Yuejiang Technology DOBOT-200 Mechanical Arm (Dobot arm) User Manual PowerPoint
Shenzhen Yuejiang Technology Co., Ltd Mechanical Arm (Dobot arm) PowerPoint
User Manual

Dobot User Manual
V2.0
Shenzhen Yuejiang Technology Co., Ltd
Let’s Dobot
Dobot 2.0 is a new generation of desktop
robotic arm. It has friendly unibody design,
better performance and more features,
while maintaining a price of a desktop level
product. With continuous development and
full optimization, it’s a powerful helper for
your home. Rich extension ports, help you
make the most out of the robot. Brand new
professional controlling software brings you
the engaging experience never had before,
and makes you feel the endless possibilities
of future technology.
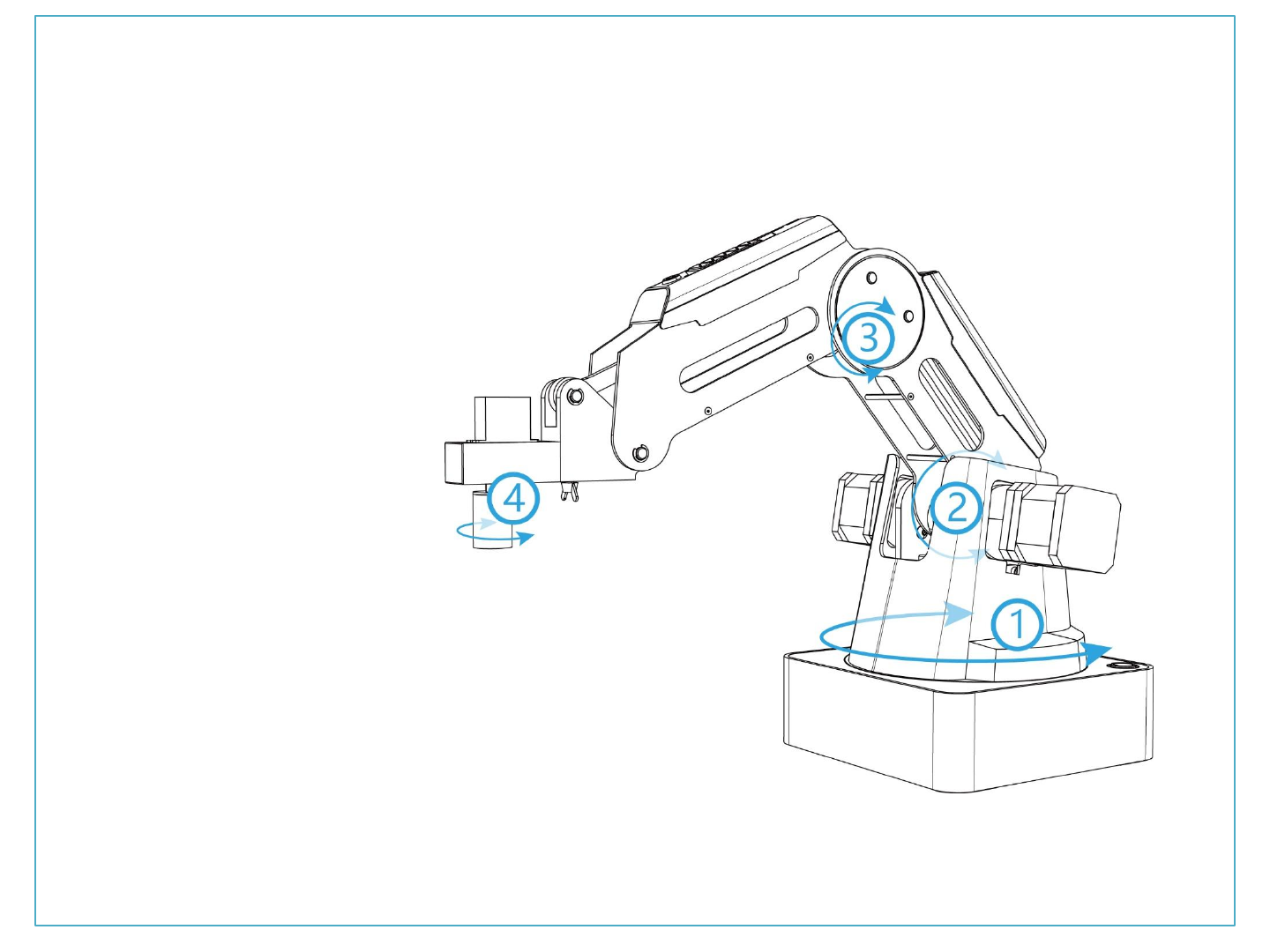
Robot Arm
Joint1
Joint2
Joint3
joint4
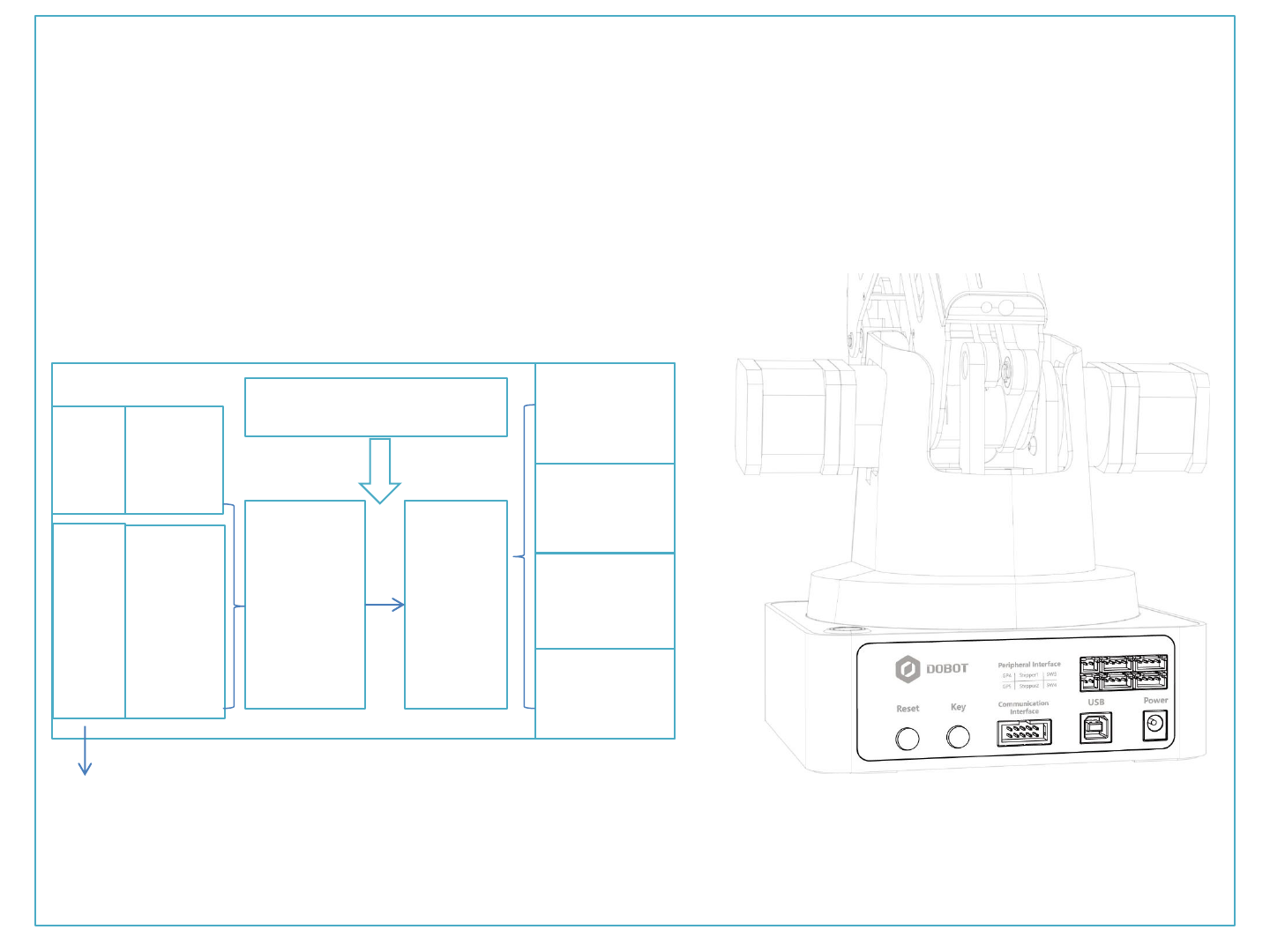
Dobot Integrated Controller
The Dobot controller is specifically designed for Dobot Application. The innovative FPGA solution significantly increases the
stability of stepper driving and gives the flexibility to STM32 for complex tasks.
Power Management
Module
STM32
Cortex M3
FPGA
5 Stepper
drivers
UART0
I/O module
A/D
Module
Power
connector
UART1
USB
Bluet
ooth
Connection interface
(for external box with Bluetooth module)
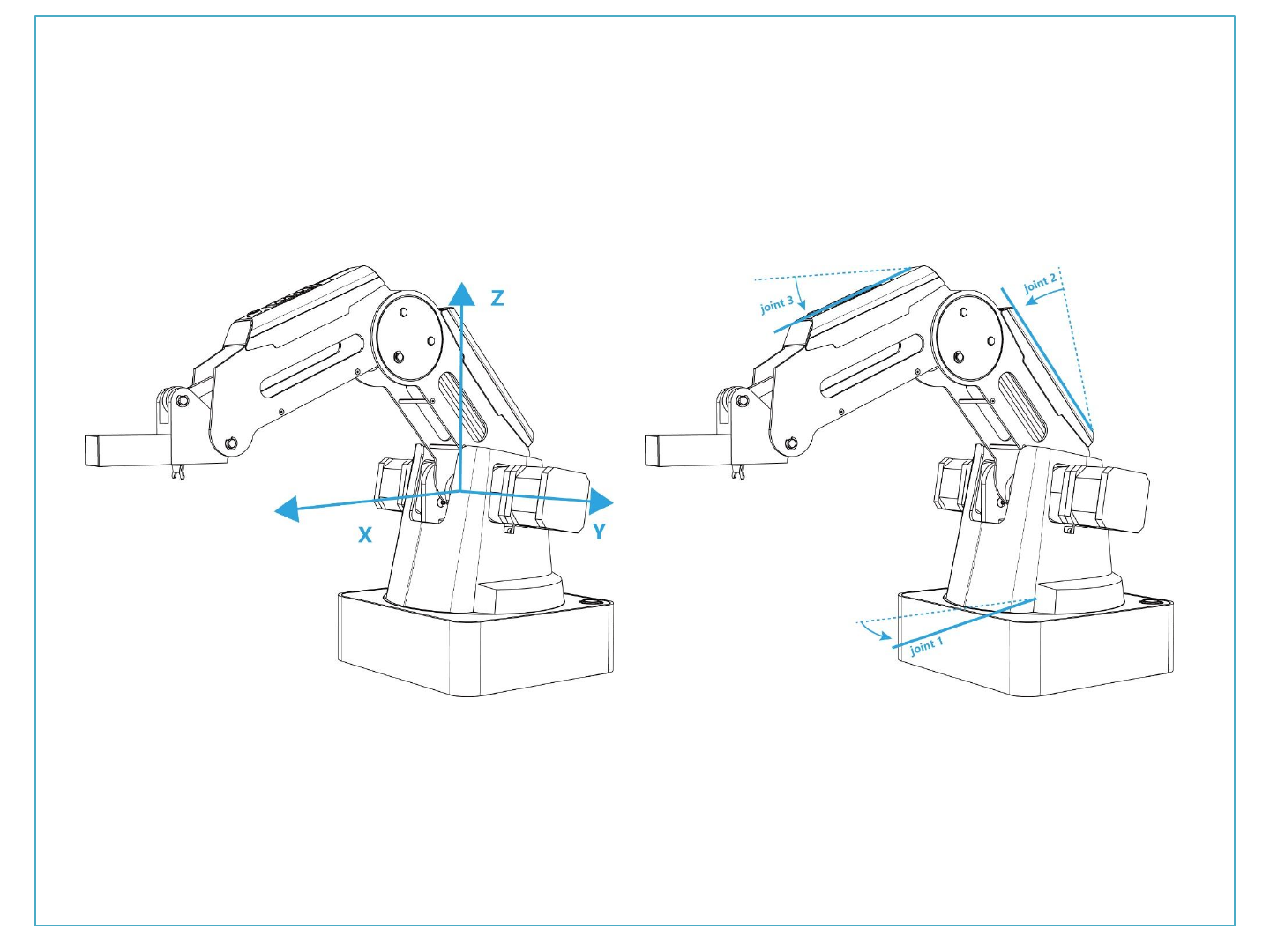
Reference Frame
Quick Start Guide
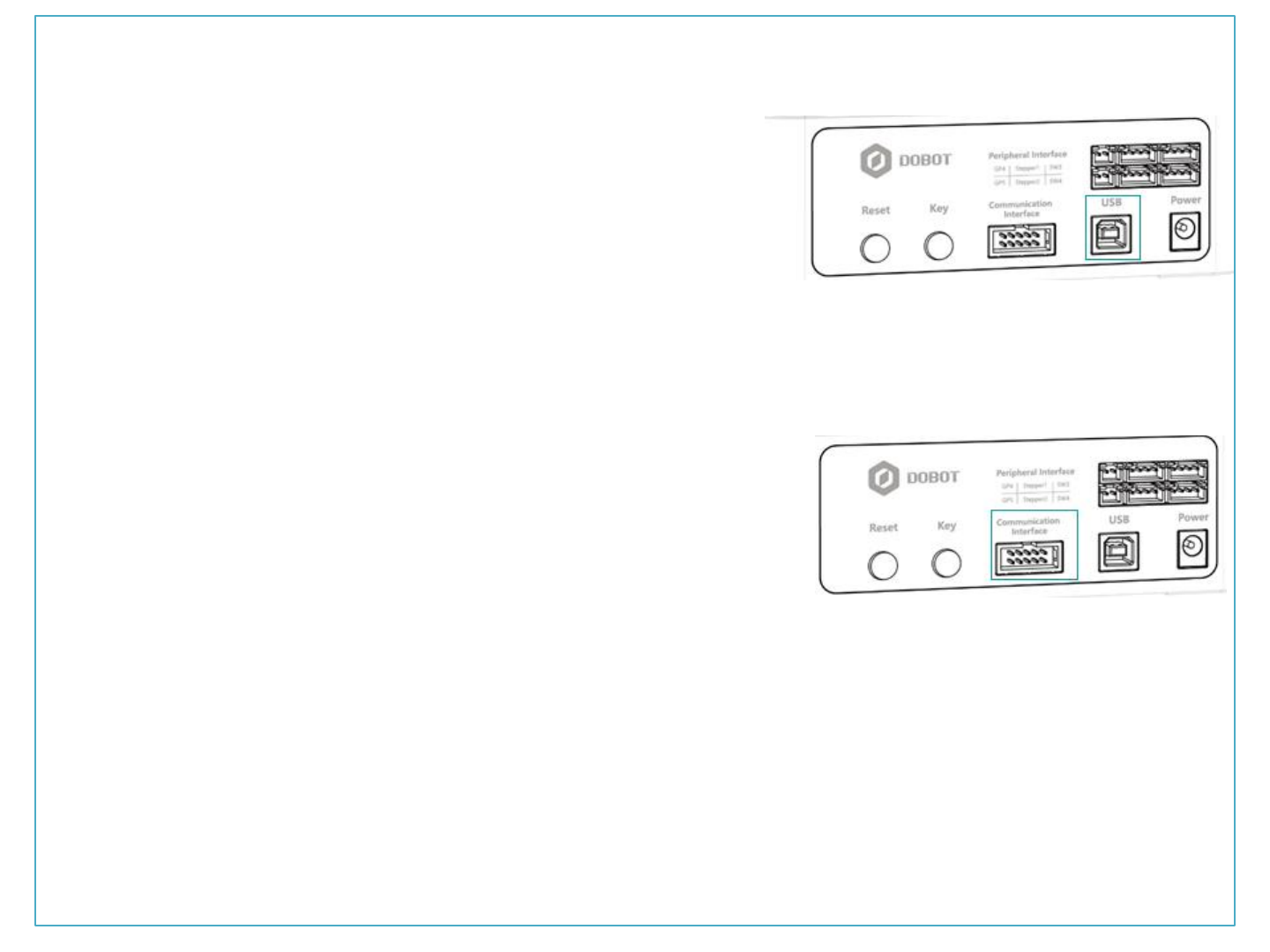
1. To control through USB
step1: Connect USB port with PC and start power;
step2: Open PC software, click ‘connect’ to access to Dobot;
step3: After a successful connection, Dobot can realize lots of
functions through jog mode or liner mode , such as
teach & playback, writing, drawing, laser engraving and so on.
2. To control through Bluetooth module(optional)
step1:Insert Bluetooth module
into corresponding interface of controller;
step2:Start power and reset Dobot;
step3:Open mobile APP, search Bluetooth port and connect,
and here password is 0000 or 1234;
step4:After a successful connection, Dobot can be controlled by APP,
like the function of teach & playback.
Note: The external box with Bluetooth module is an optional accessory. Through
the Bluetooth connection interface, the external box can connect to the Dobot 2.0 via the
cable.
USB Port
Bluetooth Interface
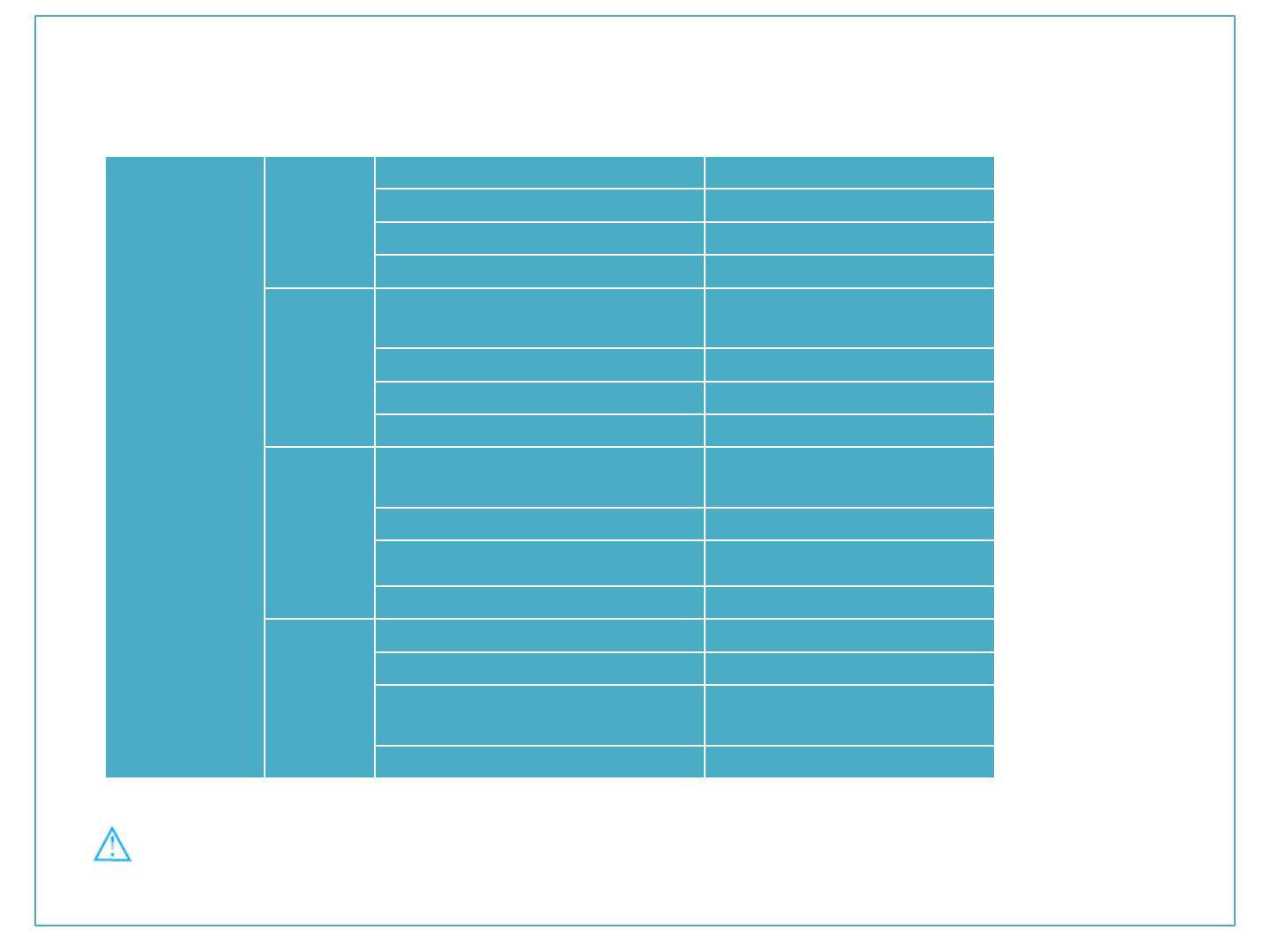
State definition
State definition
Blue
Light Gradually eliminate gradually
Connected with USB
On
Execute a command
Flash
Ready to be connected
Light 2 sec and eliminate 0.5 sec
Task suspended
Green
Light Gradually eliminate gradually
Connected with
communication port
On
Offline
Flash
Light 2 sec and eliminate 0.5 sec
Task suspended
Orange
On
Reset software when got an
unexpected interrupt or halt
Light Gradually eliminate gradually
Be at a limited position
Flash
Light 2sec and eliminate 0.5 sec
Red
On
Error: Fail to return to zero
Light Gradually eliminate gradually
Flash
Error: Reading error of angle
sensor
Long light and short eliminate
Encoder error of base
Dobot will return to zero automatically when start, so please put it in a safe place to prevent any
accidents!
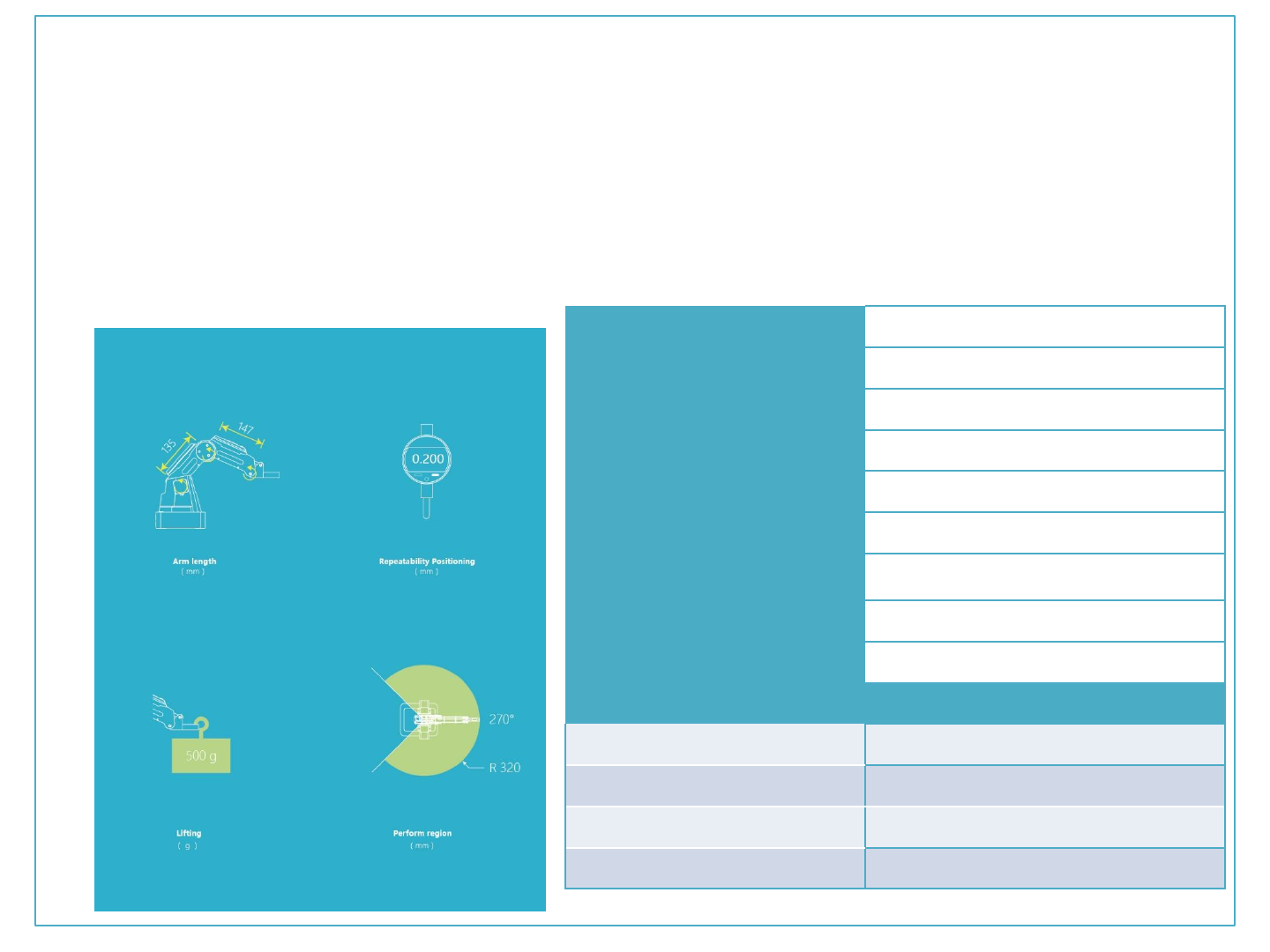
Number of Axis
4
Weight
4kg
Dimension base
158mm * 158mm
Payload
500g
Position repeatability
0.2mm
Material
Aluminum Alloy 6061
Controller
Dobot Integrated Controller
Communication
UART/Bluetooth connection interface
Power Supply
12V/5A DC
Joint
Working Range
Joint 1 base
+135° to -135°
Joint 2 rear arm
+85° to -5°
Joint 3 forearm
+95° to -10°
Joint 4 rotation servo
+90° to -90°
Support
1. More information available on our official website dobot.cc.
2. Software and detailed instructions can be found on dobot.cc/download.
3. Share your joy and creative ideas on forum.dobot.cc.
4. If you have further questions, please send email to support@dobot.cc.
Specification
Statement
Changes or modifications not expressly approved by the party responsible for compliance could v
oid the user’s authority to operate the equipment.
This device complies with Part 15 of the FCC Rules. Operation is subject to the following two con
ditions: (1) this device may not cause harmful interference, and (2) this device must accept any in
terference received, including interference that may cause undesired operation.
This equipment has been tested and found to comply with the limits for a Class B digital device, p
ursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection a
gainst harmful interference in a residential installation. This equipment generates, uses and can r
adiate radio frequency energy and, if not installed and used in accordance with the instructions,
may cause harmful interference to radio communications. However, there is no guarantee that in
terference will not occur in a particular installation.
If this equipment does cause harmful interference to radio or television reception, which can be
determined by turning the equipment off and on, the user is encouraged to try to correct the int
erference by one or more of the following measures:
-- Reorient or relocate the receiving antenna.
-- Increase the separation between the equipment and receiver.
--
Connect the equipment into an outlet on a circuit different from that to which the receiver is con
nected.
-- Consult the dealer or an experienced radio/TV technician for help.
18F, BUILDING C2, NANSHAN I PARK, NO. 1001, XUEYUAN
AVENUE, SHENZHEN, GUANGDONG PROVINCE, CHINA. 518055
TEL: +86-0755-33077021 (Mon to Sat, 09:00 AM to 18:00 PM GMT+8)
E-MAIL: sales@dobot.cc info@dobot.cc WEB: dobot.cc
Shenzhen Yuejiang Technology Co., Ltd