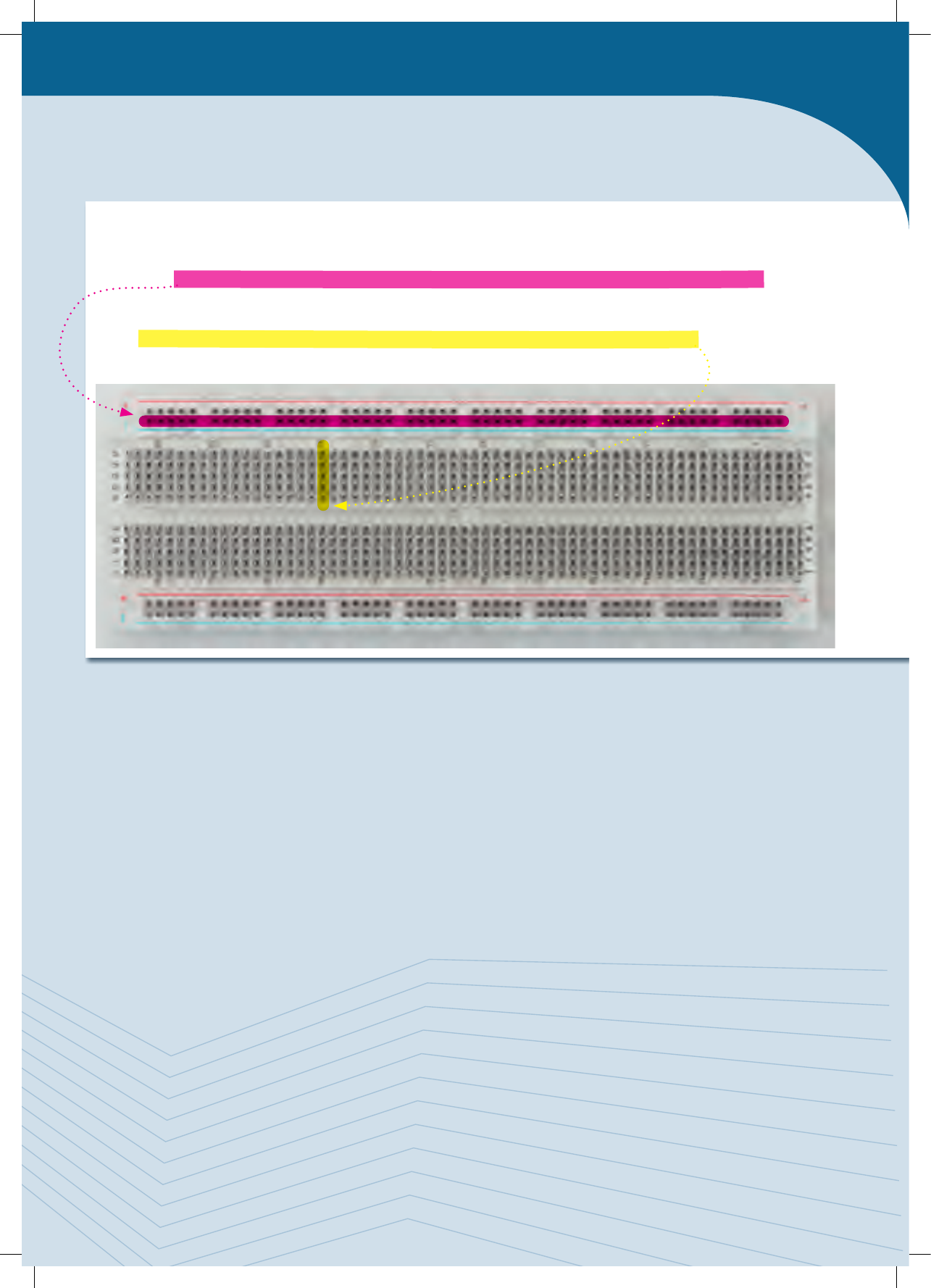
!
BREADBOARD
Das Breadboard, selten auf Deutsch auch Steckbrett genannt, ist ein einfacher Weg, kleine elektronische Schaltungen
aufzubauen. Die äußeren rot und blau gekennzeichneten Reihen sind dabei elektrisch miteinander verbunden. Hier legt
man üblicherweise die Spannungsversorgung an. Dazu verbindet man einen der mit »Gnd« (englisch für Ground, deutsch
Masse) gekennzeichneten Pins des Mikrocontrollers mit einem (-)-Feld, und einen »5V«-Pin mit einem (+)-Feld im Bread-
board. Die senkrechten Spalten (a bis e und f bis j) sind ebenfalls miteinander elektrisch verbunden. Allerdings nur bis zu
dem »Graben« in der Mitte des Breadboards. Die Details kannst du in der Abbildung erkennen.
Wie geht es weiter?
Du hast jetzt viele Grundlagen der Arduino-Programmierung erlernt. Darauf kannst und solltest du aufbauen. Das
KosmoBits-Set erlaubt dir einen guten Start, denn neben dem eigentlichen Mikrocontroller hast du bereits ein Bread-
board, einige LEDs, Jumperkabel und natürlich Sensoren. Mit Hilfe des Akkus kannst du das Ganze sogar unabhängig von
einem Computer betreiben, ohne zusätzliche Teile zu benötigen. Der Akku ist sogar ziemlich leistungsstark. Das merkst
du daran, dass er relativ selten aufgeladen werden muss. Mit anderen Worten: Du bist bestens ausgerüstet!
Im Internet wirst du jede Menge weitere Projektideen finden. Vermutlich wirst du dazu gelegentlich ein weiteres Elektro-
nikteil benötigen. Den Rest hast du aber schon. Vor allem aber kannst du mittlerweile sogar schon programmieren.
Lass deiner Kreativität freien Lauf.
Viel Spaß dabei!
KosmoBits
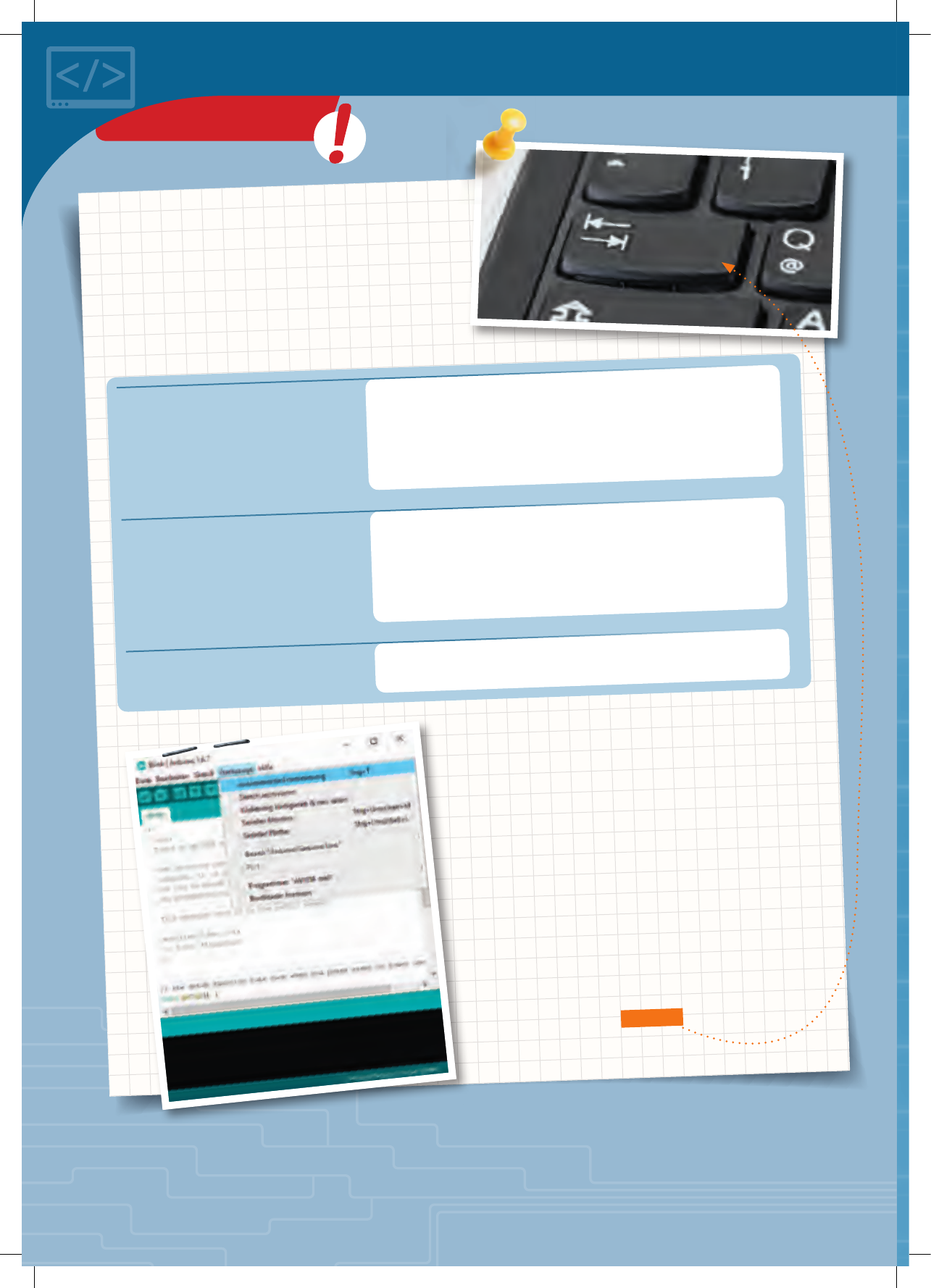
Nehmen wir mal ein einfaches Beispiel:
Das könntest du auch so schreiben:
oder sogar noch schlimmer so:
if (digitalRead(taste1) == LOW) {
rot = 255;
} else {
rot = 0;
}
if (digitalRead(taste1) == LOW) {
rot = 255;
} else {
rot = 0;
}
if (digitalRead(taste1) == LOW) {rot = 255;} else
{rot = 0;}
Eingerückt
Vielleicht hast du dich schon gewundert, dass viele
Zeilen, die du in den Programmtexten hier findest,
eingerückt sind, also ein wenig weiter rechts beginnen
als andere. Die Antwort ist recht einfach: Das erleich-
tert den Überblick über den Programmtext.
Das bedeutet alles genau das Gleiche, es ist nur etwas
anders formatiert. Und trotzdem, im ersten Beispiel
kannst du auf einen Blick die Struktur des Programms
erkennen. Es ist leichter den Code zu lesen.
Deshalb hat es sich als praktisch erwiesen, den Pro-
grammcode jedes Mal eine Stufe weiter einzurücken,
wenn ein neuer Block beginnt. Auch sollte in aller
Regel jede einzelne Anweisung eine eigene Zeile
bekommen.
Die Arduino-Umgebung unterstützt dich dabei und
rückt neue Blöcke in den meisten Fällen von alleine
ein. Wenn du Textteile doch einmal per Hand einrücken
möchtest, dann benutze dafür möglichst nicht die
Leertaste, sondern die Tab-Taste.
◀Automatische Formatierung
WISSEN KOMPAKT
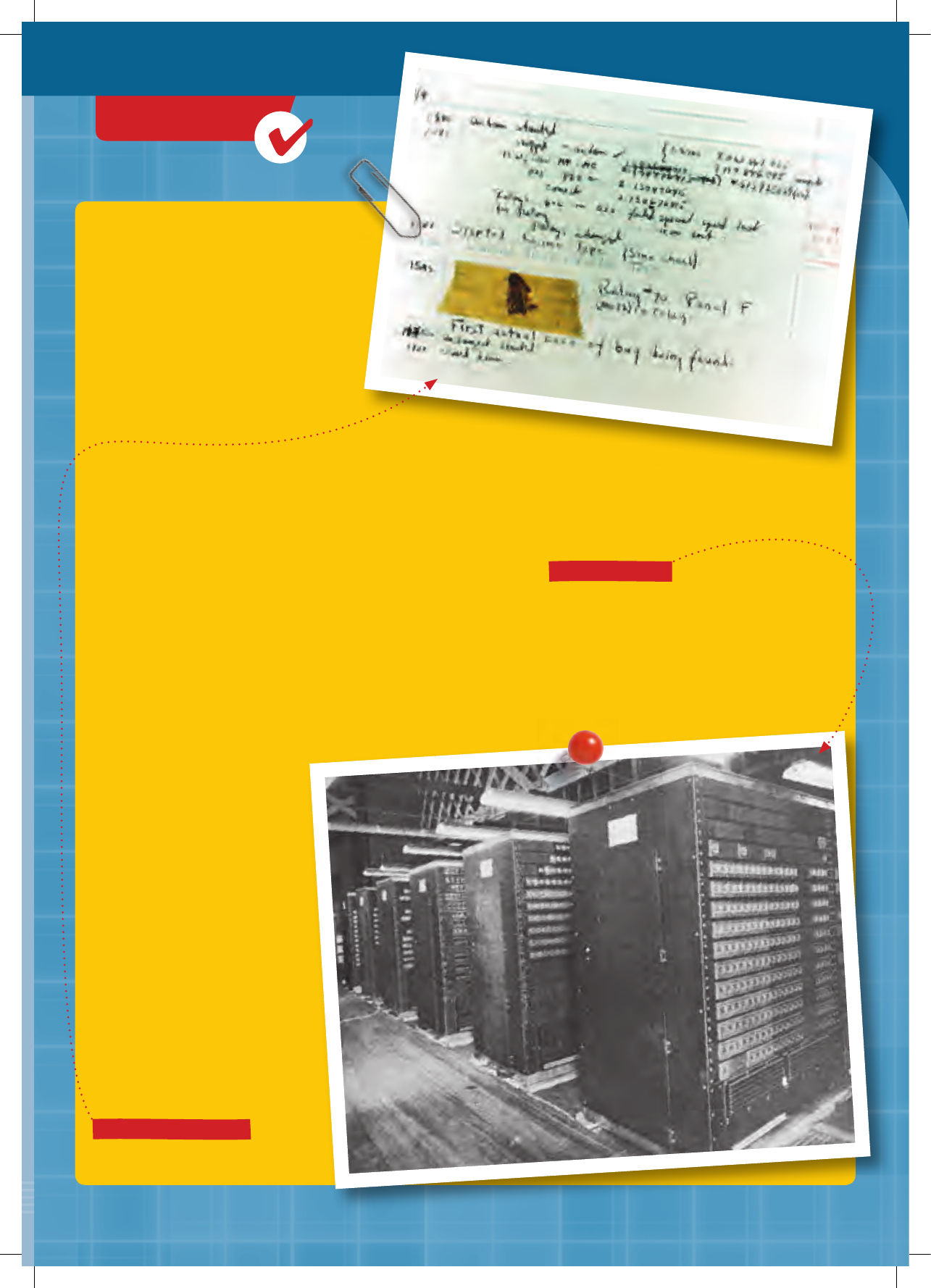
NACHGEHAKT
KosmoBits
▲Die Logbuch-Seite mit Motte
▲Harvard Mark II
Was ist
eigentlich
ein Bug?
Wenn ein Programm nicht das tut, was es eigentlich soll, spricht man von einem Bug. Man könnte
es auch einfach einen Fehler nennen, der englische Begriff Bug (deutsch: Käfer) wird aber viel öfter
verwendet. Die Geschichte dahinter ist erstaunlich!
Frühere Computer, wie zum Beispiel der 1947 fertig gestellte Harvard Mark II, besaßen noch keine
Mikroprozessoren. Stattdessen rechneten sie mit Hilfe von elektro-mechanischen Relais. Ein Relais
besteht im Grunde aus einem Elektromagneten und einem Schalter, der sich magnetisch betätigen
lässt. Schaltet man den Elektromagneten an, betätigt er den Schalter. Schaltet man den Magneten
wieder an, bewegt sich der Schalter wieder in die »Aus«-Stellung. Wichtig ist, dass sich in einem
solchen Relais tatsächlich etwas bewegt, nämlich der Schalter.
Am 9. September 1947
machten sich die für den
Mark II zuständigen Tech-
niker auf die Suche nach
einem Fehler. Sie fanden
ihn: Es handelte sich um
eine Motte, die sich in einem
Relais verklemmt hatte.
Der erste Bug in einem Pro-
gramm war also tatsächlich
ein Insekt. Die Motte haben
sie pflichtbewusst in das
Logbuch des Mark II
eingeklebt.
Maker-Projekt ▶
▲Workshop auf einer Maker Faire
NACHGEHAKT
Arduino und
die Maker
Hast du auch schon einmal davon geträumt, ein rich-
tiger Erfinder oder eine Erfinderin zu sein? Neue
Maschinen und Apparate zu erdenken und sie dann
Wirklichkeit werden zu lassen? Immer mehr Men-
schen geben sich nicht mehr mit Träumen zufrieden.
Sie machen es einfach. Sie sind Maker!
Maker ist englisch und bedeutet »Macher«. Früher
hätte man diese Macher einfach Tüftler oder Bast-
ler genannt. Doch das trifft es nicht ganz: Während die meisten Tüftler früher eher alleine in ihrer
Bastelstube vor sich hin gewerkelt haben, zieht es die Maker auch gerne in die Öffentlichkeit.
So sind in vielen Städten sogenannte Hackerspaces oder Makerspaces entstanden. Sie sind eine
Mischung aus Treffpunkt und Gemeinschaftswerkstatt. Hier tauschen sich die Maker aus, präsen-
tieren ihre neuesten Ideen, geben sich Ratschläge und können dabei auf gemeinschaftliche Teile
und Werkzeuge zurückgreifen.
Weltweit entstehen auch immer mehr Maker Faires. Das ist wieder englisch und bedeutet »Maker
Messe«. Hier können sich die Maker einer breiteren Öffentlichkeit präsentieren. Darüber hinaus
gibt es dort meist ein umfangreiches Angebot an Work-
shops, in denen erfahrene Macher dazulernen und Ein-
steiger die ersten Schritte erlernen können.
Eine wichtige Rolle spielen bei den Projekten der
Maker oft Mikrocontroller wie der Arduino. Erst durch
sie ist es möglich geworden, komplizierte Apparate
zu verwirklichen, ohne dafür erst teure Spezialelek-
tronik entwickeln zu müssen.
Auf einer Maker Faire ▶

3D-Drucker
Was nützt die beste Elektronik mit der toll-
sten Software, wenn man für seine Projekt-
idee einfach kein passendes Gehäuse findet?
Mittlerweile gibt es auch dafür eine passende Maker-Lösung: Die 3D-Drucker.
Das sind Geräte, die nicht zweidimensional (2D) auf Papier drucken, sondern dreidimensional (3D)
Dinge und Gegenstände ausdrucken können. Klingt nach Science-Fiction, ist aber vom Prinzip
eigentlich doch ganz einfach. Man benutzt dazu meist ein Kunststoffmaterial, das zunächst
ähnlich wie ein Faden auf einer Spule aufgerollt ist. Dieses Filament wird dann in einer Düse so
weit erhitzt, dass es schmilzt. In geschmolzener Form wird der Kunststoff computergesteuert an
einer bestimmten Stelle wieder ausgespritzt. Der Kunststoff kühlt dann ab und härtet aus.
Tropfen für Tropfen, Schicht für Schicht werden so aufwändigste Gegenstände aufgebaut.
Geräte, die so etwas können, gibt es schon länger, aber erst in den letzten Jahren sind sie für
Hobby-
Bastler bezahlbar geworden.
Übrigens: Auch die ersten Test-Versionen des KosmoBits-
Controllers sind auf diese Weise entstanden!
KosmoBits
◀Ein 3D-Drucker bei der Arbeit
◀Verschiedene 3D-gedruckte Prototypen aus der KosmoBits-Entwicklung
▲Filament für 3D-Drucker
Häufige Fehlermeldungen
Es wurde ein Semikolon vor einer schließenden Klammer
erwartet, aber nicht gefunden.
Ein im Programm benutzter Name, ist dem Compiler nicht
bekannt. Oftmals ein Zeichen für einen einfachen Tippfehler.
Ein im Programm benutzter Typ ist dem Compiler nicht
bekannt. In den meisten Fällen handelt es sich entweder
um einen Tippfehler, oder du hast vergessen eine entspre-
chende Datei einzubinden.
error: expected ';' before ')'
error: '...' was not declared in this scope
error: '...' does not name a type
BEISPIEL:
BEISPIEL:
BEISPIEL:
In function 'int mittelwert2()':
DoppelKlatscher:86: error: expected ';' be-
fore ')' token
for (int i = 0; i < N, ++i) {
^
exit status 1
expected ';' before ')' token
error: 'pinnMode' was not declared in this
scope
pinnMode(A1, INPUT);
error: 'KosmoBits_Pixel' does not name a
type
KosmoBits_Pixel pixel; #include <Adafruit_NeoPixel.h>
#include <KosmoBits_Pixel.h>
LÖSUNG:
LÖSUNG:
LÖSUNG:
Nach i < N muss das Komma durch ein Semikolon er-
setzt werden.
Tippfehler korrigieren: Richtig heißt es pinMode .
Binde die »KosmoBit_Pixel.h« ein:
FEHLERMELDUNGEN
Vermutlich hast du vergessen, den seriellen Monitor zu
schließen, bevor du dein Programm hochladen wolltest.
1. Du hast vergessen, den KosmoDuino mit dem Computer
zu verbinden. Vielleicht hast du das USB-Kabel auch nur
versehentlich in die Ladebuchse des Interaction Boards
gesteckt.
2. Es ist der falsche Port eingestellt. Überprüfe das im
Menü »Werkzeuge ➜ Port« und ändere den Port
gegebenenfalls.
avrdude: ser_open(): can't open device "\\.\COM4": Zugriff verweigert
avrdude: ser_open(): can't open device "\\.\COM4": Das System kann die
angegebene Datei nicht finden.
Wenig Arbeitsspeicher verfügbar, es können Stabilitätsprobleme auftreten.
BEISPIEL:
int array[1000] = {}; // Das ist zu groß!
LÖSUNG:
LÖSUNG:
LÖSUNG:
LÖSUNG:
Ändere dein Programm so, dass du mit einem kleineren
Array auskommst.
Schließe den seriellen Monitor und lade das Programm
erneut hoch.
Verwende das USB-Kabel um deinen Computer mit dem
USB-Port am KosmoDuino zu verbinden.
Wähle einen anderen Port aus.
Dein Programm füllt fast den gesamten Arbeitsspeicher
des Mikrocontrollers oder ist sogar schon zu groß dafür.
Vermutlich hast du ein ziemlich großes Array angelegt.
Nicht genug Arbeitsspeicher
KosmoBits
NOTIZEN

Android, Google Play und das Google Play-Logo sind Marken von Google Inc.
Apple und das Apple Logo sind Marken der Apple Inc., die in den USA und weiteren Ländern eingetragen sind. App Store ist eine Dienstleistungsmarke der Apple Inc.
MIT SPIELEN LOSLEGEN:
› Bau dein eigenes Gamepad zusammen
• Detaillierte Anweisungen findest du in der Anleitung
ab S. 3
› Lade den Akku des Gamepads
• Verwende dazu den USB-Anschluss am Interaction Board,
nicht den Anschluss am Kosmoduino!
› Lade die KosmoBits-App auf dein Tablet oder Smartphone
• Die App findest du bei Google Play oder im Apple App Store
› Aktiviere Bluetooth auf deinem Tablet oder Smartphone
› Starte die App
› Schalte dein Gamepad an
• Schiebe den Schalter am oberen Rand des Gamepads auf die Position »on«
• Die Verbindung erfolgt automatisch
› Bau die SensorBots zusammen und halte sie bereit
› Viel Spaß beim Spielen!
MIT PROGRAMMIEREN LOSLEGEN:
› Installiere die Arduino-Software auf deinem Computer
• Die Software bekommst du kostenlos unter arduino.cc/en/Main/
Software. Wir empfehlen die von uns getestete Version 1.6.5
› Öffne die Arduino-Software
› Schreibe dein Programm in der Arduino-Software
› Verbinde den KosmoDuino-Microcontroller per USB mit
deinem PC
› Lade dein Programm auf den KosmoDuino
• Dein Programm wird direkt nach dem Hochladen vom KosmoDuino
ausgeführt
• Viele spannende Programmier-Projekte findest du in der Anleitung
• Für viele Programmier-Projekte benötigst du die KosmoBits-Biblio-
theken. Diese kannst du kostenlos unter kosmobits.de/downloads
herunterladen. (Detaillierte Anweisungen findest du in der Anleitung auf S. 8)
› Viel Spaß beim Programmieren!
› › › KosmoBits Quickstart-Guide
0718020 SO 300416
ÜBERSICHT ÜBER EINIGE WICHTIGE BEFEHLE
PROGRAMMSTRUKTUR ERKLÄRUNG
void setup(){ }
Initialisierung. Am Anfang jedes Programms können erste Ein-
stellungen vorgenommen werden, das sogenannte »setup«. Hier
wird zum Beispiel festlegt, welche Pins welche Funktion über-
nehmen sollen oder wo die LEDs angeschlossen sind. Das setup
wird nach jedem Start oder Neustart nur einmal durchgeführt.
void loop(){ }
Hauptschleife. Der Hauptteil des Programms ist der sogenannte
Loop. Es ist eine Schleife, die sich solange wiederholt, wie der Mi-
crocontroller läuft. Hier sind alle wichtigen Funktionen unterge-
bracht, die dauerhaft das System überwachen oder verändern.
VARIABLEN BEISPIEL
int (ganze Zahlen) int led = 13;
long (lange ganze Zahlen) long meinWert = 111111;
float (Fließkommazahlen) float meinWert = 2.5;
char (Alphanumerische Zeichen: Buchstaben,
Zahlen, Sonderzeichen) char meinBuchstabe = ´a´;
array (Variablenfeld) int meineWerte[4] = {12, 18, 23, 86}
BEFEHL BEISPIEL ERKLÄRUNG
p i n M o d e () pinMode(led, OUTPUT); Setzt den Pin mit dem Namen »led« als Aus-
gabe-Pin fest.
digitalWrite() digitalWrite(led, HIGH);
Legt einen Strom auf dem Pin mit dem Namen
»led« an.
d i gi t al R e a d () digitalRead(Schalter) Liest den Zustand von Pin »Schalter« aus: Ist
der Schalter an (HIGH) oder aus (LOW)?
a n al o g W rit e() analog Write(le d, 255) Setzt den Pin mit dem Namen »led« auf den
Wert 255
analogRead() a nalog Re ad(te m p) Liest den Wert, den der Pin mit dem Namen
»temp« liefert.
d el a y () delay(1000); Lässt das Programm eine Sekunde warten
(=1000 Millisekunden).
S e r i al.b e g i n () Serial.begin(115200) Beginnt die Übertragung von Daten zum PC
mit 115200 Baud (Symbolen pro Sekunde)
Serial.println() Serial.println(„Hallo“); Zeigt im seriellen Monitor »Hallo« an.
› › › KosmoBits Quickstart-Guide