MSP430x5xx And MSP430x6xx Family (Rev. O) 5529 User's Guide Slau208o
User Manual:
Open the PDF directly: View PDF ![]() .
.
Page Count: 1191 [warning: Documents this large are best viewed by clicking the View PDF Link!]
- Table of Contents
- Preface
- 1 System Resets, Interrupts, and Operating Modes, System Control Module (SYS)
- 1.1 System Control Module (SYS) Introduction
- 1.2 System Reset and Initialization
- 1.3 Interrupts
- 1.4 Operating Modes
- 1.5 Principles for Low-Power Applications
- 1.6 Connection of Unused Pins
- 1.7 Reset Pin (RST/NMI) Configuration
- 1.8 Configuring JTAG Pins
- 1.9 Boot Code
- 1.10 Bootstrap Loader (BSL)
- 1.11 Memory Map – Uses and Abilities
- 1.12 JTAG Mailbox (JMB) System
- 1.13 Device Descriptor Table
- 1.14 SFR Registers
- 1.15 SYS Registers
- 2 Power Management Module and Supply Voltage Supervisor
- 2.1 Power Management Module (PMM) Introduction
- 2.2 PMM Operation
- 2.2.1 VCORE and the Regulator
- 2.2.2 Supply Voltage Supervisor and Monitor
- 2.2.3 Supply Voltage Supervisor and Monitor - Power-Up
- 2.2.4 Increasing VCORE to Support Higher MCLK Frequencies
- 2.2.5 Decreasing VCORE for Power Optimization
- 2.2.6 Transition From LPM3 and LPM4 Modes to AM
- 2.2.7 LPM3.5 and LPM4.5
- 2.2.8 Brownout Reset (BOR), Software BOR, Software POR
- 2.2.9 SVS and SVM Performance Modes and Wakeup Times
- 2.2.10 PMM Interrupts
- 2.2.11 Port I/O Control
- 2.2.12 Supply Voltage Monitor Output (SVMOUT, Optional)
- 2.3 PMM Registers
- 3 Battery Backup System
- 4 Auxiliary Supply System (AUX)
- 4.1 Auxiliary Supply System Introduction
- 4.2 Auxiliary Supply Operation
- 4.2.1 Startup
- 4.2.2 Switching Control
- 4.2.3 Software-Controlled Switching
- 4.2.4 Hardware-Controlled Switching
- 4.2.5 Interactions Among fSYS, VCORE, VDSYS, SVMH, and AUXxLVL
- 4.2.6 Auxiliary Supply Monitor
- 4.2.7 LPMx.5 and Auxiliary Supply Operation
- 4.2.8 Digital I/Os and Auxiliary Supplies
- 4.2.9 Measuring the Supplies
- 4.2.10 Resistive Charger
- 4.2.11 Auxiliary Supply Interrupts
- 4.2.12 Software Flow
- 4.2.13 Examples of AUX Operation
- 4.3 AUX Registers
- 5 Unified Clock System (UCS)
- 5.1 Unified Clock System (UCS) Introduction
- 5.2 UCS Operation
- 5.2.1 UCS Module Features for Low-Power Applications
- 5.2.2 Internal Very-Low-Power Low-Frequency Oscillator (VLO)
- 5.2.3 Internal Trimmed Low-Frequency Reference Oscillator (REFO)
- 5.2.4 XT1 Oscillator
- 5.2.5 XT2 Oscillator
- 5.2.6 Digitally Controlled Oscillator (DCO)
- 5.2.7 Frequency Locked Loop (FLL)
- 5.2.8 DCO Modulator
- 5.2.9 Disabling FLL Hardware and Modulator
- 5.2.10 FLL Operation From Low-Power Modes
- 5.2.11 Operation From Low-Power Modes, Requested by Peripheral Modules
- 5.2.12 UCS Module Fail-Safe Operation
- 5.2.13 Synchronization of Clock Signals
- 5.3 Module Oscillator (MODOSC)
- 5.4 UCS Registers
- 6 CPUX
- 6.1 MSP430X CPU (CPUX) Introduction
- 6.2 Interrupts
- 6.3 CPU Registers
- 6.4 Addressing Modes
- 6.5 MSP430 and MSP430X Instructions
- 6.5.1 MSP430 Instructions
- 6.5.2 MSP430X Extended Instructions
- 6.6 Instruction Set Description
- 6.6.1 Extended Instruction Binary Descriptions
- 6.6.2 MSP430 Instructions
- 6.6.2.1 ADC
- 6.6.2.2 ADD
- 6.6.2.3 ADDC
- 6.6.2.4 AND
- 6.6.2.5 BIC
- 6.6.2.6 BIS
- 6.6.2.7 BIT
- 6.6.2.8 BR, BRANCH
- 6.6.2.9 CALL
- 6.6.2.10 CLR
- 6.6.2.11 CLRC
- 6.6.2.12 CLRN
- 6.6.2.13 CLRZ
- 6.6.2.14 CMP
- 6.6.2.15 DADC
- 6.6.2.16 DADD
- 6.6.2.17 DEC
- 6.6.2.18 DECD
- 6.6.2.19 DINT
- 6.6.2.20 EINT
- 6.6.2.21 INC
- 6.6.2.22 INCD
- 6.6.2.23 INV
- 6.6.2.24 JC, JHS
- 6.6.2.25 JEQ, JZ
- 6.6.2.26 JGE
- 6.6.2.27 JL
- 6.6.2.28 JMP
- 6.6.2.29 JN
- 6.6.2.30 JNC, JLO
- 6.6.2.31 JNZ, JNE
- 6.6.2.32 MOV
- 6.6.2.33 NOP
- 6.6.2.34 POP
- 6.6.2.35 PUSH
- 6.6.2.36 RET
- 6.6.2.37 RETI
- 6.6.2.38 RLA
- 6.6.2.39 RLC
- 6.6.2.40 RRA
- 6.6.2.41 RRC
- 6.6.2.42 SBC
- 6.6.2.43 SETC
- 6.6.2.44 SETN
- 6.6.2.45 SETZ
- 6.6.2.46 SUB
- 6.6.2.47 SUBC
- 6.6.2.48 SWPB
- 6.6.2.49 SXT
- 6.6.2.50 TST
- 6.6.2.51 XOR
- 6.6.3 Extended Instructions
- 6.6.3.1 ADCX
- 6.6.3.2 ADDX
- 6.6.3.3 ADDCX
- 6.6.3.4 ANDX
- 6.6.3.5 BICX
- 6.6.3.6 BISX
- 6.6.3.7 BITX
- 6.6.3.8 CLRX
- 6.6.3.9 CMPX
- 6.6.3.10 DADCX
- 6.6.3.11 DADDX
- 6.6.3.12 DECX
- 6.6.3.13 DECDX
- 6.6.3.14 INCX
- 6.6.3.15 INCDX
- 6.6.3.16 INVX
- 6.6.3.17 MOVX
- 6.6.3.18 POPM
- 6.6.3.19 PUSHM
- 6.6.3.20 POPX
- 6.6.3.21 PUSHX
- 6.6.3.22 RLAM
- 6.6.3.23 RLAX
- 6.6.3.24 RLCX
- 6.6.3.25 RRAM
- 6.6.3.26 RRAX
- 6.6.3.27 RRCM
- 6.6.3.28 RRCX
- 6.6.3.29 RRUM
- 6.6.3.30 RRUX
- 6.6.3.31 SBCX
- 6.6.3.32 SUBX
- 6.6.3.33 SUBCX
- 6.6.3.34 SWPBX
- 6.6.3.35 SXTX
- 6.6.3.36 TSTX
- 6.6.3.37 XORX
- 6.6.4 Address Instructions
- 7 Flash Memory Controller
- 7.1 Flash Memory Introduction
- 7.2 Flash Memory Segmentation
- 7.3 Flash Memory Operation
- 7.4 FCTL Registers
- 8 Memory Integrity Detection (MID)
- 9 RAM Controller (RAMCTL)
- 10 Backup RAM
- 11 Direct Memory Access (DMA) Controller Module
- 11.1 Direct Memory Access (DMA) Introduction
- 11.2 DMA Operation
- 11.2.1 DMA Addressing Modes
- 11.2.2 DMA Transfer Modes
- 11.2.3 Initiating DMA Transfers
- 11.2.4 Halting Executing Instructions for DMA Transfers
- 11.2.5 Stopping DMA Transfers
- 11.2.6 DMA Channel Priorities
- 11.2.7 DMA Transfer Cycle Time
- 11.2.8 Using DMA With System Interrupts
- 11.2.9 DMA Controller Interrupts
- 11.2.10 Using the USCI_B I2C Module With the DMA Controller
- 11.2.11 Using ADC10 With the DMA Controller
- 11.2.12 Using ADC12 With the DMA Controller
- 11.2.13 Using DAC12 With the DMA Controller
- 11.3 DMA Registers
- 12 Digital I/O Module
- 12.1 Digital I/O Introduction
- 12.2 Digital I/O Operation
- 12.3 I/O Configuration and LPMx.5 Low-Power Modes
- 12.4 Digital I/O Registers
- 13 Port Mapping Controller
- 14 Cyclic Redundancy Check (CRC) Module
- 15 AES Accelerator
- 16 Watchdog Timer (WDT_A)
- 17 Timer_A
- 18 Timer_B
- 19 Timer_D
- 19.1 Timer_D Introduction
- 19.2 Timer_D Operation
- 19.2.1 16-Bit Timer Counter
- 19.2.2 High-Resolution Generator
- 19.2.3 Starting the Timer
- 19.2.4 Timer Mode Control
- 19.2.5 PWM Generation
- 19.2.6 Capture/Compare Blocks
- 19.2.7 Compare Mode
- 19.2.8 Switching From Capture to Compare Mode
- 19.2.9 Output Unit
- 19.2.10 Synchronization Between Timer_D Instances
- 19.2.11 Timer_D Interrupts
- 19.3 Timer_D Registers
- 20 Timer Event Control (TEC)
- 20.1 Timer Event Control Introduction
- 20.2 TEC Operation
- 20.3 TEC Registers
- 21 Real-Time Clock (RTC) Overview
- 22 Real-Time Clock (RTC_A)
- 22.1 RTC_A Introduction
- 22.2 RTC_A Operation
- 22.3 RTC_A Registers
- 22.3.1 RTCCTL0 Register
- 22.3.2 RTCCTL1 Register
- 22.3.3 RTCCTL2 Register
- 22.3.4 RTCCTL3 Register
- 22.3.5 RTCNT1 Register
- 22.3.6 RTCNT2 Register
- 22.3.7 RTCNT3 Register
- 22.3.8 RTCNT4 Register
- 22.3.9 RTCSEC Register – Calendar Mode With Hexadecimal Format
- 22.3.10 RTCSEC Register – Calendar Mode With BCD Format
- 22.3.11 RTCMIN Register – Calendar Mode With Hexadecimal Format
- 22.3.12 RTCMIN Register – Calendar Mode With BCD Format
- 22.3.13 RTCHOUR Register – Calendar Mode With Hexadecimal Format
- 22.3.14 RTCHOUR Register – Calendar Mode With BCD Format
- 22.3.15 RTCDOW Register – Calendar Mode
- 22.3.16 RTCDAY Register – Calendar Mode With Hexadecimal Format
- 22.3.17 RTCDAY Register – Calendar Mode With BCD Format
- 22.3.18 RTCMON Register – Calendar Mode With Hexadecimal Format
- 22.3.19 RTCMON Register – Calendar Mode With BCD Format
- 22.3.20 RTCYEARL Register – Calendar Mode With Hexadecimal Format
- 22.3.21 RTCYEARL Register – Calendar Mode With BCD Format
- 22.3.22 RTCYEARH Register – Calendar Mode With Hexadecimal Format
- 22.3.23 RTCYEARH Register – Calendar Mode With BCD Format
- 22.3.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format
- 22.3.25 RTCAMIN Register – Calendar Mode With BCD Format
- 22.3.26 RTCAHOUR Register – Calendar Mode With Hexadecimal Format
- 22.3.27 RTCAHOUR Register – Calendar Mode With BCD Format
- 22.3.28 RTCADOW Register
- 22.3.29 RTCADAY Register – Calendar Mode With Hexadecimal Format
- 22.3.30 RTCADAY Register – Calendar Mode With BCD Format
- 22.3.31 RTCPS0CTL Register
- 22.3.32 RTCPS1CTL Register
- 22.3.33 RT0PS Register
- 22.3.34 RT1PS Register
- 22.3.35 RTCIV Register
- 23 Real-Time Clock B (RTC_B)
- 23.1 Real-Time Clock RTC_B Introduction
- 23.2 RTC_B Operation
- 23.3 RTC_B Registers
- 23.3.1 RTCCTL0 Register
- 23.3.2 RTCCTL1 Register
- 23.3.3 RTCCTL2 Register
- 23.3.4 RTCCTL3 Register
- 23.3.5 RTCSEC Register – Hexadecimal Format
- 23.3.6 RTCSEC Register – BCD Format
- 23.3.7 RTCMIN Register – Hexadecimal Format
- 23.3.8 RTCMIN Register – BCD Format
- 23.3.9 RTCHOUR Register – Hexadecimal Format
- 23.3.10 RTCHOUR Register – BCD Format
- 23.3.11 RTCDOW Register
- 23.3.12 RTCDAY Register – Hexadecimal Format
- 23.3.13 RTCDAY Register – BCD Format
- 23.3.14 RTCMON Register – Hexadecimal Format
- 23.3.15 RTCMON Register – BCD Format
- 23.3.16 RTCYEAR Register – Hexadecimal Format
- 23.3.17 RTCYEAR Register – BCD Format
- 23.3.18 RTCAMIN Register – Hexadecimal Format
- 23.3.19 RTCAMIN Register – BCD Format
- 23.3.20 RTCAHOUR Register – Hexadecimal Format
- 23.3.21 RTCAHOUR Register – BCD Format
- 23.3.22 RTCADOW Register
- 23.3.23 RTCADAY Register – Hexadecimal Format
- 23.3.24 RTCADAY Register – BCD Format
- 23.3.25 RTCPS0CTL Register
- 23.3.26 RTCPS1CTL Register
- 23.3.27 RTCPS0 Register
- 23.3.28 RTCPS1 Register
- 23.3.29 RTCIV Register
- 23.3.30 BIN2BCD Register
- 23.3.31 BCD2BIN Register
- 24 Real-Time Clock C (RTC_C)
- 24.1 Real-Time Clock (RTC_C) Introduction
- 24.2 RTC_C Operation
- 24.2.1 Calendar Mode
- 24.2.2 Real-Time Clock and Prescale Dividers
- 24.2.3 Real-Time Clock Alarm Function
- 24.2.4 Real-Time Clock Protection
- 24.2.5 Reading or Writing Real-Time Clock Registers
- 24.2.6 Real-Time Clock Interrupts
- 24.2.7 Real-Time Clock Calibration for Crystal Offset Error
- 24.2.8 Real-Time Clock Compensation for Crystal Temperature Drift
- 24.2.9 Real-Time Clock Operation in LPM3.5 Low-Power Mode
- 24.3 RTC_C Operation - Device-Dependent Features
- 24.4 RTC_C Registers
- 24.4.1 RTCCTL0_L Register
- 24.4.2 RTCCTL0_H Register
- 24.4.3 RTCCTL1 Register
- 24.4.4 RTCCTL3 Register
- 24.4.5 RTCOCAL Register
- 24.4.6 RTCTCMP Register
- 24.4.7 RTCNT1 Register
- 24.4.8 RTCNT2 Register
- 24.4.9 RTCNT3 Register
- 24.4.10 RTCNT4 Register
- 24.4.11 RTCSEC Register – Calendar Mode With Hexadecimal Format
- 24.4.12 RTCSEC Register – Calendar Mode With BCD Format
- 24.4.13 RTCMIN Register – Calendar Mode With Hexadecimal Format
- 24.4.14 RTCMIN Register – Calendar Mode With BCD Format
- 24.4.15 RTCHOUR Register – Calendar Mode With Hexadecimal Format
- 24.4.16 RTCHOUR Register – Calendar Mode With BCD Format
- 24.4.17 RTCDOW Register – Calendar Mode
- 24.4.18 RTCDAY Register – Calendar Mode With Hexadecimal Format
- 24.4.19 RTCDAY Register – Calendar Mode With BCD Format
- 24.4.20 RTCMON Register – Calendar Mode With Hexadecimal Format
- 24.4.21 RTCMON Register – Calendar Mode With BCD Format
- 24.4.22 RTCYEAR Register – Calendar Mode With Hexadecimal Format
- 24.4.23 RTCYEAR Register – Calendar Mode With BCD Format
- 24.4.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format
- 24.4.25 RTCAMIN Register – Calendar Mode With BCD Format
- 24.4.26 RTCAHOUR Register
- 24.4.27 RTCAHOUR Register – Calendar Mode With BCD Format
- 24.4.28 RTCADOW Register – Calendar Mode
- 24.4.29 RTCADAY Register – Calendar Mode With Hexadecimal Format
- 24.4.30 RTCADAY Register – Calendar Mode With BCD Format
- 24.4.31 RTCPS0CTL Register
- 24.4.32 RTCPS1CTL Register
- 24.4.33 RTCPS0 Register
- 24.4.34 RTCPS1 Register
- 24.4.35 RTCIV Register
- 24.4.36 BIN2BCD Register
- 24.4.37 BCD2BIN Register
- 24.4.38 RTCSECBAKx Register – Hexadecimal Format
- 24.4.39 RTCSECBAKx Register – BCD Format
- 24.4.40 RTCMINBAKx Register – Hexadecimal Format
- 24.4.41 RTCMINBAKx Register – BCD Format
- 24.4.42 RTCHOURBAKx Register – Hexadecimal Format
- 24.4.43 RTCHOURBAKx Register – BCD Format
- 24.4.44 RTCDAYBAKx Register – Hexadecimal Format
- 24.4.45 RTCDAYBAKx Register – BCD Format
- 24.4.46 RTCMONBAKx Register – Hexadecimal Format
- 24.4.47 RTCMONBAKx Register – BCD Format
- 24.4.48 RTCYEARBAKx Register – Hexadecimal Format
- 24.4.49 RTCYEARBAKx Register – BCD Format
- 24.4.50 RTCTCCTL0 Register
- 24.4.51 RTCTCCTL1 Register
- 24.4.52 RTCCAPxCTL Register
- 25 32-Bit Hardware Multiplier (MPY32)
- 25.1 32-Bit Hardware Multiplier (MPY32) Introduction
- 25.2 MPY32 Operation
- 25.3 MPY32 Registers
- 26 REF
- 27 ADC10_A
- 27.1 ADC10_A Introduction
- 27.2 ADC10_A Operation
- 27.2.1 10-Bit ADC Core
- 27.2.2 ADC10_A Inputs and Multiplexer
- 27.2.3 Voltage Reference Generator
- 27.2.4 Auto Power Down
- 27.2.5 Sample and Conversion Timing
- 27.2.6 Conversion Result
- 27.2.7 ADC10_A Conversion Modes
- 27.2.8 Window Comparator
- 27.2.9 Using the Integrated Temperature Sensor
- 27.2.10 ADC10_A Grounding and Noise Considerations
- 27.2.11 ADC10_A Interrupts
- 27.3 ADC10_A Registers
- 27.3.1 ADC10CTL0 Register
- 27.3.2 ADC10CTL1 Register
- 27.3.3 ADC10CTL2 Register
- 27.3.4 ADC10MEM0 Register
- 27.3.5 ADC10MEM0 Register, Twos-Complement Format
- 27.3.6 ADC10MCTL0 Register
- 27.3.7 ADC10HI Register
- 27.3.8 ADC10HI Register, Twos-Complement Format
- 27.3.9 ADC10LO Register
- 27.3.10 ADC10LO Register, Twos-Complement Format
- 27.3.11 ADC10IE Register
- 27.3.12 ADC10IFG Register
- 27.3.13 ADC10IV Register
- 28 ADC12_A
- 28.1 ADC12_A Introduction
- 28.2 ADC12_A Operation
- 28.2.1 12-Bit ADC Core
- 28.2.2 ADC12_A Inputs and Multiplexer
- 28.2.3 Voltage Reference Generator
- 28.2.4 Auto Power Down
- 28.2.5 Sample and Conversion Timing
- 28.2.6 Conversion Memory
- 28.2.7 ADC12_A Conversion Modes
- 28.2.8 Using the Integrated Temperature Sensor
- 28.2.9 ADC12_A Grounding and Noise Considerations
- 28.2.10 ADC12_A Interrupts
- 28.3 ADC12_A Registers
- 29 SD24_B
- 29.1 SD24_B Introduction
- 29.2 SD24_B Operation
- 29.2.1 Principle of Operation
- 29.2.2 ADC Core
- 29.2.3 Voltage Reference
- 29.2.4 Modulator Clock
- 29.2.5 Auto Power-Down
- 29.2.6 Analog Inputs
- 29.2.7 Digital Filter
- 29.2.8 Bitstream Input and Output
- 29.2.9 Conversion Modes
- 29.2.10 Conversion Operation Using Preload
- 29.2.11 Grounding and Noise Considerations
- 29.2.12 Trigger Generator
- 29.2.13 SD24_B Interrupts
- 29.2.14 Using SD24_B With DMA
- 29.3 SD24_B Registers
- 29.3.1 SD24BCTL0 Register
- 29.3.2 SD24BCTL1 Register
- 29.3.3 SD24BTRGCTL Register
- 29.3.4 SD24BIFG Register
- 29.3.5 SD24BIE Register
- 29.3.6 SD24BIV Register
- 29.3.7 SD24BCCTLx Register
- 29.3.8 SD24BINCTLx Register
- 29.3.9 SD24BOSRx Register
- 29.3.10 SD24BTRGOSR Register
- 29.3.11 SD24BPREx Register
- 29.3.12 SD24BTRGPRE Register
- 29.3.13 SD24BMEMLx Register
- 29.3.14 SD24BMEMHx Register
- 30 CTSD16
- 30.1 CTSD16 Introduction
- 30.2 CTSD16 Operation
- 30.2.1 Principle of Operation
- 30.2.2 ADC Core
- 30.2.3 Voltage Reference
- 30.2.4 CTSD16 Clock
- 30.2.5 Auto Power-Down
- 30.2.6 Analog Inputs
- 30.2.7 Digital Filter
- 30.2.8 Conversion Memory Registers: CTSD16MEMx
- 30.2.9 Conversion Modes
- 30.2.10 Conversion Operation Using Preload
- 30.2.11 Using the Integrated Temperature Sensor
- 30.2.12 Using the Integrated AVCC Sense
- 30.2.13 Grounding and Noise Considerations
- 30.2.14 Interrupt Handling
- 30.3 CTSD16 Registers
- 31 DAC12_A
- 31.1 DAC12_A Introduction
- 31.2 DAC12_A Operation
- 31.3 DAC Outputs
- 31.4 DAC12_A Registers
- 31.4.1 DAC12_xCTL0 Register
- 31.4.2 DAC12_xCTL1 Register
- 31.4.3 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Right Justified
- 31.4.4 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Left Justified
- 31.4.5 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Right Justified
- 31.4.6 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Left Justified
- 31.4.7 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Right Justified
- 31.4.8 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Left Justified
- 31.4.9 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Right Justified
- 31.4.10 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Left Justified
- 31.4.11 DAC12_xCALCTL Register
- 31.4.12 DAC12_xCALDAT Register
- 31.4.13 DAC12IV Register
- 32 Comp_B
- 33 Operational Amplifier (OA)
- 34 LCD_B Controller
- 34.1 LCD_B Controller Introduction
- 34.2 LCD_B Controller Operation
- 34.3 LCD_B Registers
- 35 LCD_C Controller
- 35.1 LCD_C Introduction
- 35.2 LCD_C Operation
- 35.3 LCD_C Registers
- 36 Universal Serial Communication Interface – UART Mode
- 36.1 Universal Serial Communication Interface (USCI) Overview
- 36.2 USCI Introduction – UART Mode
- 36.3 USCI Operation – UART Mode
- 36.3.1 USCI Initialization and Reset
- 36.3.2 Character Format
- 36.3.3 Asynchronous Communication Format
- 36.3.4 Automatic Baud-Rate Detection
- 36.3.5 IrDA Encoding and Decoding
- 36.3.6 Automatic Error Detection
- 36.3.7 USCI Receive Enable
- 36.3.8 USCI Transmit Enable
- 36.3.9 UART Baud-Rate Generation
- 36.3.10 Setting a Baud Rate
- 36.3.11 Transmit Bit Timing
- 36.3.12 Receive Bit Timing
- 36.3.13 Typical Baud Rates and Errors
- 36.3.14 Using the USCI Module in UART Mode With Low-Power Modes
- 36.3.15 USCI Interrupts in UART Mode
- 36.3.16 DMA Operation
- 36.4 USCI_A UART Mode Registers
- 36.4.1 UCAxCTL0 Register
- 36.4.2 UCAxCTL1 Register
- 36.4.3 UCAxBR0 Register
- 36.4.4 UCAxBR1 Register
- 36.4.5 UCAxMCTL Register
- 36.4.6 UCAxSTAT Register
- 36.4.7 UCAxRXBUF Register
- 36.4.8 UCAxTXBUF Register
- 36.4.9 UCAxIRTCTL Register
- 36.4.10 UCAxIRRCTL Register
- 36.4.11 UCAxABCTL Register
- 36.4.12 UCAxIE Register
- 36.4.13 UCAxIFG Register
- 36.4.14 UCAxIV Register
- 37 Universal Serial Communication Interface – SPI Mode
- 37.1 Universal Serial Communication Interface (USCI) Overview
- 37.2 USCI Introduction – SPI Mode
- 37.3 USCI Operation – SPI Mode
- 37.4 USCI_A SPI Mode Registers
- 37.5 USCI_B SPI Mode Registers
- 38 Universal Serial Communication Interface – I2C Mode
- 38.1 Universal Serial Communication Interface (USCI) Overview
- 38.2 USCI Introduction – I2C Mode
- 38.3 USCI Operation – I2C Mode
- 38.4 USCI_B I2C Mode Registers
- 39 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
- 39.1 Enhanced Universal Serial Communication Interface A (eUSCI_A) Overview
- 39.2 eUSCI_A Introduction – UART Mode
- 39.3 eUSCI_A Operation – UART Mode
- 39.3.1 eUSCI_A Initialization and Reset
- 39.3.2 Character Format
- 39.3.3 Asynchronous Communication Format
- 39.3.4 Automatic Baud-Rate Detection
- 39.3.5 IrDA Encoding and Decoding
- 39.3.6 Automatic Error Detection
- 39.3.7 eUSCI_A Receive Enable
- 39.3.8 eUSCI_A Transmit Enable
- 39.3.9 UART Baud-Rate Generation
- 39.3.10 Setting a Baud Rate
- 39.3.11 Transmit Bit Timing - Error calculation
- 39.3.12 Receive Bit Timing – Error Calculation
- 39.3.13 Typical Baud Rates and Errors
- 39.3.14 Using the eUSCI_A Module in UART Mode With Low-Power Modes
- 39.3.15 eUSCI_A Interrupts in UART Mode
- 39.3.16 DMA Operation
- 39.4 eUSCI_A UART Registers
- 40 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
- 40.1 Enhanced Universal Serial Communication Interfaces (eUSCI_A, eUSCI_B) Overview
- 40.2 eUSCI Introduction – SPI Mode
- 40.3 eUSCI Operation – SPI Mode
- 40.4 eUSCI_A SPI Registers
- 40.5 eUSCI_B SPI Registers
- 41 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
- 41.1 eUSCI_B I2C Registers
- 41.1.1 UCBxCTLW0 Register
- 41.1.2 UCBxCTLW1 Register
- 41.1.3 UCBxBRW Register
- 41.1.4 UCBxSTATW
- 41.1.5 UCBxTBCNT Register
- 41.1.6 UCBxRXBUF Register
- 41.1.7 UCBxTXBUF
- 41.1.8 UCBxI2COA0 Register
- 41.1.9 UCBxI2COA1 Register
- 41.1.10 UCBxI2COA2 Register
- 41.1.11 UCBxI2COA3 Register
- 41.1.12 UCBxADDRX Register
- 41.1.13 UCBxADDMASK Register
- 41.1.14 UCBxI2CSA Register
- 41.1.15 UCBxIE Register
- 41.1.16 UCBxIFG Register
- 41.1.17 UCBxIV Register
- 42 USB Module
- 42.1 USB Introduction
- 42.2 USB Operation
- 42.3 USB Transfers
- 42.4 USB Registers
- 42.4.1 USB Configuration Registers
- 42.4.2 USB Control Registers
- 42.4.2.1 USBIEPCNF_0 Register
- 42.4.2.2 USBIEPBCNT_0 Register
- 42.4.2.3 USBOEPCNFG_0 Register
- 42.4.2.4 USBOEPBCNT_0 Register
- 42.4.2.5 USBIEPIE Register
- 42.4.2.6 USBOEPIE Register
- 42.4.2.7 USBIEPIFG Register
- 42.4.2.8 USBOEPIFG Register
- 42.4.2.9 USBVECINT Register
- 42.4.2.10 USBMAINT Register
- 42.4.2.11 USBTSREG Register
- 42.4.2.12 USBFN Register
- 42.4.2.13 USBCTL Register
- 42.4.2.14 USBIE Register
- 42.4.2.15 USBIFG Register
- 42.4.2.16 USBFUNADR Register
- 42.4.3 USB Buffer Registers and Memory
- 42.4.3.1 USBOEPCNF_n Register
- 42.4.3.2 USBOEPBBAX_n Register
- 42.4.3.3 USBOEPBCTX_n Register
- 42.4.3.4 USBOEPBBAY_n Register
- 42.4.3.5 USBOEPBCTY_n Register
- 42.4.3.6 USBOEPSIZXY_n Register
- 42.4.3.7 USBIEPCNF_n Register
- 42.4.3.8 USBIEPBBAX_n Register
- 42.4.3.9 USBIEPBCTX_n Register
- 42.4.3.10 USBIEPBBAY_n Register
- 42.4.3.11 USBIEPBCTY_n Register
- 42.4.3.12 USBIEPSIZXY_n Register
- 43 LDO-PWR Module
- 44 Embedded Emulation Module (EEM)
- Revision History
- Important Notice

MSP430x5xx and MSP430x6xx Family
User's Guide
Literature Number: SLAU208O
June 2008–Revised May 2015
Contents
Preface....................................................................................................................................... 52
1 System Resets, Interrupts, and Operating Modes, System Control Module (SYS)....................... 54
1.1 System Control Module (SYS) Introduction ............................................................................ 55
1.2 System Reset and Initialization........................................................................................... 55
1.2.1 Device Initial Conditions After System Reset.................................................................. 57
1.3 Interrupts .................................................................................................................... 57
1.3.1 (Non)Maskable Interrupts (NMIs) ............................................................................... 58
1.3.2 SNMI Timing ....................................................................................................... 59
1.3.3 Maskable Interrupts ............................................................................................... 59
1.3.4 Interrupt Processing............................................................................................... 59
1.3.5 Interrupt Nesting................................................................................................... 61
1.3.6 Interrupt Vectors................................................................................................... 61
1.3.7 SYS Interrupt Vector Generators................................................................................ 62
1.4 Operating Modes ........................................................................................................... 63
1.4.1 Entering and Exiting Low-Power Modes LPM0 Through LPM4............................................. 66
1.4.2 Entering and Exiting Low-Power Modes LPMx.5 ............................................................. 66
1.4.3 Extended Time in Low-Power Modes .......................................................................... 67
1.5 Principles for Low-Power Applications .................................................................................. 68
1.6 Connection of Unused Pins............................................................................................... 69
1.7 Reset Pin (RST/NMI) Configuration ..................................................................................... 69
1.8 Configuring JTAG Pins .................................................................................................... 70
1.9 Boot Code ................................................................................................................... 70
1.10 Bootstrap Loader (BSL) ................................................................................................... 70
1.11 Memory Map – Uses and Abilities ....................................................................................... 71
1.11.1 Vacant Memory Space .......................................................................................... 72
1.11.2 JTAG Lock Mechanism Using the Electronic Fuse .......................................................... 72
1.12 JTAG Mailbox (JMB) System ............................................................................................ 72
1.12.1 JMB Configuration ............................................................................................... 72
1.12.2 JMBOUT0 and JMBOUT1 Outgoing Mailbox................................................................. 72
1.12.3 JMBIN0 and JMBIN1 Incoming Mailbox....................................................................... 73
1.12.4 JMB NMI Usage .................................................................................................. 73
1.13 Device Descriptor Table................................................................................................... 73
1.13.1 Identifying Device Type.......................................................................................... 74
1.13.2 TLV Descriptors .................................................................................................. 75
1.13.3 Peripheral Discovery Descriptor ............................................................................... 76
1.13.4 CRC Computation................................................................................................ 80
1.13.5 Calibration Values................................................................................................ 81
1.13.6 Temperature Sensor Calibration for Devices With CTSD16 ............................................... 82
1.14 SFR Registers .............................................................................................................. 83
1.14.1 SFRIE1 Register ................................................................................................. 84
1.14.2 SFRIFG1 Register ............................................................................................... 85
1.14.3 SFRRPCR Register.............................................................................................. 87
1.15 SYS Registers .............................................................................................................. 88
1.15.1 SYSCTL Register ................................................................................................ 89
1.15.2 SYSBSLC Register .............................................................................................. 90
2Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
1.15.3 SYSJMBC Register .............................................................................................. 91
1.15.4 SYSJMBI0 Register.............................................................................................. 92
1.15.5 SYSJMBI1 Register.............................................................................................. 92
1.15.6 SYSJMBO0 Register ............................................................................................ 93
1.15.7 SYSJMBO1 Register ............................................................................................ 93
1.15.8 SYSUNIV Register ............................................................................................... 94
1.15.9 SYSSNIV Register ............................................................................................... 95
1.15.10 SYSRSTIV Register ............................................................................................ 96
1.15.11 SYSBERRIV Register.......................................................................................... 97
2 Power Management Module and Supply Voltage Supervisor ................................................... 98
2.1 Power Management Module (PMM) Introduction ...................................................................... 99
2.2 PMM Operation ........................................................................................................... 101
2.2.1 VCORE and the Regulator......................................................................................... 101
2.2.2 Supply Voltage Supervisor and Monitor ...................................................................... 101
2.2.3 Supply Voltage Supervisor and Monitor - Power-Up........................................................ 107
2.2.4 Increasing VCORE to Support Higher MCLK Frequencies ................................................... 108
2.2.5 Decreasing VCORE for Power Optimization .................................................................... 109
2.2.6 Transition From LPM3 and LPM4 Modes to AM ............................................................ 109
2.2.7 LPM3.5 and LPM4.5 ............................................................................................ 109
2.2.8 Brownout Reset (BOR), Software BOR, Software POR.................................................... 110
2.2.9 SVS and SVM Performance Modes and Wakeup Times .................................................. 110
2.2.10 PMM Interrupts.................................................................................................. 113
2.2.11 Port I/O Control ................................................................................................. 113
2.2.12 Supply Voltage Monitor Output (SVMOUT, Optional)...................................................... 113
2.3 PMM Registers............................................................................................................ 114
2.3.1 PMMCTL0 Register.............................................................................................. 115
2.3.2 PMMCTL1 Register.............................................................................................. 116
2.3.3 SVSMHCTL Register............................................................................................ 117
2.3.4 SVSMLCTL Register ............................................................................................ 118
2.3.5 SVSMIO Register ................................................................................................ 119
2.3.6 PMMIFG Register................................................................................................ 120
2.3.7 PMMRIE Register................................................................................................ 122
2.3.8 PM5CTL0 Register .............................................................................................. 123
3 Battery Backup System ..................................................................................................... 124
3.1 Battery Backup Introduction ............................................................................................. 125
3.2 Battery Backup Operation ............................................................................................... 125
3.2.1 Activate Access to Backup-Supplied Subsystem............................................................ 126
3.2.2 Manual Switching ................................................................................................ 127
3.2.3 Disable Switching ................................................................................................ 127
3.2.4 Measuring the Supplies ......................................................................................... 127
3.2.5 LPMx.5 and Backup Operation ................................................................................ 127
3.2.6 Resistive Charger................................................................................................ 128
3.3 Battery Backup Registers................................................................................................ 129
3.3.1 BAKCTL Register ................................................................................................ 130
3.3.2 BAKCHCTL Register ............................................................................................ 131
4 Auxiliary Supply System (AUX) .......................................................................................... 132
4.1 Auxiliary Supply System Introduction .................................................................................. 133
4.2 Auxiliary Supply Operation .............................................................................................. 134
4.2.1 Startup............................................................................................................. 135
4.2.2 Switching Control ................................................................................................ 135
4.2.3 Software-Controlled Switching ................................................................................. 135
4.2.4 Hardware-Controlled Switching ................................................................................ 136
4.2.5 Interactions Among fSYS, VCORE, VDSYS, SVMH, and AUXxLVL ............................................... 137
3
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
4.2.6 Auxiliary Supply Monitor ........................................................................................ 139
4.2.7 LPMx.5 and Auxiliary Supply Operation ...................................................................... 141
4.2.8 Digital I/Os and Auxiliary Supplies............................................................................. 141
4.2.9 Measuring the Supplies ......................................................................................... 142
4.2.10 Resistive Charger............................................................................................... 143
4.2.11 Auxiliary Supply Interrupts..................................................................................... 143
4.2.12 Software Flow ................................................................................................... 145
4.2.13 Examples of AUX Operation .................................................................................. 146
4.3 AUX Registers............................................................................................................. 148
4.3.1 AUXCTL0 Register .............................................................................................. 149
4.3.2 AUXCTL1 Register .............................................................................................. 150
4.3.3 AUXCTL2 Register .............................................................................................. 151
4.3.4 AUX2CHCTL Register .......................................................................................... 152
4.3.5 AUX3CHCTL Register .......................................................................................... 153
4.3.6 AUXADCCTL Register .......................................................................................... 154
4.3.7 AUXIFG Register ................................................................................................ 155
4.3.8 AUXIE Register .................................................................................................. 156
4.3.9 AUXIV Register .................................................................................................. 157
5 Unified Clock System (UCS)............................................................................................... 158
5.1 Unified Clock System (UCS) Introduction ............................................................................. 159
5.2 UCS Operation............................................................................................................ 161
5.2.1 UCS Module Features for Low-Power Applications......................................................... 161
5.2.2 Internal Very-Low-Power Low-Frequency Oscillator (VLO) ................................................ 161
5.2.3 Internal Trimmed Low-Frequency Reference Oscillator (REFO) .......................................... 162
5.2.4 XT1 Oscillator .................................................................................................... 162
5.2.5 XT2 Oscillator ................................................................................................... 163
5.2.6 Digitally Controlled Oscillator (DCO) .......................................................................... 164
5.2.7 Frequency Locked Loop (FLL) ................................................................................. 165
5.2.8 DCO Modulator .................................................................................................. 166
5.2.9 Disabling FLL Hardware and Modulator ...................................................................... 166
5.2.10 FLL Operation From Low-Power Modes..................................................................... 167
5.2.11 Operation From Low-Power Modes, Requested by Peripheral Modules................................ 167
5.2.12 UCS Module Fail-Safe Operation............................................................................. 168
5.2.13 Synchronization of Clock Signals............................................................................. 171
5.3 Module Oscillator (MODOSC)........................................................................................... 172
5.3.1 MODOSC Operation ............................................................................................ 172
5.4 UCS Registers ............................................................................................................ 173
5.4.1 UCSCTL0 Register .............................................................................................. 174
5.4.2 UCSCTL1 Register .............................................................................................. 175
5.4.3 UCSCTL2 Register .............................................................................................. 176
5.4.4 UCSCTL3 Register .............................................................................................. 177
5.4.5 UCSCTL4 Register .............................................................................................. 178
5.4.6 UCSCTL5 Register .............................................................................................. 179
5.4.7 UCSCTL6 Register .............................................................................................. 181
5.4.8 UCSCTL7 Register .............................................................................................. 183
5.4.9 UCSCTL8 Register .............................................................................................. 184
5.4.10 UCSCTL9 Register ............................................................................................. 185
6 CPUX .............................................................................................................................. 186
6.1 MSP430X CPU (CPUX) Introduction................................................................................... 187
6.2 Interrupts................................................................................................................... 189
6.3 CPU Registers ............................................................................................................ 190
6.3.1 Program Counter (PC) .......................................................................................... 190
6.3.2 Stack Pointer (SP) ............................................................................................... 190
4Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
6.3.3 Status Register (SR) ............................................................................................ 192
6.3.4 Constant Generator Registers (CG1 and CG2) ............................................................. 193
6.3.5 General-Purpose Registers (R4 to R15)...................................................................... 194
6.4 Addressing Modes........................................................................................................ 196
6.4.1 Register Mode.................................................................................................... 197
6.4.2 Indexed Mode .................................................................................................... 198
6.4.3 Symbolic Mode................................................................................................... 203
6.4.4 Absolute Mode ................................................................................................... 207
6.4.5 Indirect Register Mode .......................................................................................... 209
6.4.6 Indirect Autoincrement Mode................................................................................... 210
6.4.7 Immediate Mode ................................................................................................. 211
6.5 MSP430 and MSP430X Instructions ................................................................................... 213
6.5.1 MSP430 Instructions ............................................................................................ 213
6.5.2 MSP430X Extended Instructions .............................................................................. 218
6.6 Instruction Set Description............................................................................................... 229
6.6.1 Extended Instruction Binary Descriptions..................................................................... 230
6.6.2 MSP430 Instructions ............................................................................................ 232
6.6.3 Extended Instructions ........................................................................................... 284
6.6.4 Address Instructions............................................................................................. 327
7 Flash Memory Controller ................................................................................................... 342
7.1 Flash Memory Introduction .............................................................................................. 343
7.2 Flash Memory Segmentation............................................................................................ 344
7.2.1 Segment A........................................................................................................ 345
7.3 Flash Memory Operation ................................................................................................ 346
7.3.1 Erasing Flash Memory .......................................................................................... 346
7.3.2 Writing Flash Memory ........................................................................................... 350
7.3.3 Flash Memory Access During Write or Erase................................................................ 357
7.3.4 Stopping Write or Erase Cycle................................................................................. 358
7.3.5 Checking Flash Memory ........................................................................................ 358
7.3.6 Configuring and Accessing the Flash Memory Controller .................................................. 359
7.3.7 Flash Memory Controller Interrupts ........................................................................... 359
7.3.8 Programming Flash Memory Devices......................................................................... 360
7.4 FCTL Registers ........................................................................................................... 361
7.4.1 FCTL1 Register .................................................................................................. 362
7.4.2 FCTL3 Register .................................................................................................. 363
7.4.3 FCTL4 Register .................................................................................................. 364
7.4.4 SFRIE1 Register ................................................................................................. 365
8 Memory Integrity Detection (MID)........................................................................................ 366
8.1 MID Overview ............................................................................................................. 367
8.2 Flash Memory With MID Support....................................................................................... 368
8.3 MID Parity Check Logic.................................................................................................. 368
8.4 Detecting Unprogrammed Memory Accesses ........................................................................ 369
8.5 MID ROM .................................................................................................................. 369
8.6 MID Support Software Function ........................................................................................ 369
8.6.1 MidEnable() Function............................................................................................ 370
8.6.2 MidDisable() Function ........................................................................................... 371
8.6.3 MidGetErrAdr() Function........................................................................................ 371
8.6.4 MidCheckMem() Function ...................................................................................... 372
8.6.5 MidSetRaw() Function........................................................................................... 372
8.6.6 MidGetParity() Function......................................................................................... 373
8.6.7 MidCalcVParity() Function...................................................................................... 373
8.7 User's UNMI Interrupt Handler.......................................................................................... 373
5
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
9 RAM Controller (RAMCTL) ................................................................................................. 374
9.1 RAM Controller (RAMCTL) Introduction ............................................................................... 375
9.2 RAMCTL Operation....................................................................................................... 375
9.3 RAMCTL Registers ....................................................................................................... 376
9.3.1 RCCTL0 Register ................................................................................................ 377
10 Backup RAM .................................................................................................................... 378
10.1 Backup RAM Introduction and Operation.............................................................................. 379
10.2 Battery Backup Registers................................................................................................ 379
11 Direct Memory Access (DMA) Controller Module .................................................................. 380
11.1 Direct Memory Access (DMA) Introduction............................................................................ 381
11.2 DMA Operation............................................................................................................ 383
11.2.1 DMA Addressing Modes ....................................................................................... 383
11.2.2 DMA Transfer Modes .......................................................................................... 384
11.2.3 Initiating DMA Transfers ....................................................................................... 390
11.2.4 Halting Executing Instructions for DMA Transfers.......................................................... 390
11.2.5 Stopping DMA Transfers....................................................................................... 391
11.2.6 DMA Channel Priorities ........................................................................................ 391
11.2.7 DMA Transfer Cycle Time ..................................................................................... 392
11.2.8 Using DMA With System Interrupts .......................................................................... 392
11.2.9 DMA Controller Interrupts ..................................................................................... 392
11.2.10 Using the USCI_B I2C Module With the DMA Controller................................................. 394
11.2.11 Using ADC10 With the DMA Controller .................................................................... 394
11.2.12 Using ADC12 With the DMA Controller .................................................................... 394
11.2.13 Using DAC12 With the DMA Controller .................................................................... 394
11.3 DMA Registers ............................................................................................................ 395
11.3.1 DMACTL0 Register............................................................................................. 397
11.3.2 DMACTL1 Register............................................................................................. 398
11.3.3 DMACTL2 Register............................................................................................. 399
11.3.4 DMACTL3 Register............................................................................................. 400
11.3.5 DMACTL4 Register............................................................................................. 401
11.3.6 DMAxCTL Register............................................................................................. 402
11.3.7 DMAxSA Register .............................................................................................. 404
11.3.8 DMAxDA Register .............................................................................................. 405
11.3.9 DMAxSZ Register............................................................................................... 406
11.3.10 DMAIV Register ............................................................................................... 407
12 Digital I/O Module ............................................................................................................. 408
12.1 Digital I/O Introduction ................................................................................................... 409
12.2 Digital I/O Operation...................................................................................................... 410
12.2.1 Input Registers (PxIN).......................................................................................... 410
12.2.2 Output Registers (PxOUT) .................................................................................... 410
12.2.3 Direction Registers (PxDIR) ................................................................................... 410
12.2.4 Pullup or Pulldown Resistor Enable Registers (PxREN) .................................................. 410
12.2.5 Output Drive Strength Registers (PxDS) .................................................................... 411
12.2.6 Function Select Registers (PxSEL) .......................................................................... 411
12.2.7 Port Interrupts ................................................................................................... 411
12.2.8 Configuring Unused Port Pins ................................................................................ 413
12.3 I/O Configuration and LPMx.5 Low-Power Modes ................................................................... 413
12.4 Digital I/O Registers ...................................................................................................... 416
12.4.1 P1IV Register ................................................................................................... 422
12.4.2 P2IV Register ................................................................................................... 423
12.4.3 P1IES Register.................................................................................................. 424
12.4.4 P1IE Register ................................................................................................... 424
12.4.5 P1IFG Register.................................................................................................. 424
6Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
12.4.6 P2IES Register.................................................................................................. 425
12.4.7 P2IE Register ................................................................................................... 425
12.4.8 P2IFG Register.................................................................................................. 425
12.4.9 PxIN Register ................................................................................................... 426
12.4.10 PxOUT Register ............................................................................................... 426
12.4.11 PxDIR Register ................................................................................................ 426
12.4.12 PxREN Register ............................................................................................... 427
12.4.13 PxDS Register ................................................................................................. 427
12.4.14 PxSEL Register................................................................................................ 427
13 Port Mapping Controller .................................................................................................... 428
13.1 Port Mapping Controller Introduction................................................................................... 429
13.2 Port Mapping Controller Operation ..................................................................................... 429
13.2.1 Access ........................................................................................................... 429
13.2.2 Mapping.......................................................................................................... 429
13.3 Port Mapping Controller Registers ..................................................................................... 431
13.3.1 PMAPKEYID Register.......................................................................................... 432
13.3.2 PMAPCTL Register............................................................................................. 432
13.3.3 PxMAPy Register ............................................................................................... 432
14 Cyclic Redundancy Check (CRC) Module ............................................................................ 433
14.1 Cyclic Redundancy Check (CRC) Module Introduction.............................................................. 434
14.2 CRC Standard and Bit Order............................................................................................ 434
14.3 CRC Checksum Generation............................................................................................. 435
14.3.1 CRC Implementation ........................................................................................... 435
14.3.2 Assembler Examples........................................................................................... 436
14.4 CRC Registers ............................................................................................................ 438
14.4.1 CRCDI Register................................................................................................. 439
14.4.2 CRCDIRB Register ............................................................................................. 439
14.4.3 CRCINIRES Register........................................................................................... 440
14.4.4 CRCRESR Register ............................................................................................ 440
15 AES Accelerator ............................................................................................................... 441
15.1 AES Accelerator Introduction............................................................................................ 442
15.2 AES Accelerator Operation.............................................................................................. 443
15.2.1 Encryption ....................................................................................................... 444
15.2.2 Decryption ....................................................................................................... 445
15.2.3 Decryption Key Generation.................................................................................... 446
15.2.4 Using the AES Accelerator With Low-Power Modes....................................................... 447
15.2.5 AES Accelerator Interrupts .................................................................................... 447
15.2.6 Implementing Block Cipher Modes ........................................................................... 447
15.3 AES_ACCEL Registers .................................................................................................. 448
15.3.1 AESACTL0 Register............................................................................................ 449
15.3.2 AESACTL1 Register............................................................................................ 450
15.3.3 AESASTAT Register ........................................................................................... 451
15.3.4 AESAKEY Register............................................................................................. 452
15.3.5 AESADIN Register ............................................................................................. 453
15.3.6 AESADOUT Register .......................................................................................... 453
15.3.7 AESAXDIN Register............................................................................................ 454
15.3.8 AESAXIN Register.............................................................................................. 454
16 Watchdog Timer (WDT_A).................................................................................................. 455
16.1 WDT_A Introduction...................................................................................................... 456
16.2 WDT_A Operation ........................................................................................................ 458
16.2.1 Watchdog Timer Counter (WDTCNT)........................................................................ 458
16.2.2 Watchdog Mode ................................................................................................ 458
7
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
16.2.3 Interval Timer Mode ............................................................................................ 458
16.2.4 Watchdog Timer Interrupts .................................................................................... 458
16.2.5 Clock Fail-Safe Feature........................................................................................ 459
16.2.6 Operation in Low-Power Modes .............................................................................. 459
16.2.7 Software Examples............................................................................................. 459
16.3 WDT_A Registers......................................................................................................... 460
16.3.1 WDTCTL Register .............................................................................................. 461
17 Timer_A........................................................................................................................... 462
17.1 Timer_A Introduction ..................................................................................................... 463
17.2 Timer_A Operation ....................................................................................................... 465
17.2.1 16-Bit Timer Counter ........................................................................................... 465
17.2.2 Starting the Timer............................................................................................... 465
17.2.3 Timer Mode Control ............................................................................................ 466
17.2.4 Capture/Compare Blocks ...................................................................................... 469
17.2.5 Output Unit ...................................................................................................... 471
17.2.6 Timer_A Interrupts.............................................................................................. 475
17.3 Timer_A Registers........................................................................................................ 477
17.3.1 TAxCTL Register ............................................................................................... 478
17.3.2 TAxR Register................................................................................................... 479
17.3.3 TAxCCTLn Register ............................................................................................ 480
17.3.4 TAxCCRn Register ............................................................................................ 482
17.3.5 TAxIV Register .................................................................................................. 482
17.3.6 TAxEX0 Register ............................................................................................... 483
18 Timer_B........................................................................................................................... 484
18.1 Timer_B Introduction ..................................................................................................... 485
18.1.1 Similarities and Differences From Timer_A ................................................................. 485
18.2 Timer_B Operation ....................................................................................................... 487
18.2.1 16-Bit Timer Counter ........................................................................................... 487
18.2.2 Starting the Timer............................................................................................... 487
18.2.3 Timer Mode Control ............................................................................................ 488
18.2.4 Capture/Compare Blocks ...................................................................................... 491
18.2.5 Output Unit ...................................................................................................... 494
18.2.6 Timer_B Interrupts.............................................................................................. 498
18.3 Timer_B Registers........................................................................................................ 500
18.3.1 TBxCTL Register ............................................................................................... 501
18.3.2 TBxR Register................................................................................................... 503
18.3.3 TBxCCTLn Register ............................................................................................ 504
18.3.4 TBxCCRn Register ............................................................................................. 506
18.3.5 TBxIV Register .................................................................................................. 507
18.3.6 TBxEX0 Register ............................................................................................... 508
19 Timer_D........................................................................................................................... 509
19.1 Timer_D Introduction ..................................................................................................... 510
19.1.1 Differences From Timer_B .................................................................................... 510
19.2 Timer_D Operation ....................................................................................................... 512
19.2.1 16-Bit Timer Counter ........................................................................................... 512
19.2.2 High-Resolution Generator .................................................................................... 513
19.2.3 Starting the Timer............................................................................................... 515
19.2.4 Timer Mode Control ............................................................................................ 515
19.2.5 PWM Generation ............................................................................................... 520
19.2.6 Capture/Compare Blocks ...................................................................................... 523
19.2.7 Compare Mode.................................................................................................. 526
19.2.8 Switching From Capture to Compare Mode................................................................. 527
19.2.9 Output Unit ...................................................................................................... 527
8Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
19.2.10 Synchronization Between Timer_D Instances ............................................................ 534
19.2.11 Timer_D Interrupts ............................................................................................ 534
19.3 Timer_D Registers........................................................................................................ 536
19.3.1 TDxCTL0 Register.............................................................................................. 537
19.3.2 TDxCTL1 Register.............................................................................................. 539
19.3.3 TDxCTL2 Register.............................................................................................. 540
19.3.4 TDxR Register .................................................................................................. 541
19.3.5 TDxCCTLn Register............................................................................................ 542
19.3.6 TDxCCRn Register ............................................................................................. 544
19.3.7 TDxCLn Register ............................................................................................... 544
19.3.8 TDxHCTL0 Register............................................................................................ 545
19.3.9 TDxHCTL1 Register............................................................................................ 546
19.3.10 TDxHINT Register............................................................................................. 547
19.3.11 TDxIV Register ................................................................................................ 548
20 Timer Event Control (TEC) ................................................................................................. 549
20.1 Timer Event Control Introduction ....................................................................................... 550
20.2 TEC Operation ............................................................................................................ 551
20.2.1 AUXCLK Selection Sub-Block ................................................................................ 551
20.2.2 External Clear Sub-Block ..................................................................................... 551
20.2.3 Channel Event Sub-Block..................................................................................... 551
20.2.4 Module Level Connection Between TEC and Timer_D.................................................... 552
20.2.5 Synchronization Mechanism Between Timer_D Instances................................................ 554
20.2.6 Timer Event Control Interrupts................................................................................ 556
20.3 TEC Registers............................................................................................................. 557
20.3.1 TECxCTL0 Register ............................................................................................ 558
20.3.2 TECxCTL1 Register ............................................................................................ 560
20.3.3 TECxCTL2 Register ............................................................................................ 562
20.3.4 TECxSTA Register ............................................................................................. 563
20.3.5 TECxINT Register .............................................................................................. 564
20.3.6 TECxIV Register ................................................................................................ 565
21 Real-Time Clock (RTC) Overview ........................................................................................ 566
21.1 RTC Overview............................................................................................................. 566
22 Real-Time Clock (RTC_A) .................................................................................................. 567
22.1 RTC_A Introduction....................................................................................................... 568
22.2 RTC_A Operation......................................................................................................... 570
22.2.1 Counter Mode ................................................................................................... 570
22.2.2 Calendar Mode.................................................................................................. 570
22.2.3 Real-Time Clock Interrupts .................................................................................... 572
22.2.4 Real-Time Clock Calibration .................................................................................. 574
22.3 RTC_A Registers ......................................................................................................... 576
22.3.1 RTCCTL0 Register ............................................................................................. 578
22.3.2 RTCCTL1 Register ............................................................................................. 579
22.3.3 RTCCTL2 Register ............................................................................................. 580
22.3.4 RTCCTL3 Register ............................................................................................. 580
22.3.5 RTCNT1 Register............................................................................................... 581
22.3.6 RTCNT2 Register............................................................................................... 581
22.3.7 RTCNT3 Register............................................................................................... 581
22.3.8 RTCNT4 Register............................................................................................... 581
22.3.9 RTCSEC Register – Calendar Mode With Hexadecimal Format......................................... 582
22.3.10 RTCSEC Register – Calendar Mode With BCD Format ................................................. 582
22.3.11 RTCMIN Register – Calendar Mode With Hexadecimal Format........................................ 583
22.3.12 RTCMIN Register – Calendar Mode With BCD Format.................................................. 583
9
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
22.3.13 RTCHOUR Register – Calendar Mode With Hexadecimal Format..................................... 584
22.3.14 RTCHOUR Register – Calendar Mode With BCD Format............................................... 584
22.3.15 RTCDOW Register – Calendar Mode ...................................................................... 585
22.3.16 RTCDAY Register – Calendar Mode With Hexadecimal Format ....................................... 585
22.3.17 RTCDAY Register – Calendar Mode With BCD Format ................................................. 585
22.3.18 RTCMON Register – Calendar Mode With Hexadecimal Format ...................................... 586
22.3.19 RTCMON Register – Calendar Mode With BCD Format ................................................ 586
22.3.20 RTCYEARL Register – Calendar Mode With Hexadecimal Format.................................... 587
22.3.21 RTCYEARL Register – Calendar Mode With BCD Format.............................................. 587
22.3.22 RTCYEARH Register – Calendar Mode With Hexadecimal Format ................................... 588
22.3.23 RTCYEARH Register – Calendar Mode With BCD Format ............................................. 588
22.3.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format ...................................... 589
22.3.25 RTCAMIN Register – Calendar Mode With BCD Format................................................ 589
22.3.26 RTCAHOUR Register – Calendar Mode With Hexadecimal Format ................................... 590
22.3.27 RTCAHOUR Register – Calendar Mode With BCD Format............................................. 590
22.3.28 RTCADOW Register.......................................................................................... 591
22.3.29 RTCADAY Register – Calendar Mode With Hexadecimal Format ..................................... 591
22.3.30 RTCADAY Register – Calendar Mode With BCD Format ............................................... 591
22.3.31 RTCPS0CTL Register ........................................................................................ 593
22.3.32 RTCPS1CTL Register ........................................................................................ 594
22.3.33 RT0PS Register ............................................................................................... 595
22.3.34 RT1PS Register ............................................................................................... 595
22.3.35 RTCIV Register................................................................................................ 595
23 Real-Time Clock B (RTC_B) ............................................................................................... 596
23.1 Real-Time Clock RTC_B Introduction.................................................................................. 597
23.2 RTC_B Operation......................................................................................................... 599
23.2.1 Real-Time Clock and Prescale Dividers ..................................................................... 599
23.2.2 Real-Time Clock Alarm Function ............................................................................. 599
23.2.3 Reading or Writing Real-Time Clock Registers............................................................. 600
23.2.4 Real-Time Clock Interrupts .................................................................................... 600
23.2.5 Real-Time Clock Calibration .................................................................................. 602
23.2.6 Real-Time Clock Operation in LPM3.5 Low-Power Mode................................................. 603
23.3 RTC_B Registers ......................................................................................................... 604
23.3.1 RTCCTL0 Register ............................................................................................. 606
23.3.2 RTCCTL1 Register ............................................................................................. 607
23.3.3 RTCCTL2 Register ............................................................................................. 608
23.3.4 RTCCTL3 Register ............................................................................................. 608
23.3.5 RTCSEC Register – Hexadecimal Format .................................................................. 609
23.3.6 RTCSEC Register – BCD Format ............................................................................ 609
23.3.7 RTCMIN Register – Hexadecimal Format................................................................... 610
23.3.8 RTCMIN Register – BCD Format............................................................................. 610
23.3.9 RTCHOUR Register – Hexadecimal Format................................................................ 611
23.3.10 RTCHOUR Register – BCD Format ........................................................................ 611
23.3.11 RTCDOW Register............................................................................................ 612
23.3.12 RTCDAY Register – Hexadecimal Format................................................................. 612
23.3.13 RTCDAY Register – BCD Format........................................................................... 612
23.3.14 RTCMON Register – Hexadecimal Format ................................................................ 613
23.3.15 RTCMON Register – BCD Format.......................................................................... 613
23.3.16 RTCYEAR Register – Hexadecimal Format............................................................... 614
23.3.17 RTCYEAR Register – BCD Format......................................................................... 614
23.3.18 RTCAMIN Register – Hexadecimal Format ............................................................... 615
23.3.19 RTCAMIN Register – BCD Format ......................................................................... 615
23.3.20 RTCAHOUR Register – Hexadecimal Format ............................................................ 616
10 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
23.3.21 RTCAHOUR Register – BCD Format ...................................................................... 616
23.3.22 RTCADOW Register.......................................................................................... 617
23.3.23 RTCADAY Register – Hexadecimal Format............................................................... 618
23.3.24 RTCADAY Register – BCD Format......................................................................... 618
23.3.25 RTCPS0CTL Register ........................................................................................ 619
23.3.26 RTCPS1CTL Register ........................................................................................ 620
23.3.27 RTCPS0 Register ............................................................................................. 621
23.3.28 RTCPS1 Register ............................................................................................. 621
23.3.29 RTCIV Register................................................................................................ 622
23.3.30 BIN2BCD Register ............................................................................................ 623
23.3.31 BCD2BIN Register ............................................................................................ 623
24 Real-Time Clock C (RTC_C) ............................................................................................... 624
24.1 Real-Time Clock (RTC_C) Introduction................................................................................ 625
24.2 RTC_C Operation......................................................................................................... 627
24.2.1 Calendar Mode.................................................................................................. 627
24.2.2 Real-Time Clock and Prescale Dividers .................................................................... 627
24.2.3 Real-Time Clock Alarm Function ............................................................................ 627
24.2.4 Real-Time Clock Protection ................................................................................... 628
24.2.5 Reading or Writing Real-Time Clock Registers ............................................................ 629
24.2.6 Real-Time Clock Interrupts .................................................................................... 629
24.2.7 Real-Time Clock Calibration for Crystal Offset Error....................................................... 631
24.2.8 Real-Time Clock Compensation for Crystal Temperature Drift........................................... 632
24.2.9 Real-Time Clock Operation in LPM3.5 Low-Power Mode................................................. 634
24.3 RTC_C Operation - Device-Dependent Features .................................................................... 636
24.3.1 Counter Mode ................................................................................................... 636
24.3.2 Real-Time Clock Event/Tamper Detection With Time Stamp............................................. 639
24.4 RTC_C Registers ......................................................................................................... 641
24.4.1 RTCCTL0_L Register .......................................................................................... 644
24.4.2 RTCCTL0_H Register.......................................................................................... 645
24.4.3 RTCCTL1 Register ............................................................................................. 646
24.4.4 RTCCTL3 Register ............................................................................................. 647
24.4.5 RTCOCAL Register ............................................................................................ 647
24.4.6 RTCTCMP Register ............................................................................................ 648
24.4.7 RTCNT1 Register............................................................................................... 649
24.4.8 RTCNT2 Register............................................................................................... 649
24.4.9 RTCNT3 Register............................................................................................... 649
24.4.10 RTCNT4 Register ............................................................................................. 649
24.4.11 RTCSEC Register – Calendar Mode With Hexadecimal Format ....................................... 650
24.4.12 RTCSEC Register – Calendar Mode With BCD Format ................................................. 650
24.4.13 RTCMIN Register – Calendar Mode With Hexadecimal Format........................................ 651
24.4.14 RTCMIN Register – Calendar Mode With BCD Format.................................................. 651
24.4.15 RTCHOUR Register – Calendar Mode With Hexadecimal Format..................................... 652
24.4.16 RTCHOUR Register – Calendar Mode With BCD Format............................................... 652
24.4.17 RTCDOW Register – Calendar Mode ...................................................................... 653
24.4.18 RTCDAY Register – Calendar Mode With Hexadecimal Format ....................................... 653
24.4.19 RTCDAY Register – Calendar Mode With BCD Format ................................................. 653
24.4.20 RTCMON Register – Calendar Mode With Hexadecimal Format ...................................... 654
24.4.21 RTCMON Register – Calendar Mode With BCD Format ................................................ 654
24.4.22 RTCYEAR Register – Calendar Mode With Hexadecimal Format ..................................... 655
24.4.23 RTCYEAR Register – Calendar Mode With BCD Format ............................................... 655
24.4.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format ...................................... 656
24.4.25 RTCAMIN Register – Calendar Mode With BCD Format................................................ 656
24.4.26 RTCAHOUR Register......................................................................................... 657
11
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
24.4.27 RTCAHOUR Register – Calendar Mode With BCD Format............................................. 657
24.4.28 RTCADOW Register – Calendar Mode .................................................................... 658
24.4.29 RTCADAY Register – Calendar Mode With Hexadecimal Format ..................................... 659
24.4.30 RTCADAY Register – Calendar Mode With BCD Format ............................................... 659
24.4.31 RTCPS0CTL Register ........................................................................................ 660
24.4.32 RTCPS1CTL Register ........................................................................................ 661
24.4.33 RTCPS0 Register ............................................................................................. 663
24.4.34 RTCPS1 Register ............................................................................................. 663
24.4.35 RTCIV Register................................................................................................ 664
24.4.36 BIN2BCD Register ............................................................................................ 665
24.4.37 BCD2BIN Register ............................................................................................ 665
24.4.38 RTCSECBAKx Register – Hexadecimal Format .......................................................... 666
24.4.39 RTCSECBAKx Register – BCD Format.................................................................... 666
24.4.40 RTCMINBAKx Register – Hexadecimal Format........................................................... 667
24.4.41 RTCMINBAKx Register – BCD Format .................................................................... 667
24.4.42 RTCHOURBAKx Register – Hexadecimal Format........................................................ 668
24.4.43 RTCHOURBAKx Register – BCD Format ................................................................. 668
24.4.44 RTCDAYBAKx Register – Hexadecimal Format .......................................................... 669
24.4.45 RTCDAYBAKx Register – BCD Format.................................................................... 669
24.4.46 RTCMONBAKx Register – Hexadecimal Format ......................................................... 670
24.4.47 RTCMONBAKx Register – BCD Format ................................................................... 670
24.4.48 RTCYEARBAKx Register – Hexadecimal Format ........................................................ 671
24.4.49 RTCYEARBAKx Register – BCD Format .................................................................. 671
24.4.50 RTCTCCTL0 Register ........................................................................................ 672
24.4.51 RTCTCCTL1 Register ........................................................................................ 672
24.4.52 RTCCAPxCTL Register ...................................................................................... 673
25 32-Bit Hardware Multiplier (MPY32)..................................................................................... 674
25.1 32-Bit Hardware Multiplier (MPY32) Introduction..................................................................... 675
25.2 MPY32 Operation......................................................................................................... 677
25.2.1 Operand Registers ............................................................................................. 678
25.2.2 Result Registers ................................................................................................ 679
25.2.3 Software Examples............................................................................................. 680
25.2.4 Fractional Numbers............................................................................................. 681
25.2.5 Putting It All Together .......................................................................................... 684
25.2.6 Indirect Addressing of Result Registers ..................................................................... 687
25.2.7 Using Interrupts ................................................................................................. 687
25.2.8 Using DMA ...................................................................................................... 688
25.3 MPY32 Registers ......................................................................................................... 689
25.3.1 MPY32CTL0 Register.......................................................................................... 691
26 REF................................................................................................................................. 692
26.1 REF Introduction .......................................................................................................... 693
26.2 Principle of Operation .................................................................................................... 696
26.2.1 Low-Power Operation .......................................................................................... 697
26.2.2 REFCTL.......................................................................................................... 697
26.2.3 Reference System Requests.................................................................................. 699
26.3 REF Registers............................................................................................................. 702
26.3.1 REFCTL0 Register (offset = 00h) [reset = 0080h] ......................................................... 703
27 ADC10_A ......................................................................................................................... 705
27.1 ADC10_A Introduction ................................................................................................... 706
27.2 ADC10_A Operation...................................................................................................... 708
27.2.1 10-Bit ADC Core ................................................................................................ 708
27.2.2 ADC10_A Inputs and Multiplexer............................................................................. 708
27.2.3 Voltage Reference Generator................................................................................. 709
12 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
27.2.4 Auto Power Down .............................................................................................. 709
27.2.5 Sample and Conversion Timing .............................................................................. 709
27.2.6 Conversion Result .............................................................................................. 711
27.2.7 ADC10_A Conversion Modes................................................................................. 711
27.2.8 Window Comparator ........................................................................................... 716
27.2.9 Using the Integrated Temperature Sensor .................................................................. 717
27.2.10 ADC10_A Grounding and Noise Considerations ......................................................... 718
27.2.11 ADC10_A Interrupts .......................................................................................... 718
27.3 ADC10_A Registers ...................................................................................................... 720
27.3.1 ADC10CTL0 Register .......................................................................................... 721
27.3.2 ADC10CTL1 Register .......................................................................................... 722
27.3.3 ADC10CTL2 Register .......................................................................................... 724
27.3.4 ADC10MEM0 Register......................................................................................... 725
27.3.5 ADC10MEM0 Register, Twos-Complement Format ....................................................... 725
27.3.6 ADC10MCTL0 Register........................................................................................ 726
27.3.7 ADC10HI Register .............................................................................................. 727
27.3.8 ADC10HI Register, Twos-Complement Format ............................................................ 727
27.3.9 ADC10LO Register ............................................................................................. 728
27.3.10 ADC10LO Register, Twos-Complement Format .......................................................... 728
27.3.11 ADC10IE Register............................................................................................. 729
27.3.12 ADC10IFG Register........................................................................................... 730
27.3.13 ADC10IV Register............................................................................................. 731
28 ADC12_A ......................................................................................................................... 732
28.1 ADC12_A Introduction ................................................................................................... 733
28.2 ADC12_A Operation...................................................................................................... 736
28.2.1 12-Bit ADC Core ................................................................................................ 736
28.2.2 ADC12_A Inputs and Multiplexer............................................................................. 736
28.2.3 Voltage Reference Generator................................................................................. 737
28.2.4 Auto Power Down .............................................................................................. 738
28.2.5 Sample and Conversion Timing .............................................................................. 738
28.2.6 Conversion Memory ............................................................................................ 740
28.2.7 ADC12_A Conversion Modes................................................................................. 740
28.2.8 Using the Integrated Temperature Sensor .................................................................. 746
28.2.9 ADC12_A Grounding and Noise Considerations ........................................................... 747
28.2.10 ADC12_A Interrupts .......................................................................................... 748
28.3 ADC12_A Registers ...................................................................................................... 750
28.3.1 ADC12CTL0 Register .......................................................................................... 752
28.3.2 ADC12CTL1 Register .......................................................................................... 754
28.3.3 ADC12CTL2 Register .......................................................................................... 755
28.3.4 ADC12MEMx Register ......................................................................................... 756
28.3.5 ADC12MCTLx Register ........................................................................................ 757
28.3.6 ADC12IE Register .............................................................................................. 758
28.3.7 ADC12IFG Register ............................................................................................ 760
28.3.8 ADC12IV Register .............................................................................................. 762
29 SD24_B ........................................................................................................................... 763
29.1 SD24_B Introduction ..................................................................................................... 764
29.2 SD24_B Operation........................................................................................................ 768
29.2.1 Principle of Operation .......................................................................................... 768
29.2.2 ADC Core........................................................................................................ 769
29.2.3 Voltage Reference.............................................................................................. 769
29.2.4 Modulator Clock................................................................................................. 769
29.2.5 Auto Power-Down .............................................................................................. 769
29.2.6 Analog Inputs.................................................................................................... 769
13
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
29.2.7 Digital Filter ..................................................................................................... 770
29.2.8 Bitstream Input and Output.................................................................................... 774
29.2.9 Conversion Modes.............................................................................................. 774
29.2.10 Conversion Operation Using Preload....................................................................... 776
29.2.11 Grounding and Noise Considerations ...................................................................... 777
29.2.12 Trigger Generator ............................................................................................. 778
29.2.13 SD24_B Interrupts ............................................................................................ 779
29.2.14 Using SD24_B With DMA .................................................................................... 779
29.3 SD24_B Registers ........................................................................................................ 780
29.3.1 SD24BCTL0 Register .......................................................................................... 782
29.3.2 SD24BCTL1 Register .......................................................................................... 783
29.3.3 SD24BTRGCTL Register ...................................................................................... 784
29.3.4 SD24BIFG Register ............................................................................................ 785
29.3.5 SD24BIE Register .............................................................................................. 788
29.3.6 SD24BIV Register .............................................................................................. 790
29.3.7 SD24BCCTLx Register ........................................................................................ 791
29.3.8 SD24BINCTLx Register........................................................................................ 793
29.3.9 SD24BOSRx Register.......................................................................................... 794
29.3.10 SD24BTRGOSR Register.................................................................................... 794
29.3.11 SD24BPREx Register ........................................................................................ 795
29.3.12 SD24BTRGPRE Register .................................................................................... 795
29.3.13 SD24BMEMLx Register ...................................................................................... 796
29.3.14 SD24BMEMHx Register...................................................................................... 796
30 CTSD16 ........................................................................................................................... 797
30.1 CTSD16 Introduction ..................................................................................................... 798
30.2 CTSD16 Operation ....................................................................................................... 800
30.2.1 Principle of Operation .......................................................................................... 800
30.2.2 ADC Core........................................................................................................ 801
30.2.3 Voltage Reference.............................................................................................. 801
30.2.4 CTSD16 Clock .................................................................................................. 801
30.2.5 Auto Power-Down .............................................................................................. 802
30.2.6 Analog Inputs.................................................................................................... 802
30.2.7 Digital Filter...................................................................................................... 803
30.2.8 Conversion Memory Registers: CTSD16MEMx ............................................................ 806
30.2.9 Conversion Modes.............................................................................................. 807
30.2.10 Conversion Operation Using Preload....................................................................... 809
30.2.11 Using the Integrated Temperature Sensor................................................................. 810
30.2.12 Using the Integrated AVCC Sense.......................................................................... 811
30.2.13 Grounding and Noise Considerations ...................................................................... 811
30.2.14 Interrupt Handling ............................................................................................. 811
30.3 CTSD16 Registers........................................................................................................ 813
30.3.1 CTSD16CTL Register.......................................................................................... 814
30.3.2 CTSD16CCTL0 to CTSD16CCTL6 Register................................................................ 815
30.3.3 CTSD16MEM0 to CTSD16MEM6 Register ................................................................. 816
30.3.4 CTSD16INCTL0 to CTSD16INCTL6 Register .............................................................. 817
30.3.5 CTSD16PRE0 to CTSD16PRE6 Register................................................................... 818
30.3.6 CTSD16IFG Register .......................................................................................... 819
30.3.7 CTSD16IE Register ............................................................................................ 821
30.3.8 CTSD16IV Register ............................................................................................ 823
31 DAC12_A ......................................................................................................................... 824
31.1 DAC12_A Introduction ................................................................................................... 825
31.2 DAC12_A Operation...................................................................................................... 828
31.2.1 DAC12_A Core.................................................................................................. 828
14 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
31.2.2 DAC12_A Port Selection....................................................................................... 828
31.2.3 DAC12_A Reference ........................................................................................... 828
31.2.4 Updating the DAC12_A Voltage Output ..................................................................... 829
31.2.5 DAC12_xDAT Data Formats .................................................................................. 829
31.2.6 DAC12_A Output Amplifier Offset Calibration .............................................................. 830
31.2.7 Grouping Multiple DAC12_A Modules ....................................................................... 831
31.2.8 DAC12_A Interrupts ............................................................................................ 832
31.3 DAC Outputs .............................................................................................................. 833
31.4 DAC12_A Registers ...................................................................................................... 834
31.4.1 DAC12_xCTL0 Register ....................................................................................... 835
31.4.2 DAC12_xCTL1 Register ....................................................................................... 837
31.4.3 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Right Justified ............................... 838
31.4.4 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Left Justified ................................. 838
31.4.5 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Right Justified .................... 839
31.4.6 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Left Justified...................... 839
31.4.7 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Right Justified................................. 840
31.4.8 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Left Justified................................... 840
31.4.9 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Right Justified ..................... 841
31.4.10 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Left Justified...................... 841
31.4.11 DAC12_xCALCTL Register .................................................................................. 842
31.4.12 DAC12_xCALDAT Register.................................................................................. 842
31.4.13 DAC12IV Register............................................................................................. 843
32 Comp_B .......................................................................................................................... 844
32.1 Comp_B Introduction..................................................................................................... 845
32.2 Comp_B Operation ....................................................................................................... 846
32.2.1 Comparator ...................................................................................................... 846
32.2.2 Analog Input Switches ......................................................................................... 846
32.2.3 Port Logic ........................................................................................................ 846
32.2.4 Input Short Switch .............................................................................................. 846
32.2.5 Output Filter ..................................................................................................... 847
32.2.6 Reference Voltage Generator................................................................................. 848
32.2.7 Comp_B, Port Disable Register CBCTL3 ................................................................... 849
32.2.8 Comp_B Interrupts ............................................................................................. 849
32.2.9 Comp_B Used to Measure Resistive Elements ............................................................ 849
32.3 Comp_B Registers........................................................................................................ 852
32.3.1 CBCTL0 Register ............................................................................................... 853
32.3.2 CBCTL1 Register ............................................................................................... 854
32.3.3 CBCTL2 Register ............................................................................................... 855
32.3.4 CBCTL3 Register ............................................................................................... 856
32.3.5 CBINT Register ................................................................................................. 858
32.3.6 CBIV Register ................................................................................................... 859
33 Operational Amplifier (OA)................................................................................................. 860
33.1 OA Introduction ........................................................................................................... 861
33.2 OA Operation.............................................................................................................. 863
33.2.1 OA Modes ....................................................................................................... 863
33.2.2 Rail-to-Rail Input Modes ....................................................................................... 863
33.2.3 OA Inputs ........................................................................................................ 863
33.3 Ground Switches.......................................................................................................... 864
33.4 OA and Power Modes.................................................................................................... 864
33.5 OA Registers .............................................................................................................. 865
33.5.1 OAnCTL0 Register ............................................................................................. 866
33.5.2 OAnPSW Register.............................................................................................. 867
33.5.3 OAnNSW Register.............................................................................................. 868
15
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
33.5.4 OAnGSW Register ............................................................................................. 869
34 LCD_B Controller.............................................................................................................. 870
34.1 LCD_B Controller Introduction .......................................................................................... 871
34.2 LCD_B Controller Operation ............................................................................................ 873
34.2.1 LCD Memory .................................................................................................... 873
34.2.2 LCD Timing Generation........................................................................................ 873
34.2.3 Blanking the LCD ............................................................................................... 874
34.2.4 LCD Blinking..................................................................................................... 874
34.2.5 LCD_B Voltage And Bias Generation........................................................................ 875
34.2.6 LCD Outputs..................................................................................................... 877
34.2.7 LCD_B Interrupts ............................................................................................... 877
34.2.8 Static Mode...................................................................................................... 879
34.2.9 2-Mux Mode ..................................................................................................... 882
34.2.10 3-Mux Mode.................................................................................................... 885
34.2.11 4-Mux Mode.................................................................................................... 888
34.3 LCD_B Registers ......................................................................................................... 891
34.3.1 LCDBCTL0 Register............................................................................................ 894
34.3.2 LCDBCTL1 Register............................................................................................ 895
34.3.3 LCDBBLKCTL Register ........................................................................................ 896
34.3.4 LCDBMEMCTL Register....................................................................................... 897
34.3.5 LCDBVCTL Register ........................................................................................... 898
34.3.6 LCDBPCTL0 Register.......................................................................................... 900
34.3.7 LCDBPCTL1 Register.......................................................................................... 900
34.3.8 LCDBPCTL2 Register.......................................................................................... 901
34.3.9 LCDBPCTL3 Register.......................................................................................... 901
34.3.10 LCDBCPCTL Register........................................................................................ 902
34.3.11 LCDBIV Register .............................................................................................. 903
35 LCD_C Controller.............................................................................................................. 904
35.1 LCD_C Introduction....................................................................................................... 905
35.2 LCD_C Operation......................................................................................................... 907
35.2.1 LCD Memory .................................................................................................... 907
35.2.2 LCD Timing Generation........................................................................................ 908
35.2.3 Blanking the LCD ............................................................................................... 909
35.2.4 LCD Blinking..................................................................................................... 909
35.2.5 LCD Voltage And Bias Generation ........................................................................... 910
35.2.6 LCD Outputs..................................................................................................... 913
35.2.7 LCD Interrupts................................................................................................... 914
35.2.8 Static Mode...................................................................................................... 916
35.2.9 2-Mux Mode ..................................................................................................... 917
35.2.10 3-Mux Mode.................................................................................................... 918
35.2.11 4-Mux Mode.................................................................................................... 919
35.2.12 6-Mux Mode.................................................................................................... 920
35.2.13 8-Mux Mode.................................................................................................... 921
35.3 LCD_C Registers ......................................................................................................... 923
35.3.1 LCDCCTL0 Register ........................................................................................... 928
35.3.2 LCDCCTL1 Register ........................................................................................... 930
35.3.3 LCDCBLKCTL Register........................................................................................ 931
35.3.4 LCDCMEMCTL Register....................................................................................... 932
35.3.5 LCDCVCTL Register ........................................................................................... 933
35.3.6 LCDCPCTL0 Register.......................................................................................... 935
35.3.7 LCDCPCTL1 Register.......................................................................................... 935
35.3.8 LCDCPCTL2 Register.......................................................................................... 936
35.3.9 LCDCPCTL3 Register.......................................................................................... 936
16 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
35.3.10 LCDCCPCTL Register........................................................................................ 937
35.3.11 LCDCIV Register .............................................................................................. 937
36 Universal Serial Communication Interface – UART Mode....................................................... 938
36.1 Universal Serial Communication Interface (USCI) Overview ....................................................... 939
36.2 USCI Introduction – UART Mode....................................................................................... 940
36.3 USCI Operation – UART Mode ......................................................................................... 942
36.3.1 USCI Initialization and Reset.................................................................................. 942
36.3.2 Character Format ............................................................................................... 942
36.3.3 Asynchronous Communication Format ...................................................................... 942
36.3.4 Automatic Baud-Rate Detection .............................................................................. 945
36.3.5 IrDA Encoding and Decoding ................................................................................. 946
36.3.6 Automatic Error Detection ..................................................................................... 947
36.3.7 USCI Receive Enable .......................................................................................... 948
36.3.8 USCI Transmit Enable ......................................................................................... 948
36.3.9 UART Baud-Rate Generation ................................................................................. 949
36.3.10 Setting a Baud Rate .......................................................................................... 951
36.3.11 Transmit Bit Timing ........................................................................................... 951
36.3.12 Receive Bit Timing ............................................................................................ 952
36.3.13 Typical Baud Rates and Errors.............................................................................. 953
36.3.14 Using the USCI Module in UART Mode With Low-Power Modes ...................................... 956
36.3.15 USCI Interrupts in UART Mode ............................................................................. 956
36.3.16 DMA Operation ................................................................................................ 957
36.4 USCI_A UART Mode Registers......................................................................................... 958
36.4.1 UCAxCTL0 Register............................................................................................ 959
36.4.2 UCAxCTL1 Register............................................................................................ 960
36.4.3 UCAxBR0 Register ............................................................................................. 961
36.4.4 UCAxBR1 Register ............................................................................................. 961
36.4.5 UCAxMCTL Register ........................................................................................... 961
36.4.6 UCAxSTAT Register ........................................................................................... 962
36.4.7 UCAxRXBUF Register ......................................................................................... 963
36.4.8 UCAxTXBUF Register ......................................................................................... 963
36.4.9 UCAxIRTCTL Register......................................................................................... 964
36.4.10 UCAxIRRCTL Register ....................................................................................... 964
36.4.11 UCAxABCTL Register ........................................................................................ 965
36.4.12 UCAxIE Register .............................................................................................. 966
36.4.13 UCAxIFG Register ............................................................................................ 966
36.4.14 UCAxIV Register .............................................................................................. 967
37 Universal Serial Communication Interface – SPI Mode .......................................................... 968
37.1 Universal Serial Communication Interface (USCI) Overview ....................................................... 969
37.2 USCI Introduction – SPI Mode.......................................................................................... 970
37.3 USCI Operation – SPI Mode ............................................................................................ 972
37.3.1 USCI Initialization and Reset.................................................................................. 972
37.3.2 Character Format ............................................................................................... 972
37.3.3 Master Mode .................................................................................................... 973
37.3.4 Slave Mode...................................................................................................... 974
37.3.5 SPI Enable....................................................................................................... 975
37.3.6 Serial Clock Control ............................................................................................ 975
37.3.7 Using the SPI Mode With Low-Power Modes............................................................... 976
37.3.8 USCI Interrupts in SPI Mode .................................................................................. 977
37.4 USCI_A SPI Mode Registers............................................................................................ 978
37.4.1 UCAxCTL0 Register............................................................................................ 979
37.4.2 UCAxCTL1 Register............................................................................................ 980
37.4.3 UCAxBR0 Register ............................................................................................. 981
17
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
37.4.4 UCAxBR1 Register ............................................................................................. 981
37.4.5 UCAxMCTL Register ........................................................................................... 981
37.4.6 UCAxSTAT Register ........................................................................................... 982
37.4.7 UCAxRXBUF Register ......................................................................................... 983
37.4.8 UCAxTXBUF Register ......................................................................................... 983
37.4.9 UCAxIE Register................................................................................................ 984
37.4.10 UCAxIFG Register ............................................................................................ 984
37.4.11 UCAxIV Register .............................................................................................. 985
37.5 USCI_B SPI Mode Registers............................................................................................ 986
37.5.1 UCBxCTL0 Register............................................................................................ 987
37.5.2 UCBxCTL1 Register............................................................................................ 988
37.5.3 UCBxBR0 Register ............................................................................................. 989
37.5.4 UCBxBR1 Register ............................................................................................. 989
37.5.5 UCBxMCTL Register ........................................................................................... 989
37.5.6 UCBxSTAT Register ........................................................................................... 990
37.5.7 UCBxRXBUF Register ......................................................................................... 991
37.5.8 UCBxTXBUF Register ......................................................................................... 991
37.5.9 UCBxIE Register................................................................................................ 992
37.5.10 UCBxIFG Register ............................................................................................ 992
37.5.11 UCBxIV Register .............................................................................................. 993
38 Universal Serial Communication Interface – I2C Mode ........................................................... 994
38.1 Universal Serial Communication Interface (USCI) Overview ....................................................... 995
38.2 USCI Introduction – I2C Mode........................................................................................... 996
38.3 USCI Operation – I2C Mode ............................................................................................. 997
38.3.1 USCI Initialization and Reset.................................................................................. 998
38.3.2 I2C Serial Data .................................................................................................. 998
38.3.3 I2C Addressing Modes ........................................................................................ 1000
38.3.4 I2C Module Operating Modes ................................................................................ 1001
38.3.5 I2C Clock Generation and Synchronization ................................................................ 1012
38.3.6 Using the USCI Module in I2C Mode With Low-Power Modes .......................................... 1013
38.3.7 USCI Interrupts in I2C Mode ................................................................................. 1013
38.4 USCI_B I2C Mode Registers .......................................................................................... 1016
38.4.1 UCBxCTL0 Register .......................................................................................... 1017
38.4.2 UCBxCTL1 Register .......................................................................................... 1018
38.4.3 UCBxBR0 Register............................................................................................ 1019
38.4.4 UCBxBR1 Register............................................................................................ 1019
38.4.5 UCBxSTAT Register.......................................................................................... 1020
38.4.6 UCBxRXBUF Register........................................................................................ 1021
38.4.7 UCBxTXBUF Register ........................................................................................ 1021
38.4.8 UCBxI2COA Register......................................................................................... 1022
38.4.9 UCBxI2CSA Register ......................................................................................... 1022
38.4.10 UCBxIE Register............................................................................................. 1023
38.4.11 UCBxIFG Register........................................................................................... 1024
38.4.12 UCBxIV Register............................................................................................. 1025
39 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode .......................... 1026
39.1 Enhanced Universal Serial Communication Interface A (eUSCI_A) Overview ................................. 1027
39.2 eUSCI_A Introduction – UART Mode................................................................................. 1027
39.3 eUSCI_A Operation – UART Mode................................................................................... 1029
39.3.1 eUSCI_A Initialization and Reset ........................................................................... 1029
39.3.2 Character Format ............................................................................................. 1029
39.3.3 Asynchronous Communication Format..................................................................... 1029
39.3.4 Automatic Baud-Rate Detection............................................................................. 1032
39.3.5 IrDA Encoding and Decoding................................................................................ 1033
18 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
39.3.6 Automatic Error Detection.................................................................................... 1034
39.3.7 eUSCI_A Receive Enable.................................................................................... 1035
39.3.8 eUSCI_A Transmit Enable ................................................................................... 1035
39.3.9 UART Baud-Rate Generation ............................................................................... 1036
39.3.10 Setting a Baud Rate......................................................................................... 1038
39.3.11 Transmit Bit Timing - Error calculation.................................................................... 1039
39.3.12 Receive Bit Timing – Error Calculation ................................................................... 1039
39.3.13 Typical Baud Rates and Errors ............................................................................ 1040
39.3.14 Using the eUSCI_A Module in UART Mode With Low-Power Modes ................................ 1042
39.3.15 eUSCI_A Interrupts in UART Mode ....................................................................... 1042
39.3.16 DMA Operation............................................................................................... 1044
39.4 eUSCI_A UART Registers ............................................................................................. 1045
39.4.1 UCAxCTLW0 Register........................................................................................ 1046
39.4.2 UCAxCTLW1 Register........................................................................................ 1047
39.4.3 UCAxBRW Register........................................................................................... 1048
39.4.4 UCAxMCTLW Register....................................................................................... 1048
39.4.5 UCAxSTATW Register ....................................................................................... 1049
39.4.6 UCAxRXBUF Register........................................................................................ 1050
39.4.7 UCAxTXBUF Register ........................................................................................ 1050
39.4.8 UCAxABCTL Register ........................................................................................ 1051
39.4.9 UCAxIRCTL Register ......................................................................................... 1052
39.4.10 UCAxIE Register............................................................................................. 1053
39.4.11 UCAxIFG Register........................................................................................... 1054
39.4.12 UCAxIV Register............................................................................................. 1055
40 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode.............................. 1056
40.1 Enhanced Universal Serial Communication Interfaces (eUSCI_A, eUSCI_B) Overview ...................... 1057
40.2 eUSCI Introduction – SPI Mode....................................................................................... 1057
40.3 eUSCI Operation – SPI Mode ......................................................................................... 1059
40.3.1 eUSCI Initialization and Reset............................................................................... 1059
40.3.2 Character Format ............................................................................................. 1060
40.3.3 Master Mode................................................................................................... 1060
40.3.4 Slave Mode .................................................................................................... 1061
40.3.5 SPI Enable ..................................................................................................... 1062
40.3.6 Serial Clock Control........................................................................................... 1062
40.3.7 Using the SPI Mode With Low-Power Modes ............................................................. 1063
40.3.8 eUSCI Interrupts in SPI Mode ............................................................................... 1063
40.4 eUSCI_A SPI Registers ................................................................................................ 1065
40.4.1 UCAxCTLW0 Register........................................................................................ 1066
40.4.2 UCAxBRW Register........................................................................................... 1067
40.4.3 UCAxSTATW Register ....................................................................................... 1068
40.4.4 UCAxRXBUF Register........................................................................................ 1069
40.4.5 UCAxTXBUF Register ........................................................................................ 1070
40.4.6 UCAxIE Register .............................................................................................. 1071
40.4.7 UCAxIFG Register ............................................................................................ 1072
40.4.8 UCAxIV Register .............................................................................................. 1073
40.5 eUSCI_B SPI Registers ................................................................................................ 1074
40.5.1 UCBxCTLW0 Register........................................................................................ 1075
40.5.2 UCBxBRW Register........................................................................................... 1076
40.5.3 UCBxSTATW Register ....................................................................................... 1076
40.5.4 UCBxRXBUF Register........................................................................................ 1077
40.5.5 UCBxTXBUF Register ........................................................................................ 1077
40.5.6 UCBxIE Register ............................................................................................. 1078
40.5.7 UCBxIFG Register ............................................................................................ 1078
19
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
40.5.8 UCBxIV Register .............................................................................................. 1079
41 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode .............................. 1080
41.0.9 I2C Quick Setup................................................................................................ 1085
41.0.10 Glitch Filtering................................................................................................ 1096
41.0.11 Byte Counter ................................................................................................. 1097
41.0.12 Multiple Slave Addresses................................................................................... 1098
41.1 eUSCI_B I2C Registers ................................................................................................ 1102
41.1.1 UCBxCTLW0 Register........................................................................................ 1103
41.1.2 UCBxCTLW1 Register........................................................................................ 1105
41.1.3 UCBxBRW Register........................................................................................... 1107
41.1.4 UCBxSTATW .................................................................................................. 1107
41.1.5 UCBxTBCNT Register........................................................................................ 1108
41.1.6 UCBxRXBUF Register........................................................................................ 1109
41.1.7 UCBxTXBUF................................................................................................... 1109
41.1.8 UCBxI2COA0 Register ....................................................................................... 1110
41.1.9 UCBxI2COA1 Register ....................................................................................... 1111
41.1.10 UCBxI2COA2 Register...................................................................................... 1111
41.1.11 UCBxI2COA3 Register...................................................................................... 1112
41.1.12 UCBxADDRX Register...................................................................................... 1112
41.1.13 UCBxADDMASK Register .................................................................................. 1113
41.1.14 UCBxI2CSA Register ....................................................................................... 1113
41.1.15 UCBxIE Register............................................................................................. 1114
41.1.16 UCBxIFG Register........................................................................................... 1116
41.1.17 UCBxIV Register............................................................................................. 1118
42 USB Module ................................................................................................................... 1119
42.1 USB Introduction ........................................................................................................ 1120
42.2 USB Operation........................................................................................................... 1122
42.2.1 USB Transceiver (PHY) ...................................................................................... 1122
42.2.2 USB Power System........................................................................................... 1123
42.2.3 USB Phase-Locked Loop (PLL)............................................................................. 1126
42.2.4 USB Controller Engine ....................................................................................... 1128
42.2.5 USB Vector Interrupts ........................................................................................ 1132
42.2.6 Power Consumption .......................................................................................... 1132
42.2.7 Suspend and Resume ....................................................................................... 1133
42.3 USB Transfers ........................................................................................................... 1133
42.3.1 Control Transfers.............................................................................................. 1133
42.3.2 Interrupt Transfers ............................................................................................ 1137
42.3.3 Bulk Transfers ................................................................................................. 1138
42.4 USB Registers ........................................................................................................... 1140
42.4.1 USB Configuration Registers ................................................................................ 1140
42.4.2 USB Control Registers ....................................................................................... 1148
42.4.3 USB Buffer Registers and Memory ......................................................................... 1165
43 LDO-PWR Module ........................................................................................................... 1176
43.1 LDO-PWR Introduction ................................................................................................. 1177
43.2 LDO-PWR Operation ................................................................................................... 1178
43.2.1 Enabling/Disabling ............................................................................................ 1178
43.2.2 Powering the Rest of the MSP430 from the LDO-PWR ................................................. 1178
43.2.3 Powering Other Components in the System from LDO-PWR........................................... 1179
43.2.4 Applications That Do Not Require LDO-PWR............................................................. 1179
43.2.5 Current Limitation and Overload Protection ............................................................... 1179
43.2.6 LDO-PWR Interrupts.......................................................................................... 1180
43.2.7 Port U Control ................................................................................................. 1180
43.3 LDO-PWR Registers.................................................................................................... 1181
20 Contents SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
43.3.1 LDOKEYPID Register ........................................................................................ 1182
43.3.2 PUCTL Register ............................................................................................... 1182
43.3.3 LDOPWRCTL Register....................................................................................... 1183
44 Embedded Emulation Module (EEM).................................................................................. 1184
44.1 Embedded Emulation Module (EEM) Introduction.................................................................. 1185
44.2 EEM Building Blocks.................................................................................................... 1187
44.2.1 Triggers......................................................................................................... 1187
44.2.2 Trigger Sequencer ............................................................................................ 1187
44.2.3 State Storage (Internal Trace Buffer)....................................................................... 1187
44.2.4 Cycle Counter.................................................................................................. 1187
44.2.5 Clock Control .................................................................................................. 1187
44.3 EEM Configurations..................................................................................................... 1188
Revision History ...................................................................................................................... 1189
21
SLAU208O–June 2008–Revised May 2015 Contents
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
List of Figures
1-1. BOR/POR/PUC Reset Circuit............................................................................................. 56
1-2. Interrupt Priority............................................................................................................. 58
1-3. NMIs With Reentrance Protection........................................................................................ 59
1-4. Interrupt Processing........................................................................................................ 60
1-5. Return From Interrupt...................................................................................................... 61
1-6. Operation Modes ........................................................................................................... 64
1-7. Devices Descriptor Table.................................................................................................. 74
1-8. SFRIE1 Register ........................................................................................................... 84
1-9. SFRIFG1 Register.......................................................................................................... 85
1-10. SFRRPCR Register........................................................................................................ 87
1-11. SYSCTL Register .......................................................................................................... 89
1-12. SYSBSLC Register ........................................................................................................ 90
1-13. SYSJMBC Register ........................................................................................................ 91
1-14. SYSJMBI0 Register........................................................................................................ 92
1-15. SYSJMBI1 Register........................................................................................................ 92
1-16. SYSJMBO0 Register....................................................................................................... 93
1-17. SYSJMBO1 Register....................................................................................................... 93
1-18. SYSUNIV Register ......................................................................................................... 94
1-19. SYSSNIV Register ......................................................................................................... 95
1-20. SYSRSTIV Register........................................................................................................ 96
1-21. SYSBERRIV Register ..................................................................................................... 97
2-1. System Frequency, Supply Voltage, and Core Voltage – See Device-Specific Data Sheet ..................... 99
2-2. PMM Block Diagram...................................................................................................... 100
2-3. Available SVMHSettings Versus VCORE Settings................................................................... 103
2-4. High-Side and Low-Side Voltage Failure and Resulting PMM Actions ............................................ 104
2-5. High-Side SVS and SVM ................................................................................................ 105
2-6. Low-Side SVS and SVM................................................................................................. 106
2-7. PMM Action at Device Power-Up....................................................................................... 107
2-8. Changing VCORE and SVMLand SVSLLevels .......................................................................... 108
2-9. PMMCTL0 Register....................................................................................................... 115
2-10. PMMCTL1 Register....................................................................................................... 116
2-11. SVSMHCTL Register..................................................................................................... 117
2-12. SVSMLCTL Register ..................................................................................................... 118
2-13. SVSMIO Register......................................................................................................... 119
2-14. PMMIFG Register......................................................................................................... 120
2-15. PMMRIE Register......................................................................................................... 122
2-16. PM5CTL0 Register ....................................................................................................... 123
3-1. Battery Backup Switch Overview ....................................................................................... 126
3-2. Charger Block Diagram .................................................................................................. 128
3-3. BAKCTL Register......................................................................................................... 130
3-4. BAKCHCTL Register ..................................................................................................... 131
4-1. Auxiliary Supply Switch Overview ...................................................................................... 134
4-2. System Frequency vs Supply Voltage ................................................................................. 138
4-3. Available SVMHSettings vs VCORE Settings ............................................................................ 138
4-4. Available AUXxLVL Settings vs SVMHSettings ...................................................................... 139
4-5. Auxiliary Supply Monitor Block Diagram............................................................................... 140
4-6. I/Os Powered by Auxiliary Supplies .................................................................................... 142
22 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
4-7. AUX Connection to ADC................................................................................................. 142
4-8. Charger Block Diagram .................................................................................................. 143
4-9. Software Flow Chart...................................................................................................... 145
4-10. AUXCTL0 Register ....................................................................................................... 149
4-11. AUXCTL1 Register ....................................................................................................... 150
4-12. AUXCTL2 Register ....................................................................................................... 151
4-13. AUX2CHCTL Register ................................................................................................... 152
4-14. AUX3CHCTL Register ................................................................................................... 153
4-15. AUXADCCTL Register ................................................................................................... 154
4-16. AUXIFG Register ......................................................................................................... 155
4-17. AUXIE Register ........................................................................................................... 156
4-18. AUXIV Register ........................................................................................................... 157
5-1. UCS Block Diagram ..................................................................................................... 160
5-2. Modulator Patterns ....................................................................................................... 166
5-3. Module Request Clock System ......................................................................................... 167
5-4. Oscillator Fault Logic ..................................................................................................... 170
5-5. Switch MCLK from DCOCLK to XT1CLK.............................................................................. 172
5-6. UCSCTL0 Register ....................................................................................................... 174
5-7. UCSCTL1 Register ....................................................................................................... 175
5-8. UCSCTL2 Register ....................................................................................................... 176
5-9. UCSCTL3 Register ....................................................................................................... 177
5-10. UCSCTL4 Register ....................................................................................................... 178
5-11. UCSCTL5 Register ....................................................................................................... 179
5-12. UCSCTL6 Register ....................................................................................................... 181
5-13. UCSCTL7 Register ....................................................................................................... 183
5-14. UCSCTL8 Register ....................................................................................................... 184
5-15. UCSCTL9 Register ....................................................................................................... 185
6-1. MSP430X CPU Block Diagram ......................................................................................... 188
6-2. PC Storage on the Stack for Interrupts ................................................................................ 189
6-3. Program Counter.......................................................................................................... 190
6-4. PC Storage on the Stack for CALLA ................................................................................... 190
6-5. Stack Pointer .............................................................................................................. 191
6-6. Stack Usage............................................................................................................... 191
6-7. PUSHX.A Format on the Stack ......................................................................................... 191
6-8. PUSH SP, POP SP Sequence.......................................................................................... 191
6-9. SR Bits ..................................................................................................................... 192
6-10. Register-Byte and Byte-Register Operation........................................................................... 194
6-11. Register-Word Operation ................................................................................................ 194
6-12. Word-Register Operation ................................................................................................ 195
6-13. Register – Address-Word Operation ................................................................................... 195
6-14. Address-Word – Register Operation ................................................................................... 196
6-15. Indexed Mode in Lower 64KB........................................................................................... 198
6-16. Indexed Mode in Upper Memory ....................................................................................... 199
6-17. Overflow and Underflow for Indexed Mode ........................................................................... 200
6-18. Example for Indexed Mode.............................................................................................. 201
6-19. Symbolic Mode Running in Lower 64KB .............................................................................. 203
6-20. Symbolic Mode Running in Upper Memory ........................................................................... 204
6-21. Overflow and Underflow for Symbolic Mode .......................................................................... 205
6-22. MSP430 Double-Operand Instruction Format......................................................................... 213
23
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
6-23. MSP430 Single-Operand Instructions.................................................................................. 214
6-24. Format of Conditional Jump Instructions .............................................................................. 215
6-25. Extension Word for Register Modes ................................................................................... 218
6-26. Extension Word for Non-Register Modes.............................................................................. 218
6-27. Example for Extended Register or Register Instruction ............................................................. 219
6-28. Example for Extended Immediate or Indexed Instruction ........................................................... 220
6-29. Extended Format I Instruction Formats ................................................................................ 221
6-30. 20-Bit Addresses in Memory ............................................................................................ 221
6-31. Extended Format II Instruction Format................................................................................. 222
6-32. PUSHM and POPM Instruction Format................................................................................ 223
6-33. RRCM, RRAM, RRUM, and RLAM Instruction Format .............................................................. 223
6-34. BRA Instruction Format .................................................................................................. 223
6-35. CALLA Instruction Format ............................................................................................... 223
6-36. Decrement Overlap....................................................................................................... 249
6-37. Stack After a RET Instruction ........................................................................................... 268
6-38. Destination Operand—Arithmetic Shift Left ........................................................................... 270
6-39. Destination Operand—Carry Left Shift................................................................................. 271
6-40. Rotate Right Arithmetically RRA.B and RRA.W ...................................................................... 272
6-41. Rotate Right Through Carry RRC.B and RRC.W .................................................................... 273
6-42. Swap Bytes in Memory................................................................................................... 280
6-43. Swap Bytes in a Register................................................................................................ 280
6-44. Rotate Left Arithmetically—RLAM[.W] and RLAM.A ................................................................. 307
6-45. Destination Operand-Arithmetic Shift Left ............................................................................. 308
6-46. Destination Operand-Carry Left Shift .................................................................................. 309
6-47. Rotate Right Arithmetically RRAM[.W] and RRAM.A ................................................................ 310
6-48. Rotate Right Arithmetically RRAX(.B,.A) – Register Mode.......................................................... 312
6-49. Rotate Right Arithmetically RRAX(.B,.A) – Non-Register Mode.................................................... 312
6-50. Rotate Right Through Carry RRCM[.W] and RRCM.A .............................................................. 314
6-51. Rotate Right Through Carry RRCX(.B,.A) – Register Mode ........................................................ 316
6-52. Rotate Right Through Carry RRCX(.B,.A) – Non-Register Mode .................................................. 316
6-53. Rotate Right Unsigned RRUM[.W] and RRUM.A..................................................................... 317
6-54. Rotate Right Unsigned RRUX(.B,.A) – Register Mode .............................................................. 318
6-55. Swap Bytes SWPBX.A Register Mode ................................................................................ 322
6-56. Swap Bytes SWPBX.A In Memory ..................................................................................... 322
6-57. Swap Bytes SWPBX[.W] Register Mode .............................................................................. 323
6-58. Swap Bytes SWPBX[.W] In Memory ................................................................................... 323
6-59. Sign Extend SXTX.A ..................................................................................................... 324
6-60. Sign Extend SXTX[.W] ................................................................................................... 324
7-1. Flash Memory Module Block Diagram ................................................................................. 343
7-2. 256KB of Flash Memory Segments Example......................................................................... 344
7-3. Erase Cycle Timing....................................................................................................... 347
7-4. Erase Cycle From Flash ................................................................................................. 348
7-5. Erase Cycle From RAM.................................................................................................. 349
7-6. Byte, Word, and Long-Word Write Timing............................................................................. 350
7-7. Initiating a Byte or Word Write From Flash............................................................................ 351
7-8. Initiating a Byte or Word Write From RAM ............................................................................ 352
7-9. Initiating Long-Word Write From Flash ................................................................................ 353
7-10. Initiating Long-Word Write from RAM .................................................................................. 354
7-11. Block-Write Cycle Timing ................................................................................................ 355
24 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
7-12. Block Write Flow .......................................................................................................... 356
7-13. User-Developed Programming Solution ............................................................................... 360
7-14. FCTL1 Register ........................................................................................................... 362
7-15. FCTL3 Register ........................................................................................................... 363
7-16. FCTL4 Register ........................................................................................................... 364
7-17. SFRIE1 Register .......................................................................................................... 365
8-1. Block Diagram of MID Implementation................................................................................. 367
8-2. Overview of MSP430 Flash Memory Segmentation ................................................................. 368
8-3. cw0 Parameter ............................................................................................................ 370
8-4. cw1 Parameter ............................................................................................................ 370
9-1. RCCTL0 Register ......................................................................................................... 377
11-1. DMA Controller Block Diagram ......................................................................................... 382
11-2. DMA Addressing Modes ................................................................................................. 383
11-3. DMA Single Transfer State Diagram ................................................................................... 385
11-4. DMA Block Transfer State Diagram.................................................................................... 387
11-5. DMA Burst-Block Transfer State Diagram............................................................................. 389
11-6. DMACTL0 Register....................................................................................................... 397
11-7. DMACTL1 Register....................................................................................................... 398
11-8. DMACTL2 Register....................................................................................................... 399
11-9. DMACTL3 Register....................................................................................................... 400
11-10. DMACTL4 Register....................................................................................................... 401
11-11. DMAxCTL Register ....................................................................................................... 402
11-12. DMAxSA Register ........................................................................................................ 404
11-13. DMAxDA Register ........................................................................................................ 405
11-14. DMAxSZ Register......................................................................................................... 406
11-15. DMAIV Register........................................................................................................... 407
12-1. P1IV Register.............................................................................................................. 422
12-2. P2IV Register.............................................................................................................. 423
12-3. P1IES Register............................................................................................................ 424
12-4. P1IE Register.............................................................................................................. 424
12-5. P1IFG Register............................................................................................................ 424
12-6. P2IES Register............................................................................................................ 425
12-7. P2IE Register.............................................................................................................. 425
12-8. P2IFG Register............................................................................................................ 425
12-9. PxIN Register.............................................................................................................. 426
12-10. PxOUT Register........................................................................................................... 426
12-11. PxDIR Register............................................................................................................ 426
12-12. PxREN Register........................................................................................................... 427
12-13. PxDS Register............................................................................................................. 427
12-14. PxSEL Register ........................................................................................................... 427
13-1. PMAPKEYID Register.................................................................................................... 432
13-2. PMAPCTL Register....................................................................................................... 432
13-3. PxMAPy Register ......................................................................................................... 432
14-1. LFSR Implementation of CRC-CCITT Standard, Bit 0 is the MSB of the Result................................. 434
14-2. Implementation of CRC-CCITT Using the CRCDI and CRCINIRES Registers .................................. 436
14-3. CRCDI Register........................................................................................................... 439
14-4. CRCDIRB Register ....................................................................................................... 439
14-5. CRCINIRES Register..................................................................................................... 440
14-6. CRCRESR Register ...................................................................................................... 440
25
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
15-1. AES Accelerator Block Diagram ........................................................................................ 442
15-2. AES State Array Input and Output ..................................................................................... 443
15-3. AES-128 Encryption Process ........................................................................................... 444
15-4. AES-128 Decryption Process using AESOPx = 01 .................................................................. 445
15-5. AES-128 Decryption Process using AESOPx = 10 and 11 ......................................................... 446
15-6. AESACTL0 Register...................................................................................................... 449
15-7. AESACTL1 Register...................................................................................................... 450
15-8. AESASTAT Register ..................................................................................................... 451
15-9. AESAKEY Register....................................................................................................... 452
15-10. AESADIN Register........................................................................................................ 453
15-11. AESADOUT Register..................................................................................................... 453
15-12. AESAXDIN Register...................................................................................................... 454
15-13. AESAXIN Register........................................................................................................ 454
16-1. Watchdog Timer Block Diagram ........................................................................................ 457
16-2. WDTCTL Register ........................................................................................................ 461
17-1. Timer_A Block Diagram.................................................................................................. 464
17-2. Up Mode ................................................................................................................... 466
17-3. Up Mode Flag Setting .................................................................................................... 466
17-4. Continuous Mode ......................................................................................................... 467
17-5. Continuous Mode Flag Setting.......................................................................................... 467
17-6. Continuous Mode Time Intervals ....................................................................................... 467
17-7. Up/Down Mode............................................................................................................ 468
17-8. Up/Down Mode Flag Setting ............................................................................................ 468
17-9. Output Unit in Up/Down Mode .......................................................................................... 469
17-10. Capture Signal (SCS = 1)................................................................................................ 470
17-11. Capture Cycle ............................................................................................................. 470
17-12. Output Example – Timer in Up Mode .................................................................................. 472
17-13. Output Example – Timer in Continuous Mode........................................................................ 473
17-14. Output Example – Timer in Up/Down Mode .......................................................................... 474
17-15. Capture/Compare Interrupt Flag........................................................................................ 475
17-16. TAxCTL Register.......................................................................................................... 478
17-17. TAxR Register............................................................................................................. 479
17-18. TAxCCTLn Register ...................................................................................................... 480
17-19. TAxCCRn Register ....................................................................................................... 482
17-20. TAxIV Register ............................................................................................................ 482
17-21. TAxEX0 Register.......................................................................................................... 483
18-1. Timer_B Block Diagram.................................................................................................. 486
18-2. Up Mode ................................................................................................................... 488
18-3. Up Mode Flag Setting .................................................................................................... 488
18-4. Continuous Mode ......................................................................................................... 489
18-5. Continuous Mode Flag Setting.......................................................................................... 489
18-6. Continuous Mode Time Intervals ....................................................................................... 489
18-7. Up/Down Mode............................................................................................................ 490
18-8. Up/Down Mode Flag Setting ............................................................................................ 490
18-9. Output Unit in Up/Down Mode .......................................................................................... 491
18-10. Capture Signal (SCS = 1)................................................................................................ 492
18-11. Capture Cycle ............................................................................................................. 492
18-12. Output Example – Timer in Up Mode .................................................................................. 495
18-13. Output Example – Timer in Continuous Mode........................................................................ 496
26 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
18-14. Output Example – Timer in Up/Down Mode .......................................................................... 497
18-15. Capture/Compare TBxCCR0 Interrupt Flag ........................................................................... 498
18-16. TBxCTL Register.......................................................................................................... 501
18-17. TBxR Register............................................................................................................. 503
18-18. TBxCCTLn Register ...................................................................................................... 504
18-19. TBxCCRn Register ....................................................................................................... 506
18-20. TBxIV Register ............................................................................................................ 507
18-21. TBxEX0 Register.......................................................................................................... 508
19-1. Timer_D Block Diagram.................................................................................................. 511
19-2. High Resolution Clock Generator....................................................................................... 513
19-3. Up Mode ................................................................................................................... 516
19-4. Up Mode Flag Setting .................................................................................................... 516
19-5. Continuous Mode ......................................................................................................... 516
19-6. Continuous Mode Flag Setting.......................................................................................... 517
19-7. Continuous Mode Time Intervals ....................................................................................... 517
19-8. TDxCCR0 PWM Generation Under Continuous Mode .............................................................. 518
19-9. Up/Down Mode............................................................................................................ 518
19-10. Up/Down Mode Flag Setting ............................................................................................ 519
19-11. Output Unit in Up/Down Mode .......................................................................................... 520
19-12. Controlling Rising and Falling Edge of PWM Output in Up Mode.................................................. 522
19-13. Deadband Generation (TDxCMB = 1) ................................................................................. 523
19-14. Capture Signal (SCS = 1)................................................................................................ 524
19-15. Single Capture Cycle..................................................................................................... 524
19-16. Sequential Capture Events in Dual Capture Mode................................................................... 525
19-17. COV in Dual Capture Mode ............................................................................................. 525
19-18. Output Example, Channel 1 – Timer in Up Mode .................................................................... 529
19-19. Output Example, Channel 1 - Timer in Up Mode With External Fault Signal..................................... 530
19-20. Output Example - Timer in Up Mode with External Timer Clear Signal ........................................... 531
19-21. Output Example – Timer in Continuous Mode........................................................................ 532
19-22. Output Example – Timer in Up/Down Mode .......................................................................... 533
19-23. Capture/Compare TDxCCR0 Interrupt Flag........................................................................... 534
19-24. TDxCTL0 Register........................................................................................................ 537
19-25. TDxCTL1 Register........................................................................................................ 539
19-26. TDxCTL2 Register........................................................................................................ 540
19-27. TDxR Register............................................................................................................. 541
19-28. TDxCCTLn Register ...................................................................................................... 542
19-29. TDxCCRn Register ....................................................................................................... 544
19-30. TDxCLn Register.......................................................................................................... 544
19-31. TDxHCTL0 Register ...................................................................................................... 545
19-32. TDxHCTL1 Register ...................................................................................................... 546
19-33. TDxHINT Register ........................................................................................................ 547
19-34. TDxIV Register............................................................................................................ 548
20-1. Timer Event Control Block Diagram.................................................................................... 550
20-2. External Input Events Affect Timer_D Output ........................................................................ 552
20-3. Timer_D Output With Channel Combination .......................................................................... 552
20-4. Module Level Connection Between TEC and Timer_D ............................................................. 553
20-5. Synchronization Between Timer Instances............................................................................ 555
20-6. TECxCTL0 Register ...................................................................................................... 558
20-7. TECxCTL1 Register ...................................................................................................... 560
27
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
20-8. TECxCTL2 Register ...................................................................................................... 562
20-9. TECxSTA Register ....................................................................................................... 563
20-10. TECxINT Register ........................................................................................................ 564
20-11. TECxIV Register .......................................................................................................... 565
22-1. RTC_A ..................................................................................................................... 569
22-2. RTCCTL0 Register ....................................................................................................... 578
22-3. RTCCTL1 Register ....................................................................................................... 579
22-4. RTCCTL2 Register ....................................................................................................... 580
22-5. RTCCTL3 Register ....................................................................................................... 580
22-6. RTCNT1 Register......................................................................................................... 581
22-7. RTCNT2 Register......................................................................................................... 581
22-8. RTCNT3 Register......................................................................................................... 581
22-9. RTCNT4 Register......................................................................................................... 581
22-10. RTCSEC Register ........................................................................................................ 582
22-11. RTCSEC Register ........................................................................................................ 582
22-12. RTCMIN Register ......................................................................................................... 583
22-13. RTCMIN Register ......................................................................................................... 583
22-14. RTCHOUR Register ...................................................................................................... 584
22-15. RTCHOUR Register ...................................................................................................... 584
22-16. RTCDOW Register ....................................................................................................... 585
22-17. RTCDAY Register ........................................................................................................ 585
22-18. RTCDAY Register ........................................................................................................ 585
22-19. RTCMON Register........................................................................................................ 586
22-20. RTCMON Register........................................................................................................ 586
22-21. RTCYEARL Register ..................................................................................................... 587
22-22. RTCYEARL Register ..................................................................................................... 587
22-23. RTCYEARH Register..................................................................................................... 588
22-24. RTCYEARH Register..................................................................................................... 588
22-25. RTCAMIN Register ....................................................................................................... 589
22-26. RTCAMIN Register ....................................................................................................... 589
22-27. RTCAHOUR Register .................................................................................................... 590
22-28. RTCAHOUR Register .................................................................................................... 590
22-29. RTCADOW Register ..................................................................................................... 591
22-30. RTCADAY Register....................................................................................................... 591
22-31. RTCADAY Register....................................................................................................... 591
22-32. RTCPS0CTL Register.................................................................................................... 593
22-33. RTCPS1CTL Register.................................................................................................... 594
22-34. RT0PS Register........................................................................................................... 595
22-35. RTPS1 Register........................................................................................................... 595
22-36. RTCIV Register ........................................................................................................... 595
23-1. RTC_B Block Diagram ................................................................................................... 598
23-2. RTCCTL0 Register ....................................................................................................... 606
23-3. RTCCTL1 Register ....................................................................................................... 607
23-4. RTCCTL2 Register ....................................................................................................... 608
23-5. RTCCTL3 Register ....................................................................................................... 608
23-6. RTCSEC Register ........................................................................................................ 609
23-7. RTCSEC Register ........................................................................................................ 609
23-8. RTCMIN Register ......................................................................................................... 610
23-9. RTCMIN Register ......................................................................................................... 610
28 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
23-10. RTCHOUR Register ...................................................................................................... 611
23-11. RTCHOUR Register ...................................................................................................... 611
23-12. RTCDOW Register ....................................................................................................... 612
23-13. RTCDAY Register ........................................................................................................ 612
23-14. RTCDAY Register ........................................................................................................ 612
23-15. RTCMON Register........................................................................................................ 613
23-16. RTCMON Register........................................................................................................ 613
23-17. RTCYEAR Register....................................................................................................... 614
23-18. RTCYEAR Register....................................................................................................... 614
23-19. RTCAMIN Register ....................................................................................................... 615
23-20. RTCAMIN Register ....................................................................................................... 615
23-21. RTCAHOUR Register .................................................................................................... 616
23-22. RTCAHOUR Register .................................................................................................... 616
23-23. RTCADOW Register ..................................................................................................... 617
23-24. RTCADAY Register....................................................................................................... 618
23-25. RTCADAY Register....................................................................................................... 618
23-26. RTCPS0CTL Register.................................................................................................... 619
23-27. RTCPS1CTL Register.................................................................................................... 620
23-28. RTCPS0 Register......................................................................................................... 621
23-29. RTCPS1 Register......................................................................................................... 621
23-30. RTCIV Register ........................................................................................................... 622
23-31. BIN2BCD Register........................................................................................................ 623
23-32. BCD2BIN Register........................................................................................................ 623
24-1. RTC_C Block Diagram (RTCMODE=1)................................................................................ 626
24-2. RTC_C Offset Error Calibration and Temperature Compensation Scheme ...................................... 633
24-3. RTC_C Functional Block Diagram in Counter Mode (RTCMODE = 0)............................................ 636
24-4. RTCCTL0_L Register .................................................................................................... 644
24-5. RTCCTL0_H Register.................................................................................................... 645
24-6. RTCCTL1 Register ....................................................................................................... 646
24-7. RTCCTL3 Register ....................................................................................................... 647
24-8. RTCOCAL Register....................................................................................................... 647
24-9. RTCTCMP Register ...................................................................................................... 648
24-10. RTCNT1 Register......................................................................................................... 649
24-11. RTCNT2 Register......................................................................................................... 649
24-12. RTCNT3 Register......................................................................................................... 649
24-13. RTCNT4 Register......................................................................................................... 649
24-14. RTCSEC Register ........................................................................................................ 650
24-15. RTCSEC Register ........................................................................................................ 650
24-16. RTCMIN Register ......................................................................................................... 651
24-17. RTCMIN Register ......................................................................................................... 651
24-18. RTCHOUR Register ...................................................................................................... 652
24-19. RTCHOUR Register ...................................................................................................... 652
24-20. RTCDOW Register ....................................................................................................... 653
24-21. RTCDAY Register ........................................................................................................ 653
24-22. RTCDAY Register ........................................................................................................ 653
24-23. RTCMON Register........................................................................................................ 654
24-24. RTCMON Register........................................................................................................ 654
24-25. RTCYEAR Register....................................................................................................... 655
24-26. RTCYEAR Register....................................................................................................... 655
29
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
24-27. RTCAMIN Register ....................................................................................................... 656
24-28. RTCAMIN Register ....................................................................................................... 656
24-29. RTCAHOUR Register .................................................................................................... 657
24-30. RTCAHOUR Register .................................................................................................... 657
24-31. RTCADOW Register ..................................................................................................... 658
24-32. RTCADAY Register....................................................................................................... 659
24-33. RTCADAY Register....................................................................................................... 659
24-34. RTCPS0CTL Register.................................................................................................... 660
24-35. RTCPS1CTL Register.................................................................................................... 661
24-36. RTCPS0 Register......................................................................................................... 663
24-37. RTCPS1 Register......................................................................................................... 663
24-38. RTCIV Register ........................................................................................................... 664
24-39. BIN2BCD Register........................................................................................................ 665
24-40. BCD2BIN Register........................................................................................................ 665
24-41. RTCSECBAKx Register.................................................................................................. 666
24-42. RTCSECBAKx Register.................................................................................................. 666
24-43. RTCMINBAKx Register .................................................................................................. 667
24-44. RTCMINBAKx Register .................................................................................................. 667
24-45. RTCHOURBAKx Register ............................................................................................... 668
24-46. RTCHOURBAKx Register ............................................................................................... 668
24-47. RTCDAYBAKx Register.................................................................................................. 669
24-48. RTCDAYBAKx Register.................................................................................................. 669
24-49. RTCMONBAKx Register................................................................................................. 670
24-50. RTCMONBAKx Register................................................................................................. 670
24-51. RTCYEARBAKx Register................................................................................................ 671
24-52. RTCYEARBAKx Register................................................................................................ 671
24-53. RTCTCCTL0 Register.................................................................................................... 672
24-54. RTCTCCTL1 Register.................................................................................................... 672
24-55. RTCCAPxCTL Register.................................................................................................. 673
25-1. MPY32 Block Diagram ................................................................................................... 676
25-2. Q15 Format Representation............................................................................................. 681
25-3. Q14 Format Representation............................................................................................. 681
25-4. Saturation Flow Chart .................................................................................................... 683
25-5. Multiplication Flow Chart................................................................................................. 685
25-6. MPY32CTL0 Register .................................................................................................... 691
26-1. REF Block Diagram ...................................................................................................... 694
26-2. REF Block Diagram for Devices With a CTSD16 Module........................................................... 695
26-3. REFCTL0 Register ....................................................................................................... 703
27-1. ADC10_A Block Diagram................................................................................................ 707
27-2. Analog Multiplexer ........................................................................................................ 708
27-3. Extended Sample Mode ................................................................................................. 710
27-4. Pulse Sample Mode ...................................................................................................... 710
27-5. Analog Input Equivalent Circuit ......................................................................................... 711
27-6. Single-Channel Single-Conversion Mode ............................................................................. 712
27-7. Sequence-of-Channels Mode ........................................................................................... 713
27-8. Repeat-Single-Channel Mode........................................................................................... 714
27-9. Repeat-Sequence-of-Channels Mode.................................................................................. 715
27-10. Typical Temperature Sensor Transfer Function ...................................................................... 717
27-11. ADC10_A Grounding and Noise Considerations ..................................................................... 718
30 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
27-12. ADC10CTL0 Register .................................................................................................... 721
27-13. ADC10CTL1 Register .................................................................................................... 722
27-14. ADC10CTL2 Register .................................................................................................... 724
27-15. ADC10MEM0 Register ................................................................................................... 725
27-16. ADC10MEM0 Register ................................................................................................... 725
27-17. ADC10MCTL0 Register.................................................................................................. 726
27-18. ADC10HI Register ........................................................................................................ 727
27-19. ADC10HI Register ........................................................................................................ 727
27-20. ADC10LO Register ....................................................................................................... 728
27-21. ADC10LO Register ....................................................................................................... 728
27-22. ADC10IE Register ........................................................................................................ 729
27-23. ADC10IFG Register ...................................................................................................... 730
27-24. ADC10IV Register ........................................................................................................ 731
28-1. ADC12_A Block Diagram (Devices With REF Module).............................................................. 734
28-2. ADC12_A MSP430F54xx (non-A) Block Diagram.................................................................... 735
28-3. Analog Multiplexer ........................................................................................................ 736
28-4. Extended Sample Mode ................................................................................................. 738
28-5. Pulse Sample Mode ...................................................................................................... 739
28-6. Analog Input Equivalent Circuit ......................................................................................... 739
28-7. Single-Channel Single-Conversion Mode ............................................................................. 741
28-8. Sequence-of-Channels Mode ........................................................................................... 742
28-9. Repeat-Single-Channel Mode........................................................................................... 743
28-10. Repeat-Sequence-of-Channels Mode.................................................................................. 744
28-11. Typical Temperature Sensor Transfer Function ...................................................................... 746
28-12. ADC12_A Grounding and Noise Considerations ..................................................................... 747
28-13. ADC12CTL0 Register .................................................................................................... 752
28-14. ADC12CTL1 Register .................................................................................................... 754
28-15. ADC12CTL2 Register .................................................................................................... 755
28-16. ADC12MEMx Register ................................................................................................... 756
28-17. ADC12MCTLx Register .................................................................................................. 757
28-18. ADC12IE Register ........................................................................................................ 758
28-19. ADC12IFG Register ...................................................................................................... 760
28-20. ADC12IV Register ........................................................................................................ 762
29-1. SD24_B Overview Block Diagram...................................................................................... 765
29-2. SD24_B Reference and Clock Generation Block Diagram.......................................................... 766
29-3. SD24_B Converter Block Diagram ..................................................................................... 767
29-4. Sigma-Delta Principle .................................................................................................... 768
29-5. Analog Input Equivalent Circuit ......................................................................................... 770
29-6. SINC3Filter Structure .................................................................................................... 771
29-7. Comb Filter's Frequency Response With OSR = 32................................................................. 771
29-8. Digital Filter Step Response and Conversion Points Digital Filter Output......................................... 772
29-9. SD24_B Output Encoder and Input Decoder Block Diagram ....................................................... 774
29-10. Single Conversion Examples............................................................................................ 775
29-11. Grouped Operation - Internal Start-of-Conversion Trigger .......................................................... 776
29-12. Grouped Operation - External Start-of-Conversion Trigger ......................................................... 776
29-13. Conversion Delay Using Preload - Example .......................................................................... 776
29-14. Start of Conversion Using Preload - Example ........................................................................ 777
29-15. SD24_B Trigger Generator Block Diagram............................................................................ 778
29-16. SD24BCTL0 Register .................................................................................................... 782
31
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
29-17. SD24BCTL1 Register .................................................................................................... 783
29-18. SD24BTRGCTL Register ................................................................................................ 784
29-19. SD24BIFG Register ...................................................................................................... 785
29-20. SD24BIE Register ........................................................................................................ 788
29-21. SD24BIV Register ........................................................................................................ 790
29-22. SD24BCCTLx Register .................................................................................................. 791
29-23. SD24BINCTLx Register.................................................................................................. 793
29-24. SD24BOSRx Register.................................................................................................... 794
29-25. SD24BTRGOSR Register ............................................................................................... 794
29-26. SD24BPREx Register .................................................................................................... 795
29-27. SD24BTRGPRE Register................................................................................................ 795
29-28. SD24BMEMLx Register.................................................................................................. 796
29-29. SD24BMEMHx Register ................................................................................................. 796
30-1. CTSD16 Block Diagram.................................................................................................. 799
30-2. Sigma-Delta Principle .................................................................................................... 800
30-3. SINC3Filter Structure .................................................................................................... 803
30-4. Comb Filter Frequency Response With OSR = 32................................................................... 804
30-5. Digital Filter Step Response and Conversion Points Digital Filter Output......................................... 804
30-6. Used Bits of Digital Filter Output........................................................................................ 805
30-7. Input Voltage vs Digital Output.......................................................................................... 806
30-8. Single Channel Operation Example .................................................................................... 807
30-9. Grouped Channel Operation Example ................................................................................. 808
30-10. Conversion Delay Using Preload Example............................................................................ 809
30-11. Start of Conversion Using Preload Example .......................................................................... 809
30-12. Preload and Channel Synchronization................................................................................. 810
30-13. Typical Temperature Sensor Transfer Function ...................................................................... 810
30-14. CTSD16CTL Register .................................................................................................... 814
30-15. CTSD16CCTL0 to CTSD16CCTL6 Register.......................................................................... 815
30-16. CTSD16MEM0 to CTSD16MEM6 Register ........................................................................... 816
30-17. CTSD16INCTL0 to CTSD16INCTL6 Register ........................................................................ 817
30-18. CTSD16PRE0 to CTSD16PRE6 Register............................................................................. 818
30-19. CTSD16IFG Register..................................................................................................... 819
30-20. CTSD16IE Register....................................................................................................... 821
30-21. CTSD16IV Register....................................................................................................... 823
31-1. DAC12_A Block Diagram for Two-Module Devices.................................................................. 826
31-2. DAC12_A Block Diagram For Single-Module Devices............................................................... 827
31-3. Output Voltage vs DAC Data, 12-Bit Straight-Binary Mode......................................................... 829
31-4. Output Voltage vs DAC Data, 12-Bit Twos-Complement Mode .................................................... 830
31-5. Negative Offset............................................................................................................ 830
31-6. Positive Offset............................................................................................................. 830
31-7. DAC12_A Group Update Example, Timer_A3 Trigger............................................................... 831
31-8. DAC12_xCTL0 Register ................................................................................................. 835
31-9. DAC12_xCTL1 Register ................................................................................................. 837
31-10. DAC12_xDAT Register .................................................................................................. 838
31-11. DAC12_xDAT Register .................................................................................................. 838
31-12. DAC12_xDAT Register .................................................................................................. 839
31-13. DAC12_xDAT Register .................................................................................................. 839
31-14. DAC12_xDAT Register .................................................................................................. 840
31-15. DAC12_xDAT Register .................................................................................................. 840
32 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
31-16. DAC12_xDAT Register .................................................................................................. 841
31-17. DAC12_xDAT Register .................................................................................................. 841
31-18. DAC12_xCALCTL Register.............................................................................................. 842
31-19. DAC12_xCALDAT Register ............................................................................................. 842
31-20. DAC12IV Register ........................................................................................................ 843
32-1. Comp_B Block Diagram ................................................................................................. 845
32-2. Comp_B Sample-And-Hold.............................................................................................. 847
32-3. RC-Filter Response at the Output of the Comparator ............................................................... 848
32-4. Reference Generator Block Diagram .................................................................................. 848
32-5. Transfer Characteristic and Power Dissipation in a CMOS Inverter/Buffer ....................................... 849
32-6. Temperature Measurement System.................................................................................... 850
32-7. Timing for Temperature Measurement Systems...................................................................... 850
32-8. CBCTL0 Register ......................................................................................................... 853
32-9. CBCTL1 Register ......................................................................................................... 854
32-10. CBCTL2 Register ......................................................................................................... 855
32-11. CBCTL3 Register ......................................................................................................... 856
32-12. CBINT Register ........................................................................................................... 858
32-13. CBIV Register ............................................................................................................. 859
33-1. OA Block Diagram ........................................................................................................ 862
33-2. OAnCTL0 Register ....................................................................................................... 866
33-3. OAnPSW Register........................................................................................................ 867
33-4. OAnNSW Register........................................................................................................ 868
33-5. OAnGSW Register........................................................................................................ 869
34-1. LCD_B Controller Block Diagram....................................................................................... 872
34-2. LCD Memory - Example for 160 Segments Maximum............................................................... 873
34-3. Bias Generation........................................................................................................... 876
34-4. Example Static Waveforms.............................................................................................. 879
34-5. Static LCD Example (MAB addresses need to be replaced with LCDMx) ........................................ 880
34-6. Example 2-Mux Waveforms ............................................................................................. 882
34-7. 2-Mux LCD Example (MAB addresses need to be replaced with LCDMx) ....................................... 883
34-8. Example 3-Mux Waveforms ............................................................................................. 885
34-9. 3-Mux LCD Example (MAB addresses need to be replaced with LCDMx) ....................................... 886
34-10. Example 4-Mux Waveforms ............................................................................................. 888
34-11. 4-Mux LCD Example (MAB addresses need to be replaced with LCDMx) ....................................... 889
34-12. LCDBCTL0 Register...................................................................................................... 894
34-13. LCDBCTL1 Register...................................................................................................... 895
34-14. LCDBBLKCTL Register .................................................................................................. 896
34-15. LCDBMEMCTL Register................................................................................................. 897
34-16. LCDBVCTL Register ..................................................................................................... 898
34-17. LCDBPCTL0 Register.................................................................................................... 900
34-18. LCDBPCTL1 Register.................................................................................................... 900
34-19. LCDBPCTL2 Register.................................................................................................... 901
34-20. LCDBPCTL3 Register.................................................................................................... 901
34-21. LCDBCPCTL Register ................................................................................................... 902
34-22. LCDBIV Register.......................................................................................................... 903
35-1. LCD Controller Block Diagram .......................................................................................... 906
35-2. LCD Memory for Static and 2-Mux to 4-Mux Mode - Example for 160 Segments ............................... 907
35-3. LCD Memory for 5-Mux to 8-Mux Mode - Example for 160 Segments............................................ 908
35-4. Bias Generation........................................................................................................... 911
33
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
35-5. Example Static Waveforms.............................................................................................. 916
35-6. Example 2-Mux Waveforms ............................................................................................. 917
35-7. Example 3-Mux Waveforms ............................................................................................. 918
35-8. Example 4-Mux Waveforms ............................................................................................. 919
35-9. Example 6-Mux Waveforms ............................................................................................. 920
35-10. Example 8-Mux, 1/3 Bias Waveforms (LCDLP = 0).................................................................. 921
35-11. Example 8-Mux, 1/3 Bias Low-Power Waveforms (LCDLP = 1) ................................................... 922
35-12. LCDCCTL0 Register ..................................................................................................... 928
35-13. LCDCCTL1 Register ..................................................................................................... 930
35-14. LCDCBLKCTL Register.................................................................................................. 931
35-15. LCDCMEMCTL Register................................................................................................. 932
35-16. LCDCVCTL Register ..................................................................................................... 933
35-17. LCDCPCTL0 Register.................................................................................................... 935
35-18. LCDCPCTL1 Register.................................................................................................... 935
35-19. LCDCPCTL2 Register.................................................................................................... 936
35-20. LCDCPCTL3 Register.................................................................................................... 936
35-21. LCDCCPCTL Register ................................................................................................... 937
35-22. LCDCIV Register.......................................................................................................... 937
36-1. USCI_Ax Block Diagram – UART Mode (UCSYNC = 0) ............................................................ 941
36-2. Character Format ......................................................................................................... 942
36-3. Idle-Line Format........................................................................................................... 943
36-4. Address-Bit Multiprocessor Format..................................................................................... 944
36-5. Auto Baud-Rate Detection – Break/Synch Sequence ............................................................... 945
36-6. Auto Baud-Rate Detection – Synch Field.............................................................................. 945
36-7. UART vs IrDA Data Format ............................................................................................. 946
36-8. Glitch Suppression, USCI Receive Not Started ...................................................................... 948
36-9. Glitch Suppression, USCI Activated.................................................................................... 948
36-10. BITCLK Baud-Rate Timing With UCOS16 = 0 ........................................................................ 949
36-11. Receive Error.............................................................................................................. 952
36-12. UCAxCTL0 Register...................................................................................................... 959
36-13. UCAxCTL1 Register...................................................................................................... 960
36-14. UCAxBR0 Register ....................................................................................................... 961
36-15. UCAxBR1 Register ....................................................................................................... 961
36-16. UCAxMCTL Register ..................................................................................................... 961
36-17. UCAxSTAT Register ..................................................................................................... 962
36-18. UCAxRXBUF Register ................................................................................................... 963
36-19. UCAxTXBUF Register.................................................................................................... 963
36-20. UCAxIRTCTL Register ................................................................................................... 964
36-21. UCAxIRRCTL Register................................................................................................... 964
36-22. UCAxABCTL Register.................................................................................................... 965
36-23. UCAxIE Register.......................................................................................................... 966
36-24. UCAxIFG Register........................................................................................................ 966
36-25. UCAxIV Register.......................................................................................................... 967
37-1. USCI Block Diagram – SPI Mode ...................................................................................... 971
37-2. USCI Master and External Slave ....................................................................................... 973
37-3. USCI Slave and External Master ....................................................................................... 974
37-4. USCI SPI Timing With UCMSB = 1 .................................................................................... 976
37-5. UCAxCTL0 Register...................................................................................................... 979
37-6. UCAxCTL1 Register...................................................................................................... 980
34 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
37-7. UCAxBR0 Register ....................................................................................................... 981
37-8. UCAxBR1 Register ....................................................................................................... 981
37-9. UCAxMCTL Register ..................................................................................................... 981
37-10. UCAxSTAT Register ..................................................................................................... 982
37-11. UCAxRXBUF Register ................................................................................................... 983
37-12. UCAxTXBUF Register.................................................................................................... 983
37-13. UCAxIE Register.......................................................................................................... 984
37-14. UCAxIFG Register........................................................................................................ 984
37-15. UCAxIV Register.......................................................................................................... 985
37-16. UCBxCTL0 Register...................................................................................................... 987
37-17. UCBxCTL1 Register...................................................................................................... 988
37-18. UCBxBR0 Register ....................................................................................................... 989
37-19. UCBxBR1 Register ....................................................................................................... 989
37-20. UCBxMCTL Register ..................................................................................................... 989
37-21. UCBxSTAT Register ..................................................................................................... 990
37-22. UCBxRXBUF Register ................................................................................................... 991
37-23. UCBxTXBUF Register.................................................................................................... 991
37-24. UCBxIE Register.......................................................................................................... 992
37-25. UCBxIFG Register........................................................................................................ 992
37-26. UCBxIV Register.......................................................................................................... 993
38-1. USCI Block Diagram – I2C Mode ....................................................................................... 997
38-2. I2C Bus Connection Diagram............................................................................................ 998
38-3. I2C Module Data Transfer................................................................................................ 999
38-4. Bit Transfer on I2C Bus................................................................................................... 999
38-5. I2C Module 7-Bit Addressing Format.................................................................................. 1000
38-6. I2C Module 10-Bit Addressing Format ................................................................................ 1000
38-7. I2C Module Addressing Format With Repeated START Condition ............................................... 1000
38-8. I2C Time-Line Legend................................................................................................... 1001
38-9. I2C Slave Transmitter Mode............................................................................................ 1002
38-10. I2C Slave Receiver Mode............................................................................................... 1004
38-11. I2C Slave 10-Bit Addressing Mode .................................................................................... 1005
38-12. I2C Master Transmitter Mode .......................................................................................... 1007
38-13. I2C Master Receiver Mode ............................................................................................. 1009
38-14. I2C Master 10-Bit Addressing Mode .................................................................................. 1010
38-15. Arbitration Procedure Between Two Master Transmitters ......................................................... 1011
38-16. Synchronization of Two I2C Clock Generators During Arbitration................................................. 1012
38-17. UCBxCTL0 Register .................................................................................................... 1017
38-18. UCBxCTL1 Register .................................................................................................... 1018
38-19. UCBxBR0 Register...................................................................................................... 1019
38-20. UCBxBR1 Register...................................................................................................... 1019
38-21. UCBxSTAT Register .................................................................................................... 1020
38-22. UCBxRXBUF Register.................................................................................................. 1021
38-23. UCBxTXBUF Register .................................................................................................. 1021
38-24. UCBxI2COA Register................................................................................................... 1022
38-25. UCBxI2CSA Register ................................................................................................... 1022
38-26. UCBxIE Register ........................................................................................................ 1023
38-27. UCBxIFG Register ...................................................................................................... 1024
38-28. UCBxIV Register ........................................................................................................ 1025
39-1. eUSCI_Ax Block Diagram – UART Mode (UCSYNC = 0) ......................................................... 1028
35
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
39-2. Character Format........................................................................................................ 1029
39-3. Idle-Line Format ......................................................................................................... 1030
39-4. Address-Bit Multiprocessor Format ................................................................................... 1031
39-5. Auto Baud-Rate Detection – Break/Synch Sequence .............................................................. 1032
39-6. Auto Baud-Rate Detection – Synch Field ............................................................................ 1032
39-7. UART vs IrDA Data Format............................................................................................ 1033
39-8. Glitch Suppression, eUSCI_A Receive Not Started ................................................................ 1035
39-9. Glitch Suppression, eUSCI_A Activated ............................................................................. 1035
39-10. BITCLK Baud-Rate Timing With UCOS16 = 0 ...................................................................... 1036
39-11. Receive Error ............................................................................................................ 1040
39-12. UCAxCTLW0 Register.................................................................................................. 1046
39-13. UCAxCTLW1 Register.................................................................................................. 1047
39-14. UCAxBRW Register..................................................................................................... 1048
39-15. UCAxMCTLW Register ................................................................................................. 1048
39-16. UCAxSTATW Register ................................................................................................. 1049
39-17. UCAxRXBUF Register.................................................................................................. 1050
39-18. UCAxTXBUF Register .................................................................................................. 1050
39-19. UCAxABCTL Register .................................................................................................. 1051
39-20. UCAxIRCTL Register ................................................................................................... 1052
39-21. UCAxIE Register ........................................................................................................ 1053
39-22. UCAxIFG Register ...................................................................................................... 1054
39-23. UCAxIV Register ........................................................................................................ 1055
40-1. eUSCI Block Diagram – SPI Mode ................................................................................... 1058
40-2. eUSCI Master and External Slave (UCSTEM = 0).................................................................. 1060
40-3. eUSCI Slave and External Master .................................................................................... 1061
40-4. eUSCI SPI Timing With UCMSB = 1 ................................................................................. 1063
40-5. UCAxCTLW0 Register.................................................................................................. 1066
40-6. UCAxBRW Register..................................................................................................... 1067
40-7. UCAxSTATW Register ................................................................................................. 1068
40-8. UCAxRXBUF Register.................................................................................................. 1069
40-9. UCAxTXBUF Register .................................................................................................. 1070
40-10. UCAxIE Register ........................................................................................................ 1071
40-11. UCAxIFG Register ...................................................................................................... 1072
40-12. UCAxIV Register ........................................................................................................ 1073
40-13. UCBxCTLW0 Register.................................................................................................. 1075
40-14. UCBxBRW Register..................................................................................................... 1076
40-15. UCBxSTATW Register ................................................................................................. 1076
40-16. UCBxRXBUF Register.................................................................................................. 1077
40-17. UCBxTXBUF Register .................................................................................................. 1077
40-18. UCBxIE Register ........................................................................................................ 1078
40-19. UCBxIFG Register ...................................................................................................... 1078
40-20. UCBxIV Register ........................................................................................................ 1079
41-1. eUSCI_B Block Diagram – I2C Mode................................................................................. 1082
41-2. I2C Bus Connection Diagram .......................................................................................... 1083
41-3. I2C Module Data Transfer .............................................................................................. 1084
41-4. Bit Transfer on I2C Bus ................................................................................................. 1084
41-5. I2C Module 7-Bit Addressing Format.................................................................................. 1084
41-6. I2C Module 10-Bit Addressing Format ................................................................................ 1084
41-7. I2C Module Addressing Format With Repeated START Condition ............................................... 1085
36 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
41-8. I2C Time-Line Legend................................................................................................... 1086
41-9. I2C Slave Transmitter Mode............................................................................................ 1088
41-10. I2C Slave Receiver Mode............................................................................................... 1089
41-11. I2C Slave 10-Bit Addressing Mode .................................................................................... 1090
41-12. I2C Master Transmitter Mode .......................................................................................... 1092
41-13. I2C Master Receiver Mode ............................................................................................. 1094
41-14. I2C Master 10-Bit Addressing Mode .................................................................................. 1095
41-15. Arbitration Procedure Between Two Master Transmitters ......................................................... 1095
41-16. Synchronization of Two I2C Clock Generators During Arbitration................................................. 1096
41-17. UCBxCTLW0 Register.................................................................................................. 1103
41-18. UCBxCTLW1 Register.................................................................................................. 1105
41-19. UCBxBRW Register..................................................................................................... 1107
41-20. UCBxSTATW Register ................................................................................................. 1107
41-21. UCBxTBCNT Register.................................................................................................. 1108
41-22. UCBxRXBUF Register.................................................................................................. 1109
41-23. UCBxTXBUF Register .................................................................................................. 1109
41-24. UCBxI2COA0 Register ................................................................................................. 1110
41-25. UCBxI2COA1 Register ................................................................................................. 1111
41-26. UCBxI2COA2 Register ................................................................................................. 1111
41-27. UCBxI2COA3 Register ................................................................................................. 1112
41-28. UCBxADDRX Register ................................................................................................. 1112
41-29. UCBxADDMASK Register.............................................................................................. 1113
41-30. UCBxI2CSA Register ................................................................................................... 1113
41-31. UCBxIE Register ........................................................................................................ 1114
41-32. UCBxIFG Register ...................................................................................................... 1116
41-33. UCBxIV Register ........................................................................................................ 1118
42-1. USB Block Diagram..................................................................................................... 1121
42-2. USB Power System ..................................................................................................... 1123
42-3. USB Power Up and Down Profile ..................................................................................... 1124
42-4. Powering Entire MSP430 From VBUS ............................................................................... 1125
42-5. USB-PLL Analog Block Diagram...................................................................................... 1126
42-6. Data Buffers and Descriptors .......................................................................................... 1129
42-7. USB Timer and Time Stamp Generation............................................................................. 1131
42-8. USBKEYPID Register .................................................................................................. 1141
42-9. USBCNF Register....................................................................................................... 1141
42-10. USBPHYCTL Register.................................................................................................. 1142
42-11. USBPWRCTL Register ................................................................................................. 1143
42-12. USBPLLCTL Register .................................................................................................. 1145
42-13. USBPLLDIVB Register ................................................................................................. 1146
42-14. USBPLLIR Register..................................................................................................... 1147
42-15. USBIEPCNF_0 Register ............................................................................................... 1149
42-16. USBIEPBCNT_0 Register.............................................................................................. 1150
42-17. USBOEPCNFG_0 Register ............................................................................................ 1151
42-18. USBOEPBCNT_0 Register ............................................................................................ 1152
42-19. USBIEPIE Register ..................................................................................................... 1153
42-20. USBOEPIE Register .................................................................................................... 1155
42-21. USBIEPIFG Register.................................................................................................... 1157
42-22. USBOEPIFG Register .................................................................................................. 1158
42-23. USBVECINT Register .................................................................................................. 1159
37
SLAU208O–June 2008–Revised May 2015 List of Figures
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
42-24. USBMAINT Register .................................................................................................... 1160
42-25. USBTSREG Register ................................................................................................... 1161
42-26. USBFN Register......................................................................................................... 1161
42-27. USBCTL Register ....................................................................................................... 1162
42-28. USBIE Register.......................................................................................................... 1163
42-29. USBIFG Register........................................................................................................ 1164
42-30. USBFUNADR Register ................................................................................................. 1164
42-31. USBOEPCNF_n Register .............................................................................................. 1168
42-32. USBOEPBBAX_n Register ............................................................................................ 1169
42-33. USBOEPBCTX_n Register ............................................................................................ 1170
42-34. USBOEPBBAY_n Register ............................................................................................ 1170
42-35. USBOEPBCTY_n Register ............................................................................................ 1171
42-36. USBOEPSIZXY_n Register............................................................................................ 1171
42-37. USBIEPCNF_n Register ............................................................................................... 1172
42-38. USBIEPBBAX_n Register.............................................................................................. 1173
42-39. USBIEPBCTX_n Register.............................................................................................. 1174
42-40. USBIEPBBAY_n Register.............................................................................................. 1174
42-41. USBIEPBCTY_n Register.............................................................................................. 1175
42-42. USBIEPSIZXY_n Register ............................................................................................. 1175
43-1. LDO Block Diagram..................................................................................................... 1177
43-2. 3.3-V LDO Power Up/Down Profile ................................................................................... 1178
43-3. Powering Entire MSP430 From LDOI ................................................................................ 1179
43-4. LDOKEYPID Register .................................................................................................. 1182
43-5. PUCTL Register ......................................................................................................... 1182
43-6. LDOPWRCTL Register ................................................................................................. 1183
44-1. Large Implementation of EEM......................................................................................... 1186
38 List of Figures SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
List of Tables
1-1. Interrupt Sources, Flags, and Vectors................................................................................... 61
1-2. Operation Modes ........................................................................................................... 65
1-3. Connection of Unused Pins............................................................................................... 69
1-4. Tag Values .................................................................................................................. 75
1-5. Peripheral Discovery Descriptor.......................................................................................... 76
1-6. Values for Memory Entry.................................................................................................. 77
1-7. Values for Peripheral Entry ............................................................................................... 77
1-8. Peripheral IDs .............................................................................................................. 78
1-9. Sample Peripheral Discovery Descriptor................................................................................ 79
1-10. SFR Base Address......................................................................................................... 83
1-11. SFR Registers .............................................................................................................. 83
1-12. SFRIE1 Register Description ............................................................................................. 84
1-13. SFRIFG1 Register Description ........................................................................................... 85
1-14. SFRRPCR Register Description.......................................................................................... 87
1-15. SYS Base Address......................................................................................................... 88
1-16. SYS Registers .............................................................................................................. 88
1-17. SYSCTL Register Description ............................................................................................ 89
1-18. SYSBSLC Register Description .......................................................................................... 90
1-19. SYSJMBC Register Description.......................................................................................... 91
1-20. SYSJMBI0 Register Description.......................................................................................... 92
1-21. SYSJMBI1 Register Description.......................................................................................... 92
1-22. SYSJMBO0 Register Description ........................................................................................ 93
1-23. SYSJMBO1 Register Description ........................................................................................ 93
1-24. SYSUNIV Register Description........................................................................................... 94
1-25. SYSSNIV Register Description........................................................................................... 95
1-26. SYSRSTIV Register Description ......................................................................................... 96
1-27. SYSBERRIV Register Description ....................................................................................... 97
2-1. SVS and SVM Thresholds............................................................................................... 102
2-2. Recommended SVSLSettings .......................................................................................... 102
2-3. Recommended SVSHSettings .......................................................................................... 102
2-4. Available SVSHand SVMHSettings Versus VCORE Settings.......................................................... 103
2-5. SVSLand SVMLControl Mode Selection .............................................................................. 111
2-6. SVSLAutomatic Performance Control ................................................................................. 111
2-7. SVSLManual Performance Modes ..................................................................................... 111
2-8. SVMLAutomatic Performance Control ................................................................................. 111
2-9. SVMLManual Performance Modes..................................................................................... 111
2-10. SVSHand SVMHControl Mode Selection.............................................................................. 112
2-11. SVSHAutomatic Performance Control ................................................................................. 112
2-12. SVSHManual Performance Modes ..................................................................................... 112
2-13. SVMHAutomatic Performance Control................................................................................. 112
2-14. SVMHManual Performance Modes..................................................................................... 112
2-15. PMM Registers............................................................................................................ 114
2-16. PMMCTL0 Register Description ........................................................................................ 115
2-17. PMMCTL1 Register Description ........................................................................................ 116
2-18. SVSMHCTL Register Description ...................................................................................... 117
2-19. SVSMLCTL Register Description....................................................................................... 118
2-20. SVSMIO Register Description........................................................................................... 119
39
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
2-21. PMMIFG Register Description .......................................................................................... 120
2-22. PMMRIE Register Description .......................................................................................... 122
2-23. PM5CTL0 Register Description ......................................................................................... 123
3-1. Battery Backup Registers................................................................................................ 129
3-2. BAKCTL Register Description........................................................................................... 130
3-3. BAKCHCTL Register Description....................................................................................... 131
4-1. Next Supply Voltage Selection.......................................................................................... 137
4-2. Minimum Voltage Thresholds for Selected fSYS ....................................................................... 139
4-3. Supply Selection During LPMx.5 ....................................................................................... 141
4-4. Auxiliary Supply Registers............................................................................................... 148
4-5. AUXCTL0 Register Description ......................................................................................... 149
4-6. AUXCTL1 Register Description ......................................................................................... 150
4-7. AUXCTL2 Register Description ......................................................................................... 151
4-8. AUX2CHCTL Register Description ..................................................................................... 152
4-9. AUX3CHCTL Register Description ..................................................................................... 153
4-10. AUXADCCTL Register Description..................................................................................... 154
4-11. AUXIFG Register Description ........................................................................................... 155
4-12. AUXIE Register Description ............................................................................................. 156
4-13. AUXIV Register Description ............................................................................................. 157
5-1. Clock Request System and Power Modes ............................................................................ 168
5-2. UCS Registers ............................................................................................................ 173
5-3. UCSCTL0 Register Description......................................................................................... 174
5-4. UCSCTL1 Register Description......................................................................................... 175
5-5. UCSCTL2 Register Description......................................................................................... 176
5-6. UCSCTL3 Register Description......................................................................................... 177
5-7. UCSCTL4 Register Description......................................................................................... 178
5-8. UCSCTL5 Register Description......................................................................................... 179
5-9. UCSCTL6 Register Description......................................................................................... 181
5-10. UCSCTL7 Register Description......................................................................................... 183
5-11. UCSCTL8 Register Description......................................................................................... 184
5-12. UCSCTL9 Register Description......................................................................................... 185
6-1. SR Bit Description ........................................................................................................ 192
6-2. Values of Constant Generators CG1, CG2............................................................................ 193
6-3. Source and Destination Addressing.................................................................................... 196
6-4. MSP430 Double-Operand Instructions................................................................................. 214
6-5. MSP430 Single-Operand Instructions.................................................................................. 214
6-6. Conditional Jump Instructions........................................................................................... 215
6-7. Emulated Instructions .................................................................................................... 215
6-8. Interrupt, Return, and Reset Cycles and Length ..................................................................... 216
6-9. MSP430 Format II Instruction Cycles and Length.................................................................... 216
6-10. MSP430 Format I Instructions Cycles and Length ................................................................... 217
6-11. Description of the Extension Word Bits for Register Mode.......................................................... 218
6-12. Description of Extension Word Bits for Non-Register Modes ....................................................... 219
6-13. Extended Double-Operand Instructions................................................................................ 220
6-14. Extended Single-Operand Instructions................................................................................. 222
6-15. Extended Emulated Instructions ........................................................................................ 224
6-16. Address Instructions, Operate on 20-Bit Register Data ............................................................. 225
6-17. MSP430X Format II Instruction Cycles and Length .................................................................. 226
6-18. MSP430X Format I Instruction Cycles and Length................................................................... 227
40 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
6-19. Address Instruction Cycles and Length................................................................................ 228
6-20. Instruction Map of MSP430X............................................................................................ 229
7-1. Supported Simultaneous Code Execution and Flash Operations .................................................. 346
7-2. Erase Modes .............................................................................................................. 346
7-3. Write Modes ............................................................................................................... 350
7-4. Flash Access While Flash is Busy (BUSY = 1) ....................................................................... 357
7-5. FCTL Registers ........................................................................................................... 361
7-6. FCTL1 Register Description............................................................................................. 362
7-7. FCTL3 Register Description............................................................................................. 363
7-8. FCTL4 Register Description............................................................................................. 364
7-9. SFRIE1 Register Description............................................................................................ 365
8-1. Overview of MID Support Software Functions ........................................................................ 369
9-1. RAMCTL Registers ....................................................................................................... 376
9-2. RCCTL0 Register Description........................................................................................... 377
10-1. Backup RAM Registers .................................................................................................. 379
11-1. DMA Transfer Modes..................................................................................................... 384
11-2. DMA Trigger Operation .................................................................................................. 391
11-3. Maximum Single-Transfer DMA Cycle Time .......................................................................... 392
11-4. DMA Registers ............................................................................................................ 395
11-5. DMACTL0 Register Description......................................................................................... 397
11-6. DMACTL1 Register Description......................................................................................... 398
11-7. DMACTL2 Register Description......................................................................................... 399
11-8. DMACTL3 Register Description......................................................................................... 400
11-9. DMACTL4 Register Description......................................................................................... 401
11-10. DMAxCTL Register Description......................................................................................... 402
11-11. DMAxSA Register Description .......................................................................................... 404
11-12. DMAxDA Register Description .......................................................................................... 405
11-13. DMAxSZ Register Description .......................................................................................... 406
11-14. DMAIV Register Description............................................................................................. 407
12-1. I/O Configuration.......................................................................................................... 410
12-2. Digital I/O Registers ...................................................................................................... 416
12-3. P1IV Register Description ............................................................................................... 422
12-4. P2IV Register Description ............................................................................................... 423
12-5. P1IES Register Description ............................................................................................. 424
12-6. P1IE Register Description ............................................................................................... 424
12-7. P1IFG Register Description ............................................................................................. 424
12-8. P2IES Register Description ............................................................................................. 425
12-9. P2IE Register Description ............................................................................................... 425
12-10. P2IFG Register Description ............................................................................................. 425
12-11. PxIN Register Description ............................................................................................... 426
12-12. PxOUT Register Description ............................................................................................ 426
12-13. PxDIR Register Description ............................................................................................. 426
12-14. PxREN Register Description ............................................................................................ 427
12-15. PxDS Register Description .............................................................................................. 427
12-16. PxSEL Register Description............................................................................................. 427
13-1. Examples for Port Mapping Mnemonics and Functions ............................................................. 430
13-2. Port Mapping Control Registers ........................................................................................ 431
13-3. Port Mapping Registers for Port Px – Byte Access .................................................................. 431
13-4. Port Mapping Registers for Port Px – Word Access ................................................................. 431
41
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
13-5. PMAPKEYID Register Description ..................................................................................... 432
13-6. PMAPCTL Register Description ........................................................................................ 432
13-7. PxMAPy Register Description........................................................................................... 432
14-1. CRC Registers ............................................................................................................ 438
14-2. CRCDI Register Description............................................................................................. 439
14-3. CRCDIRB Register Description......................................................................................... 439
14-4. CRCINIRES Register Description ...................................................................................... 440
14-5. CRCRESR Register Description........................................................................................ 440
15-1. AES_ACCEL Registers .................................................................................................. 448
15-2. AESACTL0 Register Description ....................................................................................... 449
15-3. AESACTL1 Register Description ....................................................................................... 450
15-4. AESASTAT Register Description ....................................................................................... 451
15-5. AESAKEY Register Description......................................................................................... 452
15-6. AESADIN Register Description ......................................................................................... 453
15-7. AESADOUT Register Description ...................................................................................... 453
15-8. AESAXDIN Register Description ....................................................................................... 454
15-9. AESAXIN Register Description ......................................................................................... 454
16-1. WDT_A Registers......................................................................................................... 460
16-2. WDTCTL Register Description.......................................................................................... 461
17-1. Timer Modes .............................................................................................................. 466
17-2. Output Modes ............................................................................................................. 471
17-3. Timer_A Registers........................................................................................................ 477
17-4. TAxCTL Register Description ........................................................................................... 478
17-5. TAxR Register Description .............................................................................................. 479
17-6. TAxCCTLn Register Description........................................................................................ 480
17-7. TAxCCRn Register Description ......................................................................................... 482
17-8. TAxIV Register Description.............................................................................................. 482
17-9. TAxEX0 Register Description ........................................................................................... 483
18-1. Timer Modes .............................................................................................................. 488
18-2. TBxCLn Load Events..................................................................................................... 493
18-3. Compare Latch Operating Modes ...................................................................................... 494
18-4. Output Modes ............................................................................................................. 494
18-5. Timer_B Registers........................................................................................................ 500
18-6. TBxCTL Register Description ........................................................................................... 501
18-7. TBxR Register Description .............................................................................................. 503
18-8. TBxCCTLn Register Description........................................................................................ 504
18-9. TBxCCRn Register Description ......................................................................................... 506
18-10. TBxIV Register Description.............................................................................................. 507
18-11. TBxEX0 Register Description ........................................................................................... 508
19-1. Factory Preprogrammed Frequency and TDHMx, TDHCLKCR Bit Settings ..................................... 514
19-2. Timer Modes .............................................................................................................. 515
19-3. High-Resolution Mode Limitation (TDHEN = 1) - Minimum Duty Cycle ........................................... 521
19-4. High-Resolution Mode Limitation (TDHEN = 1) - Maximum Duty Cycle .......................................... 521
19-5. TDCLx Load Events ...................................................................................................... 526
19-6. Compare Latch Operating Modes ...................................................................................... 526
19-7. Output Modes ............................................................................................................. 527
19-8. Timer_D Registers........................................................................................................ 536
19-9. TDxCTL0 Register Description.......................................................................................... 537
19-10. TDxCTL1 Register Description.......................................................................................... 539
42 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
19-11. TDxCTL2 Register Description.......................................................................................... 540
19-12. TDxR Register Description .............................................................................................. 541
19-13. TDxCCTLn Register Description........................................................................................ 542
19-14. TDxCCRn Register Description......................................................................................... 544
19-15. TDxCLn Register Description ........................................................................................... 544
19-16. TDxHCTL0 Register Description........................................................................................ 545
19-17. TDxHCTL1 Register Description........................................................................................ 546
19-18. TDxHINT Register Description.......................................................................................... 547
19-19. TDxIV Register Description.............................................................................................. 548
20-1. TEC Registers............................................................................................................. 557
20-2. TECxCTL0 Register Description........................................................................................ 558
20-3. TECxCTL1 Register Description........................................................................................ 560
20-4. TECxCTL2 Register Description........................................................................................ 562
20-5. TECxSTA Register Description ......................................................................................... 563
20-6. TECxINT Register Description .......................................................................................... 564
20-7. TECxIV Register Description............................................................................................ 565
21-1. RTC Overview............................................................................................................. 566
22-1. RTC_A Registers ......................................................................................................... 576
22-2. RTCCTL0 Register Description ......................................................................................... 578
22-3. RTCCTL1 Register Description ......................................................................................... 579
22-4. RTCCTL2 Register Description ......................................................................................... 580
22-5. RTCCTL3 Register Description ......................................................................................... 580
22-6. RTCNT1 Register Description .......................................................................................... 581
22-7. RTCNT2 Register Description .......................................................................................... 581
22-8. RTCNT3 Register Description .......................................................................................... 581
22-9. RTCNT4 Register Description .......................................................................................... 581
22-10. RTCSEC Register Description .......................................................................................... 582
22-11. RTCSEC Register Description .......................................................................................... 582
22-12. RTCMIN Register Description........................................................................................... 583
22-13. RTCMIN Register Description........................................................................................... 583
22-14. RTCHOUR Register Description........................................................................................ 584
22-15. RTCHOUR Register Description........................................................................................ 584
22-16. RTCDOW Register Description ......................................................................................... 585
22-17. RTCDAY Register Description .......................................................................................... 585
22-18. RTCDAY Register Description .......................................................................................... 585
22-19. RTCMON Register Description ......................................................................................... 586
22-20. RTCMON Register Description ......................................................................................... 586
22-21. RTCYEARL Register Description....................................................................................... 587
22-22. RTCYEARL Register Description....................................................................................... 587
22-23. RTCYEARH Register Description ...................................................................................... 588
22-24. RTCYEARH Register Description ...................................................................................... 588
22-25. RTCAMIN Register Description......................................................................................... 589
22-26. RTCAMIN Register Description......................................................................................... 589
22-27. RTCAHOUR Register Description...................................................................................... 590
22-28. RTCAHOUR Register Description...................................................................................... 590
22-29. RTCADOW Register Description ....................................................................................... 591
22-30. RTCADAY Register Description ........................................................................................ 591
22-31. RTCADAY Register Description ........................................................................................ 591
22-32. RTCPS0CTL Register Description ..................................................................................... 593
43
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
22-33. RTCPS1CTL Register Description ..................................................................................... 594
22-34. RT0PS Register Description ............................................................................................ 595
22-35. RT1PS Register Description ............................................................................................ 595
22-36. RTCIV Register Description ............................................................................................. 595
23-1. RTC_B Registers ......................................................................................................... 604
23-2. RTCCTL0 Register Description ......................................................................................... 606
23-3. RTCCTL1 Register Description ......................................................................................... 607
23-4. RTCCTL2 Register Description ......................................................................................... 608
23-5. RTCCTL3 Register Description ......................................................................................... 608
23-6. RTCSEC Register Description .......................................................................................... 609
23-7. RTCSEC Register Description .......................................................................................... 609
23-8. RTCMIN Register Description........................................................................................... 610
23-9. RTCMIN Register Description........................................................................................... 610
23-10. RTCHOUR Register Description........................................................................................ 611
23-11. RTCHOUR Register Description........................................................................................ 611
23-12. RTCDOW Register Description ......................................................................................... 612
23-13. RTCDAY Register Description .......................................................................................... 612
23-14. RTCDAY Register Description .......................................................................................... 612
23-15. RTCMON Register Description ......................................................................................... 613
23-16. RTCMON Register Description ......................................................................................... 613
23-17. RTCYEAR Register Description ........................................................................................ 614
23-18. RTCYEAR Register Description ........................................................................................ 614
23-19. RTCAMIN Register Description......................................................................................... 615
23-20. RTCAMIN Register Description......................................................................................... 615
23-21. RTCAHOUR Register Description...................................................................................... 616
23-22. RTCAHOUR Register Description...................................................................................... 616
23-23. RTCADOW Register Description ....................................................................................... 617
23-24. RTCADAY Register Description ........................................................................................ 618
23-25. RTCADAY Register Description ........................................................................................ 618
23-26. RTCPS0CTL Register Description ..................................................................................... 619
23-27. RTCPS1CTL Register Description ..................................................................................... 620
23-28. RTCPS0 Register Description .......................................................................................... 621
23-29. RTCPS1 Register Description .......................................................................................... 621
23-30. RTCIV Register Description ............................................................................................. 622
23-31. BIN2BCD Register Description ......................................................................................... 623
23-32. BCD2BIN Register Description ......................................................................................... 623
24-1. RTCCAPx Pin Configuration ............................................................................................ 640
24-2. RTC_C Registers ......................................................................................................... 641
24-3. RTC_C Event and Tamper Detection Registers...................................................................... 643
24-4. RTC_C Real-Time Clock Counter Mode Aliases ..................................................................... 643
24-5. RTCCTL0_L Register Description ...................................................................................... 644
24-6. RTCCTL0_H Register Description...................................................................................... 645
24-7. RTCCTL1 Register Description ......................................................................................... 646
24-8. RTCCTL3 Register Description ......................................................................................... 647
24-9. RTCOCAL Register Description ........................................................................................ 647
24-10. RTCTCMP Register Description ........................................................................................ 648
24-11. RTCNT1 Register Description .......................................................................................... 649
24-12. RTCNT2 Register Description .......................................................................................... 649
24-13. RTCNT3 Register Description .......................................................................................... 649
44 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
24-14. RTCNT4 Register Description .......................................................................................... 649
24-15. RTCSEC Register Description .......................................................................................... 650
24-16. RTCSEC Register Description .......................................................................................... 650
24-17. RTCMIN Register Description........................................................................................... 651
24-18. RTCMIN Register Description........................................................................................... 651
24-19. RTCHOUR Register Description........................................................................................ 652
24-20. RTCHOUR Register Description........................................................................................ 652
24-21. RTCDOW Register Description ......................................................................................... 653
24-22. RTCDAY Register Description .......................................................................................... 653
24-23. RTCDAY Register Description .......................................................................................... 653
24-24. RTCMON Register Description ......................................................................................... 654
24-25. RTCMON Register Description ......................................................................................... 654
24-26. RTCYEAR Register Description ........................................................................................ 655
24-27. RTCYEAR Register Description ........................................................................................ 655
24-28. RTCAMIN Register Description......................................................................................... 656
24-29. RTCAMIN Register Description......................................................................................... 656
24-30. RTCAHOUR Register Description...................................................................................... 657
24-31. RTCAHOUR Register Description...................................................................................... 657
24-32. RTCADOW Register Description ....................................................................................... 658
24-33. RTCADAY Register Description ........................................................................................ 659
24-34. RTCADAY Register Description ........................................................................................ 659
24-35. RTCPS0CTL Register Description ..................................................................................... 660
24-36. RTCPS1CTL Register Description ..................................................................................... 661
24-37. RTCPS0 Register Description .......................................................................................... 663
24-38. RTCPS1 Register Description .......................................................................................... 663
24-39. RTCIV Register Description ............................................................................................. 664
24-40. BIN2BCD Register Description ......................................................................................... 665
24-41. BCD2BIN Register Description ......................................................................................... 665
24-42. RTCSECBAKx Register Description ................................................................................... 666
24-43. RTCSECBAKx Register Description ................................................................................... 666
24-44. RTCMINBAKx Register Description.................................................................................... 667
24-45. RTCMINBAKx Register Description.................................................................................... 667
24-46. RTCHOURBAKx Register Description................................................................................. 668
24-47. RTCHOURBAKx Register Description................................................................................. 668
24-48. RTCDAYBAKx Register Description ................................................................................... 669
24-49. RTCDAYBAKx Register Description ................................................................................... 669
24-50. RTCMONBAKx Register Description................................................................................... 670
24-51. RTCMONBAKx Register Description................................................................................... 670
24-52. RTCYEARBAKx Register Description ................................................................................. 671
24-53. RTCYEARBAKx Register Description ................................................................................. 671
24-54. RTCTCCTL0 Register Description ..................................................................................... 672
24-55. RTCTCCTL1 Register Description ..................................................................................... 672
24-56. RTCCAPxCTL Register Description.................................................................................... 673
25-1. Result Availability (MPYFRAC = 0, MPYSAT = 0) ................................................................... 677
25-2. OP1 Registers............................................................................................................. 678
25-3. OP2 Registers............................................................................................................. 678
25-4. SUMEXT and MPYC Contents.......................................................................................... 679
25-5. Result Availability in Fractional Mode (MPYFRAC = 1, MPYSAT = 0) ............................................ 682
25-6. Result Availability in Saturation Mode (MPYSAT = 1) ............................................................... 683
45
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
25-7. MPY32 Registers ......................................................................................................... 689
25-8. Alternative Registers ..................................................................................................... 690
25-9. MPY32CTL0 Register Description...................................................................................... 691
26-1. Reference Voltage Generation for Different Devices ................................................................ 696
26-2. REF Control of Reference System (REFMSTR = 1) (Default) for Devices Without CTSD16 .................. 697
26-3. REF Control of Reference System (REFMSTR = 1) (Default) for Devices With CTSD16 ...................... 698
26-4. Control of Reference System (REFMSTR = 0, ADC12_A Only) ................................................... 698
26-5. REF Registers............................................................................................................. 702
26-6. REFCTL0 Register Description ......................................................................................... 703
27-1. Conversion Mode Summary............................................................................................. 711
27-2. ADC10_A Registers ...................................................................................................... 720
27-3. ADC10CTL0 Register Description...................................................................................... 721
27-4. ADC10CTL1 Register Description...................................................................................... 722
27-5. ADC10CTL2 Register Description...................................................................................... 724
27-6. ADC10MEM0 Register Description..................................................................................... 725
27-7. ADC10MEM0 Register Description..................................................................................... 725
27-8. ADC10MCTL0 Register Description.................................................................................... 726
27-9. ADC10HI Register Description.......................................................................................... 727
27-10. ADC10HI Register Description.......................................................................................... 727
27-11. ADC10LO Register Description......................................................................................... 728
27-12. ADC10LO Register Description......................................................................................... 728
27-13. ADC10IE Register Description.......................................................................................... 729
27-14. ADC10IFG Register Description........................................................................................ 730
27-15. ADC10IV Register Description.......................................................................................... 731
28-1. ADC12_A Conversion Result Formats................................................................................. 740
28-2. Conversion Mode Summary............................................................................................. 740
28-3. ADC12_A Registers ...................................................................................................... 750
28-4. ADC12CTL0 Register Description...................................................................................... 752
28-5. ADC12CTL1 Register Description...................................................................................... 754
28-6. ADC12CTL2 Register Description...................................................................................... 755
28-7. ADC12MEMx Register Description..................................................................................... 756
28-8. ADC12MCTLx Register Description.................................................................................... 757
28-9. ADC12IE Register Description.......................................................................................... 758
28-10. ADC12IFG Register Description........................................................................................ 760
28-11. ADC12IV Register Description.......................................................................................... 762
29-1. Offset Binary Left Aligned Mapping .................................................................................... 773
29-2. Twos-Complement Left Aligned Mapping ............................................................................. 773
29-3. Data Format Example for OSR = 256.................................................................................. 773
29-4. Conversion Mode Summary............................................................................................. 774
29-5. SD24_B Registers ........................................................................................................ 780
29-6. SD24BCTL0 Register Description ...................................................................................... 782
29-7. SD24BCTL1 Register Description ...................................................................................... 783
29-8. SD24BTRGCTL Register Description.................................................................................. 784
29-9. SD24BIFG Register Description ........................................................................................ 785
29-10. SD24BIE Register Description .......................................................................................... 788
29-11. SD24BIV Register Description .......................................................................................... 790
29-12. SD24BCCTLx Register Description .................................................................................... 791
29-13. SD24BINCTLx Register Description ................................................................................... 793
29-14. SD24BOSRx Register Description ..................................................................................... 794
46 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
29-15. SD24BTRGOSR Register Description ................................................................................. 794
29-16. SD24BPREx Register Description...................................................................................... 795
29-17. SD24BTRGPRE Register Description ................................................................................. 795
29-18. SD24BMEMLx Register Description ................................................................................... 796
29-19. SD24BMEMHx Register Description ................................................................................... 796
30-1. Voltage Reference Signal Selection Requirements .................................................................. 801
30-2. Data Format ............................................................................................................... 806
30-3. Conversion Mode Summary............................................................................................. 807
30-4. CTSD16 Registers........................................................................................................ 813
30-5. CTSD16CTL Register Description...................................................................................... 814
30-6. CTSD16CCTL0 to CTSD16CCTL6 Register Description ........................................................... 815
30-7. CTSD16MEM0 to CTSD16MEM6 Register Description ............................................................. 816
30-8. CTSD16INCTL0 to CTSD16INCTL6 Register Description .......................................................... 817
30-9. CTSD16PRE0 to CTSD16PRE6 Register Description .............................................................. 818
30-10. CTSD16IFG Register Description ...................................................................................... 819
30-11. CTSD16IE Register Description ........................................................................................ 821
30-12. CTSD16IV Register Description ........................................................................................ 823
31-1. DAC Full-Scale Range (Vref = VeREF+ or VREF+ or VREFBG ).............................................................. 828
31-2. DAC12SREFx = {2,3} Signal Selection Requirements for Devices With a CTSD16 Module................... 828
31-3. DAC Output Selection.................................................................................................... 833
31-4. DAC12_A Registers ...................................................................................................... 834
31-5. DAC12_xCTL0 Register Description ................................................................................... 835
31-6. DAC12_xCTL1 Register Description ................................................................................... 837
31-7. DAC12_xDAT Register Description .................................................................................... 838
31-8. DAC12_xDAT Register Description .................................................................................... 838
31-9. DAC12_xDAT Register Description .................................................................................... 839
31-10. DAC12_xDAT Register Description .................................................................................... 839
31-11. DAC12_xDAT Register Description .................................................................................... 840
31-12. DAC12_xDAT Register Description .................................................................................... 840
31-13. DAC12_xDAT Register Description .................................................................................... 841
31-14. DAC12_xDAT Register Description .................................................................................... 841
31-15. DAC12_xCALCTL Register Description ............................................................................... 842
31-16. DAC12_xCALDAT Register Description ............................................................................... 842
31-17. DAC12IV Register Description.......................................................................................... 843
32-1. Comp_B Registers........................................................................................................ 852
32-2. CBCTL0 Register Description........................................................................................... 853
32-3. CBCTL1 Register Description........................................................................................... 854
32-4. CBCTL2 Register Description........................................................................................... 855
32-5. CBCTL3 Register Description........................................................................................... 856
32-6. CBINT Register Description ............................................................................................. 858
32-7. CBIV Register Description............................................................................................... 859
33-1. OA Mode Select........................................................................................................... 863
33-2. OA Registers .............................................................................................................. 865
33-3. OAnCTL0 Register Description ......................................................................................... 866
33-4. OAnPSW Register Description.......................................................................................... 867
33-5. OAnNSW Register Description ......................................................................................... 868
33-6. OAnGSW Register Description ......................................................................................... 869
34-1. LCD Voltage and Biasing Characteristics ............................................................................. 877
34-2. LCD_B Registers ......................................................................................................... 891
47
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
34-3. LCD_B Memory Registers .............................................................................................. 892
34-4. LCD_B Blinking Memory Registers .................................................................................... 893
34-5. LCDBCTL0 Register Description ....................................................................................... 894
34-6. LCDBCTL1 Register Description ....................................................................................... 895
34-7. LCDBBLKCTL Register Description.................................................................................... 896
34-8. LCDBMEMCTL Register Description................................................................................... 897
34-9. LCDBVCTL Register Description ....................................................................................... 898
34-10. LCDBPCTL0 Register Description...................................................................................... 900
34-11. LCDBPCTL1 Register Description...................................................................................... 900
34-12. LCDBPCTL2 Register Description...................................................................................... 901
34-13. LCDBPCTL3 Register Description...................................................................................... 901
34-14. LCDBCPCTL Register Description ..................................................................................... 902
34-15. LCDBIV Register Description ........................................................................................... 903
35-1. Differences Between LCD_B and LCD_C............................................................................. 905
35-2. Bias Voltages and external Pins ........................................................................................ 912
35-3. LCD Voltage and Biasing Characteristics ............................................................................. 913
35-4. LCD_C Control Registers................................................................................................ 923
35-5. LCD_C Memory Registers for Static and 2-Mux to 4-Mux Modes ................................................. 924
35-6. LCD Blinking Memory Registers for Static and 2-Mux to 4-Mux Modes .......................................... 925
35-7. LCD Memory Registers for 5-Mux to 8-Mux .......................................................................... 926
35-8. LCDCCTL0 Register Description ....................................................................................... 928
35-9. LCDCCTL1 Register Description ....................................................................................... 930
35-10. LCDCBLKCTL Register Description.................................................................................... 931
35-11. LCDCMEMCTL Register Description .................................................................................. 932
35-12. LCDCVCTL Register Description....................................................................................... 933
35-13. LCDCPCTL0 Register Description ..................................................................................... 935
35-14. LCDCPCTL1 Register Description ..................................................................................... 935
35-15. LCDCPCTL2 Register Description ..................................................................................... 936
35-16. LCDCPCTL3 Register Description ..................................................................................... 936
35-17. LCDCCPCTL Register Description ..................................................................................... 937
35-18. LCDCIV Register Description ........................................................................................... 937
36-1. Receive Error Conditions ................................................................................................ 947
36-2. BITCLK Modulation Pattern ............................................................................................. 949
36-3. BITCLK16 Modulation Pattern .......................................................................................... 950
36-4. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 0 ................................................. 953
36-5. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 1 ................................................. 955
36-6. USCI_A UART Mode Registers......................................................................................... 958
36-7. UCAxCTL0 Register Description ....................................................................................... 959
36-8. UCAxCTL1 Register Description ....................................................................................... 960
36-9. UCAxBR0 Register Description......................................................................................... 961
36-10. UCAxBR1 Register Description......................................................................................... 961
36-11. UCAxMCTL Register Description....................................................................................... 961
36-12. UCAxSTAT Register Description ....................................................................................... 962
36-13. UCAxRXBUF Register Description ..................................................................................... 963
36-14. UCAxTXBUF Register Description ..................................................................................... 963
36-15. UCAxIRTCTL Register Description..................................................................................... 964
36-16. UCAxIRRCTL Register Description .................................................................................... 964
36-17. UCAxABCTL Register Description ..................................................................................... 965
36-18. UCAxIE Register Description............................................................................................ 966
48 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
36-19. UCAxIFG Register Description.......................................................................................... 966
36-20. UCAxIV Register Description............................................................................................ 967
37-1. UCxSTE Operation ....................................................................................................... 972
37-2. USCI_A SPI Mode Registers............................................................................................ 978
37-3. UCAxCTL0 Register Description ....................................................................................... 979
37-4. UCAxCTL1 Register Description ....................................................................................... 980
37-5. UCAxBR0 Register Description......................................................................................... 981
37-6. UCAxBR1 Register Description......................................................................................... 981
37-7. UCAxMCTL Register Description....................................................................................... 981
37-8. UCAxSTAT Register Description ....................................................................................... 982
37-9. UCAxRXBUF Register Description ..................................................................................... 983
37-10. UCAxTXBUF Register Description ..................................................................................... 983
37-11. UCAxIE Register Description............................................................................................ 984
37-12. UCAxIFG Register Description.......................................................................................... 984
37-13. UCAxIV Register Description............................................................................................ 985
37-14. USCI_B SPI Mode Registers............................................................................................ 986
37-15. UCBxCTL0 Register Description ....................................................................................... 987
37-16. UCBxCTL1 Register Description ....................................................................................... 988
37-17. UCBxBR0 Register Description......................................................................................... 989
37-18. UCBxBR1 Register Description......................................................................................... 989
37-19. UCBxMCTL Register Description....................................................................................... 989
37-20. UCBxSTAT Register Description ....................................................................................... 990
37-21. UCBxRXBUF Register Description ..................................................................................... 991
37-22. UCBxTXBUF Register Description ..................................................................................... 991
37-23. UCBxIE Register Description............................................................................................ 992
37-24. UCBxIFG Register Description.......................................................................................... 992
37-25. UCBxIV Register Description............................................................................................ 993
38-1. I2C State Change Interrupt Flags...................................................................................... 1014
38-2. USCI_B Registers....................................................................................................... 1016
38-3. UCBxCTL0 Register Description ...................................................................................... 1017
38-4. UCBxCTL1 Register Description ...................................................................................... 1018
38-5. UCBxBR0 Register Description ....................................................................................... 1019
38-6. UCBxBR1 Register Description ....................................................................................... 1019
38-7. UCBxSTAT Register Description...................................................................................... 1020
38-8. UCBxRXBUF Register Description ................................................................................... 1021
38-9. UCBxTXBUF Register Description.................................................................................... 1021
38-10. UCBxI2COA Register Description .................................................................................... 1022
38-11. UCBxI2CSA Register Description..................................................................................... 1022
38-12. UCBxIE Register Description .......................................................................................... 1023
38-13. UCBxIFG Register Description ........................................................................................ 1024
38-14. UCBxIV Register Description .......................................................................................... 1025
39-1. Receive Error Conditions............................................................................................... 1034
39-2. Modulation Pattern Examples ......................................................................................... 1036
39-3. BITCLK16 Modulation Pattern......................................................................................... 1037
39-4. UCBRSx Settings for Fractional Portion of N = fBRCLK/Baudrate ................................................... 1038
39-5. Recommended Settings for Typical Crystals and Baudrates...................................................... 1041
39-6. UART State Change Interrupt Flags.................................................................................. 1043
39-7. eUSCI_A UART Registers ............................................................................................. 1045
39-8. UCAxCTLW0 Register Description ................................................................................... 1046
49
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
39-9. UCAxCTLW1 Register Description ................................................................................... 1047
39-10. UCAxBRW Register Description ...................................................................................... 1048
39-11. UCAxMCTLW Register Description................................................................................... 1048
39-12. UCAxSTATW Register Description ................................................................................... 1049
39-13. UCAxRXBUF Register Description ................................................................................... 1050
39-14. UCAxTXBUF Register Description.................................................................................... 1050
39-15. UCAxABCTL Register Description.................................................................................... 1051
39-16. UCAxIRCTL Register Description..................................................................................... 1052
39-17. UCAxIE Register Description .......................................................................................... 1053
39-18. UCAxIFG Register Description ........................................................................................ 1054
39-19. UCAxIV Register Description .......................................................................................... 1055
40-1. UCxSTE Operation...................................................................................................... 1059
40-2. eUSCI_A SPI Registers ................................................................................................ 1065
40-3. UCAxCTLW0 Register Description ................................................................................... 1066
40-4. UCAxBRW Register Description ...................................................................................... 1067
40-5. UCAxSTATW Register Description ................................................................................... 1068
40-6. UCAxRXBUF Register Description ................................................................................... 1069
40-7. UCAxTXBUF Register Description.................................................................................... 1070
40-8. UCAxIE Register Description .......................................................................................... 1071
40-9. UCAxIFG Register Description ........................................................................................ 1072
40-10. UCAxIV Register Description .......................................................................................... 1073
40-11. eUSCI_B SPI Registers ................................................................................................ 1074
40-12. UCBxCTLW0 Register Description ................................................................................... 1075
40-13. UCBxBRW Register Description ...................................................................................... 1076
40-14. UCBxSTATW Register Description ................................................................................... 1076
40-15. UCBxRXBUF Register Description ................................................................................... 1077
40-16. UCBxTXBUF Register Description.................................................................................... 1077
40-17. UCBxIE Register Description .......................................................................................... 1078
40-18. UCBxIFG Register Description ........................................................................................ 1078
40-19. UCBxIV Register Description .......................................................................................... 1079
41-1. Glitch Filter Length Selection Bits..................................................................................... 1096
41-2. I2C State Change Interrupt Flags...................................................................................... 1099
41-3. eUSCI_B Registers ..................................................................................................... 1102
41-4. UCBxCTLW0 Register Description ................................................................................... 1103
41-5. UCBxCTLW1 Register Description ................................................................................... 1105
41-6. UCBxBRW Register Description ...................................................................................... 1107
41-7. UCBxSTATW Register Description ................................................................................... 1107
41-8. UCBxTBCNT Register Description.................................................................................... 1108
41-9. UCBxRXBUF Register Description ................................................................................... 1109
41-10. UCBxTXBUF Register Description.................................................................................... 1109
41-11. UCBxI2COA0 Register Description ................................................................................... 1110
41-12. UCBxI2COA1 Register Description ................................................................................... 1111
41-13. UCBxI2COA2 Register Description ................................................................................... 1111
41-14. UCBxI2COA3 Register Description ................................................................................... 1112
41-15. UCBxADDRX Register Description ................................................................................... 1112
41-16. UCBxADDMASK Register Description ............................................................................... 1113
41-17. UCBxI2CSA Register Description..................................................................................... 1113
41-18. UCBxIE Register Description .......................................................................................... 1114
41-19. UCBxIFG Register Description ........................................................................................ 1116
50 List of Tables SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
41-20. UCBxIV Register Description .......................................................................................... 1118
42-1. USB-PLL Pre-Scale Divider............................................................................................ 1127
42-2. Register Settings to Generate 48 MHz Using Common Clock Input Frequencies ............................. 1127
42-3. USB Buffer Memory Map............................................................................................... 1130
42-4. USB Interrupt Vector Generation...................................................................................... 1132
42-5. USB Configuration Registers .......................................................................................... 1140
42-6. USBKEYPID Register Description .................................................................................... 1141
42-7. USBCNF Register Description......................................................................................... 1141
42-8. USBPHYCTL Register Description ................................................................................... 1142
42-9. USBPWRCTL Register Description................................................................................... 1143
42-10. USBPLLCTL Register Description .................................................................................... 1145
42-11. USBPLLDIVB Register Description ................................................................................... 1146
42-12. USBPLLIR Register Description....................................................................................... 1147
42-13. USB Control Registers.................................................................................................. 1148
42-14. USBIEPCNF_0 Register Description ................................................................................. 1149
42-15. USBIEPBCNT_0 Register Description ............................................................................... 1150
42-16. USBOEPCNFG_0 Register Description.............................................................................. 1151
42-17. USBOEPBCNT_0 Register Description .............................................................................. 1152
42-18. USBIEPIE Register Description ....................................................................................... 1153
42-19. USBOEPIE Register Description...................................................................................... 1155
42-20. USBIEPIFG Register Description ..................................................................................... 1157
42-21. USBOEPIFG Register Description.................................................................................... 1158
42-22. USBVECINT Register Description .................................................................................... 1159
42-23. USBMAINT Register Description...................................................................................... 1160
42-24. USBTSREG Register Description..................................................................................... 1161
42-25. USBFN Register Description .......................................................................................... 1161
42-26. USBCTL Register Description......................................................................................... 1162
42-27. USBIE Register Description............................................................................................ 1163
42-28. USBIFG Register Description.......................................................................................... 1164
42-29. USBFUNADR Register Description................................................................................... 1164
42-30. USB Buffer Memory..................................................................................................... 1165
42-31. USB Buffer Descriptor Registers...................................................................................... 1165
42-32. USBOEPCNF_n Register Description................................................................................ 1168
42-33. USBOEPBBAX_n Register Description .............................................................................. 1169
42-34. USBOEPBCTX_n Register Description .............................................................................. 1170
42-35. USBOEPBBAY_n Register Description .............................................................................. 1170
42-36. USBOEPBCTY_n Register Description .............................................................................. 1171
42-37. USBOEPSIZXY_n Register Description.............................................................................. 1171
42-38. USBIEPCNF_n Register Description ................................................................................. 1172
42-39. USBIEPBBAX_n Register Description................................................................................ 1173
42-40. USBIEPBCTX_n Register Description................................................................................ 1174
42-41. USBIEPBBAY_n Register Description................................................................................ 1174
42-42. USBIEPBCTY_n Register Description................................................................................ 1175
42-43. USBIEPSIZXY_n Register Description............................................................................... 1175
43-1. LDO-PWR Registers.................................................................................................... 1181
43-2. LDOKEYPID Register Description .................................................................................... 1182
43-3. PUCTL Register Description........................................................................................... 1182
43-4. LDOPWRCTL Register Description................................................................................... 1183
44-1. EEM Configurations..................................................................................................... 1188
51
SLAU208O–June 2008–Revised May 2015 List of Tables
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Preface
SLAU208O–June 2008–Revised May 2015
Read This First
About This Manual
This manual describes the modules and peripherals of the MSP430x5xx and MSP430x6xx family of
devices. Each description presents the module or peripheral in a general sense. Not all features and
functions of all modules or peripherals may be present on all devices. In addition, modules or peripherals
may differ in their exact implementation between device families, or may not be fully implemented on an
individual device or device family.
Pin functions, internal signal connections, and operational parameters differ from device to device. The
user should consult the device-specific data sheet for these details.
Related Documentation From Texas Instruments
For related documentation see the web site http://www.ti.com/msp430.
FCC Warning
This equipment is intended for use in a laboratory test environment only. It generates, uses, and can
radiate radio frequency energy and has not been tested for compliance with the limits of computing
devices pursuant to subpart J of part 15 of FCC rules, which are designed to provide reasonable
protection against radio frequency interference. Operation of this equipment in other environments may
cause interference with radio communications, in which case the user at his own expense will be required
to take whatever measures may be required to correct this interference.
Notational Conventions
Program examples, are shown in a special typeface.
Glossary
ACLK Auxiliary Clock; see Section 5.1
ADC Analog-to-Digital Converter
BOR Brown-Out Reset; see Section 1.2
BSL Bootstrap Loader; see www.ti.com/msp430 for application reports
CPU Central Processing Unit; see Section 6.1
DAC Digital-to-Analog Converter
DCO Digitally Controlled Oscillator; see Section 5.2.6
dst Destination; see Section 6.5
FLL Frequency Locked Loop; see Section 5.2.7
GIE Modes General Interrupt Enable; see Section 1.3.3
INT(N/2) Integer portion of N/2
I/O Input/Output; see Chapter 12
ISR Interrupt Service Routine
LSB Least-Significant Bit
LSD Least-Significant Digit
LPM Low-Power Mode; see Section 1.4; also named PM for Power Mode
MAB Memory Address Bus
52 Read This First SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
MCLK Master Clock; see Section 5.1
MDB Memory Data Bus
MSB Most-Significant Bit
MSD Most-Significant Digit
NMI (Non)-Maskable Interrupt; see Section 1.3.1; also split to UNMI and SNMI
PC Program Counter; see Section 6.3.1
PM Power Mode; see Section 1.4
POR Power-On Reset; see Section 1.2
PUC Power-Up Clear; see Section 1.2
RAM Random Access Memory
SCG System Clock Generator; see Section 6.3.3
SFR Special Function Register; Section 1.14
SMCLK Sub-System Master Clock; see Section 5.1
SNMI System NMI; see Section 1.3.1
SP Stack Pointer; see Section 6.3.2
SR Status Register; see Section 6.3.3
src Source; see Section 6.5
TOS Top of stack; see Section 6.3.2
UNMI User NMI; see Section 1.3.1
WDT Watchdog Timer; see Chapter 16
z16 16-bit address space
Register Bit Conventions
Each register is shown with a key indicating the accessibility of the each individual bit, and the initial
condition:
Register Bit Accessibility and Initial Condition
Key Bit Accessibility
rw Read/write
r Read only
r0 Read as 0
r1 Read as 1
w Write only
w0 Write as 0
w1 Write as 1
(w) No register bit implemented; writing a 1 results in a pulse. The register bit is always read as 0.
h0 Cleared by hardware
h1 Set by hardware
-0,-1 Condition after PUC
-(0),-(1) Condition after POR
-[0],-[1] Condition after BOR
-{0},-{1} Condition after Brownout
53
SLAU208O–June 2008–Revised May 2015 Read This First
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 1
SLAU208O–June 2008–Revised May 2015
System Resets, Interrupts, and Operating Modes, System
Control Module (SYS)
The system control module (SYS) is available on all devices. The following list shows the basic feature set
of SYS.
• Brownout reset (BOR) and power on reset (POR) handling
• Power up clear (PUC) handling
• (Non)maskable interrupt (SNMI and UNMI) event source selection and management
• Address decoding
• A user data-exchange mechanism using the JTAG mailbox (JMB)
• Bootstrap loader (BSL) entry mechanism
• Configuration management (device descriptors)
• Provides interrupt vector generators for reset and NMIs
Topic ........................................................................................................................... Page
1.1 System Control Module (SYS) Introduction .......................................................... 55
1.2 System Reset and Initialization ............................................................................ 55
1.3 Interrupts .......................................................................................................... 57
1.4 Operating Modes................................................................................................ 63
1.5 Principles for Low-Power Applications ................................................................. 68
1.6 Connection of Unused Pins................................................................................. 69
1.7 Reset Pin (RST/NMI) Configuration....................................................................... 69
1.8 Configuring JTAG Pins ....................................................................................... 70
1.9 Boot Code ......................................................................................................... 70
1.10 Bootstrap Loader (BSL) ...................................................................................... 70
1.11 Memory Map – Uses and Abilities ........................................................................ 71
1.12 JTAG Mailbox (JMB) System .............................................................................. 72
1.13 Device Descriptor Table...................................................................................... 73
1.14 SFR Registers.................................................................................................... 83
1.15 SYS Registers.................................................................................................... 88
54 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
System Control Module (SYS) Introduction
1.1 System Control Module (SYS) Introduction
SYS is responsible for the interaction between various modules throughout the system. The functions that
SYS provides for are not inherent to the modules themselves. Address decoding, bus arbitration, interrupt
event consolidation, and reset generation are some examples of the many functions that SYS provides.
1.2 System Reset and Initialization
The system reset circuitry is shown in Figure 1-1 and sources a brownout reset (BOR), a power on reset
(POR), and a power up clear (PUC). Different events trigger these reset signals and different initial
conditions exist depending on which signal was generated.
A BOR is a device reset. A BOR is only generated by the following events:
• Powering up the device
• A low signal on RST/NMI pin when configured in the reset mode
• A wake-up event from LPMx.5 (LPM3.5 or LPM4.5) modes
• A software BOR event
A POR is always generated when a BOR is generated, but a BOR is not generated by a POR. The
following events trigger a POR:
• A BOR signal
• A SVSHand/or SVSMlow condition when enabled (see the PMM chapter for details)
• A SVSLand/or SVSLlow condition when enabled (see the PMM chapter for details)
• A software POR event
A PUC is always generated when a POR is generated, but a POR is not generated by a PUC. The
following events trigger a PUC:
• A POR signal
• Watchdog timer expiration when watchdog mode only (see the WDT_A chapter for details)
• Watchdog timer password violation (see the WDT_A chapter for details)
• A Flash memory password violation (see the Flash Controller chapter for details)
• Power Management Module password violation (see the PMM chapter for details)
• Fetch from peripheral area
NOTE: The number and type of resets available may vary from device to device. See the device-
specific data sheet for all reset sources available.
55
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
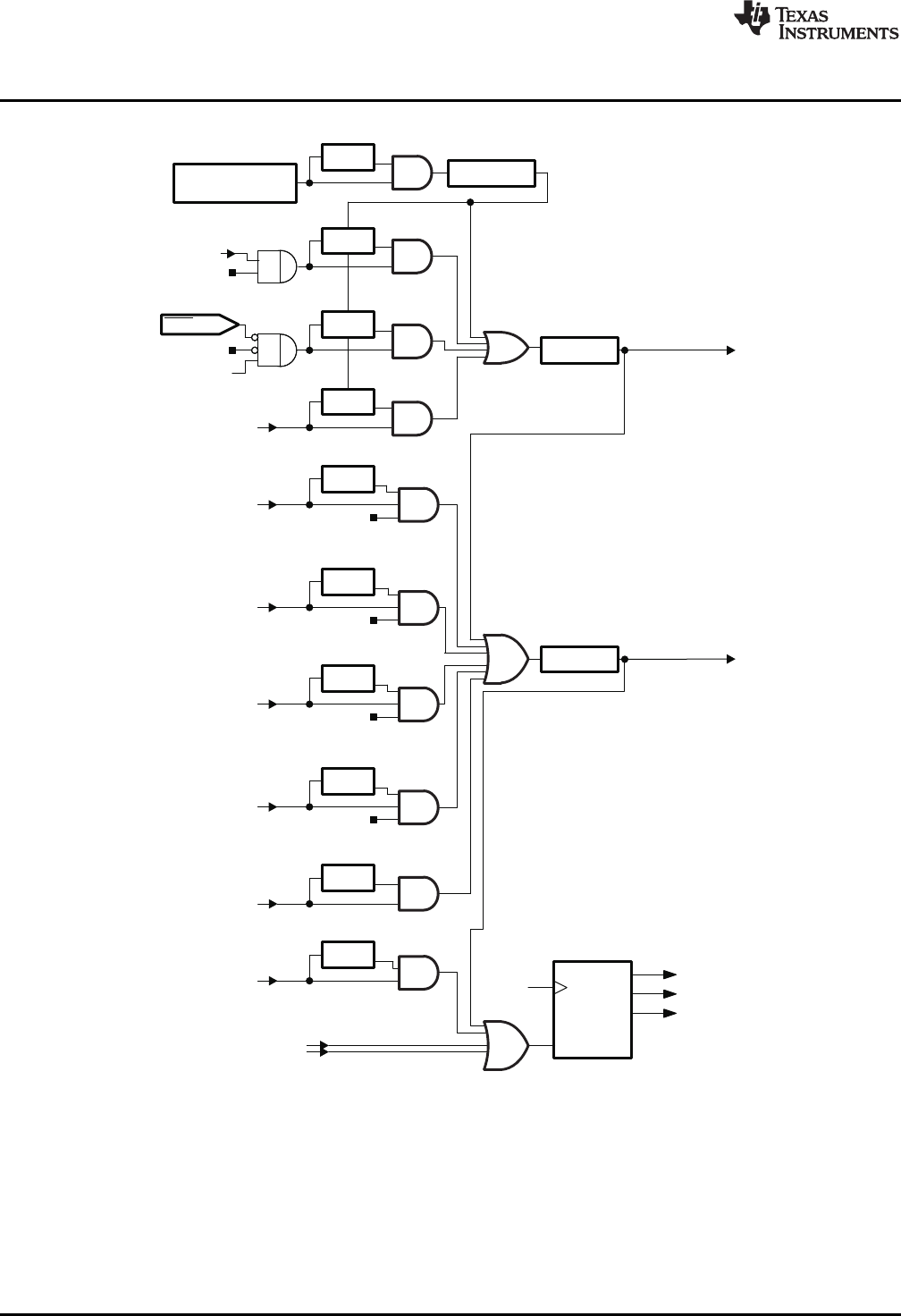
BORshadow
brownoutcircuit
PMMRSTIFG
RST/NMI
SYSNMI
s
s
PMMBORIFG
PMMSWBORevent
s
Delay BOR
SVSHIFG
PMMPORIFG
PMMSWPORevent
s
fromSVSH
s
SVSHPE
SVMHVLRIFG
fromSVMH
s
SVMHVLRPE
SVSLIFG
fromSVSL
s
SVSLPE
SVMHLVLRIFG
fromSVML
s
SVMLVLRPE
Delay POR
WDTIFG
WatchdogTimer
s
EN
fromport
wakeuplogic
s
PUCLogic
Module
PUCs
….
MCLK
notRST
Delay
clr
clr
clr
System Reset and Initialization
www.ti.com
Figure 1-1. BOR/POR/PUC Reset Circuit
56 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
System Reset and Initialization
1.2.1 Device Initial Conditions After System Reset
After a BOR, the initial device conditions are:
• The RST/NMI pin is configured in the reset mode. See Section 1.7 on configuring the RST/NMI pin.
• I/O pins are switched to input mode as described in the Digital I/O chapter.
• Other peripheral modules and registers are initialized as described in their respective chapters in this
manual.
• Status register (SR) is reset.
• The watchdog timer powers up active in watchdog mode.
• Program counter (PC) is loaded with the boot code address and boot code execution begins at that
address. See Section 1.9 for more information regarding the boot code. Upon completion of the boot
code, the PC is loaded with the address contained at the SYSRSTIV reset location (0FFFEh).
After a system reset, user software must initialize the device for the application requirements. The
following must occur:
• Initialize the stack pointer (SP), typically to the top of RAM.
• Initialize the watchdog to the requirements of the application.
• Configure peripheral modules to the requirements of the application.
NOTE: A device that is unprogrammed or blank is defined as having its reset vector value, residing
at memory address FFFEh, equal to FFFFh. Upon system reset of a blank device, the device
enters operating mode LPM4 automatically. See Section 1.4 for information on operating
modes and Section 1.3.6 for details on interrupt vectors.
NOTE: Some SRAM locations can be modified by the boot code (refer to Section 1.9) after a BOR
event. These SRAM locations, when available, are at SRAM locations 01CFAh through
01CFFh and 023FAh through 023FFh.
1.3 Interrupts
The interrupt priorities are fixed and defined by the arrangement of the modules in the connection chain as
shown in Figure 1-2. Interrupt priorities determine what interrupt is taken when more than one interrupt is
pending simultaneously.
There are three types of interrupts:
• System reset
• (Non)maskable
• Maskable
NOTE: The types of interrupt sources available and their respective priorities can change from
device to device. See the device-specific data sheet for all interrupt sources and their
priorities.
57
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
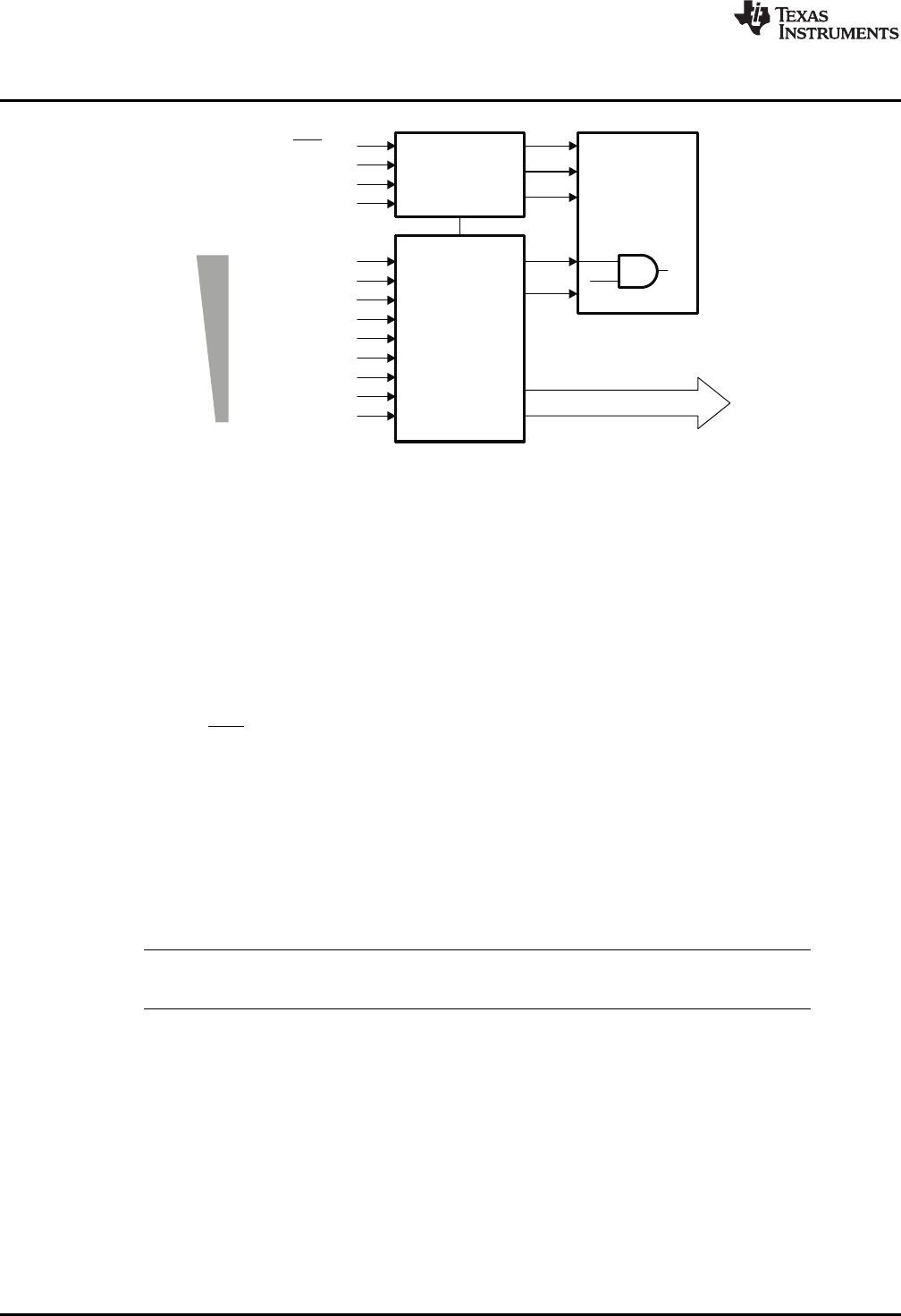
BOR/POR/PUC
circuit
Interrupt
daisychain
andvectors
CPU
PUC
INT
NMI
RST/NMI
Passwordviolations
. . .
MAB - 6LSBs
Module_A_int
Module_B_int
Module_C_int
Module_D_int
highpriority
lowpriority
GIE
SystemNMI
UserNMI
. .
. . .
POR
BOR
Interrupts
www.ti.com
Figure 1-2. Interrupt Priority
1.3.1 (Non)Maskable Interrupts (NMIs)
In general, NMIs are not masked by the general interrupt enable (GIE) bit. The family supports two levels
of NMIs — system NMI (SNMI) and user NMI (UNMI). The NMI sources are enabled by individual interrupt
enable bits. When an NMI interrupt is accepted, other NMIs of that level are automatically disabled to
prevent nesting of consecutive NMIs of the same level. Program execution begins at the address stored in
the NMI vector as shown in Table 1-1. To allow software backward compatibility to users of earlier
MSP430 families, the software may, but does not need to, reenable NMI sources. The block diagram for
NMI sources is shown in Figure 1-3.
A UNMI interrupt can be generated by following sources:
• An edge on the RST/NMI pin when configured in NMI mode
• An oscillator fault occurs
• An access violation to the flash memory
A SNMI interrupt can be generated by following sources:
• Power Management Module (PMM) SVML/SVMHsupply voltage fault
• PMM high/low side delay expiration
• Vacant memory access
• JTAG mailbox (JMB) event
NOTE: The number and types of NMI sources may vary from device to device. See the device-
specific data sheet for all NMI sources available.
58 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
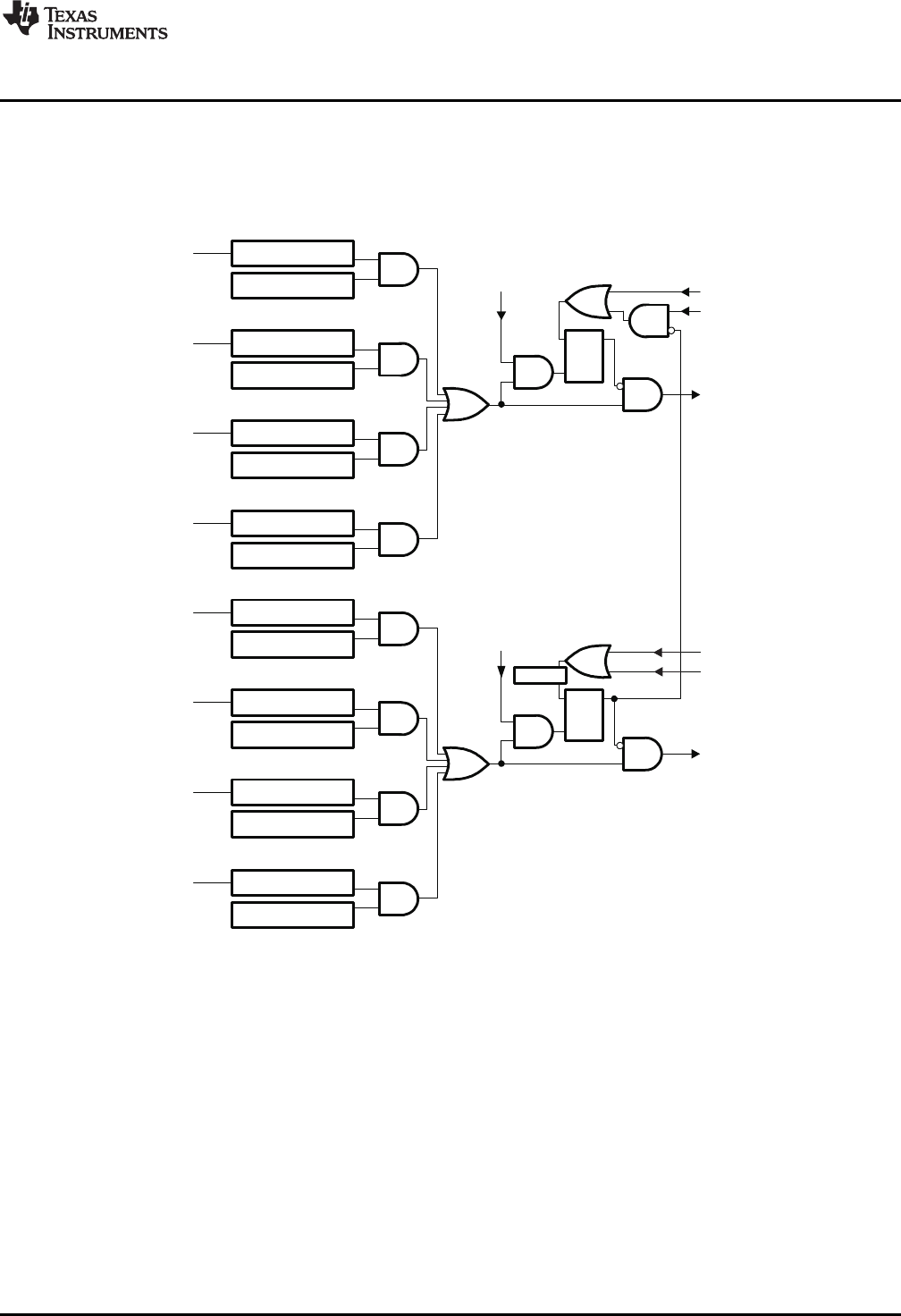
ACCV ACCVIFG
ACCVIE
NMI NMIIFG
NMIIE
...IFG
...IE
OSCFault OFIFG
OFIE
UserNMI
S
R
…. .
UserNMI
_IRQA
SVML SVMLIFG
SVMLIE
SVMH SVMHIFG
SVMHIE
...IFG
...IE
JMBevent SYSJMBIFG
SYSJMBIE
S
R
PUC
RETI
…. .
SystemNMI
_IRQA
SystemNMI
PUC
RETI
Del.FF
www.ti.com
Interrupts
1.3.2 SNMI Timing
Consecutive SNMIs that occur at a higher rate than they can be handled (interrupt storm) allow the main
program to execute one instruction after the SNMI handler is finished with a RETI instruction, before the
SNMI handler is executed again. Consecutive SNMIs are not interrupted by UNMIs in this case. This
avoids a blocking behavior on high SNMI rates.
Figure 1-3. NMIs With Reentrance Protection
1.3.3 Maskable Interrupts
Maskable interrupts are caused by peripherals with interrupt capability. Each maskable interrupt source
can be disabled individually by an interrupt enable bit, or all maskable interrupts can be disabled by the
general interrupt enable (GIE) bit in the status register (SR).
Each individual peripheral interrupt is discussed in its respective module chapter in this manual.
1.3.4 Interrupt Processing
When an interrupt is requested from a peripheral and the peripheral interrupt enable bit and GIE bit are
set, the interrupt service routine is requested. Only the individual enable bit must be set for (non)-
maskable interrupts (NMI) to be requested.
59
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Before
Interrupt
After
Interrupt
SP TOS
SP TOS
Item1
Item2
Item1
Item2
PC
SR
Interrupts
www.ti.com
1.3.4.1 Interrupt Acceptance
The interrupt latency is six cycles, starting with the acceptance of an interrupt request, and lasting until the
start of execution of the first instruction of the interrupt service routine, as shown in Figure 1-4. The
interrupt logic executes the following:
1. Any currently executing instruction is completed.
2. The PC, which points to the next instruction, is pushed onto the stack.
3. The SR is pushed onto the stack.
4. The interrupt with the highest priority is selected if multiple interrupts occurred during the last
instruction and are pending for service.
5. The interrupt request flag resets automatically on single-source flags. Multiple source flags remain set
for servicing by software.
6. All bits of SR are cleared except SCG0, thereby terminating any low-power mode. Because the GIE bit
is cleared, further interrupts are disabled.
7. The content of the interrupt vector is loaded into the PC; the program continues with the interrupt
service routine at that address.
Figure 1-4. Interrupt Processing
NOTE: Enable and Disable Interrupt
Due to the pipelined CPU architecture, setting the general interrupt enable (GIE) requires
special care.
• The instruction immediately after the enable interrupts instruction (EINT) is
always executed, even if an interrupt service request is pending.
• Include at least one instruction between the clear of an interrupt enable or
interrupt flag and the EINT instruction. For example: Insert a NOP instruction in
front of the EINT instruction.
• Include at least one instruction between DINT and the start of an code
sequence that requires protection from interrupts. For example: Insert a NOP
instruction after the DINT.
• Never clear the general interrupt enable (GIE) immediately after setting it. Insert
at least one instruction in between such sequence.
The rules above apply to all instructions that set or clear the general interrupt enable bit. Not
following these rules might result in unexpected CPU execution.
60 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Item1
Item2
SP TOS
Item1
Item2
SP TOS
PC
SR
Before After
PC
SR
Return From Interrupt
www.ti.com
Interrupts
1.3.4.2 Return From Interrupt
The interrupt handling routine terminates with the instruction:
RETI //return from an interrupt service routine
The return from the interrupt takes five cycles to execute the following actions and is shown in Figure 1-5.
1. The SR with all previous settings pops from the stack. All previous settings of GIE, CPUOFF, and
others are now in effect, regardless of the settings used during the interrupt service routine.
2. The PC pops from the stack and begins execution at the point where it was interrupted.
Figure 1-5. Return From Interrupt
1.3.5 Interrupt Nesting
Interrupt nesting is enabled if the GIE bit is set inside an interrupt service routine. When interrupt nesting
is enabled, any interrupt occurring during an interrupt service routine interrupts the routine, regardless of
the interrupt priorities.
1.3.6 Interrupt Vectors
The interrupt vectors are located in the address range 0FFFFh to 0FF80h, for a maximum of 64 interrupt
sources. A vector is programmed by the user and points to the start location of the corresponding interrupt
service routine. Table 1-1 is an example of the interrupt vectors available. See the device-specific data
sheet for the complete interrupt vector list.
Table 1-1. Interrupt Sources, Flags, and Vectors
Interrupt Source Interrupt Flag System Interrupt Word Address Priority
Reset: ... ... ... ...
power up, external reset WDTIFG Reset 0FFFEh Highest
watchdog, KEYV
flash password
System NMI: (Non)maskable 0FFFCh …
PMM
User NMI: ... ... ... ...
NMI, oscillator fault, NMIIFG (Non)maskable 0FFFAh …
flash memory access violation OFIFG (Non)maskable
ACCVIFG (Non)maskable
Device specific 0FFF8h …
... ... ...
Watchdog timer WDTIFG Maskable ... ...
... ... ...
Device specific … …
Reserved Maskable … Lowest
61
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Interrupts
www.ti.com
Some interrupt enable bits, interrupt flags, and control bits for the RST/NMI pin are located in the special
function registers (SFRs). The SFRs are located in the peripheral address range and are byte and word
accessible. See the device-specific data sheet for the SFR configuration.
1.3.6.1 Alternate Interrupt Vectors
It is possible to use the RAM as an alternate location for the interrupt vector locations. Setting the
SYSRIVECT bit in SYSCTL causes the interrupt vectors to be remapped to the top of RAM. Once set, any
interrupt vectors to the alternate locations now residing in RAM. Because SYSRIVECT is automatically
cleared on a BOR, it is critical that the reset vector at location 0FFFEh still be available and handled
properly in firmware.
1.3.7 SYS Interrupt Vector Generators
SYS collects all system NMI (SNMI) sources, user NMI (UNMI) sources, and BOR/POR/PUC (reset)
sources of all the other modules. They are combined into three interrupt vectors. The interrupt vector
registers SYSRSTIV, SYSSNIV, SYSUNIV are used to determine which flags requested an interrupt or a
reset. The interrupt with the highest priority of a group, when enabled, generates a number in the
corresponding SYSRSTIV, SYSSNIV, SYSUNIV register. This number can be directly added to the
program counter, causing a branch to the appropriate portion of the interrupt service routine. Disabled
interrupts do not affect the SYSRSTIV, SYSSNIV, SYSUNIV values. Reading SYSRSTIV, SYSSNIV,
SYSUNIV register automatically resets the highest pending interrupt flag of that register. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt. Writing to
the SYSRSTIV, SYSSNIV, SYSUNIV register automatically resets all pending interrupt flags of the group.
1.3.7.1 SYSSNIV Software Example
The following software example shows the recommended use of SYSSNIV. The SYSSNIV value is added
to the PC to automatically jump to the appropriate routine. For SYSRSTIV and SYSUNIV, a similar
software approach can be used. The following is an example for a generic device. Vectors can change in
priority for a given device. The device specific data sheet should be referenced for the vector locations. All
vectors should be coded symbolically to allow for easy portability of code.
SNI_ISR: ADD &SYSSNIV,PC ; Add offset to jump table
RETI ; Vector 0: No interrupt
JMP SVML_ISR ; Vector 2: SVMLIFG
JMP SVMH_ISR ; Vector 4: SVMHIFG
JMP DLYL_ISR ; Vector 6: SVSMLDLYIFG
JMP DLYH_ISR ; Vector 8: SVSMHDLYIFG
JMP VMA_ISR ; Vector 10: VMAIFG
JMP JMBI_ISR ; Vector 12: JMBINIFG
JMBO_ISR: ; Vector 14: JMBOUTIFG
... ; Task_E starts here
RETI ; Return
SVML_ISR: ; Vector 2
... ; Task_2 starts here
RETI ; Return
SVMH_ISR: ; Vector 4
... ; Task_4 starts here
RETI ; Return
DLYL_ISR: ; Vector 6
... ; Task_6 starts here
RETI ; Return
DLYH_ISR: ; Vector 8
... ; Task_8 starts here
RETI ; Return
VMA_ISR: ; Vector A
... ; Task_A starts here
RETI ; Return
JMBI_ISR: ; Vector C
... ; Task_C starts here
RETI ; Return
62 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Operating Modes
1.3.7.2 SYSBERRIV Bus Error Interrupt Vector Generator
Some devices, for example those that contain the USB module, include an additional system interrupt
vector generator, SYSBERRIV. In general, any type of system related bus error or timeout error is
associated with a user NMI event. Upon this event, the SYSUNIV contains an offset value corresponding
to a bus error event (BUSIFG). This offset can be added to the PC to automatically jump to the
appropriate NMI routine. Similarly, SYSBERRIV also contains an offset value corresponding to which
specific event caused the bus error event. The offset value in SYSBERRIV can be added inside the NMI
routine to automatically jump to the appropriate routine. In this way, the SYSBERRIV can be thought of as
an extension to the user NMI vectors.
1.4 Operating Modes
The MSP430 family is designed for ultra-low-power applications and uses different operating modes
shown in Figure 1-6.
The operating modes take into account three different needs:
• Ultra-low power
• Speed and data throughput
• Minimization of individual peripheral current consumption
The low-power modes LPM0 through LPM4 are configured with the CPUOFF, OSCOFF, SCG0, and
SCG1 bits in the SR. The advantage of including the CPUOFF, OSCOFF, SCG0, and SCG1 mode-control
bits in the SR is that the present operating mode is saved onto the stack during an interrupt service
routine. Program flow returns to the previous operating mode if the saved SR value is not altered during
the interrupt service routine. Program flow can be returned to a different operating mode by manipulating
the saved SR value on the stack inside of the interrupt service routine. When setting any of the mode-
control bits, the selected operating mode takes effect immediately. Peripherals operating with any disabled
clock are disabled until the clock becomes active. Peripherals may also be disabled with their individual
control register settings. All I/O port pins and RAM/registers are unchanged. Wakeup from LPM0 through
LPM4 is possible through all enabled interrupts.
When LPMx.5 (LPM3.5 or LPM4.5) is entered, the voltage regulator of the Power Management Module
(PMM) is disabled. All RAM and register contents are lost. Although the I/O register contents are lost, the
I/O pin states are locked upon LPMx.5 entry. See the Digital I/O chapter for further details. Wakeup from
LPM4.5 is possible from a power sequence, a RST event, or from specific I/O. Wakeup from LPM3.5 is
possible from a power sequence, a RST event, RTC event, or from specific I/O.
NOTE: LPM3.5 and LPM4.5 low power modes are not available on all devices. See the device
specific data sheet to see which LPMx.5 power modes are available.
NOTE: The TEST/SBWTCK pin is used for interfacing to the development tools through Spy-Bi-Wire
and JTAG. When the TEST/SBWTCK pin is high, wakeup times from LPM2, LPM3, and
LPM4 may be different compared to when TEST/SBWTCK is low. Pay careful attention to
the real-time behavior when exiting from LPM2, LPM3, and LPM4 with the device connected
to a development tool (for example, MSP-FET430UIF). See the PMM chapter for details.
63
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
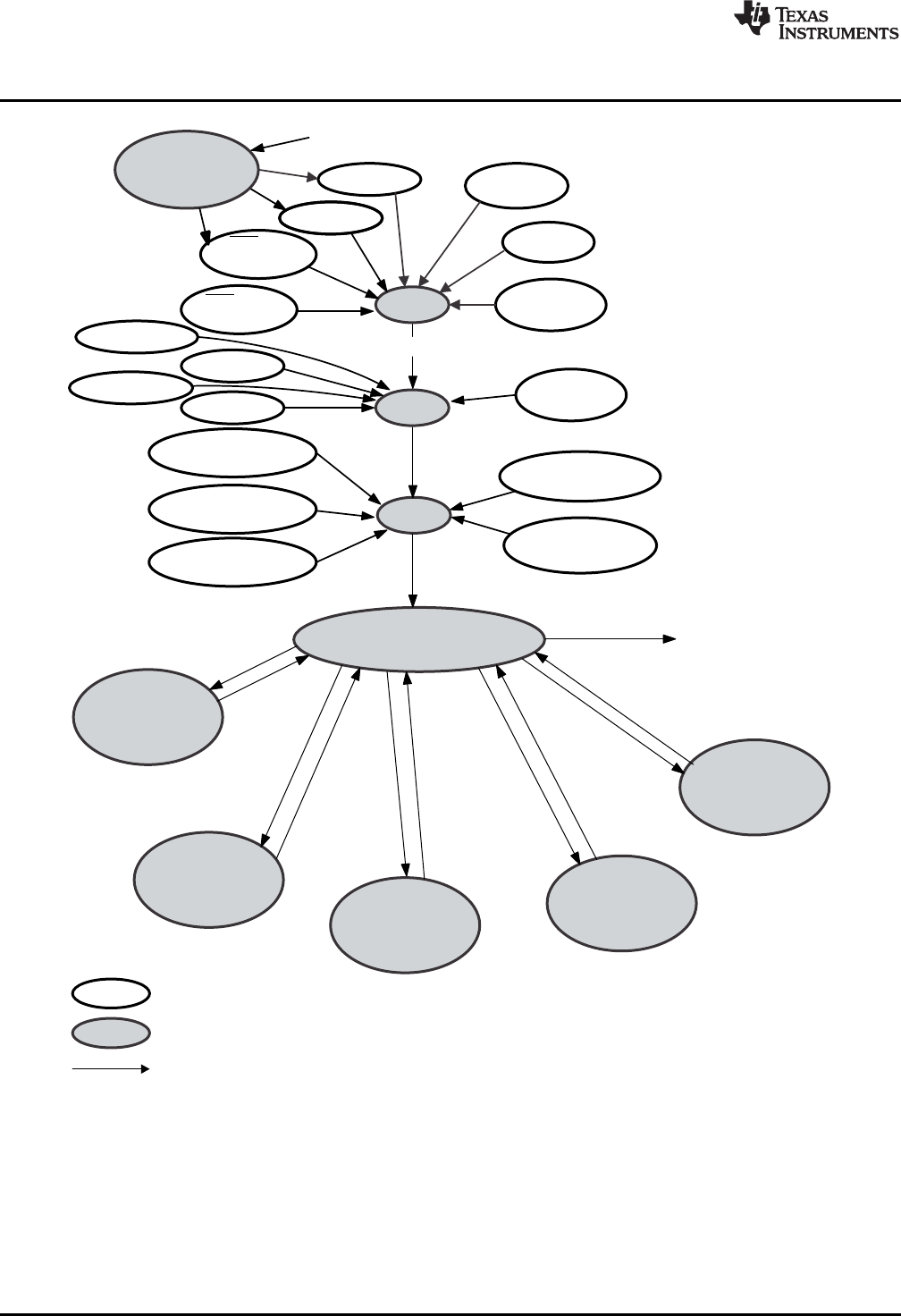
BOR
POR
PUC
Security
violation
PMMSWBOR
event
WDT Active
Time expired, Overflow
WDT Active
Password violation
Flash
Password violation
RST/NMI
(Reset wakeup)
Port wakeup
Peripheral area fetch
SVSH fault
SVSL fault
Load calibration data
Active Mode: CPU is Active
Various Modules are active
LPM0:
CPU/MCLK = off
FLL = on
ACLK = on
V = on
CORE
LPM1:
CPU/MCLK = off
FLL = off
ACLK = on
= onVCORE
LPM2:
CPU/MCLK = off
FLL = off
ACLK = on
= onVCORE
LPM3:
CPU/MCLK = off
FLL = off
ACLK = on
= onVCORE
LPM4:
CPU/MCLK = off
FLL = off
ACLK = off
= onVCORE
LPMx.5:
= off
(all modules off
optional RTC)
VCORE
CPUOFF=1
OSCOFF=0
SCG0=0
SCG1=0
CPUOFF=1
OSCOFF=0
SCG0=1
SCG1=0 CPUOFF=1
OSCOFF=0
SCG0=0
SCG1=1
CPUOFF=1
OSCOFF=0
SCG0=1
SCG1=1
CPUOFF=1
OSCOFF=1
SCG0=1
SCG1=1
PMMREGOFF = 1
PMM
Password violation
†
†
†
†
†
to LPMx.5
SVMH OVP-fault
SVML OVP-fault
From active mode
Events
Operating modes/Reset phases
Arbitrary transitions
† Any enabled interrupt and NMI performs this transition
‡ An enabled reset always restarts the device
RST/NMI
(Reset event)
‡
Brownout
fault
RTC wakeup
PMMSWPOR
event
Operating Modes
www.ti.com
Figure 1-6. Operation Modes
64 System Resets, Interrupts, and Operating Modes, System Control Module (SYS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Operating Modes
Table 1-2. Operation Modes
SCG1(1) SCG0 OSCOFF(1) CPUOFF(1) Mode CPU and Clocks Status(2)
CPU, MCLK are active.
ACLK is active. SMCLK optionally active (SMCLKOFF = 0).
DCO is enabled if sources ACLK, MCLK, or SMCLK (SMCLKOFF = 0).
0 0 0 0 Active DCO bias is enabled if DCO is enabled or DCO sources MCLK or SMCLK
(SMCLKOFF = 0).
FLL is enabled if DCO is enabled.
CPU, MCLK are disabled.
ACLK is active. SMCLK optionally active (SMCLKOFF = 0).
DCO is enabled if sources ACLK or SMCLK (SMCLKOFF = 0).
0 0 0 1 LPM0 DCO bias is enabled if DCO is enabled or DCO sources MCLK or SMCLK
(SMCLKOFF = 0).
FLL is enabled if DCO is enabled.
CPU, MCLK are disabled.
ACLK is active. SMCLK optionally active (SMCLKOFF = 0).
DCO is enabled if sources ACLK or SMCLK (SMCLKOFF = 0).
0 1 0 1 LPM1 DCO bias is enabled if DCO is enabled or DCO sources MCLK or SMCLK
(SMCLKOFF = 0).
FLL is disabled.
CPU, MCLK are disabled.
ACLK is active. SMCLK is disabled.
1 0 0 1 LPM2 DCO is enabled if sources ACLK.
FLL is disabled.
CPU, MCLK are disabled.
ACLK is active. SMCLK is disabled.
1 1 0 1 LPM3 DCO is enabled if sources ACLK.
FLL is disabled.
1 1 1 1 LPM4 CPU and all clocks are disabled.
When PMMREGOFF = 1, regulator is disabled. No memory retention. In this mode,
1 1 1 1 LPM3.5(3) RTC operation is possible when configured properly. See the RTC module for further
details.
When PMMREGOFF = 1, regulator is disabled. No memory retention. In this mode, all
1 1 1 1 LPM4.5(3) clock sources are disabled; that is, no RTC operation is possible.
(1) This bit is automatically reset when exiting low power modes. Refer to Section 1.4.1 for details.
(2) The low-power modes and, hence, the system clocks can be affected by the clock request system. See the UCS chapter for details.
(3) LPM3.5 and LPM4.5 modes are not available on all devices. See the device-specific data sheet for availability.
65
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Operating Modes
www.ti.com
1.4.1 Entering and Exiting Low-Power Modes LPM0 Through LPM4
An enabled interrupt event wakes the device from low-power operating modes LPM0 through LPM4. The
program flow for exiting LPM0 through LPM4 is:
• Enter interrupt service routine
– The PC and SR are stored on the stack.
– The CPUOFF, SCG1, and OSCOFF bits are automatically reset.
• Options for returning from the interrupt service routine
– The original SR is popped from the stack, restoring the previous operating mode.
– The SR bits stored on the stack can be modified within the interrupt service routine returning to a
different operating mode when the RETI instruction is executed.
; Enter LPM0 Example
BIS #GIE+CPUOFF,SR ; Enter LPM0
; ... ; Program stops here
;
; Exit LPM0 Interrupt Service Routine
BIC #CPUOFF,0(SP) ; Exit LPM0 on RETI
RETI
; Enter LPM3 Example
BIS #GIE+CPUOFF+SCG1+SCG0,SR ; Enter LPM3
; ... ; Program stops here
;
; Exit LPM3 Interrupt Service Routine
BIC #CPUOFF+SCG1+SCG0,0(SP) ; Exit LPM3 on RETI
RETI
; Enter LPM4 Example
BIS #GIE+CPUOFF+OSCOFF+SCG1+SCG0,SR ; Enter LPM4
; ... ; Program stops here
;
; Exit LPM4 Interrupt Service Routine
BIC #CPUOFF+OSCOFF+SCG1+SCG0,0(SP) ; Exit LPM4 on RETI
RETI
1.4.2 Entering and Exiting Low-Power Modes LPMx.5
LPMx.5 entry and exit is handled differently than the other low power modes. LPMx.5, when used
properly, gives the lowest power consumption available on a device. To achieve this, entry to LPMx.5
disables the LDO of the PMM module, removing the supply voltage from the core of the device. Since the
supply voltage is removed from the core, all register contents, as well as, SRAM contents are lost. Exit
from LPMx.5 causes a BOR event, which forces a complete reset of the system. Therefore, it is the
application's responsibility to properly reconfigure the device upon exit from LPMx.5.
The wakeup time from LPMx.5 is significantly longer than the wakeup time from the other power modes
(see the device specific data sheet). This is primarily due to the facts that after exit from LPMx.5, time is
required for the core voltage supply to be regenerated, as well as, boot code execution to complete before
the application code can begin. Therefore, the use of LPMx.5 is restricted to very low duty cycle events.
There are two LPMx.5 power modes, LPM3.5 and LPM4.5. Not all of these are available on all devices.
See the device specific data sheet to see which LPMx.5 power modes are available. LPM4.5 allows for
the lowest power consumption available. No clock sources are active during LPM4.5. LPM3.5 is similar to
LPM4.5, but has the additional capability of having a RTC mode available. In addition to the wake-up
events possible in LPM4.5, RTC wake-up events are also possible in LPM3.5.
66 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Operating Modes
The program flow for entering LPMx.5 is:
1. Configure I/O appropriately. See the Digital I/O chapter for complete details on configuring I/O for
LPMx.5.
• Set all ports to general purpose I/O. Configure each port to ensure no floating inputs based on the
application requirements.
• If wakeup from I/O is desired, configure input ports with interrupt capability appropriately.
2. If LPM3.5 is available, and desired, enable RTC operation. In addition, configure any RTC interrupts, if
desired for LPM3.5 wake-up event. See the RTC Overview chapter for complete details.
3. Ensure clock system settings allow LPMx.5 entry according to Table 5-1 in UCS chapter.
4. Enter LPMx.5 by setting PMMREGOFF = 1 and LPM4 status register bits. The following code example
shows how to enter LPMx.5 mode. See the PMM chapter for further details.
; Enter LPMx.5 Example
MOV.B #PMMPW_H, &PMMCTL0_H ; Open PMM registers for write
BIS.B #PMMREGOFF, &PMMCTL0_L ;
BIS #GIE+CPUOFF+OSCOFF+SCG1+SCG0,SR ; Enter LPMx.5 when PMMREGOFF is set.
NOTE: It is not possible to wake up from LPMx.5 if its respective interrupt flag is already asserted.
TI recommends clearing the respective flag before entering LPMx.5. TI also recommends
setting GIE = 1 before entry into LPMx.5. Any pending flags in this case could then be
serviced before LPMx.5 entry.
Although TI recommends setting GIE = 1 before entering LPMx.5, it is not required. Device
wakeup from LPMx.5 with an enabled wake-up function will still cause the device to wake up
from LPMx.5 even with GIE = 0. If GIE = 0 before LPMx.5, additional care may be required.
Should the respective interrupt event should occur during LPMx.5 entry, the device may not
recognize this or any future interrupt wake-up event on this function.
Exit from LPMx.5 is possible with a RST event, a power on cycle, or through specific I/O. Any exit from
LPMx.5 causes a BOR. Program execution continues at the location stored in the system reset vector
location 0FFFEh after execution of the boot code. The PMMLPM5IFG bit inside the PMM module is set
indicating that the device was in LPMx.5 before the wake-up event. Additionally, SYSRSTIV = 08h which
can be used to generate an efficient reset handler routine. During LPMx.5, all I/O pin conditions are
automatically locked to the current state. Upon exit from LPMx.5, the I/O pin conditions remain locked until
the application unlocks them. See the Digital I/O chapter for complete details. If LPM3.5 was in effect,
RTC operation continues uninterrupted upon wakeup. The program flow for exiting LPMx.5 is:
• Enter system reset service routine
– Reconfigure system as required for the application.
– Reconfigure I/O as required for the application.
1.4.3 Extended Time in Low-Power Modes
The temperature coefficient of the DCO should be considered when the DCO is disabled for extended low-
power mode periods. If the temperature changes significantly, the DCO frequency at wakeup may be
significantly different from when the low-power mode was entered and may be out of the specified
operating range. To avoid this, the DCO can be set to it lowest value before entering the low-power mode
for extended periods of time where temperature can change.
; Enter LPM4 Example with lowest DCO Setting
BIC #SCG0, SR ; Disable FLL
MOV #0100h, &UCSCTL0 ; Set DCO tap to first tap, clear
modulation.
BIC #DCORSEL2+DCORSEL1+DCORSEL0,&UCSCTL1 ; Lowest DCORSEL
BIS #GIE+CPUOFF+OSCOFF+SCG1+SCG0,SR ; Enter LPM4
; ... ; Program stops
;
; Interrupt Service Routine
BIC #CPUOFF+OSCOFF+SCG1+SCG0,0(SR) ; Exit LPM4 on RETI
RETI
67
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Principles for Low-Power Applications
www.ti.com
1.5 Principles for Low-Power Applications
Often, the most important factor for reducing power consumption is using the device clock system to
maximize the time in LPM3 or LPM4 modes whenever possible.
• Use interrupts to wake the processor and control program flow.
• Peripherals should be switched on only when needed.
• Use low-power integrated peripheral modules in place of software driven functions. For example,
Timer_A and Timer_B can automatically generate PWM and capture external timing with no CPU
resources.
• Calculated branching and fast table look-ups should be used in place of flag polling and long software
calculations.
• Avoid frequent subroutine and function calls due to overhead.
• For longer software routines, single-cycle CPU registers should be used.
• Overwrite RAM control register RCCTL0 with all not available and unused segments set to powered
down (= 1). For information about used RAM segments see the device-specific data sheet.
If the application has low duty cycle, slow response time events, maximizing time in LPMx.5 can further
reduce power consumption significantly.
68 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Connection of Unused Pins
1.6 Connection of Unused Pins
Table 1-3 lists the correct termination of all unused pins.
Table 1-3. Connection of Unused Pins(1)
Pin Potential Comment
AVCC DVCC
AVSS DVSS
For devices where charge pump in not used (no rail-to-rail OA and no rail-to-rail
CPCAP Open CTSD16).
LCDCAP DVSS
LDOI DVSS For devices with LDO-PWR module when not being used in the application.
LDOO Open For devices with LDO-PWR module when not being used in the application.
PJ.0/TDO The JTAG pins are shared with general purpose I/O function (PJ.x). If not being
PJ.1/TDI Open used, these should be switched to port function, output direction (PJDIR.n = 1).
PJ.2/TMS When used as JTAG pins, these pins should remain open.
PJ.3/TCK
PU.0/DP Open For USB devices only when USB module is not being used in the application
PU.1/DM
PUR(2) DVSS For USB devices only when USB module is not being used in the application
Switched to port function, output direction (PxDIR.n = 1). Px.y represents port x
Px.y Open and bit y of port x (for example, P1.0, P1.1, P2.2, PJ.0, PJ.1)
RST/NMI DVCC or VCC 47-kΩpullup or internal pullup selected with 10-nF (2.2 nF) pulldown(3)
TEST Open This pin always has an internal pulldown enabled.
V18 Open For USB devices only when USB module is not being used in the application
For devices where no separate battery backup supply in the system. Set bit
VBAK Open BAKDIS = 1.
For devices where no separate battery backup supply in the system. Set bit
VBAT DVCC BAKDIS = 1.
VBUS, VSSU DVSS For USB devices only when USB module is not being used in the application
VUSB Open For USB devices only when USB module is not being used in the application
For dedicated XIN pins only. XIN pins with shared GPIO functions should be
XIN DVSS programmed to GPIO and follow Px.y recommendations.
For dedicated XOUT pins only. XOUT pins with shared GPIO functions should be
XOUT Open programmed to GPIO and follow Px.y recommendations.
For dedicated XT2IN pins only. XT2IN pins with shared GPIO functions should be
XT2IN DVSS programmed to GPIO and follow Px.y recommendations.
For dedicated XT2OUT pins only. XT2OUT pins with shared GPIO functions should
XT2OUT Open be programmed to GPIO and follow Px.y recommendations.
(1) Any unused pin with a secondary function that is shared with general purpose I/O should follow the Px.y unused pin connection
guidelines.
(2) The default USB BSL evaluates the state of the PUR pin after a BOR reset. If it is pulled high externally, then the BSL is
invoked. Therefore, unless invoking the BSL, it is important to keep PUR pulled low after a BOR reset, even if BSL or USB is
never used. A 1-MΩresistor to ground is recommended.
(3) The pulldown capacitor should not exceed 2.2 nF when using devices with Spy-Bi-Wire interface in Spy-Bi-Wire mode or in 4-
wire JTAG mode with TI tools such as FET interfaces or GANG programmers.
1.7 Reset Pin (RST/NMI) Configuration
The reset pin can be configured as a reset function (default) or as an NMI function in the Special Function
Register (SFR), SFRRPCR. The minimum reset pulse duration is specified in the device-specific data
sheet. Setting SYSNMI causes the RST/NMI pin to be configured as an external NMI source. The external
NMI is edge sensitive, and its edge is selectable by SYSNMIIES. Setting the NMIIE enables the interrupt
of the external NMI. Upon an external NMI event, the NMIIFG is set.
69
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Configuring JTAG Pins
www.ti.com
The RST/NMI pin can have either a pullup or pulldown present or not. SYSRSTUP selects either pullup or
pulldown and SYSRSTRE causes the pullup or pulldown to be enabled or not. If the RST/NMI pin is
unused, it is required to have either the internal pullup selected and enabled or an external resistor
connected to the RST/NMI pin as shown in Table 1-3.
NOTE: All devices except the MSP430F543x (non-A devices) have the internal pullup enabled. In
this case, no external pullup resistor is required.
1.8 Configuring JTAG Pins
The JTAG pins are shared with general-purpose I/O pins. After a BOR, the SYSJTAGPIN bit in the
SYSCTL register is cleared. With SYSJTAGPIN cleared, the pins with JTAG functionality are configured
as general-purpose I/O. In this case, only a special sequences on the TEST and RST/NMI pins enables
the JTAG functionality. As long as the TEST pin is pulled to DVCC, the pins remain in their JTAG
functionality. If the TEST pin is released to DVSS, the shared JTAG pins revert to general-purpose I/Os.
If SYSJTAGPIN = 1, the JTAG pins are permanently configured to 4-wire JTAG mode and remain in this
mode until another BOR condition occurs. Use this feature early in the software if the MSP430 device is
part of a JTAG chain. Note that this also disables the Spy-Bi-Wire mode.
The SYSJTAGPIN is a write only once function. Clearing it by software is not possible.
1.9 Boot Code
The boot code is always executed after a BOR. The boot code loads factory stored calibration values of
the oscillator and reference voltages. In addition, it checks for the presence of a user-defined boot strap
loader (BSL).
1.10 Bootstrap Loader (BSL)
The BSL is software that is executed after start-up when a certain BSL entry condition is applied. The BSL
enables the user to communicate with the embedded memory in the microcontroller during the prototyping
phase, final production, and in service. All memory mapped resources, the programmable memory (flash
memory), the data memory (RAM), and the peripherals, can be modified by the BSL as required. The user
can define custom BSL code for flash-based devices and protect it against erasure and unintentional or
unauthorized access.
On devices without USB, a basic BSL program is provided by TI. This supports the commonly used UART
protocol with RS232 interfacing, allowing flexible use of both hardware and software. To use the BSL, a
specific BSL entry sequence must be applied to specific device pins. The correct entry sequence causes
SYSBSLIND to be set. An added sequence of commands initiates the desired function. A boot-loading
session can be exited by continuing operation at a defined user program address or by applying the
standard reset sequence. Access to the device memory by the BSL is protected against misuse by a user-
defined password. Devices with USB have a USB based BSL program provided by TI. For more details,
see the MSP430 Programming Via the Bootstrap Loader User's Guide (SLAU319).
The amount of BSL memory that is available is device specific. The BSL memory size is organized into
segments and can be set using the SYSBSLSIZE bits. See the device specific data sheet for the number
and size of the segments available. It is possible to assign a small amount of RAM to the allocated BSL
memory. Setting SYSBSLR allocates the lowest 16 bytes of RAM for the BSL. When the BSL memory is
protected, access to these RAM locations is only possible from within the protected BSL memory
segments.
It may be desirable in some BSL applications to only allow changing of the Power Management Module
settings from the protected BSL segments. This is possible with the SYSPMMPE bit. Normally, this bit is
cleared and allows access of the PMM control registers from any memory location. Setting SYSPMMPE,
allows access to the PMM control registers only from the protected BSL memory. Once set, SYSPMMPE
can only be cleared by a BOR event.
70 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Memory Map – Uses and Abilities
1.11 Memory Map – Uses and Abilities
This memory map represents the MSP430F5438 device. Though the address ranges differs from device
to device, overall behavior remains the same.
Can generate NMI on read/write/fetch
Generates PUC on fetch access
Protectable for read/write accesses
Always able to access PMM registers from(1); Mass erase by user possible
Mass erase by user possible
Bank erase by user possible
Segment erase by user possible
Address Range Name and Usage Properties
00000h-00FFFh Peripherals with gaps
00000h-000FFh Reserved for system extension
00100h-00FEFh Peripherals x
00FF0h-00FF3h Descriptor type(2) x
00FF4h-00FF7h Start address of descriptor structure x
01000h-011FFh BSL 0 x x
01200h-013FFh BSL 1 x x
01400h-015FFh BSL 2 x x
01600h-017FFh BSL 3 x x x
017FCh-017FFh BSL Signature Location
01800h-0187Fh Info D x
01880h-018FFh Info C x
01900h-0197Fh Info B x
01980h-019FFh Info A x
01A00h-01A7Fh Device Descriptor Table x
01C00h-05BFFh RAM 16KB
05B80-05BFFh Alternate Interrupt Vectors
05C00h-0FFFFh Program x x(1) x
0FF80h-0FFFFh Interrupt Vectors
10000h-45BFFh Program x x x
45C00h-FFFFFh Vacant x(3)
(1) Access rights are separately programmable for SYS and PMM.
(2) Fixed ID for all MSP430 devices. See Section 1.13.1 for further details.
(3) On vacant memory space, the value 03FFFh is driven on the data bus.
71
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Memory Map – Uses and Abilities
www.ti.com
1.11.1 Vacant Memory Space
Vacant memory is non-existent memory space. Accesses to vacant memory space generate a system
(non)maskable interrupt (SNMI) when enabled (VMAIE = 1). Reads from vacant memory results in the
value 3FFFh. In the case of a fetch, this is taken as JMP $. Fetch accesses from vacant peripheral space
result in a PUC. After the boot code is executed, it behaves like vacant memory space and also causes an
NMI on access.
1.11.2 JTAG Lock Mechanism Using the Electronic Fuse
A device can be protected from unauthorized access by disabling the JTAG and SBW interface. This is
achieved by programming the electronic fuse. Programming the electronic fuse, completely disables the
debug and access capabilities associated with the JTAG and Spy-Bi-Wire interface. The JTAG is locked
by programming a certain signature into the device flash memory at dedicated addresses. The JTAG
security lock key resides at the end of the bootstrap loader (BSL) memory at addresses 17FCh through
17FFh. Anything other than 0h or FFFFFFFFh programmed to these addresses locks the JTAG interface.
All of the 5xx MSP430 devices come with a preprogrammed BSL (TI-BSL) code that, by default, protects
itself from unintended erase and write access. This is done by setting SYSBSLPE in the SYSBSLC
register. Since the JTAG security lock key resides in the BSL memory address range, appropriate action
must be taken to unprotect the BSL memory area before programming the protection key. For more
details on the electronic fuse, see the MSP430 Programming Via the JTAG Interface User's Guide
(SLAU320).
Some JTAG commands are still possible after the device is secured, including the BYPASS command
(see IEEE1149-2001 Standard) and the JMB_EXCHANGE command which allows access to the JTAG
Mailbox System (see Section 1.12 for details).
NOTE: If a device has been protected, TI cannot access the device for a customer return. Access is
only possible if a BSL is provided with its corresponding key or an unlock mechanism is
provided by the customer.
1.12 JTAG Mailbox (JMB) System
The SYS module provides the capability to exchange user data through the regular JTAG test/debug
interface. The idea behind the JMB is to have a direct interface to the CPU during debugging,
programming, and test that is identical for all '430 devices of this family and uses only few or no user
application resources. The JTAG interface was chosen because it is available on all '430 devices and is a
dedicated resource for debugging, programming, and test.
Applications of the JMB are:
• Providing entry password for device lock and unlock protection
• Run-time data exchange (RTDX)
1.12.1 JMB Configuration
The JMB supports two transfer modes, 16-bit and 32-bit. Setting JMBMODE enables 32-bit transfer mode.
Clearing JMBMODE enables 16-bit transfer mode.
1.12.2 JMBOUT0 and JMBOUT1 Outgoing Mailbox
Two 16-bit registers are available for outgoing messages to the JTAG port. JMBOUT0 is only used when
using 16-bit transfer mode (JMBMODE = 0). JMBOUT1 is used in addition to JMBOUT0 when using 32-bit
transfer mode (JMBMODE = 1). When the application wishes to send a message to the JTAG port, it
writes data to JMBOUT0 for 16-bit mode, or JMBOUT0 and JMBOUT1 for 32-bit mode.
JMBOUT0FG and JMBOUT1FG are read only flags that indicate the status of JMBOUT0 and JMBOUT1,
respectively. When JMBOUT0FG is set, JMBOUT0 has been read by the JTAG port and is ready to
receive new data. When JMBOUT0FG is reset, the JMBOUT0 is not ready to receive new data.
JMBOUT1FG behaves similarly.
72 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
JTAG Mailbox (JMB) System
1.12.3 JMBIN0 and JMBIN1 Incoming Mailbox
Two 16-bit registers are available for incoming messages from the JTAG port. Only JMBIN0 is used when
in 16-bit transfer mode (JMBMODE = 0). JMBIN1 is used in addition to JMBIN0 when using 32-bit transfer
mode (JMBMODE = 1). When the JTAG port wishes to send a message to the application, it writes data
to JMBIN0 for 16-bit mode, or JMBIN0 and JMBIN1 for 32-bit mode.
JMBIN0FG and JMBIN1FG are flags that indicate the status of JMBIN0 and JMBIN1, respectively. When
JMBIN0FG is set, JMBIN0 has data that is available for reading. When JMBIN0FG is reset, no new data is
available in JMBIN0. JMBIN1FG behaves similarly.
JMBIN0FG and JMBIN1FG can be configured to clear automatically by clearing JMBCLR0OFF and
JMBCLR1OFF, respectively. Otherwise, these flags must be cleared by software.
1.12.4 JMB NMI Usage
The JMB handshake mechanism can be configured to use interrupts to avoid unnecessary polling if
desired. In 16-bit mode, JMBOUTIFG is set when JMBOUT0 has been read by the JTAG port and is
ready to receive data. In 32-bit mode, JMBOUTIFG is set when both JMBOUT0 and JMBOUT1 has been
read by the JTAG port and are ready to receive data. If JMBOUTIE is set, these events cause a system
NMI. In 16-bit mode, JMBOUTIFG is cleared automatically when data is written to JMBOUT0. In 32-bit
mode, JMBOUTIFG Is cleared automatically when data is written to both JMBOUT0 and JMBOUT1. In
addition, the JMBOUTIFG can be cleared when reading SYSSNIV. Clearing JMBOUTIE disables the NMI
interrupt.
In 16-bit mode, JMBINIFG is set when JMBIN0 is available for reading. In 32-bit mode, JMBINIFG is set
when both JMBIN0 and JMBIN1 are available for reading. If JMBOUTIE is set, these events cause a
system NMI. In 16-bit mode, JMBINIFG is cleared automatically when JMBIN0 is read. In 32-bit mode,
JMBINIFG Is cleared automatically when both JMBIN0 and JMBIN1 are read. In addition, the JMBINIFG
can be cleared when reading SYSSNIV. Clearing JMBINIE disables the NMI interrupt.
1.13 Device Descriptor Table
Each device provides a data structure in memory that allows an unambiguous identification of the device,
as well as, a more detailed description of the available modules on a given device. SYS provides this
information and can be used by device-adaptive SW tools and libraries to clearly identify a particular
device and all modules and capabilities contained within it. The validity of the device descriptor can be
verified by cyclic redundancy check (CRC). Figure 1-7 shows the logical order and structure of the device
descriptor table. The complete device descriptor table and its contents can be found in the device specific
data sheet.
73
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
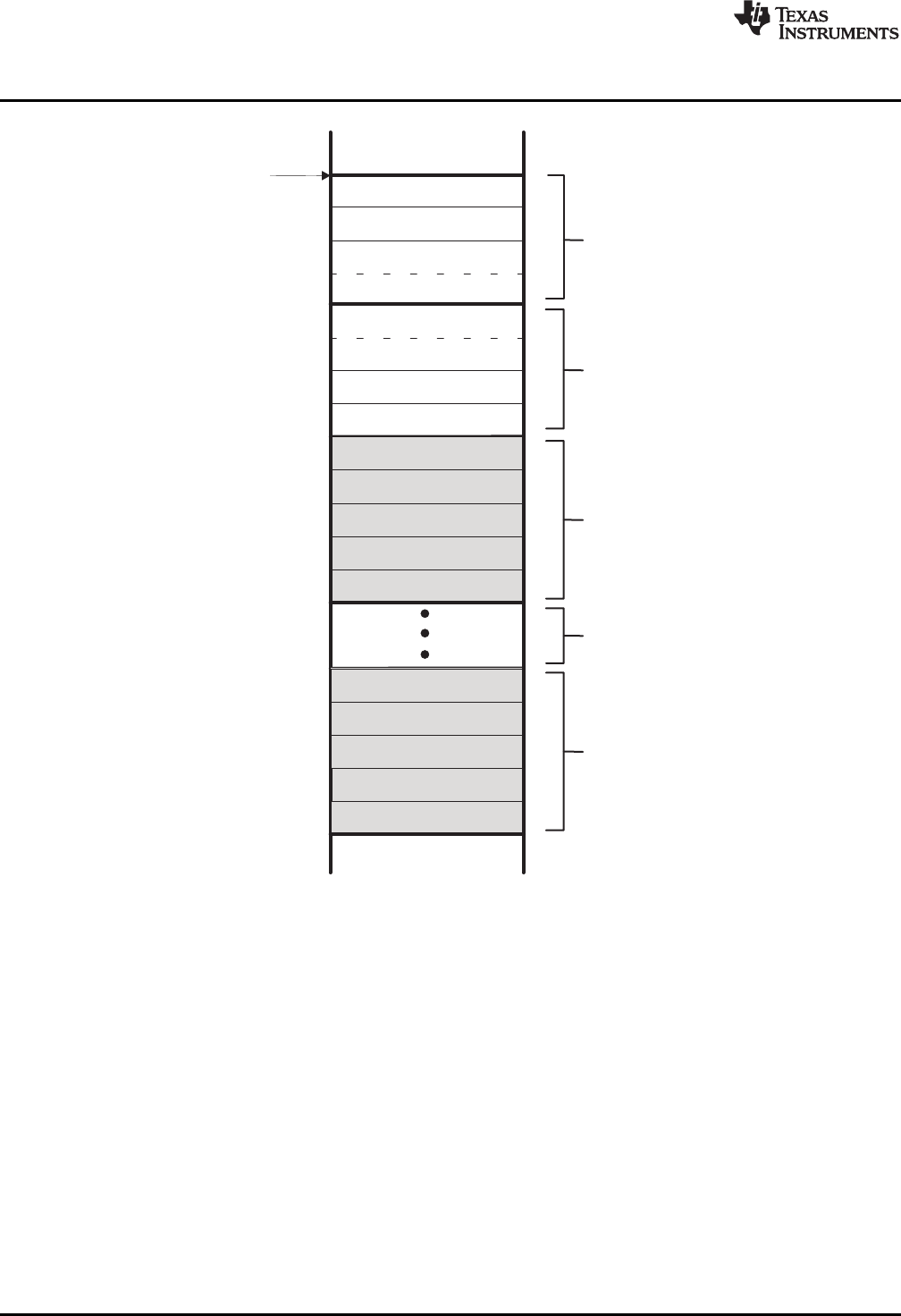
Info_length
CRC_length
CRC_value
DeviceID
Firmwarerevision
Hardwarerevision
Tag1
Len1
Valuefield1
TagN
LenN
ValuefieldN
Informationblock
DeviceIDandRevision
Information
First TLVentry
(optional)
Additional TLVentries
(optional)
Final TLVentry
(optional)
Descriptorstartaddress
Device Descriptor Table
www.ti.com
Figure 1-7. Devices Descriptor Table
1.13.1 Identifying Device Type
The value read at address location 00FF0h identifies the family branch of the device. All values starting
with 80h indicate a hierarchical structure consisting of the information block and a TLV tag-length-value
(TLV) structure containing the various descriptors. Any other value than 80h read at address location
00FF0h indicates the device is of an older family and contains a flat descriptor beginning at location
0FF0h. The information block, shown in Figure 1-7 contains the device ID, die revisions, firmware
revisions, and other manufacturer and tool related information. The descriptors contains information about
the available peripherals, their subtypes and addresses and provides the information required to build
adaptive hardware drivers for operating systems.
The length of the descriptors represented by Info_length is computed as follows:
Length = 2Info_length in 32-bit words (1)
For example, if Info_length = 5, then the length of the descriptors equals 128 bytes.
74 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
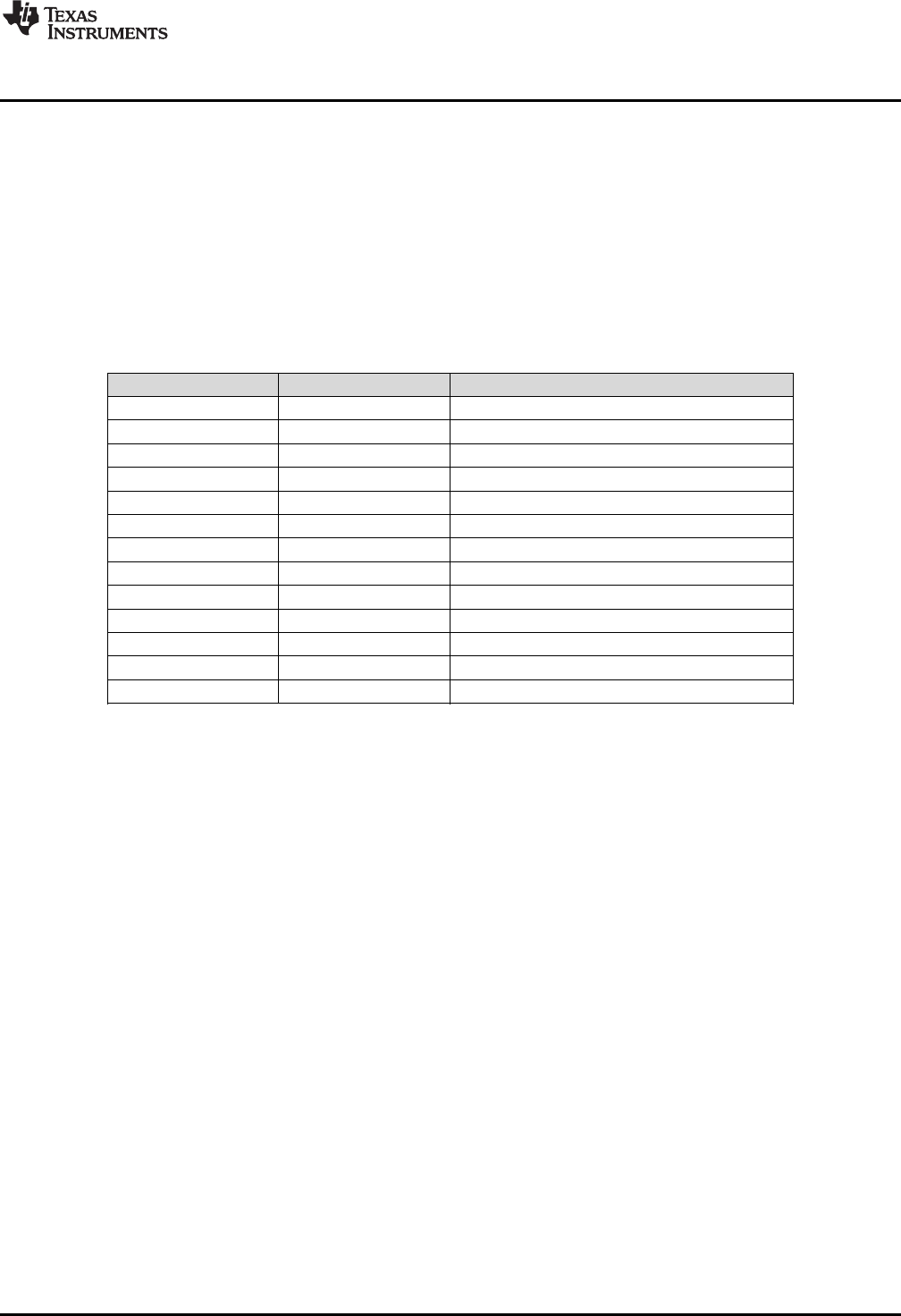
www.ti.com
Device Descriptor Table
1.13.2 TLV Descriptors
The TLV descriptors follow the information block. Because the information block is always a fixed length,
the start location of the TLV descriptors is fixed for a given device family. For the MSP430x5xx family, this
location is 01A08h. See the device-specific data sheet for the complete TLV structure and what
descriptors are available.
The TLV descriptors are unique to their respective TLV block and are always followed by the descriptor
block length.
Each TLV descriptor contains a tag field which identifies the descriptor type. Table 1-4 shows the currently
supported tags.
Table 1-4. Tag Values
Short Name Value Description
LDTAG 01h Legacy descriptor (1xx, 2xx, 4xx families)
PDTAG 02h Peripheral discovery descriptor
Reserved 03h Future use
Reserved 04h Future use
BLANK 05h Blank descriptor
Reserved 06h Future use
ADC12CAL 11h ADC12 calibration
REFCAL 12h REF calibration
ADC10CAL 13h ADC10 calibration
Reserved 14h-1Ch Future use
CTSD16CAL 1Dh CTSD16 calibration
Reserved 1Eh-FDh Future use
TAGEXT FEh Tag extender
Each tag field is unique to its respective descriptor and is always followed by a length field. The length
field is one byte if the tag value is 01h through 0FDh and represents the length of the descriptor in bytes.
If the tag value equals 0FEh (TAGEXT), the next byte extends the tag values, and the following two bytes
represent the length of the descriptor in bytes. In this way, a user can search through the TLV descriptor
table for a particular tag value, using a routine similar to below written in pseudo code:
// Identify the descriptor ID (d_ID_value) for the TLV descriptor of interest:
descriptor_address = TLV_START address;
while ( value at descriptor_address != d_ID_value && descriptor_address != TLV_TAGEND &&
descriptor_address < TLV_END)
{
// Point to next descriptor
descriptor_address = descriptor_address + (length of the current TLV block) + 2;
}
if (value at descriptor_address == d_ID_value) {
// Appropriate TLV descriptor has been found!
Return length of descriptor & descriptor_address as the location of the TLV descriptor
} else {
// No TLV descriptor found with a matching d_ID_value
Return a failing condition
}
75
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Device Descriptor Table
www.ti.com
1.13.3 Peripheral Discovery Descriptor
This descriptor type can describe concatenated or distributed memory or peripheral mappings, as well as,
the number of interrupt vectors and their order. The peripheral discovery descriptor has tag value 02h
(PDTAG). Table 1-5 shows the structure of the peripheral discovery descriptor.
NOTE: Peripheral Discovery Descriptor is not available in every device. See the Device Descriptors
section in the device-specific data sheet for the availability and details on Peripheral
Discovery Descriptor.
Table 1-5. Peripheral Discovery Descriptor
Element Size (bytes) Comments
Memory entry 1 2 Optional
Memory entry 2 2 Optional
... 2 Optional
Delimiter (00h) 1 Mandatory
Peripheral count 1 Mandatory
Peripheral entry 1 2 Optional
Peripheral entry 2 2 Optional
... 2 Optional
Interrupt priority N-3 1 Optional
Interrupt priority N-4 1 Optional
... 1 Optional
Delimiter (00h) 1 Mandatory
The structures for a memory entry and peripheral entry are shown below. A memory entry consists of two
bytes (one word). Table 1-6 shows the individual bit fields of a memory entry word and their respective
meanings. Similarly, a peripheral entry consists of two bytes (one word). Table 1-7 shows the individual bit
fields of a peripheral entry word and their respective meanings.
76 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
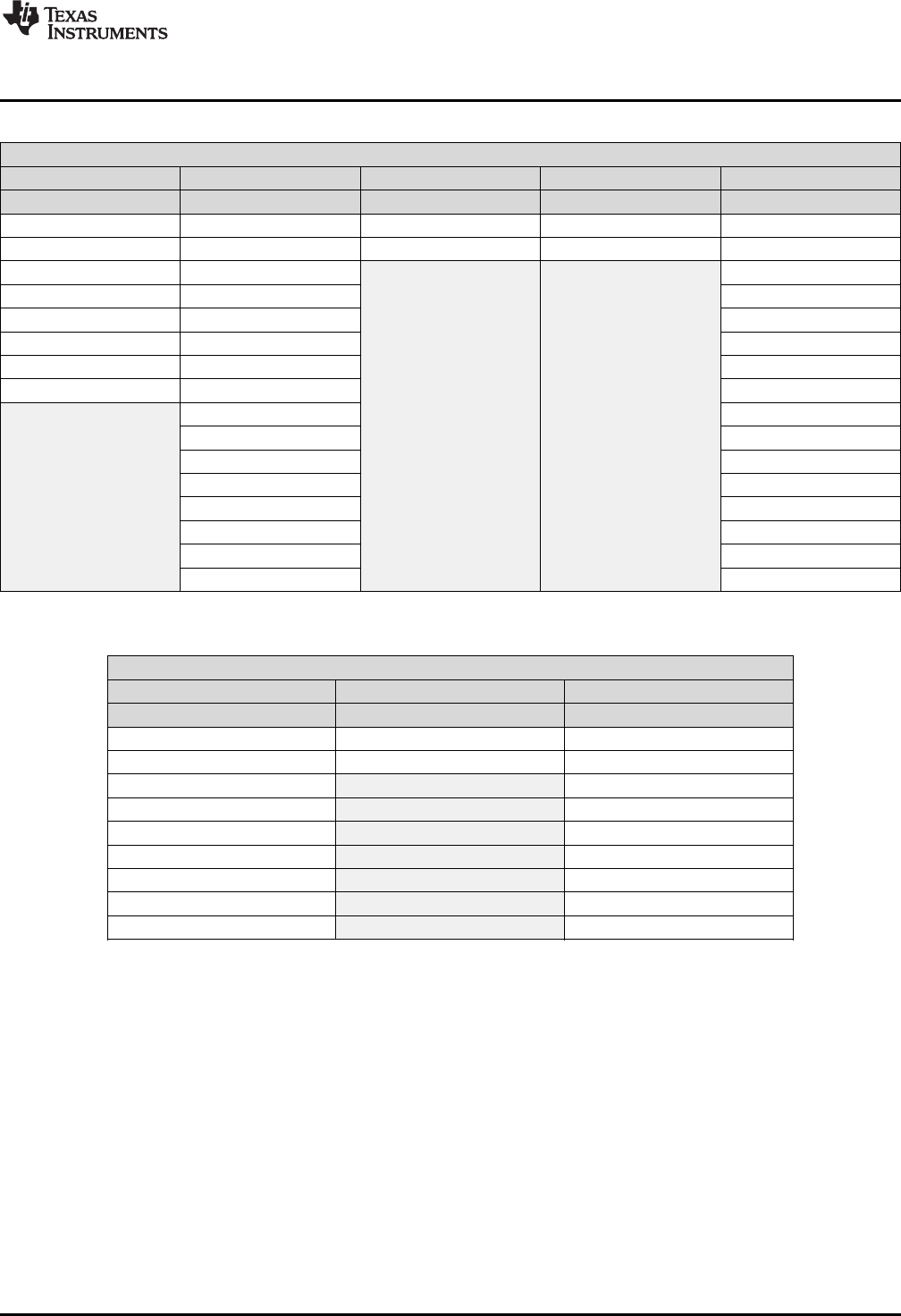
www.ti.com
Device Descriptor Table
Table 1-6. Values for Memory Entry
Bit Fields
[15:13] [12:9] [8] [7] [6:0]
Memory Type Size More Unit Size Address Value
000: None 0000: 0 B 0: End Entry 0: 0200h 0000000
001: RAM 0001: 128 B 1: More Entries 1: 010000h 0000001
010: EEPROM 0010: 256 B 0000010
011: Reserved 0011: 512 B 0000011
100: FLASH 0100: 1KB 0000100
101: ROM 0101: 2KB 0000101
110: MemType appended 0110: 4KB 0000110
111: Undefined 0111: 8KB 0000111
1000: 16KB 0001000
1001: 32KB 0001001
1010: 64KB 0001010
1011: 128KB 0001011
1100: 256KB 0001100
1101: 512KB ...
1110: Size appended ...
1111: Undefined 1111111
Table 1-7. Values for Peripheral Entry
Bit Fields
[15:8] [7] [6:0]
Peripheral ID (PID)(1) UnitSize AdrVal
Any PID 0: 010h 0000000
Any PID 1: 0800h 0000001
Any PID 0000010
Any PID 0000011
Any PID 0000100
Any PID 0000101
Any PID ...
Any PID ...
Any PID 1111111
(1) The Peripheral IDs are listed in Table 1-8. This is not a complete list, but shown as an example.
77
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
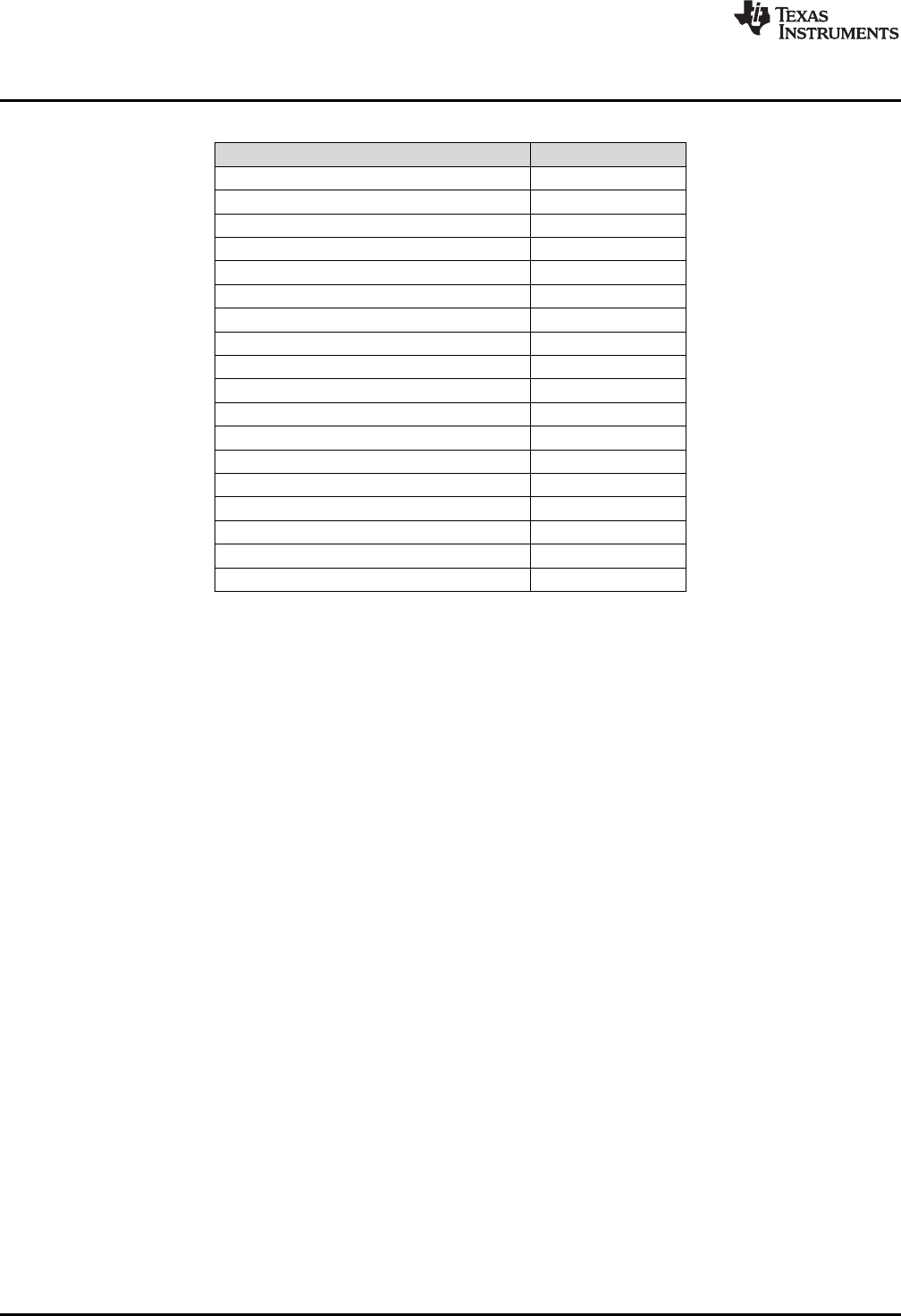
Device Descriptor Table
www.ti.com
Table 1-8. Peripheral IDs(1)
Peripheral or Module PID
No Module 00h
WDT 01h
SFR 02h
UCS 03h
SYS 04h
PMM 05h
Flash Controller 08h
CRC16 09h
Port 1, 2 51h
Port 3, 4 52h
Port 5, 6 53h
Port 7, 8 54h
Port 9, 10 55h
Port J 5Fh
Timer A0 81h
Timer A1 82h
Special info appended FEh
Undefined module FFh
(1) This table is not a complete list of all peripheral IDs that might be
available on a device, and is shown here for illustrative purposes
only.
78 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Device Descriptor Table
Table 1-9 shows a simple example for a peripheral discovery descriptor of a hypothetical device:
Table 1-9. Sample Peripheral Discovery Descriptor
Hex Binary Entry Type Description
030h, 0Eh 001_1000_ 0_0_0001110 memory RAM 16KB, Start address = 01C00h (0Eh × 0200h)(1)
09Bh, 02Eh 100_1011_0_0_0101110 memory Flash 128KB, Start address = 05C00h (2Eh × 0200h)
00h 0000_0000_0000_0000 delimiter No more memory entries
0Fh 0000_1111 peripheral count Peripheral count = 15
02h, 10h 00000010_0_0010000 peripheral SFR at address = 0100h (10h × 10h)
01h, 01h 00000001_0_0000001 peripheral WDT at address = 0110h (0100h + 10h)
05h, 01h 00000101_0_0000001 peripheral PMM at address = 0120h (0110h + 10h)
03h, 01h 00000011_0_0000001 peripheral UCS at address = 0130h (0120h + 10h)
08h, 01h 00001000_0_0000001 peripheral FLCTL at address = 0140h (0130h + 10h)
09h, 01h 00001001_0_0000001 peripheral CRC16 at address = 0150h (0140h + 10h)
04h, 01h 00000100_0_0000001 peripheral SYS at address = 0160h (0150h + 10h)
51h, 0Ah 01010001_0_0001010 peripheral Port 1, 2 at address = 0200h (0160h + 10h × 10h)
52h, 02h 01010010_0_0000010 peripheral Port 3, 4 at address = 0220h (0200h + 02h × 10h)
53h, 02h 01010011_0_0000010 peripheral Port 5, 6 at address = 0240h (0220h + 02h × 10h)
54h, 02h 01010100_0_0000010 peripheral Port 7, 8 at address = 0260h (0240h + 02h × 10h)
55h, 02h 01010101_0_0000010 peripheral Port 9, 10 at address = 0280h (0260h + 02h × 10h)
5Fh, 0Ah 01011111_0_0001010 peripheral Port J at address = 0320h (0280h + 0Ah × 10h)
81h, 02h 10000001_0_0000010 peripheral Timer A0 at address = 0340h (0320h + 02h × 10h)
82h, 04h 10000010_0_0000100 peripheral Timer A1 at address = 0380h (0340h + 04h × 10h)
– No appended entries
SYSRSTIV at 0FFFEh (implied)
SYSSNIV at 0FFFCh (implied)
SYSUNIV at 0FFFAh (implied)
81h 1000_0001 interrupt TA0 CCR0 at 0FFF8h
81h 1000_0001 interrupt TA0 CCR1, CCR1, TA0IFG at 0FFF6h
51h 0101_0001 interrupt Port 1 at 0FFF4h
82h 1000_0010 interrupt TA1CCR0 at 0FFF2h
51h 0101_0001 interrupt Port 2 at 0FFF0h
81h 1000_0010 interrupt TA1 CCR1, CCR1, TA1IFG at 0FFEEh
00h 0000_0000 delimiter No more interrupt entries
(1) In this example, the memory type is RAM (bits[15:13] = 001b), the size is 16KB (bits[12:9] = 1000b), and the starting address is
01C00h. The starting address is computed by taking the size field indicated by bit[7] (in this case, 0200h) and multiplying it by
the address value (bits[6:0] = 0001110b. In this case, 0200h × 00Eh = 01C00h.
NOTE: The interrupt ordering has some implied rules:
• For timers, CCR0 interrupt has higher priority over all other CCRn interrupts.
• For communication ports, RX has higher priority over TX
• For port pairs, Port 1 has higher priority than Port 2, Port 3 has higher priority
than Port 4, and so on.
79
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Device Descriptor Table
www.ti.com
1.13.4 CRC Computation
The CRC checksum for the TLV structure is stored at memory locations 0x1A02 and 0x1A03. The least
significant byte (LSB) and most significant byte (MSB) reside at memory locations 0x1A02 and 0x1A03,
respectively. The checksum is computed using data stored at memory locations 0x1A04 through 0x1AFF.
The CRC checksum can be easily computed using the CRC16 module. The following simplified C code
utilizes the CRC16 module to compute the checksum. See the CRC16 chapter for further details on the
CRC algorithm implementation.
NOTE: The CRC module on the MSP430F543x and MSP430F541x non-A versions does not
support the bit-wise reverse feature used in this code example. Registers CRCDIRB and
CRCRESR, along with their respective functionality, are not available.
unsigned int i;
unsigned char CRCRESULT_LSB, CRCRESULT_MSB;
WDTCTL = WDTPW + WDTHOLD;
CRCINIRES = 0xFFFF;
for (i = 0x01A04; i <= 0x01AFF; i++){
CRCDIRB_L = *(unsigned char*)(i);
}
CRCRESULT_LSB = CRCINIRES_L; // value stored at 0x1A02
CRCRESULT_MSB = CRCINIRES_H; // value stored at 0x1A03
80 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
15
2
1
___ ´=
GAIN
FACTORGAINADCCAL
OFFSETADCCALrawADCcorrectedoffsetADC __)()_( +=
15
2
1
_15_)()( ´´= FACTORVREFADCCALrawADCcorrectedADC
15
2
1
_20_)()( ´´= FACTORVREFADCCALrawADCcorrectedADC
15
2
1
_25_)()( ´´= FACTORVREFADCCALrawADCcorrectedADC
15
2
5.1
_15__ ´= +
V
V
FACTORVREFADCCAL REF
15
2
0.2
_20__ ´= +
V
V
FACTORVREFADCCAL REF
15
2
5.2
_25__ ´= +
V
V
FA C TO RV R E FA D CC A L REF
www.ti.com
Device Descriptor Table
1.13.5 Calibration Values
The TLV structure contains calibration values that can be used to improve the measurement capability of
various functions. The calibration values available on a given device are shown in the TLV structure of the
device-specific data sheet.
1.13.5.1 REF Calibration
The calibration data for the REF module consists of three words, one word for each reference voltage
available (1.5, 2.0, and 2.5 V). The reference voltages are measured at room temperature. The measured
values are normalized by 1.5 V, 2.0 V, or 2.5 V before being stored into the TLV structure:
(2)
In this way, a conversion result is corrected by multiplying it with the CAL_15VREF_FACTOR (or
CAL_20VREF_FACTOR, CAL_25VREF_FACTOR) and dividing the result by 215 as shown for each of the
respective reference voltages:
(3)
In the following example, the integrated 1.5-V reference voltage is used during a conversion.
• Conversion result: 0x0100 = 256 decimal
• Reference voltage calibration factor (CAL_15VREF_FACTOR) : 0x7BBB
The following steps show how the ADC conversion result can be corrected:
• Multiply the conversion result by 2 (this step simplifies the final division): 0x0100 x 0x0002 = 0x0200
• Multiply the result by CAL_15VREF_FACTOR: 0x200 x 0x7FEE = 0x00F7_7600
• Divide the result by 216: 0x00F7_7600 / 0x0001_0000 = 0x0000_00F7 = 247 decimal
1.13.5.2 ADC and CTSD16 Offset and Gain Calibration
The offset of the ADC (ADC10, ADC12, or CTSD16) is determined and stored as a twos-complement
number in the TLV structure. The offset error correction is done by adding the CAL_ADC_OFFSET to the
conversion result.
(4)
The gain of the ADC is calculated by Equation 5:
(5)
The conversion result is gain corrected by multiplying it with the CAL_ADC_GAIN_FACTOR and dividing
the result by 215:
81
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

( ) 30
30__85__
3085
30__)( +
÷
÷
ø
ö
ç
ç
è
æ
-
-
´-= TA D CC A LTA D CC A L
TAD CC A LrawA D CTem p
SENSORSENSORSENSE VTempTCV +´=
( ) 30
30__85__
3085
30__)( +
÷
÷
ø
ö
ç
ç
è
æ
-
-
´-= TA D CC A LTA D CC A L
TAD CC A LrawA D CTem p
SENSORSENSORSENSE VTempTCV +´=
15
2
1
___)()_( ´´= FACTORGAINADCCALrawADCcorrectedgainADC
OFFSETADCCALcorrectedgainADCfinalADC __)_()( +=
15
2
1
___)()_( ´´= FACTORGAINADCCALrawADCcorrectedgainADC
Device Descriptor Table
www.ti.com
(6)
If both gain and offset are corrected, the gain correction is done first:
(7)
1.13.5.3 Temperature Sensor Calibration for Devices With ADCx
The temperature sensor is calibrated using the internal voltage references. Each reference voltage
(1.5/2.0/2.5 V) contains a measured value for two temperatures, 30°C ±3°C and 85°C ±3°C and are stored
in the TLV structure. The characteristic equation of the temperature sensor voltage, in mV is:
(8)
The temperature coefficient, TCSENSORin mV/°C, represents the slope of the equation. VSENSOR, in mV,
represents the y-intercept of the equation. Temp, in °C, is the temperature of interest.
The temperature (Temp, °C) can be computed as follows for each of the reference voltages used in the
ADC measurement:
(9)
1.13.6 Temperature Sensor Calibration for Devices With CTSD16
The temperature sensor is calibrated using the internal VREFBG voltage reference. A value for two
temperatures, 30°C ±3°C and 85°C ±3°C, is stored in the TLV structure. The characteristic equation of the
temperature sensor voltage, in mV is:
(10)
The temperature coefficient, TCSENSORin mV/°C, represents the slope of the equation. VSENSOR, in mV,
represents the y-intercept of the equation. Temp, in °C, is the temperature of interest.
The temperature (Temp, °C) can be computed as follows:
(11)
82 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SFR Registers
1.14 SFR Registers
The SFRs are listed in Table 1-11. The base address for the SFRs is listed in Table 1-10. Many of the bits
inside the SFRs are described in other chapters throughout this user's guide. These bits are marked with
a note and a reference. See the specific chapter of the respective module for details.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 1-10. SFR Base Address
Module Base Address
SFR 00100h
Table 1-11. SFR Registers
Offset Acronym Register Name Type Access Reset Section
00h SFRIE1 Interrupt Enable Read/write Word 0000h Section 7.4.4
00h SFRIE1_L (IE1) Read/write Byte 00h
01h SFRIE1_H (IE2) Read/write Byte 00h
02h SFRIFG1 Interrupt Flag Read/write Word 0082h Section 1.14.2
02h SFRIFG1_L (IFG1) Read/write Byte 82h
03h SFRIFG1_H (IFG2) Read/write Byte 00h
04h SFRRPCR Reset Pin Control Read/write Word 0000h Section 1.14.3
04h SFRRPCR_L Read/write Byte 00h
05h SFRRPCR_H Read/write Byte 00h
83
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SFR Registers
www.ti.com
1.14.1 SFRIE1 Register
Interrupt Enable Register
Figure 1-8. SFRIE1 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
JMBOUTIE JMBINIE ACCVIE(1) NMIIE VMAIE Reserved OFIE(2) WDTIE(3)
rw-0 rw-0 rw-0 rw-0 rw-0 r0 rw-0 rw-0
(1) See the Flash Controller chapter for details.
(2) See the UCS chapter for details.
(3) See the WDT_A chapter for details.
Table 1-12. SFRIE1 Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7 JMBOUTIE RW 0h JTAG mailbox output interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
6 JMBINIE RW 0h JTAG mailbox input interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
5 ACCVIE RW 0h Flash controller access violation interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
4 NMIIE RW 0h NMI pin interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
3 VMAIE RW 0h Vacant memory access interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
2 Reserved R 0h Reserved. Always reads as 0.
1 OFIE RW 0h Oscillator fault interrupt enable flag
0b = Interrupts disabled
1b = Interrupts enabled
0 WDTIE RW 0h Watchdog timer interrupt enable. This bit enables the WDTIFG interrupt for
interval timer mode. It is not necessary to set this bit for watchdog mode.
Because other bits in ~IE1 may be used for other modules, it is recommended to
set or clear this bit using BIS.B or BIC.B instructions, rather than MOV.B or
CLR.B instruction
0b = Interrupts disabled
1b = Interrupts enabled
84 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SFR Registers
1.14.2 SFRIFG1 Register
Interrupt Flag Register
Figure 1-9. SFRIFG1 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
JMBOUTIFG JMBINIFG Reserved NMIIFG VMAIFG Reserved OFIFG(1) WDTIFG(2)
rw-(1) rw-(0) r0 rw-0 rw-0 r0 rw-(1) rw-0
(1) See the UCS chapter for details.
(2) See the WDT_A chapter for details.
Table 1-13. SFRIFG1 Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7 JMBOUTIFG RW 1h JTAG mailbox output interrupt flag
0b = No interrupt pending. When in 16-bit mode (JMBMODE = 0), this bit is
cleared automatically when JMBO0 has been written with a new message to the
JTAG module by the CPU. When in 32-bit mode (JMBMODE = 1), this bit is
cleared automatically when both JMBO0 and JMBO1 have been written with new
messages to the JTAG module by the CPU. This bit is also cleared when the
associated vector in SYSUNIV has been read.
1b = Interrupt pending, JMBO registers are ready for new messages. In 16-bit
mode (JMBMODE = 0), JMBO0 has been received by the JTAG module and is
ready for a new message from the CPU. In 32-bit mode (JMBMODE = 1) ,
JMBO0 and JMBO1 have been received by the JTAG module and are ready for
new messages from the CPU.
6 JMBINIFG RW 0h JTAG mailbox input interrupt flag
0b = No interrupt pending. When in 16-bit mode (JMBMODE = 0), this bit is
cleared automatically when JMBI0 is read by the CPU. When in 32-bit mode
(JMBMODE = 1), this bit is cleared automatically when both JMBI0 and JMBI1
have been read by the CPU. This bit is also cleared when the associated vector
in SYSUNIV has been read
1b = Interrupt pending, a message is waiting in the JMBIN registers. In 16-bit
mode (JMBMODE = 0) when JMBI0 has been written by the JTAG module. In
32-bit mode (JMBMODE = 1) when JMBI0 and JMBI1 have been written by the
JTAG module.
5 Reserved R 0h Reserved. Always reads as 0.
4 NMIIFG RW 0h NMI pin interrupt flag
0b = No interrupt pending
1b = Interrupt pending
3 VMAIFG RW 0h Vacant memory access interrupt flag
0b = No interrupt pending
1b = Interrupt pending
2 Reserved R 0h Reserved. Always reads as 0.
1 OFIFG RW 1h Oscillator fault interrupt flag
0b = No interrupt pending
1b = Interrupt pending
85
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SFR Registers
www.ti.com
Table 1-13. SFRIFG1 Register Description (continued)
Bit Field Type Reset Description
0 WDTIFG RW 0h Watchdog timer interrupt flag. In watchdog mode, WDTIFG will self clear upon a
watchdog timeout event. The SYSRSTIV can be read to determine if the reset
was caused by a watchdog timeout event. In interval mode, WDTIFG is reset
automatically by servicing the interrupt, or can be reset by software. Because
other bits in ~IFG1 may be used for other modules, it is recommended to set or
clear WDTIFG by using BIS.B or BIC.B instructions, rather than MOV.B or
CLR.B instructions.
0b = No interrupt pending
1b = Interrupt pending
86 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SFR Registers
1.14.3 SFRRPCR Register
Reset Pin Control Register
Figure 1-10. SFRRPCR Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved SYSRSTRE(1) SYSRSTUP(1) SYSNMIIES SYSNMI
r0 r0 r0 r0 rw-1 rw-1 rw-0 rw-0
(1) All devices except the MSP430F5438 (non-A) default to pullup enabled on the reset pin.
Table 1-14. SFRRPCR Register Description
Bit Field Type Reset Description
15-4 Reserved R 0h Reserved. Always reads as 0.
3 SYSRSTRE RW 1h Reset pin resistor enable
0b = Pullup/pulldown resistor at the RST/NMI pin is disabled
1b = Pullup/pulldown resistor at the RST/NMI pin is enabled
2 SYSRSTUP RW 1h Reset resistor pin pullup/pulldown
0b = Pulldown is selected
1b = Pullup is selected
1 SYSNMIIES RW 0h NMI edge select. This bit selects the interrupt edge for the NMI when SYSNMI =
1. Modifying this bit can trigger an NMI. Modify this bit when SYSNMI = 0 to
avoid triggering an accidental NMI.
0b = NMI on rising edge
1b = NMI on falling edge
0 SYSNMI RW 0h NMI select. This bit selects the function for the RST/NMI pin.
0b = Reset function
1b = NMI function
87
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SYS Registers
www.ti.com
1.15 SYS Registers
The SYS configuration registers are listed in Table 1-16 and the base address is listed in Table 1-15. A
detailed description of each register and its bits is also provided. Each register starts at a word boundary.
Either word or byte data can be written to the SYS configuration registers.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 1-15. SYS Base Address
Module Base Address
SYS 00180h
Table 1-16. SYS Registers
Offset Acronym Register Name Type Access Reset Section
00h SYSCTL System Control Read/write Word 0000h Section 1.15.1
00h SYSCTL_L Read/write Byte 00h
01h SYSCTL_H Read/write Byte 00h
02h SYSBSLC Bootstrap Loader Configuration Read/write Word 0003h Section 1.15.2
02h SYSBSLC_L Read/write Byte 03h
03h SYSBSLC_H Read/write Byte 00h
06h SYSJMBC JTAG Mailbox Control Read/write Word 0000h Section 1.15.3
06h SYSJMBC_L Read/write Byte 00h
07h SYSJMBC_H Read/write Byte 00h
08h SYSJMBI0 JTAG Mailbox Input 0 Read/write Word 0000h Section 1.15.4
08h SYSJMBI0_L Read/write Byte 00h
09h SYSJMBI0_H Read/write Byte 00h
0Ah SYSJMBI1 JTAG Mailbox Input 1 Read/write Word 0000h Section 1.15.5
0Ah SYSJMBI1_L Read/write Byte 00h
0Bh SYSJMBI1_H Read/write Byte 00h
0Ch SYSJMBO0 JTAG Mailbox Output 0 Read/write Word 0000h Section 1.15.6
0Ch SYSJMBO0_L Read/write Byte 00h
0Dh SYSJMBO0_H Read/write Byte 00h
0Eh SYSJMBO1 JTAG Mailbox Output 1 Read/write Word 0000h Section 1.15.7
0Eh SYSJMBO1_L Read/write Byte 00h
0Fh SYSJMBO1_H Read/write Byte 00h
18h SYSBERRIV Bus Error Vector Generator Read Word 0000h Section 1.15.11
1Ah SYSUNIV User NMI Vector Generator Read Word 0000h Section 1.15.8
1Ch SYSSNIV System NMI Vector Generator Read Word 0000h Section 1.15.9
1Eh SYSRSTIV Reset Vector Generator Read Word 0002h Section 1.15.10
88 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SYS Registers
1.15.1 SYSCTL Register
SYS Control Register
Figure 1-11. SYSCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved SYSJTAGPIN SYSBSLIND Reserved SYSPMMPE Reserved SYSRIVECT
r0 r0 rw-[0] r-0 r0 rw-[0] r0 rw-[0]
Table 1-17. SYSCTL Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved. Always reads as 0.
5 SYSJTAGPIN RW 0h Dedicated JTAG pins enable. Setting this bit disables the shared functionality of
the JTAG pins and permanently enables the JTAG function. This bit can be set
only once. After it is set, it remains set until a BOR occurs.
0b = Shared JTAG pins (JTAG mode selectable by SBW sequence)
1b = Dedicated JTAG pins (explicit 4-wire JTAG mode selection)
4 SYSBSLIND RW 0h BSL entry indication. This bit indicates a BSL entry sequence detected on the
Spy-Bi-Wire pins.
0b = No BSL entry sequence detected
1b = BSL entry sequence detected
3 Reserved R 0h Reserved. Always reads as 0.
2 SYSPMMPE RW 0h PMM access protect. This controls the accessibility of the PMM control registers.
Once set to 1, it only can be cleared by a BOR.
0b = Access from anywhere in memory
1b = Access only from the protected BSL segments
1 Reserved R 0h Reserved. Always reads as 0.
0 SYSRIVECT RW 0h RAM-based interrupt vectors
0b = Interrupt vectors generated with end address TOP of lower 64KB of flash,
FFFFh
1b = Interrupt vectors generated with end address TOP of RAM
89
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SYS Registers
www.ti.com
1.15.2 SYSBSLC Register
Bootstrap Loader Configuration Register
Figure 1-12. SYSBSLC Register
15 14 13 12 11 10 9 8
SYSBSLPE SYSBSLOFF Reserved
rw-[0] rw-[0] r0 r0 r0 r0 r0 r0
76543210
Reserved SYSBSLR SYSBSLSIZE
r0 r0 r0 r0 r0 rw-[0] rw-[1] rw-[1]
Table 1-18. SYSBSLC Register Description
Bit Field Type Reset Description
15 SYSBSLPE RW 0h Bootstrap loader memory protection enable for the size covered in SYSBSLSIZE.
By default, this bit is cleared by hardware with a BOR event (as indicated above),
however the boot code that checks for an available BSL may set this bit by
software to protect the BSL. Because devices normally come with a TI BSL
preprogrammed and protected, the boot code sets this bit.
0b = Area not protected. Read, program, and erase of BSL memory is possible.
1b = Area protected
14 SYSBSLOFF RW 0h Bootstrap loader memory disable for the size covered in SYSBSLSIZE
0b = BSL memory is addressed when this area is read.
1b = BSL memory behaves like vacant memory. Reads cause 3FFFh to be read.
Fetches cause JMP $ to be executed.
13-3 Reserved R 0h Reserved. Always reads as 0.
2 SYSBSLR RW 0h RAM assigned to BSL
0b = No RAM assigned to BSL area
1b = Lowest 16 bytes of RAM assigned to BSL
1-0 SYSBSLSIZE RW 03h Bootstrap loader size. Defines the space and size of flash memory that is
reserved for the BSL.
00b = Size: BSL segment 3
01b = Size: BSL segments 2 and 3
10b = Size: BSL segments 1, 2, and 3
11b = Size: BSL segments 0, 1, 2, and 3
90 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SYS Registers
1.15.3 SYSJMBC Register
JTAG Mailbox Control Register
Figure 1-13. SYSJMBC Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
JMBCLR1OFF JMBCLR0OFF Reserved JMBM0DE JMBOUT1FG JMBOUT0FG JMBIN1FG JMBIN0FG
rw-(0) rw-(0) r0 rw-0 r-(1) r-(1) rw-(0) rw-(0)
Table 1-19. SYSJMBC Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7 JMBCLR1OFF RW 0h Incoming JTAG Mailbox 1 flag auto-clear disable
0b = JMBIN1FG cleared on read of JMB1IN register
1b = JMBIN1FG cleared by software
6 JMBCLR0OFF RW 0h Incoming JTAG Mailbox 0 flag auto-clear disable
0b = JMBIN0FG cleared on read of JMB0IN register
1b = JMBIN0FG cleared by software
5 Reserved R 0h Reserved. Always reads as 0.
4 JMBMODE RW 0h This bit defines the operation mode of JMB for JMBI0/1 and JMBO0/1. Before
switching this bit, pad and flush out any partial content to avoid data drops.
0b = 16-bit transfers using JMBO0 and JMBI0 only
1b = 32-bit transfers using JMBO0/1 and JMBI0/1
3 JMBOUT1FG RW 1h Outgoing JTAG Mailbox 1 flag. This bit is cleared automatically when a message
is written to the upper byte of JMBO1 or as word access (by the CPU, DMA,…)
and is set after the message was read by JTAG.
0b = JMBO1 is not ready to receive new data.
1b = JMBO1 is ready to receive new data.
2 JMBOUT0FG RW 1h Outgoing JTAG Mailbox 0 flag. This bit is cleared automatically when a message
is written to the upper byte of JMBO0 or as word access (by the CPU, DMA,…)
and is set after the message was read by JTAG.
0b = JMBO0 is not ready to receive new data.
1b = JMBO0 is ready to receive new data.
1 JMBIN1FG RW 0h Incoming JTAG Mailbox 1 flag. This bit is set when a new message (provided by
JTAG) is available in JMBI1. This flag is cleared automatically on read of JMBI1
when JMBCLR1OFF = 0 (auto clear mode). On JMBCLR1OFF = 1, JMBIN1FG
needs to be cleared by SW.
0b = JMBI1 has no new data.
1b = JMBI1 has new data available.
0 JMBIN0FG RW 0h Incoming JTAG Mailbox 0 flag. This bit is set when a new message (provided by
JTAG) is available in JMBI0. This flag is cleared automatically on read of JMBI0
when JMBCLR0OFF = 0 (auto clear mode). On JMBCLR0OFF = 1, JMBIN0FG
needs to be cleared by SW.
0b = JMBI1 has no new data.
1b = JMBI1 has new data available.
91
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SYS Registers
www.ti.com
1.15.4 SYSJMBI0 Register
JTAG Mailbox Input 0 Register
Figure 1-14. SYSJMBI0 Register
15 14 13 12 11 10 9 8
MSGHI
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
MSGLO
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 1-20. SYSJMBI0 Register Description
Bit Field Type Reset Description
15-8 MSGHI R 0h JTAG mailbox incoming message high byte
7-0 MSGLO R 0h JTAG mailbox incoming message low byte
1.15.5 SYSJMBI1 Register
JTAG Mailbox Input 0 Register
Figure 1-15. SYSJMBI1 Register
15 14 13 12 11 10 9 8
MSGHI
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
MSGLO
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 1-21. SYSJMBI1 Register Description
Bit Field Type Reset Description
15-8 MSGHI R 0h JTAG mailbox incoming message high byte
7-0 MSGLO R 0h JTAG mailbox incoming message low byte
92 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SYS Registers
1.15.6 SYSJMBO0 Register
JTAG Mailbox Output 0 Register
Figure 1-16. SYSJMBO0 Register
15 14 13 12 11 10 9 8
MSGHI
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
MSGL0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 1-22. SYSJMBO0 Register Description
Bit Field Type Reset Description
15-8 MSGHI RW 0h JTAG mailbox outgoing message high byte
7-0 MSGLO RW 0h JTAG mailbox outgoing message low byte
1.15.7 SYSJMBO1 Register
JTAG Mailbox Output 1 Register
Figure 1-17. SYSJMBO1 Register
15 14 13 12 11 10 9 8
MSGHI
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
MSGL0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 1-23. SYSJMBO1 Register Description
Bit Field Type Reset Description
15-8 MSGHI RW 0h JTAG mailbox outgoing message high byte
7-0 MSGLO RW 0h JTAG mailbox outgoing message low byte
93
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SYS Registers
www.ti.com
1.15.8 SYSUNIV Register
User NMI Vector Register
NOTE: Additional events for more complex devices are appended to this table; sources that are
removed reduce the length of this table. The vectors are expected to be accessed symbolic
only with the corresponding include file of the device in use.
Figure 1-18. SYSUNIV Register
15 14 13 12 11 10 9 8
SYSUNVEC
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SYSUNVEC
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 1-24. SYSUNIV Register Description
Bit Field Type Reset Description
15-0 SYSUNIV R 0h User NMI vector. Generates a value that can be used as address offset for fast
interrupt service routine handling. Writing to this register clears all pending user
NMI flags.
00h = No interrupt pending
02h = NMIIFG interrupt pending (highest priority)
04h = OFIFG interrupt pending
06h = ACCVIFG interrupt pending
08h = BUSIFG interrupt pending (Not present on all devices. See device-specific
datasheet)
94 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SYS Registers
1.15.9 SYSSNIV Register
System NMI Vector Register
NOTE: Additional events for more complex devices are appended to this table; sources that are
removed reduce the length of this table. The vectors are expected to be accessed symbolic
only with the corresponding include file of the used device.
Figure 1-19. SYSSNIV Register
15 14 13 12 11 10 9 8
SYSSNVEC
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SYSSNVEC
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 1-25. SYSSNIV Register Description
Bit Field Type Reset Description
15-0 SYSSNIV R 0h System NMI vector. Generates a value that can be used as address offset for
fast interrupt service routine handling. Writing to this register clears all pending
system NMI flags.
00h = No interrupt pending
02h = SVMLIFG interrupt pending (highest priority)
04h = SVMHIFG interrupt pending
06h = SVSMLDLYIFG interrupt pending
08h = SVSMHDLYIFG interrupt pending
0Ah = VMAIFG interrupt pending
0Ch = JMBINIFG interrupt pending
0Eh = JMBOUTIFG interrupt pending
10h = SVMLVLRIFG interrupt pending
12h = SVMHVLRIFG interrupt pending
14h = Reserved
95
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SYS Registers
www.ti.com
1.15.10 SYSRSTIV Register
Reset Interrupt Vector Register
NOTE: Additional events for more complex devices are appended to this table; sources that are removed
reduce the length of this table. The vectors are expected to be accessed symbolic only with the
corresponding include file of the used device.
Figure 1-20. SYSRSTIV Register
15 14 13 12 11 10 9 8
SYSRSTVEC
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SYSRSTVEC
r0 r0 r(1) r(1) r(1) r(1) r(1) r0
(1) Reset value depends on reset source.
Table 1-26. SYSRSTIV Register Description
Bit Field Type Reset Description
15-0 SYSRSTIV R 02h- Reset interrupt vector. Generates a value that can be used as address offset for
3Eh(1) fast interrupt service routine handling to identify the last cause of a reset (BOR,
POR, PUC) . Writing to this register clears all pending reset source flags.
00h = No interrupt pending
02h = Brownout (BOR) (highest priority)
04h = RST/NMI (BOR)
06h = PMMSWBOR (BOR)
08h = Wakeup from LPMx.5 (BOR)
0Ah = Security violation (BOR)
0Ch = SVSL (POR)
0Eh = SVSH (POR)
10h = SVML_OVP (POR)
12h = SVMH_OVP (POR)
14h = PMMSWPOR (POR)
16h = WDT time out (PUC)
18h = WDT password violation (PUC)
1Ah = Flash password violation (PUC)
1Ch = Reserved
1Eh = PERF peripheral/configuration area fetch (PUC)
20h = PMM password violation (PUC)
22h to 3Eh = Reserved
(1) Reset value depends on reset source.
96 System Resets, Interrupts, and Operating Modes, System Control Module SLAU208O–June 2008–Revised May 2015
(SYS) Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SYS Registers
1.15.11 SYSBERRIV Register
System Bus Error Interrupt Vector Register
NOTE: Additional events for more complex devices are appended to this table; sources that are removed
reduce the length of this table. The vectors are expected to be accessed symbolic only with the
corresponding include file of the used device.
Figure 1-21. SYSBERRIV Register
15 14 13 12 11 10 9 8
SYSBERRIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SYSBERRIV
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 1-27. SYSBERRIV Register Description
Bit Field Type Reset Description
15-0 SYSBERRIV R 0h System bus error interrupt vector. Generates a value that can be used as an
address offset for fast interrupt service routine handling. Writing to this register
clears all pending flags.
00h = No interrupt pending
02h = USB module timed out. Wait state time out of 8 clock cycles. 16 clock
cycles only on the F552x and F551x devices.
04h = Reserved for future extensions
06h = Reserved for future extensions
08h = Reserved for future extensions
97
SLAU208O–June 2008–Revised May 2015 System Resets, Interrupts, and Operating Modes, System Control Module
(SYS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 2
SLAU208O–June 2008–Revised May 2015
Power Management Module and Supply Voltage
Supervisor
This chapter describes the operation of the Power Management Module (PMM) and
Supply Voltage Supervisor (SVS).
Topic ........................................................................................................................... Page
2.1 Power Management Module (PMM) Introduction .................................................... 99
2.2 PMM Operation................................................................................................. 101
2.3 PMM Registers ................................................................................................. 114
98 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
2.01.8
f0
0
SystemFrequency-MHz
SupplyVoltage-V
ThenumberswithinthefieldsdenotethesupportedPMMCOREVxsettings.
2.2 2.4 3.6
0,1,2,30,1,20,10
1,2,3
1,2
1
2,3
3
2
f1
f2
f3
www.ti.com
Power Management Module (PMM) Introduction
2.1 Power Management Module (PMM) Introduction
PMM features include:
• Wide supply voltage (DVCC) range: 1.8 V to 3.6 V
• Generation of voltage for the device core (VCORE) with up to four programmable levels
• Supply voltage supervisor (SVS) for DVCC and VCORE with programmable threshold levels
• Supply voltage monitor (SVM) for DVCC and VCORE with programmable threshold levels
• Brownout reset (BOR)
• Software accessible power-fail indicators
• I/O protection during power-fail condition
• Software selectable supervisor or monitor state output (optional)
The PMM manages all functions related to the power supply and its supervision for the device. Its primary
functions are first to generate a supply voltage for the core logic, and second, provide several
mechanisms for the supervision and monitoring of both the voltage applied to the device (DVCC) and the
voltage generated for the core (VCORE).
The PMM uses an integrated low-dropout voltage regulator (LDO) to produce a secondary core voltage
(VCORE) from the primary one applied to the device (DVCC). In general, VCORE supplies the CPU, memories
(flash and RAM), and the digital modules, while DVCC supplies the I/Os and all analog modules (including
the oscillators). The VCORE output is maintained using a dedicated voltage reference. VCORE is
programmable up to four steps, to provide only as much power as is needed for the speed that has been
selected for the CPU. This enhances power efficiency of the system. The input or primary side of the
regulator is referred to in this chapter as its high side. The output or secondary side is referred to in this
chapter as its low side.
The required minimum voltage for the core depends on the selected MCLK rate. Figure 2-1 shows the
relationship between the system frequency for a given core voltage setting, as well as the minimum
required voltage applied to the device. Figure 2-1 is only an example—see the device-specific data sheet
to determine which core voltage levels are supported and what level of system frequency performance is
possible for a given device.
Figure 2-1. System Frequency, Supply Voltage, and Core Voltage – See Device-Specific Data Sheet
99
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
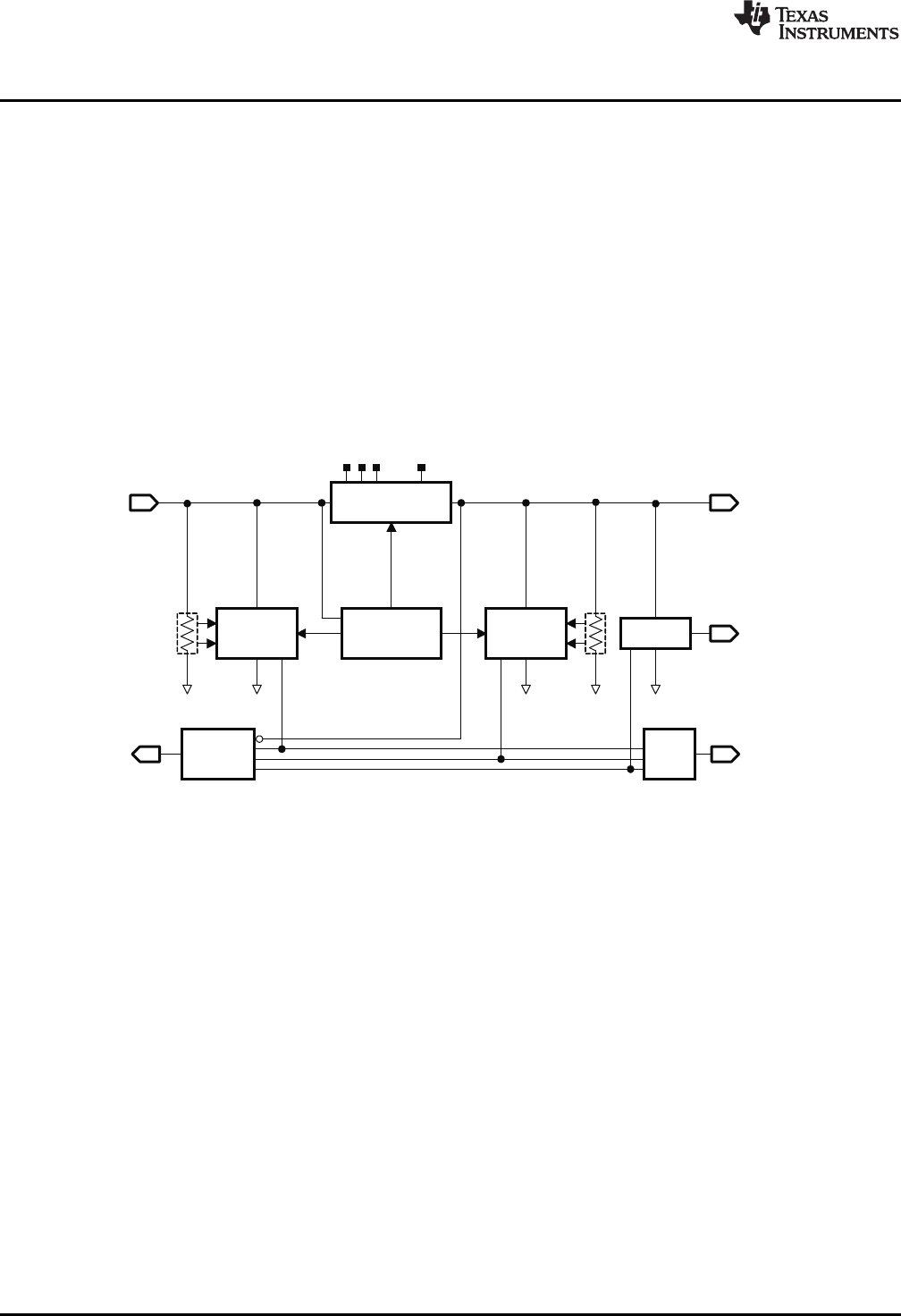
SVS
SVM
H
H
Regulator
SVS
SVM
L
L
DVCC
Reference
VCORE
OR
To reset logic
NOR
Ports ON
BOR
Control bits PMMCOREV
To reset logic
Power Management Module (PMM) Introduction
www.ti.com
The PMM module provides means for DVCC and VCORE to be supervised and monitored. Both of these
functions detect when a voltage falls under a specific threshold. In general, the difference is that
supervision results in a power-on reset (POR) event, while monitoring results in the generation of an
interrupt flag that software may then handle. As such, DVCC is supervised and monitored by the high-side
supervisor (SVSH) and high-side monitor (SVMH), respectively. VCORE is supervised and monitored by the
low-side supervisor (SVSL) and low-side monitor (SVML), respectively. Thus, there are four separate
supervision and monitoring modules that can be active at any given time. The thresholds enforced by
these modules are derived from the same voltage reference used by the regulator to generate VCORE.
In addition to the SVSH, SVMH, SVSL, and SVMLmodules, VCORE is further monitored by the brownout reset
(BOR) circuit. As DVCC ramps up from 0 V at power up, the BOR keeps the device in reset until VCORE is at
a sufficient level for operation at the default MCLK rate and for the SVSHand SVSLmechanisms to be
activated. During operation, the BOR also generates a reset if VCORE falls below a preset threshold. BOR
can be used to provide an even lower-power means of monitoring the supply rail if the flexibility of the
SVSLis not required.
The block diagram of the PMM is shown in Figure 2-2.
Figure 2-2. PMM Block Diagram
100 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
PMM Operation
2.2 PMM Operation
2.2.1 VCORE and the Regulator
DVCC can be powered from a wide input voltage range, but the core logic of the device must be kept at a
voltage lower than what this range allows. For this reason, a regulator has been integrated into the PMM.
The regulator derives the necessary core voltage (VCORE) from DVCC.
Higher MCLK speeds require higher levels of VCORE. Higher levels of VCORE consume more power, and so
the core voltage has been made programmable in up to four steps to allow it to provide only as much
power as is required for a given MCLK setting. The level is controlled by the PMMCOREV bits. Note that
the default setting, the lowest value of PMMCOREV, enables operation of MCLK over a very wide
frequency range. As such, no PMM changes are required for many applications. See the device-specific
data sheet for performance characteristics and core step levels supported.
Before increasing MCLK to a higher speed, it is necessary for software to ensure that the VCORE level is
sufficiently high for the chosen frequency. Failure to do so may force the CPU to attempt operation without
sufficient power, which can cause unpredictable results. See Section 2.2.4 for more information on the
appropriate procedure to raise VCORE for higher MCLK frequencies.
The regulator supports two different load settings to optimize power. The high-current mode is required
when:
• The CPU is in active, LPM0, or LPM1 modes
• A clock source greater than 32 kHz is used to drive any module
• An interrupt is executed
Otherwise, the low-current mode is used. The hardware controls the load settings automatically, according
to the criteria above.
2.2.2 Supply Voltage Supervisor and Monitor
The high-side supervisor and monitor (SVSHand SVMH) oversee DVCC, and the low-side supervisor and
monitor (SVSLand SVML) oversee VCORE. By default, all of these modules are active, but each can be
disabled using the corresponding enable bit (SVSHE, SVMHE, SVSLE, SVMLE), resulting in some power
savings.
Typical application scenarios for supply voltage supervisors and monitors are:
• High-Side Supervisor, SVSH
– Supervision of external power supply (DVCC)
– Device reset because of low battery or supply voltage
• High-Side Monitor, SVMH
– Monitoring of external power supply (DVCC)
– Detection of low battery voltage (Pre-warning)
• Low-Side Supervisor, SVSL
– Supervision of internal core voltage used to supply digital core
– Device reset because of disruptive conditions at external VCORE pin (for example a short). The
internal core voltage never drops below a critical level if parasitic events at the external VCORE pin
are avoided.
• Low-Side Monitor, SVML
– Monitoring of internal core voltage used to supply digital core
– Detection of correct internal voltage levels when changing (especially increasing) the core voltage
level before changing, for example, to higher system frequencies (also see Section 2.2.4).
101
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Operation
www.ti.com
2.2.2.1 SVS and SVM Thresholds
The voltage thresholds enforced by the SVS and SVM modules are selectable. Table 2-1 shows the SVS
and SVM threshold registers, the voltage threshold they control, and the number of threshold options.
Table 2-1. SVS and SVM Thresholds
Register Description Threshold Available Steps
SVSHRVL SVSHreset voltage level SVSH_IT- 4
SVSMHRRL SVSH, SVMHreset release voltage level SVSH_IT+, SVMH8
SVSLRVL SVSLreset voltage level SVSL_IT- 4
SVSMLRRL SVSL, SVMLreset release voltage level SVSL_IT+, SVML4(1)
(1) The register settings support up to eight levels (0 through 7); however, levels 3 through 7 are identical.
2.2.2.1.1 Recommended SVSLSettings
For each of the core voltages, there are two supply voltage supervisor levels available. The SVSLRVL bits
define the voltage level of VCORE below which the reset is activated. The SVSMLRRL bits define the
voltage level of VCORE at which the reset is released. Although various settings can be chosen, there is
one set of SVSLRVL and SVSMLRRL settings that is well suited for each core voltage selected by
PMMCOREV. By default, an SVSLevent always generates a POR (SVSLPE = 1), and it is recommended
to always configure SVSLPE = 1 for reliable device startup. The most commonly used and recommended
settings are shown in Table 2-2.
Table 2-2. Recommended SVSLSettings
SVSMLRRL[2:0]
SVSLRVL[1:0]
PMMCOREV[1:0] DVCC (V) Sets SVSL_IT+ and SVML
Sets SVSL_IT- Level levels
00 ≥1.8 00 000
01 ≥2.0 01 001
10 ≥2.2 10 010
11 ≥2.4 11 011
2.2.2.1.1.1 Recommended SVSHSettings
For the high-side supply, there are two supply voltage supervisor levels available. The SVSMHRRL bits
define the voltage level of DVCC at which the reset is released. The SVSHRVL register defines the
voltage level of DVCC below which the reset is turned on. These settings should be selected according to
the minimum voltages required for device operation in a given application, as well as system power supply
characteristics. See the device-specific data sheet for threshold values corresponding to the settings
shown here. Although various settings are available, the most common are based on the maximum
frequency required which, in turn, determines the minimum DVCC level supervised. By default, an SVSH
event always generates a POR (SVSHPE = 1), and it is recommended to always configure SVSHPE = 1
for reliable device startup. The most commonly used and recommended settings are shown in Table 4-2 .
Table 2-3. Recommended SVSHSettings
SVSMHRRL[2:0]
fSYS Max DVCC SVSHRVL[1:0] Sets SVSH_IT+ and PMMCOREV[1:0]
(MHz) (V) Sets SVSH_IT- Level SVMHLevels
8 >1.8 00 000 00
12 >2.0 01 001 01
20 >2.2 10 010 10
25 >2.4 11 011 11
102 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
SVSMHRRLx
111 (7)
110 (6)
101 (5)
100 (4)
011 (3)
010 (2)
001 (1)
000 (0)
11
10
01
00
PMMCOREVx
Invalid
Invalid
Valid
www.ti.com
PMM Operation
The available voltage threshold settings of SVSHand SVMHare dependent on the voltage level setting of
VCORE. Table 2-4 summarizes all of the possible settings available. All other settings not listed are invalid
and should not be used. Also SVSMHRRL must always be equal or larger than SVSHRVL. Figure 2-3
shows the available settings for the SVMH.
Table 2-4. Available SVSHand SVMHSettings Versus VCORE Settings
SVSHRVL[1:0] SVSMHRRL[2:0]
PMMCOREV[1:0] Sets SVSH_IT- Level Sets SVSH_IT+ and SVMHLevels
00 00 through 11 000 through 011
01 00 through 11 001 through 100
10 00 through 11 010 through 101
11 00 through 11 011 through 111
Figure 2-3. Available SVMHSettings Versus VCORE Settings
The behavior of the SVS and SVM according to these thresholds is best portrayed graphically. Figure 2-4
shows how the supervisors and monitors respond to various supply failure conditions.
As Figure 2-4 shows, there is hysteresis built into the supervision thresholds, such that the thresholds in
force depend on whether the voltage rail is going up or down. There is no hysteresis in the monitoring
thresholds.
NOTE: SVS Hysteresis
There is only a reliable hysteresis if the bit setting for SVSMHRRL is equal or larger than the
bit setting for SVSHRVL. Thus you must select a SVSMHRRL setting that is equal or larger
than the SVSHRVL setting.
103
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
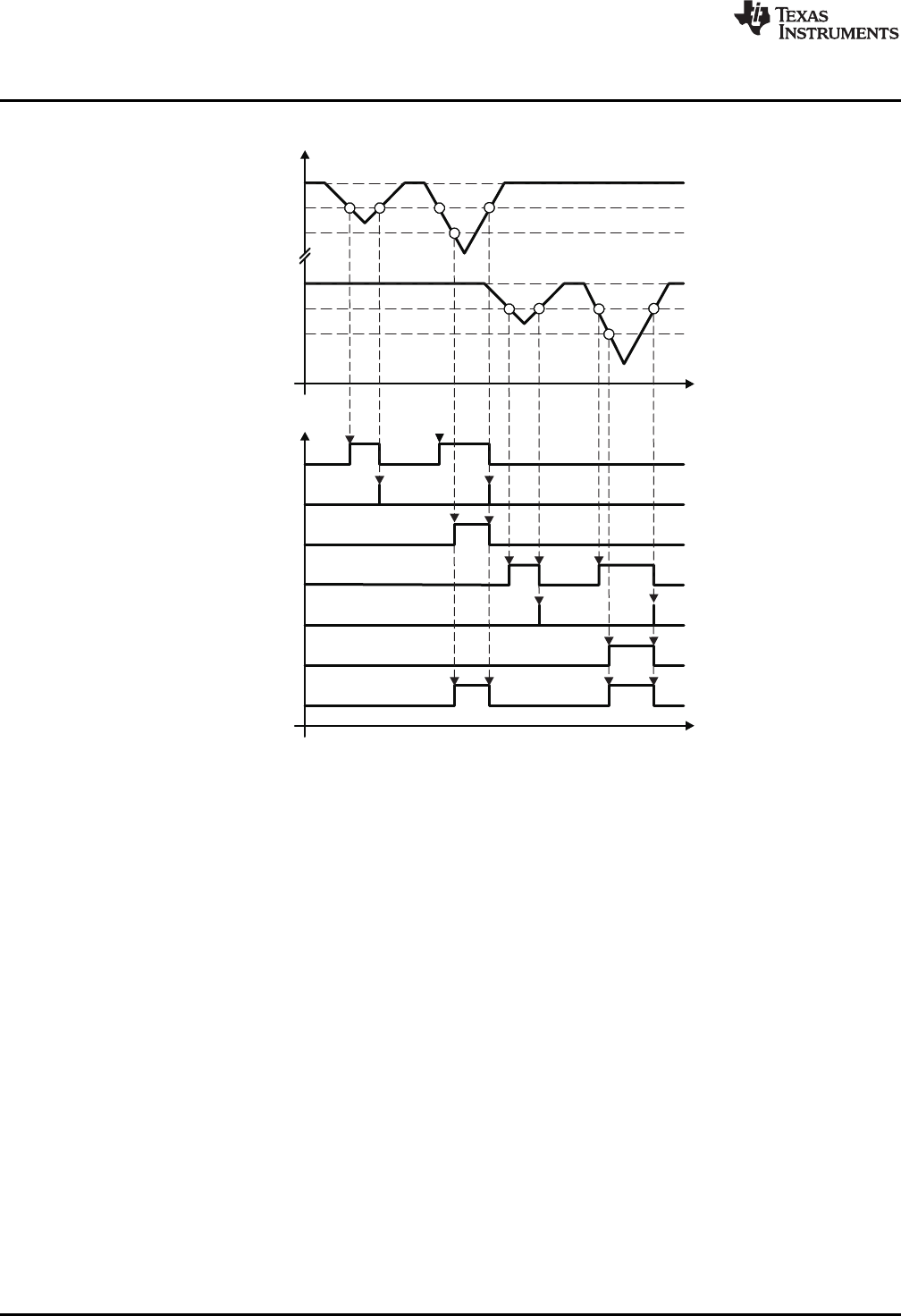
DVCC
Voltage
VCORE
SVM ,SVS
L _IT+L
SVSL_IT-
SVM ,SVS
H H_IT+
SVSH_IT-
Time
Set SVMHIFG
Set SVSHIFG
POR
Set SVMLIFG
Set SVSLIFG
Set SVMHVLRIFG
Set SVMLVLRIFG
PMM Operation
www.ti.com
Figure 2-4. High-Side and Low-Side Voltage Failure and Resulting PMM Actions
104 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
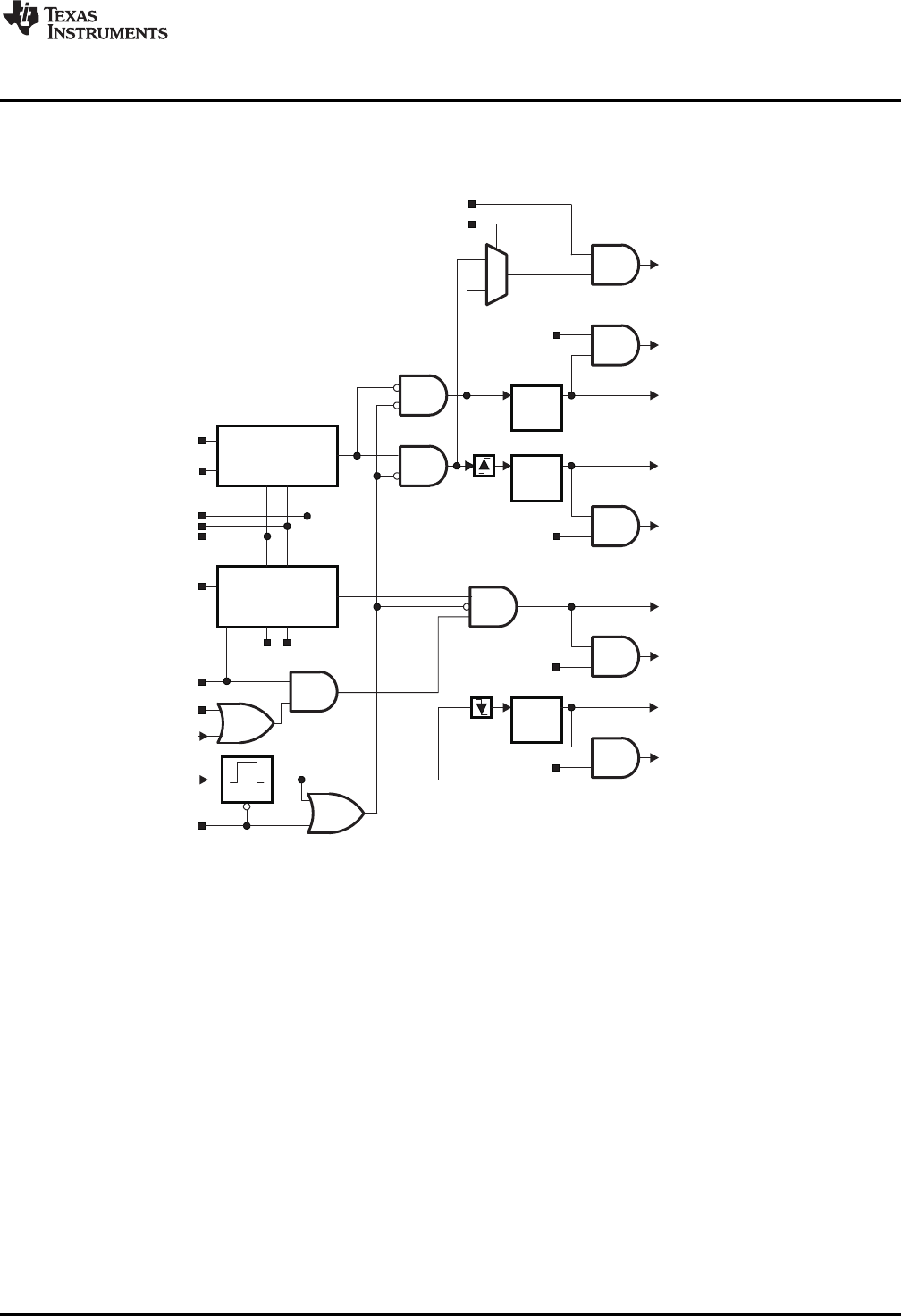
SVSHFP SVSH
SVSHRVL SVSHPE Set POR
Set SVSHIFG
LPM or SVSMHCTL
change
SVSHE
SVMH
SVSMHRRL
SVMHFP
SVMHE
SVMHOVPE
SVMHVLRPE
Set POR
SVMHVLRIFG
SVMHVLRIE SVM Reached Interrupt
H
SVMHIE
SVMHIFG
SVSMHDLYIE
SVSMHDLYIFG
IFG
Set
IFG
Set
IFG
Set
High Side Delay Interrupt
SVSHMD
High power mode
1
0
ONON
EN
ON
SVSMHEVM
SVM Interrupt
H
www.ti.com
PMM Operation
2.2.2.2 High-Side Supervisor (SVSH) and High-Side Monitor (SVMH)
The SVSHand SVMHmodules are enabled by default. They can be disabled by clearing the SVSHE and
SVMHE bits, respectively. Their block diagrams are shown in Figure 2-5.
Figure 2-5. High-Side SVS and SVM
If DVCC falls below the SVSHlevel, SVSHIFG (SVSHinterrupt flag) is set. If DVCC remains below the SVSH
level and software attempts to clear SVSHIFG, it is immediately set again by hardware. If the SVSHPE
(SVSHPOR enable) bit is set when SVSHIFG gets set, a POR is generated.
If DVCC falls below the SVMHlevel, SVMHIFG (SVMHinterrupt flag) is set. If DVCC remains below the SVMH
level and software attempts to clear SVMHIFG, it is immediately set again by hardware. If the SVMHIE
(SVMHinterrupt enable) bit is set when SVMHIFG gets set, an interrupt is generated. If a POR is desired
when SVMHIFG is set, the SVMHcan be configured to do so by setting the SVMHVLRPE (SVMHvoltage
level reached POR enable) bit while SVMHOVPE bit is cleared.
If DVCC rises above the SVMHlevel, the SVMHVLRIFG (SVMHvoltage level reached) interrupt flag is set. If
SVMHVLRIE (SVMHvoltage level reached interrupt enable) is set when this occurs, an interrupt is also
generated.
Alternatively the SVMHmodule can be used for overvoltage detection, but only with the highest core
voltage setting (PMMCOREV = 11b), . This is accomplished by setting the SVMHOVPE (SVMH
overvoltage POR enable) bit in addition to setting SVMHVLRPE. Under these conditions, if a rising DVCC
exceeds safe device operation, a POR is generated.
105
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
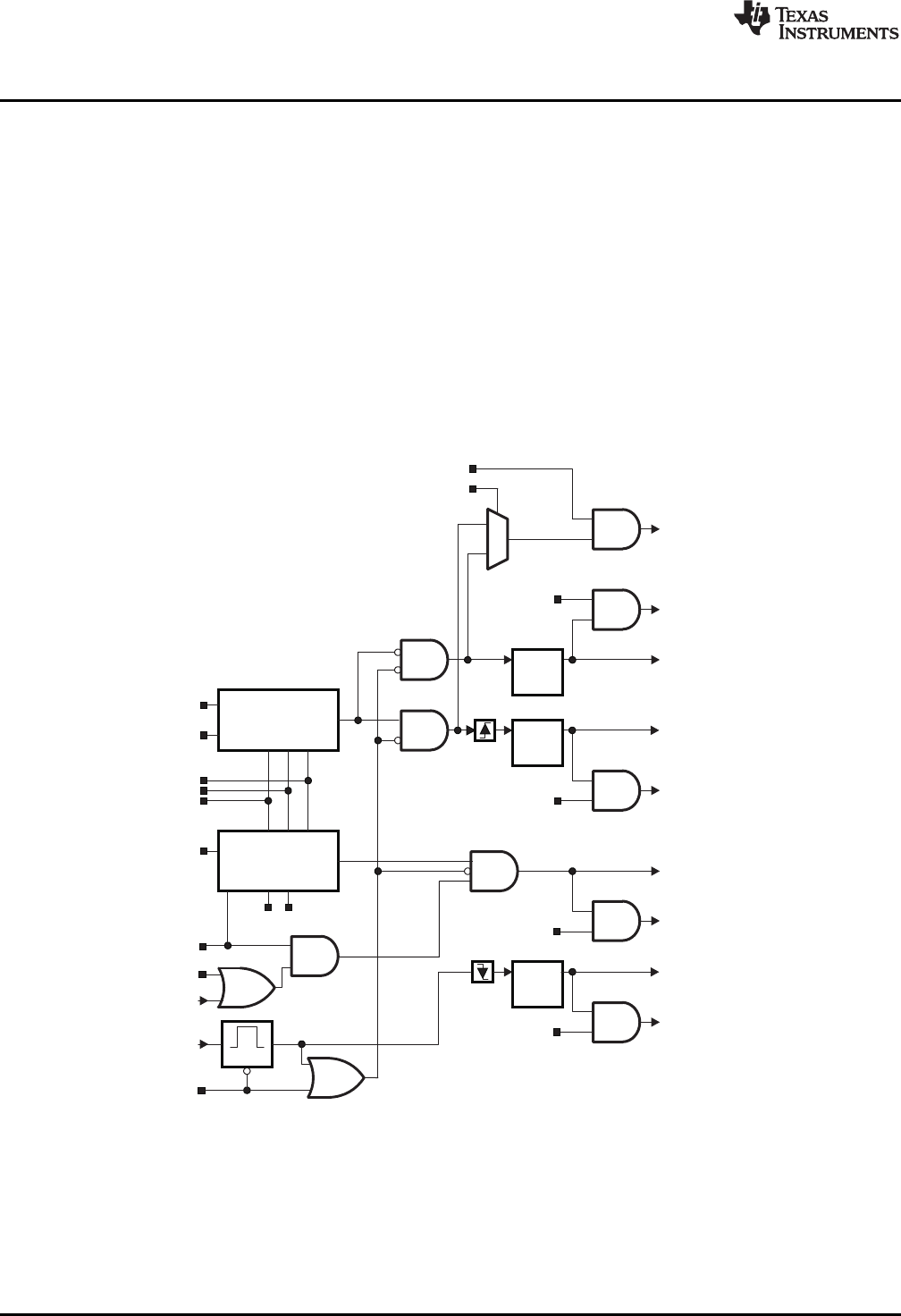
SVSLFP SVSL
SVSLRVL SVSLPE Set POR
Set SVSLIFG
SVSLE
SVML
SVSMLRRL
SVMLFP
SVMLE
SVMLOVPE
SVMLVLRPE
Set POR
SVMLVLRIFG
SVMLVLRIE SVM Reached Interrupt
L
SVMLIE
SVMLIFG
SVSMLDLYIE
SVSMLDLYIFG
IFG
Set
IFG
Set
IFG
Set
Low Side Delay Interrupt
SVSLMD
High power mode
1
0
ONON
ON
SVM Interrupt
L
LPM or SVSMLCTL
change EN
SVSMLEVM
PMM Operation
www.ti.com
The SVSHand SVMHmodules have configurable performance modes for power-saving operation. (See
Section 2.2.9 for more information.) If these SVSHand SVMHpower modes are modified, or if a voltage
level is modified, a delay element masks the interrupts and POR sources until the SVSHand SVMHcircuits
have settled. When SVSMHDLYST (delay status) reads zero, the delay has expired. In addition, the
SVSMHDLYIFG (SVSHand SVMHdelay expired) interrupt flag is set. If the SVSMHDLYIE (SVSHand
SVMHdelay expired interrupt enable) is set when this occurs, an interrupt is also generated.
In case of power-fail conditions, setting SVSHMD causes the SVSHinterrupt flag to be set in LPM2, LPM3,
and LPM4. If SVSHMD is not set, the SVSHinterrupt flag is not set in LPM2, LPM3, and LPM4. In addition,
all SVSHand SVMHevents can be masked by setting SVSMHEVM. For most applications, SVSMHEVM
should be cleared.
All the interrupt flags of SVSHand SVMHremain set until cleared by a BOR or by software.
2.2.2.3 Low-Side Supervisor (SVSL) and Low-Side Monitor (SVML)
The SVSLand SVMLmodules are enabled by default. They can be disabled by clearing SVSLE and
SVMLE bits, respectively. Their block diagrams are shown in Figure 2-6.
Figure 2-6. Low-Side SVS and SVM
If VCORE falls below the SVSLlevel, SVSLIFG (SVSLinterrupt flag) is set. If VCORE remains below the SVSL
level and software attempts to clear SVSLIFG, it is immediately set again by hardware. If the SVSLPE
(SVSLPOR enable) bit is set when SVSLIFG gets set, a POR is generated.
106 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

DVCC
Voltage
VCORE
SVSH_IT+
SVSL_IT+
Time
POR
Reset from SVSH
Reset from SVSL
www.ti.com
PMM Operation
If VCORE falls below the SVMLlevel, SVMLIFG (SVMLinterrupt flag) is set. If VCORE remains below the SVML
level and software attempts to clear SVMLIFG, it is immediately set again by hardware. If the SVMLIE
(SVMLinterrupt enable) bit is set when SVMLIFG gets set, an interrupt is generated. If a POR is desired
when SVMLIFG is set, the SVMLcan be configured to do so by setting the SVMLVLRPE (SVMLvoltage
level reached POR enable) bit while SVMLOVPE bit is cleared.
If VCORE rises above the SVMLlevel, the SVMLVLRIFG (SVMLvoltage level reached) interrupt flag is set. If
SVMLVLRIE (SVMLvoltage level reached interrupt enable) is set when this occurs, an interrupt is also
generated.
The SVMLmodule can also be used for overvoltage detection. This is accomplished by setting the
SVMLOVPE (SVMLovervoltage POR enable) bit, in addition to setting SVMLVLRPE. Under these
conditions, if VCORE exceeds safe device operation, a POR is generated.
The SVSLand SVMLmodules have configurable performance modes for power-saving operation. (See
Section 2.2.9 for more information.) If these SVSLand SVMLpower modes are modified, or if a voltage
level is modified, a delay element masks the interrupts and POR sources until the SVSLand SVMLcircuits
have settled. When SVSMLDLYST (delay status) reads zero, the delay has expired. In addition, the
SVSMLDLYIFG (SVSL/SVMLdelay expired) interrupt flag is set. If the SVSMLDLYIE (SVSLand SVML
delay expired interrupt enable) is set when this occurs, an interrupt is also generated.
In case of power-fail conditions, setting SVSLMD causes the SVSLinterrupt flag to be set in LPM2, LPM3,
and LPM4. If SVSLMD is not set, the SVSLinterrupt flag is not set in LPM2, LPM3, and LPM4. In addition,
all SVSLand SVMLevents can be masked by setting SVSMLEVM. For most applications, SVSMLEVM
should be cleared.
All the interrupt flags of SVSLand SVMLremain set until cleared by a BOR or by software.
2.2.3 Supply Voltage Supervisor and Monitor - Power-Up
When the device is powering up, the SVSHand SVSLfunctions are enabled by default. Initially, DVCC is
low, and therefore the PMM holds the device in POR reset. When both the SVSHand SVSLlevels are met,
the reset is released. Figure 2-7 shows this process.
Figure 2-7. PMM Action at Device Power-Up
After this point, both voltage domains are supervised and monitored while the respective modules are
enabled.
107
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
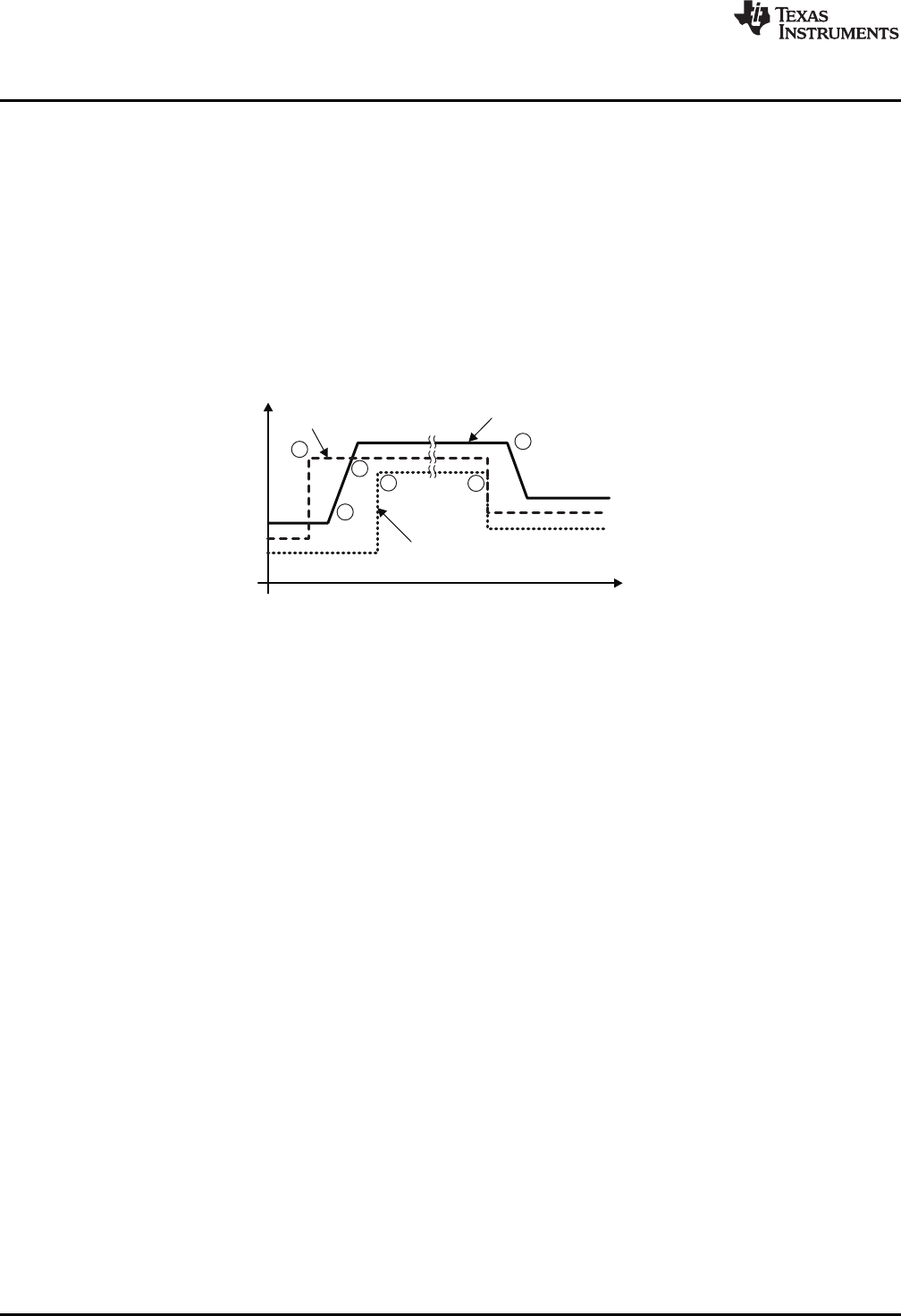
Voltage
VCORE
Time
SVML
SVSL
1
2
3
45
6
PMM Operation
www.ti.com
2.2.4 Increasing VCORE to Support Higher MCLK Frequencies
With a reset, VCORE and all the PMM thresholds, default to their lowest possible levels. These default
settings allow a wide range of MCLK operation, and in many applications no change to these levels is
required. However, if the application requires the performance provided by higher MCLK frequencies,
software should ensure that VCORE has been raised to a sufficient voltage level before changing MCLK,
since failing to supply sufficient voltage to the CPU could produce unpredictable results. For a given
device, minimum VCORE levels required for maximum MCLK frequencies have been established (See the
device data sheet for specific values).
After setting PMMCOREV to increase VCORE, there is a time delay until the new voltage has been
established. Software must not raise MCLK until the necessary core voltage has settled. SVMLcan be
used to verify that VCORE has met the required minimum value, prior to increasing MCLK. Figure 2-8 shows
this procedure.
Figure 2-8. Changing VCORE and SVMLand SVSLLevels
It is critical that the VCORE level be increased by only one level at a time. The following steps 1 through 4
show the procedure to increase VCORE by one level. This sequence is repeated to change the VCORE level
until the targeted level is obtained:
• Step 1: Make sure that DVCC has settled before you continue with the next steps.
• Step 2: Program the SVMHand SVSHto the next level. This makes sure that DVCC is high enough for
the next VCORE level.
• Step 3: Program the SVMLto the next level and wait until SVSMLDLYIFG is one.
• Step 4: Program PMMCOREV to the next VCORE level.
• Step 5: Wait until SVMLVLRIFG flag is one. It indicates that the core voltage reached the level you
programmed in Step 4.
• Step 6: Program the SVSLto the next level.
As a reference, the following is a C code example for increasing VCORE. The sample libraries provide
routines for increasing and decreasing the VCORE and should be used whenever possible.
; C Code example for increasing core voltage.
; Note: Change core voltage one level at a time.
void SetVCoreUp (unsigned int level)
{
// Open PMM registers for write access
PMMCTL0_H = 0xA5;
// Make sure no flags are set for iterative sequences
while ((PMMIFG & SVSMHDLYIFG) == 0);
while ((PMMIFG & SVSMLDLYIFG) == 0);
// Set SVS/SVM high side new level
SVSMHCTL = SVSHE + SVSHRVL0 * level + SVMHE + SVSMHRRL0 * level;
// Set SVM low side to new level
SVSMLCTL = SVSLE + SVMLE + SVSMLRRL0 * level;
// Wait till SVM is settled
while ((PMMIFG & SVSMLDLYIFG) == 0);
108 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Operation
// Clear already set flags
PMMIFG &= ~(SVMLVLRIFG + SVMLIFG);
// Set VCore to new level
PMMCTL0_L = PMMCOREV0 * level;
// Wait till new level reached
if ((PMMIFG & SVMLIFG))
while ((PMMIFG & SVMLVLRIFG) == 0);
// Set SVS/SVM low side to new level
SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level;
// Lock PMM registers for write access
PMMCTL0_H = 0x00;
}
NOTE: See the MSP430x5xx and MSP430x6xx Core Libraries (SLAA448). These libraries contain
useful and ready-to-use functions for easily configuring and using the PMM module.
2.2.5 Decreasing VCORE for Power Optimization
The risk posed by increasing MCLK frequency does not exist when decreasing MCLK from the current
VCORE or higher settings, because higher VCORE levels can still support MCLK frequencies below the ones
for which they were intended. However, significant power efficiency gains can be made by operating VCORE
at the lowest value required for a given MCLK frequency. It is critical that the VCORE level be decreased by
only one level at a time. The following steps show the procedure to decrease VCORE by one level. This
sequence is repeated to change the VCORE level until the targeted level is obtained:
The following steps show the procedure to decrease VCORE:
• Step 1: Program the SVMLand SVSLto the new level and wait for (SVSMLDLYIFG) to be set.
• Step 2: Program PMMCOREV to the new VCORE level.
It is critical when lowering the VCORE setting that the maximum MCLK frequency for the new VCORE setting is
not violated (see the device-specific data sheet).
2.2.6 Transition From LPM3 and LPM4 Modes to AM
The LDO requires time to settle when the application transitions from low-power modes to active modes. If
a transition from LPM3 or LPM4 occurs and the devices does not stay in active mode long enough, the
LDO does not have time to settle sufficiently. Circuitry inside the LDO ensures that the LDO has its
minimum required time to settle to its proper operating voltage. The circuitry ensures that every eighth
transition from LPM3 or LPM4 causes the LDO to remain on long enough to properly settle. This is
handled automatically and requires no setting by the application.
2.2.7 LPM3.5 and LPM4.5
LPM3.5 and LPM4.5 are additional low-power modes in which the regulator of the PMM is completely
disabled, providing additional power savings. Not all devices support all LPMx.5 modes, so see the
device-specific data sheet. Because there is no power supplied to VCORE during LPMx.5, the CPU and
all digital modules including RAM are unpowered. This disables the entire device and, as a result, the
contents of the registers and RAM are lost. Any essential values should be stored to flash prior to entering
LPMx.5. PMMREGOFF bit is used to disable the regulator. See the SYS module for complete descriptions
and proper uses of LPMx.5.
Because the regulator of the PMM is disabled upon entering LPMx.5, all I/O register configurations are
lost. Therefore, the configuration of I/O pins must be handled differently to ensure that all pins in the
application behave in a controlled manner upon entering and exiting LPMx.5. Properly setting the I/O pins
is critical to achieving the lowest possible power consumption in LPMx.5, as well as preventing any
possible uncontrolled input or output I/O state in the application. The application has complete control of
109
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Operation
www.ti.com
the I/O pin conditions preventing the possibility of unwanted spurious activity upon entry and exit from
LPMx.5. The I/O pin state is held and locked based on the settings prior to LPMx.5 entry. Upon entry into
LPMx.5, the LOCKLPM5 bit in PM5CTL0 of the PMM module is set automatically. Note that only the pin
condition is retained. All other port configuration register settings are lost. See the Digital I/O chapter for
further details.
2.2.8 Brownout Reset (BOR), Software BOR, Software POR
The primary function of the brownout reset (BOR) circuit occurs when the device is powering up. It is
functional very early in the power-up ramp, generating a POR that initializes the system. It also functions
when no SVS is enabled and a brownout condition occurs. It sustains this reset until the input power is
sufficient for the logic, for proper reset of the system.
In an application, it may be desired to cause a BOR by software. Setting PMMSWBOR causes a software-
driven BOR. PMMBORIFG is set accordingly. Note that a BOR also initiates a POR and PUC.
PMMBORIFG can be cleared by software or by reading SYSRSTIV. Similarly, it is possible to cause a
POR by software by setting PMMSWPOR. PMMPORIFG is set accordingly. A POR also initiates a PUC.
PMMPORIFG can be cleared by software or by reading SYSRSTIV. Both PMMSWBOR and PMMSWPOR
are self clearing. See the SYS module for complete descriptions of BOR, POR, and PUC resets.
2.2.9 SVS and SVM Performance Modes and Wakeup Times
The supervisors/monitors can function in one of two modes: normal and full performance. The difference
is a tradeoff in response time versus the power consumed; full-performance mode has a faster response
time but consumes considerably more power than normal mode. Full-performance mode might be
considered in applications in which the decoupling of the external power supply cannot adequately prevent
fast spikes on DVCC from occurring, or when the application has a particular intolerance to failure. In such
cases, full-performance mode provides an additional layer of protection.
There are two ways to control the performance mode: manual and automatic. In manual mode, the
normal/full-performance selection is the same for every operational mode except LPMx.5 (the SVS and
SVM are always disabled in LPMx.5). In this case, the normal or full-performance selection is made with
the SVSHFP, SVMHFP, SVSLFP, or SVMLFP bit, for their respective modules.
In automatic mode, hardware changes the normal or full-performance selection depending on the
operational mode in effect.
The wake-up time of the device from low-power modes is affected by the settings of the SVSLand SVML
performance modes as listed in Table 2-6,Table 2-7,Table 2-8, and Table 2-9. The wake-up time from
low-power modes is not affected by the settings of the SVSHand SVMH. All wake-ups from LPMx.5
(LPM3.5 or LPM4.5), are defined by the data sheet parametric, tWAKE-UP-LPM5, regardless of the performance
modes for SVSLor SVML, because these are disabled in LPMx.5.
The tables in Section 2.2.9.1 and Section 2.2.9.2 show the required settings to select the control and
performance modes for SVSL, SVML, SVSH, and SVMH.
NOTE: Low-Power Modes
Even if the CPU requests a specific low-power mode, the device might not go into that state
because of modules requesting clocks that should be switched off or have higher
frequencies or because of modules requesting a higher drive capability of the LDO. The low-
power modes mentioned in the tables assume that the device is actually in the requested
state; that is, no module is requesting a deviating clock setting or drive capability.
110 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Operation
2.2.9.1 Low-Side SVS and SVM Control and Performance Mode Selection
Table 2-5. SVSLand SVMLControl Mode Selection
SVSMLACE SVSLMD SVSLControl Mode SVMLControl Mode
0 0 Automatic (see Table 2-6) Manual (see Table 2-8)
0 1 Manual (see Table 2-7) Manual (see Table 2-8)
1 0 Automatic (see Table 2-6) Automatic (see Table 2-9)
1 1 Automatic (see Table 2-6) Automatic (see Table 2-9)
Table 2-6. SVSLAutomatic Performance Control
AM, LPM0, LPM1 LPM2, LPM3, LPM4 Wakeup Time
SVSLE SVSLMD SVSLFP SVSLState SVSLState LPM2, LPM3, LPM4
0 x x Off Off tWAKE-UP-FAST
1 0 0 Normal Off tWAKE-UP-SLOW
1 0 1 Full performance Off tWAKE-UP-FAST
1 1 0 Normal Off tWAKE-UP-SLOW
1 1 1 Full performance Normal tWAKE-UP-FAST
Table 2-7. SVSLManual Performance Modes
AM, LPM0, LPM1 LPM2, LPM3, LPM4 Wakeup Time
SVSLE SVSLFP SVSLState SVSLState LPM2, LPM3, LPM4
0 x Off Off tWAKE-UP-FAST
1 0 Normal Normal tWAKE-UP-SLOW
1 1 Full performance Full performance tWAKE-UP-FAST
Table 2-8. SVMLAutomatic Performance Control
AM, LPM0, LPM1 LPM2, LPM3, LPM4 Wakeup Time
SVMLE SVMLFP SVMLState SVMLState LPM2, LPM3, LPM4
0 x Off Off tWAKE-UP-FAST
1 0 Normal Off tWAKE-UP-SLOW
1 1 Full performance Normal tWAKE-UP-FAST
Table 2-9. SVMLManual Performance Modes
AM, LPM0, LPM1 LPM2, LPM3, LPM4 Wakeup Time
SVMLE SVMLFP SVMLState SVMLState LPM2, LPM3, LPM4
0 x Off Off tWAKE-UP-FAST
1 0 Normal Normal tWAKE-UP-SLOW
1 1 Full performance Full performance tWAKE-UP-FAST
111
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Operation
www.ti.com
2.2.9.2 High-Side SVS and SVM Control and Performance Mode Selection
Table 2-10. SVSHand SVMHControl Mode Selection
SVSMHACE SVSHMD SVSHControl Mode SVMHControl Mode
0 0 Automatic (see Table 2-11) Manual (see Table 2-13)
0 1 Manual (see Table 2-12) Manual (see Table 2-13)
1 0 Automatic (see Table 2-11) Automatic (see Table 2-14)
1 1 Automatic (see Table 2-11) Automatic (see Table 2-14)
Table 2-11. SVSHAutomatic Performance Control
AM, LPM0, LPM1 LPM2, LPM3, LPM4
SVSHE SVSHMD SVSHFP SVSHState SVSHState
0 x x Off Off
1 0 0 Normal Off
1 0 1 Full performance Off
1 1 0 Normal Off
1 1 1 Full performance Normal
Table 2-12. SVSHManual Performance Modes
AM, LPM0, LPM1 LPM2, LPM3, LPM4
SVSHE SVSHFP SVSHState SVSHState
0 x Off Off
1 0 Normal Normal
1 1 Full performance Full performance
Table 2-13. SVMHAutomatic Performance Control
AM, LPM0, LPM1 LPM2, LPM3, LPM4
SVMHE SVMHFP SVMH State SVMHState
0 x Off Off
1 0 Normal Off
1 1 Full performance Normal
Table 2-14. SVMHManual Performance Modes
AM, LPM0, LPM1 LPM2, LPM3, LPM4
SVMHE SVMHFP SVMHState SVMHState
0 x Off Off
1 0 Normal Normal
1 1 Full performance Full performance
2.2.9.3 Wake-up Times in Debug Mode
The TEST/SBWTCK pin is used for interfacing to the development tools by Spy-Bi-Wire and JTAG. When
the TEST/SBWTCK pin is high, wake-up times from LPM2, LPM3, and LPM4 may be different compared
to when TEST/SBWTCK is low. When the TEST/SBWTCK pin is high, all delays associated with the SVSL
and SVMLsettings have no effect and the device wakes within tWAKE-UP-FAST . Pay careful attention to the
real-time behavior when exiting from LPM2, LPM3, and LPM4 with the device connected to a development
tool (for example, MSP-FET430UIF).
112 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
PMM Operation
2.2.10 PMM Interrupts
Interrupt flags generated by the PMM are routed to the system NMI interrupt vector generator register,
SYSSNIV. When the PMM causes a reset, a value is generated in the system reset interrupt vector
generator register, SYSRSTIV, corresponding to the source of the reset. These registers are defined
within the SYS module. More information on the relationship between the PMM and SYS modules is
available in the SYS chapter.
2.2.11 Port I/O Control
The PMM provides a means of ensuring that I/O pins cannot behave in uncontrolled fashion during an
undervoltage event. During these times, outputs are disabled, both normal drive and the weak
pullup/pulldown function. If the CPU is functioning normally, and then an undervoltage event occurs, any
pin configured as an input has its PxIN register value locked in at the point the event occurs, until voltage
is restored. During the undervoltage event, external voltage changes on the pin are not registered
internally. This helps prevent erratic behavior from occurring.
2.2.12 Supply Voltage Monitor Output (SVMOUT, Optional)
The state of SVMLIFG, SVMLVLRIFG, SVMHIFG, and SVMLVLRIFG can be monitored on the external
SVMOUT pin. Each of these interrupt flags can be enabled (SVMLOE, SVMLVLROE, SVMHOE,
SVMLVLROE) to generate an output signal. The polarity of the output is selected by the SVMOUTPOL bit.
If SVMOUTPOL is set, the output is set to 1 if an enabled interrupt flag is set.
113
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

PMM Registers
www.ti.com
2.3 PMM Registers
The PMM registers are listed in Table 2-15. The base address of the PMM module can be found in the
device-specific data sheet. The address offset of each PMM register is given in Table 2-15. The password,
PMMPW, defined in the PMMCTL0 register controls access to all PMM, SVS, and SVM registers. Once
the correct password is written, the write access is enabled. The write access is disabled by writing a
wrong password in byte mode to the PMMCTL0 upper byte. Word accesses to PMMCTL0 with a wrong
password triggers a PUC. A write access to a register other than PMMCTL0 while write access is not
enabled causes a PUC.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 2-15. PMM Registers
Offset Acronym Register Name Type Access Reset Section
00h PMMCTL0 PMM control register 0 Read/write Word 9600h Section 2.3.1
00h PMMCTL0_L Read/write Byte 00h
01h PMMCTL0_H Read/write Byte 96h
02h PMMCTL1 PMM control register 1 Read/write Word 0000h Section 2.3.2
02h PMMCTL1_L Read/write Byte 00h
03h PMMCTL1_H Read/write Byte 00h
04h SVSMHCTL SVS and SVM high side control register Read/write Word 4400h Section 2.3.3
04h SVSMHCTL_L Read/write Byte 00h
05h SVSMHCTL_H Read/write Byte 44h
06h SVSMLCTL SVS and SVM low side control register Read/write Word 4400h Section 2.3.4
06h SVSMLCTL_L Read/write Byte 00h
07h SVSMLCTL_H Read/write Byte 44h
08h SVSMIO SVSIN and SVMOUT control register Read/write Word 0020h Section 2.3.5
(optional)
08h SVSMIO_L Read/write Byte 20h
09h SVSMIO_H Read/write Byte 00h
0Ch PMMIFG PMM interrupt flag register Read/write Word 0000h Section 2.3.6
0Ch PMMIFG_L Read/write Byte 00h
0Dh PMMIFG_H Read/write Byte 00h
0Eh PMMRIE PMM interrupt enable register Read/write Word 1100h Section 2.3.7
0Eh PMMRIE_L Read/write Byte 00h
0Fh PMMRIE_H Read/write Byte 11h
10h PM5CTL0 Power mode 5 control register 0 Read/write Word 0000h Section 2.3.8
10h PM5CTL0_L Read/write Byte 00h
11h PM5CTL0_H Read/write Byte 00h
114 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Registers
2.3.1 PMMCTL0 Register
Power Management Module Control Register 0
Figure 2-9. PMMCTL0 Register
15 14 13 12 11 10 9 8
PMMPW
rw-1 rw-0 rw-0 rw-1 rw-0 rw-1 rw-1 rw-0
76543210
Reserved Reserved PMMREGOFF PMMSWPOR PMMSWBOR PMMCOREV
rw-0 r-0 r-0 rw-0 rw-0 rw-0 rw-[0] rw-[0]
Table 2-16. PMMCTL0 Register Description
Bit Field Type Reset Description
15-8 PMMPW RW 96h PMM password. Always read as 096h. When using word operations, must be
written with 0A5h or a PUC is generated. When using byte operation, writing
0A5h unlocks all PMM registers. When using byte operation, writing anything
different than 0A5h locks all PMM registers.
7 Reserved RW 0h Reserved. Must always be written as 0.
6-5 Reserved R 0h Reserved. Always reads as 0.
4 PMMREGOFF RW 0h Regulator off (see the SYS chapter for details)
3 PMMSWPOR RW 0h Software power-on reset. Setting this bit to 1 triggers a POR. This bit is self
clearing.
2 PMMSWBOR RW 0h Software brownout reset. Setting this bit to 1 triggers a BOR. This bit is self
clearing.
1-0 PMMCOREV RW 0h Core voltage (see the device-specific data sheet for supported levels and
corresponding voltages)
00b = V(CORE) level 0
01b = V(CORE) level 1
10b = V(CORE) level 2
11b = V(CORE) level 3
115
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Registers
www.ti.com
2.3.2 PMMCTL1 Register
Power Management Module Control Register 1
Figure 2-10. PMMCTL1 Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved Reserved Reserved Reserved
r-0 r-0 rw-[0] rw-[0] r-0 r-0 rw-0 rw-0
Table 2-17. PMMCTL1 Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved. Always reads as 0.
5-4 Reserved RW 0h Reserved. Must always be written with 0.
3-2 Reserved R 0h Reserved. Always reads as 0.
1-0 Reserved RW 0h Reserved. Must always be written with 0.
116 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Registers
2.3.3 SVSMHCTL Register
Supply Voltage Supervisor and Monitor High-Side Control Register
Figure 2-11. SVSMHCTL Register
15 14 13 12 11 10 9 8
SVMHFP SVMHE Reserved SVMHOVPE SVSHFP SVSHE SVSHRVL
rw-[0] rw-1 r-0 rw-[0] rw-[0] rw-1 rw-[0] rw-[0]
76543210
SVSMHACE SVSMHEVM Reserved SVSHMD SVSMHDLYST SVSMHRRL
rw-[0] rw-0 r-0 rw-0 r-0 rw-[0] rw-[0] rw-[0]
Table 2-18. SVSMHCTL Register Description
Bit Field Type Reset Description
15 SVMHFP RW 0h SVM high-side full-performance mode. If this bit is set, the SVMH operates in
full-performance mode.
0b = Normal mode. See the device-specific data sheet for response times.
1b = Full-performance mode. See the device-specific data sheet for response
times.
14 SVMHE RW 1h SVM high-side enable. If this bit is set, the SVMH is enabled.
13 Reserved R 0h Reserved. Always reads as 0.
12 SVMHOVPE RW 0h SVM high-side overvoltage enable. If this bit is set, the SVMH overvoltage
detection is enabled. If SVMHVLRPE is also set, a POR occurs on an
overvoltage condition.
11 SVSHFP RW 0h SVS high-side full-performance mode. If this bit is set, the SVSH operates in full-
performance mode.
0b = Normal mode. See the device-specific data sheet for response times.
1b = Full-performance mode. See the device-specific data sheet for response
times.
10 SVSHE RW 1h SVS high-side enable. If this bit is set, the SVSH is enabled.
9-8 SVSHRVL RW 0h SVS high-side reset voltage level. If DVCC falls short of the SVSH voltage level
selected by SVSHRVL, a reset is triggered (if SVSHPE = 1). The voltage levels
are defined in the device-specific data sheet.
Note: SVSMHRRL must always be equal or larger than SVSHRVL.
7 SVSMHACE RW 0h SVS and SVM high-side automatic control enable. If this bit is set, the low-power
mode of the SVSH and SVMH circuits is under hardware control.
6 SVSMHEVM RW 0h SVS and SVM high-side event mask. If this bit is set, the SVSH and SVMH
events are masked.
0b = No events are masked.
1b = All events are masked.
5 Reserved R 0h Reserved. Always reads as 0.
4 SVSHMD RW 0h SVS high-side mode. If this bit is set, the SVSH interrupt flag is set in LPM2,
LPM3, and LPM4 in case of power-fail conditions. If this bit is not set, the SVSH
interrupt is not set in LPM2, LPM3, and LPM4.
3 SVSMHDLYST R 0h SVS and SVM high-side delay status. If this bit is set, the SVSH and SVMH
events are masked for some delay time. The delay time depends on the power
mode of the SVSH and SVMH. If SVMHFP = 1 and SVSHFP = 1 (that is, full-
performance mode), the delay is shorter. See the device-specific data sheet for
details. The bit is cleared by hardware if the delay has expired.
2-0 SVSMHRRL RW 0h SVS and SVM high-side reset release voltage level. These bits define the reset
release voltage level of the SVSH. It is also used for the SVMH to define the
voltage reached level. The voltage levels are defined in the device-specific data
sheet.
Note: SVSMHRRL must always be equal or larger than SVSHRVL.
117
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Registers
www.ti.com
2.3.4 SVSMLCTL Register
Supply Voltage Supervisor and Monitor Low-Side Control Register
Figure 2-12. SVSMLCTL Register
15 14 13 12 11 10 9 8
SVMLFP SVMLE Reserved SVMLOVPE SVSLFP SVSLE SVSLRVL
rw-[0] rw-1 r-0 rw-[0] rw-[0] rw-1 rw-[0] rw-[0]
76543210
SVSMLACE SVSMLEVM Reserved SVSLMD SVSMLDLYST SVSMLRRL
rw-[0] rw-0 r-0 rw-0 r-0 rw-[0] rw-[0] rw-[0]
Table 2-19. SVSMLCTL Register Description
Bit Field Type Reset Description
15 SVMLFP RW 0h SVM low-side full-performance mode. If this bit is set, the SVML operates in full-
performance mode.
0b = Normal mode. See the device-specific data sheet for response times.
1b = Full-performance mode. See the device-specific data sheet for response
times.
14 SVMLE RW 1h SVM low-side enable. If this bit is set, the SVML is enabled.
13 Reserved R 0h Reserved. Always reads as 0.
12 SVMLOVPE RW 0h SVM low-side overvoltage enable. If this bit is set, the SVML overvoltage
detection is enabled.
11 SVSLFP RW 0h SVS low-side full-performance mode. If this bit is set, the SVSL operates in full-
performance mode.
0b = Normal mode. See the device-specific data sheet for response times.
1b = Full-performance mode. See the device-specific data sheet for response
times.
10 SVSLE RW 1h SVS low-side enable. If this bit is set, the SVSL is enabled.
9-8 SVSLRVL RW 0h SVS low-side reset voltage level. If V(CORE) falls short of the SVSL voltage
level selected by SVSLRVL, a reset is triggered (if SVSLPE = 1).
Note: SVSMLRRL must always be equal or larger than SVSLRVL.
7 SVSMLACE RW 0h SVS and SVM low-side automatic control enable. If this bit is set, the low-power
mode of the SVSL and SVML circuits is under hardware control.
6 SVSMLEVM RW 0h SVS and SVM low-side event mask. If this bit is set, the SVSL and SVML events
are masked.
0b = No events are masked.
1b = All events are masked.
5 Reserved R 0h Reserved. Always reads as 0.
4 SVSLMD RW 0h SVS low-side mode. If this bit is set, the SVSL interrupt flag is set in LPM2,
LPM3 and LPM4 in case of power-fail conditions. If this bit is not set, the SVSL
interrupt is not set in LPM2, LPM3, and LPM4.
3 SVSMLDLYST RW 0h SVS and SVM low-side delay status. If this bit is set, the SVSL and SVML events
are masked for a delay time. The delay time depends on the power mode of the
SVSL and SVML. If SVMLFP = 1 and SVSLFP = 1 (that is, full-performance
mode), the delay is shorter. The bit is cleared by hardware if the delay has
expired.
2-0 SVSMLRRL RW 0h SVS and SVM low-side reset release voltage level. These bits define the reset
release voltage level of the SVSL. It is also used for the SVML to define the
voltage reached level.
Note: SVSMLRRL must always be equal or larger than SVSLRVL.
118 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Registers
2.3.5 SVSMIO Register
SVSIN and SVMOUT Control Register
Figure 2-13. SVSMIO Register
15 14 13 12 11 10 9 8
Reserved SVMHVLROE SVMHOE Reserved
r-0 r-0 r-0 rw-[0] rw-[0] r-0 r-0 r-0
76543210
Reserved SVMOUTPOL SVMLVLROE SVMLOE Reserved
r-0 r-0 rw-[1] rw-[0] rw-[0] r-0 r-0 r-0
Table 2-20. SVSMIO Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12 SVMHVLROE RW 0h SVM high-side voltage level reached output enable. If this bit is set, the
SVMHVLRIFG bit is output to the device SVMOUT pin. The device-specific port
logic has to be configured accordingly.
11 SVMHOE RW 0h SVM high-side output enable. If this bit is set, the SVMHIFG bit is output to the
device SVMOUT pin. The device-specific port logic has to be configured
accordingly.
10-6 Reserved R 0h Reserved. Always reads as 0.
5 SVMOUTPOL RW 1h SVMOUT pin polarity. If this bit is set, SVMOUT is active high. An error condition
is signaled by a 1 at SVMOUT. If SVMOUTPOL is cleared, the error condition is
signaled by a 0 at the SVMOUT pin.
4 SVMLVLROE RW 0h SVM low-side voltage level reached output enable. If this bit is set, the
SVMLVLRIFG bit is output to the device SVMOUT pin. The device-specific port
logic has to be configured accordingly.
3 SVMLOE RW 0h SVM low-side output enable. If this bit is set, the SVMLIFG bit is output to the
device SVMOUT pin. The device-specific port logic has to be configured
accordingly.
2-0 Reserved R 0h Reserved. Always reads as 0.
119
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Registers
www.ti.com
2.3.6 PMMIFG Register
Power Management Module Interrupt Flag Register
Figure 2-14. PMMIFG Register
15 14 13 12 11 10 9 8
PMMLPM5IFG Reserved SVSLIFG(1) SVSHIFG(1) Reserved PMMPORIFG PMMRSTIFG PMMBORIFG
rw-[0] r-0 rw-[0] rw-[0] r-0 rw-[0] rw-[0] rw-[0]
76543210
Reserved SVMHVLRIFG(SVMHIFG SVSMHDLYIF Reserved SVMLVLRIFG(1 SVMLIFG SVSMLDLYIFG
1) G)
r-0 rw-[0] rw-[0] rw-0 r-0 rw-[0] rw-[0] rw-0
(1) After power up, the reset value depends on the power sequence.
(1) After power up, the reset value depends on the power sequence.
Table 2-21. PMMIFG Register Description
Bit Field Type Reset Description
15 PMMLPM5IFG RW 0h LPMx.5 flag. This bit is set if the system was in LPMx.5 before. The bit is cleared
by software or by reading the reset vector word. A power failure on the DVCC
domain clears the bit.
0b = No interrupt pending
1b = Interrupt pending
14 Reserved R 0h Reserved. Always reads as 0.
13 SVSLIFG RW 0h SVS low-side interrupt flag. The bit is cleared by software or by reading the reset
vector word.
0b = No interrupt pending
1b = Interrupt pending
12 SVSHIFG RW 0h SVS high-side interrupt flag. The bit is cleared by software or by reading the
reset vector word.
0b = No interrupt pending
1b = Interrupt pending
11 Reserved R 0h Reserved. Always reads as 0.
10 PMMPORIFG RW 0h PMM software power-on reset interrupt flag. This interrupt flag is set if a software
POR is triggered. The bit is cleared by software or by reading the reset vector
word, SYSRSTIV.
0b = No interrupt pending
1b = Interrupt pending
9 PMMRSTIFG RW 0h PMM reset pin interrupt flag. This interrupt flag is set if the RST/NMI pin is the
reset source. The bit is cleared by software or by reading the reset vector word.
0b = No interrupt pending
1b = Interrupt pending
8 PMMBORIFG RW 0h PMM software brownout reset interrupt flag. This interrupt flag is set if a software
BOR (PMMSWBOR) is triggered. The bit is cleared by software or by reading the
reset vector word, SYSRSTIV.
0b = No interrupt pending
1b = Interrupt pending
7 Reserved R 0h Reserved. Always reads as 0.
6 SVMHVLRIFG RW 0h SVM high-side voltage level reached interrupt flag. The bit is cleared by software
or by reading the reset vector (SVSHPE = 1) word or by reading the interrupt
vector (SVSHPE = 0) word.
0b = No interrupt pending
1b = Interrupt pending
5 SVMHIFG RW 0h SVM high-side interrupt flag. The bit is cleared by software.
0b = No interrupt pending
1b = Interrupt pending
120 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
PMM Registers
Table 2-21. PMMIFG Register Description (continued)
Bit Field Type Reset Description
4 SVSMHDLYIFG RW 0h SVS and SVM high-side delay expired interrupt flag. This interrupt flag is set if
the delay element expired. The bit is cleared by software or by reading the
interrupt vector word.
0b = No interrupt pending
1b = Interrupt pending
3 Reserved R 0h Reserved. Always reads as 0.
2 SVMLVLRIFG RW 0h SVM low-side voltage level reached interrupt flag. The bit is cleared by software
or by reading the reset vector (SVSLPE = 1) word or by reading the interrupt
vector (SVSLPE = 0) word.
0b = No interrupt pending
1b = Interrupt pending
1 SVMLIFG RW 0h SVM low-side interrupt flag. The bit is cleared by software.
0b = No interrupt pending
1b = Interrupt pending
0 SVSMLDLYIFG RW 0h SVS and SVM low-side delay expired interrupt flag. This interrupt flag is set if the
delay element expired. The bit is cleared by software or by reading the interrupt
vector word.
0b = No interrupt pending
1b = Interrupt pending
121
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
PMM Registers
www.ti.com
2.3.7 PMMRIE Register
Power Management Module Reset and Interrupt Enable Register
Figure 2-15. PMMRIE Register
15 14 13 12 11 10 9 8
Reserved SVMHVLRPE SVSHPE Reserved SVMLVLRPE SVSLPE
r-0 r-0 rw-[0] rw-[1] r-0 r-0 rw-[0] rw-[1]
76543210
Reserved SVMHVLRIE SVMHIE SVSMHDLYIE Reserved SVMLVLRIE SVMLIE SVSMLDLYIE
r-0 rw-0 rw-0 rw-0 r-0 rw-0 rw-0 rw-0
Table 2-22. PMMRIE Register Description
Bit Field Type Reset Description
15-14 Reserved R 0h Reserved. Always reads as 0.
13 SVMHVLRPE RW 0h SVM high-side voltage level reached power-on reset enable. If this bit is set,
exceeding the SVMH voltage level triggers a POR.
12 SVSHPE RW 1h SVS high-side power-on reset enable. If this bit is set, falling below the SVSH
voltage level triggers a POR.
11-10 Reserved R 0h Reserved. Always reads as 0.
9 SVMLVLRPE RW 0h SVM low-side voltage level reached power-on reset enable. If this bit is set,
exceeding the SVML voltage level triggers a POR.
8 SVSLPE RW 1h SVS low-side power-on reset enable. If this bit is set, falling below the SVSL
voltage level triggers a POR.
7 Reserved R 0h Reserved. Always reads as 0.
6 SVMHVLRIE RW 0h SVM high-side reset voltage level interrupt enable
5 SVMHIE RW 0h SVM high-side interrupt enable. This bit is cleared by software or if the interrupt
vector word is read.
4 SVSMHDLYIE RW 0h SVS and SVM high-side delay expired interrupt enable
3 Reserved R 0h Reserved. Always reads as 0.
2 SVMLVLRIE RW 0h SVM low-side reset voltage level interrupt enable
1 SVMLIE RW 0h SVM low-side interrupt enable. This bit is cleared by software or if the interrupt
vector word is read.
0 SVSMLDLYIE RW 0h SVS and SVM low-side delay expired interrupt enable
122 Power Management Module and Supply Voltage Supervisor SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
PMM Registers
2.3.8 PM5CTL0 Register
Power Mode 5 Control Register 0
Figure 2-16. PM5CTL0 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved LOCKLPM5
r0 r0 r0 r0 r0 r0 r0 rw-[0]
Table 2-23. PM5CTL0 Register Description
Bit Field Type Reset Description
15-1 Reserved R 0h Reserved. Always reads as 0.
0 LOCKLPM5 RW 0h Lock I/O pin configuration upon entry to or exit from LPMx.5. When power is
applied to the device, this bit, once set, can only be cleared by the user or via
another power cycle.
Note: This bit was formerly named LOCKIO, and some application reports and
code examples may continue to use this terminology.
0b = I/O pin configuration is not locked and defaults to its reset condition.
1b = I/O pin configuration remains locked. Pin state is held during LPMx.5 entry
and exit.
123
SLAU208O–June 2008–Revised May 2015 Power Management Module and Supply Voltage Supervisor
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 3
SLAU208O–June 2008–Revised May 2015
Battery Backup System
The battery backup system can operate a real-time clock (RTC_B module) and retain some bytes in a
backup RAM from a backup source when the primary supply fails. The battery backup system also
includes a simple charging circuitry to charge capacitors connected to the backup supply. This chapter
describes the battery backup system.
Topic ........................................................................................................................... Page
3.1 Battery Backup Introduction .............................................................................. 125
3.2 Battery Backup Operation ................................................................................. 125
3.3 Battery Backup Registers.................................................................................. 129
124 Battery Backup System SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Battery Backup Introduction
3.1 Battery Backup Introduction
The battery backup system features include:
• Automatic and manual switching to the backup supply
• Backup-supplied backup subsystem that can contain:
– Backup-supplied real-time clock with 32-kHz crystal oscillator (see the RTC_B chapter and Clock
System chapter)
– Backup-supplied backup RAM (see the Backup RAM chapter)
• Resistive charger for backup capacitors
NOTE: Operation without separate battery backup supply
If there is no separate battery backup supply in the system, connect the VBAT pin to DVCC
and set bit BAKDIS=1.
3.2 Battery Backup Operation
The battery backup system supplies a subsystem from a secondary supply (VBAT) if the primary supply
(DVCC) fails. The backup-supplied subsystem usually contains a real-time clock module (together with the
required LF-crystal oscillator) and a backup RAM. These modules are described in their respective User's
Guide chapters.
The high-side SVS (SVSH) that is located in the PMM module and supervises the primary supply (DVCC)
controls the switching between primary and secondary supply.
NOTE: Restrictions
When the lowest high-side SVS level (00b) is used to monitor the primary supply, the
temperature range is restricted to 0°C to 85°C.
Figure 3-1 shows an overview of the battery backup switch.
The secondary supply VBAT powers the backup-supplied subsystem
• at power on
• if bit BAKDIS = 0 in the BAKCTL register and
– if the primary supply drops below the configured high-side SVS level
– if the high-side SVS (SVSH) is disabled
– during LPMx.5
– if bit BAKSW=1 in the BAKCTL register
The primary supply DVCC powers the backup-supplied subsystem
• if the primary supply rises above the power-on level of the high-side SVS level
• if the primary supply remains above the configured high-side SVS level
• if bit BAKDIS = 1 in the BAKCTL register
If the backup-supplied subsystem is powered by the secondary supply VBAT, the access and control to
modules located in the subsystem is restricted:
• The data stored in the backup RAM is retained but cannot be accessed.
• The RTC, if enabled, together with the 32-kHz crystal oscillator continue to operate but the time and
date information cannot be accessed.
• Changes to the LF crystal oscillator setting in the clock system do not take effect.
If the backup-supplied subsystem is powered by the primary supply DVCC and LOCKBAK = 0, the
modules located in the subsystem can be access and controlled normally.
125
SLAU208O–June 2008–Revised May 2015 Battery Backup System
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
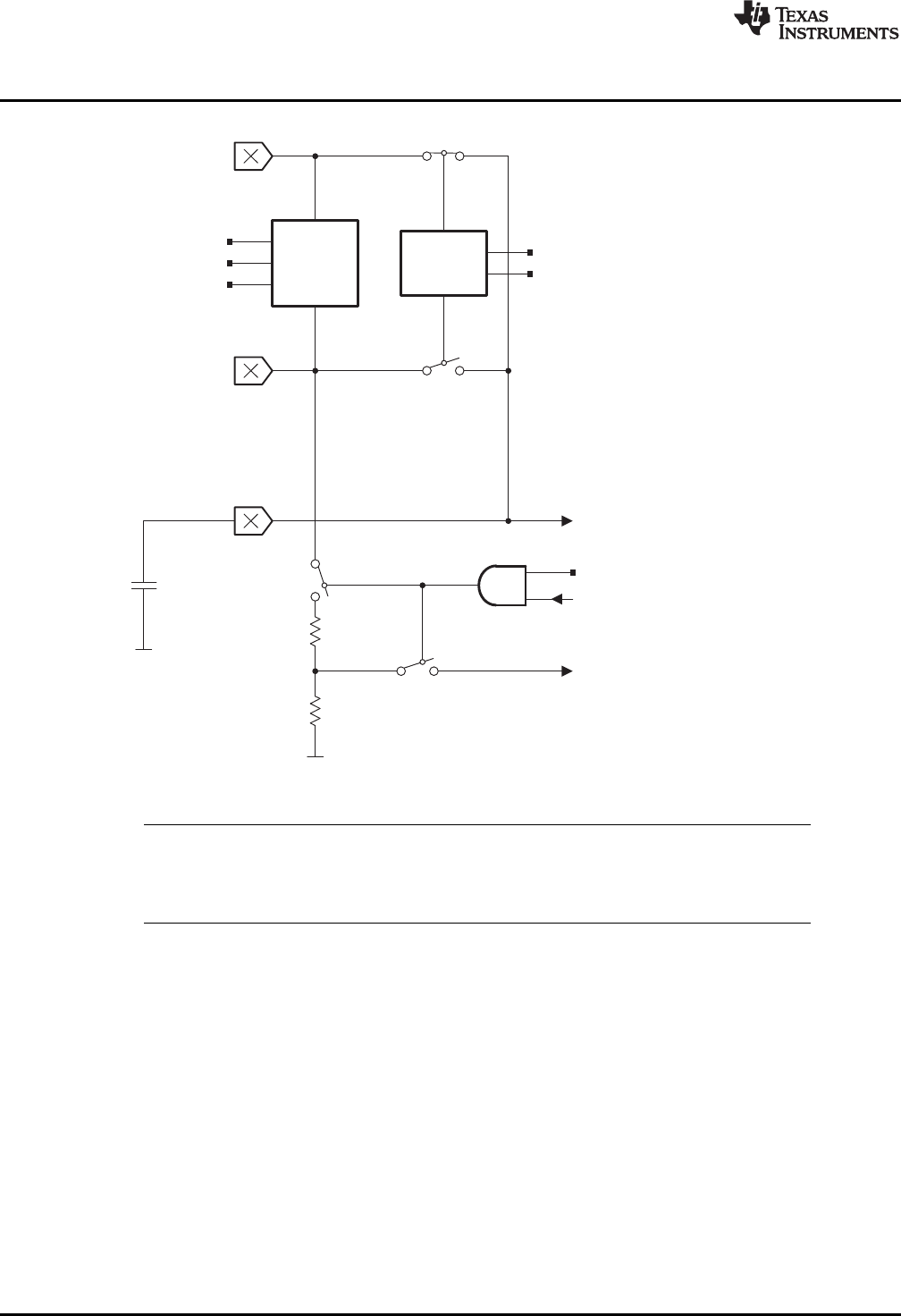
DVCC
VBAT
CBAK
VBAK
VBAK
VCC
VBAT
Charger
VBAK
1
1
Enable signal from ADC
To ADC input
(usually channel 12;
respective ADC chapter and
the device-specific data sheet
for details)
see the
Supply voltage of
backup subsystem
BAKCHEN BAKSW
BAKCHVx
BAKADC
BAKCHCx BAKDIS
Switch
Control
VBAT3
Battery Backup Operation
www.ti.com
Figure 3-1. Battery Backup Switch Overview
NOTE: CBAK shown in Figure 3-1 is used to ensure proper decoupling during a switchover event. See
the device-specific data sheet for recommended values. This capacitance should not be
confused with an external capacitor that may be placed on VBAT to maintain charge during
backup operation in the application.
3.2.1 Activate Access to Backup-Supplied Subsystem
If the backup-supplied subsystem is powered by the secondary supply VBAT the LOCKBAK bit is
automatically set. While LOCKBAK=1 it is impossible to access to the information stored in the backup-
supplied subsystem. After its supply switched back to the primary supply do the following steps to get
access to it :
1. Initialize the configuration registers of the real-time clock module exactly the same way as they were
configured before the switch to the secondary supply.
2. Clear the LOCKBAK bit in the BAKCTL register.
3. Check the LOCKBAK bit.
If LOCKBAK = 0, continue with the next step.
If LOCKBAK = 1, the supply for the backup-supplied subsystem has not settled yet. Continue with step
2.
4. Enable RTC interrupts.
5. The enabled RTC interrupts will now be serviced as normal interrupts.
126 Battery Backup System SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Battery Backup Operation
3.2.2 Manual Switching
The backup-supplied subsystem is always powered from the secondary supply VBAT if the bit BAKSW in
the Battery Backup Control register BAKCTL is set to 1. A POR resets the BAKSW bit, and the system
returns to automatic switch control.
3.2.3 Disable Switching
If the bit BAKDIS in the Battery Backup Control register BAKCTL is set to 1, the battery backup system is
disabled and the backup-supplied subsystem is always powered from the primary supply DVCC. A POR
resets the BAKDIS bit, and the system returns to automatic switch control.
3.2.4 Measuring the Supplies
With an integrated ADC, the primary and secondary supplies can be measured. Select the channel of the
ADC that is reserved to measure the supply voltage of the device. This is usually ADC channel 12; see
the respective ADC chapter and the device-specific data sheet for details.
If BAKADC = 0, VBAT measurement is disabled.
If BAKADC = 1, the secondary supply VBAT is measured.
The resistive dividers are connected to the supplies only during the sampling phase of the ADC.
3.2.5 LPMx.5 and Backup Operation
During LPMx.5 (LPM3.5 or LPM4.5), the backup subsystem is always supplied from the backup battery,
except when switching is completely disabled by setting the BAKDIS bit.
If using a capacitor to source the backup supply, the device can wake up regularly from LPMx.5, recharge
the capacitor, and return to LPMx.5. The time interval must be designed such that the remaining charge
on the capacitor is always sufficient to bridge the worst-case backup time (that is, the time without any
primary supply).
127
SLAU208O–June 2008–Revised May 2015 Battery Backup System
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
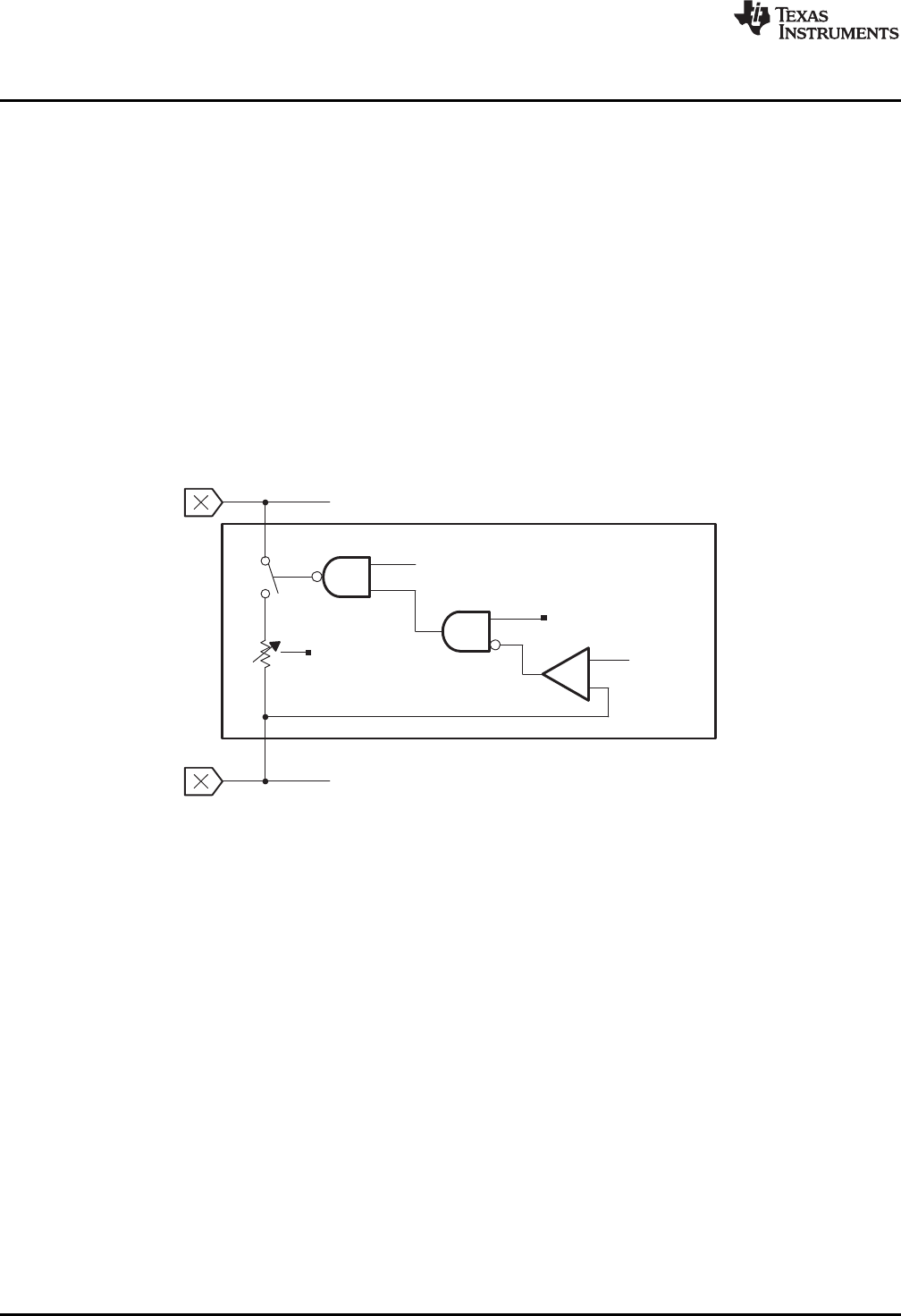
DVCC
VBAT
Charger
BAKCHCx
BAKCHV1
~2.7V
Charger enable
Battery Backup Operation
www.ti.com
3.2.6 Resistive Charger
Together with the battery backup switch, a resistive charging circuit is implemented to charge capacitors
connected to the backup supply. A simplified block diagram of the charger is shown in Figure 3-2. The
charger is enabled by writing the correct password (069h) into the upper byte of BAKCHCTL, together with
BAKCHEN = 1, selecting a charging resistor with BAKCHCx ≠00b, and a charge end voltage with
BAKCHVx ≠00b. Writing to the charger control register with an incorrect password disables the charger,
and all control register bits are reset to 0.
If VCC is selected as charge end voltage with BACKCHVx = 01b (or if VCC < 2.7 V with BACKCHVx = 10b),
an attached capacitor is charged to VCC with VBAT(t) ≈VCC × (1 – exp(-t/RC), with R being the selected
charging resistor and C being the capacitor attached to pin VBAT (this is not CBAK).
If a charge end voltage of 2.7 V is selected (BACKCHVx = 10b) and VCC > 2.7 V, then an attached
capacitor is charged with VBAT(t) ≈VCC × (1 – exp(-t/RC) (same as above) but as soon as VBAT reaches
approximately 2.7 V, the charging process is halted. If VBAT drops by approximately 70 mV (the comparator
hysteresis), the charging process continues again until the capacitor connected to pin VBAT is again
charged to approximately 2.7 V. Note: For low power reasons, the VBAT voltage is compared against the
2.7-V limit only once during each VLO clock cycle, and only then is charging disabled or re-enabled.
Figure 3-2. Charger Block Diagram
128 Battery Backup System SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Battery Backup Registers
3.3 Battery Backup Registers
The battery backup registers are listed in Table 3-1. The base address for the backup RAM registers can
be found in the device-specific data sheet. The address offsets are given in Table 3-1.
Table 3-1. Battery Backup Registers
LPMx.5,
Backup
Offset Acronym Register Name Type Retention Section
00h BAKCTL Battery Backup Control Read/write not retained Section 3.3.1
02h BAKCHCTL Battery Charger Control Read/write not retained Section 3.3.2
129
SLAU208O–June 2008–Revised May 2015 Battery Backup System
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Battery Backup Registers
www.ti.com
3.3.1 BAKCTL Register
Battery Backup Control Register
Figure 3-3. BAKCTL Register
15 14 13 12 11 10 9 8
Reserved
r r r0 r0 r0 r0 r0 r0
76543210
Reserved BAKDIS BAKADC BAKSW LOCKBAK
r0 r0 r0 r0 rw rw-(0) rw-(0) r/w0-[1]
Table 3-2. BAKCTL Register Description
Bit Field Type Reset Description
15-4 Reserved R 0h Reserved. Always reads as 0.
3 BAKDIS RW 0h Disable backup supply switching. Reset to 0 after a complete power cycle.
0b = Backup supply switching enabled
1b = Backup supply switching disabled. Backup subsystem always powered from
VCC (also during LPMx.5).
2 BAKADC RW 0h Battery backup supply to ADC
0b = Vbat measurement disabled
1b = Vbat measurement enabled
1 BAKSW RW 0h Manual switch to battery backup supply
0b = Switching is automatic
1b = Switch to battery backup supply
0 LOCKBAK RW 0h Lock backup subsystem. Can only be written as 0.
The LOCKBAK bit should only be written as 0 after configuring the RTC control
registers. This ensures that RTC will not be stopped after leaving backup or
LPMx.5 mode. SVSH has to be active when LOCKBAK bit is cleared.
LOCKBAK is always set to 1 by hardware after the core was powered down
either due to a complete power cycle of the main supply DVCC or due to LPMx.5
operation.
0b = Backup subsystem not locked
1b = Backup subsystem locked
130 Battery Backup System SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Battery Backup Registers
3.3.2 BAKCHCTL Register
Battery Charger Control Register
Figure 3-4. BAKCHCTL Register
15 14 13 12 11 10 9 8
BAKCHKEYx
rw rw rw rw rw rw rw rw
76543210
Reserved BAKCHVx Reserved BAKCHCx BAKCHEN
r0 r0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 3-3. BAKCHCTL Register Description
Bit Field Type Reset Description
15-8 BAKCHKEYx RW 5Ah Charger access key. Always read as 05Ah. Must be written as 069h together
with low byte; any other write disables the charger and all control register bits are
reset to 0.
7-6 Reserved R 0h Reserved. Always reads as 0.
5-4 BAKCHVx RW 0h Charger end voltage
00b = Charger disabled
01b = VCC
10b = Approximately 2.7 V, or VCC if VCC is lower than 2.7 V
11b = Reserved
3 Reserved R 0h Reserved. Always reads as 0.
2-1 BAKCHCx RW 0h Charger charge current
00b = Charger disabled
01b = Charge current defined by a maximum 5-kΩresistor
10b = Charge current defined by a maximum 10-kΩresistor
11b = Charge current defined by a maximum 20-kΩresistor
0 BAKCHEN RW 0h Charger enable
0b = Charger disabled
1b = Charger enabled
131
SLAU208O–June 2008–Revised May 2015 Battery Backup System
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 4
SLAU208O–June 2008–Revised May 2015
Auxiliary Supply System (AUX)
The auxiliary supply system (AUX) allows the device to operate from alternate supplies (also called
auxiliary supplies) if the primary supply (DVCC and AVCC) fails. The AUX includes simple charging
circuitry to charge capacitors connected to the auxiliary supplies. This chapter describes the AUX.
Topic ........................................................................................................................... Page
4.1 Auxiliary Supply System Introduction ................................................................. 133
4.2 Auxiliary Supply Operation................................................................................ 134
4.3 AUX Registers.................................................................................................. 148
132 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Auxiliary Supply System Introduction
4.1 Auxiliary Supply System Introduction
The auxiliary supply system features include:
• Automatic or manual switching from the primary supply to an auxiliary supply while maintaining full
functionality.
• One or two auxiliary supplies (AUXVCC1 and AUXVCC2), depending on the specific device.
• Automatic threshold-based monitoring of primary and auxiliary supplies.
• At startup, automatically chooses between the primary supply (DVCC/AVCC) and AUXVCC1, based on
which one is higher voltage.
• A separate auxiliary supply (AUXVCC3) can power a backup subsystem (1).
• Simple charger for capacitors on AUXVCC2 and AUXVCC3.
NOTE: Unused auxiliary supplies
Any unused auxiliary supply inputs (AUXVCC1, or AUXVCC2) must be connected to DVSS.
If AUXVCC1 or AUXVCC2 are unused, they should be disabled by setting AUXxMD = 1 and
AUXxOK = 0 in software, too.
If AUXVCC3 is not powered by a dedicated supply, it can either be connected to DVCC
externally or powered by enabling the AUXVCC3 charger. If powered by the charger, the
recommended capacitor should be connected externally. If AUXVCC3 is not powered or
connected to DVSS, the backup subsystem (including, for example, the 32-kHz crystal
oscillator) is not functional.
(1) The backup subsystem usually contains a real-time clock (RTC) module with a 32-kHz crystal oscillator, backup RAM, and optionally
(device-specific) up to two digital I/O pins.
133
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
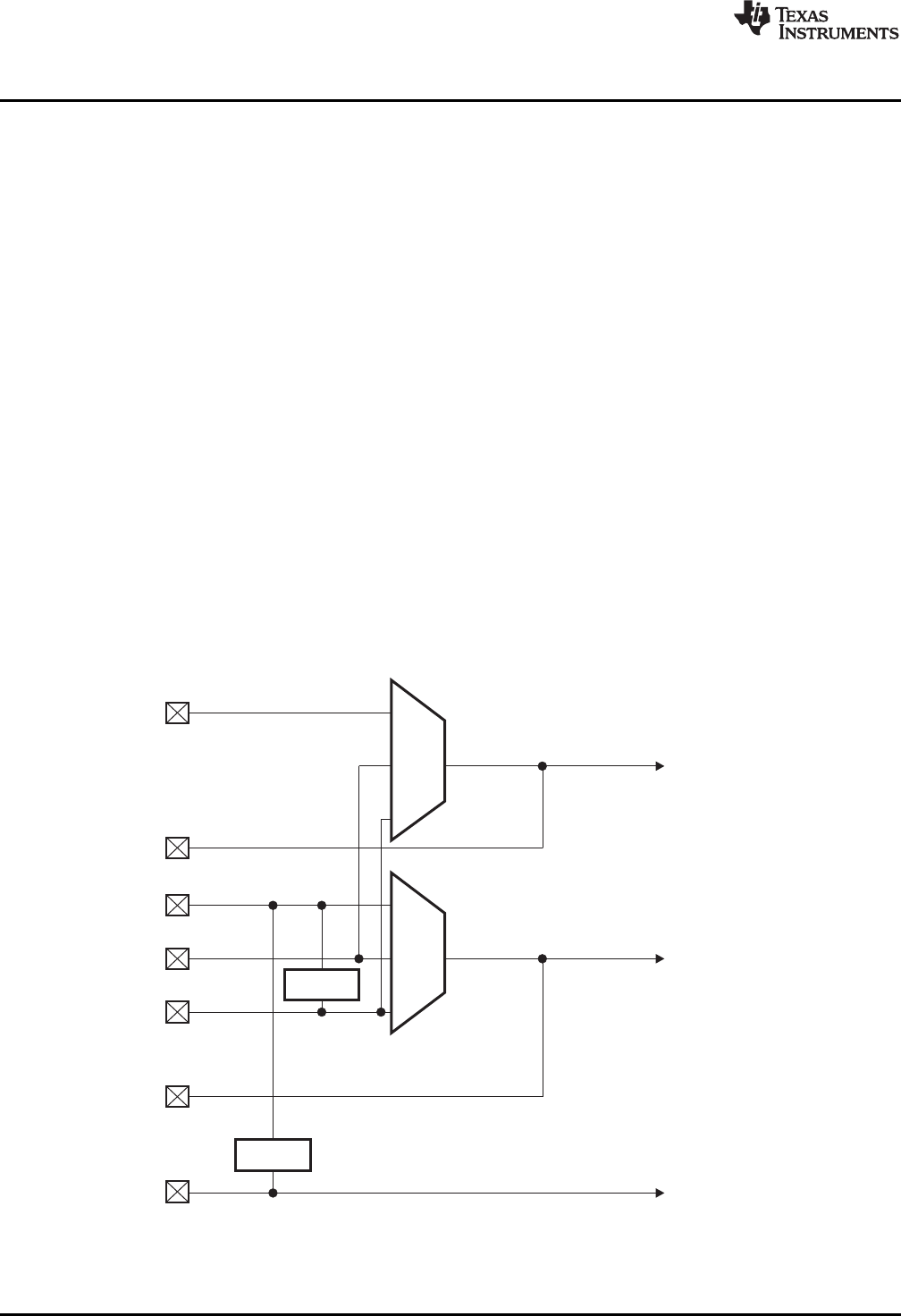
DVCC
AUXVCC1
AUX 2VCC
VDSYS
VASYS
AUX 3VCC
PMM->Core Logic
Backup Subsystem
VDSYS
VBAK
AVCC
Analog Modules
VASYS
Charger
Charger
Auxiliary Supply Operation
www.ti.com
4.2 Auxiliary Supply Operation
The AUX module allows the device to switch between the primary supply (DVCC and AVCC) and up to
two auxiliary supplies (AUXVCC1 and AUXVCC2) while maintaining full device functionality. When using
an auxiliary supply, both AVCC and DVCC are switched to the same auxiliary supply.
Switching can be controlled automatically through hardware or manually through software. In the
hardware-controlled mode, switching is triggered by the high-side supply voltage monitor (SVM), which
must be enabled and configured as described in Section 4.2.4. In the software-controlled mode, switching
is triggered by changing values in AUX module registers, as described in Section 4.2.3.
Figure 4-1 shows an overview of the auxiliary supply switches.
The digital core of the device is supplied through the Power Management Module (PMM) by the internal
digital system voltage VDSYS. In the PMM chapter of this user's guide, that supply is assumed to be DVCC;
however, on devices with the AUX module, AUX switches VDSYS among the DVCC, AUXVCC1, and
AUXVCC2 inputs. VDSYS is also output on the VDSYS pin, which must be connected to an external
capacitor as specified in the device-specific data sheet.
The analog modules of the device are supplied by the internal analog system voltage VASYS. The AUX
module switches VASYS among the AVCC, AUXVCC1, and AUXVCC2 inputs. VASYS is also output on the
VASYS pin, which must be connected to an external capacitor as specified in the device-specific data
sheet.
The switches for the digital and the analog system voltages are controlled by the same signals and always
connect to the same voltage (primary voltage DVCC/AVCC, first auxiliary voltage AUXVCC1, or second
auxiliary voltage AUXVCC2).
Auxiliary voltage AUXVCC3 supplies VBAK to the backup subsystem, which usually contains a real-time
clock (RTC) module with a 32-kHz crystal oscillator, some backup RAM, and optionally (device-specific)
up to two digital I/O pins.
Figure 4-1. Auxiliary Supply Switch Overview
134 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Auxiliary Supply Operation
4.2.1 Startup
The device starts whenever a supply is connected to DVCC or AUXVCC1. If both supplies are connected,
AUX uses whichever voltage is higher to supply the digital and analog system voltages, VDSYS and VASYS. If
the supplies (DVCC/AVCC and AUXVCC1) differ by less than 100 mV the selected supply can be either
DVCC/AVCC or AUXVCC1 - only if the difference is greater than 100 mV always the supply with the
higher voltage is selected.
After startup from any condition that causes a BOR event (including connection of power or wake from
LPMx.5), the AUX module is automatically locked (that is, the LOCKAUX bit is set). The behavior of the
auxiliary supply system can then be configured in software (see Section 4.2.2).
After configuration is completed, unlock the AUX module by clearing the LOCKAUX bit. The AUX module
is then operational and switches between the input supplies as defined during configuration.
If the LOCKAUX bit remains set, the programmed configuration is ignored, and the device continues to be
supplied by DVCC or AUXVCC1 (whichever was selected at startup).
Section 4.2.7 describes additional considerations for setting the power supply before entering LPMx.5.
NOTE: Highest Supply Voltage
To ensure reliable operation, the selected supply voltage (by default, the highest voltage in
the system) must always supply at least 0.5 µA to critical circuitry.
NOTE: DVCC vs AUXVCC1 at Startup
Under normal operating conditions it is recommended to have DVCC supplied by a voltage
at least 100 mV higher than AUXVCC1. This ensures a reliable startup from DVCC and
avoids an unwanted startup from AUXVCC1.
4.2.2 Switching Control
During normal operation (that is, when the LOCKAUX bit is cleared) switching to another supply is
triggered either by software or by hardware (specifically, by the high-side SVM). Section 4.2.3 describes
the configuration and control of the AUX for software-controlled switching. Section 4.2.4 describes
configuration and control of the AUX for hardware-controlled switching. Section 4.2.13 includes examples
of how to configure hardware-controlled mode based on different usage scenarios.
4.2.3 Software-Controlled Switching
To enable or disable a supply using software-controlled switching:
1. To enable software control of a supply, set AUXxMD = 1 (AUX0MD for DVCC, AUX1MD for
AUXVCC1, and AUX2MD for AUXVCC2).
2. To select the supply to use, set AUXxOK = 1 (AUX0OK for DVCC, AUX1OK for AUXVCC1, and
AUX2OK for AUXVCC2).
When AUXxOK is set, the AUX module immediately switches to the specified supply.
If AUXxOK = 1 for more than one supply, AUX uses the one with the highest priority. The default
priority is DVCC, then AUXVCC1, then AUXVCC2. To make AUXVCC2 priority higher than AUXVCC1,
set AUX2PRIO = 1.
3. To disable a supply, clear AUXxOK = 0. If the current supply is software-controlled (AUXxMD = 1) and
AUXxOK is changed from 1 to 0, the next available supply (considering the priority defined by
AUX2PRIO) is used to source the system voltages.
When a switch from one supply to another occurs, interrupts are generated as described in
Section 4.2.11.
The software control can be used to permanently disable a supply or, for example, to qualify the quality of
the supplies by measuring the actual supply voltage with an ADC (see Section 4.2.9) instead of using the
auxiliary supply monitor (see Section 4.2.6).
135
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
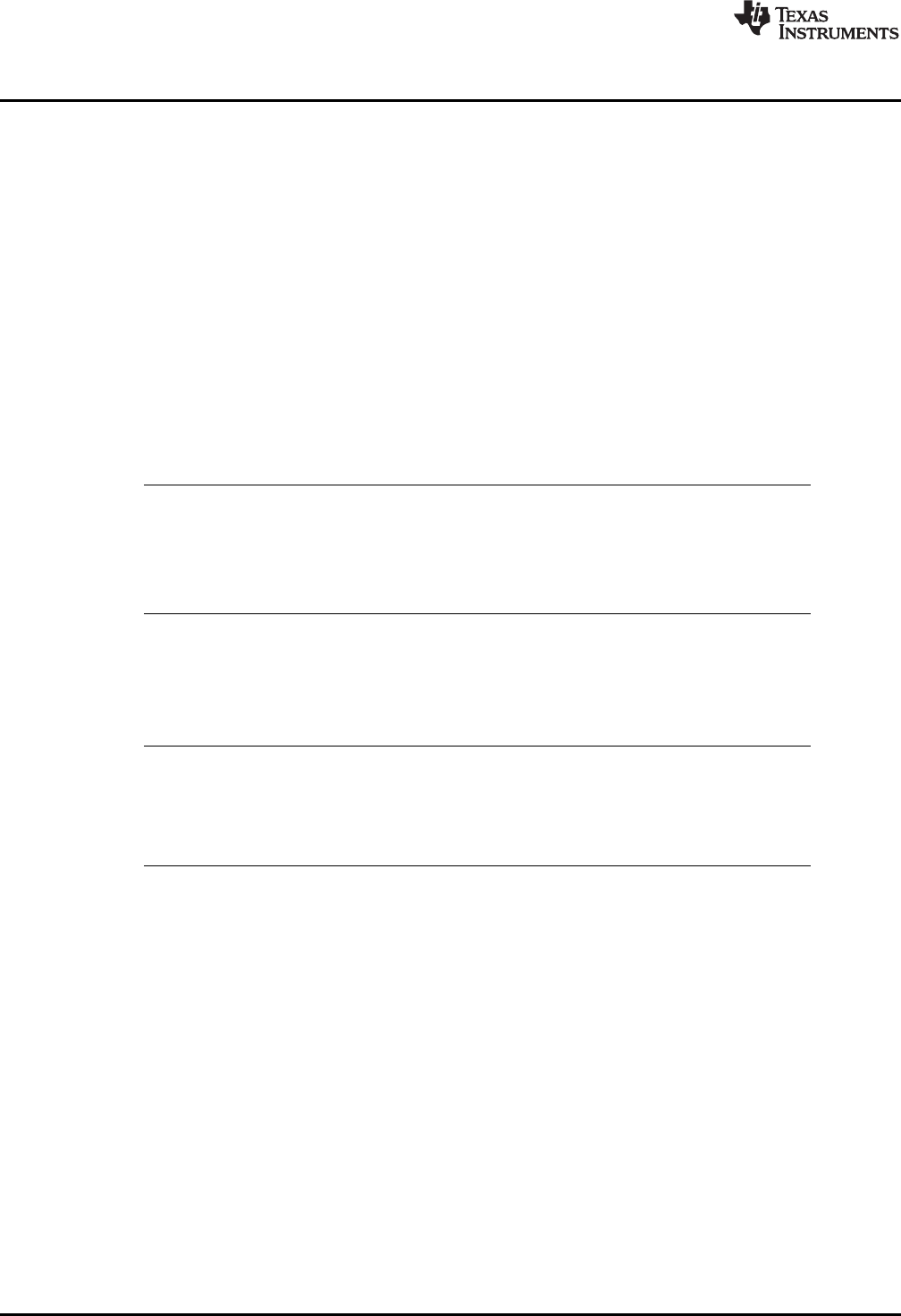
Auxiliary Supply Operation
www.ti.com
When using software-controlled mode for all supplies, the SVS and SVM in the PMM are not required.
They may be enabled, and they will operate as described in the PMM chapter, but they do not interact
with the AUX during software-controlled mode.
4.2.4 Hardware-Controlled Switching
To enable hardware-controlled switching, clear AUXxMD = 0 (AUX0MD for DVCC, AUX1MD for
AUXVCC1, and AUX2MD for AUXVCC2). A supply can be disabled and, therefore, excluded from the
automatic switching system by setting the corresponding AUXxMD = 1 and AUXxOK = 0. For example, to
disable AUXVCC2, set AUX2MD = 1 and AUX2OK = 0.
During hardware-controlled switching, the SVM in the PMM must be enabled and configured. The SVS
can also be enabled and operates as described in the PMM chapter, but it does not interact with the AUX
module.
The high-side SVM of the PMM monitors VDSYS, which is output from the AUX module. If VDSYS falls below
the voltage set by the SVSMHRRVL bits, the SVM notifies AUX to switch to the next valid supply. AUX
switches to the next valid supply immediately after receiving the trigger from the SVM. When a switch
occurs, interrupts are generated as described in Section 4.2.11.
NOTE: Voltage Dip on VDSYS
Because the SVM does not signal AUX to change the supply until the voltage on VDSYS falls
to the SVM monitoring level (set in the SVSMHRRL bits), there is a dip in VDSYS from the
nominal operating level. This change in voltage must be considered when selecting system
frequency and core voltage (see Section 4.2.5).
AUX determines which supplies are valid based on the threshold voltage set in the AUXxLVL bits. The
validity of a supply is reported by the corresponding AUXxOK bit. When AUXxMD = 0, the AUXxOK bit is
controlled by hardware and cannot be written by software. AUXxOK = 1 indicates a valid/"good" supply
voltage, and AUXxOK = 0 indicates an invalid/"bad" supply voltage. See Section 4.2.6 for details on the
monitoring of the auxiliary supplies.
NOTE: Interactions Among SVMH, VCORE, and AUX
Because of the relationship between supply voltage, core voltage, and maximum system
frequency, see Section 4.2.5 for considerations when setting the AUXxLVL and SVMHlevels.
In particular, note that AUX0LVL must be higher than the SVMHlevel.
The selection of the next valid supply depends on the state of the AUXxOK and AUX2PRIO bits when the
trigger occurs as shown in Table 4-1. If there is no valid supply available to switch to (that is, all other
AUXxOK bits are 0) no switching takes place, and the device eventually goes into reset if the current
supply continues to fall. To avoid rapid switching back and forth between supplies, any further switching is
prevented during a "recovery time" of several 100 µs as specified in the device-specific data sheet after
each switch-over.
136 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
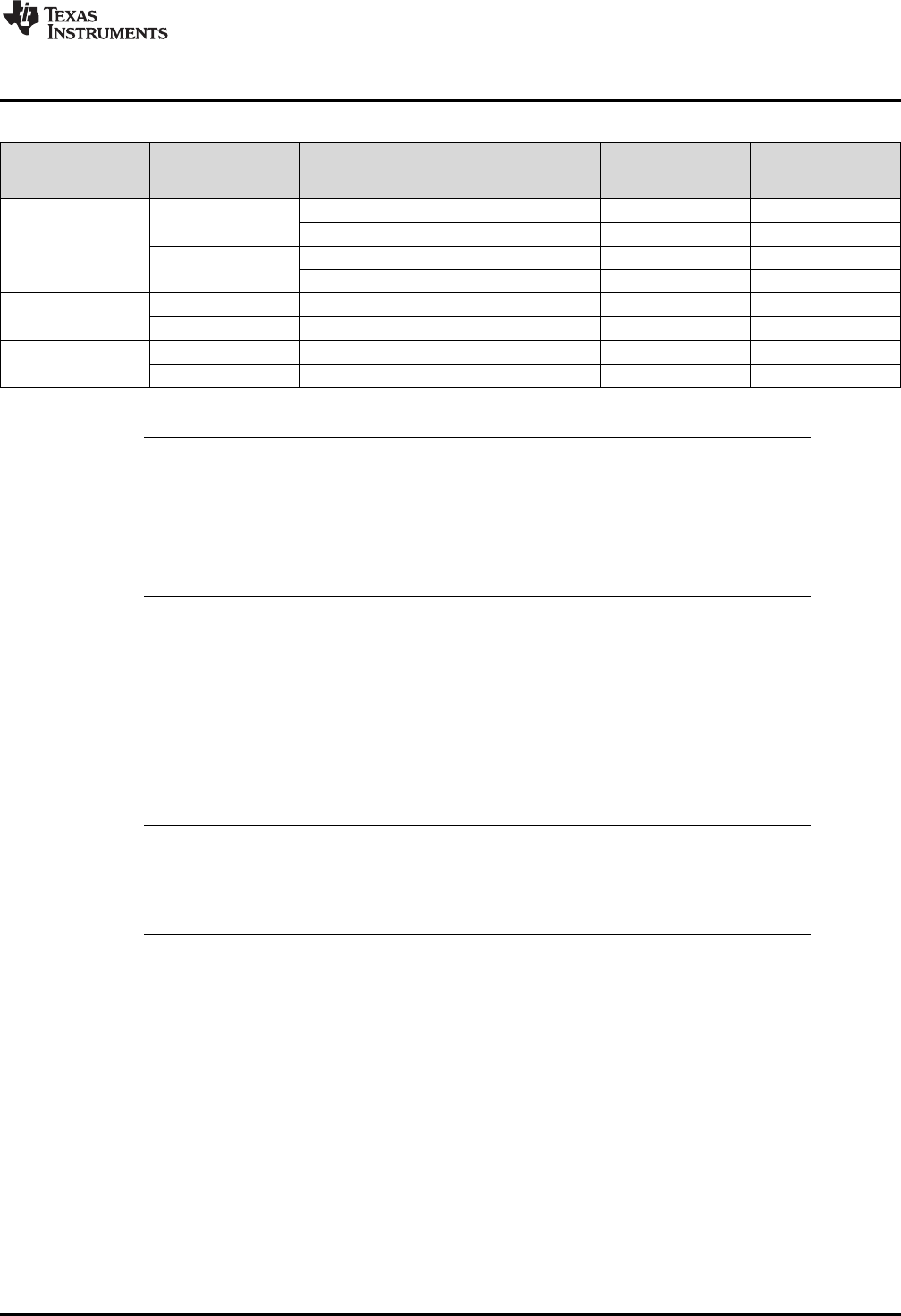
www.ti.com
Auxiliary Supply Operation
Table 4-1. Next Supply Voltage Selection
AUXVCC1/
DVCC OK? AUXVCC1 OK? AUXVCC2 OK?
Current Supply Next Supply(1) AUXVCC2 Priority
(AUX0OK) (AUX1OK) (AUX2OK) (AUX2PRIO)
don't care 1 don't care 0
AUXVCC1 don't care 1 0 1
DVCC/AVCC don't care 0 1 don't care
AUXVCC2 don't care 1 1 1
DVCC 1 don't care don't care don't care
AUXVCC1 AUXVCC2 0 don't care 1 don't care
DVCC 1 don't care don't care don't care
AUXVCC2 AUXVCC1 0 1 don't care don't care
(1) If there is no valid supply available to switch to, no switching takes place.
NOTE: Special Case for Switching to DVCC/AVCC
If the device is supplied by AUXVCC1 or AUXVCC2, and the AUX0OK bit transitions from 0
to 1 (either by hardware or by software), AUX switches to the DVCC/AVCC supply without
any signal from the SVM.
AUX does not automatically switch from AUX2VCC to AUX1VCC when AUX1OK transitions
from 0 to 1, unless the SVM signals that a switch is necessary.
4.2.5 Interactions Among fSYS, VCORE, VDSYS, SVMH, and AUXxLVL
The interactions that must be considered when setting the threshold levels in the SVM and AUX are:
• Minimum VCORE required to support the selected system frequency (fSYS)
• Valid SVMHto support the selected VCORE
• Minimum VDSYS and minimum AUXxLVL required to support the selected VCORE
The interactions among fSYS, DVCC (VDSYS for devices with AUX), VCORE, and SVMHare described in detail
in the PMM chapter. This section adds considerations for the valid AUXxLVL values.
NOTE: Maximum System Frequency
The following discussion describes all system frequencies supported in this family. However,
the maximum system frequency varies by device; therefore, see the device-specific data
sheet to determine this value.
Figure 4-2 shows typical requirements for supply voltage and VCORE compared to the system frequency
(see the device-specific data sheet for the values required for each device). As shown here, there is a
minimum VCORE (set by PMMCOREV[1:0]) and a minimum supply voltage (VDSYS) for each system
frequency. For details on the recommended settings for PMMCOREV[1:0] and supply voltage, see
Section 2.2.2.1.
137
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
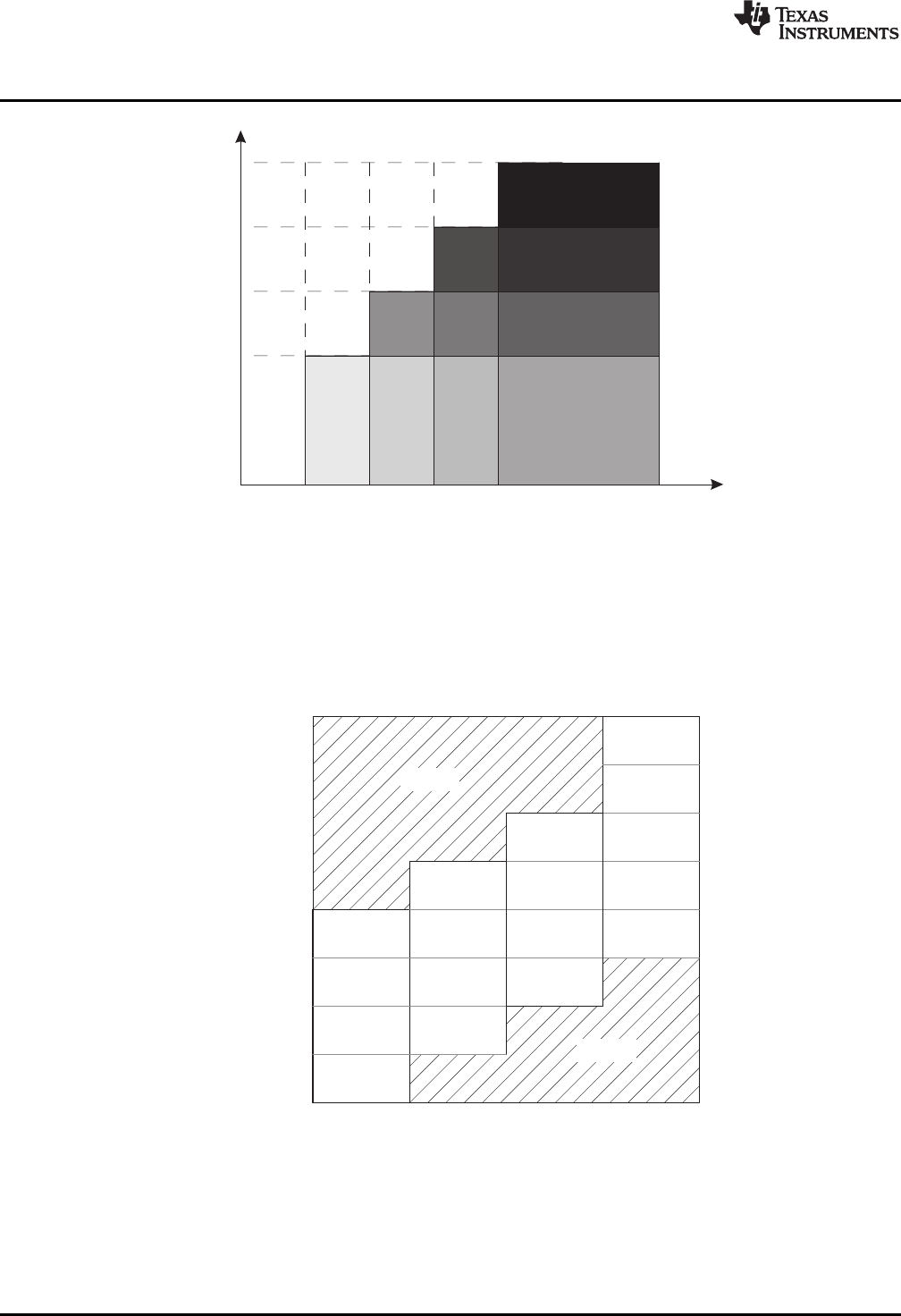
3.00
3.00
2.65
2.35
2.2
2.1
1.9
1.7
SVSMHRRLx
111 (7)
110 (6)
101 (5)
100 (4)
011 (3)
010 (2)
001 (1)
000 (0)
11
10
01
00
PMMCOREVx
Invalid
Invalid
2.01.8
8
0
12
20
25
SystemFrequency-MHz
SupplyVoltage-V
ThenumberswithinthefieldsdenotethesupportedPMMCOREVxsettings.
2.2 2.4 3.6
0,1,2,30,1,20,10
1,2,3
1,2
1
2,3
3
2
Auxiliary Supply Operation
www.ti.com
Figure 4-2. System Frequency vs Supply Voltage
After selecting the system frequency and PMMCOREV[1:0] values, the SVM threshold must be selected.
Figure 4-3 shows the valid values for SVMH(SVSMHRRL[2:0]) based on the selected VCORE
(PMMCOREV[1:0]). This information is also included in Section 2.2.2.1.
Figure 4-3. Available SVMHSettings vs VCORE Settings
138 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

AUX0LVLx
AUX1LVLx/AUX2LVLx
111 (7)
110 (6)
101 (5)
100 (4)
011 (3)
010 (2)
001 (1)
000 (0)
110
(6)
111
(7)
100
(4)
101
(5)
010
(2)
011
(3)
000
(0)
001
(1)
SVSMHRRLx
Invalid
2.2
3.0
2.1
3.0
1.9
2.65
1.7
2.35
www.ti.com
Auxiliary Supply Operation
Based on the preceding selections, the auxiliary supply threshold levels must be set. These thresholds are
the minimum supply voltage that are available from each auxiliary supply. Figure 4-4 shows the valid
AUXxLVL settings compared to the selected SVM setting. The level setting for DVCC/AVCC AUX0LVL
must be chosen at least one step above the SVSMHRRLx level to avoid any unwanted switching between
DVCC/AVCC and AUXVCC1 or AUXVCC2.
Figure 4-4. Available AUXxLVL Settings vs SVMHSettings
Table 4-2 combines the information from the preceding figures and discussions.
Table 4-2. Minimum Voltage Thresholds for Selected fSYS
Minimum Minimum
fSYS (max) Minimum Minimum
SVSMHRRL[2:0] Minimum VDSYS AUX1LVL,
(MHz) PMMCOREV[1:0] AUX0LVL
(Sets SVMHLevel) AUX2LVL
8 00 000 1.8 V 001 000
12 01 001 2.0 V 010 001
20 10 010 2.2 V 011 010
25 11 011 2.4 V 100 011
4.2.6 Auxiliary Supply Monitor
Supplies that are not currently in use and that are not software controlled (AUXxMD = 0) are monitored
using a low-power comparator. For example, if DVCC supplies the device and the AUXxMD bits are 0 for
both AUXVCC1 and AUXVCC2, then AUXVCC1 and AUXVCC2 are monitored. As another example, if
AUXVCC1 supplies the device and AUX2MD = 1, only DVCC is monitored. If all unselected supplies are
controlled by software (AUXxMD = 1), then the automatic monitoring is disabled. The level the supply
voltages are compared against is programmable with the AUXxLVL bits. If a supply drops below the
selected threshold level the corresponding AUXxDRPIFG is set. Figure 4-5 shows a principle block
diagram of the monitoring circuitry.
139
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
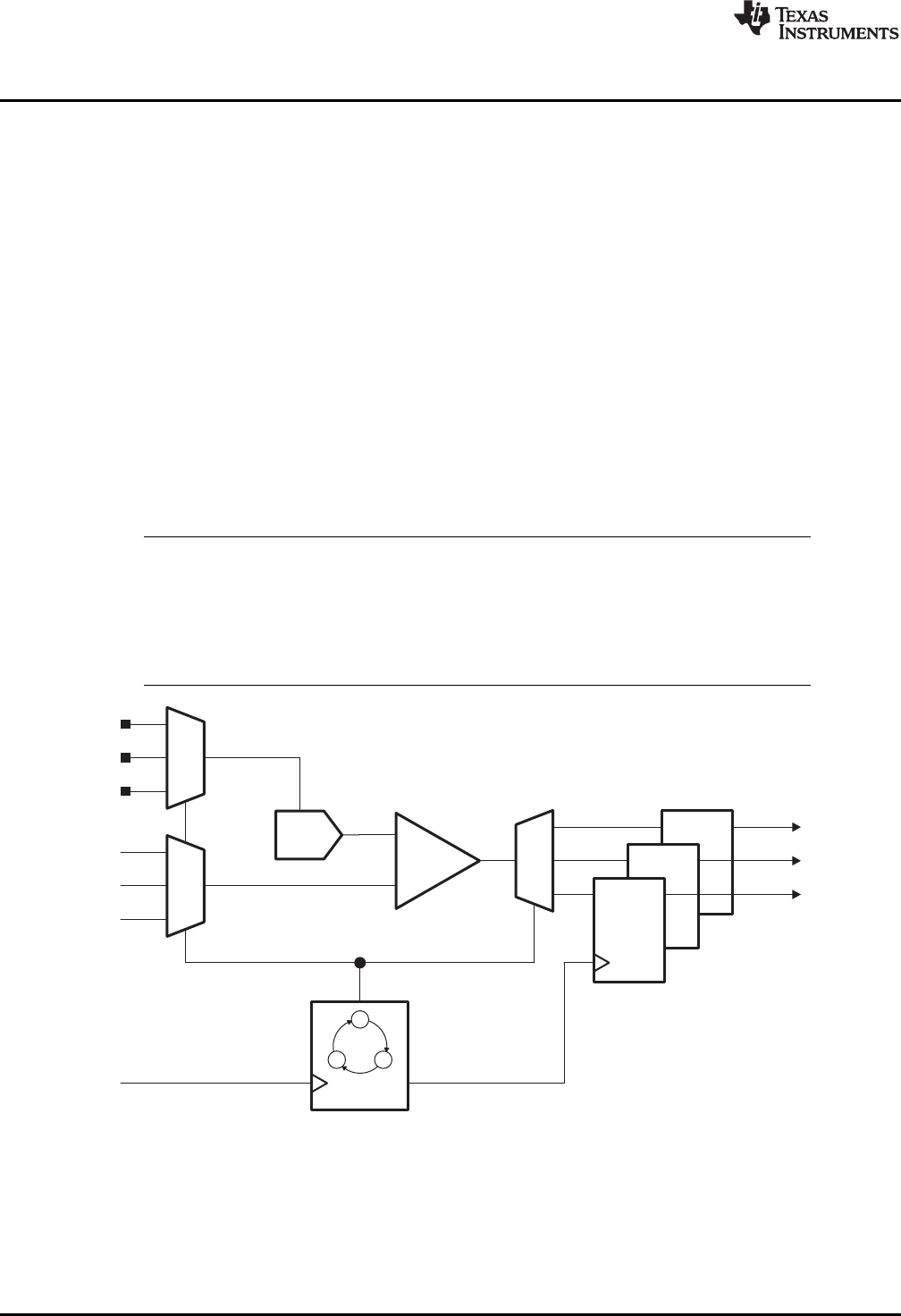
AUX0LVLx
AUX0OK
AUX1OK
AUX2OK
AUX1LVLx
AUX2LVLx
DVCC
AUXVCC1
AUXVCC2
VLOCLK
Threshold
DAC
Comparator
DEMUX
Control Logic
Auxiliary Supply Operation
www.ti.com
If two supplies are monitored this happens in a time-division multiplexing scheme clocked by the VLO.
During one VLO clock period, one supply is compared against its AUXxLVL threshold; during the next
VLO clock period, the other supply is compared against its threshold. This means the AUXxOK bits of
these supplies are updated approximately every 300 µs (worst case) with VLO clock frequency of
approximately 6 kHz. If only one supply is monitored, the output of the comparator is sampled using the
VLO clock, so that an update of the corresponding AUXxOK bit occurs approximately every 150 µs (worst
case).
Each monitoring cycle uses some charge from the monitored supply. The discharge of the monitored
supplies can be reduced by decreasing the monitoing rate by changing the AUXMRx bits. By default (with
AUXMRx = 00b) the supplies are monitored continously as described above. By setting AUXMRx = 01b,
the supplies are monitored every 32 VLO clock cycles; by setting AUXMRx = 10b, the supplies are
monitored every 1024 VLO clock cycles. The AUXMONIFG signals the completion of each monitoring
cycle.
If an unused supply is changed from software to hardware control (AUXxMD is changed from 1 to 0) a
new monitoring cycle is started with the next VLO clock cycle. Switching of the supplies does not affect
the timing of the monitoring cycles, it only changes which supplies are monitored.
The auxiliary supply monitor is enabled after clearing the LOCKAUX bit unless all unused supplies are
controlled by software. The monitored supplies are considered "not okay" until the first montoring cycle
completes.
NOTE: Switching and Monitoring
Switching is independent from the update interval of the AUXxOK bits. Switching is triggered
either by the high-side SVM or by software and takes place immediate after the trigger
occurs, taking the current AUXxOK states into account to select the next supply. Only a
change of AUX0OK from 0 to 1 indicating the DVCC changed from a "not okay" to an "okay"
state triggers a switch back to DVCC.
Figure 4-5. Auxiliary Supply Monitor Block Diagram
140 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
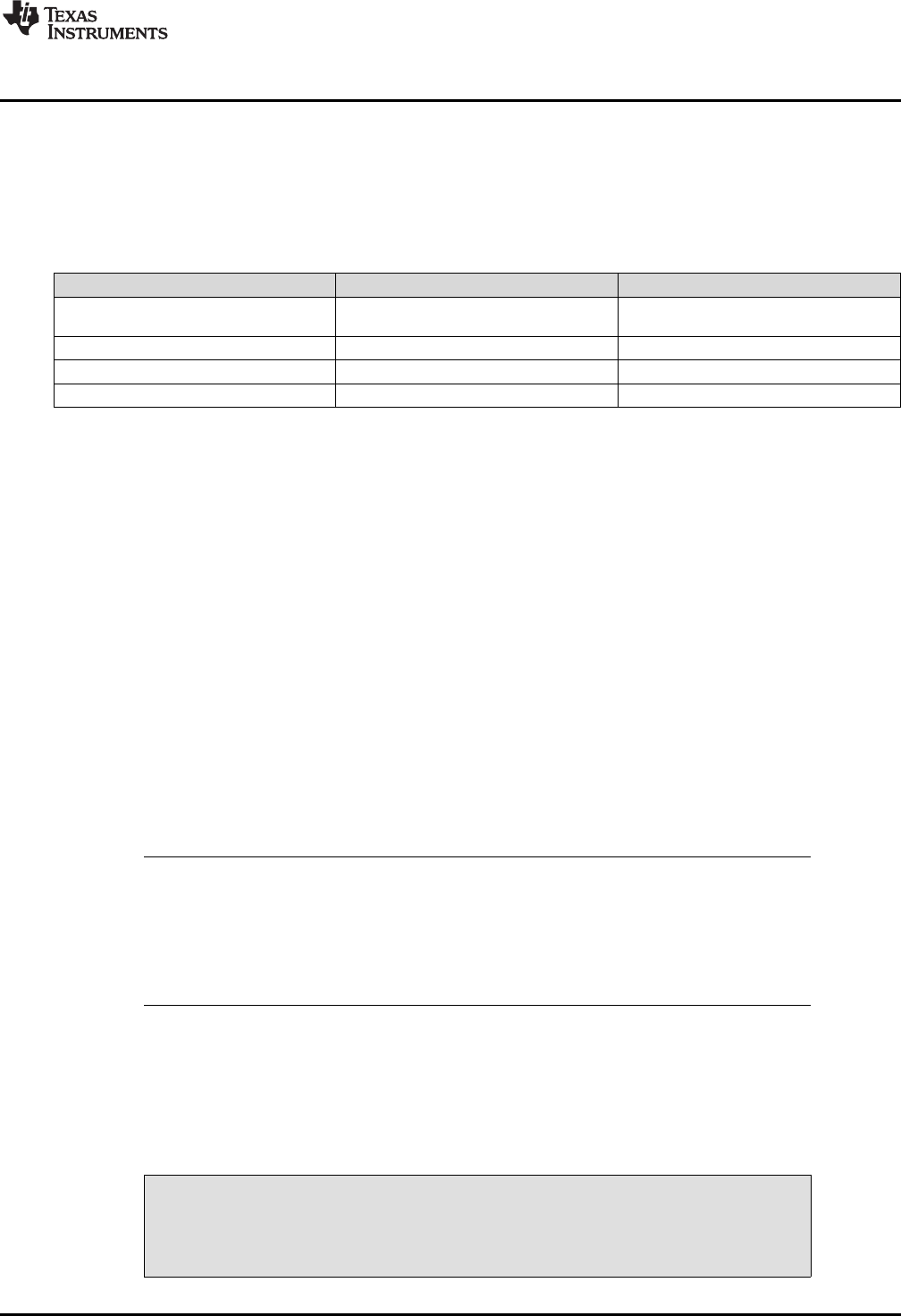
www.ti.com
Auxiliary Supply Operation
4.2.7 LPMx.5 and Auxiliary Supply Operation
During LPMx.5, the device is powered by whichever input supply was active when entering the low-power
mode. To force the device to use a specific supply during LPMx.5, activate that supply before entering
LPMx.5. Table 4-3 lists the supply selection during LPMx.5 based on the disabled supplies. The automatic
threshold-based supply monitoring scheme is always disabled during LPMx.5.
Table 4-3. Supply Selection During LPMx.5
Supply During LPMx.5 DVCC/AVCC Status(1) AUXVCC1 Status(2)
DVCC/AVCC or AUXVCC1 Not disabled Not disabled
(whichever is higher(3))
DVCC/AVCC Not disabled Disabled
AUXVCC1 Disabled Not disabled
AUXVCC2 Disabled Disabled
(1) DVCC/AVCC is disabled if AUX0MD = 1 and AUX0OK = 0; otherwise it is enabled.
(2) AUXVCC1 is disabled if AUX1MD = 1 and AUX1OK = 0; otherwise it is enabled.
(3) If the supplies (DVCC/AVCC and AUXVCC1) differ by less than 100 mV, the selected supply can be either DVCC/AVCC or
AUXVCC1. The supply with the higher voltage is selected only if the difference is greater than 100 mV.
After wakeup from LPMx.5, the LOCKAUX bit is set. The LPMx.5 supply selection remains active until the
LOCKAUX bit is cleared. When the LOCKAUX bit is cleared, the auxiliary supply system is controlled as
defined by the control register settings that were configured before clearing the LOCKAUX bit. None of the
AUX registers are retained during LPMx.5; thus, all registers must be reconfigured after wakeup from
LPMx.5 and before releasing LOCKAUX.
The supplies monitored by hardware (AUXxMD = 0) are considered "not okay" until the status is updated
for the first time by the auxiliary supply monitor. Only the supply that was used during LPMx.5 is
considered "okay" unless it drops below the programmed SVM level. If this behavior is unwanted, the
state can be set to "okay" by temporarily switching to software mode (AUXxMD = 1), setting the AUXxOK
bit to 1, and then return to hardware mode (AUXxMD = 0). The last state defined in software mode is
retained when switching back to hardware mode until the first update occurs by the auxililary supply
monitor.
The supplies controlled by software (AUXxMD = 1) are considered "not okay" or "okay" according to their
AUXxOK setting. If the supply that was used during LPMx.5 is set to "not okay" (AUXxMD = 1 and
AUXxOK = 0) the auxiliary supply system tries to switch to another ("okay") supply according to Table 4-1
as soon as LOCKAUX is cleared.
NOTE: DVCC vs AUXVCC1 during LPMx.5
Under normal operating conditions, TI recommends supplying DVCC by a voltage at least
100 mV higher than AUXVCC1 if automatic switching between DVCC and AUXVCC1 is
active (that is, if both supplies are not disabled when entering LPMx.5) (see Table 4-3). This
ensures a reliable operation from DVCC and avoids a potentially unwanted operation from
AUXVCC1.
4.2.8 Digital I/Os and Auxiliary Supplies
In most devices that implement the auxiliary supply system, the digital I/Os can be powered by the
switched supplies. In this case, care must be taken that large currents sink to DVSS and are not sourced
from the switched supplies, because of the voltage drop across the supply switches as shown in Figure 4-
6.
CAUTION
Check connection of external loads at digital I/Os to avoid high voltage drops
across switches. This might cause unwanted resets.
141
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

00
01
10
11
AUXADCSELx
2
DVCC
AUXVCC1
AUXVCC2
AUX 3VCC
ADC Sampling
and INCHx = 0Ch
To ADC (A12)
AUXADCRx
AUXADC
2
DVCC
DVSYS
sink
Correct Incorrect
DVSYS
source
Auxiliary Supply Operation
www.ti.com
Figure 4-6. I/Os Powered by Auxiliary Supplies
4.2.9 Measuring the Supplies
The primary and all auxiliary supply voltages can be measured if the device provides an ADC. The supply
to be measured is selected with the AUXADCSELx bit in the AUXADCCTL register. In addition, the
resistive load applied to the selected supply during the sampling phase of the ADC can be selected with
the AUXADCRx bits. This allows to perform a "health" check of the supplies even when not loaded by the
application. The ADC supply voltage channel (usually channel 12 (0Ch)) must be selected and the
auxiliary supply voltage measurement must be enabled with AUXADC = 1. The resistive divider is
connected to the supplies only during the sampling phase of the ADC.
Figure 4-7. AUX Connection to ADC
142 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
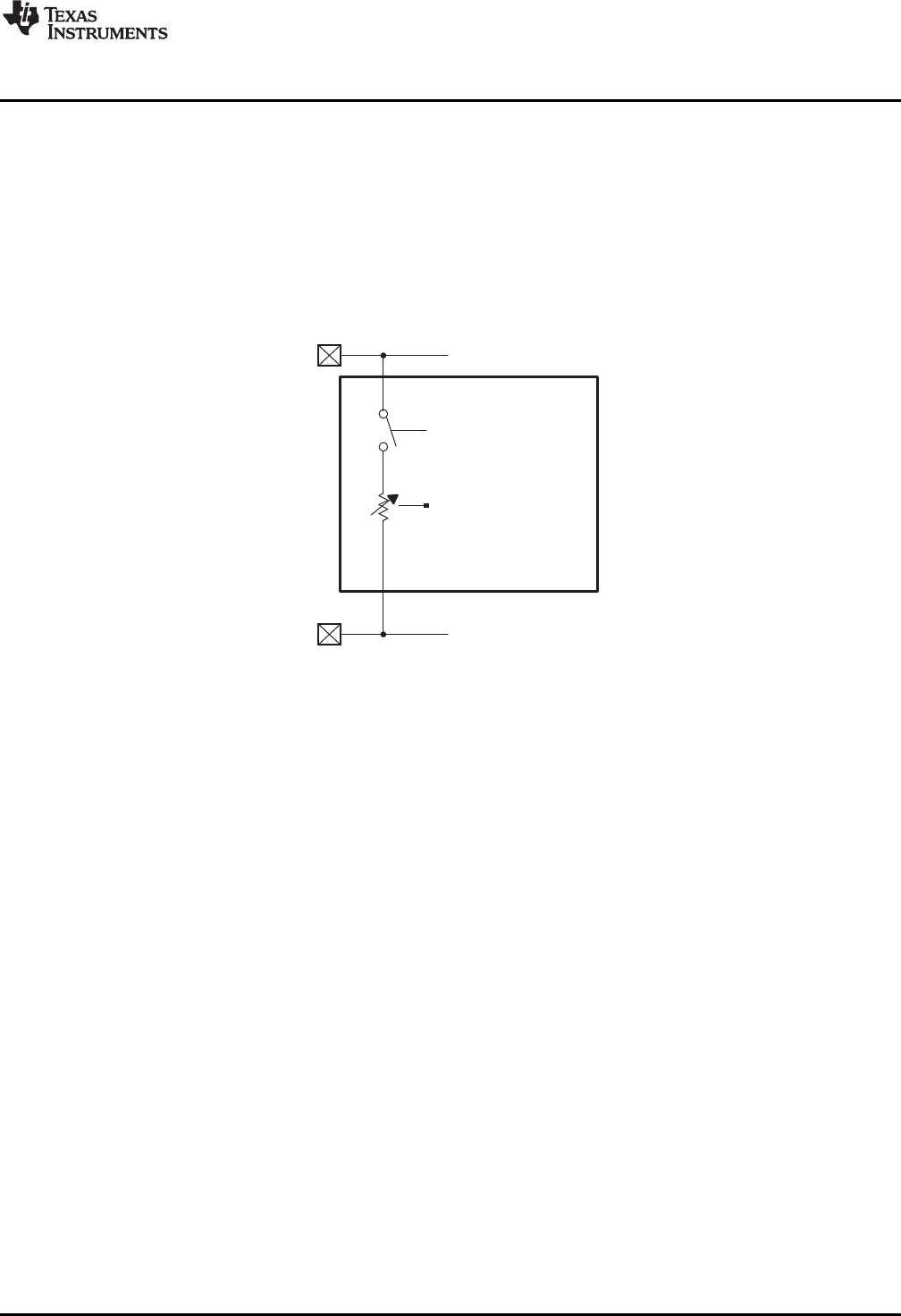
DVCC
AUXVCC2 or
AUX 3
VCC
Charger
AUXCHCx
Charger enable
www.ti.com
Auxiliary Supply Operation
4.2.10 Resistive Charger
Two simple resistive charging circuits are implemented to charge capacitors connected to AUXVCC2 and
AUXVCC3. A simplified block diagram of the charger is shown in Figure 4-8. The charger for AUXVCC2 or
AUXVCC3 is enabled by writing the correct key (069h) into the upper byte of AUX2CHCTL or
AUX3CHCTL, respectively, together with AUXCHVx = 01b, AUXCHEN = 1 and selecting a charging
resistor with AUXCHCx ≠00b. Writing to the charger control register with an incorrect key disables the
charger, and all control register bits are reset to 0.
Both chargers are disabled when DVCC is not selected as the supply source and AUXCHEN is reset by
hardware.
Figure 4-8. Charger Block Diagram
4.2.11 Auxiliary Supply Interrupts
The auxiliary supply system provides seven interrupt sources:
• AUXSWNMIFG: (non-)maskable supplies switched interrupt
• AUX0SWIFG: switched to DVCC interrupt
• AUX1SWIFG: switched to AUXVCC1 interrupt
• AUX2SWIFG: switched to AUXVCC2 interrupt
• AUX1DRPIFG: AUXVCC1 dropped below threshold interrupt
• AUX2DRPIFG: AUXVCC2 dropped below threshold interrupt
• AUXMONIFG: supply monitor interrupt
The AUXSWNMIFG is set after the system switched from one supply to another supply. A nonmaskable
interrupt request is generated if the AUXSWNMIE bit is set; otherwise, if (only) the AUXSWGIE bit and
additionally the GIE bit are set, a maskable interrupt request is generated.
The AUXxSWIFG bits are set if the auxiliary supply system switched to the corresponding supply (DVCC,
AUXVCC1 or AUXVCC2). This information can be used in the interrupt service routine together with the
interrupt vector generator AUXIV to reconfigure the device to the new supply situation. A (maskable)
interrupt request is generated if the corresponding AUXxSWIE bit and the GIE bit are set.
The AUXxDRPIFG bits are set if the corresponding supplies AUXxOK state changes from 1 to 0 due to
the supply voltage dropping below the selected threshold value AUXxLVL with the hardware monitor being
enabled (AUXxMD = 0). A (maskable) interrupt request is generated if the corresponding AUXxDRPIE bit
and the GIE bit are set.
143
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Auxiliary Supply Operation
www.ti.com
The AUXMONIFG bit is set if a hardware monitoring cycle is completed and the supply AUXxOK states
are updated accordingly. A (maskable) interrupt request is generated if the corresonding AUXMONIE bit
and the GIE bit are set.
4.2.11.1 AUXIV, Interrupt Vector Generator
All (maskable) auxiliary supply system interrupt sources are prioritized and combined to source a single
interrupt vector. AUXIV is used to determine which enabled interrupt source requested an interrupt. The
highest priority interrupt request that is enabled generates a number in the AUXIV register (see register
description). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled interrupts do not affect the AUXIV value.
Any read access of the AUXIV register automatically resets the highest pending interrupt flag. A write
access to the AUXIV register automatically resets all pending interrupt flags. All interrupt flags can also be
cleared by software.
4.2.11.2 Auxiliary Supply Nonmaskable Interrupt
If AUXSWNMIFG is configured as a nonmaskable interrupt source (with AUXSWNMIE=1), it will source
(together with interrupt flags from other modules) the user-NMI interrupt vector. In the user-NMI interrupt
service routine, the SYSUNIV interrupt vector word register can be evaluated or added to the program
counter to automatically enter the appropriate part of the user-NMI interrupt service routine. Refer to
device-specific data sheet concerning the user-NMI interrupt vector sources and priorities.
If both AUXSWNMIE and AUXSWGIE are set, the nonmaskable interrupt service routine is called when
AUXSWNMIFG is set because the user-NMI has a higher priority. In this case, both interrupt vector
generators, the SYSUNIV and the AUXIV, indicate a pending AUXSWNMIFG.
144 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
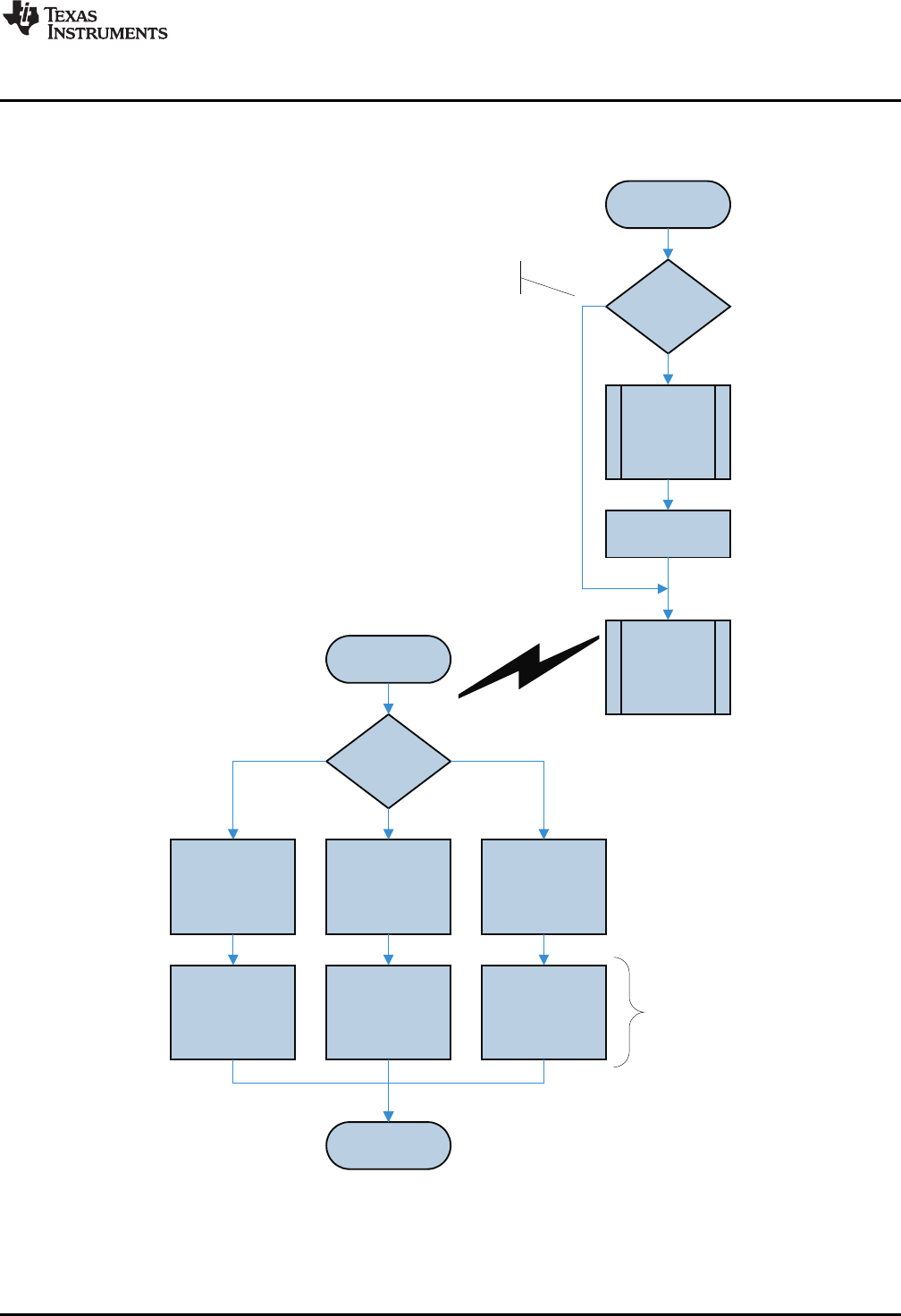
Reset
LOCKAUX=1?
Configure
Aux. Supply
System
LOCKAUX=0
“Main
Program”
no
yes
“only” PUC
AUXSW-ISR
“New”
Supply?
Updated
high-side SVM
level
(if needed)
Reduce
System
Performance
RETI
(End of ISR)
Updated
high-side SVM
level
(if needed)
Restore “Full”
System
Performance
Updated
high-side SVM
level
(if needed)
Reduce to
RTC only
Interrupt Request by
AUXxSWIFG
AUX1 AUX2
DVCC
Example
www.ti.com
Auxiliary Supply Operation
4.2.12 Software Flow
Figure 4-9 shows a sample software flow chart for the use and control of the auxiliary supply system.
NOTE: Configuration of the auxiliary supply system is required after wakeup from LPMx.5. None of the AUX
registers are retained during LPMx.5.
Figure 4-9. Software Flow Chart
145
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Auxiliary Supply Operation
www.ti.com
4.2.13 Examples of AUX Operation
The following sections show sample configurations of the AUX module. Some settings in these examples
do not apply to all devices; see the device-specific data sheet.
4.2.13.1 Example 1
This example shows configuration for running at 25-MHz system frequency at a supply voltage of 3
V ± 0.3 V, maintaining that frequency when switching to AUX1 or AUX2.
The maximum SVMHlevel must be less than or equal to 2.7 V, so that switching occurs only when VDSYS
goes outside 3 V ± 0.3 V. To switch back to DVCC/AVCC as soon as possible when it is within 3
V ± 0.3 V, the maximum AUX0LVL must also be less than or equal to 2.7 V. Because AUX0LVL must be
1 higher than SVSMHRRL, set AUX0LVL = 4 and SVSMHRRL = 3.
To support 25-MHz operation, PMMCOREV must equal 3. With SVSMHRRL = 3, all core voltage settings
are supported, so this is valid. Based on this core voltage setting, configure SVS levels (see
Section 2.2.2.1.1.1 for details).
To continue operation at 25-MHz without glitches even when using AUX1 and AUX2, the thresholds for
these must be equal to or higher than SVSMHRRL. To minimize use of the auxiliary supplies, they should
be set equal to SVSMHRRL. Therefore, set AUX1LVL and AUX2LVL = 3.
4.2.13.2 Example 2
This example shows configuration for running at a supply voltage of 3.3 V ± 0.3 V and allowing for
switching supplies without functional glitches.
The maximum SVMHlevel must be less than or equal to 3 V, so that switching occurs only when VDSYS
goes outside 3.3 V ± 0.3 V. To switch back to DVCC/AVCC as soon as possible when it is within
3.3 V ± 0.3 V, the maximum AUX0LVL must also be less than or equal to 3 V. Because AUX0LVL must
be 1 higher than SVSMHRRL, set = 6 and SVSMHRRL = 5.
With SVSMHRRL = 5, the core voltage setting (PMMCOREV) must be 2 or 3. Assuming the application
requires a system frequency up to 20 MHz, set PMMCOREV = 2. Based on this core voltage setting,
configure SVS levels (see Section 2.2.2.1.1.1 for details).
To continue operation without glitches when switching to AUX1 and AUX2, the thresholds for these must
be equal to or higher than SVSMHRRL. To minimize use of the auxiliary supplies, they should be set
equal to SVSMHRRL. Therefore, set AUX1LVL and AUX2LVL = 5.
4.2.13.3 Example 3
This example shows configuration for running at a system frequency of 8 MHz an a nominal supply
voltage of 3.3 V with settings designed to minimize power consumption.
To minimize power consumption at 8 MHz, set PMMCOREV = 0. With this core voltage, the
recommended SVMHsetting is SVSMHRRL = 0. Because AUX0LVL must be at least 1 higher than
SVSMHRRL, set AUX0LVL = 1.
To continue operation without glitches when switching to AUX1 and AUX2, the thresholds for these must
be equal to or higher than SVSMHRRL. To minimize use of the auxiliary supplies, they should be set
equal to SVSMHRRL. Therefore, set AUX1LVL and AUX2LVL = 0.
4.2.13.4 Example 4
This example shows configuration for running at a system frequency of 25 MHz when operating on a
supply voltage of 3 V ± 0.3 V from DVCC, and then changing the system frequency to 12 MHz when
supplied from AUX1 and to 8 MHz when supplied from AUX2.
The maximum SVMHlevel must be less than or equal to 2.7 V, so that switching occurs only when VDSYS
goes outside 3 V ± 0.3 V. To switch back to DVCC/AVCC as soon as possible when it is within
3 V ± 0.3 V, the maximum AUX0LVL must also be less than or equal to 2.7 V. Because AUX0LVL must
be 1 higher than SVSMHRRL, set = 4 and SVSMHRRL = 3.
146 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Auxiliary Supply Operation
To support 25-MHz operation, PMMCOREV must equal 3. With SVSMHRRL = 3, all core voltage settings
are supported, so this is valid. Based on this core voltage setting, configure SVS levels (see
Section 2.2.2.1.1.1 for details).
When switching back to AUX0 (DVCC/AVCC) after having failed over to AUX1 or AUX2, these same
settings must be restored.
Given that the system frequency should be changed to 12 MHz when running from AUX1, settings must
be changed when switching to AUX1.
When switching from AUX0 (DVCC/AVCC) to AUX1:
1. Decrease system frequency to 12 MHz
2. Decrease core voltage level by setting PMMCOREV = 1 (also change SVS settings)
3. Decrease the SVM level by setting SVSMHRRL = 1
4. Set AUX1LVL and AUX2LVL to 1
When switching from AUX2 to AUX1:
1. Increase AUX1LVL and AUX2LVL to 1
2. Increase the SVM level by setting SVSMHRRL = 1
3. Increase core voltage level by setting PMMCOREV = 1 (also change SVS settings)
4. Increase system frequency to 12 MHz
Given that the system frequency should be changed to 8 MHz when running from AUX2, settings must be
changed when switching to AUX2.
1. Decrease system frequency to 8 MHz
2. Decrease core voltage level by setting PMMCOREV = 0 (also change SVS settings)
3. Decrease the SVM level by setting SVSMHRRL = 0
4. Set AUX1LVL and AUX2LVL to 0
147
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AUX Registers
www.ti.com
4.3 AUX Registers
The registers to control the auxiliary supplies are listed in Table 4-4. The base address for the registers
can be found in the device-specific data sheet. The address offsets are given in Table 4-4.
The access key, AUXKEY, defined in the AUXCTL0 register controls access to the AUXCTLx registers.
Once the correct key is written, the write access is enabled. The write access is disabled by writing a
wrong key in byte mode to the AUXCTL0 upper byte. Word accesses to AUXCTL0 with a wrong key also
disables the write access. A write access to a AUXCTLx register other than AUXCTL0 while write access
is not enabled is ignored.
NOTE: Bit Naming Convention
The bits and bit fields in the AUXCTL0 to AUXCTL2 registers are named according to what
supplies they refer to: AUX0... refers to DVCC, AUX1... refers to AUXVCC1, and AUX2...
refers to AUXVCC2. In any description, the occurence of a bit name like AUXx... refers to all
the bit names AUX0..., AUX1..., and AUX2....
Table 4-4. Auxiliary Supply Registers
Offset Acronym Register Name Type Reset Section
00h AUXCTL0 Auxiliary Supply Control 0 register(1) Read/write 9601h Section 4.3.1
02h AUXCTL1 Auxiliary Supply Control 1 register(1) Read/write 0000h Section 4.3.2
04h AUXCTL2 Auxiliary Supply Control 2 register(1) Read/write 0000h Section 4.3.3
06h Reserved
08h Reserved
0Ah Reserved
0Ch Reserved
0Eh Reserved
10h Reserved
12h AUX2CHCTL AUX2 Charger Control Read/write 5A00h Section 4.3.4
14h AUX3CHCTL AUX3 Charger Control Read/write 5A00h Section 4.3.5
16h AUXADCCTL AUX ADC Control Read/write 0000h Section 4.3.6
18h Reserved
1Ah AUXIFG AUX Interrupt Flag Read/write 0000h Section 4.3.7
1Ch AUXIE AUX Interrupt Enable Read/write 0000h Section 4.3.8
1Eh AUXIV AUX Interrupt Vector Word Read/write 0000h Section 4.3.9
(1) Access protected by key AUXKEY in AUXCTL0.
148 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AUX Registers
4.3.1 AUXCTL0 Register
Auxiliary Supply Control 0 Register
Figure 4-10. AUXCTL0 Register
15 14 13 12 11 10 9 8
AUXKEY
rw-1 rw-0 rw-0 rw-1 rw-0 rw-1 rw-1 rw-0
76543210
Reserved AUX2SW AUX1SW AUX0SW LOCKAUX
r0 r0 r0 r0 r-(0) r-(0) r-(0) r/w0-[1]
Table 4-5. AUXCTL0 Register Description
Bit Field Type Reset Description
15-8 AUXKEY RW 96h AUX access key. Always read as 096h. Must be written with 0A5h or all writes to
AUXCTLx registers are ignored.
7-4 Reserved R 0h Reserved. Always reads as 0.
3 AUX2SW R 0h AUXVCC2 switch state
0b = AUXVCC2 switch open
1b = AUXVCC2 switch closed
2 AUX1SW R 0h AUXVCC1 switch state
0b = AUXVCC1 switch open
1b = AUXVCC1 switch closed
1 AUX0SW R 0h DVCC switch state
0b = DVCC switch open
1b = DVCC switch closed
0 LOCKAUX RW 0h Lock auxiliary supply system. Can only be written as 0.
LOCKAUX is always set to 1 by hardware after the core was powered down
either due to a complete power cycle of the main suppies (DVCC, AUXVCC1, or
AUXVCC2) or due to LPMx.5 operation.
0b = Auxiliary supply system not locked
1b = Auxiliary supply system locked - operating from either DVCC or AUXVCC1
149
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AUX Registers
www.ti.com
4.3.2 AUXCTL1 Register
Auxiliary Supply Control 1 Register
Figure 4-11. AUXCTL1 Register
15 14 13 12 11 10 9 8
Reserved AUX2MD AUX1MD AUX0MD
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
76543210
Reserved AUX2PRIO AUX2OK AUX1OK AUX0OK
r0 r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0)
Table 4-6. AUXCTL1 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10 AUX2MD RW 0h AUXVCC2 auxiliary supply mode
0b = Hardware controlled
1b = Software controlled
9 AUX1MD RW 0h AUXVCC1 auxiliary supply mode
0b = Hardware controlled
1b = Software controlled
8 AUX0MD RW 0h DVCC auxiliary supply mode
0b = Hardware controlled
1b = Software controlled
7-4 Reserved R 0h Reserved. Always reads as 0.
3 AUX2PRIO RW 0h Auxiliary supply AUXVCC2 priority. Defines order of switching between
AUXVCC1 and AUXVCC2.
0b = AUXVCC2 has lower priority than AUXVCC1
1b = AUXVCC2 has higher priority than AUXVCC1
2 AUX2OK RW 0h AUXVCC2 okay flag.
Read-only if AUX2MD = 0 and indicates the status monitored by the hardware
based on the selected level AUX2LVLx.
If AUX2MD = 1 the bit must be controlled by software to indicate the status of the
supply. It is not modified by hardware in this case.
0b = Supply not okay - below AUX2LVLx if AUX2MD = 0
1b = Supply okay - above AUX2LVLx if AUX2MD = 0
1 AUX1OK RW 0h AUXVCC1 okay flag.
Read-only if AUX1MD = 0 and indicates the status monitored by the hardware
based on the selected level AUX1LVLx.
If AUX1MD = 1 the bit must be controlled by software to indicate the status of the
supply. It is not modified by hardware in this case.
0b = Supply not okay - below AUX1LVLx if AUX1MD = 0
1b = Supply okay - above AUX1LVLx if AUX1MD = 0
0 AUX0OK RW 0h DVCC okay flag.
Read-only if AUX0MD = 0 and indicates the status monitored by the hardware
based on the selected level AUX0LVLx.
If AUX0MD = 1 the bit must be controlled by software to indicate the status of the
supply. It is not modified by hardware in this case.
0b = Supply not okay - below AUX0LVLx if AUX0MD = 0
1b = Supply okay - above AUX0LVLx if AUX0MD = 0
150 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AUX Registers
4.3.3 AUXCTL2 Register
Auxiliary Supply Control 2 Register
Figure 4-12. AUXCTL2 Register
15 14 13 12 11 10 9 8
Reserved AUXMRx Reserved AUX2LVLx
r0 r0 rw-(0) rw-(0) r0 rw-(0) rw-(0) rw-(0)
76543210
Reserved AUX1LVLx Reserved AUX0LVLx
r0 rw-(0) rw-(0) rw-(0) r0 rw-(0) rw-(0) rw-(0)
Table 4-7. AUXCTL2 Register Description
Bit Field Type Reset Description
15-14 Reserved R 0h Reserved. Always reads as 0.
13-12 AUXMRx RW 0h Auxiliary supply monitoring rate
00b = Continous monitoring
01b = Monitoring every 32 VLO clock cycles (≈5ms)
10b = Monitoring every 1024 VLO clock cycles (≈150ms)
11b = Reserved
11 Reserved R 0h Reserved. Always reads as 0.
10-8 AUX2LVLx RW 0h AUXVCC2 auxiliary supply threshold level. The levels are specified in the device-
specific data sheet.
000b = Approximately 1.74 V
001b = Approximately 1.94 V
010b = Approximately 2.14 V
011b = Approximately 2.26 V
100b = Approximately 2.40 V
101b = Approximately 2.70 V
110b = Approximately 3.00 V
111b = Approximately 3.00 V
7 Reserved R 0h Reserved. Always reads as 0.
6-4 AUX1LVLx RW 0h AUXVCC1 auxiliary supply threshold level. The levels are specified in the device-
specific data sheet.
000b = Approximately 1.74 V
001b = Approximately 1.94 V
010b = Approximately 2.14 V
011b = Approximately 2.26 V
100b = Approximately 2.40 V
101b = Approximately 2.70 V
110b = Approximately 3.00 V
111b = Approximately 3.00 V
3 Reserved R 0h Reserved. Always reads as 0.
2-0 AUX0LVLx RW 0h DVCC auxiliary supply threshold level. The levels are specified in the device-
specific data sheet.
000b = Approximately 1.74 V
001b = Approximately 1.94 V
010b = Approximately 2.14 V
011b = Approximately 2.26 V
100b = Approximately 2.40 V
101b = Approximately 2.70 V
110b = Approximately 3.00 V
111b = Approximately 3.00 V
151
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

AUX Registers
www.ti.com
4.3.4 AUX2CHCTL Register
AUX Charger Control Register for AUX2
Figure 4-13. AUX2CHCTL Register
15 14 13 12 11 10 9 8
AUXCHKEYx
rw-0 rw-1 rw-0 rw-1 rw-1 rw-0 rw-1 rw-0
76543210
Reserved AUXCHVx Reserved AUXCHCx AUXCHEN
r0 r0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 4-8. AUX2CHCTL Register Description
Bit Field Type Reset Description
15-8 AUXCHKEYx RW 5Ah Charger access key. Always read as 05Ah. Must be written as 069h together
with low byte; writing any other value disables the charger and all control register
bits are reset to 0.
7-6 Reserved R 0h Reserved. Always reads as 0.
5-4 AUXCHVx RW 0h Charger end voltage
00b = Charger disabled
01b = VCC
10b = Reserved
11b = Reserved
3 Reserved R 0h Reserved. Always reads as 0.
2-1 AUXCHCx RW 0h Charger charge current
00b = Charger disabled
01b = Charge current defined by a maximum 5-kΩresistor
10b = Charge current defined by a maximum 10-kΩresistor
11b = Charge current defined by a maximum 20-kΩresistor
0 AUXCHEN RW 0h Charger enable
0b = Charger disabled
1b = Charger enabled
152 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AUX Registers
4.3.5 AUX3CHCTL Register
AUX Charger Control Register for AUX3
Figure 4-14. AUX3CHCTL Register
15 14 13 12 11 10 9 8
AUXCHKEYx
rw-0 rw-1 rw-0 rw-1 rw-1 rw-0 rw-1 rw-0
76543210
Reserved AUXCHVx Reserved AUXCHCx AUXCHEN
r0 r0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 4-9. AUX3CHCTL Register Description
Bit Field Type Reset Description
15-8 AUXCHKEYx RW 5Ah Charger access key. Always read as 05Ah. Must be written as 069h together
with low byte; writing any other value disables the charger and all control register
bits are reset to 0.
7-6 Reserved R 0h Reserved. Always reads as 0.
5-4 AUXCHVx RW 0h Charger end voltage
00b = Charger disabled
01b = VCC
10b = Reserved
11b = Reserved
3 Reserved R 0h Reserved. Always reads as 0.
2-1 AUXCHCx RW 0h Charger charge current
00b = Charger disabled
01b = Charge current defined by a maximum 5-kΩresistor
10b = Charge current defined by a maximum 10-kΩresistor
11b = Charge current defined by a maximum 20-kΩresistor
0 AUXCHEN RW 0h Charger enable
0b = Charger disabled
1b = Charger enabled
153
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AUX Registers
www.ti.com
4.3.6 AUXADCCTL Register
Auxiliary Supply ADC Control Register
Figure 4-15. AUXADCCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved AUXADCRx Reserved AUXADCSELx AUXADC
r0 r0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 4-10. AUXADCCTL Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved. Always reads as 0.
5-4 AUXADCRx RW 0h Load resistance (R(tot) = 3R) during sampling of selected supply. Refer to the
device-specific data sheet, too.
00b = R(tot) ≈15 kΩ- I = U/R = 3.6 V / 15 kΩ= 240 µA; I = 1.8 V / 16 kΩ= 120
µA
01b = R(tot) ≈1.5 kΩ- I = 2.4 mA at 3.6 V; I = 1.2 mA at 1.8V
10b = R(tot) ≈0.5 kΩ- I = 7.2 mA at 3.6 V; I = 3.6 mA at 1.8 V
11b = Reserved
3 Reserved R 0h Reserved. Always reads as 0.
2-1 AUXADCSELx RW 0h Select supply to be measured with ADC.
00b = DVCC
01b = AUXVCC1
10b = AUXVCC2
11b = AUXVCC3
0 AUXADC RW 0h Auxiliary supplies to ADC
0b = Auxiliary supply measurement disabled
1b = Auxiliary supply measurement enabled
154 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
AUX Registers
4.3.7 AUXIFG Register
Auxiliary Supply Interrupt Flag Register
Figure 4-16. AUXIFG Register
15 14 13 12 11 10 9 8
Reserved AUXSWNMIFG
r0 r0 r0 r0 r0 r0 r0 rw-(0)
76543210
AUXMONIFG AUX2DRPIFG AUX1DRPIFG Reserved Reserved AUX2SWIFG AUX1SWIFG AUX0SWIFG
rw-(0) rw-(0) rw-(0) rw-(0) r0 rw-(0) rw-(0) rw-(0)
Table 4-11. AUXIFG Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved. Always reads as 0.
8 AUXSWNMIFG RW 0h Supplies switched (non-)maskable interrupt flag.
Set if a switch from any supply to any other supply happened. Sources an NMI if
AUXSWNMIE is set, otherwise sources a maskable interrupt if AUXSWGIE and
GIE is set.
0b = No interrupt pending
1b = Interrupt pending
7 AUXMONIFG RW 0h Supply monitor interrupt flag.
Set after completion of a hardware monitoring cycle.
0b = No interrupt pending
1b = Interrupt pending
6 AUX2DRPIFG RW 0h AUXVCC2 dropped below its threshold interrupt flag.
0b = No interrupt pending
1b = Interrupt pending
5 AUX1DRPIFG RW 0h AUXVCC1 dropped below its threshold interrupt flag.
0b = No interrupt pending
1b = Interrupt pending
4 Reserved RW 0h Reserved. Always write as 0.
3 Reserved R 0h Reserved. Always reads as 0.
2 AUX2SWIFG RW 0h Switched to AUXVCC2 interrupt flag.
0b = No interrupt pending
1b = Interrupt pending
1 AUX1SWIFG RW 0h Switched to AUXVCC1 interrupt flag.
0b = No interrupt pending
1b = Interrupt pending
0 AUX0SWIFG RW 0h Switched to DVCC interrupt flag.
0b = No interrupt pending
1b = Interrupt pending
155
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AUX Registers
www.ti.com
4.3.8 AUXIE Register
Auxiliary Supply Interrupt Enable Register
Figure 4-17. AUXIE Register
15 14 13 12 11 10 9 8
Reserved AUXSWNMIE
r0 r0 r0 r0 r0 r0 r0 r0
76543210
AUXMONIE AUX2DRPIE AUX1DRPIE Reserved AUXSWGIE AUX2SWIE AUX1SWIE AUX0SWIE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 4-12. AUXIE Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved. Always reads as 0.
8 AUXSWNMIE R 0h Supplies switched non-maskable interrupt enable.
0b = Non-maskable interrupt disabled
1b = Non-maskable interrupt enabled
7 AUXMONIE RW 0h Supply monitor interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
6 AUX2DRPIE RW 0h AUXVCC2 dropped below its threshold interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
5 AUX1DRPIE RW 0h AUXVCC1 dropped below its threshold interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
4 Reserved RW 0h Reserved. Always write as 0.
3 AUXSWGIE RW 0h Global supply switched interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
2 AUX2SWIE RW 0h Switched to AUXVCC2 interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
1 AUX1SWIE RW 0h Switched to AUXVCC1 interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
0 AUX0SWIE RW 0h Switched to DVCC interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
156 Auxiliary Supply System (AUX) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AUX Registers
4.3.9 AUXIV Register
Auxiliary Supply Interrupt Vector Register
Figure 4-18. AUXIV Register
15 14 13 12 11 10 9 8
AUXIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
AUXIVx
r0 r0 r-(0) r-(0) r-(0) r-(0) r-(0) r0
Table 4-13. AUXIV Register Description
Bit Field Type Reset Description
15-0 AUXIVx R 0h Auxiliary Supply Interrupt vector value. It generates a value that can be used as
address offset for fast interrupt service routine handling. Writing to this register
clears all pending interrupt flags.
00h = No interrupt pending
02h = Interrupt Source: Global (non-)maskable supply switched interrupt flag;
Interrupt Flag: AUXSWNMIFG; Interrupt Priority: Highest
04h = Interrupt Source: Switched to DVCC interrupt flag; Interrupt Flag:
AUX0SWIFG
06h = Interrupt Source: Switched to AUXVCC1 interrupt flag; Interrupt Flag:
AUX1SWIFG
08h = Interrupt Source: Switched to AUXVCC2 interrupt flag; Interrupt Flag:
AUX2SWIFG
0Ah = Interrupt Source: Reserved; Interrupt Flag: -
0Ch = Interrupt Source: AUXVCC1 below threshold interrupt flag; Interrupt Flag:
AUX1DRPIFG
0Eh = Interrupt Source: AUXVCC2 below threshold interrupt flag; Interrupt Flag:
AUX2DRPIFG
10h = Interrupt Source: Supply monitor interrupt flag; Interrupt Flag:
AUXMONIFG; Interrupt Priority: Lowest
157
SLAU208O–June 2008–Revised May 2015 Auxiliary Supply System (AUX)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 5
SLAU208O–June 2008–Revised May 2015
Unified Clock System (UCS)
The Unified Clock System (UCS) module provides the various clocks for a device. This chapter describes
the operation of the UCS module, which is implemented in all devices.
Topic ........................................................................................................................... Page
5.1 Unified Clock System (UCS) Introduction ............................................................ 159
5.2 UCS Operation ................................................................................................. 161
5.3 Module Oscillator (MODOSC)............................................................................. 172
5.4 UCS Registers.................................................................................................. 173
158 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Unified Clock System (UCS) Introduction
5.1 Unified Clock System (UCS) Introduction
The UCS module supports low system cost and ultra-low power consumption. Using three internal clock
signals, the user can select the best balance of performance and low power consumption. The UCS
module can be configured to operate without any external components, with one or two external crystals,
or with resonators, under full software control.
The UCS module includes up to five clock sources:
• XT1CLK: Low-frequency or high-frequency oscillator that can be used either with low-frequency 32768-
Hz watch crystals, standard crystals, resonators, or external clock sources in the 4 MHz to 32 MHz
range. XT1CLK can be used as a clock reference into the FLL. Some devices only support the low-
frequency oscillator for XT1CLK. See the device-specific data sheet for supported functions.
• VLOCLK: Internal very low power, low-frequency oscillator with 10-kHz typical frequency
• REFOCLK: Internal, trimmed, low-frequency oscillator with 32768-Hz typical frequency, with the ability
to be used as a clock reference into the FLL
• DCOCLK: Internal digitally controlled oscillator (DCO) that can be stabilized by the FLL
• XT2CLK: Optional high-frequency oscillator that can be used with standard crystals, resonators, or
external clock sources in the 4 MHz to 32 MHz range. XT2CLK can be used as a clock reference into
the FLL.
Three clock signals are available from the UCS module:
• ACLK: Auxiliary clock. The ACLK is software selectable as XT1CLK, REFOCLK, VLOCLK, DCOCLK,
DCOCLKDIV, and when available, XT2CLK. DCOCLKDIV is the DCOCLK frequency divided by 1, 2, 4,
8, 16, or 32 within the FLL block. ACLK can be divided by 1, 2, 4, 8, 16, or 32. ACLK/n is ACLK
divided by 1, 2, 4, 8, 16, or 32 and is available externally at a pin. ACLK is software selectable by
individual peripheral modules.
• MCLK: Master clock. MCLK is software selectable as XT1CLK, REFOCLK, VLOCLK, DCOCLK,
DCOCLKDIV, and when available, XT2CLK. DCOCLKDIV is the DCOCLK frequency divided by 1, 2, 4,
8, 16, or 32 within the FLL block. MCLK can be divided by 1, 2, 4, 8, 16, or 32. MCLK is used by the
CPU and system.
• SMCLK: Subsystem master clock. SMCLK is software selectable as XT1CLK, REFOCLK, VLOCLK,
DCOCLK, DCOCLKDIV, and when available, XT2CLK. DCOCLKDIV is the DCOCLK frequency divided
by 1, 2, 4, 8, 16, or 32 within the FLL block. SMCLK can be divided by 1, 2, 4, 8, 16, or 32. SMCLK is
software selectable by individual peripheral modules.
The block diagram of the UCS module is shown in Figure 5-1.
159
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
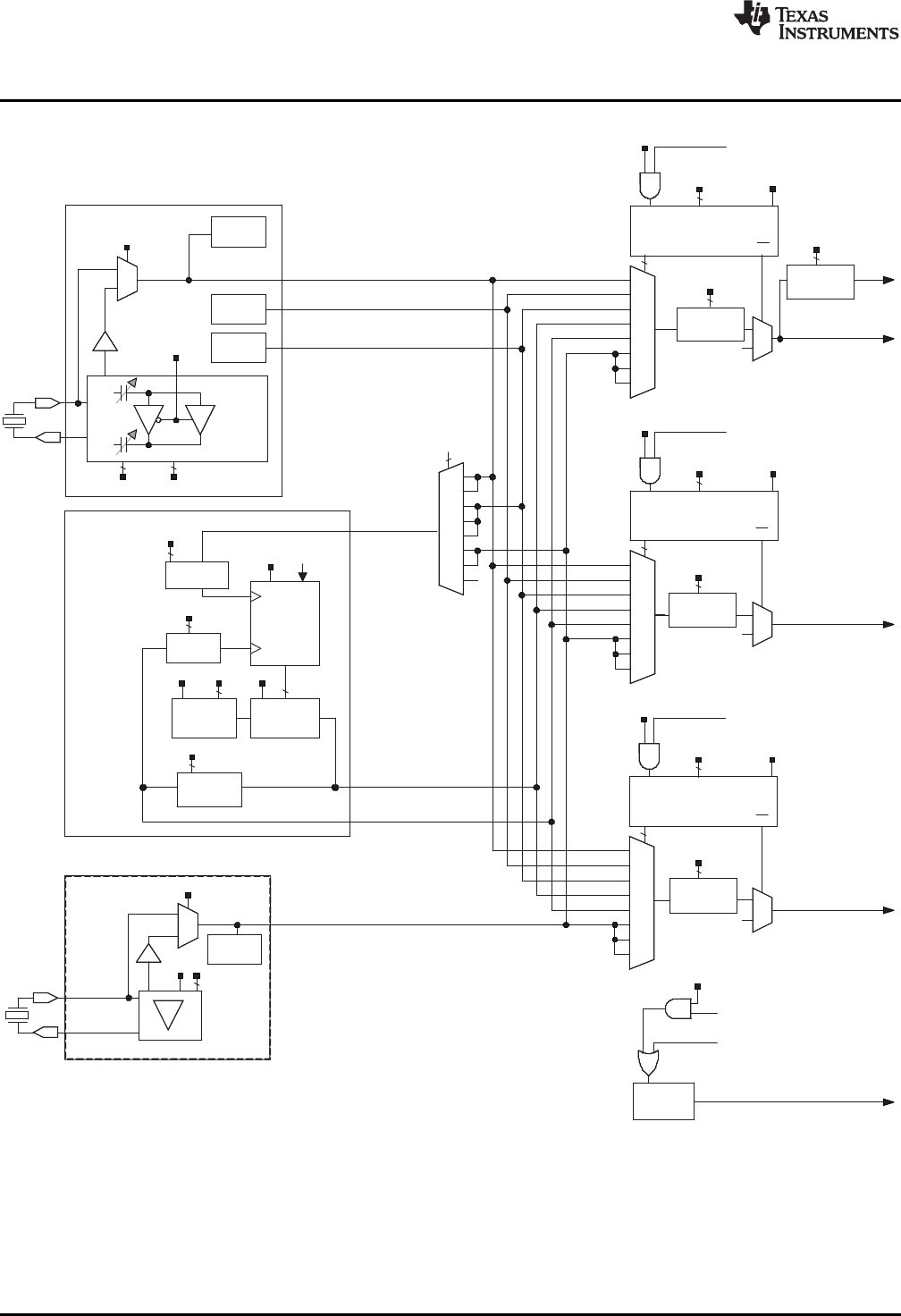
XT20FF
XT2IN
XT2OUT XT2 Oscillator
2XT2DRIVE
0
1
XT2BYPASS
XT2(Optional)
XT2 Fault
Detection
XIN
XOUT
XCAP
XT1
LF HF
0 V
0 V
XTS
VLOCLK
XT1CLK
2 2
XT1DRIVE
REFOCLK
OSC
XT2CLK
0
1
XT1BYPASS
REFO
VLO
10-bit
Frequency
Integrator
DCO
+
Modulator
DC
Generator
DCORSEL
SCG1
off
SCG0
off
PUC
Reset
FLLD
10
+
−
Divider
/(N+1)
Prescaler
3
DCO,
MOD
FLLREFDIV
3
FLLN
10
3
DISMOD
FLL
Divider
/1/2/4/8/12/16
MODOSC
MODOSC_REQEN
MODOSC_REQ
MODCLK
UnconditonalMODOSC
requests.
EN
XT1 Fault
Detection
3
000
001
010
011
100
101
110
111
SELREF
FLLREFCLK
DCOCLK
DCOCLKDIV
ACLKEnableLogic
OSCOFF
ACLK_REQEN
ACLK_REQ
3
000
001
010
011
100
101
110
111
SELA
3
ACLK/n
ACLK
3
Divider
DIVPA
1
0
3
Divider
DIVA
EN
MCLKEnableLogic
CPUOFF
3
MCLK_REQEN
MCLK_REQ
3
000
001
010
011
100
101
110
111
SELM
MCLK
1
0
3
Divider
DIVM
SMCLKEnableLogic
SMCLKOFF
3
SMCLK_REQEN
SMCLK_REQ
3
000
001
010
011
100
101
110
111
SELS
SMCLK
1
0
3
Divider
DIVS
/1/2/4/8/16/32
/1/2/4/8/16/32
/1/2/4/8/16/32
/1/2/4/8/16/32
/1/2/4/8/16/32
EN
EN
Unified Clock System (UCS) Introduction
www.ti.com
Figure 5-1. UCS Block Diagram
160 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Operation
5.2 UCS Operation
After a PUC, the UCS module default configuration is:
• XT1 in LF mode is selected as the oscillator source for XT1CLK. XT1CLK is selected for ACLK.
• DCOCLKDIV is selected for MCLK.
• DCOCLKDIV is selected for SMCLK.
• FLL operation is enabled and XT1CLK is selected as the FLL reference clock, FLLREFCLK.
• On devices that have XIN and XOUT shared with general-purpose I/O, XIN and XOUT pins are set to
general-purpose I/Os and XT1 remains disabled until the I/O ports are configured for XT1 operation. If
XIN and XOUT are not shared with general-purpose I/Os, XT1 is enabled.
• When available, XT2IN and XT2OUT pins are set to general-purpose I/Os and XT2 is disabled.
As previously stated, FLL operation with XT1 is selected by default. If the crystal pins (XIN, XOUT) are
shared with general-purpose I/Os, XT1 will remain disabled until the PSEL bits associated with the crystal
pins are set. If XIN and XOUT are not shared with general-purpose I/O, XT1 is enabled. When a 32768-
Hz crystal is used for XT1CLK, the fault control logic immediately causes ACLK to be sourced by the
REFOCLK, because XT1 is not stable immediately (see Section 5.2.12). When crystal startup is obtained
and settled, the FLL stabilizes MCLK and SMCLK to 1.048576 MHz and fDCO = 2.097152 MHz.
Status register control bits (SCG0, SCG1, OSCOFF, and CPUOFF) configure the operating modes and
enable or disable portions of the UCS module (see the SYS chapter). Registers UCSCTL0 through
UCSCTL8 configure the UCS module.
The UCS module can be configured or reconfigured by software at any time during program execution.
NOTE: For devices using RTC_B, RTC_C, or RTC_D (RTC modules that support LPM3.5), setting
bit RTCHOLD = 0 in register RTCCTL1 also enables XT1, independent from UCS
configuration.
5.2.1 UCS Module Features for Low-Power Applications
Conflicting requirements typically exist in battery-powered applications:
• Low clock frequency for energy conservation and time keeping
• High clock frequency for fast response times and fast burst processing capabilities
• Clock stability over operating temperature and supply voltage
• Low-cost applications with less-constrained clock accuracy requirements
The UCS module addresses these conflicting requirements by allowing the user to select from the three
available clock signals: ACLK, MCLK, and SMCLK.
All three available clock signals can be sourced from any of the available clock sources (XT1CLK,
VLOCLK, REFOCLK, DCOCLK, DCOCLKDIV, or XT2CLK), giving complete flexibility in the system clock
configuration. A flexible clock distribution and divider system is provided to fine tune the individual clock
requirements.
5.2.2 Internal Very-Low-Power Low-Frequency Oscillator (VLO)
The internal VLO provides a typical frequency of 10 kHz (see device-specific data sheet for parameters)
without requiring a crystal. The VLO provides for a low-cost ultra-low-power clock source for applications
that do not require an accurate time base.
The VLO is enabled when it is used to source ACLK, MCLK, or SMCLK (SELA = {1} or SELM = {1} or
SELS = {1}).
161
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

UCS Operation
www.ti.com
5.2.3 Internal Trimmed Low-Frequency Reference Oscillator (REFO)
The internal trimmed low-frequency REFO can be used for cost-sensitive applications where a crystal is
not required or desired. REFO is internally trimmed to 32.768 kHz typical and provides for a stable
reference frequency that can be used as FLLREFCLK. REFO, combined with the FLL, provides for a
flexible range of system clock settings without the need for a crystal. REFO consumes no power when not
being used.
REFO is enabled under any of the following conditions:
• REFO is a source for ACLK (SELA = {2}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• REFO is a source for MCLK (SELM = {2}) and in active mode (AM) (CPUOFF = 0)
• REFO is a source for SMCLK (SELS = {2}) and in active mode (AM) through LPM1 (SMCLKOFF = 0)
• REFO is a source for FLLREFCLK (SELREF = {2}) and the DCO is a source for ACLK (SELA = {3,4})
and in active mode (AM) through LPM3 (OSCOFF = 0)
• REFO is a source for FLLREFCLK (SELREF = {2}) and the DCO is a source for MCLK (SELM = {3,4})
and in active mode (AM) (CPUOFF = 0)
• REFO is a source for FLLREFCLK (SELREF = {2}) and the DCO is a source for SMCLK
(SELS = {3,4}) and in active mode (AM) through LPM1 (SMCLKOFF = 0)
NOTE: REFO Enable for MSP430F543x, MSP430F541x devices
REFO is enabled under any of the following conditions:
• REFO is a source for ACLK (SELA = {2}), MCLK (SELM = {2}), or SMCLK
(SELS = {2}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• REFO is a source for FLLREFCLK (SELREF = {2}) and the DCO is a source for
ACLK, MCLK, or SMCLK (SELA = {3,4}), MCLK (SELM = {3,4}), or SMCLK
(SELS = {3,4}) and in active mode (AM) through LPM3 (OSCOFF = 0)
5.2.4 XT1 Oscillator
The XT1 oscillator supports ultra-low-current consumption using a 32768-Hz watch crystal in low-
frequency (LF) mode (XTS = 0) . A watch crystal connects to XIN and XOUT without any other external
components. The software-selectable XCAP bits configure the internally provided load capacitance for the
XT1 crystal in LF mode. This capacitance can be selected as 2 pF, 6 pF, 9 pF, or 12 pF (typical).
Additional external capacitors can be added if necessary.
On some devices, the XT1 oscillator also supports high-speed crystals or resonators when in high-
frequency (HF) mode (XTS = 1). The high-speed crystal or resonator connects to XIN and XOUT and
requires external capacitors on both terminals. These capacitors should be sized according to the crystal
or resonator specifications.
The drive settings of XT1 in LF mode can be increased with the XT1DRIVE bits. At power up, the XT1
starts with the highest drive settings for fast, reliable startup. If needed, user software can reduce the drive
strength to further reduce power. In HF mode, different crystal or resonator ranges are supported by
choosing the proper XT1DRIVE settings .
XT1 may be used with an external clock signal on the XIN pin in either LF or HF mode by setting
XT1BYPASS. When used with an external signal, the external frequency must meet the data sheet
parameters for the chosen mode. XT1 is powered down when used in bypass mode.
Some devices support XT1 bypass operation with external clock inputs that reside on a different external
supply domain, called DVIO. Refer to the device-specific data sheet. On these devices, DVIO has a voltage
range of 1.8 V ± 10 %. When using the XT1 bypass operation with external clock inputs that reside on
DVIO, it is required that XT1BYPASSLV = 1. For example, when XT1BYPASSLV = 1, it is assumed the
external clock signal swings from 0 V to DVIO. With XT1BYPASS = 0, it is assumed the external clock
signal swings from 0 V to DVCC. The usage of XT1BYPASSLV allows for interfacing to external clock
sources that reside on either the DVCC or DVIO supply domains. When used with an external signal, the
external frequency must meet the data sheet parameters for the chosen mode. XT1 is powered down
when used in bypass mode.
162 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
UCS Operation
On many devices, the XT1 pins are shared with general-purpose I/O ports (refer to the device-specific
data sheet for availability). At power up, the default operation is XT1, LF mode of operation. However, for
devices that have XT1 shared with general-purpose I/O ports, XT1 will remain disabled until the ports
shared with XT1 are configured for XT1 operation. The configuration of the shared I/O is determined by
the PSEL bit associated with XIN and the XT1BYPASS bit. Setting the PSEL bit causes the XIN and
XOUT ports to be configured for XT1 operation. If XT1BYPASS is also set, XT1 is configured for bypass
mode of operation, and the oscillator associated with XT1 is powered down. In bypass mode of operation,
XIN can accept an external clock input signal and XOUT is configured as a general-purpose I/O. The
PSEL bit associated with XOUT is a don't care. If the PSEL bit associated with XIN is cleared, both XIN
and XOUT ports are configured as general-purpose I/Os, and XT1 is disabled.
On devices where XT1 is not shared with general-purpose I/O ports, XT1 is enabled at power up. In
bypass mode of operation (XT1BYPASS = 1), XIN can accept an external clock input signal, and XT1 is
powered down.
XT1 is enabled under any of the following conditions:
• XT1 is a source for ACLK (SELA = {0}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT1 is a source for MCLK (SELM = {0}) and in active mode (AM) (CPUOFF = 0)
• XT1 is a source for SMCLK (SELS = {0}) and in active mode (AM) through LPM1 (SMCLKOFF = 0)
• XT1 is a source for FLLREFCLK (SELREF = {0}) and the DCO is a source for ACLK (SELA = {3,4})
and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT1 is a source for FLLREFCLK (SELREF = {0}) and the DCO is a source for MCLK (SELM = {3,4})
and in active mode (AM) (CPUOFF = 0)
• XT1 is a source for FLLREFCLK (SELREF = {0}) and the DCO is a source for SMCLK (SELS = {3,4})
and in active mode (AM) through LPM1 (SMCLKOFF = 0)
• XT1OFF = 0. XT1 enabled in active mode (AM) through LPM4. For devices that support LPMx.5, XT1
also remains enabled.
NOTE: XT1 Enable for MSP430F543x, MSP430F541x devices
XT1 is enabled under any of the following conditions:
• XT1 is a source for ACLK, MCLK, or SMCLK (SELA = {0}), MCLK (SELM = {0}),
or SMCLK (SELS = {0}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT1 is a source for FLLREFCLK (SELREF = {0}) and the DCO is a source for
ACLK, MCLK, or SMCLK (SELA = {3,4}), MCLK (SELM = {3,4}), or SMCLK
(SELS = {3,4}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT1OFF = 0. XT1 enabled in active mode (AM) through LPM4.
5.2.5 XT2 Oscillator
Some devices have a second crystal oscillator, XT2. XT2 sources XT2CLK, and its characteristics are
identical to XT1 in HF mode. The XT2DRIVE bits select the frequency range of operation of XT2.
XT2 may be used with external clock signals on the XT2IN pin by setting XT2BYPASS. When used with
an external signal, the external frequency must meet the data-sheet parameters for XT2. XT2 is powered
down when used in bypass mode.
Some devices support XT2 bypass operation with external clock inputs that reside on a different external
supply domain, called DVIO. Refer to the device-specific data sheet. On these devices, DVIO has a voltage
range of 1.8 V ±10%. When using the XT2 bypass operation with external clock inputs that reside on DVIO,
it is required that XT2BYPASSLV = 1. For example, when XT2BYPASSLV = 1, it is assumed the external
clock signal swings from 0 V to DVIO. With XT2BYPASS = 0, it is assumed the external clock signal
swings from 0 V to DVCC. The use of XT2BYPASSLV allows for interfacing to external clock sources that
reside on either the DVCC or DVIO supply domains. When used with an external signal, the external
frequency must meet the data sheet parameters for the chosen mode. XT2 is powered down when used in
bypass mode.
163
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

UCS Operation
www.ti.com
The XT2 pins are shared with general-purpose I/O ports. At power up, the default operation is XT2.
However, XT2 remains disabled until the ports shared with XT2 are configured for XT2 operation. The
configuration of the shared I/O is determined by the PSEL bit associated with XT2IN and the XT2BYPASS
bit. Setting the PSEL bit causes the XT2IN and XT2OUT ports to be configured for XT2 operation. If
XT2BYPASS is also set, XT2 is configured for bypass mode of operation, and the oscillator associated
with XT2 is powered down. In bypass mode of operation, XT2IN can accept an external clock input signal
and XT2OUT is configured as a general-purpose I/O. The PSEL bit associated with XT2OUT is a don't
care.
If the PSEL bit associated with XT2IN is cleared, both XT2IN and XT2OUT ports are configured as
general-purpose I/Os, and XT2 is disabled.
XT2 is enabled under any of the following conditions:
• XT2 is a source for ACLK (SELA = {5,6,7}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT2 is a source for MCLK (SELM = {5,6,7}) and in active mode (AM) (CPUOFF = 0)
• XT2 is a source for SMCLK (SELS = {5,6,7}) and in active mode (AM) through LPM1 (SMCLKOFF = 0)
• XT2 is a source for FLLREFCLK (SELREF = {5,6}) and the DCO is a source for ACLK (SELA = {3,4})
and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT2 is a source for FLLREFCLK (SELREF = {5,6}) and the DCO is a source for MCLK (SELM = {3,4})
and in active mode (AM) (CPUOFF = 0)
• XT2 is a source for FLLREFCLK (SELREF = {5,6}) and the DCO is a source for SMCLK (SELS = {3,4})
and in active mode (AM) through LPM1 (SMCLKOFF = 0)
• XT2OFF = 0. XT2 enabled in active mode (AM) through LPM4. For devices that support LPMx.5, XT2
also remains enabled.
NOTE: XT2 Enable for MSP430F543x and MSP430F541x devices
XT2 is enabled under any of the following conditions:
• XT2 is a source for ACLK, MCLK, or SMCLK (SELA = {5,6,7}), MCLK (SELM =
{5,6,7}), or SMCLK (SELS = {5,6,7}) and in active mode (AM) through LPM3
(OSCOFF = 0)
• XT2 is a source for FLLREFCLK (SELREF = {5,6,7}) and the DCO is a source
for ACLK, MCLK, or SMCLK (SELA = {3,4}), MCLK (SELM = {3,4}), or SMCLK
(SELS = {3,4}) and in active mode (AM) through LPM3 (OSCOFF = 0)
• XT2OFF = 0. XT2 enabled in active mode (AM) through LPM4.
5.2.6 Digitally Controlled Oscillator (DCO)
The DCO is an integrated digitally controlled oscillator. The DCO frequency can be adjusted by software
using the DCORSEL, DCO, and MOD bits. The DCO frequency can be optionally stabilized by the FLL to
a multiple frequency of FLLREFCLK/n. The FLL can accept different reference sources selectable by the
SELREF bits. Reference sources include XT1CLK, REFOCLK, or XT2CLK (if available) . The value of n is
defined by the FLLREFDIV bits (n = 1, 2, 4, 8, 12, or 16). The default is n = 1. There may be scenarios in
which FLL operation is not required or desired; in these cases, no FLLREFCLK is necessary. This can be
accomplished by setting SELREF = {7}.
NOTE: For the F543x and F541x non-A versions only.
Setting SELREF = {7} sets XT2CLK as the FLL reference clock.
The FLLD bits configure the FLL prescaler divider value D to 1, 2, 4, 8, 16, or 32. By default, D = 2, and
MCLK and SMCLK are sourced from DCOCLKDIV, providing a clock frequency DCOCLK/2.
164 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Operation
The divider (N + 1) and the divider value D define the DCOCLK and DCOCLKDIV frequencies. The divider
(N + 1) can be set using the FLLN bits, where N > 0. The smallest divider (N + 1) that can be used is a
divider of two. The logic will cause FLLN = 1h, if FLLN = 0h is unintentionally written. Therefore setting
FLLN = 0h is also equivalent to setting FLLN = 1h and will result in a divider of 2. All other FLLN settings
behave as described; for example, FLLN = 2h results in a divider of 3, or FLLN = 3h results in a divider of
4.
fDCOCLK = D × (N + 1) × (fFLLREFCLK ÷ n)
fDCOCLKDIV = (N + 1) × (fFLLREFCLK ÷ n)
5.2.6.1 Adjusting DCO Frequency
By default, FLL operation is enabled. FLL operation can be disabled by setting SCG0 or SCG1. When the
FLL is disabled, the DCO continues to operate at the current settings defined in UCSCTL0 and UCSCTL1.
The DCO frequency can be adjusted manually if desired. Otherwise, the DCO frequency is stabilized by
the FLL operation.
After a PUC, DCORSEL = {2} and DCO = {0}. MCLK and SMCLK are sourced from DCOCLKDIV.
Because the CPU executes code from MCLK, which is sourced from the fast-starting DCO, code
execution begins from PUC in less than 5 µs.
The frequency of DCOCLK is set by the following functions:
• The three DCORSEL bits select one of eight nominal frequency ranges for the DCO. These ranges are
defined for an individual device in the device-specific data sheet.
• The five DCO bits divide the DCO range selected by the DCORSEL bits into 32 frequency steps,
separated by approximately 8%.
• The five MOD bits switch between the frequency selected by the DCO bits and the next-higher
frequency set by {DCO + 1}. When DCO = {31}, the MOD bits have no effect, because the DCO is
already at the highest setting for the selected DCORSEL range.
5.2.7 Frequency Locked Loop (FLL)
The FLL continuously counts up or down a frequency integrator. The output of the frequency integrator
that drives the DCO can be read in UCSCTL0, UCSCTL1 (bits MOD and DCO). The count is adjusted +1
with the frequency fFLLREFCLK/n (n = 1, 2, 4, 8, 12, or 16) or –1 with the frequency fDCOCLK/[D × (N+1)].
NOTE: Reading MOD and DCO bits
The integrator is updated by the DCOCLK, which may differ in frequency of operation of
MCLK. It is possible that immediate reads of a previously written value are not visible to the
user because the update to the integrator has not occurred. This is normal. When the
integrator is updated at the next successive DCOCLK, the correct value can be read.
In addition, because the MCLK can be asynchronous to the integrator updates, reading the
values may be cause a corrupted value to be read under this condition. In this case, a
majority vote method should be performed.
Five of the integrator bits (UCSCTL0 bits 12 to 8) set the DCO frequency tap. Thirty-two taps are
implemented for the DCO, and each is approximately 8% higher than the previous. The modulator mixes
two adjacent DCO frequencies to produce fractional taps.
For a given DCO bias range setting, time must be allowed for the DCO to settle on the proper tap for
normal operation. (n × 32) fFLLREFCLK cycles are required between taps requiring a worst case of
(n × 32 × 32) fFLLREFCLK cycles for the DCO to settle. The value n is defined by the FLLREFDIV bits (n = 1,
2, 4, 8, 12, or 16).
165
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
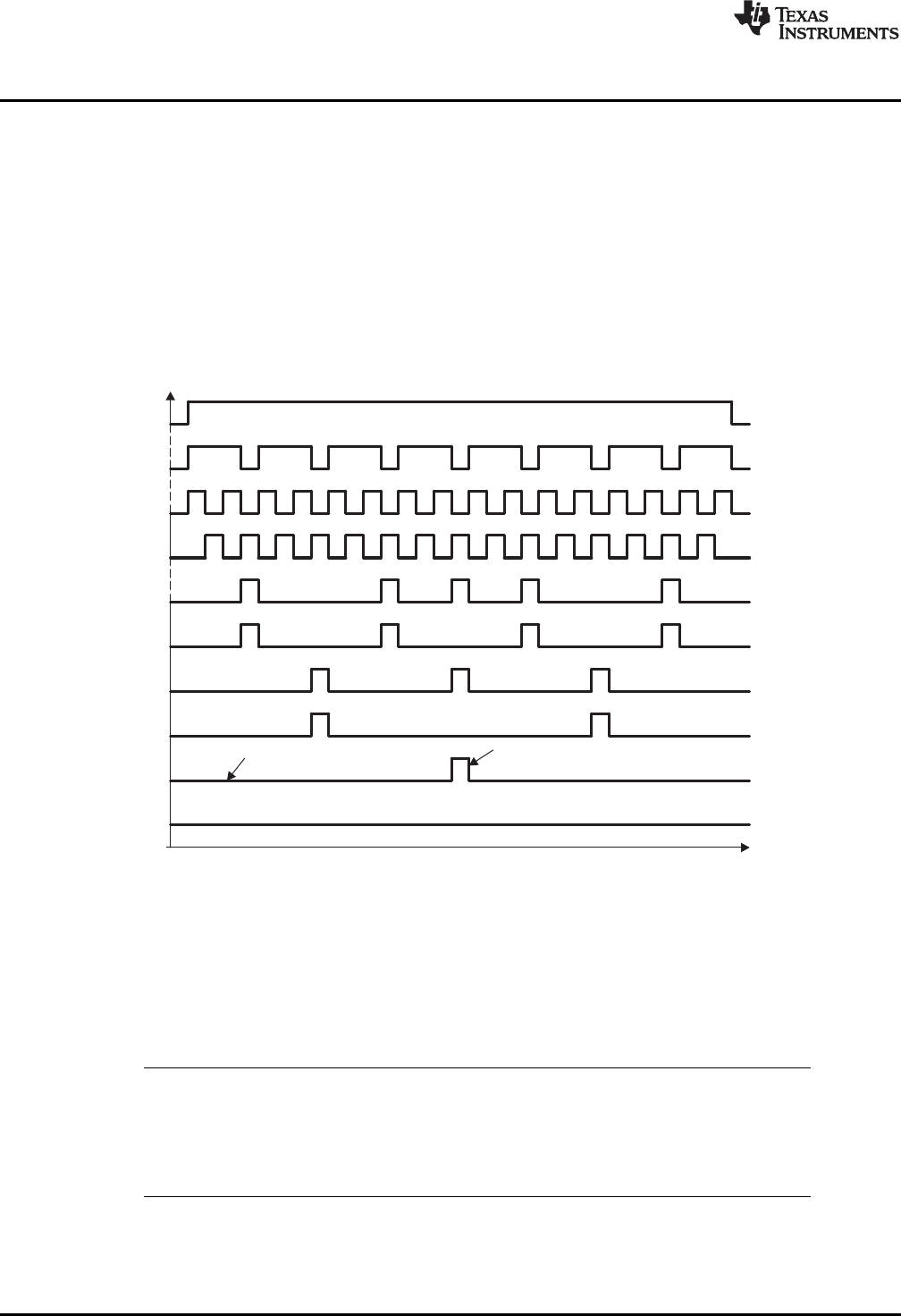
MODx
Lower DCO Tap Frequency fDCO
31
24
16
15
5
4
3
2
1
0
Upper DCO Tap Frequency fDCO+1
UCS Operation
www.ti.com
5.2.8 DCO Modulator
The modulator mixes two DCO frequencies, fDCO and fDCO+1 to produce an intermediate effective
frequency between fDCO and fDCO+1 and spread the clock energy, reducing electromagnetic interference
(EMI). The modulator mixes fDCO and fDCO+1 for 32 DCOCLK clock cycles and is configured with the MOD
bits. When MOD = {0}, the modulator is off.
The modulator mixing formula is:
t = (32 – MOD) × tDCO + MOD × tDCO+1
Figure 5-2 shows the modulator operation.
When FLL operation is enabled, the modulator settings and DCO are controlled by the FLL hardware. If
FLL operation is not desired, the modulator settings and DCO control can be configured with software.
Figure 5-2. Modulator Patterns
5.2.9 Disabling FLL Hardware and Modulator
The FLL is disabled when the status register bits SCG0 or SCG1 are set. When the FLL is disabled, the
DCO runs at the previously selected tap and DCOCLK is not automatically stabilized.
The DCO modulator is disabled when DISMOD is set. When the DCO modulator is disabled, the DCOCLK
is adjusted to the DCO tap selected by the DCO bits.
NOTE: DCO operation without FLL
When the FLL operation is disabled, the DCO continues to operate at the current settings.
Because it is not stabilized by the FLL, temperature and voltage variations influence the
frequency of operation. See the device-specific data sheet for voltage and temperature
coefficients to ensure reliable operation.
166 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
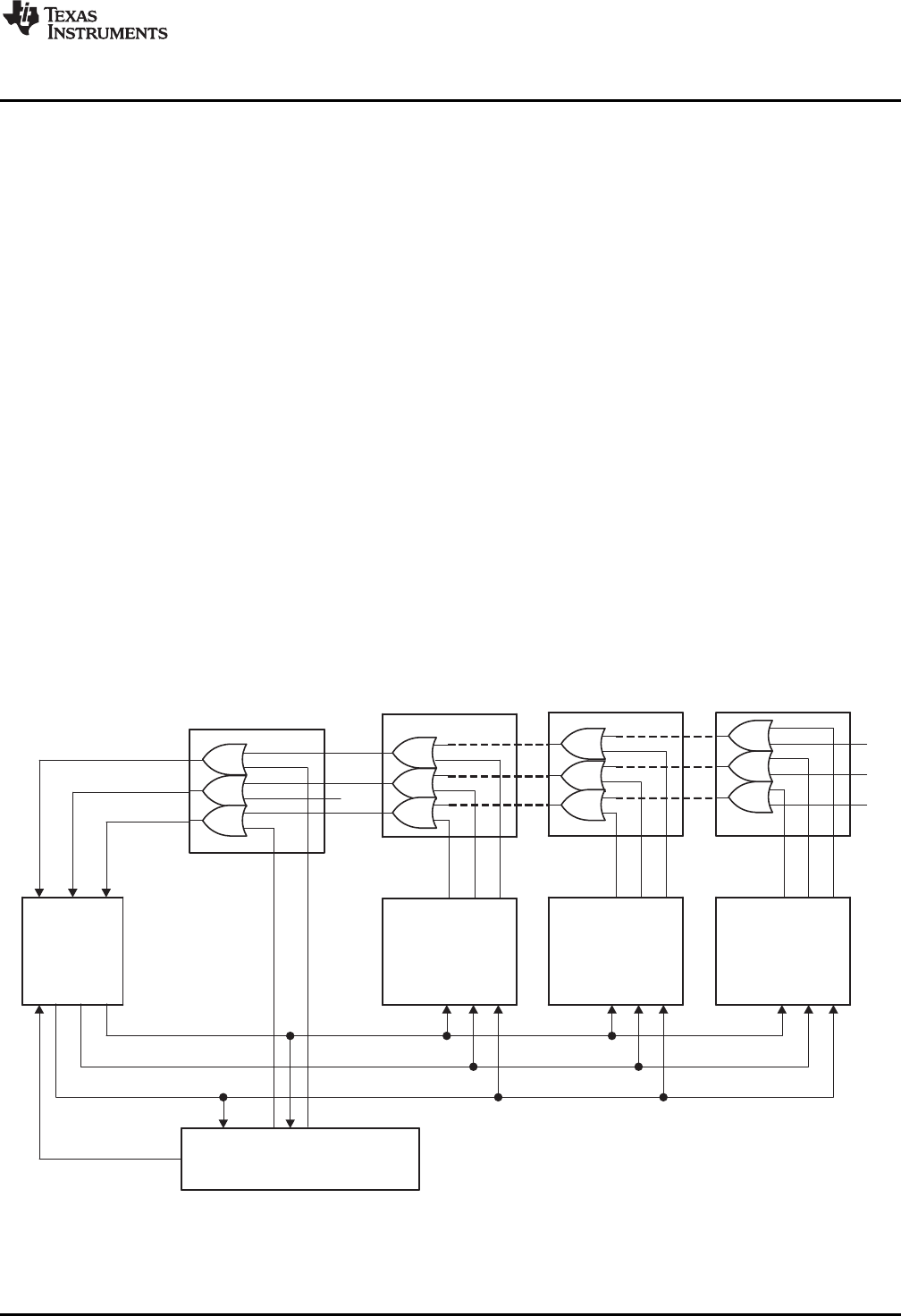
ACLK_REQ
MCLK_REQ
SMCLK_REQ
WatchDogTimerModule
UCS
Modulen−1 Modulen
WDTACLKON WDTSMCLKON
ACLK_REQ
MCLK_REQ
SMCLK_REQ
ACLK_REQ
MCLK_REQ
SMCLK_REQ
ACLK
MCLK
SMCLK
Directclockrequest
inWatchdogmode
Modulen−2
ACLK_REQ
MCLK_REQ
SMCLK_REQ
0
0
0
0
www.ti.com
UCS Operation
5.2.10 FLL Operation From Low-Power Modes
An interrupt service request clears SCG1, CPUOFF, and OSCOFF if set, but does not clear SCG0. This
means that for FLL operation from within an interrupt service routine entered from LPM1, 3, or 4, the FLL
remains disabled and the DCO operates at the previous setting as defined in UCSCTL0 and UCSCTL1.
SCG0 can be cleared by user software if FLL operation is required.
5.2.11 Operation From Low-Power Modes, Requested by Peripheral Modules
A peripheral module requests its clock sources automatically from the UCS module if required for its
proper operation, regardless of the current mode of operation, as shown in Figure 5-3.
A peripheral module asserts one of three possible clock request signals based on its control bits:
ACLK_REQ, MCLK_REQ, or SMCLK_REQ. These request signals are based on the configuration and
clock selection of the respective module. For example, if a timer selects ACLK as its clock source and the
timer is enabled, the timer generates an ACLK_REQ signal to the UCS system. The UCS, in turn, enables
ACLK regardless of the LPM settings.
Any clock request from a peripheral module causes its respective clock off signal to be overridden, but
does not change the setting of clock off control bit. For example, a peripheral module may require ACLK
that is currently disabled by the OSCOFF bit (OSCOFF = 1). The module can request ACLK by generating
an ACLK_REQ. This causes the OSCOFF bit to have no effect, thereby allowing ACLK to be available to
the requesting peripheral module. The OSCOFF bit remains at its current setting (OSCOFF = 1).
If the requested source is not active, the software NMI handler must take care of the required actions. For
the previous example, if ACLK was sourced by XT1 and XT1 was not enabled, an oscillator fault condition
occurs and the software must handle the event. The watchdog, due to its security requirement, actively
selects the VLOCLK source if the originally selected clock source is not available.
Due to the clock request feature, care must be taken in the application when entering low-power modes to
save power. Although the device enters the selected low-power mode, a clock request may exhibit more
current consumption than the specified values in the data sheet.
Figure 5-3. Module Request Clock System
167
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
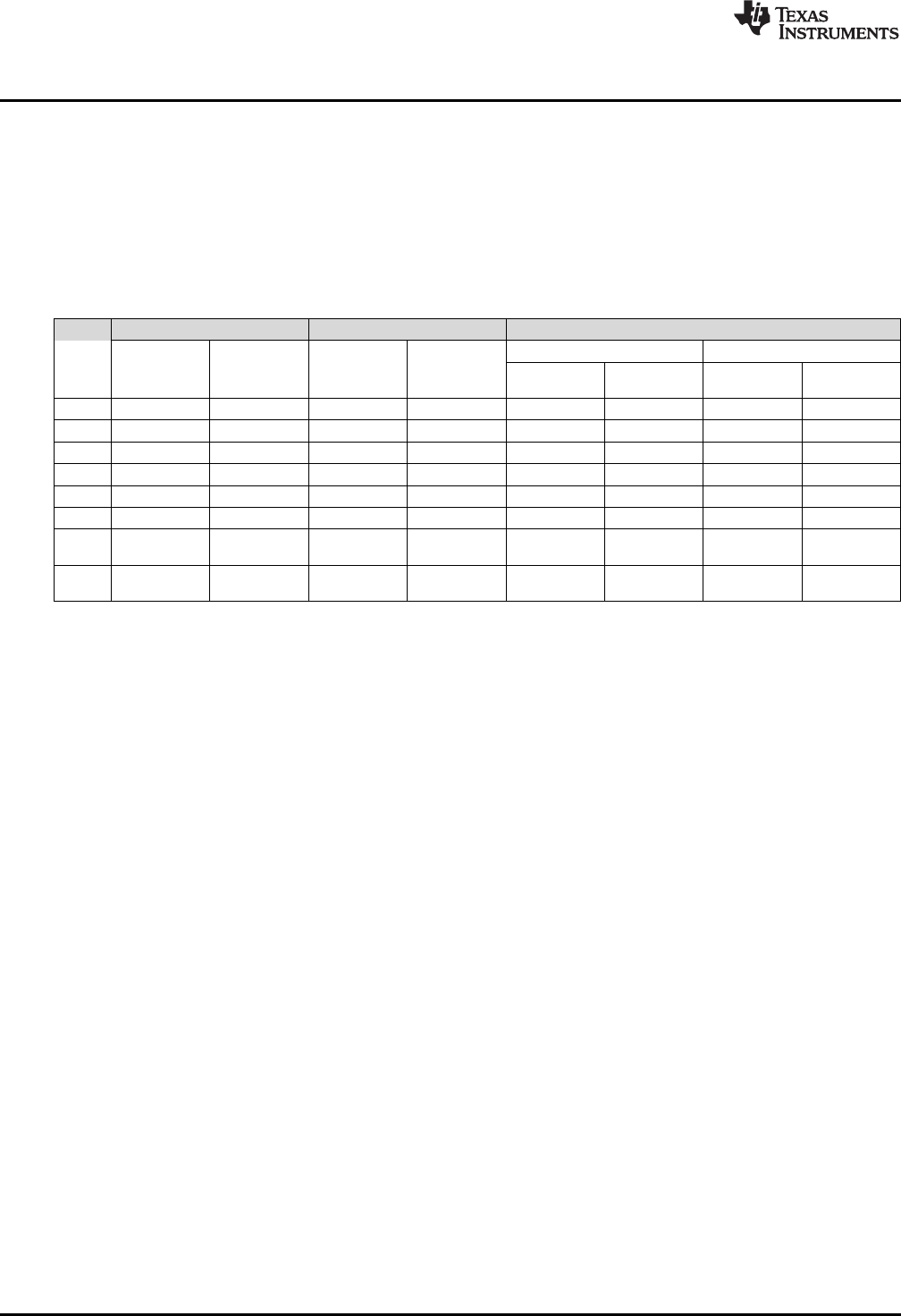
UCS Operation
www.ti.com
By default, the clock request logic is enabled. The clock request logic can be disabled by clearing
ACLKREQEN, MCLKREQEN, or SMCLKREQEN, for each respective system clock. When ACLKREQEN
or MCLKREQEN bits are set, or active, the clock is available to the system and prevents entry into a low-
power mode until all modules requesting the clock are disabled. When ACLKREQEN or MCLKREQEN bits
are cleared, or disabled, the clock is always halted as defined by the low-power modes. The
SMCLKREQEN logic behaves similarly, but is also influenced by the SMCLKOFF bit in the UCSCTL6
register. Table 5-1 shows the relationship between the system clocks and the low-power modes in
conjunction with the clock request logic.
Table 5-1. Clock Request System and Power Modes
ACLK MCLK SMCLK
SMCLKOFF = 0 SMCLKOFF = 1
ACLKREQEN ACLKREQEN MCLKREQEN MCLKREQEN
Mode SMCLKREQEN SMCLKREQEN SMCLKREQEN SMCLKREQEN
= 0 = 1 = 0 = 1 = 0 = 1 = 0 = 1
AM Active Active Active Active Active Active Disabled Active
LPM0 Active Active Disabled Active Active Active Disabled Active
LPM1 Active Active Disabled Active Active Active Disabled Active
LPM2 Active Active Disabled Active Disabled Active Disabled Active
LPM3 Active Active Disabled Active Disabled Active Disabled Active
LPM4 Disabled Active Disabled Active Disabled Active Disabled Active
LPM3.5 Disabled Disabled Disabled Disabled Disabled Disabled Disabled Disabled
(1)
LPM4.5 Disabled Disabled Disabled Disabled Disabled Disabled Disabled Disabled
(1)
(1) Any clock request prior to entry into LPM3.5 or LPM4.5 is ignored and LPM3.5 or LPM4.5 entry occurs. For the special case
when XT1OFF = 0 or XT2OFF = 0, the LPMx.5 request is ignored and the device does not enter LPMx.5.
5.2.12 UCS Module Fail-Safe Operation
The UCS module incorporates an oscillator-fault fail-safe feature. This feature detects an oscillator fault for
XT1, DCO, and XT2 as shown in Figure 5-4. The available fault conditions are:
• Low-frequency oscillator fault (XT1LFOFFG) for XT1 in LF mode
• High-frequency oscillator fault (XT1HFOFFG) for XT1 in HF mode
• High-frequency oscillator fault (XT2OFFG) for XT2
• DCO fault flag (DCOFFG) for the DCO
The crystal oscillator fault bits XT1LFOFFG, XT1HFOFFG, and XT2OFFG are set if the corresponding
crystal oscillator is turned on and not operating properly. After the fault bits are set, they remain set until
reset in software, even if the fault condition no longer exists. If the user clears the fault bits and the fault
condition still exists, the fault bits are automatically set, otherwise they remain cleared.
When using XT1 operation in LF mode as the reference source into the FLL (SELREF = {0}), a crystal
fault automatically causes the FLL reference source, FLLREFCLK, to be sourced by the REFO.
XT1LFOFFG is set. When using XT1 operation in HF mode as the reference source into the FLL, a crystal
fault causes no FLLREFCLK signal to be generated and the FLL continues to count down to zero in an
attempt to lock FLLREFCLK and DCOCLK/[D × (N + 1)]. The DCO tap moves to the lowest position (DCO
are cleared) and the DCOFFG is set. DCOFFG is also set if the N-multiplier value is set too high for the
selected DCO frequency range, resulting in the DCO tap moving to the highest position (UCSCTL0.12 to
UCSCTL0.8 are set). The DCOFFG remains set until cleared by the user. If the user clears the DCOFFG
and the fault condition remains, it is automatically set, otherwise it remains cleared. XT1HFOFFG is set.
When using XT2 as the reference source into the FLL, a crystal fault causes no FLLREFCLK signal to be
generated, and the FLL continues to count down to zero in an attempt to lock FLLREFCLK and
DCOCLK/[D × (N + 1)]. The DCO tap moves to the lowest position (DCO are cleared) and the DCOFFG is
set. DCOFFG is also set if the N-multiplier value is set too high for the selected DCO frequency range,
resulting in the DCO tap moving to the highest position (UCSCTL0.12 to UCSCTL0.8 are set). The
DCOFFG remains set until cleared by the user. If the user clears the DCOFFG and the fault condition
remains, it is automatically set, otherwise it remains cleared. XT2OFFG is set.
168 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
UCS Operation
The OFIFG oscillator-fault interrupt flag is set and latched at POR or when any oscillator fault
(XT1LFOFFG, XT1HFOFFG, XT2OFFG, DCOFFG , or CTSD16OFFG (if available)) is detected. When
OFIFG is set and OFIE is set, the OFIFG requests an NMI. When the interrupt is granted, the OFIE is not
reset automatically as it is in previous MSP430 families. It is no longer required to reset the OFIE. NMI
entry and exit circuitry removes this requirement. The OFIFG flag must be cleared by software. The
source of the fault can be identified by checking the individual fault bits.
If a fault is detected for the oscillator sourcing MCLK, MCLK is automatically switched to the DCO for its
clock source (DCOCLKDIV) for all clock sources except XT1 LF mode. If MCLK is sourced from XT1 in LF
mode, an oscillator fault causes MCLK to be automatically switched to the REFO for its clock source
(REFOCLK). This does not change the SELM bit settings. This condition must be handled by user
software.
If a fault is detected for the oscillator sourcing SMCLK, SMCLK is automatically switched to the DCO for
its clock source (DCOCLKDIV) for all clock sources except XT1 LF mode. If SMCLK is sourced from XT1
in LF mode, an oscillator fault causes SMCLK to be automatically switched to the REFO for its clock
source (REFOCLK). This does not change the SELS bit settings. This condition must be handled by user
software.
If a fault is detected for the oscillator sourcing ACLK, ACLK is automatically switched to the DCO for its
clock source (DCOCLKDIV) for all clock sources except XT1 LF mode. If ACLK is sourced from XT1 in LF
mode, an oscillator fault causes ACLK to be automatically switched to the REFO for its clock source
(REFOCLK). This does not change the SELA bit settings. This condition must be handled by user
software.
NOTE: DCO active during oscillator fault
DCOCLKDIV is active even at the lowest DCO tap. The clock signal is available for the CPU
to execute code and service an NMI during an oscillator fault.
169
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
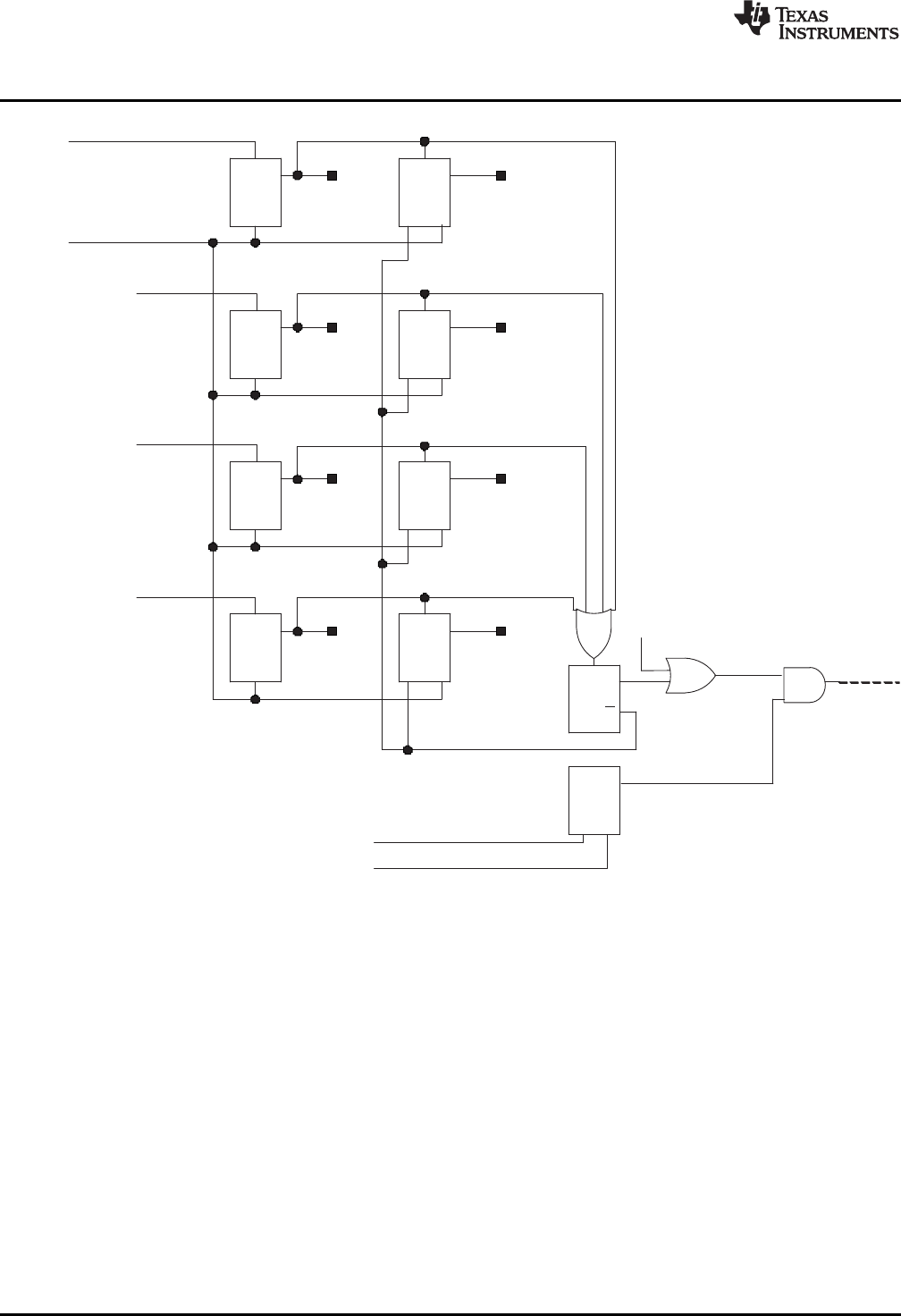
S
R
QS
R
Q
SQ
XT 1 LFOFFG
Q
S
R
PUC
NMI _IRQA
OFIFG
OFIE
NMIRS
XT 1_ LFOF
S
R
QS
R
Q
XT 1 HFOFFG
S
R
QS
R
Q
XT 2OFFG
S
R
QS
R
Q
DCOFFG
XT 1_ HFOF
XT 2_ OF
DCO _OF
POR
DCO _Fault
XT 1 _LF _ OscFault
XT 1_HF _ OscFault
XT 2_ OscFault
OscFault_Clr
OscFault_Set
Q
R
R
R
R
R
CTSD16OFFG (from CTSD16 module)
UCS Operation
www.ti.com
Figure 5-4. Oscillator Fault Logic
170 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Operation
NOTE: Fault conditions
DCO_Fault: DCOFFG is set if DCO bits in UCSCTL0 register value equals {0} or {31}.
CTSD16CLK_Fault: This signal is set after a fault has been detected in the CTSD16CLK.
When set, the fault bits remain set until reset in software, even if the fault condition no longer
exists. The fault condition causes CTSD16OFFG in the CTSD16CTL register to be set and
remain set. If software clears CTSD16OFFG and the fault condition still exists,
CTSD16OFFG remains set.
XT1_LF_OscFault: This signal is set after the XT1 (LF mode) oscillator has stopped
operation and cleared after operation resumes. The fault condition causes XT1LFOFFG to
be set and remain set. If software clears XT1LFOFFG and the fault condition still exists,
XT1LFOFFG remains set.
XT1_HF_OscFault: This signal is set after the XT1 (HF mode) oscillator has stopped
operation and cleared after operation resumes. The fault condition causes XT1HFOFFG to
be set and remain set. If software clears XT1HFOFFG and the fault condition still exists,
XT1HFOFFG remains set.
XT2_OscFault: This signal is set after the XT2 oscillator has stopped operation and cleared
after operation resumes. The fault condition causes XT2OFFG to be set and remain set. If
software clears XT2OFFG and the fault condition still exists, XT2OFFG remains set.
NOTE: Fault logic
As long as a fault condition still exists, the OFIFG remains set. The application must take
special care when clearing the OFIFG signal. If no fault condition remains when the OFIFG
signal is cleared, the clock logic switches back to the original user settings prior to the fault
condition.
NOTE: Fault logic counters
Each crystal oscillator circuit has hardware counters. These counters are reset each time a
fault condition occurs on its respective oscillator, causing the fault flag to be set. The
counters begin to count after the fault condition is removed. When the maximum count is
reached, the fault flag is removed.
In XT1 LF mode, the maximum count is 8192. In XT1 HF mode (and XT2 when available),
the maximum count is 1024. In bypass modes, regardless of LF or HF settings, the
maximum count is 8192.
5.2.13 Synchronization of Clock Signals
When switching MCLK or SMCLK from one clock source to the another, the switch is synchronized to
avoid critical race conditions as shown in Figure 5-5:
• The current clock cycle continues until the next rising edge.
• The clock remains high until the next rising edge of the new clock.
• The new clock source is selected and continues with a full high period.
171
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
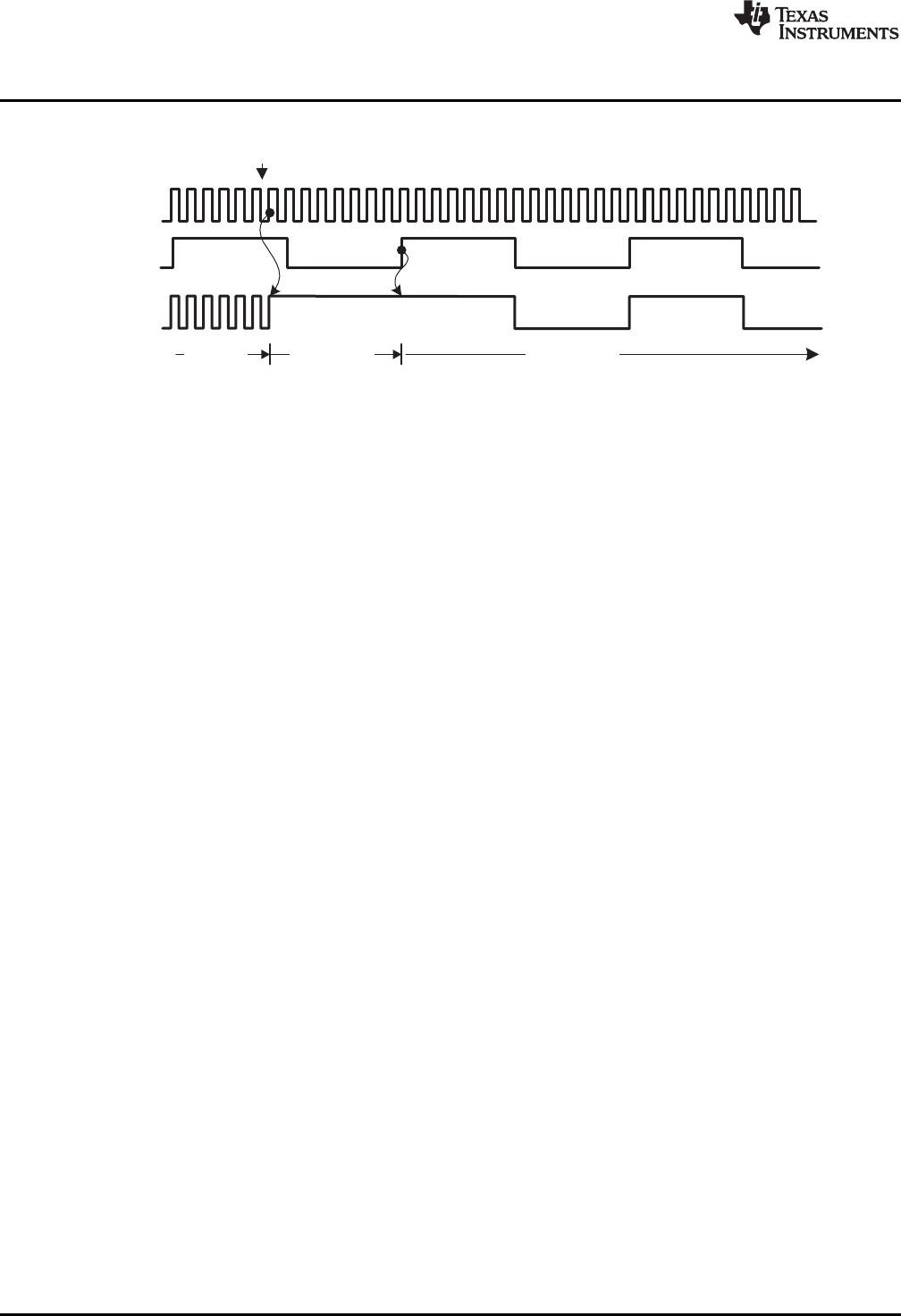
DCOCLK
ACLK
MCLK
ACLK
DCOCLK
Select
ACLK
Wait for
ACLK
Module Oscillator (MODOSC)
www.ti.com
Figure 5-5. Switch MCLK from DCOCLK to XT1CLK
5.3 Module Oscillator (MODOSC)
The UCS module also supports an internal oscillator, MODOSC, that is used by the flash memory
controller module and optionally by other modules in the system. The MODOSC sources MODCLK.
5.3.1 MODOSC Operation
To conserve power, MODOSC is powered down when not needed and is enabled only when required.
When the MODOSC source is required, the respective module requests it. MODOSC is enabled based on
unconditional and conditional requests. Setting MODOSCREQEN enables conditional requests.
Unconditional requests are always enabled. It is not necessary to set MODOSCREQEN for modules that
use unconditional requests; for example, the flash controller or ADC12_A.
The flash memory controller only requires MODCLK when performing write or erase operations. When
performing such operations, the flash memory controller issues an unconditional request for the MODOSC
source. Upon doing so, the MODOSC source is enabled, if it is not already enabled by previous requests
from other modules.
The ADC12_A may optionally use MODOSC as a clock source for its conversion clock. The user chooses
the ADC12OSC as the conversion clock source. During a conversion, the ADC12_A module issues an
unconditional request for the ADC12OSC clock source. Upon doing so, the MODOSC source is enabled, if
it is not already enabled by previous requests from other modules.
172 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
UCS Registers
5.4 UCS Registers
The UCS module registers are listed in Table 5-2. The base address can be found in the device-specific
data sheet. The address offset is listed in Table 5-2.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 5-2. UCS Registers
Offset Acronym Register Name Type Access Reset Section
00h UCSCTL0 Unified Clock System Control 0 Read/write Word 0000h Section 5.4.1
00h UCSCTL0_L Read/write Byte 00h
01h UCSCTL0_H Read/write Byte 00h
02h UCSCTL1 Unified Clock System Control 1 Read/write Word 0020h Section 5.4.2
02h UCSCTL1_L Read/write Byte 20h
03h UCSCTL1_H Read/write Byte 00h
04h UCSCTL2 Unified Clock System Control 2 Read/write Word 101Fh Section 5.4.3
04h UCSCTL2_L Read/write Byte 1Fh
05h UCSCTL2_H Read/write Byte 10h
06h UCSCTL3 Unified Clock System Control 3 Read/write Word 0000h Section 5.4.4
06h UCSCTL3_L Read/write Byte 00h
07h UCSCTL3_H Read/write Byte 00h
08h UCSCTL4 Unified Clock System Control 4 Read/write Word 0044h Section 5.4.5
08h UCSCTL4_L Read/write Byte 44h
09h UCSCTL4_H Read/write Byte 00h
0Ah UCSCTL5 Unified Clock System Control 5 Read/write Word 0000h Section 5.4.6
0Ah UCSCTL5_L Read/write Byte 00h
0Bh UCSCTL5_H Read/write Byte 00h
0Ch UCSCTL6 Unified Clock System Control 6 Read/write Word C1CDh Section 5.4.7
0Ch UCSCTL6_L Read/write Byte CDh
0Dh UCSCTL6_H Read/write Byte C1h
0Eh UCSCTL7 Unified Clock System Control 7 Read/write Word 0703h Section 5.4.8
0Eh UCSCTL7_L Read/write Byte 03h
0Fh UCSCTL7_H Read/write Byte 07h
10h UCSCTL8 Unified Clock System Control 8 Read/write Word 0707h Section 5.4.9
10h UCSCTL8_L Read/write Byte 07h
11h UCSCTL8_H Read/write Byte 07h
12h UCSCTL9 Unified Clock System Control 9(1) Read/write Word 0000h Section 5.4.10
12h UCSCTL9_L Read/write Byte 00h
13h UCSCTL9_H Read/write Byte 00h
(1) This register is not available on all devices. See the device-specific data sheet.
173
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
5.4.1 UCSCTL0 Register
Unified Clock System Control 0 Register
Figure 5-6. UCSCTL0 Register
15 14 13 12 11 10 9 8
Reserved DCO
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
MOD Reserved
rw-0 rw-0 rw-0 rw-0 rw-0 r0 r0 r0
Table 5-3. UCSCTL0 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-8 DCO RW 0h DCO tap selection. These bits select the DCO tap and are modified automatically
during FLL operation.
7-3 MOD RW 0h Modulation bit counter. These bits select the modulation pattern. All MOD bits
are modified automatically during FLL operation. The DCO register value is
incremented when the modulation bit counter rolls over from 31 to 0. If the
modulation bit counter decrements from 0 to the maximum count, the DCO
register value is also decremented.
2-0 Reserved R 0h Reserved. Always reads as 0.
174 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.2 UCSCTL1 Register
Unified Clock System Control 1 Register
Figure 5-7. UCSCTL1 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved DCORSEL Reserved Reserved DISMOD
r0 rw-0 rw-1 rw-0 r0 r0 rw-0 rw-0
Table 5-4. UCSCTL1 Register Description
Bit Field Type Reset Description
15-7 Reserved R 0h Reserved. Always reads as 0.
6-4 DCORSEL RW 2h DCO frequency range select. These bits select the DCO frequency range of
operation defined in the device-specific datasheet.
3-2 Reserved R 0h Reserved. Always reads as 0.
1 Reserved RW 0h Reserved. Always reads as 0.
0 DISMOD RW 0h Modulation. This bit enables or disables the modulation.
0b = Modulation enabled
1b = Modulation disabled
175
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
5.4.3 UCSCTL2 Register
Unified Clock System Control 2 Register
Figure 5-8. UCSCTL2 Register
15 14 13 12 11 10 9 8
Reserved FLLD Reserved FLLN
r0 rw-0 rw-0 rw-1 r0 r0 rw-0 rw-0
76543210
FLLN
rw-0 rw-0 rw-0 rw-1 rw-1 rw-1 rw-1 rw-1
Table 5-5. UCSCTL2 Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-12 FLLD RW 1h FLL loop divider. These bits divide fDCOCLK in the FLL feedback loop. This results
in an additional multiplier for the multiplier bits. See also multiplier bits.
000b = fDCOCLK/1
001b = fDCOCLK/2
010b = fDCOCLK/4
011b = fDCOCLK/8
100b = fDCOCLK/16
101b = fDCOCLK/32
110b = Reserved for future use. Defaults to fDCOCLK/32.
111b = Reserved for future use. Defaults to fDCOCLK/32.
11-10 Reserved R 0h Reserved. Always reads as 0.
9-0 FLLN RW 1Fh Multiplier bits. These bits set the multiplier value N of the DCO. N must be
greater than 0. Writing zero to FLLN causes N to be set to 1.
176 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.4 UCSCTL3 Register
Unified Clock System Control 3 Register
Figure 5-9. UCSCTL3 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved SELREF Reserved FLLREFDIV
r0 rw-0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 5-6. UCSCTL3 Register Description
Bit Field Type Reset Description
15-7 Reserved R 0h Reserved. Always reads as 0.
6-4 SELREF RW 0h FLL reference select. These bits select the FLL reference clock source.
000b = XT1CLK
001b = Reserved for future use. Defaults to XT1CLK.
010b = REFOCLK
011b = Reserved for future use. Defaults to REFOCLK.
100b = Reserved for future use. Defaults to REFOCLK.
101b = XT2CLK when available, otherwise REFOCLK.
110b = Reserved for future use. XT2CLK when available, otherwise REFOCLK.
111b = Reserved for future use. XT2CLK when available, otherwise REFOCLK.
3 Reserved R 0h Reserved. Always reads as 0.
2-0 FLLREFDIV RW 0h FLL reference divider. These bits define the divide factor for fFLLREFCLK. The
divided frequency is used as the FLL reference frequency.
000b = fFLLREFCLK/1
001b = fFLLREFCLK/2
010b = fFLLREFCLK/4
011b = fFLLREFCLK/8
100b = fFLLREFCLK/12
101b = fFLLREFCLK/16
110b = Reserved for future use. Defaults to fFLLREFCLK/16.
111b = Reserved for future use. Defaults to fFLLREFCLK/16.
177
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
5.4.5 UCSCTL4 Register
Unified Clock System Control 4 Register
Figure 5-10. UCSCTL4 Register
15 14 13 12 11 10 9 8
Reserved SELA
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
Reserved SELS Reserved SELM
r0 rw-1 rw-0 rw-0 r0 rw-1 rw-0 rw-0
Table 5-7. UCSCTL4 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10-8 SELA RW 0h Selects the ACLK source
000b = XT1CLK
001b = VLOCLK
010b = REFOCLK
011b = DCOCLK
100b = DCOCLKDIV
101b = XT2CLK when available, otherwise DCOCLKDIV
110b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
111b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
7 Reserved R 0h Reserved. Always reads as 0.
6-4 SELS RW 4h Selects the SMCLK source
000b = XT1CLK
001b = VLOCLK
010b = REFOCLK
011b = DCOCLK
100b = DCOCLKDIV
101b = XT2CLK when available, otherwise DCOCLKDIV
110b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
111b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
3 Reserved R 0h Reserved. Always reads as 0.
2-0 SELM RW 4h Selects the MCLK source
000b = XT1CLK
001b = VLOCLK
010b = REFOCLK
011b = DCOCLK
100b = DCOCLKDIV
101b = XT2CLK when available, otherwise DCOCLKDIV
110b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
111b = Reserved for future use. Defaults to XT2CLK when available, otherwise
DCOCLKDIV.
178 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.6 UCSCTL5 Register
Unified Clock System Control 5 Register
Figure 5-11. UCSCTL5 Register
15 14 13 12 11 10 9 8
Reserved DIVPA Reserved DIVA
r0 rw-0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
76543210
Reserved DIVS Reserved DIVM
r0 rw-0 rw-0 rw-0 r0 rw-0 rw-0 rw-0
Table 5-8. UCSCTL5 Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-12 DIVPA RW 0h ACLK source divider available at external pin. Divides the frequency of ACLK
and presents it to an external pin.
000b = fACLK/1
001b = fACLK/2
010b = fACLK/4
011b = fACLK/8
100b = fACLK/16
101b = fACLK/32
110b = Reserved for future use. Defaults to fACLK/32.
111b = Reserved for future use. Defaults to fACLK/32.
11 Reserved R 0h Reserved. Always reads as 0.
10-8 DIVA RW 0h ACLK source divider. Divides the frequency of the ACLK clock source.
000b = fACLK/1
001b = fACLK/2
010b = fACLK/4
011b = fACLK/8
100b = fACLK/16
101b = fACLK/32
110b = Reserved for future use. Defaults to fACLK/32.
111b = Reserved for future use. Defaults to fACLK/32.
7 Reserved R 0h Reserved. Always reads as 0.
6-4 DIVS RW 0h SMCLK source divider
000b = fSMCLK/1
001b = fSMCLK/2
010b = fSMCLK/4
011b = fSMCLK/8
100b = fSMCLK/16
101b = fSMCLK/32
110b = Reserved for future use. Defaults to fSMCLK/32.
111b = Reserved for future use. Defaults to fSMCLK/32.
3 Reserved R 0h Reserved. Always reads as 0.
179
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
Table 5-8. UCSCTL5 Register Description (continued)
Bit Field Type Reset Description
2-0 DIVM RW 0h MCLK source divider
000b = fMCLK/1
001b = fMCLK/2
010b = fMCLK/4
011b = fMCLK/8
100b = fMCLK/16
101b = fMCLK/32
110b = Reserved for future use. Defaults to fMCLK/32.
111b = Reserved for future use. Defaults to fMCLK/32.
180 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.7 UCSCTL6 Register
Unified Clock System Control 6 Register
Figure 5-12. UCSCTL6 Register
15 14 13 12 11 10 9 8
XT2DRIVE Reserved XT2BYPASS Reserved XT2OFF
rw-1 rw-1 r0 rw-0 r0 r0 r0 rw-1
76543210
XT1DRIVE XTS XT1BYPASS XCAP SMCLKOFF XT1OFF
rw-1 rw-1 rw-0 rw-0 rw-1 rw-1 rw-0 rw-1
Table 5-9. UCSCTL6 Register Description
Bit Field Type Reset Description
15-14 XT2DRIVE RW 3h The XT2 oscillator current can be adjusted to its drive needs. Initially, it starts
with the highest supply current for reliable and quick startup. If needed, user
software can reduce the drive strength.
00b = Lowest current consumption. XT2 oscillator operating range is 4 MHz to
8 MHz.
01b = Increased drive strength XT2 oscillator. XT2 oscillator operating range is
8 MHz to 16 MHz.
10b = Increased drive capability XT2 oscillator. XT2 oscillator operating range is
16 MHz to 24 MHz.
11b = Maximum drive capability and maximum current consumption for both XT2
oscillator. XT2 oscillator operating range is 24 MHz to 32 MHz.
13 Reserved R 0h Reserved. Always reads as 0.
12 XT2BYPASS RW 0h XT2 bypass select
0b = XT2 sourced from external crystal
1b = XT2 sourced from external clock signal
11-9 Reserved R 0h Reserved. Always reads as 0.
8 XT2OFF RW 1h Turns off the XT2 oscillator
0b = XT2 is on if XT2 is selected by the port selection and XT2 is not in bypass
mode of operation
1b = XT2 is off if it is not used as a source for ACLK, MCLK, or SMCLK or is not
used as a reference source required for FLL operation
7-6 XT1DRIVE RW 3h The XT1 oscillator current can be adjusted to its drive needs. Initially, it starts
with the highest supply current for reliable and quick startup. If needed, user
software can reduce the drive strength.
00b = Lowest current consumption for XT1 LF mode. XT1 oscillator operating
range in HF mode is 4 MHz to 8 MHz.
01b = Increased drive strength for XT1 LF mode. XT1 oscillator operating range
in HF mode is 8 MHz to 16 MHz.
10b = Increased drive capability for XT1 LF mode. XT1 oscillator operating range
in HF mode is 16 MHz to 24 MHz.
11b = Maximum drive capability and maximum current consumption for XT1 LF
mode. XT1 oscillator operating range in HF mode is 24 MHz to 32 MHz.
5 XTS RW 0h XT1 mode select
0b = Low-frequency mode. XCAP bits define the capacitance at the XIN and
XOUT pins.
1b = High-frequency mode. XCAP bits are not used.
4 XT1BYPASS RW 0h XT1 bypass select
0b = XT1 sourced from external crystal
1b = XT1 sourced from external clock signal
181
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
Table 5-9. UCSCTL6 Register Description (continued)
Bit Field Type Reset Description
3-2 XCAP RW 3h Oscillator capacitor selection. These bits select the capacitors applied to the LF
crystal or resonator in the LF mode (XTS = 0). The effective capacitance (seen
by the crystal) is C(eff) ≈(C(XIN) + 2 pF) / 2. It is assumed that
C(XIN) = C(XOUT) and that a parasitic capacitance of 2 pF is added by the
package and the printed circuit board. For details about the typical internal and
the effective capacitors, see the device-specific data sheet.
1 SMCLKOFF RW 0h SMCLK off. This bit turns off the SMCLK.
0b = SMCLK on
1b = SMCLK off
0 XT1OFF RW 1h XT1 off. This bit turns off the XT1.
0b = XT1 is on if XT1 is selected by the port selection and XT1 is not in bypass
mode of operation.
1b = XT1 is off if it is not used as a source for ACLK, MCLK, or SMCLK or is not
used as a reference source required for FLL operation.
182 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.8 UCSCTL7 Register
Unified Clock System Control 7 Register
Figure 5-13. UCSCTL7 Register
15 14 13 12 11 10 9 8
Reserved Reserved Reserved Reserved
r0 r0 rw-0 rw-(0) rw-(1) rw-(1) r-1 r-1
76543210
Reserved Reserved XT2OFFG(1) XT1HFOFFG(1) XT1LFOFFG DCOFFG
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(1) rw-(1)
(1) Not available on all devices. When not available, this bit is reserved.
Table 5-10. UCSCTL7 Register Description
Bit Field Type Reset Description
15-14 Reserved R 0h Reserved. Always reads as 0.
13-12 Reserved RW 0h Reserved. Must always be written with 0.
11-10 Reserved RW 3h Reserved. The states of these bits should be ignored.
9-8 Reserved R 3h Reserved. The states of these bits should be ignored.
7-5 Reserved R 0h Reserved. Always reads as 0.
4 Reserved RW 0h Reserved. The state of this bit should be ignored.
3 XT2OFFG(1) RW 0h XT2 oscillator fault flag. If this bit is set, the OFIFG flag is also set. XT2OFFG is
set if a XT2 fault condition exists. XT2OFFG can be cleared by software. If the
XT2 fault condition still remains, XT2OFFG is set.
0b = No fault condition occurred after the last reset.
1b = XT2 fault. An XT2 fault occurred after the last reset.
2 XT1HFOFFG(1) RW 0h XT1 oscillator fault flag (HF mode). If this bit is set, the OFIFG flag is also set.
XT1HFOFFG is set if a XT1 fault condition exists. XT1HFOFFG can be cleared
by software. If the XT1 fault condition still remains, XT1HFOFFG is set.
0b = No fault condition occurred after the last reset.
1b = XT1 fault. An XT1 fault occurred after the last reset.
1 XT1LFOFFG RW 1h XT1 oscillator fault flag (LF mode). If this bit is set, the OFIFG flag is also set.
XT1LFOFFG is set if a XT1 fault condition exists. XT1LFOFFG can be cleared
by software. If the XT1 fault condition still remains, XT1LFOFFG is set.
0b = No fault condition occurred after the last reset.
1b = XT1 fault (LF mode). A XT1 fault occurred after the last reset.
0 DCOFFG RW 1h DCO fault flag. If this bit is set, the OFIFG flag is also set. The DCOFFG bit is
set if DCO = {0} or DCO = {31}. DCOFFG can be cleared by software. If the
DCO fault condition still remains, DCOFFG is set.
0b = No fault condition occurred after the last reset.
1b = DCO fault. A DCO fault occurred after the last reset.
(1) Not available on all devices. When not available, this bit is reserved.
183
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
UCS Registers
www.ti.com
5.4.9 UCSCTL8 Register
Unified Clock System Control 8 Register
Figure 5-14. UCSCTL8 Register
15 14 13 12 11 10 9 8
Reserved Reserved
r0 r0 r0 r0 r0 rw-(1) rw-(1) rw-(1)
76543210
Reserved Reserved MODOSCREQ SMCLKREQEN MCLKREQEN ACLKREQEN
EN
r0 r0 r0 rw-(0) rw-(0) rw-(1) rw-(1) rw-(1)
Table 5-11. UCSCTL8 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10-8 Reserved R 0h Reserved. Must always be written as 1.
7-5 Reserved R 0h Reserved. Always reads as 0.
4 Reserved R 0h Reserved. Must always be written as 0.
3 MODOSCREQEN RW 0h MODOSC clock request enable. Setting this enables conditional module requests
for MODOSC.
0b = MODOSC conditional requests are disabled.
1b = MODOSC conditional requests are enabled.
2 SMCLKREQEN RW 1h SMCLK clock request enable. Setting this enables conditional module requests
for SMCLK
0b = SMCLK conditional requests are disabled.
1b = SMCLK conditional requests are enabled.
1 MCLKREQEN RW 1h MCLK clock request enable. Setting this enables conditional module requests for
MCLK
0b = MCLK conditional requests are disabled.
1b = MCLK conditional requests are enabled.
0 ACLKREQEN RW 1h ACLK clock request enable. Setting this enables conditional module requests for
ACLK
0b = ACLK conditional requests are disabled.
1b = ACLK conditional requests are enabled.
184 Unified Clock System (UCS) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
UCS Registers
5.4.10 UCSCTL9 Register
Unified Clock System Control 9 Register
This register is not available on all devices. See the device-specific data sheet.
Figure 5-15. UCSCTL9 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved XT2BYPASSLV XT1BYPASSLV
r0 r0 r0 r0 r0 r0 rw-0 rw-0
Table 5-12. UCSCTL9 Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved. Always reads as 0.
1 XT2BYPASSLV RW 0h Selects XT2 bypass input swing level. Must be set for reduced swing operation.
0b = Input range from 0 to DVCC
1b = Input range from 0 to DVIO
0 XT1BYPASSLV RW 0h Selects XT1 bypass input swing level. Must be set for reduced swing operation.
0b = Input range from 0 to DVCC
1b = Input range from 0 to DVIO
185
SLAU208O–June 2008–Revised May 2015 Unified Clock System (UCS)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 6
SLAU208O–June 2008–Revised May 2015
CPUX
This chapter describes the extended MSP430X 16-bit RISC CPU (CPUX) with 1MB memory access, its
addressing modes, and instruction set.
NOTE: The MSP430X CPUX implemented on this device family, formally called CPUXV2, has in
some cases, slightly different cycle counts from the MSP430X CPUX implemented on the
2xx and 4xx families.
Topic ........................................................................................................................... Page
6.1 MSP430X CPU (CPUX) Introduction .................................................................... 187
6.2 Interrupts......................................................................................................... 189
6.3 CPU Registers.................................................................................................. 190
6.4 Addressing Modes............................................................................................ 196
6.5 MSP430 and MSP430X Instructions .................................................................... 213
6.6 Instruction Set Description ................................................................................ 229
186 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
MSP430X CPU (CPUX) Introduction
6.1 MSP430X CPU (CPUX) Introduction
The MSP430X CPU incorporates features specifically designed for modern programming techniques, such
as calculated branching, table processing, and the use of high-level languages such as C. The MSP430X
CPU can address a 1MB address range without paging. The MSP430X CPU is completely backward
compatible with the MSP430 CPU.
The MSP430X CPU features include:
• RISC architecture
• Orthogonal architecture
• Full register access including program counter (PC), status register (SR), and stack pointer (SP)
• Single-cycle register operations
• Large register file reduces fetches to memory.
• 20-bit address bus allows direct access and branching throughout the entire memory range without
paging.
• 16-bit data bus allows direct manipulation of word-wide arguments.
• Constant generator provides the six most often used immediate values and reduces code size.
• Direct memory-to-memory transfers without intermediate register holding
• Byte, word, and 20-bit address-word addressing
The block diagram of the MSP430X CPU is shown in Figure 6-1.
187
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
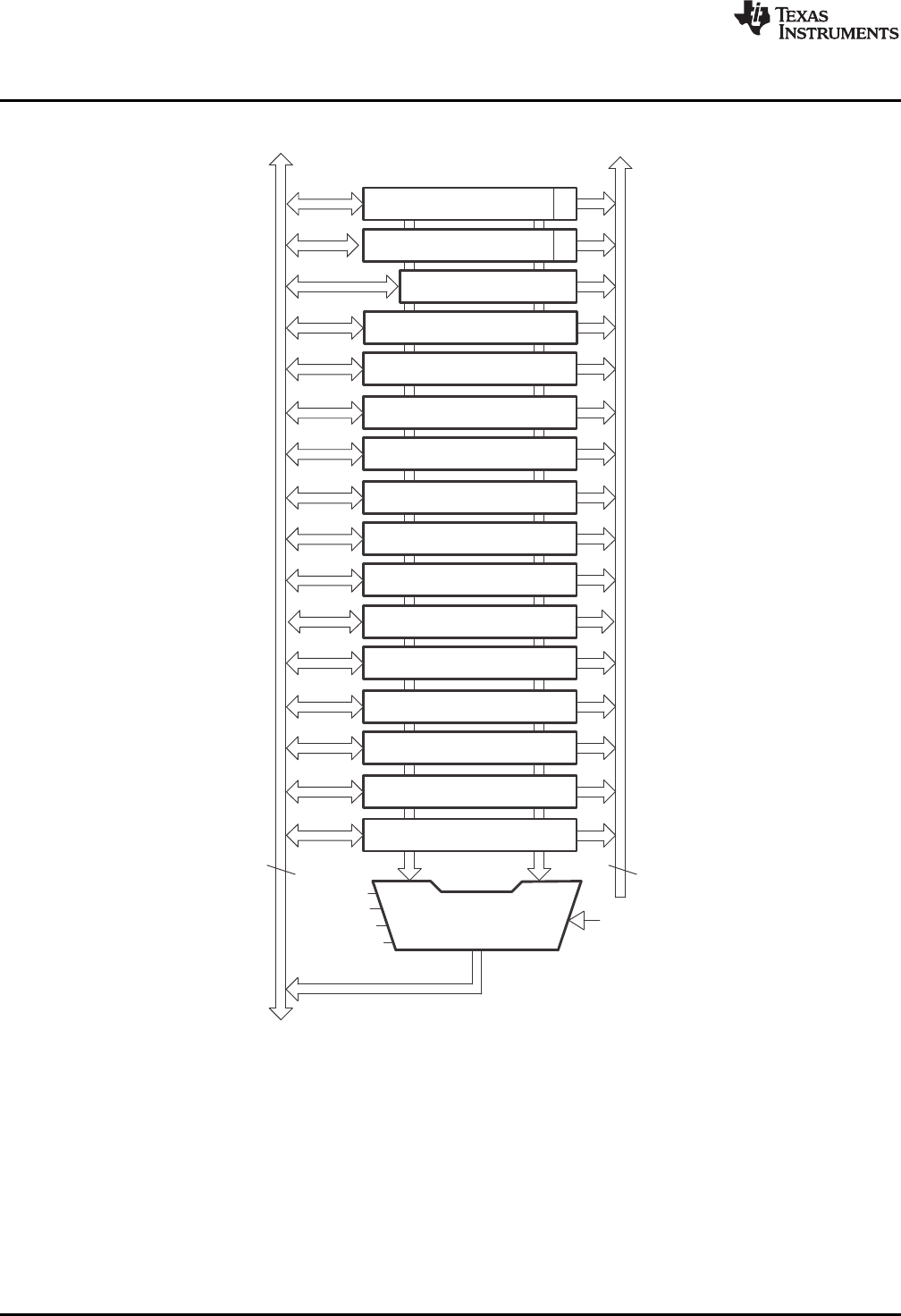
R6
R5
R4
R3/CG2 Constant Generator
R7
R8
R9
R10
R11
R12
R13
R14
R15
0
0
R0/PC Program Counter
19
R1/SP Pointer Stack
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
General Purpose
Memory Address Bus − MABMDB − Memory Data Bus
16
20
16/20-bit ALU
srcdst
Zero, Z
Carry, C
Overflow,V
Negative,N
MCLK
0
16 15
R2/SR Status Register
MSP430X CPU (CPUX) Introduction
www.ti.com
Figure 6-1. MSP430X CPU Block Diagram
188 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Item n-1
PC.19:16
PC.15:0
SPold
SP SR.11:0
www.ti.com
Interrupts
6.2 Interrupts
The MSP430X has the following interrupt structure:
• Vectored interrupts with no polling necessary
• Interrupt vectors are located downward from address 0FFFEh.
The interrupt vectors contain 16-bit addresses that point into the lower 64KB memory. This means all
interrupt handlers must start in the lower 64KB memory.
During an interrupt, the program counter (PC) and the status register (SR) are pushed onto the stack as
shown in Figure 6-2. The MSP430X architecture stores the complete 20-bit PC value efficiently by
appending the PC bits 19:16 to the stored SR value automatically on the stack. When the RETI instruction
is executed, the full 20-bit PC is restored making return from interrupt to any address in the memory range
possible.
Figure 6-2. PC Storage on the Stack for Interrupts
189
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Item n
PC.19:16
PC.15:0
SPold
SP
0Program Counter Bits 19 to 1
19 15 1 016
CPU Registers
www.ti.com
6.3 CPU Registers
The CPU incorporates 16 registers (R0 through R15). Registers R0, R1, R2, and R3 have dedicated
functions. Registers R4 through R15 are working registers for general use.
6.3.1 Program Counter (PC)
The 20-bit Program Counter (PC, also called R0) points to the next instruction to be executed. Each
instruction uses an even number of bytes (2, 4, 6, or 8 bytes), and the PC is incremented accordingly.
Instruction accesses are performed on word boundaries, and the PC is aligned to even addresses.
Figure 6-3 shows the PC.
Figure 6-3. Program Counter
The PC can be addressed with all instructions and addressing modes. A few examples:
MOV.W #LABEL,PC ; Branch to address LABEL (lower 64KB)
MOVA #LABEL,PC ; Branch to address LABEL (1MB memory)
MOV.W LABEL,PC ; Branch to address in word LABEL
; (lower 64KB)
MOV.W @R14,PC ; Branch indirect to address in
; R14 (lower 64KB)
ADDA #4,PC ; Skip two words (1MB memory)
The BR and CALL instructions reset the upper four PC bits to 0. Only addresses in the lower 64KB
address range can be reached with the BR or CALL instruction. When branching or calling, addresses
beyond the lower 64KB range can only be reached using the BRA or CALLA instructions. Also, any
instruction to directly modify the PC does so according to the used addressing mode. For example,
MOV.W #value,PC clears the upper four bits of the PC, because it is a .W instruction.
The PC is automatically stored on the stack with CALL (or CALLA) instructions and during an interrupt
service routine. Figure 6-4 shows the storage of the PC with the return address after a CALLA instruction.
A CALL instruction stores only bits 15:0 of the PC.
Figure 6-4. PC Storage on the Stack for CALLA
The RETA instruction restores bits 19:0 of the PC and adds 4 to the stack pointer (SP). The RET
instruction restores bits 15:0 to the PC and adds 2 to the SP.
6.3.2 Stack Pointer (SP)
The 20-bit Stack Pointer (SP, also called R1) is used by the CPU to store the return addresses of
subroutine calls and interrupts. It uses a predecrement, postincrement scheme. In addition, the SP can be
used by software with all instructions and addressing modes. Figure 6-5 shows the SP. The SP is
initialized into RAM by the user, and is always aligned to even addresses.
190 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
SPold
SPold
SP1
PUSHSP
Thestackpointerischangedafter
aPUSHSP instruction.
SP1
SP2
POP SP
ThestackpointerisnotchangedafteraPOP SP
instruction.ThePOP SP instructionplacesSP1intothe
stackpointerSP (SP2=SP1)
Item n-1
Item.19:16
Item.15:0
SPold
SP
I3
I1
I2
I3
0xxxh
0xxxh - 2
0xxxh - 4
0xxxh - 6
0xxxh - 8
I1
I2
SP
0123h SP
I1
I2
I3 SP
PUSH #0123h POP R8Address
0Stack Pointer Bits 19 to 1
19 1 0
MOV.W2(SP),R6;CopyItemI2toR6
MOV.WR7,0(SP);OverwriteTOSwithR7
PUSH#0123h;Put0123honstack
POPR8;R8=0123h
www.ti.com
CPU Registers
Figure 6-6 shows the stack usage. Figure 6-7 shows the stack usage when 20-bit address words are
pushed.
Figure 6-5. Stack Pointer
Figure 6-6. Stack Usage
Figure 6-7. PUSHX.A Format on the Stack
The special cases of using the SP as an argument to the PUSH and POP instructions are described and
shown in Figure 6-8.
Figure 6-8. PUSH SP, POP SP Sequence
191
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SCG0 GIE Z C
rw-0
15 0
Reserved N
CPU
OFF
OSC
OFF
SCG1V
8 79
CPU Registers
www.ti.com
6.3.3 Status Register (SR)
The 16-bit Status Register (SR, also called R2), used as a source or destination register, can only be used
in register mode addressed with word instructions. The remaining combinations of addressing modes are
used to support the constant generator. Figure 6-9 shows the SR bits. Do not write 20-bit values to the
SR. Unpredictable operation can result.
Figure 6-9. SR Bits
Table 6-1 describes the SR bits.
Table 6-1. SR Bit Description
Bit Description
Reserved Reserved
V Overflow. This bit is set when the result of an arithmetic operation overflows the signed-variable range.
Set when:
ADD(.B), ADDX(.B,.A), positive + positive = negative
ADDC(.B), ADDCX(.B.A), negative + negative = positive
ADDA otherwise reset
Set when:
SUB(.B), SUBX(.B,.A), positive – negative = negative
SUBC(.B),SUBCX(.B,.A), negative – positive = positive
SUBA, CMP(.B), otherwise reset
CMPX(.B,.A), CMPA
SCG1 System clock generator 1. This bit may be used to enable or disable functions in the clock system depending on the
device family; for example, DCO bias enable or disable.
SCG0 System clock generator 0. This bit may be used to enable or disable functions in the clock system depending on the
device family; for example, FLL enable or disable.
OSCOFF Oscillator off. When this bit is set, it turns off the LFXT1 crystal oscillator when LFXT1CLK is not used for MCLK or
SMCLK.
CPUOFF CPU off. When this bit is set, it turns off the CPU.
GIE General interrupt enable. When this bit is set, it enables maskable interrupts. When it is reset, all maskable interrupts
are disabled.
N Negative. This bit is set when the result of an operation is negative and cleared when the result is positive.
Z Zero. This bit is set when the result of an operation is 0 and cleared when the result is not 0.
C Carry. This bit is set when the result of an operation produced a carry and cleared when no carry occurred.
NOTE: Bit manipulations of the SR should be done by the following instructions: MOV, BIS, and
BIC.
192 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
CPU Registers
6.3.4 Constant Generator Registers (CG1 and CG2)
Six commonly-used constants are generated with the constant generator registers R2 (CG1) and R3
(CG2), without requiring an additional 16-bit word of program code. The constants are selected with the
source register addressing modes (As), as described in Table 6-2.
Table 6-2. Values of Constant Generators CG1, CG2
Register As Constant Remarks
R2 00 – Register mode
R2 01 (0) Absolute address mode
R2 10 00004h +4, bit processing
R2 11 00008h +8, bit processing
R3 00 00000h 0, word processing
R3 01 00001h +1
R3 10 00002h +2, bit processing
R3 11 FFh, FFFFh, FFFFFh –1, word processing
The constant generator advantages are:
• No special instructions required
• No additional code word for the six constants
• No code memory access required to retrieve the constant
The assembler uses the constant generator automatically if one of the six constants is used as an
immediate source operand. Registers R2 and R3, used in the constant mode, cannot be addressed
explicitly; they act as source-only registers.
6.3.4.1 Constant Generator – Expanded Instruction Set
The RISC instruction set of the MSP430 has only 27 instructions. However, the constant generator allows
the MSP430 assembler to support 24 additional emulated instructions. For example, the single-operand
instruction:
CLR dst
is emulated by the double-operand instruction with the same length:
MOV R3,dst
where the #0 is replaced by the assembler, and R3 is used with As = 00.
INC dst
is replaced by:
ADD #1,dst
193
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
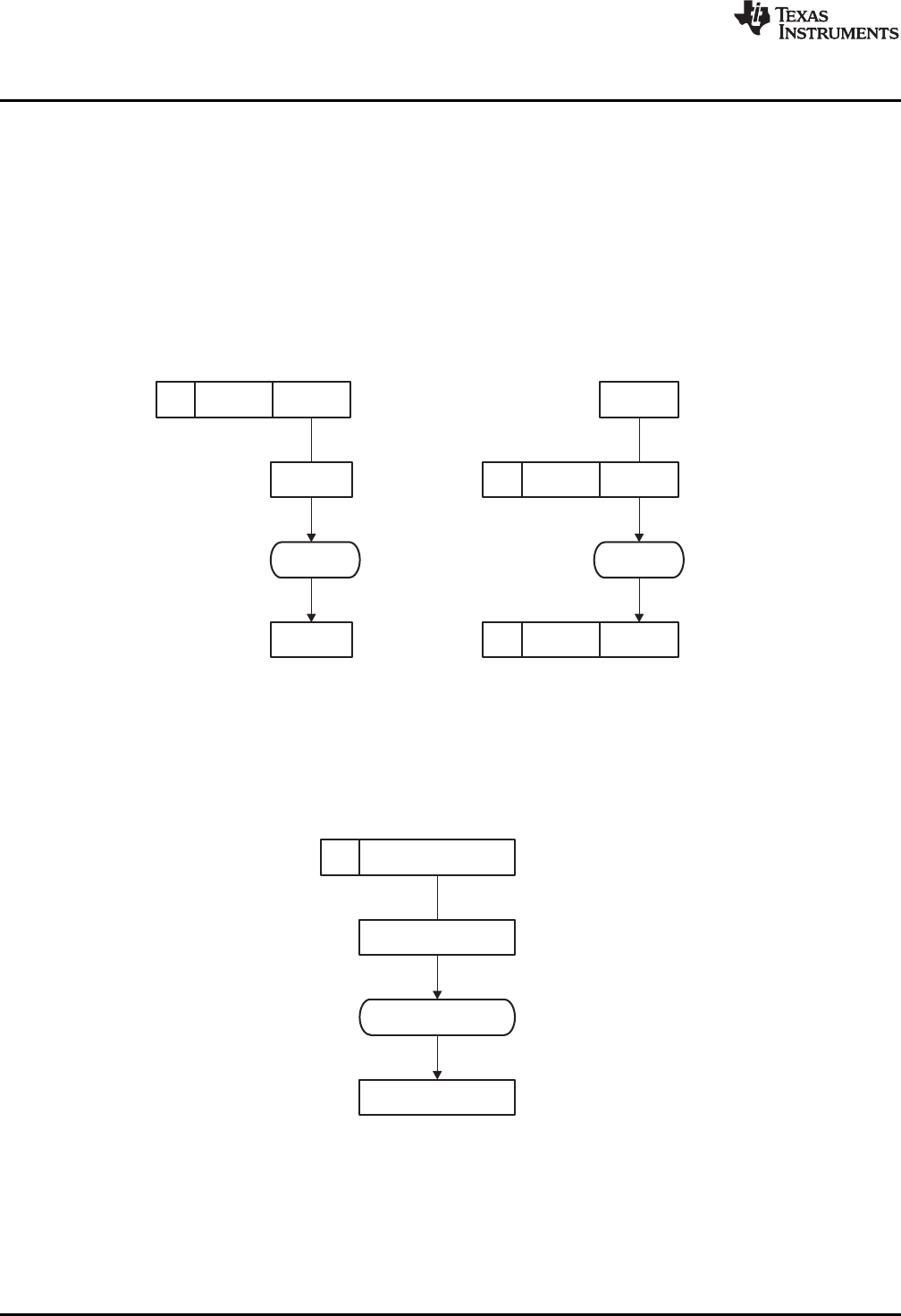
High Byte Low Byte
Register-Word Operation
Register
Memory
Operation
Memory
Un-
used
19 16 15 0
8 7
Unused
High Byte Low Byte
Register-Byte Operation
High Byte Low Byte
Byte-Register Operation
Register
Memory Register
Memory
Operation
Memory
Operation
0 Register
Unused
Un-
used
0
19 16 15 0
19 16 15 0
8 7
8 7
Un-
used
CPU Registers
www.ti.com
6.3.5 General-Purpose Registers (R4 to R15)
The 12 CPU registers (R4 to R15) contain 8-bit, 16-bit, or 20-bit values. Any byte-write to a CPU register
clears bits 19:8. Any word-write to a register clears bits 19:16. The only exception is the SXT instruction.
The SXT instruction extends the sign through the complete 20-bit register.
Figure 6-10 through Figure 6-14 show the handling of byte, word, and address-word data. Note the reset
of the leading most significant bits (MSBs) if a register is the destination of a byte or word instruction.
Figure 6-10 shows byte handling (8-bit data, .B suffix). The handling is shown for a source register and a
destination memory byte and for a source memory byte and a destination register.
Figure 6-10. Register-Byte and Byte-Register Operation
Figure 6-11 and Figure 6-12 show 16-bit word handling (.W suffix). The handling is shown for a source
register and a destination memory word and for a source memory word and a destination register.
Figure 6-11. Register-Word Operation
194 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
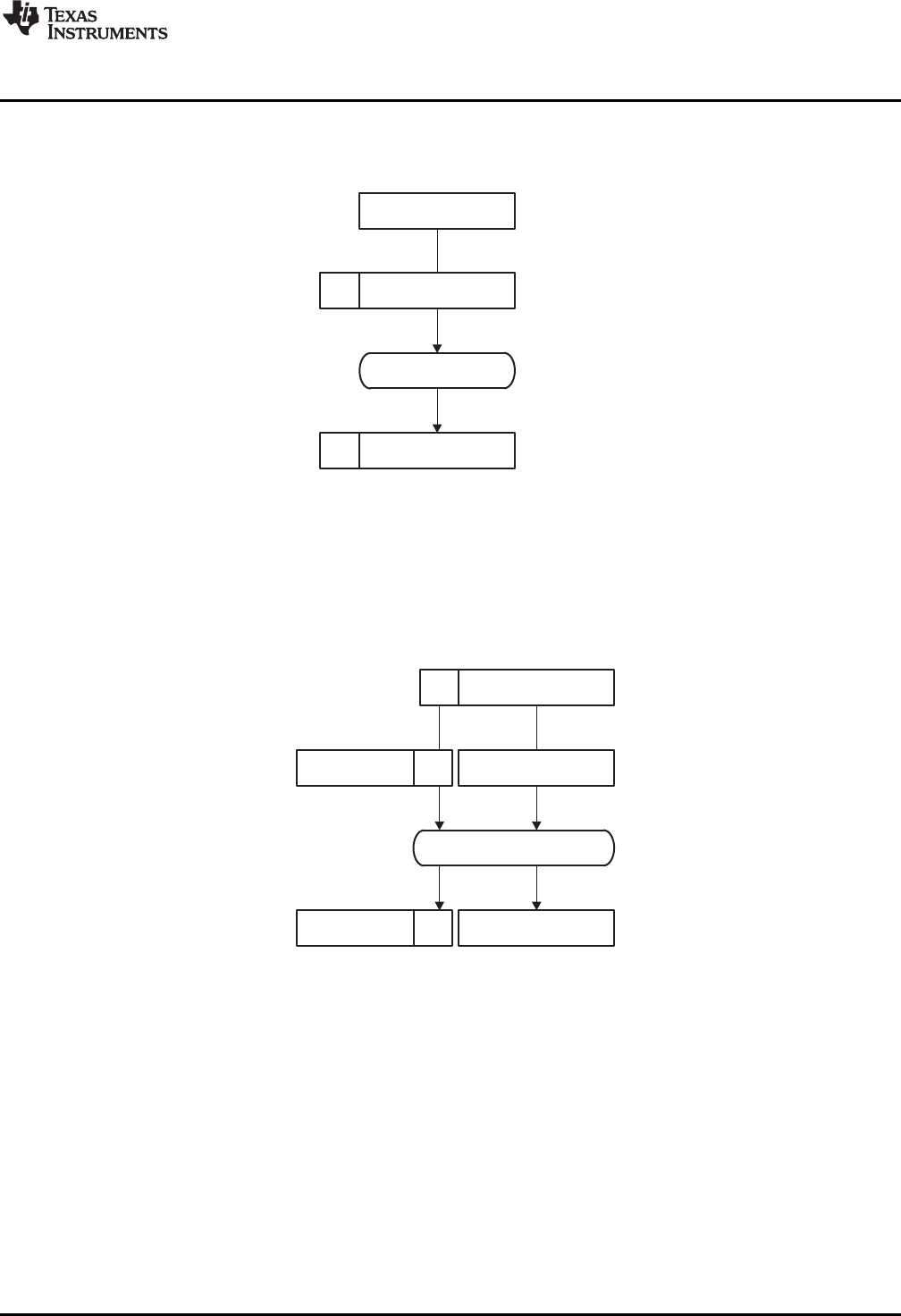
High Byte Low Byte
Register - Ad dress-Word Operation
Register
Memory
Operation
Memory
Unused
0
Memory +2
Memory +2
19 16 15 0
8 7
High Byte Low Byte
Word-Register Operation
Register
Memory
Operation
0Register
Un-
used
19 16 15 0
8 7
www.ti.com
CPU Registers
Figure 6-12. Word-Register Operation
Figure 6-13 and Figure 6-14 show 20-bit address-word handling (.A suffix). The handling is shown for a
source register and a destination memory address-word and for a source memory address-word and a
destination register.
Figure 6-13. Register – Address-Word Operation
195
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
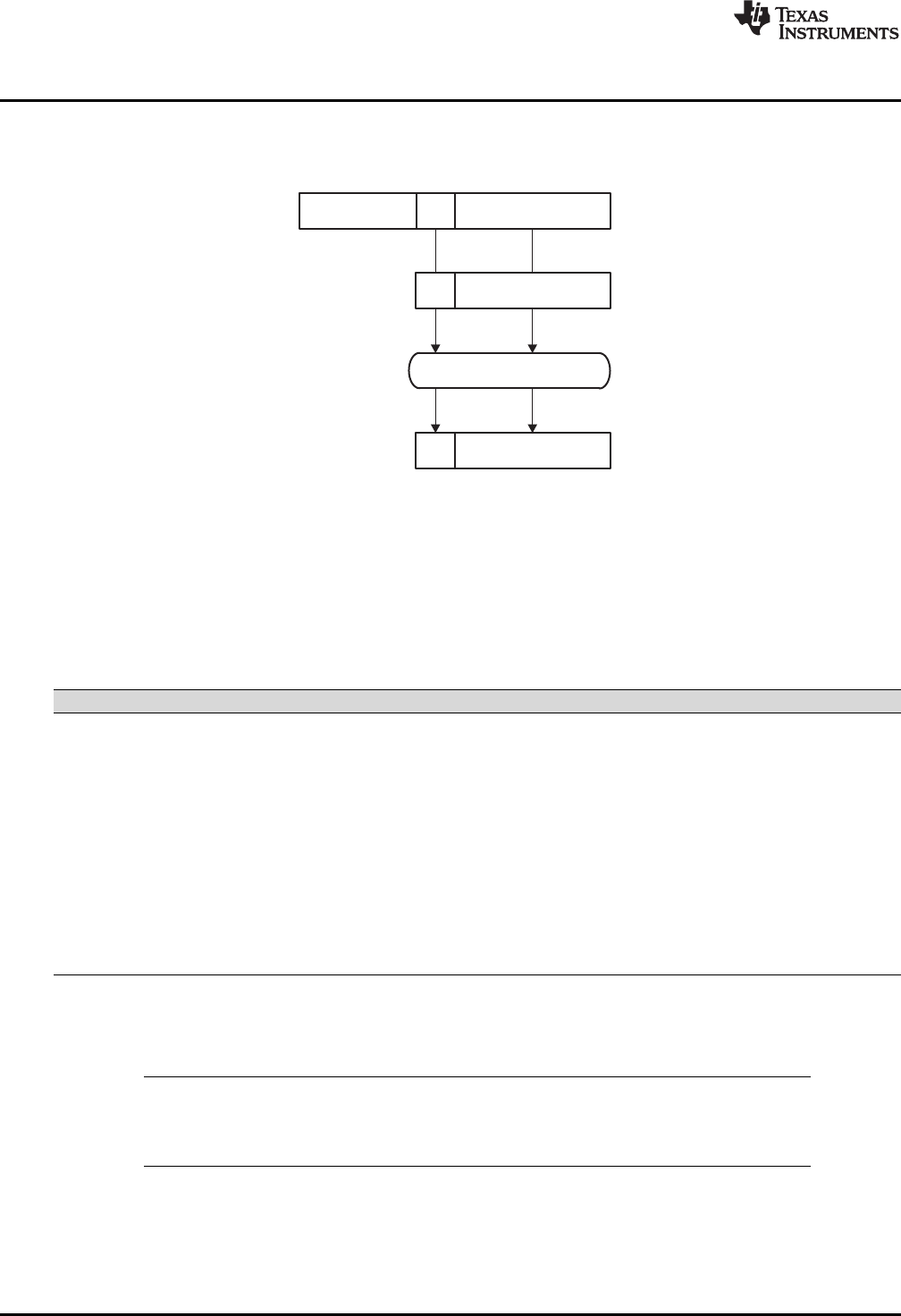
High Byte Low Byte
Address-Word - Register Operation
Register
Memory
Operation
Register
UnusedMemory +2
19 16 15 0
8 7
Addressing Modes
www.ti.com
Figure 6-14. Address-Word – Register Operation
6.4 Addressing Modes
Seven addressing modes for the source operand and four addressing modes for the destination operand
use 16-bit or 20-bit addresses (see Table 6-3). The MSP430 and MSP430X instructions are usable
throughout the entire 1MB memory range.
Table 6-3. Source and Destination Addressing
As, Ad Addressing Mode Syntax Description
00, 0 Register Rn Register contents are operand.
01, 1 Indexed X(Rn) (Rn + X) points to the operand. X is stored in the next word, or stored in combination of
the preceding extension word and the next word.
01, 1 Symbolic ADDR (PC + X) points to the operand. X is stored in the next word, or stored in combination of
the preceding extension word and the next word. Indexed mode X(PC) is used.
01, 1 Absolute &ADDR The word following the instruction contains the absolute address. X is stored in the next
word, or stored in combination of the preceding extension word and the next word.
Indexed mode X(SR) is used.
10, – Indirect Register @Rn Rn is used as a pointer to the operand.
11, – Indirect @Rn+ Rn is used as a pointer to the operand. Rn is incremented afterwards by 1 for .B
Autoincrement instructions, by 2 for .W instructions, and by 4 for .A instructions.
11, – Immediate #N N is stored in the next word, or stored in combination of the preceding extension word
and the next word. Indirect autoincrement mode @PC+ is used.
The seven addressing modes are explained in detail in the following sections. Most of the examples show
the same addressing mode for the source and destination, but any valid combination of source and
destination addressing modes is possible in an instruction.
NOTE: Use of Labels EDE, TONI, TOM, and LEO
Throughout MSP430 documentation, EDE, TONI, TOM, and LEO are used as generic labels.
They are only labels and have no special meaning.
196 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
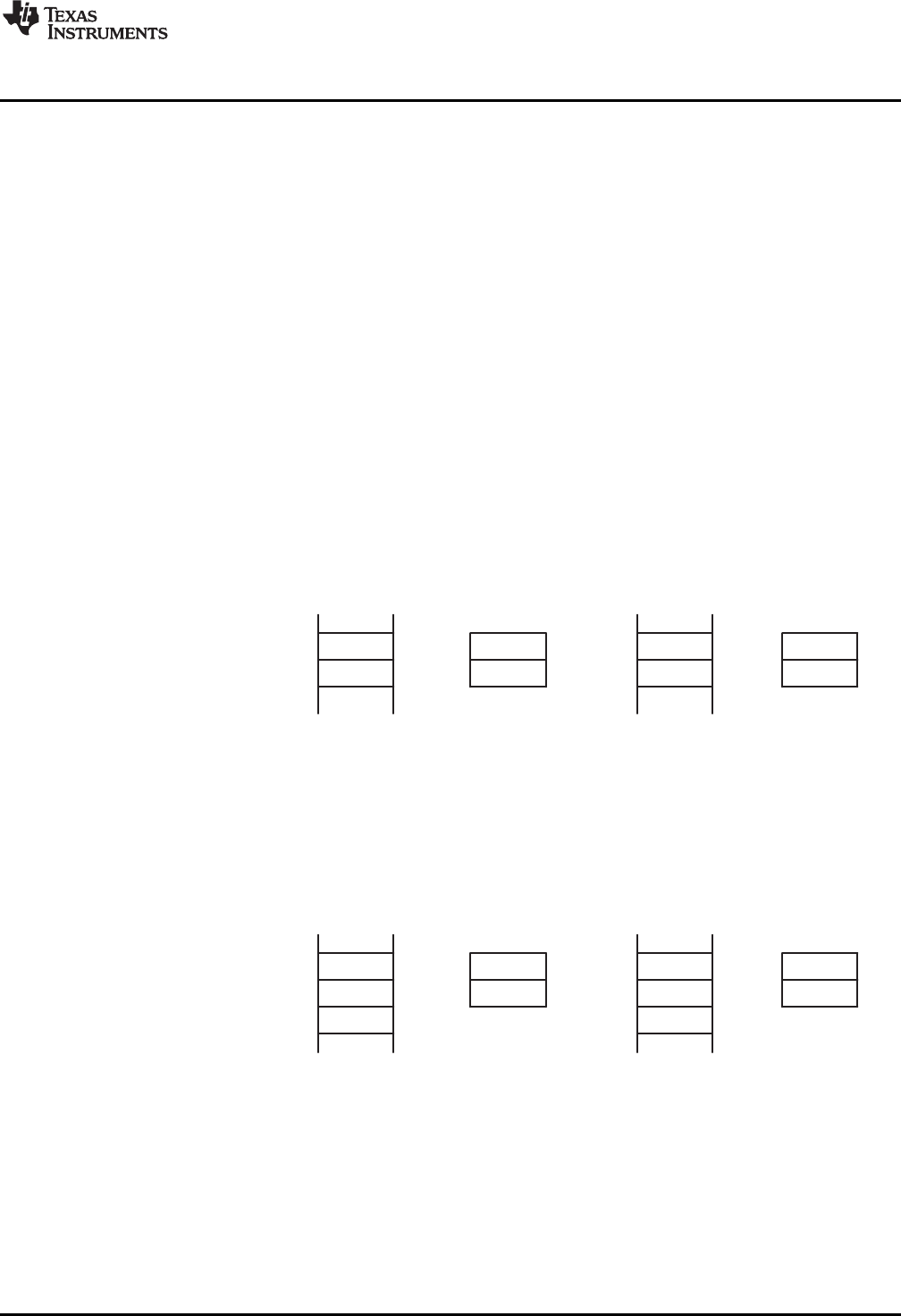
xxxxh
Address
Space
D546h
PC
21036h
21034h
AA550h
11111h
R5
R6
Register
Before:
Address
Space
PC AA550h
BB551h
R5
R6
Register
After:
AA550h.or.11111h = BB551h
1800h21032h
xxxxh
D546h
21036h
21034h
1800h21032h
xxxxh
Address
Space
D506h PC
21036h
21034h
AA550h
11111h
R5
R6
Register
Before:
xxxxh
Address
Space
D506h
PC21036h
21034h
AA550h
0B551h
R5
R6
Register
After:
A550h.or.1111h = B551h
www.ti.com
Addressing Modes
6.4.1 Register Mode
Operation: The operand is the 8-, 16-, or 20-bit content of the used CPU register.
Length: One, two, or three words
Comment: Valid for source and destination
Byte operation: Byte operation reads only the eight least significant bits (LSBs) of the source
register Rsrc and writes the result to the eight LSBs of the destination register Rdst.
The bits Rdst.19:8 are cleared. The register Rsrc is not modified.
Word operation: Word operation reads the 16 LSBs of the source register Rsrc and writes the result
to the 16 LSBs of the destination register Rdst. The bits Rdst.19:16 are cleared.
The register Rsrc is not modified.
Address-word Address-word operation reads the 20 bits of the source register Rsrc and writes the
operation: result to the 20 bits of the destination register Rdst. The register Rsrc is not
modified
SXT exception: The SXT instruction is the only exception for register operation. The sign of the low
byte in bit 7 is extended to the bits Rdst.19:8.
BIS.W R5,R6 ;
Example:
This instruction logically ORs the 16-bit data contained in R5 with the 16-bit
contents of R6. R6.19:16 is cleared.
BISX.A R5,R6 ;
Example:
This instruction logically ORs the 20-bit data contained in R5 with the 20-bit
contents of R6.
The extension word contains the A/L bit for 20-bit data. The instruction word uses
byte mode with bits A/L:B/W = 01. The result of the instruction is:
197
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
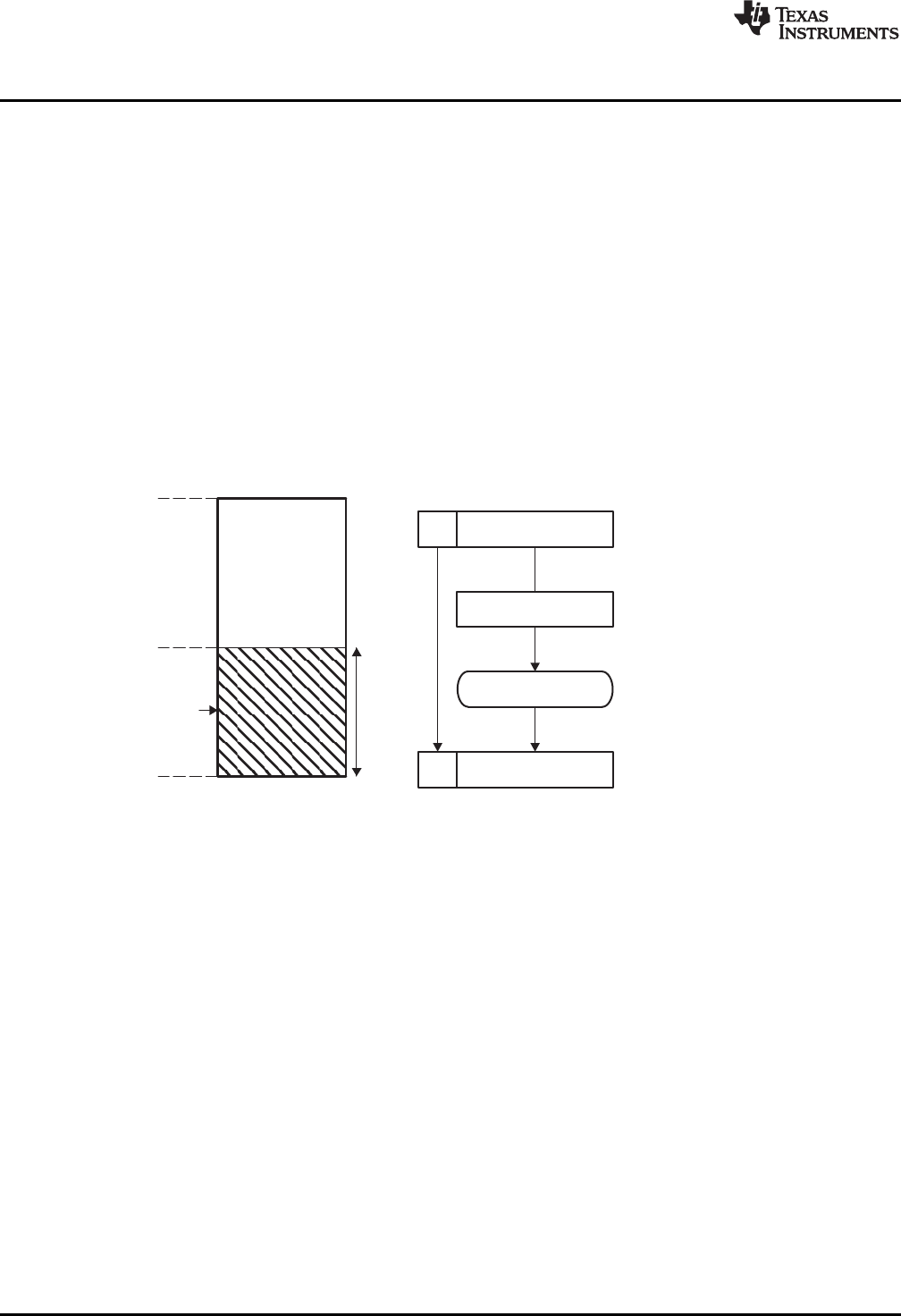
16-bit signed index
CPU Register Rn
16-bit signed add
0 Memory address
FFFFF
00000
Lower 64KB
0FFFF
10000
Rn.19:0
Lower 64 KB
Rn.19:16 = 0
16-bit byte index
0
19 16 15 0
S
Addressing Modes
www.ti.com
6.4.2 Indexed Mode
The Indexed mode calculates the address of the operand by adding the signed index to a CPU register.
The Indexed mode has four addressing possibilities:
• Indexed mode in lower 64KB memory
• MSP430 instruction with Indexed mode addressing memory above the lower 64KB memory
• MSP430X instruction with Indexed mode
• MSP430X address instructions with Indexed mode
6.4.2.1 Indexed Mode in Lower 64KB Memory
If the CPU register Rn points to an address in the lower 64KB of the memory range, the calculated
memory address bits 19:16 are cleared after the addition of the CPU register Rn and the signed 16-bit
index. This means the calculated memory address is always located in the lower 64KB and does not
overflow or underflow out of the lower 64KB memory space. The RAM and the peripheral registers can be
accessed this way and existing MSP430 software is usable without modifications as shown in Figure 6-15.
Figure 6-15. Indexed Mode in Lower 64KB
Length: Two or three words
Operation: The signed 16-bit index is located in the next word after the instruction and is added to
the CPU register Rn. The resulting bits 19:16 are cleared giving a truncated 16-bit
memory address, which points to an operand address in the range 00000h to 0FFFFh.
The operand is the content of the addressed memory location.
Comment: Valid for source and destination. The assembler calculates the register index and inserts
it.
ADD.B 1000h(R5),0F000h(R6);
Example:
This instruction adds the 8-bit data contained in source byte 1000h(R5) and the
destination byte 0F000h(R6) and places the result into the destination byte. Source and
destination bytes are both located in the lower 64KB due to the cleared bits 19:16 of
registers R5 and R6.
Source: The byte pointed to by R5 + 1000h results in address 0479Ch + 1000h = 0579Ch after
truncation to a 16-bit address.
Destination: The byte pointed to by R6 + F000h results in address 01778h + F000h = 00778h after
truncation to a 16-bit address.
198 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
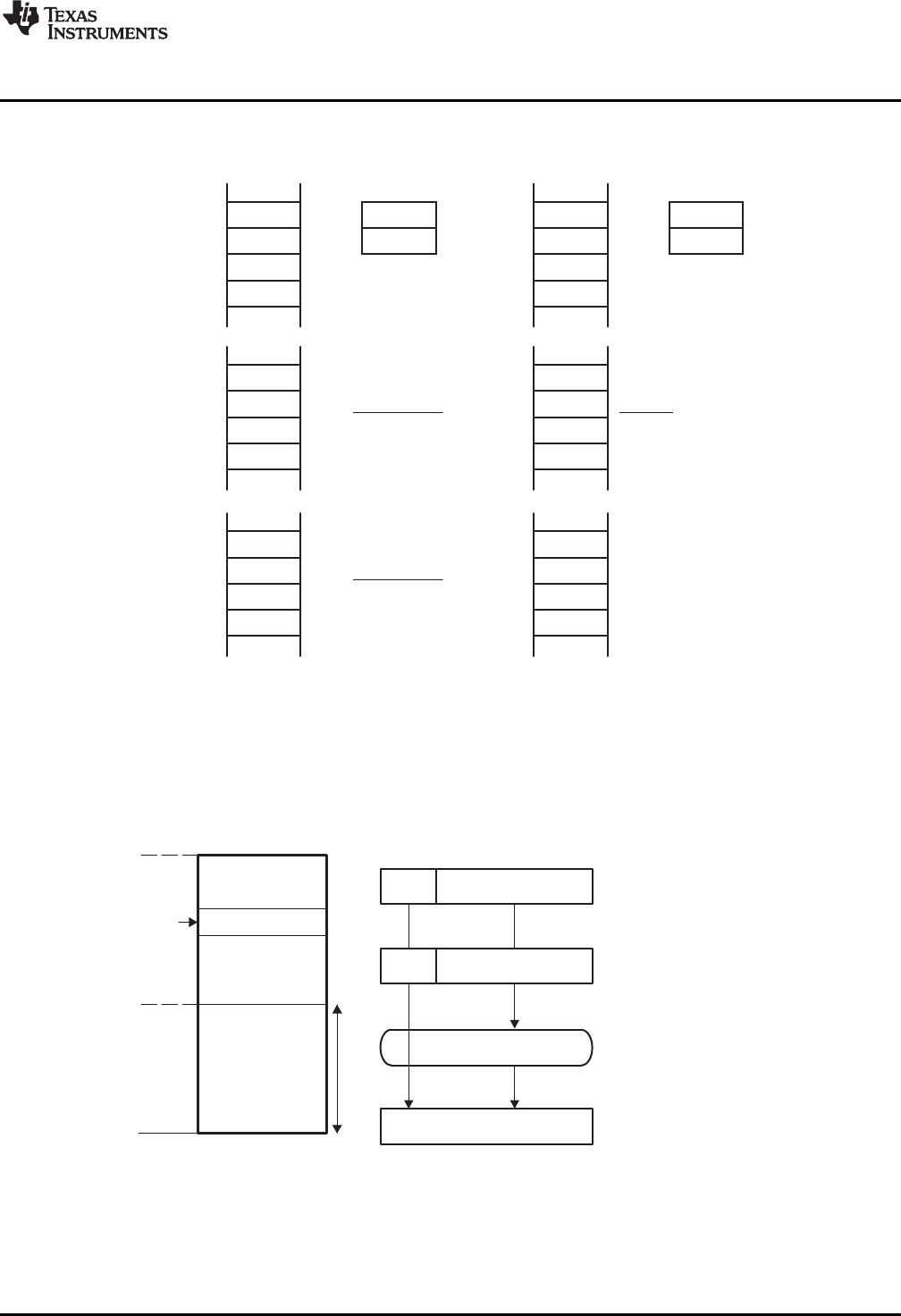
16-bit signed index
(sign extended to 20 bits)
CPU Register Rn
20-bit signed add
Memory address
FFFFF
00000
Lower 64 KB
0FFFF
10000
Upper Memory
Rn.19:16 > 0
16-bit byte index
1 ... 15
19 16 15 0
S
Rn ± 32 KB
S
Rn.19:0
xxxxh
Address
Space
F000h
1000h
PC
1103Ah
11038h
11036h
0479Ch
01778h
R5
R6
01778h
+F000h
00778h
Register
Before:
Address
Space
Register
After:
55D6h
11034h
xxxxh
F000h
1000h
PC1103Ah
11038h
11036h
0479Ch
01778h
R5
R6
55D6h
11034h
xxxxh
xx45h
0077Ah
00778h
xxxxh
xx77h
0077Ah
00778h
32h
+45h
77h
src
dst
Sum
0479Ch
+1000h
0579Ch
xxxxh
xx32h
0579Eh
0579Ch
xxxxh
xx32h
0579Eh
0579Ch
www.ti.com
Addressing Modes
6.4.2.2 MSP430 Instruction With Indexed Mode in Upper Memory
If the CPU register Rn points to an address above the lower 64KB memory, the Rn bits 19:16 are used for
the address calculation of the operand. The operand may be located in memory in the range Rn ±32KB,
because the index, X, is a signed 16-bit value. In this case, the address of the operand can overflow or
underflow into the lower 64KB memory space (see Figure 6-16 and Figure 6-17).
Figure 6-16. Indexed Mode in Upper Memory
199
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
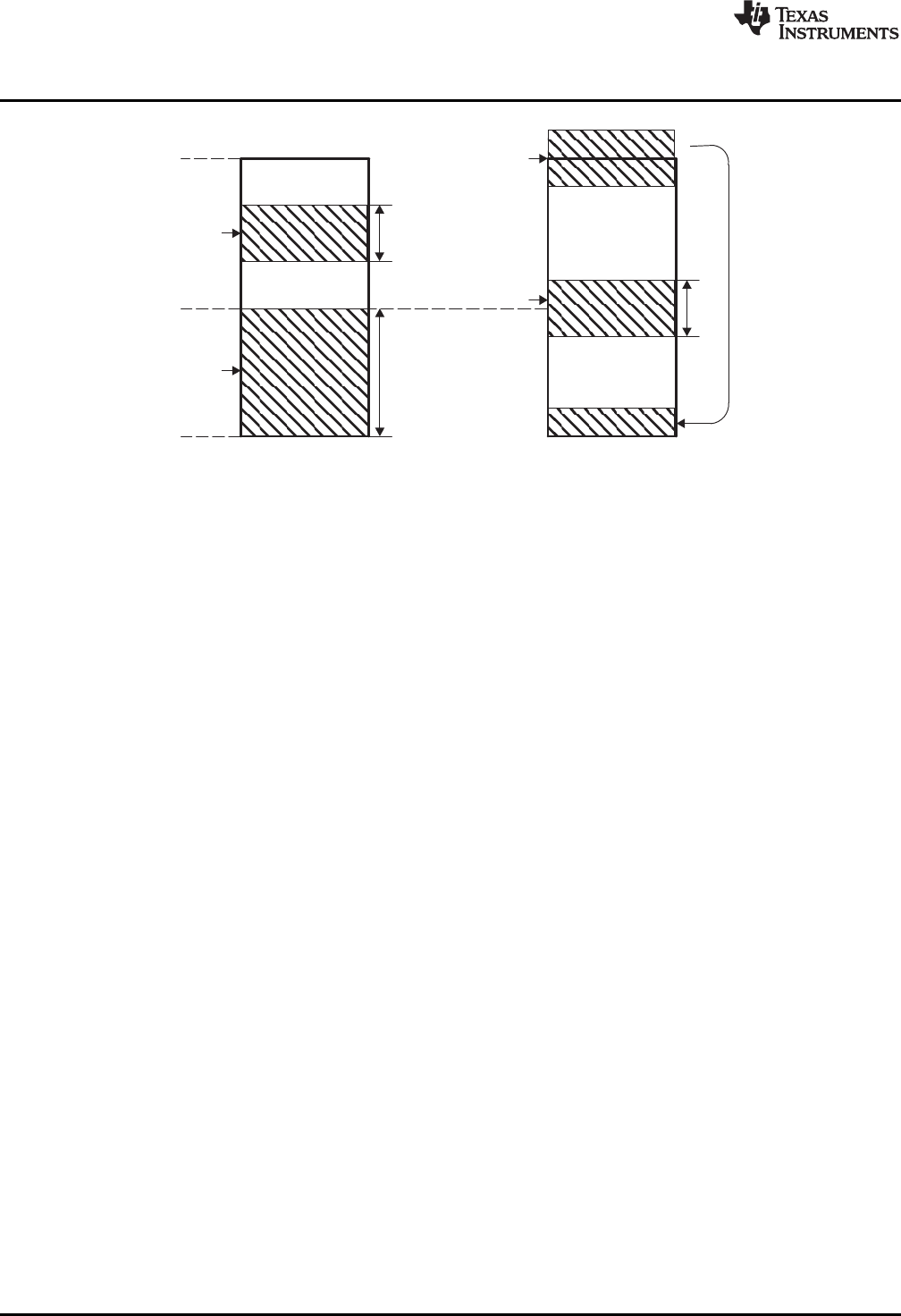
FFFFF
0000C
Lower 64 KB
0,FFFF
10000
Rn.19:0
Rn.19:0
Rn.19:0
±32 KB
Rn.19:0
±32 KB
Addressing Modes
www.ti.com
Figure 6-17. Overflow and Underflow for Indexed Mode
Length: Two or three words
Operation: The sign-extended 16-bit index in the next word after the instruction is added to the
20 bits of the CPU register Rn. This delivers a 20-bit address, which points to an
address in the range 0 to FFFFFh. The operand is the content of the addressed
memory location.
Comment: Valid for source and destination. The assembler calculates the register index and
inserts it.
ADD.W 8346h(R5),2100h(R6) ;
Example:
This instruction adds the 16-bit data contained in the source and the destination
addresses and places the 16-bit result into the destination. Source and destination
operand can be located in the entire address range.
Source: The word pointed to by R5 + 8346h. The negative index 8346h is sign extended,
which results in address 23456h + F8346h = 1B79Ch.
Destination: The word pointed to by R6 + 2100h results in address 15678h + 2100h = 17778h.
200 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
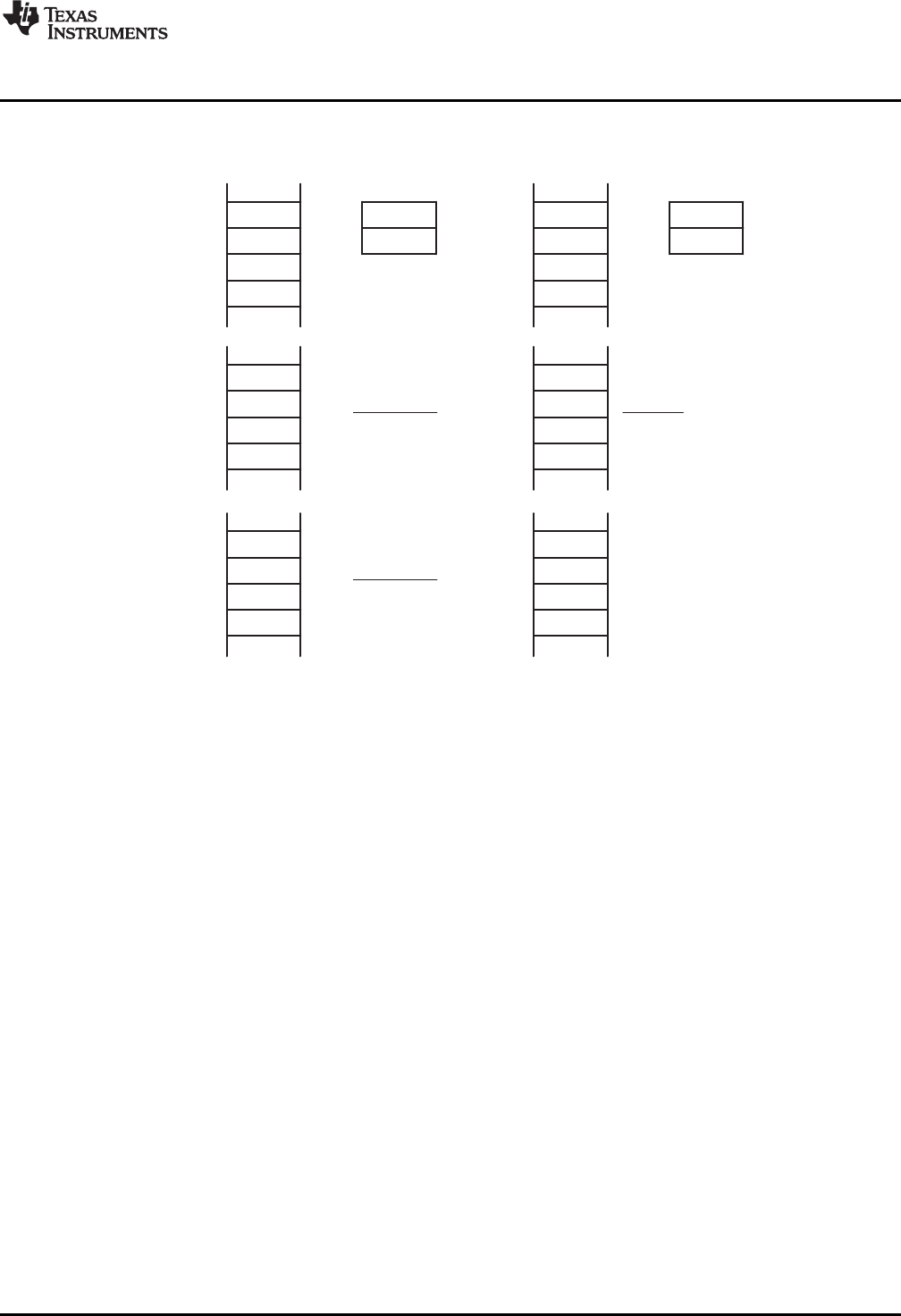
xxxxh
Address
Space
2100h
8346h
PC
1103Ah
11038h
11036h
23456h
15678h
R5
R6
15678h
+02100h
17778h
Register
Before:
Address
Space
Register
After:
5596h
11034h
xxxxh
2100h
8346h
PC1103Ah
11038h
11036h
23456h
15678h
R5
R6
5596h
11034h
xxxxh
2345h
1777Ah
17778h
xxxxh
7777h
1777Ah
17778h
05432h
+02345h
07777h
src
dst
Sum
23456h
+F8346h
1B79Ch
xxxxh
5432h
1B79Eh
1B79Ch
xxxxh
5432h
1B79Eh
1B79Ch
www.ti.com
Addressing Modes
Figure 6-18. Example for Indexed Mode
6.4.2.3 MSP430X Instruction With Indexed Mode
When using an MSP430X instruction with Indexed mode, the operand can be located anywhere in the
range of Rn + 19 bits.
Length: Three or four words
Operation: The operand address is the sum of the 20-bit CPU register content and the 20-bit
index. The 4 MSBs of the index are contained in the extension word; the 16 LSBs
are contained in the word following the instruction. The CPU register is not modified
Comment: Valid for source and destination. The assembler calculates the register index and
inserts it.
ADDX.A 12346h(R5),32100h(R6) ;
Example:
This instruction adds the 20-bit data contained in the source and the destination
addresses and places the result into the destination.
Source: Two words pointed to by R5 + 12346h which results in address 23456h + 12346h =
3579Ch.
Destination: Two words pointed to by R6 + 32100h which results in address 45678h + 32100h =
77778h.
201
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
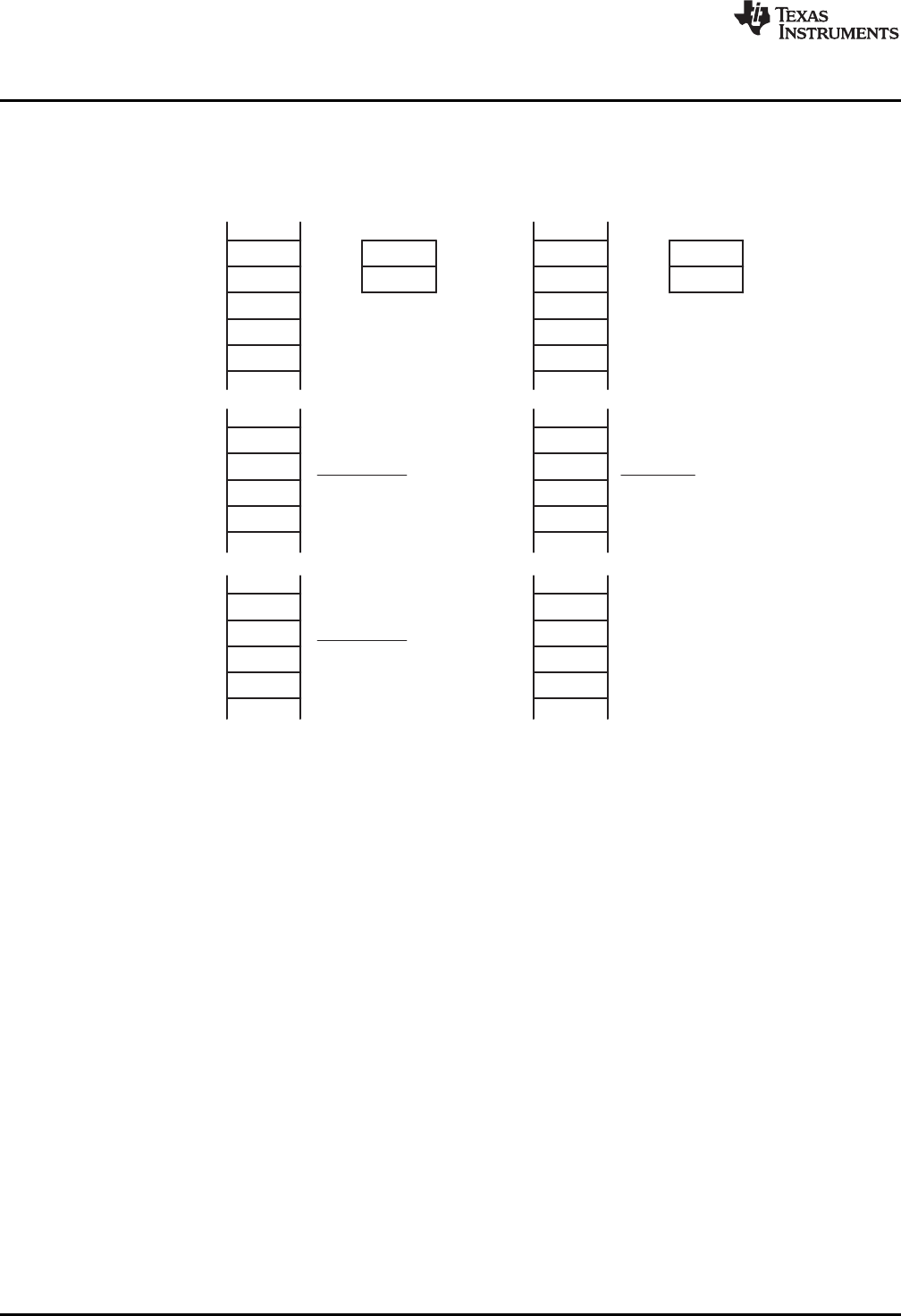
2100h
Address
Space
2346h
55D6h
PC
21038h
21036h
21034h
23456h
45678h
R5
R6
45678h
+32100h
77778h
Register
Before:
Address
Space
Register
After:
PC 23456h
45678h
R5
R6
0001h
2345h
7777Ah
77778h
0007h
7777h
7777Ah
77778h
65432h
+12345h
77777h
src
dst
Sum
0006h
5432h
3579Eh
3579Ch
0006h
5432h
3579Eh
3579Ch
1883h
21032h
xxxxh
2103Ah
2100h
2346h
55D6h
21038h
21036h
21034h
1883h
21032h
xxxxh
2103Ah
23456h
+12346h
3579Ch
Addressing Modes
www.ti.com
The extension word contains the MSBs of the source index and of the destination index and the A/L bit for
20-bit data. The instruction word uses byte mode due to the 20-bit data length with bits A/L:B/W = 01.
6.4.2.4 MSP430X Address Instructions With Indexed Mode
When using an MSP430X Address Instruction with Indexed mode, the operand is located in memory in the
range Rn ±32KB, because the index, X, is a signed 16-bit value.
Length: Two words
Operation: The sign-extended 16-bit index in the next word after the instruction is added to the 20
bits of the CPU register Rn. This delivers a 20-bit address, which points to an address in
the range 0 to FFFFFh. The operand is the content of the addressed memory location.
Comment: Valid for source and destination. The assembler calculates the register index and inserts
it.
MOVA 8002h(R5),R6 ; // R5 = 0x100
Example:
This instruction loads the 20-bit data contained in the source address into destination
register.
Source: Two words pointed to by R5 + 8002h and R5 + 8002h + 2h which results in address
00100h + F8002h (+2h) = F8102h and F8104h.
Destination: Register R6
202 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
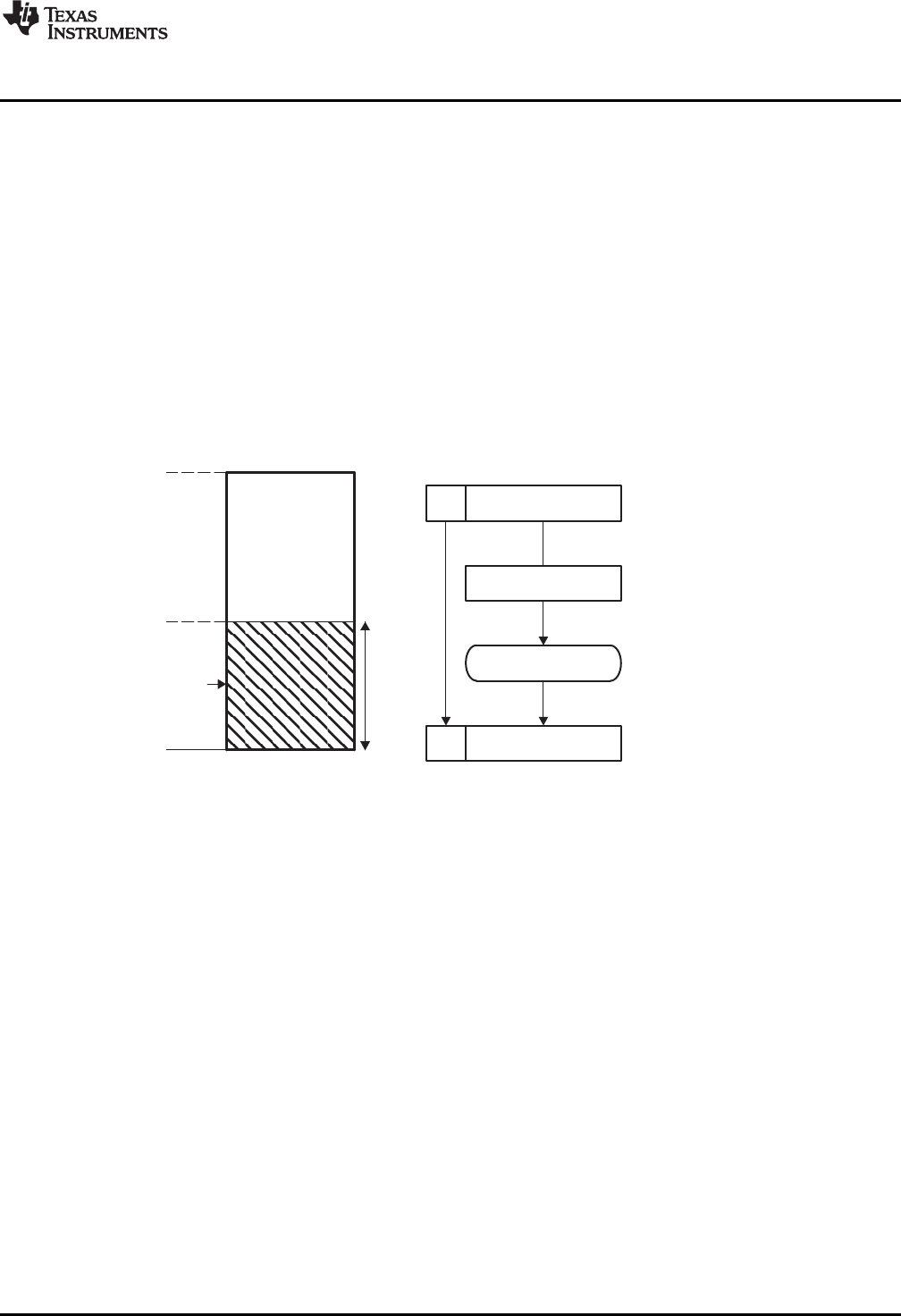
16-bit signed
PC index
Program
counter PC
16-bit signed add
0 Memory address
FFFFF
00000
Lower 64 KB
0FFFF
10000
PC.19:0
Lower 64 KB
PC.19:16 = 0
16-bit byte index
0
19 16 15 0
S
www.ti.com
Addressing Modes
6.4.3 Symbolic Mode
The Symbolic mode calculates the address of the operand by adding the signed index to the PC. The
Symbolic mode has three addressing possibilities:
• Symbolic mode in lower 64KB of memory
• MSP430 instruction with Symbolic mode addressing memory above the lower 64KB of memory.
• MSP430X instruction with Symbolic mode
6.4.3.1 Symbolic Mode in Lower 64KB
If the PC points to an address in the lower 64KB of the memory range, the calculated memory address
bits 19:16 are cleared after the addition of the PC and the signed 16-bit index. This means the calculated
memory address is always located in the lower 64KB and does not overflow or underflow out of the lower
64KB memory space. The RAM and the peripheral registers can be accessed this way and existing
MSP430 software is usable without modifications as shown in Figure 6-19.
Figure 6-19. Symbolic Mode Running in Lower 64KB
Operation: The signed 16-bit index in the next word after the instruction is added temporarily to
the PC. The resulting bits 19:16 are cleared giving a truncated 16-bit memory
address, which points to an operand address in the range 00000h to 0FFFFh. The
operand is the content of the addressed memory location.
Length: Two or three words
Comment: Valid for source and destination. The assembler calculates the PC index and
inserts it.
ADD.B EDE,TONI ;
Example:
This instruction adds the 8-bit data contained in source byte EDE and destination
byte TONI and places the result into the destination byte TONI. Bytes EDE and
TONI and the program are located in the lower 64KB.
Source: Byte EDE located at address 0579Ch, pointed to by PC + 4766h, where the PC
index 4766h is the result of 0579Ch – 01036h = 04766h. Address 01036h is the
location of the index for this example.
Destination: Byte TONI located at address 00778h, pointed to by PC + F740h, is the truncated
16-bit result of 00778h – 1038h = FF740h. Address 01038h is the location of the
index for this example.
203
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
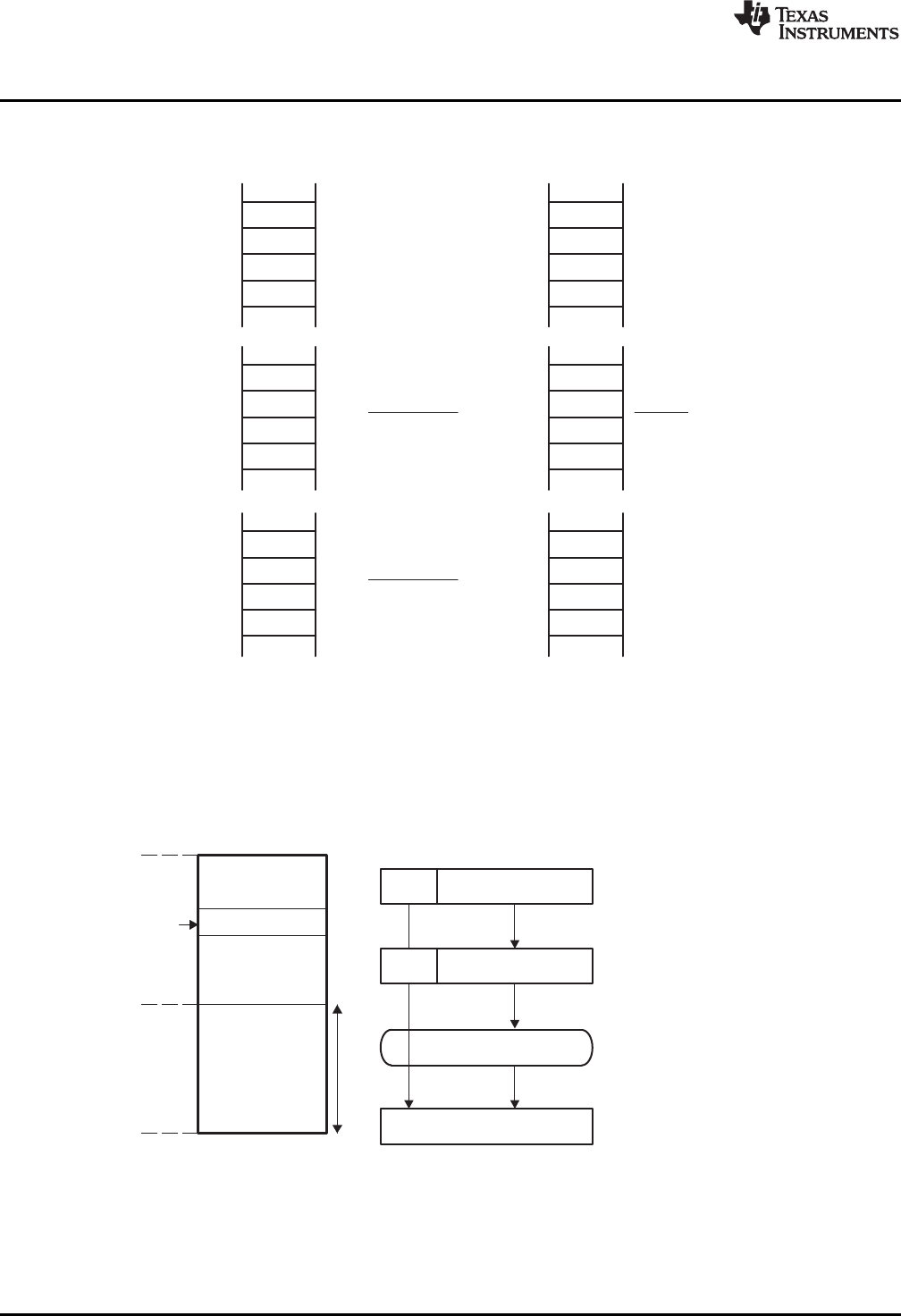
16-bit signed PC index
(sign extended to 20 bits)
Program
counter PC
20-bit signed add
Memory address
FFFFF
00000
Lower 64 KB
0FFFF
10000
PC.19:0
Upper Memory
PC.19:16 > 0
16-bit byte index
1 ... 15
19 16 15 0
S
PC ±32 KB
S
xxxxh
Address
Space
F740h
4766h
PC
0103Ah
01038h
01036h
01038h
+0F740h
00778h
Before:
Address
Space
After:
05D0h
01034h
xxxxh
F740h
4766h
PC0103Ah
01038h
01036h
50D0h
01034h
xxxxh
xx45h
0077Ah
00778h
xxxxh
xx77h
0077Ah
00778h
32h
+45h
77h
src
dst
Sum
01036h
+04766h
0579Ch
xxxxh
xx32h
0579Eh
0579Ch
xxxxh
xx32h
0579Eh
0579Ch
Addressing Modes
www.ti.com
6.4.3.2 MSP430 Instruction With Symbolic Mode in Upper Memory
If the PC points to an address above the lower 64KB memory, the PC bits 19:16 are used for the address
calculation of the operand. The operand may be located in memory in the range PC ± 32KB, because the
index, X, is a signed 16-bit value. In this case, the address of the operand can overflow or underflow into
the lower 64KB memory space as shown in Figure 6-20 and Figure 6-21.
Figure 6-20. Symbolic Mode Running in Upper Memory
204 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
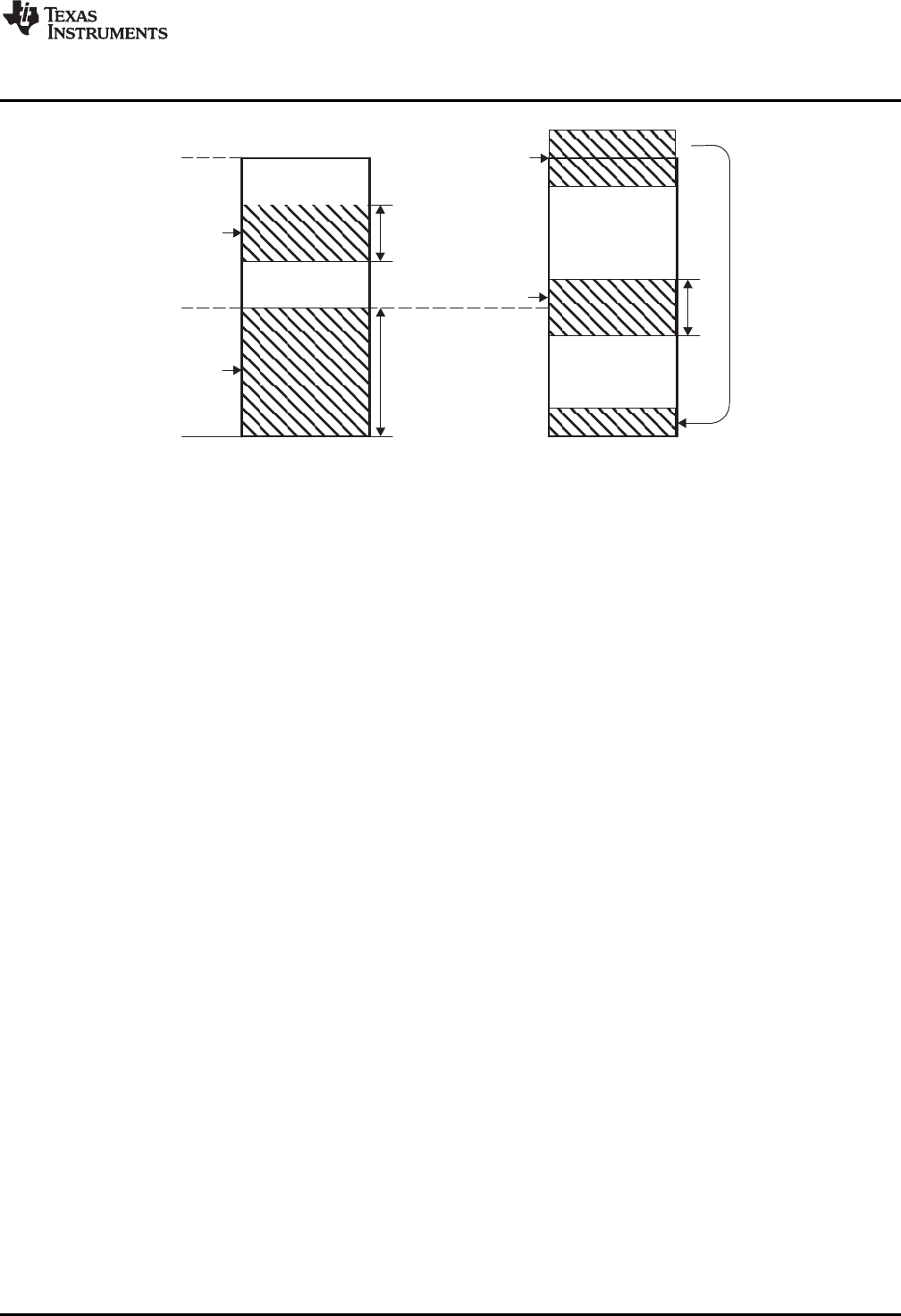
FFFFF
0000C
Lower 64 KB
0FFFF
10000
PC.19:0
PC.19:0
PC.19:0
±32 KB
PC.19:0
±32 KB
www.ti.com
Addressing Modes
Figure 6-21. Overflow and Underflow for Symbolic Mode
Length: Two or three words
Operation: The sign-extended 16-bit index in the next word after the instruction is added to the
20 bits of the PC. This delivers a 20-bit address, which points to an address in the
range 0 to FFFFFh. The operand is the content of the addressed memory location.
Comment: Valid for source and destination. The assembler calculates the PC index and
inserts it
ADD.W EDE,&TONI ;
Example:
This instruction adds the 16-bit data contained in source word EDE and destination
word TONI and places the 16-bit result into the destination word TONI. For this
example, the instruction is located at address 2F034h.
Source: Word EDE at address 3379Ch, pointed to by PC + 4766h, which is the 16-bit result
of 3379Ch – 2F036h = 04766h. Address 2F036h is the location of the index for this
example.
Destination: Word TONI located at address 00778h pointed to by the absolute address 00778h
205
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
xxxxh
Address
Space
0778h
4766h
PC
2F03Ah
2F038h
2F036h
2F036h
+04766h
3379Ch
Before:
Address
Space
After:
5092h
2F034h
xxxxh
0778h
4766h
PC2F03Ah
2F038h
2F036h
5092h
2F034h
xxxxh
5432h
3379Eh
3379Ch
xxxxh
5432h
3379Eh
3379Ch
5432h
+2345h
7777h
src
dst
Sum
xxxxh
2345h
0077Ah
00778h
xxxxh
7777h
0077Ah
00778h
Addressing Modes
www.ti.com
6.4.3.3 MSP430X Instruction With Symbolic Mode
When using an MSP430X instruction with Symbolic mode, the operand can be located anywhere in the
range of PC + 19 bits.
Length: Three or four words
Operation: The operand address is the sum of the 20-bit PC and the 20-bit index. The 4 MSBs
of the index are contained in the extension word; the 16 LSBs are contained in the
word following the instruction.
Comment: Valid for source and destination. The assembler calculates the register index and
inserts it.
ADDX.B EDE,TONI ;
Example:
This instruction adds the 8-bit data contained in source byte EDE and destination
byte TONI and places the result into the destination byte TONI.
Source: Byte EDE located at address 3579Ch, pointed to by PC + 14766h, is the 20-bit
result of 3579Ch – 21036h = 14766h. Address 21036h is the address of the index
in this example.
Destination: Byte TONI located at address 77778h, pointed to by PC + 56740h, is the 20-bit
result of 77778h – 21038h = 56740h. Address 21038h is the address of the index in
this example.
206 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

6740h
Address Space
4766h
50D0h
PC
21038h
21036h
21034h
21038h
+56740h
77778h
Before: Address SpaceAfter:
PC
xxxxh
xx45h
7777Ah
77778h
xxxxh
xx77h
7777Ah
77778h
32h
+45h
77h
src
dst
Sum
xxxxh
xx32h
3579Eh
3579Ch
xxxxh
xx32h
3579Eh
3579Ch
18C5h
21032h
xxxxh
2103Ah
6740h
4766h
50D0h
21038h
21036h
21034h
18C5h
21032h
xxxxh
2103Ah
21036h
+14766h
3579Ch
www.ti.com
Addressing Modes
6.4.4 Absolute Mode
The Absolute mode uses the contents of the word following the instruction as the address of the operand.
The Absolute mode has two addressing possibilities:
• Absolute mode in lower 64KB memory
• MSP430X instruction with Absolute mode
6.4.4.1 Absolute Mode in Lower 64KB
If an MSP430 instruction is used with Absolute addressing mode, the absolute address is a 16-bit value
and, therefore, points to an address in the lower 64KB of the memory range. The address is calculated as
an index from 0 and is stored in the word following the instruction The RAM and the peripheral registers
can be accessed this way and existing MSP430 software is usable without modifications.
Length: Two or three words
Operation: The operand is the content of the addressed memory location.
Comment: Valid for source and destination. The assembler calculates the index from 0 and
inserts it.
ADD.W &EDE,&TONI ;
Example:
This instruction adds the 16-bit data contained in the absolute source and
destination addresses and places the result into the destination.
Source: Word at address EDE
Destination: Word at address TONI
207
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
xxxxh
Address Space
7778h
579Ch
PC
2103Ah
21038h
21036h
Before: Address SpaceAfter:
5292h
21034h
xxxxh
7778h
579Ch
PC2103Ah
21038h
21036h
5292h
21034h
xxxxh
2345h
0777Ah
07778h
xxxxh
7777h
0777Ah
07778h
5432h
+2345h
7777h
src
dst
Sum
xxxxh
5432h
0579Eh
0579Ch
xxxxh
5432h
0579Eh
0579Ch
Addressing Modes
www.ti.com
6.4.4.2 MSP430X Instruction With Absolute Mode
If an MSP430X instruction is used with Absolute addressing mode, the absolute address is a 20-bit value
and, therefore, points to any address in the memory range. The address value is calculated as an index
from 0. The 4 MSBs of the index are contained in the extension word, and the 16 LSBs are contained in
the word following the instruction.
Length: Three or four words
Operation: The operand is the content of the addressed memory location.
Comment: Valid for source and destination. The assembler calculates the index from 0 and
inserts it.
ADDX.A &EDE,&TONI ;
Example:
This instruction adds the 20-bit data contained in the absolute source and
destination addresses and places the result into the destination.
Source: Two words beginning with address EDE
Destination: Two words beginning with address TONI
208 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
7778h
Address
Space
579Ch
52D2h
PC
21038h
21036h
21034h
Before:
Address
Space
After:
PC
0001h
2345h
7777Ah
77778h
0007h
7777h
7777Ah
77778h
65432h
+12345h
77777h
src
dst
Sum
0006h
5432h
3579Eh
3579Ch
0006h
5432h
3579Eh
3579Ch
1987h
21032h
xxxxh
2103Ah
7778h
579Ch
52D2h
21038h
21036h
21034h
1987h
21032h
xxxxh
2103Ah
www.ti.com
Addressing Modes
6.4.5 Indirect Register Mode
The Indirect Register mode uses the contents of the CPU register Rsrc as the source operand. The
Indirect Register mode always uses a 20-bit address.
Length: One, two, or three words
Operation: The operand is the content the addressed memory location. The source register
Rsrc is not modified.
Comment: Valid only for the source operand. The substitute for the destination operand is
0(Rdst).
ADDX.W @R5,2100h(R6)
Example:
This instruction adds the two 16-bit operands contained in the source and the
destination addresses and places the result into the destination.
Source: Word pointed to by R5. R5 contains address 3579Ch for this example.
Destination: Word pointed to by R6 + 2100h, which results in address 45678h + 2100h = 7778h
209
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
xxxxh
Address
Space
2100h
55A6h PC
21038h
21036h
21034h
3579Ch
45678h
R5
R6
45678h
+02100h
47778h
Register
Before:
Address
Space
Register
After:
xxxxh
2100h
55A6h
PC21038h
21036h
21034h
3579Ch
45678h
R5
R6
xxxxh
2345h
4777Ah
47778h
xxxxh
7777h
4777Ah
47778h
5432h
+2345h
7777h
src
dst
Sum
xxxxh
5432h
3579Eh
3579Ch
xxxxh
5432h
3579Eh
3579Ch
R5 R5
Addressing Modes
www.ti.com
6.4.6 Indirect Autoincrement Mode
The Indirect Autoincrement mode uses the contents of the CPU register Rsrc as the source operand. Rsrc
is then automatically incremented by 1 for byte instructions, by 2 for word instructions, and by 4 for
address-word instructions immediately after accessing the source operand. If the same register is used for
source and destination, it contains the incremented address for the destination access. Indirect
Autoincrement mode always uses 20-bit addresses.
Length: One, two, or three words
Operation: The operand is the content of the addressed memory location.
Comment: Valid only for the source operand
ADD.B @R5+,0(R6)
Example:
This instruction adds the 8-bit data contained in the source and the destination
addresses and places the result into the destination.
Source: Byte pointed to by R5. R5 contains address 3579Ch for this example.
Destination: Byte pointed to by R6 + 0h, which results in address 0778h for this example
210 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
xxxxh
Address
Space
0000h
55F6h PC
21038h
21036h
21034h
3579Ch
00778h
R5
R6
00778h
+0000h
00778h
Register
Before:
Address
Space
Register
After:
xxxxh
0000h
55F6h
PC21038h
21036h
21034h
3579Dh
00778h
R5
R6
xxxxh
xx45h
0077Ah
00778h
xxxxh
xx77h
0077Ah
00778h
32h
+45h
77h
src
dst
Sum
xxh
32h
3579Dh
3579Ch
xxh
xx32h
3579Dh
3579Ch
R5
R5
www.ti.com
Addressing Modes
6.4.7 Immediate Mode
The Immediate mode allows accessing constants as operands by including the constant in the memory
location following the instruction. The PC is used with the Indirect Autoincrement mode. The PC points to
the immediate value contained in the next word. After the fetching of the immediate operand, the PC is
incremented by 2 for byte, word, or address-word instructions. The Immediate mode has two addressing
possibilities:
• 8-bit or 16-bit constants with MSP430 instructions
• 20-bit constants with MSP430X instruction
6.4.7.1 MSP430 Instructions With Immediate Mode
If an MSP430 instruction is used with Immediate addressing mode, the constant is an 8- or 16-bit value
and is stored in the word following the instruction.
Length: Two or three words. One word less if a constant of the constant generator can be
used for the immediate operand.
Operation: The 16-bit immediate source operand is used together with the 16-bit destination
operand.
Comment: Valid only for the source operand
ADD #3456h,&TONI
Example:
This instruction adds the 16-bit immediate operand 3456h to the data in the
destination address TONI.
Source: 16-bit immediate value 3456h
Destination: Word at address TONI
211
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
7778h
Address
Space
3456h
50F2h
PC
21038h
21036h
21034h
Before:
Address
Space
After:
PC
0001h
2345h
7777Ah
77778h
0003h
579Bh
7777Ah
77778h
23456h
+12345h
3579Bh
src
dst
Sum
1907h
21032h
xxxxh
2103Ah
7778h
3456h
50F2h
21038h
21036h
21034h
1907h
21032h
xxxxh
2103Ah
xxxxh
Address
Space
0778h
3456h
PC
2103Ah
21038h
21036h
Before:
Address
Space
After:
50B2h
21034h
xxxxh
0778h
3456h
PC2103Ah
21038h
21036h
50B2h
21034h
xxxxh
2345h
0077Ah
00778h
xxxxh
579Bh
0077Ah
00778h
3456h
+2345h
579Bh
src
dst
Sum
Addressing Modes
www.ti.com
6.4.7.2 MSP430X Instructions With Immediate Mode
If an MSP430X instruction is used with Immediate addressing mode, the constant is a 20-bit value. The 4
MSBs of the constant are stored in the extension word, and the 16 LSBs of the constant are stored in the
word following the instruction.
Length: Three or four words. One word less if a constant of the constant generator can be
used for the immediate operand.
Operation: The 20-bit immediate source operand is used together with the 20-bit destination
operand.
Comment: Valid only for the source operand
ADDX.A #23456h,&TONI ;
Example:
This instruction adds the 20-bit immediate operand 23456h to the data in the
destination address TONI.
Source: 20-bit immediate value 23456h
Destination: Two words beginning with address TONI
212 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
15 12 11 8 7 6 5 4 0
Op-code Rsrc Ad B/W As Rdst
SourceorDestination15:0
Destination15:0
www.ti.com
MSP430 and MSP430X Instructions
6.5 MSP430 and MSP430X Instructions
MSP430 instructions are the 27 implemented instructions of the MSP430 CPU. These instructions are
used throughout the 1MB memory range unless their 16-bit capability is exceeded. The MSP430X
instructions are used when the addressing of the operands or the data length exceeds the 16-bit capability
of the MSP430 instructions.
There are three possibilities when choosing between an MSP430 and MSP430X instruction:
• To use only the MSP430 instructions – The only exceptions are the CALLA and the RETA instruction.
This can be done if a few, simple rules are met:
– Place all constants, variables, arrays, tables, and data in the lower 64KB. This allows the use of
MSP430 instructions with 16-bit addressing for all data accesses. No pointers with 20-bit addresses
are needed.
– Place subroutine constants immediately after the subroutine code. This allows the use of the
symbolic addressing mode with its 16-bit index to reach addresses within the range of PC + 32KB.
• To use only MSP430X instructions – The disadvantages of this method are the reduced speed due to
the additional CPU cycles and the increased program space due to the necessary extension word for
any double-operand instruction.
• Use the best fitting instruction where needed.
Section 6.5.1 lists and describes the MSP430 instructions, and Section 6.5.2 lists and describes the
MSP430X instructions.
6.5.1 MSP430 Instructions
The MSP430 instructions can be used, regardless if the program resides in the lower 64KB or beyond it.
The only exceptions are the instructions CALL and RET, which are limited to the lower 64KB address
range. CALLA and RETA instructions have been added to the MSP430X CPU to handle subroutines in the
entire address range with no code size overhead.
6.5.1.1 MSP430 Double-Operand (Format I) Instructions
Figure 6-22 shows the format of the MSP430 double-operand instructions. Source and destination words
are appended for the Indexed, Symbolic, Absolute, and Immediate modes. Table 6-4 lists the 12 MSP430
double-operand instructions.
Figure 6-22. MSP430 Double-Operand Instruction Format
213
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
15 7 6 5 4 0
Op-code B/W Ad Rdst
Destination15:0
MSP430 and MSP430X Instructions
www.ti.com
Table 6-4. MSP430 Double-Operand Instructions
Status Bits(1)
S-Reg,
Mnemonic Operation
D-Reg V N Z C
src,dst src →dst – – – –
MOV(.B)
src,dst src + dst →dst * * * *
ADD(.B)
src,dst src + dst + C →dst * * * *
ADDC(.B)
src,dst dst + .not.src + 1 →dst * * * *
SUB(.B)
src,dst dst + .not.src + C →dst * * * *
SUBC(.B)
src,dst dst - src * * * *
CMP(.B)
src,dst src + dst + C →dst (decimally) * * * *
DADD(.B)
src,dst src .and. dst 0 * * Z
BIT(.B)
src,dst .not.src .and. dst →dst – – – –
BIC(.B)
src,dst src .or. dst →dst – – – –
BIS(.B)
src,dst src .xor. dst →dst * * * Z
XOR(.B)
src,dst src .and. dst →dst 0 * * Z
AND(.B)
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
6.5.1.2 MSP430 Single-Operand (Format II) Instructions
Figure 6-23 shows the format for MSP430 single-operand instructions, except RETI. The destination word
is appended for the Indexed, Symbolic, Absolute, and Immediate modes. Table 6-5 lists the seven single-
operand instructions.
Figure 6-23. MSP430 Single-Operand Instructions
Table 6-5. MSP430 Single-Operand Instructions
Status Bits(1)
S-Reg,
Mnemonic Operation
D-Reg V N Z C
dst C →MSB →.......LSB →C 0 * * *
RRC(.B)
dst MSB →MSB →....LSB →C 0 * * *
RRA(.B)
src SP - 2 →SP, src →SP – – – –
PUSH(.B)
dst bit 15...bit 8 ↔bit 7...bit 0 – – – –
SWPB
dst Call subroutine in lower 64KB – – – –
CALL
TOS →SR, SP + 2 →SP * * * *
RETI
TOS →PC,SP + 2 →SP
Register mode: bit 7 →bit 8...bit 19
dst 0 * * Z
SXT Other modes: bit 7 →bit 8...bit 15
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
214 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
15
Op-Code
13 12 10 9 8 0
Condition S 10-Bit Signed PC Offset
www.ti.com
MSP430 and MSP430X Instructions
6.5.1.3 Jump Instructions
Figure 6-24 shows the format for MSP430 and MSP430X jump instructions. The signed 10-bit word offset
of the jump instruction is multiplied by two, sign-extended to a 20-bit address, and added to the 20-bit PC.
This allows jumps in a range of –511 to +512 words relative to the PC in the full 20-bit address space.
Jumps do not affect the status bits. Table 6-6 lists and describes the eight jump instructions.
Figure 6-24. Format of Conditional Jump Instructions
Table 6-6. Conditional Jump Instructions
S-Reg,
Mnemonic Operation
D-Reg
Label Jump to label if zero bit is set
JEQ, JZ
Label Jump to label if zero bit is reset
JNE, JNZ
Label Jump to label if carry bit is set
JC
Label Jump to label if carry bit is reset
JNC
Label Jump to label if negative bit is set
JN
Label Jump to label if (N .XOR. V) = 0
JGE
Label Jump to label if (N .XOR. V) = 1
JL
Label Jump to label unconditionally
JMP
6.5.1.4 Emulated Instructions
In addition to the MSP430 and MSP430X instructions, emulated instructions are instructions that make
code easier to write and read, but do not have op-codes themselves. Instead, they are replaced
automatically by the assembler with a core instruction. There is no code or performance penalty for using
emulated instructions. The emulated instructions are listed in Table 6-7.
Table 6-7. Emulated Instructions
Status Bits(1)
Instruction Explanation Emulation V N Z C
Add Carry to dst * * * *
ADC(.B) dst ADDC(.B) #0,dst
Branch indirectly dst – – – –
BR dst MOV dst,PC
Clear dst – – – –
CLR(.B) dst MOV(.B) #0,dst
Clear Carry bit – – – 0
CLRC BIC #1,SR
Clear Negative bit – 0 – –
CLRN BIC #4,SR
Clear Zero bit – – 0 –
CLRZ BIC #2,SR
Add Carry to dst decimally * * * *
DADC(.B) dst DADD(.B) #0,dst
Decrement dst by 1 * * * *
DEC(.B) dst SUB(.B) #1,dst
Decrement dst by 2 * * * *
DECD(.B) dst SUB(.B) #2,dst
Disable interrupt – – – –
DINT BIC #8,SR
Enable interrupt – – – –
EINT BIS #8,SR
Increment dst by 1 * * * *
INC(.B) dst ADD(.B) #1,dst
Increment dst by 2 * * * *
INCD(.B) dst ADD(.B) #2,dst
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
215
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
MSP430 and MSP430X Instructions
www.ti.com
Table 6-7. Emulated Instructions (continued)
Status Bits(1)
Instruction Explanation Emulation V N Z C
Invert dst * * * *
INV(.B) dst XOR(.B) #–1,dst
No operation – – – –
NOP MOV R3,R3
Pop operand from stack – – – –
POP dst MOV @SP+,dst
Return from subroutine – – – –
RET MOV @SP+,PC
Shift left dst arithmetically * * * *
RLA(.B) dst ADD(.B) dst,dst
Shift left dst logically through Carry * * * *
RLC(.B) dst ADDC(.B) dst,dst
Subtract Carry from dst * * * *
SBC(.B) dst SUBC(.B) #0,dst
Set Carry bit – – – 1
SETC BIS #1,SR
Set Negative bit – 1 – –
SETN BIS #4,SR
Set Zero bit – – 1 –
SETZ BIS #2,SR
Test dst (compare with 0) 0 * * 1
TST(.B) dst CMP(.B) #0,dst
6.5.1.5 MSP430 Instruction Execution
The number of CPU clock cycles required for an instruction depends on the instruction format and the
addressing modes used – not the instruction itself. The number of clock cycles refers to MCLK.
6.5.1.5.1 Instruction Cycles and Length for Interrupt, Reset, and Subroutines
Table 6-8 lists the length and the CPU cycles for reset, interrupts, and subroutines.
Table 6-8. Interrupt, Return, and Reset Cycles and Length
Execution Time Length of Instruction
Action (MCLK Cycles) (Words)
Return from interrupt RETI 5 1
Return from subroutine RET 4 1
Interrupt request service (cycles needed before first 6 –
instruction)
WDT reset 4 –
Reset (RST/NMI) 4 –
6.5.1.5.2 Format II (Single-Operand) Instruction Cycles and Lengths
Table 6-9 lists the length and the CPU cycles for all addressing modes of the MSP430 single-operand
instructions.
Table 6-9. MSP430 Format II Instruction Cycles and Length
No. of Cycles Length of
Addressing Mode Example
RRA, RRC Instruction
PUSH CALL
SWPB, SXT
Rn 1 3 4 1 SWPB R5
@Rn 3 3 4 1 RRC @R9
@Rn+ 3 3 4 1 SWPB @R10+
#N N/A 3 4 2 CALL #LABEL
X(Rn) 4 4 5 2 CALL 2(R7)
EDE 4 4 5 2 PUSH EDE
&EDE 4 4 6 2 SXT &EDE
216 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MSP430 and MSP430X Instructions
6.5.1.5.3 Jump Instructions Cycles and Lengths
All jump instructions require one code word and take two CPU cycles to execute, regardless of whether
the jump is taken or not.
6.5.1.5.4 Format I (Double-Operand) Instruction Cycles and Lengths
Table 6-10 lists the length and CPU cycles for all addressing modes of the MSP430 Format I instructions.
Table 6-10. MSP430 Format I Instructions Cycles and Length
Addressing Mode Length of
No. of Cycles Example
Instruction
Source Destination
Rn Rm 1 1 MOV R5,R8
PC 3 1 BR R9
x(Rm) 4(1) 2ADD R5,4(R6)
EDE 4(1) 2XOR R8,EDE
&EDE 4(1) 2MOV R5,&EDE
@Rn Rm 2 1 AND @R4,R5
PC 4 1 BR @R8
x(Rm) 5(1) 2XOR @R5,8(R6)
EDE 5(1) 2MOV @R5,EDE
&EDE 5(1) 2XOR @R5,&EDE
@Rn+ Rm 2 1 ADD @R5+,R6
PC 4 1 BR @R9+
x(Rm) 5(1) 2XOR @R5,8(R6)
EDE 5(1) 2MOV @R9+,EDE
&EDE 5(1) 2MOV @R9+,&EDE
#N Rm 2 2 MOV #20,R9
PC 3 2 BR #2AEh
x(Rm) 5(1) 3MOV #0300h,0(SP)
EDE 5(1) 3ADD #33,EDE
&EDE 5(1) 3ADD #33,&EDE
x(Rn) Rm 3 2 MOV 2(R5),R7
PC 5 2 BR 2(R6)
TONI 6(1) 3MOV 4(R7),TONI
x(Rm) 6(1) 3ADD 4(R4),6(R9)
&TONI 6(1) 3MOV 2(R4),&TONI
EDE Rm 3 2 AND EDE,R6
PC 5 2 BR EDE
TONI 6(1) 3CMP EDE,TONI
x(Rm) 6(1) 3MOV EDE,0(SP)
&TONI 6(1) 3MOV EDE,&TONI
&EDE Rm 3 2 MOV &EDE,R8
PC 5 2 BR &EDE
TONI 6(1) 3MOV &EDE,TONI
x(Rm) 6(1) 3MOV &EDE,0(SP)
&TONI 6(1) 3MOV &EDE,&TONI
(1) MOV, BIT, and CMP instructions execute in one fewer cycle.
217
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

15 12 11 10 7 6 5 4 3 0
0001 1 Source bits 19:16 A/L 0 0 Destination bits 19:16
15 12 11 10 9 8 7 6 5 4 3 0
0001 1 00 ZC # A/L 0 0 (n-1)/Rn
MSP430 and MSP430X Instructions
www.ti.com
6.5.2 MSP430X Extended Instructions
The extended MSP430X instructions give the MSP430X CPU full access to its 20-bit address space. Most
MSP430X instructions require an additional word of op-code called the extension word. Some extended
instructions do not require an additional word and are noted in the instruction description. All addresses,
indexes, and immediate numbers have 20-bit values when preceded by the extension word.
There are two types of extension words:
• Register or register mode for Format I instructions and register mode for Format II instructions
• Extension word for all other address mode combinations
6.5.2.1 Register Mode Extension Word
The register mode extension word is shown in Figure 6-25 and described in Table 6-11. An example is
shown in Figure 6-27.
Figure 6-25. Extension Word for Register Modes
Table 6-11. Description of the Extension Word Bits for Register Mode
Bit Description
15:11 Extension word op-code. Op-codes 1800h to 1FFFh are extension words.
10:9 Reserved
ZC Zero carry
0 The executed instruction uses the status of the carry bit C.
1 The executed instruction uses the carry bit as 0. The carry bit is defined by the result of the final operation after
instruction execution.
# Repetition
0 The number of instruction repetitions is set by extension word bits 3:0.
1 The number of instruction repetitions is defined by the value of the four LSBs of Rn. See description for bits 3:0.
A/L Data length extension. Together with the B/W bits of the following MSP430 instruction, the AL bit defines the used data
length of the instruction.
A/L B/W Comment
0 0 Reserved
0 1 20-bit address word
1 0 16-bit word
1 1 8-bit byte
5:4 Reserved
3:0 Repetition count
# = 0 These four bits set the repetition count n. These bits contain n – 1.
# = 1 These four bits define the CPU register whose bits 3:0 set the number of repetitions. Rn.3:0 contain n – 1.
6.5.2.2 Non-Register Mode Extension Word
The extension word for non-register modes is shown in Figure 6-26 and described in Table 6-12. An
example is shown in Figure 6-28.
Figure 6-26. Extension Word for Non-Register Modes
218 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0 0 1 1 00 ZC # A/L Rsvd (n-1)/Rn
Op-code Rsrc Ad B/W As Rdst
XORX.A R9,R8
0 0 0 1 1 0 0 0 0 0 0
14(XOR) 90 1 0 8(R8)
XORX instruction Source R9
0: Use Carry
1: Repetition count
in bits 3:0
01:Address word
Destination
register mode Source
register mode
Destination R8
www.ti.com
MSP430 and MSP430X Instructions
Table 6-12. Description of Extension Word Bits for Non-Register Modes
Bit Description
15:11 Extension word op-code. Op-codes 1800h to 1FFFh are extension words.
Source Bits The four MSBs of the 20-bit source. Depending on the source addressing mode, these four MSBs may belong to an
19:16 immediate operand, an index, or to an absolute address.
A/L Data length extension. Together with the B/W bits of the following MSP430 instruction, the AL bit defines the used
data length of the instruction.
A/L B/W Comment
0 0 Reserved
0 1 20-bit address word
1 0 16-bit word
1 1 8-bit byte
5:4 Reserved
Destination The four MSBs of the 20-bit destination. Depending on the destination addressing mode, these four MSBs may
Bits 19:16 belong to an index or to an absolute address.
NOTE: B/W and A/L bit settings for SWPBX and SXTX
A/L B/W
0 0 SWPBX.A, SXTX.A
0 1 N/A
1 0 SWPB.W, SXTX.W
1 1 N/A
Figure 6-27. Example for Extended Register or Register Instruction
219
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
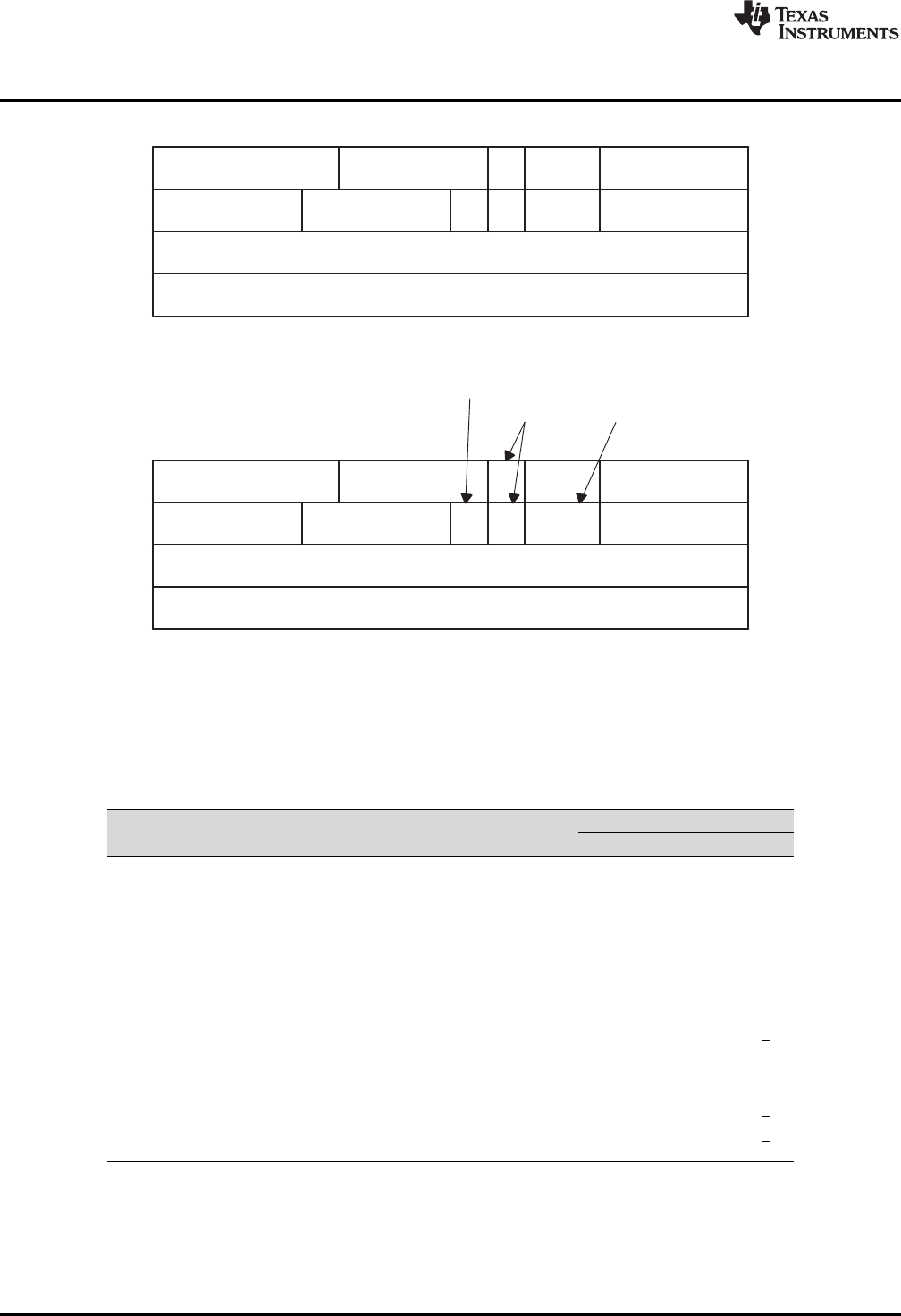
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0 0 1 1 Source 19:16 A/L Rsvd Destination 19:16
Op-code Rsrc Ad B/W As Rdst
XORX.A #12345h,45678h(R15)
0 0 0 1 1 1 0 0 4
14 (XOR) 0 (PC) 1 1 3 15 (R15)
18xx extension word 12345h
@PC+
X(Rn)
Source 15:0
Destination 15:0
Immediate operand LSBs: 2345h
Index destination LSBs: 5678h
01: Address
word
MSP430 and MSP430X Instructions
www.ti.com
Figure 6-28. Example for Extended Immediate or Indexed Instruction
6.5.2.3 Extended Double-Operand (Format I) Instructions
All 12 double-operand instructions have extended versions as listed in Table 6-13.
Table 6-13. Extended Double-Operand Instructions
Status Bits(1)
Mnemonic Operands Operation V N Z C
src,dst src →dst – – – –
MOVX(.B,.A)
src,dst src + dst →dst * * * *
ADDX(.B,.A)
src,dst src + dst + C →dst * * * *
ADDCX(.B,.A)
src,dst dst + .not.src + 1 →dst * * * *
SUBX(.B,.A)
src,dst dst + .not.src + C →dst * * * *
SUBCX(.B,.A)
src,dst dst – src * * * *
CMPX(.B,.A)
src,dst src + dst + C →dst (decimal) * * * *
DADDX(.B,.A)
src,dst src .and. dst 0 * * Z
BITX(.B,.A)
src,dst .not.src .and. dst →dst – – – –
BICX(.B,.A)
src,dst src .or. dst →dst – – – –
BISX(.B,.A)
src,dst src .xor. dst →dst * * * Z
XORX(.B,.A)
src,dst src .and. dst →dst 0 * * Z
ANDX(.B,.A)
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
220 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
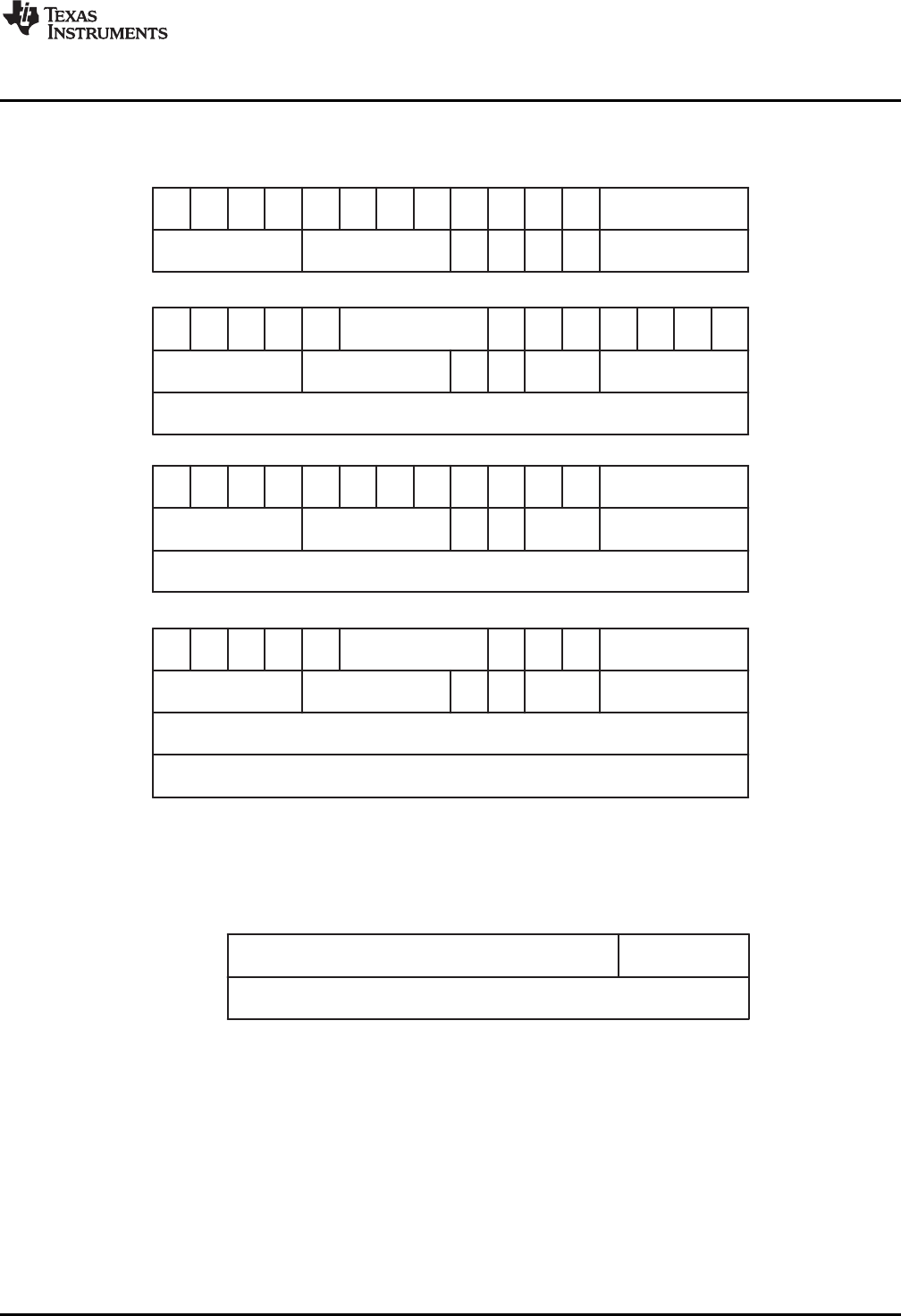
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 19:16
Operand LSBs 15:0
0.......................................................................................
Address
Address+2
15 14 13 12 11 10 9 8 7 6 5 4 3 0
0 0 0 1 1 0 A/L n-1/Rn
Op-code B/W dst
0 ZC # 0 0
src 0 0 0
0 0 0 1 1 A/L
Op-code B/W dst
src.15:0
src.19:16 0 0
src Ad As
0 0 0 1 1 A/L
Op-code B/W dst
dst.15:0
0 0
src Ad
0 0 0 1 1 A/L dst.19:16
Op-code B/W dst
src.15:0
0 0
src Ad
0 0 0 0
dst.19:16
0 0 0 0
As
src.19:16
As
dst.15:0
www.ti.com
MSP430 and MSP430X Instructions
The four possible addressing combinations for the extension word for Format I instructions are shown in
Figure 6-29.
Figure 6-29. Extended Format I Instruction Formats
If the 20-bit address of a source or destination operand is located in memory, not in a CPU register, then
two words are used for this operand as shown in Figure 6-30.
Figure 6-30. 20-Bit Addresses in Memory
221
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
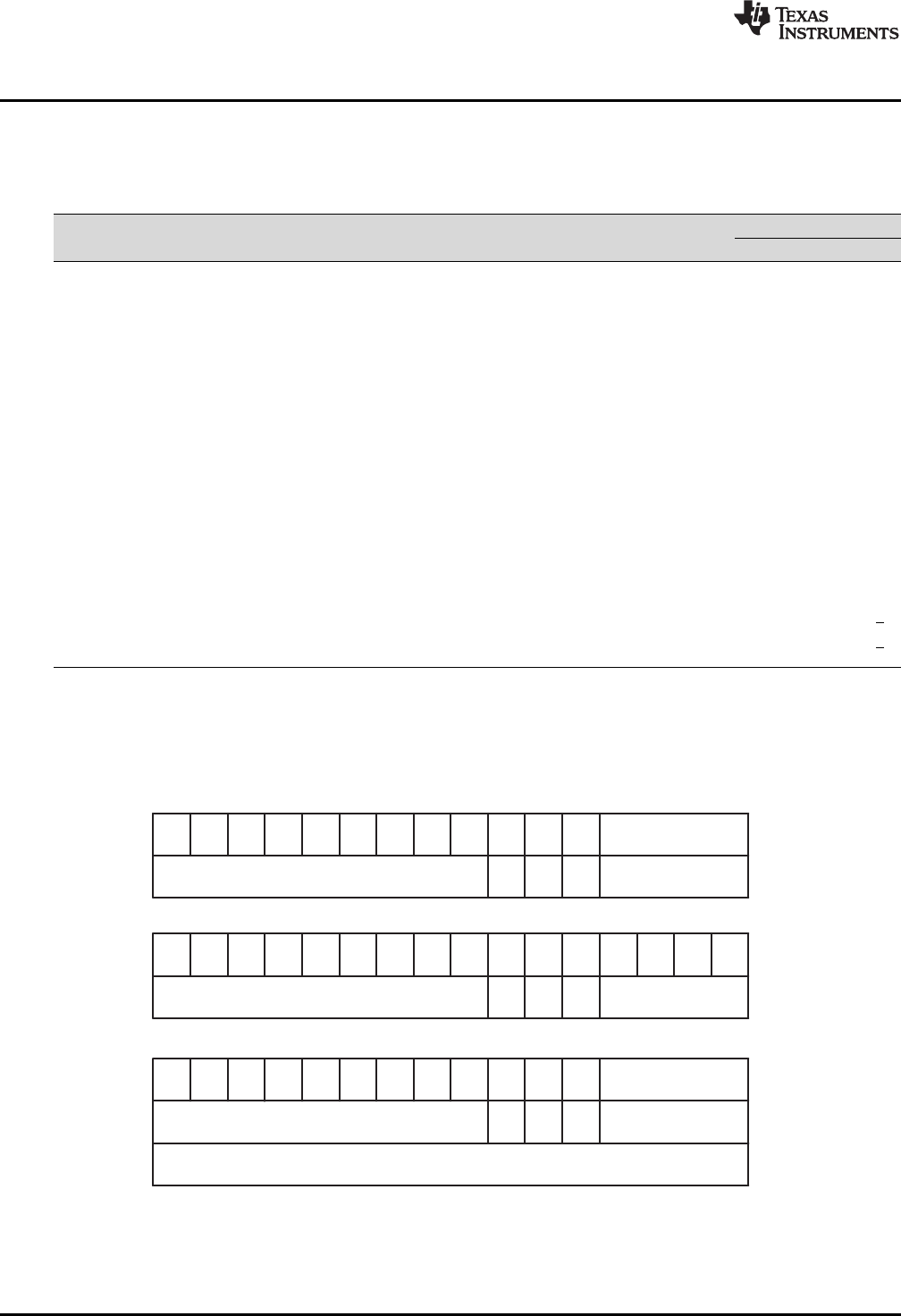
15 14 13 12 11 10 9 8 7 6 5 4 3 0
0 0 0 1 1 0 A/L n-1/Rn
Op-code B/W dst
0 ZC # 0 0
0 0 0 1 1 A/L
Op-code B/W dst
0 0
0 0 0 1 1 A/L
Op-code B/W dst
dst.15:0
0 0
0 0 0 0
dst.19:160 0 0 0
00 0 0
0 0
1 x
x 1
MSP430 and MSP430X Instructions
www.ti.com
6.5.2.4 Extended Single-Operand (Format II) Instructions
Extended MSP430X Format II instructions are listed in Table 6-14.
Table 6-14. Extended Single-Operand Instructions
Status Bits(1)
Mnemonic Operands Operation n V N Z C
dst Call indirect to subroutine (20-bit address) – – – –
CALLA
#n,Rdst Pop n 20-bit registers from stack 1 to 16 – – – –
POPM.A
#n,Rdst Pop n 16-bit registers from stack 1 to 16 – – – –
POPM.W
#n,Rsrc Push n 20-bit registers to stack 1 to 16 – – – –
PUSHM.A
#n,Rsrc Push n 16-bit registers to stack 1 to 16 – – – –
PUSHM.W
src Push 8-, 16-, or 20-bit source to stack – – – –
PUSHX(.B,.A)
#n,Rdst Rotate right Rdst n bits through carry (16-, 20-bit register) 1 to 4 0 * * *
RRCM(.A)
#n,Rdst Rotate right Rdst n bits unsigned (16-, 20-bit register) 1 to 4 0 * * *
RRUM(.A)
#n,Rdst Rotate right Rdst n bits arithmetically (16-, 20-bit register) 1 to 4 0 * * *
RRAM(.A)
#n,Rdst Rotate left Rdst n bits arithmetically (16-, 20-bit register) 1 to 4 * * * *
RLAM(.A)
dst Rotate right dst through carry (8-, 16-, 20-bit data) 1 0 * * *
RRCX(.B,.A)
Rdst Rotate right dst unsigned (8-, 16-, 20-bit) 1 0 * * *
RRUX(.B,.A)
dst Rotate right dst arithmetically 1 0 * * *
RRAX(.B,.A)
dst Exchange low byte with high byte 1 – – – –
SWPBX(.A)
Rdst Bit7 →bit8 ... bit19 1 0 * * Z
SXTX(.A)
dst Bit7 →bit8 ... MSB 1 0 * * Z
SXTX(.A)
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
The three possible addressing mode combinations for Format II instructions are shown in Figure 6-31.
Figure 6-31. Extended Format II Instruction Format
222 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
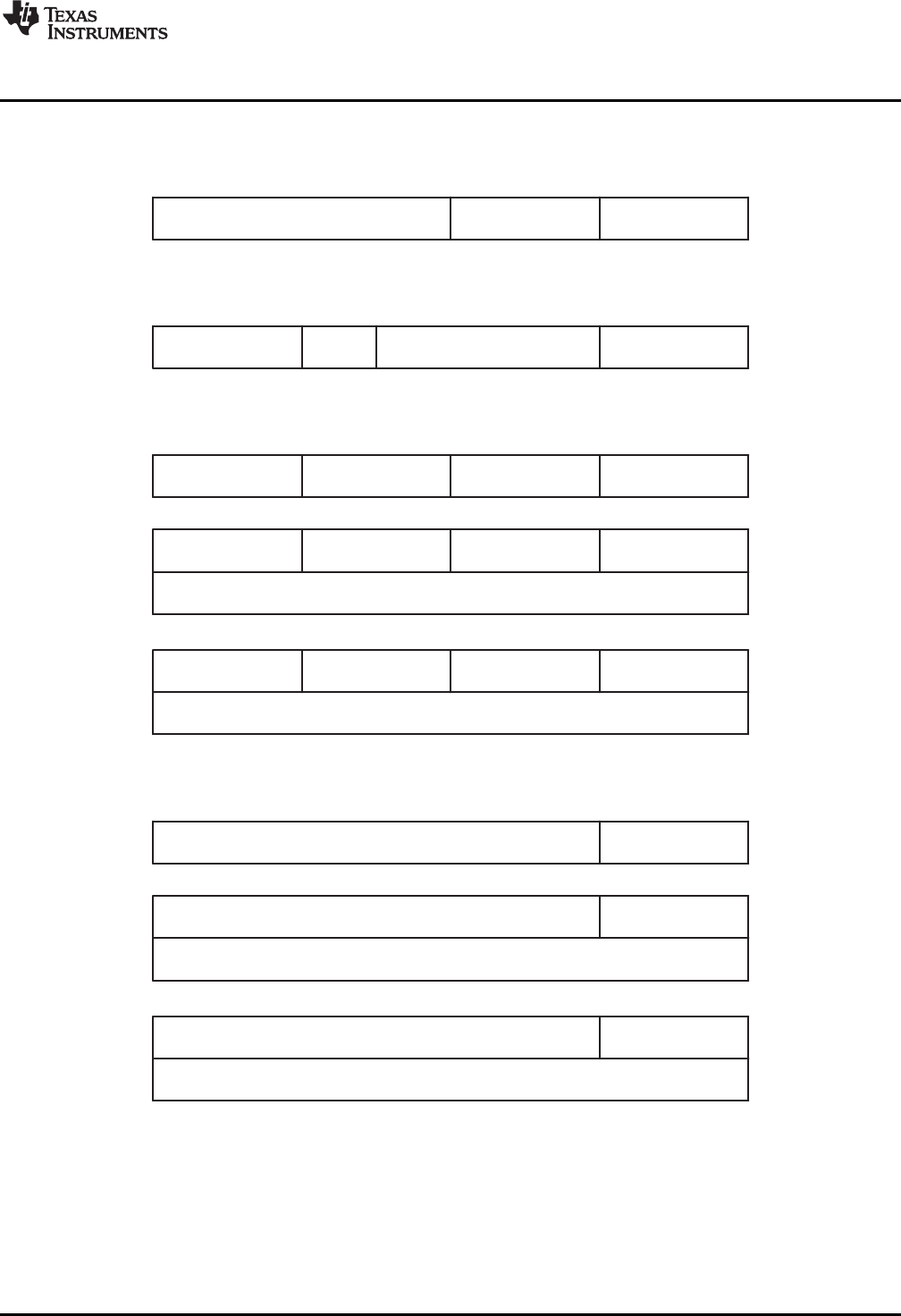
15 4 3 0
Op-code Rdst
Op-code Rdst
Op-code #imm/ix/abs19:16
index15:0
#imm15:0 / index15:0 / &abs15:0
15 12 11 8 7 4 3 0
C Rsrc Op-code 0(PC)
C #imm/abs19:16 Op-code 0(PC)
C Rsrc Op-code 0(PC)
#imm15:0 / &abs15:0
index15:0
15 12 11 10 9 4 3 0
C n-1 Op-code Rdst
15 8 7 4 3 0
Op-code n-1 Rdst - n+1
www.ti.com
MSP430 and MSP430X Instructions
6.5.2.4.1 Extended Format II Instruction Format Exceptions
Exceptions for the Format II instruction formats are shown in Figure 6-32 through Figure 6-35.
Figure 6-32. PUSHM and POPM Instruction Format
Figure 6-33. RRCM, RRAM, RRUM, and RLAM Instruction Format
Figure 6-34. BRA Instruction Format
Figure 6-35. CALLA Instruction Format
223
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MSP430 and MSP430X Instructions
www.ti.com
6.5.2.5 Extended Emulated Instructions
The extended instructions together with the constant generator form the extended emulated instructions.
Table 6-15 lists the emulated instructions.
Table 6-15. Extended Emulated Instructions
Instruction Explanation Emulation
Add carry to dst
ADCX(.B,.A) dst ADDCX(.B,.A) #0,dst
Branch indirect dst
BRA dst MOVA dst,PC
Return from subroutine
RETA MOVA @SP+,PC
Clear Rdst
CLRA Rdst MOV #0,Rdst
Clear dst
CLRX(.B,.A) dst MOVX(.B,.A) #0,dst
Add carry to dst decimally
DADCX(.B,.A) dst DADDX(.B,.A) #0,dst
Decrement dst by 1
DECX(.B,.A) dst SUBX(.B,.A) #1,dst
Decrement Rdst by 2
DECDA Rdst SUBA #2,Rdst
Decrement dst by 2
DECDX(.B,.A) dst SUBX(.B,.A) #2,dst
Increment dst by 1
INCX(.B,.A) dst ADDX(.B,.A) #1,dst
Increment Rdst by 2
INCDA Rdst ADDA #2,Rdst
Increment dst by 2
INCDX(.B,.A) dst ADDX(.B,.A) #2,dst
Invert dst
INVX(.B,.A) dst XORX(.B,.A) #-1,dst
Shift left dst arithmetically
RLAX(.B,.A) dst ADDX(.B,.A) dst,dst
Shift left dst logically through carry
RLCX(.B,.A) dst ADDCX(.B,.A) dst,dst
Subtract carry from dst
SBCX(.B,.A) dst SUBCX(.B,.A) #0,dst
Test Rdst (compare with 0)
TSTA Rdst CMPA #0,Rdst
Test dst (compare with 0)
TSTX(.B,.A) dst CMPX(.B,.A) #0,dst
Pop to dst
POPX dst MOVX(.B, .A) @SP+,dst
224 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MSP430 and MSP430X Instructions
6.5.2.6 MSP430X Address Instructions
MSP430X address instructions are instructions that support 20-bit operands but have restricted
addressing modes. The addressing modes are restricted to the Register mode and the Immediate mode,
except for the MOVA instruction as listed in Table 6-16. Restricting the addressing modes removes the
need for the additional extension-word op-code improving code density and execution time. Address
instructions should be used any time an MSP430X instruction is needed with the corresponding restricted
addressing mode.
Table 6-16. Address Instructions, Operate on 20-Bit Register Data
Status Bits(1)
Mnemonic Operands Operation V N Z C
Add source to destination register * * * *
ADDA Rsrc,Rdst
#imm20,Rdst
Move source to destination – – – –
MOVA Rsrc,Rdst
#imm20,Rdst
z16(Rsrc),Rdst
EDE,Rdst
&abs20,Rdst
@Rsrc,Rdst
@Rsrc+,Rdst
Rsrc,z16(Rdst)
Rsrc,&abs20
Compare source to destination register * * * *
CMPA Rsrc,Rdst
#imm20,Rdst
Subtract source from destination register * * * *
SUBA Rsrc,Rdst
#imm20,Rdst
(1) * = Status bit is affected.
– = Status bit is not affected.
0 = Status bit is cleared.
1 = Status bit is set.
225
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MSP430 and MSP430X Instructions
www.ti.com
6.5.2.7 MSP430X Instruction Execution
The number of CPU clock cycles required for an MSP430X instruction depends on the instruction format
and the addressing modes used, not the instruction itself. The number of clock cycles refers to MCLK.
6.5.2.7.1 MSP430X Format II (Single-Operand) Instruction Cycles and Lengths
Table 6-17 lists the length and the CPU cycles for all addressing modes of the MSP430X extended single-
operand instructions.
Table 6-17. MSP430X Format II Instruction Cycles and Length
Execution Cycles, Length of Instruction (Words)
Instruction Rn @Rn @Rn+ #N X(Rn) EDE &EDE
RRAM n, 1 – – – – – –
RRCM n, 1 – – – – – –
RRUM n, 1 – – – – – –
RLAM n, 1 – – – – – –
PUSHM 2+n, 1 – – – – – –
PUSHM.A 2+2n, 1 – – – – – –
POPM 2+n, 1 – – – – – –
POPM.A 2+2n, 1 – – – – – –
CALLA 5, 1 6, 1 6, 1 5, 2 5(1), 2 7, 2 7, 2
RRAX(.B) 1+n, 2 4, 2 4, 2 – 5, 3 5, 3 5, 3
RRAX.A 1+n, 2 6, 2 6, 2 – 7, 3 7, 3 7, 3
RRCX(.B) 1+n, 2 4, 2 4, 2 – 5, 3 5, 3 5, 3
RRCX.A 1+n, 2 6, 2 6, 2 – 7, 3 7, 3 7, 3
PUSHX(.B) 4, 2 4, 2 4, 2 4, 3 5(1), 3 5, 3 5, 3
PUSHX.A 5, 2 6, 2 6, 2 5, 3 7(1), 3 7, 3 7, 3
POPX(.B) 3, 2 – – – 5, 3 5, 3 5, 3
POPX.A 4, 2 – – – 7, 3 7, 3 7, 3
(1) Add one cycle when Rn = SP
226 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MSP430 and MSP430X Instructions
6.5.2.7.2 MSP430X Format I (Double-Operand) Instruction Cycles and Lengths
Table 6-18 lists the length and CPU cycles for all addressing modes of the MSP430X extended Format I
instructions.
Table 6-18. MSP430X Format I Instruction Cycles and Length
Length of
Addressing Mode No. of Cycles Instruction Examples
Source Destination .B/.W .A .B/.W/.A
Rn Rm(1) 2 2 2 BITX.B R5,R8
PC 4 4 2 ADDX R9,PC
x(Rm) 5(2) 7(3) 3ANDX.A R5,4(R6)
EDE 5(2) 7(3) 3XORX R8,EDE
&EDE 5(2) 7(3) 3BITX.W R5,&EDE
@Rn Rm 3 4 2 BITX @R5,R8
PC 5 6 2 ADDX @R9,PC
x(Rm) 6(2) 9(3) 3ANDX.A @R5,4(R6)
EDE 6(2) 9(3) 3XORX @R8,EDE
&EDE 6(2) 9(3) 3BITX.B @R5,&EDE
@Rn+ Rm 3 4 2 BITX @R5+,R8
PC 5 6 2 ADDX.A @R9+,PC
x(Rm) 6(2) 9(3) 3ANDX @R5+,4(R6)
EDE 6(2) 9(3) 3XORX.B @R8+,EDE
&EDE 6(2) 9(3) 3BITX @R5+,&EDE
#N Rm 3 3 3 BITX #20,R8
PC(4) 4 4 3 ADDX.A #FE000h,PC
x(Rm) 6(2) 8(3) 4ANDX #1234,4(R6)
EDE 6(2) 8(3) 4XORX #A5A5h,EDE
&EDE 6(2) 8(3) 4BITX.B #12,&EDE
x(Rn) Rm 4 5 3 BITX 2(R5),R8
PC(4) 6 7 3 SUBX.A 2(R6),PC
TONI 7(2) 10(3) 4ANDX 4(R7),4(R6)
x(Rm) 7(2) 10(3) 4XORX.B 2(R6),EDE
&TONI 7(2) 10(3) 4BITX 8(SP),&EDE
EDE Rm 4 5 3 BITX.B EDE,R8
PC(4) 6 7 3 ADDX.A EDE,PC
TONI 7(2) 10(3) 4ANDX EDE,4(R6)
x(Rm) 7(2) 10(3) 4ANDX EDE,TONI
&TONI 7(2) 10(3) 4BITX EDE,&TONI
&EDE Rm 4 5 3 BITX &EDE,R8
PC(4) 6 7 3 ADDX.A &EDE,PC
TONI 7(2) 10(3) 4ANDX.B &EDE,4(R6)
x(Rm) 7(2) 10(3) 4XORX &EDE,TONI
&TONI 7(2) 10(3) 4BITX &EDE,&TONI
(1) Repeat instructions require n + 1 cycles, where n is the number of times the instruction is executed.
(2) Reduce the cycle count by one for MOV, BIT, and CMP instructions.
(3) Reduce the cycle count by two for MOV, BIT, and CMP instructions.
(4) Reduce the cycle count by one for MOV, ADD, and SUB instructions.
227
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MSP430 and MSP430X Instructions
www.ti.com
6.5.2.7.3 MSP430X Address Instruction Cycles and Lengths
Table 6-19 lists the length and the CPU cycles for all addressing modes of the MSP430X address
instructions.
Table 6-19. Address Instruction Cycles and Length
Execution Time Length of Instruction
Addressing Mode (MCLK Cycles) (Words)
Example
CMPA CMPA
MOVA
Source Destination ADDA MOVA ADDA
BRA SUBA SUBA
Rn Rn 1 1 1 1 CMPA R5,R8
PC 3 3 1 1 SUBA R9,PC
x(Rm) 4 – 2 – MOVA R5,4(R6)
EDE 4 – 2 – MOVA R8,EDE
&EDE 4 – 2 – MOVA R5,&EDE
@Rn Rm 3 – 1 – MOVA @R5,R8
PC 5 – 1 – MOVA @R9,PC
@Rn+ Rm 3 – 1 – MOVA @R5+,R8
PC 5 – 1 – MOVA @R9+,PC
#N Rm 2 3 2 2 CMPA #20,R8
PC 3 3 2 2 SUBA #FE000h,PC
x(Rn) Rm 4 – 2 – MOVA 2(R5),R8
PC 6 – 2 – MOVA 2(R6),PC
EDE Rm 4 – 2 – MOVA EDE,R8
PC 6 – 2 – MOVA EDE,PC
&EDE Rm 4 – 2 – MOVA &EDE,R8
PC 6 – 2 – MOVA &EDE,PC
228 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
6.6 Instruction Set Description
Table 6-20 shows all available instructions:
Table 6-20. Instruction Map of MSP430X
000 040 080 0C0 100 140 180 1C0 200 240 280 2C0 300 340 380 3C0
0xxx MOVA, CMPA, ADDA, SUBA, RRCM, RRAM, RLAM, RRUM
RRC. SWP RRA. PUS PUS CALL
10xx RRC RRA SXT CALL RETI
B B B H H.B A
14xx PUSHM.A, POPM.A, PUSHM.W, POPM.W
18xx Extension word for Format I and Format II instructions
1Cxx
20xx JNE, JNZ
24xx JEQ, JZ
28xx JNC
2Cxx JC
30xx JN
34xx JGE
38xx JL
3Cxx JMP
4xxx MOV, MOV.B
5xxx ADD, ADD.B
6xxx ADDC, ADDC.B
7xxx SUBC, SUBC.B
8xxx SUB, SUB.B
9xxx CMP, CMP.B
Axxx DADD, DADD.B
Bxxx BIT, BIT.B
Cxxx BIC, BIC.B
Dxxx BIS, BIS.B
Exxx XOR, XOR.B
Fxxx AND, AND.B
229
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.1 Extended Instruction Binary Descriptions
Detailed MSP430X instruction binary descriptions are shown in the following tables.
Instruction Instruction
src or data.19:16 dst
Group Identifier
Instruction
15 12 11 8 7 4 3 0
MOVA 0 0 0 0 src 0 0 0 0 dst MOVA @Rsrc,Rdst
0 0 0 0 src 0 0 0 1 dst MOVA @Rsrc+,Rdst
0 0 0 0 &abs.19:16 0 0 1 0 dst MOVA &abs20,Rdst
&abs.15:0
0 0 0 0 src 0 0 1 1 dst MOVA z16(Rsrc),Rdst
x.15:0
0 0 0 0 src 0 1 1 0 &abs.19:16 MOVA Rsrc,&abs20
&abs.15:0
0 0 0 0 src 0 1 1 1 dst MOVA Rsrc,z16(Rdst)
x.15:0
0 0 0 0 imm.19:16 1 0 0 0 dst MOVA #imm20,Rdst
imm.15:0
CMPA 0 0 0 0 imm.19:16 1 0 0 1 dst CMPA #imm20,Rdst
imm.15:0
ADDA 0 0 0 0 imm.19:16 1 0 1 0 dst ADDA #imm20,Rdst
imm.15:0
SUBA 0 0 0 0 imm.19:16 1 0 1 1 dst SUBA #imm20,Rdst
imm.15:0
MOVA 0 0 0 0 src 1 1 0 0 dst MOVA Rsrc,Rdst
CMPA 0 0 0 0 src 1 1 0 1 dst CMPA Rsrc,Rdst
ADDA 0 0 0 0 src 1 1 1 0 dst ADDA Rsrc,Rdst
SUBA 0 0 0 0 src 1 1 1 1 dst SUBA Rsrc,Rdst
Instruction Instruction
Bit Loc. Inst. ID dst
Group Identifier
Instruction
15 12 11 10 9 8 7 4 3 0
RRCM.A 0 0 0 0 n – 1 0 0 0 1 0 0 dst RRCM.A #n,Rdst
RRAM.A 0 0 0 0 n – 1 0 1 0 1 0 0 dst RRAM.A #n,Rdst
RLAM.A 0 0 0 0 n – 1 1 0 0 1 0 0 dst RLAM.A #n,Rdst
RRUM.A 0 0 0 0 n – 1 1 1 0 1 0 0 dst RRUM.A #n,Rdst
RRCM.W 0 0 0 0 n – 1 0 0 0 1 0 1 dst RRCM.W #n,Rdst
RRAM.W 0 0 0 0 n – 1 0 1 0 1 0 1 dst RRAM.W #n,Rdst
RLAM.W 0 0 0 0 n – 1 1 0 0 1 0 1 dst RLAM.W #n,Rdst
RRUM.W 0 0 0 0 n – 1 1 1 0 1 0 1 dst RRUM.W #n,Rdst
230 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
Instruction Identifier dst
Instruction 15 12 11 8 7 6 5 4 3 0
RETI 0001001100000000
CALLA 000100110100 dst CALLA Rdst
000100110101 dst CALLA x(Rdst)
x.15:0
000100110110 dst CALLA @Rdst
000100110111 dst CALLA @Rdst+
0 0 0 1 0 0 1 1 1 0 0 0 &abs.19:16 CALLA &abs20
&abs.15:0
000100111001 x.19:16 CALLA EDE
x.15:0 CALLA x(PC)
000100111011 imm.19:16 CALLA #imm20
imm.15:0
Reserved 0 0 0 1 0 0 1 1 1 0 1 0 x x x x
Reserved 0 0 0 1 0 0 1 1 1 1 x x x x x x
PUSHM.A 0 0 0 1 0 1 0 0 n – 1 dst PUSHM.A #n,Rdst
PUSHM.W 0 0 0 1 0 1 0 1 n – 1 dst PUSHM.W #n,Rdst
POPM.A 0 0 0 1 0 1 1 0 n – 1 dst – n + 1 POPM.A #n,Rdst
POPM.W 0 0 0 1 0 1 1 1 n – 1 dst – n + 1 POPM.W #n,Rdst
231
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.1 ADC
* ADC[.W] Add carry to destination
* ADC.B Add carry to destination
Syntax ADC dst or ADC.W dst
ADC.B dst
Operation dst + C →dst
ADDC #0,dst
Emulation
ADDC.B #0,dst
Description The carry bit (C) is added to the destination operand. The previous contents of the
destination are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Set if dst was incremented from 0FFFFh to 0000, reset otherwise
Set if dst was incremented from 0FFh to 00, reset otherwise
V: Set if an arithmetic overflow occurs, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 16-bit counter pointed to by R13 is added to a 32-bit counter pointed to by R12.
ADD @R13,0(R12) ; Add LSDs
ADC 2(R12) ; Add carry to MSD
Example The 8-bit counter pointed to by R13 is added to a 16-bit counter pointed to by R12.
ADD.B @R13,0(R12) ; Add LSDs
ADC.B 1(R12) ; Add carry to MSD
233
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.2.2 ADD
ADD[.W] Add source word to destination word
ADD.B Add source byte to destination byte
Syntax ADD src,dst or ADD.W src,dst
ADD.B src,dst
Operation src + dst →dst
Description The source operand is added to the destination operand. The previous content of the
destination is lost.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Ten is added to the 16-bit counter CNTR located in lower 64 K.
ADD.W #10,&CNTR ; Add 10 to 16-bit counter
Example A table word pointed to by R5 (20-bit address in R5) is added to R6. The jump to label
TONI is performed on a carry.
ADD.W @R5,R6 ; Add table word to R6. R6.19:16 = 0
JC TONI ; Jump if carry
... ; No carry
Example A table byte pointed to by R5 (20-bit address) is added to R6. The jump to label TONI is
performed if no carry occurs. The table pointer is auto-incremented by 1. R6.19:8 = 0
ADD.B @R5+,R6 ; Add byte to R6. R5 + 1. R6: 000xxh
JNC TONI ; Jump if no carry
... ; Carry occurred
234 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.3 ADDC
ADDC[.W] Add source word and carry to destination word
ADDC.B Add source byte and carry to destination byte
Syntax ADDC src,dst or ADDC.W src,dst
ADDC.B src,dst
Operation src + dst + C →dst
Description The source operand and the carry bit C are added to the destination operand. The
previous content of the destination is lost.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Constant value 15 and the carry of the previous instruction are added to the 16-bit
counter CNTR located in lower 64 K.
ADDC.W #15,&CNTR ; Add 15 + C to 16-bit CNTR
Example A table word pointed to by R5 (20-bit address) and the carry C are added to R6. The
jump to label TONI is performed on a carry. R6.19:16 = 0
ADDC.W @R5,R6 ; Add table word + C to R6
JC TONI ; Jump if carry
... ; No carry
Example A table byte pointed to by R5 (20-bit address) and the carry bit C are added to R6. The
jump to label TONI is performed if no carry occurs. The table pointer is auto-incremented
by 1. R6.19:8 = 0
ADDC.B @R5+,R6 ; Add table byte + C to R6. R5 + 1
JNC TONI ; Jump if no carry
... ; Carry occurred
235
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.2.4 AND
AND[.W] Logical AND of source word with destination word
AND.B Logical AND of source byte with destination byte
Syntax AND src,dst or AND.W src,dst
AND.B src,dst
Operation src .and. dst →dst
Description The source operand and the destination operand are logically ANDed. The result is
placed into the destination. The source operand is not affected.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if the result is not zero, reset otherwise. C = (.not. Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The bits set in R5 (16-bit data) are used as a mask (AA55h) for the word TOM located in
the lower 64 K. If the result is zero, a branch is taken to label TONI. R5.19:16 = 0
MOV #AA55h,R5 ; Load 16-bit mask to R5
AND R5,&TOM ; TOM .and. R5 -> TOM
JZ TONI ; Jump if result 0
... ; Result > 0
or shorter:
AND #AA55h,&TOM ; TOM .and. AA55h -> TOM
JZ TONI ; Jump if result 0
Example A table byte pointed to by R5 (20-bit address) is logically ANDed with R6. R5 is
incremented by 1 after the fetching of the byte. R6.19:8 = 0
AND.B @R5+,R6 ; AND table byte with R6. R5 + 1
236 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.5 BIC
BIC[.W] Clear bits set in source word in destination word
BIC.B Clear bits set in source byte in destination byte
Syntax BIC src,dst or BIC.W src,dst
BIC.B src,dst
Operation (.not. src) .and. dst →dst
Description The inverted source operand and the destination operand are logically ANDed. The
result is placed into the destination. The source operand is not affected.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The bits 15:14 of R5 (16-bit data) are cleared. R5.19:16 = 0
BIC #0C000h,R5 ; Clear R5.19:14 bits
Example A table word pointed to by R5 (20-bit address) is used to clear bits in R7. R7.19:16 = 0
BIC.W @R5,R7 ; Clear bits in R7 set in @R5
Example A table byte pointed to by R5 (20-bit address) is used to clear bits in Port1.
BIC.B @R5,&P1OUT ; Clear I/O port P1 bits set in @R5
237
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.6 BIS
BIS[.W] Set bits set in source word in destination word
BIS.B Set bits set in source byte in destination byte
Syntax BIS src,dst or BIS.W src,dst
BIS.B src,dst
Operation src .or. dst →dst
Description The source operand and the destination operand are logically ORed. The result is placed
into the destination. The source operand is not affected.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Bits 15 and 13 of R5 (16-bit data) are set to one. R5.19:16 = 0
BIS #A000h,R5 ; Set R5 bits
Example A table word pointed to by R5 (20-bit address) is used to set bits in R7. R7.19:16 = 0
BIS.W @R5,R7 ; Set bits in R7
Example A table byte pointed to by R5 (20-bit address) is used to set bits in Port1. R5 is
incremented by 1 afterwards.
BIS.B @R5+,&P1OUT ; Set I/O port P1 bits. R5 + 1
238 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.7 BIT
BIT[.W] Test bits set in source word in destination word
BIT.B Test bits set in source byte in destination byte
Syntax BIT src,dst or BIT.W src,dst
BIT.B src,dst
Operation src .and. dst
Description The source operand and the destination operand are logically ANDed. The result affects
only the status bits in SR.
Register mode: the register bits Rdst.19:16 (.W) resp. Rdst. 19:8 (.B) are not cleared!
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if the result is not zero, reset otherwise. C = (.not. Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Test if one (or both) of bits 15 and 14 of R5 (16-bit data) is set. Jump to label TONI if this
is the case. R5.19:16 are not affected.
BIT #C000h,R5 ; Test R5.15:14 bits
JNZ TONI ; At least one bit is set in R5
... ; Both bits are reset
Example A table word pointed to by R5 (20-bit address) is used to test bits in R7. Jump to label
TONI if at least one bit is set. R7.19:16 are not affected.
BIT.W @R5,R7 ; Test bits in R7
JC TONI ; At least one bit is set
... ; Both are reset
Example A table byte pointed to by R5 (20-bit address) is used to test bits in output Port1. Jump
to label TONI if no bit is set. The next table byte is addressed.
BIT.B @R5+,&P1OUT ; Test I/O port P1 bits. R5 + 1
JNC TONI ; No corresponding bit is set
... ; At least one bit is set
239
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.8 BR, BRANCH
* BR, Branch to destination in lower 64K address space
BRANCH
BR dst
Syntax
Operation dst →PC
MOV dst,PC
Emulation
Description An unconditional branch is taken to an address anywhere in the lower 64K address
space. All source addressing modes can be used. The branch instruction is a word
instruction.
Status Bits Status bits are not affected.
Example Examples for all addressing modes are given.
BR #EXEC ; Branch to label EXEC or direct branch (for example #0A4h)
; Core instruction MOV @PC+,PC
BR EXEC ; Branch to the address contained in EXEC
; Core instruction MOV X(PC),PC
; Indirect address
BR &EXEC ; Branch to the address contained in absolute
; address EXEC
; Core instruction MOV X(0),PC
; Indirect address
BR R5 ; Branch to the address contained in R5
; Core instruction MOV R5,PC
; Indirect R5
BR @R5 ; Branch to the address contained in the word
; pointed to by R5.
; Core instruction MOV @R5,PC
; Indirect, indirect R5
BR @R5+ ; Branch to the address contained in the word pointed
; to by R5 and increment pointer in R5 afterwards.
; The next time-S/W flow uses R5 pointer-it can
; alter program execution due to access to
; next address in a table pointed to by R5
; Core instruction MOV @R5,PC
; Indirect, indirect R5 with autoincrement
BR X(R5) ; Branch to the address contained in the address
; pointed to by R5 + X (for example table with address
; starting at X). X can be an address or a label
; Core instruction MOV X(R5),PC
; Indirect, indirect R5 + X
240 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.9 CALL
CALL Call a subroutine in lower 64 K
CALL dst
Syntax
Operation dst →tmp 16-bit dst is evaluated and stored
SP – 2 →SP
PC →@SP updated PC with return address to TOS
tmp →PC saved 16-bit dst to PC
Description A subroutine call is made from an address in the lower 64 K to a subroutine address in
the lower 64 K. All seven source addressing modes can be used. The call instruction is a
word instruction. The return is made with the RET instruction.
Status Bits Status bits are not affected.
PC.19:16 cleared (address in lower 64 K)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Examples Examples for all addressing modes are given.
Immediate Mode: Call a subroutine at label EXEC (lower 64 K) or call directly to address.
CALL #EXEC ; Start address EXEC
CALL #0AA04h ; Start address 0AA04h
Symbolic Mode: Call a subroutine at the 16-bit address contained in address EXEC.
EXEC is located at the address (PC + X) where X is within PC ± 32 K.
CALL EXEC ; Start address at @EXEC. z16(PC)
Absolute Mode: Call a subroutine at the 16-bit address contained in absolute address
EXEC in the lower 64 K.
CALL &EXEC ; Start address at @EXEC
Register mode: Call a subroutine at the 16-bit address contained in register R5.15:0.
CALL R5 ; Start address at R5
Indirect Mode: Call a subroutine at the 16-bit address contained in the word pointed to by
register R5 (20-bit address).
CALL @R5 ; Start address at @R5
241
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.10 CLR
* CLR[.W] Clear destination
* CLR.B Clear destination
Syntax CLR dst or CLR.W dst
CLR.B dst
Operation 0→dst
MOV #0,dst
Emulation
MOV.B #0,dst
Description The destination operand is cleared.
Status Bits Status bits are not affected.
Example RAM word TONI is cleared.
CLR TONI ; 0 -> TONI
Example Register R5 is cleared.
CLR R5
Example RAM byte TONI is cleared.
CLR.B TONI ; 0 -> TONI
242 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.11 CLRC
* CLRC Clear carry bit
CLRC
Syntax
Operation 0→C
BIC #1,SR
Emulation
Description The carry bit (C) is cleared. The clear carry instruction is a word instruction.
Status Bits N: Not affected
Z: Not affected
C: Cleared
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 16-bit decimal counter pointed to by R13 is added to a 32-bit counter pointed to by
R12.
CLRC ; C=0: defines start
DADD @R13,0(R12) ; add 16-bit counter to low word of 32-bit counter
DADC 2(R12) ; add carry to high word of 32-bit counter
243
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.12 CLRN
* CLRN Clear negative bit
CLRN
Syntax
Operation 0→N
or
(.NOT.src .AND. dst →dst)
BIC #4,SR
Emulation
Description The constant 04h is inverted (0FFFBh) and is logically ANDed with the destination
operand. The result is placed into the destination. The clear negative bit instruction is a
word instruction.
Status Bits N: Reset to 0
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The negative bit in the SR is cleared. This avoids special treatment with negative
numbers of the subroutine called.
CLRN
CALL SUBR
......
......
SUBR JN SUBRET ; If input is negative: do nothing and return
......
......
......
SUBRET RET
244 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.13 CLRZ
* CLRZ Clear zero bit
CLRZ
Syntax
Operation 0→Z
or
(.NOT.src .AND. dst →dst)
BIC #2,SR
Emulation
Description The constant 02h is inverted (0FFFDh) and logically ANDed with the destination
operand. The result is placed into the destination. The clear zero bit instruction is a word
instruction.
Status Bits N: Not affected
Z: Reset to 0
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The zero bit in the SR is cleared.
CLRZ
Indirect, Auto-Increment mode: Call a subroutine at the 16-bit address contained in the
word pointed to by register R5 (20-bit address) and increment the 16-bit address in R5
afterwards by 2. The next time the software uses R5 as a pointer, it can alter the
program execution due to access to the next word address in the table pointed to by R5.
CALL @R5+ ; Start address at @R5. R5 + 2
Indexed mode: Call a subroutine at the 16-bit address contained in the 20-bit address
pointed to by register (R5 + X); for example, a table with addresses starting at X. The
address is within the lower 64KB. X is within ±32KB.
CALL X(R5) ; Start address at @(R5+X). z16(R5)
245
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.14 CMP
CMP[.W] Compare source word and destination word
CMP.B Compare source byte and destination byte
Syntax CMP src,dst or CMP.W src,dst
CMP.B src,dst
Operation (.not.src) + 1 + dst
or
dst – src
BIC #2,SR
Emulation
Description The source operand is subtracted from the destination operand. This is made by adding
the 1s complement of the source + 1 to the destination. The result affects only the status
bits in SR.
Register mode: the register bits Rdst.19:16 (.W) resp. Rdst. 19:8 (.B) are not cleared.
Status Bits N: Set if result is negative (src > dst), reset if positive (src = dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow).
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Compare word EDE with a 16-bit constant 1800h. Jump to label TONI if EDE equals the
constant. The address of EDE is within PC + 32 K.
CMP #01800h,EDE ; Compare word EDE with 1800h
JEQ TONI ; EDE contains 1800h
... ; Not equal
Example A table word pointed to by (R5 + 10) is compared with R7. Jump to label TONI if R7
contains a lower, signed 16-bit number. R7.19:16 is not cleared. The address of the
source operand is a 20-bit address in full memory range.
CMP.W 10(R5),R7 ; Compare two signed numbers
JL TONI ; R7 < 10(R5)
... ; R7 >= 10(R5)
Example A table byte pointed to by R5 (20-bit address) is compared to the value in output Port1.
Jump to label TONI if values are equal. The next table byte is addressed.
CMP.B @R5+,&P1OUT ; Compare P1 bits with table. R5 + 1
JEQ TONI ; Equal contents
... ; Not equal
246 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.15 DADC
* DADC[.W] Add carry decimally to destination
* DADC.B Add carry decimally to destination
Syntax DADC dst or DADC.W dst
DADC.B dst
Operation dst + C →dst (decimally)
DADD #0,dst
Emulation
DADD.B #0,dst
Description The carry bit (C) is added decimally to the destination.
Status Bits N: Set if MSB is 1
Z: Set if dst is 0, reset otherwise
C: Set if destination increments from 9999 to 0000, reset otherwise
Set if destination increments from 99 to 00, reset otherwise
V: Undefined
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The four-digit decimal number contained in R5 is added to an eight-digit decimal number
pointed to by R8.
CLRC ; Reset carry
; next instruction's start condition is defined
DADD R5,0(R8) ; Add LSDs + C
DADC 2(R8) ; Add carry to MSD
Example The two-digit decimal number contained in R5 is added to a four-digit decimal number
pointed to by R8.
CLRC ; Reset carry
; next instruction's start condition is defined
DADD.B R5,0(R8) ; Add LSDs + C
DADC 1(R8) ; Add carry to MSDs
247
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.16 DADD
* DADD[.W] Add source word and carry decimally to destination word
* DADD.B Add source byte and carry decimally to destination byte
Syntax DADD src,dst or DADD.W src,dst
DADD.B src,dst
Operation src + dst + C →dst (decimally)
Description The source operand and the destination operand are treated as two (.B) or four (.W)
binary coded decimals (BCD) with positive signs. The source operand and the carry bit C
are added decimally to the destination operand. The source operand is not affected. The
previous content of the destination is lost. The result is not defined for non-BCD
numbers.
Status Bits N: Set if MSB of result is 1 (word > 7999h, byte > 79h), reset if MSB is 0
Z: Set if result is zero, reset otherwise
C: Set if the BCD result is too large (word > 9999h, byte > 99h), reset otherwise
V: Undefined
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Decimal 10 is added to the 16-bit BCD counter DECCNTR.
DADD #10h,&DECCNTR ; Add 10 to 4-digit BCD counter
Example The eight-digit BCD number contained in 16-bit RAM addresses BCD and BCD+2 is
added decimally to an eight-digit BCD number contained in R4 and R5 (BCD+2 and R5
contain the MSDs). The carry C is added, and cleared.
CLRC ; Clear carry
DADD.W &BCD,R4 ; Add LSDs. R4.19:16 = 0
DADD.W &BCD+2,R5 ; Add MSDs with carry. R5.19:16 = 0
JC OVERFLOW ; Result >9999,9999: go to error routine
... ; Result ok
Example The two-digit BCD number contained in word BCD (16-bit address) is added decimally to
a two-digit BCD number contained in R4. The carry C is added, also. R4.19:8 = 0
CLRC ; Clear carry
DADD.B &BCD,R4 ; Add BCD to R4 decimally.
R4: 0,00ddh
248 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
EDE
EDE+254
TONI
TONI+254
www.ti.com
Instruction Set Description
6.6.2.17 DEC
* DEC[.W] Decrement destination
* DEC.B Decrement destination
Syntax DEC dst or DEC.W dst
DEC.B dst
Operation dst – 1 →dst
SUB #1,dst
Emulation
SUB.B #1,dst
Description The destination operand is decremented by one. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 1, reset otherwise
C: Reset if dst contained 0, set otherwise
V: Set if an arithmetic overflow occurs, otherwise reset.
Set if initial value of destination was 08000h, otherwise reset.
Set if initial value of destination was 080h, otherwise reset.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R10 is decremented by 1.
DEC R10 ; Decrement R10
; Move a block of 255 bytes from memory location starting with EDE to
; memory location starting with TONI. Tables should not overlap: start of
; destination address TONI must not be within the range EDE to EDE+0FEh
MOV #EDE,R6
MOV #255,R10
L$1 MOV.B @R6+,TONI-EDE-1(R6)
DEC R10
JNZ L$1
Do not transfer tables using the routine above with the overlap shown in Figure 6-36.
Figure 6-36. Decrement Overlap
249
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.18 DECD
* DECD[.W] Double-decrement destination
* DECD.B Double-decrement destination
Syntax DECD dst or DECD.W dst
DECD.B dst
Operation dst – 2 →dst
SUB #2,dst
Emulation
SUB.B #2,dst
Description The destination operand is decremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 2, reset otherwise
C: Reset if dst contained 0 or 1, set otherwise
V: Set if an arithmetic overflow occurs, otherwise reset
Set if initial value of destination was 08001 or 08000h, otherwise reset
Set if initial value of destination was 081 or 080h, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R10 is decremented by 2.
DECD R10 ; Decrement R10 by two
; Move a block of 255 bytes from memory location starting with EDE to
; memory location starting with TONI.
; Tables should not overlap: start of destination address TONI must not
; be within the range EDE to EDE+0FEh
MOV #EDE,R6
MOV #255,R10
L$1 MOV.B @R6+,TONI-EDE-2(R6)
DECD R10
JNZ L$1
Example Memory at location LEO is decremented by two.
DECD.B LEO ; Decrement MEM(LEO)
Decrement status byte STATUS by two
DECD.B STATUS
250 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.19 DINT
* DINT Disable (general) interrupts
DINT
Syntax
Operation 0→GIE
or
(0FFF7h .AND. SR →SR / .NOT.src .AND. dst →dst)
BIC #8,SR
Emulation
Description All interrupts are disabled.
The constant 08h is inverted and logically ANDed with the SR. The result is placed into
the SR.
Status Bits Status bits are not affected.
Mode Bits GIE is reset. OSCOFF and CPUOFF are not affected.
Example The general interrupt enable (GIE) bit in the SR is cleared to allow a nondisrupted move
of a 32-bit counter. This ensures that the counter is not modified during the move by any
interrupt.
DINT ; All interrupt events using the GIE bit are disabled
NOP ; Required due to pipelined CPU architecture
MOV COUNTHI,R5 ; Copy counter
MOV COUNTLO,R6
EINT ; All interrupt events using the GIE bit are enabled
NOTE: Disable interrupt
Due to the pipelined CPU architecture, clearing the general interrupt enable (GIE) requires
special care.
• Include at least one instruction between DINT and the start of an code
sequence that requires protection from interrupts. For example: Insert a NOP
instruction after the DINT.
• Never clear the general interrupt enable (GIE) immediately after setting it. Insert
at least one instruction in between such sequence.
The rules above apply to all instructions that clear the general interrupt enable bit. Not
following these rules might result in unexpected CPU execution.
251
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.2.20 EINT
* EINT Enable (general) interrupts
EINT
Syntax
Operation 1→GIE
or
(0008h .OR. SR →SR / .src .OR. dst →dst)
BIS #8,SR
Emulation
Description All interrupts are enabled.
The constant #08h and the SR are logically ORed. The result is placed into the SR.
Status Bits Status bits are not affected.
Mode Bits GIE is set. OSCOFF and CPUOFF are not affected.
Example The general interrupt enable (GIE) bit in the SR is set.
PUSH.B &P1IN
BIC.B @SP,&P1IFG ; Reset only accepted flags
NOP ; Required due to pipelined CPU architecture
EINT ; Preset port 1 interrupt flags stored on stack
; other interrupts are allowed
BIT #Mask,@SP
JEQ MaskOK ; Flags are present identically to mask: jump
......
MaskOK BIC #Mask,@SP
......
INCD SP ; Housekeeping: inverse to PUSH instruction
; at the start of interrupt subroutine. Corrects
; the stack pointer.
RETI
NOTE: Enable interrupt
Due to the pipelined CPU architecture, setting the general interrupt enable (GIE) requires
special care.
• The instruction immediately after the enable interrupts instruction (EINT) is
always executed, even if an interrupt service request is pending.
• Include at least one instruction between the clear of an interrupt enable or
interrupt flag and the EINT instruction. For example: Insert a NOP instruction in
front of the EINT instruction.
• Never clear the general interrupt enable (GIE) immediately after setting it. Insert
at least one instruction in between such sequence.
The rules above apply to all instructions that set the general interrupt enable bit. Not
following these rules might result in unexpected CPU execution.
252 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.21 INC
* INC[.W] Increment destination
* INC.B Increment destination
Syntax INC dst or INC.W dst
INC.B dst
Operation dst + 1 →dst
ADD #1,dst
Emulation
Description The destination operand is incremented by one. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
C: Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
V: Set if dst contained 07FFFh, reset otherwise
Set if dst contained 07Fh, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The status byte, STATUS, of a process is incremented. When it is equal to 11, a branch
to OVFL is taken.
INC.B STATUS
CMP.B #11,STATUS
JEQ OVFL
253
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.22 INCD
* INCD[.W] Double-increment destination
* INCD.B Double-increment destination
Syntax INCD dst or INCD.W dst
INCD.B dst
Operation dst + 2 →dst
ADD #2,dst
Emulation
Description The destination operand is incremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFEh, reset otherwise
Set if dst contained 0FEh, reset otherwise
C: Set if dst contained 0FFFEh or 0FFFFh, reset otherwise
Set if dst contained 0FEh or 0FFh, reset otherwise
V: Set if dst contained 07FFEh or 07FFFh, reset otherwise
Set if dst contained 07Eh or 07Fh, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The item on the top of the stack (TOS) is removed without using a register.
.......
PUSH R5 ; R5 is the result of a calculation, which is stored
; in the system stack
INCD SP ; Remove TOS by double-increment from stack
; Do not use INCD.B, SP is a word-aligned register
RET
Example The byte on the top of the stack is incremented by two.
INCD.B 0(SP) ; Byte on TOS is increment by two
254 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.23 INV
* INV[.W] Invert destination
* INV.B Invert destination
Syntax INV dst or INV.W dst
INV.B dst
Operation .not.dst →dst
XOR #0FFFFh,dst
Emulation
XOR.B #0FFh,dst
Description The destination operand is inverted. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
C: Set if result is not zero, reset otherwise ( = .NOT. Zero)
V: Set if initial destination operand was negative, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Content of R5 is negated (twos complement).
MOV #00AEh,R5 ; R5 = 000AEh
INV R5 ; Invert R5, R5 = 0FF51h
INC R5 ; R5 is now negated, R5 = 0FF52h
Example Content of memory byte LEO is negated.
MOV.B #0AEh,LEO ; MEM(LEO) = 0AEh
INV.B LEO ; Invert LEO, MEM(LEO) = 051h
INC.B LEO ; MEM(LEO) is negated, MEM(LEO) = 052h
255
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.24 JC, JHS
JC Jump if carry
JHS Jump if higher or same (unsigned)
JC label
Syntax
JHS label
Operation If C = 1: PC + (2 × Offset) →PC
If C = 0: execute the following instruction
Description The carry bit C in the SR is tested. If it is set, the signed 10-bit word offset contained in
the instruction is multiplied by two, sign extended, and added to the 20-bit PC. This
means a jump in the range –511 to +512 words relative to the PC in the full memory
range. If C is reset, the instruction after the jump is executed.
JC is used for the test of the carry bit C.
JHS is used for the comparison of unsigned numbers.
Status Bits Status bits are not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The state of the port 1 pin P1IN.1 bit defines the program flow.
BIT.B #2,&P1IN ; Port 1, bit 1 set? Bit -> C
JC Label1 ; Yes, proceed at Label1
... ; No, continue
Example If R5 ≥R6 (unsigned), the program continues at Label2.
CMP R6,R 5 ; Is R5 >= R6? Info to C
JHS Label2 ; Yes, C = 1
... ; No, R5 < R6. Continue
Example If R5 ≥12345h (unsigned operands), the program continues at Label2.
CMPA #12345h,R5 ; Is R5 >= 12345h? Info to C
JHS Label2 ; Yes, 12344h < R5 <= F,FFFFh. C = 1
... ; No, R5 < 12345h. Continue
256 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.25 JEQ, JZ
JEQ Jump if equal
JZ Jump if zero
JEQ label
Syntax
JZ label
Operation If Z = 1: PC + (2 × Offset) →PC
If Z = 0: execute following instruction
Description The zero bit Z in the SR is tested. If it is set, the signed 10-bit word offset contained in
the instruction is multiplied by two, sign extended, and added to the 20-bit PC. This
means a jump in the range –511 to +512 words relative to the PC in the full memory
range. If Z is reset, the instruction after the jump is executed.
JZ is used for the test of the zero bit Z.
JEQ is used for the comparison of operands.
Status Bits Status bits are not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The state of the P2IN.0 bit defines the program flow.
BIT.B #1,&P2IN ; Port 2, bit 0 reset?
JZ Label1 ; Yes, proceed at Label1
... ; No, set, continue
Example If R5 = 15000h (20-bit data), the program continues at Label2.
CMPA #15000h,R5 ; Is R5 = 15000h? Info to SR
JEQ Label2 ; Yes, R5 = 15000h. Z = 1
... ; No, R5 not equal 15000h. Continue
Example R7 (20-bit counter) is incremented. If its content is zero, the program continues at
Label4.
ADDA #1,R7 ; Increment R7
JZ Label4 ; Zero reached: Go to Label4
... ; R7 not equal 0. Continue here.
257
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.26 JGE
JGE Jump if greater or equal (signed)
JGE label
Syntax
Operation If (N .xor. V) = 0: PC + (2 × Offset) →PC
If (N .xor. V) = 1: execute following instruction
Description The negative bit N and the overflow bit V in the SR are tested. If both bits are set or both
are reset, the signed 10-bit word offset contained in the instruction is multiplied by two,
sign extended, and added to the 20-bit PC. This means a jump in the range -511 to +512
words relative to the PC in full Memory range. If only one bit is set, the instruction after
the jump is executed.
JGE is used for the comparison of signed operands: also for incorrect results due to
overflow, the decision made by the JGE instruction is correct.
Note that JGE emulates the nonimplemented JP (jump if positive) instruction if used after
the instructions AND, BIT, RRA, SXTX, and TST. These instructions clear the V bit.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example If byte EDE (lower 64 K) contains positive data, go to Label1. Software can run in the full
memory range.
TST.B &EDE ; Is EDE positive? V <- 0
JGE Label1 ; Yes, JGE emulates JP
... ; No, 80h <= EDE <= FFh
Example If the content of R6 is greater than or equal to the memory pointed to by R7, the program
continues a Label5. Signed data. Data and program in full memory range.
CMP @R7,R6 ; Is R6 >= @R7?
JGE Label5 ; Yes, go to Label5
... ; No, continue here
Example If R5 ≥12345h (signed operands), the program continues at Label2. Program in full
memory range.
CMPA #12345h,R5 ; Is R5 >= 12345h?
JGE Label2 ; Yes, 12344h < R5 <= 7FFFFh
... ; No, 80000h <= R5 < 12345h
258 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.27 JL
JL Jump if less (signed)
JL label
Syntax
Operation If (N .xor. V) = 1: PC + (2 × Offset) →PC
If (N .xor. V) = 0: execute following instruction
Description The negative bit N and the overflow bit V in the SR are tested. If only one is set, the
signed 10-bit word offset contained in the instruction is multiplied by two, sign extended,
and added to the 20-bit PC. This means a jump in the range –511 to +512 words relative
to the PC in full memory range. If both bits N and V are set or both are reset, the
instruction after the jump is executed.
JL is used for the comparison of signed operands: also for incorrect results due to
overflow, the decision made by the JL instruction is correct.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example If byte EDE contains a smaller, signed operand than byte TONI, continue at Label1. The
address EDE is within PC ± 32 K.
CMP.B &TONI,EDE ; Is EDE < TONI
JL Label1 ; Yes
... ; No, TONI <= EDE
Example If the signed content of R6 is less than the memory pointed to by R7 (20-bit address), the
program continues at Label5. Data and program in full memory range.
CMP @R7,R6 ; Is R6 < @R7?
JL Label5 ; Yes, go to Label5
... ; No, continue here
Example If R5 < 12345h (signed operands), the program continues at Label2. Data and program
in full memory range.
CMPA #12345h,R5 ; Is R5 < 12345h?
JL Label2 ; Yes, 80000h =< R5 < 12345h
... ; No, 12344h < R5 <= 7FFFFh
259
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.28 JMP
JMP Jump unconditionally
JMP label
Syntax
Operation PC + (2 × Offset) →PC
Description The signed 10-bit word offset contained in the instruction is multiplied by two, sign
extended, and added to the 20-bit PC. This means an unconditional jump in the range
–511 to +512 words relative to the PC in the full memory. The JMP instruction may be
used as a BR or BRA instruction within its limited range relative to the PC.
Status Bits Status bits are not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The byte STATUS is set to 10. Then a jump to label MAINLOOP is made. Data in lower
64 K, program in full memory range.
MOV.B #10,&STATUS ; Set STATUS to 10
JMP MAINLOOP ; Go to main loop
Example The interrupt vector TAIV of Timer_A3 is read and used for the program flow. Program in
full memory range, but interrupt handlers always starts in lower 64 K.
ADD &TAIV,PC ; Add Timer_A interrupt vector to PC
RETI ; No Timer_A interrupt pending
JMP IHCCR1 ; Timer block 1 caused interrupt
JMP IHCCR2 ; Timer block 2 caused interrupt
RETI ; No legal interrupt, return
260 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.29 JN
JN Jump if negative
JN label
Syntax
Operation If N = 1: PC + (2 × Offset) →PC
If N = 0: execute following instruction
Description The negative bit N in the SR is tested. If it is set, the signed 10-bit word offset contained
in the instruction is multiplied by two, sign extended, and added to the 20-bit program
PC. This means a jump in the range -511 to +512 words relative to the PC in the full
memory range. If N is reset, the instruction after the jump is executed.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The byte COUNT is tested. If it is negative, program execution continues at Label0. Data
in lower 64 K, program in full memory range.
TST.B &COUNT ; Is byte COUNT negative?
JN Label0 ; Yes, proceed at Label0
... ; COUNT >= 0
Example R6 is subtracted from R5. If the result is negative, program continues at Label2. Program
in full memory range.
SUB R6,R5 ; R5 - R6 -> R5
JN Label2 ; R5 is negative: R6 > R5 (N = 1)
... ; R5 >= 0. Continue here.
Example R7 (20-bit counter) is decremented. If its content is below zero, the program continues at
Label4. Program in full memory range.
SUBA #1,R7 ; Decrement R7
JN Label4 ; R7 < 0: Go to Label4
... ; R7 >= 0. Continue here.
261
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.30 JNC, JLO
JNC Jump if no carry
JLO Jump if lower (unsigned)
JNC label
Syntax
JLO label
Operation If C = 0: PC + (2 × Offset) →PC
If C = 1: execute following instruction
Description The carry bit C in the SR is tested. If it is reset, the signed 10-bit word offset contained in
the instruction is multiplied by two, sign extended, and added to the 20-bit PC. This
means a jump in the range –511 to +512 words relative to the PC in the full memory
range. If C is set, the instruction after the jump is executed.
JNC is used for the test of the carry bit C.
JLO is used for the comparison of unsigned numbers.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example If byte EDE < 15, the program continues at Label2. Unsigned data. Data in lower 64 K,
program in full memory range.
CMP.B #15,&EDE ; Is EDE < 15? Info to C
JLO Label2 ; Yes, EDE < 15. C = 0
... ; No, EDE >= 15. Continue
Example The word TONI is added to R5. If no carry occurs, continue at Label0. The address of
TONI is within PC ± 32 K.
ADD TONI,R5 ; TONI + R5 -> R5. Carry -> C
JNC Label0 ; No carry
... ; Carry = 1: continue here
262 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
6.6.2.31 JNZ, JNE
JNZ Jump if not zero
JNE Jump if not equal
JNZ label
Syntax
JNE label
Operation If Z = 0: PC + (2 × Offset) →PC
If Z = 1: execute following instruction
Description The zero bit Z in the SR is tested. If it is reset, the signed 10-bit word offset contained in
the instruction is multiplied by two, sign extended, and added to the 20-bit PC. This
means a jump in the range –511 to +512 words relative to the PC in the full memory
range. If Z is set, the instruction after the jump is executed.
JNZ is used for the test of the zero bit Z.
JNE is used for the comparison of operands.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The byte STATUS is tested. If it is not zero, the program continues at Label3. The
address of STATUS is within PC ± 32 K.
TST.B STATUS ; Is STATUS = 0?
JNZ Label3 ; No, proceed at Label3
... ; Yes, continue here
Example If word EDE ≠1500, the program continues at Label2. Data in lower 64 K, program in full
memory range.
CMP #1500,&EDE ; Is EDE = 1500? Info to SR
JNE Label2 ; No, EDE not equal 1500.
... ; Yes, R5 = 1500. Continue
Example R7 (20-bit counter) is decremented. If its content is not zero, the program continues at
Label4. Program in full memory range.
SUBA #1,R7 ; Decrement R7
JNZ Label4 ; Zero not reached: Go to Label4
... ; Yes, R7 = 0. Continue here.
263
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.32 MOV
MOV[.W] Move source word to destination word
MOV.B Move source byte to destination byte
Syntax MOV src,dst or MOV.W src,dst
MOV.B src,dst
Operation src →dst
Description The source operand is copied to the destination. The source operand is not affected.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Move a 16-bit constant 1800h to absolute address-word EDE (lower 64 K)
MOV #01800h,&EDE ; Move 1800h to EDE
Example The contents of table EDE (word data, 16-bit addresses) are copied to table TOM. The
length of the tables is 030h words. Both tables reside in the lower 64 K.
MOV #EDE,R10 ; Prepare pointer (16-bit address)
Loop MOV @R10+,TOM-EDE-2(R10) ; R10 points to both tables.
; R10+2
CMP #EDE+60h,R10 ; End of table reached?
JLO Loop ; Not yet
... ; Copy completed
Example The contents of table EDE (byte data, 16-bit addresses) are copied to table TOM. The
length of the tables is 020h bytes. Both tables may reside in full memory range, but must
be within R10 ± 32 K.
MOVA #EDE,R10 ; Prepare pointer (20-bit)
MOV #20h,R9 ; Prepare counter
Loop MOV.B @R10+,TOM-EDE-1(R10) ; R10 points to both tables.
; R10+1
DEC R9 ; Decrement counter
JNZ Loop ; Not yet done
... ; Copy completed
264 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.33 NOP
* NOP No operation
NOP
Syntax
Operation None
MOV #0, R3
Emulation
Description No operation is performed. The instruction may be used for the elimination of instructions
during the software check or for defined waiting times.
Status Bits Status bits are not affected.
265
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.34 POP
* POP[.W] Pop word from stack to destination
* POP.B Pop byte from stack to destination
POP dst
Syntax
POP.B dst
Operation @SP →temp
SP + 2 →SP
temp →dst
Emulation MOV @SP+,dst or MOV.W @SP+,dst
MOV.B @SP+,dst
Description The stack location pointed to by the SP (TOS) is moved to the destination. The SP is
incremented by two afterwards.
Status Bits Status bits are not affected.
Example The contents of R7 and the SR are restored from the stack.
POP R7 ; Restore R7
POP SR ; Restore status register
Example The contents of RAM byte LEO is restored from the stack.
POP.B LEO ; The low byte of the stack is moved to LEO.
Example The contents of R7 is restored from the stack.
POP.B R7 ; The low byte of the stack is moved to R7,
; the high byte of R7 is 00h
Example The contents of the memory pointed to by R7 and the SR are restored from the stack.
POP.B 0(R7) ; The low byte of the stack is moved to the
; the byte which is pointed to by R7
: Example: R7 = 203h
; Mem(R7) = low byte of system stack
: Example: R7 = 20Ah
; Mem(R7) = low byte of system stack
POP SR ; Last word on stack moved to the SR
NOTE: System stack pointer
The system SP is always incremented by two, independent of the byte suffix.
266 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.35 PUSH
PUSH[.W] Save a word on the stack
PUSH.B Save a byte on the stack
Syntax PUSH dst or PUSH.W dst
PUSH.B dst
Operation SP – 2 →SP
dst →@SP
Description The 20-bit SP SP is decremented by two. The operand is then copied to the RAM word
addressed by the SP. A pushed byte is stored in the low byte; the high byte is not
affected.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Save the two 16-bit registers R9 and R10 on the stack
PUSH R9 ; Save R9 and R10 XXXXh
PUSH R10 ; YYYYh
Example Save the two bytes EDE and TONI on the stack. The addresses EDE and TONI are
within PC ± 32 K.
PUSH.B EDE ; Save EDE xxXXh
PUSH.B TONI ; Save TONI xxYYh
267
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Item n
PCReturn
Item n
Stack before RET
instruction
Stack after RET
instruction
SP
SP
Instruction Set Description
www.ti.com
6.6.2.36 RET
* RET Return from subroutine
RET
Syntax
Operation @SP →PC.15:0 Saved PC to PC.15:0. PC.19:16 ←0
SP + 2 →SP
Description The 16-bit return address (lower 64 K), pushed onto the stack by a CALL instruction is
restored to the PC. The program continues at the address following the subroutine call.
The four MSBs of the PC.19:16 are cleared.
Status Bits Status bits are not affected.
PC.19:16: Cleared
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Call a subroutine SUBR in the lower 64 K and return to the address in the lower 64 K
after the CALL.
CALL #SUBR ; Call subroutine starting at SUBR
... ; Return by RET to here
SUBR PUSH R14 ; Save R14 (16 bit data)
... ; Subroutine code
POP R14 ; Restore R14
RET ; Return to lower 64 K
Figure 6-37. Stack After a RET Instruction
268 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.37 RETI
RETI Return from interrupt
RETI
Syntax
Operation @SP →SR.15:0 Restore saved SR with PC.19:16
SP + 2 →SP
@SP →PC.15:0 Restore saved PC.15:0
SP + 2 →SP Housekeeping
Description The SR is restored to the value at the beginning of the interrupt service routine. This
includes the four MSBs of the PC.19:16. The SP is incremented by two afterward.
The 20-bit PC is restored from PC.19:16 (from same stack location as the status bits)
and PC.15:0. The 20-bit PC is restored to the value at the beginning of the interrupt
service routine. The program continues at the address following the last executed
instruction when the interrupt was granted. The SP is incremented by two afterward. No
interrupt flags are modified by this command.
Status Bits N: Restored from stack
C: Restored from stack
Z: Restored from stack
V: Restored from stack
Mode Bits OSCOFF, CPUOFF, and GIE are restored from stack.
Example Interrupt handler in the lower 64 K. A 20-bit return address is stored on the stack.
INTRPT PUSHM.A #2,R14 ; Save R14 and R13 (20-bit data)
... ; Interrupt handler code
POPM.A #2,R14 ; Restore R13 and R14 (20-bit data)
RETI ; Return to 20-bit address in full memory range
269
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
15 0
7 0
C
Byte
Word
0
Instruction Set Description
www.ti.com
6.6.2.38 RLA
* RLA[.W] Rotate left arithmetically
* RLA.B Rotate left arithmetically
Syntax RLA dst or RLA.W dst
RLA.B dst
Operation C←MSB ←MSB-1 .... LSB+1 ←LSB ←0
ADD dst,dst
Emulation
ADD.B dst,dst
Description The destination operand is shifted left one position as shown in Figure 6-38. The MSB is
shifted into the carry bit (C) and the LSB is filled with 0. The RLA instruction acts as a
signed multiplication by 2.
An overflow occurs if dst ≥04000h and dst < 0C000h before operation is performed; the
result has changed sign.
Figure 6-38. Destination Operand—Arithmetic Shift Left
An overflow occurs if dst ≥040h and dst < 0C0h before the operation is performed; the
result has changed sign.
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Loaded from the MSB
V: Set if an arithmetic overflow occurs; the initial value is 04000h ≤dst < 0C000h,
reset otherwise
Set if an arithmetic overflow occurs; the initial value is 040h ≤dst < 0C0h, reset
otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R7 is multiplied by 2.
RLA R7 ; Shift left R7 (x 2)
Example The low byte of R7 is multiplied by 4.
RLA.B R7 ; Shift left low byte of R7 (x 2)
RLA.B R7 ; Shift left low byte of R7 (x 4)
NOTE: RLA substitution
The assembler does not recognize the instructions:
RLA @R5+ RLA.B @R5+ RLA(.B) @R5
They must be substituted by:
ADD @R5+,-2(R5) ADD.B @R5+,-1(R5) ADD(.B) @R5
270 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

15 0
7 0
C
Byte
Word
www.ti.com
Instruction Set Description
6.6.2.39 RLC
* RLC[.W] Rotate left through carry
* RLC.B Rotate left through carry
Syntax RLC dst or RLC.W dst
RLC.B dst
Operation C←MSB ←MSB-1 .... LSB+1 ←LSB ←C
ADDC dst,dst
Emulation
Description The destination operand is shifted left one position as shown in Figure 6-39. The carry bit
(C) is shifted into the LSB, and the MSB is shifted into the carry bit (C).
Figure 6-39. Destination Operand—Carry Left Shift
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Loaded from the MSB
V: Set if an arithmetic overflow occurs; the initial value is 04000h ≤dst < 0C000h,
reset otherwise
Set if an arithmetic overflow occurs; the initial value is 040h ≤dst < 0C0h, reset
otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R5 is shifted left one position.
RLC R5 ; (R5 x 2) + C -> R5
Example The input P1IN.1 information is shifted into the LSB of R5.
BIT.B #2,&P1IN ; Information -> Carry
RLC R5 ; Carry=P0in.1 -> LSB of R5
Example The MEM(LEO) content is shifted left one position.
RLC.B LEO ; Mem(LEO) x 2 + C -> Mem(LEO)
NOTE: RLA substitution
The assembler does not recognize the instructions:
RLC @R5+ RLC.B @R5+ RLC(.B) @R5
They must be substituted by:
ADDC @R5+,-2(R5) ADDC.B @R5+,-1(R5) ADDC(.B) @R5
271
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
C
19 0
MSB
0 0 0 0 0 0 0
715
0 0 0 0 0 LSB
C
19 0
MSB
0 0 0 0
15
LSB
Instruction Set Description
www.ti.com
6.6.2.40 RRA
RRA[.W] Rotate right arithmetically destination word
RRA.B Rotate right arithmetically destination byte
Syntax RRA.B dst or RRA.W dst
Operation MSB →MSB →MSB–1 →... LSB+1 →LSB →C
Description The destination operand is shifted right arithmetically by one bit position as shown in
Figure 6-40. The MSB retains its value (sign). RRA operates equal to a signed division
by 2. The MSB is retained and shifted into the MSB–1. The LSB+1 is shifted into the
LSB. The previous LSB is shifted into the carry bit C.
Status Bits N: Set if result is negative (MSB = 1), reset otherwise (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The signed 16-bit number in R5 is shifted arithmetically right one position.
RRA R5 ; R5/2 -> R5
Example The signed RAM byte EDE is shifted arithmetically right one position.
RRA.B EDE ; EDE/2 -> EDE
Figure 6-40. Rotate Right Arithmetically RRA.B and RRA.W
272 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
C
19 0
MSB
0 0 0 0 0 0 0
715
0 0 0 0 0 LSB
C
19 0
MSB
0 0 0 0
15
LSB
www.ti.com
Instruction Set Description
6.6.2.41 RRC
RRC[.W] Rotate right through carry destination word
RRC.B Rotate right through carry destination byte
Syntax RRC dst or RRC.W dst
RRC.B dst
Operation C→MSB →MSB–1 →... LSB+1 →LSB →C
Description The destination operand is shifted right by one bit position as shown in Figure 6-41. The
carry bit C is shifted into the MSB and the LSB is shifted into the carry bit C.
Status Bits N: Set if result is negative (MSB = 1), reset otherwise (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM word EDE is shifted right one bit position. The MSB is loaded with 1.
SETC ; Prepare carry for MSB
RRC EDE ; EDE = EDE >> 1 + 8000h
Figure 6-41. Rotate Right Through Carry RRC.B and RRC.W
273
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.42 SBC
* SBC[.W] Subtract borrow (.NOT. carry) from destination
* SBC.B Subtract borrow (.NOT. carry) from destination
Syntax SBC dst or SBC.W dst
SBC.B dst
Operation dst + 0FFFFh + C →dst
dst + 0FFh + C →dst
SUBC #0,dst
Emulation
SUBC.B #0,dst
Description The carry bit (C) is added to the destination operand minus one. The previous contents
of the destination are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
Set to 1 if no borrow, reset if borrow
V: Set if an arithmetic overflow occurs, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 16-bit counter pointed to by R13 is subtracted from a 32-bit counter pointed to by
R12.
SUB @R13,0(R12) ; Subtract LSDs
SBC 2(R12) ; Subtract carry from MSD
Example The 8-bit counter pointed to by R13 is subtracted from a 16-bit counter pointed to by
R12.
SUB.B @R13,0(R12) ; Subtract LSDs
SBC.B 1(R12) ; Subtract carry from MSD
NOTE: Borrow implementation
The borrow is treated as a .NOT. carry:
Borrow Carry Bit
Yes 0
No 1
274 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.43 SETC
* SETC Set carry bit
SETC
Syntax
Operation 1→C
BIS #1,SR
Emulation
Description The carry bit (C) is set.
Status Bits N: Not affected
Z: Not affected
C: Set
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Emulation of the decimal subtraction:
Subtract R5 from R6 decimally.
Assume that R5 = 03987h and R6 = 04137h.
DSUB ADD #06666h,R5 ; Move content R5 from 0-9 to 6-0Fh
; R5 = 03987h + 06666h = 09FEDh
INV R5 ; Invert this (result back to 0-9)
; R5 = .NOT. R5 = 06012h
SETC ; Prepare carry = 1
DADD R5,R6 ; Emulate subtraction by addition of:
; (010000h - R5 - 1)
;R6=R6+R5+1
; R6 = 0150h
275
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.44 SETN
* SETN Set negative bit
SETN
Syntax
Operation 1→N
BIS #4,SR
Emulation
Description The negative bit (N) is set.
Status Bits N: Set
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
276 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.45 SETZ
* SETZ Set zero bit
SETZ
Syntax
Operation 1→N
BIS #2,SR
Emulation
Description The zero bit (Z) is set.
Status Bits N: Not affected
Z: Set
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
277
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.46 SUB
SUB[.W] Subtract source word from destination word
SUB.B Subtract source byte from destination byte
Syntax SUB src,dst or SUB.W src,dst
SUB.B src,dst
Operation (.not.src) + 1 + dst →dst or dst – src →dst
Description The source operand is subtracted from the destination operand. This is made by adding
the 1s complement of the source + 1 to the destination. The source operand is not
affected, the result is written to the destination operand.
Status Bits N: Set if result is negative (src > dst), reset if positive (src ≤dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example A 16-bit constant 7654h is subtracted from RAM word EDE.
SUB #7654h,&EDE ; Subtract 7654h from EDE
Example A table word pointed to by R5 (20-bit address) is subtracted from R7. Afterwards, if R7
contains zero, jump to label TONI. R5 is then auto-incremented by 2. R7.19:16 = 0.
SUB @R5+,R7 ; Subtract table number from R7. R5 + 2
JZ TONI ; R7 = @R5 (before subtraction)
... ; R7 <> @R5 (before subtraction)
Example Byte CNT is subtracted from byte R12 points to. The address of CNT is within PC ± 32K.
The address R12 points to is in full memory range.
SUB.B CNT,0(R12) ; Subtract CNT from @R12
278 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.47 SUBC
SUBC[.W] Subtract source word with carry from destination word
SUBC.B Subtract source byte with carry from destination byte
Syntax SUBC src,dst or SUBC.W src,dst
SUBC.B src,dst
Operation (.not.src) + C + dst →dst or dst – (src – 1) + C →dst
Description The source operand is subtracted from the destination operand. This is done by adding
the 1s complement of the source + carry to the destination. The source operand is not
affected, the result is written to the destination operand. Used for 32, 48, and 64-bit
operands.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example A 16-bit constant 7654h is subtracted from R5 with the carry from the previous
instruction. R5.19:16 = 0
SUBC.W #7654h,R5 ; Subtract 7654h + C from R5
Example A 48-bit number (3 words) pointed to by R5 (20-bit address) is subtracted from a 48-bit
counter in RAM, pointed to by R7. R5 points to the next 48-bit number afterwards. The
address R7 points to is in full memory range.
SUB @R5+,0(R7) ; Subtract LSBs. R5 + 2
SUBC @R5+,2(R7) ; Subtract MIDs with C. R5 + 2
SUBC @R5+,4(R7) ; Subtract MSBs with C. R5 + 2
Example Byte CNT is subtracted from the byte, R12 points to. The carry of the previous instruction
is used. The address of CNT is in lower 64 K.
SUBC.B &CNT,0(R12) ; Subtract byte CNT from @R12
279
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
15 8 7 0
15 8 7 0
Low Byte
Low ByteHigh Byte
High Byte
Before SWPB
After SWPB
0
x
0...
19
19
16
16
15 8 7 0
15 8 7 0
Low Byte
Low ByteHigh Byte
High Byte
Before SWPB
After SWPB
Instruction Set Description
www.ti.com
6.6.2.48 SWPB
SWPB Swap bytes
SWPB dst
Syntax
Operation dst.15:8 ↔dst.7:0
Description The high and the low byte of the operand are exchanged. PC.19:16 bits are cleared in
register mode.
Status Bits Status bits are not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Exchange the bytes of RAM word EDE (lower 64 K)
MOV #1234h,&EDE ; 1234h -> EDE
SWPB &EDE ; 3412h -> EDE
Figure 6-42. Swap Bytes in Memory
Figure 6-43. Swap Bytes in a Register
280 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
6.6.2.49 SXT
SXT Extend sign
SXT dst
Syntax
Operation dst.7 →dst.15:8, dst.7 →dst.19:8 (register mode)
Description Register mode: the sign of the low byte of the operand is extended into the bits
Rdst.19:8.
Rdst.7 = 0: Rdst.19:8 = 000h afterwards
Rdst.7 = 1: Rdst.19:8 = FFFh afterwards
Other modes: the sign of the low byte of the operand is extended into the high byte.
dst.7 = 0: high byte = 00h afterwards
dst.7 = 1: high byte = FFh afterwards
Status Bits N: Set if result is negative, reset otherwise
Z: Set if result is zero, reset otherwise
C: Set if result is not zero, reset otherwise (C = .not.Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The signed 8-bit data in EDE (lower 64 K) is sign extended and added to the 16-bit
signed data in R7.
MOV.B &EDE,R5 ; EDE -> R5. 00XXh
SXT R5 ; Sign extend low byte to R5.19:8
ADD R5,R7 ; Add signed 16-bit values
Example The signed 8-bit data in EDE (PC +32 K) is sign extended and added to the 20-bit data
in R7.
MOV.B EDE,R5 ; EDE -> R5. 00XXh
SXT R5 ; Sign extend low byte to R5.19:8
ADDA R5,R7 ; Add signed 20-bit values
281
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.2.50 TST
* TST[.W] Test destination
* TST.B Test destination
Syntax TST dst or TST.W dst
TST.B dst
Operation dst + 0FFFFh + 1
dst + 0FFh + 1
CMP #0,dst
Emulation
CMP.B #0,dst
Description The destination operand is compared with zero. The status bits are set according to the
result. The destination is not affected.
Status Bits N: Set if destination is negative, reset if positive
Z: Set if destination contains zero, reset otherwise
C: Set
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R7 is tested. If it is negative, continue at R7NEG; if it is positive but not zero, continue at
R7POS.
TST R7 ; Test R7
JN R7NEG ; R7 is negative
JZ R7ZERO ; R7 is zero
R7POS ...... ; R7 is positive but not zero
R7NEG ...... ; R7 is negative
R7ZERO ...... ; R7 is zero
Example The low byte of R7 is tested. If it is negative, continue at R7NEG; if it is positive but not
zero, continue at R7POS.
TST.B R7 ; Test low byte of R7
JN R7NEG ; Low byte of R7 is negative
JZ R7ZERO ; Low byte of R7 is zero
R7POS ...... ; Low byte of R7 is positive but not zero
R7NEG ..... ; Low byte of R7 is negative
R7ZERO ...... ; Low byte of R7 is zero
282 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.2.51 XOR
XOR[.W] Exclusive OR source word with destination word
XOR.B Exclusive OR source byte with destination byte
Syntax XOR src,dst or XOR.W src,dst
XOR.B src,dst
Operation src .xor. dst →dst
Description The source and destination operands are exclusively ORed. The result is placed into the
destination. The source operand is not affected. The previous content of the destination
is lost.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if result is not zero, reset otherwise (C = .not. Z)
V: Set if both operands are negative before execution, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Toggle bits in word CNTR (16-bit data) with information (bit = 1) in address-word TONI.
Both operands are located in lower 64 K.
XOR &TONI,&CNTR ; Toggle bits in CNTR
Example A table word pointed to by R5 (20-bit address) is used to toggle bits in R6. R6.19:16 = 0.
XOR @R5,R6 ; Toggle bits in R6
Example Reset to zero those bits in the low byte of R7 that are different from the bits in byte EDE.
R7.19:8 = 0. The address of EDE is within PC ± 32 K.
XOR.B EDE,R7 ; Set different bits to 1 in R7.
INV.B R7 ; Invert low byte of R7, high byte is 0h
283
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3 Extended Instructions
The extended MSP430X instructions give the MSP430X CPU full access to its 20-bit address space.
MSP430X instructions require an additional word of op-code called the extension word. All addresses,
indexes, and immediate numbers have 20-bit values when preceded by the extension word. The
MSP430X extended instructions are listed and described in the following pages.
284 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.1 ADCX
* ADCX.A Add carry to destination address-word
* ADCX.[W] Add carry to destination word
* ADCX.B Add carry to destination byte
ADCX.A dst
Syntax
ADCX dst or ADCX.W dst
ADCX.B dst
Operation dst + C →dst
ADDCX.A #0,dst
Emulation
ADDCX #0,dst
ADDCX.B #0,dst
Description The carry bit (C) is added to the destination operand. The previous contents of the
destination are lost.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 40-bit counter, pointed to by R12 and R13, is incremented.
INCX.A @R12 ; Increment lower 20 bits
ADCX.A @R13 ; Add carry to upper 20 bits
285
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.2 ADDX
ADDX.A Add source address-word to destination address-word
ADDX.[W] Add source word to destination word
ADDX.B Add source byte to destination byte
ADDX.A src,dst
Syntax
ADDX src,dst or ADDX.W src,dst
ADDX.B src,dst
Operation src + dst →dst
Description The source operand is added to the destination operand. The previous contents of the
destination are lost. Both operands can be located in the full address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Ten is added to the 20-bit pointer CNTR located in two words CNTR (LSBs) and
CNTR+2 (MSBs).
ADDX.A #10,CNTR ; Add 10 to 20-bit pointer
Example A table word (16-bit) pointed to by R5 (20-bit address) is added to R6. The jump to label
TONI is performed on a carry.
ADDX.W @R5,R6 ; Add table word to R6
JC TONI ; Jump if carry
... ; No carry
Example A table byte pointed to by R5 (20-bit address) is added to R6. The jump to label TONI is
performed if no carry occurs. The table pointer is auto-incremented by 1.
ADDX.B @R5+,R6 ; Add table byte to R6. R5 + 1. R6: 000xxh
JNC TONI ; Jump if no carry
... ; Carry occurred
Note: Use ADDA for the following two cases for better code density and execution.
ADDX.A Rsrc,Rdst
ADDX.A #imm20,Rdst
286 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.3 ADDCX
ADDCX.A Add source address-word and carry to destination address-word
ADDCX.[W] Add source word and carry to destination word
ADDCX.B Add source byte and carry to destination byte
ADDCX.A src,dst
Syntax
ADDCX src,dst or ADDCX.W src,dst
ADDCX.B src,dst
Operation src + dst + C →dst
Description The source operand and the carry bit C are added to the destination operand. The
previous contents of the destination are lost. Both operands may be located in the full
address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Constant 15 and the carry of the previous instruction are added to the 20-bit counter
CNTR located in two words.
ADDCX.A #15,&CNTR ; Add 15 + C to 20-bit CNTR
Example A table word pointed to by R5 (20-bit address) and the carry C are added to R6. The
jump to label TONI is performed on a carry.
ADDCX.W @R5,R6 ; Add table word + C to R6
JC TONI ; Jump if carry
... ; No carry
Example A table byte pointed to by R5 (20-bit address) and the carry bit C are added to R6. The
jump to label TONI is performed if no carry occurs. The table pointer is auto-incremented
by 1.
ADDCX.B @R5+,R6 ; Add table byte + C to R6. R5 + 1
JNC TONI ; Jump if no carry
... ; Carry occurred
287
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.4 ANDX
ANDX.A Logical AND of source address-word with destination address-word
ANDX.[W] Logical AND of source word with destination word
ANDX.B Logical AND of source byte with destination byte
ANDX.A src,dst
Syntax
ANDX src,dst or ANDX.W src,dst
ANDX.B src,dst
Operation src .and. dst →dst
Description The source operand and the destination operand are logically ANDed. The result is
placed into the destination. The source operand is not affected. Both operands may be
located in the full address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if the result is not zero, reset otherwise. C = (.not. Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The bits set in R5 (20-bit data) are used as a mask (AAA55h) for the address-word TOM
located in two words. If the result is zero, a branch is taken to label TONI.
MOVA #AAA55h,R5 ; Load 20-bit mask to R5
ANDX.A R5,TOM ; TOM .and. R5 -> TOM
JZ TONI ; Jump if result 0
... ; Result > 0
or shorter:
ANDX.A #AAA55h,TOM ; TOM .and. AAA55h -> TOM
JZ TONI ; Jump if result 0
Example A table byte pointed to by R5 (20-bit address) is logically ANDed with R6. R6.19:8 = 0.
The table pointer is auto-incremented by 1.
ANDX.B @R5+,R6 ; AND table byte with R6. R5 + 1
288 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.5 BICX
BICX.A Clear bits set in source address-word in destination address-word
BICX.[W] Clear bits set in source word in destination word
BICX.B Clear bits set in source byte in destination byte
BICX.A src,dst
Syntax
BICX src,dst or BICX.W src,dst
BICX.B src,dst
Operation (.not. src) .and. dst →dst
Description The inverted source operand and the destination operand are logically ANDed. The
result is placed into the destination. The source operand is not affected. Both operands
may be located in the full address space.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The bits 19:15 of R5 (20-bit data) are cleared.
BICX.A #0F8000h,R5 ; Clear R5.19:15 bits
Example A table word pointed to by R5 (20-bit address) is used to clear bits in R7. R7.19:16 = 0.
BICX.W @R5,R7 ; Clear bits in R7
Example A table byte pointed to by R5 (20-bit address) is used to clear bits in output Port1.
BICX.B @R5,&P1OUT ; Clear I/O port P1 bits
289
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.6 BISX
BISX.A Set bits set in source address-word in destination address-word
BISX.[W] Set bits set in source word in destination word
BISX.B Set bits set in source byte in destination byte
BISX.A src,dst
Syntax
BISX src,dst or BISX.W src,dst
BISX.B src,dst
Operation src .or. dst →dst
Description The source operand and the destination operand are logically ORed. The result is placed
into the destination. The source operand is not affected. Both operands may be located
in the full address space.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Bits 16 and 15 of R5 (20-bit data) are set to one.
BISX.A #018000h,R5 ; Set R5.16:15 bits
Example A table word pointed to by R5 (20-bit address) is used to set bits in R7.
BISX.W @R5,R7 ; Set bits in R7
Example A table byte pointed to by R5 (20-bit address) is used to set bits in output Port1.
BISX.B @R5,&P1OUT ; Set I/O port P1 bits
290 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.7 BITX
BITX.A Test bits set in source address-word in destination address-word
BITX.[W] Test bits set in source word in destination word
BITX.B Test bits set in source byte in destination byte
BITX.A src,dst
Syntax
BITX src,dst or BITX.W src,dst
BITX.B src,dst
Operation src .and. dst →dst
Description The source operand and the destination operand are logically ANDed. The result affects
only the status bits. Both operands may be located in the full address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if the result is not zero, reset otherwise. C = (.not. Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Test if bit 16 or 15 of R5 (20-bit data) is set. Jump to label TONI if so.
BITX.A #018000h,R5 ; Test R5.16:15 bits
JNZ TONI ; At least one bit is set
... ; Both are reset
Example A table word pointed to by R5 (20-bit address) is used to test bits in R7. Jump to label
TONI if at least one bit is set.
BITX.W @R5,R7 ; Test bits in R7: C = .not.Z
JC TONI ; At least one is set
... ; Both are reset
Example A table byte pointed to by R5 (20-bit address) is used to test bits in input Port1. Jump to
label TONI if no bit is set. The next table byte is addressed.
BITX.B @R5+,&P1IN ; Test input P1 bits. R5 + 1
JNC TONI ; No corresponding input bit is set
... ; At least one bit is set
291
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.3.8 CLRX
* CLRX.A Clear destination address-word
* CLRX.[W] Clear destination word
* CLRX.B Clear destination byte
CLRX.A dst
Syntax
CLRX dst or CLRX.W dst
CLRX.B dst
Operation 0→dst
MOVX.A #0,dst
Emulation
MOVX #0,dst
MOVX.B #0,dst
Description The destination operand is cleared.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM address-word TONI is cleared.
CLRX.A TONI ; 0 -> TONI
292 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.9 CMPX
CMPX.A Compare source address-word and destination address-word
CMPX.[W] Compare source word and destination word
CMPX.B Compare source byte and destination byte
CMPX.A src,dst
Syntax
CMPX src,dst or CMPX.W src,dst
CMPX.B src,dst
Operation (.not. src) + 1 + dst or dst – src
Description The source operand is subtracted from the destination operand by adding the 1s
complement of the source + 1 to the destination. The result affects only the status bits.
Both operands may be located in the full address space.
Status Bits N: Set if result is negative (src > dst), reset if positive (src ≤dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Compare EDE with a 20-bit constant 18000h. Jump to label TONI if EDE equals the
constant.
CMPX.A #018000h,EDE ; Compare EDE with 18000h
JEQ TONI ; EDE contains 18000h
... ; Not equal
Example A table word pointed to by R5 (20-bit address) is compared with R7. Jump to label TONI
if R7 contains a lower, signed, 16-bit number.
CMPX.W @R5,R7 ; Compare two signed numbers
JL TONI ; R7 < @R5
... ; R7 >= @R5
Example A table byte pointed to by R5 (20-bit address) is compared to the input in I/O Port1.
Jump to label TONI if the values are equal. The next table byte is addressed.
CMPX.B @R5+,&P1IN ; Compare P1 bits with table. R5 + 1
JEQ TONI ; Equal contents
... ; Not equal
Note: Use CMPA for the following two cases for better density and execution.
CMPA Rsrc,Rdst
CMPA #imm20,Rdst
293
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.10 DADCX
* DADCX.A Add carry decimally to destination address-word
* DADCX.[W] Add carry decimally to destination word
* DADCX.B Add carry decimally to destination byte
DADCX.A dst
Syntax
DADCX dst or DADCX.W dst
DADCX.B dst
Operation dst + C →dst (decimally)
DADDX.A #0,dst
Emulation
DADDX #0,dst
DADDX.B #0,dst
Description The carry bit (C) is added decimally to the destination.
Status Bits N: Set if MSB of result is 1 (address-word > 79999h, word > 7999h, byte > 79h), reset
if MSB is 0
Z: Set if result is zero, reset otherwise
C: Set if the BCD result is too large (address-word > 99999h, word > 9999h, byte >
99h), reset otherwise
V: Undefined
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 40-bit counter, pointed to by R12 and R13, is incremented decimally.
DADDX.A #1,0(R12) ; Increment lower 20 bits
DADCX.A 0(R13) ; Add carry to upper 20 bits
294 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.11 DADDX
DADDX.A Add source address-word and carry decimally to destination address-word
DADDX.[W] Add source word and carry decimally to destination word
DADDX.B Add source byte and carry decimally to destination byte
DADDX.A src,dst
Syntax
DADDX src,dst or DADDX.W src,dst
DADDX.B src,dst
Operation src + dst + C →dst (decimally)
Description The source operand and the destination operand are treated as two (.B), four (.W), or
five (.A) binary coded decimals (BCD) with positive signs. The source operand and the
carry bit C are added decimally to the destination operand. The source operand is not
affected. The previous contents of the destination are lost. The result is not defined for
non-BCD numbers. Both operands may be located in the full address space.
Status Bits N: Set if MSB of result is 1 (address-word > 79999h, word > 7999h, byte > 79h), reset
if MSB is 0.
Z: Set if result is zero, reset otherwise
C: Set if the BCD result is too large (address-word > 99999h, word > 9999h, byte >
99h), reset otherwise
V: Undefined
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Decimal 10 is added to the 20-bit BCD counter DECCNTR located in two words.
DADDX.A #10h,&DECCNTR ; Add 10 to 20-bit BCD counter
Example The eight-digit BCD number contained in 20-bit addresses BCD and BCD+2 is added
decimally to an eight-digit BCD number contained in R4 and R5 (BCD+2 and R5 contain
the MSDs).
CLRC ; Clear carry
DADDX.W BCD,R4 ; Add LSDs
DADDX.W BCD+2,R5 ; Add MSDs with carry
JC OVERFLOW ; Result >99999999: go to error routine
... ; Result ok
Example The two-digit BCD number contained in 20-bit address BCD is added decimally to a two-
digit BCD number contained in R4.
CLRC ; Clear carry
DADDX.B BCD,R4 ; Add BCD to R4 decimally.
; R4: 000ddh
295
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.12 DECX
* DECX.A Decrement destination address-word
* DECX.[W] Decrement destination word
* DECX.B Decrement destination byte
DECX.A dst
Syntax
DECX dst or DECX.W dst
DECX.B dst
Operation dst – 1 →dst
SUBX.A #1,dst
Emulation
SUBX #1,dst
SUBX.B #1,dst
Description The destination operand is decremented by one. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 1, reset otherwise
C: Reset if dst contained 0, set otherwise
V: Set if an arithmetic overflow occurs, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM address-word TONI is decremented by one.
DECX.A TONI ; Decrement TONI
296 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.13 DECDX
* DECDX.A Double-decrement destination address-word
* DECDX.[W] Double-decrement destination word
* DECDX.B Double-decrement destination byte
DECDX.A dst
Syntax
DECDX dst or DECDX.W dst
DECDX.B dst
Operation dst – 2 →dst
SUBX.A #2,dst
Emulation
SUBX #2,dst
SUBX.B #2,dst
Description The destination operand is decremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 2, reset otherwise
C: Reset if dst contained 0 or 1, set otherwise
V: Set if an arithmetic overflow occurs, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM address-word TONI is decremented by two.
DECDX.A TONI ; Decrement TONI
297
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.14 INCX
* INCX.A Increment destination address-word
* INCX.[W] Increment destination word
* INCX.B Increment destination byte
INCX.A dst
Syntax
INCX dst or INCX.W dst
INCX.B dst
Operation dst + 1 →dst
ADDX.A #1,dst
Emulation
ADDX #1,dst
ADDX.B #1,dst
Description The destination operand is incremented by one. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFFFh, reset otherwise
Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
C: Set if dst contained 0FFFFFh, reset otherwise
Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
V: Set if dst contained 07FFFh, reset otherwise
Set if dst contained 07FFFh, reset otherwise
Set if dst contained 07Fh, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM address-wordTONI is incremented by one.
INCX.A TONI ; Increment TONI (20-bits)
298 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.15 INCDX
* INCDX.A Double-increment destination address-word
* INCDX.[W] Double-increment destination word
* INCDX.B Double-increment destination byte
INCDX.A dst
Syntax
INCDX dst or INCDX.W dst
INCDX.B dst
Operation dst + 2 →dst
ADDX.A #2,dst
Emulation
ADDX #2,dst
ADDX.B #2,dst
Description The destination operand is incremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFFEh, reset otherwise
Set if dst contained 0FFFEh, reset otherwise
Set if dst contained 0FEh, reset otherwise
C: Set if dst contained 0FFFFEh or 0FFFFFh, reset otherwise
Set if dst contained 0FFFEh or 0FFFFh, reset otherwise
Set if dst contained 0FEh or 0FFh, reset otherwise
V: Set if dst contained 07FFFEh or 07FFFFh, reset otherwise
Set if dst contained 07FFEh or 07FFFh, reset otherwise
Set if dst contained 07Eh or 07Fh, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM byte LEO is incremented by two; PC points to upper memory.
INCDX.B LEO ; Increment LEO by two
299
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.16 INVX
* INVX.A Invert destination
* INVX.[W] Invert destination
* INVX.B Invert destination
INVX.A dst
Syntax
INVX dst or INVX.W dst
INVX.B dst
Operation .NOT.dst →dst
XORX.A #0FFFFFh,dst
Emulation
XORX #0FFFFh,dst
XORX.B #0FFh,dst
Description The destination operand is inverted. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if dst contained 0FFFFFh, reset otherwise
Set if dst contained 0FFFFh, reset otherwise
Set if dst contained 0FFh, reset otherwise
C: Set if result is not zero, reset otherwise ( = .NOT. Zero)
V: Set if initial destination operand was negative, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example 20-bit content of R5 is negated (twos complement).
INVX.A R5 ; Invert R5
INCX.A R5 ; R5 is now negated
Example Content of memory byte LEO is negated. PC is pointing to upper memory.
INVX.B LEO ; Invert LEO
INCX.B LEO ; MEM(LEO) is negated
300 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.17 MOVX
MOVX.A Move source address-word to destination address-word
MOVX.[W] Move source word to destination word
MOVX.B Move source byte to destination byte
MOVX.A src,dst
Syntax
MOVX src,dst or MOVX.W src,dst
MOVX.B src,dst
Operation src →dst
Description The source operand is copied to the destination. The source operand is not affected.
Both operands may be located in the full address space.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Move a 20-bit constant 18000h to absolute address-word EDE
MOVX.A #018000h,&EDE ; Move 18000h to EDE
Example The contents of table EDE (word data, 20-bit addresses) are copied to table TOM. The
length of the table is 030h words.
MOVA #EDE,R10 ; Prepare pointer (20-bit address)
Loop MOVX.W @R10+,TOM-EDE-2(R10) ; R10 points to both tables.
; R10+2
CMPA #EDE+60h,R10 ; End of table reached?
JLO Loop ; Not yet
... ; Copy completed
Example The contents of table EDE (byte data, 20-bit addresses) are copied to table TOM. The
length of the table is 020h bytes.
MOVA #EDE,R10 ; Prepare pointer (20-bit)
MOV #20h,R9 ; Prepare counter
Loop MOVX.W @R10+,TOM-EDE-2(R10) ; R10 points to both tables.
; R10+1
DEC R9 ; Decrement counter
JNZ Loop ; Not yet done
... ; Copy completed
Ten of the 28 possible addressing combinations of the MOVX.A instruction can use the
MOVA instruction. This saves two bytes and code cycles. Examples for the addressing
combinations are:
MOVX.A Rsrc,Rdst MOVA Rsrc,Rdst ; Reg/Reg
MOVX.A #imm20,Rdst MOVA #imm20,Rdst ; Immediate/Reg
MOVX.A &abs20,Rdst MOVA &abs20,Rdst ; Absolute/Reg
MOVX.A @Rsrc,Rdst MOVA @Rsrc,Rdst ; Indirect/Reg
MOVX.A @Rsrc+,Rdst MOVA @Rsrc+,Rdst ; Indirect,Auto/Reg
MOVX.A Rsrc,&abs20 MOVA Rsrc,&abs20 ; Reg/Absolute
The next four replacements are possible only if 16-bit indexes are sufficient for the
addressing:
301
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
MOVX.A z20(Rsrc),Rdst MOVA z16(Rsrc),Rdst ; Indexed/Reg
MOVX.A Rsrc,z20(Rdst) MOVA Rsrc,z16(Rdst) ; Reg/Indexed
MOVX.A symb20,Rdst MOVA symb16,Rdst ; Symbolic/Reg
MOVX.A Rsrc,symb20 MOVA Rsrc,symb16 ; Reg/Symbolic
302 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.18 POPM
POPM.A Restore n CPU registers (20-bit data) from the stack
POPM.[W] Restore n CPU registers (16-bit data) from the stack
POPM.A #n,Rdst
Syntax 1≤n≤16
POPM.W #n,Rdst or POPM #n,Rdst 1≤n≤16
Operation POPM.A: Restore the register values from stack to the specified CPU registers. The SP
is incremented by four for each register restored from stack. The 20-bit values from
stack (two words per register) are restored to the registers.
POPM.W: Restore the 16-bit register values from stack to the specified CPU registers.
The SP is incremented by two for each register restored from stack. The 16-bit values
from stack (one word per register) are restored to the CPU registers.
Note : This instruction does not use the extension word.
Description POPM.A: The CPU registers pushed on the stack are moved to the extended CPU
registers, starting with the CPU register (Rdst – n + 1). The SP is incremented by (n ×
4) after the operation.
POPM.W: The 16-bit registers pushed on the stack are moved back to the CPU
registers, starting with CPU register (Rdst – n + 1). The SP is incremented by (n × 2)
after the instruction. The MSBs (Rdst.19:16) of the restored CPU registers are cleared.
Status Bits Status bits are not affected, except SR is included in the operation.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Restore the 20-bit registers R9, R10, R11, R12, R13 from the stack
POPM.A #5,R13 ; Restore R9, R10, R11, R12, R13
Example Restore the 16-bit registers R9, R10, R11, R12, R13 from the stack.
POPM.W #5,R13 ; Restore R9, R10, R11, R12, R13
303
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.19 PUSHM
PUSHM.A Save n CPU registers (20-bit data) on the stack
PUSHM.[W] Save n CPU registers (16-bit words) on the stack
PUSHM.A #n,Rdst
Syntax 1≤n≤16
PUSHM.W #n,Rdst or PUSHM #n,Rdst 1≤n≤16
Operation PUSHM.A: Save the 20-bit CPU register values on the stack. The SP is decremented
by four for each register stored on the stack. The MSBs are stored first (higher
address).
PUSHM.W: Save the 16-bit CPU register values on the stack. The SP is decremented
by two for each register stored on the stack.
Description PUSHM.A: The n CPU registers, starting with Rdst backwards, are stored on the stack.
The SP is decremented by (n × 4) after the operation. The data (Rn.19:0) of the pushed
CPU registers is not affected.
PUSHM.W: The n registers, starting with Rdst backwards, are stored on the stack. The
SP is decremented by (n × 2) after the operation. The data (Rn.19:0) of the pushed
CPU registers is not affected.
Note : This instruction does not use the extension word.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Save the five 20-bit registers R9, R10, R11, R12, R13 on the stack
PUSHM.A #5,R13 ; Save R13, R12, R11, R10, R9
Example Save the five 16-bit registers R9, R10, R11, R12, R13 on the stack
PUSHM.W #5,R13 ; Save R13, R12, R11, R10, R9
304 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
6.6.3.20 POPX
* POPX.A Restore single address-word from the stack
* POPX.[W] Restore single word from the stack
* POPX.B Restore single byte from the stack
POPX.A dst
Syntax
POPX dst or POPX.W dst
POPX.B dst
Operation Restore the 8-, 16-, 20-bit value from the stack to the destination. 20-bit addresses are
possible. The SP is incremented by two (byte and word operands) and by four
(address-word operand).
MOVX(.B,.A) @SP+,dst
Emulation
Description The item on TOS is written to the destination operand. Register mode, Indexed mode,
Symbolic mode, and Absolute mode are possible. The SP is incremented by two or
four.
Note: the SP is incremented by two also for byte operations.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Write the 16-bit value on TOS to the 20-bit address &EDE
POPX.W &EDE ; Write word to address EDE
Example Write the 20-bit value on TOS to R9
POPX.A R9 ; Write address-word to R9
305
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.21 PUSHX
PUSHX.A Save single address-word to the stack
PUSHX.[W] Save single word to the stack
PUSHX.B Save single byte to the stack
PUSHX.A src
Syntax
PUSHX src or PUSHX.W src
PUSHX.B src
Operation Save the 8-, 16-, 20-bit value of the source operand on the TOS. 20-bit addresses are
possible. The SP is decremented by two (byte and word operands) or by four (address-
word operand) before the write operation.
Description The SP is decremented by two (byte and word operands) or by four (address-word
operand). Then the source operand is written to the TOS. All seven addressing modes
are possible for the source operand.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Save the byte at the 20-bit address &EDE on the stack
PUSHX.B &EDE ; Save byte at address EDE
Example Save the 20-bit value in R9 on the stack.
PUSHX.A R9 ; Save address-word in R9
306 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
C
19 0
MSB
0000
15
LSB
C
19 0
MSB LSB
16
0
0
www.ti.com
Instruction Set Description
6.6.3.22 RLAM
RLAM.A Rotate left arithmetically the 20-bit CPU register content
RLAM.[W] Rotate left arithmetically the 16-bit CPU register content
RLAM.A #n,Rdst
Syntax 1≤n≤4
RLAM.W #n,Rdst or RLAM #n,Rdst 1≤n≤4
Operation C←MSB ←MSB-1 .... LSB+1 ←LSB ←0
Description The destination operand is shifted arithmetically left one, two, three, or four positions as
shown in Figure 6-44. RLAM works as a multiplication (signed and unsigned) with 2, 4,
8, or 16. The word instruction RLAM.W clears the bits Rdst.19:16.
Note : This instruction does not use the extension word.
Status Bits N: Set if result is negative
.A: Rdst.19 = 1, reset if Rdst.19 = 0
.W: Rdst.15 = 1, reset if Rdst.15 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the MSB (n = 1), MSB-1 (n = 2), MSB-2 (n = 3), MSB-3 (n = 4)
V: Undefined
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit operand in R5 is shifted left by three positions. It operates equal to an
arithmetic multiplication by 8.
RLAM.A #3,R5 ; R5 = R5 x 8
Figure 6-44. Rotate Left Arithmetically—RLAM[.W] and RLAM.A
307
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MSB
C0
LSB
0
Instruction Set Description
www.ti.com
6.6.3.23 RLAX
* RLAX.A Rotate left arithmetically address-word
* RLAX.[W] Rotate left arithmetically word
* RLAX.B Rotate left arithmetically byte
RLAX.A dst
Syntax
RLAX dst or RLAX.W dst
RLAX.B dst
Operation C←MSB ←MSB-1 .... LSB+1 ←LSB ←0
ADDX.A dst,dst
Emulation
ADDX dst,dst
ADDX.B dst,dst
Description The destination operand is shifted left one position as shown in Figure 6-45. The MSB
is shifted into the carry bit (C) and the LSB is filled with 0. The RLAX instruction acts as
a signed multiplication by 2.
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Loaded from the MSB
V: Set if an arithmetic overflow occurs: the initial value is 040000h ≤dst < 0C0000h;
reset otherwise
Set if an arithmetic overflow occurs: the initial value is 04000h ≤dst < 0C000h;
reset otherwise
Set if an arithmetic overflow occurs: the initial value is 040h ≤dst < 0C0h; reset
otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R7 is multiplied by 2
RLAX.A R7 ; Shift left R7 (20-bit)
Figure 6-45. Destination Operand-Arithmetic Shift Left
308 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

MSB
0
CLSB
www.ti.com
Instruction Set Description
6.6.3.24 RLCX
* RLCX.A Rotate left through carry address-word
* RLCX.[W] Rotate left through carry word
* RLCX.B Rotate left through carry byte
RLCX.A dst
Syntax
RLCX dst or RLCX.W dst
RLCX.B dst
Operation C←MSB ←MSB-1 .... LSB+1 ←LSB ←C
ADDCX.A dst,dst
Emulation
ADDCX dst,dst
ADDCX.B dst,dst
Description The destination operand is shifted left one position as shown in Figure 6-46. The carry
bit (C) is shifted into the LSB and the MSB is shifted into the carry bit (C).
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Loaded from the MSB
V: Set if an arithmetic overflow occurs: the initial value is 040000h ≤dst < 0C0000h;
reset otherwise
Set if an arithmetic overflow occurs: the initial value is 04000h ≤dst < 0C000h;
reset otherwise
Set if an arithmetic overflow occurs: the initial value is 040h ≤dst < 0C0h; reset
otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R5 is shifted left one position.
RLCX.A R5 ; (R5 x 2) + C -> R5
Example The RAM byte LEO is shifted left one position. PC is pointing to upper memory.
RLCX.B LEO ; RAM(LEO) x 2 + C -> RAM(LEO)
Figure 6-46. Destination Operand-Carry Left Shift
309
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
C
19 0
MSB
0000
15
LSB
C
19 0
MSB LSB
16
Instruction Set Description
www.ti.com
6.6.3.25 RRAM
RRAM.A Rotate right arithmetically the 20-bit CPU register content
RRAM.[W] Rotate right arithmetically the 16-bit CPU register content
RRAM.A #n,Rdst
Syntax 1≤n≤4
RRAM.W #n,Rdst or RRAM #n,Rdst 1≤n≤4
Operation MSB →MSB →MSB–1 ... LSB+1 →LSB →C
Description The destination operand is shifted right arithmetically by one, two, three, or four bit
positions as shown in Figure 6-47. The MSB retains its value (sign). RRAM operates
equal to a signed division by 2, 4, 8, or 16. The MSB is retained and shifted into MSB-1.
The LSB+1 is shifted into the LSB, and the LSB is shifted into the carry bit C. The word
instruction RRAM.W clears the bits Rdst.19:16.
Note : This instruction does not use the extension word.
Status Bits N: Set if result is negative
.A: Rdst.19 = 1, reset if Rdst.19 = 0
.W: Rdst.15 = 1, reset if Rdst.15 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB (n = 1), LSB+1 (n = 2), LSB+2 (n = 3), or LSB+3 (n = 4)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The signed 20-bit number in R5 is shifted arithmetically right two positions.
RRAM.A #2,R5 ; R5/4 -> R5
Example The signed 20-bit value in R15 is multiplied by 0.75. (0.5 + 0.25) × R15.
PUSHM.A #1,R15 ; Save extended R15 on stack
RRAM.A #1,R15 ; R15 y 0.5 -> R15
ADDX.A @SP+,R15 ; R15 y 0.5 + R15 = 1.5 y R15 -> R15
RRAM.A #1,R15 ; (1.5 y R15) y 0.5 = 0.75 y R15 -> R15
Figure 6-47. Rotate Right Arithmetically RRAM[.W] and RRAM.A
310 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.26 RRAX
RRAX.A Rotate right arithmetically the 20-bit operand
RRAX.[W] Rotate right arithmetically the 16-bit operand
RRAX.B Rotate right arithmetically the 8-bit operand
RRAX.A Rdst
Syntax
RRAX.W Rdst
RRAX Rdst
RRAX.B Rdst
RRAX.A dst
RRAX dst or RRAX.W dst
RRAX.B dst
Operation MSB →MSB →MSB–1 ... LSB+1 →LSB →C
Description Register mode for the destination: the destination operand is shifted right by one bit
position as shown in Figure 6-48. The MSB retains its value (sign). The word instruction
RRAX.W clears the bits Rdst.19:16, the byte instruction RRAX.B clears the bits
Rdst.19:8. The MSB retains its value (sign), the LSB is shifted into the carry bit. RRAX
here operates equal to a signed division by 2.
All other modes for the destination: the destination operand is shifted right arithmetically
by one bit position as shown in Figure 6-49. The MSB retains its value (sign), the LSB
is shifted into the carry bit. RRAX here operates equal to a signed division by 2. All
addressing modes, with the exception of the Immediate mode, are possible in the full
memory.
Status Bits N: Set if result is negative, reset if positive
.A: dst.19 = 1, reset if dst.19 = 0
.W: dst.15 = 1, reset if dst.15 = 0
.B: dst.7 = 1, reset if dst.7 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The signed 20-bit number in R5 is shifted arithmetically right four positions.
RPT #4
RRAX.A R5 ; R5/16 -> R5
Example The signed 8-bit value in EDE is multiplied by 0.5.
311
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
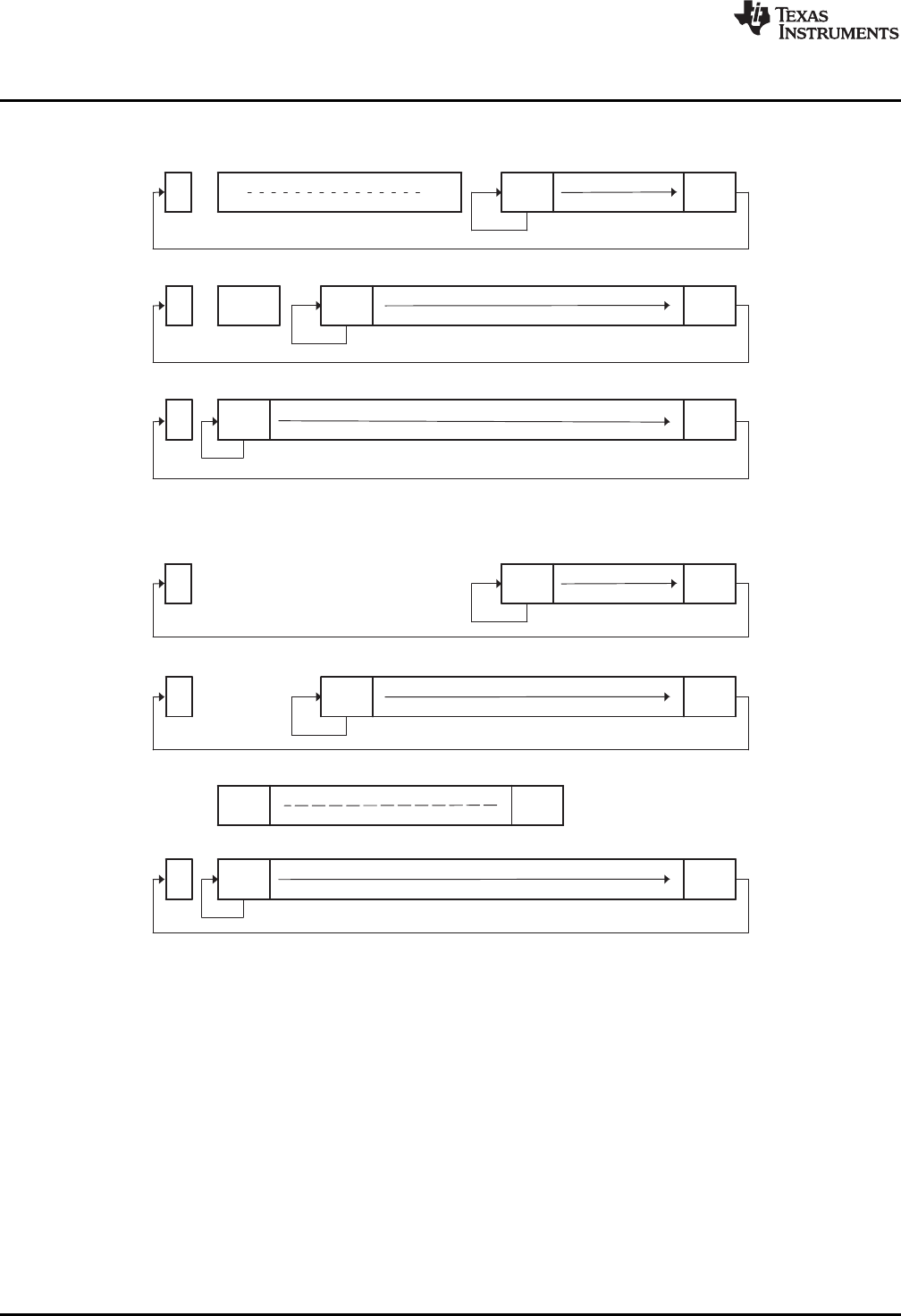
C
0
MSB
7
LSB
C
15 0
MSB LSB
C
19 0
MSB LSB
31 20
0 0
C
0
MSB
7
LSB
C
15 0
MSB LSB
C
19 0
MSB LSB
819
0 0
19 16
0000
Instruction Set Description
www.ti.com
RRAX.B &EDE ; EDE/2 -> EDE
Figure 6-48. Rotate Right Arithmetically RRAX(.B,.A) – Register Mode
Figure 6-49. Rotate Right Arithmetically RRAX(.B,.A) – Non-Register Mode
312 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.27 RRCM
RRCM.A Rotate right through carry the 20-bit CPU register content
RRCM.[W] Rotate right through carry the 16-bit CPU register content
RRCM.A #n,Rdst
Syntax 1≤n≤4
RRCM.W #n,Rdst or RRCM #n,Rdst 1≤n≤4
Operation C→MSB →MSB–1 ... LSB+1 →LSB →C
Description The destination operand is shifted right by one, two, three, or four bit positions as
shown in Figure 6-50. The carry bit C is shifted into the MSB, the LSB is shifted into the
carry bit. The word instruction RRCM.W clears the bits Rdst.19:16.
Note : This instruction does not use the extension word.
Status Bits N: Set if result is negative
.A: Rdst.19 = 1, reset if Rdst.19 = 0
.W: Rdst.15 = 1, reset if Rdst.15 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB (n = 1), LSB+1 (n = 2), LSB+2 (n = 3), or LSB+3 (n = 4)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
313
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
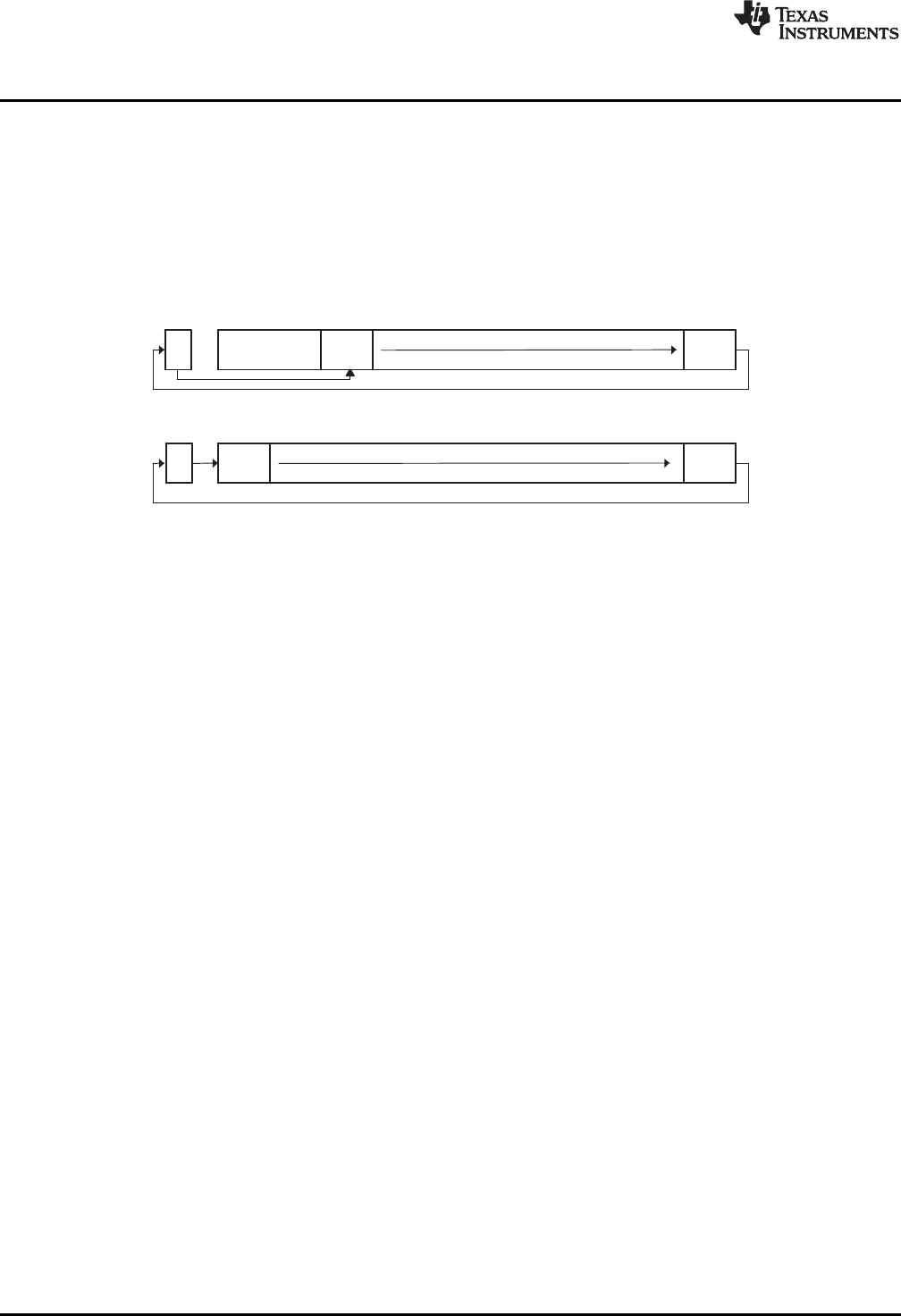
C
19 0
MSB
0
15
LSB
C
19 0
MSB LSB
16
Instruction Set Description
www.ti.com
Example The address-word in R5 is shifted right by three positions. The MSB–2 is loaded with 1.
SETC ; Prepare carry for MSB-2
RRCM.A #3,R5 ; R5 = R5 » 3 + 20000h
Example The word in R6 is shifted right by two positions. The MSB is loaded with the LSB. The
MSB–1 is loaded with the contents of the carry flag.
RRCM.W #2,R6 ; R6 = R6 » 2. R6.19:16 = 0
Figure 6-50. Rotate Right Through Carry RRCM[.W] and RRCM.A
314 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.28 RRCX
RRCX.A Rotate right through carry the 20-bit operand
RRCX.[W] Rotate right through carry the 16-bit operand
RRCX.B Rotate right through carry the 8-bit operand
RRCX.A Rdst
Syntax
RRCX.W Rdst
RRCX Rdst
RRCX.B Rdst
RRCX.A dst
RRCX dst or RRCX.W dst
RRCX.B dst
Operation C→MSB →MSB–1 ... LSB+1 →LSB →C
Description Register mode for the destination: the destination operand is shifted right by one bit
position as shown in Figure 6-51. The word instruction RRCX.W clears the bits
Rdst.19:16, the byte instruction RRCX.B clears the bits Rdst.19:8. The carry bit C is
shifted into the MSB, the LSB is shifted into the carry bit.
All other modes for the destination: the destination operand is shifted right by one bit
position as shown in Figure 6-52. The carry bit C is shifted into the MSB, the LSB is
shifted into the carry bit. All addressing modes, with the exception of the Immediate
mode, are possible in the full memory.
Status Bits N: Set if result is negative
.A: dst.19 = 1, reset if dst.19 = 0
.W: dst.15 = 1, reset if dst.15 = 0
.B: dst.7 = 1, reset if dst.7 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit operand at address EDE is shifted right by one position. The MSB is loaded
with 1.
SETC ; Prepare carry for MSB
RRCX.A EDE ; EDE = EDE » 1 + 80000h
Example The word in R6 is shifted right by 12 positions.
315
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
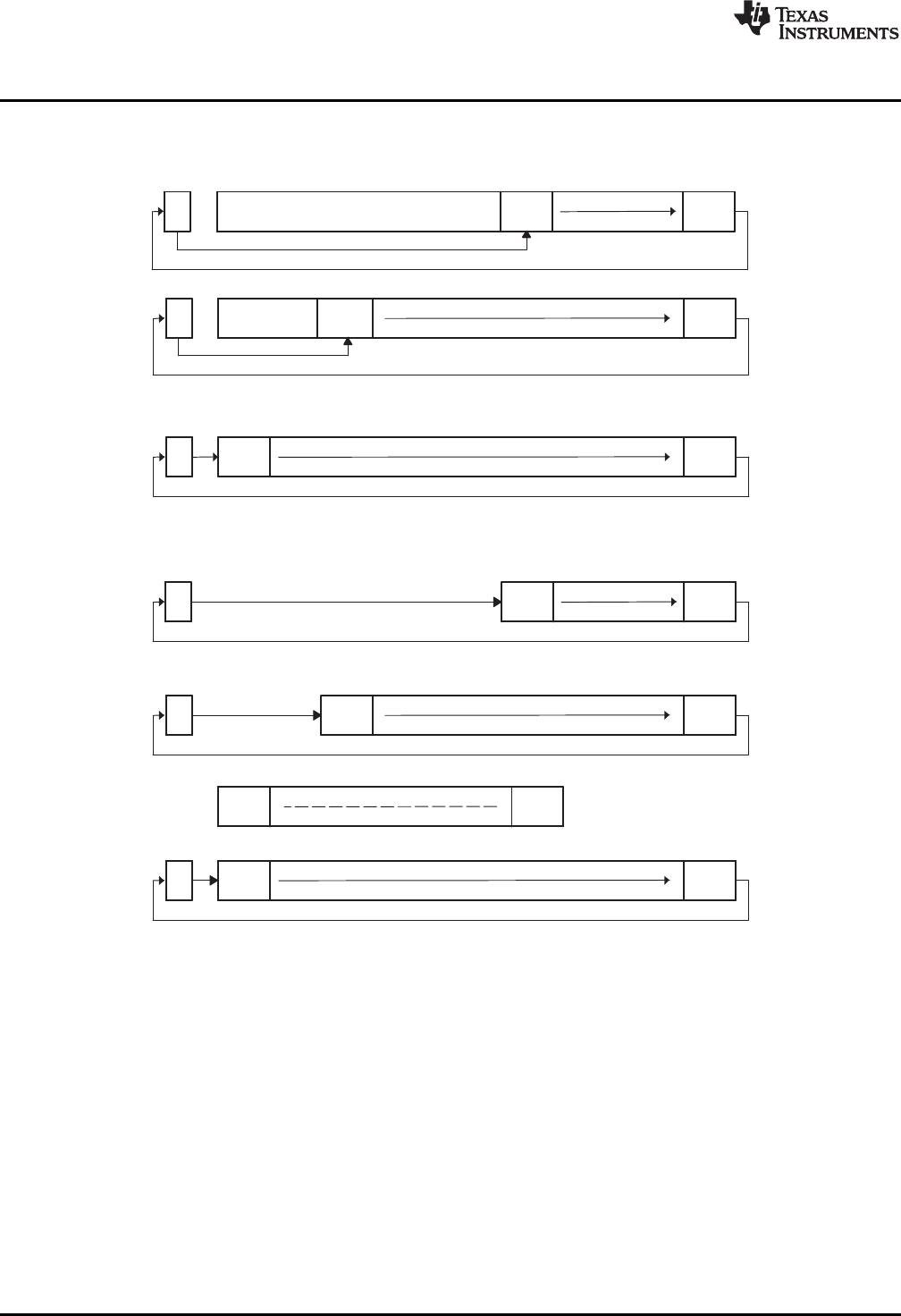
C
0
MSB
7
LSB
C
15 0
MSB LSB
C
19 0
MSB LSB
31 20
0 0
C
19 0
MSB
0 - - - - - - - - - - - - - - - - - - - - 0
7
LSB
C
19 0
MSB LSB
8
C
15 0
MSB LSB
19 16
0 0 0 0
Instruction Set Description
www.ti.com
RPT #12
RRCX.W R6 ; R6 = R6 » 12. R6.19:16 = 0
Figure 6-51. Rotate Right Through Carry RRCX(.B,.A) – Register Mode
Figure 6-52. Rotate Right Through Carry RRCX(.B,.A) – Non-Register Mode
316 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
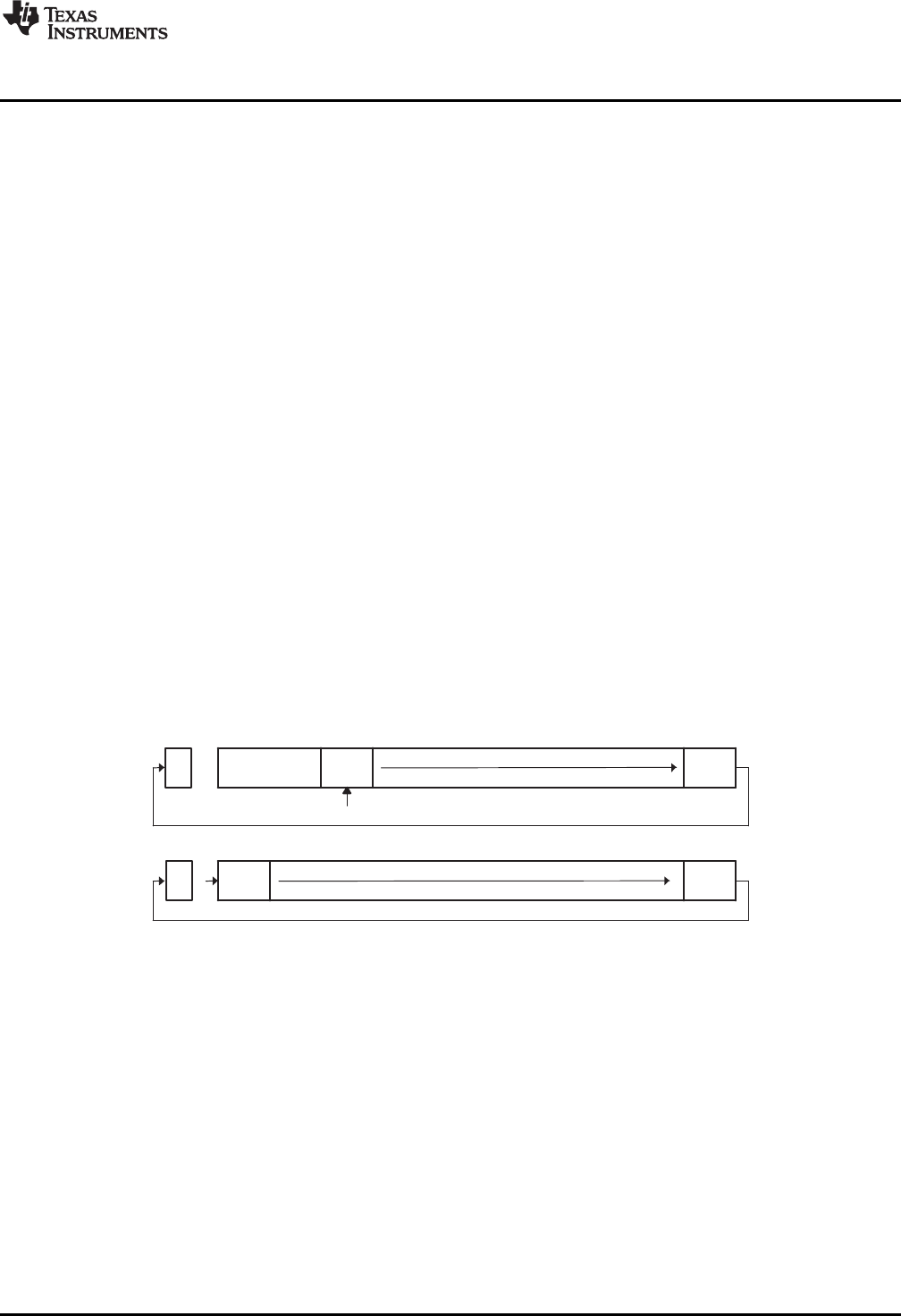
C
19 0
MSB
0000
15
LSB
C
19 0
MSB LSB
0
0
16
www.ti.com
Instruction Set Description
6.6.3.29 RRUM
RRUM.A Rotate right through carry the 20-bit CPU register content
RRUM.[W] Rotate right through carry the 16-bit CPU register content
RRUM.A #n,Rdst
Syntax 1≤n≤4
RRUM.W #n,Rdst or RRUM #n,Rdst 1≤n≤4
Operation 0→MSB →MSB–1 ... LSB+1 →LSB →C
Description The destination operand is shifted right by one, two, three, or four bit positions as
shown in Figure 6-53. Zero is shifted into the MSB, the LSB is shifted into the carry bit.
RRUM works like an unsigned division by 2, 4, 8, or 16. The word instruction RRUM.W
clears the bits Rdst.19:16.
Note : This instruction does not use the extension word.
Status Bits N: Set if result is negative
.A: Rdst.19 = 1, reset if Rdst.19 = 0
.W: Rdst.15 = 1, reset if Rdst.15 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB (n = 1), LSB+1 (n = 2), LSB+2 (n = 3), or LSB+3 (n = 4)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The unsigned address-word in R5 is divided by 16.
RRUM.A #4,R5 ; R5 = R5 » 4. R5/16
Example The word in R6 is shifted right by one bit. The MSB R6.15 is loaded with 0.
RRUM.W #1,R6 ; R6 = R6/2. R6.19:15 = 0
Figure 6-53. Rotate Right Unsigned RRUM[.W] and RRUM.A
317
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
C
19 0
MSB0 - - - - - - - - - - - - - - - - - - - - 0
7
LSB
C
19 0
MSB LSB
8
C
15 0
MSB LSB
19 16
0 0 0 0
0
0
0
Instruction Set Description
www.ti.com
6.6.3.30 RRUX
RRUX.A Shift right unsigned the 20-bit CPU register content
RRUX.[W] Shift right unsigned the 16-bit CPU register content
RRUX.B Shift right unsigned the 8-bit CPU register content
RRUX.A Rdst
Syntax
RRUX.W Rdst
RRUX Rdst
RRUX.B Rdst
Operation C=0 →MSB →MSB–1 ... LSB+1 →LSB →C
Description RRUX is valid for register mode only: the destination operand is shifted right by one bit
position as shown in Figure 6-54. The word instruction RRUX.W clears the bits
Rdst.19:16. The byte instruction RRUX.B clears the bits Rdst.19:8. Zero is shifted into
the MSB, the LSB is shifted into the carry bit.
Status Bits N: Set if result is negative
.A: dst.19 = 1, reset if dst.19 = 0
.W: dst.15 = 1, reset if dst.15 = 0
.B: dst.7 = 1, reset if dst.7 = 0
Z: Set if result is zero, reset otherwise
C: Loaded from the LSB
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The word in R6 is shifted right by 12 positions.
RPT #12
RRUX.W R6 ; R6 = R6 » 12. R6.19:16 = 0
Figure 6-54. Rotate Right Unsigned RRUX(.B,.A) – Register Mode
318 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.31 SBCX
* SBCX.A Subtract borrow (.NOT. carry) from destination address-word
* SBCX.[W] Subtract borrow (.NOT. carry) from destination word
* SBCX.B Subtract borrow (.NOT. carry) from destination byte
SBCX.A dst
Syntax
SBCX dst or SBCX.W dst
SBCX.B dst
Operation dst + 0FFFFFh + C →dst
dst + 0FFFFh + C →dst
dst + 0FFh + C →dst
SBCX.A #0,dst
Emulation
SBCX #0,dst
SBCX.B #0,dst
Description The carry bit (C) is added to the destination operand minus one. The previous contents
of the destination are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB of the result, reset otherwise
Set to 1 if no borrow, reset if borrow
V: Set if an arithmetic overflow occurs, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 8-bit counter pointed to by R13 is subtracted from a 16-bit counter pointed to by
R12.
SUBX.B @R13,0(R12) ; Subtract LSDs
SBCX.B 1(R12) ; Subtract carry from MSD
NOTE: Borrow implementation
The borrow is treated as a .NOT. carry:
Borrow Carry Bit
Yes 0
No 1
319
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.32 SUBX
SUBX.A Subtract source address-word from destination address-word
SUBX.[W] Subtract source word from destination word
SUBX.B Subtract source byte from destination byte
SUBX.A src,dst
Syntax
SUBX src,dst or SUBX.W src,dst
SUBX.B src,dst
Operation (.not. src) + 1 + dst →dst or dst – src →dst
Description The source operand is subtracted from the destination operand. This is done by adding
the 1s complement of the source + 1 to the destination. The source operand is not
affected. The result is written to the destination operand. Both operands may be located
in the full address space.
Status Bits N: Set if result is negative (src > dst), reset if positive (src ≤dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example A 20-bit constant 87654h is subtracted from EDE (LSBs) and EDE+2 (MSBs).
SUBX.A #87654h,EDE ; Subtract 87654h from EDE+2|EDE
Example A table word pointed to by R5 (20-bit address) is subtracted from R7. Jump to label
TONI if R7 contains zero after the instruction. R5 is auto-incremented by two. R7.19:16 =
0.
SUBX.W @R5+,R7 ; Subtract table number from R7. R5 + 2
JZ TONI ; R7 = @R5 (before subtraction)
... ; R7 <> @R5 (before subtraction)
Example Byte CNT is subtracted from the byte R12 points to in the full address space. Address of
CNT is within PC ± 512 K.
SUBX.B CNT,0(R12) ; Subtract CNT from @R12
Note: Use SUBA for the following two cases for better density and execution.
SUBX.A Rsrc,Rdst
SUBX.A #imm20,Rdst
320 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Instruction Set Description
6.6.3.33 SUBCX
SUBCX.A Subtract source address-word with carry from destination address-word
SUBCX.[W] Subtract source word with carry from destination word
SUBCX.B Subtract source byte with carry from destination byte
SUBCX.A src,dst
Syntax
SUBCX src,dst or SUBCX.W src,dst
SUBCX.B src,dst
Operation (.not. src) + C + dst →dst or dst – (src – 1) + C →dst
Description The source operand is subtracted from the destination operand. This is made by adding
the 1s complement of the source + carry to the destination. The source operand is not
affected, the result is written to the destination operand. Both operands may be located
in the full address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source operand
from a negative destination operand delivers a positive result, reset otherwise (no
overflow).
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example A 20-bit constant 87654h is subtracted from R5 with the carry from the previous
instruction.
SUBCX.A #87654h,R5 ; Subtract 87654h + C from R5
Example A 48-bit number (3 words) pointed to by R5 (20-bit address) is subtracted from a 48-bit
counter in RAM, pointed to by R7. R5 auto-increments to point to the next 48-bit number.
SUBX.W @R5+,0(R7) ; Subtract LSBs. R5 + 2
SUBCX.W @R5+,2(R7) ; Subtract MIDs with C. R5 + 2
SUBCX.W @R5+,4(R7) ; Subtract MSBs with C. R5 + 2
Example Byte CNT is subtracted from the byte R12 points to. The carry of the previous instruction
is used. 20-bit addresses.
SUBCX.B &CNT,0(R12) ; Subtract byte CNT from @R12
321
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
15 8 7 0
Low ByteHigh Byte
Before SWPBX.A
After SWPBX.A
X
19 16
31 20
X
15 8 7 0
High ByteLow Byte
0
19 16
31 20
X
15 8 7 0
15 8 7 0
Low Byte
Low ByteHigh Byte
High Byte
Before SWPBX.A
After SWPBX.A
X
X
19
19
16
16
Instruction Set Description
www.ti.com
6.6.3.34 SWPBX
SWPBX.A Swap bytes of lower word
SWPBX.[W] Swap bytes of word
SWPBX.A dst
Syntax
SWPBX dst or SWPBX.W dst
Operation dst.15:8 ↔dst.7:0
Description Register mode: Rn.15:8 are swapped with Rn.7:0. When the .A extension is used,
Rn.19:16 are unchanged. When the .W extension is used, Rn.19:16 are cleared.
Other modes: When the .A extension is used, bits 31:20 of the destination address are
cleared, bits 19:16 are left unchanged, and bits 15:8 are swapped with bits 7:0. When
the .W extension is used, bits 15:8 are swapped with bits 7:0 of the addressed word.
Status Bits Status bits are not affected.
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Exchange the bytes of RAM address-word EDE
MOVX.A #23456h,&EDE ; 23456h -> EDE
SWPBX.A EDE ; 25634h -> EDE
Example Exchange the bytes of R5
MOVA #23456h,R5 ; 23456h -> R5
SWPBX.W R5 ; 05634h -> R5
Figure 6-55. Swap Bytes SWPBX.A Register Mode
Figure 6-56. Swap Bytes SWPBX.A In Memory
322 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
15 8 7 0
15 8 7 0
Low Byte
Low ByteHigh Byte
High Byte
Before SWPBX
After SWPBX
15 8 7 0
15 8 7 0
Low Byte
Low ByteHigh Byte
High Byte
Before SWPBX
After SWPBX
X
0
19
19
16
16
www.ti.com
Instruction Set Description
Figure 6-57. Swap Bytes SWPBX[.W] Register Mode
Figure 6-58. Swap Bytes SWPBX[.W] In Memory
323
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
15 8 7 6 0
S
15 8 7 6 019 16
S
19 16
SXTX[.W] Rdst
SXTX[.W] dst
15 8 7 6 019 162031
0 0...... S
19 16
15 8 7 6 019 16
S
19 16
SXTX.A Rdst
SXTX.A dst
Instruction Set Description
www.ti.com
6.6.3.35 SXTX
SXTX.A Extend sign of lower byte to address-word
SXTX.[W] Extend sign of lower byte to word
SXTX.A dst
Syntax
SXTX dst or SXTX.W dst
Operation dst.7 →dst.15:8, Rdst.7 →Rdst.19:8 (Register mode)
Description Register mode: The sign of the low byte of the operand (Rdst.7) is extended into the bits
Rdst.19:8.
Other modes: SXTX.A: the sign of the low byte of the operand (dst.7) is extended into
dst.19:8. The bits dst.31:20 are cleared.
SXTX[.W]: the sign of the low byte of the operand (dst.7) is extended into dst.15:8.
Status Bits N: Set if result is negative, reset otherwise
Z: Set if result is zero, reset otherwise
C: Set if result is not zero, reset otherwise (C = .not.Z)
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The signed 8-bit data in EDE.7:0 is sign extended to 20 bits: EDE.19:8. Bits 31:20
located in EDE+2 are cleared.
SXTX.A &EDE ; Sign extended EDE -> EDE+2/EDE
Figure 6-59. Sign Extend SXTX.A
Figure 6-60. Sign Extend SXTX[.W]
324 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.3.36 TSTX
* TSTX.A Test destination address-word
* TSTX.[W] Test destination word
* TSTX.B Test destination byte
TSTX.A dst
Syntax
TSTX dst or TSTX.W dst
TSTX.B dst
Operation dst + 0FFFFFh + 1
dst + 0FFFFh + 1
dst + 0FFh + 1
CMPX.A #0,dst
Emulation
CMPX #0,dst
CMPX.B #0,dst
Description The destination operand is compared with zero. The status bits are set according to the
result. The destination is not affected.
Status Bits N: Set if destination is negative, reset if positive
Z: Set if destination contains zero, reset otherwise
C: Set
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example RAM byte LEO is tested; PC is pointing to upper memory. If it is negative, continue at
LEONEG; if it is positive but not zero, continue at LEOPOS.
TSTX.B LEO ; Test LEO
JN LEONEG ; LEO is negative
JZ LEOZERO ; LEO is zero
LEOPOS ...... ; LEO is positive but not zero
LEONEG ...... ; LEO is negative
LEOZERO ...... ; LEO is zero
325
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.3.37 XORX
XORX.A Exclusive OR source address-word with destination address-word
XORX.[W] Exclusive OR source word with destination word
XORX.B Exclusive OR source byte with destination byte
XORX.A src,dst
Syntax
XORX src,dst or XORX.W src,dst
XORX.B src,dst
Operation src .xor. dst →dst
Description The source and destination operands are exclusively ORed. The result is placed into
the destination. The source operand is not affected. The previous contents of the
destination are lost. Both operands may be located in the full address space.
Status Bits N: Set if result is negative (MSB = 1), reset if positive (MSB = 0)
Z: Set if result is zero, reset otherwise
C: Set if result is not zero, reset otherwise (carry = .not. Zero)
V: Set if both operands are negative (before execution), reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Toggle bits in address-word CNTR (20-bit data) with information in address-word TONI
(20-bit address)
XORX.A TONI,&CNTR ; Toggle bits in CNTR
Example A table word pointed to by R5 (20-bit address) is used to toggle bits in R6.
XORX.W @R5,R6 ; Toggle bits in R6. R6.19:16 = 0
Example Reset to zero those bits in the low byte of R7 that are different from the bits in byte EDE
(20-bit address)
XORX.B EDE,R7 ; Set different bits to 1 in R7
INV.B R7 ; Invert low byte of R7. R7.19:8 = 0.
326 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4 Address Instructions
MSP430X address instructions are instructions that support 20-bit operands but have restricted
addressing modes. The addressing modes are restricted to the Register mode and the Immediate mode,
except for the MOVA instruction. Restricting the addressing modes removes the need for the additional
extension-word op-code improving code density and execution time. The MSP430X address instructions
are listed and described in the following pages.
327
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Instruction Set Description
www.ti.com
6.6.4.1 ADDA
ADDA Add 20-bit source to a 20-bit destination register
ADDA Rsrc,Rdst
Syntax
ADDA #imm20,Rdst
Operation src + Rdst →Rdst
Description The 20-bit source operand is added to the 20-bit destination CPU register. The previous
contents of the destination are lost. The source operand is not affected.
Status Bits N: Set if result is negative (Rdst.19 = 1), reset if positive (Rdst.19 = 0)
Z: Set if result is zero, reset otherwise
C: Set if there is a carry from the 20-bit result, reset otherwise
V: Set if the result of two positive operands is negative, or if the result of two negative
numbers is positive, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example R5 is increased by 0A4320h. The jump to TONI is performed if a carry occurs.
ADDA #0A4320h,R5 ; Add A4320h to 20-bit R5
JC TONI ; Jump on carry
... ; No carry occurred
328 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.2 BRA
* BRA Branch to destination
BRA dst
Syntax
Operation dst →PC
MOVA dst,PC
Emulation
Description An unconditional branch is taken to a 20-bit address anywhere in the full address
space. All seven source addressing modes can be used. The branch instruction is an
address-word instruction. If the destination address is contained in a memory location
X, it is contained in two ascending words: X (LSBs) and (X + 2) (MSBs).
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Examples Examples for all addressing modes are given.
Immediate mode: Branch to label EDE located anywhere in the 20-bit address space or
branch directly to address.
BRA #EDE ; MOVA #imm20,PC
BRA #01AA04h
Symbolic mode: Branch to the 20-bit address contained in addresses EXEC (LSBs) and
EXEC+2 (MSBs). EXEC is located at the address (PC + X) where X is within ±32 K.
Indirect addressing.
BRA EXEC ; MOVA z16(PC),PC
Note: If the 16-bit index is not sufficient, a 20-bit index may be used with the following
instruction.
MOVX.A EXEC,PC ; 1M byte range with 20-bit index
Absolute mode: Branch to the 20-bit address contained in absolute addresses EXEC
(LSBs) and EXEC+2 (MSBs). Indirect addressing.
BRA &EXEC ; MOVA &abs20,PC
Register mode: Branch to the 20-bit address contained in register R5. Indirect R5.
BRA R5 ; MOVA R5,PC
Indirect mode: Branch to the 20-bit address contained in the word pointed to by register
R5 (LSBs). The MSBs have the address (R5 + 2). Indirect, indirect R5.
BRA @R5 ; MOVA @R5,PC
329
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
Indirect, Auto-Increment mode: Branch to the 20-bit address contained in the words
pointed to by register R5 and increment the address in R5 afterwards by 4. The next
time the software flow uses R5 as a pointer, it can alter the program execution due to
access to the next address in the table pointed to by R5. Indirect, indirect R5.
BRA @R5+ ; MOVA @R5+,PC. R5 + 4
Indexed mode: Branch to the 20-bit address contained in the address pointed to by
register (R5 + X) (for example, a table with addresses starting at X). (R5 + X) points to
the LSBs, (R5 + X + 2) points to the MSBs of the address. X is within R5 ± 32 K.
Indirect, indirect (R5 + X).
BRA X(R5) ; MOVA z16(R5),PC
Note: If the 16-bit index is not sufficient, a 20-bit index X may be used with the following
instruction:
MOVX.A X(R5),PC ; 1M byte range with 20-bit index
330 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.3 CALLA
CALLA Call a subroutine
CALLA dst
Syntax
Operation dst →tmp 20-bit dst is evaluated and stored
SP – 2 →SP
PC.19:16 →@SP updated PC with return address to TOS (MSBs)
SP – 2 →SP
PC.15:0 →@SP updated PC to TOS (LSBs)
tmp →PC saved 20-bit dst to PC
Description A subroutine call is made to a 20-bit address anywhere in the full address space. All
seven source addressing modes can be used. The call instruction is an address-word
instruction. If the destination address is contained in a memory location X, it is
contained in two ascending words, X (LSBs) and (X + 2) (MSBs). Two words on the
stack are needed for the return address. The return is made with the instruction RETA.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Examples Examples for all addressing modes are given.
Immediate mode: Call a subroutine at label EXEC or call directly an address.
CALLA #EXEC ; Start address EXEC
CALLA #01AA04h ; Start address 01AA04h
Symbolic mode: Call a subroutine at the 20-bit address contained in addresses EXEC
(LSBs) and EXEC+2 (MSBs). EXEC is located at the address (PC + X) where X is
within ±32 K. Indirect addressing.
CALLA EXEC ; Start address at @EXEC. z16(PC)
Absolute mode: Call a subroutine at the 20-bit address contained in absolute addresses
EXEC (LSBs) and EXEC+2 (MSBs). Indirect addressing.
CALLA &EXEC ; Start address at @EXEC
Register mode: Call a subroutine at the 20-bit address contained in register R5. Indirect
R5.
CALLA R5 ; Start address at @R5
Indirect mode: Call a subroutine at the 20-bit address contained in the word pointed to
by register R5 (LSBs). The MSBs have the address (R5 + 2). Indirect, indirect R5.
CALLA @R5 ; Start address at @R5
331
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
Indirect, Auto-Increment mode: Call a subroutine at the 20-bit address contained in the
words pointed to by register R5 and increment the 20-bit address in R5 afterwards by 4.
The next time the software flow uses R5 as a pointer, it can alter the program execution
due to access to the next word address in the table pointed to by R5. Indirect, indirect
R5.
CALLA @R5+ ; Start address at @R5. R5 + 4
Indexed mode: Call a subroutine at the 20-bit address contained in the address pointed
to by register (R5 + X); for example, a table with addresses starting at X. (R5 + X)
points to the LSBs, (R5 + X + 2) points to the MSBs of the word address. X is within R5
± 32 K. Indirect, indirect (R5 + X).
CALLA X(R5) ; Start address at @(R5+X). z16(R5)
332 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.4 CLRA
* CLRA Clear 20-bit destination register
CLRA Rdst
Syntax
Operation 0→Rdst
MOVA #0,Rdst
Emulation
Description The destination register is cleared.
Status Bits Status bits are not affected.
Example The 20-bit value in R10 is cleared.
CLRA R10 ; 0 -> R10
333
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.4.5 CMPA
CMPA Compare the 20-bit source with a 20-bit destination register
CMPA Rsrc,Rdst
Syntax
CMPA #imm20,Rdst
Operation (.not. src) + 1 + Rdst or Rdst – src
Description The 20-bit source operand is subtracted from the 20-bit destination CPU register. This
is made by adding the 1s complement of the source + 1 to the destination register. The
result affects only the status bits.
Status Bits N: Set if result is negative (src > dst), reset if positive (src ≤dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB, reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source
operand from a negative destination operand delivers a positive result, reset
otherwise (no overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example A 20-bit immediate operand and R6 are compared. If they are equal, the program
continues at label EQUAL.
CMPA #12345h,R6 ; Compare R6 with 12345h
JEQ EQUAL ; R6 = 12345h
... ; Not equal
Example The 20-bit values in R5 and R6 are compared. If R5 is greater than (signed) or equal to
R6, the program continues at label GRE.
CMPA R6,R5 ; Compare R6 with R5 (R5 - R6)
JGE GRE ; R5 >= R6
... ; R5 < R6
334 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.6 DECDA
* DECDA Double-decrement 20-bit destination register
DECDA Rdst
Syntax
Operation Rdst – 2 →Rdst
SUBA #2,Rdst
Emulation
Description The destination register is decremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if Rdst contained 2, reset otherwise
C: Reset if Rdst contained 0 or 1, set otherwise
V: Set if an arithmetic overflow occurs, otherwise reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R5 is decremented by 2.
DECDA R5 ; Decrement R5 by two
335
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.4.7 INCDA
* INCDA Double-increment 20-bit destination register
INCDA Rdst
Syntax
Operation Rdst + 2 →Rdst
ADDA #2,Rdst
Emulation
Description The destination register is incremented by two. The original contents are lost.
Status Bits N: Set if result is negative, reset if positive
Z: Set if Rdst contained 0FFFFEh, reset otherwise
Set if Rdst contained 0FFFEh, reset otherwise
Set if Rdst contained 0FEh, reset otherwise
C: Set if Rdst contained 0FFFFEh or 0FFFFFh, reset otherwise
Set if Rdst contained 0FFFEh or 0FFFFh, reset otherwise
Set if Rdst contained 0FEh or 0FFh, reset otherwise
V: Set if Rdst contained 07FFFEh or 07FFFFh, reset otherwise
Set if Rdst contained 07FFEh or 07FFFh, reset otherwise
Set if Rdst contained 07Eh or 07Fh, reset otherwise
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R5 is incremented by two.
INCDA R5 ; Increment R5 by two
336 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.8 MOVA
MOVA Move the 20-bit source to the 20-bit destination
MOVA Rsrc,Rdst
Syntax
MOVA #imm20,Rdst
MOVA z16(Rsrc),Rdst
MOVA EDE,Rdst
MOVA &abs20,Rdst
MOVA @Rsrc,Rdst
MOVA @Rsrc+,Rdst
MOVA Rsrc,z16(Rdst)
MOVA Rsrc,&abs20
Operation src →Rdst
Rsrc →dst
Description The 20-bit source operand is moved to the 20-bit destination. The source operand is not
affected. The previous content of the destination is lost.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Examples Copy 20-bit value in R9 to R8
MOVA R9,R8 ; R9 -> R8
Write 20-bit immediate value 12345h to R12
MOVA #12345h,R12 ; 12345h -> R12
Copy 20-bit value addressed by (R9 + 100h) to R8. Source operand in addresses (R9 +
100h) LSBs and (R9 + 102h) MSBs.
MOVA 100h(R9),R8 ; Index: + 32 K. 2 words transferred
Move 20-bit value in 20-bit absolute addresses EDE (LSBs) and EDE+2 (MSBs) to R12
MOVA &EDE,R12 ; &EDE -> R12. 2 words transferred
Move 20-bit value in 20-bit addresses EDE (LSBs) and EDE+2 (MSBs) to R12. PC
index ± 32 K.
MOVA EDE,R12 ; EDE -> R12. 2 words transferred
Copy 20-bit value R9 points to (20 bit address) to R8. Source operand in addresses
@R9 LSBs and @(R9 + 2) MSBs.
MOVA @R9,R8 ; @R9 -> R8. 2 words transferred
337
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
Copy 20-bit value R9 points to (20 bit address) to R8. R9 is incremented by four
afterwards. Source operand in addresses @R9 LSBs and @(R9 + 2) MSBs.
MOVA @R9+,R8 ; @R9 -> R8. R9 + 4. 2 words transferred.
Copy 20-bit value in R8 to destination addressed by (R9 + 100h). Destination operand
in addresses @(R9 + 100h) LSBs and @(R9 + 102h) MSBs.
MOVA R8,100h(R9) ; Index: +- 32 K. 2 words transferred
Move 20-bit value in R13 to 20-bit absolute addresses EDE (LSBs) and EDE+2 (MSBs)
MOVA R13,&EDE ; R13 -> EDE. 2 words transferred
Move 20-bit value in R13 to 20-bit addresses EDE (LSBs) and EDE+2 (MSBs). PC
index ± 32 K.
MOVA R13,EDE ; R13 -> EDE. 2 words transferred
338 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.9 RETA
* RETA Return from subroutine
RETA
Syntax
Operation @SP →PC.15:0 LSBs (15:0) of saved PC to PC.15:0
SP + 2 →SP
@SP →PC.19:16 MSBs (19:16) of saved PC to PC.19:16
SP + 2 →SP
MOVA @SP+,PC
Emulation
Description The 20-bit return address information, pushed onto the stack by a CALLA instruction, is
restored to the PC. The program continues at the address following the subroutine call.
The SR bits SR.11:0 are not affected. This allows the transfer of information with these
bits.
Status Bits N: Not affected
Z: Not affected
C: Not affected
V: Not affected
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example Call a subroutine SUBR from anywhere in the 20-bit address space and return to the
address after the CALLA
CALLA #SUBR ; Call subroutine starting at SUBR
... ; Return by RETA to here
SUBR PUSHM.A #2,R14 ; Save R14 and R13 (20 bit data)
... ; Subroutine code
POPM.A #2,R14 ; Restore R13 and R14 (20 bit data)
RETA ; Return (to full address space)
339
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Instruction Set Description
www.ti.com
6.6.4.10 SUBA
SUBA Subtract 20-bit source from 20-bit destination register
SUBA Rsrc,Rdst
Syntax
SUBA #imm20,Rdst
Operation (.not.src) + 1 + Rdst →Rdst or Rdst – src →Rdst
Description The 20-bit source operand is subtracted from the 20-bit destination register. This is
made by adding the 1s complement of the source + 1 to the destination. The result is
written to the destination register, the source is not affected.
Status Bits N: Set if result is negative (src > dst), reset if positive (src ≤dst)
Z: Set if result is zero (src = dst), reset otherwise (src ≠dst)
C: Set if there is a carry from the MSB (Rdst.19), reset otherwise
V: Set if the subtraction of a negative source operand from a positive destination
operand delivers a negative result, or if the subtraction of a positive source
operand from a negative destination operand delivers a positive result, reset
otherwise (no overflow)
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R5 is subtracted from R6. If a carry occurs, the program continues at
label TONI.
SUBA R5,R6 ; R6 - R5 -> R6
JC TONI ; Carry occurred
... ; No carry
340 CPUX SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Instruction Set Description
6.6.4.11 TSTA
* TSTA Test 20-bit destination register
TSTA Rdst
Syntax
Operation dst + 0FFFFFh + 1
dst + 0FFFFh + 1
dst + 0FFh + 1
CMPA #0,Rdst
Emulation
Description The destination register is compared with zero. The status bits are set according to the
result. The destination register is not affected.
Status Bits N: Set if destination register is negative, reset if positive
Z: Set if destination register contains zero, reset otherwise
C: Set
V: Reset
Mode Bits OSCOFF, CPUOFF, and GIE are not affected.
Example The 20-bit value in R7 is tested. If it is negative, continue at R7NEG; if it is positive but
not zero, continue at R7POS.
TSTA R7 ; Test R7
JN R7NEG ; R7 is negative
JZ R7ZERO ; R7 is zero
R7POS ...... ; R7 is positive but not zero
R7NEG ...... ; R7 is negative
R7ZERO ...... ; R7 is zero
341
SLAU208O–June 2008–Revised May 2015 CPUX
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 7
SLAU208O–June 2008–Revised May 2015
Flash Memory Controller
This chapter describes the operation of the flash memory controller.
Topic ........................................................................................................................... Page
7.1 Flash Memory Introduction................................................................................ 343
7.2 Flash Memory Segmentation.............................................................................. 344
7.3 Flash Memory Operation ................................................................................... 346
7.4 FCTL Registers ................................................................................................ 361
342 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
MAB MDB
Control Registers Address/Data Latch
Timing
Generator
Programming
Voltage
Generator
Flash
Memory
Array
www.ti.com
Flash Memory Introduction
7.1 Flash Memory Introduction
The flash memory is byte, word, and long-word addressable and programmable. The flash memory
module has an integrated controller that controls programming and erase operations. The module contains
three registers, a timing generator, and a voltage generator to supply program and erase voltages. The
cumulative high-voltage time must not be exceeded, and each 32-bit word can be written not more than
four times (in byte, word, or long word write modes) before another erase cycle (see device-specific data
sheet for details).
The flash memory features include:
• Internal programming voltage generation
• Byte, word (2 bytes), and long (4 bytes) programmable
• Ultra-low-power operation
• Segment erase, bank erase (device specific), and mass erase
• Marginal 0 and marginal 1 read modes
• Each bank (device specific) can be erased individually while program execution can proceed in a
different flash bank.
NOTE: Bank operations are not supported on all devices. See the device-specific data sheet for
banks supported and their respective sizes.
Figure 7-1 shows the block diagram of the flash memory and controller.
Figure 7-1. Flash Memory Module Block Diagram
343
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
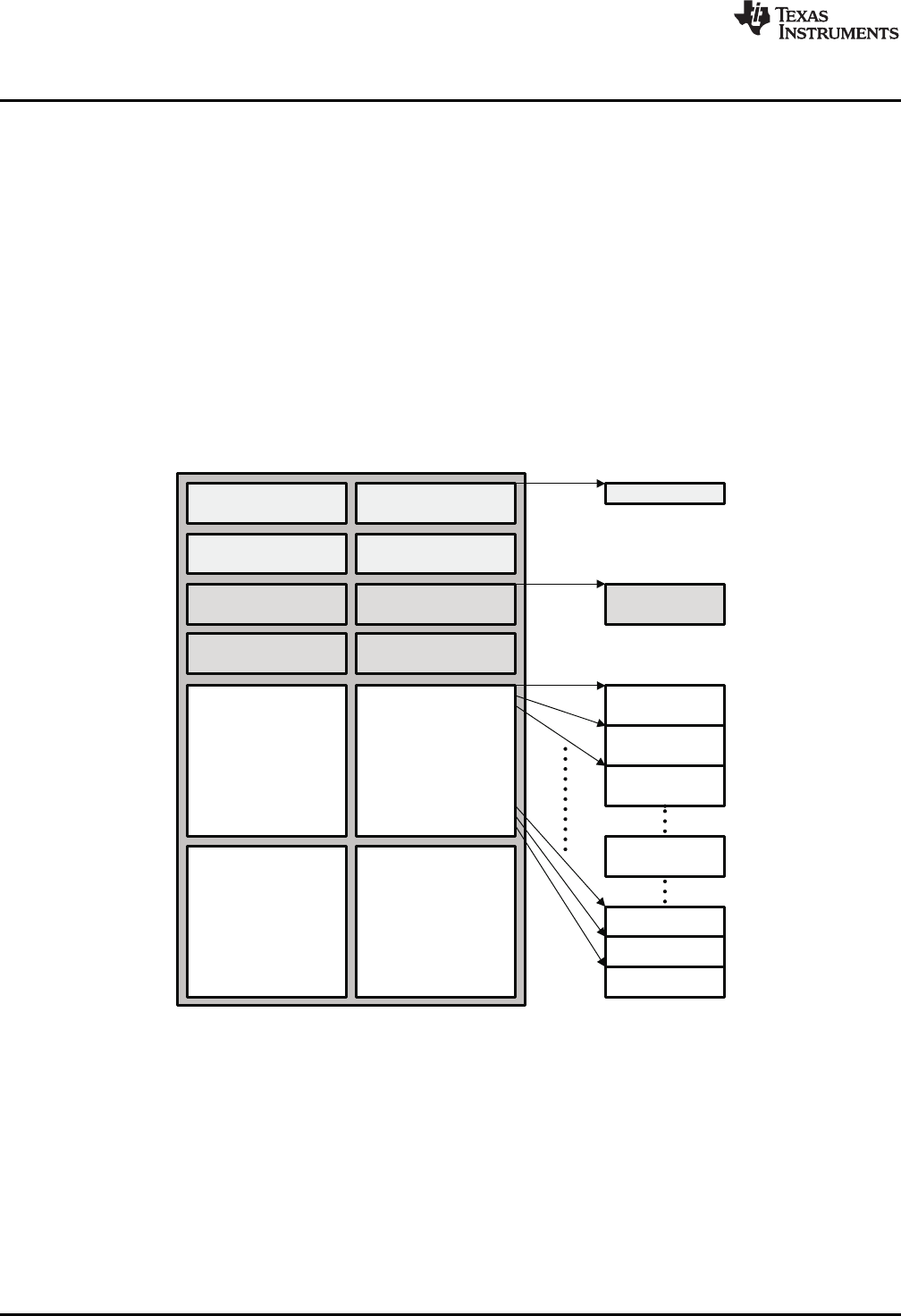
64-kbyte
Flash Memory
Bank C
64-kbyte
Flash Memory
Bank D
64-kbyte
Flash Memory
Bank A
64-kbyte
Flash Memory
Bank B
512-byte
BSL Memory A
128-byte Information
Memory Segment B
128-byte Information
Memory Segment A
512-byte
BSL Memory B
128-byte Information
Memory Segment D
128-byte Information
Memory Segment C
512-byte
BSL Memory C
512-byte
BSL Memory D
Segment 0
Segment 0
Segment 0
Segment 1
Segment 2
Segment 125
Segment126
Segment127
Segment X
Flash Memory Segmentation
www.ti.com
7.2 Flash Memory Segmentation
The flash main memory is partitioned into 512-byte segments. Single bits, bytes, or words can be written
to flash memory, but a segment is the smallest size of the flash memory that can be erased.
The flash memory is partitioned into main and information memory sections. There is no difference in the
operation of the main and information memory sections. Code and data can be located in either section.
The difference between the sections is the segment size.
There are four information memory segments, A through D. Each information memory segment contains
128 bytes and can be erased individually.
The bootstrap loader (BSL) memory consists of four segments, A through D. Each BSL memory segment
contains 512 bytes and can be erased individually.
The main memory segment size is 512 byte. See the device-specific data sheet for the start and end
addresses of each bank, when available, and for the complete memory map of a device.
Figure 7-2 shows the flash segmentation using an example of 256KB of flash that has four banks of 64KB
(segments A through D) and information memory.
Figure 7-2. 256KB of Flash Memory Segments Example
344 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Flash Memory Segmentation
7.2.1 Segment A
Segment A of the information memory is locked separately from all other segments with the LOCKA bit. If
LOCKA = 1, segment A cannot be written or erased, and all information memory is protected from being
segment erased. If LOCKA = 0, segment A can be erased and written like any other flash memory
segment.
The state of the LOCKA bit is toggled when a 1 is written to it. Writing a 0 to LOCKA has no effect. This
allows existing flash programming routines to be used unchanged.
; Unlock Info Memory
MOV #FWPW,&FCTL4 ; Clear LOCKINFO, if set
; Unlock SegmentA
BIT #LOCKA,&FCTL3 ; Test LOCKA
JZ SEGA_UNLOCKED ; Already unlocked?
MOV #FWPW+LOCKA,&FCTL3 ; No, unlock SegmentA
SEGA_UNLOCKED ; Yes, continue
; SegmentA is unlocked
; Lock SegmentA
BIT #LOCKA,&FCTL3 ; Test LOCKA
JNZ SEGA_LOCKED ; Already locked?
MOV #FWPW+LOCKA,&FCTL3 ; No, lock SegmentA
SEGA_LOCKED ; Yes, continue
; SegmentA is locked
; Lock Info Memory
MOV #FWPW+LOCKINFO,&FCTL4 ; Set LOCKINFO
345
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
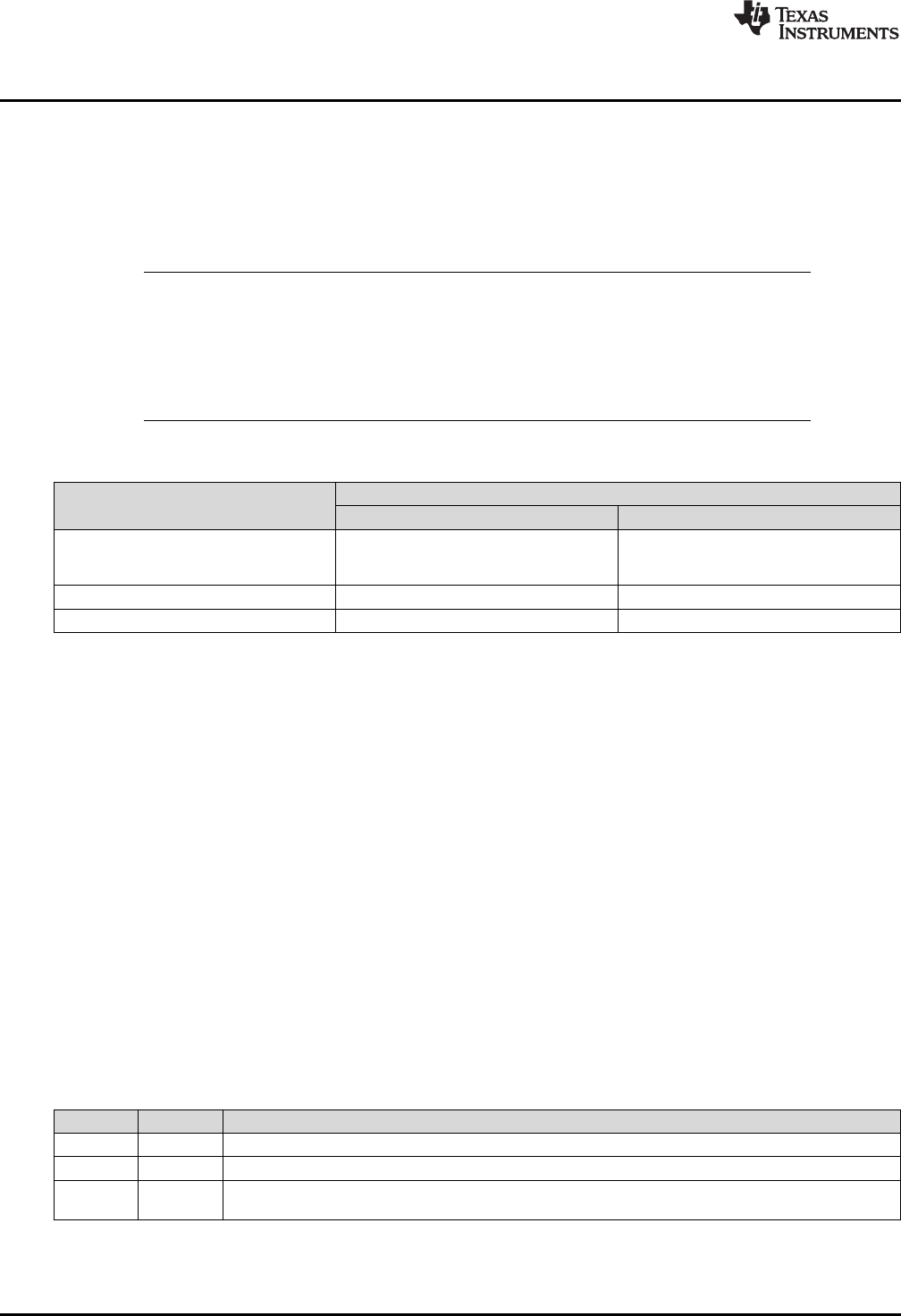
Flash Memory Operation
www.ti.com
7.3 Flash Memory Operation
The default mode of the flash memory is read mode. In read mode, the flash memory is not being erased
or written, the flash timing generator and voltage generator are off, and the memory operates identically to
ROM.
Read and fetch while erase – The flash memory allows execution of a program from flash while a
different flash bank is erased. Data reads are also possible from any flash bank not being erased.
NOTE: Read and fetch while erase
The read and fetch while erase feature is available in flash memory configurations where
more than one flash bank is available. If there is one flash bank available, holding the
complete flash program memory, the read from the program memory and information
memory and BSL memory during the erase is not provided. Table 7-1 summarizes which
flash operations are supported for devices that support read and fetch while erasing.
Table 7-1. Supported Simultaneous Code Execution and Flash Operations
Simultaneous Code Execution
Flash Operation Within Flash Within RAM
Supported
Bank Erase Executed code must not reside in the Supported
bank to be erased
Segment Erase Not Supported Supported
Byte, word, long-word write Not supported Supported
Flash memory is in-system programmable (ISP) without the need for additional external voltage. The CPU
can program the flash memory. The flash memory write and erase modes are selected by the BLKWRT,
WRT, MERAS, and ERASE bits and are:
• Byte, word, or long-word (32-bit) write
• Block write
• Segment erase
• Bank erase (only main memory)
• Mass erase (all main memory banks)
• Read during bank erase (except for the one currently read from)
Reading or writing to flash memory while it is busy programming or erasing (page, mass, or bank) from
the same bank is prohibited. Any flash erase or programming can be initiated from within flash memory or
RAM.
7.3.1 Erasing Flash Memory
The logical value of an erased flash memory bit is 1. Each bit can be programmed from 1 to 0 individually,
but to reprogram from 0 to 1 requires an erase cycle. The smallest amount of flash that can be erased is
one segment. There are three erase modes selected by the ERASE and MERAS bits listed in Table 7-2.
Table 7-2. Erase Modes
MERAS ERASE Erase Mode
0 1 Segment erase
1 0 Bank erase (of one bank) selected by the dummy write address(1)
Mass erase (all memory banks are erased. Information memory A to D and BSL segments A to D are
1 1 not erased)
(1) Bank operations are not supported on all devices. See the device-specific data sheet for support of bank operations.
346 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
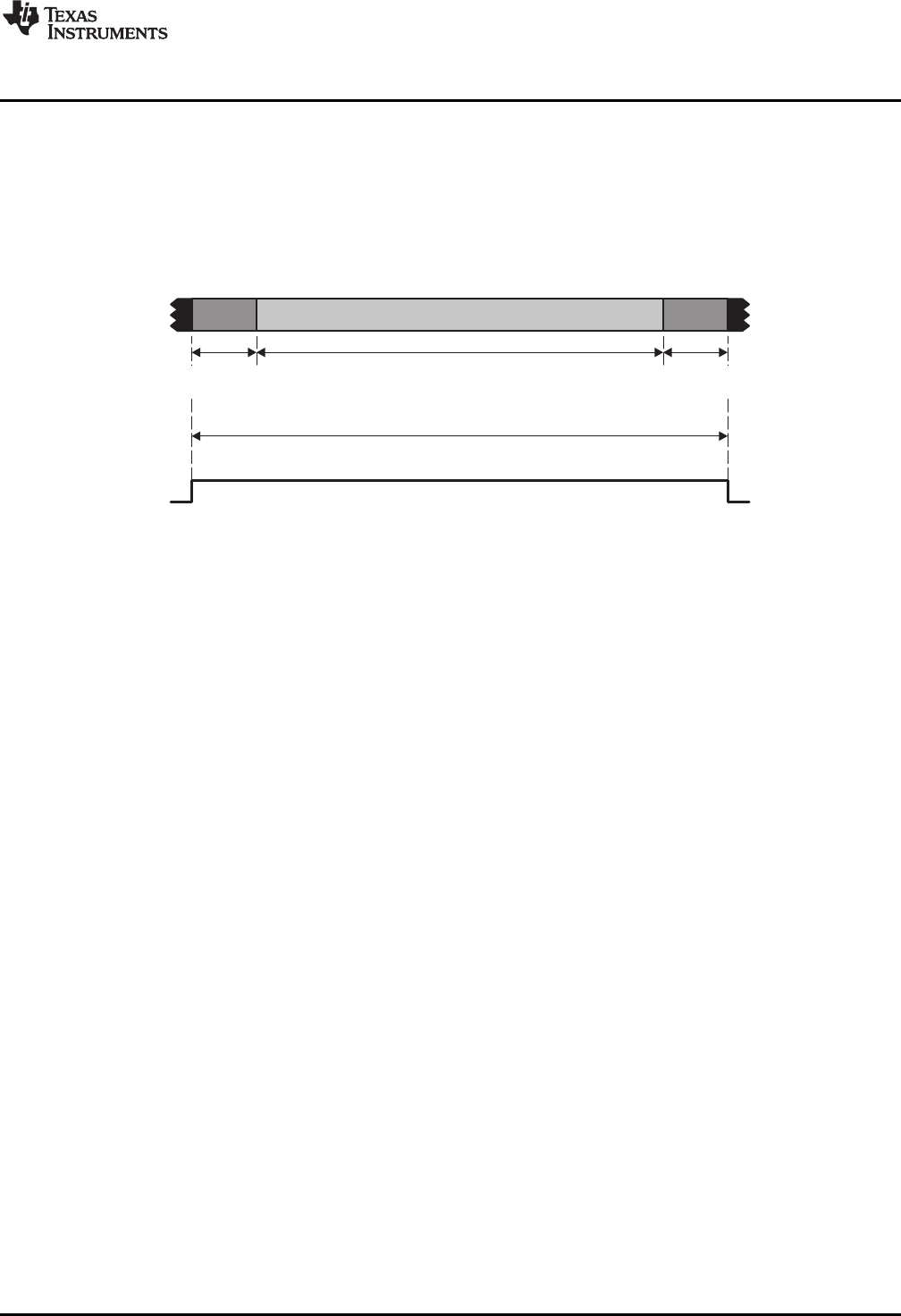
BUSY
EraseOperation Active
EraseTime,CurrentConsumptionisIncreased
Generate
ProgrammingVoltage
Remove
ProgrammingVoltage
t =t
Erase Mass_erase, Segment_erase, Bank_erase
www.ti.com
Flash Memory Operation
7.3.1.1 Erase Cycle
An erase cycle is initiated by a dummy write to the address range of the segment to be erased. The
dummy write starts the erase operation and is required for all erase operations including mass erase.
Figure 7-3 shows the erase cycle timing. The BUSY bit is set immediately after the dummy write and
remains set throughout the erase cycle. BUSY, MERAS, and ERASE are automatically cleared when the
cycle completes. No additional dummy write access should be made while the control bits are cleared,
otherwise, ACCVIFG is set. The mass erase cycle timing is not dependent on the amount of flash memory
present on a device. Erase cycle times are equivalent for all devices.
Figure 7-3. Erase Cycle Timing
7.3.1.2 Erasing Main Memory
The main memory consists of one or more banks. Each bank can be erased individually (bank erase). All
main memory banks can be erased in the mass erase mode.
7.3.1.3 Erasing Information Memory or BSL Flash Segments
The information memory A to D and the BSL segments A to D can only be erased in segment erase
mode. They are not erased during a bank erase or a mass erase. Erasing is only possible by first clearing
the LOCKINFO bit.
347
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
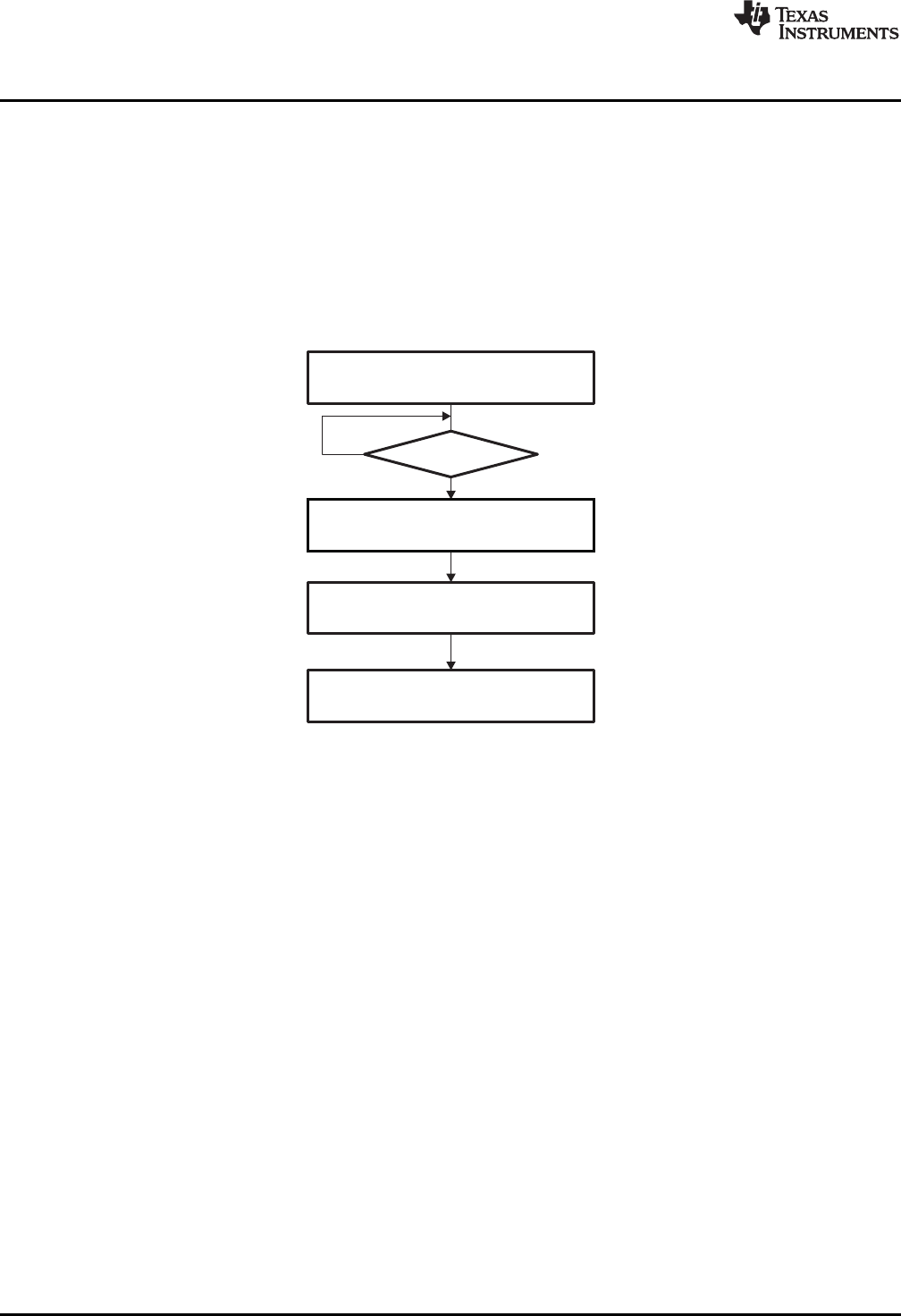
Yes BUSY =1
Disablewatchdog
Setupflashcontrollerand
erasemode
Dummywrite
SetLOCK=1,(SetLOCKINFO=1)
reenable watchdog
Flash Memory Operation
www.ti.com
7.3.1.4 Initiating Erase From Flash
An erase cycle can be initiated from within flash memory. During a bank erase, code can be executed
from flash or RAM. The executed code cannot be located in a bank to be erased.
For any segment erase, the CPU is held until the erase cycle completes regardless of the bank the code
resides in. After the segment erase cycle ends, the CPU resumes code execution with the instruction
following the dummy write.
When initiating an erase cycle from within flash memory, it is possible to erase the code needed for
execution after the erase operation. If this occurs, CPU execution is unpredictable after the erase cycle.
The flow to initiate an erase from flash is shown in Figure 7-4.
Figure 7-4. Erase Cycle From Flash
; Segment Erase from flash.
; Assumes Program Memory. Information memory or BSL
; requires LOCKINFO to be cleared as well.
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
L1 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L1 ; Loop while busy
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+ERASE,&FCTL1 ; Enable segment erase
CLR &0FC10h ; Dummy write
L2 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L2 ; Loop while busy
MOV #FWPW+LOCK,&FCTL3 ; Done, set LOCK
... ; Re-enable WDT?
348 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

Yes BUSY =1
Yes BUSY =1
Disablewatchdog
Setupflashcontrollerand
erasemode
Dummywrite
SetLOCK=1,(SetLOCKINFO=1)
Reenablewatchdog
www.ti.com
Flash Memory Operation
7.3.1.5 Initiating Erase From RAM
An erase cycle can be initiated from RAM. In this case, the CPU is not held and continues to execute
code from RAM. The mass erase (all main memory banks) operation is initiated while executing from
RAM. The BUSY bit is used to determine the end of the erase cycle. If the flash is busy completing a bank
erase, flash addresses of a different bank can be used to read data or to fetch instructions. While the flash
is BUSY, starting an erase cycle or a programming cycle causes an access violation, ACCIFG is set to 1,
and the result of the erase operation is unpredictable.
The flow to initiate an erase from flash from RAM is shown in Figure 7-5.
Figure 7-5. Erase Cycle From RAM
; segment Erase from RAM.
; Assumes Program Memory. Information memory or BSL
; requires LOCKINFO to be cleared as well.
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
L1 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L1 ; Loop while busy
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+ERASE,&FCTL1 ; Enable page erase
CLR &0FC10h ; Dummy write
L2 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L2 ; Loop while busy
MOV #FWPW+LOCK,&FCTL3 ; Done, set LOCK
... ; Re-enable WDT?
349
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

BUSY
ProgrammingOperation Active
ProgrammingTime,V CurrentConsumptionisIncreased
CC
tWrite
Generate
ProgrammingVoltage
Remove
ProgrammingVoltage
Flash Memory Operation
www.ti.com
7.3.2 Writing Flash Memory
The write modes, selected by the WRT and BLKWRT bits, are listed in Table 7-3.
Table 7-3. Write Modes
BLKWRT WRT Write Mode
0 1 Byte or word write
1 0 Long-word write
1 1 Long-word block write
The write modes use a sequence of individual write instructions. Using the long-word write mode is
approximately twice as fast as the byte or word mode. Using the long-word block write mode is
approximately four times faster than byte or word mode, because the voltage generator remains on for the
complete block write, and long-words are written in parallel. Any instruction that modifies a destination can
be used to modify a flash location in either byte or word write mode, long-word write mode, or block long-
word write mode.
The BUSY bit is set while the write operation is active and cleared when the operation completes. If the
write operation is initiated from RAM, the CPU must not access flash while BUSY is set to 1. Otherwise,
an access violation occurs, ACCVIFG is set, and the flash write is unpredictable.
7.3.2.1 Byte or Word Write
A byte or word write operation can be initiated from within flash memory or from RAM. When initiating
from within flash memory, the CPU is held while the write completes. After the write completes, the CPU
resumes code execution with the instruction following the write access. The byte, word, and long-word
write timing is shown in Figure 7-6. Byte, word, and long-word write times are identical.
Figure 7-6. Byte, Word, and Long-Word Write Timing
When a byte or word write is executed from RAM, the CPU continues to execute code from RAM. The
BUSY bit must be zero before the CPU accesses flash again, otherwise an access violation occurs,
ACCVIFG is set, and the write result is unpredictable.
In any write mode, the internally-generated programming voltage is applied to the complete 128-byte
block. The cumulative programming time, tCPT, must not be exceeded for any block. Each byte, word, or
long-word write adds to the cumulative program time of a segment. If the maximum cumulative program
time is reached or exceeded, the segment must be erased. Further programming or using the data returns
unpredictable results (see the device-specific data sheet for specifications).
350 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Setup flash controller
and set WRT = 1
Disable watchdog
Set WRT = 0, LOCK = 1,
reenable watchdog
Write byte or word
www.ti.com
Flash Memory Operation
7.3.2.2 Initiating Byte or Word Write From Flash
The flow to initiate a byte or word write from flash is shown in Figure 7-7.
Figure 7-7. Initiating a Byte or Word Write From Flash
; Byte or word write from flash.
; Assumes 0x0FF1E is already erased
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+WRT,&FCTL1 ; Enable write
MOV #0123h,&0FF1Eh ; 0123h -> 0x0FF1E
MOV #FWPW,&FCTL1 ; Done. Clear WRT
MOV #FWPW+LOCK,&FCTL3 ; Set LOCK
... ; Re-enable WDT?
351
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Yes
BUSY = 1
Yes
BUSY = 1
Disable watchdog
Setup flash controller
and set WRT = 1
Write byte or word
Set WRT = 0, LOCK = 1,
Reenable watchdog
Flash Memory Operation
www.ti.com
7.3.2.3 Initiating Byte or Word Write From RAM
The flow to initiate a byte or word write from RAM is shown in Figure 7-8.
Figure 7-8. Initiating a Byte or Word Write From RAM
; Byte or word write from RAM.
; Assumes 0x0FF1E is already erased
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
L1 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L1 ; Loop while busy
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+WRT,&FCTL1 ; Enable write
MOV #0123h,&0FF1Eh ; 0123h -> 0x0FF1E
L2 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L2 ; Loop while busy
MOV #FWPW,&FCTL1 ; Clear WRT
MOV #FWPW+LOCK,&FCTL3 ; Set LOCK
... ; Re-enable WDT?
352 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Setup flash controller
and set BLKWRT = 1
Disable watchdog
Set BLKWRT = 0, LOCK = 1,
Reenable watchdog
Write 4 bytes or 2 words
www.ti.com
Flash Memory Operation
7.3.2.4 Long-Word Write
A long-word write operation can be initiated from within flash memory or from RAM. The BUSY bit is set to
1 after 32 bits are written to the flash controller and the programming cycle starts. When initiating from
within flash memory, the CPU is held while the write completes. After the write completes, the CPU
resumes code execution with the instruction following the write access. The long-word write timing is
shown in Figure 7-6.
A long-word consists of four consecutive bytes aligned to at 32-bit address (only the lower two address
bits are different). The bytes can be written in any order or any combination of bytes and words. If a byte
or word is written more than once, the last data written to the four bytes are stored into the flash memory.
If a write to a flash address outside of the 32-bit address happens before all four bytes are available, the
data written so far is discarded, and the latest byte or word written defines the new 32-bit aligned address.
When 32 bits are available, the write cycle is executed. When executing from RAM, the CPU continues to
execute code. The BUSY bit must be zero before the CPU accesses flash again, otherwise an access
violation occurs, ACCVIFG is set, and the write result is unpredictable.
In long-word write mode, the internally-generated programming voltage is applied to a complete 128-byte
block. The cumulative programming time, tCPT, must not be exceeded for any block. Each write adds to the
cumulative program time of a segment. If the maximum cumulative program time is reached or exceeded,
the segment must be erased. Further programming or using the data returns unpredictable results.
With each write, the amount of time the block is subjected to the programming voltage accumulates. If the
cumulative programming time is reached or exceeded, the block must be erased before further
programming or use (see the device-specific data sheet for specifications).
7.3.2.5 Initiating Long-Word Write From Flash
The flow to initiate a long-word write from flash is shown in Figure 7-9.
Figure 7-9. Initiating Long-Word Write From Flash
; Long-word write from flash.
; Assumes 0x0FF1C and 0x0FF1E is already erased
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+BLKWRT,&FCTL1 ; Enable 2-word write
MOV #0123h,&0FF1Ch ; 0123h -> 0x0FF1C
MOV #45676h,&0FF1Eh ; 04567h -> 0x0FF1E
MOV #FWPW,&FCTL1 ; Done. Clear BLKWRT
MOV #FWPW+LOCK,&FCTL3 ; Set LOCK
... ; Re-enable WDT?
353
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Yes
BUSY = 1
Yes
BUSY = 1
Disable watchdog
Setup flash controller
and set BLKWRT = 1
Write 4 bytes or 2 words
Set BLKWRT=0, LOCK = 1,
Reenable watchdog
Flash Memory Operation
www.ti.com
7.3.2.6 Initiating Long-Word Write From RAM
The flow to initiate a long-word write from RAM is shown in Figure 7-10.
Figure 7-10. Initiating Long-Word Write from RAM
; Two 16-bit word writes from RAM.
; Assumes 0x0FF1C and 0x0FF1E is already erased
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
L1 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L1 ; Loop while busy
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+BLKWRT,&FCTL1 ; Enable write
MOV #0123h,&0FF1Ch ; 0123h -> 0x0FF1C
MOV #4567h,&0FF1Eh ; 4567h -> 0x0FF1E
L2 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L2 ; Loop while busy
MOV #FWPW,&FCTL1 ; Clear WRT
MOV #FWPW+LOCK,&FCTL3 ; Set LOCK
... ; Re-enable WDT?
354 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
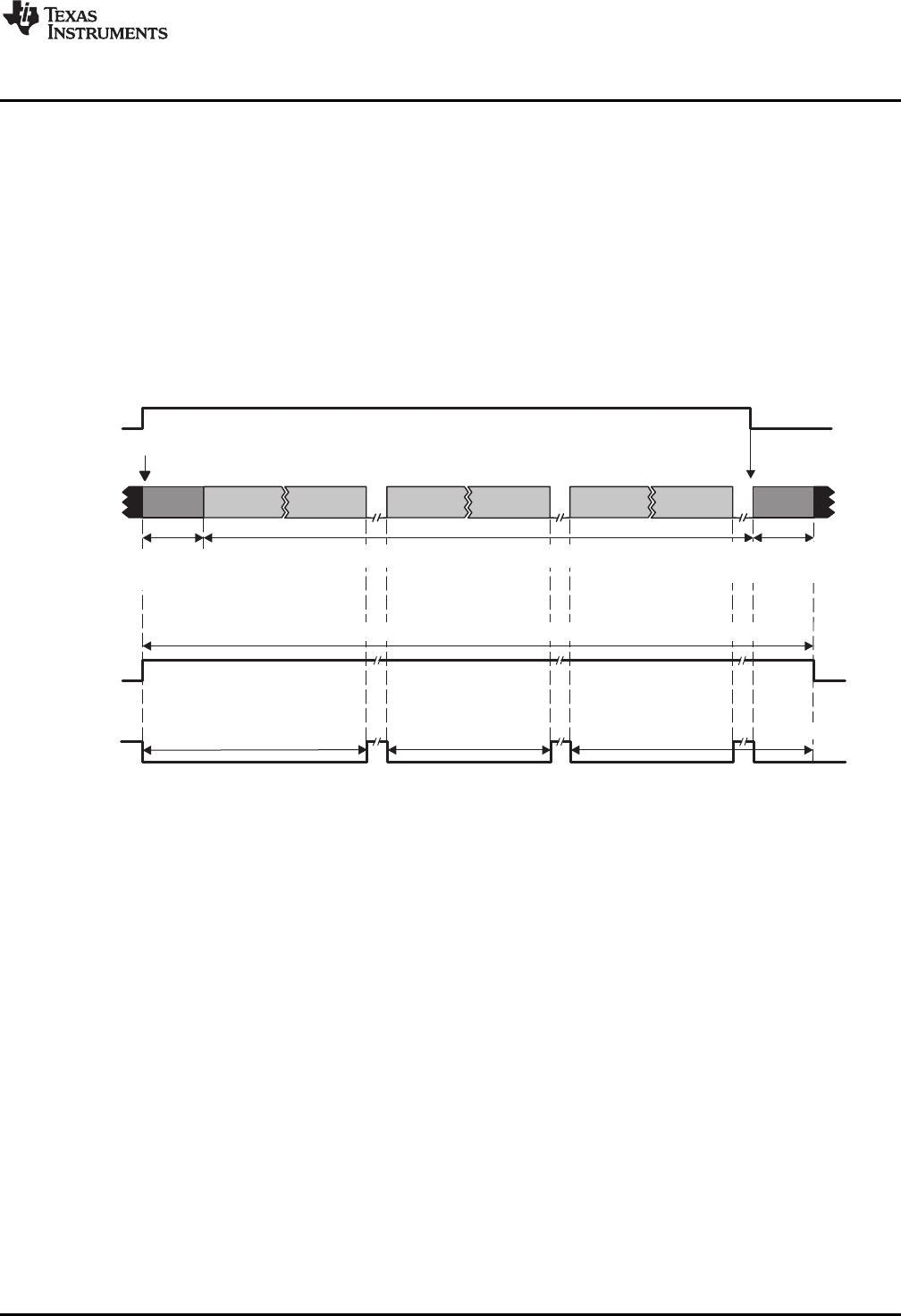
BUSY
WAIT
tBlock,0
WritetoFlash;e.g., #0123h,&Flash
MOV#4567h,&Flash1
MOV
BLKWRTbit
tBlock,1–(N-1) tBlock,N
Generate
ProgrammingVoltage
ProgrammingOperation Active Remove
ProgrammingVoltage
CumulativeProgrammingTime<t ,V CurrentConsumptionisIncreased
CPT CC
www.ti.com
Flash Memory Operation
7.3.2.7 Block Write
The block write can be used to accelerate the flash write process when many sequential bytes or words
need to be programmed. The flash programming voltage remains on for the duration of writing the 128-
byte row. The cumulative programming time, tCPT, must not be exceeded for any row during a block write.
Only long-word writes are possible using block write mode.
A block write cannot be initiated from within flash memory. The block write must be initiated from RAM.
The BUSY bit remains set throughout the duration of the block write. The WAIT bit must be checked
between writing four bytes, or two words, to the block. When WAIT is set, then four bytes, or two 16-bit
words, of the block can be written. When writing successive blocks, the BLKWRT bit must be cleared after
the current block is completed. BLKWRT can be set initiating the next block write after the required flash
recovery time given by tEND. BUSY is cleared following each block write completion, indicating the next
block can be written. Figure 7-11 shows the block write timing. The first long-word write requires tBlock,0 and
the last long-write requires tBlock,N. All other blocks require tBlock,1-(N-1).
Figure 7-11. Block-Write Cycle Timing
355
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Yes
BUSY = 1
Disable watchdog
Setup flash controller
Set BLKWRT = WRT = 1
Write 4 bytes or 2 words
No
Block Border?
Yes
WAIT = 0?
Yes
BUSY = 1
Set BLKWRT=0
Yes Another
Block?
Set WRT = 0, LOCK = 1,
Reenable WDT
Flash Memory Operation
www.ti.com
7.3.2.8 Block Write Flow and Example
A block write flow is shown in Figure 7-12 and the following code example.
Figure 7-12. Block Write Flow
356 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Flash Memory Operation
; Write one block starting at 0F000h.
; Must be executed from RAM, Assumes Flash is already erased.
; Assumes ACCVIE = NMIIE = OFIE = 0.
MOV #32,R5 ; Use as write counter
MOV #0F000h,R6 ; Write pointer
MOV #WDTPW+WDTHOLD,&WDTCTL ; Disable WDT
L1 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L1 ; Loop while busy
MOV #FWPW,&FCTL3 ; Clear LOCK
MOV #FWPW+BLKWRT+WRT,&FCTL1 ; Enable block write
L2 MOV Write_Value1,0(R6) ; Write 1st location
MOV Write_Value2,2(R6) ; Write 2nd word
L3 BIT #WAIT,&FCTL3 ; Test WAIT
JZ L3 ; Loop while WAIT=0
INCD R6 ; Point to next words
INCD R6 ; Point to next words
DEC R5 ; Decrement write counter
JNZ L2 ; End of block?
MOV #FWPW,&FCTL1 ; Clear WRT, BLKWRT
L4 BIT #BUSY,&FCTL3 ; Test BUSY
JNZ L4 ; Loop while busy
MOV #FWPW+LOCK,&FCTL3 ; Set LOCK
... ; Re-enable WDT if needed
7.3.3 Flash Memory Access During Write or Erase
When a write or an erase operation is initiated from RAM while BUSY = 1, the CPU may not write to any
flash location. Otherwise, an access violation occurs, ACCVIFG is set, and the result is unpredictable.
ACCVIFG is also set if a Flash write or erase access is attempted without any Flash write or erase mode
selected first.
When a write operation is initiated from within flash memory, the CPU continues code execution with the
next instruction fetch after the write cycle completed (BUSY = 0).
The op-code 3FFFh is the JMP PC instruction. This causes the CPU to loop until the flash operation is
finished. When the operation is finished and BUSY = 0, the flash controller allows the CPU to fetch the op-
code and program execution resumes.
The flash access conditions while BUSY = 1 are listed in Table 7-4.
Table 7-4. Flash Access While Flash is Busy (BUSY = 1)
Flash Operation Flash Access WAIT Result
From the erased bank: ACCVIFG = 0. 03FFFh is the value read.
Read 0 From any other flash location: ACCVIFG = 0. Valid read.
Write 0 ACCVIFG = 1. Write is ignored.
Bank erase From the erased bank: ACCVIFG = 0. CPU fetches 03FFFh. This is the
Instruction fetch 0 JMP PC instruction.
From any other flash location: ACCVIFG = 0. Valid instruction fetch.
Read 0 ACCVIFG = 0: 03FFFh is the value read.
Segment erase Write 0 ACCVIFG = 1: Write is ignored.
Instruction fetch 0 ACCVIFG = 0: CPU fetches 03FFFh. This is the JMP PC instruction.
Read 0 ACCVIFG = 0: 03FFFh is the value read.
Word or byte write Write 0 ACCVIFG = 1: Write is ignored.
or long-word write Instruction fetch 0 ACCVIFG = 0: CPU fetches 03FFFh. This is the JMP PC instruction.
Any 0 ACCVIFG = 1: LOCK = 1, block write is exited.
Read 1 ACCVIFG = 0: 03FFFh is the value read.
Block write Write 1 ACCVIFG = 0: Valid write
Instruction fetch 1 ACCVIFG = 1: LOCK = 1, block write is exited
357
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Flash Memory Operation
www.ti.com
Interrupts are automatically disabled during any flash operation.
The watchdog timer (in watchdog mode) should be disabled before a flash erase cycle. A reset aborts the
erase and the result is unpredictable. After the erase cycle has completed, the watchdog may be
reenabled.
7.3.4 Stopping Write or Erase Cycle
Any write or erase operation can be stopped before its normal completion by setting the emergency exit
bit EMEX. Setting the EMEX bit stops the active operation and resets the flash controller. All flash
operations cease, the flash returns to read mode, and all bits in the FCTL1 register are reset. The LOCK
bit of FCTL3 is set. The result of the intended operation is unpredictable.
7.3.4.1 EMEX With Single Bank Flash Memory
For devices with single bank flash memories, write and erase operations initiated from flash, the CPU is
held until the flash operation completes. Therefore it is not possible to perform an emergency exit by the
EMEX bit. The emergency exit of write or erase operations initiated from RAM can be performed using the
EMEX bit. The BUSY bit is used to determine the end of the emergency exit cycle. The user must ensure
that code execution does not continue until the BUSY bit is cleared by the flash controller.
7.3.4.2 EMEX With Multiple Bank Flash Memory
For devices with multiple bank flash memories, write and segment erase operations initiated from flash,
regardless of which bank the code resides in, the CPU is held until the flash operation completes.
Therefore it is not possible to perform an emergency exit by the EMEX bit. For bank erase, there is a
possibility to perform an EMEX if the bank being erased is not where the code resides. The BUSY bit is
used to determine the end of the emergency exit cycle. The user must ensure that code execution does
not continue until the BUSY bit is cleared by the flash controller.
The emergency exit of write or any erase operations initiated from RAM can be performed using the
EMEX bit. The BUSY bit is used to determine the end of the emergency exit cycle. The user must ensure
that code execution does not continue until the BUSY bit is cleared by the flash controller.
7.3.5 Checking Flash Memory
The result of a programming cycle of the flash memory can be checked by calculating and storing a
checksum (CRC) of parts or the complete flash memory content. The CRC module can be used for this
purpose (see the device-specific data sheet). During the runtime of the system, the known checksums can
be recalculated and compared with the expected values stored in the flash memory. The program
checking the flash memory content is executed in RAM.
To get an early indication of weak memory cells, reading the flash can be done in combination with the
device-specific marginal read modes. The marginal read modes are controlled by the FCTL4.MRG0 and
FCTL4.MRG1 register bits if available (device specific). During marginal read mode, marginally
programmed flash memory bit locations can be detected. One method for identifying such memory
locations would be to periodically perform a checksum calculation over a section of flash memory (for
example, a flash segment) and repeating this procedure with the marginal read mode enabled. If they do
not match, it could indicate an insufficiently programmed flash memory location. It is possible to refresh
the affected Flash memory segment by disabling marginal read mode, copying to RAM, erasing the flash
segment, and writing back to it from RAM.
The program checking the flash memory contents must be executed from RAM. Executing code from flash
automatically disables the marginal read mode. The marginal read modes are controlled by the MRG0 and
MRG1 register bits. Setting MRG1 is used to detect insufficiently programmed flash cells containing a "1"
(erased bits). Setting MRG0 is used to detect insufficiently programmed flash cells containing a "0"
(programmed bits). Only one of these bits should be set at a time. Therefore, a full marginal read check
requires two passes of checking the flash memory content’s integrity. During marginal read mode, the
flash access speed (MCLK) must be limited to 1 MHz (see the device-specific data sheet).
358 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Flash Memory Operation
7.3.6 Configuring and Accessing the Flash Memory Controller
The FCTLx registers are 16-bit password-protected read and write registers. Any read or write access
must use word instructions, and write accesses must include the write password 0A5h in the upper byte.
Any write to any FCTLx register with a value other than 0A5h in the upper byte is a password violation,
sets the KEYV flag, and triggers a PUC system reset. Any read of any FCTLx registers reads 096h in the
upper byte.
Any write to FCTL1 during an erase or byte, word, double-word write operation is an access violation and
sets ACCVIFG. Writing to FCTL1 is allowed in block write mode when WAIT = 1, but writing to FCTL1 in
block write mode when WAIT = 0 is an access violation and sets ACCVIFG.
Any write to FCTL2 (this register is currently not implemented) when BUSY = 1 is an access violation.
Any FCTLx register may be read when BUSY = 1. A read does not cause an access violation.
7.3.7 Flash Memory Controller Interrupts
The flash controller has two interrupt sources, KEYV and ACCVIFG. ACCVIFG is set when an access
violation occurs. When the ACCVIE bit is reenabled after a flash write or erase, a set ACCVIFG flag
generates an interrupt request. The ACCVIE bit resides in the Special Function Register, SFRIE1 (see the
SYS chapter for details). ACCVIFG sources the NMI interrupt vector, so it is not necessary for GIE to be
set for ACCVIFG to request an interrupt. ACCVIFG may also be checked by software to determine if an
access violation occurred. ACCVIFG must be reset by software.
The password violation flag, KEYV, is set when any of the flash control registers are written with an
incorrect password. When this occurs, a PUC is generated immediately, resetting the device.
359
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
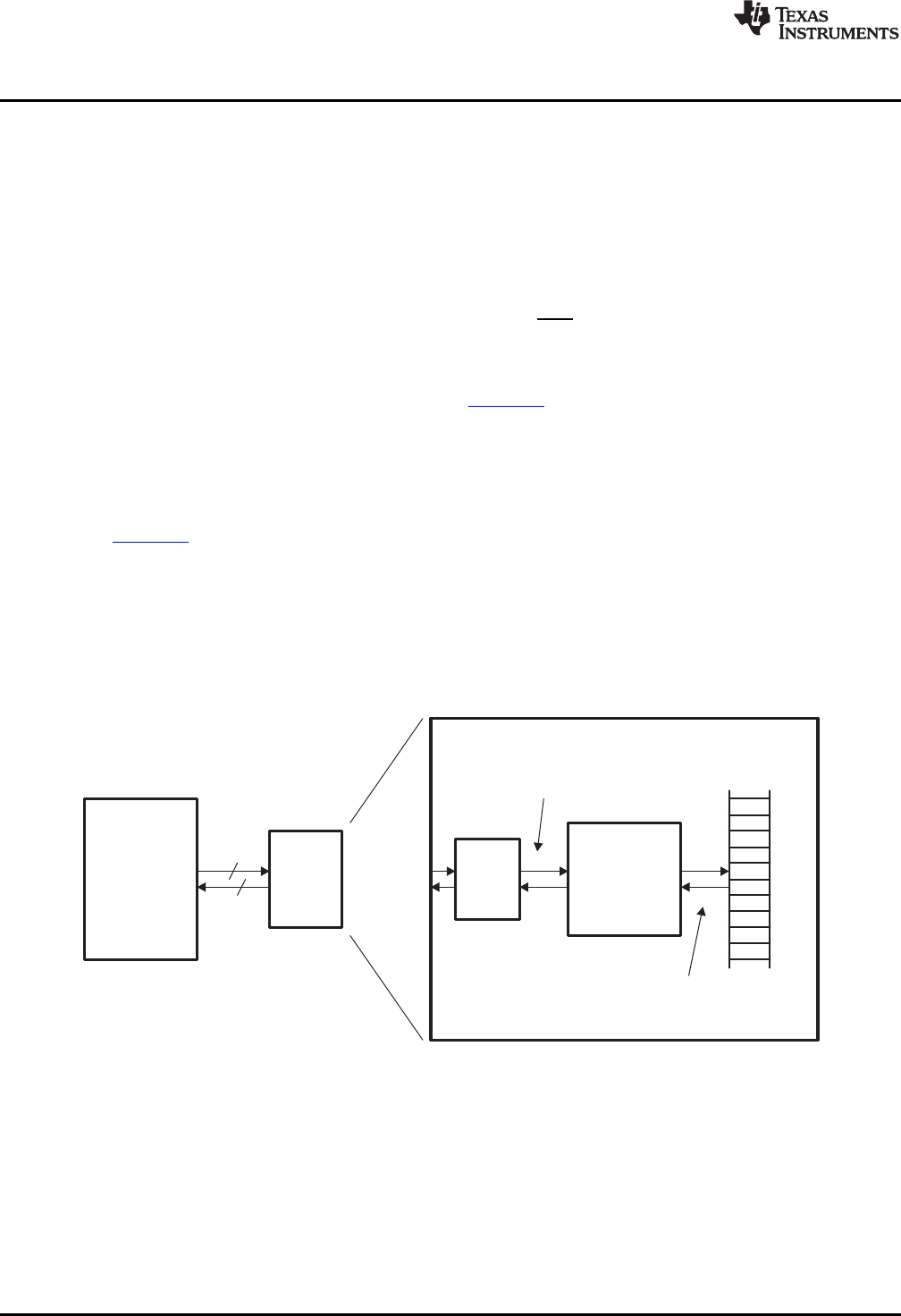
Host
Flash memory
UAR
Px.x,
etc.
T
SPI,
,
CPU executes
user software
Commands, data, etc.
Read/write flash memory
MSP430
Flash Memory Operation
www.ti.com
7.3.8 Programming Flash Memory Devices
There are three options for programming a flash device. All options support in-system programming.
• Program through JTAG (Section 7.3.8.1)
• Program through the BSL (Section 7.3.8.2)
• Program through a custom solution (Section 7.3.8.3)
7.3.8.1 Programming Flash Memory Through JTAG
Devices can be programmed through the JTAG port. The JTAG interface requires four signals (five signals
on 20- and 28-pin devices), ground, and optionally VCC and RST/NMI.
The JTAG port is protected with a fuse. Blowing the fuse completely disables the JTAG port and is not
reversible. Further access to the device through JTAG is not possible. For more details, see the MSP430
Programming Via the JTAG Interface User's Guide (SLAU320).
7.3.8.2 Programming Flash Memory Via Bootstrap Loader (BSL)
Every flash device contains a BSL. The BSL enables users to read or program the flash memory or RAM
using a UART serial interface. Access to the flash memory through the BSL is protected by a 256-bit user-
defined password. For more details, see the MSP430 Programming Via the Bootstrap Loader User's
Guide (SLAU319).
7.3.8.3 Programming Flash Memory Through Custom Solution
The ability of the MSP430 CPU to write to its own flash memory allows for in-system and external custom
programming solutions as shown in Figure 7-13. The user can choose to provide data through any means
available (for example, UART or SPI). User-developed software can receive the data and program the
flash memory. Because this type of solution is developed by the user, it can be completely customized to
fit the application needs for programming, erasing, or updating the flash memory.
Figure 7-13. User-Developed Programming Solution
360 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
FCTL Registers
7.4 FCTL Registers
The flash memory controller (FCTL) registers are listed in Table 7-5. The base address can be found in
the device-specific data sheet. The address offset is given in Table 7-5.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 7-5. FCTL Registers
Offset Acronym Register Name Type Access Reset Section
00h FCTL1 Flash Memory Control 1 Read/write Word 9600h Section 7.4.1
00h FCTL1_L Read/Write Byte 00h
01h FCTL1_H Read/Write Byte 96h
04h FCTL3 Flash Memory Control 3 Read/write Word 9658h Section 7.4.2
04h FCTL3_L Read/Write Byte 58h
05h FCTL3_H Read/Write Byte 96h
06h FCTL4 Flash Memory Control 4 Read/write Word 9600h Section 7.4.3
06h FCTL4_L Read/Write Byte 00h
07h FCTL4_H Read/Write Byte 96h
361
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
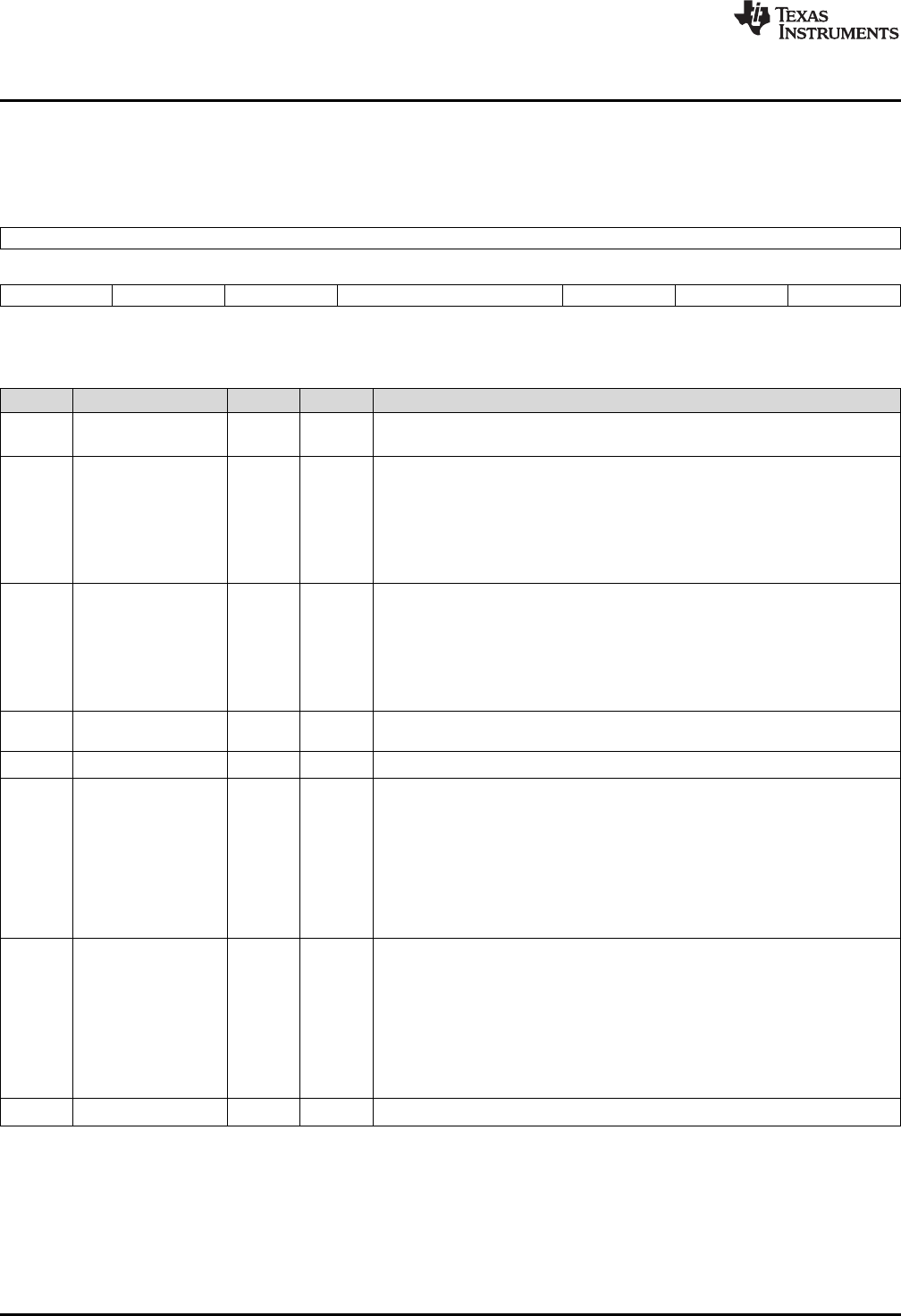
FCTL Registers
www.ti.com
7.4.1 FCTL1 Register
Flash Memory Control 1 Register
Figure 7-14. FCTL1 Register
15 14 13 12 11 10 9 8
FRPW/FWPW
76543210
BLKWRT WRT SWRT Reserved MERAS ERASE Reserved
rw-0 rw-0 rw-0 r-0 r-0 rw-0 rw-0 r-0
Table 7-6. FCTL1 Register Description
Bit Field Type Reset Description
15-8 FRPW/FWPW RW 96h FCTL password. Always read as 096h. Must be written as 0A5h or a PUC is
generated.
7 BLKWRT RW 0h Block write. BLKWRT and WRT are used together to select the write mode.
The values shown below are for BLKWRT-WRT.
0-0 = Reserved
0-1 = Byte or word write
1-0 = Long-word write
1-1 = Long-word block write
6 WRT RW 0h Write. BLKWRT and WRT are used together to select the write mode.
The values shown below are for BLKWRT-WRT.
0-0 = Reserved
0-1 = Byte or word write
1-0 = Long-word write
1-1 = Long-word block write
5 SWRT RW 0h Smart write. If this bit is set, the program time is shortened. The programming
quality has to be checked by marginal read modes.
4-3 Reserved R 0h Reserved. Always reads as 0.
2 MERAS Mass erase. MERAS and ERASE are used together to select the erase mode.
MERAS and ERASE are automatically reset when EMEX is set or a flash erase
operation has completed.
The values shown below are for MERAS-ERASE.
0-0 = No erase
0-1 = Segment erase
1-0 = Bank erase (erase of one bank)
1-1 = Mass erase (erase all flash memory banks)
1 ERASE Erase. MERAS and ERASE are used together to select the erase mode. MERAS
and ERASE are automatically reset when EMEX is set or a flash erase operation
has completed.
The values shown below are for MERAS-ERASE.
0-0 = No erase
0-1 = Segment erase
1-0 = Bank erase (erase of one bank)
1-1 = Mass erase (erase all flash memory banks)
0 Reserved R 0h Reserved. Always reads as 0.
362 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
FCTL Registers
7.4.2 FCTL3 Register
Flash Memory Control 3 Register
Figure 7-15. FCTL3 Register
15 14 13 12 11 10 9 8
FRPW/FWPW
76543210
Reserved LOCKA EMEX LOCK WAIT ACCVIFG KEYV BUSY
r-0 rw-1 rw-0 rw-1 r-1 rw-0 rw-(0) r-0
Table 7-7. FCTL3 Register Description
Bit Field Type Reset Description
15-8 FRPW/FWPW RW 96h FCTLx password. Always read as 096h. Must be written as 0A5h or a PUC is
generated.
7 Reserved R 0h Reserved. Always reads as 0.
6 LOCKA RW 1h Segment A lock. Write a 1 to this bit to change its state. Writing 0 has no effect.
0b = Segment A of the information memory is unlocked and can be written or
erased in segment erase mode.
1b = Segment A of the information memory is locked and can not be written or
erased in segment erase mode.
5 EMEX RW 0h Emergency exit. Setting this bit stops any erase or write operation. The LOCK bit
is set.
0b = No emergency exit
1b = Emergency exit
4 LOCK RW 1h Lock. This bit unlocks the flash memory for writing or erasing. The LOCK bit can
be set any time during a byte or word write or erase operation, and the operation
completes normally. In the block write mode, if the LOCK bit is set while
BLKWRT = WAIT = 1, BLKWRT and WAIT are reset and the mode ends
normally.
0b = Unlocked
1b = Locked
3 WAIT R 1h Wait. Indicates the flash memory is being written to.
0b = Flash memory is not ready for the next byte or word write.
1b = Flash memory is ready for the next byte or word write.
2 ACCVIFG RW 0h Access violation interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1 KEYV RW 0h Flash password violation. This bit indicates an incorrect FCTLx password was
written to any flash control register and generates a PUC when set. KEYV must
be reset with software.
0b = FCTLx password was written correctly.
1b = FCTLx password was written incorrectly.
0 BUSY R 0h Busy. This bit indicates if the flash is currently busy erasing or programming.
0b = Not busy
1b = Busy
363
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
FCTL Registers
www.ti.com
7.4.3 FCTL4 Register
Flash Memory Control 4 Register
Figure 7-16. FCTL4 Register
15 14 13 12 11 10 9 8
FRPW/FWPW
76543210
LOCKINFO Reserved MRG1 MRG0 Reserved VPE
rw-0 r-0 rw-0 rw-0 r-0 r-0 r-0 rw-0
Table 7-8. FCTL4 Register Description
Bit Field Type Reset Description
15-8 FRPW/FWPW RW 96h FCTLx password. Always reads as 096h. Must be written as 0A5h or a PUC is
generated.
7 LOCKINFO RW 0h Lock information memory. If set, the information memory cannot be erased in
segment erase mode and cannot be written to.
6 Reserved R 0h Reserved. Always reads as 0.
5 MRG1 RW 0h Marginal read 1 mode. This bit enables the marginal 1 read mode. The marginal
read 1 bit is valid for reads from the flash memory only. During a fetch cycle, the
marginal mode is turned off automatically. If both MRG1 and MRG0 are set,
MRG1 is active and MRG0 is ignored.
0b = Marginal 1 read mode is disabled.
1b = Marginal 1 read mode is enabled.
4 MRG0 RW 0h Marginal read 0 mode. This bit enables the marginal 0 read mode. The marginal
read 1 bit is valid for reads from the flash memory only. During a fetch cycle, the
marginal mode is turned off automatically. If both MRG1 and MRG0 are set,
MRG1 is active and MRG0 is ignored.
0b = Marginal 0 read mode is disabled.
1b = Marginal 0 read mode is enabled.
3-1 Reserved R 0h Reserved. Always reads as 0.
0 VPE RW 0h Voltage changed during program error. This bit is set by hardware and can only
be cleared by software. If DVCC changed significantly during programming, this
bit is set to indicate an invalid result. The ACCVIFG bit is set if VPE is set.
364 Flash Memory Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
FCTL Registers
7.4.4 SFRIE1 Register
Interrupt Enable 1 Register
Figure 7-17. SFRIE1 Register
15 14 13 12 11 10 9 8
OTHER
76543210
ACCVIE
rw-0
Table 7-9. SFRIE1 Register Description
Bit Field Type Reset Description
15-6 These bits may be used by other modules (see the device-specific data sheet
and the SYS chapter for details).
5 ACCVIE RW 0h Flash memory access violation interrupt enable. This bit enables the ACCVIFG
interrupt. Because other bits in SFRIE1 may be used for other modules, it is
recommended to set or clear this bit using BIS or BIC instructions, rather than
MOV or CLR instructions. See the SYS chapter for more details.
0b = Interrupt not enabled
1b = Interrupt enabled
4-0 These bits may be used by other modules (see the device-specific data sheet
and the SYS chapter for details).
365
SLAU208O–June 2008–Revised May 2015 Flash Memory Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 8
SLAU208O–June 2008–Revised May 2015
Memory Integrity Detection (MID)
Memory Integrity Detection (MID) is a program and data protection mechanism that is available on several
device families (for example, MSP430F6659). It provides a high level of operation safety for fault-critical
application areas. This chapter explains how to use the firmware for the level of operational safety and
overall fault response that suits different applications.
Topic ........................................................................................................................... Page
8.1 MID Overview................................................................................................... 367
8.2 Flash Memory With MID Support ........................................................................ 368
8.3 MID Parity Check Logic ..................................................................................... 368
8.4 Detecting Unprogrammed Memory Accesses....................................................... 369
8.5 MID ROM ......................................................................................................... 369
8.6 MID Support Software Function.......................................................................... 369
8.7 User's UNMI Interrupt Handler............................................................................ 373
366 Memory Integrity Detection (MID) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

Timing
Generator
Programming
Voltage
Generator
Control Registers Address/Data Latch
Parity Generator
and Parity Check
Flash
Memory
Array
(plain
data)
MID Parity Information
(horizontal Parity Bits)
MAB
MDB
MID Add-on
MID ROM
(Preprogrammed
MID support software
allows control of
MID hardware)
MSP430 Flash
Memory Controller
www.ti.com
MID Overview
8.1 MID Overview
The MID is an add-on to the MSP430 flash memory controller. MID provides additional functionality over
the regular flash operation methods as described in the Flash Memory Controller chapter.
The main purpose of the MID function is to help gain higher reliability of flash content and overall system
integrity in harsh environments and in applications requiring such features. The additional level of security
is reached by calculating parity information.
The complete MID solution consists of the blocks Parity Generator and Parity Check and MID ROM. The
Parity Generator and Parity Check provides all of the necessary logic elements needed to identify bit
errors in the whole memory array. The on-chip MID ROM contains the MID Support Software, and this
software performs all the necessary tasks to operate MID. The built-in MID functions provide all
functionality to use the MID features.
Figure 8-1. Block Diagram of MID Implementation
367
SLAU208O–June 2008–Revised May 2015 Memory Integrity Detection (MID)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MSP430
Flash
Memory
Main
Memory
Information
Memory
Banks
Bank 0
Bank 1
Bank 2
Bank 3
Segments
...
Info A
Info B
Info C
Info D
Info A
Info B
Info C
Info D
Bootstrap
Loader
(BSL)
BSL 3
BSL 2
BSL 1
BSL 0
BSL 3
BSL 2
BSL 1
BSL 0
¬CW0.15
Enable bits
(see Note 1)
¬CW0.14
¬CW0.13
¬CW0.12
¬CW0.11
¬CW0.10
¬CW0.9
¬CW0.8
¬CW0.7
¬CW0.6
¬CW0.5
¬CW0.4
¬CW0.3
¬CW0.2
¬CW0.1
¬CW0.0
¬CW1.4
¬CW1.5
¬CW1.6
¬CW1.7
¬CW1.3
¬CW1.2
¬CW1.1
¬CW1.0
...
...
...
MID Flash
Memory
Blocks
Flash Memory With MID Support
www.ti.com
8.2 Flash Memory With MID Support
The MSP430 flash memory is partitioned into different memory areas—main and information memory,
banks, segments, and memory blocks—where MID protection can be enabled. Figure 8-2 shows an
example for a typical MSP430 flash segmentation including the MID feature.
(1) The cw0.x and cw1.x bits are used to enable MID functionality for the individual memory ranges. Further
information can be found in Section 8.6.1.
Figure 8-2. Overview of MSP430 Flash Memory Segmentation
The whole flash memory array consist of MID supported flash memory blocks. For a device with 512KB of
flash main memory, each MID flash memory block has a size of 32KB (main memory divided by 16). Each
row consists of one word of plain data (16 bits) and a horizontal parity bit (H-parity bit).
Erased segments show all ones in the data array field and horizontal parity. Writing to flash memory (with
MID after reset) automatically writes the horizontal parity bits along with the data bits. Writing to the plain
data field can, of course, be interrupted and continued in any order. Adding content after the horizontal
parity has been written is impractical, as the horizontal parity information changes as well. The whole
segment (not just a single MID memory block) would need to be erased before it can be written again. The
shown method is excellent for data content of static nature like code, tables, and so on. For data
acquisition into flash, other methods (for example, majority vote) are more suitable; but complete blocks of
acquisition data can be protected with this method again.
8.3 MID Parity Check Logic
Any access to MID enabled flash memory causes a verification of its horizontal parity in the background. It
does not matter if code or data is read from the flash memory. If a parity error is detected, the bus error
event "parity error" is triggered and calls the user NMI exception handler. The application software can
then react on the failure by, for example, showing an error message on the application's display.
368 Memory Integrity Detection (MID) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Detecting Unprogrammed Memory Accesses
8.4 Detecting Unprogrammed Memory Accesses
All bits are set after erasing the flash memory; this also includes the horizontal parity bit. If an erased
memory range is accessed, the MID causes a NMI interrupt, because of a detected parity failure. Only
programmed addresses are accessible without a MID failure interrupt; that is especially the case for the
content 0xFFFF. If memory content should be 0xFFFF, it must be programmed. This ensures that the
horizontal parity bit is cleared (0).
Enabling the MID functionality for nonprogrammed memory ranges allows detecting memory accesses to
these nonprogrammed addresses.
8.5 MID ROM
The MID ROM is 1KB of read-only memory. The on-chip MID ROM is factory programmed with MID
support software. These software functions are used to enable or disable the MID module. The start
address of the MID ROM depends on the MSP430 device; see the device-specific data sheet for
specifications.
8.6 MID Support Software Function
The MID is disabled by default after power-up of the device. To use the MID feature, it must be enabled
within the application software. Enabling is done by calling the MidInit() function with parameters that
define which MID memory blocks should be enabled or disabled.
Table 8-1 list all existing MID functions. These functions are stored in the MID ROM; its start address is
defined in the device-specific data sheet.
Table 8-1. Overview of MID Support Software Functions
Function Address Description
Offset
0x00 Content of address: 2843h
Revision 0x02 Content of address: 80xyh, xy is the revision word
MidEnable 0x04 Initialization and enabling of MID
MidDisable 0x08 MID is disabled
MidGetErrAdr 0x0C Returns the error location
MidCheckMem 0x10 Memory check is performed
MidSetRaw 0x14 Writing a data word and parity bit into a defined address
MidGetParity 0x18 Read out horizontal parity bit
MidCalcVParity 0x1C Calculating vertical parity
Reserved 0x20
Reserved 0x24
Reserved 0x28
Reserved 0x2C
369
SLAU208O–June 2008–Revised May 2015 Memory Integrity Detection (MID)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MID Support Software Function
www.ti.com
8.6.1 MidEnable() Function
Function
void MidEnable(unsigned short cw0,unsigned short cw1);
Function Description
This function initializes and enables MID. The argument cw0 and cw1 allow an explicit control what MID
flash memory blocks are to be protected. MID feature is disabled after a power-up or BOR. MidEnable()
function is expected to be called early after application start. Calling it again later reconfigures the settings.
Parameters
Name Type Description
Configuration word 0. It is used to activate the MID feature for certain memory
unsigned short
cw0 ranges. The main memory is divided into 16 blocks. The LSB bit of cw0 activates
R12.W the lowest address range (see Figure 8-3).
unsigned short Configuration word 1. This bit is used the same as cw0, the only difference is
cw1 R13.W that BAL and Info memory are used instead of main memory (see Figure 8-4).
Figure 8-3. cw0 Parameter
15 14 13 12 11 10 9 8
cw0.15 cw0.14 cw0.13 cw0.12 cw0.11 cw0.10 cw0.9 cw0.8
76543210
cw0.7 cw0.6 cw0.5 cw0.4 cw0.3 cw0.2 cw0.1 cw0.0
Bit Field Description
15-0 cw0.x Main memory is split into MID flash memory blocks. Each MID flash memory block has a size of
main memory divided by 16 (for example, for a 512KB main memory, the MID memory block size
is 32KB). The cw0.x bits allow to enable MID support for the different flash memory blocks. For
example, cw0.0 activates the lowest flash memory block, and cw0.15 activates the highest flash
memory block.
0 = MID support is deactivated
1 = MID support is active
Figure 8-4. cw1 Parameter
15 14 13 12 11 10 9 8
Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved
76543210
cw1.7 cw1.6 cw1.5 cw1.4 cw1.3 cw1.2 cw1.1 cw1.0
Bit Field Description
15-8 Reserved These bits are reserved. It is strongly recommended to reset (0) these bits.
7 cw1.7 Enables or disables MID for the flash information memory segment D.
0 = MID support is deactivated
1 = MID support is active
6 cw1.6 Enables or disables MID for the flash information memory segment C.
0 = MID support is deactivated
1 = MID support is active
5 cw1.5 Enables or disables MID for the flash information memory segment B.
0 = MID support is deactivated
1 = MID support is active
4 cw1.4 Enables or disables MID for the flash information memory segment A.
0 = MID support is deactivated
1 = MID support is active
370 Memory Integrity Detection (MID) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
MID Support Software Function
Bit Field Description
3 cw1.3 Enables or disables MID for the bootstrap loader memory 3.
0 = MID support is deactivated
1 = MID support is active
2 cw1.2 Enables or disables MID for the bootstrap loader memory 2.
0 = MID support is deactivated
1 = MID support is active
1 cw1.1 Enables or disables MID for the bootstrap loader memory 1.
0 = MID support is deactivated
1 = MID support is active
0 cw1.0 Enables or disables MID for the bootstrap loader memory 0.
0 = MID support is deactivated
1 = MID support is active
8.6.2 MidDisable() Function
Function
void MidDisable(void);
Function Description
This function clears the cw0 and cw1 parameters that were set during MidEnable() function call and it
disables the MID hardware.
8.6.3 MidGetErrAdr() Function
Function
unsigned short * MidGetErrAdr(void);
Function Description
This function returns the error location is there was a memory integrity failure. If there is no valid failure
address or error location, the function returns the value F'FFFFh.
Note that the MidGetErrAdr() function returns only the correct error address when this function is called
prior to a read access of SYSBERRIV register. The code example in Section 8.7 shows where the
MidGetErrAdr() function call should be placed.
371
SLAU208O–June 2008–Revised May 2015 Memory Integrity Detection (MID)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MID Support Software Function
www.ti.com
8.6.4 MidCheckMem() Function
Function
void MidCheckMem(unsigned short * startAdr, unsigned short * endAdr);
Function Description
This function allows doing a memory integrity check. First, the MidEnable function should be called. This
function enables MID and it defines the memory blocks that should be protected. After that the
MidCheckMem function can be called. Its parameter list defines an address range that is accessed with
wordwise reads. An UNMI interrupt (MID interrupt) is generated in case a parity error occurs and the read
address is enabled for MID protection.
Parameters
Name Type Description
unsigned short Start address for the memory integrity check. The startAdr must be an even
startAdr *R12.W number.
End address for the memory integrity check. The endAdr must be an even
unsigned short
endAdr number. The address defined with endAdr is included in the memory integrity
R13.W check.
8.6.5 MidSetRaw() Function
Function
void MidSetRaw(unsigned short data, unsigned short parity, unsigned short * adr,
unsigned short flashKey);
Function Description
This function writes one word (data) and a separately definable parity bit (parity) to an MID memory
address (adr). The Flash memory key is needed to allow access to flash control registers; this parameter
is passed through the argument flashKey (see the follwoing example).
Parameters
Name Type Description
unsigned short
data Data to be written
R12.W
unsigned short
parity If parity = 0, the parity bit 0 is written. If parity <> 0, the parity bit 1 is written.
R13.W
unsigned short
adr Destination address where raw information is written
*R14.A
Flash memory key. This is needed to allow the MidSetRaw function access to the
unsigned short
flashKey flash control registers. The passing parameter is usually defined in the standard
R15.W MSP430 header files; therefore, "FWKEY" can be used here.
Example
#include <msp430f6659.h>
const unsigned short FlashAdr=0xFF00; // Flash memory address will be reprogrammed
void main(void)
{ static unsigned short Data; // variable for data the will be read
static unsigned short Parity; // H-parity bit that will be read
WDTCTL=WTDPW+WDTHOLD; // disable Watchdog
Data=0x5A5A; // data that will be written into flash memory
Parity=0; // parity bit that will be written
MIDSetRaw(Data,Parity,&FlashAdr,FWKEY); // write data and parity bit
while(1);
}
372 Memory Integrity Detection (MID) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MID Support Software Function
8.6.6 MidGetParity() Function
Function
unsigned short MidGetParity(unsigned short * adr);
Function Description
This function returns the parity bit of the appropriate address. Reading the parity bit works only when MID
was enabled before calling MidGetParity() function and the appropriate MID memory block is enabled.
Parameters
Name Type Description
unsigned short
adr Defines the address where the parity bit should be read.
*R12.A
8.6.7 MidCalcVParity() Function
Function
unsigned short MidCalcVParity(unsigned short * startAdr, unsigned short * endAdr);
Function Description
This function allows to calculate a vertical parity for a defined memory range.
Parameters
Name Type Description
unsigned short Defines the start address for calculating vertical parity. The startAdr must be an
startAdr *R12.A even number.
unsigned short End address for calculating vertical parity. The endAdr must be an even number.
endAdr *R13.A The address defined with endAdr is included in the vertical parity calculation.
8.7 User's UNMI Interrupt Handler
If an error is detected, the on-chip MID generates an UNMI interrupt. The application software must
manage error handling.
UNMI handler framework for MID error handling:
__interrupt void unmi_isr(void)
{ switch(__even_in_range(SYSUNIV, 0x08))
{
case 0x00: break;
case 0x02: break; // NMIIFG
case 0x04: break; // OFIFG
case 0x06: break; // ACCVIFG
case 0x08: // BUSIFG
// If needed, obtain the flash error location here.
ErrorLocation = MidGetErrAdr();
switch(__even_in_range(SYSBERRIV, 0x08))
{ case 0x00: break; // no bus error
case 0x02: break; // USB bus error
case 0x04: break; // reserved
case 0x06: // MID error
<place your MID error handler code here>
break;
case 0x08: break;
default: break;
}
break;
default: break;
}
373
SLAU208O–June 2008–Revised May 2015 Memory Integrity Detection (MID)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 9
SLAU208O–June 2008–Revised May 2015
RAM Controller (RAMCTL)
The RAM controller (RAMCTL) allows control of the operation of the RAM.
Topic ........................................................................................................................... Page
9.1 RAM Controller (RAMCTL) Introduction............................................................... 375
9.2 RAMCTL Operation........................................................................................... 375
9.3 RAMCTL Registers ........................................................................................... 376
374 RAM Controller (RAMCTL) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RAM Controller (RAMCTL) Introduction
9.1 RAM Controller (RAMCTL) Introduction
The RAMCTL provides access to the different power modes of the RAM. The RAMCTL enters retention
mode to reduce the leakage current while the CPU is off. The RAM can also be switched off by software.
In retention mode, the RAM content is saved. In off mode, the RAM content is lost.
The RAM is partitioned in sectors, typically of 4KB (sector) size. See the device-specific data sheet for
actual block allocation and size. Each sector is controlled by the RAM controller RAM Sector Off control bit
(RCRSyOFF) of the RAMCTL Control 0 register (RCCTL0). The RCCTL0 register is protected with a key.
The RCCTL0 register content can be modified only if the correct key is written during a word write. Byte
write accesses or write accesses with a wrong key are ignored.
9.2 RAMCTL Operation
Active mode
In active mode, the RAM can be read and written at any time. If any RAM address in a sector must
hold data, the whole sector cannot be switched off.
Low-power modes
In all low-power modes, the CPU is switched off. As soon as the CPU is switched off, the RAM enters
retention mode to reduce the leakage current.
RAM off mode
Each sector can be turned off independent of the other sectors by setting the respective RCRSyOFF
bit to 1. Reading from a switched off RAM sector returns 0 as data. All data previously stored in a
switched off RAM sector is lost and cannot be read, even if the sector is turned on again.
Stack pointer
The program stack is located in RAM. Sectors holding the stack must not be turned off if an interrupt
must be executed or if a low-power mode is entered.
USB buffer memory
On devices with USB, the USB buffer memory is located in RAM. Sector 7 is used for this purpose.
RCRS7OFF can be set to switch off this memory if it is not required for USB operation or is not being
used in normal operation.
375
SLAU208O–June 2008–Revised May 2015 RAM Controller (RAMCTL)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RAMCTL Registers
www.ti.com
9.3 RAMCTL Registers
The RAMCTL module register is listed in Table 9-1. The base address can be found in the device-specific
data sheet. The address offset is given in Table 9-1.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 9-1. RAMCTL Registers
Offset Acronym Register Name Type Access Reset Section
00h RCCTL0 RAM Controller Control 0 Read/write Word 6900h Section 9.3.1
00h RCCTL0_L Read/write Byte 00h
01h RCCTL0_H Read/write Byte 69h
376 RAM Controller (RAMCTL) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RAMCTL Registers
9.3.1 RCCTL0 Register
RAM Controller Control 0 Register
Figure 9-1. RCCTL0 Register
15 14 13 12 11 10 9 8
RCKEY
rw-0 rw-1 rw-1 rw-0 rw-1 rw-0 rw-0 rw-1
76543210
RCRS7OFF RCRS6OFF RCRS5OFF RCRS4OFF RCRS3OFF RCRS2OFF RCRS1OFF RCRS0OFF
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 9-2. RCCTL0 Register Description
Bit Field Type Reset Description
15-8 RCKEY RW 69h RAM controller key. Always read as 69h. Must be written as 5Ah, otherwise the
RAMCTL write is ignored.
7 RCRS7OFF RW 0h RAM controller RAM sector 7 off. Setting the bit to 1 turns off the RAM sector 7.
All data of the RAM sector 7 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
6 RCRS6OFF RW 0h RAM controller RAM sector 6 off. Setting the bit to 1 turns off the RAM sector 6.
All data of the RAM sector 6 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
5 RCRS5OFF RW 0h RAM controller RAM sector 5 off. Setting the bit to 1 turns off the RAM sector 5.
All data of the RAM sector 5 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
4 RCRS4OFF RW 0h RAM controller RAM sector 4 off. Setting the bit to 1 turns off the RAM sector 4.
All data of the RAM sector 4 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
3 RCRS3OFF RW 0h RAM controller RAM sector 3 off. Setting the bit to 1 turns off the RAM sector 3.
All data of the RAM sector 3 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
2 RCRS2OFF RW 0h RAM controller RAM sector 2 off. Setting the bit to 1 turns off the RAM sector 2.
All data of the RAM sector 2 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
1 RCRS1OFF RW 0h RAM controller RAM sector 1 off. Setting the bit to 1 turns off the RAM sector 1.
All data of the RAM sector 1 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
0 RCRS0OFF RW 0h RAM controller RAM sector 0 off. Setting the bit to 1 turns off the RAM sector 0.
All data of the RAM sector 0 is lost. See the device-specific data sheet to find the
the number of RAM sectors available along with their respective address ranges
and sizes.
377
SLAU208O–June 2008–Revised May 2015 RAM Controller (RAMCTL)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 10
SLAU208O–June 2008–Revised May 2015
Backup RAM
The backup RAM is a (volatile) memory that is retained during LPMx.5 and operation from a backup
supply (if supported by the device). This chapter describes the backup RAM.
Topic ........................................................................................................................... Page
10.1 Backup RAM Introduction and Operation ............................................................ 379
10.2 Battery Backup Registers.................................................................................. 379
378 Backup RAM SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Backup RAM Introduction and Operation
10.1 Backup RAM Introduction and Operation
The backup RAM provides a limited number of bytes of RAM that are retained during LPMx.5 and during
operation from a backup supply (if the device integrates the complete battery backup system). At least one
byte or one word (one word is preferred) should be used to generate a checksum of the stored data or to
store a signature to ensure that the data is still reliable when returning from LPMx.5 or from backup
operation.
10.2 Battery Backup Registers
The backup RAM registers are listed in Table 10-1. The base address for the backup RAM registers can
be found in the device-specific data sheet. The address offsets are given in Table 10-1.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 10-1. Backup RAM Registers
LPMx.5
Offset Acronym Register Name Type Access Reset Backup
Operation
00h BAKMEM0 Battery Backup Memory 0 Read/write Word Undefined retained
00h BAKMEM0_L Read/write Byte Undefined retained
01h BAKMEM0_H Read/write Byte Undefined retained
02h BAKMEM1 Battery Backup Memory 1 Read/write Word Undefined retained
02h BAKMEM1_L Read/write Byte Undefined retained
03h BAKMEM1_H Read/write Byte Undefined retained
04h BAKMEM2 Battery Backup Memory 2 Read/write Word Undefined retained
04h BAKMEM2_L Read/write Byte Undefined retained
05h BAKMEM2_H Read/write Byte Undefined retained
06h BAKMEM3 Battery Backup Memory 3 Read/write Word Undefined retained
06h BAKMEM3_L Read/write Byte Undefined retained
07h BAKMEM3_H Read/write Byte Undefined retained
379
SLAU208O–June 2008–Revised May 2015 Backup RAM
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 11
SLAU208O–June 2008–Revised May 2015
Direct Memory Access (DMA) Controller Module
The direct memory access (DMA) controller module transfers data from one address to another without
CPU intervention. This chapter describes the operation of the DMA controller.
Topic ........................................................................................................................... Page
11.1 Direct Memory Access (DMA) Introduction .......................................................... 381
11.2 DMA Operation................................................................................................. 383
11.3 DMA Registers ................................................................................................. 395
380 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Direct Memory Access (DMA) Introduction
11.1 Direct Memory Access (DMA) Introduction
The DMA controller transfers data from one address to another, without CPU intervention, across the
entire address range. For example, the DMA controller can move data from the ADC conversion memory
to RAM.
Devices that contain a DMA controller may have up to eight DMA channels available. Therefore,
depending on the number of DMA channels available, some features described in this chapter are not
applicable to all devices. See the device-specific data sheet for number of channels supported.
Using the DMA controller can increase the throughput of peripheral modules. It can also reduce system
power consumption by allowing the CPU to remain in a low-power mode, without having to awaken to
move data to or from a peripheral.
DMA controller features include:
• Up to eight independent transfer channels
• Configurable DMA channel priorities
• Requires only two MCLK clock cycles per transfer
• Byte or word and mixed byte and word transfer capability
• Block sizes up to 65535 bytes or words
• Configurable transfer trigger selections
• Selectable-edge or level-triggered transfer
• Four addressing modes
• Single, block, or burst-block transfer modes
Figure 11-1 shows the DMA controller block diagram.
381
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
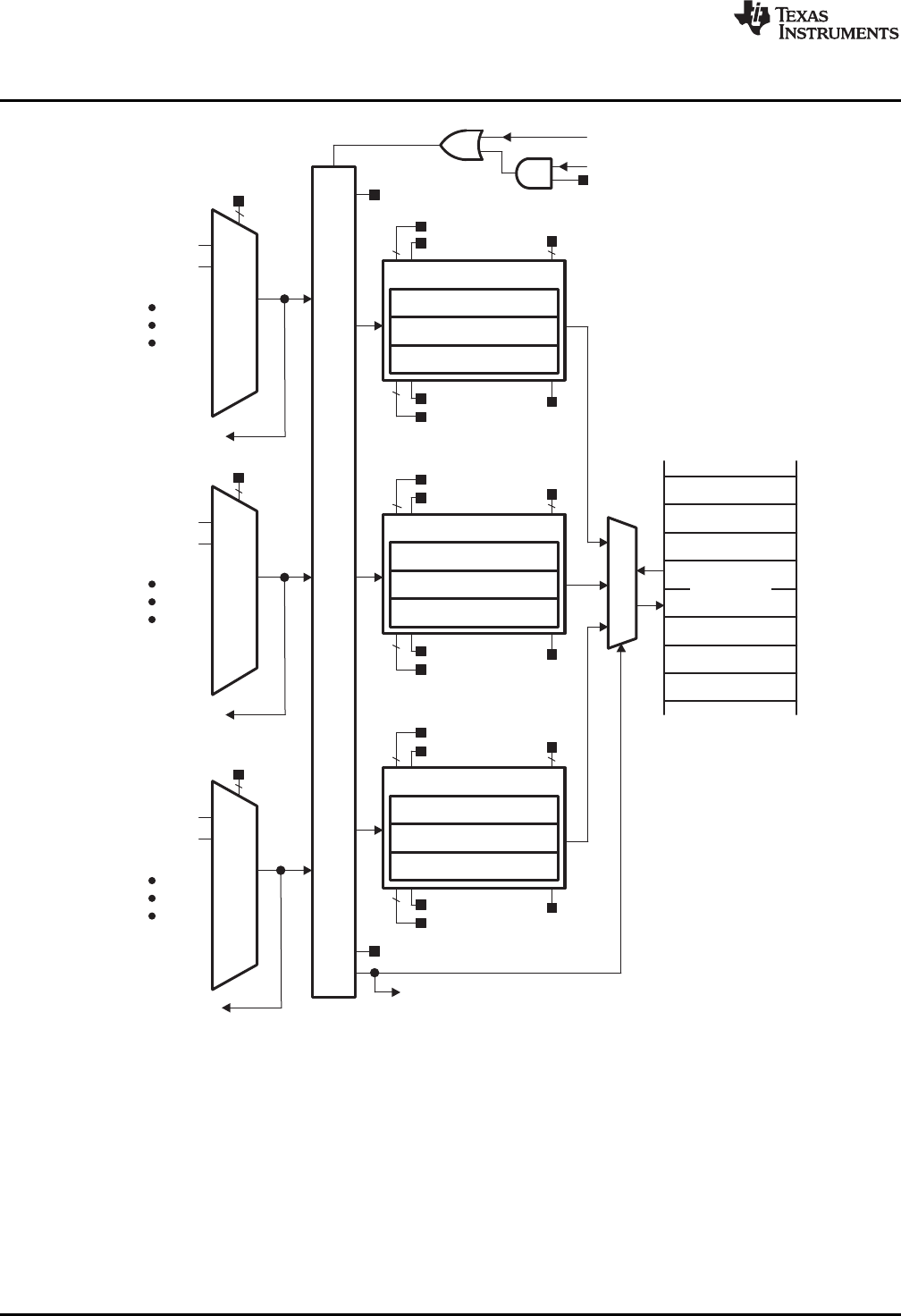
ENNMI
DMA Channeln
DMASRSBYTE
DMAnSZ
DMAnDA
DMAnSA
DMADSTBYTE
DMASRCINCR
DMADSTINCR
2
2
3
DMADT
DMAEN
DMA Channel1
DMASRSBYTE
DMA1SZ
DMA1DA
DMA1SA
DMADSTBYTE
DMASRCINCR
DMADSTINCR
2
2
3
DMADT
DMAEN
DMA Channel0
DMASRSBYTE
DMA0SZ
DMA0DA
DMA0SA
DMADSTBYTE
DMASRCINCR
DMADSTINCR
2
2
3
DMADT
DMAEN
Address
Space
NMIInterruptRequest
JTAG Active
Halt
HaltCPU
ROUNDROBIN
DMARMWDIS
DMAnTSEL
DMA0TRIG31
DMA0TRIG0
DMA0TSEL
5
DMA0TRIG1
00000
00001
11111
DMA1TRIG31
DMA1TRIG0
DMA1TSEL
5
DMA1TRIG1
00000
00001
11111
DMAnTRIG31
DMAnTRIG0
5
DMAnTRIG1
00000
00001
11111
toUSB
ifavailable
toUSB
ifavailable
DMA Priority and Control
toUSB
ifavailable
Direct Memory Access (DMA) Introduction
www.ti.com
Figure 11-1. DMA Controller Block Diagram
382 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
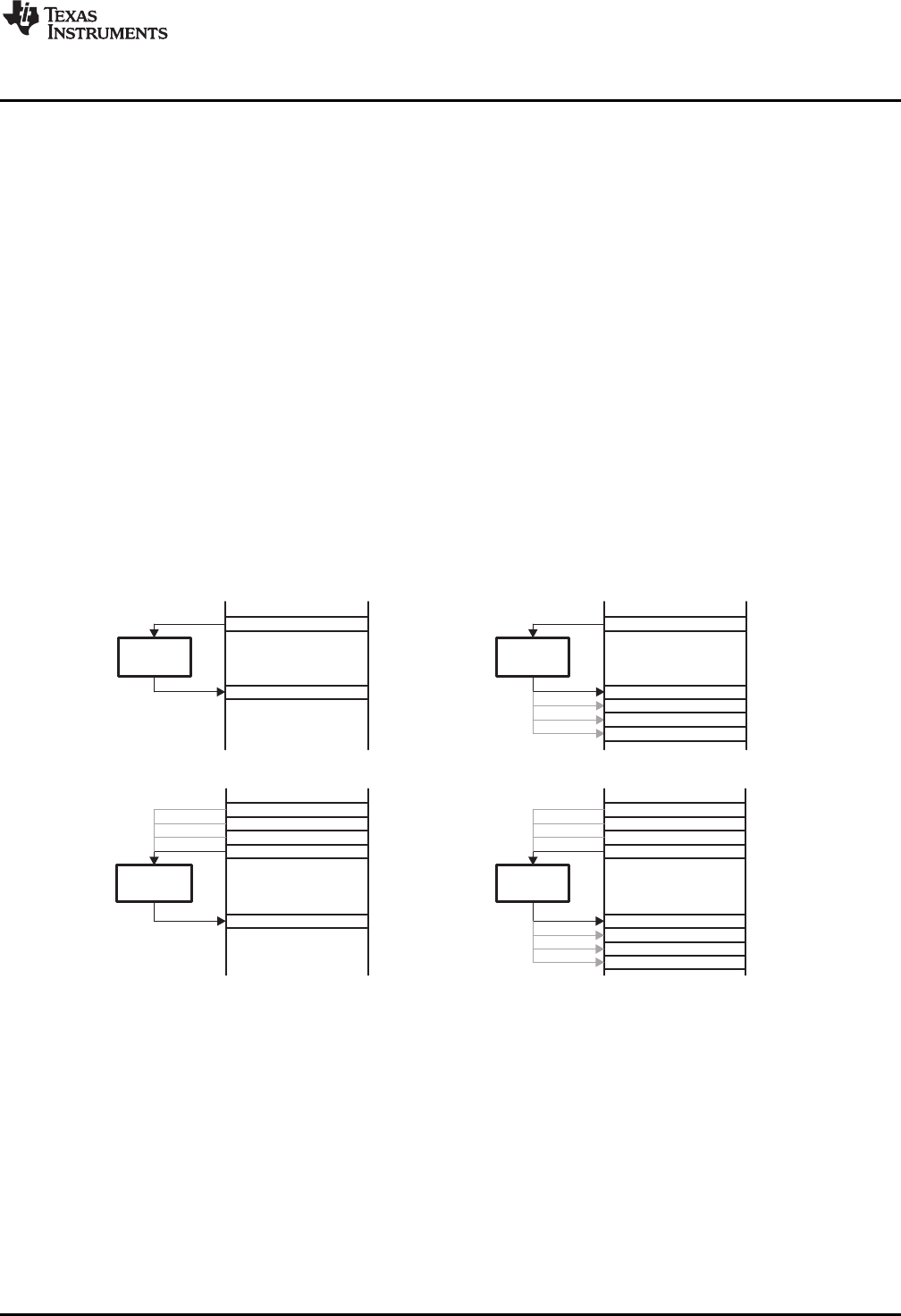
Address SpaceAddress Space
DMA
Controller Address Space Address Space
Fixed Address To Block Of Addresses
Fixed Address To Fixed Address
Block Of Addresses To Fixed Address Block Of Addresses To Block Of Addresses
DMA
Controller
DMA
Controller
DMA
Controller
www.ti.com
DMA Operation
11.2 DMA Operation
The DMA controller is configured with user software. The setup and operation of the DMA is discussed in
the following sections.
11.2.1 DMA Addressing Modes
The DMA controller has four addressing modes. The addressing mode for each DMA channel is
independently configurable. For example, channel 0 may transfer between two fixed addresses, while
channel 1 transfers between two blocks of addresses. The addressing modes are shown in Figure 11-2.
The addressing modes are:
• Fixed address to fixed address
• Fixed address to block of addresses
• Block of addresses to fixed address
• Block of addresses to block of addresses
The addressing modes are configured with the DMASRCINCR and DMADSTINCR control bits. The
DMASRCINCR bits select if the source address is incremented, decremented, or unchanged after each
transfer. The DMADSTINCR bits select if the destination address is incremented, decremented, or
unchanged after each transfer.
Transfers may be byte to byte, word to word, byte to word, or word to byte. When transferring word to
byte, only the lower byte of the source-word transfers. When transferring byte to word, the upper byte of
the destination-word is cleared when the transfer occurs.
Figure 11-2. DMA Addressing Modes
383
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Operation
www.ti.com
11.2.2 DMA Transfer Modes
The DMA controller has six transfer modes selected by the DMADT bits as listed in Table 11-1. Each
channel is individually configurable for its transfer mode. For example, channel 0 may be configured in
single transfer mode, while channel 1 is configured for burst-block transfer mode, and channel 2 operates
in repeated block mode. The transfer mode is configured independently from the addressing mode. Any
addressing mode can be used with any transfer mode.
Two types of data can be transferred selectable by the DMAxCTL DSTBYTE and SRCBYTE fields. The
source and/or destination location can be either byte or word data. It is also possible to transfer byte to
byte, word to word, or any combination.
Table 11-1. DMA Transfer Modes
DMADT Transfer Mode Description
Each transfer requires a trigger. DMAEN is automatically cleared when DMAxSZ
000 Single transfer transfers have been made.
A complete block is transferred with one trigger. DMAEN is automatically cleared at
001 Block transfer the end of the block transfer.
CPU activity is interleaved with a block transfer. DMAEN is automatically cleared at
010, 011 Burst-block transfer the end of the burst-block transfer.
100 Repeated single transfer Each transfer requires a trigger. DMAEN remains enabled.
101 Repeated block transfer A complete block is transferred with one trigger. DMAEN remains enabled.
Repeated burst-block
110, 111 CPU activity is interleaved with a block transfer. DMAEN remains enabled.
transfer
384 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
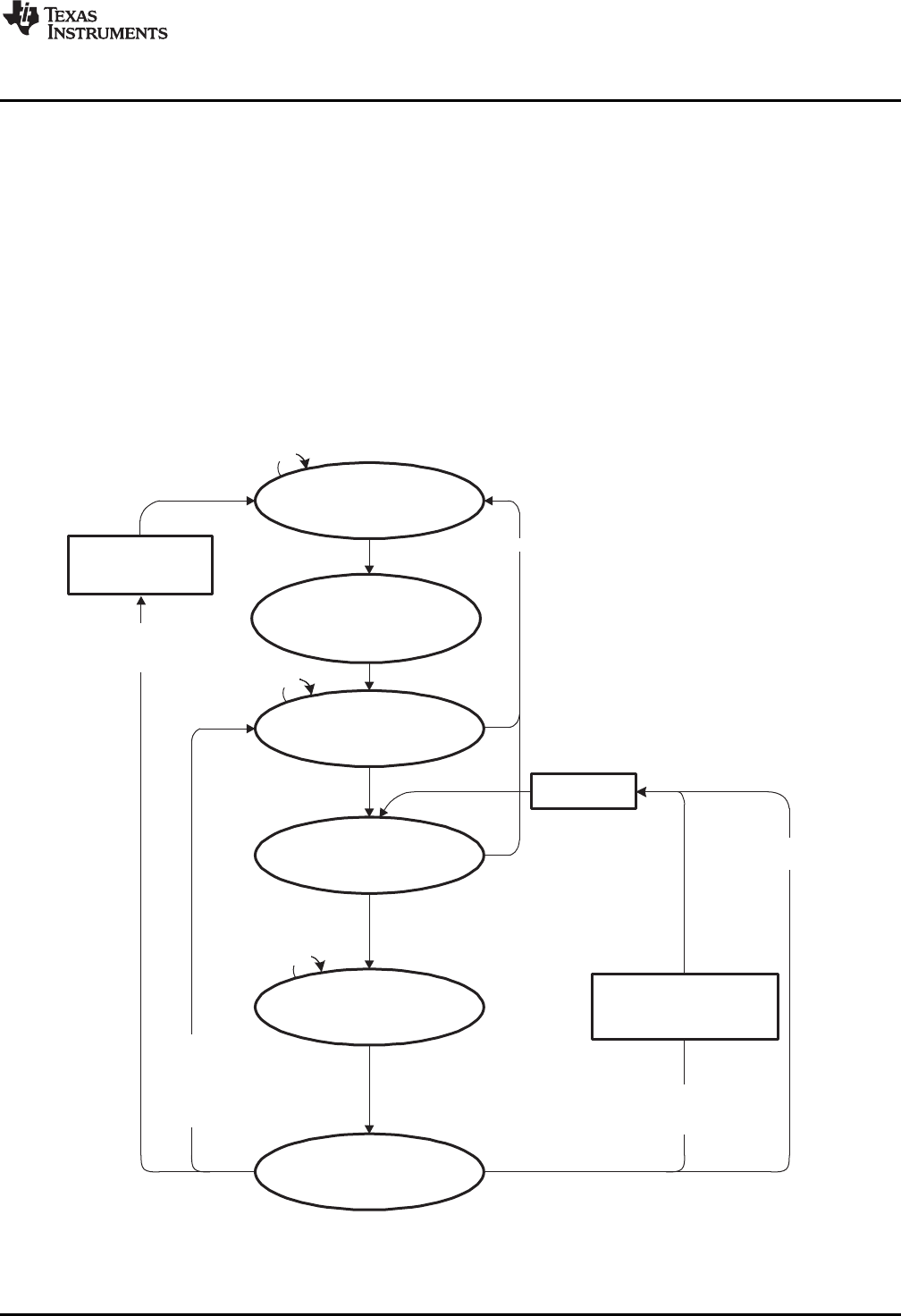
Reset
WaitforTrigger
Idle
HoldCPU,
Transferoneword/byte
[+Trigger ANDDMALEVEL =0]
OR
[Trigger=1 ANDDMALEVEL =1]
DMAABORT=0
DMAABORT =1
2xMCLK
DMAEN=0
DecrementDMAxSZ
ModifyT_SourceAdd
ModifyT_DestAdd
[ENNMI=1
ANDNMIevent]
OR
[DMALEVEL =1
ANDTrigger=0]
[DMADT={0}
ANDDMAxSZ=0]
ORDMAEN=0
DMAxSZ T_Size
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
DMAREQ=0
DMAxSZ>0
ANDDMAEN=1
DMAEN=0
DMAEN=1
T_Size DMAxSZ
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
DMADT={4}
ANDDMAxSZ=0
ANDDMAEN=1
DMAEN=0
DMAREQ=0
T_Size →DMAxSZ
www.ti.com
DMA Operation
11.2.2.1 Single Transfer
In single transfer mode, each byte/word transfer requires a separate trigger. The single transfer state
diagram is shown in Figure 11-3.
The DMAxSZ register is used to define the number of transfers to be made. The DMADSTINCR and
DMASRCINCR bits select if the destination address and the source address are incremented or
decremented after each transfer. If DMAxSZ = 0, no transfers occur.
The DMAxSA, DMAxDA, and DMAxSZ registers are copied into temporary registers. The temporary
values of DMAxSA and DMAxDA are incremented or decremented after each transfer. The DMAxSZ
register is decremented after each transfer. When the DMAxSZ register decrements to zero, it is reloaded
from its temporary register and the corresponding DMAIFG flag is set. When DMADT = {0}, the DMAEN
bit is cleared automatically when DMAxSZ decrements to zero and must be set again for another transfer
to occur.
In repeated single transfer mode, the DMA controller remains enabled with DMAEN = 1, and a transfer
occurs every time a trigger occurs.
Figure 11-3. DMA Single Transfer State Diagram
385
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DMA Operation
www.ti.com
11.2.2.2 Block Transfer
In block transfer mode, a transfer of a complete block of data occurs after one trigger. When DMADT = {1}
,the DMAEN bit is cleared after the completion of the block transfer and must be set again before another
block transfer can be triggered. After a block transfer has been triggered, further trigger signals occurring
during the block transfer are ignored. The block transfer state diagram is shown in Figure 11-4.
The DMAxSZ register is used to define the size of the block, and the DMADSTINCR and DMASRCINCR
bits select if the destination address and the source address are incremented or decremented after each
transfer of the block. If DMAxSZ = 0, no transfers occur.
The DMAxSA, DMAxDA, and DMAxSZ registers are copied into temporary registers. The temporary
values of DMAxSA and DMAxDA are incremented or decremented after each transfer in the block. The
DMAxSZ register is decremented after each transfer of the block and shows the number of transfers
remaining in the block. When the DMAxSZ register decrements to zero, it is reloaded from its temporary
register and the corresponding DMAIFG flag is set.
During a block transfer, the CPU is halted until the complete block has been transferred. The block
transfer takes 2 × MCLK × DMAxSZ clock cycles to complete. CPU execution resumes with its previous
state after the block transfer is complete.
In repeated block transfer mode, the DMAEN bit remains set after completion of the block transfer. The
next trigger after the completion of a repeated block transfer triggers another block transfer.
386 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
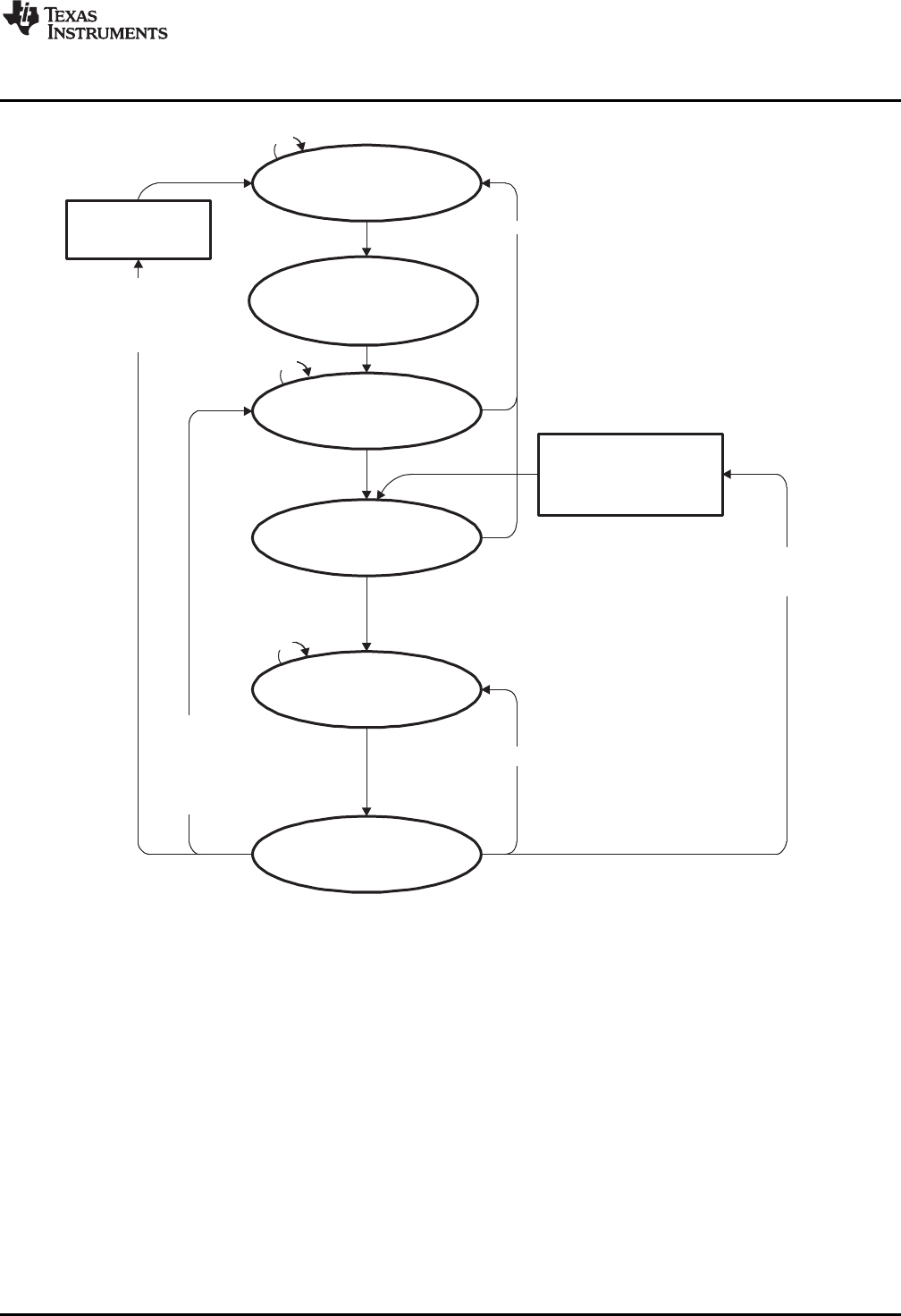
Reset
WaitforTrigger
Idle
HoldCPU,
Transferoneword/byte
[+TriggerANDDMALEVEL=0 ]
OR
[Trigger=1ANDDMALEVEL=1]
DMAABORT=0
DecrementDMAxSZ
ModifyT_SourceAdd
ModifyT_DestAdd
DMAxSZ>0
[ENNMI=1
ANDNMIevent]
OR
[DMALEVEL =1
ANDTrigger=0]
[DMADT={1}
ANDDMAxSZ=0]
OR
DMAEN=0
DMAxSZ T_Size
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
DMAREQ=0
T_Size DMAxSZ
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
DMADT={5}
ANDDMAxSZ=0
ANDDMAEN=1
DMAEN=0
DMAEN=1
DMAEN=0
DMAREQ=0
T_Size DMAxSZ→
DMAABORT=1
2×MCLK
DMAEN=0
www.ti.com
DMA Operation
Figure 11-4. DMA Block Transfer State Diagram
387
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DMA Operation
www.ti.com
11.2.2.3 Burst-Block Transfer
In burst-block mode, transfers are block transfers with CPU activity interleaved. The CPU executes
two MCLK cycles after every four byte/word transfers of the block, resulting in 20% CPU execution
capacity. After the burst-block, CPU execution resumes at 100% capacity and the DMAEN bit is cleared.
DMAEN must be set again before another burst-block transfer can be triggered. After a burst-block
transfer has been triggered, further trigger signals occurring during the burst-block transfer are ignored.
The burst-block transfer state diagram is shown in Figure 11-5.
The DMAxSZ register is used to define the size of the block, and the DMADSTINCR and DMASRCINCR
bits select if the destination address and the source address are incremented or decremented after each
transfer of the block. If DMAxSZ = 0, no transfers occur.
The DMAxSA, DMAxDA, and DMAxSZ registers are copied into temporary registers. The temporary
values of DMAxSA and DMAxDA are incremented or decremented after each transfer in the block. The
DMAxSZ register is decremented after each transfer of the block and shows the number of transfers
remaining in the block. When the DMAxSZ register decrements to zero, it is reloaded from its temporary
register and the corresponding DMAIFG flag is set.
In repeated burst-block mode, the DMAEN bit remains set after completion of the burst-block transfer and
no further trigger signals are required to initiate another burst-block transfer. Another burst-block transfer
begins immediately after completion of a burst-block transfer. In this case, the transfers must be stopped
by clearing the DMAEN bit, or by an (non)maskable interrupt (NMI) when ENNMI is set. In repeated burst-
block mode the CPU executes at 20% capacity continuously until the repeated burst-block transfer is
stopped.
388 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
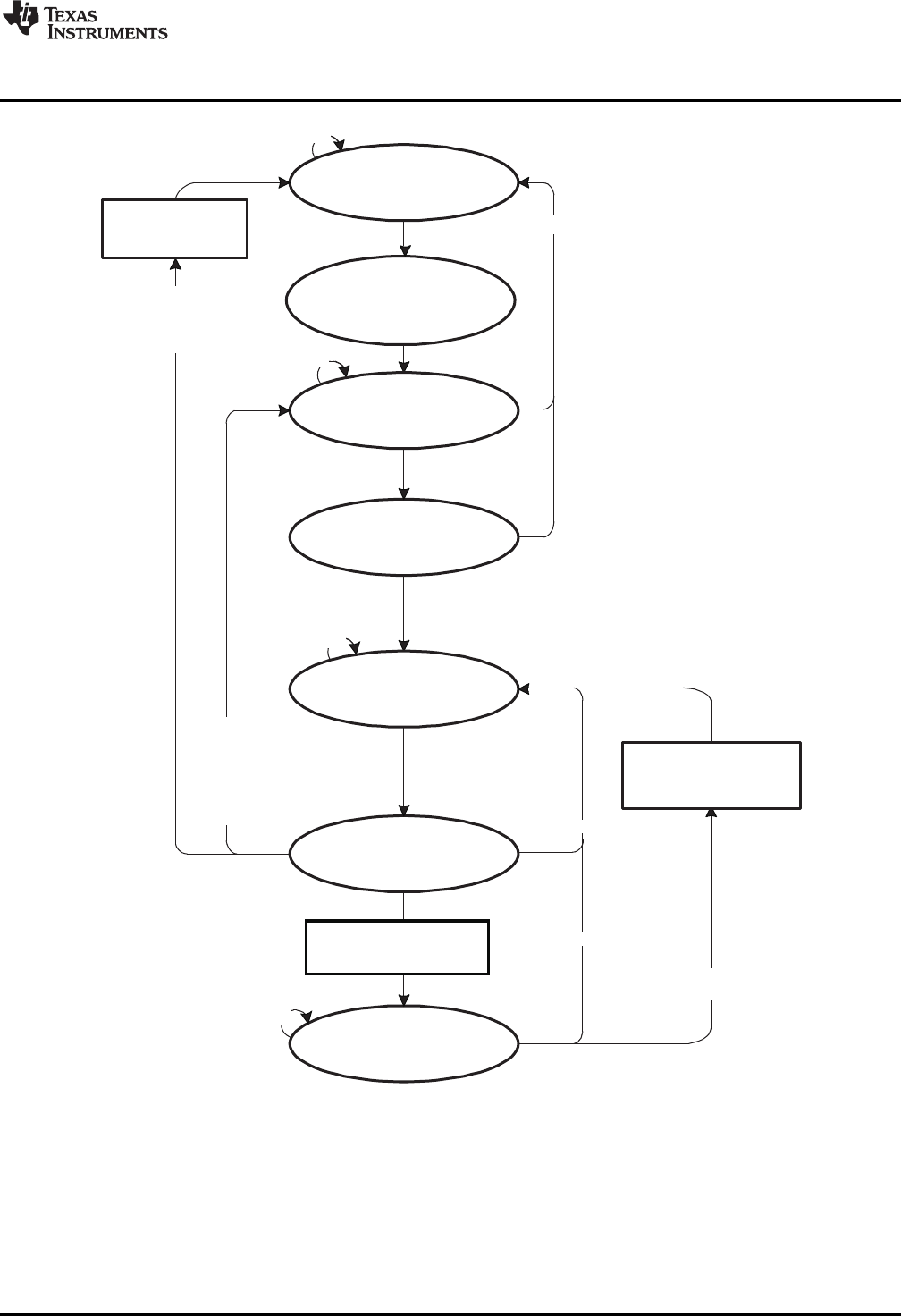
2×MCLK
Reset
WaitforTrigger
Idle
HoldCPU,
Transferoneword/byte
BurstState
(releaseCPUfor2×MCLK)
[+Trigger ANDDMALEVEL =0]
OR
[Trigger=1 ANDDMALEVEL=1]
DMAABORT=0
DMAABORT=1
2×MCLK
DMAEN=0
DecrementDMAxSZ
ModifyT_SourceAdd
ModifyT_DestAdd
[DMADT={6,7}
ANDDMAxSZ=0]
[ENNMI=1
ANDNMIevent]
OR
[DMALEVEL =1
AND
Trigger=0]
[DMADT={2,3}
ANDDMAxSZ=0]
OR
DMAEN=0
DMAxSZ T_Size
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
T_Size
DMAxSA T_SourceAdd
DMAxDA T_DestAdd
→
→
→
DMAxSZ
DMAEN=0
DMAEN=1
DMAxSZ>0
DMAxSZ>0 AND
amultipleof4words/bytes
weretransferred
DMAxSZ>0
DMAEN=0
DMAREQ=0
T_Size DMAxSZ→
www.ti.com
DMA Operation
Figure 11-5. DMA Burst-Block Transfer State Diagram
389
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DMA Operation
www.ti.com
11.2.3 Initiating DMA Transfers
Each DMA channel is independently configured for its trigger source with the DMAxTSEL. The
DMAxTSEL bits should be modified only when the DMACTLx DMAEN bit is 0. Otherwise, unpredictable
DMA triggers may occur.Table 11-2 describes the trigger operation for each type of module. See the
device-specific data sheet for the list of triggers available, along with their respective DMAxTSEL values.
When selecting the trigger, the trigger must not have already occurred, or the transfer does not take place.
NOTE: DMA trigger selection and USB
On devices that contain a USB module, the triggers selection from DMA channels 0, 1, or 2
can be used for the USB time stamp event selection (see the USB module description for
further details).
11.2.3.1 Edge-Sensitive Triggers
When DMALEVEL = 0, edge-sensitive triggers are used, and the rising edge of the trigger signal initiates
the transfer. In single-transfer mode, each transfer requires its own trigger. When using block or burst-
block modes, only one trigger is required to initiate the block or burst-block transfer.
11.2.3.2 Level-Sensitive Triggers
When DMALEVEL = 1, level-sensitive triggers are used. For proper operation, level-sensitive triggers can
only be used when external trigger DMAE0 is selected as the trigger. DMA transfers are triggered as long
as the trigger signal is high and the DMAEN bit remains set.
The trigger signal must remain high for a block or burst-block transfer to complete. If the trigger signal
goes low during a block or burst-block transfer, the DMA controller is held in its current state until the
trigger goes back high or until the DMA registers are modified by software. If the DMA registers are not
modified by software, when the trigger signal goes high again, the transfer resumes from where it was
when the trigger signal went low.
When DMALEVEL = 1, transfer modes selected when DMADT = {0, 1, 2, 3} are recommended because
the DMAEN bit is automatically reset after the configured transfer.
11.2.4 Halting Executing Instructions for DMA Transfers
The DMARMWDIS bit controls when the CPU is halted for DMA transfers. When DMARMWDIS = 0, the
CPU is halted immediately and the transfer begins when a trigger is received. In this case, it is possible
that CPU read-modify-write operations can be interrupted by a DMA transfer. When DMARMWDIS = 1,
the CPU finishes the currently executing read-modify-write operation before the DMA controller halts the
CPU and the transfer begins (see Table 11-2).
390 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
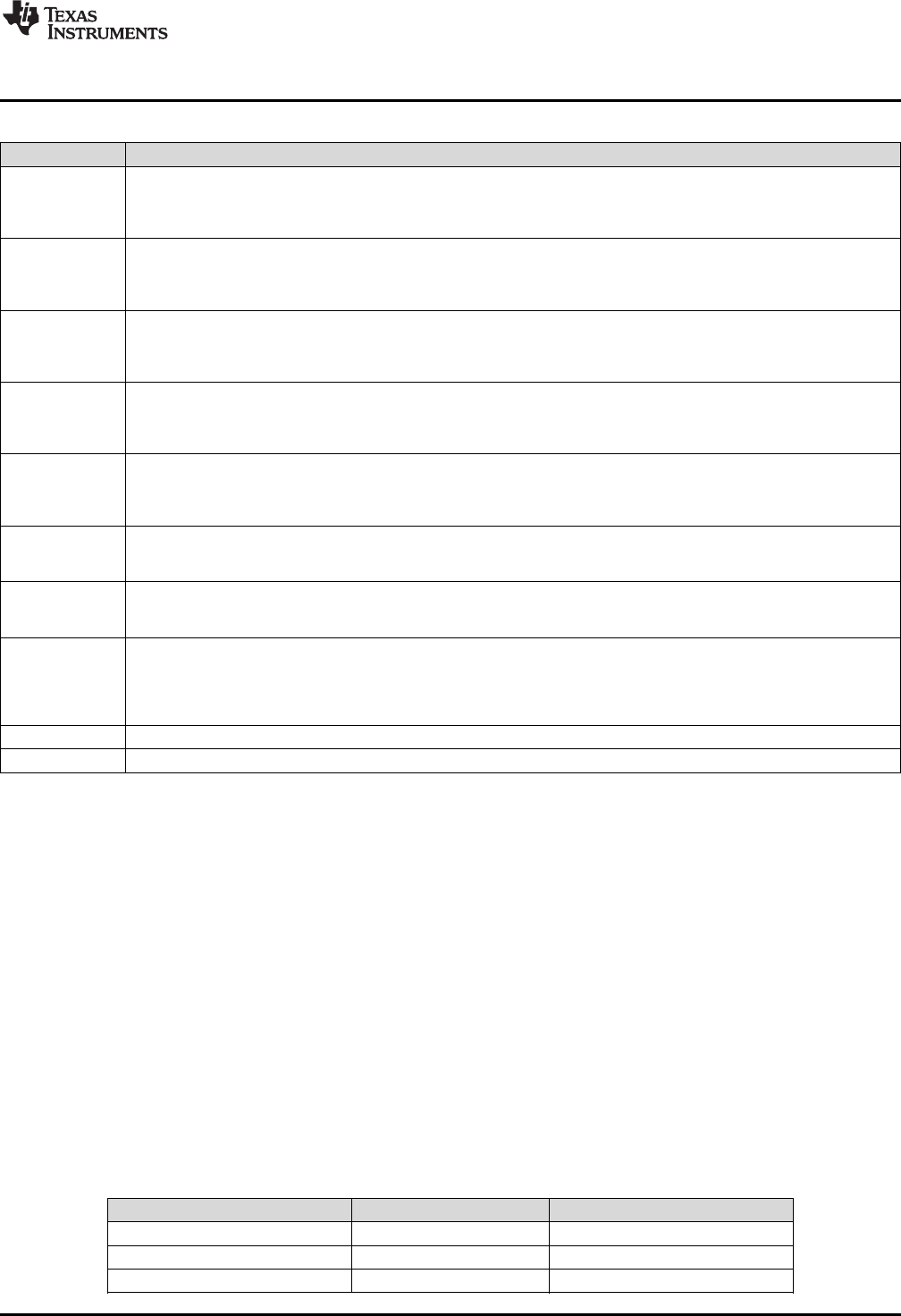
www.ti.com
DMA Operation
Table 11-2. DMA Trigger Operation
Module Operation
A transfer is triggered when the DMAREQ bit is set. The DMAREQ bit is automatically reset when the transfer starts.
A transfer is triggered when the DMAxIFG flag is set. DMA0IFG triggers channel 1, DMA1IFG triggers channel 2, and
DMA DMA2IFG triggers channel 0. None of the DMAxIFG flags are automatically reset when the transfer starts.
A transfer is triggered by the external trigger DMAE0.
A transfer is triggered when the TAxCCR0 CCIFG flag is set. The TAxCCR0 CCIFG flag is automatically reset when the
transfer starts. If the TAxCCR0 CCIE bit is set, the TAxCCR0 CCIFG flag dies not trigger a transfer.
Timer_A A transfer is triggered when the TAxCCR2 CCIFG flag is set. The TAxCCR2 CCIFG flag is automatically reset when the
transfer starts. If the TAxCCR2 CCIE bit is set, the TAxCCR2 CCIFG flag does not trigger a transfer.
A transfer is triggered when the TBxCCR0 CCIFG flag is set. The TBxCCR0 CCIFG flag is automatically reset when the
transfer starts. If the TBxCCR0 CCIE bit is set, the TBxCCR0 CCIFG flag does not trigger a transfer.
Timer_B A transfer is triggered when the TBxCCR2 CCIFG flag is set. The TBxCCR2 CCIFG flag is automatically reset when the
transfer starts. If the TBxCCR2 CCIE bit is set, the TBxCCR2 CCIFG flag does not trigger a transfer.
A transfer is triggered when USCI_Ax receives new data. UCAxRXIFG is automatically reset when the transfer starts. If
UCAxRXIE is set, the UCAxRXIFG does not trigger a transfer.
USCI_Ax A transfer is triggered when USCI_Ax is ready to transmit new data. UCAxTXIFG is automatically reset when the
transfer starts. If UCAxTXIE is set, the UCAxTXIFG does not trigger a transfer.
A transfer is triggered when USCI_Bx receives new data. UCBxRXIFG is automatically reset when the transfer starts. If
UCBxRXIE is set, the UCBxRXIFG does not trigger a transfer.
USCI_Bx A transfer is triggered when USCI_Bx is ready to transmit new data. UCBxTXIFG is automatically reset when the
transfer starts. If UCBxTXIE is set, the UCBxTXIFG does not trigger a transfer.
A transfer is triggered when the DAC12_xCTL0 DAC12IFG flag is set. The DAC12_xCTL0 DAC12IFG flag is
DAC12_A automatically cleared when the transfer starts. If the DAC12_xCTL0 DAC12IE bit is set, the DAC12_xCTL0 DAC12IFG
flag does not trigger a transfer.
A transfer is triggered by an ADC10IFG0 flag. A transfer is triggered when the conversion is completed and the
ADC10_A ADC10IFG0 is set. Setting the ADC10IFG0 with software does not trigger a transfer. The ADC10IFG0 flag is
automatically reset when the ADC10MEM0 register is accessed by the DMA controller.
A transfer is triggered by an ADC12IFG flag. When single-channel conversions are performed, the corresponding
ADC12IFG is the trigger. When sequences are used, the ADC12IFG for the last conversion in the sequence is the
ADC12_A trigger. A transfer is triggered when the conversion is completed and the ADC12IFG is set. Setting the ADC12IFG with
software does not trigger a transfer. All ADC12IFG flags are automatically reset when the associated ADC12MEMx
register is accessed by the DMA controller.
MPY A transfer is triggered when the hardware multiplier is ready for a new operand.
Reserved No transfer is triggered.
11.2.5 Stopping DMA Transfers
There are two ways to stop DMA transfers in progress:
• A single, block, or burst-block transfer may be stopped with an NMI, if the ENNMI bit is set in register
DMACTL1.
• A burst-block transfer may be stopped by clearing the DMAEN bit.
11.2.6 DMA Channel Priorities
The default DMA channel priorities are DMA0 through DMA7. If two or three triggers happen
simultaneously or are pending, the channel with the highest priority completes its transfer (single, block, or
burst-block transfer) first, then the second priority channel, then the third priority channel. Transfers in
progress are not halted if a higher-priority channel is triggered. The higher-priority channel waits until the
transfer in progress completes before starting.
The DMA channel priorities are configurable with the ROUNDROBIN bit. When the ROUNDROBIN bit is
set, the channel that completes a transfer becomes the lowest priority. The order of the priority of the
channels always stays the same, DMA0-DMA1-DMA2, for example, for three channels. When the
ROUNDROBIN bit is cleared, the channel priority returns to the default priority.
DMA Priority Transfer Occurs New DMA Priority
DMA0-DMA1-DMA2 DMA1 DMA2-DMA0-DMA1
DMA2-DMA0-DMA1 DMA2 DMA0-DMA1-DMA2
DMA0-DMA1-DMA2 DMA0 DMA1-DMA2-DMA0
391
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Operation
www.ti.com
11.2.7 DMA Transfer Cycle Time
The DMA controller requires one or two MCLK clock cycles to synchronize before each single transfer or
complete block or burst-block transfer. Each byte/word transfer requires two MCLK cycles after
synchronization, and one cycle of wait time after the transfer. Because the DMA controller uses MCLK, the
DMA cycle time is dependent on the MSP430 operating mode and clock system setup.
If the MCLK source is active but the CPU is off, the DMA controller uses the MCLK source for each
transfer, without reenabling the CPU. If the MCLK source is off, the DMA controller temporarily restarts
MCLK, sourced with DCOCLK, for the single transfer or complete block or burst-block transfer. The CPU
remains off and after the transfer completes, MCLK is turned off. The maximum DMA cycle time for all
operating modes is shown in Table 11-3.
Table 11-3. Maximum Single-Transfer DMA Cycle Time
CPU Operating Mode Clock Source Maximum DMA Cycle Time
Active mode MCLK = DCOCLK 4 MCLK cycles
Active mode MCLK = LFXT1CLK 4 MCLK cycles
Low-power mode LPM0/1 MCLK = DCOCLK 5 MCLK cycles
Low-power mode LPM3/4 MCLK = DCOCLK 5 MCLK cycles + 5 µs(1)
Low-power mode LPM0/1 MCLK = LFXT1CLK 5 MCLK cycles
Low-power mode LPM3 MCLK = LFXT1CLK 5 MCLK cycles
Low-power mode LPM4 MCLK = LFXT1CLK 5 MCLK cycles + 5 µs(1)
(1) The additional 5 µs are needed to start the DCOCLK. It is the t(LPMx) parameter in the data sheet.
11.2.8 Using DMA With System Interrupts
DMA transfers are not interruptible by system interrupts. System interrupts remain pending until the
completion of the transfer. NMIs can interrupt the DMA controller if the ENNMI bit is set.
System interrupt service routines are interrupted by DMA transfers. If an interrupt service routine or other
routine must execute with no interruptions, the DMA controller should be disabled prior to executing the
routine.
11.2.9 DMA Controller Interrupts
Each DMA channel has its own DMAIFG flag. Each DMAIFG flag is set in any mode when the
corresponding DMAxSZ register counts to zero. If the corresponding DMAIE and GIE bits are set, an
interrupt request is generated.
All DMAIFG flags are prioritized, with DMA0IFG being the highest, and combined to source a single
interrupt vector. The highest-priority enabled interrupt generates a number in the DMAIV register. This
number can be evaluated or added to the program counter (PC) to automatically enter the appropriate
software routine. Disabled DMA interrupts do not affect the DMAIV value.
Any access, read or write, of the DMAIV register automatically resets the highest pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
For example, assume that DMA0 has the highest priority. If the DMA0IFG and DMA2IFG flags are set
when the interrupt service routine accesses the DMAIV register, DMA0IFG is reset automatically. After the
RETI instruction of the interrupt service routine is executed, the DMA2IFG generates another interrupt.
392 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
DMA Operation
11.2.9.1 DMAIV Software Example
The following software example shows the recommended use of DMAIV and the handling overhead for an
eight channel DMA controller. The DMAIV value is added to the PC to automatically jump to the
appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
;Interrupt handler for DMAxIFG Cycles
DMA_HND ... ; Interrupt latency 6
ADD &DMAIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP DMA0_HND ; Vector 2: DMA channel 0 2
JMP DMA1_HND ; Vector 4: DMA channel 1 2
JMP DMA2_HND ; Vector 6: DMA channel 2 2
JMP DMA3_HND ; Vector 8: DMA channel 3 2
JMP DMA4_HND ; Vector 10: DMA channel 4 2
JMP DMA5_HND ; Vector 12: DMA channel 5 2
JMP DMA6_HND ; Vector 14: DMA channel 6 2
JMP DMA7_HND ; Vector 16: DMA channel 7 2
DMA7_HND ; Vector 16: DMA channel 7
... ; Task starts here
RETI ; Back to main program 5
DMA6_HND ; Vector 14: DMA channel 6
... ; Task starts here
RETI ; Back to main program 5
DMA5_HND ; Vector 12: DMA channel 5
... ; Task starts here
RETI ; Back to main program 5
DMA4_HND ; Vector 10: DMA channel 4
... ; Task starts here
RETI ; Back to main program 5
DMA3_HND ; Vector 8: DMA channel 3
... ; Task starts here
RETI ; Back to main program 5
DMA2_HND ; Vector 6: DMA channel 2
... ; Task starts here
RETI ; Back to main program 5
DMA1_HND ; Vector 4: DMA channel 1
... ; Task starts here
RETI ; Back to main program 5
DMA0_HND ; Vector 2: DMA channel 0
... ; Task starts here
RETI ; Back to main program 5
393
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DMA Operation
www.ti.com
11.2.10 Using the USCI_B I2C Module With the DMA Controller
The USCI_B I2C module provides two trigger sources for the DMA controller. The USCI_B I2C module can
trigger a transfer when new I2C data is received and the when the transmit data is needed.
11.2.11 Using ADC10 With the DMA Controller
MSP430 devices with an integrated DMA controller can automatically move data from the ADC10MEM0
register to another location. DMA transfers are done without CPU intervention and independently of any
low-power modes. The DMA controller increases throughput of the ADC10 module and enhances low-
power applications allowing the CPU to remain off while data transfers occur. A transfer is triggered when
the conversion is completed and the ADC10IFG0 is set. Setting the ADC10IFG0 with software does not
trigger a transfer. The ADC10IFG0 flag is automatically reset when the ADC10MEM0 register is accessed
by the DMA controller.
11.2.12 Using ADC12 With the DMA Controller
MSP430 devices with an integrated DMA controller can automatically move data from any ADC12MEMx
register to another location. DMA transfers are done without CPU intervention and independently of any
low-power modes. The DMA controller increases throughput of the ADC12 module, and enhances low-
power applications allowing the CPU to remain off while data transfers occur.
DMA transfers can be triggered from any ADC12IFG flag. When CONSEQx = {0,2}, the ADC12IFG flag for
the ADC12MEMx used for the conversion can trigger a DMA transfer. When CONSEQx = {1,3}, the
ADC12IFG flag for the last ADC12MEMx in the sequence can trigger a DMA transfer. Any ADC12IFG flag
is automatically cleared when the DMA controller accesses the corresponding ADC12MEMx.
11.2.13 Using DAC12 With the DMA Controller
MSP430 devices with an integrated DMA controller can automatically move data to the DAC12_xDAT
register. DMA transfers are done without CPU intervention and independently of any low-power modes.
The DMA controller increases throughput to the DAC12 module, and enhances low-power applications
allowing the CPU to remain off while data transfers occur.
Applications requiring periodic waveform generation can benefit from using the DMA controller with the
DAC12. For example, an application that produces a sinusoidal waveform may store the sinusoid values
in a table. The DMA controller can continuously and automatically transfer the values to the DAC12 at
specific intervals creating the sinusoid with zero CPU execution. The DAC12_xCTL DAC12IFG flag is
automatically cleared when the DMA controller accesses the DAC12_xDAT register.
394 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3 DMA Registers
The DMA module registers are listed in Table 11-4. The base addresses can be found in the device-
specific data sheet. Each channel starts at its respective base address. The address offsets are listed in
Table 11-4.
Table 11-4. DMA Registers
Offset Acronym Register Name Type Access Reset Section
00h DMACTL0 DMA Control 0 Read/write Word 0000h Section 11.3.1
02h DMACTL1 DMA Control 1 Read/write Word 0000h Section 11.3.2
04h DMACTL2 DMA Control 2 Read/write Word 0000h Section 11.3.3
06h DMACTL3 DMA Control 3 Read/write Word 0000h Section 11.3.4
08h DMACTL4 DMA Control 4 Read/write Word 0000h Section 11.3.5
0Eh DMAIV DMA Interrupt Vector Read only Word 0000h Section 11.3.10
00h DMA0CTL DMA Channel 0 Control Read/write Word 0000h Section 11.3.6
02h DMA0SA DMA Channel 0 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA0DA DMA Channel 0 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA0SZ DMA Channel 0 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA1CTL DMA Channel 1 Control Read/write Word 0000h Section 11.3.6
02h DMA1SA DMA Channel 1 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA1DA DMA Channel 1 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA1SZ DMA Channel 1 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA2CTL DMA Channel 2 Control Read/write Word 0000h Section 11.3.6
02h DMA2SA DMA Channel 2 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA2DA DMA Channel 2 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA2SZ DMA Channel 2 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA3CTL DMA Channel 3 Control Read/write Word 0000h Section 11.3.6
02h DMA3SA DMA Channel 3 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA3DA DMA Channel 3 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA3SZ DMA Channel 3 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA4CTL DMA Channel 4 Control Read/write Word 0000h Section 11.3.6
02h DMA4SA DMA Channel 4 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA4DA DMA Channel 4 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA4SZ DMA Channel 4 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA5CTL DMA Channel 5 Control Read/write Word 0000h Section 11.3.6
02h DMA5SA DMA Channel 5 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA5DA DMA Channel 5 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA5SZ DMA Channel 5 Transfer Size Read/write Word undefined Section 11.3.9
395
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

DMA Registers
www.ti.com
Table 11-4. DMA Registers (continued)
Offset Acronym Register Name Type Access Reset Section
00h DMA6CTL DMA Channel 6 Control Read/write Word 0000h Section 11.3.6
02h DMA6SA DMA Channel 6 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA6DA DMA Channel 6 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA6SZ DMA Channel 6 Transfer Size Read/write Word undefined Section 11.3.9
00h DMA7CTL DMA Channel 7 Control Read/write Word 0000h Section 11.3.6
02h DMA7SA DMA Channel 7 Source Address Read/write Word, undefined Section 11.3.7
double word
06h DMA7DA DMA Channel 7 Destination Address Read/write Word, undefined Section 11.3.8
double word
0Ah DMA7SZ DMA Channel 7 Transfer Size Read/write Word undefined Section 11.3.9
396 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3.1 DMACTL0 Register
DMA Control 0 Register
Figure 11-6. DMACTL0 Register
15 14 13 12 11 10 9 8
Reserved DMA1TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved DMA0TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 11-5. DMACTL0 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-8 DMA1TSEL RW 0h DMA 1 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA1TRIG0
00001b = DMA1TRIG1
00010b = DMA1TRIG2
⋮
11110b = DMA1TRIG30
11111b = DMA1TRIG31
7-5 Reserved R 0h Reserved. Always reads as 0.
4-0 DMA0TSEL RW 0h DMA 0 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA0TRIG0
00001b = DMA0TRIG1
00010b = DMA0TRIG2
⋮
11110b = DMA0TRIG30
11111b = DMA0TRIG31
397
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Registers
www.ti.com
11.3.2 DMACTL1 Register
DMA Control 1 Register
Figure 11-7. DMACTL1 Register
15 14 13 12 11 10 9 8
Reserved DMA3TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved DMA2TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 11-6. DMACTL1 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-8 DMA3TSEL RW 0h DMA 3 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA3TRIG0
00001b = DMA3TRIG1
00010b = DMA3TRIG2
⋮
11110b = DMA3TRIG30
11111b = DMA3TRIG31
7-5 Reserved R 0h Reserved. Always reads as 0.
4-0 DMA2TSEL RW 0h DMA 2 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA2TRIG0
00001b = DMA2TRIG1
00010b = DMA2TRIG2
⋮
11110b = DMA2TRIG30
11111b = DMA2TRIG31
398 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3.3 DMACTL2 Register
DMA Control 2 Register
Figure 11-8. DMACTL2 Register
15 14 13 12 11 10 9 8
Reserved DMA5TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved DMA4TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 11-7. DMACTL2 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-8 DMA5TSEL RW 0h DMA 5 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA5TRIG0
00001b = DMA5TRIG1
00010b = DMA5TRIG2
⋮
11110b = DMA5TRIG30
11111b = DMA5TRIG31
7-5 Reserved R 0h Reserved. Always reads as 0.
4-0 DMA4TSEL RW 0h DMA 4 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA4TRIG0
00001b = DMA4TRIG1
00010b = DMA4TRIG2
⋮
11110b = DMA4TRIG30
11111b = DMA4TRIG31
399
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Registers
www.ti.com
11.3.4 DMACTL3 Register
DMA Control 3 Register
Figure 11-9. DMACTL3 Register
15 14 13 12 11 10 9 8
Reserved DMA7TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved DMA6TSEL
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 11-8. DMACTL3 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-8 DMA7TSEL RW 0h DMA 7 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA7TRIG0
00001b = DMA7TRIG1
00010b = DMA7TRIG2
⋮
11110b = DMA7TRIG30
11111b = DMA7TRIG31
7-5 Reserved R 0h Reserved. Always reads as 0.
4-0 DMA6TSEL RW 0h DMA 6 trigger select. These bits select the DMA transfer trigger. See the device-
specific data sheet for number of channels and trigger assignment.
00000b = DMA6TRIG0
00001b = DMA6TRIG1
00010b = DMA6TRIG2
⋮
11110b = DMA6TRIG30
11111b = DMA6TRIG31
400 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3.5 DMACTL4 Register
DMA Control 4 Register
Figure 11-10. DMACTL4 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved DMARMWDIS ROUNDROBIN ENNMI
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
Table 11-9. DMACTL4 Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved. Always reads as 0.
2 DMARMWDIS RW 0h Read-modify-write disable. When set, this bit inhibits any DMA transfers from
occurring during CPU read-modify-write operations.
0b = DMA transfers can occur during read-modify-write CPU operations.
1b = DMA transfers inhibited during read-modify-write CPU operations
1 ROUNDROBIN RW 0h Round robin. This bit enables the round-robin DMA channel priorities.
0b = DMA channel priority is DMA0-DMA1-DMA2 - ...... -DMA7.
1b = DMA channel priority changes with each transfer.
0 ENNMI RW 0h Enable NMI. This bit enables the interruption of a DMA transfer by an NMI. When
an NMI interrupts a DMA transfer, the current transfer is completed normally,
further transfers are stopped and DMAABORT is set.
0b = NMI does not interrupt DMA transfer.
1b = NMI interrupts a DMA transfer.
401
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Registers
www.ti.com
11.3.6 DMAxCTL Register
DMA Channel x Control Register
Figure 11-11. DMAxCTL Register
15 14 13 12 11 10 9 8
Reserved DMADT DMADSTINCR DMASRCINCR
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DMADSTBYTE DMASRCBYTE DMALEVEL DMAEN DMAIFG DMAIE DMAABORT DMAREQ
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 11-10. DMAxCTL Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-12 DMADT RW 0h DMA transfer mode
000b = Single transfer
001b = Block transfer
010b = Burst-block transfer
011b = Burst-block transfer
100b = Repeated single transfer
101b = Repeated block transfer
110b = Repeated burst-block transfer
111b = Repeated burst-block transfer
11-10 DMADSTINCR RW 0h DMA destination increment. This bit selects automatic incrementing or
decrementing of the destination address after each byte or word transfer. When
DMADSTBYTE = 1, the destination address increments/decrements by one.
When DMADSTBYTE = 0, the destination address increments/decrements by
two. The DMAxDA is copied into a temporary register and the temporary register
is incremented or decremented. DMAxDA is not incremented or decremented.
00b = Destination address is unchanged.
01b = Destination address is unchanged.
10b = Destination address is decremented.
11b = Destination address is incremented.
9-8 DMASRCINCR RW 0h DMA source increment. This bit selects automatic incrementing or decrementing
of the source address for each byte or word transfer. When DMASRCBYTE = 1,
the source address increments/decrements by one. When DMASRCBYTE = 0,
the source address increments/decrements by two. The DMAxSA is copied into a
temporary register and the temporary register is incremented or decremented.
DMAxSA is not incremented or decremented.
00b = Source address is unchanged.
01b = Source address is unchanged.
10b = Source address is decremented.
11b = Source address is incremented.
7 DMADSTBYTE RW 0h DMA destination byte. This bit selects the destination as a byte or word.
0b = Word
1b = Byte
6 DMASRCBYTE RW 0h DMA source byte. This bit selects the source as a byte or word.
0b = Word
1b = Byte
5 DMALEVEL RW 0h DMA level. This bit selects between edge-sensitive and level-sensitive triggers.
0b = Edge sensitive (rising edge)
1b = Level sensitive (high level)
4 DMAEN RW 0h DMA enable
0b = Disabled
1b = Enabled
402 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
Table 11-10. DMAxCTL Register Description (continued)
Bit Field Type Reset Description
3 DMAIFG RW 0h DMA interrupt flag
0b = No interrupt pending
1b = Interrupt pending
2 DMAIE RW 0h DMA interrupt enable
0b = Disabled
1b = Enabled
1 DMAABORT RW 0h DMA abort. This bit indicates if a DMA transfer was interrupt by an NMI.
0b = DMA transfer not interrupted
1b = DMA transfer interrupted by NMI
0 DMAREQ RW 0h DMA request. Software-controlled DMA start. DMAREQ is reset automatically.
0b = No DMA start
1b = Start DMA
403
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Registers
www.ti.com
11.3.7 DMAxSA Register
DMA Channel x Source Address Register
Figure 11-12. DMAxSA Register
31 30 29 28 27 26 25 24
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
23 22 21 20 19 18 17 16
Reserved DMAxSA
r0 r0 r0 r0 rw rw rw rw
15 14 13 12 11 10 9 8
DMAxSA
rw rw rw rw rw rw rw rw
76543210
DMAxSA
rw rw rw rw rw rw rw rw
Table 11-11. DMAxSA Register Description
Bit Field Type Reset Description
31-20 Reserved R 0h Reserved. Always reads as 0.
19-0 DMAxSA RW undefined DMA source address. The source address register points to the DMA source
address for single transfers or the first source address for block transfers. The
source address register remains unchanged during block and burst-block
transfers. There are two words for the DMAxSA register. Bits 31-20 are
reserved and always read as zero. Reading or writing bits 19-16 requires the
use of extended instructions. When writing to DMAxSA with word instructions,
bits 19-16 are cleared.
404 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3.8 DMAxDA Register
DMA Channel x Destination Address Register
Figure 11-13. DMAxDA Register
31 30 29 28 27 26 25 24
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
23 22 21 20 19 18 17 16
Reserved DMAxDA
r0 r0 r0 r0 rw rw rw rw
15 14 13 12 11 10 9 8
DMAxDA
rw rw rw rw rw rw rw rw
76543210
DMAxDA
rw rw rw rw rw rw rw rw
Table 11-12. DMAxDA Register Description
Bit Field Type Reset Description
31-20 Reserved R 0h Reserved. Always reads as 0.
19-0 DMAxDA RW undefined DMA destination address. The destination address register points to the DMA
destination address for single transfers or the first destination address for block
transfers. The destination address register remains unchanged during block and
burst-block transfers. There are two words for the DMAxDA register. Bits 31-20
are reserved and always read as zero. Reading or writing bits 19-16 requires
the use of extended instructions. When writing to DMAxDA with word
instructions, bits 19-16 are cleared.
405
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DMA Registers
www.ti.com
11.3.9 DMAxSZ Register
DMA Channel x Size Address Register
Figure 11-14. DMAxSZ Register
15 14 13 12 11 10 9 8
DMAxSZ
rw rw rw rw rw rw rw rw
76543210
DMAxSZ
rw rw rw rw rw rw rw rw
Table 11-13. DMAxSZ Register Description
Bit Field Type Reset Description
15-0 DMAxSZ RW undefined DMA size. The DMA size register defines the number of byte/word data per
block transfer. DMAxSZ register decrements with each word or byte transfer.
When DMAxSZ decrements to 0, it is immediately and automatically reloaded
with its previously initialized value.
00000h = Transfer is disabled.
00001h = One byte or word is transferred.
00002h = Two bytes or words are transferred.
⋮
0FFFFh = 65535 bytes or words are transferred.
406 Direct Memory Access (DMA) Controller Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DMA Registers
11.3.10 DMAIV Register
DMA Interrupt Vector Register
Figure 11-15. DMAIV Register
15 14 13 12 11 10 9 8
DMAIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
DMAIV
r0 r0 r-(0) r-(0) r-(0) r-(0) r-(0) r0
Table 11-14. DMAIV Register Description
Bit Field Type Reset Description
15-0 DMAIV R 0h DMA interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: DMA channel 0; Interrupt Flag: DMA0IFG; Interrupt
Priority: Highest
04h = Interrupt Source: DMA channel 1; Interrupt Flag: DMA1IFG
06h = Interrupt Source: DMA channel 2; Interrupt Flag: DMA2IFG
08h = Interrupt Source: DMA channel 3; Interrupt Flag: DMA3IFG
0Ah = Interrupt Source: DMA channel 4; Interrupt Flag: DMA4IFG
0Ch = Interrupt Source: DMA channel 5; Interrupt Flag: DMA5IFG
0Eh = Interrupt Source: DMA channel 6; Interrupt Flag: DMA6IFG
10h = Interrupt Source: DMA channel 7; Interrupt Flag: DMA7IFG; Interrupt
Priority: Lowest
407
SLAU208O–June 2008–Revised May 2015 Direct Memory Access (DMA) Controller Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 12
SLAU208O–June 2008–Revised May 2015
Digital I/O Module
This chapter describes the operation of the digital I/O ports in all devices.
Topic ........................................................................................................................... Page
12.1 Digital I/O Introduction ...................................................................................... 409
12.2 Digital I/O Operation ......................................................................................... 410
12.3 I/O Configuration and LPMx.5 Low-Power Modes ................................................. 413
12.4 Digital I/O Registers.......................................................................................... 416
408 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Digital I/O Introduction
12.1 Digital I/O Introduction
The digital I/O features include:
• Independently programmable individual I/Os
• Any combination of input or output
• Individually configurable P1 and P2 interrupts. Some devices may include additional port interrupts.
• Independent input and output data registers
• Individually configurable pullup or pulldown resistors
Devices within the family may have up to twelve digital I/O ports implemented (P1 to P11 and PJ). Most
ports contain eight I/O lines; however, some ports may contain less (see the device-specific data sheet for
ports available). Each I/O line is individually configurable for input or output direction, and each can be
individually read or written. Each I/O line is individually configurable for pullup or pulldown resistors, as
well as, configurable drive strength, full or reduced. PJ contains only four I/O lines.
Ports P1 and P2 always have interrupt capability. Each interrupt for the P1 and P2 I/O lines can be
individually enabled and configured to provide an interrupt on a rising or falling edge of an input signal. All
P1 I/O lines source a single interrupt vector P1IV, and all P2 I/O lines source a different, single interrupt
vector P2IV. On some devices, additional ports with interrupt capability may be available (see the device-
specific data sheet for details) and contain their own respective interrupt vectors.
Individual ports can be accessed as byte-wide ports or can be combined into word-wide ports and
accessed in word formats. Port pairs P1 and P2, P3 and P4, P5 and P6, and so on, are associated with
the names PA, PB, PC, and so on, respectively. All port registers are handled in this manner with this
naming convention except for the interrupt vector registers; for example, PAIV does not exist for P1IV and
P2IV.
When writing to port PA with word operations, all 16 bits are written to the port. When writing to the lower
byte of the PA port using byte operations, the upper byte remains unchanged. Similarly, writing to the
upper byte of the PA port using byte instructions leaves the lower byte unchanged. When writing to a port
that contains less than the maximum number of bits possible, the unused bits are a "don't care". Ports PB,
PC, PD, PE, and PF behave similarly.
Reading of the PA port using word operations causes all 16 bits to be transferred to the destination.
Reading the lower or upper byte of the PA port (P1 or P2) and storing to memory using byte operations
causes only the lower or upper byte to be transferred to the destination, respectively. Reading of the PA
port and storing to a general-purpose register using byte operations causes the byte transferred to be
written to the least significant byte of the register. The upper significant byte of the destination register is
cleared automatically. Ports PB, PC, PD, PE, and PF behave similarly. When reading from ports that
contain less than the maximum bits possible, unused bits are read as zeros (similarly for port PJ).
409
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Operation
www.ti.com
12.2 Digital I/O Operation
The digital I/O are configured with user software. The setup and operation of the digital I/O are discussed
in the following sections.
12.2.1 Input Registers (PxIN)
Each bit in each PxIN register reflects the value of the input signal at the corresponding I/O pin when the
pin is configured as I/O function. These registers are read only.
• Bit = 0: Input is low
• Bit = 1: Input is high
NOTE: Writing to read-only registers PxIN
Writing to these read-only registers results in increased current consumption while the write
attempt is active.
12.2.2 Output Registers (PxOUT)
Each bit in each PxOUT register is the value to be output on the corresponding I/O pin when the pin is
configured as I/O function, output direction.
• Bit = 0: Output is low
• Bit = 1: Output is high
If the pin is configured as I/O function, input direction and the pullup or pulldown resistor are enabled; the
corresponding bit in the PxOUT register selects pullup or pulldown.
• Bit = 0: Pin is pulled down
• Bit = 1: Pin is pulled up
12.2.3 Direction Registers (PxDIR)
Each bit in each PxDIR register selects the direction of the corresponding I/O pin, regardless of the
selected function for the pin. PxDIR bits for I/O pins that are selected for other functions must be set as
required by the other function.
• Bit = 0: Port pin is switched to input direction
• Bit = 1: Port pin is switched to output direction
12.2.4 Pullup or Pulldown Resistor Enable Registers (PxREN)
Each bit in each PxREN register enables or disables the pullup or pulldown resistor of the corresponding
I/O pin. The corresponding bit in the PxOUT register selects if the pin contains a pullup or pulldown.
• Bit = 0: Pullup or pulldown resistor disabled
• Bit = 1: Pullup or pulldown resistor enabled
Table 12-1 summarizes the usage of PxDIR, PxREN, and PxOUT for proper I/O configuration.
Table 12-1. I/O Configuration
PxDIR PxREN PxOUT I/O Configuration
0 0 x Input
0 1 0 Input with pulldown resistor
0 1 1 Input with pullup resistor
1 x x Output
410 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Digital I/O Operation
12.2.5 Output Drive Strength Registers (PxDS)
Each bit in each PxDS register selects either full drive or reduced drive strength. Default is reduced drive
strength.
• Bit = 0: Reduced drive strength
• Bit = 1: Full drive strength
NOTE: Drive strength and EMI
All outputs default to reduced drive strength to reduce EMI. Using full drive strength can
result in increased EMI.
12.2.6 Function Select Registers (PxSEL)
Port pins are often multiplexed with other peripheral module functions. See the device-specific data sheet
to determine pin functions. Each PxSEL bit is used to select the pin function – I/O port or peripheral
module function.
• Bit = 0: I/O Function is selected for the pin
• Bit = 1: Peripheral module function is selected for the pin
Setting PxSEL = 1 does not automatically set the pin direction. Other peripheral module functions may
require the PxDIR bits to be configured according to the direction needed for the module function. See the
pin schematics in the device-specific data sheet.
NOTE: P1 and P2 interrupts are disabled when PxSEL = 1
When any PxSEL bit is set, the corresponding pin’s interrupt function is disabled. Therefore,
signals on these pins does not generate P1 or P2 interrupts, regardless of the state of the
corresponding P1IE or P2IE bit.
When a port pin is selected as an input to a peripheral, the input signal to the peripheral is a latched
representation of the signal at the device pin. While its corresponding PxSEL = 1, the internal input signal
follows the signal at the pin. However, if its PxSEL = 0, the input to the peripheral maintains the value of
the input signal at the device pin before its corresponding PxSEL bit was reset.
12.2.7 Port Interrupts
Each pin in ports P1 and P2 has interrupt capability, configured with the PxIFG, PxIE, and PxIES
registers. On some devices, additional ports have interrupt capability (see the device-specific data sheet).
All P1 interrupt flags are prioritized, with P1IFG.0 being the highest, and combined to source a single
interrupt vector. The highest priority enabled interrupt generates a number in the P1IV register. This
number can be evaluated or added to the program counter to automatically enter the appropriate software
routine. Disabled P1 interrupts do not affect the P1IV value. The same functionality exists for P2. Some
devices may contain additional port interrupts besides P1 and P2. See the device specific data sheet to
determine which port interrupts are available.
Each PxIFG bit is the interrupt flag for its corresponding I/O pin and is set when the selected input signal
edge occurs at the pin. All PxIFG interrupt flags request an interrupt when their corresponding PxIE bit
and the GIE bit are set. Software can also set each PxIFG flag, providing a way to generate a software-
initiated interrupt.
• Bit = 0: No interrupt is pending
• Bit = 1: An interrupt is pending
Only transitions, not static levels, cause interrupts. If any PxIFG flag becomes set during a Px interrupt
service routine, or is set after the RETI instruction of a Px interrupt service routine is executed, the set
PxIFG flag generates another interrupt. This ensures that each transition is acknowledged.
411
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Digital I/O Operation
www.ti.com
NOTE: PxIFG flags when changing PxOUT, PxDIR, or PxREN
Writing to P1OUT, P1DIR, P1REN, P2OUT, P2DIR, or P2REN can result in setting the
corresponding P1IFG or P2IFG flags.
Any access (read or write) of the lower byte of the P1IV register, either word or byte access, automatically
resets the highest pending interrupt flag. If another interrupt flag is set, another interrupt is immediately
generated after servicing the initial interrupt. For example, assume that P1IFG.0 has the highest priority. If
the P1IFG.0 and P1IFG.2 flags are set when the interrupt service routine accesses the P1IV register,
P1IFG.0 is reset automatically. After the RETI instruction of the interrupt service routine is executed, the
P1IFG.2 generates another interrupt.
Port P2 interrupts behave similarly, and source a separate single interrupt vector and utilize the P2IV
register.
12.2.7.1 Port Interrupt Software Example
The following software example shows the recommended use of P1IV and the handling overhead. The
P1IV value is added to the PC to automatically jump to the appropriate routine. The P2IV is similar.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
;Interrupt handler for P1 Cycles
P1_HND ... ; Interrupt latency 6
ADD &P1IV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP P1_0_HND ; Vector 2: Port 1 bit 0 2
JMP P1_1_HND ; Vector 4: Port 1 bit 1 2
JMP P1_2_HND ; Vector 6: Port 1 bit 2 2
JMP P1_3_HND ; Vector 8: Port 1 bit 3 2
JMP P1_4_HND ; Vector 10: Port 1 bit 4 2
JMP P1_5_HND ; Vector 12: Port 1 bit 5 2
JMP P1_6_HND ; Vector 14: Port 1 bit 6 2
JMP P1_7_HND ; Vector 16: Port 1 bit 7 2
P1_7_HND ; Vector 16: Port 1 bit 7
... ; Task starts here
RETI ; Back to main program 5
P1_6_HND ; Vector 14: Port 1 bit 6
... ; Task starts here
RETI ; Back to main program 5
P1_5_HND ; Vector 12: Port 1 bit 5
... ; Task starts here
RETI ; Back to main program 5
P1_4_HND ; Vector 10: Port 1 bit 4
... ; Task starts here
RETI ; Back to main program 5
P1_3_HND ; Vector 8: Port 1 bit 3
... ; Task starts here
RETI ; Back to main program 5
P1_2_HND ; Vector 6: Port 1 bit 2
... ; Task starts here
RETI ; Back to main program 5
P1_1_HND ; Vector 4: Port 1 bit 1
... ; Task starts here
RETI ; Back to main program 5
P1_0_HND ; Vector 2: Port 1 bit 0
412 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Digital I/O Operation
... ; Task starts here
RETI ; Back to main program 5
12.2.7.2 Interrupt Edge Select Registers (PxIES)
Each PxIES bit selects the interrupt edge for the corresponding I/O pin.
• Bit = 0: Respective PxIFG flag is set with a low-to-high transition
• Bit = 1: Respective PxIFG flag is set with a high-to-low transition
NOTE: Writing to PxIES
Writing to P1IES or P2IES for each corresponding I/O can result in setting the corresponding
interrupt flags.
PxIES PxIN PxIFG
0→1 0 Will be set
0→1 1 Unchanged
1→0 0 Unchanged
1→0 1 Will be set
12.2.7.3 Interrupt Enable Registers (PxIE)
Each PxIE bit enables the associated PxIFG interrupt flag.
• Bit = 0: The interrupt is disabled
• Bit = 1: The interrupt is enabled
12.2.8 Configuring Unused Port Pins
Unused I/O pins should be configured as I/O function, output direction, and left unconnected on the PC
board, to prevent a floating input and reduce power consumption. The value of the PxOUT bit is don't
care, because the pin is unconnected. Alternatively, the integrated pullup or pulldown resistor can be
enabled by setting the PxREN bit of the unused pin to prevent the floating input. See the SYS chapter for
termination of unused pins.
NOTE: Configuring port J and shared JTAG pins:
Application should ensure that port PJ is configured properly to prevent a floating input.
Because port PJ is shared with the JTAG function, floating inputs may not be noticed when
in an emulation environment. Port J is initialized to high-impedance inputs by default.
12.3 I/O Configuration and LPMx.5 Low-Power Modes
NOTE: The LPMx.5 low-power modes may not be available on all devices. The LPM4.5 power mode
allows for lowest power consumption and no clocks are available. The LPM3.5 power mode
allows for RTC mode operation at the lowest power consumption available. See the SYS
chapter for details; also see the device-specific datasheet for LPMx.5 low-power modes that
are available. With respect to the digital I/O, this section is applicable for both LPM3.5 and
LPM4.5.
413
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
I/O Configuration and LPMx.5 Low-Power Modes
www.ti.com
The regulator of the Power Management Module (PMM) is disabled upon entering LPMx.5 (LPM3.5 or
LPM4.5), which causes all I/O register configurations to be lost. Because the I/O register configurations
are lost, the configuration of I/O pins must be handled differently to ensure that all pins in the application
behave in a controlled manner upon entering and exiting LPMx.5. Properly setting the I/O pins is critical to
achieving the lowest possible power consumption in LPMx.5, as well as preventing any possible
uncontrolled input or output I/O state in the application. The application has complete control of the I/O pin
conditions preventing the possibility of unwanted spurious activity upon entry and exit from LPMx.5. The
detailed flow for entering and exiting LPMx.5 with respect to the I/O operation is as follows:
1. Set all I/Os to general-purpose I/Os and configure as needed. Each I/O can be set to input high
impedance, input with pulldown, input with pullup, output high (low or high drive strength), or output low
(low or high drive strength). It is critical that no inputs are left floating in the application, otherwise
excess current may be drawn in LPMx.5. Configuring the I/O in this manner ensures that each pin is in
a safe condition before entering LPMx.5.
Optionally, configure input interrupt pins for wakeup from LPMx.5. To wake the device from LPMx.5, a
general-purpose I/O port must contain an input port with interrupt capability. Not all devices include
wakeup from LPMx.5 by I/O, and not all inputs with interrupt capability offer wakeup from LPMx.5. See
the device-specific data sheet for availability. To configure a port to wake the device, the I/O should be
configured properly before entering LPMx.5. Each port should be configured as general-purpose input.
Pulldowns or pullups can be applied if required. Setting the PxIES bit of the corresponding register
determines the edge transition that wakes the device. Last, the PxIE for the port must be enabled, as
well as the general interrupt enable.
NOTE: It is not possible to wake from LPMx.5 if the respective I/O interrupt flag is already asserted.
It is recommended that the respective flag be cleared before entering LPMx.5. It is also
recommended that GIE = 1 be set before entry into LPMx.5. Any pending flags in this case
could then be serviced before LPMx.5 entry.
Although it is recommended to set GIE = 1 before entering LPMx.5, it is not required. Device
wakeup from LPMx.5 with an enabled wake-up function still causes the device to wake from
LPMx.5 even with GIE = 0. If GIE = 0 before LPMx.5, additional care may be required. If the
respective interrupt event occurs during LPMx.5 entry, the device may not recognize this or
any future interrupt wakeup event on this function.
2. Enter LPMx.5 with LPMx.5 entry sequence, enable general interrupts for wakeup:
MOV.B #PMMPW_H, &PMMCTL0_H ; Open PMM registers for write
BIS.B #PMMREGOFF, &PMMCTL0_L ;
BIS #GIE+CPUOFF+OSCOFF+SCG1+SCG0,SR ; Enter LPMx.5 when PMMREGOFF is set
3. Upon entry into LPMx.5, the LOCKLPM5 bit in the PM5CTL0 register of the PMM module is set
automatically. The I/O pin states are held and locked based on the settings before LPMx.5 entry. Note
that only the pin conditions are retained. All other port configuration register settings such as PxDIR,
PxREN, PxOUT, PxDS, PxIES, and PxIE contents are lost.
4. An LPMx.5 wake-up event (for example, an edge on a configured wake-up input pin) starts the BOR
entry sequence together with the regulator. All peripheral registers are set to their default conditions.
Upon exit from LPMx.5, the I/O pins remain locked while LOCKLPM5 remains set. Keeping the I/O
pins locked ensures that all pin conditions remain stable upon entering the active mode regardless of
the default I/O register settings.
5. When in active mode, the I/O configuration and I/O interrupt configuration that was not retained during
LPMx.5 should be restored to the values before entering LPMx.5. It is recommended to reconfigure the
PxIES and PxIE to their previous settings to prevent a false port interrupt from occurring. The
LOCKLPM5 bit can then be cleared, which releases the I/O pin conditions and I/O interrupt
configuration. Any changes to the port configuration registers while LOCKLPM5 is set have no effect
on the I/O pins.
6. After enabling the I/O interrupts, the I/O interrupt that caused the wakeup can be serviced indicated by
the PxIFG flags. These flags can be used directly, or the corresponding PxIV register may be used.
Note that the PxIFG flag cannot be cleared until the LOCKLPM5 bit has been cleared.
414 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
I/O Configuration and LPMx.5 Low-Power Modes
NOTE: It is possible that multiple events occurred on various ports. In these cases, multiple PxIFG
flags will be set, and it cannot be determined which port has caused the I/O wakeup.
415
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Registers
www.ti.com
12.4 Digital I/O Registers
The digital I/O registers are listed in Table 12-2. The base addresses can be found in the device-specific
data sheet. Each port grouping begins at its base address. The address offsets are given in Table 12-2.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 12-2. Digital I/O Registers
Offset Acronym Register Name Type Access Reset Section
0Eh P1IV Port 1 Interrupt Vector Read only Word 0000h Section 12.4.1
0Eh P1IV_L Read only Byte 00h
0Fh P1IV_H Read only Byte 00h
1Eh P2IV Port 2 Interrupt Vector Read only Word 0000h Section 12.4.2
1Eh P2IV_L Read only Byte 00h
1Fh P2IV_H Read only Byte 00h
00h P1IN or Port 1 Input Read only Byte Section 12.4.9
PAIN_L
02h P1OUT or Port 1 Output Read/write Byte undefined Section 12.4.10
PAOUT_L
04h P1DIR or Port 1 Direction Read/write Byte 00h Section 12.4.11
PADIR_L
06h P1REN or Port 1 Resistor Enable Read/write Byte 00h Section 12.4.12
PAREN_L
08h P1DS or Port 1 Drive Strength Read/write Byte 00h Section 12.4.13
PADS_L
0Ah P1SEL or Port 1 Port Select Read/write Byte 00h Section 12.4.14
PASEL_L
18h P1IES or Port 1 Interrupt Edge Select Read/write Byte undefined Section 12.4.3
PAIES_L
1Ah P1IE or Port 1 Interrupt Enable Read/write Byte 00h Section 12.4.4
PAIE_L
1Ch P1IFG or Port 1 Interrupt Flag Read/write Byte 00h Section 12.4.5
PAIFG_L
01h P2IN or Port 2 Input Read only Byte Section 12.4.9
PAIN_H
03h P2OUT or Port 2 Output Read/write Byte undefined Section 12.4.10
PAOUT_H
05h P2DIR or Port 2 Direction Read/write Byte 00h Section 12.4.11
PADIR_H
07h P2REN or Port 2 Resistor Enable Read/write Byte 00h Section 12.4.12
PAREN_H
09h P2DS or Port 2 Drive Strength Read/write Byte 00h Section 12.4.13
PADS_H
0Bh P2SEL or Port 2 Port Select Read/write Byte 00h Section 12.4.14
PASEL_H
19h P2IES or Port 2 Interrupt Edge Select Read/write Byte undefined Section 12.4.6
PAIES_H
1Bh P2IE or Port 2 Interrupt Enable Read/write Byte 00h Section 12.4.7
PAIE_H
1Dh P2IFG or Port 2 Interrupt Flag Read/write Byte 00h Section 12.4.8
PAIFG_H
00h P3IN or Port 3 Input Read only Byte Section 12.4.9
PBIN_L
02h P3OUT or Port 3 Output Read/write Byte undefined Section 12.4.10
PBOUT_L
416 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Digital I/O Registers
Table 12-2. Digital I/O Registers (continued)
Offset Acronym Register Name Type Access Reset Section
04h P3DIR or Port 3 Direction Read/write Byte 00h Section 12.4.11
PBDIR_L
06h P3REN or Port 3 Resistor Enable Read/write Byte 00h Section 12.4.12
PBREN_L
08h P3DS or Port 3 Drive Strength Read/write Byte 00h Section 12.4.13
PBDS_L
0Ah P3SEL or Port 3 Port Select Read/write Byte 00h Section 12.4.14
PBSEL_L
01h P4IN or Port 4 Input Read only Byte Section 12.4.9
PBIN_H
03h P4OUT or Port 4 Output Read/write Byte undefined Section 12.4.10
PBOUT_H
05h P4DIR or Port 4 Direction Read/write Byte 00h Section 12.4.11
PBDIR_H
07h P4REN or Port 4 Resistor Enable Read/write Byte 00h Section 12.4.12
PBREN_H
09h P4DS or Port 4 Drive Strength Read/write Byte 00h Section 12.4.13
PBDS_H
0Bh P4SEL or Port 4 Port Select Read/write Byte 00h Section 12.4.14
PBSEL_H
00h P5IN or Port 5 Input Read only Byte Section 12.4.9
PCIN_L
02h P5OUT or Port 5 Output Read/write Byte undefined Section 12.4.10
PCOUT_L
04h P5DIR or Port 5 Direction Read/write Byte 00h Section 12.4.11
PCDIR_L
06h P5REN or Port 5 Resistor Enable Read/write Byte 00h Section 12.4.12
PCREN_L
08h P5DS or Port 5 Drive Strength Read/write Byte 00h Section 12.4.13
PCDS_L
0Ah P5SEL or Port 5 Port Select Read/write Byte 00h Section 12.4.14
PCSEL_L
01h P6IN or Port 6 Input Read only Byte Section 12.4.9
PCIN_H
03h P6OUT or Port 6 Output Read/write Byte undefined Section 12.4.10
PCOUT_H
05h P6DIR or Port 6 Direction Read/write Byte 00h Section 12.4.11
PCDIR_H
07h P6REN or Port 6 Resistor Enable Read/write Byte 00h Section 12.4.12
PCREN_H
09h P6DS or Port 6 Drive Strength Read/write Byte 00h Section 12.4.13
PCDS_H
0Bh P6SEL or Port 6 Port Select Read/write Byte 00h Section 12.4.14
PCSEL_H
00h P7IN or Port 7 Input Read only Byte Section 12.4.9
PDIN_L
02h P7OUT or Port 7 Output Read/write Byte undefined Section 12.4.10
PDOUT_L
04h P7DIR or Port 7 Direction Read/write Byte 00h Section 12.4.11
PDDIR_L
06h P7REN or Port 7 Resistor Enable Read/write Byte 00h Section 12.4.12
PDREN_L
08h P7DS or Port 7 Drive Strength Read/write Byte 00h Section 12.4.13
PDDS_L
0Ah P7SEL or Port 7 Port Select Read/write Byte 00h Section 12.4.14
PDSEL_L
417
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Registers
www.ti.com
Table 12-2. Digital I/O Registers (continued)
Offset Acronym Register Name Type Access Reset Section
01h P8IN or Port 8 Input Read only Byte Section 12.4.9
PDIN_H
03h P8OUT or Port 8 Output Read/write Byte undefined Section 12.4.10
PDOUT_H
05h P8DIR or Port 8 Direction Read/write Byte 00h Section 12.4.11
PDDIR_H
07h P8REN or Port 8 Resistor Enable Read/write Byte 00h Section 12.4.12
PDREN_H
09h P8DS or Port 8 Drive Strength Read/write Byte 00h Section 12.4.13
PDDS_H
0Bh P8SEL or Port 8 Port Select Read/write Byte 00h Section 12.4.14
PDSEL_H
00h P9IN or Port 9 Input Read only Byte Section 12.4.9
PEIN_L
02h P9OUT or Port 9 Output Read/write Byte undefined Section 12.4.10
PEOUT_L
04h P9DIR or Port 9 Direction Read/write Byte 00h Section 12.4.11
PEDIR_L
06h P9REN or Port 9 Resistor Enable Read/write Byte 00h Section 12.4.12
PEREN_L
08h P9DS or Port 9 Drive Strength Read/write Byte 00h Section 12.4.13
PEDS_L
0Ah P9SEL or Port 9 Port Select Read/write Byte 00h Section 12.4.14
PESEL_L
01h P10IN or Port 10 Input Read only Byte Section 12.4.9
PEIN_H
03h P10OUT or Port 10 Output Read/write Byte undefined Section 12.4.10
PEOUT_H
05h P10DIR or Port 10 Direction Read/write Byte 00h Section 12.4.11
PEDIR_H
07h P10REN or Port 10 Resistor Enable Read/write Byte 00h Section 12.4.12
PEREN_H
09h P10DS or Port 10 Drive Strength Read/write Byte 00h Section 12.4.13
PEDS_H
0Bh P10SEL or Port 10 Port Select Read/write Byte 00h Section 12.4.14
PESEL_H
00h P11IN or Port 11 Input Read only Byte Section 12.4.9
PFIN_L
02h P11OUT or Port 11 Output Read/write Byte undefined Section 12.4.10
PFOUT_L
04h P11DIR or Port 11 Direction Read/write Byte 00h Section 12.4.11
PFDIR_L
06h P11REN or Port 11 Resistor Enable Read/write Byte 00h Section 12.4.12
PFREN_L
08h P11DS or Port 11 Drive Strength Read/write Byte 00h Section 12.4.13
PFDS_L
0Ah P11SEL or Port 11 Port Select Read/write Byte 00h Section 12.4.14
PFSEL_L
00h PAIN Port A Input Read only Word
00h PAIN_L Read only Byte
01h PAIN_H Read only Byte
02h PAOUT Port A Output Read/write Word undefined
02h PAOUT_L Read/write Byte undefined
03h PAOUT_H Read/write Byte undefined
04h PADIR Port A Direction Read/write Word 0000h
418 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Digital I/O Registers
Table 12-2. Digital I/O Registers (continued)
Offset Acronym Register Name Type Access Reset Section
04h PADIR_L Read/write Byte 00h
05h PADIR_H Read/write Byte 00h
06h PAREN Port A Resistor Enable Read/write Word 0000h
06h PAREN_L Read/write Byte 00h
07h PAREN_H Read/write Byte 00h
08h PADS Port A Drive Strength Read/write Word 0000h
08h PADS_L Read/write Byte 00h
09h PADS_H Read/write Byte 00h
0Ah PASEL Port A Port Select Read/write Word 0000h
0Ah PASEL_L Read/write Byte 00h
0Bh PASEL_H Read/write Byte 00h
18h PAIES Port A Interrupt Edge Select Read/write Word undefined
18h PAIES_L Read/write Byte undefined
19h PAIES_H Read/write Byte undefined
1Ah PAIE Port A Interrupt Enable Read/write Word 0000h
1Ah PAIE_L Read/write Byte 00h
1Bh PAIE_H Read/write Byte 00h
1Ch PAIFG Port A Interrupt Flag Read/write Word 0000h
1Ch PAIFG_L Read/write Byte 00h
1Dh PAIFG_H Read/write Byte 00h
00h PBIN Port B Input Read only Word
00h PBIN_L Read only Byte
01h PBIN_H Read only Byte
02h PBOUT Port B Output Read/write Word undefined
02h PBOUT_L Read/write Byte undefined
03h PBOUT_H Read/write Byte undefined
04h PBDIR Port B Direction Read/write Word 0000h
04h PBDIR_L Read/write Byte 00h
05h PBDIR_H Read/write Byte 00h
06h PBREN Port B Resistor Enable Read/write Word 0000h
06h PBREN_L Read/write Byte 00h
07h PBREN_H Read/write Byte 00h
08h PBDS Port B Drive Strength Read/write Word 0000h
08h PBDS_L Read/write Byte 00h
09h PBDS_H Read/write Byte 00h
0Ah PBSEL Port B Port Select Read/write Word 0000h
0Ah PBSEL_L Read/write Byte 00h
0Bh PBSEL_H Read/write Byte 00h
00h PCIN Port C Input Read only Word
00h PCIN_L Read only Byte
01h PCIN_H Read only Byte
02h PCOUT Port C Output Read/write Word undefined
02h PCOUT_L Read/write Byte undefined
03h PCOUT_H Read/write Byte undefined
04h PCDIR Port C Direction Read/write Word 0000h
04h PCDIR_L Read/write Byte 00h
05h PCDIR_H Read/write Byte 00h
419
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

Digital I/O Registers
www.ti.com
Table 12-2. Digital I/O Registers (continued)
Offset Acronym Register Name Type Access Reset Section
06h PCREN Port C Resistor Enable Read/write Word 0000h
06h PCREN_L Read/write Byte 00h
07h PCREN_H Read/write Byte 00h
08h PCDS Port C Drive Strength Read/write Word 0000h
08h PCDS_L Read/write Byte 00h
09h PCDS_H Read/write Byte 00h
0Ah PCSEL Port C Port Select Read/write Word 0000h
0Ah PCSEL_L Read/write Byte 00h
0Bh PCSEL_H Read/write Byte 00h
00h PDIN Port D Input Read only Word
00h PDIN_L Read only Byte
01h PDIN_H Read only Byte
02h PDOUT Port D Output Read/write Word undefined
02h PDOUT_L Read/write Byte undefined
03h PDOUT_H Read/write Byte undefined
04h PDDIR Port D Direction Read/write Word 0000h
04h PDDIR_L Read/write Byte 00h
05h PDDIR_H Read/write Byte 00h
06h PDREN Port D Resistor Enable Read/write Word 0000h
06h PDREN_L Read/write Byte 00h
07h PDREN_H Read/write Byte 00h
08h PDDS Port D Drive Strength Read/write Word 0000h
08h PDDS_L Read/write Byte 00h
09h PDDS_H Read/write Byte 00h
0Ah PDSEL Port D Port Select Read/write Word 0000h
0Ah PDSEL_L Read/write Byte 00h
0Bh PDSEL_H Read/write Byte 00h
00h PEIN Port E Input Read only Word
00h PEIN_L Read only Byte
01h PEIN_H Read only Byte
02h PEOUT Port E Output Read/write Word undefined
02h PEOUT_L Read/write Byte undefined
03h PEOUT_H Read/write Byte undefined
04h PEDIR Port E Direction Read/write Word 0000h
04h PEDIR_L Read/write Byte 00h
05h PEDIR_H Read/write Byte 00h
06h PEREN Port E Resistor Enable Read/write Word 0000h
06h PEREN_L Read/write Byte 00h
07h PEREN_H Read/write Byte 00h
08h PEDS Port E Drive Strength Read/write Word 0000h
08h PEDS_L Read/write Byte 00h
09h PEDS_H Read/write Byte 00h
0Ah PESEL Port E Port Select Read/write Word 0000h
0Ah PESEL_L Read/write Byte 00h
0Bh PESEL_H Read/write Byte 00h
00h PFIN Port F Input Read only Word
00h PFIN_L Read only Byte
420 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Digital I/O Registers
Table 12-2. Digital I/O Registers (continued)
Offset Acronym Register Name Type Access Reset Section
01h PFIN_H Read only Byte
02h PFOUT Port F Output Read/write Word undefined
02h PFOUT_L Read/write Byte undefined
03h PFOUT_H Read/write Byte undefined
04h PFDIR Port F Direction Read/write Word 0000h
04h PFDIR_L Read/write Byte 00h
05h PFDIR_H Read/write Byte 00h
06h PFREN Port F Resistor Enable Read/write Word 0000h
06h PFREN_L Read/write Byte 00h
07h PFREN_H Read/write Byte 00h
08h PFDS Port F Drive Strength Read/write Word 0000h
08h PFDS_L Read/write Byte 00h
09h PFDS_H Read/write Byte 00h
0Ah PFSEL Port F Port Select Read/write Word 0000h
0Ah PFSEL_L Read/write Byte 00h
0Bh PFSEL_H Read/write Byte 00h
00h PJIN Port J Input Read only Word
00h PJIN_L Read only Byte
01h PJIN_H Read only Byte
02h PJOUT Port J Output Read/write Word undefined
02h PJOUT_L Read/write Byte undefined
03h PJOUT_H Read/write Byte undefined
04h PJDIR Port J Direction Read/write Word 0000h
04h PJDIR_L Read/write Byte 00h
05h PJDIR_H Read/write Byte 00h
06h PJREN Port J Resistor Enable Read/write Word 0000h
06h PJREN_L Read/write Byte 00h
07h PJREN_H Read/write Byte 00h
08h PJDS Port J Drive Strength Read/write Word 0000h
08h PJDS_L Read/write Byte 00h
09h PJDS_H Read/write Byte 00h
421
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Registers
www.ti.com
12.4.1 P1IV Register
Port 1 Interrupt Vector Register
Figure 12-1. P1IV Register
15 14 13 12 11 10 9 8
P1IV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
P1IV
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 12-3. P1IV Register Description
Bit Field Type Reset Description
15-0 P1IV R 0h Port 1 interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Port 1.0 interrupt; Interrupt Flag: P1IFG.0; Interrupt
Priority: Highest
04h = Interrupt Source: Port 1.1 interrupt; Interrupt Flag: P1IFG.1
06h = Interrupt Source: Port 1.2 interrupt; Interrupt Flag: P1IFG.2
08h = Interrupt Source: Port 1.3 interrupt; Interrupt Flag: P1IFG.3
0Ah = Interrupt Source: Port 1.4 interrupt; Interrupt Flag: P1IFG.4
0Ch = Interrupt Source: Port 1.5 interrupt; Interrupt Flag: P1IFG.5
0Eh = Interrupt Source: Port 1.6 interrupt; Interrupt Flag: P1IFG.6
10h = Interrupt Source: Port 1.7 interrupt; Interrupt Flag: P1IFG.7; Interrupt
Priority: Lowest
422 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Digital I/O Registers
12.4.2 P2IV Register
Port 2 Interrupt Vector Register
Figure 12-2. P2IV Register
15 14 13 12 11 10 9 8
P2IV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
P2IV
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 12-4. P2IV Register Description
Bit Field Type Reset Description
15-0 P2IV R 0h Port 2 interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Port 2.0 interrupt; Interrupt Flag: P2IFG.0; Interrupt
Priority: Highest
04h = Interrupt Source: Port 2.1 interrupt; Interrupt Flag: P2IFG.1
06h = Interrupt Source: Port 2.2 interrupt; Interrupt Flag: P2IFG.2
08h = Interrupt Source: Port 2.3 interrupt; Interrupt Flag: P2IFG.3
0Ah = Interrupt Source: Port 2.4 interrupt; Interrupt Flag: P2IFG.4
0Ch = Interrupt Source: Port 2.5 interrupt; Interrupt Flag: P2IFG.5
0Eh = Interrupt Source: Port 2.6 interrupt; Interrupt Flag: P2IFG.6
10h = Interrupt Source: Port 2.7 interrupt; Interrupt Flag: P2IFG.7; Interrupt
Priority: Lowest
423
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Registers
www.ti.com
12.4.3 P1IES Register
Port 1 Interrupt Edge Select Register
Figure 12-3. P1IES Register
76543210
P1IES
rw rw rw rw rw rw rw rw
Table 12-5. P1IES Register Description
Bit Field Type Reset Description
7-0 P1IES RW undefined Port 1 interrupt edge select
0b = P1IFG flag is set with a low-to-high transition.
1b = P1IFG flag is set with a high-to-low transition.
12.4.4 P1IE Register
Port 1 Interrupt Enable Register
Figure 12-4. P1IE Register
76543210
P1IE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-6. P1IE Register Description
Bit Field Type Reset Description
7-0 P1IE RW 0h Port 1 interrupt enable
0b = Corresponding port interrupt disabled
1b = Corresponding port interrupt enabled
12.4.5 P1IFG Register
Port 1 Interrupt Flag Register
Figure 12-5. P1IFG Register
76543210
P1IFG
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-7. P1IFG Register Description
Bit Field Type Reset Description
7-0 P1IFG RW 0h Port 1 interrupt flag
0b = No interrupt is pending
1b = Interrupt is pending
424 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Digital I/O Registers
12.4.6 P2IES Register
Port 2 Interrupt Edge Select Register
Figure 12-6. P2IES Register
76543210
P2IES
rw rw rw rw rw rw rw rw
Table 12-8. P2IES Register Description
Bit Field Type Reset Description
7-0 P2IES RW undefined Port 2 interrupt edge select
0b = P2IFG flag is set with a low-to-high transition.
1b = P2IFG flag is set with a high-to-low transition.
12.4.7 P2IE Register
Port 2 Interrupt Enable Register
Figure 12-7. P2IE Register
76543210
P2IE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-9. P2IE Register Description
Bit Field Type Reset Description
7-0 P2IE RW 0h Port 2 interrupt enable
0b = Corresponding port interrupt disabled
1b = Corresponding port interrupt enabled
12.4.8 P2IFG Register
Port 2 Interrupt Flag Register
Figure 12-8. P2IFG Register
76543210
P2IFG
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-10. P2IFG Register Description
Bit Field Type Reset Description
7-0 P2IFG RW 0h Port 2 interrupt flag
0b = No interrupt is pending
1b = Interrupt is pending
425
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Digital I/O Registers
www.ti.com
12.4.9 PxIN Register
Port x Input Register
Figure 12-9. PxIN Register
76543210
PxIN
rrrrrrrr
Table 12-11. PxIN Register Description
Bit Field Type Reset Description
7-0 PxIN R undefined Port x input. Read only.
12.4.10 PxOUT Register
Port x Output Register
Figure 12-10. PxOUT Register
76543210
PxOUT
rw rw rw rw rw rw rw rw
Table 12-12. PxOUT Register Description
Bit Field Type Reset Description
7-0 PxOUT RW undefined Port x output
When I/O configured to output mode:
0b = Output is low
1b = Output is high
When I/O configured to input mode and pullups/pulldowns enabled:
0b = Pulldown selected
1b = Pullup selected
12.4.11 PxDIR Register
Port x Direction Register
Figure 12-11. PxDIR Register
76543210
PxDIR
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-13. PxDIR Register Description
Bit Field Type Reset Description
7-0 PxDIR RW 0h Port x direction
0b = Port configured as input
1b = Port configured as output
426 Digital I/O Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Digital I/O Registers
12.4.12 PxREN Register
Port x Pullup/Pulldown Resistor Enable Register
Figure 12-12. PxREN Register
76543210
PxREN
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-14. PxREN Register Description
Bit Field Type Reset Description
7-0 PxREN RW 0h Port x pullup or pulldown resistor enable. When respective port is configured as
input, setting this bit will enable the pullup or pulldown. See Table 12-1
0b = Pullup or pulldown disabled
1b = Pullup or pulldown enabled
12.4.13 PxDS Register
Port x Drive Strength Register
Figure 12-13. PxDS Register
76543210
PxDS
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-15. PxDS Register Description
Bit Field Type Reset Description
7-0 PxDS RW 0h Port x drive strength
0b = Reduced output drive strength
1b = Full output drive strength
12.4.14 PxSEL Register
Port x Port Select Register
Figure 12-14. PxSEL Register
76543210
PxSEL
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 12-16. PxSEL Register Description
Bit Field Type Reset Description
7-0 PxSEL RW 0h Port x function selection
0b = I/O function is selected
1b = Peripheral module function is selected
427
SLAU208O–June 2008–Revised May 2015 Digital I/O Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 13
SLAU208O–June 2008–Revised May 2015
Port Mapping Controller
The port mapping controller allows a flexible mapping of digital functions to port pins. This chapter
describes the port mapping controller.
Topic ........................................................................................................................... Page
13.1 Port Mapping Controller Introduction.................................................................. 429
13.2 Port Mapping Controller Operation ..................................................................... 429
13.3 Port Mapping Controller Registers...................................................................... 431
428 Port Mapping Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Port Mapping Controller Introduction
13.1 Port Mapping Controller Introduction
The port mapping controller allows the flexible and reconfigurable mapping of digital functions to port pins.
The port mapping controller features are:
• Configuration protected by write access key.
• Default mapping provided for each port pin (device-dependent, the device pinout in the device-specific
data sheet).
• Mapping can be reconfigured during runtime.
• Each output signal can be mapped to several output pins.
13.2 Port Mapping Controller Operation
The port mapping is configured with user software. The setup is discussed in the following sections.
13.2.1 Access
To enable write access to any of the port mapping controller registers, the correct key must be written into
the PMAPKEYID register. The PMAPKEYID register always reads 096A5h. Writing the key 02D52h grants
write access to all port mapping controller registers. Read access is always possible.
If an invalid key is written while write access is granted, any further write accesses are prevented. It is
recommended that the application completes mapping configuration by writing an invalid key.
There is a timeout counter implemented that is incremented with each (assembler) instruction, and when it
counts to 32, the write access is locked again. Any access to the port mapping controller registers resets
the counter. Interrupts should be disabled during the configuration process or the application should take
precautions that the execution of an interrupt service routine does not accidentally cause a permanent
lock of the port mapping registers; for example, by using the reconfiguration capability (see
Section 13.2.2).
The access status is reflected in the PMAPLOCK bit.
By default, the port mapping controller allows only one configuration after PUC. A second attempt to
enable write access by writing the correct key is ignored, and the registers remain locked. A PUC is
required to disable the permanent lock again. If it is necessary to reconfigure the mapping during runtime,
the PMAPRECFG bit must be set during the first write access timeslot. If PMAPRECFG is cleared during
later configuration sessions, no more configuration sessions are possible.
13.2.2 Mapping
For each port pin, Px.y, on ports providing the mapping functionality, a mapping register, PxMAPy, is
available. Setting this register to a certain value maps a module's input and output signals to the
respective port pin Px.y. The port pin itself is switched from a general purpose I/O to the selected
peripheral/secondary function by setting the corresponding PxSEL.y bit to 1. If the input or the output
function of the module is used, it is typically defined by the setting the PxDIR.y bit. If PxDIR.y = 0, the pin
is an input, if PxDIR.y = 1, the pin is an output. There are also peripherals (for example, the USCI module)
that control the direction or even other functions of the pin (for example, open drain), and these options
are documented in the mapping table.
With the port mapping functionality the output of a module can be mapped to multiple pins. Also the input
of a module can receive inputs from multiple pins. When mapping multiple inputs onto one function, care
needs to be taken because the input signals are logically ORed together without applying any priority;
therefore, a logic one on any of the inputs results in a logic one at the module. If the PxSEL.y bit is 0, the
corresponding input signal is a logic zero.
The mapping is device-dependent; see the device-specific data sheet for available functions and specific
values. The use of mapping mnemonics to abstract the underlying PxMAPy values is recommended to
allow simple portability between different devices. Table 13-1 shows some examples for mapping
mnemonics of some common peripherals.
429
SLAU208O–June 2008–Revised May 2015 Port Mapping Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Port Mapping Controller Operation
www.ti.com
All mappable port pins provide the function PM_ANALOG (0FFh). Setting the port mapping register
PxMAPy to PM_ANALOG together with PxSEL.y = 1 disables the output driver and the input Schmitt-
trigger, to prevent parasitic cross currents when applying analog signals.
Table 13-1. Examples for Port Mapping Mnemonics and Functions
Input Pin Function Output Pin Function
PxMAPy Mnemonic With PxSEL.y = 1 and PxDIR.y = 0 With PxSEL.y = 1 and PxDIR.y = 1
PM_NONE None DVSS
PM_ACLK None ACLK
PM_MCLK None MCLK
PM_SMCLK None SMCLK
PM_TA0CLK Timer_A0 clock input DVSS
PM_TA0CCR0A Timer_A0 CCR0 capture input CCI0A TA0 CCR0 compare output Out0
PM_TA0CCR1A Timer_A0 CCR1 capture input CCI1A TA0 CCR1 compare output Out1
PM_TA0CCR2A Timer_A0 CCR2 capture input CCI2A TA0 CCR2 compare output Out2
PM_TA0CCR3A Timer_A0 CCR3 capture input CCI3A TA0 CCR3 compare output Out3
PM_TA0CCR4A Timer_A0 CCR4 capture input CCI4A TA0 CCR4 compare output Out4
PM_TA1CLK Timer_A1 clock input DVSS
PM_TA1CCR0A Timer_A1 CCR0 capture input CCI0A TA1 CCR0 compare output Out0
PM_TA1CCR1A Timer_A1 CCR1 capture input CCI1A TA1 CCR1 compare output Out1
PM_TA1CCR2A Timer_A1 CCR2 capture input CCI2A TA1 CCR2 compare output Out2
PM_TBCLK Timer_B clock input DVSS
PM_TBOUTH Timer_B outputs high impedance DVSS
PM_TBCCR0A Timer_B CCR0 capture input CCI0A TB CCR0 compare output Out0
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR1A Timer_B CCR1 capture input CCI1A TB CCR1 compare output Out1
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR2A Timer_B CCR2 capture input CCI2A TB CCR2 compare output Out2
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR3A Timer_B CCR3 capture input CCI3A TB CCR3 compare output Out3
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR4A Timer_B CCR4 capture input CCI4A TB CCR4 compare output Out4
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR5A Timer_B CCR5 capture input CCI3A TB CCR5 compare output Out5
[direction controlled by Timer_B (TBOUTH)]
PM_TBCCR6A Timer_B CCR6 capture input CCI4A TB CCR6 compare output Out6
[direction controlled by Timer_B (TBOUTH)]
PM_UCA0RXD USCI_A0 UART RXD (direction controlled by USCI - input)
PM_UCA0SOMI USCI_A0 SPI slave out master in (direction controlled by USCI)
PM_UCA0TXD USCI_A0 UART TXD (direction controlled by USCI - output)
PM_UCA0SIMO USCI_A0 SPI slave in master out (direction controlled by USCI)
PM_UCA0CLK USCI_A0 clock input/output (direction controlled by USCI)
PM_UCA0STE USCI_A0 SPI slave transmit enable (direction controlled by USCI)
PM_UCB0SOMI USCI_B0 SPI slave out master in (direction controlled by USCI)
PM_UCB0SCL USCI_B0 I2C clock (open drain and direction controlled by USCI
PM_UCB0SIMO USCI_B0 SPI slave in master out (direction controlled by USCI)
PM_UCB0SDA USCI_B0 I2C data (open drain and direction controlled by USCI)
PM_UCB0CLK USCI_B0 clock input/output (direction controlled by USCI)
PM_UCB0STE USCI_B0 SPI slave transmit enable (direction controlled by USCI)
PM_ANALOG Disables the output driver and the input Schmitt-trigger to prevent parasitic cross currents when applying
analog signals
430 Port Mapping Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Port Mapping Controller Registers
13.3 Port Mapping Controller Registers
The control register for the port mapping controller are listed in Table 13-2. The mapping registers are
listed in Table 13-3. The mapping registers can also be accessed as words, as shown in Table 13-4.
Table 13-2. Port Mapping Control Registers
Offset Acronym Register Name Type Reset
00h PMAPKEYID Port mapping key register Read/write Reset with PUC
02h PMAPCTL Port mapping control register Read/write Reset with PUC
Table 13-3. Port Mapping Registers for Port Px – Byte Access
Offset Acronym Register Name Type Reset
00h PxMAP0 Port Px.0 mapping register Read/write Device dependent
01h PxMAP1 Port Px.1 mapping register Read/write Device dependent
02h PxMAP2 Port Px.2 mapping register Read/write Device dependent
03h PxMAP3 Port Px.3 mapping register Read/write Device dependent
04h PxMAP4 Port Px.4 mapping register Read/write Device dependent
05h PxMAP5 Port Px.5 mapping register Read/write Device dependent
06h PxMAP6 Port Px.6 mapping register Read/write Device dependent
07h PxMAP7 Port Px.7 mapping register Read/write Device dependent
Table 13-4. Port Mapping Registers for Port Px – Word Access
Offset Acronym Register Name Type Reset
00h PxMAP01 Port Px.0/Port Px.1 mapping register Read/write Device dependent
02h PxMAP23 Port Px.2/Port Px.3 mapping register Read/write Device dependent
04h PxMAP45 Port Px.4/Port Px.5 mapping register Read/write Device dependent
06h PxMAP67 Port Px.6/Port Px.7 mapping register Read/write Device dependent
431
SLAU208O–June 2008–Revised May 2015 Port Mapping Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Port Mapping Controller Registers
www.ti.com
13.3.1 PMAPKEYID Register
Port Mapping Key Register
Figure 13-1. PMAPKEYID Register
15 14 13 12 11 10 9 8
PMAPKEYx
76543210
PMAPKEYx
Table 13-5. PMAPKEYID Register Description
Bit Field Type Reset Description
15-0 PMAPKEYx RW 96A5h Port write access key. Always reads 096A5h. Must be written 02D52h for write
access to the port mapping registers.
13.3.2 PMAPCTL Register
Port Mapping Control Register
Figure 13-2. PMAPCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved PMAPRECFG PMAPLOCKED
r0 r0 r0 r0 r0 r0 rw-0 r-1
Table 13-6. PMAPCTL Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved. Always reads as 0.
1 PMAPRECFG RW 0h Port mapping reconfiguration control bit
0b = Configuration allowed only once
1b = Allow reconfiguration of port mapping
0 PMAPLOCKED R 1h Port mapping lock bit. Read only
0b = Access to mapping registers is granted
1b = Access to mapping registers is locked
13.3.3 PxMAPy Register
Port Px.y Mapping Register
Figure 13-3. PxMAPy Register
76543210
PMAPx
rw-0(1) rw-0(1) rw-0(1) rw-0(1) rw-0(1) rw-0(1) rw-0(1) rw-0(1)
(1) If not all bits are required to decode all provided functions, the unused bits are r0.
Table 13-7. PxMAPy Register Description
Bit Field Type Reset Description
7-0 PMAPx RW 0h Selects secondary port function. Settings are device-dependent; see the device-
specific data sheet.
432 Port Mapping Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 14
SLAU208O–June 2008–Revised May 2015
Cyclic Redundancy Check (CRC) Module
The cyclic redundancy check (CRC) module provides a signature for a given data sequence. This chapter
describes the operation and use of the CRC module.
NOTE: The CRC module on the MSP430F543x and MSP430F541x non-A versions does not
support the bit-wise reverse feature described in this module description. Registers
CRCDIRB and CRCRESR, along with their respective functionality, are not available.
Topic ........................................................................................................................... Page
14.1 Cyclic Redundancy Check (CRC) Module Introduction.......................................... 434
14.2 CRC Standard and Bit Order.............................................................................. 434
14.3 CRC Checksum Generation ............................................................................... 435
14.4 CRC Registers.................................................................................................. 438
433
SLAU208O–June 2008–Revised May 2015 Cyclic Redundancy Check (CRC) Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
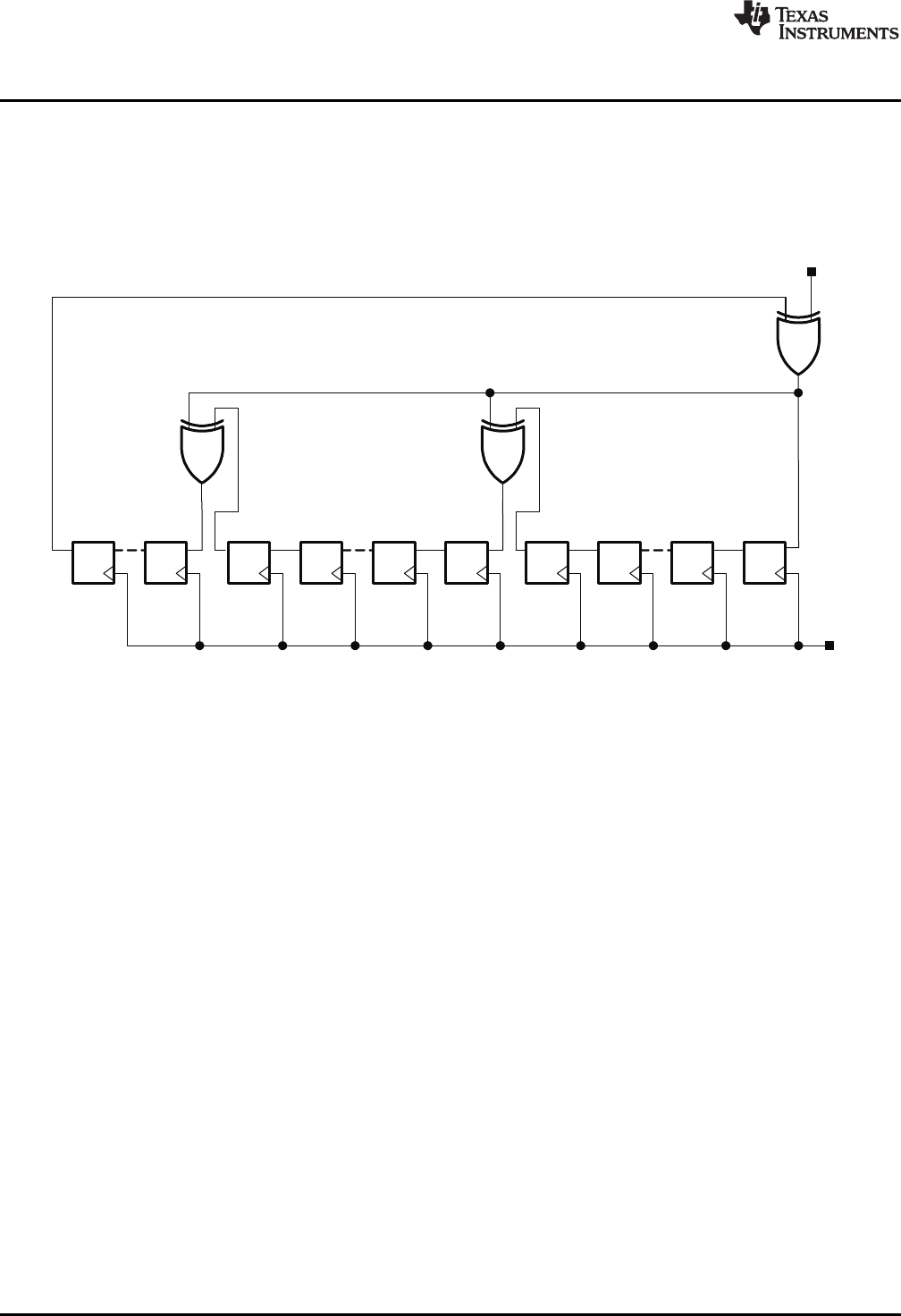
Data In
Q D Q D Q D Q D Q D Q D Q D Q D Q D Q D
Bit
15
Bit
12
Bit
11
Bit
10
Bit
6
Bit
5
Bit
4
Bit
3
Bit
1
Bit
0
Shift Clock
Cyclic Redundancy Check (CRC) Module Introduction
www.ti.com
14.1 Cyclic Redundancy Check (CRC) Module Introduction
The CRC module produces a signature for a given sequence of data values. The signature is generated
through a feedback path from data bits 0, 4, 11, and 15 (see Figure 14-1). The CRC signature is based on
the polynomial given in the CRC-CCITT-BR polynomial (see Equation 12) .
f(x) = x16 + x12 + x5+1 (12)
Figure 14-1. LFSR Implementation of CRC-CCITT Standard, Bit 0 is the MSB of the Result
Identical input data sequences result in identical signatures when the CRC is initialized with a fixed seed
value, whereas different sequences of input data, in general, result in different signatures.
14.2 CRC Standard and Bit Order
The definitions of the various CRC standards were done in the era of main frame computers, and by
convention bit 0 was treated as the MSB. Today, as in most microcontrollers such as the MSP430, bit 0
normally denotes the LSB. In Figure 14-1, the bit convention shown is as given in the original standards
i.e. bit 0 is the MSB. The fact that bit 0 is treated for some as LSB, and for others as MSB, continues to
cause confusion. The CRC16 module therefore provides a bit reversed register pair for CRC16 operations
to support both conventions.
434 Cyclic Redundancy Check (CRC) Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
CRC Checksum Generation
14.3 CRC Checksum Generation
The CRC generator is first initialized by writing a 16-bit word (seed) to the CRC Initialization and Result
(CRCINIRES) register. Any data that should be included into the CRC calculation must be written to the
CRC Data Input (CRCDI or CRCDIRB) register in the same order that the original CRC signature was
calculated. The actual signature can be read from the CRCINIRES register to compare the computed
checksum with the expected checksum.
Signature generation describes a method on how the result of a signature operation can be calculated.
The calculated signature, which is computed by an external tool, is called checksum in the following text.
The checksum is stored in the product's memory and is used to check the correctness of the CRC
operation result.
14.3.1 CRC Implementation
To allow parallel processing of the CRC, the linear feedback shift register (LFSR) functionality is
implemented with an XOR tree. This implementation shows the identical behavior as the LFSR approach
after 8 bits of data are shifted in when the LSB is 'shifted' in first. The generation of a signature calculation
has to be started by writing a seed to the CRCINIRES register to initialize the register. Software or
hardware (for example, DMA) can transfer data to the CRCDI or CRCDIRB register (for example, from
memory). The value in CRCDI or CRCDIRB is then included into the signature, and the result is available
in the signature result registers at the next read access (CRCINIRES and CRCRESR). The signature can
be generated using word or byte data.
If a word data is processed, the lower byte at the even address is used at the first clock (MCLK) cycle.
During the second clock cycle, the higher byte is processed. Thus, it takes two clock cycles to process
word data, while it takes only one clock (MCLK) cycle to process byte data.
Data bytes written to CRCDIRB in word mode or the data byte in byte mode are bit-wise reversed before
the CRC engine adds them to the signature. The bits among each byte are reversed. Data bytes written to
CRCDI in word mode or the data byte in byte mode are not bit reversed before use by the CRC engine.
If the Check Sum itself (with reversed bit order) is included into the CRC operation (as data written to
CRCDI or CRCDIRB), the result in the CRCINIRES and CRCRESR registers must be zero.
435
SLAU208O–June 2008–Revised May 2015 Cyclic Redundancy Check (CRC) Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
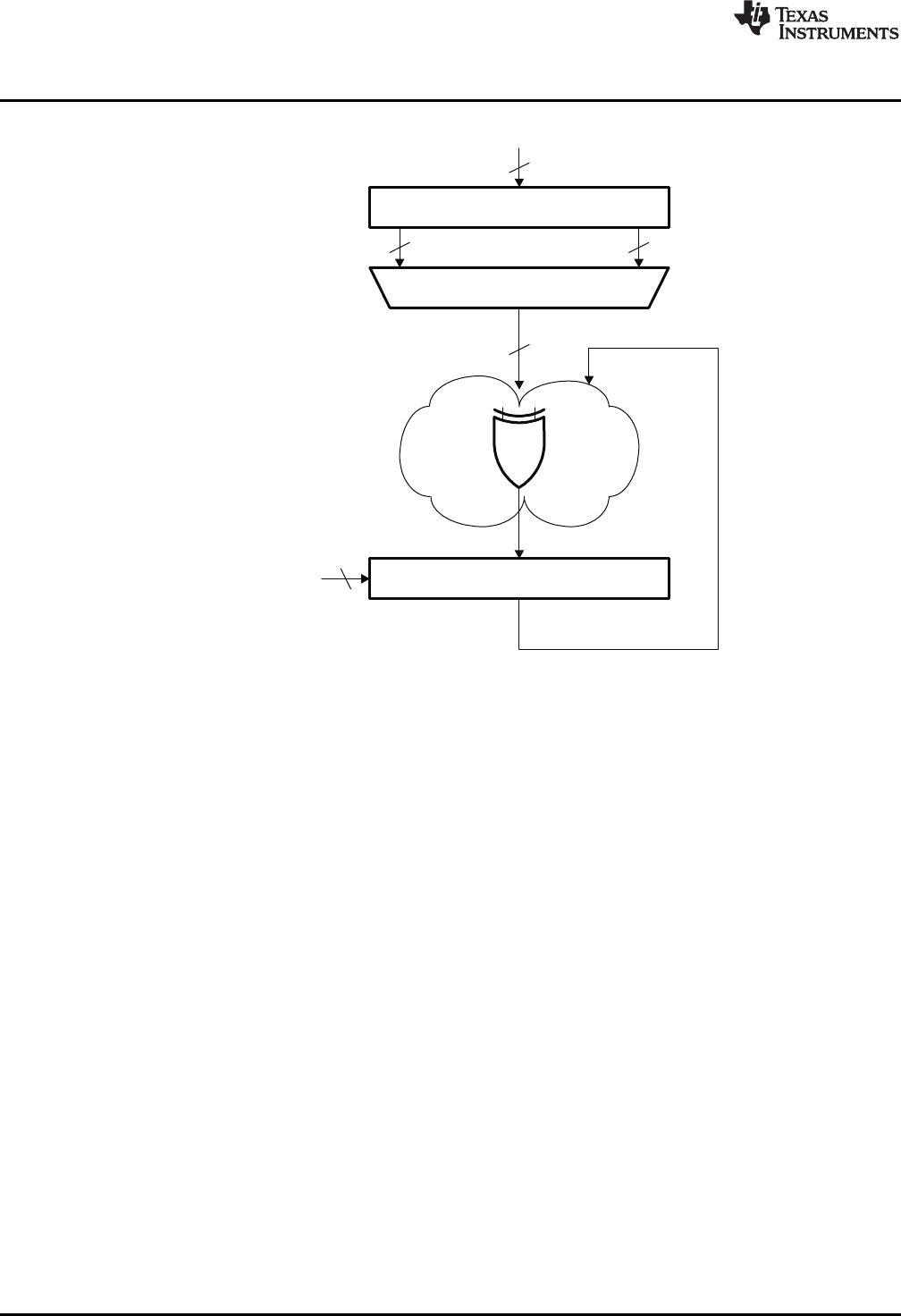
CRC Data In Register CRCDI
Data In
8-bit or 16-bit
Byte MUX
8
CRC Initialization and Result Register
CRCINIRES
8
816
Write to CRCINIRES 16
CRC Checksum Generation
www.ti.com
Figure 14-2. Implementation of CRC-CCITT Using the CRCDI and CRCINIRES Registers
14.3.2 Assembler Examples
14.3.2.1 General Assembler Example
This example demonstrates the operation of the on-chip CRC:
...
PUSH R4 ; Save registers
PUSH R5
MOV #StartAddress,R4 ; StartAddress < EndAddress
MOV #EndAddress,R5
MOV &INIT, &CRCINIRES ; INIT to CRCINIRES
L1 MOV @R4+,&CRCDI ; Item to Data In register
CMP R5,R4 ; End address reached?
JLO L1 ; No
MOV &Check_Sum,&CRCDI ; Yes, Include checksum
TST &CRCINIRES ; Result = 0?
JNZ CRC_ERROR ; No, CRCRES <> 0: error
... ; Yes, CRCRES=0:
; information ok.
POP R5 ; Restore registers
POP R4
436 Cyclic Redundancy Check (CRC) Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
CRC Checksum Generation
14.3.2.2 Reference Data Sequence
The details of the implemented CRC algorithm is shown by the following data sequences using word or
byte accesses and the CRC data-in as well as the CRC data-in reverse byte registers:
...
mov #0FFFFh,&CRCINIRES ; initialize CRC
mov.b #00031h,&CRCDI_L ; "1"
mov.b #00032h,&CRCDI_L ; "2"
mov.b #00033h,&CRCDI_L ; "3"
mov.b #00034h,&CRCDI_L ; "4"
mov.b #00035h,&CRCDI_L ; "5"
mov.b #00036h,&CRCDI_L ; "6"
mov.b #00037h,&CRCDI_L ; "7"
mov.b #00038h,&CRCDI_L ; "8"
mov.b #00039h,&CRCDI_L ; "9"
cmp #089F6h,&CRCINIRES ; compare result
; CRCRESR contains 06F91h
jeq &Success ; no error
br &Error ; to error handler
mov #0FFFFh,&CRCINIRES ; initialize CRC
mov.w #03231h,&CRCDI ; "1" & "2"
mov.w #03433h,&CRCDI ; "3" & "4"
mov.w #03635h,&CRCDI ; "5" & "6"
mov.w #03837h,&CRCDI ; "7" & "8"
mov.b #039h, &CRCDI_L ; "9"
cmp #089F6h,&CRCINIRES ; compare result
; CRCRESR contains 06F91h
jeq &Success ; no error
br &Error ; to error handler
...
mov #0FFFFh,&CRCINIRES ; initialize CRC
mov.b #00031h,&CRCDIRB_L ; "1"
mov.b #00032h,&CRCDIRB_L ; "2"
mov.b #00033h,&CRCDIRB_L ; "3"
mov.b #00034h,&CRCDIRB_L ; "4"
mov.b #00035h,&CRCDIRB_L ; "5"
mov.b #00036h,&CRCDIRB_L ; "6"
mov.b #00037h,&CRCDIRB_L ; "7"
mov.b #00038h,&CRCDIRB_L ; "8"
mov.b #00039h,&CRCDIRB_L ; "9"
cmp #029B1h,&CRCINIRES ; compare result
; CRCRESR contains 08D94h
jeq &Success ; no error
br &Error ; to error handler
...
mov #0FFFFh,&CRCINIRES ; initialize CRC
mov.w #03231h,&CRCDIRB ; "1" & "2"
mov.w #03433h,&CRCDIRB ; "3" & "4"
mov.w #03635h,&CRCDIRB ; "5" & "6"
mov.w #03837h,&CRCDIRB ; "7" & "8"
mov.b #039h, &CRCDIRB_L ; "9"
cmp #029B1h,&CRCINIRES ; compare result
; CRCRESR contains 08D94h
jeq &Success ; no error
br &Error ; to error handler
437
SLAU208O–June 2008–Revised May 2015 Cyclic Redundancy Check (CRC) Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

CRC Registers
www.ti.com
14.4 CRC Registers
The CRC module registers are listed in Table 14-1. The base address can be found in the device-specific
data sheet. The address offset is given in Table 14-1.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 14-1. CRC Registers
Offset Acronym Register Name Type Access Reset Section
0000h CRCDI CRC Data In Read/write Word 0000h Section 14.4.1
0000h CRCDI_L Read/write Byte 00h
0001h CRCDI_H Read/write Byte 00h
0002h CRCDIRB CRC Data In Reverse Byte(1) Read/write Word 0000h Section 14.4.2
0002h CRCDIRB_L Read/write Byte 00h
0003h CRCDIRB_H Read/write Byte 00h
0004h CRCINIRES CRC Initialization and Result Read/write Word FFFFh Section 14.4.3
0004h CRCINIRES_L Read/write Byte FFh
0005h CRCINIRES_H Read/write Byte FFh
0006h CRCRESR CRC Result Reverse(1) Read only Word FFFFh Section 14.4.4
0006h CRCRESR_L Read/write Byte FFh
0007h CRCRESR_H Read/write Byte FFh
(1) Not available on MSP430F543x and MSP430F541x non-A versions.
438 Cyclic Redundancy Check (CRC) Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CRC Registers
14.4.1 CRCDI Register
CRC Data In Register
Figure 14-3. CRCDI Register
15 14 13 12 11 10 9 8
CRCDI
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
CRCDI
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 14-2. CRCDI Register Description
Bit Field Type Reset Description
15-0 CRCDI RW 0h CRC data in. Data written to the CRCDI register is included to the present
signature in the CRCINIRES register according to the CRC-CCITT standard.
14.4.2 CRCDIRB Register
CRC Data In Reverse Register
Figure 14-4. CRCDIRB Register
15 14 13 12 11 10 9 8
CRCDIRB
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
CRCDIRB
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 14-3. CRCDIRB Register Description
Bit Field Type Reset Description
15-0 CRCDIRB RW 0h CRC data in reverse byte. Data written to the CRCDIRB register is included to
the present signature in the CRCINIRES and CRCRESR registers according to
the CRC-CCITT standard. Reading the register returns the register CRCDI
content.
439
SLAU208O–June 2008–Revised May 2015 Cyclic Redundancy Check (CRC) Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CRC Registers
www.ti.com
14.4.3 CRCINIRES Register
CRC Initialization and Result Register
Figure 14-5. CRCINIRES Register
15 14 13 12 11 10 9 8
CRCINIRES
rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1
76543210
CRCINIRES
rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1
Table 14-4. CRCINIRES Register Description
Bit Field Type Reset Description
15-0 CRCINIRES RW FFFFh CRC initialization and result. This register holds the current CRC result
(according to the CRC-CCITT standard). Writing to this register initializes the
CRC calculation with the value written to it. The value just written can be read
from CRCINIRES register.
14.4.4 CRCRESR Register
CRC Reverse Result Register
Figure 14-6. CRCRESR Register
15 14 13 12 11 10 9 8
CRCRESR
r-1 r-1 r-1 r-1 r-1 r-1 r-1 r-1
76543210
CRCRESR
r-1 r-1 r-1 r-1 r-1 r-1 r-1 r-1
Table 14-5. CRCRESR Register Description
Bit Field Type Reset Description
15-0 CRCRESR R FFFFh CRC reverse result. This register holds the current CRC result (according to the
CRC-CCITT standard). The order of bits is reversed (for example,
CRCINIRES[15] = CRCRESR[0]) compared to the order of bits in the
CRCINIRES register (see example code).
440 Cyclic Redundancy Check (CRC) Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 15
SLAU208O–June 2008–Revised May 2015
AES Accelerator
The AES accelerator module performs AES128 encryption or decryption in hardware. This chapter
describes the AES accelerator.
Topic ........................................................................................................................... Page
15.1 AES Accelerator Introduction............................................................................. 442
15.2 AES Accelerator Operation................................................................................ 443
15.3 AES_ACCEL Registers...................................................................................... 448
441
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
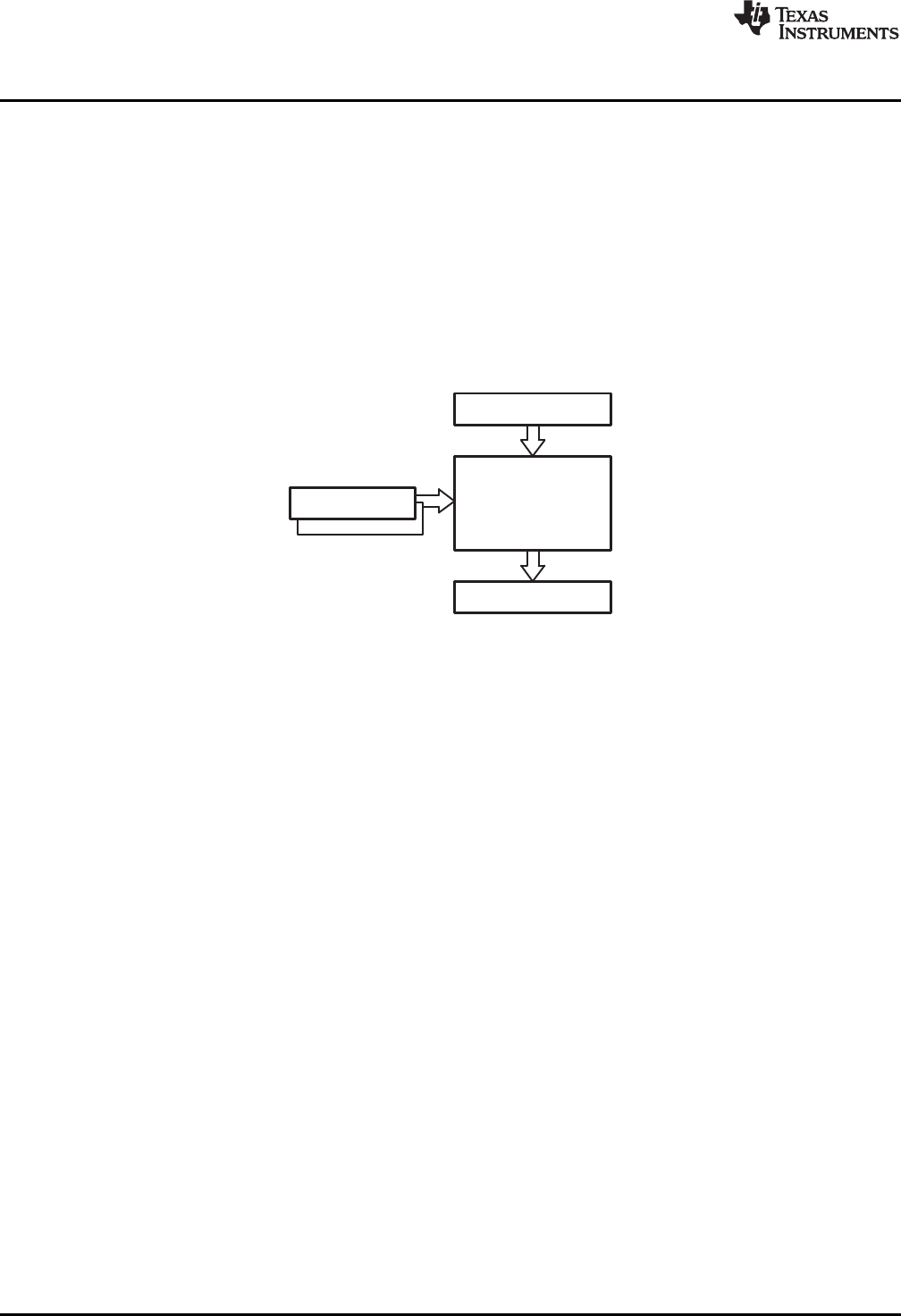
AES128
Encryption/
Decryption
Core
AESADIN
AESADOUT
Key Buffer
AESAKEY
AES Accelerator Introduction
www.ti.com
15.1 AES Accelerator Introduction
The AES accelerator module performs encryption and decryption of 128-bit data with 128-bit keys
according to the advanced encryption standard (AES) (FIPS PUB 197) in hardware.
The AES accelerator features are:
• Encryption and decryption according to AES FIPS PUB 197 with 128-bit key
• On-the-fly key expansion for encryption and decryption
• Off-line key generation for decryption
• Byte and word access to key, input, and output data
• AES ready interrupt flag
The AES accelerator block diagram is shown in Figure 15-1.
Figure 15-1. AES Accelerator Block Diagram
442 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

in[3]
in[2]
in[1]
in[0]
in[7]
in[6]
in[5]
in[4]
in[11]
in[10]
in[9]
in[8]
in[15]
in[14]
in[13]
in[12]
s[3,0]
s[2,0]
s[1,0]
s[0,0]
s[3,1]
s[2,1]
s[1,1]
s[0,1]
s[3,2]
s[2,2]
s[1,2]
s[0,2]
s[3,3]
s[2,3]
s[1,3]
s[0,3]
Input bytes State array Output bytes
out[3]
out[2]
out[1]
out[0]
out[7]
out[6]
out[5]
out[4]
out[11]
out[10]
out[9]
out[8]
out[15]
out[14]
out[13]
out[12]
www.ti.com
AES Accelerator Operation
15.2 AES Accelerator Operation
The AES accelerator is configured with user software. The setup and operation is discussed in the
following sections.
Internally, the AES algorithm’s operations are performed on a two-dimensional array of bytes called the
State. For AES-128, the State consists of four rows of bytes, each containing four bytes. The input is
assigned to the State array as illustrated in Figure 15-2, with in[0] being the first data byte written into the
AES accelerator data input register, AESADIN. The encrypt or decrypt operations are then conducted on
the State array, after which its final values can be read from the output with out[0] being the first data byte
read from the AES accelerator data output register, AESADOUT.
Figure 15-2. AES State Array Input and Output
The module allows word and byte access to all data registers, AESAKEY, AESADIN, and AESADOUT.
Word and byte access should not be mixed while reading from or writing into one of the registers.
However, it is possible to write one of the registers using byte access and another using word access.
NOTE: Access Restrictions
While the AES accelerator is busy (AESBUSY = 1), AESADOUT always reads as zero, the
AESDOUTCNTx counter, the AESDOUTRD flag, and the AESDINWR flag are reset, any
attempt to change AESOPx, AESDINWR, or AESKEYWR is ignored, and writing to
AESAKEY or AESADIN aborts the current operation, the complete module is reset (except
for AESRDYIE and AESOPx), and the AES error flag AESERRFG is set.
AESADIN and AESAKEY are write-only registers and always read as zero.
Writing data into AESADIN influences the content of the corresponding output data; for
example, writing in[0] alters out[0], writing in[1] alters out[1], etc., but interleafed operation is
possible; for example, first reading out[0], then writing in[0], and continuing with reading
out[1], writing in[1], etc.
NOTE: When using a code debugger, the AES module does not stop its operation when program
code is halted or single stepped.
443
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
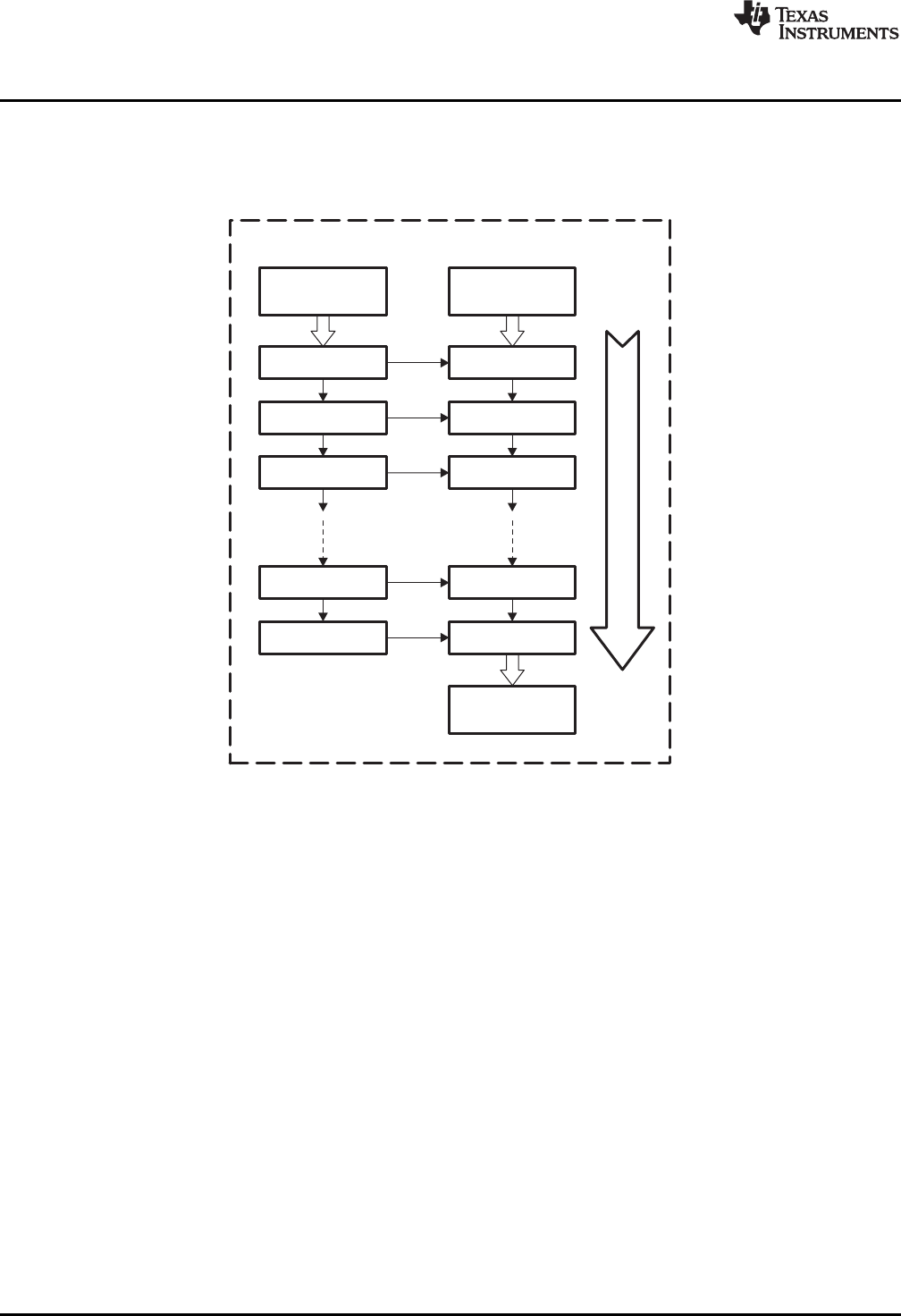
Plaintext
(AESADIN)
Ciphertext
(AESADOUT)
Cipher Key
(AESAKEY)
Encryption Process
Cipher
Initial RoundInitial Key
Round 1Round Key 1
Round 2Round Key 2
Round 9Round Key 9
Final Round
Round Key 10
AES Accelerator Operation
www.ti.com
15.2.1 Encryption
Figure 15-3 shows the encryption process with the cipher being a series of transformations that converts
the plaintext written into the AESADIN register to a ciphertext that can be read from the AESADOUT
register using the cipher key provided via the AESAKEY register.
Figure 15-3. AES-128 Encryption Process
The steps to perform encryption are:
1. Set AESOPx = 00 to select encryption. Changing the AESOPx bits clears the AESKEYWR flag, and a
new key must be loaded in the next step.
2. Load the 128-bit key into AESAKEY or set the AESKEYWR flag by software, if the key from a previous
operation should be used. When all 16 bytes are written, the AESKEYWR flag indicates completion.
If a key was loaded previously without changing AESOPx, the AESKEYWR flag is cleared with the first
write access to AESAKEY. Loading the key mist be completed before the next step is performed.
3. Load 128-bit data into AESADIN, or set the AESDINWR flag by software if the output data from a
previous operation should be encrypted. When all 16 bytes are written, the AESDINWR flag indicates
completion. The module starts encrypting the presented data when AESDINWR = 1.
4. While the AES module is performing encryption, the AESBUSY bit is 1. The encryption takes
167 MCLK clock cycles. After its completion, the AESRDYIFG is set, and the result can be read from
AESADOUT. When all 16 bytes are read, the AESDOUTRD flag indicates completion.
The AESRDYIFG flag is cleared when reading AESADOUT or writing to AESAKEY or AESADIN.
5. If additional data should be encrypted with the same key loaded in step 2, new data can be written into
AESADIN after the results of the operation on the previous data were read from AESADOUT. When an
additional 16 data bytes are written, the module automatically starts the encryption using the key
loaded in step 2.
When using the output feedback (OFB) cipher block chaining mode, setting the AESDINWR flag is
sufficient to trigger the next encryption, and the module starts the encryption automatically using the
output data from the previous encryption as input data.
444 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
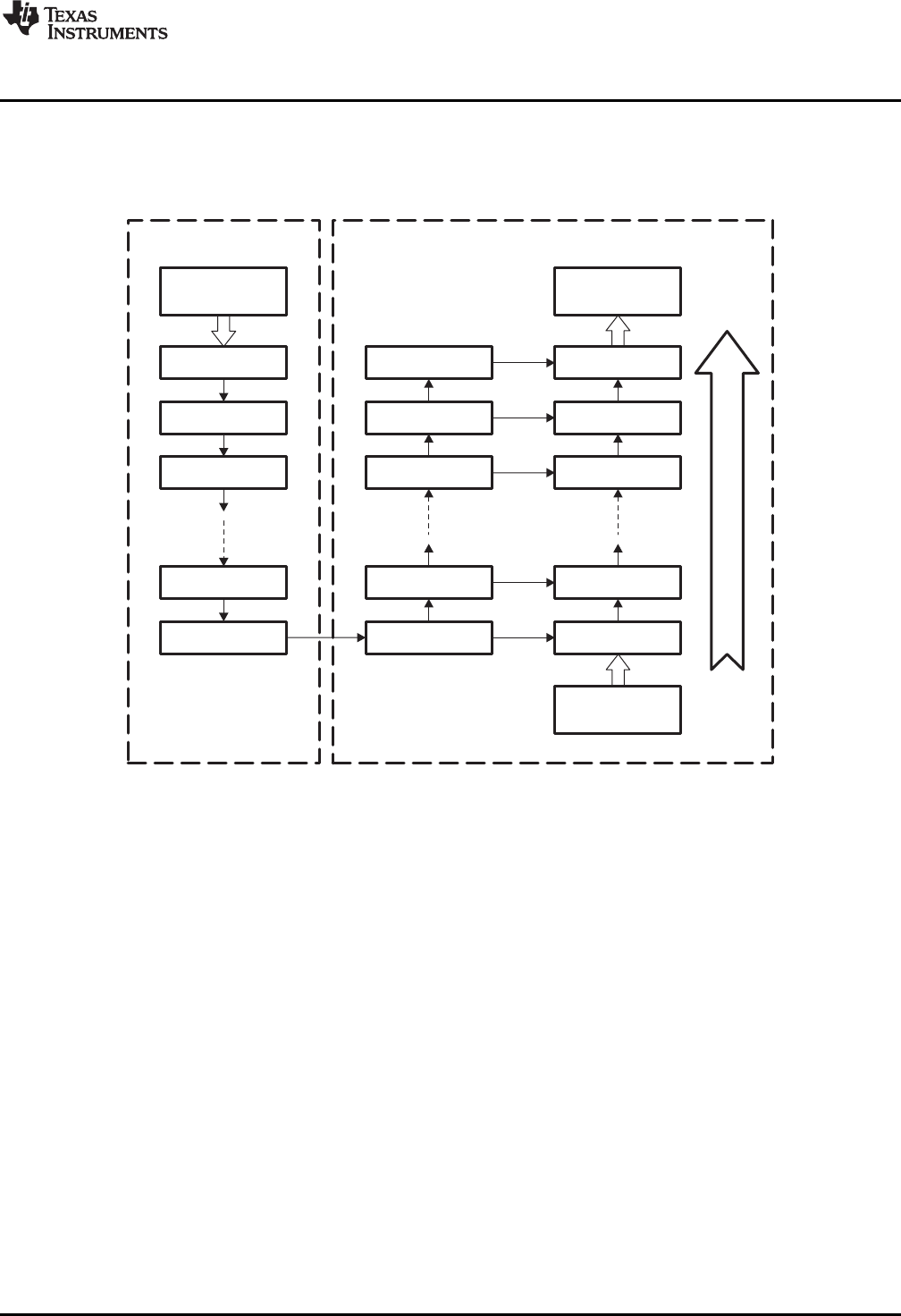
Decryption Process – Inverse CipherDecrypt Key Generation
Cipher Key
(AESAKEY)
Initial Key
Round Key 1
Round Key 2
Round Key 9
Round Key 10
Inverse Cipher
Plaintext
(AESADOUT)
Ciphertext
(AESADIN)
Inverse
Initial Round
Initial Key
Inverse Round 1Round Key 1
Inverse Round 2Round Key 2
Inverse Round 9Round Key 9
Inverse
Final Round
Round Key 10
www.ti.com
AES Accelerator Operation
15.2.2 Decryption
Figure 15-4 shows the decryption process with the inverse cipher being a series of transformations that
convert the ciphertext written into the AESADIN register to a plaintext that can be read from the
AESADOUT register using the cipher key provided via the AESAKEY register.
Figure 15-4. AES-128 Decryption Process using AESOPx = 01
The steps to perform decryption are:
1. Set AESOPx = 01 to select decryption using the same key used for encryption. Set AESOPx = 11 if
the first-round key required for decryption (round key 10) is already generated and is loaded in step 2.
Changing the AESOPx bits clears the AESKEYWR flag, and a new key must be loaded in step 2.
2. Load the 128-bit key into AESAKEY, or set the AESKEYWR flag by software, if the key from a
previous operation should be used. When all 16 bytes are written, the AESKEYWR flag indicates
completion.
If a key was loaded previously without changing AESOPx, the AESKEYWR flag is cleared with the first
write access to AESAKEY. Loading the key must be completed before the next step is performed.
3. Load 128-bit data into AESADIN or set the AESDINWR flag by software if the output data from a
previous operation should be decrypted. When all 16 bytes are written, the AESDINWR flag indicates
completion. The module starts decrypting the presented data as soon as AESDINWR = 1.
4. While the AES module is performing decryption, the AESBUSY bit is 1. The decryption takes
214 MCLK clock cycles with AESOPx = 01 and 167 MCLK clock cycles with AESOPx = 11. After its
completion, the AESRDYIFG is set, and the result can be read from AESADOUT. When all 16 bytes
are read the AESDOUTRD flag indicates completion.
The AESRDYIFG flag is cleared when reading AESADOUT or writing to AESAKEY or AESADIN.
5. If additional data should be decrypted with the same key loaded in step 2, new data can be written into
AESADIN after the results of the operation on the previous data were read from AESADOUT. When
additional 16 data bytes are written, the module automatically starts the decryption using the key
loaded in step 2.
445
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
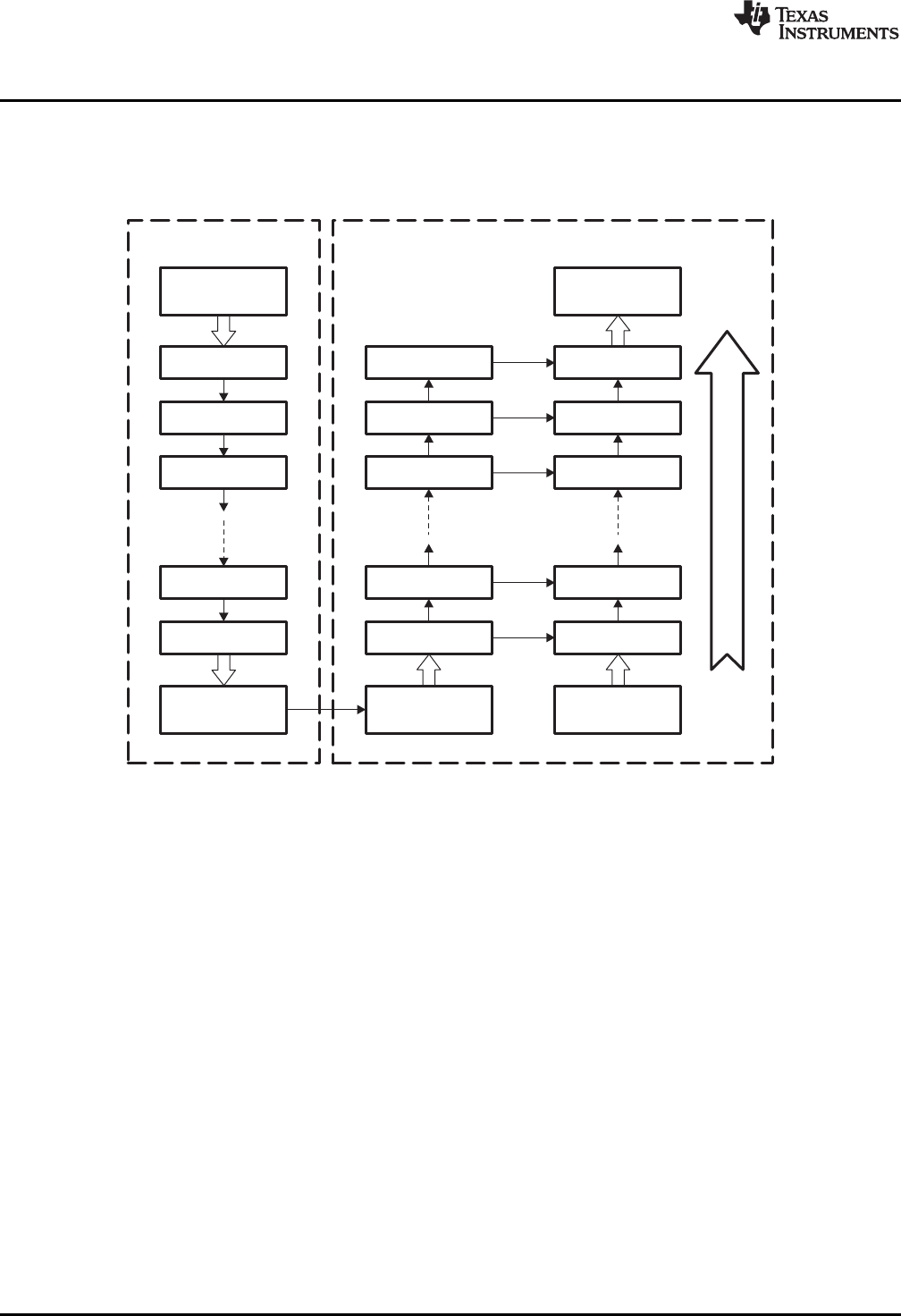
Decryption Process – Inverse Cipher
(AESOPx = 11)
Decrypt Key Generation
(AESOPx = 10)
Cipher Key
(AESAKEY)
Initial Key
Round Key 1
Round Key 2
Round Key 9
Round Key 10
Inverse Cipher
Plaintext
(AESADOUT)
Ciphertext
(AESADIN)
Inverse
Initial Round
Initial Key
Inverse Round 1Round Key 1
Inverse Round 2Round Key 2
Inverse Round 9Round Key 9
Inverse
Final Round
Round Key 10
Pregenerated Key
(AESAKEY)
Pregenerated Key
(AESADOUT)
AES Accelerator Operation
www.ti.com
15.2.3 Decryption Key Generation
Figure 15-5 shows the decryption process with a pregenerated decryption key. In this case, the decryption
key is calculated first with AESOPx = 10, then the precalculated key can be used together with the
decryption operation AESOPx = 11.
Figure 15-5. AES-128 Decryption Process using AESOPx = 10 and 11
To generate the decryption key independent from the actual decryption, the following steps are required:
1. Set AESOPx = 10 to select decryption key generation. Changing the AESOPx bits clears the
AESKEYWR flag, and a new key must be loaded in step 2.
2. Load the 128-bit key into AESAKEY, or set the AESKEYWR flag by software if the key from a previous
operation should be used. When all 16 bytes are written, the AESKEYWR flag indicates completion.
The generation of the first round key required for decryption is started immediately.
3. While the AES module is performing the key generation, the AESBUSY bit is 1. It takes 52 CPU clock
cycles to complete the key generation. After its completion, the AESRDYIFG is set, and the result can
be read from AESADOUT. When all 16 bytes are read, the AESDOUTRD flag indicates completion.
The AESRDYIFG flag is cleared when reading AESADOUT or writing to AESAKEY or AESADIN.
4. If data should be decrypted with the generated key, AESOPx must be set to 11. Then the generated
key must be loaded or, if it was just generated with AESOPx = 10, it is sufficient to set the
AESKEYWR flag by software to indicate that the key is already valid. Afterward, the steps described in
Section 15.2.2 to load the data, etc., must be followed.
446 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
AES Accelerator Operation
15.2.4 Using the AES Accelerator With Low-Power Modes
The AES accelerator module provides automatic clock activation for MCLK for use with low-power modes.
When the AES accelerator is busy, it automatically activates MCLK, regardless of the control-bit settings
for the clock source. The clock remains active until the AES accelerator completes its operation.
15.2.5 AES Accelerator Interrupts
The AESRDYIFG interrupt flag is set when the AES module completes the selected operation on the
provided data. An interrupt request is generated if AESRDYIE and GIE are also set. AESRDYIFG is
automatically reset if the AES interrupt is serviced, if AESADOUT is read, or if AESADIN or AESAKEY are
written. AESRDYIFG is reset after a PUC or with AESSWRST = 1. AESRDYIE is reset after a PUC but is
not reset by AESSWRST = 1.
15.2.6 Implementing Block Cipher Modes
All block cipher modes can be implemented using the AES accelerator together with software. A separate
application report describes the block cipher modes together with their implementation in software.
447
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AES_ACCEL Registers
www.ti.com
15.3 AES_ACCEL Registers
The AES Accelerator registers are listed in Table 15-1.
Table 15-1. AES_ACCEL Registers
Offset Acronym Register Name Type Access Reset Section
000h AESACTL0 AES accelerator control register 0 Read/write Word 00h Section 15.3.1
002h AESACTL1 AES accelerator control register 1 Read/write Word 00h Section 15.3.2
004h AESASTAT AES accelerator status register Read only Word 00h Section 15.3.3
006h AESAKEY AES accelerator key register Read/write Word 00h Section 15.3.4
008h AESADIN AES accelerator data in register Read/write Word 00h Section 15.3.5
00Ah AESADOUT AES accelerator data out register Read/write Word 00h Section 15.3.6
00Ch AESAXDIN AES accelerator XORed data in Read/write Word 00h Section 15.3.7
register
00Eh AESAXIN AES accelerator XORed data in Read/write Word 00h Section 15.3.8
register (no trigger)
448 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
AES_ACCEL Registers
15.3.1 AESACTL0 Register
AES Accelerator Control Register 0
AESACTL0 is shown in Figure 15-6 and described in Table 15-2.
Figure 15-6. AESACTL0 Register
15 14 13 12 11 10 9 8
AESCMEN Reserved AESRDYIE AESERRFG Reserved AESRDYIFG
rw-0 r0 r0 rw-0 rw-0 r0 r0 rw-0
76543210
AESSWRST AESCMx Reserved AESKLx AESOPx
rw-0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
Table 15-2. AESACTL0 Register Description
Bit Field Type Reset Description
15 AESCMEN RW 0h AESCMEN enables the support of the ciphermodes ECB, CBC, OFB, and CFB
together with the DMA.
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
0 = No DMA triggers are generated
1 = DMA ciphermode support operation is enabled and the corresponding DMA
triggers are generated.
14-13 Reserved R 0h Reserved
12 AESRDYIE RW 0h AES ready interrupt enable. AESRDYIE is not reset by AESSWRST = 1.
0 = Interrupt disabled
1 = Interrupt enabled
11 AESERRFG RW 0h AES error flag. AESAKEY or AESADIN were written while an AES operation was
in progress. The bit must be cleared by software.
0 = No error
1 = Error occurred
10-9 Reserved R 0h Reserved
8 AESRDYIFG RW 0h AES ready interrupt flag. Set when the selected AES operation was completed
and the result can be read from AESADOUT. Automatically cleared when
AESADOUT is read or AESAKEY or AESADIN is written.
0 = No interrupt pending
1 = Interrupt pending
7 AESSWRST RW 0h AES software reset. Immediately resets the complete AES accelerator module
even when busy except for the AESRDYIE, AESKLx, and AESOPx bits. It also
clears the (internal) state memory.
The AESSWRST bit is automatically reset and always reads as zero.
0 = No reset
1 = Reset AES accelerator module
6-5 AESCMx R 0h AES cipher mode select. These bits are ignored for AESCMEN = 0.
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
00 = ECB
01 = CBC
10 = OFB
11 = CFB
4 Reserved R 0h Reserved
449
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AES_ACCEL Registers
www.ti.com
Table 15-2. AESACTL0 Register Description (continued)
Bit Field Type Reset Description
3-2 AESKLx RW 0h AES key length. These bits define which of the three AES standards is
performed. The AESKLx bits are not reset by AESSWRST = 1.
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
00 = AES128. The key size is 128 bit.
01 = AES192. The key size is 192 bit.
10 = AES256. The key size is 256 bit.
11 = Reserved
1-0 AESOPx RW 0h AES operation. The AESOPx bits are not reset by AESSWRST = 1.
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
00 = Encryption
01 = Decryption. The provided key is the same key used for encryption.
10 = Generate first round key required for decryption.
11 = Decryption. The provided key is the first round key required for decryption.
15.3.2 AESACTL1 Register
AES Accelerator Control Register 1
AESACTL1 is shown in Figure 15-7 and described in Table 15-3.
Figure 15-7. AESACTL1 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
AESBLKCNTx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
Table 15-3. AESACTL1 Register Description
Bit Field Type Reset Description
15-8 Reserved R 0 Reserved. Always reads 0.
7-0 AESBLKCNTx RW 0 Cipher Block Counter. Number of blocks to be encrypted or decrypted with block
cipher modes enabled (AESCMEN = 1). Ignored if AESCMEN = 0.
The block counter decrements with each performed encryption or decryption.
Writes are ignored when AESCMEN = 1 and AESBLKCNTx > 0.
450 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AES_ACCEL Registers
15.3.3 AESASTAT Register
AES Accelerator Status Register
AESASTAT is shown in Figure 15-8 and described in Table 15-4.
Figure 15-8. AESASTAT Register
15 14 13 12 11 10 9 8
AESDOUTCNTx AESDINCNTx
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
AESKEYCNTx AESDOUTRD AESDINWR AEKEYWR AESBUSY
r-0 r-0 r-0 r-0 r-0 rw-0 rw-0 r-0
Table 15-4. AESASTAT Register Description
Bit Field Type Reset Description
15-12 AESDOUTCNTx R 0h Bytes read from AESADOUT. Reset when AESDOUTRD is reset.
If AESDOUTCNTx = 0 and AESDOUTRD = 0, no bytes were read.
If AESDOUTCNTx = 0 and AESDOUTRD = 1, all bytes were read.
11-8 AESDINCNTx R 0h Bytes written by AESADIN, AESAXDIN, or AESAXIN. Reset when AESDINWR is
reset.
If AESDINCNTx = 0 and AESDINWR = 0, no bytes were written.
If AESDINCNTx = 0 and AESDINWR = 1, all bytes were written.
7-4 AESKEYCNTx R 0h Bytes written by AESAKEY for AESKLx = 00, words written by AESAKEY if
AESKLx = 01, 10, or 11. Reset when AESKEYWR is reset.
If AESKEYCNTx = 0 and AESKEYWR = 0, no bytes were written.
If AESKEYCNTx = 0 and AESKEYWR = 1, all bytes were written.
3 AESDOUTRD R 0h All 16 bytes read from AESADOUT.
AESDOUTRD is reset by PUC, AESSWRST, an error condition, changing
AESOPx, changing AESKLx, when the AES accelerator is busy, or when the
output data is read again.
0 = Not all bytes read
1 = All bytes read
2 AESDINWR RW 0h All 16 bytes written to AESADIN, AESAXDIN, or AESAXIN. This bit can be
modified by software only if AESCMEN = 0. Changing its state by software also
resets the AESDINCNTx bits.
AESDINWR is reset by PUC, AESSWRST, an error condition, changing
AESOPx, changing AESKLx, the start to (over)write the data, or when the AES
accelerator is busy. Because it is reset when AESOPx or AESKLx is changed, it
can be set by software again to indicate that the current data is still valid.
0 = Not all bytes written
1 = All bytes written
1 AESKEYWR RW 0h All 16 bytes written to AESAKEY. This bit can be modified by software but it
must not be reset by software (1→0) if AESCMEN = 1. Changing its state by
software also resets the AESKEYCNTx bits.
AESKEYWR is reset by PUC, AESSWRST, an error condition, changing
AESOPx, changing AESKLx, or the start to (over)write a new key. Because it is
reset when AESOPx is changed, it can be set by software again to indicate that
the loaded key is still valid.
0 = Not all bytes written
1 = All bytes written
0 AESBUSY R 0h AES accelerator module busy; encryption, decryption, or key generation in
progress.
0 = Not busy
1 = Busy
451
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AES_ACCEL Registers
www.ti.com
15.3.4 AESAKEY Register
AES Accelerator Key Register
AESAKEY is shown in Figure 15-9 and described in Table 15-5.
Figure 15-9. AESAKEY Register
15 14 13 12 11 10 9 8
AESKEY1x (Key Byte n+1)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
76543210
AESKEY0x (Key Byte n)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
Table 15-5. AESAKEY Register Description
Bit Field Type Reset Description
15-8 AESKEY1x W 0 AES key byte n+1 when AESAKEY is written as word.
Do not use these bits for byte access.
Do not mix word and byte access.
Always reads as zero.
The key is reset by PUC or by AESSWRST = 1.
7-0 AESKEY0x W 0 AES key byte n when AESAKEY is written as word.
AES next key byte when AESAKEY_L is written as byte.
Do not mix word and byte access.
Always reads as zero.
The key is reset by PUC or by AESSWRST = 1.
452 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
AES_ACCEL Registers
15.3.5 AESADIN Register
AES Accelerator Data In Register
AESADIN is shown in Figure 15-10 and described in Table 15-6.
Figure 15-10. AESADIN Register
15 14 13 12 11 10 9 8
AESDIN1x (DIN Byte n+1)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
76543210
AESDIN0x (DIN Byte n)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
Table 15-6. AESADIN Register Description
Bit Field Type Reset Description
15-8 AESDIN1x W 0 AES data in byte n+1 when AESADIN is written as word.
Do not use these bits for byte access.
Do not mix word and byte access.
Always reads as zero.
7-0 AESDIN0x W 0 AES data in byte n when AESADIN is written as word.
AES next data in byte when AESADIN_L is written as byte.
Do not mix word and byte access.
Always reads as zero.
15.3.6 AESADOUT Register
AES Accelerator Data Out Register
AESADOUT is shown in Figure 15-11 and described in Table 15-7.
Figure 15-11. AESADOUT Register
15 14 13 12 11 10 9 8
AESDOUT1x (DOUT Byte n+1)
76543210
AESDOUT0x (DOUT Byte n)
Table 15-7. AESADOUT Register Description
Bit Field Type Reset Description
15-8 AESDOUT1x R 0 AES data out byte n+1 when AESADOUT is read as word.
Do not use these bits for byte access.
Do not mix word and byte access.
7-0 AESDOUT0x R 0 AES data out byte n when AESADOUT is read as word.
AES next data out byte when AESADOUT_L is read as byte.
Do not mix word and byte access.
453
SLAU208O–June 2008–Revised May 2015 AES Accelerator
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
AES_ACCEL Registers
www.ti.com
15.3.7 AESAXDIN Register
AES Accelerator XORed Data In Register
AESAXDIN is shown in Figure 15-12 and described in Table 15-8.
Figure 15-12. AESAXDIN Register
15 14 13 12 11 10 9 8
AESXDIN1x (XDIN Byte n+1)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
76543210
AESXDIN0x (XDIN Byte n)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
Table 15-8. AESAXDIN Register Description
Bit Field Type Reset Description
15-8 AESXDIN1x W 0 AES data in byte n+1 when AESAXDIN is written as word.
Do not use these bits for byte access.
Do not mix word and byte access.
Always reads as zero.
7-0 AESXDIN0x W 0 AES data in byte n when AESAXDIN is written as word.
AES next data in byte when AESAXDIN_L is written as byte.
Do not mix word and byte access.
Always reads as zero.
15.3.8 AESAXIN Register
AES Accelerator XORed Data In Register (No Trigger)
AESAXIN is shown in Figure 15-13 and described in Table 15-9.
Figure 15-13. AESAXIN Register
15 14 13 12 11 10 9 8
AESXIN1x (DIN Byte n+1)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
76543210
AESXIN0x (DIN Byte n)
w-0 w-0 w-0 w-0 w-0 w-0 w-0 w-0
Table 15-9. AESAXIN Register Description
Bit Field Type Reset Description
15-8 AESXIN1x W 0 AES data in byte n+1 when AESAXIN is written as word.
Do not use these bits for byte access.
Do not mix word and byte access.
Always reads as zero.
7-0 AESXIN0x W 0 AES data in byte n when AESAXIN is written as word.
AES next data in byte when AESAXIN_L is written as byte.
Do not mix word and byte access.
Always reads as zero.
454 AES Accelerator SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 16
SLAU208O–June 2008–Revised May 2015
Watchdog Timer (WDT_A)
The watchdog timer is a 32-bit timer that can be used as a watchdog or as an interval timer. This chapter
describes the watchdog timer. The enhanced watchdog timer, WDT_A, is implemented in all devices.
Topic ........................................................................................................................... Page
16.1 WDT_A Introduction.......................................................................................... 456
16.2 WDT_A Operation............................................................................................. 458
16.3 WDT_A Registers ............................................................................................. 460
455
SLAU208O–June 2008–Revised May 2015 Watchdog Timer (WDT_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
WDT_A Introduction
www.ti.com
16.1 WDT_A Introduction
The primary function of the watchdog timer (WDT_A) module is to perform a controlled system restart
after a software problem occurs. If the selected time interval expires, a system reset is generated. If the
watchdog function is not needed in an application, the module can be configured as an interval timer and
can generate interrupts at selected time intervals.
Features of the watchdog timer module include:
• Eight software-selectable time intervals
• Watchdog mode
• Interval mode
• Password-protected access to Watchdog Timer Control ( WDTCTL) register
• Selectable clock source
• Can be stopped to conserve power
• Clock fail-safe feature
The watchdog timer block diagram is shown in Figure 16-1.
NOTE: Watchdog timer powers up active.
After a PUC, the WDT_A module is automatically configured in the watchdog mode with an
initial ~32-ms reset interval using the SMCLK. The user must setup or halt the WDT_A prior
to the expiration of the initial reset interval.
456 Watchdog Timer (WDT_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
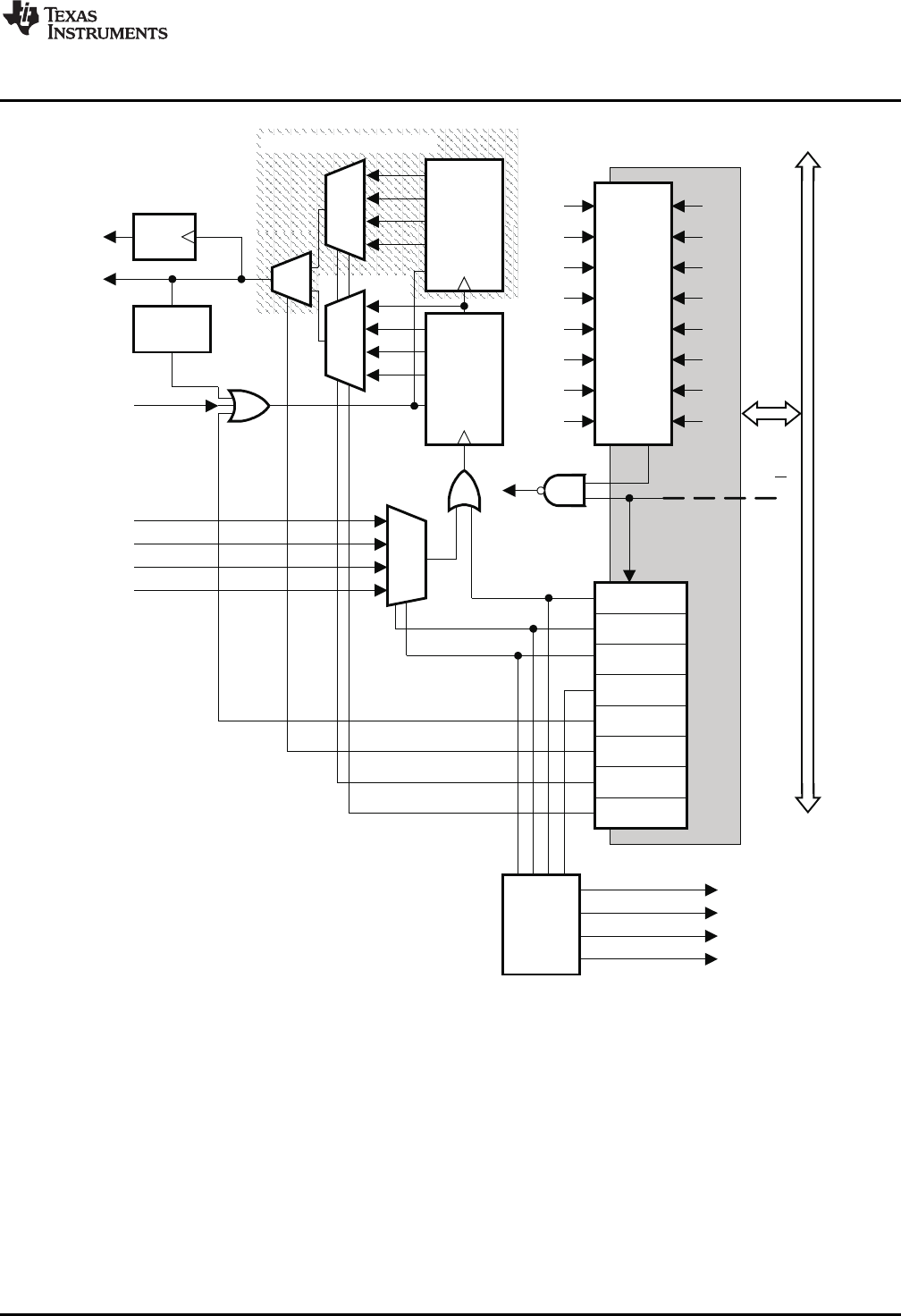
WDTQn
Q6 16-bit
Counter
CLK
01
00
PUC
SMCLK
ACLK
Clear
Password
Compare
0
0
0
0
1
1
1
1
WDTCNTCL
WDTTMSEL
WDTSSEL0
WDTSSEL1
WDTIS1
WDTIS2
WDTIS0
WDTHOLD
EQU
EQU
WriteEnable
LowByte R / W
MDB
LSB
MSB
WDTCTL
(Asyn)
Int.
Flag
Pulse
Generator
VLOCLK
Clock
Request
Logic
X_CLKrequest
SMCLKrequest
ACLKrequest
VLOCLKrequest
10
11
Q9
Q13
Q15
Q19
Q23
Q27
Q31
X_CLK
11
10
01
00
11
10
01
00
0
1
16-bit
Counter
CLK
32BitWDTextension
www.ti.com
WDT_A Introduction
Figure 16-1. Watchdog Timer Block Diagram
457
SLAU208O–June 2008–Revised May 2015 Watchdog Timer (WDT_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
WDT_A Operation
www.ti.com
16.2 WDT_A Operation
The watchdog timer module can be configured as either a watchdog or interval timer with the WDTCTL
register. WDTCTL is a 16-bit password-protected read/write register. Any read or write access must use
word instructions and write accesses must include the write password 05Ah in the upper byte. Any write to
WDTCTL with any value other than 05Ah in the upper byte is a password violation and triggers a PUC
system reset, regardless of timer mode. Any read of WDTCTL reads 069h in the upper byte. Byte reads
on WDTCTL high or low part result in the value of the low byte. Writing byte wide to upper or lower parts
of WDTCTL results in a PUC.
16.2.1 Watchdog Timer Counter (WDTCNT)
The WDTCNT is a 32-bit up counter that is not directly accessible by software. The WDTCNT is controlled
and its time intervals are selected through the Watchdog Timer Control (WDTCTL) register. The WDTCNT
can be sourced from SMCLK, ACLK, VLOCLK, or X_CLK on some devices. The clock source is selected
with the WDTSSEL bits. The timer interval is selected with the WDTIS bits.
16.2.2 Watchdog Mode
After a PUC condition, the WDT module is configured in the watchdog mode with an initial ~32-ms reset
interval using the SMCLK. The user must setup, halt, or clear the watchdog timer prior to the expiration of
the initial reset interval or another PUC is generated. When the watchdog timer is configured to operate in
watchdog mode, either writing to WDTCTL with an incorrect password, or expiration of the selected time
interval triggers a PUC. A PUC resets the watchdog timer to its default condition.
16.2.3 Interval Timer Mode
Setting the WDTTMSEL bit to 1 selects the interval timer mode. This mode can be used to provide
periodic interrupts. In interval timer mode, the WDTIFG flag is set at the expiration of the selected time
interval. A PUC is not generated in interval timer mode at expiration of the selected timer interval, and the
WDTIFG enable bit WDTIE remains unchanged.
When the WDTIE bit and the GIE bit are set, the WDTIFG flag requests an interrupt. The WDTIFG
interrupt flag is automatically reset when its interrupt request is serviced, or it may be reset by software.
The interrupt vector address in interval timer mode is different from that in watchdog mode.
NOTE: Modifying the watchdog timer
The watchdog timer interval should be changed together with WDTCNTCL = 1 in a single
instruction to avoid an unexpected immediate PUC or interrupt. The watchdog timer should
be halted before changing the clock source to avoid a possible incorrect interval.
16.2.4 Watchdog Timer Interrupts
The watchdog timer uses two bits in the SFRs for interrupt control:
• WDT interrupt flag, WDTIFG, located in SFRIFG1.0
• WDT interrupt enable, WDTIE, located in SFRIE1.0
When using the watchdog timer in the watchdog mode, the WDTIFG flag sources a reset vector
interrupt.The WDTIFG will self clear upon a watchdog timeout event. The SYSRSTIV can be read to
determine if the reset was caused by a watchdog timeout event.
When using the watchdog timer in interval timer mode, the WDTIFG flag is set after the selected time
interval and requests a watchdog timer interval timer interrupt if the WDTIE and the GIE bits are set. The
interval timer interrupt vector is different from the reset vector used in watchdog mode. In interval timer
mode, the WDTIFG flag is reset automatically when the interrupt is serviced, or can be reset with
software.
458 Watchdog Timer (WDT_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
WDT_A Operation
16.2.5 Clock Fail-Safe Feature
The WDT_A provides a fail-safe clocking feature, ensuring the clock to the WDT_A cannot be disabled
while in watchdog mode. This means that the low-power modes may be affected by the choice for the
WDT_A clock.
If SMCLK or ACLK fails as the WDT_A clock source, VLOCLK is automatically selected as the WDT_A
clock source.
When the WDT_A module is used in interval timer mode, there is no fail-safe feature within WDT_A for
the clock source.
16.2.6 Operation in Low-Power Modes
The devices have several low-power modes. Different clock signals are available in different low-power
modes. The requirements of the application and the type of clocking that is used determine how the
WDT_A should be configured. For example, the WDT_A should not be configured in watchdog mode with
a clock source that is originally sourced from DCO, XT1 in high-frequency mode, or XT2 via SMCLK or
ACLK, if the user wants to use low-power mode 3. In this case, SMCLK or ACLK would remain enabled,
increasing the current consumption of LPM3. When the watchdog timer is not required, the WDTHOLD bit
can be used to hold the WDTCNT, reducing power consumption.
16.2.7 Software Examples
Any write operation to WDTCTL must be a word operation with 05Ah (WDTPW) in the upper byte:
; Periodically clear an active watchdog
MOV #WDTPW+WDTIS2+WDTIS1+WDTCNTCL,&WDTCTL
;
; Change watchdog timer interval
MOV #WDTPW+WDTCNTCL+SSEL,&WDTCTL
;
; Stop the watchdog
MOV #WDTPW+WDTHOLD,&WDTCTL
;
; Change WDT to interval timer mode, clock/8192 interval
MOV #WDTPW+WDTCNTCL+WDTTMSEL+WDTIS2+WDTIS0,&WDTCTL
459
SLAU208O–June 2008–Revised May 2015 Watchdog Timer (WDT_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

WDT_A Registers
www.ti.com
16.3 WDT_A Registers
The watchdog timer module registers are listed in Table 16-1. The base address for the watchdog timer
module registers and special function registers (SFRs) can be found in device-specific data sheets. The
address offset is given in Table 16-1.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 16-1. WDT_A Registers
Offset Acronym Register Name Type Access Reset Section
00h WDTCTL Watchdog Timer Control Read/write Word 6904h Section 16.3.1
00h WDTCTL_L Read/write Byte 04h
01h WDTCTL_H Read/write Byte 69h
460 Watchdog Timer (WDT_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
WDT_A Registers
16.3.1 WDTCTL Register
Watchdog Timer Control Register
Figure 16-2. WDTCTL Register
15 14 13 12 11 10 9 8
WDTPW
76543210
WDTHOLD WDTSSEL WDTTMSEL WDTCNTCL WDTIS
rw-0 rw-0 rw-0 rw-0 r0(w) rw-1 rw-0 rw-0
Table 16-2. WDTCTL Register Description
Bit Field Type Reset Description
15-8 WDTPW RW 69h Watchdog timer password. Always read as 069h. Must be written as 5Ah; if any
other value is written, a PUC is generated.
7 WDTHOLD RW 0h Watchdog timer hold. This bit stops the watchdog timer. Setting WDTHOLD = 1
when the WDT is not in use conserves power.
0b = Watchdog timer is not stopped.
1b = Watchdog timer is stopped.
6-5 WDTSSEL RW 0h Watchdog timer clock source select
00b = SMCLK
01b = ACLK
10b = VLOCLK
11b = X_CLK; VLOCLK in devices that do not support X_CLK
4 WDTTMSEL RW 0h Watchdog timer mode select
0b = Watchdog mode
1b = Interval timer mode
3 WDTCNTCL RW 0h Watchdog timer counter clear. Setting WDTCNTCL = 1 clears the count value to
0000h. WDTCNTCL is automatically reset.
0b = No action
1b = WDTCNT = 0000h
2-0 WDTIS RW 4h Watchdog timer interval select. These bits select the watchdog timer interval to
set the WDTIFG flag and/or generate a PUC.
000b = Watchdog clock source /(2^31) (18h:12m:16s at 32.768 kHz)
001b = Watchdog clock source /(2^27) (01h:08m:16s at 32.768 kHz)
010b = Watchdog clock source /(2^23) (00h:04m:16s at 32.768 kHz)
011b = Watchdog clock source /(2^19) (00h:00m:16s at 32.768 kHz)
100b = Watchdog clock source /(2^15) (1 s at 32.768 kHz)
101b = Watchdog clock source /(2^13) (250 ms at 32.768 kHz)
110b = Watchdog clock source /(2^9) (15.625 ms at 32.768 kHz)
111b = Watchdog clock source /(2^6) (1.95 ms at 32.768 kHz)
461
SLAU208O–June 2008–Revised May 2015 Watchdog Timer (WDT_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 17
SLAU208O–June 2008–Revised May 2015
Timer_A
Timer_A is a 16-bit timer and counter with multiple capture/compare registers. There can be multiple
Timer_A modules on a given device (see the device-specific data sheet). This chapter describes the
operation and use of the Timer_A module.
Topic ........................................................................................................................... Page
17.1 Timer_A Introduction ........................................................................................ 463
17.2 Timer_A Operation............................................................................................ 465
17.3 Timer_A Registers ............................................................................................ 477
462 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Timer_A Introduction
17.1 Timer_A Introduction
Timer_A is a 16-bit timer/counter with up to seven capture/compare registers. Timer_A can support
multiple capture/compares, PWM outputs, and interval timing. Timer_A also has extensive interrupt
capabilities. Interrupts may be generated from the counter on overflow conditions and from each of the
capture/compare registers.
Timer_A features include:
• Asynchronous 16-bit timer/counter with four operating modes
• Selectable and configurable clock source
• Up to seven configurable capture/compare registers
• Configurable outputs with pulse width modulation (PWM) capability
• Asynchronous input and output latching
• Interrupt vector register for fast decoding of all Timer_A interrupts
The block diagram of Timer_A is shown in Figure 17-1.
NOTE: Use of the word count
Count is used throughout this chapter. It means the counter must be in the process of
counting for the action to take place. If a particular value is directly written to the counter, an
associated action does not take place.
NOTE: Nomenclature
There may be multiple instantiations of Timer_A on a given device. The prefix TAx is used,
where x is a greater than equal to zero indicating the Timer_A instantiation. For devices with
one instantiation, x = 0. The suffix n, where n = 0 to 6, represents the specific
capture/compare registers associated with the Timer_A instantiation.
463
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
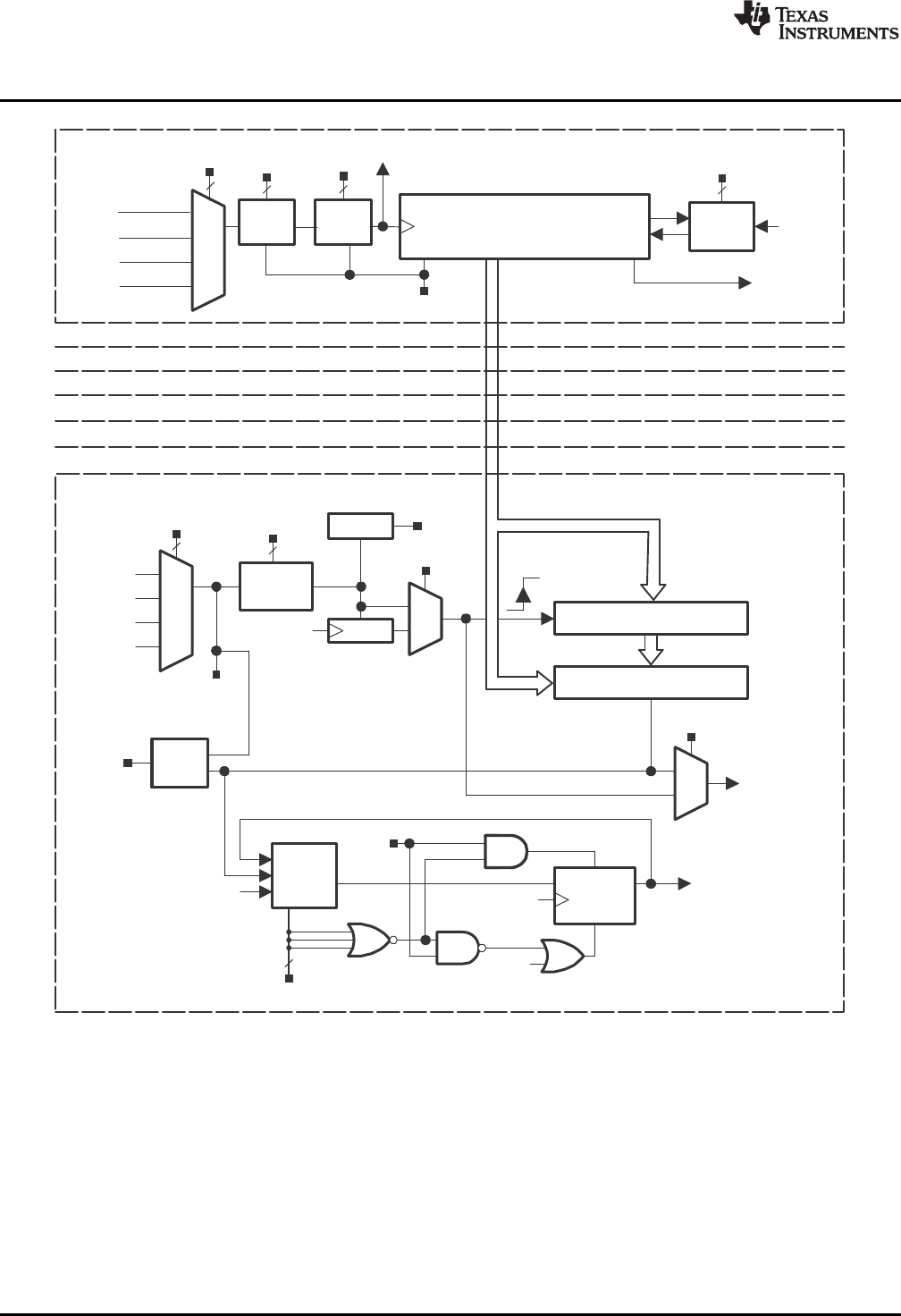
CCR6
Comparator 6
CCI
15 0
CCIS
OUTMOD
Capture
Mode
CM
Sync
SCS
COVlogic
Output
Unit4 DSet Q
EQU0
OUT
OUT6 Signal
Reset
GND
VCC
CCI6A
CCI6B
EQU6
Divider
/1/2/4/8
Count
Mode
T16-bit imer
TAxR
RC
Set TAxCTL
TAIFG
15 0
TASSEL MC
ID
00
01
10
11
Clear
Timer Clock
EQU0
Timer Clock
Timer Clock
T
AxCCR6
SCCI Y A
EN
CCR1
POR
TACLR
CCR0
Timer Block
00
01
10
11
Set TAxCCR6
CCIFG
CAP
1
0
1
0
CCR2
CCR3
ACLK
SMCLK
TAxCLK
INCLK
IDEX
Divider
/1.../8
CCR4
CCR5
22 3 2
22
3
Timer_A Introduction
www.ti.com
Figure 17-1. Timer_A Block Diagram
464 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_A Operation
17.2 Timer_A Operation
The Timer_A module is configured with user software. The setup and operation of Timer_A are discussed
in the following sections.
17.2.1 16-Bit Timer Counter
The 16-bit timer/counter register, TAxR, increments or decrements (depending on mode of operation) with
each rising edge of the clock signal. TAxR can be read or written with software. Additionally, the timer can
generate an interrupt when it overflows.
TAR may be cleared by setting the TACLR bit. Setting TACLR also clears the clock divider counter logic
(the divider setting remains unchanged) and count direction for up/down mode.
NOTE: Modifying Timer_A registers
It is recommended to stop the timer before modifying its operation (with exception of the
interrupt enable, interrupt flag, and TACLR) to avoid errant operating conditions.
When the timer clock is asynchronous to the CPU clock, any read from TAxR should occur
while the timer is not operating or the results may be unpredictable. Alternatively, the timer
may be read multiple times while operating, and a majority vote taken in software to
determine the correct reading. Any write to TAxR takes effect immediately.
17.2.1.1 Clock Source Select and Divider
The timer clock can be sourced from ACLK, SMCLK, or externally via TAxCLK or INCLK. The clock
source is selected with the TASSEL bits. The selected clock source may be passed directly to the timer or
divided by 2, 4, or 8, using the ID bits. The selected clock source can be further divided by 2, 3, 4, 5, 6, 7,
or 8 using the TAIDEX bits. The timer clock divider logic is reset when TACLR is set.
NOTE: Timer_A dividers
After programming ID or TAIDEX bits, set the TACLR bit. This clears the contents of TAxR
and resets the clock divider logic to a defined state. The clock dividers are implemented as
down counters. Therefore, when the TACLR bit is cleared, the timer clock immediately
begins clocking at the first rising edge of the Timer_A clock source selected with the
TASSEL bits and continues clocking at the divider settings set by the ID and TAIDEX bits.
17.2.2 Starting the Timer
The timer may be started or restarted in the following ways:
• The timer counts when MC > { 0 } and the clock source is active.
• When the timer mode is either up or up/down, the timer may be stopped by writing 0 to TAxCCR0. The
timer may then be restarted by writing a nonzero value to TAxCCR0. In this scenario, the timer starts
incrementing in the up direction from zero.
465
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
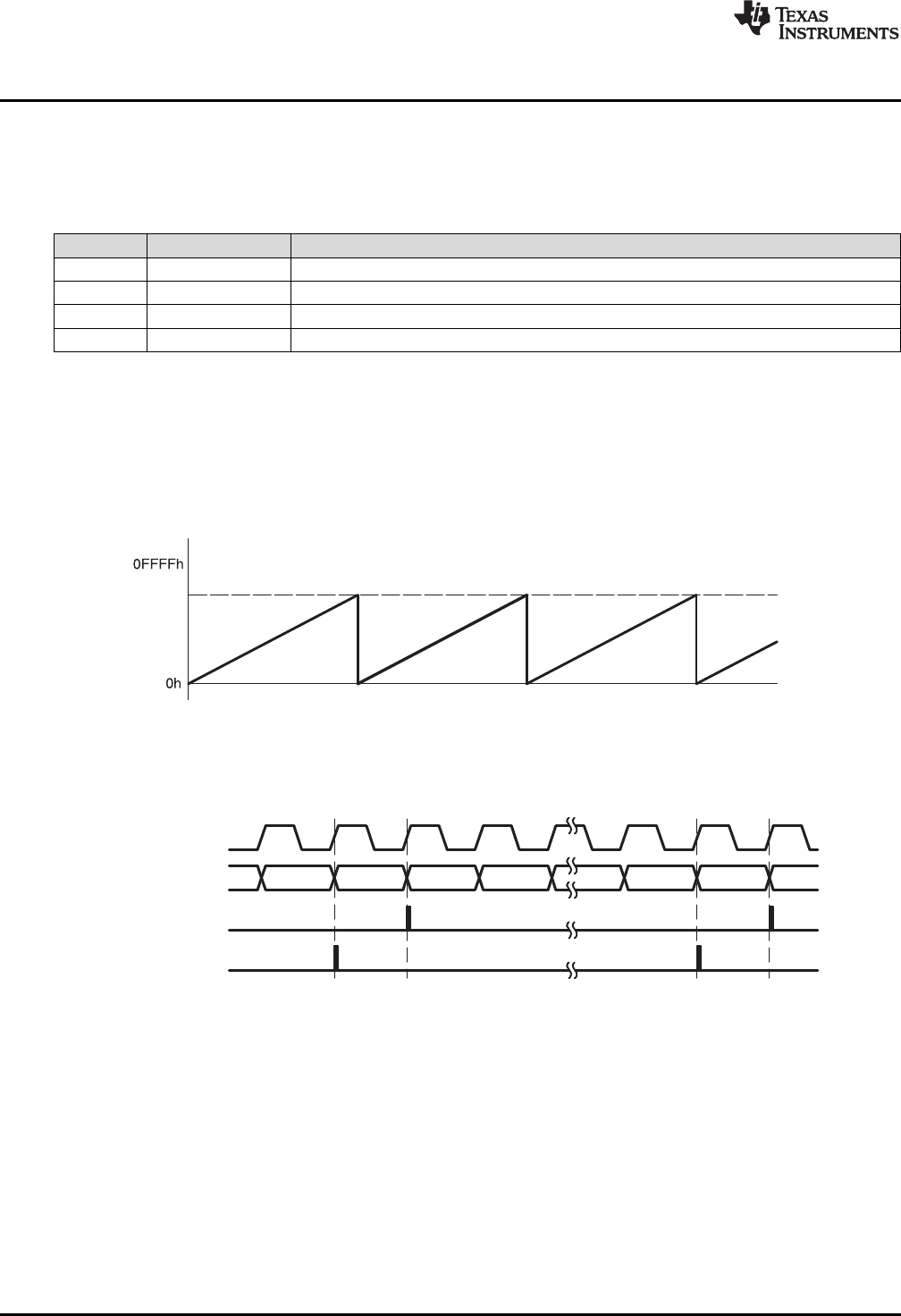
CCR0-1 CCR0 0h
TimerClock
Timer
Set TAxCTL TAIFG
Set TAxCCR0CCIFG
1h CCR0-1 CCR0 0h
TAxCCR0
Timer_A Operation
www.ti.com
17.2.3 Timer Mode Control
The timer has four modes of operation: stop, up, continuous, and up/down (see Table 17-1). The
operating mode is selected with the MC bits.
Table 17-1. Timer Modes
MC Mode Description
00 Stop The timer is halted.
01 Up The timer repeatedly counts from zero to the value of TAxCCR0
10 Continuous The timer repeatedly counts from zero to 0FFFFh.
11 Up/down The timer repeatedly counts from zero up to the value of TAxCCR0 and back down to zero.
17.2.3.1 Up Mode
The up mode is used if the timer period must be different from 0FFFFh counts. The timer repeatedly
counts up to the value of compare register TAxCCR0, which defines the period (see Figure 17-2). The
number of timer counts in the period is TAxCCR0 + 1. When the timer value equals TAxCCR0, the timer
restarts counting from zero. If up mode is selected when the timer value is greater than TAxCCR0, the
timer immediately restarts counting from zero.
Figure 17-2. Up Mode
The TAxCCR0 CCIFG interrupt flag is set when the timer counts to the TAxCCR0 value. The TAIFG
interrupt flag is set when the timer counts from TAxCCR0 to zero. Figure 17-3 shows the flag set cycle.
Figure 17-3. Up Mode Flag Setting
17.2.3.1.1 Changing Period Register TAxCCR0
When changing TAxCCR0 while the timer is running, if the new period is greater than or equal to the old
period or greater than the current count value, the timer counts up to the new period. If the new period is
less than the current count value, the timer rolls to zero. However, one additional count may occur before
the counter rolls to zero.
466 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
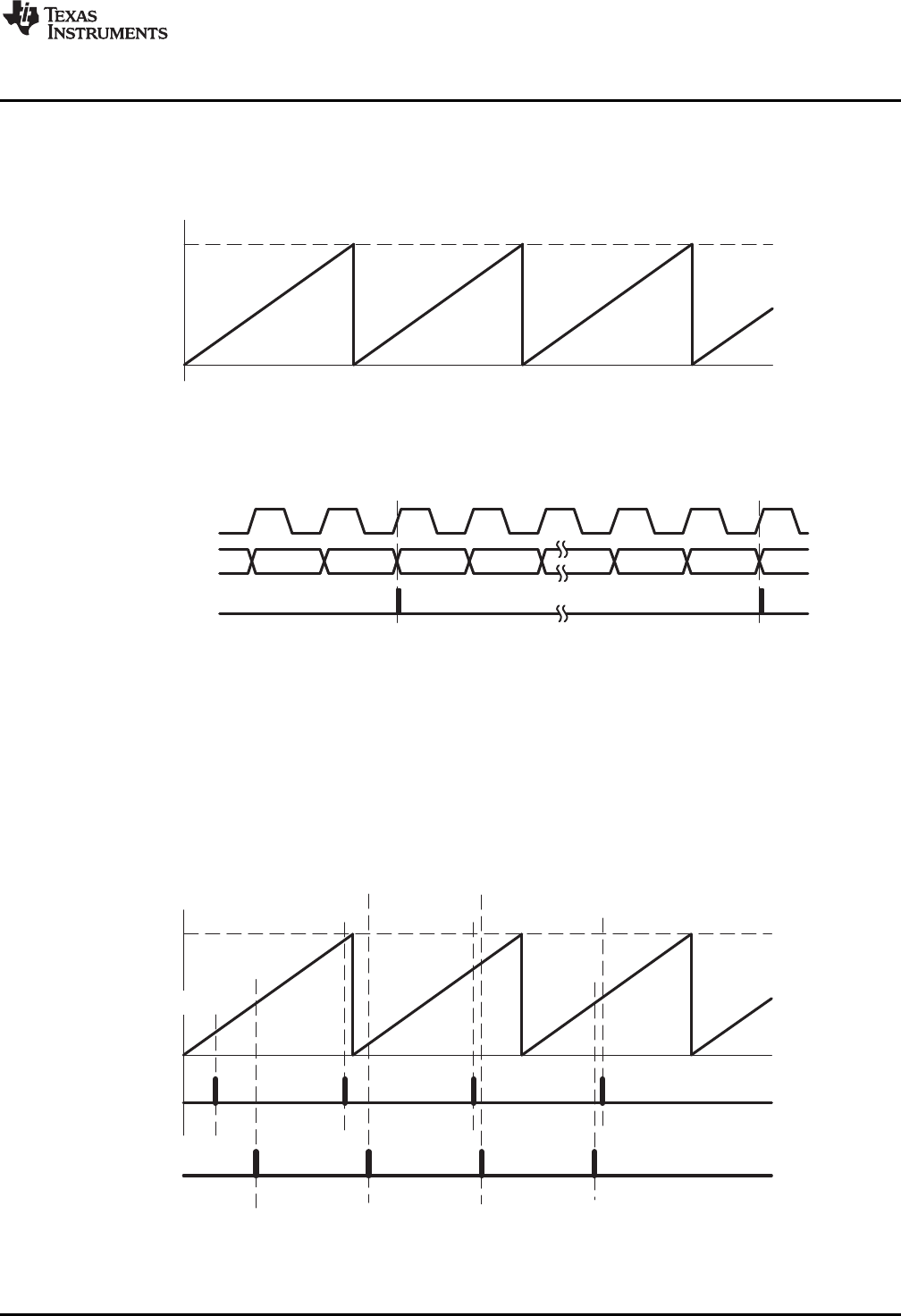
0FFFFh
TAxCCR0a
TAxCCR0b TAxCCR0c TAxCCR0d
t1
t0t0
TAxCCR1a
TAxCCR1b TAxCCR1c
TAxCCR1d
t1t1
t0
FFFEh FFFFh 0h
TimerClock
Timer
Set TAxCTL TAIFG
1h FFFEh FFFFh 0h
0h
0FFFFh
www.ti.com
Timer_A Operation
17.2.3.2 Continuous Mode
In the continuous mode, the timer repeatedly counts up to 0FFFFh and restarts from zero as shown in
Figure 17-4. The capture/compare register TAxCCR0 works the same way as the other capture/compare
registers.
Figure 17-4. Continuous Mode
The TAIFG interrupt flag is set when the timer counts from 0FFFFh to zero. Figure 17-5 shows the flag set
cycle.
Figure 17-5. Continuous Mode Flag Setting
17.2.3.3 Use of Continuous Mode
The continuous mode can be used to generate independent time intervals and output frequencies. Each
time an interval is completed, an interrupt is generated. The next time interval is added to the TAxCCRn
register in the interrupt service routine. Figure 17-6 shows two separate time intervals, t0and t1, being
added to the capture/compare registers. In this usage, the time interval is controlled by hardware, not
software, without impact from interrupt latency. Up to n (where n = 0 to 6), independent time intervals or
output frequencies can be generated using capture/compare registers.
Figure 17-6. Continuous Mode Time Intervals
467
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
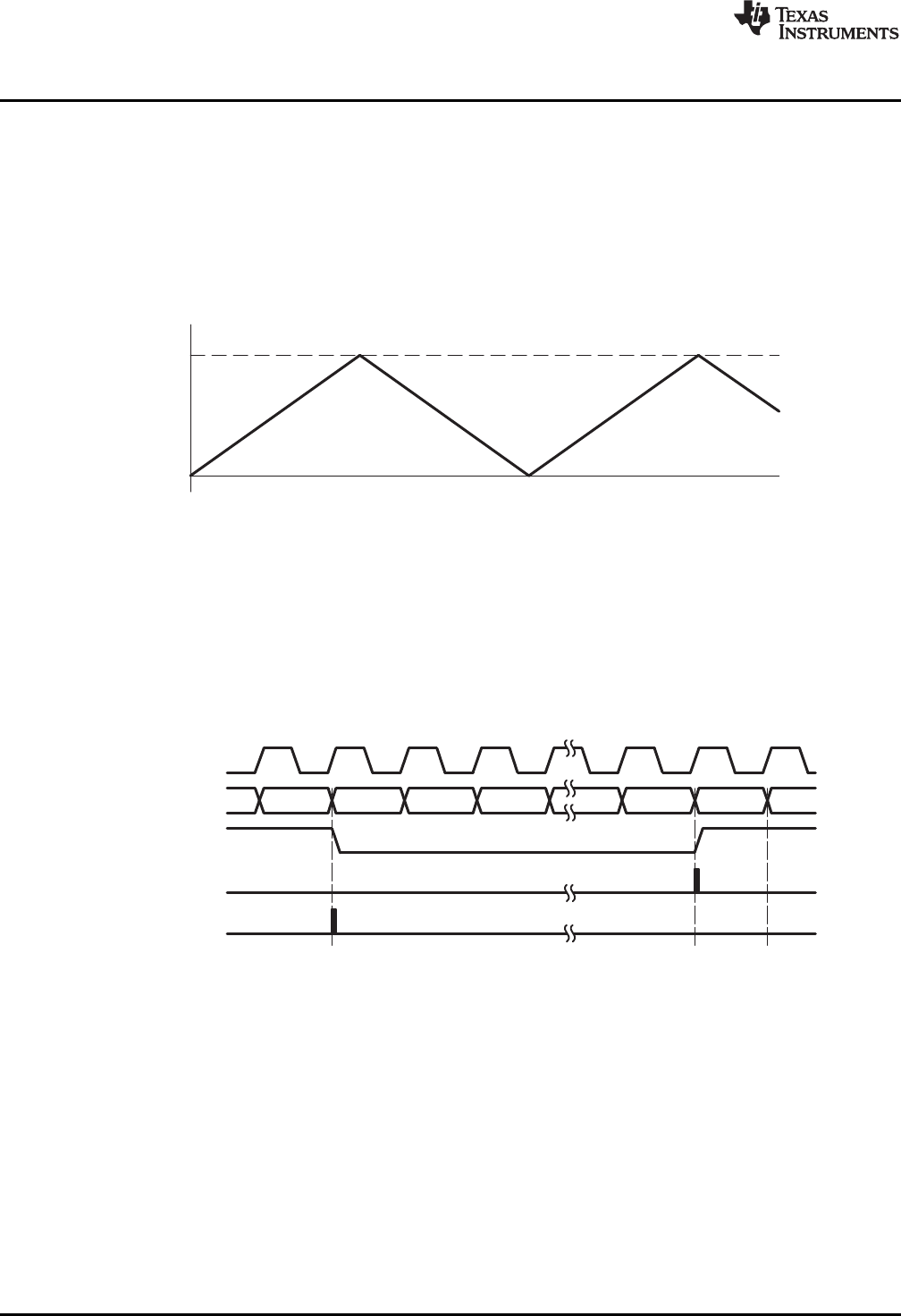
CCR0-1 CCR0 CCR0-1
TimerClock
Timer
Set TAxCTL TAIFG
Set TAxCCR0CCIFG
CCR0-2 1h 0h
Up/Down
0h
TAxCCR0
0FFFFh
Timer_A Operation
www.ti.com
Time intervals can be produced with other modes as well, where TAxCCR0 is used as the period register.
Their handling is more complex since the sum of the old TAxCCRn data and the new period can be higher
than the TAxCCR0 value. When the previous TAxCCRn value plus txis greater than the TAxCCR0 data,
the TAxCCR0 value must be subtracted to obtain the correct time interval.
17.2.3.4 Up/Down Mode
The up/down mode is used if the timer period must be different from 0FFFFh counts, and if symmetrical
pulse generation is needed. The timer repeatedly counts up to the value of compare register TAxCCR0
and back down to zero (see Figure 17-7). The period is twice the value in TAxCCR0.
Figure 17-7. Up/Down Mode
The count direction is latched. This allows the timer to be stopped and then restarted in the same direction
it was counting before it was stopped. If this is not desired, the TACLR bit must be set to clear the
direction. Setting TACLR also clears the TAR value and the clock divider counter logic (the divider setting
remains unchanged).
In up/down mode, the TAxCCR0 CCIFG interrupt flag and the TAIFG interrupt flag are set only once
during a period, separated by one-half the timer period. The TAxCCR0 CCIFG interrupt flag is set when
the timer counts from TAxCCR0-1 to TAxCCR0, and TAIFG is set when the timer completes counting
down from 0001h to 0000h. Figure 17-8 shows the flag set cycle.
Figure 17-8. Up/Down Mode Flag Setting
17.2.3.4.1 Changing Period Register TAxCCR0
When changing TAxCCR0 while the timer is running and counting in the down direction, the timer
continues its descent until it reaches zero. The new period takes effect after the counter counts down to
zero.
When the timer is counting in the up direction, and the new period is greater than or equal to the old
period or greater than the current count value, the timer counts up to the new period before counting
down.
When the timer is counting in the up direction and the new period is less than the current count value, the
timer begins counting down. However, one additional count may occur before the counter begins counting
down.
468 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
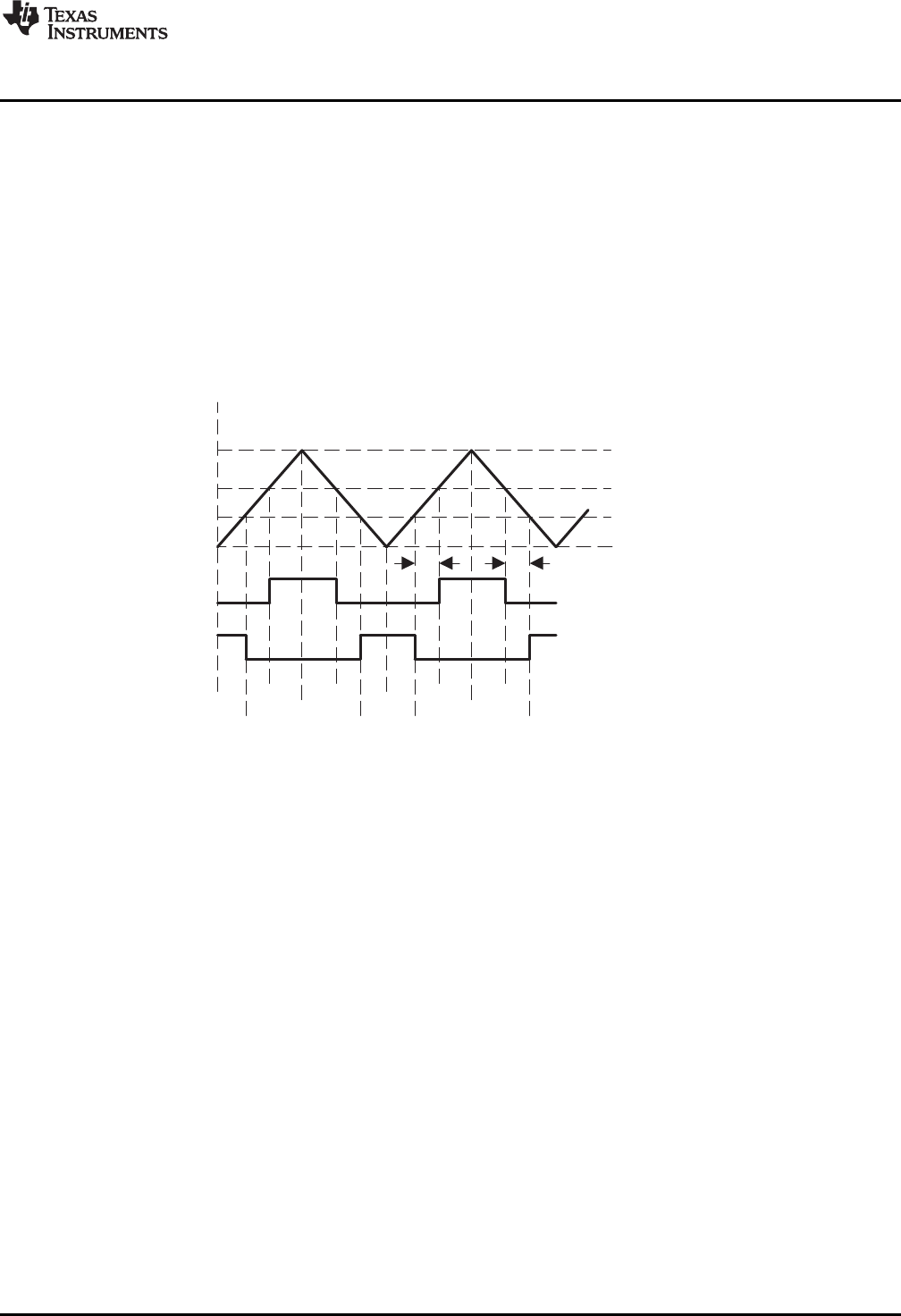
0h
0FFFFh
TAIFG
OutputMode2: Toggle/Reset
OutputMode6: Toggle/Set
TAxCCR0
TAxCCR1
EQU1 TAIFG InterruptEvents
EQU1
EQU0
EQU1 EQU1
EQU0
TAxCCR2
EQU2 EQU2
EQU2 EQU2
Dead Time
www.ti.com
Timer_A Operation
17.2.3.5 Use of Up/Down Mode
The up/down mode supports applications that require dead times between output signals (see section
Timer_A Output Unit). For example, to avoid overload conditions, two outputs driving an H-bridge must
never be in a high state simultaneously. In the example shown in Figure 17-9, the tdead is:
tdead = ttimer ×(TAxCCR1 –TAxCCR2)
Where:
tdead = Time during which both outputs need to be inactive
ttimer = Cycle time of the timer clock
TAxCCRn = Content of capture/compare register n
The TAxCCRn registers are not buffered. They update immediately when written to. Therefore, any
required dead time is not maintained automatically.
Figure 17-9. Output Unit in Up/Down Mode
17.2.4 Capture/Compare Blocks
Up to seven identical capture/compare blocks, TAxCCRn (where n = 0 to 7), are present in Timer_A. Any
of the blocks may be used to capture the timer data or to generate time intervals.
17.2.4.1 Capture Mode
The capture mode is selected when CAP = 1. Capture mode is used to record time events. It can be used
for speed computations or time measurements. The capture inputs CCIxA and CCIxB are connected to
external pins or internal signals and are selected with the CCIS bits. The CM bits select the capture edge
of the input signal as rising, falling, or both. A capture occurs on the selected edge of the input signal. If a
capture occurs:
• The timer value is copied into the TAxCCRn register.
• The interrupt flag CCIFG is set.
The input signal level can be read at any time via the CCI bit. Devices may have different signals
connected to CCIxA and CCIxB. See the device-specific data sheet for the connections of these signals.
The capture signal can be asynchronous to the timer clock and cause a race condition. Setting the SCS
bit synchronizes the capture with the next timer clock. Setting the SCS bit to synchronize the capture
signal with the timer clock is recommended (see Figure 17-10).
469
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
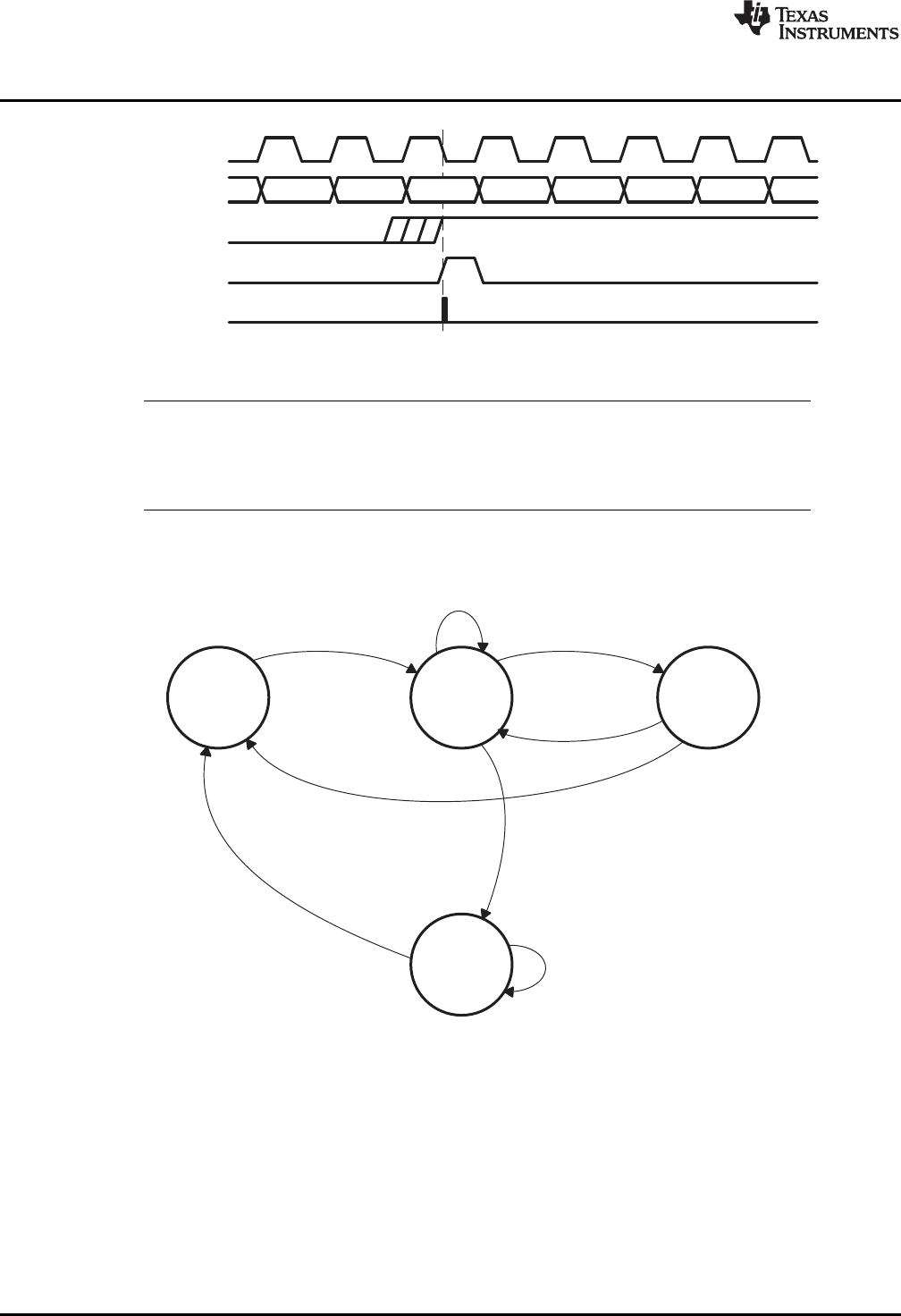
Second
Capture
COV=1
Taken
Capture
Taken
No
Capture
Taken
Read
Taken
Capture
ClearBitCOV
inRegister TAxCCTLn
Idle
Idle
Capture
CaptureReadandNoCapture
Capture
CaptureReadCapture
Set TAxCCRnCCIFG
Capture
CCI
Timer
TimerClock
n–2 n–1 nn+1 n+2 n+3 n+4
Timer_A Operation
www.ti.com
Figure 17-10. Capture Signal (SCS = 1)
NOTE: Changing Capture Inputs
Changing capture inputs while in capture mode may cause unintended capture events. To
avoid this scenario, capture inputs should only be changed when capture mode is disabled
(CM = {0} or CAP = 0).
Overflow logic is provided in each capture/compare register to indicate if a second capture was performed
before the value from the first capture was read. Bit COV is set when this occurs as shown in Figure 17-
11. COV must be reset with software.
Figure 17-11. Capture Cycle
470 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
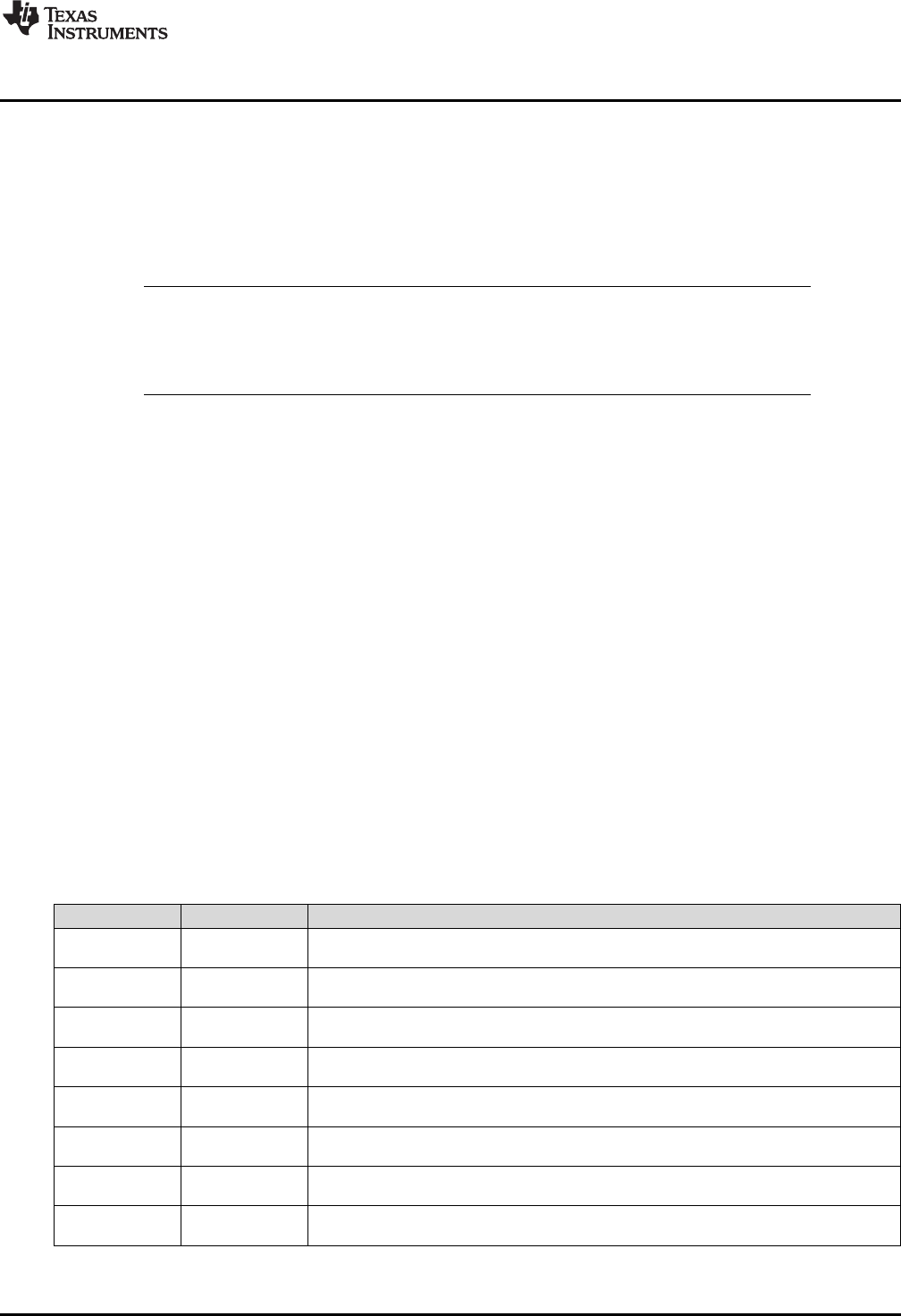
www.ti.com
Timer_A Operation
17.2.4.1.1 Capture Initiated by Software
Captures can be initiated by software. The CMx bits can be set for capture on both edges. Software then
sets CCIS1 = 1 and toggles bit CCIS0 to switch the capture signal between VCC and GND, initiating a
capture each time CCIS0 changes state:
MOV #CAP+SCS+CCIS1+CM_3,&TA0CCTL1 ; Setup TA0CCTL1, synch. capture mode
; Event trigger on both edges of capture input.
XOR #CCIS0,&TA0CCTL1 ; TA0CCR1 = TA0R
NOTE: Capture Initiated by Software
In general, changing capture inputs while in capture mode may cause unintended capture
events. For this scenario, switching the capture input between VCC and GND, disabling the
capture mode is not required.
17.2.4.2 Compare Mode
The compare mode is selected when CAP = 0. The compare mode is used to generate PWM output
signals or interrupts at specific time intervals. When TAxR counts to the value in a TAxCCRn, where n
represents the specific capture/compare register.
• Interrupt flag CCIFG is set.
• Internal signal EQUn = 1.
• EQUn affects the output according to the output mode.
• The input signal CCI is latched into SCCI.
17.2.5 Output Unit
Each capture/compare block contains an output unit. The output unit is used to generate output signals,
such as PWM signals. Each output unit has eight operating modes that generate signals based on the
EQU0 and EQUn signals.
17.2.5.1 Output Modes
The output modes are defined by the OUTMOD bits and are described in Table 17-2. The OUTn signal is
changed with the rising edge of the timer clock for all modes except mode 0. Output modes 2, 3, 6, and 7
are not useful for output unit 0 because EQUn = EQU0.
Table 17-2. Output Modes
OUTMODx Mode Description
The output signal OUTn is defined by the OUT bit. The OUTn signal updates immediately
000 Output when OUT is updated.
The output is set when the timer counts to the TAxCCRn value. It remains set until a reset
001 Set of the timer, or until another output mode is selected and affects the output.
The output is toggled when the timer counts to the TAxCCRn value. It is reset when the
010 Toggle/Reset timer counts to the TAxCCR0 value.
The output is set when the timer counts to the TAxCCRn value. It is reset when the timer
011 Set/Reset counts to the TAxCCR0 value.
The output is toggled when the timer counts to the TAxCCRn value. The output period is
100 Toggle double the timer period.
The output is reset when the timer counts to the TAxCCRn value. It remains reset until
101 Reset another output mode is selected and affects the output.
The output is toggled when the timer counts to the TAxCCRn value. It is set when the timer
110 Toggle/Set counts to the TAxCCR0 value.
The output is reset when the timer counts to the TAxCCRn value. It is set when the timer
111 Reset/Set counts to the TAxCCR0 value.
471
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
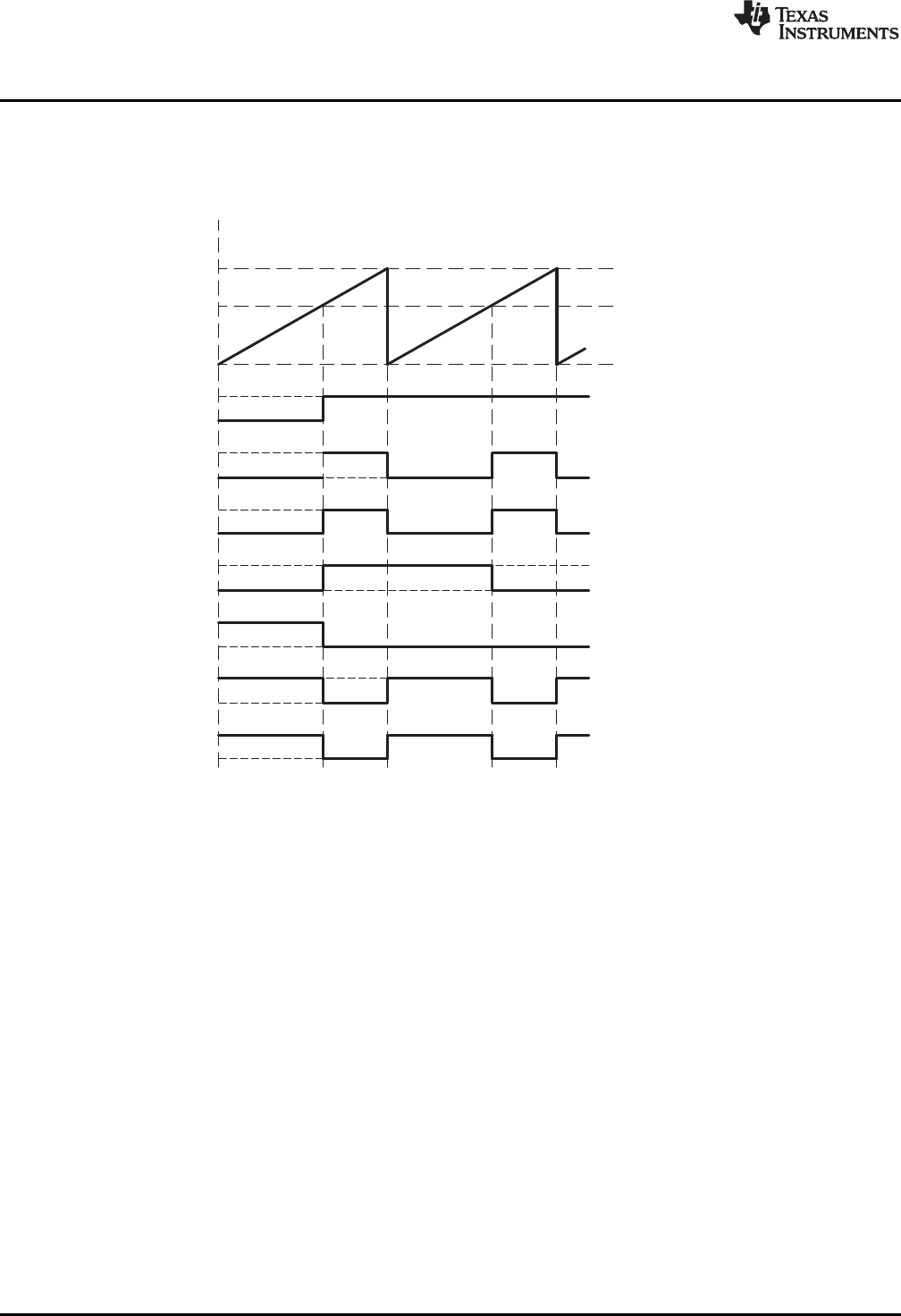
0h
0FFFFh
EQU0
TAIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: Toggle/Set
OutputMode7:Reset/Set
TAxCCR0
TAxCCR1
EQU1 EQU0
TAIFG
EQU1 EQU0
TAIFG InterruptEvents
Timer_A Operation
www.ti.com
17.2.5.1.1 Output Example—Timer in Up Mode
The OUTn signal is changed when the timer counts up to the TAxCCRn value and rolls from TAxCCR0 to
zero, depending on the output mode. An example is shown in Figure 17-12 using TAxCCR0 and
TAxCCR1.
Figure 17-12. Output Example – Timer in Up Mode
472 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
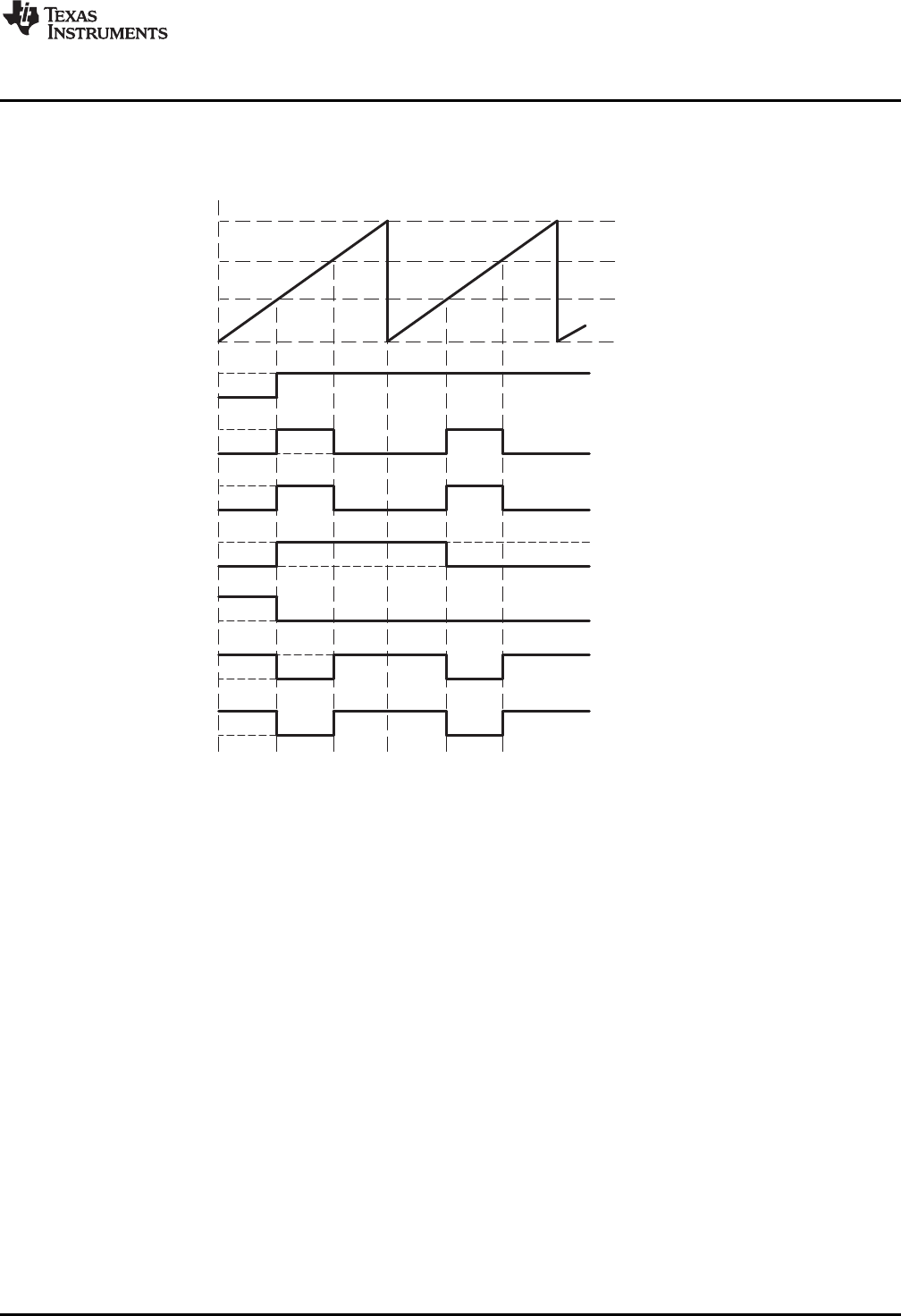
0h
0FFFFh
TAIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: oggle/SetT
OutputMode7:Reset/Set
TAxCCR0
TAxCCR1
EQU1 TAIFG EQU1 EQU0 InterruptEventsEQU0
www.ti.com
Timer_A Operation
17.2.5.1.2 Output Example – Timer in Continuous Mode
The OUTn signal is changed when the timer reaches the TAxCCRn and TAxCCR0 values, depending on
the output mode. An example is shown in Figure 17-13 using TAxCCR0 and TAxCCR1.
Figure 17-13. Output Example – Timer in Continuous Mode
473
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
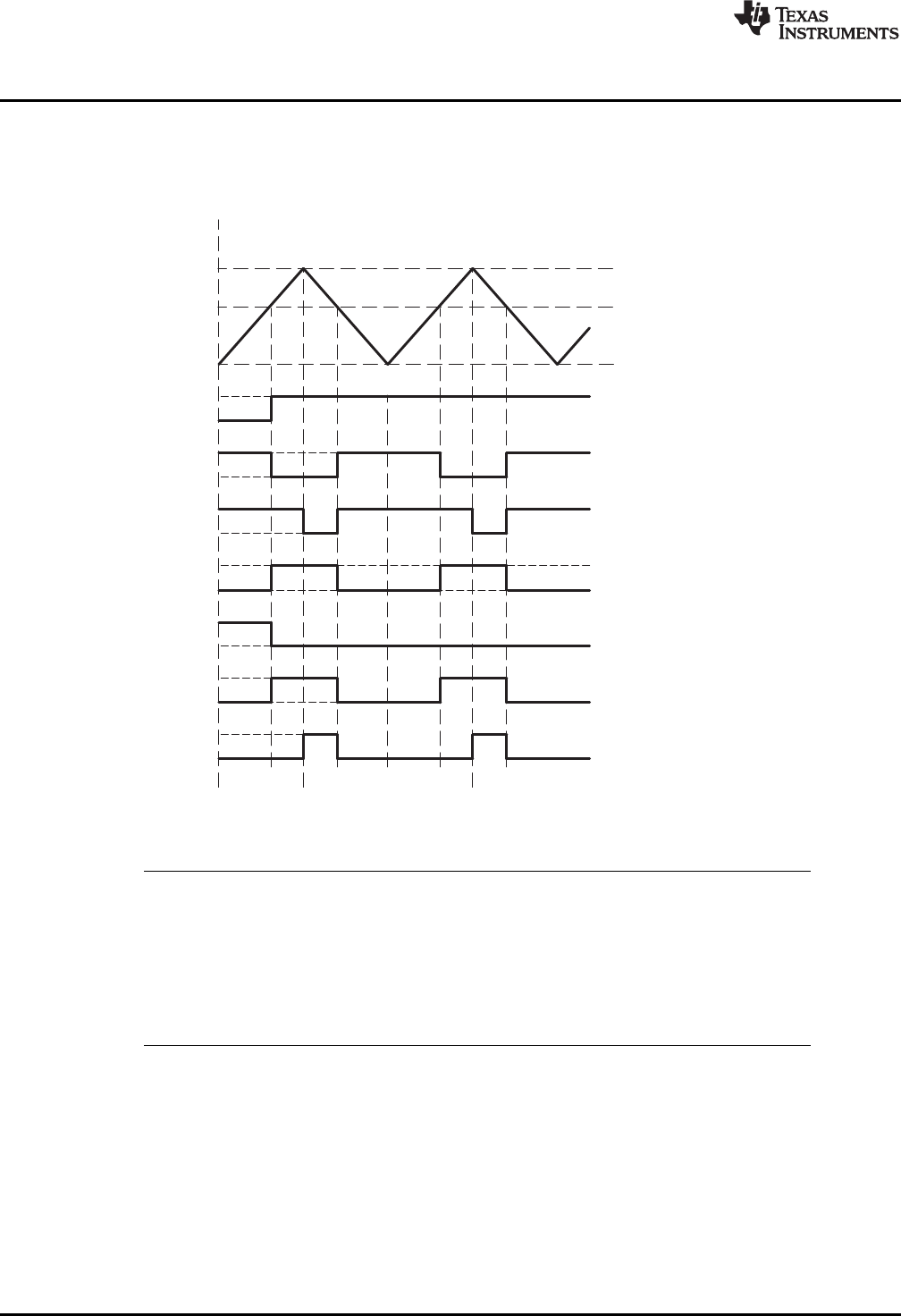
0h
0FFFFh
TAIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: Toggle/Set
OutputMode7:Reset/Set
TAxCCR0
TAxCCR2
EQU2
TAIFG InterruptEvents
EQU2
EQU0
EQU2 EQU2
EQU0
Timer_A Operation
www.ti.com
17.2.5.1.3 Output Example – Timer in Up/Down Mode
The OUTn signal changes when the timer equals TAxCCRn in either count direction and when the timer
equals TAxCCR0, depending on the output mode. An example is shown in Figure 17-14 using TAxCCR0
and TAxCCR2.
Figure 17-14. Output Example – Timer in Up/Down Mode
NOTE: Switching between output modes
When switching between output modes, one of the OUTMOD bits should remain set during
the transition, unless switching to mode 0. Otherwise, output glitching can occur, because a
NOR gate decodes output mode 0. A safe method for switching between output modes is to
use output mode 7 as a transition state:
BIS #OUTMOD_7,&TA0CCTL1 ; Set output mode=7
BIC #OUTMOD,&TA0CCTL1 ; Clear unwanted bits
474 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
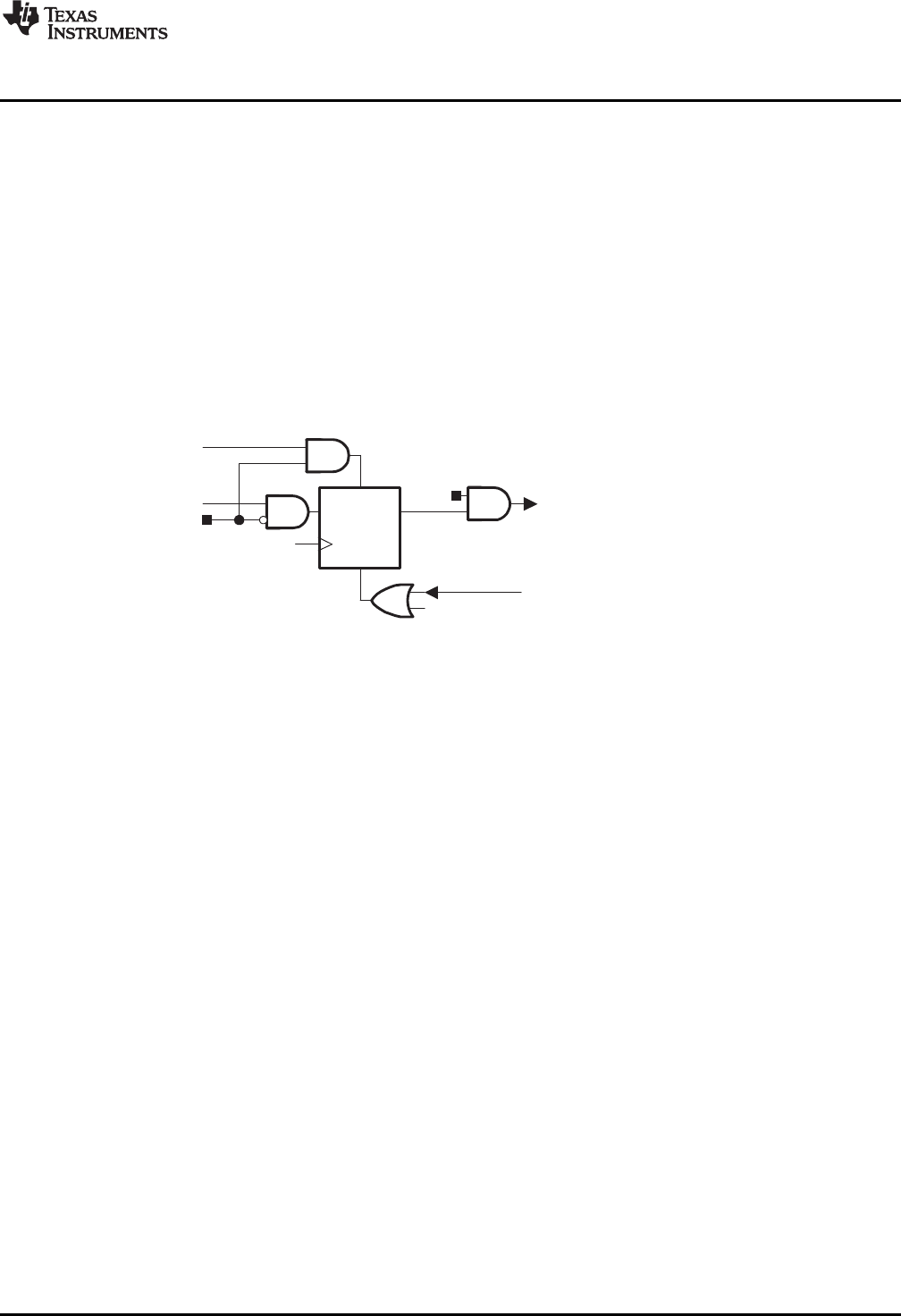
DSet QIRQ, Interrupt Service Requested
Reset
Timer Clock
POR
CAP
EQU0
Capture
IRACC, Interrupt Request Accepted
CCIE
www.ti.com
Timer_A Operation
17.2.6 Timer_A Interrupts
Two interrupt vectors are associated with the 16-bit Timer_A module:
•TAxCCR0 interrupt vector for TAxCCR0 CCIFG
•TAxIV interrupt vector for all other CCIFG flags and TAIFG
In capture mode, any CCIFG flag is set when a timer value is captured in the associated TAxCCRn
register. In compare mode, any CCIFG flag is set if TAxR counts to the associated TAxCCRn value.
Software may also set or clear any CCIFG flag. All CCIFG flags request an interrupt when their
corresponding CCIE bit and the GIE bit are set.
17.2.6.1 TAxCCR0 Interrupt
The TAxCCR0 CCIFG flag has the highest Timer_A interrupt priority and has a dedicated interrupt vector
as shown in Figure 17-15. The TAxCCR0 CCIFG flag is automatically reset when the TAxCCR0 interrupt
request is serviced.
Figure 17-15. Capture/Compare TAxCCR0 Interrupt Flag
17.2.6.2 TAxIV, Interrupt Vector Generator
The TAxCCRy CCIFG flags and TAIFG flags are prioritized and combined to source a single interrupt
vector. The interrupt vector register TAxIV is used to determine which flag requested an interrupt.
The highest-priority enabled interrupt generates a number in the TAxIV register (see register description).
This number can be evaluated or added to the program counter to automatically enter the appropriate
software routine. Disabled Timer_A interrupts do not affect the TAxIV value.
Any access, read or write, of the TAxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
For example, if the TAxCCR1 and TAxCCR2 CCIFG flags are set when the interrupt service routine
accesses the TAxIV register, TAxCCR1 CCIFG is reset automatically. After the RETI instruction of the
interrupt service routine is executed, the TAxCCR2 CCIFG flag generates another interrupt.
475
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Timer_A Operation
www.ti.com
17.2.6.2.1 TAxIV Software Example
The following software example shows the recommended use of TAxIV and the handling overhead. The
TAxIV value is added to the PC to automatically jump to the appropriate routine. The example assumes a
single instantiation of the largest timer configuration available.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself. The latencies are:
• Capture/compare block TA0CCR0: 11 cycles
• Capture/compare blocks TA0CCR1, TA0CCR2, TA0CCR3, TA0CCR4, TA0CCR5, TA0CCR6:
16 cycles
• Timer overflow TA0IFG: 14 cycles
; Interrupt handler for TA0CCR0 CCIFG. Cycles
CCIFG_0_HND
; ... ; Start of handler Interrupt latency 6
RETI 5
; Interrupt handler for TA0IFG, TA0CCR1 through TA0CCR6 CCIFG.
TA0_HND ... ; Interrupt latency 6
ADD &TA0IV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP CCIFG_1_HND ; Vector 2: TA0CCR1 2
JMP CCIFG_2_HND ; Vector 4: TA0CCR2 2
JMP CCIFG_3_HND ; Vector 6: TA0CCR3 2
JMP CCIFG_4_HND ; Vector 8: TA0CCR4 2
JMP CCIFG_5_HND ; Vector 10: TA0CCR5 2
JMP CCIFG_6_HND ; Vector 12: TA0CCR6 2
TA0IFG_HND ; Vector 14: TA0IFG Flag
... ; Task starts here
RETI 5
CCIFG_6_HND ; Vector 12: TA0CCR6
... ; Task starts here
RETI ; Back to main program 5
CCIFG_5_HND ; Vector 10: TA0CCR5
... ; Task starts here
RETI ; Back to main program 5
CCIFG_4_HND ; Vector 8: TA0CCR4
... ; Task starts here
RETI ; Back to main program 5
CCIFG_3_HND ; Vector 6: TA0CCR3
... ; Task starts here
RETI ; Back to main program 5
CCIFG_2_HND ; Vector 4: TA0CCR2
... ; Task starts here
RETI ; Back to main program 5
CCIFG_1_HND ; Vector 2: TA0CCR1
... ; Task starts here
RETI ; Back to main program 5
476 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Timer_A Registers
17.3 Timer_A Registers
Timer_A registers are listed in Table 17-3 for the largest configuration available. The base address can be
found in the device-specific data sheet.
Table 17-3. Timer_A Registers
Offset Acronym Register Name Type Access Reset Section
00h TAxCTL Timer_Ax Control Read/write Word 0000h Section 17.3.1
02h TAxCCTL0 Timer_Ax Capture/Compare Control 0 Read/write Word 0000h Section 17.3.3
04h TAxCCTL1 Timer_Ax Capture/Compare Control 1 Read/write Word 0000h Section 17.3.3
06h TAxCCTL2 Timer_Ax Capture/Compare Control 2 Read/write Word 0000h Section 17.3.3
08h TAxCCTL3 Timer_Ax Capture/Compare Control 3 Read/write Word 0000h Section 17.3.3
0Ah TAxCCTL4 Timer_Ax Capture/Compare Control 4 Read/write Word 0000h Section 17.3.3
0Ch TAxCCTL5 Timer_Ax Capture/Compare Control 5 Read/write Word 0000h Section 17.3.3
0Eh TAxCCTL6 Timer_Ax Capture/Compare Control 6 Read/write Word 0000h Section 17.3.3
10h TAxR Timer_Ax Counter Read/write Word 0000h Section 17.3.2
12h TAxCCR0 Timer_Ax Capture/Compare 0 Read/write Word 0000h Section 17.3.4
14h TAxCCR1 Timer_Ax Capture/Compare 1 Read/write Word 0000h Section 17.3.4
16h TAxCCR2 Timer_Ax Capture/Compare 2 Read/write Word 0000h Section 17.3.4
18h TAxCCR3 Timer_Ax Capture/Compare 3 Read/write Word 0000h Section 17.3.4
1Ah TAxCCR4 Timer_Ax Capture/Compare 4 Read/write Word 0000h Section 17.3.4
1Ch TAxCCR5 Timer_Ax Capture/Compare 5 Read/write Word 0000h Section 17.3.4
1Eh TAxCCR6 Timer_Ax Capture/Compare 6 Read/write Word 0000h Section 17.3.4
2Eh TAxIV Timer_Ax Interrupt Vector Read only Word 0000h Section 17.3.5
20h TAxEX0 Timer_Ax Expansion 0 Read/write Word 0000h Section 17.3.6
477
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
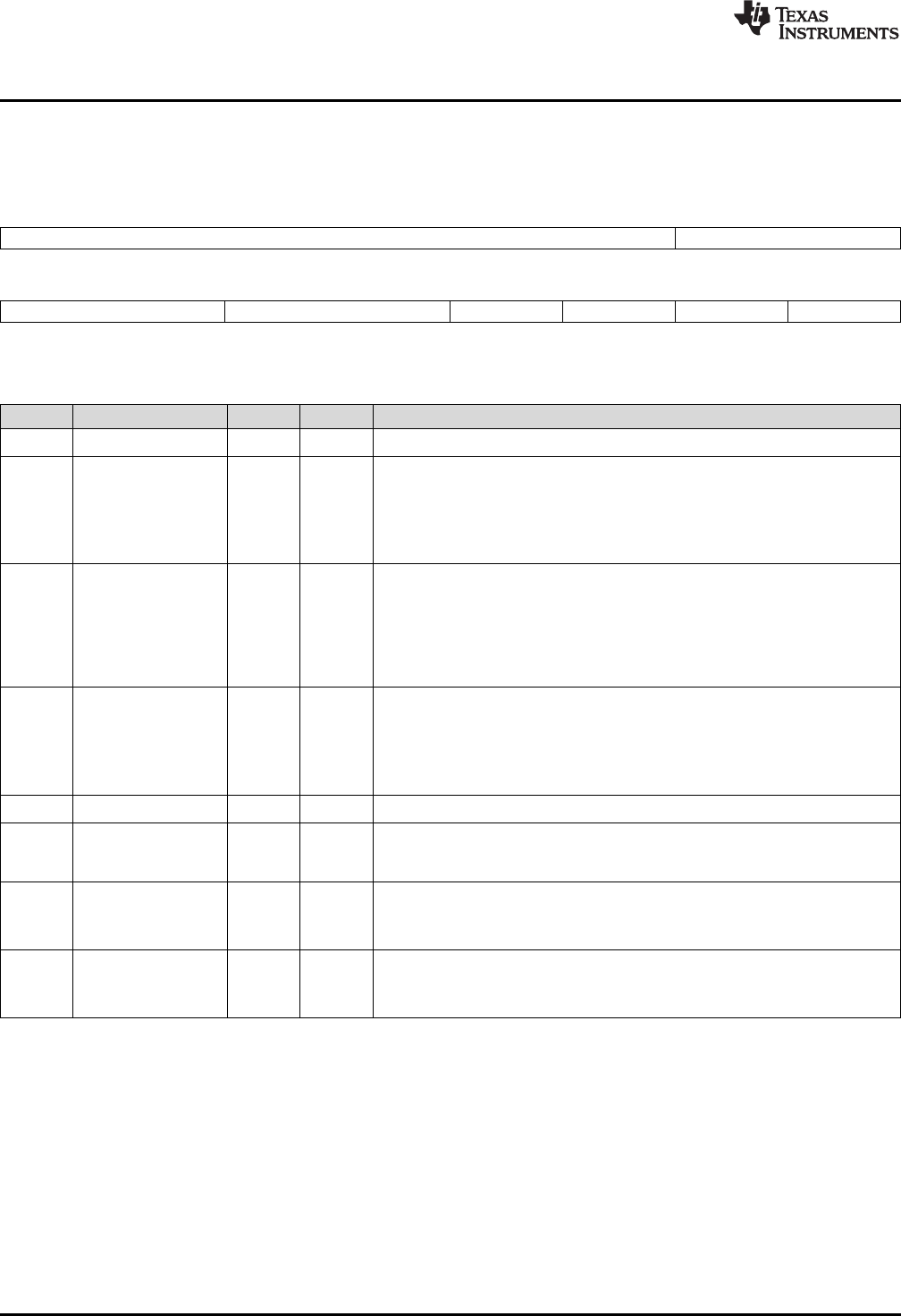
Timer_A Registers
www.ti.com
17.3.1 TAxCTL Register
Timer_Ax Control Register
Figure 17-16. TAxCTL Register
15 14 13 12 11 10 9 8
Reserved TASSEL
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ID MC Reserved TACLR TAIE TAIFG
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) w-(0) rw-(0) rw-(0)
Table 17-4. TAxCTL Register Description
Bit Field Type Reset Description
15-10 Reserved RW 0h Reserved
9-8 TASSEL RW 0h Timer_A clock source select
00b = TAxCLK
01b = ACLK
10b = SMCLK
11b = INCLK
7-6 ID RW 0h Input divider. These bits along with the TAIDEX bits select the divider for the
input clock.
00b = /1
01b = /2
10b = /4
11b = /8
5-4 MC RW 0h Mode control. Setting MCx = 00h when Timer_A is not in use conserves power.
00b = Stop mode: Timer is halted
01b = Up mode: Timer counts up to TAxCCR0
10b = Continuous mode: Timer counts up to 0FFFFh
11b = Up/down mode: Timer counts up to TAxCCR0 then down to 0000h
3 Reserved RW 0h Reserved
2 TACLR RW 0h Timer_A clear. Setting this bit clears TAR, the clock divider logic (the divider
setting remains unchanged), and the count direction. The TACLR bit is
automatically reset and is always read as zero.
1 TAIE RW 0h Timer_A interrupt enable. This bit enables the TAIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
0 TAIFG RW 0h Timer_A interrupt flag
0b = No interrupt pending
1b = Interrupt pending
478 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_A Registers
17.3.2 TAxR Register
Timer_Ax Counter Register
Figure 17-17. TAxR Register
15 14 13 12 11 10 9 8
TAxR
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TAxR
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 17-5. TAxR Register Description
Bit Field Type Reset Description
15-0 TAxR RW 0h Timer_A register. The TAxR register is the count of Timer_A.
479
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
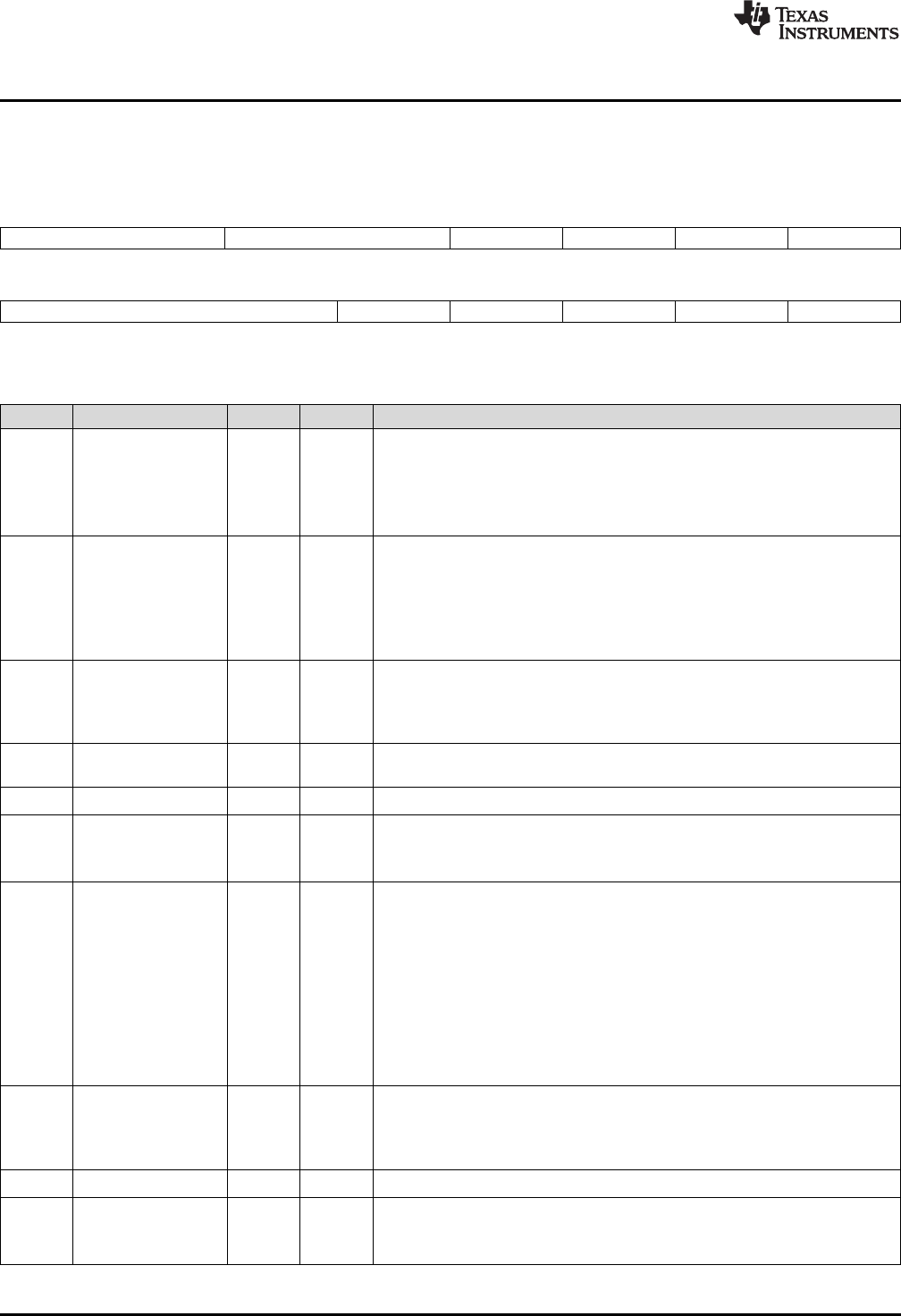
Timer_A Registers
www.ti.com
17.3.3 TAxCCTLn Register
Timer_Ax Capture/Compare Control n Register
Figure 17-18. TAxCCTLn Register
15 14 13 12 11 10 9 8
CM CCIS SCS SCCI Reserved CAP
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) r-(0) r-(0) rw-(0)
76543210
OUTMOD CCIE CCI OUT COV CCIFG
rw-(0) rw-(0) rw-(0) rw-(0) r rw-(0) rw-(0) rw-(0)
Table 17-6. TAxCCTLn Register Description
Bit Field Type Reset Description
15-14 CM RW 0h Capture mode
00b = No capture
01b = Capture on rising edge
10b = Capture on falling edge
11b = Capture on both rising and falling edges
13-12 CCIS RW 0h Capture/compare input select. These bits select the TAxCCR0 input signal. See
the device-specific data sheet for specific signal connections.
00b = CCIxA
01b = CCIxB
10b = GND
11b = VCC
11 SCS RW 0h Synchronize capture source. This bit is used to synchronize the capture input
signal with the timer clock.
0b = Asynchronous capture
1b = Synchronous capture
10 SCCI RW 0h Synchronized capture/compare input. The selected CCI input signal is latched
with the EQUx signal and can be read via this bit.
9 Reserved R 0h Reserved. Reads as 0.
8 CAP RW 0h Capture mode
0b = Compare mode
1b = Capture mode
7-5 OUTMOD RW 0h Output mode. Modes 2, 3, 6, and 7 are not useful for TAxCCR0 because EQUx
= EQU0.
000b = OUT bit value
001b = Set
010b = Toggle/reset
011b = Set/reset
100b = Toggle
101b = Reset
110b = Toggle/set
111b = Reset/set
4 CCIE RW 0h Capture/compare interrupt enable. This bit enables the interrupt request of the
corresponding CCIFG flag.
0b = Interrupt disabled
1b = Interrupt enabled
3 CCI R 0h Capture/compare input. The selected input signal can be read by this bit.
2 OUT RW 0h Output. For output mode 0, this bit directly controls the state of the output.
0b = Output low
1b = Output high
480 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_A Registers
Table 17-6. TAxCCTLn Register Description (continued)
Bit Field Type Reset Description
1 COV RW 0h Capture overflow. This bit indicates a capture overflow occurred. COV must be
reset with software.
0b = No capture overflow occurred
1b = Capture overflow occurred
0 CCIFG RW 0h Capture/compare interrupt flag
0b = No interrupt pending
1b = Interrupt pending
481
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_A Registers
www.ti.com
17.3.4 TAxCCRn Register
Timer_A Capture/Compare n Register
Figure 17-19. TAxCCRn Register
15 14 13 12 11 10 9 8
TAxCCRn
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TAxCCRn
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 17-7. TAxCCRn Register Description
Bit Field Type Reset Description
15-0 TAxCCR0 RW 0h Compare mode: TAxCCRn holds the data for the comparison to the timer value
in the Timer_A Register, TAR.
Capture mode: The Timer_A Register, TAR, is copied into the TAxCCRn register
when a capture is performed.
17.3.5 TAxIV Register
Timer_Ax Interrupt Vector Register
Figure 17-20. TAxIV Register
15 14 13 12 11 10 9 8
TAIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
TAIV
r0 r0 r0 r0 r-(0) r-(0) r-(0) r0
Table 17-8. TAxIV Register Description
Bit Field Type Reset Description
15-0 TAIV R 0h Timer_A interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Capture/compare 1; Interrupt Flag: TAxCCR1 CCIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Capture/compare 2; Interrupt Flag: TAxCCR2 CCIFG
06h = Interrupt Source: Capture/compare 3; Interrupt Flag: TAxCCR3 CCIFG
08h = Interrupt Source: Capture/compare 4; Interrupt Flag: TAxCCR4 CCIFG
0Ah = Interrupt Source: Capture/compare 5; Interrupt Flag: TAxCCR5 CCIFG
0Ch = Interrupt Source: Capture/compare 6; Interrupt Flag: TAxCCR6 CCIFG
0Eh = Interrupt Source: Timer overflow; Interrupt Flag: TAxCTL TAIFG; Interrupt
Priority: Lowest
482 Timer_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_A Registers
17.3.6 TAxEX0 Register
Timer_Ax Expansion 0 Register
Figure 17-21. TAxEX0 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved TAIDEX(1)
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
(1) After programming TAIDEX bits and configuration of the timer, set TACLR bit to ensure proper reset of the timer divider logic.
Table 17-9. TAxEX0 Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved. Reads as 0.
2-0 TAIDEX RW 0h Input divider expansion. These bits along with the ID bits select the divider for
the input clock.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
483
SLAU208O–June 2008–Revised May 2015 Timer_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Chapter 18
SLAU208O–June 2008–Revised May 2015
Timer_B
Timer_B is a 16-bit timer/counter with multiple capture/compare registers. There can be multiple Timer_B
modules on a given device (see the device-specific data sheet). This chapter describes the operaand use
of the Timer_B module.
Topic ........................................................................................................................... Page
18.1 Timer_B Introduction ........................................................................................ 485
18.2 Timer_B Operation............................................................................................ 487
18.3 Timer_B Registers ............................................................................................ 500
484 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Timer_B Introduction
18.1 Timer_B Introduction
Timer_B is a 16-bit timer/counter with up to seven capture/compare registers. Timer_B can support
multiple capture/compares, PWM outputs, and interval timing. Timer_B also has extensive interrupt
capabilities. Interrupts may be generated from the counter on overflow conditions and from each of the
capture/compare registers.
Timer_B features include:
• Asynchronous 16-bit timer/counter with four operating modes and four selectable lengths
• Selectable and configurable clock source
• Up to seven configurable capture/compare registers
• Configurable outputs with PWM capability
• Double-buffered compare latches with synchronized loading
• Interrupt vector register for fast decoding of all Timer_B interrupts
The block diagram of Timer_B is shown in Figure 18-1.
NOTE: Use of the word count
Count is used throughout this chapter. It means the counter must be in the process of
counting for the action to take place. If a particular value is directly written to the counter, an
associated action does not take place.
NOTE: Nomenclature
There may be multiple instantiations of Timer_B on a given device. The prefix TBx is used,
where x is a greater than equal to zero indicating the Timer_B instantiation. For devices with
one instantiation, x = 0. The suffix n, where n = 0 to 6, represents the specific
capture/compare registers associated with the Timer_B instantiation.
18.1.1 Similarities and Differences From Timer_A
Timer_B is identical to Timer_A with the following exceptions:
• The length of Timer_B is programmable to be 8, 10, 12, or 16 bits.
• Timer_B TBxCCRn registers are double-buffered and can be grouped.
• All Timer_B outputs can be put into a high-impedance state.
• The SCCI bit function is not implemented in Timer_B.
485
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

CCR6
Comparator 6
CCI
15 0
OUTMOD
Capture
Mode
CM
Sync
COVlogic
Output
Unit6 DSet Q
EQU0
OUT
OUT6 Signal
Reset
POR
EQU6
Count
Mode
16-bit Timer
TBxR
Set TBxCTL
TBIFG
15 0
MC
Clear
TBCLR
CCR0
EQU0
Timer Clock
Timer Clock
VCC
TBxR=0
UP/DOWN
EQU0
CLLD
CNTL
Load
CCR1
CCR2
CCR3
CCR4
CCR5
Timer Block
TBxCCR6
RC
10 12 168
TBCLGRP
CCR5
CCR4
CCR1
Group
Load Logic
Group
Load Logic
TBSSEL
00
01
10
11
GND
VCC
CCI6A
CCI6B
00
01
10
11
CCIS
00
01
10
11
00
01
10
11 CAP
1
0
SCS
1
0
Set TBxCCR6
CCIFG
Compare Latch TBxCL6
ACLK
SMCLK
TBxCLK
INCLK
Timer Clock
Divider
/1/2/4/8
ID IDEX
Divider
/1.../8
22 3
2
2
2
22
2
3
Timer_B Introduction
www.ti.com
Figure 18-1. Timer_B Block Diagram
486 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Operation
18.2 Timer_B Operation
The Timer_B module is configured with user software. The setup and operation of Timer_B is discussed in
the following sections.
18.2.1 16-Bit Timer Counter
The 16-bit timer/counter register, TBxR, increments or decrements (depending on mode of operation) with
each rising edge of the clock signal. TBxR can be read or written with software. Additionally, the timer can
generate an interrupt when it overflows.
TBxR may be cleared by setting the TBCLR bit. Setting TBCLR also clears the clock divider counter logic
(the divider setting remains unchanged) and count direction for up/down mode.
NOTE: Modifying Timer_B registers
It is recommended to stop the timer before modifying its operation (with exception of the
interrupt enable, interrupt flag, and TBCLR) to avoid errant operating conditions.
When the timer clock is asynchronous to the CPU clock, any read from TBxR should occur
while the timer is not operating or the results may be unpredictable. Alternatively, the timer
may be read multiple times while operating, and a majority vote taken in software to
determine the correct reading. Any write to TBxR takes effect immediately.
18.2.1.1 TBxR Length
Timer_B is configurable to operate as an 8-, 10-, 12-, or 16-bit timer with the CNTL bits. The maximum
count value, TBxR(max), for the selectable lengths is 0FFh, 03FFh, 0FFFh, and 0FFFFh, respectively. Data
written to the TBxR register in 8-, 10-, and 12-bit mode is right justified with leading zeros.
18.2.1.2 Clock Source Select and Divider
The timer clock can be sourced from ACLK, SMCLK, or externally via TBxCLK or INCLK. The clock
source is selected with the TBSSEL bits. The selected clock source may be passed directly to the timer or
divided by 2,4, or 8, using the ID bits. The selected clock source can be further divided by 2, 3, 4, 5, 6, 7,
or 8 using the TBIDEX bits. The timer clock divider logic is reset when TBCLR is set.
NOTE: Timer_B dividers
After programming ID or TBIDEX bits, set the TBCLR bit. This clears the contents of TBxR
and resets the clock divider logic to a defined state. The clock dividers are implemented as
down counters. Therefore, when the TBCLR bit is cleared, the timer clock immediately
begins clocking at the first rising edge of the Timer_B clock source selected with the
TBSSEL bits and continues clocking at the divider settings set by the ID and TBIDEX bits.
18.2.2 Starting the Timer
The timer may be started or restarted in the following ways:
• The timer counts when MC > { 0 } and the clock source is active.
• When the timer mode is either up or up/down, the timer may be stopped by loading 0 to TBxCL0. The
timer may then be restarted by loading a nonzero value to TBxCL0. In this scenario, the timer starts
incrementing in the up direction from zero.
487
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

TBCL0-1 TBCL0 0h
TimerClock
Timer
Set TBxCTL TBIFG
Set TBxCCR0CCIFG
1h TBCL0-1 TBCL0 0h
0h
TBxR(max)
TBxCL0
Timer_B Operation
www.ti.com
18.2.3 Timer Mode Control
The timer has four modes of operation: stop, up, continuous, and up/down (see Table 18-1). The
operating mode is selected with the MC bits.
Table 18-1. Timer Modes
MC Mode Description
00 Stop The timer is halted.
01 Up The timer repeatedly counts from zero to the value of compare register TBxCL0.
10 Continuous The timer repeatedly counts from zero to the value selected by the CNTL bits.
11 Up/down The timer repeatedly counts from zero up to the value of TBxCL0 and then back down to zero.
18.2.3.1 Up Mode
The up mode is used if the timer period must be different from TBxR(max) counts. The timer repeatedly
counts up to the value of compare latch TBxCL0, which defines the period (see Figure 18-2). The number
of timer counts in the period is TBxCL0 + 1. When the timer value equals TBxCL0, the timer restarts
counting from zero. If up mode is selected when the timer value is greater than TBxCL0, the timer
immediately restarts counting from zero.
Figure 18-2. Up Mode
The TBxCCR0 CCIFG interrupt flag is set when the timer counts to the TBxCL0 value. The TBIFG
interrupt flag is set when the timer counts from TBxCL0 to zero. Figure 18-3 shows the flag set cycle.
Figure 18-3. Up Mode Flag Setting
18.2.3.1.1 Changing Period Register TBxCL0
When changing TBxCL0 while the timer is running and when the TBxCL0 load mode is immediate, if the
new period is greater than or equal to the old period or greater than the current count value, the timer
counts up to the new period. If the new period is less than the current count value, the timer rolls to zero.
However, one additional count may occur before the counter rolls to zero.
488 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
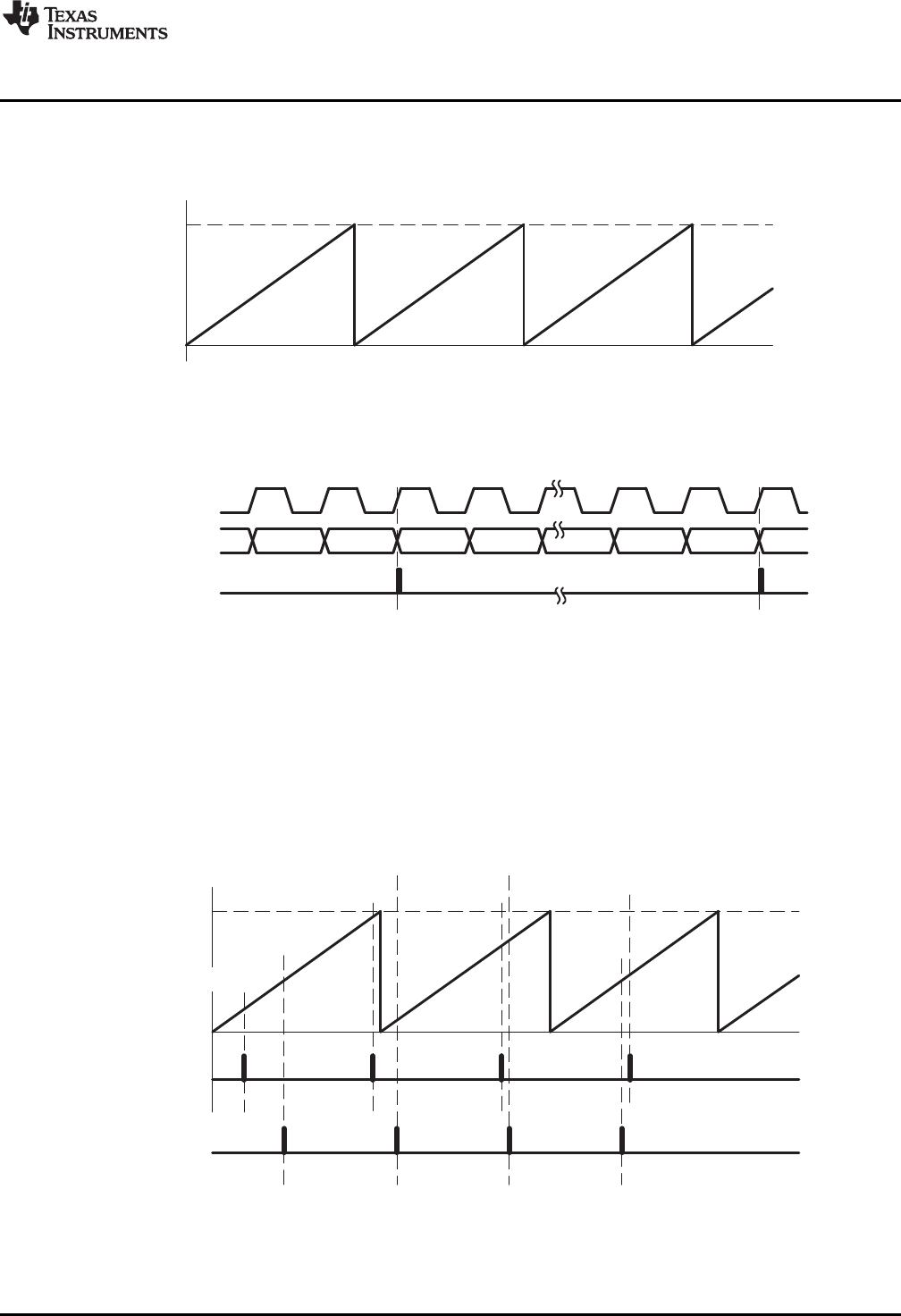
0h
EQU0Interrupt
TBxCL0a
TBxCL0b TBxCL0c TBxCL0d
t1
t0t0
TBxCL1a
TBxCL1b TBxCL1c
TBxCL1d
t1t1
t0
EQU1Interrupt
TBxR(max)
TBR – 1
(max) TBR(max) 0h
TimerClock
Timer
Set TBxCTL TBIFG
1h 0h
TBR – 1
(max) TBR(max)
0h
TBxR(max)
www.ti.com
Timer_B Operation
18.2.3.2 Continuous Mode
In continuous mode, the timer repeatedly counts up to TBxR(max) and restarts from zero (see Figure 18-4).
The compare latch TBxCL0 works the same way as the other capture/compare registers.
Figure 18-4. Continuous Mode
The TBIFG interrupt flag is set when the timer counts from TBxR(max) to zero. Figure 18-5 shows the flag
set cycle.
Figure 18-5. Continuous Mode Flag Setting
18.2.3.3 Use of Continuous Mode
The continuous mode can be used to generate independent time intervals and output frequencies. Each
time an interval is completed, an interrupt is generated. The next time interval is added to the TBxCLn
latch in the interrupt service routine. Figure 18-6 shows two separate time intervals, t0and t1, being added
to the capture/compare registers. The time interval is controlled by hardware, not software, without impact
from interrupt latency. Up to n (where n = 0 to 7), independent time intervals or output frequencies can be
generated using capture/compare registers.
Figure 18-6. Continuous Mode Time Intervals
489
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
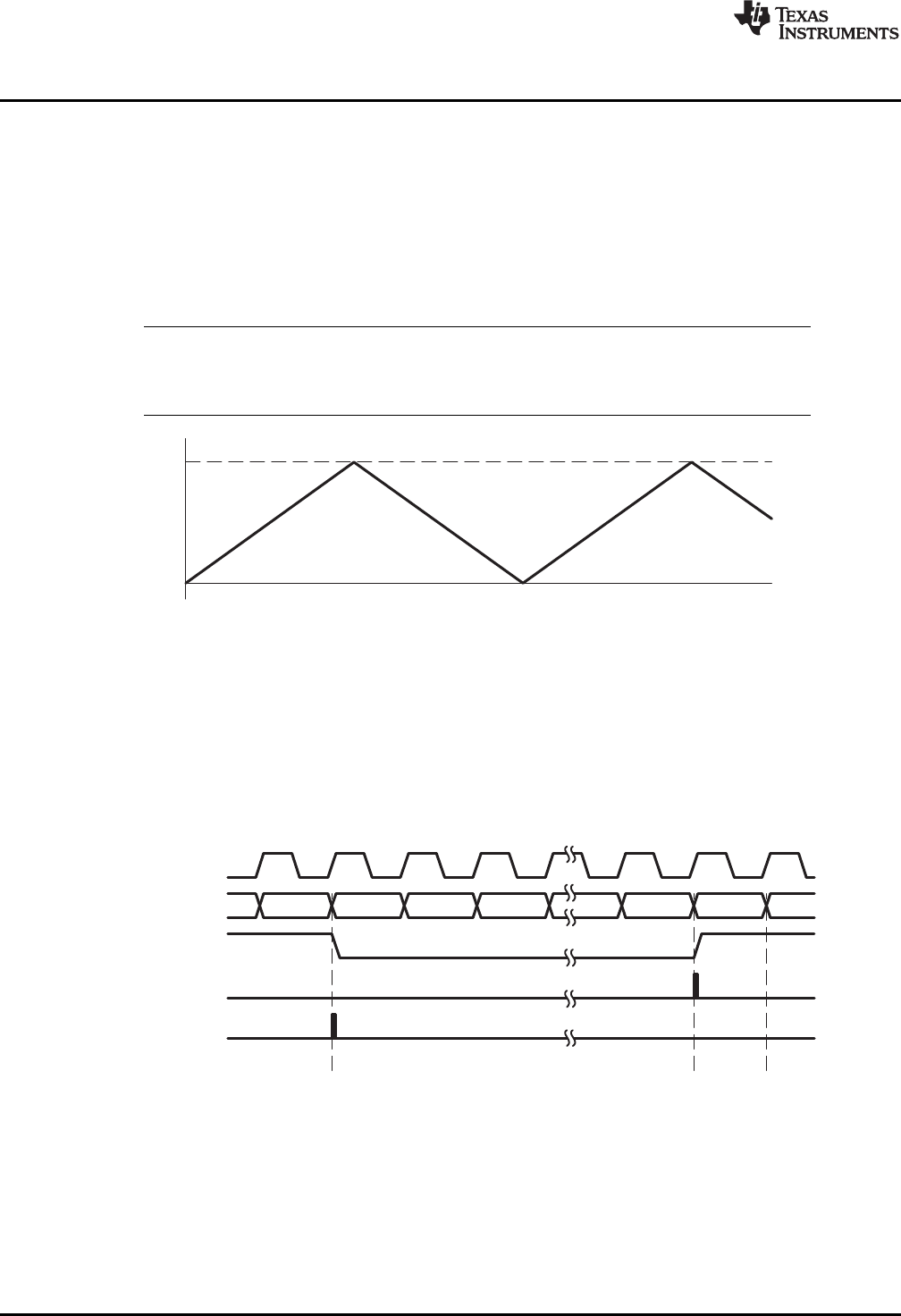
TBCL0-1 TBCL0 TBCL0-1
TimerClock
Timer
Set TBxCTL TBIFG
Set TBxCCR0CCIFG
TBCL0-2 1h 0h 1h
Up/Down
0h
TBxCL0
Timer_B Operation
www.ti.com
Time intervals can be produced with other modes as well, where TBxCL0 is used as the period register.
Their handling is more complex, because the sum of the old TBxCLn data and the new period can be
higher than the TBxCL0 value. When the sum of the previous TBxCLn value plus txis greater than the
TBxCL0 data, the old TBxCL0 value must be subtracted to obtain the correct time interval.
18.2.3.4 Up/Down Mode
The up/down mode is used if the timer period must be different from TBxR(max) counts and if symmetrical
pulse generation is needed. The timer repeatedly counts up to the value of compare latch TBxCL0, and
back down to zero (see Figure 18-7). The period is twice the value in TBxCL0.
NOTE: TBxCL0 > TBxR(max)
If TBxCL0 > TBxR(max), the counter operates as if it were configured for continuous mode. It
does not count down from TBxR(max) to zero.
Figure 18-7. Up/Down Mode
The count direction is latched. This allows the timer to be stopped and then restarted in the same direction
it was counting before it was stopped. If this is not desired, the TBCLR bit must be used to clear the
direction. Setting TBCLR also clears the TBxR value and the clock divider counter logic (the divider setting
remains unchanged).
In up/down mode, the TBxCCR0 CCIFG interrupt flag and the TBIFG interrupt flag are set only once
during the period, separated by one-half the timer period. The TBxCCR0 CCIFG interrupt flag is set when
the timer counts from TBxCL0-1 to TBxCL0, and TBIFG is set when the timer completes counting down
from 0001h to 0000h. Figure 18-8 shows the flag set cycle.
Figure 18-8. Up/Down Mode Flag Setting
18.2.3.4.1 Changing the Value of Period Register TBxCL0
When changing TBxCL0 while the timer is running and counting in the down direction, and when the
TBxCL0 load mode is immediate, the timer continues its descent until it reaches zero. The new period
takes effect after the counter counts down to zero.
490 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
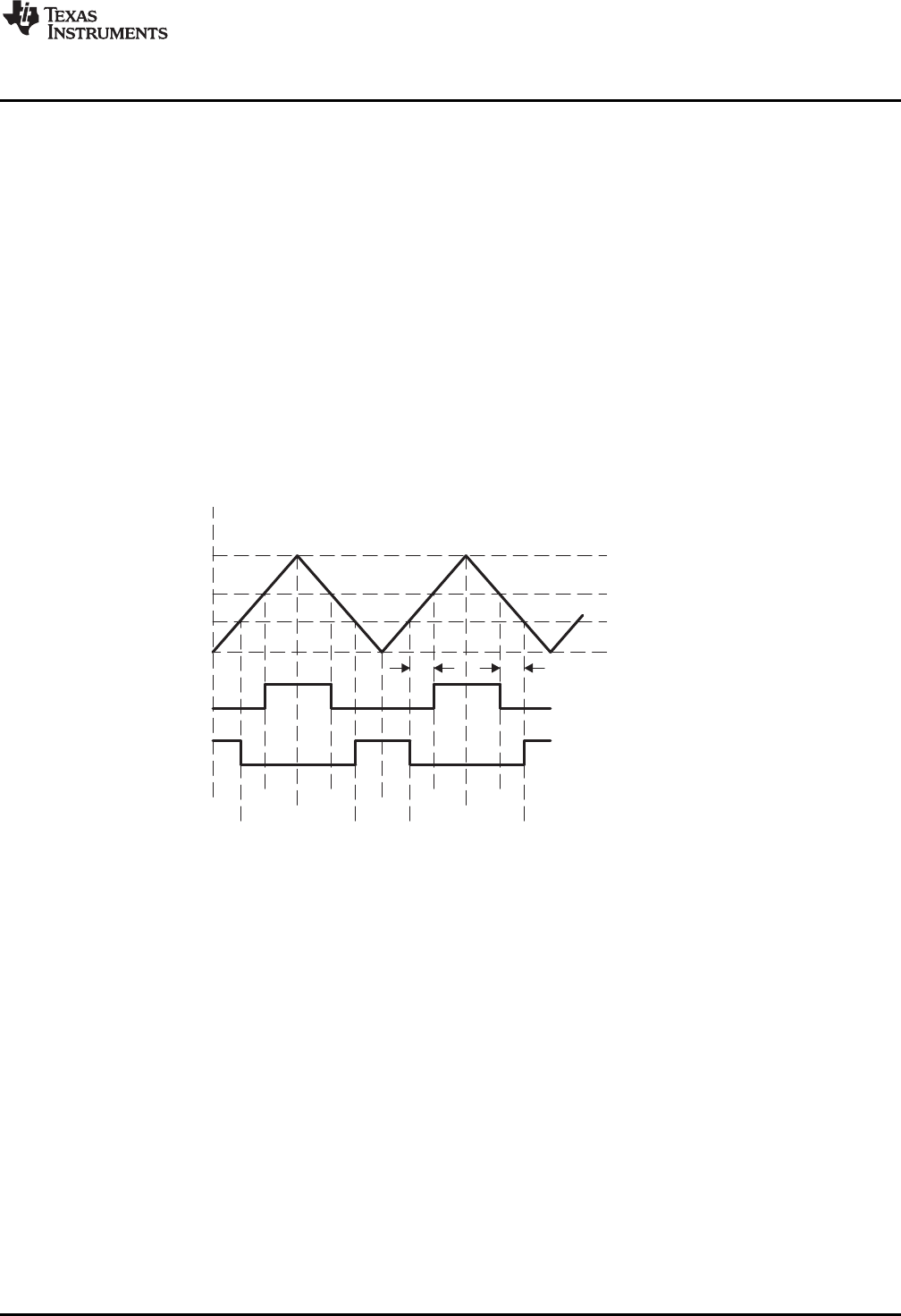
TBIFG
0h
TBR(max)
OutputMode2: Toggle/Reset
OutputMode6: Toggle/Set
TBxCL0
TBxCL1
EQU1 TBIFG InterruptEvents
EQU1
EQU0
EQU1 EQU1
EQU0
TBxCL3
EQU3 EQU3
EQU3 EQU3
Dead Time
www.ti.com
Timer_B Operation
If the timer is counting in the up direction when the new period is latched into TBxCL0, and the new period
is greater than or equal to the old period or greater than the current count value, the timer counts up to the
new period before counting down. When the timer is counting in the up direction, and the new period is
less than the current count value when TBxCL0 is loaded, the timer begins counting down. However, one
additional count may occur before the counter begins counting down.
18.2.3.5 Use of Up/Down Mode
The up/down mode supports applications that require dead times between output signals (see
Section 18.2.5). For example, to avoid overload conditions, two outputs driving an H-bridge must never be
in a high state simultaneously. In the example shown in Figure 18-9, the tdead is:
tdead = ttimer × (TBxCL1 – TBxCL3)
Where:
tdead = Time during which both outputs need to be inactive
ttimer = Cycle time of the timer clock
TBxCLn = Content of compare latch n
The ability to simultaneously load grouped compare latches ensures the dead times.
Figure 18-9. Output Unit in Up/Down Mode
18.2.4 Capture/Compare Blocks
Up to seven identical capture/compare blocks, TBxCCRn (where n = 0 to 6), are present in Timer_B. Any
of the blocks may be used to capture the timer data or to generate time intervals.
18.2.4.1 Capture Mode
The capture mode is selected when CAP = 1. Capture mode is used to record time events. It can be used
for speed computations or time measurements. The capture inputs CCIxA and CCIxB are connected to
external pins or internal signals and are selected with the CCIS bits. The CM bits select the capture edge
of the input signal as rising, falling, or both. A capture occurs on the selected edge of the input signal. If a
capture is performed:
• The timer value is copied into the TBxCCRn register.
• The interrupt flag CCIFG is set.
The input signal level can be read at any time via the CCI bit. Devices may have different signals
connected to CCIxA and CCIxB. See the device-specific data sheet for the connections of these signals.
491
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
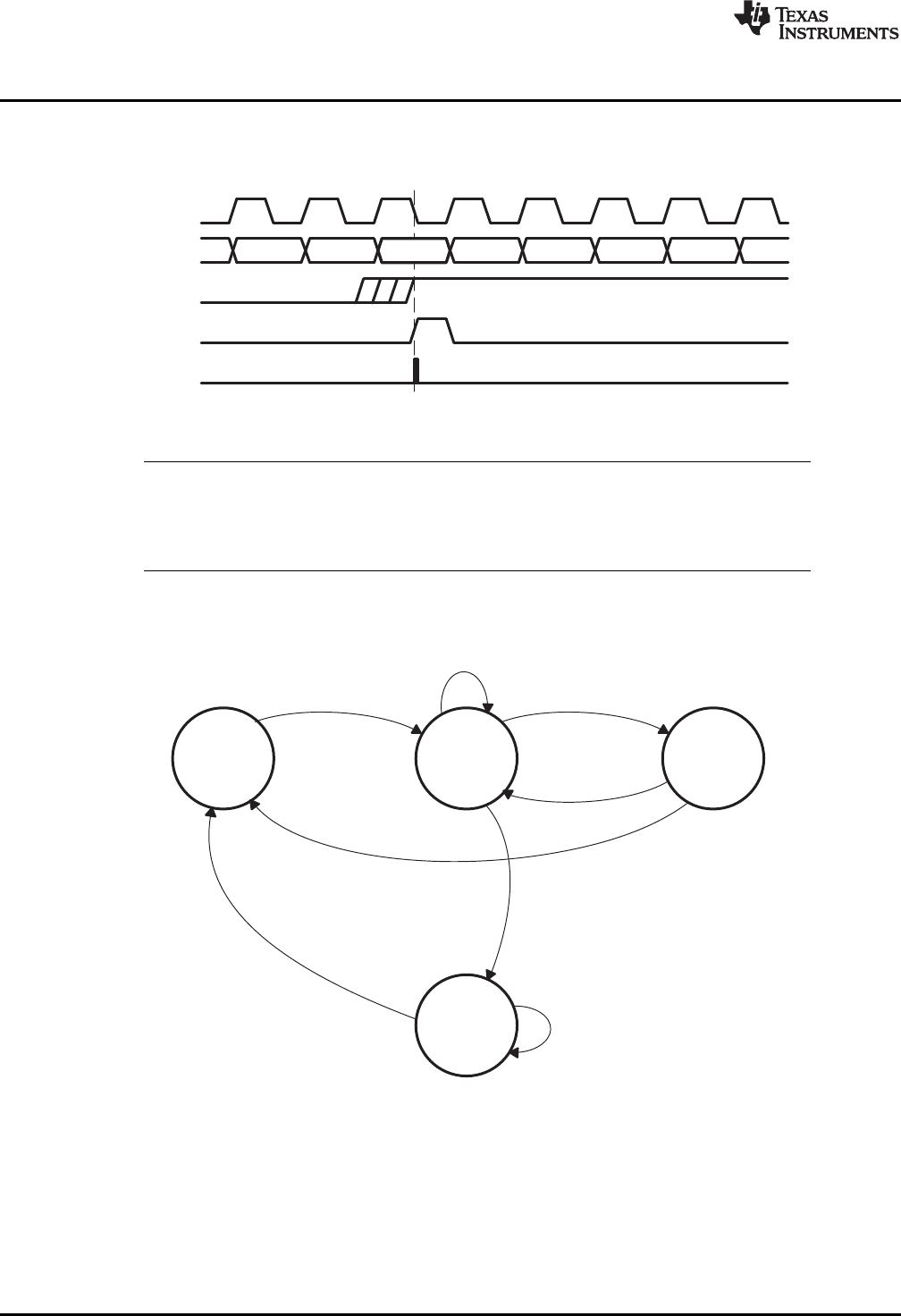
Second
Capture
Taken
COV=1
Capture
akenT
No
T
Capture
aken
Read
Taken
Capture
ClearBitCOV
inRegister TBxCCTLn
Idle
Idle
Capture
CaptureReadandNoCapture
Capture
CaptureReadCapture
n–2 n 1–
TimerClock
Timer n+1 n+3 n+4
CCI
Capture
n+2
n
Timer_B Operation
www.ti.com
The capture signal can be asynchronous to the timer clock and cause a race condition. Setting the SCS
bit synchronizes the capture with the next timer clock. Setting the SCS bit to synchronize the capture
signal with the timer clock is recommended (see Figure 18-10).
Figure 18-10. Capture Signal (SCS = 1)
NOTE: Changing Capture Inputs
Changing capture inputs while in capture mode may cause unintended capture events. To
avoid this scenario, capture inputs should only be changed when capture mode is disabled
(CM = {0} or CAP = 0).
Overflow logic is provided in each capture/compare register to indicate if a second capture was performed
before the value from the first capture was read. Bit COV is set when this occurs (see Figure 18-11). COV
must be reset with software.
Figure 18-11. Capture Cycle
492 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Operation
18.2.4.1.1 Capture Initiated by Software
Captures can be initiated by software. The CM bits can be set for capture on both edges. Software then
sets bit CCIS1 = 1 and toggles bit CCIS0 to switch the capture signal between VCC and GND, initiating a
capture each time CCIS0 changes state:
MOV #CAP+SCS+CCIS1+CM_3,&TB0CCTL1 ; Setup TB0CCTL1
XOR #CCIS0,&TB0CCTL1 ; TB0CCR1 = TB0R
NOTE: Capture Initiated by Software
In general, changing capture inputs while in capture mode may cause unintended capture
events. For this scenario, switching the capture input between VCC and GND, disabling the
capture mode is not required.
18.2.4.2 Compare Mode
The compare mode is selected when CAP = 0. Compare mode is used to generate PWM output signals or
interrupts at specific time intervals. When TBxR counts to the value in a TBxCLn, where n represents the
specific capture/compare latch:
• Interrupt flag CCIFG is set.
• Internal signal EQUn = 1.
• EQUn affects the output according to the output mode.
18.2.4.2.1 Compare Latch TBxCLn
The TBxCCRn compare latch, TBxCLn, holds the data for the comparison to the timer value in compare
mode. TBxCLn is buffered by TBxCCRn. The buffered compare latch gives the user control over when a
compare period updates. The user cannot directly access TBxCLn. Compare data is written to each
TBxCCRn and automatically transferred to TxBCLn. The timing of the transfer from TBxCCRn to TBxCLn
is user selectable, with the CLLD bits as described in Table 18-2.
Table 18-2. TBxCLn Load Events
CLLD Description
00 New data is transferred from TBxCCRn to TBxCLn immediately when TBxCCRn is written to.
01 New data is transferred from TBxCCRn to TBxCLn when TBxR counts to 0.
New data is transferred from TBxCCRn to TBxCLn when TBxR counts to 0 for up and continuous modes. New data
10 is transferred to from TBxCCRn to TBxCLn when TBxR counts to the old TBxCL0 value or to 0 for up/down mode.
11 New data is transferred from TBxCCRn to TBxCLn when TBxR counts to the old TBxCLn value.
493
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_B Operation
www.ti.com
18.2.4.2.2 Grouping Compare Latches
Multiple compare latches may be grouped together for simultaneous updates with the TBCLGRPx bits.
When using groups, the CLLD bits of the lowest numbered TBxCCRn in the group determine the load
event for each compare latch of the group, except when TBCLGRP = 3 (see Table 18-3). The CLLD bits
of the controlling TBxCCRn must not be set to zero. When the CLLD bits of the controlling TBxCCRn are
set to zero, all compare latches update immediately when their corresponding TBxCCRn is written; no
compare latches are grouped.
Two conditions must exist for the compare latches to be loaded when grouped. First, all TBxCCRn
registers of the group must be updated, even when new TBxCCRn data = old TBxCCRn data. Second,
the load event must occur.
Table 18-3. Compare Latch Operating Modes
TBCLGRPx Grouping Update Control
00 None Individual
TBxCL1+TBxCL2 TBxCCR1
01 TBxCL3+TBxCL4 TBxCCR3
TBxCL5+TBxCL6 TBxCCR5
TBxCL1+TBxCL2+TBxCL3 TBxCCR1
10 TBxCL4+TBxCL5+TBxCL6 TBxCCR4
11 TBxCL0+TBxCL1+TBxCL2+TBxCL3+TBxCL4+TBxCL5+TBxCL6 TBxCCR1
18.2.5 Output Unit
Each capture/compare block contains an output unit. The output unit is used to generate output signals,
such as PWM signals. Each output unit has eight operating modes that generate signals based on the
EQU0 and EQUn signals. The TBOUTH pin function can be used to put all Timer_B outputs into a high-
impedance state. When the TBOUTH pin function is selected for the pin (corresponding PSEL bit is set,
and port configured as input) and when the pin is pulled high, all Timer_B outputs are in a high-impedance
state.
18.2.5.1 Output Modes
The output modes are defined by the OUTMOD bits and are described in Table 18-4. The OUTn signal is
changed with the rising edge of the timer clock for all modes except mode 0. Output modes 2, 3, 6, and 7
are not useful for output unit 0 because EQUn = EQU0.
Table 18-4. Output Modes
OUTMOD Mode Description
The output signal OUTn is defined by the OUT bit. The OUTn signal updates immediately
000 Output when OUT is updated.
The output is set when the timer counts to the TBxCLn value. It remains set until a reset of
001 Set the timer, or until another output mode is selected and affects the output.
The output is toggled when the timer counts to the TBxCLn value. It is reset when the timer
010 Toggle/Reset counts to the TBxCL0 value.
The output is set when the timer counts to the TBxCLn value. It is reset when the timer
011 Set/Reset counts to the TBxCL0 value.
The output is toggled when the timer counts to the TBxCLn value. The output period is
100 Toggle double the timer period.
The output is reset when the timer counts to the TBxCLn value. It remains reset until
101 Reset another output mode is selected and affects the output.
The output is toggled when the timer counts to the TBxCLn value. It is set when the timer
110 Toggle/Set counts to the TBxCL0 value.
The output is reset when the timer counts to the TBxCLn value. It is set when the timer
111 Reset/Set counts to the TBxCL0 value.
494 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
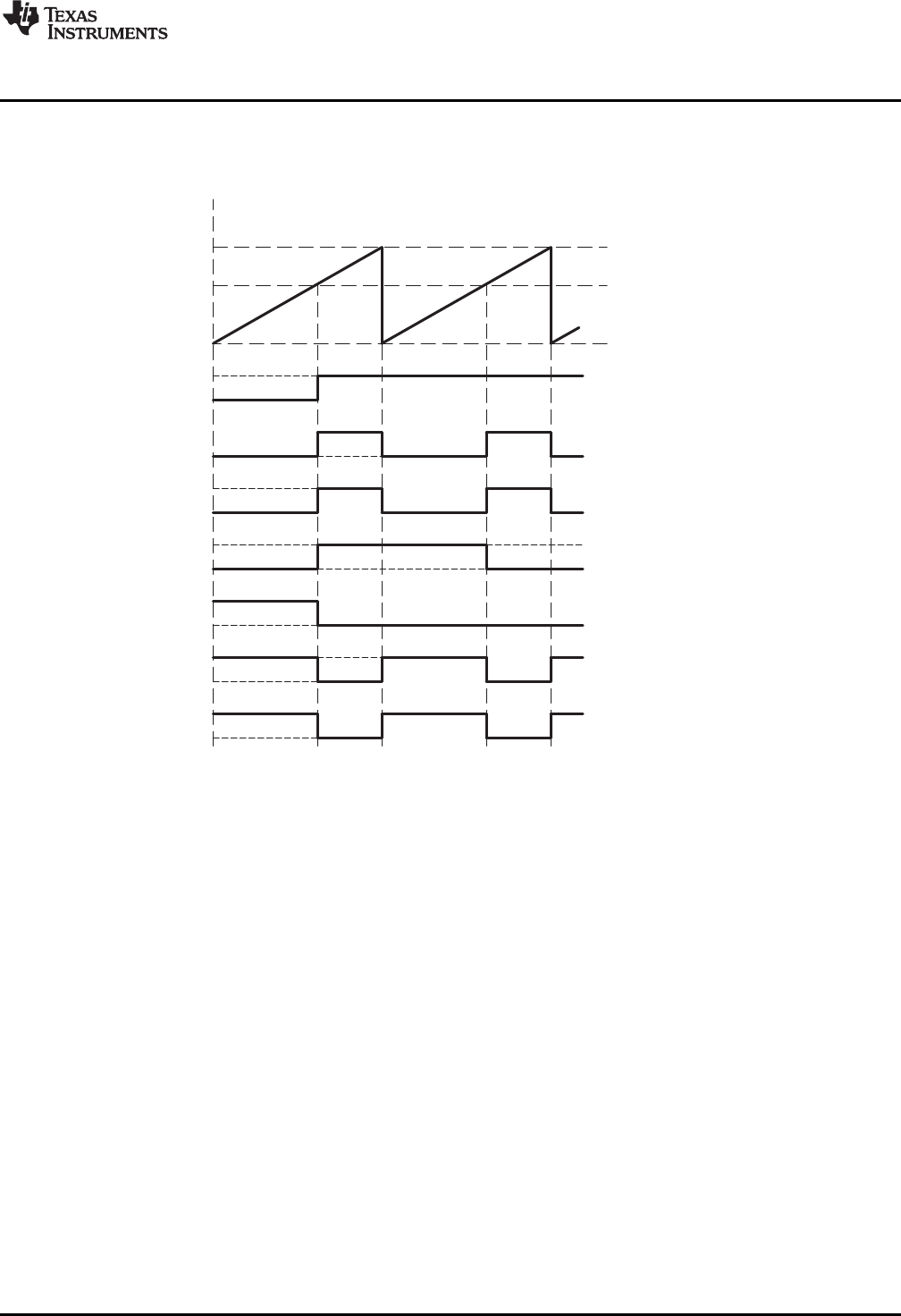
0h
TBxR(max)
EQU0
TBIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: Toggle/Set
OutputMode7:Reset/Set
TBxCL0
TBxCL1
EQU1 EQU0
TBIFG
EQU1 EQU0
TBIFG InterruptEvents
www.ti.com
Timer_B Operation
18.2.5.1.1 Output Example – Timer in Up Mode
The OUTn signal is changed when the timer counts up to the TBxCLn value, and rolls from TBxCL0 to
zero, depending on the output mode. An example is shown in Figure 18-12 using TBxCL0 and TBxCL1.
Figure 18-12. Output Example – Timer in Up Mode
495
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
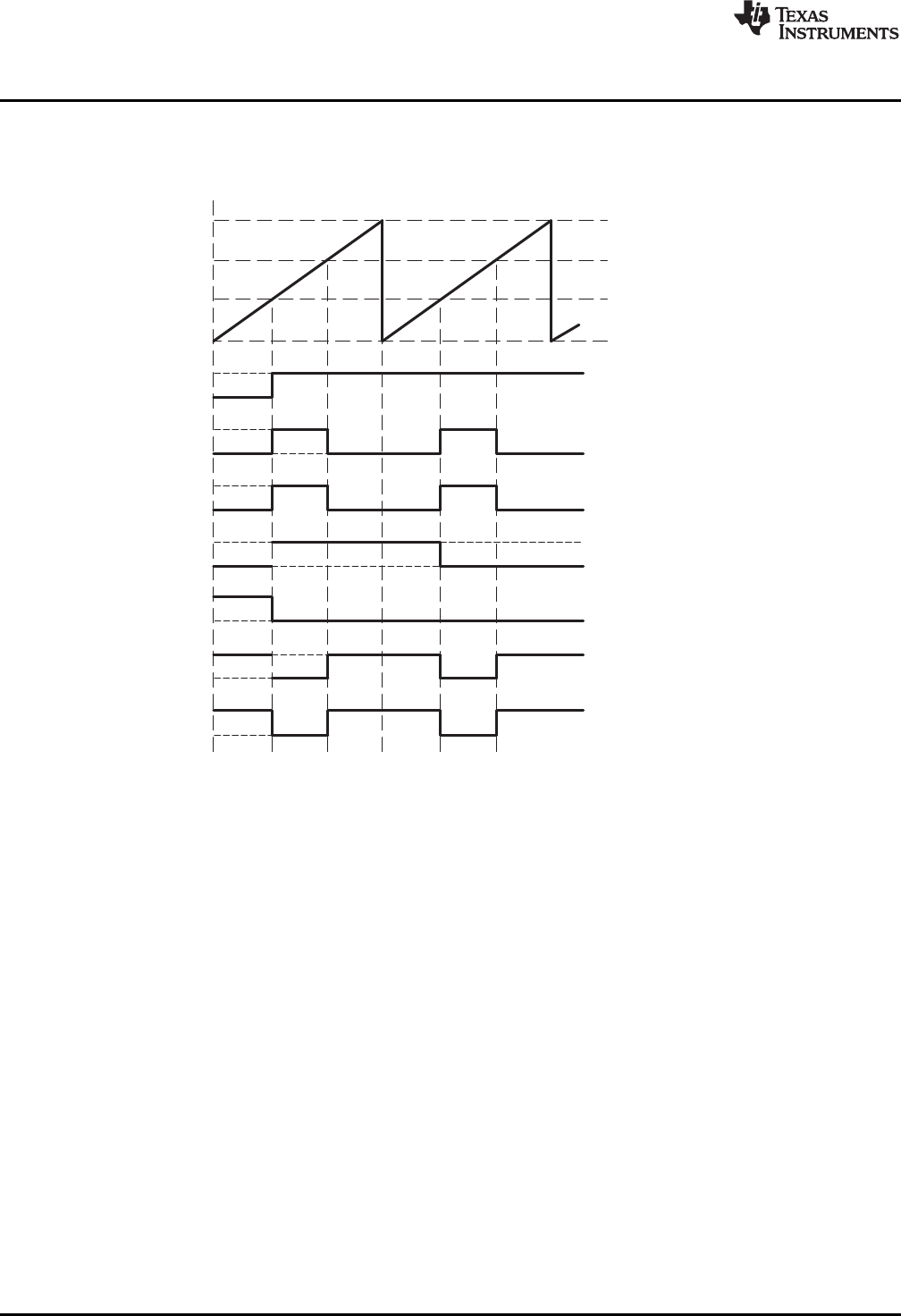
0h
TBxR(max)
TBIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: Toggle/Set
OutputMode7:Reset/Set
TBxCL0
TBxCL1
EQU1 TBIFG EQU1 EQU0 InterruptEvents
EQU0
Timer_B Operation
www.ti.com
18.2.5.1.2 Output Example – Timer in Continuous Mode
The OUTn signal is changed when the timer reaches the TBxCLn and TBxCL0 values, depending on the
output mode. An example is shown in Figure 18-13 using TBxCL0 and TBxCL1.
Figure 18-13. Output Example – Timer in Continuous Mode
496 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
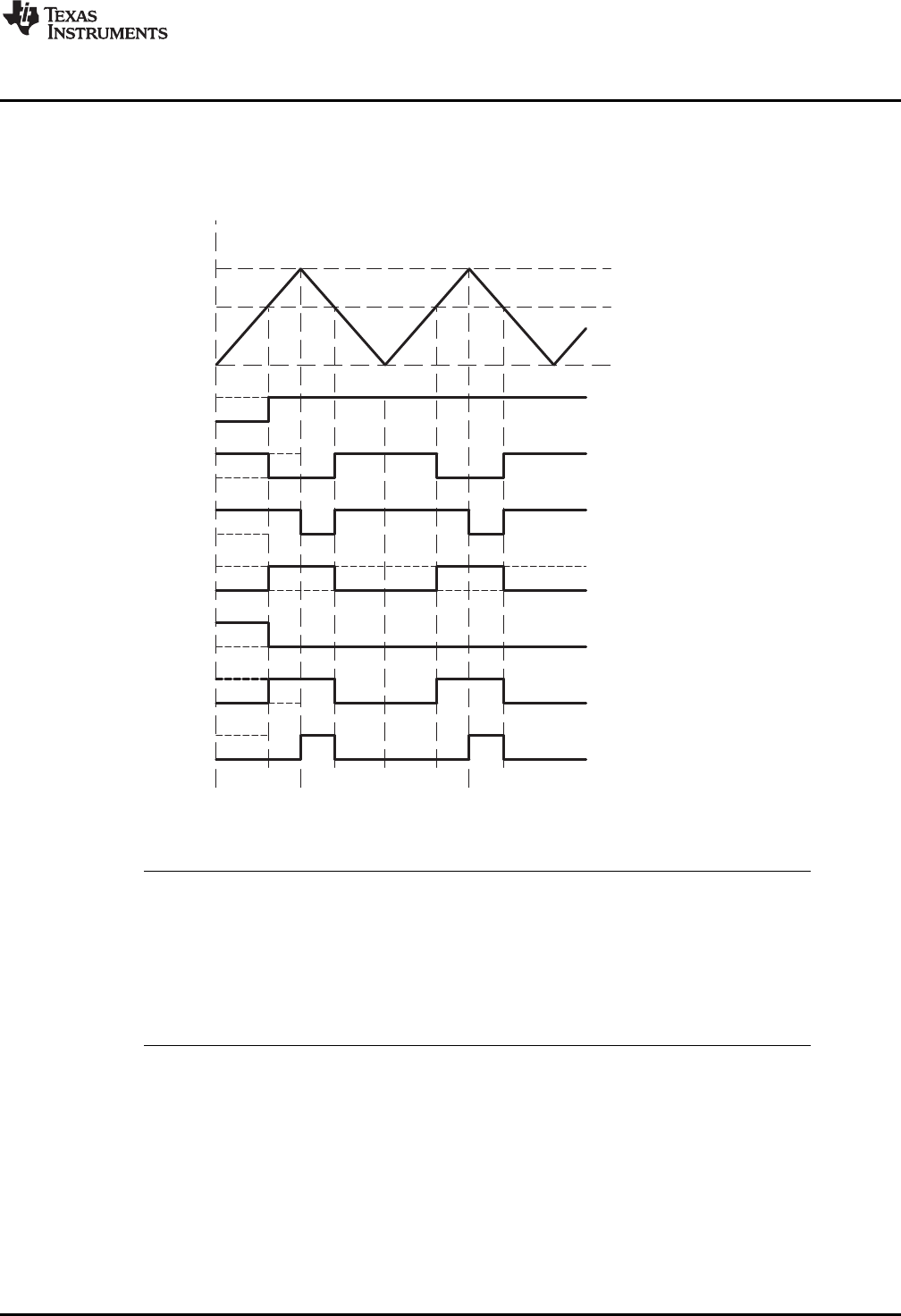
TBIFG
OutputMode1:Set
OutputMode2: Toggle/Reset
OutputMode3:Set/Reset
OutputMode4: Toggle
OutputMode5:Reset
OutputMode6: Toggle/Set
OutputMode7:Reset/Set
EQU3
TBIFG InterruptEvents
EQU3
EQU0
EQU3 EQU3
EQU0
0h
TBxR(max)
TBxCL0
TBxCL3
www.ti.com
Timer_B Operation
18.2.5.1.3 Output Example – Timer in Up/Down Mode
The OUTn signal changes when the timer equals TBxCLn in either count direction and when the timer
equals TBxCL0, depending on the output mode. An example is shown in Figure 18-14 using TBxCL0 and
TBxCL3.
Figure 18-14. Output Example – Timer in Up/Down Mode
NOTE: Switching between output modes
When switching between output modes, one of the OUTMOD bits should remain set during
the transition, unless switching to mode 0. Otherwise, output glitching can occur because a
NOR gate decodes output mode 0. A safe method for switching between output modes is to
use output mode 7 as a transition state:
BIS #OUTMOD_7,&TBCCTLx ; Set output mode=7
BIC #OUTMOD,&TBCCTLx ; Clear unwanted bits
497
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
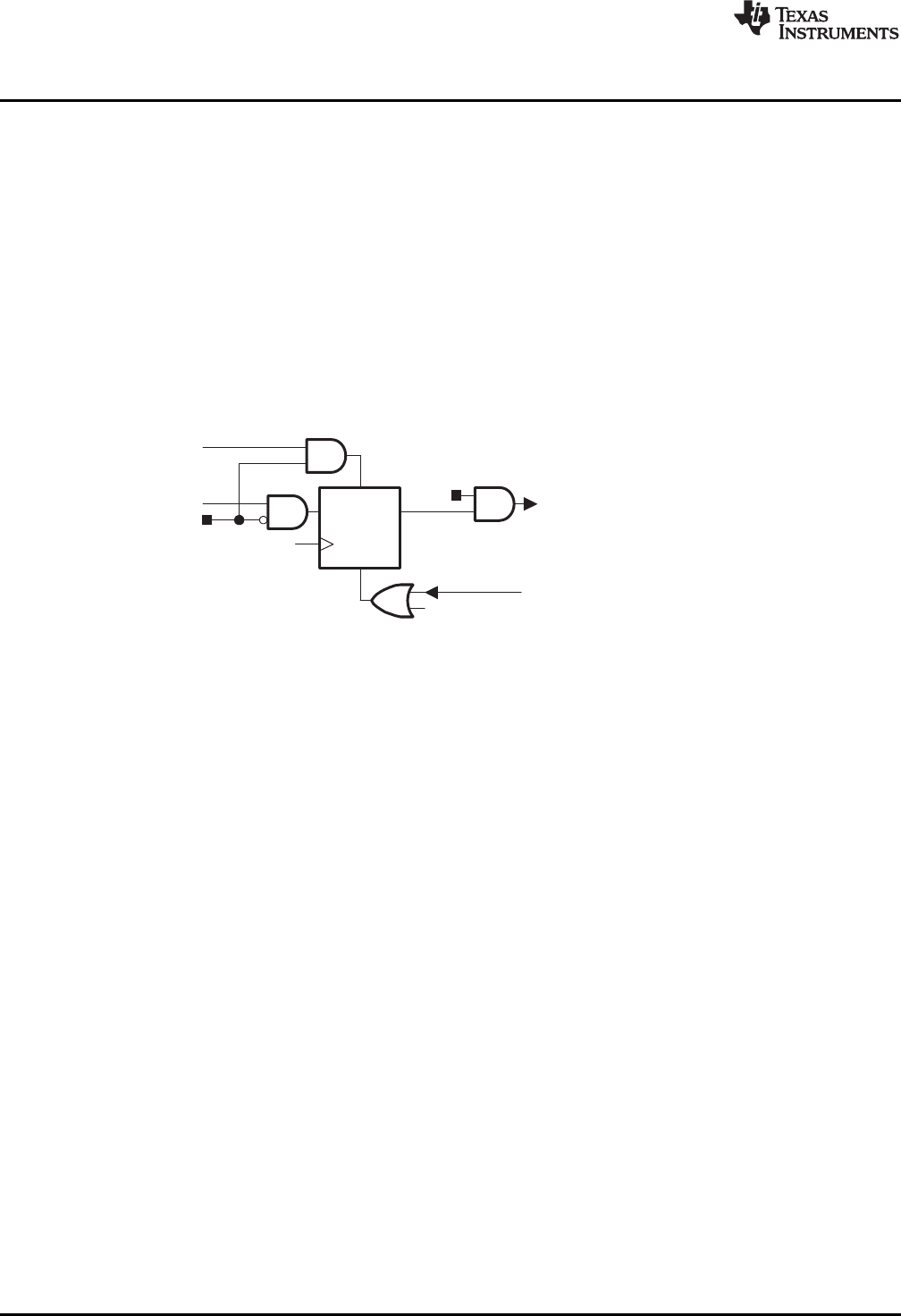
DSet QIRQ, Interrupt Service Requested
Reset
Timer Clock
POR
CAP
EQU0
Capture
IRACC, Interrupt Request Accepted
CCIE
Timer_B Operation
www.ti.com
18.2.6 Timer_B Interrupts
Two interrupt vectors are associated with the 16-bit Timer_B module:
• TBxCCR0 interrupt vector for TBxCCR0 CCIFG
• TBIV interrupt vector for all other CCIFG flags and TBIFG
In capture mode, any CCIFG flag is set when a timer value is captured in the associated TBxCCRn
register. In compare mode, any CCIFG flag is set when TBxR counts to the associated TBxCLn value.
Software may also set or clear any CCIFG flag. All CCIFG flags request an interrupt when their
corresponding CCIE bit and the GIE bit are set.
18.2.6.1 TBxCCR0 Interrupt Vector
The TBxCCR0 CCIFG flag has the highest Timer_B interrupt priority and has a dedicated interrupt vector
(see Figure 18-15). The TBxCCR0 CCIFG flag is automatically reset when the TBxCCR0 interrupt request
is serviced.
Figure 18-15. Capture/Compare TBxCCR0 Interrupt Flag
18.2.6.2 TBxIV, Interrupt Vector Generator
The TBIFG flag and TBxCCRn CCIFG flags (excluding TBxCCR0 CCIFG) are prioritized and combined to
source a single interrupt vector. The interrupt vector register TBxIV is used to determine which flag
requested an interrupt.
The highest-priority enabled interrupt (excluding TBxCCR0 CCIFG) generates a number in the TBxIV
register (see register description). This number can be evaluated or added to the program counter to
automatically enter the appropriate software routine. Disabled Timer_B interrupts do not affect the TBxIV
value.
Any access, read or write, of the TBxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
For example, if the TBxCCR1 and TBxCCR2 CCIFG flags are set when the interrupt service routine
accesses the TBxIV register, TBxCCR1 CCIFG is reset automatically. After the RETI instruction of the
interrupt service routine is executed, the TBxCCR2 CCIFG flag generates another interrupt.
18.2.6.3 TBxIV, Interrupt Handler Examples
The following software example shows the recommended use of TBxIV and the handling overhead. The
TBxIV value is added to the PC to automatically jump to the appropriate routine. The example assumes a
single instantiation of the largest timer configuration available.
The numbers at the right margin show the necessary CPU clock cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself. The latencies are:
• Capture/compare block CCR0: 11 cycles
• Capture/compare blocks CCR1 to CCR6: 16 cycles
• Timer overflow TBIFG: 14 cycles
498 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Timer_B Operation
The following software example shows the recommended use of TBxIV for Timer_B3.
; Interrupt handler for TB0CCR0 CCIFG. Cycles
CCIFG_0_HND
; ... ; Start of handler Interrupt latency 6
RETI 5
; Interrupt handler for TB0IFG, TB0CCR1 through TB0CCR6 CCIFG.
TB0_HND ... ; Interrupt latency 6
ADD &TB0IV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP CCIFG_1_HND ; Vector 2: TB0CCR1 2
JMP CCIFG_2_HND ; Vector 4: TB0CCR2 2
JMP CCIFG_3_HND ; Vector 6: TB0CCR3 2
JMP CCIFG_4_HND ; Vector 8: TB0CCR4 2
JMP CCIFG_5_HND ; Vector 10: TB0CCR5 2
JMP CCIFG_6_HND ; Vector 12: TB0CCR6 2
TB0IFG_HND ; Vector 14: TB0IFG Flag
... ; Task starts here
RETI 5
CCIFG_6_HND ; Vector 12: TB0CCR6
... ; Task starts here
RETI ; Back to main program 5
CCIFG_5_HND ; Vector 10: TB0CCR5
... ; Task starts here
RETI ; Back to main program 5
CCIFG_4_HND ; Vector 8: TB0CCR4
... ; Task starts here
RETI ; Back to main program 5
CCIFG_3_HND ; Vector 6: TB0CCR3
... ; Task starts here
RETI ; Back to main program 5
CCIFG_2_HND ; Vector 4: TB0CCR2
... ; Task starts here
RETI ; Back to main program 5
CCIFG_1_HND ; Vector 2: TB0CCR1
... ; Task starts here
RETI ; Back to main program 5
499
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_B Registers
www.ti.com
18.3 Timer_B Registers
The Timer_B registers are listed in Table 18-5. The base address can be found in the device-specific data
sheet. The address offset is listed in Table 18-5.
Table 18-5. Timer_B Registers
Offset Acronym Register Name Type Access Reset Section
00h TBxCTL Timer_B Control Read/write Word 0000h Section 18.3.1
02h TBxCCTL0 Timer_B Capture/Compare Control 0 Read/write Word 0000h Section 18.3.3
04h TBxCCTL1 Timer_B Capture/Compare Control 1 Read/write Word 0000h Section 18.3.3
06h TBxCCTL2 Timer_B Capture/Compare Control 2 Read/write Word 0000h Section 18.3.3
08h TBxCCTL3 Timer_B Capture/Compare Control 3 Read/write Word 0000h Section 18.3.3
0Ah TBxCCTL4 Timer_B Capture/Compare Control 4 Read/write Word 0000h Section 18.3.3
0Ch TBxCCTL5 Timer_B Capture/Compare Control 5 Read/write Word 0000h Section 18.3.3
0Eh TBxCCTL6 Timer_B Capture/Compare Control 6 Read/write Word 0000h Section 18.3.3
10h TBxR Timer_B Counter Read/write Word 0000h Section 18.3.2
12h TBxCCR0 Timer_B Capture/Compare 0 Read/write Word 0000h Section 18.3.4
14h TBxCCR1 Timer_B Capture/Compare 1 Read/write Word 0000h Section 18.3.4
16h TBxCCR2 Timer_B Capture/Compare 2 Read/write Word 0000h Section 18.3.4
18h TBxCCR3 Timer_B Capture/Compare 3 Read/write Word 0000h Section 18.3.4
1Ah TBxCCR4 Timer_B Capture/Compare 4 Read/write Word 0000h Section 18.3.4
1Ch TBxCCR5 Timer_B Capture/Compare 5 Read/write Word 0000h Section 18.3.4
1Eh TBxCCR6 Timer_B Capture/Compare 6 Read/write Word 0000h Section 18.3.4
2Eh TBxIV Timer_B Interrupt Vector Read only Word 0000h Section 18.3.5
20h TBxEX0 Timer_B Expansion 0 Read/write Word 0000h Section 18.3.6
500 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Registers
18.3.1 TBxCTL Register
Timer_B x Control Register
Figure 18-16. TBxCTL Register
15 14 13 12 11 10 9 8
Reserved TBCLGRPx CNTL Reserved TBSSEL
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ID MC Reserved TBCLR TBIE TBIFG
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) w-(0) rw-(0) rw-(0)
Table 18-6. TBxCTL Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-13 TBCLGRP RW 0h TBxCLn group
00b = Each TBxCLn latch loads independently.
01b = TBxCL1+TBxCL2 (TBxCCR1 CLLD bits control the update);
TBxCL3+TBxCL4 (TBxCCR3 CLLD bits control the update); TBxCL5+TBxCL6
(TBxCCR5 CLLD bits control the update); TBxCL0 independent
10b = TBxCL1+TBxCL2+TBxCL3 (TBxCCR1 CLLD bits control the update);
TBxCL4+TBxCL5+TBxCL6 (TBxCCR4 CLLD bits control the update); TBxCL0
independent
11b = TBxCL0+TBxCL1+TBxCL2+TBxCL3+TBxCL4+TBxCL5+TBxCL6
(TBxCCR1 CLLD bits control the update)
12-11 CNTL RW 0h Counter length
00b = 16-bit, TBxR(max) = 0FFFFh
01b = 12-bit, TBxR(max) = 0FFFh
10b = 10-bit, TBxR(max) = 03FFh
11b = 8-bit, TBxR(max) = 0FFh
10 Reserved R 0h Reserved. Always reads as 0.
9-8 TBSSEL RW 0h Timer_B clock source select
00b = TBxCLK
01b = ACLK
10b = SMCLK
11b = INCLK
7-6 ID RW 0h Input divider. These bits, along with the TBIDEX bits, select the divider for the
input clock.
00b = /1
01b = /2
10b = /4
11b = /8
5-4 MC RW 0h Mode control. Setting MC = 00h when Timer_B is not in use conserves power.
00b = Stop mode: Timer is halted
01b = Up mode: Timer counts up to TBxCL0
10b = Continuous mode: Timer counts up to the value set by CNTL
11b = Up/down mode: Timer counts up to TBxCL0 and down to 0000h
3 Reserved R 0h Reserved. Always reads as 0.
2 TBCLR RW 0h Timer_B clear. Setting this bit clears TBR, the clock divider logic (the divider
setting remains unchanged), and the count direction. The TBCLR bit is
automatically reset and is always read as zero.
1 TBIE RW 0h Timer_B interrupt enable. This bit enables the TBIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
501
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_B Registers
www.ti.com
Table 18-6. TBxCTL Register Description (continued)
Bit Field Type Reset Description
0 TBIFG RW 0h Timer_B interrupt flag
0b = No interrupt pending
1b = Interrupt pending
502 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Registers
18.3.2 TBxR Register
Timer_B x Counter Register
Figure 18-17. TBxR Register
15 14 13 12 11 10 9 8
TBxR
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TBxR
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 18-7. TBxR Register Description
Bit Field Type Reset Description
15-0 TBxR RW 0h Timer_B register. The TBxR register is the count of Timer_B.
503
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_B Registers
www.ti.com
18.3.3 TBxCCTLn Register
Timer_B x Capture/Compare Control Register n
Figure 18-18. TBxCCTLn Register
15 14 13 12 11 10 9 8
CM CCIS SCS CLLD CAP
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
OUTMOD CCIE CCI OUT COV CCIFG
rw-(0) rw-(0) rw-(0) rw-(0) r rw-(0) rw-(0) rw-(0)
Table 18-8. TBxCCTLn Register Description
Bit Field Type Reset Description
15-14 CM RW 0h Capture mode
00b = No capture
01b = Capture on rising edge
10b = Capture on falling edge
11b = Capture on both rising and falling edges
13-12 CCIS RW 0h Capture/compare input select. These bits select the TBxCCRn input signal. See
the device-specific data sheet for specific signal connections.
00b = CCIxA
01b = CCIxB
10b = GND
11b = VCC
11 SCS RW 0h Synchronize capture source. This bit is used to synchronize the capture input
signal with the timer clock.
0b = Asynchronous capture
1b = Synchronous capture
10-9 CLLD RW 0h Compare latch load. These bits select the compare latch load event.
00b = TBxCLn loads on write to TBxCCRn
01b = TBxCLn loads when TBxR counts to 0
10b = TBxCLn loads when TBxR counts to 0 (up or continuous mode). TBxCLn
loads when TBxR counts to TBxCL0 or to 0 (up/down mode).
11b = TBxCLn loads when TBxR counts to TBxCLn
8 CAP RW 0h Capture mode
0b = Compare mode
1b = Capture mode
7-5 OUTMOD RW 0h Output mode. Modes 2, 3, 6, and 7 are not useful for TBxCL0 because EQUn =
EQU0.
000b = OUT bit value
001b = Set
010b = Toggle/reset
011b = Set/reset
100b = Toggle
101b = Reset
110b = Toggle/set
111b = Reset/set
4 CCIE RW 0h Capture/compare interrupt enable. This bit enables the interrupt request of the
corresponding CCIFG flag.
0b = Interrupt disabled
1b = Interrupt enabled
3 CCI R Undef Capture/compare input. The selected input signal can be read by this bit.
504 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Registers
Table 18-8. TBxCCTLn Register Description (continued)
Bit Field Type Reset Description
2 OUT RW 0h Output. For output mode 0, this bit directly controls the state of the output.
0b = Output low
1b = Output high
1 COV RW 0h Capture overflow. This bit indicates a capture overflow occurred. COV must be
reset with software.
0b = No capture overflow occurred
1b = Capture overflow occurred
0 CCIFG RW 0h Capture/compare interrupt flag
0b = No interrupt pending
1b = Interrupt pending
505
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_B Registers
www.ti.com
18.3.4 TBxCCRn Register
Timer_B x Capture/Compare Register n
Figure 18-19. TBxCCRn Register
15 14 13 12 11 10 9 8
TBxCCRn
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TBxCCRn
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 18-9. TBxCCRn Register Description
Bit Field Type Reset Description
15-0 TBxCCRn RW 0h Timer_B capture/compare register.
Compare mode: TBxCCRn holds the data for the comparison to the timer value
in the Timer_B Register, TBR.
Capture mode: The Timer_B Register, TBR, is copied into the TBxCCRn register
when a capture is performed.
506 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_B Registers
18.3.5 TBxIV Register
Timer_B x Interrupt Vector Register
Figure 18-20. TBxIV Register
15 14 13 12 11 10 9 8
TBIV
r-(0) r-(0) r-(0) r-(0) r-(0) r-(0) r-(0) r-(0)
76543210
TBIV
r-(0) r-(0) r-(0) r-(0) r-(0) r-(0) r-(0) r-(0)
Table 18-10. TBxIV Register Description
Bit Field Type Reset Description
15-0 TBIV R 0h Timer_B interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Capture/compare 1; Interrupt Flag: TBxCCR1 CCIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Capture/compare 2; Interrupt Flag: TBxCCR2 CCIFG
06h = Interrupt Source: Capture/compare 3; Interrupt Flag: TBxCCR3 CCIFG
08h = Interrupt Source: Capture/compare 4; Interrupt Flag: TBxCCR4 CCIFG
0Ah = Interrupt Source: Capture/compare 5; Interrupt Flag: TBxCCR5 CCIFG
0Ch = Interrupt Source: Capture/compare 6; Interrupt Flag: TBxCCR6 CCIFG
0Eh = Interrupt Source: Timer overflow; Interrupt Flag: TBxCTL TBIFG; Interrupt
Priority: Lowest
507
SLAU208O–June 2008–Revised May 2015 Timer_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Timer_B Registers
www.ti.com
18.3.6 TBxEX0 Register
Timer_B x Expansion Register 0
Figure 18-21. TBxEX0 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved TBIDEX(1)
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
(1) After programming TBIDEX bits and configuration of the timer, set TBCLR bit to ensure proper reset of the timer divider logic.
Table 18-11. TBxEX0 Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved. Always reads as 0.
2-0 TBIDEX RW 0h Input divider expansion. These bits along with the ID bits select the divider for
the input clock.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
508 Timer_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 19
SLAU208O–June 2008–Revised May 2015
Timer_D
Timer_D is a 16-bit timer/counter with multiple capture/compare registers. This chapter describes
Timer_D.
Topic ........................................................................................................................... Page
19.1 Timer_D Introduction ........................................................................................ 510
19.2 Timer_D Operation............................................................................................ 512
19.3 Timer_D Registers ............................................................................................ 536
509
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Timer_D Introduction
www.ti.com
19.1 Timer_D Introduction
Timer_D is a 16-bit timer/counter with multiple capture/compare registers. Timer_D can support multiple
capture/compares, interval timing, and PWM outputs both in general and high resolution modes. Timer_D
also has extensive interrupt capabilities. Interrupts may be generated from the counter on overflow
conditions, from each of the capture/compare registers.
Timer_D features include:
• Asynchronous 16-bit timer/counter with four operating modes and four selectable lengths
• Selectable and configurable clock source
• Configurable capture/compare registers
• Controlling rising and falling PWM edges by combining two neighbor TDCCR registers in one compare
channel output
• Configurable outputs with PWM capability
• High-resolution mode with a fine clock frequency up to 16 times the timer input clock frequency
• Double-buffered compare registers with synchronized loading
• Interrupt vector register for fast decoding of all Timer_D interrupts
The block diagram of Timer_D is shown in Figure 19-1.
NOTE: Use of the word count
Count is used throughout this chapter. It means the counter must be in the process of
counting for the action to take place. If a particular value is directly written to the counter, any
associated action does not take place.
19.1.1 Differences From Timer_B
Timer_D is identical to Timer_B with the following exceptions:
• Timer_D supports high-resolution mode.
• Timer_D supports the combination of two adjacent TDCCRx registers in one capture/compare channel.
• Timer_D supports the dual capture event mode.
• Timer_D supports external fault input, external clear input, and signal. See the TEC chapter for
detailed information.
• Timer_D can synchronize with a second timer instance when available. See the TEC chapter for
detailed information.
510 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
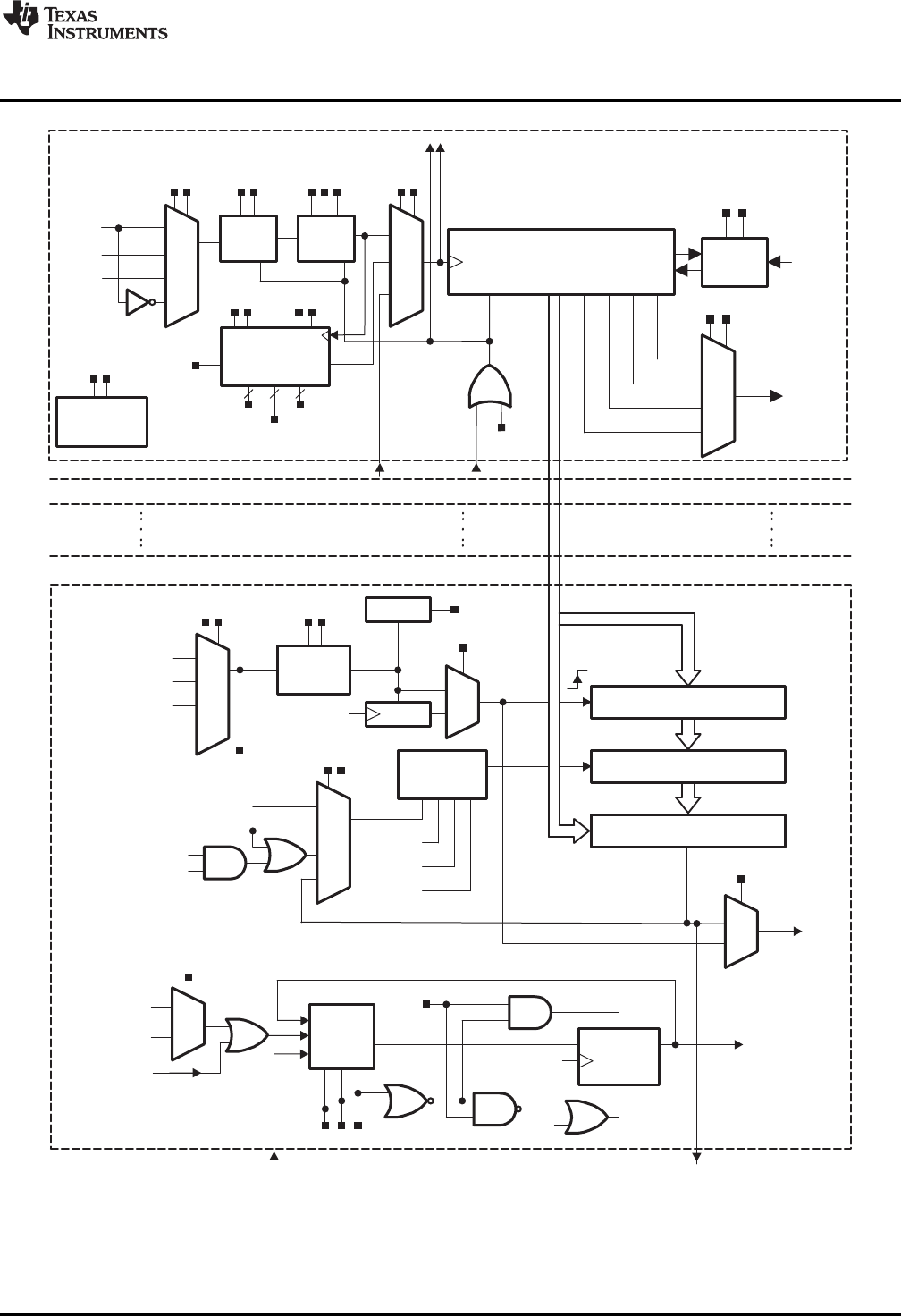
CCR0*
CCR1
Count
Mode
16-bit Timer
TDR
Set TDIFG
15 0
MCx
Clear
TDCLR
EQU0
CNTLx
RC
10 12 168
TDCLGRPx
Group
Load Logic
TDSSELx
00
01
10
11
00
01
10
11
ACLK
SMCLK
TDCLK
Timer Clock
Divider
/1/2/4/8
IDx IDEXx
Divider
/1.../8
High Resolution
Generator
TDCLKMx
00
01
10
TDCLR1
TDHMx
Divider /1/2/4/8
TDHCLKSRx
TDHCLKTRIMx
27
TDHCLKRx
5
TDHDx
TDAUXCLK
TDAUXCLROUT
CCR5
CCR6
Comparator 6
CCI
15 0
OUTMODx
Capture
Mode
CMx
Sync
COV
logic
Output
Unit6 DSet Q
OUT
OUT6 Signal
Reset
POR
EQU6
Timer Clock
Timer Clock
VCC
TDR=0
UP/DOWN
EQU0
CLLDx Load
TDCCR6
CCR5
CCR4
CCR1
Group
Load Logic
GND
VCC
CCI6A
CCI6B
00
01
10
11
CCISx
00
01
10
11 CAP
1
0
SCS
1
0
Set TDCCR6
CCIFG
Compare Latch TDCL6
1
0
CH5EVNT
TD6CMB
EXTCLR
CH0EVNT
CH6EVNT
EQU6
Timer Block
CCRx Block
TDHREGEN
www.ti.com
Timer_D Introduction
Figure 19-1. Timer_D Block Diagram
511
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Timer_D Operation
www.ti.com
NOTE: TDxCCR0 is slightly different from the other capture/compare blocks. The input signals to the
output unit are:
• OUT0 signal
• EXTCLR signal
• Timer Counter overflow
This enables channel 0 to generate a PWM output signal in Continuous mode. The events to
set and reset the PWM output 0 are the CCR0 match and the Timer Counter overflow
(TDIFG).
NOTE: TDCCRx channels with odd channel numbers do not have the TDxCMB bit capabilities.
Therefore, there is no MUX, and the CH0EVNT is ORed with EXTCLR.
19.2 Timer_D Operation
The Timer_D module is configured with user software. The setup and operation of Timer_D is discussed
in the following sections.
19.2.1 16-Bit Timer Counter
The 16-bit timer/counter register, TDxR, increments or decrements (depending on mode of operation) with
each rising edge of the clock signal. TDxR can be read or written with software. Additionally, the timer can
generate an interrupt when it overflows.
TDxR may be cleared by any of the following events:
• Writing 1 to TDCLR bit
• A logical high TDCLR1 signal. See the TEC chapter for details.
When the TDxR is cleared, the timer divider is restarted.
NOTE: Modifying Timer_D registers
It is recommended to stop the timer before modifying its operation to avoid errant operating
conditions. Stopping the timer is not required for the following cases:
• To enable interrupt
• Setting interrupt flags
• Setting TDCLR bit
• Enabling or disabling calibration in high-resolution mode
When the TDCLK is asynchronous to the CPU clock, any read from TDxR should occur while
the timer is not operating, or the results may be unpredictable. Alternatively, the timer may
be read multiple times while operating, and a majority vote taken in software to determine the
correct reading. Any write to TDxR takes effect immediately.
19.2.1.1 TDxR Length
Timer_D is configurable to operate as an 8-, 10-, 12-, or 16-bit timer with the CNTLx bits. The maximum
count value, TDR(max), for the selectable lengths is 0FFh, 03FFh, 0FFFh, and 0FFFFh, respectively. Data
written to the TDxR register in 8-, 10-, and 12-bit mode is right justified with leading zeros.
512 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
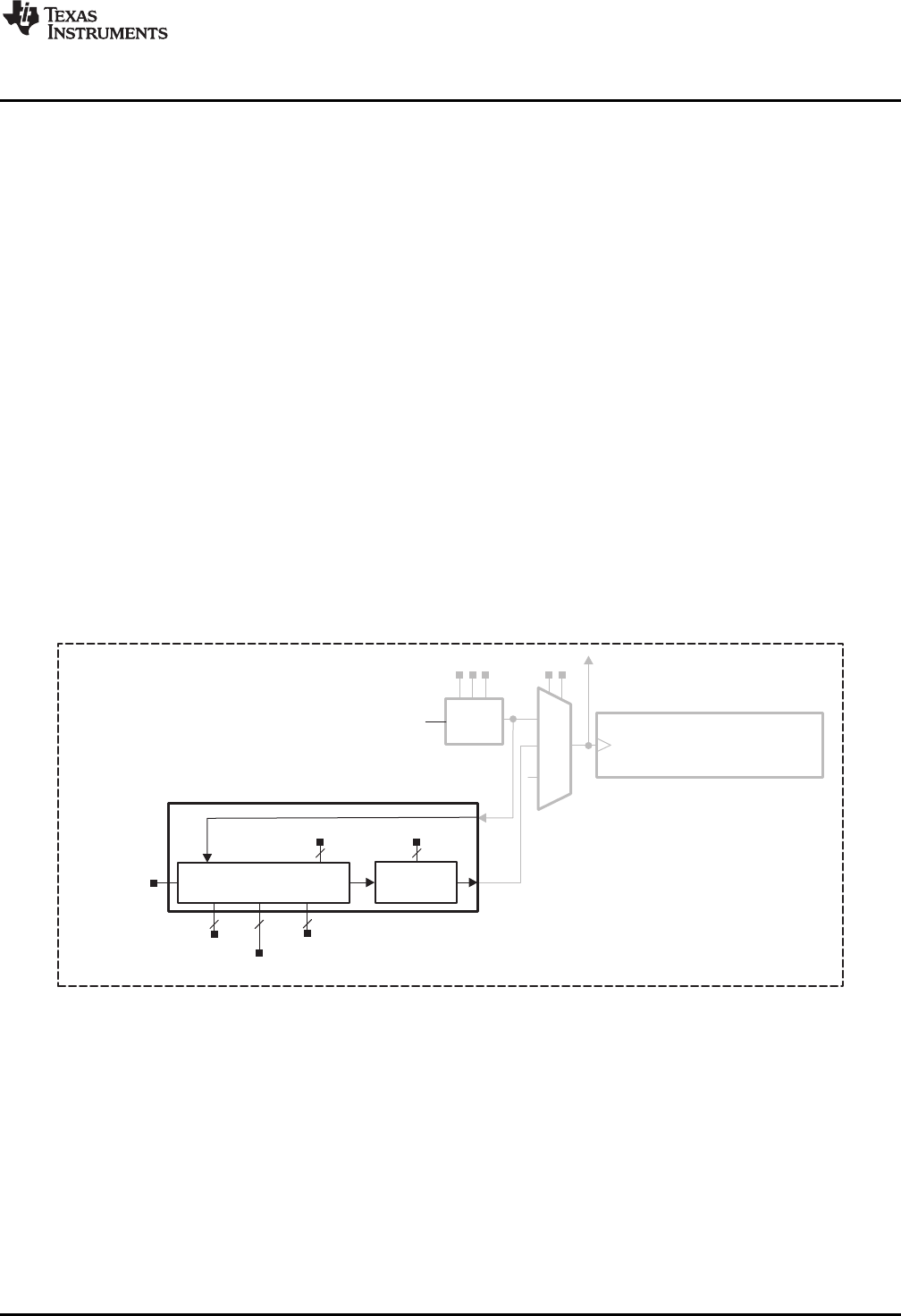
IDEXx
Divider
/1.../8
Clock
Generation
TDCLKMx
00
01
10
TDHMx
Divider
/1 /2 /4 /8
TDHCLKSRx
TDHCLKTRIMx
27
TDHCLKRx
5
TDHDx
Timer Block
TDHREGEN
16-bit Timer
TDR
Timer Clock
Multiplier
8x / 16x
2 2
Regulation
Enable
www.ti.com
Timer_D Operation
19.2.1.2 Clock Source Select and Divider
The TDCLKMx bits of the control register 1 (TDxCTL1) select the timer clock between the timer input clock
source, the high-resolution local clock, or the auxiliary clock of another timer instance.
The timer input clock can be sourced from ACLK, SMCLK, or externally via TDCLK or INCLK. The clock
source is selected with the TDSSELx bits. The selected clock source may be passed directly to the timer
or to a 2-stage division process by using the ID and IDEX bits. Whenever a timer clear event occurs, the
clock divider is restarted. The clock divider is also restarted when passing the selected clock to the high-
resolution generator.
19.2.2 High-Resolution Generator
In high-resolution mode, the high-resolution generator is used. Figure 19-2 shows the high resolution clock
generator block diagram. It can be operated in free-running mode or in regulated mode.
In free-running mode (TDHREGEN = 0), the high-resolution clock is selected by the high-resolution clock
range selection bits TDHCLKRx in the register TDxHCTL1. Each clock range is divided into 2TDHCLKSRx sub-
ranges. And in each sub-range, a total number of 2TDHCLKTRIMx slots can be chosen by configuring the
TDHCLKTRIMx bits in the TDxHCTL1 register.
In regulated mode (TDHREGEN = 1), the selected high-resolution generator frequency is adjusted to the
timer input clock frequency. The high-resolution clock frequency is 8x (TDHMx = 00) or 16x (TDHMx = 01)
higher than the selected timer input clock. The timer input clock frequency can be within the range of 8
MHz to 16 MHz if 16x is selected (TDHMx = 00) or 8 MHz to 25 MHz if 8x (TDHMx = 01) is selected.
When the timer input clock frequency is greater than 15 MHz, the TDHCLKCR bit in the TDxHCTL1
register should be set. The TDHCLKRx bits are used to preset the frequency range of the high-resolution
generator.
Figure 19-2. High Resolution Clock Generator
19.2.2.1 Free-Running Mode of the High-Resolution Generator
When the high-resolution generator is used in free-running mode, the register TDxHCTL1 is configured by
the user software. Before the high-resolution generator is enabled, the bits TDHCLKCR, TDHCLKRx,
TDHSRx, and TDHCLKTRIMx must be configured. See the device-specific data sheet for details about the
frequency selection. After the high-resolution generator is turned on, only the TDHCLKTRIMx bits should
be changed by +1 or -1 at a time. All other settings must not be altered manually. Using TDHCLKTRIMx
allows changing the frequency by at least ±20% from TDHCLKTRIM = 64.
513
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Operation
www.ti.com
There are factory preprogrammed values stored in the TLV structure of the flash memory for the
TDHCLKRx, TDHSRx, and TDHCLKTRIMx registers for specific frequencies. To use the calibrated
settings, the register setting is copied into the TDHCLKRx, TDHSRx, and TDHCLKTRIMx registers. In
addition to these settings, a clock multiplication factor and coarse clock range selection must be applied to
the TDHMx and TDHCLKCR bits of the TDHCTL0 register (see Table 19-1).
Table 19-1. Factory Preprogrammed Frequency and TDHMx, TDHCLKCR Bit Settings
Frequency TLV Label TDHMx TDHCLKCR Description
TDHxCTL1_64 00 0 Local clock generator of Timer_Dx generates a frequency of
64 64 MHz = 8 × 8 MHz.
TDHxCTL1_128 00 1 Local clock generator of Timer_Dx generates a frequency of
128 128 MHz = 8 × 16 MHz.
TDHxCTL1_200 00 1 Local clock generator of Timer_Dx generates a frequency of
200 200 MHz = 8 × 25 MHz.
TDHxCTL1_256 01 1 Local clock generator of Timer_Dx generates a frequency of
256 256 MHz = 16 × 16 MHz.
19.2.2.2 Change Frequency of High-Resolution Generator (Free-Running Mode)
To change the frequency of the high-resolution generator in free-running mode:
1. Increment or decrement TDHCLKTRIM by 1 until TDHCLKTRIM = 64 is reached. If the clock range
must be changed, proceed to Step 1a for a higher clock range or to Step 1b for a lower clock range.
(a) If the clock range, TDHCLKRx, must be changed to a higher clock range, then the TDHCLKSR
must be brought to TDHCLKSR = 31 by incrementing by 1.
(b) If the clock range, TDHCLKRx, must be changed to a lower clock range, then the TDHCLKSR must
be brought to TDHCLKSR = 0 by decrementing by 1.
2. Change the clock range, TDHCLKR, after step 1a or 1b. Increment or decrement by 1 at a time.
3. Increment or decrement TDHCLKSR by 1 until the desired clock frequency is reached to an accuracy
of approximately ±3%.
4. Increment or decrement TDHCLKTRIM by 1 until the desired clock frequency is reached to an
accuracy of approximately ±1.5%.
Further changes to track the frequency because of changes in the environment can be done by changing
only the TDHCLTRIM values.
19.2.2.3 Regulated Mode of the High-Resolution Generator
In regulated mode, the high-resolution generator produces 8 or 16 equidistant events per timer input clock
cycle. Regulation is enabled by setting the high-resolution calibration enable bit TDHREGEN. The high-
resolution generator tracks changes of the timer input clock after locking to the timer input clock
frequency. Locking is indicated by setting the lock interrupt flag TDHLKIFG. As long as the high-resolution
generator is not locked, the interrupt flag TDHUNLKIFG is set.
If the timer input clock is out of the frequency range of the high-resolution generator, then the fail-high
interrupt flag (TDHFHIFG) or the fail-low interrupt flag (TDHFLIFG) is set.
If the TDHREGEN bit is cleared, the continuous regulation is stopped and the high-resolution frequency
enters free-running mode. The latest settings are kept.
Example 20-1 shows how to set the timer to high-resolution mode.
514 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
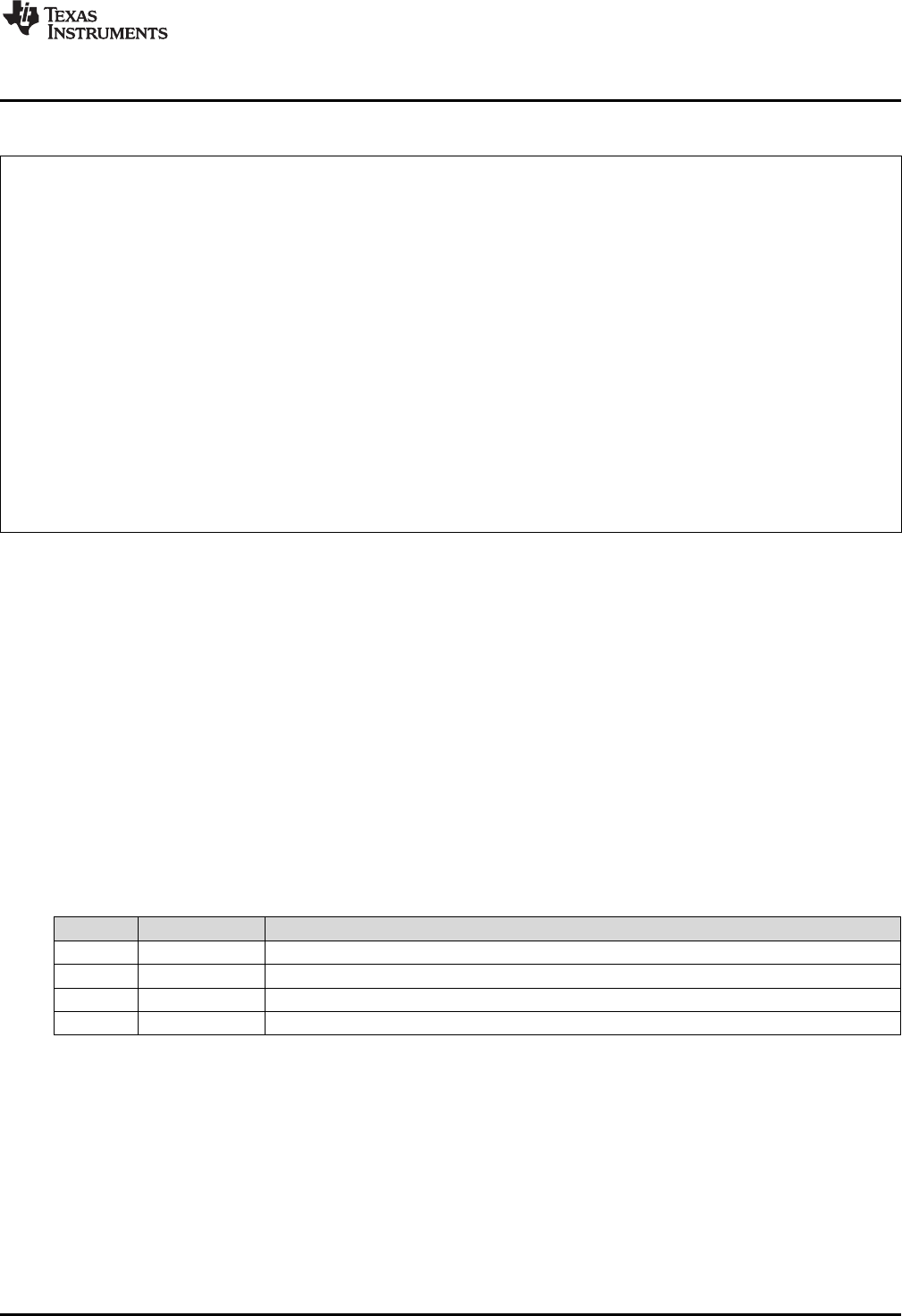
www.ti.com
Timer_D Operation
Example 19-1. Set the Timer to High-Resolution Mode
; Example: TDCLK=12MHz ; Generate the high-resolution frequency 12x16MHz
;
MOV #TDHCLKCR_0+TDHCLKR_x+TDHSR_x+TDHCLKTRIM_x, &TDxHCTL1 ; pre-selected Clock Range
MOV #TDSSEL_0, &TDxCTL0 ; TDCLK, High-Res input
; clock
MOV #TDCLKM_1, &TDxCTL1 ; Select High-Res Clock
MOV #TDHM_1+TDHREGEN+TDHEN+TDHRON,&TDxHCTL0 ; 16x, Regulation
; Waiting for TDHLKIFG
TD_HANDLER ... ; Int handler Timer_D
ADD &TDxIV, PC ; Add offset to Jump table
RETI ; Vector 0: No Interrupt
... ; Other vectors
JMP TDHLK_HANDLER ; Vector 24: Locked handler
...
TDHLK_HANDLER ; Begin of Clock Locked handler
MOV #MC_1, &TDxCTL0 ; Up Mode. Start Timer_D
...
RETI
19.2.3 Starting the Timer
The timer may be started or restarted by any of the following methods:
• The timer counts when MCx > 0 and the clock source is active.
• TDHEN = 0: When the timer mode is either up or up/down, the timer may be stopped by loading 0 to
TDxCL0. The timer may then be restarted by loading a nonzero value to TDxCL0. In this case, the
timer starts incrementing in the up direction from zero.
• TDHEN = 1: When the timer mode is in either up mode or up/down mode, the timer may be stopped by
loading 0 to TDxCL0. The timer may then be restarted by loading a nonzero value to TDxCL0. In this
case, the timer starts incrementing in the up direction from zero.
19.2.4 Timer Mode Control
The timer has four modes of operation: stop, up, continuous, and up/down. The operating mode is
selected with the MSCx bits (see Table 19-2).
Table 19-2. Timer Modes
MCx Mode Description
00 Stop The timer is halted.
01 Up The timer repeatedly counts from zero to the value of compare register TDxCL0.
10 Continuous The timer repeatedly counts from zero to the value selected by the TDCNTLx bits.
11 Up/down The timer repeatedly counts from zero up to the value of TDxCL0 and then back down to zero.
515
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
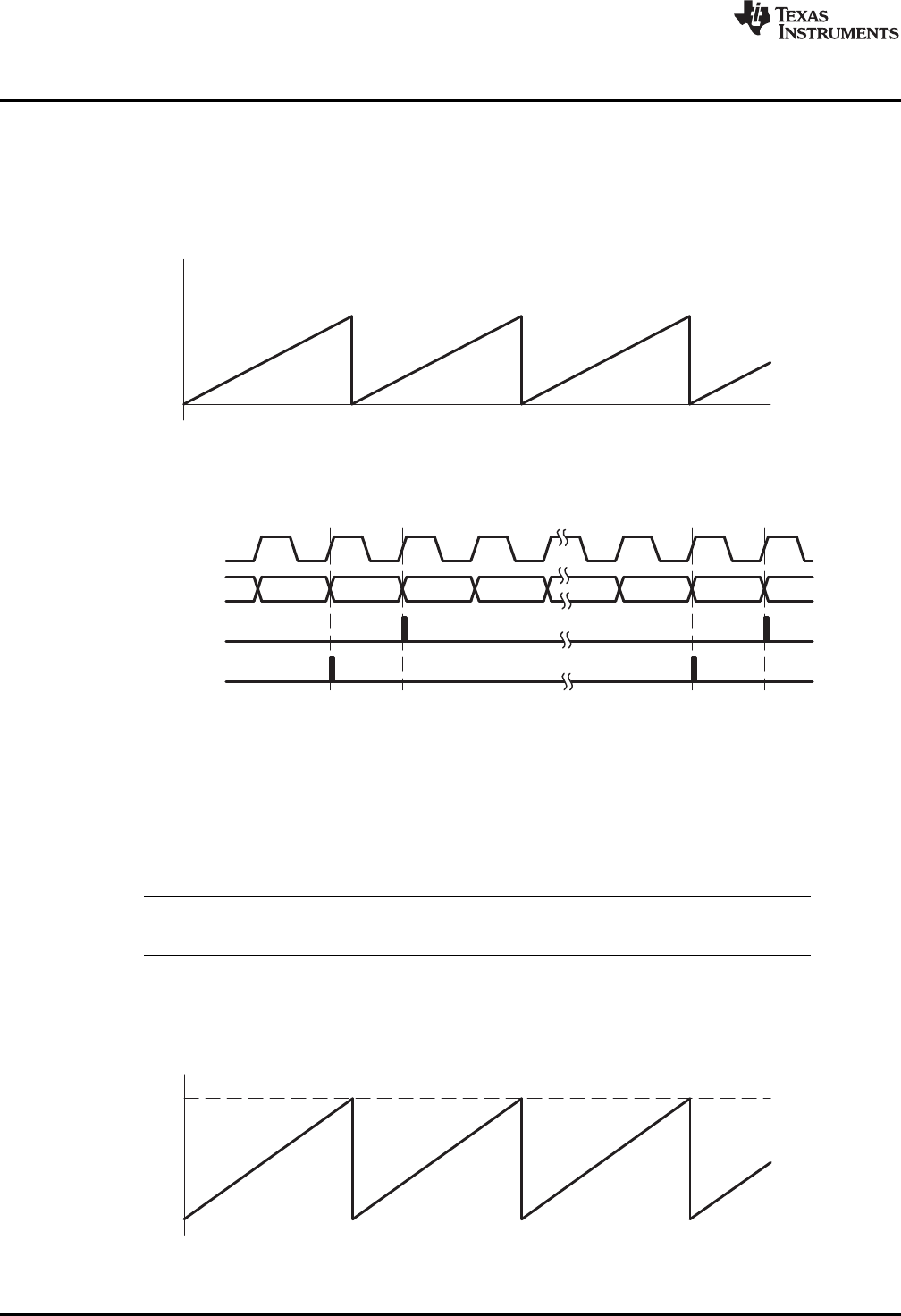
0h
TDR(max)
TDCL0-1 TDCL0 0h
Timer Clock
Timer
Set TDIFG
Set TDCCR0 CCIFG
1h TDCL0-1 TDCL0 0h
0h
TDR(max)
TDCL0
Timer_D Operation
www.ti.com
19.2.4.1 Up Mode
The up mode is used if the timer period must be different from TDR(max) counts. The timer repeatedly
counts up to the value of compare latch TDxCL0, which defines the period (see Figure 19-3). The number
of timer counts in the period is TDCL0 + 1. When the timer value equals TDCL0, the timer restarts
counting from zero. If up mode is selected when the timer value is greater than TDCL0, the timer
immediately restarts counting from zero.
Figure 19-3. Up Mode
The TDxCCR0 CCIFG interrupt flag is set when the timer counts to the TDCL0 value. The TDIFG interrupt
flag is set when the timer counts from TDCL0 to zero. Figure 19-4 shows the flag set cycle.
Figure 19-4. Up Mode Flag Setting
19.2.4.1.1 Changing Period Register TDxCL0
When changing TDxCL0 while the timer is running and when the TDxCL0 load mode is immediate, if the
new period is greater than or equal to the old period or greater than the current count value, the timer
counts up to the new period. If the new period is less than the current count value, the timer rolls to zero.
However, one additional count may occur before the counter rolls to zero.
NOTE: When TDxCL0 is used as period register under high-resolution mode, the four LSB of the
TDxCL0 in the 16x case or the three LSB in the 8x case are ignored.
19.2.4.2 Continuous Mode
In continuous mode, the timer repeatedly counts up to TDR(max) and restarts from zero (see Figure 19-5).
The compare latch TDxCL0 works the same way as the other capture/compare registers.
Figure 19-5. Continuous Mode
516 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
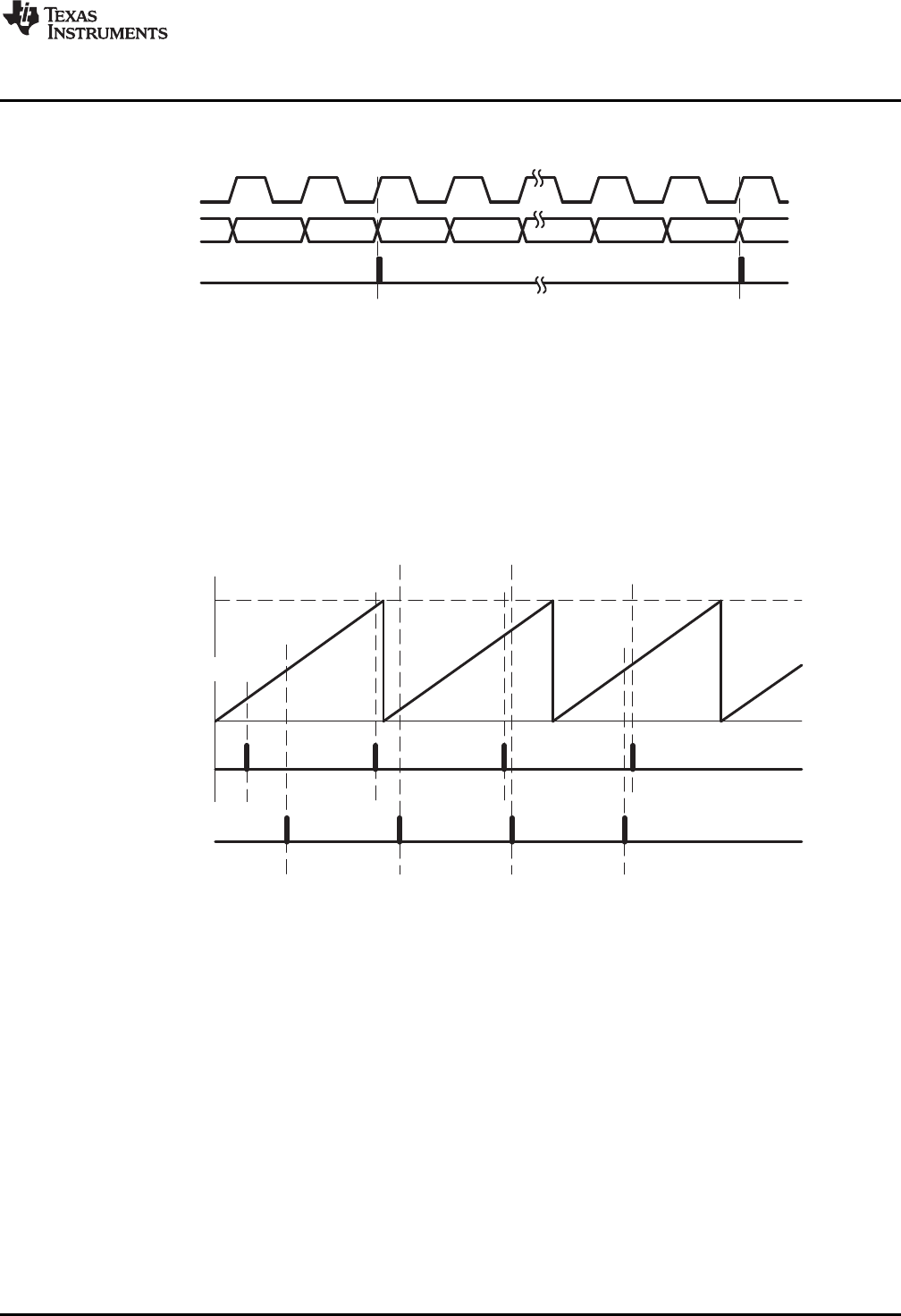
0h
EQU0 Interrupt
TDCL0a
TDCL0b TDCL0c TDCL0d
t1
t0t0
TDCL1a
TDCL1b TDCL1c
TDCL1d
t1t1
t0
EQU1 Interrupt
TDR(max)
TDR – 1
(max) TDR(max) 0h
Timer Clock
Timer
Set TDIFG
1h 0h
TDR – 1
(max) TDR(max)
www.ti.com
Timer_D Operation
The TDIFG interrupt flag is set when the timer counts from TDR(max) to zero. Figure 19-6 shows the flag set
cycle.
Figure 19-6. Continuous Mode Flag Setting
19.2.4.3 Use of Continuous Mode
The continuous mode can be used to generate independent time intervals and output frequencies. Each
time an interval is completed, an interrupt is generated. The next time interval is added to the TDCLx latch
in the interrupt service routine. Figure 19-7 shows two separate time intervals, t0and t1, being added to the
capture/compare registers. The time interval is controlled by hardware, not software, without impact from
interrupt latency. Up to three (for Timer_D3) or 7 (for Timer_D7) independent time intervals or output
frequencies can be generated using capture/compare registers.
Figure 19-7. Continuous Mode Time Intervals
Time intervals can be produced with other modes as well, using TDxCL0 as the period register. Their
handling is more complex, because the sum of the old TDCLx data and the new period can be higher than
the TDxCL0 value. When the sum of the previous TDCLx value plus txis greater than the TDCL0 data, the
old TDCL0 value must be subtracted to obtain the correct time interval.
517
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
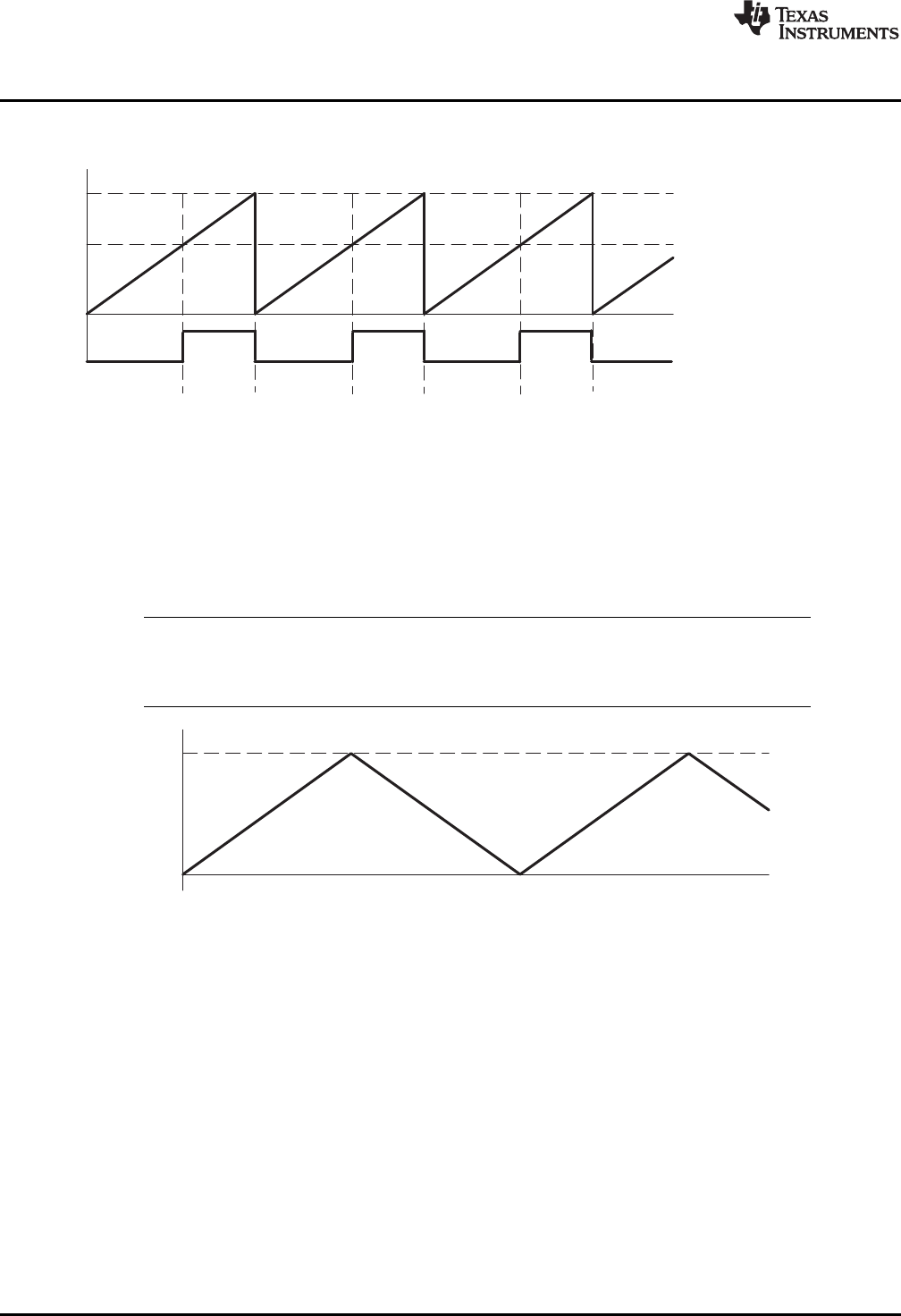
0h
TDCL0
0h
OUT0
TDCL0
TDR(max)
EQU0 EQU0 EQU0
Output Mode 3: Set/Reset
TDIFG TDIFG TDIFG TDIFG Interrupt Events
Timer_D Operation
www.ti.com
PWM output can be generated in capture/compare channel 0 by using the timer overflow signal together
with TDCL0. Figure 19-8 shows an example.
Figure 19-8. TDxCCR0 PWM Generation Under Continuous Mode
19.2.4.4 Up/Down Mode
The up/down mode is used if the timer period must be different from TDR(max) counts and if symmetrical
pulse generation is needed. The timer repeatedly counts up to the value of compare latch TDxCL0, and
back down to zero (see Figure 19-9). The period is twice the value in TDCL0.
NOTE: TDCL0 > TDR(max)
If TDCL0 > TDR(max), the counter operates as if it were configured for continuous mode. It
does not count down from TDR(max) to zero.
Figure 19-9. Up/Down Mode
The count direction is latched. This allows the timer to be stopped and then restarted in the same direction
it was counting before it was stopped. If this is not desired, the TDCLR bit must be used to clear the
direction. The TDCLR bit also clears the TDR value and the TDCLK divider.
518 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
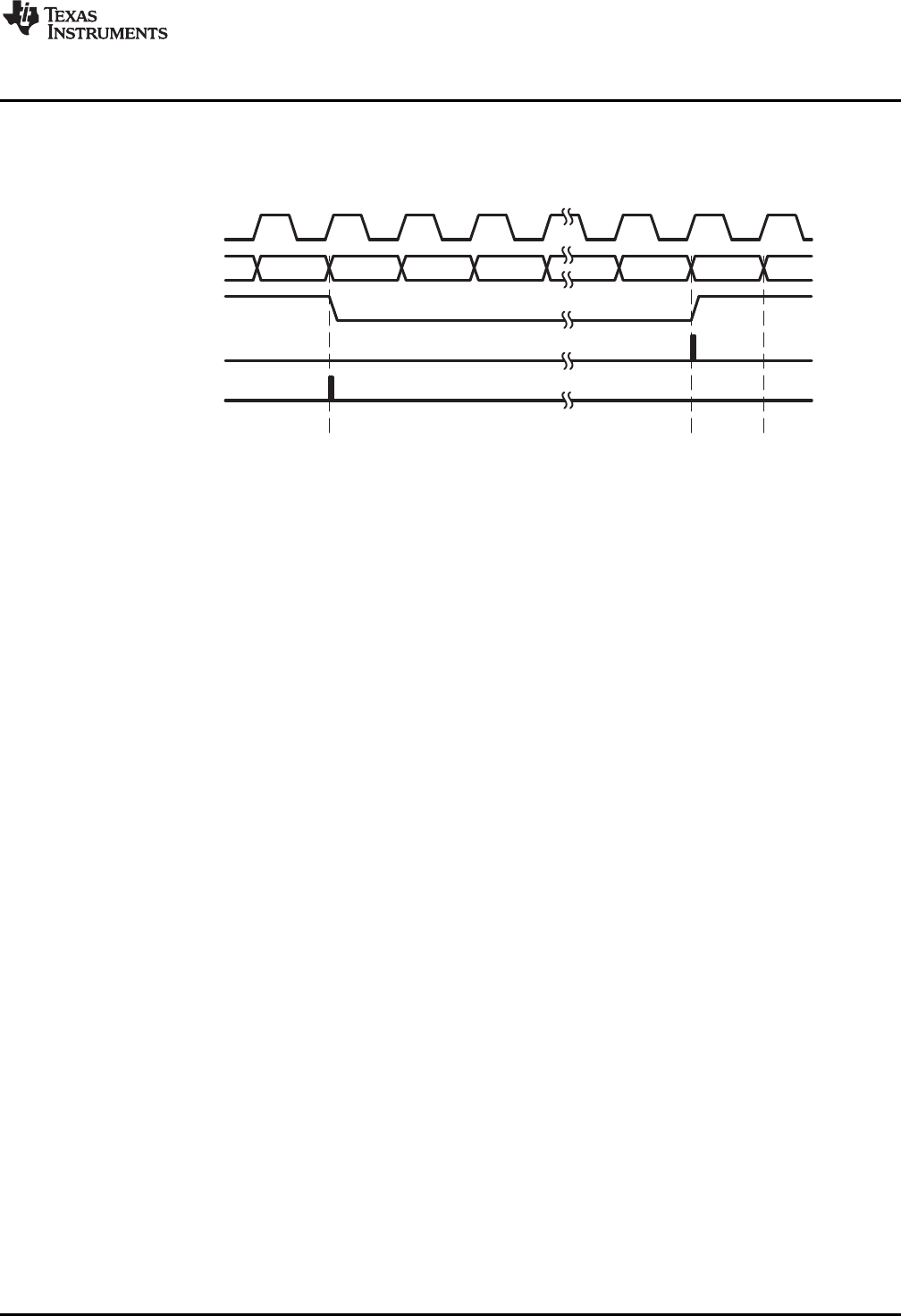
TDCL0-1 TDCL0 TDCL0-1
Timer Clock
Timer
Set TDIFG
Set TDCCR0 CCIFG
TDCL0-2 1h 0h 1h
Up/Down
www.ti.com
Timer_D Operation
In up/down mode, the TDxCCR0 CCIFG interrupt flag and the TDIFG interrupt flag are set only once
during the period, separated by one-half the timer period. The TDxCCR0 CCIFG interrupt flag is set when
the timer counts from TDCL0 – 1 to TDCL0, and TDIFG is set when the timer completes counting down
from 0001h to 0000h. Figure 19-10 shows the flag set cycle.
Figure 19-10. Up/Down Mode Flag Setting
19.2.4.4.1 Changing the Value of Period Register TDxCL0
When changing TDxCL0 while the timer is running and counting in the down direction, and when the
TDxCL0 load mode is immediate, the timer continues its descent until it reaches zero. The new period
takes effect after the counter counts down to zero.
If the timer is counting in the up direction when the new period is latched into TDxCL0, and the new period
is greater than or equal to the old period or greater than the current count value, the timer counts up to the
new period before counting down. When the timer is counting in the up direction and the new period is
less than the current count value when TDxCL0 is loaded, the timer begins counting down. However, one
additional count may occur before the counter begins counting down.
19.2.4.5 Use of Up/Down Mode
The up/down mode supports applications that require dead times between output signals (see
Section 19.2.9). For example, to avoid overload conditions, two outputs driving an H-bridge must never be
in a high state simultaneously. In the example shown in Figure 19-11, the tdead is:
tdead = ttimer × (TDCL1 – TDCL3)
Where:
tdead = Time during which both outputs need to be inactive
ttimer = Cycle time of the timer clock
TDCLx = Content of compare latch x
The ability to simultaneously load grouped compare latches ensures the dead times.
519
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
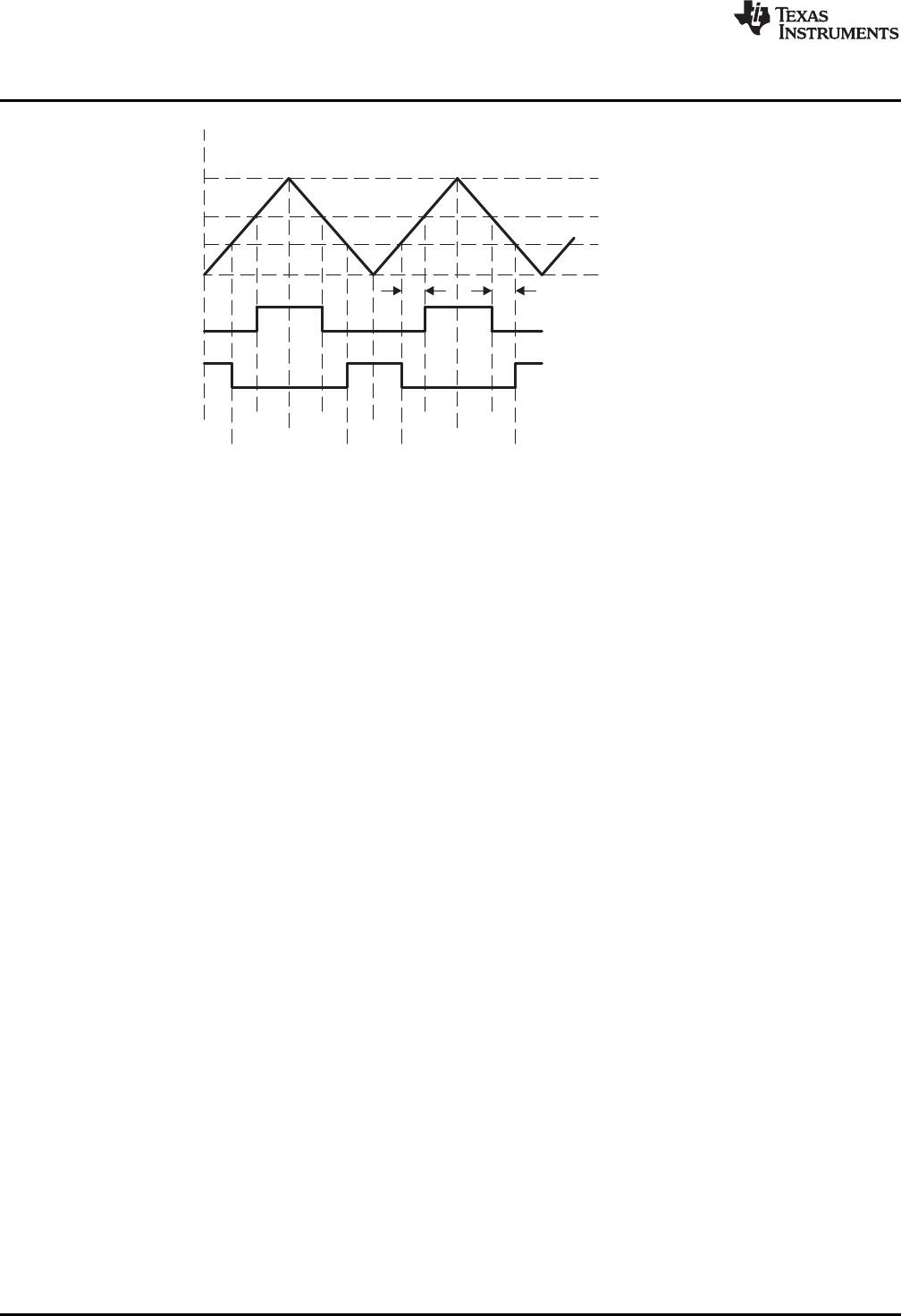
TDIFG
0h
TDR(max)
Output Mode 2: Toggle/Reset
Output Mode 6: Toggle/Set
TDCL0
TDCL1
EQU1 TDIFG Interrupt Events
EQU1
EQU0
EQU1 EQU1
EQU0
TDCL3
EQU3 EQU3
EQU3 EQU3
Dead Time
Timer_D Operation
www.ti.com
Figure 19-11. Output Unit in Up/Down Mode
19.2.5 PWM Generation
The previous examples have shown that PWM output can be produced by using a single TDCCRx. In
TDxCCR0, for example, either the falling or the rising edge of the PWM signal is controlled by the
TDxCCR0 or the period overflow (see Figure 19-8). In the other TDCCRx (x ≠0), PWM can be generated
by setting the output to up/down mode and using the TDCCRx register to control both the rising and the
falling edges of the signal (see Figure 19-11). However, this cannot always meet the application
requirements; for example, in motor control applications.
The control bits, TDxCMB of the TDxCTL1 register, are implemented so that two neighbor TDCCR
registers can be used for one channel to control both edges of one PWM output signal. If TDxCMB is set,
TDCCRx-1 and TDCCRxare combined to channel TDx; for example, TDxCCR1 and TDxCCR2 for TD2
output, TDxCCR3 and TDxCCR4 for TD4 output, and TDxCCR5 and TDxCCR6 for TD6. By configuring
TDxCMB bit, a Timer_D5 can then generate either two fully controlled PWM signals or four independent
channels.
The PWM duty cycle can be zero. The smallest pulse width depends on the TDHEN and TDHMx settings.
• In normal timer mode, TDHEN = 0, TDHMx = don't care: CCRx = 1
• In high-resolution timer mode, 8x reference frequency, TDHEN = 1, TDHMx = 00: CCRx = 0x0010, 8
high-resolution cycles
• In high-resolution timer mode, 16x reference frequency, TDHEN = 1, TDHMx = 01: CCRx = 0x0020, 16
high-resolution cycles
Figure 19-12 shows an example.
Table 19-3 and Table 19-4 summarize the duty cycle limitations of the Timer_D. Duty cycles close to 0%
and 100% should be avoided. Table 19-3 and Table 19-4 show how the output signal behaves in case the
TDCCRx register is programmed to values beyond the recommended range of values dependent on the
OUTMODx setting.
520 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
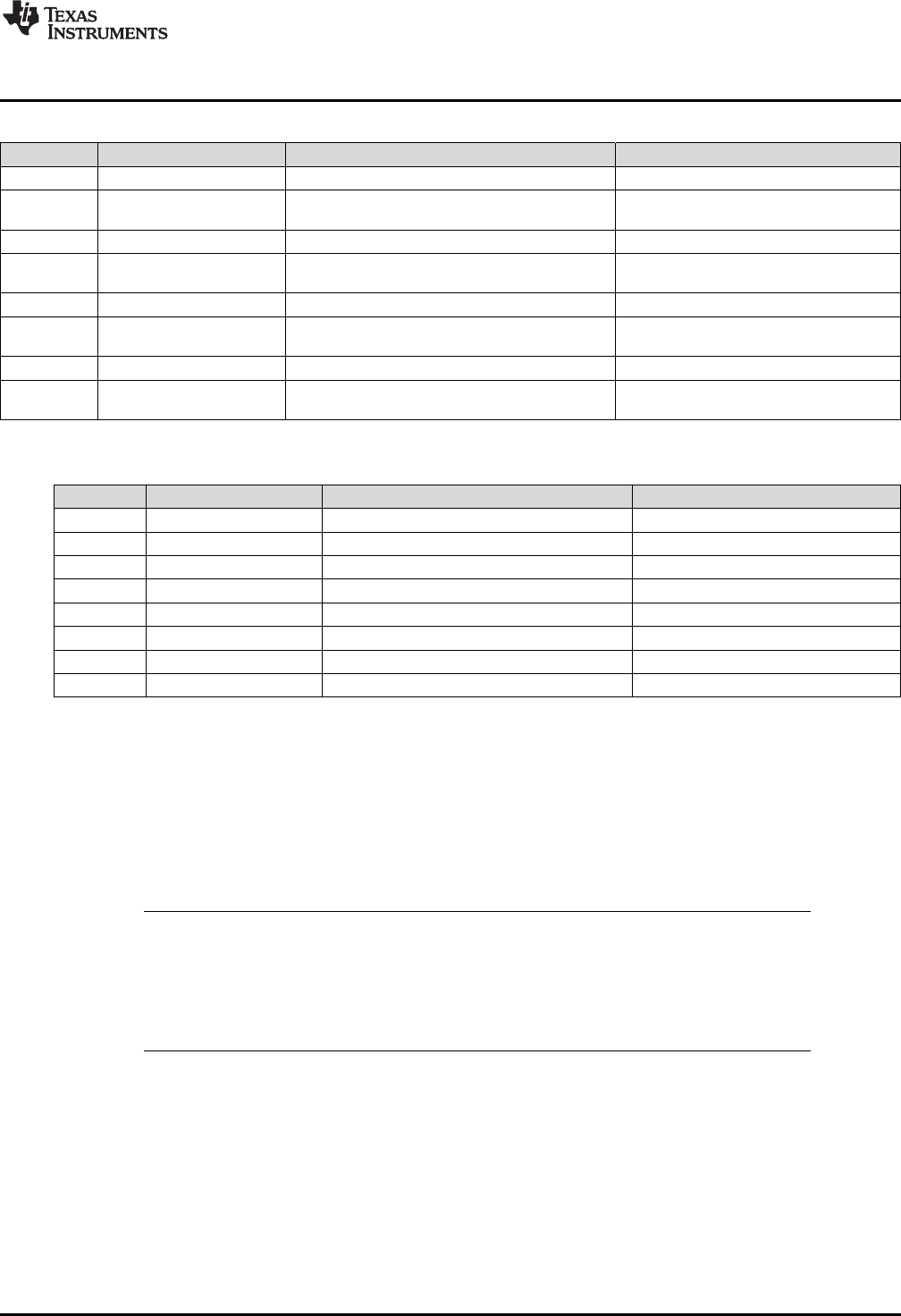
www.ti.com
Timer_D Operation
Table 19-3. High-Resolution Mode Limitation (TDHEN = 1) - Minimum Duty Cycle
OUTMODx Mode Condition Description
000 Output n/a n/a
Set TDHMx = 0: TDCCRx < 0x0007 Output is not set.
001 TDHMx = 1: TDCCRx < 0x000F
010 Toggle/Reset - Not recommended.
Set/Reset TDHMx = 0: TDCCRx < 0x0007 Result is 100% duty cycle.
011 TDHMx = 1: TDCCRx < 0x000F
100 Toggle - Not recommended.
Reset TDHMx = 0: TDCCRx < 0x0007 Output is not reset.
101 TDHMx = 1: TDCCRx < 0x000F
110 Toggle/Set - Not recommended.
Reset/Set TDHMx = 0: TDCCRx < 0x0007 Result is 0% duty cycle.
111 TDHMx = 1: TDCCRx < 0x000F
Table 19-4. High-Resolution Mode Limitation (TDHEN = 1) - Maximum Duty Cycle
OUTMODx Mode Condition Description
000 Output n/a n/a
001 Set TDCCRx > TDCCR0 - 0x0008 Output is not set.
010 Toggle/Reset - Not recommended.
011 Set/Reset TDCCRx > TDCCR0 - 0x0008 Result is 100% duty cycle.
100 Toggle - Not recommended.
101 Reset TDCCRx > TDCCR0 - 0x0008 Output is not reset.
110 Toggle/Set - Not recommended.
111 Reset/Set TDCCRx > TDCCR0 - 0x0008 Result is 0% duty cycle.
In high-resolution compare mode there are limitations of the minimum and maximum duty cycles.
Minimum duty cycle:
TDHMx = 0: TDCCRx < 8 are set to TDCCRx = 0; that is, return 0 duty cycle.
TDHMX = 1: TDCCRx < 16 are set to TDCCRx = 0; that is, return 0 duty cycle.
Maximum duty cycle:
TDHMx = 0 or 1: The maximum duty cycle is limited to TDCCRx < TDCCR0 - 0x000F. Values of
TDCCRx greater than TDCCR0 - 0x000F lead to 0 duty cycle.
NOTE: In high-resolution mode, when the two CCRx channels are combined by setting
TDxCMB = 1, the minimum difference between the output compare registers (CCRx and
CCRx + 1 must be:
if TDHMx = 00: | TDCCRx- TDCCRx-1 | > 7
if TDHMx = 01: | TDCCRx- TDCCRx-1 | > 15
521
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
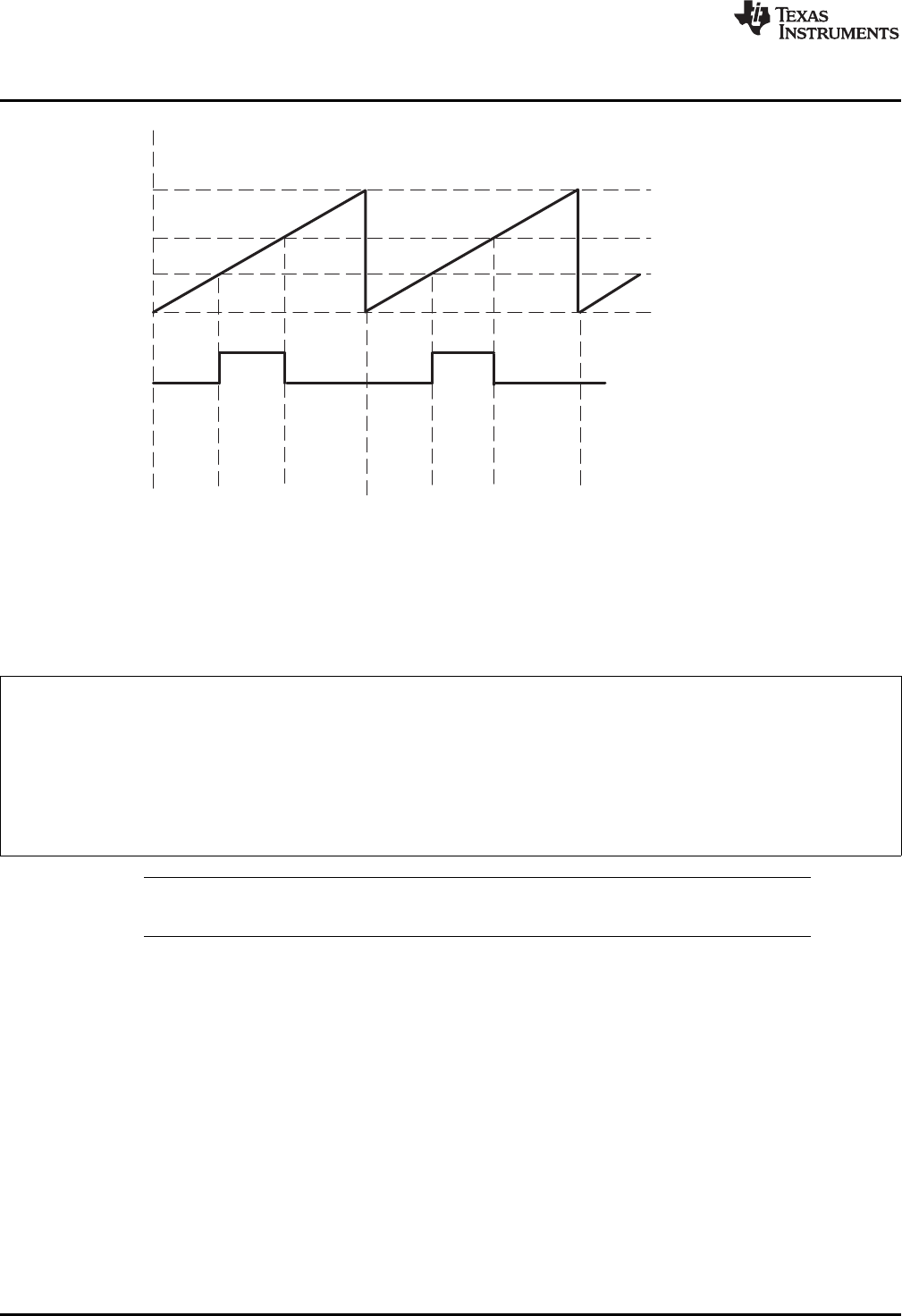
TDIFG
0h
TDR(max)
Output Mode 7: Reset/Set
(TD2CMB = 1)
TDCL0
TDCL2
EQU1
TDIFG Interrupt Events
EQU2
EQU0 EQU1 EQU2 EQU0
TDCL1
EQU0
OUT2
TDIFG
Timer_D Operation
www.ti.com
Figure 19-12. Controlling Rising and Falling Edge of PWM Output in Up Mode
Example 19-2 shows how to set up the timer for the case shown in Figure 19-12.
Example 19-2.
MOV #TD2CMB+TDCLKM_0, &TDxCTL1 ; Combine TDxCCR1&TDxCCR2,
; External Clock
MOV #OUTMOD_7, &TDxCCTL2 ; TDxCCR2 Reset/Set
MOV 0x80, &TDxCCR0 ; PWM Period TDxCCR0 128
MOV 0x28, &TDxCCR1 ; TDxCCR1 is 40, Set
MOV 0x50, &TDxCCR2 ; TDxCCR2 is 80, Reset
MOV #TDSSEL_1+MC_1, &TDxCTL0 ; ACLK, Up Mode
BIS #CPUOFF,SR ; Enter LPM0
NOTE: Channels TD1, TD3, and TD5 are still controlled by TDxCCR1, TDxCCR3, and TDxCCR5,
respectively, even when the TDxCCRx registers are paired.
Combining two pairs of CCRx channels to two PWM outputs can be used to generate non-overlapping
PWM channels.
522 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
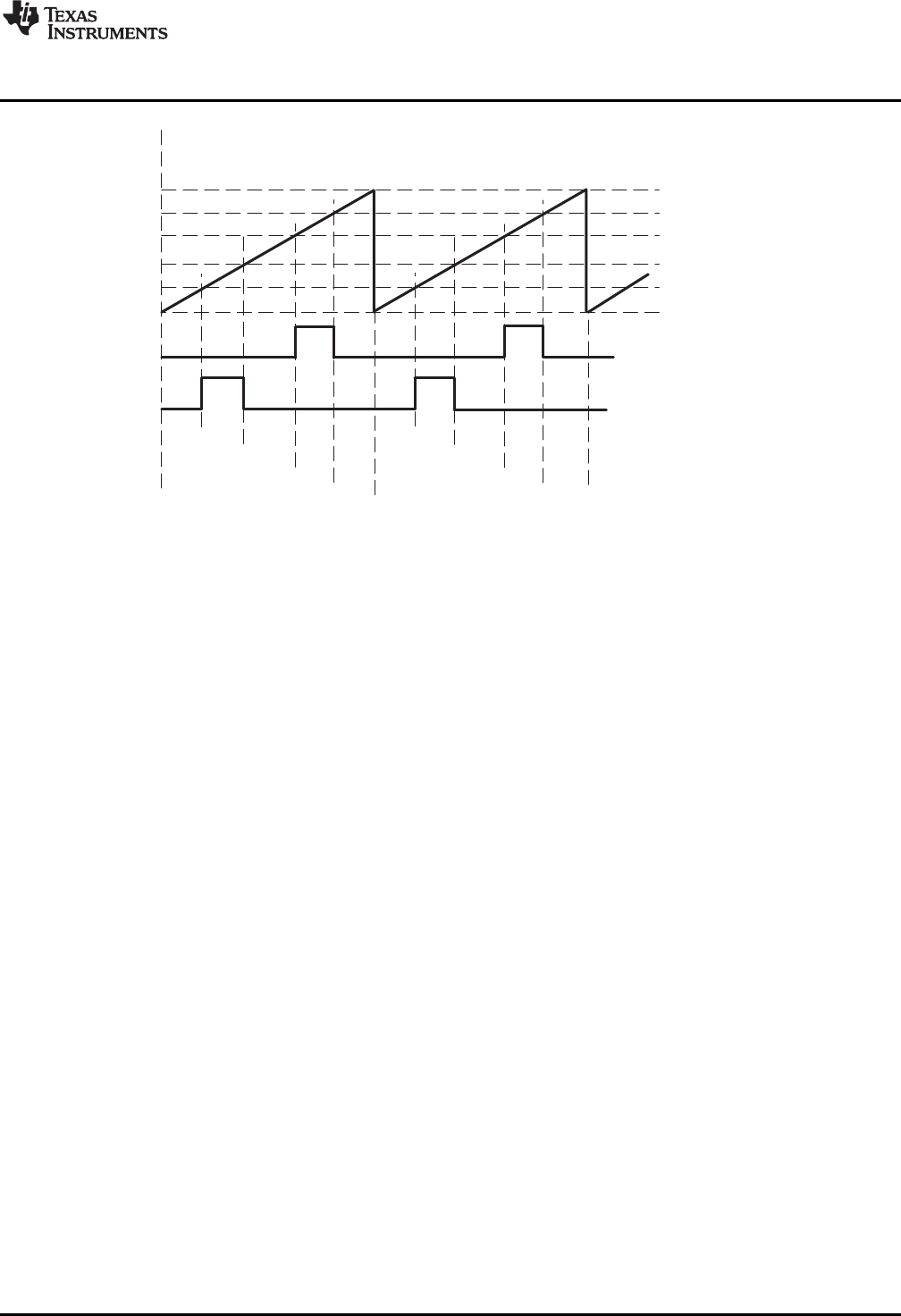
0h
TDR(max)
Output Mode 7: Reset/Set
(TD4CMB = 1)
TDCL0
TDCL2
EQU1
EQU2
EQU0
EQU1
EQU2
EQU0
TDCL1
EQU0
OUT4
TDCL4
TDCL3
EQU3
EQU4
EQU3
EQU4
Output Mode 7: Reset/Set
(TD2CMB = 1)
OUT2
www.ti.com
Timer_D Operation
Figure 19-13. Deadband Generation (TDxCMB = 1)
19.2.6 Capture/Compare Blocks
Several identical capture/compare blocks, TDCCRx, are present in Timer_D. Any of the blocks may be
used to capture the timer data or to generate time intervals. See the device-specific data sheet for the
number of capture/compare blocks available.
19.2.6.1 Capture Mode
The capture mode is used to record time events. It can be used for speed computations or time
measurements. The capture inputs CCIxA and CCIxB are connected to external pins or internal signals
and are selected with the CCISx bits. The CMx bits select the capture edge of the input signal as rising,
falling, or both. A capture occurs on the selected edge of the input signal. If a capture is performed:
• The timer value is copied into the TDCCRx register.
• The TDCCRx register is copied into the TDCLx register.
• The interrupt flag CCIFG is set.
• The Capture Overflow bit is set at a capture overflow condition.
The input signal level can be read at any time via the CCI bit. Devices may have different signals
connected to CCIxA and CCIxB. See the device-specific data sheet for the connections of these signals.
The capture signal can be asynchronous to the timer clock and cause a race condition. Setting the SCS
bit synchronizes the capture with the next timer clock. Setting the SCS bit to synchronize the capture
signal with the timer clock is recommended (see Figure 19-14). In high-resolution mode, the SCS bit is
ignored.
523
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
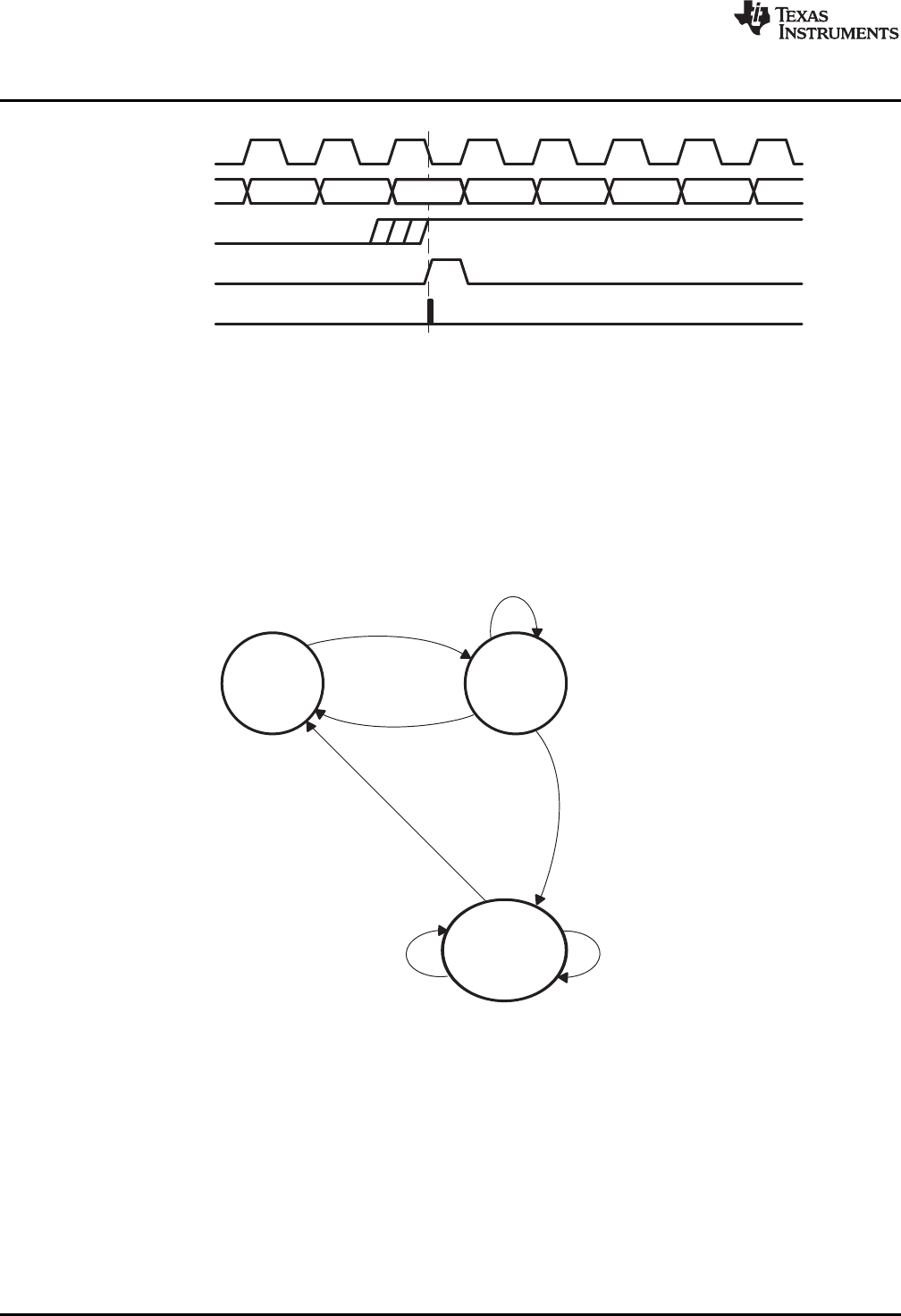
Overflow
TDCCRx = 2nd
TDCLx = 1st
COV = 1
Capture
Taken
TDCCRx =
TDR
No
Capture
Taken
Clear COV and
TDIFG
Idle
Idle
Second Capture
Read Captures from
TDCCRx
check COV = 0,
clear TDIFG
First Capture
New Capture
n–2 n 1–
Timer Clock
Timer
Set
TDCCRx CCIFG
n+1 n+3 n+4
CCI
Capture
n+2
n
Timer_D Operation
www.ti.com
Figure 19-14. Capture Signal (SCS = 1)
Overflow logic is provided in each capture/compare register to indicate a capture overflow condition.
19.2.6.1.1 Single Capture Mode (TDCAPMx = 0)
Each input capture channel can be operated in single capture (compatibility) mode or in dual capture
mode. The single capture mode is selected by TDCAPMx = 0. In single capture mode, the content of
register TDCCRx is shifted to TDCLx register at each capture event. In single capture mode, the capture
overflow bit (COV) is set if a capture events occurs before the TDCCRx register has been read (see
Figure 19-15). COV must be reset by software.
Figure 19-15. Single Capture Cycle
19.2.6.1.2 Dual Capture Mode (TDCAPMx = 1)
Each input capture channel can be operated in single capture (compatibility) mode or in dual capture
mode. The dual capture mode is selected by TDCAPMx = 1. In dual capture mode, the register TDCCRx
content is shifted to the TDCLx register per each capture event; that is, the second capture event shifts
the first capture value from TDCCRx into the TDCLx register. Then TDCCRx holds the second capture
value while TDCLx holds the first, and the CCIFG interrupt flag is set. To make sure there is no earlier
captured value in the TDCCRx and TDCLx registers these registers should be read prior to using the dual
capture mode. The COV bit is set at the third capture event if both TDCCRx and TDCLx have not been
read prior to the third capture event (see Figure 19-16). The third capture event again shifts the TDCCRx
register content to the TDCLx register. The first capture value is no longer available.
524 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
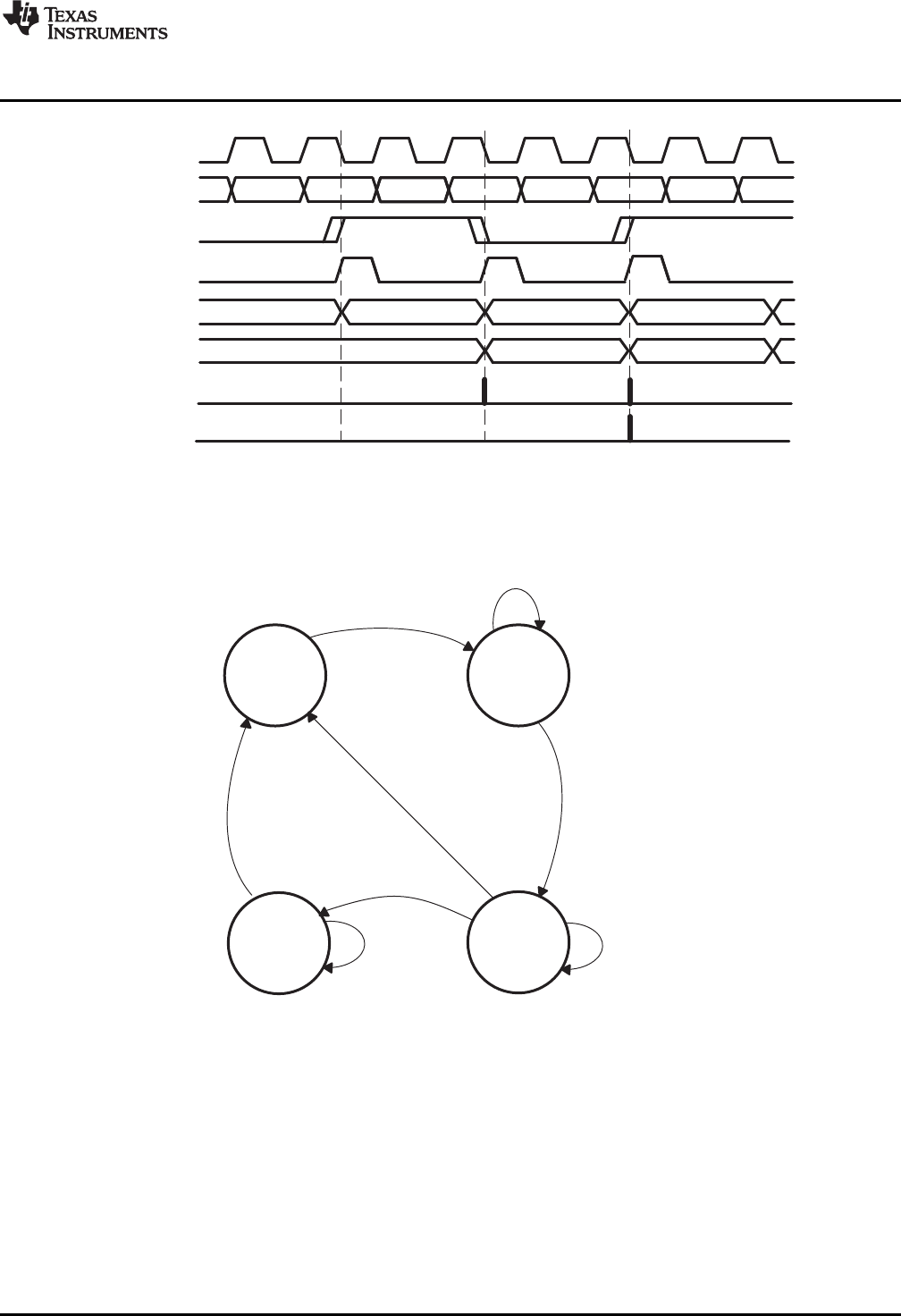
Second
Capture
TDCCRx = 2nd
TDCLx = 1st
Capture
Taken
TDCCRx = 1st
TDCLx = x
No
Capture
Taken
Overflow
TDCCRx = 3rd
TDCLx = 2nd
COV = 1
Clear COV and
TDIFG
Idle
Idle
Second Capture
Read Captures from
TDCCRx and TDCLx,
check COV = 0,
clear TDIFG
First Capture
Third Capture
Idle
N–1 N
Timer Clock
Timer N+2 N+4 N+5
CCI
Capture
N+3
N+1
Set CCIFG
TDCCR
TDCL
NN+2 N+4
undefined NN+2
Set COV
undefined
www.ti.com
Timer_D Operation
Figure 19-16. Sequential Capture Events in Dual Capture Mode
The COV bit is set at the third capture if TDCCRx and TDCLx are not read prior to the third capture event
(see Figure 19-17). Checking for COV = 0 after reading the capture registers TDCCRx and TDCLx
validates the register content.
Figure 19-17. COV in Dual Capture Mode
525
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Operation
www.ti.com
19.2.6.1.3 Capture Initiated by Software
Captures can be initiated by software. The CMx bits can be set for capture on both edges. Software then
sets bit CCIS1 = 1 and toggles bit CCIS0 to switch the capture signal between VCC and GND, initiating a
capture each time CCIS0 changes state:
MOV #CAP+SCS+CCIS1+CM_3,&TDxCCTLx ; Set up TDCCTLx
XOR #CCIS0,&TDCCTLx ; TDCCRx = TDR
19.2.7 Compare Mode
The compare mode is selected when CAP = 0. Compare mode is used to generate PWM output signals or
interrupts at specific time intervals. When TDxR counts to the value in a TDCLx:
• Interrupt flag CCIFG is set.
• Internal signal EQUx = 1.
• EQUx affects the output according to the output mode.
19.2.7.1 Compare Latch TDCLx
The TDCCRx compare latch, TDCLx, holds the data for the comparison to the timer value in compare
mode. TDCLx is buffered by TDCCRx. The buffered compare latch gives the user control over when a
compare period updates. Compare data is written to each TDCCRx and automatically transferred to
TDCLx. The timing of the transfer from TDCCRx to TDCLx is user selectable by setting the CLLDx bits as
described in Table 19-5.
Table 19-5. TDCLx Load Events
CLLDx Description
00 New data is transferred from TDCCRx to TDCLx immediately when TDCCRx is written to.
01 New data is transferred from TDCCRx to TDCLx when TDxR counts to 0.
New data is transferred from TDCCRx to TDCLx when TDxR counts to 0 for up and continuous modes. New data is
10 transferred to from TDCCRx to TDCLx when TDxR counts to the old TDCL0 value or to 0 for up/down mode.
11 New data is transferred from TDCCRx to TDCLx when TDxR counts to the old TDCLx value.
19.2.7.2 Grouping Compare Latches
Multiple compare latches may be grouped together for simultaneous updates with the TDCLGRPx bits.
When using groups, the CLLDx bits of the lowest numbered TDCCRx in the group determine the load
event for each compare latch of the group, except when TDCLGRP = 3 (see Table 19-6). The CLLDx bits
of the controlling TDCCRx must not be set to zero. When the CLLDx bits of the controlling TDCCRx are
set to zero, all compare latches update immediately when their corresponding TDCCRx is written; no
compare latches are grouped.
Two conditions must exist for the compare latches to be loaded when grouped. First, all TDCCRx registers
of the group must be updated, even when new TDCCRx data equals the old TDCCRx data. Second, the
load event must occur.
Table 19-6. Compare Latch Operating Modes
TDCLGRPx Grouping Update Control
00 None Individual
TDxCL1+TDxCL2 TDxCCR1
01 TDxCL3+TDxCL4 TDxCCR3
TDxCL5+TDxCL6 TDxCCR5
TDxCL1+TDxCL2+TDxCL3 TDxCCR1
10 TDxCL4+TDxCL5+TDxCL6 TDxCCR4
11 TDxCL0+TDxCL1+TDxCL2+TDxCL3+TDxCL4+TDxCL5+TDxCL6 TDxCCR1
526 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Timer_D Operation
19.2.8 Switching From Capture to Compare Mode
As discussed in Section 19.2.7, the TDCLx register holds the first captured value when a second capture
is taking place. Therefore, when the capture/compare block switches from capture mode to compare
mode, TDCLx may have a non-zero initial value. It is important to clear the TDCLx before use or to update
the TDCLx immediately when TDCCRx is written; that is, set CLLDx = 0x0.
19.2.9 Output Unit
Each capture/compare block contains an output unit. The output unit is used to generate output signals,
such as PWM signals. Each output unit has eight operating modes that generate signals based on the
EQU0 and EQUx signals. The TDOUTH pin function can be used to put all Timer_D outputs into a high-
impedance state. When the TDOUTH pin function is selected for the pin (corresponding PSEL bit is set,
and port configured as input) and when the pin is pulled high, all Timer_D outputs are in a high-impedance
state.
19.2.9.1 Output Modes
The output modes are defined by the OUTMODx bits and are described in Table 19-7. The OUTx signal is
changed with the rising edge of the timer clock for all modes except mode 0. In the the term TDyR period
match is used. The period match in continuous mode is defined by the counter length (TDyCNTLx), and in
Up mode and Up/Down mode by TDyCL0 register.
Table 19-7. Output Modes
OUTMODx Mode Description
000 Output The output signal OUTx is defined by the OUTx bit. The OUTx signal updates immediately when
OUTx is updated.
001 Set Set events: Timer counts to TDyCLx, external fault (TECyFLTx).
It remains set until a reset of the timer, or until another output mode is selected and affects the
output.
010 Toggle/Reset TDxCMB = 0:
Toggle events: Timer counts to TDyCLx, external fault (TECyFLTx).
Reset events: Timer counts to TDyCLx, TDyR period match, external fault (TECyFLT0), external
clear (TECyCLR).
TD2CMB = 1:
Toggle events: Timer counts to TDyCL2, external fault (TECyFLT2).
Reset events: Timer counts to TDyCL1, external fault (TECyFLT1), external clear (TECyCLR).
TD4CMB = 1:
Toggle events: Timer counts to TDyCL4, external fault (TECyFLT4).
Reset events: Timer counts to TDyCL3, external fault (TECyFLT3), external clear (TECyCLR).
TD6CMB = 1:
Toggle events: Timer counts to TDyCL6, external fault (TECyFLT6).
Reset events: Timer counts to TDyCL5, external fault (TECyFLT5), external clear (TECyCLR).
011 Set/Reset TDxCMB = 0:
Set events: Timer counts to TDyCLx, external fault (TECyFLTx).
Reset events: Timer counts to TDyCLx, TDyR period match, external fault (TECyFLT0), external
clear (TECyCLR).
TD2CMB = 1:
Set events: Timer counts to TDyCL2, external fault (TECyFLT2).
Reset events: Timer counts to TDyCL1, external fault (TECyFLT1),, external clear (TECyCLR).
TD4CMB = 1:
Set events: Timer counts to TDyCL4, external fault (TECyFLT4).
Reset events: Timer counts to TDyCL3, external fault (TECyFLT3), external clear (TECyCLR).
TD6CMB = 1:
Set events: Timer counts to TDyCL6, external fault (TECyFLT6).
Reset events: Timer counts to TDyCL5, external fault (TECyFLT5), external clear (TECyCLR).
100 Toggle Toggle events: Timer counts to TDyCLx, external fault (TECyFLTx).
The output period is twice the timer period.
101 Reset Reset events: Timer counts to TDyCLx, external fault (TECyFLTx).
It remains reset until another output mode is selected and affects the output.
527
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Operation
www.ti.com
Table 19-7. Output Modes (continued)
OUTMODx Mode Description
110 Toggle/Set TDxCMB = 0:
Toggle events: Timer counts to TDyCLx, external fault (TECyFLTx).
Set events: Timer counts to TDyCLx, TDyR period match, external fault (TECyFLT0), external
clear (TECyCLR).
TD2CMB = 1:
Toggle events: Timer counts to TDyCL2, external fault (TECyFLT2).
Set events: Timer counts to TDyCL1, external fault (TECyFLT1), external clear (TECyCLR).
TD4CMB = 1:
Toggle events: Timer counts to TDyCL4, external fault (TECyFLT4).
Set events: Timer counts to TDyCL3, external fault (TECyFLT3), external clear (TECyCLR).
TD6CMB = 1:
Toggle events: Timer counts to TDyCL6, external fault (TECyFLT6).
Set events: Timer counts to TDyCL5, external fault (TECyFLT5), external clear
(TECyCLR).TDxCMB=0:
111 Reset/Set TDxCMB = 0:
Reset events: Timer counts to TDyCLx, external fault (TECyFLTx).
Set events: Timer counts to TDyCLx, TDyR period match, external fault (TECyFLT0), external
clear (TECyCLR).
TD2CMB = 1:
Reset events: Timer counts to TDyCL2, external fault (TECyFLT2).
Set events: Timer counts to TDyCL1, external fault (TECyFLT1), external clear (TECyCLR).
TD4CMB = 1:
Reset events: Timer counts to TDyCL4, external fault (TECyFLT4).
Set events: Timer counts to TDyCL3, external fault (TECyFLT3), external clear (TECyCLR).
TD6CMB = 1:
Reset events: Timer counts to TDyCL6, external fault (TECyFLT6).
Set events: Timer counts to TDyCL5, external fault (TECyFLT5), external clear
(TECyCLR).TDxCMB=0:
528 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
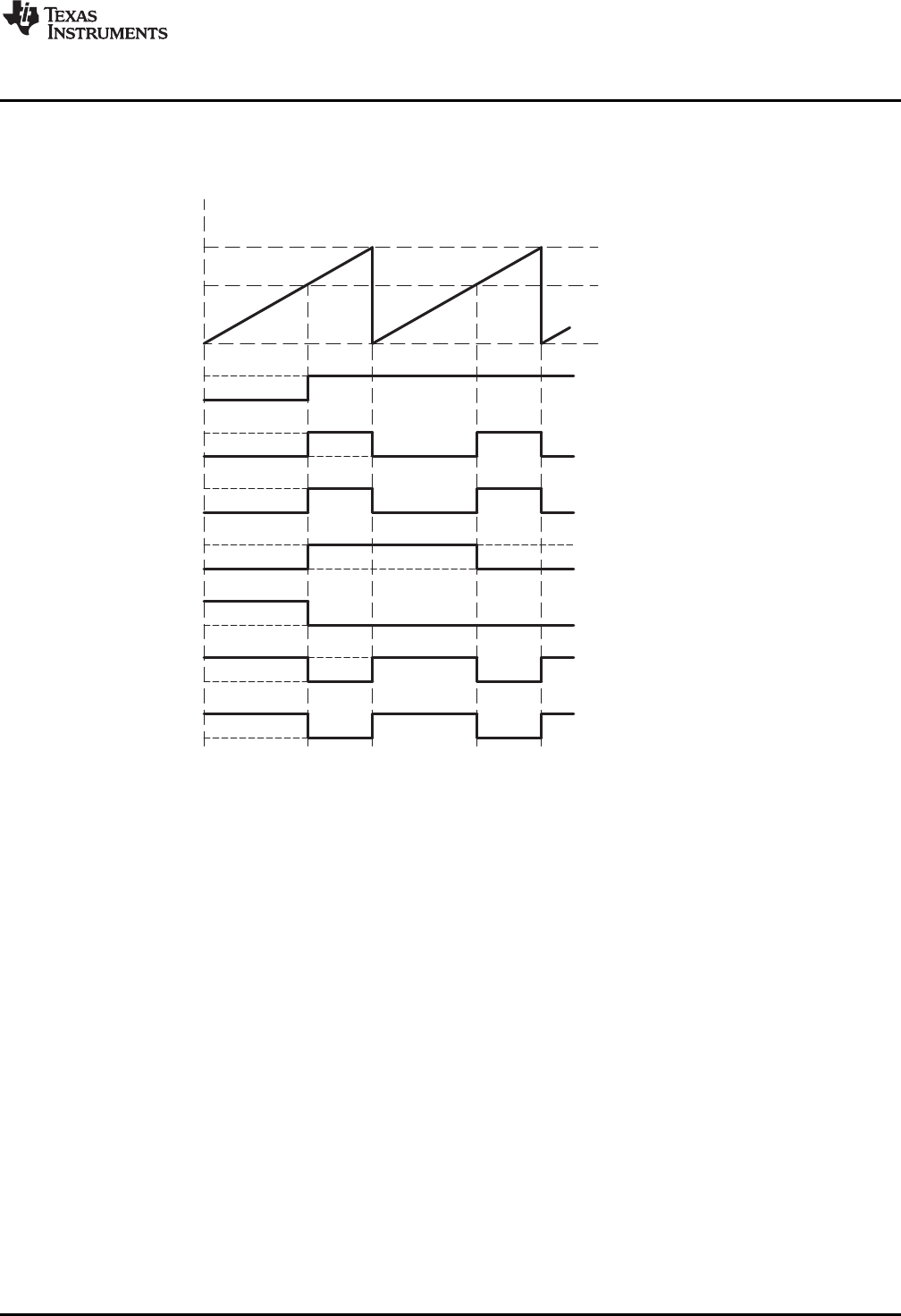
0h
TDR(max)
EQU0
TDIFG
Output Mode 1: Set
Output Mode 2: Toggle/Reset
Output Mode 3: Set/Reset
Output Mode 4: Toggle
Output Mode 5: Reset
Output Mode 6: Toggle/Set
Output Mode 7: Reset/Set
TDCL0
TDCL1
EQU1 EQU0
TDIFG
EQU1 EQU0
TDIFG Interrupt Events
www.ti.com
Timer_D Operation
19.2.9.1.1 Output Example – Timer in Up Mode
The OUTx signal is changed when the timer counts up to the TDCLx value, and rolls from TDCL0 to zero,
depending on the output mode. An example is shown in Figure 19-18 using TDxCL0 and TDxCL1.
Figure 19-18. Output Example, Channel 1 – Timer in Up Mode
529
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
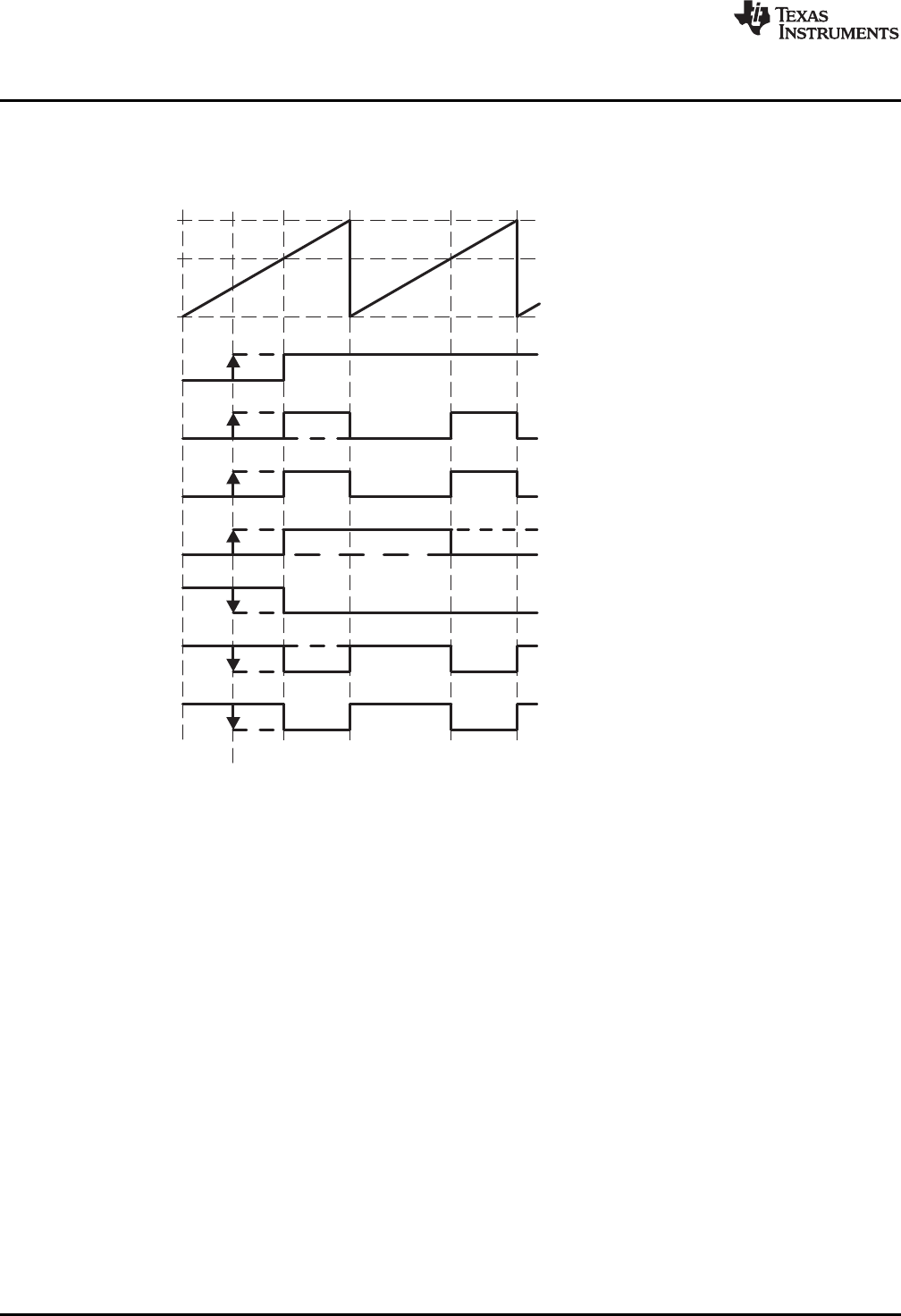
TDR(max)
EQU0
Output Mode 1: Set
Output Mode 2: Toggle/Reset
Output Mode 3: Set/Reset
Output Mode 4: Toggle
Output Mode 5: Reset
Output Mode 6: Toggle/Set
Output Mode 7: Reset/Set
TDCL0
TDCL1
EQU1 EQU0 EQU1 EQU0 Interrupt Events
TECxFLT1
0h
Timer_D Operation
www.ti.com
The OUTx signal is changed when the timer counts up to the TDCLx value, and rolls from TDCL0 to zero,
depending on the output mode. The activity selected for the TDCCRx match event (TDR = TDCCLx)
occurs at the point in time where the external fault event happens. An example is shown in Figure 19-19
using TDxCL0 and TDxCL1.
Figure 19-19. Output Example, Channel 1 - Timer in Up Mode With External Fault Signal
530 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
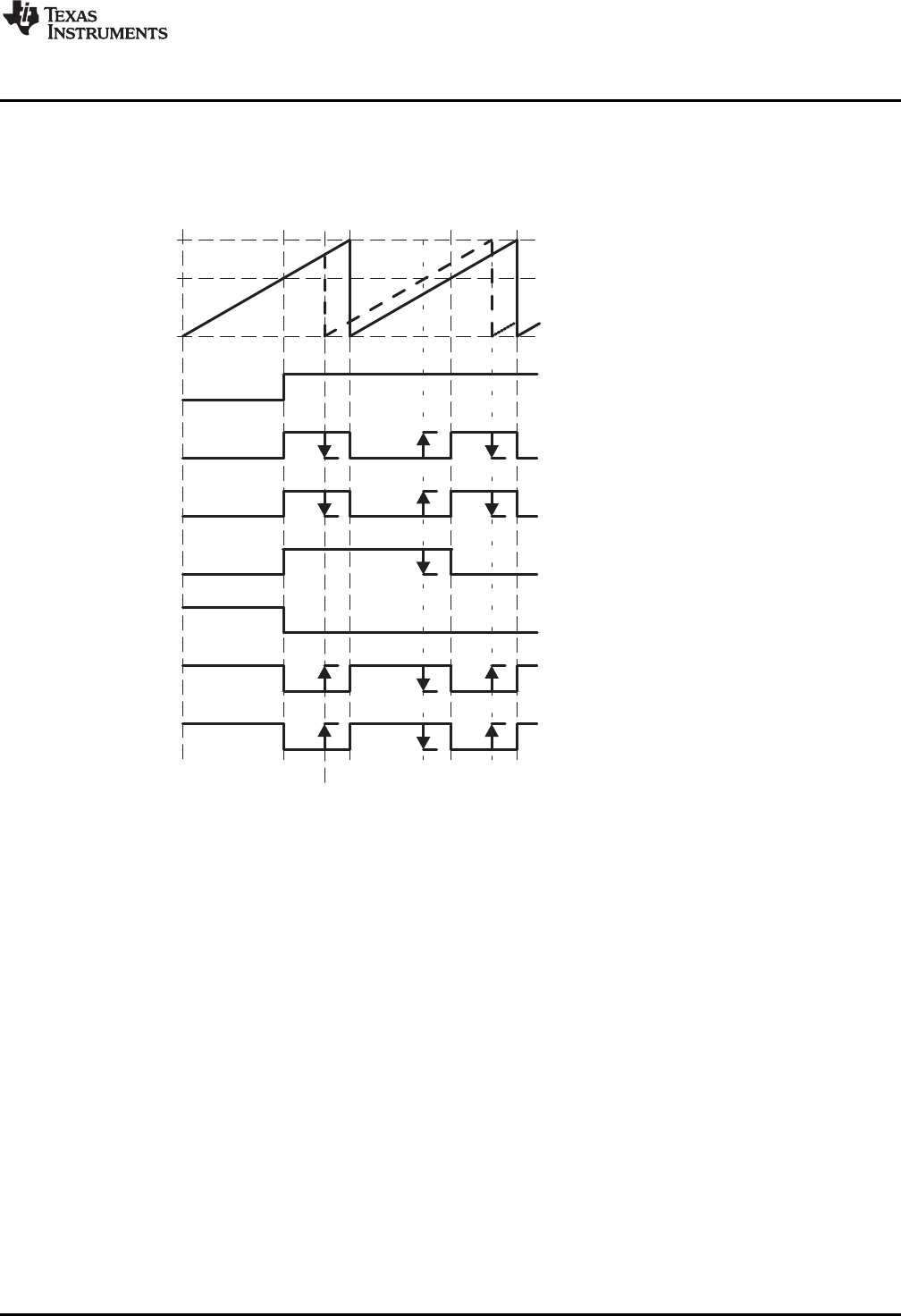
TDR(max)
EQU0
Output Mode 1: Set
Output Mode 2: Toggle/Reset
Output Mode 3: Set/Reset
Output Mode 4: Toggle
Output Mode 5: Reset
Output Mode 6: Toggle/Set
Output Mode 7: Reset/Set
TDCL0
TDCL1
EQU1 EQU0 EQU1 EQU0
TECEXCLR
0h
www.ti.com
Timer_D Operation
The OUTx signal is changed when the timer counts up to the TDCLx value, and rolls from TDCL0 to zero,
depending on the output mode. The activity selected for the period match event (TDR = TDCCL0) occurs
at the point in time when the external clear event happens. The external clear event restarts the timer
counter. As a consequence, the next period starts earlier, and all following events happen earlier as well.
An example is shown in Figure 19-20 using TDxCL0 and TDxCL1.
Figure 19-20. Output Example - Timer in Up Mode with External Timer Clear Signal
531
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
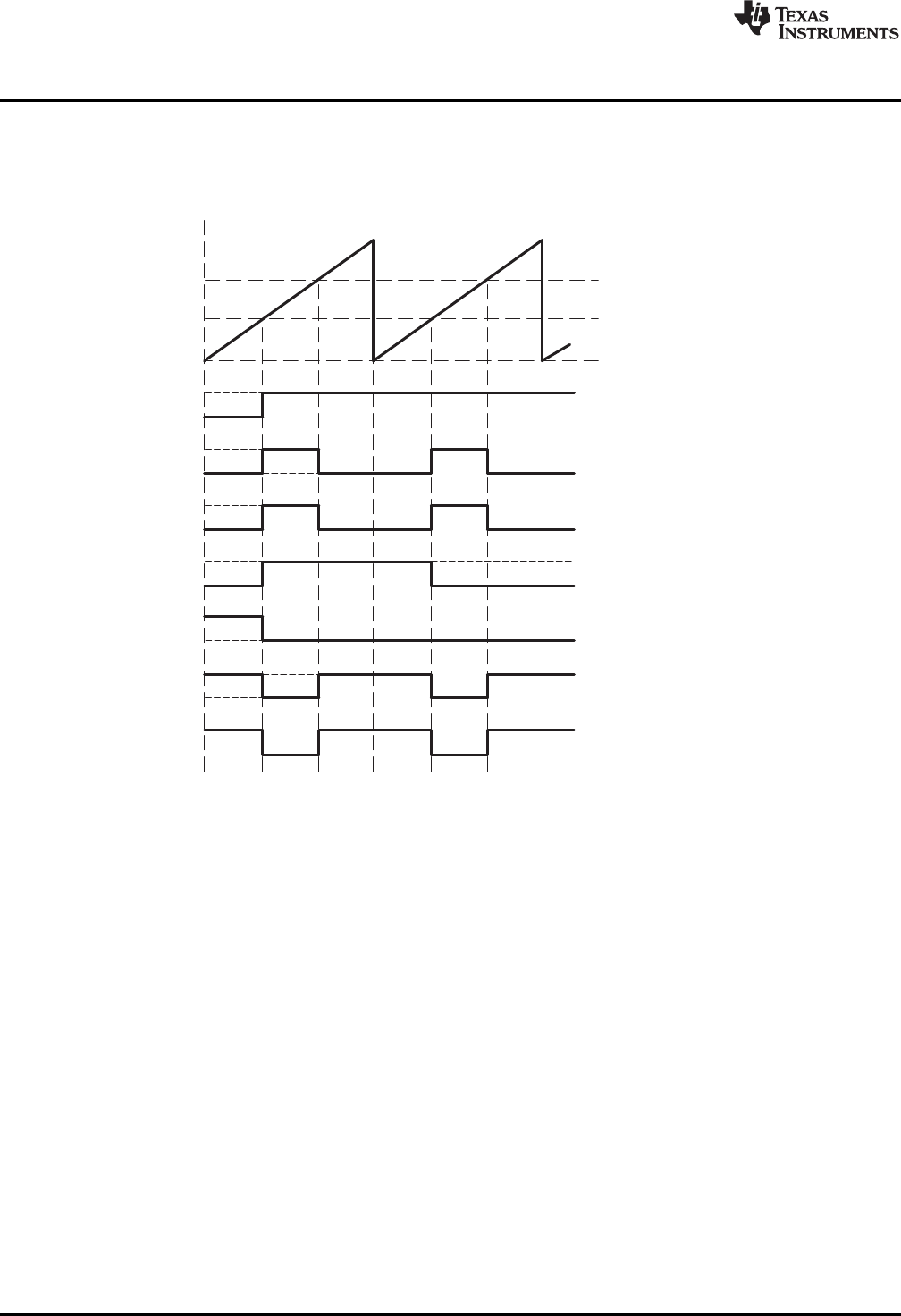
0h
TDR(max)
TDIFG
Output Mode 1: Set
Output Mode 2: Toggle/Reset
Output Mode 3: Set/Reset
Output Mode 4: Toggle
Output Mode 5: Reset
Output Mode 6: Toggle/Set
Output Mode 7: Reset/Set
TDCL0
TDCL1
EQU1 TDIFG EQU1 EQU0 Interrupt Events
EQU0
Timer_D Operation
www.ti.com
19.2.9.1.2 Output Example – Timer in Continuous Mode
The OUTx signal is changed when the timer reaches the TDCLx and TDCL0 values, depending on the
output mode. An example is shown in Figure 19-21 using TDxCL0 and TDxCL1. The external fault and
external clear signals have the same impact to the output signals as in Up mode as shown in and .
Figure 19-21. Output Example – Timer in Continuous Mode
532 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
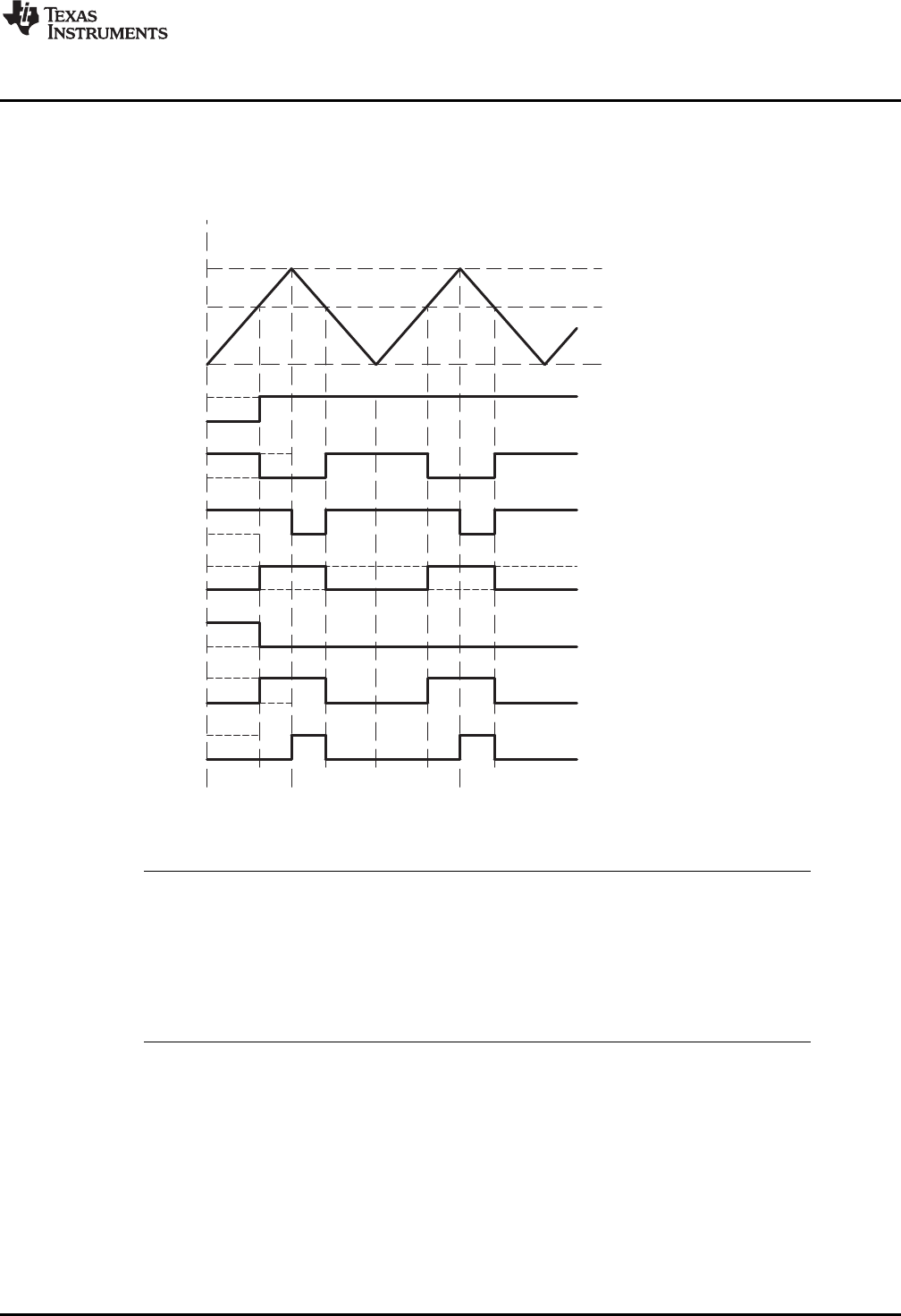
TDIFG
Output Mode 1: Set
Output Mode 2: Toggle/Reset
Output Mode 3: Set/Reset
Output Mode 4: Toggle
Output Mode 5: Reset
Output Mode 6: Toggle/Set
Output Mode 7: Reset/Set
EQU3
TDIFG Interrupt Events
EQU3
EQU0
EQU3 EQU3
EQU0
0h
TDR(max)
TDCL0
TDCL3
www.ti.com
Timer_D Operation
19.2.9.1.3 Output Example – Timer in Up/Down Mode
The OUTx signal changes when the timer equals TDCLx in either count direction and when the timer
equals TDCL0, depending on the output mode. An example is shown in Figure 19-22 using TDxCL0 and
TDxCL3.
Figure 19-22. Output Example – Timer in Up/Down Mode
NOTE: Switching between output modes
When switching between output modes, one of the OUTMODx bits should remain set during
the transition, unless switching to mode 0. Otherwise, output glitching can occur because a
NOR gate decodes output mode 0. A safe method for switching between output modes is to
use output mode 7 as a transition state:
BIS #OUTMOD_7,&TDCCTLx ; Set output mode=7
BIC #OUTMODx,&TDCCTLx ; Clear unwanted bits
533
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
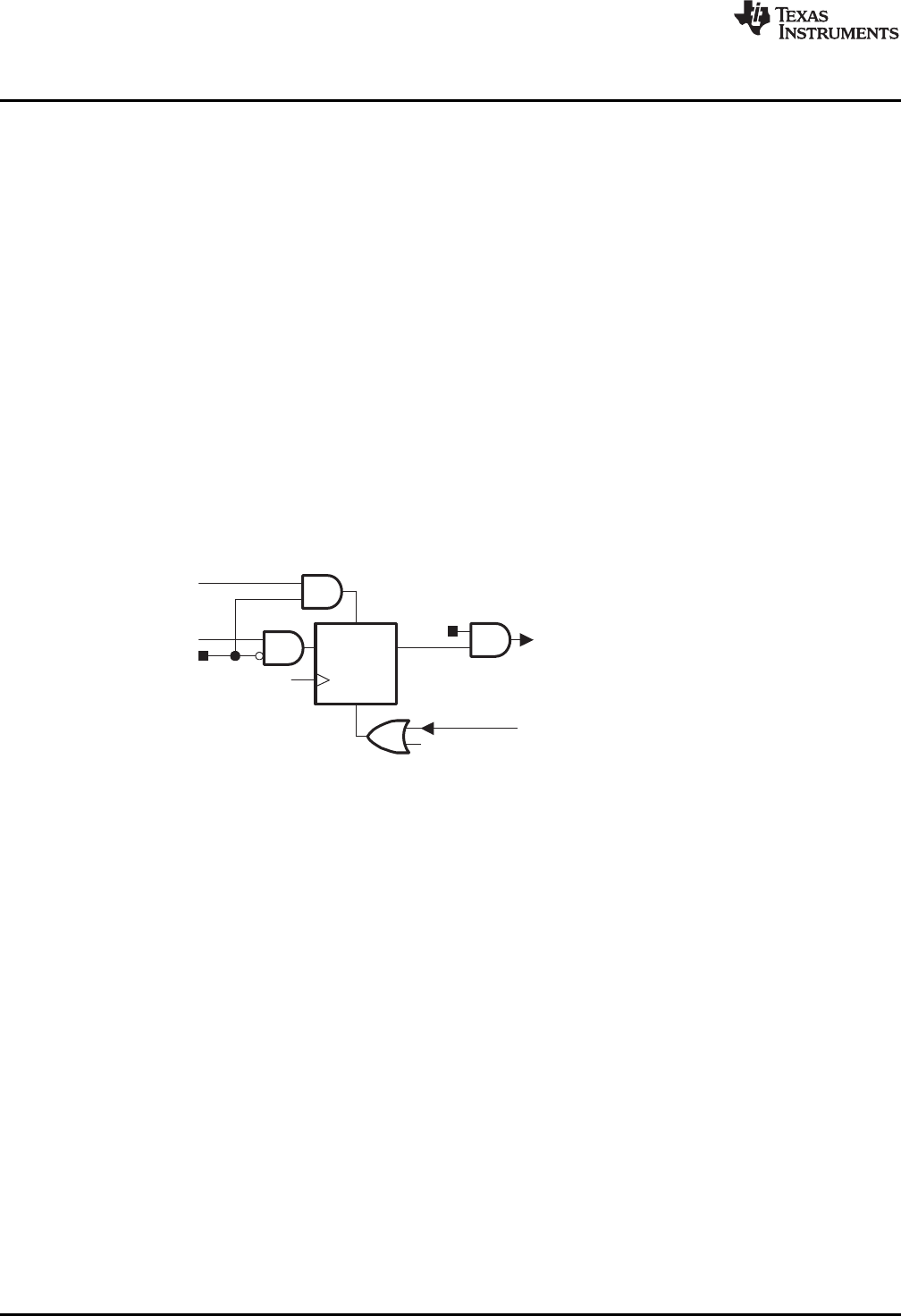
DSet QIRQ, Interrupt Service Requested
Reset
Timer Clock
POR
CAP
EQU0
Capture
IRACC, Interrupt Request Accepted
CCIE
Timer_D Operation
www.ti.com
19.2.10 Synchronization Between Timer_D Instances
For some devices that contain more than one Timer_D instance, internal signals assist the
synchronization between different timers. Those signals include Timer Clock, TDAUXCLK,
TDAUXCLROUT, and some other signals that connect the Timer_D module and the Timer Event Control
module. See the TEC chapter for details.
19.2.11 Timer_D Interrupts
Two interrupt vectors are associated with the 16-bit Timer_D module:
• TDxCCR0 interrupt vector for TDxCCR0 CCIFG
• TDIV interrupt vector for all other interrupt flags
In capture mode, any CCIFG flag is set when a timer value is captured in the associated TDCCRx
register. In compare mode, any CCIFG flag is set when TDxR counts to the associated TDCLx value.
Software may also set or clear any CCIFG flag. All CCIFG flags request an interrupt when their
corresponding CCIE bit and the GIE bit are set.
19.2.11.1 TDxCCR0 Interrupt Vector
The TDxCCR0 CCIFG flag has the highest Timer_D interrupt priority and has a dedicated interrupt vector
(see Figure 19-23). The TDxCCR0 CCIFG flag is automatically reset when the TDxCCR0 interrupt request
is serviced.
Figure 19-23. Capture/Compare TDxCCR0 Interrupt Flag
19.2.11.2 TDIV, Interrupt Vector Generator
The TDIFG flag, TDCCRx CCIFG flags (excluding TDxCCR0 CCIFG), and all of the high-resolution related
interrupts are prioritized and combined to source a single interrupt vector. The interrupt vector register
TDIV is used to determine which flag requested an interrupt.
The highest-priority enabled interrupt (excluding TDxCCR0 CCIFG) generates a number in the TDxIV
register (see Section 19.3.11). This number can be evaluated or added to the program counter to
automatically enter the appropriate software routine. Disabled Timer_D interrupts do not affect the TDIV
value.
Read access of the TDIV register automatically resets the highest-pending interrupt flag. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt. For
example, if the TDxCCR1 and TDxCCR2 CCIFG flags are set when the interrupt service routine accesses
the TDIV register, TDxCCR1 CCIFG is reset automatically. After the RETI instruction of the interrupt
service routine is executed, the TDxCCR2 CCIFG flag generates another interrupt.
Write access of the TDIV register clears all pending interrupt conditions and flags.
534 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Operation
19.2.11.3 TDIV, Interrupt Handler Examples
The following software example shows the recommended use of TDIV. The TDIV value is added to the PC
to automatically jump to the appropriate routine.
Example 19-3 shows the recommended use of TDIV for Timer_D3.
Example 19-3.
; Interrupt handler for TDxCCR0 CCIFG.
CCIFG_0_HANDLER
... ; Start of handler Interrupt latency
RETI
; Interrupt handler for TDxIFG, TDxCCR1 and TDxCCR2 CCIFG.
TD_HANDLER ... ; Interrupt latency
ADD &TDxIV,PC ; Add offset to Jump table
RETI ; Vector 0: No interrupt
JMP CCIFG_1_HANDLER ; Vector 2: Module 1
JMP CCIFG_2_HANDLER ; Vector 4: Module 2
RETI ; Vector 6
RETI ; Vector 8
RETI ; Vector 10
RETI ; Vector 12
JMP TDxIFG_HANDLER ; Vector 14
RETI ; Vector 16
RETI ; Vector 18
RETI ; Vector 20
JMP TDHxUNLKIFG_HANDLER ; Vector 22
...
TDHxUNLKIFG_HANDLER ; Vector 22: TDHUNLKIFG Flag
... ; Task starts here
RETI
TDxIFG_HANDLER ; Vector 14: TIMOV Flag
... ; Task starts here
RETI
...
CCIFG_2_HANDLER ; Vector 4: Module 2
... ; Task starts here
RETI ; Back to main program
; The Module 1 handler shows a way to look if any other
; interrupt is pending: 5 cycles have to be spent, but
; 9 cycles may be saved if another interrupt is pending
CCIFG_1_HANDLER ; Vector 2: Module 1
... ; Task starts here
JMP TD_HANDLER ; Look for pending ints
535
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
19.3 Timer_D Registers
The Timer_D registers and address offsets are listed in Table 19-8. The base address for each instance of
Timer_D can be found in the device-specific data sheet.
Table 19-8. Timer_D Registers
Offset Acronym Register Name Type Reset Section
0000h TDxCTL0 Timer_D Control 0 Read/write On POR Section 19.3.1
0002h TDxCTL1 Timer_D Control 1 Read/write On POR Section 19.3.2
0004h TDxCTL2 Timer_D Control 2 Read/write On POR Section 19.3.3
0006h TDxR Timer_D Counter Read/write On POR Section 19.3.4
0008h TDxCCTL0 Timer_D Capture/Compare Control 0 Read/write On POR Section 19.3.5
000Ah TDxCCR0 Timer_D Capture/Compare 0 Read/write On POR Section 19.3.6
000Ch TDxCL0 Timer_D Capture/Compare Latch 0 Read only On POR Section 19.3.7
000Eh TDxCCTL1 Timer_D Capture/Compare Control 1 Read/write On POR Section 19.3.5
0010h TDxCCR1 Timer_D Capture/Compare 1 Read/write On POR Section 19.3.6
0012h TDxCL1 Timer_D Capture/Compare Latch 1 Read only On POR Section 19.3.7
0014h TDxCCTL2 Timer_D Capture/Compare Control 2 Read/write On POR Section 19.3.5
0016h TDxCCR2 Timer_D Capture/Compare 2 Read/write On POR Section 19.3.6
0018h TDxCL2 Timer_D Capture/Compare Latch 2 Read only On POR Section 19.3.7
001Ah TDxCCTL3 Timer_D Capture/Compare Control 3 Read/write On POR Section 19.3.5
001Ch TDxCCR3 Timer_D Capture/Compare 3 Read/write On POR Section 19.3.6
001Eh TDxCL3 Timer_D Capture/Compare Latch 3 Read only On POR Section 19.3.7
0020h TDxCCTL4 Timer_D Capture/Compare Control 4 Read/write On POR Section 19.3.5
0022h TDxCCR4 Timer_D Capture/Compare 4 Read/write On POR Section 19.3.6
0024h TDxCL4 Timer_D Capture/Compare Latch 4 Read only On POR Section 19.3.7
0026h TDxCCTL5 Timer_D Capture/Compare Control 5 Read/write On POR Section 19.3.5
0028h TDxCCR5 Timer_D Capture/Compare 5 Read/write On POR Section 19.3.6
002Ah TDxCL5 Timer_D Capture/Compare Latch 5 Read only On POR Section 19.3.7
002Ch TDxCCTL6 Timer_D Capture/Compare Control 6 Read/write On POR Section 19.3.5
002Eh TDxCCR6 Timer_D Capture/Compare 6 Read/write On POR Section 19.3.6
0030h TDxCL6 Timer_D Capture/Compare Latch 6 Read only On POR Section 19.3.7
0032h Reserved
0034h Reserved
0036h Reserved
0038h TDxHCTL0 Timer_D High-resolution Control 0 Read/write On POR Section 19.3.8
003Ah TDxHCTL1 Timer_D High-resolution Control 1 Read/write On POR Section 19.3.9
003Ch TDxHINT Timer_D High-resolution Interrupt Read/write On POR Section 19.3.10
003Eh TDxIV Timer_D Interrupt Vector Read only On POR Section 19.3.11
536 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
19.3.1 TDxCTL0 Register
Timer_D x Control Register 0
Figure 19-24. TDxCTL0 Register
15 14 13 12 11 10 9 8
Reserved TDCLGRPx CNTLx Reserved TDSSELx
r0 rw-(0) rw-(0) rw-(0) rw-(0) r0 rw-(0) rw-(0)
76543210
ID MCx Reserved TDCLR TDIE TDIFG
rw-(0) rw-(0) rw-(0) rw-(0) r0 w-(0) rw-(0) rw-(0)
Table 19-9. TDxCTL0 Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-13 TDCLGRPx RW 0h TDCLx group
00b = Each TDCLx latch loads independently.
01b = TDxCL1+TDxCL2 (TDxCCR1 CLLDx bits control the update)
TDxCL3+TDxCL4 (TDxCCR3 CLLDx bits control the update)
TDxCL5+TDxCL6 (TDxCCR5 CLLDx bits control the update)
TDxCL0 independent
10b = TDxCL1+TDxCL2+TDxCL3 (TDxCCR1 CLLDx bits control the update)
TDxCL4+TDxCL5+TDxCL6 (TDxCCR4 CLLDx bits control the update)
TDxCL0 independent
11b = TDxCL0+TDxCL1+TDxCL2+TDxCL3+TDxCL4+TDxCL5+TDxCL6
(TDxCCR1 CLLDx bits control the update)
12-11 CNTLx RW 0h Counter length
00b = 16-bit, TDR(max) = 0FFFFh
01b = 12-bit, TDR(max) = 0FFFh
10b = 10-bit, TDR(max) = 03FFh
11b = 8-bit, TDR(max) = 0FFh
10 Reserved R 0h Reserved. Always reads as 0.
9-8 TDSSELx RW 0h Timer_D clock source select
00b = TDCLK
01b = ACLK
10b = SMCLK
11b = Inverted TDCLK
7-6 ID RW 0h Input divider. These bits, along with the IDEX bits in TDxCTL1, select the divider
for the input clock.
00b = Divide by 1
01b = Divide by 2
10b = Divide by 4
11b = Divide by 8
5-4 MCx RW 0h Mode control. Setting MCx = 00h when Timer_D is not in use saves power.
00b = Stop mode: Timer is halted
01b = Up mode: Timer counts up to TDCL0
10b = Continuous mode: Timer counts up to the value set by CNTLx (counter
length)
11b = Up/down mode: Timer counts up to TDCL0 and down to 0000h
3 Reserved R 0h Reserved. Always reads as 0.
2 TDCLR W 0h Timer_D clear. Setting this bit resets TDR, the TDCLK divider, and the count
direction. The TDCLR bit always read as zero.
537
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
Table 19-9. TDxCTL0 Register Description (continued)
Bit Field Type Reset Description
1 TDIE RW 0h Timer_D interrupt enable. This bit enables the TDIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
0 TDIFG RW 0h Timer_D interrupt flag
0b = No interrupt pending
1b = Interrupt pending
538 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
19.3.2 TDxCTL1 Register
Timer_D x Control Register 1
Figure 19-25. TDxCTL1 Register
15 14 13 12 11 10 9 8
Reserved IDEX
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
76543210
Reserved TD6CMB TD4CMB TD2CMB Reserved TDCLKMx
r0 rw-(0) rw-(0) rw-(0) r0 r0 rw-(0) rw-(0)
Table 19-10. TDxCTL1 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10-8 IDEX RW 0h Input divider extension. These bits, along with the ID bits in TDxCTL0, select the
divider for the input clock.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
7 Reserved R 0h Reserved. Always reads as 0.
6 TD6CMB RW 0h Control bit for TDCCR registers combination in TD6 (only available on Timer_D7)
0b = TDxCCR5 and TDxCCR6 are not combined
1b = TDxCCR5 and TDxCCR6 are combined
5 TD4CMB RW 0h Control bit for TDCCR registers combination in TD4 (available on Timer_D5,
Timer_D7)
0b = TDxCCR3 and TDxCCR4 are not combined
1b = TDxCCR3 and TDxCCR4 are combined
4 TD2CMB RW 0h Control bit for TDCCR registers combination in TD2
0b = TDxCCR1 and TDxCCR2 are not combined
1b = TDxCCR1 and TDxCCR2 are combined
3-2 Reserved R 0h Reserved. Always reads as 0.
1-0 TDCLKMx RW 0h Timer_D clocking mode register
00b = External clock source is used
01b = High-resolution local clock is used
10b = Auxiliary clock source from another timer instance is used
11b = Reserved
539
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
19.3.3 TDxCTL2 Register
Timer_D x Control Register 2
Figure 19-26. TDxCTL2 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved TDCAPM6 TDCAPM5 TDCAPM4 TDCAPM3 TDCAPM2 TDCAPM1 TDCAPM0
r0
Table 19-11. TDxCTL2 Register Description
Bit Field Type Reset Description
15-7 Reserved R 0h Reserved. Always reads as 0.
6 TDCAPM6 RW 0h Capture mode of channel 6
0b = Single capture mode
1b = Dual capture mode
5 TDCAPM5 RW 0h Capture mode of channel 5
0b = Single capture mode
1b = Dual capture mode
4 TDCAPM4 RW 0h Capture mode of channel 4
0b = Single capture mode
1b = Dual capture mode
3 TDCAPM3 RW 0h Capture mode of channel 3
0b = Single capture mode
1b = Dual capture mode
2 TDCAPM2 RW 0h Capture mode of channel 2
0b = Single capture mode
1b = Dual capture mode
1 TDCAPM1 RW 0h Capture mode of channel 1
0b = Single capture mode
1b = Dual capture mode
0 TDCAPM0 RW 0h Capture mode of channel 0
0b = Single capture mode
1b = Dual capture mode
540 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
19.3.4 TDxR Register
Timer_D x Counter Register
Figure 19-27. TDxR Register
15 14 13 12 11 10 9 8
TDRx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TDRx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 19-12. TDxR Register Description
Bit Field Type Reset Description
15-0 TDRx RW 0h Timer_D register. The TDxR register is the count of Timer_D. In high-resolution
mode, the bits 0 to 3 return zero when the TDxR register is read.
541
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Timer_D Registers
www.ti.com
19.3.5 TDxCCTLn Register
Timer_D x Capture/Compare Control Register
Figure 19-28. TDxCCTLn Register
15 14 13 12 11 10 9 8
CMx CCISx SCS CLLDx CAP
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
OUTMODx CCIE CCI OUT COV CCIFG
rw-(0) rw-(0) rw-(0) rw-(0) r rw-(0) rw-(0) rw-(0)
Table 19-13. TDxCCTLn Register Description
Bit Field Type Reset Description
15-14 CMx RW 0h Capture mode
00b = No capture
01b = Capture on rising edge
10b = Capture on falling edge
11b = Capture on both rising and falling edges
13-12 CCISx RW 0h Capture/compare input select. These bits select the TDCCRx input signal. See
the device-specific data sheet for specific signal connections.
00b = CCIxA
01b = CCIxB
10b = GND
11b = VCC
11 SCS RW 0h Synchronize capture source. This bit is used to synchronize the capture input
signal with the timer clock. In high-resolution mode, the capture is always
synchronous to the high-resolution clock, and this setting is ignored.
0b = Asynchronous capture
1b = Synchronous capture
10-9 CLLDx RW 0h Compare latch load. These bits select the compare latch load event.
00b = TDCLx loads on write to TDCCRx
01b = TDCLx loads when TDR counts to 0
10b = TDCLx loads when TDR counts to 0 (up or continuous mode). TDCLx
loads when TDR counts to TDxCL0 or to 0 (up/down mode).
11b = TDCLx loads when TDR counts to TDCLx
8 CAP RW 0h Capture mode
0b = Compare mode
1b = Capture mode
7-5 OUTMODx RW 0h Output mode
000b = OUT bit value
001b = Set
010b = Toggle/reset
011b = Set/reset
100b = Toggle
101b = Reset
110b = Toggle/set
111b = Reset/set
4 CCIE RW 0h Capture/compare interrupt enable. Enables the interrupt request of the
corresponding CCIFG flag.
0b = Interrupt disabled
1b = Interrupt enabled
3 CCI R 0h Capture/compare input. The selected input signal can be read by this bit.
542 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
Table 19-13. TDxCCTLn Register Description (continued)
Bit Field Type Reset Description
2 OUT RW 0h Output. For output mode 0, this bit directly controls the state of the output.
0b = Output low
1b = Output high
1 COV RW 0h Capture overflow. Indicates a capture overflow occurred. COV must be reset with
software.
0b = No capture overflow occurred
1b = Capture overflow occurred
0 CCIFG RW 0h Capture/compare interrupt flag
0b = No interrupt pending
1b = Interrupt pending
543
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
19.3.6 TDxCCRn Register
Timer_D x Capture/Compare Register
Figure 19-29. TDxCCRn Register
15 14 13 12 11 10 9 8
TDCCRx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TDCCRx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 19-14. TDxCCRn Register Description
Bit Field Type Reset Description
15-0 TDCCRx RW 0h Timer_D capture/compare register. The TDCCRx register is the count of
capture/compare block x.
Note: In high-resolution compare mode there are limitations of the minimum and
maximum duty cycles. See Table 19-3 and Table 19-4 for details.
19.3.7 TDxCLn Register
Timer_D x Capture/Compare Latch Register
Figure 19-30. TDxCLn Register
15 14 13 12 11 10 9 8
TDCLx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TDCLx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 19-15. TDxCLn Register Description
Bit Field Type Reset Description
15-0 TDCLx RW 0h Timer_D capture/compare latch register. TDCLx register holds the comparison
value in compare mode. In capture mode the register content of TDxCCRx is
copied into TDxCLx at each capture event.
544 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
19.3.8 TDxHCTL0 Register
Timer_D x High-Resolution Control Register 0
Figure 19-31. TDxHCTL0 Register
15 14 13 12 11 10 9 8
Reserved TDHFW
r0 r0 r0 r0 r0 r0 r0 rw-(0)
76543210
TDHDx TDHMx TDHRON TDHEAEN TDHREGEN TDHEN
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 19-16. TDxHCTL0 Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved. Always reads as 0.
8 TDHFW RW 0h High-resolution generator fast wakeup enable
0b = High-resolution generator fast wakeup disabled
1b = High-resolution generator fast wakeup enable
7-6 TDHDx RW 0h High-resolution clock divider. These bits select the divider for the high resolution
clock.
00b = Divide by 1
01b = Divide by 2
10b = Divide by 4
11b = Divide by 8
5-4 TDHMx RW 0h Timer_D high-resolution clock multiplication factor
00b = High-resolution clock 8x Timer_D clock
01b = High-resolution clock 16x Timer_D clock
10b = Reserved
11b = Reserved
3 TDHRON RW 0h Timer_D high-resolution generator forced on.
0b = High-resolution generator is on if the Timer_D counter MCx bits are 01, 10
or 11.
1b = High-resolution generator is on in all Timer_D MCx modes. The PMM
remains in high-current mode.
2 TDHEAEN RW 0h Timer_D high-resolution clock enhanced accuracy enable bit. Setting this bit
reduces the accumulated frequency offset of the high-resolution clock generator
and the reference clock.
0b = Normal accuracy
1b = Enhanced accuracy enable
1 TDHREGEN RW 0h Timer_D regulation enable. Set this bit to synchronize the high-resolution clock to
the Timer_D input clock defined by TDSSELx.
0b = Regulation disabled
1b = Regulation enabled
0 TDHEN RW 0h Timer_D high-resolution enable bit. This bit must be set to enable high-resolution
operation mode. Whenever a high-resolution TDAUXCLK from another Timer_D
instance is used, this bit must also be set.
0b = High-resolution mode disable
1b = High-resolution mode enable
545
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
19.3.9 TDxHCTL1 Register
Timer_D x High-Resolution Control Register 1
Figure 19-32. TDxHCTL1 Register
15 14 13 12 11 10 9 8
TDHCLKCR TDHCLKRx TDHCLKSRx
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
TDHCLKTRIMx Reserved
rw-(1) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) r0
Table 19-17. TDxHCTL1 Register Description
Bit Field Type Reset Description
15 TDHCLKCR RW 0h Timer_D high-resolution coarse clock range selection bits. For detailed frequency
numbers, see the device-specific data sheet.
0b = Timer_D input clock to the high-resolution generator is <15 MHz.
1b = Timer_D input clock to the high-resolution generator is >15 MHz.
14-13 TDHCLKRx RW 0h Timer_D high-resolution clock range selection bits. These bits are used to define
the coarse clock range of the high-resolution clock generator. If TDHREGEN = 1
these register bits are modified by hardware.
00b = Clock range 0. See data sheet for frequency details.
01b = Clock range 1. See data sheet for frequency details.
10b = Clock range 2. See data sheet for frequency details.
11b = Reserved
12-8 TDHCLKSRx RW 0h Timer_D high-resolution clock sub-range selection bits. These bits are used to
define the sub-clock range of the high-resolution clock generator. The frequency
change due to a change of the TDHCLKTRIMx bits is approximately half of the
TDHCLKSRx bits in each clock range. If TDHREGEN = 1, these register bits are
modified by hardware.
7-1 TDHCLKTRIMx RW 40h Timer_D high-resolution clock trim selection bits. These bits are used to change
the clock frequency slightly. The frequency change due to a change of the
TDHCLKTRIMx bits is approximately half of the TDHCLKSRx bits in each clock
range. If TDHREGEN = 1, these register bits are modified by hardware.
0 Reserved R 0h Reserved. Always reads as 0.
546 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Timer_D Registers
19.3.10 TDxHINT Register
Timer_D x High-Resolution Interrupt Register
Figure 19-33. TDxHINT Register
15 14 13 12 11 10 9 8
Reserved TDHUNLKIE TDHLKIE TDHFHIE TDHFLIE
r0 r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved TDHUNLKIFG TDHLKIFG TDHFHIFG TDHFLIFG
r0 r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0)
Table 19-18. TDxHINT Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11 TDHUNLKIE RW 0h Timer_D interrupt enable. This bit enables the TDHUNLKIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
10 TDHLKIE RW 0h Timer_D interrupt enable. This bit enables the TDHLKIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
9 TDHFHIE RW 0h Timer_D interrupt enable. This bit enables the TDHFHIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
8 TDHFLIE RW 0h Timer_D interrupt enable. This bit enables the TDHFLIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
7-4 Reserved R 0h Reserved. Always reads as 0.
3 TDHUNLKIFG RW 0h Timer_D high-resolution frequency unlock interrupt flag if TDHREGEN is set to 1.
This bit is set if the frequency is still unlocked and the calibration is not yet
completed. If the bit is set until cleared by writing to it.
0b = No interrupt pending
1b = Interrupt pending
2 TDHLKIFG RW 0h Timer_D high-resolution frequency lock interrupt flag if TDHREGEN is set to 1.
This bit is set if the frequency is locked and the calibration is completed. If the bit
is set it remains set until cleared by writing to it.
0b = No interrupt pending
1b = Interrupt pending
1 TDHFHIFG RW 0h Timer_D high-resolution fail high interrupt flag. This bit is set if the high-
resolution generator cannot generate the high-resolution frequency because the
input frequency is too high. If the bit is set until cleared by writing to it.
0b = No interrupt pending
1b = Interrupt pending
0 TDHFLIFG RW 0h Timer_D high-resolution fail low interrupt flag. This bit is set if the high-resolution
generator cannot generate the high-resolution frequency because the input
frequency is too low. If the bit is set until cleared by writing o it.
0b = No interrupt pending
1b = Interrupt pending
547
SLAU208O–June 2008–Revised May 2015 Timer_D
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Timer_D Registers
www.ti.com
19.3.11 TDxIV Register
Timer_D x Interrupt Vector Register
Figure 19-34. TDxIV Register
15 14 13 12 11 10 9 8
TDIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
TDIVx
r0 r0 r0 r-(0) r-(0) r-(0) r-(0) r0
Table 19-19. TDxIV Register Description
Bit Field Type Reset Description
15-0 TDIVx R 0h Timer_D external interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Capture/compare 1; Interrupt Flag: TDxCCR1 CCIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Capture/compare 2; Interrupt Flag: TDxCCR2 CCIFG
06h = Interrupt Source: Capture/compare 3; Interrupt Flag: TDxCCR3 CCIFG
08h = Interrupt Source: Capture/compare 4; Interrupt Flag: TDxCCR4 CCIFG
0Ah = Interrupt Source: Capture/compare 5; Interrupt Flag: TDxCCR5 CCIFG
0Ch = Interrupt Source: Capture/compare 6; Interrupt Flag: TDxCCR6 CCIFG
0Eh = Reserved
10h = Interrupt Source: Timer overflow; Interrupt Flag: TDxIFG
12h = Interrupt Source: Clock fail low; Interrupt Flag: TDxHINT TDHFLIFG
14h = Interrupt Source: Clock fail high; Interrupt Flag: TDxHINT TDHFHIFG
16h = Interrupt Source: High-resolution frequency locked; Interrupt Flag:
TDxHINT TDHLKIFG
18h = Interrupt Source: High-resolution frequency unlocked; Interrupt Flag:
TDxHINT TDHUNLKIFG
1Ah = Reserved
1Ch = Reserved
1Eh = Reserved ; Interrupt Priority: Lowest
548 Timer_D SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 20
SLAU208O–June 2008–Revised May 2015
Timer Event Control (TEC)
Timer Event Control (TEC) module is the interface between Timer modules and the external events. This
chapter describes the TEC Module.
Topic ........................................................................................................................... Page
20.1 Timer Event Control Introduction ....................................................................... 550
20.2 TEC Operation.................................................................................................. 551
20.3 TEC Registers .................................................................................................. 557
549
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
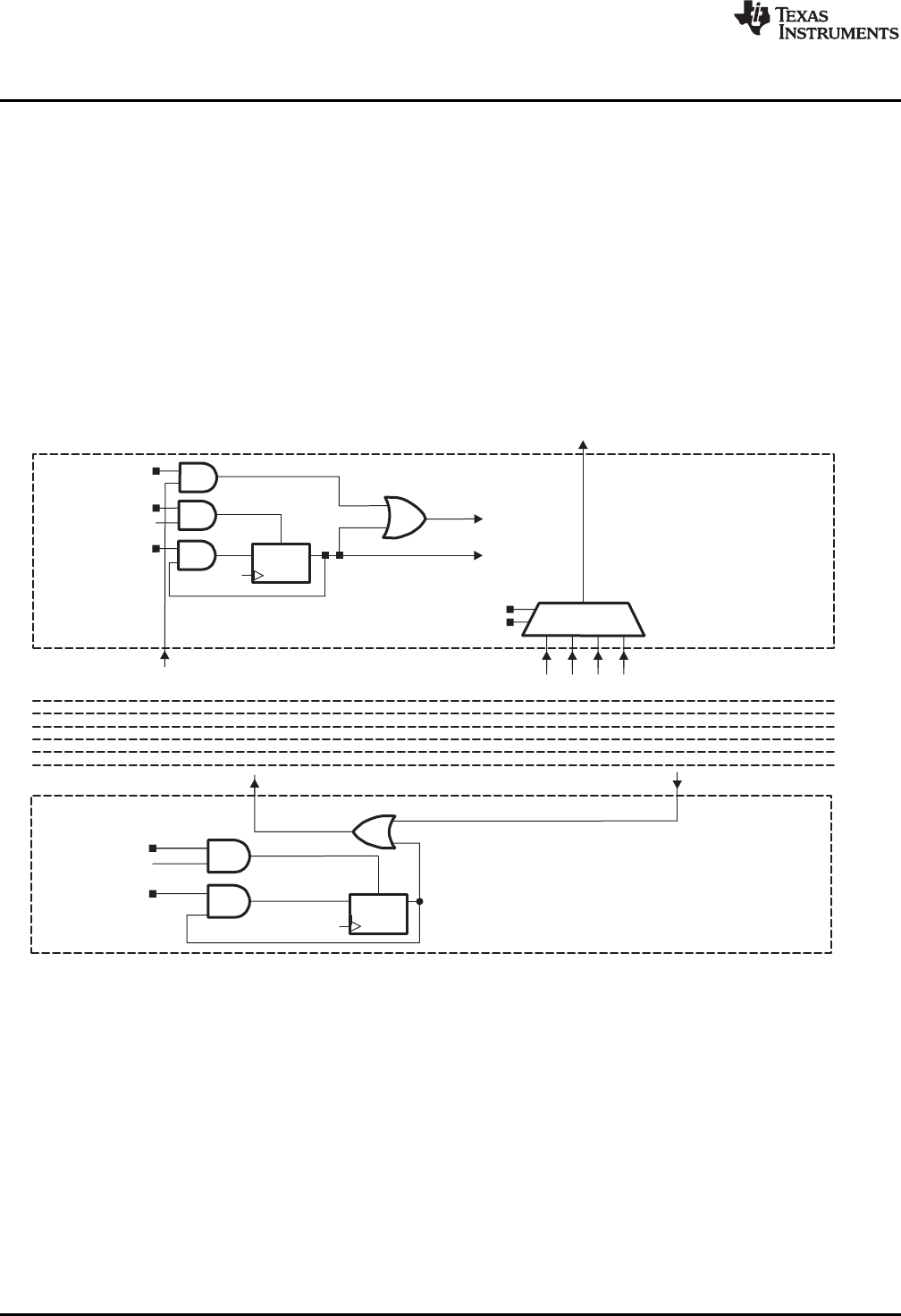
CE0
TDAUXCLK
CLKSELx
CLK0
TECxCLR
TECAXCLRIN
TECAXCLREN
TECxCLREN
EXTCLR
DQ
Timer Clock
TECxCLRHLD S
TEC Timer Block
00 01 10 11
TDCLR1
CE1
CE2
CE3
CE4
CE5
CE6
CLK1
CLK2
CLK3
TECxFLTEN6
TECxFLT6
CH6EVNT
EQU6
DQ
Timer Clock
TECxFLTHLD6 S
TEC CCR6 Block
Timer Event Control Introduction
www.ti.com
20.1 Timer Event Control Introduction
TEC is a module that connects different Timer modules to each other and routes the external signals to
the Timer modules. TEC contains the control registers to configure the routing between the Timer
modules, and it also has the enable register bits and the interrupt enable and interrupt flags for external
event inputs.
TEC features include:
• Enabling of internal and external clear signals
• Routing of internal signals (between Timer_D instances) and external clear signals
• Support of external fault input signals
• Interrupt vector generation of external fault and clear signals.
• Generating feedback signals to the Timer capture/compare channels to affect the timer outputs
The block diagram of TEC is shown in Figure 20-1.
Figure 20-1. Timer Event Control Block Diagram
550 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
TEC Operation
20.2 TEC Operation
The TEC module contains three sub-blocks:
• AUXCLK Selection sub-block
The AUXCLK Selection sub-block chooses the auxiliary clock source for the timer.
• External Clear sub-block
The External Clear sub-block controls the operation of the timer counter.
• Channel Event sub-block
The Channel Event sub-block controls the operation of a capture/compare channel.
This structure means that one Timer_D3 module, for example, needs a TEC that contains one AUXCLK
Selection sub-block, one External Clear sub-block, and three Channel Event sub-blocks.
20.2.1 AUXCLK Selection Sub-Block
The AUXCLK Selection sub-block provides the auxiliary clock to Timer_D. By configuring the CLKSELx
bits, one of the four clock sources can be chosen.
20.2.2 External Clear Sub-Block
The External Clear sub-block accepts external signals that can clear the Timer_D and affect the timer
output. The TDR register in Timer_D module can be cleared by the following external events:
• External input TECEXCLR is enabled and is high.
• The auxiliary clear signal TECAXCLRIN is enabled and is high.
20.2.3 Channel Event Sub-Block
The Channel Event sub-block is responsible for timer event control and signaling. One Channel Event
sub-block corresponds to one capture/compare channel in Timer_D module. The output unit of a
capture/compare channel accepts the external fault input as well as the EQUx signal coming from the
CCRx unit of the Timer_D. Both events will affect the PWM output.
When a TECXFLTx event is enabled and occurs, the corresponding status bit TECXFLTxSTA in the
TECSTA register is set. This event also sets the TECXFLTIFG interrupt flag. When TECXFLTIFG is set to
logical 1, the TECXFLTxSTA status bits show which external fault signal or signals are active. The
TECXFLTHLDx control bit holds the external fault signal. Clearing the TECXFLTxSTA status bits also
resets the held signal back to zero.
551
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
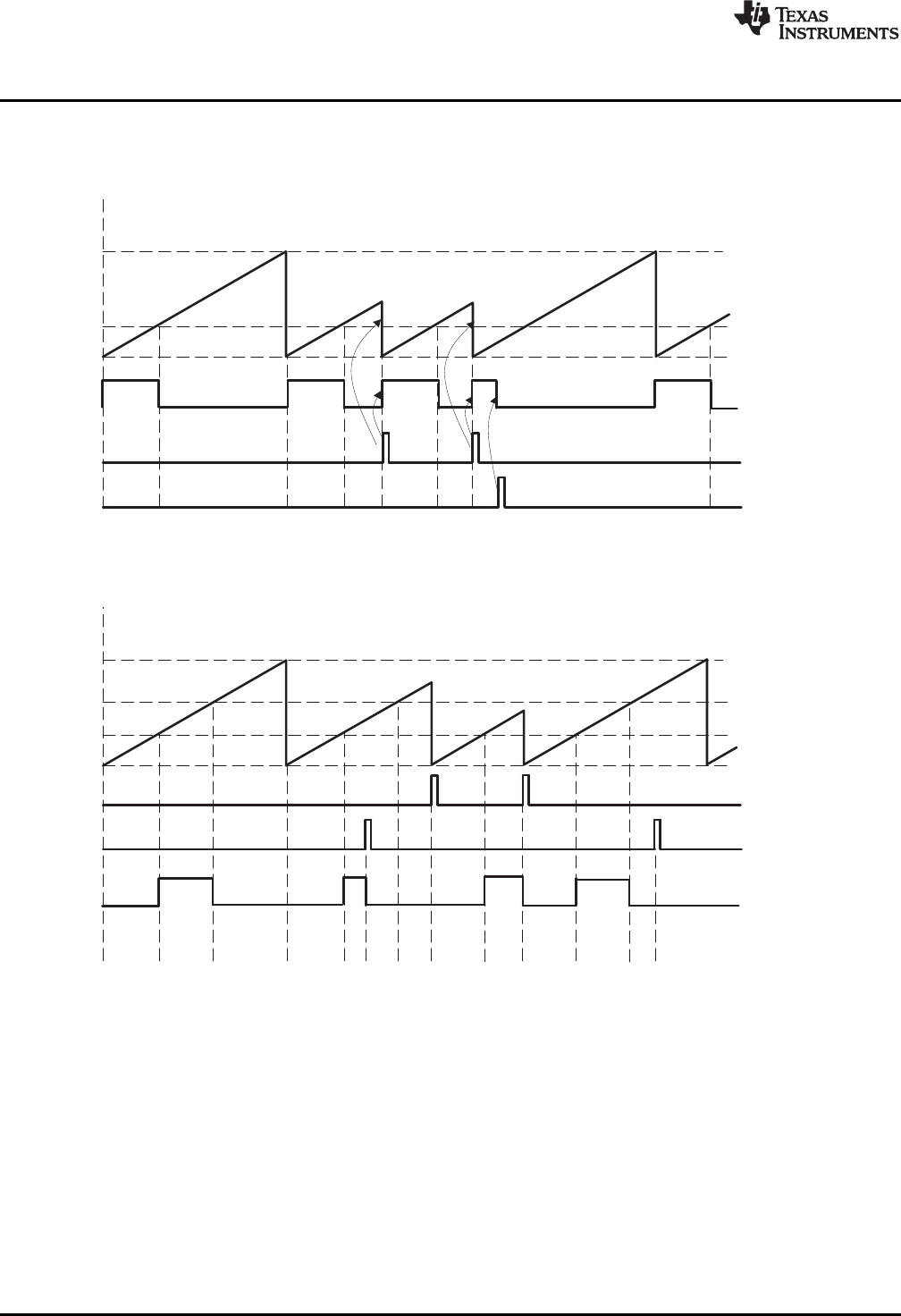
0h
Timer_D: TDR(max)
(Timer_D: TD2CMB = 1,
TECXFLTEN2=0,
TECEXCLREN=1)
TECXFLTEN1=1,
Timer_D: TDCL0
Timer_D: TDCL2
Timer_D: OUT2
TECEXCLR
TECXFLT1
Output Mode 3: Set/Reset
EQU2
Timer_D: TDCL1
EQU1 EQU0 EQU2 EQU1 EQU2 EQU1EQU2
0h
Timer_D: TDR(max)
Output Mode 8: Reset/Set
(Timer_D: TD2CMB = 0,
TECXFLTEN2=1,
TECEXCLREN=1)
Timer_D: TDCL0
Timer_D: TDCL2
Timer_D: OUT2
TECEXCLR
TECXFLT2
Ton Toff Toff Toff
Ton TonTon Ton Ton
TEC Operation
www.ti.com
20.2.3.1 External Input Events Affect Timer Output
Figure 20-2 shows how the external signals affect the Timer_D output in a Power Factor Corrector (PFC)
application.
Figure 20-2. External Input Events Affect Timer_D Output
Figure 20-3 shows an example in which channels are combined.
Figure 20-3. Timer_D Output With Channel Combination
20.2.4 Module Level Connection Between TEC and Timer_D
The TEC and Timer_D modules are connected through internal signals. Figure 20-4 shows the
interconnection between TEC and Timer_D module. See the Timer_D chapter for more Timer_D module
information.
552 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
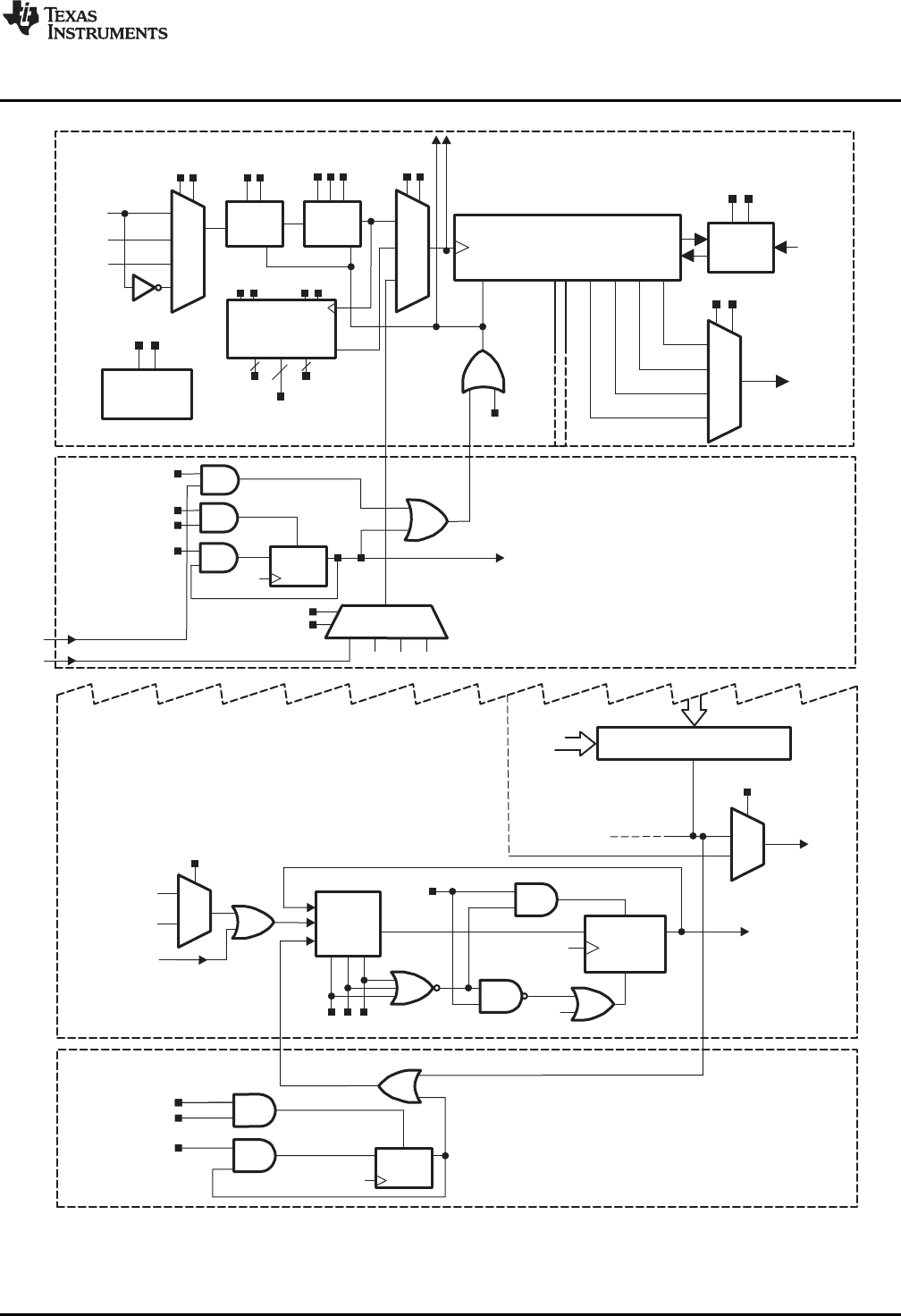
Count
Mode
16-bit Timer
TDR
Set TDIFG
15 0
MCx
Clear
TDCLR
EQU0
CNTLx
RC
10 12 168
TDCLGRPx
Group
Load Logic
TDSSELx
00
01
10
11
00
01
10
11
ACLK
SMCLK
TDCLK
Timer Clock
Divider
/1/2/4/8
IDx IDEXx
Divider
/1.../8
High Resolution
Generator
TDCLKMx
00
01
10
TDCLR1
TDHDx
Divider /1/2/4/8
TDHCLKSRx
TDHCLKTRIMx
27
TDHCLKRx
5
TDHMx
TDAUXCLK
CLKSELx = 0
TDAUXCLK
TECEXCLR
TECAXCLRIN
TECAXCLREN
TECEXCLREN
EXTCLR
DQ
Timer Clock
TECEXCLRHLD S
00 01 10 11
TDAUXCLROUT
CCR6
Comparator 6
OUTMODx
Output
Unit6 DSet Q
OUT
OUT6 Signal
Reset
POR
EQU6
Timer Clock
CAP
1
0Set TDCCR6
CCIFG
1
0
CH5EVNT
TD6CMB
EXTCLR
CH0EVNT
TECXFLTEN6
TECXFLT6
CH6EVNT
EQU6
DQ
Timer Clock
TECXFLTHLD6 S
Timer Block
TEC - TImer Block
TEC - CCR6 Block
www.ti.com
TEC Operation
Figure 20-4. Module Level Connection Between TEC and Timer_D
553
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

TEC Operation
www.ti.com
20.2.5 Synchronization Mechanism Between Timer_D Instances
Two or more Timer_D modules can be synchronized to each other. One instance can be the master of the
other Timer_D instance (slave). The master is the instance that supplies the clock to the other instance. If
two timer instances are synchronized to each other, then there is a device specific order; for example,
Timer0_D is the master of Timer1_D. The slave uses the settings of the TDHEN bit, the CNTLx bits, and
the MCx bits of the master. The CCR0 registers of the master and the slave must be programmed to
equal values. Figure 20-5 shows the combination of a Timer_D master and a Timer_D slave and the
control signals routed through the TEC module of the slave. The clock generator of the Timer_D slave is
powered down by selecting the TDCLKMx to accept the clock input from the Timer_D master. The
TECEXCLR signals of the slave timers do not propagate to the master but the clear events of the master
timers are signaled to the slave timers. See Figure Figure 20-5 for the detailed signal routing between
master and slave. The divider and clock selector settings of the slave timers are ignored. The high
resolution generator of the slave timer is disabled.
The Example 20-1 shows how to program the master timer and the slave timer to synchronize them.
Example 20-1.
// Example: TD0 is master timer, TD1 is slave timer
// Period is 200. TD0 channel 1: 20% duty cycle. TD0 channel 2: 40% duty cycle
// TD1 channel 1: 60% duty cycle. TD1 channel 2: 80% duty cycle
// Configure Master TD0
TD0CTL0 = TDSSEL_2; // TDCLK = SMCLK = Hi-Res input clk
TD0CTL1 |= TDCLKM_1; // TD0 clock = Hi-res local clock
TD0HCTL0 = TDHM_0 + TDHREGEN + TDHEN; // Hi-res clock 8x TDCLK,
//
Regulation and Hi-res mode enable
// TD0HINT |= TDHLKIE; // Set TDH Lock IFG -
not used in the example
// Configure Slave TD1
TD1CTL1 = TDCLKM_2; // TD1 clock = Auxiliary clock source from
master
//
timer instance
// Configure Slave TEC1
TEC1XCTL2 |= TECAXCLREN;
// Enable synchronized clear
// Configure TD0 and its PWM outputs
TD0CTL0 |= TDCLR; // Clear timer counter master+slave
TD0CCR0 = 200; // TD0CCR0
TD0CCR1 = 40; // 20% dutycycle
TD0CCTL1 |= OUTMOD_7; // TD0CCR1, Reset/Set
TD0CCR2 = 80; // 40% dutycycle
TD0CCTL2 |= OUTMOD_7; // TD0CCR2, Reset/Set
// Configure TD1 PWM outputs
TD1CCR0 = 200; // TD1CCR0
TD1CCR1 = 120; // 60% dutycycle
TD1CCTL1 |= OUTMOD_7; // TD1CCR1, Reset/Set
TD1CCR2 = 160; // 80% dutycycle
TD1CCTL2 |= OUTMOD_7; // TD1CCR2, Reset/Set
// Start timers and select Up-mode
TD0CTL0 |= MC_1 + TDCLR; // up-mode, start timer
554 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
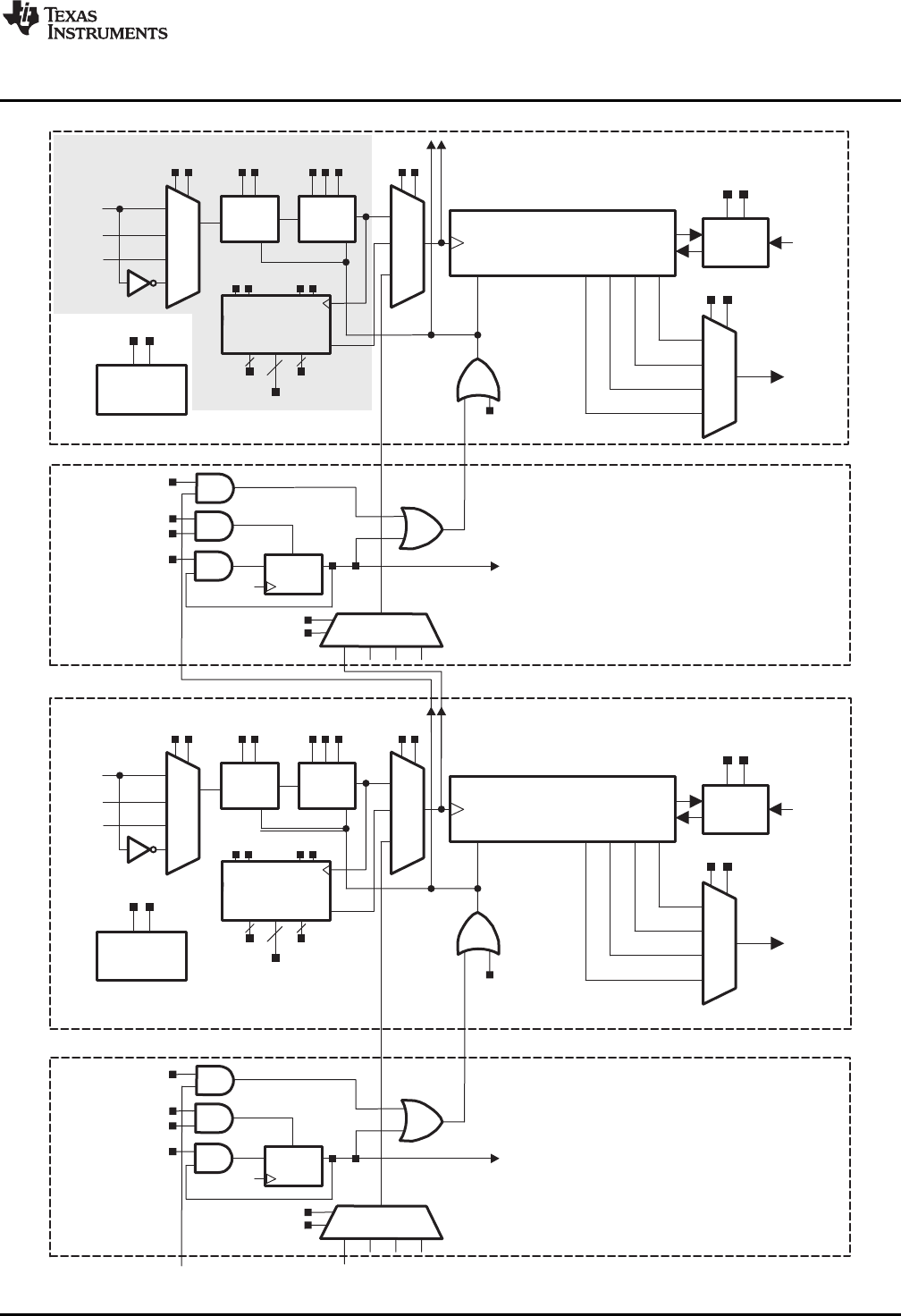
Count
Mode
16-bit Timer
TDR
Set TDIFG
15 0
MCx
Clear
TDCLR
EQU0
CNTLx
RC
10 12 168
TDCLGRPx
Group
Load Logic
TDSSELx
00
01
10
11
00
01
10
11
ACLK
SMCLK
TDCLK
Timer Clock
Divider
/1/2/4/8
IDx IDEXx
Divider
/1.../8
High Resolution
Generator
TDCLKMx
00
01
10
TDAUXCLROUT
TDCLR1
Timer_D - Slave
TDHDx
Divider /1/2/4/8
CLKSELx = 0
TDAUXCLK
TECEXCLR
TECAXCLRIN
TECAXCLREN=1
TECEXCLREN
EXTCLR
DQ
Timer Clock
TECEXCLRHLD S
TDHCLKSRx
TDHCLKTRIMx
27
TDHCLKRx
5
TDHMx
TEC Timer_D - Slave
Count
Mode
16-bit Timer
TDR
Set TDIFG
15 0
MCx
Clear
TDCLR
EQU0
CNTLx
RC
10 12 168
TDCLGRPx
Group
Load Logic
TDSSELx
00
01
10
11
00
01
10
11
ACLK
SMCLK
TDCLK
Timer Clock
Divider
/1/2/4/8
IDx IDEXx
Divider
/1.../8
High Resolution
Generator
TDCLKMx
00
01
10
TDAUXCLROUT
TDCLR1
Timer_D - Master
TDHDx
Divider /1/2/4/8
TDHCLKSRx
TDHCLKTRIMx
27
TDHCLKRx
5
TDHMx
TDAUXCLK
TDAUXCLK
00 01 10 11
CLKSELx = 0
TDAUXCLK
TECEXCLR
TECAXCLRIN
TECAXCLREN=1
TECEXCLREN
EXTCLR
DQ
Timer Clock
TECEXCLRHLD S
TEC Timer_D - Master
00 01 10 11
www.ti.com
TEC Operation
Figure 20-5. Synchronization Between Timer Instances
555
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

TEC Operation
www.ti.com
20.2.6 Timer Event Control Interrupts
The TEC module has only one interrupt vector, TECxIV.
20.2.6.1 TECxIV, Interrupt Vector Generator
The external fault interrupt TECXFLTIFG, the external clear interrupt TECEXCLRIFG, and the auxiliary
clear interrupt TECAXCLRIFG are prioritized and combined to source a single interrupt vector. The
interrupt vector register TECxIV is used to determine which flag requested an interrupt.
The highest-priority enabled interrupt generates a number in the TECxIV register (see Section 20.3.6).
This number can be evaluated or added to the program counter to automatically enter the appropriate
software routine. Disabled TEC interrupts do not affect the TECxIV value.
Read access of the TECxIV register automatically resets the highest-pending interrupt flag. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
Write access of the TECxIV register clears all pending interrupt conditions and flags.
556 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
TEC Registers
20.3 TEC Registers
The Timer Event Control registers are listed in Table 20-1. The base address can be found in the device-
specific data sheet. The address offset is listed in Table 20-1.
Table 20-1. TEC Registers
Offset Acronym Register Name Type Reset Section
0000h TECxCTL0 Timer Event Control External Control 0 Read/write 0000h Section 20.3.1
0002h TECxCTL1 Timer Event Control External Control 1 Read/write 0000h Section 20.3.2
0004h TECxCTL2 Timer Event Control External Control 2 Read/write 0000h Section 20.3.3
0006h TECxSTA Timer Event Control Status Read/write 0000h Section 20.3.4
0008h TECxINT Timer Event Control External Interrupt Read/write 0000h Section 20.3.5
000Ah TECxIV Timer Event Control Interrupt Vector Read only 0000h Section 20.3.6
557
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
TEC Registers
www.ti.com
20.3.1 TECxCTL0 Register
Timer Event Control External Control Register 0
Figure 20-6. TECxCTL0 Register
15 14 13 12 11 10 9 8
Reserved TECXFLTEN6 TECXFLTEN5 TECXFLTEN4 TECXFLTEN3 TECXFLTEN2 TECXFLTEN1 TECXFLTEN0
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved TECXFLTHLD6 TECXFLTHLD5 TECXFLTHLD4 TECXFLTHLD3 TECXFLTHLD2 TECXFLTHLD1 TECXFLTHLD0
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 20-2. TECxCTL0 Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14 TECXFLTEN6 RW 0h External fault signal enable for channel event block 6 (only available on TEC7)
0b = External fault signal is disabled for CE6
1b = External fault signal is enabled for CE6
13 TECXFLTEN5 RW 0h External fault signal enable for channel event block 5 (only available on TEC7)
0b = External fault signal is disabled for CE5
1b = External fault signal is enabled for CE5
12 TECXFLTEN4 RW 0h External fault signal enable for channel event block 4 (only available on TEC5 or
TEC7)
0b = External fault signal is disabled for CE4
1b = External fault signal is enabled for CE4
11 TECXFLTEN3 RW 0h External fault signal enable for channel event block 3 (only available on TEC5 or
TEC7)
0b = External fault signal is disabled for CE3
1b = External fault signal is enabled for CE3
10 TECXFLTEN2 RW 0h External fault signal enable for channel event block 2
0b = External fault signal is disabled for CE2
1b = External fault signal is enabled for CE2
9 TECXFLTEN1 RW 0h External fault signal enable for channel event block 1
0b = External fault signal is disabled for CE1
1b = External fault signal is enabled for CE1
8 TECXFLTEN0 RW 0h External fault signal enable for channel event block 0
0b = External fault signal is disabled for CE0
1b = External fault signal is enabled for CE0
7 Reserved R 0h Reserved. Always reads as 0.
6 TECXFLTHLD6 RW 0h External fault signal hold bit for CE6
0b = External fault signal is not held
1b = External fault signal is held
5 TECXFLTHLD5 RW 0h External fault signal hold bit for CE5
0b = External fault signal is not held
1b = External fault signal is held
4 TECXFLTHLD4 RW 0h External fault signal hold bit for CE4
0b = External fault signal is not held
1b = External fault signal is held
3 TECXFLTHLD3 RW 0h External fault signal hold bit for CE3
0b = External fault signal is not held
1b = External fault signal is held
558 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
TEC Registers
Table 20-2. TECxCTL0 Register Description (continued)
Bit Field Type Reset Description
2 TECXFLTHLD2 RW 0h External fault signal hold bit for CE2
0b = External fault signal is not held
1b = External fault signal is held
1 TECXFLTHLD1 RW 0h External fault signal hold bit for CE1
0b = External fault signal is not held
1b = External fault signal is held
0 TECXFLTHLD0 RW 0h External fault signal hold bit for CE0
0b = External fault signal is not held
1b = External fault signal is held
559
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
TEC Registers
www.ti.com
20.3.2 TECxCTL1 Register
Timer Event Control External Control Register 1
Figure 20-7. TECxCTL1 Register
15 14 13 12 11 10 9 8
Reserved TECXFLTLVS6 TECXFLTLVS5 TECXFLTLVS4 TECXFLTLVS3 TECXFLTLVS2 TECXFLTLVS1 TECXFLTLVS0
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved TECXFLTPOL6 TECXFLTPOL5 TECXFLTPOL4 TECXFLTPOL3 TECXFLTPOL2 TECXFLTPOL1 TECXFLTPOL0
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 20-3. TECxCTL1 Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14 TECXFLTLVS6 RW 0h Signal type of external fault 6
0b = Edge sensitive
1b = Level sensitive
13 TECXFLTLVS5 RW 0h Signal type of external fault 5
0b = Edge sensitive
1b = Level sensitive
12 TECXFLTLVS4 RW 0h Signal type of external fault 4
0b = Edge sensitive
1b = Level sensitive
11 TECXFLTLVS3 RW 0h Signal type of external fault 3
0b = Edge sensitive
1b = Level sensitive
10 TECXFLTLVS2 RW 0h Signal type of external fault 2
0b = Edge sensitive
1b = Level sensitive
9 TECXFLTLVS1 RW 0h Signal type of external fault 1
0b = Edge sensitive
1b = Level sensitive
8 TECXFLTLVS0 RW 0h Signal type of external fault 0
0b = Edge sensitive
1b = Level sensitive
7 Reserved R 0h Reserved. Always reads as 0.
6 TECXFLTPOL6 RW 0h Polarity bit of external fault 6
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
5 TECXFLTPOL5 RW 0h Polarity bit of external fault 5
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
4 TECXFLTPOL4 RW 0h Polarity bit of external fault 4
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
3 TECXFLTPOL3 RW 0h Polarity bit of external fault 3
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
2 TECXFLTPOL2 RW 0h Polarity bit of external fault 2
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
560 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
TEC Registers
Table 20-3. TECxCTL1 Register Description (continued)
Bit Field Type Reset Description
1 TECXFLTPOL1 RW 0h Polarity bit of external fault 1
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
0 TECXFLTPOL0 RW 0h Polarity bit of external fault 0
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
561
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
TEC Registers
www.ti.com
20.3.3 TECxCTL2 Register
Timer Event Control External Control Register 2
Figure 20-8. TECxCTL2 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved TECEXCLRLV TECEXCLRPO TECEXCLRHL TECEXCLREN TECAXCLREN CLKSELx
S L D
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 20-4. TECxCTL2 Register Description
Bit Field Type Reset Description
15-7 Reserved R 0h Reserved. Always reads as 0.
6 TECEXCLRLVS RW 0h Signal type of external clear
0b = Edge sensitive
1b = Level sensitive
5 TECEXCLRPOL RW 0h Polarity bit of external clear
0b = Selects falling edge in edge sensitive or low level in level sensitive
1b = Selects rising edge in edge sensitive or high level in level sensitive
4 TECEXCLRHLD RW 0h External clear signal hold bit
0b = External clear signal is not held
1b = External clear signal is held
3 TECEXCLREN RW 0h External clear signal control bit
0b = External clear signal disabled
1b = External clear signal enabled
2 TECAXCLREN RW 0h Auxiliary clear signal control bit
0b = Auxiliary clear signal disabled
1b = Auxiliary clear signal enabled
1-0 CLKSELx RW 0h Auxiliary clock source selection bits
00b = Clock input from a Timer_D master instance
01b = Reserved
10b = Reserved
11b = Reserved
562 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
TEC Registers
20.3.4 TECxSTA Register
Timer Event Control Status Register
Figure 20-9. TECxSTA Register
15 14 13 12 11 10 9 8
Reserved TECXCLRSTA
r0 r0 r0 r0 r0 r0 r0 rw-(0)
76543210
Reserved TECXFLT6STA TECXFLT5STA TECXFLT4STA TECXFLT3STA TECXFLT2STA TECXFLT1STA TECXFLT0STA
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 20-5. TECxSTA Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved. Always reads as 0.
8 TECXCLRSTA RW 0h External clear status flag. This bit is set if the external clear input is detected. If
the bit is set it remains set until cleared by writing 0 to it.
0b = No external clear detected
1b = External clear detected
7 Reserved R 0h Reserved. Always reads as 0.
6 TECXFLT6STA RW 0h External fault status flag. This bit is set if the external fault signal in CE6 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
5 TECXFLT5STA RW 0h External fault status flag. This bit is set if the external fault signal in CE5 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
4 TECXFLT4STA RW 0h External fault status flag. This bit is set if the external fault signal in CE4 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
3 TECXFLT3STA RW 0h External fault status flag. This bit is set if the external fault signal in CE3 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
2 TECXFLT2STA RW 0h External fault status flag. This bit is set if the external fault signal in CE2 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
1 TECXFLT1STA RW 0h External fault status flag. This bit is set if the external fault signal in CE1 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
0 TECXFLT0STA RW 0h External fault status flag. This bit is set if the external fault signal in CE0 is
detected. If the bit is set it remains set until cleared by writing 0 to it.
0b = No external fault detected
1b = External fault detected
563
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
TEC Registers
www.ti.com
20.3.5 TECxINT Register
Timer Event Control External Interrupt Register
Figure 20-10. TECxINT Register
15 14 13 12 11 10 9 8
Reserved TECXFLTIE TECEXCLRIE TECAXCLRIE
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
76543210
Reserved TECXFLTIFG TECEXCLRIFG TECAXCLRIFG
r0 r0 r0 r0 r0 rw-(0) rw-(0) rw-(0)
Table 20-6. TECxINT Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10 TECXFLTIE RW 0h External fault interrupt enable. This bit enables the TECXFLTIFG interrupt
request.
0b = Interrupt disabled
1b = Interrupt enabled
9 TECEXCLRIE RW 0h External clear interrupt enable. This bit enables the TECEXCLRIFG interrupt
request.
0b = Interrupt disabled
1b = Interrupt enabled
8 TECAXCLRIE RW 0h Auxiliary interrupt enable. This bit enables the TECAXCLRIFG interrupt request.
0b = Interrupt disabled
1b = Interrupt enabled
7-3 Reserved R 0h Reserved. Always reads as 0.
2 TECXFLTIFG RW 0h External fault interrupt flag. This bit is set if one of the external fault signal
TECXFLTx is detected. Software has to look into the control register TECSTA to
find out which one it is. If the bit is set it remains set until cleared by reading it or
writing a 0 to it.
0b = No interrupt pending
1b = Interrupt pending
1 TECEXCLRIFG RW 0h External clear interrupt flag. This bit is set if the external clear signal is detected.
If the bit is set it remains set until cleared by reading it or writing a 0 to it.
0b = No interrupt pending
1b = Interrupt pending
0 TECAXCLRIFG RW 0h Auxiliary clear interrupt flag. This bit is set if the auxiliary clear signal is detected.
If the bit is set it remains set until cleared by reading it or writing a 0 to it.
0b = No interrupt pending
1b = Interrupt pending
564 Timer Event Control (TEC) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
TEC Registers
20.3.6 TECxIV Register
Timer Event Control Interrupt Vector Register
Figure 20-11. TECxIV Register
15 14 13 12 11 10 9 8
TECxIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
TECxIVx
r0 r0 r0 r0 r0 r-(0) r-(0) r0
Table 20-7. TECxIV Register Description
Bit Field Type Reset Description
15-0 TECxIVx R 0h TEC external interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: External fault; Interrupt Flag: TECXFLTIFG; Interrupt
Priority: Highest
04h = Interrupt Source: External clear; Interrupt Flag: TECEXCLRIFG
06h = Interrupt Source: Auxiliary clear; Interrupt Flag: TECAXCLRIFG; Interrupt
Priority: Lowest
565
SLAU208O–June 2008–Revised May 2015 Timer Event Control (TEC)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 21
SLAU208O–June 2008–Revised May 2015
Real-Time Clock (RTC) Overview
21.1 RTC Overview
Table 21-1. RTC Overview
RTC_A RTC_B RTC_C
LPM3.5, Calendar Mode Only Protection Plus Improved
Feature Calibration and
Compensation
Calendar Mode Yes Yes Yes
Counter Mode Yes No Optional (device-dependent)(1)
Programmable Alarms Yes Yes Yes
Password Protected Calendar No No Yes
Registers
Input Clocks ALCK, SMCLK 32-kHz crystal oscillator 32-kHz crystal oscillator
LPM3.5 Support No Yes Yes
Offset Calibration Register Yes Yes Yes
Temperature Compensation No No Yes
Register
-2.035 ppm × 63 ≈-128 ppm -2.17 ppm × 59 ≈-128 ppm
Frequency Adjustment Range -240 ppm, +240 ppm(2)
+4.069 ppm × 63 ≈+256 ppm +4.34 ppm × 59 ≈+256 ppm
Frequency Adjustment Steps -2.035 ppm, +4.069 ppm -2.17 ppm, +4.34 ppm -1 ppm, +1 ppm
With software using separate
With software, manipulating With software, manipulating
Temperature Compensation temperature compensation
offset calibration value offset calibration value register
Calibration and Compensation 64 min 60 min 1 min
Period
Integrated for Calendar Mode Integrated for Calendar Mode
BCD to Binary Conversion Integrated for Calendar Mode plus separate conversion plus separate conversion
registers registers
Event/Tamper Detect With No No Optional (device-dependent)(1)
Time Stamp
(1) See the device-specific data sheet.
(2) Total adjustment range of offset calibration plus temperature compensation. See the RTC_C chapter for details.
566 Real-Time Clock (RTC) Overview SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 22
SLAU208O–June 2008–Revised May 2015
Real-Time Clock (RTC_A)
The Real-Time Clock (RTC_A) module provides clock counters with a calendar, a flexible programmable
alarm, and calibration. This chapter describes the RTC_A module.
Topic ........................................................................................................................... Page
22.1 RTC_A Introduction .......................................................................................... 568
22.2 RTC_A Operation.............................................................................................. 570
22.3 RTC_A Registers .............................................................................................. 576
567
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Introduction
www.ti.com
22.1 RTC_A Introduction
The RTC_A module provides a real-time clock and calendar function that can also be configured as a
general-purpose counter.
RTC_A features include:
• Configurable for real-time clock with calendar function or general-purpose counter
• Provides seconds, minutes, hours, day of week, day of month, month, and year in real-time clock with
calendar function
• Interrupt capability
• Selectable BCD or binary format in real-time clock mode
• Programmable alarms in real-time clock mode
• Calibration logic for time offset correction in real-time clock mode
The RTC_A block diagram is shown in Figure 22-1.
NOTE: Real-time clock initialization
Most RTC_A module registers have no initial condition. These registers must be configured
by user software before use.
568 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
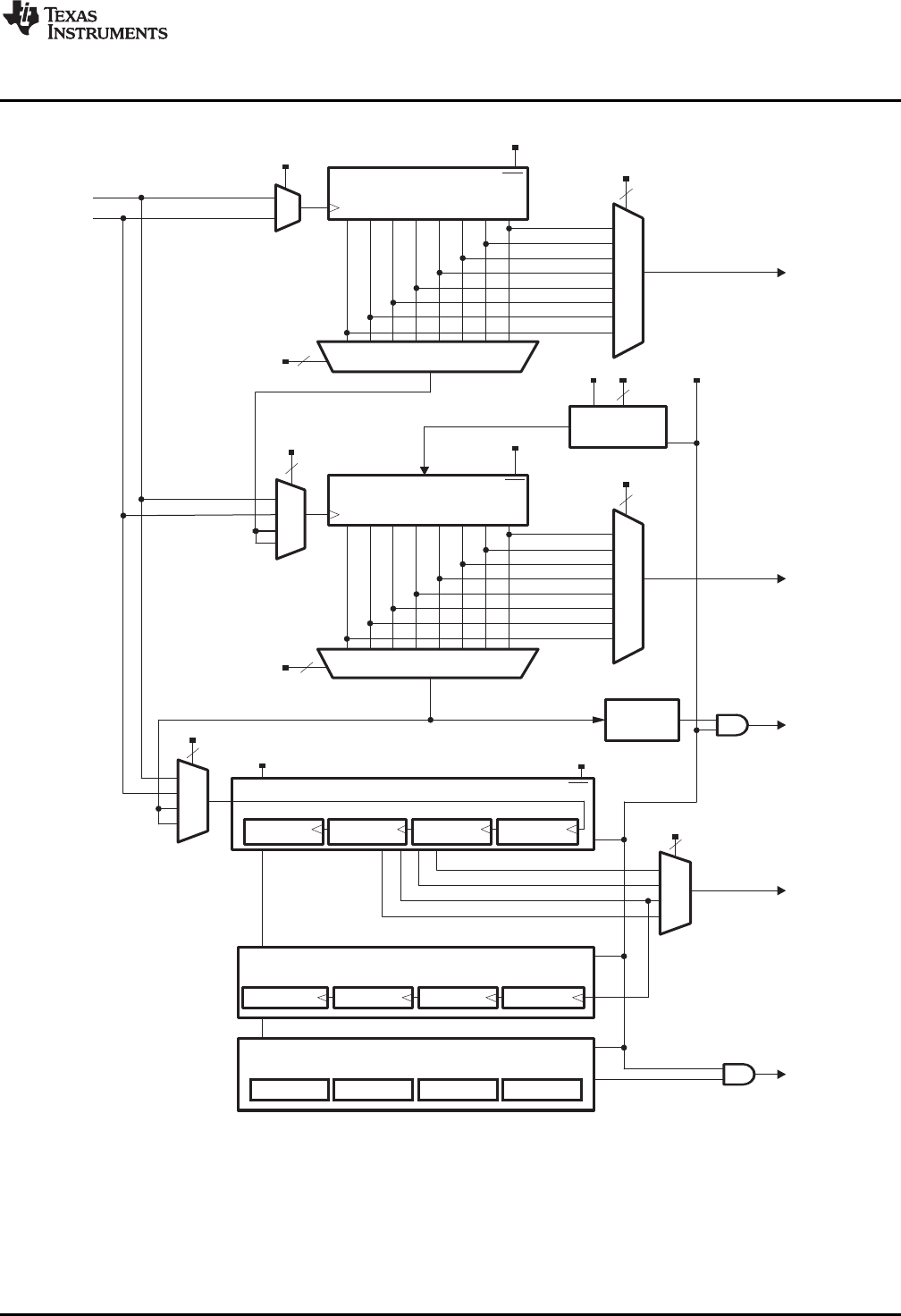
078... ...15
RTCNT4/
RTCDOW
16...2324...31
Calendar
RTCMONRTCYEARLRTCYEARH RTCDAY
RTCTEV
00
01
10
11
8-bitoverflow/minutechanged
RTCSSEL
00
01
10
11
2RTCBCD
Alarm
RTCAHOURRTCADAYRTCADOW RTCAMIN
Set_RTCTEVIFG
Set_RTCAIFG
2
EN
EN
EN
RTCHOLD
RT1PS
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
RT1SSEL
00
01
10
11
3
2
RT1PSDIV
Set_RT1PSIFG
EN 3
RT1IP
RT1PSHOLD
RT0PS
RT0SSEL
3
RT0PSDIV
Set_RT0PSIFG
EN
110
101
100
011
010
001
000
3
RT0IP
SMCLK
ACLK
RT0PSHOLD
1
0
Keepout
Logic
Set_RTCRDYIFG
Calibration
Logic EN
5
RTCCALS RTCCAL RTCMODE
111
110
101
100
011
010
001
000
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
111
111
110
101
100
011
010
001
000
16-bitoverflow/hourchanged
24-bitoverflow/midnight
32-bitoverflow/noon
RTCNT3/
RTCHOUR
RTCNT2/
RTCMIN
RTCNT1/
RTCSEC
110
101
100
011
010
001
000
111
www.ti.com
RTC_A Introduction
Figure 22-1. RTC_A
569
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Operation
www.ti.com
22.2 RTC_A Operation
The RTC_A module can be configured as a real-time clock with calendar function (calendar mode) or as a
32-bit general purpose counter (counter mode) with the RTCMODE bit.
22.2.1 Counter Mode
Counter mode is selected when RTCMODE is reset. In this mode, a 32-bit counter is provided that is
directly accessible by software. Switching from calendar mode to counter mode resets the count value
(RTCNT1, RTCNT2, RTCNT3, RTCNT4), as well as the prescale counters (RT0PS, RT1PS).
The clock to increment the counter can be sourced from ACLK, SMCLK, or prescaled versions of ACLK or
SMCLK. Prescaled versions of ACLK or SMCLK are sourced from the prescale dividers (RT0PS and
RT1PS). RT0PS and RT1PS output /2, /4, /8, 16, /32, /64, /128, and /256 versions of ACLK and SMCLK,
respectively. The output of RT0PS can be cascaded with RT1PS. The cascaded output can be used as a
clock source input to the 32-bit counter.
Four individual 8-bit counters are cascaded to provide the 32-bit counter. This provides 8-bit, 16-bit, 24-bit,
or 32-bit overflow intervals of the counter clock. The RTCTEV bits select the respective trigger event. An
RTCTEV event can trigger an interrupt by setting the RTCTEVIE bit. Each counter, RTCNT1 through
RTCNT4, is individually accessible and may be written to.
RT0PS and RT1PS can be configured as two 8-bit counters or cascaded into a single 16-bit counter.
RT0PS and RT1PS can be halted on an individual basis by setting their respective RT0PSHOLD and
RT1PSHOLD bits. When RT0PS is cascaded with RT1PS, setting RT0PSHOLD causes both RT0PS and
RT1PS to be halted. The 32-bit counter can be halted several ways depending on the configuration. If the
32-bit counter is sourced directly from ACLK or SMCLK, it can be halted by setting RTCHOLD. If it is
sourced from the output of RT1PS, it can be halted by setting RT1PSHOLD or RTCHOLD. Finally, if it is
sourced from the cascaded outputs of RT0PS and RT1PS, it can be halted by setting RT0PSHOLD,
RT1PSHOLD, or RTCHOLD.
NOTE: Accessing the RTCNT1, RTCNT2, RTCNT3, RTCNT4, RT0PS, RT1PS registers
When the counter clock is asynchronous to the CPU clock, any read from any RTCNT1,
RTCNT2, RTCNT3, RTCNT4, RT0PS, or RT1PS register should occur while the counter is
not operating. Otherwise, the results may be unpredictable. Alternatively, the counter may be
read multiple times while operating, and a majority vote taken in software to determine the
correct reading. Any write to these registers takes effect immediately.
22.2.2 Calendar Mode
Calendar mode is selected when RTCMODE is set. In calendar mode, the RTC_A module provides
seconds, minutes, hours, day of week, day of month, month, and year in selectable BCD or hexadecimal
format. The calendar includes a leap-year algorithm that considers all years evenly divisible by four as
leap years. This algorithm is accurate from the year 1901 through 2099.
22.2.2.1 Real-Time Clock and Prescale Dividers
The prescale dividers, RT0PS and RT1PS, are automatically configured to provide a 1-s clock interval for
the RTC_A. RT0PS is sourced from ACLK. ACLK must be set to 32768 Hz (nominal) for proper RTC_A
calendar operation. RT1PS is cascaded with the output ACLK/256 of RT0PS. The RTC_A is sourced with
the /128 output of RT1PS, thereby providing the required 1-s interval. Switching from counter to calendar
mode clears the seconds, minutes, hours, day-of-week, and year counts and sets day-of-month and
month counts to 1. In addition, RT0PS and RT1PS are cleared.
When RTCBCD = 1, BCD format is selected for the calendar registers. The format must be selected
before the time is set. Changing the state of RTCBCD clears the seconds, minutes, hours, day-of-week,
and year counts and sets day-of-month and month counts to 1. In addition, RT0PS and RT1PS are
cleared.
570 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_A Operation
In calendar mode, the RT0SSEL, RT1SSEL, RT0PSDIV, RT1PSDIV, RT0PSHOLD, RT1PSHOLD, and
RTCSSEL bits are don't care. Setting RTCHOLD halts the real-time counters and prescale counters,
RT0PS and RT1PS.
22.2.2.2 Real-Time Clock Alarm Function
The RTC_A module provides for a flexible alarm system. There is a single user-programmable alarm that
can be programmed based on the settings contained in the alarm registers for minutes, hours, day of
week, and day of month. The user-programmable alarm function is only available in the calendar mode of
operation.
Each alarm register contains an alarm enable (AE) bit that can be used to enable the respective alarm
register. By setting AE bits of the various alarm registers, a variety of alarm events can be generated.
• Example 1: A user wishes to set an alarm every hour at 15 minutes past the hour; that is, at 00:15:00,
01:15:00, 02:15:00, and so on. This is possible by setting RTCAMIN to 15. By setting the AE bit of the
RTCAMIN and clearing all other AE bits of the alarm registers, the alarm is enabled. When enabled,
the AF is set when the count transitions from 00:14:59 to 00:15:00, 01:14:59 to 01:15:00, 02:14:59 to
02:15:00, etc.
• Example 2: A user wishes to set an alarm every day at 04:00:00. This is possible by setting
RTCAHOUR to 4. By setting the AE bit of the RTCHOUR and clearing all other AE bits of the alarm
registers, the alarm is enabled. When enabled, the AF is set when the count transitions from 03:59:59
to 04:00:00.
• Example 3: A user wishes to set an alarm for 06:30:00. RTCAHOUR would be set to 6 and RTCAMIN
would be set to 30. By setting the AE bits of RTCAHOUR and RTCAMIN, the alarm is enabled. Once
enabled, the AF is set when the the time count transitions from 06:29:59 to 06:30:00. In this case, the
alarm event occurs every day at 06:30:00.
• Example 4: A user wishes to set an alarm every Tuesday at 06:30:00. RTCADOW would be set to 2,
RTCAHOUR would be set to 6 and RTCAMIN would be set to 30. By setting the AE bits of
RTCADOW, RTCAHOUR and RTCAMIN, the alarm is enabled. Once enabled, the AF is set when the
the time count transitions from 06:29:59 to 06:30:00 and the RTCDOW transitions from 1 to 2.
• Example 5: A user wishes to set an alarm the fifth day of each month at 06:30:00. RTCADAY would be
set to 5, RTCAHOUR would be set to 6 and RTCAMIN would be set to 30. By setting the AE bits of
RTCADAY, RTCAHOUR and RTCAMIN, the alarm is enabled. Once enabled, the AF is set when the
the time count transitions from 06:29:59 to 06:30:00 and the RTCDAY equals 5.
NOTE: Invalid alarm settings
Invalid alarm settings are not checked via hardware. It is the user's responsibility to ensure
that valid alarm settings are entered.
NOTE: Invalid time and date values
Writing of invalid date and/or time information or data values outside the legal ranges
specified in the RTCSEC, RTCMIN, RTCHOUR, RTCDAY, RTCDOW, RTCYEARH,
RTCYEARL, RTCAMIN, RTCAHOUR, RTCADAY, and RTCADOW registers can result in
unpredictable behavior.
NOTE: Setting the alarm
To prevent potential erroneous alarm conditions from occurring, the alarms should be
disabled by clearing the RTCAIE, RTCAIFG, and AE bits prior to writing new time values to
the RTC time registers.
22.2.2.3 Reading or Writing Real-Time Clock Registers in Calendar Mode
Because the system clock may be asynchronous to the RTC_A clock source, special care must be taken
when accessing the real-time clock registers.
571
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Operation
www.ti.com
In calendar mode, the real-time clock registers are updated once per second. To prevent reading any real-
time clock register at the time of an update, which could result in an invalid time being read, a keepout
window is provided. The keepout window is centered approximately -128/32768 s around the update
transition. The read-only RTCRDY bit is reset during the keepout window period and set outside the
keepout the window period. Any read of the clock registers while RTCRDY is reset is considered to be
potentially invalid, and the time read should be ignored.
An easy way to safely read the real-time clock registers is to use the RTCRDYIFG interrupt flag. Setting
RTCRDYIE enables the RTCRDYIFG interrupt. Once enabled, an interrupt is generated based on the
rising edge of the RTCRDY bit, causing the RTCRDYIFG to be set. At this point, the application has
nearly a complete second to safely read any or all of the real-time clock registers. This synchronization
process prevents reading the time value during transition. The RTCRDYIFG flag is reset automatically
when the interrupt is serviced, or can be reset with software.
In counter mode, the RTCRDY bit remains reset. RTCRDYIE is a don't care and RTCRDYIFG remains
reset.
NOTE: Reading or writing real-time clock registers
When the counter clock is asynchronous to the CPU clock, any read from any RTCSEC,
RTCMIN, RTCHOUR, RTCDOW, RTCDAY, RTCMON, RTCYEARL, or RTCYEARH register
while the RTCRDY is reset may result in invalid data being read. To safely read the counting
registers, either polling of the RTCRDY bit or the synchronization procedure previously
described can be used. Alternatively, the counter register can be read multiple times while
operating, and a majority vote taken in software to determine the correct reading. Reading
the RT0PS and RT1PS can only be handled by reading the registers multiple times and a
majority vote taken in software to determine the correct reading or by halting the counters.
Any write to any counting register takes effect immediately. However, the clock is stopped
during the write. In addition, RT0PS and RT1PS registers are reset. This could result in
losing up to 1 s during a write. Writing of data outside the legal ranges or invalid time stamp
combinations results in unpredictable behavior.
22.2.3 Real-Time Clock Interrupts
The RTC_A module has five interrupt sources available, each with independent enables and flags.
22.2.3.1 Real-Time Clock Interrupts in Calendar Mode
In calendar mode, five sources for interrupts are available, namely RT0PSIFG, RT1PSIFG, RTCRDYIFG,
RTCTEVIFG, and RTCAIFG. These flags are prioritized and combined to source a single interrupt vector.
The interrupt vector register (RTCIV) is used to determine which flag requested an interrupt.
The highest-priority enabled interrupt generates a number in the RTCIV register (see register description).
This number can be evaluated or added to the program counter (PC) to automatically enter the
appropriate software routine. Disabled RTC interrupts do not affect the RTCIV value.
Any access, read or write, of the RTCIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
In addition, all flags can be cleared via software.
The user-programmable alarm event sources the real-time clock interrupt, RTCAIFG. Setting RTCAIE
enables the interrupt. In addition to the user-programmable alarm, the RTC_A module provides for an
interval alarm that sources real-time clock interrupt, RTCTEVIFG. The interval alarm can be selected to
cause an alarm event when RTCMIN changed or RTCHOUR changed, every day at midnight (00:00:00)
or every day at noon (12:00:00). The event is selectable with the RTCTEV bits. Setting the RTCTEVIE bit
enables the interrupt.
The RTCRDY bit sources the real-time clock interrupt, RTCRDYIFG, and is useful in synchronizing the
read of time registers with the system clock. Setting the RTCRDYIE bit enables the interrupt.
572 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_A Operation
RT0PSIFG can be used to generate interrupt intervals selectable by the RT0IP bits. In calendar mode,
RT0PS is sourced with ACLK at 32768 Hz, so intervals of 16384 Hz, 8192 Hz, 4096 Hz, 2048 Hz,
1024 Hz, 512 Hz, 256 Hz, or 128 Hz are possible. Setting the RT0PSIE bit enables the interrupt.
RT1PSIFG can generate interrupt intervals selectable by the RT1IP bits. In calendar mode, RT1PS is
sourced with the output of RT0PS, which is 128 Hz (32768/256 Hz). Therefore, intervals of 64 Hz, 32 Hz,
16 Hz, 8 Hz, 4 Hz, 2 Hz, 1 Hz, or 0.5 Hz are possible. Setting the RT1PSIE bit enables the interrupt.
22.2.3.2 Real-Time Clock Interrupts in Counter Mode
In counter mode, three interrupt sources are available: RT0PSIFG, RT1PSIFG, and RTCTEVIFG.
RTCAIFG and RTCRDYIFG are cleared. RTCRDYIE and RTCAIE are don't care.
RT0PSIFG can be used to generate interrupt intervals selectable by the RT0IP bits. In counter mode,
RT0PS is sourced with ACLK or SMCLK, so divide ratios of /2, /4, /8, /16, /32, /64, /128, and /256 of the
respective clock source are possible. Setting the RT0PSIE bit enables the interrupt.
RT1PSIFG can be used to generate interrupt intervals selectable by the RT1IP bits. In counter mode,
RT1PS is sourced with ACLK, SMCLK, or the output of RT0PS, so divide ratios of /2, /4, /8, /16, /32, /64,
/128, and /256 of the respective clock source are possible. Setting the RT1PSIE bit enables the interrupt.
The RTC_A module provides for an interval timer that sources real-time clock interrupt, RTCTEVIFG. The
interval timer can be selected to cause an interrupt event when an 8-bit, 16-bit, 24-bit, or 32-bit overflow
occurs within the 32-bit counter. The event is selectable with the RTCTEV bits. Setting the RTCTEVIE bit
enables the interrupt.
22.2.3.2.1 RTCIV Software Example
The following software example shows the recommended use of RTCIV and the handling overhead. The
RTCIV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
; Interrupt handler for RTC interrupt flags. Cycles
RTC_HND ; Interrupt latency 6
ADD &RTCIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP RTCRDYIFG_HND ; Vector 2: RTCRDYIFG 2
JMP RTCTEVIFG_HND ; Vector 4: RTCTEVIFG 2
JMP RTCAIFG ; Vector 6: RTCAIFG 5
JMP RT0PSIFG ; Vector 8: RT0PSIFG 5
JMP RT1PSIFG ; Vector A: RT1PSIFG 5
RETI ; Vector C: Reserved 5
RTCRDYIFG_HND ; Vector 2: RTCRDYIFG Flag
to ; Task starts here
RETI 5
RTCTEVIFG_HND ; Vector 4: RTCTEVIFG
to ; Task starts here
RETI ; Back to main program 5
RTCAIFG_HND ; Vector 6: RTCAIFG
to ; Task starts here
RT0PSIFG_HND ; Vector 8: RT0PSIFG
to ; Task starts here
RT1PSIFG_HND ; Vector A: RT1PSIFG
to ; Task starts here
573
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Operation
www.ti.com
22.2.4 Real-Time Clock Calibration
The RTC_A module has calibration logic that allows for adjusting the crystal frequency in approximately
+4-ppm or –2-ppm steps, allowing for higher time keeping accuracy from standard crystals.The RTCCAL
bits are used to adjust the frequency. When RTCCALS is set, each RTCCAL LSB causes a ≈+4-ppm
adjustment. When RTCCALS is cleared, each RTCCAL LSB causes a ≈–2-ppm adjustment. Calibration is
available only in calendar mode. In counter mode (RTCMODE = 0), the calibration logic is disabled.
Calibration is accomplished by periodically adjusting the RT1PS counter based on the RTCCALS and
RTCCALx settings. In calendar mode, the RT0PS divides the nominial 37268-Hz low-frequency (LF)
crystal clock input by 256. A 64-minute period has 32768 cycles/sec × 60 sec/min × 64 min = 125829120
cycles. Therefore a –2-ppm reduction in frequency (down calibration) approximately equates to adding an
additional 256 cycles every 125829120 cycles (256/125829120 = 2.035 ppm). This is accomplished by
holding the RT1PS counter for one additional clock of the RT0PS output within a 64-minute period.
Similary, a +4-ppm increase in frequency (up calibration) approximately equates to removing 512 cycles
every 125829120 cycle (512/125829120 = 4.069 ppm). This is accomplished by incrementing the RT1PS
counter for two additional clocks of the RT0PS output within a 64-minute period. Each RTCCALx
calibration bit causes either 256 LF crystal clock cycles to be added every 64 minutes or 512 LF crystal
clock cycles to be subtracted every 64 minutes, giving a frequency adjustment of approximately –2 ppm or
+4 ppm, respectively.
To calibrate the frequency, the RTCCLK output signal is available at a pin. The RTCCALF bits can be
used to select the frequency rate of the RTCCLK output signal, either no signal, 512 Hz, 256 Hz, or 1 Hz.
The basic flow to calibrate the frequency is as follows:
1. Configure the RTCCLK pin.
2. Measure the RTCCLK output signal with an appropriate resolution frequency counter; that is, within the
resolution required.
3. Compute the absolute error in ppm: Absolute Error (ppm) = |106× ( fMEASURED – fRTCCLK)/fRTCCLK|, where
fRTCCLK is the expected frequency of 512 Hz, 256 Hz, or 1 Hz.
4. Adjust the frequency, by performing the following:
(a) If the frequency is too low, set RTCALS = 1 and apply the appropriate RTCCALx bits, where
RTCCALx = (Absolute Error) / 4.069, rounded to the nearest integer.
(b) If the frequency is too high, clear RTCALS = 0 and apply the appropriate RTCCALx bits, where
RTCCALx = (Absolute Error) / 2.035, rounded to the nearest integer.
For example, assume that RTCCLK is output at a frequency of 512 Hz. The measured RTCCLK is
511.9658 Hz. The frequency error is approximately 66.8 ppm low. To increase the frequency by 66.8 ppm,
RTCCALS would be set, and RTCCAL would be set to 16 (66.8/4.069). Similarly, assume that the
measured RTCCLK is 512.0125 Hz. The frequency error is approximately 24.4 ppm high. To decrease the
frequency by 24.4 ppm, RTCCALS would be cleared, and RTCCAL would be set to 12 (24.4 / 2.035).
The calibration corrects only initial offsets and does not adjust for temperature and aging effects. This can
be handled by periodically measuring temperature and using the crystal's charateristic curve to adjust the
ppm based on temperature as required. In counter mode (RTCMODE = 0), the calibration logic is
disabled.
NOTE: Minimum Possible Calibration
The minimial calibration possible is -4 ppm or +8 ppm. For example, setting RTCCALS = 0
and RTCCAL = 0h would result in a -4 ppm decrease in frequency. Similarly, setting
RTCCALS = 1 and RTCCAL = 0h would result in a +8 ppm increase in frequency.
574 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_A Operation
NOTE: Calibration output frequency
The 512-Hz and 256-Hz output frequencies observed at the RTCCLK pin are not affected by
changes in the calibration settings since these output frequencies are generated prior to the
calibration logic. The 1-Hz output frequency is affected by changes in the calibration settings.
Because the frequency change is small and infrequent over a very long time interval, it can
be difficult to observe.
575
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Registers
www.ti.com
22.3 RTC_A Registers
The RTC_A module registers are listed in and Table 22-1. The base register for the RTC_A module
registers can be found in the device-specific data sheet. The address offsets are given in Table 22-1.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 22-1. RTC_A Registers
Offset Acronym Register Name Type Access Reset
00h RTCCTL01 Real-Time Clock Control 0, 1 Read/write Word 4000h
00h RTCCTL0 Real-Time Clock Control 0 Read/write Byte 00h
or RTCCTL01_L
01h RTCCTL1 Real-Time Clock Control 1 Read/write Byte 40h
or RTCCTL01_H
02h RTCCTL23 Real-Time Clock Control 2, 3 Read/write Word 0000h
02h RTCCTL2 Real-Time Clock Control 2 Read/write Byte 00h
or RTCCTL23_L
03h RTCCTL3 Real-Time Clock Control 3 Read/write Byte 00h
or RTCCTL23_H
08h RTCPS0CTL Real-Time Prescale Timer 0 Control Read/write Word 0100h
08h RTCPS0CTLL Read/write Byte 00h
or RTCPS0CTL_L
09h RTCPS0CTLH Read/write Byte 01h
or RTCPS0CTL_H
0Ah RTCPS1CTL Real-Time Prescale Timer 1 Control Read/write Word 0100h
0Ah RTCPS1CTLL Read/write Byte 00h
or RTCPS1CTL_L
0Bh RTCPS0CTLH Read/write Byte 01h
or RTCPS0CTL_H
0Ch RTCPS Real-Time Prescale Timer 0, 1 Counter Read/write Word undefined
0Ch RT0PS Real-Time Prescale Timer 0 Counter Read/write Byte undefined
or RTCPS_L
0Dh RT1PS Real-Time Prescale Timer 1 Counter Read/write Byte undefined
or RTCPS_H
0Eh RTCIV Real Time Clock Interrupt Vector Read Word 0000h
0Eh RTCIV_L Read Byte 00h
0Fh RTCIV_H Read Byte 00h
10h RTCTIM0 Real-Time Clock Seconds, Minutes Read/write Word undefined
or RTCNT12 Real-Time Counter 1, 2
10h RTCSEC Real-Time Clock Seconds Read/write Byte undefined
RTCNT1 Real-Time Counter 1
or RTCTIM0_L
11h RTCMIN Real-Time Clock Minutes Read/write Byte undefined
RTCNT2 Real-Time Counter 2
or RTCTIM0_H
12h RTCTIM1 Real-Time Clock Hour, Day of Week Read/write Word undefined
or RTCNT34 Real-Time Counter 3, 4
12h RTCHOUR Real-Time Clock Hour Read/write Byte undefined
576 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_A Registers
Table 22-1. RTC_A Registers (continued)
Offset Acronym Register Name Type Access Reset
RTCNT3 Real-Time Counter 3
or RTCTIM1_L
13h RTCDOW Real-Time Clock Day of Week Read/write Byte undefined
RTCNT4 Real-Time Counter 4
or RTCTIM1_H
14h RTCDATE Real-Time Clock Date Read/write Word undefined
14h RTCDAY Real-Time Clock Day of Month Read/write Byte undefined
or RTCDATE_L
15h RTCMON Real-Time Clock Month Read/write Byte undefined
or RTCDATE_H
16h RTCYEAR Real-Time Clock Year Read/write Word undefined
16h RTCYEARL Read/write Byte undefined
or RTCYEAR_L
17h RTCYEARH Read/write Byte undefined
or RTCYEAR_H
18h RTCAMINHR Real-Time Clock Minutes, Hour Alarm Read/write Word undefined
18h RTCAMIN Real-Time Clock Minutes Alarm Read/write Byte undefined
or RTCAMINHR_L
19h RTCAHOUR Real-Time Clock Hours Alarm Read/write Byte undefined
or RTCAMINHR_H
1Ah RTCADOWDAY Real-Time Clock Day of Week, Day of Month Read/write Word undefined
Alarm
1Ah RTCADOW Real-Time Clock Day of Week Alarm Read/write Byte undefined
or RTCADOWDAY_L
1Bh RTCADAY Real-Time Clock Day of Month Alarm Read/write Byte undefined
or RTCADOWDAY_H
577
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Registers
www.ti.com
22.3.1 RTCCTL0 Register
Real-Time Clock Control 0 Register
Figure 22-2. RTCCTL0 Register
76543210
Reserved RTCTEVIE RTCAIE RTCRDYIE Reserved RTCTEVIFG RTCAIFG RTCRDYIFG
r0 rw-0 rw-0 rw-0 r0 rw-(0) rw-(0) rw-(0)
Table 22-2. RTCCTL0 Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6 RTCTEVIE RW 0h Real-time clock time event interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
5 RTCAIE RW 0h Real-time clock alarm interrupt enable. This bit remains cleared when in counter
mode (RTCMODE = 0).
0b = Interrupt not enabled
1b = Interrupt enabled
4 RTCRDYIE RW 0h Real-time clock read ready interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
3 Reserved R 0h Reserved. Always reads as 0.
2 RTCTEVIFG RW 0h Real-time clock time event flag
0b = No time event occurred.
1b = Time event occurred.
1 RTCAIFG RW 0h Real-time clock alarm flag. This bit remains cleared when in counter mode
(RTCMODE = 0).
0b = No time event occurred.
1b = Time event occurred.
0 RTCRDYIFG RW 0h Real-time clock read ready flag
0b = RTC cannot be read safely.
1b = RTC can be read safely.
578 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.2 RTCCTL1 Register
Real-Time Clock Control Register 1
Figure 22-3. RTCCTL1 Register
76543210
RTCBCD RTCHOLD RTCMODE RTCRDY RTCSSEL RTCTEV
rw-(0) rw-(1) rw-(0) r-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 22-3. RTCCTL1 Register Description
Bit Field Type Reset Description
7 RTCBCD RW 0h Real-time clock BCD select. Selects BCD counting for real-time clock. Applies to
calendar mode (RTCMODE = 1) only; setting is ignored in counter mode.
Changing this bit clears seconds, minutes, hours, day of week, and year to 0 and
sets day of month and month to 1. The real-time clock registers must be set by
software afterwards.
0b = Binary (hexadecimal) code selected
1b = Binary coded decimal (BCD) code selected
6 RTCHOLD RW 1h Real-time clock hold
0b = Real-time clock (32-bit counter or calendar mode) is operational.
1b = In counter mode (RTCMODE = 0), only the 32-bit counter is stopped. In
calendar mode (RTCMODE = 1), the calendar is stopped as well as the prescale
counters, RT0PS and RT1PS. RT0PSHOLD and RT1PSHOLD are don't care.
5 RTCMODE RW 0h Real-time clock mode
0b = 32-bit counter mode
1b = Calendar mode. Switching between counter and calendar mode resets the
real-time clock counter registers. Switching to calendar mode clears seconds,
minutes, hours, day of week, and year to 0 and sets day of month and month to
1. The real-time clock registers must be set by software afterwards. RT0PS and
RT1PS are also cleared.
4 RTCRDY RW 0h Real-time clock ready
0b = RTC time values in transition (calendar mode only)
1b = RTC time values safe for reading (calendar mode only). This bit indicates
when the real-time clock time values are safe for reading (calendar mode only).
In counter mode, RTCRDY signal remains cleared.
3-2 RTCSSEL RW 0h Real-time clock source select. Selects clock input source to the RTC/32-bit
counter. In calendar mode, these bits are don't care. The clock input is
automatically set to the output of RT1PS.
00b = ACLK
01b = SMCLK
10b = Output from RT1PS
11b = Output from RT1PS
1-0 RTCTEV RW 0h Real-time clock time event
Counter mode (RTCMODE = 0)
00b = 8-bit overflow
01b = 16-bit overflow
10b = 24-bit overflow
11b = 32-bit overflow
Calendar mode (RTCMODE = 1)
00b = Minute changed
01b = Hour changed
10b = Every day at midnight (00:00)
11b = Every day at noon (12:00)
579
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Registers
www.ti.com
22.3.3 RTCCTL2 Register
Real-Time Clock Control 2 Register
Figure 22-4. RTCCTL2 Register
76543210
RTCCALS Reserved RTCCAL
rw-(0) r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 22-4. RTCCTL2 Register Description
Bit Field Type Reset Description
7 RTCCALS RW 0h Real-time clock calibration sign
0b = Frequency adjusted down
1b = Frequency adjusted up
6 Reserved R 0h Reserved. Always reads as 0.
5-0 RTCCAL RW 0h Real-time clock calibration. Each LSB represents approximately +4ppm
(RTCCALS = 1) or a –2ppm (RTCCALS = 0) adjustment in frequency.
22.3.4 RTCCTL3 Register
Real-Time Clock Control 3 Register
Figure 22-5. RTCCTL3 Register
76543210
Reserved RTCCALF
r0 r0 r0 r0 r0 r0 rw-(0) rw-(0)
Table 22-5. RTCCTL3 Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1-0 RTCCALF RW 0h Real-time clock calibration frequency. Selects frequency output to RTCCLK pin
for calibration measurement. The corresponding port must be configured for the
peripheral module function. The RTCCLK is not available in counter mode and
remains low, and the RTCCALF bits are don't care.
00b = No frequency output to RTCCLK pin
01b = 512 Hz
10b = 256 Hz
11b = 1 Hz
580 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.5 RTCNT1 Register
Real-Time Clock Counter 1 Register – Counter Mode
Figure 22-6. RTCNT1 Register
76543210
RTCNT1
rw rw rw rw rw rw rw rw
Table 22-6. RTCNT1 Register Description
Bit Field Type Reset Description
7-0 RTCNT1 RW undefined The RTCNT1 register is the count of RTCNT1
22.3.6 RTCNT2 Register
Real-Time Clock Counter 2 Register – Counter Mode
Figure 22-7. RTCNT2 Register
76543210
RTCNT2
rw rw rw rw rw rw rw rw
Table 22-7. RTCNT2 Register Description
Bit Field Type Reset Description
7-0 RTCNT2 RW undefined The RTCNT2 register is the count of RTCNT2
22.3.7 RTCNT3 Register
Real-Time Clock Counter 3 Register – Counter Mode
Figure 22-8. RTCNT3 Register
76543210
RTCNT3
rw rw rw rw rw rw rw rw
Table 22-8. RTCNT3 Register Description
Bit Field Type Reset Description
7-0 RTCNT3 RW undefined The RTCNT3 register is the count of RTCNT3
22.3.8 RTCNT4 Register
Real-Time Clock Counter 4 Register – Counter Mode
Figure 22-9. RTCNT4 Register
76543210
RTCNT4
rw rw rw rw rw rw rw rw
Table 22-9. RTCNT4 Register Description
Bit Field Type Reset Description
7-0 RTCNT4 RW undefined The RTCNT4 register is the count of RTCNT4.
581
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Registers
www.ti.com
22.3.9 RTCSEC Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Seconds Register – Calendar Mode With Hexadecimal Format
Figure 22-10. RTCSEC Register
76543210
0 Seconds
r-0 r-0 rw rw rw rw rw rw
Table 22-10. RTCSEC Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-0 Seconds RW undefined Seconds (0 to 59)
22.3.10 RTCSEC Register – Calendar Mode With BCD Format
Real-Time Clock Seconds Register – Calendar Mode With BCD Format
Figure 22-11. RTCSEC Register
76543210
0 Seconds – high digit Seconds – low digit
r-0 rw rw rw rw rw rw rw
Table 22-11. RTCSEC Register Description
Bit Field Type Reset Description
7 0 R 0h Always 0
6-4 Seconds – high digit RW undefined Seconds – high digit (0 to 5)
3-0 Seconds – low digit RW undefined Seconds – low digit (0 to 9)
582 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.11 RTCMIN Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Minutes Register – Calendar Mode With Hexadecimal Format
Figure 22-12. RTCMIN Register
76543210
0 Minutes
r-0 r-0 rw rw rw rw rw rw
Table 22-12. RTCMIN Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-0 Minutes RW undefined Minutes (0 to 59)
22.3.12 RTCMIN Register – Calendar Mode With BCD Format
Real-Time Clock Minutes Register – Calendar Mode With BCD Format
Figure 22-13. RTCMIN Register
76543210
0 Minutes – high digit Minutes – low digit
r-0 rw rw rw rw rw rw rw
Table 22-13. RTCMIN Register Description
Bit Field Type Reset Description
7 0 R 0h Always 0
6-4 Minutes – high digit RW undefined Minutes – high digit (0 to 5)
3-0 Minutes – low digit RW undefined Minutes – low digit (0 to 9)
583
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Registers
www.ti.com
22.3.13 RTCHOUR Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Hours Register – Calendar Mode With Hexadecimal Format
Figure 22-14. RTCHOUR Register
76543210
0 Hours
r-0 r-0 r-0 rw rw rw rw rw
Table 22-14. RTCHOUR Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4-0 Hours RW undefined Hours (0 to 23)
22.3.14 RTCHOUR Register – Calendar Mode With BCD Format
Real-Time Clock Hours Register – Calendar Mode With BCD Format
Figure 22-15. RTCHOUR Register
76543210
0 Hours – high digit Hours – low digit
r-0 r-0 rw rw rw rw rw rw
Table 22-15. RTCHOUR Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-4 Hours – high digit RW undefined Hours – high digit (0 to 2)
3-0 Hours – low digit RW undefined Hours – low digit (0 to 9)
584 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.15 RTCDOW Register – Calendar Mode
Real-Time Clock Day of Week Register – Calendar Mode
Figure 22-16. RTCDOW Register
76543210
0 Day of week
r-0 r-0 r-0 r-0 r-0 rw rw rw
Table 22-16. RTCDOW Register Description
Bit Field Type Reset Description
7-3 0 R 0h Always 0
2-0 Day of week RW undefined Day of week (0 to 6)
22.3.16 RTCDAY Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Day of Month Register – Calendar Mode With Hexadecimal Format
Figure 22-17. RTCDAY Register
76543210
0 Day of month
r-0 r-0 r-0 rw rw rw rw rw
Table 22-17. RTCDAY Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4-0 Day of month RW undefined Day of month (1 to 28, 29, 30, 31)
22.3.17 RTCDAY Register – Calendar Mode With BCD Format
Real-Time Clock Day of Month Register – Calendar Mode With BCD Format
Figure 22-18. RTCDAY Register
76543210
0 Day of month – high digit Day of month – low digit
r-0 r-0 rw rw rw rw rw rw
Table 22-18. RTCDAY Register Description
Bit Field Type Reset Description
7-6 0 R 0h
5-4 Day of month – high RW undefined Day of month – high digit (0 to 3)
digit
3-0 Day of month – low RW undefined Day of month – low digit (0 to 9)
digit
585
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Registers
www.ti.com
22.3.18 RTCMON Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Month Register – Calendar Mode With Hexadecimal Format
Figure 22-19. RTCMON Register
76543210
0 Month
r-0 r-0 r-0 r-0 rw rw rw rw
Table 22-19. RTCMON Register Description
Bit Field Type Reset Description
7-4 0 R 0h Always 0
3-0 Month RW undefined Month (1 to 12)
22.3.19 RTCMON Register – Calendar Mode With BCD Format
Real-Time Clock Month Register – Calendar Mode With BCD Format
Figure 22-20. RTCMON Register
76543210
0 Month – high Month – low digit
digit
r-0 r-0 r-0 rw rw rw rw rw
Table 22-20. RTCMON Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4 Month – high digit RW undefined Month – high digit (0 or 1)
3-0 Month – low digit RW undefined Month – low digit (0 to 9)
586 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.20 RTCYEARL Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Year Low-Byte Register – Calendar Mode With Hexadecimal Format
Figure 22-21. RTCYEARL Register
76543210
Year – low byte of 0 to 4095
rw rw rw rw rw rw rw rw
Table 22-21. RTCYEARL Register Description
Bit Field Type Reset Description
7-0 Year RW undefined Year – low byte of 0 to 4095
22.3.21 RTCYEARL Register – Calendar Mode With BCD Format
Real-Time Clock Year Low-Byte Register – Calendar Mode With BCD Format
Figure 22-22. RTCYEARL Register
76543210
Decade Year – lowest digit
rw rw rw rw rw rw rw rw
Table 22-22. RTCYEARL Register Description
Bit Field Type Reset Description
7-4 Decade RW undefined Decade (0 to 9)
3-0 Year – lowest digit RW undefined Year – lowest digit (0 to 9)
587
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Registers
www.ti.com
22.3.22 RTCYEARH Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Year High-Byte Register – Calendar Mode With Hexadecimal Format
Figure 22-23. RTCYEARH Register
76543210
0 Year – high byte of 0 to 4095
r-0 r-0 r-0 r-0 rw rw rw rw
Table 22-23. RTCYEARH Register Description
Bit Field Type Reset Description
7-4 0 R 0h Always 0
3-0 Year RW undefined Year – high byte of 0 to 4095
22.3.23 RTCYEARH Register – Calendar Mode With BCD Format
Real-Time Clock Year High-Byte Register – Calendar Mode With BCD Format
Figure 22-24. RTCYEARH Register
76543210
0 Century – high digit Century – low digit
r-0 rw rw rw rw rw rw rw
Table 22-24. RTCYEARH Register Description
Bit Field Type Reset Description
7 0 R 0h Always 0
6-4 Century – high digit RW undefined Century – high digit (0 to 4)
3-0 Century – low digit RW undefined Century – low digit (0 to 9)
588 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Minutes Alarm Register – Calendar Mode With Hexadecimal Format
Figure 22-25. RTCAMIN Register
76543210
AE 0 Minutes
rw r-0 rw rw rw rw rw rw
Table 22-25. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0
5-0 Minutes RW undefined Minutes (0 to 59)
22.3.25 RTCAMIN Register – Calendar Mode With BCD Format
Real-Time Clock Minutes Alarm Register – Calendar Mode With BCD Format
Figure 22-26. RTCAMIN Register
76543210
AE Minutes – high digit Minutes – low digit
rw rw rw rw rw rw rw rw
Table 22-26. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW 0h Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-4 Minutes – high digit RW undefined Minutes – high digit (0 to 5)
3-0 Minutes – low digit RW undefined Minutes – low digit (0 to 9)
589
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Registers
www.ti.com
22.3.26 RTCAHOUR Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Hours Alarm Register – Calendar Mode With Hexadecimal Format
Figure 22-27. RTCAHOUR Register
76543210
AE 0 Hours
rw r-0 r-0 rw rw rw rw rw
Table 22-27. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always 0
4-0 Hours RW undefined Hours (0 to 23)
22.3.27 RTCAHOUR Register – Calendar Mode With BCD Format
Real-Time Clock Hours Alarm Register – Calendar Mode With BCD Format
Figure 22-28. RTCAHOUR Register
76543210
AE 0 Hours – high digit Hours – low digit
rw r-0 rw rw rw rw rw rw
Table 22-28. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0
5-4 Hours – high digit RW undefined Hours – high digit (0 to 2)
3-0 Hours – low digit RW undefined Hours – low digit (0 to 9)
590 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.28 RTCADOW Register
Real-Time Clock Day of Week Alarm Register – Calendar Mode
Figure 22-29. RTCADOW Register
76543210
AE 0 Day of week
rw r-0 r-0 r-0 r-0 rw rw rw
Table 22-29. RTCADOW Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-3 0 R 0h Always 0
2-0 Day of week RW undefined Day of week (0 to 6)
22.3.29 RTCADAY Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Day of Month Alarm Register – Calendar Mode With Hexadecimal Format
Figure 22-30. RTCADAY Register
76543210
AE 0 Day of month
rw r-0 r-0 rw rw rw rw rw
Table 22-30. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always 0
4-0 Day of month RW undefined Day of month (1 to 28, 29, 30, 31)
22.3.30 RTCADAY Register – Calendar Mode With BCD Format
Real-Time Clock Day of Month Alarm Register – Calendar Mode With BCD Format
Figure 22-31. RTCADAY Register
76543210
AE 0 Day of month – high digit Day of month – low digit
rw r-0 rw rw rw rw rw rw
Table 22-31. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0
5-4 Day of month – high RW undefined Day of month – high digit (0 to 3)
digit
591
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_A Registers
www.ti.com
Table 22-31. RTCADAY Register Description (continued)
Bit Field Type Reset Description
3-0 Day of month – low RW undefined Day of month – low digit (0 to 9)
digit
592 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.31 RTCPS0CTL Register
Real-Time Clock Prescale Timer 0 Control Register
Figure 22-32. RTCPS0CTL Register
15 14 13 12 11 10 9 8
Reserved RT0SSEL RT0PSDIV Reserved RT0PSHOLD
rw-0 rw-0 rw-0 rw-0 rw-0 r0 r0 rw-1
76543210
Reserved RT0IP RT0PSIE RT0PSIFG
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 rw-(0)
Table 22-32. RTCPS0CTL Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14 RT0SSEL RW 0h Prescale timer 0 clock source select. Selects clock input source to the RT0PS
counter. In real-time clock calendar mode, these bits are do not care. RT0PS
clock input is automatically set to the output of RT0PS.
0b = ACLK
1b = SMCLK
13-11 RT0PSDIV RW 0h Prescale timer 0 clock divide. These bits control the divide ratio of the RT0PS
counter. In real-time clock calendar mode, these bits are don't care for RT0PS
and RT1PS. RT0PS clock output is automatically set to /256. RT1PS clock
output is automatically set to /128.
00b = Divide by 2
01b = Divide by 4
10b = Divide by 8
11b = Divide by 16
00b = Divide by 32
01b = Divide by 64
10b = Divide by 128
11b = Divide by 256
10-9 Reserved R 0h Reserved. Always reads as 0.
8 RT0PSHOLD RW 1h Prescale timer 0 hold. In real-time clock calendar mode, this bit is don't care.
RT0PS is stopped via the RTCHOLD bit.
0b = RT0PS operational
1b = RT0PS held
7-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT0IP RW 0h Prescale timer 0 interrupt interval
00b = Divide by 2
01b = Divide by 4
10b = Divide by 8
11b = Divide by 16
00b = Divide by 32
01b = Divide by 64
10b = Divide by 128
11b = Divide by 256
1 RT0PSIE RW 0h Prescale timer 0 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
0 RT0PSIFG RW 0h Prescale timer 0 interrupt flag
0b = No time event occurred
1b = Time event occurred
593
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_A Registers
www.ti.com
22.3.32 RTCPS1CTL Register
Real-Time Clock Prescale Timer 1 Control Register
Figure 22-33. RTCPS1CTL Register
15 14 13 12 11 10 9 8
RT1SSEL RT1PSDIV Reserved RT1PSHOLD
rw-0 rw-0 rw-0 rw-0 rw-0 r0 r0 rw-1
76543210
Reserved RT1IP RT1PSIE RT1PSIFG
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 rw-(0)
Table 22-33. RTCPS1CTL Register Description
Bit Field Type Reset Description
15-14 RT1SSEL RW 0h Prescale timer 1 clock source select. Selects clock input source to the RT1PS
counter. In real-time clock calendar mode, these bits are do not care. RT1PS
clock input is automatically set to the output of RT0PS.
00b = ACLK
01b = SMCLK
10b = Output from RT0PS
11b = Output from RT0PS
13-11 RT1PSDIV RW 0h Prescale timer 1 clock divide. These bits control the divide ratio of the RT0PS
counter. In real-time clock calendar mode, these bits are don't care for RT0PS
and RT1PS. RT0PS clock output is automatically set to /256. RT1PS clock
output is automatically set to /128.
00b = Divide by 2
01b = Divide by 4
10b = Divide by 8
11b = Divide by 16
00b = Divide by 32
01b = Divide by 64
10b = Divide by 128
11b = Divide by 256
10-9 Reserved R 0h Reserved. Always reads as 0.
8 RT1PSHOLD RW 1h Prescale timer 1 hold. In real-time clock calendar mode, this bit is don't care.
RT1PS is stopped via the RTCHOLD bit.
0b = RT1PS operational
1b = RT1PS held
7-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT1IP RW 0h Prescale timer 1 interrupt interval
00b = Divide by 2
01b = Divide by 4
10b = Divide by 8
11b = Divide by 16
00b = Divide by 32
01b = Divide by 64
10b = Divide by 128
11b = Divide by 256
1 RT1PSIE RW 0h Prescale timer 1 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
0 RT1PSIFG RW 0h Prescale timer 1 interrupt flag
0b = No time event occurred
1b = Time event occurred
594 Real-Time Clock (RTC_A) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_A Registers
22.3.33 RT0PS Register
Real-Time Clock Prescale Timer 0 Counter Register
Figure 22-34. RT0PS Register
76543210
RT0PS
rw rw rw rw rw rw rw rw
Table 22-34. RT0PS Register Description
Bit Field Type Reset Description
7-0 RT0PS RW Undefined Prescale timer 0 counter value
22.3.34 RT1PS Register
Real-Time Clock Prescale Timer 1 Counter Register
Figure 22-35. RTPS1 Register
76543210
RT1PS
rw rw rw rw rw rw rw rw
Table 22-35. RT1PS Register Description
Bit Field Type Reset Description
7-0 RT1PS RW Undefined Prescale timer 1 counter value
22.3.35 RTCIV Register
Real-Time Clock Interrupt Vector Register
Figure 22-36. RTCIV Register
15 14 13 12 11 10 9 8
RTCIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
RTCIV
r0 r0 r0 r-(0) r-(0) r-(0) r-(0) r0
Table 22-36. RTCIV Register Description
Bit Field Type Reset Description
15-0 RTCIV R 0h Real-time clock interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: RTC ready; Interrupt Flag: RTCRDYIFG
04h = Interrupt Source: RTC interval timer; Interrupt Flag: RTCTEVIFG
06h = Interrupt Source: RTC user alarm; Interrupt Flag: RTCAIFG
08h = Interrupt Source: RTC prescaler 0; Interrupt Flag: RT0PSIFG
0Ah = Interrupt Source: RTC prescaler 1; Interrupt Flag: RT1PSIFG
0Ch = Reserved
0Eh = Reserved
10h = Reserved ; Interrupt Priority: Lowest
595
SLAU208O–June 2008–Revised May 2015 Real-Time Clock (RTC_A)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 23
SLAU208O–June 2008–Revised May 2015
Real-Time Clock B (RTC_B)
The real-time clock RTC_B module provides clock counters with calendar mode, a flexible programmable
alarm, and calibration. Note that the RTC_B supports only calendar mode and not counter mode. The
RTC_B also support operation in LPM3.5 and device-dependent operation from a backup supply. See the
device-specific data sheet for the supported features. This chapter describes the RTC_B module.
Topic ........................................................................................................................... Page
23.1 Real-Time Clock RTC_B Introduction.................................................................. 597
23.2 RTC_B Operation.............................................................................................. 599
23.3 RTC_B Registers .............................................................................................. 604
596 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Real-Time Clock RTC_B Introduction
23.1 Real-Time Clock RTC_B Introduction
The RTC_B module provides configurable clock counters.
RTC_B features include:
• Real-time clock and calendar mode providing seconds, minutes, hours, day of week, day of month,
month, and year (including leap year correction)
Note that only the calendar mode is supported by RTC_B; the counter mode that is available in some
other RTC modules is not supported.
• Interrupt capability
• Selectable BCD or binary format
• Programmable alarms
• Calibration logic for time offset correction
• Operation in LPM3.5
• Operation from backup supply with programmable charger for backup supply (device-dependent) (see
the Battery Backup chapter.
The RTC_B block diagram for devices supporting LPM3.5 is shown in Figure 23-1.
NOTE: Real-time clock initialization
Most RTC_B module registers have no initial condition. These registers must be configured
by user software before use.
597
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
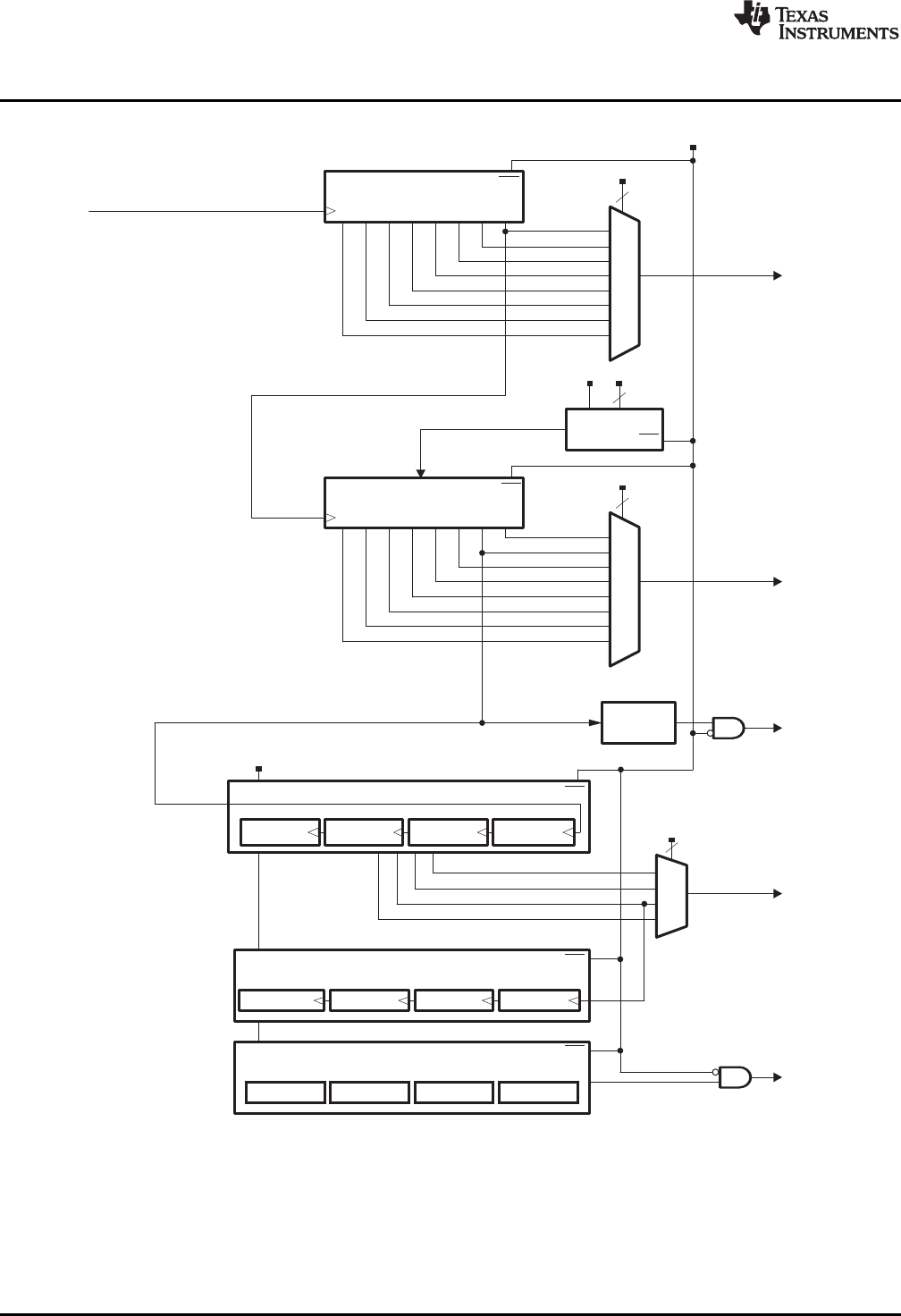
RTCDOW
Calendar
RTCMONRTCYEARLRTCYEARH RTCDAY
RTCTEV
00
01
10
11
minutechanged
RTCBCD
Alarm
RTCAHOURRTCADAYRTCADOW RTCAMIN
Set_RTCTEVIFG
Set_RTCAIFG
2
EN
EN
EN
EN
RT1PS
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
Set_RT1PSIFG
EN 3
RT1IP
RT0PS
Set_RT0PSIFG
EN
110
101
100
011
010
001
000
3
RT0IP
RTCHOLD
Keepout
Logic
Set_RTCRDYIFG
Calibration
Logic
5
RTCCALS RTCCAL
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
111
hourchanged
midnight
noon
RTCHOUR RTCMIN RTCSEC
110
101
100
011
010
001
000
111
from32kHzCrystalOsc.
Real-Time Clock RTC_B Introduction
www.ti.com
Figure 23-1. RTC_B Block Diagram
598 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_B Operation
23.2 RTC_B Operation
The RTC_B module provides seconds, minutes, hours, day of week, day of month, month, and year in
selectable BCD or hexadecimal format. The calendar includes a leap-year algorithm that considers all
years evenly divisible by four as leap years. This algorithm is accurate from the year 1901 through 2099.
23.2.1 Real-Time Clock and Prescale Dividers
The prescale dividers, RT0PS and RT1PS, are automatically configured to provide a 1-s clock interval for
the RTC_B. The low-frequency oscillator must be operated at 32768 Hz (nominal) for proper RTC_B
operation. RT0PS is sourced from the low-frequency oscillator XT1. The output of RT0PS / 256 (Q7) is
used to source RT1PS. RT1PS is further divider and the /128 output sources the real-time clock counter
registers providing the required 1-second time interval.
When RTCBCD = 1, BCD format is selected for the calendar registers. It is possible to switch between
BCD and hexadecimal format while the RTC is counting.
Setting RTCHOLD halts the real-time counters and prescale counters, RT0PS, and RT1PS.
23.2.2 Real-Time Clock Alarm Function
The RTC_B module provides for a flexible alarm system. There is a single user-programmable alarm that
can be programmed based on the settings contained in the alarm registers for minutes, hours, day of
week, and day of month.
Each alarm register contains an alarm enable (AE) bit that can be used to enable the respective alarm
register. By setting AE bits of the various alarm registers, a variety of alarm events can be generated.
• Example 1: A user wishes to set an alarm every hour at 15 minutes past the hour (that is, at 00:15:00,
01:15:00, 02:15:00, etc). This is possible by setting RTCAMIN to 15. By setting the AE bit of the
RTCAMIN and clearing all other AE bits of the alarm registers, the alarm is enabled. When enabled,
the RTCAIFG is set when the count transitions from 00:14:59 to 00:15:00, 01:14:59 to 01:15:00,
02:14:59 to 02:15:00, and so on.
• Example 2: A user wishes to set an alarm every day at 04:00:00. This is possible by setting
RTCAHOUR to 4. By setting the AE bit of the RTCHOUR and clearing all other AE bits of the alarm
registers, the alarm is enabled. When enabled, the RTCAIFG is set when the count transitions from
03:59:59 to 04:00:00.
• Example 3: A user wishes to set an alarm for 06:30:00. RTCAHOUR would be set to 6 and RTCAMIN
would be set to 30. By setting the AE bits of RTCAHOUR and RTCAMIN, the alarm is enabled. Once
enabled, the RTCAIFG is set when the time count transitions from 06:29:59 to 06:30:00. In this case,
the alarm event occurs every day at 06:30:00.
• Example 4: A user wishes to set an alarm every Tuesday at 06:30:00. RTCADOW would be set to 2,
RTCAHOUR would be set to 6, and RTCAMIN would be set to 30. By setting the AE bits of
RTCADOW, RTCAHOUR, and RTCAMIN, the alarm is enabled. Once enabled, the RTCAIFG is set
when the time count transitions from 06:29:59 to 06:30:00 and the RTCDOW transitions from 1 to 2.
• Example 5: A user wishes to set an alarm the fifth day of each month at 06:30:00. RTCADAY would be
set to 5, RTCAHOUR would be set to 6, and RTCAMIN would be set to 30. By setting the AE bits of
RTCADAY, RTCAHOUR, and RTCAMIN, the alarm is enabled. Once enabled, the RTCAIFG is set
when the time count transitions from 06:29:59 to 06:30:00 and the RTCDAY equals 5.
NOTE: Setting the alarm
Prior to setting an initial alarm, all alarm registers including the AE bits should be cleared.
To prevent potential erroneous alarm conditions from occurring, the alarms should be
disabled by clearing the RTCAIE, RTCAIFG, and AE bits prior to writing initial or new time
values to the RTC time registers.
599
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_B Operation
www.ti.com
NOTE: Invalid alarm settings
Invalid alarm settings are not checked via hardware. It is the user's responsibility that valid
alarm settings are entered.
NOTE: Invalid time and date values
Writing of invalid date or time information or data values outside the legal ranges specified in
the RTCSEC, RTCMIN, RTCHOUR, RTCDAY, RTCDOW, RTCYEAR, RTCAMIN,
RTCAHOUR, RTCADAY, and RTCADOW registers can result in unpredictable behavior.
23.2.3 Reading or Writing Real-Time Clock Registers
Because the system clock may in fact be asynchronous to the RTC_B clock source, special care must be
used when accessing the real-time clock registers.
The real-time clock registers are updated once per second. To prevent reading any real-time clock register
at the time of an update, which could result in an invalid time being read, a keep-out window is provided.
The keep-out window is centered approximately 128/32768 seconds around the update transition. The
read-only RTCRDY bit is reset during the keep-out window period and set outside the keep-out the
window period. Any read of the clock registers while RTCRDY is reset is considered to be potentially
invalid, and the time read should be ignored.
An easy way to safely read the real-time clock registers is to utilize the RTCRDYIFG interrupt flag. Setting
RTCRDYIE enables the RTCRDYIFG interrupt. Once enabled, an interrupt is generated based on the
rising edge of the RTCRDY bit, causing the RTCRDYIFG to be set. At this point, the application has
nearly a complete second to safely read any or all of the real-time clock registers. This synchronization
process prevents reading the time value during transition. The RTCRDYIFG flag is reset automatically
when the interrupt is serviced, or it can be reset with software.
NOTE: Reading or writing real-time clock registers
When the counter clock is asynchronous to the CPU clock, any read from any RTCSEC,
RTCMIN, RTCHOUR, RTCDOW, RTCDAY, RTCMON, or RTCYEAR register while the
RTCRDY is reset may result in invalid data being read. To safely read the counting registers,
either polling of the RTCRDY bit or the synchronization procedure previously described can
be used. Alternatively, the counter register can be read multiple times while operating, and a
majority vote taken in software to determine the correct reading. Reading the RT0PS and
RT1PS can only be handled by reading the registers multiple times and a majority vote taken
in software to determine the correct reading or by halting the counters.
Any write to any counting register takes effect immediately. However, the clock is stopped
during the write. In addition, RT0PS and RT1PS registers are reset. This could result in
losing up to 1 second during a write. Writing of data outside the legal ranges or invalid time
stamp combinations results in unpredictable behavior.
23.2.4 Real-Time Clock Interrupts
Six sources for interrupts are available, namely RT0PSIFG, RT1PSIFG, RTCRDYIFG, RTCTEVIFG,
RTCAIFG, and RTCOFIFG. These flags are prioritized and combined to source a single interrupt vector.
The interrupt vector register (RTCIV) is used to determine which flag requested an interrupt.
The highest-priority enabled interrupt generates a number in the RTCIV register (see register description).
This number can be evaluated or added to the program counter (PC) to automatically enter the
appropriate software routine. Disabled RTC interrupts do not affect the RTCIV value.
Any access, read or write, of the RTCIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
In addition, all flags can be cleared via software.
600 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Operation
The user-programmable alarm event sources the real-time clock interrupt, RTCAIFG. Setting RTCAIE
enables the interrupt. In addition to the user-programmable alarm, the RTC_B module provides for an
interval alarm that sources real-time clock interrupt, RTCTEVIFG. The interval alarm can be selected to
cause an alarm event when RTCMIN changed or RTCHOUR changed, every day at midnight (00:00:00)
or every day at noon (12:00:00). The event is selectable with the RTCTEV bits. Setting the RTCTEVIE bit
enables the interrupt.
The RTCRDY bit sources the real-time clock interrupt, RTCRDYIFG, and is useful in synchronizing the
read of time registers with the system clock. Setting the RTCRDYIE bit enables the interrupt.
RT0PSIFG can be used to generate interrupt intervals selectable by the RT0IP bits. RT0PS is sourced
with low-frequency oscillator clock at 32768 Hz, so intervals of 16384 Hz, 8192 Hz, 4096 Hz, 2048 Hz,
1024 Hz, 512 Hz, 256 Hz, or 128 Hz are possible. Setting the RT0PSIE bit enables the interrupt.
RT1PSIFG can be used to generate interrupt intervals selectable by the RT1IP bits. RT1PS is sourced
with the output of RT0PS, which is 128 Hz (32768/256 Hz). Therefore, intervals of 64 Hz, 32 Hz, 16 Hz,
8 Hz, 4 Hz, 2 Hz, 1 Hz, or 0.5 Hz are possible. Setting the RT1PSIE bit enables the interrupt.
NOTE: Changing RT0IP or RT1IP
Changing the settings of the interrupt interval bits RT0IP or RT1IP while the corresponding
pre-scaler is running or is stopped in a non-zero state can result in setting the corresponding
interrupt flags.
The RTCOFIFG bit flags a failure of the 32-kHz crystal oscillator. Its main purpose is to wake up the CPU
from LPM3.5 if an oscillator failure occurs. On devices with a backup-supply subsystem, it also stores a
failure event that occurred while the RTC was operating on the backup supply.
23.2.4.1 RTCIV Software Example
The following software example shows the recommended use of RTCIV and the handling overhead. The
RTCIV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
; Interrupt handler for RTC interrupt flags.
RTC_HND ; Interrupt latency 6
ADD &RTCIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP RTCRDYIFG_HND ; Vector 2: RTCRDYIFG 2
JMP RTCTEVIFG_HND ; Vector 4: RTCTEVIFG 2
JMP RTCAIFG_HND ; Vector 6: RTCAIFG 5
JMP RT0PSIFG_HND ; Vector 8: RT0PSIFG 5
JMP RT1PSIFG_HND ; Vector A: RT1PSIFG 5
JMP RTCOFIFG_HND ; Vector C: RTCOFIFG 5
RETI ; Vector E: Reserved 5
RTCRDYIFG_HND ; Vector 2: RTCRDYIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RTCTEVIFG_HND ; Vector 4: RTCTEVIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RTCAIFG_HND ; Vector 6: RTCAIFG Flag
... ; Task starts here
RETI ; Back to main program 5
601
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_B Operation
www.ti.com
RT0PSIFG_HND ; Vector 8: RT0PSIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RT1PSIFG_HND ; Vector A: RT1PSIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RTCOFIFG_HND ; Vector C: RTCOFIFG Flag
... ; Task starts here
RETI ; Back to main program 5
23.2.5 Real-Time Clock Calibration
The RTC_B module has calibration logic that allows for adjusting the crystal frequency in approximately
+4-ppm or –2-ppm steps, allowing for higher time keeping accuracy from standard crystals. The RTCCALx
bits are used to adjust the frequency. When RTCCALS is set, each RTCCALx LSB causes a ≈+4-ppm
adjustment. When RTCCALS is cleared, each RTCCALx LSB causes a ≈–2-ppm adjustment.
Calibration is accomplished by periodically adjusting the RT1PS counter based on the RTCCALS and
RTCCALx settings. The RT0PS divides the nominal 37268-Hz low-frequency (LF) crystal clock input by
256. A 60-minute period has 32768 cycles/sec × 60 sec/min × 60 min = 117964800 cycles. Therefore, a
–2-ppm reduction in frequency (down calibration) approximately equates to adding an additional 256
cycles every 117964800 cycles (256/117964800 = 2.17 ppm). This is accomplished by holding the RT1PS
counter for one additional clock of the RT0PS output within a 60-minute period. Similarly, a +4-ppm
increase in frequency (up calibration) approximately equates to removing 512 cycles every 117964800
cycle (512/117964800 = 4.34 ppm). This is accomplished by incrementing the RT1PS counter for two
additional clocks of the RT0PS output within a 60-minute period. Each RTCCALx calibration bit causes
either 256 LF crystal clock cycles to be added every 60 minutes or 512 LF crystal clock cycles to be
subtracted every 60 minutes, giving a frequency adjustment of approximately -2 ppm or +4 ppm,
respectively.
To calibrate the frequency, the RTCCLK output signal is available at a pin. RTCCALF bits can be used to
select the frequency rate of the output signal, either no signal, 512 Hz, 256 Hz, or 1 Hz.
The basic flow to calibrate the frequency is as follows:
1. Configure the RTCCLK pin.
2. Measure the RTCCLK output signal with an appropriate resolution frequency counter ; that is, within
the resolution required.
3. Compute the absolute error in ppm: Absolute error (ppm) = |106(fMEASURED – fRTCCLK)/fRTCCLK|, where
fRTCCLK is the expected frequency of 512 Hz, 256 Hz, or 1 Hz.
4. Adjust the frequency by performing the following:
(a) If the frequency is too low, set RTCCALS = 1 and apply the appropriate RTCCALx bits, where
RTCCALx = (Absolute Error) / 4.34 rounded to the nearest integer
(b) If the frequency is too high, clear RTCCALS = 0 and apply the appropriate RTCCALx bits, where
RTCCALx = (Absolute Error) / 2.17 rounded to the nearest integer
For example, assume that RTCCLK is configured to output at a frequency of 512 Hz. The measured
RTCCLK is 511.9658 Hz. This frequency error is approximately 66.8 ppm too low. To increase the
frequency by 66.8 ppm, RTCCALS would be set, and RTCCALx would be set to 15 (66.8 / 4.34). Similarly,
assume that the measured RTCCLK is 512.0125 Hz. The frequency error is approximately 24.4 ppm too
high. To decrease the frequency by 24.4 ppm, RTCCALS would be cleared, and RTCCAL would be set to
11 (24.4 / 2.17).
The calibration corrects only initial offsets and does not adjust for temperature and aging effects. These
effects can be handled by periodically measuring temperature and using the crystal's characteristic curve
to adjust the ppm based on temperature, as required.
602 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_B Operation
NOTE: Minimum Possible Calibration
The minimal calibration possible is -4 ppm or +8 ppm. For example, setting RTCCALS = 0
and RTCCAL = 0h would result in a -4 ppm decrease in frequency. Similarly, setting
RTCCALS = 1 and RTCCAL = 0h would result in a +8 ppm increase in frequency.
NOTE: Calibration output frequency
The 512-Hz and 256-Hz output frequencies observed at the RTCCLK pin are not affected by
changes in the calibration settings, because these output frequencies are generated prior to
the calibration logic. The 1-Hz output frequency is affected by changes in the calibration
settings. Because the frequency change is small and infrequent over a very long time
interval, it can be difficult to observe.
23.2.6 Real-Time Clock Operation in LPM3.5 Low-Power Mode
The regulator of the Power Management Module (PMM) is disabled upon entering LPM3.5, which causes
most of the RTC_B configuration registers to be lost; only the counters and the backup RAM are retained.
Table 23-1 lists the retained registers in LPM3.5. Also the configuration of the interrupts is stored so that
the configured interrupts can cause a wakeup upon exit from LPM3.5. Interrupt flags that are set prior to
entering LPM3.5 are cleared upon entering LPM3.5 (Note: this can only happen if the corresponding
interrupt is not enabled). The interrupt flags RTCTEVIFG, RTCAIFG, RT1PSIFG, and RTCOFIFG can be
used as RTC_B wake-up interrupt sources. After restoring the configuration registers (and clearing
LOCKLPM5) the interrupts can be serviced as usual. The detailed flow is as follows:
1. Set all I/Os to general purpose I/Os and configure as needed. Optionally configure input interrupt pins
for wake-up. Configure RTC_B interrupts for wake-up (set RTCTEVIE, RTCAIE, RT1PSIE, or
RTCOFIE. If the alarm interrupt is also used as wake-up event, the alarm registers must be configured
as needed).
2. Enter LPMx.5 with LPMx.5 entry sequence.
MOV #PMMKEY + PMMREGOFF, &PMMCTL0 ; Open PMM registers for write and set PMMREGOFF
;
BIS #LPM4,SR ; Enter LPMx.5 when PMMREGOFF is set
3. LOCKLPM5 is automatically set by hardware upon entering LPMx.5, the core voltage regulator is
disabled, and all clocks are disabled except for the 32-kHz crystal oscillator clock if the RTC is enabled
with RTCHOLD = 0.
4. An LPMx.5 wake-up event, such as an edge on a wake-up input pin, or an RTC_B interrupt event will
start the BOR entry sequence together with the core voltage regulator. All peripheral registers are set
to their default conditions. The I/O pin state remains locked as well as the interrupt configuration for the
RTC_B.
5. The device can be configured. The I/O configuration and the RTC_B interrupt configuration that was
not retained during LPM3.5 should be restored to the values prior to entering LPM3.5. Then the
LOCKLPM5 bit can be cleared, this releases the I/O pin conditions as well as the RTC_B interrupt
configuration.
6. After enabling I/O and RTC_B interrupts, the interrupt that caused the wake-up can be serviced.
7. To re-enter LPMx.5, the LOCKLPM5 bit must be cleared prior to re-entry, otherwise LPMx.5 is not
entered.
If the RTC is enabled (RTCHOLD = 0), the 32-kHz oscillator remains active during LPM3.5. The fault
detection also remains functional. If a fault occurs during LPM3.5 and the RTCOFIE was set before
entering LPM3.5, a wake-up event is issued.
603
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_B Registers
www.ti.com
23.3 RTC_B Registers
The RTC_B module registers are listed in Table 23-1. This table also lists the retention during LPMx.5.
Registers that are not retained during LPMx.5 must be restored after exit from LPMx.5. The base address
for the RTC_B module registers can be found in the device-specific data sheet. The address offsets are
given in Table 23-1.
NOTE: Most registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 23-1. RTC_B Registers
LPMx.5
Offset Acronym Register Name Type Access Reset Operation
00h RTCCTL01 Real-Time Clock Control 0, 1 Read/write Word 7000h not retained
00h RTCCTL0 Real-Time Clock Control 0 Read/write Byte 00h not retained
or RTCCTL01_L
01h RTCCTL1 Real-Time Clock Control 1 Read/write Byte 70h not retained
or RTCCTL01_H
02h RTCCTL23 Real-Time Clock Control 2, 3 Read/write Word 0000h retained
02h RTCCTL2 Real-Time Clock Control 2 Read/write Byte 00h retained
or RTCCTL23_L
03h RTCCTL3 Real-Time Clock Control 3 Read/write Byte 00h retained
or RTCCTL23_H
08h RTCPS0CTL Real-Time Prescale Timer 0 Control Read/write Word 0000h not retained
08h RTCPS0CTLL Read/write Byte 00h not retained
or RTCPS0CTL_L
09h RTCPS0CTLH Read/write Byte 00h not retained
or RTCPS0CTL_H
0Ah RTCPS1CTL Real-Time Prescale Timer 1 Control Read/write Word 0000h not retained
0Ah RTCPS1CTLL Read/write Byte 00h not retained
or RTCPS1CTL_L
0Bh RTCPS0CTLH Read/write Byte 00h not retained
or RTCPS0CTL_H
0Ch RTCPS Real-Time Prescale Timer 0, 1 Counter Read/write Word none retained
0Ch RT0PS Real-Time Prescale Timer 0 Counter Read/write Byte none retained
or RTCPS_L
0Dh RT1PS Real-Time Prescale Timer 1 Counter Read/write Byte none retained
or RTCPS_H
0Eh RTCIV Real Time Clock Interrupt Vector Read Word 0000h not retained
10h RTCTIM0 Real-Time Clock Seconds, Minutes Read/write Word undefined retained
10h RTCSEC Real-Time Clock Seconds Read/write Byte undefined retained
or RTCTIM0_L
11h RTCMIN Real-Time Clock Minutes Read/write Byte undefined retained
or RTCTIM0_H
12h RTCTIM1 Real-Time Clock Hour, Day of Week Read/write Word undefined retained
12h RTCHOUR Real-Time Clock Hour Read/write Byte undefined retained
or RTCTIM1_L
13h RTCDOW Real-Time Clock Day of Week Read/write Byte undefined retained
or RTCTIM1_H
604 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_B Registers
Table 23-1. RTC_B Registers (continued)
LPMx.5
Offset Acronym Register Name Type Access Reset Operation
14h RTCDATE Real-Time Clock Date Read/write Word undefined retained
14h RTCDAY Real-Time Clock Day of Month Read/write Byte undefined retained
or RTCDATE_L
15h RTCMON Real-Time Clock Month Read/write Byte undefined retained
or RTCDATE_H
16h RTCYEAR Real-Time Clock Year(1) Read/write Word undefined retained
18h RTCAMINHR Real-Time Clock Minutes, Hour Alarm Read/write Word undefined retained
18h RTCAMIN Real-Time Clock Minutes Alarm Read/write Byte undefined retained
or RTCAMINHR_L
19h RTCAHOUR Real-Time Clock Hours Alarm Read/write Byte undefined retained
or RTCAMINHR_H
1Ah RTCADOWDAY Real-Time Clock Day of Week, Day of Read/write Word undefined retained
Month Alarm
1Ah RTCADOW Real-Time Clock Day of Week Alarm Read/write Byte undefined retained
or
RTCADOWDAY_L
1Bh RTCADAY Real-Time Clock Day of Month Alarm Read/write Byte undefined retained
or
RTCADOWDAY_H
1Ch BIN2BCD Binary-to-BCD Conversion Register Read/write Word 00h not retained
1Eh BCD2BIN BCD-to-Binary Conversion Register Read/write Word 00h not retained
(1) Do not access the RTCYEAR register in byte mode.
605
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.1 RTCCTL0 Register
Real-Time Clock Control 0 Register
Figure 23-2. RTCCTL0 Register
76543210
RTCOFIE(1) RTCTEVIE(1) RTCAIE(1) RTCRDYIE RTCOFIFG RTCTEVIFG RTCAIFG RTCRDYIFG
rw-0 rw-0 rw-0 rw-0 rw-(0) rw-(0) rw-(0) rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits itself; therefore,
reconfiguration after wake-up from LPMx.5 before clearing LOCKLPM5 is required.
Table 23-2. RTCCTL0 Register Description
Bit Field Type Reset Description
7 RTCOFIE RW 0h 32-kHz crystal oscillator fault interrupt enable. This interrupt can be used as
LPMx.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPMx.5 wake-up enabled)
6 RTCTEVIE RW 0h Real-time clock time event interrupt enable. In modules supporting LPMx.5 this
interrupt can be used as LPMx.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPMx.5 wake-up enabled)
5 RTCAIE RW 0h Real-time clock alarm interrupt enable. In modules supporting LPMx.5 this
interrupt can be used as LPMx.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPMx.5 wake-up enabled)
4 RTCRDYIE RW 0h Real-time clock ready interrupt enable.
0b = Interrupt not enabled
1b = Interrupt enabled
3 RTCOFIFG RW 0h 32-kHz crystal oscillator fault interrupt flag. This interrupt can be used as LPMx.5
wake-up event.
0b = No interrupt pending
1b = Interrupt pending. A 32-kHz crystal oscillator fault occurred after last reset.
2 RTCTEVIFG RW 0h Real-time clock time event interrupt flag. In modules supporting LPMx.5 this
interrupt can be used as LPMx.5 wake-up event.
0b = No time event occurred
1b = Time event occurred
1 RTCAIFG RW 0h Real-time clock alarm interrupt flag. In modules supporting LPMx.5 this interrupt
can be used as LPMx.5 wake-up event.
0b = No time event occurred
1b = Time event occurred
0 RTCRDYIFG RW 0h Real-time clock ready interrupt flag
0b = RTC cannot be read safely
1b = RTC can be read safely
606 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_B Registers
23.3.2 RTCCTL1 Register
Real-Time Clock Control Register 1
Figure 23-3. RTCCTL1 Register
76543210
RTCBCD RTCHOLD(1) Reserved RTCRDY Reserved RTCTEVx(1)
rw-(0) rw-(1) r1 r-(1) r0 r0 rw-(0) rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits itself; therefore,
reconfiguration after wake-up from LPMx.5 before clearing LOCKLPM5 is required.
Table 23-3. RTCCTL1 Register Description
Bit Field Type Reset Description
7 RTCBCD RW 0h Real-time clock BCD select. Selects BCD counting for real-time clock.
0b = Binary-hexadecimal code selected
1b = BCD Binary coded decimal (BCD) code selected
6 RTCHOLD RW 1h Real-time clock hold
0b = Real-time clock is operational.
1b = The calendar is stopped as well as the prescale counters, RT0PS, and
RT1PS.
5 Reserved R 1h Reserved. Always read as 1.
4 RTCRDY RW 1h Real-time clock ready
0b = RTC time values in transition
1b = RTC time values safe for reading. This bit indicates when the real-time
clock time values are safe for reading.
3-2 Reserved R 0h Reserved. Always read as 0.
1-0 RTCTEVx RW 0h Real-time clock time interrupt event
00b = Minute changed
01b = Hour changed
10b = Every day at midnight (00:00)
11b = Every day at noon (12:00)
607
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.3 RTCCTL2 Register
Real-Time Clock Control 2 Register
Figure 23-4. RTCCTL2 Register
76543210
RTCCALS Reserved RTCCALx
rw-(0) r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 23-4. RTCCTL2 Register Description
Bit Field Type Reset Description
7 RTCCALS RW 0h Real-time clock calibration sign
0b = Frequency adjusted down
1b = Frequency adjusted up
6 Reserved R 0h Reserved. Always read as 0.
5-0 RTCCALx RW 0h Real-time clock calibration. Each LSB represents approximately +4-ppm
(RTCCALS = 1) or a –2-ppm (RTCCALS = 0) adjustment in frequency.
23.3.4 RTCCTL3 Register
Real-Time Clock Control 3 Register
Figure 23-5. RTCCTL3 Register
76543210
Reserved RTCCALFx
r0 r0 r0 r0 r0 r0 rw-(0) rw-(0)
Table 23-5. RTCCTL3 Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always read as 0.
1-0 RTCCALFx RW 0h Real-time clock calibration frequency. Selects frequency output to RTCCLK pin
for calibration measurement. The corresponding port must be configured for the
peripheral module function.
00b = No frequency output to RTCCLK pin
01b = 512 Hz
10b = 256 Hz
11b = 1 Hz
608 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.5 RTCSEC Register – Hexadecimal Format
Real-Time Clock Seconds Register – Hexadecimal Format
Figure 23-6. RTCSEC Register
76543210
0 0 Seconds
r-0 r-0 rw rw rw rw rw rw
Table 23-6. RTCSEC Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always reads as 0.
5-0 Seconds RW undefined Seconds. Valid values are 0 to 59.
23.3.6 RTCSEC Register – BCD Format
Real-Time Clock Seconds Register – BCD Format
Figure 23-7. RTCSEC Register
76543210
0 Seconds – high digit Seconds – low digit
r-0 rw rw rw rw rw rw rw
Table 23-7. RTCSEC Register Description
Bit Field Type Reset Description
7 0 R 0h Always reads as 0.
6-4 Seconds – high digit RW undefined Seconds – high digit. Valid values are 0 to 5.
3-0 Seconds – low digit RW undefined Seconds – low digit. Valid values are 0 to 9.
609
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.7 RTCMIN Register – Hexadecimal Format
Real-Time Clock Minutes Register – Hexadecimal Format
Figure 23-8. RTCMIN Register
76543210
0 0 Minutes
r-0 r-0 rw rw rw rw rw rw
Table 23-8. RTCMIN Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always reads as 0.
5-0 Minutes RW undefined Minutes. Valid values are 0 to 59.
23.3.8 RTCMIN Register – BCD Format
Real-Time Clock Minutes Register – BCD Format
Figure 23-9. RTCMIN Register
76543210
0 Minutes – high digit Minutes – low digit
r-0 rw rw rw rw rw rw rw
Table 23-9. RTCMIN Register Description
Bit Field Type Reset Description
7 0 R 0h Always reads as 0.
6-4 Minutes – high digit RW undefined Minutes – high digit. Valid values are 0 to 5.
3-0 Minutes – low digit RW undefined Minutes – low digit. Valid values are 0 to 9.
610 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_B Registers
23.3.9 RTCHOUR Register – Hexadecimal Format
Real-Time Clock Hours Register – Hexadecimal Format
Figure 23-10. RTCHOUR Register
76543210
0 0 0 Hours
r-0 r-0 r-0 rw rw rw rw rw
Table 23-10. RTCHOUR Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always reads as 0.
4-0 Hours RW undefined Hours. Valid values are 0 to 23.
23.3.10 RTCHOUR Register – BCD Format
Real-Time Clock Hours Register – BCD Format
Figure 23-11. RTCHOUR Register
76543210
0 0 Hours – high digit Hours – low digit
r-0 r-0 rw rw rw rw rw rw
Table 23-11. RTCHOUR Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always reads as 0.
5-4 Hours – high digit RW undefined Hours – high digit. Valid values are 0 to 2.
3-0 Hours – low digit RW undefined Hours – low digit. Valid values are 0 to 9.
611
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.11 RTCDOW Register
Real-Time Clock Day of Week Register
Figure 23-12. RTCDOW Register
76543210
0 0 0 0 0 Day of week
r-0 r-0 r-0 r-0 r-0 rw rw rw
Table 23-12. RTCDOW Register Description
Bit Field Type Reset Description
7-3 0 R 0h Always reads as 0.
2-0 Day of week RW undefined Day of week. Valid values are 0 to 6.
23.3.12 RTCDAY Register – Hexadecimal Format
Real-Time Clock Day of Month Register – Hexadecimal Format
Figure 23-13. RTCDAY Register
76543210
0 0 0 Day of month
r-0 r-0 r-0 rw rw rw rw rw
Table 23-13. RTCDAY Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always reads as 0.
4-0 Day of month RW undefined Day of month. Valid values are 1 to 31.
23.3.13 RTCDAY Register – BCD Format
Real-Time Clock Day of Month Register – BCD Format
Figure 23-14. RTCDAY Register
76543210
0 0 Day of month – high digit Day of month – low digit
r-0 r-0 rw rw rw rw rw rw
Table 23-14. RTCDAY Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always reads as 0.
5-4 Day of month – high RW undefined Day of month – high digit. Valid values are 0 to 3.
digit
3-0 Day of month – low RW undefined Day of month – low digit. Valid values are 0 to 9.
digit
612 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.14 RTCMON Register – Hexadecimal Format
Real-Time Clock Month Register – Hexadecimal Format
Figure 23-15. RTCMON Register
76543210
0 0 0 0 Month
r-0 r-0 r-0 r-0 rw rw rw rw
Table 23-15. RTCMON Register Description
Bit Field Type Reset Description
7-4 0 R 0h Always reads as 0.
3-0 Month RW undefined Month. Valid values are 1 to 12.
23.3.15 RTCMON Register – BCD Format
Real-Time Clock Month Register
Figure 23-16. RTCMON Register
76543210
0 0 0 Month – high Month – low digit
digit
r-0 r-0 r-0 rw rw rw rw rw
Table 23-16. RTCMON Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always reads as 0.
4 Month – high digit RW undefined Month – high digit. Valid values are 0 or 1.
3-0 Month – low digit RW undefined Month – low digit. Valid values are 0 to 9.
613
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.16 RTCYEAR Register – Hexadecimal Format
Real-Time Clock Year Register – Hexadecimal Format
Figure 23-17. RTCYEAR Register
15 14 13 12 11 10 9 8
0 0 0 0 Year – high byte
r-0 r-0 r-0 r-0 rw rw rw rw
76543210
Year – low byte
rw rw rw rw rw rw rw rw
Table 23-17. RTCYEAR Register Description
Bit Field Type Reset Description
15-12 0 R 0h Always reads as 0.
11-8 Year – high byte RW undefined Year – high byte. Valid values of Year are 0 to 4095.
7-0 Year – low byte RW undefined Year – low byte. Valid values of Year are 0 to 4095.
23.3.17 RTCYEAR Register – BCD Format
Real-Time Clock Year Register – BCD Format
Figure 23-18. RTCYEAR Register
15 14 13 12 11 10 9 8
0 Century – high digit Century – low digit
r-0 rw rw rw rw rw rw rw
76543210
Decade Year – lowest digit
rw rw rw rw rw rw rw rw
Table 23-18. RTCYEAR Register Description
Bit Field Type Reset Description
15 0 R 0h Always reads as 0.
14-12 Century – high digit RW undefined Century – high digit . Valid values are 0 to 4.
11-8 Century – low digit RW undefined Century – low digit. Valid values are 0 to 9.
7-4 Decade RW undefined Decade. Valid values are 0 to 9.
3-0 Year – lowest digit RW undefined Year – lowest digit. Valid values are 0 to 9.
614 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.18 RTCAMIN Register – Hexadecimal Format
Real-Time Clock Minutes Alarm Register – Hexadecimal Format
Figure 23-19. RTCAMIN Register
76543210
AE 0 Minutes
rw r-0 rw rw rw rw rw rw
Table 23-19. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always reads as 0.
5-0 Minutes RW undefined Minutes. Valid values are 0 to 59.
23.3.19 RTCAMIN Register – BCD Format
Real-Time Clock Minutes Alarm Register – BCD Format
Figure 23-20. RTCAMIN Register
76543210
AE Minutes – high digit Minutes – low digit
rw rw rw rw rw rw rw rw
Table 23-20. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-4 Minutes – high digit RW undefined Minutes – high digit. Valid values are 0 to 5.
3-0 Minutes – low digit RW undefined Minutes – low digit. Valid values are 0 to 9.
615
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.20 RTCAHOUR Register – Hexadecimal Format
Real-Time Clock Hours Alarm Register – Hexadecimal Format
Figure 23-21. RTCAHOUR Register
76543210
AE 0 0 Hours
rw r-0 r-0 rw rw rw rw rw
Table 23-21. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always reads as 0.
4-0 Hours RW undefined Hours. Valid values are 0 to 23.
23.3.21 RTCAHOUR Register – BCD Format
Real-Time Clock Hours Alarm Register – BCD Format
Figure 23-22. RTCAHOUR Register
76543210
AE 0 Hours – high digit Hours – low digit
rw r-0 rw rw rw rw rw rw
Table 23-22. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always reads as 0.
5-4 Hours – high digit RW undefined Hours – high digit. Valid values are 0 to 2.
3-0 Hours – low digit RW undefined Hours – low digit. Valid values are 0 to 9.
616 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.22 RTCADOW Register
Real-Time Clock Day of Week Alarm Register
Figure 23-23. RTCADOW Register
76543210
AE 0 0 0 0 Day of week
rw r-0 r-0 r-0 r-0 rw rw rw
Table 23-23. RTCADOW Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-3 0 R 0h Always reads as 0.
2-0 Day of week RW undefined Day of week. Valid values are 0 to 6.
617
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.23 RTCADAY Register – Hexadecimal Format
Real-Time Clock Day of Month Alarm Register – Hexadecimal Format
Figure 23-24. RTCADAY Register
76543210
AE 0 0 Day of month
rw r-0 r-0 rw rw rw rw rw
Table 23-24. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always reads as 0.
4-0 Day of month RW undefined Day of month. Valid values are 1 to 31.
23.3.24 RTCADAY Register – BCD Format
Real-Time Clock Day of Month Alarm Register – BCD Format
Figure 23-25. RTCADAY Register
76543210
AE 0 Day of month – high digit Day of month – low digit
rw r-0 rw rw rw rw rw rw
Table 23-25. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always reads as 0.
5-4 Day of month – high RW undefined Day of month – high digit. Valid values are 0 to 3.
digit
3-0 Day of month – low RW undefined Day of month – low digit. Valid values are 0 to 9.
digit
618 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.25 RTCPS0CTL Register
Real-Time Clock Prescale Timer 0 Control Register
Figure 23-26. RTCPS0CTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved RT0IPx(1) RT0PSIE RT0PSIFG
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-0 rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits itself; therefore,
reconfiguration after wake-up from LPMx.5 before clearing LOCKLPM5 is required.
Table 23-26. RTCPS0CTL Register Description
Bit Field Type Reset Description
15-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT0IPx RW 0h Prescale timer 0 interrupt interval
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
1 RT0PSIE RW 0h Prescale timer 0 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
0 RT0PSIFG RW 0h Prescale timer 0 interrupt flag
0b = No time event occurred
1b = Time event occurred
619
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.26 RTCPS1CTL Register
Real-Time Clock Prescale Timer 1 Control Register
Figure 23-27. RTCPS1CTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved RT1IPx(1) RT1PSIE(1) RT1PSIFG
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-0 rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration after wake-up from LPMx.5 before clearing LOCKLPM5 is required.
Table 23-27. RTCPS1CTL Register Description
Bit Field Type Reset Description
15-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT1IPx RW 0h Prescale timer 1 interrupt interval
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
1 RT1PSIE RW 0h Prescale timer 1 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled (LPMx.5 wake-up enabled)
0 RT1PSIFG RW 0h Prescale timer 1 interrupt flag. In modules supporting LPMx.5 this interrupt can
be used as LPMx.5 wake-up event.
0b = No time event occurred
1b = Time event occurred
620 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.27 RTCPS0 Register
Real-Time Clock Prescale Timer 0 Counter Register
Figure 23-28. RTCPS0 Register
76543210
RT0PS
rw rw rw rw rw rw rw rw
Table 23-28. RTCPS0 Register Description
Bit Field Type Reset Description
7-0 RT0PS RW undefined Prescale timer 0 counter value
23.3.28 RTCPS1 Register
Real-Time Clock Prescale Timer 1 Counter Register
Figure 23-29. RTCPS1 Register
76543210
RT1PS
rw rw rw rw rw rw rw rw
Table 23-29. RTCPS1 Register Description
Bit Field Type Reset Description
7-0 RT1PS RW undefined Prescale timer 1 counter value
621
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_B Registers
www.ti.com
23.3.29 RTCIV Register
Real-Time Clock Interrupt Vector Register
Figure 23-30. RTCIV Register
15 14 13 12 11 10 9 8
RTCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
RTCIVx
r0 r0 r0 r0 r-(0) r-(0) r-(0) r0
Table 23-30. RTCIV Register Description
Bit Field Type Reset Description
15-0 RTCIVx R 0h Real-time clock interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: RTC ready; Interrupt Flag: RTCRDYIFG; Interrupt
Priority: Highest
04h = Interrupt Source: RTC interval timer; Interrupt Flag: RTCTEVIFG
06h = Interrupt Source: RTC user alarm; Interrupt Flag: RTCAIFG
08h = Interrupt Source: RTC prescaler 0; Interrupt Flag: RT0PSIFG
0Ah = Interrupt Source: RTC prescaler 1; Interrupt Flag: RT1PSIFG
0Ch = Interrupt Source: RTC oscillator failure; Interrupt Flag: RTCOFIFG
0Eh = Reserved; Interrupt Priority: Lowest
622 Real-Time Clock B (RTC_B) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_B Registers
23.3.30 BIN2BCD Register
Binary-to-BCD Conversion Register
Figure 23-31. BIN2BCD Register
15 14 13 12 11 10 9 8
BIN2BCDx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
BIN2BCDx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 23-31. BIN2BCD Register Description
Bit Field Type Reset Description
15-0 BIN2BCDx RW 0h Read: 16-bit BCD conversion of previously written 12-bit binary number
Write: 12-bit binary number to be converted
23.3.31 BCD2BIN Register
BCD-to-Binary Conversion Register
Figure 23-32. BCD2BIN Register
15 14 13 12 11 10 9 8
BCD2BINx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
BCD2BINx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 23-32. BCD2BIN Register Description
Bit Field Type Reset Description
15-0 BCD2BINx RW 0h Read: 12-bit binary conversion of previously written 16-bit BCD number
Write: 16-bit BCD number to be converted
623
SLAU208O–June 2008–Revised May 2015 Real-Time Clock B (RTC_B)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 24
SLAU208O–June 2008–Revised May 2015
Real-Time Clock C (RTC_C)
The Real-Time Clock C (RTC_C) module provides clock counters with calendar mode, a flexible
programmable alarm, offset calibration, and a provision for temperature compensation. The RTC_C also
supports operation in LPM3.5. This chapter describes the RTC_C module.
Topic ........................................................................................................................... Page
24.1 Real-Time Clock (RTC_C) Introduction................................................................ 625
24.2 RTC_C Operation.............................................................................................. 627
24.3 RTC_C Operation - Device-Dependent Features ................................................... 636
24.4 RTC_C Registers .............................................................................................. 641
624 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Real-Time Clock (RTC_C) Introduction
24.1 Real-Time Clock (RTC_C) Introduction
The RTC_C module provides configurable clock counters.
RTC_C features include:
• Real-time clock and calendar mode that provides seconds, minutes, hours, day of week, day of month,
month, and year (including leap year correction)
• Protection for real-time clock registers
• Interrupt capability
• Selectable BCD or binary format
• Programmable alarms
• Real-time clock calibration for crystal offset error
• Real-time clock compensation for crystal temperature drift
• Operation in LPM3.5
The RTC_C module can provide the following device-dependent features. Refer to the device-specific
data sheet to determine if these features are available in a particular device.
• General-purpose counter mode (see Section 24.3.1)
• Event and tamper detection with time stamp (see Section 24.3.2)
• Operation from a separate voltage supply
NOTE: Real-time clock initialization
Most RTC_C module registers have no initial condition. These registers must be configured
by user software before use.
Figure 24-1 shows the RTC_C block diagram.
625
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
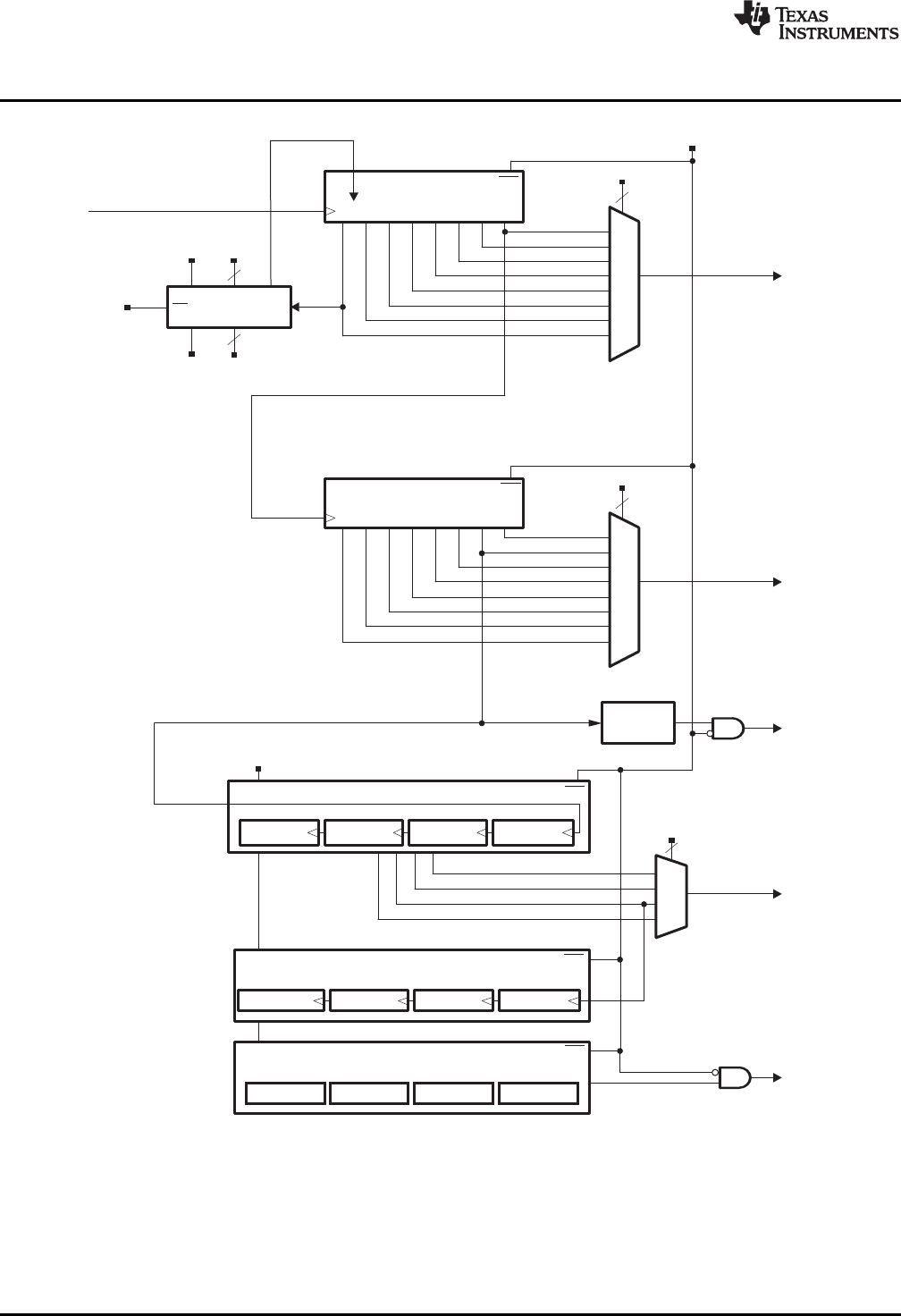
RTCDOW
Calendar
RTCMONRTCYEARLRTCYEARH RTCDAY
RTCTEV
00
01
10
11
minute changed
RTCBCD
Alarm
RTCAHOURRTCADAYRTCADOW RTCAMIN
Set_RTCTEVIFG
Set_RTCAIFG
2
EN
EN
EN
RT1PS
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
Set_RT1PSIFG
EN 3
RT1IP
RT0PS
Set_RT0PSIFG
EN
110
101
100
011
010
001
000
3
RT0IP
RTCHOLD
Keepout
Logic
Set_RTCRDYIFG
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
111
hour changed
midnight
noon
RTCHOUR RTCMIN RTCSEC
110
101
100
011
010
001
000
111
from 32kHz
Crystal Osc.
RTCOCALS RTCOCAL
EN Calibration
Logic
8
RTCTCMPS RTCTCMP
8
RTCHOLD
Real-Time Clock (RTC_C) Introduction
www.ti.com
Figure 24-1. RTC_C Block Diagram (RTCMODE=1)
626 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Operation
24.2 RTC_C Operation
24.2.1 Calendar Mode
Calendar mode is selected when RTCMODE is set. In calendar mode, the RTC_C module provides
seconds, minutes, hours, day of week, day of month, month, and year in selectable BCD or hexadecimal
format. The calendar includes a leap-year algorithm that considers all years evenly divisible by four as
leap years. This algorithm is accurate from the year 1901 through 2099. Switching from counter mode (if
available) to calendar mode does not reset the calendar registers (RTCSEC, RTCMIN, RTCHOUR,
RTCDAY, RTCDOW, and RTCYEAR) and the prescale counters (RT0PS, RT1PS). These registers must
be configured by user software before use.
24.2.2 Real-Time Clock and Prescale Dividers
The prescale dividers, RT0PS and RT1PS, are automatically configured to provide a 1-second clock
interval for the RTC_C. The low-frequency oscillator must be operated at 32768 Hz (nominal) for proper
RTC_C operation. RT0PS is sourced from the low-frequency oscillator XT1. The output of RT0PS divided
by 256 (Q7) sources RT1PS. RT1PS is further divided by 128 to source the real-time clock counter
registers that provide the required 1-second time interval.
When RTCBCD = 1, BCD format is selected for the calendar registers. It is possible to switch between
BCD and hexadecimal format while the RTC is counting.
Setting RTCHOLD halts the real-time counters and prescale counters, RT0PS and RT1PS.
NOTE: For reliable update to all Calendar Mode registers
Set RTCHOLD = 1 before writing into any of the calendar or prescalar registers (RTCPS0,
RTCPS1, RTCSEC, RTCMIN, RTCHOUR, RTCDAY, RTCDOW, RTCMON, and RTCYEAR).
24.2.3 Real-Time Clock Alarm Function
The RTC_C module provides for a flexible alarm system. There is a single user-programmable alarm that
can be programmed based on the settings contained in the alarm registers for minutes, hours, day of
week, and day of month.
Each alarm register contains an alarm enable (AE) bit that can be used to enable the respective alarm
register. By setting AE bits of the various alarm registers, a variety of alarm events can be generated.
• Example 1: A user wishes to set an alarm every hour at 15 minutes past the hour (that is, 00:15:00,
01:15:00, 02:15:00, and so on). This is possible by setting RTCAMIN to 15. By setting the AE bit of the
RTCAMIN and clearing all other AE bits of the alarm registers, the alarm is enabled. When enabled,
the RTCAIFG is set when the count transitions from 00:14:59 to 00:15:00, 01:14:59 to 01:15:00,
02:14:59 to 02:15:00, and so on.
• Example 2: A user wishes to set an alarm every day at 04:00:00. This is possible by setting
RTCAHOUR to 4. By setting the AE bit of the RTCHOUR and clearing all other AE bits of the alarm
registers, the alarm is enabled. When enabled, the RTCAIFG is set when the count transitions from
03:59:59 to 04:00:00.
• Example 3: A user wishes to set an alarm for 06:30:00. RTCAHOUR would be set to 6, and RTCAMIN
would be set to 30. By setting the AE bits of RTCAHOUR and RTCAMIN, the alarm is enabled. When
enabled, the RTCAIFG is set when the time count transitions from 06:29:59 to 06:30:00. In this case,
the alarm event occurs every day at 06:30:00.
• Example 4: A user wishes to set an alarm every Tuesday at 06:30:00. RTCADOW would be set to 2,
RTCAHOUR would be set to 6, and RTCAMIN would be set to 30. By setting the AE bits of
RTCADOW, RTCAHOUR, and RTCAMIN, the alarm is enabled. When enabled, the RTCAIFG is set
when the time count transitions from 06:29:59 to 06:30:00 and the RTCDOW transitions from 1 to 2.
• Example 5: A user wishes to set an alarm the fifth day of each month at 06:30:00. RTCADAY would be
set to 5, RTCAHOUR would be set to 6, and RTCAMIN would be set to 30. By setting the AE bits of
RTCADAY, RTCAHOUR, and RTCAMIN, the alarm is enabled. When enabled, the RTCAIFG is set
when the time count transitions from 06:29:59 to 06:30:00 and the RTCDAY equals 5.
627
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Operation
www.ti.com
NOTE: Invalid alarm settings
Invalid alarm settings are not checked by hardware. It is the user's responsibility that valid
alarm settings are entered.
NOTE: Invalid time and date values
Writing of invalid date or time information or data values outside the legal ranges specified in
the RTCSEC, RTCMIN, RTCHOUR, RTCDAY, RTCDOW, RTCYEARH, RTCYEARL,
RTCAMIN, RTCAHOUR, RTCADAY, and RTCADOW registers can result in unpredictable
behavior.
NOTE: Setting the alarm
Prior to setting an initial alarm, all alarm registers including the AE bits should be cleared.
To prevent potential erroneous alarm conditions from occurring, the alarms should be
disabled by clearing the RTCAIE, RTCAIFG, and AE bits prior to writing initial or new time
values to the RTC time registers.
24.2.4 Real-Time Clock Protection
RTC_C registers are key protected to ensure clock integrity and module configuration against software
crash or from runaway code. Key protection does not apply for reads from the RTC_C registers. That is,
any RTC_C register can be read at any time without having to unlock the module. Some predefined
registers of RTC_C are key protected for write access. The control registers, clock registers, calendar
register, prescale timer registers, and offset error calibration registers are protected. RTC_C alarm
function registers, prescale timer control registers, interrupt vector register, and temperature compensation
registers are not protected. RTC_C registers that are not protected can be written at any time without
unlocking the module. Table 24-2 shows which registers are affected by the protection scheme.
The RTCCTL0_H register implements key protection and controls the lock or unlock state of the module.
When this register is written with correct key, 0A5h, the module is unlocked and unlimited write access
possible to RTC_C registers. After the module is unlocked, it remains unlocked until the user writes any
incorrect key or until the module is reset. A read from RTCCTL0_H register returns value 96h. Write
access to any protected registers of RTC_C is ignored when the module is locked.
RTC_C Key Protection Software Example
; Unlock/lock sequence for RTC_C
MOV.B #RTCKEY, &RTCCTL0_H ; Write correct key to unlock RTC_C
MOV.B #8bit_value, &RTCSEC ; Write 8 bit value into RTCSEC
MOV.B #8bit_value, &RTCMIN ; Write 8 bit value into RTCMIN
MOV.W #16bit_value, &RTCTIM1 ; Write 16bit value into RTCTIM1
MOV.W #RTCKEY+8bit_value, &RTCCTL0 ; Write into RTCCTL0 with correct key in word mode
...
MOV.B #00h, &RTCCTL0_H ; Write incorrect key to lock RTC_C
628 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Operation
24.2.5 Reading or Writing Real-Time Clock Registers
Because the system clock may be asynchronous to the RTC_C clock source, special care must be used
when accessing the real-time clock registers.
The real-time clock registers are updated once per second. To prevent reading any real-time clock register
at the time of an update that could result in an invalid time being read, a keep-out window is provided. The
keep-out window is centered approximately 128/32768 seconds around the update transition. The read-
only RTCRDY bit is reset during the keep-out window period and set outside the keep-out the window
period. Any read of the clock registers while RTCRDY is reset is considered to be potentially invalid, and
the time read should be ignored.
An easy way to safely read the real-time clock registers is to use the RTCRDYIFG interrupt flag. Setting
RTCRDYIE enables the RTCRDYIFG interrupt. When enabled, an interrupt is generated based on the
rising edge of the RTCRDY bit, causing the RTCRDYIFG to be set. At this point, the application has
nearly a complete second to safely read any or all of the real-time clock registers. This synchronization
process prevents reading the time value during transition. The RTCRDYIFG flag is reset automatically
when the interrupt is serviced or can be reset with software.
NOTE: Reading or writing real-time clock registers
When the counter clock is asynchronous to the CPU clock, any read from any RTCSEC,
RTCMIN, RTCHOUR, RTCDOW, RTCDAY, RTCMON, RTCYEARL, or RTCYEARH register
while the RTCRDY is reset may result in invalid data being read. To safely read the counting
registers, either polling of the RTCRDY bit or the synchronization procedure previously
described can be used. Alternatively, the counter register can be read multiple times while
operating, and a majority vote taken in software to determine the correct reading. Reading
the RT0PS and RT1PS can only be handled by reading the registers multiple times and a
majority vote taken in software to determine the correct reading or by halting the counters.
Any write to any counting register takes effect immediately. However, the clock is stopped
during the write. In addition, RT0PS and RT1PS registers are reset. This could result in
losing up to 1 second during a write. Writing of data outside the legal ranges or invalid time
stamp combinations results in unpredictable behavior.
24.2.6 Real-Time Clock Interrupts
At least six sources for interrupts are available, namely RT0PSIFG, RT1PSIFG, RTCRDYIFG,
RTCTEVIFG, RTCAIFG, and RTCOFIFG. These flags are prioritized and combined to source a single
interrupt vector. The interrupt vector register (RTCIV) is used to determine which flag requested an
interrupt.
The highest-priority enabled interrupt generates a number in the RTCIV register (see register description).
This number can be evaluated or added to the program counter (PC) to automatically enter the
appropriate software routine. Disabled RTC interrupts do not affect the RTCIV value.
Writes into RTCIV register clear all pending interrupt conditions. Reads from RTCIV register clear the
highest priority pending interrupt condition. If another interrupt flag is set, another interrupt is immediately
generated after servicing the initial interrupt. In addition, all flags can be cleared by software.
The user-programmable alarm event sources the real-time clock interrupt, RTCAIFG. Setting RTCAIE
enables the interrupt. In addition to the user-programmable alarm, the RTC_C module provides for an
interval alarm that sources real-time clock interrupt, RTCTEVIFG. The interval alarm can be selected to
cause an alarm event when RTCMIN changed or RTCHOUR changed, every day at midnight (00:00:00)
or every day at noon (12:00:00). The event is selectable with the RTCTEV bits. Setting the RTCTEVIE bit
enables the interrupt.
The RTCRDY bit sources the real-time clock interrupt, RTCRDYIFG, and is useful in synchronizing the
read of time registers with the system clock. Setting the RTCRDYIE bit enables the interrupt.
RT0PSIFG can be used to generate interrupt intervals selectable by the RT0IP bits. RT0PS is sourced
with low-frequency oscillator clock at 32768 Hz, so intervals of 16384 Hz, 8192 Hz, 4096 Hz, 2048 Hz,
1024 Hz, 512 Hz, 256 Hz, or 128 Hz are possible. Setting the RT0PSIE bit enables the interrupt.
629
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Operation
www.ti.com
RT1PSIFG can be used to generate interrupt intervals selectable by the RT1IP bits. RT1PS is sourced
with the output of RT0PS, which is 128 Hz (32768/256 Hz). Therefore, intervals of 64 Hz, 32 Hz, 16 Hz,
8 Hz, 4 Hz, 2 Hz, 1 Hz, or 0.5 Hz are possible. Setting the RT1PSIE bit enables the interrupt.
NOTE: Changing RT0IP or RT1IP
Changing the settings of the interrupt interval bits RT0IP or RT1IP while the corresponding
pre-scaler is running or is stopped in a non-zero state can result in setting the corresponding
interrupt flags.
The RTCOFIFG bit flags the failure of the 32-kHz crystal oscillator. Its main purpose is to wake up the
CPU from LPM3.5 if an oscillator failure occurs. On devices with separate supply for RTC, this flag also
stores a failure event that occurs when the core supply is not available.
24.2.6.1 RTCIV Software Example
The following software example shows the recommended use of RTCIV and the handling overhead. The
RTCIV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
; Interrupt handler for RTC interrupt flags.
RTC_HND ; Interrupt latency 6
ADD &RTCIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP RTCOFIFG_HND ; Vector 2: RTCOFIFG 2
JMP RTCRDYIFG_HND ; Vector 4: RTCRDYIFG 2
JMP RTCTEVIFG_HND ; Vector 6: RTCTEVIFG 2
JMP RTCAIFG ; Vector 8: RTCAIFG 5
JMP RT0PSIFG ; Vector A: RT0PSIFG 5
JMP RT1PSIFG ; Vector C: RT1PSIFG 5
RETI ; Vector E: Reserved 5
RTCOFIFG_HND ; Vector 2: RTCOFIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RTCRDYIFG_HND ; Vector 4: RTCRDYIFG Flag
... ; Task starts here
RETI ; Back to main program 5
RTCTEVIFG_HND ; Vector 6: RTCTEVIFG
... ; Task starts here
RETI ; Back to main program 5
RTCAIFG_HND ; Vector 8: RTCAIFG
... ; Task starts here
RETI ; Back to main program 5
RT0PSIFG_HND ; Vector A: RT0PSIFG
... ; Task starts here
RETI ; Back to main program 5
RT1PSIFG_HND ; Vector C: RT1PSIFG
... ; Task starts here
RETI ; Back to main program 5
630 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Operation
24.2.7 Real-Time Clock Calibration for Crystal Offset Error
The RTC_C module can be calibrated for crystal manufacturing tolerance or offset error to enable better
accuracy of time keeping accuracy. The crystal frequency error of up to ±240 ppm can be calibrated
smoothly over a period of 60 seconds. RTCOCAL_L register is used to adjust the frequency. The
calibration value is written into RTCOCAL_L register, and each LSB in this register represent
approximately ±1-ppm correction based on RTCOCALS bit in RTCOCAL_H register. When RTCOCALS
bit is set (up calibration), each LSB in RTCOCAL_L represent +1-ppm adjustment. When RTCOCALS is
cleared (down calibration), each LSB in RTCOCAL_L represent –1-ppm adjustment to frequency. Both
RTCOCAL_L and RTCOCAL_H registers are protected and require RTC_C to be unlocked prior to writing
into these registers.
24.2.7.1 Calibration Frequency
To calibrate the frequency, the RTCCLK output signal is available at a pin. RTCCALFx bits in RTCCTL3
register can be used to select the frequency rate of the output signal. When RTCCALFx = 00, no signal is
output on RTCCLK pin. The other settings of RTCCALFx select one the three frequencies: 512 Hz,
256 Hz, or 1 Hz. RTCCLK can be measured, and the result of this measurement can be applied to the
RTCOCALS and RTCOCALx bits to effectively reduce the initial offset of the clock.
24.2.7.1.1 Calibration Mechanism
RTCOCAL_L is an 8-bit register. Software can write a value of up to 256 ppm into this register, but the
maximum frequency error that can be corrected is only 240 ppm. Software must make sure to write legal
values into this register. A read from RTCOCAL always returns the value that was written by software.
Real-time clock offset error calibration is inactive when RTC_C is not enabled (RTCHOLD = 0) or when
RTCOCALx bits are zero. RTCOCAL should only be written when RTCHOLD = 1. Writing RTCOCAL
resets temperature compensation to zero.
In RTC_C, the offset error calibration takes place over a period of 60 seconds. To achieve approximately
±1-ppm correction, the 16-kHz clock (Q0 output of RT0PS) is adjusted to add or subtract one clock pulse.
For +1-ppm correction, one clock pulse is added to the 16-kHz clock, and for –1-ppm correction, one clock
pulse is subtracted from the 16-kHz clock. This correction happens once every quarter second until the
programmed ppm error is compensated.
fACLK,meas < 32768 Hz →RTCOCALS = 1, RTCOCALx = Round (60 × 16384 × (1 – fACLK,meas/32768))
fACLK,meas ≥32768 Hz →RTCOCALS = 0, RTCOCALx = Round (60 × 16384 × (1 – fACLK,meas/32768))
As an example for up calibration, when the measured frequency is 511.9658 Hz against the reference
frequency of 512 Hz, the frequency error is approximately 67 ppm low. To increase the frequency by
67 ppm, RTCOCALS should be set, and RTCOCALx should be set to Round (60 × 16384 × (1 – 511.9658
× 64 / 32768)) = 66.
As an example for down calibration, when the measured frequency is 512.0241 Hz against the reference
frequency of 512 Hz, the frequency error is approximately 47 ppm high. To decrease the frequency by
47 ppm, RTCOCALS should be cleared, and RTCOCALx should be set to Round (60 × 16384 × (1 –
512.0241 × 64 / 32768)) = 46.
All three possible output frequencies (512 Hz, 256 Hz, and 1 Hz) at RTCCLK pin are affected by
calibration settings. RT0PS interrupt triggered by RT0PS – Q0 (RT0IPx = 000) is based on the
uncalibrated clock, while RT0PS interrupt triggered by RT0PS – Q1 to Q7 (RT0IPx ≠000) is based on the
calibrated clock. RT1PS interrupt (RT1PSIFG) and RTC counter interrupt (RTCTEVIFG) are also based
on the calibrated clock.
631
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Operation
www.ti.com
24.2.8 Real-Time Clock Compensation for Crystal Temperature Drift
The frequency output of the crystal varies considerably due to drift in temperature. It would be necessary
to compensate the real-time clock for this temperature drift for higher time keeping accuracy from standard
crystals. A hybrid software and hardware approach can be followed to achieve temperature compensation
for RTC_C.
The software can make use of an (on-chip) temperature sensor to measure the temperature at desired
intervals (for example, once every few seconds or minutes). The temperature sensor parameters are
calibrated at production and stored in the nonvolatile memory. Using the temperature sensor parameters
and the measured temperature, software can do parabolic calculations to find out the corresponding
frequency error in ppm.
This frequency error can be written into RTCTCMP_L register for temperature compensation.
RTCTCMP_L is an 8-bit register that allows correction for a frequency error up to ±240 ppm. Each LSB in
this register represent ±1 ppm based on the RTCTCMPS bit in the RTCTCMP_H register. When
RTCTCMPS bit is set, each LSB in RTCTCMP represents +1-ppm adjustment (up calibration). When
RTCTCMPS is cleared, each LSB in RTCTCMP represents –1-ppm adjustment (down calibration).
RTCTCMP register is not protected and can be written any time without unlocking RTC_C.
24.2.8.1 Temperature Compensation Scheme
RTCTCMP_L is an 8-bit register. Software can write up to value of 256 ppm into this register, but the
maximum frequency error that can be corrected including the crystal offset error is 240 ppm. Real-time
clock temperature compensation is inactive when RTC_C is not enabled (RTCHOLD = 0) or when
RTCTCMPx bits are zero.
When the temperature compensation value is written into RTCTCMP_L, it is added to the offset error
calibration value, and the resulting value is taken into account from next calibration cycle onwards. The
ongoing calibration cycle is not affected by writes into the RTCTCMP register. The maximum frequency
error that can be corrected to account for both offset error and temperature variation is ±240 ppm. This
means the sign addition of offset error value and temperature compensation value should not exceed
maximum of ±240 ppm; otherwise, the excess value above ±240 ppm is ignored by hardware. Reading
from the RTCTCMP register at any time returns the cumulative value which is the signed addition of
RTCOCALx and RTCTCMPx values. (Note that writing RTCOCAL resets the temperature compensation
value to zero.)
For example, when RTCOCAL value is +150 ppm, and the value written into RTCTCMP is +200 ppm, the
effective value taken in for next calibration cycle is +240 ppm. Software is expected to do temperature
measurement at certain regularity, calculate the frequency error, and write into RTCTCMP register to not
exceed the maximum limit of ±240 ppm.
Changing the sign bit by writing to RTCTCMP_H becomes effective only after also writing RTCTCMP_L.
Thus it is recommended to write the sign bit together with compensation value as a 16-bit value into
RTCTCMP.
24.2.8.2 Writing to RTCTCMP Register
Because the system clock can be asynchronous to the RTC_C clock source, the RTCTCRDY bit in the
RTCTCMP_H register should be considered for reliable writing into RTCTCMP register. RTCTCRDY is a
read-only bit that is set when the hardware is ready to take in the new temperature compensation value. A
write to RTCTCMP should be avoided when RTCTCRDY bit is reset. Writes into RTCTCMP register when
RTCTCRDY is reset are ignored.
RTCTCOK is a status bit that indicates if the write to RTCTCMP register is successful or not. RTCTCOK
is set if the write to RTCTCMP is successful and reset if the write is unsuccessful. The status remains the
same until the next write to the RTCTCMP register. If the write to RTCTCMP is unsuccessful, then the
user needs to attempt writing into RTCTCMP again when RTCTCRDY is set.
Figure 24-2 shows the scheme for real-time clock offset error calibration and temperature compensation.
632 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
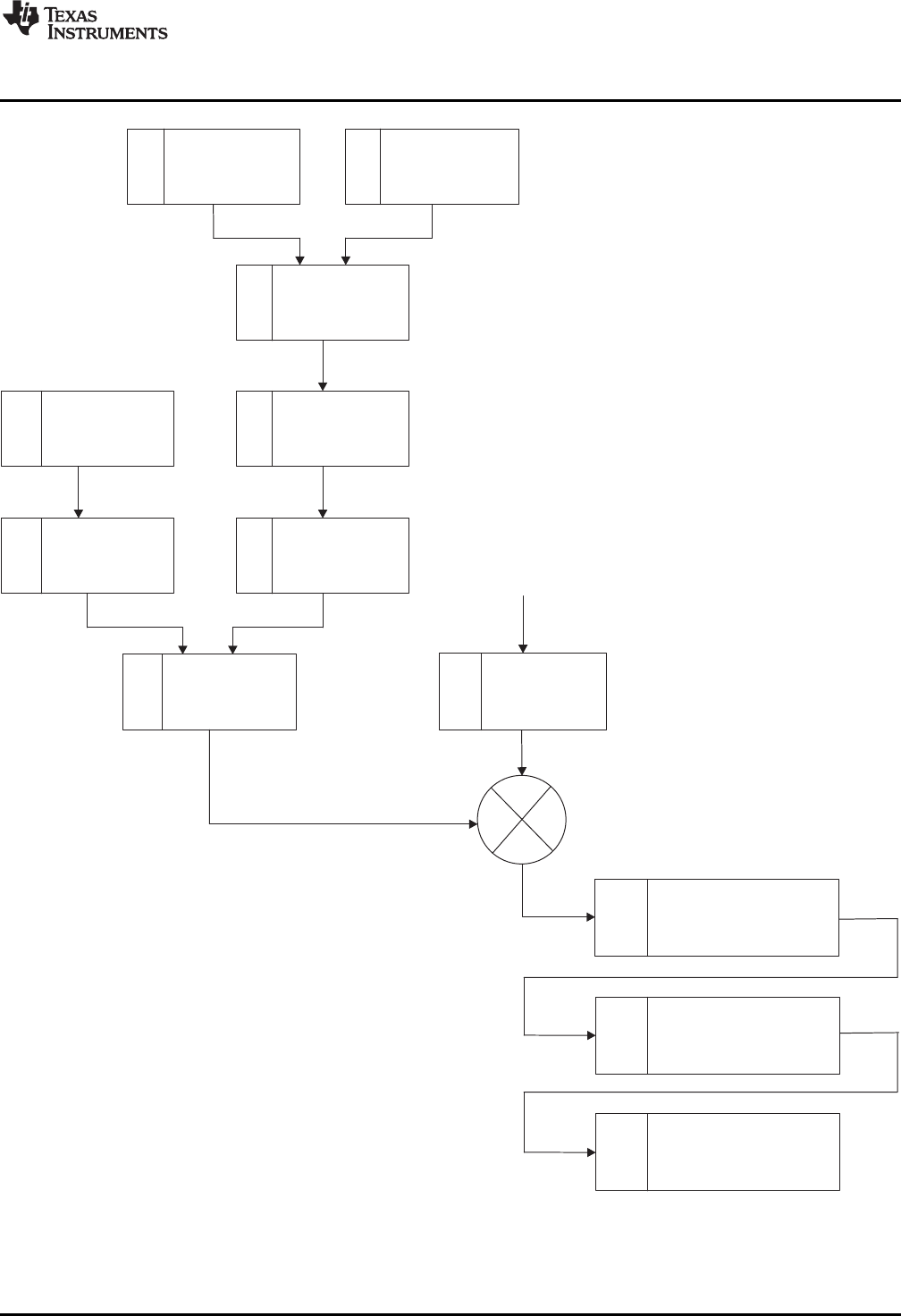
SW Temperature Sensor
Parameters SW Temperature Sensor
Readings
SW Temperature
Estimation
SW Parabolic
Calculations
SW Crystal Offset Error
Calculation
HW Write to RTCOCAL HW Write to RTCTCMP
HW Calibration Logic
Uncalibrated
32kHz Clock
Uncalibrated
16kHz Clock
Calibrated
16kHz Clock
Calibrated
128Hz Clock
Calibrated
1Hz Clock
HW RT0PS - Q0
HW
HW
HW
RT0PS - Q1 to Q7
RT1PS - Q0 to Q6
RTC Counters
www.ti.com
RTC_C Operation
Figure 24-2. RTC_C Offset Error Calibration and Temperature Compensation Scheme
633
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Operation
www.ti.com
24.2.8.3 Temperature Measurement and Updates to RTC_C
The user may wish to perform temperature measurement once every few seconds or once every minute
or once in several minutes. Writing to RTCTCMP register for temperature compensation is effective
always once in one minute. This means that if the user performs temperature measurement every minute
and updates RTCTCMP register with the frequency error, compensation would immediately work fine. But
if software performs temperature measurement more frequently than once per minute (for example once
every 5 seconds) then it needs to average the error over one minute and update RTCTCMP register once
per minute. If the software performs temperature measurement less frequently than once per minute (for
example, once every 5 minutes) then it needs to calculate the frequency error for the measured
temperature and write into RTCTCMP register. The value written into RTCTCMP in this case would be
effective until it is updated again by software.
24.2.9 Real-Time Clock Operation in LPM3.5 Low-Power Mode
The regulator of the Power Management Module (PMM) is disabled when the device enters LPM3.5,
which causes most of the RTC_C configuration registers to be lost; only the counters and calibration
registers are retained. Table 24-2 shows which registers are retained in LPM3.5. Also the configuration of
the interrupt enables is stored so that the configured interrupts can cause a wakeup upon exit from
LPM3.5. Interrupt flags that are set prior to entering LPM3.5 are cleared upon entering LPM3.5 (Note: this
can only happen if the corresponding interrupt is not enabled). The interrupt flags RTCTEVIFG, RTCAIFG,
RT1PSIFG, and RTCOFIFG can be used as RTC_C wakeup interrupt sources. Any interrupt event that
occurs during LPM3.5 is stored in the corresponding flags, but only enabled interrupts can wake up the
device. After restoring the configuration registers (and clearing LOCKLPM5), the interrupts can be
serviced as usual.
The detailed flow is as follows:
1. Set all I/Os to general-purpose I/Os and configure as needed. Optionally, configure input interrupt pins
for wakeup. Configure RTC_C interrupts for wake-up (set RTCTEVIE, RTCAIE, RT1PSIE, or
RTCOFIE. If the alarm interrupt is also used as wake-up event, the alarm registers must be configured
as needed).
2. Enter LPM3.5 with LPM3.5 entry sequence:
bic #RTCHOLD, &RTCCTL13
bis #PMMKEY + REGOFF, &PMMCTL0
bis #LPM4, SR
3. LOCKLPM5 is automatically set by hardware upon entering LPM3.5, the core voltage regulator is
disabled, and all clocks are disabled except for the 32-kHz crystal oscillator clock as the RTC_C is
enabled with RTCHOLD = 0.
4. An LPM3.5 wake-up event like an edge on a wake-up input pin or an RTC_C interrupt event starts the
BOR entry sequence and the core voltage regulator. All peripheral registers are set to their default
conditions. The I/O pin state and the interrupt configuration for the RTC_C remain locked.
5. The device can be configured. The I/O configuration and the RTC_C interrupt configuration that was
not retained during LPM3.5 should be restored to the values that they had prior to entering LPM3.5.
Then the LOCKLPM5 bit can be cleared, which releases the I/O pin conditions and the RTC_C
interrupt configuration. Registers that are retained during LPM3.5 should not be altered before
LOCKLPM5 is cleared.
6. After enabling I/O and RTC_C interrupts, the interrupt that caused the wake-up can be serviced.
If the RTC_C is enabled (RTCHOLD = 0), the 32-kHz oscillator remains active during LPM3.5. The fault
detection also remains functional. If a fault occurs during LPM3.5 and the RTCOFIE was set before
entering LPM3.5, a wake-up event is issued.
634 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Operation
In F677xA, F673xA, and F672xA devices, the RTCLOCK bit in RTCCTL3 allows to keep all LPM3.5
retention logic from write and reset operations. In addition, the following interrupt bits are also protected:
• RTCTCCTL1: RTCCAPIFG
• RTCCAPxCTL: CAPEV
When set, this bit also affects XT1 LF control bits which can be retained in LPM3.5. These XT1 control
bits include:
• UCSCTL6: XT1DRIVE, XTS, XT1BYPASS, XCAP
When this bit is set, LPM3.5 retention logic is not writable, and any reset cannot change its operation
unless a power cycle occurs. Meanwhile, an unlock operation is required to open the write access of
interrupt flags before they are cleared in ISR. If this bit is clear, these logics are writable and can be reset
by PUC, POR, and BOR.
635
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
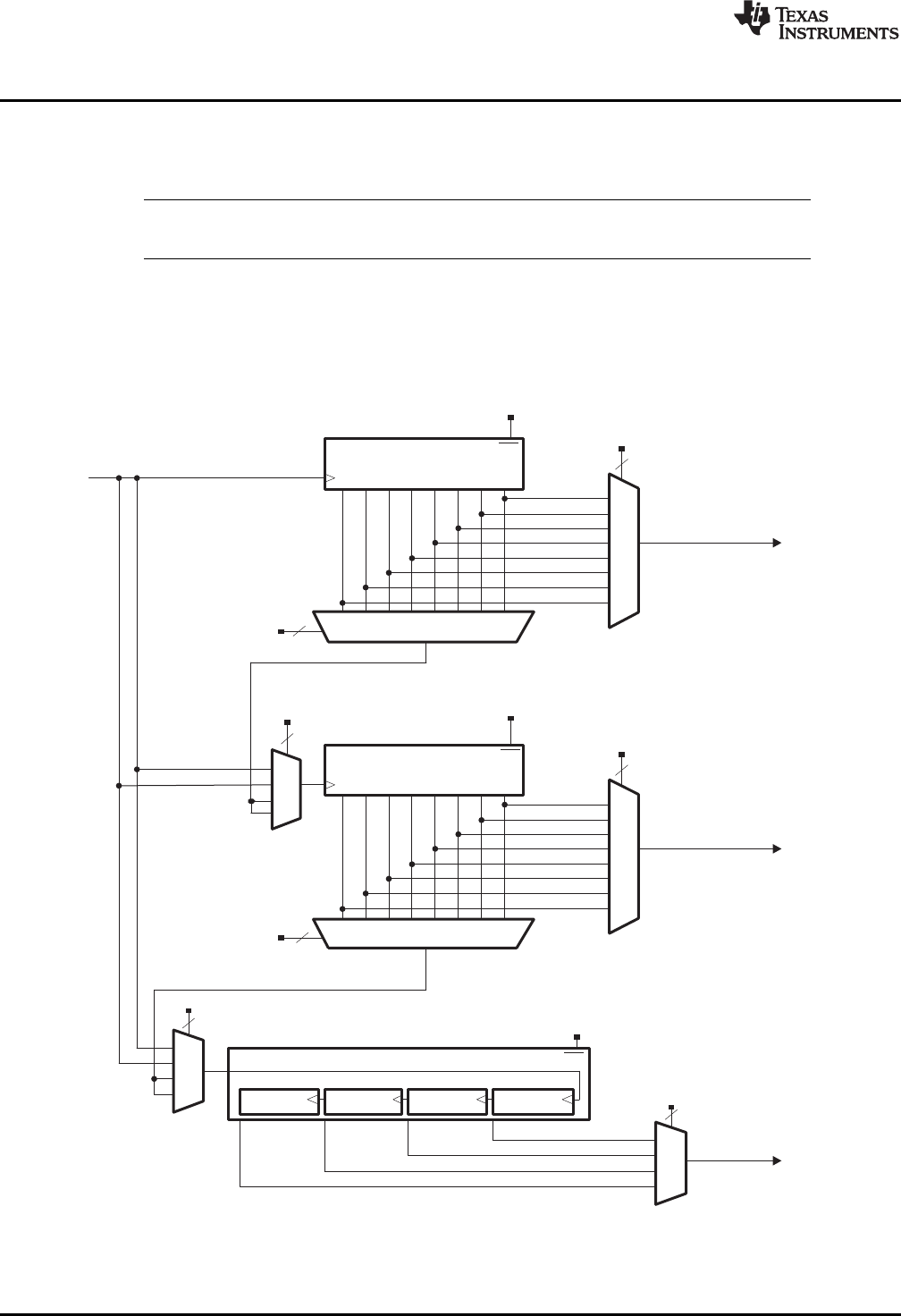
078... ...15
RTCNT4
16...2324...31
RTCTEV
00
01
10
11
8-bit overflow
RTCSSEL
00
01
10
11
2
Set_RTCTEVIFG
2
EN
RTCHOLD
RT1PS
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
RT1SSEL
00
01
10
11
3
2
RT1PSDIV
Set_RT1PSIFG
EN 3
RT1IP
RT1PSHOLD
RT0PS
3
RT0PSDIV
Set_RT0PSIFG
EN
110
101
100
011
010
001
000
3
RT0IP
from 32kHz
Crystal Osc.
RT0PSHOLD
111
110
101
100
011
010
001
000
Q0 Q1 Q2 Q3 Q4 Q5 Q6 Q7
111
111
110
101
100
011
010
001
000
16-bit overflow
24-bit overflow
32-bit overflow
RTCNT3 RTCNT2 RTCNT1
110
101
100
011
010
001
000
111
RTC_C Operation - Device-Dependent Features
www.ti.com
24.3 RTC_C Operation - Device-Dependent Features
24.3.1 Counter Mode
NOTE: This feature is available only on selected devices. See the device-specific data sheet to
determine if this feature is available.
The RTC_C module can be configured as a real-time clock with calendar function (calendar mode) or as a
32-bit general-purpose counter (counter mode) with the RTCMODE bit.
Counter mode is selected when RTCMODE is reset. In this mode, a 32-bit counter is provided that is
directly accessible by software. Figure 24-3 shows the functional block diagram of a RTC_C module in
counter mode (RTCMODE = 0).
Figure 24-3. RTC_C Functional Block Diagram in Counter Mode (RTCMODE = 0)
636 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Operation - Device-Dependent Features
24.3.1.1 Switching between Calendar and Counter Mode
To switch from calendar mode to counter mode do the following steps:
1. Stop the RTC with RTCHOLD=1.
2. Clear the RTCMODE bit to enable the counter mode.
3. Initialize the count registers (RTCNT1, RTCNT2, RTCNT3, RTCNT4) and the prescale counters
(RT0PS, RT1PS) as needed. (The switch from calendar mode to counter mode does not reset the
count value (RTCNT1, RTCNT2, RTCNT3, RTCNT4) or the prescale counters (RT0PS, RT1PS).
These registers must be configured by user software before use.)
4. Clear the RTCHOLD bit to start the counters.
To switch back from counter mode to calender mode do the following steps:
1. Stop the counters with RTCHOLD=1.
2. Set RTCMODE=1 to enable the calendar mode.
3. Initialize the clock and calendar registers and the prescale counters (RT0PS, RT1PS) as needed. (The
switch from counter mode to calendar mode does not reset the clock and calendar registers nor the
prescale counters (RT0PS, RT1PS). These registers must be configured by user software before use.)
4. Clear the RTCHOLD bit to start the RTC.
24.3.1.2 Counter Mode Operation
The clock that increments the counter can be sourced from the 32-kHz crystal oscillator or from prescaled
versions of the 32-kHz crystal oscillator clock. Prescaled versions are sourced from the prescale dividers
(RT0PS and RT1PS). RT0PS and RT1PS can output /2, /4, /8, 16, /32, /64, /128, and /256 versions of the
32-kHz clock. The output of RT0PS can be cascaded with RT1PS. The cascaded output can also be used
as a clock source input to the 32-bit counter.
Four individual 8-bit counters are cascaded to provide the 32-bit counter. This provides 8-bit, 16-bit, 24-bit,
or 32-bit overflow intervals of the counter clock. The RTCTEV bits select the respective trigger event. An
RTCTEV event can trigger an interrupt by setting the RTCTEVIE bit. Each counter, RTCNT1 through
RTCNT4, is individually accessible and may be written.
RT0PS and RT1PS can be configured as two 8-bit counters or cascaded into a single 16-bit counter.
RT0PS and RT1PS can be halted on an individual basis by setting their respective RT0PSHOLD and
RT1PSHOLD bits. When RT0PS is cascaded with RT1PS, setting RT0PSHOLD causes both RT0PS and
RT1PS to be halted. The 32-bit counter can be halted several ways, depending on the configuration. If the
32-bit counter is sourced directly by the 32-kHz crystal clock, it can be halted by setting RTCHOLD. If it is
sourced from the output of RT1PS, it can be halted by setting RT1PSHOLD or RTCHOLD. Finally, if it is
sourced from the cascaded outputs of RT0PS and RT1PS, it can be halted by setting RT0PSHOLD,
RT1PSHOLD, or RTCHOLD.
NOTE: Accessing the RTCNT1, RTCNT2, RTCNT3, RTCNT4, RT0PS, RT1PS registers
When the counter clock is asynchronous to the CPU clock, any read from any RTCNT1,
RTCNT2, RTCNT3, RTCNT4, RT0PS, or RT1PS register should occur while the counter is
not operating. Otherwise, the results may be unpredictable. Alternatively, the counter may be
read multiple times while operating, and a majority vote taken in software to determine the
correct reading. Any write to these registers takes effect immediately.
NOTE: For reliable update to all Counter Mode registers
Depending on the cascading of counters, when a write occurs, hold all subsequent counters.
For example, if RTPS0 is being updated, set RTCPS1HOLD = 1, and if RTPS1 is being
updated, set RTCHOLD = 1.
637
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Operation - Device-Dependent Features
www.ti.com
24.3.1.3 Real-Time Clock Interrupts in Counter Mode
In counter mode, four interrupt sources are available: RT0PSIFG, RT1PSIFG, RTCTEVIFG, and
RTCOFIFG. RTCAIFG and RTCRDYIFG are cleared. RTCRDYIE and RTCAIE are don't care.
RT0PSIFG can be used to generate interrupt intervals selectable by the RT0IP bits. In counter mode,
divide ratios of /2, /4, /8, /16, /32, /64, /128, and /256 of the clock source are possible. Setting the
RT0PSIE bit enables the interrupt.
RT1PSIFG can be used to generate interrupt intervals selectable by the RT1IP bits. In counter mode,
RT1PS is sourced with low-frequency oscillator clock, or the output of RT0PS, so divide ratios of /2, /4, /8,
/16, /32, /64, /128, and /256 of the respective clock source are possible. Setting the RT1PSIE bit enables
the interrupt.
In Counter Mode, the RTC_C module provides for an interval timer that sources real-time clock interrupt,
RTCTEVIFG. The interval timer can be selected to cause an interrupt event when an 8-bit, 16-bit, 24-bit,
or 32-bit overflow occurs within the 32-bit counter. The event is selectable with the RTCTEV bits. Setting
the RTCTEVIE bit enables the interrupt.
The RTCOFIFG bit flags a failure of the 32-kHz crystal oscillator. It's main purpose is to wake-up the CPU
from LPM3.5 in case an oscillator failure occurred.
638 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Operation - Device-Dependent Features
24.3.2 Real-Time Clock Event/Tamper Detection With Time Stamp
NOTE: This feature is available only on selected devices. See the device-specific data sheet to
determine if this feature is available.
The RTC_C module provides an external event or tamper detection and time stamp for up to two external
events. The pins RTCCAP0 and RTCCAP1 (1) can be used as an event or tamper detection input of an
external switch (mechanical or electronic). After device power-up, this feature can be enabled by setting
the TCEN bit in the RTCTCCTL0 register. Event/Tamper Detection with time stamp is supported in all
MSP430 operating modes, as long as there is a valid RTC power supply.
• When there is an event on RTCCAPx pin and the time capture feature is enabled (TCEN = 1), the
corresponding CAPEV bit in RTCCAPxCTL register is set and the corresponding time stamp
information (seconds, minutes, hours, day of month, month and year) is stored in the respective
backup registers (RTCSECBAKx, RTCMINBAKx, RTCHOURBAKx, RTCDAYBAKx, RTCMONBAKx
and RTCYEARBAKx).
• In case of multiple events, ONLY the time stamp of the event that occurred first is stored in the
respective backup registers. After CAPEV is set by the first event on RTCCAPx, all subsequent events
on RTCCAPx are ignored until the CAPEV bit is cleared by the user.
• The CAPES bit in the RTCCAPxCTL register sets the event edge for the corresponding RTCCAPx pin.
– Bit = 0: CAPEV flag is set with a low-to-high transition.
– Bit = 1: CAPEV flag is set with a high-to-low transition.
NOTE: Writing to CAPESx
Writing to CAPES can result in setting the corresponding interrupt flags.
CAPESx RTCCAPx RTCCAPIFG
0→1 0 May be set
0→1 1 Unchanged
1→0 0 Unchanged
1→0 1 May be set
(1) These pins are present only on devices that support this feature of RTC_C. Refer to the device-specific data sheet to determine the
availability of this feature.
• The interrupt flag RTCCAPIFG is set when any of the individual CAPEV bits are set. If the RTCIV is
read, RTCCAPIFG is cleared but not the status flags (CAPEV bits). They are then read by the CPU
and must be cleared by software only.
• By setting the RTCCAPIE bit, an event on RTCCAPx generates an interrupt. This interrupt can be
used as LPM3.5 or LPM4.5 wake-up event in modules that support LPM3.5 or LPM4.5.
• When the time capture feature is enabled (TCEN = 1), all of the backup registers (RTCSECBAKx,
RTCMINBAKx, RTCHOURBAKx, RTCDAYBAKx, RTCMONBAKx, and RTCYEARBAKx) are read-only
to user and can be written only by the RTC hardware. When RTCBCD = 1 and TCEN = 1, BCD format
is selected for the backup registers. If the backup registers were written to by the hardware before
TCEN was set, then the previous values are retained until there is a time capture event that overrides
the values with the time stamp.
• When the time capture feature is disabled (TCEN = 0), all of the backup registers (RTCSECBAKx,
RTCMINBAKx, RTCHOURBAKx, RTCDAYBAKx, RTCMONBAKx, and RTCYEARBAKx) can be written
only by the CPU. When TCEN = 0, the RTCBCD bit setting is ignored for the backup registers. The
data in the backup registers when TCEN = 1 is retained until the user writes new values after TCEN is
cleared.
• When TCEN is cleared, all CAPEV bits and RTCCAPIFG are cleared.
•Table 24-1 shows how to use the DIR, REN, and OUT bits in RTCCAPxCTL for proper configuration of
RTCCAPx pins.
639
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Operation - Device-Dependent Features
www.ti.com
Table 24-1. RTCCAPx Pin Configuration
DIR REN OUT RTCCAPx Configuration
0 0 x Input
0 1 0 Input with pulldown resistor
0 1 1 Input with pullup resistor
1 x x Output
24.3.2.1 Real-Time Clock Event/Tamper Detection Interrupts
With the event or tamper detection feature, one additional interrupt sources is available, RTCCAPIFG.
This flag is prioritized and combined with the other interrupt flags to source a single interrupt vector. The
interrupt vector register (RTCIV) is used to determine which flag requested an interrupt.
The RTCCAPIFG bit flags the occurrence of a tamper event. The exact source of the interrupt among
multiple tamper events can be found out by reading the CAPEV bit in the respective RTCCAPxCTL
registers (one per tamper source). When RTCIV is read, the RTCCAPIFG is cleared but not the status
flags (CAPEV bits).
640 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Registers
24.4 RTC_C Registers
The RTC_C module registers are shown in Table 24-2. This table also shows which registers are key
protected and which are retained during LPM3.5. The registers that are retained during LPM3.5 and given
with a reset value are not reset on POR; they are reset based on a signal derived from the RTC supply.
Registers that are not retained during LPM3.5 must be restored after exit from LPM3.5.
The high-side SVS must not be disabled by software if the real-time clock feature is needed. When the
high-side SVS is disabled, the RTC_C registers with LPM3.5 retention are not accessible by the CPU.
The base address for the RTC_C module registers can be found in the device-specific data sheet. The
address offsets are shown in Table 24-2.
The additional registers that are available if Event/Tamper Detection is implemented are shown in
Table 24-3 together with the corresponding address offsets.
If the counter mode is supported, the register aliases shown in Table 24-4 can be used to access the
counter registers.
NOTE: Most registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 24-2. RTC_C Registers
Key LPM3.5
Offset Acronym Register Name Type Access Reset Protected Retention
00h RTCCTL0 Real-Time Clock Control 0 Read/write Word 9600h yes not retained
00h RTCCTL0_L Real-Time Clock Control 0 Low Read/write Byte 00h yes not retained
01h RTCCTL0_H Real-Time Clock Control 0 High Read/write Byte 96h n/a not retained
02h RTCCTL13 Real-Time Clock Control 1, 3 Read/write Word 0070h yes high byte
retained
02h RTCCTL1 Real-Time Clock Control 1 Read/write Byte 70h yes not retained
or RTCCTL13_L
03h RTCCTL3 Real-Time Clock Control 3 Read/write Byte 00h yes retained
or RTCCTL13_H
04h RTCOCAL Real-Time Clock Offset Read/write Word 0000h yes retained
Calibration
04h RTCOCAL_L Read/write Byte 00h yes retained
05h RTCOCAL_H Read/write Byte 00h yes retained
06h RTCTCMP Real-Time Clock Temperature Read/write Word 4000h no retained
Compensation
06h RTCTCMP_L Read/write Byte 00h no retained
07h RTCTCMP_H Read/write Byte 40h no retained
08h RTCPS0CTL Real-Time Prescale Timer 0 Read/write Word 0100h no not retained
Control
08h RTCPS0CTL_L Read/write Byte 00h no not retained
09h RTCPS0CTL_H Read/write Byte 01h no not retained
0Ah RTCPS1CTL Real-Time Prescale Timer 1 Read/write Word 0100h no not retained
Control
0Ah RTCPS1CTL_L Read/write Byte 00h no not retained
0Bh RTCPS1CTL_H Read/write Byte 01h no not retained
0Ch RTCPS Real-Time Prescale Timer 0, 1 Read/write Word none yes retained
Counter
0Ch RT0PS Real-Time Prescale Timer 0 Read/write Byte none yes retained
Counter
or RTCPS_L
641
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Registers
www.ti.com
Table 24-2. RTC_C Registers (continued)
Key LPM3.5
Offset Acronym Register Name Type Access Reset Protected Retention
0Dh RT1PS Real-Time Prescale Timer 1 Read/write Byte none yes retained
Counter
or RTCPS_H
0Eh RTCIV Real Time Clock Interrupt Read Word 0000h no not retained
Vector
10h RTCTIM0 Real-Time Clock Seconds, Read/write Word undefined yes retained
Minutes
10h RTCSEC Real-Time Clock Seconds Read/write Byte undefined yes retained
or RTCTIM0_L
11h RTCMIN Real-Time Clock Minutes Read/write Byte undefined yes retained
or RTCTIM0_H
12h RTCTIM1 Real-Time Clock Hour, Day of Read/write Word undefined yes retained
Week
12h RTCHOUR Real-Time Clock Hour Read/write Byte undefined yes retained
or RTCTIM1_L
13h RTCDOW Real-Time Clock Day of Week Read/write Byte undefined yes retained
or RTCTIM1_H
14h RTCDATE Real-Time Clock Date Read/write Word undefined yes retained
14h RTCDAY Real-Time Clock Day of Month Read/write Byte undefined yes retained
or RTCDATE_L
15h RTCMON Real-Time Clock Month Read/write Byte undefined yes retained
or RTCDATE_H
16h RTCYEAR Real-Time Clock Year(1) Read/write Word undefined yes retained
18h RTCAMINHR Real-Time Clock Minutes, Hour Read/write Word undefined no retained
Alarm
18h RTCAMIN Real-Time Clock Minutes Alarm Read/write Byte undefined no retained
or RTCAMINHR_L
19h RTCAHOUR Real-Time Clock Hours Alarm Read/write Byte undefined no retained
or RTCAMINHR_H
1Ah RTCADOWDAY Real-Time Clock Day of Week, Read/write Word undefined no retained
Day of Month Alarm
1Ah RTCADOW Real-Time Clock Day of Week Read/write Byte undefined no retained
Alarm
or
RTCADOWDAY_L
1Bh RTCADAY Real-Time Clock Day of Month Read/write Byte undefined no retained
Alarm
or
RTCADOWDAY_H
1Ch BIN2BCD Binary-to-BCD conversion Read/write Word 0000h no not retained
register
1Eh BCD2BIN BCD-to-binary conversion Read/write Word 0000h no not retained
register
(1) Do not access the year register RTCYEAR in byte mode.
642 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
Table 24-3. RTC_C Event and Tamper Detection Registers
Key LPM3.5
Offset Acronym Register Name Type Access Reset Protected Retention
20h RTCTCCTL0 Real-Time Clock Time Capture Read/write Byte 02h yes retained
Control Register 0
21h RTCTCCTL1 Real-Time Clock Time Capture Read/write Byte 00h yes not retained
Control Register 1
22h RTCCAP0CTL Tamper Detect Pin 0 Control Read/write Byte 00h yes not retained
Register
23h RTCCAP1CTL Tamper Detect Pin 1 Control Read/write Byte 00h yes not retained
Register
30h RTCSECBAK0 Real-Time Clock Seconds Backup Read/write Byte 00h yes retained
Register 0
31h RTCMINBAK0 Real-Time Clock Minutes Backup Read/write Byte 00h yes retained
Register 0
32h RTCHOURBAK0 Real-Time Clock Hours Backup Read/write Byte 00h yes retained
Register 0
33h RTCDAYBAK0 Real-Time Clock Days Backup Read/write Byte 00h yes retained
Register 0
34h RTCMONBAK0 Real-Time Clock Months Backup Read/write Byte 00h yes retained
Register 0
36h RTCYEARBAK0 Real-Time Clock year Backup Read/write Word 00h yes retained
Register 0
38h RTCSECBAK1 Real-Time Clock Seconds Backup Read/write Byte 00h yes retained
Register 1
39h RTCMINBAK1 Real-Time Clock Minutes Backup Read/write Byte 00h yes retained
Register 1
3Ah RTCHOURBAK1 Real-Time Clock Hours Backup Read/write Byte 00h yes retained
Register 1
3Bh RTCDAYBAK1 Real-Time Clock Days Backup Read/write Byte 00h yes retained
Register 1
3Ch RTCMONBAK1 Real-Time Clock Months Backup Read/write Byte 00h yes retained
Register 1
3Eh RTCYEARBAK1 Real-Time Clock Year Backup Read/write Word 00h yes retained
Register 1
Table 24-4. RTC_C Real-Time Clock Counter Mode Aliases
Key LPM3.5
Offset Acronym Register Name Type Access Reset Protected Retention
10h RTCCNT12 Real-Time Counter 1, 2 Read/write Word undefined yes retained
10h RTCCNT1 Real-Time Counter 1 Read/write Byte undefined yes retained
11h RTCCNT2 Real-Time Counter 2 Read/write Byte undefined yes retained
12h RTCCNT34 Real-Time Counter 3, 4 Read/write Word undefined yes retained
12h RTCCNT3 Real-Time Counter 3 Read/write Byte undefined yes retained
13h RTCCNT4 Real-Time Counter 4 Read/write Byte undefined yes retained
643
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.1 RTCCTL0_L Register
Real-Time Clock Control 0 Low Register
Figure 24-4. RTCCTL0_L Register
76543210
RTCOFIE(1) RTCTEVIE(1) RTCAIE(1) RTCRDYIE RTCOFIFG RTCTEVIFG RTCAIFG RTCRDYIFG
rw-0 rw-0 rw-0 rw-0 rw-(0) rw-(0) rw-(0) rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wakeup from LPMx.5 before clearing LOCKLPM5.
Table 24-5. RTCCTL0_L Register Description
Bit Field Type Reset Description
7 RTCOFIE RW 0h 32-kHz crystal oscillator fault interrupt enable. This interrupt can be used as
LPM3.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPM3.5 wake-up enabled)
6 RTCTEVIE RW 0h Real-time clock time event interrupt enable. In modules supporting LPM3.5 this
interrupt can be used as LPM3.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPM3.5 wake-up enabled)
5 RTCAIE RW 0h Real-time clock alarm interrupt enable. In modules supporting LPM3.5 this
interrupt can be used as LPM3.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPM3.5 wake-up enabled)
4 RTCRDYIE RW 0h Real-time clock ready interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
3 RTCOFIFG RW 0h 32-kHz crystal oscillator fault interrupt flag. This interrupt can be used as LPM3.5
wake-up event. It also indicates a clock failure during backup operation.
0b = No interrupt pending
1b = Interrupt pending. A 32-kHz crystal oscillator fault occurred after last reset.
2 RTCTEVIFG RW 0h Real-time clock time event interrupt flag. In modules supporting LPM3.5 this
interrupt can be used as LPM3.5 wake-up event.
0b = No time event occurred
1b = Time event occurred
1 RTCAIFG RW 0h Real-time clock alarm interrupt flag. In modules supporting LPM3.5 this interrupt
can be used as LPM3.5 wake-up event.
0b = No time event occurred
1b = Time event occurred
0 RTCRDYIFG RW 0h Real-time clock ready interrupt flag
0b = RTC cannot be read safely
1b = RTC can be read safely
644 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.2 RTCCTL0_H Register
Real-Time Clock Control 0 High Register
Figure 24-5. RTCCTL0_H Register
76543210
RTCKEY
rw-1 rw-0 rw-0 rw-1 rw-0 rw-1 rw-1 rw-0
Table 24-6. RTCCTL0_H Register Description
Bit Field Type Reset Description
7-0 RTCKEY RW 96h Real-time clock key. This register should be written with A5h to unlock RTC_C.
Any write with value other than A5h will lock the module. Read from this register
always returns 96h.
645
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.3 RTCCTL1 Register
Real-Time Clock Control Register 1
Figure 24-6. RTCCTL1 Register
76543210
RTCBCD RTCHOLD(1) RTCMODE(1) RTCRDY RTCSSELx(1) RTCTEVx(1)
rw-(0) rw-(1) rw-(1) r-(1) rw-(0) rw-(0) rw-(0) rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wakeup from LPMx.5 before clearing LOCKLPM5.
Table 24-7. RTCCTL1 Register Description
Bit Field Type Reset Description
7 RTCBCD RW 0h Real-time clock BCD select. Selects BCD counting for real-time clock. Applies to
calendar mode (RTCMODE = 1) only; setting is ignored in counter mode.
0b = Binary (hexadecimal) code selected
1b = Binary coded decimal (BCD) code selected
6 RTCHOLD RW 1h Real-time clock hold
0b = Real-time clock (32-bit counter or calendar mode) is operational.
1b = In counter mode (RTCMODE = 0), only the 32-bit counter is stopped. In
calendar mode (RTCMODE = 1), the calendar is stopped as well as the prescale
counters, RT0PS and RT1PS. RT0PSHOLD and RT1PSHOLD are don't care.
5 RTCMODE RW 1h Real-time clock mode. In RTC_C modules without counter mode support this bit
is read-only and always reads 1.
0b = 32-bit counter mode
1b = Calendar mode. Switching between counter and calendar mode does not
reset the real-time clock counter registers. These registers must be configured by
user software before use.
4 RTCRDY R 1h Real-time clock ready
0b = RTC time values in transition (calendar mode only)
1b = RTC time values safe for reading (calendar mode only). This bit indicates
when the real-time clock time values are safe for reading (calendar mode only).
In counter mode, RTCRDY remains cleared.
3-2 RTCSSELx RW 0h Real-time clock source select. In counter mode, selects clock input source to the
32-bit counter. In calendar mode, these bits are don't care. The clock input is
automatically set to the output of RT1PS.
00b = 32-kHz crystal oscillator clock
01b = 32-kHz crystal oscillator clock
10b = Output from RT1PS
11b = Output from RT1PS
1-0 RTCTEVx RW 0h Real-time clock time event
Calendar Mode (RTCMODE = 1)
00b = Minute changed
01b = Hour changed
10b = Every day at midnight (00:00)
11b = Every day at noon (12:00)
Counter Mode (RTCMODE = 0)
00b = 8-bit overflow
01b = 16-bit overflow
10b = 24-bit overflow
11b = 32-bit overflow
646 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.4 RTCCTL3 Register
Real-Time Clock Control 3 Register
Figure 24-7. RTCCTL3 Register
76543210
Reserved RTCLOCK(1) RTCCALFx(2)
r0 r0 r0 r0 r0 rw-[0] rw-(0) rw-(0)
(1) This bit is implemented in only the F677xA, F673xA, and F672xA devices. For other devices, this bit is reserved and always reads as 0.
(2) These bits are not reset on POR; they are reset based on a signal derived from the AUXVCC3 supply voltage level.
Table 24-8. RTCCTL3 Register Description
Bit Field Type Reset Description
7-3 Reserved R 0h Reserved. Always reads as 0.
2 RTCLOCK(1) RW 0h Real-time clock lock. When this bit is set, all control in LPM3.5 retention is held
and not accessible even when the device is under BOR.
0b = LPM3.5 retention logic unlocked
1b = LPM3.5 retention logic locked
1-0 RTCCALFx RW 0h Real-time clock calibration frequency. Selects frequency output to RTCCLK pin
for calibration measurement. The corresponding port must be configured for the
peripheral module function. The RTCCLK is not available in counter mode and
remains low, and the RTCCALF bits are don't care.
00b = No frequency output to RTCCLK pin
01b = 512 Hz
10b = 256 Hz
11b = 1 Hz
(1) This bit is implemented in only the F677xA, F673xA, and F672xA devices. For other devices, this bit is reserved and always reads as 0.
24.4.5 RTCOCAL Register
Real-Time Clock Offset Calibration Register
Figure 24-8. RTCOCAL Register
15 14 13 12 11 10 9 8
RTCOCALS(1) Reserved
rw-(0) r0 r0 r0 r0 r0 r0 r0
76543210
RTCOCALx(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the AUXVCC3 supply voltage level.
(1) These bits are not reset on POR; they are reset based on a signal derived from the AUXVCC3 supply voltage level.
Table 24-9. RTCOCAL Register Description
Bit Field Type Reset Description
15 RTCOCALS RW 0h Real-time clock offset error calibration sign. This bit decides the sign of offset
error calibration.
0b = Down calibration. Frequency adjusted down.
1b = Up calibration. Frequency adjusted up.
14-8 Reserved R 0h Reserved. Always reads as 0.
7-0 RTCOCALx RW 0h Real-time clock offset error calibration. Each LSB represents approximately
+1 ppm (RTCOCALS = 1) or –1 ppm (RTCOCALS = 0) adjustment in frequency.
Maximum effective calibration value is ±240 ppm. Excess values written above
±240 ppm are ignored by hardware.
647
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.6 RTCTCMP Register
Real-Time Clock Temperature Compensation Register
Figure 24-9. RTCTCMP Register
15 14 13 12 11 10 9 8
RTCTCMPS(1) RTCTCRDY(1) RTCTCOK(1) Reserved
rw-(0) r-(1) r-(0) r0 r0 r0 r0 r0
76543210
RTCTCMPx(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the AUXVCC3 supply voltage level.
Table 24-10. RTCTCMP Register Description
Bit Field Type Reset Description
15 RTCTCMPS RW 0h Real-time clock temperature compensation sign. This bit decides the sign of
temperature compensation.(1)
0b = Down calibration. Frequency adjusted down.
1b = Up calibration. Frequency adjusted up.
14 RTCTCRDY R 1h Real-time clock temperature compensation ready. This is a read only bit that
indicates when the RTCTCMPx can be written. Write to RTCTCMPx should be
avoided when RTCTCRDY is reset.
13 RTCTCOK R 0h Real-time clock temperature compensation write OK. This is a read-only bit that
indicates if the write to RTCTCMP is successful or not.
0b = Write to RTCTCMPx is unsuccessful
1b = Write to RTCTCMPx is successful
12-8 Reserved R 0h Reserved. Always reads as 0.
7-0 RTCTCMPx RW 0h Real-time clock temperature compensation. Value written into this register is
used for temperature compensation of RTC_C. Each LSB represents
approximately +1 ppm (RTCTCMPS = 1) or –1 ppm (RTCTCMPS = 0)
adjustment in frequency. Maximum effective calibration value is ±240 ppm.
Excess values written above ±240 ppm are ignored by hardware.
(1) Changing the sign-bit by writing to RTCTCMP_H becomes effective only after also writing RTCTCMP_L.
648 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.7 RTCNT1 Register
Real-Time Clock Counter 1 Register – Counter Mode
Figure 24-10. RTCNT1 Register
76543210
RTCNT1
rw rw rw rw rw rw rw rw
Table 24-11. RTCNT1 Register Description
Bit Field Type Reset Description
7-0 RTCNT1 RW undefined The RTCNT1 register is the count of RTCNT1
24.4.8 RTCNT2 Register
Real-Time Clock Counter 2 Register – Counter Mode
Figure 24-11. RTCNT2 Register
76543210
RTCNT2
rw rw rw rw rw rw rw rw
Table 24-12. RTCNT2 Register Description
Bit Field Type Reset Description
7-0 RTCNT2 RW undefined The RTCNT2 register is the count of RTCNT2
24.4.9 RTCNT3 Register
Real-Time Clock Counter 3 Register – Counter Mode
Figure 24-12. RTCNT3 Register
76543210
RTCNT3
rw rw rw rw rw rw rw rw
Table 24-13. RTCNT3 Register Description
Bit Field Type Reset Description
7-0 RTCNT3 RW undefined The RTCNT3 register is the count of RTCNT3
24.4.10 RTCNT4 Register
Real-Time Clock Counter 4 Register – Counter Mode
Figure 24-13. RTCNT4 Register
76543210
RTCNT4
rw rw rw rw rw rw rw rw
Table 24-14. RTCNT4 Register Description
Bit Field Type Reset Description
7-0 RTCNT4 RW undefined The RTCNT4 register is the count of RTCNT4.
649
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.11 RTCSEC Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Seconds Register – Calendar Mode With Hexadecimal Format
Figure 24-14. RTCSEC Register
76543210
0 Seconds
r-0 r-0 rw rw rw rw rw rw
Table 24-15. RTCSEC Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-0 Seconds RW undefined Seconds (0 to 59)
24.4.12 RTCSEC Register – Calendar Mode With BCD Format
Real-Time Clock Seconds Register – Calendar Mode With BCD Format
Figure 24-15. RTCSEC Register
76543210
0 Seconds – high digit Seconds – low digit
r-0 rw rw rw rw rw rw rw
Table 24-16. RTCSEC Register Description
Bit Field Type Reset Description
7 0 R 0h Always 0
6-4 Seconds – high digit RW undefined Seconds – high digit (0 to 5)
3-0 Seconds – low digit RW undefined Seconds – low digit (0 to 9)
650 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.13 RTCMIN Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Minutes Register – Calendar Mode With Hexadecimal Format
Figure 24-16. RTCMIN Register
76543210
0 Minutes
r-0 r-0 rw rw rw rw rw rw
Table 24-17. RTCMIN Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-0 Minutes RW undefined Minutes (0 to 59)
24.4.14 RTCMIN Register – Calendar Mode With BCD Format
Real-Time Clock Minutes Register – Calendar Mode With BCD Format
Figure 24-17. RTCMIN Register
76543210
0 Minutes – high digit Minutes – low digit
r-0 rw rw rw rw rw rw rw
Table 24-18. RTCMIN Register Description
Bit Field Type Reset Description
7 0 R 0h Always 0
6-4 Minutes – high digit RW undefined Minutes – high digit (0 to 5)
3-0 Minutes – low digit RW undefined Minutes – low digit (0 to 9)
651
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.15 RTCHOUR Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Hours Register – Calendar Mode With Hexadecimal Format
Figure 24-18. RTCHOUR Register
76543210
0 Hours
r-0 r-0 r-0 rw rw rw rw rw
Table 24-19. RTCHOUR Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4-0 Hours RW undefined Hours (0 to 23)
24.4.16 RTCHOUR Register – Calendar Mode With BCD Format
Real-Time Clock Hours Register – Calendar Mode With BCD Format
Figure 24-19. RTCHOUR Register
76543210
0 Hours – high digit Hours – low digit
r-0 r-0 rw rw rw rw rw rw
Table 24-20. RTCHOUR Register Description
Bit Field Type Reset Description
7-6 0 R 0h Always 0
5-4 Hours – high digit RW undefined Hours – high digit (0 to 2)
3-0 Hours – low digit RW undefined Hours – low digit (0 to 9)
652 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.17 RTCDOW Register – Calendar Mode
Real-Time Clock Day of Week Register – Calendar Mode
Figure 24-20. RTCDOW Register
76543210
0 Day of week
r-0 r-0 r-0 r-0 r-0 rw rw rw
Table 24-21. RTCDOW Register Description
Bit Field Type Reset Description
7-3 0 R 0h Always 0
2-0 Day of week RW undefined Day of week (0 to 6)
24.4.18 RTCDAY Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Day of Month Register – Calendar Mode With Hexadecimal Format
Figure 24-21. RTCDAY Register
76543210
0 Day of month
r-0 r-0 r-0 rw rw rw rw rw
Table 24-22. RTCDAY Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4-0 Day of month RW undefined Day of month (1 to 28, 29, 30, 31)
24.4.19 RTCDAY Register – Calendar Mode With BCD Format
Real-Time Clock Day of Month Register – Calendar Mode With BCD Format
Figure 24-22. RTCDAY Register
76543210
0 Day of month – high digit Day of month – low digit
r-0 r-0 rw rw rw rw rw rw
Table 24-23. RTCDAY Register Description
Bit Field Type Reset Description
7-6 0 R 0h
5-4 Day of month – high RW undefined Day of month – high digit (0 to 3)
digit
3-0 Day of month – low RW undefined Day of month – low digit (0 to 9)
digit
653
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.20 RTCMON Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Month Register – Calendar Mode With Hexadecimal Format
Figure 24-23. RTCMON Register
76543210
0 Month
r-0 r-0 r-0 r-0 rw rw rw rw
Table 24-24. RTCMON Register Description
Bit Field Type Reset Description
7-4 0 R 0h Always 0
3-0 Month RW undefined Month (1 to 12)
24.4.21 RTCMON Register – Calendar Mode With BCD Format
Real-Time Clock Month Register – Calendar Mode With BCD Format
Figure 24-24. RTCMON Register
76543210
0 Month – high Month – low digit
digit
r-0 r-0 r-0 rw rw rw rw rw
Table 24-25. RTCMON Register Description
Bit Field Type Reset Description
7-5 0 R 0h Always 0
4 Month – high digit RW undefined Month – high digit (0 or 1)
3-0 Month – low digit RW undefined Month – low digit (0 to 9)
654 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.22 RTCYEAR Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Year Low-Byte Register – Calendar Mode With Hexadecimal Format
Figure 24-25. RTCYEAR Register
15 14 13 12 11 10 9 8
0 Year – high byte
r-0 r-0 r-0 r-0 rw rw rw rw
76543210
Year – low byte
rw rw rw rw rw rw rw rw
Table 24-26. RTCYEAR Register Description
Bit Field Type Reset Description
15-12 0 R 0h Always 0
11-8 Year – high byte RW undefined Year – high byte. Valid values for Year are 0 to 4095.
7-0 Year – low byte RW undefined Year – low byte. Valid values for Year are 0 to 4095.
24.4.23 RTCYEAR Register – Calendar Mode With BCD Format
Real-Time Clock Year Low-Byte Register – Calendar Mode With BCD Format
Figure 24-26. RTCYEAR Register
15 14 13 12 11 10 9 8
0 Century – high digit Century – low digit
r-0 rw rw rw rw rw rw rw
76543210
Decade Year – lowest digit
rw rw rw rw rw rw rw rw
Table 24-27. RTCYEAR Register Description
Bit Field Type Reset Description
15 0 R 0h Always 0
14-10 Century – high digit RW undefined Century – high digit (0 to 4)
11-8 Century – low digit RW undefined Century – low digit (0 to 9)
7-4 Decade RW undefined Decade (0 to 9)
3-0 Year – lowest digit RW undefined Year – lowest digit (0 to 9)
655
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.24 RTCAMIN Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Minutes Alarm Register – Calendar Mode With Hexadecimal Format
Figure 24-27. RTCAMIN Register
76543210
AE 0 Minutes
rw r-0 rw rw rw rw rw rw
Table 24-28. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0.
5-0 Minutes RW undefined Minutes (0 to 59)
24.4.25 RTCAMIN Register – Calendar Mode With BCD Format
Real-Time Clock Minutes Alarm Register – Calendar Mode With BCD Format
Figure 24-28. RTCAMIN Register
76543210
AE Minutes – high digit Minutes – low digit
rw rw rw rw rw rw rw rw
Table 24-29. RTCAMIN Register Description
Bit Field Type Reset Description
7 AE RW 0h Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-4 Minutes – high digit RW undefined Minutes – high digit (0 to 5)
3-0 Minutes – low digit RW undefined Minutes – low digit (0 to 9)
656 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.26 RTCAHOUR Register
Real-Time Clock Hours Alarm Register – Calendar Mode With Hexadecimal Format
Figure 24-29. RTCAHOUR Register
76543210
AE 0 Hours
rw r-0 r-0 rw rw rw rw rw
Table 24-30. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always 0
4-0 Hours RW undefined Hours (0 to 23)
24.4.27 RTCAHOUR Register – Calendar Mode With BCD Format
Real-Time Clock Hours Alarm Register – Calendar Mode With BCD Format
Figure 24-30. RTCAHOUR Register
76543210
AE 0 Hours – high digit Hours – low digit
rw r-0 rw rw rw rw rw rw
Table 24-31. RTCAHOUR Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0
5-4 Hours – high digit RW undefined Hours – high digit (0 to 2)
3-0 Hours – low digit RW undefined Hours – low digit (0 to 9)
657
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.28 RTCADOW Register – Calendar Mode
Real-Time Clock Day of Week Alarm Register – Calendar Mode
Figure 24-31. RTCADOW Register
76543210
AE 0 Day of week
rw r-0 r-0 r-0 r-0 rw rw rw
Table 24-32. RTCADOW Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-3 0 R 0h Always 0
2-0 Day of week RW undefined Day of week (0 to 6)
658 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.29 RTCADAY Register – Calendar Mode With Hexadecimal Format
Real-Time Clock Day of Month Alarm Register – Calendar Mode With Hexadecimal Format
Figure 24-32. RTCADAY Register
76543210
AE 0 Day of month
rw r-0 r-0 rw rw rw rw rw
Table 24-33. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6-5 0 R 0h Always 0
4-0 Day of month RW undefined Day of month (1 to 28, 29, 30, 31)
24.4.30 RTCADAY Register – Calendar Mode With BCD Format
Real-Time Clock Day of Month Alarm Register – Calendar Mode With BCD Format
Figure 24-33. RTCADAY Register
76543210
AE 0 Day of month – high digit Day of month – low digit
rw r-0 rw rw rw rw rw rw
Table 24-34. RTCADAY Register Description
Bit Field Type Reset Description
7 AE RW undefined Alarm enable
0b = This alarm register is disabled
1b = This alarm register is enabled
6 0 R 0h Always 0
5-4 Day of month – high RW undefined Day of month – high digit (0 to 3)
digit
3-0 Day of month – low RW undefined Day of month – low digit (0 to 9)
digit
659
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.31 RTCPS0CTL Register
Real-Time Clock Prescale Timer 0 Control Register
Figure 24-34. RTCPS0CTL Register
15 14 13 12 11 10 9 8
Reserved RT0PSDIV(1) Reserved RT0PSHOLD(1)
r0 r0 rw-(0) rw-(0) rw-(0) r0 r0 rw-(1)
76543210
Reserved RT0IP(1) RT0PSIE RT0PSIFG
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-0 rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wake-up from LPMx.5 before clearing LOCKLPM5.
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wake-up from LPMx.5 before clearing LOCKLPM5.
Table 24-35. RTCPS0CTL Register Description
Bit Field Type Reset Description
15-14 Reserved R 0h Reserved. Always reads as 0.
13-11 RT0PSDIV RW 0h Prescale timer 0 clock divide. These bits control the divide ratio of the RT0PS
counter. In real-time clock calendar mode, these bits are don't care for RT0PS
and RT1PS. RT0PS clock output is automatically set to /256. RT1PS clock
output is automatically set to /128.
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
10-9 Reserved R 0h Reserved. Always reads as 0.
8 RT0PSHOLD RW 1h Prescale timer 0 hold. In real-time clock calendar mode, this bit is don't care.
RT0PS is stopped via the RTCHOLD bit.
0b = RT0PS is operational
1b = RT0PS is held
7-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT0IP RW 0h Prescale timer 0 interrupt interval
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
1 RT0PSIE RW 0h Prescale timer 0 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled
0 RT0PSIFG RW 0h Prescale timer 0 interrupt flag
0b = No time event occurred
1b = Time event occurred
660 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.32 RTCPS1CTL Register
Real-Time Clock Prescale Timer 1 Control Register
Figure 24-35. RTCPS1CTL Register
15 14 13 12 11 10 9 8
RT1SSELx(1) RT1PSDIVx(1) Reserved RT1PSHOLD(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) r0 r0 rw-(1)
76543210
Reserved RT1IPx(1) RT1PSIE RT1PSIFG
r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-0 rw-(0)
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wake-up from LPMx.5 before clearing LOCKLPM5.
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the register bits themselves; therefore,
reconfiguration is required after wake-up from LPMx.5 before clearing LOCKLPM5.
Table 24-36. RTCPS1CTL Register Description
Bit Field Type Reset Description
15-14 RT1SSELx RW 0h Prescale timer 1 clock source select. Selects clock input source to the RT1PS
counter. In real-time clock calendar mode, these bits are do not care. RT1PS
clock input is automatically set to the output of RT0PS.
00b = 32-kHz crystal oscillator clock
01b = 32-kHz crystal oscillator clock
10b = Output from RT0PS
11b = Output from RT0PS
13-11 RT1PSDIVx RW 0h Prescale timer 1 clock divide. These bits control the divide ratio of the RT0PS
counter. In real-time clock calendar mode, these bits are don't care for RT0PS
and RT1PS. RT0PS clock output is automatically set to /256. RT1PS clock
output is automatically set to /128.
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
10-9 Reserved R 0h Reserved. Always reads as 0.
8 RT1PSHOLD RW 1h Prescale timer 1 hold. In real-time clock calendar mode, this bit is don't care.
RT1PS is stopped via the RTCHOLD bit.
0b = RT1PS is operational
1b = RT1PS is held
7-5 Reserved R 0h Reserved. Always reads as 0.
4-2 RT1IPx RW 0h Prescale timer 1 interrupt interval
000b = Divide by 2
001b = Divide by 4
010b = Divide by 8
011b = Divide by 16
100b = Divide by 32
101b = Divide by 64
110b = Divide by 128
111b = Divide by 256
1 RT1PSIE RW 0h Prescale timer 1 interrupt enable
0b = Interrupt not enabled
1b = Interrupt enabled (LPMx.5 wake-up enabled)
661
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
Table 24-36. RTCPS1CTL Register Description (continued)
Bit Field Type Reset Description
0 RT1PSIFG RW 0h Prescale timer 1 interrupt flag. This interrupt can be used as LPMx.5 wake-up
event.
0b = No time event occurred
1b = Time event occurred
662 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
RTC_C Registers
24.4.33 RTCPS0 Register
Real-Time Clock Prescale Timer 0 Counter Register
Figure 24-36. RTCPS0 Register
76543210
RT0PS
rw rw rw rw rw rw rw rw
Table 24-37. RTCPS0 Register Description
Bit Field Type Reset Description
7-0 RT0PS RW undefined Prescale timer 0 counter value
24.4.34 RTCPS1 Register
Real-Time Clock Prescale Timer 1 Counter Register
Figure 24-37. RTCPS1 Register
76543210
RT1PS
rw rw rw rw rw rw rw rw
Table 24-38. RTCPS1 Register Description
Bit Field Type Reset Description
7-0 RT1PS RW undefined Prescale timer 1 counter value
663
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.35 RTCIV Register
Real-Time Clock Interrupt Vector Register
Figure 24-38. RTCIV Register
15 14 13 12 11 10 9 8
RTCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
RTCIVx
r0 r0 r0 r-(0) r-(0) r-(0) r-(0) r0
Table 24-39. RTCIV Register Description
Bit Field Type Reset Description
15-0 RTCIVx R 0h Real-time clock interrupt vector value
Without Event/Tamper Detection implemented:
00h = No interrupt pending
02h = Interrupt Source: RTC oscillator failure; Interrupt Flag: RTCOFIFG;
Interrupt Priority: Highest
04h = Interrupt Source: RTC ready; Interrupt Flag: RTCRDYIFG
06h = Interrupt Source: RTC interval timer; Interrupt Flag: RTCTEVIFG
08h = Interrupt Source: RTC user alarm; Interrupt Flag: RTCAIFG
0Ah = Interrupt Source: RTC prescaler 0; Interrupt Flag: RT0PSIFG
0Ch = Interrupt Source: RTC prescaler 1; Interrupt Flag: RT1PSIFG
0Eh = Reserved
10h = Reserved ; Interrupt Priority: Lowest
With Event/Tamper Detection implemented:
00h = No interrupt pending
02h = Interrupt Source: RTC oscillator failure; Interrupt Flag: RTCOFIFG;
Interrupt Priority: Highest
04h = Interrupt Source: RTC Tamper Event; Interrupt Flag: RTCCAPIFG
06h = Interrupt Source: RTC ready; Interrupt Flag: RTCRDYIFG
08h = Interrupt Source: RTC interval timer; Interrupt Flag: RTCTEVIFG
0Ah = Interrupt Source: RTC user alarm; Interrupt Flag: RTCAIFG
0Ch = Interrupt Source: RTC prescaler 0; Interrupt Flag: RT0PSIFG
0Eh = Interrupt Source: RTC prescaler 1; Interrupt Flag: RT1PSIFG
10h = Reserved ; Interrupt Priority: Lowest
664 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.36 BIN2BCD Register
Binary-to-BCD Conversion Register
Figure 24-39. BIN2BCD Register
15 14 13 12 11 10 9 8
BIN2BCDx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
BIN2BCDx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 24-40. BIN2BCD Register Description
Bit Field Type Reset Description
15-0 BIN2BCDx RW 0h Read: 16-bit BCD conversion of previously written 12-bit binary number.
Write: 12-bit binary number to be converted.
24.4.37 BCD2BIN Register
BCD-to-Binary Conversion Register
Figure 24-40. BCD2BIN Register
15 14 13 12 11 10 9 8
BCD2BINx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
BCD2BINx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 24-41. BCD2BIN Register Description
Bit Field Type Reset Description
15-0 BCD2BINx RW 0h Read: 12-bit binary conversion of previously written 16-bit BCD number.
Write: 16-bit BCD number to be converted.
665
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Registers
www.ti.com
24.4.38 RTCSECBAKx Register – Hexadecimal Format
Real-Time Clock Seconds Backup Register – Hexadecimal Format
Figure 24-41. RTCSECBAKx Register
76543210
0 0 Seconds(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-42. RTCSECBAKx Register Description
Bit Field Type Reset Description
7-6 0 RW 0h Always 0.
5-0 Seconds RW 0h Seconds. Valid values are 0 to 59.
24.4.39 RTCSECBAKx Register – BCD Format
Real-Time Clock Seconds Backup Register – BCD Format
Figure 24-42. RTCSECBAKx Register
76543210
0 Seconds – high digit(1) Seconds – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-43. RTCSECBAKx Register Description
Bit Field Type Reset Description
7 0 RW 0h Always 0.
6-4 Seconds – high digit RW 0h Seconds – high digit. Valid values are 0 to 5.
3-0 Seconds – low digit RW 0h Seconds – low digit. Valid values are 0 to 9.
666 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.40 RTCMINBAKx Register – Hexadecimal Format
Real-Time Clock Minutes Backup Register – Hexadecimal Format
Figure 24-43. RTCMINBAKx Register
76543210
0 0 Minutes(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-44. RTCMINBAKx Register Description
Bit Field Type Reset Description
7-6 0 RW 0h Always 0.
5-0 Minutes RW 0h Minutes. Valid values are 0 to 59.
24.4.41 RTCMINBAKx Register – BCD Format
Real-Time Clock Minutes Backup Register – BCD Format
Figure 24-44. RTCMINBAKx Register
76543210
0 Minutes – high digit(1) Minutes – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-45. RTCMINBAKx Register Description
Bit Field Type Reset Description
7 0 RW 0h Always 0.
6-4 Minutes – high digit RW 0h Minutes – high digit. Valid values are 0 to 5.
3-0 Minutes – low digit RW 0h Minutes – low digit. Valid values are 0 to 9.
667
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.42 RTCHOURBAKx Register – Hexadecimal Format
Real-Time Clock Hours Backup Register – Hexadecimal Format
Figure 24-45. RTCHOURBAKx Register
76543210
0 0 0 Hours(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-46. RTCHOURBAKx Register Description
Bit Field Type Reset Description
7-5 0 RW 0h Always 0.
4-0 Hours RW 0h Hours. Valid values are 0 to 23.
24.4.43 RTCHOURBAKx Register – BCD Format
Real-Time Clock Hours Backup Register – BCD Format
Figure 24-46. RTCHOURBAKx Register
76543210
0 0 Hours – high digit(1) Hours – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-47. RTCHOURBAKx Register Description
Bit Field Type Reset Description
7-6 0 RW 0h Always 0.
5-4 Hours – high digit RW 0h Hours – high digit. Valid values are 0 to 2.
3-0 Hours – low digit RW 0h Hours – low digit. Valid values are 0 to 9.
668 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.44 RTCDAYBAKx Register – Hexadecimal Format
Real-Time Clock Day of Month Backup Register – Hexadecimal Format
Figure 24-47. RTCDAYBAKx Register
76543210
0 0 0 Day of month(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-48. RTCDAYBAKx Register Description
Bit Field Type Reset Description
7-5 0 RW 0h Always 0.
4-0 Day of month RW 0h Day of month. Valid values are 1 to 31.
24.4.45 RTCDAYBAKx Register – BCD Format
Real-Time Clock Day of Month Backup Register – BCD Format
Figure 24-48. RTCDAYBAKx Register
76543210
0 0 Day of month – high digit(1) Day of month – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-49. RTCDAYBAKx Register Description
Bit Field Type Reset Description
7-6 0 RW 0h Always 0.
5-4 Day of month – high RW 0h Day of month – high digit. Valid values are 0 to 3.
digit
3-0 Day of month – low RW 0h Day of month – low digit. Valid values are 0 to 9.
digit
669
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

RTC_C Registers
www.ti.com
24.4.46 RTCMONBAKx Register – Hexadecimal Format
Real-Time Clock Month Backup Register – Hexadecimal Format
Figure 24-49. RTCMONBAKx Register
76543210
0 0 0 0 Month(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-50. RTCMONBAKx Register Description
Bit Field Type Reset Description
7-4 0 RW 0h Always 0.
3-0 Month RW 0h Month. Valid values are 1 to 12.
24.4.47 RTCMONBAKx Register – BCD Format
Real-Time Clock Month Backup Register – BCD Format
Figure 24-50. RTCMONBAKx Register
76543210
0 0 Month – high digit(1) Month – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-51. RTCMONBAKx Register Description
Bit Field Type Reset Description
7-6 0 RW 0h Always 0.
5-4 Month – high digit RW 0h Month – high digit. Valid values are 0 to 3.
3-0 Month – low digit RW 0h Month – low digit. Valid values are 0 to 9.
670 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.48 RTCYEARBAKx Register – Hexadecimal Format
Real-Time Clock Year Low-Byte Backup Register – Hexadecimal Format
Figure 24-51. RTCYEARBAKx Register
15 14 13 12 11 10 9 8
0 0 0 0 Year – high byte(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Year – low byte(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-52. RTCYEARBAKx Register Description
Bit Field Type Reset Description
15-12 0 RW 0h Always 0.
11-8 Year – high byte RW 0h Year – high byte. Valid values of Year are 0 to 4095.
7-0 Year – low byte RW 0h Year – low byte. Valid values of Year are 0 to 4095.
24.4.49 RTCYEARBAKx Register – BCD Format
Real-Time Clock Year Low-Byte Backup Register – BCD Format
Figure 24-52. RTCYEARBAKx Register
15 14 13 12 11 10 9 8
0 Century – high digit(1) Century – low digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Decade(1) Year – lowest digit(1)
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-53. RTCYEARBAKx Register Description
Bit Field Type Reset Description
15 0 RW 0h Always 0.
14-12 Century – high digit RW 0h Century – high digit. Valid values are 0 to 4.
11-8 Century – low digit RW 0h Century – low digit. Valid values are 0 to 9.
7-4 Decade RW 0h Decade. Valid values are 0 to 9.
3-0 Year – lowest digit RW 0h Year – lowest digit. Valid values are 0 to 9.
671
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
RTC_C Registers
www.ti.com
24.4.50 RTCTCCTL0 Register
Real-Time Clock Time Capture Control Register 0
Figure 24-53. RTCTCCTL0 Register
76543210
Reserved AUX3RST(1) TCEN(1)
r-0 r-0 r-0 r-0 r-0 r-0 rw-(1) rw-(0)
(1) These bits are not reset on POR; they are reset based on a signal derived from the RTC supply.
Table 24-54. RTCTCCTL0 Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 AUX3RST RW 1h Indication of power cycle on AUXVCC3
0b = No power cycle on AUXVCC3 since the last clear by the User
1b = Indication of AUXVCC3 power cycle. Needs to be cleared by User to
observe the next power cycle on AUXVCC3
0 TCEN RW 0h Enable for RTC tamper detection with time stamp
0b = Tamper detection with time stamp disabled
1b = Tamper detection with time stamp enabled
24.4.51 RTCTCCTL1 Register
Real-Time Clock Time Capture Control Register 1
Figure 24-54. RTCTCCTL1 Register
76543210
Reserved RTCCAPIE RTCCAPIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-(0) rw-(0)
Table 24-55. RTCTCCTL1 Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 RTCCAPIE RW 0h Tamper event interrupt enable. In modules that support LPM3.5 or LPM4.5, this
interrupt can be used as LPM3.5 or LPM4.5 wake-up event.
0b = Interrupt not enabled
1b = Interrupt enabled (LPM3.5 and LPM4.5 wake-up enabled)
0 RTCCAPIFG RW 0h Common interrupt flag for all tamper events. In modules that support LPM3.5 or
LPM4.5, this interrupt can be used as LPM3.5 or LPM4.5 wake-up event.
0b = Tamper event did not occur
1b = At least one tamper event occurred. Status of individual tamper events can
be found from the CAPEV bit in RTCCAPxCTL.
672 Real-Time Clock C (RTC_C) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
RTC_C Registers
24.4.52 RTCCAPxCTL Register
Tamper Detect Pin Control Register
Figure 24-55. RTCCAPxCTL Register
76543210
Reserved OUT(1) DIR(1) IN(1) REN(1) CAPES(1) Reserved CAPEV(1)
r-0 rw-(0) rw-(0) r rw-(0) rw-(0) r-0 r/w0
(1) The configuration of these bits is retained during LPMx.5 until LOCKLPM5 is cleared, but not the bits themselves; therefore,
reconfiguration is required after wakeup from LPMx.5 before clearing LOCKLPM5.
Table 24-56. RTCCAPxCTL Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6 OUT RW 0h RTCCAPx output
0b = Output low
1b = Output high
5 DIR RW 0h RTCCAPx pin direction
0b = RTCCAPx pin configured as input
1b = RTCCAPx pin configured as output
4 IN R 0h RTCCAPx input. The external input on RTCCAPx pin can be read by this bit.
0b = Input is low
1b = Input is high
3 REN RW 0h RTCCAPx pin pullup or pulldown resistor enable. When respective pin is
configured as input, setting this bit enables the pullup or pulldown (see Table 24-
1).
0b = Pullup or pulldown disabled
1b = Pullup or pulldown enabled
2 CAPES RW 0h Event edge selection
0b = Event on a low-to-high transition
1b = Event on a high-to-low transition
1 Reserved R 0h Reserved. Always reads as 0.
0 CAPEV RW 0h Tamper event status flag. All subsequent events on RTCCAPx after CAPEV is
set are ignored until CAPEV is cleared by the user. Can only be written as 0.
0b = Tamper event did not occur
1b = Tamper event occurred
673
SLAU208O–June 2008–Revised May 2015 Real-Time Clock C (RTC_C)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 25
SLAU208O–June 2008–Revised May 2015
32-Bit Hardware Multiplier (MPY32)
This chapter describes the 32-bit hardware multiplier (MPY32). The MPY32 module is implemented in all
devices.
Topic ........................................................................................................................... Page
25.1 32-Bit Hardware Multiplier (MPY32) Introduction .................................................. 675
25.2 MPY32 Operation.............................................................................................. 677
25.3 MPY32 Registers .............................................................................................. 689
674 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
32-Bit Hardware Multiplier (MPY32) Introduction
25.1 32-Bit Hardware Multiplier (MPY32) Introduction
The MPY32 is a peripheral and is not part of the CPU. This means its activities do not interfere with the
CPU activities. The multiplier registers are peripheral registers that are loaded and read with CPU
instructions.
The MPY32 supports:
• Unsigned multiply
• Signed multiply
• Unsigned multiply accumulate
• Signed multiply accumulate
• 8-bit, 16-bit, 24-bit, and 32-bit operands
• Saturation
• Fractional numbers
• 8-bit and 16-bit operation compatible with 16-bit hardware multiplier
• 8-bit and 24-bit multiplications without requiring a "sign extend" instruction
The MPY32 block diagram is shown in Figure 25-1.
675
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
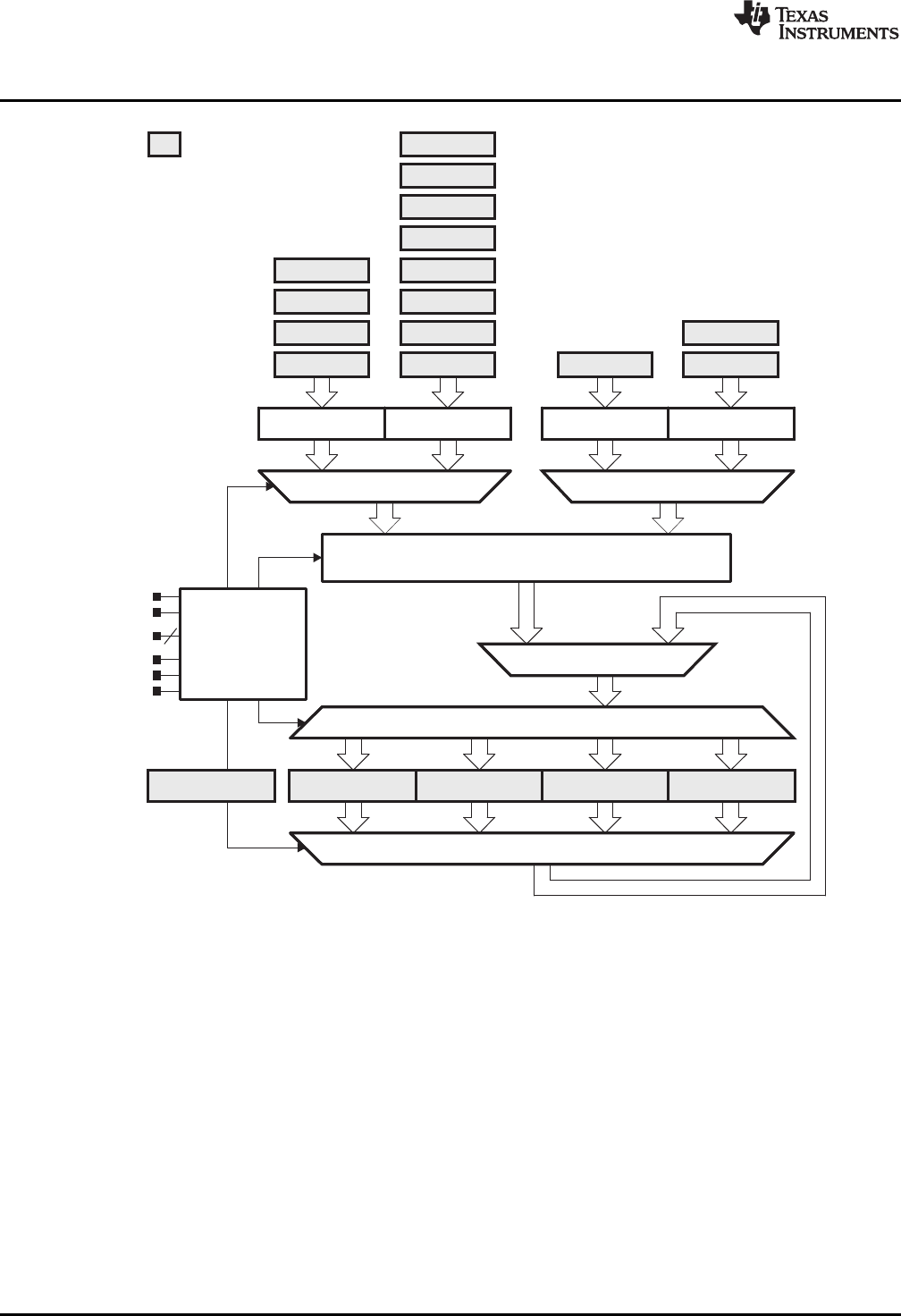
OP1 (high word)
16×16 Multiplier
Accessible
Register
32-bit Adder
RES0/RESLO
OP2 (high word)
15
OP2 (low word)
16
OP2
OP2LOP2HMACS32L
MAC32L
MPYS32L
MPY32L
MACS32H
MAC32H
MPYS32H
MPY32H
MACS
MAC
MPYS
MPY
RES1/RESHIRES2RES3SUMEXT
31 0151631 0
32-bit Demultiplexer
32-bit Multiplexer
16-bit Multiplexer 16-bit Multiplexer
OP1_32
OP2_32
MPYMx
MPYSAT
MPYFRAC
MPYC
2Control
Logic
OP1 (low word)
32-Bit Hardware Multiplier (MPY32) Introduction
www.ti.com
Figure 25-1. MPY32 Block Diagram
676 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MPY32 Operation
25.2 MPY32 Operation
The MPY32 supports 8-bit, 16-bit, 24-bit, and 32-bit operands with unsigned multiply, signed multiply,
unsigned multiply-accumulate, and signed multiply-accumulate operations. The size of the operands are
defined by the address the operand is written to and if it is written as word or byte. The type of operation is
selected by the address the first operand is written to.
The hardware multiplier has two 32-bit operand registers – operand one (OP1) and operand two (OP2),
and a 64-bit result register accessible via registers RES0 to RES3. For compatibility with the 16×16
hardware multiplier, the result of a 8-bit or 16-bit operation is accessible via RESLO, RESHI, and
SUMEXT, as well. RESLO stores the low word of the 16×16-bit result, RESHI stores the high word of the
result, and SUMEXT stores information about the result.
The result of a 8-bit or 16-bit operation is ready in three MCLK cycles and can be read with the next
instruction after writing to OP2, except when using an indirect addressing mode to access the result.
When using indirect addressing for the result, a NOP is required before the result is ready.
The result of a 24-bit or 32-bit operation can be read with successive instructions after writing OP2 or
OP2H starting with RES0, except when using an indirect addressing mode to access the result. When
using indirect addressing for the result, a NOP is required before the result is ready.
Table 25-1 summarizes when each word of the 64-bit result is available for the various combinations of
operand sizes. With a 32-bit-wide second operand, OP2L and OP2H must be written. Depending on when
the two 16-bit parts are written, the result availability may vary; thus, the table shows two entries, one for
OP2L written and one for OP2H written. The worst case defines the actual result availability.
Table 25-1. Result Availability (MPYFRAC = 0, MPYSAT = 0)
Result Ready in MCLK Cycles
Operation After
(OP1 × OP2) RES0 RES1 RES2 RES3 MPYC Bit
8/16 × 8/16 3 3 4 4 3 OP2 written
24/32 × 8/16 3 5 6 7 7 OP2 written
3 5 6 7 7 OP2L written
8/16 × 24/32 N/A 3 4 4 4 OP2H written
3 8 10 11 11 OP2L written
24/32 × 24/32 N/A 3 5 6 6 OP2H written
677
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MPY32 Operation
www.ti.com
25.2.1 Operand Registers
Operand one (OP1) has 12 registers (see Table 25-2) used to load data into the multiplier and also select
the multiply mode. Writing the low word of the first operand to a given address selects the type of multiply
operation to be performed, but does not start any operation. When writing a second word to a high-word
register with suffix 32H, the multiplier assumes a 32-bit-wide OP1, otherwise, 16 bits are assumed. The
last address written prior to writing OP2 defines the width of the first operand. For example, if MPY32L is
written first followed by MPY32H, all 32 bits are used and the data width of OP1 is set to 32 bits. If
MPY32H is written first followed by MPY32L, the multiplication ignores MPY32H and assumes a 16-bit-
wide OP1 using the data written into MPY32L.
Repeated multiply operations may be performed without reloading OP1 if the OP1 value is used for
successive operations. It is not necessary to rewrite the OP1 value to perform the operations.
Table 25-2. OP1 Registers
OP1 Register Operation
MPY Unsigned multiply – operand bits 0 up to 15
MPYS Signed multiply – operand bits 0 up to 15
MAC Unsigned multiply accumulate –operand bits 0 up to 15
MACS Signed multiply accumulate – operand bits 0 up to 15
MPY32L Unsigned multiply – operand bits 0 up to 15
MPY32H Unsigned multiply – operand bits 16 up to 31
MPYS32L Signed multiply – operand bits 0 up to 15
MPYS32H Signed multiply – operand bits 16 up to 31
MAC32L Unsigned multiply accumulate – operand bits 0 up to 15
MAC32H Unsigned multiply accumulate – operand bits 16 up to 31
MACS32L Signed multiply accumulate – operand bits 0 up to 15
MACS32H Signed multiply accumulate – operand bits 16 up to 31
Writing the second operand to the OP2 initiates the multiply operation. Writing OP2 starts the selected
operation with a 16-bit-wide second operand together with the values stored in OP1. Writing OP2L starts
the selected operation with a 32-bit-wide second operand and the multiplier expects a the high word to be
written to OP2H. Writing to OP2H without a preceding write to OP2L is ignored.
Table 25-3. OP2 Registers
OP2 Register Operation
OP2 Start multiplication with 16-bit-wide OP2 – operand bits 0 up to 15
OP2L Start multiplication with 32-bit-wide OP2 – operand bits 0 up to 15
OP2H Continue multiplication with 32-bit-wide OP2 – operand bits 16 up to 31
For 8-bit or 24-bit operands, the operand registers can be accessed with byte instructions. Accessing the
multiplier with a byte instruction during a signed operation automatically causes a sign extension of the
byte within the multiplier module. For 24-bit operands, only the high word should be written as byte. If the
24-bit operands are sign-extended as defined by the register, that is used to write the low word to,
because this register defines if the operation is unsigned or signed.
The high-word of a 32-bit operand remains unchanged when changing the size of the operand to 16 bit,
either by modifying the operand size bits or by writing to the respective operand register. During the
execution of the 16-bit operation, the content of the high-word is ignored.
678 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MPY32 Operation
NOTE: Changing of first or second operand during multiplication
By default, changing OP1 or OP2 while the selected multiply operation is being calculated
renders any results invalid that are not ready at the time the new operands are changed.
Writing OP2 or OP2L aborts any ongoing calculation and starts a new operation. Results that
are not ready at that time are also invalid for following MAC or MACS operations.
To avoid this behavior, the MPYDLYWRTEN bit can be set to 1. Then, all writes to any
MPY32 registers are delayed with MPYDLY32 = 0 until the 64-bit result is ready or with
MPYDLY32 = 1 until the 32-bit result is ready. For MAC and MACS operations, the complete
64-bit result should always be ready.
See Table 25-1 for how many CPU cycles are needed until a certain result register is ready
and valid for each of the different modes.
25.2.2 Result Registers
The multiplication result is always 64 bits wide. It is accessible via registers RES0 to RES3. Used with a
signed operation, MPYS or MACS, the results are appropriately sign extended. If the result registers are
loaded with initial values before a MACS operation, the user software must take care that the written value
is properly sign extended to 64 bits.
NOTE: Changing of result registers during multiplication
The result registers must not be modified by the user software after writing the second
operand into OP2 or OP2L until the initiated operation is completed.
In addition to RES0 to RES3, for compatibility with the 16×16 hardware multiplier, the 32-bit result of a 8-
bit or 16-bit operation is accessible via RESLO, RESHI, and SUMEXT. In this case, the result low register
RESLO holds the lower 16 bits of the calculation result and the result high register RESHI holds the upper
16 bits. RES0 and RES1 are identical to RESLO and RESHI, respectively, in usage and access of
calculated results.
The sum extension register SUMEXT contents depend on the multiply operation and are listed in
Table 25-4. If all operands are 16 bits wide or less, the 32-bit result is used to determine sign and carry. If
one of the operands is larger than 16 bits, the 64-bit result is used.
The MPYC bit reflects the multiplier's carry as listed in Table 25-4 and, thus, can be used as 33rd or 65th
bit of the result, if fractional or saturation mode is not selected. With MAC or MACS operations, the MPYC
bit reflects the carry of the 32-bit or 64-bit accumulation and is not taken into account for successive MAC
and MACS operations as the 33rd or 65th bit.
Table 25-4. SUMEXT and MPYC Contents
Mode SUMEXT MPYC
MPY SUMEXT is always 0000h. MPYC is always 0.
SUMEXT contains the extended sign of the result. MPYC contains the sign of the result.
MPYS 00000h = Result was positive or zero 0 = Result was positive or zero
0FFFFh = Result was negative 1 = Result was negative
SUMEXT contains the carry of the result. MPYC contains the carry of the result.
MAC 0000h = No carry for result 0 = No carry for result
0001h = 1 = Result has a carry
SUMEXT contains the extended sign of the result. MPYC contains the carry of the result.
MACS 00000h = Result was positive or zero 0 = No carry for result
0FFFFh = Result was negative 1 = Result has a carry
679
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MPY32 Operation
www.ti.com
25.2.2.1 MACS Underflow and Overflow
The multiplier does not automatically detect underflow or overflow in MACS mode. For example, working
with 16-bit input data and 32-bit results (that is, using only RESLO and RESHI), the available range for
positive numbers is 0 to 07FFF FFFFh and for negative numbers is 0FFFF FFFFh to 08000 0000h. An
underflow occurs when the sum of two negative numbers yields a result that is in the range for a positive
number. An overflow occurs when the sum of two positive numbers yields a result that is in the range for a
negative number.
The SUMEXT register contains the sign of the result in both cases described above, 0FFFFh for a 32-bit
overflow and 0000h for a 32-bit underflow. The MPYC bit in MPY32CTL0 can be used to detect the
overflow condition. If the carry is different from the sign reflected by the SUMEXT register, an overflow or
underflow occurred. User software must handle these conditions appropriately.
25.2.3 Software Examples
Examples for all multiplier modes follow. All 8×8 modes use the absolute address for the registers,
because the assembler does not allow .B access to word registers when using the labels from the
standard definitions file.
There is no sign extension necessary in software. Accessing the multiplier with a byte instruction during a
signed operation automatically causes a sign extension of the byte within the multiplier module.
; 32x32 Unsigned Multiply
MOV #01234h,&MPY32L ; Load low word of 1st operand
MOV #01234h,&MPY32H ; Load high word of 1st operand
MOV #05678h,&OP2L ; Load low word of 2nd operand
MOV #05678h,&OP2H ; Load high word of 2nd operand
; ... ; Process results
; 16x16 Unsigned Multiply
MOV #01234h,&MPY ; Load 1st operand
MOV #05678h,&OP2 ; Load 2nd operand
; ... ; Process results
; 8x8 Unsigned Multiply. Absolute addressing.
MOV.B #012h,&MPY_B ; Load 1st operand
MOV.B #034h,&OP2_B ; Load 2nd operand
; ... ; Process results
; 32x32 Signed Multiply
MOV #01234h,&MPYS32L ; Load low word of 1st operand
MOV #01234h,&MPYS32H ; Load high word of 1st operand
MOV #05678h,&OP2L ; Load low word of 2nd operand
MOV #05678h,&OP2H ; Load high word of 2nd operand
; ... ; Process results
; 16x16 Signed Multiply
MOV #01234h,&MPYS ; Load 1st operand
MOV #05678h,&OP2 ; Load 2nd operand
; ... ; Process results
; 8x8 Signed Multiply. Absolute addressing.
MOV.B #012h,&MPYS_B ; Load 1st operand
MOV.B #034h,&OP2_B ; Load 2nd operand
; ... ; Process results
680 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

S1
2
1
4
1
8
1
16 ...1
14 bits
S1
2
1
4
1
8
1
16 ...
Fractional part
Radix point
Sign bit
15 bits
www.ti.com
MPY32 Operation
25.2.4 Fractional Numbers
The MPY32 provides support for fixed-point signal processing. In fixed-point signal processing, fractional
number are numbers that have a fixed number of digits after (and sometimes also before) the radix point.
To classify different ranges of binary fixed-point numbers, a Q-format is used. Different Q-formats
represent different locations of the radix point. Figure 25-2 shows the format of a signed Q15 number
using 16 bits. Every bit after the radix point has a resolution of 1/2, and the most significant bit (MSB) is
used as the sign bit. The most negative number is 08000h and the maximum positive number is 07FFFh.
This gives a range from –1.0 to 0.999969482 ≈1.0 for the signed Q15 format with 16 bits.
Figure 25-2. Q15 Format Representation
The range can be increased by shifting the radix point to the right as shown in Figure 25-3. The signed
Q14 format with 16 bits gives a range from –2.0 to 1.999938965 ≈2.0.
Figure 25-3. Q14 Format Representation
The benefit of using 16-bit signed Q15 or 32-bit signed Q31 numbers with multiplication is that the product
of two number in the range from –1.0 to 1.0 is always in that same range.
25.2.4.1 Fractional Number Mode
Multiplying two fractional numbers using the default multiplication mode with MPYFRAC = 0 and
MPYSAT = 0 gives a result with two sign bits. For example, if two 16-bit Q15 numbers are multiplied, a
32-bit result in Q30 format is obtained. To convert the result into Q15 format manually, the first 15 trailing
bits and the extended sign bit must be removed. However, when the fractional mode of the multiplier is
used, the redundant sign bit is automatically removed, yielding a result in Q31 format for the multiplication
of two 16-bit Q15 numbers. Reading the result register RES1 gives the result as 16-bit Q15 number. The
32-bit Q31 result of a multiplication of two 32-bit Q31 numbers is accessed by reading registers RES2 and
RES3.
The fractional mode is enabled with MPYFRAC = 1 in register MPY32CTL0. The actual content of the
result registers is not modified when MPYFRAC = 1. When the result is accessed using software, the
value is left shifted one bit, resulting in the final Q formatted result. This allows user software to switch
between reading both the shifted (fractional) and the unshifted result. The fractional mode should only be
enabled when required and disabled after use.
In fractional mode, the SUMEXT register contains the sign extended bits 32 and 33 of the shifted result for
16×16-bit operations and bits 64 and 65 for 32×32-bit operations – not only bits 32 or 64, respectively.
681
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MPY32 Operation
www.ti.com
The MPYC bit is not affected by the fractional mode. It always reads the carry of the nonfractional result.
; Example using
; Fractional 16x16 multiplication
BIS #MPYFRAC,&MPY32CTL0 ; Turn on fractional mode
MOV &FRACT1,&MPYS ; Load 1st operand as Q15
MOV &FRACT2,&OP2 ; Load 2nd operand as Q15
MOV &RES1,&PROD ; Save result as Q15
BIC #MPYFRAC,&MPY32CTL0 ; Back to normal mode
Table 25-5. Result Availability in Fractional Mode (MPYFRAC = 1, MPYSAT = 0)
Result Ready in MCLK Cycles
Operation After
(OP1 × OP2) RES0 RES1 RES2 RES3 MPYC Bit
8/16 × 8/16 3 3 4 4 3 OP2 written
24/32 × 8/16 3 5 6 7 7 OP2 written
3 5 6 7 7 OP2L written
8/16 × 24/32 N/A 3 4 4 4 OP2H written
3 8 10 11 11 OP2L written
24/32 × 24/32 N/A 3 5 6 6 OP2H written
25.2.4.2 Saturation Mode
The multiplier prevents overflow and underflow of signed operations in saturation mode. The saturation
mode is enabled with MPYSAT = 1 in register MPY32CTL0. If an overflow occurs, the result is set to the
most-positive value available. If an underflow occurs, the result is set to the most-negative value available.
This is useful to reduce mathematical artifacts in control systems on overflow and underflow conditions.
The saturation mode should only be enabled when required and disabled after use.
The actual content of the result registers is not modified when MPYSAT = 1. When the result is accessed
using software, the value is automatically adjusted to provide the most-positive or most-negative result
when an overflow or underflow has occurred. The adjusted result is also used for successive multiply-and-
accumulate operations. This allows user software to switch between reading the saturated and the
nonsaturated result.
With 16×16 operations, the saturation mode only applies to the least significant 32 bits; that is, the result
registers RES0 and RES1. Using the saturation mode in MAC or MACS operations that mix 16×16
operations with 32×32, 16×32, or 32×16 operations leads to unpredictable results.
With 32×32, 16×32, and 32×16 operations, the saturated result can only be calculated when RES3 is
ready.
Enabling the saturation mode does not affect the content of the SUMEXT register nor the content of the
MPYC bit.
; Example using
; Fractional 16x16 multiply accumulate with Saturation
; Turn on fractional and saturation mode:
BIS #MPYSAT+MPYFRAC,&MPY32CTL0
MOV &A1,&MPYS ; Load A1 for 1st term
MOV &K1,&OP2 ; Load K1 to get A1*K1
MOV &A2,&MACS ; Load A2 for 2nd term
MOV &K2,&OP2 ; Load K2 to get A2*K2
MOV &RES1,&PROD ; Save A1*K1+A2*K2 as result
BIC #MPYSAT+MPYFRAC,&MPY32CTL0 ; turn back to normal
682 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
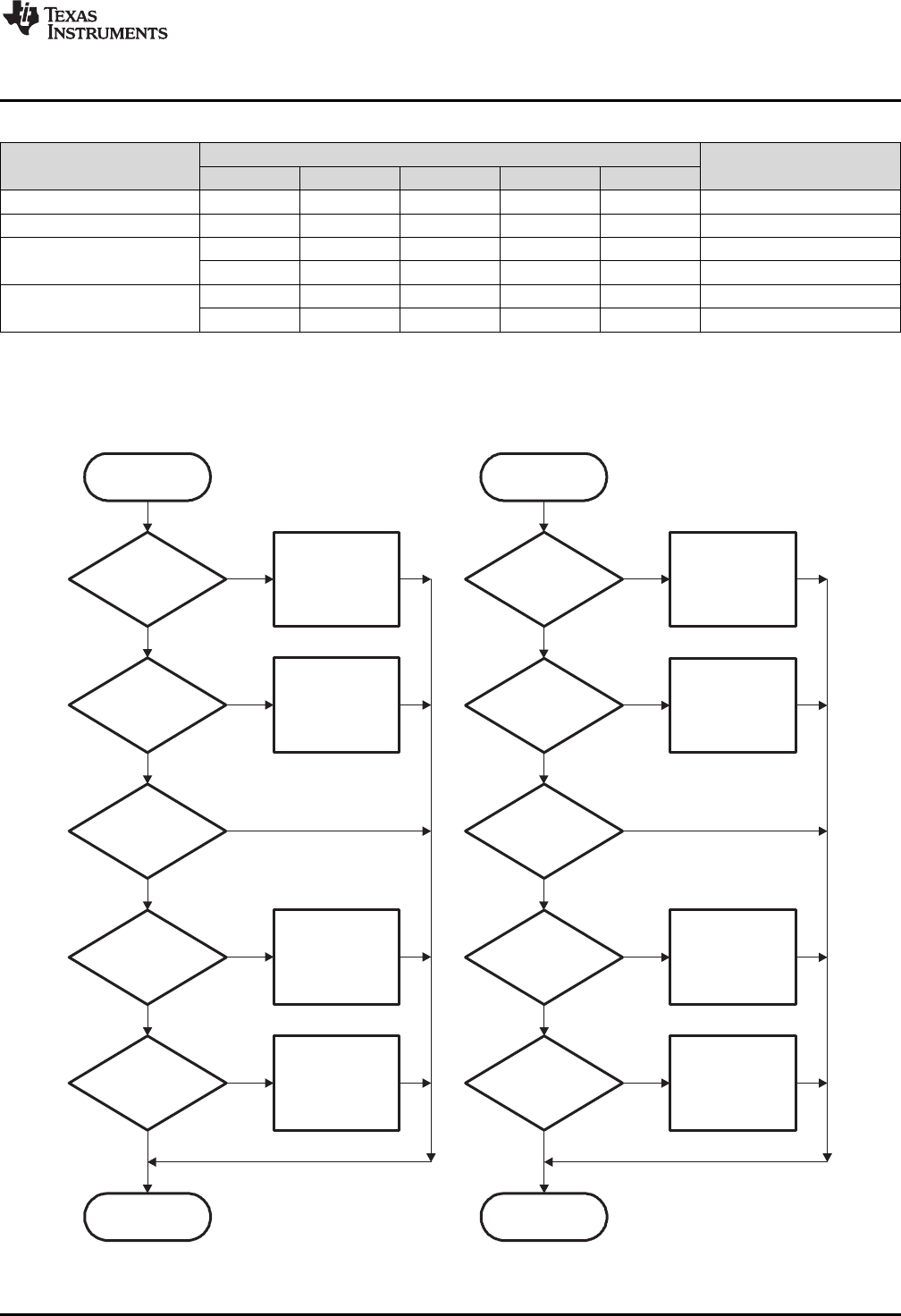
64-bit Saturation
Overflow:
RES3 unchanged
RES2 unchanged
RES1 = 07FFFh
RES0 = 0FFFFh
Yes
No
Underflow:
RES3 unchanged
RES2 unchanged
RES1 = 08000h
RES0 = 00000h
Yes
No
No
Yes
Overflow:
RES3 unchanged
RES2 unchanged
RES1 = 07FFFh
RES0 = 0FFFFh
Yes
No
Yes
No
32-bit Saturation
completed
Yes
No
Yes
No
No
Yes
Yes
No
Yes
No
Underflow:
RES3 unchanged
RES2 unchanged
RES1 = 08000h
RES0 = 00000h
Overflow:
RES3 = 07FFFh
RES2 = 0FFFFh
RES1 = 0FFFFh
RES0 = 0FFFFh
Underflow:
RES3 = 08000h
RES2 = 00000h
RES1 = 00000h
RES0 = 00000h
Overflow:
RES3 = 07FFFh
RES2 = 0FFFFh
RES1 = 0FFFFh
RES0 = 0FFFFh
Underflow:
RES3 = 08000h
RES2 = 00000h
RES1 = 00000h
RES0 = 00000h
64-bit Saturation
completed
32-bit Saturation
MPYC=0 and
unshifted RES3,
bit15=1
MPYC=1 and
unshifted RES3,
bit15=0
MPYFRAC=1
Unshifted RES3,
bit 15=0 and
bit 14=1
Unshifted RES3,
bit 15=1 and
bit 14=0
MPYC=0 and
unshifted RES1,
bit15=1
MPYC=1 and
unshifted RES1,
bit15=0
MPYFRAC=1
Unshifted RES1,
bit 15=0 and
bit 14=1
Unshifted RES1,
bit 15=1 and
bit 14=0
www.ti.com
MPY32 Operation
Table 25-6. Result Availability in Saturation Mode (MPYSAT = 1)
Result Ready in MCLK Cycles
Operation After
(OP1 × OP2) RES0 RES1 RES2 RES3 MPYC Bit
8/16 × 8/16 3 3 N/A N/A 3 OP2 written
24/32 × 8/16 7 7 7 7 7 OP2 written
7 7 7 7 7 OP2L written
8/16 × 24/32 4 4 4 4 4 OP2H written
11 11 11 11 11 OP2L written
24/32 × 24/32 6 6 6 6 6 OP2H written
Figure 25-4 shows the flow for 32-bit saturation used for 16×16 bit multiplications and the flow for 64-bit
saturation used in all other cases. Primarily, the saturated results depends on the carry bit MPYC and the
MSB of the result. Secondly, if the fractional mode is enabled, it depends also on the two MSBs of the
unshift result, that is, the result that is read with fractional mode disabled.
Figure 25-4. Saturation Flow Chart
683
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
MPY32 Operation
www.ti.com
NOTE: Saturation in fractional mode
In case of multiplying –1.0 × –1.0 in fractional mode, the result of +1.0 is out of range, thus,
the saturated result gives the most positive result.
When using multiply-and-accumulate operations, the accumulated values are saturated as if
MPYFRAC = 0; only during read accesses to the result registers the values are saturated
taking the fractional mode into account. This provides additional dynamic range during the
calculation and only the end result is then saturated if needed.
The following example illustrates a special case showing the saturation function in fractional mode. It also
uses the 8-bit functionality of the MPY32 module.
; Turn on fractional and saturation mode,
; clear all other bits in MPY32CTL0:
MOV #MPYSAT+MPYFRAC,&MPY32CTL0
;Pre-load result registers to demonstrate overflow
MOV #0,&RES3 ;
MOV #0,&RES2 ;
MOV #07FFFh,&RES1 ;
MOV #0FA60h,&RES0 ;
MOV.B #050h,&MACS_B ; 8-bit signed MAC operation
MOV.B #012h,&OP2_B ; Start 16x16 bit operation
MOV &RES0,R6 ; R6 = 0FFFFh
MOV &RES1,R7 ; R7 = 07FFFh
The result is saturated because already the result not converted into a fractional number shows an
overflow. The multiplication of the two positive numbers 00050h and 00012h gives 005A0h. 005A0h added
to 07FFF FA60h results in 8000 059Fh, without MPYC being set. Because the MSB of the unmodified
result RES1 is 1 and MPYC = 0, the result is saturated according Figure 25-4.
NOTE: Validity of saturated result
The saturated result is valid only if the registers RES0 to RES3, the size of OP1 and OP2,
and MPYC are not modified.
If the saturation mode is used with a preloaded result, user software must ensure that MPYC
in the MPY32CTL0 register is loaded with the sign bit of the written result; otherwise, the
saturation mode erroneously saturates the result.
25.2.5 Putting It All Together
Figure 25-5 shows the complete multiplication flow, depending on the various selectable modes for the
MPY32 module.
684 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
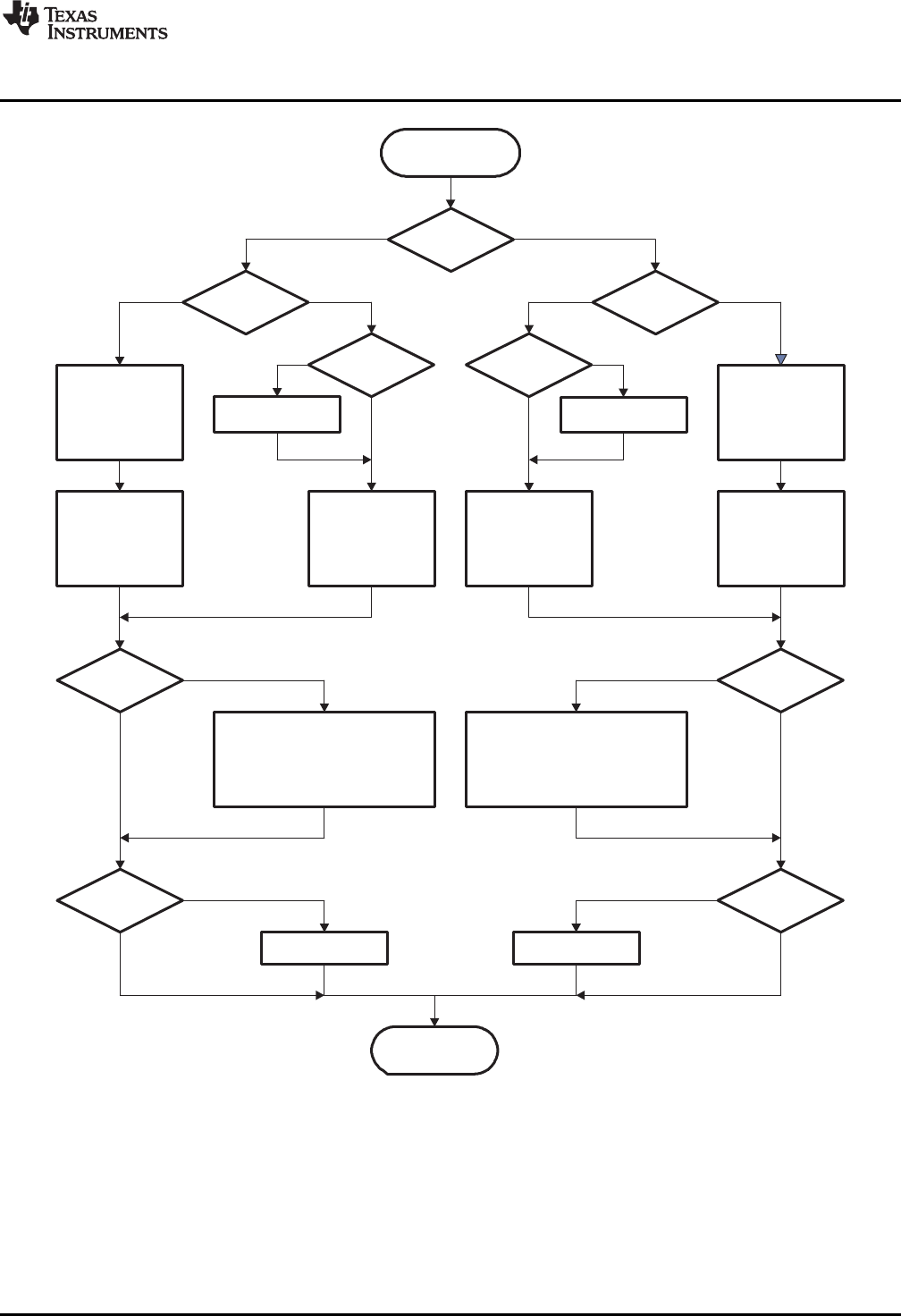
NewMultiplication
Started
16×16
?
MACorMACS
?
MPYSAT=1
?
ClearResult:
RES1=00000h
RES0=00000h
Perform16×16
MPY orMPYS
Operation
Yes No
YesNo
Yes
No
MPYFRAC=1
?
non-fractional
32-bitSaturation
Shift 64bitresult.
CalculateSUMEXTbasedon
MPYCandbit15 of
unshifted RES1.
MPYSAT=1
?
Yes
No
Yes
No
Multiplication
completed
MPYSAT=1
?ClearResult:
RES3 = 00000h
RES2 = 00000h
RES1 = 00000h
RES0 = 00000h
Yes No
Yes
No
MPYFRAC=1
?
non-fractional
64-bitSaturation
MPYSAT=1
?
Yes
No
Yes
No
Shift 64bitresult.
CalculateSUMEXTbasedon
MPYCandbit15 of
unshifted RES3.
Perform16×16
MACorMACS
Operation
Perform
MACorMACS
Operation
Perform
MPY orMPYS
Operation
MACorMACS
?
32-bitSaturation 64-bitSaturation
www.ti.com
MPY32 Operation
Figure 25-5. Multiplication Flow Chart
685
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MPY32 Operation
www.ti.com
Given the separation in processing of 16-bit operations (32-bit results) and 32-bit operations (64-bit
results) by the module, it is important to understand the implications when using MAC/MACS operations
and mixing 16-bit operands or results with 32-bit operands or results. User software must address these
points during use when mixing these operations. The following code illustrates the issue.
; Mixing 32x24 multiplication with 16x16 MACS operation
MOV #MPYSAT,&MPY32CTL0 ; Saturation mode
MOV #052C5h,&MPY32L ; Load low word of 1st operand
MOV #06153h,&MPY32H ; Load high word of 1st operand
MOV #001ABh,&OP2L ; Load low word of 2nd operand
MOV.B #023h,&OP2H_B ; Load high word of 2nd operand
;... 5 NOPs required
MOV &RES0,R6 ; R6 = 00E97h
MOV &RES1,R7 ; R7 = 0A6EAh
MOV &RES2,R8 ; R8 = 04F06h
MOV &RES3,R9 ; R9 = 0000Dh
; Note that MPYC = 0!
MOV #0CCC3h,&MACS ; Signed MAC operation
MOV #0FFB6h,&OP2 ; 16x16 bit operation
MOV &RESLO,R6 ; R6 = 0FFFFh
MOV &RESHI,R7 ; R7 = 07FFFh
The second operation gives a saturated result because the 32-bit value used for the 16×16-bit MACS
operation was already saturated when the operation was started; the carry bit MPYC was 0 from the
previous operation, but the MSB in result register RES1 is set. As one can see in the flow chart, the
content of the result registers are saturated for multiply-and-accumulate operations after starting a new
operation based on the previous results, but depending on the size of the result (32 bit or 64 bit) of the
newly initiated operation.
The saturation before the multiplication can cause issues if the MPYC bit is not properly set as the
following code shows.
;Pre-load result registers to demonstrate overflow
MOV #0,&RES3 ;
MOV #0,&RES2 ;
MOV #0,&RES1 ;
MOV #0,&RES0 ;
; Saturation mode and set MPYC:
MOV #MPYSAT+MPYC,&MPY32CTL0
MOV.B #082h,&MACS_B ; 8-bit signed MAC operation
MOV.B #04Fh,&OP2_B ; Start 16x16 bit operation
MOV &RES0,R6 ; R6 = 00000h
MOV &RES1,R7 ; R7 = 08000h
Even though the result registers were loaded with all zeros, the final result is saturated. This is because
the MPYC bit was set, causing the result used for the multiply-and-accumulate to be saturated to
08000 0000h. Adding a negative number to it would again cause an underflow, thus, the final result is also
saturated to 08000 0000h.
686 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
MPY32 Operation
25.2.6 Indirect Addressing of Result Registers
When using indirect or indirect autoincrement addressing mode to access the result registers and the
multiplier requires three cycles until result availability according to Table 25-1, at least one instruction is
needed between loading the second operand and accessing the result registers:
; Access multiplier 16x16 results with indirect addressing
MOV #RES0,R5 ; RES0 address in R5 for indirect
MOV &OPER1,&MPY ; Load 1st operand
MOV &OPER2,&OP2 ; Load 2nd operand
NOP ; Need one cycle
MOV @R5+,&xxx ; Move RES0
MOV @R5,&xxx ; Move RES1
In case of a 32×16 multiplication, there is also one instruction required between reading the first result
register RES0 and the second result register RES1:
; Access multiplier 32x16 results with indirect addressing
MOV #RES0,R5 ; RES0 address in R5 for indirect
MOV &OPER1L,&MPY32L ; Load low word of 1st operand
MOV &OPER1H,&MPY32H ; Load high word of 1st operand
MOV &OPER2,&OP2 ; Load 2nd operand (16 bits)
NOP ; Need one cycle
MOV @R5+,&xxx ; Move RES0
NOP ; Need one additional cycle
MOV @R5,&xxx ; Move RES1
; No additional cycles required!
MOV @R5,&xxx ; Move RES2
25.2.7 Using Interrupts
If an interrupt occurs after writing OP, but before writing OP2, and the multiplier is used in servicing that
interrupt, the original multiplier mode selection is lost and the results are unpredictable. To avoid this,
disable interrupts before using the MPY32, do not use the MPY32 in interrupt service routines, or use the
save and restore functionality of the MPY32.
; Disable interrupts before using the hardware multiplier
DINT ; Disable interrupts
NOP ; Required for DINT
MOV #xxh,&MPY ; Load 1st operand
MOV #xxh,&OP2 ; Load 2nd operand
EINT ; Interrupts may be enabled before
; processing results if result
; registers are stored and restored in
; interrupt service routines
687
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MPY32 Operation
www.ti.com
25.2.7.1 Save and Restore
If the multiplier is used in interrupt service routines, its state can be saved and restored using the
MPY32CTL0 register. The following code example shows how the complete multiplier status can be saved
and restored to allow interruptible multiplications together with the usage of the multiplier in interrupt
service routines. Because the state of the MPYSAT and MPYFRAC bits are unknown, they should be
cleared before the registers are saved as shown in the code example.
; Interrupt service routine using multiplier
MPY_USING_ISR
PUSH &MPY32CTL0 ; Save multiplier mode, etc.
BIC #MPYSAT+MPYFRAC,&MPY32CTL0
; Clear MPYSAT+MPYFRAC
PUSH &RES3 ; Save result 3
PUSH &RES2 ; Save result 2
PUSH &RES1 ; Save result 1
PUSH &RES0 ; Save result 0
PUSH &MPY32H ; Save operand 1, high word
PUSH &MPY32L ; Save operand 1, low word
PUSH &OP2H ; Save operand 2, high word
PUSH &OP2L ; Save operand 2, low word
;
... ; Main part of ISR
; Using standard MPY routines
;
POP &OP2L ; Restore operand 2, low word
POP &OP2H ; Restore operand 2, high word
; Starts dummy multiplication but
; result is overwritten by
; following restore operations:
POP &MPY32L ; Restore operand 1, low word
POP &MPY32H ; Restore operand 1, high word
POP &RES0 ; Restore result 0
POP &RES1 ; Restore result 1
POP &RES2 ; Restore result 2
POP &RES3 ; Restore result 3
POP &MPY32CTL0 ; Restore multiplier mode, etc.
reti ; End of interrupt service routine
25.2.8 Using DMA
In devices with a DMA controller, the multiplier can trigger a transfer when the complete result is available.
The DMA controller needs to start reading the result with MPY32RES0 successively up to MPY32RES3.
Not all registers need to be read. The trigger timing is such that the DMA controller starts reading
MPY32RES0 when its ready, and that the MPY32RES3 can be read exactly in the clock cycle when it is
available to allow fastest access via DMA. The signal into the DMA controller is 'Multiplier ready' (see the
DMA Controller chapter for details).
688 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MPY32 Registers
25.3 MPY32 Registers
MPY32 registers are listed in Table 25-7. The base address can be found in the device-specific data
sheet. The address offsets are listed in Table 25-7.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 25-7. MPY32 Registers
Offset Acronym Register Name Type Access Reset
00h MPY 16-bit operand one – multiply Read/write Word Undefined
00h MPY_L Read/write Byte Undefined
01h MPY_H Read/write Byte Undefined
00h MPY_B 8-bit operand one – multiply Read/write Byte Undefined
02h MPYS 16-bit operand one – signed multiply Read/write Word Undefined
02h MPYS_L Read/write Byte Undefined
03h MPYS_H Read/write Byte Undefined
02h MPYS_B 8-bit operand one – signed multiply Read/write Byte Undefined
04h MAC 16-bit operand one – multiply accumulate Read/write Word Undefined
04h MAC_L Read/write Byte Undefined
05h MAC_H Read/write Byte Undefined
04h MAC_B 8-bit operand one – multiply accumulate Read/write Byte Undefined
06h MACS 16-bit operand one – signed multiply accumulate Read/write Word Undefined
06h MACS_L Read/write Byte Undefined
07h MACS_H Read/write Byte Undefined
06h MACS_B 8-bit operand one – signed multiply accumulate Read/write Byte Undefined
08h OP2 16-bit operand two Read/write Word Undefined
08h OP2_L Read/write Byte Undefined
09h OP2_H Read/write Byte Undefined
08h OP2_B 8-bit operand two Read/write Byte Undefined
0Ah RESLO 16x16-bit result low word Read/write Word Undefined
0Ah RESLO_L Read/write Byte Undefined
0Ch RESHI 16x16-bit result high word Read/write Word Undefined
0Eh SUMEXT 16x16-bit sum extension register Read Word Undefined
10h MPY32L 32-bit operand 1 – multiply – low word Read/write Word Undefined
10h MPY32L_L Read/write Byte Undefined
11h MPY32L_H Read/write Byte Undefined
12h MPY32H 32-bit operand 1 – multiply – high word Read/write Word Undefined
12h MPY32H_L Read/write Byte Undefined
13h MPY32H_H Read/write Byte Undefined
12h MPY32H_B 24-bit operand 1 – multiply – high byte Read/write Byte Undefined
14h MPYS32L 32-bit operand 1 – signed multiply – low word Read/write Word Undefined
14h MPYS32L_L Read/write Byte Undefined
15h MPYS32L_H Read/write Byte Undefined
16h MPYS32H 32-bit operand 1 – signed multiply – high word Read/write Word Undefined
16h MPYS32H_L Read/write Byte Undefined
17h MPYS32H_H Read/write Byte Undefined
16h MPYS32H_B 24-bit operand 1 – signed multiply – high byte Read/write Byte Undefined
18h MAC32L 32-bit operand 1 – multiply accumulate – low word Read/write Word Undefined
689
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
MPY32 Registers
www.ti.com
Table 25-7. MPY32 Registers (continued)
Offset Acronym Register Name Type Access Reset
18h MAC32L_L Read/write Byte Undefined
19h MAC32L_H Read/write Byte Undefined
1Ah MAC32H 32-bit operand 1 – multiply accumulate – high word Read/write Word Undefined
1Ah MAC32H_L Read/write Byte Undefined
1Bh MAC32H_H Read/write Byte Undefined
1Ah MAC32H_B 24-bit operand 1 – multiply accumulate – high byte Read/write Byte Undefined
1Ch MACS32L 32-bit operand 1 – signed multiply accumulate – low word Read/write Word Undefined
1Ch MACS32L_L Read/write Byte Undefined
1Dh MACS32L_H Read/write Byte Undefined
1Eh MACS32H 32-bit operand 1 – signed multiply accumulate – high word Read/write Word Undefined
1Eh MACS32H_L Read/write Byte Undefined
1Fh MACS32H_H Read/write Byte Undefined
1Eh MACS32H_B 24-bit operand 1 – signed multiply accumulate – high byte Read/write Byte Undefined
20h OP2L 32-bit operand 2 – low word Read/write Word Undefined
20h OP2L_L Read/write Byte Undefined
21h OP2L_H Read/write Byte Undefined
22h OP2H 32-bit operand 2 – high word Read/write Word Undefined
22h OP2H_L Read/write Byte Undefined
23h OP2H_H Read/write Byte Undefined
22h OP2H_B 24-bit operand 2 – high byte Read/write Byte Undefined
24h RES0 32x32-bit result 0 – least significant word Read/write Word Undefined
24h RES0_L Read/write Byte Undefined
26h RES1 32x32-bit result 1 Read/write Word Undefined
28h RES2 32x32-bit result 2 Read/write Word Undefined
2Ah RES3 32x32-bit result 3 – most significant word Read/write Word Undefined
2Ch MPY32CTL0 MPY32 control register 0 Read/write Word Undefined
2Ch MPY32CTL0_L Read/write Byte Undefined
2Dh MPY32CTL0_H Read/write Byte 00h
The registers listed in Table 25-8 are treated equally.
Table 25-8. Alternative Registers
Register Alternative 1 Alternative 2
16-bit operand one – multiply MPY MPY32L
8-bit operand one – multiply MPY_B or MPY_L MPY32L_B or MPY32L_L
16-bit operand one – signed multiply MPYS MPYS32L
8-bit operand one – signed multiply MPYS_B or MPYS_L MPYS32L_B or MPYS32L_L
16-bit operand one – multiply accumulate MAC MAC32L
8-bit operand one – multiply accumulate MAC_B or MAC_L MAC32L_B or MAC32L_L
16-bit operand one – signed multiply accumulate MACS MACS32L
8-bit operand one – signed multiply accumulate MACS_B or MACS_L MACS32L_B or MACS32L_L
16x16-bit result low word RESLO RES0
16x16-bit result high word RESHI RES1
690 32-Bit Hardware Multiplier (MPY32) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
MPY32 Registers
25.3.1 MPY32CTL0 Register
32-Bit Hardware Multiplier Control 0 Register
Figure 25-6. MPY32CTL0 Register
15 14 13 12 11 10 9 8
Reserved MPYDLY32 MPYDLYWRTE
N
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
76543210
MPYOP2_32 MPYOP1_32 MPYMx MPYSAT MPYFRAC Reserved MPYC
rw rw rw rw rw-0 rw-0 rw-0 rw
Table 25-9. MPY32CTL0 Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9 MPYDLY32 RW 0h Delayed write mode
0b = Writes are delayed until 64-bit result (RES0 to RES3) is available.
1b = Writes are delayed until 32-bit result (RES0 to RES1) is available.
8 MPYDLYWRTEN RW 0h Delayed write enable
All writes to any MPY32 register are delayed until the 64-bit (MPYDLY32 = 0) or
32-bit (MPYDLY32 = 1) result is ready.
0b = Writes are not delayed.
1b = Writes are delayed.
7 MPYOP2_32 RW 0h Multiplier bit width of operand 2
0b = 16 bits
1b = 32 bits
6 MPYOP1_32 RW 0h Multiplier bit width of operand 1
0b = 16 bits
1b = 32 bits
5-4 MPYMx RW 0h Multiplier mode
00b = MPY – Multiply
01b = MPYS – Signed multiply
10b = MAC – Multiply accumulate
11b = MACS – Signed multiply accumulate
3 MPYSAT RW 0h Saturation mode
0b = Saturation mode disabled
1b = Saturation mode enabled
2 MPYFRAC RW 0h Fractional mode
0b = Fractional mode disabled
1b = Fractional mode enabled
1 Reserved RW 0h Reserved. Always reads as 0.
0 MPYC RW 0h Carry of the multiplier. It can be considered as 33rd or 65th bit of the result if
fractional or saturation mode is not selected, because the MPYC bit does not
change when switching to saturation or fractional mode.
It is used to restore the SUMEXT content in MAC mode.
0b = No carry for result
1b = Result has a carry
691
SLAU208O–June 2008–Revised May 2015 32-Bit Hardware Multiplier (MPY32)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Chapter 26
SLAU208O–June 2008–Revised May 2015
REF
The REF module is a general purpose reference system that is used to generate voltage references
required for other subsystems available on a given device such as digital-to-analog converters, analog-to-
digital converters, or comparators. This chapter describes the REF module.
Topic ........................................................................................................................... Page
26.1 REF Introduction .............................................................................................. 693
26.2 Principle of Operation ....................................................................................... 696
26.3 REF Registers .................................................................................................. 702
692 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
REF Introduction
26.1 REF Introduction
The reference module (REF) generates all critical reference voltages that can be used by various analog
peripherals in a given device. These include, but are not necessarily limited to, the ADC10_A, ADC12_A,
CTSD16, DAC12_A, LCD_B, and COMP_B modules (availability of a given module depends on the
particular device). The heart of the reference system is the bandgap from which all other references are
derived by unity or noninverting gain stages. The REFGEN subsystem consists of the bandgap, the
bandgap bias, and the noninverting buffer stage, which generates the three primary voltage reference
available in the system, namely 1.5 V, 2.0 V, and 2.5 V. In addition, when enabled, a buffered bandgap
voltage is also available.
Features of the REF include:
• Centralized factory-trimmed bandgap with excellent PSRR, temperature coefficient, and accuracy
• 1.5-V, 2.0-V, or 2.5-V user-selectable internal references
• Buffered bandgap voltage available to rest of system
• Power saving features
• Backward compatibility to existing reference system
Figure 26-1 shows the block diagram of the REF module in an example device with ADC12_A. Figure 26-
2shows the block diagram of the REF module in an example device with a CTSD16 module.
NOTE: For devices with the CTSD16 module, external reference VeREF+ cannot be applied while
internal reference VREFBG is being used by another module, because they share the same
pin,and contention on the signal line will occur. Therefore, if the external reference is used,
make sure that no modules request the internal reference VREFBG.
Devices with ADC10_A might not include the reference voltage output to the external pad. Refer to the
device-specific data sheet.
693
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
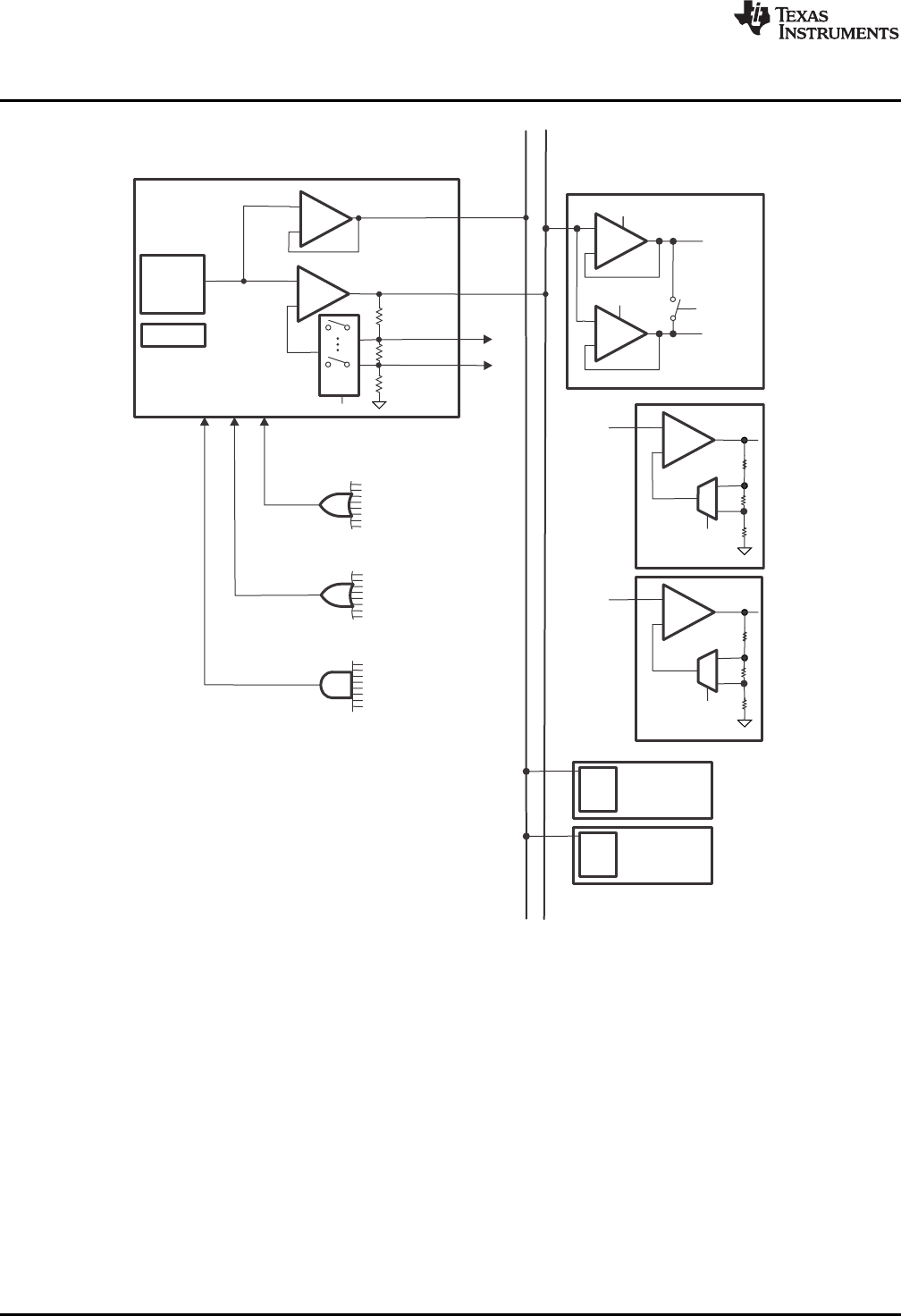
+
−
BANDGAP
1.5/2.0/2.5V
+
−
+
−
To external pad
To ADC12_A
capacitor array
COMP_B0
REFGEN
Variable Reference
ADC12_A
+
−
DAC12OG
DAC12_A
Channel 0
+
−
+
−
DAC12OG
DAC12_A
Channel 1
To DAC12
To DAC12
From REFGEN
From REFGEN
Switch
Mux
Bandgap Reference
Local
Buffer
COMP_B1
Local
Buffer
Vref/2
Vref/3
Vref
REFMODEREQ
BIAS
REFBGREQ
REFGENREQ
REF Introduction
www.ti.com
Figure 26-1. REF Block Diagram
694 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
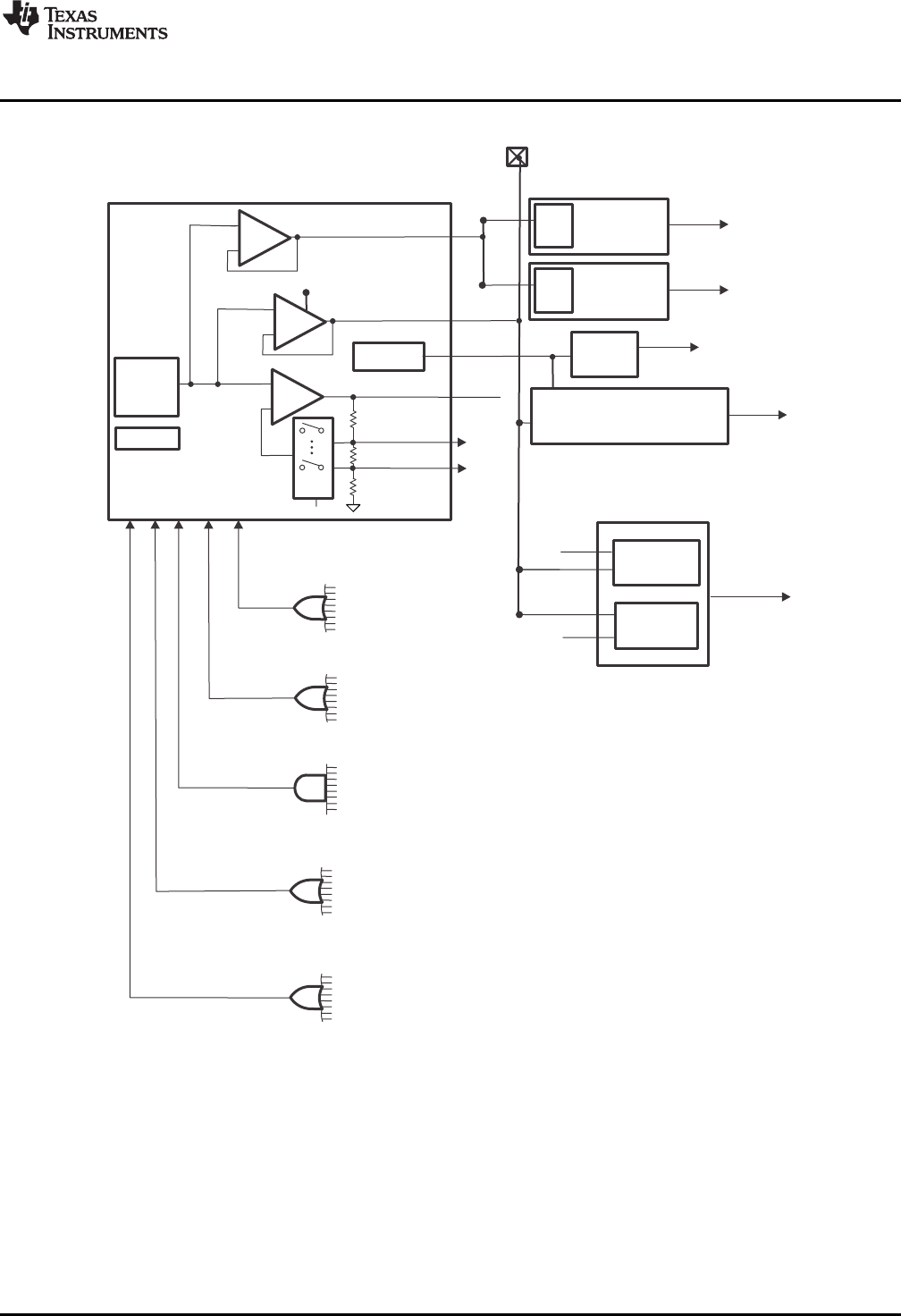
+
−
BANDGAP
1.5/2.0/2.5V
COMP_B0
REFGEN
Variable Reference
CTSD16
+
−
To DAC12
To DAC12
Switch
Mux
Local
Buffer
LCD
Local
Buffer
Vref/2
Vref/3
Vref
REFMODEREQ
BIAS
REFBGREQ
REFGENREQ
Request
low power
bandgap
reference
Request
low power
bandgap
reference
OA
VREFBG/VeREF
request
V
reference
and
AFE bias
REFBG
Channel 0
Request
Reference
or
variable reference
VREFBG
Channel 1
DAC12_A
+
−
Low Power Bandgap Reference
AFE biases
request
AFE bias
REFAFEBIASREQ REFBGGENREQ
VREFBG/VeREF+
+
REFOUT
Bandgap Reference VREFBG
from REFGEN
from REFGEN
www.ti.com
REF Introduction
Figure 26-2. REF Block Diagram for Devices With a CTSD16 Module
695
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
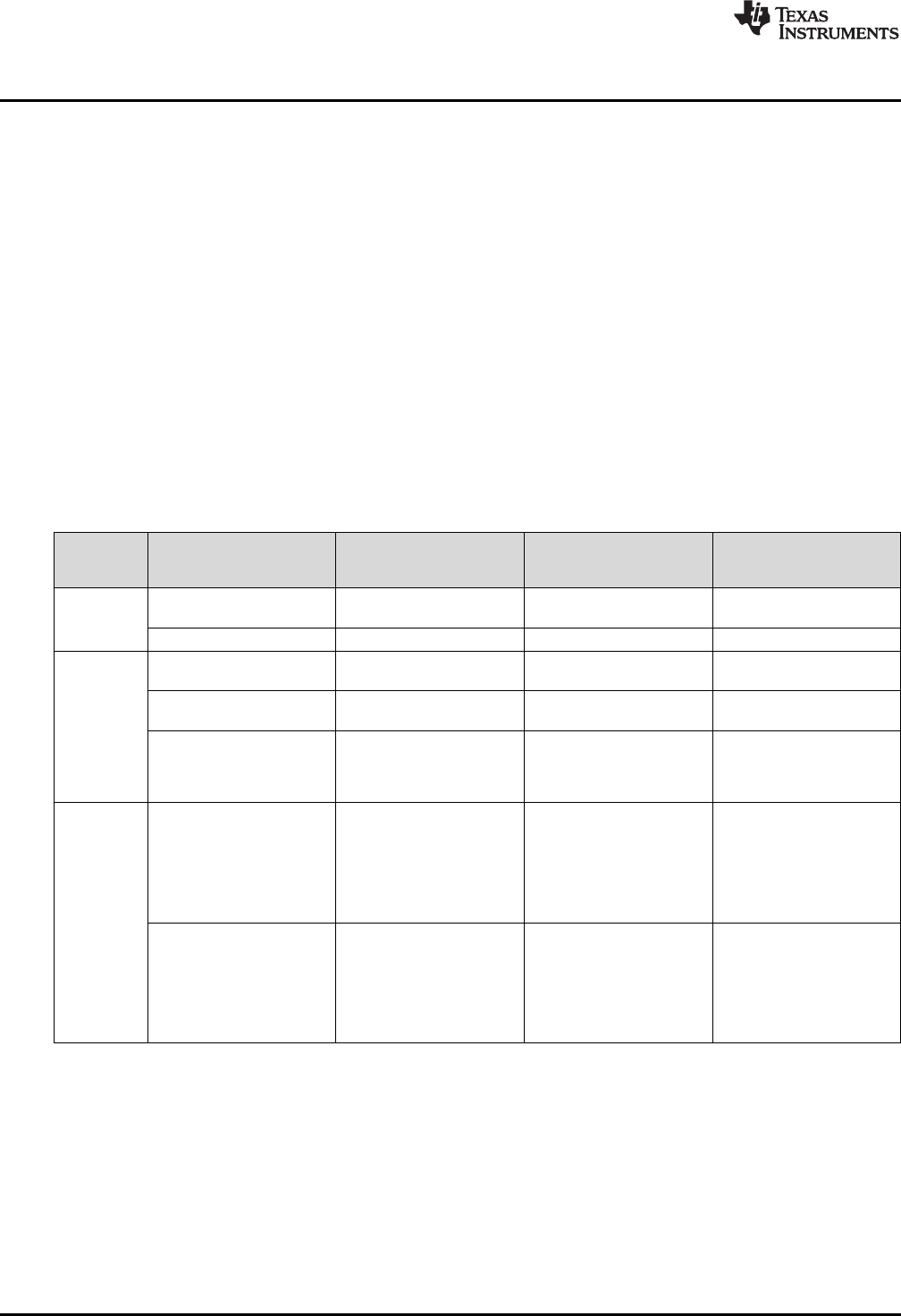
Principle of Operation
www.ti.com
26.2 Principle of Operation
The REF module provides all the necessary voltage references to be used by various peripheral modules
throughout the system. These may include, but are not limited to, devices that contain an ADC10_A,
ADC12_A, CTSD16, DAC12_A, LCD_B, or COMP_B.
The REFGEN subsystem contains a high-performance bandgap. This bandgap has very good accuracy
(factory trimmed), low temperature coefficient, and high PSRR even while operating at low power. The
bandgap voltage is used to generate three voltages through a noninverting amplifier stage, namely 1.5 V,
2.0 V, and 2.5 V. One voltage can be selected at a time. One output of the REFGEN subsystem is the
variable reference line. The variable reference line provides either 1.5 V, 2.0 V, or 2.5 V to the rest of the
system. A second output of the REFGEN subsystem provides a buffered bandgap reference line that can
also be used by modules throughout the system. Devices with a CTSD16 module have a second buffered
bandgap reference line, VREFBG, which is available internally as well as external to the device (refer to the
device-specific data sheet for PxSEL.y bit requirements). Additionally, the REFGEN supports the voltage
references required for the DAC12_A module, when available. Lastly, the REFGEN subsystem also
includes the temperature sensor circuitry, because it is derived from the bandgap. The temperature sensor
is used by an ADC to measure a voltage proportional to temperature.
Table 26-1 describes the difference reference voltages that are available and how to enable them.
Table 26-1. Reference Voltage Generation for Different Devices(1)
External Reference Input
REF How to Enable on How to Enable On
Voltage Available to Device (VeREF+) is
Voltage Devices Without CTSD16 Devices With CTSD16 Available
Internal on request from Module requests it Module requests it Y
Low-power module
bandgap Internal continuously REFON = 1 REFON = 1 Y
Internally on request from Module requests it, set DAC requests it, set Y
module REFVSEL as desired REFVSEL as desired
REFON = 1, set REFVSEL REFON = 1, set REFVSEL
Internally continuously Y
VREF 1.5 V, as desired as desired
2.0 V, 2.5 V Not when VREF and
Internally and externally REFOUT = 1, set VeREF+ (external
NA
continuously REFVSEL as desired reference input to device)
share a single pin
REFOUT = 1, Set PxSEL.y,
and request from module
VREFBG is always available
Internally and externally, on NA inside the device and on N(2)
request from module the pin. If PxSEL.y is not
set, VREFBG is not available
inside the chip.
VREFBG REFON = 1, REFOUT = 1,
and set PxSEL.y.
VREFBG is always available
Internally and externally NA inside the device and on N(2)
continuously the pin. If PxSEL.y is not
set, VREFBG is not available
inside the chip.
(1) Refer to the block diagrams in this user's guide for each module to determine which reference voltages are available for each
module.
(2) External reference VeREF+ cannot be applied while internal reference VREFBG is being used by another module, because they share
the same pin, and contention on the signal line will occur. Therefore, if the external reference is selected, make sure that no
other modules are requesting internal reference VREFBG. VeREF+ is available when VREFBG is not enabled.
696 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Principle of Operation
26.2.1 Low-Power Operation
The REF module supports low-power applications such as LCD generation. Many of these applications do
not require a very accurate reference, compared to data conversion, yet power is of prime concern. To
support these kinds of applications, the bandgap can be used in a sampled mode. In sampled mode, the
bandgap circuitry is clocked by the VLO at an appropriate duty cycle. This reduces the average power of
the bandgap circuitry significantly, at the cost of accuracy. When not in sampled mode, the bandgap is in
static mode. Its power is at its highest, but so is its accuracy.
Modules automatically can request static mode or sampled mode using their own individual request lines.
In this way, the particular module determines which mode is appropriate for its proper operation and
performance. If any one active module requests static mode, all other modules use static mode, even if
another module requests sampled mode. In other words, static mode always has higher priority than
sampled mode.
26.2.2 REFCTL
The REFCTL registers provide a way to control the reference system from one centralized set of registers.
By default, REFCTL is used as the primary control of the reference system.
26.2.2.1 REFMSTR = 1
This mode is implemented in all devices with ADC10_A and CTSD16. Also all ADC12_A devices except
for MSP430F5438 and MSP430F5438A support this mode.
Setting the reference master bit (REFMSTR = 1), allows the reference system to be controlled through the
REFCTL register. This is the default setting.
Devices with ADC12_A: In this mode (REFMSTR = 1), the legacy control bits inside the ADC register set
(ADC12REFON, ADC12REF2_5V, ADC12TCOFF, and ADC12REFOUT) are do not care. The ADC12SR
and ADC12REFBURST are still controlled through the ADC12_A, because these are very specific to the
ADC12_A module. If REFMSTR is cleared, all settings in the REFCTL are do not care and the reference
system is controlled completely by the legacy control bits inside the ADC12_A module.
Devices with ADC10_A: This is the only mode supported. REFMSTR must be set at all times. ADC10SR
is controlled by the ADC10_A, because these are very specific to the ADC10_A module.
Devices with CTSD16: This is the only mode supported. REFMSTR must be set at all times.
Table 26-2 summarizes the REFCTL bits and their effect on the REF module for all devices except those
with CTSD16 which is summarized Table 26-3
Table 26-2. REF Control of Reference System (REFMSTR = 1) (Default) for Devices Without CTSD16
REF Register Function
Setting
Setting this bit enables the REFGEN subsystem, which includes the bandgap, the bandgap bias circuitry, and
the 1.5-V, 2.0-V, or 2.5-V buffer. Setting this bit causes the REFGEN subsystem to remain enabled regardless of
REFON whether or not any module has requested it. Clearing this bit disables the REFGEN subsystem only when there
are no pending requests for REFGEN from any module. REFON must also be set to enable the temperature
sensor when required.
Selects 1.5 V, 2.0 V, or 2.5 V to be present on the variable reference line when REFON = 1 or REFGEN is
REFVSEL requested by any module.
Setting this bits enables the variable reference line voltage to be present external to the device through a buffer
REFOUT (external reference buffer).
REFTCOFF Setting this bit disables the temperature sensor (when available) to conserve power.
697
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Principle of Operation
www.ti.com
Table 26-3. REF Control of Reference System (REFMSTR = 1) (Default) for Devices With CTSD16
REF Register Function
Setting
Setting this bit enables the REFGEN subsystem, which includes the bandgap, the bandgap bias circuitry, AFE
biases, and the 1.5-V, 2.0-V, 2.5-V buffer. Setting this bit causes the REFGEN subsystem to remain enabled
REFON regardless of whether or not any module has requested it. Clearing this bit disables the REFGEN subsystem
only when there are no pending requests for REFGEN from any module. REFON must also be set to enable the
temperature sensor when required.
REFVSEL Selects 1.5 V, 2.0 V, or 2.5 V to be present on the variable reference line when REFON = 1.
Setting this bits enables the VREFBG voltage to be present internally and external to the device through a buffer
REFOUT when REFON = 1 or a module requests VREFBG.
REFTCOFF Setting this bit disables the temperature sensor (when available) to conserve power.
26.2.2.2 REFMSTR = 0
Devices with ADC10_A: Do not support this mode. REFMSTR bit must not be cleared.
Devices with CTSD16: Do not support this mode. REFMSTR bit must not be cleared.
Devices with ADC12_A: This setting is applicable. On legacy devices, the ADC12_A provided the control
bits necessary to configure the reference system, namely ADC12REFON, ADC12REF2_5V,
ADC12TCOFF, ADC12REFOUT, ADC12SR, and ADC12REFBURST. The ADC12SR and
ADC12REFBURST bits are very specific to the ADC12 operation and, therefore, are not included in
REFCTL. All legacy control bits can still be used to configure the reference system, wich allows for
backward compatibility by clearing REFMSTR. In this case, the REFCTL register bits are don't care.
Table 26-4 summarizes the ADC12_A control bits and their effect on the REF module. See the ADC12_A
module description for further details.
NOTE: Although the REF module supports using the ADC12_A bits as control for the reference
system, it is recommended that the use of the new REFCTL register be used and older code
migrated to this methodology. This allows the logical partitioning of the reference system to
be separate from the ADC12_A system and forms a more natural partitioning for future
products.
Table 26-4. Control of Reference System (REFMSTR = 0, ADC12_A Only)
ADC12_A
Register Function
Setting
Setting this bit enables the REFGEN subsystem which includes the bandgap, the bandgap bias circuitry, and the
1.5-V, 2.0-V, 2.5-V buffer. Setting this bit causes the REFGEN subsystem to remain enabled regardless if any
ADC12REFON module has requested it. Clearing this bit disables the REFGEN subsystem only when there are no pending
requests for REFGEN from all modules.
ADC12REF2_5 Setting this bits causes 2.5 V to be present on the variable reference line when ADC12REFON = 1. Clearing this
V bit causes 1.5 V to be present on the variable reference line when ADC12REFON = 1.
Setting this bits enables the variable reference line voltage to be present external to the device through a buffer
ADC12REFOUT (external reference buffer).
ADC12TCOFF Setting this bit disables the temperature sensor to conserve power.
As stated previously, the ADC12REFBURST has an effect on the reference system and can be controlled
through the ADC12_A. This bit is in effect regardless of whether REFCTL or the ADC12_A is controlling
the reference system. Setting ADC12REFBURST = 1 enables burst mode when REFON = 1 and
REFMSTR = 1 or when ADC12REFON = 1 and REFMSTR = 0. In burst mode, the internal buffer
(ADC12REFOUT = 0) or the external buffer (ADC12REFOUT = 1) is enabled only during a conversion
and is disabled automatically to conserve power.
698 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Principle of Operation
NOTE: The legacy ADC12_A bit ADC12REF2_5V only allows for selecting either 1.5 V or 2.5 V. To
select 2.0 V, the REFVSEL control bits must be used (REFMSTR = 1).
26.2.3 Reference System Requests
There are three basic reference system requests that are used by the reference system. Each module can
use these requests to obtain the proper response from the reference system. The three basic requests are
REFGENREQ, REFBGREQ, and REFMODEREQ. No interaction is required by the user code. The
modules select the proper requests automatically.
A reference request signal, REFGENREQ, is available as an input into the REFGEN subsystem. This
signal represents a logical OR of individual requests coming from the various modules in the system that
require a voltage reference to be available on the variable reference line. When a module requires a
voltage reference, it asserts its corresponding REFGENREQ signal. When the REFGENREQ is asserted,
the REFGEN subsystem is enabled. After the specified settling time, the variable reference line voltage is
stable and ready for use. The REFVSEL settings determine which voltage is generated on the variable
reference line.
In addition to the REFGENREQ, a second reference request signal, REFBGREQ is available. The
REFBGREQ signal represents a logical OR of requests coming from the various modules that require the
bandgap reference line. When the REFBGREQ is asserted, the bandgap, along with its bias circuitry and
local buffer, is enabled if it is not already enabled by a prior request.
The REFMODEREQ request signal is available that configures the bandgap and its bias circuitry to
operate in a sampled or static mode of operation. The REFMODEREQ signal basically represents a
logical AND of individual requests coming from the various analog modules. In reality, a REFMODEREQ
occurs only if a module's REFGENREQ or REFBGQ is also asserted, otherwise it is a do not care. When
REFMODEREQ = 1, the bandgap operates in sampled mode. When a module asserts its corresponding
REFMODEREQ signal, it is requesting that the bandgap operate in sampled mode. Because
REMODEREQ is a logical AND of all individual requests, any modules requesting static mode cause the
bandgap to operate in static mode. The BGMODE bit can be used as an indicator of static or sampled
mode of operation.
26.2.3.1 Specifics for Devices With CTSD16
Devices with a CTSD16 module have two additional request signals. The REFBGGENREQ signal
represents a logical OR of individual requests coming from the various modules in the system that require
the bandgap voltage reference VREFBG to be available on the VREFBG/VeREF+ signal line. When a module
requires a bandgap voltage reference VREFBG, it asserts its corresponding REFBGGENREQ signal. When
the REFBGGENREQ is asserted, the REFGEN subsystem required to generate the bandgap voltage is
enabled. This is different from the bandgap reference line, labeled as low power bandgap reference in the
block diagram, which is requested with the REFGENREQ. The second request signal specific to devices
with a CTSD16 module is the REFAFEBIASREQ. This signal represents a logical OR of individual
requests coming from the various modules in the system that require the AFE biases. When a module
requires the AFE biases, it asserts its corresponding REFAFEBIASREQ signal. When the
REFAFEBIASREQ is asserted, the REFGEN subsystem required to generate the AFE biases is enabled.
26.2.3.2 REFBGACT, REFGENACT, REFGENBUSY
Any module that is using the variable reference line causes REFGENACT to be set inside the REFCTL
register. This bit is read only and indicates to the user that the REFGEN is active or off. Similarly, the
REFBGACT is active any time one or more modules is actively utilizing the bandgap reference line and
indicates to the user that the REFBG is active or off.
The REFGENBUSY signal, when asserted, indicates that a module is using the reference and cannot
have any of it settings changed. For example, during an active ADC12_A conversion, the reference
voltage level should not be changed.
699
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Principle of Operation
www.ti.com
REFGENBUSY is asserted when any of the following are true:
• there is an active ADC12_A conversion (ENC = 1)
• the DAC12_A is actively converting (DAC12AMPx > 1 and DAC12SREFx = 0 or on devices with
CTSD16 if DAC12SREFx = {2,3} and REFOUT = 1 and REFON = 1 (or bandgap is requested) )
• when CTSD16 is actively converting CTSD16SC = 1 and CTSD16REFS = 1
REFGENBUSY when asserted, write protects the REFCTL register. This prevents the reference from
being disabled or its level changed during any active conversion. Note that there is no such protection for
the DAC12_A if the ADC12_A legacy control bits are used for the reference control. If the user changes
the ADC12_A settings and the DAC12_A is using the reference, the DAC12_A conversion is affected.
26.2.3.3 ADC10_A
For devices that contain an ADC10_A module, the ADC10_A module contains only one local buffer. This
buffer is required when using the internal reference voltage and must be enabled and stable prior to a
conversion.
In devices without a reference output buffer REFOUT must be written 0. Refer to the device-specific data
sheet.
In devices with ADC10_A the REFMSTR bit must be set at all times.
In devices with ADC10_A the REFON bit must be set if the internal reference voltage is used.
26.2.3.4 ADC12_A
For devices that contain an ADC12_A module, the ADC12_A module contains two local buffers. The
larger buffer can be used to drive the reference voltage, present on the variable reference line, external to
the device. This buffer has larger power consumption due to a selectable burst mode, as well as, its need
to drive larger DC loads that may be present outside the device. The large buffer is enabled continuously
when REFON = 1, REFOUT = 1, and ADC12REFBURST = 0. When ADC12REFBURST = 1, the buffer is
enabled only during an ADC conversion, shutting down automatically upon completion of a conversion to
save power. In addition, when REFON = 1 and REFOUT = 1, the second smaller buffer is automatically
disabled. In this case, the output of the large buffer is connected to the capacitor array through an internal
analog switch. This ensures the same reference is used throughout the system. If REFON = 1 and
REFOUT = 0, the internal buffer is used for ADC conversion and the large buffer remains disabled. The
small internal buffer can operate in burst mode as well by setting ADC12REFBURST = 1
26.2.3.5 CTSD16
For devices that contain a CTSD16 module, the VREFBG signal is driven external to the device even if it is
only used internally and requires that PxSEL.y bit = 1. If PxSEL.y is not set, VREFBG is not driven even
internal to the chip. The VREFBG signal is enabled continuously when REFON = 1 and REFOUT = 1. The
CTSD16 module only requests VREFBG during active conversions, when CTSD16SC = 1, and bursts the
VREFBG signal unless REFON = 1 and REFOUT = 1. The DAC12_A similarly bursts the request for the
voltage.
26.2.3.6 DAC12_A
Some devices contain a DAC12_A module. The DAC12_A can use the 1.5 V, 2.0 V, or 2.5 V from the
variable reference line, and on devices with a CTSD16 module, the DAC12_A can use the 1.16 V from the
VREFBG reference line for its reference. The DAC12_A can request its reference directly by the settings
within the DAC12_A module itself except the 1.16 V, which also requires REFOUT = 1. Therefore, if the
DAC is enabled and the internal reference is selected, the DAC requests the reference voltage from the
REF module. In addition, as before, setting REFON = 1 (REFMSTR = 1) or ADC12REFON = 1
(REFMSTR = 0) can enable the variable reference line independent of the DAC12_A control bits.
The REFGEN subsystem provides divided versions of the variable reference line for use in the DAC12_A
module. The DAC12_A module requires either /2 or /3 of the variable reference. The selection of these
depends on the control bits inside the DAC12_A module (DAC12IR, DAC12OG) and is handled
automatically by the REF module.
700 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Principle of Operation
When the DAC12_A selects AVcc or VeREF+ or VREFBG (if available) as its reference, the DAC12_A has its
own /2 and /3 resistor string available that scales the input reference appropriately based on the DAC12IR
and DAC12OG settings.
26.2.3.7 LCD_B, LCD_C
In devices that contain an LCD module, the LCD module requires a reference to generate the proper LCD
voltages. The bandgap reference line from the REFGEN subsystem is used for this purpose. The LCD is
enabled when LCDON = 1 of the LCD_B or LCD_C module. This causes a REFBGREQ from the LCD
module to be asserted. The buffered bandgap is made available on the bandgap reference line for use
inside the LCD module.
701
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
REF Registers
www.ti.com
26.3 REF Registers
The REF registers are listed in Table 26-5. The base address can be found in the device specific
datasheet. The address offset is listed in Table 26-5.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 26-5. REF Registers
Offset Acronym Register Name Type Access Reset Section
00h REFCTL0 REF Control Register 0 Read/write Word 0080h Section 26.3.1
00h REFCTL0_L Read/write Byte 80h
01h REFCTL0_H Read/write Byte 00h
702 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
REF Registers
26.3.1 REFCTL0 Register (offset = 00h) [reset = 0080h]
REF Control Register 0
Figure 26-3. REFCTL0 Register
15 14 13 12 11 10 9 8
Reserved BGMODE REFGENBUSY REFBGACT REFGENACT
r0 r0 r0 r0 r-(0) r-(0) r-(0) r-(0)
76543210
REFMSTR Reserved REFVSEL REFTCOFF Reserved REFOUT REFON
rw-(1) r0 rw-(0) rw-(0) rw-(0) r0 rw-(0) rw-(0)
Can be modified only when REFGENBUSY = 0.
Table 26-6. REFCTL0 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11 BGMODE R 0h Bandgap mode. Read only.
0b = Static mode
1b = Sampled mode
10 REFGENBUSY R 0h Reference generator busy. Read only.
0b = Reference generator not busy
1b = Reference generator busy
9 REFBGACT R 0h Reference bandgap active. Read only.
0b = Reference bandgap buffer not active
1b = Reference bandgap buffer active
8 REFGENACT R 0h Reference generator active. Read only.
0b = Reference generator not active
1b = Reference generator active
7 REFMSTR RW 1h REF master control. ADC10_A and CTSD16 devices: Must be written 1.
0b = Reference system controlled by legacy control bits inside the ADC12_A
module when available.
1b = Reference system controlled by REFCTL register. Common settings inside
the ADC12_A module (if exists) are don't care.
6 Reserved R 0h Reserved. Always reads as 0.
5-4 REFVSEL RW 0h Reference voltage level select for devices
00b = 1.5 V available when reference requested or REFON = 1
01b = 2.0 V available when reference requested or REFON = 1
10b = 2.5 V available when reference requested or REFON = 1
11b = 2.5 V available when reference requested or REFON = 1
3 REFTCOFF RW 0h Temperature sensor disabled
0b = Temperature sensor enabled
1b = Temperature sensor disabled to save power
2 Reserved R 0h Reserved. Always reads as 0.
1 REFOUT RW 0h Reference output buffer. ADC10_A devices without reference output buffer: Must
be written 0.
0b = Reference output not available externally
1b = Reference output available externally. If ADC12REFBURST = 0, or
DAC12_A is enabled, output is available continuously. If ADC12REFBURST = 1,
output is available only during an ADC12_A conversion.
For devices with CTSD16, REFON must also be set to 1 for VREFBG to be
available continuously. Otherwise, VREFBG is only available externally when a
module requests it.
703
SLAU208O–June 2008–Revised May 2015 REF
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
REF Registers
www.ti.com
Table 26-6. REFCTL0 Register Description (continued)
Bit Field Type Reset Description
0 REFON RW 0h Reference enable.
ADC10_A: The ADC10_A does not support the reference request. REFON must
be set if the internal reference voltage is used.
0b = Disables reference if no other reference requests are pending.
1b = Enables reference.
704 REF SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 27
SLAU208O–June 2008–Revised May 2015
ADC10_A
The ADC10_A module is a high-performance 10-bit analog-to-digital converter (ADC). This chapter
describes the operation of the ADC10_A module.
Topic ........................................................................................................................... Page
27.1 ADC10_A Introduction....................................................................................... 706
27.2 ADC10_A Operation.......................................................................................... 708
27.3 ADC10_A Registers .......................................................................................... 720
705
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC10_A Introduction
www.ti.com
27.1 ADC10_A Introduction
The ADC10_A module supports fast 10-bit analog-to-digital conversions. The module implements a 10-bit
SAR core with sample select control and a window comparator.
ADC10_A features include:
• Greater than 200-ksps maximum conversion rate
• Monotonic 10-bit converter with no missing codes
• Sample-and-hold with programmable sampling periods controlled by software or timers.
• Conversion initiation by software or different Timers
• Software-selectable on-chip reference using the REF module or external reference
• 12 individually configurable external input channels
• Conversion channel for temperature sensor of the REF module
• Selectable conversion clock source
• Single-channel, repeat-single-channel, sequence (autoscan), and repeat-sequence (repeated
autoscan) conversion modes
• Window comparator for low-power monitoring of input signals
• Interrupt vector register for fast decoding of six ADC Interrupts (ADC10IFG0, ADC10TOVIFG,
ADC10OVIFG, ADC10LOIFG, ADC10INIFG, ADC10HIIFG)
Figure 27-1 shows the block diagram of ADC10_A. The on-chip reference voltage generation is located in
the reference module (see the device-specific data sheet).
706 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
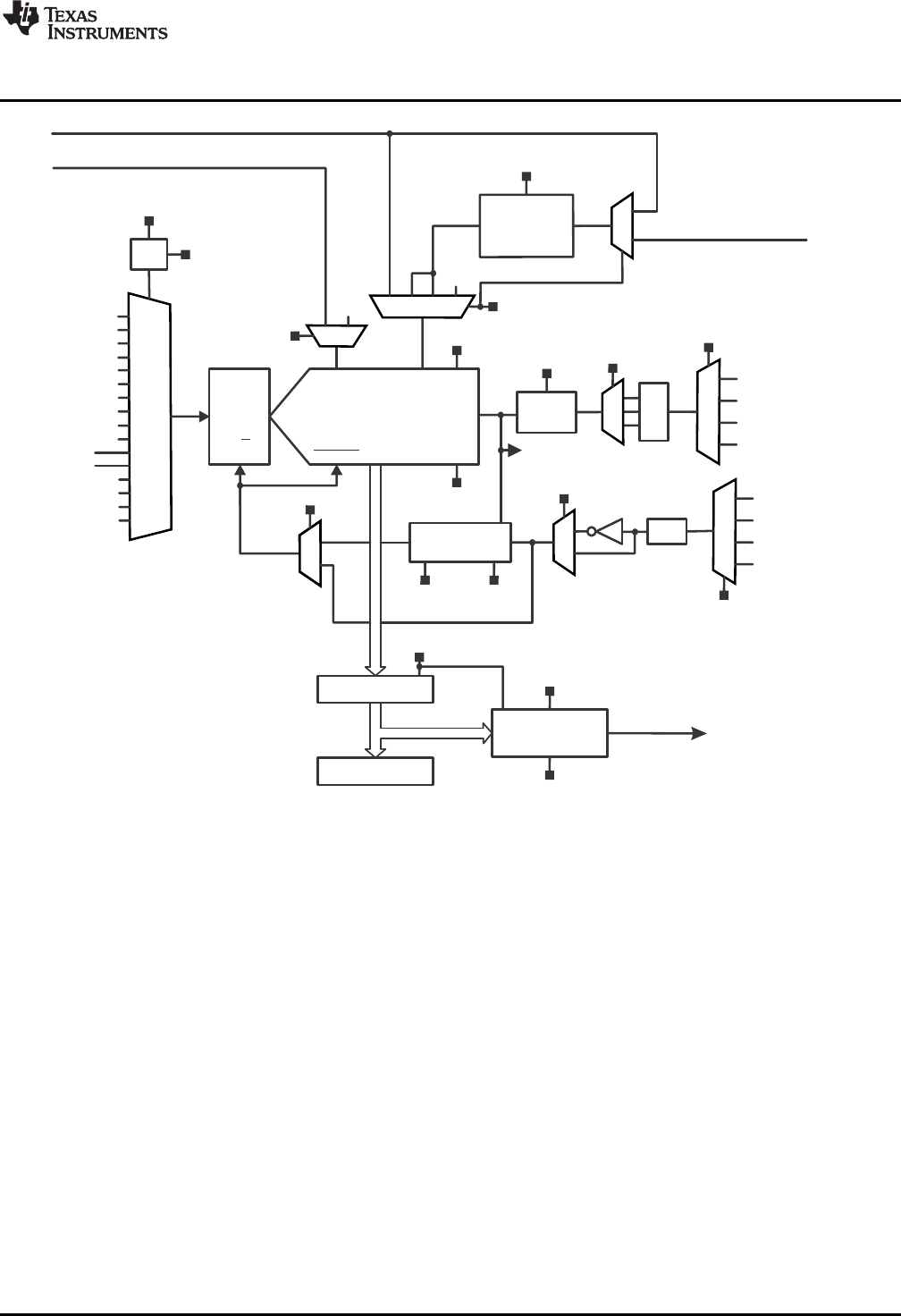
Divider
/1 .. /8
:1
:4
:64
00
01
10
10-bit ADC Core
VR- VR+
Convert
Sample
and
Hold
S/H
0011 0110
1 0
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
Sample Timer
/4 .. /1024
1
0
1
0
Sync
1
0
1
0
00
11
01
10
MODCLK from UCS
ACLK
MCLK
SMCLK
00
11
01
10
ADC10SC
3 inputs
from Timers
Data Format
ADC10MEM
10-bit Window
Comparator
VSS
Vcc
VREF 1.5 / 2.0 / 2.5 V from shared reference
ADC10SR
ADC10ON
ADC10SREFx
ADC10SREF2
Auto
ADC10CONSEQx
ADC10INCHx
A0
A1
A2
A3
A4
A5
A6
A7
A15
A14
A13
A12
TempSense
Batt.Monitor
VEREF+
VEREF-
ADC10DIVx
ADC10
PDIVx
ADC10
SSELx
ADC10BUSY
ADC10SHP
ADC10
MSC
ADC10
SHTx
SHI
ADC10ISSH
SAMPCON
ADC10
MSC
ADC10HIx
ADC10LOx
ADC10DF
To Interrupt Logic
01
10
ADC10CLK
Reference
Buffer
ADC10
SHSx
A8
A9
www.ti.com
ADC10_A Introduction
A MODCLK is generated by the MODOSC, which is part of the UCS. See the UCS chapter for more information.
B When using ADC10SHP = 0 no synchronisation of the trigger input is done.
Figure 27-1. ADC10_A Block Diagram
707
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
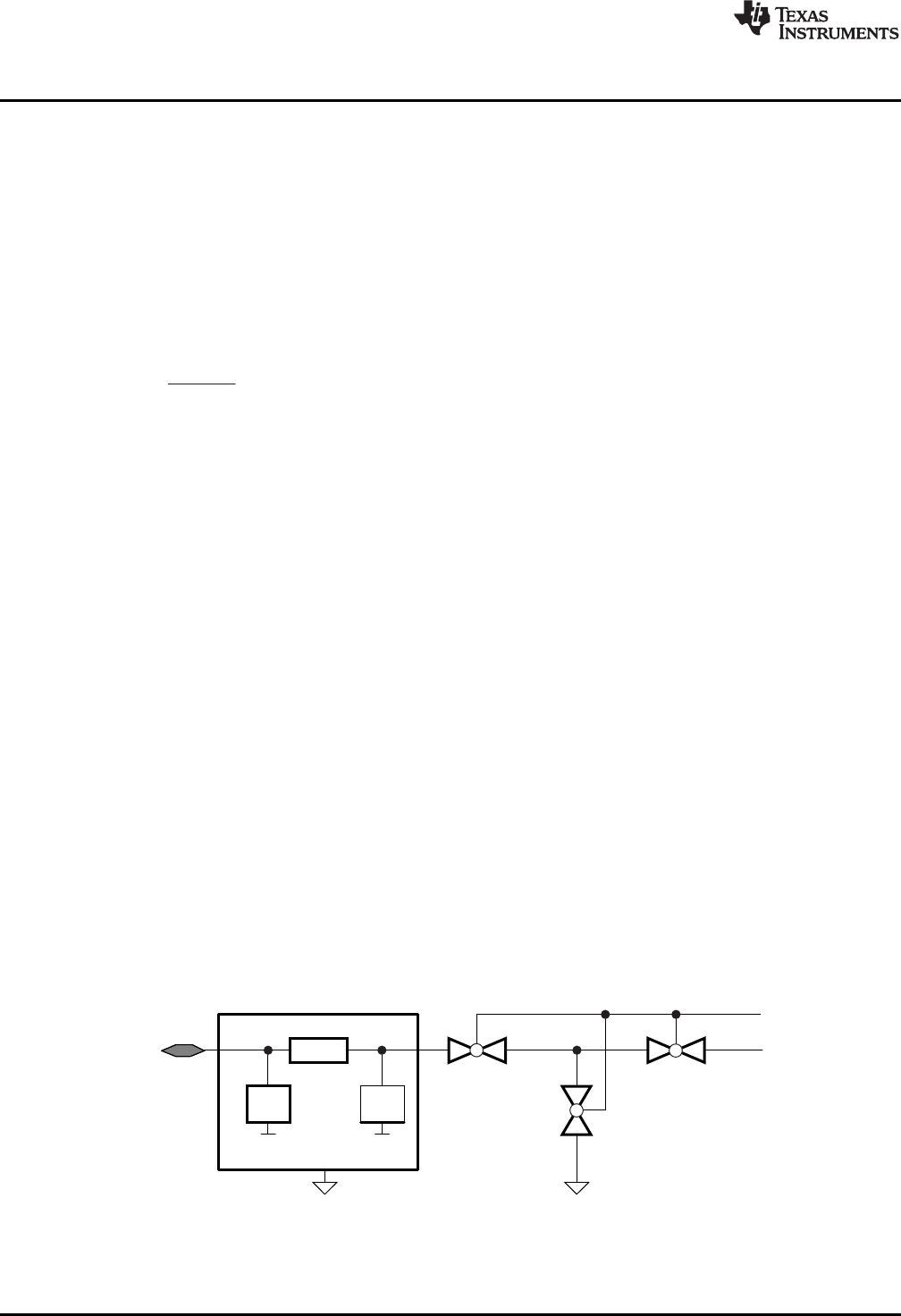
ESD Protection
R~ 50 kOhm ADC10MCTL0.0–3
Input
Ax
N =1023×
ADC
Vin – VR–
V – V
R+ R–
ADC10_A Operation
www.ti.com
27.2 ADC10_A Operation
The ADC10_A module is configured with user software. The setup and operation of the ADC10_A is
discussed in the following sections.
27.2.1 10-Bit ADC Core
The ADC core converts an analog input to its 10-bit digital representation and stores the result in the
conversion register ADC10MEM0. The core uses two programmable/selectable voltage levels (VR+ and
VR–) to define the upper and lower limits of the conversion. The digital output (NADC) is full scale (03FFh)
when the input signal is equal to or higher than VR+, and zero when the input signal is equal to or lower
than VR–. The input channel and the reference voltage levels (VR+ and VR–) are defined in the conversion-
control memory. The conversion formula for the ADC result NADC is shown in Equation 13:
(13)
The ADC10_A core is configured by the control registers ADC10CTL0, ADC10CTL1 and ADC10CTL2.
The core is enabled with the ADC10ON bit. The ADC10_A can be turned off when not in use to save
power. With few exceptions, the ADC10_A control bits can only be modified when ADC10ENC = 0.
ADC10ENC must be set to 1 before any conversion can take place.
27.2.1.1 Conversion Clock Selection
The ADC10CLK is used both as the conversion clock and to generate the sampling period when the pulse
sampling mode is selected. The ADC10_A source clock is selected using the ADC10SSELx bits. Possible
ADC10CLK sources are SMCLK, MCLK, ACLK, and the MODCLK. The input clock can be divided from
1–512 using both the ADC10DIVx bits and the ADC10PDIVx bits.
MODCLK, generated internally in the UCS, is in the 5-MHz range but varies with individual devices, supply
voltage, and temperature. See the device-specific data sheet for the MODOSC specification.
The user must ensure that the clock chosen for ADC10CLK remains active until the end of a conversion. If
the clock is removed during a conversion, the operation does not complete and any result is invalid.
27.2.2 ADC10_A Inputs and Multiplexer
The 14 external and 2 internal analog signals are selected as the channel for conversion by the analog
input multiplexer. The input multiplexer is a break-before-make type to reduce input-to-input noise injection
resulting from channel switching (see Figure 27-2). The input multiplexer is also a T-switch to minimize the
coupling between channels. Channels that are not selected are isolated from the ADC and the
intermediate node is connected to analog ground (AVSS) so that the stray capacitance is grounded to
eliminate crosstalk.
The ADC10_A uses the charge redistribution method. When the inputs are internally switched, the
switching action may cause transients on the input signal. These transients decay and settle before
causing errant conversion.
Figure 27-2. Analog Multiplexer
708 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC10_A Operation
27.2.2.1 Analog Port Selection
The ADC10_A inputs are multiplexed with digital port pins. When analog signals are applied to digital
gates, parasitic current can flow from VCC to GND. This parasitic current occurs if the input voltage is near
the transition level of the gate. Disabling the digital part of the port pin eliminates the parasitic current flow
and, therefore, reduces overall current consumption. The PxSEL.y bits provide the ability to disable the
port pin input and output buffers.
; Px.0 and Px.1 configured for analog input
BIS.B #3h,&PxSEL ; Px.1 and Px.0 ADC10_A function
27.2.3 Voltage Reference Generator
The ADC10_A module is designed to be used either with the on-chip reference supplied by the REF
module or an externally reference voltage supplied on external pins.
The on-chip reference is capable of supplying 1.5 V, 2.0 V, and 2.5 V. The reference voltages are
controlled by the control registers of the REF module (see the REF chapter for details). The internal VCC
can also be used as the voltage reference.
External reference voltages may be supplied for VR+ and VR– through pins VEREF+ and VEREF-,
respectively.
27.2.3.1 Internal Reference Low-Power Features
The on-chip reference is designed for low-power applications. This reference includes a band-gap voltage
source and a separate reference buffer both located in the REF module. The current consumption of each
is specified separately in the device-specific data sheet. The ADC10_A also contains an internal buffer for
reference voltages. This buffer is automatically enabled when the internal reference is selected for
VREF+, but it is also optionally available for VEREF+. The on-chip reference from the REF module must
be enabled by software. Its settling time is typical 25 µs. See the device-specific data sheet and the REF
chapter for further information on the on-chip reference.
The reference buffer of the ADC10_A also has selectable speed versus power settings. When the
maximum conversion rate is below 50 ksps, setting ADC10SR = 1 reduces the current consumption of the
buffer approximately 50%.
27.2.4 Auto Power Down
The ADC10_A is designed for low-power applications. When the ADC10_A is not actively converting, the
core is automatically disabled and automatically reenabled when needed. The MODOSC is also
automatically enabled when needed and disabled when not needed.
27.2.5 Sample and Conversion Timing
An analog-to-digital conversion is initiated with a rising edge of the sample input signal SHI. The source
for SHI is selected with the ADC10SHSx bits and includes the following:
• ADC10SC bit and
• Three timer outputs
The polarity of the SHI signal source can be inverted with the ADC10ISSH bit. The SAMPCON signal
controls the sample period and start of conversion. When SAMPCON is high, sampling is active. The high-
to-low SAMPCON transition starts the analog-to-digital conversion, which requires 12 ADC10CLK cycles
in 10-bit resolution mode. One additional ADC10CLK is used for the window comparator. Two different
sample-timing methods are defined by control bit ADC10SHP, extended sample mode, and pulse mode.
709
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
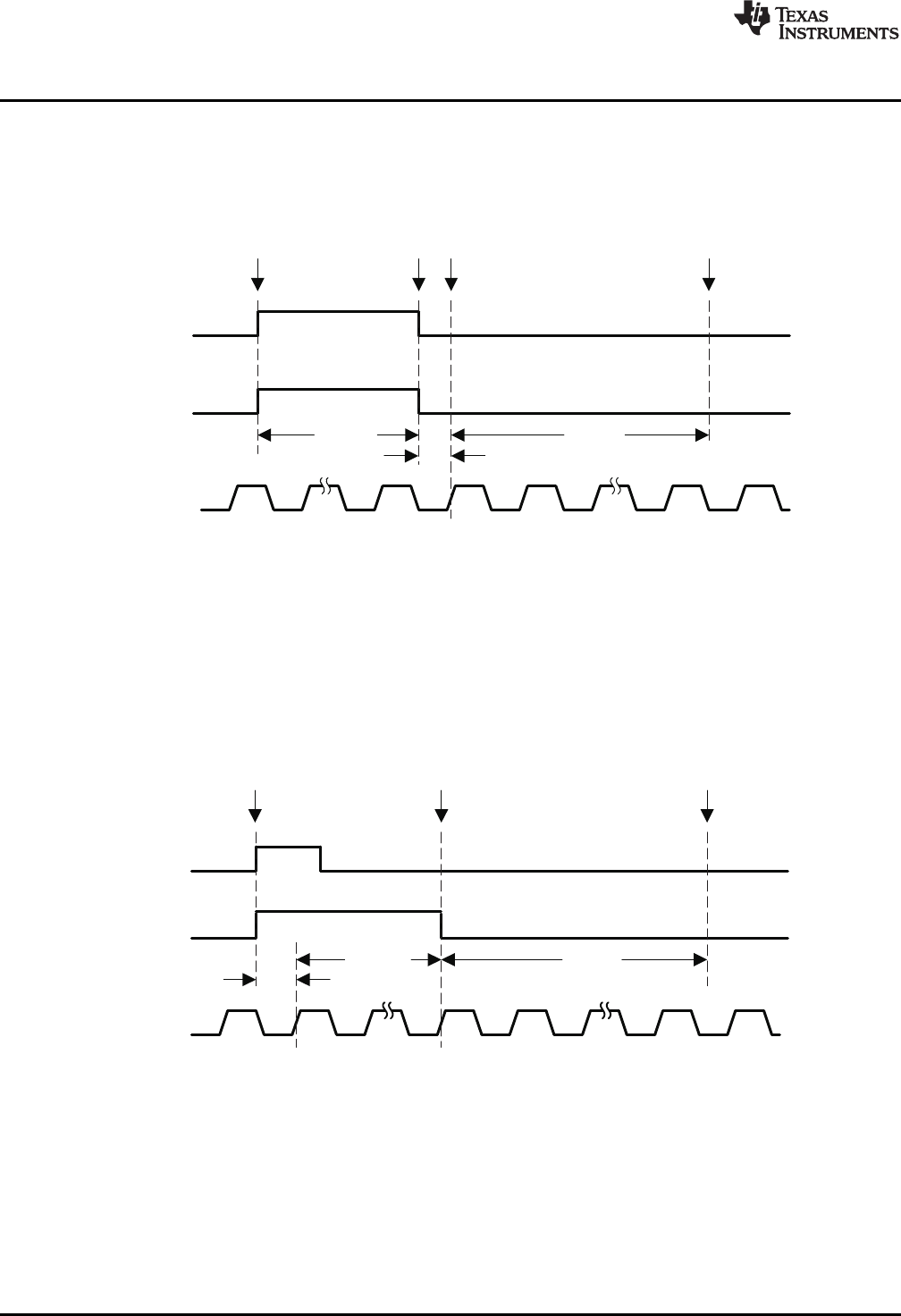
Start
Sampling
Stop
Sampling
Conversion
Complete
SAMPCON
SHI
tsample tconvert
tsync
12 × ADC10CLK
Start
Conversion
ADC10CLK
Start
Sampling
Stop
Sampling
Conversion
Complete
SAMPCON
SHI
tsample tconvert
tsync
12× ADC10CLK
Start
Conversion
ADC10CLK
ADC10_A Operation
www.ti.com
27.2.5.1 Extended Sample Mode
The extended sample mode is selected when ADC10SHP = 0. The SHI signal directly controls SAMPCON
and defines the length of the sample period tsample. When SAMPCON is high, sampling is active. The high-
to-low SAMPCON transition starts the conversion after synchronization with ADC10CLK (see Figure 27-3).
Figure 27-3. Extended Sample Mode
27.2.5.2 Pulse Sample Mode
The pulse sample mode is selected when ADC10SHP = 1. The SHI signal is used to trigger the sampling
timer. The ADC10SHTx bits in ADC10CTL0 control the interval of the sampling timer that defines the
SAMPCON sample period tsample. The sampling timer keeps SAMPCON high after synchronization with
AD10CLK for a programmed interval tsample. The total sampling time is tsample plus tsync (see Figure 27-4).
The ADC10SHTx bits select the sampling time in 4× multiples of ADC10CLK.
Figure 27-4. Pulse Sample Mode
710 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
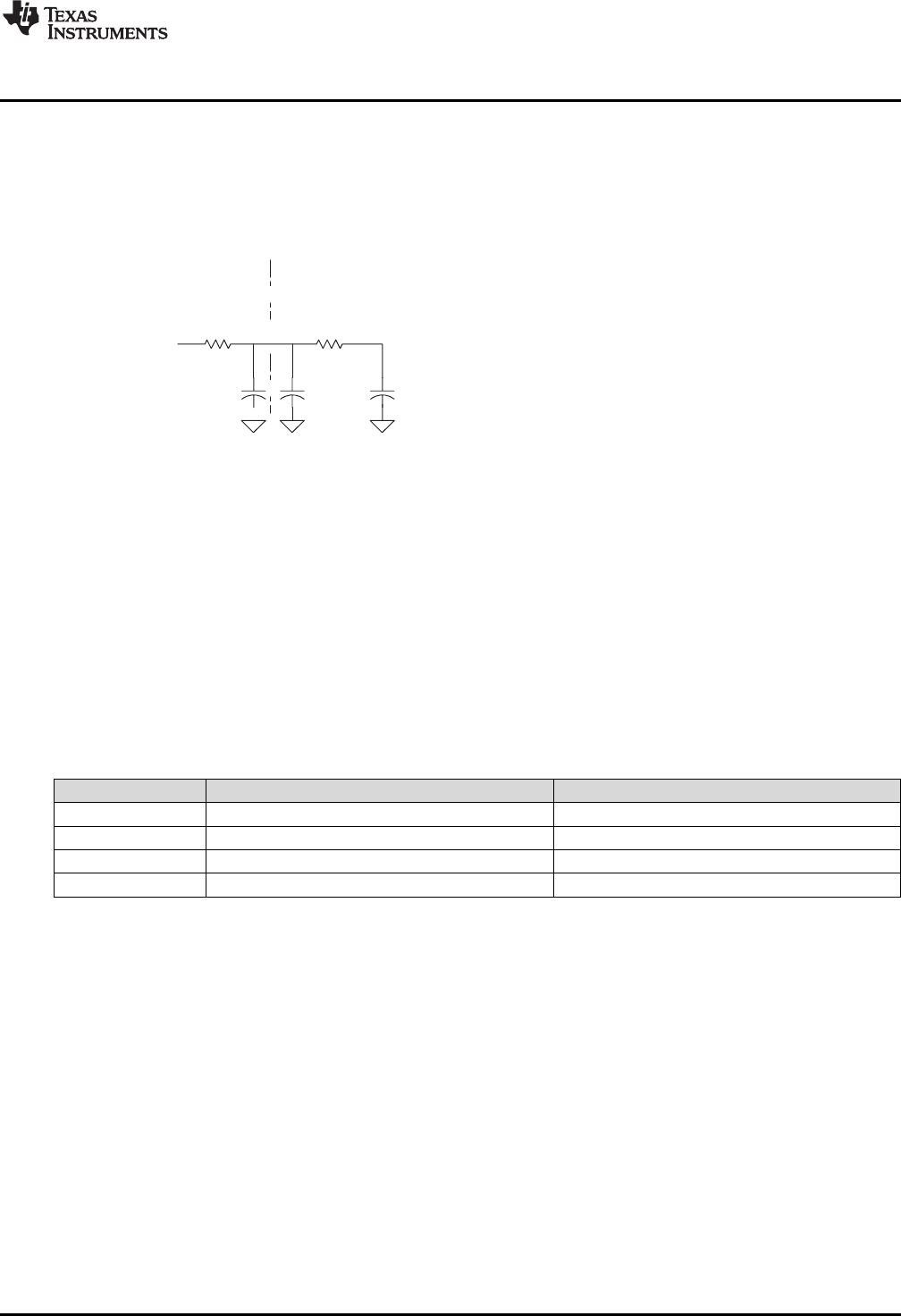
VS
RSVIRI
VC
CI
V = Input voltage at pin Ax
V = External source voltage
R = External source resistance
R = Internal MUX-on input resistance
C = Input capacitance
V = Capacitance-charging voltage
I
S
S
I
I
C
C = Parasitic capacitance, internal
C = Parasitic capacitance, external
pint
Pext
~1pF
MSP430
Cpint
Cpext
www.ti.com
ADC10_A Operation
27.2.5.3 Sample Timing Considerations
When SAMPCON = 0, all Ax inputs are high impedance. When SAMPCON = 1, the selected Ax input can
be modeled as an RC low-pass filter during the sampling time tsample (see Figure 27-5). An internal MUX-on
input resistance RI(see device specific datasheet) in series with capacitor CI(see device specific
datasheet) is seen by the source. The capacitor CIvoltage VCmust be charged to within one-half LSB of
the source voltage VSfor an accurate 10-bit conversion.
Figure 27-5. Analog Input Equivalent Circuit
The resistance of the source RSand RIaffect tsample. The minimum sample time must not be violated.
Violation of the minimum sample time may cause a conversion not to take place. See the device specific
datasheet for the tsample limits.
27.2.6 Conversion Result
The conversion result is accessible using the ADC10MEM0 register independently of the conversion mode
selected by the user. When a conversion result is written to ADC10MEM0, the ADC10IFG0 is set.
27.2.7 ADC10_A Conversion Modes
The ADC10_A has four operating modes selected by the CONSEQx bits as listed in Table 27-1.
Table 27-1. Conversion Mode Summary
ADC10CONSEQx Mode Operation
00 Single-channel single-conversion A single channel is converted once.
01 Sequence-of-channels (autoscan) A sequence of channels is converted once.
10 Repeat-single-channel A single channel is converted repeatedly.
11 Repeat-sequence-of-channels (repeated autoscan) A sequence of channels is converted repeatedly.
711
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC10
off
x = ADC10INCHx
Wait for Enable
Wait for Trigger
SAMPCON=
SAMPCON=1
Convert
SAMPCON=
ADC10ENC =0
ADC10ENC =0*
10 × ADC10CLK
Conversion
Completed,
Result Stored Into
ADC10MEM0,
ADC10IFG0 is Set
1 × ADC10CLK
ADC10ON = 1
ADC10CONSEQx = 00
ADC10ENC
ADC10ENC =
ADC10ENC =
ADC10ENC =0*
ADC10SHSx
ADC10ENC
ADC10SC =
= 0
and
= 1 or
and
*Conversionresultisunpredictable
** Two ADC10CLKcyclesneeded
x-pointertotheselected ADC10_A channeldefinedby
Allbit-orregisternamesaremarkedwithboldfont,signalsarenotedinnormalfont
ADC10INCHx
SampleInput
Channelx
**
ADC10_A Operation
www.ti.com
27.2.7.1 Single-Channel Single-Conversion Mode
A single channel selected by ADC10INCHx is sampled and converted once. The ADC result is written to
ADC10MEM0. Figure 27-6 shows the flow of the single-channel single-conversion mode. When ADC10SC
triggers a conversion, successive conversions can be triggered by the ADC10SC bit. When any other
trigger source is used, ADC10ENC must be toggled between each conversion.
Resetting ADC10ON bit within a conversion causes the ADC10_A to go back into "ADC10 off" state. In
this case, the value of the conversion register and the value of the interrupt flags are unpredictable.
Figure 27-6. Single-Channel Single-Conversion Mode
712 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
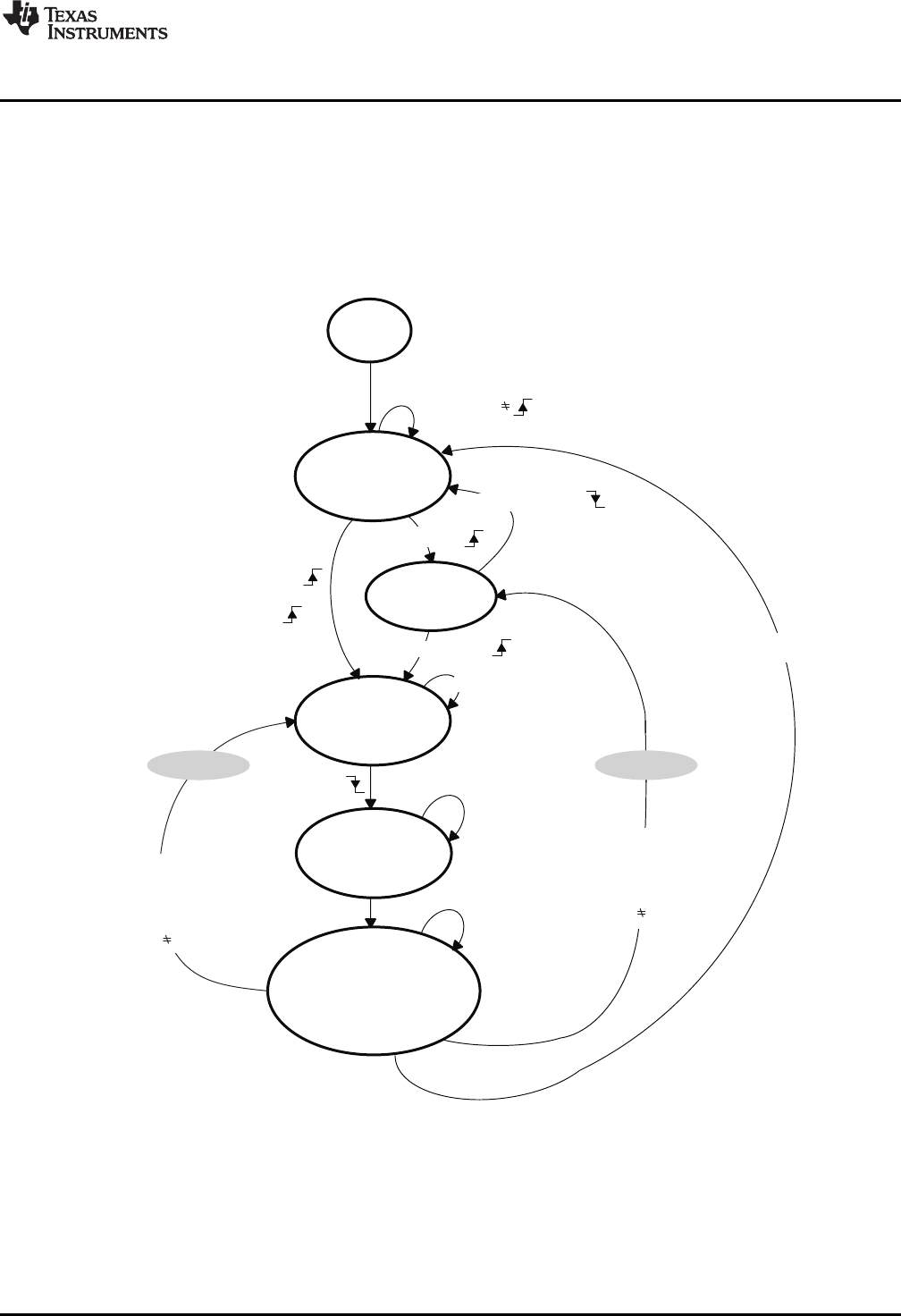
ADC10
off
x = ADC10INCHx
Wait for Enable
ADC10ENC
Wait for Trigger
ADC10ENC =
ADC10SHSx
ADC10ENC
ADC10SC
= 0
and
= 1 or
and
=
SAMPCON=
SAMPCON=1
Convert
SAMPCON= 10 × ADC10CLK
Conversion
Completed,
Result Stored Into
ADC10MEM0,
ADC10IFG0 is set
1 × ADC10CLK
ADC10ON = 1
ADC10CONSEQx = 01
( =0
or
=0)
and
x0
ADC10MSC
ADC10SHP
ADC10ENC =
ADC10MSC
ADC10SHP
=1
and
=1
and
x0
x-inputchannel Ax
Allbit-orregisternamesaremarkedwithboldfont,signalsarenotedinnormalfont
** Two ADC10CLKcyclesneeded
SampleInput
Channelx
Ifx>0thenx=x-1
x=x-1
x=0
x=x-1
**
www.ti.com
ADC10_A Operation
27.2.7.2 Sequence-of-Channels Mode (Autoscan Mode)
In sequence-of-channels mode, also referred to as autoscan mode, a sequence of channels is sampled
and converted once. The sequence begins with the channel selected by the ADC10INCHx bits and
decrements to channel A0. Each ADC result is written to ADC10MEM0. The sequence stops after
conversion of channel A0. Figure 27-7 shows the sequence-of-channels mode. When ADC10SC triggers a
sequence, successive sequences can be triggered by the ADC10SC bit. When any other trigger source is
used, ADC10ENC must be toggled between each sequence. As in all conversion modes resetting
ADC10ON bit within a conversion causes the ADC10_A to go back into "ADC10 off" state.
Figure 27-7. Sequence-of-Channels Mode
713
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
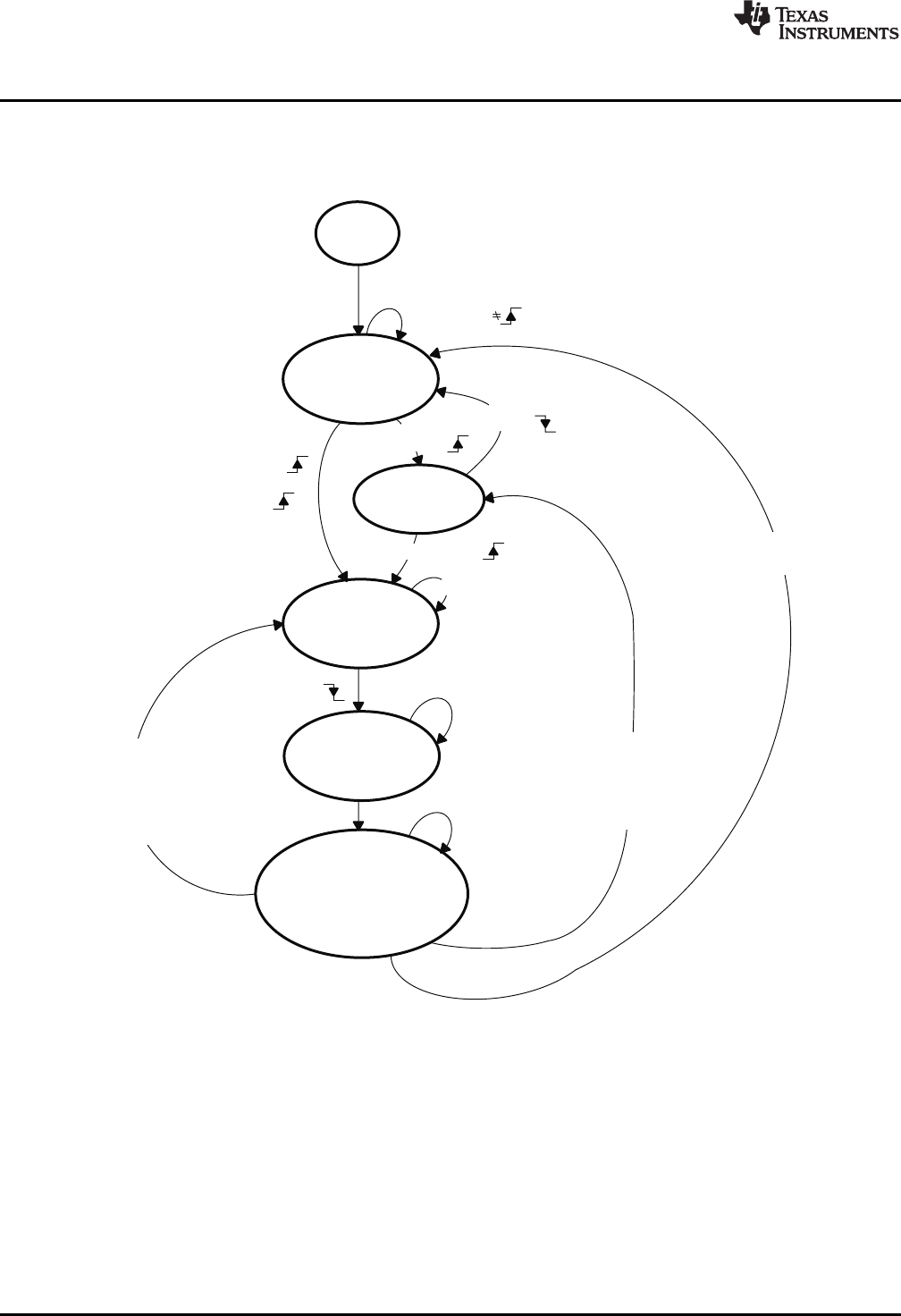
ADC10
off
x = ADC10INCHx
Wait for Enable
ADC10ENC
Wait for Trigger
ADC10SHSx
ADC10ENC
ADC10SC
= 0
and
= 1 or
and
=
SAMPCON=
SAMPCON=1
Convert
SAMPCON =10 × ADC10CLK
Conversion
Completed,
Result Stored Into
ADC10MEM0,
ADC10IFG0 is Set
1 × ADC10CLK
ADC10ON = 1
ADC10CONSEQx = 10
ADC10MSC
ADC10SHP
ADC10ENC
=1
and
=1
and
=1
ADC10ENC =0
( =0
or
=0)
and
=1
ADC10MSC
ADC10SHP
ADC10ENC
ADC10ENC
=
ADC10ENC
=
x-pointertotheselected ADC10_A channeldefinedby
Allbit-orregisternamesaremarkedwithboldfont,signalsarenotedinnormalfont
ADC10INCHx
** Two ADC10CLKcyclesneeded
SampleInput
Channelx
**
ADC10_A Operation
www.ti.com
27.2.7.3 Repeat-Single-Channel Mode
A single channel selected by ADC10INCHx is sampled and converted continuously. Each ADC result is
written to ADC10MEM0. Figure 27-8 shows the repeat-single-channel mode.
Figure 27-8. Repeat-Single-Channel Mode
714 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
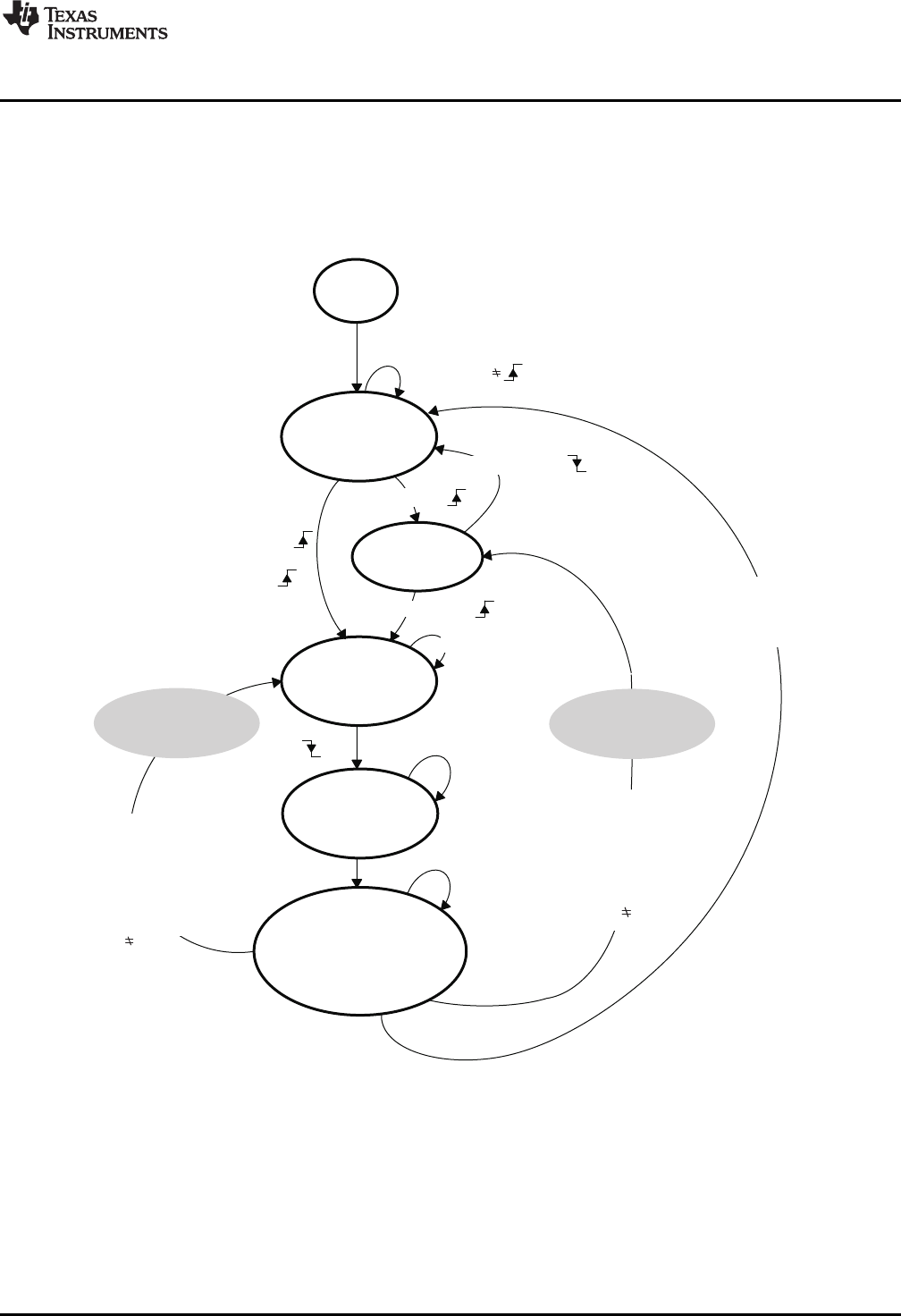
ADC10
off
ADC10INCHx
Wait for Enable
ADC10ENC
Wait for Trigger
ADC10SHSx
ADC10ENC
ADC10SC
= 0
and
= 1 or
and
=
SAMPCON=
SAMPCON=1
10 × ADC10CLK
ConversionCompleted,
ResultStoredInto
isSet
ADC10MEM0,
ADC10IFG0
1 × ADC10CLK
ADC10ON = 1
ADC10CONSEQx = 11
ADC10MSC
ADC10SHP
ADC10ENC
=1
and
=1
and
( =1
or
x0)
ADC10ENC =0
and
x=0
( =0
or
=0)
and
( =1
or
x0
ADC10MSC
ADC10SHP
ADC10ENC
Convert
ADC10ENC =
ADC10ENC =
SampleInput
Channelx
Ifx>0thenx=x-1
else
x= ADC10INCHx SAMPCON
=
Ifx>0thenx=x-1
else
x= ADC10INCHx
**
www.ti.com
ADC10_A Operation
27.2.7.4 Repeat-Sequence-of-Channels Mode (Repeated Autoscan Mode)
In this mode, a sequence of channels is sampled and converted repeatedly. This mode is also referred to
as repeated autoscan mode. The sequence begins with the channel selected by ADC10INCHx and
decrements to channel A0. Each ADC result is written to ADC10MEM0. The sequence ends after
conversion of channel A0, and the next trigger signal re-starts the sequence. Figure 27-9 shows the
repeat-sequence-of-channels mode.
Figure 27-9. Repeat-Sequence-of-Channels Mode
715
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC10_A Operation
www.ti.com
27.2.7.5 Using the Multiple Sample and Convert (ADC10MSC) Bit
To configure the converter to perform successive conversions automatically and as quickly as possible, a
multiple sample and convert function is available. When ADC10MSC = 1, CONSEQx > 0, and the sample
timer is used, the first rising edge of the SHI signal triggers the first conversion. Successive conversions
are triggered automatically as soon as the prior conversion is completed. Additional rising edges on SHI
are ignored until the sequence is completed in the single-sequence mode, or until the ADC10ENC bit is
toggled in repeat-single-channel or repeated-sequence modes. The function of the ADC10ENC bit is
unchanged when using the ADC10MSC bit.
27.2.7.6 Stopping Conversions
Stopping ADC10_A activity depends on the mode of operation. The recommended ways to stop an active
conversion or conversion sequence are:
• Resetting ADC10ENC in single-channel single-conversion mode stops a conversion immediately and
the results are unpredictable. For correct results, poll the busy bit until reset before clearing
ADC10ENC.
• Resetting ADC10ENC during repeat-single-channel operation stops the converter at the end of the
current conversion.
• Resetting ADC10ENC during a sequence or repeat-sequence mode stops the converter at the end of
the sequence.
• Any conversion mode may be stopped immediately by setting the CONSEQx = 0 and resetting the
ADC10ENC bit. Conversion data are unreliable.
27.2.8 Window Comparator
The window comparator allows to monitor analog signals without any CPU interaction. The following list
describes the available interrupt flags and the conditions when they are asserted:
• The ADC10LO interrupt flag (ADC10LOIFG) is set if the current result of the ADC10_A conversion is
below the low threshold defined in register ADC10LO.
• The ADC10HI interrupt flag (ADC10HIIFG) is set if the current result of the ADC10_A conversion is
greater than the high threshold defined in register ADC10HI.
• The ADC10IN interrupt flag (ADC10INIFG) is set if the current result of the ADC10_A conversion is
greater than the low threshold defined in register ADC10LO and less than the high threshold defined in
ADC10HI.
These interrupts are generated independently of the conversion mode selected by the user. The update of
the window comparator interrupt flags happens in parallel to the ADC10IFG0.
Make sure that the values in the ADC10HI and ADC10LO registers are in the correct data format. For
example, if the binary data format is selected (ADC10DF = 0), then the thresholds in the threshold
registers ADC10HI and ADC10LO also must be entered binary coded. Changing ADC10DF or the
ADC10RES resets the threshold registers.
The interrupt flags must be reset by the user software. The ADC10_A only updates the flags each time a
new value is available in the ADC10MEM0. This update is only a set of the corresponding interrupt flag.
When the user uses the window comparator flags, it must be ensured that they are reset by software
according to the application needs.
716 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
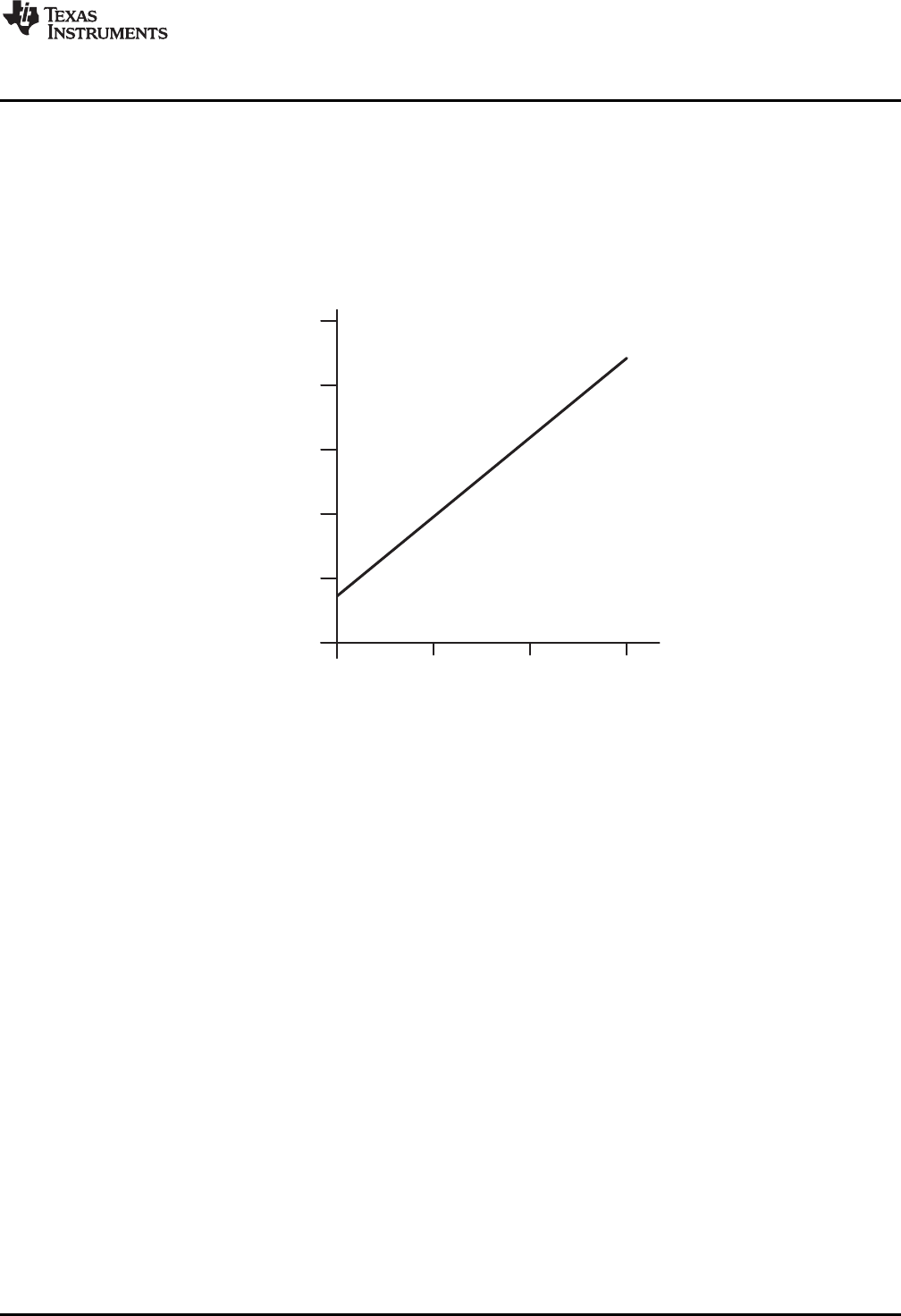
–50 0 50 100
0.500
0.600
0.700
0.800
0.900
1.000
V = 0.00252 x (TEMP ) + 0.688
TEMP C
Temperature – °C
Voltage
www.ti.com
ADC10_A Operation
27.2.9 Using the Integrated Temperature Sensor
To use the on-chip temperature sensor, select the analog input channel ADC10INCHx = 1010. Any other
configuration is done as if an external channel was selected, including reference selection, conversion-
mode selection, and other settings. The temperature sensor is located in the REF module of the device is
configured by using the REF module's control registers.
The typical temperature sensor transfer function is shown in Figure 27-10. When using the temperature
sensor, the sample period must be greater than 30 µs. The temperature sensor offset error can be large
and may need to be calibrated for most applications (see the device-specific data sheet for parameters).
Figure 27-10. Typical Temperature Sensor Transfer Function
717
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
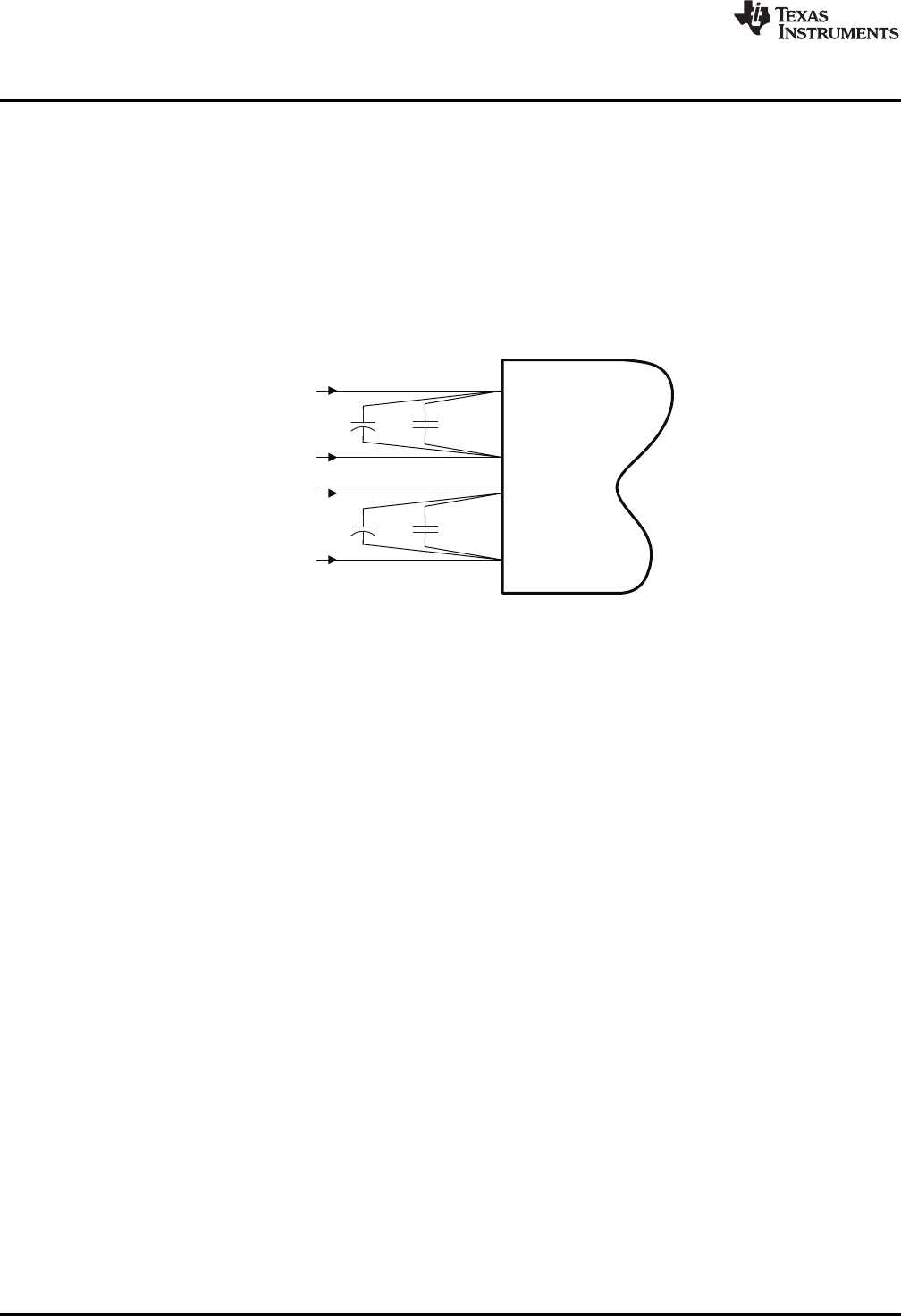
Digital
Power Supply
Decoupling
100 nF10 Fµ
Analog
Power Supply
Decoupling
DVCC
DVSS
AVCC
AVSS
+
+
100 nF10 Fµ
ADC10_A Operation
www.ti.com
27.2.10 ADC10_A Grounding and Noise Considerations
As with any high-resolution ADC, appropriate printed-circuit-board layout and grounding techniques should
be followed to eliminate ground loops, unwanted parasitic effects, and noise.
Ground loops are formed when return current from the ADC flows through paths that are common with
other analog or digital circuitry. If care is not taken, this current can generate small, unwanted offset
voltages that can add to or subtract from the reference or input voltages of the ADC. The connections
shown in Figure 27-11 prevent this.
In addition to grounding, ripple and noise spikes on the power-supply lines due to digital switching or
switching power supplies can corrupt the conversion result. A noise-free design using separate analog and
digital ground planes with a single-point connection is recommended to achieve high accuracy.
Figure 27-11. ADC10_A Grounding and Noise Considerations
27.2.11 ADC10_A Interrupts
The ADC10_A has 6 Interrupt sources:
• ADC10IFG0 : conversion ready Interrupt
• ADC10OVIFG : ADC10MEM0 overflow
• ADC10TOVIFG : ADC10_A conversion time overflow
• ADC10LOIFG, ADC10INIFG, ADC10HIIFG : window comparator Interrupt flags
The ADC10IFG0 bit is set when the ADC10MEM0 memory register is loaded with the conversion result.
An Interrupt request is generated if ADC10IE0 bit and the GIE bit are set. The ADC10OV condition occurs
when a conversion result is written to the ADC10MEM0 before its previous conversion result was read.
The ADC10TOV condition is generated when another sample-and-conversion is requested before the
current conversion is completed. The DMA is triggered after each conversion.
The window comparator Interrupt flags are set corresponding to the description in the Window Comparator
section (see Section 27.2.8).
27.2.11.1 ADC10IV, Interrupt Vector Generator
All ADC10_A Interrupt sources are prioritized and combined to source a single Interrupt vector. The
Interrupt vector register ADC10IV is used to determine which enabled ADC10_A Interrupt source
requested an Interrupt.
The highest-priority enabled ADC10_A Interrupt generates a number in the ADC10IV register (see register
description). This number can be evaluated or added to the program counter (PC) to automatically enter
the appropriate software routine. Disabled ADC10_A Interrupts do not affect the ADC10IV value.
Read access of the ADC10IV register automatically resets the highest-pending Interrupt condition and
flag. Only the ADC10IFG0 is not reset by this ADC10IV read access. ADC10IFG0 is automatically reset by
reading the ADC10MEM0 register or may be reset with software.
Write access of the ADC10IV register clears all pending Interrupt conditions and flags.
718 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC10_A Operation
If another Interrupt is pending after servicing of an Interrupt, another Interrupt is generated. For example, if
the ADC10OV, ADC10HIIFG and ADC10IFG0 Interrupts are pending when the Interrupt service routine
accesses the ADC10IV register, the highest priority interrupt (ADC10OV Interrupt condition) is reset
automatically. After the RETI instruction of the Interrupt service routine is executed, the ADC10HIIFG
generates another Interrupt.
27.2.11.2 ADC10_A Interrupt Handling Software Example
The following software example shows the recommended use of the ADC10IV. The ADC10IV value is
added to the PC to automatically jump to the appropriate routine.
• ADC10IFG0, ADC10TOV, and ADC10OV: 16 cycles
; Interrupt handler for ADC10_A.
INT_ADC10_A ; Enter Interrupt Service Routine
ADD &ADC10IV,PC ; Add offset to PC
RETI ; Vector 0: No Interrupt
JMP ADOV ; Vector 2: ADC10_A overflow
JMP ADTOV ; Vector 4: ADC10_A timing overflow
JMP ADHI ; Vector 6: ADC10_A window comparator high
Interrupt
JMP ADLO ; Vector 8: ADC10_A window comparator low
Interrupt
JMP ADIN ; Vector 10: ADC10_A window comparator in
Interrupt
;
; Handler for ADC10IFG0 starts here. No JMP required.
;
ADMEM MOV &ADC10MEM0,xxx ; Move result, flag is reset
... ; Other instruction needed?
RETI ; Return ;
ADOV ... ; Handle ADCMEM0 overflow
RETI ; Return ;
ADTOV ... ; Handle Conv. time overflow
RETI ; Return ;
ADHI ... ; Handle window comparator high Interrupt
RETI ; Return ;
ADLO ... ; Handle window comparator low Interrupt
RETI ; Return ;
ADIN ... ; Handle window comparator in window Interrupt
RETI ; Return
719
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC10_A Registers
www.ti.com
27.3 ADC10_A Registers
The ADC10_A registers are listed in Table 27-2. The base address of the ADC10_A can be found in the
device-specific data sheet. The address offset of each ADC10_A register is given in Table 27-2.
Table 27-2. ADC10_A Registers
Offset Acronym Register Name Type Reset Section
00h ADC10CTL0 ADC10_A Control 0 register Read/write 0000h Section 27.3.1
02h ADC10CTL1 ADC10_A Control 1 register Read/write 0000h Section 27.3.2
04h ADC10CTL2 ADC10_A Control 2 register Read/write 1000h Section 27.3.3
06h ADC10LO ADC10_A Window Comparator Low Read/write 0000h Section 27.3.9
Threshold register
08h ADC10HI ADC10_A Window Comparator High Read/write FF03h Section 27.3.7
Threshold register
0Ah ADC10MCTL0 ADC10_A Memory Control register Read/write 00h Section 27.3.6
12h ADC10MEM0 ADC10_A Conversion Memory register Read/write undefined Section 27.3.4
1Ah ADC10IE ADC10_A Interrupt Enable register Read/write 0000h Section 27.3.11
1Ch ADC10IFG ADC10_A Interrupt Flag register Read/write 0000h Section 27.3.12
1Eh ADC10IV ADC10_A Interrupt Vector register Read/write 0000h Section 27.3.13
720 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
27.3.1 ADC10CTL0 Register
ADC10_A Control Register 0
Figure 27-12. ADC10CTL0 Register
15 14 13 12 11 10 9 8
Reserved ADC10SHTx
r0 r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC10MSC Reserved ADC10ON Reserved ADC10ENC ADC10SC
rw-(0) r0 r0 rw-(0) r0 r0 rw-(0) rw-(0)
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by software and changing these fields
immediately shows effect when a conversion is active.
Table 27-3. ADC10CTL0 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11-8 ADC10SHTx RW 0h ADC10_A sample-and-hold time. These bits define the number of ADC10CLK
cycles in the sampling period for the ADC10.
0000b = 4 ADC10CLK cycles
0001b = 8 ADC10CLK cycles
0010b = 16 ADC10CLK cycles
0011b = 32 ADC10CLK cycles
0100b = 64 ADC10CLK cycles
0101b = 96 ADC10CLK cycles
0110b = 128 ADC10CLK cycles
0111b = 192 ADC10CLK cycles
1000b = 256 ADC10CLK cycles
1001b = 384 ADC10CLK cycles
1010b = 512 ADC10CLK cycles
1011b = 768 ADC10CLK cycles
1100b = 1024 ADC10CLK cycles
1101b = 1024 ADC10CLK cycles
1110b = 1024 ADC10CLK cycles
1111b = 1024 ADC10CLK cycles
7 ADC10MSC RW 0h ADC10_A multiple sample and conversion. Valid only for sequence or repeated
modes.
0b = The sampling timer requires a rising edge of the SHI signal to trigger each
sample-and-convert.
1b = The first rising edge of the SHI signal triggers the sampling timer, but further
sample-and-conversions are performed automatically as soon as the prior
conversion is completed.
6-5 Reserved R 0h Reserved. Always reads as 0.
4 ADC10ON RW 0h ADC10_A on
0b = ADC10_A off
1b = ADC10_A on
3-2 Reserved R 0h Reserved. Always reads as 0.
1 ADC10ENC RW 0h ADC10_A enable conversion
0b = ADC10_A disabled
1b = ADC10_A enabled
0 ADC10SC RW 0h ADC10_A start conversion. Software-controlled sample-and-conversion start.
ADC10SC and ADC10ENC may be set together with one instruction. ADC10SC
is reset automatically.
0b = No sample-and-conversion-start
1b = Start sample-and-conversion
721
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC10_A Registers
www.ti.com
27.3.2 ADC10CTL1 Register
ADC10_A Control Register 1
Figure 27-13. ADC10CTL1 Register
15 14 13 12 11 10 9 8
Reserved ADC10SHSx ADC10SHP ADC10ISSH
r0 r0 r0 r0 rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC10DIVx ADC10SSELx ADC10CONSEQx ADC10BUSY
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) r-(0)
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by software and changing these fields
immediately shows effect also when a conversion is active.
Table 27-4. ADC10CTL1 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11-10 ADC10SHSx RW 0h ADC10_A sample-and-hold source select
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
00b = ADC10SC bit
01b = Timer trigger 0 - see the device-specific data sheet
10b = Timer trigger 1 - see the device-specific data sheet
11b = Timer trigger 2 - see the device-specific data sheet
9 ADC10SHP RW 0h ADC10_A sample-and-hold pulse-mode select. This bit selects the source of the
sampling signal (SAMPCON) to be either the output of the sampling timer or the
sample-input signal directly.
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
0b = SAMPCON signal is sourced from the sample-input signal
1b = SAMPCON signal is sourced from the sampling timer
8 ADC10ISSH RW 0h ADC10_A invert signal sample-and-hold
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
0b = The sample-input signal is not inverted
1b = The sample-input signal is inverted
7-5 ADC10DIVx RW 0h ADC10_A clock divider
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
722 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
Table 27-4. ADC10CTL1 Register Description (continued)
Bit Field Type Reset Description
4-3 ADC10SSELx RW 0h ADC10_A clock source select
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
00b = MODCLK
01b = ACLK
10b = MCLK
11b = SMCLK
2-1 ADC10CONSEQx RW 0h ADC10_A conversion sequence mode select
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
00b = Single-channel, single-conversion
01b = Sequence-of-channels
10b = Repeat-single-channel
11b = Repeat-sequence-of-channels
0 ADC10BUSY R 0h ADC10_A busy. This bit indicates an active sample or conversion operation.
0b = No operation is active
1b = A sequence, sample, or conversion is active
723
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC10_A Registers
www.ti.com
27.3.3 ADC10CTL2 Register
ADC10_A Control Register 2
Figure 27-14. ADC10CTL2 Register
15 14 13 12 11 10 9 8
Reserved ADC10PDIVx
r0 r0 r0 r0 r0 r0 rw-(0) rw-(0)
76543210
Reserved ADC10RES ADC10DF ADC10SR Reserved
r0 r0 r0 rw-(1) rw-(0) rw-(0) r0 r0
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by software and changing these fields
immediately shows effect also when a conversion is active.
Table 27-5. ADC10CTL2 Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-8 ADC10PDIVx RW 0h ADC10_A predivider. This bit predivides the selected ADC10_A clock source
before it gets divided again using ADC10DIVx.
00b = Predivide by 1
01b = Predivide by 4
10b = Predivide by 64
11b = Reserved
7-5 Reserved R 0h Reserved. Always reads as 0.
4 ADC10RES RW 1h ADC10_A resolution. This bit defines the conversion result resolution.
0b = 8 bit (10 clock cycle conversion time)
1b = 10 bit (12 clock cycle conversion time)
3 ADC10DF RW 0h ADC10_A data read-back format. Data is always stored in the binary unsigned
format.
0b = Binary unsigned. Theoretically, the analog input voltage -V(REF) results in
0000h, and the analog input voltage +V(REF) results in 03FFh.
1b = Signed binary (twos complement), left aligned. Theoretically, the analog
input voltage -V(REF) results in 8000h, and the analog input voltage +V(REF)
results in 7FC0h.
2 ADC10SR RW 0h ADC10_A sampling rate. This bit selects drive capability of the ADC10_A
reference buffer for the maximum sampling rate. Setting ADC10SR reduces the
current consumption of this buffer.
0b = ADC10_A buffer supports up to approximately 200 ksps.
1b = ADC10_A buffer supports up to approximately 50 ksps.
1-0 Reserved R 0h Reserved. Always reads as 0.
724 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
27.3.4 ADC10MEM0 Register
ADC10_A Conversion Memory Register
Figure 27-15. ADC10MEM0 Register
15 14 13 12 11 10 9 8
Reserved Conversion_Results
r0 r0 r0 r0 r0 r0 rw rw
76543210
Conversion_Results
rw rw rw rw rw rw rw rw
Table 27-6. ADC10MEM0 Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 Conversion_Results RW undefined The 10-bit conversion results are right justified. Bit 9 is the MSB. Bits 15-10 are
0 in 10-bit mode, and bits 15-8 are 0 in 8-bit mode. Writing to the conversion
memory register corrupts the results. This data format is used if ADC10DF = 0.
27.3.5 ADC10MEM0 Register, Twos-Complement Format
ADC10_A Conversion Memory Register, Twos-Complement Format
Figure 27-16. ADC10MEM0 Register
15 14 13 12 11 10 9 8
Conversion_Results
rw rw rw rw rw rw rw rw
76543210
Conversion_Results Reserved
rw rw r0 r0 r0 r0 r0 r0
Table 27-7. ADC10MEM0 Register Description
Bit Field Type Reset Description
15-6 Conversion_Results RW undefined The 10-bit conversion results are left justified, twos-complement format. Bit 15
is the MSB. Bits 5-0 are 0 in 10-bit mode, and bits 7-0 are 0 in 8-bit mode. This
data format is used if ADC10DF = 1. The data is stored in the right-justified
format and is converted to the left-justified twos-complement format during read
back. Writing to the conversion memory register corrupts the results.
5-0 Reserved R 0h Reserved. Always reads as 0.
725
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC10_A Registers
www.ti.com
27.3.6 ADC10MCTL0 Register
ADC10_A Conversion Memory Control Register
Figure 27-17. ADC10MCTL0 Register
76543210
Reserved ADC10SREFx ADC10INCHx
r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by software and changing these fields
immediately shows effect also when a conversion is active.
Table 27-8. ADC10MCTL0 Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6-4 ADC10SREFx RW 0h Select reference. It is not recommended to change this setting while a
conversion is ongoing.
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
000b = V(R+) = AVCC and V(R-) = AVSS
001b = V(R+) = VREF and V(R-) = AVSS
010b = V(R+) = VEREF+ buffered and V(R-) = AVSS
011b = V(R+) = VEREF+ and V(R-) = AVSS
100b = V(R+) = AVCC and V(R-) = VEREF-
101b = V(R+) = VREF and V(R-) = VEREF-
110b = V(R+) = VEREF+ buffered and V(R-) = VEREF-
111b = V(R+) = VEREF+ and V(R-) = VEREF-
3-0 ADC10INCHx RW 0h Input channel select. Writing these bits select the channel for a single-conversion
or the highest channel for a sequence of conversions. Reading these bits in
ADC10CONSEQ = 01 or 11 returns the channel currently converted.
ADC10INCHx is not synchronized, so a read while the state machine is not in
"wait for enable" or "wait for trigger" could lead to a wrong result.
Can be modified only when ADC10ENC = 0. Resetting ADC10ENC = 0 by
software and changing these fields immediately shows effect also when a
conversion is active.
0000b = A0
0001b = A1
0010b = A2
0011b = A3
0100b = A4
0101b = A5
0110b = A6
0111b = A7
1000b = A8
1001b = A9
1010b = A10
1011b = A11
1100b = A12
1101b = A13
1110b = A14
1111b = A15
726 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
27.3.7 ADC10HI Register
ADC10_A Window Comparator High Threshold Register
Figure 27-18. ADC10HI Register
15 14 13 12 11 10 9 8
Reserved High_Threshold
r0 r0 r0 r0 r0 r0 rw-(1) rw-(1)
76543210
High_Threshold
rw-(1) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1)
Table 27-9. ADC10HI Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 High_Threshold RW 3FFh The 10-bit threshold value needs to be right justified. Bit 9 is the MSB. Bits 15-10
are 0 in 10-bit mode, and bits 15-8 are 0 in 8-bit mode. This data format is used
if ADC10DF = 0.
27.3.8 ADC10HI Register, Twos-Complement Format
ADC10_A Window Comparator High Threshold Register, Twos-Complement Format
Figure 27-19. ADC10HI Register
15 14 13 12 11 10 9 8
High_Threshold
rw-(0) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1) rw-(1)
76543210
High_Threshold Reserved
rw-(1) rw-(1) r0 r0 r0 r0 r0 r0
Table 27-10. ADC10HI Register Description
Bit Field Type Reset Description
15-6 High_Threshold RW 1FFh The 10-bit threshold value needs to be left justified if twos-complement format is
chosen. Bit 15 is the MSB. Bits 5-0 are 0 in 10-bit mode, and bits 7-0 are 0 in 8-
bit mode. This data format is used if ADC10DF = 1.
5-0 Reserved R 0h Reserved. Always reads as 0.
727
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC10_A Registers
www.ti.com
27.3.9 ADC10LO Register
ADC10_A Window Comparator Low Threshold Register
Figure 27-20. ADC10LO Register
15 14 13 12 11 10 9 8
Reserved Low_Threshold
r0 r0 r0 r0 r0 r0 rw-(0) rw-(0)
76543210
Low_Threshold
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 27-11. ADC10LO Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 Low_Threshold RW 0h The 10-bit threshold value needs to be right justified. Bit 9 is the MSB. Bits 15-10
are 0 in 10-bit mode, and bits 15-8 are 0 in 8-bit mode. This data format is used
if ADC10DF = 0.
27.3.10 ADC10LO Register, Twos-Complement Format
ADC10_A Window Comparator Low Threshold Register, Twos-Complement Format
Figure 27-21. ADC10LO Register
15 14 13 12 11 10 9 8
Low_Threshold
rw-(1) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Low_Threshold Reserved
rw-(0) rw-(0) r0 r0 r0 r0 r0 r0
Table 27-12. ADC10LO Register Description
Bit Field Type Reset Description
15-6 Low_Threshold RW 200h The 10-bit threshold value needs to be left justified if twos-complement format is
chosen. Bit 15 is the MSB. Bits 5-0 are 0 in 10-bit mode, and bits 7-0 are 0 in 8-
bit mode. This data format is used if ADC10DF = 1.
5-0 Reserved R 0h Reserved. Always reads as 0.
728 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
27.3.11 ADC10IE Register
ADC10_A Interrupt Enable Register
Figure 27-22. ADC10IE Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved ADC10TOVIE ADC10OVIE ADC10HIIE ADC10LOIE ADC10INIE ADC10IE0
r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 27-13. ADC10IE Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved. Always reads as 0.
5 ADC10TOVIE RW 0h ADC10_A conversion-time-overflow interrupt enable.
0b = Conversion time overflow interrupt disabled
1b = Conversion time overflow interrupt enabled
4 ADC10OVIE RW 0h ADC10MEM0 overflow interrupt enable.
0b = Overflow interrupt disabled
1b = Overflow interrupt enabled
3 ADC10HIIE RW 0h Interrupt enable for the above upper threshold interrupt of the window
comparator.
0b = Above upper threshold interrupt disabled
1b = Above upper threshold interrupt enabled
2 ADC10LOIE RW 0h Interrupt enable for the below lower threshold interrupt of the window
comparator.
0b = Below lower threshold interrupt disabled
1b = Below lower threshold interrupt enabled
1 ADC10INIE RW 0h Interrupt enable for the inside of window interrupt of the window comparator.
0b = Inside of window interrupt disabled
1b = Inside of window interrupt enabled
0 ADC10IE0 RW 0h Interrupt enable. This bits enable or disable the interrupt request for a completed
ADC10_A conversion.
0b = Interrupt disabled
1b = Interrupt enabled
729
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC10_A Registers
www.ti.com
27.3.12 ADC10IFG Register
ADC10_A Interrupt Flag Register
Figure 27-23. ADC10IFG Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved ADC10TOVIFG ADC10OVIFG ADC10HIIFG ADC10LOIFG ADC10INIFG ADC10IFG0
r0 r0 rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 27-14. ADC10IFG Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved. Always reads as 0.
5 ADC10TOVIFG RW 0h The ADC10TOVIFG is set when an ADC10_A conversion is triggered before the
actual conversion has completed.
0b = No interrupt pending
1b = Interrupt pending
4 ADC10OVIFG RW 0h The ADC10OVIFG is set when the ADC10MEM0 register is written before the
last conversion result has been read.
0b = No interrupt pending
1b = Interrupt pending
3 ADC10HIIFG RW 0h The ADC10HIIFG is set when the result of the current ADC10_A conversion is
greater than the upper threshold defined by the window comparator's upper
threshold register.
0b = No interrupt pending
1b = Interrupt pending
2 ADC10LOIFG RW 0h The ADC10LOIFG is set when the result of the current ADC10_A conversion is
below the lower threshold defined by the window comparator's lower threshold
register.
0b = No interrupt pending
1b = Interrupt pending
1 ADC10INIFG RW 0h The ADC10INIFG is set when the result of the current ADC10_A conversion is
within the thresholds defined by the window comparator's threshold registers.
0b = No interrupt pending
1b = Interrupt pending
0 ADC10IFG0 RW 0h The ADC10IFG0 is set when an ADC10_A conversion is completed. This bit gets
reset, when the ADC10MEM0 get read, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
730 ADC10_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC10_A Registers
27.3.13 ADC10IV Register
ADC10_A Interrupt Vector Register
Figure 27-24. ADC10IV Register
15 14 13 12 11 10 9 8
ADC10IVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
ADC10IVx
r0 r0 r0 r0 r-(0) r-(0) r-(0) r0
Table 27-15. ADC10IV Register Description
Bit Field Type Reset Description
15-0 ADC10IVx R 0h ADC10_A interrupt vector value. It generates an value that can be used as
address offset for fast interrupt service routine handling. Writing to this register
clears all pending interrupt flags.
00h = No interrupt pending
02h = Interrupt Source: ADC10MEM0 overflow; Interrupt Flag: ADC10OVIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Conversion time overflow; Interrupt Flag: ADC10TOVIFG
06h = Interrupt Source: ADC10HI Interrupt flag; Interrupt Flag: ADC10HIIFG
08h = Interrupt Source: ADC10LO Interrupt flag; Interrupt Flag: ADC10LOIFG
0Ah = Interrupt Source: ADC10IN Interrupt flag; Interrupt Flag: ADC10INIFG
0Ch = Interrupt Source: ADC10_A memory Interrupt flag; Interrupt Flag:
ADC10IFG0; Interrupt Priority: Lowest
731
SLAU208O–June 2008–Revised May 2015 ADC10_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 28
SLAU208O–June 2008–Revised May 2015
ADC12_A
The ADC12_A module is a high-performance 12-bit analog-to-digital converter (ADC). This chapter
describes the operation of the ADC12_A module.
Topic ........................................................................................................................... Page
28.1 ADC12_A Introduction....................................................................................... 733
28.2 ADC12_A Operation.......................................................................................... 736
28.3 ADC12_A Registers .......................................................................................... 750
732 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC12_A Introduction
28.1 ADC12_A Introduction
The ADC12_A module supports fast 12-bit analog-to-digital conversions. The module implements a 12-bit
SAR core, sample select control, reference generator (MSP430F54xx (non-A only) – in other devices,
separate REF module), and a 16-word conversion-and-control buffer. The conversion-and-control buffer
allows up to 16 independent analog-to-digital converter (ADC) samples to be converted and stored without
any CPU intervention.
ADC12_A features include:
• Greater than 200-ksps maximum conversion rate
• Monotonic 12-bit converter with no missing codes
• Sample-and-hold with programmable sampling periods controlled by software or timers
• Conversion initiation by software or timers
• Software-selectable on-chip reference voltage generation (MSP430F54xx (non-A only): 1.5 V or 2.5 V,
all other devices: 1.5 V, 2.0 V, or 2.5 V)
• Software-selectable internal or external reference
• Up to 12 individually configurable external input channels
• Conversion channels for internal temperature sensor, AVCC, and external references
• Independent channel-selectable reference sources for both positive and negative references
• Selectable conversion clock source
• Single-channel, repeat-single-channel, sequence (autoscan), and repeat-sequence (repeated
autoscan) conversion modes
• ADC core and reference voltage can be powered down separately
• Interrupt vector register for fast decoding of 18 ADC interrupts
• 16 conversion-result storage registers
The block diagram of ADC12_A is shown in Figure 28-1. In MSP430F54xx (non-A only), the reference
generator is located in the ADC12_A module itself. In other devices, the reference generator is located in
the reference module, REF. See the REF module chapter and the device-specific data sheet for further
details. Figure 28-1 shows the block diagram for devices that have the REF module available. Figure 28-2
shows the block diagram for the MSP430F54xx (non-A only) which does not incorporate the REF module.
733
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
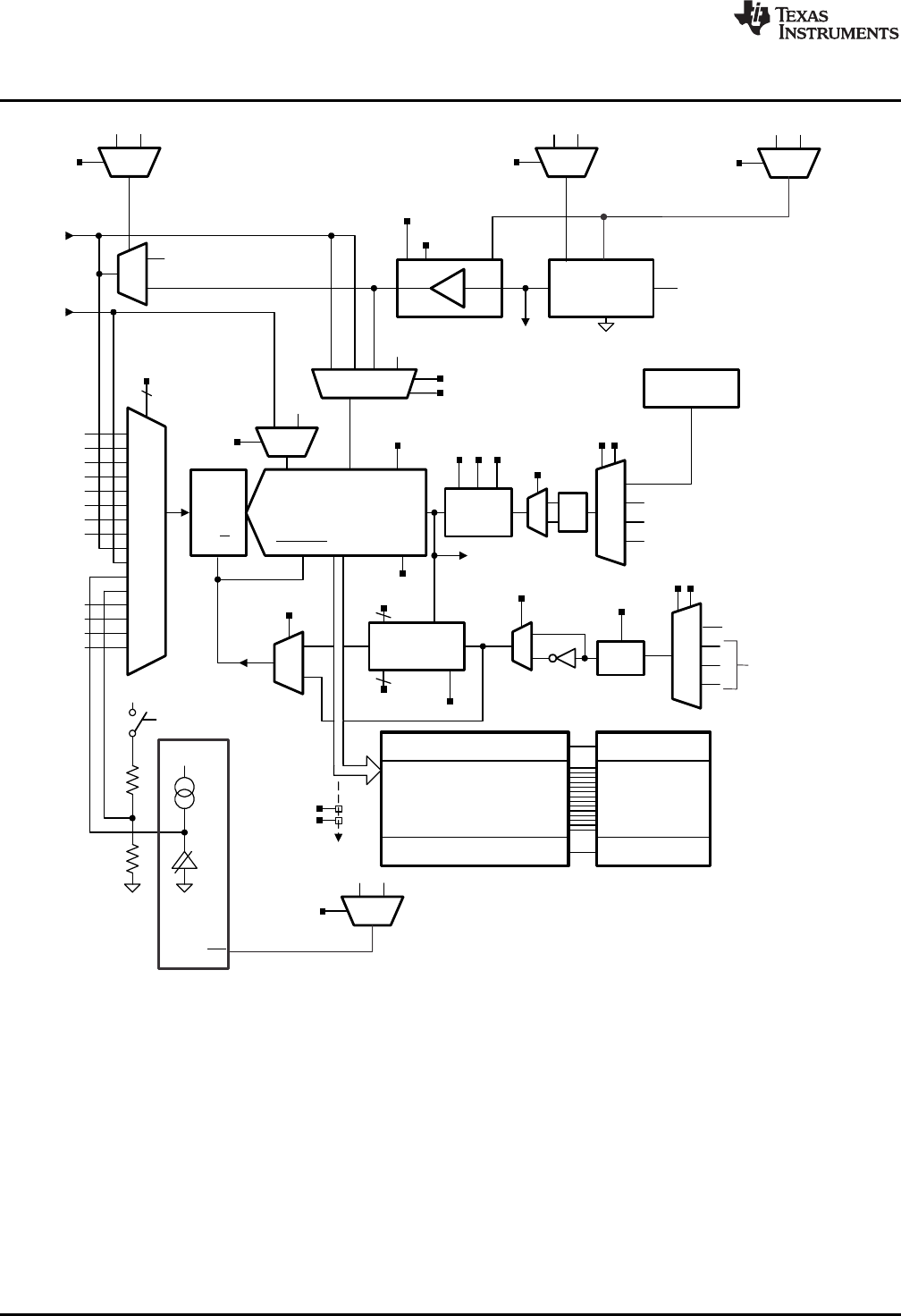
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
0000
INCHx
4
Sample
and
Hold
S/H
12-bit ADC Core
VR- VR+
Convert
1 0
ADC12SREF2
0
A0
A1
A2
A3
A4
A5
A6
A7
VeREF+
V /V
REF- eREF-
VREF+
11 10 01 00
AVCC
ADC12SREF1
ADC12SREF0
ADC12SR
ADC12REFBURST
ADC12ON
SAMPCON
Sample Timer
/4 ../1024
ADC12BUSY
0
1
ADC12ISSH
SHI
ADC12SHT1x
ADC12MSC
Divider
/1 .. /8
ADC12CLK
ADC12DIVx
Ref_x
on
Reference*
AVCC
1
00
01
10
11
ACLK
MCLK
SMCLK
ADC12OSC
(see Note A)
ADC12SSELx
Sync
R
R
AVCC
AVSS
Ref_x
INCHx = 0Bh
-
16 x 8
Memory
Control
-
00
01
10
11
Timer sources
(see Note B)
ADC12SHSx
ADC12SC
ADC12MCTL0
ADC12MCTL15
-
16 x 12
Memory
Buffer
-
ADC12MEM0
ADC12MEM15
4
CSTARTADDx
CONSEQx
1
0
ADC12SHP ADC12SHT0x
4
A12
A13
A14
A15
:1
:4
0
1
ADC12PDIV
REFOUT*
ADC12ENC
1.5/2.0/2.5 V
REFMSTR*
ADC12REFOUT
1 0
REFVSELx*
REFMSTR*
ADC12REF2_5V
1 0
REFON*
REFMSTR*
ADC12REFON
1 0
AVSS
Temp.
Sensor* 1 0
REFTCOFF*
REFMSTR*
ADC12TCOFF
EN
* Resides in REF module.
ADC12_A Introduction
www.ti.com
A ADC12OSC refers to the MODCLK from the UCS. See the UCS chapter for more information.
B See the device-specific data sheet for timer sources available.
Figure 28-1. ADC12_A Block Diagram (Devices With REF Module)
734 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
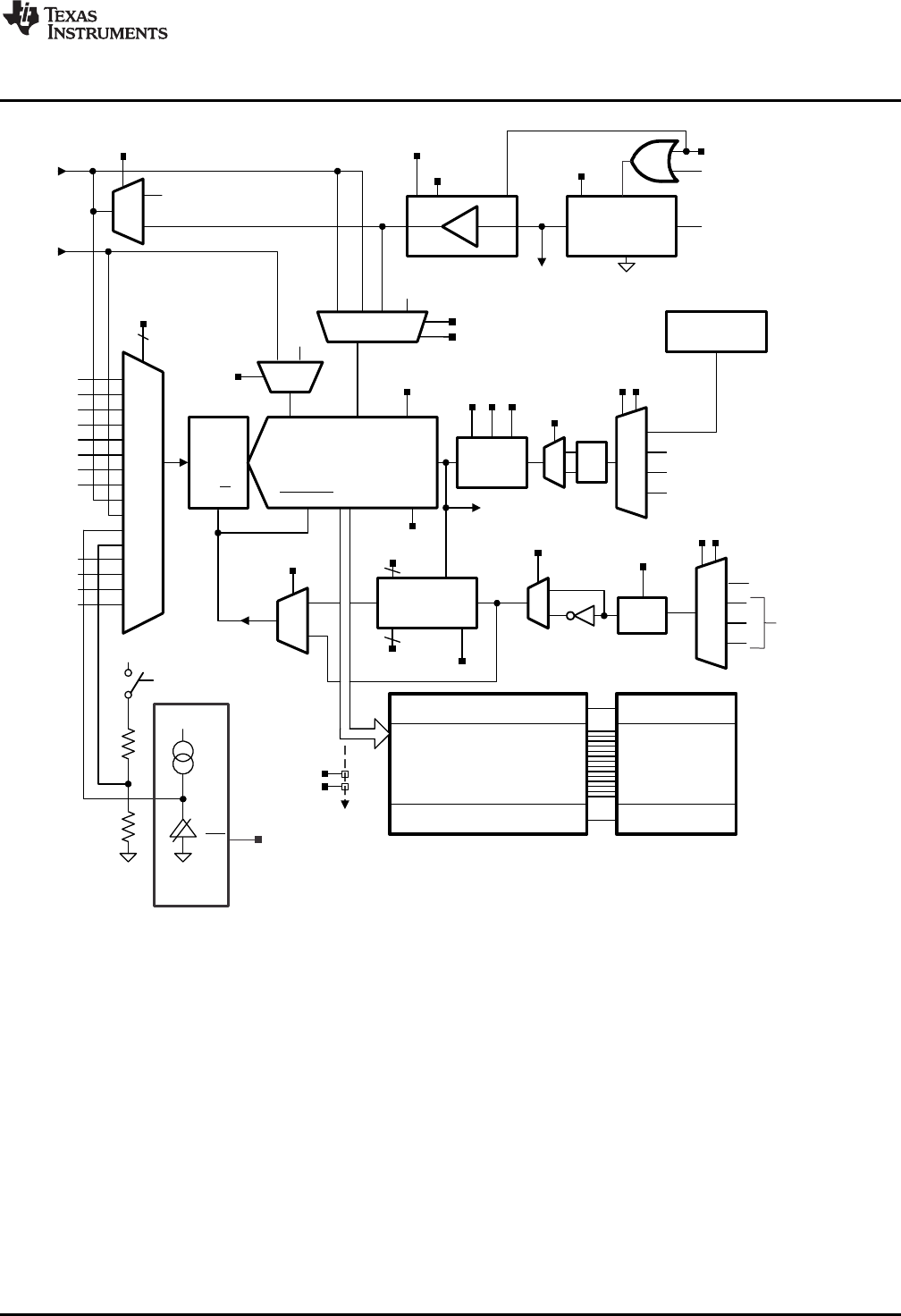
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
0000
INCHx
4
Sample
and
Hold
S/H
12-bit ADC Core
VR- VR+
Convert
1 0
ADC12SREF2
0
ADC12REFOUT
A0
A1
A2
A3
A4
A5
A6
A7
VeREF+
V /V
REF- eREF-
VREF+
11 10 01 00
AVCC
ADC12SREF1
ADC12SREF0
ADC12SR
ADC12REFBURST
ADC12ON
SAMPCON
Sample Timer
/4 ../1024
ADC12BUSY
0
1
ADC12ISSH
SHI
ADC12SHT1x
ADC12MSC
Divider
/1 .. /8
ADC12CLK
ADC12DIVx
Ref_x
on
1.5 V or2.5 V
Reference
AVCC
ADC12REF2_5V
1
00
01
10
11
ACLK
MCLK
SMCLK
ADC12OSC
(see Note A)
ADC12SSELx
Sync
ADC12REFON
R
R
AVCC
AVSS
Ref_x
INCHx = 0Bh
-
16 x 8
Memory
Control
-
00
01
10
11
Timer sources
(see Note B)
ADC12SHSx
ADC12SC
ADC12MCTL0
ADC12MCTL15
-
16 x 12
Memory
Buffer
-
ADC12MEM0
ADC12MEM15
4
CSTARTADDx
CONSEQx
1
0
ADC12SHP ADC12SHT0x
4
A12
A13
A14
A15
:1
:4
0
1
ADC12PDIV
AVSS
ADC12ENC
Temp.
Sensor
EN ADC12TCOFF
INCHx = 0Ah
www.ti.com
ADC12_A Introduction
A ADC12OSC refers to the MODCLK from the UCS. See the UCS chapter for more information.
B See the device-specific data sheet for timer sources available.
Figure 28-2. ADC12_A MSP430F54xx (non-A) Block Diagram
735
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
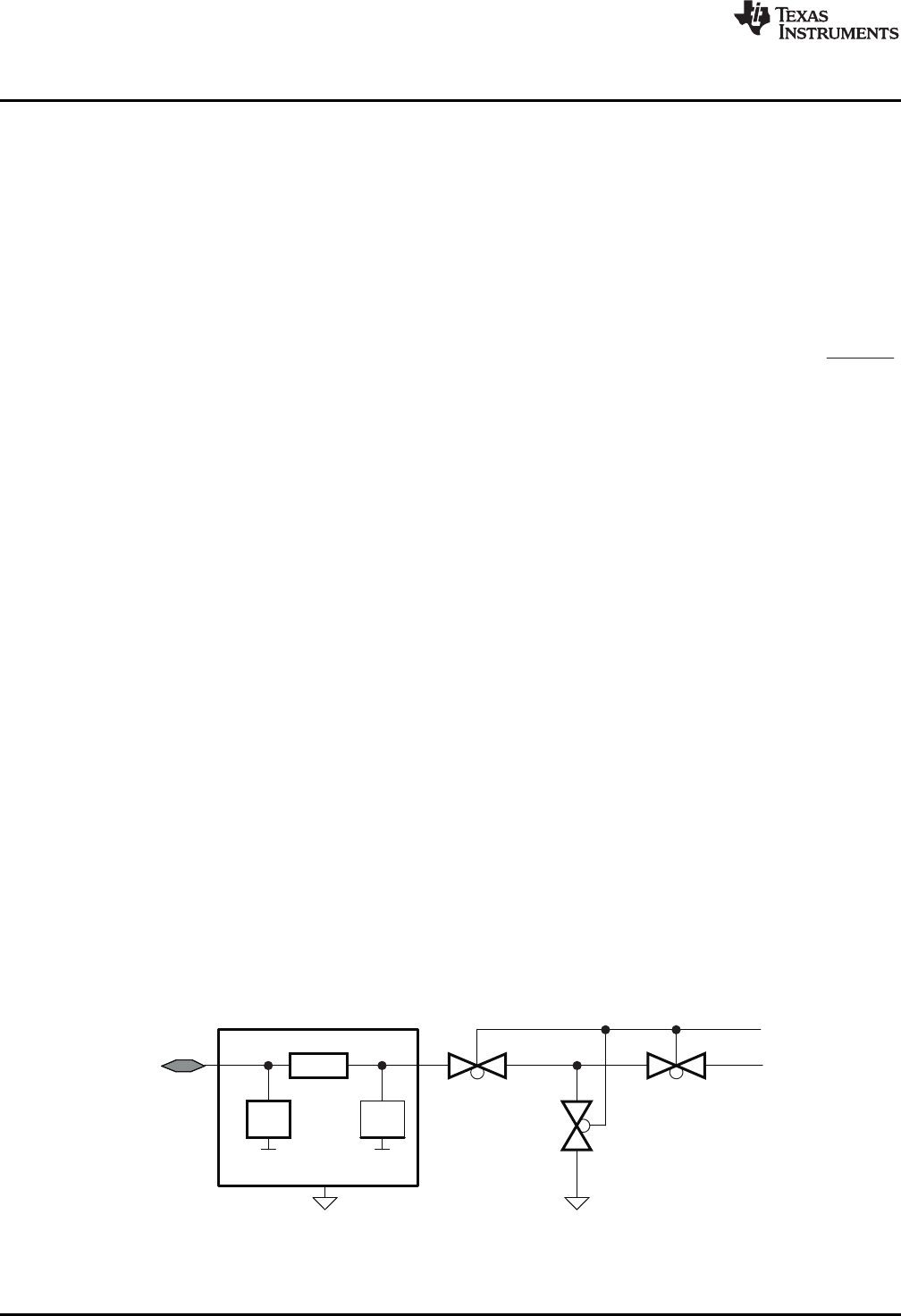
ESD Protection
R ~ 100 WADC12MCTLx.0–3
Input
Ax
N = 4095 ×
ADC
Vin – VR–
V – V
R+ R–
ADC12_A Operation
www.ti.com
28.2 ADC12_A Operation
The ADC12_A module is configured with user software. The setup and operation of the ADC12_A is
discussed in the following sections.
28.2.1 12-Bit ADC Core
The ADC core converts an analog input to its 12-bit digital representation and stores the result in
conversion memory. The core uses two programmable and selectable voltage levels (VR+ and VR–) to
define the upper and lower limits of the conversion. The digital output (NADC) is full scale (0FFFh) when the
input signal is equal to or higher than VR+. The digital output (NADC) is zero when the input signal is equal
to or lower than VR–. The input channel and the reference voltage levels (VR+ and VR–) are defined in the
conversion-control memory. The conversion formula for the ADC result NADC is:
The ADC12_A core is configured by two control registers, ADC12CTL0 and ADC12CTL1. The core is
enabled with the ADC12ON bit. The ADC12_A can be turned off when it is not in use to save power. With
few exceptions, the ADC12_A control bits can be modified only when ADC12ENC = 0. ADC12ENC must
be set to 1 before any conversion can take place.
28.2.1.1 Conversion Clock Selection
The ADC12CLK is used both as the conversion clock and to generate the sampling period when the pulse
sampling mode is selected. The ADC12_A source clock is selected using the predivider controlled by the
ADC12PDIV bit and the divider using the ADC12SSELx bits. The input clock can be divided from 1 to 32
using both the ADC12DIVx bits and the ADC12PDIV bit. Possible ADC12CLK sources are SMCLK,
MCLK, ACLK, and the ADC12OSC.
The ADC12OSC in the block diagram (see Figure 28-1) refers to the MODCLK 5-MHz oscillator from the
UCS (see the UCS module for more information) which can vary with individual devices, supply voltage,
and temperature. See the device-specific data sheet for the ADC12OSC specification.
The user must ensure that the clock chosen for ADC12CLK remains active until the end of a conversion. If
the clock is removed during a conversion, the operation does not complete and the results are invalid.
28.2.2 ADC12_A Inputs and Multiplexer
The 12 external and 4 internal analog signals are selected as the channel for conversion by the analog
input multiplexer. The input multiplexer is a break-before-make type to reduce input-to-input noise injection
resulting from channel switching (see Figure 28-3). The input multiplexer is also a T-switch to minimize the
coupling between channels. Channels that are not selected are isolated from the ADC, and the
intermediate node is connected to analog ground (AVSS) so that the stray capacitance is grounded to
eliminate crosstalk.
The ADC12_A uses the charge redistribution method. When the inputs are internally switched, the
switching action may cause transients on the input signal. These transients decay and settle before
causing errant conversion.
Figure 28-3. Analog Multiplexer
736 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC12_A Operation
28.2.2.1 Analog Port Selection
The ADC12_A inputs are multiplexed with digital port pins. When analog signals are applied to digital
gates, parasitic current can flow from VCC to GND. This parasitic current occurs if the input voltage is near
the transition level of the gate. Disabling the digital part of the port pin eliminates the parasitic current flow
and, therefore, reduces overall current consumption. The PxSEL.y bits provide the ability to disable the
port pin input and output buffers.
; Px.0 and Px.1 configured for analog input
BIS.B #3h,&PxSEL ; Px.1 and Px.0 ADC12_A function
28.2.3 Voltage Reference Generator
The ADC12_A modules have a separate reference module (REF) that supplies three selectable voltage
levels, 1.5 V, 2.0 V, and 2.5 V to the ADC12_A. Any of these voltages may be used internally and
externally on pin VREF+. The internal AVCC can also be used as the reference.
The ADC12_A module of the MSP430F54xx devices (non-A only) does not use the REF module and only
has two selectable voltage levels, 1.5 V and 2.5 V. The internal AVCC can also be used as the reference.
On devices with the REF module, the voltage reference settings can be controlled either by the REF
module or by the ADC12_A module. This is to allow for backward compatability with older families. This is
handled by the REFMSTR bit in the REF module. If REFMSTR = 1 (default), the REF module registers
control the reference settings. If REFMSTR = 0, the ADC12_A reference setting define the reference
voltage of the ADC12_A module. Four control settings that reside in the ADC12_A can be controlled also
by four corresponding settings in the REF module: ADC12REF2_5V (REFVSEL), ADC12REFON
(REFON), ADC12REFOUT (REFOUT), and ADC12TCOFF (REFTCOFF), respectively. When REFMSTR
= 1, ADC12REF2_5V, ADC12REFON, ADC12REFOUT, and ADC12TCOFF are do not care. Similarly,
when REFMSTR = 0, REFVSEL, REFON, REFOUT, and REFTCOFF are do not care. See the REF
module chapter for further details.
On devices with the REF module, to use the ADC12_A reference control bits, set REFMSTR = 0. In this
case, setting ADC12REFON = 1 enables the reference voltage of the ADC12_A module. When
ADC12REF2_5V = 1, the internal reference is 2.5 V; when ADC12REF2_5V = 0, the reference is 1.5 V.
Similarly, on devices with the REF module, to use the REF module reference control bits, set REFMSTR =
1. In this case, setting REFON = 1 of the REF module enables the reference voltage. The REFVSEL bits
of the REF module can be used to select either 1.5 V, 2.0 V, or 2.5 V. The reference can be turned off to
save power when not in use. On the MSP430F54xx devices (non-A only), as stated previously, the REF
module is not present, and these devices behave the same as devices with the REF module with
REFMSTR = 0.
External references may be supplied for VR+ and VR– through pins VREF+/VeREF+ and VREF-/VeREF-,
respectively.
External storage capacitors are required only if ADC12REFOUT = 1 (REFOUT = 1 when using REF
module) and the reference voltage is made available at the pins.
28.2.3.1 Internal Reference Low-Power Features
The ADC12_A internal reference generator is designed for low-power applications. The reference
generator includes a bandgap voltage source and a separate buffer. The current consumption and settling
time of each is specified separately in the device-specific data sheet. When ADC12REFON = 1 (REFON =
1 when using REF module), both are enabled; when ADC12REFON = 0 (REFON = 0 when using REF
module), both are disabled.
When ADC12REFON = 1 (REFON = 1 when using REF module) and ADC12REFBURST = 1 but no
conversion is active, the buffer is automatically disabled and automatically reenabled when needed. When
the buffer is disabled, it consumes no current. In this case, the bandgap voltage source remains enabled.
The ADC12REFBURST bit controls the operation of the reference buffer. When ADC12REFBURST = 1,
the buffer is automatically disabled when the ADC12_A is not actively converting, and is automatically
reenabled when needed. When ADC12REFBURST = 0, the buffer is on continuously. This allows the
reference voltage to be present outside the device continuously if ADC12REFOUT = 1 (REFOUT = 1
when using REF module).
737
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
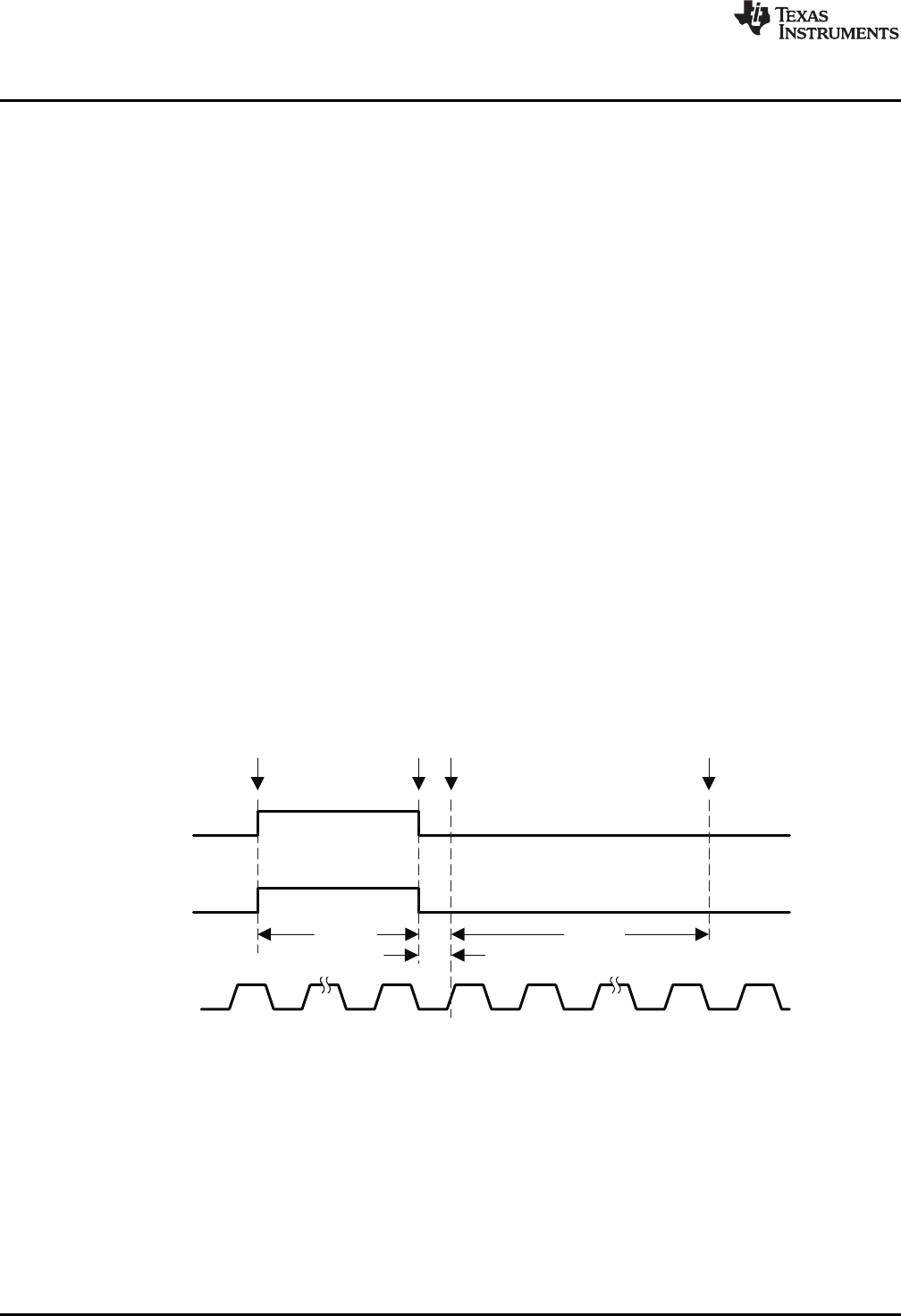
Start
Sampling
Stop
Sampling
Conversion
Complete
SAMPCON
SHI
tsample tconvert
tsync
13 × ADC12CLK
Start
Conversion
ADC12CLK
ADC12_A Operation
www.ti.com
The internal reference buffer also has selectable speed versus power settings. When the maximum
conversion rate is below 50 ksps, setting ADC12SR = 1 reduces the current consumption of the buffer by
approximately 50%.
28.2.4 Auto Power Down
The ADC12_A is designed for low-power applications. When the ADC12_A is not actively converting, the
core is automatically disabled, and it is automatically reenabled when needed. The MODOSC is also
automatically enabled when needed and disabled when not needed.
28.2.5 Sample and Conversion Timing
An analog-to-digital conversion is initiated with a rising edge of the sample input signal SHI. The source
for SHI is selected with the SHSx bits and includes the following:
• ADC12SC bit
• Up to three timer outputs (see the device-specific data sheet for available timer sources)
The ADC12_A supports 8-bit, 10-bit, and 12-bit resolution modes selectable by the ADC12RES bits. The
analog-to-digital conversion requires 9, 11, and 13 ADC12CLK cycles, respectively. The polarity of the SHI
signal source can be inverted with the ADC12ISSH bit. The SAMPCON signal controls the sample period
and start of conversion. When SAMPCON is high, sampling is active. The high-to-low SAMPCON
transition starts the analog-to-digital conversion. Two different sample-timing methods are defined by
control bit ADC12SHP, extended sample mode and pulse mode. See the device-specific data sheet for
available timers for SHI sources.
28.2.5.1 Extended Sample Mode
The extended sample mode is selected when ADC12SHP = 0. The SHI signal directly controls SAMPCON
and defines the length of the sample period tsample. When SAMPCON is high, sampling is active. The high-
to-low SAMPCON transition starts the conversion after synchronization with ADC12CLK (see Figure 28-4).
Figure 28-4. Extended Sample Mode
28.2.5.2 Pulse Sample Mode
Set ADC12SHP = 1 to select the pulse sample mode. The SHI signal is used to trigger the sampling timer.
The ADC12SHT0x and ADC12SHT1x bits in ADC12CTL0 control the interval of the sampling timer that
defines the SAMPCON sample period tsample. The sampling timer keeps SAMPCON high after
synchronization with AD12CLK for a programmed interval tsample. The total sampling time is tsample plus tsync
(see Figure 28-5).
The ADC12SHTx bits select the sampling time in 4× multiples of ADC12CLK. ADC12SHT0x selects the
sampling time for ADC12MCTL0 to ADC12MCTL7. ADC12SHT1x selects the sampling time for
ADC12MCTL8 to ADC12MCTL15.
738 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
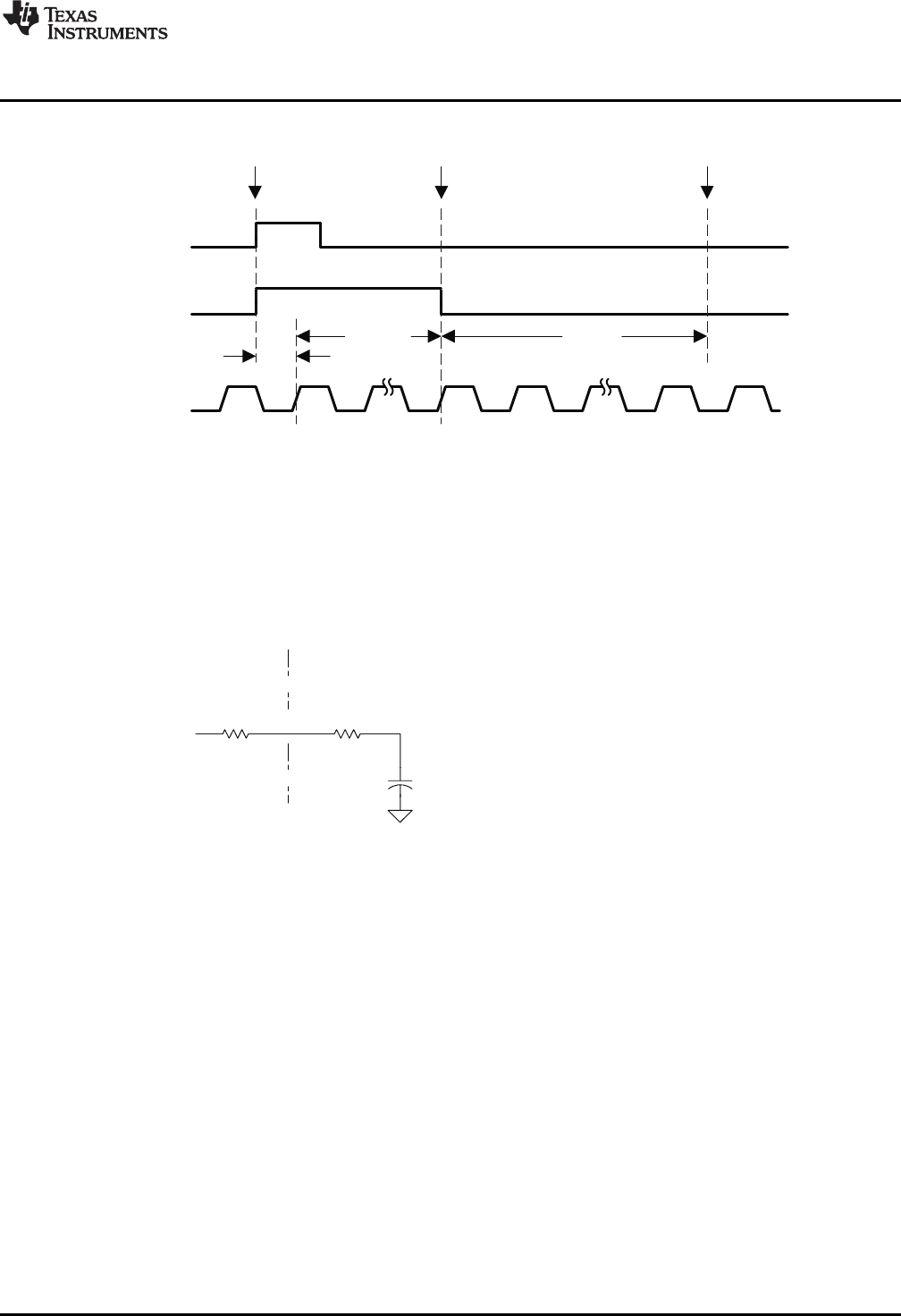
VS
RSVIRI
VC
CI
V = Input voltage at pin Ax
V = External source voltage
R = External source resistance
R = Internal MUX-on input resistance
C = Input capacitance
V = Capacitance-charging voltage
I
S
S
I
I
C
MSP430
Start
Sampling
Stop
Sampling
Conversion
Complete
SAMPCON
SHI
tsample tconvert
tsync
13 × ADC12CLK
Start
Conversion
ADC12CLK
www.ti.com
ADC12_A Operation
Figure 28-5. Pulse Sample Mode
28.2.5.3 Sample Timing Considerations
When SAMPCON = 0, all Ax inputs are high impedance. When SAMPCON = 1, the selected Ax input can
be modeled as an RC low-pass filter during the sampling time tsample (see Figure 28-6). An internal MUX-on
input resistance RI(maximum 1.8 kΩ) in series with capacitor CI(25 pF maximum) is seen by the source.
The capacitor CIvoltage VCmust be charged to within one-half LSB of the source voltage VSfor an
accurate n-bit conversion, where n is the bits of resolution required.
Figure 28-6. Analog Input Equivalent Circuit
The resistance of the source RSand RIaffect tsample. The following equation can be used to calculate the
minimum sampling time tsample for a n-bit conversion, where n equals the bits of resolution:
tsample > (RS+ RI) × ln(2n+1) × CI+ 800 ns
Substituting the values for RIand CIgiven above, the equation becomes:
tsample > (RS+ 1.8 kΩ) × ln(2n+1) × 25 pF + 800 ns
For example, for 12-bit resolution, if RSis 10 kΩ, tsample must be greater than 3.46 μs.
739
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC12_A Operation
www.ti.com
28.2.6 Conversion Memory
There are 16 ADC12MEMx conversion memory registers to store conversion results. Each ADC12MEMx
is configured with an associated ADC12MCTLx control register. The SREFx bits define the voltage
reference and the INCHx bits select the input channel. The ADC12EOS bit defines the end of sequence
when a sequential conversion mode is used. A sequence rolls over from ADC12MEM15 to ADC12MEM0
when the ADC12EOS bit in ADC12MCTL15 is not set.
The CSTARTADDx bits define the first ADC12MCTLx used for any conversion. If the conversion mode is
single-channel or repeat-single-channel, the CSTARTADDx points to the single ADC12MCTLx to be used.
If the conversion mode selected is either sequence-of-channels or repeat-sequence-of-channels,
CSTARTADDx points to the first ADC12MCTLx location to be used in a sequence. A pointer, not visible to
software, is incremented automatically to the next ADC12MCTLx in a sequence when each conversion
completes. The sequence continues until an ADC12EOS bit in ADC12MCTLx is processed; this is the last
control byte processed.
When conversion results are written to a selected ADC12MEMx, the corresponding flag in the ADC12IFGx
register is set.
There are two formats available to store the conversion result, ADC12MEMx. When ADC12DF = 0, the
conversion is right justified, unsigned. For 8-bit, 10-bit, and 12-bit resolutions, the upper 8, 6, and 4 bits of
ADC12MEMx are always zeros, respectively. When ADC12DF = 1, the conversion result is left justified,
twos complement. For 8-bit, 10-bit, and 12-bit resolutions, the lower 8, 6, and 4 bits of ADC12MEMx are
always zeros, respectively. This is summarized in Table 28-1.
Table 28-1. ADC12_A Conversion Result Formats
Analog Input ADC12DF ADC12RES Ideal Conversion Results ADC12MEMx
Voltage
0 00 0 to 255 0000h - 00FFh
0 01 0 to 1023 0000h - 03FFh
0 10 0 to 4095 0000h - 0FFFh
–VREF to +VREF 1 00 -128 to 127 8000h - 7F00h
1 01 -512 to 511 8000h - 7FC0h
1 10 -2048 to 2047 8000h - 7FF0h
28.2.7 ADC12_A Conversion Modes
The ADC12_A has four operating modes selected by the CONSEQx bits as listed in Table 28-2. All state
diagrams assume a 12-bit resolution setting.
Table 28-2. Conversion Mode Summary
ADC12CONSEQx Mode Operation
00 Single-channel single-conversion A single channel is converted once.
01 Sequence-of-channels (autoscan) A sequence of channels is converted once.
10 Repeat-single-channel A single channel is converted repeatedly.
11 Repeat-sequence-of-channels (repeated autoscan) A sequence of channels is converted repeatedly.
740 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
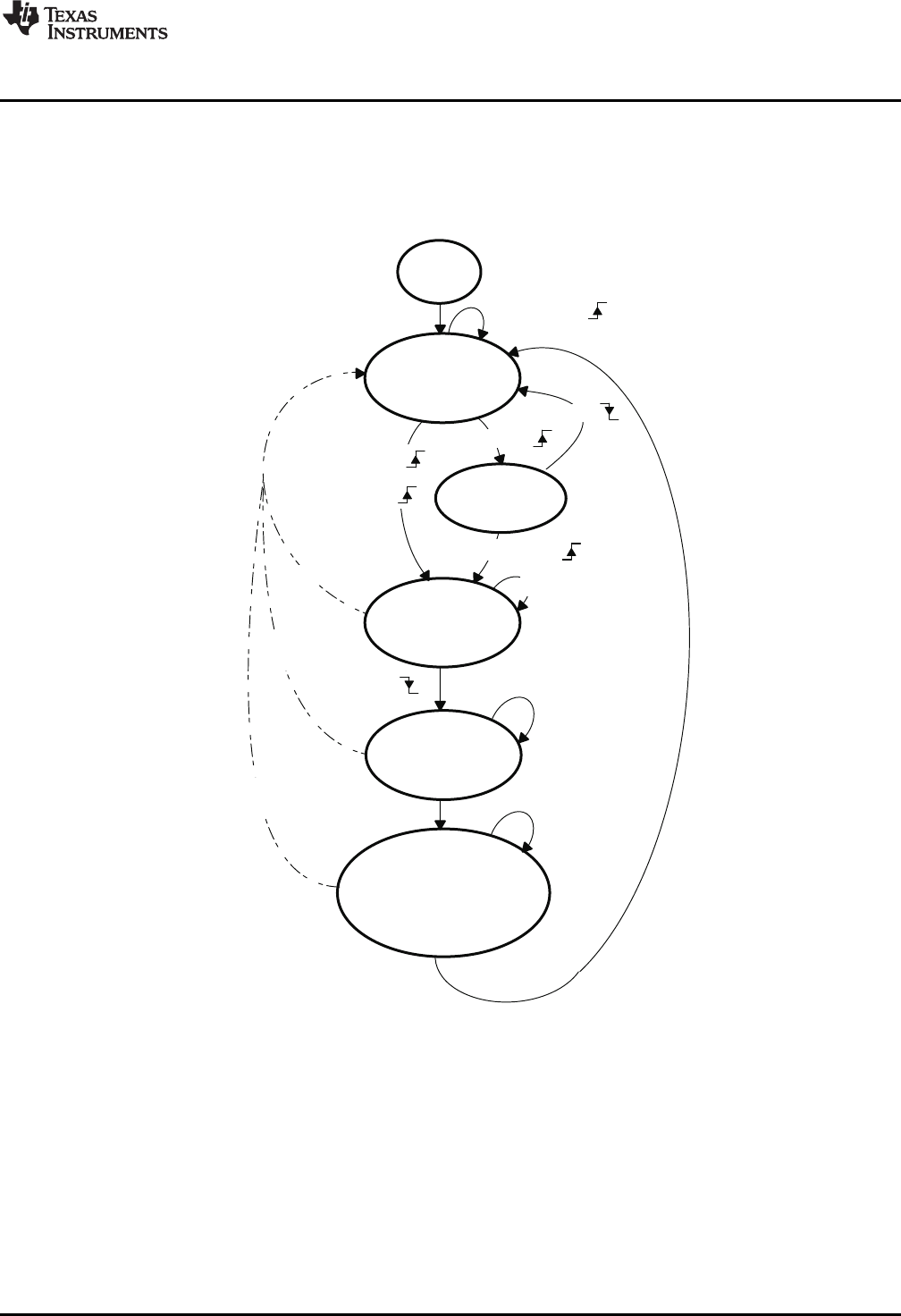
ADC12
off
x = CSTARTADDx
Wait for Enable
Wait for Trigger
Sample, Input
Channel Defined in
ADC12MCTLx
SAMPCON =
SAMPCON = 1
Convert
SAMPCON =
ADC12ENC = 0
ADC12ENC = 0
(see Note A)
12 × ADC12CLK
Conversion
Completed,
Result Stored Into
ADC12MEMx,
ADC12IFG.x is Set
1 × ADC12CLK
ADC12ON = 1
CONSEQx = 00
x = pointer to ADC12MCTLx
ADC12ENC ¹
ADC12ENC =
ADC12ENC =
ADC12ENC = 0
(see Note A)
SHSx = 0
and
ADC12ENC = 1 or
and
ADC12SC =
www.ti.com
ADC12_A Operation
28.2.7.1 Single-Channel Single-Conversion Mode
A single channel is sampled and converted once. The ADC result is written to the ADC12MEMx defined
by the CSTARTADDx bits. Figure 28-7 shows the flow of the single-channel single-conversion mode.
When ADC12SC triggers a conversion, successive conversions can be triggered by the ADC12SC bit.
When any other trigger source is used, ADC12ENC must be toggled between each conversion.
A Conversion result is unpredictable.
Figure 28-7. Single-Channel Single-Conversion Mode
741
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
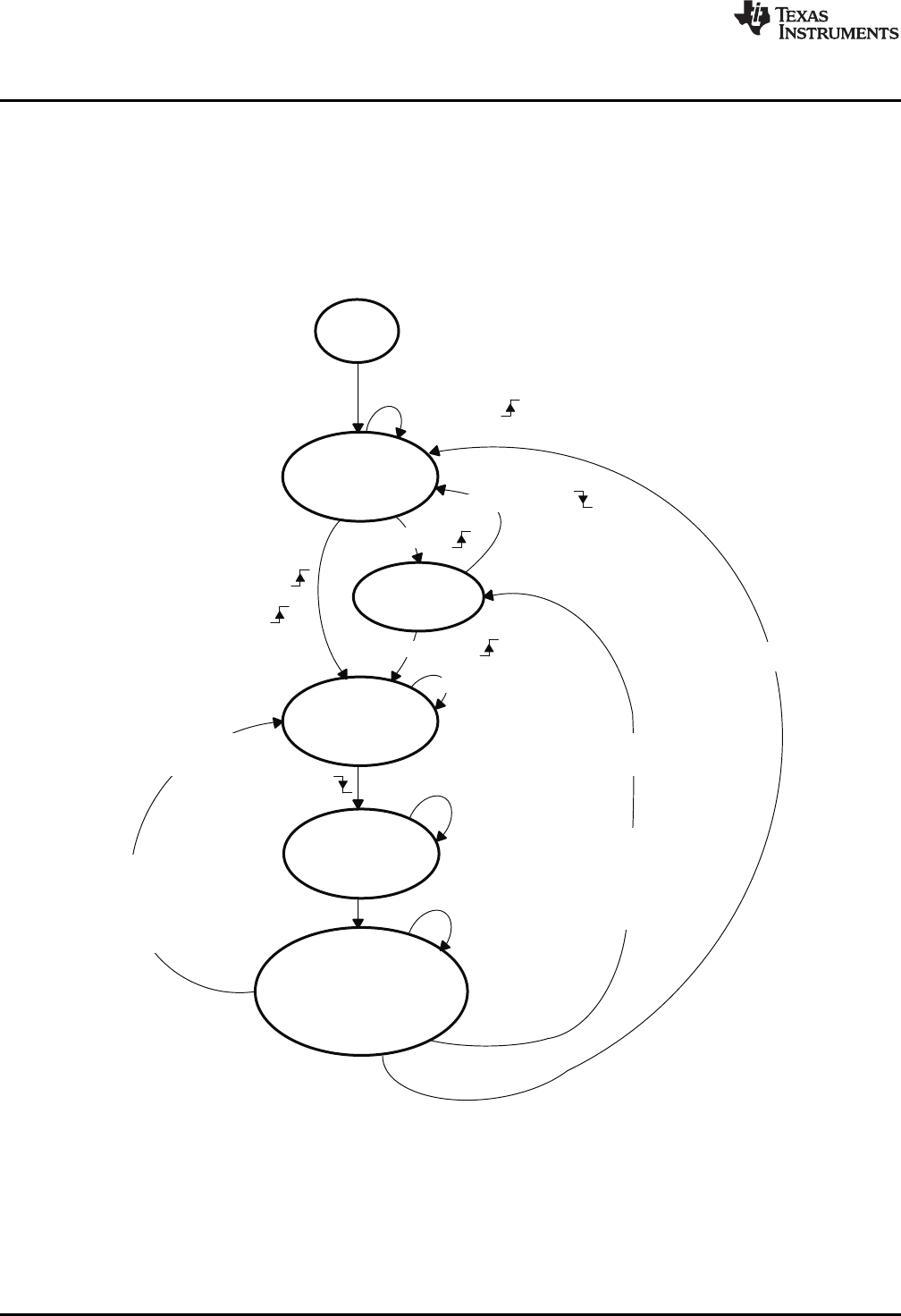
ADC12
off
x = CSTARTADDx
Wait for Enable
ADC12ENC ¹
Wait for Trigger
Sample, Input
Channel Defined in
ADC12MCTLx
ADC12ENC =
SHSx = 0
and
ADC12ENC = 1 or
and
ADC12SC =
SAMPCON =
SAMPCON = 1
Convert
SAMPCON = 12 × ADC12CLK
Conversion
Completed,
Result Stored Into
ADC12MEMx,
ADC12IFG.x is Set
1 × ADC12CLK
ADC12ON = 1
CONSEQx = 01
ADC12MSC = 1
and
ADC12SHP = 1
and
ADC12EOS.x = 0
ADC12EOS.x = 1
If x < 15 then x = x + 1
else x = 0
If x < 15 then x = x + 1
else x = 0
(ADC12MSC = 0
or
ADC12SHP = 0)
and
ADC12EOS.x = 0
x = pointer to ADC12MCTLx
ADC12ENC =
ADC12_A Operation
www.ti.com
28.2.7.2 Sequence-of-Channels Mode (Autoscan Mode)
In sequence-of-channels mode, also referred to as autoscan mode, a sequence of channels is sampled
and converted one time. The ADC results are written to the conversion memories starting with the
ADCMEMx defined by the CSTARTADDx bits. The sequence stops after the measurement of the channel
with a set ADC12EOS bit. Figure 28-8 shows the sequence-of-channels mode. When ADC12SC triggers a
sequence, successive sequences can be triggered by the ADC12SC bit. The ADC12SC must be cleared
by software after each sequence to trigger another sequence. When any other trigger source is used,
ADC12ENC must be toggled between each sequence.
Figure 28-8. Sequence-of-Channels Mode
742 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
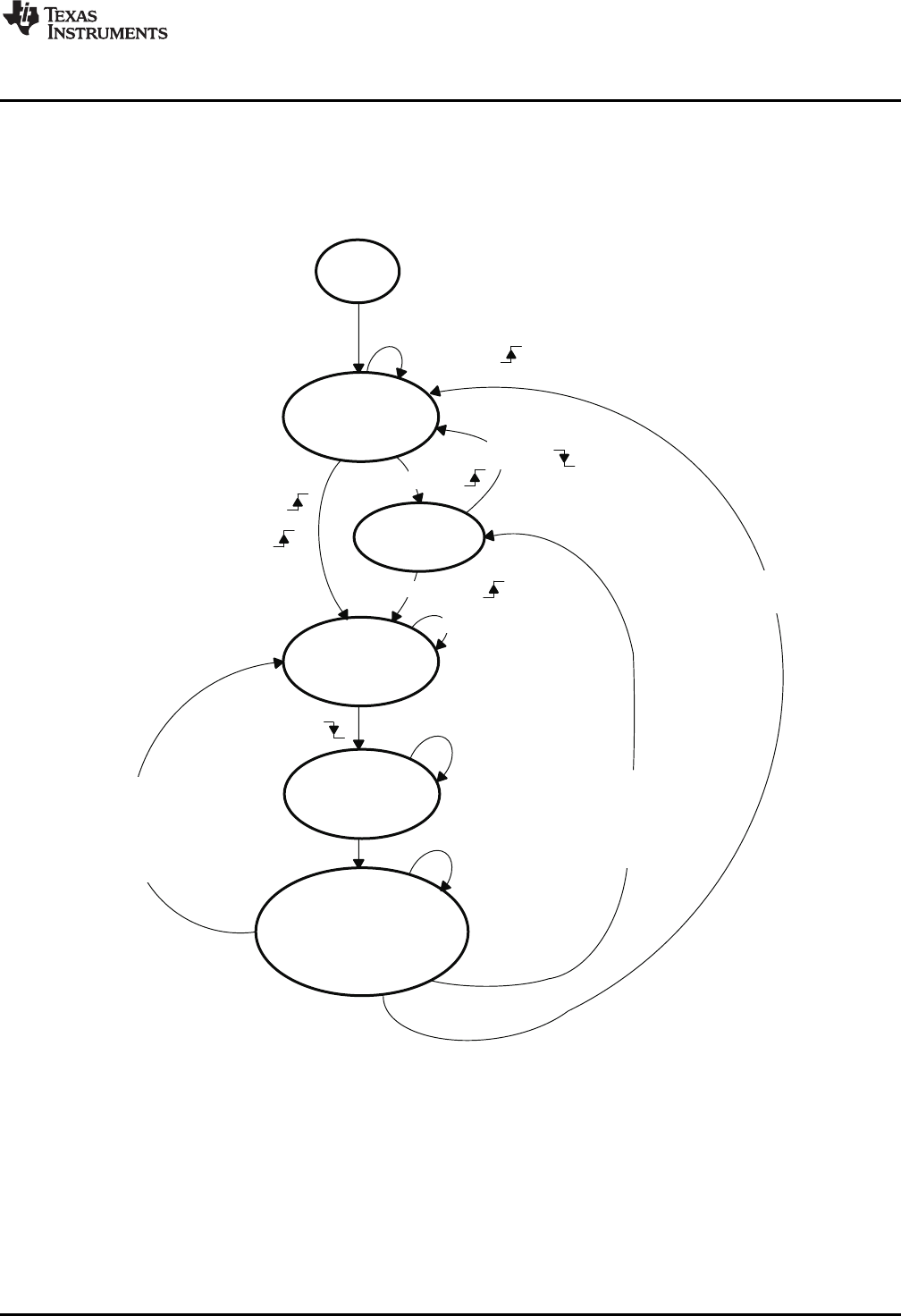
ADC12
off
x = CSTARTADDx
Wait for Enable
ADC12ENC ¹
Wait for Trigger
Sample, Input
Channel Defined in
ADC12MCTLx
ADC12
ENC =
ADC12
ENC =
SHSx = 0
and
ADC12ENC = 1 or
and
ADC12SC =
SAMPCON =
SAMPCON = 1
Convert
SAMPCON = 12 × ADC12CLK
Conversion
Completed,
Result Stored Into
ADC12MEMx,
ADC12IFG.x is Set
1 × ADC12CLK
ADC12ON = 1
CONSEQx = 10
ADC12MSC = 1
and
ADC12SHP = 1
and
ADC12ENC = 1
ADC12ENC = 0
(ADC12MSC = 0
or
ADC12SHP = 0)
and
ADC12ENC = 1
x = pointer to ADC12MCTLx
www.ti.com
ADC12_A Operation
28.2.7.3 Repeat-Single-Channel Mode
A single channel is sampled and converted continuously. The ADC results are written to the ADC12MEMx
defined by the CSTARTADDx bits. It is necessary to read the result after each completed conversion,
because only one ADC12MEMx memory is used and is overwritten by the next conversion. Figure 28-9
shows the repeat-single-channel mode.
Figure 28-9. Repeat-Single-Channel Mode
743
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
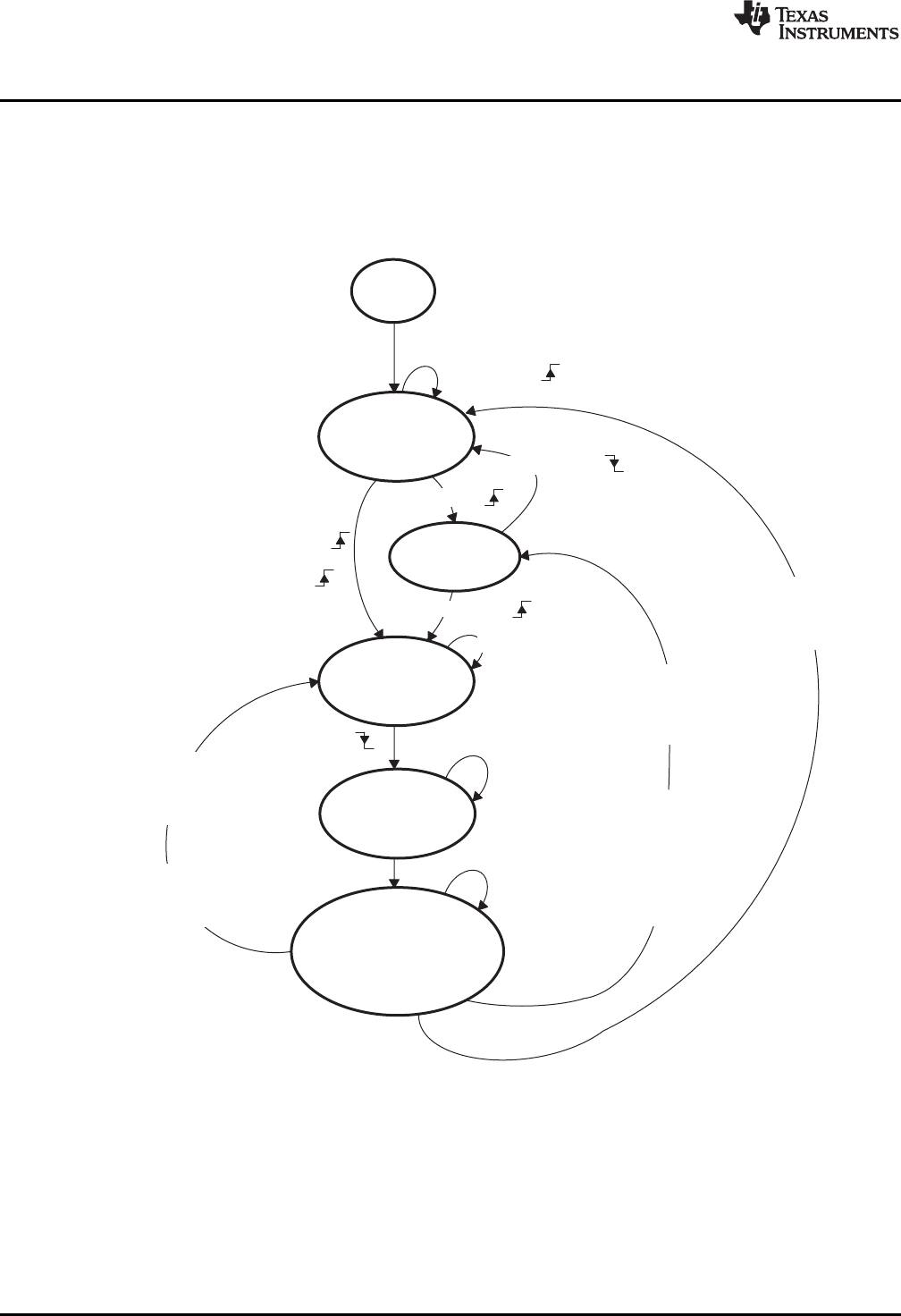
ADC12
off
x = CSTARTADDx
Wait for Enable
ADC12ENC ¹
Wait for Trigger
Sample, Input
Channel Defined in
ADC12MCTLx
SHSx = 0
and
ADC12ENC = 1 or
and
ADC12SC =
SAMPCON=
SAMPCON=1
SAMPCON=
12 × ADC12CLK
ConversionCompleted,
ResultStoredInto
ADC12MEMx,
ADC12IFG.xisSet
1 × ADC12CLK
ADC12ON = 1
CONSEQx = 11
ADC12MSC=1and ADC12SHP =1
and(ADC12ENC=1or ADC12EOS.x=0)
ADC12ENC=0
and
ADC12EOS.x=1
(ADC12MSC=0
or
ADC12SHP =0)
and
(ADC12ENC=1
or
ADC12EOS.x=0)
If ADC12EOS.x = 1 then
x =CSTARTADDx
else {if x < 15 then x = x + 1 else
x = 0}
If ADC12EOS.x = 1 then
x =CSTARTADDx
else {if x < 15 then x = x + 1 else
x = 0}
Convert
ADC12ENC=
ADC12ENC=
x=pointerto ADC12MCTLx
ADC12_A Operation
www.ti.com
28.2.7.4 Repeat-Sequence-of-Channels Mode (Repeated Autoscan Mode)
In this mode, a sequence of channels is sampled and converted repeatedly. This mode is also referred to
as repeated autoscan mode. The ADC results are written to the conversion memories starting with the
ADC12MEMx defined by the CSTARTADDx bits. The sequence ends after the measurement of the
channel with a set ADC12EOS bit and the next trigger signal restarts the sequence. Figure 28-10 shows
the repeat-sequence-of-channels mode.
Figure 28-10. Repeat-Sequence-of-Channels Mode
744 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC12_A Operation
28.2.7.5 Using the Multiple Sample and Convert (ADC12MSC) Bit
To configure the converter to perform successive conversions automatically and as quickly as possible, a
multiple sample-and-convert function is available. When ADC12MSC = 1, CONSEQx > 0, and the sample
timer is used, the first rising edge of the SHI signal triggers the first conversion. Successive conversions
are triggered automatically as soon as the prior conversion is completed. Additional rising edges on SHI
are ignored until the sequence is completed in the single-sequence mode, or until the ADC12ENC bit is
toggled in repeat-single-channel or repeated-sequence modes. The function of the ADC12ENC bit is
unchanged when using the ADC12MSC bit.
28.2.7.6 Stopping Conversions
Stopping ADC12_A activity depends on the mode of operation. The recommended ways to stop an active
conversion or conversion sequence are:
• Resetting ADC12ENC in single-channel single-conversion mode stops a conversion immediately and
the results are unpredictable. For correct results, poll the busy bit until reset before clearing
ADC12ENC.
• Resetting ADC12ENC during repeat-single-channel operation stops the converter at the end of the
current conversion.
• Resetting ADC12ENC during a sequence or repeat-sequence mode stops the converter at the end of
the sequence.
• Any conversion mode may be stopped immediately by setting the CONSEQx = 0 and resetting the
ADC12ENC bit. Conversion data are unreliable.
NOTE: No ADC12EOS bit set for sequence
If no ADC12EOS bit is set and a sequence mode is selected, resetting the ADC12ENC bit
does not stop the sequence. To stop the sequence, first select a single-channel mode and
then reset ADC12ENC.
745
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
0.550
0.600
0.650
0.700
0.750
0.800
0.850
0.900
−40 −20 0 20 40 60 80 100
AmbientTemperature – °C
TypicalTemperatureSensorVoltage – V
0.950
ADC12_A Operation
www.ti.com
28.2.8 Using the Integrated Temperature Sensor
To use the on-chip temperature sensor, select the analog input channel INCHx = 1010. Any other
configuration is done as if an external channel were selected, including reference selection and
conversion-memory selection. The temperature sensor is part of the reference. Therefore, for devices with
the REF module, in addition to the input channels selection INCHx = 1010, configuring ADC12REFON = 1
(for REFMSTR = 0) or REFON = 1 (for REFMSTR = 1) is required to enable the temperature sensor.
For the MSP430F54xx (non-A) devices, which do not include the REF module, selecting the temperature
sensor by configuring INCHx = 1010 automatically enables the reference generator required for the
temperature sensor. Any other configuration is done as if an external channel were selected, including
reference selection and conversion-memory selection.
A typical temperature sensor transfer function is shown in Figure 28-11. The transfer function that is
shown in Figure 28-11 is only an example; the device-specific data sheet contains the actual parameters
for a given device. When using the temperature sensor, the sample period must be greater than 30 μs.
The temperature sensor offset error can be large and may need to be calibrated for most applications.
Temperature calibration values are available for use in the TLV descriptors (see the device-specific data
sheet for locations).
Figure 28-11. Typical Temperature Sensor Transfer Function
746 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

Digital
Power Supply
Decoupling
100 nF10 Fµ
Analog
Power Supply
Decoupling
Using an
External
Positive
Reference
Using an
External
Negative
Reference
DVCC
DVSS
AVCC
AVSS
V /V
REF– eREF–
V /V
REF+ eREF+
+
+
+
+
100 nF10 Fµ
100 nF10 Fµ
100 nF10 Fµ
www.ti.com
ADC12_A Operation
28.2.9 ADC12_A Grounding and Noise Considerations
As with any high-resolution ADC, appropriate printed circuit board layout and grounding techniques should
be followed to eliminate ground loops, unwanted parasitic effects, and noise.
Ground loops are formed when return current from the ADC flows through paths that are common with
other analog or digital circuitry. If care is not taken, this current can generate small unwanted offset
voltages that can add to or subtract from the reference or input voltages of the ADC. The connections
shown in Figure 28-12 prevent this.
In addition to grounding, ripple and noise spikes on the power-supply lines due to digital switching or
switching power supplies can corrupt the conversion result. To achieve high accuracy, TI recommends a
noise-free design using separate analog and digital ground planes with a single-point connection.
Figure 28-12. ADC12_A Grounding and Noise Considerations
747
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC12_A Operation
www.ti.com
28.2.10 ADC12_A Interrupts
The ADC12_A has 18 interrupt sources:
• ADC12IFG0 to ADC12IFG15
• ADC12OV, ADC12MEMx overflow
• ADC12TOV, ADC12_A conversion time overflow
The ADC12IFGx bits are set when their corresponding ADC12MEMx memory register is loaded with a
conversion result. An interrupt request is generated if the corresponding ADC12IEx bit and the GIE bit are
set. The ADC12OV condition occurs when a conversion result is written to any ADC12MEMx before its
previous conversion result was read. The ADC12TOV condition is generated when another sample-and-
conversion is requested before the current conversion is completed. The DMA is triggered after the
conversion in single-channel conversion mode or after the completion of a sequence of channel
conversions in sequence-of-channels conversion mode.
28.2.10.1 ADC12IV, Interrupt Vector Generator
All ADC12_A interrupt sources are prioritized and combined to source a single interrupt vector. The
interrupt vector register ADC12IV is used to determine which enabled ADC12_A interrupt source
requested an interrupt.
The highest-priority enabled ADC12_A interrupt generates a number in the ADC12IV register (see register
description). This number can be evaluated or added to the program counter (PC) to automatically enter
the appropriate software routine. Disabled ADC12_A interrupts do not affect the ADC12IV value.
Any access, read or write, of the ADC12IV register automatically resets the ADC12OV condition or the
ADC12TOV condition if either was the highest-pending interrupt. Neither interrupt condition has an
accessible interrupt flag. The ADC12IFGx flags are not reset by an ADC12IV access. ADC12IFGx bits are
reset automatically by accessing their associated ADC12MEMx register or may be reset with software.
If another interrupt is pending after servicing of an interrupt, another interrupt is generated. For example, if
the ADC12OV and ADC12IFG3 interrupts are pending when the interrupt service routine accesses the
ADC12IV register, the ADC12OV interrupt condition is reset automatically. After the RETI instruction of the
interrupt service routine is executed, the ADC12IFG3 generates another interrupt.
748 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC12_A Operation
28.2.10.2 ADC12_A Interrupt Handling Software Example
The following software example shows the recommended use of the ADC12IV and handling overhead.
The ADC12IV value is added to the PC to automatically jump to the appropriate routine.
The software overhead for different interrupt sources includes interrupt latency and return-from-interrupt
cycles, but not the task handling itself. The latencies are:
• ADC12IFG0 to ADC12IFG14, ADC12TOV, and ADC12OV: 16 cycles
• ADC12IFG15: 14 cycles
The interrupt handler for ADC12IFG15 shows a way to check immediately if a higher-prioritized interrupt
occurred during the processing of ADC12IFG15. This saves nine cycles if another ADC12_A interrupt is
pending.
; Interrupt handler for ADC12.
INT_ADC12 ; Enter Interrupt Service Routine
ADD &ADC12IV,PC ; Add offset to PC
RETI ; Vector 0: No interrupt
JMP ADOV ; Vector 2: ADC overflow
JMP ADTOV ; Vector 4: ADC timing overflow
JMP ADM0 ; Vector 6: ADC12IFG0
... ; Vectors 8-32
JMP ADM14 ; Vector 34: ADC12IFG14
;
; Handler for ADC12IFG15 starts here. No JMP required.
;
ADM15 MOV &ADC12MEM15,xxx ; Move result, flag is reset
... ; Other instruction needed?
JMP INT_ADC12 ; Check other int pending
;
; ADC12IFG14-ADC12IFG1 handlers go here
;
ADM0 MOV &ADC12MEM0,xxx ; Move result, flag is reset
... ; Other instruction needed?
RETI ; Return
;
ADTOV ... ; Handle Conv. time overflow
RETI ; Return
;
ADOV ... ; Handle ADCMEMx overflow
RETI ; Return
749
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC12_A Registers
www.ti.com
28.3 ADC12_A Registers
The ADC12_A registers are listed in Table 28-3. The base address of the ADC12_A can be found in the
device-specific data sheet. The address offset of each ADC12_A register is given in Table 28-3.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 28-3. ADC12_A Registers
Offset Acronym Register Name Type Access Reset Section
00h ADC12CTL0 ADC12_A Control 0 Read/write Word 0000h Section 28.3.1
00h ADC12CTL0_L Read/write Byte 00h
01h ADC12CTL0_H Read/write Byte 00h
02h ADC12CTL1 ADC12_A Control 1 Read/write Word 0000h Section 28.3.2
02h ADC12CTL1_L Read/write Byte 00h
03h ADC12CTL1_H Read/write Byte 00h
04h ADC12CTL2 ADC12_A Control 2 Read/write Word 0020h Section 28.3.3
04h ADC12CTL2_L Read/write Byte 20h
05h ADC12CTL2_H Read/write Byte 00h
0Ah ADC12IFG ADC12_A Interrupt Flag Read/write Word 0000h Section 28.3.7
0Ah ADC12IFG_L Read/write Byte 00h
0Bh ADC12IFG_H Read/write Byte 00h
0Ch ADC12IE ADC12_A Interrupt Enable Read/write Word 0000h Section 28.3.6
0Ch ADC12IE_L Read/write Byte 00h
0Dh ADC12IE_H Read/write Byte 00h
0Eh ADC12IV ADC12_A Interrupt Vector Read Word 0000h Section 28.3.8
0Eh ADC12IV_L Read Byte 00h
0Fh ADC12IV_H Read Byte 00h
20h ADC12MEM0 ADC12_A Memory 0 Read/write Word undefined Section 28.3.4
20h ADC12MEM0_L Read/write Byte undefined
21h ADC12MEM0_H Read/write Byte undefined
22h ADC12MEM1 ADC12_A Memory 1 Read/write Word undefined Section 28.3.4
22h ADC12MEM1_L Read/write Byte undefined
23h ADC12MEM1_H Read/write Byte undefined
24h ADC12MEM2 ADC12_A Memory 2 Read/write Word undefined Section 28.3.4
24h ADC12MEM2_L Read/write Byte undefined
25h ADC12MEM2_H Read/write Byte undefined
26h ADC12MEM3 ADC12_A Memory 3 Read/write Word undefined Section 28.3.4
26h ADC12MEM3_L Read/write Byte undefined
27h ADC12MEM3_H Read/write Byte undefined
28h ADC12MEM4 ADC12_A Memory 4 Read/write Word undefined Section 28.3.4
28h ADC12MEM4_L Read/write Byte undefined
29h ADC12MEM4_H Read/write Byte undefined
2Ah ADC12MEM5 ADC12_A Memory 5 Read/write Word undefined Section 28.3.4
2Ah ADC12MEM5_L Read/write Byte undefined
2Bh ADC12MEM5_H Read/write Byte undefined
2Ch ADC12MEM6 ADC12_A Memory 6 Read/write Word undefined Section 28.3.4
2Ch ADC12MEM6_L Read/write Byte undefined
2Dh ADC12MEM6_H Read/write Byte undefined
750 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
ADC12_A Registers
Table 28-3. ADC12_A Registers (continued)
Offset Acronym Register Name Type Access Reset Section
2Eh ADC12MEM7 ADC12_A Memory 7 Read/write Word undefined Section 28.3.4
2Eh ADC12MEM7_L Read/write Byte undefined
2Fh ADC12MEM7_H Read/write Byte undefined
30h ADC12MEM8 ADC12_A Memory 8 Read/write Word undefined Section 28.3.4
30h ADC12MEM8_L Read/write Byte undefined
31h ADC12MEM8_H Read/write Byte undefined
32h ADC12MEM9 ADC12_A Memory 9 Read/write Word undefined Section 28.3.4
32h ADC12MEM9_L Read/write Byte undefined
33h ADC12MEM9_H Read/write Byte undefined
34h ADC12MEM10 ADC12_A Memory 10 Read/write Word undefined Section 28.3.4
34h ADC12MEM10_L Read/write Byte undefined
35h ADC12MEM10_H Read/write Byte undefined
36h ADC12MEM11 ADC12_A Memory 11 Read/write Word undefined Section 28.3.4
36h ADC12MEM11_L Read/write Byte undefined
37h ADC12MEM11_H Read/write Byte undefined
38h ADC12MEM12 ADC12_A Memory 12 Read/write Word undefined Section 28.3.4
38h ADC12MEM12_L Read/write Byte undefined
39h ADC12MEM12_H Read/write Byte undefined
3Ah ADC12MEM13 ADC12_A Memory 13 Read/write Word undefined Section 28.3.4
3Ah ADC12MEM13_L Read/write Byte undefined
3Bh ADC12MEM13_H Read/write Byte undefined
3Ch ADC12MEM14 ADC12_A Memory 14 Read/write Word undefined Section 28.3.4
3Ch ADC12MEM14_L Read/write Byte undefined
3Dh ADC12MEM14_H Read/write Byte undefined
3Dh ADC12MEM15 ADC12_A Memory 15 Read/write Word undefined Section 28.3.4
3Dh ADC12MEM15_L Read/write Byte undefined
3Eh ADC12MEM15_H Read/write Byte undefined
10h ADC12MCTL0 ADC12_A Memory Control 0 Read/write Byte undefined Section 28.3.5
11h ADC12MCTL1 ADC12_A Memory Control 1 Read/write Byte undefined Section 28.3.5
12h ADC12MCTL2 ADC12_A Memory Control 2 Read/write Byte undefined Section 28.3.5
13h ADC12MCTL3 ADC12_A Memory Control 3 Read/write Byte undefined Section 28.3.5
14h ADC12MCTL4 ADC12_A Memory Control 4 Read/write Byte undefined Section 28.3.5
15h ADC12MCTL5 ADC12_A Memory Control 5 Read/write Byte undefined Section 28.3.5
16h ADC12MCTL6 ADC12_A Memory Control 6 Read/write Byte undefined Section 28.3.5
17h ADC12MCTL7 ADC12_A Memory Control 7 Read/write Byte undefined Section 28.3.5
18h ADC12MCTL8 ADC12_A Memory Control 8 Read/write Byte undefined Section 28.3.5
19h ADC12MCTL9 ADC12_A Memory Control 9 Read/write Byte undefined Section 28.3.5
1Ah ADC12MCTL10 ADC12_A Memory Control 10 Read/write Byte undefined Section 28.3.5
1Bh ADC12MCTL11 ADC12_A Memory Control 11 Read/write Byte undefined Section 28.3.5
1Ch ADC12MCTL12 ADC12_A Memory Control 12 Read/write Byte undefined Section 28.3.5
1Dh ADC12MCTL13 ADC12_A Memory Control 13 Read/write Byte undefined Section 28.3.5
1Eh ADC12MCTL14 ADC12_A Memory Control 14 Read/write Byte undefined Section 28.3.5
1Fh ADC12MCTL15 ADC12_A Memory Control 15 Read/write Byte undefined Section 28.3.5
751
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC12_A Registers
www.ti.com
28.3.1 ADC12CTL0 Register
ADC12_A Control Register 0
Figure 28-13. ADC12CTL0 Register
15 14 13 12 11 10 9 8
ADC12SHT1x ADC12SHT0x
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC12MSC ADC12REF2_5 ADC12REFON ADC12ON ADC12OVIE ADC12TOVIE ADC12ENC ADC12SC
V
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Can be modified only when ADC12ENC = 0
Table 28-4. ADC12CTL0 Register Description
Bit Field Type Reset Description
15-12 ADC12SHT1x RW 0h ADC12_A sample-and-hold time. These bits define the number of ADC12CLK
cycles in the sampling period for registers ADC12MEM8 to ADC12MEM15.
11-8 ADC12SHT0x RW 0h ADC12_A sample-and-hold time. These bits define the number of ADC12CLK
cycles in the sampling period for registers ADC12MEM0 to ADC12MEM7.
0000b = 4 ADC12CLK cycles
0001b = 8 ADC12CLK cycles
0010b = 16 ADC12CLK cycles
0011b = 32 ADC12CLK cycles
0100b = 64 ADC12CLK cycles
0101b = 96 ADC12CLK cycles
0110b = 128 ADC12CLK cycles
0111b = 192 ADC12CLK cycles
1000b = 256 ADC12CLK cycles
1001b = 384 ADC12CLK cycles
1010b = 512 ADC12CLK cycles
1011b = 768 ADC12CLK cycles
1100b = 1024 ADC12CLK cycles
1101b = 1024 ADC12CLK cycles
1110b = 1024 ADC12CLK cycles
1111b = 1024 ADC12CLK cycles
7 ADC12MSC RW 0h ADC12_A multiple sample and conversion. Valid only for sequence or repeated
modes.
0b = The sampling timer requires a rising edge of the SHI signal to trigger each
sample-and-convert.
1b = The first rising edge of the SHI signal triggers the sampling timer, but further
sample-and-conversions are performed automatically as soon as the prior
conversion is completed.
6 ADC12REF2_5V RW 0h ADC12_A reference generator voltage. ADC12REFON must also be set. In
devices with the REF module, this bit is only valid if the REFMSTR bit of the REF
module is set to 0. In the F54xx devices (non-A), the REF module is not
available.
0b = 1.5 V
1b = 2.5 V
5 ADC12REFON RW 0h ADC12_A reference generator on. In devices with the REF module, this bit is
only valid if the REFMSTR bit of the REF module is set to 0. In the F54xx
devices (non-A), the REF module is not available.
0b = Reference off
1b = Reference on
4 ADC12ON RW 0h ADC12_A on
0b = ADC12_A off
1b = ADC12_A on
752 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC12_A Registers
Table 28-4. ADC12CTL0 Register Description (continued)
Bit Field Type Reset Description
3 ADC12OVIE RW 0h ADC12MEMx overflow-interrupt enable. The GIE bit must also be set to enable
the interrupt.
0b = Overflow interrupt disabled
1b = Overflow interrupt enabled
2 ADC12TOVIE RW 0h ADC12_A conversion-time-overflow interrupt enable. The GIE bit must also be
set to enable the interrupt.
0b = Conversion time overflow interrupt disabled
1b = Conversion time overflow interrupt enabled
1 ADC12ENC RW 0h ADC12_A enable conversion
0b = ADC12_A disabled
1b = ADC12_A enabled
0 ADC12SC RW 0h ADC12_A start conversion. Software-controlled sample-and-conversion start.
ADC12SC and ADC12ENC may be set together with one instruction. ADC12SC
is reset automatically.
0b = No sample-and-conversion-start
1b = Start sample-and-conversion
753
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC12_A Registers
www.ti.com
28.3.2 ADC12CTL1 Register
ADC12_A Control Register 1
Figure 28-14. ADC12CTL1 Register
15 14 13 12 11 10 9 8
ADC12CSTARTADDx ADC12SHSx ADC12SHP ADC12ISSH
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC12DIVx ADC12SSELx ADC12CONSEQx ADC12BUSY
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) r-(0)
Can be modified only when ADC12ENC = 0
Table 28-5. ADC12CTL1 Register Description
Bit Field Type Reset Description
15-12 ADC12CSTARTADDx RW 0h ADC12_A conversion start address. These bits select which ADC12_A
conversion-memory register is used for a single conversion or for the first
conversion in a sequence. The value of CSTARTADDx is 0 to 0Fh,
corresponding to ADC12MEM0 to ADC12MEM15.
11-10 ADC12SHSx RW 0h ADC12_A sample-and-hold source select
00b = ADC12SC bit
01b = Timer source (see device-specific data sheet for exact timer and locations)
10b = Timer source (see device-specific data sheet for exact timer and locations)
11b = Timer source (see device-specific data sheet for exact timer and locations)
9 ADC12SHP RW 0h ADC12_A sample-and-hold pulse-mode select. This bit selects the source of the
sampling signal (SAMPCON) to be either the output of the sampling timer or the
sample-input signal directly.
0b = SAMPCON signal is sourced from the sample-input signal.
1b = SAMPCON signal is sourced from the sampling timer.
8 ADC12ISSH RW 0h ADC12_A invert signal sample-and-hold
0b = The sample-input signal is not inverted.
1b = The sample-input signal is inverted.
7-5 ADC12DIVx RW 0h ADC12_A clock divider
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
4-3 ADC12SSELx RW 0h ADC12_A clock source select
00b = ADC12OSC (MODCLK)
01b = ACLK
10b = MCLK
11b = SMCLK
2-1 ADC12CONSEQx RW 0h ADC12_A conversion sequence mode select
00b = Single-channel, single-conversion
01b = Sequence-of-channels
10b = Repeat-single-channel
11b = Repeat-sequence-of-channels
0 ADC12BUSY R 0h ADC12_A busy. This bit indicates an active sample or conversion operation.
0b = No operation is active.
1b = A sequence, sample, or conversion is active.
754 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC12_A Registers
28.3.3 ADC12CTL2 Register
ADC12_A Control Register 2
Figure 28-15. ADC12CTL2 Register
15 14 13 12 11 10 9 8
Reserved ADC12PDIV
r-0 r-0 r-0 r-0 r-0 r-0 r-0 rw-0
76543210
ADC12TCOFF Reserved ADC12RES ADC12DF ADC12SR ADC12REFOU ADC12REFBU
T RST
rw-(0) r-0 rw-(1) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Can be modified only when ADC12ENC = 0
Table 28-6. ADC12CTL2 Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved. Always reads as 0.
8 ADC12PDIV RW 0h ADC12_A predivider. This bit predivides the selected ADC12_A clock source.
0b = Predivide by 1
1b = Predivide by 4
7 ADC12TCOFF RW 0h ADC12_A temperature sensor off. If the bit is set, the temperature sensor turned
off. This is used to save power.
In devices with the REF module, this bit is only valid if the REFMSTR bit of the
REF module is set to 0. In the F54xx devices (non-A), the REF module is not
available.
0b = Temperature sensor on
1b = Temperature sensor off
6 Reserved R 0h Reserved. Always reads as 0.
5-4 ADC12RES RW 2h ADC12_A resolution. This bit defines the conversion result resolution.
00b = 8 bit (9 clock cycle conversion time)
01b = 10 bit (11 clock cycle conversion time)
10b = 12 bit (13 clock cycle conversion time)
11b = Reserved
3 ADC12DF RW 0h ADC12_A data read-back format. Data is always stored in the binary unsigned
format.
0b = Binary unsigned. Theoretically, the analog input voltage -VREF results in
0000h, the analog input voltage +VREF results in 0FFFh.
1b = Signed binary (twos complement), left aligned. Theoretically, the analog
input voltage -VREF results in 8000h, the analog input voltage +VREF results in
7FF0h.
2 ADC12SR RW 0h ADC12_A sampling rate. This bit selects the reference buffer drive capability for
the maximum sampling rate. Setting ADC12SR reduces the current consumption
of the reference buffer.
0b = Reference buffer supports up to approximately 200 ksps.
1b = Reference buffer supports up to approximately 50 ksps.
1 ADC12REFOUT RW 0h Reference output. In devices with the REF module, this bit is only valid if the
REFMSTR bit of the REF module is set to 0. In the F54xx devices (non-A), the
REF module is not available.
0b = Reference output off
1b = Reference output on
0 ADC12REFBURST RW 0h Reference burst
0b = Reference buffer on continuously
1b = Reference buffer on only during sample-and-conversion
755
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC12_A Registers
www.ti.com
28.3.4 ADC12MEMx Register
ADC12_A Conversion Memory Register
Figure 28-16. ADC12MEMx Register
15 14 13 12 11 10 9 8
Conversion Results
rw rw rw rw rw rw rw rw
76543210
Conversion Results
rw rw rw rw rw rw rw rw
Table 28-7. ADC12MEMx Register Description
Bit Field Type Reset Description
15-0 Conversion Results RW undefined Binary unsigned format: This data format is used if ADC12DF = 0. The 12-bit
conversion results are right justified. Bit 11 is the MSB. Bits 15–12 are 0 in 12-
bit mode, bits 15–10 are 0 in 10-bit mode, and bits 15–8 are 0 in 8-bit mode.
Writing to the conversion memory registers corrupts the results.
Twos-complement format: This data format is used if ADC12DF = 1. The 12-bit
conversion results are left justified, twos-complement format. Bit 15 is the MSB.
Bits 3–0 are 0 in 12-bit mode, bits 5–0 are 0 in 10-bit mode, and bits 7–0 are 0
in 8-bit mode. The data is stored in the right-justified format and is converted to
the left-justified twos-complement format during read back.
756 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC12_A Registers
28.3.5 ADC12MCTLx Register
ADC12_A Conversion Memory Control Register
Figure 28-17. ADC12MCTLx Register
76543210
ADC12EOS ADC12SREFx ADC12INCHx
rw rw rw rw rw rw rw rw
Can be modified only when ADC12ENC = 0
Table 28-8. ADC12MCTLx Register Description
Bit Field Type Reset Description
7 ADC12EOS RW 0h End of sequence. Indicates the last conversion in a sequence.
0b = Not end of sequence
1b = End of sequence
6-4 ADC12SREFx RW 0h Select reference
000b = V(R+) = AVCC and V(R-) = AVSS
001b = V(R+) = VREF+ and V(R-) = AVSS
010b = V(R+) = VeREF+ and V(R-) = AVSS
011b = V(R+) = VeREF+ and V(R-) = AVSS
100b = V(R+) = AVCC and V(R-) = VREF-/VeREF-
101b = V(R+) = VREF+ and V(R-) = VREF-/VeREF-
110b = V(R+) = VeREF+ and V(R-) = VREF-/VeREF-
111b = V(R+) = VeREF+ and V(R-) = VREF-/VeREF-
3-0 ADC12INCHx RW 0h Input channel select
0000b = A0
0001b = A1
0010b = A2
0011b = A3
0100b = A4
0101b = A5
0110b = A6
0111b = A7
1000b = VeREF+
1001b = VREF-/VeREF-
1010b = Temperature diode
1011b = (AVCC – AVSS) / 2
1100b = A12. On devices with the Battery Backup System, VBAT can be
measured internally by the ADC.
1101b = A13
1110b = A14
1111b = A15
757
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
ADC12_A Registers
www.ti.com
28.3.6 ADC12IE Register
ADC12_A Interrupt Enable Register
Figure 28-18. ADC12IE Register
15 14 13 12 11 10 9 8
ADC12IE15 ADC12IE14 ADC12IE13 ADC12IE12 ADC12IE11 ADC12IE10 ADC12IE9 ADC12IE8
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC12IE7 ADC12IE6 ADC12IE5 ADC12IE4 ADC12IE3 ADC12IE2 ADC12IE1 ADC12IE0
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 28-9. ADC12IE Register Description
Bit Field Type Reset Description
15 ADC12IE15 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG15 bit.
0b = Interrupt disabled
1b = Interrupt enabled
14 ADC12IE14 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG14 bit.
0b = Interrupt disabled
1b = Interrupt enabled
13 ADC12IE13 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG13 bit.
0b = Interrupt disabled
1b = Interrupt enabled
12 ADC12IE12 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG12 bit.
0b = Interrupt disabled
1b = Interrupt enabled
11 ADC12IE11 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG11 bit.
0b = Interrupt disabled
1b = Interrupt enabled
10 ADC12IE10 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG10 bit.
0b = Interrupt disabled
1b = Interrupt enabled
9 ADC12IE9 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG9 bit.
0b = Interrupt disabled
1b = Interrupt enabled
8 ADC12IE8 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG8 bit.
0b = Interrupt disabled
1b = Interrupt enabled
7 ADC12IE7 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG7 bit.
0b = Interrupt disabled
1b = Interrupt enabled
6 ADC12IE6 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG6 bit.
0b = Interrupt disabled
1b = Interrupt enabled
758 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
ADC12_A Registers
Table 28-9. ADC12IE Register Description (continued)
Bit Field Type Reset Description
5 ADC12IE5 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG5 bit.
0b = Interrupt disabled
1b = Interrupt enabled
4 ADC12IE4 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG4 bit.
0b = Interrupt disabled
1b = Interrupt enabled
3 ADC12IE3 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG3 bit.
0b = Interrupt disabled
1b = Interrupt enabled
2 ADC12IE2 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG2 bit.
0b = Interrupt disabled
1b = Interrupt enabled
1 ADC12IE1 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG1 bit.
0b = Interrupt disabled
1b = Interrupt enabled
0 ADC12IE0 RW 0h Interrupt enable. This bit enables or disables the interrupt request for the
ADC12IFG0 bit.
0b = Interrupt disabled
1b = Interrupt enabled
759
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
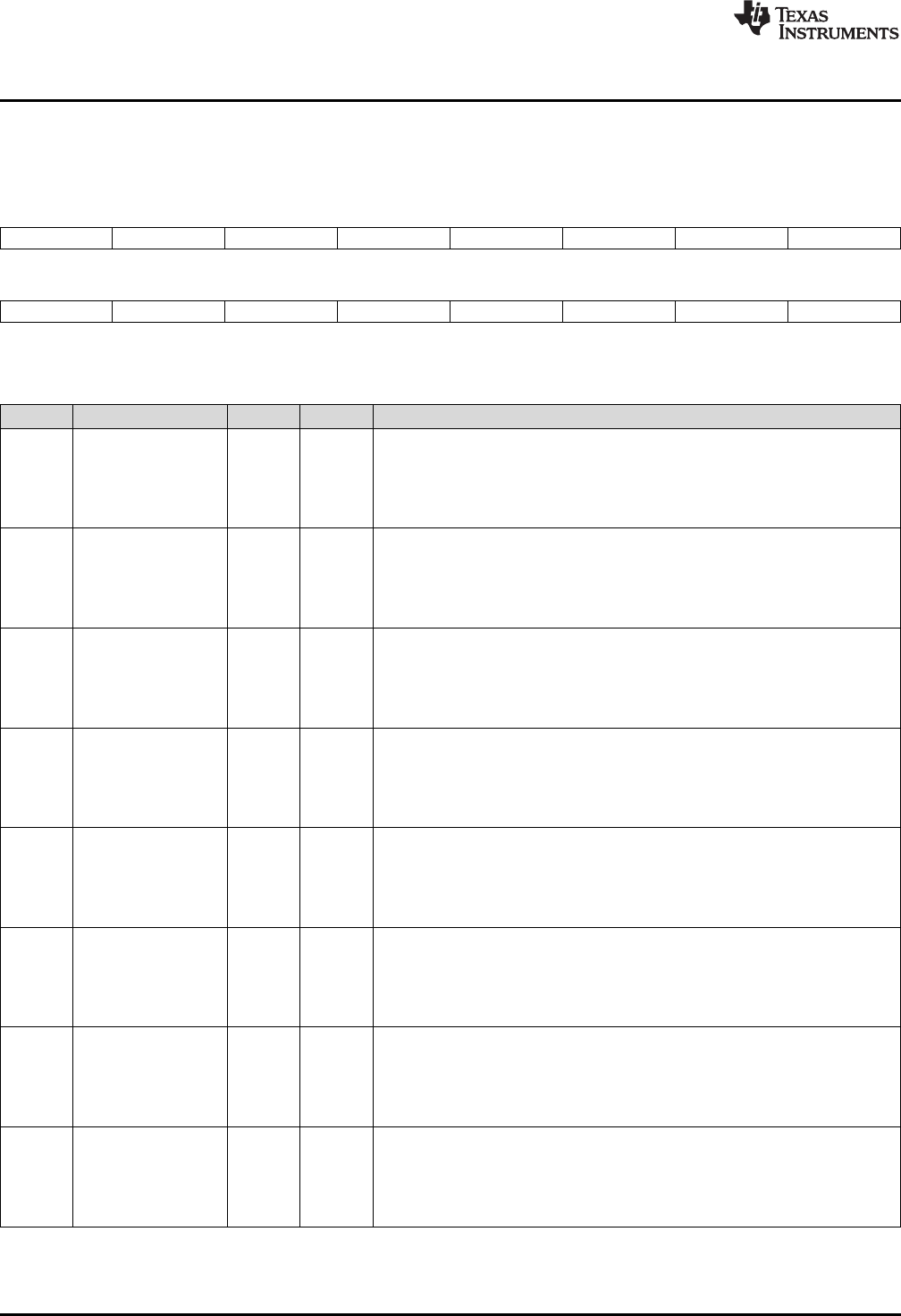
ADC12_A Registers
www.ti.com
28.3.7 ADC12IFG Register
ADC12_A Interrupt Flag Register
Figure 28-19. ADC12IFG Register
15 14 13 12 11 10 9 8
ADC12IFG15 ADC12IFG14 ADC12IFG13 ADC12IFG12 ADC12IFG11 ADC12IFG10 ADC12IFG9 ADC12IFG8
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
ADC12IFG7 ADC12IFG6 ADC12IFG5 ADC12IFG4 ADC12IFG3 ADC12IFG2 ADC12IFG1 ADC12IFG0
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 28-10. ADC12IFG Register Description
Bit Field Type Reset Description
15 ADC12IFG15 RW 0h ADC12MEM15 interrupt flag. This bit is set when ADC12MEM15 is loaded with a
conversion result. This bit is reset if the ADC12MEM15 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
14 ADC12IFG14 RW 0h ADC12MEM14 interrupt flag. This bit is set when ADC12MEM14 is loaded with a
conversion result. This bit is reset if the ADC12MEM14 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
13 ADC12IFG13 RW 0h ADC12MEM13 interrupt flag. This bit is set when ADC12MEM13 is loaded with a
conversion result. This bit is reset if the ADC12MEM13 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
12 ADC12IFG12 RW 0h ADC12MEM12 interrupt flag. This bit is set when ADC12MEM12 is loaded with a
conversion result. This bit is reset if the ADC12MEM12 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
11 ADC12IFG11 RW 0h ADC12MEM11 interrupt flag. This bit is set when ADC12MEM11 is loaded with a
conversion result. This bit is reset if the ADC12MEM11 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
10 ADC12IFG10 RW 0h ADC12MEM10 interrupt flag. This bit is set when ADC12MEM10 is loaded with a
conversion result. This bit is reset if the ADC12MEM10 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
9 ADC12IFG9 RW 0h ADC12MEM9 interrupt flag. This bit is set when ADC12MEM9 is loaded with a
conversion result. This bit is reset if the ADC12MEM9 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
8 ADC12IFG8 RW 0h ADC12MEM8 interrupt flag. This bit is set when ADC12MEM8 is loaded with a
conversion result. This bit is reset if the ADC12MEM8 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
760 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
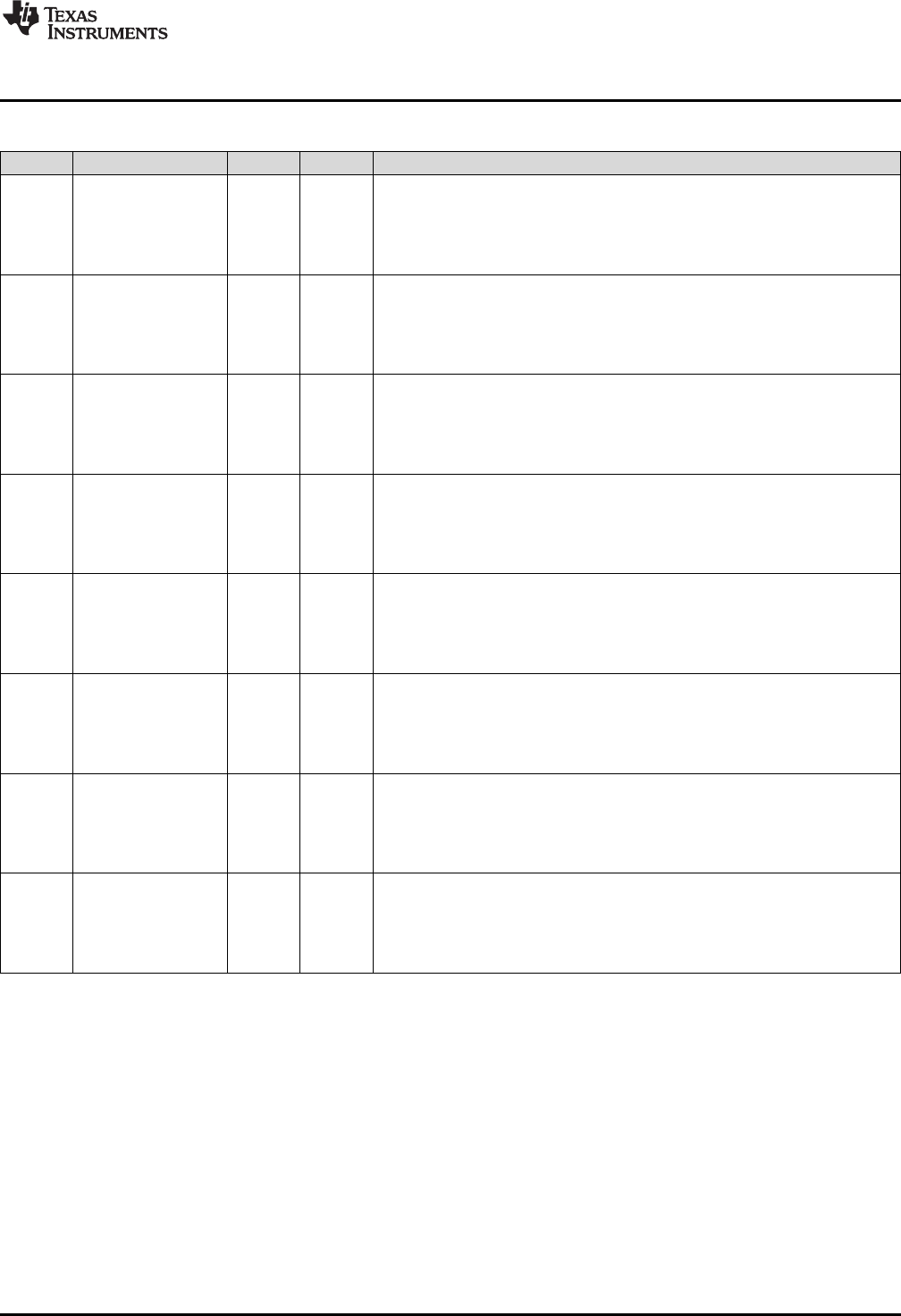
www.ti.com
ADC12_A Registers
Table 28-10. ADC12IFG Register Description (continued)
Bit Field Type Reset Description
7 ADC12IFG7 RW 0h ADC12MEM7 interrupt flag. This bit is set when ADC12MEM7 is loaded with a
conversion result. This bit is reset if the ADC12MEM7 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
6 ADC12IFG6 RW 0h ADC12MEM6 interrupt flag. This bit is set when ADC12MEM6 is loaded with a
conversion result. This bit is reset if the ADC12MEM6 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
5 ADC12IFG5 RW 0h ADC12MEM5 interrupt flag. This bit is set when ADC12MEM5 is loaded with a
conversion result. This bit is reset if the ADC12MEM5 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
4 ADC12IFG4 RW 0h ADC12MEM4 interrupt flag. This bit is set when ADC12MEM4 is loaded with a
conversion result. This bit is reset if the ADC12MEM4 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
3 ADC12IFG3 RW 0h ADC12MEM3 interrupt flag. This bit is set when ADC12MEM3 is loaded with a
conversion result. This bit is reset if the ADC12MEM3 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
2 ADC12IFG2 RW 0h ADC12MEM2 interrupt flag. This bit is set when ADC12MEM2 is loaded with a
conversion result. This bit is reset if the ADC12MEM2 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
1 ADC12IFG1 RW 0h ADC12MEM1 interrupt flag. This bit is set when ADC12MEM1 is loaded with a
conversion result. This bit is reset if the ADC12MEM1 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
0 ADC12IFG0 RW 0h ADC12MEM0 interrupt flag. This bit is set when ADC12MEM0 is loaded with a
conversion result. This bit is reset if the ADC12MEM0 is accessed, or it may be
reset with software.
0b = No interrupt pending
1b = Interrupt pending
761
SLAU208O–June 2008–Revised May 2015 ADC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

ADC12_A Registers
www.ti.com
28.3.8 ADC12IV Register
ADC12_A Interrupt Vector Register
Figure 28-20. ADC12IV Register
15 14 13 12 11 10 9 8
ADC12IVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
ADC12IVx
r0 r0 r-(0) r-(0) r-(0) r-(0) r-(0) r0
Table 28-11. ADC12IV Register Description
Bit Field Type Reset Description
15-0 ADC12IVx R 0h ADC12_A interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: ADC12MEMx overflow; Interrupt Flag: –; Interrupt
Priority: Highest
04h = Interrupt Source: Conversion time overflow; Interrupt Flag: –
06h = Interrupt Source: ADC12MEM0 interrupt flag; Interrupt Flag: ADC12IFG0
08h = Interrupt Source: ADC12MEM1 interrupt flag; Interrupt Flag: ADC12IFG1
0Ah = Interrupt Source: ADC12MEM2 interrupt flag; Interrupt Flag: ADC12IFG2
0Ch = Interrupt Source: ADC12MEM3 interrupt flag; Interrupt Flag: ADC12IFG3
0Eh = Interrupt Source: ADC12MEM4 interrupt flag; Interrupt Flag: ADC12IFG4
10h = Interrupt Source: ADC12MEM5 interrupt flag; Interrupt Flag: ADC12IFG5
12h = Interrupt Source: ADC12MEM6 interrupt flag; Interrupt Flag: ADC12IFG6
14h = Interrupt Source: ADC12MEM7 interrupt flag; Interrupt Flag: ADC12IFG7
16h = Interrupt Source: ADC12MEM8 interrupt flag; Interrupt Flag: ADC12IFG8
18h = Interrupt Source: ADC12MEM9 interrupt flag; Interrupt Flag: ADC12IFG9
1Ah = Interrupt Source: ADC12MEM10 interrupt flag; Interrupt Flag:
ADC12IFG10
1Ch = Interrupt Source: ADC12MEM11 interrupt flag; Interrupt Flag:
ADC12IFG11
1Eh = Interrupt Source: ADC12MEM12 interrupt flag; Interrupt Flag:
ADC12IFG12
20h = Interrupt Source: ADC12MEM13 interrupt flag; Interrupt Flag:
ADC12IFG13
22h = Interrupt Source: ADC12MEM14 interrupt flag; Interrupt Flag:
ADC12IFG14
24h = Interrupt Source: ADC12MEM15 interrupt flag; Interrupt Flag:
ADC12IFG15; Interrupt Priority: Lowest
762 ADC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 29
SLAU208O–June 2008–Revised May 2015
SD24_B
The SD24_B is a multi-input multiple-converter sigma-delta analog-to-digital conversion module. This
chapter describes the operation of the SD24_B module.
Topic ........................................................................................................................... Page
29.1 SD24_B Introduction......................................................................................... 764
29.2 SD24_B Operation ............................................................................................ 768
29.3 SD24_B Registers............................................................................................. 780
763
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

SD24_B Introduction
www.ti.com
29.1 SD24_B Introduction
The SD24_B module consists of up to eight independent sigma-delta analog-to-digital converters. The
converters are based on second-order oversampling sigma-delta modulators and digital decimation filters.
The decimation filters are comb type filters with selectable oversampling ratios of up to 1024. Additional
filtering can be done in software.
Features of the SD24_B include:
• Second-order sigma-delta architecture
• Up to eight independent simultaneously-sampling ADCs. (The number of converters is device
dependent, see the device-specific data sheet.)
Figure 29-1 shows an overview block diagram of the SD24_B module. Figure 29-2 shows the block
diagram of the voltage reference and clock generation circuitry. The reference voltage generation is
located in the shared reference module (see the device-specific data sheet). Figure 29-3 shows the
converter-specific block diagram.
764 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
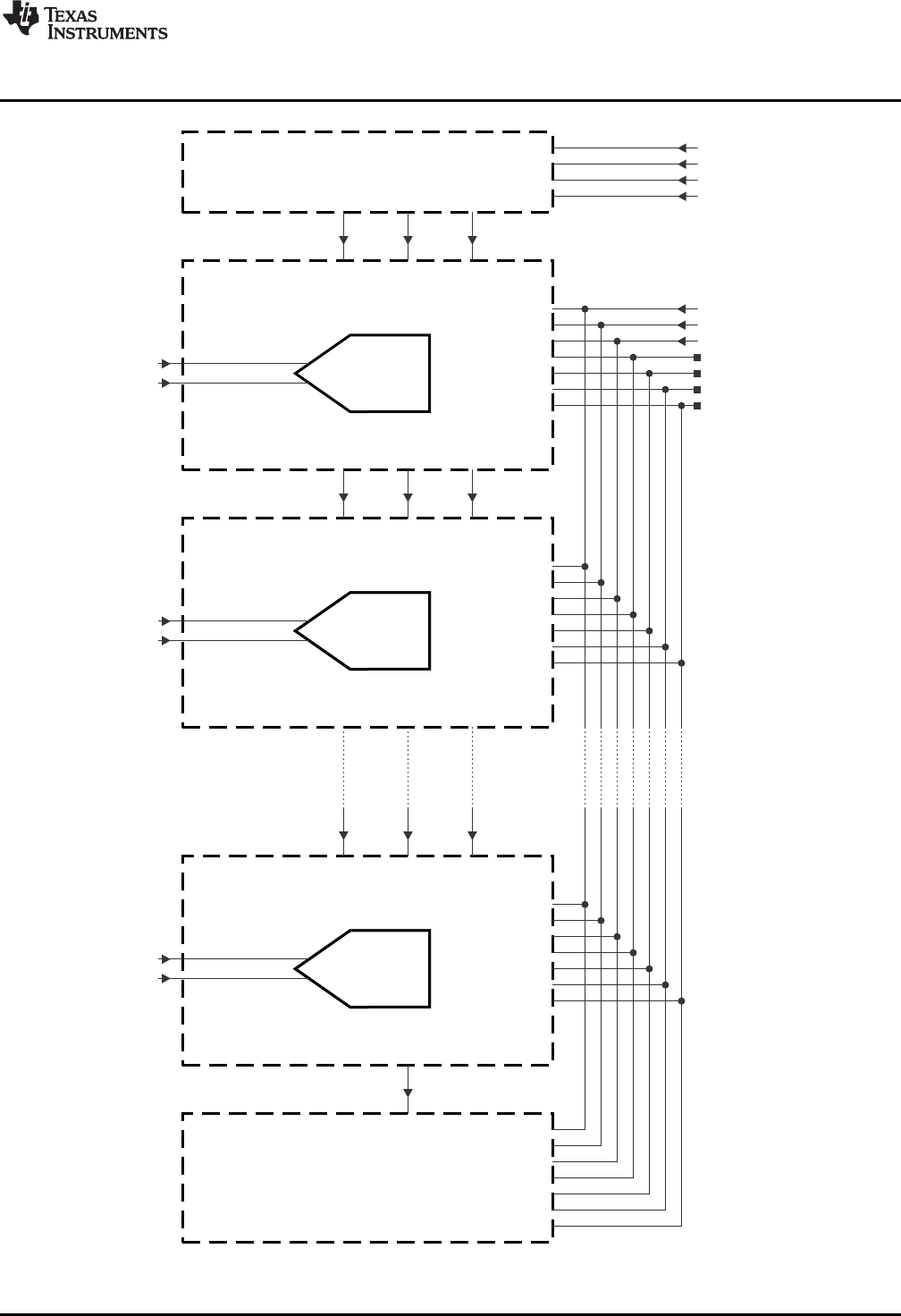
VREF
VREF
VREF
fM
fM
fM
fM
fMC
fMC
fMC
SD0P0
SD1P0
SD7P0
SD0N0
SD1N0
SD7N0
MCLK
ext. Trigger 0
SMCLK
ext. Trigger 1
ACLK
ext. Trigger 2
ext. Clock
SD24GRP0SC
SD24GRP0SC
SD24GRP0SC
SD24GRP0SC
Reference and Clock Generation
Converter 0
Converter 1
Converter 7
Trigger Generator
www.ti.com
SD24_B Introduction
Figure 29-1. SD24_B Overview Block Diagram
765
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
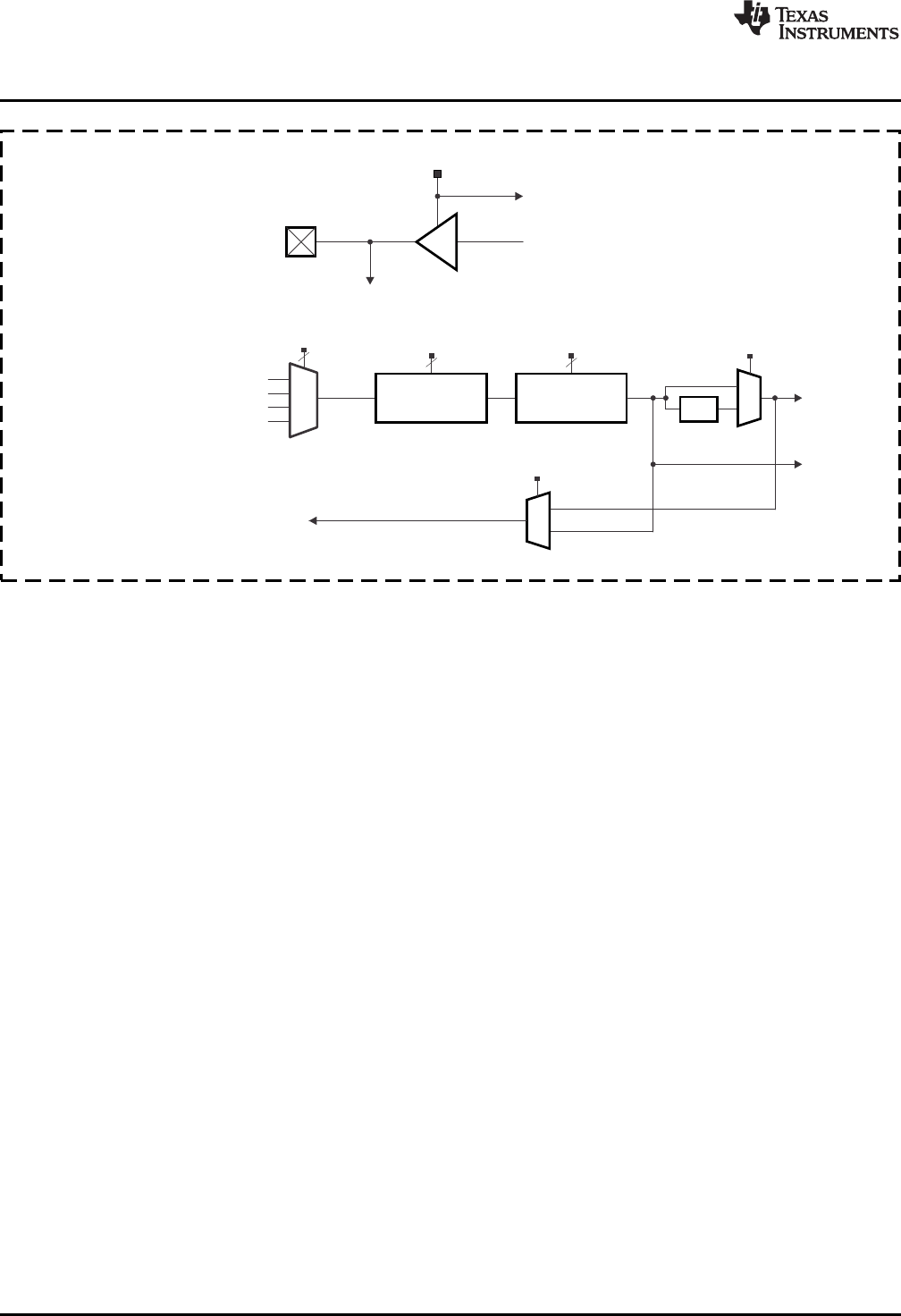
Reference and Clock Generation
VREF
VREF
Pad
SD24REFS
ACLK
SMCLK
MCLK
ext. Clock
~1.2 V from shared REF
Request to shared REF
SD24SSELx SD24PDIVx SD24DIVx
00
01
10
11
fM
fSD24
fSD24SCLK
fMC
23 5
/1 /2 /4 /8 ... /128
/4
/1 /2 /3 /4 ... /32
to Pad
0
0
1
1
SD24M4
(to modulators)
(to Manchester
decoder)
SD24CLKOS
SD24_B Introduction
www.ti.com
Figure 29-2. SD24_B Reference and Clock Generation Block Diagram
766 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
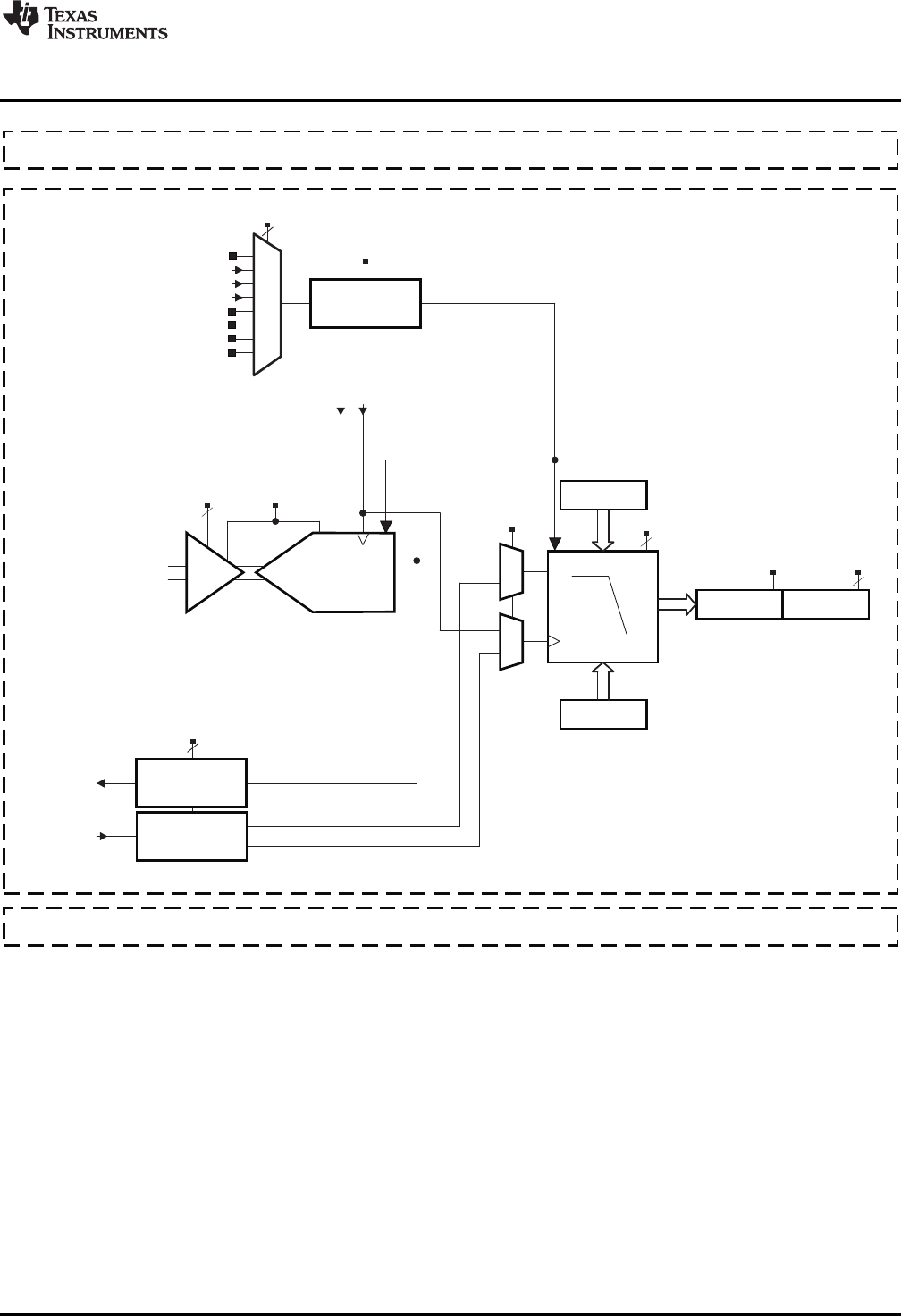
VREF fM
0
1
ext. Trigger 2
ext. Trigger 1
SD24SC
SD24GRP0SC
SD24GRP1SC
SD24GRP2SC
SD24GRP3SC
ext. Trigger 3
2nd Order
ModulatorΣΔ 2
2
SD24SCSx
SD24MCx
SD24GAINx SD24CAL
SD24SNGL
SD24DI
SD24ALGN SD24DFx
SD24DFSx
000
110
SD1P0
SD1N0
+
-
001
100
111
010
101
to Pad
from Pad
Data
Clock
011
3
2
3
Conversion Logic
Converter 1
Converter 0
Converter 2 (up to Converter 7)
SD24BMEMH1 SD24BMEML1
SD24BOSR1
SD24BPRE1
Output
Encoder
Input
Decoder
PGA
0
1
www.ti.com
SD24_B Introduction
Figure 29-3. SD24_B Converter Block Diagram
767
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
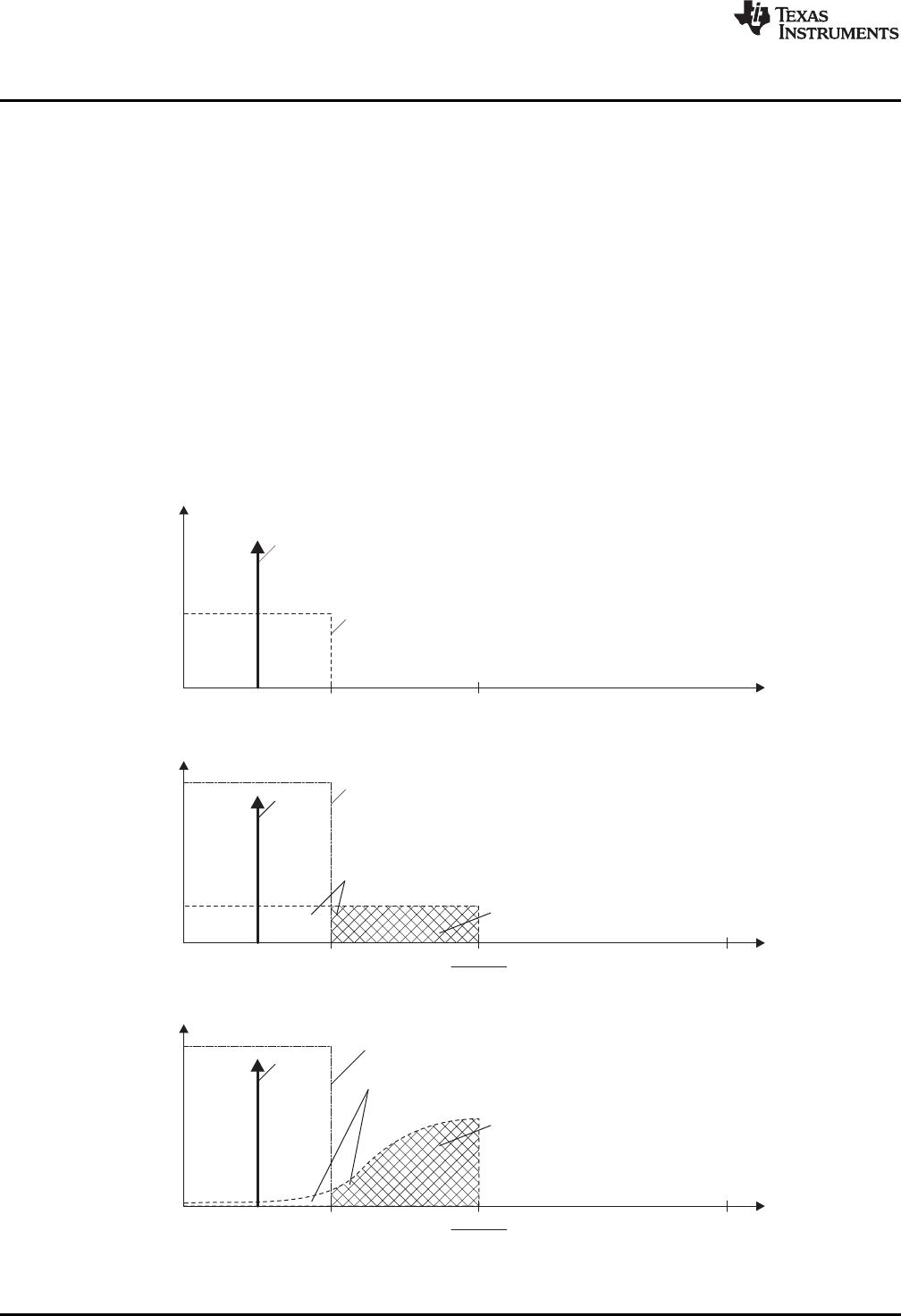
fSignal f /2
sfs
Quantization Noise
a)
fSignal f /2
s
Quantization Noise
“Shaped” Quantization Noise
Signal
b)
Signal
OSR × fs
fSignal f /2
s
Noise filtered out by digital filter
Signal
c)
OSR × fs
2
OSR × fs
OSR × fs
2
Noise filtered out by digital filter
Digital Filter
Digital Filter
SD24_B Operation
www.ti.com
29.2 SD24_B Operation
The SD24_B module is configured with user software. The setup and operation of the SD24_B is
described in the following sections.
29.2.1 Principle of Operation
A sigma-delta analog-to-digital converter basically consists of two parts: the analog part (called the
modulator) and the digital part (called the decimation filter). The modulator of the SD24_B provides a
bitstream of zeros and ones to the digital decimation filter. The digital filter averages the bitstream from the
modulator over a given number of bits (specified by the oversampling rate) and provides samples at a
reduced rate for further processing to the CPU.
Averaging can be used to increase the signal-to-noise performance of a conversion (see Figure 30-2 a
and b). With a conventional ADC, each factor-of-4 oversampling can improve the SNR by approximately
6 dB or 1 bit. To achieve a 16-bit resolution out of a simple 1-bit ADC would require an impractical
oversampling rate of 415 = 1 073 741 824. To overcome this limitation, the sigma-delta modulator
implements a technique called noise-shaping—due to an implemented feedback loop and integrators, the
quantization noise is pushed to higher frequencies and, thus, much lower oversampling rates are sufficient
to achieve high resolutions (see Figure 30-2 c).
Figure 29-4. Sigma-Delta Principle
768 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Operation
29.2.2 ADC Core
The analog-to-digital conversion is performed by a 1-bit second-order sigma-delta modulator. A single-bit
comparator within the modulator quantizes the input signal with the modulator frequency fM. The resulting
1-bit data stream is averaged by the digital filter for the conversion result.
29.2.3 Voltage Reference
The SD24_B module can use an external reference voltage (SD24REFS = 0) or an internal reference
(SD24REFS = 1).
The internal SD24_B reference provides one fixed voltage of approximately 1.2 V. It requests and uses
the bandgap voltage provided by the shared reference (REF) module as its reference voltage. The internal
reference voltage is used by all SD24_B converters when requested with SD24REFS = 1. When using the
internal reference, connect an external 100-nF capacitor connected from VREF to AVSS to reduce noise.
See the device-specific data sheet for the parameters of the internal reference.
An external voltage reference must be applied to the VREF input when SD24REFS = 0. See the device-
specific data sheet for the supported voltage range.
29.2.4 Modulator Clock
The modulator clock is generated globally for all modulators so that all modulators convert synchronously.
NOTE: Using an FLL-Based Clock
When an FLL-based clock with enabled clock modulation (DISMOD = 0 in UCSCTL1) is
selected to clock the sigma-delta modulator, the clock that is provided to the modulator must
be DCOCLK divided at least by 2. The division can be done in the FLL itself by selecting
DCOCLKDIV instead of DCOCLK as the clock source and setting the FLLD bits to a non-
zero value, by using the clock system clock dividers DIVM, DIVS, or DIVA corresponding to
the sigma-delta input clock MCLK, SMCLK, or ACLK, respectively, or by using the clock
divider build into the sigma-delta module.
29.2.5 Auto Power-Down
The SD24_B is designed for low-power applications. When a SD24_B converter is not actively converting,
it is automatically disabled; it is automatically re-enabled when a conversion is started. When a converter
is disabled, it consumes no current.
29.2.6 Analog Inputs
29.2.6.1 Analog Input Range and PGA
The full-scale input voltage range for each analog input pair is dependent on the gain setting of each
converter. See the device-specific data sheet for full-scale input specifications.
29.2.6.2 Analog Input Setup
The analog input of each converter is configured using the SD24BINCTLx register. These settings can be
independently configured for each SD24_B converter.
The gain for each PGA is selected by the SD24GAINx bits. A total of eight gain settings are available.
During conversion, any modification of the SD24BINCTLx register becomes effective with the next
decimation step of the digital filter. After these bits are modified, the next three conversions may be invalid
due to the settling time of the digital filter. This can be handled automatically with the SD24INTDLYx bits.
When SD24INTDLYx = 00b, conversion interrupt requests do not begin until the fourth conversion after a
start condition.
769
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
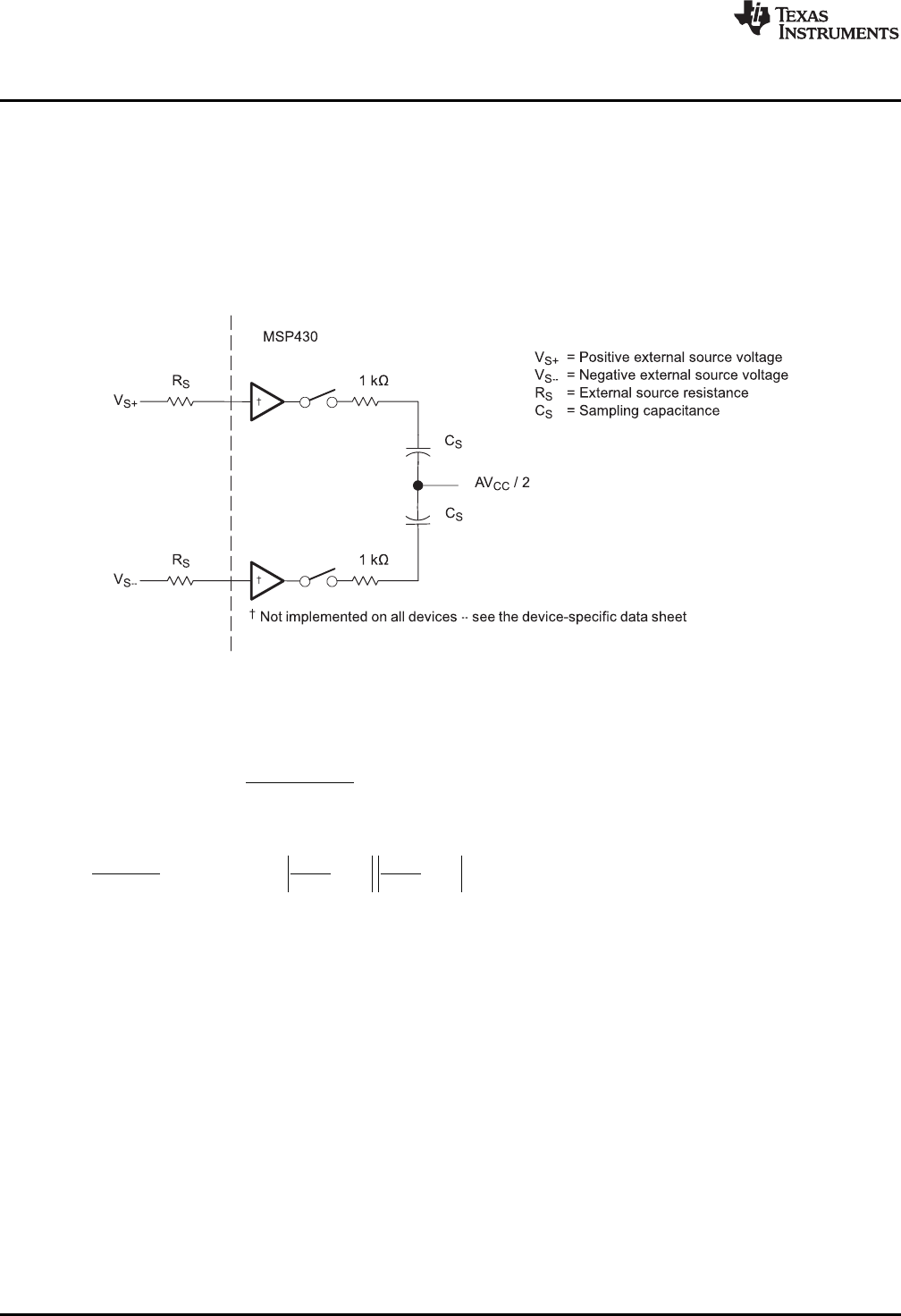
÷
÷
ø
ö
ç
ç
è
æ--=
÷
÷
ø
ö
ç
ç
è
æ
´
=-+ S
CC
S
CC
Ax
settling
MV
2
AV
,V
2
AV
maxVand
t2
1
f
÷
÷
ø
ö
ç
ç
è
æ´´
´´W+³
REF
Ax
17
SSSettling V
V2GAIN
lnC)1k(Rt
SD24_B Operation
www.ti.com
An external RC anti-aliasing filter is recommended for the SD24_B to prevent aliasing of the input signal.
The cutoff frequency should be less than 10 kHz for a 1-MHz modulator clock and OSR = 256. The cutoff
frequency may be set to a lower frequency for applications that have lower bandwidth requirements.
With SD24CAL = 1, the offset of the converter can be measured and calibrated in software afterwards.
29.2.6.3 Analog Input Characteristics
The SD24_B uses a switched-capacitor input stage that appears as an impedance to external circuitry
(see Figure 29-5).
Figure 29-5. Analog Input Equivalent Circuit
The maximum modulator frequency fMmay be calculated from the minimum settling time tSettling of the
sampling circuit.
(14)
Where
(15)
The sampling capacitor CSvaries with the gain setting. See the device-specific data sheet for parameters.
29.2.7 Digital Filter
The digital filter processes the 1-bit data stream from the modulator.
29.2.7.1 SINC3Filter
Figure 29-6 shows the structure of a SINC3filter.
770 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
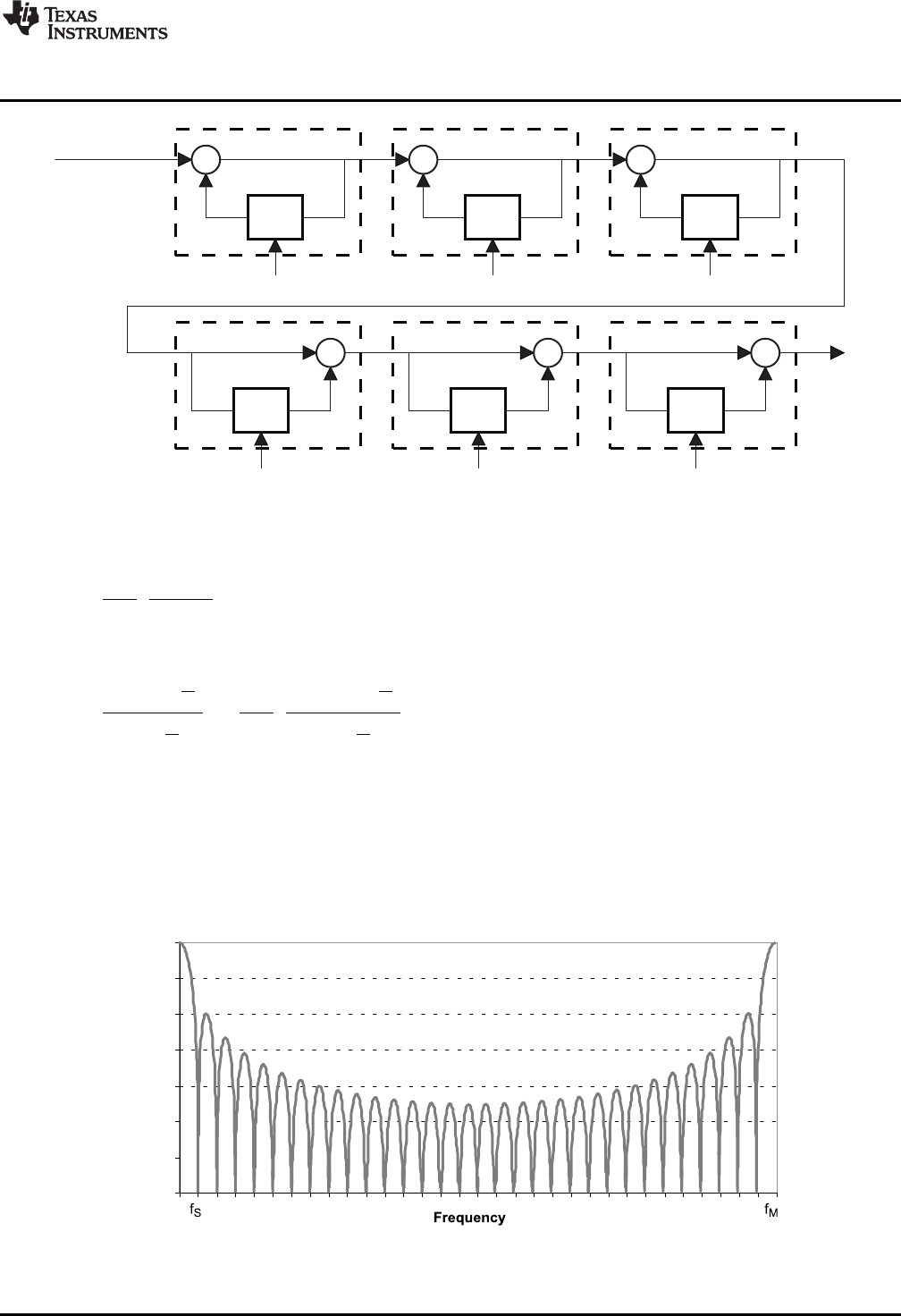
-20
-40
0
-60
-80
-100
-120
-140
Gain (dB)
3
M
M
3
M
M
f
f
sin
f
f
OSRsin
OSR
1
f
f
sinc
f
f
OSRsinc
H(f)
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ´
÷
÷
ø
ö
ç
ç
è
æ´´
´=
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
=
p
p
p
p
3
1
OSR
z1
z1
OSR
1
H(z) ÷
÷
ø
ö
ç
ç
è
æ
-
-
´= -
-
fS
fMfMfM
fSfS
Differentiator
Integrator
Bitstreamfrom
Modulator
Integrator Integrator
Differentiator Differentiator
z-1
z-1 z-1 z-1
z-1 z-1
+
+++
+ +
- - -
www.ti.com
SD24_B Operation
Figure 29-6. SINC3Filter Structure
The transfer function is described in the z-domain by:
(16)
The transfer function is described in the frequency domain by:
(17)
where the oversampling rate, OSR, is the ratio of the modulator frequency fMto the sample frequency fS.
Figure 29-7 shows the filter's frequency response for an OSR of 32. The first filter notch is always at fS=
fM/OSR. The notch's frequency can be adjusted by changing the modulator's frequency, fM, using
SD24SSELx, SD24PDIVx, and SD24DIVx or by adjusting the oversampling rate using the SD24BOSRx
registers.
The digital filter for each enabled ADC converter completes the decimation of the digital bitstream and
outputs new conversion results to the corresponding SD24BMEMx register at the sample frequency fS.
Figure 29-7. Comb Filter's Frequency Response With OSR = 32
771
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
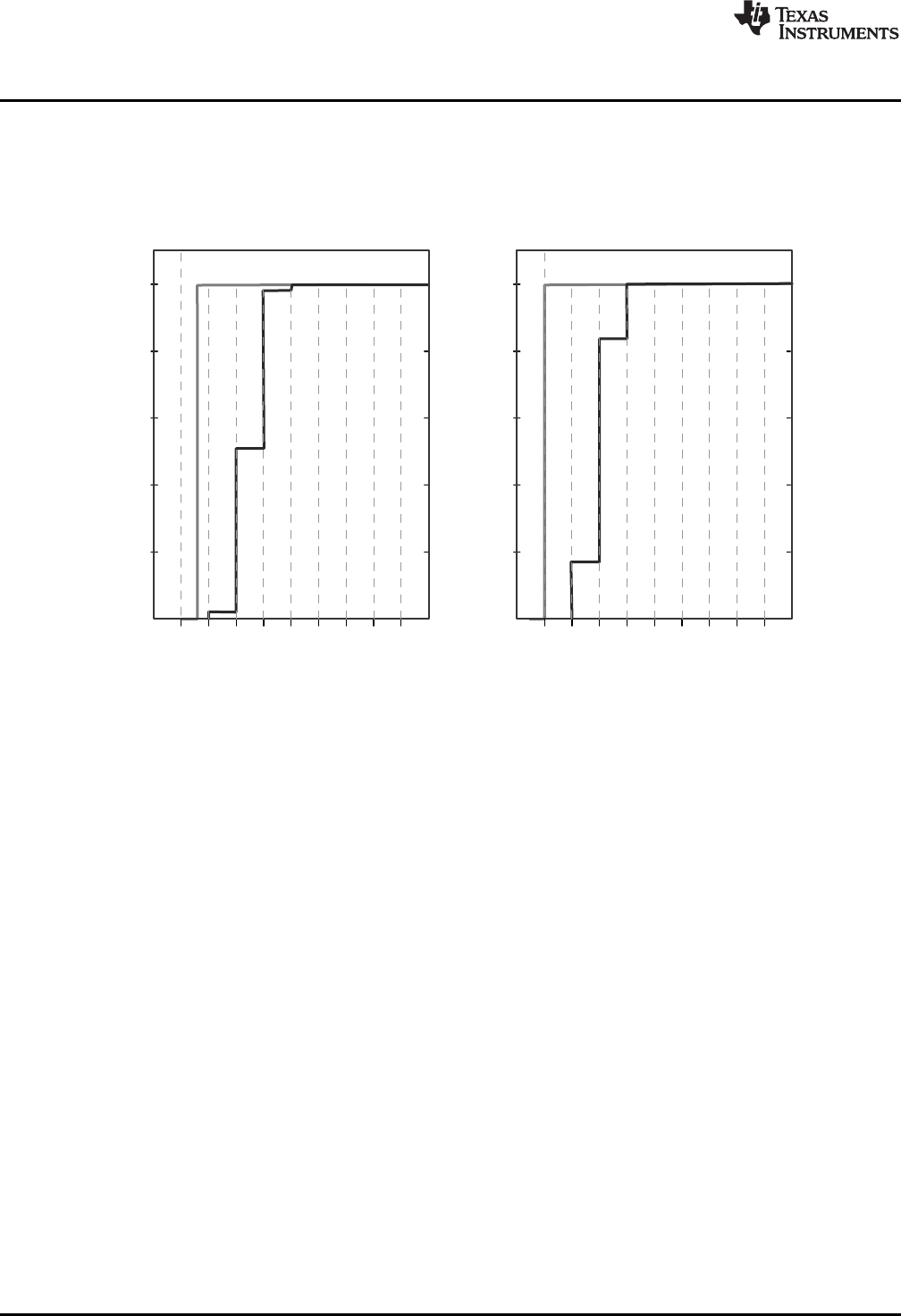
20
40
60
80
100
0
% VFSR
Asynchronous Step Synchronous Step
Conversions Conversions
01234 5 67 8
20
40
60
80
100
0
% VFSR
0 1 234 5 67 8
SD24_B Operation
www.ti.com
Figure 29-8 shows the digital filter step response and conversion points. For step changes at the input
after start of conversion, a settling time must be allowed before a valid conversion result is available. The
SD24INTDLYx bits can provide sufficient filter settling time for a full-scale change at the ADC input. If the
step occurs synchronously to the decimation of the digital filter, the valid data is available on the third
conversion. An asynchronous step requires one additional conversion before valid data is available.
Figure 29-8. Digital Filter Step Response and Conversion Points Digital Filter Output
29.2.7.2 Cascade of Integrators
With each start of conversion or after change of the SD24INCTLx register for a given converter, the digital
filter of this converter is reset. This allows the integrators implemented into the SINC filter to be used as a
"Cascade of Integrators" by setting the interrupt delay to SD24INTDLYx = 11b and starting a new
conversion (for example by writing SD24INCTLx) after each decimation step.
The full-scale value output by the "Cascade of Integrators" is given by FS = 1/6 × (OSR3+ 3×OSR2+
2×OSR). In offset binary mode, the full-scale range is from 0 to FS. In twos-complement mode, the full-
scale range is from -FS to +FS.
29.2.7.3 Digital Filter Output
The full-scale value output by the SINC3digital filter is dependent on the oversampling ratio OSR and is
given by FS = 2^(3×log2(OSR)). In offset binary mode, the full-scale range is from 0 to FS. In twos-
complement mode, the full-scale range is from -FS to +FS.
For example, the maximum OSR of 1024 results in a full-scale value of 1073741824 or 4000 000h; that is,
a value that can be represented by 31 bits. All 31 bits can be accessed using the SD24BMEMHx and
SD24BMEMLx registers. Depending on the selected data format and alignment, the representation within
the SD24BMEMx registers differs.
In offset binary mode (SD24DFx = 00b), the bitstream coming from the modulator is interpreted as a
stream of ones (1) and zeros (0). In twos-complement mode (SD24DFx = 01b), the bitstream is interpreted
as ones (1) and minus ones (-1). In offset binary mode (SD24DFx = 00b) the output values range from 0
to FS. In twos-complement mode (SD24DFx = 01b), the output values range from -FS to +FS.
If right alignment is selected with SD24ALGN = 0, the digital filter's output value is directly mapped to the
SD24_B conversion result registers SD24BMEMHx and SD24BMEMLx with the LSB of the filter's output
being mapped to the LSB of SD24BMEMLx.
772 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Operation
If left alignment is selected with SD24ALGN = 1, the mapping of the filter's output value to the conversion
registers is dependent on the selected oversampling rate. In left aligned offset binary mode, the 32-bit
value is left-shifted according to Table 29-1. In left aligned twos-complement mode, the 32-bit twos
complement of the digital filter's output is left-shifted according to Table 29-2.
Table 29-3 gives an example for an oversampling rate of 256.
Table 29-1. Offset Binary Left Aligned Mapping
Filter Output Left
OSR Range SD24BOSRx Register Filter's LSB Mapped to
Shifted by
1 to 32 0000h to 001Fh 17 bits Bit 1of SD24BMEMHx
33 to 64 0020h to 003Fh 14 bits Bit 14 of SD24BMEMLx
65 to 128 0040h to 007Fh 11 bits Bit 11 of SD24BMEMLx
129 to 256 0080h to 00FFh 8 bits Bit 8 of SD24BMEMLx
257 to 512 0100h to 01FFh 5 bits Bit 5 of SD24BMEMLx
513 to 1024 0200h to 03FFh 2 bits Bit 2 of SD24BMEMLx
Table 29-2. Twos-Complement Left Aligned Mapping
Filter Output Left
OSR Range SD24BOSRx Register Filter's LSB Mapped to
Shifted by
1 to 32 0000h to 001Fh 16 bits Bit 16 of SD24BMEMLx
33 to 64 0020h to 003Fh 13 bits Bit 13 of SD24BMEMLx
65 to 128 0040h to 007Fh 10 bits Bit 10 of SD24BMEMLx
129 to 256 0080h to 00FFh 7 bits Bit 7 of SD24BMEMLx
257 to 512 0100h to 01FFh 4 bits Bit 4 of SD24BMEMLx
513 to 1024 0200h to 03FFh 1 bit Bit 1 of SD24BMEMLx
Table 29-3. Data Format Example for OSR = 256
SD24BMEMHx
SD24DFx SD24ALGN Format Analog Input Filter Output (hex) SD24BMEMLx (hex)
+VFSR 0FF FFFF 00FF FFFF
Bipolar offset binary,
00b 0 0 V 080 0000 0080 0000
right aligned -VFSR 000 0000 0000 0000
+VFSR 0FF FFFF FFFF FF00
Bipolar offset binary,
00b 1 0 V 080 0000 8000 0000
left aligned -VFSR 000 0000 0000 0000
+VFSR 00FF FFFF 00FF FFFF
Bipolar twos complement,
01b 0 0 V 0000 0000 0000 0000
right aligned -VFSR FF00 0000 FF00 0000
+VFSR 00FF FFFF 7FFF FF80
Bipolar twos complement,
01b 1 0 V 0000 0000 0000 0000
left aligned -VFSR FF00 0000 8000 0000
773
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
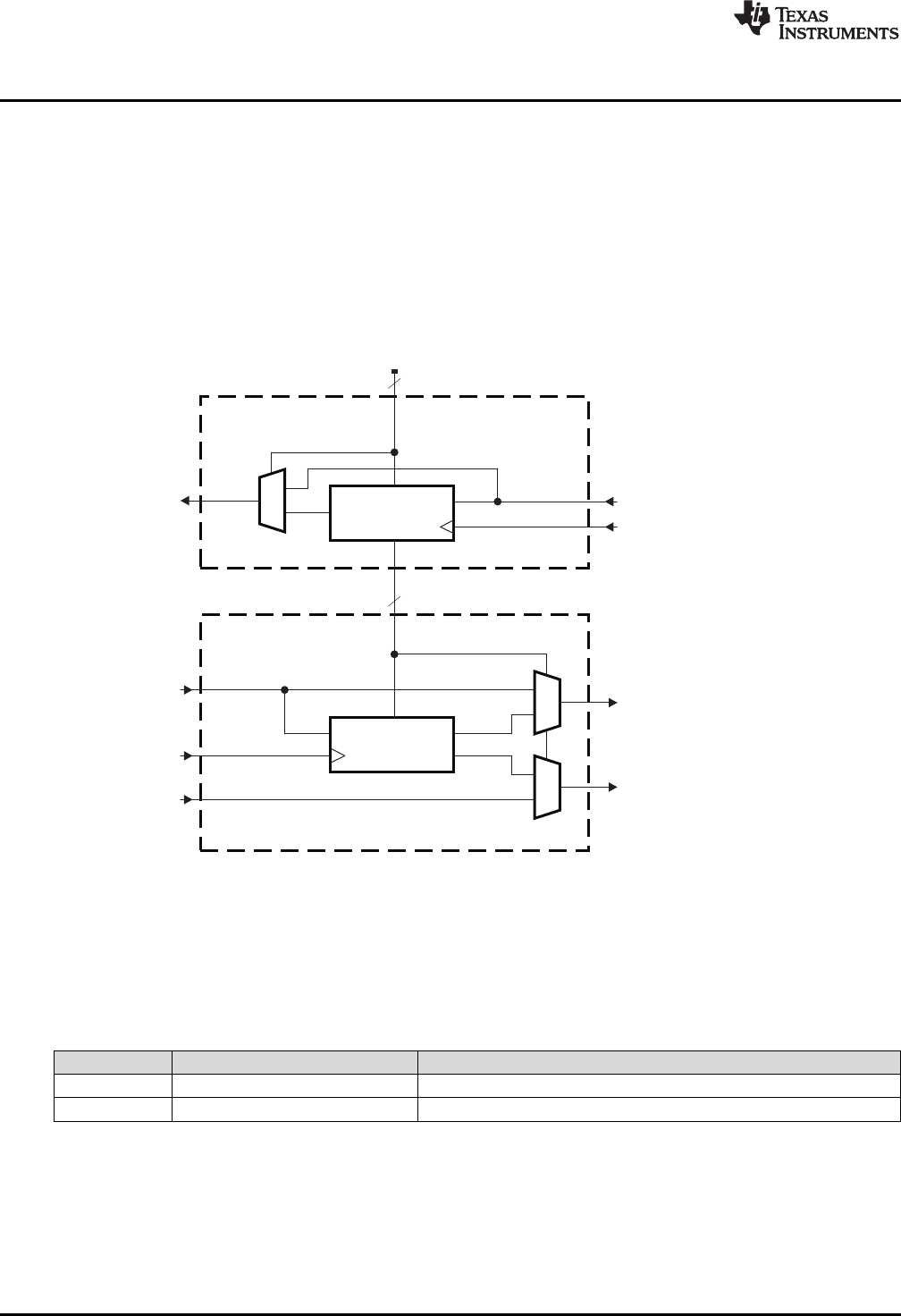
1x
0x
0x
0x
1x
1x Bitstream from Modulator
Bitstream to Digital Filter
Clock to Digital Filter
fM
fMC
fM
2
2
SD24MCx
SD24MCx
to Pad
from Pad
Data
Clock
Output Encoder
Input Decoder
Manchester
Encoder
Manchester
Decoder
SD24_B Operation
www.ti.com
29.2.8 Bitstream Input and Output
The bitstream of each modulator can be fed to pins. The SD24MCx selects the encoding of the output
bitstream.
The SD24_B module also allows to feed in a modulator bitstream into the digital filter with SD24DI = 1.
Setting SD24DI = 1 for a converter disables the associated modulator. The incoming bitstream can be
either synchronous to the modulator frequency fMor it can be a Manchester decoded bitstream. The
format is selected with the SD24MCx bits. The Manchester decoder requires a zero-to-one or a one-to-
zero transition in the incoming bitstream to be able to synchronize correctly to it. Up to the first transition,
the decoded data can be incorrect.
Figure 29-9 shows the block diagram of the output encoder and the input decoder.
Figure 29-9. SD24_B Output Encoder and Input Decoder Block Diagram
29.2.9 Conversion Modes
Each SD24_B converter can be configured for two modes of operation, single conversion and continuous
conversion, as listed in Table 29-4. The SD24SNGL bit selects the converter's conversion mode.
Table 29-4. Conversion Mode Summary
SD24SNGL Mode Operation
1 Single conversion The converter converts once, until the corresponding IFG is set.
0 Continuous conversion The converter converts continuously.
In addition, the converters can be grouped together by selecting a common start-of-conversion trigger
using the SD24SCSx bits. There are up to four software start-of-conversion triggers and three external (for
example a timer output) start-of-conversion triggers available.
774 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
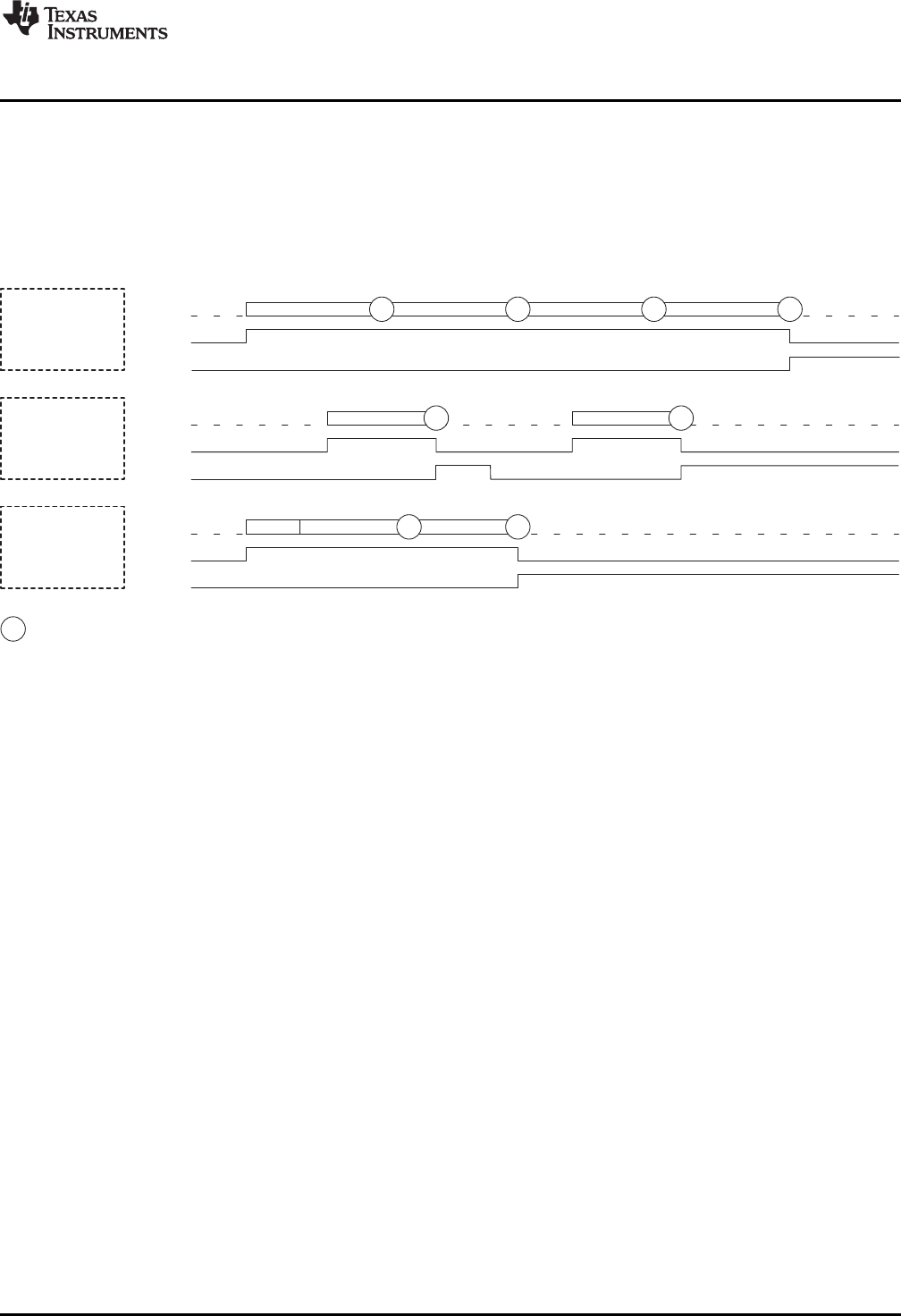
Conversion
Conversion
Conversion
PRE2 Conversion
Conversion
Conversion Conversion Conversion
Channel 0
SD24SNGL=1
SD24INTDLYx=00b
SD24PREx=00h
Channel 1
SD24SNGL=1
SD24INTDLYx=11b
SD24PREx=00h
SD24SC
SD24SC
SD24SC
SD24IFG0
SD24IFG1
SD24IFG2
Set by SW
Set by SW
Set by SW
Set by SW
Auto-clear
Auto-clear
Auto-clear
Auto-clear
= Result written into SD24BMEMH/Lx
Channel 2
SD24SNGL=1
SD24INTDLYx=10b
SD24PREx=PRE2
www.ti.com
SD24_B Operation
29.2.9.1 Single Converter, Single Conversion
Setting the SD24SC bit of a converter initiates one conversion on that converter when SD24SNGL = 1 and
SD24SCSx = 00b; that is, the converter is not grouped with any other converters. The SD24SC bit is
automatically cleared after conversion completion; that is, when the converter's interrupt flag is set.
Clearing SD24SC before the conversion is completed immediately stops conversion of the selected
converter, the converter is powered down, and the corresponding digital filter is turned off.
Figure 29-10 shows examples of single conversions with different SD24INTDLYx and SD24PREx settings.
Figure 29-10. Single Conversion Examples
29.2.9.2 Single Converter, Continuous Conversion
When SD24SNGL = 0, continuous conversion mode is selected. A converter configured with SD24SCSx =
00b begins converting when SD24SC is set and continues until the SD24SC bit is cleared by software.
Clearing SD24SC immediately stops conversion of the selected converter, the converter is powered down,
and the corresponding digital filter is turned off.
29.2.9.3 Group of Converters
SD24_B converters can be grouped together with a common start-of-conversion trigger by setting
SD24SCSx to a non-zero value. All converters with the same SD24SCS settings form a group, and the
conversion is started by the selected group for all attached converters synchronously. The conversion can
be started either by software by setting the respective SD24GRPxSC bit (see Figure 29-11) or by a rising
edge on an external trigger signal like a timer output (see Figure 29-12). The connected trigger sources
are device dependent–see the device-specific data sheet for details.
When SD24SNGL = 1 for a converter in a group, single conversion mode is selected. A single conversion
of this converter occurs synchronously when the group trigger starts conversion.
The start of conversion is also reflected in each converter's SD24SC bit. By clearing the SD24SC bit of
one converter in a group, the conversion of this converter is immediately stopped. Setting the SD24SC bit
of an individual converter in a group immediately starts conversion for this converter independent of the
group's start of conversion trigger.
775
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
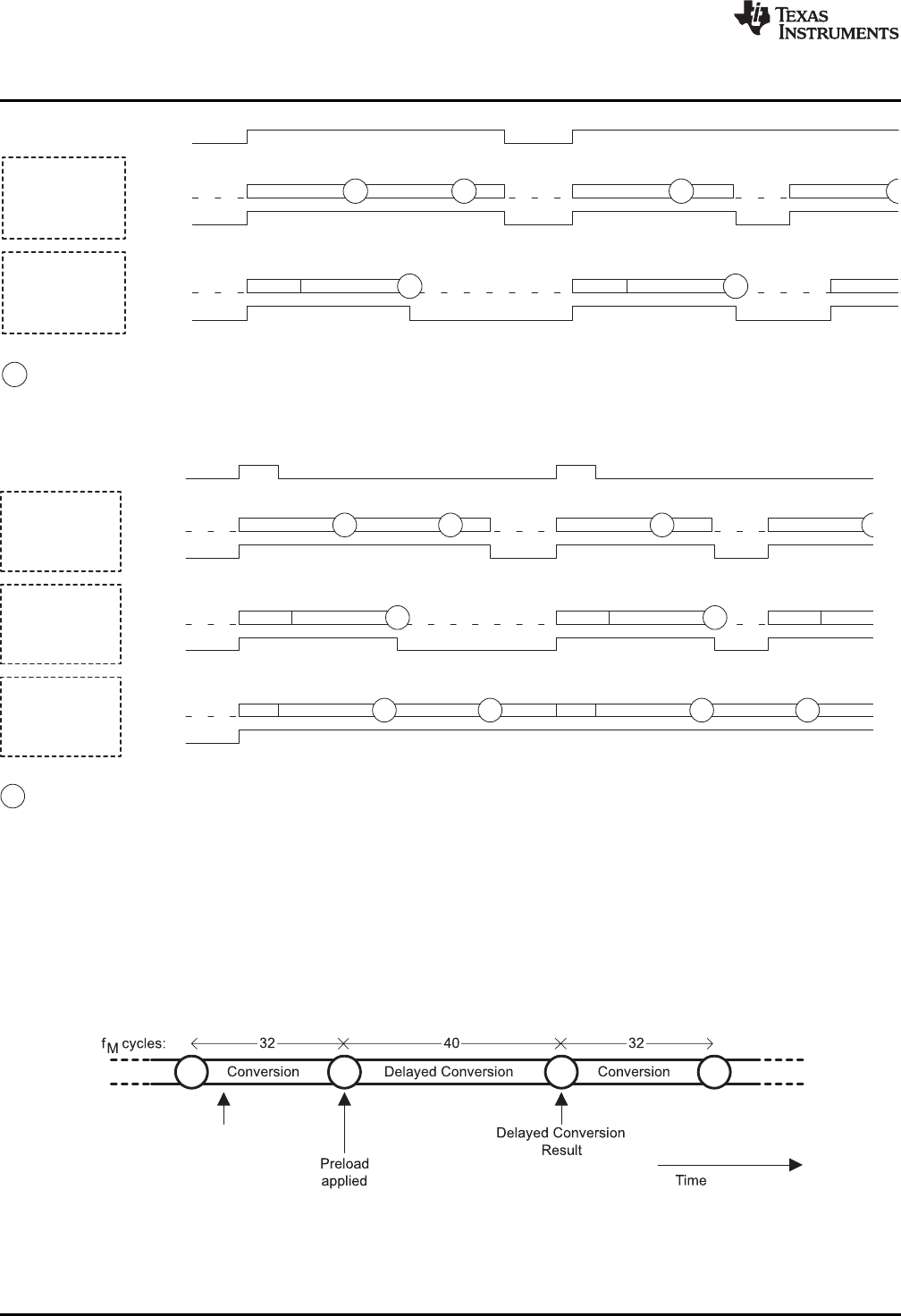
SD24OSRx = 32
Load SD24BPREx
with SD24PREx = 8
= Result written into SD24BMEMH/Lx
Conversion Conversion
PRE1 PRE1
Conversion Conversion
Conv
Co Conversion ConversionConv
Channel 1
SD24SCSx=001b
SD24SNGL=1
SD24INTDLYx=11b
SD24PREx=PRE1
Channel 0
SD24SCSx=001b
SD24SNGL=0
SD24PREx=00h
SD24SC
SD24SC
ext. Trigger 0
Set by ext. Trigger 0
Set by ext. Trigger 0 Set by SW
Set by SW
Reset by SWReset by SW
Set by ext. Trigger 0
Set by ext. Trigger 0
Auto-clearAuto-clear
Conversion Conversion Convers Conversion Conversion
PRE2PRE2 Convers
Channel 2
SD24SCSx=001b
SD24SNGL=0
SD24PREx=PRE2
SD24SC Set by ext. Trigger 0
PRE1
Conversion Conversion
PRE1 PRE1
Conversion Conversion
Convers
Co Conversion ConversionConv
Channel 1
SD24SCSx=100b
SD24SNGL=1
SD24INTDLYx=11b
SD24PREx=PRE1
Channel 0
SD24SCSx=100b
SD24SNGL=0
SD24PREx=00h
SD24SC
SD24SC
SD24GRP0SC
Set by GRP0SC
Set by GRP0SC
Set by SW Set by SW
Set by SW
Set by SW
Reset by SW
Reset by SWReset by GRP0SC
Set by GRP0SC
Set by GRP0SC
Auto-clearAuto-clear
= Result written into SD24BMEMH/Lx
SD24_B Operation
www.ti.com
Figure 29-11. Grouped Operation - Internal Start-of-Conversion Trigger
Figure 29-12. Grouped Operation - External Start-of-Conversion Trigger
29.2.10 Conversion Operation Using Preload
When multiple converters are grouped, the SD24BPREx registers can be used to delay the conversion
time frame for each converter. Using SD24BPREx, the decimation time of the digital filter is increased one
time by the specified number of fMclock cycles, which can range from 0 to 1023. Figure 29-13 shows an
example using SD24BPREx.
Figure 29-13. Conversion Delay Using Preload - Example
776 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
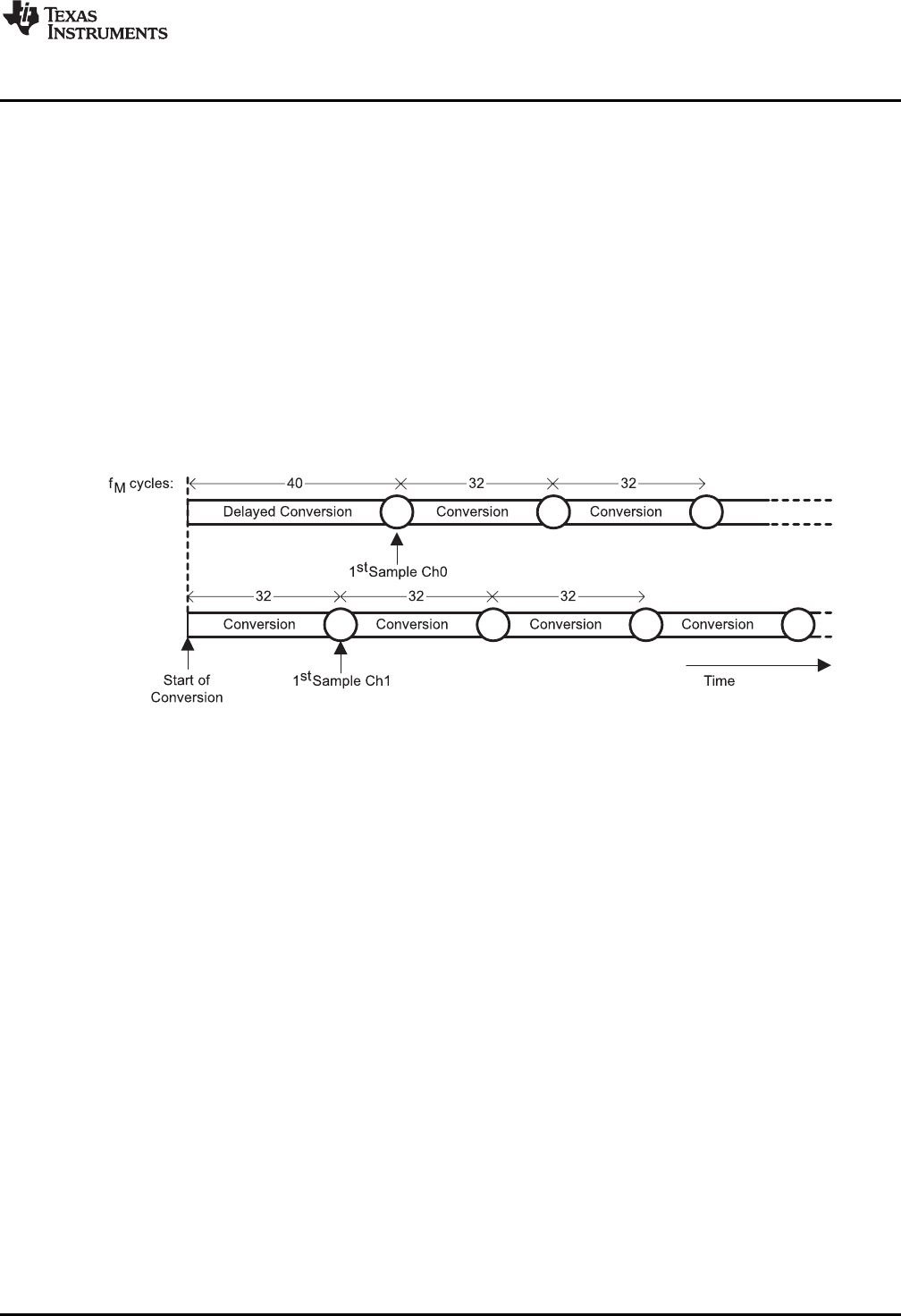
SD24OSRx = 32
SD24PRE0 = 8
SD24PRE1 = 0
www.ti.com
SD24_B Operation
The SD24BPREx delay is applied at the beginning of the next conversion cycle after it is written; that is,
the specified number of delay cycles is applied to the conversion cycle following the write to SD24BPREx.
Further conversions are not delayed. After modifying SD24BPREx, the next write to SD24BPREx should
not occur until the current conversion cycle is completed and the written value is applied. For example, the
preload value can be modified after the corresponding SD24IFGx is set. At start of conversion, the first
conversion is delayed by the latest value written into SD24BPREx. If no delay at start of conversion is
desired, a previously written non-zero value must be changed to zero before starting the conversion.
The accuracy of the result for the delayed conversion cycle using SD24BPREx is dependent on the length
of the delay and the frequency of the analog signal being sampled. For example, when measuring a dc
signal, SD24BPREx delay has no effect on the conversion result regardless of the duration. The user must
determine when the delayed conversion result is useful in an application.
Figure 29-14 shows the operation of grouped converters 0 and 1. The preload register of converter 1 is
loaded with zero, which results in immediate conversion, while the conversion cycle of converter 0 is
delayed by setting SD24BPRE0 = 8. The first converter 0 conversion uses SD24BPREx = 8, shifting all
subsequent conversions by 8 fMclock cycles.
Figure 29-14. Start of Conversion Using Preload - Example
29.2.11 Grounding and Noise Considerations
As with any high-resolution ADC, appropriate printed circuit board layout and grounding techniques should
be followed to eliminate ground loops, unwanted parasitic effects, and noise.
Ground loops are formed when return current from the ADC flows through paths that are common with
other analog or digital circuitry. If care is not taken, this current can generate small unwanted offset
voltages that can add to or subtract from the reference or input voltages of the ADC. Therefore, solid
decoupling on both the digital and analog supply is required (best with two capacitors, one 10 µF and one
100 nF, per supply).
In addition to grounding, ripple and noise spikes on the power-supply lines due to digital switching or
switching power supplies can corrupt the conversion result. A noise-free design using separate analog and
digital ground planes with a single-point connection is recommended to achieve high accuracy.
If the internal reference is used, the reference voltage should be buffered externally by connecting a small
(approximately 100 nF) capacitor to VREF to reduce the noise on the reference.
777
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
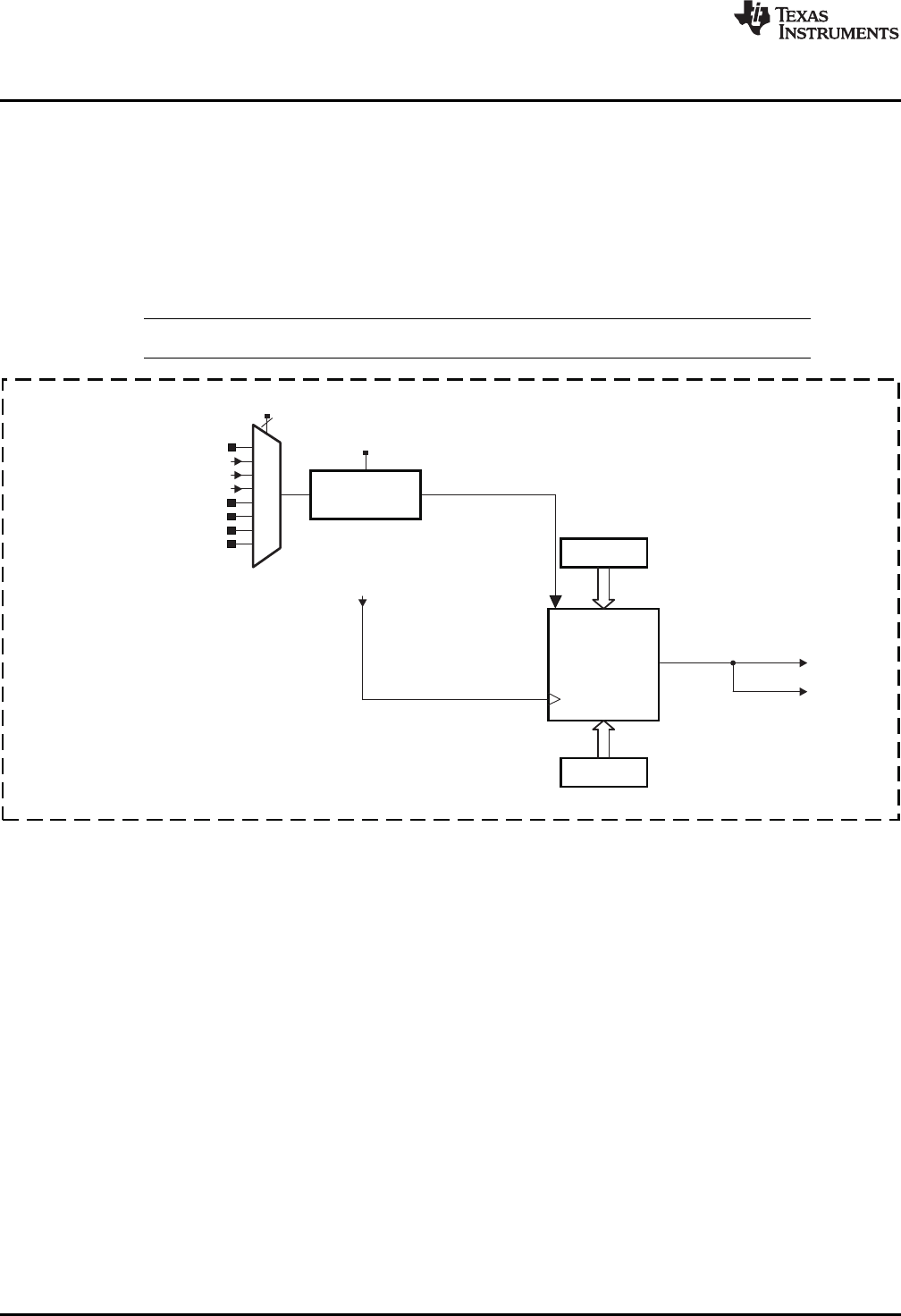
fM
ext. Trigger 2
ext. Trigger 1
SD24SC
SD24GRP0SC
SD24GRP1SC
SD24GRP2SC
SD24GRP3SC
ext. Trigger 3
SD24SCSx
SD24SNGL
000
110
001
100
111
010
101
011
3
Conversion Logic
Trigger Generator
SD24BTRGOSR
SD24BTRGPRE
(Decimation)
Counter
Trigger Pulse
Set TRGIFG
SD24_B Operation
www.ti.com
29.2.12 Trigger Generator
The SD24_B module provides a trigger generator that allows synchronization of external modules (for
example other ADCs) with the SD24_B. Configuration of the trigger generator (see the block diagram in
Figure 29-15) is similar to a converter (although it does not provide the analog part and thus all associated
digital logic). It can be started the same as a converter, and the trigger pulse and the setting of the
interrupt flag is generated as it would be generated by a converter with the same OSR and preload
settings. This means that the trigger generator mimics the timing of a converter. If the trigger generator is
configured the same as the converters and is started together with the converters, it can trigger external
modules synchronous with the conversion (that is, decimation) of the SD24_B converters.
NOTE: Only the MSP430F676x1(A) devices support the trigger generator.
Figure 29-15. SD24_B Trigger Generator Block Diagram
778 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
SD24_B Operation
29.2.13 SD24_B Interrupts
The SD24_B has these interrupt sources for each ADC converter:
• SD24IFGx : conversion ready interrupt
• SD24OVIFGx : conversion memory overflow
• SD24TRGIFG: trigger generator interrupt
The SD24IFGx bits are set when their corresponding SD24BMEMHx and SD24BMEMLx memory registers
are written with a conversion result. An interrupt request is generated if the corresponding SD24IEx bit
and the GIE bit are set. Whether or not an SD24_B overflow condition sets a SD24OVIFG depends on the
SD24OV32 setting: If SD24OV32 = 0, the overflow occurs when a conversion result is written to a
SD24BMEMHx and SD24BMEMLx register pair before one of the registers was read. If SD24OV32 = 1,
the overflow occurs when a new conversion result is written before the complete 32-bit of the previous
conversion result was read.
29.2.13.1 SD24BIV, Interrupt Vector Generator
All SD24_B interrupt sources are prioritized and combined to source a single interrupt vector. SD24BIV is
used to determine which enabled SD24_B interrupt source requested an interrupt. The highest priority
SD24_B interrupt request that is enabled generates a number in the SD24BIV register (see register
description). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled SD24_B interrupts do not affect the SD24BIV value.
Any read access of the SD24BIV register has no effect on the SD24OVIFG or SD24IFG flags. The
SD24IFG flags are reset by reading the associated SD24BMEMx register or by clearing the flags in
software. SD24OVIFG bits can only be reset with software. The SD24TRGIFG is reset by reading
SD24BIV or by clearing the flag in software. A write access to SD24BIV clears all interrupt flags.
If another interrupt is pending after servicing of an interrupt, another interrupt is generated. For example, if
a SD24OVIFGx and one or more SD24IFGx interrupts are pending when the interrupt service routine
accesses the SD24BIV register, the SD24OVIFGx interrupt condition is serviced first and the
corresponding flags must be cleared in software. After the RETI instruction of the interrupt service routine
is executed, the highest priority SD24IFGx pending generates another interrupt request.
29.2.13.2 Interrupt Delay Operation
The SD24INTDLYx bits control the timing for the first interrupt service request for the corresponding
converter. This feature delays the interrupt request for a completed conversion by up to four conversion
cycles allowing the digital filter to settle prior to generating an interrupt request. The delay is applied each
time the conversion is started or when the SD24BINCTLx register is modified. SD24INTDLYx disables
overflow interrupt generation for the converter for the selected number of delay cycles. Interrupt requests
for the delayed conversions are not generated during the delay.
29.2.14 Using SD24_B With DMA
Devices with an integrated DMA controller can automatically move data from any SD24BMEMHx and
SD24BMEMLx register to another location. DMA transfers are done without CPU intervention and
independent of any low-power modes.
The SD24DMAx bits in SD24BCTL1 register select the converter that triggers a DMA transfer. The
transfer is triggered by the respective SD24IFGx flag. If the respective interrupt enable bit SD24IEx is set,
the selected SD24IFGx flag does not trigger a transfer. Any SD24IFGx is automatically cleared when the
DMA controller accesses the corresponding SD24BMEMHx and SD24BMEMLx registers.
779
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

SD24_B Registers
www.ti.com
29.3 SD24_B Registers
The SD24_B registers are listed in Table 29-5. The available converter registers are device-specific
depending on the number of implemented converters.
The base address of the SD24_B module can be found in the device-specific data sheet. The address
offset of each SD24_B register is given in Table 29-5.
Table 29-5. SD24_B Registers
Offset Acronym Register Name Type Reset Section
00h SD24BCTL0 SD24_B Control 0 Register Read/write 0000h Section 29.3.1
02h SD24BCTL1 SD24_B Control 1 Register Read/write 0800h Section 29.3.2
04h SD24BTRGCTL SD24_B Trigger Control Register Read/write 0000h Section 29.3.3
06h SD24BTRGOSR SD24_B Trigger OSR Control Register Read/write 00FFh Section 29.3.10
08h SD24BTRGPRE SD24_B Trigger Preload Register Read/write 0000h Section 29.3.12
0Ah SD24BIFG SD24_B Interrupt Flag Register Read/write 0000h Section 29.3.4
0Ch SD24BIE SD24_B Interrupt Enable Register Read/write 0000h Section 29.3.5
0Eh SD24BIV SD24_B Interrupt Vector Register Read/write 0000h Section 29.3.6
10h SD24BCCTL0 SD24_B Converter 0 Control Register Read/write 0000h Section 29.3.7
12h SD24BINCTL0 SD24_B Converter 0 Input Control Register Read/write 0000h Section 29.3.8
14h SD24BOSR0 SD24_B Converter 0 OSR Control Register Read/write 00FFh Section 29.3.9
16h SD24BPRE0 SD24_B Converter 0 Preload Register Read/write 0000h Section 29.3.11
18h SD24BCCTL1 SD24_B Converter 1 Control Register Read/write 0000h Section 29.3.7
1Ah SD24BINCTL1 SD24_B Converter 1 Input Control Register Read/write 0000h Section 29.3.8
1Ch SD24BOSR1 SD24_B Converter 1 OSR Control Register Read/write 00FFh Section 29.3.9
1Eh SD24BPRE1 SD24_B Converter 1 Preload Register Read/write 0000h Section 29.3.11
20h SD24BCCTL2 SD24_B Converter 2 Control regi5ster Read/write 0000h Section 29.3.7
22h SD24BINCTL2 SD24_B Converter 2 Input Control Register Read/write 0000h Section 29.3.8
24h SD24BOSR2 SD24_B Converter 2 OSR Control Register Read/write 00FFh Section 29.3.9
26h SD24BPRE2 SD24_B Converter 2 Preload Register Read/write 0000h Section 29.3.11
28h SD24BCCTL3 SD24_B Converter 3 Control Register Read/write 0000h Section 29.3.7
2Ah SD24BINCTL3 SD24_B Converter 3 Input Control Register Read/write 0000h Section 29.3.8
2Ch SD24BOSR3 SD24_B Converter 3 OSR Control Register Read/write 00FFh Section 29.3.9
2Eh SD24BPRE3 SD24_B Converter 3 Preload Register Read/write 0000h Section 29.3.11
30h SD24BCCTL4 SD24_B Converter 4 Control Register Read/write 0000h Section 29.3.7
32h SD24BINCTL4 SD24_B Converter 4 Input Control Register Read/write 0000h Section 29.3.8
34h SD24BOSR4 SD24_B Converter 4 OSR Control Register Read/write 00FFh Section 29.3.9
36h SD24BPRE4 SD24_B Converter 4 Preload Register Read/write 0000h Section 29.3.11
38h SD24BCCTL5 SD24_B Converter 5 Control Register Read/write 0000h Section 29.3.7
3Ah SD24BINCTL5 SD24_B Converter 5 Input Control Register Read/write 0000h Section 29.3.8
3Ch SD24BOSR5 SD24_B Converter 5 OSR Control Register Read/write 00FFh Section 29.3.9
3Eh SD24BPRE5 SD24_B Converter 5 Preload Register Read/write 0000h Section 29.3.11
40h SD24BCCTL6 SD24_B Converter 6 Control Register Read/write 0000h Section 29.3.7
42h SD24BINCTL6 SD24_B Converter 6 Input Control Register Read/write 0000h Section 29.3.8
44h SD24BOSR6 SD24_B Converter 6 OSR Control Register Read/write 00FFh Section 29.3.9
46h SD24BPRE6 SD24_B Converter 6 Preload Register Read/write 0000h Section 29.3.11
48h SD24BCCTL7 SD24_B Converter 7 Control Register Read/write 0000h Section 29.3.7
4Ah SD24BINCTL7 SD24_B Converter 7 Input Control Register Read/write 0000h Section 29.3.8
4Ch SD24BOSR7 SD24_B Converter 7 OSR Control Register Read/write 00FFh Section 29.3.9
4Eh SD24BPRE7 SD24_B Converter 7 Preload Register Read/write 0000h Section 29.3.11
50h SD24BMEML0 SD24_B Converter 0 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
780 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
SD24_B Registers
Table 29-5. SD24_B Registers (continued)
Offset Acronym Register Name Type Reset Section
52h SD24BMEMH0 SD24_B Converter 0 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
54h SD24BMEML1 SD24_B Converter 1 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
56h SD24BMEMH1 SD24_B Converter 1 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
58h SD24BMEML2 SD24_B Converter 2 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
5Ah SD24BMEMH2 SD24_B Converter 2 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
5Ch SD24BMEML3 SD24_B Converter 3 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
5Eh SD24BMEMH3 SD24_B Converter 3 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
60h SD24BMEML4 SD24_B Converter 4 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
62h SD24BMEMH4 SD24_B Converter 4 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
64h SD24BMEML5 SD24_B Converter 5 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
66h SD24BMEMH5 SD24_B Converter 5 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
68h SD24BMEML6 SD24_B Converter 6 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
6Ah SD24BMEMH6 SD24_B Converter 6 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
6Ch SD24BMEML7 SD24_B Converter 7 Conversion Memory Read/write 0000h Section 29.3.13
Low Word Register
6Eh SD24BMEMH7 SD24_B Converter 7 Conversion Memory Read/write 0000h Section 29.3.14
High Word Register
781
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.1 SD24BCTL0 Register
SD24_B Control Register 0
Figure 29-16. SD24BCTL0 Register
15 14 13 12 11 10 9 8
SD24DIVx SD24PDIVx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
SD24CLKOS SD24M4 SD24SSELx Reserved SD24REFS SD24OV32 Reserved
rw-0 rw-0 rw-0 rw-0 r0 rw-0 rw-0 r0
Table 29-6. SD24BCTL0 Register Description
Bit Field Type Reset Description
15-11 SD24DIVx RW 0h SD24_B frequency divider. Together with SD24PDIVx, the SD24_B frequency
fSD24 is calculated as fSD24 = fSD24SCLK / [(SD24DIVx + 1) × 2SD24PDIVx].
0000b = Divide by 1
0001b = Divide by 2
⋮
11110b = Divide by 31
11111b = Divide by 32
10-8 SD24PDIVx RW 0h SD24_B frequency pre-scaler. Together with SD24DIVx, the SD24_B frequency
fSD24 is calculated as fSD24 = fSD24SCLK / [(SD24DIVx + 1) × 2SD24PDIVx].
000b = Divide by 1
001b = Divide by 2
010b = Divide by 4
011b = Divide by 8
100b = Divide by 16
101b = Divide by 32
110b = Divide by 64
111b = Divide by 128
7 SD24CLKOS RW 0h Clock output select
0b = Modulator clock, fM
1b = Manchester decoder clock, fMC. Depending on SD24M4, the Manchester
decoder clock is equal to the modulator clock or four times the modulator clock.
6 SD24M4 RW 0h Modulator clock to Manchester decoder clock ratio
0b = Modulator clock equals Manchester decoder clock, fM= fMC = fSD24
1b = Modulator clock is 1/4 of the Manchester decoder clock, fM= fMC/4 = fSD24/4,
fMC = fSD24
5-4 SD24SSEL RW 0h SD24_B clock source select
00b = MCLK
01b = SMCLK
10b = ACLK
11b = External SD24_B clock (SD24CLK)
3 Reserved R 0h Reserved. Always reads as 0.
2 SD24REFS RW 0h Reference select
0b = External reference selected. Internal reference voltage buffer disabled.
1b = Internal reference from shared REF selected. This requests the reference
voltage from the shared REF and buffers it internally to the SD24_B.
1 SD24OV32 RW 0h SD24_B overflow control
0b = Overflow on 16-bit (1 word) only; that is, only one of the SD24BMEMLx and
SD24BMEMHx registers must be read to prevent the overflow interrupt flag being
set.
1b = Overflow on 32-bit (2 words); that is, both SD24BMEMx and SD24BMEMHx
registers must be read to prevent the overflow interrupt flag being set.
0 Reserved R 0h Reserved. Always reads as 0.
782 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
29.3.2 SD24BCTL1 Register
SD24_B Control Register 1
Figure 29-17. SD24BCTL1 Register
15 14 13 12 11 10 9 8
Reserved SD24DMAx
r0 r0 r0 r0 rw-1 rw-0 rw-0 rw-0
76543210
Reserved SD24GRP3SC SD24GRP2SC SD24GRP1SC SD24GRP0SC
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Table 29-7. SD24BCTL1 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11-8 SD24DMAx RW 8h DMA trigger select. Selects the converter that should trigger a DMA transfer.
0000b = SD24IFG0 triggers DMA (if SD24IE0 = 0)
0001b = SD24IFG1 triggers DMA (if SD24IE1 = 0)
0010b = SD24IFG2 triggers DMA (if SD24IE2 = 0)
0011b = SD24IFG3 triggers DMA (if SD24IE3 = 0)
0100b = SD24IFG4 triggers DMA (if SD24IE4 = 0)
0101b = SD24IFG5 triggers DMA (if SD24IE5 = 0)
0110b = SD24IFG6 triggers DMA (if SD24IE6 = 0)
0111b = SD24IFG7 triggers DMA (if SD24IE7 = 0)
1000b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1001b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1010b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1011b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1100b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1101b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1110b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
1111b = SD24TRGIFG triggers DMA (if SD24TRGIE = 0)
7-4 Reserved R 0h Reserved. Always reads as 0.
3 SD24GRP3SC RW 0h SD24_B Group 3 start of conversion. Software controlled start of conversion for
all converters belonging to group 3.
0b = No conversion start
1b = Start conversion for group 3
2 SD24GRP2SC RW 0h SD24_B Group 2 start of conversion. Software controlled start of conversion for
all converters belonging to group 2.
0b = No conversion start
1b = Start conversion for group 2
1 SD24GRP1SC RW 0h SD24_B Group 1 start of conversion. Software controlled start of conversion for
all converters belonging to group 1.
0b = No conversion start
1b = Start conversion for group 1
0 SD24GRP0SC RW 0h SD24_B Group 0 start of conversion. Software controlled start of conversion for
all converters belonging to group 0.
0b = No conversion start
1b = Start conversion for group 0
783
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.3 SD24BTRGCTL Register
SD24_B Trigger Control Register
Note: Only the MSP430F676x1(A) devices support the trigger generator.
Figure 29-18. SD24BTRGCTL Register
15 14 13 12 11 10 9 8
Reserved SD24TRGIE SD24TRGIFG Reserved SD24SNGL
r0 r0 r0 r0 rw-0 rw-0 r0 rw-0
76543210
Reserved SD24SCSx SD24SC
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Table 29-8. SD24BTRGCTL Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11 SD24TRGIE RW 0h SD24_B trigger interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
10 SD24TRGIFG RW 0h SD24_B trigger interrupt flag
0b = No interrupt pending
1b = Interrupt pending
9 Reserved R 0h Reserved. Always reads as 0.
8 SD24SNGL RW 0h Single trigger mode select
0b = Continuous triggers generated (like a converter in continuous conversion
mode).
1b = Single trigger generated (like a converter in single conversion mode).
7-4 Reserved R 0h Reserved. Always reads as 0.
3-1 SD24SCSx RW 0h Start of conversion or trigger generation select
000b = SD24SC bit
001b = External trigger 1 (see the device-specific data sheet)
010b = External trigger 2 (see the device-specific data sheet)
011b = External trigger 3 (see the device-specific data sheet)
100b = Group 0 - Start of conversion defined by SD24GRP0SC bits in register
SD24BCTL1
101b = Group 1 - Start of conversion defined by SD24GRP1SC bits in register
SD24BCTL1
110b = Group 2 - Start of conversion defined by SD24GRP2SC bits in register
SD24BCT1L
111b = Group 3 - Start of conversion defined by SD24GRP3SC bits in register
SD24BCTL1
0 SD24SC RW 0h Start of conversion or trigger generation. Software controlled start of conversion
if SD24SCS = 00b. Manual stop of conversion (independent of SD24SCS
setting).
If a conversion is ongoing (triggered by any source selected through SD24SCS)
this is indicated by SD24SC = 1.
0b = No conversion start or stop conversion
1b = Start conversion or trigger generation
784 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
29.3.4 SD24BIFG Register
SD24_B Interrupt Flag Register
Figure 29-19. SD24BIFG Register
15 14 13 12 11 10 9 8
SD24OVIFG7 SD24OVIFG6 SD24OVIFG5 SD24OVIFG4 SD24OVIFG3 SD24OVIFG2 SD24OVIFG1 SD24OVIFG0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
SD24IFG7 SD24IFG6 SD24IFG5 SD24IFG4 SD24IFG3 SD24IFG2 SD24IFG1 SD24IFG0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-9. SD24BIFG Register Description
Bit Field Type Reset Description
15 SD24OVIFG7 RW 0h SD24_B converter 7 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML7 or
SD24BMEMH7 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML7 or
SD24BMEMH7 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
14 SD24OVIFG6 RW 0h SD24_B converter 6 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML6 or
SD24BMEMH6 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML6 or
SD24BMEMH6 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
13 SD24OVIFG5 RW 0h SD24_B converter 5 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML5 or
SD24BMEMH5 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML5 or
SD24BMEMH5 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
12 SD24OVIFG4 RW 0h SD24_B converter 4 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML4 or
SD24BMEMH4 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML4 or
SD24BMEMH4 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
11 SD24OVIFG3 RW 0h SD24_B converter 3 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML3 or
SD24BMEMH3 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML3 or
SD24BMEMH3 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
785
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
Table 29-9. SD24BIFG Register Description (continued)
Bit Field Type Reset Description
10 SD24OVIFG2 RW 0h SD24_B converter 2 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML2 or
SD24BMEMH2 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML2 or
SD24BMEMH2 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
9 SD24OVIFG1 RW 0h SD24_B converter 1 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML1 or
SD24BMEMH1 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML1 or
SD24BMEMH1 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
8 SD24OVIFG0 RW 0h SD24_B converter 0 overflow interrupt flag.
These bits are set depending on the SD24OV32 bit settings:
When none of the corresponding conversion registers SD24BMEML0 or
SD24BMEMH0 are read before new values are loaded (SD24OV32 = 0).
When only one of the corresponding conversion registers SD24BMEML0 or
SD24BMEMH0 is read before new values are loaded (SD24OV32 = 1).
0b = No interrupt pending
1b = Interrupt pending
7 SD24IFG7 RW 0h SD24_B converter 7 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML7 and SD24BMEMH7 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML7 or
SD24BMEMH7 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
6 SD24IFG6 RW 0h SD24_B converter 6 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML6 and SD24BMEMH6 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML6 or
SD24BMEMH6 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
5 SD24IFG5 RW 0h SD24_B converter 5 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML5 and SD24BMEMH5 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML5 or
SD24BMEMH5 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
4 SD24IFG4 RW 0h SD24_B converter 4 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML4 and SD24BMEMH4 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML4 or
SD24BMEMH4 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
3 SD24IFG3 RW 0h SD24_B converter 3 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML3 and SD24BMEMH3 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML3 or
SD24BMEMH3 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
786 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
Table 29-9. SD24BIFG Register Description (continued)
Bit Field Type Reset Description
2 SD24IFG2 RW 0h SD24_B converter 2 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML2 and SD24BMEMH2 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML2 or
SD24BMEMH2 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
1 SD24IFG1 RW 0h SD24_B converter 1 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML1 and SD24BMEMH1 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML1 or
SD24BMEMH1 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
0 SD24IFG0 RW 0h SD24_B converter 0 interrupt flag. These bits are set when the corresponding
conversion registers SD24BMEML0 and SD24BMEMH0 are loaded with a new
conversion result. The bits are reset by reading one of the SD24BMEML0 or
SD24BMEMH0 registers, or may be reset by software.
0b = No interrupt pending
1b = Interrupt pending
787
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.5 SD24BIE Register
SD24_B Interrupt Enable Register
Figure 29-20. SD24BIE Register
15 14 13 12 11 10 9 8
SD24OVIE7 SD24OVIE6 SD24OVIE5 SD24OVIE4 SD24OVIE3 SD24OVIE2 SD24OVIE1 SD24OVIE0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
SD24IE7 SD24IE6 SD24IE5 SD24IE4 SD24IE3 SD24IE2 SD24IE1 SD24IE0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-10. SD24BIE Register Description
Bit Field Type Reset Description
15 SD24OVIE7 RW 0h SD24_B converter 7 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
14 SD24OVIE6 RW 0h SD24_B converter 6 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
13 SD24OVIE5 RW 0h SD24_B converter 5 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
12 SD24OVIE4 RW 0h SD24_B converter 4 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
11 SD24OVIE3 RW 0h SD24_B converter 3 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
10 SD24OVIE2 RW 0h SD24_B converter 2 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
9 SD24OVIE1 RW 0h SD24_B converter 1 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
8 SD24OVIE0 RW 0h SD24_B converter 0 overflow interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7 SD24IE7 RW 0h SD24_B converter 7 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
6 SD24IE6 RW 0h SD24_B converter 6 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
5 SD24IE5 RW 0h SD24_B converter 5 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
4 SD24IE4 RW 0h SD24_B converter 4 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
788 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
Table 29-10. SD24BIE Register Description (continued)
Bit Field Type Reset Description
3 SD24IE3 RW 0h SD24_B converter 3 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
2 SD24IE2 RW 0h SD24_B converter 2 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1 SD24IE1 RW 0h SD24_B converter 1 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 SD24IE0 RW 0h SD24_B converter 0 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
789
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.6 SD24BIV Register
SD24_B Interrupt Vector Register
Figure 29-21. SD24BIV Register
15 14 13 12 11 10 9 8
SD24BIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SD24BIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 29-11. SD24BIV Register Description
Bit Field Type Reset Description
15-0 SD24BIVx R 0h SD24_B Interrupt vector value. It generates an value that can be used as
address offset for fast interrupt service routine handling. Writing to this register
clears all pending interrupt flags.
When an overflow occurs (02h), the software must check all SD24OVIFGx flags
to determine which converter caused the overflow.
00h = No Interrupt pending
02h = Interrupt Source: SD24_B memory overflow; Interrupt Flag: SD24OVIFGx;
Interrupt Priority: Highest
04h = Interrupt Source: SD24_B trigger interrupt flag; Interrupt Flag:
SD24TRGIFG
06h = Interrupt Source: SD24_B converter 0 memory interrupt flag; Interrupt
Flag: SD24IFG0
08h = Interrupt Source: SD24_B converter 1 memory interrupt flag; Interrupt
Flag: SD24IFG1
0Ah = Interrupt Source: SD24_B converter 2 memory interrupt flag; Interrupt
Flag: SD24IFG2
0Ch = Interrupt Source: SD24_B converter 3 memory interrupt flag; Interrupt
Flag: SD24IFG3
0Eh = Interrupt Source: SD24_B converter 4 memory interrupt flag; Interrupt
Flag: SD24IFG4
10h = Interrupt Source: SD24_B converter 5 memory interrupt flag; Interrupt
Flag: SD24IFG5
12h = Interrupt Source: SD24_B converter 6 memory interrupt flag; Interrupt
Flag: SD24IFG6
14h = Interrupt Source: SD24_B converter 7 memory interrupt flag; Interrupt
Flag: SD24IFG7; Interrupt Priority: Lowest
790 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
29.3.7 SD24BCCTLx Register
SD24_B Converter x Control Register
Figure 29-22. SD24BCCTLx Register
15 14 13 12 11 10 9 8
Reserved SD24MCx SD24DI SD24DFSx SD24CAL SD24SNGL
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved SD24ALGN SD24DFx SD24SCSx SD24SC
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-12. SD24BCCTLx Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14-16 SD24MCx RW 0h Manchester Coding of bitstream.
00b = Bitstream synchronous to fM. Output data changes with falling clock edge,
input data is captured with rising clock edge.
01b = Bitstream synchronous to fM. Output data changes with rising clock edge,
input data is captured with falling clock edge.
10b = Output bitstream Manchester encoded. Input bitstream Manchester
decoded with oversampling of the input signal. A logic 1 is represented by a
high-low transition, a logic 0 is represented by a low-high transition.
11b = Output bitstream Manchester encoded. Input bitstream Manchester
decoded with oversampling of the input signal. A logic 1 is represented by a low-
high transition, a logic 0 is represented by a high-low transition.
12 SD24DI RW 0h Digital bitstream input
0b = Bitstream from modulator fed into digital filter
1b = External bitstream fed into digital filter. Modulator is off.
11-10 SD24DFSx RW 0h Digital filter select
00b = SINC3 filter
01b = Reserved (defaults to 00, SINC).
10b = Reserved (defaults to 00, SINC).
11b = Reserved (defaults to 00, SINC).
9 SD24CAL RW 0h Calibration
0b = Calibration disabled.
1b = Calibration enabled. With a single conversion the offset of the modulator
and PGA can be measured.
8 SD24SNGL RW 0h Single conversion mode select
0b = Continuous conversion mode
1b = Single conversion mode
7 Reserved R 0h Reserved. Always reads as 0.
6 SD24ALGN RW 0h Data alignment
0b = Right-aligned. LSB of filter output is Bit 0.
1b = Left-aligned. MSB of filter output (depending on OSR) is Bit 31.
5-4 SD24DFx RW 0h Data format
00b = Offset binary
01b = Twos complement
10b = Reserved (defaults to 00, Offset binary)
11b = Reserved (defaults to 01, twos complement)
791
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
Table 29-12. SD24BCCTLx Register Description (continued)
Bit Field Type Reset Description
3-1 SD24SCSx RW 0h Start of conversion select
000b = SD24SC bit
001b = External trigger 1. See the device-specific data sheet.
010b = External trigger 2. See the device-specific data sheet.
011b = External trigger 3. See the device-specific data sheet.
100b = Group 0 - Start of conversion defined by SD24GRP0SC bits in register
SD24BCTL1.
101b = Group 1 - Start of conversion defined by SD24GRP1SC bits in register
SD24BCTL1.
110b = Group 2 - Start of conversion defined by SD24GRP2SC bits in register
SD24BCT1L.
111b = Group 3 - Start of conversion defined by SD24GRP3SC bits in register
SD24BCTL1.
0 SD24SC RW 0h Start of conversion. Software controlled start of conversion if SD24SCS = 00b.
Manual stop of conversion (independent of SD24SCS setting).
If a conversion is ongoing (triggered by any source selected through SD24SCS)
this is indicated by SD24SC = 1. When starting the conversion (also by setting
SD24SC) this bit will only read 1 when the start of conversion was
synchronization to the modulator clock and the actual conversion started.
0b = No conversion start (that is, conversion stopped)
1b = Conversion ongoing
792 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
29.3.8 SD24BINCTLx Register
SD24_B Converter x Input Control Register
Figure 29-23. SD24BINCTLx Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
SD24INTDLYx SD24GAINx Reserved
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-13. SD24BINCTLx Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7-6 SD24INTDLYx RW 0h Interrupt delay generation after conversion start. These bits select the delay for
the first interrupt after conversion start.
00b = Fourth sample causes interrupt
01b = Third sample causes interrupt
10b = Second sample causes interrupt
11b = First sample causes interrupt
5-3 SD24GAINx RW 0h Gain
000b = 1
001b = 2
010b = 4
011b = 8
100b = 16
101b = 32
110b = 64
111b = 128
2-0 Reserved RW 0h Reserved
793
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.9 SD24BOSRx Register
SD24_B Converter x Oversampling Control Register
Figure 29-24. SD24BOSRx Register
15 14 13 12 11 10 9 8
Reserved SD24OSRx
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
SD24OSRx
rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1
Table 29-14. SD24BOSRx Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 SD24OSRx RW 0h Oversampling rate. The oversampling rate is defined as OSRx + 1. Valid
oversampling rates are 1 to 1024. Default is 256.
29.3.10 SD24BTRGOSR Register
SD24_B Trigger Oversampling Control Register
Note: Only the MSP430F676x1(A) devices support the trigger generator.
Figure 29-25. SD24BTRGOSR Register
15 14 13 12 11 10 9 8
Reserved SD24OSRx
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
SD24OSRx
rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1
Table 29-15. SD24BTRGOSR Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 SD24OSRx RW 0h Oversampling rate. The oversampling rate is defined as OSRx + 1. Valid
oversampling rates are 1 to 1024. Default is 256.
794 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
SD24_B Registers
29.3.11 SD24BPREx Register
SD24_B Converter x Preload Register
Figure 29-26. SD24BPREx Register
15 14 13 12 11 10 9 8
Reserved SD24PREx
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
SD24PREx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-16. SD24BPREx Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 SD24BPREx RW 0h Digital filter preload value
29.3.12 SD24BTRGPRE Register
SD24_B Trigger Preload Register
Note: Only the MSP430F676x1(A) devices support the trigger generator.
Figure 29-27. SD24BTRGPRE Register
15 14 13 12 11 10 9 8
Reserved SD24PREx
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
SD24PREx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 29-17. SD24BTRGPRE Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 SD24BPREx RW 0h Digital filter preload value
795
SLAU208O–June 2008–Revised May 2015 SD24_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
SD24_B Registers
www.ti.com
29.3.13 SD24BMEMLx Register
SD24_B Converter x Conversion Memory Low Word Register
Figure 29-28. SD24BMEMLx Register
15 14 13 12 11 10 9 8
Conversion Results - Low Word
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Conversion Results - Low Word
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 29-18. SD24BMEMLx Register Description
Bit Field Type Reset Description
15-0 Conversion Results - R 0h Conversion results. Actual format depends on selected data format, and
Low Word oversampling rate.
29.3.14 SD24BMEMHx Register
SD24_B Converter x Conversion Memory High Word Register
Figure 29-29. SD24BMEMHx Register
15 14 13 12 11 10 9 8
Conversion Results - High Word
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Conversion Results - High Word
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 29-19. SD24BMEMHx Register Description
Bit Field Type Reset Description
15-0 Conversion Results - R 0h Conversion results. Actual format depends on selected data format, and
High Word oversampling rate.
796 SD24_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 30
SLAU208O–June 2008–Revised May 2015
CTSD16
The CTSD16 is a multi-input multi-converter sigma-delta analog-to-digital conversion module. This chapter
describes the operation of the CTSD16 module.
Topic ........................................................................................................................... Page
30.1 CTSD16 Introduction......................................................................................... 798
30.2 CTSD16 Operation ............................................................................................ 800
30.3 CTSD16 Registers............................................................................................. 813
797
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

CTSD16 Introduction
www.ti.com
30.1 CTSD16 Introduction
The CTSD16 module consists of up to seven independent sigma-delta analog-to-digital converters,
referred to as channels. The converters are based on second-order oversampling sigma-delta modulators
and digital decimation filters. The decimation filters are comb-type filters with selectable oversampling
ratios of up to 256. Additional filtering can be done in software.
Features of the CTSD16 include:
• Second-order sigma-delta architecture
• Up to seven independent simultaneously-sampling ADCs (the number of channels is device
dependent, see the device-specific data sheet)
• Up to six single-ended external analog inputs, up to four differential or single-ended external analog
inputs (which can also be configured as single-ended), internal temperature sense input, internal
AVCC sense input, internal VBAT sense, and internal shorted differential inputs to VREFBG/VeREF+ signal
or DAC0 output per channel (the number of inputs is device dependent, see the device-specific data
sheet)
• Fixed 1.024-MHz modulator input frequency
• Software-selectable internal or external voltage reference
• Software-selectable AVCC sense, VBAT sense, and temperature sensor accessible by all channels
Figure 30-1 shows the block diagram of the CTSD16 module.
798 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
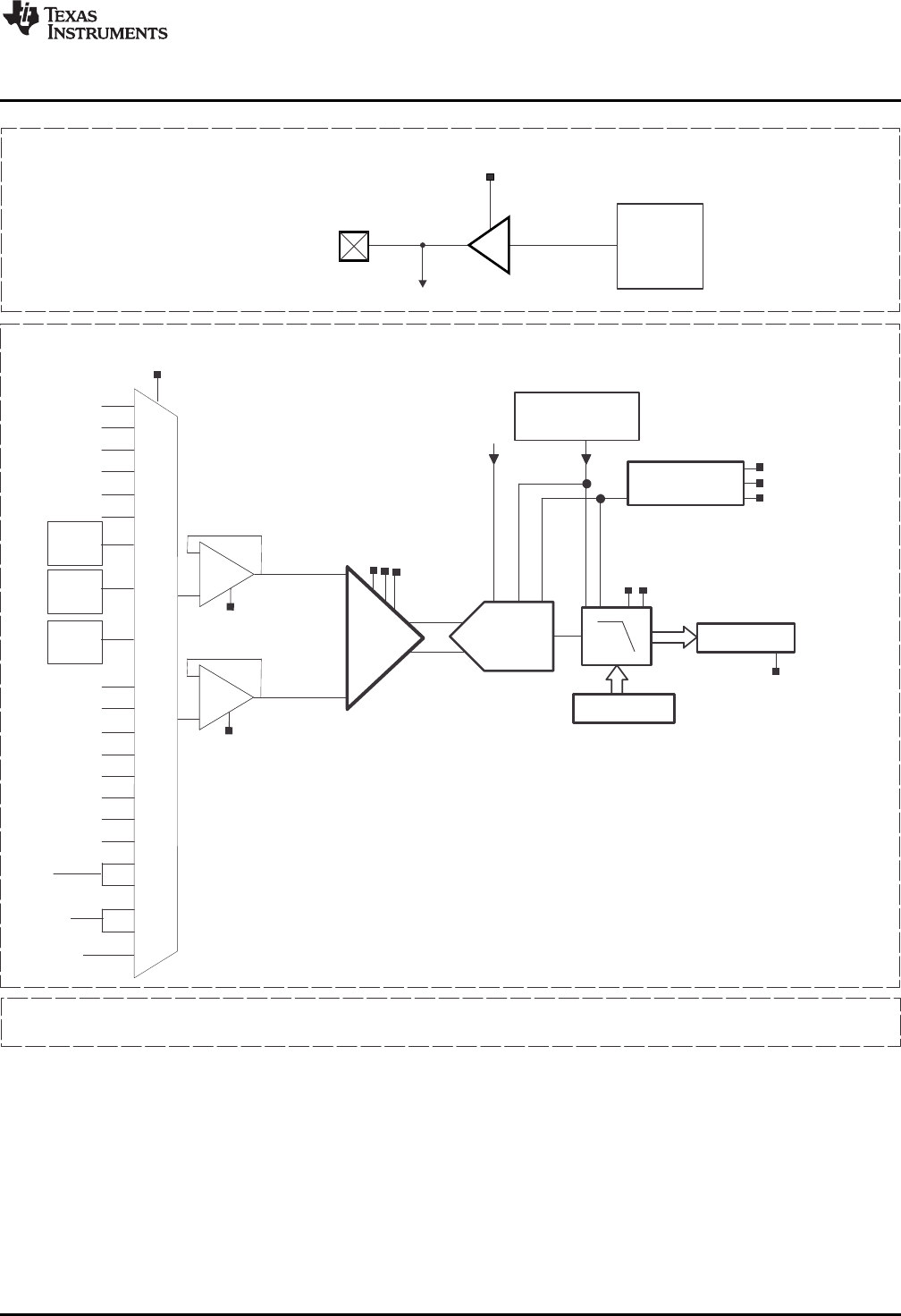
CTSD16INCHx
PGA
1..16 2nd Order
Σ∆ Modulator
CTSD16GAINx
CTSD16DF
CTSD16PRE0
90
CTSD16SC
CTSD16OSRx
CTSD16SNGL
CTSD16MEM
VREF f
M = 1.024 MHz
REF
CTSD16GRP
Group/Start
Conversion Logic
Reference Generation
VREFBG/VeREF+
VR
Pad
CTSD16REFS
~1.16V from
REF
-
+
BUF
A0
A3
AD0+
AD0-
AD1+
AD1-
AD2+
AD2-
AD3+
AD3-
AD4+
AD4-
Temp
Sense
AVCC
Sense
A1
A2
A5
A4
–
+
BUF
–
+
BUF
+
BUF
CTSD16CLK
+
Channel 0
up to Channel 1-6
A7
A6
CTSD16RRI
CTSD16RRI 0
15
VBAT
Sense
A8
AD4+
AD4-
VREFBG VeREF+
/
DAC0
VREFBG VeREF+
/
VREFBG VeREF+
/
www.ti.com
CTSD16 Introduction
Figure 30-1. CTSD16 Block Diagram
799
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
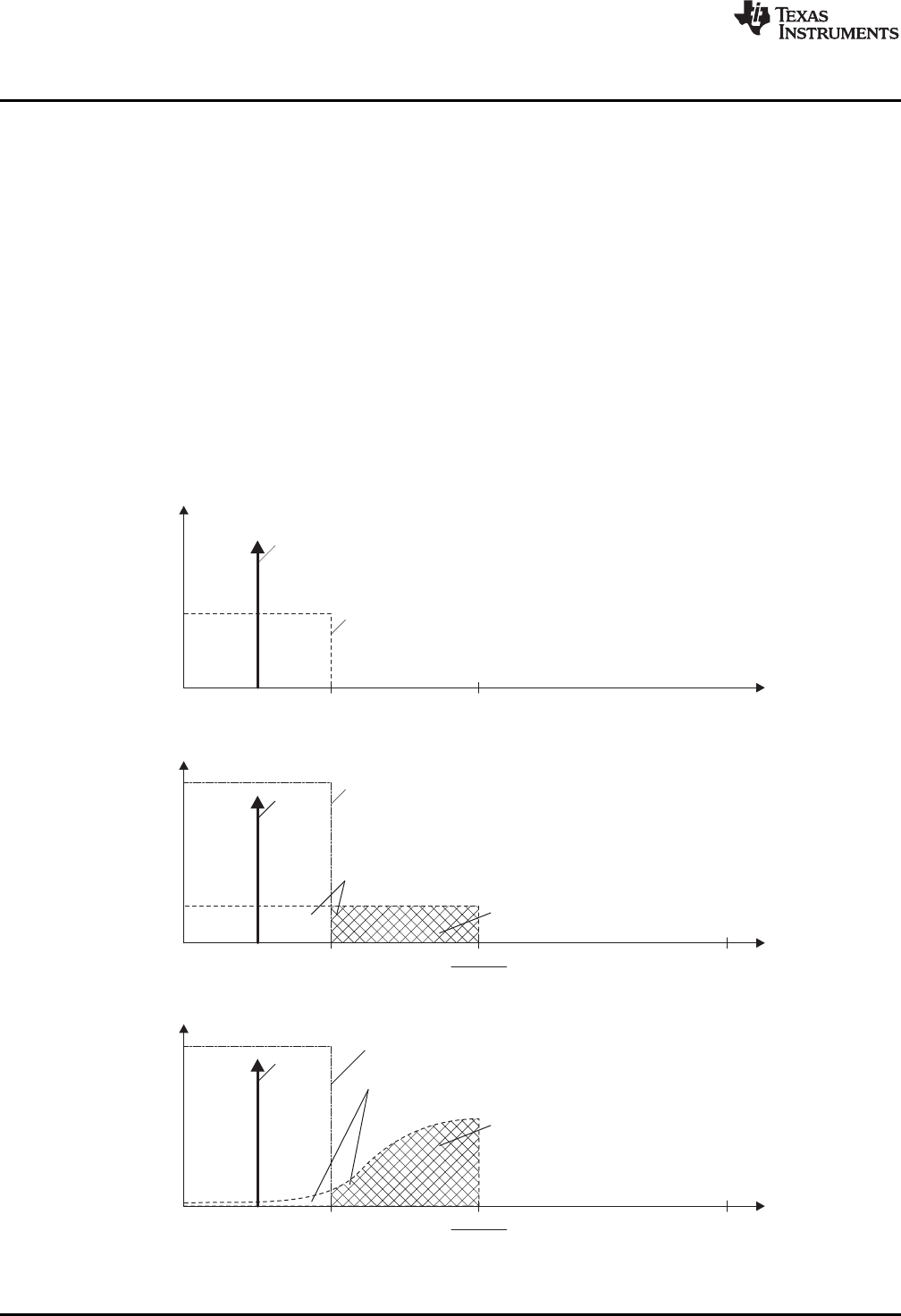
fSignal f /2
sfs
Quantization Noise
a)
fSignal f /2
s
Quantization Noise
“Shaped” Quantization Noise
Signal
b)
Signal
OSR × fs
fSignal f /2
s
Noise filtered out by digital filter
Signal
c)
OSR × fs
2
OSR × fs
OSR × fs
2
Noise filtered out by digital filter
Digital Filter
Digital Filter
CTSD16 Operation
www.ti.com
30.2 CTSD16 Operation
The CTSD16 module is configured with user software. The setup and operation of the CTSD16 is
described in the following sections.
30.2.1 Principle of Operation
A sigma-delta analog-to-digital converter consists of two parts: the analog part (called the modulator) and
the digital part (called the decimation filter). The modulator of the CTSD16 provides a bitstream of zeros
and ones to the digital decimation filter. The digital filter averages the bitstream from the modulator over a
given number of bits (specified by the oversampling rate) and provides samples at a reduced rate for
further processing to the CPU.
Averaging can be used to increase the signal-to-noise performance of a conversion [see Figure 30-2 a)
and b)]. With a conventional ADC, each factor-of-4 oversampling improves the SNR by approximately
6 dB or 1 bit. To achieve a 16-bit resolution out of a simple 1-bit ADC would require an impractical
oversampling rate of 415 = 1 073 741 824. To overcome this limitation, the sigma-delta modulator
implements a technique called noise shaping. Due to a feedback loop and integrators, the quantization
noise is pushed to higher frequencies, and thus much lower oversampling rates are sufficient to achieve
high resolutions [see Figure 30-2 c)].
Figure 30-2. Sigma-Delta Principle
800 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Operation
30.2.2 ADC Core
The analog-to-digital conversion is performed by a 1-bit second-order sigma-delta modulator. A single-bit
comparator within the modulator quantizes the input signal with the modulator frequency fM. The resulting
1-bit data stream is averaged by the digital filter for the conversion result.
30.2.3 Voltage Reference
The CTSD16 module can use an external reference voltage with CTSD16REFS = 0 or an internal
reference with CTSD16REFS = 1. CTSD16 uses the shared reference (REF) module as its internal
voltage reference source and will request it when needed. REF is used for each CTSD16 channel when
requested with CTSD16REFS = 1. When using the internal reference, refer to the device-specific data
sheet for PxSEL.y bit requirements for the internal reference pin. Also, TI recommends using an external
capacitor connected from the VREFBG pin to AVSS to reduce noise with the internal reference. See the
device-specific data sheet for the capacitor value and other reference parametrics.
An external voltage reference must be applied to the VeREF+ input when CTSD16REFS = 0.
NOTE: The external reference VeREF+ cannot be applied while the internal reference VREFBG is
being used by another module, because VeREF+ and VREFBG share the same pin, and
contention on the signal line will occur. Therefore, if the user selects the external reference,
care must be taken to ensure no other modules are requesting the internal reference VREFBG.
Table 30-1. Voltage Reference Signal Selection Requirements
Signal REFOUT REFON PxSEL.y CTSD16REFS(1)
Selected
VeREF+ 0 x 1 If CTSD16 module is used, must be set to 0.
VREFBG 1 1 1(2) If CTSD16 module is used, CTSD16REFS must be set to 1.
(1) If CTSD16 is used, CTSD16REFS bit must be set according to this table as external voltage reference VeREF+ and internal
voltage reference VREFBG cannot both be used at the same time as they use the same pin.
(2) When VREFBG is selected, PxSEL.y must always be set even if VREFBG is only used inside the device.
30.2.4 CTSD16 Clock
The CTSD16 clock (CTSD16CLK) generates a 1.024-MHz fixed frequency clock (fM). This clock is
supplied to all modulators so that all modulators convert synchronously. It also supplies the device charge
pump used for rail-to-rail CTSD16 inputs and rail-to-rail Operational Amplifier (OA) operation on devices
with an OA module. This is not a free running clock, and it runs only when a CTSD16 channel conversion
is active or if the charge pump is on (CTSD16RRIBURST = 0 or OARRI = 1).
The CTSD16CLK has fault detection. If the CTSD16CLK detects any abnormality, then the CTSD16OFFG
bit is set to 1 to indicate a CTSD16CLK fault. After it is set, the fault bit remains set until reset in software,
even if the fault condition no longer exists. If the user clears the fault bit and the fault condition still exists,
the fault bit is automatically set again; otherwise, it remains cleared. The fault condition is removed when
CTSD16CLK is powered off. Note that if only the CTSD16 is requesting the CTSD16CLK, the clock is
powered down when not actively converting to save power, so if the fault condition still exists when the
CTSD16CK is powered down and the user clears the fault bit, the fault will not reappear until the
CTSD16CLK is powered up again.
The CTSD16OFFG bit also sets the OFIFG bit in SFRIFG1 register which is shared with the system
oscillators fault conditions. OFIFG can source a nonmaskable interrupt to the CPU when the OFIE bit is
enabled in the SFRIE1 register. CTSD16OFFG is a status bit and is set or cleared based on CTSD16CLK
fault indication. OFIFG is a sticky bit that is set when CTSD16OFFG is set, and it cannot be cleared as
long as CTSD16OFFG is set. When CTSD16OFFG is cleared by software, OFIFG is not cleared
automatically and must be cleared by software.
801
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

CTSD16 Operation
www.ti.com
30.2.5 Auto Power-Down
The CTSD16 module is designed for low-power applications. When a CTSD16 channel is not actively
converting, it is automatically disabled and the CTSD16CLK request removed and automatically re-
enabled when a conversion is started. When a channel is disabled, it consumes no current. If
CTSD16REFS = 1, the CTSD16 module bursts the request for the VREFBG signal to the REF module so it is
only requested when CTSD16 is actively converting.
30.2.6 Analog Inputs
30.2.6.1 Analog Input Range and PGA
The full-scale input voltage range for each analog input pair is dependent on the gain setting of each
channel. See the device-specific data sheet for full-scale input specifications.
30.2.6.2 Analog Input Pair Selection
The CTSD16 can convert up to 15 inputs multiplexed into the buffer and PGA. Up to four differential
analog input pairs (AD0 to AD3) and up to six single-ended analog inputs (A0 to A5) are available
externally on the device. The four differential analog input pairs (AD0 to AD3) can also be configured as
single-ended with CTSD16INCHx to save an input pin if differential input is not needed. For lowest noise,
differential input should be used even for single-ended signals. When any singled-ended input is selected,
the positive input is the Ax input and the negative input is internally connected to the VREFBG/VeREF+ signal.
Thus, it is pseudo single-ended as only one external pin is needed but internally the full differential path is
used. An internal temperature sensor is available using the A6 multiplexer input. A resistive divider to
measure the supply voltage is available using the A7 multiplexer input. VBAT can be measured on the
internal input A8. Inputs AD4+ and AD4- are tied together, and when CTSD16INCHx = 0x11, they are
connected to the VREFBG/VeREF+ signal. When CTSD16INCHx = 0x12, they are connected to the DAC0
output to calibrate the offset of each CTSD16 input stage. Note that the measured offset depends on the
impedance of the external circuitry; thus, the actual offset seen at any of the analog inputs may be
different.
30.2.6.3 Analog Input Setup
The analog input of each channel is configured using the CTSD16INCTLx register. These settings can be
independently configured for each CTSD16 channel.
The gain for each PGA is selected by the CTSD16GAINx bits. A total of five gain settings are available.
During conversion, any modification of the CTSD16INCTLx register bits INTDLYx, GAINx, and INCHx
becomes effective with the next decimation step of the digital filter. After these bits are modified, the next
three conversions may be invalid due to the settling time of the digital filter. This can be handled
automatically with the CTSD16INTDLY bit. When CTSD16INTDLY = 0b, conversion interrupt requests do
not begin until the fourth conversion after a start condition. The preferred method is to modify the
CTSD16INCTLx register when CTSD16 is not converting (CTSD16SC = 0).
An external RC anti-aliasing filter is recommended for the CTSD16 to prevent aliasing of the input signal.
The cutoff frequency should be <10 kHz for a 1-MHz modulator clock and OSR = 256. The cutoff
frequency may be set to a lower frequency for applications that have lower bandwidth requirements.
30.2.6.3.1 Rail-to-Rail Input
The input buffers allow rail-to-rail operation when CTSD16RRI = 1. Rail-to-rail operation can be useful for
signals whose common mode voltage is close to the rail (see device-specific data sheet OA section VCM
parameter for the input range supported when CTSD16RRI (OARRI) = 0 or 1) as it allows linear operation
over a wider range with the charge pump enabled at the cost of additional current. Refer to the device-
specific data sheet OA section ICP for the charge pump current consumption as well as other parametrics
such as turnon time. For more details on rail-to-rail operation, refer to Chapter 33. Rail-to-rail requires a
single external capacitor from the CPCAP terminal to ground for proper operation. See the data sheet for
proper value and tolerances. Rail-to-rail input mode ready is indicated by CTSD16RRIRDY bit being set or
refer to device-specific data sheet OA section for charge pump settle time.
802 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
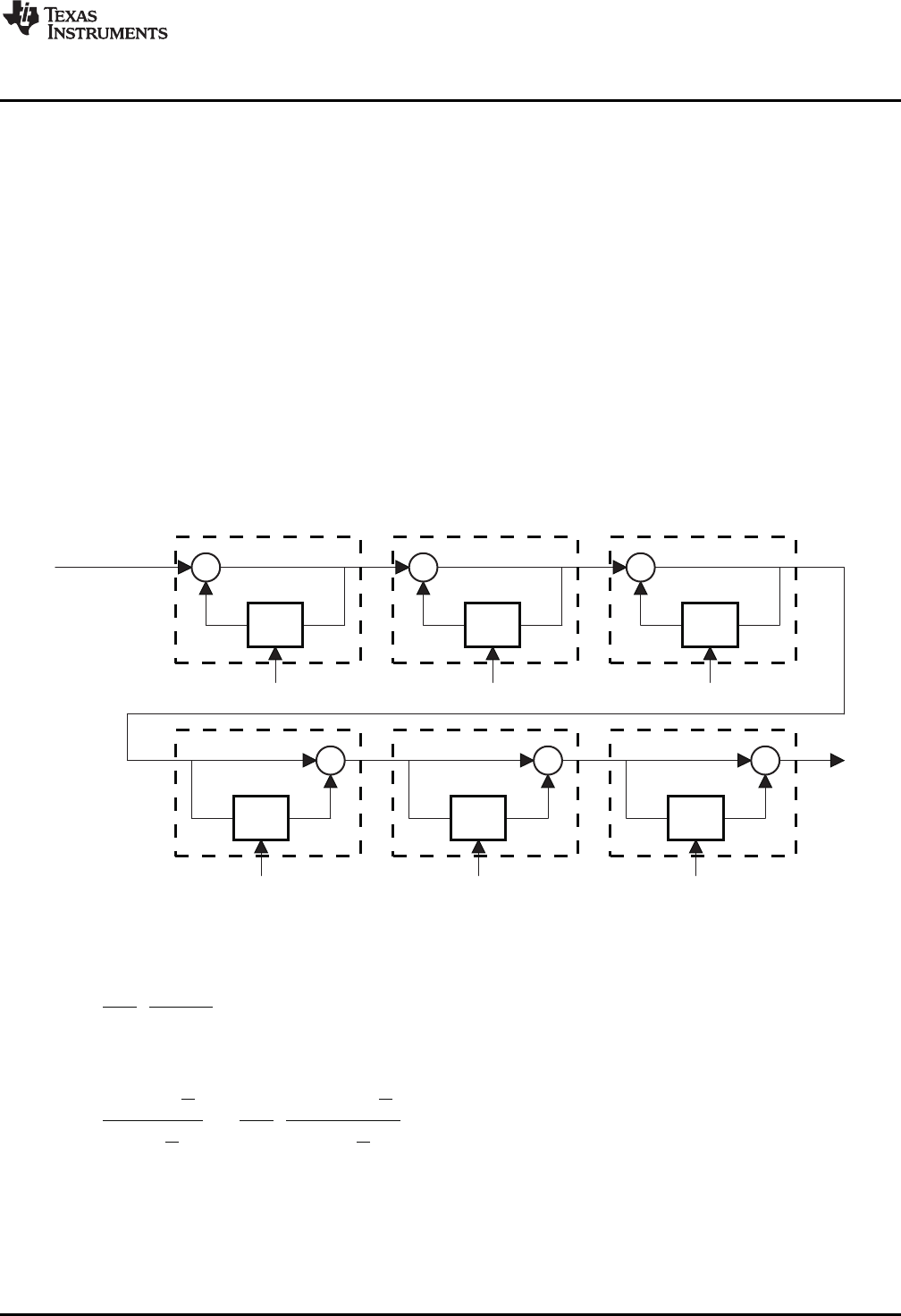
3
M
M
3
M
M
f
f
sin
f
f
OSRsin
OSR
1
f
f
sinc
f
f
OSRsinc
H(f)
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ´
÷
÷
ø
ö
ç
ç
è
æ´´
´=
÷
÷
÷
÷
÷
ø
ö
ç
ç
ç
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
÷
÷
ø
ö
ç
ç
è
æ
=
p
p
p
p
3
1
OSR
z1
z1
OSR
1
H(z) ÷
÷
ø
ö
ç
ç
è
æ
-
-
´= -
-
fS
fMfMfM
fSfS
Differentiator
Integrator
Bitstreamfrom
Modulator
Integrator Integrator
Differentiator Differentiator
z-1
z-1 z-1 z-1
z-1 z-1
+
+++
+ +
- - -
www.ti.com
CTSD16 Operation
Rail-to-rail input mode takes time to enable if the charge pump is not already on. CTSD16RRIRDY bit is
set once rail-to-rail input is ready or refer to device-specific data sheet OA section for charge pump settle
time. If power is a concern and the OA module is not in rail-to-rail input mode (OARRI = 1), the
CTSD16RRIBURST bit can be set to allow the CTSD16 to only request the charge pump for rail-to-rail
input mode when CTSD16 is converting.
30.2.6.4 Analog Port Selection
The CTSD16 inputs are multiplexed with digital port pins. When analog signals are applied to digital gates,
parasitic current can flow from VCC to GND. This parasitic current occurs if the input voltage is near the
transition level of the gate. Disabling the digital part of the port pin eliminates the parasitic current flow
and, therefore, reduces overall current consumption. The PxSEL.y bits provide the ability to disable the
port pin input and output buffers.
30.2.7 Digital Filter
The digital filter processes the 1-bit data stream from the modulator using a SINC3comb filter.
30.2.7.1 SINC3Filter
The structure of a SINC3filter is shown in Figure 30-3.
Figure 30-3. SINC3Filter Structure
The transfer function is described in the z-domain by:
(18)
The transfer function is described in the frequency domain by:
(19)
Where the oversampling rate, OSR, is the ratio of the modulator frequency fMto the sample frequency fS.
Figure 30-4 shows the filter's frequency response for an OSR of 32. The first filter notch is always at fS=
fM/OSR. The notch's frequency can be adjusted by changing the oversampling rate using the
CTSD16OSRx bits.
803
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
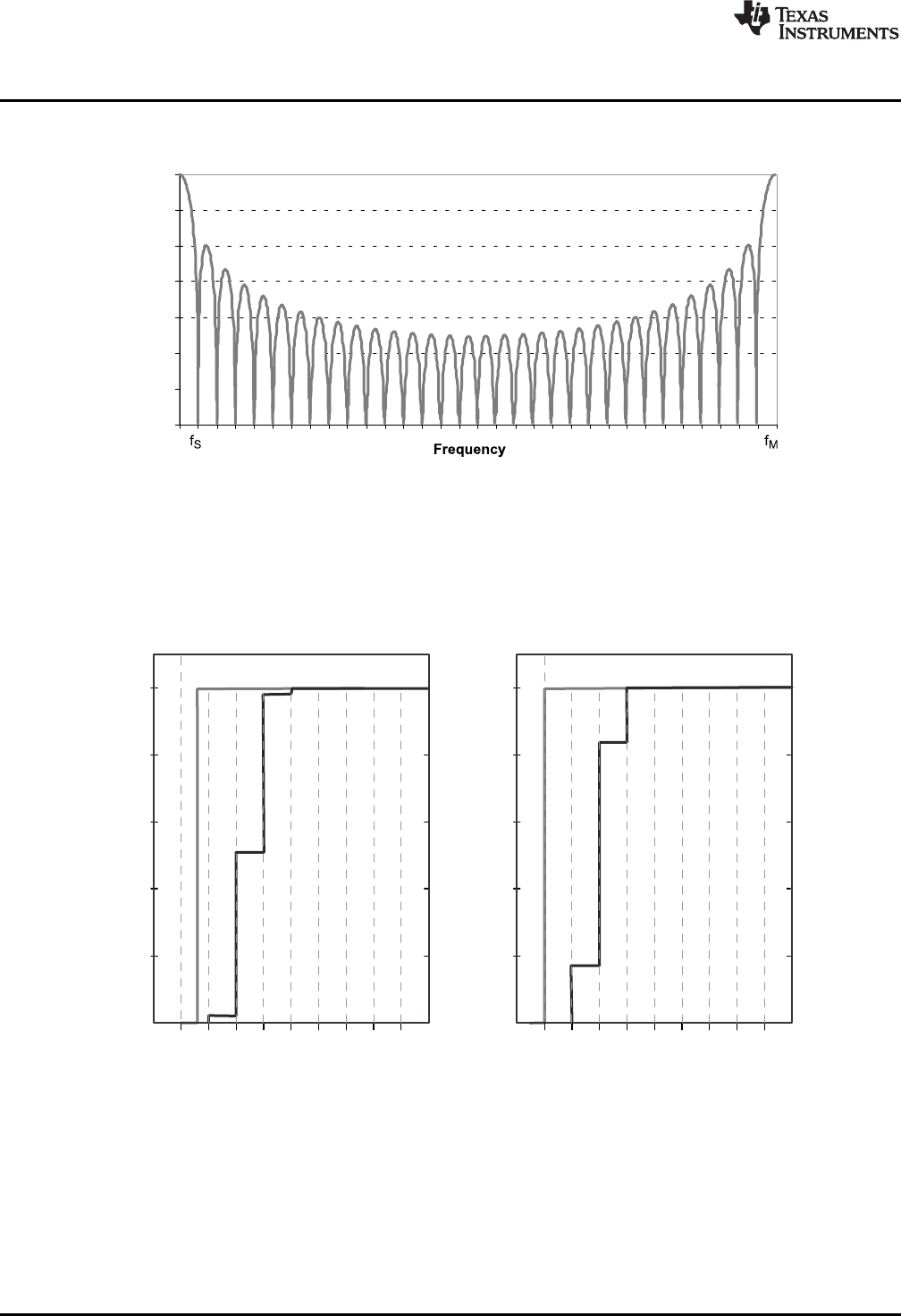
20
40
60
80
100
0
% VFSR
Asynchronous Step Synchronous Step
Conversions Conversions
01234 5 67 8
20
40
60
80
100
0
% VFSR
0 1 234 5 67 8
-20
-40
0
-60
-80
-100
-120
-140
Gain (dB)
CTSD16 Operation
www.ti.com
The digital filter for each enabled ADC channel completes the decimation of the digital bitstream and
outputs new conversion results to the corresponding CTSD16MEMx register at the sample frequency fS.
Figure 30-4. Comb Filter Frequency Response With OSR = 32
Figure 30-5 shows the digital filter step response and conversion points. For step changes at the input
after start of conversion a settling time must be allowed before a valid conversion result is available. The
CTSD16INTDLY bit can provide sufficient filter settling time for a full-scale change at the ADC input. If the
step occurs synchronously to the decimation of the digital filter the valid data will be available on the third
conversion. An asynchronous step will require one additional conversion before valid data is available.
Figure 30-5. Digital Filter Step Response and Conversion Points Digital Filter Output
804 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
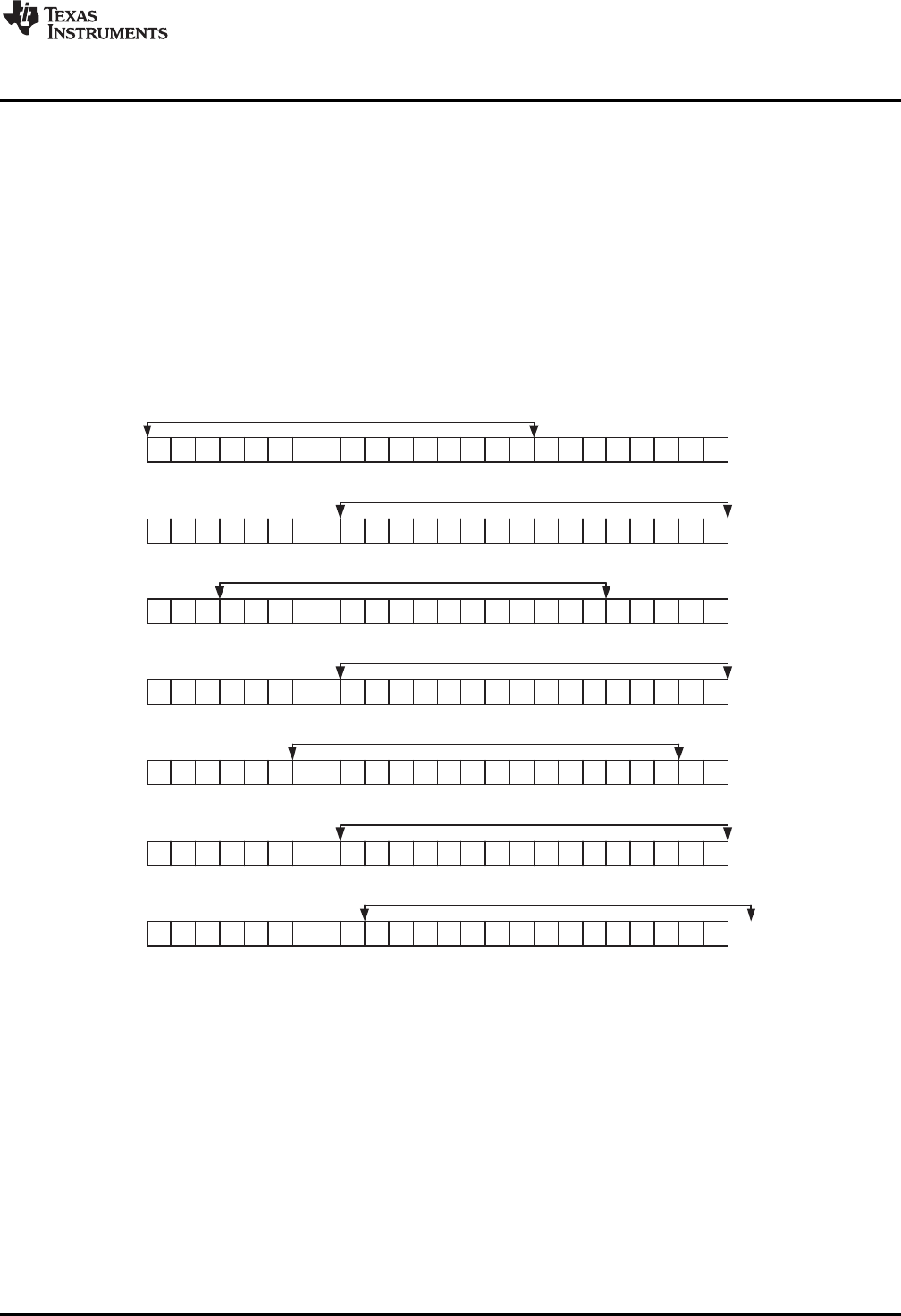
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=32, LSBACC=x
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=64, LSBACC=1
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=64, LSBACC=0
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=128, LSBACC=1
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=128, LSBACC=0
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=256, LSBACC=1
048121620 15 3 269 723 22 21 19 18 17 15 14 13 11 10
OSR=256, LSBACC=0
www.ti.com
CTSD16 Operation
30.2.7.2 Digital Filter Output
The number of bits output by each digital filter is dependent on the oversampling ratio and ranges from
16 to 24 bits. Figure 30-6 shows the digital filter output bits and their relation to CTSD16MEMx for
each OSR. For example, for OSR = 256 and LSBACC = 0, the CTSD16MEMx register contains bits 23
- 8 of the digital filter output. When OSR = 32, the CTSD16MEMx LSB is always zero.
The CTSD16LSBACC and CTSD16LSBTOG bits give access to the least significant bits of the digital
filter output. When CTSD16LSBACC = 1 the 16 least significant bits of the digital filter's output are read
from CTSD16MEMx using word instructions. The CTSD16MEMx register can also be accessed with
byte instructions returning only the 8 least significant bits of the digital filter output.
When CTSD16LSBTOG = 1 the CTSD16LSBACC bit is automatically toggled each time the
corresponding channel's CTSD16MEMx register is read. This allows the complete digital filter output
result to be read with two read accesses of CTSD16MEMx. Setting or clearing CTSD16LSBTOG does
not change CTSD16LSBACC until the next CTSD16MEMx access.
Figure 30-6. Used Bits of Digital Filter Output
805
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
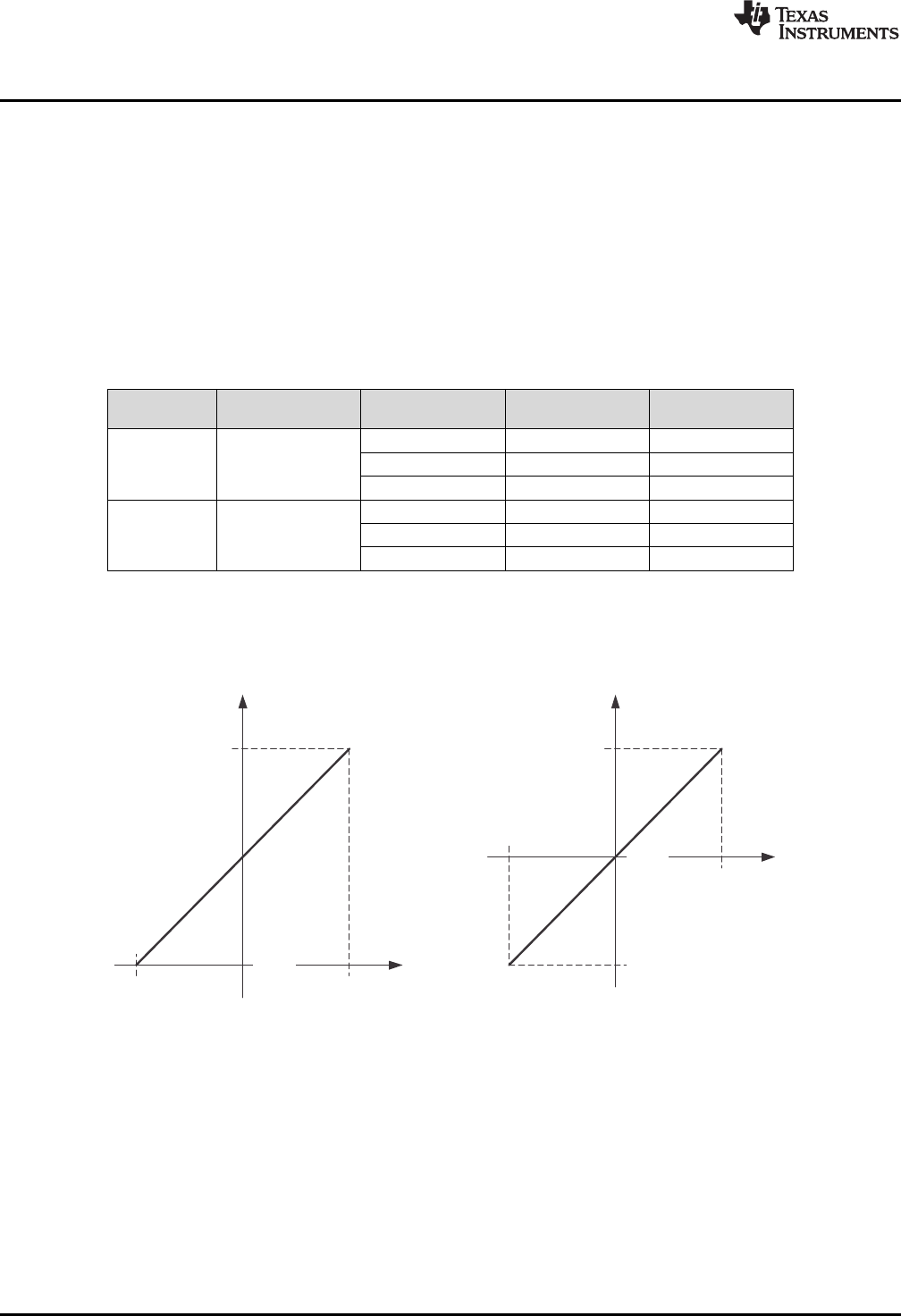
Input
Voltage
CTSD16MEMx
−VFSR
+VFSR
7FFFh
8000h
Twos complement
Input
Voltage
CTSD16MEMx
−VFSR +VFSR
FFFFh
8000h
Offset Binary
0000h
0000h
CTSD16 Operation
www.ti.com
30.2.8 Conversion Memory Registers: CTSD16MEMx
One CTSD16MEMx register is associated with each CTSD16 channel. Conversion results for each
channel are moved to the corresponding CTSD16MEMx register with each decimation step of the digital
filter. The CTSD16IFG bit for a given channel is set when new data is written to CTSD16MEMx.
CTSD16IFG is automatically cleared when CTSD16MEMx is read by the CPU or may be cleared with
software.
30.2.8.1 Output Data Format
The output data format is configurable in twos complement or offset binary as shown in Table 30-2. The
data format is selected by the CTSD16DF bit.
Table 30-2. Data Format
Digital Filter
CTSD16DF Format Analog Input CTSD16MEMx(1) Output (OSR = 256)
+FSR FFFF FFFFFF
0 Offset binary ZERO 8000 800000
-FSR 0000 000000
+FSR 7FFF 7FFFFF
1 Twos complement ZERO 0000 000000
-FSR 8000 800000
(1) Independent of SD24OSRx setting; SD24LSBACC = 0
Figure 30-7 shows the relationship between the full-scale input voltage range from –VFSR to +VFSR and the
conversion result. The digital values for both data formats are illustrated.
Figure 30-7. Input Voltage vs Digital Output
806 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
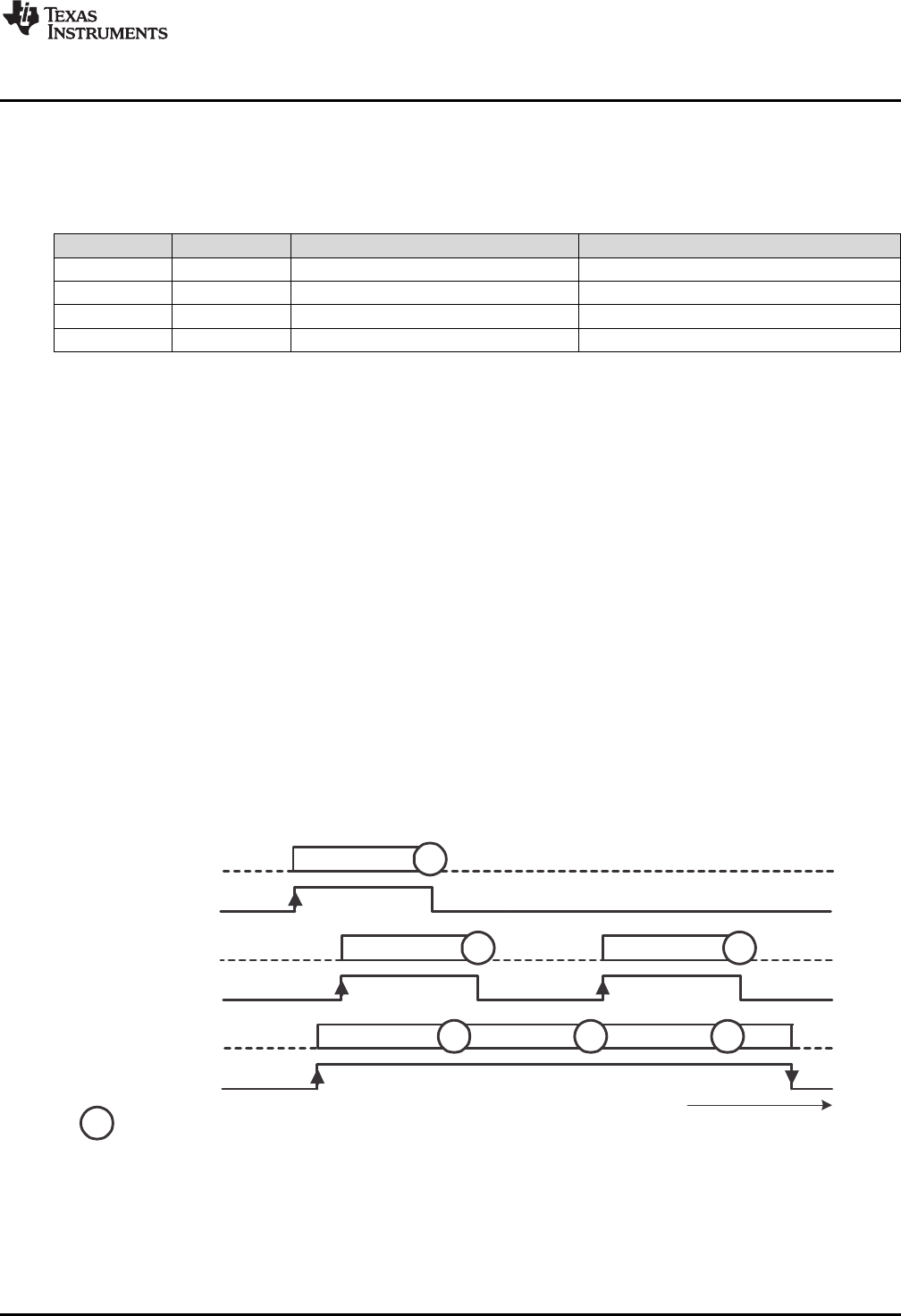
Channel 0
CTSD16SNGL = 1
CTSD16GRP = 0
Time
Conversion
CTSD16SC
Channel 1
CTSD16SNGL = 1
CTSD16GRP = 0
Conversion
Channel 2
CTSD16SNGL = 0
CTSD16GRP = 0
Conversion
CTSD16SC
CTSD16SC
Conversion Conversion
Conversion
Set by Software Auto−clear
Set by Software Auto−clear Set by Software Auto−clear
Set by Software
Conv
Cleared by Software
= Result written to CTSD16MEMx
www.ti.com
CTSD16 Operation
30.2.9 Conversion Modes
The CTSD16 module can be configured for four modes of operation, listed in Table 30-3. The
CTSD16SNGL and CTSD16GRP bits for each channel selects the conversion mode.
Table 30-3. Conversion Mode Summary
CTSD16SNGL CTSD16GRP(1) Mode Operation
1 0 Single channel, Single conversion A single channel is converted once.
0 0 Single channel, Continuous conversion A single channel is converted continuously.
1 1 Group of channels, Single conversion A group of channels is converted once.
0 1 Group of channels, Continuous conversion A group of channels is converted continuously.
(1) A channel is grouped and is the master channel of the group when CTSD16GRP = 0 if CTSD16GRP for the prior channel is set.
30.2.9.1 Single Channel, Single Conversion
Setting the CTSD16SC bit of a channel initiates one conversion on that channel when CTSD16SNGL = 1
and it is not grouped with any other channels. The CTSD16SC bit is automatically cleared after conversion
is complete.
Clearing CTSD16SC before the conversion is completed immediately stops conversion of the selected
channel, the channel is powered down, and the corresponding digital filter is turned off. The value in
CTSD16MEMx can change when CTSD16SC is cleared. TI recommends reading the conversion data in
CTSD16MEMx before clearing CTSD16SC to avoid reading an invalid result.
30.2.9.2 Single Channel, Continuous Conversion
When CTSD16SNGL = 0, continuous conversion mode is selected. Conversion of the selected channel
begins when CTSD16SC is set and continues until the CTSD16SC bit is cleared by software when the
channel is not grouped with any other channel.
Clearing CTSD16SC immediately stops conversion of the selected channel, the channel is powered down
and the corresponding digital filter is turned off. The value in CTSD16MEMx can change when
CTSD16SC is cleared. TI recommends reading the conversion data in CTSD16MEMx before clearing
CTSD16SC to avoid reading an invalid result.
Figure 30-8 shows single channel operation for single conversion mode and continuous conversion mode.
Figure 30-8. Single Channel Operation Example
807
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
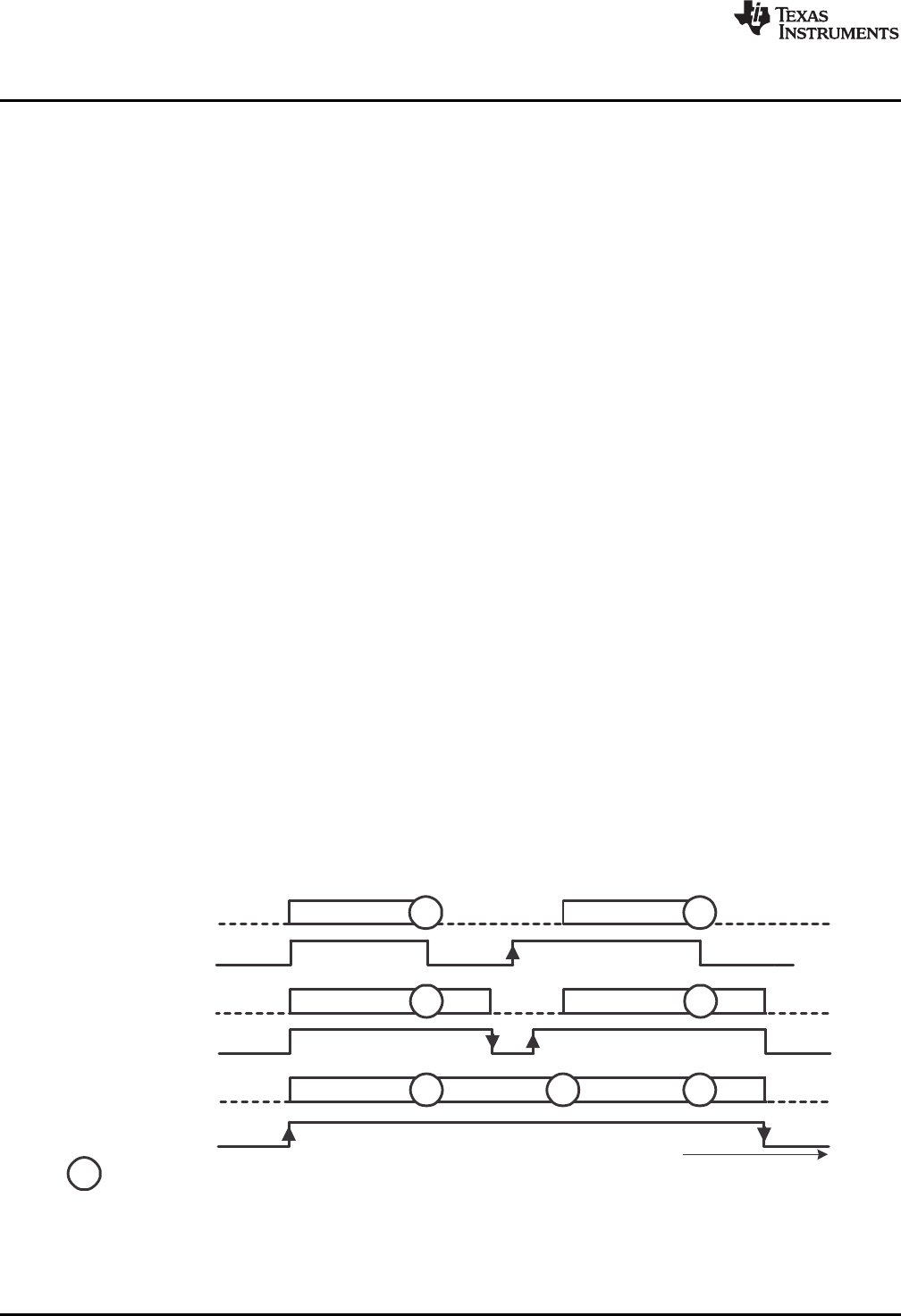
Channel 0
CTSD16SNGL = 1
CTSD16GRP = 1
Time
Conversion
CTSD16SC
Channel 1
CTSD16SNGL = 0
CTSD16GRP =1
Conversion
Channel 2
CTSD16SNGL = 0
CTSD16GRP = 0
Conversion
CTSD16SC
CTSD16SC
Conversion Conversion
Set by Ch2 Auto−clear
Set by Ch2
Conv
Set by Software Cleared by Software
Conversion Conv
Cleared by Ch2
Set by Software Auto−clear
Conversion
(syncronized to master)
Cleared by
Software
Conv
Set by Software
(syncronized to master)
= Result written to CTSD16MEMx
CTSD16 Operation
www.ti.com
30.2.9.3 Group of Channels, Single Conversion
Consecutive CTSD16 channels can be grouped together with the CTSD16GRP bit to synchronize
conversions. Setting CTSD16GRP for a channel groups that channel with the next channel in the module.
For example, setting CTSD16GRP for channel 0 groups that channel with channel 1. In this case, channel
1 is the master channel, enabling and disabling conversion of all channels in the group with its CTSD16SC
bit. The CTSD16GRP bit of the master channel is always 0. The CTSD16GRP bit of last channel in
CTSD16 has no function and is always 0.
When CTSD16SNGL = 1 for a channel in a group, single conversion mode is selected. A single
conversion of that channel will occur synchronously when the master channel CTSD16SC bit is set. The
CTSD16SC bit of all channels in the group will automatically be set and cleared by CTSD16SC of the
master channel. CTSD16SC for each channel can also be cleared in software independently.
Clearing CTSD16SC of the master channel before the conversions are completed immediately stops
conversions of all channels in the group, the channels are powered down and the corresponding digital
filters are turned off. Values in CTSD16MEMx can change when CTSD16SC is cleared. TI recommends
reading the conversion data in CTSD16MEMx before clearing CTSD16SC to avoid reading an invalid
result.
30.2.9.4 Group of Channels, Continuous Conversion
When CTSD16SNGL = 0 for a channel in a group, continuous conversion mode is selected. Continuous
conversion of that channel occurs synchronously when the master channel CTSD16SC bit is set.
CTSD16SC bits for all grouped channels are automatically set and cleared with the master channel's
CTSD16SC bit. CTSD16SC for each channel in the group can also be cleared in software independently.
When CTSD16SC of a grouped channel is set by software independently of the master, conversion of that
channel automatically synchronizes to conversions of the master channel. This ensures that conversions
for grouped channels are always synchronous to the master.
Clearing CTSD16SC of the master channel immediately stops conversions of all channels in the group,
the channels are powered down, and the corresponding digital filters are turned off. Values in
CTSD16MEMx can change when CTSD16SC is cleared. TI recommends reading the conversion data in
CTSD16MEMx before clearing CTSD16SC to avoid reading an invalid result.
Figure 30-9 shows grouped channel operation for three CTSD16 channels. Channel 0 is configured for
single conversion mode, CTSD16SNGL = 1, and channels 1 and 2 are in continuous conversion mode,
CTSD16SNGL = 0. Channel two, the last channel in the group, is the master channel. Conversions of all
channels in the group occur synchronously to the master channel regardless of when each CTSD16SC bit
is set using software.
Figure 30-9. Grouped Channel Operation Example
808 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
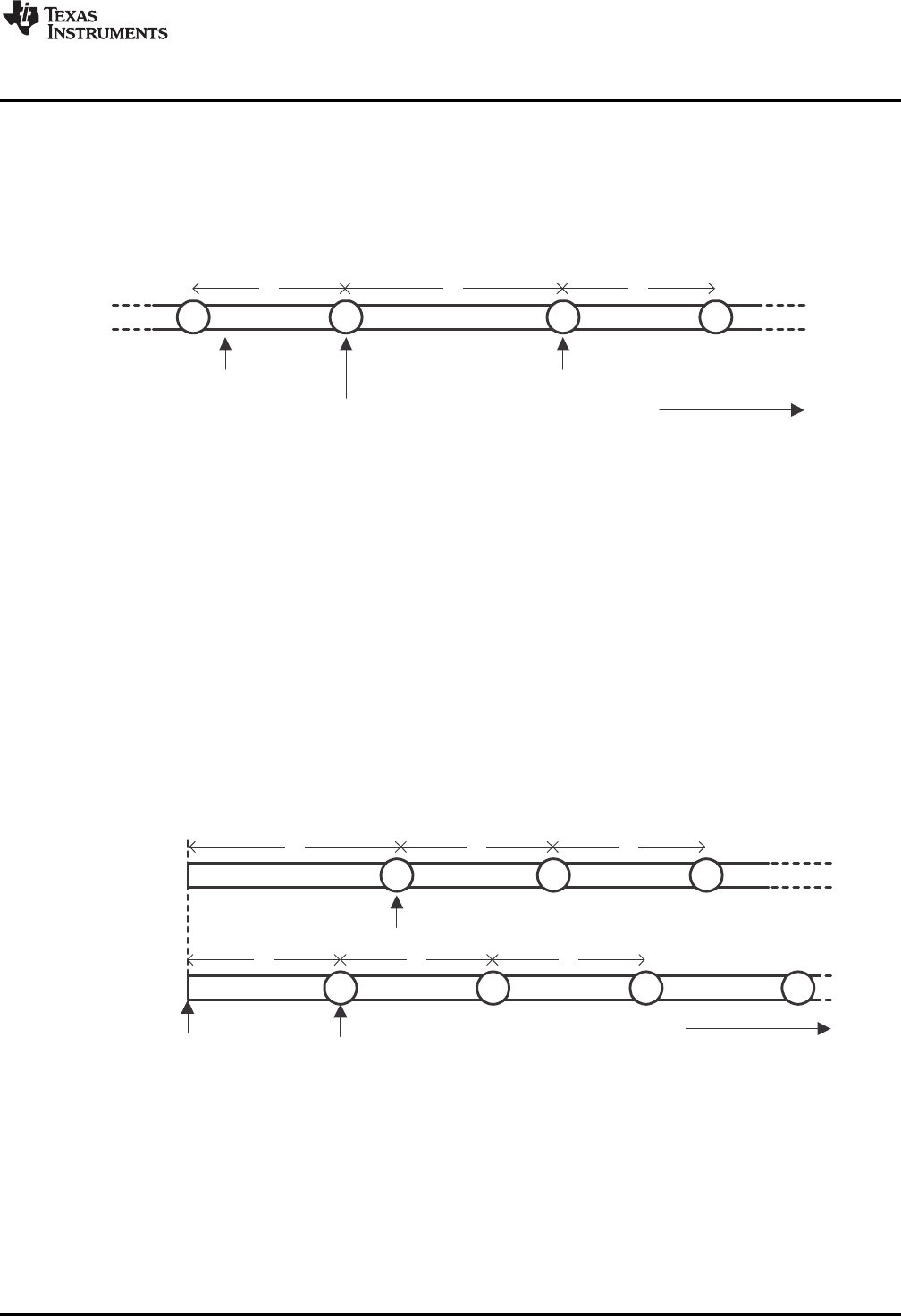
Delayed Conversion
40
CTSD16OSRx = 32
Start of
Conversion
Time
Conversion
32
Conversion
32f Mcycles:
First Sample Ch1
CTSD16PRE0 = 8
CTSD16PRE1 = 0 Conversion
32
Conversion
32
Conversion
32
Conversion
First Sample Ch0
Conversion
32
CTSD16OSRx = 32
Load CTSD16PREx:
CTSD16PREx = 8 Preload
applied Time
Delayed Conversion
40
Delayed Conversion
Result
Conversion
32fMcycles:
www.ti.com
CTSD16 Operation
30.2.10 Conversion Operation Using Preload
The CTSD16PREx register is used to determine a delay based on startup time requirements and when
multiple channels are grouped the CTSD16PREx registers can be used to delay the conversion time
frame for each channel. Using CTSD16PREx, the decimation time of the digital filter is increased by the
specified number of fMclock cycles and can range from 0 to 1023. Figure 30-10 shows an example using
CTSD16PREx.
Figure 30-10. Conversion Delay Using Preload Example
The CTSD16PREx delay is applied to the beginning of the next conversion cycle after being written. The
delay is used on the first conversion after CTSD16SC is set and on the conversion cycle following each
write to CTSD16PREx. Following conversions are not delayed. After modifying CTSD16PREx, the next
write to CTSD16PREx should not occur until the next conversion cycle is completed, otherwise the
conversion results may be incorrect.
The accuracy of the result for the delayed conversion cycle using CTSD16PREx is dependent on the
length of the delay and the frequency of the analog signal being sampled. For example, when measuring a
DC signal, if there is no startup time required (see the CTSD16PREx register PreloadValue bit description
for details) CTSD16PREx delay has no effect on the conversion result regardless of the duration. The user
must determine when the delayed conversion result is useful in their application.
Figure 30-11 shows the operation of grouped channels 0 and 1. The preload register of channel 1 is
loaded with zero resulting in immediate conversion whereas the conversion cycle of channel 0 is delayed
by setting CTSD16PRE0 = 8. The first channel 0 conversion uses CTSD16PREx = 8, shifting all
subsequent conversions by 8 fMclock cycles.
Figure 30-11. Start of Conversion Using Preload Example
When channels are grouped, care must be taken when a channel or channels operate in single
conversion mode or are disabled in software while the master channel remains active. Each time channels
in the group are re-enabled and resynchronized with the master channel, the preload delay for that
channel is reintroduced. Figure 30-12 shows the resynchronization and preload delays for channels in a
group. It is recommended that CTSD16PREx = 0 for the master channel to maintain a consistent delay
between the master and remaining channels in the group when they are re-enabled.
809
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
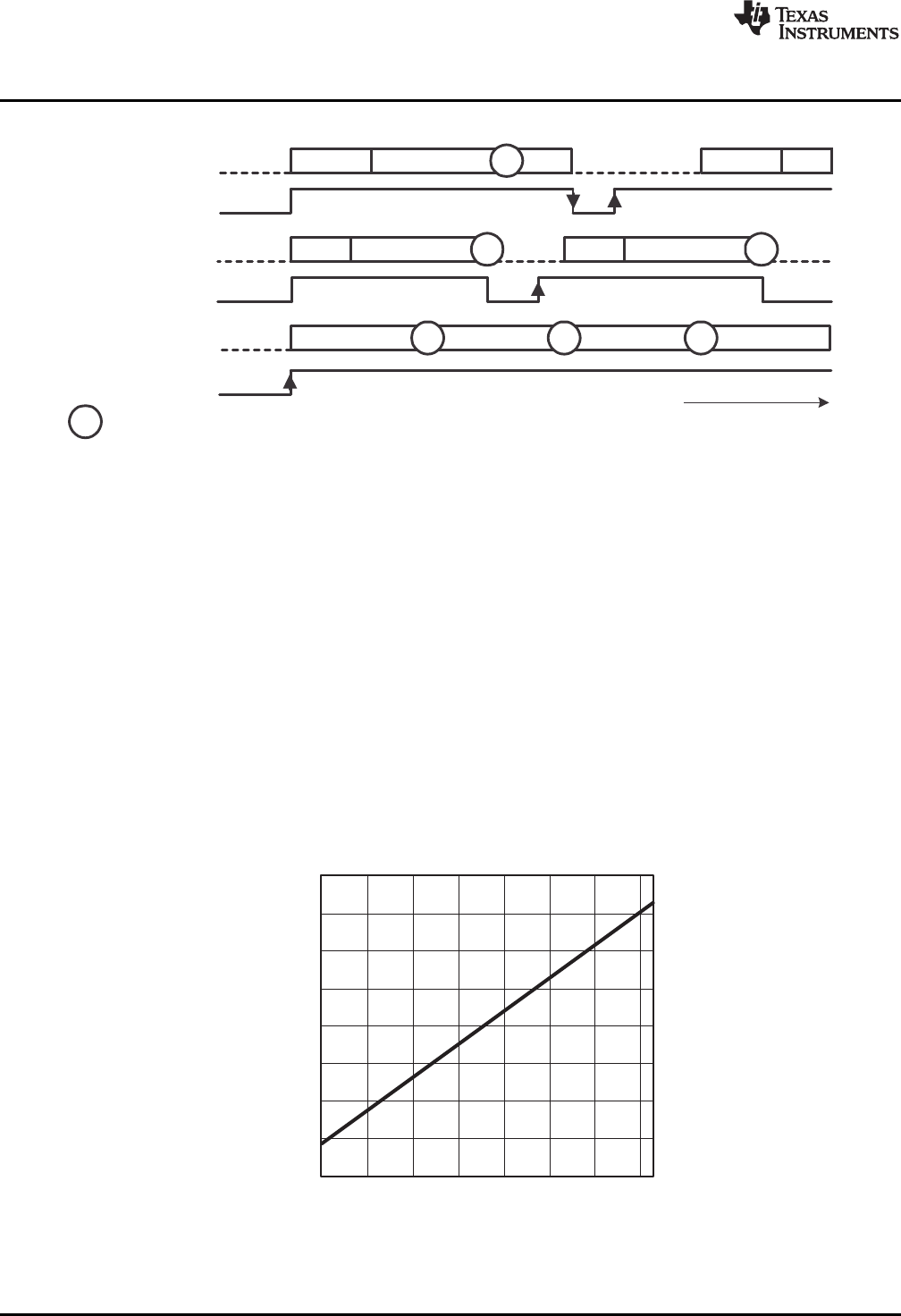
0.550
0.600
0.650
0.700
0.750
0.800
0.850
0.900
−40 −20 0 20 40 60 80 100
Ambient Temperature – °C
Typical Temperature Sensor Voltage – V
0.950
Channel 0
CTSD16SNGL = 0
CTSD16GRP = 1
Time
Conversion
CTSD16SC
Channel 1
CTSD16SNGL = 1
CTSD16GRP =1
Conversion
Channel 2
CTSD16SNGL = 0
CTSD16GRP = 0
Conversion
CTSD16SC
CTSD16SC
Conversion Conversion
Set by Ch2 Auto−clear
Set by Ch2
Conv
Set by Software
Conversion
Set by Software Auto−clear
(syncronized to master)
Cleared by Software
Conv
Set by Software
(syncronized to master)
= Result written to CTSD16MEMx
PRE1 PRE1
PRE0
Conversion
PRE0 Conv
CTSD16 Operation
www.ti.com
Figure 30-12. Preload and Channel Synchronization
30.2.11 Using the Integrated Temperature Sensor
To use the on-chip temperature sensor, select the analog input pair CTSD16INCHx = 0x6 and set
REFTCOFF = 0 in REFCTL0 (REF module). This connects the temperature sensor to the positive
CTSD16 input and connects the negative input to VREFBG/VeREF+, as for any single-ended input selection.
Any other configuration is done as if an external analog input pair was selected, including
CTSD16INTDLYx and CTSD16GAINx settings. The temperature sensor is part of the reference. It is
possible to use the temperature sensor together with any of the available CTSD16 channels. However, it
is not possible to use the temperature sensor with more than one CTSD16 channel at a time. The
temperature measurement results will not be correct if more than one CTSD16 channel selects
temperature sensor for conversion. CTSD16 can operate with either internal or external reference while
using the temperature sensor.
The typical temperature sensor transfer function is shown in Figure 30-13. When switching inputs of an
CTSD16 channel to the temperature sensor, adequate delay must be provided using CTSD16INTDLYx to
allow the digital filter to settle and assure that conversion results are valid. The temperature sensor offset
error can be large. TLV temperature sensor calibration values can be used as described in Section 1.13,
Device Descriptor Table.
Figure 30-13. Typical Temperature Sensor Transfer Function
810 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
CTSD16 Operation
30.2.12 Using the Integrated AVCC Sense
To use the on-chip AVCC measurement, select the analog input pair CTSD16INCHx = 0x7. This connects
AVCC sense to the positive CTSD16 input and connects the negative input to VREFBG/VeREF+, as for any
single-ended input selection. Any other configuration is done as if an external analog input pair was
selected, including CTSD16INTDLYx and CTSD16GAINx settings. It is possible to use the AVCC sense
together with any of the available CTSD16 channels. However, it is not possible to use the AVCC sense
with more than one CTSD16 channel at a time. The AVCC measurement results will not be correct if more
than one CTSD16 channel selects AVCC sense for conversion. CTSD16 can operate with either internal
or external reference while using the AVCC sense. AVCC sense measures the AVCC voltage divided by
2.
30.2.13 Grounding and Noise Considerations
As with any high-resolution ADC, appropriate printed circuit board layout and grounding techniques should
be followed to eliminate ground loops, unwanted parasitic effects, and noise.
Ground loops are formed when return current from the ADC flows through paths that are common with
other analog or digital circuitry. If care is not taken, this current can generate small unwanted offset
voltages that can add to or subtract from the reference or input voltages of the ADC. Therefore, solid
decoupling on both the digital and analog supply is required (best with two capacitors, one 10 µF and one
100 nF, per supply).
In addition to grounding, ripple and noise spikes on the power-supply lines due to digital switching or
switching power supplies can corrupt the conversion result. To achieve high accuracy, TI recommends a
noise-free design using separate analog and digital ground planes with a single-point connection.
If the internal reference is used, the reference voltage should be buffered externally by connecting a small
capacitor as defined in the device-specific data sheet (CVREFBG) to the VREFBG pin to reduce the noise on
the reference.
30.2.14 Interrupt Handling
The CTSD16 has two interrupt sources for each channel:
• CTSD16IFGx: conversion ready interrupt
• CTSD16OVIFGx: conversion memory overflow
The CTSD16IFGx bits are set when their corresponding CTSD16MEMx memory register is written with a
conversion result. An interrupt request is generated if the corresponding CTSD16IEx bit and the GIE bit
are set. The CTSD16 overflow condition occurs when a conversion result is written to any CTSD16MEMx
location before the previous conversion result was read.
The CTSD16 also has the CTSD16OFFG bit (the CTSD16 clock fault bit) which sets the OFIFG bit in
SFRIFG1 register. OFIFG is shared with the system oscillators fault conditions.
30.2.14.1 CTSD16IV, Interrupt Vector Generator
All CTSD16 interrupt sources are prioritized and combined to source a single interrupt vector. CTSD16IV
is used to determine which enabled CTSD16 interrupt source requested an interrupt. The highest priority
CTSD16 interrupt request that is enabled generates a number in the CTSD16IV register (see
Section 30.3.8). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled CTSD16 interrupts do not affect the CTSD16IV value.
Any read access of the CTSD16IV register has no effect on the CTSD16OVIFGx or CTSD16IFGx. The
CTSD16IFGx flags are reset by reading the associated CTSD16MEMx register or by clearing the flags in
software. CTSD16OVIFGx bits can only be reset with software. A write access to CTSD16IV clears all
interrupt flags. If another interrupt is pending after servicing of an interrupt, another interrupt is generated.
For example, if the CTSD16OVIFG0 and one or more CTSD16IFGx interrupts are pending when the
interrupt service routine accesses the CTSD16IV register, the CTSD16OVIFG0 interrupt condition is
serviced first and the corresponding flags must be cleared in software. After the RETI instruction of the
interrupt service routine is executed, the highest priority CTSD16IFG pending generates another interrupt
request.
811
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Operation
www.ti.com
30.2.14.2 Interrupt Delay Operation
The CTSD16INTDLY bit controls the timing for the first interrupt service request for the corresponding
channel. This feature delays the interrupt request for a completed conversion by up to four conversion
cycles to allow the digital filter to settle before generating an interrupt request. The delay is applied each
time the CTSD16SC bit is set or when the CTSD16GAINx or CTSD16INCHx bits for the channel are
modified. CTSD16INTDLY disables overflow interrupt generation for the channel for the selected number
of delay cycles. Interrupt requests for the delayed conversions are not generated during the delay.
Example 30-1 shows the recommended use of CTSD16IV and the handling overhead. The CTSD16IV
value is added to the PC to automatically jump to the appropriate routine.
Example 30-1. CTSD16 Interrupt Handling Software Example
The numbers at the right margin show the necessary CPU cycles for each instruction. The software overhead
for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not the task
handling itself. The latencies are:
• CTSD16OVIFG, CH0 CTSD16IFG, CH1 CTSD16IFG: 16 cycles
• CH2 CTSD16IFG: 14 cycles
The interrupt handler for channel 2 CTSD16IFG2 shows a way to check immediately if a higher prioritized
interrupt occurred during the processing of the ISR. This saves nine cycles if another CTSD16 interrupt is
pending.
; Interrupt handler for CTSD16.
INT_CTSD16 ; Enter Interrupt Service Routine 6
ADD &CTSD16IV,PC ; Add offset to PC 3
RETI ; Vector 0: No interrupt 5
JMP ADOV ; Vector 2: ADC overflow 2
JMP ADM0 ; Vector 4: CH_0 CTSD16IFG0 2
JMP ADM1 ; Vector 6: CH_1 CTSD16IFG1 2
;
; Handler for CH_2 CTSD16IFG2 starts here. No JMP required.
;
ADM2 MOV &CTSD16MEM2,xxx ; Move result, flag is reset
... ; Other instruction needed?
JMP INT_CTSD16 ; Check other int pending 2
;
; Remaining Handlers
;
ADM1 MOV &CTSD16MEM1,xxx ; Move result, flag is reset
... ; Other instruction needed?
RETI ; Return 5
;
ADM0 MOV &CTSD16MEM0,xxx ; Move result, flag is reset
RETI ; Return 5
;
ADOV ... ; Handle CTSD16MEMx overflow
RETI ; Return 5
30.2.14.3 Using CTSD16 With DMA
Devices with an integrated DMA controller can automatically move data from any CTSD16MEMx to
another location. DMA transfers are done without CPU intervention and independent of any low-power
modes.
If the respective interrupt enable bit CTSD16IEx is set, the selected CTSD16IFGx flag does not trigger a
transfer. Any CTSD16IFGx is automatically cleared when the DMA controller accesses the corresponding
CTSD16MEMx registers.
812 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3 CTSD16 Registers
The CTSD16 registers are listed in Table 30-4. The base address can be found in the device-specific data
sheet. The address offset is listed inTable 30-4.
Table 30-4. CTSD16 Registers
Offset Acronym Register Name Type Access Reset Section
00h CTSD16CTL CTSD16 Control Read/write Word 0000h Section 30.3.1
02h CTSD16CCTL0 CTSD16 Control Channel 0 Read/write Word 0000h Section 30.3.2
32h CTSD16MEM0 CTSD16 Channel 0 Conversion Memory Read Word 0000h Section 30.3.3
04h CTSD16INCTL0 CTSD16 Channel 0 Input Control Read/write Word 0000h Section 30.3.4
06h CTSD16PRE0 CTSD16 Channel 0 Preload Read/write Word 0030h Section 30.3.5
08h CTSD16CCTL1 CTSD16 Channel 1 Control Read/write Word 0000h Section 30.3.2
34h CTSD16MEM1 CTSD16 Channel 1 Conversion Memory Read Word 0000h Section 30.3.3
0Ah CTSD16INCTL1 CTSD16 Channel 1 Input Control Read/write Word 0000h Section 30.3.4
0Ch CTSD16PRE1 CTSD16 Channel 1 Preload Read/write Word 00h Section 30.3.5
0Eh CTSD16CCTL2 CTSD16 Channel 2 Control Read/write Word 0000h Section 30.3.2
36h CTSD16MEM2 CTSD16 Channel 2 Conversion Memory Read Word 0000h Section 30.3.3
10h CTSD16INCTL2 CTSD16 Channel 2 Input Control Read/write Word 0000h Section 30.3.4
12h CTSD16PRE2 CTSD16 Channel 2 Preload Read/write Word 00h Section 30.3.5
14h CTSD16CCTL3 CTSD16 Channel 3 Control Read/write Word 0000h Section 30.3.2
38h CTSD16MEM3 CTSD16 Channel 3 Conversion Memory Read Word 0000h Section 30.3.3
16h CTSD16INCTL3 CTSD16 Channel 3 Input Control Read/write Word 0000h Section 30.3.4
18h CTSD16PRE3 CTSD16 Channel 3 Preload Read/write Word 00h Section 30.3.5
1Ah CTSD16CCTL4 CTSD16 Channel 4 Control Read/write Word 0000h Section 30.3.2
3Ah CTSD16MEM4 CTSD16 Channel 4 Conversion Memory Read Word 0000h Section 30.3.3
1Ch CTSD16INCTL4 CTSD16 Channel 4 Input Control Read/write Word 0000h Section 30.3.4
1Eh CTSD16PRE4 CTSD16 Channel 4 Preload Read/write Word 00h Section 30.3.5
20h CTSD16CCTL5 CTSD16 Channel 5 Control Read/write Word 0000h Section 30.3.2
3Ch CTSD16MEM5 CTSD16 Channel 5 Conversion Memory Read Word 0000h Section 30.3.3
22h CTSD16INCTL5 CTSD16 Channel 5 Input Control Read/write Word 0000h Section 30.3.4
24h CTSD16PRE5 CTSD16 Channel 5 Preload Read/write Word 00h Section 30.3.5
26h CTSD16CCTL6 CTSD16 Channel 6 Control Read/write Word 0000h Section 30.3.2
3Eh CTSD16MEM6 CTSD16 Channel 6 Conversion Memory Read Word 0000h Section 30.3.3
28h CTSD16INCTL6 CTSD16 Channel 6 Input Control Read/write Word 0000h Section 30.3.4
2Ah CTSD16PRE6 CTSD16 Channel 6 Preload Read/write Word 00h Section 30.3.5
2C CTSD16IFG CTSD16 Interrupt Flag Register Read/write Word 0000h Section 30.3.6
2E CTSD16IE CTSD16 Interrupt Enable Register Read/write Word 0000h Section 30.3.7
30 CTSD16IV CTSD16 Interrupt Vector Read/write Word 0000h Section 30.3.8
813
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Registers
www.ti.com
30.3.1 CTSD16CTL Register
CTSD16 Control Register
Figure 30-14. CTSD16CTL Register
15 14 13 12 11 10 9 8
Reserved CTSD16RRIERR CTSD16RRIRDY CTSD16RRIBURST
r0 r0 r0 r0 r0 r0 r0 rw-0
7654321 0
Reserved CTSD16OFFG Reserved CTSD16REFS Reserved Reserved
r0 r0 r0 rw-0 rw-0 rw-0 r0 r0
Table 30-5. CTSD16CTL Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10 CTSD16RRIERR R 0h Rail-to-rail input error
0b = Rail-to-rail input no error (ready)
1b = Rail-to-rail input error (was ready but then not ready)
9 CTSD16RRIRDY R 0 Rail-to-rail input ready
0b = Rail-to-rail input not ready
1b = Rail-to-rail input ready
8 CTSD16RRIBURST RW 0h Rail-to-rail input charge pump burst mode request from CTSD16
0b = Disables the rail-to-rail input charge pump burst mode request from
CTSD16
1b = Enables the rail-to-rail input charge pump burst mode request from
CTSD16, where charge pump is only enable when CTSD16 is converting to save
power however the enable time of the charge pump must be considered. See the
device specific OA data sheet section for the charge pump enable time.
7-5 Reserved R 0h Reserved. Always reads as 0.
4 CTSD16OFFG RW 0h CTSD16 clock fault flag. If this bit is set, the OFIFG flag is also set.
CTSD16OFFG bit is set when a fault is detected with the CTSD16 clock (used by
OA in rail-to-rail mode or CTSD16 module)
0b = No CTSD16 clock fault
1b = CTSD16 clock fault detected
3 Reserved RW 0h Reserved. Always write as 0.
2 CTSD16REFS RW 0h CTSD16 reference select.
0b = External reference selected. Internal reference voltage buffer disabled.
1b = Internal reference from shared REF selected and buffered internally to
CTSD16
1 Reserved R 0h Reserved. Always reads as 0.
0 Reserved R 0h Reserved. Always reads as 0.
814 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3.2 CTSD16CCTL0 to CTSD16CCTL6 Register
CTSD16 Channel x Control Register (x = 0 to 6)
Figure 30-15. CTSD16CCTL0 to CTSD16CCTL6 Register
15 14 13 12 11 10 9 8
Reserved CTSD16SNGL CTSD16OSRx
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
CTSD16LSBTOG CTSD16LSBACC Reserved CTSD16DF Reserved CTSD16SC CTSD16GRP
rw-0 rw-0 r0 rw-0 r0 r0 rw-0 rw-0
Table 30-6. CTSD16CCTL0 to CTSD16CCTL6 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10 CTSD16SNGL RW 0h Single conversion mode select
0b = Continuous conversion mode
1b = Single conversion mode
9-8 CTSD16OSRx RW 0h Oversampling ratio
00b = 256
01b = 128
10b = 64
11b = 32
7 CTSD16LSBTOG RW 0h LSB toggle. This bit, when set, causes CTSD16LSBACC to toggle each time the
CTSD16MEMx register is read.
0b = CTSD16LSBACC does not toggle with each CTSD16MEMx read
1b = CTSD16LSBACC toggles with each CTSD16MEMx read
6 CTSD16LSBACC RW 0h LSB access. This bit allows access to the upper or lower 16-bits of the CTSD16
conversion result.
0b = CTSD16MEMx contains the most significant 16-bits of the conversion.
1b = CTSD16MEMx contains the least significant 16-bits of the conversion.
5 Reserved R 0h Reserved. Always reads as 0.
4 CTSD16DF RW 0h CTSD16 data format
0b = Offset binary
1b = Twos complement
3-2 Reserved R 0h Reserved. Always reads as 0.
1 CTSD16SC RW 0h CTSD16 start conversion
0b = No conversion start
1b = Start conversion
0 CTSD16GRP RW 0h CTSD16 group. Groups CTSD16 channel with next higher channel. Not used for
the last channel.
0b = Not grouped
1b = Grouped
815
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Registers
www.ti.com
30.3.3 CTSD16MEM0 to CTSD16MEM6 Register
CTSD16 Channel x Conversion Memory Register (x = 0 to 6)
Figure 30-16. CTSD16MEM0 to CTSD16MEM6 Register
15 14 13 12 11 10 9 8
Conversion Results
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Conversion Results
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 30-7. CTSD16MEM0 to CTSD16MEM6 Register Description
Bit Field Type Reset Description
15-0 Conversion Results R 0h Conversion results. This register holds the upper or lower 16-bits of the digital
filter output, depending on the CTSD16LSBACC bit.
816 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3.4 CTSD16INCTL0 to CTSD16INCTL6 Register
CTSD16 Channel x Input Control Register (x = 0 to 6)
Figure 30-17. CTSD16INCTL0 to CTSD16INCTL6 Register
15 14 13 12 11 10 9 8
Reserved CTSD16RRI Reserved Reserved CTSD16INTDLY
r0 r0 r0 r0 rw-0 rw-0 r0 rw-0
76543210
CTSD16GAINx CTSD16INCHx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 30-8. CTSD16INCTL0 to CTSD16INCTL6 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11 CTSD16RRI RW 0h Rail-to-rail input enable.
0b = Rail-to-rail input disabled
1b = Rail-to-rail input enabled
10 Reserved RW 0h Reserved. Always write as 0.
9 Reserved R 0h Reserved. Always reads as 0.
8 CTSD16INTDLY RW 0h Interrupt delay generation after conversion start. This bit selects the delay for the
first interrupt after conversion start.
0b = Fourth sample causes interrupt
1b = First sample causes interrupt
7-5 CTSD16GAINx RW 0h CTSD16 preamplifier gain
000b = x1
001b = x2
010b = x4
011b = x8
100b = x16
101b = Reserved
110b = Reserved
111b = Reserved
4-0 CTSD16INCHx RW 0h CTSD16 channel input
00000b = in+ = A0, in- = VREFBG/VeREF+
00001b = in+ = A1, in- = VREFBG/VeREF+
00010b = in+ = A2, in- = VREFBG/VeREF+
00011b = in+ = A3, in- = VREFBG/VeREF+
00100b = in+ = A4, in- = VREFBG/VeREF+
00101b = in+ = A5, in- = VREFBG/VeREF+
00110b = int+ = internal temperature sensor in- = VREFBG/VeREF+
00111b = in+ = internal VCC sense in- = VREFBG/VeREF+
01000b = in+ = internal VBAT sense in- = VREFBG/VeREF+
01001b = in+ = AD0+, in- = AD0-
01010b = in+ = AD0+, in- = VREFBG/VeREF+
01011b = in+ = AD1+, in- = AD1-
01100b = in+ = AD1+, in- = VREFBG/VeREF+
01101b = in+ = AD2+, in- = AD2-
01110b = in+ = AD2+, in- = VREFBG/VeREF+
01111b = in+ = AD3+, in- = AD3-
10000b = in+ = AD3+, in- = VREFBG/VeREF+
10001b = AD4x, shorted differential inputs to VREFBG/VeREF+
10010b = AD4x, shorted differential inputs to DAC0 output
817
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Registers
www.ti.com
30.3.5 CTSD16PRE0 to CTSD16PRE6 Register
CTSD16 Channel x Preload Register (x = 0 to 6)
Figure 30-18. CTSD16PRE0 to CTSD16PRE6 Register
15 14 13 12 11 10 9 8
Reserved PreloadValue
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
PreloadValue
rw-0 rw-0 rw-1 rw-1 rw-0 rw-0 rw-0 rw-0
Table 30-9. CTSD16PRE0 to CTSD16PRE6 Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 PreloadValue RW 30h CTSD16 digital filter preload value. Value represents number of CTSD16 clock
cycles.
• If internal reference is used and but not already on and settle when CTSD16
starts a conversion, refer to device-specific data sheet for VREFBG settle time to
determine preload minimum value. Note VREFBG can be turned on with REFON
= 1 and REFOUT = 1.
Else, if CTSD16RRI = 1 need to use the charge pump startup time if not
already on (OARRI = 1 or CTSD16RRIBURST = 0). Refer to the device data
sheet OA section for charge pump enable time tCP_EN. If charge pump is
already on there is no minimum preload value
• If internal reference is already settled or not used and CTSD16RRI = 0 and
OARRI = 1 there is no preload minimum value required.
• If internal reference is already settled or not used and CTSD16RRI = 0 and
OARRI = 0 then the minimum preload value is the default one.
818 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3.6 CTSD16IFG Register
CTSD16 Interrupt Flag Register
Figure 30-19. CTSD16IFG Register
15 14 13 12 11 10 9 8
Reserved CTSD16OVIFG6 CTSD16OVIFG5 CTSD16OVIFG4 CTSD16OVIFG3 CTSD16OVIFG2 CTSD16OVIFG1 CTSD16OVIFG0
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved CTSD16IFG6 CTSD16IFG5 CTSD16IFG4 CTSD16IFG3 CTSD16IFG2 CTSD16IFG1 CTSD16IFG0
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 30-10. CTSD16IFG Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14 CTSD16OVIFG6 RW 0h CTSD16 converter 6 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
13 CTSD16OVIFG5 RW 0h CTSD16 converter 5 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
12 CTSD16OVIFG4 RW 0h CTSD16 converter 4 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
11 CTSD16OVIFG3 RW 0h CTSD16 converter 3 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
10 CTSD16OVIFG2 RW 0h CTSD16 converter 2 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
9 CTSD16OVIFG1 RW 0h CTSD16 converter 1 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
8 CTSD16OVIFG0 RW 0h CTSD16 converter 0 overflow interrupt flag
0b = No interrupt pending
1b = Interrupt pending
7 Reserved R 0h Reserved. Always reads as 0.
6 CTSD16IFG6 RW 0h CTSD16 converter 6 interrupt flag. CTSD16IFG6 is set when new conversion
results are available. CTSD16IFG6 is automatically reset when the
CTSD16MEM6 register is read, or may be cleared with software.
0b = No interrupt pending
1b = Interrupt pending
5 CTSD16IFG5 RW 0h CTSD16 converter 5 interrupt flag. CTSD16IFG5 is set when new conversion
results are available. CTSD16IFG5 is automatically reset when the
CTSD16MEM5 register is read, or may be cleared with software.
0b = No interrupt pending
1b = Interrupt pending
4 CTSD16IFG4 RW 0h CTSD16 converter 4 interrupt flag. CTSD16IFG4 is set when new conversion
results are available. CTSD16IFG4 is automatically reset when the
CTSD16MEM4 register is read, or may be cleared with software.
0b = No interrupt pending
1b = Interrupt pending
819
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Registers
www.ti.com
Table 30-10. CTSD16IFG Register Description (continued)
Bit Field Type Reset Description
3 CTSD16IFG3 RW 0h CTSD16 converter 3 interrupt flag. CTSD16IFG3 is set when new conversion
results are available. CTSD16IFG3 is automatically reset when the
CTSD16MEM3 register is read, or may be cleared with software.
0b = No interrupt pending
1b = Interrupt pending
2 CTSD16IFG2 RW 0h CTSD16 converter 2 interrupt flag. CTSD16IFG2 is set when new conversion
results are available. CTSD16IFG2 is automatically reset when the
CTSD16MEM2 register is read, or may be cleared with software.
0b = No interrupt pending
1b = Interrupt pending
1 CTSD16IFG1 RW 0h CTSD16 converter 1 interrupt flag. CTSD16IFG1 is set when new conversion
results are available. CTSD16IFG1 is automatically reset when the
CTSD16MEM1 register is read, or may be cleared with software
0b = No interrupt pending
1b = Interrupt pending
0 CTSD16IFG0 RW 0h CTSD16 converter 0 interrupt flag. CTSD16IFG0 is set when new conversion
results are available. CTSD16IFG0 is automatically reset when the
CTSD16MEM0 register is read, or may be cleared with software
0b = No interrupt pending
1b = Interrupt pending
820 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3.7 CTSD16IE Register
CTSD16 Interrupt Enable Register
Figure 30-20. CTSD16IE Register
15 14 13 12 11 10 9 8
Reserved CTSD16OVIE6 CTSD16OVIE5 CTSD16OVIE4 CTSD16OVIE3 CTSD16OVIE2 CTSD16OVIE1 CTSD16OVIE0
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved CTSD16IE6 CTSD16IE5 CTSD16IE4 CTSD16IE3 CTSD16IE2 CTSD16IE1 CTSD16IE0
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 30-11. CTSD16IE Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved. Always reads as 0.
14 CTSD16OVIE6 RW 0h CTSD16 converter 6 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
13 CTSD16OVIE5 RW 0h CTSD16 converter 5 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
12 CTSD16OVIE4 RW 0h CTSD16 converter 4 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
11 CTSD16OVIE3 RW 0h CTSD16 converter 3 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
10 CTSD16OVIE2 RW 0h CTSD16 converter 2 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
9 CTSD16OVIE1 RW 0h CTSD16 converter 1 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
8 CTSD16OVIE0 RW 0h CTSD16 converter 0 overflow interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
7 Reserved R 0h Reserved. Always reads as 0.
6 CTSD16IE6 RW 0h CTSD16 converter 6 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
5 CTSD16IE5 RW 0h CTSD16 converter 5 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
4 CTSD16IE4 RW 0h CTSD16 converter 4 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
3 CTSD16IE3 RW 0h CTSD16 converter 3 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
2 CTSD16IE2 RW 0h CTSD16 converter 2 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
821
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
CTSD16 Registers
www.ti.com
Table 30-11. CTSD16IE Register Description (continued)
Bit Field Type Reset Description
1 CTSD16IE1 RW 0h CTSD16 converter 1 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
0 CTSD16IE0 RW 0h CTSD16 converter 0 interrupt enable
0b = Interrupt disabled.
1b = Interrupt enabled.
822 CTSD16 SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
CTSD16 Registers
30.3.8 CTSD16IV Register
CTSD16 Interrupt Vector Register
Figure 30-21. CTSD16IV Register
15 14 13 12 11 10 9 8
00000000
r0 r0 r0 r0 r0 r0 r0 r0
76543210
0 0 0 CTSD16IVx
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 30-12. CTSD16IV Register Description
Bit Field Type Reset Description
15-5 Reserved R 0h Reserved. Always reads as 0.
4-0 CTSD16IVx RW 0h CTSD16 interrupt vector value. Writing to this register clears all pending interrupt
flags.
00h = No interrupt pending
02h = Interrupt Source: CTSD16MEMx overflow; Interrupt Flag:
CTSD16OVIFG(1); Interrupt Priority = Highest.
04h = Interrupt Source: CTSD16_0 Interrupt; Interrupt Flag: CTSD16IFG0
06h = Interrupt Source: CTSD16_1 Interrupt; Interrupt Flag: CTSD16IFG1
08h = Interrupt Source: CTSD16_2 Interrupt; Interrupt Flag: CTSD16IFG2
0Ah = Interrupt Source: CTSD16_3 Interrupt; Interrupt Flag: CTSD16IFG3
0Ch = Interrupt Source: CTSD16_4 Interrupt; Interrupt Flag: CTSD16IFG4
0Eh = Interrupt Source: CTSD16_5 Interrupt; Interrupt Flag: CTSD16IFG5
10h = Interrupt Source: CTSD16_6 Interrupt; Interrupt Flag: CTSD16IFG6;
Interrupt Priority = Lowest
(1) When an CTSD16 overflow occurs, the user must check all CTSD16CCTLx CTSD16OVIFG flags to determine which channel
overflowed.
823
SLAU208O–June 2008–Revised May 2015 CTSD16
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 31
SLAU208O–June 2008–Revised May 2015
DAC12_A
The DAC12_A module is a 12-bit, voltage output digital-to-analog converter. This chapter describes the
operation and use of the DAC12_A module.
Topic ........................................................................................................................... Page
31.1 DAC12_A Introduction....................................................................................... 825
31.2 DAC12_A Operation.......................................................................................... 828
31.3 DAC Outputs.................................................................................................... 833
31.4 DAC12_A Registers .......................................................................................... 834
824 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Introduction
31.1 DAC12_A Introduction
The DAC12_A module is a 12-bit voltage-output DAC. The DAC12_A can be configured in 8-bit or 12-bit
mode and may be used in conjunction with the DMA controller. When multiple DAC12_A modules are
present, they may be grouped together for synchronous operation.
Features of the DAC12_A include:
• 12-bit monotonic output
• 8-bit or 12-bit voltage-output resolution
• Programmable settling time vs power consumption
• Internal or external reference selection
• Straight binary or twos-complement data format, right or left justified
• Self-calibration option for offset correction
• Synchronized update capability for multiple DAC12_A modules
NOTE: Multiple DAC12_A Modules
Some devices may integrate more than one DAC12_A module. In the case where more than
one DAC12_A is present on a device, the multiple DAC12_A modules operate identically.
Throughout this chapter, nomenclature appears such as DAC12_xDAT or DAC12_xCTL to
describe register names. When this occurs, the x is used to indicate which DAC12 module is
being discussed. In cases where operation is identical, the register is simply referred to as
DAC12_xCTL.
Figure 31-1 shows the block diagram for devices with two DAC12_A modules. Figure 31-2 shows the
block diagram for devices with one DAC12_A module.
825
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
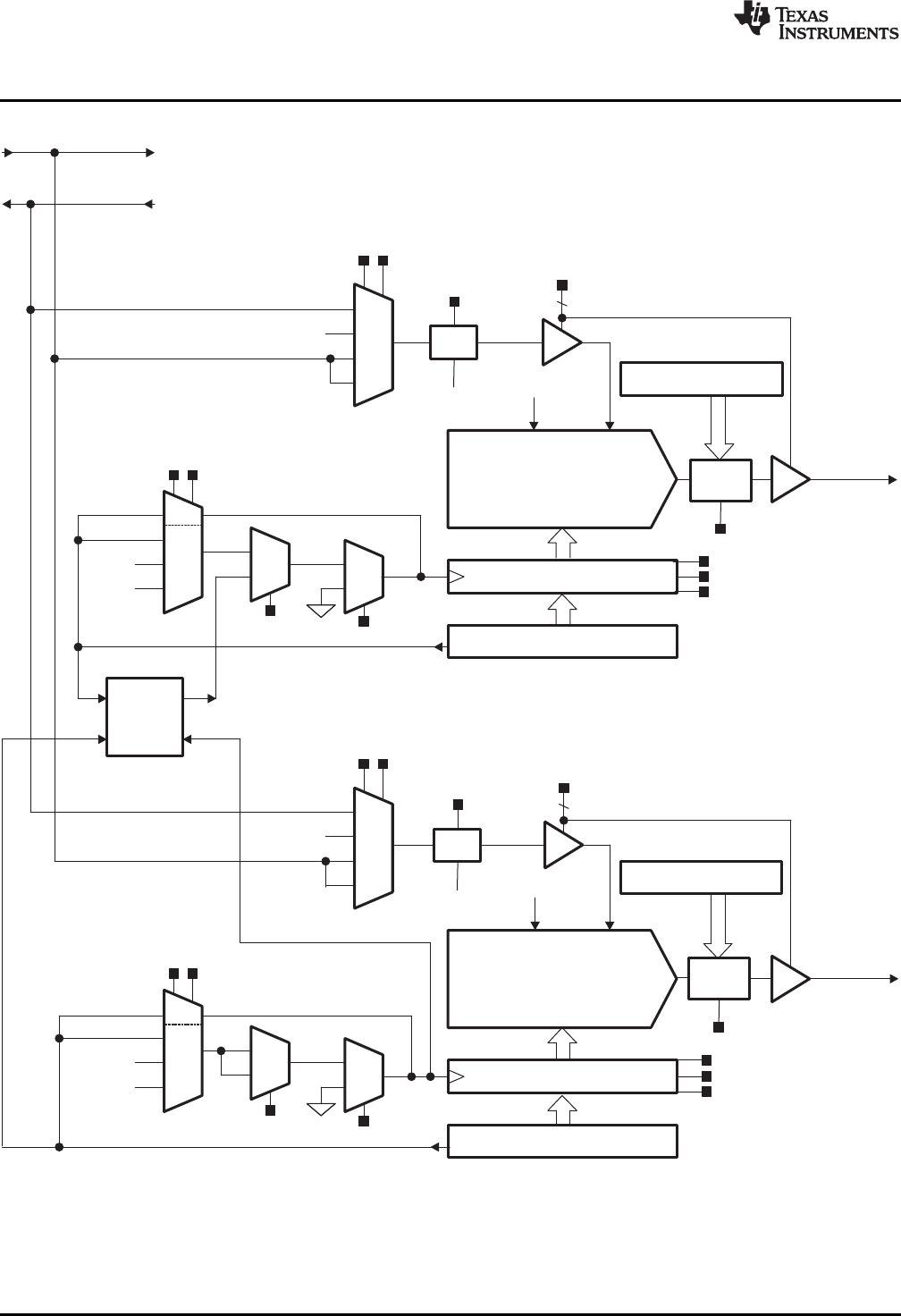
DAC12_0
DAC12_0OUT
2.5 V, 2.0 V, or 1.5 V reference from REF module
DAC12SREFx
VR− VR+
DAC12_0DAT
DAC12_0Latch
DAC12_1
DAC12LSELx
VR− VR+
DAC12_1DAT
DAC12_1Latch
TB2
TA1 DAC12DF
DAC12RES
AVSS
00
01
10
11
00
01
10
11
00
01
10
11
Latch Bypass
DAC12LSELx
TB2
TA1
00
01
10
11
00
01
10
11
Latch Bypass
To other modules
DAC12_1DAT Updated
DAC12_0DAT Updated
1
0
0
1
ENC
0
1
ENC
DAC12GRP
1
0
DAC12GRP
DAC12SREFx
AVSS
00
01
10
11
DAC12_1OUT
DAC12AMPx
3
Group
Load
Logic
DAC12AMPx
3
AVCC
AVCC
DAC12DFJ
DAC12DF
DAC12RES
DAC12DFJ
DAC12_0CALDAT
DAC12_1CALDAT
x2, x3
DAC12OG
x2, x3
DAC12OG
DAC12IR
/2, /3
DAC12OG
DAC12IR
/2, /3
DAC12OG
VeREF+ (devices with CTSD16 this signal is V /V )
REFBG eREF+
VREF+
DAC12_A Introduction
www.ti.com
Figure 31-1. DAC12_A Block Diagram for Two-Module Devices
826 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
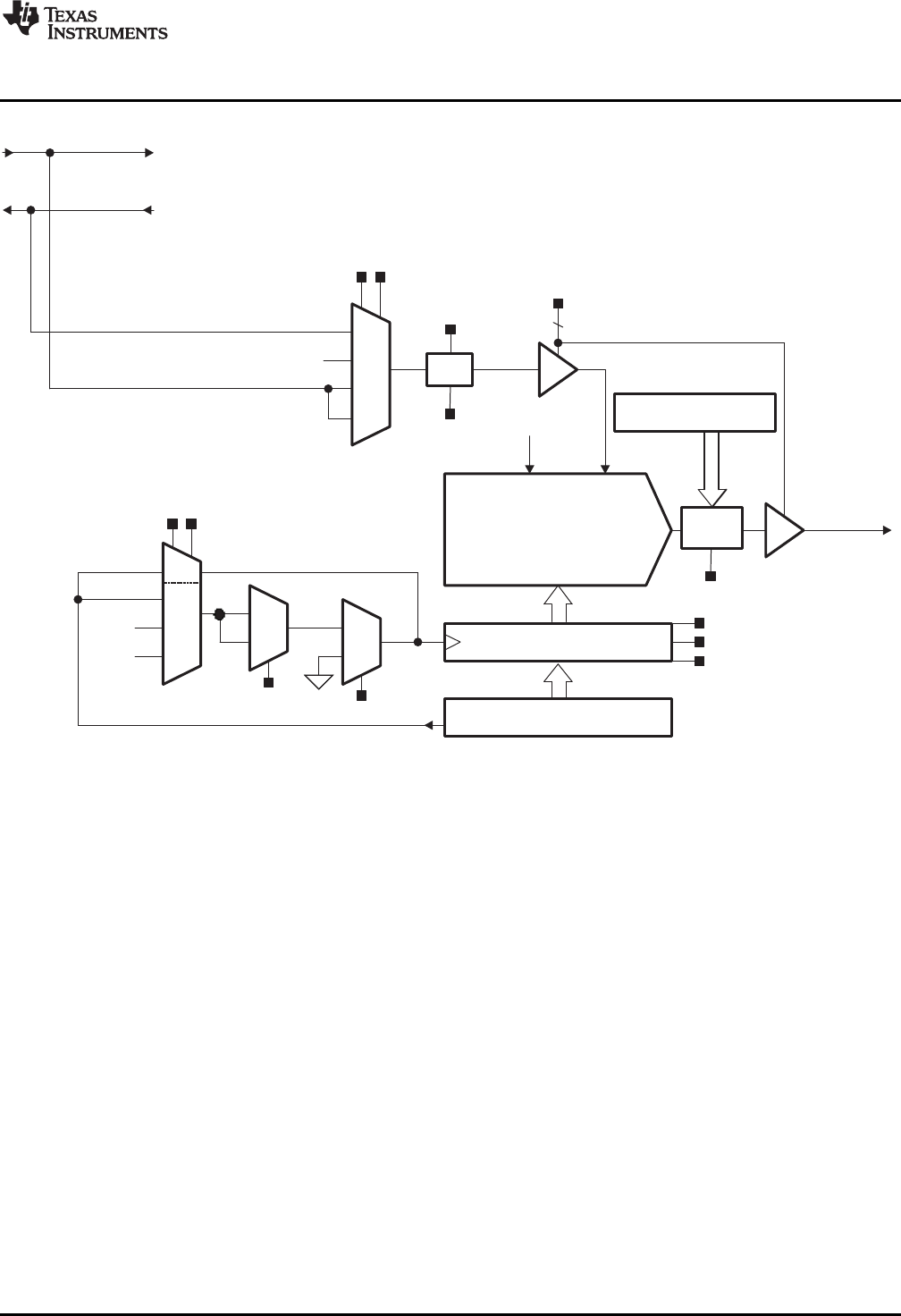
DAC12_0
DAC12_0OUT
2.5V,2.0V,or1.5VreferencefromREFmodule
DAC12SREFx
VR− VR+
DAC12_0DAT
DAC12_0Latch
AVSS
00
01
10
11
VeREF+
VREF+
DAC12DF
DAC12RES
DAC12LSELx
TB2
TA1
00
01
10
11
00
01
10
11
LatchBypass
Toothermodules
DAC12_0DATUpdated
0
1
ENC
1
0
DAC12GRP
DAC12AMPx
3
AVCC
DAC12DFJ
DAC12_0CALDAT
x2,x3
DAC12OG
DAC12IR
/2,/3
DAC12OG
www.ti.com
DAC12_A Introduction
Figure 31-2. DAC12_A Block Diagram For Single-Module Devices
827
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DAC12_A Operation
www.ti.com
31.2 DAC12_A Operation
The DAC12_A module is configured with user software. The setup and operation of the DAC12_A is
discussed in the following sections.
31.2.1 DAC12_A Core
The DAC12_A can be configured to operate in 8-bit or 12-bit mode using the DAC12RES bit. The full-
scale output is programmable to be 1x, 2x, or 3x the selected reference voltage using the DAC12IR and
DAC12OG bits. This feature allows the user to control the dynamic range of the DAC. The DAC12DF bit
allows the user to select between straight-binary data and twos-complement data for the DAC. When
using straight-binary data format, the formula for the output voltage is given in Table 31-1.
Table 31-1. DAC Full-Scale Range (Vref = VeREF+ or VREF+ or VREFBG (1))
Resolution DAC12RES DAC12OG DAC12IR Output Voltage Formula
0 Vout = Vref × 3 × (DAC12_xDAT/4096)
0
12 bit 0 1 Vout = Vref × 2 x (DAC12_xDAT/4096)
x 1 Vout = Vref × (DAC12_xDAT/4096)
0 Vout = Vref × 3 × (DAC12_xDAT/256)
0
8 bit 1 1 Vout = Vref × 2 × (DAC12_xDAT/256)
x 1 Vout = Vref × (DAC12_xDAT/256)
(1) VREFBG is not available on all devices; see the device-specific data sheet for availability.
In 8-bit mode the maximum useable value for DAC12_xDAT is 0FFh and in 12-bit mode the maximum
useable value for DAC12_xDAT is 0FFFh. Values greater than these may be written to the register, but all
leading bits are ignored.
31.2.2 DAC12_A Port Selection
On most devices, the DAC outputs are multiplexed with the port Px pins and potentially other secondary
functions. When DAC12AMPx > 0, the DAC function is automatically selected for the pin, regardless of the
state of the associated PxSEL.y and PxDIR.y bits. See the port pin schematic in the device-specific data
sheet for more details.
31.2.3 DAC12_A Reference
The reference for the DAC12_A is configured to use AVCC, an external reference voltage, or internal 1.16-
V, VREFBG, voltage reference (only available on devices with a CTSD16 module, refer to the device-specific
data sheet), or the internal 1.5-V, 2.0-V, or 2.5-V reference from the REF module with the DAC12SREFx
bits. When DAC12SREFx = {0} and DAC12AMPx > {1}, VREF+ is used as the reference, which is supplied
from the REF module. See the REF chapter for further information. When DAC12SREFx = {1}, AVCC is
used as the reference, and when DAC12SREFx = {2,3} the external reference, VeREF+ signal, is used as
the reference unless the device has a CTSD16 module. On devices that have a CTSD16 module (refer to
device specific data sheet), when DAC12SREFx = {2,3} either the external reference, VeREF+ signal or the
internally generated reference, VREFBG signal, is selected. See Table 31-2 for details on which bits to set to
select between the VeREF+ and VREFBG signals.
Table 31-2. DAC12SREFx = {2,3} Signal Selection Requirements for Devices With a CTSD16 Module
Signal Selected REFOUT REFON PxSEL.y CTSD16REFS(1)
VeREF+ 0 x 1 If CTSD16 module is used, must be set to 0.
VREFBG 1 1 1(2) If CTSD16 module is used, CTSD16REFS must be set to 1.
(1) If CTSD16 is used, CTSD16REFS bit must be set according to this table as external voltage reference VeREF+ and internal
voltage reference VREFBG cannot both be used at the same time as they use the same pin.
(2) When VREFBG is selected, PxSEL.y must always be set even if VREFBG is only used inside the device.
828 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Full-Scale Output
0 0FFFh
0
Output Voltage
DAC Data
www.ti.com
DAC12_A Operation
31.2.3.1 DAC12_A Reference Input and Voltage Output Buffers
The reference input and voltage output buffers of the DAC can be configured for optimized settling time vs
power consumption. Eight combinations are selected using the DAC12AMPx bits. In the low/low setting,
the settling time is the slowest, and the current consumption of both buffers is the lowest. The medium
and high settings have faster settling times, but the current consumption increases. See the device-
specific data sheet for parameters.
31.2.4 Updating the DAC12_A Voltage Output
The DAC12_xDAT register can be connected directly to the DAC core or double buffered. The trigger for
updating the DAC voltage output is selected with the DAC12LSELx bits.
When DAC12LSELx = 0 the data latch is transparent and the DAC12_xDAT register is applied directly to
the DAC core, the DAC output updates immediately when new DAC data is written to the DAC12_xDAT
register, regardless of the state of the DAC12ENC bit.
When DAC12LSELx = 1, DAC data is latched and applied to the DAC core after new data is written to
DAC12_xDAT. When DAC12LSELx = 2 or 3, data is latched on the rising edge from the Timer_A CCR1
output or Timer_B CCR2 output, respectively. DAC12ENC must be set to latch the new data when
DAC12LSELx > 0.
31.2.5 DAC12_xDAT Data Formats
The DAC12_A supports both straight-binary and twos-complement data formats. When using straight-
binary data format, the full-scale output value is 0FFFh in 12-bit mode (0FFh in 8-bit mode), as shown in
Figure 31-3.
Figure 31-3. Output Voltage vs DAC Data, 12-Bit Straight-Binary Mode
When using twos-complement data format, the range is shifted such that a DAC12_xDAT value of 0800h
(0080h in 8-bit mode) results in a zero output voltage, 0000h is the mid-scale output voltage, and 07FFh
(007Fh for 8-bit mode) is the full-scale voltage output, as shown in Figure 31-4.
829
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
VCC
Output Voltage
0
DAC Data Full-Scale Code
Output Voltage
0
DAC Data
Negative Offset
Full-Scale Output
0800h (-2048) 07FFh (+2047)0
0
Output Voltage
DAC Data
Mid-Scale Output
DAC12_A Operation
www.ti.com
Figure 31-4. Output Voltage vs DAC Data, 12-Bit Twos-Complement Mode
31.2.6 DAC12_A Output Amplifier Offset Calibration
The offset voltage of the DAC output amplifier can be positive or negative. When the offset is negative, the
output amplifier attempts to drive the voltage negative, but cannot do so. The output voltage remains at
zero until the DAC digital input produces a sufficient positive output voltage to overcome the negative
offset voltage, resulting in the transfer function shown in Figure 31-5.
Figure 31-5. Negative Offset
When the output amplifier has a positive offset, a digital input of zero does not result in a zero output
voltage. The DAC12_A output voltage reaches the maximum output level before the DAC12_A data
reaches the maximum code. This is shown in Figure 31-6.
Figure 31-6. Positive Offset
830 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
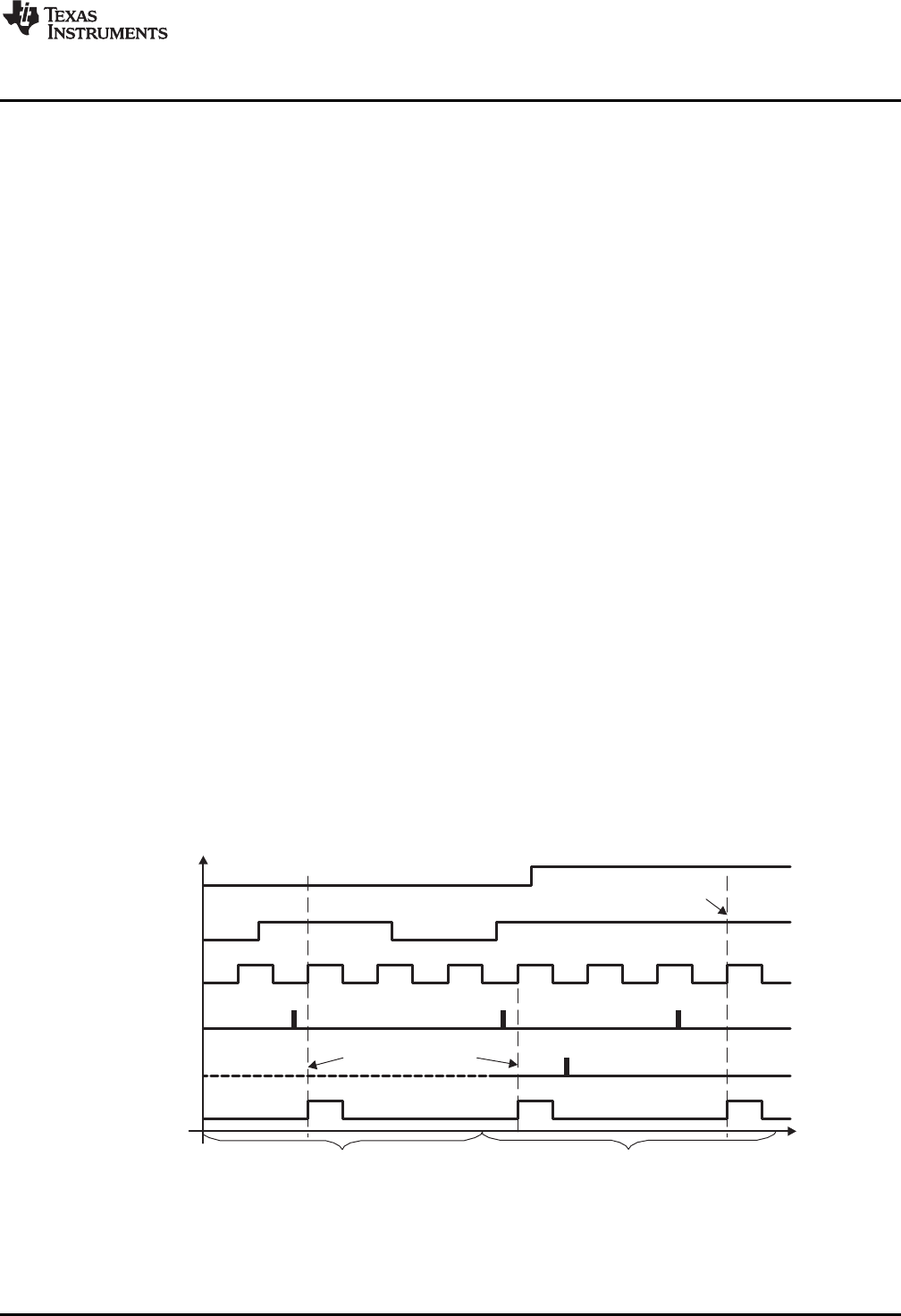
DAC12_0
DAC12GRP
DAC12_0
DAC12ENC
TimerA_OUT1
DAC12_0
Latch Trigger
DAC12_0 Updated
DAC12_0 DAC12LSELx = 2 DAC12_0 DAC12LSELx > 0 AND
DAC12_1 DAC12LSELx = 2
DAC12_0DAT
New Data
DAC12_1DAT
New Data
DAC12_0 and DAC12_1
Updated Simultaneously
www.ti.com
DAC12_A Operation
The DAC12_A can calibrate the offset voltage of the output amplifier. Setting the DAC12CALON bit
initiates the offset calibration. Allow the calibration to complete before using the DAC. This can be
checked by monitoring the DAC12CALON bit. When the calibration is complete, the DAC12CALON bit is
automatically reset. The DAC12AMPx bits should be configured before calibration. For best calibration
results, port and CPU activity should be minimized during calibration.
The contents of DAC12x_CALDAT can be protected from inadvertent write access by a lock mechanism
controlled by the DAC12x_CALCTL register. At power up, the LOCK bit is set, and calibration is not
possible and writing to the DAC12x_CALDAT is ignored. To perform calibration, the LOCK bit must be
cleared by writing the correct password to DAC12x_CALCTL and clearing the LOCK bit. After LOCK is
cleared, calibration or writing to the DAC12x_CALDAT can be performed. After calibration is performed,
lock the calibration registers by writing the correct password to DAC12x_CALCTL and setting the LOCK
bit.
Reading DAC12_xCALDAT should only be performed while the DAC12CALON bit is cleared, otherwise
incorrect values may be read. The DAC12xCAL data format is twos complement. Only the lower byte is
used and the upper byte has no effect on the calibration.
31.2.7 Grouping Multiple DAC12_A Modules
Multiple DAC12_A modules can be grouped together with the DAC12GRP bit to synchronize the update of
each DAC output. Hardware ensures that all DAC12_A modules in a group update simultaneously
independent of any interrupt or NMI event.
On devices that contain more than one DAC, DAC12_0 and DAC12_1 are grouped by setting the
DAC12GRP bit of DAC12_0. The DAC12GRP bit of DAC12_1 is don't care. When DAC12_0 and
DAC12_1 are grouped:
• The DAC12_0 and DAC12_1 DAC12LSELx bits select the update trigger for both DACs.
• The DAC12LSELx bits for both DACs must be the same.
• The DAC12LSELx bits for both DACs must be > 0
• The DAC12ENC bits of both DACs must be set to 1
When DAC12_0 and DAC12_1 are grouped, both DAC12_xDAT registers must be written before the
outputs update, even if data for one or both of the DACs is not changed. Figure 31-7 shows a latch-update
timing example for grouped DAC12_0 and DAC12_1.
When DAC12_0 DAC12GRP = 1 and both DAC12_x DAC12LSELx > 0 and either DAC12ENC = 0,
neither DAC updates.
Figure 31-7. DAC12_A Group Update Example, Timer_A3 Trigger
831
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DAC12_A Operation
www.ti.com
NOTE: DAC12_A Settling Time
The DMA controller can transfer data to the DAC12_A faster than the DAC12_A output can
settle. The user must make sure that the DAC12_A settling time is not violated when using
the DMA controller. See the device-specific data sheet for parameters.
31.2.8 DAC12_A Interrupts
The DAC12IFG bit is set when DAC12LSELx > 0 and DAC data is latched from the DAC12_xDAT register
into the data latch. When DAC12LSELx = 0, the DAC12IFG flag is not set.
A set DAC12IFG bit indicates that the DAC is ready for new data. If both the DAC12IE and GIE bits are
set, the DAC12IFG generates an interrupt request. The DAC12IFG flag must be reset by software or can
be reset automatically by accessing the DAC12IV register. See the DAC12IV description for further
information.
For devices that contain a DMA, each DAC channel has a DMA trigger associated with it. When
DAC12IFG is set, it can trigger a DMA transfer to the DAC12_xDAT register. DAC12IFG is automatically
reset when the transfer begins. If the DAC12IE is also set, no DMA transfer occurs when the DAC12IFG is
set.
31.2.8.1 DAC12IV, Interrupt Vector Generator
The DAC12_A flags are prioritized and combined to source a single interrupt vector. The interrupt vector
register DAC12IV is used to determine which flag requested an interrupt.
The highest priority enabled interrupt generates a number in the DAC12IV register (see register
description). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled DAC interrupts do not affect the DAC12IV value.
Any access, read or write, of the DAC12IV register automatically resets the highest pending interrupt flag.
If another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
For example, if the DAC12IFG_0 and DAC12IFG_1 flags are set when the interrupt service routine
accesses the DAC12IV register, the DAC12IFG_0 flag is reset automatically. After the RETI instruction of
the interrupt service routine is executed, the DAC12IFG_1 flag generates another interrupt.
31.2.8.1.1 DAC12IV Software Example
The following software example shows the recommended use of DAC12IV and the handling overhead.
The DAC12IV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself. The latencies are:
; Interrupt handler for DAC12_A. Cycles
DAC12_HND ; Interrupt latency 6
ADD &DAC12IV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP DAC12IFG_0_HND ; Vector 2: DAC12_0 2
JMP DAC12IFG_1_HND ; Vector 4: DAC12_1 2
RETI ; Vector 6: Reserved 5
RETI ; Vector 8: Reserved 5
RETI ; Vector 8: Reserved 5
RETI ; Vector 10: Reserved 5
DAC12IFG_1_HND ; Vector 4: DAC12_1
... ; Task starts here
RETI ; Back to main program
DAC12IFG_0_HND ; Vector 2: DAC12_0
... ; Task starts here
RETI ; Back to main program 5
832 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC Outputs
31.3 DAC Outputs
On most devices, each DAC channel can be output to two different port pins selected by the DAC12OPS
bit. When DAC12OPS = 0, one of the two ports is selected as the DAC output. Similarly, when
DAC12OPS =1, the other port is selected as the DAC output. Table 31-3 summarizes this for a single
DAC channel that can be output to either ports Pm.y or Pn.z.
Table 31-3. DAC Output Selection
DAC12OPS DAC12AMP Pm.y Function Pn.z Function
0 {0} I/O I/O
0 {1} I/O DAC output, 0 V
0 {>1} I/O DAC output
1 {0} I/O I/O
1 {1} DAC output, 0 V I/O
1 {>1} DAC output I/O
833
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DAC12_A Registers
www.ti.com
31.4 DAC12_A Registers
The DAC12_A registers are listed in Table 31-4. The base address can be found in the device-specific
data sheet. The address offset is listed in Table 31-4.
Table 31-4. DAC12_A Registers
Offset Acronym Register Name Type Access Reset Section
00h DAC12_0CTL0 DAC12_0 Control 0 Read/write Word 0000h Section 31.4.1
02h DAC12_0CTL1 DAC12_0 Control 1 Read/write Word 0000h Section 31.4.2
04h DAC12_0DAT DAC12_0 Data Read/write Word 0000h Section 31.4.3
through
Section 31.4.10
06h DAC12_0CALCTL DAC12_0 Calibration Control Read/write Word 9601h Section 31.4.11
08h DAC12_0CALDAT DAC12_0 Calibration Data Read/write Word 0000h Section 31.4.12
10h DAC12_1CTL0 DAC12_1 Control 0 Read/write Word 0000h Section 31.4.1
12h DAC12_1CTL1 DAC12_1 Control 1 Read/write Word 0000h Section 31.4.2
14h DAC12_1DAT DAC12_1 Data Read/write Word 0000h Section 31.4.3
through
Section 31.4.10
16h DAC12_1CALCTL DAC12_1 Calibration Control Read/write Word 0000h Section 31.4.11
18h DAC12_1CALDAT DAC12_1 Calibration Data Read/write Word 0000h Section 31.4.12
1Eh DAC12IV DAC12IV Read Word 0000h Section 31.4.13
834 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Registers
31.4.1 DAC12_xCTL0 Register
DAC12 Control Register 0
Figure 31-8. DAC12_xCTL0 Register
15 14 13 12 11 10 9 8
DAC12OPS DAC12SREFx DAC12RES DAC12LSELx DAC12CALON DAC12IR
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DAC12AMPx DAC12DF DAC12IE DAC12IFG DAC12ENC DAC12GRP
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Can be modified only when DAC12ENC = 0
Table 31-5. DAC12_xCTL0 Register Description
Bit Field Type Reset Description
15 DAC12OPS RW 0h DAC output select
0b = DAC12_x channel output on Pm.y
1b = DAC12_x channel output on Pn.z
14-13 DAC12SREFx RW 0h DAC select reference voltage
00b = VREF+
01b = AVCC
10b = VeREF+; for devices with CTSD16 = VeREF+/VREFBG, see Table 31-2
for details on the selection between external reference VeREF+ and the internally
generated VREFBG signal
11b = VeREF+; for devices with CTSD16 = VeREF+/VREFBG, see Table 31-2
for details on the selection between external reference VeREF+ and the internally
generated VREFBG signal
12 DAC12RES RW 0h DAC resolution select
0b = 12-bit resolution
1b = 8-bit resolution
11-10 DAC12LSELx RW 0h DAC load select. Selects the load trigger for the DAC latch. DAC12ENC must be
set for the DAC to update, except when DAC12LSELx = 0.
00b = DAC latch loads when DAC12_xDAT written (DAC12ENC is ignored)
01b = DAC latch loads when DAC12_xDAT written, or, when grouped, when all
DAC12_xDAT registers in the group have been written.
10b = Rising edge of Timer_A.OUT1 (TA1)
11b = Rising edge of Timer_B.OUT2 (TB2)
9 DAC12CALON RW 0h DAC calibration on. This bit initiates the DAC offset calibration sequence and is
automatically reset when the calibration completes.
0b = Calibration is not active
1b = Initiate calibration or calibration in progress
8 DAC12IR RW 0h DAC input range. The DAC12IR bit along with the DAC12OG bit set the
reference input and voltage output range.
0b = If DAC12OG = 0, then DAC12 full-scale output = 3x reference voltage; if
DAC12OG = 1, then DAC12 full-scale output = 2x reference voltage
1b = DAC12 full-scale output = 1x reference voltage
835
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DAC12_A Registers
www.ti.com
Table 31-5. DAC12_xCTL0 Register Description (continued)
Bit Field Type Reset Description
7-5 DAC12AMPx RW 0h DAC amplifier setting. These bits select settling time vs current consumption for
the DAC input and output amplifiers.
000b = Input Buffer: Off; Output Buffer: DAC Off, output high impedance
001b = Input Buffer: Off; Output Buffer: DAC Off, output 0 V
010b = Input Buffer: Low speed and current; Output Buffer: Low speed and
current
011b = Input Buffer: Low speed and current; Output Buffer: Medium speed and
current
100b = Input Buffer: Low speed and current; Output Buffer: High speed and
current
101b = Input Buffer: Medium speed and current; Output Buffer: Medium speed
and current
110b = Input Buffer: Medium speed and current; Output Buffer: High speed and
current
111b = Input Buffer: High speed and current; Output Buffer: High speed and
current
4 DAC12DF RW 0h DAC data format
0b = Straight binary
1b = Twos complement
3 DAC12IE RW 0h DAC interrupt enable
0b = Disabled
1b = Enabled
2 DAC12IFG RW 0h DAC interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1 DAC12ENC RW 0h DAC enable conversion. This bit enables the DAC12_A module when
DAC12LSELx > 0. when DAC12LSELx = 0, DAC12ENC is ignored.
0b = DAC disabled
1b = DAC enabled
0 DAC12GRP RW 0h DAC group. Groups DAC12_x with the next higher DAC12_x. Not used for
DAC12_1 on dual DAC devices.
0b = Not grouped
1b = Grouped
836 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Registers
31.4.2 DAC12_xCTL1 Register
DAC12 Control Register 1
Figure 31-9. DAC12_xCTL1 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved DAC12OG DAC12DFJ
r0 r0 r0 r0 r0 r0 rw-(0) rw-(0)
Can be modified only when DAC12ENC = 0
Table 31-6. DAC12_xCTL1 Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved. Always reads as 0.
1 DAC12OG RW 0h DAC output buffer gain. Can be modified only when DAC12ENC = 0.
0b = 3x gain
1b = 2x gain
0 DAC12DFJ RW 0h DAC data format justification. Can be modified only when DAC12ENC = 0.
0b = Data format right justified
1b = Data format left justified
837
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

DAC12_A Registers
www.ti.com
31.4.3 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Right Justified
DAC12 Data Register unsigned 12-bit binary format, right justified (DAC12RES = 0, DAC12DF = 0,
DAC12DFJ = 0)
Figure 31-10. DAC12_xDAT Register
15 14 13 12 11 10 9 8
Reserved DAC12 Data
r(0) r(0) r(0) r(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 31-7. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11-0 DAC12 Data RW 0h DAC data in unsigned format. Bit 11 represents the MSB.
31.4.4 DAC12_xDAT Register, Unsigned 12-Bit Binary Format, Left Justified
DAC12 Data Register unsigned 12-bit binary format, left justified (DAC12RES = 0, DAC12DF = 0,
DAC12DFJ = 1)
Figure 31-11. DAC12_xDAT Register
15 14 13 12 11 10 9 8
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DAC12 Data Reserved
rw-(0) rw-(0) rw-(0) rw-(0) r(0) r(0) r(0) r(0)
Table 31-8. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-4 DAC12 Data RW 0h DAC data in unsigned format. Bit 15 represents the MSB.
3-0 Reserved R 0h Reserved. Always reads as 0.
838 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Registers
31.4.5 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Right Justified
DAC12 Data Register twos complement 12-bit binary format, right justified (DAC12RES = 0, DAC12DF =
1, DAC12DFJ = 0)
Figure 31-12. DAC12_xDAT Register
15 14 13 12 11 10 9 8
Bit 11 Bit 11 Bit 11 Bit 11 DAC12 Data
r(0) r(0) r(0) r(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 31-9. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-12 Bit 11 R 0h These bits are sign extension bits and are equal to the contents of bit 11. These
bits are automatically updated with the contents of bit 11.
11-0 DAC12 Data RW 0h DAC data in twos complement format. Bit 11 represents the sign bit of the twos
complement value.
31.4.6 DAC12_xDAT Register, Twos-Complement 12-Bit Binary Format, Left Justified
DAC12 Data Register twos complement 12-bit binary format, left justified (DAC12RES = 0, DAC12DF = 1,
DAC12DFJ = 1)
Figure 31-13. DAC12_xDAT Register
15 14 13 12 11 10 9 8
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
DAC12 Data Reserved
rw-(0) rw-(0) rw-(0) rw-(0) r(0) r(0) r(0) r(0)
Table 31-10. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-4 DAC12 Data RW 0h DAC data in twos complement format. Bit 15 represents the sign bit of the twos
complement value.
3-0 Reserved R 0h Reserved. Always reads as 0.
839
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DAC12_A Registers
www.ti.com
31.4.7 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Right Justified
DAC12 Data Register unsigned 8-bit binary format, right justified (DAC12RES = 1, DAC12DF = 0,
DAC12DFJ = 0)
Figure 31-14. DAC12_xDAT Register
15 14 13 12 11 10 9 8
Reserved
r(0) r(0) r(0) r(0) r(0) r(0) r(0) r(0)
76543210
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 31-11. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7-0 DAC12 Data RW 0h DAC data in unsigned format. Bit 7 represents the MSB.
31.4.8 DAC12_xDAT Register, Unsigned 8-Bit Binary Format, Left Justified
DAC12 Data Register unsigned 8-bit binary format, left justified (DAC12RES = 1, DAC12DF = 0,
DAC12DFJ = 1)
Figure 31-15. DAC12_xDAT Register
15 14 13 12 11 10 9 8
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved
r(0) r(0) r(0) r(0) r(0) r(0) r(0) r(0)
Table 31-12. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-8 DAC12 Data RW 0h DAC data in unsigned format. Bit 15 represents the MSB.
7-0 Reserved R 0h Reserved. Always reads as 0.
840 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Registers
31.4.9 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Right Justified
DAC12 Data Register twos complement 8-bit binary format, right justified (DAC12RES = 1, DAC12DF = 1,
DAC12DFJ = 0)
Figure 31-16. DAC12_xDAT Register
15 14 13 12 11 10 9 8
Bit 7 Bit 7 Bit 7 Bit 7 Bit 7 Bit 7 Bit 7 Bit 7
r(0) r(0) r(0) r(0) r(0) r(0) r(0) r(0)
76543210
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 31-13. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-8 Bit 7 R 0h These bits are sign extension bits and are equal to the contents of bit 7. These
bits are automatically updated with the contents of bit 7.
7-0 DAC12 Data RW 0h DAC data in twos complement format. Bit 7 represents the sign bit of the twos
complement value.
31.4.10 DAC12_xDAT Register, Twos-Complement 8-Bit Binary Format, Left Justified
DAC12 Data Register twos complement 8-bit binary format, left justified (DAC12RES = 1, DAC12DF = 1,
DAC12DFJ = 1)
Figure 31-17. DAC12_xDAT Register
15 14 13 12 11 10 9 8
DAC12 Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
Reserved
r(0) r(0) r(0) r(0) r(0) r(0) r(0) r(0)
Table 31-14. DAC12_xDAT Register Description
Bit Field Type Reset Description
15-8 DAC12 Data RW 0h DAC data in twos complement format. Bit 15 represents the sign bit of the twos
complement value.
7-0 Reserved R 0h Reserved. Always reads as 0.
841
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
DAC12_A Registers
www.ti.com
31.4.11 DAC12_xCALCTL Register
DAC12 Calibration Control Register
Figure 31-18. DAC12_xCALCTL Register
15 14 13 12 11 10 9 8
DAC12KEY
rw rw rw rw rw rw rw rw
76543210
Reserved LOCK
r0 r0 r0 r0 r0 r0 r0 rw-(1)
Table 31-15. DAC12_xCALCTL Register Description
Bit Field Type Reset Description
15-8 DAC12KEY RW 96h DAC calibration lock password. Always reads as 0x96. Must be written with 0xA5
for LOCK bit to be set or cleared. An incorrect key results in the LOCK bit being
set, thereby disabling write access to DAC12_xCALDAT.
7-1 Reserved R 0h Reserved. Always reads as 0.
0 LOCK RW 1h DAC calibration lock. To enable write access to the DAC12 calibration data
register, this bit must be cleared by writing 0xA5 to DAC12KEY along with LOCK
= 0. Writing an incorrect key or writing to DAC12x_CALCTL using byte mode
causes the LOCK bit to be automatically set. If the LOCK bit is set, write access
to the calibration data registers and hardware calibration is not possible. All
previous values in the DAC12_xCALDAT are retained.
0b = Calibration data register write access enabled, calibration can be
performed.
1b = Calibration data register write access disabled, calibration disabled.
31.4.12 DAC12_xCALDAT Register
DAC12 Calibration DATA Register
Figure 31-19. DAC12_xCALDAT Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
DAC12 Calibration Data
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 31-16. DAC12_xCALDAT Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7-0 DAC12 Calibration RW 0h DAC calibration data. The DAC calibration data is represented in twos
Data complement format providing a range of –128 to +127.
842 DAC12_A SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
DAC12_A Registers
31.4.13 DAC12IV Register
DAC12 Interrupt Vector Register
Figure 31-20. DAC12IV Register
15 14 13 12 11 10 9 8
DAC12IVx
r(0) r(0) r(0) r(0) r(0) r(0) r(0) r(0)
76543210
DAC12IVx
r(0) r(0) r(0) r(0) r-(0) r-(0) r-(0) r(0)
Table 31-17. DAC12IV Register Description
Bit Field Type Reset Description
15-0 DAC12IVx R 0h DAC interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: DAC12 channel 0; Interrupt Flag: DAC12IFG_0; Interrupt
Priority: Highest
04h = Interrupt Source: DAC12 channel 1; Interrupt Flag: DAC12IFG_1; Interrupt
Priority: Lowest
06h = Reserved
08h = Reserved
0Ah = Reserved
0Ch = Reserved
0Eh = Reserved
843
SLAU208O–June 2008–Revised May 2015 DAC12_A
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 32
SLAU208O–June 2008–Revised May 2015
Comp_B
Comp_B is an analog voltage comparator. This chapter describes the Comp_B. Comp_B covers general
comparator functionality for up to 16 channels.
Topic ........................................................................................................................... Page
32.1 Comp_B Introduction........................................................................................ 845
32.2 Comp_B Operation ........................................................................................... 846
32.3 Comp_B Registers............................................................................................ 852
844 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
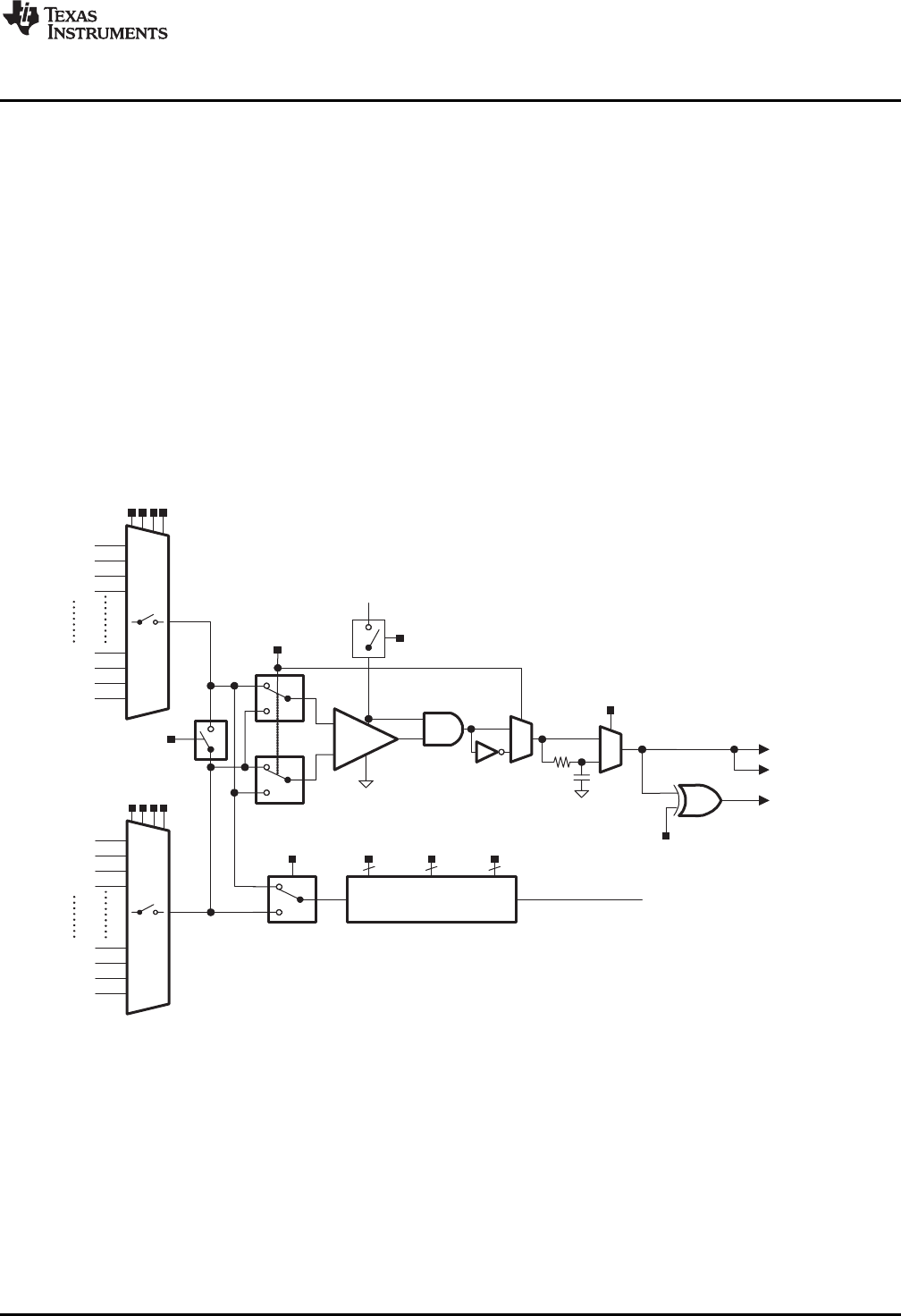
CBEX
CBSHORT
+
-
CBON
0
1
CBOUT
CCI1B
Set CBIFG
CBF
CBRSEL
0
1
CBOUTPOL
from shared
reference
CBRSCBREF1 CBREF0
5
CB0
CB1
CB2
CB3
CB12
CB13
CB14
CB15
CBIPSEL
0000
0001
1110
1111
CB0
CB1
CB2
CB3
CB12
CB13
CB14
CB15
CBIMSEL
0000
0001
1110
1111
VCC
Reference Voltage
Generator
5 2
www.ti.com
Comp_B Introduction
32.1 Comp_B Introduction
The Comp_B module supports precision slope analog-to-digital conversions, supply voltage supervision,
and monitoring of external analog signals.
Features of Comp_B include:
• Inverting and noninverting terminal input multiplexer
• Software-selectable RC filter for the comparator output
• Output provided to Timer_A capture input
• Software control of the port input buffer
• Interrupt capability
• Selectable reference voltage generator, voltage hysteresis generator
• Reference voltage input from shared reference
• Ultra-low-power comparator mode
• Interrupt driven measurement system – low-power operation support
The Comp_B block diagram is shown in Figure 32-1.
Figure 32-1. Comp_B Block Diagram
845
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Comp_B Operation
www.ti.com
32.2 Comp_B Operation
The Comp_B module is configured by user software. The setup and operation of Comp_B is discussed in
the following sections.
32.2.1 Comparator
The comparator compares the analog voltages at the + and – input terminals. If the + terminal is more
positive than the – terminal, the comparator output CBOUT is high. The comparator can be switched on or
off using control bit CBON. The comparator should be switched off when not in use to reduce current
consumption. When the comparator is switched off, CBOUT is always low. The bias current of the
comparator is programmable.
32.2.2 Analog Input Switches
The analog input switches connect or disconnect the two comparator input terminals to associated port
pins using the CBIPSELx and CBIMSELx bits. The comparator terminal inputs can be controlled
individually. The CBIPSELx/CBIMSELx bits allow:
• Application of an external signal to the + and – terminals of the comparator
• Application of an external current source (for example, a resistor) to the + or – terminal of the
comparator
• The mapping of both terminals of the internal multiplexer to the outside
Internally, the input switch is constructed as a T-switch to suppress distortion in the signal path.
NOTE: Comparator Input Connection
When the comparator is on, the input terminals should be connected to a signal, power, or
ground. Otherwise, floating levels may cause unexpected interrupts and increased current
consumption.
The CBEX bit controls the input multiplexer, permuting the input signals of the comparator's + and –
terminals. Additionally, when the comparator terminals are permuted, the output signal from the
comparator is inverted too. This allows the user to determine or compensate for the comparator input
offset voltage.
32.2.3 Port Logic
The Px.y pins associated with a comparator channel are enabled by the CBIPSELx or CBIMSELx bits to
disable its digital components while used as comparator input. Only one of the comparator input pins is
selected as input to the comparator by the input multiplexer at a time.
32.2.4 Input Short Switch
The CBSHORT bit shorts the Comp_B inputs. This can be used to build a simple sample-and-hold for the
comparator as shown in Figure 32-2.
846 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
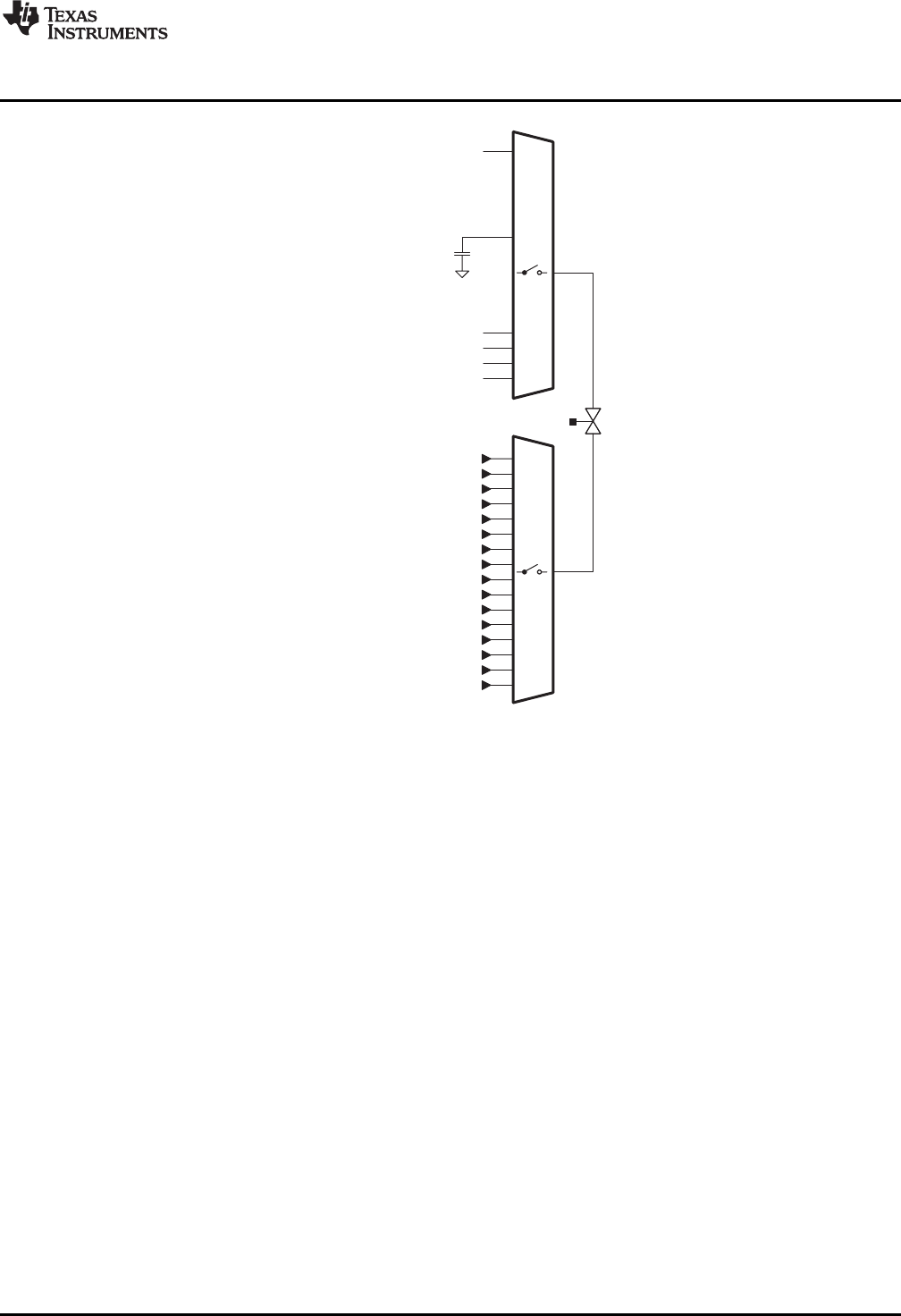
0000
1100
1101
1110
1111
0000
0001
0010
0011
1100
1101
1110
1111
CxSHORT
Sampling capacitor, C
S
Analog Inputs
www.ti.com
Comp_B Operation
Figure 32-2. Comp_B Sample-And-Hold
The required sampling time is proportional to the size of the sampling capacitor (CS), the resistance of the
input switches in series with the short switch (Ri), and the resistance of the external source (RS). The total
internal resistance (RI) is typically in the range of 1 kΩ. The sampling capacitor CSshould be greater than
100 pF. The time constant, Tau, to charge the sampling capacitor CScan be calculated with the following
equation:
Tau = (RI+ RS)×CS
Depending on the required accuracy, 3 to 10 Tau should be used as a sampling time. With 3 Tau the
sampling capacitor is charged to approximately 95% of the input signals voltage level, with 5 Tau it is
charged to more than 99%, and with 10 Tau the sampled voltage is sufficient for 12-bit accuracy.
32.2.5 Output Filter
The output of the comparator can be used with or without internal filtering. When control bit CBF is set, the
output is filtered with an on-chip RC filter. The delay of the filter can be adjusted in four different steps.
All comparator outputs are oscillating if the voltage difference across the input terminals is small. Internal
and external parasitic effects and cross coupling on and between signal lines, power supply lines, and
other parts of the system are responsible for this behavior as shown in Figure 32-3. The comparator
output oscillation reduces the accuracy and resolution of the comparison result. Selecting the output filter
can reduce errors associated with comparator oscillation.
847
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
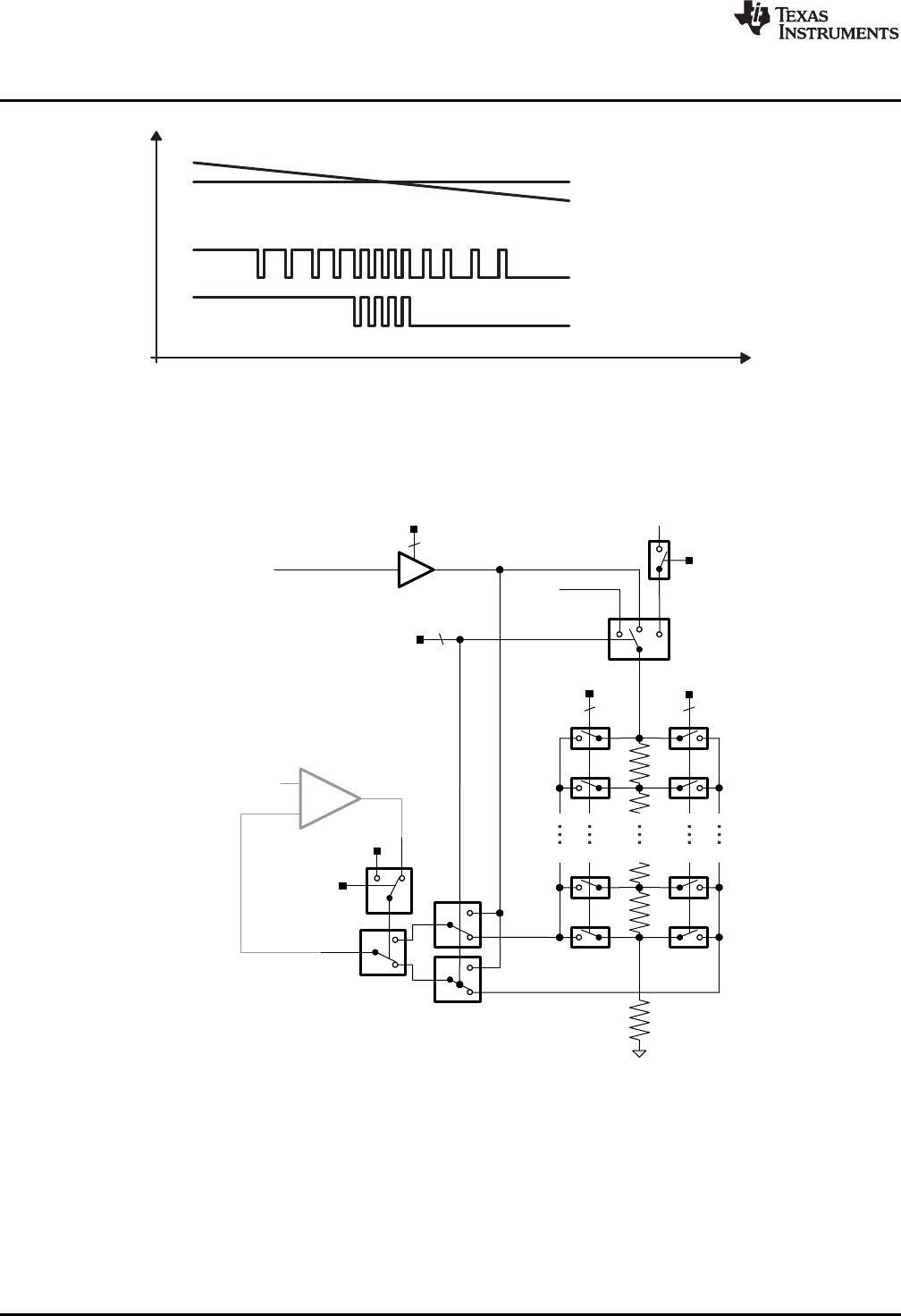
1
0
CBON
CBREF0
5
VCC
5
1
01
0
CBRS = 11
0110
00, 11
CBRSx 2
VREF
VREF1
VREF0
1.2 V from the
shared reference
CBREFLx
1 0
CBMRVS
CBMRVL
2
CBREF1
+ Terminal
- Terminal Comparator Inputs
Comparator Output
Unfiltered at CBOUT
Comparator Output
Filtered at CBOUT
Comp_B Operation
www.ti.com
Figure 32-3. RC-Filter Response at the Output of the Comparator
32.2.6 Reference Voltage Generator
The Comp_B reference block diagram is shown in Figure 32-4.
Figure 32-4. Reference Generator Block Diagram
The voltage reference generator is used to generate VREF, which can be applied to either comparator
input terminal. The CBREF1x (VREF1) and CBREF0x (VREF0) bits control the output of the voltage
generator. The CBRSEL bit selects the comparator terminal to which VREF is applied. If external signals
are applied to both comparator input terminals, the internal reference generator should be turned off to
reduce current consumption. The voltage reference generator can generate a fraction of the device's VCC
or of the voltage reference of the integrated precision voltage reference source. Vref1 is used while
CBOUT is 1 and Vref0 is used while CBOUT is 0. This allows the generation of a hysteresis without using
external components.
848 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
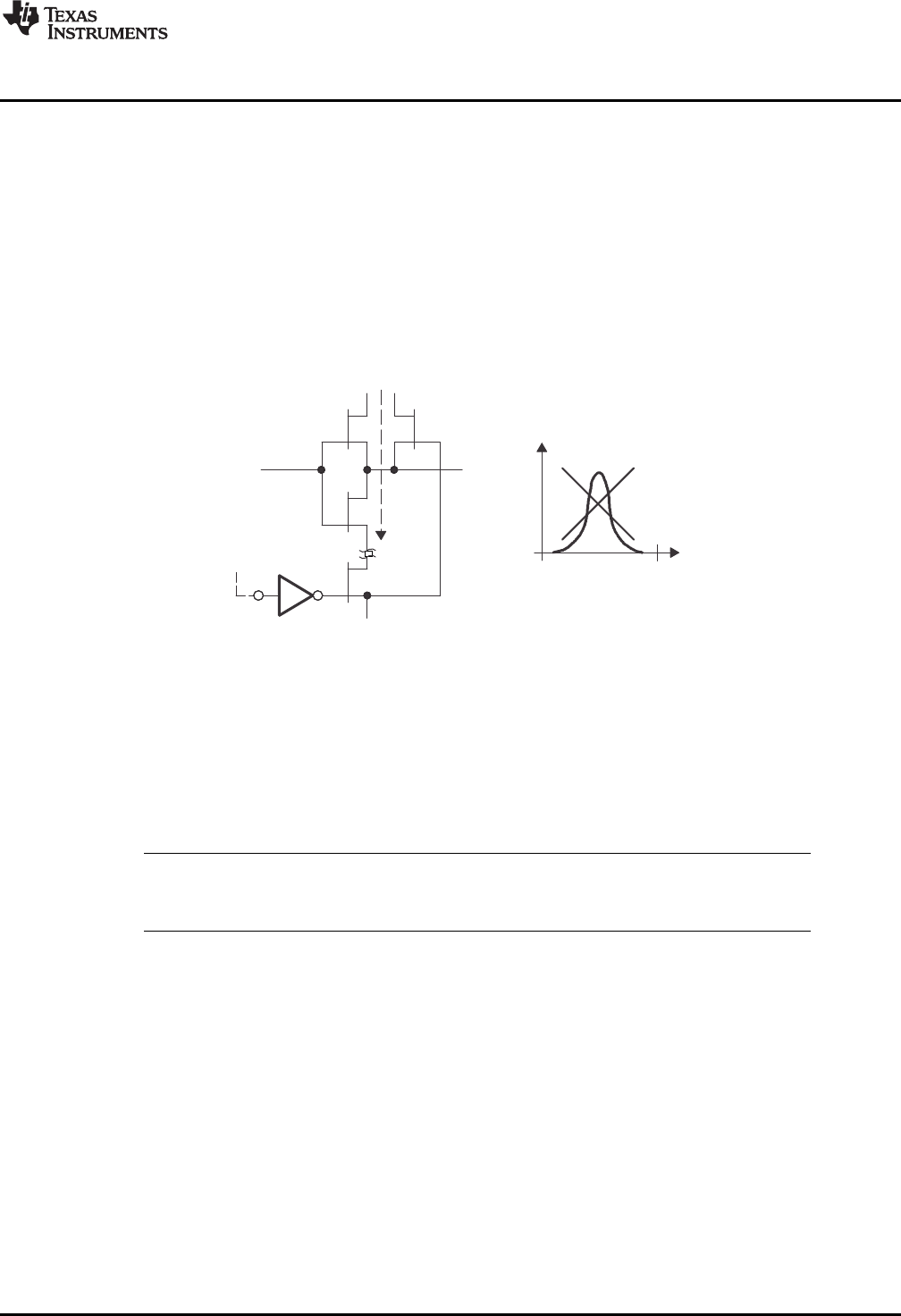
VCC
VSS
ICC
VO
VI
0 VCC
VI
VCC
ICC
CBPDx = 1
www.ti.com
Comp_B Operation
32.2.7 Comp_B, Port Disable Register CBCTL3
The comparator input and output functions are multiplexed with the associated I/O port pins, which are
digital CMOS gates. When analog signals are applied to digital CMOS gates, parasitic current can flow
from VCC to GND. This parasitic current occurs if the input voltage is near the transition level of the gate.
Disabling the port pin buffer eliminates the parasitic current flow and therefore reduces overall current
consumption.
The CBPDx bits in the CBCTL3 register, when set, disable the corresponding Px.y input buffer as shown
in Figure 32-5. When current consumption is critical, any Px.y pin connected to analog signals should be
disabled with their associated CBPDx bits.
Selecting an input pin to the comparator multiplexer with the CBIPSEL or CBIMSEL bits automatically
disables the input buffer for that pin, regardless of the state of the associated CBPDx bit.
Figure 32-5. Transfer Characteristic and Power Dissipation in a CMOS Inverter/Buffer
32.2.8 Comp_B Interrupts
One interrupt flag and one interrupt vector is associated with the Comp_B.
The interrupt flag CBIFG is set on either the rising or falling edge of the comparator output, selected by
the CBIES bit. If both the CBIE and the GIE bits are set, then the CBIFG interrupt flag generates an
interrupt request.
NOTE: Changing the value of the CBIES bit might set the comparator interrupt flag CBIFG. This can
happen even when the comparator is disabled (CBON = 0). It is recommended to clear
CBIFG after configuring the comparator for proper interrupt behavior during operation.
32.2.9 Comp_B Used to Measure Resistive Elements
The Comp_B can be optimized to precisely measure resistive elements using single slope analog-to-
digital conversion. For example, temperature can be converted into digital data using a thermistor, by
comparing the thermistor's capacitor discharge time to that of a reference resistor as shown in Figure 32-
6. A reference resister Rref is compared to Rmeas.
849
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

VC
V or V
CC REF0
VREF1
Phase I:
Charge
Phase II:
Discharge
Phase III:
Charge
tref
Phase IV
Discharge
tmeas
t
Rmeas
Rref
Rref
Rmeas
+
-
0.25 × VCC
CCI1B Capture
Input Of Timer_A
CB0
Px.x
Px.y
Comp_B Operation
www.ti.com
Figure 32-6. Temperature Measurement System
The resources used to calculate the temperature sensed by Rmeas are:
• Two digital I/O pins charge and discharge the capacitor.
• I/O is set to output high (VCC) to charge capacitor, reset to discharge.
• I/O is switched to high-impedance input with CBPDx set when not in use.
• One output charges and discharges the capacitor through Rref.
• One output discharges capacitor through Rmeas.
• The + terminal is connected to the positive terminal of the capacitor.
• The – terminal is connected to a reference level, for example 0.25 × VCC.
• The output filter should be used to minimize switching noise.
• CBOUT is used to gate Timer_A CCI1B, capturing capacitor discharge time.
More than one resistive element can be measured. Additional elements are connected to CB0 with
available I/O pins and switched to high impedance when not being measured.
The thermistor measurement is based on a ratiometric conversion principle. The ratio of two capacitor
discharge times is calculated as shown in Figure 32-7.
Figure 32-7. Timing for Temperature Measurement Systems
The VCC voltage and the capacitor value should remain constant during the conversion, but are not critical
since they cancel in the ratio:
850 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

Comp_B Registers
www.ti.com
32.3 Comp_B Registers
The Comp_B registers are listed in Table 32-1. The base address of the Comp_B module can be found in
the device-specific data sheet.
Table 32-1. Comp_B Registers
Offset Acronym Register Name Type Access Reset Section
00h CBCTL0 Comp_B control register 0 Read/write Word 0000h Section 32.3.1
02h CBCTL1 Comp_B control register 1 Read/write Word 0000h Section 32.3.2
04h CBCTL2 Comp_B control register 2 Read/write Word 0000h Section 32.3.3
06h CBCTL3 Comp_B control register 3 Read/write Word 0000h Section 32.3.4
0Ch CBINT Comp_B interrupt register Read/write Word 0000h Section 32.3.5
0Eh CBIV Comp_B interrupt vector word Read Word 0000h Section 32.3.6
852 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Comp_B Registers
32.3.1 CBCTL0 Register
Comp_B Control Register 0
Figure 32-8. CBCTL0 Register
15 14 13 12 11 10 9 8
CBIMEN Reserved CBIMSEL
rw-0 r-0 r-0 r-0 rw-0 rw-0 rw-0 rw-0
76543210
CBIPEN Reserved CBIPSEL
rw-0 r-0 r-0 r-0 rw-0 rw-0 rw-0 rw-0
Table 32-2. CBCTL0 Register Description
Bit Field Type Reset Description
15 CBIMEN RW 0h Channel input enable for the V– terminal of the comparator.
0b = Selected analog input channel for V– terminal is disabled.
1b = Selected analog input channel for V– terminal is enabled.
14-12 Reserved R 0h Reserved. Always reads as 0.
11-8 CBIMSEL RW 0h Channel input selected for the V– terminal of the comparator if CBIMEN is set to
1.
7 CBIPEN RW 0h Channel input enable for the V+ terminal of the comparator.
0b = Selected analog input channel for V+ terminal is disabled.
1b = Selected analog input channel for V+ terminal is enabled.
6-4 Reserved R 0h Reserved. Always reads as 0.
3-0 CBIPSEL RW 0h Channel input selected for the V+ terminal of the comparator if CBIPEN is set to
1.
853
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Comp_B Registers
www.ti.com
32.3.2 CBCTL1 Register
Comp_B Control Register 1
Figure 32-9. CBCTL1 Register
15 14 13 12 11 10 9 8
Reserved CBMRVS CBMRVL CBON CBPWRMD
r-0 r-0 r-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
CBFDLY CBEX CBSHORT CBIES CBF CBOUTPOL CBOUT
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-0
Table 32-3. CBCTL1 Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12 CBMRVS RW 0h This bit defines if the comparator output selects between VREF0 or VREF1 if
CBRS = 00, 01, or 10.
0b = Comparator output state selects between VREF0 or VREF1.
1b = CBMRVL selects between VREF0 or VREF1.
11 CBMRVL RW 0h This bit is valid of CBMRVS is set to 1.
0b = VREF0 is selected if CBRS = 00, 01, or 10.
1b = VREF1 is selected if CBRS = 00, 01, or 10.
10 CBON RW 0h On. This bit turns the comparator on. When the comparator is turned off the
Comp_B consumes no power.
0b = Off
1b = On
9-8 CBPWRMD RW 0h Power mode. Not all modes are supported in all products. See devices specific
data sheet for details.
00b = High-speed mode (optional)
01b = Normal mode (optional)
10b = Ultra-low-power mode (optional)
11b = Reserved
7-6 CBFDLY RW 0h Filter delay. The filter delay can be selected in 4 steps. See the device-specific
data sheet for details.
00b = Typical filter delay of 450 ns
01b = Typical filter delay of 900 ns
10b = Typical filter delay of 1800 ns
11b = Typical filter delay of 3600 ns
5 CBEX RW 0h Exchange. This bit permutes the comparator 0 inputs and inverts the comparator
0 output.
4 CBSHORT RW 0h Input short. This bit shorts the + and – input terminals.
0b = Inputs not shorted
1b = Inputs shorted
3 CBIES RW 0h Interrupt edge select for CBIIFG and CBIFG
0b = Rising edge for CBIFG, falling edge for CBIIFG
1b = Falling edge for CBIFG, rising edge for CBIIFG
2 CBF RW 0h Output filter
0b = Comp_B output is not filtered
1b = Comp_B output is filtered
1 CBOUTPOL RW 0h Output polarity. This bit defines the CBOUT polarity.
0b = Noninverted
1b = Inverted
0 CBOUT R 0h Output value. This bit reflects the value of the Comp_B output. Writing this bit
has no effect on the comparator output.
854 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Comp_B Registers
32.3.3 CBCTL2 Register
Comp_B Control Register 2
Figure 32-10. CBCTL2 Register
15 14 13 12 11 10 9 8
CBREFACC CBREFL CBREF1
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
CBRS CBRSEL CBREF0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 32-4. CBCTL2 Register Description
Bit Field Type Reset Description
15 CBREFACC RW 0h Reference accuracy. A reference voltage is requested only if CBREFL > 0.
0b = Static mode
1b = Clocked (low-power, low-accuracy) mode
14-13 CBREFL RW 0h Reference voltage level
00b = Reference voltage is disabled. No reference voltage is requested.
01b = 1.5 V
10b = 2.0 V
11b = 2.5 V
12-8 CBREF1 RW 0h Reference resistor tap 1. This register defines the tap of the resistor string while
CBOUT = 1.
7-6 CBRS RW 0h Reference source. This bit define if the reference voltage is derived from VCC or
from the precise shared reference.
00b = No current is drawn by the reference curcuitry.
01b = VCC applied to the resistor ladder
10b = Shared reference voltage applied to the resistor ladder.
11b = Shared reference voltage supplied to V(CREF). Resistor ladder is off.
5 CBRSEL RW 0h Reference select. This bit selects which terminal the V(CCREF) is applied to.
0b = When CBEX = 0: V(REF) is applied to the + terminal; When CBEX = 1:
V(REF) is applied to the – terminal
1b = When CBEX = 0: V(REF) is applied to the – terminal; When CBEX = 1:
V(REF) is applied to the + terminal
4-0 CBREF0 RW 0h Reference resistor tap 0. This register defines the tap of the resistor string while
CBOUT = 0.
855
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Comp_B Registers
www.ti.com
32.3.4 CBCTL3 Register
Comp_B Control Register 3
Figure 32-11. CBCTL3 Register
15 14 13 12 11 10 9 8
CBPD15 CBPD14 CBPD13 CBPD14 CBPD11 CBPD10 CBPD9 CBPD8
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
76543210
CBPD7 CBPD6 CBPD5 CBPD4 CBPD3 CBPD2 CBPD1 CBPD0
rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0) rw-(0)
Table 32-5. CBCTL3 Register Description
Bit Field Type Reset Description
15 CBPD15 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD15 disables the port of the comparator
channel 15.
0b = Input buffer enabled
1b = Input buffer disabled
14 CBPD14 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD14 disables the port of the comparator
channel 14.
0b = Input buffer enabled
1b = Input buffer disabled
13 CBPD13 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD13 disables the port of the comparator
channel 13.
0b = Input buffer enabled
1b = Input buffer disabled
12 CBPD12 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD12 disables the port of the comparator
channel 12.
0b = Input buffer enabled
1b = Input buffer disabled
11 CBPD11 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD11 disables the port of the comparator
channel 11.
0b = Input buffer enabled
1b = Input buffer disabled
10 CBPD10 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD10 disables the port of the comparator
channel 10.
0b = Input buffer enabled
1b = Input buffer disabled
9 CBPD9 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD9 disables the port of the comparator
channel 9.
0b = Input buffer enabled
1b = Input buffer disabled
8 CBPD8 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD8 disables the port of the comparator
channel 8.
0b = Input buffer enabled
1b = Input buffer disabled
856 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Comp_B Registers
Table 32-5. CBCTL3 Register Description (continued)
Bit Field Type Reset Description
7 CBPD7 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD7 disables the port of the comparator
channel 7.
0b = Input buffer enabled
1b = Input buffer disabled
6 CBPD6 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD6 disables the port of the comparator
channel 6.
0b = Input buffer enabled
1b = Input buffer disabled
5 CBPD5 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD5 disables the port of the comparator
channel 5.
0b = Input buffer enabled
1b = Input buffer disabled
4 CBPD4 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD4 disables the port of the comparator
channel 4.
0b = Input buffer enabled
1b = Input buffer disabled
3 CBPD3 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD3 disables the port of the comparator
channel 3.
0b = Input buffer enabled
1b = Input buffer disabled
2 CBPD2 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD2 disables the port of the comparator
channel 2.
0b = Input buffer enabled
1b = Input buffer disabled
1 CBPD1 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD1 disables the port of the comparator
channel 1.
0b = Input buffer enabled
1b = Input buffer disabled
0 CBPD0 RW 0h Port disable. This bit individually disables the input buffer for the pins of the port
associated with Comp_B. The bit CBPD0 disables the port of the comparator
channel 0.
0b = Input buffer enabled
1b = Input buffer disabled
857
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Comp_B Registers
www.ti.com
32.3.5 CBINT Register
Comp_B Interrupt Control Register
Figure 32-12. CBINT Register
15 14 13 12 11 10 9 8
Reserved CBIIE CBIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
76543210
Reserved CBIIFG CBIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 32-6. CBINT Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9 CBIIE RW 0h Comp_B output interrupt enable inverted polarity
0b = Interrupt is disabled
1b = Interrupt is enabled
8 CBIE RW 0h Comp_B output interrupt enable
0b = Interrupt is disabled
1b = Interrupt is enabled
7-2 Reserved R 0h Reserved. Always reads as 0.
1 CBIIFG RW 0h Comp_B output inverted interrupt flag. The bit CBIES defines the transition of the
output setting this bit.
0b = No interrupt pending
1b = Output interrupt pending
0 CBIFG RW 0h Comp_B output interrupt flag. The bit CBIES defines the transition of the output
setting this bit.
0b = No interrupt pending
1b = Output interrupt pending
858 Comp_B SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Comp_B Registers
32.3.6 CBIV Register
Comp_B Interrupt Vector Word Register
Figure 32-13. CBIV Register
15 14 13 12 11 10 9 8
CBIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
CBIV
r0 r0 r0 r0 r0 r-0 r-0 r0
Table 32-7. CBIV Register Description
Bit Field Type Reset Description
15-0 CBIV R 0h Comp_B interrupt vector word register. The interrupt vector register reflects only
interrupt flags whose interrupt enable bit are set. Reading the CBIV register
clears the pending interrupt flag with the highest priority.
00h = No interrupt pending
02h = Interrupt Source: CBOUT interrupt; Interrupt Flag: CBIFG; Interrupt
Priority: Highest
04h = Interrupt Source: CBOUT interrupt inverted polarity; Interrupt Flag:
CBIIFG; Interrupt Priority: Lowest
859
SLAU208O–June 2008–Revised May 2015 Comp_B
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 33
SLAU208O–June 2008–Revised May 2015
Operational Amplifier (OA)
The operational amplifier (OA) module is a general-purpose operational amplifier. This chapter describes
the OA.
Topic ........................................................................................................................... Page
33.1 OA Introduction................................................................................................ 861
33.2 OA Operation ................................................................................................... 863
33.3 Ground Switches.............................................................................................. 864
33.4 OA and Power Modes........................................................................................ 864
33.5 OA Registers.................................................................................................... 865
860 Operational Amplifier (OA) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
OA Introduction
33.1 OA Introduction
The OA operational amplifiers can be used to support front-end analog signal conditioning before analog-
to-digital conversion as well as other general-purpose applications.
Features of the OA include:
• Single-supply low-current operation
• Software selectable rail-to-rail input
• Rail-to-rail output
• Input switches on positive and negative inputs individually software selectable
• Internal voltage follower setting
• Low-impedance ground switches individually software selectable (not available on all devices)
NOTE: Multiple OA Modules
Some devices may integrate more than one OA module. If more than one OA is present on a
device, the multiple OA modules operate identically.
Throughout this chapter, nomenclature appears such as OAnCTL0 to describe register
names. When this occurs, the nindicates which OA module is being discussed. In cases
where operation is identical, the register is simply referred to as OAnCTL0.
NOTE: Switches and Configurations
The connections of the amplifier to device pins or internal connections are device specific.
Refer to the device-specific data sheet for specific interconnections and device pin
connections. The information in this chapter applies to all operational amplifiers in the family.
Figure 33-1 shows the block diagram of the OA module.
861
SLAU208O–June 2008–Revised May 2015 Operational Amplifier (OA)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
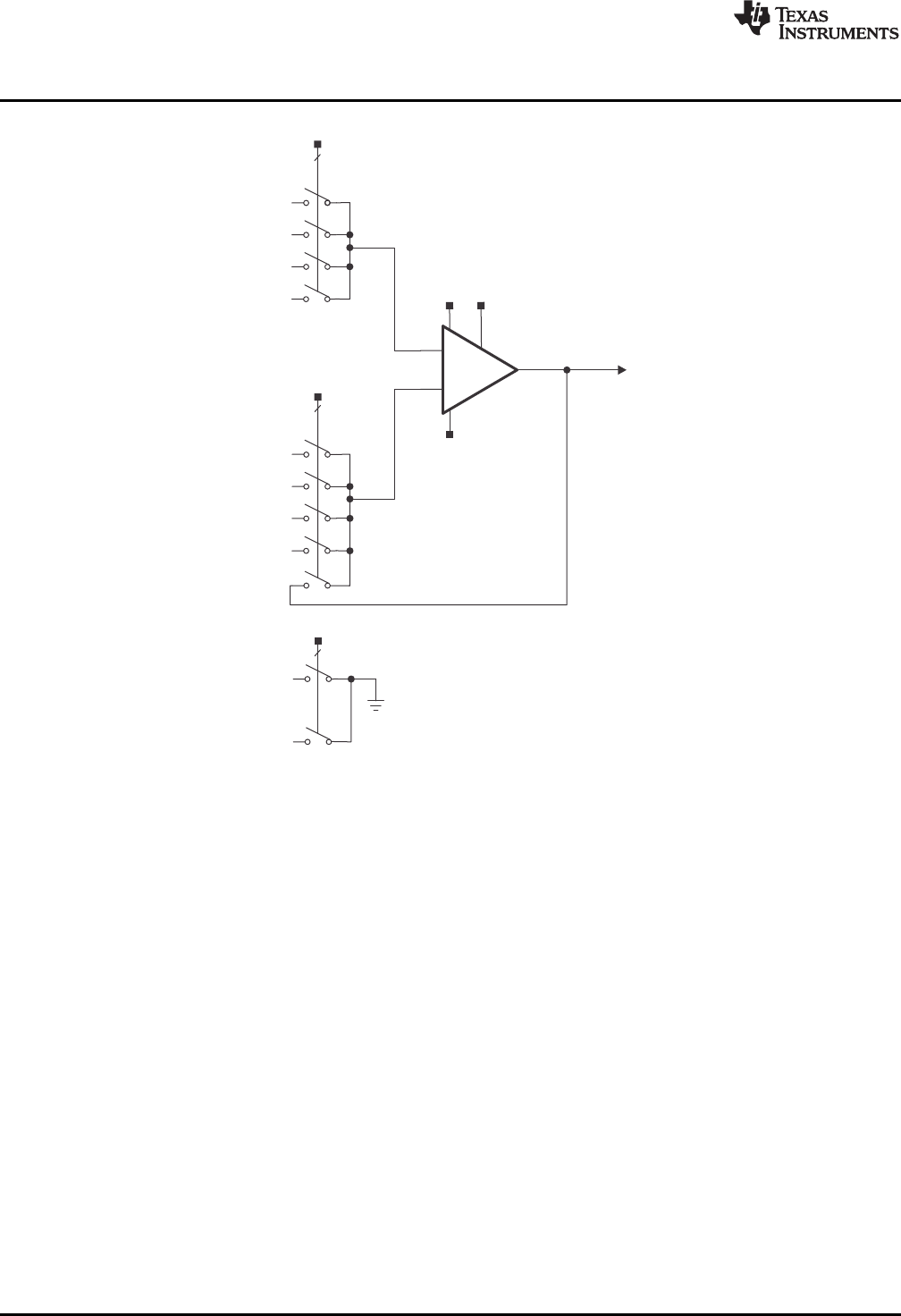
OAnIP0
PSW
4
OAnIP3
OAnIN0
OAnIN1
OAnIN3
+
–
OAM
OAnO
NSW
5
OAnIP2
OAnIP1
OAnIN2
PSW0
PSW1
PSW2
PSW3
NSW0
NSW1
NSW2
NSW3
NSW4
GSW0
GSW1
GnSW0
GnSW1
AVSS
GSW
OARRI
OARRIRDY
2
OA Introduction
www.ti.com
Figure 33-1. OA Block Diagram
862 Operational Amplifier (OA) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
OA Operation
33.2 OA Operation
The OA module is configured with user software. The setup and operation of the OA is discussed in the
following sections.
33.2.1 OA Modes
The OA can be enabled and disabled using OAM as listed in Table 33-1. To speed up the enable time of
the OA, The REF module REFON bit in the REFCTL register can be set before enabling OA to allow the
AFE bias, required by the OA, to turn on.
Table 33-1. OA Mode Select
OAM OA Function
0 Disabled. Output high impedance. All input switches opened, regardless of PSW or NSW settings.
Enabled. If OA output is shared with a digital I/O port, the digital I/O port is automatically disabled regardless of the
1PxSEL settings of the respective port.
33.2.2 Rail-to-Rail Input Modes
Each operational amplifier supports rail-to-rail input swings. Setting OARRI = 1 enables the rail-to-rail input
mode but requires additional current. Thus, to save current, rail-to-rail input mode (OARRI) should be
selected only if the dynamic range required for the application requires it. Refer to the common-mode
voltage range VCM specified in the device-specific data sheet for OARRI = 0 and 1. Rail-to-rail operation is
made possible by an integrated charge pump that increases the internal supply of the respective
amplifier's input stage to allow linear operation over the complete common mode range. The charge pump
is shared with all operational amplifier instantiations. Setting any OARRI = 1 of any respective OA will
enable the charge pump independently of the OAM setting. The charge pump can also be enabled from
the CTSD16 module if in rail-to-rail input mode, CTSD16RRI = 1. When OARRI = 1 is set, the charge
pump, if not already enabled, is enabled. OARRIRDY = 1 indicates the charge pump is ready and stable,
and the rail-to-rail input mode is ready for usage. Setting OARRI = 0 causes OARRIDY = 0 for the
corresponding OA. The charge pump does incur additional power to operate. The charge pump requires a
single external capacitor from the CPCAP terminal to ground for proper operation. See the device-specific
data sheet for proper value and tolerances. Setting OARRI = 0 provides for a reduced input swing range
on the respective amplifier. Setting OARRI = 0 of all OA instances and setting CTSD16RRI=0 is required
to disable the charge pump. See the device-specific data sheet for input ranges supported for all OARRI
settings.
NOTE: On devices that contain the CTSD16, the charge pump is also used for PGA buffers when
rail-to-rail input mode is selected, CTSD16RRI = 1. Therefore, the charge pump may remain
enabled although OARRI = 0 for all OA instances.
NOTE: On devices that contain the CTSD16, the charge pump uses a clock that is provided by the
CTSD16CLK. If any OA is enabled and set to rail-to-rail input mode, the CTSD16CLK will
automatically be enabled regardless if the CTSD16 is enabled or not. In addition, the
CTSD16CLK has fault detection logic that may cause an NMI to occur. Any existing fault
should be corrected for proper OA operation.
33.2.3 OA Inputs
The OA has a configurable input selection. The signals for the + and – inputs are individually selected with
the OAxPSW and OAxNSW bits, respectively. Each switch is independently selectable. The connection of
inputs can either be internal or external connections and are device specific. Refer to the device-specific
data sheet for all operational amplifier connections. When OAM = 0, the OA is disabled and all input
switches are opened regardless of the OAxPSW and OAxNSW settings.
Negative input terminal switch 4 control, NSW4, allows for an internally connected voltage follower
configuration. Refer to device-specific data sheet for other internal connection options.
863
SLAU208O–June 2008–Revised May 2015 Operational Amplifier (OA)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Ground Switches
www.ti.com
33.3 Ground Switches
Ground switches are an optional feature of the operational amplifier module. Refer to device-specific data
sheet for availability and connections. Each ground switch can be enabled individually by software using
the GSW bits. Setting GSW = 1 closes the switch and provides a low-ohmic connection to the analog
ground to the GxSWx external pin and internal connections (see device-specific data sheet for internal
connections available). If a ground switch output is shared with a digital I/O port, the digital I/O port is
automatically disabled when GSW = 1, regardless of the PxSEL settings of the respective port.
33.4 OA and Power Modes
The OA can be used in all power modes except LPMx.5 modes. Note that although the respective LPM
mode can be entered, there is additional power dissipation due to the OA being active. Therefore, entering
some of the lower-power modes, such as LPM2 through LPM4, while the module is enabled has reduced
low-power benefits.
864 Operational Amplifier (OA) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
OA Registers
33.5 OA Registers
Table 33-2 lists the OA module registers. The base address can be found in the device-specific data
sheet. The address offset is listed in Table 33-2.
NOTE: All registers have word or byte register access. For a generic register ANYREG, the suffix
"_L" (ANYREG_L) refers to the lower byte of the register (bits 0 through 7). The suffix "_H"
(ANYREG_H) refers to the upper byte of the register (bits 8 through 15).
Table 33-2. OA Registers
Offset Acronym Register Name Type Access Reset Section
00h OAnCTL0 OAn Control 0 Read/write Word 0000h Section 33.5.1
00h OAnCTL0_L Read/write Byte 00h
01h OAnCTL0_H Read/write Byte 00h
02h OAnPSW OAn Positive Input Terminal Switches Read/write Word 0000h Section 33.5.2
02h OAnPSW_L Read/write Byte 00h
03h OAnPSW_H Read/write Byte 00h
04h OAnNSW OAn Negative Input Terminal Switches Read/write Word 0000h Section 33.5.3
04h OAnNSW_L Read/write Byte 00h
05h OAnNSW_H Read/write Byte 00h
0Eh OAnGSW OAn Ground Switches Read/write Word 0000h Section 33.5.4
0Eh OAnGSW_L Read/write Byte 00h
0Fh OAnGSW_H Read/write Byte 00h
865
SLAU208O–June 2008–Revised May 2015 Operational Amplifier (OA)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
OA Registers
www.ti.com
33.5.1 OAnCTL0 Register
Operational Amplifier n Control 0
Figure 33-2. OAnCTL0 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved OARRIRDY OARRI Reserved Reserved OAM
r0 r-0 rw-0 r0 r0 r0 r0 rw-0
Table 33-3. OAnCTL0 Register Description
Bit Field Type Reset Description
15-7 Reserved R 0h Reserved. Always reads as 0.
6 OARRIRDY R 0h Rail-to-rail input ready status.
0b = Rail-to-rail input not ready
1b = Rail-to-rail input ready
5 OARRI RW 0h Rail-to-rail input enable.
0b = Rail-to-rail input disabled
1b = Rail-to-rail input enabled
4 Reserved R 0h Reserved. Always read as 0.
3-1 Reserved R 0h Reserved. Always read as 0. These bits are reserved for future amplifier mode
(OAM) settings.
0 OAM RW 0h Amplifier mode selection.
0b = Disabled. Output high impedance. All input switches opened, regardless of
PSW and NSW settings.
1b = Enabled. If OA output is shared with a digital I/O port, the digital I/O port is
automatically disabled regardless of the PxSEL settings of the respective port.
866 Operational Amplifier (OA) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
OA Registers
33.5.2 OAnPSW Register
Operational Amplifier n Positive Terminal Switches
Figure 33-3. OAnPSW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved PSW3 PSW2 PSW1 PSW0
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Table 33-4. OAnPSW Register Description
Bit Field Type Reset Description
15-4 Reserved R 0h Reserved. Always reads as 0.
3 PSW3 RW 0h Positive input terminal switch 3 control.
0b = Switch open
1b = Switch closed
2 PSW2 RW 0h Positive input terminal switch 2 control.
0b = Switch open
1b = Switch closed
1 PSW1 RW 0h Positive input terminal switch 1 control.
0b = Switch open
1b = Switch closed
0 PSW0 RW 0h Positive input terminal switch 0 control.
0b = Switch open
1b = Switch closed
867
SLAU208O–June 2008–Revised May 2015 Operational Amplifier (OA)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
OA Registers
www.ti.com
33.5.3 OAnNSW Register
Operational Amplifier n Negative Terminal Switches
Figure 33-4. OAnNSW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved NSW4 NSW3 NSW2 NSW1 NSW0
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 33-5. OAnNSW Register Description
Bit Field Type Reset Description
15-5 Reserved R 0h Reserved. Always reads as 0.
4 NSW4 RW 0h Negative input terminal switch 4 control. Voltage follower configuration.
0b = Switch open
1b = Switch closed. Amplifier output internally connected to negative input
terminal.
3 NSW3 RW 0h Negative input terminal switch 3 control.
0b = Switch open
1b = Switch closed
2 NSW2 RW 0h Negative input terminal switch 2 control.
0b = Switch open
1b = Switch closed
1 NSW1 RW 0h Negative input terminal switch 1 control.
0b = Switch open
1b = Switch closed
0 NSW0 RW 0h Negative input terminal switch 0 control.
0b = Switch open
1b = Switch closed
868 Operational Amplifier (OA) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
OA Registers
33.5.4 OAnGSW Register
Operational Amplifier n Ground Switches
Figure 33-5. OAnGSW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved GSW1 GSW0
r0 r0 r0 r0 r0 r0 rw-0 rw-0
Table 33-6. OAnGSW Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved. Always reads as 0.
1 GSW1 RW 0h Ground switch.
0b = Switch open
1b = Switch closed and external GxSW1 pin and internal connections (see
device-specific data sheet for internal connections available) are connected to
analog ground. If ground switch output is shared with a digital I/O port, the digital
I/O port is automatically disabled regardless of the PxSEL settings of the
respective port.
0 GSW0 RW 0h Ground switch.
0b = Switch open
1b = Switch closed and external GxSW0 pin and internal connections (see
device-specific data sheet for internal connections available) are connected to
analog ground. If ground switch output is shared with a digital I/O port, the digital
I/O port is automatically disabled regardless of the PxSEL settings of the
respective port.
869
SLAU208O–June 2008–Revised May 2015 Operational Amplifier (OA)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 34
SLAU208O–June 2008–Revised May 2015
LCD_B Controller
The LCD_B controller drives static, 2-mux, 3-mux, or 4-mux LCDs. This chapter describes the LCD_B
controller.
Topic ........................................................................................................................... Page
34.1 LCD_B Controller Introduction........................................................................... 871
34.2 LCD_B Controller Operation .............................................................................. 873
34.3 LCD_B Registers .............................................................................................. 891
870 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_B Controller Introduction
34.1 LCD_B Controller Introduction
The LCD_B controller directly drives LCD displays by creating the ac segment and common voltage
signals automatically. The LCD_B controller can support static, 2-mux, 3-mux, and 4-mux LCD glasses.
The LCD_B controller features are:
• Display memory
• Automatic signal generation
• Configurable frame frequency
• Blinking of individual segments with separate blinking memory
• Regulated charge pump
• Contrast control by software
• Support for four types of LCDs
– Static
– 2-mux, 1/2 bias or 1/3 bias
– 3-mux, 1/2 bias or 1/3 bias
– 4-mux, 1/2 bias or 1/3 bias
The LCD_B controller block diagram for a configuration with a maximum of 160 segments is shown in
Figure 34-1.
NOTE: Maximum LCD Segment Control
The maximum number of segment lines and memory registers available differs with device.
See the device-specific data sheet for available segment pins and the maximum number of
segments supported.
871
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
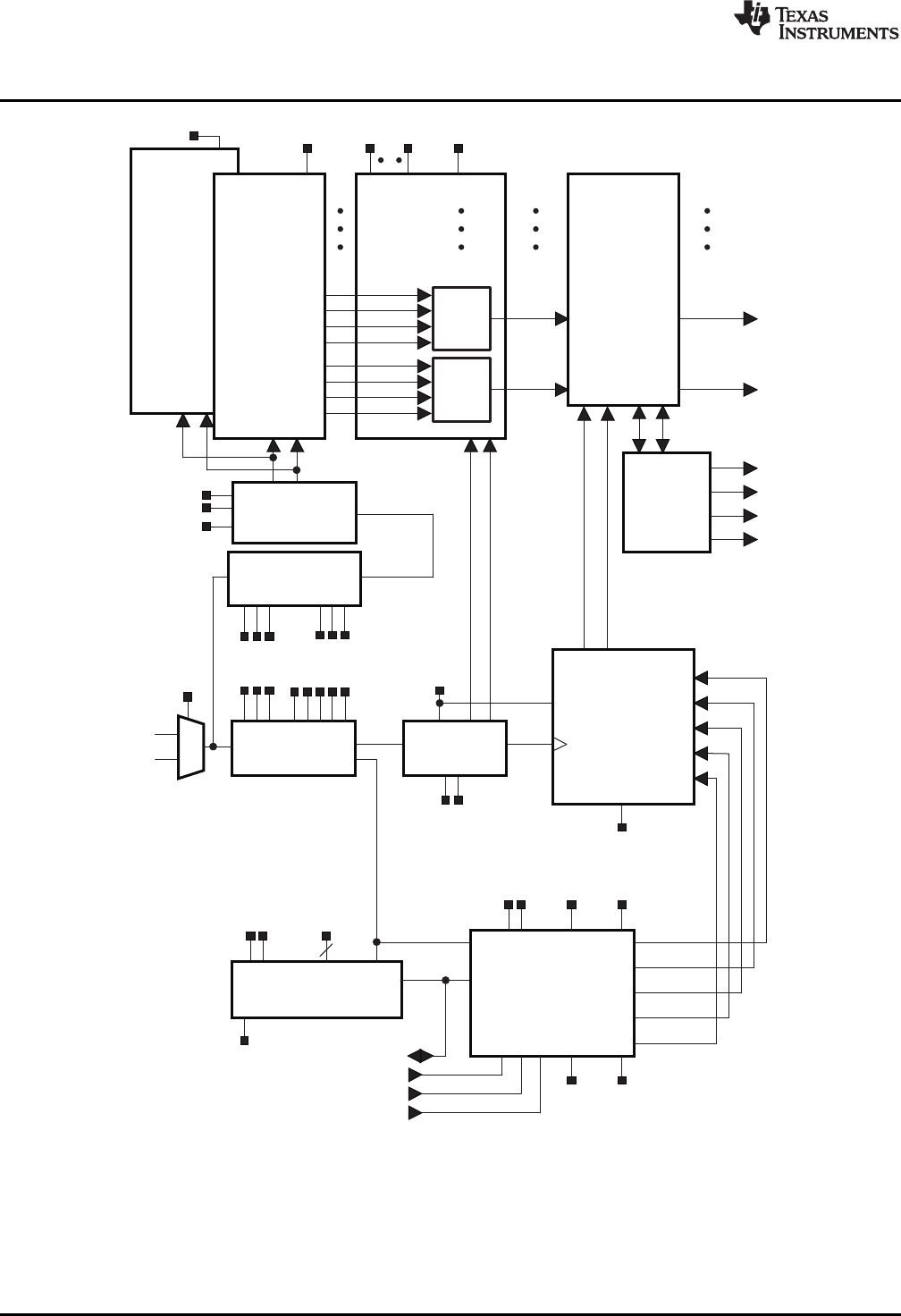
VLCDREFx
Segment
Output
Control
COM0
COM2
COM1
COM3
S0
S1
Common
Output
Control
SEG0
SEG1
Mux
Mux
LCDMXx
LCDON
fLCD
OSCOFF
(from SR)
LCDPREx
Regulated Charge
Pump/
Contrast Control
VLCDx
VLCD
LCDCAP/R33
LCD Bias Generator
V1
VLCD
LCD2B
LCDMXx
V2
V3
V4
LCDCPEN
V5
LCD Frequency
Divider
4
LCD
REXT
R23
LCDREF/R13
R03
R03EXT
Blinking
Memory
Registers
LCDBMx
LCD
Memory
Registers
LCDMx
0
1
ACLK
VLOCLK
Analog
Voltage
Multiplexer
V1
V2
V3
V4
VDVCVBVA
V5
LCDDIVx
LCDBLKPREx LCDBLKDIVx
LCDSx LCDSON
LCDBLKMODx Blinking and
Display Control
Blinking
Frequency Divider
BLKCLK
Timing
Generator
LCDDISP
LCDCLRBM LCDCLRM
LCDSSEL
LCD
EXTBIAS
LCD_B Controller Introduction
www.ti.com
Figure 34-1. LCD_B Controller Block Diagram
872 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
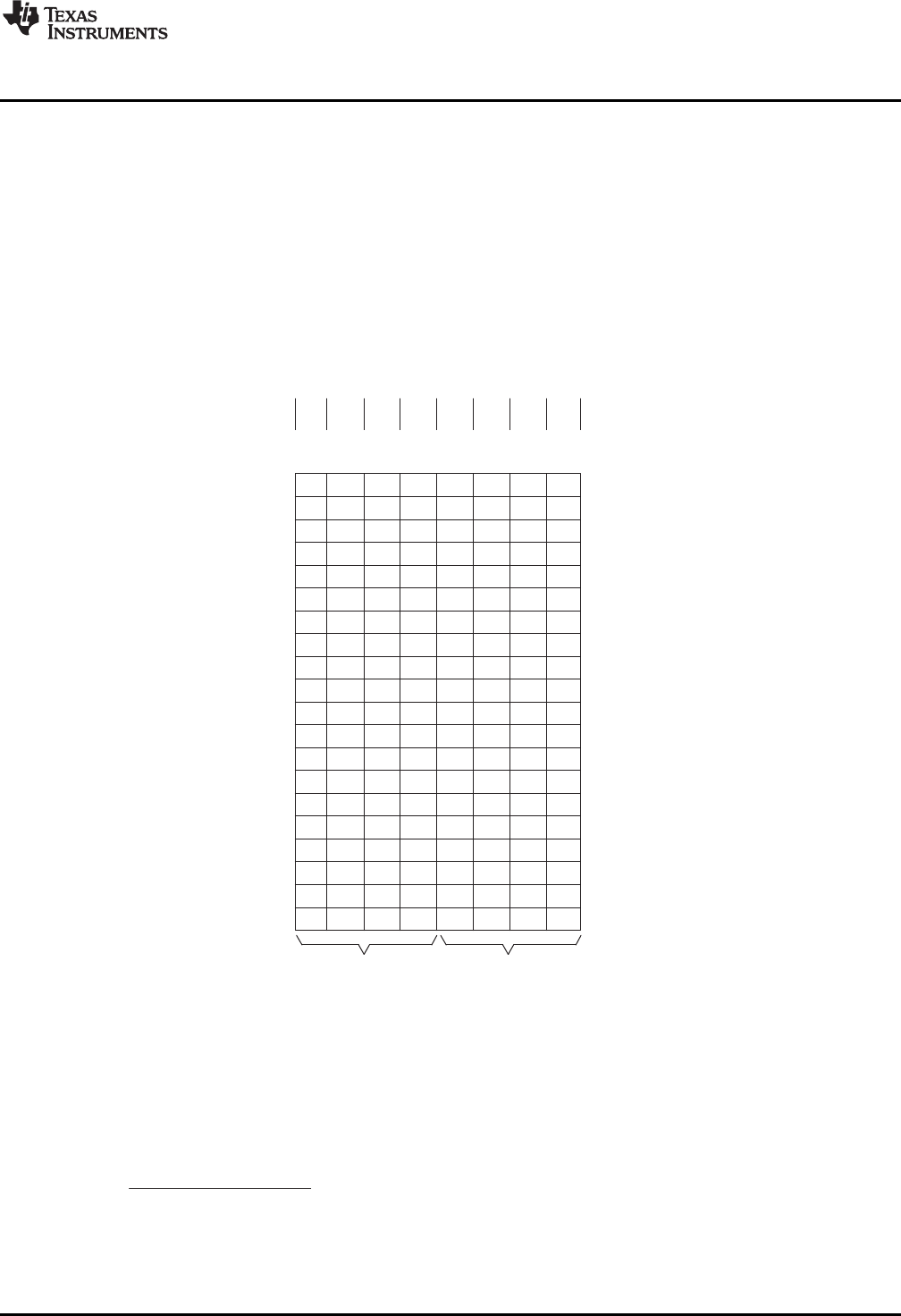
f =
LCD
fACLK/VLOCLK
(LCDDIVx + 1) × 2LCDPRE
32 1 0 3 2 1 0
Associated
Common Pins
Register 70
Associated
Segment Pins
Sn+1 Sn
------ ------
LCDM15 29, 28
-- -- 28
------ ------
LCDM14 27, 26
-- -- 26
------ ------
LCDM13 25, 24
-- -- 24
------ ------
LCDM12 23, 22
-- -- 22
------ ------
LCDM11 21, 20
-- -- 20
------ ------
LCDM10 19, 18
-- -- 18
------ ------
LCDM9 17, 16
-- -- 16
------ ------
LCDM8 15, 14
-- -- 14
------ -------- --
LCDM7 13, 12
12
n
3, 2
2
------ -------- --
LCDM2
5, 4
4
------ -------- --
LCDM3
7, 6
6
------ -------- --
LCDM4
9, 8
8
------ -------- --
LCDM5
------ ------ 1, 10
-- -- 10
LCDM6
------ ------
LCDM16 -- -- 31, 30
30
------ ------
LCDM17 -- -- 33, 32
32
------ ------
LCDM18 -- -- 35, 34
34
------ ------
LCDM19 -- -- 37, 36
36
------ ------
LCDM20 -- -- 39, 38
38
1, 0
0
------ -------- --
LCDM1
www.ti.com
LCD_B Controller Operation
34.2 LCD_B Controller Operation
The LCD_B controller is configured with user software. The setup and operation of the LCD_B controller is
discussed in the following sections.
34.2.1 LCD Memory
The LCD memory map for a device with a 160-segment maximum is shown in Figure 34-2. Each memory
bit corresponds to one LCD segment or is not used, depending on the mode. To turn on an LCD segment,
its corresponding memory bit is set.
The memory can also be accessed word-wise using the even addresses starting at LCDM1, LCDM3, etc.
Setting the bit LCDCLRM clears all LCD memory registers at the next frame boundary. It is reset
automatically after the registers are cleared.
Figure 34-2. LCD Memory - Example for 160 Segments Maximum
34.2.2 LCD Timing Generation
The LCD_B controller uses the fLCD signal from the integrated clock divider to generate the timing for
common and segment lines. With the LCDSSEL bit ACLK with a frequency between 30 kHz and 40 kHz
or VLOCLK can be selected as clock source into the divider. The fLCD frequency is selected with the
LCDPREx and LCDDIVx bits. The resulting fLCD frequency is calculated by:
The proper fLCD frequency depends on the LCD's requirement for framing frequency and the LCD multiplex
rate and is calculated by:
fLCD = 2 × mux × fFrame
873
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

f =
Blink
fACLK/VLO
(LCDBLKDIVx + 1) × 29+LCDBLKPREx
LCD_B Controller Operation
www.ti.com
For example, to calculate fLCD for a 3-mux LCD, with a frame frequency of 30 Hz to 100 Hz:
fFrame (from LCD data sheet) = 30 Hz to 100 Hz
fLCD = 2 × 3 × fFrame
fLCD(min) = 180 Hz
fLCD(max) = 600 Hz
With fACLK/VLOCLK = 32768 Hz, LCDPREx = 011, and LCDDIVx = 10101:
fLCD = 32768 Hz / ((21+1) × 23) = 32768 Hz / 176 = 186 Hz
With LCDPREx = 001 and LCDDIVx = 11011:
fLCD = 32768 Hz / ((27+1) × 21) = 32768 Hz / 56 = 585 Hz
The lowest frequency has the lowest current consumption. The highest frequency has the least flicker.
34.2.3 Blanking the LCD
The LCD controller allows to blank the complete LCD. The LCDSON bit is ANDed with each segment's
memory bit. When LCDSON = 1, each segment is on or off according to its bit value. When LCDSON = 0,
each LCD segment is off.
34.2.4 LCD Blinking
The LCD_B controller also supports blinking. The blinking mode LCDBLKMODx = 01 allows to blink
individual segments, with LCDBLKMODx = 10 all segments are blinking, and with LCDBLKMODx = 00
blinking is disabled.
34.2.4.1 Blinking Memory
To enable individual segments for blinking the corresponding bit in the blinking memory LCDBMx registers
needs to be set. The memory uses the same structure as the LCD memory shown in Figure 34-2. Each
memory bit corresponds to one LCD segment, or is not used, depending on the multiplexing mode
LCDMXx. To enable blinking for a LCD segment, its corresponding memory bit is set.
The blinking memory can also be accessed word-wise using the even addresses starting at LCDBM1,
LCDBM3, etc.
Setting the bit LCDCLRBM clears all blinking memory registers at the next frame boundary. It is
automatically reset after the registers are cleared.
34.2.4.2 Blinking Frequency
The blinking frequency fBLINK is selected with the LCDBLKPREx and LCDBLKDIVx bits. The same clock is
used as selected for the LCD frequency fLCD. The resulting fBLINK frequency is calculated by:
The divider generating the blinking frequency fBLINK is reset while LCDBLKMODx = 00. After a blinking
mode LCDBLKMODx = 01 or 10 is selected, the enabled segments or all segments go blank at the next
frame boundary and stay off for half a BLKCLK period. Then they go active at the next frame boundary
and stay on for another half BLKCLK period before they go blank again at a frame boundary.
NOTE: Blinking Frequency Restrictions
The blinking frequency must be smaller than the frame frequency, fFrame.
The blinking frequency should be changed only when LCDBLKMODx = 00.
34.2.4.3 Dual Display Memory
The blinking memory can also be used as a secondary display memory when no blinking mode
LCDBLKMODx = 01 or 10 is selected. The memory to be displayed can be selected either manually using
the LCDDISP bit or automatically with LCDBLKMODx = 11.
874 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_B Controller Operation
With LCDDISP = 0 the LCD memory is selected, with LCDDISP = 1 the blinking memory is selected as
display memory. Switching between the memories is synchronized to the frame boundaries.
With LCDBLKMODx = 11 the LCD controller switches automatically between the memories using the
divider to generate the blinking frequency. After LCDBLKMODx = 11 is selected the memory to be
displayed for the first half a BLKCLK period is the LCD memory. In the second half the blinking memory is
used as display memory. Switching between the memories is synchronized to the frame boundaries.
34.2.5 LCD_B Voltage And Bias Generation
The LCD_B module allows selectable sources for the peak output waveform voltage, V1, as well as the
fractional LCD biasing voltages V2 to V5. VLCD may be sourced from VCC, an internal charge pump, or
externally.
All internal voltage generation is disabled if the selected clock source (ACLK or VLOCLK) is turned off
(OSCOFF = 1) or the LCD_B module is disabled (LCDON = 0).
34.2.5.1 LCD Voltage Selection
VLCD is sourced from VCC when VLCDEXT = 0, VLCDx = 0, and VREFx = 0. VLCD is sourced from the
internal charge pump when VLCDEXT = 0, VLCDCPEN = 1, and VLCDx > 0. The charge pump is always
sourced from DVCC. The VLCDx bits provide a software selectable LCD voltage from 2.6 V to 3.44 V
(typical) independent of DVCC. See the device-specific data sheet for specifications.
When the internal charge pump is used, a 4.7-µF or larger capacitor must be connected between pin
LCDCAP and ground. If no capacitor is connected and the charge pump is enabled, the LCDNOCAPIFG
interrupt flag is set, and the charge pump is disabled to prevent damage to the device. The charge pump
may be temporarily disabled by setting LCDCPEN = 0 with VLCDx > 0 to reduce system noise, or it can
be automatically disabled during certain periods by setting the corresponding bits in the LCDBCPCTL
register. In this case, the voltage present at the external capacitor is used for the LCD voltages until the
charge pump is re-enabled.
NOTE: Capacitor Required For Internal Charge Pump
A 4.7-µF or larger capacitor must be connected from pin LCDCAP to ground when the
internal charge pump is enabled. If no capacitor is connected, the LCDNOCAPIFG interrupt
flag is set and the charge pump is disabled.
The internal charge pump may use an external reference voltage when VLCDREFx = 01 (and LCDREXT
= 0 and LCDEXTBIAS = 0). In this case, the charge pump voltage is set to a multiply of the external
reference voltage according to the VLCDx bits setting.
When VLCDEXT = 1, VLCD is sourced externally from the LCDCAP, pin and the internal charge pump is
disabled.
34.2.5.2 LCD Bias Generation
The fractional LCD biasing voltages, V2 to V5 can be generated internally or externally, independent of
the source for VLCD. The LCD bias generation block diagram is shown in Figure 34-3.
The internally generated bias voltages V2 to V4 are switched to external pins with LCDREXT = 1.
To source the bias voltages V2 to V4 externally, LCDEXTBIAS is set. This also disables the internal bias
generation. Typically, an equally weighted resistor divider is used with resistors ranging from a few kΩto 1
MΩ, depending on the size of the display. When using an external resistor divider, the VLCD voltage may
be sourced from the internal charge pump when VLCDEXT = 0 taking the maximum charge pump load
current into account. V5 can also be sourced externally when R03EXT is set to control the contrast of the
connected display by changing the voltage at the low end of the external resistor divider as shown in the
left part of Figure 34-3.
When using an external resistor divider R33 may serve as a switched VLCD output when VLCDEXT = 0.
This allows the power to the resistor ladder to be turned off, eliminating current consumption when the
LCD is not used. When VLCDEXT = 1, R33 serves as a VLCD input.
875
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
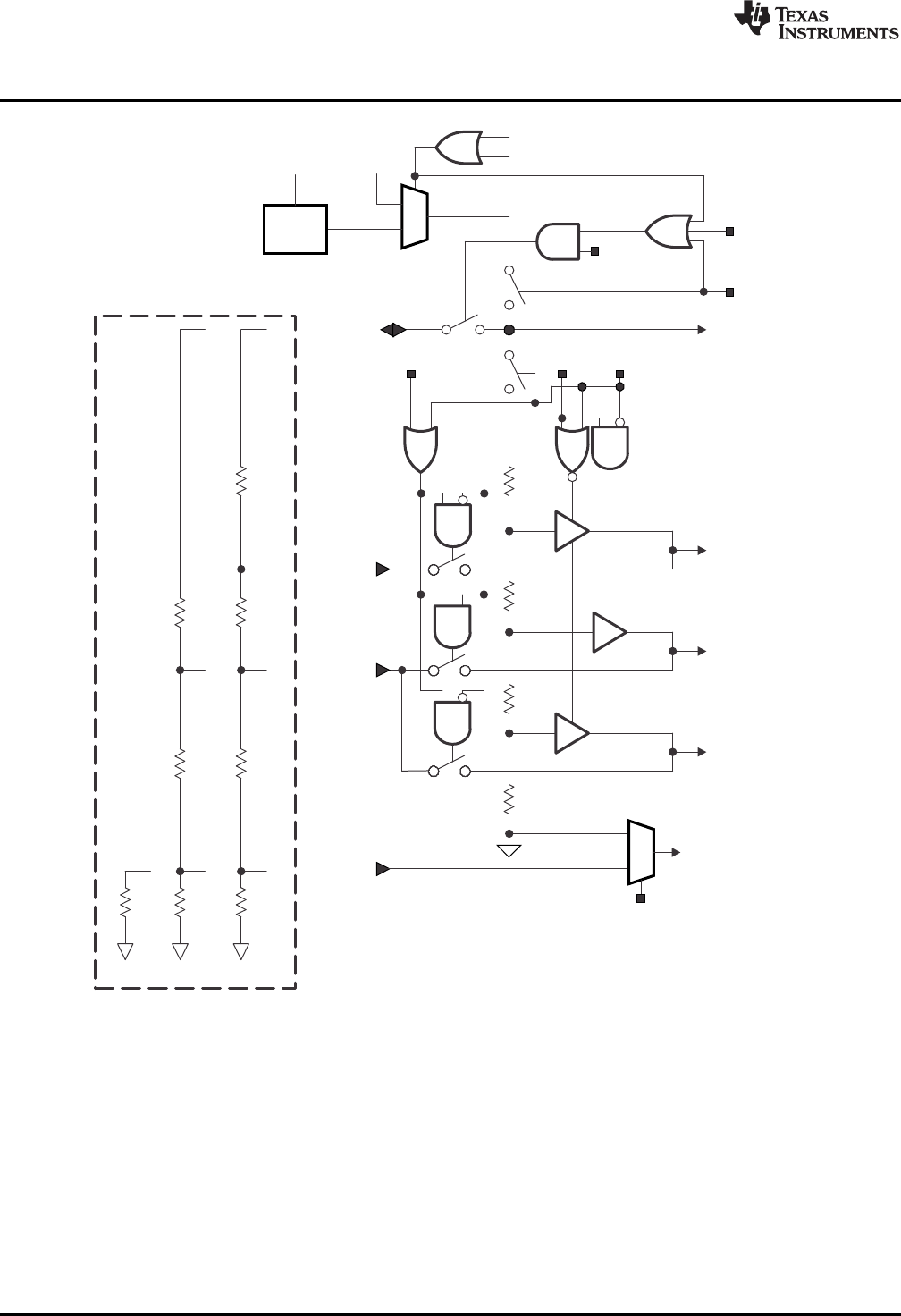
0
1
0
1
Internal VLCD
LCDREF/R13
R23
R03
LCDCAP/R33
1
0
V1 (V )
LCD
V2 (2/3 V )
LCD
V5
V4 int
V3 int
V2 int
VLCD
AVCC
0
VLCDx > 0
VLCDREFx > 0
R03EXT
Charge
Pump
DVCC
R
R
R
R
R
Rx Rx
Static 1/2 Bias 1/3 Bias
Optional external resistors
Rx = Optional contrast control
LCD2B
LCD
EXTBIAS
1
1
1
LCDREXT
V3 (1/2 V )
LCD
V4 (1/3 V )
LCD
Rx
VLCDEXT
LCDREXT
LCDON
LCD_B Controller Operation
www.ti.com
Figure 34-3. Bias Generation
The internal bias generator supports 1/2 bias LCDs when LCD2B = 1, and 1/3 bias LCDs when LCD2B =
0 in 2-mux, 3-mux, and 4-mux modes. In static mode, the internal divider is disabled.
Some devices share the LCDCAP, R33, and R23 functions. In this case, the charge pump cannot be used
together with an external resistor divider with 1/3 biasing. When R03 is not available externally, V5 is
always VSS.
34.2.5.3 LCD Contrast Control
The peak voltage of the output waveforms together with the selected mode and biasing determine the
contrast and the contrast ratio of the LCD. The LCD contrast can be controlled in software by adjusting the
LCD voltage generated by the integrated charge pump using the VLCDx settings.
876 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Controller Operation
The contrast ratio depends on the used LCD display and the selected biasing scheme. Table 34-1 shows
the biasing configurations that apply to the different modes together with the RMS voltages for the
segments turned on (VRMS,ON) and turned off (VRMS,OFF) as functions of VLCD. It also shows the resulting
contrast ratios between the on and off states.
Table 34-1. LCD Voltage and Biasing Characteristics
Contrast
Bias COM
Mode LCDMx LCD2B Voltage Levels VRMS,OFF/ VLCD VRMS,ON/ VLCD Ratio VRMS,ON/
Config Lines VRMS,OFF
Static Static 0 X 1 V1, V5 0 1 1/0
2-mux 1/2 1 1 2 V1, V3, V5 0.354 0.791 2.236
2-mux 1/3 1 0 2 V1, V2, V4, V5 0.333 0.745 2.236
3-mux 1/2 10 1 3 V1, V3, V5 0.408 0.707 1.732
3-mux 1/3 10 0 3 V1, V2, V4, V5 0.333 0.638 1.915
4-mux 1/2 11 1 4 V1, V3, V5 0.433 0.661 1.528
4-mux 1/3 11 0 4 V1, V2, V4, V5 0.333 0.577 1.732
A typical approach to determine the required VLCD is by equating VRMS,OFF with a defined LCD threshold
voltage, typically when the LCD exhibits approximately 10% contrast (Vth,10%): VRMS,OFF = Vth,10%. Using the
values for VRMS,OFF/VLCD provided in the table results in VLCD = Vth,10%/(VRMS,OFF/VLCD). In the static mode, a
suitable choice is VLCD greater or equal than 3 times Vth,10%.
In 3-mux and 4-mux mode typically a 1/3 biasing is used but a 1/2 biasing scheme is also possible. The
1/2 bias reduces the contrast ratio but the advantage is a reduction of the required full-scale LCD voltage
VLCD.
34.2.6 LCD Outputs
Some LCD segment, common, and Rxx functions are multiplexed with digital I/O functions. These pins
can function either as digital I/O or as LCD functions.
The LCD segment functions, when multiplexed with digital I/O, are selected using the LCDSx bits in the
LCDBPCTLx registers. The LCDSx bits select the LCD function for each segment line. When LCDSx = 0,
a multiplexed pin is set to digital I/O function. When LCDSx = 1, a multiplexed pin is selected as LCD
function.
The pin functions for COMx and Rxx, when multiplexed with digital I/O, are selected as described in the
port schematic section of the device-specific datasheet. The COM1 to COM3 pins are shared with
segment lines. If these pins are required as COM pins due to the selected LCD multiplexing mode the
COM functionality takes precedence over the segment function that can be selected for those pins with
the LCDSx bits as for all other segment pins.
See the port schematic section of the device-specific data sheet for details on controlling the pin
functionality.
NOTE: LCDSx Bits Do Not Affect Dedicated LCD Segment Pins
The LCDSx bits only affect pins with multiplexed LCD segment functions and digital I/O
functions. Dedicated LCD segment pins are not affected by the LCDSx bits.
34.2.7 LCD_B Interrupts
The LCD_B module has four interrupt sources available, each with independent enables and flags.
The four interrupt flags, namely LCDFRMIFG, LCDBLKOFFIFG, LCDBLKONIFG, and LCDNOCAPIFG,
are prioritized and combined to source a single interrupt vector. The interrupt vector register LCDBIV is
used to determine which flag requested an interrupt.
877
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_B Controller Operation
www.ti.com
The highest priority enabled interrupt generates a number in the LCDBIV register (see register
description). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled LCD_B interrupts do not affect the LCDBIV value.
Any read access of the LCDBIV register automatically resets the highest pending interrupt flag. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt. A write
access to the LCDBIV register automatically resets all pending interrupt flags. In addition, all flags can be
cleared via software.
The LCDNOCAPIFG indicates that no capacitor is present at the LCDCAP pin when the charge pump is
enabled. Setting the LCDNOCAPIE bit enables the interrupt.
The LCDBLKONIFG is set at the BLKCLK edge synchronized to the frame boundaries that turns on the
segments when blinking is enabled with LCDBLKMODx = 01 or 10. It is also set at the BLKCLK edge
synchronized to the frame boundaries that selects the blinking memory as display memory when
LCDBLKMODx = 11. It is automatically cleared when a LCD or blinking memory register is written. Setting
the LCDBLKONIE bit enables the interrupt.
The LCDBLKOFFIFG is set at the BLKCLK edge synchronized to the frame boundaries that blanks the
segments when blinking is enabled with LCDBLKMODx = 01 or 10. It is also set at the BLKCLK edge
synchronized to the frame boundaries that selects the LCD memory as display memory when
LCDBLKMODx = 11.It is automatically cleared when a LCD or blinking memory register is written. Setting
the LCDBLKOFFIE bit enables the interrupt.
The LCDFRMIFG is set at a frame boundary. It is automatically cleared when a LCD or blinking memory
register is written. Setting the LCDFRMIFGIE bit enables the interrupt.
34.2.7.1 LCDBIV Software Example
The following software example shows the recommended use of LCDBIV and the handling overhead. The
LCDBIV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles but not
the task handling itself.
; Interrupt handler for LCD_B interrupt flags.
LCDB_HND ; Interrupt latency 6
ADD &LCDBIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP LCDNOCAP_HND ; Vector 2: LCDNOCAPIFG 2
JMP LCDBLKON_HND ; Vector 4: LCDBLKONIFG 2
JMP LCDBLKOFF_HND ; Vector 6: LCDBLKOFFIFG 2
LCDFRM_HND ; Vector 8: LCDFRMIFG
... ; Task starts here
RETI 5
LCDNOCAP_HND ; Vector 2: LCDNOCAPIFG
... ; Task starts here
RETI 5
LCDBLKON_HND ; Vector 4: LCDBLKONIFG
... ; Task starts here
RETI ; Back to main program 5
LCDBLKOFF_HND ; Vector 6: LCDBLKOFFIFG
... ; Task starts here
RETI ; Back to main program 5
878 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
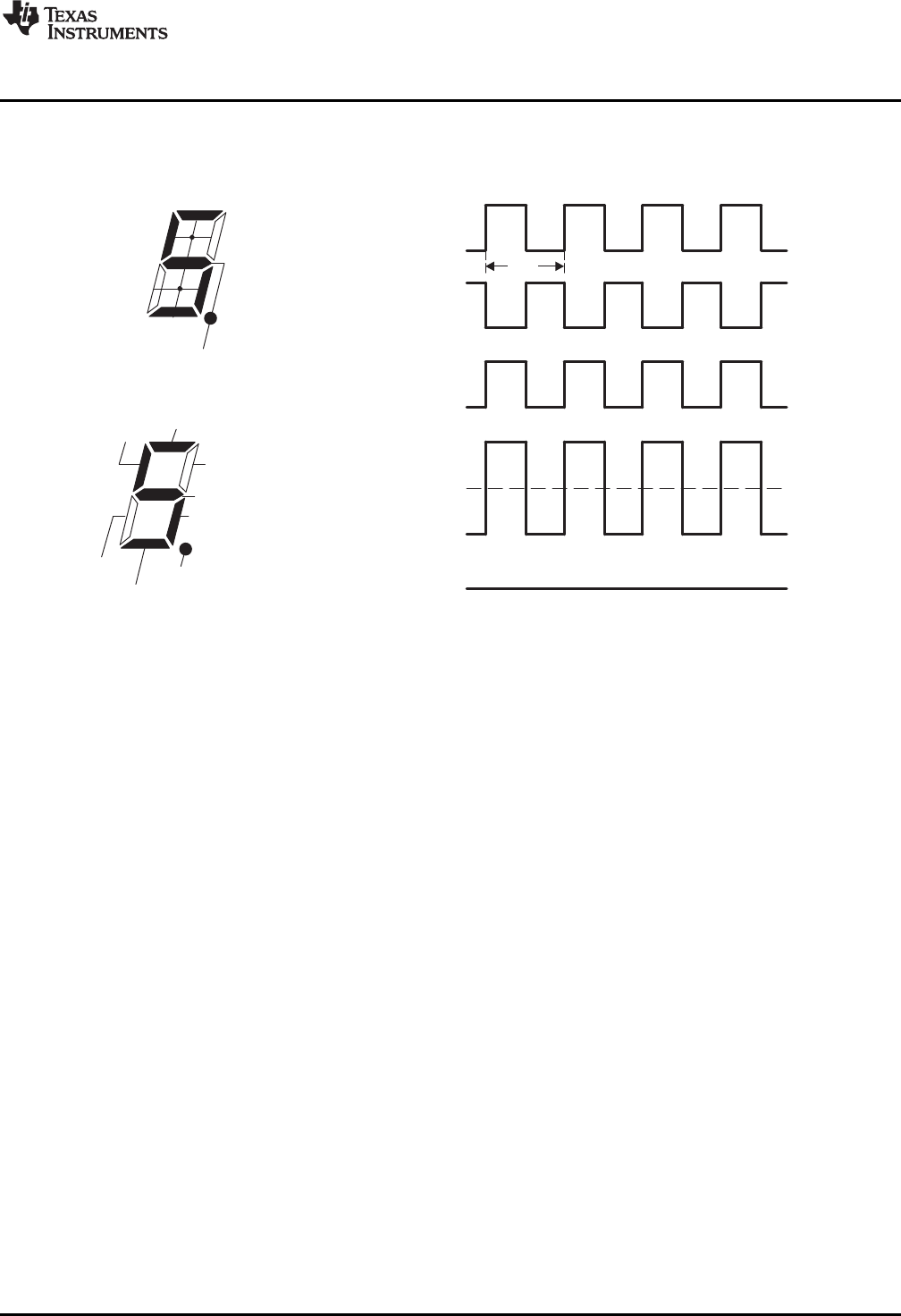
COM0
SP1
SP2
Resulting voltage for
Segment a (COM0-SP1)
Segment is on.
COM0
SP1
SP6
SP2
SP7
SP3
SP8
SP4
SP5
V1
V5
V1
V5
V1
V5
V1
0 V
-V1
0 V
SP = Segment Pin
Resulting voltage for
Segment b (COM0-SP2)
Segment is off.
a
b
fframe
www.ti.com
LCD_B Controller Operation
34.2.8 Static Mode
In static mode, each MSP430 segment pin drives one LCD segment and one common line, COM0, is
used. Figure 34-4 shows some example static waveforms.
Figure 34-4. Example Static Waveforms
879
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
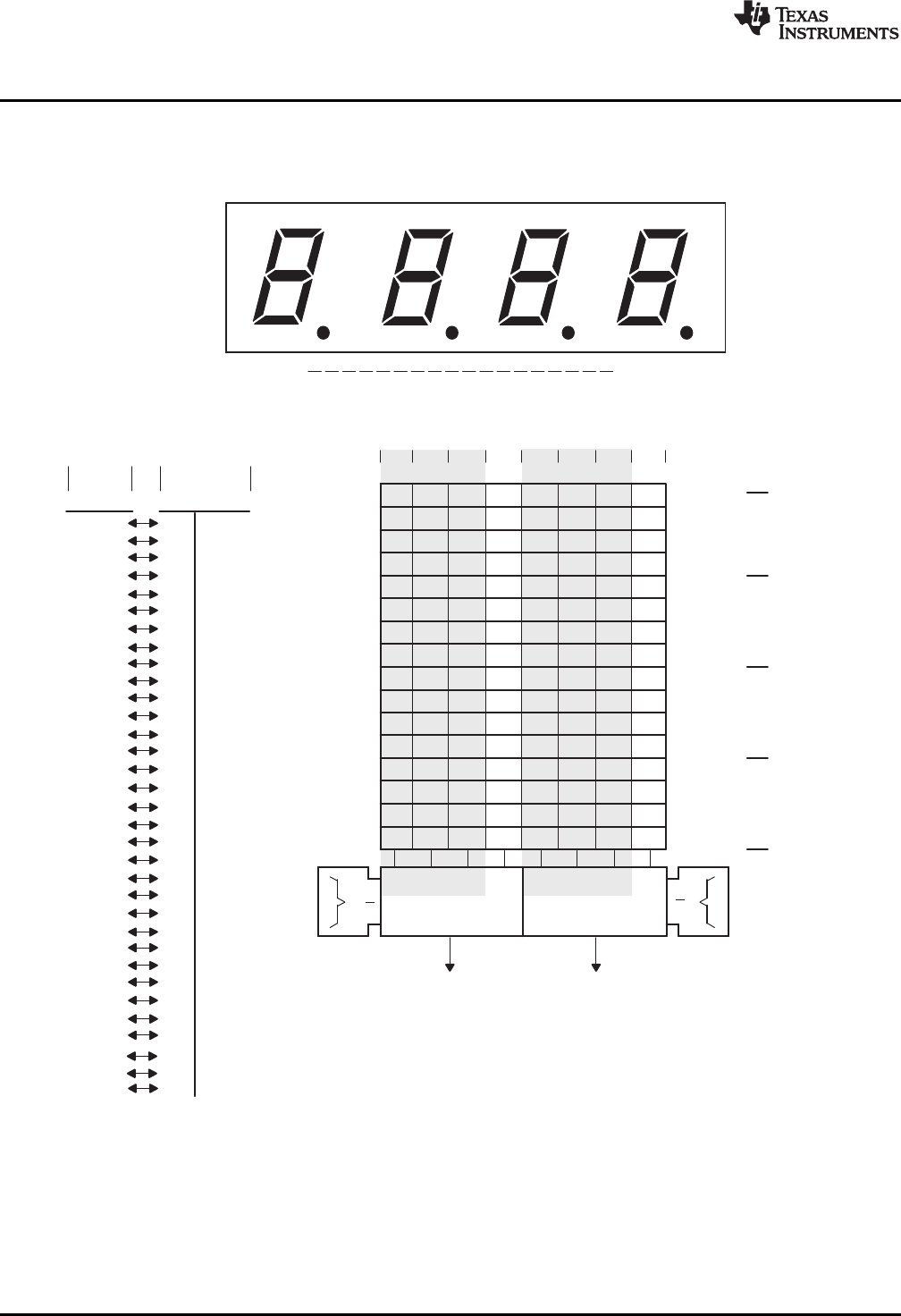
A
BG0
3
Sn+1 Sn
Parallel-Serial
Conversion
c
28
26
-- b a
32 1 0 3 2 1 0
COM
091h ---- ------
-- d c---- ------
-- f e---- ------
-- h g---- ------
-- b a---- ------
-- d c---- ------
-- f e---- ------
-- h g---- ------
-- b a---- ------
-- d c---- ------
-- f e---- ------
-- h g---- ------
-- b a---- ------
-- d---- ------
-- f e---- ------
092h
093h
094h
095h
096h
097h
098h
099h
09Ah
09Bh
09Ch
09Dh
09Eh
09Fh
24
22
20
18
16
14
12
10
8
6
4
2
0
Digit 4
Digit 3
Digit 2
Digit 1
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
S13
S14
S15
S16
S17
S18
S19
S20
S21
S22
S23
S24
S25
S26
S27
S28
S29
S30
S31
COM0
COM1
COM2
COM3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1a
1b
1c
1d
1e
1f
1g
1h
2a
2b
2c
2d
2e
2f
2g
2h
3a
3b
3c
3d
3e
3f
3g
3h
4a
4b
4c
4d
4e
4f
4g
4h
COM0
PIN COM0
MSP430
Pins LCD Pinout
NC
NC
NC
Pinout and Connections
LCD
Display Memory
Connections
A
B
G
0
3
3 2 1 0 03 2 1
-- h g---- ------ n = 30
MAB 0A0h
DIGIT4 DIGIT1
LCD_B Controller Operation
www.ti.com
Figure 34-5 shows an example static LCD, pinout, LCD-to-MSP430 connections, and the resulting
segment mapping. This is only an example. Segment mapping in a user's application depends on the LCD
pinout and on the MSP430-to-LCD connections.
Figure 34-5. Static LCD Example (MAB addresses need to be replaced with LCDMx)
880 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_B Controller Operation
34.2.8.1 Static Mode Software Example
; All eight segments of a digit are often located in four
; display memory bytes with the static display method.
;
a EQU 001h
b EQU 010h
c EQU 002h
d EQU 020h
e EQU 004h
f EQU 040h
g EQU 008h
h EQU 080h
; The register content of Rx should be displayed.
; The Table represents the 'on'-segments according to the
; content of Rx.
MOV.B Table (Rx),RY ; Load segment information
; into temporary memory.
; (Ry) = 0000 0000 hfdb geca
MOV.B Ry,&LCDn ; Note:
; All bits of an LCD memory
; byte are written
RRA Ry ; (Ry) = 0000 0000 0hfd bgec
MOV.B Ry,&LCDn+1 ; Note:
; All bits of an LCD memory
; byte are written
RRA Ry ; (Ry) = 0000 0000 00hf dbge
MOV.B Ry,&LCDn+2 ; Note:
; All bits of an LCD memory
; byte are written
RRA Ry ; (Ry) = 0000 0000 000h fdbg
MOV.B Ry,&LCDn+3 ; Note:
; All bits of an LCD memory
; byte are written
........... ........... ; Table
DB a+b+c+d+e+f ; displays "0"
DB b+c; ; displays "1"
........... ...........
DB ...........
881
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
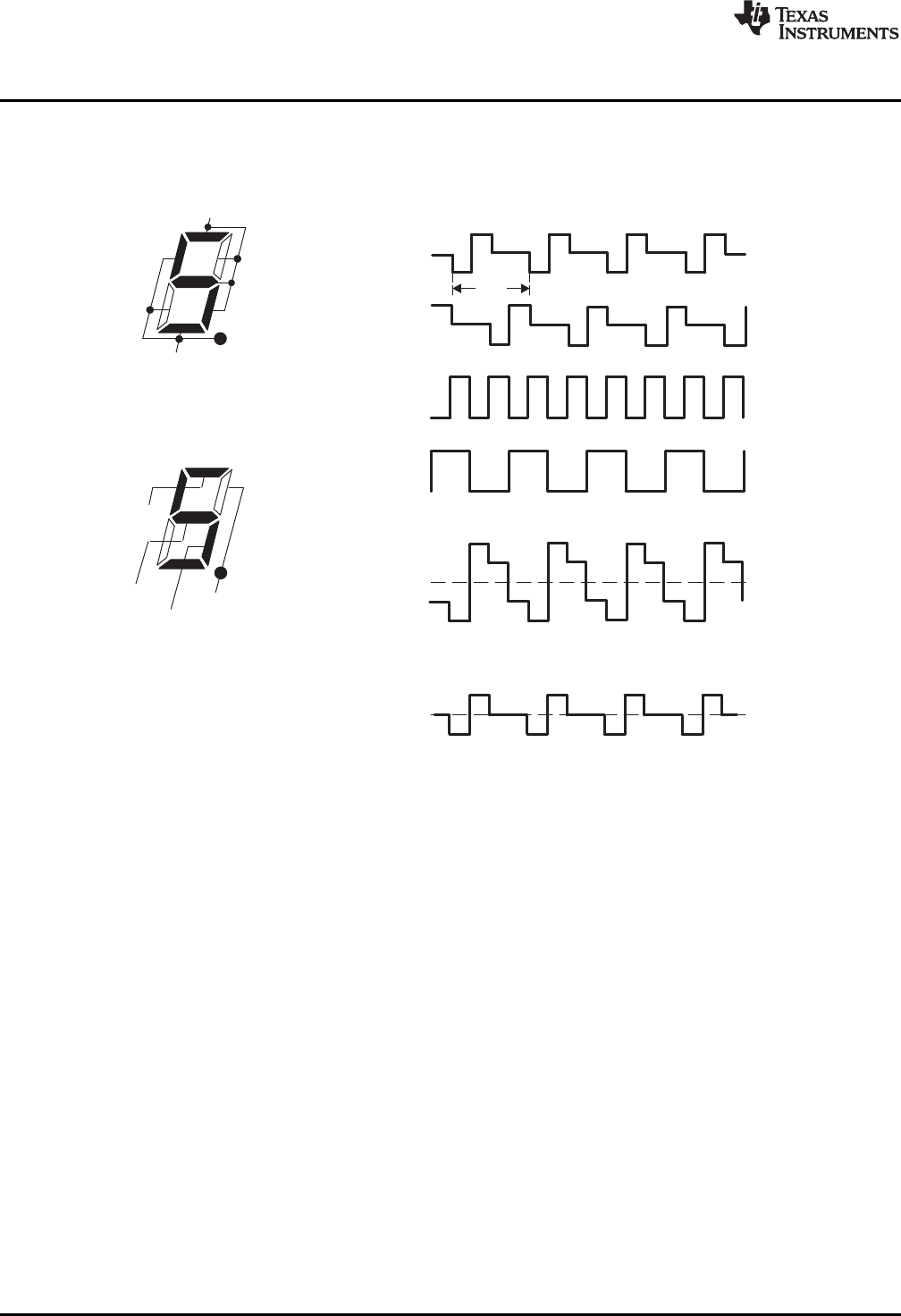
COM1
COM0
COM0
COM1
SP1
SP2
SP1
SP2
SP3
SP4
V1
V3
V5
V1
V5
V1
V5
V1
V3
0 V
-V3
-V1
V1
V3
0 V
-V3
-V5
Resulting voltage for
Segment h (COM0-SP2)
Segment is on.
Resulting voltage for
Segment b (COM1-SP2)
Segment is Off.
SP = Segment Pin
b
h
V1
V3
V5
fframe
LCD_B Controller Operation
www.ti.com
34.2.9 2-Mux Mode
In 2-mux mode, each MSP430 segment pin drives two LCD segments and two common lines, COM0 and
COM1, are used. Figure 34-6 shows some example 2-mux, 1/2 bias waveforms.
Figure 34-6. Example 2-Mux Waveforms
882 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
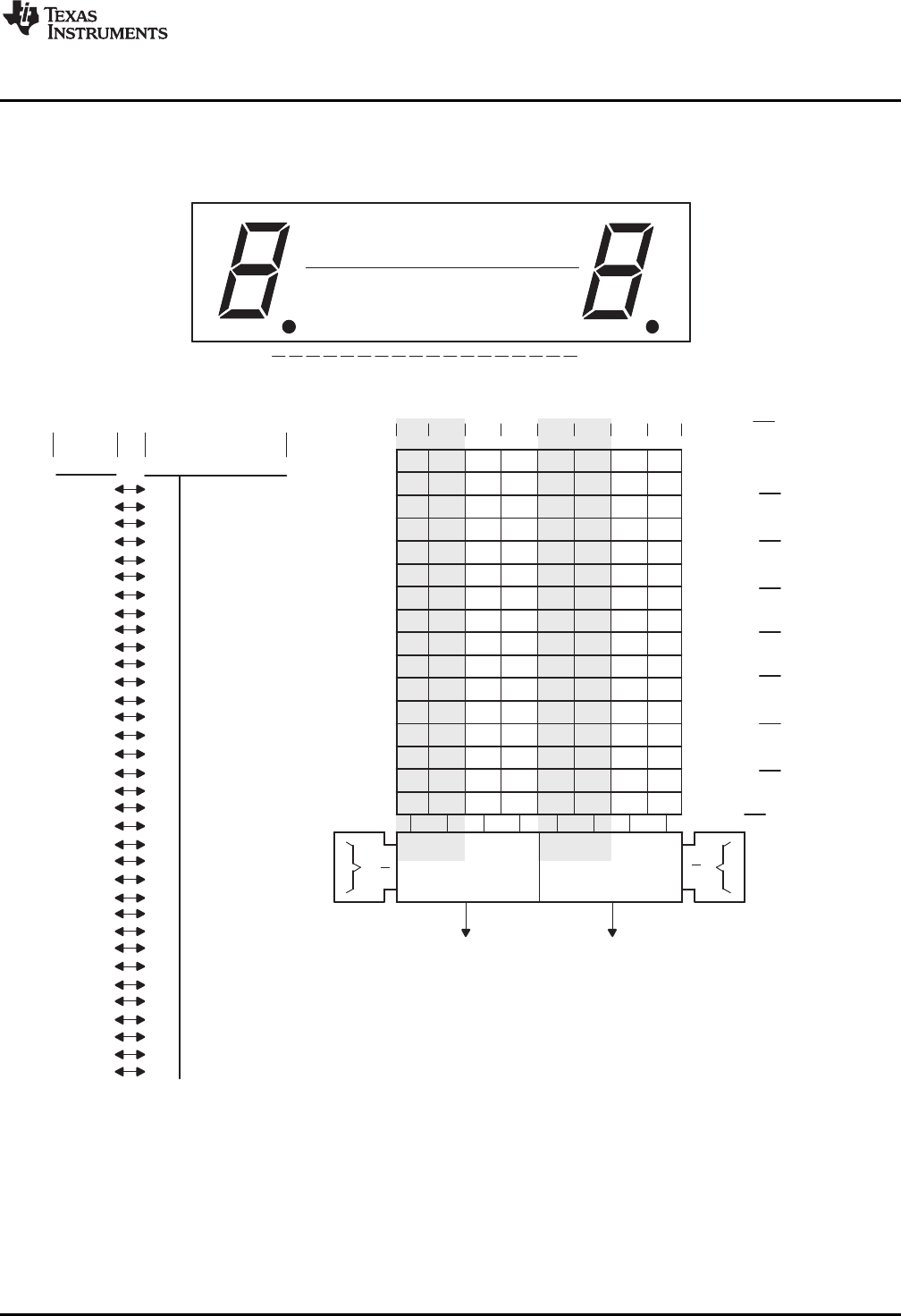
28
d
f
A
BG0
3
A
B
G
0
3
3 2 1 0 0
b h f
3 2 1 0 3 2 1 0
Sn+1 Sn
Parallel-Serial
Conversion
COM
---- a----
g e d---- c----
b h f---- a----
g e d---- c----
b h f---- a----
g e d---- c----
b h f---- a----
g e d---- c----
b h f---- a----
g e d---- c----
b h f---- a----
g e d---- c----
b h f---- a----
g e---- c----
b h---- a----
26
24
22
20
18
16
14
12
10
8
6
4
2
0
Digit 7
Digit 6
Digit 4
Digit 2
3 2 1
1/2 Digit 8
Digit 5
Digit 3
Digit 1
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
S13
S14
S15
S16
S17
S18
S19
S20
S21
S22
S23
S24
S25
S26
S27
S28
S29
S30
S31
COM0
COM1
COM2
COM3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1f
1h
1d
1e
2f
2h
2d
2e
3f
3h
3d
3e
4f
4h
4d
4e
5f
5h
5d
5e
6f
6h
6d
6e
7f
7h
7d
7e
8f
8h
8d
8e
COM0
PIN COM0
MSP430
Pins LCD Pinout
Pinout and Connections
NC
NC
DIGIT8 DIGIT1
1a
1b
1c
1g
2a
2b
2c
2g
3a
3b
3c
3g
4a
4b
4c
4g
5a
5b
5c
5g
6a
6b
6c
6g
7a
7b
7c
7g
8a
8b
8c
8g
COM1
COM1
LCD
Display Memory
Connections
g e d---- c---- n = 30
091h
092h
093h
094h
095h
096h
097h
098h
099h
09Ah
09Bh
09Ch
09Dh
09Eh
09Fh
MAB 0A0h
www.ti.com
LCD_B Controller Operation
Figure 34-7 shows an example 2-mux LCD, pinout, LCD-to-MSP430 connections, and the resulting
segment mapping. This is only an example. Segment mapping in a user's application completely depends
on the LCD pinout and on the MSP430-to-LCD connections.
Figure 34-7. 2-Mux LCD Example (MAB addresses need to be replaced with LCDMx)
883
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_B Controller Operation
www.ti.com
34.2.9.1 2-Mux Mode Software Example
; All eight segments of a digit are often located in two
; display memory bytes with the 2-mux display rate ;
a EQU 002h
b EQU 020h
c EQU 008h
d EQU 004h
e EQU 040h
f EQU 001h
g EQU 080h
h EQU 010h
; The register content of Rx should be displayed.
; The Table represents the 'on'-segments according to the
; content of Rx. ;
........... ...........
MOV.B Table(Rx),Ry ; Load segment information into
; temporary memory.
MOV.B Ry,&LCDn ; (Ry) = 0000 0000 gebh cdaf
; Note:
; All bits of an LCD memory byte
; are written
RRA Ry ; (Ry) = 0000 0000 0geb hcda
RRA Ry ; (Ry) = 0000 0000 00ge bhcd
MOV.B Ry,&LCDn+1 ; Note:
; All bits of an LCD memory byte
; are written
........... ........... ...........
Table
DB a+b+c+d+e+f ; displays "0"
...........
DB a+b+c+d+e+f+g ; displays "8"
........... ...........
DB ........... ;
884 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
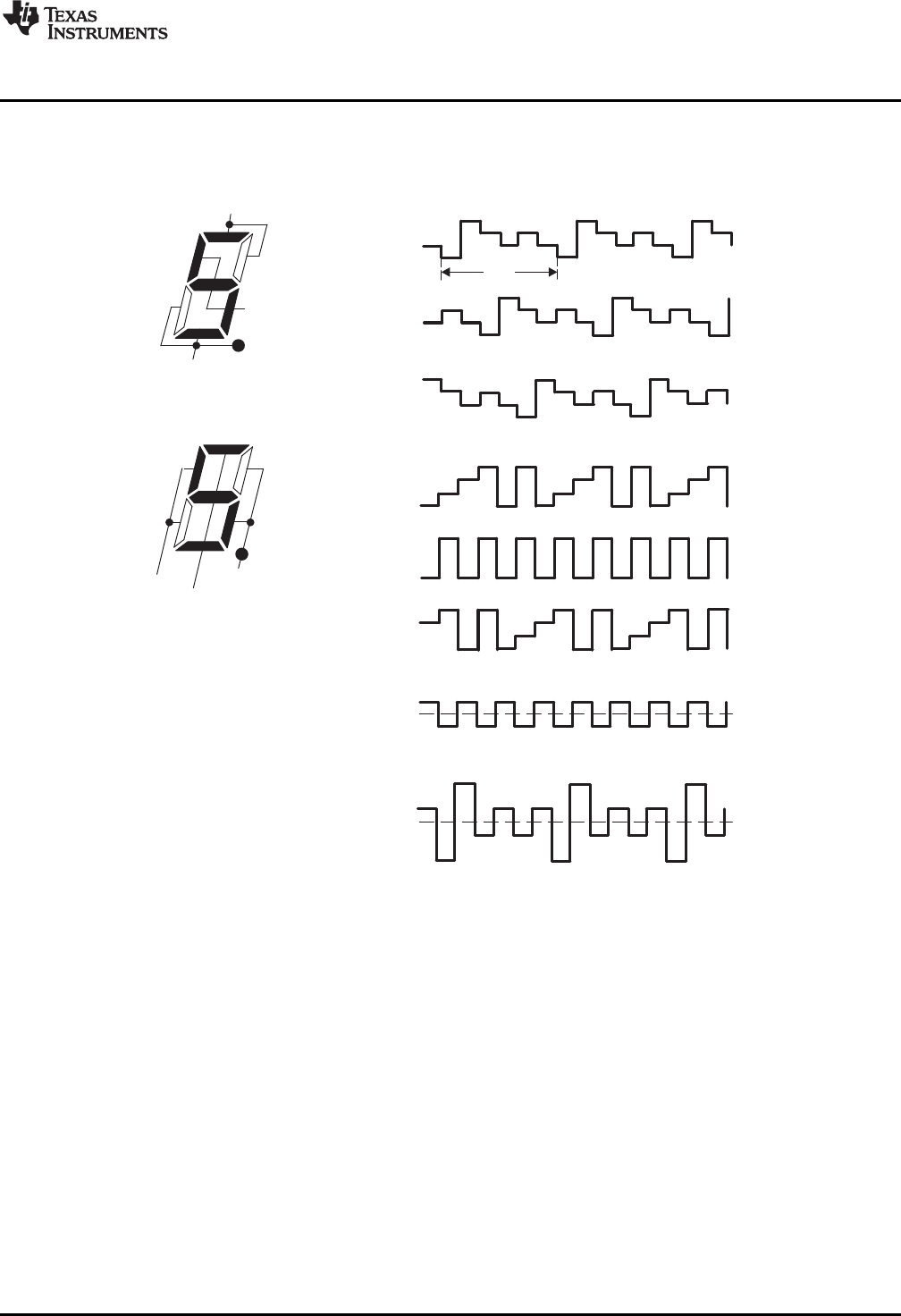
COM0
COM1
COM2
SP1
SP2
SP3
V1
V2
V4
V5
V1
V5
V1
V5
V1
0 V
-V1
V1
0 V
-V1
COM2
COM0
COM1
Resulting voltage for
Segment e (COM0-SP1)
Segment is off.
Resulting voltage for
Segment is on.
Segment d (COM0-SP2)
SP3
SP2
SP1
SP = Segment Pin
d
e
V1
V2
V4
V5
V1
V2
V4
V5
V1
V2
V4
V5
fframe
www.ti.com
LCD_B Controller Operation
34.2.10 3-Mux Mode
In 3-mux mode, each MSP430 segment pin drives three LCD segments and three common lines (COM0,
COM1, and COM2) are used.Figure 34-8 shows some example 3-mux, 1/3 bias waveforms.
Figure 34-8. Example 3-Mux Waveforms
885
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
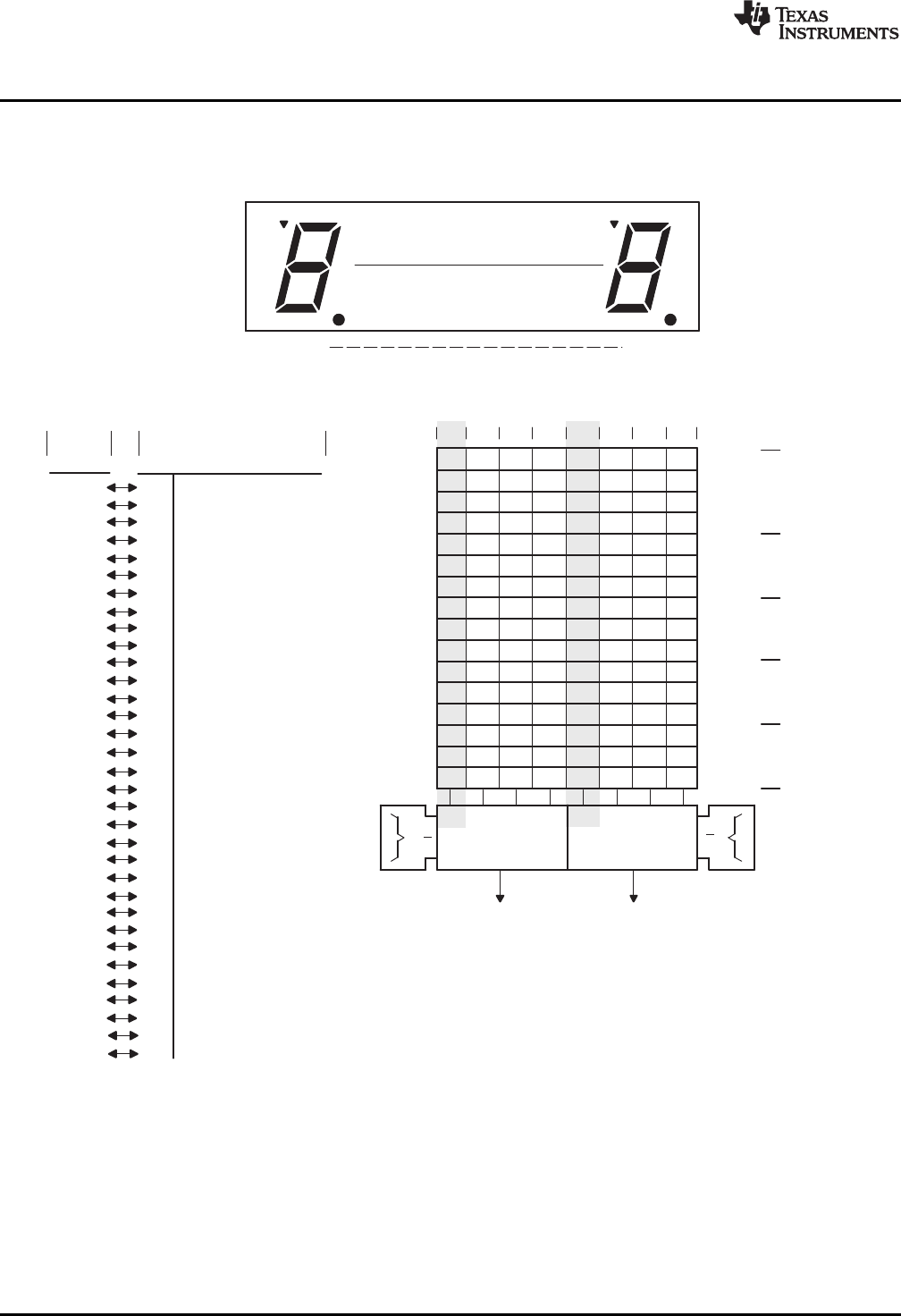
28
e
h
d
A
BG0
3
A
B
G
0
3
3 2 1 0 0
g d e
3 2 1 0 3 2 1 0
Sn+1 Sn
Parallel-Serial
Conversion
COM
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
a-- fy--
f e hy-- cb--
c h db-- ga--
g d ea-- fy--
f e hy-- cb--
c h db-- ga--
g d ea-- fy--
f e hy-- cb--
c h db-- ga--
g d ea-- fy--
f e hy-- cb--
c h db-- ga--
g da-- fy--
f ey-- cb--
c hb-- ga--
26
24
22
20
18
16
14
12
10
8
6
4
2
0
Digit 9
Digit 7
Digit 4
Digit 2
3 2 1
y y
Digit 5
Digit 3
Digit 1
Digit 6
Digit 8
Digit 10
DIGIT10 DIGIT1
S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
S13
S14
S15
S16
S17
S18
S19
S20
S21
S22
S23
S24
S25
S26
S27
S28
S29
COM0
COM1
COM2
COM3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
1e
1d
1h
2e
2d
2h
3e
3d
3h
4e
4d
4h
5e
5d
5h
6e
6d
6h
7e
7d
7h
8e
8d
8h
9e
9d
9h
10e
10d
10h
COM0
PIN COM0
MSP430
Pins LCD Pinout
Pinout and Connections
NC
1f
1g
1c
2f
2g
2c
3f
3g
3c
4f
4g
4c
5f
5g
5c
6f
6g
6c
7f
7g
7c
8f
8g
8c
9f
9g
9c
10f
10g
10c
COM1
COM1
1y
1a
1b
2y
2a
2b
3y
3a
3b
4y
4a
4b
5y
5a
5b
6y
6a
6b
7y
7a
7b
8y
8a
8b
9y
9a
9b
10y
10a
10b
COM2
COM2
Display Memory
LCD
Connections
eg da-- fy--
091h
092h
093h
094h
095h
096h
097h
098h
099h
09Ah
09Bh
09Ch
09Dh
09Eh
09Fh
MAB n = 30
LCD_B Controller Operation
www.ti.com
Figure 34-9 shows an example 3-mux LCD, pinout, LCD-to-MSP430 connections, and the resulting
segment mapping. This is only an example. Segment mapping in a user's application depends on the LCD
pinout and on the MSP430-to-LCD connections.
Figure 34-9. 3-Mux LCD Example (MAB addresses need to be replaced with LCDMx)
886 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_B Controller Operation
34.2.10.1 3-Mux Mode Software Example
; The 3-mux rate can support nine segments for each
; digit. The nine segments of a digit are located in
; 1 1/2 display memory bytes.
;
a EQU 0040h
b EQU 0400h
c EQU 0200h
d EQU 0010h
e EQU 0001h
f EQU 0002h
g EQU 0020h
h EQU 0100h
Y EQU 0004h
; The LSDigit of register Rx should be displayed.
; The Table represents the 'on'-segments according to the
; LSDigit of register of Rx.
; The register Ry is used for temporary memory
;
ODDDIG
RLA Rx ; LCD in 3-mux has 9 segments per
; digit
; word table required for
; displayed characters.
MOV Table(Rx),Ry ; Load segment information to
; temporary mem.
; (Ry) = 0000 0bch 0agd 0yfe
MOV.B Ry,&LCDn ; write 'a, g, d, y, f, e' of
; Digit n (LowByte)
SWPB Ry ; (Ry) = 0agd 0yfe 0000 0bch
BIC.B #07h,&LCDn+1 ; write 'b, c, h' of Digit n
; (HighByte)
BIS.B Ry,&LCDn+1
.....
EVNDIG
RLA Rx ; LCD in 3-mux has 9 segments per
; digit
; word table required for
; displayed characters.
MOV Table(Rx),Ry ; Load segment information to
; temporary mem.
; (Ry) = 0000 0bch 0agd 0yfe
RLA Ry ; (Ry) = 0000 bch0 agd0 yfe0
RLA Ry ; (Ry) = 000b ch0a gd0y fe00
RLA Ry ; (Ry) = 00bc h0ag d0yf e000
RLA Ry ; (Ry) = 0bch 0agd 0yfe 0000
BIC.B #070h,&LCDn+1
BIS.B Ry,&LCDn+1 ; write 'y, f, e' of Digit n+1
; (LowByte)
SWPB Ry ; (Ry) = 0yfe 0000 0bch 0agd
MOV.B Ry,&LCDn+2 ; write 'b, c, h, a, g, d' of
; Digit n+1 (HighByte)
...........
Table
DW a+b+c+d+e+f ; displays "0"
DW b+c ; displays "1"
........... ...........
DW a+e+f+g ; displays "F"
887
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
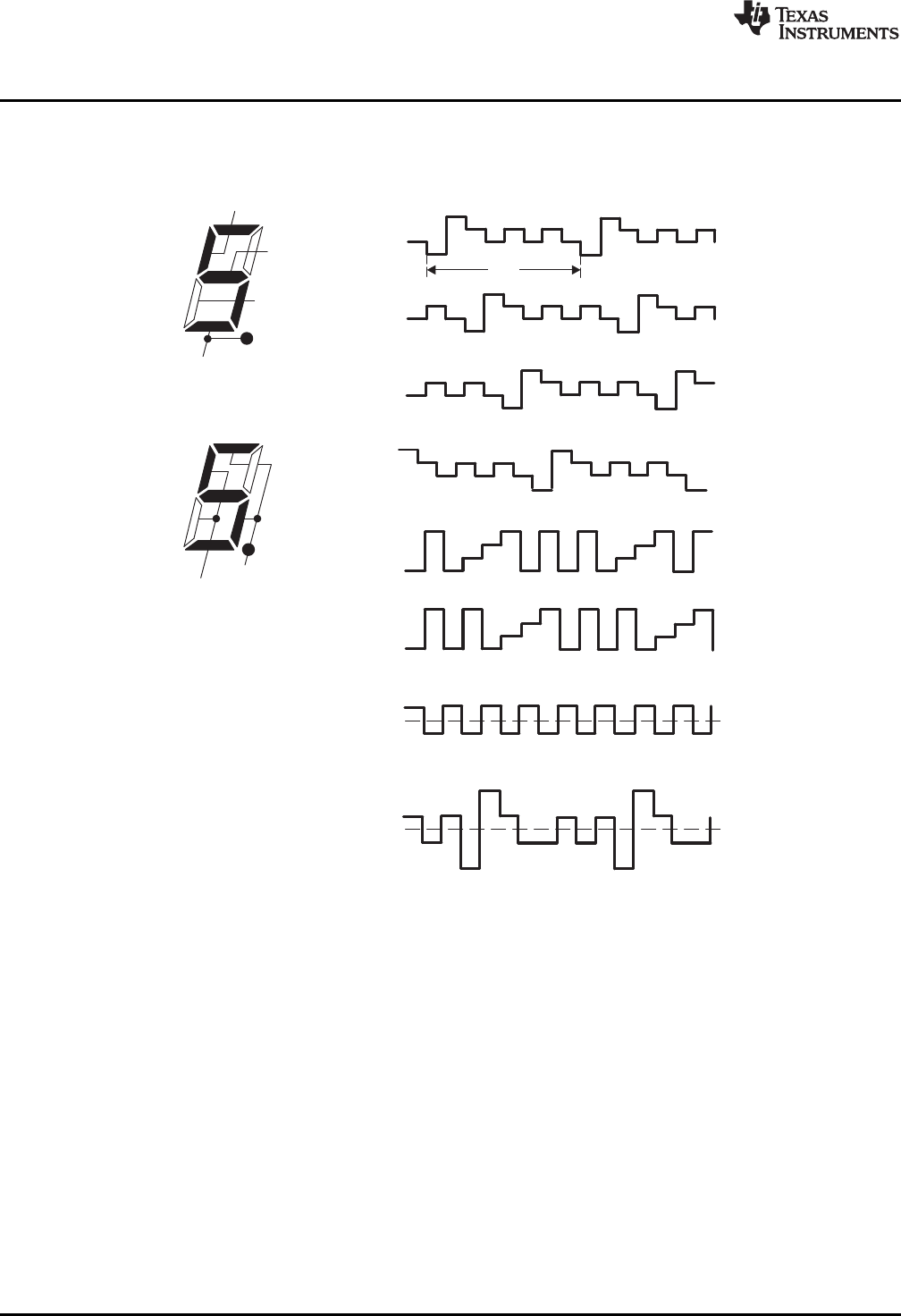
V1
V2
V4
V5
V1
0 V
-V1
V1
0 V
-V1
COM0
COM1
COM2
COM3
SP1
SP2
COM3
COM2
COM1
COM0
SP2
SP1
Resulting voltage for
Segment e (COM1-SP1)
Segment is off.
Resulting voltage for
Segment c (COM1-SP2)
Segment is on.
SP = Segment Pin
c
e
V1
V2
V4
V5
V1
V2
V4
V5
V1
V2
V4
V5
V1
V2
V4
V5
V1
V2
V4
V5
fframe
LCD_B Controller Operation
www.ti.com
34.2.11 4-Mux Mode
In 4-mux mode, each MSP430 segment pin drives four LCD segments and all four common lines (COM0,
COM1, COM2, and COM3) are used. Figure 34-10 shows some example 4-mux, 1/3 bias waveforms.
Figure 34-10. Example 4-Mux Waveforms
888 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
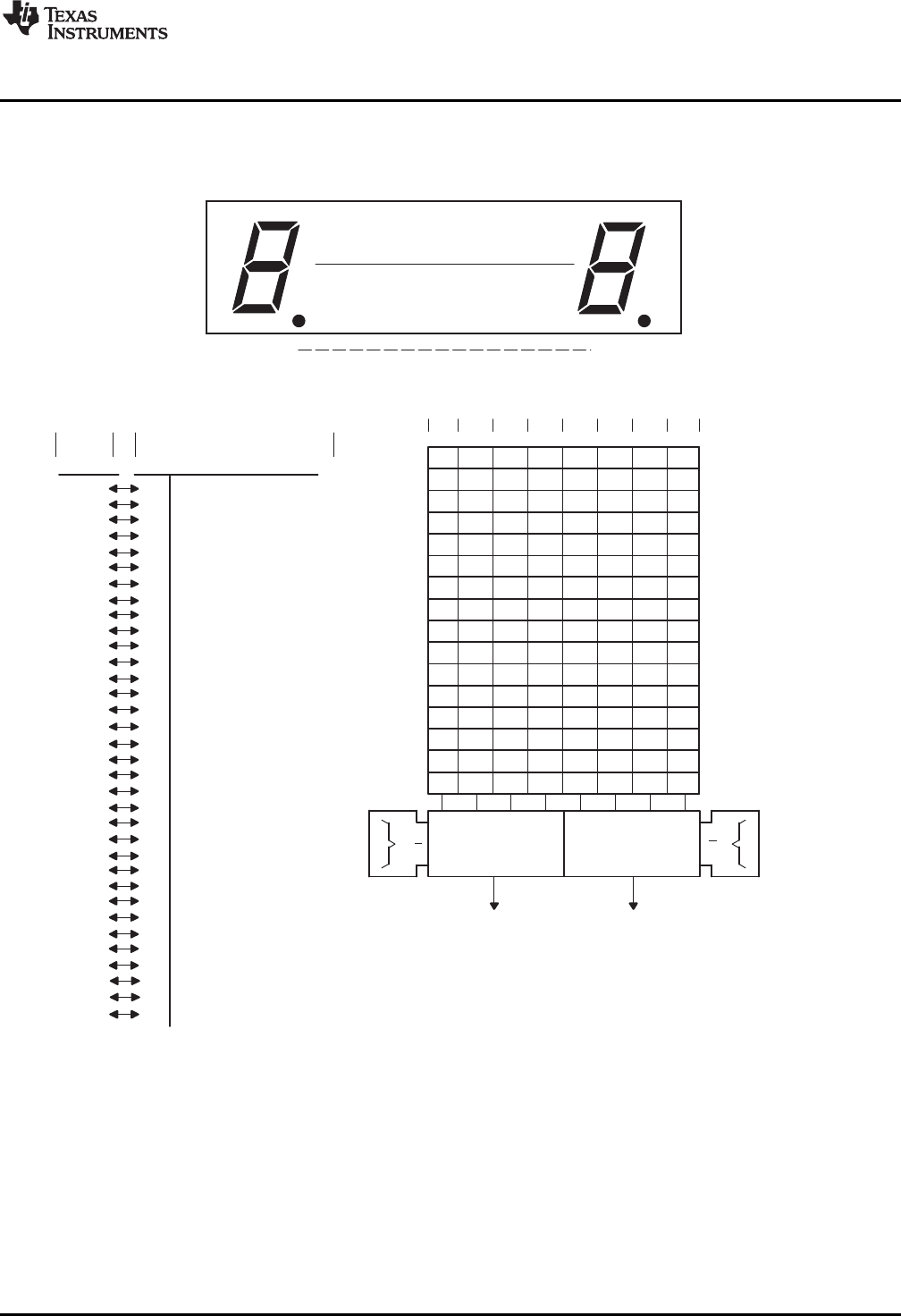
e d
26
28
A
BG0
3
A
B
G
0
3
3 2 1 0 0
3 2 1 0 3 2 1 0
Sn+1 Sn
COM
c hba gf
24
22
20
18
16
14
12
10
8
6
4
2
0
Digit 9
Digit 7
Digit 4
Digit 2
3 2 1
Digit 5
Digit 3
Digit 1
Digit 6
Digit 8
Digit 10
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
c h dba egf
Digit 14
Digit 12
Digit 11
Digit 13
Digit 15
a
b
c
d
e
fg
h
a
b
c
d
e
fg
h
DIGIT15 DIGIT1
S0
S1
S2
S3
S4
S5
S6
S7
S8
S9
S10
S11
S12
S13
S14
S15
S16
S17
S18
S19
S20
S21
S22
S23
S24
S25
S26
S27
S28
S29
COM0
COM1
COM2
COM3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
1d
1h
2d
2h
3d
3h
4d
4h
5d
5h
6d
6h
7d
7h
8d
8h
9d
9h
10d
10h
11d
11h
12d
12h
13d
13h
14d
14h
15d
15h
COM0
PIN COM0
MSP430
Pins LCD Pinout
Connections
1e
1c
2e
2c
3e
3c
4e
4c
5e
5c
6e
6c
7e
7c
8e
8c
9e
9c
10e
10c
11e
11c
12e
12c
13e
13c
14e
14c
15e
15c
COM1
COM1
1g
1b
2g
2b
3g
3b
4g
4b
5g
5b
6g
6b
7g
7b
8g
8b
9g
9b
10g
10b
11g
11b
12g
12b
13g
13b
14g
14b
15g
15b
COM2
COM2
1f
1a
2f
2a
3f
3a
4f
4a
5f
5a
6f
6a
7f
7a
8f
8a
9f
9a
10f
10a
11f
11a
12f
12a
13f
13a
14f
14a
15f
15a
COM3
COM3
Display Memory
LCD
Parallel-Serial
Conversion
Pinout and Connections
e dc hba gf n = 30 Digit 16
091h
092h
093h
094h
095h
096h
097h
098h
099h
09Ah
09Bh
09Ch
09Dh
09Eh
09Fh
MAB
www.ti.com
LCD_B Controller Operation
Figure 34-11 shows an example 4-mux LCD, pinout, LCD-to-MSP430 connections, and the resulting
segment mapping. This is only an example. Segment mapping in a user's application depends on the LCD
pinout and on the MSP430-to-LCD connections.
Figure 34-11. 4-Mux LCD Example (MAB addresses need to be replaced with LCDMx)
889
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_B Controller Operation
www.ti.com
34.2.11.1 4-Mux Mode Software Example
; The 4-mux rate supports eight segments for each digit.
; All eight segments of a digit can often be located in
; one display memory byte
a EQU 080h
b EQU 040h
c EQU 020h
d EQU 001h
e EQU 002h
f EQU 008h
g EQU 004h
h EQU 010h
;
; The LSDigit of register Rx should be displayed.
; The Table represents the 'on'-segments according to the
; content of Rx.
;
MOV.B Table(Rx),&LCDn ; n = 1 ..... 15
; all eight segments are
; written to the display
; memory
........... ...........
Table
DB a+b+c+d+e+f ; displays "0"
DB b+c ; displays "1"
........... ...........
DB b+c+d+e+g ; displays "d"
DB a+d+e+f+g ; displays "E"
DB a+e+f+g ; displays "F"
890 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
34.3 LCD_B Registers
The LCD_B registers are listed in Table 34-2 to Table 34-4. The LCD memory and blinking memory
registers can also be accessed as word.
Table 34-2. LCD_B Registers
Offset Acronym Register Name Type Reset Section
000h LCDBCTL0 LCD_B control register 0 Read/write 0000h Section 34.3.1
002h LCDBCTL1 LCD_B control register 1 Read/write 0000h Section 34.3.2
004h LCDBBLKCTL LCD_B blinking control register Read/write 0000h Section 34.3.3
006h LCDBMEMCTL LCD_B memory control register Read/write 0000h Section 34.3.4
008h LCDBVCTL LCD_B voltage control register Read/write 0000h Section 34.3.5
00Ah LCDBPCTL0 LCD_B port control 0 Read/write 0000h Section 34.3.6
00Ch LCDBPCTL1 LCD_B port control 1 Read/write 0000h Section 34.3.7
00Eh LCDBPCTL2 LCD_B port control 2 (≥128 segments) Read/write 0000h Section 34.3.8
010h LCDBPCTL3 LCD_B port control 3 (192 segments) Read/write 0000h Section 34.3.9
012h LCDBCPCTL LCD_B charge pump control Read/write 0000h Section 34.3.10
014h Reserved
016h Reserved
018h Reserved
01Ah Reserved
01Ch Reserved
01Eh LCDBIV LCD_B interrupt vector Read/write 0000h Section 34.3.11
891
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

LCD_B Registers
www.ti.com
Table 34-3. LCD_B Memory Registers(1)
Offset Acronym Register Name Type Reset
020h LCDM1 LCD memory 1 (S1/S0) Read/write Unchanged
021h LCDM2 LCD memory 2 (S3/S2) Read/write Unchanged
022h LCDM3 LCD memory 3 (S5/S4) Read/write Unchanged
023h LCDM4 LCD memory 4 (S7/S6) Read/write Unchanged
024h LCDM5 LCD memory 5 (S9/S8) Read/write Unchanged
025h LCDM6 LCD memory 6 (S11/S10) Read/write Unchanged
026h LCDM7 LCD memory 7 (S13/S12) Read/write Unchanged
027h LCDM8 LCD memory 8 (S15/S14) Read/write Unchanged
028h LCDM9 LCD memory 9 (S17/S16) Read/write Unchanged
029h LCDM10 LCD memory 10 (S19/S18) Read/write Unchanged
02Ah LCDM11 LCD memory 11 (S21/S20) Read/write Unchanged
02Bh LCDM12 LCD memory 12 (S23/S22) Read/write Unchanged
02Ch LCDM13 LCD memory 13 (S25/S24) Read/write Unchanged
02Dh LCDM14 LCD memory 14 (S27/S26) Read/write Unchanged
02Eh LCDM15 LCD memory 15 (S29/S28, ≥128 segments) Read/write Unchanged
02Fh LCDM16 LCD memory 16 (S31/S30, ≥128 segments) Read/write Unchanged
030h LCDM17 LCD memory 17 (S33/S32, ≥128 segments) Read/write Unchanged
031h LCDM18 LCD memory 18 (S35/S34, ≥128 segments) Read/write Unchanged
032h LCDM19 LCD memory 19 (S37/S36, ≥160 segments) Read/write Unchanged
033h LCDM20 LCD memory 20 (S39/S38, ≥160 segments) Read/write Unchanged
034h LCDM21 LCD memory 21 (S41/S40, ≥160 segments) Read/write Unchanged
035h LCDM22 LCD memory 22 (S43/S42, ≥160 segments) Read/write Unchanged
036h LCDM23 LCD memory 23 (S45/S44, 192 segments) Read/write Unchanged
037h LCDM24 LCD memory 24 (S47/S46, 192 segments) Read/write Unchanged
038h LCDM25 LCD memory 25 (S49/S48, 192 segments) Read/write Unchanged
039h LCDM26 LCD memory 26 (S50, 192 segments) Read/write Unchanged
03Ah Reserved Read/write Unchanged
03Bh Reserved Read/write Unchanged
03Ch Reserved Read/write Unchanged
03Dh Reserved Read/write Unchanged
03Eh Reserved Read/write Unchanged
03Fh Reserved Read/write Unchanged
(1) The LCD memory registers can also be accessed as word.
892 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_B Registers
Table 34-4. LCD_B Blinking Memory Registers(1)
Offset Acronym Register Name Type Reset
040h LCDBM1 LCD blinking memory 1 Read/write Unchanged
041h LCDBM2 LCD blinking memory 2 Read/write Unchanged
042h LCDBM3 LCD blinking memory 3 Read/write Unchanged
043h LCDBM4 LCD blinking memory 4 Read/write Unchanged
044h LCDBM5 LCD blinking memory 5 Read/write Unchanged
045h LCDBM6 LCD blinking memory 6 Read/write Unchanged
046h LCDBM7 LCD blinking memory 7 Read/write Unchanged
047h LCDBM8 LCD blinking memory 8 Read/write Unchanged
048h LCDBM9 LCD blinking memory 9 Read/write Unchanged
049h LCDBM10 LCD blinking memory 10 Read/write Unchanged
04Ah LCDBM11 LCD blinking memory 11 Read/write Unchanged
04Bh LCDBM12 LCD blinking memory 12 Read/write Unchanged
04Ch LCDBM13 LCD blinking memory 13 Read/write Unchanged
04Dh LCDBM14 LCD blinking memory 14 Read/write Unchanged
04Eh LCDBM15 LCD blinking memory 15 (≥128 segments) Read/write Unchanged
04Fh LCDBM16 LCD blinking memory 16 (≥128 segments) Read/write Unchanged
050h LCDBM17 LCD blinking memory 17 (≥128 segments) Read/write Unchanged
051h LCDBM18 LCD blinking memory 18 (≥128 segments) Read/write Unchanged
052h LCDBM19 LCD blinking memory 19 (≥160 segments) Read/write Unchanged
053h LCDBM20 LCD blinking memory 20 (≥160 segments) Read/write Unchanged
054h LCDBM21 LCD blinking memory 21 (≥160 segments) Read/write Unchanged
055h LCDBM22 LCD blinking memory 22 (≥160 segments) Read/write Unchanged
056h LCDBM23 LCD blinking memory 23 (190 segments) Read/write Unchanged
057h LCDBM24 LCD blinking memory 24 (190 segments) Read/write Unchanged
058h LCDBM25 LCD blinking memory 25 (190 segments) Read/write Unchanged
059h LCDBM26 LCD blinking memory 26 (190 segments) Read/write Unchanged
05Ah Reserved Read/write Unchanged
05Bh Reserved Read/write Unchanged
05Ch Reserved Read/write Unchanged
05Dh Reserved Read/write Unchanged
05Eh Reserved Read/write Unchanged
05Fh Reserved Read/write Unchanged
(1) The LCD blinking memory registers can also be accessed as word.
893
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_B Registers
www.ti.com
34.3.1 LCDBCTL0 Register
LCD_B Control Register 0
Figure 34-12. LCDBCTL0 Register
15 14 13 12 11 10 9 8
LCDDIVx LCDPREx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDSSEL Reserved LCDMXx LCDSON Reserved LCDON
rw-0 r0 r0 rw-0 rw-0 rw-0 r0 rw-0
Table 34-5. LCDBCTL0 Register Description
Bit Field Type Reset Description
15-11 LCDDIVx RW 0h LCD frequency divider. Together with LCDPREx the LCD frequency f(LCD) is
calculated as f(LCD) = f(ACLK/VLO) / [(LCDDIVx + 1) × 2^(LCDPREx)].
Settings for this bit should be changed only while LCDON = 0.
00000b = Divide by 1
00001b = Divide by 2
⋮
11110b = Divide by 31
11111b = Divide by 32
10-8 LCDPREx RW 0h LCD frequency pre-scaler. Together with LCDDIVx the LCD frequency f(LCD) is
calculated as f(LCD) = f(ACLK/VLO) / [(LCDDIVx + 1) × 2^(LCDPREx)].
Settings for this bit should be changed only while LCDON = 0.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 4
011b = Divide by 8
100b = Divide by 16
101b = Divide by 32
110b = Reserved - Defaults to divide by 32
111b = Reserved - Defaults to divide by 32
7 LCDSSEL RW 0h Clock source select for LCD and blinking frequency
Settings for this bit should be changed only while LCDON = 0.
0b = ACLK (30 kHz to 40 kHz)
1b = VLOCLK
6-5 Reserved R 0h Reserved. Always reads as 0.
4-3 LCDMXx RW 0h LCD mux rate. These bits select the LCD mode.
Settings for this bit should be changed only while LCDON = 0.
00b = Static
01b = 2-mux
10b = 3-mux
11b = 4-mux
2 LCDSON RW 0h LCD segments on. This bit supports flashing LCD applications by turning off all
segment lines, while leaving the LCD timing generator and R33 enabled.
0b = All LCD segments are off.
1b = All LCD segments are enabled and on or off according to their
corresponding memory location.
1 Reserved R 0h Reserved. Always reads as 0.
0 LCDON RW 0h LCD on. This bit turns the LCD_B module on or off.
0b = LCD_B module off
1b = LCD_B module on
894 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
34.3.2 LCDBCTL1 Register
LCD_B Control Register 1
Figure 34-13. LCDBCTL1 Register
15 14 13 12 11 10 9 8
Reserved LCDNOCAPIE LCDBLKONIE LCDBLKOFFIE LCDFRMIE
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved LCDNOCAPIF LCDBLKONIFG LCDBLKOFFIF LCDFRMIFG
G G
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Table 34-6. LCDBCTL1 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved. Always reads as 0.
11 LCDNOCAPIE RW 0h No capacitance connected interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
10 LCDBLKONIE RW 0h LCD blinking interrupt enable, segments switched on
0b = Interrupt disabled
1b = Interrupt enabled
9 LCDBLKOFFIE RW 0h LCD blinking interrupt enable, segments switched off
0b = Interrupt disabled
1b = Interrupt enabled
8 LCDFRMIE RW 0h LCD frame interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7-4 Reserved R 0h Reserved. Always reads as 0.
3 LCDNOCAPIFG RW 0h No capacitance connected interrupt flag. Set when charge pump is enabled but
no capacitance is connected to LCDCAP pin.
0b = No interrupt pending
1b = Interrupt pending
2 LCDBLKONIFG RW 0h LCD blinking interrupt flag, segments switched on. Automatically cleared when
data is written into a memory register.
0b = No interrupt pending
1b = Interrupt pending
1 LCDBLKOFFIFG RW 0h LCD blinking interrupt flag, segments switched off. Automatically cleared when
data is written into a memory register.
0b = No interrupt pending
1b = Interrupt pending
0 LCDFRMIFG RW 0h LCD frame interrupt flag. Automatically cleared when data is written into a
memory register.
0b = No interrupt pending
1b = Interrupt pending
895
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_B Registers
www.ti.com
34.3.3 LCDBBLKCTL Register
LCD_B Blink Control Register
Figure 34-14. LCDBBLKCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDBLKDIVx LCDBLKPREx LCDBLKMODx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-7. LCDBBLKCTL Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7-5 LCDBLKDIVx RW 0h Clock divider for blinking frequency. Together with LCDBLKPREx, the blinking
frequency f(BLINK) is calculated as f(BLINK) = f(ACLK/VLO) / [(LCDBLKDIVx +
1) × 2^(9+LCDBLKPREx)].
Settings for this bit should be changed only while LCDBLKMODx = 00.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
4-2 LCDBLKPREx RW 0h Clock pre-scaler for blinking frequency. Together with LCDBLKDIVx, the blinking
frequency f(BLINK) is calculated as f(BLINK) = f(ACLK/VLO) / ((LCDBLKDIVx +
1) × 2^(9+LCDBLKPREx)).
Settings for this bit should be changed only while LCDBLKMODx = 00.
000b = Divide by 512
001b = Divide by 1024
010b = Divide by 2048
011b = Divide by 4096
100b = Divide by 8162
101b = Divide by 16384
110b = Divide by 32768
111b = Divide by 65536
1-0 LCDBLKMODx RW 0h Blinking mode
00b = Blinking disabled
01b = Blinking of individual segments as enabled in blinking memory register
LCDBMx
10b = Blinking of all segments
11b = Switching between display contents as stored in LCDMx and LCDBMx
memory registers.
896 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
34.3.4 LCDBMEMCTL Register
LCD_B Memory Control Register
Figure 34-15. LCDBMEMCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved LCDCLRBM LCDCLRM LCDDISP
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
Table 34-8. LCDBMEMCTL Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved. Always reads as 0.
2 LCDCLRBM RW 0h Clear LCD blinking memory
Clears all blinking memory registers LCDBMx. The bit is automatically reset
when the blinking memory is cleared.
0b = Contents of blinking memory registers LCDBMx remain unchanged
1b = Clear content of all blinking memory registers LCDBMx
1 LCDCLRM RW 0h Clear LCD memory
Clears all LCD memory registers LCDMx. The bit is automatically reset when the
LCD memory is cleared.
0b = Contents of LCD memory registers LCDMx remain unchanged
1b = Clear content of all LCD memory registers LCDMx
0 LCDDISP RW 0h Select LCD memory registers for display
The bit is cleared in LCDBLKMODx = 01 and LCDBLKMODx = 10 and cannot be
changed by software.
When LCDBLKMODx = 11, this bit reflects the currently displayed memory but
cannot be changed by software. When returning to LCDBLKMODx = 00 the bit is
cleared.
0b = Display content of LCD memory registers LCDMx
1b = Display content of LCD blinking memory registers LCDBMx
897
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_B Registers
www.ti.com
34.3.5 LCDBVCTL Register
LCD_B Voltage Control Register
Figure 34-16. LCDBVCTL Register
15 14 13 12 11 10 9 8
Reserved VLCDx Reserved
r0 r0 r0 rw-0 rw-0 rw-0 rw-0 r0
76543210
LCDREXT R03EXT LCDEXTBIAS VLCDEXT LCDCPEN VLCDREFx LCD2B
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-9. LCDBVCTL Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12-9 VLCDx RW 0h Charge pump voltage select. LCDCPEN must be 1 for the charge pump to be
enabled. V(CC) is used for V(LCD) when VLCDx = 0000 and VLCDREFx = 00
and VLCDEXT = 0.
If VLCDREFx = 00 or 10:
0000b = Charge pump disabled
0001b = V(LCD) = 2.60 V
0010b = V(LCD) = 2.66 V
0011b = V(LCD) = 2.72 V
0100b = V(LCD) = 2.78 V
0101b = V(LCD) = 2.84 V
0110b = V(LCD) = 2.90 V
0111b = V(LCD) = 2.96 V
1000b = V(LCD) = 3.02 V
1001b = V(LCD) = 3.08 V
1010b = V(LCD) = 3.14 V
1011b = V(LCD) = 3.20 V
1100b = V(LCD) = 3.26 V
1101b = V(LCD) = 3.32 V
1110b = V(LCD) = 3.38 V
1111b = V(LCD) = 3.44 V
If VLCDREFx = 01 or 11:
0000b = Charge pump disabled
0001b = V(LCD) = 2.17 × V(REF)
0010b = V(LCD) = 2.22 × V(REF)
0011b = V(LCD) = 2.27 × V(REF)
0100b = V(LCD) = 2.32 × V(REF)
0101b = V(LCD) = 2.37 × V(REF)
0110b = V(LCD) = 2.42 × V(REF)
0111b = V(LCD) = 2.47 × V(REF)
1000b = V(LCD) = 2.52 × V(REF)
1001b = V(LCD) = 2.57 × V(REF)
1010b = V(LCD) = 2.62 × V(REF)
1011b = V(LCD) = 2.67 × V(REF)
1100b = V(LCD) = 2.72 × V(REF)
1101b = V(LCD) = 2.77 × V(REF)
1110b = V(LCD) = 2.82 × V(REF)
1111b = V(LCD) = 2.87 × V(REF)
8 Reserved R 0h Reserved. Always reads as 0.
898 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
Table 34-9. LCDBVCTL Register Description (continued)
Bit Field Type Reset Description
7 LCDREXT RW 0h V2 to V4 voltage on external Rx3 pins. This bit selects the external connections
for voltages V2 to V4 with internal bias generation (LCDEXTBIAS = 0). The bit is
don't care if external biasing is selected (LCDEXTBIAS = 1).
Settings for this bit should be changed only while LCDON = 0.
0b = Internally generated V2 to V4 are not switched to pins (LCDEXTBIAS = 0).
1b = Internally generated V2 to V4 are switched to pins (LCDEXTBIAS = 0).
6 R03EXT RW 0h V5 voltage select. This bit selects the external connection for the lowest LCD
voltage. R03EXT is ignored if there is no R03 pin available.
Settings for this bit should be changed only while LCDON = 0.
0b = V5 is V(SS)
1b = V5 is sourced from the R03 pin
5 LCDEXTBIAS RW 0h V2 to V4 voltage select. This bit selects the generation for voltages V2 to V4.
Settings for this bit should be changed only while LCDON = 0.
0b = V2 to V4 are generated internally.
1b = V2 to V4 are sourced externally and the internal bias generator is switched
off.
4 VLCDEXT RW 0h V(LCD) source select
Settings for this bit should be changed only while LCDON = 0.
0b = V(LCD) is generated internally.
1b = V(LCD) is sourced externally.
3 LCDCPEN RW 0h Charge pump enable
0b = Charge pump disabled
1b = Charge pump enabled when V(LCD) is generated internally (VLCDEXT = 0)
and VLCDx > 0 or VLCDREFx > 0.
2-1 VLCDREFx RW 0h Charge pump reference select
If LCDEXTBIAS = 1 or LCDREXT = 1 settings 01, 10 and 11 are not supported.
Internal reference voltage used instead.
Settings for this bit should be changed only while LCDON = 0.
00b = Internal reference voltage
01b = External reference voltage
10b = Internal reference voltage switched to external pin LCDREF/R13.
11b = Reserved. Defaults to external reference voltage.
0 LCD2B RW 0h Bias select. LCD2B is ignored when LCDMx = 00.
0b = 1/3 bias
1b = 1/2 bias
899
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_B Registers
www.ti.com
34.3.6 LCDBPCTL0 Register
LCD_B Port Control Register 0
Figure 34-17. LCDBPCTL0 Register
15 14 13 12 11 10 9 8
LCDS15 LCDS14 LCDS13 LCDS12 LCDS11 LCDS10 LCDS9 LCDS8
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS7 LCDS6 LCDS5 LCDS4 LCDS3 LCDS2 LCDS1 LCDS0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-10. LCDBPCTL0 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
0b = Multiplexed pins are port functions.
1b = Pins are LCD functions.
34.3.7 LCDBPCTL1 Register
LCD_B Port Control Register 1
Figure 34-18. LCDBPCTL1 Register
15 14 13 12 11 10 9 8
LCDS31 LCDS30 LCDS29 LCDS28 LCDS27 LCDS26 LCDS25 LCDS24
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS23 LCDS22 LCDS21 LCDS20 LCDS19 LCDS18 LCDS17 LCDS16
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-11. LCDBPCTL1 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable
LCDS27 to LCDS31 are reserved on devices supporting a maximum of 96
segments.
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
0b = Multiplexed pins are port functions.
1b = Pins are LCD functions.
900 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
34.3.8 LCDBPCTL2 Register
LCD_B Port Control Register 2 (≥128 Segments)
Figure 34-19. LCDBPCTL2 Register
15 14 13 12 11 10 9 8
LCDS47 LCDS46 LCDS45 LCDS44 LCDS43 LCDS42 LCDS41 LCDS40
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS39 LCDS38 LCDS37 LCDS36 LCDS35 LCDS34 LCDS33 LCDS32
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-12. LCDBPCTL2 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable
LCDS35 to LCDS47 are reserved on devices supporting a maximum of 128
segments.
LCDS43 to LCDS47 are reserved on devices supporting a maximum of 160
segments.
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
0b = Multiplexed pins are port functions.
1b = Pins are LCD functions.
34.3.9 LCDBPCTL3 Register
LCD_B Port Control Register 2 (192 Segments)
Figure 34-20. LCDBPCTL3 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved LCDS50 LCDS49 LCDS48
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
Table 34-13. LCDBPCTL3 Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved. Always reads as 0.
2-0 LCDSx RW 0h LCD segment line x enable
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
0b = Multiplexed pins are port functions.
1b = Pins are LCD functions.
901
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_B Registers
www.ti.com
34.3.10 LCDBCPCTL Register
LCD_B Charge Pump Control Register
Figure 34-21. LCDBCPCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDCPDIS7 LCDCPDIS6 LCDCPDIS5 LCDCPDIS4 LCDCPDIS3 LCDCPDIS2 LCDCPDIS1 LCDCPDIS0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 34-14. LCDBCPCTL Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved. Always reads as 0.
7 LCDCPDIS7 RW 0h Reserved
6 LCDCPDIS6 RW 0h Reserved
5 LCDCPDIS5 RW 0h Reserved
4 LCDCPDIS4 RW 0h Reserved
3 LCDCPDIS3 RW 0h Reserved
2 LCDCPDIS2 RW 0h LCD charge pump disable during ADC12 conversion
0b = LCD charge pump not automatically disabled during conversion.
1b = LCD charge pump automatically disabled during conversion.
1 LCDCPDIS1 RW 0h Reserved
0 LCDCPDIS0 RW 0h Reserved
902 LCD_B Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_B Registers
34.3.11 LCDBIV Register
LCD_B Interrupt Vector Register
Figure 34-22. LCDBIV Register
15 14 13 12 11 10 9 8
LCDBIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDBIVx
r0 r0 r0 r0 r0 r0 r0 r0
Table 34-15. LCDBIV Register Description
Bit Field Type Reset Description
15-0 LCDBIVx R 0h LCD_B interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: No capacitor connected; Interrupt Flag: LCDNOCAPIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Blink, segments off; Interrupt Flag: LCDBLKOFFIFG
06h = Interrupt Source: Blink, segments on; Interrupt Flag: LCDBLKONIFG
08h = Interrupt Source: Frame interrupt; Interrupt Flag: LCDFRMIFG; Interrupt
Priority: Lowest
903
SLAU208O–June 2008–Revised May 2015 LCD_B Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 35
SLAU208O–June 2008–Revised May 2015
LCD_C Controller
The LCD_C controller drives static and 2-mux to 8-mux LCDs. This chapter describes the LCD_C
controller. The differences between LCD_B and LCD_C are listed in Table 35-1.
Topic ........................................................................................................................... Page
35.1 LCD_C Introduction .......................................................................................... 905
35.2 LCD_C Operation.............................................................................................. 907
35.3 LCD_C Registers .............................................................................................. 923
904 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Introduction
35.1 LCD_C Introduction
The LCD_C controller directly drives LCD displays by automatically creating the ac segment and common
voltage signals. The LCD_C controller can support static and 2-mux to 8-mux LCD glasses.
The LCD_C controller features are:
• Display memory
• Automatic signal generation
• Configurable frame frequency
• Blinking of individual segments with separate blinking memory for static, and 2- to 4-mux LCDs
• Blinking of complete display for 5- to 8-mux LCDs
• Regulated charge pump up to 3.44 V (typical)
• Contrast control by software
• Support for the following types of LCDs
– Static
– 2-mux, 1/2 bias or 1/3 bias
– 3-mux, 1/2 bias or 1/3 bias
– 4-mux, 1/2 bias or 1/3 bias
– 5-mux, 1/3 bias
– 6-mux, 1/3 bias
– 7-mux, 1/3 bias
– 8-mux, 1/3 bias
The differences between LCD_B and LCD_C are listed in Table 35-1.
Table 35-1. Differences Between LCD_B and LCD_C
Feature LCD_B LCD_C
Supported types of LCDs Static, 2-, 3-, 4-mux Static, 2-, 3-, 4-, 5-, 6-, 7, 8-mux
Maximum VLCDx settings 001111b 001111b
Maximum LCD voltage (VLCD,typ) 3.44 V 3.44 V
Supported biasing schemes for 5-mux to 8-mux 5- to 8-mux not supported 1/3 biasing
The LCD controller block diagram is shown in Figure 35-1.
NOTE: Maximum LCD Segment Control
The maximum number of segment lines and memory registers available differs with device.
See the device-specific data sheet for available segment pins and the maximum number of
segments supported.
905
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
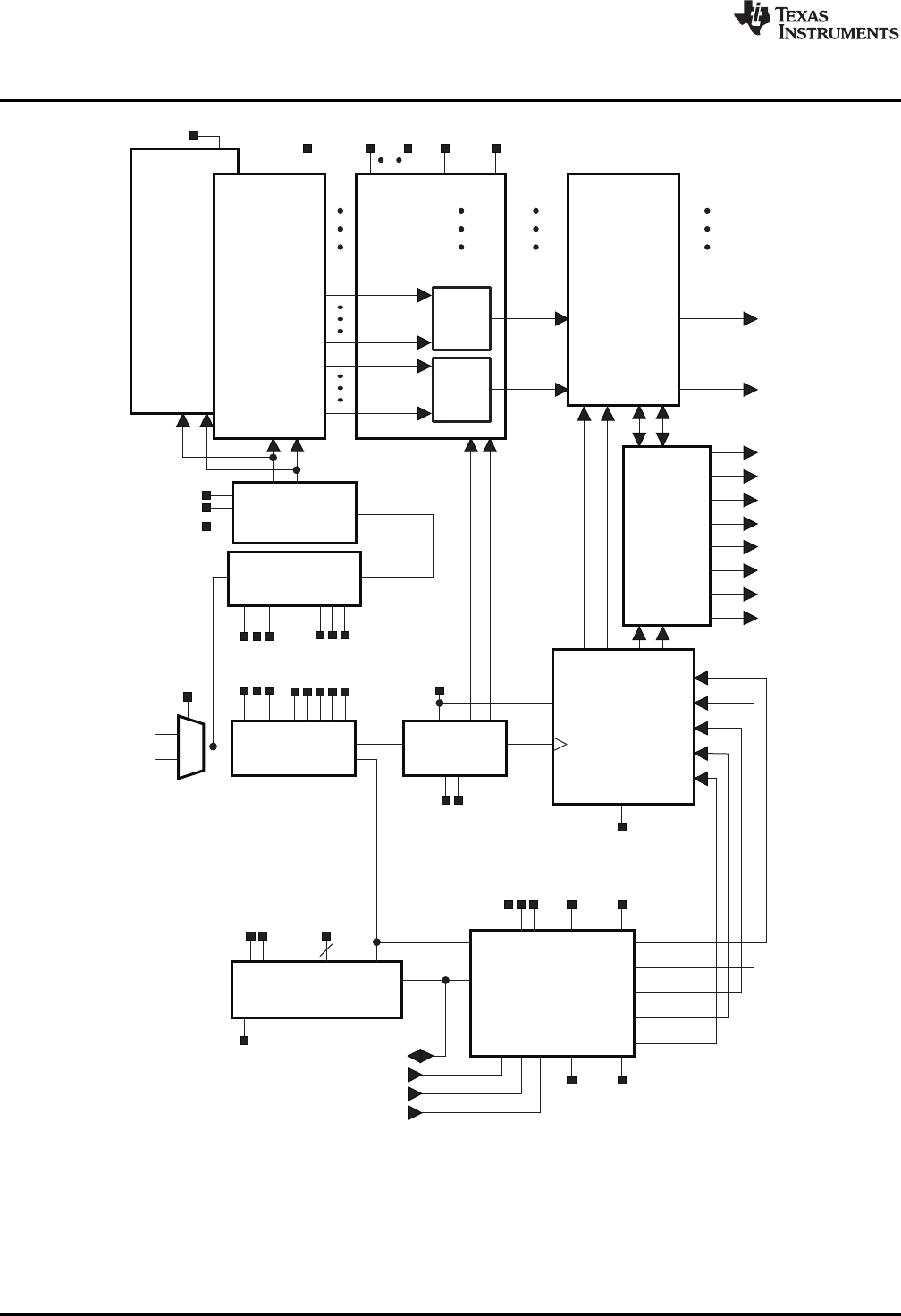
VLCDREFx
Segment
Output
Control
COM4
COM0
COM6
COM2
COM5
COM1
COM7
COM3
S0
S1
Common
Output
Control
SEG0
SEG1
Mux
Mux
LCDMXx
LCDON
fLCD
OSCOFF
(from SR)
LCDPREx
Regulated Charge
Pump/
Contrast Control
VLCDx
VLCD
LCDCAP/R33
LCD Bias Generator
V1
VLCD
LCD2B
LCDMXx
V2
V3
V4
LCDCPEN
V5
LCD Frequency
Divider
4
LCD
REXT
R23
LCDREF/R13
R03
R03EXT
Blinking
Memory
Registers
LCDBMx
(only static,
2- to 4-mux)
LCD
Memory
Registers
LCDMx
0
1
ACLK
VLOCLK
Analog
Voltage
Multiplexer
V1
V2
V3
V4
VDVCVBVA
V5
LCDDIVx
LCDBLKPREx LCDBLKDIVx
LCDSx LCDSON LCDLP
LCDBLKMODx Blinking and
Display Control
Blinking
Frequency Divider
BLKCLK
Timing
Generator
LCDDISP
LCDCLRBM LCDCLRM
LCDSSEL
LCD
EXTBIAS
LCD_C Introduction
www.ti.com
Figure 35-1. LCD Controller Block Diagram
906 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
32 1 0 3 2 1 0
Associated
CommonPins
Register 70
Associated
SegmentPins
Sn+1 Sn
------ ------
LCDM15 29,28
-- -- 28
------ ------
LCDM14 27,26
-- -- 26
------ ------
LCDM13 25,24
-- -- 24
------ ------
LCDM12 23,22
-- -- 22
------ ------
LCDM11 21,20
-- -- 20
------ ------
LCDM10 19,18
-- -- 18
------ ------
LCDM9 17,16
-- -- 16
------ ------
LCDM8 15,14
-- -- 14
------ -------- --
LCDM7 13,12
12
n
3,2
2
------ -------- --
LCDM2
5,4
4
------ -------- --
LCDM3
7,6
6
------ -------- --
LCDM4
9,8
8
------ -------- --
LCDM5
------ ------ 1,10
-- -- 10
LCDM6
------ ------
LCDM16 -- -- 31,30
30
------ ------
LCDM17 -- -- 33,32
32
------ ------
LCDM18 -- -- 35,34
34
------ ------
LCDM19 -- -- 37,36
36
------ ------
LCDM20 -- -- 39,38
38
1,0
0
------ -------- --
LCDM1
www.ti.com
LCD_C Operation
35.2 LCD_C Operation
The LCD controller is configured with user software. The setup and operation of the LCD controller is
discussed in the following sections.
35.2.1 LCD Memory
The LCD memory organization differs slightly depending on the mode.
Each memory bit corresponds to one LCD segment or is not used, depending on the mode. To turn on an
LCD segment, its corresponding memory bit is set.
The memory can also be accessed word-wise using the even addresses starting at LCDM1, LCDM3, ...
Setting the bit LCDCLRM clears all LCD memory registers at the next frame boundary. It is reset
automatically after the registers are cleared.
35.2.1.1 Static and 2-Mux to 4-Mux Mode
For static and 2-mux to 4-mux modes, one byte of the LCD memory contains the information for two
segment lines. An example LCD memory map for these modes with 160 segments is shown in Figure 35-
2.
Figure 35-2. LCD Memory for Static and 2-Mux to 4-Mux Mode - Example for 160 Segments
907
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
f =
LCD
fACLK/VLOCLK
(LCDDIVx + 1) × 2LCDPRE
76 5 4 3 2 1 0
Associated
CommonPins
Register 70
Associated
SegmentPins
Sn
------ ------
LCDM15 14
-- -- 14
------ ------
LCDM14 13
-- -- 13
------ ------
LCDM13 12
-- -- 12
------ ------
LCDM12 11
-- -- 11
------ ------
LCDM11 10
-- -- 10
------ ------
LCDM10 9
-- -- 9
------ ------
LCDM9 8
-- -- 8
------ ------
LCDM8 7
-- -- 7
------ -------- --
LCDM7 6
6
n
1
1
------ -------- --
LCDM2
2
2
------ -------- --
LCDM3
3
3
------ -------- --
LCDM4
4
4
------ -------- --
LCDM5
------ ------ 5
-- -- 5
LCDM6
------ ------
LCDM16 -- -- 15
15
------ ------
LCDM17 -- -- 16
16
------ ------
LCDM18 -- -- 17
17
------ ------
LCDM19 -- -- 18
18
------ ------
LCDM20 -- -- 19
19
0
0
------ -------- --
LCDM1
LCD_C Operation
www.ti.com
35.2.1.2 5-Mux to 8-Mux Mode
For 5-mux to 8-mux modes, one byte of the LCD memory contains the information for one segment line.
An example LCD memory map for these modes with 160 segments is shown in Figure 35-3
Figure 35-3. LCD Memory for 5-Mux to 8-Mux Mode - Example for 160 Segments
35.2.2 LCD Timing Generation
The LCD_C controller uses the fLCD signal from the integrated clock divider to generate the timing for
common and segment lines. With the LCDSSEL bit, ACLK with a frequency between 30 kHz and 40 kHz
or VLOCLK can be selected as clock source into the divider. The fLCD frequency is selected with the
LCDPREx and LCDDIVx bits. The resulting fLCD frequency is calculated by:
The proper fLCD frequency depends on the LCD's requirement for framing frequency and the LCD multiplex
rate. It is calculated by:
fLCD = 2 × mux × fFrame
For example, to calculate fLCD for a 3-mux LCD with a frame frequency of 30 Hz to 100 Hz:
fFrame (from LCD data sheet) = 30 Hz to 100 Hz
fLCD = 2 × 3 × fFrame
fLCD(min) = 180 Hz
fLCD(max) = 600 Hz
With fACLK/VLOCLK = 32768 Hz, LCDPREx = 011, and LCDDIVx = 10101:
fLCD = 32768 Hz / ((21+1) × 23) = 32768 Hz / 176 = 186 Hz
908 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

f =
Blink
fACLK/VLO
(LCDBLKDIVx + 1) × 29+LCDBLKPREx
www.ti.com
LCD_C Operation
With LCDPREx = 001 and LCDDIVx = 11011:
fLCD = 32768 Hz / ((27+1) × 21) = 32768 Hz / 56 = 585 Hz
The lowest frequency has the lowest current consumption. The highest frequency has the least flicker.
35.2.3 Blanking the LCD
The LCD controller allows blanking the complete LCD. The LCDSON bit is combined with a logical AND
with each segment's memory bit. When LCDSON = 1, each segment is on or off according to its bit value.
When LCDSON = 0, each LCD segment is off.
35.2.4 LCD Blinking
The LCD controller also supports blinking. In static and 2-mux to 4-mux mode, the blinking mode
LCDBLKMODx = 01 allows blinking of individual segments; with LCDBLKMODx = 10 all segments are
blinking; and with LCDBLKMODx = 00 blinking is disabled. In 5-mux mode and above, only blinking mode
LCDBLKMODx = 10 that allows blinking of all segments is available; if another mode is selected, blinking
is disabled.
35.2.4.1 Blinking Memory
In static and 2-mux to 4-mux mode, a separate blinking memory is implemented to select the blinking
segments. To enable individual segments for blinking, the corresponding bit in the blinking memory
LCDBMx registers must be set. The memory uses the same structure as the LCD memory shown in
Figure 35-2. Each memory bit corresponds to one LCD segment or is not used, depending on the
multiplexing mode LCDMXx. To enable blinking for a LCD segment, its corresponding memory bit is set.
The blinking memory can also be accessed word-wise using the even addresses starting at LCDBM1,
LCDBM3, ...
Setting the bit LCDCLRBM clears all blinking memory registers at the next frame boundary. It is
automatically reset after the registers are cleared.
35.2.4.2 Blinking Frequency
The blinking frequency fBLINK is selected with the LCDBLKPREx and LCDBLKDIVx bits. The same clock is
used as selected for the LCD frequency fLCD. The resulting fBLINK frequency is calculated by:
The divider generating the blinking frequency fBLINK is reset when LCDBLKMODx = 00. After a blinking
mode LCDBLKMODx = 01 or 10 is selected, the enabled segments or all segments go blank at the next
frame boundary and stay off for half of a BLKCLK period. Then they go active at the next frame boundary
and stay on for another half BLKCLK period before they go blank again at a frame boundary.
NOTE: Blinking Frequency Restrictions
The blinking frequency must be smaller than the frame frequency fFrame.
The blinking frequency should only be changed when LCDBLKMODx = 00.
35.2.4.3 Dual Display Memory
In static and 2-mux to 4-mux mode, the blinking memory can also be used as a secondary display
memory when no blinking mode LCDBLKMODx = 01 or 10 is selected. The memory to be displayed can
be selected either manually using the LCDDISP bit or automatically with LCDBLKMODx = 11.
With LCDDISP = 0, the LCD memory is selected, and with LCDDISP = 1 the blinking memory is selected
as display memory. Switching between the memories is synchronized to the frame boundaries.
909
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_C Operation
www.ti.com
With LCDBLKMODx = 11 the LCD controller switches automatically between the memories using the
divider to generate the blinking frequency. After LCDBLKMODx = 11 is selected, the memory to be
displayed for the first half a BLKCLK period is the LCD memory. In the second half, the blinking memory is
used as display memory. Switching between the memories is synchronized to the frame boundaries.
35.2.5 LCD Voltage And Bias Generation
The LCD_C module allows selectable sources for the peak output waveform voltage, V1, as well as the
fractional LCD biasing voltages V2 to V5. VLCD may be sourced from VCC, an internal charge pump, or
externally.
All internal voltage generation is disabled if the selected clock source (ACLK or VLOCLK) is turned off
(OSCOFF = 1) or the LCD_C module is disabled (LCDON = 0).
35.2.5.1 LCD Voltage Selection
VLCD is sourced from VCC when VLCDEXT = 0, VLCDx = 0, and VREFx = 0. VLCD is sourced from the
internal charge pump when VLCDEXT = 0, VLCDCPEN = 1, and VLCDx > 0. The charge pump is always
sourced from DVCC. The VLCDx bits provide a software selectable LCD voltage from 2.6 V to 3.44 V
(typical) independent of DVCC. See the device-specific data sheet for specifications.
When the internal charge pump is used, a 4.7-µF or larger capacitor must be connected between the
LCDCAP pin and ground. If no capacitor is connected and the charge pump is enabled, the
LCDNOCAPIFG interrupt flag is set, and the charge pump is disabled to prevent damage to the device.
The charge pump may be temporarily disabled by setting LCDCPEN = 0 with VLCDx > 0 to reduce
system noise. It can be automatically disabled during certain periods by setting the corresponding bits in
the LCDCCPCTL register. In this case, the voltage present at the external capacitor is used for the LCD
voltages until the charge pump is re-enabled.
NOTE: Capacitor Required For Internal Charge Pump
A 4.7-µF or larger capacitor must be connected from the LCDCAP pin to ground when the
internal charge pump is enabled. If no capacitor is connected, the LCDNOCAPIFG interrupt
flag is set and the charge pump is disabled.
The internal charge pump may use an external reference voltage when VLCDREFx = 01 (and LCDREXT
= 0 and LCDEXTBIAS = 0). In this case, the charge pump voltage is set to a multiply of the external
reference voltage according to the VLCDx bits setting.
When VLCDEXT = 1, VLCD is sourced externally from the LCDCAP, pin and the internal charge pump is
disabled.
910 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
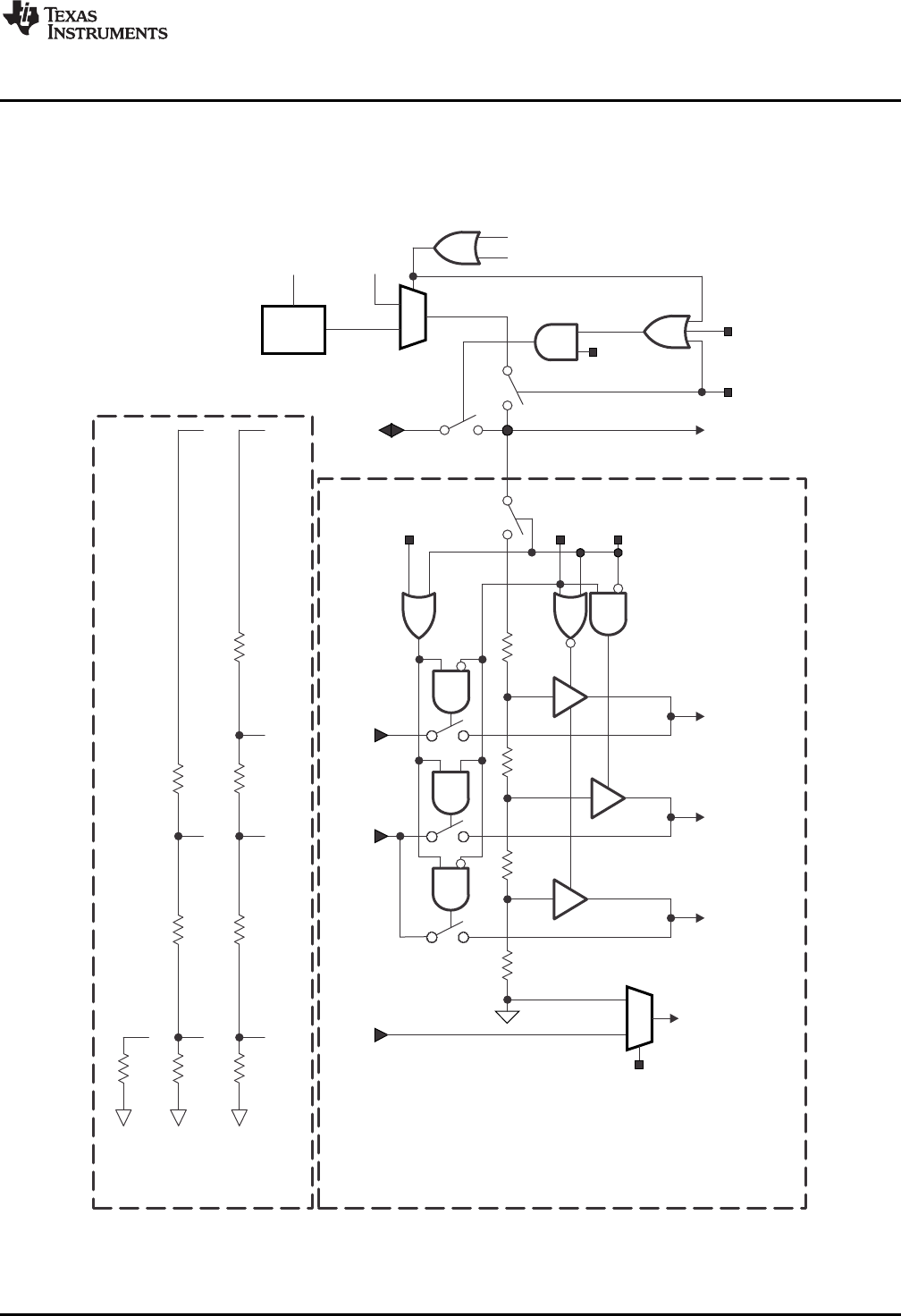
0
1
VLCDEXT
LCDREXT
LCDON
0
1
Internal VLCD
LCDREF/R13
R23
R03
LCDCAP/R33
1
0
V1 (V )
LCD
V2 (2/3 V )
LCD
V5
V4 int
V3 int
V2 int
VLCD
AVCC
0
VLCDx > 0
VLCDREFx > 0
R03EXT
Charge
Pump
DVCC
R
R
R
R
R
Rx Rx
Static 1/2 Bias 1/3 Bias
Optional external resistors
Rx = Optional contrast control
LCD2B
LCD
EXTBIAS
1
1
1
LCDREXT
V3 (1/2 V )
LCD
V4 (1/3 V )
LCD
Rx
www.ti.com
LCD_C Operation
35.2.5.2 LCD Bias Generation
The fractional LCD biasing voltages, V2 to V5 can be generated internally or externally, independent of
the source for VLCD.
The bias generation block diagram for LCD_C static and 2-mux to 8-mux modes is shown in Figure 35-4.
Figure 35-4. Bias Generation
The internally generated bias voltages V2 to V4 are switched to external pins with LCDREXT = 1.
911
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_C Operation
www.ti.com
To source the bias voltages V2 to V4 externally, LCDEXTBIAS is set. This also disables the internal bias
generation. Typically, an equally weighted resistor divider is used with resistors ranging from a few kΩto
1 MΩ, depending on the size of the display. When using an external resistor divider, the VLCD voltage may
be sourced from the internal charge pump when VLCDEXT = 0 taking the maximum charge pump load
current into account. V5 can also be sourced externally when R03EXT = 1. In static mode and all mux
modes using 1/2 biasing or 1/3 biasing, when R03EXT = 1 V5 can control the contrast of the connected
display by changing the voltage at the low end of the external resistor divider Rx as shown in the left part
of Figure 35-4.
When using an external resistor divider, R33 may serve as a switched VLCD output when VLCDEXT = 0.
This allows the power to the resistor ladder to be turned off, which eliminates current consumption when
the LCD is not used. When VLCDEXT = 1, R33 serves as a VLCD input.
The bias generator supports 1/2 biasing when LCD2B = 1 and 1/3 biasing when LCD2B = 0. In static
mode, the internal divider is disabled.
Table 35-2. Bias Voltages and external Pins
Mode Bias Config LCD2B Voltage Level Pin Condition
V1 ("1") R33 if LCDREXT = 1 or LCDEXTBIAS = 1
Static Static X V5 ("0") R03 if R03EXT = 1
V1 ("1") R33 if LCDREXT = 1 or LCDEXTBIAS = 1
2-mux, 3-mux, 4-mux 1/2 1 V3 ("1/2") R13 if LCDREXT = 1 or LCDEXTBIAS = 1
V5 ("0") R03 if R03EXT = 1
V1 ("1") R33 if LCDREXT = 1 or LCDEXTBIAS = 1
V2 ("2/3") R23 if LCDREXT = 1 or LCDEXTBIAS = 1
2-mux, 3-mux, 4-mux 1/3 0 V4 ("1/3") R13 if LCDREXT = 1 or LCDEXTBIAS = 1
V5 ("0") R03 if R03EXT = 1
V1 ("1") R33 if LCDREXT = 1 or LCDEXTBIAS = 1
V2 ("2/3") R23 if LCDREXT = 1 or LCDEXTBIAS = 1
5-mux to 8-mux 1/3 0 V4 ("1/3") R13 if LCDREXT = 1 or LCDEXTBIAS = 1
V5 ("0") R03 if R03EXT = 1
912 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Operation
35.2.5.3 LCD Contrast Control
The peak voltage of the output waveforms together with the selected mode and biasing determine the
contrast and the contrast ratio of the LCD. The LCD contrast can be controlled in software by adjusting the
LCD voltage generated by the integrated charge pump using the VLCDx settings.
The contrast ratio depends on the used LCD display and the selected biasing scheme. Table 35-3 shows
the biasing configurations that apply to the different modes together with the RMS voltages for the
segments turned on (VRMS,ON) and turned off (VRMS,OFF) as functions of VLCD. It also shows the resulting
contrast ratios between the on and off states.
Table 35-3. LCD Voltage and Biasing Characteristics
Contrast
Bias COM
Mode LCDMx LCD2B Voltage Levels VRMS,OFF/ VLCD VRMS,ON/ VLCD Ratio VRMS,ON/
Config Lines VRMS,OFF
Static Static 0000 X 1 V1, V5 0 1 1/0
2-mux 1/2 (1) 0001 1 2 V1, V3, V5 0.354 0.791 2.236
1/3 0001 0 2 V1, V2, V4, V5 0.333 0.745 2.236
3-mux 1/2 0010 1 3 V1, V3, V5 0.408 0.707 1.732
1/3 (1) 0010 0 3 V1, V2, V4, V5 0.333 0.638 1.915
4-mux 1/2 0011 1 4 V1, V3, V5 0.433 0.661 1.528
1/3 (1) 0011 0 4 V1, V2, V4, V5 0.333 0.577 1.732
5-mux 1/3 (1) 0100 0 5 V1, V2, V4, V5 0.333 0.537 1.612
6-mux 1/3 (1) 0101 0 6 V1, V2, V4, V5 0.333 0.509 1.528
7-mux 1/3(1) 0110 0 7 V1, V2, V4, V5 0.333 0.488 1.464
8-mux 1/3(1) 0111 0 8 V1, V2, V4, V5 0.333 0.471 1.414
(1) Recommended setting to achieve best contrast
A typical approach to determine the required VLCD is by equating VRMS,OFF with a LCD threshold voltage
provided by the LCD manufacturer, for example when the LCD exhibits approximately 10% contrast
(Vth,10%): VRMS,OFF = Vth,10%. Using the values for VRMS,OFF/VLCD provided in the table results in VLCD =
Vth,10%/(VRMS,OFF/VLCD). In the static mode, a suitable choice is VLCD greater than or equal to three times
Vth,10%.
In 3-mux and 4-mux mode, a 1/3 biasing is typically used, but a 1/2 biasing scheme is also possible. The
1/2 bias reduces the contrast ratio, but the advantage is a reduction of the required full-scale LCD voltage
VLCD.
35.2.6 LCD Outputs
Some LCD segment, common, and Rxx functions are multiplexed with digital I/O functions. These pins
can function either as digital I/O or as LCD functions.
The LCD segment functions, when multiplexed with digital I/O, are selected using the LCDSx bits in the
LCDCPCTLx registers. The LCDSx bits select the LCD function for each segment line. When LCDSx = 0,
a multiplexed pin is set to digital I/O function. When LCDSx = 1, a multiplexed pin is selected as LCD
function.
The pin functions for COMx and Rxx, when multiplexed with digital I/O, are selected as described in the
port schematic section of the device-specific data sheet. An some devices the COM1 to COM7 pins are
shared with segment lines, refer to the device-specific data sheet. If these pins are required as COM pins
due to the selected LCD multiplexing mode, the COM functionality takes precedence over the segment
function that can be selected for those pins with the LCDSx bits as for all other segment pins.
See the port schematic section of the device-specific data sheet for details on controlling the pin
functionality.
913
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_C Operation
www.ti.com
NOTE: LCDSx Bits Do Not Affect Dedicated LCD Segment Pins
The LCDSx bits only affect pins with multiplexed LCD segment functions and digital I/O
functions. Dedicated LCD segment pins are not affected by the LCDSx bits.
35.2.7 LCD Interrupts
The LCD_C module has four interrupt sources available, each with independent enables and flags.
The four interrupt flags, namely LCDFRMIFG, LCDBLKOFFIFG, LCDBLKONIFG, and LCDNOCAPIFG,
are prioritized and combined to source a single interrupt vector. The interrupt vector register LCDCIV is
used to determine which flag requested an interrupt.
The highest priority enabled interrupt generates a number in the LCDCIV register (see register
description). This number can be evaluated or added to the program counter to automatically enter the
appropriate software routine. Disabled LCD interrupts do not affect the LCDCIV value.
Any read access of the LCDCIV register automatically resets the highest pending interrupt flag. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt. A write
access to the LCDCIV register automatically resets all pending interrupt flags. In addition, all flags can be
cleared via software.
The LCDNOCAPIFG indicates that no capacitor is present at the LCDCAP pin when the charge pump is
enabled. Setting the LCDNOCAPIE bit enables the interrupt.
The LCDBLKONIFG is set at the BLKCLK edge synchronized to the frame boundaries that turns on the
segments when blinking is enabled with LCDBLKMODx = 01 or 10. It is also set at the BLKCLK edge
synchronized to the frame boundaries that selects the blinking memory as display memory when
LCDBLKMODx = 11. It is automatically cleared when a LCD or blinking memory register is written. Setting
the LCDBLKONIE bit enables the interrupt.
The LCDBLKOFFIFG is set at the BLKCLK edge synchronized to the frame boundaries that blanks the
segments when blinking is enabled with LCDBLKMODx = 01 or 10. It is also set at the BLKCLK edge
synchronized to the frame boundaries that selects the LCD memory as display memory when
LCDBLKMODx = 11. It is automatically cleared when a LCD or blinking memory register is written. Setting
the LCDBLKOFFIE bit enables the interrupt.
The LCDFRMIFG is set at a frame boundary. It is automatically cleared when a LCD or blinking memory
register is written. Setting the LCDFRMIFGIE bit enables the interrupt.
914 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_C Operation
35.2.7.1 LCDCIV Software Example
The following software example shows the recommended use of LCDCIV and the handling overhead. The
LCDCIV value is added to the PC to automatically jump to the appropriate routine.
The numbers at the right margin show the necessary CPU cycles for each instruction. The software
overhead for different interrupt sources includes interrupt latency and return-from-interrupt cycles, but not
the task handling itself.
; Interrupt handler for LCD_B interrupt flags.
LCDB_HND ; Interrupt latency 6
ADD &LCDBIV,PC ; Add offset to Jump table 3
RETI ; Vector 0: No interrupt 5
JMP LCDNOCAP_HND ; Vector 2: LCDNOCAPIFG 2
JMP LCDBLKON_HND ; Vector 4: LCDBLKONIFG 2
JMP LCDBLKOFF_HND ; Vector 6: LCDBLKOFFIFG 2
LCDFRM_HND ; Vector 8: LCDFRMIFG
... ; Task starts here
RETI 5
LCDNOCAP_HND ; Vector 2: LCDNOCAPIFG
... ; Task starts here
RETI 5
LCDBLKON_HND ; Vector 4: LCDBLKONIFG
... ; Task starts here
RETI ; Back to main program 5
LCDBLKOFF_HND ; Vector 6: LCDBLKOFFIFG
... ; Task starts here
RETI ; Back to main program 5
915
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
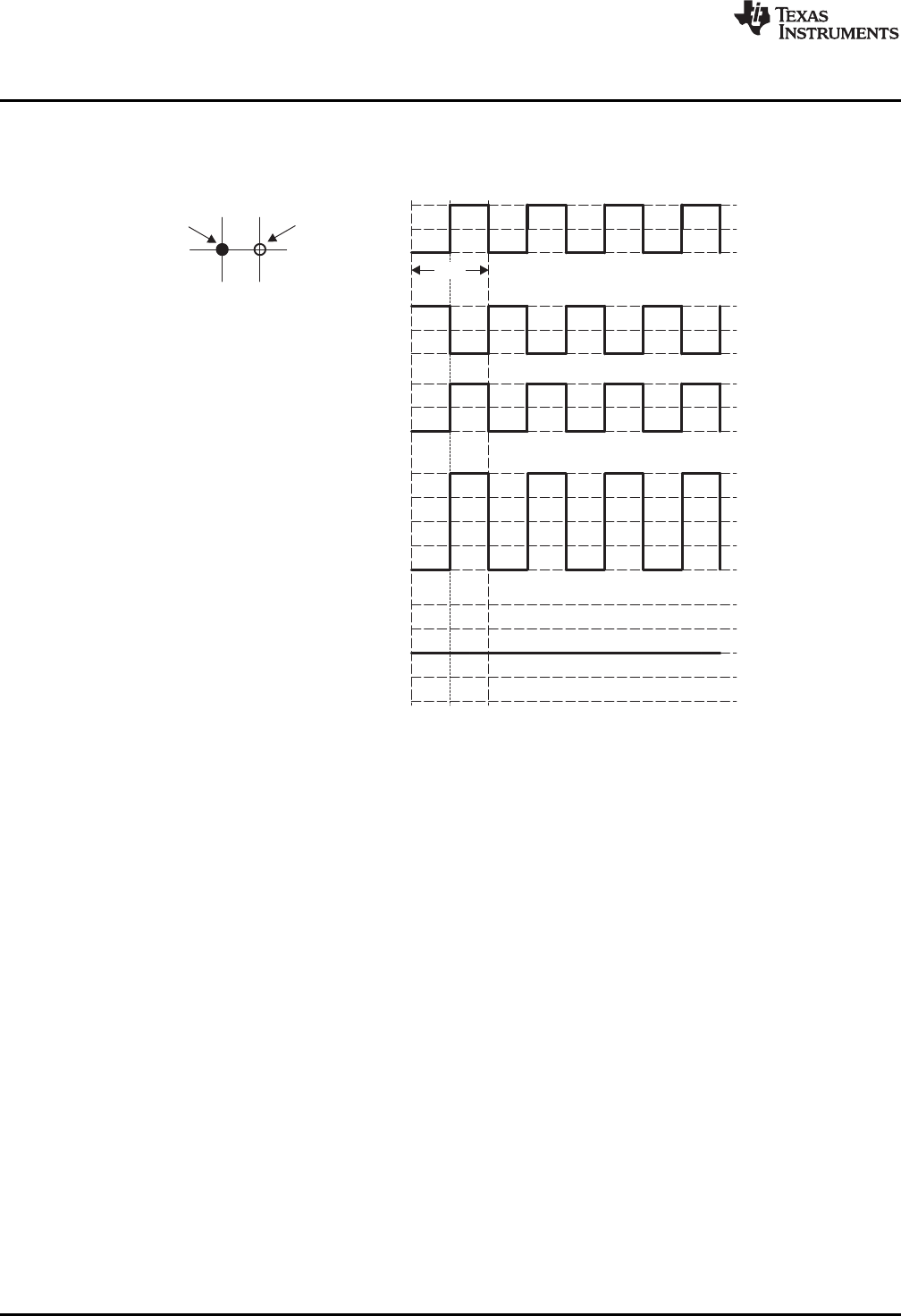
V1
V1
0V
0V
−V1
−V1
COM0
S0
S1
COM0
S0 S1
off
on
COM0-S0
Segment is on.
COM0-S1
Segment is off.
V1
V1
V1
V5
V5
V5
fframe
LCD_C Operation
www.ti.com
35.2.8 Static Mode
In static mode, each MSP430 segment pin drives one LCD segment, and one common line (COM0) is
used. Figure 35-5 shows some example static waveforms.
Figure 35-5. Example Static Waveforms
916 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
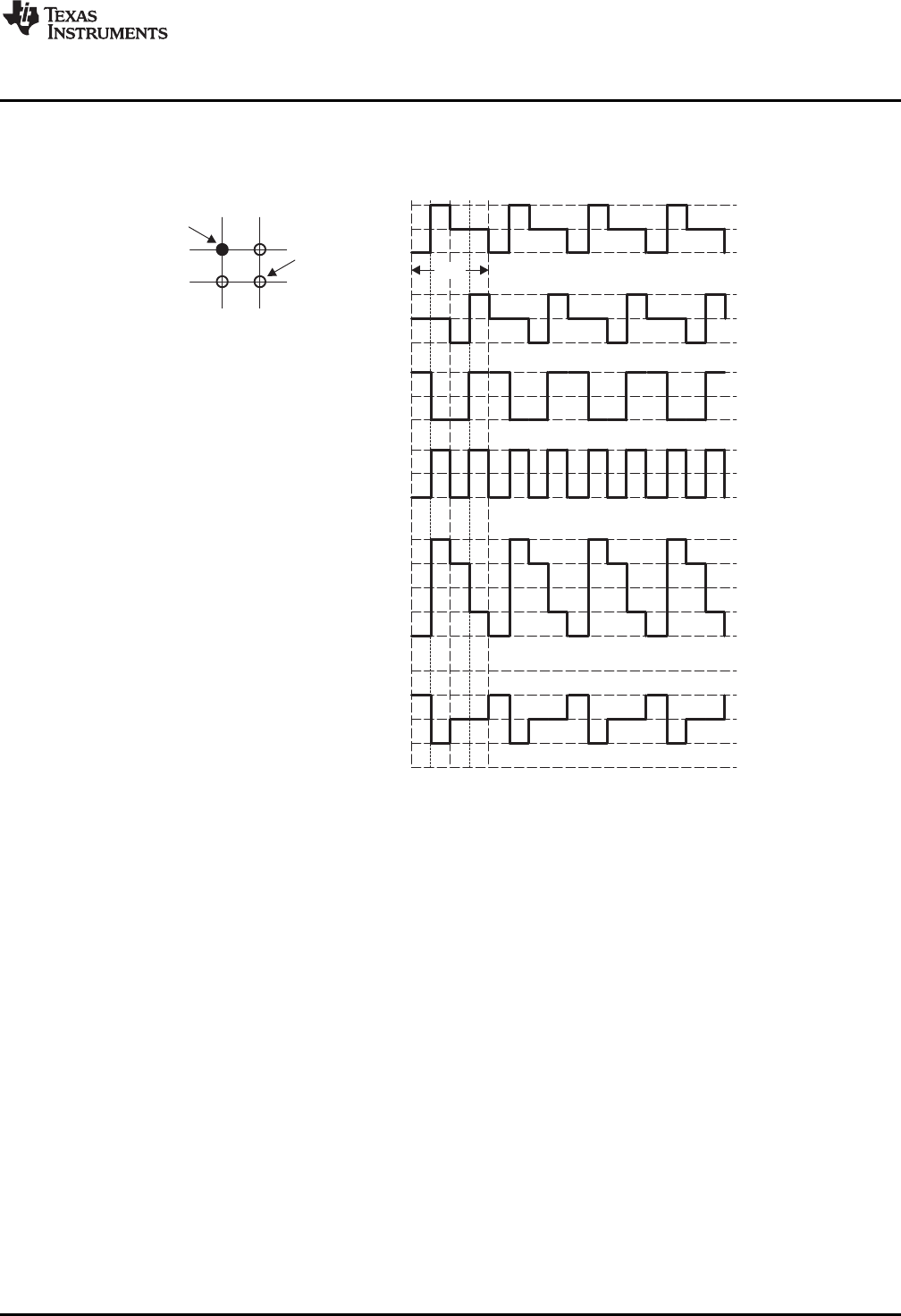
V3
V3
V3
V3
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
S0 S1
off
on
COM0-S0
Segment is on.
COM1-S1
Segment is off.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
www.ti.com
LCD_C Operation
35.2.9 2-Mux Mode
In 2-mux mode, each MSP430 segment pin drives two LCD segments, and two common lines (COM0 and
COM1) are used. Figure 35-6 shows some example 2-mux 1/2-bias waveforms.
Figure 35-6. Example 2-Mux Waveforms
917
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
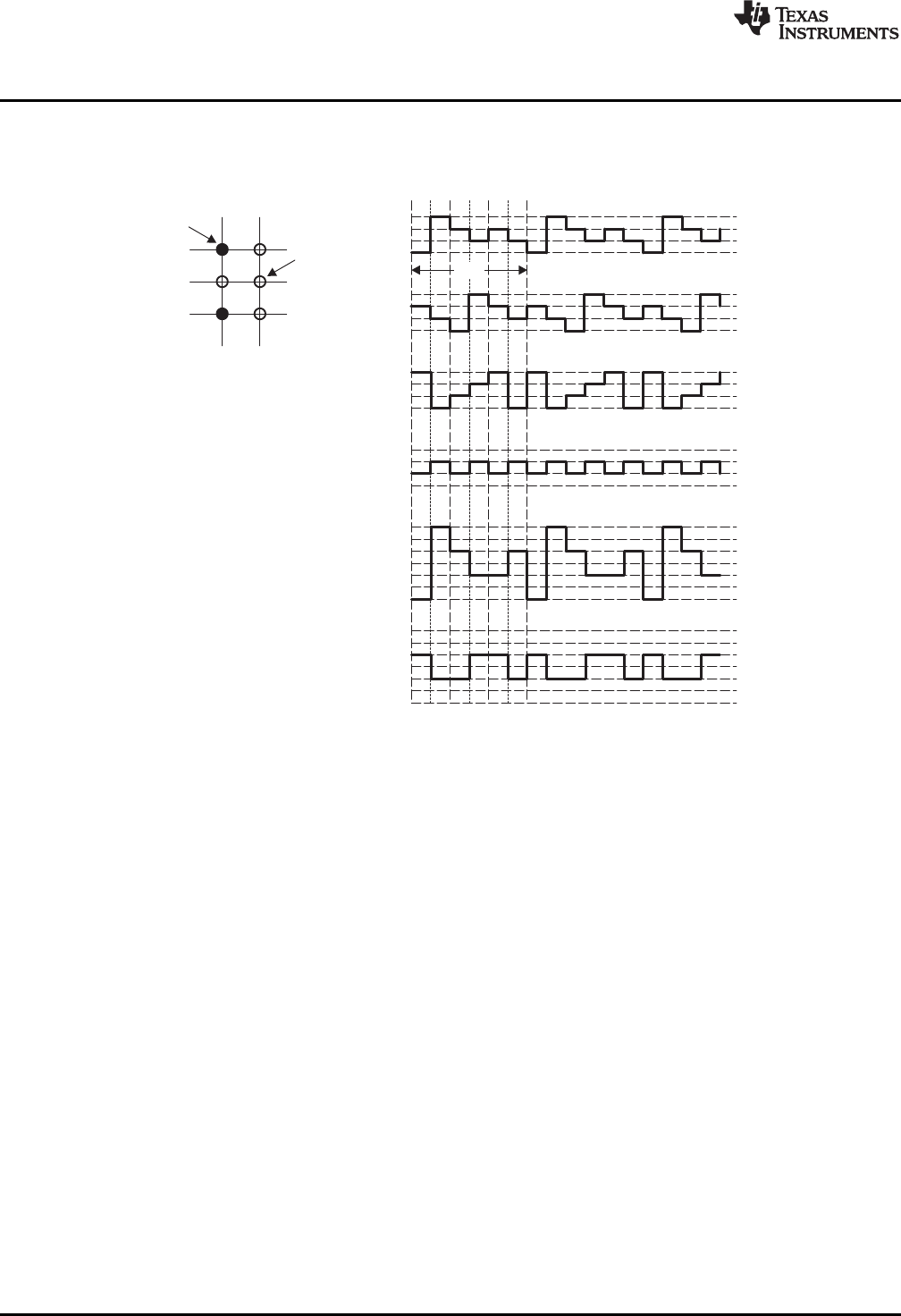
V2
V2
V2
V2
V4
V4
V4
V4
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
COM2
S0 S1
off
on
COM1-S1
Segment is off.
COM0-S0
Segment is on.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
LCD_C Operation
www.ti.com
35.2.10 3-Mux Mode
In 3-mux mode, each MSP430 segment pin drives three LCD segments, and three common lines (COM0,
COM1, and COM2) are used. Figure 35-7 shows some example 3-mux 1/3-bias waveforms.
Figure 35-7. Example 3-Mux Waveforms
918 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
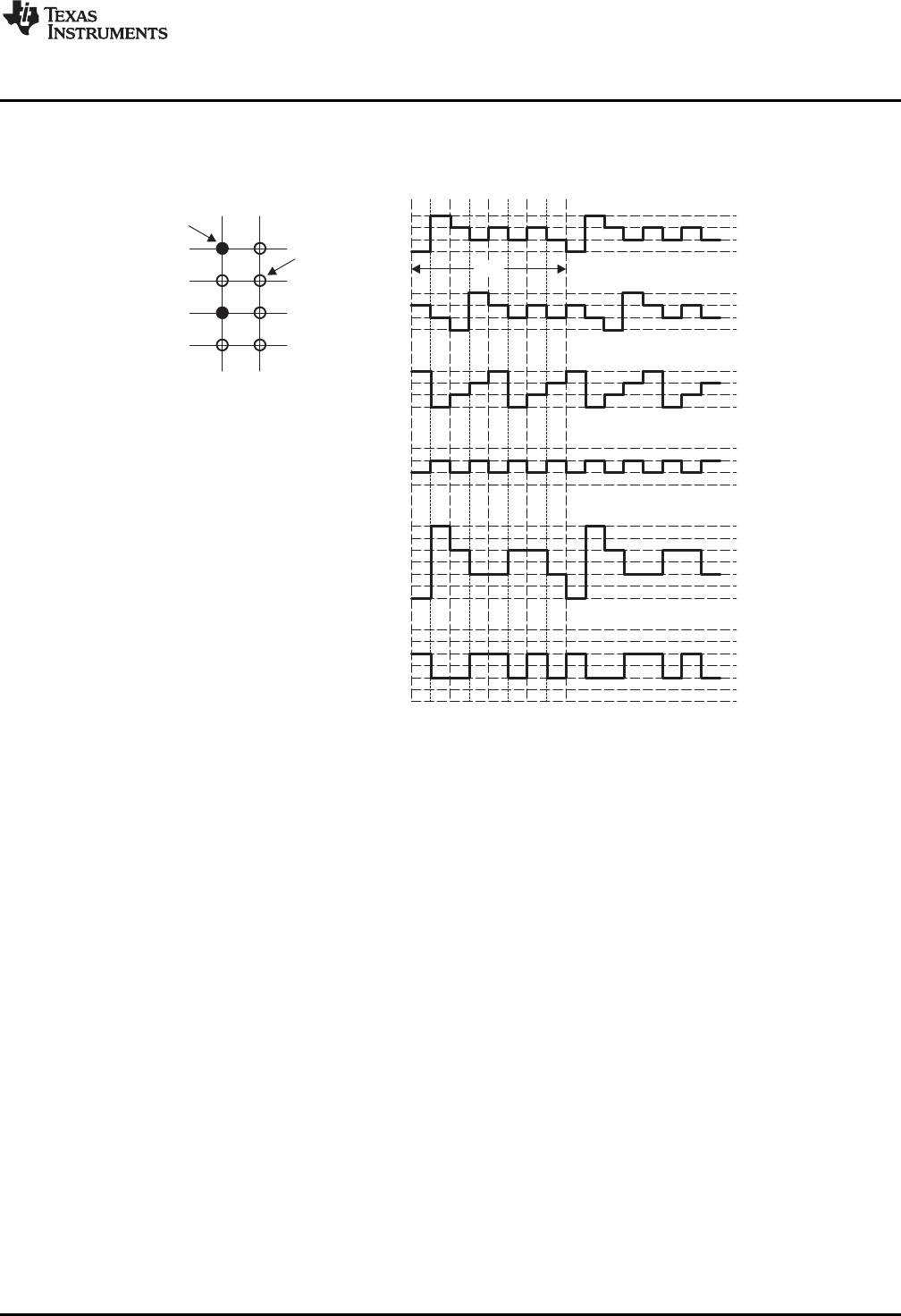
V2
V2
V2
V2
V4
V4
V4
V4
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
COM2
COM3
S0 S1
off
on
COM1-S1
Segmentisoff.
COM0-S0
Segmentison.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
www.ti.com
LCD_C Operation
35.2.11 4-Mux Mode
In 4-mux mode, each MSP430 segment pin drives four LCD segments and four common lines (COM0,
COM1, COM2, and COM3) are used. Figure 35-8 shows some example 4-mux 1/3-bias waveforms.
Figure 35-8. Example 4-Mux Waveforms
919
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
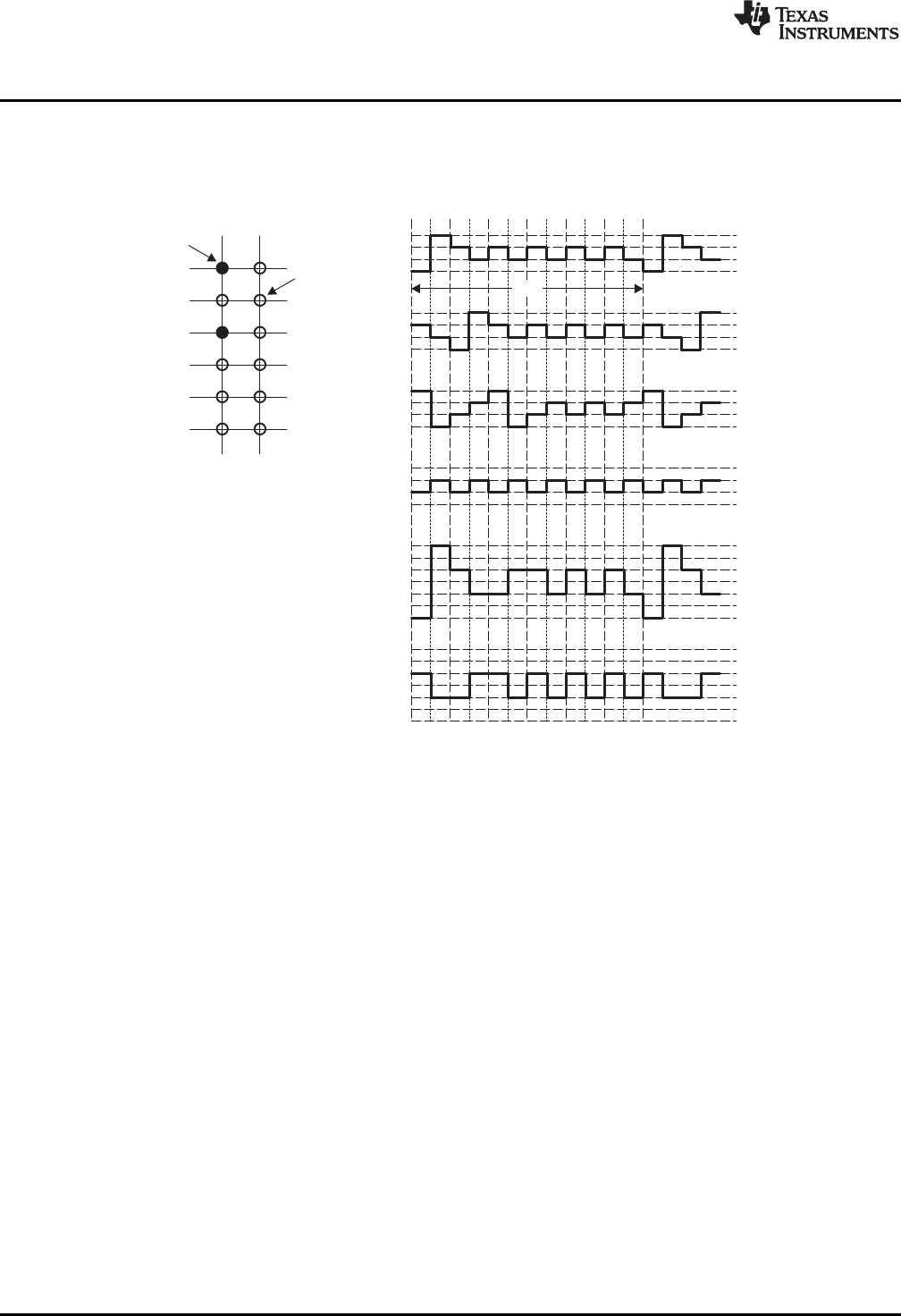
V2
V2
V2
V2
V4
V4
V4
V4
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
COM2
COM3
COM4
COM5
S0 S1
off
on
COM1-S1
Segmentisoff.
COM0-S0
Segmentison.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
LCD_C Operation
www.ti.com
35.2.12 6-Mux Mode
In 6-mux mode, each MSP430 segment pin drives six LCD segments, and six common lines (COM0,
COM1, COM2, COM3, COM4, and COM5) are used. Figure 35-9 shows some example 6-mux 1/3-bias
waveforms.
Figure 35-9. Example 6-Mux Waveforms
920 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
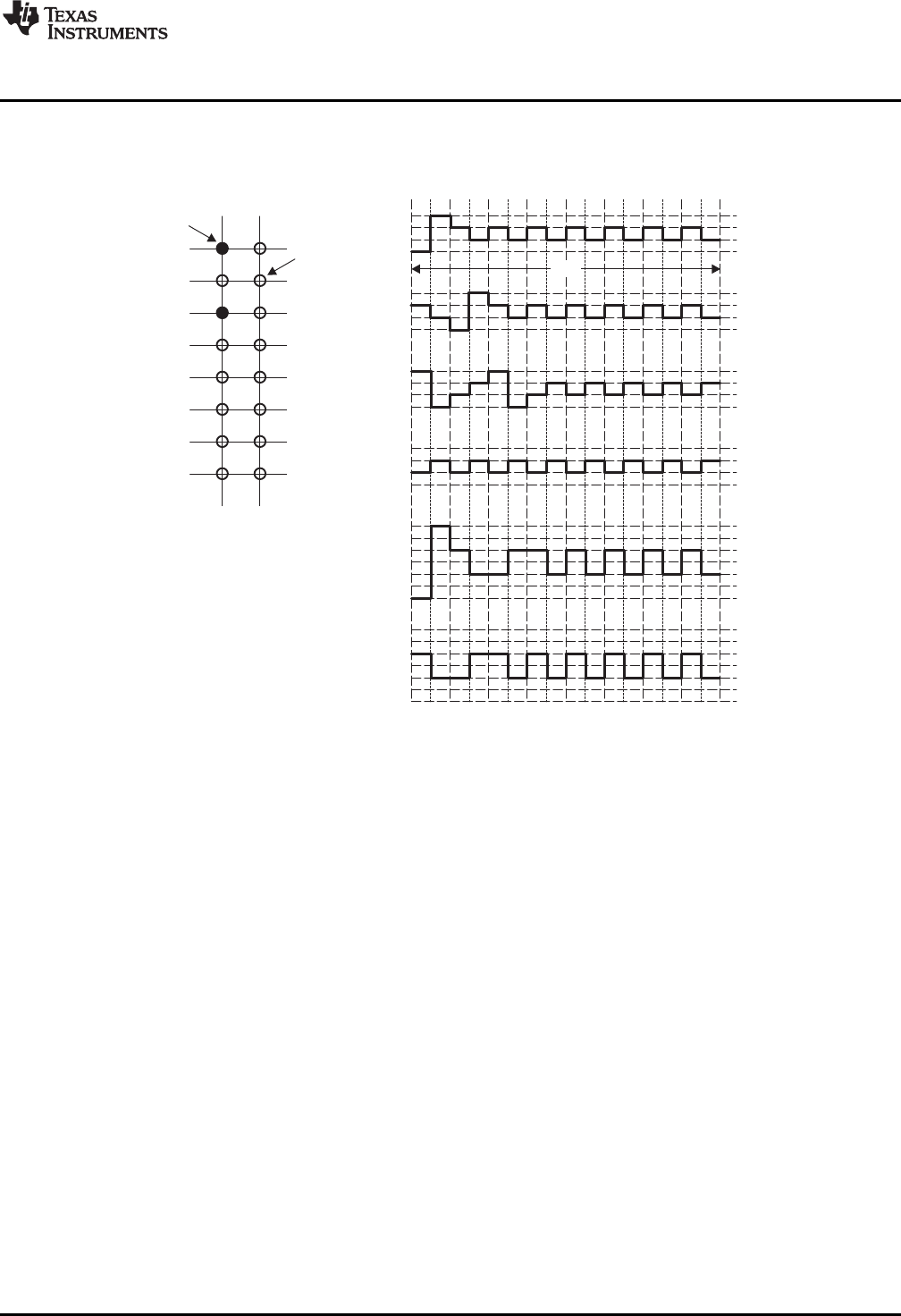
V2
V2
V2
V2
V4
V4
V4
V4
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
COM2
COM3
COM4
COM5
COM6
COM7
S0 S1
off
on * * * * * * * *
COM1-S1
Segmentisoff.
COM0-S0
Segmentison.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
www.ti.com
LCD_C Operation
35.2.13 8-Mux Mode
In 8-mux mode, each MSP430 segment pin drives eight LCD segments, and eight common lines (COM0
through COM7) are used. Figure 35-10 shows some example 8-mux 1/3-bias waveforms.
Figure 35-10. Example 8-Mux, 1/3 Bias Waveforms (LCDLP = 0)
921
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
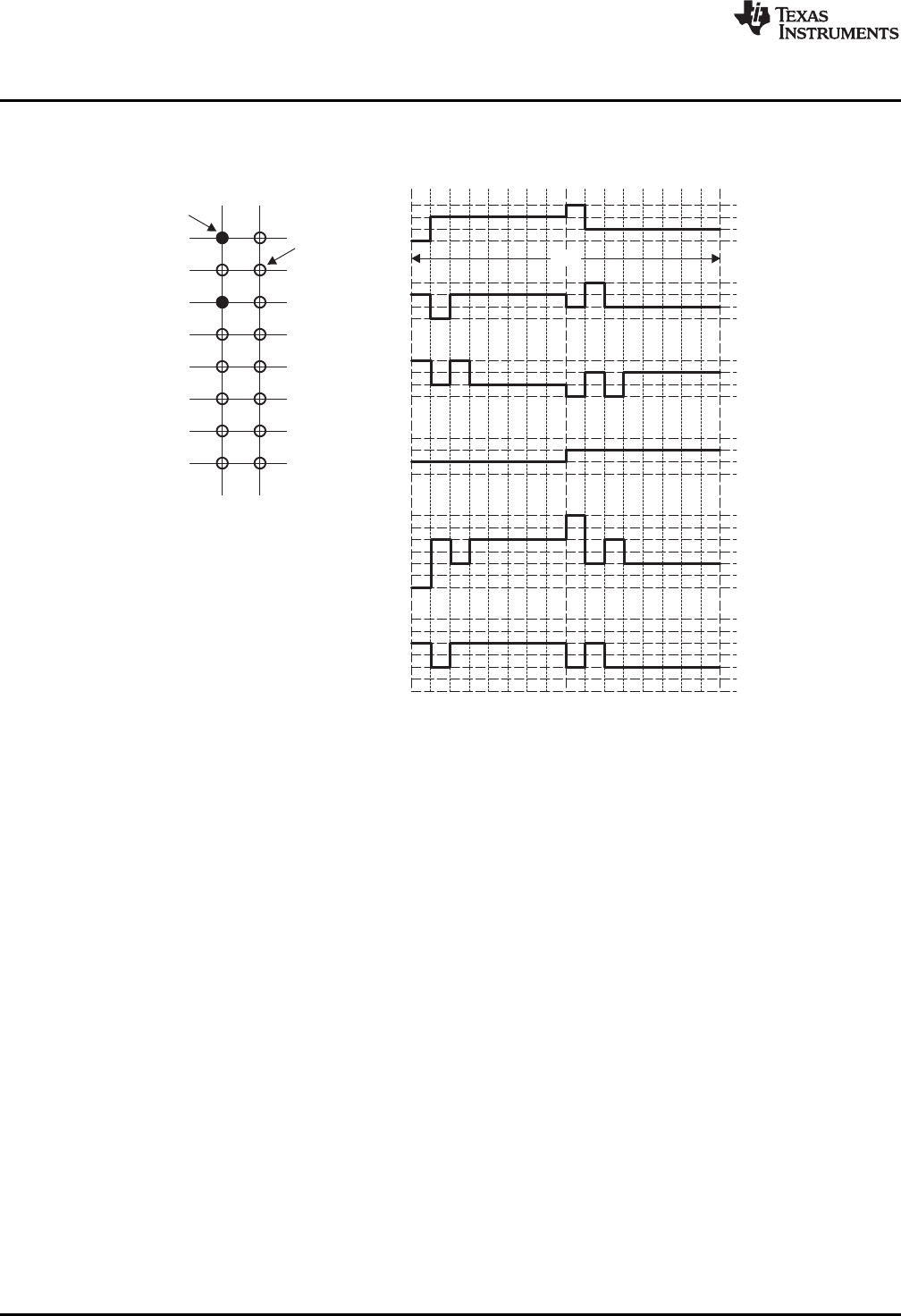
V2
V2
V2
V2
V4
V4
V4
V4
V1
V1
0V
0V
−V1
−V1
COM0
COM1
S0
S1
COM0
COM1
COM2
COM3
COM4
COM5
COM6
COM7
S0 S1
off
on
COM1-S1
Segmentisoff.
COM0-S0
Segmentison.
V1
V1
V1
V1
V5
V5
V5
V5
fframe
* * * * * * * *
LCD_C Operation
www.ti.com
Figure 35-11 shows some example 8-mux 1/3-bias waveforms with LCDLP = 1. With LCDLP = 1, the
voltage sequence compared to the non-low power waveform is reshuffled; that is, all of the timeslots
marked with "*" in Figure 35-10 are grouped together. The same principle applies to all mux modes.
Figure 35-11. Example 8-Mux, 1/3 Bias Low-Power Waveforms (LCDLP = 1)
922 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_C Registers
35.3 LCD_C Registers
The LCD_C registers are listed in Table 35-4 to Table 35-7. The LCD memory and blinking memory
registers can also be accessed as word.
The number of available memory registers on a given device depends on the number of available
segment pins; see the device-specific data sheet.
Table 35-4. LCD_C Control Registers
Offset Acronym Register Name Type Reset Section
000h LCDCCTL0 LCD_C control 0 Read/write 0000h Section 35.3.1
002h LCDCCTL1 LCD_C control 1 Read/write 0000h Section 35.3.2
004h LCDCBLKCTL LCD_C blinking control Read/write 0000h Section 35.3.3
006h LCDCMEMCTL LCD_C memory control Read/write 0000h Section 35.3.4
008h LCDCVCTL LCD_C voltage control Read/write 0000h Section 35.3.5
00Ah LCDCPCTL0 LCD_C port control 0 Read/write 0000h Section 35.3.6
00Ch LCDCPCTL1 LCD_C port control 1 Read/write 0000h Section 35.3.7
00Eh LCDCPCTL2 LCD_C port control 2 (≥256 segments) Read/write 0000h Section 35.3.8
010h LCDCPCTL3 LCD_C port control 3 (384 segments) Read/write 0000h Section 35.3.9
012h LCDCCPCTL LCD_C charge pump control Read/write 0000h Section 35.3.10
014h Reserved
016h Reserved
018h Reserved
01Ah Reserved
01Ch Reserved
01Eh LCDCIV LCD_C interrupt vector Read/write 0000h Section 35.3.11
923
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

LCD_C Registers
www.ti.com
Table 35-5. LCD_C Memory Registers for Static and 2-Mux to 4-Mux Modes(1)(2)
Offset Acronym Register Name Type Reset
020h LCDM1 LCD memory 1 (S1/S0) Read/write Unchanged
021h LCDM2 LCD memory 2 (S3/S2) Read/write Unchanged
022h LCDM3 LCD memory 3 (S5/S4) Read/write Unchanged
023h LCDM4 LCD memory 4 (S7/S6) Read/write Unchanged
024h LCDM5 LCD memory 5 (S9/S8) Read/write Unchanged
025h LCDM6 LCD memory 6 (S11/S10) Read/write Unchanged
026h LCDM7 LCD memory 7 (S13/S12) Read/write Unchanged
027h LCDM8 LCD memory 8 (S15/S14) Read/write Unchanged
028h LCDM9 LCD memory 9 (S17/S16) Read/write Unchanged
029h LCDM10 LCD memory 10 (S19/S18) Read/write Unchanged
02Ah LCDM11 LCD memory 11 (S21/S20) Read/write Unchanged
02Bh LCDM12 LCD memory 12 (S23/S22) Read/write Unchanged
02Ch LCDM13 LCD memory 13 (S25/S24) Read/write Unchanged
02Dh LCDM14 LCD memory 14 (S27/S26) Read/write Unchanged
02Eh LCDM15 LCD memory 15 (S29/S28) Read/write Unchanged
02Fh LCDM16 LCD memory 16 (S31/S30) Read/write Unchanged
030h LCDM17 LCD memory 17 (S33/S32) Read/write Unchanged
031h LCDM18 LCD memory 18 (S35/S34) Read/write Unchanged
032h LCDM19 LCD memory 19 (S37/S36) Read/write Unchanged
033h LCDM20 LCD memory 20 (S39/S38) Read/write Unchanged
034h LCDM21 LCD memory 21 (S41/S40) Read/write Unchanged
035h LCDM22 LCD memory 22 (S43/S42) Read/write Unchanged
036h LCDM23 LCD memory 23 (S45/S44) Read/write Unchanged
037h LCDM24 LCD memory 24 (S47/S46) Read/write Unchanged
038h LCDM25 LCD memory 25 (S49/S48) Read/write Unchanged
039h LCDM26 LCD memory 26 (S51/S50) Read/write Unchanged
03Ah LCDM27 LCD memory 27 (S53/S52) Read/write Unchanged
03Bh LCDM28 LCD memory 28 (S54) Read/write Unchanged
03Ch Reserved
03Dh Reserved
03Eh Reserved
03Fh Reserved
(1) The LCD memory registers can also be accessed as word.
(2) The number of available memory registers on a given device depends on the number of available segment pins; see the device-specific
data sheet.
924 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_C Registers
Table 35-6. LCD Blinking Memory Registers for Static and 2-Mux to 4-Mux Modes(1)(2)
Offset Acronym Register Name Type Reset
040h LCDBM1 LCD blinking memory 1 Read/write Unchanged
041h LCDBM2 LCD blinking memory 2 Read/write Unchanged
042h LCDBM3 LCD blinking memory 3 Read/write Unchanged
043h LCDBM4 LCD blinking memory 4 Read/write Unchanged
044h LCDBM5 LCD blinking memory 5 Read/write Unchanged
045h LCDBM6 LCD blinking memory 6 Read/write Unchanged
046h LCDBM7 LCD blinking memory 7 Read/write Unchanged
047h LCDBM8 LCD blinking memory 8 Read/write Unchanged
048h LCDBM9 LCD blinking memory 9 Read/write Unchanged
049h LCDBM10 LCD blinking memory 10 Read/write Unchanged
04Ah LCDBM11 LCD blinking memory 11 Read/write Unchanged
04Bh LCDBM12 LCD blinking memory 12 Read/write Unchanged
04Ch LCDBM13 LCD blinking memory 13 Read/write Unchanged
04Dh LCDBM14 LCD blinking memory 14 Read/write Unchanged
04Eh LCDBM15 LCD blinking memory 15 Read/write Unchanged
04Fh LCDBM16 LCD blinking memory 16 Read/write Unchanged
050h LCDBM17 LCD blinking memory 17 Read/write Unchanged
051h LCDBM18 LCD blinking memory 18 Read/write Unchanged
052h LCDBM19 LCD blinking memory 19 Read/write Unchanged
053h LCDBM20 LCD blinking memory 20 Read/write Unchanged
054h LCDBM21 LCD blinking memory 21 Read/write Unchanged
055h LCDBM22 LCD blinking memory 22 Read/write Unchanged
056h LCDBM23 LCD blinking memory 23 Read/write Unchanged
057h LCDBM24 LCD blinking memory 24 Read/write Unchanged
058h LCDBM25 LCD blinking memory 25 Read/write Unchanged
059h LCDBM26 LCD blinking memory 26 Read/write Unchanged
05Ah LCDBM27 LCD blinking memory 27 Read/write Unchanged
05Bh LCDBM28 LCD blinking memory 28 Read/write Unchanged
05Ch Reserved
05Dh Reserved
05Eh Reserved
05Fh Reserved
(1) The LCD blinking memory registers can also be accessed as word.
(2) The number of available memory registers on a given device depends on the number of available segment pins; see the device-specific
data sheet.
925
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

LCD_C Registers
www.ti.com
Table 35-7. LCD Memory Registers for 5-Mux to 8-Mux(1)(2)
Offset Acronym Register Name Type Reset
020h LCDM1 LCD memory 1 (S0) Read/write Unchanged
021h LCDM2 LCD memory 2 (S1) Read/write Unchanged
022h LCDM3 LCD memory 3 (S2) Read/write Unchanged
023h LCDM4 LCD memory 4 (S3) Read/write Unchanged
024h LCDM5 LCD memory 5 (S4) Read/write Unchanged
025h LCDM6 LCD memory 6 (S5) Read/write Unchanged
026h LCDM7 LCD memory 7 (S6) Read/write Unchanged
027h LCDM8 LCD memory 8 (S7) Read/write Unchanged
028h LCDM9 LCD memory 9 (S8) Read/write Unchanged
029h LCDM10 LCD memory 10 (S9) Read/write Unchanged
02Ah LCDM11 LCD memory 11 (S10) Read/write Unchanged
02Bh LCDM12 LCD memory 12 (S11) Read/write Unchanged
02Ch LCDM13 LCD memory 13 (S12) Read/write Unchanged
02Dh LCDM14 LCD memory 14 (S13) Read/write Unchanged
02Eh LCDM15 LCD memory 15 (S14) Read/write Unchanged
02Fh LCDM16 LCD memory 16 (S15) Read/write Unchanged
030h LCDM17 LCD memory 17 (S16) Read/write Unchanged
031h LCDM18 LCD memory 18 (S17) Read/write Unchanged
032h LCDM19 LCD memory 19 (S18) Read/write Unchanged
033h LCDM20 LCD memory 20 (S19) Read/write Unchanged
034h LCDM21 LCD memory 21 (S20) Read/write Unchanged
035h LCDM22 LCD memory 22 (S21) Read/write Unchanged
036h LCDM23 LCD memory 23 (S22) Read/write Unchanged
037h LCDM24 LCD memory 24 (S23) Read/write Unchanged
038h LCDM25 LCD memory 25 (S24) Read/write Unchanged
039h LCDM26 LCD memory 26 (S25) Read/write Unchanged
03Ah LCDM27 LCD memory 27 (S26) Read/write Unchanged
03Bh LCDM28 LCD memory 28 (S27) Read/write Unchanged
03Ch LCDM29 LCD memory 29 (S28) Read/write Unchanged
03Dh LCDM30 LCD memory 30 (S29) Read/write Unchanged
03Eh LCDM31 LCD memory 31 (S30) Read/write Unchanged
03Fh LCDM32 LCD memory 32 (S31) Read/write Unchanged
040h LCDM33 LCD memory 33 (S32) Read/write Unchanged
041h LCDM34 LCD memory 34 (S33) Read/write Unchanged
042h LCDM35 LCD memory 35 (S34) Read/write Unchanged
043h LCDM36 LCD memory 36 (S35) Read/write Unchanged
044h LCDM37 LCD memory 37 (S36) Read/write Unchanged
045h LCDM38 LCD memory 38 (S37) Read/write Unchanged
046h LCDM39 LCD memory 39 (S38) Read/write Unchanged
047h LCDM40 LCD memory 40 (S39) Read/write Unchanged
048h LCDM41 LCD memory 41 (S40) Read/write Unchanged
049h LCDM42 LCD memory 42 (S41) Read/write Unchanged
04Ah LCDM43 LCD memory 43 (S42) Read/write Unchanged
04Bh LCDM44 LCD memory 44 (S43) Read/write Unchanged
04Ch LCDM45 LCD memory 45 (S44) Read/write Unchanged
(1) The LCD memory registers can also be accessed as word.
(2) The number of available memory registers on a given device depends on the number of available segment pins; see the device-specific
data sheet.
926 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LCD_C Registers
Table 35-7. LCD Memory Registers for 5-Mux to 8-Mux(1)(2) (continued)
Offset Acronym Register Name Type Reset
04Dh LCDM46 LCD memory 46 (S45) Read/write Unchanged
04Eh LCDM47 LCD memory 47 (S46) Read/write Unchanged
04Fh LCDM48 LCD memory 48 (S47) Read/write Unchanged
050h LCDM49 LCD memory 49 (S48) Read/write Unchanged
051h LCDM50 LCD memory 50 (S49) Read/write Unchanged
052h LCDM51 LCD memory 51 (S50) Read/write Unchanged
053h LCDM52 LCD memory 52 (S51) Read/write Unchanged
054h Reserved
055h Reserved
056h Reserved
057h Reserved
058h Reserved
059h Reserved
05Ah Reserved
05Bh Reserved
05Ch Reserved
05Dh Reserved
05Eh Reserved
05Fh Reserved
927
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_C Registers
www.ti.com
35.3.1 LCDCCTL0 Register
LCD_C Control Register 0
NOTE: Settings for LCDDIVx, LCDPREx, LCDSSEL, LCDLP and LCDMXx should be changed only while
LCDON = 0.
Figure 35-12. LCDCCTL0 Register
15 14 13 12 11 10 9 8
LCDDIVx LCDPREx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDSSEL Reserved LCDMXx LCDSON LCDLP LCDON
rw-0 r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-8. LCDCCTL0 Register Description
Bit Field Type Reset Description
15-11 LCDDIVx RW 0h LCD frequency divider. Together with LCDPREx the LCD frequency f(LCD) is
calculated as f(LCD) = f(ACLK/VLO) / ((LCDDIVx + 1) × 2^(LCDPREx)).
00000b = Divide by 1
00001b = Divide by 2
⋮
11110b = Divide by 31
11111b = Divide by 32
10-8 LCDPREx RW 0h LCD frequency pre-scaler. Together with LCDDIVx the LCD frequency f(LCD) is
calculated as f(LCD) = f(ACLK/VLO) / ((LCDDIVx + 1) × 2^(LCDPREx)).
000b = Divide by 1
001b = Divide by 2
010b = Divide by 4
011b = Divide by 8
100b = Divide by 16
101b = Divide by 32
110b = Reserved (defaults to divide by 32)
111b = Reserved (defaults to divide by 32)
7 LCDSSEL RW 0h Clock source select for LCD and blinking frequency
0b = ACLK (30 kHz to 40 kHz)
1b = VLOCLK
6 Reserved R 0h Reserved
5-3 LCDMXx RW 0h LCD mux rate. These bits select the LCD mode.
000b = Static
001b = 2-mux
010b = 3-mux
011b = 4-mux
100b = 5-mux
101b = 6-mux
110b = 7-mux
111b = 8-mux
2 LCDSON RW 0h LCD segments on. This bit supports flashing LCD applications by turning off all
segment lines, while leaving the LCD timing generator and R33 enabled.
0b = All LCD segments are off
1b = All LCD segments are enabled and on or off according to their
corresponding memory location
1 LCDLP RW 0h LCD low-power waveform
0b = Standard LCD waveforms on segment and common lines selected
1b = Low-power LCD waveforms on segment and common lines selected
928 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Registers
Table 35-8. LCDCCTL0 Register Description (continued)
Bit Field Type Reset Description
0 LCDON RW 0h LCD on. This bit turns the LCD_C module on or off.
0b = LCD_C module off
1b = LCD_C module on
929
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LCD_C Registers
www.ti.com
35.3.2 LCDCCTL1 Register
LCD_C Control Register 1
Figure 35-13. LCDCCTL1 Register
15 14 13 12 11 10 9 8
Reserved LCDNOCAPIE LCDBLKONIE LCDBLKOFFIE LCDFRMIE
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved LCDNOCAPIF LCDBLKONIFG LCDBLKOFFIF LCDFRMIFG
G G
r0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Table 35-9. LCDCCTL1 Register Description
Bit Field Type Reset Description
15-12 Reserved R 0h Reserved
11 LCDNOCAPIE RW 0h No capacitance connected interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
10 LCDBLKONIE RW 0h LCD blinking interrupt enable, segments switched on
0b = Interrupt disabled
1b = Interrupt enabled
9 LCDBLKOFFIE RW 0h LCD blinking interrupt enable, segments switched off
0b = Interrupt disabled
1b = Interrupt enabled
8 LCDFRMIE RW 0h LCD frame interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7-4 Reserved R 0h Reserved
3 LCDNOCAPIFG RW 0h No capacitance connected interrupt flag. Set when charge pump is enabled but
no capacitance is connected to LCDCAP pin.
0b = No interrupt pending
1b = Interrupt pending
2 LCDBLKONIFG RW 0h LCD blinking interrupt flag, segments switched on. Automatically cleared when
data is written into a memory register.
0b = No interrupt pending
1b = Interrupt pending
1 LCDBLKOFFIFG RW 0h LCD blinking interrupt flag, segments switched off. Automatically cleared when
data is written into a memory register.
0b = No interrupt pending
1b = Interrupt pending
0 LCDFRMIFG RW 0h LCD frame interrupt flag. Automatically cleared when data is written into a
memory register.
0b = No interrupt pending
1b = Interrupt pending
930 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Registers
35.3.3 LCDCBLKCTL Register
LCD_C Blink Control Register
NOTE: Settings for LCDBLKDIVx and LCDBLKPREx should only be changed while LCDBLKMODx = 00.
Figure 35-14. LCDCBLKCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDBLKDIVx LCDBLKPREx LCDBLKMODx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-10. LCDCBLKCTL Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-5 LCDBLKDIVx RW 0h Clock divider for blinking frequency. Together with LCDBLKPREx, the blinking
frequency f(BLINK) is calculated as f(BLINK) = f(ACLK/VLO) / ((LCDBLKDIVx +
1) × 2^(9+LCDBLKPREx)).
NOTE: Should only be changed while LCDBLKMODx = 00.
000b = Divide by 1
001b = Divide by 2
010b = Divide by 3
011b = Divide by 4
100b = Divide by 5
101b = Divide by 6
110b = Divide by 7
111b = Divide by 8
4-2 LCDBLKPREx RW 0h Clock pre-scaler for blinking frequency. Together with LCDBLKDIVx, the blinking
frequency f(BLINK) is calculated as f(BLINK) = f(ACLK/VLO) / ((LCDBLKDIVx +
1) × 2^(9+LCDBLKPREx)).
NOTE: Should only be changed while LCDBLKMODx = 00.
000b = Divide by 512
001b = Divide by 1024
010b = Divide by 2048
011b = Divide by 4096
100b = Divide by 8162
101b = Divide by 16384
110b = Divide by 32768
111b = Divide by 65536
1-0 LCDBLKMODx RW 0h Blinking mode
00b = Blinking disabled
01b = Blinking of individual segments as enabled in blinking memory register
LCDBMx. In mux mode >5 blinking is disabled.
10b = Blinking of all segments
11b = Switching between display contents as stored in LCDMx and LCDBMx
memory registers. In mux mode >5 blinking is disabled.
931
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_C Registers
www.ti.com
35.3.4 LCDCMEMCTL Register
LCD_C Memory Control Register
Figure 35-15. LCDCMEMCTL Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved LCDCLRBM LCDCLRM LCDDISP
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
Table 35-11. LCDCMEMCTL Register Description
Bit Field Type Reset Description
15-3 Reserved R 0h Reserved
2 LCDCLRBM RW 0h Clear LCD blinking memory
Clears all blinking memory registers LCDBMx. The bit is automatically reset
when the blinking memory is cleared.
Setting this bit has in 5-mux mode and above has no effect. It's immediately
reset again.
0b = Contents of blinking memory registers LCDBMx remain unchanged
1b = Clear content of all blinking memory registers LCDBMx
1 LCDCLRM RW 0h Clear LCD memory
Clears all LCD memory registers LCDMx. The bit is automatically reset when the
LCD memory is cleared.
0b = Contents of LCD memory registers LCDMx remain unchanged
1b = Clear content of all LCD memory registers LCDMx
0 LCDDISP RW 0h Select LCD memory registers for display
The bit is cleared in LCDBLKMODx = 01 and LCDBLKMODx = 10 or if a mux
mode ≥5 is selected and cannot be changed by software.
When LCDBLKMODx = 11, this bit reflects the currently displayed memory but
cannot be changed by software. When returning to LCDBLKMODx = 00 the bit is
cleared.
0b = Display content of LCD memory registers LCDMx
1b = Display content of LCD blinking memory registers LCDBMx
932 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Registers
35.3.5 LCDCVCTL Register
LCD_C Voltage Control Register
NOTE: Settings for LCDREXT, R03EXT, LCDEXTBIAS, VLCDEXT, VLCDREFx, and LCD2B should be
changed only while LCDON = 0.
Figure 35-16. LCDCVCTL Register
15 14 13 12 11 10 9 8
Reserved VLCDx Reserved
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r0
76543210
LCDREXT R03EXT LCDEXTBIAS VLCDEXT LCDCPEN VLCDREFx LCD2B
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-12. LCDCVCTL Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved
12-9 VLCDx RW 0h Charge pump voltage select. LCDCPEN must be 1 for the charge pump to be
enabled. VCC is used for V(LCD) when VLCDx = 0000 and VLCDREFx = 00 and
VLCDEXT = 0.
0000b = Charge pump disabled
0001b = If VLCDREFx = 00 or 10: V(LCD) = 2.60 V; If VLCDREFx = 01 or 11:
V(LCD) = 2.17 × V(REF)
0010b to 1110b = If VLCDREFx = 00 or 10: V(LCD) = 2.60 V + (VLCDx - 1) ×
0.06 V; If VLCDREFx = 01 or 11: V(LCD) = 2.17 × V(REF) + (VLCDx - 1) × 0.05
× V(REF)
1111b = If VLCDREFx = 00 or 10: V(LCD) = 2.60 V + (15 - 1) × 0.06 V = 3.44 V;
If VLCDREFx = 01 or 11: V(LCD) = 2.17 × V(REF) + (15 - 1) × 0.05 × V(REF) =
2.87 × V(REF)
8 Reserved R 0h Reserved
7 LCDREXT RW 0h V2 to V4 voltage on external Rx3 pins. This bit selects the external connections
for voltages V2 to V4 with internal bias generation (LCDEXTBIAS = 0). The bit is
don't care if external biasing is selected (LCDEXTBIAS = 1).
NOTE: Should be changed only while LCDON = 0.
0b = Internally generated V2 to V4 are not switched to pins (LCDEXTBIAS = 0)
1b = Internally generated V2 to V4 are switched to pins (LCDEXTBIAS = 0)
6 R03EXT RW 0h V5 voltage select. This bit selects the external connection for the lowest LCD
voltage. R03EXT is ignored if there is no R03 pin available.
NOTE: Should be changed only while LCDON = 0.
0b = V5 is VSS
1b = V5 is sourced from the R03 pin
5 LCDEXTBIAS RW 0h V2 to V4 voltage select. This bit selects the generation for voltages V2 to V4.
NOTE: Should be changed only while LCDON = 0.
0b = V2 to V4 are generated internally
1b = V2 to V4 are sourced externally and the internal bias generator is switched
off
4 VLCDEXT RW 0h V(LCD) source select
NOTE: Should be changed only while LCDON = 0.
0b = V(LCD) is generated internally
1b = V(LCD) is sourced externally
3 LCDCPEN RW 0h Charge pump enable
0b = Charge pump disabled
1b = Charge pump enabled when V(LCD) is generated internally (VLCDEXT = 0)
and VLCDx > 0 or VLCDREFx > 0
933
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_C Registers
www.ti.com
Table 35-12. LCDCVCTL Register Description (continued)
Bit Field Type Reset Description
2-1 VLCDREFx RW 0h Charge pump reference select. If LCDEXTBIAS = 1 or LCDREXT = 1, settings
01, 10, and 11 are not supported; the internal reference voltage is used instead.
NOTE: Should be changed only while LCDON = 0.
00b = Internal reference voltage
01b = External reference voltage
10b = Internal reference voltage switched to external pin LCDREF/R13
11b = Reserved (defaults to external reference voltage)
0 LCD2B RW 0h Bias select. LCD2B is ignored in static mode or mux modes ≥5.
NOTE: Should be changed only while LCDON = 0.
0b = 1/3 bias
1b = 1/2 bias
934 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Registers
35.3.6 LCDCPCTL0 Register
LCD_C Port Control Register 0
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
Figure 35-17. LCDCPCTL0 Register
15 14 13 12 11 10 9 8
LCDS15 LCDS14 LCDS13 LCDS12 LCDS11 LCDS10 LCDS9 LCDS8
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS7 LCDS6 LCDS5 LCDS4 LCDS3 LCDS2 LCDS1 LCDS0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-13. LCDCPCTL0 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable. This bit affects only pins with multiplexed functions.
Dedicated LCD pins are always LCD function.
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
0b = Multiplexed pins are port functions
1b = Pins are LCD functions
35.3.7 LCDCPCTL1 Register
LCD_C Port Control Register 1
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
Figure 35-18. LCDCPCTL1 Register
15 14 13 12 11 10 9 8
LCDS31 LCDS30 LCDS29 LCDS28 LCDS27 LCDS26 LCDS25 LCDS24
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS23 LCDS22 LCDS21 LCDS20 LCDS19 LCDS18 LCDS17 LCDS16
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-14. LCDCPCTL1 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable.
On devices supporting a maximum of 192 segments LCDS31 is reserved, if
COM7 to COM1 are shared with segments. If COM7 to COM1 are not shared
with segments LCDS24 to LCDS31 are reserved.
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
0b = Multiplexed pins are port functions
1b = Pins are LCD functions
935
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LCD_C Registers
www.ti.com
35.3.8 LCDCPCTL2 Register
LCD_C Port Control Register 2 (≥256 Segments)
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
Figure 35-19. LCDCPCTL2 Register
15 14 13 12 11 10 9 8
LCDS47 LCDS46 LCDS45 LCDS44 LCDS43 LCDS42 LCDS41 LCDS40
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LCDS39 LCDS38 LCDS37 LCDS36 LCDS35 LCDS34 LCDS33 LCDS32
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-15. LCDCPCTL2 Register Description
Bit Field Type Reset Description
15-0 LCDSx RW 0h LCD segment line x enable.
On devices supporting a maximum of 256 segments LCDS39 to LCDS47 are
reserved, if COM7 to COM1 are shared with segments. If COM7 to COM1 are
not shared with segments the complete register LCDCPCTL2 is not available.
On devices supporting a maximum of 320 segments, LCDS47 is reserved if
COM7 to COM1 are shared with segments. If COM7 to COM1 are not shared
with segments, LCDS40 to LCDS47 are reserved.
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
0b = Multiplexed pins are port functions
1b = Pins are LCD functions
35.3.9 LCDCPCTL3 Register
LCD_C Port Control Register 2 (384 Segments, COMs Shared With Segments)
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
Figure 35-20. LCDCPCTL3 Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved LCDS53 LCDS52 LCDS51 LCDS50 LCDS49 LCDS48
r0 r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-16. LCDCPCTL3 Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved
5-0 LCDSx RW 0h LCD segment line x enable.
This bit affects only pins with multiplexed functions. Dedicated LCD pins are
always LCD function.
NOTE: Settings for LCDSx should be changed only while LCDON = 0.
0b = Multiplexed pins are port functions
1b = Pins are LCD functions
936 LCD_C Controller SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LCD_C Registers
35.3.10 LCDCCPCTL Register
LCD_C Charge Pump Control Register
Figure 35-21. LCDCCPCTL Register
15 14 13 12 11 10 9 8
LCDCPCLKSY Reserved
NC
rw-0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDCPDISx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 35-17. LCDCCPCTL Register Description
Bit Field Type Reset Description
15 LCDCPCLKSYNC RW 0h LCD charge pump clock synchronization (device specific).
The charge pump clock is synchronized to a device specific clock (device-
specific) when the respective clock source is enabled and does not indicate a
fault via its fault signal - if available.
0b = Synchronization disabled
1b = Synchronization enabled
14-8 Reserved R 0h Reserved
7-0 LCDCPDISx RW 0h LCD charge pump disable (number of implemented bits and connected function
is device-specific)
0b = Connected function cannot disable charge pump
1b = Connected function can disable charge pump
35.3.11 LCDCIV Register
LCD_C Interrupt Vector Register
Figure 35-22. LCDCIV Register
15 14 13 12 11 10 9 8
LCDCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
LCDCIVx
r0 r0 r0 r0 r0 r0 r0 r0
Table 35-18. LCDCIV Register Description
Bit Field Type Reset Description
15-0 LCDCIVx R 0h LCD_C interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: No capacitor connected; Interrupt Flag: LCDNOCAPIFG;
Interrupt Priority: Highest
04h = Interrupt Source: Blink, segments off; Interrupt Flag: LCDBLKOFFIFG
06h = Interrupt Source: Blink, segments on; Interrupt Flag: LCDBLKONIFG
08h = Interrupt Source: Frame interrupt; Interrupt Flag: LCDFRMIFG; Interrupt
Priority: Lowest
937
SLAU208O–June 2008–Revised May 2015 LCD_C Controller
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 36
SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – UART Mode
The universal serial communication interface (USCI) supports multiple serial communication modes with
one hardware module. This chapter discusses the operation of the asynchronous UART mode.
Topic ........................................................................................................................... Page
36.1 Universal Serial Communication Interface (USCI) Overview .................................. 939
36.2 USCI Introduction – UART Mode......................................................................... 940
36.3 USCI Operation – UART Mode............................................................................ 942
36.4 USCI_A UART Mode Registers ........................................................................... 958
938 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Universal Serial Communication Interface (USCI) Overview
36.1 Universal Serial Communication Interface (USCI) Overview
The USCI modules support multiple serial communication modes. Different USCI modules support
different modes. Each different USCI module is named with a different letter. For example, USCI_A is
different from USCI_B, etc. If more than one identical USCI module is implemented on one device, those
modules are named with incrementing numbers. For example, if one device has two USCI_A modules,
they are named USCI_A0 and USCI_A1. See the device-specific data sheet to determine which USCI
modules, if any, are implemented on which devices.
USCI_Ax modules support:
• UART mode
• Pulse shaping for IrDA communications
• Automatic baud-rate detection for LIN communications
• SPI mode
USCI_Bx modules support:
• I2C mode
• SPI mode
939
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Introduction – UART Mode
www.ti.com
36.2 USCI Introduction – UART Mode
In asynchronous mode, the USCI_Ax modules connect the device to an external system via two external
pins, UCAxRXD and UCAxTXD. UART mode is selected when the UCSYNC bit is cleared.
UART mode features include:
• 7- or 8-bit data with odd, even, or non-parity
• Independent transmit and receive shift registers
• Separate transmit and receive buffer registers
• LSB-first or MSB-first data transmit and receive
• Built-in idle-line and address-bit communication protocols for multiprocessor systems
• Receiver start-edge detection for auto wake up from LPMx modes (wake up from LPMx.5 is not
supported)
• Programmable baud rate with modulation for fractional baud-rate support
• Status flags for error detection and suppression
• Status flags for address detection
• Independent interrupt capability for receive and transmit
940 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
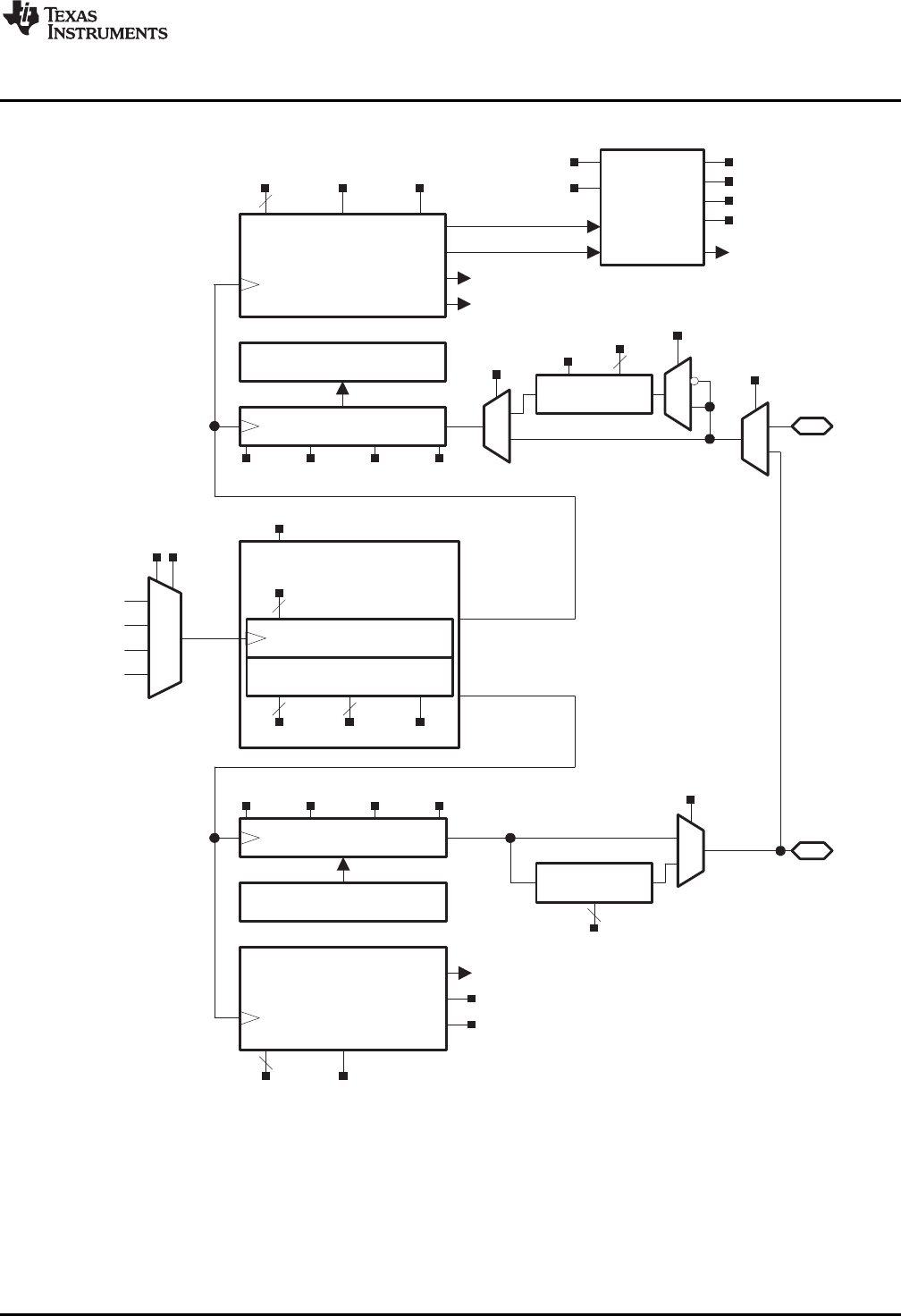
Modulator
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
UCAxCLK
Prescaler/Divider
ReceiveBaudrateGenerator
UC0BRx
16
UCBRFx
4
UCBRSx
3
UCOS16
UCRXERR
ErrorFlags
SetFlags
UCPE
UCFE
UCOE
UCABEN
ReceiveShiftRegister
ReceiveBufferUCAxRXBUF
ReceiveStateMachine
1
0
UCIREN
UCPEN UCPAR UCMSB UC7BIT
UCDORMUCMODEx
2
UCSPB
SetUCBRK
SetUCADDR /UCIDLE
0
1
UCLISTEN
UCAxRXD
1
0
UCIRRXPL
IrDA Decoder
UCIRRXFE
UCIRRXFLx
6
TransmitBufferUCAxTXBUF
TransmitStateMachine
UCTXADDR
UCTXBRK
TransmitShiftRegister
UCPEN UCPAR UCMSB UC7BIT UCIREN
UCIRTXPLx
6
0
1
IrDA Encoder UCAxTXD
TransmitClock
ReceiveClock
BRCLK
UCMODEx
2
UCSPB
UCRXEIE
UCRXBRKIE
SetUCRXIFG
SetUCTXIFG
SetRXIFG
www.ti.com
USCI Introduction – UART Mode
Figure 36-1 shows the USCI_Ax when configured for UART mode.
Figure 36-1. USCI_Ax Block Diagram – UART Mode (UCSYNC = 0)
941
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
[Parity Bit, UCPEN = 1]
[Address Bit, UCMODEx = 10]
Mark
Space
D0 D6 D7 AD PA SP SP
[Optional Bit, Condition]
[2nd Stop Bit, UCSPB = 1]
[8th Data Bit, UC7BIT = 0]
ST
USCI Operation – UART Mode
www.ti.com
36.3 USCI Operation – UART Mode
In UART mode, the USCI transmits and receives characters at a bit rate asynchronous to another device.
Timing for each character is based on the selected baud rate of the USCI. The transmit and receive
functions use the same baud-rate frequency.
36.3.1 USCI Initialization and Reset
The USCI is reset by a PUC or by setting the UCSWRST bit. After a PUC, the UCSWRST bit is
automatically set, keeping the USCI in a reset condition. When set, the UCSWRST bit resets the UCRXIE,
UCTXIE, UCRXIFG, UCRXERR, UCBRK, UCPE, UCOE, UCFE, UCSTOE, and UCBTOE bits, and sets
the UCTXIFG bit. Clearing UCSWRST releases the USCI for operation.
To avoid unpredictable behavior, configure or reconfigure the USCI_A module only when UCSWRST is
set.
NOTE: Initializing or reconfiguring the USCI module
The recommended USCI initialization/reconfiguration process is:
1. Set UCSWRST (BIS.B
#UCSWRST,&UCAxCTL1).
2. Initialize all USCI registers with UCSWRST = 1 (including UCAxCTL1).
3. Configure ports.
4. Clear UCSWRST via software (BIC.B
#UCSWRST,&UCAxCTL1).
5. Enable interrupts (optional) via UCRXIE and/or UCTXIE.
36.3.2 Character Format
The UART character format (see Figure 36-2) consists of a start bit, seven or eight data bits, an
even/odd/no parity bit, an address bit (address-bit mode), and one or two stop bits. The UCMSB bit
controls the direction of the transfer and selects LSB or MSB first. LSB first is typically required for UART
communication.
Figure 36-2. Character Format
36.3.3 Asynchronous Communication Format
When two devices communicate asynchronously, no multiprocessor format is required for the protocol.
When three or more devices communicate, the USCI supports the idle-line and address-bit multiprocessor
communication formats.
36.3.3.1 Idle-Line Multiprocessor Format
When UCMODEx = 01, the idle-line multiprocessor format is selected. Blocks of data are separated by an
idle time on the transmit or receive lines (see Figure 36-3). An idle receive line is detected when ten or
more continuous ones (marks) are received after the one or two stop bits of a character. The baud-rate
generator is switched off after reception of an idle line until the next start edge is detected. When an idle
line is detected, the UCIDLE bit is set.
942 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
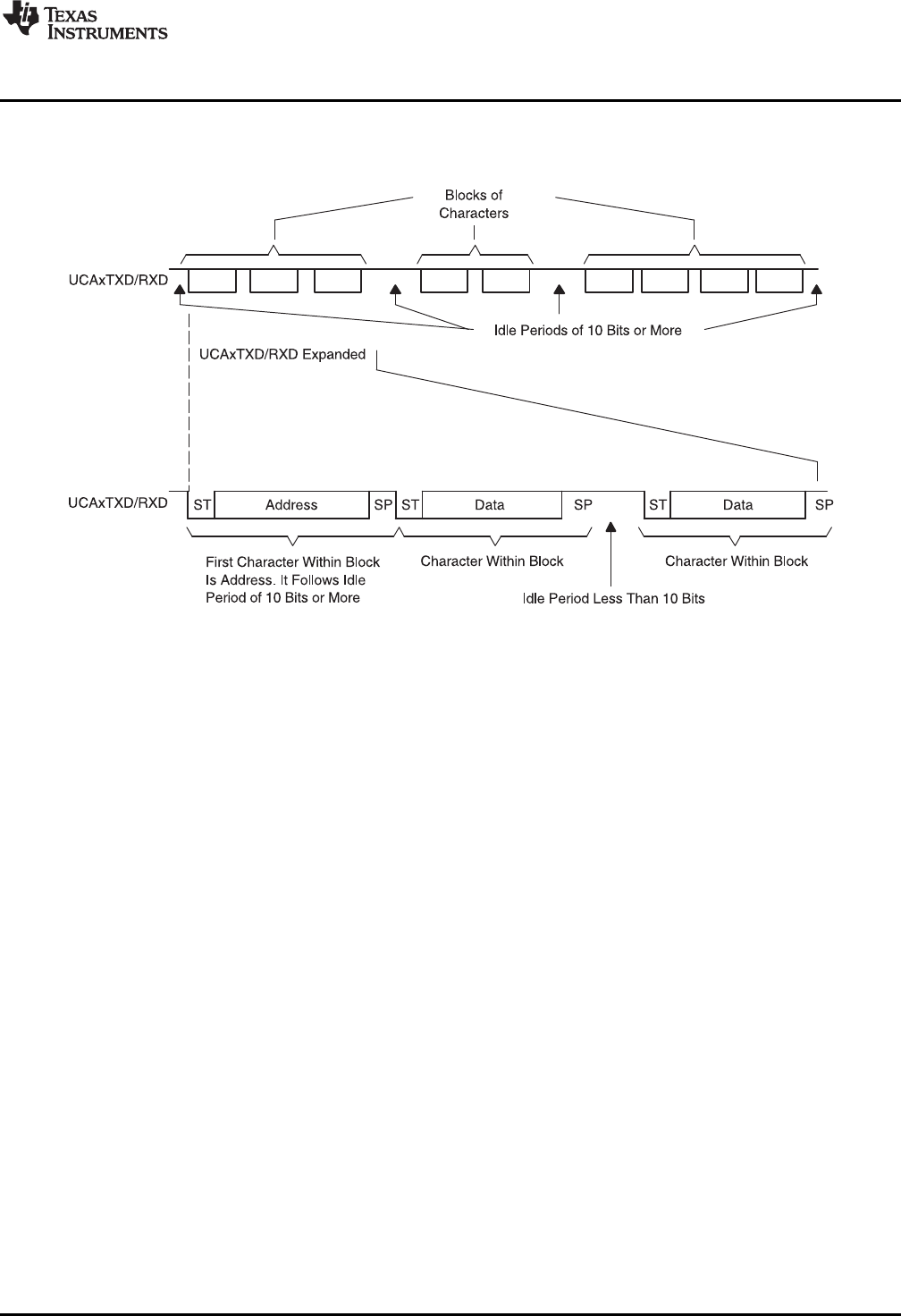
www.ti.com
USCI Operation – UART Mode
The first character received after an idle period is an address character. The UCIDLE bit is used as an
address tag for each block of characters. In idle-line multiprocessor format, this bit is set when a received
character is an address.
Figure 36-3. Idle-Line Format
The UCDORM bit is used to control data reception in the idle-line multiprocessor format. When
UCDORM = 1, all non-address characters are assembled but not transferred into the UCAxRXBUF, and
interrupts are not generated. When an address character is received, the character is transferred into
UCAxRXBUF, UCRXIFG is set, and any applicable error flag is set when UCRXEIE = 1. When UCRXEIE
= 0 and an address character is received but has a framing error or parity error, the character is not
transferred into UCAxRXBUF and UCRXIFG is not set.
If an address is received, user software can validate the address and must reset UCDORM to continue
receiving data. If UCDORM remains set, only address characters are received. When UCDORM is cleared
during the reception of a character, the receive interrupt flag is set after the reception completed. The
UCDORM bit is not modified by the USCI hardware automatically.
For address transmission in idle-line multiprocessor format, a precise idle period can be generated by the
USCI to generate address character identifiers on UCAxTXD. The double-buffered UCTXADDR flag
indicates if the next character loaded into UCAxTXBUF is preceded by an idle line of 11 bits. UCTXADDR
is automatically cleared when the start bit is generated.
36.3.3.1.1 Transmitting an Idle Frame
The following procedure sends out an idle frame to indicate an address character followed by associated
data:
1. Set UCTXADDR, then write the address character to UCAxTXBUF. UCAxTXBUF must be ready for
new data (UCTXIFG = 1).
This generates an idle period of exactly 11 bits followed by the address character. UCTXADDR is reset
automatically when the address character is transferred from UCAxTXBUF into the shift register.
2. Write desired data characters to UCAxTXBUF. UCAxTXBUF must be ready for new data (UCTXIFG =
1).
The data written to UCAxTXBUF is transferred to the shift register and transmitted as soon as the shift
register is ready for new data.
The idle-line time must not be exceeded between address and data transmission or between data
transmissions. Otherwise, the transmitted data is misinterpreted as an address.
943
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
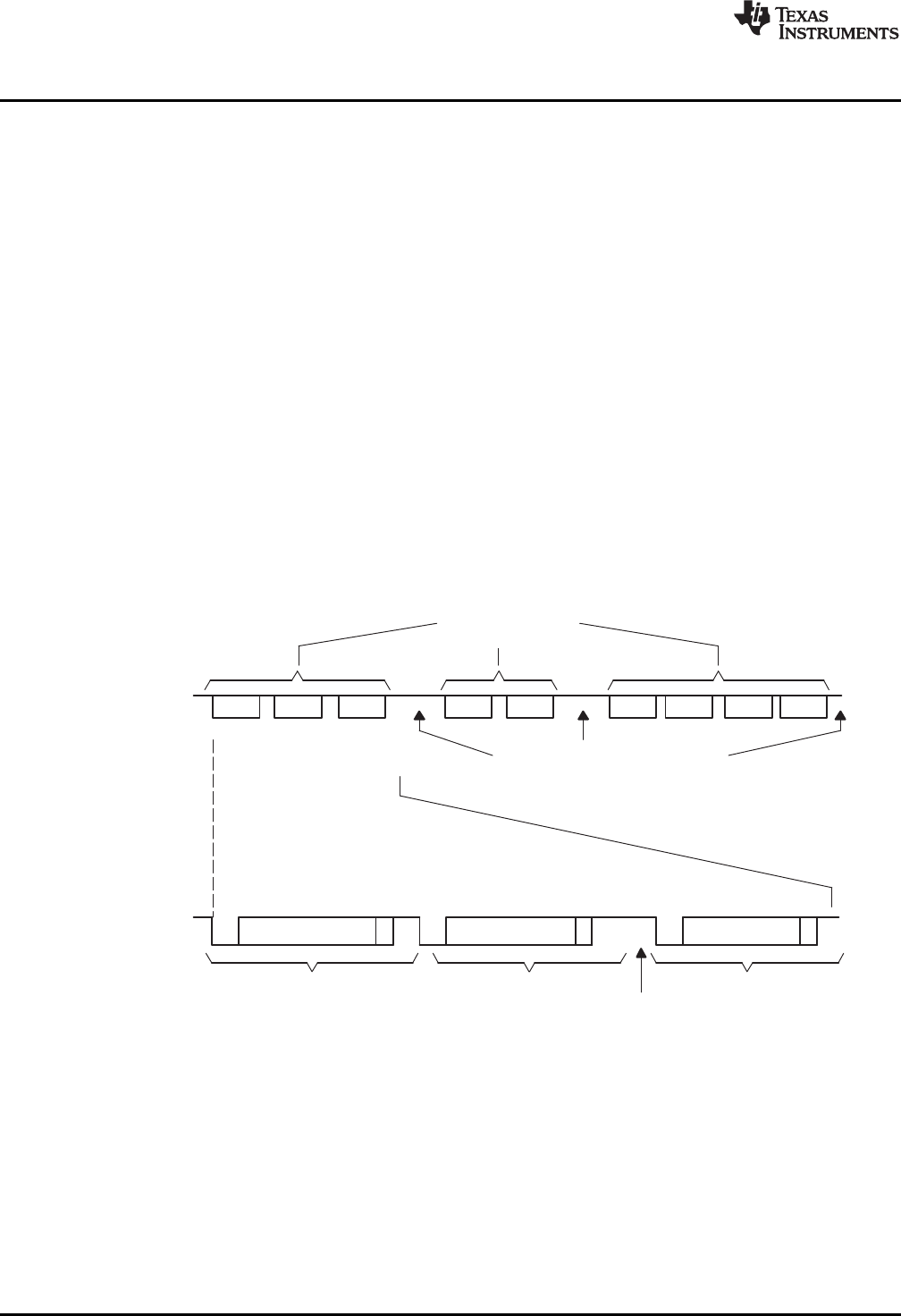
ST Address SP ST Data SP ST Data SP
Blocks of
Characters
Idle Periods of No Significance
UCAxTXD/UCAxRXD
Expanded
UCAxTXD/UCAxRXD
First Character Within Block
Is an Address. AD Bit Is 1
AD Bit Is 0 for
Data Within Block. Idle Time Is of No Significance
UCAxTXD/UCAxRXD 1 0 0
USCI Operation – UART Mode
www.ti.com
36.3.3.2 Address-Bit Multiprocessor Format
When UCMODEx = 10, the address-bit multiprocessor format is selected. Each processed character
contains an extra bit used as an address indicator (see Figure 36-4). The first character in a block of
characters carries a set address bit that indicates that the character is an address. The USCI UCADDR bit
is set when a received character has its address bit set and is transferred to UCAxRXBUF.
The UCDORM bit is used to control data reception in the address-bit multiprocessor format. When
UCDORM is set, data characters with address bit = 0 are assembled by the receiver but are not
transferred to UCAxRXBUF and no interrupts are generated. When a character containing a set address
bit is received, the character is transferred into UCAxRXBUF, UCRXIFG is set, and any applicable error
flag is set when UCRXEIE = 1. When UCRXEIE = 0 and a character containing a set address bit is
received but has a framing error or parity error, the character is not transferred into UCAxRXBUF and
UCRXIFG is not set.
If an address is received, user software can validate the address and must reset UCDORM to continue
receiving data. If UCDORM remains set, only address characters with address bit = 1 are received. The
UCDORM bit is not modified by the USCI hardware automatically.
When UCDORM = 0, all received characters set the receive interrupt flag UCRXIFG. If UCDORM is
cleared during the reception of a character, the receive interrupt flag is set after the reception is
completed.
For address transmission in address-bit multiprocessor mode, the address bit of a character is controlled
by the UCTXADDR bit. The value of the UCTXADDR bit is loaded into the address bit of the character
transferred from UCAxTXBUF to the transmit shift register. UCTXADDR is automatically cleared when the
start bit is generated.
Figure 36-4. Address-Bit Multiprocessor Format
36.3.3.2.1 Break Reception and Generation
When UCMODEx = 00, 01, or 10, the receiver detects a break when all data, parity, and stop bits are low,
regardless of the parity, address mode, or other character settings. When a break is detected, the UCBRK
bit is set. If the break interrupt enable bit (UCBRKIE) is set, the receive interrupt flag UCRXIFG is also set.
In this case, the value in UCAxRXBUF is 0h, because all data bits were zero.
To transmit a break, set the UCTXBRK bit, then write 0h to UCAxTXBUF. UCAxTXBUF must be ready for
new data (UCTXIFG = 1). This generates a break with all bits low. UCTXBRK is automatically cleared
when the start bit is generated.
944 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
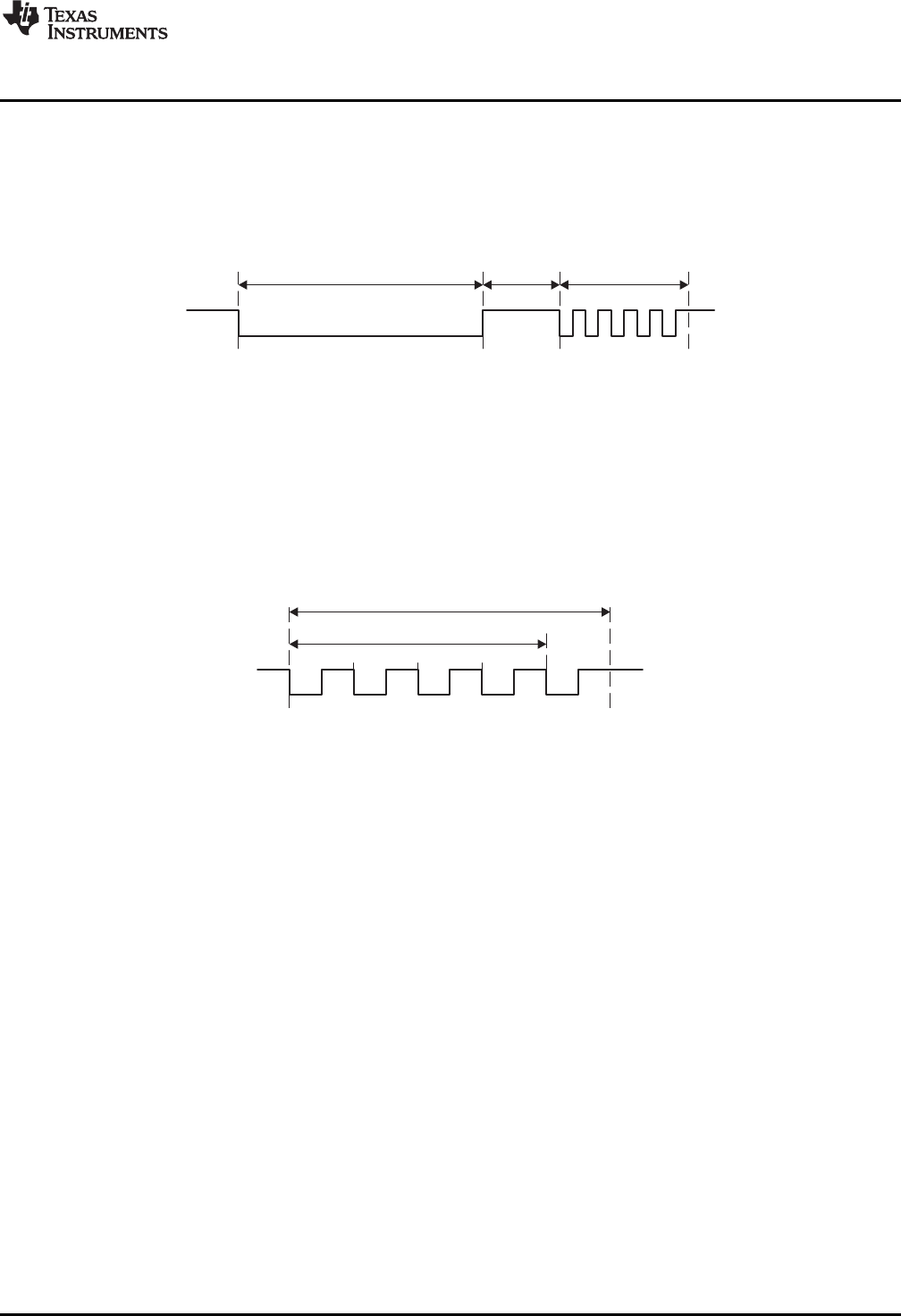
Synch
Start
Bit
Stop
Bit
01234567
8 Bit Times
Break Delimiter Synch
www.ti.com
USCI Operation – UART Mode
36.3.4 Automatic Baud-Rate Detection
When UCMODEx = 11, UART mode with automatic baud-rate detection is selected. For automatic baud-
rate detection, a data frame is preceded by a synchronization sequence that consists of a break and a
synch field. A break is detected when 11 or more continuous zeros (spaces) are received. If the length of
the break exceeds 21 bit times the break timeout error flag UCBTOE is set. The USCI can not transmit
data while receiving the break/sync field. The synch field follows the break as shown in Figure 36-5.
Figure 36-5. Auto Baud-Rate Detection – Break/Synch Sequence
For LIN conformance, the character format should be set to eight data bits, LSB first, no parity, and one
stop bit. No address bit is available.
The synch field consists of the data 055h inside a byte field (see Figure 36-6). The synchronization is
based on the time measurement between the first falling edge and the last falling edge of the pattern. The
transmit baud-rate generator is used for the measurement if automatic baud-rate detection is enabled by
setting UCABDEN. Otherwise, the pattern is received but not measured. The result of the measurement is
transferred into the baud-rate control registers (UCAxBR0, UCAxBR1, and UCAxMCTL). If the length of
the synch field exceeds the measurable time, the synch timeout error flag UCSTOE is set.
Figure 36-6. Auto Baud-Rate Detection – Synch Field
The UCDORM bit is used to control data reception in this mode. When UCDORM is set, all characters are
received but not transferred into the UCAxRXBUF, and interrupts are not generated. When a break/synch
field is detected, the UCBRK flag is set. The character following the break/synch field is transferred into
UCAxRXBUF and the UCRXIFG interrupt flag is set. Any applicable error flag is also set. If the UCBRKIE
bit is set, reception of the break/synch sets the UCRXIFG. The UCBRK bit is reset by user software or by
reading the receive buffer UCAxRXBUF.
When a break/synch field is received, user software must reset UCDORM to continue receiving data. If
UCDORM remains set, only the character after the next reception of a break/synch field is received. The
UCDORM bit is not modified by the USCI hardware automatically.
When UCDORM = 0, all received characters set the receive interrupt flag UCRXIFG. If UCDORM is
cleared during the reception of a character, the receive interrupt flag is set after the reception is complete.
The counter used to detect the baud rate is limited to 07FFFh (32767) counts. This means the minimum
baud rate detectable is 488 baud in oversampling mode and 30 baud in low-frequency mode.
The automatic baud-rate detection mode can be used in a full-duplex communication system with some
restrictions. The USCI can not transmit data while receiving the break/sync field and, if a 0h byte with
framing error is received, any data transmitted during this time gets corrupted. The latter case can be
discovered by checking the received data and the UCFE bit.
945
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
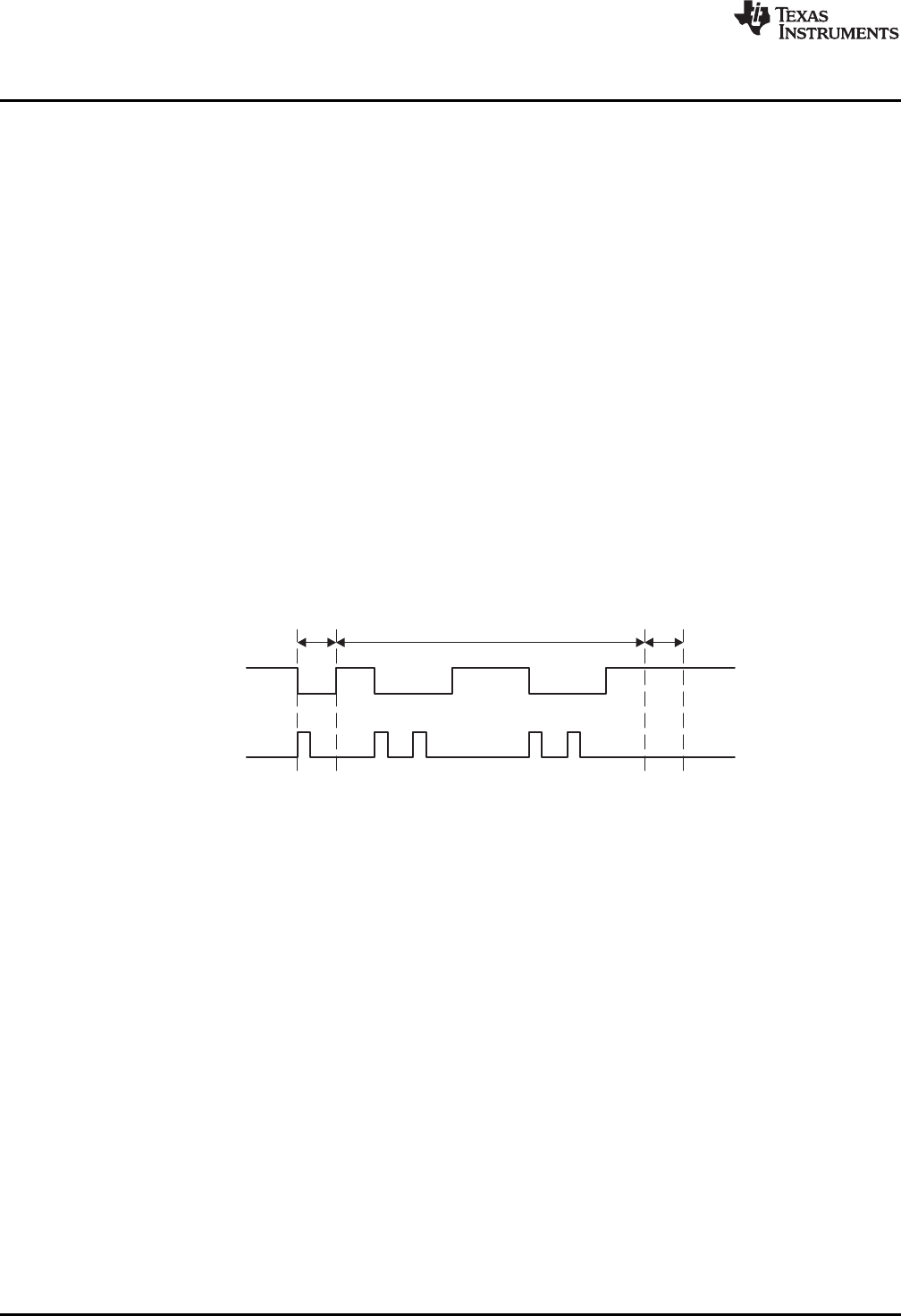
UART
Start
Bit Data Bits
Stop
Bit
IrDA
USCI Operation – UART Mode
www.ti.com
36.3.4.1 Transmitting a Break/Synch Field
The following procedure transmits a break/synch field:
1. Set UCTXBRK with UMODEx = 11.
2. Write 055h to UCAxTXBUF. UCAxTXBUF must be ready for new data (UCTXIFG = 1).
This generates a break field of 13 bits followed by a break delimiter and the synch character. The
length of the break delimiter is controlled with the UCDELIMx bits. UCTXBRK is reset automatically
when the synch character is transferred from UCAxTXBUF into the shift register.
3. Write desired data characters to UCAxTXBUF. UCAxTXBUF must be ready for new data
(UCTXIFG = 1).
The data written to UCAxTXBUF is transferred to the shift register and transmitted as soon as the shift
register is ready for new data.
36.3.5 IrDA Encoding and Decoding
When UCIREN is set, the IrDA encoder and decoder are enabled and provide hardware bit shaping for
IrDA communication.
36.3.5.1 IrDA Encoding
The encoder sends a pulse for every zero bit in the transmit bitstream coming from the UART (see
Figure 36-7). The pulse duration is defined by UCIRTXPLx bits specifying the number of one-half clock
periods of the clock selected by UCIRTXCLK.
Figure 36-7. UART vs IrDA Data Format
To set the pulse time of 3/16 bit period required by the IrDA standard, the BITCLK16 clock is selected with
UCIRTXCLK = 1 ,and the pulse length is set to six one-half clock cycles with UCIRTXPLx = 6 – 1 = 5.
When UCIRTXCLK = 0, the pulse length tPULSE is based on BRCLK and is calculated as:
UCIRTXPLx = tPULSE × 2 × fBRCLK – 1
When UCIRTXCLK = 0 ,the prescaler UCBRx must to be set to a value greater or equal to 5.
36.3.5.2 IrDA Decoding
The decoder detects high pulses when UCIRRXPL = 0. Otherwise, it detects low pulses. In addition to the
analog deglitch filter, an additional programmable digital filter stage can be enabled by setting UCIRRXFE.
When UCIRRXFE is set, only pulses longer than the programmed filter length are passed. Shorter pulses
are discarded. The equation to program the filter length UCIRRXFLx is:
UCIRRXFLx = (tPULSE −tWAKE) × 2 × fBRCLK – 4
Where:
tPULSE = Minimum receive pulse width
tWAKE = Wake time from any low-power mode. Zero when the device is in active mode.
946 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI Operation – UART Mode
36.3.6 Automatic Error Detection
Glitch suppression prevents the USCI from being accidentally started. Any pulse on UCAxRXD shorter
than the deglitch time tt(approximately 150 ns) is ignored (see the device-specific data sheet for
parameters).
When a low period on UCAxRXD exceeds tt, a majority vote is taken for the start bit. If the majority vote
fails to detect a valid start bit, the USCI halts character reception and waits for the next low period on
UCAxRXD. The majority vote is also used for each bit in a character to prevent bit errors.
The USCI module automatically detects framing errors, parity errors, overrun errors, and break conditions
when receiving characters. The bits UCFE, UCPE, UCOE, and UCBRK are set when their respective
condition is detected. When the error flags UCFE, UCPE, or UCOE are set, UCRXERR is also set. The
error conditions are described in Table 36-1.
Table 36-1. Receive Error Conditions
Error Condition Error Flag Description
A framing error occurs when a low stop bit is detected. When two stop bits are used, both
Framing error UCFE stop bits are checked for framing error. When a framing error is detected, the UCFE bit is set.
A parity error is a mismatch between the number of 1s in a character and the value of the
Parity error UCPE parity bit. When an address bit is included in the character, it is included in the parity
calculation. When a parity error is detected, the UCPE bit is set.
An overrun error occurs when a character is loaded into UCAxRXBUF before the prior
Receive overrun UCOE character has been read. When an overrun occurs, the UCOE bit is set.
When not using automatic baud-rate detection, a break is detected when all data, parity, and
Break condition UCBRK stop bits are low. When a break condition is detected, the UCBRK bit is set. A break condition
can also set the interrupt flag UCRXIFG if the break interrupt enable UCBRKIE bit is set.
When UCRXEIE = 0 and a framing error or parity error is detected, no character is received into
UCAxRXBUF. When UCRXEIE = 1, characters are received into UCAxRXBUF and any applicable error
bit is set.
When any of the UCFE, UCPE, UCOE, UCBRK, or UCRXERR bit is set, the bit remains set until user
software resets it or UCAxRXBUF is read. UCOE must be reset by reading UCAxRXBUF. Otherwise, it
does not function properly. To detect overflows reliably the following flow is recommended. After a
character was received and UCAxRXIFG is set, first read UCAxSTAT to check the error flags including the
overflow flag UCOE. Read UCAxRXBUF next. This clears all error flags except UCOE, if UCAxRXBUF
was overwritten between the read access to UCAxSTAT and to UCAxRXBUF. Therefore, the UCOE flag
should be checked after reading UCAxRXBUF to detect this condition. Note that, in this case, the
UCRXERR flag is not set.
947
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
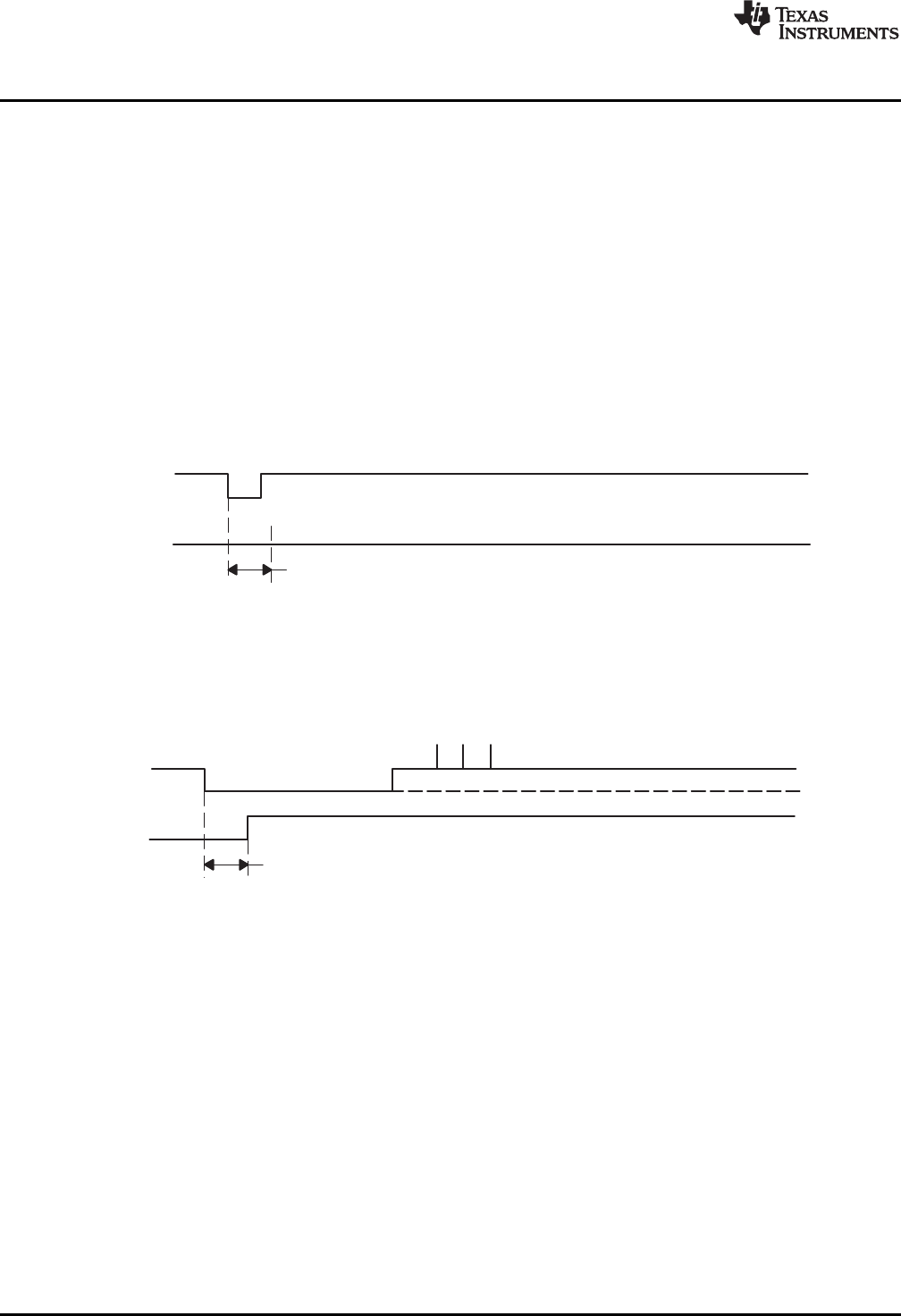
URXS
MajorityVote Taken
tt
tt
UCAxRXD
URXS
USCI Operation – UART Mode
www.ti.com
36.3.7 USCI Receive Enable
The USCI module is enabled by clearing the UCSWRST bit and the receiver is ready and in an idle state.
The receive baud rate generator is in a ready state but is not clocked nor producing any clocks.
The falling edge of the start bit enables the baud rate generator and the UART state machine checks for a
valid start bit. If no valid start bit is detected the UART state machine returns to its idle state and the baud
rate generator is turned off again. If a valid start bit is detected, a character is received.
When the idle-line multiprocessor mode is selected with UCMODEx = 01 the UART state machine checks
for an idle line after receiving a character. If a start bit is detected another character is received. Otherwise
the UCIDLE flag is set after 10 ones are received and the UART state machine returns to its idle state and
the baud rate generator is turned off.
36.3.7.1 Receive Data Glitch Suppression
Glitch suppression prevents the USCI from being accidentally started. Any glitch on UCAxRXD shorter
than the deglitch time tt(approximately 150 ns) is ignored by the USCI, and further action is initiated as
shown in Figure 36-8 (see the device-specific data sheet for parameters).
Figure 36-8. Glitch Suppression, USCI Receive Not Started
When a glitch is longer than tt, or a valid start bit occurs on UCAxRXD, the USCI receive operation is
started and a majority vote is taken (see Figure 36-9). If the majority vote fails to detect a start bit, the
USCI halts character reception.
Figure 36-9. Glitch Suppression, USCI Activated
36.3.8 USCI Transmit Enable
The USCI module is enabled by clearing the UCSWRST bit and the transmitter is ready and in an idle
state. The transmit baud-rate generator is ready but is not clocked nor producing any clocks.
A transmission is initiated by writing data to UCAxTXBUF. When this occurs, the baud-rate generator is
enabled, and the data in UCAxTXBUF is moved to the transmit shift register on the next BITCLK after the
transmit shift register is empty. UCTXIFG is set when new data can be written into UCAxTXBUF.
Transmission continues as long as new data is available in UCAxTXBUF at the end of the previous byte
transmission. If new data is not in UCAxTXBUF when the previous byte has transmitted, the transmitter
returns to its idle state and the baud-rate generator is turned off.
948 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
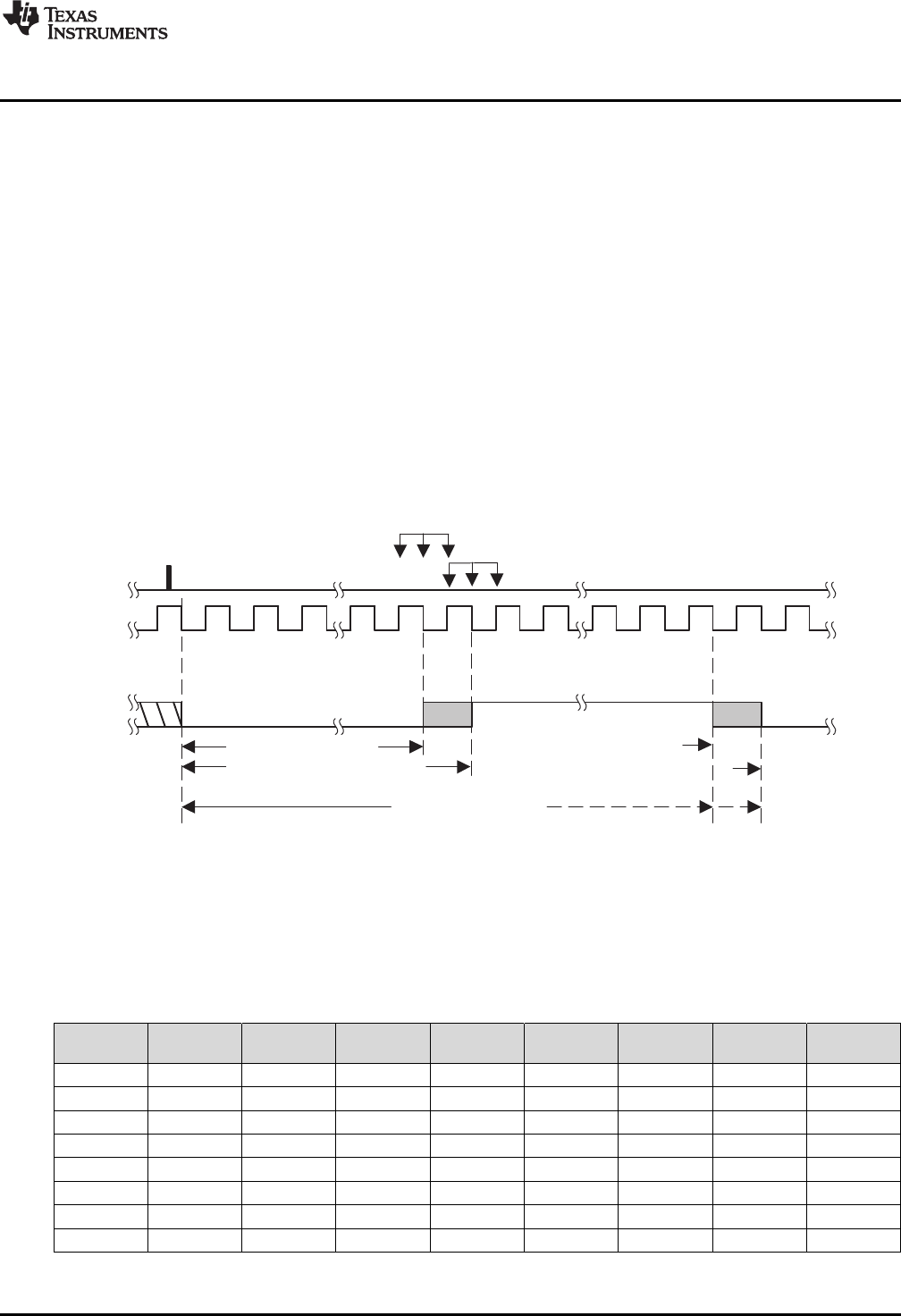
N/2
Bit Start
BRCLK
Counter
BITCLK
N/2-1 N/2-2 1 N/2 N/2-1 1 N/2 N/2-1
N/2-2
0 N/2 N/2-11
INT(N/2) + m(= 0)
INT(N/2) + m(= 1)
1 0 N/2
Bit Period
NEVEN: INT(N/2)
NODD: INT(N/2) + R(= 1)
m: corresponding modulation bit
R: Remainder from N/2 division
Majority Vote: (m= 0)
(m= 1)
www.ti.com
USCI Operation – UART Mode
36.3.9 UART Baud-Rate Generation
The USCI baud-rate generator is capable of producing standard baud rates from nonstandard source
frequencies. It provides two modes of operation selected by the UCOS16 bit. The baud-rate is generate
using the BRCLK that can be sourced by the external clock UCAxCLK, or the internal clocks ACLK or
SMCLK depending on the UCSSELx settings.
36.3.9.1 Low-Frequency Baud-Rate Generation
The low-frequency mode is selected when UCOS16 = 0. This mode allows generation of baud rates from
low frequency clock sources (for example, 9600 baud from a 32768-Hz crystal). By using a lower input
frequency, the power consumption of the module is reduced. Using this mode with higher frequencies and
higher prescaler settings causes the majority votes to be taken in an increasingly smaller window and,
thus, decrease the benefit of the majority vote.
In low-frequency mode, the baud-rate generator uses one prescaler and one modulator to generate bit
clock timing. This combination supports fractional divisors for baud-rate generation. In this mode, the
maximum USCI baud rate is one-third the UART source clock frequency BRCLK.
Timing for each bit is shown in Figure 36-10. For each bit received, a majority vote is taken to determine
the bit value. These samples occur at the N/2 – 1/2, N/2, and N/2 + 1/2 BRCLK periods, where N is the
number of BRCLKs per BITCLK.
Figure 36-10. BITCLK Baud-Rate Timing With UCOS16 = 0
Modulation is based on the UCBRSx setting (see Table 36-2). A 1 in the table indicates that m = 1 and the
corresponding BITCLK period is one BRCLK period longer than a BITCLK period with m = 0. The
modulation wraps around after eight bits but restarts with each new start bit.
Table 36-2. BITCLK Modulation Pattern
Bit 0
UCBRSx Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
(Start Bit)
000000000
101000000
201000100
301010100
401010101
501110101
601110111
701111111
949
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Operation – UART Mode
www.ti.com
36.3.9.2 Oversampling Baud-Rate Generation
The oversampling mode is selected when UCOS16 = 1. This mode supports sampling a UART bitstream
with higher input clock frequencies. This results in majority votes that are always 1/16 of a bit clock period
apart. This mode also easily supports IrDA pulses with a 3/16 bit time when the IrDA encoder and decoder
are enabled.
This mode uses one prescaler and one modulator to generate the BITCLK16 clock that is 16 times faster
than the BITCLK. An additional divider and modulator stage generates BITCLK from BITCLK16. This
combination supports fractional divisions of both BITCLK16 and BITCLK for baud-rate generation. In this
mode, the maximum USCI baud rate is 1/16 the UART source clock frequency BRCLK. When UCBRx is
set to 0 or 1, the first prescaler and modulator stage is bypassed and BRCLK is equal to BITCLK16 – in
this case, no modulation for the BITCLK16 is possible and, thus, the UCBRFx bits are ignored.
Modulation for BITCLK16 is based on the UCBRFx setting (see Table 36-3). A 1 in the table indicates that
the corresponding BITCLK16 period is one BRCLK period longer than the periods m = 0. The modulation
restarts with each new bit timing.
Modulation for BITCLK is based on the UCBRSx setting (see Table 36-2) as previously described.
Table 36-3. BITCLK16 Modulation Pattern
Number of BITCLK16 Clocks After Last Falling BITCLK Edge
UCBRFx 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
00h 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
01h 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
02h 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1
03h 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
04h 0 1 1 0 0 0 0 0 0 0 0 0 0 0 1 1
05h 0 1 1 1 0 0 0 0 0 0 0 0 0 0 1 1
06h 0 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1
07h 0 1 1 1 1 0 0 0 0 0 0 0 0 1 1 1
08h 0 1 1 1 1 0 0 0 0 0 0 0 1 1 1 1
09h 0 1 1 1 1 1 0 0 0 0 0 0 1 1 1 1
0Ah 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1
0Bh 0 1 1 1 1 1 1 0 0 0 0 1 1 1 1 1
0Ch 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1
0Dh 0 1 1 1 1 1 1 1 0 0 1 1 1 1 1 1
0Eh 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1
0Fh 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
950 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

mUCBR xF [j]
15
j = 0
S
T [i] =
bit,TX
1
fBRCLK
(
(
(16 + m [i]) × UCBRx + [j]
UCBRSx UCBR x
mF
S
15
j = 0
www.ti.com
USCI Operation – UART Mode
36.3.10 Setting a Baud Rate
For a given BRCLK clock source, the baud rate used determines the required division factor N:
N=fBRCLK/Baudrate
The division factor N is often a noninteger value, thus, at least one divider and one modulator stage is
used to meet the factor as closely as possible.
If N is equal or greater than 16, the oversampling baud-rate generation mode can be chosen by setting
UCOS16.
36.3.10.1 Low-Frequency Baud-Rate Mode Setting
In low-frequency mode, the integer portion of the divisor is realized by the prescaler:
UCBRx = INT(N)
and the fractional portion is realized by the modulator with the following nominal formula:
UCBRSx = round[( N – INT(N)) × 8]
Incrementing or decrementing the UCBRSx setting by one count may give a lower maximum bit error for
any given bit. To determine if this is the case, a detailed error calculation must be performed for each bit
for each UCBRSx setting.
36.3.10.2 Oversampling Baud-Rate Mode Setting
In the oversampling mode, the prescaler is set to:
UCBRx = INT(N/16)
and the first stage modulator is set to:
UCBRFx = round([(N/16) – INT(N/16)] × 16)
When greater accuracy is required, the UCBRSx modulator can also be implemented with values from 0
to 7. To find the setting that gives the lowest maximum bit error rate for any given bit, a detailed error
calculation must be performed for all settings of UCBRSx from 0 to 7 with the initial UCBRFx setting, and
with the UCBRFx setting incremented and decremented by one.
36.3.11 Transmit Bit Timing
The timing for each character is the sum of the individual bit timings. Using the modulation features of the
baud-rate generator reduces the cumulative bit error. The individual bit error can be calculated using the
following steps.
36.3.11.1 Low-Frequency Baud-Rate Mode Bit Timing
In low-frequency mode, calculate the length of bit i Tbit,TX[i] based on the UCBRx and UCBRSx settings:
Tbit,TX[i] = (1/fBRCLK)(UCBRx + mUCBRSx[i])
Where:
mUCBRSx[i] = Modulation of bit i from Table 36-2
36.3.11.2 Oversampling Baud-Rate Mode Bit Timing
In oversampling baud-rate mode, calculate the length of bit i Tbit,TX[i] based on the baud-rate generator
UCBRx, UCBRFx and UCBRSx settings:
Where:
= Sum of ones from the corresponding row in Table 36-3
mUCBRSx[i] = Modulation of bit i from Table 36-2
951
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
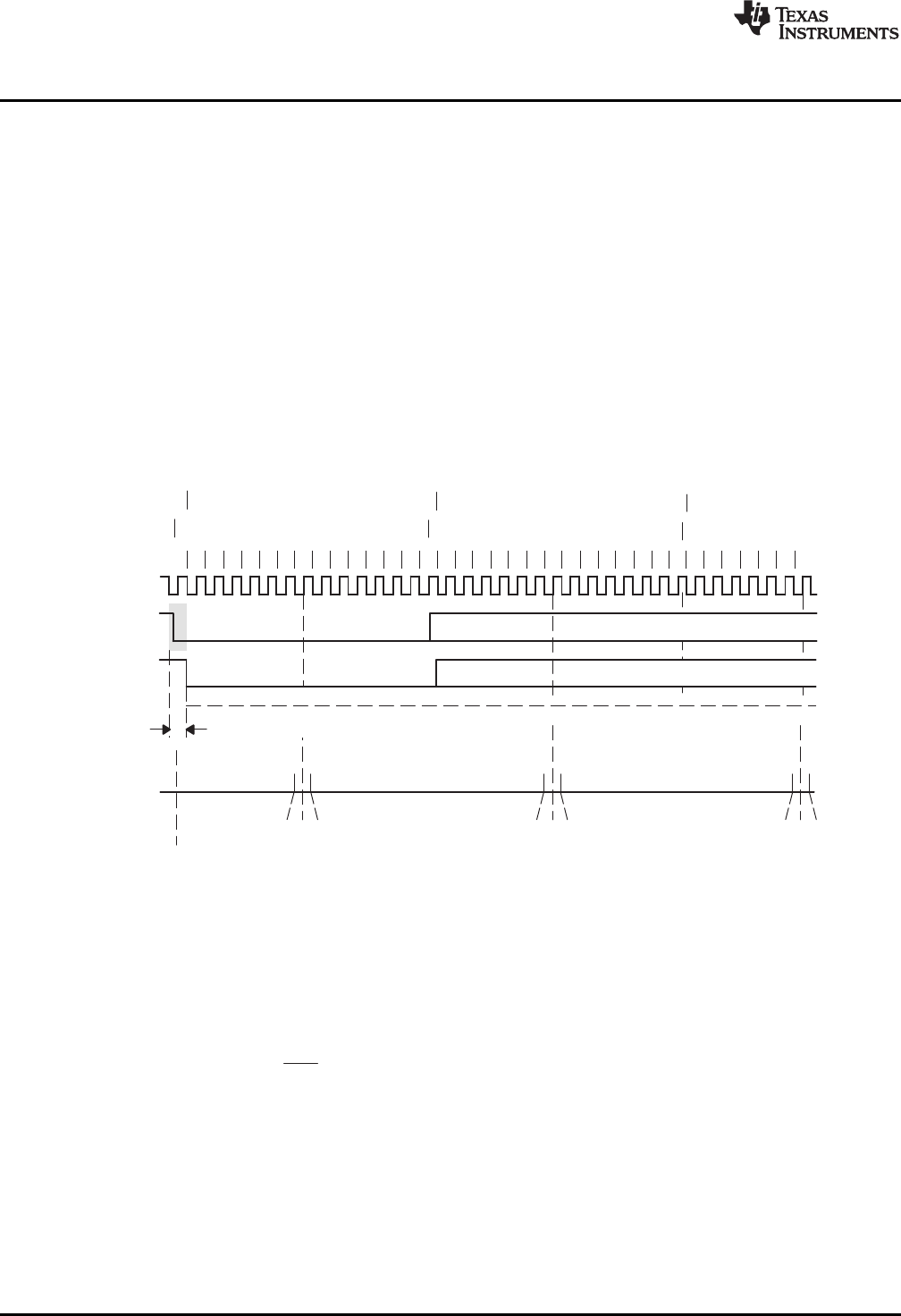
T [j] +
bit,RX
i – 1
j = 0
S1
fBRCLK
t [i] = t +
bit,RX SYNC INT(½UCBRx) + m [i]
UCBRSx
(
(
1 2 3 4 5 6
0
i
t0
tideal
7 8
1 2
9 10 11 12 13 14 1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 2 3 4 5 6 7
ST D0 D1
D0 D1
ST
Synchronization Error ± 0.5x BRCLK
Majority Vote Taken Majority Vote Taken Majority Vote Taken
BRCLK
UCAxRXD
RXD synch.
tactual
Sample
RXD synch.
t0
t1
t1t2
Tbit,TX[j]
i
j = 0
S
Tbit,TX[i] =
USCI Operation – UART Mode
www.ti.com
This results in an end-of-bit time tbit,TX[i] equal to the sum of all previous and the current bit times:
To calculate bit error, this time is compared to the ideal bit time tbit,ideal,TX[i]:
tbit,ideal,TX[i] = (1/Baudrate)(i + 1)
This results in an error normalized to one ideal bit time (1/baudrate):
ErrorTX[i] = (tbit,TX[i] – tbit,ideal,TX[i]) × Baudrate × 100%
36.3.12 Receive Bit Timing
Receive timing error consists of two error sources. The first is the bit-to-bit timing error similar to the
transmit bit timing error. The second is the error between a start edge occurring and the start edge being
accepted by the USCI module. Figure 36-11 shows the asynchronous timing errors between data on the
UCAxRXD pin and the internal baud-rate clock. This results in an additional synchronization error. The
synchronization error tSYNC is between –0.5 BRCLKs and +0.5 RCLKs, independent of the selected baud-
rate generation mode.
Figure 36-11. Receive Error
The ideal sampling time tbit,ideal,RX[i] is in the middle of a bit period:
tbit,ideal,RX[i] = (1/Baudrate)(i + 0.5)
The real sampling time, tbit,RX[i], is equal to the sum of all previous bits according to the formulas shown in
the transmit timing section, plus one-half BITCLK for the current bit i, plus the synchronization error tSYNC.
This results in the following tbit,RX[i] for the low-frequency baud-rate mode:
Where:
Tbit,RX[i] = (1/fBRCLK)(UCBRx + mUCBRSx[i])
mUCBRSx[i] = Modulation of bit i from Table 36-2
952 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
m [j]
UCBRFx
7 + m [i]
UCBRSx
j = 0
S
(16 + m [i]) × UCBRx +
UCBRSx
T [i] =
bit,RX
1
fBRCLK
(
(
m [j]
UCBRFx
15
j = 0
S
t [i] = t +
bit,RX SYNC (8 + m [i]) × UCBRx +
UCBRSx
T [j] +
bit,RX
i – 1
j = 0
S1
fBRCLK
(
(
m [j]
UCBRFx
7 + m [i]
UCBRSx
j = 0
S
www.ti.com
USCI Operation – UART Mode
For the oversampling baud-rate mode, the sampling time tbit,RX[i] of bit i is calculated by:
Where:
= Sum of ones from columns 0 to (7 + mUCBRSx[i]) from the corresponding row in
Table 36-3.
mUCBRSx[i] = Modulation of bit i from Table 36-2
This results in an error normalized to one ideal bit time (1/baudrate) according to the following formula:
ErrorRX[i] = (tbit,RX[i] – tbit,ideal,RX[i]) × Baudrate × 100%
36.3.13 Typical Baud Rates and Errors
Standard baud-rate data for UCBRx, UCBRSx, and UCBRFx are listed in Table 36-4 and Table 36-5 for a
32,768-Hz crystal sourcing ACLK and typical SMCLK frequencies. Make sure that the selected BRCLK
frequency does not exceed the device-specific maximum USCI input frequency (see the device-specific
data sheet).
The receive error is the accumulated time versus the ideal scanning time in the middle of each bit. The
worst-case error is given for the reception of an 8-bit character with parity and one stop bit including
synchronization error.
The transmit error is the accumulated timing error versus the ideal time of the bit period. The worst-case
error is given for the transmission of an 8-bit character with parity and stop bit.
Table 36-4. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 0
BRCLK Baud Rate Maximum TX Error Maximum RX Error
Frequency UCBRx UCBRSx UCBRFx
(baud) (%) (%)
(Hz)
32 768 1200 27 2 0 -2.8 1.4 -5.9 2.0
32 768 2400 13 6 0 -4.8 6.0 -9.7 8.3
32 768 4800 6 7 0 -12.1 5.7 -13.4 19.0
32 768 9600 3 3 0 -21.1 15.2 -44.3 21.3
1 000 000 9600 104 1 0 -0.5 0.6 -0.9 1.2
1 000 000 19200 52 0 0 -1.8 0 -2.6 0.9
1 000 000 38400 26 0 0 -1.8 0 -3.6 1.8
1 000 000 57600 17 3 0 -2.1 4.8 -6.8 5.8
1 000 000 115200 8 6 0 -7.8 6.4 -9.7 16.1
1 048 576 9600 109 2 0 -0.2 0.7 -1.0 0.8
1 048 576 19200 54 5 0 -1.1 1.0 -1.5 2.5
1 048 576 38400 27 2 0 -2.8 1.4 -5.9 2.0
1 048 576 57600 18 1 0 -4.6 3.3 -6.8 6.6
1 048 576 115200 9 1 0 -1.1 10.7 -11.5 11.3
4 000 000 9600 416 6 0 -0.2 0.2 -0.2 0.4
4 000 000 19200 208 3 0 -0.2 0.5 -0.3 0.8
4 000 000 38400 104 1 0 -0.5 0.6 -0.9 1.2
4 000 000 57600 69 4 0 -0.6 0.8 -1.8 1.1
4 000 000 115200 34 6 0 -2.1 0.6 -2.5 3.1
4 000 000 230400 17 3 0 -2.1 4.8 -6.8 5.8
4 194 304 9600 436 7 0 -0.3 0 -0.3 0.2
953
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
USCI Operation – UART Mode
www.ti.com
Table 36-4. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 0 (continued)
BRCLK Baud Rate Maximum TX Error Maximum RX Error
Frequency UCBRx UCBRSx UCBRFx
(baud) (%) (%)
(Hz)
4 194 304 19200 218 4 0 -0.2 0.2 -0.3 0.6
4 194 304 57600 72 7 0 -1.1 0.6 -1.3 1.9
4 194 304 115200 36 3 0 -1.9 1.5 -2.7 3.4
8 000 000 9600 833 2 0 -0.1 0 -0.2 0.1
8 000 000 19200 416 6 0 -0.2 0.2 -0.2 0.4
8 000 000 38400 208 3 0 -0.2 0.5 -0.3 0.8
8 000 000 57600 138 7 0 -0.7 0 -0.8 0.6
8 000 000 115200 69 4 0 -0.6 0.8 -1.8 1.1
8 000 000 230400 34 6 0 -2.1 0.6 -2.5 3.1
8 000 000 460800 17 3 0 -2.1 4.8 -6.8 5.8
8 388 608 9600 873 7 0 -0.1 0.06 -0.2 0.1
8 388 608 19200 436 7 0 -0.3 0 -0.3 0.2
8 388 608 57600 145 5 0 -0.5 0.3 -1.0 0.5
8 388 608 115200 72 7 0 -1.1 0.6 -1.3 1.9
12 000 000 9600 1250 0 0 0 0 -0.05 0.05
12 000 000 19200 625 0 0 0 0 -0.2 0
12 000 000 38400 312 4 0 -0.2 0 -0.2 0.2
12 000 000 57600 208 2 0 -0.5 0.2 -0.6 0.5
12 000 000 115200 104 1 0 -0.5 0.6 -0.9 1.2
12 000 000 230400 52 0 0 -1.8 0 -2.6 0.9
12 000 000 460800 26 0 0 -1.8 0 -3.6 1.8
16 000 000 9600 1666 6 0 -0.05 0.05 -0.05 0.1
16 000 000 19200 833 2 0 -0.1 0.05 -0.2 0.1
16 000 000 38400 416 6 0 -0.2 0.2 -0.2 0.4
16 000 000 57600 277 7 0 -0.3 0.3 -0.5 0.4
16 000 000 115200 138 7 0 -0.7 0 -0.8 0.6
16 000 000 230400 69 4 0 -0.6 0.8 -1.8 1.1
16 000 000 460800 34 6 0 -2.1 0.6 -2.5 3.1
16 777 216 9600 1747 5 0 -0.04 0.03 -0.08 0.05
16 777 216 19200 873 7 0 -0.09 0.06 -0.2 0.1
16 777 216 57600 291 2 0 -0.2 0.2 -0.5 0.2
16 777 216 115200 145 5 0 -0.5 0.3 -1.0 0.5
20 000 000 9600 2083 2 0 -0.05 0.02 -0.09 0.02
20 000 000 19200 1041 6 0 -0.06 0.06 -0.1 0.1
20 000 000 38400 520 7 0 -0.2 0.06 -0.2 0.2
20 000 000 57600 347 2 0 -0.06 0.2 -0.3 0.3
20 000 000 115200 173 5 0 -0.4 0.3 -0.8 0.5
20 000 000 230400 86 7 0 -1.0 0.6 -1.0 1.7
20 000 000 460800 43 3 0 -1.4 1.3 -3.3 1.8
954 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI Operation – UART Mode
Table 36-5. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 1
BRCLK Baud Rate Maximum TX Error Maximum RX Error
Frequency UCBRx UCBRSx UCBRFx
(baud) (%) (%)
(Hz)
1 000 000 9600 6 0 8 -1.8 0 -2.2 0.4
1 000 000 19200 3 0 4 -1.8 0 -2.6 0.9
1 048 576 9600 6 0 13 -2.3 0 -2.2 0.8
1 048 576 19200 3 1 6 -4.6 3.2 -5.0 4.7
4 000 000 9600 26 0 1 0 0.9 0 1.1
4 000 000 19200 13 0 0 -1.8 0 -1.9 0.2
4 000 000 38400 6 0 8 -1.8 0 -2.2 0.4
4 000 000 57600 4 5 3 -3.5 3.2 -1.8 6.4
4 000 000 115200 2 3 2 -2.1 4.8 -2.5 7.3
4 194 304 9600 27 0 5 0 0.2 0 0.5
4 194 304 19200 13 0 10 -2.3 0 -2.4 0.1
4 194 304 57600 4 4 7 -2.5 2.5 -1.3 5.1
4 194 304 115200 2 6 3 -3.9 2.0 -1.9 6.7
8 000 000 9600 52 0 1 -0.4 0 -0.4 0.1
8 000 000 19200 26 0 1 0 0.9 0 1.1
8 000 000 38400 13 0 0 -1.8 0 -1.9 0.2
8 000 000 57600 8 0 11 0 0.88 0 1.6
8 000 000 115200 4 5 3 -3.5 3.2 -1.8 6.4
8 000 000 230400 2 3 2 -2.1 4.8 -2.5 7.3
8 388 608 9600 54 0 10 0 0.2 -0.05 0.3
8 388 608 19200 27 0 5 0 0.2 0 0.5
8 388 608 57600 9 0 2 0 2.8 -0.2 3.0
8 388 608 115200 4 4 7 -2.5 2.5 -1.3 5.1
12 000 000 9600 78 0 2 0 0 -0.05 0.05
12 000 000 19200 39 0 1 0 0 0 0.2
12 000 000 38400 19 0 8 -1.8 0 -1.8 0.1
12 000 000 57600 13 0 0 -1.8 0 -1.9 0.2
12 000 000 115200 6 0 8 -1.8 0 -2.2 0.4
12 000 000 230400 3 0 4 -1.8 0 -2.6 0.9
16 000 000 9600 104 0 3 0 0.2 0 0.3
16 000 000 19200 52 0 1 -0.4 0 -0.4 0.1
16 000 000 38400 26 0 1 0 0.9 0 1.1
16 000 000 57600 17 0 6 0 0.9 -0.1 1.0
16 000 000 115200 8 0 11 0 0.9 0 1.6
16 000 000 230400 4 5 3 -3.5 3.2 -1.8 6.4
16 000 000 460800 2 3 2 -2.1 4.8 -2.5 7.3
16 777 216 9600 109 0 4 0 0.2 -0.02 0.3
16 777 216 19200 54 0 10 0 0.2 -0.05 0.3
16 777 216 57600 18 0 3 -1.0 0 -1.0 0.3
16 777 216 115200 9 0 2 0 2.8 -0.2 3.0
20 000 000 9600 130 0 3 -0.2 0 -0.2 0.04
20 000 000 19200 65 0 2 0 0.4 -0.03 0.4
20 000 000 38400 32 0 9 0 0.4 0 0.5
20 000 000 57600 21 0 11 -0.7 0 -0.7 0.3
20 000 000 115200 10 0 14 0 2.5 -0.2 2.6
20 000 000 230400 5 0 7 0 2.5 0 3.5
955
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI Operation – UART Mode
www.ti.com
Table 36-5. Commonly Used Baud Rates, Settings, and Errors, UCOS16 = 1 (continued)
BRCLK Baud Rate Maximum TX Error Maximum RX Error
Frequency UCBRx UCBRSx UCBRFx
(baud) (%) (%)
(Hz)
20 000 000 460800 2 6 10 -3.2 1.8 -2.8 4.6
36.3.14 Using the USCI Module in UART Mode With Low-Power Modes
The USCI module provides automatic clock activation for use with low-power modes. When the USCI
clock source is inactive because the device is in a low-power mode, the USCI module automatically
activates it when needed, regardless of the control-bit settings for the clock source. The clock remains
active until the USCI module returns to its idle condition. After the USCI module returns to the idle
condition, control of the clock source reverts to the settings of its control bits.
36.3.15 USCI Interrupts in UART Mode
The USCI has only one interrupt vector that is shared for transmission and for reception. USCI_Ax and
USC_Bx do not share the same interrupt vector.
36.3.15.1 UART Transmit Interrupt Operation
The UCTXIFG interrupt flag is set by the transmitter to indicate that UCAxTXBUF is ready to accept
another character. An interrupt request is generated if UCTXIE and GIE are also set. UCTXIFG is
automatically reset if a character is written to UCAxTXBUF.
UCTXIFG is set after a PUC or when UCSWRST = 1. UCTXIE is reset after a PUC or when
UCSWRST = 1.
36.3.15.2 UART Receive Interrupt Operation
The UCRXIFG interrupt flag is set each time a character is received and loaded into UCAxRXBUF. An
interrupt request is generated if UCRXIE and GIE are also set. UCRXIFG and UCRXIE are reset by a
system reset PUC signal or when UCSWRST = 1. UCRXIFG is automatically reset when UCAxRXBUF is
read.
Additional interrupt control features include:
• When UCAxRXEIE = 0, erroneous characters do not set UCRXIFG.
• When UCDORM = 1, nonaddress characters do not set UCRXIFG in multiprocessor modes. In plain
UART mode, no characters are set UCRXIFG.
• When UCBRKIE = 1, a break condition sets the UCBRK bit and the UCRXIFG flag.
36.3.15.3 UCAxIV, Interrupt Vector Generator
The USCI interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCAxIV is used to determine which flag requested an interrupt. The highest-priority
enabled interrupt generates a number in the UCAxIV register that can be evaluated or added to the
program counter to automatically enter the appropriate software routine. Disabled interrupts do not affect
the UCAxIV value.
Any access, read or write, of the UCAxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
956 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – UART Mode
36.3.15.3.1 UCAxIV Software Example
The following software example shows the recommended use of UCAxIV. The UCAxIV value is added to
the PC to automatically jump to the appropriate routine. The following example is given for USCI_A0.
USCI_UART_ISR
ADD &UCA0IV, PC ; Add offset to jump table
RETI ; Vector 0: No interrupt
JMP RXIFG_ISR ; Vector 2: RXIFG
TXIFG_ISR ; Vector 4: TXIFG
... ; Task starts here
RETI ; Return
RXIFG_ISR ; Vector 2
... ; Task starts here
RETI ; Return
36.3.16 DMA Operation
In devices with a DMA controller, the eUSCI module can trigger DMA transfers when the transmit buffer
UCAxTXBUF is empty or when data was received in the UCAxRXBUF buffer. The DMA trigger signals
correspond to the UCTXIFG transmit interrupt flag and the UCRXIFG receive interrupt flag, respectively.
The interrupt functionality must be disabled for the selected DMA triggers with UCTXIE = 0 and
UCRXIE = 0.
A DMA read access to UCAxRXBUF has the same effects as a CPU (software) read: all error flags
(UCRXERR, UCFE, UCPE, UCOE, and UCBRK) are cleared after the read. Thus these errors might go
unnoticed.
957
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A UART Mode Registers
www.ti.com
36.4 USCI_A UART Mode Registers
The USCI registers applicable in UART mode listed in Table 36-6. The base address can be found in the
device-specific data sheet. The address offsets are listed in Table 36-6.
Table 36-6. USCI_A UART Mode Registers
Offset Acronym Register Name Type Access Reset Section
00h UCAxCTLW0 USCI_Ax Control Word 0 Read/write Word 0001h
00h UCAxCTL1 USCI_Ax Control 1 Read/write Byte 01h Section 36.4.2
01h UCAxCTL0 USCI_Ax Control 0 Read/write Byte 00h Section 36.4.1
06h UCAxBRW USCI_Ax Baud Rate Control Word Read/write Word 0000h
06h UCAxBR0 USCI_Ax Baud Rate Control 0 Read/write Byte 00h Section 36.4.3
07h UCAxBR1 USCI_Ax Baud Rate Control 1 Read/write Byte 00h Section 36.4.4
08h UCAxMCTL USCI_Ax Modulation Control Read/write Byte 00h Section 36.4.5
09h Reserved - reads zero Read Byte 00h
0Ah UCAxSTAT USCI_Ax Status Read/write Byte 00h Section 36.4.6
0Bh Reserved - reads zero Read Byte 00h
0Ch UCAxRXBUF USCI_Ax Receive Buffer Read/write Byte 00h Section 36.4.7
0Dh Reserved - reads zero Read Byte 00h
0Eh UCAxTXBUF USCI_Ax Transmit Buffer Read/write Byte 00h Section 36.4.8
0Fh Reserved - reads zero Read Byte 00h
10h UCAxABCTL USCI_Ax Auto Baud Rate Control Read/write Byte 00h Section 36.4.11
11h Reserved - reads zero Read Byte 00h
12h UCAxIRCTL USCI_Ax IrDA Control Read/write Word 0000h
12h UCAxIRTCTL USCI_Ax IrDA Transmit Control Read/write Byte 00h Section 36.4.9
13h UCAxIRRCTL USCI_Ax IrDA Receive Control Read/write Byte 00h Section 36.4.10
1Ch UCAxICTL USCI_Ax Interrupt Control Read/write Word 0000h
1Ch UCAxIE USCI_Ax Interrupt Enable Read/write Byte 00h Section 36.4.12
1Dh UCAxIFG USCI_Ax Interrupt Flag Read/write Byte 00h Section 36.4.13
1Eh UCAxIV USCI_Ax Interrupt Vector Read Word 0000h Section 36.4.14
958 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A UART Mode Registers
36.4.1 UCAxCTL0 Register
USCI_Ax Control Register 0
Figure 36-12. UCAxCTL0 Register
76543210
UCPEN UCPAR UCMSB UC7BIT UCSPB UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 36-7. UCAxCTL0 Register Description
Bit Field Type Reset Description
7 UCPEN RW 0h Parity enable
0b = Parity disabled
1b = Parity enabled. Parity bit is generated (UCAxTXD) and expected
(UCAxRXD). In address-bit multiprocessor mode, the address bit is included in
the parity calculation.
6 UCPAR RW 0h Parity select. UCPAR is not used when parity is disabled.
0b = Odd parity
1b = Even parity
5 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
4 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
3 UCSPB RW 0h Stop bit select. Number of stop bits.
0b = One stop bit
1b = Two stop bits
2-1 UCMODEx RW 0h USCI mode. The UCMODEx bits select the asynchronous mode when UCSYNC
= 0.
00b = UART mode
01b = Idle-line multiprocessor mode
10b = Address-bit multiprocessor mode
11b = UART mode with automatic baud-rate detection
0 UCSYNC RW 0h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
959
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A UART Mode Registers
www.ti.com
36.4.2 UCAxCTL1 Register
USCI_Ax Control Register 1
Figure 36-13. UCAxCTL1 Register
76543210
UCSSELx UCRXEIE UCBRKIE UCDORM UCTXADDR UCTXBRK UCSWRST
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 36-8. UCAxCTL1 Register Description
Bit Field Type Reset Description
7-6 UCSSELx RW 0h USCI clock source select. These bits select the BRCLK source clock.
00b = UCAxCLK (external USCI clock)
01b = ACLK
10b = SMCLK
11b = SMCLK
5 UCRXEIE RW 0h Receive erroneous-character interrupt enable
0b = Erroneous characters rejected and UCRXIFG is not set.
1b = Erroneous characters received set UCRXIFG.
4 UCBRKIE RW 0h Receive break character interrupt enable
0b = Received break characters do not set UCRXIFG.
1b = Received break characters set UCRXIFG.
3 UCDORM RW 0h Dormant. Puts USCI into sleep mode.
0b = Not dormant. All received characters set UCRXIFG.
1b = Dormant. Only characters that are preceded by an idle-line or with address
bit set UCRXIFG. In UART mode with automatic baud-rate detection, only the
combination of a break and synch field sets UCRXIFG.
2 UCTXADDR RW 0h Transmit address. Next frame to be transmitted is marked as address, depending
on the selected multiprocessor mode.
0b = Next frame transmitted is data.
1b = Next frame transmitted is an address.
1 UCTXBRK RW 0h Transmit break. Transmits a break with the next write to the transmit buffer. In
UART mode with automatic baud-rate detection, 055h must be written into
UCAxTXBUF to generate the required break/synch fields. Otherwise, 0h must be
written into the transmit buffer.
0b = Next frame transmitted is not a break.
1b = Next frame transmitted is a break or a break/synch.
0 UCSWRST RW 1h Software reset enable
0b = Disabled. USCI reset released for operation.
1b = Enabled. USCI logic held in reset state.
960 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A UART Mode Registers
36.4.3 UCAxBR0 Register
USCI_Ax Baud Rate Control Register 0
Figure 36-14. UCAxBR0 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 36-9. UCAxBR0 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefine Low byte of clock prescaler setting of the baud-rate generator. The 16-bit value
dof (UCAxBR0 + UCAxBR1 × 256) forms the prescaler value UCBRx.
36.4.4 UCAxBR1 Register
USCI_Ax Baud Rate Control Register 1
Figure 36-15. UCAxBR1 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 36-10. UCAxBR1 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefined High byte of clock prescaler setting of the baud-rate generator. The 16-bit value
of (UCAxBR0 + UCAxBR1 × 256) forms the prescaler value UCBRx.
36.4.5 UCAxMCTL Register
USCI_Ax Modulation Control Register
Figure 36-16. UCAxMCTL Register
76543210
UCBRFx UCBRSx UCOS16
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 36-11. UCAxMCTL Register Description
Bit Field Type Reset Description
7-4 UCBRFx RW 0h First modulation stage select. These bits determine the modulation pattern for
BITCLK16 when UCOS16 = 1. Ignored with UCOS16 = 0. Table 36-2 shows the
modulation pattern.
3-1 UCBRSx RW 0h Second modulation stage select. These bits determine the modulation pattern for
BITCLK. Table 36-2 shows the modulation pattern.
0 UCOS16 RW 0h Oversampling mode enabled
0b = Disabled
1b = Enabled
961
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A UART Mode Registers
www.ti.com
36.4.6 UCAxSTAT Register
USCI_Ax Status Register
Figure 36-17. UCAxSTAT Register
76543210
UCLISTEN UCFE UCOE UCPE UCBRK UCRXERR UCADDR/ UCBUSY
UCIDLE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-0
Modify only when UCSWRST = 1.
Table 36-12. UCAxSTAT Register Description
Bit Field Type Reset Description
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. UCAxTXD is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. UCFE is cleared when UCAxRXBUF is read.
0b = No error
1b = Character received with low stop bit
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into
UCAxRXBUF before the previous character was read. UCOE is cleared
automatically when UCxRXBUF is read, and must not be cleared by software.
Otherwise, it does not function correctly.
0b = No error
1b = Overrun error occurred
4 UCPE RW 0h Parity error flag. When UCPEN = 0, UCPE is read as 0. UCPE is cleared when
UCAxRXBUF is read.
0b = No error
1b = Character received with parity error
3 UCBRK RW 0h Break detect flag. UCBRK is cleared when UCAxRXBUF is read.
0b = No break condition
1b = Break condition occurred
2 UCRXERR RW 0h Receive error flag. This bit indicates a character was received with error(s).
When UCRXERR = 1, on or more error flags, UCFE, UCPE, or UCOE is also
set. UCRXERR is cleared when UCAxRXBUF is read.
0b = No receive errors detected
1b = Receive error detected
1 UCADDR/UCIDLE RW 0h UCADDR: Address received in address-bit multiprocessor mode. UCADDR is
cleared when UCAxRXBUF is read.
0b = Received character is data.
1b = Received character is an address.
UCIDLE: Idle line detected in idle-line multiprocessor mode. UCIDLE is cleared
when UCAxRXBUF is read.
0b = No idle line detected
1b = Idle line detected
0 UCBUSY R 0h USCI busy. This bit indicates if a transmit or receive operation is in progress.
0b = USCI inactive
1b = USCI transmitting or receiving
962 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A UART Mode Registers
36.4.7 UCAxRXBUF Register
USCI_Ax Receive Buffer Register
Figure 36-18. UCAxRXBUF Register
76543210
UCRXBUFx
rrrrrrrr
Table 36-13. UCAxRXBUF Register Description
Bit Field Type Reset Description
7-0 UCRXBUFx R undefined The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCAxRXBUF resets the
receive-error bits, the UCADDR or UCIDLE bit, and UCRXIFG. In 7-bit data
mode, UCAxRXBUF is LSB justified and the MSB is always reset.
36.4.8 UCAxTXBUF Register
USCI_Ax Transmit Buffer Register
Figure 36-19. UCAxTXBUF Register
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 36-14. UCAxTXBUF Register Description
Bit Field Type Reset Description
7-0 UCTXBUFx RW undefined The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted on UCAxTXD. Writing to
the transmit data buffer clears UCTXIFG. The MSB of UCAxTXBUF is not used
for 7-bit data and is reset.
963
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A UART Mode Registers
www.ti.com
36.4.9 UCAxIRTCTL Register
USCI_Ax IrDA Transmit Control Register
Figure 36-20. UCAxIRTCTL Register
76543210
UCIRTXPLx UCIRTXCLK UCIREN
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 36-15. UCAxIRTCTL Register Description
Bit Field Type Reset Description
7-2 UCIRTXPLx RW 0h Transmit pulse length. Pulse length t(PULSE) = (UCIRTXPLx + 1) / [2 ×
f(IRTXCLK)]
1 UCIRTXCLK RW 0h IrDA transmit pulse clock select
0b = BRCLK
1b = BITCLK16 when UCOS16 = 1. Otherwise, BRCLK.
0 UCIREN RW 0h IrDA encoder and decoder enable
0b = IrDA encoder and decoder disabled
1b = IrDA encoder and decoder enabled
36.4.10 UCAxIRRCTL Register
USCI_Ax IrDA Receive Control Register
Figure 36-21. UCAxIRRCTL Register
76543210
UCIRRXFLx UCIRRXPL UCIRRXFE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 36-16. UCAxIRRCTL Register Description
Bit Field Type Reset Description
7-2 UCIRRXFLx RW 0h Receive filter length. The minimum pulse length for receive is given by: t(MIN) =
(UCIRRXFLx + 4) / (2 × f(BRCLK))
1 UCIRRXPL RW 0h IrDA receive input UCAxRXD polarity
0b = IrDA transceiver delivers a high pulse when a light pulse is seen.
1b = IrDA transceiver delivers a low pulse when a light pulse is seen.
0 UCIRRXFE RW 0h IrDA receive filter enabled
0b = Receive filter disabled
1b = Receive filter enabled
964 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A UART Mode Registers
36.4.11 UCAxABCTL Register
USCI_Ax Auto Baud Rate Control Register
Figure 36-22. UCAxABCTL Register
76543210
Reserved UCDELIMx UCSTOE UCBTOE Reserved UCABDEN
r-0 r-0 rw-0 rw-0 rw-0 rw-0 r-0 rw-0
Modify only when UCSWRST = 1.
Table 36-17. UCAxABCTL Register Description
Bit Field Type Reset Description
7-6 Reserved R 0h Reserved. Always reads as 0.
5-4 UCDELIMx RW 0h Break and synch delimiter length
00b = 1 bit time
01b = 2 bit times
10b = 3 bit times
11b = 4 bit times
3 UCSTOE RW 0h Synch field time out error
0b = No error
1b = Length of synch field exceeded measurable time.
2 UCBTOE RW 0h Break time out error
0b = No error
1b = Length of break field exceeded 22 bit times.
1 Reserved R 0h Reserved. Always reads as 0.
0 UCABDEN RW 0h Automatic baud-rate detect enable
0b = Baud-rate detection disabled. Length of break and synch field is not
measured.
1b = Baud-rate detection enabled. Length of break and synch field is measured
and baud-rate settings are changed accordingly.
965
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A UART Mode Registers
www.ti.com
36.4.12 UCAxIE Register
USCI_Ax Interrupt Enable Register
Figure 36-23. UCAxIE Register
76543210
Reserved UCTXIE UCRXIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 36-18. UCAxIE Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
36.4.13 UCAxIFG Register
USCI_Ax Interrupt Flag Register
Figure 36-24. UCAxIFG Register
76543210
Reserved UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-0
Table 36-19. UCAxIFG Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCAxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCAxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
966 Universal Serial Communication Interface – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A UART Mode Registers
36.4.14 UCAxIV Register
USCI_Ax Interrupt Vector Register
Figure 36-25. UCAxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 36-20. UCAxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h USCI interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
967
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 37
SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – SPI Mode
The universal serial communication interface (USCI) supports multiple serial communication modes with
one hardware module. This chapter discusses the operation of the synchronous peripheral interface (SPI)
mode.
Topic ........................................................................................................................... Page
37.1 Universal Serial Communication Interface (USCI) Overview................................... 969
37.2 USCI Introduction – SPI Mode............................................................................ 970
37.3 USCI Operation – SPI Mode ............................................................................... 972
37.4 USCI_A SPI Mode Registers............................................................................... 978
37.5 USCI_B SPI Mode Registers............................................................................... 986
968 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Universal Serial Communication Interface (USCI) Overview
37.1 Universal Serial Communication Interface (USCI) Overview
The universal serial communication interface (USCI) modules support multiple serial communication
modes. Different USCI modules support different modes. Each different USCI module is named with a
different letter. For example, USCI_A is different from USCI_B. If more than one identical USCI module is
implemented on one device, those modules are named with incrementing numbers. For example, if one
device has two USCI_A modules, they are named USCI_A0 and USCI_A1. See the device-specific data
sheet to determine which USCI modules, if any, are implemented on which devices.
USCI_Ax modules support:
• UART mode
• Pulse shaping for IrDA communications
• Automatic baud-rate detection for LIN communications
• SPI mode
USCI_Bx modules support:
• I2C mode
• SPI mode
969
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Introduction – SPI Mode
www.ti.com
37.2 USCI Introduction – SPI Mode
In synchronous mode, the USCI connects the device to an external system via three or four pins:
UCxSIMO, UCxSOMI, UCxCLK, and UCxSTE. SPI mode is selected when the UCSYNC bit is set, and
SPI mode (3-pin or 4-pin) is selected with the UCMODEx bits.
SPI mode features include:
• 7-bit or 8-bit data length
• LSB-first or MSB-first data transmit and receive
• 3-pin and 4-pin SPI operation
• Master or slave modes
• Independent transmit and receive shift registers
• Separate transmit and receive buffer registers
• Continuous transmit and receive operation
• Selectable clock polarity and phase control
• Programmable clock frequency in master mode
• Independent interrupt capability for receive and transmit
• Slave operation in LPM4
Figure 37-1 shows the USCI when configured for SPI mode.
970 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
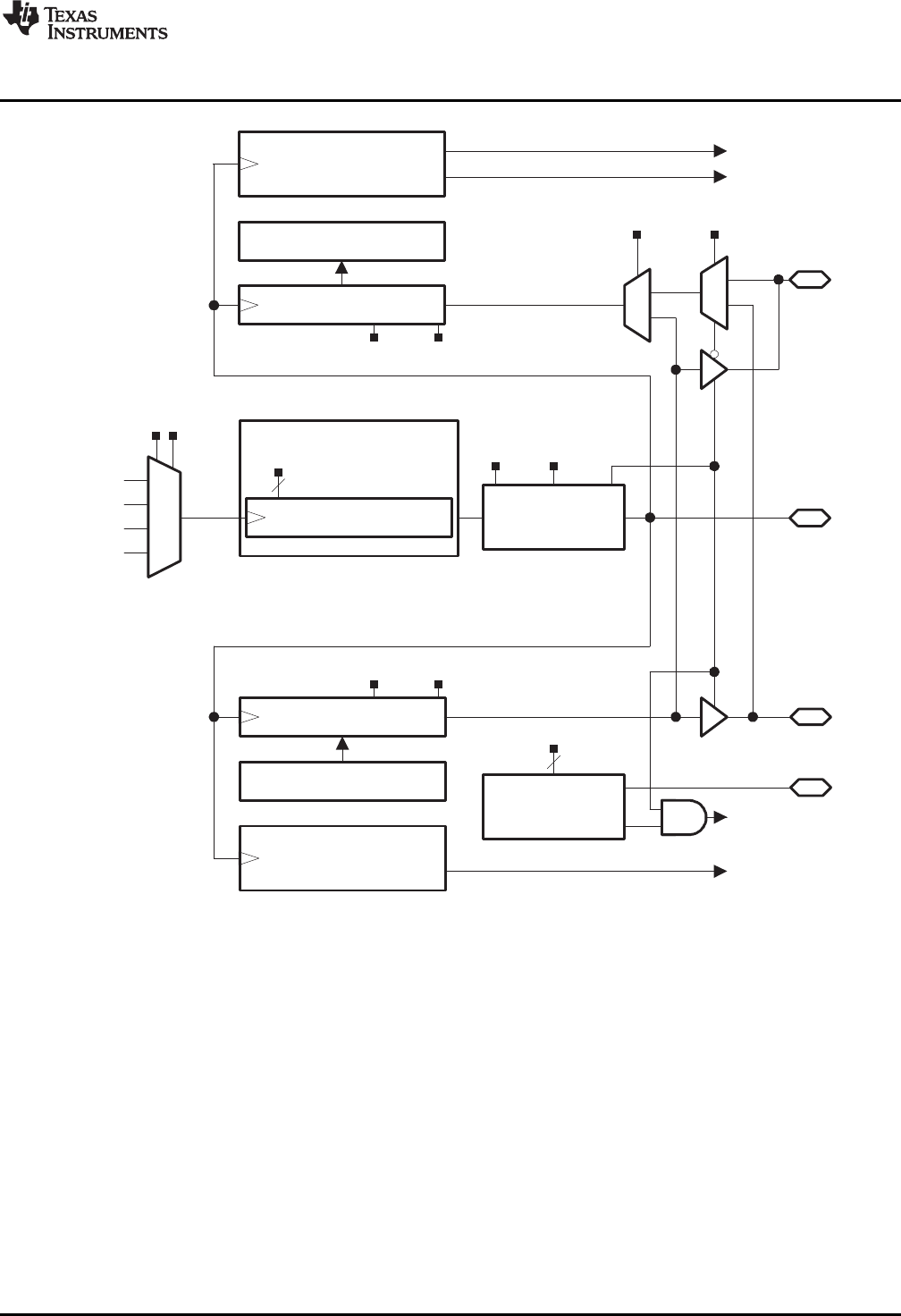
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
N/A
Prescaler/Divider
Bit Clock Generator
UCxBRx
16
Receive Shift Register
Receive Buffer UCxRXBUF
Receive State Machine
UCMSB UC7BIT
1
0
UCMST
UCxSOMI
Transmit Buffer UC xTXBUF
Transmit State Machine
Transmit Shift Register
UCMSB UC7BIT
BRCLK
Set UCxRXIFG
Set UCxTXIFG
0
1
UCLISTEN
Clock Direction,
Phase and Polarity
UCCKPH UCCKPL
UCxSIMO
UCxCLK
Set UCOE
Transmit Enable
Control
2
UCMODEx
UCxSTE
Set UCFE
www.ti.com
USCI Introduction – SPI Mode
Figure 37-1. USCI Block Diagram – SPI Mode
971
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI Operation – SPI Mode
www.ti.com
37.3 USCI Operation – SPI Mode
In SPI mode, serial data is transmitted and received by multiple devices using a shared clock provided by
the master. An additional pin, UCxSTE, is provided to enable a device to receive and transmit data and is
controlled by the master.
Three or four signals are used for SPI data exchange:
• UCxSIMO – slave in, master out
Master mode: UCxSIMO is the data output line.
Slave mode: UCxSIMO is the data input line.
• UCxSOMI – slave out, master in
Master mode: UCxSOMI is the data input line.
Slave mode: UCxSOMI is the data output line.
• UCxCLK – USCI SPI clock
Master mode: UCxCLK is an output.
Slave mode: UCxCLK is an input.
• UCxSTE – slave transmit enable
Used in 4-pin mode to allow multiple masters on a single bus. Not used in 3-pin mode.
Table 37-1 describes the UCxSTE operation.
Table 37-1. UCxSTE Operation
UCMODEx UCxSTE Active State UCxSTE Slave Master
0 Inactive Active
01 High 1 Active Inactive
0 Active Inactive
10 Low 1 Inactive Active
37.3.1 USCI Initialization and Reset
The USCI is reset by a PUC or by the UCSWRST bit. After a PUC, the UCSWRST bit is automatically set,
keeping the USCI in a reset condition. When set, the UCSWRST bit resets the UCRXIE, UCTXIE,
UCRXIFG, UCOE, and UCFE bits, and sets the UCTXIFG flag. Clearing UCSWRST releases the USCI for
operation.
To avoid unpredictable behavior, configure or reconfigure the USCI module only when UCSWRST is set.
NOTE: Initializing or reconfiguring the USCI module
The recommended USCI initialization/reconfiguration process is:
1. Set UCSWRST (BIS.B
#UCSWRST,&UCxCTL1).
2. Initialize all USCI registers with UCSWRST = 1 (including UCxCTL1).
3. Configure ports.
4. Clear UCSWRST via software (BIC.B
#UCSWRST,&UCxCTL1).
5. Enable interrupts (optional) via UCRXIE and/or UCTXIE.
37.3.2 Character Format
The USCI module in SPI mode supports 7-bit and 8-bit character lengths selected by the UC7BIT bit. In 7-
bit data mode, UCxRXBUF is LSB justified and the MSB is always reset. The UCMSB bit controls the
direction of the transfer and selects LSB or MSB first.
972 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
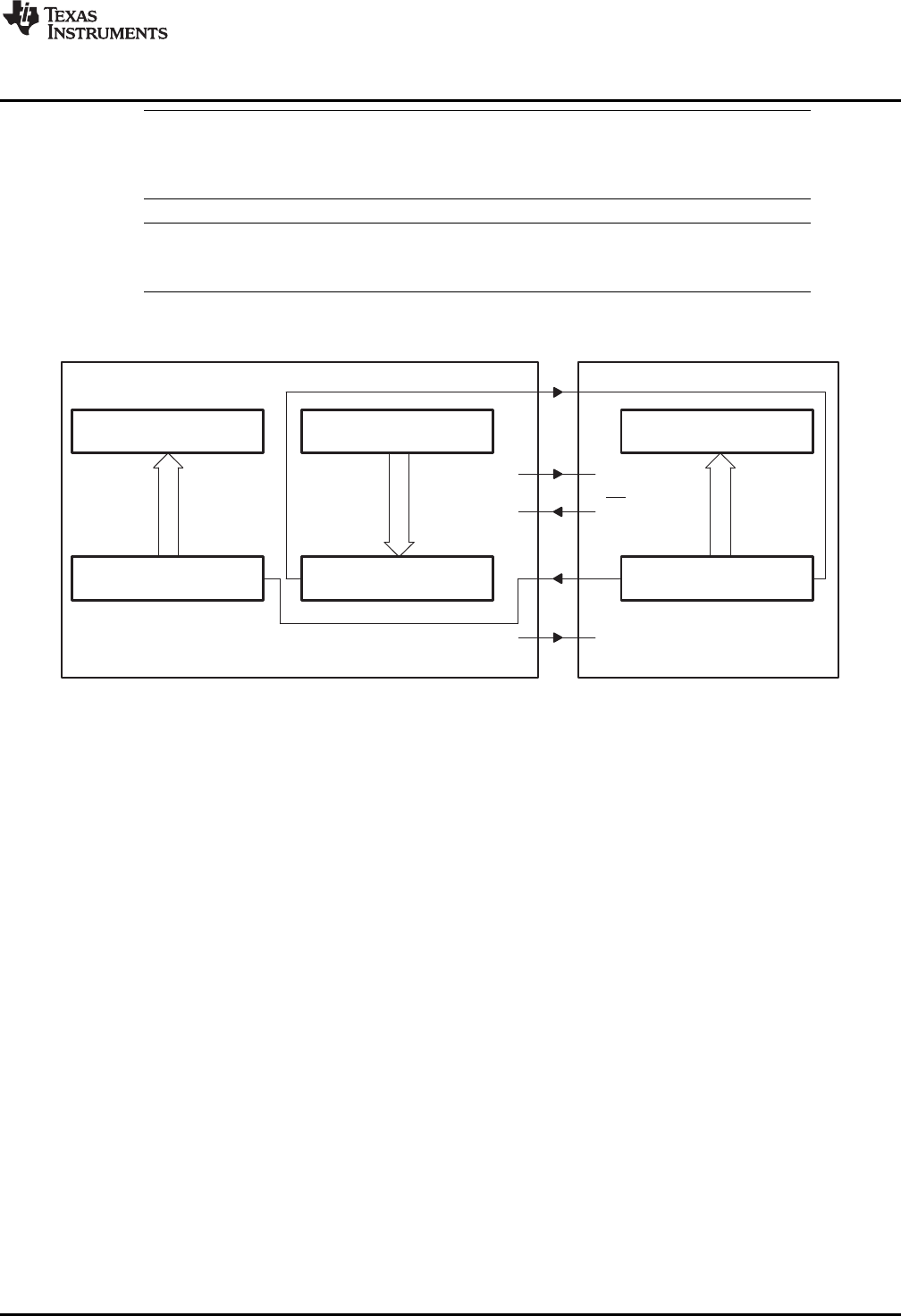
Receive Buffer
UCxRXBUF
Receive Shift Register
Transmit Buffer
UCxTXBUF
Transmit Shift Register
SPI Receive Buffer
Data Shift Register (DSR)
UCx
SOMI SOMI
UCxSIMO SIMO
MASTER SLAVE
Px.x STE
UCxSTE SS
Port.x
UCxCLK SCLK
MSP430 USCI COMMON SPI
www.ti.com
USCI Operation – SPI Mode
NOTE: Default character format
The default SPI character transmission is LSB first. For communication with other SPI
interfaces, MSB-first mode may be required.
NOTE: Character format for Figures
Figures throughout this chapter use MSB-first format.
37.3.3 Master Mode
Figure 37-2. USCI Master and External Slave
Figure 37-2 shows the USCI as a master in both 3-pin and 4-pin configurations. The USCI initiates data
transfer when data is moved to the transmit data buffer UCxTXBUF. The UCxTXBUF data is moved to the
transmit (TX) shift register when the TX shift register is empty, initiating data transfer on UCxSIMO starting
with either the MSB or LSB, depending on the UCMSB setting. Data on UCxSOMI is shifted into the
receive shift register on the opposite clock edge. When the character is received, the receive data is
moved from the receive (RX) shift register to the received data buffer UCxRXBUF and the receive
interrupt flag UCRXIFG is set, indicating the RX/TX operation is complete.
A set transmit interrupt flag, UCTXIFG, indicates that data has moved from UCxTXBUF to the TX shift
register and UCxTXBUF is ready for new data. It does not indicate RX/TX completion.
To receive data into the USCI in master mode, data must be written to UCxTXBUF, because receive and
transmit operations operate concurrently.
37.3.3.1 4-Pin SPI Master Mode
In 4-pin master mode, UCxSTE is used to prevent conflicts with another master and controls the master
as described in Table 37-1. When UCxSTE is in the master-inactive state:
• UCxSIMO and UCxCLK are set to inputs and no longer drive the bus.
• The error bit UCFE is set, indicating a communication integrity violation to be handled by the user.
• The internal state machines are reset and the shift operation is aborted.
If data is written into UCxTXBUF while the master is held inactive by UCxSTE, it is transmit as soon as
UCxSTE transitions to the master-active state. If an active transfer is aborted by UCxSTE transitioning to
the master-inactive state, the data must be rewritten into UCxTXBUF to be transferred when UCxSTE
transitions back to the master-active state. The UCxSTE input signal is not used in 3-pin master mode.
973
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
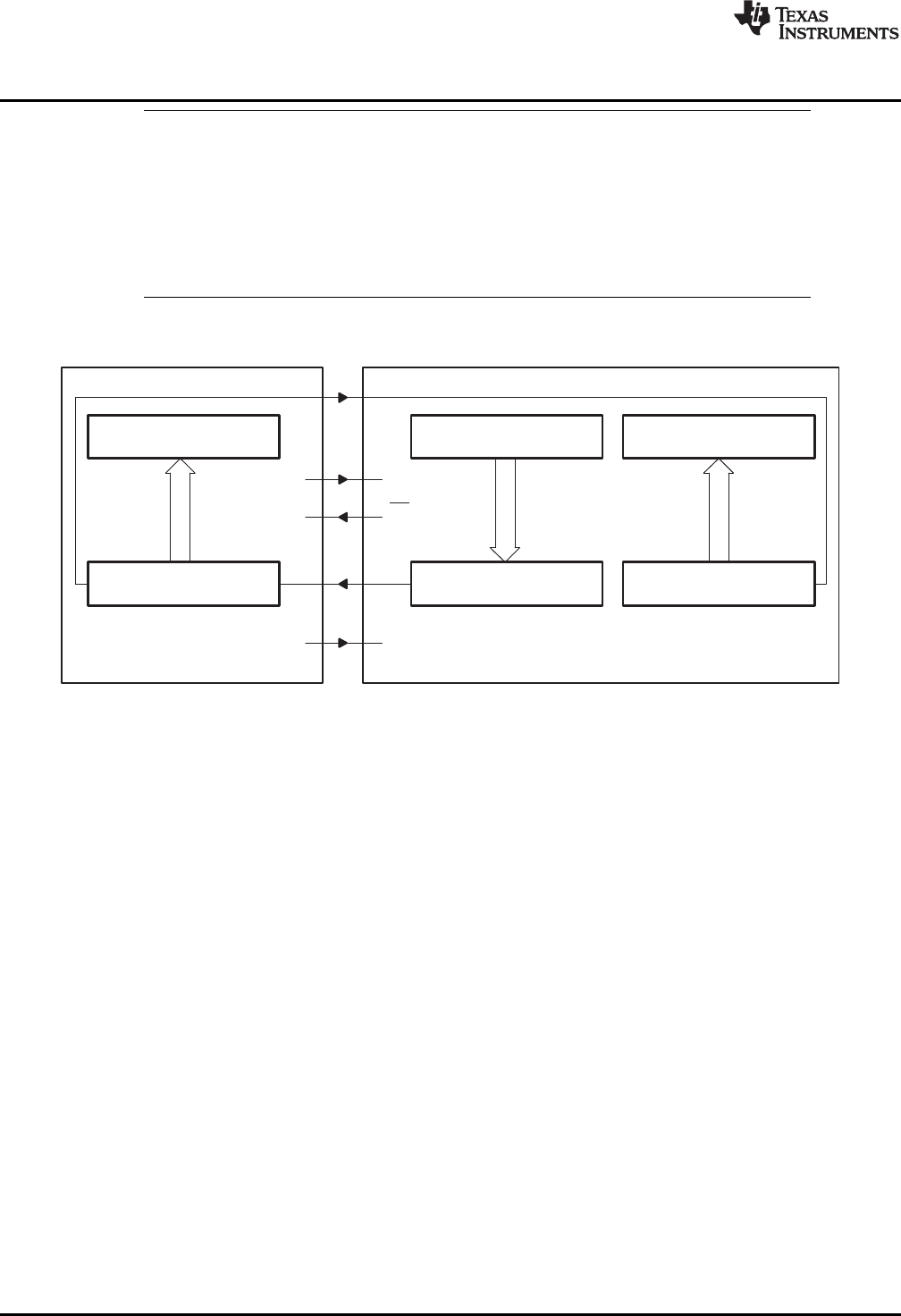
Receive Buffer
UCxRXBUF
Receive Shift Register
Transmit Buffer UCxTXBUF
Transmit Shift Register
SPI Receive Buffer
Data Shift Register DSR
UCx
SOMI
SOMI
UCxSIMOSIMO
MASTER SLAVE
Px.x UCxSTE
STE SS
Port.x
UCxCLK
SCLK
MSP430 USCICOMMON SPI
USCI Operation – SPI Mode
www.ti.com
NOTE: Shared UCxSTE and UCxCLK pins
On some devices the UCAxSTE functionality of an USCI_Ax module shares the same pin
with the UCBxCLK functionality of the corresponding USCI_Bx module and vice versa
(UCBxSTE shared with UCAxCLK). If the UCxCLK functionality is required by the
corresponding module the UCxSTE functionality cannot be used by the other module. If the
latter is configured in 4-pin SPI master mode, the clock signal will be interpreted as the STE
signal and will corrupt its communication. To avoid this error, make sure that the latter
module is configured in 3-pin SPI master mode.
37.3.4 Slave Mode
Figure 37-3. USCI Slave and External Master
Figure 37-3 shows the USCI as a slave in both 3-pin and 4-pin configurations. UCxCLK is used as the
input for the SPI clock and must be supplied by the external master. The data-transfer rate is determined
by this clock and not by the internal bit clock generator. Data written to UCxTXBUF and moved to the TX
shift register before the start of UCxCLK is transmitted on UCxSOMI. Data on UCxSIMO is shifted into the
receive shift register on the opposite edge of UCxCLK and moved to UCxRXBUF when the set number of
bits are received. When data is moved from the RX shift register to UCxRXBUF, the UCRXIFG interrupt
flag is set, indicating that data has been received. The overrun error bit UCOE is set when the previously
received data is not read from UCxRXBUF before new data is moved to UCxRXBUF.
37.3.4.1 4-Pin SPI Slave Mode
In 4-pin slave mode, UCxSTE is used by the slave to enable the transmit and receive operations and is
provided by the SPI master. When UCxSTE is in the slave-active state, the slave operates normally.
When UCxSTE is in the slave- inactive state:
• Any receive operation in progress on UCxSIMO is halted.
• UCxSOMI is set to the input direction.
• The shift operation is halted until the UCxSTE line transitions into the slave transmit active state.
The UCxSTE input signal is not used in 3-pin slave mode.
974 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – SPI Mode
NOTE: Shared UCxSTE and UCxCLK pins
On some devices the UCAxSTE functionality of an USCI_Ax module shares the same pin
with the UCBxCLK functionality of the corresponding USCI_Bx module and vice versa
(UCBxSTE shared with UCAxCLK). If the UCxCLK functionality is required by the
corresponding module the UCxSTE functionality cannot be used by the other module. If the
latter is configured in 4-pin SPI master mode, the clock signal will be interpreted as the STE
signal and will corrupt its communication. To avoid this error, make sure that the latter
module is configured in 3-pin SPI master mode.
37.3.5 SPI Enable
When the USCI module is enabled by clearing the UCSWRST bit, it is ready to receive and transmit. In
master mode, the bit clock generator is ready, but is not clocked nor producing any clocks. In slave mode,
the bit clock generator is disabled and the clock is provided by the master.
A transmit or receive operation is indicated by UCBUSY = 1.
A PUC or set UCSWRST bit disables the USCI immediately and any active transfer is terminated.
37.3.5.1 Transmit Enable
In master mode, writing to UCxTXBUF activates the bit clock generator, and the data begins to transmit.
In slave mode, transmission begins when a master provides a clock and, in 4-pin mode, when the
UCxSTE is in the slave-active state.
37.3.5.2 Receive Enable
The SPI receives data when a transmission is active. Receive and transmit operations operate
concurrently.
37.3.6 Serial Clock Control
UCxCLK is provided by the master on the SPI bus. When UCMST = 1, the bit clock is provided by the
USCI bit clock generator on the UCxCLK pin. The clock used to generate the bit clock is selected with the
UCSSELx bits. When UCMST = 0, the USCI clock is provided on the UCxCLK pin by the master, the bit
clock generator is not used, and the UCSSELx bits are don't care. The SPI receiver and transmitter
operate in parallel and use the same clock source for data transfer.
The 16-bit value of UCBRx in the bit rate control registers (UCxxBR1 and UCxxBR0) is the division factor
of the USCI clock source, BRCLK. The maximum bit clock that can be generated in master mode is
BRCLK. Modulation is not used in SPI mode, and UCAxMCTL should be cleared when using SPI mode
for USCI_A.
The UCAxCLK/UCBxCLK frequency is given by:
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
Even UCBRx settings result in even divisions and, thus, generate a bit clock with a 50/50 duty cycle.
Odd UCBRx settings result in odd divisions. In this case, the high phase of the bit clock is one BRCLK
cycle longer than the low phase.
When UCBRx = 0, no division is applied to BRCLK, and the bit clock equals BRCLK.
37.3.6.1 Serial Clock Polarity and Phase
The polarity and phase of UCxCLK are independently configured via the UCCKPL and UCCKPH control
bits of the USCI. Timing for each case is shown in Figure 37-4.
975
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
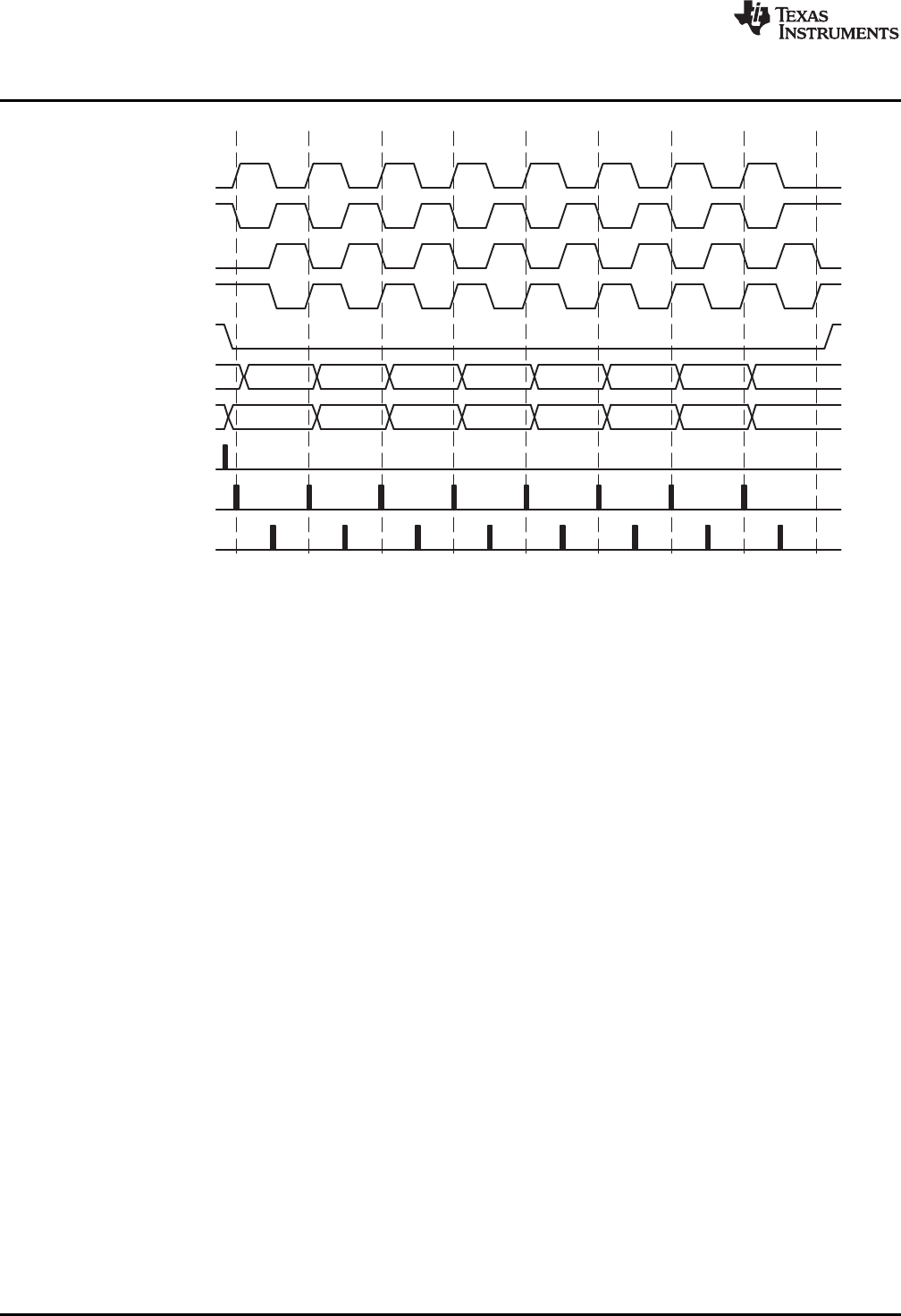
CKPH CKPL Cycle#
UCxCLK
UCxCLK
UCxCLK
UCxCLK
UCxSIMO/
UCxSOMI
UCxSIMO
UCxSOMI
Move to UCxTXBUF
RX Sample Points
0
1
0
0
01
1 1
0 X
1 X
MSB
MSB
1 2 3 4 5 6 7 8
LSB
LSB
TX Data Shifted Out
UCxSTE
UC UC
USCI Operation – SPI Mode
www.ti.com
Figure 37-4. USCI SPI Timing With UCMSB = 1
37.3.7 Using the SPI Mode With Low-Power Modes
The USCI module provides automatic clock activation for use with low-power modes. When the USCI
clock source is inactive because the device is in a low-power mode, the USCI module automatically
activates it when needed, regardless of the control-bit settings for the clock source. The clock remains
active until the USCI module returns to its idle condition. After the USCI module returns to the idle
condition, control of the clock source reverts to the settings of its control bits.
In SPI slave mode, no internal clock source is required because the clock is provided by the external
master. It is possible to operate the USCI in SPI slave mode while the device is in LPM4 and all clock
sources are disabled. The receive or transmit interrupt can wake up the CPU from any low-power mode.
976 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – SPI Mode
37.3.8 USCI Interrupts in SPI Mode
The USCI has only one interrupt vector that is shared for transmission and for reception. USCI_Ax and
USC_Bx do not share the same interrupt vector.
37.3.8.1 SPI Transmit Interrupt Operation
The UCTXIFG interrupt flag is set by the transmitter to indicate that UCxTXBUF is ready to accept another
character. An interrupt request is generated if UCTXIE and GIE are also set. UCTXIFG is automatically
reset if a character is written to UCxTXBUF. UCTXIFG is set after a PUC or when UCSWRST = 1.
UCTXIE is reset after a PUC or when UCSWRST = 1.
NOTE: Writing to UCxTXBUF in SPI mode
Data written to UCxTXBUF when UCTXIFG = 0 may result in erroneous data transmission.
37.3.8.2 SPI Receive Interrupt Operation
The UCRXIFG interrupt flag is set each time a character is received and loaded into UCxRXBUF. An
interrupt request is generated if UCRXIE and GIE are also set. UCRXIFG and UCRXIE are reset by a
system reset PUC signal or when UCSWRST = 1. UCRXIFG is automatically reset when UCxRXBUF is
read.
37.3.8.3 UCxIV, Interrupt Vector Generator
The USCI interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCxIV is used to determine which flag requested an interrupt. The highest-priority enabled
interrupt generates a number in the UCxIV register that can be evaluated or added to the program counter
(PC) to automatically enter the appropriate software routine. Disabled interrupts do not affect the UCxIV
value.
Any access, read or write, of the UCxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
37.3.8.3.1 UCxIV Software Example
The following software example shows the recommended use of UCxIV. The UCxIV value is added to the
PC to automatically jump to the appropriate routine. The following example is given for USCI_B0.
USCI_SPI_ISR
ADD &UCB0IV, PC ; Add offset to jump table
RETI ; Vector 0: No interrupt
JMP RXIFG_ISR ; Vector 2: RXIFG
TXIFG_ISR ; Vector 4: TXIFG
... ; Task starts here
RETI ; Return
RXIFG_ISR ; Vector 2
... ; Task starts here
RETI ; Return
977
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A SPI Mode Registers
www.ti.com
37.4 USCI_A SPI Mode Registers
The USCI_A registers that are applicable in SPI mode are listed in Table 37-2. The base addresses can
be found in the device-specific data sheet. The address offsets are listed in Table 37-2.
Table 37-2. USCI_A SPI Mode Registers
Offset Acronym Register Name Type Access Reset Section
00h UCAxCTLW0 USCI_Ax Control Word 0 Read/write Word 0001h
00h UCAxCTL1 USCI_Ax Control 1 Read/write Byte 01h Section 37.4.2
01h UCAxCTL0 USCI_Ax Control 0 Read/write Byte 00h Section 37.4.1
06h UCAxBRW USCI_Ax Bit Rate Control Word Read/write Word 0000h
06h UCAxBR0 USCI_Ax Bit Rate Control 0 Read/write Byte 00h Section 37.4.3
07h UCAxBR1 USCI_Ax Bit Rate Control 1 Read/write Byte 00h Section 37.4.4
08h UCAxMCTL USCI_Ax Modulation Control Read/write Byte 00h Section 37.4.5
0Ah UCAxSTAT USCI_Ax Status Read/write Byte 00h Section 37.4.6
0Bh Reserved - reads zero Read Byte 00h
0Ch UCAxRXBUF USCI_Ax Receive Buffer Read/write Byte 00h Section 37.4.7
0Dh Reserved - reads zero Read Byte 00h
0Eh UCAxTXBUF USCI_Ax Transmit Buffer Read/write Byte 00h Section 37.4.8
0Fh Reserved - reads zero Read Byte 00h
1Ch UCAxICTL USCI_Ax Interrupt Control Read/write Word 0200h
1Ch UCAxIE USCI_Ax Interrupt Enable Read/write Byte 00h Section 37.4.9
1Dh UCAxIFG USCI_Ax Interrupt Flag Read/write Byte 02h Section 37.4.10
1Eh UCAxIV USCI_Ax Interrupt Vector Read Word 0000h Section 37.4.11
978 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A SPI Mode Registers
37.4.1 UCAxCTL0 Register
USCI_Ax Control Register 0
Figure 37-5. UCAxCTL0 Register
76543210
UCCKPH UCCKPL UCMSB UC7BIT UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 37-3. UCAxCTL0 Register Description
Bit Field Type Reset Description
7 UCCKPH RW 0h Clock phase select
0b = Data is changed on the first UCLK edge and captured on the following
edge.
1b = Data is captured on the first UCLK edge and changed on the following
edge.
6 UCCKPL RW 0h Clock polarity select
0b = The inactive state is low.
1b = The inactive state is high.
5 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
4 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
3 UCMST RW 0h Master mode select
0b = Slave mode
1b = Master mode
2-1 UCMODEx RW 0h USCI mode. The UCMODEx bits select the synchronous mode when UCSYNC =
1.
00b = 3-pin SPI
01b = 4-pin SPI with UCxSTE active high: Slave enabled when UCxSTE = 1
10b = 4-pin SPI with UCxSTE active low: Slave enabled when UCxSTE = 0
11b = I2C mode
0 UCSYNC RW 0h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
979
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A SPI Mode Registers
www.ti.com
37.4.2 UCAxCTL1 Register
USCI_Ax Control Register 1
Figure 37-6. UCAxCTL1 Register
76543210
UCSSELx Reserved UCSWRST
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 37-4. UCAxCTL1 Register Description
Bit Field Type Reset Description
7-6 UCSSELx RW 0h USCI clock source select. These bits select the BRCLK source clock in master
mode. UCxCLK is always used in slave mode.
00b = Reserved
01b = ACLK
10b = SMCLK
11b = SMCLK
5-1 Reserved RW 0h Reserved. Always write as 0.
0 UCSWRST RW 1h Software reset enable
0b = Disabled. USCI reset released for operation.
1b = Enabled. USCI logic held in reset state.
980 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A SPI Mode Registers
37.4.3 UCAxBR0 Register
USCI_Ax Bit Rate Control Register 0
Figure 37-7. UCAxBR0 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 37-5. UCAxBR0 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefine Bit clock prescaler low byte. The 16-bit value of (UCAxBR0 + UCAxBR1 × 256)
dforms the prescaler value UCBRx.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
37.4.4 UCAxBR1 Register
USCI_Ax Bit Rate Control Register 1
Figure 37-8. UCAxBR1 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 37-6. UCAxBR1 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefined Bit clock prescaler high byte. The 16-bit value of (UCAxBR0 + UCAxBR1 × 256)
forms the prescaler value UCBRx.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
37.4.5 UCAxMCTL Register
USCI_Ax Modulation Control Register
Figure 37-9. UCAxMCTL Register
76543210
Reserved
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 37-7. UCAxMCTL Register Description
Bit Field Type Reset Description
7-0 Reserved R 0h Reserved. Always write as 0.
981
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A SPI Mode Registers
www.ti.com
37.4.6 UCAxSTAT Register
USCI_Ax Status Register
Figure 37-10. UCAxSTAT Register
76543210
UCLISTEN UCFE UCOE Reserved UCBUSY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-0
Modify only when UCSWRST = 1.
Table 37-8. UCAxSTAT Register Description
Bit Field Type Reset Description
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. The transmitter output is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. This bit indicates a bus conflict in 4-wire master mode. UCFE
is not used in 3-wire master or any slave mode.
0b = No error
1b = Bus conflict occurred.
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into UCxRXBUF
before the previous character was read. UCOE is cleared automatically when
UCxRXBUF is read, and must not be cleared by software. Otherwise, it does not
function correctly.
0b = No error
1b = Overrun error occurred
4-1 Reserved R 0h Reserved. Always reads as 0.
0 UCBUSY R 0h USCI busy. This bit indicates if a transmit or receive operation is in progress.
0b = USCI inactive
1b = USCI transmitting or receiving
982 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI_A SPI Mode Registers
37.4.7 UCAxRXBUF Register
USCI_Ax Receive Buffer Register
Figure 37-11. UCAxRXBUF Register
76543210
UCRXBUFx
rrrrrrrr
Table 37-9. UCAxRXBUF Register Description
Bit Field Type Reset Description
7-0 UCRXBUFx R undefined The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCRXBUF resets the receive-
error bits and UCRXIFG. In 7-bit data mode, UCRXBUF is LSB justified and the
MSB is always reset.
37.4.8 UCAxTXBUF Register
USCI_Ax Transmit Buffer Register
Figure 37-12. UCAxTXBUF Register
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 37-10. UCAxTXBUF Register Description
Bit Field Type Reset Description
7-0 UCTXBUFx RW undefined The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit
data buffer clears UCTXIFG. The MSB of UCAxTXBUF is not used for 7-bit data
and is reset.
983
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_A SPI Mode Registers
www.ti.com
37.4.9 UCAxIE Register
USCI_Ax Interrupt Enable Register
Figure 37-13. UCAxIE Register
76543210
Reserved UCTXIE UCRXIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 37-11. UCAxIE Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
37.4.10 UCAxIFG Register
USCI_Ax Interrupt Flag Register
Figure 37-14. UCAxIFG Register
76543210
Reserved UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-0
Table 37-12. UCAxIFG Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCAxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCAxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
984 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_A SPI Mode Registers
37.4.11 UCAxIV Register
USCI_Ax Interrupt Vector Register
Figure 37-15. UCAxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 37-13. UCAxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h USCI interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
985
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B SPI Mode Registers
www.ti.com
37.5 USCI_B SPI Mode Registers
The USCI_B registers applicable in SPI mode are listed in Table 37-14. The base addresses can be found
in the device-specific data sheet. The address offsets are listed in Table 37-14.
Table 37-14. USCI_B SPI Mode Registers
Offset Acronym Register Name Type Access Reset Section
00h UCBxCTLW0 USCI_Bx Control Word 0 Read/write Word 0101h
00h UCBxCTL1 USCI_Bx Control 1 Read/write Byte 01h Section 37.5.2
01h UCBxCTL0 USCI_Bx Control 0 Read/write Byte 01h Section 37.5.1
06h UCBxBRW USCI_Bx Bit Rate Control Word Read/write Word 0000h
06h UCBxBR0 USCI_Bx Bit Rate Control 0 Read/write Byte 00h Section 37.5.3
07h UCBxBR1 USCI_Bx Bit Rate Control 1 Read/write Byte 00h Section 37.5.4
08h UCBxMCTL USCI_Bx Modulation Control Read/write Byte 00h Section 37.5.5
0Ah UCBxSTAT USCI_Bx Status Read/write Byte 00h Section 37.5.6
0Bh Reserved - reads zero Read Byte 00h
0Ch UCBxRXBUF USCI_Bx Receive Buffer Read/write Byte 00h Section 37.5.7
0Dh Reserved - reads zero Read Byte 00h
0Eh UCBxTXBUF USCI_Bx Transmit Buffer Read/write Byte 00h Section 37.5.8
0Fh Reserved - reads zero Read Byte 00h
1Ch UCBxICTL USCI_Bx Interrupt Control Read/write Word 0200h
1Ch UCBxIE USCI_Bx Interrupt Enable Read/write Byte 00h Section 37.5.9
1Dh UCBxIFG USCI_Bx Interrupt Flag Read/write Byte 02h Section 37.5.10
1Eh UCBxIV USCI_Bx Interrupt Vector Read Word 0000h Section 37.5.11
986 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B SPI Mode Registers
37.5.1 UCBxCTL0 Register
USCI_Bx Control Register 0
Figure 37-16. UCBxCTL0 Register
76543210
UCCKPH UCCKPL UCMSB UC7BIT UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 37-15. UCBxCTL0 Register Description
Bit Field Type Reset Description
7 UCCKPH RW 0h Clock phase select
0b = Data is changed on the first UCLK edge and captured on the following
edge.
1b = Data is captured on the first UCLK edge and changed on the following
edge.
6 UCCKPL RW 0h Clock polarity select
0b = The inactive state is low.
1b = The inactive state is high.
5 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
4 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
3 UCMST RW 0h Master mode select
0b = Slave mode
1b = Master mode
2-1 UCMODEx RW 0h USCI mode. The UCMODEx bits select the synchronous mode when UCSYNC =
1.
00b = 3-pin SPI
01b = 4-pin SPI with UCxSTE active high: Slave enabled when UCxSTE = 1
10b = 4-pin SPI with UCxSTE active low: Slave enabled when UCxSTE = 0
11b = I2C mode
0 UCSYNC RW 1h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
987
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B SPI Mode Registers
www.ti.com
37.5.2 UCBxCTL1 Register
USCI_Bx Control Register 1
Figure 37-17. UCBxCTL1 Register
76543210
UCSSELx Reserved UCSWRST
rw-0 rw-0 r0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 37-16. UCBxCTL1 Register Description
Bit Field Type Reset Description
7-6 UCSSELx RW 0h USCI clock source select. These bits select the BRCLK source clock in master
mode. UCxCLK is always used in slave mode.
00b = Reserved
01b = ACLK
10b = SMCLK
11b = SMCLK
5-1 Reserved RW 0h Reserved. Always write as 0.
0 UCSWRST RW 1h Software reset enable
0b = Disabled. USCI reset released for operation.
1b = Enabled. USCI logic held in reset state.
988 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B SPI Mode Registers
37.5.3 UCBxBR0 Register
USCI_Bx Bit Rate Control Register 0
Figure 37-18. UCBxBR0 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 37-17. UCBxBR0 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefine Bit clock prescaler low byte. The 16-bit value of (UCBxBR0 + UCBxBR1 × 256)
dforms the prescaler value UCBRx.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
37.5.4 UCBxBR1 Register
USCI_Bx Bit Rate Control Register 1
Figure 37-19. UCBxBR1 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 37-18. UCBxBR1 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefined Bit clock prescaler high byte. The 16-bit value of (UCBxBR0 + UCBxBR1 × 256)
forms the prescaler value UCBRx.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
37.5.5 UCBxMCTL Register
USCI_Bx Modulation Control Register
Figure 37-20. UCBxMCTL Register
76543210
Reserved
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 37-19. UCBxMCTL Register Description
Bit Field Type Reset Description
7-0 Reserved R 0h Reserved. Always write as 0.
989
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI_B SPI Mode Registers
www.ti.com
37.5.6 UCBxSTAT Register
USCI_Bx Status Register
Figure 37-21. UCBxSTAT Register
76543210
UCLISTEN UCFE UCOE Reserved UCBUSY
rw-0 rw-0 rw-0 r0 r0 r0 r0 r-0
Modify only when UCSWRST = 1.
Table 37-20. UCBxSTAT Register Description
Bit Field Type Reset Description
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. The transmitter output is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. This bit indicates a bus conflict in 4-wire master mode. UCFE
is not used in 3-wire master or any slave mode.
0b = No error
1b = Bus conflict occurred.
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into UCxRXBUF
before the previous character was read. UCOE is cleared automatically when
UCxRXBUF is read, and must not be cleared by software. Otherwise, it does not
function correctly.
0b = No error
1b = Overrun error occurred
4-1 Reserved R 0h Reserved. Always reads as 0.
0 UCBUSY R 0h USCI busy. This bit indicates if a transmit or receive operation is in progress.
0b = USCI inactive
1b = USCI transmitting or receiving
990 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B SPI Mode Registers
37.5.7 UCBxRXBUF Register
USCI_Bx Receive Buffer Register
Figure 37-22. UCBxRXBUF Register
76543210
UCRXBUFx
rrrrrrrr
Table 37-21. UCBxRXBUF Register Description
Bit Field Type Reset Description
7-0 UCRXBUFx R undefined The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCRXBUF resets the receive-
error bits and UCRXIFG. In 7-bit data mode, UCRXBUF is LSB justified and the
MSB is always reset.
37.5.8 UCBxTXBUF Register
USCI_Bx Transmit Buffer Register
Figure 37-23. UCBxTXBUF Register
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 37-22. UCBxTXBUF Register Description
Bit Field Type Reset Description
7-0 UCTXBUFx RW undefined The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit
data buffer clears UCTXIFG. The MSB of UCBxTXBUF is not used for 7-bit data
and is reset.
991
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B SPI Mode Registers
www.ti.com
37.5.9 UCBxIE Register
USCI_Bx Interrupt Enable Register
Figure 37-24. UCBxIE Register
76543210
Reserved UCTXIE UCRXIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 37-23. UCBxIE Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
37.5.10 UCBxIFG Register
USCI_Bx Interrupt Flag Register
Figure 37-25. UCBxIFG Register
76543210
Reserved UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-0
Table 37-24. UCBxIFG Register Description
Bit Field Type Reset Description
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCBxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCBxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
992 Universal Serial Communication Interface – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B SPI Mode Registers
37.5.11 UCBxIV Register
USCI_Bx Interrupt Vector Register
Figure 37-26. UCBxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 37-25. UCBxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h USCI interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
993
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 38
SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode
The universal serial communication interface (USCI) supports multiple serial communication modes with
one hardware module. This chapter discusses the operation of the I2C mode.
Topic ........................................................................................................................... Page
38.1 Universal Serial Communication Interface (USCI) Overview................................... 995
38.2 USCI Introduction – I2C Mode............................................................................. 996
38.3 USCI Operation – I2C Mode ................................................................................ 997
38.4 USCI_B I2C Mode Registers ............................................................................. 1016
994 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Universal Serial Communication Interface (USCI) Overview
38.1 Universal Serial Communication Interface (USCI) Overview
The USCI modules support multiple serial communication modes. Different USCI modules support
different modes. Each different USCI module is named with a different letter. For example, USCI_A is
different from USCI_B, etc. If more than one identical USCI module is implemented on one device, those
modules are named with incrementing numbers. For example, if one device has two USCI_A modules,
they are named USCI_A0 and USCI_A1. See the device-specific data sheet to determine which USCI
modules, if any, are implemented on each device.
USCI_Ax modules support:
• UART mode
• Pulse shaping for IrDA communications
• Automatic baud-rate detection for LIN communications
• SPI mode
USCI_Bx modules support:
• I2C mode
• SPI mode
995
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Introduction – I2C Mode
www.ti.com
38.2 USCI Introduction – I2C Mode
In I2C mode, the USCI module provides an interface between the device and I2C-compatible devices
connected by the two-wire I2C serial bus. External components attached to the I2C bus serially transmit
and/or receive serial data to/from the USCI module through the 2-wire I2C interface.
The I2C mode features include:
• Compliance to the Philips Semiconductor I2C specification v2.1
• 7-bit and 10-bit device addressing modes
• General call
• START/RESTART/STOP
• Multi-master transmitter/receiver mode
• Slave receiver/transmitter mode
• Standard mode up to 100 kbps and fast mode up to 400 kbps support
• Programmable UCxCLK frequency in master mode
• Designed for low power
• Slave receiver START detection for auto wake up from LPMx modes (wake up from LPMx.5 is not
supported)
• Slave operation in LPM4
Figure 38-1 shows the USCI when configured in I2C mode.
996 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
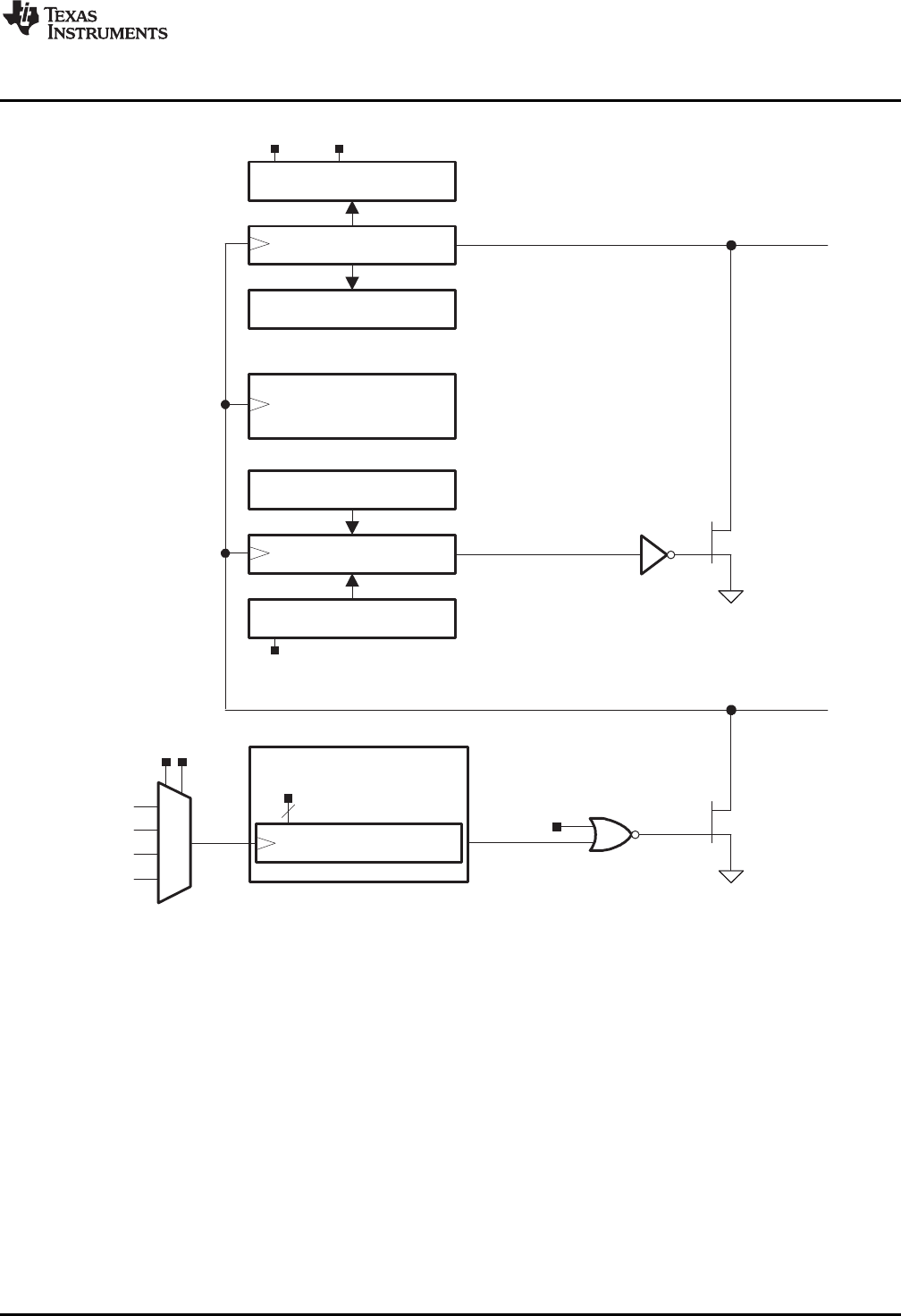
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
UC1CLK
Prescaler/Divider
Bit Clock Generator
UCxBRx
16
BRCLK
Slave Address UC 1SA
Transmit Shift Register
UCMST
Transmit Buffer UC 1TXBUF
I2C State Machine
Own Address UC1OA
Receive Shift Register
UCA10
Receive Buffer UC1RXBUF
UCGCEN
UCxSDA
UCxSCL
UCSLA10
www.ti.com
USCI Operation – I2C Mode
Figure 38-1. USCI Block Diagram – I2C Mode
38.3 USCI Operation – I2C Mode
The I2C mode supports any slave or master I2C-compatible device. Figure 38-2 shows an example of an
I2C bus. Each I2C device is recognized by a unique address and can operate as either a transmitter or a
receiver. A device connected to the I2C bus can be considered as the master or the slave when
performing data transfers. A master initiates a data transfer and generates the clock signal SCL. Any
device addressed by a master is considered a slave.
I2C data is communicated using the serial data (SDA) pin and the serial clock (SCL) pin. Both SDA and
SCL are bidirectional and must be connected to a positive supply voltage using a pullup resistor.
997
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
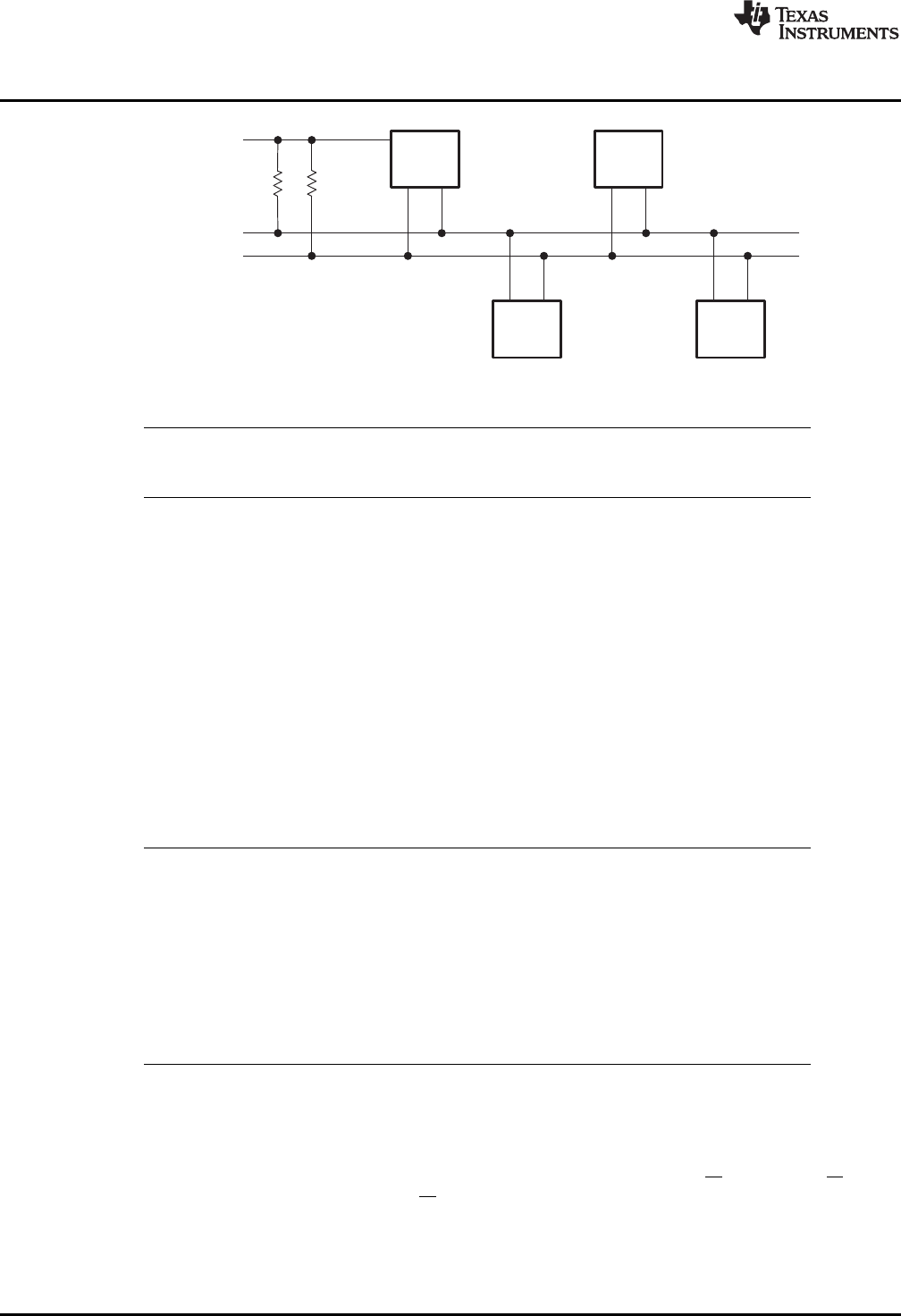
MSP430
VCC
Serial Data (SDA)
Serial Clock (SCL)
Device A
Device B Device C
USCI Operation – I2C Mode
www.ti.com
Figure 38-2. I2C Bus Connection Diagram
NOTE: SDA and SCL levels
The SDA and SCL pins must not be pulled up above the device VCC level.
38.3.1 USCI Initialization and Reset
The USCI is reset by a PUC or by setting the UCSWRST bit. After a PUC, the UCSWRST bit is
automatically set, keeping the USCI in a reset condition. To select I2C operation, the UCMODEx bits must
be set to 11. After module initialization, it is ready for transmit or receive operation. Clearing UCSWRST
releases the USCI for operation.
To avoid unpredictable behavior, configure or reconfigure the USCI module only when UCSWRST is set.
Setting UCSWRST in I2C mode has the following effects:
• I2C communication stops.
• SDA and SCL are high impedance.
• UCBxI2CSTAT, bits 6–0 are cleared.
• Registers UCBxIE and UCBxIFG are cleared.
• All other bits and register remain unchanged.
NOTE: Initializing or re-configuring the USCI module
The recommended USCI initialization/reconfiguration process is:
1. Set UCSWRST (BIS.B
#UCSWRST,&UCxCTL1).
2. Initialize all USCI registers with UCSWRST = 1.
3. Configure ports.
4. Clear UCSWRST via software (BIC.B
#UCSWRST,&UCxCTL1).
5. Enable interrupts (optional).
38.3.2 I2C Serial Data
One clock pulse is generated by the master device for each data bit transferred. The I2C mode operates
with byte data. Data is transferred MSB first as shown in Figure 38-3.
The first byte after a START condition consists of a 7-bit slave address and the R/W bit. When R/W = 0,
the master transmits data to a slave. When R/W = 1, the master receives data from a slave. The ACK bit
is sent from the receiver after each byte on the ninth SCL clock.
998 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
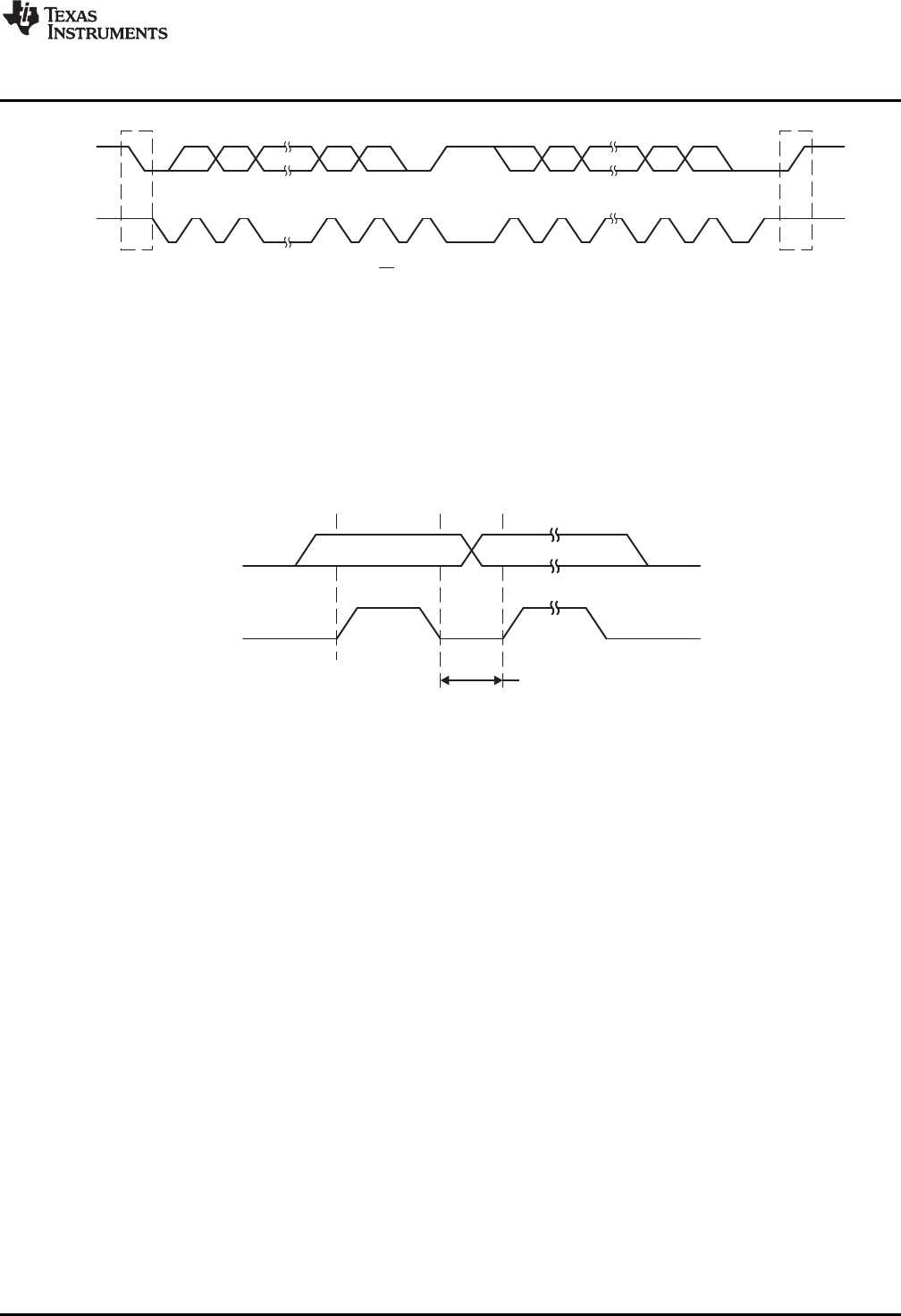
Data Line
Stable Data
Change of Data Allowed
SDA
SCL
SDA
SCL
MSB Acknowledgement
Signal From Receiver
Acknowledgement
Signal From Receiver
1 2 7 8 9 1 2 8 9
ACK ACK
START
Condition (S)
STOP
Condition (P)
R/W
www.ti.com
USCI Operation – I2C Mode
Figure 38-3. I2C Module Data Transfer
START and STOP conditions are generated by the master and are shown in Figure 38-3. A START
condition is a high-to-low transition on the SDA line while SCL is high. A STOP condition is a low-to-high
transition on the SDA line while SCL is high. The bus busy bit, UCBBUSY, is set after a START and
cleared after a STOP.
Data on SDA must be stable during the high period of SCL (see Figure 38-4). The high and low state of
SDA can only change when SCL is low, otherwise START or STOP conditions are generated.
Figure 38-4. Bit Transfer on I2C Bus
999
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

17 8 7 8
1 1 1 1 1 1 1 1
S Slave Address R/W ACK Data ACK S Slave Address ACK Data ACK P
1 Any
Number
1 Any Number
R/W
S
1
Slave Address 1st byte
7
Slave Address 2nd byteACKR/W
11 8
ACK
1
Data
8
ACK
1
P
1
1 1 1 1 0 X X
S Slave Address R/W ACK Data ACK Data ACK P
7 8 8
1 1 1 1 1 1
USCI Operation – I2C Mode
www.ti.com
38.3.3 I2C Addressing Modes
The I2C mode supports 7-bit and 10-bit addressing modes.
38.3.3.1 7-Bit Addressing
In the 7-bit addressing format (see Figure 38-5), the first byte is the 7-bit slave address and the R/W bit.
The ACK bit is sent from the receiver after each byte.
Figure 38-5. I2C Module 7-Bit Addressing Format
38.3.3.2 10-Bit Addressing
In the 10-bit addressing format (see Figure 38-6), the first byte is made up of 11110b plus the two MSBs
of the 10-bit slave address and the R/W bit. The ACK bit is sent from the receiver after each byte. The
next byte is the remaining eight bits of the 10-bit slave address, followed by the ACK bit and the 8-bit data.
See I2C Slave 10-bit Addressing Mode and I2C Master 10-bit Addressing Mode for details how to use the
10-bit addressing mode with the USCI module.
Figure 38-6. I2C Module 10-Bit Addressing Format
38.3.3.3 Repeated Start Conditions
The direction of data flow on SDA can be changed by the master, without first stopping a transfer, by
issuing a repeated START condition. This is called a RESTART. After a RESTART is issued, the slave
address is again sent out with the new data direction specified by the R/W bit. The RESTART condition is
shown in Figure 38-7.
Figure 38-7. I2C Module Addressing Format With Repeated START Condition
1000 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
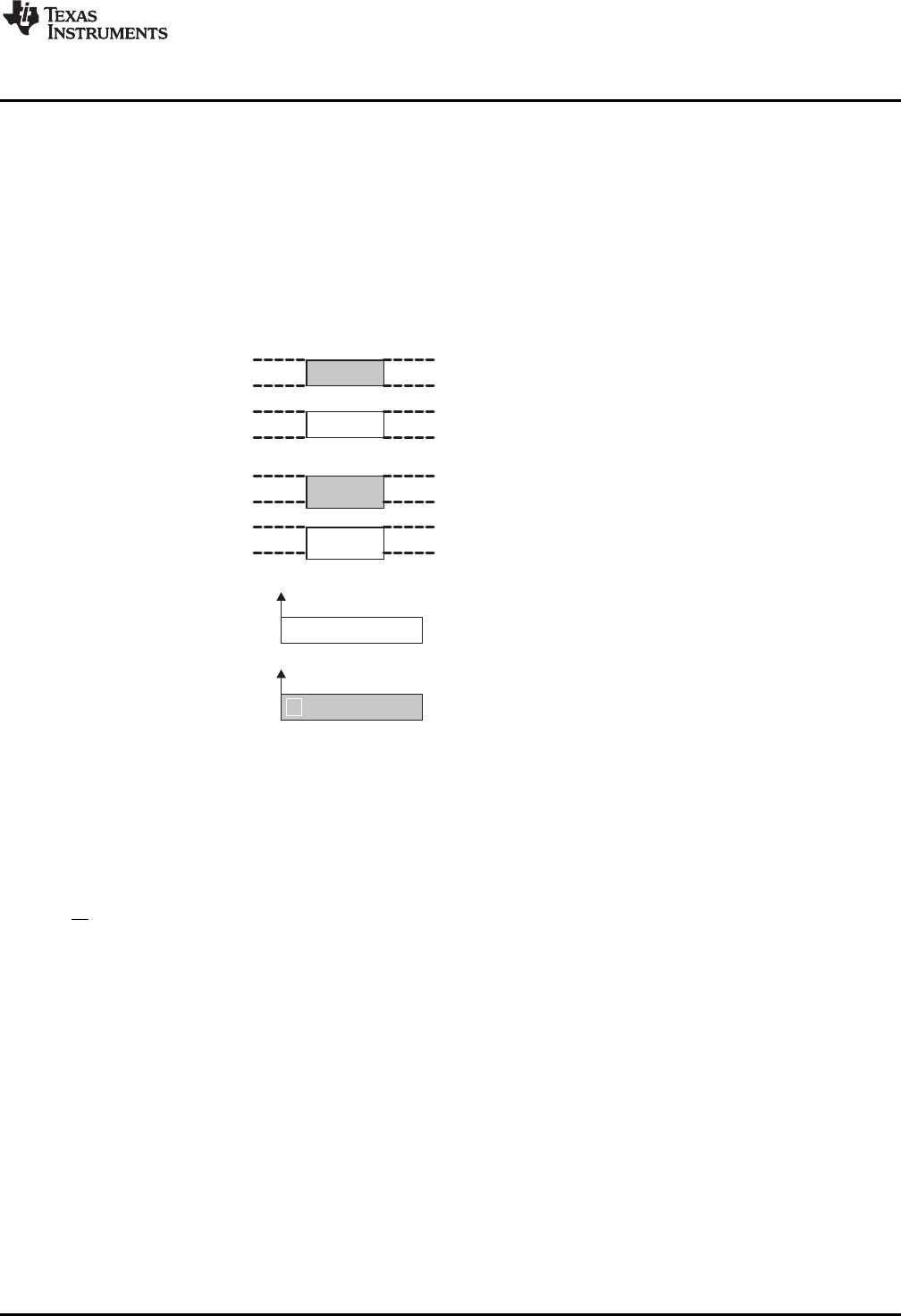
...
USCI Master
USCI Slave
Other Master
Other Slave
... Bits set or reset by software
Bits set or reset by hardware
www.ti.com
USCI Operation – I2C Mode
38.3.4 I2C Module Operating Modes
In I2C mode, the USCI module can operate in master transmitter, master receiver, slave transmitter, or
slave receiver mode. The modes are discussed in the following sections. Time lines are used to illustrate
the modes.
Figure 38-8 shows how to interpret the time-line figures. Data transmitted by the master is represented by
grey rectangles; data transmitted by the slave is represented by white rectangles. Data transmitted by the
USCI module, either as master or slave, is shown by rectangles that are taller than the others.
Actions taken by the USCI module are shown in grey rectangles with an arrow indicating where in the data
stream the action occurs. Actions that must be handled with software are indicated with white rectangles
with an arrow pointing to where in the data stream the action must take place.
Figure 38-8. I2C Time-Line Legend
38.3.4.1 Slave Mode
The USCI module is configured as an I2C slave by selecting the I2C mode with UCMODEx = 11 and
UCSYNC = 1 and clearing the UCMST bit.
Initially, the USCI module must to be configured in receiver mode by clearing the UCTR bit to receive the
I2C address. Afterwards, transmit and receive operations are controlled automatically, depending on the
R/W bit received together with the slave address.
The USCI slave address is programmed with the UCBxI2COA register. When UCA10 = 0, 7-bit addressing
is selected. When UCA10 = 1, 10-bit addressing is selected. The UCGCEN bit selects if the slave
responds to a general call.
When a START condition is detected on the bus, the USCI module receives the transmitted address and
compare it against its own address stored in UCBxI2COA. The UCSTTIFG flag is set when address
received matches the USCI slave address.
1001
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
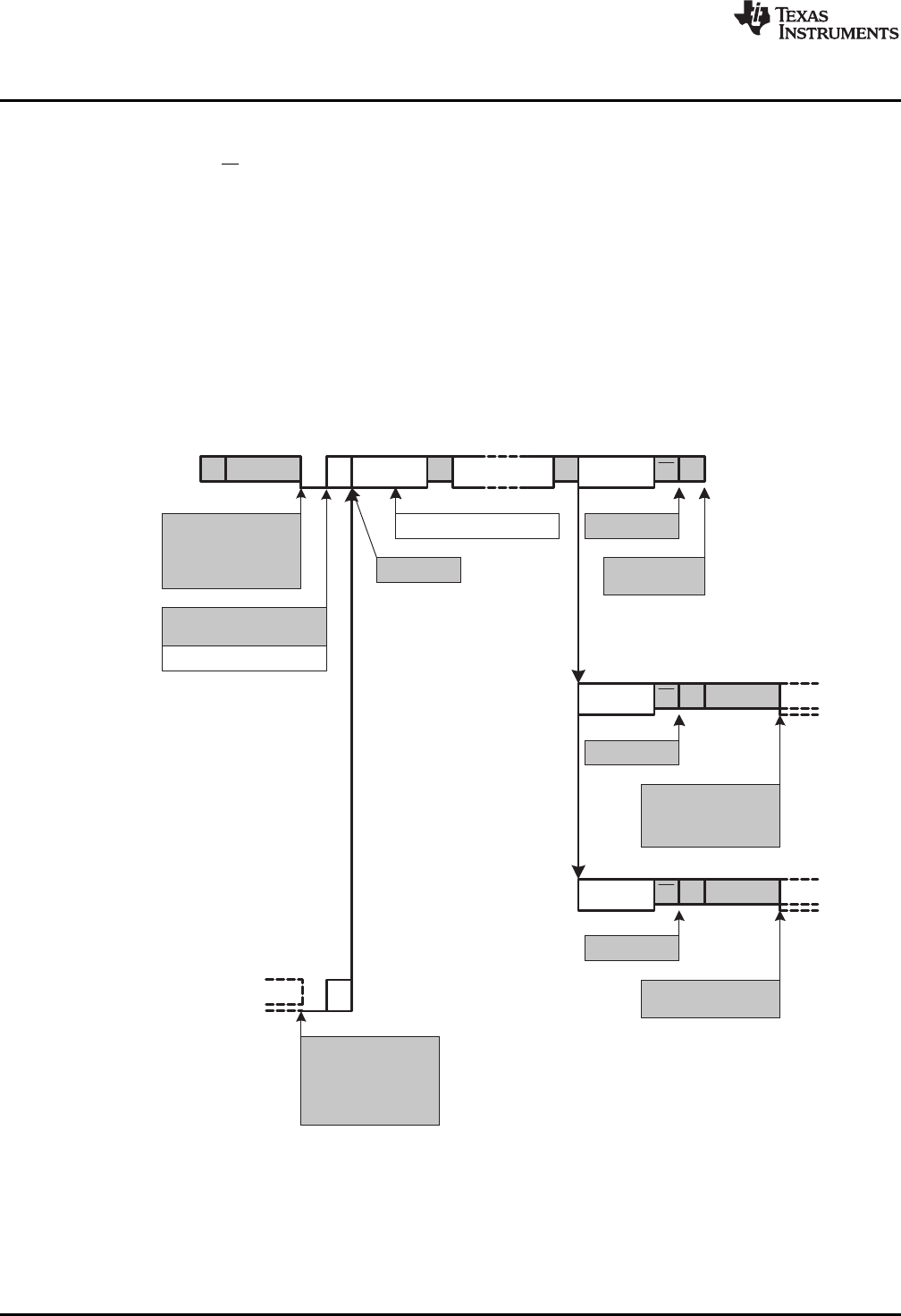
S SLA/R A DATA A P
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCSTPIFG=0
UCBxTXBUFdiscarded
Receptionofown
addressand
transmissionofdata
bytes
Busstalled (SCL heldlow)
untildataavailable
DATADATA A
UCSTPIFG=1
UCSTTIFG=0
A
A
DATA A S SLA/R
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCBxTXBUFdiscarded
DATA A S SLA/W
UCTR=0(Receiver)
UCSTTIFG=1
Arbitrationlostas
masterand
addressedasslave
UCALIFG=1
UCMST=0
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCSTPIFG=0
UCTXIFG=0
Repeatedstart -
continueas
slavetransmitter
Repeatedstart -
continueas
slavereceiver
WritedatatoUCBxTXBUF
UCTXIFG=1
UCTXIFG=0
UCTXIFG=0
WritedatatoUCBxTXBUF
USCI Operation – I2C Mode
www.ti.com
38.3.4.1.1 I2C Slave Transmitter Mode
Slave transmitter mode is entered when the slave address transmitted by the master is identical to its own
address with a set R/W bit. The slave transmitter shifts the serial data out on SDA with the clock pulses
that are generated by the master device. The slave device does not generate the clock, but it does hold
SCL low while intervention of the CPU is required after a byte has been transmitted.
If the master requests data from the slave, the USCI module is automatically configured as a transmitter
and UCTR and UCTXIFG become set. The SCL line is held low until the first data to be sent is written into
the transmit buffer UCBxTXBUF. Then the address is acknowledged, the UCSTTIFG flag is cleared, and
the data is transmitted. As soon as the data is transferred into the shift register, the UCTXIFG is set again.
After the data is acknowledged by the master, the next data byte written into UCBxTXBUF is transmitted
or, if the buffer is empty, the bus is stalled during the acknowledge cycle by holding SCL low until new
data is written into UCBxTXBUF. If the master sends a NACK succeeded by a STOP condition, the
UCSTPIFG flag is set. If the NACK is succeeded by a repeated START condition, the USCI I2C state
machine returns to its address-reception state.
Figure 38-9 shows the slave transmitter operation.
Figure 38-9. I2C Slave Transmitter Mode
1002 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – I2C Mode
38.3.4.1.2 I2C Slave Receiver Mode
Slave receiver mode is entered when the slave address transmitted by the master is identical to its own
address and a cleared R/W bit is received. In slave receiver mode, serial data bits received on SDA are
shifted in with the clock pulses that are generated by the master device. The slave device does not
generate the clock, but it can hold SCL low if intervention of the CPU is required after a byte has been
received.
If the slave should receive data from the master, the USCI module is automatically configured as a
receiver and UCTR is cleared. After the first data byte is received, the receive interrupt flag UCRXIFG is
set. The USCI module automatically acknowledges the received data and can receive the next data byte.
If the previous data was not read from the receive buffer UCBxRXBUF at the end of a reception, the bus
is stalled by holding SCL low. As soon as UCBxRXBUF is read, the new data is transferred into
UCBxRXBUF, an acknowledge is sent to the master, and the next data can be received.
Setting the UCTXNACK bit causes a NACK to be transmitted to the master during the next
acknowledgment cycle. A NACK is sent even if UCBxRXBUF is not ready to receive the latest data. If the
UCTXNACK bit is set while SCL is held low, the bus is released, a NACK is transmitted immediately, and
UCBxRXBUF is loaded with the last received data. Because the previous data was not read, that data is
lost. To avoid loss of data, the UCBxRXBUF must be read before UCTXNACK is set.
When the master generates a STOP condition, the UCSTPIFG flag is set.
If the master generates a repeated START condition, the USCI I2C state machine returns to its address
reception state.
Figure 38-10 shows the I2C slave receiver operation.
1003
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
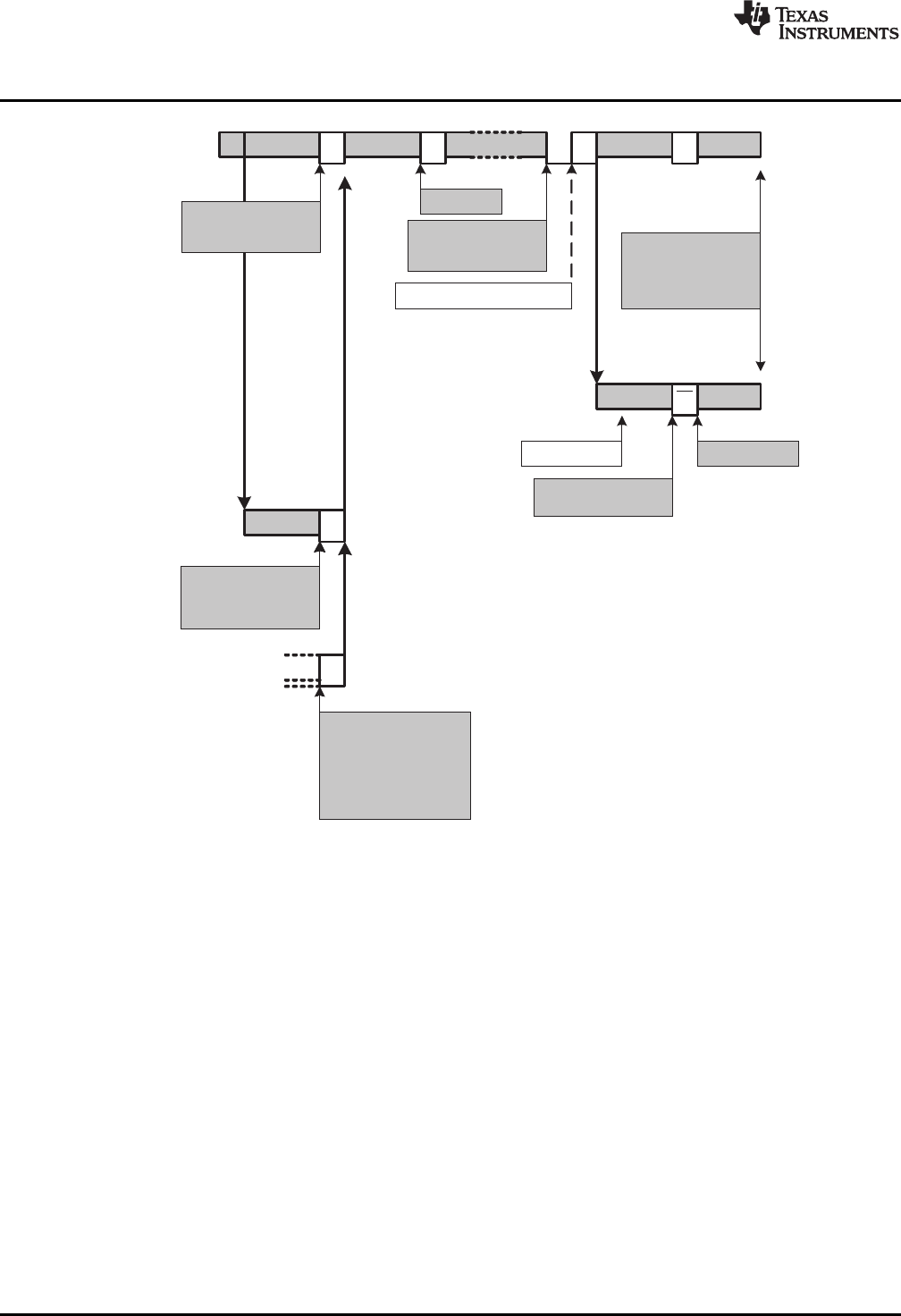
S SLA/W ADATA AP orS
Receptionofown
addressanddata
bytes. Allare
acknowledged.
UCRXIFG=1
DATADATA A A
UCTXNACK=1
Referto:
”Slave Transmitter”
TimingDiagram
Bus not stalledevenif
UCBxRXBUFnotread
P orSDATA A
A
Arbitrationlostas
masterand
addressedasslave
UCALIFG=1
UCMST=0
UCTR=0(Receiver)
UCSTTIFG=1
(UCGC=1ifgeneralcall)
UCTXIFG=0
UCSTPIFG=0
Lastbyteisnot
acknowledged.
UCTR=0(Receiver)
UCSTTIFG=1
UCSTPIFG=0
GenCall A
UCTR=0(Receiver)
UCSTTIFG=1
UCGC=1
Receptionofthe
generalcall
address.
UCTXNACK=0
Busstalled
(SCL heldlow)
ifUCBxRXBUFnotread
ReaddatafromUCBxRXBUF
UCSTPIFG=0
USCI Operation – I2C Mode
www.ti.com
Figure 38-10. I2C Slave Receiver Mode
1004 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
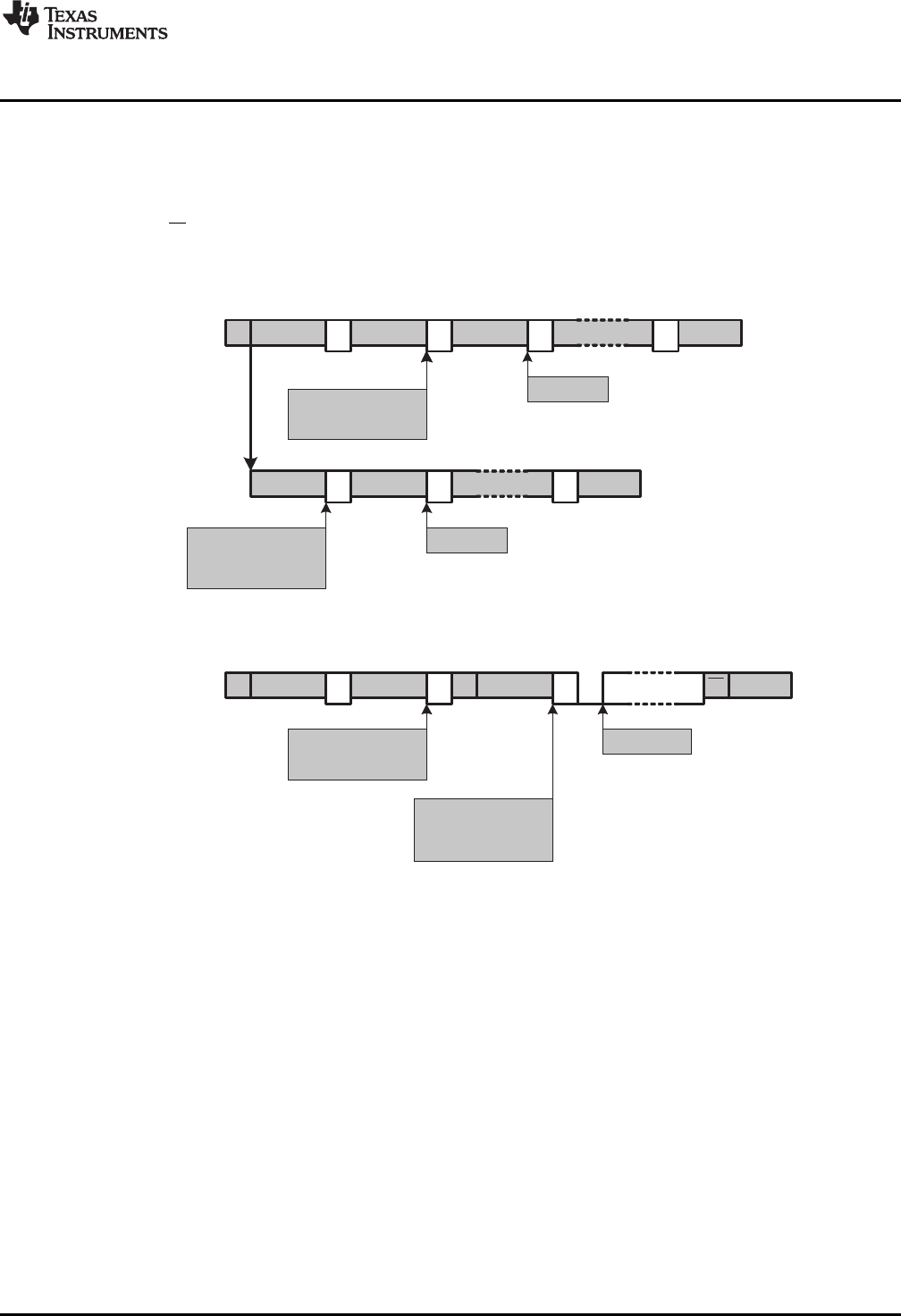
S
S 11110 xx/W ASLA (2.) AP orS
Receptionofown
addressanddata
bytes. Allare
acknowledged.
UCRXIFG=1
DATA DATA
A A
UCTR=0(Receiver)
UCSTTIFG=1
UCSTPIFG=0
GenCall A
UCTR=0(Receiver)
UCSTTIFG=1
UCGC=1
Receptionofthe
generalcall
address.
P orS
UCRXIFG=1
DATA DATA
A A
S 11110 xx/W ASLA (2.) A
UCTR=0(Receiver)
UCSTTIFG=1
UCSTPIFG=0
11110 xx/R A
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCSTPIFG=0
UCSTTIFG=0
DATA A P orS
Receptionofown
addressand
transmissionofdata
bytes
SlaveTransmitter
SlaveReceiver
UCSTPIFG=0
www.ti.com
USCI Operation – I2C Mode
38.3.4.1.3 I2C Slave 10-Bit Addressing Mode
The 10-bit addressing mode is selected when UCA10 = 1 and is as shown in Figure 38-11. In 10-bit
addressing mode, the slave is in receive mode after the full address is received. The USCI module
indicates this by setting the UCSTTIFG flag while the UCTR bit is cleared. To switch the slave into
transmitter mode, the master sends a repeated START condition together with the first byte of the address
but with the R/W bit set. This sets the UCSTTIFG flag if it was previously cleared by software, and the
USCI modules switches to transmitter mode with UCTR = 1.
Figure 38-11. I2C Slave 10-Bit Addressing Mode
38.3.4.2 Master Mode
The USCI module is configured as an I2C master by selecting the I2C mode with UCMODEx = 11 and
UCSYNC = 1 and setting the UCMST bit. When the master is part of a multi-master system, UCMM must
be set and its own address must be programmed into the UCBxI2COA register. When UCA10 = 0, 7-bit
addressing is selected. When UCA10 = 1, 10-bit addressing is selected. The UCGCEN bit selects if the
USCI module responds to a general call.
1005
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Operation – I2C Mode
www.ti.com
38.3.4.2.1 I2C Master Transmitter Mode
After initialization, master transmitter mode is initiated by writing the desired slave address to the
UCBxI2CSA register, selecting the size of the slave address with the UCSLA10 bit, setting UCTR for
transmitter mode, and setting UCTXSTT to generate a START condition.
The USCI module checks if the bus is available, generates the START condition, and transmits the slave
address. The UCTXIFG bit is set when the START condition is generated and the first data to be
transmitted can be written into UCBxTXBUF. As soon as the slave acknowledges the address, the
UCTXSTT bit is cleared.
NOTE: Handling of TXIFG in a multi-master system
In a multi-master system (UCMM =1), if the bus is unavailable, the USCI module waits and
checks for bus release. Bus unavailability can occur even after the UCTXSTT bit has been
set. While waiting for the bus to become available, the USCI may update the TXIFG based
on SCL clock line activity. Checking the UCTXSTT bit to verify if the START condition has
been sent ensures that the TXIFG is being serviced correctly.
The data written into UCBxTXBUF is transmitted if arbitration is not lost during transmission of the slave
address. UCTXIFG is set again as soon as the data is transferred from the buffer into the shift register. If
there is no data loaded to UCBxTXBUF before the acknowledge cycle, the bus is held during the
acknowledge cycle with SCL low until data is written into UCBxTXBUF. Data is transmitted or the bus is
held, as long as the UCTXSTP bit or UCTXSTT bit is not set.
Setting UCTXSTP generates a STOP condition after the next acknowledge from the slave. If UCTXSTP is
set during the transmission of the slave's address or while the USCI module waits for data to be written
into UCBxTXBUF, a STOP condition is generated, even if no data was transmitted to the slave. When
transmitting a single byte of data, the UCTXSTP bit must be set while the byte is being transmitted or
anytime after transmission begins, without writing new data into UCBxTXBUF. Otherwise, only the
address is transmitted. When the data is transferred from the buffer to the shift register, UCTXIFG is set,
indicating data transmission has begun, and the UCTXSTP bit may be set.
Setting UCTXSTT generates a repeated START condition. In this case, UCTR may be set or cleared to
configure transmitter or receiver, and a different slave address may be written into UCBxI2CSA if desired.
If the slave does not acknowledge the transmitted data, the not-acknowledge interrupt flag UCNACKIFG is
set. The master must react with either a STOP condition or a repeated START condition. If data was
already written into UCBxTXBUF, it is discarded. If this data should be transmitted after a repeated
START, it must be written into UCBxTXBUF again. Any set UCTXSTT is also discarded. To trigger a
repeated START, UCTXSTT must be set again.
Figure 38-12 shows the I2C master transmitter operation.
1006 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
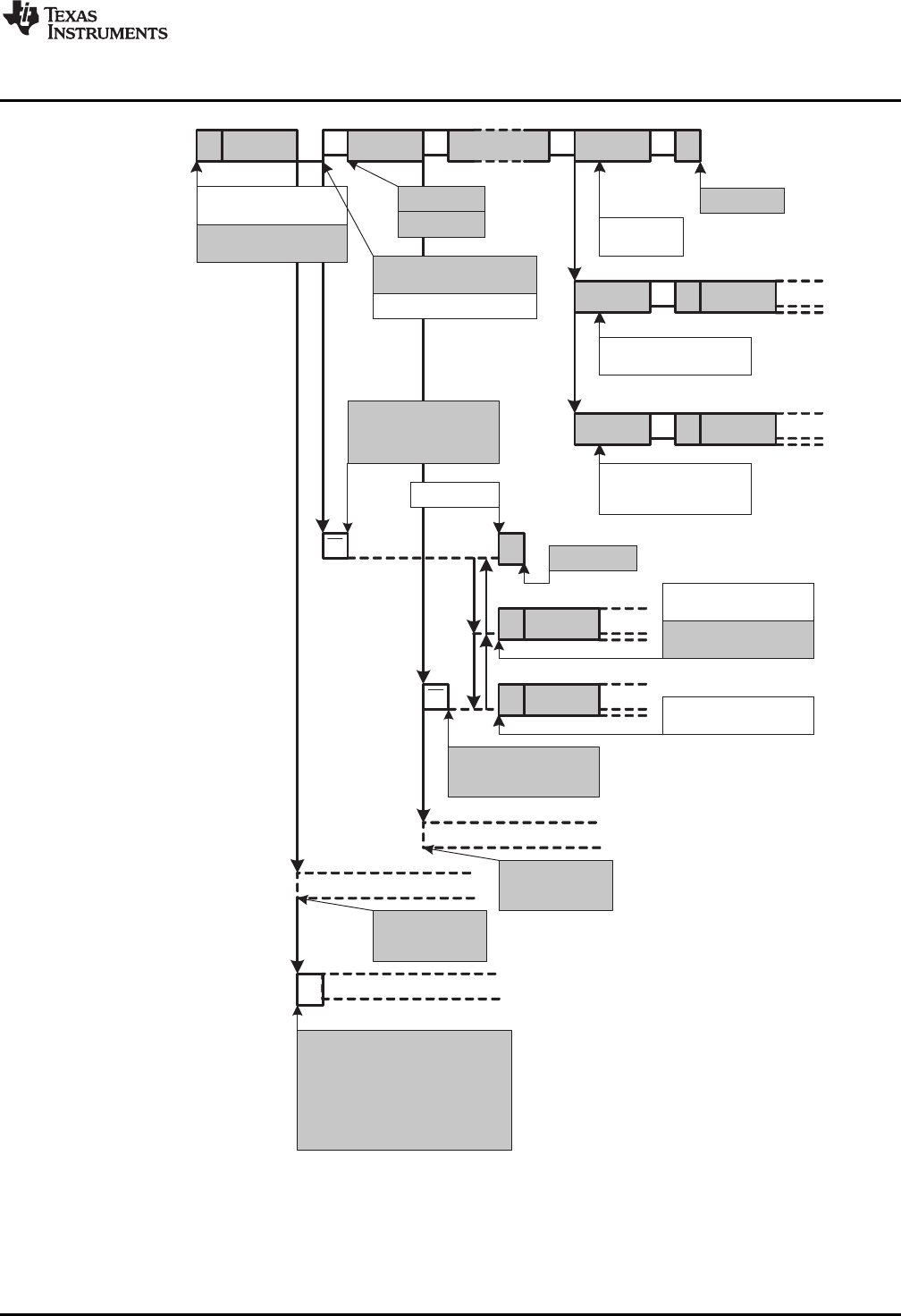
Othermastercontinues
S SLA/W ADATA AP
Successful
transmissiontoa
slavereceiver
UCTXIFG=1
DATADATA A A
UCTXSTP=1
UCTXIFG=0
Nexttransferstarted
witharepeatedstart
condition
DATA AS SLA/W
1) UCTR=1(Transmitter)
2) UCTXSTT=1
DATA AS SLA/R
1) UCTR=0(Receiver)
2) UCTXSTT=1
3) UCTXIFG=0
Notacknowledge
receivedafterslave
address
P
S SLA/W
S SLA/R
UCTXSTP=1
1) UCTR=1(Transmitter)
2) UCTXSTT=1
1) UCTR=0(Receiver)
2) UCTXSTT=1
Arbitrationlostin
slaveaddressor
databyte
A
A
Othermastercontinues
Arbitrationlostand
addressedasslave Othermastercontinues
A
UCALIFG=1
UCMST=0
UCTR=0(Receiver)
UCSTTIFG=1
(UCGC=1ifgeneralcall)
UCTXIFG=0
UCSTPIFG=0
USCIcontinuesasSlaveReceiver
Notacknowledge
receivedafteradata
byte
UCTXSTT=0 UCTXSTP=0
UCTXSTP=0
UCALIFG=1
UCMST=0
(UCSTTIFG=0)
Busstalled (SCL heldlow)
untildataavailable
WritedatatoUCBxTXBUF
1) UCTR=1(Transmitter)
2) UCTXSTT=1
UCTXIFG=1
UCBxTXBUFdiscarded
UCTXSTT=0
UCNACKIFG=1
UCTXIFG=0
UCBxTXBUFdiscarded
UCTXIFG=1
UCBxTXBUFdiscarded
UCNACKIFG=1
UCTXIFG=0
UCBxTXBUFdiscarded
UCALIFG=1
UCMST=0
(UCSTTIFG=0)
www.ti.com
USCI Operation – I2C Mode
Figure 38-12. I2C Master Transmitter Mode
1007
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI Operation – I2C Mode
www.ti.com
38.3.4.2.2 I2C Master Receiver Mode
After initialization, master receiver mode is initiated by writing the desired slave address to the
UCBxI2CSA register, selecting the size of the slave address with the UCSLA10 bit, clearing UCTR for
receiver mode, and setting UCTXSTT to generate a START condition.
The USCI module checks if the bus is available, generates the START condition, and transmits the slave
address. As soon as the slave acknowledges the address, the UCTXSTT bit is cleared.
After the acknowledge of the address from the slave, the first data byte from the slave is received and
acknowledged and the UCRXIFG flag is set. Data is received from the slave, as long as UCTXSTP or
UCTXSTT is not set. If UCBxRXBUF is not read, the master holds the bus during reception of the last
data bit and until the UCBxRXBUF is read.
If the slave does not acknowledge the transmitted address, the not-acknowledge interrupt flag
UCNACKIFG is set. The master must react with either a STOP condition or a repeated START condition.
Setting the UCTXSTP bit generates a STOP condition. After setting UCTXSTP, a NACK followed by a
STOP condition is generated after reception of the data from the slave, or immediately if the USCI module
is currently waiting for UCBxRXBUF to be read.
If a master wants to receive a single byte only, the UCTXSTP bit must be set while the byte is being
received. For this case, the UCTXSTT may be polled to determine when it is cleared:
BIS.B #UCTXSTT, &UCB0CTL1 ;Transmit START cond.
POLL_STT BIT.B #UCTXSTT, &UCB0CTL1 ;Poll UCTXSTT bit
JC POLL_STT ;When cleared,
BIS.B #UCTXSTP, &UCB0CTL1 ;transmit STOP cond.
Setting UCTXSTT generates a repeated START condition. In this case, UCTR may be set or cleared to
configure transmitter or receiver, and a different slave address may be written into UCBxI2CSA if desired.
NOTE: Repeated START
The UCTXSTT bit must be set before the last data byte is received; that is, immediately after
the UCRXIFG is set and the UCRXBUF with the second to last byte is read, the UCTXSTT
bit should be set.
NOTE: Consecutive master transactions without repeated START
When performing multiple consecutive I2C master transactions without the repeated START
feature, the current transaction must be completed before the next one is initiated. This can
be done by ensuring that the transmit STOP condition flag UCTXSTP is cleared before the
next I2C transaction is initiated with setting UCTXSTT = 1. Otherwise, the current transaction
might be affected.
Figure 38-13 shows the I2C master receiver operation.
1008 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
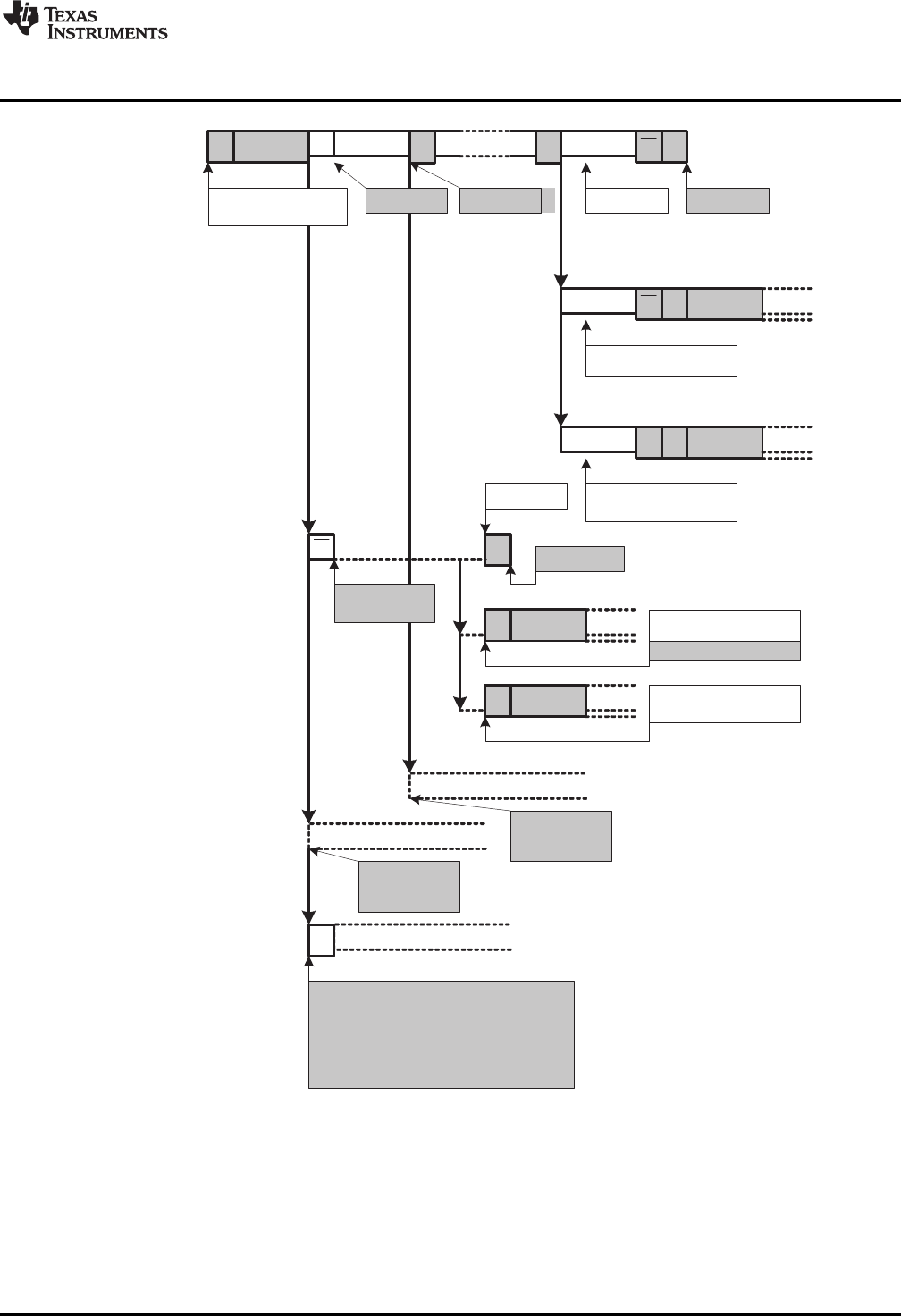
Othermastercontinues
S SLA/R A DATA AP
1)UCTR=0(Receiver)
2)UCTXSTT=1
Successful
receptionfroma
slavetransmitter
UCRXIFG=1
DATADATA A
UCTXSTP=1
Nexttransferstarted
witharepeatedstart
condition
DATA S SLA/W
1) UCTR=1(Transmitter)
2) UCTXSTT=1
DATA S SLA/R
1)
UCTR=0(Receiver)
2) UCTXSTT=1
Notacknowledge
receivedafterslave
address
UCTXSTT=0
UCNACKIFG=1
P
S SLA/W
S SLA/R
1) UCTR=1(Transmitter)
2) UCTXSTT=1
1) UCTR=0(Receiver)
2) UCTXSTT=1
Arbitrationlostin
slaveaddressor
databyte
A
Othermastercontinues
UCALIFG=1
UCMST=0
(UCSTTIFG=0)
Arbitrationlostand
addressedasslave Othermastercontinues
A
UCALIFG=1
UCMST=0
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCSTPIFG=0
USCIcontinuesasSlave Transmitter
A
A
A
UCTXSTT=0 UCTXSTP=0
UCTXIFG=1
UCALIFG=1
UCMST=0
(UCSTTIFG=0)
UCTXSTP=1
UCTXSTP=0
www.ti.com
USCI Operation – I2C Mode
Figure 38-13. I2C Master Receiver Mode
38.3.4.2.3 I2C Master 10-Bit Addressing Mode
The 10-bit addressing mode is selected when UCSLA10 = 1 and is shown in Figure 38-14.
1009
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

MasterTransmitter
SA A P
1)UCTR=1(Transmitter)
2)UCTXSTT=1
Successful
transmissiontoa
slavereceiver
UCTXIFG=1
UCTXIFG=1
DATADATA A A
UCTXSTP=1
UCTXSTT=0 UCTXSTP=0
11110xx/W SLA(2.)
SAP
1)UCTR=0(Receiver)
2)UCTXSTT=1
Successful
receptionfroma
slavetransmitter
DA ATDATA A
UCTXSTP=1
A
UCTXSTT=0 UCTXSTP=0
A A
11110xxW/ SLA(2.) 11110xx/R
MasterReceiver
S
UCRXIFG=1
USCI Operation – I2C Mode
www.ti.com
Figure 38-14. I2C Master 10-Bit Addressing Mode
1010 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
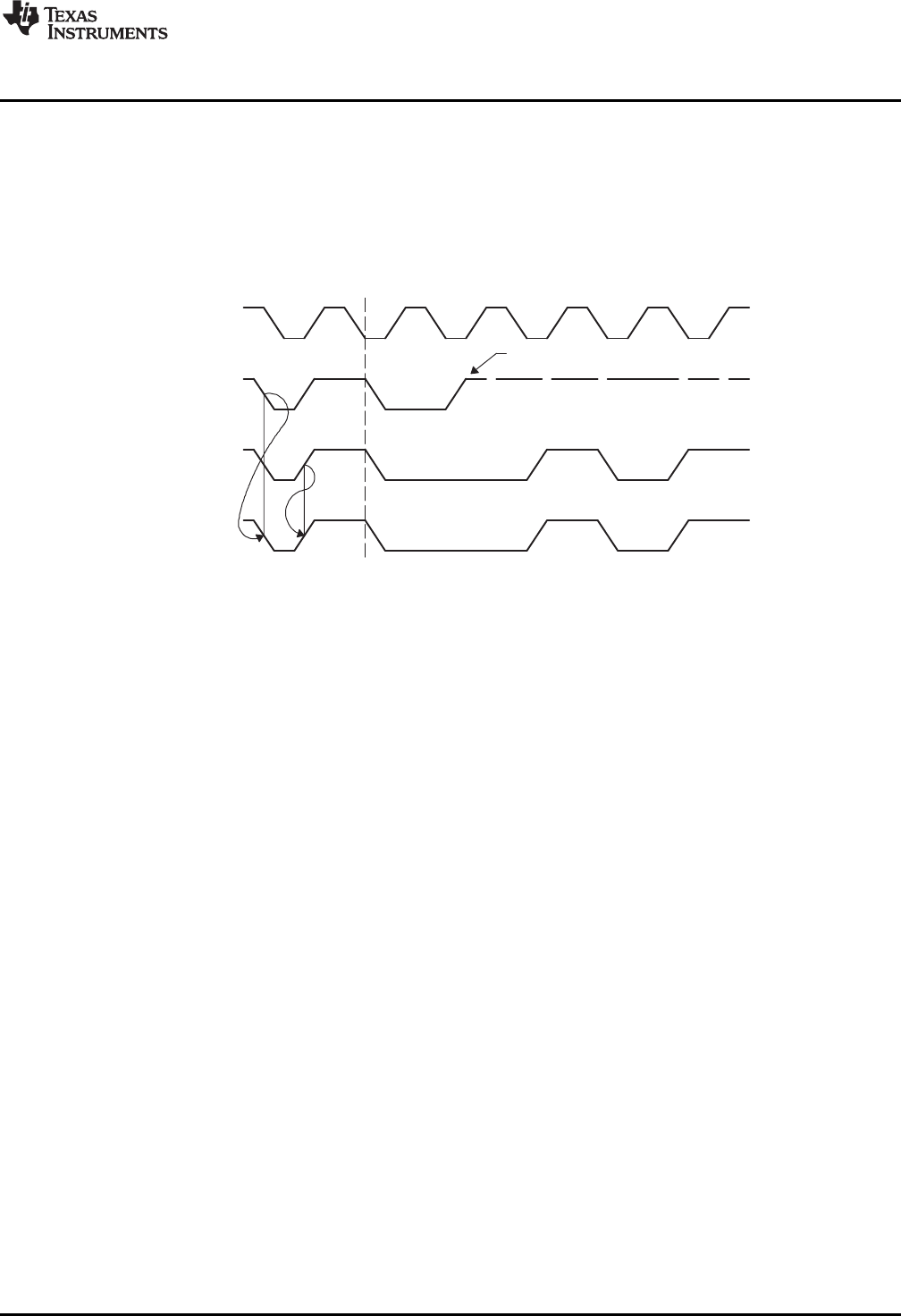
1
0 0 0
1
0 0 0
1 1
111
n
Device #1 Lost Arbitration
and Switches Off
Bus Line
SCL
Data From
Device #1
Data From
Device #2
Bus Line
SDA
www.ti.com
USCI Operation – I2C Mode
38.3.4.3 Arbitration
If two or more master transmitters simultaneously start a transmission on the bus, an arbitration procedure
is invoked. Figure 38-15 shows the arbitration procedure between two devices. The arbitration procedure
uses the data presented on SDA by the competing transmitters. The first master transmitter that generates
a logic high is overruled by the opposing master generating a logic low. The arbitration procedure gives
priority to the device that transmits the serial data stream with the lowest binary value. The master
transmitter that lost arbitration switches to the slave receiver mode and sets the arbitration lost flag
UCALIFG. If two or more devices send identical first bytes, arbitration continues on the subsequent bytes.
Figure 38-15. Arbitration Procedure Between Two Master Transmitters
1011
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
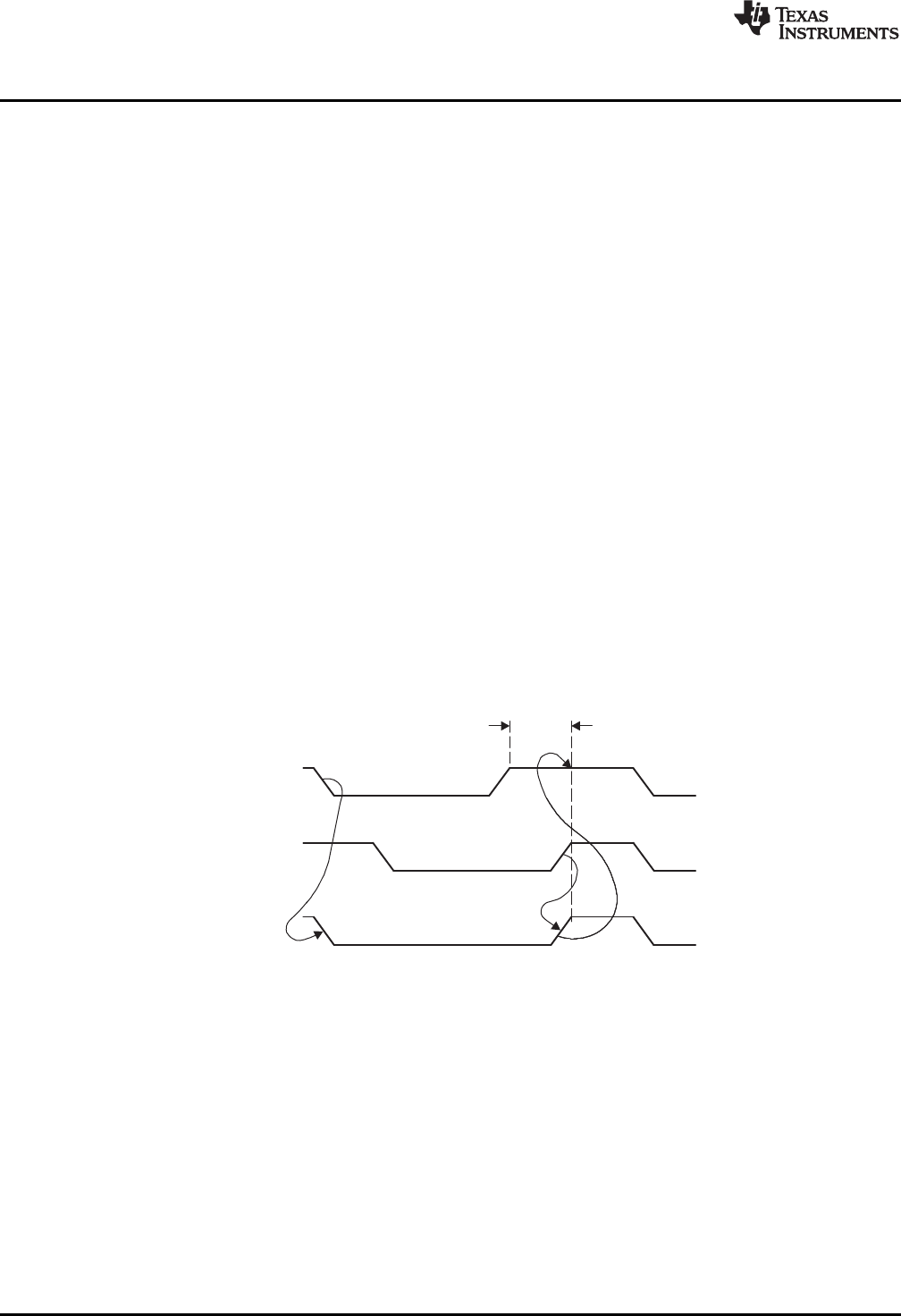
Wait
State Start HIGH
Period
SCL From
Device #1
SCL From
Device #2
Bus Line
SCL
USCI Operation – I2C Mode
www.ti.com
If the arbitration procedure is in progress when a repeated START condition or STOP condition is
transmitted on SDA, the master transmitters involved in arbitration must send the repeated START
condition or STOP condition at the same position in the format frame. Arbitration is not allowed between:
• A repeated START condition and a data bit
• A STOP condition and a data bit
• A repeated START condition and a STOP condition
38.3.5 I2C Clock Generation and Synchronization
The I2C clock SCL is provided by the master on the I2C bus. When the USCI is in master mode, BITCLK is
provided by the USCI bit clock generator and the clock source is selected with the UCSSELx bits. In slave
mode, the bit clock generator is not used and the UCSSELx bits are don't care.
The 16-bit value of UCBRx in registers UCBxBR1 and UCBxBR0 is the division factor of the USCI clock
source, BRCLK. The maximum bit clock that can be used in single master mode is fBRCLK/4. In multi-master
mode, the maximum bit clock is fBRCLK/8. The BITCLK frequency is given by:
fBitClock = fBRCLK/UCBRx
The minimum high and low periods of the generated SCL are:
tLOW,MIN = tHIGH,MIN = (UCBRx/2)/fBRCLK when UCBRx is even
tLOW,MIN = tHIGH,MIN = ((UCBRx – 1)/2)/fBRCLK when UCBRx is odd
The USCI clock source frequency and the prescaler setting UCBRx must to be chosen such that the
minimum low and high period times of the I2C specification are met.
During the arbitration procedure the clocks from the different masters must be synchronized. A device that
first generates a low period on SCL overrules the other devices, forcing them to start their own low
periods. SCL is then held low by the device with the longest low period. The other devices must wait for
SCL to be released before starting their high periods. Figure 38-16 shows the clock synchronization. This
allows a slow slave to slow down a fast master.
Figure 38-16. Synchronization of Two I2C Clock Generators During Arbitration
1012 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – I2C Mode
38.3.5.1 Clock Stretching
The USCI module supports clock stretching and also makes use of this feature as described in the
Operation Mode sections.
The UCSCLLOW bit can be used to observe if another device pulls SCL low while the USCI module
already released SCL due to the following conditions:
• USCI is acting as master and a connected slave drives SCL low.
• USCI is acting as master and another master drives SCL low during arbitration.
The UCSCLLOW bit is also active if the USCI holds SCL low because it is waiting as transmitter for data
being written into UCBxTXBUF or as receiver for the data being read from UCBxRXBUF.
The UCSCLLOW bit might get set for a short time with each rising SCL edge because the logic observes
the external SCL and compares it to the internally generated SCL.
38.3.6 Using the USCI Module in I2C Mode With Low-Power Modes
The USCI module provides automatic clock activation for use with low-power modes. When the USCI
clock source is inactive because the device is in a low-power mode, the USCI module automatically
activates it when needed, regardless of the control-bit settings for the clock source. The clock remains
active until the USCI module returns to its idle condition. After the USCI module returns to the idle
condition, control of the clock source reverts to the settings of its control bits.
In I2C slave mode, no internal clock source is required because the clock is provided by the external
master. It is possible to operate the USCI in I2C slave mode while the device is in LPM4 and all internal
clock sources are disabled. The receive or transmit interrupts can wake up the CPU from any low-power
mode.
38.3.7 USCI Interrupts in I2C Mode
The USCI has only one interrupt vector that is shared for transmission, reception, and the state change.
USCI_Ax and USC_Bx do not share the same interrupt vector.
Each interrupt flag has its own interrupt enable bit. When an interrupt is enabled and the GIE bit is set, the
interrupt flag generates an interrupt request. DMA transfers are controlled by the UCTXIFG and UCRXIFG
flags on devices with a DMA controller.
38.3.7.1 I2C Transmit Interrupt Operation
The UCTXIFG interrupt flag is set by the transmitter to indicate that UCBxTXBUF is ready to accept
another character. An interrupt request is generated if UCTXIE and GIE are also set. UCTXIFG is
automatically reset if a character is written to UCBxTXBUF or if a NACK is received. UCTXIFG is set
when UCSWRST = 1 and the I2C mode is selected. UCTXIE is reset after a PUC or when UCSWRST = 1.
38.3.7.2 I2C Receive Interrupt Operation
The UCRXIFG interrupt flag is set when a character is received and loaded into UCBxRXBUF. An
interrupt request is generated if UCRXIE and GIE are also set. UCRXIFG and UCRXIE are reset after a
PUC signal or when UCSWRST = 1. UCRXIFG is automatically reset when UCxRXBUF is read.
1013
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI Operation – I2C Mode
www.ti.com
38.3.7.3 I2C State Change Interrupt Operation
Table 38-1 describes the I2C state change interrupt flags.
Table 38-1. I2C State Change Interrupt Flags
Interrupt Flag Interrupt Condition
UCALIFG Arbitration-lost. Arbitration can be lost when two or more transmitters start a transmission simultaneously, or
when the USCI operates as master but is addressed as a slave by another master in the system. The
UCALIFG flag is set when arbitration is lost. When UCALIFG is set, the UCMST bit is cleared and the I2C
controller becomes a slave.
UCNACKIFG Not-acknowledge interrupt. This flag is set when an acknowledge is expected but is not received.
UCNACKIFG is automatically cleared when a START condition is received.
UCSTTIFG START condition detected interrupt. This flag is set when the I2C module detects a START condition together
with its own address while in slave mode. UCSTTIFG is used in slave mode only and is automatically cleared
when a STOP condition is received.
UCSTPIFG STOP condition detected interrupt. This flag is set when the I2C module detects a STOP condition while in
slave mode. UCSTPIFG is used in slave mode only and is automatically cleared when a START condition is
received.
1014 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI Operation – I2C Mode
38.3.7.4 UCBxIV, Interrupt Vector Generator
The USCI interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCBxIV is used to determine which flag requested an interrupt. The highest-priority
enabled interrupt generates a number in the UCBxIV register that can be evaluated or added to the PC to
automatically enter the appropriate software routine. Disabled interrupts do not affect the UCBxIV value.
Any access, read or write, of the UCBxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
38.3.7.4.1 UCBxIV Software Example
The following software example shows the recommended use of UCBxIV. The UCBxIV value is added to
the PC to automatically jump to the appropriate routine. The example is given for USCI_B0.
USCI_I2C_ISR
ADD &UCB0IV, PC ; Add offset to jump table
RETI ; Vector 0: No interrupt
JMP ALIFG_ISR ; Vector 2: ALIFG
JMP NACKIFG_ISR ; Vector 4: NACKIFG
JMP STTIFG_ISR ; Vector 6: STTIFG
JMP STPIFG_ISR ; Vector 8: STPIFG
JMP RXIFG_ISR ; Vector 10: RXIFG
TXIFG_ISR ; Vector 12
... ; Task starts here
RETI ; Return
ALIFG_ISR ; Vector 2
... ; Task starts here
RETI ; Return
NACKIFG_ISR ; Vector 4
... ; Task starts here
RETI ; Return
STTIFG_ISR ; Vector 6
... ; Task starts here
RETI ; Return
STPIFG_ISR ; Vector 8
... ; Task starts here
RETI ; Return
RXIFG_ISR ; Vector 10
... ; Task starts here
RETI ; Return
1015
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B I2C Mode Registers
www.ti.com
38.4 USCI_B I2C Mode Registers
The USCI registers applicable in I2C mode are listed in Table 38-2. The base address can be found in the
device-specific data sheet. The address offsets are listed in Table 38-2.
Table 38-2. USCI_B Registers
Offset Acronym Register Name Type Access Reset Section
00h UCBxCTLW0 USCI_Bx Control Word 0 Read/write Word 0101h
00h UCBxCTL1 USCI_Bx Control 1 Read/write Byte 01h Section 38.4.2
01h UCBxCTL0 USCI_Bx Control 0 Read/write Byte 01h Section 38.4.1
06h UCBxBRW USCI_Bx Bit Rate Control Word Read/write Word 0000h
06h UCBxBR0 USCI_Bx Bit Rate Control 0 Read/write Byte 00h Section 38.4.3
07h UCBxBR1 USCI_Bx Bit Rate Control 1 Read/write Byte 00h Section 38.4.4
0Ah UCBxSTAT USCI_Bx Status Read/write Byte 00h Section 38.4.5
0Bh Reserved - reads zero Read Byte 00h
0Ch UCBxRXBUF USCI_Bx Receive Buffer Read/write Byte 00h Section 38.4.6
0Dh Reserved - reads zero Read Byte 00h
0Eh UCBxTXBUF USCI_Bx Transmit Buffer Read/write Byte 00h Section 38.4.7
0Fh Reserved - reads zero Read Byte 00h
10h UCBxI2COA USCI_Bx I2C Own Address Read/write Word 0000h Section 38.4.8
12h UCBxI2CSA USCI_Bx I2C Slave Address Read/write Word 0000h Section 38.4.9
1Ch UCBxICTL USCI_Bx Interrupt Control Read/write Word 0200h
1Ch UCBxIE USCI_Bx Interrupt Enable Read/write Byte 00h Section 38.4.10
1Dh UCBxIFG USCI_Bx Interrupt Flag Read/write Byte 02h Section 38.4.11
1Eh UCBxIV USCI_Bx Interrupt Vector Read Word 0000h Section 38.4.12
1016 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USCI_B I2C Mode Registers
38.4.1 UCBxCTL0 Register
USCI_Bx Control Register 0
Figure 38-17. UCBxCTL0 Register
76543210
UCA10 UCSLA10 UCMM Reserved UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-1
Modify only when UCSWRST = 1.
Table 38-3. UCBxCTL0 Register Description
Bit Field Type Reset Description
7 UCA10 RW 0h Own addressing mode select
0b = Own address is a 7-bit address
1b = Own address is a 10-bit address
6 UCSLA10 RW 0h Slave addressing mode select
0b = Address slave with 7-bit address
1b = Address slave with 10-bit address
5 UCMM RW 0h Multi-master environment select
0b = Single master environment. There is no other master in the system. The
address compare unit is disabled.
1b = Multi-master environment
4 Reserved R 0h Reserved. Always reads as 0.
3 UCMST RW 0h Master mode select. When a master loses arbitration in a multi-master
environment (UCMM = 1), the UCMST bit is automatically cleared and the
module acts as slave.
0b = Slave mode
1b = Master mode
2-1 UCMODEx RW 0h USCI mode. The UCMODEx bits select the synchronous mode when UCSYNC =
1.
00b = 3-pin SPI
01b = 4-pin SPI (master/slave enabled if STE = 1)
10b = 4-pin SPI (master/slave enabled if STE = 0)
11b = I2C mode
0 UCSYNC R 1h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
1017
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B I2C Mode Registers
www.ti.com
38.4.2 UCBxCTL1 Register
USCI_Bx Control Register 1
Figure 38-18. UCBxCTL1 Register
76543210
UCSSELx Reserved UCTR UCTXNACK UCTXSTP UCTXSTT UCSWRST
rw-0 rw-0 r0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 38-4. UCBxCTL1 Register Description
Bit Field Type Reset Description
7-6 UCSSELx RW 0h USCI clock source select. These bits select the BRCLK source clock.
00b = UCLKI
01b = ACLK
10b = SMCLK
11b = SMCLK
5 Reserved RW 0h Reserved. Always reads as 0.
4 UCTR RW 0h Transmitter or receiver
0b = Receiver
1b = Transmitter
3 UCTXNACK RW 0h Transmit a NACK. UCTXNACK is automatically cleared after a NACK is
transmitted.
0b = Acknowledge normally
1b = Generate NACK
2 UCTXSTP RW 0h Transmit STOP condition in master mode. Ignored in slave mode. In master
receiver mode, the STOP condition is preceded by a NACK. UCTXSTP is
automatically cleared after STOP is generated.
0b = No STOP generated
1b = Generate STOP
1 UCTXSTT RW 0h Transmit START condition in master mode. Ignored in slave mode. In master
receiver mode, a repeated START condition is preceded by a NACK. UCTXSTT
is automatically cleared after START condition and address information is
transmitted. Ignored in slave mode.
0b = Do not generate START condition
1b = Generate START condition
0 UCSWRST RW 1h Software reset enable
0b = Disabled. USCI reset released for operation.
1b = Enabled. USCI logic held in reset state.
1018 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B I2C Mode Registers
38.4.3 UCBxBR0 Register
USCI_Bx Baud Rate Control Register 0
Figure 38-19. UCBxBR0 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 38-5. UCBxBR0 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefined Bit clock prescaler low byte. The 16-bit value of (UCxxBR0 + UCxxBR1 × 256)
forms the prescaler value UCBRx.
38.4.4 UCBxBR1 Register
USCI_Bx Baud Rate Control Register 1
Figure 38-20. UCBxBR1 Register
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 38-6. UCBxBR1 Register Description
Bit Field Type Reset Description
7-0 UCBRx RW undefined Bit clock prescaler high byte. The 16-bit value of (UCxxBR0 + UCxxBR1 × 256)
forms the prescaler value UCBRx.
1019
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B I2C Mode Registers
www.ti.com
38.4.5 UCBxSTAT Register
USCI_Bx Status Register
Figure 38-21. UCBxSTAT Register
76543210
Reserved UCSCLLOW UCGC UCBBUSY Reserved
rw-0 r-0 rw-0 r-0 r0 r0 r0 r0
Table 38-7. UCBxSTAT Register Description
Bit Field Type Reset Description
7 Reserved RW 0h Reserved. Always reads as 0.
6 UCSCLLOW R 0h SCL low
0b = SCL is not held low.
1b = SCL is held low.
5 UCGC RW 0h General call address received. UCGC is automatically cleared when a START
condition is received.
0b = No general call address received
1b = General call address received
4 UCBBUSY R 0h Bus busy
0b = Bus inactive
1b = Bus busy
3-0 Reserved R 0h Reserved. Always reads as 0.
1020 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B I2C Mode Registers
38.4.6 UCBxRXBUF Register
USCI_Bx Receive Buffer Register
Figure 38-22. UCBxRXBUF Register
76543210
UCRXBUFx
rrrrrrrr
Table 38-8. UCBxRXBUF Register Description
Bit Field Type Reset Description
7-0 UCRXBUFx R undefined The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCBxRXBUF resets
UCRXIFG.
38.4.7 UCBxTXBUF Register
USCI_Bx Transmit Buffer Register
Figure 38-23. UCBxTXBUF Register
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 38-9. UCBxTXBUF Register Description
Bit Field Type Reset Description
7-0 UCTXBUFx RW undefined The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit
data buffer clears UCTXIFG.
1021
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USCI_B I2C Mode Registers
www.ti.com
38.4.8 UCBxI2COA Register
USCIBx I2C Own Address Register
Figure 38-24. UCBxI2COA Register
15 14 13 12 11 10 9 8
UCGCEN Reserved I2COAx
rw-0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
I2COAx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 38-10. UCBxI2COA Register Description
Bit Field Type Reset Description
15 UCGCEN RW 0h General call response enable
0b = Do not respond to a general call
1b = Respond to a general call
14-10 Reserved R 0h Reserved. Always reads as 0.
9-0 I2COAx RW 0h I2C own address. The I2COAx bits contain the local address of the USCI_Bx I2C
controller. The address is right justified. In 7-bit addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit addressing mode, bit 9 is the MSB.
38.4.9 UCBxI2CSA Register
USCI_Bx I2C Slave Address Register
Figure 38-25. UCBxI2CSA Register
15 14 13 12 11 10 9 8
Reserved I2CSAx
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
I2CSAx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 38-11. UCBxI2CSA Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9-0 I2CSAx RW 0h I2C slave address. The I2CSAx bits contain the slave address of the external
device to be addressed by the USCI_Bx module. It is only used in master mode.
The address is right justified. In 7-bit slave addressing mode, bit 6 is the MSB
and bits 9-7 are ignored. In 10-bit slave addressing mode, bit 9 is the MSB.
1022 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B I2C Mode Registers
38.4.10 UCBxIE Register
USCI_Bx I2C Interrupt Enable Register
Figure 38-26. UCBxIE Register
76543210
Reserved UCNACKIE UCALIE UCSTPIE UCSTTIE UCTXIE UCRXIE
r-0 r-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 38-12. UCBxIE Register Description
Bit Field Type Reset Description
7-6 Reserved R 0h Reserved. Always reads as 0.
5 UCNACKIE RW 0h Not-acknowledge interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
4 UCALIE RW 0h Arbitration lost interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
3 UCSTPIE RW 0h STOP condition interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
2 UCSTTIE RW 0h START condition interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1023
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USCI_B I2C Mode Registers
www.ti.com
38.4.11 UCBxIFG Register
USCI_Bx I2C Interrupt Flag Register
Figure 38-27. UCBxIFG Register
76543210
Reserved UCNACKIFG UCALIFG UCSTPIFG UCSTTIFG UCTXIFG UCRXIFG
r-0 r-0 rw-0 rw-0 rw-0 rw-0 rw-1 rw-0
Table 38-13. UCBxIFG Register Description
Bit Field Type Reset Description
7-6 Reserved R 0h Reserved. Always reads as 0.
5 UCNACKIFG RW 0h Not-acknowledge received interrupt flag. UCNACKIFG is automatically cleared
when a START condition is received.
0b = No interrupt pending
1b = Interrupt pending
4 UCALIFG RW 0h Arbitration lost interrupt flag
0b = No interrupt pending
1b = Interrupt pending
3 UCSTPIFG RW 0h STOP condition interrupt flag. UCSTPIFG is automatically cleared when a
START condition is received.
0b = No interrupt pending
1b = Interrupt pending
2 UCSTTIFG RW 0h START condition interrupt flag. UCSTTIFG is automatically cleared if a STOP
condition is received.
0b = No interrupt pending
1b = Interrupt pending
1 UCTXIFG RW 0h USCI transmit interrupt flag. UCTXIFG is set when UCBxTXBUF is empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h USCI receive interrupt flag. UCRXIFG is set when UCBxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
1024 SLAU208O–June 2008–Revised May 2015
Universal Serial Communication Interface – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USCI_B I2C Mode Registers
38.4.12 UCBxIV Register
USCI_Bx Interrupt Vector Register
Figure 38-28. UCBxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r0 r-0 r-0 r-0 r0
Table 38-14. UCBxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h USCI interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Arbitration lost; Interrupt Flag: UCALIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Not acknowledgment; Interrupt Flag: UCNACKIFG
06h = Interrupt Source: Start condition received; Interrupt Flag: UCSTTIFG
08h = Interrupt Source: Stop condition received; Interrupt Flag: UCSTPIFG
0Ah = Interrupt Source: Data received; Interrupt Flag: UCRXIFG
0Ch = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
1025
SLAU208O–June 2008–Revised May 2015 Universal Serial Communication Interface – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 39
SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface
(eUSCI) – UART Mode
The enhanced universal serial communication interface A (eUSCI_A) supports multiple serial
communication modes with one hardware module. This chapter discusses the operation of the
asynchronous UART mode.
Topic ........................................................................................................................... Page
39.1 Enhanced Universal Serial Communication Interface A (eUSCI_A) Overview ........ 1027
39.2 eUSCI_A Introduction – UART Mode ................................................................. 1027
39.3 eUSCI_A Operation – UART Mode..................................................................... 1029
39.4 eUSCI_A UART Registers ................................................................................ 1045
1026 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Enhanced Universal Serial Communication Interface A (eUSCI_A) Overview
39.1 Enhanced Universal Serial Communication Interface A (eUSCI_A) Overview
The eUSCI_A module supports two serial communication modes:
• UART mode
• SPI mode
39.2 eUSCI_A Introduction – UART Mode
In asynchronous mode, the eUSCI_Ax modules connect the device to an external system via two external
pins, UCAxRXD and UCAxTXD. UART mode is selected when the UCSYNC bit is cleared.
UART mode features include:
• 7-bit or 8-bit data with odd, even, or non-parity
• Independent transmit and receive shift registers
• Separate transmit and receive buffer registers
• LSB-first or MSB-first data transmit and receive
• Built-in idle-line and address-bit communication protocols for multiprocessor systems
• Receiver start-edge detection for auto wake up from LPMx modes (wake up from LPMx.5 is not
supported)
• Programmable baud rate with modulation for fractional baud-rate support
• Status flags for error detection and suppression
• Status flags for address detection
• Independent interrupt capability for receive, transmit, start bit received, and transmit complete
Figure 39-1 shows the eUSCI_Ax when configured for UART mode.
1027
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
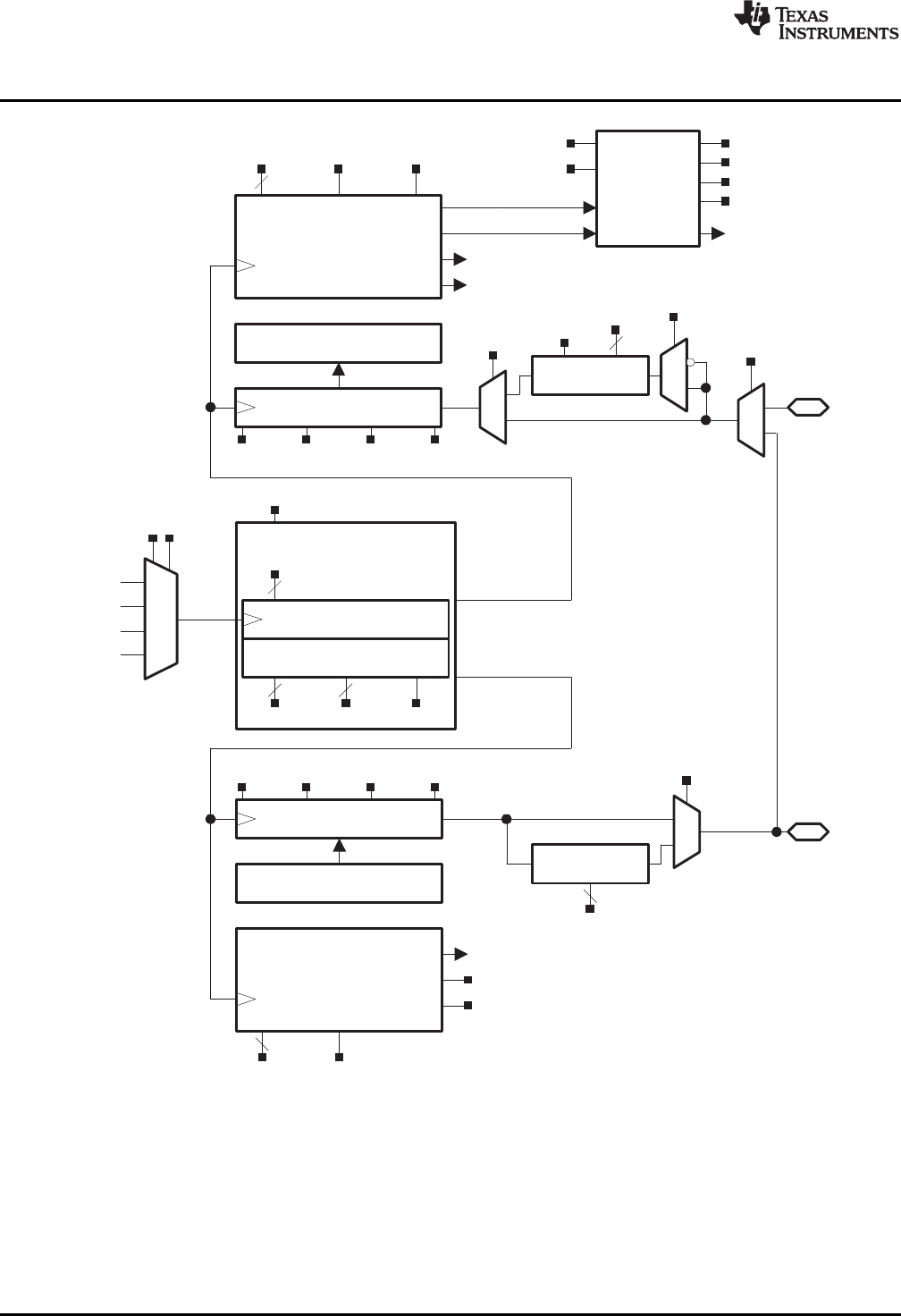
Modulator
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
UC0CLK
Prescaler/Divider
ReceiveBaudrateGenerator
UC0BRx
16
UCBRFx
4
UCBRSx
8
UCOS16
UCRXERR
ErrorFlags
SetFlags
UCPE
UCFE
UCOE
UCABEN
ReceiveShiftRegister
ReceiveBufferUCAxRXBUF
ReceiveStateMachine
1
0
UCIREN
UCPEN UCPAR UCMSB UC7BIT
UCDORMUCMODEx
2
UCSPB
SetUCBRK
SetUCADDR /UCIDLE
0
1
UCLISTEN
UCAxRXD
1
0
UCIRRXPL
IrDA Decoder
UCIRRXFE
UCIRRXFLx
6
TransmitBufferUCAxTXBUF
TransmitStateMachine
UCTXADDR
UCTXBRK
TransmitShiftRegister
UCPEN UCPAR UCMSB UC7BIT UCIREN
UCIRTXPLx
6
0
1
IrDA Encoder UCAxTXD
TransmitClock
ReceiveClock
BRCLK
UCMODEx
2
UCSPB
UCRXEIE
UCRXBRKIE
SetUCRXIFG
SetUCTXIFG
SetRXIFG
eUSCI_A Introduction – UART Mode
www.ti.com
Figure 39-1. eUSCI_Ax Block Diagram – UART Mode (UCSYNC = 0)
1028 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
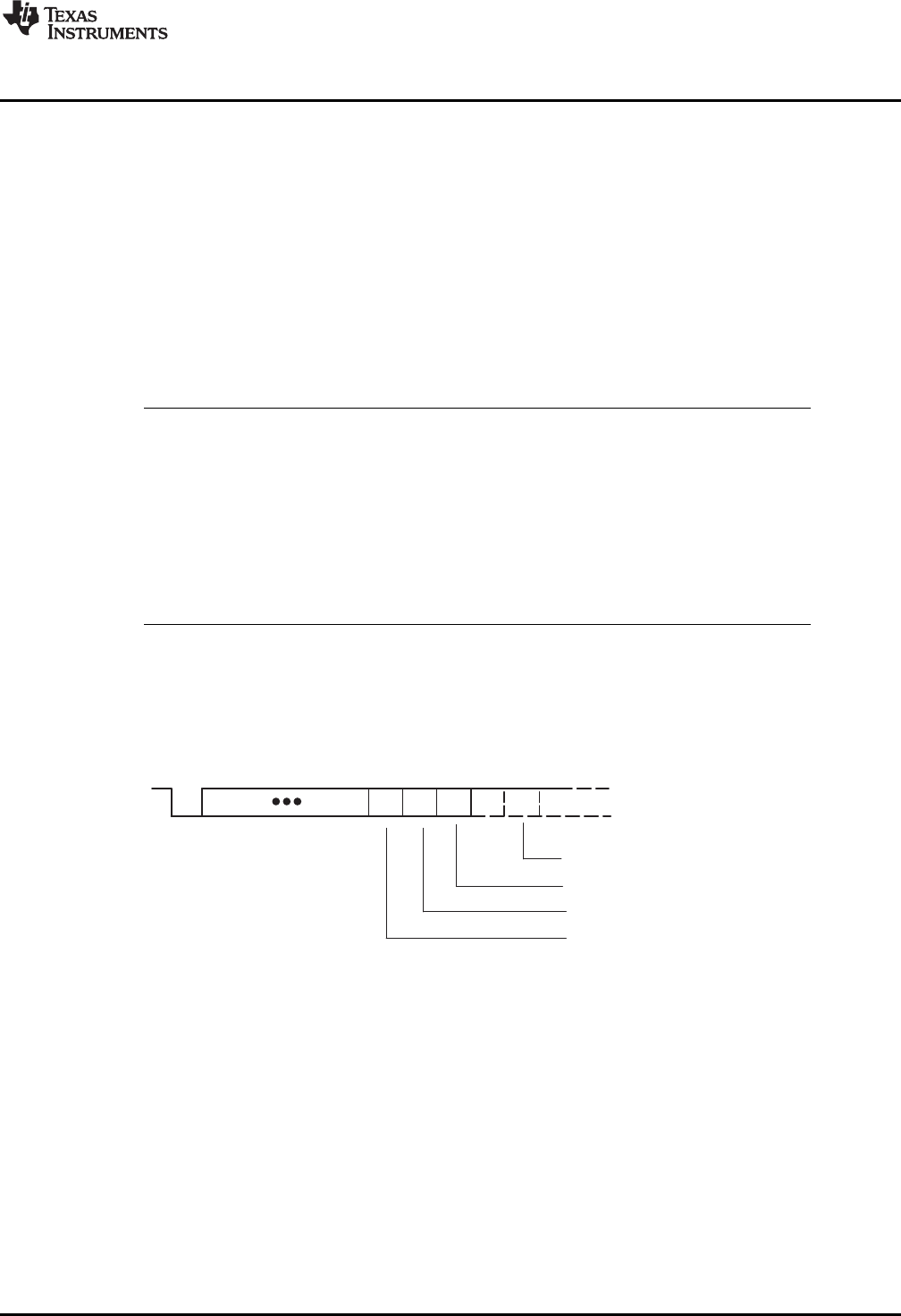
[Parity Bit, UCPEN = 1]
[Address Bit, UCMODEx = 10]
Mark
Space
D0 D6 D7 AD PA SP SP
[Optional Bit, Condition]
[2nd Stop Bit, UCSPB = 1]
[8th Data Bit, UC7BIT = 0]
ST
www.ti.com
eUSCI_A Operation – UART Mode
39.3 eUSCI_A Operation – UART Mode
In UART mode, the eUSCI_A transmits and receives characters at a bit rate asynchronous to another
device. Timing for each character is based on the selected baud rate of the eUSCI_A. The transmit and
receive functions use the same baud-rate frequency.
39.3.1 eUSCI_A Initialization and Reset
The eUSCI_A is reset by a PUC or by setting the UCSWRST bit. After a PUC, the UCSWRST bit is
automatically set, keeping the eUSCI_A in a reset condition. When set, the UCSWRST bit sets the
UCTXIFG bit and resets the UCRXIE, UCTXIE, UCRXIFG, UCRXERR, UCBRK, UCPE, UCOE, UCFE,
UCSTOE, and UCBTOE bits. Clearing UCSWRST releases the eUSCI_A for operation.
Configuring and reconfiguring the eUSCI_A module should be done when UCSWRST is set to avoid
unpredictable behavior.
NOTE: Initializing or reconfiguring the eUSCI_A module
The recommended eUSCI_A initialization/reconfiguration process is:
1. Set UCSWRST (BIS.B
#UCSWRST,&UCAxCTL1).
2. Initialize all eUSCI_A registers with UCSWRST = 1 (including UCAxCTL1).
3. Configure ports.
4. Clear UCSWRST via software (BIC.B
#UCSWRST,&UCAxCTL1).
5. Enable interrupts (optional) via UCRXIE or UCTXIE.
39.3.2 Character Format
The UART character format (see Figure 39-2) consists of a start bit, seven or eight data bits, an
even/odd/no parity bit, an address bit (address-bit mode), and one or two stop bits. The UCMSB bit
controls the direction of the transfer and selects LSB or MSB first. LSB first is typically required for UART
communication.
Figure 39-2. Character Format
39.3.3 Asynchronous Communication Format
When two devices communicate asynchronously, no multiprocessor format is required for the protocol.
When three or more devices communicate, the eUSCI_A supports the idle-line and address-bit
multiprocessor communication formats.
39.3.3.1 Idle-Line Multiprocessor Format
When UCMODEx = 01, the idle-line multiprocessor format is selected. Blocks of data are separated by an
idle time on the transmit or receive lines (see Figure 39-3). An idle receive line is detected when ten or
more continuous ones (marks) are received after the one or two stop bits of a character. The baud-rate
generator is switched off after reception of an idle line until the next start edge is detected. When an idle
line is detected, the UCIDLE bit is set.
1029
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

eUSCI_A Operation – UART Mode
www.ti.com
The first character received after an idle period is an address character. The UCIDLE bit is used as an
address tag for each block of characters. In idle-line multiprocessor format, this bit is set when a received
character is an address.
Figure 39-3. Idle-Line Format
The UCDORM bit is used to control data reception in the idle-line multiprocessor format. When UCDORM
= 1, all non-address characters are assembled but not transferred into the UCAxRXBUF, and interrupts
are not generated. When an address character is received, the character is transferred into UCAxRXBUF,
UCRXIFG is set, and any applicable error flag is set when UCRXEIE = 1. When UCRXEIE = 0 and an
address character is received but has a framing error or parity error, the character is not transferred into
UCAxRXBUF and UCRXIFG is not set.
If an address is received, user software can validate the address and must reset UCDORM to continue
receiving data. If UCDORM remains set, only address characters are received. When UCDORM is cleared
during the reception of a character, the receive interrupt flag is set after the reception completed. The
UCDORM bit is not modified automatically by the eUSCI_A hardware.
For address transmission in idle-line multiprocessor format, a precise idle period can be generated by the
eUSCI_A to generate address character identifiers on UCAxTXD. The double-buffered UCTXADDR flag
indicates if the next character loaded into UCAxTXBUF is preceded by an idle line of 11 bits. UCTXADDR
is automatically cleared when the start bit is generated.
39.3.3.1.1 Transmitting an Idle Frame
The following procedure sends out an idle frame to indicate an address character followed by associated
data:
1. Set UCTXADDR, then write the address character to UCAxTXBUF. UCAxTXBUF must be ready for
new data (UCTXIFG = 1).
This generates an idle period of exactly 11 bits followed by the address character. UCTXADDR is reset
automatically when the address character is transferred from UCAxTXBUF into the shift register.
2. Write desired data characters to UCAxTXBUF. UCAxTXBUF must be ready for new data
(UCTXIFG = 1).
The data written to UCAxTXBUF is transferred to the shift register and transmitted as soon as the shift
register is ready for new data.
The idle-line time must not be exceeded between address and data transmission or between data
transmissions. Otherwise, the transmitted data is misinterpreted as an address.
1030 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
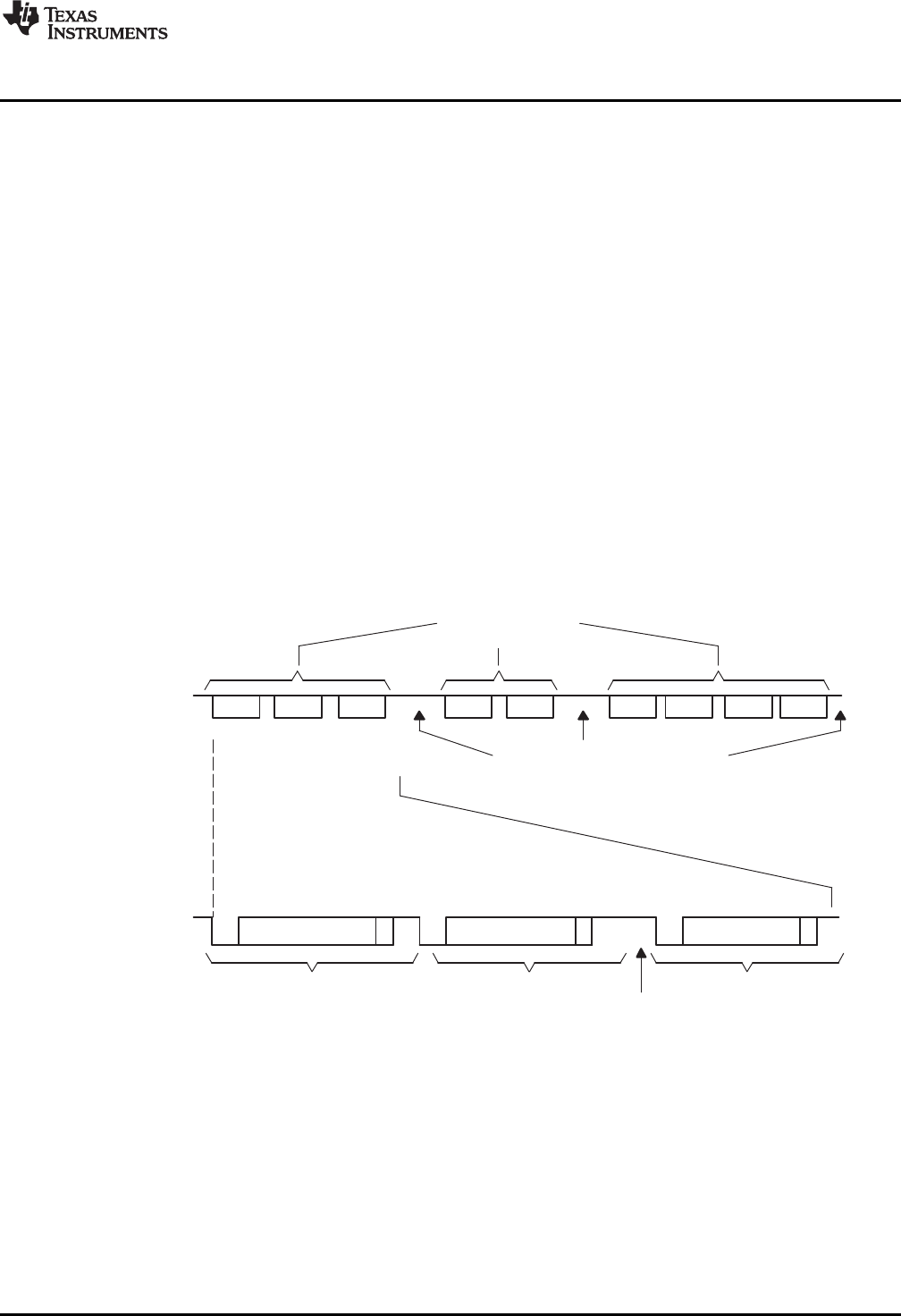
ST Address SP ST Data SP ST Data SP
Blocks of
Characters
Idle Periods of No Significance
UCAxTXD/UCAxRXD
Expanded
UCAxTXD/UCAxRXD
First Character Within Block
Is an Address. AD Bit Is 1
AD Bit Is 0 for
Data Within Block. Idle Time Is of No Significance
UCAxTXD/UCAxRXD 1 0 0
www.ti.com
eUSCI_A Operation – UART Mode
39.3.3.2 Address-Bit Multiprocessor Format
When UCMODEx = 10, the address-bit multiprocessor format is selected. Each processed character
contains an extra bit used as an address indicator (see Figure 39-4). The first character in a block of
characters carries a set address bit that indicates that the character is an address. The eUSCI_A
UCADDR bit is set when a received character has its address bit set and is transferred to UCAxRXBUF.
The UCDORM bit is used to control data reception in the address-bit multiprocessor format. When
UCDORM is set, data characters with address bit = 0 are assembled by the receiver but are not
transferred to UCAxRXBUF and no interrupts are generated. When a character containing a set address
bit is received, the character is transferred into UCAxRXBUF, UCRXIFG is set, and any applicable error
flag is set when UCRXEIE = 1. When UCRXEIE = 0 and a character containing a set address bit is
received but has a framing error or parity error, the character is not transferred into UCAxRXBUF and
UCRXIFG is not set.
If an address is received, user software can validate the address and must reset UCDORM to continue
receiving data. If UCDORM remains set, only address characters with address bit = 1 are received. The
UCDORM bit is not modified by the eUSCI_A hardware automatically.
When UCDORM = 0, all received characters set the receive interrupt flag UCRXIFG. If UCDORM is
cleared during the reception of a character, the receive interrupt flag is set after the reception is
completed.
For address transmission in address-bit multiprocessor mode, the address bit of a character is controlled
by the UCTXADDR bit. The value of the UCTXADDR bit is loaded into the address bit of the character
transferred from UCAxTXBUF to the transmit shift register. UCTXADDR is automatically cleared when the
start bit is generated.
Figure 39-4. Address-Bit Multiprocessor Format
39.3.3.2.1 Break Reception and Generation
When UCMODEx = 00, 01, or 10, the receiver detects a break when all data, parity, and stop bits are low,
regardless of the parity, address mode, or other character settings. When a break is detected, the UCBRK
bit is set. If the break interrupt enable bit (UCBRKIE) is set, the receive interrupt flag UCRXIFG is also set.
In this case, the value in UCAxRXBUF is 0h, because all data bits were zero.
To transmit a break, set the UCTXBRK bit, then write 0h to UCAxTXBUF. UCAxTXBUF must be ready for
new data (UCTXIFG = 1). This generates a break with all bits low. UCTXBRK is automatically cleared
when the start bit is generated.
1031
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
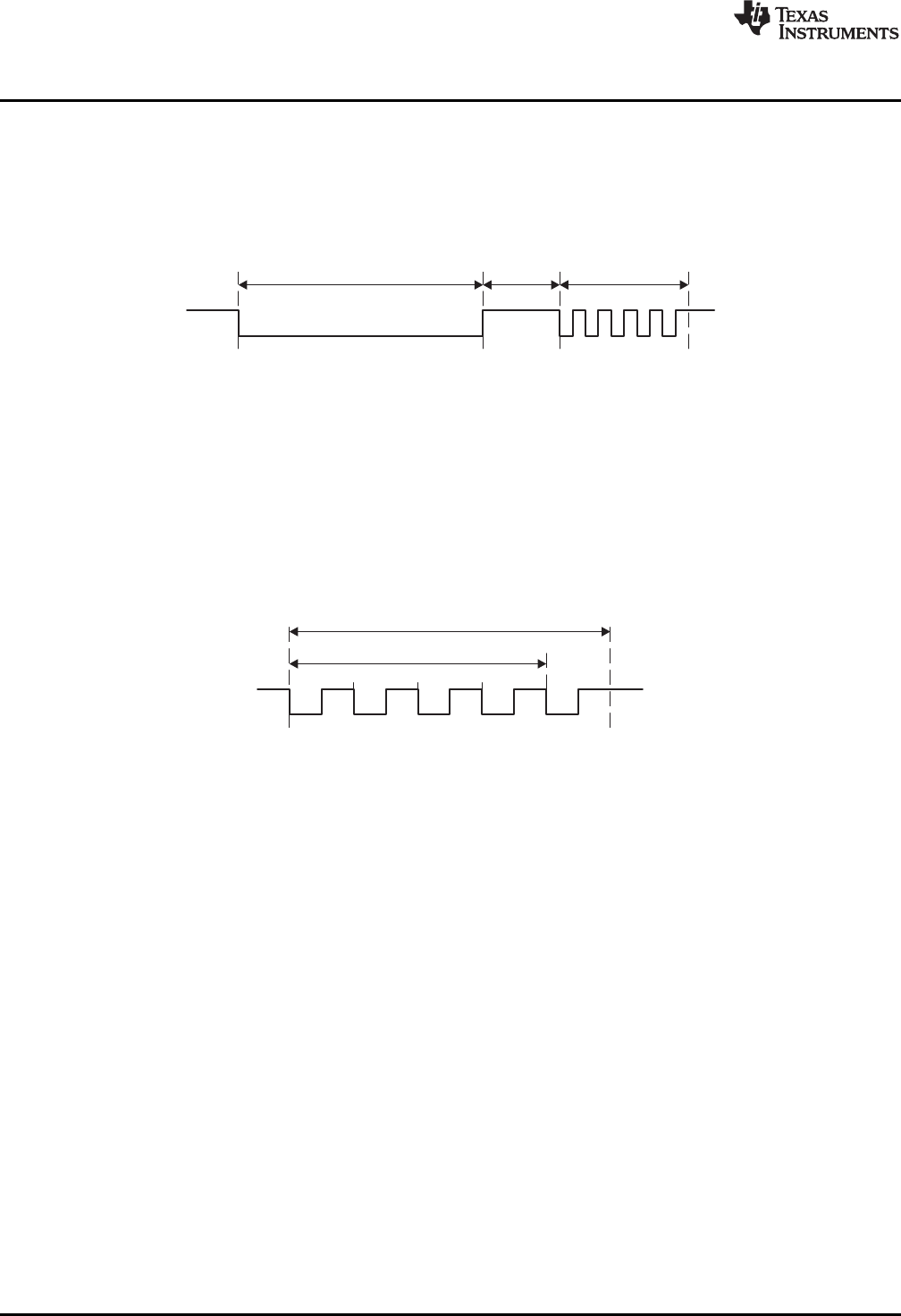
Synch
Start
Bit
Stop
Bit
01234567
8 Bit Times
Break Delimiter Synch
eUSCI_A Operation – UART Mode
www.ti.com
39.3.4 Automatic Baud-Rate Detection
When UCMODEx = 11, UART mode with automatic baud-rate detection is selected. For automatic baud-
rate detection, a data frame is preceded by a synchronization sequence that consists of a break and a
synch field. A break is detected when 11 or more continuous zeros (spaces) are received. If the length of
the break exceeds 21 bit times, the break timeout error flag UCBTOE is set. The eUSCI_A cannot transmit
data while receiving the break/sync field. The synch field follows the break as shown in Figure 39-5.
Figure 39-5. Auto Baud-Rate Detection – Break/Synch Sequence
For LIN conformance, the character format should be set to eight data bits, LSB first, no parity, and one
stop bit. No address bit is available.
The synch field consists of the data 055h inside a byte field (see Figure 39-6). The synchronization is
based on the time measurement between the first falling edge and the last falling edge of the pattern. The
transmit baud-rate generator is used for the measurement if automatic baud-rate detection is enabled by
setting UCABDEN. Otherwise, the pattern is received but not measured. The result of the measurement is
transferred into the baud-rate control registers (UCAxBRW and UCAxMCTLW). If the length of the synch
field exceeds the measurable time, the synch timeout error flag UCSTOE is set. The result can be read
after the receive interrupt flag UCRXIFG is set.
Figure 39-6. Auto Baud-Rate Detection – Synch Field
The UCDORM bit is used to control data reception in this mode. When UCDORM is set, all characters are
received but not transferred into the UCAxRXBUF, and interrupts are not generated. When a break/synch
field is detected, the UCBRK flag is set. The character following the break/synch field is transferred into
UCAxRXBUF and the UCRXIFG interrupt flag is set. Any applicable error flag is also set. If the UCBRKIE
bit is set, reception of the break/synch sets the UCRXIFG. The UCBRK bit is reset by user software or by
reading the receive buffer UCAxRXBUF.
When a break/synch field is received, user software must reset UCDORM to continue receiving data. If
UCDORM remains set, only the character after the next reception of a break/synch field is received. The
UCDORM bit is not modified by the eUSCI_A hardware automatically.
When UCDORM = 0, all received characters set the receive interrupt flag UCRXIFG. If UCDORM is
cleared during the reception of a character, the receive interrupt flag is set after the reception is complete.
The counter used to detect the baud rate is limited to 0FFFFh (216) counts. This means the minimum baud
rate detectable is 244 baud in oversampling mode and 15 baud in low-frequency mode. The highest
detectable baudrate is 1 Mbaud.
The automatic baud-rate detection mode can be used in a full-duplex communication system with some
restrictions. The eUSCI_A cannot transmit data while receiving the break/sync field and, if a 0h byte with
framing error is received, any data transmitted during this time is corrupted. The latter case can be
discovered by checking the received data and the UCFE bit.
1032 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
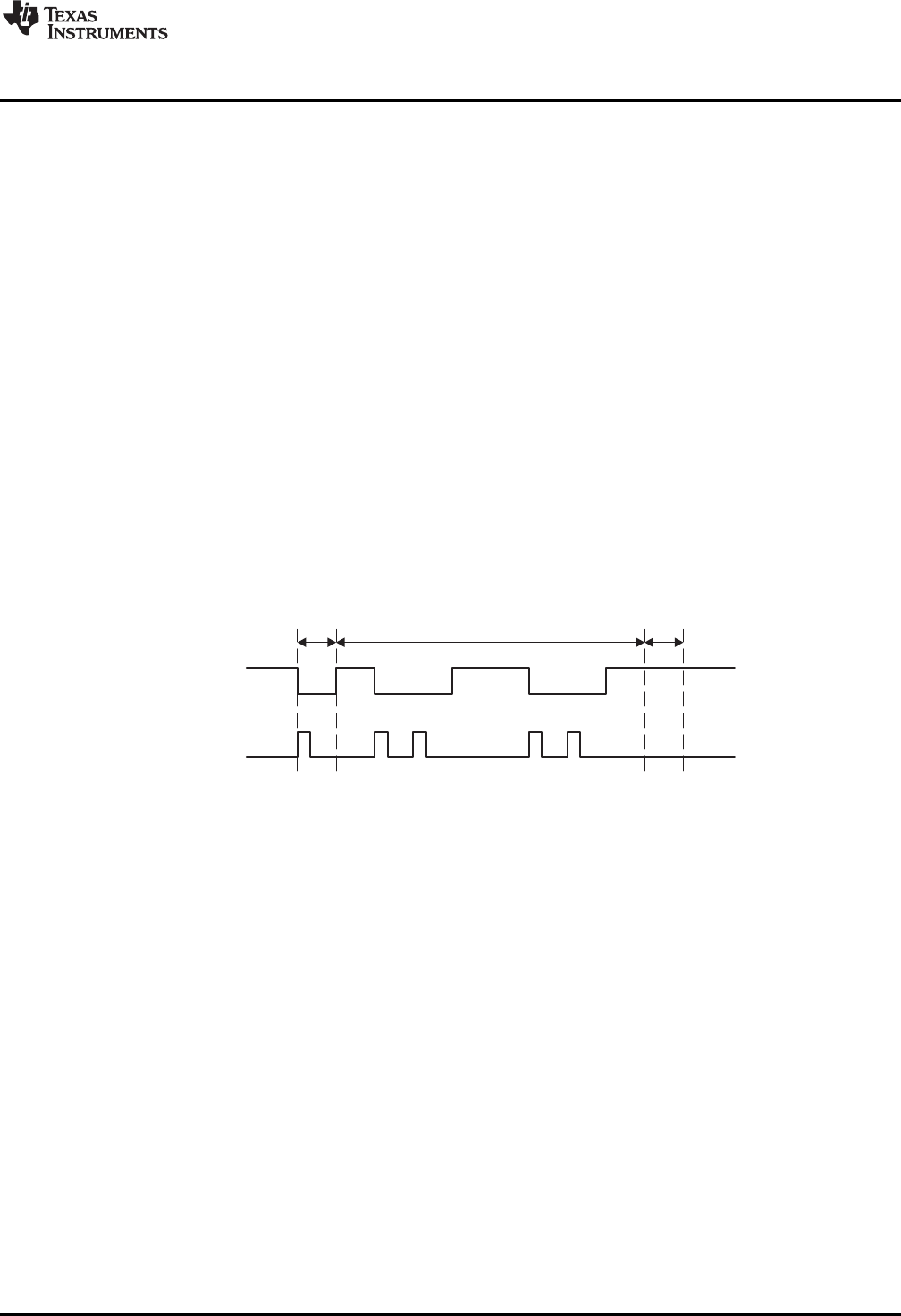
UART
Start
Bit Data Bits
Stop
Bit
IrDA
www.ti.com
eUSCI_A Operation – UART Mode
39.3.4.1 Transmitting a Break/Synch Field
The following procedure transmits a break/synch field:
1. Set UCTXBRK with UMODEx = 11.
2. Write 055h to UCAxTXBUF. UCAxTXBUF must be ready for new data (UCTXIFG = 1).
This generates a break field of 13 bits followed by a break delimiter and the synch character. The
length of the break delimiter is controlled with the UCDELIMx bits. UCTXBRK is reset automatically
when the synch character is transferred from UCAxTXBUF into the shift register.
3. Write desired data characters to UCAxTXBUF. UCAxTXBUF must be ready for new data (UCTXIFG =
1).
The data written to UCAxTXBUF is transferred to the shift register and transmitted as soon as the shift
register is ready for new data.
39.3.5 IrDA Encoding and Decoding
When UCIREN is set, the IrDA encoder and decoder are enabled and provide hardware bit shaping for
IrDA communication.
39.3.5.1 IrDA Encoding
The encoder sends a pulse for every zero bit in the transmit bitstream coming from the UART (see
Figure 39-7). The pulse duration is defined by UCIRTXPLx bits specifying the number of one-half clock
periods of the clock selected by UCIRTXCLK.
Figure 39-7. UART vs IrDA Data Format
To set the pulse time of 3/16 bit period required by the IrDA standard, the BITCLK16 clock is selected with
UCIRTXCLK = 1, and the pulse length is set to six one-half clock cycles with UCIRTXPLx = 6 – 1 = 5.
When UCIRTXCLK = 0, the pulse length tPULSE is based on BRCLK and is calculated as:
UCIRTXPLx = tPULSE × 2 × fBRCLK – 1
When UCIRTXCLK = 0, the prescaler UCBRx must be set to a value greater or equal to 5.
39.3.5.2 IrDA Decoding
The decoder detects high pulses when UCIRRXPL = 0. Otherwise, it detects low pulses. In addition to the
analog deglitch filter, an additional programmable digital filter stage can be enabled by setting UCIRRXFE.
When UCIRRXFE is set, only pulses longer than the programmed filter length are passed. Shorter pulses
are discarded. The equation to program the filter length UCIRRXFLx is:
UCIRRXFLx = (tPULSE −tWAKE) × 2 × fBRCLK – 4
Where:
tPULSE = Minimum receive pulse width
tWAKE = Wake time from any low-power mode. Zero when the device is in active mode.
1033
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
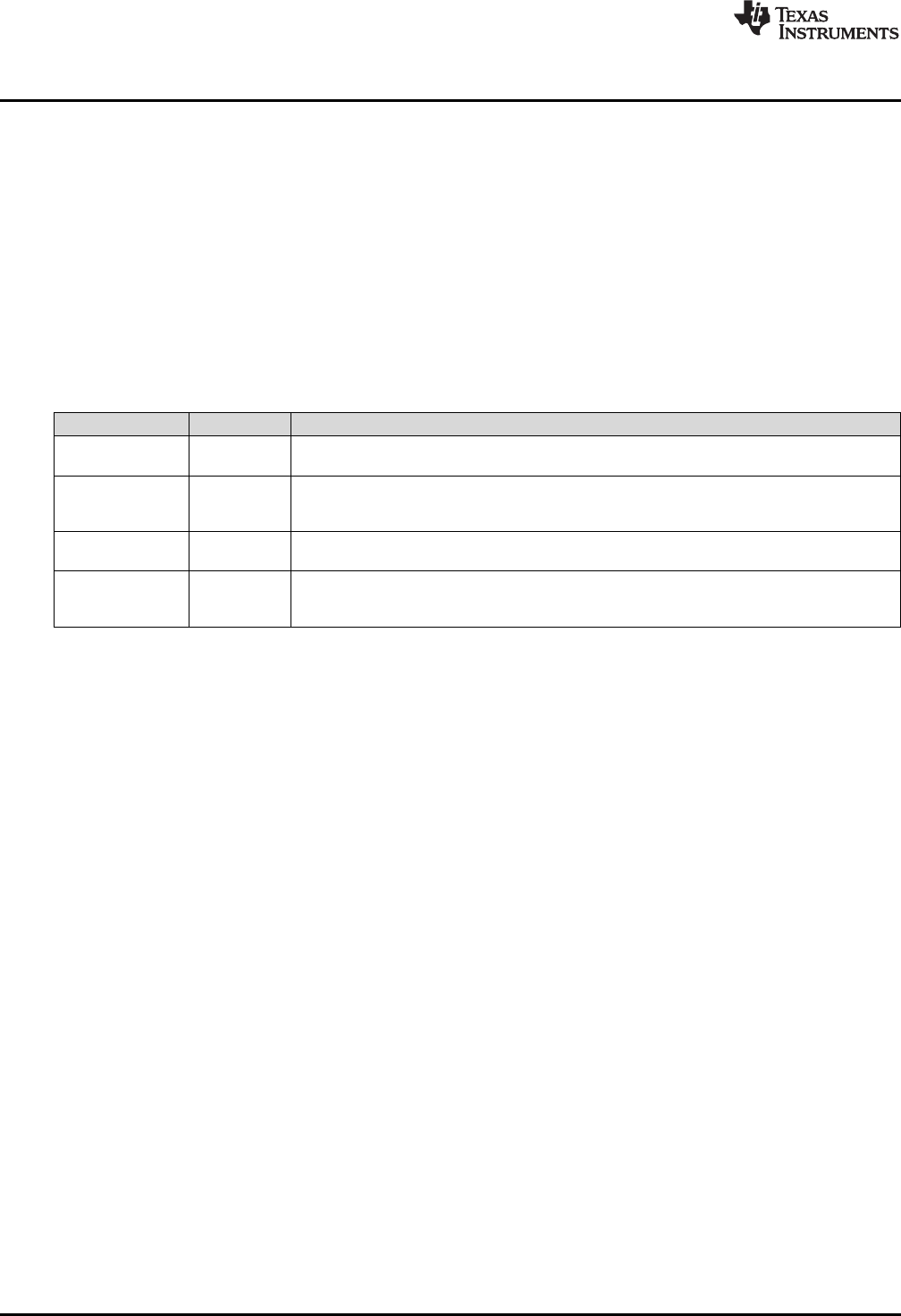
eUSCI_A Operation – UART Mode
www.ti.com
39.3.6 Automatic Error Detection
Glitch suppression prevents the eUSCI_A from being accidentally started. Any pulse on UCAxRXD shorter
than the deglitch time tt(selected by UCGLITx) is ignored (see the device-specific data sheet for
parameters).
When a low period on UCAxRXD exceeds tt, a majority vote is taken for the start bit. If the majority vote
fails to detect a valid start bit, the eUSCI_A halts character reception and waits for the next low period on
UCAxRXD. The majority vote is also used for each bit in a character to prevent bit errors.
The eUSCI_A module automatically detects framing errors, parity errors, overrun errors, and break
conditions when receiving characters. The bits UCFE, UCPE, UCOE, and UCBRK are set when their
respective condition is detected. When the error flags UCFE, UCPE, or UCOE are set, UCRXERR is also
set. The error conditions are described in Table 39-1.
Table 39-1. Receive Error Conditions
Error Condition Error Flag Description
A framing error occurs when a low stop bit is detected. When two stop bits are used, both
Framing error UCFE stop bits are checked for framing error. When a framing error is detected, the UCFE bit is set.
A parity error is a mismatch between the number of 1s in a character and the value of the
Parity error UCPE parity bit. When an address bit is included in the character, it is included in the parity
calculation. When a parity error is detected, the UCPE bit is set.
An overrun error occurs when a character is loaded into UCAxRXBUF before the prior
Receive overrun UCOE character has been read. When an overrun occurs, the UCOE bit is set.
When not using automatic baud-rate detection, a break is detected when all data, parity, and
Break condition UCBRK stop bits are low. When a break condition is detected, the UCBRK bit is set. A break condition
can also set the interrupt flag UCRXIFG if the break interrupt enable UCBRKIE bit is set.
When UCRXEIE = 0 and a framing error or parity error is detected, no character is received into
UCAxRXBUF. When UCRXEIE = 1, characters are received into UCAxRXBUF and any applicable error
bit is set.
When any of the UCFE, UCPE, UCOE, UCBRK, or UCRXERR bit is set, the bit remains set until user
software resets it or UCAxRXBUF is read. UCOE must be reset by reading UCAxRXBUF. Otherwise, it
does not function properly. To detect overflows reliably, the following flow is recommended. After a
character is received and UCAxRXIFG is set, first read UCAxSTATW to check the error flags including the
overflow flag UCOE. Read UCAxRXBUF next. This clears all error flags except UCOE, if UCAxRXBUF
was overwritten between the read access to UCAxSTATW and to UCAxRXBUF. Therefore, the UCOE flag
should be checked after reading UCAxRXBUF to detect this condition. Note that, in this case, the
UCRXERR flag is not set.
1034 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

URXS
MajorityVote Taken
tt
tt
UCAxRXD
URXS
www.ti.com
eUSCI_A Operation – UART Mode
39.3.7 eUSCI_A Receive Enable
The eUSCI_A module is enabled by clearing the UCSWRST bit and the receiver is ready and in an idle
state. The receive baud rate generator is in a ready state but is not clocked nor producing any clocks.
The falling edge of the start bit enables the baud rate generator and the UART state machine checks for a
valid start bit. If no valid start bit is detected the UART state machine returns to its idle state and the baud
rate generator is turned off again. If a valid start bit is detected, a character is received.
When the idle-line multiprocessor mode is selected with UCMODEx = 01, the UART state machine checks
for an idle line after receiving a character. If a start bit is detected, another character is received.
Otherwise, the UCIDLE flag is set after 10 ones are received, the UART state machine returns to its idle
state, and the baud rate generator is turned off.
39.3.7.1 Receive Data Glitch Suppression
Glitch suppression prevents the eUSCI_A from being accidentally started. Any glitch on UCAxRXD shorter
than the deglitch time ttis ignored by the eUSCI_A, and further action is initiated as shown in Figure 39-8
(see the device-specific data sheet for parameters). The deglitch time ttcan be set to four different values
using the UCGLITx bits.
Figure 39-8. Glitch Suppression, eUSCI_A Receive Not Started
When a glitch is longer than tt, or a valid start bit occurs on UCAxRXD, the eUSCI_A receive operation is
started and a majority vote is taken (see Figure 39-9). If the majority vote fails to detect a start bit, the
eUSCI_A halts character reception.
Figure 39-9. Glitch Suppression, eUSCI_A Activated
39.3.8 eUSCI_A Transmit Enable
The eUSCI_A module is enabled by clearing the UCSWRST bit and the transmitter is ready and in an idle
state. The transmit baud-rate generator is ready but is not clocked nor producing any clocks.
A transmission is initiated by writing data to UCAxTXBUF. When this occurs, the baud-rate generator is
enabled, and the data in UCAxTXBUF is moved to the transmit shift register on the next BITCLK after the
transmit shift register is empty. UCTXIFG is set when new data can be written into UCAxTXBUF.
Transmission continues as long as new data is available in UCAxTXBUF at the end of the previous byte
transmission. If new data is not in UCAxTXBUF when the previous byte has transmitted, the transmitter
returns to its idle state and the baud-rate generator is turned off.
1035
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
N/2
Bit Start
BRCLK
Counter
BITCLK
N/2-1 N/2-2 1 N/2 N/2-1 1 N/2 N/2-1
N/2-2
0 N/2 N/2-11
INT(N/2) + m(= 0)
INT(N/2) + m(= 1)
1 0 N/2
Bit Period
NEVEN: INT(N/2)
NODD: INT(N/2) + R(= 1)
m: corresponding modulation bit
R: Remainder from N/2 division
Majority Vote: (m= 0)
(m= 1)
eUSCI_A Operation – UART Mode
www.ti.com
39.3.9 UART Baud-Rate Generation
The eUSCI_A baud-rate generator is capable of producing standard baud rates from nonstandard source
frequencies. It provides two modes of operation selected by the UCOS16 bit.
A quick setup for finding the correct baudrate settings for the eUSCI_A can be found in Section 39.3.10.
39.3.9.1 Low-Frequency Baud-Rate Generation
The low-frequency mode is selected when UCOS16 = 0. This mode allows generation of baud rates from
low-frequency clock sources (for example, 9600 baud from a 32768-Hz crystal). By using a lower input
frequency, the power consumption of the module is reduced. Using this mode with higher frequencies and
higher prescaler settings causes the majority votes to be taken in an increasingly smaller window and,
thus, decrease the benefit of the majority vote.
In low-frequency mode, the baud-rate generator uses one prescaler and one modulator to generate bit
clock timing. This combination supports fractional divisors for baud-rate generation. In this mode, the
maximum eUSCI_A baud rate is one-third the UART source clock frequency BRCLK.
Timing for each bit is shown in Figure 39-10. For each bit received, a majority vote is taken to determine
the bit value. These samples occur at the N/2 – 1/2, N/2, and N/2 + 1/2 BRCLK periods, where N is the
number of BRCLKs per BITCLK.
Figure 39-10. BITCLK Baud-Rate Timing With UCOS16 = 0
Modulation is based on the UCBRSx setting as shown in Table 39-2. A 1 in the table indicates that m = 1
and the corresponding BITCLK period is one BRCLK period longer than a BITCLK period with m = 0. The
modulation wraps around after 8 bits but restarts with each new start bit.
Table 39-2. Modulation Pattern Examples
Bit 0
UCBRSx Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
(Start Bit)
0x00 0 0 0 0 0 0 0 0
0x01 0 0 0 0 0 0 0 1
⋮
0x35 0 0 1 1 0 1 0 1
0x36 0 0 1 1 0 1 1 0
0x37 0 0 1 1 0 1 1 1
⋮
0xff 1 1 1 1 1 1 1 1
The correct setting of UCBRSx can be found as described in Section 39.3.10.
1036 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
eUSCI_A Operation – UART Mode
39.3.9.2 Oversampling Baud-Rate Generation
The oversampling mode is selected when UCOS16 = 1. This mode supports sampling a UART bitstream
with higher input clock frequencies. This results in majority votes that are always 1/16 of a bit clock period
apart. This mode also easily supports IrDA pulses with a 3/16 bit time when the IrDA encoder and decoder
are enabled.
This mode uses one prescaler and one modulator to generate the BITCLK16 clock that is 16 times faster
than the BITCLK. An additional divider by 16 and modulator stage generates BITCLK from BITCLK16.
This combination supports fractional divisions of both BITCLK16 and BITCLK for baud-rate generation. In
this mode, the maximum eUSCI_A baud rate is 1/16 the UART source clock frequency BRCLK.
Modulation for BITCLK16 is based on the UCBRFx setting (see Table 39-3). A 1 in the table indicates that
the corresponding BITCLK16 period is one BRCLK period longer than the periods m = 0. The modulation
restarts with each new bit timing.
Modulation for BITCLK is based on the UCBRSx setting as previously described.
Table 39-3. BITCLK16 Modulation Pattern
Number of BITCLK16 Clocks After Last Falling BITCLK Edge
UCBRFx 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
00h 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
01h 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
02h 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1
03h 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1
04h 0 1 1 0 0 0 0 0 0 0 0 0 0 0 1 1
05h 0 1 1 1 0 0 0 0 0 0 0 0 0 0 1 1
06h 0 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1
07h 0 1 1 1 1 0 0 0 0 0 0 0 0 1 1 1
08h 0 1 1 1 1 0 0 0 0 0 0 0 1 1 1 1
09h 0 1 1 1 1 1 0 0 0 0 0 0 1 1 1 1
0Ah 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1
0Bh 0 1 1 1 1 1 1 0 0 0 0 1 1 1 1 1
0Ch 0 1 1 1 1 1 1 0 0 0 1 1 1 1 1 1
0Dh 0 1 1 1 1 1 1 1 0 0 1 1 1 1 1 1
0Eh 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1
0Fh 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1037
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A Operation – UART Mode
www.ti.com
39.3.10 Setting a Baud Rate
For a given BRCLK clock source, the baud rate used determines the required division factor N:
N=fBRCLK/Baudrate
The division factor N is often a noninteger value, thus, at least one divider and one modulator stage is
used to meet the factor as closely as possible.
If N is equal or greater than 16, it is recommended to use the oversampling baud-rate generation mode by
setting UCOS16.
NOTE: Baudrate settings quick set up
To calculate the correct the correct settings for the baudrate generation, perform these steps:
1. Calculate N = fBRCLK/Baudrate [if N > 16 continue with step 3, otherwise with step 2]
2. OS16 = 0, UCBRx = INT(N) [continue with step 4]
3. OS16 = 1, UCBRx = INT(N/16), UCBRFx = INT([(N/16) – INT(N/16)] × 16)
4. UCBRSx can be found by looking up the fractional part of N ( = N - INT(N) ) in table
Table 39-4
5. If OS16 = 0 was chosen, a detailed error calculation is recommended to be performed
Table 39-4 can be used as a lookup table for finding the correct UCBRSx modulation pattern for the
corresponding fractional part of N. The values there are optimized for transmitting.
Table 39-4. UCBRSx Settings for Fractional Portion of N = fBRCLK/Baudrate
Fractional Portion of N UCBRSx(1) Fractional Portion of N UCBRSx(1)
0.0000 0x00 0.5002 0xAA
0.0529 0x01 0.5715 0x6B
0.0715 0x02 0.6003 0xAD
0.0835 0x04 0.6254 0xB5
0.1001 0x08 0.6432 0xB6
0.1252 0x10 0.6667 0xD6
0.1430 0x20 0.7001 0xB7
0.1670 0x11 0.7147 0xBB
0.2147 0x21 0.7503 0xDD
0.2224 0x22 0.7861 0xED
0.2503 0x44 0.8004 0xEE
0.3000 0x25 0.8333 0xBF
0.3335 0x49 0.8464 0xDF
0.3575 0x4A 0.8572 0xEF
0.3753 0x52 0.8751 0xF7
0.4003 0x92 0.9004 0xFB
0.4286 0x53 0.9170 0xFD
0.4378 0x55 0.9288 0xFE
(1) The UCBRSx setting in one row is valid from the fractional portion given in that row until the one in the next row
39.3.10.1 Low-Frequency Baud-Rate Mode Setting
In low-frequency mode, the integer portion of the divisor is realized by the prescaler:
UCBRx = INT(N)
The fractional portion is realized by the modulator with its UCBRSx setting. The recommended way of
determining the correct UCBRSx is performing a detailed error calculation as explained in the following
sections. However it is also possible to look up the correct settings in table with typical crystals (see
Table 39-5).
1038 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Tbit,TX[j]
i
j = 0
S
Tbit,TX[i] =
mUCBR xF [j]
15
j= 0
T [i]=
bit,TX
1
fBRCLK
(
(
(16*UCBRx)+
15
j= 0
m [j]+m [i]
UCBRFx UCBRSx
www.ti.com
eUSCI_A Operation – UART Mode
39.3.10.2 Oversampling Baud-Rate Mode Setting
In the oversampling mode, the prescaler is set to:
UCBRx = INT(N/16)
and the first stage modulator is set to:
UCBRFx = INT([(N/16) – INT(N/16)] × 16)
The second modulation stage setting (UCBRSx) can be found by performing a detailed error calculation or
by using Table 39-4 and the fractional part of N = fBRCLK/Baudrate.
39.3.11 Transmit Bit Timing - Error calculation
The timing for each character is the sum of the individual bit timings. Using the modulation features of the
baud-rate generator reduces the cumulative bit error. The individual bit error can be calculated using the
following steps.
39.3.11.1 Low-Frequency Baud-Rate Mode Bit Timing
In low-frequency mode, calculation of the length of bit i Tbit,TX[i] is based on the UCBRx and UCBRSx
settings:
Tbit,TX[i] = (1/fBRCLK)(UCBRx + mUCBRSx[i])
Where:
mUCBRSx[i] = Modulation of bit i of UCBRSx
39.3.11.2 Oversampling Baud-Rate Mode Bit Timing
In oversampling baud-rate mode, calculation of the length of bit i Tbit,TX[i] is based on the baud-rate
generator UCBRx, UCBRFx and UCBRSx settings:
Where:
≤= Sum of ones from the corresponding row in Table 39-3
mUCBRSx[i] = Modulation of bit i of UCBRSx
This results in an end-of-bit time tbit,TX[i] equal to the sum of all previous and the current bit times:
To calculate bit error, this time is compared to the ideal bit time tbit,ideal,TX[i]:
tbit,ideal,TX[i] = (1/Baudrate)(i + 1)
This results in an error normalized to one ideal bit time (1/baudrate):
ErrorTX[i] = (tbit,TX[i] – tbit,ideal,TX[i]) × Baudrate × 100%
39.3.12 Receive Bit Timing – Error Calculation
Receive timing error consists of two error sources. The first is the bit-to-bit timing error similar to the
transmit bit timing error. The second is the error between a start edge occurring and the start edge being
accepted by the eUSCI_A module. Figure 39-11 shows the asynchronous timing errors between data on
the UCAxRXD pin and the internal baud-rate clock. This results in an additional synchronization error. The
synchronization error tSYNC is between –0.5 BRCLKs and +0.5 RCLKs, independent of the selected baud-
rate generation mode.
1039
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
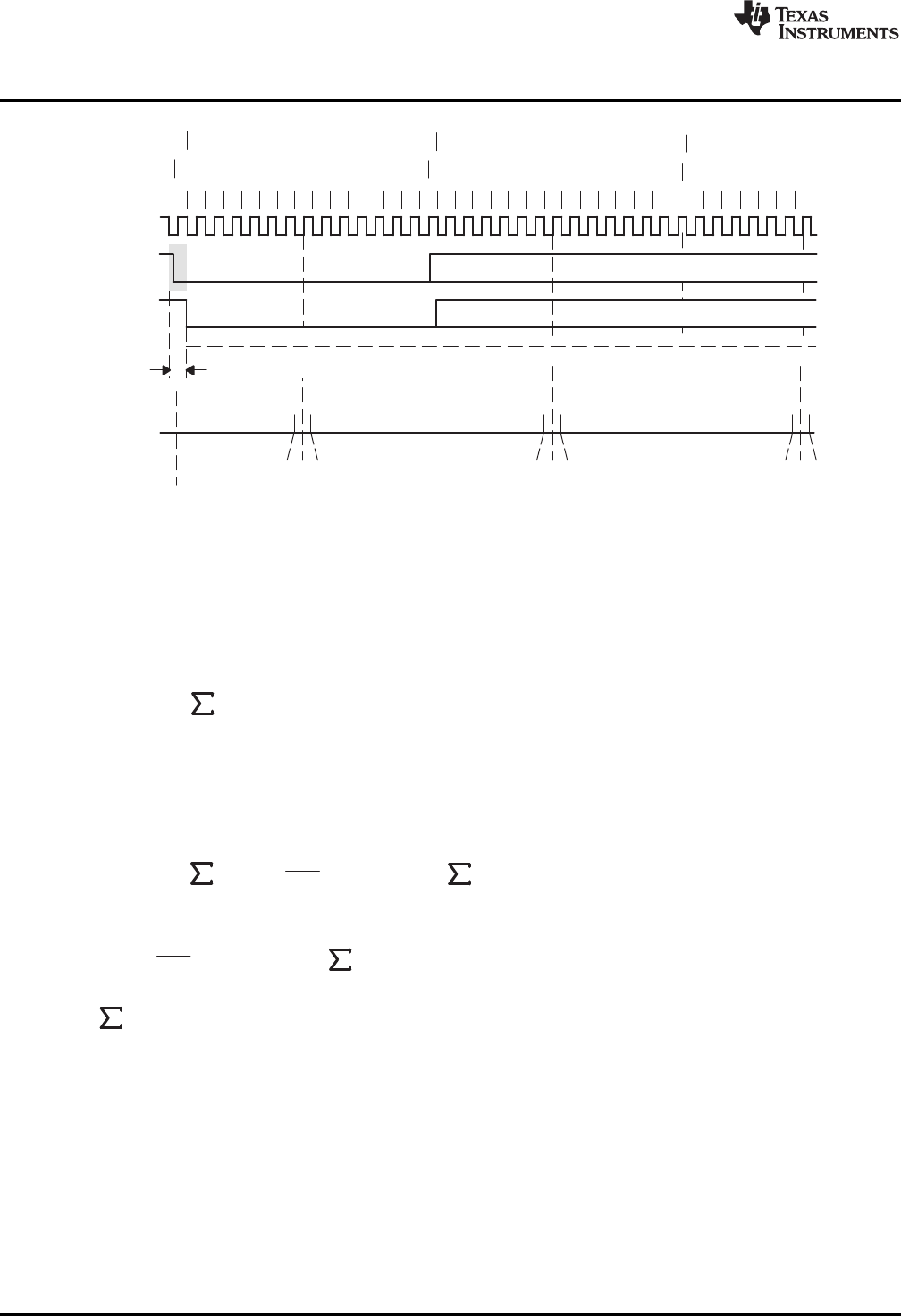
m [j]
UCBRFx
7+ m [i]
UCBRSx
j= 0
T [i]=
bit,RX
1
fBRCLK
(
(
(16*UCBRx)+
15
j= 0
m [j]+m [i]
UCBRFx UCBRSx
t [i]=t +
bit,RX SYNC (8* UCBRx)+
T [j]+
bit,RX
i – 1
j= 0
1
fBRCLK
(
(
m [j]
UCBRFx
7
j= 0
+m [i]
UCBRSx
T [j]+
bit,RX
i – 1
j=0
1
fBRCLK
t [i]=t +
bit,RX SYNC INT(½UCBRx)+m [i]
UCBRSx
(
(
1 2 3 4 5 6
0
i
t0
tideal
7 8
1 2
9 10 11 12 13 14 1 2 3 4 5 6 7 8 9 10 11 12 13 14 1 2 3 4 5 6 7
ST D0 D1
D0 D1
ST
Synchronization Error ± 0.5x BRCLK
Majority Vote Taken Majority Vote Taken Majority Vote Taken
BRCLK
UCAxRXD
RXD synch.
tactual
Sample
RXD synch.
t0
t1
t1t2
eUSCI_A Operation – UART Mode
www.ti.com
Figure 39-11. Receive Error
The ideal sampling time tbit,ideal,RX[i] is in the middle of a bit period:
tbit,ideal,RX[i] = (1/Baudrate)(i + 0.5)
The real sampling time, tbit,RX[i], is equal to the sum of all previous bits according to the formulas shown in
the transmit timing section, plus one-half BITCLK for the current bit i, plus the synchronization error tSYNC.
This results in the following tbit,RX[i] for the low-frequency baud-rate mode:
Where:
Tbit,RX[i] = (1/fBRCLK)(UCBRx + mUCBRSx[i])
mUCBRSx[i] = Modulation of bit i of UCBRSx
For the oversampling baud-rate mode, the sampling time tbit,RX[i] of bit i is calculated by:
Where:
= Sum of ones from columns 0 to (7 + mUCBRSx[i]) from the corresponding row in
Table 39-3.
mUCBRSx[i] = Modulation of bit i of UCBRSx
This results in an error normalized to one ideal bit time (1/baudrate) according to the following formula:
ErrorRX[i] = (tbit,RX[i] – tbit,ideal,RX[i]) × Baudrate × 100%
39.3.13 Typical Baud Rates and Errors
Standard baud-rate data for UCBRx, UCBRSx, and UCBRFx are listed in Table 39-5 for a 32768-Hz
crystal sourcing ACLK and typical SMCLK frequencies. Make sure that the selected BRCLK frequency
does not exceed the device specific maximum eUSCI_A input frequency (see the device-specific data
sheet).
1040 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A Operation – UART Mode
The receive error is the accumulated time versus the ideal scanning time in the middle of each bit. The
worst-case error is given for the reception of an 8-bit character with parity and one stop bit including
synchronization error.
The transmit error is the accumulated timing error versus the ideal time of the bit period. The worst-case
error is given for the transmission of an 8-bit character with parity and stop bit.
Table 39-5. Recommended Settings for Typical Crystals and Baudrates
TX Error (%) RX Error (%)
BRCLK Baudrate UCOS16 UCBRx UCBRFx UCBRSx neg pos neg pos
32768 1200 1 1 11 0x25 -2.29 2.25 -2.56 5.35
32768 2400 0 13 - 0xB6 -3.12 3.91 -5.52 8.84
32768 4800 0 6 - 0xEE -7.62 8.98 -21 10.25
32768 9600 0 3 - 0x92 -17.19 16.02 -23.24 37.3
1000000 9600 1 6 8 0x20 -0.48 0.64 -1.04 1.04
1000000 19200 1 3 4 0x2 -0.8 0.96 -1.84 1.84
1000000 38400 1 1 10 0x0 0 1.76 0 3.44
1000000 57600 0 17 - 0x4A -2.72 2.56 -3.76 7.28
1000000 115200 0 8 - 0xD6 -7.36 5.6 -17.04 6.96
1048576 9600 1 6 13 0x22 -0.46 0.42 -0.48 1.23
1048576 19200 1 3 6 0xAD -0.88 0.83 -2.36 1.18
1048576 38400 1 1 11 0x25 -2.29 2.25 -2.56 5.35
1048576 57600 0 18 - 0x11 -2 3.37 -5.31 5.55
1048576 115200 0 9 - 0x08 -5.37 4.49 -5.93 14.92
4000000 9600 1 26 0 0xB6 -0.08 0.16 -0.28 0.2
4000000 19200 1 13 0 0x84 -0.32 0.32 -0.64 0.48
4000000 38400 1 6 8 0x20 -0.48 0.64 -1.04 1.04
4000000 57600 1 4 5 0x55 -0.8 0.64 -1.12 1.76
4000000 115200 1 2 2 0xBB -1.44 1.28 -3.92 1.68
4000000 230400 0 17 - 0x4A -2.72 2.56 -3.76 7.28
4194304 9600 1 27 4 0xFB -0.11 0.1 -0.33 0
4194304 19200 1 13 10 0x55 -0.21 0.21 -0.55 0.33
4194304 38400 1 6 13 0x22 -0.46 0.42 -0.48 1.23
4194304 57600 1 4 8 0xEE -0.75 0.74 -2 0.87
4194304 115200 1 2 4 0x92 -1.62 1.37 -3.56 2.06
4194304 230400 0 18 - 0x11 -2 3.37 -5.31 5.55
8000000 9600 1 52 1 0x49 -0.08 0.04 -0.1 0.14
8000000 19200 1 26 0 0xB6 -0.08 0.16 -0.28 0.2
8000000 38400 1 13 0 0x84 -0.32 0.32 -0.64 0.48
8000000 57600 1 8 10 0xF7 -0.32 0.32 -1 0.36
8000000 115200 1 4 5 0x55 -0.8 0.64 -1.12 1.76
8000000 230400 1 2 2 0xBB -1.44 1.28 -3.92 1.68
8000000 460800 0 17 - 0x4A -2.72 2.56 -3.76 7.28
8388608 9600 1 54 9 0xEE -0.06 0.06 -0.11 0.13
8388608 19200 1 27 4 0xFB -0.11 0.1 -0.33 0
8388608 38400 1 13 10 0x55 -0.21 0.21 -0.55 0.33
8388608 57600 1 9 1 0xB5 -0.31 0.31 -0.53 0.78
8388608 115200 1 4 8 0xEE -0.75 0.74 -2 0.87
8388608 230400 1 2 4 0x92 -1.62 1.37 -3.56 2.06
8388608 460800 0 18 - 0x11 -2 3.37 -5.31 5.55
12000000 9600 1 78 2 0x0 0 0 0 0.04
1041
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A Operation – UART Mode
www.ti.com
Table 39-5. Recommended Settings for Typical Crystals and Baudrates (continued)
TX Error (%) RX Error (%)
BRCLK Baudrate UCOS16 UCBRx UCBRFx UCBRSx neg pos neg pos
12000000 19200 1 39 1 0x0 0 0 0 0.16
12000000 38400 1 19 8 0x65 -0.16 0.16 -0.4 0.24
12000000 57600 1 13 0 0x25 -0.16 0.32 -0.48 0.48
12000000 115200 1 6 8 0x20 -0.48 0.64 -1.04 1.04
12000000 230400 1 3 4 0x2 -0.8 0.96 -1.84 1.84
12000000 460800 1 1 10 0x0 0 1.76 0 3.44
16000000 9600 1 104 2 0xD6 -0.04 0.02 -0.09 0.03
16000000 19200 1 52 1 0x49 -0.08 0.04 -0.1 0.14
16000000 38400 1 26 0 0xB6 -0.08 0.16 -0.28 0.2
16000000 57600 1 17 5 0xDD -0.16 0.2 -0.3 0.38
16000000 115200 1 8 10 0xF7 -0.32 0.32 -1 0.36
16000000 230400 1 4 5 0x55 -0.8 0.64 -1.12 1.76
16000000 460800 1 2 2 0xBB -1.44 1.28 -3.92 1.68
16777216 9600 1 109 3 0xB5 -0.03 0.02 -0.05 0.06
16777216 19200 1 54 9 0xEE -0.06 0.06 -0.11 0.13
16777216 38400 1 27 4 0xFB -0.11 0.1 -0.33 0
16777216 57600 1 18 3 0x44 -0.16 0.15 -0.2 0.45
16777216 115200 1 9 1 0xB5 -0.31 0.31 -0.53 0.78
16777216 230400 1 4 8 0xEE -0.75 0.74 -2 0.87
16777216 460800 1 2 4 0x92 -1.62 1.37 -3.56 2.06
20000000 9600 1 130 3 0x25 -0.02 0.03 0 0.07
20000000 19200 1 65 1 0xD6 -0.06 0.03 -0.1 0.1
20000000 38400 1 32 8 0xEE -0.1 0.13 -0.27 0.14
20000000 57600 1 21 11 0x22 -0.16 0.13 -0.16 0.38
20000000 115200 1 10 13 0xAD -0.29 0.26 -0.46 0.66
20000000 230400 1 5 6 0xEE -0.67 0.51 -1.71 0.62
20000000 460800 1 2 11 0x92 -1.38 0.99 -1.84 2.8
39.3.14 Using the eUSCI_A Module in UART Mode With Low-Power Modes
The eUSCI_A module provides automatic clock activation for use with low-power modes. When the
eUSCI_A clock source is inactive because the device is in a low-power mode, the eUSCI_A module
automatically activates it when needed, regardless of the control-bit settings for the clock source. The
clock remains active until the eUSCI_A module returns to its idle condition. After the eUSCI_A module
returns to the idle condition, control of the clock source reverts to the settings of its control bits.
NOTE: Clock Activation Time
If the clock source is not already active when the eUSCI_A module requests it then the clock
must be activated. This takes time. This clock activation time depending on the selected
clock source and the selected low power mode. If the DCO is used as clock source the
activation time is approximately the wake-up time as specified in the device-specific data
sheet.
39.3.15 eUSCI_A Interrupts in UART Mode
The eUSCI_A has only one interrupt vector that is shared for transmission and for reception.
1042 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A Operation – UART Mode
39.3.15.1 UART Transmit Interrupt Operation
The UCTXIFG interrupt flag is set by the transmitter to indicate that UCAxTXBUF is ready to accept
another character. An interrupt request is generated if UCTXIE and GIE are also set. UCTXIFG is
automatically reset if a character is written to UCAxTXBUF.
UCTXIFG is set after a PUC or when UCSWRST = 1. UCTXIE is reset after a PUC or when
UCSWRST = 1.
39.3.15.2 UART Receive Interrupt Operation
The UCRXIFG interrupt flag is set each time a character is received and loaded into UCAxRXBUF. An
interrupt request is generated if UCRXIE and GIE are also set. UCRXIFG and UCRXIE are reset by a
system reset PUC signal or when UCSWRST = 1. UCRXIFG is automatically reset when UCAxRXBUF is
read.
Additional interrupt control features include:
• When UCAxRXEIE = 0, erroneous characters do not set UCRXIFG.
• When UCDORM = 1, nonaddress characters do not set UCRXIFG in multiprocessor modes. In plain
UART mode, no characters are set UCRXIFG.
• When UCBRKIE = 1, a break condition sets the UCBRK bit and the UCRXIFG flag.
39.3.15.3 UART State Change Interrupt Operation
Table 39-6 describes the UART state change interrupt flags.
Table 39-6. UART State Change Interrupt Flags
Interrupt Flag Interrupt Condition
UCSTTIFG START byte received interrupt. This flag is set when the UART module receives a START byte.
Transmit complete interrupt. This flag is set, after the complete UART byte in the internal shift register
UCTXCPTIFG including STOP bit got shifted out and UCAxTXBUF is empty.
39.3.15.4 UCAxIV, Interrupt Vector Generator
The eUSCI_A interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCAxIV is used to determine which flag requested an interrupt. The highest-priority
enabled interrupt generates a number in the UCAxIV register that can be evaluated or added to the
program counter to automatically enter the appropriate software routine. Disabled interrupts do not affect
the UCAxIV value.
Read access of the UCAxIV register automatically resets the highest-pending Interrupt condition and flag.
Write access of the UCAxIV register clears all pending Interrupt conditions and flags. If another interrupt
flag is set, another interrupt is generated immediately after servicing the initial interrupt.
Example 39-1 shows the recommended use of UCAxIV. The UCAxIV value is added to the PC to
automatically jump to the appropriate routine. The following example is given for eUSCI_A0.
1043
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

eUSCI_A Operation – UART Mode
www.ti.com
Example 39-1. UCAxIV Software Example
#pragma vector = USCI_A0_VECTOR __interrupt void USCI_A0_ISR(void) {
switch(__even_in_range(UCA0IV,18)) {
case 0x00: // Vector 0: No interrupts
break;
case 0x02: ... // Vector 2: UCRXIFG
break;
case 0x04: ... // Vector 4: UCTXIFG
break;
case 0x06: ... // Vector 6: UCSTTIFG
break;
case 0x08: ... // Vector 8: UCTXCPTIFG
break;
default: break;
}
}
39.3.16 DMA Operation
In devices with a DMA controller, the eUSCI module can trigger DMA transfers when the transmit buffer
UCAxTXBUF is empty or when data was received in the UCAxRXBUF buffer. The DMA trigger signals
correspond to the UCTXIFG transmit interrupt flag and the UCRXIFG receive interrupt flag, respectively.
The interrupt functionality must be disabled for the selected DMA triggers with UCTXIE = 0 and UCRXIE =
0.
A DMA read access to UCAxRXBUF has the same effects as a CPU (software) read: all error flags
(UCRXERR, UCFE, UCPE, UCOE, and UCBRK) are cleared after the read. Thus these errors might go
unnoticed.
1044 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
eUSCI_A UART Registers
39.4 eUSCI_A UART Registers
The eUSCI_A registers applicable in UART mode and their address offsets are listed in Table 39-7. The
base address can be found in the device-specific data sheet.
Table 39-7. eUSCI_A UART Registers
Offset Acronym Register Name Type Access Reset Section
00h UCAxCTLW0 eUSCI_Ax Control Word 0 Read/write Word 0001h Section 39.4.1
01h UCAxCTL0(1) eUSCI_Ax Control 0 Read/write Byte 00h
00h UCAxCTL1 eUSCI_Ax Control 1 Read/write Byte 01h
02h UCAxCTLW1 eUSCI_Ax Control Word 1 Read/write Word 0003h Section 39.4.2
06h UCAxBRW eUSCI_Ax Baud Rate Control Word Read/write Word 0000h Section 39.4.3
06h UCAxBR0(1) eUSCI_Ax Baud Rate Control 0 Read/write Byte 00h
07h UCAxBR1 eUSCI_Ax Baud Rate Control 1 Read/write Byte 00h
08h UCAxMCTLW eUSCI_Ax Modulation Control Word Read/write Word 00h Section 39.4.4
0Ah UCAxSTATW eUSCI_Ax Status Read/write Word 00h Section 39.4.5
0Ch UCAxRXBUF eUSCI_Ax Receive Buffer Read/write Word 00h Section 39.4.6
0Eh UCAxTXBUF eUSCI_Ax Transmit Buffer Read/write Word 00h Section 39.4.7
10h UCAxABCTL eUSCI_Ax Auto Baud Rate Control Read/write Word 00h Section 39.4.8
12h UCAxIRCTL eUSCI_Ax IrDA Control Read/write Word 0000h Section 39.4.9
12h UCAxIRTCTL eUSCI_Ax IrDA Transmit Control Read/write Byte 00h
13h UCAxIRRCTL eUSCI_Ax IrDA Receive Control Read/write Byte 00h
1Ah UCAxIE eUSCI_Ax Interrupt Enable Read/write Word 00h Section 39.4.10
1Ch UCAxIFG eUSCI_Ax Interrupt Flag Read/write Word 02h Section 39.4.11
1Eh UCAxIV eUSCI_Ax Interrupt Vector Read Word 0000h Section 39.4.12
(1) It is recommended to access these registers using 16-bit access. If 8-bit access is used, the corresponding bit names must be
followed by "_H".
1045
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A UART Registers
www.ti.com
39.4.1 UCAxCTLW0 Register
eUSCI_Ax Control Word Register 0
Figure 39-12. UCAxCTLW0 Register
15 14 13 12 11 10 9 8
UCPEN UCPAR UCMSB UC7BIT UCSPB UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCSSELx UCRXEIE UCBRKIE UCDORM UCTXADDR UCTXBRK UCSWRST
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1
Table 39-8. UCAxCTLW0 Register Description
Bit Field Type Reset Description
15 UCPEN RW 0h Parity enable
0b = Parity disabled
1b = Parity enabled. Parity bit is generated (UCAxTXD) and expected
(UCAxRXD). In address-bit multiprocessor mode, the address bit is included in
the parity calculation.
14 UCPAR RW 0h Parity select. UCPAR is not used when parity is disabled.
0b = Odd parity
1b = Even parity
13 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
12 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
11 UCSPB RW 0h Stop bit select. Number of stop bits.
0b = One stop bit
1b = Two stop bits
10-9 UCMODEx RW 0h eUSCI_A mode. The UCMODEx bits select the asynchronous mode when
UCSYNC = 0.
00b = UART mode
01b = Idle-line multiprocessor mode
10b = Address-bit multiprocessor mode
11b = UART mode with automatic baud-rate detection
8 UCSYNC RW 0h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
7-6 UCSSELx RW 0h eUSCI_A clock source select. These bits select the BRCLK source clock.
00b = UCLK
01b = ACLK
10b = SMCLK
11b = SMCLK
5 UCRXEIE RW 0h Receive erroneous-character interrupt enable
0b = Erroneous characters rejected and UCRXIFG is not set.
1b = Erroneous characters received set UCRXIFG.
4 UCBRKIE RW 0h Receive break character interrupt enable
0b = Received break characters do not set UCRXIFG.
1b = Received break characters set UCRXIFG.
1046 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A UART Registers
Table 39-8. UCAxCTLW0 Register Description (continued)
Bit Field Type Reset Description
3 UCDORM RW 0h Dormant. Puts eUSCI_A into sleep mode.
0b = Not dormant. All received characters set UCRXIFG.
1b = Dormant. Only characters that are preceded by an idle-line or with address
bit set UCRXIFG. In UART mode with automatic baud-rate detection, only the
combination of a break and synch field sets UCRXIFG.
2 UCTXADDR RW 0h Transmit address. Next frame to be transmitted is marked as address, depending
on the selected multiprocessor mode.
0b = Next frame transmitted is data.
1b = Next frame transmitted is an address.
1 UCTXBRK RW 0h Transmit break. Transmits a break with the next write to the transmit buffer. In
UART mode with automatic baud-rate detection, 055h must be written into
UCAxTXBUF to generate the required break/synch fields. Otherwise, 0h must be
written into the transmit buffer.
0b = Next frame transmitted is not a break.
1b = Next frame transmitted is a break or a break/synch.
0 UCSWRST RW 1h Software reset enable
0b = Disabled. eUSCI_A reset released for operation.
1b = Enabled. eUSCI_A logic held in reset state.
39.4.2 UCAxCTLW1 Register
eUSCI_Ax Control Word Register 1
Figure 39-13. UCAxCTLW1 Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved UCGLITx
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-1
Table 39-9. UCAxCTLW1 Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved
1-0 UCGLITx RW 3h Deglitch time
00b = Approximately 2 ns
01b = Approximately 50 ns
10b = Approximately 100 ns
11b = Approximately 200 ns
1047
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A UART Registers
www.ti.com
39.4.3 UCAxBRW Register
eUSCI_Ax Baud Rate Control Word Register
Figure 39-14. UCAxBRW Register
15 14 13 12 11 10 9 8
UCBRx
rw rw rw rw rw rw rw rw
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1
Table 39-10. UCAxBRW Register Description
Bit Field Type Reset Description
15-0 UCBRx RW 0h Clock prescaler setting of the Baud rate generator
39.4.4 UCAxMCTLW Register
eUSCI_Ax Modulation Control Word Register
Figure 39-15. UCAxMCTLW Register
15 14 13 12 11 10 9 8
UCBRSx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCBRFx Reserved UCOS16
rw-0 rw-0 rw-0 rw-0 r0 r0 r0 rw-0
Modify only when UCSWRST = 1
Table 39-11. UCAxMCTLW Register Description
Bit Field Type Reset Description
15-8 UCBRSx RW 0h Second modulation stage select. These bits hold a free modulation pattern for
BITCLK.
7-4 UCBRFx RW 0h First modulation stage select. These bits determine the modulation pattern for
BITCLK16 when UCOS16 = 1. Ignored with UCOS16 = 0. The "Oversampling
Baud-Rate Generation" section shows the modulation pattern.
3-1 Reserved R 0h Reserved
0 UCOS16 RW 0h Oversampling mode enabled
0b = Disabled
1b = Enabled
1048 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A UART Registers
39.4.5 UCAxSTATW Register
eUSCI_Ax Status Register
Figure 39-16. UCAxSTATW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCLISTEN UCFE UCOE UCPE UCBRK UCRXERR UCADDR UCBUSY
UCIDLE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-0
Modify only when UCSWRST = 1
Table 39-12. UCAxSTATW Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. UCAxTXD is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. UCFE is cleared when UCAxRXBUF is read.
0b = No error
1b = Character received with low stop bit
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into
UCAxRXBUF before the previous character was read. UCOE is cleared
automatically when UCxRXBUF is read, and must not be cleared by software.
Otherwise, it does not function correctly.
0b = No error
1b = Overrun error occurred.
4 UCPE RW 0h Parity error flag. When UCPEN = 0, UCPE is read as 0. UCPE is cleared when
UCAxRXBUF is read.
0b = No error
1b = Character received with parity error
3 UCBRK RW 0h Break detect flag. UCBRK is cleared when UCAxRXBUF is read.
0b = No break condition
1b = Break condition occurred.
2 UCRXERR RW 0h Receive error flag. This bit indicates a character was received with one or more
errors. When UCRXERR = 1, on or more error flags, UCFE, UCPE, or UCOE is
also set. UCRXERR is cleared when UCAxRXBUF is read.
0b = No receive errors detected
1b = Receive error detected
1 UCADDR UCIDLE RW 0h UCADDR: Address received in address-bit multiprocessor mode. UCADDR is
cleared when UCAxRXBUF is read.
UCIDLE: Idle line detected in idle-line multiprocessor mode. UCIDLE is cleared
when UCAxRXBUF is read.
0b = UCADDR: Received character is data. UCIDLE: No idle line detected
1b = UCADDR: Received character is an address. UCIDLE: Idle line detected
0 UCBUSY R 0h eUSCI_A busy. This bit indicates if a transmit or receive operation is in progress.
0b = eUSCI_A inactive
1b = eUSCI_A transmitting or receiving
1049
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A UART Registers
www.ti.com
39.4.6 UCAxRXBUF Register
eUSCI_Ax Receive Buffer Register
Figure 39-17. UCAxRXBUF Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
UCRXBUFx
rrrrrrrr
Table 39-13. UCAxRXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCRXBUFx R 0h The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCAxRXBUF resets the
receive-error bits, the UCADDR or UCIDLE bit, and UCRXIFG. In 7-bit data
mode, UCAxRXBUF is LSB justified and the MSB is always reset.
39.4.7 UCAxTXBUF Register
eUSCI_Ax Transmit Buffer Register
Figure 39-18. UCAxTXBUF Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 39-14. UCAxTXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCTXBUFx RW 0h The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted on UCAxTXD. Writing to
the transmit data buffer clears UCTXIFG. The MSB of UCAxTXBUF is not used
for 7-bit data and is reset.
1050 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A UART Registers
39.4.8 UCAxABCTL Register
eUSCI_Ax Auto Baud Rate Control Register
Figure 39-19. UCAxABCTL Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved UCDELIMx UCSTOE UCBTOE Reserved UCABDEN
r-0 r-0 rw-0 rw-0 rw-0 rw-0 r-0 rw-0
Modify only when UCSWRST = 1
Table 39-15. UCAxABCTL Register Description
Bit Field Type Reset Description
15-6 Reserved R 0h Reserved
5-4 UCDELIMx RW 0h Break/synch delimiter length
00b = 1 bit time
01b = 2 bit times
10b = 3 bit times
11b = 4 bit times
3 UCSTOE RW 0h Synch field time out error
0b = No error
1b = Length of synch field exceeded measurable time.
2 UCBTOE RW 0h Break time out error
0b = No error
1b = Length of break field exceeded 22 bit times.
1 Reserved R 0h Reserved
0 UCABDEN RW 0h Automatic baud-rate detect enable
0b = Baud-rate detection disabled. Length of break and synch field is not
measured.
1b = Baud-rate detection enabled. Length of break and synch field is measured
and baud-rate settings are changed accordingly.
1051
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

eUSCI_A UART Registers
www.ti.com
39.4.9 UCAxIRCTL Register
eUSCI_Ax IrDA Control Word Register
Figure 39-20. UCAxIRCTL Register
15 14 13 12 11 10 9 8
UCIRRXFLx UCIRRXPL UCIRRXFE
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCIRTXPLx UCIRTXCLK UCIREN
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1
Table 39-16. UCAxIRCTL Register Description
Bit Field Type Reset Description
15-10 UCIRRXFLx RW 0h Receive filter length. The minimum pulse length for receive is given by:
t(MIN) = (UCIRRXFLx + 4) / [2 × f(IRTXCLK)]
9 UCIRRXPL RW 0h IrDA receive input UCAxRXD polarity
0b = IrDA transceiver delivers a high pulse when a light pulse is seen.
1b = IrDA transceiver delivers a low pulse when a light pulse is seen.
8 UCIRRXFE RW 0h IrDA receive filter enabled
0b = Receive filter disabled
1b = Receive filter enabled
7-2 UCIRTXPLx RW 0h Transmit pulse length.
Pulse length t(PULSE) = (UCIRTXPLx + 1) / [2 × f(IRTXCLK)]
1 UCIRTXCLK RW 0h IrDA transmit pulse clock select
0b = BRCLK
1b = BITCLK16 when UCOS16 = 1. Otherwise, BRCLK.
0 UCIREN RW 0h IrDA encoder/decoder enable
0b = IrDA encoder/decoder disabled
1b = IrDA encoder/decoder enabled
1052 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
eUSCI_A UART Registers
39.4.10 UCAxIE Register
eUSCI_Ax Interrupt Enable Register
Figure 39-21. UCAxIE Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved UCTXCPTIE UCSTTIE UCTXIE UCRXIE
r-0 r-0 r-0 r-0 rw-0 rw-0 rw-0 rw-0
Table 39-17. UCAxIE Register Description
Bit Field Type Reset Description
15-4 Reserved R 0h Reserved
3 UCTXCPTIE RW 0h Transmit complete interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
2 UCSTTIE RW 0h Start bit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1053
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A UART Registers
www.ti.com
39.4.11 UCAxIFG Register
eUSCI_Ax Interrupt Flag Register
Figure 39-22. UCAxIFG Register
15 14 13 12 11 10 9 8
Reserved
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved UCTXCPTIFG UCSTTIFG UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 rw-0 rw-0 rw-1 rw-0
Table 39-18. UCAxIFG Register Description
Bit Field Type Reset Description
15-4 Reserved R 0h Reserved
3 UCTXCPTIFG RW 0h Transmit complete interrupt flag. UCTXCPTIFG is set when the entire byte in the
internal shift register got shifted out and UCAxTXBUF is empty.
0b = No interrupt pending
1b = Interrupt pending
2 UCSTTIFG RW 0h Start bit interrupt flag. UCSTTIFG is set after a Start bit was received
0b = No interrupt pending
1b = Interrupt pending
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCAxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCAxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
1054 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A UART Registers
39.4.12 UCAxIV Register
eUSCI_Ax Interrupt Vector Register
Figure 39-23. UCAxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r0 r-(0) r-(0) r-(0) r0
Table 39-19. UCAxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h eUSCI_A interrupt vector value
00h = No interrupt pending
02h = Interrupt Source: Receive buffer full; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG
06h = Interrupt Source: Start bit received; Interrupt Flag: UCSTTIFG
08h = Interrupt Source: Transmit complete; Interrupt Flag: UCTXCPTIFG;
Interrupt Priority: Lowest
1055
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – UART Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 40
SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface
(eUSCI) – SPI Mode
The enhanced universal serial communication interfaces, eUSCI_A and eUSCI_B, support multiple serial
communication modes with one hardware module. This chapter discusses the operation of the
synchronous peripheral interface (SPI) mode.
Topic ........................................................................................................................... Page
40.1 Enhanced Universal Serial Communication Interfaces (eUSCI_A, eUSCI_B)
Overview........................................................................................................ 1057
40.2 eUSCI Introduction – SPI Mode......................................................................... 1057
40.3 eUSCI Operation – SPI Mode............................................................................ 1059
40.4 eUSCI_A SPI Registers.................................................................................... 1065
40.5 eUSCI_B SPI Registers.................................................................................... 1074
1056 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Enhanced Universal Serial Communication Interfaces (eUSCI_A, eUSCI_B) Overview
40.1 Enhanced Universal Serial Communication Interfaces (eUSCI_A, eUSCI_B) Overview
Both the eUSCI_A and the eUSCI_B support serial communication in SPI mode.
40.2 eUSCI Introduction – SPI Mode
In synchronous mode, the eUSCI connects the device to an external system via three or four pins:
UCxSIMO, UCxSOMI, UCxCLK, and UCxSTE. SPI mode is selected when the UCSYNC bit is set, and
SPI mode (3-pin or 4-pin) is selected with the UCMODEx bits.
SPI mode features include:
• 7-bit or 8-bit data length
• LSB-first or MSB-first data transmit and receive
• 3-pin and 4-pin SPI operation
• Master or slave modes
• Independent transmit and receive shift registers
• Separate transmit and receive buffer registers
• Continuous transmit and receive operation
• Selectable clock polarity and phase control
• Programmable clock frequency in master mode
• Independent interrupt capability for receive and transmit
• Slave operation in LPM4
Figure 40-1 shows the eUSCI when configured for SPI mode.
1057
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
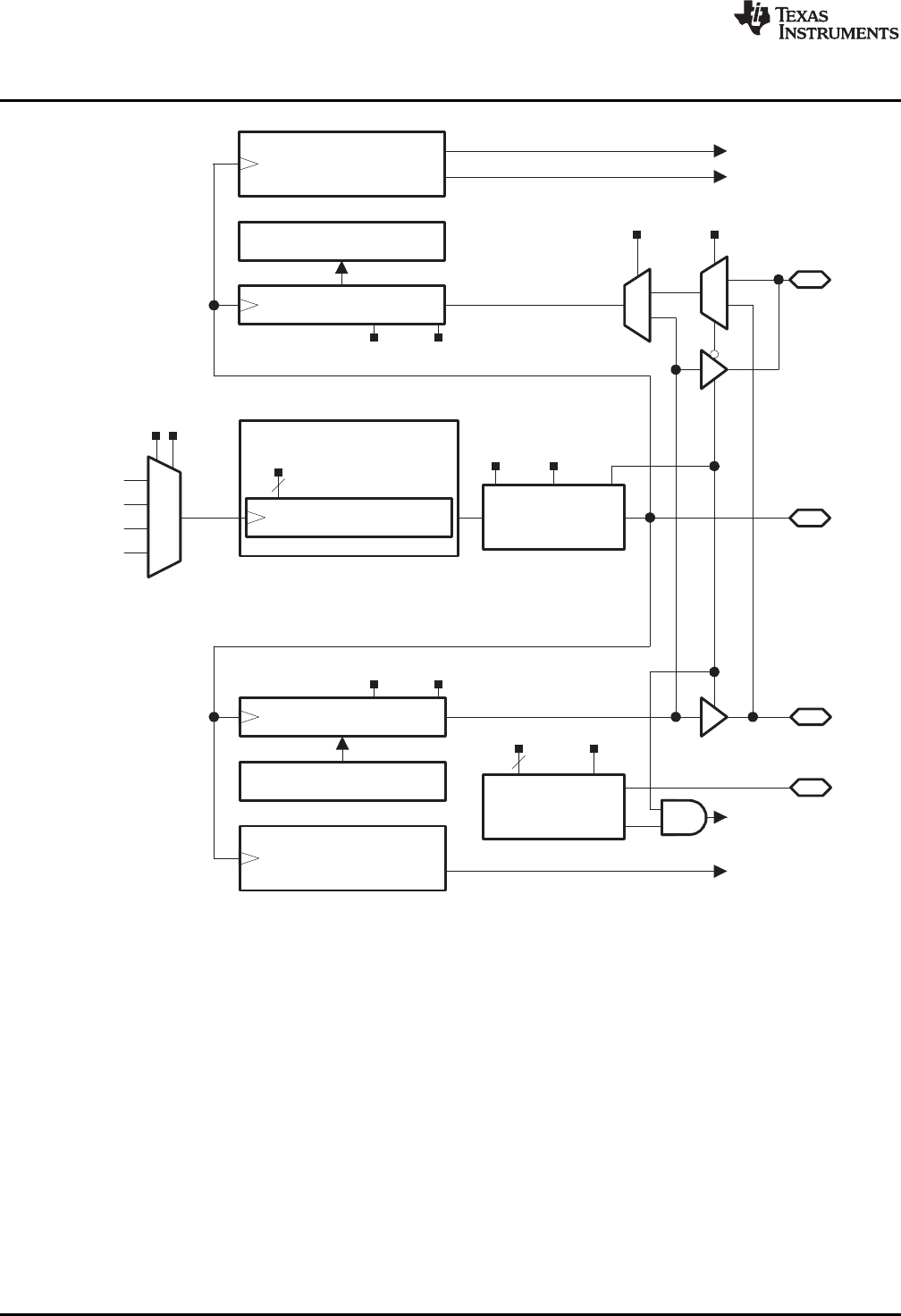
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
N/A
Prescaler/Divider
BitClockGenerator
UCxBRx
16
ReceiveShiftRegister
ReceiveBufferUCxRXBUF
ReceiveStateMachine
UCMSB UC7BIT
1
0
UCMST
UCxSOMI
TransmitBufferUC xTXBUF
TransmitStateMachine
TransmitShiftRegister
UCMSB UC7BIT
BRCLK
SetUCxRXIFG
SetUCxTXIFG
0
1
UCLISTEN
ClockDirection,
PhaseandPolarity
UCCKPH UCCKPL
UCxSIMO
UCxCLK
SetUCOE
TransmitEnable
Control
UCSTEM
UCxSTE
SetUCFE
2
UCMODEx
eUSCI Introduction – SPI Mode
www.ti.com
Figure 40-1. eUSCI Block Diagram – SPI Mode
1058 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI Operation – SPI Mode
40.3 eUSCI Operation – SPI Mode
In SPI mode, serial data is transmitted and received by multiple devices using a shared clock provided by
the master. An additional pin controlled by the master, UCxSTE, is provided to enable a device to receive
and transmit data.
Three or four signals are used for SPI data exchange:
• UCxSIMO – slave in, master out
Master mode: UCxSIMO is the data output line.
Slave mode: UCxSIMO is the data input line.
• UCxSOMI – slave out, master in
Master mode: UCxSOMI is the data input line.
Slave mode: UCxSOMI is the data output line.
• UCxCLK – eUSCI SPI clock
Master mode: UCxCLK is an output.
Slave mode: UCxCLK is an input.
• UCxSTE – slave transmit enable.
Used in 4-pin mode to allow multiple masters on a single bus. Not used in 3-pin mode. Table 40-1
describes the UCxSTE operation.
Table 40-1. UCxSTE Operation
UCxSTE
UCMODEx UCxSTE Slave Master
Active State
0 Inactive Active
01 High 1 Active Inactive
0 Active Inactive
10 Low 1 Inactive Active
40.3.1 eUSCI Initialization and Reset
The eUSCI is reset by a PUC or by the UCSWRST bit. After a PUC, the UCSWRST bit is automatically
set, keeping the eUSCI in a reset condition. When set, the UCSWRST bit resets the UCRXIE, UCTXIE,
UCRXIFG, UCOE, and UCFE bits, and sets the UCTXIFG flag. Clearing UCSWRST releases the eUSCI
for operation.
Configuring and reconfiguring the eUSCI module should be done when UCSWRST is set to avoid
unpredictable behavior.
NOTE: Initializing or reconfiguring the eUSCI module
The recommended eUSCI initialization or reconfiguration process is:
1. Set UCSWRST.
BIS.B #UCSWRST,&UCxCTL1
2. Initialize all eUSCI registers with UCSWRST = 1 (including UCxCTL1).
3. Configure ports.
4. Ensure that any input signals into the SPI module such as UCxSOMI (in master mode)
or UCxSIMO and UCxCLK (in slave mode) have settled to their final voltage levels
before clearing UCSWRST and avoid any unwanted transitions during operation.
5. Clear UCSWRST.
BIC.B #UCSWRST,&UCxCTL1
6. Enable interrupts (optional) with UCRXIE or UCTXIE.
1059
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
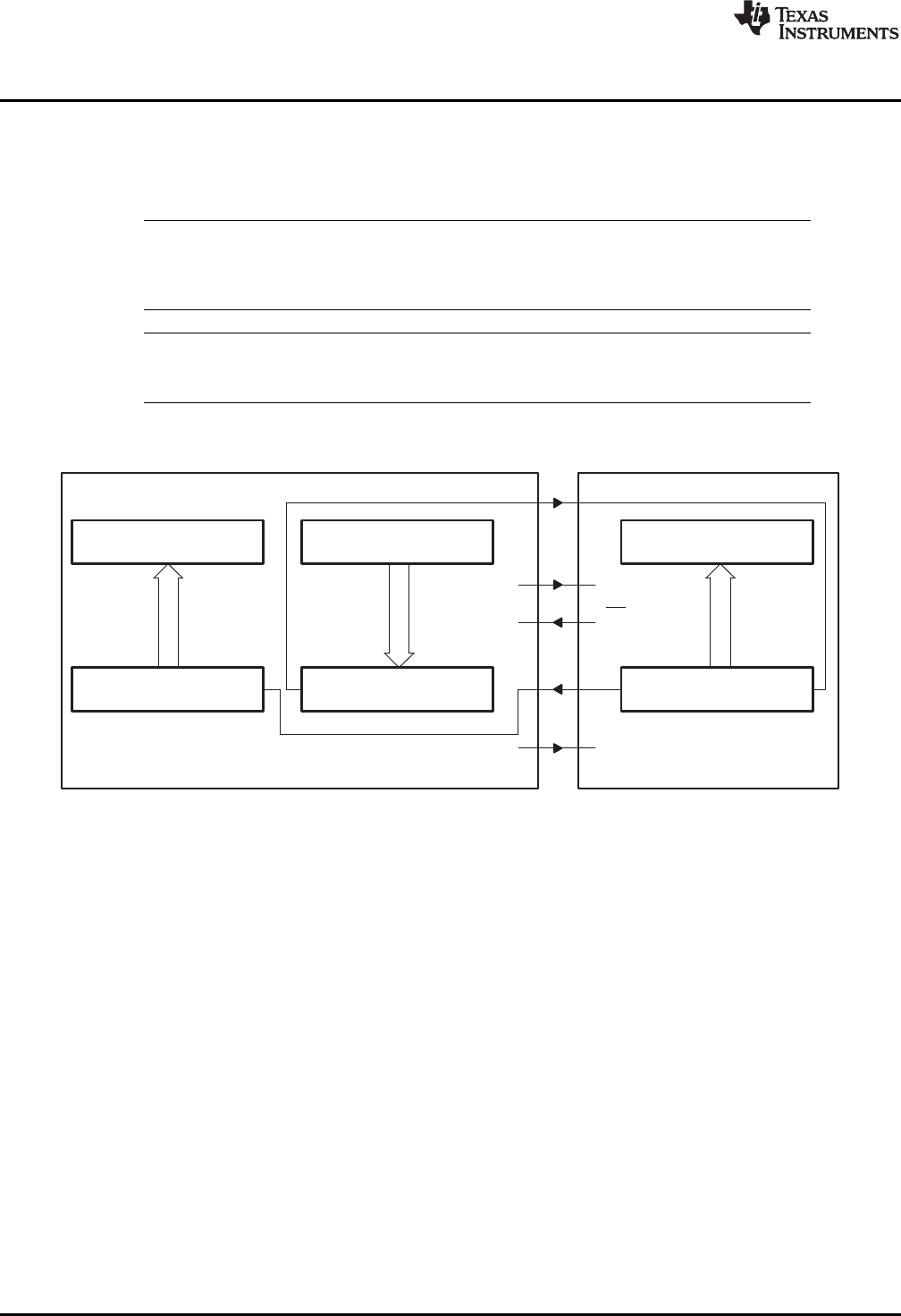
Receive Buffer
UCxRXBUF
Receive Shift Register
Transmit Buffer
UCxTXBUF
Transmit Shift Register
SPI Receive Buffer
Data Shift Register (DSR)
UCx
SOMI SOMI
UCxSIMO SIMO
MASTER SLAVE
Px.x STE
UCxSTE SS
Port.x
UCxCLK SCLK
MSP430 USCI COMMON SPI
eUSCI Operation – SPI Mode
www.ti.com
40.3.2 Character Format
The eUSCI module in SPI mode supports 7-bit and 8-bit character lengths selected by the UC7BIT bit. In
7-bit data mode, UCxRXBUF is LSB justified and the MSB is always reset. The UCMSB bit controls the
direction of the transfer and selects LSB or MSB first.
NOTE: Default character format
The default SPI character transmission is LSB first. For communication with other SPI
interfaces, MSB-first mode may be required.
NOTE: Character format for figures
Figures throughout this chapter use MSB-first format.
40.3.3 Master Mode
Figure 40-2. eUSCI Master and External Slave (UCSTEM = 0)
Figure 40-2 shows the eUSCI as a master in both 3-pin and 4-pin configurations. The eUSCI initiates data
transfer when data is moved to the transmit data buffer UCxTXBUF. The UCxTXBUF data is moved to the
transmit (TX) shift register when the TX shift register is empty, initiating data transfer on UCxSIMO starting
with either the MSB or LSB, depending on the UCMSB setting. Data on UCxSOMI is shifted into the
receive shift register on the opposite clock edge. When the character is received, the receive data is
moved from the receive (RX) shift register to the received data buffer UCxRXBUF and the receive
interrupt flag UCRXIFG is set, indicating the RX/TX operation is complete.
A set transmit interrupt flag, UCTXIFG, indicates that data has moved from UCxTXBUF to the TX shift
register and UCxTXBUF is ready for new data. It does not indicate RX/TX completion.
To receive data into the eUSCI in master mode, data must be written to UCxTXBUF, because receive and
transmit operations operate concurrently.
There two different options for configuring the eUSCI as a 4-pin master, which are described in the next
sections:
• The fourth pin is used as input to prevent conflicts with other masters (UCSTEM = 0).
• The fourth pin is used as output to generate a slave enable signal (UCSTEM = 1).
The bit UCSTEM is used to select the corresponding mode.
1060 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
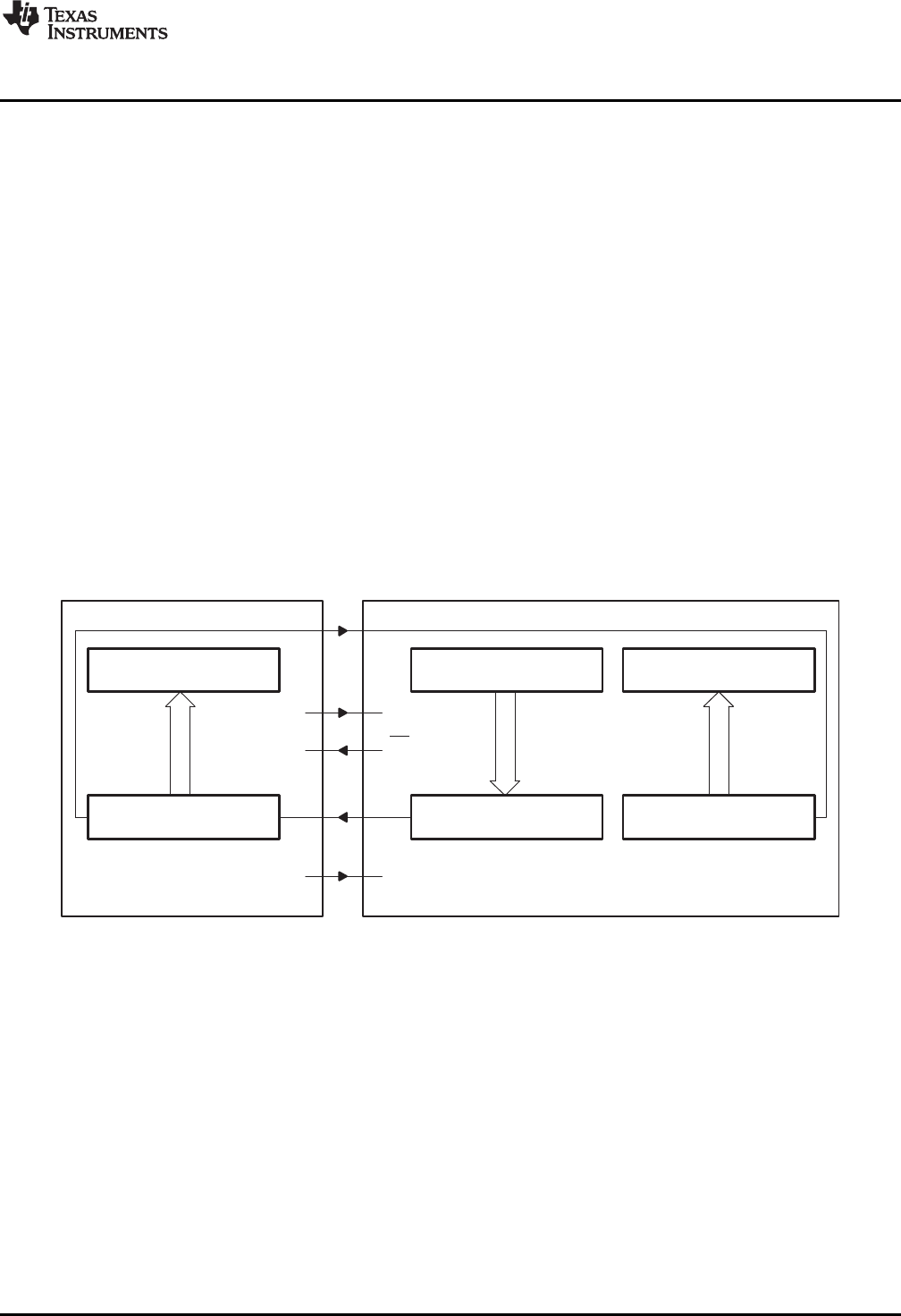
Receive Buffer
UCxRXBUF
Receive Shift Register
Transmit Buffer UCxTXBUF
Transmit Shift Register
SPI Receive Buffer
Data Shift Register DSR
UCx
SOMI
SOMI
UCxSIMOSIMO
MASTER SLAVE
Px.x UCxSTE
STE SS
Port.x
UCxCLK
SCLK
MSP430 USCICOMMON SPI
www.ti.com
eUSCI Operation – SPI Mode
40.3.3.1 4-Pin SPI Master Mode (UCSTEM = 0)
In 4-pin master mode with UCSTEM = 0, UCxSTE is a digital input that can be used to prevent conflicts
with another master and controls the master as described in Table 40-1. When UCxSTE is in the master-
inactive state and UCSTEM = 0:
• UCxSIMO and UCxCLK are set to inputs and no longer drive the bus.
• The error bit UCFE is set, indicating a communication integrity violation to be handled by the user.
• The internal state machines are reset and the shift operation is aborted.
If data is written into UCxTXBUF while the master is held inactive by UCxSTE, it is transmit as soon as
UCxSTE transitions to the master-active state. If an active transfer is aborted by UCxSTE transitioning to
the master-inactive state, the data must be rewritten into UCxTXBUF to be transferred when UCxSTE
transitions back to the master-active state. The UCxSTE input signal is not used in 3-pin master mode.
40.3.3.2 4-Pin SPI Master Mode (UCSTEM = 1)
If UCSTEM = 1 in 4-pin master mode, UCxSTE is a digital output. In this mode the slave enable signal for
a single slave is automatically generated on UCxSTE. The corresponding behavior can be seen in
Figure 40-4.
If multiple slaves are desired, this feature is not applicable and the software needs to use general purpose
I/O pins instead to generate STE signals for each slave individually.
40.3.4 Slave Mode
Figure 40-3. eUSCI Slave and External Master
Figure 40-3 shows the eUSCI as a slave in both 3-pin and 4-pin configurations. UCxCLK is used as the
input for the SPI clock and must be supplied by the external master. The data-transfer rate is determined
by this clock and not by the internal bit clock generator. Data written to UCxTXBUF and moved to the TX
shift register before the start of UCxCLK is transmitted on UCxSOMI. Data on UCxSIMO is shifted into the
receive shift register on the opposite edge of UCxCLK and moved to UCxRXBUF when the set number of
bits are received. When data is moved from the RX shift register to UCxRXBUF, the UCRXIFG interrupt
flag is set, indicating that data has been received. The overrun error bit UCOE is set when the previously
received data is not read from UCxRXBUF before new data is moved to UCxRXBUF.
1061
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI Operation – SPI Mode
www.ti.com
40.3.4.1 4-Pin SPI Slave Mode
In 4-pin slave mode, UCxSTE is a digital input used by the slave to enable the transmit and receive
operations and is driven by the SPI master. When UCxSTE is in the slave-active state, the slave operates
normally. When UCxSTE is in the slave-inactive state:
• Any receive operation in progress on UCxSIMO is halted.
• UCxSOMI is set to the input direction.
• The shift operation is halted until the UCxSTE line transitions into the slave transmit active state.
The UCxSTE input signal is not used in 3-pin slave mode.
40.3.5 SPI Enable
When the eUSCI module is enabled by clearing the UCSWRST bit, it is ready to receive and transmit. In
master mode, the bit clock generator is ready, but is not clocked nor producing any clocks. In slave mode,
the bit clock generator is disabled and the clock is provided by the master.
A transmit or receive operation is indicated by UCBUSY = 1.
A PUC or set UCSWRST bit disables the eUSCI immediately and any active transfer is terminated.
40.3.5.1 Transmit Enable
In master mode, writing to UCxTXBUF activates the bit clock generator, and the data begins to transmit.
In slave mode, transmission begins when a master provides a clock and, in 4-pin mode, when the
UCxSTE is in the slave-active state.
40.3.5.2 Receive Enable
The SPI receives data when a transmission is active. Receive and transmit operations operate
concurrently.
40.3.6 Serial Clock Control
UCxCLK is provided by the master on the SPI bus. When UCMST = 1, the bit clock is provided by the
eUSCI bit clock generator on the UCxCLK pin. The clock used to generate the bit clock is selected with
the UCSSELx bits. When UCMST = 0, the eUSCI clock is provided on the UCxCLK pin by the master, the
bit clock generator is not used, but the UCSSELx bits must be set to 0. The SPI receiver and transmitter
operate in parallel and use the same clock source for data transfer.
The 16-bit value of UCBRx in the bit rate control registers UCxxBRW is the division factor of the eUSCI
clock source, BRCLK. With UCBRx = 0 the maximum bit clock that can be generated in master mode is
BRCLK. Modulation is not used in SPI mode, and UCAxMCTL should be cleared when using SPI mode
for eUSCI_A.
The UCAxCLK or UCBxCLK frequency is given by:
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
Even UCBRx settings result in even divisions and, thus, generate a bit clock with a 50/50 duty cycle.
Odd UCBRx settings result in odd divisions. In this case, the high phase of the bit clock is one BRCLK
cycle longer than the low phase.
When UCBRx = 0, no division is applied to BRCLK, and the bit clock equals BRCLK.
40.3.6.1 Serial Clock Polarity and Phase
The polarity and phase of UCxCLK are independently configured via the UCCKPL and UCCKPH control
bits of the eUSCI. Timing for each case is shown in Figure 40-4.
1062 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
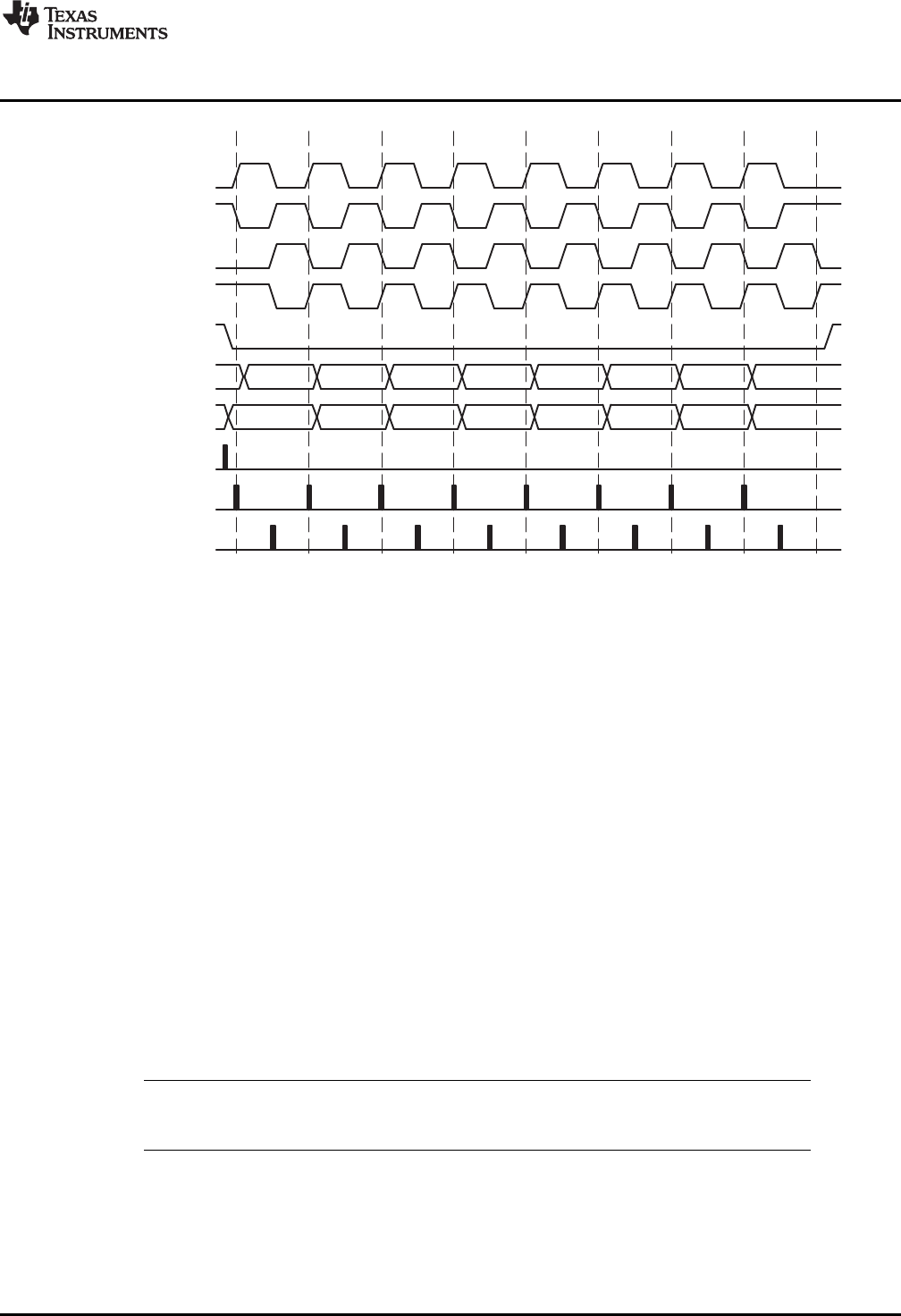
CKPH CKPL Cycle#
UCxCLK
UCxCLK
UCxCLK
UCxCLK
UCxSIMO/
UCxSOMI
UCxSIMO
UCxSOMI
Move to UCxTXBUF
RX Sample Points
0
1
0
0
01
1 1
0 X
1 X
MSB
MSB
1 2 3 4 5 6 7 8
LSB
LSB
TX Data Shifted Out
UCxSTE
UC UC
www.ti.com
eUSCI Operation – SPI Mode
Figure 40-4. eUSCI SPI Timing With UCMSB = 1
40.3.7 Using the SPI Mode With Low-Power Modes
The eUSCI module provides automatic clock activation for use with low-power modes. When the eUSCI
clock source is inactive because the device is in a low-power mode, the eUSCI module automatically
activates it when needed, regardless of the control-bit settings for the clock source. The clock remains
active until the eUSCI module returns to its idle condition. After the eUSCI module returns to the idle
condition, control of the clock source reverts to the settings of its control bits.
In SPI slave mode, no internal clock source is required because the clock is provided by the external
master. It is possible to operate the eUSCI in SPI slave mode while the device is in LPM4 and all clock
sources are disabled. The receive or transmit interrupt can wake up the CPU from any low-power mode.
40.3.8 eUSCI Interrupts in SPI Mode
The eUSCI has only one interrupt vector that is shared for transmission and for reception. eUSCI_Ax and
eUSCI_Bx do not share the same interrupt vector.
40.3.8.1 SPI Transmit Interrupt Operation
The UCTXIFG interrupt flag is set by the transmitter to indicate that UCxTXBUF is ready to accept another
character. An interrupt request is generated if UCTXIE and GIE are also set. UCTXIFG is automatically
reset if a character is written to UCxTXBUF. UCTXIFG is set after a PUC or when UCSWRST = 1.
UCTXIE is reset after a PUC or when UCSWRST = 1.
NOTE: Writing to UCxTXBUF in SPI mode
Data written to UCxTXBUF when UCTXIFG = 0 may result in erroneous data transmission.
40.3.8.2 SPI Receive Interrupt Operation
The UCRXIFG interrupt flag is set each time a character is received and loaded into UCxRXBUF. An
interrupt request is generated if UCRXIE and GIE are also set. UCRXIFG and UCRXIE are reset by a
system reset PUC signal or when UCSWRST = 1. UCRXIFG is automatically reset when UCxRXBUF is
read.
1063
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

eUSCI Operation – SPI Mode
www.ti.com
40.3.8.3 UCxIV, Interrupt Vector Generator
The eUSCI interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCxIV is used to determine which flag requested an interrupt. The highest-priority enabled
interrupt generates a number in the UCxIV register that can be evaluated or added to the program counter
(PC) to automatically enter the appropriate software routine. Disabled interrupts do not affect the UCxIV
value.
Any access, read or write, of the UCxIV register automatically resets the highest-pending interrupt flag. If
another interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
40.3.8.3.1 UCxIV Software Example
The following software example shows the recommended use of UCxIV. The UCxIV value is added to the
PC to automatically jump to the appropriate routine. The following example is given for eUSCI_B0.
USCI_SPI_ISR
ADD &UCB0IV, PC ; Add offset to jump table
RETI ; Vector 0: No interrupt
JMP RXIFG_ISR ; Vector 2: RXIFG
TXIFG_ISR ; Vector 4: TXIFG
... ; Task starts here
RETI ; Return
RXIFG_ISR ; Vector 2
... ; Task starts here
RETI ; Return
1064 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A SPI Registers
40.4 eUSCI_A SPI Registers
The eUSCI_A registers applicable in SPI mode and their address offsets are listed in Table 40-2. The
base addresses can be found in the device-specific data sheet.
Table 40-2. eUSCI_A SPI Registers
Offset Acronym Register Name Type Access Reset Section
00h UCAxCTLW0 eUSCI_Ax Control Word 0 Read/write Word 0001h Section 40.4.1
00h UCAxCTL1 eUSCI_Ax Control 1 Read/write Byte 01h
01h UCAxCTL0 eUSCI_Ax Control 0 Read/write Byte 00h
06h UCAxBRW eUSCI_Ax Bit Rate Control Word Read/write Word 0000h Section 40.4.2
06h UCAxBR0 eUSCI_Ax Bit Rate Control 0 Read/write Byte 00h
07h UCAxBR1 eUSCI_Ax Bit Rate Control 1 Read/write Byte 00h
0Ah UCAxSTATW eUSCI_Ax Status Read/write Word 00h Section 40.4.3
0Ch UCAxRXBUF eUSCI_Ax Receive Buffer Read/write Word 00h Section 40.4.4
0Eh UCAxTXBUF eUSCI_Ax Transmit Buffer Read/write Word 00h Section 40.4.5
1Ah UCAxIE eUSCI_Ax Interrupt Enable Read/write Word 00h Section 40.4.6
1Ch UCAxIFG eUSCI_Ax Interrupt Flag Read/write Word 02h Section 40.4.7
1Eh UCAxIV eUSCI_Ax Interrupt Vector Read Word 0000h Section 40.4.8
1065
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A SPI Registers
www.ti.com
40.4.1 UCAxCTLW0 Register
eUSCI_Ax Control Register 0
Figure 40-5. UCAxCTLW0 Register
15 14 13 12 11 10 9 8
UCCKPH UCCKPL UCMSB UC7BIT UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCSSELx Reserved UCSTEM UCSWRST
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 40-3. UCAxCTLW0 Register Description
Bit Field Type Reset Description
15 UCCKPH RW 0h Clock phase select
0b = Data is changed on the first UCLK edge and captured on the following
edge.
1b = Data is captured on the first UCLK edge and changed on the following
edge.
14 UCCKPL RW 0h Clock polarity select
0b = The inactive state is low.
1b = The inactive state is high.
13 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
12 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
11 UCMST RW 0h Master mode select
0b = Slave mode
1b = Master mode
10-9 UCMODEx RW 0h eUSCI mode. The UCMODEx bits select the synchronous mode when UCSYNC
= 1.
00b = 3-pin SPI
01b = 4-pin SPI with UCxSTE active high: Slave enabled when UCxSTE = 1
10b = 4-pin SPI with UCxSTE active low: Slave enabled when UCxSTE = 0
11b = Reserved
8 UCSYNC RW 0h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
7-6 UCSSELx RW 0h eUSCI clock source select. These bits select the BRCLK source clock.
00b = UCxCLK in slave mode. Do not use in master mode.
01b = ACLK in master mode. Do not use in slave mode.
10b = SMCLK in master mode. Do not use in slave mode.
11b = SMCLK in master mode. Do not use in slave mode.
5-2 Reserved R 0h Reserved
1 UCSTEM RW 0h STE mode select in master mode. This byte is ignored in slave or 3-wire mode.
0b = STE pin is used to prevent conflicts with other masters
1b = STE pin is used to generate the enable signal for a 4-wire slave
0 UCSWRST RW 1h Software reset enable
0b = Disabled. eUSCI reset released for operation.
1b = Enabled. eUSCI logic held in reset state.
1066 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A SPI Registers
40.4.2 UCAxBRW Register
eUSCI_Ax Bit Rate Control Register 1
Figure 40-6. UCAxBRW Register
15 14 13 12 11 10 9 8
UCBRx
rw rw rw rw rw rw rw rw
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 40-4. UCAxBRW Register Description
Bit Field Type Reset Description
15-0 UCBRx RW 0h Bit clock prescaler setting.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
1067
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A SPI Registers
www.ti.com
40.4.3 UCAxSTATW Register
eUSCI_Ax Status Register
Figure 40-7. UCAxSTATW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCLISTEN UCFE UCOE Reserved UCBUSY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 r-0
Modify only when UCSWRST = 1.
Table 40-5. UCAxSTATW Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. The transmitter output is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. This bit indicates a bus conflict in 4-wire master mode. UCFE
is not used in 3-wire master or any slave mode.
0b = No error
1b = Bus conflict occurred
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into UCxRXBUF
before the previous character was read. UCOE is cleared automatically when
UCxRXBUF is read, and must not be cleared by software. Otherwise, it does not
function correctly.
0b = No error
1b = Overrun error occurred
4-1 Reserved RW 0h Reserved
0 UCBUSY R 0h eUSCI busy. This bit indicates if a transmit or receive operation is in progress.
0b = eUSCI inactive
1b = eUSCI transmitting or receiving
1068 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A SPI Registers
40.4.4 UCAxRXBUF Register
eUSCI_Ax Receive Buffer Register
Figure 40-8. UCAxRXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCRXBUFx
rw rw rw rw rw rw rw rw
Table 40-6. UCAxRXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCRXBUFx R 0h The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCxRXBUF resets the receive-
error bits and UCRXIFG. In 7-bit data mode, UCxRXBUF is LSB justified and the
MSB is always reset.
1069
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A SPI Registers
www.ti.com
40.4.5 UCAxTXBUF Register
eUSCI_Ax Transmit Buffer Register
Figure 40-9. UCAxTXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 40-7. UCAxTXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCTXBUFx RW 0h The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit data
buffer clears UCTXIFG. The MSB of UCxTXBUF is not used for 7-bit data and is
reset.
1070 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A SPI Registers
40.4.6 UCAxIE Register
eUSCI_Ax Interrupt Enable Register
Figure 40-10. UCAxIE Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved UCTXIE UCRXIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 40-8. UCAxIE Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1071
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_A SPI Registers
www.ti.com
40.4.7 UCAxIFG Register
eUSCI_Ax Interrupt Flag Register
Figure 40-11. UCAxIFG Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-0
Table 40-9. UCAxIFG Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCxxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCxxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
1072 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_A SPI Registers
40.4.8 UCAxIV Register
eUSCI_Ax Interrupt Vector Register
Figure 40-12. UCAxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 40-10. UCAxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h eUSCI interrupt vector value
000h = No interrupt pending
002h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
004h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
1073
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B SPI Registers
www.ti.com
40.5 eUSCI_B SPI Registers
The eUSCI_B registers applicable in SPI mode and their address offsets are listed in Table 40-11. The
base addresses can be found in the device-specific data sheet.
Table 40-11. eUSCI_B SPI Registers
Offset Acronym Register Name Type Access Reset Section
00h UCBxCTLW0 eUSCI_Bx Control Word 0 Read/write Word 01C1h Section 40.5.1
00h UCBxCTL1 eUSCI_Bx Control 1 Read/write Byte C1h
01h UCBxCTL0 eUSCI_Bx Control 0 Read/write Byte 01h
06h UCBxBRW eUSCI_Bx Bit Rate Control Word Read/write Word 0000h Section 40.5.2
06h UCBxBR0 eUSCI_Bx Bit Rate Control 0 Read/write Byte 00h
07h UCBxBR1 eUSCI_Bx Bit Rate Control 1 Read/write Byte 00h
08h UCBxSTATW eUSCI_Bx Status Read/write Word 00h Section 40.5.3
0Ch UCBxRXBUF eUSCI_Bx Receive Buffer Read/write Word 00h Section 40.5.4
0Eh UCBxTXBUF eUSCI_Bx Transmit Buffer Read/write Word 00h Section 40.5.5
2Ah UCBxIE eUSCI_Bx Interrupt Enable Read/write Word 00h Section 40.5.6
2Ch UCBxIFG eUSCI_Bx Interrupt Flag Read/write Word 02h Section 40.5.7
2Eh UCBxIV eUSCI_Bx Interrupt Vector Read Word 0000h Section 40.5.8
1074 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B SPI Registers
40.5.1 UCBxCTLW0 Register
eUSCI_Bx Control Register 0
Figure 40-13. UCBxCTLW0 Register
15 14 13 12 11 10 9 8
UCCKPH UCCKPL UCMSB UC7BIT UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
76543210
UCSSELx Reserved UCSTEM UCSWRST
rw-1 rw-1 r0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 40-12. UCBxCTLW0 Register Description
Bit Field Type Reset Description
15 UCCKPH RW 0h Clock phase select
0b = Data is changed on the first UCLK edge and captured on the following
edge.
1b = Data is captured on the first UCLK edge and changed on the following
edge.
14 UCCKPL RW 0h Clock polarity select
0b = The inactive state is low.
1b = The inactive state is high.
13 UCMSB RW 0h MSB first select. Controls the direction of the receive and transmit shift register.
0b = LSB first
1b = MSB first
12 UC7BIT RW 0h Character length. Selects 7-bit or 8-bit character length.
0b = 8-bit data
1b = 7-bit data
11 UCMST RW 0h Master mode select
0b = Slave mode
1b = Master mode
10-9 UCMODEx RW 0h eUSCI mode. The UCMODEx bits select the synchronous mode when UCSYNC
= 1.
00b = 3-pin SPI
01b = 4-pin SPI with UCxSTE active high: Slave enabled when UCxSTE = 1
10b = 4-pin SPI with UCxSTE active low: Slave enabled when UCxSTE = 0
11b = I2C mode
8 UCSYNC RW 1h Synchronous mode enable
0b = Asynchronous mode
1b = Synchronous mode
7-6 UCSSELx RW 3h eUSCI clock source select. These bits select the BRCLK source clock.
00b = UCxCLK in slave mode. Don't use in master mode.
01b = ACLK in master mode. Don't use in slave mode.
10b = SMCLK in master mode. Don't use in slave mode.
11b = SMCLK in master mode. Don't use in slave mode.
5-2 Reserved R 0h Reserved
1 UCSTEM RW 0h STE mode select in master mode. This byte is ignored in slave or 3-wire mode.
0b = STE pin is used to prevent conflicts with other masters
1b = STE pin is used to generate the enable signal for a 4-wire slave
0 UCSWRST RW 1h Software reset enable
0b = Disabled. eUSCI reset released for operation.
1b = Enabled. eUSCI logic held in reset state.
1075
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B SPI Registers
www.ti.com
40.5.2 UCBxBRW Register
eUSCI_Bx Bit Rate Control Register 1
Figure 40-14. UCBxBRW Register
15 14 13 12 11 10 9 8
UCBRx
rw rw rw rw rw rw rw rw
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 40-13. UCBxBRW Register Description
Bit Field Type Reset Description
15-0 UCBRx RW 0h Bit clock prescaler setting.
fBitClock = fBRCLK / UCBRx
If UCBRx = 0, fBitClock = fBRCLK
40.5.3 UCBxSTATW Register
eUSCI_Bx Status Register
Figure 40-15. UCBxSTATW Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCLISTEN UCFE UCOE Reserved UCBUSY
rw-0 rw-0 rw-0 r0 r0 r0 r0 r-0
Modify only when UCSWRST = 1.
Table 40-14. UCBxSTATW Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7 UCLISTEN RW 0h Listen enable. The UCLISTEN bit selects loopback mode.
0b = Disabled
1b = Enabled. The transmitter output is internally fed back to the receiver.
6 UCFE RW 0h Framing error flag. This bit indicates a bus conflict in 4-wire master mode. UCFE
is not used in 3-wire master or any slave mode.
0b = No error
1b = Bus conflict occurred
5 UCOE RW 0h Overrun error flag. This bit is set when a character is transferred into UCxRXBUF
before the previous character was read. UCOE is cleared automatically when
UCxRXBUF is read, and must not be cleared by software. Otherwise, it does not
function correctly.
0b = No error
1b = Overrun error occurred
4-1 Reserved R 0h Reserved
0 UCBUSY R 0h eUSCI busy. This bit indicates if a transmit or receive operation is in progress.
0b = eUSCI inactive
1b = eUSCI transmitting or receiving
1076 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B SPI Registers
40.5.4 UCBxRXBUF Register
eUSCI_Bx Receive Buffer Register
Figure 40-16. UCBxRXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCRXBUFx
rw rw rw rw rw rw rw rw
Table 40-15. UCBxRXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCRXBUFx R 0h The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCxRXBUF resets the receive-
error bits and UCRXIFG. In 7-bit data mode, UCxRXBUF is LSB justified and the
MSB is always reset.
40.5.5 UCBxTXBUF Register
eUSCI_Bx Transmit Buffer Register
Figure 40-17. UCBxTXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 40-16. UCBxTXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCTXBUFx RW 0h The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit data
buffer clears UCTXIFG. The MSB of UCxTXBUF is not used for 7-bit data and is
reset.
1077
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B SPI Registers
www.ti.com
40.5.6 UCBxIE Register
eUSCI_Bx Interrupt Enable Register
Figure 40-18. UCBxIE Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved UCTXIE UCRXIE
r-0 r-0 r-0 r-0 r-0 r-0 rw-0 rw-0
Table 40-17. UCBxIE Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved
1 UCTXIE RW 0h Transmit interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE RW 0h Receive interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
40.5.7 UCBxIFG Register
eUSCI_Bx Interrupt Flag Register
Figure 40-19. UCBxIFG Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved UCTXIFG UCRXIFG
r-0 r-0 r-0 r-0 r-0 r-0 rw-1 rw-0
Table 40-18. UCBxIFG Register Description
Bit Field Type Reset Description
15-2 Reserved R 0h Reserved
1 UCTXIFG RW 1h Transmit interrupt flag. UCTXIFG is set when UCxxTXBUF empty.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG RW 0h Receive interrupt flag. UCRXIFG is set when UCxxRXBUF has received a
complete character.
0b = No interrupt pending
1b = Interrupt pending
1078 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B SPI Registers
40.5.8 UCBxIV Register
eUSCI_Bx Interrupt Vector Register
Figure 40-20. UCBxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r-0 r-0 r-0 r-0 r0
Table 40-19. UCBxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h eUSCI interrupt vector value
0000h = No interrupt pending
0002h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG; Interrupt
Priority: Highest
0004h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG;
Interrupt Priority: Lowest
1079
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – SPI Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 41
SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface
(eUSCI) – I2C Mode
The enhanced universal serial communication interface B (eUSCI_B) supports multiple serial
communication modes with one hardware module. This chapter discusses the operation of the I2C mode.
Topic ........................................................................................................................... Page
41.1 eUSCI_B I2C Registers .................................................................................... 1102
1080 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
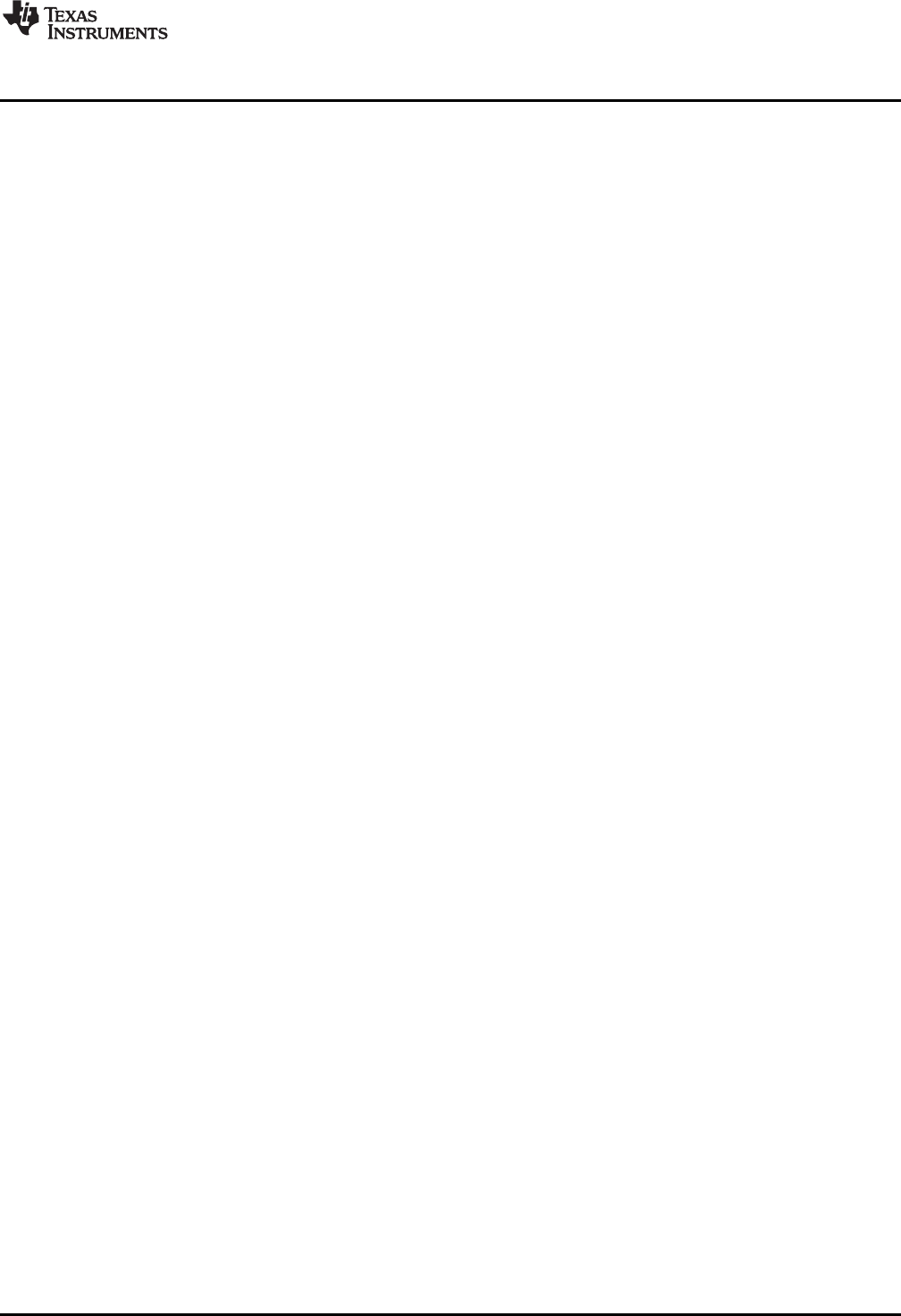
www.ti.com
Enhanced Universal Serial Communication Interface B (eUSCI_B) Overview
The eUSCI_B module supports two serial communication modes:
• I2C mode
• SPI mode
If more than one eUSCI_B module is implemented on one device, those modules are named with
incrementing numbers. For example, if one device has two eUSCI_B modules, they are named eUSCI0_B
and eUSCI1_B.
eUSCI_B Introduction – I2C Mode
In I2C mode, the eUSCI_B module provides an interface between the device and I2C-compatible devices
connected by the two-wire I2C serial bus. External components attached to the I2C bus serially transmit or
receive serial data to or from the eUSCI_B module through the 2-wire I2C interface.
The eUSCI_B I2C mode features include:
• 7-bit and 10-bit device addressing modes
• General call
• START, RESTART, STOP
• Multi-master transmitter or receiver mode
• Slave receiver or transmitter mode
• Standard mode up to 100 kbps and fast mode up to 400 kbps support
• Programmable UCxCLK frequency in master mode
• Designed for low power
• 8-bit byte counter with interrupt capability and automatic STOP assertion
• Up to four hardware slave addresses, each having its own interrupt and DMA trigger
• Mask register for slave address and address received interrupt
• Clock low timeout interrupt to avoid bus stalls
• Slave operation in LPM4
• Slave receiver START detection for auto wake-up from LPMx modes (not LPM3.5 and LPM4.5)
Figure 41-1 shows the eUSCI_B when configured in I2C mode.
1081
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
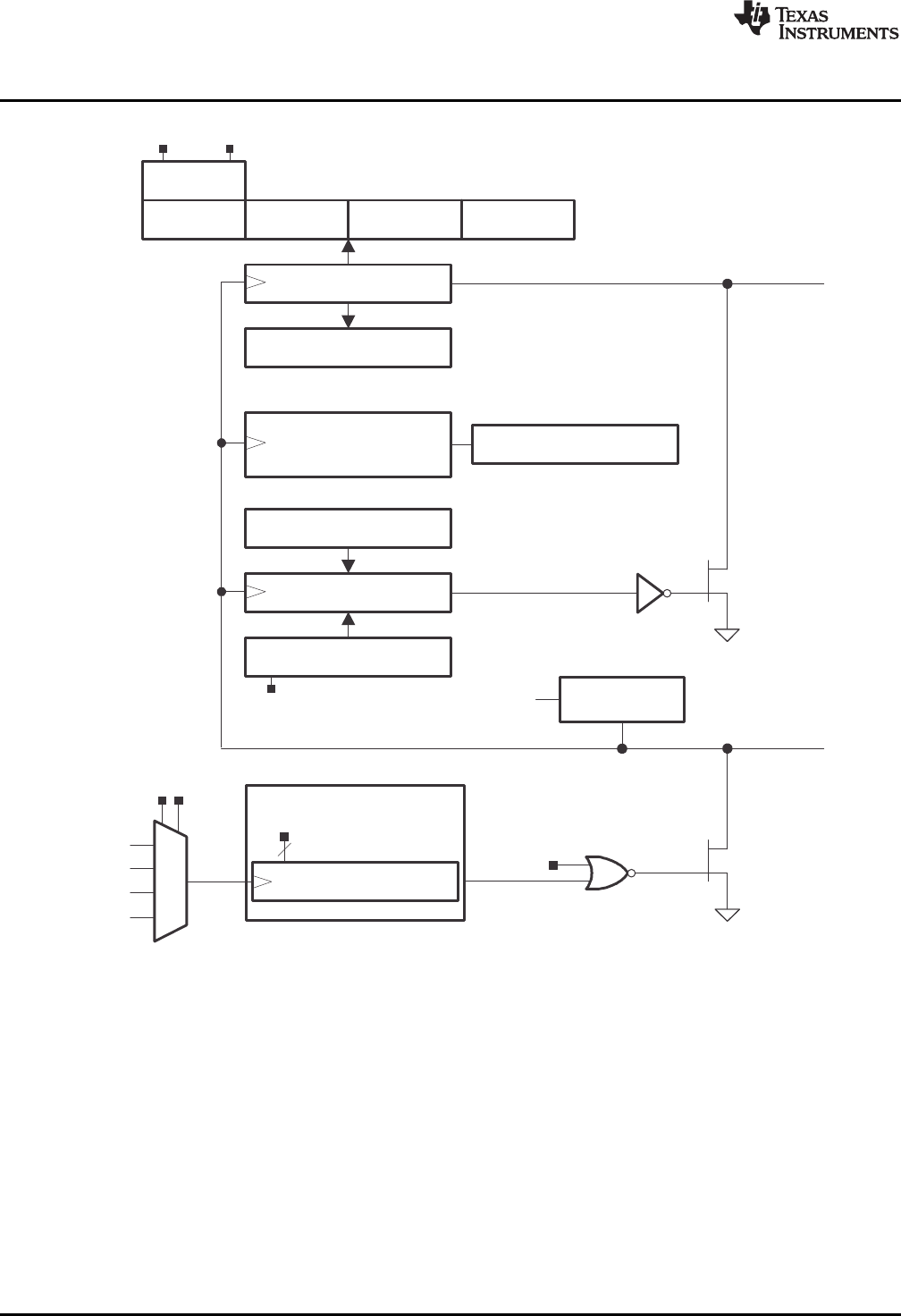
ACLK
SMCLK
SMCLK
00
01
10
11
UCSSELx
UCLKI(1)
Prescaler/Divider
Bit Clock Generator
UCxBRx
16
BRCLK
Transmit Shift Register
UCMST
I2C State Machine
Receive Shift Register
UCA10 UCGCEN
UCxSDA
UCxSCL
UCSLA10
Address Mask
UCBxADDMASK
Byte Counter UCBxBCNT
Own Address
UCBxI2COA0
Receive Buffer UCBxRXBUF
Transmit Buffer UCBxTXBUF
Slave Address UCBxI2CSA
Own Address
UCBxI2COA1
Own Address
UCBxI2COA2
Own Address
UCBxI2COA3
(1)
(2)
Externally provided clock on the eUSCI_B SPI clock input pin
Not the actual implementation (transistor not located in eUSCI_B module)
(2)
(2)
Clock Low
timeout generator
MODCLK
www.ti.com
Figure 41-1. eUSCI_B Block Diagram – I2C Mode
eUSCI_B Operation – I2C Mode
The I2C mode supports any slave or master I2C-compatible device. Figure 41-2 shows an example of an
I2C bus. Each I2C device is recognized by a unique address and can operate as either a transmitter or a
receiver. A device connected to the I2C bus can be considered as the master or the slave when
performing data transfers. A master initiates a data transfer and generates the clock signal SCL. Any
device addressed by a master is considered a slave.
I2C data is communicated using the serial data (SDA) pin and the serial clock (SCL) pin. Both SDA and
SCL are bidirectional and must be connected to a positive supply voltage using a pullup resistor.
1082 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
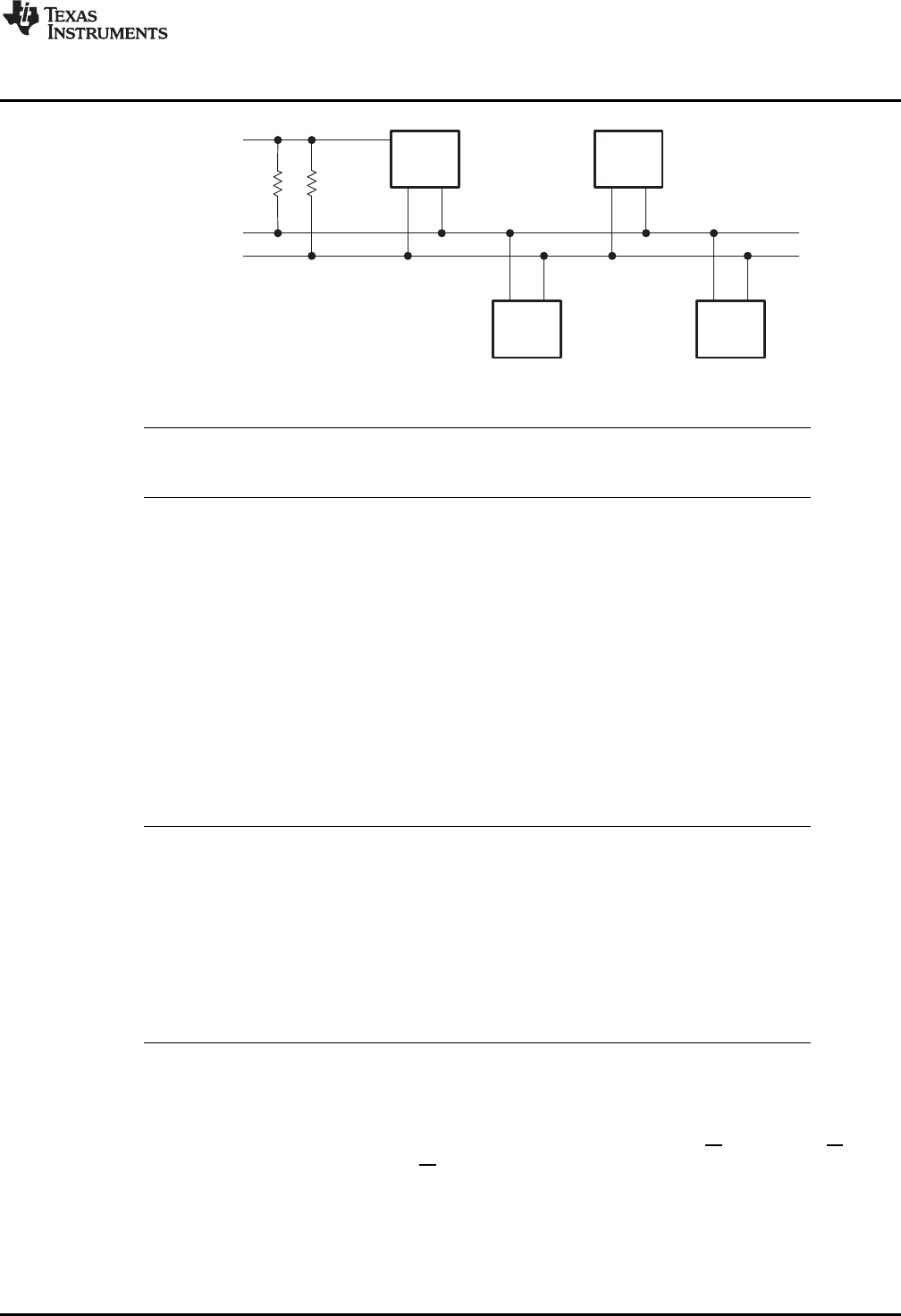
MSP430
VCC
Serial Data (SDA)
Serial Clock (SCL)
Device A
Device B Device C
www.ti.com
Figure 41-2. I2C Bus Connection Diagram
NOTE: SDA and SCL levels
The SDA and SCL pins must not be pulled up above the device VCC level.
eUSCI_B Initialization and Reset
The eUSCI_B is reset by a PUC or by setting the UCSWRST bit. After a PUC, the UCSWRST bit is
automatically set, keeping the eUSCI_B in a reset condition. To select I2C operation, the UCMODEx bits
must be set to 11. After module initialization, it is ready for transmit or receive operation. Clearing
UCSWRST releases the eUSCI_B for operation.
Configuring and reconfiguring the eUSCI_B module should be done when UCSWRST is set to avoid
unpredictable behavior. Setting UCSWRST in I2C mode has the following effects:
• I2C communication stops.
• SDA and SCL are high impedance.
• UCBxSTAT, bits 15-9 and 6-4 are cleared.
• Registers UCBxIE and UCBxIFG are cleared.
• All other bits and registers remain unchanged.
NOTE: Initializing or re-configuring the eUSCI_B module
The recommended eUSCI_B initialization/reconfiguration process is:
1. Set UCSWRST (BIS.B
#UCSWRST,&UCxCTL1).
2. Initialize all eUSCI_B registers with UCSWRST = 1 (including UCxCTL1).
3. Configure ports.
4. Clear UCSWRST via software (BIC.B
#UCSWRST,&UCxCTL1).
5. Enable interrupts (optional).
I2C Serial Data
One clock pulse is generated by the master device for each data bit transferred. The I2C mode operates
with byte data. Data is transferred MSB first as shown in Figure 41-3.
The first byte after a START condition consists of a 7-bit slave address and the R/W bit. When R/W = 0,
the master transmits data to a slave. When R/W = 1, the master receives data from a slave. The ACK bit
is sent from the receiver after each byte on the ninth SCL clock.
1083
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
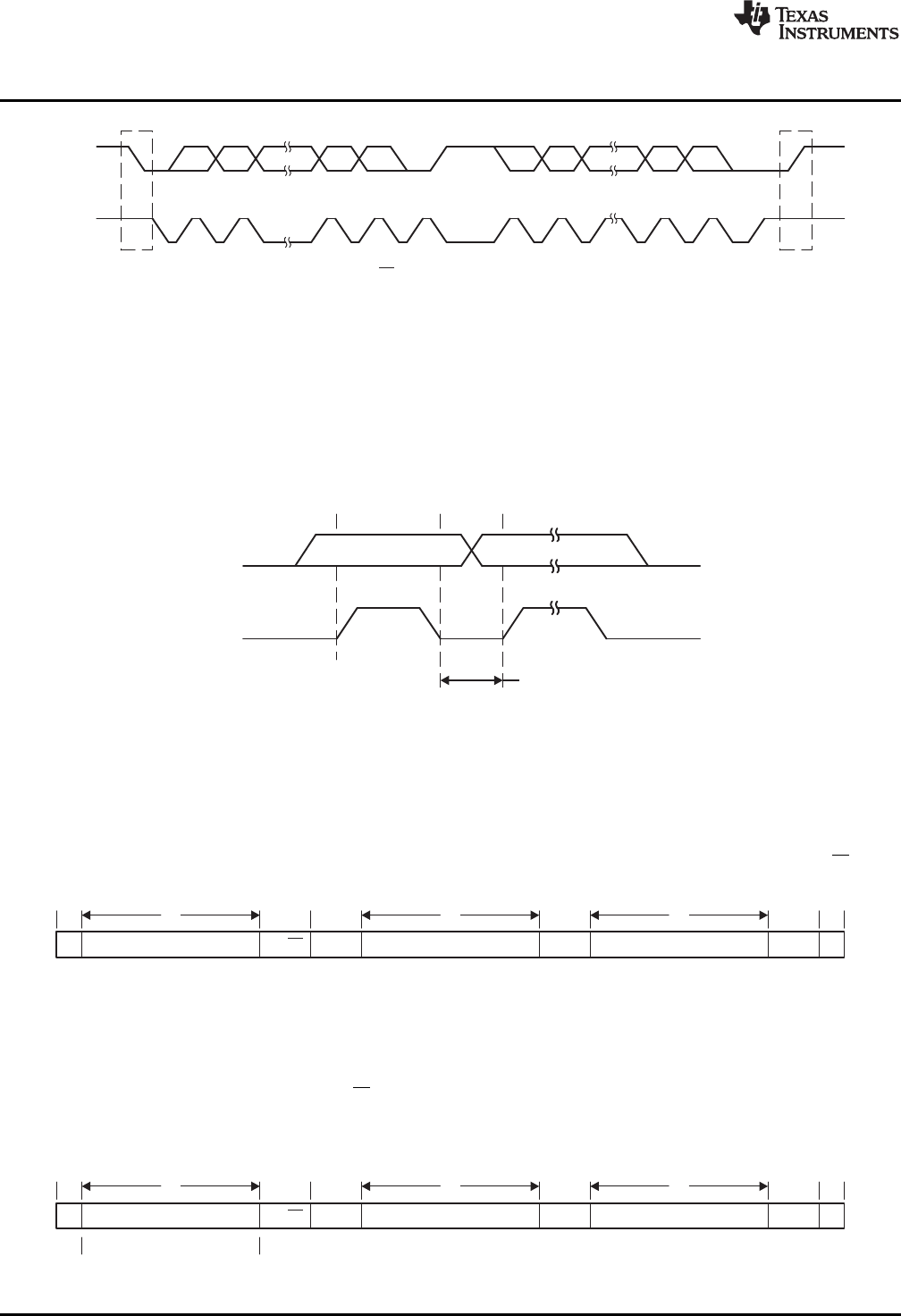
S
1
Slave Address 1st byte
7
Slave Address 2nd byteACKR/W
11 8
ACK
1
Data
8
ACK
1
P
1
1 1 1 1 0 X X
S Slave Address R/W ACK Data ACK Data ACK P
7 8 8
1 1 1 1 1 1
Data Line
Stable Data
Change of Data Allowed
SDA
SCL
SDA
SCL
MSB Acknowledgement
Signal From Receiver
Acknowledgement
Signal From Receiver
1 2 7 8 9 1 2 8 9
ACK ACK
START
Condition (S)
STOP
Condition (P)
R/W
www.ti.com
Figure 41-3. I2C Module Data Transfer
START and STOP conditions are generated by the master and are shown in Figure 41-3. A START
condition is a high-to-low transition on the SDA line while SCL is high. A STOP condition is a low-to-high
transition on the SDA line while SCL is high. The bus busy bit, UCBBUSY, is set after a START and
cleared after a STOP.
Data on SDA must be stable during the high period of SCL (see Figure 41-4). The high and low state of
SDA can change only when SCL is low, otherwise START or STOP conditions are generated.
Figure 41-4. Bit Transfer on I2C Bus
I2C Addressing Modes
The I2C mode supports 7-bit and 10-bit addressing modes.
7-Bit Addressing
In the 7-bit addressing format (see Figure 41-5), the first byte is the 7-bit slave address and the R/W bit.
The ACK bit is sent from the receiver after each byte.
Figure 41-5. I2C Module 7-Bit Addressing Format
10-Bit Addressing
In the 10-bit addressing format (see Figure 41-6), the first byte is made up of 11110b plus the two MSBs
of the 10-bit slave address and the R/W bit. The ACK bit is sent from the receiver after each byte. The
next byte is the remaining eight bits of the 10-bit slave address, followed by the ACK bit and the 8-bit data.
See I2C Slave 10-bit Addressing Mode and I2C Master 10-bit Addressing Mode for details how to use the
10-bit addressing mode with the eUSCI_B module.
Figure 41-6. I2C Module 10-Bit Addressing Format
1084 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
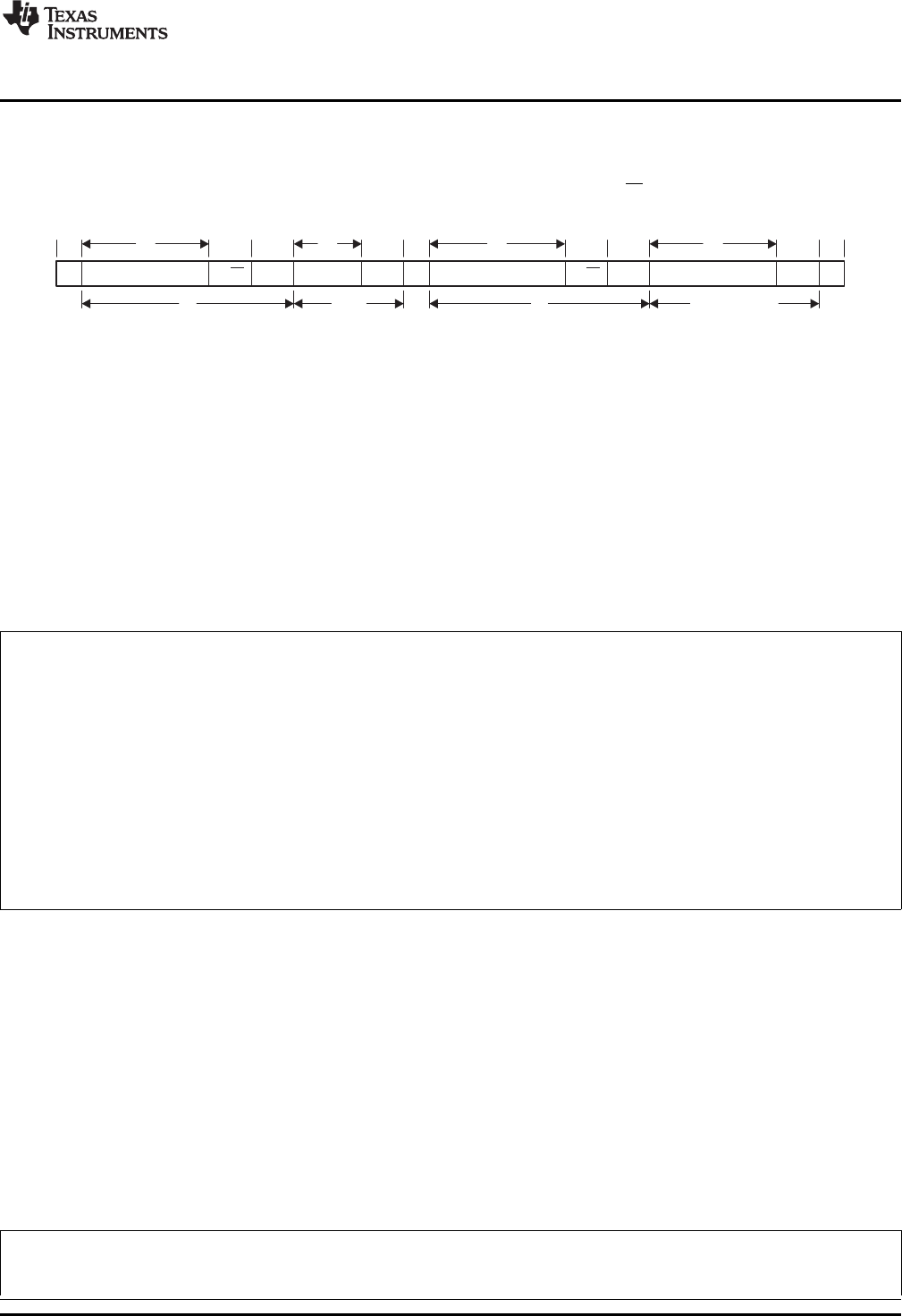
17 8 7 8
1 1 1 1 1 1 1 1
S Slave Address R/W ACK Data ACK S Slave Address ACK Data ACK P
1 Any
Number
1 Any Number
R/W
www.ti.com
Repeated Start Conditions
The direction of data flow on SDA can be changed by the master, without first stopping a transfer, by
issuing a repeated START condition. This is called a RESTART. After a RESTART is issued, the slave
address is again sent out with the new data direction specified by the R/W bit. The RESTART condition is
shown in Figure 41-7.
Figure 41-7. I2C Module Addressing Format With Repeated START Condition
41.0.9 I2C Quick Setup
This section gives a quick introduction into the operation of the eUSCI_B in I2C mode. The basic steps to
start communication are described and shown as a software example. More detailed information about the
possible configurations and details can be found in I2C Module Operating Modes.
The latest code examples can be found on the MSP430 web under "Code Examples".
To set up the eUSCI_B as a master transmitter that transmits to a slave with the address 0x12h, only a
few steps are needed (see Example 41-1).
Example 41-1. Master TX With 7-Bit Address
UCBxCTL1 |= UCSWRST; // put eUSCI_B in reset state
UCBxCTLW0 |= UCMODE_3 + UCMST; // I2C master mode
UCBxBRW = 0x0008; // baudrate = SMCLK / 8
UCBxCTLW1 = UCASTP_2; // autom. STOP assertion
UCBxTBCNT = 0x07; // TX 7 bytes of data
UCBxI2CSA = 0x0012; // address slave is 12hex
P2SEL |= 0x03; // configure I2C pins (device specific)
UCBxCTL1 &= ^UCSWRST; // eUSCI_B in operational state
UCBxIE |= UCTXIE; // enable TX-interrupt
GIE; // general interrupt enable
...
// inside the eUSCI_B TX interrupt service routine
UCBxTXBUF = 0x77; // fill TX buffer
As shown in the code example, all configurations must be done while UCSWRST is set. To select the I2C
operation of the eUSCI_B, UCMODE must be set accordingly. The baudrate of the transmission is set by
writing the correct divider in the UCBxBRW register. The default clock selected is SMCLK. How many
bytes are transmitted in one frame is controlled by the byte counter threshold register UCBxTBCNT
together with the UCASTPx bits.
The slave address to send to is specified in the UCBxI2CSA register. Finally, the ports must be
configured. This step is device dependent; see the data sheet for the pins that must be used.
Each byte that is to be transmitted must be written to the UCBxTXBUF inside the interrupt service routine.
The recommended structure of the interrupt service routine can be found in Example 41-3.
Example 41-2 shows the steps needed to set up the eUSCI_B as a slave with the address 0x12h that is
able to receive and transmit data to the master.
Example 41-2. Slave RX With 7-Bit Address
UCBxCTL1 |= UCSWRST; // eUSCI_B in reset state
UCBxCTLW0 |= UCMODE_3; // I2C slave mode
UCBxI2COA0 = 0x0012; // own address is 12hex
1085
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
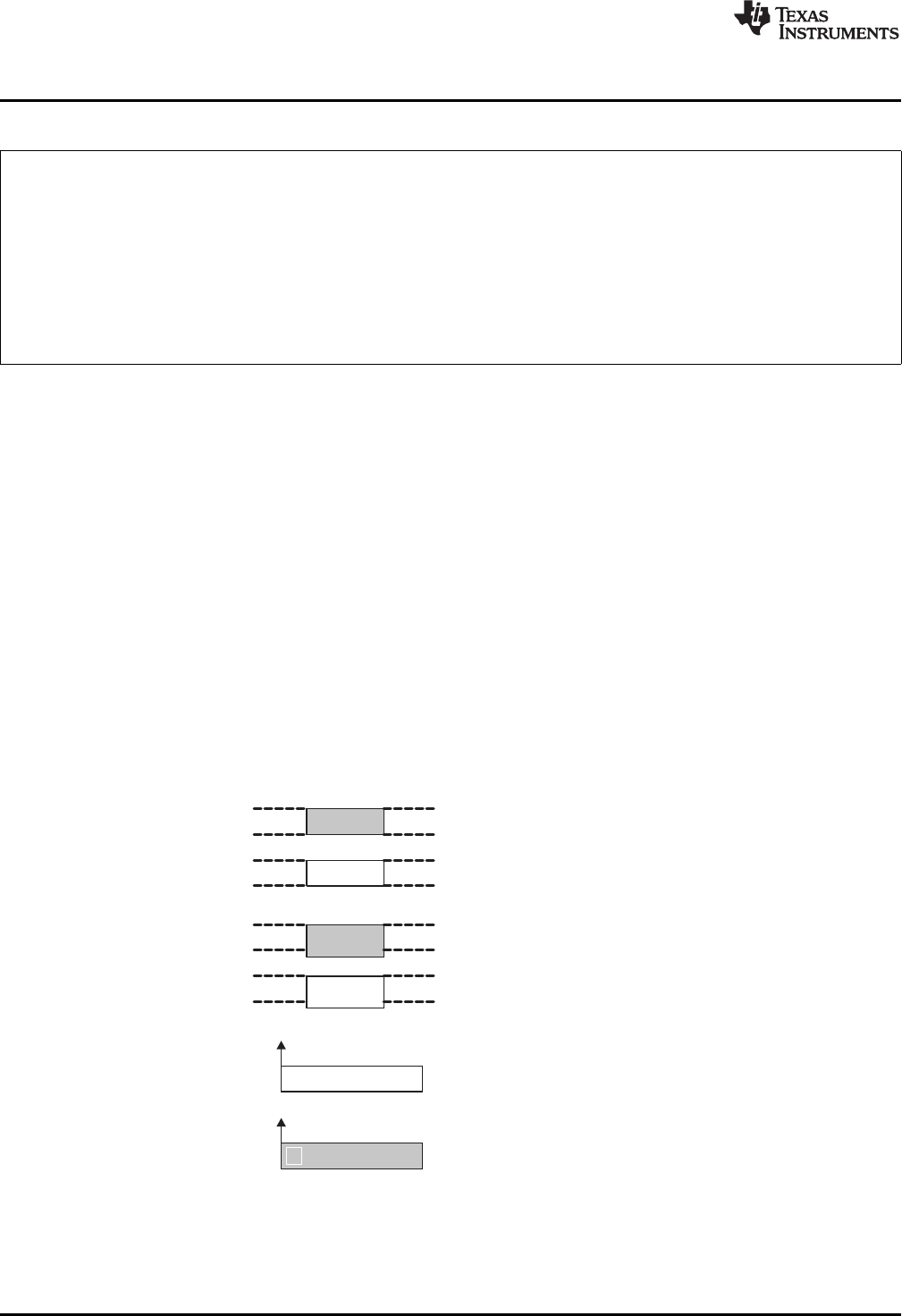
...
USCI Master
USCI Slave
Other Master
Other Slave
... Bits set or reset by software
Bits set or reset by hardware
www.ti.com
Example 41-2. Slave RX With 7-Bit Address (continued)
P2SEL |= 0x03; // configure I2C pins (device specific)
UCBxCTL1 &= ^UCSWRST; // eUSCI_B in operational state
UCBxIE |= UCTXIE + UCRXIE; // enable TX&RX-interrupt
GIE; // general interrupt enable
...
// inside the eUSCI_B TX interrupt service routine
UCBxTXBUF = 0x77; // send 077h
...
// inside the eUSCI_B RX interrupt service routine
data = UCBxRXBUF; // data is the internal variable
As shown in Example 41-2, all configurations must be done while UCSWRST is set. For the slave, I2C
operation is selected by setting UCMODE. The slave address is specified in the UCBxI2COA0 register. To
enable the interrupts for receive and transmit requests, the according bits in UCBxIE and, at the end, GIE
need to be set. Finally the ports must be configured. This step is device dependent; see the data sheet for
the pins that are used.
The RX interrupt service routine is called for every byte received by a master device. The TX interrupt
service routine is executed each time the master requests a byte. The recommended structure of the
interrupt service routine can be found in Example 41-3.
I2C Module Operating Modes
In I2C mode, the eUSCI_B module can operate in master transmitter, master receiver, slave transmitter, or
slave receiver mode. The modes are discussed in the following sections. Time lines are used to illustrate
the modes.
Figure 41-8 shows how to interpret the time-line figures. Data transmitted by the master is represented by
grey rectangles; data transmitted by the slave is represented by white rectangles. Data transmitted by the
eUSCI_B module, either as master or slave, is shown by rectangles that are taller than the others.
Actions taken by the eUSCI_B module are shown in grey rectangles with an arrow indicating where in the
data stream the action occurs. Actions that must be handled with software are indicated with white
rectangles with an arrow pointing to where in the data stream the action must take place.
Figure 41-8. I2C Time-Line Legend
1086 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Slave Mode
The eUSCI_B module is configured as an I2C slave by selecting the I2C mode with UCMODEx = 11 and
UCSYNC = 1 and clearing the UCMST bit.
Initially, the eUSCI_B module must be configured in receiver mode by clearing the UCTR bit to receive the
I2C address. Afterwards, transmit and receive operations are controlled automatically, depending on the
R/W bit received together with the slave address.
The eUSCI_B slave address is programmed with the UCBxI2COA0 register. Support for multiple slave
addresses is explained in Section 41.0.12. When UCA10 = 0, 7-bit addressing is selected. When UCA10 =
1, 10-bit addressing is selected. The UCGCEN bit selects if the slave responds to a general call.
When a START condition is detected on the bus, the eUSCI_B module receives the transmitted address
and compares it against its own address stored in UCBxI2COA0. The UCSTTIFG flag is set when address
received matches the eUSCI_B slave address.
I2C Slave Transmitter Mode
Slave transmitter mode is entered when the slave address transmitted by the master is identical to its own
address with a set R/W bit. The slave transmitter shifts the serial data out on SDA with the clock pulses
that are generated by the master device. The slave device does not generate the clock, but it does hold
SCL low while intervention of the CPU is required after a byte has been transmitted.
If the master requests data from the slave, the eUSCI_B module is automatically configured as a
transmitter and UCTR and UCTXIFG0 become set. The SCL line is held low until the first data to be sent
is written into the transmit buffer UCBxTXBUF. Then the address is acknowledged and the data is
transmitted. As soon as the data is transferred into the shift register, the UCTXIFG0 is set again. After the
data is acknowledged by the master, the next data byte written into UCBxTXBUF is transmitted or, if the
buffer is empty, the bus is stalled during the acknowledge cycle by holding SCL low until new data is
written into UCBxTXBUF. If the master sends a NACK followed by a STOP condition, the UCSTPIFG flag
is set. If the NACK is followed by a repeated START condition, the eUSCI_B I2C state machine returns to
its address-reception state.
Figure 41-9 shows the slave transmitter operation.
1087
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

S SLA/R A DATA A P
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCBxTXBUFdiscarded
Receptionofown
addressand
transmissionofdata
bytes
Busstalled (SCL heldlow)
untildataavailable
DATADATA A
UCSTPIFG=1
A
A
DATA A S SLA/R
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
UCBxTXBUFdiscarded
DATA A S SLA/W
UCTR=0(Receiver)
UCSTTIFG=1
Arbitrationlostas
masterand
addressedasslave
UCALIFG=1
UCMST=0
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
Repeatedstart -
continueas
slavetransmitter
Repeatedstart -
continueas
slavereceiver
WritedatatoUCBxTXBUF
UCTXIFG=1
WritedatatoUCBxTXBUF
www.ti.com
Figure 41-9. I2C Slave Transmitter Mode
I2C Slave Receiver Mode
Slave receiver mode is entered when the slave address transmitted by the master is identical to its own
address and a cleared R/W bit is received. In slave receiver mode, serial data bits received on SDA are
shifted in with the clock pulses that are generated by the master device. The slave device does not
generate the clock, but it can hold SCL low if intervention of the CPU is required after a byte has been
received.
If the slave receives data from the master, the eUSCI_B module is automatically configured as a receiver
and UCTR is cleared. After the first data byte is received, the receive interrupt flag UCRXIFG0 is set. The
eUSCI_B module automatically acknowledges the received data and can receive the next data byte.
If the previous data was not read from the receive buffer UCBxRXBUF at the end of a reception, the bus
is stalled by holding SCL low. As soon as UCBxRXBUF is read, the new data is transferred into
UCBxRXBUF, an acknowledge is sent to the master, and the next data can be received.
Setting the UCTXNACK bit causes a NACK to be transmitted to the master during the next
acknowledgment cycle. A NACK is sent even if UCBxRXBUF is not ready to receive the latest data. If the
UCTXNACK bit is set while SCL is held low, the bus is released, a NACK is transmitted immediately, and
UCBxRXBUF is loaded with the last received data. Because the previous data was not read, that data is
lost. To avoid loss of data, the UCBxRXBUF must be read before UCTXNACK is set.
When the master generates a STOP condition, the UCSTPIFG flag is set.
1088 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
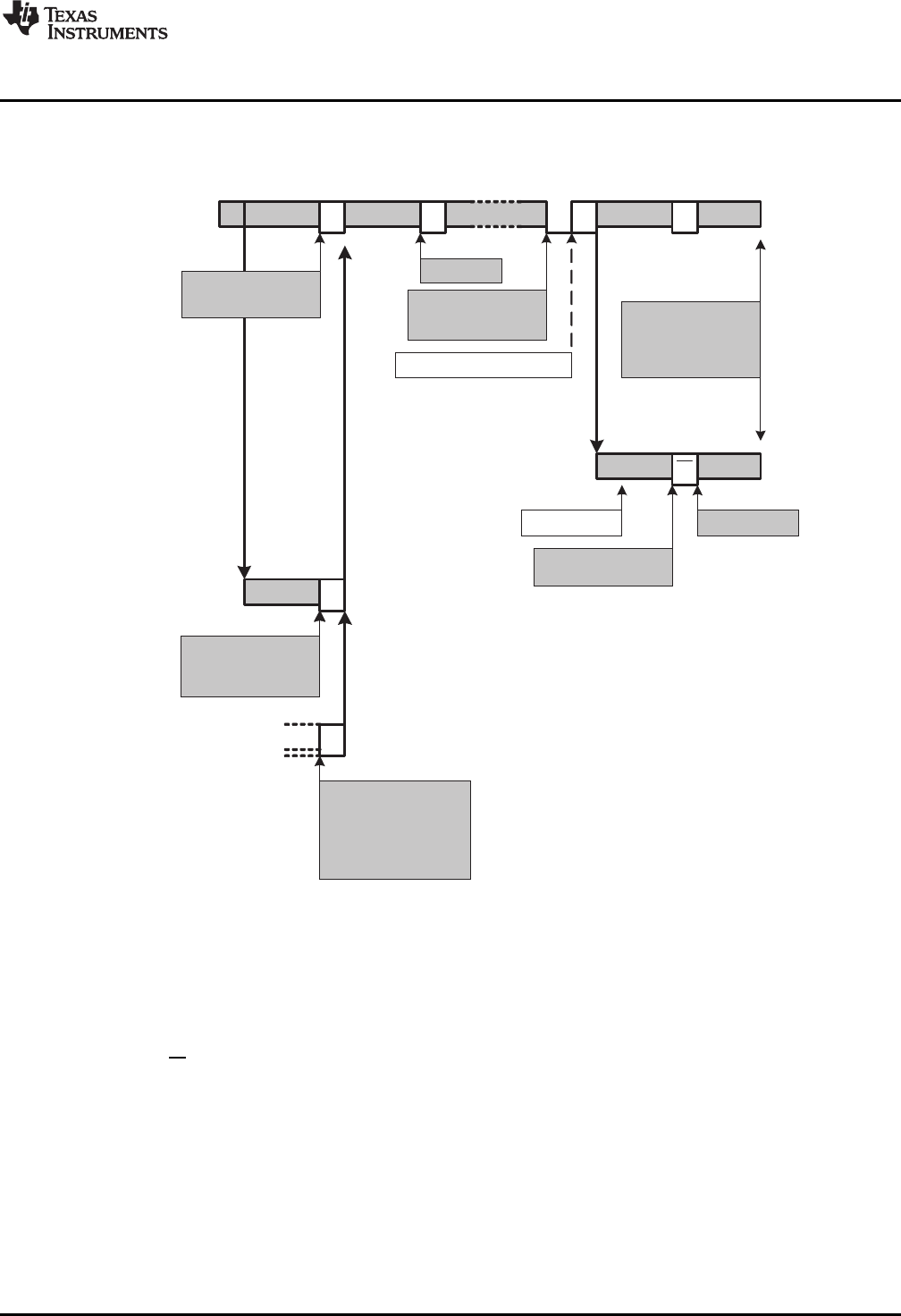
S SLA/W ADATA AP orS
Receptionofown
addressanddata
bytes. Allare
acknowledged.
UCRXIFG=1
DATADATA A A
UCTXNACK=1
Referto:
”Slave Transmitter”
TimingDiagram
Bus not stalledevenif
UCBxRXBUFnotread
P orSDATA A
A
Arbitrationlostas
masterand
addressedasslave
UCALIFG=1
UCMST=0
UCTR=0(Receiver)
UCSTTIFG=1
(UCGC=1ifgeneralcall)
Lastbyteisnot
acknowledged.
UCTR=0(Receiver)
UCSTTIFG=1
UCSTPIFG=0
GenCall A
UCTR=0(Receiver)
UCSTTIFG=1
UCGC=1
Receptionofthe
generalcall
address.
UCTXNACK=0
Busstalled
(SCL heldlow)
ifUCBxRXBUFnotread
ReaddatafromUCBxRXBUF
UCSTPIFG=0
UCTXIFG=0
UCSTPIFG=0
www.ti.com
If the master generates a repeated START condition, the eUSCI_B I2C state machine returns to its
address-reception state.
Figure 41-10 shows the I2C slave receiver operation.
Figure 41-10. I2C Slave Receiver Mode
I2C Slave 10-Bit Addressing Mode
The 10-bit addressing mode is selected when UCA10 = 1 and is as shown in Figure 41-11. In 10-bit
addressing mode, the slave is in receive mode after the full address is received. The eUSCI_B module
indicates this by setting the UCSTTIFG flag while the UCTR bit is cleared. To switch the slave into
transmitter mode, the master sends a repeated START condition together with the first byte of the address
but with the R/W bit set. This sets the UCSTTIFG flag if it was previously cleared by software, and the
eUSCI_B modules switches to transmitter mode with UCTR = 1.
1089
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
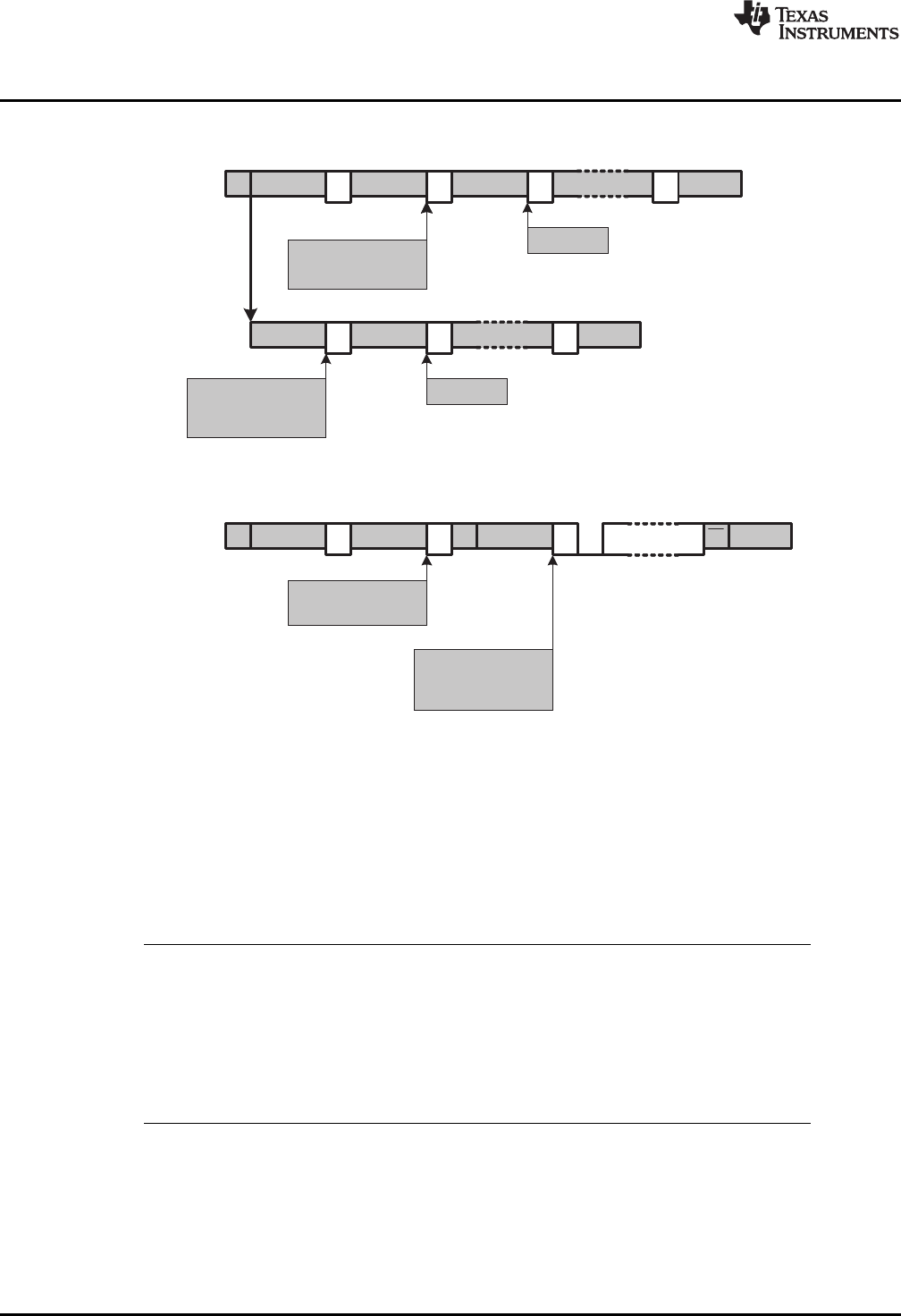
S
S 11110 xx/W ASLA (2.) AP orS
Receptionofown
addressanddata
bytes. Allare
acknowledged.
UCRXIFG=1
DATA DATA
A A
UCTR=0(Receiver)
UCSTTIFG=1
GenCall A
UCTR=0(Receiver)
UCSTTIFG=1
UCSTPIFG=0
Receptionofthe
generalcall
address.
P orS
UCRXIFG=1
DATA DATA
A A
S 11110 xx/W ASLA (2.) A
UCTR=0(Receiver)
UCSTTIFG=1
11110 xx/R A
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
DATA A P orS
Receptionofown
addressand
transmissionofdata
bytes
SlaveTransmitter
SlaveReceiver
UCSTPIFG=0
UCGC=1
UCSTPIFG=0
UCSTPIFG=0
www.ti.com
Figure 41-11. I2C Slave 10-Bit Addressing Mode
Master Mode
The eUSCI_B module is configured as an I2C master by selecting the I2C mode with UCMODEx = 11 and
UCSYNC = 1 and setting the UCMST bit. When the master is part of a multi-master system, UCMM must
be set and its own address must be programmed into the UCBxI2COA0 register. Support for multiple
slave addresses is explained in Section 41.0.12. When UCA10 = 0, 7-bit addressing is selected. When
UCA10 = 1, 10-bit addressing is selected. The UCGCEN bit selects if the eUSCI_B module responds to a
general call.
NOTE: Addresses and multi-master systems
In master mode with own-address detection enabled (UCOAEN = 1)—especially in multi-
master systems—it is not allowed to specify the same address in the own address and slave
address register (UCBxI2CSA = UCBxI2COAx). This would mean that the eUSCI_B
addresses itself.
The user software must ensure that this situation does not occur. There is no hardware
detection for this case, and the consequence is unpredictable behavior of the eUSCI_B.
1090 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
I2C Master Transmitter Mode
After initialization, master transmitter mode is initiated by writing the desired slave address to the
UCBxI2CSA register, selecting the size of the slave address with the UCSLA10 bit, setting UCTR for
transmitter mode, and setting UCTXSTT to generate a START condition.
The eUSCI_B module waits until the bus is available, then generates the START condition, and transmits
the slave address. The UCTXIFG0 bit is set when the START condition is generated and the first data to
be transmitted can be written into UCBxTXBUF. The UCTXSTT flag is cleared as soon as the complete
address is sent.
The data written into UCBxTXBUF is transmitted if arbitration is not lost during transmission of the slave
address. UCTXIFG0 is set again as soon as the data is transferred from the buffer into the shift register. If
there is no data loaded to UCBxTXBUF before the acknowledge cycle, the bus is held during the
acknowledge cycle with SCL low until data is written into UCBxTXBUF. Data is transmitted or the bus is
held, as long as:
• No automatic STOP is generated
• The UCTXSTP bit is not set
• The UCTXSTT bit is not set
Setting UCTXSTP generates a STOP condition after the next acknowledge from the slave. If UCTXSTP is
set during the transmission of the slave address or while the eUSCI_B module waits for data to be written
into UCBxTXBUF, a STOP condition is generated, even if no data was transmitted to the slave. In this
case, the UCSTPIFG is set. When transmitting a single byte of data, the UCTXSTP bit must be set while
the byte is being transmitted or any time after transmission begins, without writing new data into
UCBxTXBUF. Otherwise, only the address is transmitted. When the data is transferred from the buffer to
the shift register, UCTXIFG0 is set, indicating data transmission has begun, and the UCTXSTP bit may be
set. When UCASTPx = 10 is set, the byte counter is used for STOP generation and the user does not
need to set the UCTXSTP. This is recommended when transmitting only one byte.
Setting UCTXSTT generates a repeated START condition. In this case, UCTR may be set or cleared to
configure transmitter or receiver, and a different slave address may be written into UCBxI2CSA, if desired.
If the slave does not acknowledge the transmitted data, the not-acknowledge interrupt flag UCNACKIFG is
set. The master must react with either a STOP condition or a repeated START condition. If data was
already written into UCBxTXBUF, it is discarded. If this data should be transmitted after a repeated
START, it must be written into UCBxTXBUF again. Any set UCTXSTT or UCTXSTP is also discarded.
Figure 41-12 shows the I2C master transmitter operation.
1091
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Othermastercontinues
S SLA/W ADATA AP
Successful
transmissiontoa
slavereceiver
UCTXIFG=1
DATADATA A A
UCTXSTP=1
Nexttransferstarted
witharepeatedstart
condition
DATA AS SLA/W
1) UCTR=1(Transmitter)
2) UCTXSTT=1
DATA AS SLA/R
1) UCTR=0(Receiver)
2) UCTXSTT=1
Notacknowledge
receivedafterslave
address
P
S SLA/W
S SLA/R
UCTXSTP=1
1) UCTR=1(Transmitter)
2) UCTXSTT=1
1) UCTR=0(Receiver)
2) UCTXSTT=1
Arbitrationlostin
slaveaddressor
databyte
A
A
Othermastercontinues
Arbitrationlostand
addressedasslave Othermastercontinues
A
UCALIFG=1
UCMST=0
UCTR=0(Receiver)
UCSTTIFG=1
(UCGC=1ifgeneralcall)
USCIcontinuesasSlaveReceiver
Notacknowledge
receivedafteradata
byte
UCTXSTT=0 UCTXSTP=0
UCTXSTP=0
UCALIFG=1
UCMST=0
Busstalled (SCL heldlow)
untildataavailable
WritedatatoUCBxTXBUF
1) UCTR=1(Transmitter)
2) UCTXSTT=1
UCTXIFG=1
UCBxTXBUFdiscarded
UCTXSTT=0
UCNACKIFG=1
UCBxTXBUFdiscarded
UCTXIFG=1
UCBxTXBUFdiscarded
UCNACKIFG=1
UCBxTXBUFdiscarded
UCALIFG=1
UCMST=0
www.ti.com
Figure 41-12. I2C Master Transmitter Mode
1092 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
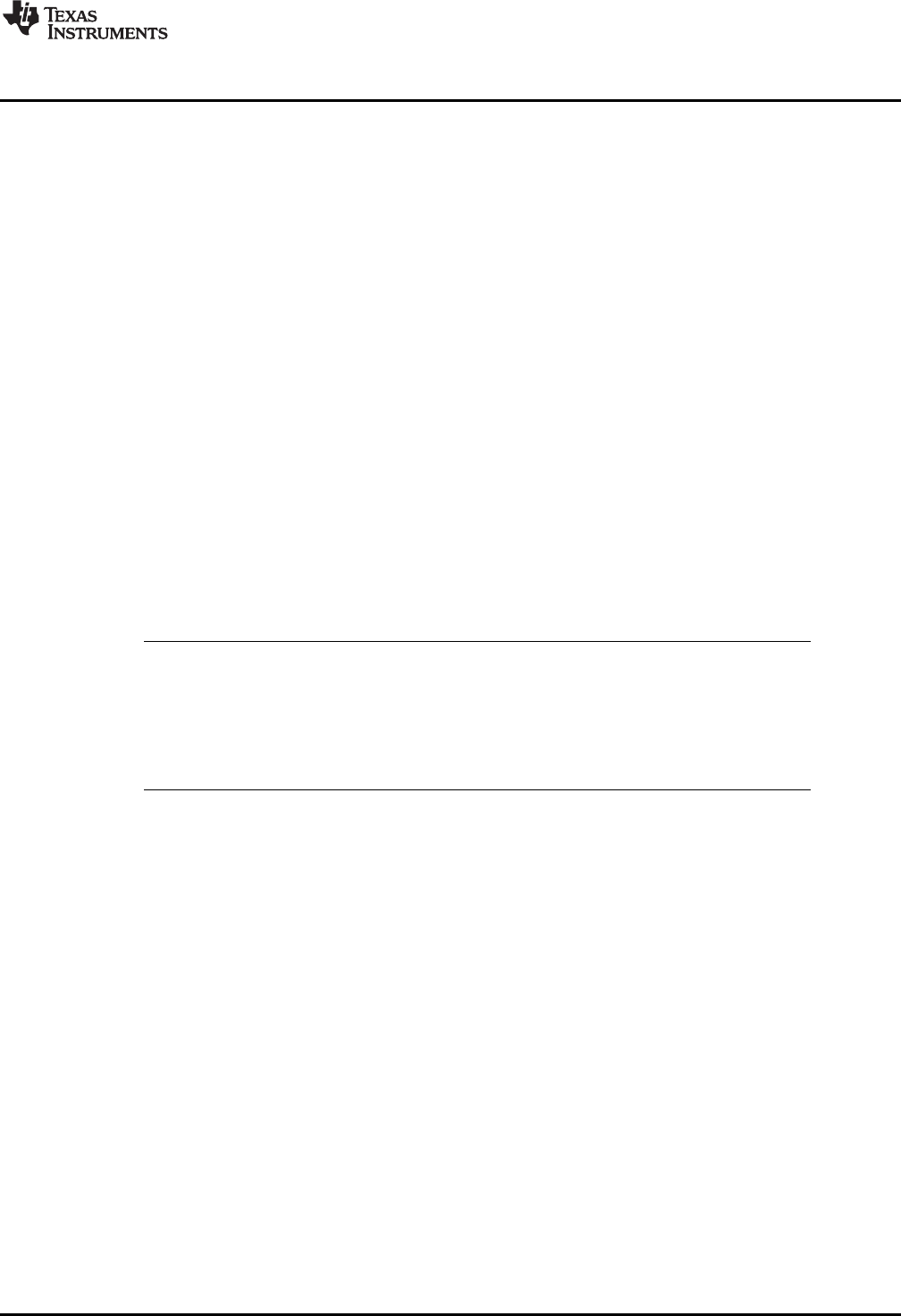
www.ti.com
I2C Master Receiver Mode
After initialization, master receiver mode is initiated by writing the desired slave address to the
UCBxI2CSA register, selecting the size of the slave address with the UCSLA10 bit, clearing UCTR for
receiver mode, and setting UCTXSTT to generate a START condition.
The eUSCI_B module checks if the bus is available, generates the START condition, and transmits the
slave address. The UCTXSTT flag is cleared as soon as the complete address is sent.
After the acknowledge of the address from the slave, the first data byte from the slave is received and
acknowledged and the UCRXIFG flag is set. Data is received from the slave, as long as:
• No automatic STOP is generated
• The UCTXSTP bit is not set
• The UCTXSTT bit is not set
If a STOP condition was generated by the eUSCI_B module, the UCSTPIFG is set. If UCBxRXBUF is not
read, the master holds the bus during reception of the last data bit and until the UCBxRXBUF is read.
If the slave does not acknowledge the transmitted address, the not-acknowledge interrupt flag
UCNACKIFG is set. The master must react with either a STOP condition or a repeated START condition.
A STOP condition is either generated by the automatic STOP generation or by setting the UCTXSTP bit.
The next byte received from the slave is followed by a NACK and a STOP condition. This NACK occurs
immediately if the eUSCI_B module is currently waiting for UCBxRXBUF to be read.
If a RESTART is sent, UCTR may be set or cleared to configure transmitter or receiver, and a different
slave address may be written into UCBxI2CSA if desired.
Figure 41-13 shows the I2C master receiver operation.
NOTE: Consecutive master transactions without repeated START
When performing multiple consecutive I2C master transactions without the repeated START
feature, the current transaction must be completed before the next one is initiated. This can
be done by ensuring that the transmit STOP condition flag UCTXSTP is cleared before the
next I2C transaction is initiated with setting UCTXSTT = 1. Otherwise, the current transaction
might be affected.
1093
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
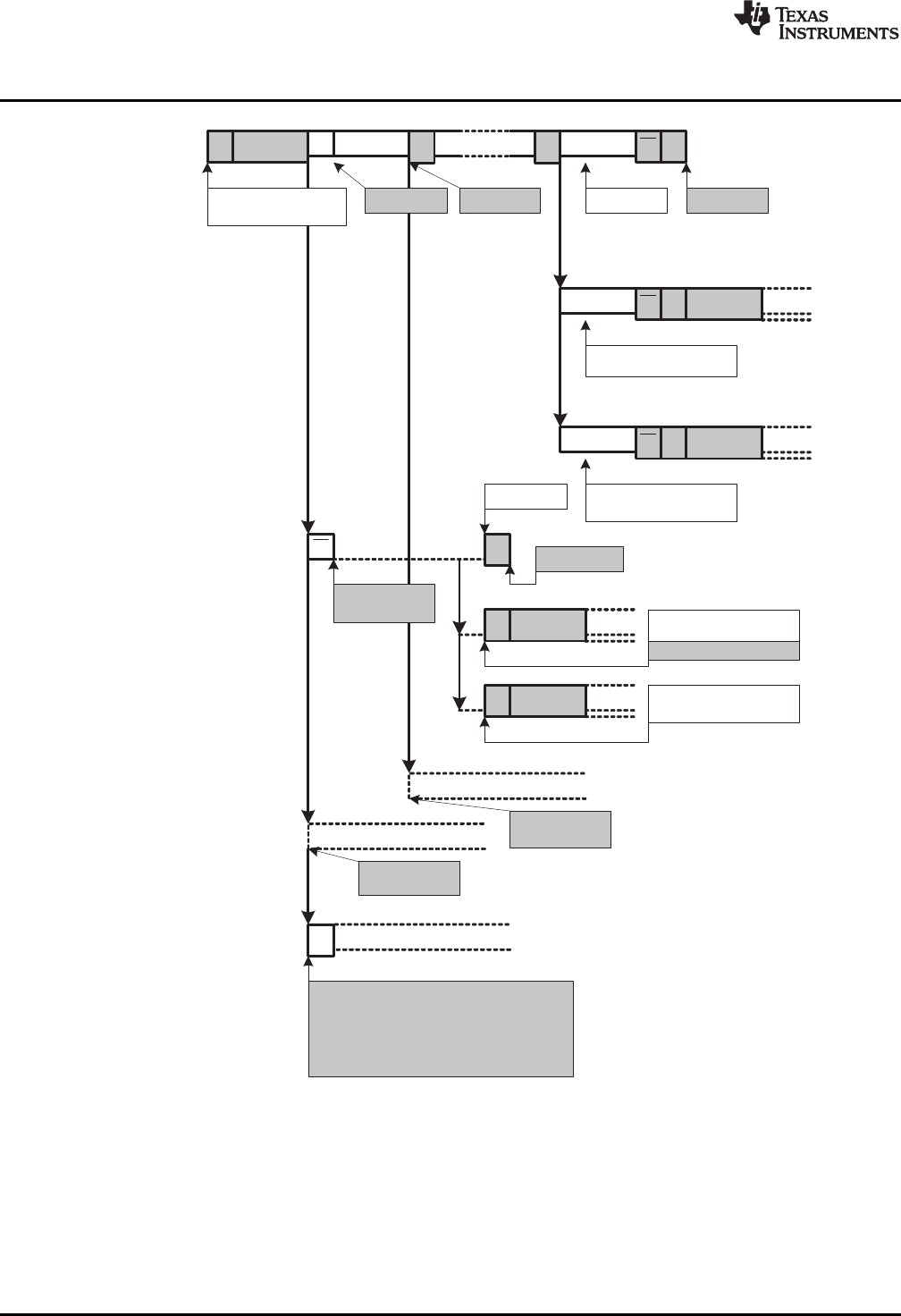
Othermastercontinues
S SLA/R A DATA AP
1)UCTR=0(Receiver)
2)UCTXSTT=1
Successful
receptionfroma
slavetransmitter
UCRXIFG=1
DATADATA A
UCTXSTP=1
Nexttransferstarted
witharepeatedstart
condition
DATA S SLA/W
1) UCTR=1(Transmitter)
2) UCTXSTT=1
DATA S SLA/R
1)
UCTR=0(Receiver)
2) UCTXSTT=1
Notacknowledge
receivedafterslave
address
UCTXSTT=0
UCNACKIFG=1
P
S SLA/W
S SLA/R
1) UCTR=1(Transmitter)
2) UCTXSTT=1
1) UCTR=0(Receiver)
2) UCTXSTT=1
Arbitrationlostin
slaveaddressor
databyte
A
Othermastercontinues
UCALIFG=1
UCMST=0
Arbitrationlostand
addressedasslave Othermastercontinues
A
UCALIFG=1
UCMST=0
UCTR=1(Transmitter)
UCSTTIFG=1
UCTXIFG=1
USCIcontinuesasSlave Transmitter
A
A
A
UCTXSTT=0 UCTXSTP=0
UCTXIFG=1
UCALIFG=1
UCMST=0
UCTXSTP=1
UCTXSTP=0
www.ti.com
Figure 41-13. I2C Master Receiver Mode
1094 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
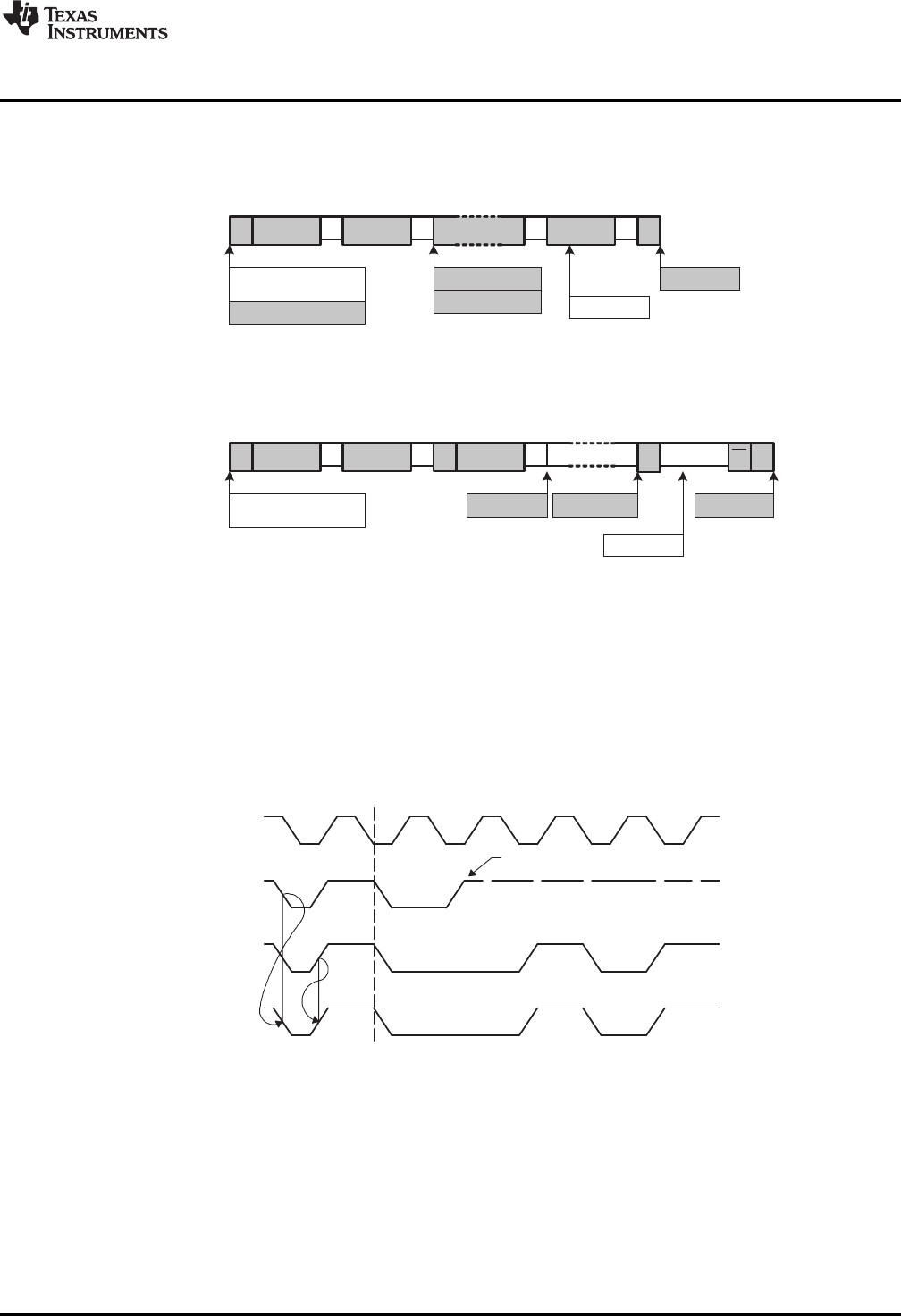
1
0 0 0
1
0 0 0
1 1
111
n
Device #1 Lost Arbitration
and Switches Off
Bus Line
SCL
Data From
Device #1
Data From
Device #2
Bus Line
SDA
MasterTransmitter
SA A P
1)UCTR=1(Transmitter)
2)UCTXSTT=1
Successful
transmissiontoa
slavereceiver
UCTXIFG=1
UCTXIFG=1
DATADATA A A
UCTXSTP=1
UCTXSTT=0 UCTXSTP=0
11110xx/W SLA(2.)
SAP
1)UCTR=0(Receiver)
2)UCTXSTT=1
Successful
receptionfroma
slavetransmitter
DA ATDATA A
UCTXSTP=1
A
UCTXSTT=0 UCTXSTP=0
A A
11110xxW/ SLA(2.) 11110xx/R
MasterReceiver
S
UCRXIFG=1
www.ti.com
I2C Master 10-Bit Addressing Mode
The 10-bit addressing mode is selected when UCSLA10 = 1 and is shown in Figure 41-14.
Figure 41-14. I2C Master 10-Bit Addressing Mode
Arbitration
If two or more master transmitters simultaneously start a transmission on the bus, an arbitration procedure
is invoked. Figure 41-15 shows the arbitration procedure between two devices. The arbitration procedure
uses the data presented on SDA by the competing transmitters. The first master transmitter that generates
a logic high is overruled by the opposing master generating a logic low. The arbitration procedure gives
priority to the device that transmits the serial data stream with the lowest binary value. The master
transmitter that lost arbitration switches to the slave receiver mode and sets the arbitration lost flag
UCALIFG. If two or more devices send identical first bytes, arbitration continues on the subsequent bytes.
Figure 41-15. Arbitration Procedure Between Two Master Transmitters
There is an undefined condition if the arbitration procedure is still in progress when one master sends a
repeated START or a STOP condition while the other master is still sending data. In other words, the
following combinations result in an undefined condition:
• Master 1 sends a repeated START condition and master 2 sends a data bit.
• Master 1 sends a STOP condition and master 2 sends a data bit.
• Master 1 sends a repeated START condition and master 2 sends a STOP condition.
1095
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
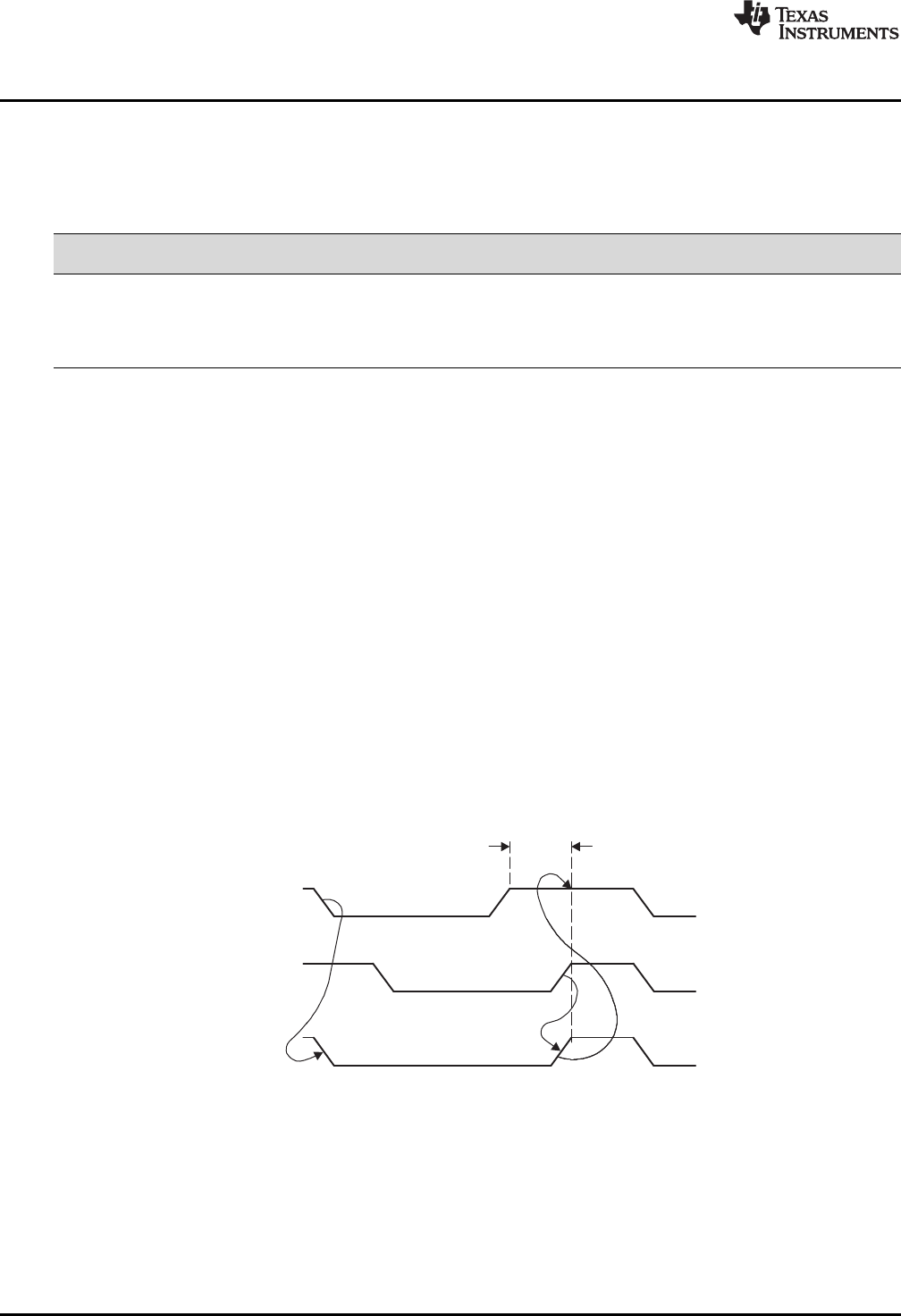
Wait
State Start HIGH
Period
SCL From
Device #1
SCL From
Device #2
Bus Line
SCL
www.ti.com
41.0.10 Glitch Filtering
According to the I2C standard, both the SDA and the SCL line need to be glitch filtered. The eUSCI_B
module provides the UCGLITx bits to configure the length of this glitch filter:
Table 41-1. Glitch Filter Length Selection Bits
UCGLITx Corresponding Glitch Filter Length on SDA and SCL According to I2C
Standard
00 Pulses of max 50-ns length are filtered yes
01 Pulses of max 25-ns length are filtered. no
10 Pulses of max 12.5-ns length are filtered. no
11 Pulses of max 6.25-ns length are filtered. no
I2C Clock Generation and Synchronization
The I2C clock SCL is provided by the master on the I2C bus. When the eUSCI_B is in master mode,
BITCLK is provided by the eUSCI_B bit clock generator and the clock source is selected with the
UCSSELx bits. In slave mode, the bit clock generator is not used and the UCSSELx bits are don't care.
The 16-bit value of UCBRx in registers UCBxBR1 and UCBxBR0 is the division factor of the eUSCI_B
clock source, BRCLK. The maximum bit clock that can be used in single master mode is fBRCLK/4. In multi-
master mode, the maximum bit clock is fBRCLK/8. The BITCLK frequency is given by:
fBitClock = fBRCLK/UCBRx
The minimum high and low periods of the generated SCL are:
tLOW,MIN = tHIGH,MIN = (UCBRx/2)/fBRCLK when UCBRx is even
tLOW,MIN = tHIGH,MIN = ((UCBRx – 1)/2)/fBRCLK when UCBRx is odd
The eUSCI_B clock source frequency and the prescaler setting UCBRx must to be chosen such that the
minimum low and high period times of the I2C specification are met.
During the arbitration procedure the clocks from the different masters must be synchronized. A device that
first generates a low period on SCL overrules the other devices, forcing them to start their own low
periods. SCL is then held low by the device with the longest low period. The other devices must wait for
SCL to be released before starting their high periods. Figure 41-16 shows the clock synchronization. This
allows a slow slave to slow down a fast master.
Figure 41-16. Synchronization of Two I2C Clock Generators During Arbitration
Clock Stretching
The eUSCI_B module supports clock stretching and also makes use of this feature as described in the
Operation Mode sections.
The UCSCLLOW bit can be used to observe if another device pulls SCL low while the eUSCI_B module
already released SCL due to the following conditions:
• eUSCI_B is acting as master and a connected slave drives SCL low.
1096 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
• eUSCI_B is acting as master and another master drives SCL low during arbitration.
The UCSCLLOW bit is also active if the eUSCI_B holds SCL low because it is waiting as transmitter for
data being written into UCBxTXBUF or as receiver for the data being read from UCBxRXBUF. The
UCSCLLOW bit might be set for a short time with each rising SCL edge because the logic observes the
external SCL and compares it to the internally generated SCL.
Avoiding Clock Stretching
Even though clock stretching is part of the I2C specification, there are applications in which clock
stretching should be avoided.
The clock is stretched by the eUSCI_B under the following conditions:
• The internal shift register is expecting data, but the TXIFG is still pending
• The internal shift register is full, but the RXIFG is still pending
• The arbitration lost interrupt is pending
• UCSWACK is selected and UCBxI2COA0 did cause a match
To avoid clock stretching, all of these situations for clock stretch either need to be avoided or the
corresponding interrupt flags need to be processed before the actual clock stretch can occur.
Using the DMA (on devices that contain a DMA) is the most secure way to avoid clock stretching. If no
DMA is available, the software must ensure that the corresponding interrupts are serviced in time before
the clock is stretched.
In slave transmitter mode, the TXIFG is set only after the reception of the direction bit; therefore, there is
only a short amount of time for the software to write the TXBUF before a clock stretch occurs. This
situation can be remedied by using the early Transmit Interrupt (see Early I2C Transmit Interrupt).
Clock Low Timeout
The UCCLTOIFG interrupt allows the software to react if the clock is low longer than a defined time. It is
possible to detect the situation, when a clock is stretched by a master or slave for a too long time. The
user can then, for example, reset the eUSCI_B module by using the UCSWRST bit.
The clock low timeout feature is enabled using the UCCLTO bits. It is possible to select one of three
predefined times for the clock low timeout. If the clock has been low longer than the time defined with the
UCCLTO bits and the eUSCI_B was actively receiving or transmitting, the UCCLTOIFG is set and an
interrupt request is generated if UCCLTOIE and GIE are set as well. The UCCLTOIFG is set only once,
even if the clock is stretched a multiple of the time defined in UCCLTO.
41.0.11 Byte Counter
The eUSCI_B module supports hardware counting of the bytes received or transmitted. The counter is
automatically active and counts up for each byte seen on the bus in both master and slave mode.
The byte counter is incremented at the second bit position of each byte independently of the following
ACK or NACK. A START or RESTART condition resets the counter value to zero. Address bytes do not
increment the counter. The byte counter is also incremented at the second bit position, if an arbitration lost
occurs during the first bit of data.
41.0.11.1 Byte Counter Interrupt
If UCASTPx = 01 or 10 the UCBCNTIFG is set when the byte counter threshold value UCBxTBCNT is
reached in both master- and slave-mode. Writing zero to UCBxTBCNT does not generate an interrupt.
Because the UCBCNTIFG has a lower interrupt priority than the UCBTXIFG and UCBRXIFG, it is
recommended to only use it for protocol control together with the DMA handling the received and
transmitted bytes. Otherwise the application must have enough processor bandwidth to ensure that the
UCBCNT interrupt routine is executed in time to generate for example a RESTART.
1097
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Automatic STOP Generation
When the eUSCI_B module is configured as a master, the byte counter can be used for automatic STOP
generation by setting the UCASTPx = 10. Before starting the transmission using UCTXSTT, the byte
counter threshold UCBxTBCNT must be set to the number of bytes that are to be transmitted or received.
After the number of bytes that are configured in UCBxTBCNT have been transmitted, the eUSCI_B
automatically generates a STOP condition.
UCBxTBCNT cannot be used if the user wants to transmit the slave address only without any data. In this
case, it is recommended to set UCTXSTT and UCTXSTP at the same time.
41.0.12 Multiple Slave Addresses
The eUSCI_B module supports two different ways of implementing multiple slave addresses at the same
time:
• Hardware support for up to 4 different slave addresses, each with its own interrupt flag and DMA
trigger
• Software support for up to 210 different slave addresses all sharing one interrupt
Multiple Slave Address Registers
The registers UCBxI2COA0, UCBxI2COA1, UCBxI2COA2, and UCBxI2COA3 contain four slave
addresses. Up to four address registers are compared against a received 7- or 10-bit address. Each slave
address must be activated by setting the UCAOEN bit in the corresponding UCBxI2COAx register.
Register UCBxI2COA3 has the highest priority if the address received on the bus matches more than one
of the slave address registers. The priority decreases with the index number of the address register, so
that UCBxI2COA0 in combination with the address mask has the lowest priority.
When one of the slave registers matches the 7- or 10-bit address seen on the bus, the address is
acknowledged. In the following the corresponding receive- or transmit-interrupt flag (UCTXIFGx or
UCRXIFGx) to the received address is updated. The state change interrupt flags are independent of the
address comparison result. They are updated according to the bus condition.
Address Mask Register
The address mask register can be used when the eUSCI_B is configured in slave or in multiple-master
mode. To activate this feature, at least one bit of the address mask in register UCBxADDMASK must be
cleared.
If the received address matches the own address in UCBxI2COA0 on all bit positions that are not masked
by UCBxADDMASK, the eUSCI_B module considers the received address as its own address. If
UCSWACK = 0, the module sends an acknowledge automatically. If UCSWACK = 1, the user software
must evaluate the received address in register UCBxADDRX after the UCSTTIFG is set. To acknowledge
the received address, the software must set UCTXACK to 1.
The eUSCI_B module also automatically acknowledges a slave address that is seen on the bus if the
address matches any of the enabled slave addresses defined in UCBxI2COA1 to UCBxI2COA3.
NOTE: UCSWACK and slave-transmitter
If the user selects manual acknowledge of slave addresses, TXIFG is set if the slave is
addressed as a transmitter. If the software decides not to acknowledge the address, TXIFG0
must be reset.
Using the eUSCI_B Module in I2C Mode With Low-Power Modes
The eUSCI_B module provides automatic clock activation for use with low-power modes. When the
eUSCI_B clock source is inactive because the device is in a low-power mode, the eUSCI_B module
automatically activates it when needed, regardless of the control-bit settings for the clock source. The
clock remains active until the eUSCI_B module returns to its idle condition. After the eUSCI_B module
returns to the idle condition, control of the clock source reverts to the settings of its control bits.
1098 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
In I2C slave mode, no internal clock source is required because the clock is provided by the external
master. It is possible to operate the eUSCI_B in I2C slave mode while the device is in LPM4 and all
internal clock sources are disabled. The receive or transmit interrupts can wake up the CPU from any low-
power mode.
eUSCI_B Interrupts in I2C Mode
The eUSCI_B has only one interrupt vector that is shared for transmission, reception, and the state
change.
Each interrupt flag has its own interrupt enable bit. When an interrupt is enabled and the GIE bit is set, the
interrupt flag generates an interrupt request. DMA transfers are controlled by the UCTXIFGx and
UCRXIFGx flags on devices with a DMA controller. It is possible to react on each slave address with an
individual DMA channel.
All interrupt flags are not cleared automatically, but they need to be cleared together by user interactions
(for example, reading the UCRXBUF clears UCRXIFGx). If the user wants to use an interrupt flag he
needs to ensure that the flag has the correct state before the corresponding interrupt is enabled.
I2C Transmit Interrupt Operation
The UCTXIFG0 interrupt flag is set whenever the transmitter is able to accept a new byte. When operating
as a slave with multiple slave addresses, the UCTXIFGx flags are set corresponding to which address
was received before. If, for example, the slave address specified in register UCBxI2COA3 did match the
address seen on the bus, the UCTXIFG3 indicates that the UCBxTXBUF is ready to accept a new byte.
When operating in master mode with automatic STOP generation (UCASTPx = 10), the UCTXIFG0 is set
as many times as defined in UCBxTBCNT.
An interrupt request is generated if UCTXIEx and GIE are also set. UCTXIFGx is automatically reset if a
write to UCBxTXBUF occurs or if the UCALIFG is cleared. UCTXIFGx is set when:
• Master mode: UCTXSTT was set by the user
• Slave mode: own address was received(UCETXINT = 0) or START was received (UCETXINT = 1)
UCTXIEx is reset after a PUC or when UCSWRST = 1.
Early I2C Transmit Interrupt
Setting the UCETXINT causes UCTXIFG0 to be sent out automatically when a START condition is sent
and the eUSCI_B is configured as slave. In this case, it is not allowed to enable the other slave addresses
UCBxI2COA1-UCBxI2COA3. This allows the software more time to handle the UCTXIFG0 compared to
the normal situation, when UCTXIFG0 is sent out after the slave address match was detected. Situations
where the UCTXIFG0 was set and afterward no slave address match occurred need to be handled in
software. The use of the byte counter is recommended to handle this.
I2C Receive Interrupt Operation
The UCRXIFG0 interrupt flag is set when a character is received and loaded into UCBxRXBUF. When
operating as a slave with multiple slave addresses, the UCRXIFGx flag is set corresponding to which
address was received before.
An interrupt request is generated if UCRXIEx and GIE are also set. UCRXIFGx and UCRXIEx are reset
after a PUC signal or when UCSWRST = 1. UCRXIFGx is automatically reset when UCxRXBUF is read.
I2C State Change Interrupt Operation
Table 41-2 describes the I2C state change interrupt flags.
Table 41-2. I2C State Change Interrupt Flags
Interrupt Flag Interrupt Condition
Arbitration lost interrupt. Arbitration can be lost when two or more transmitters start a transmission
simultaneously, or when the eUSCI_B operates as master but is addressed as a slave by another master in
UCALIFG the system. The UCALIFG flag is set when arbitration is lost. When UCALIFG is set, the UCMST bit is cleared
and the I2C controller becomes a slave.
1099
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Table 41-2. I2C State Change Interrupt Flags (continued)
Interrupt Flag Interrupt Condition
Not acknowledge interrupt. This flag is set when an acknowledge is expected but is not received.
UCNACKIFG UCNACKIFG is used in master mode only.
UCCLTOIFG Clock low timeout. This interrupt flag is set, if the clock is held low longer than defined by the UCCLTO bits.
This interrupt flag is generated each time the eUSCI_B is transferring the nineth clock cycle of a byte of data.
UCBIT9IFG This gives the user the ability to follow the I2C communication in software if wanted. UCBIT9IFG is not set for
address information.
Byte counter interrupt. This flag is set when the byte counter value reaches the value defined in UCBxTBCNT
UCBCNTIFG and UCASTPx = 01 or 10. This bit allows to organize following communications, especially if a RESTART will
be issued.
START condition detected interrupt. This flag is set when the I2C module detects a START condition together
UCSTTIFG with its own address(1). UCSTTIFG is used in slave mode only.
STOP condition detected interrupt. This flag is set when the I2C module detects a STOP condition on the bus.
UCSTPIFG UCSTPIFG is used in slave and master mode.
(1) The address evaluation includes the address mask register if it is used.
UCBxIV, Interrupt Vector Generator
The eUSCI_B interrupt flags are prioritized and combined to source a single interrupt vector. The interrupt
vector register UCBxIV is used to determine which flag requested an interrupt. The highest-priority
enabled interrupt generates a number in the UCBxIV register that can be evaluated or added to the PC to
automatically enter the appropriate software routine. Disabled interrupts do not affect the UCBxIV value.
Read access of the UCBxIV register automatically resets the highest-pending interrupt flag. If another
interrupt flag is set, another interrupt is immediately generated after servicing the initial interrupt.
Write access of the UCBxIV register clears all pending Interrupt conditions and flags.
Example 41-3 shows the recommended use of UCBxIV. The UCBxIV value is added to the PC to
automatically jump to the appropriate routine. The example is given for eUSCI0_B.
1100 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Example 41-3. UCBxIV Software Example
#pragma vector = USCI_B0_VECTOR __interrupt void USCI_B0_ISR(void) {
switch(__even_in_range(UCB0IV,0x1e)) {
case 0x00: // Vector 0: No interrupts
break;
case 0x02: ... // Vector 2: ALIFG
break;
case 0x04: ... // Vector 4: NACKIFG
break;
case 0x06: ... // Vector 6: STTIFG
break;
case 0x08: ... // Vector 8: STPIFG
break;
case 0x0a: ... // Vector 10: RXIFG3
break;
case 0x0c: ... // Vector 12: TXIFG3
break;
case 0x0e: ... // Vector 14: RXIFG2
break;
case 0x10: ... // Vector 16: TXIFG2
break;
case 0x12: ... // Vector 18: RXIFG1
break;
case 0x14: ... // Vector 20: TXIFG1
break;
case 0x16: ... // Vector 22: RXIFG0
break;
case 0x18: ... // Vector 24: TXIFG0
break;
case 0x1a: ... // Vector 26: BCNTIFG
break;
case 0x1c: ... // Vector 28: clock low timeout
break;
case 0x1e: ... // Vector 30: 9th bit
break;
default: break;
}
}
1101
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

eUSCI_B I2C Registers
www.ti.com
41.1 eUSCI_B I2C Registers
The eUSCI_B registers applicable in I2C mode and their address offsets are listed in Table 41-3. The
base address can be found in the device-specific data sheet.
Table 41-3. eUSCI_B Registers
Offset Acronym Register Name Type Access Reset Section
00h UCBxCTLW0 eUSCI_Bx Control Word 0 Read/write Word 01C1h Section 41.1.1
00h UCBxCTL1 eUSCI_Bx Control 1 Read/write Byte C1h
01h UCBxCTL0 eUSCI_Bx Control 0 Read/write Byte 01h
02h UCBxCTLW1 eUSCI_Bx Control Word 1 Read/write Word 0000h Section 41.1.2
06h UCBxBRW eUSCI_Bx Bit Rate Control Word Read/write Word 0000h Section 41.1.3
06h UCBxBR0 eUSCI_Bx Bit Rate Control 0 Read/write Byte 00h
07h UCBxBR1 eUSCI_Bx Bit Rate Control 1 Read/write Byte 00h
08h UCBxSTATW eUSCI_Bx Status Word Read Word 0000h Section 41.1.4
08h UCBxSTAT eUSCI_Bx Status Read Byte 00h
09h UCBxBCNT eUSCI_Bx Byte Counter Register Read Byte 00h
eUSCI_Bx Byte Counter Threshold
0Ah UCBxTBCNT Read/Write Word 00h Section 41.1.5
Register
0Ch UCBxRXBUF eUSCI_Bx Receive Buffer Read/write Word 00h Section 41.1.6
0Eh UCBxTXBUF eUSCI_Bx Transmit Buffer Read/write Word 00h Section 41.1.7
14h UCBxI2COA0 eUSCI_Bx I2C Own Address 0 Read/write Word 0000h Section 41.1.8
16h UCBxI2COA1 eUSCI_Bx I2C Own Address 1 Read/write Word 0000h Section 41.1.9
18h UCBxI2COA2 eUSCI_Bx I2C Own Address 2 Read/write Word 0000h Section 41.1.10
1Ah UCBxI2COA3 eUSCI_Bx I2C Own Address 3 Read/write Word 0000h Section 41.1.11
1Ch UCBxADDRX eUSCI_Bx Received Address Register Read Word Section 41.1.12
1Eh UCBxADDMASK eUSCI_Bx Address Mask Register Read/write Word 03FFh Section 41.1.13
20h UCBxI2CSA eUSCI_Bx I2C Slave Address Read/write Word 0000h Section 41.1.14
2Ah UCBxIE eUSCI_Bx Interrupt Enable Read/write Word 0000h Section 41.1.15
2Ch UCBxIFG eUSCI_Bx Interrupt Flag Read/write Word 0002h Section 41.1.16
2Eh UCBxIV eUSCI_Bx Interrupt Vector Read Word 0000h Section 41.1.17
1102 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.1 UCBxCTLW0 Register
eUSCI_Bx Control Word Register 0
Figure 41-17. UCBxCTLW0 Register
15 14 13 12 11 10 9 8
UCA10 UCSLA10 UCMM Reserved UCMST UCMODEx UCSYNC
rw-0 rw-0 rw-0 r0 rw-0 rw-0 rw-0 r1
76543210
UCSSELx UCTXACK UCTR UCTXNACK UCTXSTP UCTXSTT UCSWRST
rw-1 rw-1 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1
Modify only when UCSWRST = 1.
Table 41-4. UCBxCTLW0 Register Description
Bit Field Type Reset Description
15 UCA10 RW 0h Own addressing mode select.
Modify only when UCSWRST = 1.
0b = Own address is a 7-bit address.
1b = Own address is a 10-bit address.
14 UCSLA10 RW 0h Slave addressing mode select
0b = Address slave with 7-bit address
1b = Address slave with 10-bit address
13 UCMM RW 0h Multi-master environment select.
Modify only when UCSWRST = 1.
0b = Single master environment. There is no other master in the system. The
address compare unit is disabled.
1b = Multi-master environment
12 Reserved R 0h Reserved
11 UCMST RW 0h Master mode select. When a master loses arbitration in a multi-master
environment (UCMM = 1), the UCMST bit is automatically cleared and the
module acts as slave.
0b = Slave mode
1b = Master mode
10-9 UCMODEx RW 0h eUSCI_B mode. The UCMODEx bits select the synchronous mode when
UCSYNC = 1.
Modify only when UCSWRST = 1.
00b = 3-pin SPI
01b = 4-pin SPI (master or slave enabled if STE = 1)
10b = 4-pin SPI (master or slave enabled if STE = 0)
11b = I2C mode
8 UCSYNC RW 1h Synchronous mode enable. For eUSCI_B always read and write as 1.
7-6 UCSSELx RW 3h eUSCI_B clock source select. These bits select the BRCLK source clock. These
bits are ignored in slave mode.
Modify only when UCSWRST = 1.
00b = UCLKI
01b = ACLK
10b = SMCLK
11b = SMCLK
5 UCTXACK RW 0h Transmit ACK condition in slave mode with enabled address mask register. After
the UCSTTIFG has been set, the user needs to set or reset the UCTXACK flag
to continue with the I2C protocol. The clock is stretched until the UCBxCTL1
register has been written. This bit is cleared automatically after the ACK has
been send.
0b = Do not acknowledge the slave address
1b = Acknowledge the slave address
1103
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
Table 41-4. UCBxCTLW0 Register Description (continued)
Bit Field Type Reset Description
4 UCTR RW 0h Transmitter/receiver
0b = Receiver
1b = Transmitter
3 UCTXNACK RW 0h Transmit a NACK. UCTXNACK is automatically cleared after a NACK is
transmitted. Only for slave receiver mode.
0b = Acknowledge normally
1b = Generate NACK
2 UCTXSTP RW 0h Transmit STOP condition in master mode. Ignored in slave mode. In master
receiver mode, the STOP condition is preceded by a NACK. UCTXSTP is
automatically cleared after STOP is generated. This bit is a don't care, if
automatic UCASTPx is different from 01 or 10.
0b = No STOP generated
1b = Generate STOP
1 UCTXSTT RW 0h Transmit START condition in master mode. Ignored in slave mode. In master
receiver mode, a repeated START condition is preceded by a NACK. UCTXSTT
is automatically cleared after START condition and address information is
transmitted. Ignored in slave mode.
0b = Do not generate START condition
1b = Generate START condition
0 UCSWRST RW 1h Software reset enable.
Modify only when UCSWRST = 1.
0b = Disabled. eUSCI_B released for operation.
1b = Enabled. eUSCI_B logic held in reset state.
1104 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.2 UCBxCTLW1 Register
eUSCI_Bx Control Word Register 1
Figure 41-18. UCBxCTLW1 Register
15 14 13 12 11 10 9 8
Reserved UCETXINT
r0 r0 r0 r0 r0 r0 r0 rw-0
76543210
UCCLTO UCSTPNACK UCSWACK UCASTPx UCGLITx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-5. UCBxCTLW1 Register Description
Bit Field Type Reset Description
15-9 Reserved R 0h Reserved
8 UCETXINT RW 0h Early UCTXIFG0. Only in slave mode. When this bit is set, the slave addresses
defined in UCxI2COA1 to UCxI2COA3 must be disabled.
Modify only when UCSWRST = 1.
0b = UCTXIFGx is set after an address match with UCxI2COAx and the direction
bit indicating slave transmit
1b = UCTXIFG0 is set for each START condition
7-6 UCCLTO RW 0h Clock low timeout select.
Modify only when UCSWRST = 1.
00b = Disable clock low timeout counter
01b = 135 000 MODCLK cycles (approximately 28 ms)
10b = 150 000 MODCLK cycles (approximately 31 ms)
11b = 165 000 MODCLK cycles (approximately 34 ms)
5 UCSTPNACK RW 0h The UCSTPNACK bit allows to make the eUSCI_B master acknowledge the last
byte in master receiver mode as well. This is not conform to the I2C specification
and should only be used for slaves, which automatically release the SDA after a
fixed packet length.
Modify only when UCSWRST = 1.
0b = Send a non-acknowledge before the STOP condition as a master receiver
(conform to I2C standard)
1b = All bytes are acknowledged by the eUSCI_B when configured as master
receiver
4 UCSWACK RW 0h Using this bit it is possible to select, whether the eUSCI_B module triggers the
sending of the ACK of the address or if it is controlled by software.
0b = The address acknowledge of the slave is controlled by the eUSCI_B
module
1b = The user needs to trigger the sending of the address ACK by issuing
UCTXACK
3-2 UCASTPx RW 0h Automatic STOP condition generation. In slave mode only UCBCNTIFG is
available.
Modify only when UCSWRST = 1.
00b = No automatic STOP generation. The STOP condition is generated after
the user sets the UCTXSTP bit. The value in UCBxTBCNT is a don't care.
01b = UCBCNTIFG is set with the byte counter reaches the threshold defined in
UCBxTBCNT
10b = A STOP condition is generated automatically after the byte counter value
reached UCBxTBCNT. UCBCNTIFG is set with the byte counter reaching the
threshold.
11b = Reserved
1105
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
Table 41-5. UCBxCTLW1 Register Description (continued)
Bit Field Type Reset Description
1-0 UCGLITx RW 0h Deglitch time
00b = 50 ns
01b = 25 ns
10b = 12.5 ns
11b = 6.25 ns
1106 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.3 UCBxBRW Register
eUSCI_Bx Bit Rate Control Word Register
Figure 41-19. UCBxBRW Register
15 14 13 12 11 10 9 8
UCBRx
rw rw rw rw rw rw rw rw
76543210
UCBRx
rw rw rw rw rw rw rw rw
Modify only when UCSWRST = 1.
Table 41-6. UCBxBRW Register Description
Bit Field Type Reset Description
15-0 UCBRx RW 0h Bit clock prescaler.
Modify only when UCSWRST = 1.
41.1.4 UCBxSTATW
eUSCI_Bx Status Word Register
Figure 41-20. UCBxSTATW Register
15 14 13 12 11 10 9 8
UCBCNTx
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
Reserved UCSCLLOW UCGC UCBBUSY Reserved
r0 r-0 r-0 r-0 r-0 r0 r0 r0
Table 41-7. UCBxSTATW Register Description
Bit Field Type Reset Description
15-8 UCBCNTx R 0h Hardware byte counter value. Reading this register returns the number of bytes
received or transmitted on the I2C-Bus since the last START or RESTART.
There is no synchronization of this register done. When reading UCBxBCNT
during the first bit position, a faulty readback can occur.
7 Reserved R 0h Reserved
6 UCSCLLOW R 0h SCL low
0b = SCL is not held low
1b = SCL is held low
5 UCGC R 0h General call address received. UCGC is automatically cleared when a START
condition is received.
0b = No general call address received
1b = General call address received
4 UCBBUSY R 0h Bus busy
0b = Bus inactive
1b = Bus busy
3-0 Reserved R 0h Reserved
1107
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.5 UCBxTBCNT Register
eUSCI_Bx Byte Counter Threshold Register
Figure 41-21. UCBxTBCNT Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCTBCNTx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-8. UCBxTBCNT Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCTBCNTx RW 0h The byte counter threshold value is used to set the number of I2C data bytes
after which the automatic STOP or the UCSTPIFG should occur. This value is
evaluated only if UCASTPx is different from 00.
Modify only when UCSWRST = 1.
1108 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.6 UCBxRXBUF Register
eUSCI_Bx Receive Buffer Register
Figure 41-22. UCBxRXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCRXBUFx
rrrrrrrr
Table 41-9. UCBxRXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCRXBUFx R 0h The receive-data buffer is user accessible and contains the last received
character from the receive shift register. Reading UCBxRXBUF resets the
UCRXIFGx flags.
41.1.7 UCBxTXBUF
eUSCI_Bx Transmit Buffer Register
Figure 41-23. UCBxTXBUF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCTXBUFx
rw rw rw rw rw rw rw rw
Table 41-10. UCBxTXBUF Register Description
Bit Field Type Reset Description
15-8 Reserved R 0h Reserved
7-0 UCTXBUFx RW 0h The transmit data buffer is user accessible and holds the data waiting to be
moved into the transmit shift register and transmitted. Writing to the transmit data
buffer clears the UCTXIFGx flags.
1109
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.8 UCBxI2COA0 Register
eUSCI_Bx I2C Own Address 0 Register
Figure 41-24. UCBxI2COA0 Register
15 14 13 12 11 10 9 8
UCGCEN Reserved UCOAEN I2COA0
rw-0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
I2COA0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-11. UCBxI2COA0 Register Description
Bit Field Type Reset Description
15 UCGCEN RW 0h General call response enable. This bit is only available in UCBxI2COA0.
Modify only when UCSWRST = 1.
0b = Do not respond to a general call
1b = Respond to a general call
14-11 Reserved R 0h Reserved
10 UCOAEN RW 0h Own Address enable register. With this register it can be selected if the I2C
slave-address related to this register UCBxI2COA0 is evaluated or not.
Modify only when UCSWRST = 1.
0b = The slave address defined in I2COA0 is disabled
1b = The slave address defined in I2COA0 is enabled
9-0 I2COAx RW 0h I2C own address. The I2COA0 bits contain the local address of the eUSCIx_B
I2C controller. The address is right justified. In 7-bit addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit addressing mode, bit 9 is the MSB.
Modify only when UCSWRST = 1.
1110 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.9 UCBxI2COA1 Register
eUSCI_Bx I2C Own Address 1 Register
Figure 41-25. UCBxI2COA1 Register
15 14 13 12 11 10 9 8
Reserved UCOAEN I2COA1
rw-0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
I2COA1
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-12. UCBxI2COA1 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved
10 UCOAEN RW 0h Own Address enable register. With this register it can be selected if the I2C
slave-address related to this register UCBxI2COA1 is evaluated or not.
Modify only when UCSWRST = 1.
0b = The slave address defined in I2COA1 is disabled
1b = The slave address defined in I2COA1 is enabled
9-0 I2COA1 RW 0h I2C own address. The I2COAx bits contain the local address of the eUSCIx_B
I2C controller. The address is right justified. In 7-bit addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit addressing mode, bit 9 is the MSB.
Modify only when UCSWRST = 1.
41.1.10 UCBxI2COA2 Register
eUSCI_Bx I2C Own Address 2 Register
Figure 41-26. UCBxI2COA2 Register
15 14 13 12 11 10 9 8
Reserved UCOAEN I2COA2
rw-0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
I2COA2
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-13. UCBxI2COA2 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved
10 UCOAEN RW 0h Own Address enable register. With this register it can be selected if the I2C
slave-address related to this register UCBxI2COA2 is evaluated or not.
Modify only when UCSWRST = 1.
0b = The slave address defined in I2COA2 is disabled
1b = The slave address defined in I2COA2 is enabled
9-0 I2COA2 RW 0h I2C own address. The I2COAx bits contain the local address of the eUSCIx_B
I2C controller. The address is right justified. In 7-bit addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit addressing mode, bit 9 is the MSB.
Modify only when UCSWRST = 1.
1111
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.11 UCBxI2COA3 Register
eUSCI_Bx I2C Own Address 3 Register
Figure 41-27. UCBxI2COA3 Register
15 14 13 12 11 10 9 8
Reserved UCOAEN I2COA3
rw-0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
I2COA3
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Modify only when UCSWRST = 1.
Table 41-14. UCBxI2COA3 Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved
10 UCOAEN RW 0h Own Address enable register. With this register it can be selected if the I2C
slave-address related to this register UCBxI2COA3 is evaluated or not.
Modify only when UCSWRST = 1.
0b = The slave address defined in I2COA3 is disabled
1b = The slave address defined in I2COA3 is enabled
9-0 I2COA3 RW 0h I2C own address. The I2COA3 bits contain the local address of the eUSCIx_B
I2C controller. The address is right justified. In 7-bit addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit addressing mode, bit 9 is the MSB.
Modify only when UCSWRST = 1.
41.1.12 UCBxADDRX Register
eUSCI_Bx I2C Received Address Register
Figure 41-28. UCBxADDRX Register
15 14 13 12 11 10 9 8
Reserved ADDRXx
r-0 r0 r0 r0 r0 r0 r-0 r-0
76543210
ADDRXx
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 41-15. UCBxADDRX Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved
9-0 ADDRXx R 0h Received Address Register. This register contains the last received slave
address on the bus. Using this register and the address mask register it is
possible to react on more than one slave address using one eUSCI_B module.
1112 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
41.1.13 UCBxADDMASK Register
eUSCI_Bx I2C Address Mask Register
Figure 41-29. UCBxADDMASK Register
15 14 13 12 11 10 9 8
Reserved ADDMASKx
r-0 r0 r0 r0 r0 r0 rw-1 rw-1
76543210
ADDMASKx
rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1 rw-1
Modify only when UCSWRST = 1.
Table 41-16. UCBxADDMASK Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved
9-0 ADDMASKx RW 3FFh Address Mask Register. By clearing the corresponding bit of the own address,
this bit is a don't care when comparing the address on the bus to the own
address. Using this method, it is possible to react on more than one slave
address. When all bits of ADDMASKx are set, the address mask feature is
deactivated.
Modify only when UCSWRST = 1.
41.1.14 UCBxI2CSA Register
eUSCI_Bx I2C Slave Address Register
Figure 41-30. UCBxI2CSA Register
15 14 13 12 11 10 9 8
Reserved I2CSAx
r-0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
I2CSAx
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 41-17. UCBxI2CSA Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved
9-0 I2CSAx RW 0h I2C slave address. The I2CSAx bits contain the slave address of the external
device to be addressed by the eUSCIx_B module. It is only used in master
mode. The address is right justified. In 7-bit slave addressing mode, bit 6 is the
MSB and bits 9-7 are ignored. In 10-bit slave addressing mode, bit 9 is the MSB.
1113
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.15 UCBxIE Register
eUSCI_Bx I2C Interrupt Enable Register
Figure 41-31. UCBxIE Register
15 14 13 12 11 10 9 8
Reserved UCBIT9IE UCTXIE3 UCRXIE3 UCTXIE2 UCRXIE2 UCTXIE1 UCRXIE1
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCCLTOIE UCBCNTIE UCNACKIE UCALIE UCSTPIE UCSTTIE UCTXIE0 UCRXIE0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 41-18. UCBxIE Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved
14 UCBIT9IE RW 0h Bit position 9 interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
13 UCTXIE3 RW 0h Transmit interrupt enable 3
0b = Interrupt disabled
1b = Interrupt enabled
12 UCRXIE3 RW 0h Receive interrupt enable 3
0b = Interrupt disabled
1b = Interrupt enabled
11 UCTXIE2 RW 0h Transmit interrupt enable 2
0b = Interrupt disabled
1b = Interrupt enabled
10 UCRXIE2 RW 0h Receive interrupt enable 2
0b = Interrupt disabled
1b = Interrupt enabled
9 UCTXIE1 RW 0h Transmit interrupt enable 1
0b = Interrupt disabled
1b = Interrupt enabled
8 UCRXIE1 RW 0h Receive interrupt enable 1
0b = Interrupt disabled
1b = Interrupt enabled
7 UCCLTOIE RW 0h Clock low timeout interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
6 UCBCNTIE RW 0h Byte counter interrupt enable.
0b = Interrupt disabled
1b = Interrupt enabled
5 UCNACKIE RW 0h Not-acknowledge interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
4 UCALIE RW 0h Arbitration lost interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
3 UCSTPIE RW 0h STOP condition interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1114 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
Table 41-18. UCBxIE Register Description (continued)
Bit Field Type Reset Description
2 UCSTTIE RW 0h START condition interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
1 UCTXIE0 RW 0h Transmit interrupt enable 0
0b = Interrupt disabled
1b = Interrupt enabled
0 UCRXIE0 RW 0h Receive interrupt enable 0
0b = Interrupt disabled
1b = Interrupt enabled
1115
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.16 UCBxIFG Register
eUSCI_Bx I2C Interrupt Flag Register
Figure 41-32. UCBxIFG Register
15 14 13 12 11 10 9 8
Reserved UCBIT9IFG UCTXIFG3 UCRXIFG3 UCTXIFG2 UCRXIFG2 UCTXIFG1 UCRXIFG1
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
UCCLTOIFG UCBCNTIFG UCNACKIFG UCALIFG UCSTPIFG UCSTTIFG UCTXIFG0 UCRXIFG0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-1 rw-0
Table 41-19. UCBxIFG Register Description
Bit Field Type Reset Description
15 Reserved R 0h Reserved
14 UCBIT9IFG RW 0h Bit position 9 interrupt flag
0b = No interrupt pending
1b = Interrupt pending
13 UCTXIFG3 RW 0h eUSCI_B transmit interrupt flag 3. UCTXIFG3 is set when UCBxTXBUF is empty
in slave mode, if the slave address defined in UCBxI2COA3 was on the bus in
the same frame.
0b = No interrupt pending
1b = Interrupt pending
12 UCRXIFG3 RW 0h Receive interrupt flag 2. UCRXIFG2 is set when UCBxRXBUF has received a
complete byte in slave mode and if the slave address defined in UCBxI2COA2
was on the bus in the same frame.
0b = No interrupt pending
1b = Interrupt pending
11 UCTXIFG2 RW 0h eUSCI_B transmit interrupt flag 2. UCTXIFG2 is set when UCBxTXBUF is empty
in slave mode, if the slave address defined in UCBxI2COA2 was on the bus in
the same frame.
0b = No interrupt pending
1b = Interrupt pending
10 UCRXIFG2 RW 0h Receive interrupt flag 2. UCRXIFG2 is set when UCBxRXBUF has received a
complete byte in slave mode and if the slave address defined in UCBxI2COA2
was on the bus in the same frame.
0b = No interrupt pending
1b = Interrupt pending
9 UCTXIFG1 RW 0h eUSCI_B transmit interrupt flag 1. UCTXIFG1 is set when UCBxTXBUF is empty
in slave mode, if the slave address defined in UCBxI2COA1 was on the bus in
the same frame.
0b = No interrupt pending
1b = Interrupt pending
8 UCRXIFG1 RW 0h Receive interrupt flag 1. UCRXIFG1 is set when UCBxRXBUF has received a
complete byte in slave mode and if the slave address defined in UCBxI2COA1
was on the bus in the same frame.
0b = No interrupt pending
1b = Interrupt pending
7 UCCLTOIFG RW 0h Clock low timeout interrupt flag
0b = No interrupt pending
1b = Interrupt pending
6 UCBCNTIFG RW 0h Byte counter interrupt flag. When using this interrupt the user needs to ensure
enough processing bandwidth (see the Byte Counter Interrupt section).
0b = No interrupt pending
1b = Interrupt pending
1116 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
eUSCI_B I2C Registers
Table 41-19. UCBxIFG Register Description (continued)
Bit Field Type Reset Description
5 UCNACKIFG RW 0h Not-acknowledge received interrupt flag. This flag only is updated when
operating in master mode.
0b = No interrupt pending
1b = Interrupt pending
4 UCALIFG RW 0h Arbitration lost interrupt flag
0b = No interrupt pending
1b = Interrupt pending
3 UCSTPIFG RW 0h STOP condition interrupt flag
0b = No interrupt pending
1b = Interrupt pending
2 UCSTTIFG RW 0h START condition interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1 UCTXIFG0 RW 0h eUSCI_B transmit interrupt flag 0. UCTXIFG0 is set when UCBxTXBUF is empty
in master mode or in slave mode, if the slave address defined in UCBxI2COA0
was on the bus in the same frame.
0b = No interrupt pending
1b = Interrupt pending
0 UCRXIFG0 RW 0h eUSCI_B receive interrupt flag 0. UCRXIFG0 is set when UCBxRXBUF has
received a complete character in master mode or in slave mode, if the slave
address defined in UCBxI2COA0 was on the bus in the same frame.
0b = No interrupt pending
1b = Interrupt pending
1117
SLAU208O–June 2008–Revised May 2015 Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
eUSCI_B I2C Registers
www.ti.com
41.1.17 UCBxIV Register
eUSCI_Bx Interrupt Vector Register
Figure 41-33. UCBxIV Register
15 14 13 12 11 10 9 8
UCIVx
r0 r0 r0 r0 r0 r0 r0 r0
76543210
UCIVx
r0 r0 r0 r0 r-0 r-0 r-0 r0
Table 41-20. UCBxIV Register Description
Bit Field Type Reset Description
15-0 UCIVx R 0h eUSCI_B interrupt vector value. It generates an value that can be used as
address offset for fast interrupt service routine handling. Writing to this register
clears all pending interrupt flags.
00h = No interrupt pending
02h = Interrupt Source: Arbitration lost; Interrupt Flag: UCALIFG; Interrupt
Priority: Highest
04h = Interrupt Source: Not acknowledgment; Interrupt Flag: UCNACKIFG
06h = Interrupt Source: Start condition received; Interrupt Flag: UCSTTIFG
08h = Interrupt Source: Stop condition received; Interrupt Flag: UCSTPIFG
0Ah = Interrupt Source: Slave 3 Data received; Interrupt Flag: UCRXIFG3
0Ch = Interrupt Source: Slave 3 Transmit buffer empty; Interrupt Flag:
UCTXIFG3
0Eh = Interrupt Source: Slave 2 Data received; Interrupt Flag: UCRXIFG2
10h = Interrupt Source: Slave 2 Transmit buffer empty; Interrupt Flag: UCTXIFG2
12h = Interrupt Source: Slave 1 Data received; Interrupt Flag: UCRXIFG1
14h = Interrupt Source: Slave 1 Transmit buffer empty; Interrupt Flag: UCTXIFG1
16h = Interrupt Source: Data received; Interrupt Flag: UCRXIFG0
18h = Interrupt Source: Transmit buffer empty; Interrupt Flag: UCTXIFG0
1Ah = Interrupt Source: Byte counter zero; Interrupt Flag: UCBCNTIFG
1Ch = Interrupt Source: Clock low timeout; Interrupt Flag: UCCLTOIFG
1Eh = Interrupt Source: Nineth bit position; Interrupt Flag: UCBIT9IFG; Priority:
Lowest
1118 SLAU208O–June 2008–Revised May 2015
Enhanced Universal Serial Communication Interface (eUSCI) – I2C Mode Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 42
SLAU208O–June 2008–Revised May 2015
USB Module
This chapter describes the USB module that is available in some devices.
Topic ........................................................................................................................... Page
42.1 USB Introduction ............................................................................................ 1120
42.2 USB Operation................................................................................................ 1122
42.3 USB Transfers ................................................................................................ 1133
42.4 USB Registers ................................................................................................ 1140
1119
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Introduction
www.ti.com
42.1 USB Introduction
The features of the USB module include:
• Fully compliant with the USB 2.0 full-speed specification
– Full-speed device (12 Mbps) with integrated USB transceiver (PHY)
– Up to eight input and eight output endpoints
– Supports control, interrupt, and bulk transfers
– Supports USB suspend, resume, and remote wakeup
• A power supply system independent from the PMM system
– Integrated 3.3-V LDO regulator with sufficient output to power entire MSP430 and system circuitry
from 5-V VBUS
– Integrated 1.8-V LDO regulator for PHY and PLL
– Easily used in either bus-powered or self-powered operation
– Current-limiting capability on 3.3-V LDO output
– Autonomous power-up of device on arrival of USB power possible (low or no battery condition)
• Internal 48-MHz USB clock
– Integrated programmable PLL
– Highly-flexible input clock frequencies for use with lowest-cost crystals
• 1904 bytes of dedicated USB buffer space for endpoints, with fully configurable size to a granularity of
eight bytes
• Timestamp generator with 62.5-ns resolution
• When USB is disabled
– Buffer space is mapped into general RAM, providing additional 2KB to the system
– USB interface pins become high-current general purpose I/O pins
NOTE: Use of the word device
The word device is used throughout the chapter. This word can mean one of two things,
depending on the context. In a USB context, it means what the USB specification refers to as
a device, function, or peripheral; that is, a piece of equipment that can be attached to a USB
host or hub. In a semiconductor context, it refers to an integrated circuit such as the
MSP430.
To avoid confusion, the term USB device in this document refers to the USB-context
meaning of the word. The word device by itself refers to silicon devices such as the MSP430.
Figure 42-1 shows a block diagram of the USB module.
1120 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
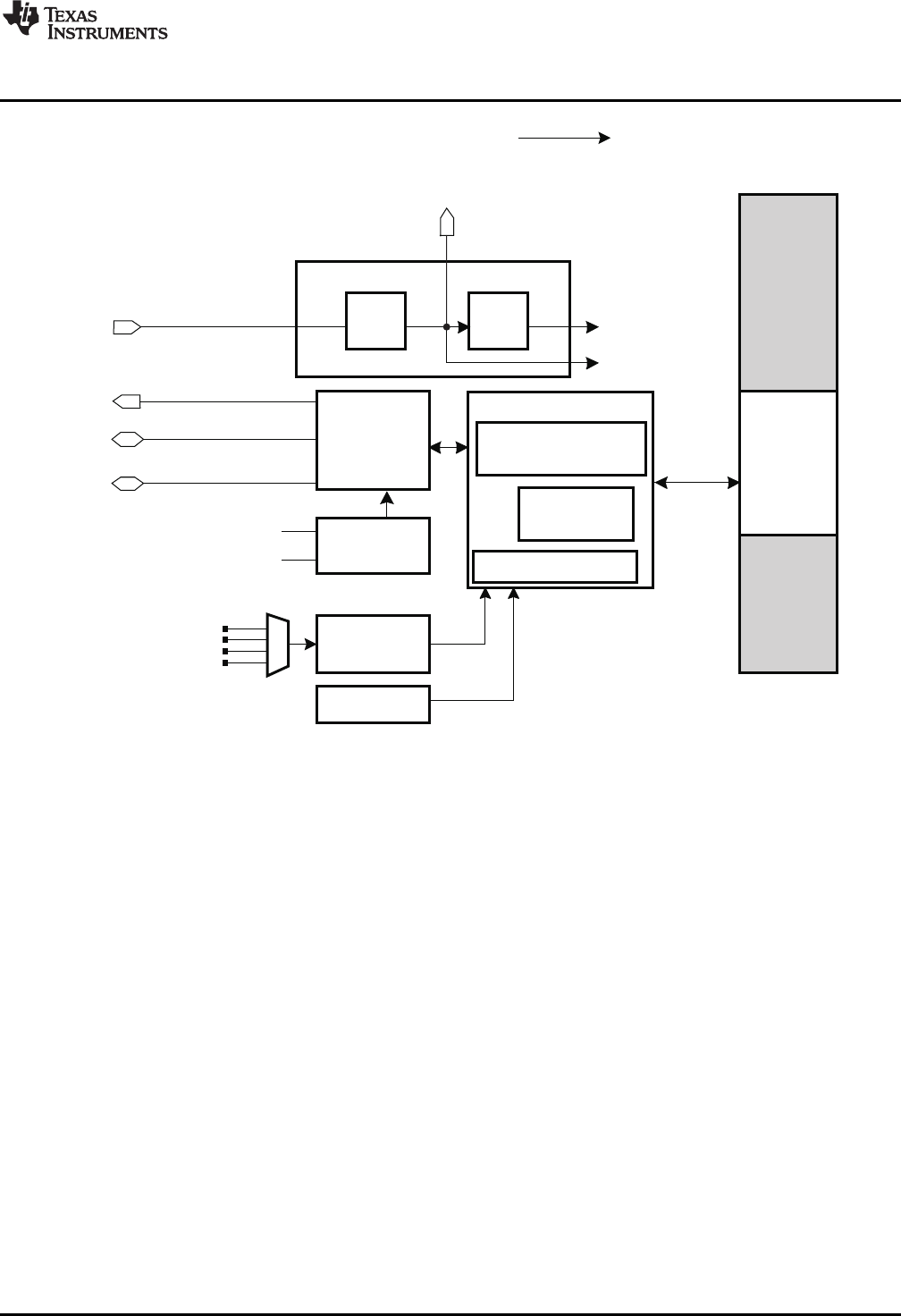
System VCORE All USB digital logic power
System RAM
USB
Buffer
RAM
VBUS
PUR
D+
D–
XT1 clock source
XT2 clock source
TSEn
USB Timer
Timerstamp
Generator
48 MHz PLL
Transceiver
(PHY)
3.3 V
LDO
1.8 V
LDO
VUSB
USB Power System
PLL power
PHY power
Serial Interface
Engine (SIE)
USB Buffer
Manager (UBM)
USB Control Registers
USB Engine
www.ti.com
USB Introduction
Figure 42-1. USB Block Diagram
1121
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Operation
www.ti.com
42.2 USB Operation
The USB module is a comprehensive full-speed USB device compliant with the USB 2.0 specification.
The USB engine coordinates all USB-related traffic. It consists of the USB SIE (serial interface engine)
and USB Buffer Manager (UBM). All traffic received on the USB receive path is de-serialized and placed
into receive buffers in the USB buffer RAM. Data in the buffer RAM marked 'ready to be sent' are
serialized into packets and sent to the USB host.
The USB engine requires an accurate 48-MHz clock to sample the incoming data stream. This is
generated by a PLL that is fed from one of the system oscillators (XT1 or XT2). A crystal of 4 MHz or
greater is required. In addition to crystal operation, the crystal bypass mode can also be used to supply
the clock required by the PLL. The PLL is very flexible and can adapt to a wide range of crystal and input
frequencies, allowing for cost-effective clock designs.
NOTE: The reference clock to the PLL depends on the device configuration. On devices that contain
the optional XT2, the reference clock to the PLL is XT2CLK, regardless of whether or not
XT1 is available. If the device has only XT1, then the reference is XT1CLK. See the device-
specific data sheet for clock sources available.
NOTE: The USB module only supports active operation during power modes AM through LPM1.
The USB buffer memory is where data is exchanged between the USB interface and the application
software. It is also where the usage of endpoints 1 to 7 are defined. This buffer memory is implemented
such that it can be easily accessed like RAM by the CPU or DMA while USB module is not in suspend
condition.
42.2.1 USB Transceiver (PHY)
The physical layer interface (USB transceiver) is a differential line driver directly powered from VUSB (3.3
V). The line driver is connected to the DP and DM pins, which form the signaling mechanism of the USB
interface.
When the PUSEL bit is set, DP and DM are configured to function as USB drivers controlled by the USB
core logic. When the bit is cleared, these two pins become "Port U", which is a pair of high-current general
purpose I/O pins. In this case, the pins are controlled by the Port U control registers. Port U is powered
from the VUSB rail, separate from the main device DVCC. If these pins are to be used, whether for USB
or general purpose use, it is necessary that VUSB be properly powered from either the internal regulators
or an external source.
42.2.1.1 D+ Pullup Via PUR Pin
When a full-speed USB device is attached to a USB host, it must pull up the D+ line (DP pin) for the host
to recognize its presence. The MSP430 USB module implements this with a software-controlled pin that
activates a pullup resistor. The bit that controls this function is PUR_EN. If software control is not desired,
the pullup can be connected directly to VUSB.
42.2.1.2 Shorts on Damaged Cables and Clamping
USB devices must tolerate connection to a cable that is damaged, such that it has developed shorts on
either ground or VBUS. The device should not become damaged by this event, either electrically or
physically. To this end, the MSP430 USB power system features a current limitation mechanism that limits
the available transceiver current in the event of a short to ground. The transceiver interface itself therefore
does not need a current limiting function.
Note that if VUSB is to be powered from a source other than the integrated regulator, the absence of
current-limiting in the transceiver means that the external power source must itself be tolerant of this same
shorting event, through its own means of current limiting.
1122 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
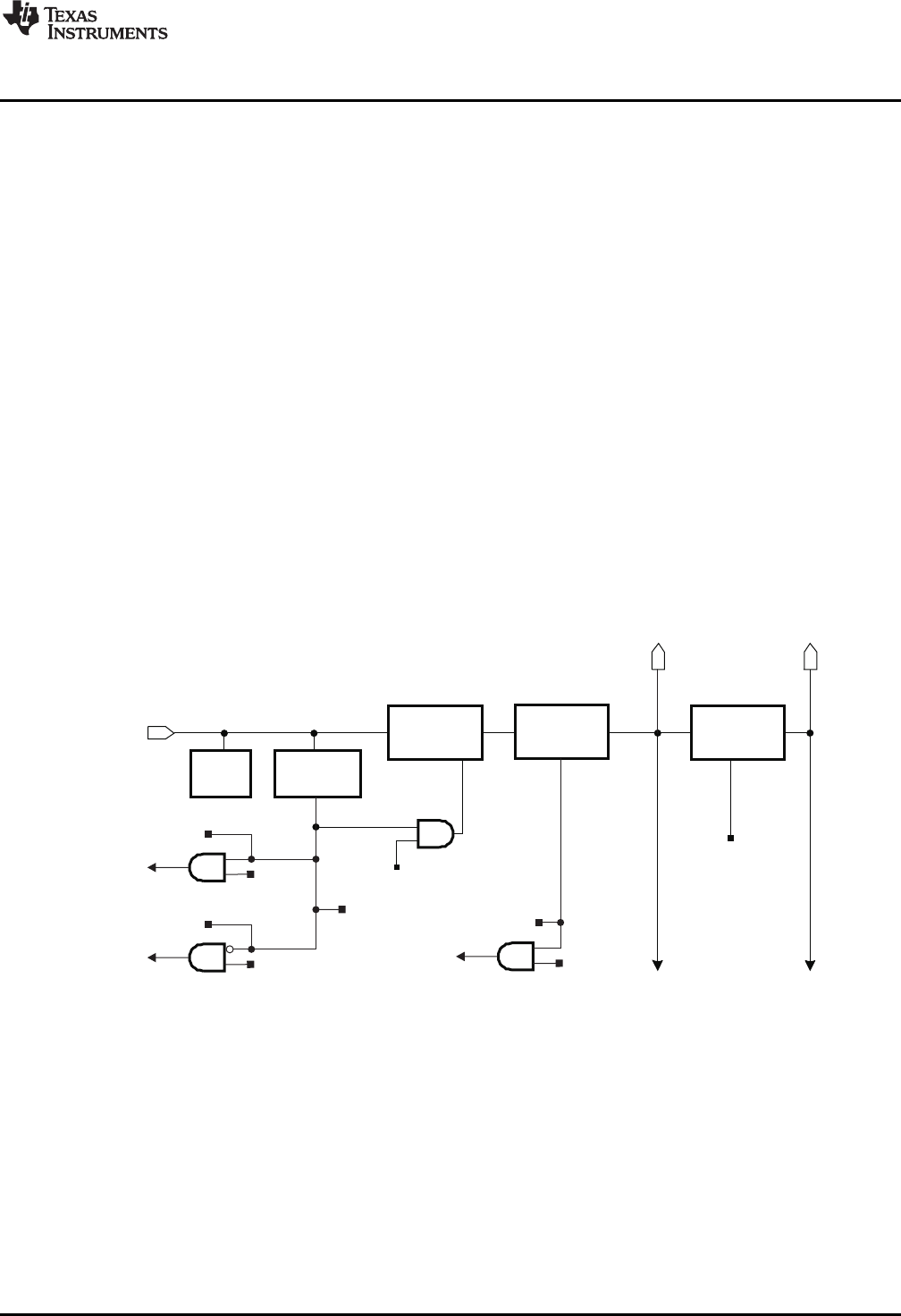
VBUS
USB
BOR
VUSBEN
PHY Power PHY,PLL Power
V18
VUSB
1.8VLDO
Overload
Detection
3.3VLDO
Low
Detection
SLDOEN
“VBUSpresent"
interrupt VBONIE
VBONIFG
VBOFFIE
VBOFFIFG
"VBUSremoved”
interrupt
USBBGVBV
"VBUSoverload"
interrupt
LDOOVLIE
LDOOVLIFG
www.ti.com
USB Operation
42.2.1.3 Port U Control
When PUSEL is cleared, the Port U pins (PU.0 and PU.1) function as general-purpose, high-current I/O
pins. These pins can only be configured together as either both inputs or both outputs. Port U is supplied
by the VUSB rail. If the 3.3-V LDO is not being used in the system (disabled), the VUSB pin can be
supplied externally.
PUOPE controls the enable of both outputs residing on the Port U pins. Setting PUIPE =1 causes both
input buffers to be enabled. When Port U outputs are enabled (PUOPE = 1), the PUIN0 and PUIN1 pins
mirror what is present on the outputs assuming PUIPE = 1. To use the Port U pins as inputs, the outputs
should be disabled by setting PUOPE = 0, and enabling the input buffers by setting PUIPE = 1. Once
configured as inputs (PUIPE = 1), the PUIN0 and PUIN1 bits can be read to determine the respective
input values.
When PUOPE is set, both Port U pins function as outputs, controlled by PUOUT0 and PUOUT1. When
driven high, they use the VUSB rail, and they are capable of a drive current higher than other I/O pins on
the device. See the device-specific datasheet for parameters.
By default, PUOPE and PUIPE are cleared. PU.0 and PU.1 are high-impedance (input buffers are
disabled and outputs are disabled).
42.2.2 USB Power System
The USB power system incorporates dual LDO regulators (3.3 V and 1.8 V) that allow the entire MSP430
device to be powered from 5-V VBUS when it is made available from the USB host. Alternatively, the
power system can supply power only to the USB module, or it can be unused altogether, as in a fully self-
powered device. The block diagram is shown in Figure 42-2.
Figure 42-2. USB Power System
The 3.3-V LDO receives 5 V from VBUS and provides power to the transceiver, as well as the VUSB pin.
Using this setup prevents the relatively high load of the transceiver and PLL from loading a local system
power supply, if used. Thus it is very useful in battery-powered devices.
The 1.8-V LDO receives power from the VUSB pin – which is to be sourced either from the internal 3.3-V
LDO or externally – and provides power to the USB PLL and transceiver. The 1.8-V LDO in the USB
module is not related to the LDO that resides in the MSP430 Power Management Module (PMM).
The inputs and outputs of the LDOs are shown in Figure 42-2. VBUS, VUSB, and V18 need to be
connected to external capacitors. The V18 pin is not intended to source other components in the system,
rather it exists solely for the attachment of a load capacitor.
1123
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
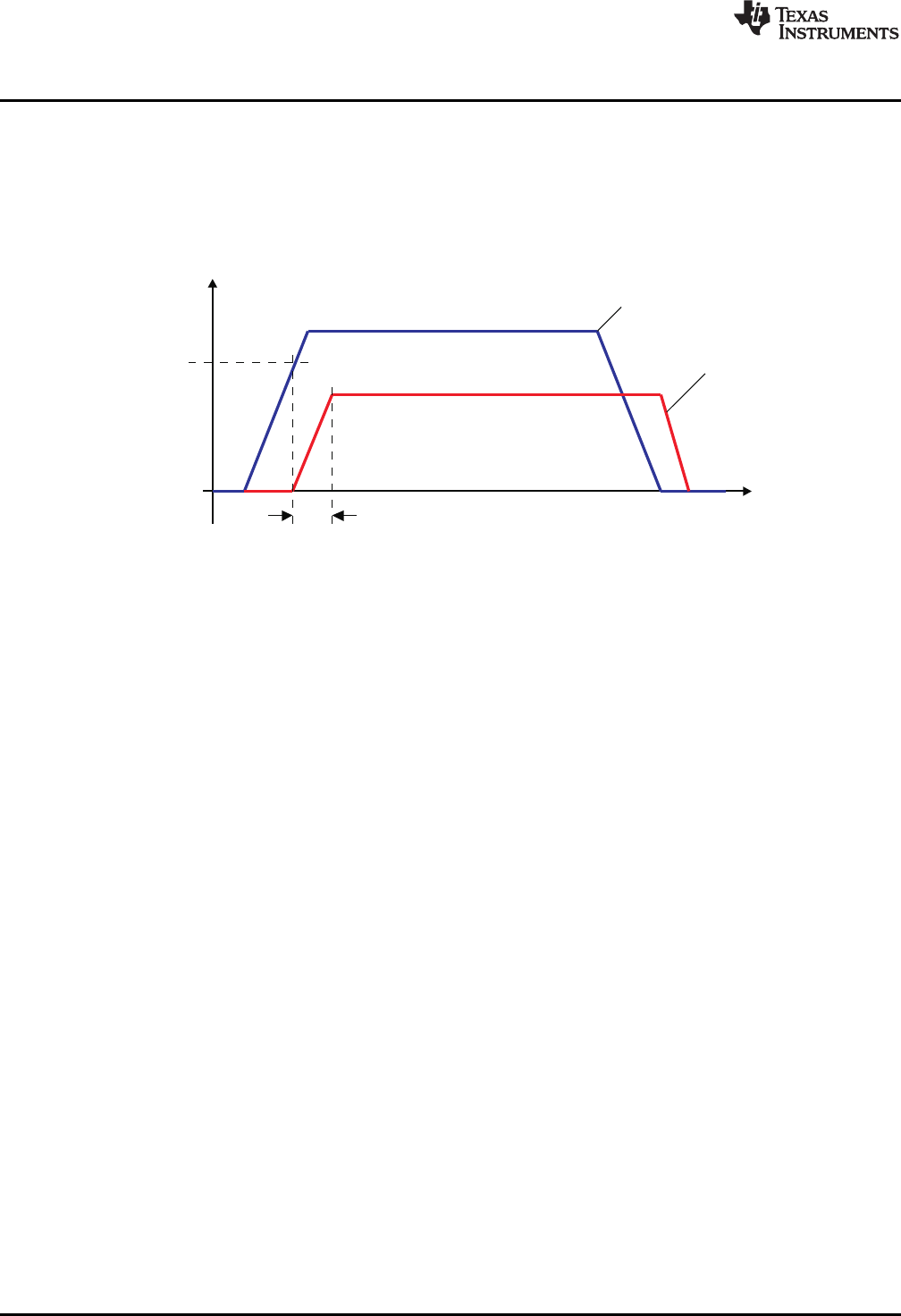
VBUS
VLAUNCH
Time
VUSB
VBUS
tENABLE
USB Operation
www.ti.com
42.2.2.1 Enabling and Disabling
The 3.3-V LDO is enabled or disabled by setting or clearing VUSBEN, respectively. Even if enabled, if the
voltage on VBUS is detected to be low or nonexistent, the LDO is suspended. No additional current is
consumed while the LDO is suspended. When VBUS rises above the USB power brownout level, the LDO
reference and low voltage detection become enabled. When VBUS rises further above the launch voltage
VLAUNCH, the LDO module becomes enabled (see Figure 42-3). See device-specific data sheet for value of
VLAUNCH.
Figure 42-3. USB Power Up and Down Profile
The 1.8-V LDO can be enabled or disabled by setting SLDOEN accordingly. By default, the 1.8-V LDO is
controlled automatically according to whether power is available on VBUS. This auto-enable feature is
controlled by SLDOAON. In this case, that the SLDOEN bit does not reflect the state of the 1.8-V LDO. If
the user wishes to know the state while using the auto-enable feature, the USBBGVBV bit in
USBPWRCTL can be read. In addition, to disable the 1.8-V LDO, SLDOAON must be cleared along with
SLDOEN. If providing VUSB from an external source, rather than through the integrated 3.3-V LDO, keep
in mind that if 5 V is not present on VBUS, the 1.8-V LDO is not automatically enabled. In this situation,
either VBUS much be attached to USB bus power, or the SLDOAON bit must be cleared and SLDOEN
set.
It is required that power from the USB cable's VBUS be directed through a Schottky diode prior to entering
the VBUS terminal. This prevents current from draining into the cable's VBUS from the LDO input,
allowing the MSP430 to tolerate a suspended or unpowered USB cable that remains electrically
connected.
The VBONIFG flag can be used to indicate that the voltage on VBUS has risen above the launch voltage.
In addition to the VBONIFG being set, an interrupt is also generated when VBONIE = 1. Similarly, the
VBOFFIFG flag can be used to indicate that the voltage on VBUS has fallen below the launch voltage. In
addition to the VBOFFIFG being set, an interrupt is also generated when VBOFFIE = 1. The USBBGVBV
bit can also be polled to indicate the level of VBUS; that is, above or below the launch voltage.
42.2.2.2 Powering the Rest of the MSP430 From USB Bus Power Via VUSB
The output of the 3.3-V LDO can be used to power the entire MSP430 device, sourcing the DVCC rail. If
this is desired, the VUSB and DVCC should be connected externally. Power from the 3.3-V LDO is
sourced into DVCC (see Figure 42-4).
1124 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
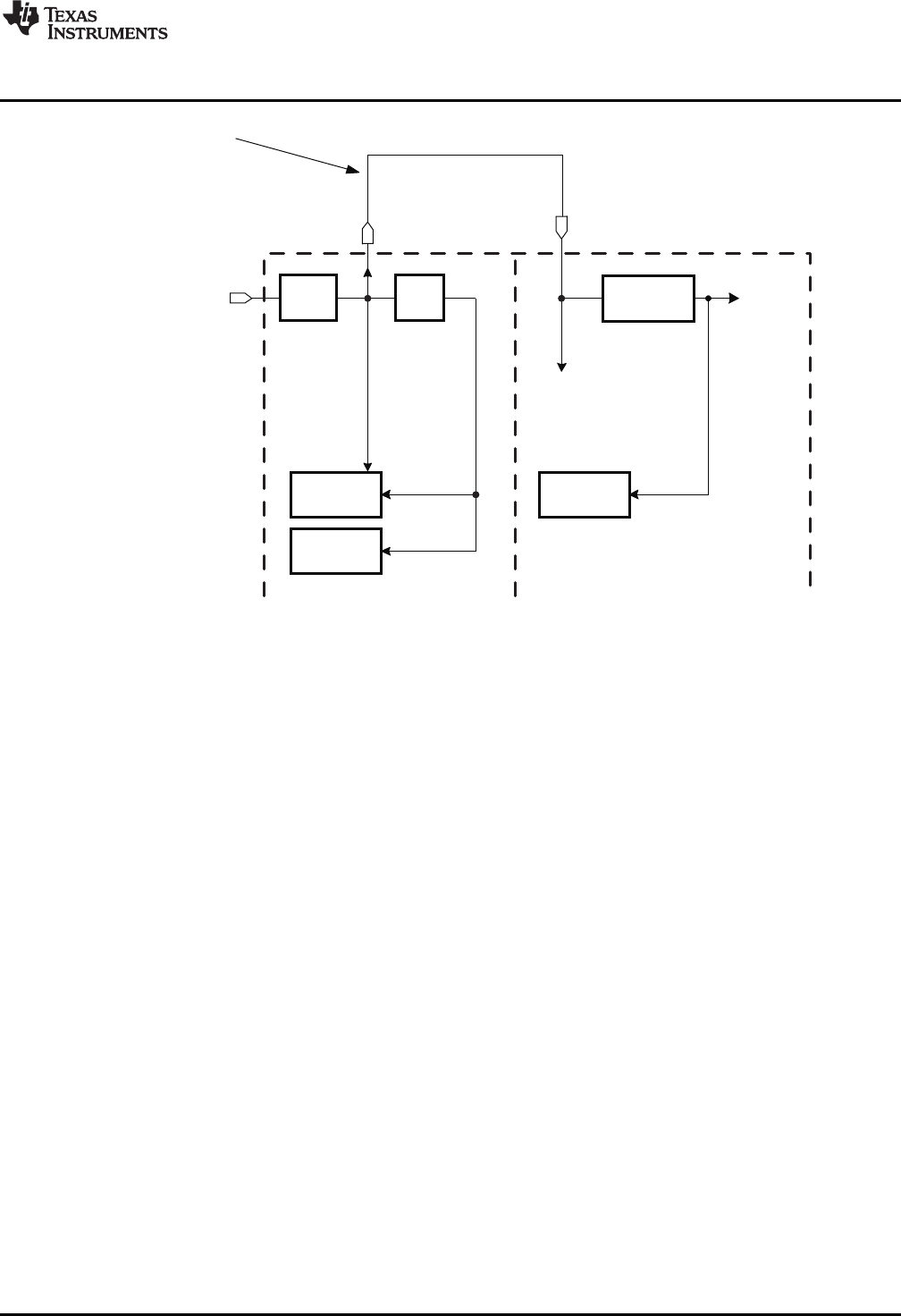
ExternalConnection
VBUS 3.3V
LDO
1.8V
LDO
USB
Transceiver
USBPLL
USBDigital
Core
USBPowerDomain MSP430DVCCPowerDomain
PMM VCORE
DVCC
VUSB
I/Os
www.ti.com
USB Operation
Figure 42-4. Powering Entire MSP430 From VBUS
With this connection made, the MSP430 allows for autonomous power up of the device when VBUS rises
above VLAUNCH. If no voltage is present on VCORE – meaning the device is unpowered (or, in LPMx.5
mode) – then both the 3.3-V and 1.8-V LDOs automatically turn on when VBUS rises above VLAUNCH.
Note that if DVCC is being driven from VUSB in this manner, and if power is available from VUSB,
attempting to place the device into LPMx.5 results in the device immediately re-powering. This is because
it re-creates the conditions of the autonomous feature described above (no VCORE but power available on
VBUS). The resulting drop of VCORE would cause the system to immediately power up again.
When DVCC is being powered from VUSB, it is up to the user to ensure that the total current being drawn
from VBUS stays below IDET.
42.2.2.3 Powering Other Components in the System from VUSB
There is sufficient current capacity available from the 3.3-V LDO to power not only the entire MSP430 but
also other components in the system, via the VUSB pin.
If the device is to always be connected to USB, then perhaps no other power system is needed. If it only
occasionally connects to USB and is battery-powered otherwise, then sourcing system power via the 3.3-V
LDO takes power burden away from the battery. Alternatively, if the battery is rechargeable, the
recharging can be driven from VUSB.
42.2.2.4 Self-Powered Devices
Some applications may be self-powered, in that the VUSB power is supplied externally. In these cases,
the 3.3-V LDO would be disabled (VUSBEN = 0). For proper USB operation, the voltage on VBUS can still
be detected, even while the 3.3-V LDO disabled, by setting USBDETEN = 1. When VBUS rises above the
USB power brownout level, low voltage detection becomes enabled. When VBUS rises further above the
launch voltage VLAUNCH, the voltage on VBUS is detected.
1125
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
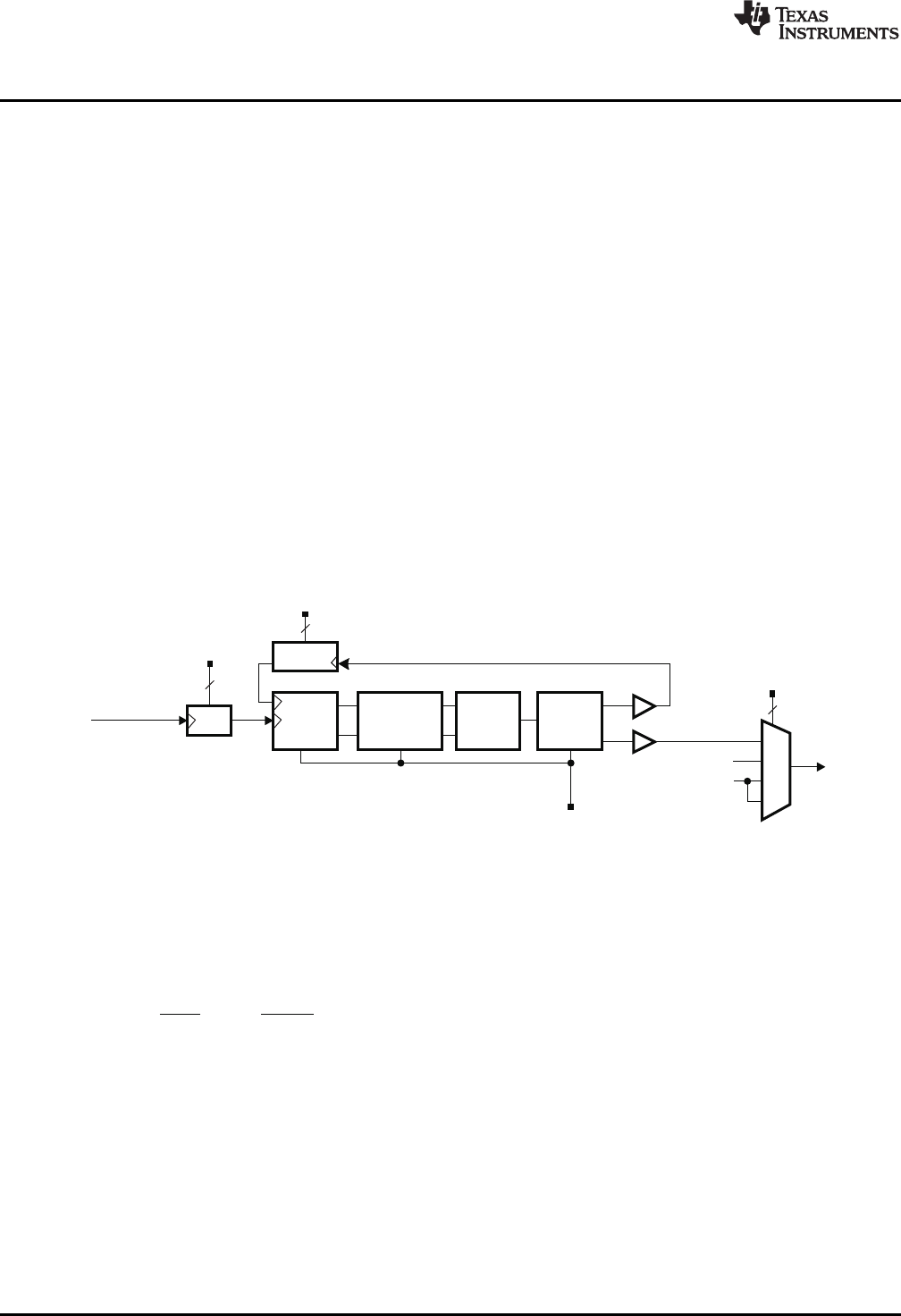
f = CLK ×
OUT SEL
DIVM
DIVQ with
CLKSEL
DIVQ = f 1.5 MHz
UPD ³
PLL referenceclock†
†XT2CLKondeviceswithXT2,otherwiseXT1CLK.
UPQB
/Q
UPMB
PFD Charge
Pump
Loop
Filter VCO
UPLLEN
UCLKSEL
USBCLK
00
01
10
11
reserved
reserved
/M
2
6
3
USB Operation
www.ti.com
42.2.2.5 Current Limitation and Overload Protection
The 3.3-V LDO features current limitation to protect the transceiver during shorted-cable conditions. A
short or overload condition – that is, when the output of the LDO becomes current-limited to IDET. This is
reported to software via the VUOVLIFG flag. See device-specific data sheet for value of IDET.
If this event occurs, it means USB operation may become unreliable, due to insufficient power supply. As
a result, software may wish to cease USB operation. If the OVLAOFF bit is set, USB operation is
automatically terminated by clearing VUSBEN.
During overload conditions, VUSB and V18 drop below their nominal output voltage. In power scenarios
where DVCC is exclusively supplied from VUSB, repetitive system restarts may be triggered as long the
short or overload condition exists. For this reason, firmware should avoid re-enabling USB after detection
of an overload on the previous power session, until the cause of failure can be identified. Ultimately, it is
the user's responsibility to ensure that the current drawn from VBUS does not exceed IDET.
The VUOVLIFG flag can be used to indicate an overcurrent condition on the 3.3-V LDO. When an
overcurrent condition is detected, VUOVLIFG = 1. In addition to the VUOVLIFG being set, an interrupt is
also generated when VUOVLIE = 1.
The USB power system brownout circuit is supplied from VBUS or DVCC, whichever carries the higher
voltage.
42.2.3 USB Phase-Locked Loop (PLL)
The PLL provides the low-jitter high-accuracy clock needed for USB operation (see Figure 42-5).
Figure 42-5. USB-PLL Analog Block Diagram
The reference clock to the PLL depends on the device configuration. On devices that contain the optional
XT2, the reference clock to the PLL is XT2CLK, regardless if XT1 is available. If the device has only XT1,
then the reference is XT1CLK. A four-bit prescale counter controlled by the UPQB bits allows division of
the reference to generate the PLL update clock. The UPMB bits control the divider in the feedback path
and define the multiplication rate of the PLL (see Equation 20).
(20)
Where
CLKSEL is the PLL reference clock frequency
DIVQ is derived from Table 42-1
DIVM represents the value of UPMB field
Table 42-2 lists some common clock input frequencies for CLKSEL, along with the appropriate register
settings for generating the nominal 48-MHz clock required by the USB serial engine. For crystal operation,
a 4 MHz or higher crystal is required. For crystal bypass mode of operation, 1.5 MHz is the lowest external
clock input possible for CLKSEL.
1126 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
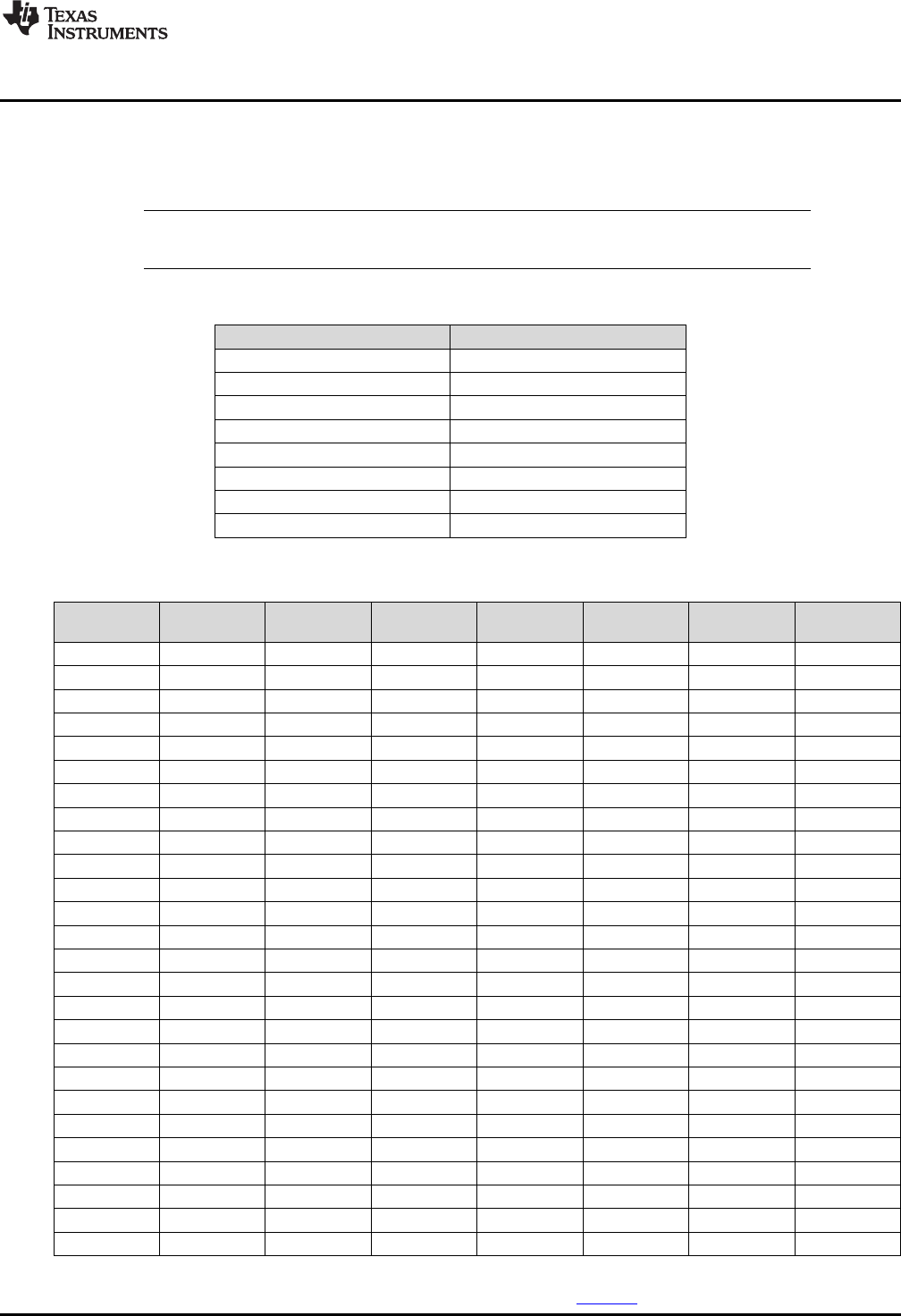
www.ti.com
USB Operation
If USB operation is used in a bus-powered configuration, disabling the PLL is necessary to pass the USB
requirement of not consuming more than 500 µA. The UPLLEN bit enables or disables the PLL. The
PFDEN bit must be set to enable the phase and frequency discriminator. Out-of-lock, loss-of-signal, and
out-of-range are indicated and flagged in the interrupt flags OOLIFG, LOSIFG, OORIFG, respectively.
NOTE: UCLKSEL bits should always be cleared, which is the default operation. All other
combinations are reserved for future usages.
Table 42-1. USB-PLL Pre-Scale Divider
UPQB DIVQ
000 1
001 2
010 3
011 4
100 6
101 8
110 13
111 16
Table 42-2. Register Settings to Generate 48 MHz Using Common Clock Input Frequencies
CLKLOOP UPLLCLK ACCURACY
CLKSEL (MHz) UPQB UPMB DIVQ DIVM (MHz) (MHz) (ppm)
1.5 000 011111 1 32 1.5 48 0
1.6 000 011101 1 30 1.6 48 0
1.7778 000 011010 1 27 1.7778 48 0
1.8432 000 011001 1 26 1.8432 47.92 -1570
1.8461 000 011001 1 26 1.8461 48 0
1.92 000 011000 1 25 1.92 48 0
2 000 010111 1 24 2 48 0
2.4 000 010011 1 20 2.4 48 0
2.6667 000 010001 1 18 2.6667 48 0
3 000 001111 1 16 3 48 0
3.2 001 011110 2 30 1.6 48 0
3.5556 001 011010 2 27 1.7778 48 0
3.84 001 011001 2 25 1.92 48 0
4(1) 001 010111 2 24 2 48 0
4.1739 001 010110 2 23 2.086 48 0
4.3636 001 010101 2 22 2.1818 48 0
4.5 010 011111 3 32 1.5 48 0
4.8 001 010011 2 20 2.4 48 0
5.33 ≉(16/3) 001 010001 2 18 2.6667 48 0
5.76 010 011000 3 25 1.92 48 0
6 010 010111 3 24 2 48 0
6.4 011 011101 4 30 1.6 48 0
7.2 010 010011 3 20 2.4 48 0
7.68 011 011000 4 25 1.92 48 0
8(1) 010 010001 3 18 2.6667 48 0
9 010 001111 3 16 3 48 0
(1) This frequency can be automatically detected by the factory-supplied BSL, for use in production programming of the MSP430 via
USB. See the MSP430 Programming Via the Bootstrap Loader User's Guide (SLAU319) for details.
1127
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
USB Operation
www.ti.com
Table 42-2. Register Settings to Generate 48 MHz Using Common Clock Input
Frequencies (continued)
CLKLOOP UPLLCLK ACCURACY
CLKSEL (MHz) UPQB UPMB DIVQ DIVM (MHz) (MHz) (ppm)
9.6 011 010011 4 20 2.4 48 0
10.66 ≉(32/3) 011 010001 4 18 2.6667 48 0
12(1) 011 001111 4 16 3 48 0
12.8 101 011101 8 30 1.6 48 0
14.4 100 010011 6 20 2.4 48 0
16 100 010001 6 18 2.6667 48 0
16.9344 100 010000 6 17 2.8224 47.98 -400
16.94118 100 010000 6 17 2.8235 48 0
18 100 001111 6 16 3 48 0
19.2 101 010011 8 20 2.4 48 0
24(1) 101 001111 8 16 3 48 0
25.6 111 011101 16 30 1.6 48 0
26.0 110 010111 13 24 2 48 0
32 111 010111 16 24 2.6667 48 0
42.2.3.1 Modifying the Divider Values
Updating the values of UPQB (DIVQ) and UPMB (DIVM) to select the desired PLL frequency must occur
simultaneously to avoid spurious frequency artifacts. The values of UPQB and UPMB can be calculated
and written to their buffer registers; the final update of UPQB and UPMB occurs when the upper byte of
UPLLDIVB (UPQB) is written.
42.2.3.2 PLL Error Indicators
The PLL can detect three kinds of errors. Out-of-lock (OOL) is indicated if a frequency correction is
performed in the same direction (that is, up or down) for four consecutive update periods. Loss-of-signal
(LOS) is indicated if a frequency correction is performed in the same direction (that is, up or down) for 16
consecutive update periods. Out-of-range (OOR) is indicated if PLL was unable to lock for more than 32
update periods.
OOL, LOS, and OOR trigger their respective interrupt flags (USBOOLIFG, USBLOSIFG, USBOORIFG) if
errors occur, and interrupts are generated if enabled by their enable bits (USBOOLIE, USBLOSIE,
USBOORIE).
42.2.3.3 PLL Startup Sequence
To achieve the fastest startup of the PLL, the following sequence is recommended.
1. Enable VUSB and V18.
2. Wait 2 ms for external capacitors to charge, so that proper VUSB is in place. (During this time, the
USB registers and buffers can be initialized.)
3. Activate the PLL, using the required divider values.
4. Wait 2 ms and check PLL. If it stays locked, it is ready to be used.
42.2.4 USB Controller Engine
The USB controller engine transfers data packets arriving from the USB host into the USB buffers, and
also transmits valid data from the buffers to the USB host. The controller engine has dedicated, fixed
buffer space for input endpoint 0 and output endpoint 0, which are the default USB endpoints for control
transfers.
1128 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
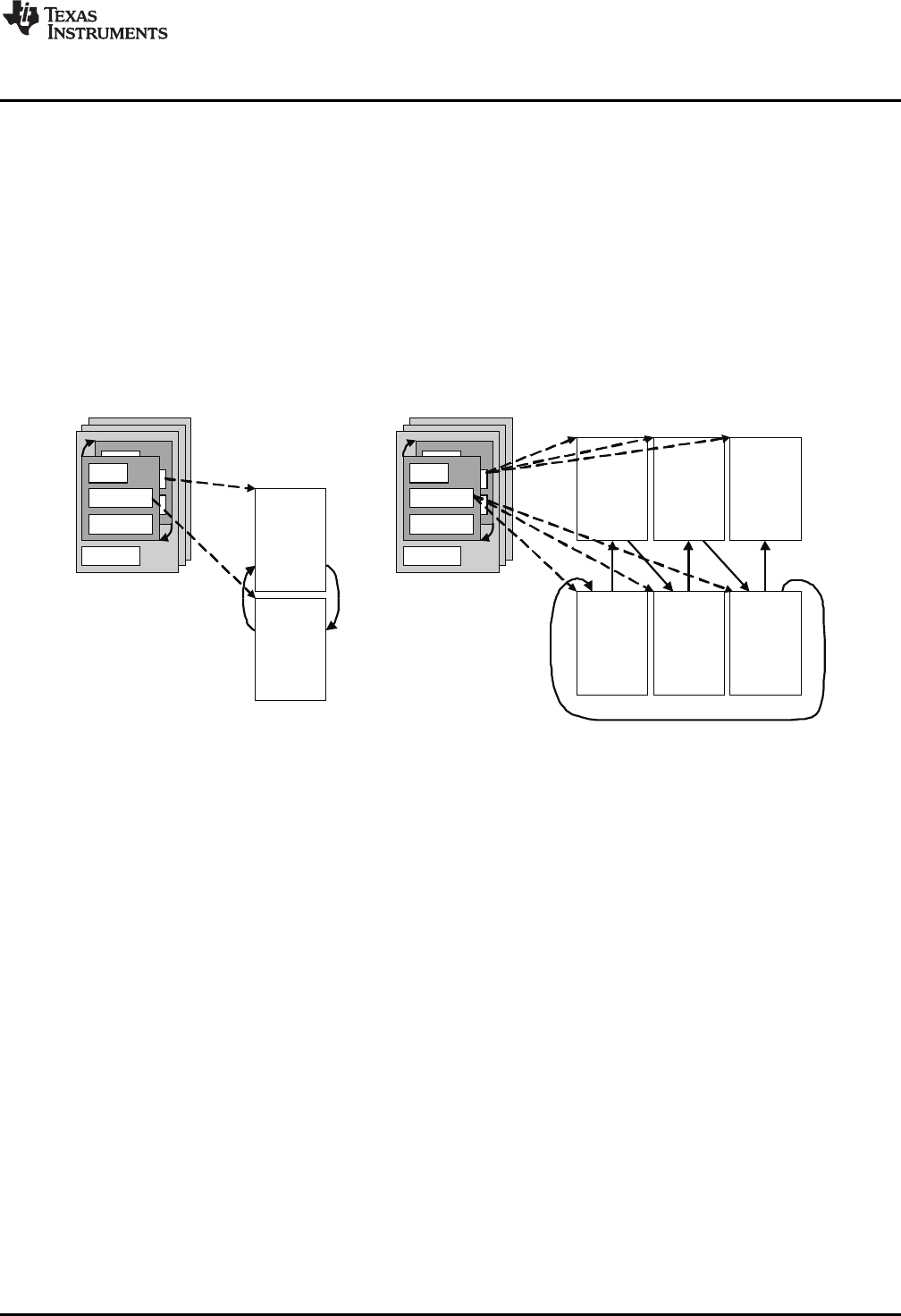
Counter
Pointer
Flag X
Y
Config EPn
Counter
Pointer
Flag X
Y
Config EPn
-
EP0toEP7 EP0toEP7
X-Buffer
(64bytes)
Y-Buffer
(64bytes)
X'-Buffer
(64bytes)
X-Buffer
(64bytes)
X''-Buffer
(64bytes)
Y''-Buffer
(64bytes)
Y'-Buffer
(64bytes)
Y-Buffer
(64bytes)
www.ti.com
USB Operation
The 14 remaining endpoints (seven input and seven output) may have one or more USB buffers assigned
to them. All the buffers are located in the USB buffer memory. This memory is implemented as "multiport"
memory, in that it can be accessed both by the USB buffer manager and also by the CPU and DMA.
Each endpoint has a dedicated set of descriptor registers that describe the use of that endpoint (see
Figure 42-6). Configuration of each endpoint is performed by setting its descriptor registers. These data
structures are located in the USB buffer memory and contain address pointers to the next memory buffer
for receive or transmit.
Assigning one or two data buffers to an endpoint, of up to 64 bytes, requires no further software
involvement after configuration. If more than two buffers per endpoint are desired, however, software must
change the address pointers on the fly during a receive or transmit process.
Synchronization of empty and full buffers is done using validation flags. All events are indicated by flags
and fire a vector interrupt when enabled. Transfer event indication can be enabled separately.
Figure 42-6. Data Buffers and Descriptors
42.2.4.1 USB Serial Interface Engine (SIE)
The SIE logic manages the USB packet protocol requirements for the packets being received and
transmitted on the bus. For packets being received, the SIE decodes the packet identifier field (packet ID)
to determine the type of packet being received and to ensure the packet ID is valid. For token and data
packets being received, the SIE calculates the packet cycle redundancy check (CRC) and compares the
value to the CRC contained in the packet to verify that the packet was not corrupted during transmission.
For token and data packets being transmitted, the SIE generates the CRC that is transmitted with the
packet. For packets being transmitted, the SIE also generates the synchronization field (SYNC), which is
an eight-bit field at the beginning of each packet. In addition, the SIE generates the correct packet ID for
all packets being transmitted.
Another major function of the SIE is the overall serial-to-parallel conversion of the data packets being
received or transmitted.
42.2.4.2 USB Buffer Manager (UBM)
The USB buffer manager provides the control logic that interfaces the SIE to the USB endpoint buffers.
One of the major functions of the UBM is to decode the USB device address to determine if the USB host
is addressing this particular USB device. In addition, the endpoint address field and direction signal are
decoded to determine which particular USB endpoint is being addressed. Based on the direction of the
USB transaction and the endpoint number, the UBM either writes or reads the data packet to or from the
appropriate USB endpoint data buffer.
1129
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Operation
www.ti.com
The TOGGLE bit for each output endpoint configuration register is used by the UBM to track successful
output data transactions. If a valid data packet is received and the data packet ID matches the expected
packet ID, the TOGGLE bit is toggled. Similarly, the TOGGLE bit for each input endpoint configuration is
used by the UBM to track successful input data transactions. If a valid data packet is transmitted, the
TOGGLE bit is toggled. If the TOGGLE bit is cleared, a DATA0 packet ID is transmitted in the data packet
to the host. If the TOGGLE bit is set, a DATA1 packet ID is transmitted in the data packet to the host. See
Section 42.3 regarding details of USB transfers.
42.2.4.3 USB Buffer Memory
The USB buffer memory contains the data buffers for all endpoints and for SETUP packets. In that the
buffers for endpoints 1 to 7 are flexible, there are USB buffer configuration registers that define them, and
these too are in the USB buffer memory. (Endpoint 0 is defined with a set of registers in the USB control
register space.) Storing these in open memory allows for efficient, flexible use, which is advantageous
because use of these endpoints is very application-specific.
This memory is implemented as "multiport" memory, in that it can be accessed both by the USB buffer
manager and also by the CPU and DMA. The SIE allows CPU or DMA access, but reserves priority. As a
result, CPU or DMA access is delayed using wait states if a conflict arises with an SIE access.
When the USB module is disabled (USBEN = 0), the buffer memory behaves like regular RAM. When
changing the state of the USBEN bit (enabling or disabling the USB module), the USB buffer memory
should not be accessed within four clocks before and eight clocks after changing this bit, as doing so
reconfigures the access method to the USB memory.
Accessing of the USB buffer memory by CPU or DMA is only possible if the USB PLL is active. When a
host requests suspend condition the application software (for example, USB stack) of client has to switch
off the PLL within 10 ms. Note that the MSP430 USB suspend interrupt occurs around 5 ms after the host
request.
Each endpoint is defined by a block of six configuration "registers" (based in RAM, they are not true
registers in the strict sense of the word). These registers specify the endpoint type, buffer address, buffer
size and data packet byte count. They define an endpoint buffer space that is 1904 bytes in size. An
additional 24 bytes are allotted to three remaining blocks – the EP0_IN buffer, the EP0_OUT buffer, and
the SETUP packet buffer (see Table 42-3).
Table 42-3. USB Buffer Memory Map
Address
Memory Short Form Access Type Offset
Start of buffer space STABUFF Read/Write 0000h
1904 bytes of configurable buffer space ⋮Read/Write ⋮
End of buffer space TOPBUFF Read/Write 076Fh
Read/Write 0770h
Output endpoint_0 buffer USBOEP0BUF Read/Write ⋮
Read/Write 0777h
Read/Write 0778h
Input endpoint_0 buffer USBIEP0BUF Read/Write ⋮
Read/Write 077Fh
Read/Write 0780h
Setup Packet Block USBSUBLK Read/Write ⋮
Read/Write 0787h
Software can configure each buffer according to the total number of endpoints needed. Single or double
buffering of each endpoint is possible.
Unlike the descriptor registers for endpoints 1 to 7, which are defined as memory entries in USB RAM,
endpoint 0 is described by a set of four registers (two for output and two for input) in the USB control
register set. Endpoint 0 has no base-address register, since these addresses are hardwired. The bit
positions have been preserved to provide consistency with endpoint_n (n = 1 to 7).
1130 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
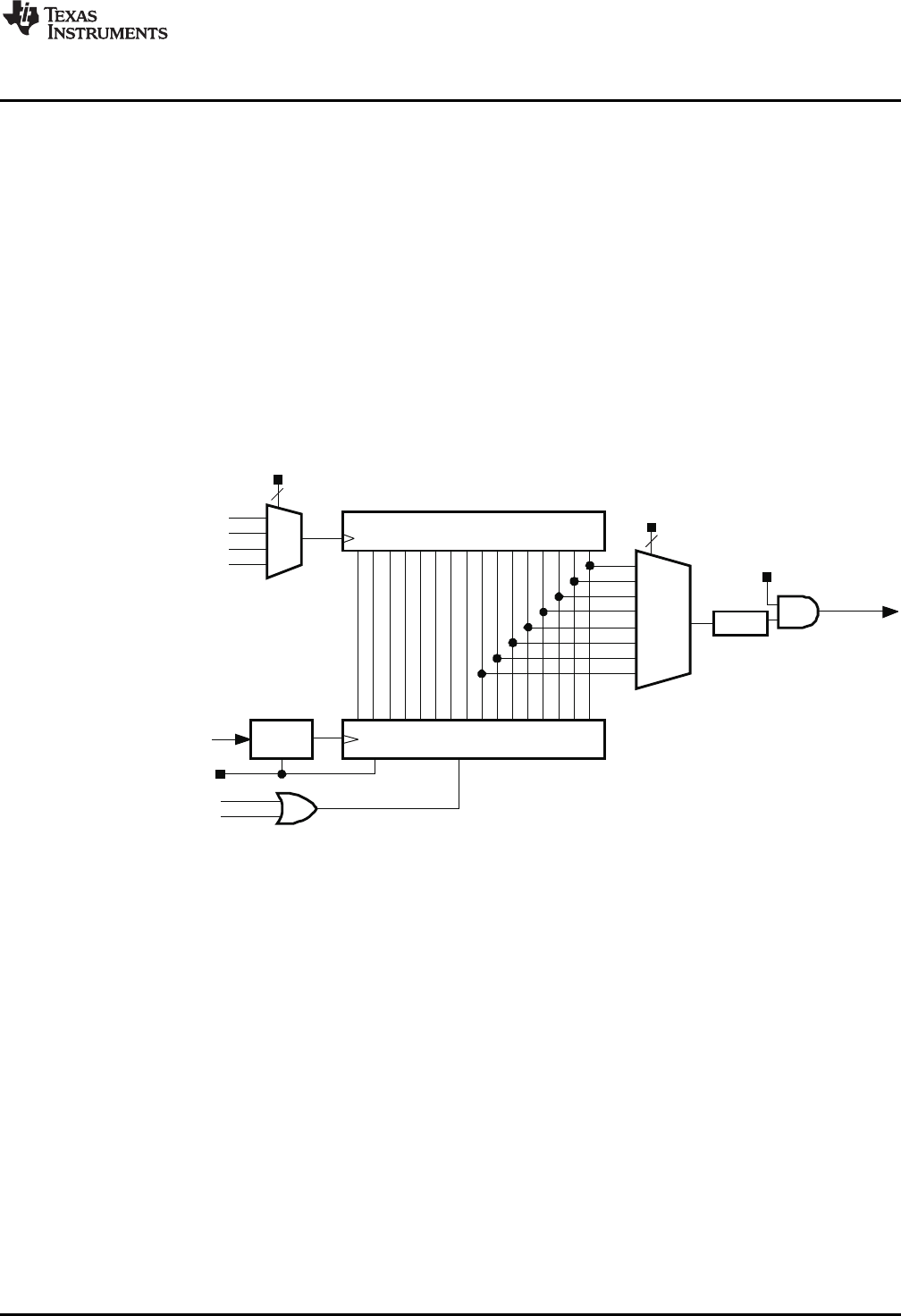
/3
USBCLK
(48MHz) 16-BitUSBTimer(notaccessible)
Resetto0FrameNumberReceived
Reset
(ofUSBConfigurationRegisters)
16-BitTimeStampRegister(readonly)
000
TSE0 00
01
10
11
TSE1
TSE2
TSE3
TSESEL
001
010
011
100
101
110
111
UTSEL
UTIE
VECINT
UTIFG
TSGEN
2
3
www.ti.com
USB Operation
42.2.4.4 USB Fine Timestamp
The USB module is capable of saving a timestamp associated with particular USB events (see Figure 42-
7). This can be useful in compensating for delays in software response. The timestamp values are based
on the USB module's internal timer, driven by USBCLK.
Up to four events can be selected to generate the timestamp, selected with the TSESEL bits. When they
occur, the value of the USB timer is transferred to the timestamp register USBTSREG, and thus the exact
moment of the event is recorded. The trigger options include one of three DMA channels, or a software-
driven event. The USB timer cannot be directly accessed by reading.
Furthermore, the value of the USB timer can be used to generate periodic interrupts. Since the USBCLK
can have a frequency different from the other system clocks, this gives another option for periodic system
interrupts. The UTSEL bits select the divider from the USB clock. UTIE must be set for an interrupt vector
to get triggered.
The timestamp register is set to zero on a frame-number-receive event and pseudo-start-of-frame.
TSGEN enables or disables the time stamp generator.
Figure 42-7. USB Timer and Time Stamp Generation
42.2.4.5 Suspend and Resume Logic
The USB suspend and resume logic detects suspend and resume conditions on the USB bus. These
events are flagged in SUSRIFG and RESRIFG, respectively, and they fire dedicated interrupts, if the
interrupts are enabled (SUSRIE and RESRIE).
The remote wakeup mechanism, in which a USB device can cause the USB host to awaken and resume
the device, is triggered by setting the RWUP bit of the USBCTL register.
See Section 42.2.6 for more information.
42.2.4.6 Reset Logic
A PUC resets the USB module logic. When FRSTE = 1, the logic is also reset when a USB reset event
occurs on the bus, triggered from the USB host. (A USB reset also sets the RSTRIFG flag.) USB buffer
memory is not reset by a USB reset.
1131
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Operation
www.ti.com
42.2.5 USB Vector Interrupts
The USB module uses a single interrupt vector generator register to handle multiple USB interrupts. All
USB-related interrupt sources trigger the USBVECINT (also called USBIV) vector, which then contains a
6-bit vector value that identifies the interrupt source. Each of the interrupt sources results in a different
offset value read. The interrupt vector returns zero when no interrupt is pending.
Reading the interrupt vector register clears the corresponding interrupt flag and updates its value. The
interrupt with highest priority returns the value 0002h; the interrupt with lowest priority returns the value
003Eh when reading the interrupt vector register. Writing to this register clears all interrupt flags.
For each input and output endpoints resides an USB transaction interrupt indication enable. Software may
set this bit to define if interrupts are to be flagged in general. To generate an interrupt the corresponding
interrupt enable and flag must be set.
Table 42-4. USB Interrupt Vector Generation
USBVECINT Interrupt Source Interrupt Flag Bit Interrupt Enable Bit Indication Enable Bit
Value
0000h no interrupt – – –
0002h USB-PWR drop ind. USBPWRCTL.VUOVLIFG USBPWRCTL.VUOVLIE –
0004h USB-PLL lock error USBPLLIR.USBPLLOOLIFG USBPLLIR.USBPLLOOLIE –
0006h USB-PLL signal error USBPLLIR.USBPLLOSIFG USBPLLIR.USBPLLLOSIE –
0008h USB-PLL range error USBPLLIR.USBPLLOORIFG USBPLLIR.USBPLLOORIE –
000Ah USB-PWR VBUS-on USBPWRCTL.VBONIFG USBPWRCTL.VBONIE –
000Ch USB-PWR VBUS-off USBPWRCTL.VBOFFIFG USBPWRCTL.VBOFFIE –
000Eh reserved – – –
0010h USB timestamp event USBMAINTL.UTIFG USBMAINTL.UTIE –
0012h Input Endpoint-0 USBIEPIFG.EP0 USBIEPIE.EP0 USBIEPCNFG_0.USBIIE
0014h Output Endpoint-0 USBOEPIFG.EP0 USBOEPIE.EP0 USBOEPCNFG_0.USBIIE
0016h RSTR interrupt USBIFG.RSTRIFG USBIE.RSTRIE –
0018h SUSR interrupt USBIFG.SUSRIFG USBIE.SUSRIE –
001Ah RESR interrupt USBIFG.RESRIFG USBIE.RESRIE –
001Ch reserved – – –
001Eh reserved – – –
0020h Setup packet received USBIFG.SETUPIFG USBIE.SETUPIE –
0022h Setup packet overwrite USBIFG.STPOWIFG USBIE.STPOWIE –
0024h Input Endpoint-1 USBIEPIFG.EP1 USBIEPIE.EP1 USBIEPCNF_1.USBIIE
0026h Input Endpoint-2 USBIEPIFG.EP2 USBIEPIE.EP2 USBIEPCNF_2.USBIIE
0028h Input Endpoint-3 USBIEPIFG.EP3 USBIEPIE.EP3 USBIEPCNF_3.USBIIE
002Ah Input Endpoint-4 USBIEPIFG.EP4 USBIEPIE.EP4 USBIEPCNF_4.USBIIE
002Ch Input Endpoint-5 USBIEPIFG.EP5 USBIEPIE.EP5 USBIEPCNF_5.USBIIE
002Eh Input Endpoint-6 USBIEPIFG.EP6 USBIEPIE.EP6 USBIEPCNF_6.USBIIE
0030h Input Endpoint-7 USBIEPIFG.EP7 USBIEPIE.EP7 USBIEPCNF_7.USBIIE
0032h Output Endpoint-1 USBOEPIFG.EP1 USBOEPIE.EP1 USBOEPCNF_1.USBIIE
0034h Output Endpoint-2 USBOEPIFG.EP2 USBOEPIE.EP2 USBOEPCNF_2.USBIIE
0036h Output Endpoint-3 USBOEPIFG.EP3 USBOEPIE.EP3 USBOEPCNF_3.USBIIE
0038h Output Endpoint-4 USBOEPIFG.EP4 USBOEPIE.EP4 USBOEPCNF_4.USBIIE
003Ah Output Endpoint-5 USBOEPIFG.EP5 USBOEPIE.EP5 USBOEPCNF_5.USBIIE
003Ch Output Endpoint-6 USBOEPIFG.EP6 USBOEPIE.EP6 USBOEPCNF_6.USBIIE
003Eh Output Endpoint-7 USBOEPIFG.EP7 USBOEPIE.EP7 USBOEPCNF_7.USBIIE
42.2.6 Power Consumption
USB functionality consumes more power than is typically drawn in the MSP430. Since most MSP430
applications are power sensitive, the MSP430 USB module has been designed to protect the battery by
ensuring that significant power load only occurs when attached to the bus, allowing power to be drawn
from VBUS.
1132 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Operation
The two components of the USB module that draw the most current are the transceiver and the PLL. The
transceiver can consume large amounts of power while transmitting, but in its quiescent state – that is,
when not transmitting data – the transceiver actually consumes very little power. This is the amount
specified as IIDLE. This amount is so little that the transceiver can be kept active during suspend mode
without presenting a problem for bus-powered applications. Fortunately the transceiver always has access
to VBUS power when drawing the level of current required for transmitting.
The PLL consumes a larger amount of current. However, it need only be active while connected to the
host, and the host can supply the power. When the PLL is disabled (for example, during USB suspend),
USBCLK automatically is sourced from the VLO.
42.2.7 Suspend and Resume
All USB devices must support the ability to be suspended into a no-activity state, and later resumed.
When suspended, a device is not allowed to consume more than 500uA from the USB's VBUS power rail,
if the device is drawing any power from that source. A suspended device must also monitor for a resume
event on the bus.
The host initiates a suspend condition by creating a constant idle state on the bus for more than 3.0 ms. It
is the responsibility of the software to ensure the device enters its low power suspend state within 10 ms
of the suspend condition. The USB specification requires that a suspended bus-powered USB device not
draw in excess of 500 µA from the bus.
42.2.7.1 Entering Suspend
When the host suspends the USB device, a suspend interrupt is generated (SUSRIFG). From this point,
the software has 10 ms to ensure that no more than 500uA is being drawn from the host via VBUS.
For most applications, the integrated 3.3-V LDO is being used. In this case, the following actions should
be taken:
• Disable the PLL by clearing UPLLEN (UPLLEN = 0)
• Limit all current sourced from VBUS that causes the total current sourced from VBUS equal to 500 µA
minus the suspend current, ISUSPEND (see the device-specific data sheet).
Disabling the PLL eliminates the largest on-chip draw of power from VBUS. During suspend, the USBCLK
is automatically sourced by the VLO (VLOCLK), allowing the USB module to detect resume when it
occurs. It is a good idea to also then ensure that the RESRIE bit is also set, so that an interrupt is
generated when the host resumes the device. If desired, the high frequency crystal can also be disabled
to save additional system power, however it does not contribute to the power from VBUS since it draws
power from the DVCC supply.
42.2.7.2 Entering Resume Mode
When the USB device is in a suspended condition, any non-idle signaling, including reset signaling, on the
host side is detected by the suspend and resume logic and device operation is resumed. RESRIFG is set,
causing an USB interrupt. The interrupt service routine can be used to resume USB operation.
42.3 USB Transfers
The USB module supports control, bulk, and interrupt data transfer types. In accordance with the USB
specification, endpoint 0 is reserved for the control endpoint and is bidirectional. In addition to the control
endpoint, the USB module is capable of supporting up to 7 input endpoints and 7 output endpoints. These
additional endpoints can be configured either as bulk or interrupt endpoints. The software handles all
control, bulk, and interrupt endpoint transactions.
42.3.1 Control Transfers
Control transfers are used for configuration, command, and status communication between the host and
the USB device. Control transfers to the USB device use input endpoint 0 and output endpoint 0. The
three types of control transfers are control write, control write with no data stage, and control read. Note
that the control endpoint must be initialized before connecting the USB device to the USB.
1133
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Transfers
www.ti.com
42.3.1.1 Control Write Transfer
The host uses a control write transfer to write data to the USB device. A control write transfer consists of a
setup stage transaction, at least one output data stage transaction, and an input status stage transaction.
The stage transactions for a control write transfer are:
• Setup stage transaction:
1. Input endpoint 0 and output endpoint 0 are initialized by programming the appropriate USB
endpoint configuration blocks. This entails enabling the endpoint interrupt (USBIIE = 1) and
enabling the endpoint (UBME = 1). The NAK bit for both input endpoint 0 and output endpoint 0
must be cleared.
2. The host sends a setup token packet followed by the setup data packet addressed to output
endpoint 0. If the data is received without an error, then the UBM writes the data to the setup data
packet buffer, sets the setup stage transaction bit (SETUPIFG = 1) in the USB Interrupt Flag
register (USBIFG), returns an ACK handshake to the host, and asserts the setup stage transaction
interrupt. Note that as long as SETUPIFG = 1, the UBM returns a NAK handshake for any data
stage or status stage transactions regardless of the endpoint 0 NAK or STALL bit values.
3. The software services the interrupt, reads the setup data packet from the buffer, and then decodes
the command. If the command is not supported or invalid, the software should set the STALL bit in
the output endpoint 0 configuration register (USBOEPCNFG_0) and the input endpoint 0
configuration register (USBIEPCNFG_0) . This causes the device to return a STALL handshake for
any data or status stage transaction. For control write transfers, the packet ID used by the host for
the first data packet output is a DATA1 packet ID and the TOGGLE bit must match.
NOTE: When using USBIV, SETUPIFG is cleared upon reading USBIV. In addition, the NAK on
input endpoint 0 and output endpoint 0 are also cleared. In this case, the host may send or
receive the next setup packet even if MSP430 did not perform the first setup packet. To
prevent this, first read the SETUPIFG directly, perform the required setup, and then use the
USBIV for further processing.
NOTE: The priority of input endpoint 0 is higher than the setup flag inside USBIV (SETUPIFG).
Therefore, if both the USBIEPIFG.EP0 and SETUPIFG are pending, reading USBIV gives
the higher priority interrupt (EP0) as opposed to SETUPIFG. Therefore, read SETUPIFG
directly, process the pending setup packet, then proceed to read the USBIV.
• Data stage transaction:
1. The host sends an OUT token packet followed by a data packet addressed to output endpoint 0. If
the data is received without an error, the UBM writes the data to the output endpoint buffer
(USBOEP0BUF), updates the data count value, toggles the TOGGLE bit, sets the NAK bit, returns
an ACK handshake to the host , and asserts the output endpoint interrupt 0 (OEPIFG0).
2. The software services the interrupt and reads the data packet from the output endpoint buffer. To
read the data packet, the software first needs to obtain the data count value inside the
USBOEPBCNT_0 register. After reading the data packet, the software should clear the NAK bit to
allow the reception of the next data packet from the host.
3. If the NAK bit is set when the data packet is received, the UBM simply returns a NAK handshake to
the host. If the STALL bit is set when the data packet is received, the UBM simply returns a STALL
handshake to the host. If a CRC or bit stuff error occurs when the data packet is received, then no
handshake is returned to the host.
• Status stage transaction:
1. For input endpoint 0, the software updates the data count value to zero, sets the TOGGLE bit, then
clears the NAK bit to enable the data packet to be sent to the host. Note that for a status stage
transaction, a null data packet with a DATA1 packet ID is sent to the host.
2. The host sends an IN token packet addressed to input endpoint 0. After receiving the IN token, the
UBM transmits a null data packet to the host. If the data packet is received without errors by the
host, then an ACK handshake is returned. The UBM then toggles the TOGGLE bit and sets the
NAK bit.
1134 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Transfers
3. If the NAK bit is set when the IN token packet is received, the UBM simply returns a NAK
handshake to the host. If the STALL bit is set when the IN token packet is received, the UBM
simply returns a STALL handshake to the host. If no handshake packet is received from the host,
then the UBM prepares to retransmit the same data packet again.
42.3.1.2 Control Write Transfer with No Data Stage Transfer
The host uses a control write transfer to write data to the USB device. A control write with no data stage
transfer consists of a setup stage transaction and an input status stage transaction. For this type of
transfer, the data to be written to the USB device is contained in the two byte value field of the setup stage
transaction data packet.
The stage transactions for a control write transfer with no data stage transfer are:
• Setup stage transaction:
1. Input endpoint 0 and output endpoint 0 are initialized by programming the appropriate USB
endpoint configuration blocks. This entails programming the buffer size and buffer base address,
selecting the buffer mode, enabling the endpoint interrupt (USBIIE = 1), initializing the TOGGLE bit,
enabling the endpoint (UBME = 1). The NAK bit for both input endpoint 0 and output endpoint 0
must be cleared.
2. The host sends a setup token packet followed by the setup data packet addressed to output
endpoint 0. If the data is received without an error then the UBM writes the data to the setup data
packet buffer, sets the setup stage transaction (SETUP) bit in the USB status register, returns an
ACK handshake to the host, and asserts the setup stage transaction interrupt. Note that as long as
the setup transaction (SETUP) bit is set, the UBM returns a NAK handshake for any data stage or
status stage transaction regardless of the endpoint 0 NAK or STALL bit values.
3. The software services the interrupt and reads the setup data packet from the buffer then decodes
the command. If the command is not supported or invalid, the software should set the STALL bits in
the output endpoint 0 and the input endpoint 0 configuration registers before clearing the setup
stage transaction (SETUP) bit. This causes the device to return a STALL handshake for data or
status stage transactions. After reading the data packet and decoding the command, the software
should clear the interrupt, which automatically clears the setup stage transaction status bit.
NOTE: When using USBIV, the SETUPIFG is cleared upon reading USBIV. In addition, the NAK on
input endpoint 0 and output endpoint 0 is also cleared. In this case, the host may send or
receive the next setup packet even if MSP430 did not perform the first setup packet. To
prevent this, first read the SETUPIFG directly, perform the required setup, and then use the
USBIV for further processing.
NOTE: The priority of input endpoint 0 is higher than setup flag inside USBIV. Therefore, if both the
USBIEPIFG.EP0 and SETUPIFG are pending, reading the USBIV gives the higher priority
interrupt (EP0) as opposed to the SETUPIFG. Therefore, read SETUPIFG directly, process
the pending setup packet, then proceed to read the USBIV.
• Status stage transaction:
1. For input endpoint 0, the software updates the data count value to zero, sets the TOGGLE bit, then
clears the NAK bit to enable the data packet to be sent to the host. Note that for a status stage
transaction a null data packet with a DATA1 packet ID is sent to the host.
2. The host sends an IN token packet addressed to input endpoint 0. After receiving the IN token, the
UBM transmits a null data packet to the host. If the data packet is received without errors by the
host, then an ACK handshake is returned. The UBM then toggles the TOGGLE bit, sets the NAK
bit, and asserts the endpoint interrupt.
3. If the NAK bit is set when the IN token packet is received, the UBM simply returns a NAK
handshake to the host. If the STALL bit is set when the IN token packet is received, the UBM
simply returns a STALL handshake to the host. If no handshake packet is received from the host,
then the UBM prepares to retransmit the same data packet again.
1135
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Transfers
www.ti.com
42.3.1.3 Control Read Transfer
The host uses a control read transfer to read data from the USB device. A control read transfer consists of
a setup stage transaction, at least one input data stage transaction and an output status stage transaction.
The stage transactions for a control read transfer are:
• Setup stage transaction:
1. Input endpoint 0 and output endpoint 0 are initialized by programming the appropriate USB
endpoint configuration blocks. This entails enabling the endpoint interrupt (USBIIE = 1) and
enabling the endpoint (UBME = 1). The NAK bit for both input endpoint 0 and output endpoint 0
must be cleared.
2. The host sends a setup token packet followed by the setup data packet addressed to output
endpoint 0. If the data is received without an error, then the UBM writes the data to the setup
buffer, sets the setup stage transaction (SETUP) bit in the USB status register, returns an ACK
handshake to the host, and asserts the setup stage transaction interrupt. Note that as long as the
setup transaction (SETUP) bit is set, the UBM returns a NAK handshake for any data stage or
status stage transactions regardless of the endpoint 0 NAK or STALL bit values.
3. The software services the interrupt and reads the setup data packet from the buffer then decodes
the command. If the command is not supported or invalid, the software should set the STALL bits in
the output endpoint 0 and the input endpoint 0 configuration registers before clearing the setup
stage transaction (SETUP) bit. This causes the device to return a STALL handshake for a data
stage or status stage transactions. After reading the data packet and decoding the command, the
software should clear the interrupt, which automatically clears the setup stage transaction status bit.
The software should also set the TOGGLE bit in the input endpoint 0 configuration register. For
control read transfers, the packet ID used by the host for the first input data packet is a DATA1
packet ID.
NOTE: When using USBIV, the SETUPIFG is cleared upon reading USBIV. In addition, it also the
clears NAK on input endpoint 0 and output endpoint 0. In this case, the host may send or
receive the next setup packet even if MSP430 did not perform the first setup packet. To
prevent this, first read the SETUPIFG directly, perform the required setup, and then use the
USBIV for further processing.
NOTE: The priority of input endpoint 0 is higher than the setup flag inside USBIV. Therefore, if both
the USBIEPIFG.EP0 and SETUPIFG are pending, reading the USBIV gives the higher
priority interrupt (EP0) as opposed to the SETUPIFG. Therefore, read SETUPIFG directly,
process the pending setup packet, then proceed to read the USBIV.
• Data stage transaction:
1. The data packet to be sent to the host is written to the input endpoint 0 buffer by the software. The
software also updates the data count value then clears the input endpoint 0 NAK bit to enable the
data packet to be sent to the host.
2. The host sends an IN token packet addressed to input endpoint 0. After receiving the IN token, the
UBM transmits the data packet to the host. If the data packet is received without errors by the host,
then an ACK handshake is returned. The UBM sets the NAK bit and asserts the endpoint interrupt.
3. The software services the interrupt and prepares to send the next data packet to the host.
4. If the NAK bit is set when the IN token packet is received, the UBM simply returns a NAK
handshake to the host. If the STALL bit is set when the IN token packet is received, the UBM
simply returns a STALL handshake to the host. If no handshake packet is received from the host,
then the UBM prepares to retransmit the same data packet again.
5. The software continues to send data packets until all data has been sent to the host.
• Status stage transaction:
1. For output endpoint 0, the software sets the TOGGLE bit, then clears the NAK bit to enable the
data packet to be sent to the host. Note that for a status stage transaction a null data packet with a
DATA1 packet ID is sent to the host.
2. The host sends an OUT token packet addressed to output endpoint 0. If the data packet is received
1136 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Transfers
without an error then the UBM updates the data count value, toggles the TOGGLE bit, sets the
NAK bit, returns an ACK handshake to the host, and asserts the endpoint interrupt.
3. The software services the interrupt. If the status stage transaction completed successfully, then the
software should clear the interrupt and clear the NAK bit.
4. If the NAK bit is set when the input data packet is received, the UBM simply returns a NAK
handshake to the host. If the STALL bit is set when the in data packet is received, the UBM simply
returns a STALL handshake to the host. If a CRC or bit stuff error occurs when the data packet is
received, then no handshake is returned to the host.
42.3.2 Interrupt Transfers
The USB module supports interrupt data transfers both to and from the host. Devices that need to send or
receive a small amount of data with a specified service period are best served by the interrupt transfer
type. Input endpoints 1 through 7 and output endpoints 1 through 7 can be configured as interrupt
endpoints.
42.3.2.1 Interrupt OUT Transfer
The steps for an interrupt OUT transfer are:
1. The software initializes one of the output endpoints as an output interrupt endpoint by programming the
appropriate endpoint configuration block. This entails programming the buffer size and buffer base
address, selecting the buffer mode, enabling the endpoint interrupt, initializing the toggle bit, enabling
the endpoint, and clearing the NAK bit.
2. The host sends an OUT token packet followed by a data packet addressed to the output endpoint. If
the data is received without an error then the UBM writes the data to the endpoint buffer, updates the
data count value, toggles the toggle bit, sets the NAK bit, returns an ACK handshake to the host, and
asserts the endpoint interrupt.
3. The software services the interrupt and reads the data packet from the buffer. To read the data packet,
the software first needs to obtain the data count value. After reading the data packet, the software
should clear the interrupt and clear the NAK bit to allow the reception of the next data packet from the
host.
4. If the NAK bit is set when the data packet is received, the UBM simply returns a NAK handshake to the
host. If the STALL bit is set when the data packet is received, the UBM simply returns a STALL
handshake to the host. If a CRC or bit stuff error occurs when the data packet is received, then no
handshake is returned to the host device.
In double buffer mode, the UBM selects between the X and Y buffer based on the value of the toggle bit. If
the toggle bit is a 0, the UBM writes the data packet to the X buffer. If the toggle bit is a 1, the UBM writes
the data packet to the Y buffer. When a data packet is received, the software could determine which buffer
contains the data packet by reading the toggle bit. However, when using double buffer mode, the
possibility exists for data packets to be received and written to both the X and Y buffer before the software
responds to the endpoint interrupt. In this case, simply using the toggle bit to determine which buffer
contains the data packet would not work. Hence, in double buffer mode, the software should read the X
buffer NAK bit, the Y buffer NAK bit, and the toggle bits to determine the status of the buffers.
42.3.2.2 Interrupt IN Transfer
The steps for an interrupt IN transfer are:
1. The software initializes one of the input endpoints as an input interrupt endpoint by programming the
appropriate endpoint configuration block. This entails programming the buffer size and buffer base
address, selecting the buffer mode, enabling the endpoint interrupt, initializing the toggle bit, enabling
the endpoint, and setting the NAK bit.
2. The data packet to be sent to the host is written to the buffer by the software. The software also
updates the data count value then clears the NAK bit to enable the data packet to be sent to the host.
3. The host sends an IN token packet addressed to the input endpoint. After receiving the IN token, the
UBM transmits the data packet to the host. If the data packet is received without errors by the host,
then an ACK handshake is returned. The UBM then toggles the toggle bit, sets the NAK bit, and
asserts the endpoint interrupt.
1137
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Transfers
www.ti.com
4. The software services the interrupt and prepares to send the next data packet to the host.
5. If the NAK bit is set when the in token packet is received, the UBM simply returns a NAK handshake to
the host. If the STALL bit is set when the IN token packet is received, the UBM simply returns a STALL
handshake to the host. If no handshake packet is received from the host, then the UBM prepares to
retransmit the same data packet again.
In double buffer mode, the UBM selects between the X and Y buffer based on the value of the toggle bit. If
the toggle bit is a 0, the UBM reads the data packet from the X buffer. If the toggle bit is a 1, the UBM
reads the data packet from the Y buffer.
42.3.3 Bulk Transfers
The USB module supports bulk data transfers both to and from the host. Devices that need to send or
receive a large amount of data without a suitable bandwidth are best served by the bulk transfer type. In
endpoints 1 through 7 and out endpoints 1 through 7 can all be configured as bulk endpoints.
42.3.3.1 Bulk OUT Transfer
The steps for a bulk OUT transfer are:
1. The software initializes one of the output endpoints as an output bulk endpoint by programming the
appropriate endpoint configuration block. This entails programming the buffer size and buffer base
address, selecting the buffer mode, enabling the endpoint interrupt, initializing the toggle bit, enabling
the endpoint, and clearing the NAK bit.
2. The host sends an out token packet followed by a data packet addressed to the output endpoint. If the
data is received without an error then the UBM writes the data to the endpoint buffer, updates the data
count value, toggles the toggle bit, sets the NAK bit, returns an ACK handshake to the host, and
asserts the endpoint interrupt.
3. The software services the interrupt and reads the data packet from the buffer. To read the data packet,
the software first needs to obtain the data count value. After reading the data packet, the software
should clear the interrupt and clear the NAK bit to allow the reception of the next data packet from the
host.
4. If the NAK bit is set when the data packet is received, the UBM simply returns a NAK handshake to the
host. If the STALL bit is set when the data packet is received, the UBM simply returns a STALL
handshake to the host. If a CRC or bit stuff error occurs when the data packet is received, then no
handshake is returned to the host.
In double buffer mode, the UBM selects between the X and Y buffer based on the value of the toggle bit. If
the toggle bit is a 0, the UBM writes the data packet to the X buffer. If the toggle bit is a 1, the UBM writes
the data packet to the Y buffer. When a data packet is received, the software could determine which buffer
contains the data packet by reading the toggle bit. However, when using double buffer mode, the
possibility exists for data packets to be received and written to both the X and Y buffer before the software
responds to the endpoint interrupt. In this case, simply using the toggle bit to determine which buffer
contains the data packet would not work. Hence, in double buffer mode, the software should read the X
buffer NAK bit, the Y buffer NAK bit, and the toggle bits to determine the status of the buffers.
42.3.3.2 Bulk IN Transfer
The steps for a bulk IN transfer are:
1. The software initializes one of the input endpoints as an input bulk endpoint by programming the
appropriate endpoint configuration block. This entails programming the buffer size and buffer base
address, selecting the buffer mode, enabling the endpoint interrupt, initializing the toggle bit, enabling
the endpoint, and setting the NAK bit.
2. The data packet to be sent to the host is written to the buffer by the software. The software also
updates the data count value then clears the NAK bit to enable the data packet to be sent to the host.
3. The host sends an IN token packet addressed to the input endpoint. After receiving the IN token, the
UBM transmits the data packet to the host. If the data packet is received without errors by the host,
then an ACK handshake is returned. The UBM then toggles the toggle bit, sets the NAK bit, and
asserts the endpoint interrupt.
1138 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Transfers
4. The software services the interrupt and prepares to send the next data packet to the host.
5. If the NAK bit is set when the in token packet is received, the UBM simply returns a NAK handshake to
the host. If the STALL bit is set when the In token packet is received, the UBM simply returns a STALL
handshake to the host. If no handshake packet is received from the host, then the UBM prepares to
retransmit the same data packet again.
In double buffer mode , the UBM selects between the X and Y buffer based on the value of the toggle bit.
If the toggle bit is a 0, the UBM reads the data packet from the X buffer. If the toggle bit is a 1, the UBM
reads the data packet from the Y buffer.
1139
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4 USB Registers
The USB register space is subdivided into configuration registers, control registers, and USB buffer
memory.
The configuration and control registers are physical registers located in peripheral memory, while the
buffer memory is implemented in RAM. See the device-specific data sheet for base addresses of these
register groupings.
The USB control registers can be written only while the USB module is enabled.
When the USB module is disabled, it no longer uses the RAM buffer memory. This memory then behaves
as a 2KB RAM block and can be used by the CPU or DMA without any limitation.
42.4.1 USB Configuration Registers
The configuration registers control the hardware functions needed to make a USB connection, including
the PHY, PLL, and LDOs.
Access to the configuration registers is allowed or disallowed using the USBKEYPID register. Writing the
proper value (9628h) unlocks the configuration registers and enables access. Writing any other value
disables access while leaving the values of the registers intact. Locking should be done intentionally after
the configuration is finished. Read access is available without the need to write to the USBKEYPID
register.
The configuration registers are listed in Table 42-5. All addresses are expressed as offsets; the base
address can be found in the device-specific data sheet.
All registers are byte and word accessible.
Table 42-5. USB Configuration Registers
Offset Acronym Register Name Type Reset Section
00h USBKEYPID USB controller key and ID register Read/Write 0000h Section 42.4.1.1
02h USBCNF USB controller configuration register Read/Write 0000h Section 42.4.1.2
04h USBPHYCTL USB-PHY control register Read/Write 0000h Section 42.4.1.3
08h USBPWRCTL USB-PWR control register Read/Write 1850h Section 42.4.1.4
10h USBPLLCTL USB-PLL control register Read/Write 0000h Section 42.4.1.5
12h USBPLLDIVB USB-PLL divider buffer register Read/Write 0000h Section 42.4.1.6
14h USBPLLIR USB-PLL interrupt register Read/Write 0000h Section 42.4.1.7
1140 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.1.1 USBKEYPID Register
USB Key Register
Figure 42-8. USBKEYPID Register
15 14 13 12 11 10 9 8
USBKEY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
USBKEY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 42-6. USBKEYPID Register Description
Bit Field Type Reset Description
15-0 USBKEY RW 00h Key register. Must be written with a value of 9628h to be recognized as a valid
key. This "unlocks" the configuration registers. If written with any other value, the
registers become "locked". Reads back as A528h if the registers are unlocked.
42.4.1.2 USBCNF Register
USB Module Configuration Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-9. USBCNF Register
15 14 13 12 11 10 9 8
Reserved
r0 r0 r0 r0 r0 r0 r0 r0
76543210
Reserved FNTEN BLKRDY PUR_IN PUR_EN USB_EN
r0 r0 r0 rw-0 rw-0 r rw-0 rw-0
Can be modified only when USBKEYPID is unlocked
Table 42-7. USBCNF Register Description
Bit Field Type Reset Description
15-5 Reserved R 0h Reserved. Always reads as 0.
4 FNTEN RW 0h Frame number receive trigger enable for DMA transfers
0b = Frame number receive trigger is blocked.
1b = Frame number receive trigger is gated through to DMA.
3 BLKRDY RW 0h Block transfer ready signaling for DMA transfers
0b = DMA triggering is disabled.
1b = DMA is triggered whenever the USB bus interface can accept new write
transfers.
2 PUR_IN R 0h PUR input value. This bit reflects the input value present on PUR. This bit may
be used as an indication to start a USB based boot loading program (USB-BSL).
The PUR input logic is powered by VUSB. PUR_IN returns zero when VUSB is
zero.
1 PUR_EN RW 0h PUR pin enable
0b = PUR pin is in high-impedance state
1b = PUR pin is driven high
0 USB_EN RW 0h USB module enable
0b = USB module is disabled
1b = USB module is enabled
1141
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.1.3 USBPHYCTL Register
USB-PHY Control Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-10. USBPHYCTL Register
15 14 13 12 11 10 9 8
Reserved Reserved PUIPE
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
PUSEL Reserved PUOPE Reserved PUIN1 PUIN0 PUOUT1 PUOUT0
rw-0 r rw-0 rw-0 r r rw-0 rw-0
Can be modified only when USBKEYPID is unlocked.
Table 42-8. USBPHYCTL Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9 Reserved RW 0h Reserved. Always write as 0.
8 PUIPE RW 0h PU input enable. This bit is valid only when PUSEL = 0.
0b = PU.0 and PU.1 inputs are disabled
1b = PU.0 and PU.1 inputs are enabled
7 PUSEL RW 0h USB port function select. This bit selects the function of the PU.0/DP and
PU.1/DM pins.
0b = PU.0 and PU.1 function selected (general purpose I/O)
1b = DP and DM function selected (USB terminals)
6 Reserved R 0h Reserved. Always reads as 0.
5 PUOPE RW 0h PU output enable. This bit is valid only when PUSEL = 0.
0b = PU.0 and PU.1 outputs are disabled
1b = PU.0 and PU.1 outputs are enabled.
4 Reserved RW 0h Reserved. Always write as 0.
3 PUIN1 R 0h PU.1 input data. This bit reflects the logic value on the PU.1 terminal when
PUIPE = 1.
2 PUIN0 R 0h PU.0 input data. This bit reflects the logic value on the PU.0 terminal when
PUIPE = 1.
1 PUOUT1 RW 0h PU.1 output data. This bits defines the value of the PU.1 pin when PUOPE = 1.
0 PUOUT0 RW 0h PU.0 output data. This bits defines the value of the PU.0 pin when PUOPE = 1.
1142 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.1.4 USBPWRCTL Register
USB-Power Control Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-11. USBPWRCTL Register
15 14 13 12 11 10 9 8
Reserved SLDOEN VUSBEN VBOFFIE VBONIE VUOVLIE
r0 r0 r0 rw-1 rw-1 rw-0 rw-0 rw-0
76543210
Reserved SLDOAON OVLAOFF USBDETEN USBBGVBV VBOFFIFG VBONIFG VUOVLIFG
r0 rw-1 rw-0 rw-1 r rw-0 rw-0 rw-0
Can be modified only when USBKEYPID is unlocked
Table 42-9. USBPWRCTL Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12 SLDOEN RW 1h 1.8-V (secondary) LDO enable. When set, the LDO is enabled. Can be cleared
only if SLDOAON = 0.
0b = 1.8-V LDO is disabled
1b = 1.8-V LDO is enabled
11 VUSBEN RW 1h 3.3-V LDO enable. When set, the LDO is enabled.
0b = 3.3-V LDO is disabled
1b = 3.3-V LDO is enabled
10 VBOFFIE RW 0h VBUS "going OFF" interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
9 VBONIE RW 0h VBUS "coming ON" interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
8 VUOVLIE RW 0h VUSB overload indication interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7 Reserved R 0h Reserved. Always reads as 0.
6 SLDOAON RW 1h 1.8-V LDO auto-on enable
0b = LDO must be turned on manually using SLDOEN
1b = A "VBUS coming on" enables the secondary LDO, but SLDOEN is not set
automatically.
5 OVLAOFF RW 0h LDO overload auto-off enable
0b = During an overload on the 3.3-V LDO, the LDO automatically enters
current-limiting mode and stays there until the condition stops.
1b = An overload indication clears the VUSBEN bit.
4 USBDETEN RW 1h Enable bit for VBUS on and off events.
0b = USB module does not detect USB-PWR VBUS on and off events
1b = USB module does detect USB-PWR VBUS on and off events
3 USBBGVBV R 0h VBUS valid
0b = VBUS is not valid yet
1b = VBUS is valid and within bounds
1143
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Registers
www.ti.com
Table 42-9. USBPWRCTL Register Description (continued)
Bit Field Type Reset Description
2 VBOFFIFG RW 0h VBUS "going OFF" interrupt flag. This bit indicates that VBUS fell below the
launch voltage. It is automatically cleared when the corresponding vector of the
USB interrupt vector register is read, or if a value is written to the interrupt vector
register.
0b = VBUS did not fall below the launch voltage.
1b = VBUS fell below the launch voltage.
1 VBONIFG RW 0h VBUS "coming ON" interrupt flag. This bit indicates that VBUS rose above the
launch voltage. This bit is automatically cleared when the corresponding vector
of the USB interrupt vector register is read, or if a value is written to the interrupt
vector register.
0b = VUSB did not rise above the launch voltage.
1b = VUSB rose above the launch voltage.
0 VUOVLIFG RW 0h VUSB overload interrupt flag. This bit indicates that the 3.3-V LDO entered an
overload condition.
0b = No overload condition detected.
1b = Overload condition detected.
1144 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.1.5 USBPLLCTL Register
USB-PLL Control Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-12. USBPLLCTL Register
15 14 13 12 11 10 9 8
Reserved Reserved Reserved UPFDEN UPLLEN
r0 r0 r0 rw-0 r0 r0 rw-0 rw-0
76543210
UCLKSEL Reserved
rw-0 rw-0 r0 r0 r0 r0 r0 r0
Can be modified only when USBKEYPID is unlocked
Table 42-10. USBPLLCTL Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12 Reserved RW 0h Reserved. Always write as 0.
11-10 Reserved R 0h Reserved. Always reads as 0.
9 UPFDEN RW 0h Phase frequency discriminator (PFD) enable
0b = PFD is disabled
1b = PFD is enabled
8 UPLLEN RW 0h PLL enable
0b = PLL is disabled
1b = PLL is enabled
7-6 UCLKSEL RW 0h USB module clock select. Must always be written with 00.
00b = PLLCLK (default)
01b = Reserved
10b = Reserved
11b = Reserved
5-0 Reserved R 0h Reserved. Always reads as 0.
1145
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.1.6 USBPLLDIVB Register
USB-PLL Clock Divider Buffer Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-13. USBPLLDIVB Register
15 14 13 12 11 10 9 8
Reserved UPQB
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
Reserved UPMB
r0 r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBKEYPID is unlocked
Table 42-11. USBPLLDIVB Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10-8 UPQB RW 0h PLL pre-scale divider buffer register. These bits select the pre-scale division
value. The value of this register is transferred to UPQB as soon it is written.
000b = fUPD = fREF
001b = fUPD = fREF / 2
010b = fUPD = fREF / 3
011b = fUPD = fREF / 4
100b = fUPD = fREF / 6
101b = fUPD = fREF / 8
110b = fUPD = fREF / 13
111b = fUPD = fREF / 16
7-6 Reserved R 0h Reserved. Always reads as 0.
5-0 UPMB RW 0h USB PLL feedback divider buffer register. These bits select the value of the
feedback divider. The value of this register is transferred to UPMB automatically
when UPQB is written.
000000b = Feedback division rate: 1
000001b = Feedback division rate: 2
⋮
111111b = Feedback division rate: 64
1146 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.1.7 USBPLLIR Register
USB-PLL Interrupt Register
This register can be modified only when USBKEYPID is unlocked.
Figure 42-14. USBPLLIR Register
15 14 13 12 11 10 9 8
Reserved USBOORIE USBLOSIE USBOOLIE
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
76543210
Reserved USBOORIFG USBLOSIFG USBOOLIFG
r0 r0 r0 r0 r0 rw-0 rw-0 rw-0
Can be modified only when USBKEYPID is unlocked.
Table 42-12. USBPLLIR Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10 USBOORIE RW 0h PLL out-of-range interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
9 USBLOSIE RW 0h PLL loss-of-signal interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
8 USBOOLIE RW 0h PLL out-of-lock interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7-3 Reserved R 0h Reserved. Always reads as 0.
2 USBOORIFG RW 0h PLL out-of-range interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1 USBLOSIFG RW 0h PLL loss-of-signal interrupt flag
0b = No interrupt pending
1b = Interrupt pending
0 USBOOLIFG RW 0h PLL out-of-lock interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1147
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2 USB Control Registers
The control registers affect core USB operations that are fundamental for any USB connection. This
includes control endpoint 0, interrupts, bus address and frame, and timestamps. Control of endpoints other
than zero are found in the operation registers. Unlike the operation registers, the control registers are
actual physical registers, whereas the operation registers exist in RAM, which can be re-allocated to
general-purpose use.
The control registers are listed in Table 42-13. All addresses are expressed as offsets; the base address
can be found in the device-specific data sheet.
All registers are byte and word accessible.
Table 42-13. USB Control Registers
Offset Acronym Register Name Type Reset Section
00h USBIEPCNF_0 Input endpoint_0: Configuration Read/Write 00h Section 42.4.2.1
01h USBIEPBCNT_0 Input endpoint_0: Byte Count Read/Write 80h Section 42.4.2.2
02h USBOEPCNFG_0 Output endpoint_0: Configuration Read/Write 00h Section 42.4.2.3
03h USBOEPBCNT_0 Output endpoint_0: Byte count Read/Write 00h Section 42.4.2.4
0Eh USBIEPIE Input endpoint interrupt enables Read/Write 00h Section 42.4.2.5
0Fh USBOEPIE Output endpoint interrupt enables Read/Write 00h Section 42.4.2.6
10h USBIEPIFG Input endpoint interrupt flags Read/Write 00h Section 42.4.2.7
11h USBOEPIFG Output endpoint interrupt flags Read/Write 00h Section 42.4.2.8
12h USBVECINT Vector interrupt register Read/Write 0000h Section 42.4.2.9
or USBIV
16h USBMAINT Timestamp maintenance register Read/Write 0000h Section 42.4.2.10
18h USBTSREG Timestamp register Read/Write 0000h Section 42.4.2.11
1Ah USBFN USB frame number Read only 0000h Section 42.4.2.12
1Ch USBCTL USB control register Read/Write 00h Section 42.4.2.13
1Dh USBIE USB interrupt enable register Read/Write 00h Section 42.4.2.14
1Eh USBIFG USB interrupt flag register Read/Write 00h Section 42.4.2.15
1Fh USBFUNADR Function address register Read/Write 00h Section 42.4.2.16
1148 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.1 USBIEPCNF_0 Register
USB Input Endpoint-0 Configuration Register
Figure 42-15. USBIEPCNF_0 Register
76543210
UBME Reserved TOGGLE Reserved STALL USBIIE Reserved
rw-0 r0 r-0 r0 rw-0 rw-0 r0 r0
Can be modified only when USBEN = 1
Table 42-14. USBIEPCNF_0 Register Description
Bit Field Type Reset Description
7 UBME RW 0h UBM in endpoint-0 enable
0b = UBM cannot use this endpoint
1b = UBM can use this endpoint
6 Reserved R 0h Reserved. Always reads as 0.
5 TOGGLE R 0h Toggle bit. Reads as 0, because the configuration endpoint does not need to
toggle.
4 Reserved R 0h Reserved. Always reads as 0.
3 STALL RW 0h USB stall condition. When set, hardware automatically returns a stall handshake
to the USB host for any transaction transmitted from endpoint-0. The stall bit is
cleared automatically by the next setup transaction.
0b = Indicates no stall
1b = Indicates stall
2 USBIIE RW 0h USB transaction interrupt indication enable. Software may set this bit to define if
interrupts are to be flagged in general. To generate an interrupt the
corresponding interrupt flag must be set (IEPIE).
0b = Corresponding interrupt flag is not set
1b = Corresponding interrupt flag is set
1-0 Reserved R 0h Reserved. Always reads as 0.
1149
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2.2 USBIEPBCNT_0 Register
USB Input Endpoint-0 Byte Count Register
Figure 42-16. USBIEPBCNT_0 Register
76543210
NAK Reserved CNT
rw-0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-15. USBIEPBCNT_0 Register Description
Bit Field Type Reset Description
7 NAK RW 0h No acknowledge status bit. This bit is set by the UBM at the end of a successful
USB IN transaction from endpoint-0, to indicate that the EP-0 IN buffer is empty.
When this bit is set, all subsequent transactions from endpoint-0 result in a NAK
handshake response to the USB host. To re-enable this endpoint to transmit
another data packet to the host, this bit must be cleared by software.
0b = Buffer contains a valid data packet for host device
1b = Buffer is empty (Host-In request receives a NAK)
6-4 Reserved R 0h Reserved. Always reads as 0.
3-0 CNT RW 0h Byte count. The In_EP-0 buffer data count value should be set by software when
a new data packet is written to the buffer. This four-bit value contains the number
of bytes in the data packet.
0000b to 1000b are valid numbers for 0 to 8 bytes to be sent.
1001b to 1111b are reserved values (if used, defaults to 8).
1150 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.3 USBOEPCNFG_0 Register
USB Output Endpoint-0 Configuration Register
Figure 42-17. USBOEPCNFG_0 Register
76543210
UBME Reserved TOGGLE Reserved STALL USBIIE Reserved
rw-0 r0 r-0 r0 rw-0 rw-0 r0 r0
Can be modified only when USBEN = 1
Table 42-16. USBOEPCNFG_0 Register Description
Bit Field Type Reset Description
7 UBME RW 0h UBM out Endpoint-0 enable
0b = UBM cannot use this endpoint
1b = UBM can use this endpoint
6 Reserved R 0h Reserved. Always reads as 0.
5 TOGGLE RW 0h Toggle bit. Reads as 0, because the configuration endpoint does not need to
toggle.
4 Reserved R 0h Reserved. Always reads as 0.
3 STALL RW 0h USB stall condition. When set, hardware automatically returns a stall handshake
to the USB host for any transaction transmitted into endpoint-0. The stall bit is
cleared automatically by the next setup transaction.
0b = Indicates no stall
1b = Indicates stall
2 USBIIE RW 0h USB transaction interrupt indication enable. Software may set this bit to define if
interrupts are to be flagged in general. To generate an interrupt the
corresponding interrupt flag must be set (OEPIE).
0b = Corresponding interrupt flag will not be set
1b = Corresponding interrupt flag will be set
1-0 Reserved R 0h Reserved. Always reads as 0.
1151
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2.4 USBOEPBCNT_0 Register
USB Output Endpoint-0 Byte Count Register
Figure 42-18. USBOEPBCNT_0 Register
76543210
NAK Reserved CNT
rw-0 r0 r0 r0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-17. USBOEPBCNT_0 Register Description
Bit Field Type Reset Description
7 NAK RW 0h No acknowledge status bit. This bit is set by the UBM at the end of a successful
USB out transaction into endpoint-0, to indicate that the EP-0 buffer contains a
valid data packet and that the buffer data count value is valid. When this bit is
set, all subsequent transactions to endpoint-0 result in a NAK handshake
response to the USB host. To re-enable this endpoint to receive another data
packet from the host, this bit must be cleared by software.
0b = No valid data in the buffer. The buffer is ready to receive a host OUT
transaction
1b = The buffer contains a valid packet from the host that has not been picked
up. (Any subsequent Host-Out requests receive a NAK.)
6-4 Reserved R 0h Reserved. Always reads as 0.
3-0 CNT RW 0h Byte count. This data count value is set by the UBM when a new data packet is
received by the buffer for the out endpoint-0. The four-bit value contains the
number of bytes received in the data buffer.
0000b to 1000b are valid numbers for 0 to 8 received bytes
1001b to 1111b are reserved values
1152 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.5 USBIEPIE Register
USB Input Endpoint Interrupt Enable Register
Figure 42-19. USBIEPIE Register
76543210
IEPIE7 IEPIE6 IEPIE5 IEPIE4 IEPIE3 IEPIE2 IEPIE1 IEPIE0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-18. USBIEPIE Register Description
Bit Field Type Reset Description
7 IEPIE7 RW 0h Input endpoint interrupt enable 7. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
6 IEPIE6 RW 0h Input endpoint interrupt enable 6. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
5 IEPIE5 RW 0h Input endpoint interrupt enable 5. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
4 IEPIE4 RW 0h Input endpoint interrupt enable 4. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
3 IEPIE3 RW 0h Input endpoint interrupt enable 3. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
2 IEPIE2 RW 0h Input endpoint interrupt enable 2. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1 IEPIE1 RW 0h Input endpoint interrupt enable 1. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1153
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
Table 42-18. USBIEPIE Register Description (continued)
Bit Field Type Reset Description
0 IEPIE0 RW 0h Input endpoint interrupt enable 0. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1154 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.6 USBOEPIE Register
USB Output Endpoint Interrupt Enable Register
Figure 42-20. USBOEPIE Register
76543210
OEPIE7 OEPIE6 OEPIE5 OEPIE4 OEPIE3 OEPIE2 OEPIE1 OEPIE0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-19. USBOEPIE Register Description
Bit Field Type Reset Description
7 OEPIE7 RW 0h Output endpoint interrupt enable 7. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
6 OEPIE6 RW 0h Output endpoint interrupt enable 6. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
5 OEPIE5 RW 0h Output endpoint interrupt enable 5. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
4 OEPIE4 RW 0h Output endpoint interrupt enable 4. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
3 OEPIE3 RW 0h Output endpoint interrupt enable 3. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
2 OEPIE2 RW 0h Output endpoint interrupt enable 2. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1 OEPIE1 RW 0h Output endpoint interrupt enable 1. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1155
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
Table 42-19. USBOEPIE Register Description (continued)
Bit Field Type Reset Description
0 OEPIE0 RW 0h Output endpoint interrupt enable 0. This bit enables or disables whether an event
can trigger an interrupt. It does not influence whether the event is flagged; the
flag is enabled or disabled with the interrupt indication enable bit in the Endpoint
descriptors.
0b = Event does not generate an interrupt
1b = Event does generate an interrupt
1156 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.7 USBIEPIFG Register
USB Input Endpoint Interrupt Flag Register
Figure 42-21. USBIEPIFG Register
76543210
IEPIFG7 IEPIFG6 IEPIFG5 IEPIFG4 IEPIFG3 IEPIFG2 IEPIFG1 IEPIFG0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-20. USBIEPIFG Register Description
Bit Field Type Reset Description
7 IEPIFG7 RW 0h Input endpoint interrupt flag 7. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
6 IEPIFG6 RW 0h Input endpoint interrupt flag 6. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
5 IEPIFG5 RW 0h Input endpoint interrupt flag 5. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
4 IEPIFG4 RW 0h Input endpoint interrupt flag 4. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
3 IEPIFG3 RW 0h Input endpoint interrupt flag 3. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
2 IEPIFG2 RW 0h Input endpoint interrupt flag 2. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
1 IEPIFG1 RW 0h Input endpoint interrupt flag 1. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
0 IEPIFG0 RW 0h Input endpoint interrupt flag 0. This bit is set by the UBM when a successful
completion of a transaction occurs for this endpoint. When set, a USB interrupt is
generated. The interrupt flag is cleared when the MCU reads the value from the
USBVECINT (USBIV) register corresponding with this interrupt, or when it writes
any value to the interrupt vector register. An interrupt flag can also be cleared by
writing zero to that bit location.
1157
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2.8 USBOEPIFG Register
USB Output Endpoint Interrupt Flag Register
Figure 42-22. USBOEPIFG Register
76543210
OEPIFG7 OEPIFG6 OEPIFG5 OEPIFG4 OEPIFG3 OEPIFG2 OEPIFG1 OEPIFG0
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-21. USBOEPIFG Register Description
Bit Field Type Reset Description
7 OEPIFG7 RW 0h Output endpoint interrupt flag 7. The output endpoint interrupt flag is set to 1 by
the UBM when a successful completion of a transaction occurs to that out
endpoint. When the bit is set, a USB interrupt is generated. The interrupt flag is
cleared when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
6 OEPIFG6 RW 0h Output endpoint interrupt flag 6. The output endpoint interrupt flag is set to 1 by
the UBM when a successful completion of a transaction occurs to that out
endpoint. When the bit is set, a USB interrupt is generated. The interrupt flag is
cleared when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
5 OEPIFG5 RW 0h Output endpoint interrupt flag 5. The output endpoint interrupt flag is set to 1 by
the UBM when a successful completion of a transaction occurs to that out
endpoint. When the bit is set, a USB interrupt is generated. The interrupt flag is
cleared when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
4 OEPIFG4 RW 0h Output endpoint interrupt flag 4. The output endpoint interrupt flag is set to 1 by
the UBM when a successful completion of a transaction occurs to that out
endpoint. When the bit is set, a USB interrupt is generated. The interrupt flag is
cleared when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
3 OEPIFG3 RW 0h Output endpoint interrupt flag 3. The output endpoint interrupt flag set to 1 by the
UBM when a successful completion of a transaction occurs to that out endpoint.
When the bit is set, a USB interrupt is generated. The interrupt flag is cleared
when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
2 OEPIFG2 RW 0h Output endpoint interrupt flag 2. The output endpoint interrupt flag set to 1 by the
UBM when a successful completion of a transaction occurs to that out endpoint.
When the bit is set, a USB interrupt is generated. The interrupt flag is cleared
when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
1 OEPIFG1 RW 0h Output endpoint interrupt flag 1. The output endpoint interrupt flag set to 1 by the
UBM when a successful completion of a transaction occurs to that out endpoint.
When the bit is set, a USB interrupt is generated. The interrupt flag is cleared
when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
1158 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
Table 42-21. USBOEPIFG Register Description (continued)
Bit Field Type Reset Description
0 OEPIFG0 RW 0h Output endpoint interrupt flag 0. The output endpoint interrupt flag set to 1 by the
UBM when a successful completion of a transaction occurs to that out endpoint.
When the bit is set, a USB interrupt is generated. The interrupt flag is cleared
when the MCU reads the value from the USBVECINT (USBIV) register
corresponding with this interrupt, or when it writes any value to the interrupt
vector register. An interrupt flag can also be cleared by writing a zero to this bit
location.
42.4.2.9 USBVECINT Register
USB Interrupt Vector Register
This register is also referred to as USBIV.
Figure 42-23. USBVECINT Register
15 14 13 12 11 10 9 8
USBIV
r0 r0 r0 r0 r0 r0 r0 r0
76543210
USBIV
r0 r0 r-0 r-0 r-0 r-0 r-0 r0
Table 42-22. USBVECINT Register Description
Bit Field Type Reset Description
15-0 USBIV R 0h USB interrupt vector value. This register is to be accessed as a whole word only.
When an interrupt is pending, reading this register results in a value that can be
added to the program counter to handle the corresponding event. Writing to this
register clears all pending USB interrupt flags independent of the status of
USBEN.
00h = No interrupt pending
02h = See Section 42.2.5.; Interrupt Priority: Highest
3Eh = Interrupt Priority: Lowest
1159
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2.10 USBMAINT Register
Timestamp Maintenance Register
Figure 42-24. USBMAINT Register
15 14 13 12 11 10 9 8
UTSEL Reserved TSE3 TSESEL TSGEN
rw-0 rw-0 rw-0 r0 rw-0 rw-0 rw-0 rw-0
76543210
Reserved UTIE UTIFG
r0 r0 r0 r0 r0 r0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-23. USBMAINT Register Description
Bit Field Type Reset Description
15-13 UTSEL RW 0h USB timer selection
000b = USB Timer Period: 4096 µs; Approximate Frequency: 250 Hz (244 Hz)
001b = USB Timer Period: 2048 µs; Approximate Frequency: 500 Hz (488 Hz)
010b = USB Timer Period: 1024 µs; Approximate Frequency: 1 kHz (977 Hz)
011b = USB Timer Period: 512 µs; Approximate Frequency: 2 kHz (1953 Hz)
100b = USB Timer Period: 256 µs; Approximate Frequency: 4 kHz (3906 Hz)
101b = USB Timer Period: 128 µs; Approximate Frequency: 8 kHz (7812 Hz)
110b = USB Timer Period: 64 µs; Approximate Frequency: 16 kHz (15625 Hz)
111b = USB Timer Period: 32 µs; Approximate Frequency: 31 kHz (31250 Hz)
12 Reserved R 0h Reserved. Always reads as 0.
11 TSE3 RW 0h Timestamp Event 3 bit. This bit allows the triggering of a software-driven
timestamp event (when TSESEL = 11b).
0b = No TSE3 event signaled
1b = TSE3 event signaled
10-9 TSESEL RW 0h Timestamp Event Selection. TSE[2:0] are connected to the event multiplexer of
the three DMA channels of the DMA controller if not otherwise noted in data
sheet
00b = TSE0 (DMA0) signal is qualified timestamp event
01b = TSE1 (DMA1) signal is qualified timestamp event
10b = TSE2 (DMA2) signal is qualified timestamp event
11b = Software-driven timestamp event
8 TSGEN RW 0h Timestamp generator enable
0b = Timestamp mechanism disabled
1b = Timestamp mechanism enabled
7-2 Reserved R 0h Reserved. Always reads as 0.
1 UTIE RW 0h USB timer interrupt enable bit
0b = USB timer interrupt disabled
1b = USB timer interrupt enabled
0 UTIFG RW 0h USB timer interrupt flag
0b = No interrupt pending
1b = Interrupt pending
1160 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.11 USBTSREG Register
USB Timestamp Register
Figure 42-25. USBTSREG Register
15 14 13 12 11 10 9 8
TVAL
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
76543210
TVAL
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Can be modified only when USBEN = 1
Table 42-24. USBTSREG Register Description
Bit Field Type Reset Description
15-0 TVAL R 0h Timestamp high register. The timestamp value is updated by hardware from the
USB timer. A qualified timestamp trigger signal causes the current timer value to
be latched into this register.
42.4.2.12 USBFN Register
USB Frame Number Register
Figure 42-26. USBFN Register
15 14 13 12 11 10 9 8
Reserved USBFN
r0 r0 r0 r0 r0 r-0 r-0 r-0
76543210
USBFN
r-0 r-0 r-0 r-0 r-0 r-0 r-0 r-0
Table 42-25. USBFN Register Description
Bit Field Type Reset Description
15-11 Reserved R 0h Reserved. Always reads as 0.
10-0 USBFN R 0h USB Frame Number register. The frame number bit values are updated by
hardware; each USB frame with the frame number field value received in the
USB start-of-frame packet. The frame number can be used as a timestamp. If
the local (MSP430's) frame timer is not locked to the USB host's frame timer,
then the frame number is automatically incremented from the previous value
when a pseudo start-of-frame occurs.
1161
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Registers
www.ti.com
42.4.2.13 USBCTL Register
USB Control Register
Figure 42-27. USBCTL Register
76543210
Reserved FEN RWUP FRSTE Reserved DIR
r0 rw-0 rw-0 rw-0 r0 r0 r0 rw-0
Can be modified only when USBEN = 1
Table 42-26. USBCTL Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6 FEN RW 0h Function Enable Bit. This bit needs to be set to enable the USB device to
respond to USB transactions. If this bit is not set, the UBM ignores all USB
transactions. It is cleared by a USB reset. (This bit is primarily intended for
debugging.)
0b = Function is disabled
1b = Function is enabled
5 RWUP RW 0h Device Remote Wakeup request. The remote wake-up bit is set by software to
request the suspend/resume logic to generate resume signaling upstream on the
USB. This bit is used to exit a USB low-power suspend state when a remote
wake-up event occurs. The bit is self-clearing.
0b = Writing 0 has no effect
1b = A Remote-Wakeup pulse is generated
4 FRSTE RW 0h Function Reset Connection Enable. This bit selects whether a bus reset on the
USB causes an internal reset of the USB module.
0b = Bus reset does not cause a reset of the module
1b = Bus reset does cause a reset of the module
3-1 Reserved R 0h Reserved. Always reads as 0.
0 DIR RW 0h Data response to setup packet interrupt status bit. Software must decode the
request and set/clear this bit to reflect the data transfer direction.
0b = USB data-OUT transaction (from host to device)
1b = USB data-IN transaction (from device to host)
1162 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.2.14 USBIE Register
USB Interrupt Enable Register
Figure 42-28. USBIE Register
76543210
RSTRIE SUSRIE RESRIE Reserved SETUPIE Reserved STPOWIE
rw-0 rw-0 rw-0 r0 r0 rw-0 r0 rw-0
Can be modified only when USBEN = 1
Table 42-27. USBIE Register Description
Bit Field Type Reset Description
7 RSTRIE RW 0h USB reset interrupt enable. Causes an interrupt to be generated if the RSTRIFG
bit is set.
0b = Function Reset interrupt disabled
1b = Function Reset interrupt enabled
6 SUSRIE RW 0h Suspend interrupt enable. Causes an interrupt to be generated if the SUSRIFG
bit is set.
0b = Suspend interrupt disabled
1b = Suspend interrupt enabled
5 RESRIE RW 0h Resume interrupt enable. Causes an interrupt to be generated if the RESRIFG
bit is set.
0b = Resume interrupt disabled
1b = Resume interrupt enabled
4-3 Reserved R 0h Reserved. Always reads as 0.
2 SETUPIE RW 0h Setup interrupt enable. Causes an interrupt to be generated if the SETUPIFG bit
is set.
0b = Setup interrupt disabled
1b = Setup interrupt enabled
1 Reserved R 0h Reserved. Always reads as 0.
0 STPOWIE RW 0h Setup Overwrite interrupt enable. Causes an interrupt to be generated if the
STPOWIFG bit is set.
0b = Setup Overwrite interrupt disabled
1b = Setup Overwrite interrupt enabled
1163
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.2.15 USBIFG Register
USB Interrupt Flag Register
Figure 42-29. USBIFG Register
76543210
RSTRIFG SUSRIFG RESRIFG Reserved SETUPIFG Reserved STPOWIFG
rw-0 rw-0 rw-0 r0 r0 rw-0 r0 rw-0
Can be modified only when USBEN = 1
Table 42-28. USBIFG Register Description
Bit Field Type Reset Description
7 RSTRIFG RW 0h USB reset request bit. This bit is set to one by hardware in response to the host
initiating a USB port reset. A USB reset causes a reset of the USB module logic,
but this bit is not affected.
6 SUSRIFG RW 0h Suspend request bit. This bit is set by hardware in response to the host/hub
causing a global or selective suspend condition.
5 RESRIFG RW 0h Resume request bit. This bit is set by hardware in response to the host/hub
causing a resume event.
4-3 Reserved R 0h Reserved. Always reads as 0.
2 SETUPIFG RW 0h Setup transaction received bit. This bit is set by hardware when a SETUP
transaction is received. As long as this bit is set, transactions on IN and OUT on
endpoint-0 receive a NAK, regardless of their corresponding NAK bit value.
1 Reserved R 0h Reserved. Always reads as 0.
0 STPOWIFG RW 0h Setup overwrite bit. This bit is set by hardware when a setup packet is received
while there is already a packet in the setup buffer.
42.4.2.16 USBFUNADR Register
USB Function Address Register
Figure 42-30. USBFUNADR Register
76543210
Reserved FA6 FA5 FA4 FA3 FA2 FA1 FA0
r0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Can be modified only when USBEN = 1
Table 42-29. USBFUNADR Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6-0 FA[6:0] RW 0h Function address (USB address 0 to 127). These bits define the current device
address assigned to this USB device. Software must write a value from 0 to 127
when a Set-Address command is received from the host.
1164 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.3 USB Buffer Registers and Memory
The data buffers for all endpoints, as well as the registers that define endpoints 1 to 7, are stored in the
USB RAM buffer memory. Doing so allows for efficient and flexible use of this memory. The memory area
is known as the USB buffer memory, and the registers that define its use are the buffer descriptor
registers.
The buffer memory blocks are listed in Table 42-30. The registers are listed in Table 42-31. All addresses
are expressed as offsets; the base address can be found in the device-specific data sheet.
All memory is byte and word accessible.
Table 42-30. USB Buffer Memory
Offset Acronym Memory Type
0000h USBSTABUFF Start of buffer space Read/Write
⋮ ⋮ 1904 bytes of configurable buffer space ⋮
076Fh USBTOPBUFF End of buffer space Read/Write
0770h Read/Write
⋮USBOEP0BUF Output endpoint_0 buffer ⋮
0777h Read/Write
0778h Read/Write
⋮USBIEP0BUF Input endpoint_0 buffer ⋮
077Fh Read/Write
0780h Read/Write
⋮USBSUBLK Setup Packet Block ⋮
0787h Read/Write
Table 42-31. USB Buffer Descriptor Registers
Offset Acronym Register Name Type Section
0788h USBOEPCNF_1 Output Endpoint_1 Configuration Register Read/Write Section 42.4.3.1
0789h USBOEPBBAX_1 Output Endpoint_1 X Buffer Base Address Register Read/Write Section 42.4.3.2
078Ah USBOEPBCTX_1 Output Endpoint_1 X Byte Count Register Read/Write Section 42.4.3.3
078Dh USBOEPBBAY_1 Output Endpoint_1 Y Buffer Base Address Register Read/Write Section 42.4.3.4
078Eh USBOEPBCTY_1 Output Endpoint_1 Y Byte Count Register Read/Write Section 42.4.3.5
078Fh USBOEPSIZXY_1 Output Endpoint_1 X and Y Buffer Size Register Read/Write Section 42.4.3.6
0790h USBOEPCNF_2 Output Endpoint_2 Configuration Register Read/Write Section 42.4.3.1
0791h USBOEPBBAX_2 Output Endpoint_2 X Buffer Base Address Register Read/Write Section 42.4.3.2
0792h USBOEPBCTX_2 Output Endpoint_2 X Byte Count Register Read/Write Section 42.4.3.3
0795h USBOEPBBAY_2 Output Endpoint_2 Y Buffer Base Address Register Read/Write Section 42.4.3.4
0796h USBOEPBCTY_2 Output Endpoint_2 Y Byte Count Register Read/Write Section 42.4.3.5
0797h USBOEPSIZXY_2 Output Endpoint_2 X and Y Buffer Size Register Read/Write Section 42.4.3.6
0798h USBOEPCNF_3 Output Endpoint_3 Configuration Register Read/Write Section 42.4.3.1
0799h USBOEPBBAX_3 Output Endpoint_3 X Buffer Base Address Register Read/Write Section 42.4.3.2
079Ah USBOEPBCTX_3 Output Endpoint_3 X Byte Count Register Read/Write Section 42.4.3.3
079Dh USBOEPBBAY_3 Output Endpoint_3 Y Buffer Base Address Register Read/Write Section 42.4.3.4
079Eh USBOEPBCTY_3 Output Endpoint_3 Y Byte Count Register Read/Write Section 42.4.3.5
079Fh USBOEPSIZXY_3 Output Endpoint_3 X and Y Buffer Size Register Read/Write Section 42.4.3.6
1165
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
Table 42-31. USB Buffer Descriptor Registers (continued)
Offset Acronym Register Name Type Section
07A0h USBOEPCNF_4 Output Endpoint_4 Configuration Register Read/Write Section 42.4.3.1
07A1h USBOEPBBAX_4 Output Endpoint_4 X Buffer Base Address Register Read/Write Section 42.4.3.2
07A2h USBOEPBCTX_4 Output Endpoint_4 X Byte Count Register Read/Write Section 42.4.3.3
07A5h USBOEPBBAY_4 Output Endpoint_4 Y Buffer Base Address Register Read/Write Section 42.4.3.4
07A6h USBOEPBCTY_4 Output Endpoint_4 Y Byte Count Register Read/Write Section 42.4.3.5
07A7h USBOEPSIZXY_4 Output Endpoint_4 X and Y Buffer Size Register Read/Write Section 42.4.3.6
07A8h USBOEPCNF_5 Output Endpoint_5 Configuration Register Read/Write Section 42.4.3.1
07A9h USBOEPBBAX_5 Output Endpoint_5 X Buffer Base Address Register Read/Write Section 42.4.3.2
07AAh USBOEPBCTX_5 Output Endpoint_5 X Byte Count Register Read/Write Section 42.4.3.3
07ADh USBOEPBBAY_5 Output Endpoint_5 Y Buffer Base Address Register Read/Write Section 42.4.3.4
07AEh USBOEPBCTY_5 Output Endpoint_5 Y Byte Count Register Read/Write Section 42.4.3.5
07AFh USBOEPSIZXY_5 Output Endpoint_5 X and Y Buffer Size Register Read/Write Section 42.4.3.6
07B0h USBOEPCNF_6 Output Endpoint_6 Configuration Register Read/Write Section 42.4.3.1
07B1h USBOEPBBAX_6 Output Endpoint_6 X Buffer Base Address Register Read/Write Section 42.4.3.2
07B2h USBOEPBCTX_6 Output Endpoint_6 X Byte Count Register Read/Write Section 42.4.3.3
07B5h USBOEPBBAY_6 Output Endpoint_6 Y Buffer Base Address Register Read/Write Section 42.4.3.4
07B6h USBOEPBCTY_6 Output Endpoint_6 Y Byte Count Register Read/Write Section 42.4.3.5
07B7h USBOEPSIZXY_6 Output Endpoint_6 X and Y Buffer Size Register Read/Write Section 42.4.3.6
07B8h USBOEPCNF_7 Output Endpoint_7 Configuration Register Read/Write Section 42.4.3.1
07B9h USBOEPBBAX_7 Output Endpoint_7 X Buffer Base Address Register Read/Write Section 42.4.3.2
07BAh USBOEPBCTX_7 Output Endpoint_7 X Byte Count Register Read/Write Section 42.4.3.3
07BDh USBOEPBBAY_7 Output Endpoint_7 Y Buffer Base Address Register Read/Write Section 42.4.3.4
07BEh USBOEPBCTY_7 Output Endpoint_7 Y Byte Count Register Read/Write Section 42.4.3.5
07BFh USBOEPSIZXY_7 Output Endpoint_7 X and Y Buffer Size Register Read/Write Section 42.4.3.6
07C8h USBIEPCNF_1 Input Endpoint_1 Configuration Register Read/Write Section 42.4.3.7
07C9h USBIEPBBAX_1 Input Endpoint_1 X Buffer Base Address Register Read/Write Section 42.4.3.8
07CAh USBIEPBCTX_1 Input Endpoint_1 X Byte Count Register Read/Write Section 42.4.3.9
07CDh USBIEPBBAY_1 Input Endpoint_1 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07CEh USBIEPBCTY_1 Input Endpoint_1 Y Byte Count Register Read/Write Section 42.4.3.11
07CFh USBIEPSIZXY_1 Input Endpoint_1 X and Y Buffer Size Register Read/Write Section 42.4.3.12
07D0h USBIEPCNF_2 Input Endpoint_2 Configuration Register Read/Write Section 42.4.3.7
07D1h USBIEPBBAX_2 Input Endpoint_2 X Buffer Base Address Register Read/Write Section 42.4.3.8
07D2h USBIEPBCTX_2 Input Endpoint_2 X Byte Count Register Read/Write Section 42.4.3.9
07D5h USBIEPBBAY_2 Input Endpoint_2 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07D6h USBIEPBCTY_2 Input Endpoint_2 Y Byte Count Register Read/Write Section 42.4.3.11
07D7h USBIEPSIZXY_2 Input Endpoint_2 X and Y Buffer Size Register Read/Write Section 42.4.3.12
07D8h USBIEPCNF_3 Input Endpoint_3 Configuration Register Read/Write Section 42.4.3.7
07D9h USBIEPBBAX_3 Input Endpoint_3 X Buffer Base Address Register Read/Write Section 42.4.3.8
07DAh USBIEPBCTX_3 Input Endpoint_3 X Byte Count Register Read/Write Section 42.4.3.9
07DDh USBIEPBBAY_3 Input Endpoint_3 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07DEh USBIEPBCTY_3 Input Endpoint_3 Y Byte Count Register Read/Write Section 42.4.3.11
07DFh USBIEPSIZXY_3 Input Endpoint_3 X and Y Buffer Size Register Read/Write Section 42.4.3.12
1166USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Registers
Table 42-31. USB Buffer Descriptor Registers (continued)
Offset Acronym Register Name Type Section
07E0h USBIEPCNF_4 Input Endpoint_4 Configuration Register Read/Write Section 42.4.3.7
07E1h USBIEPBBAX_4 Input Endpoint_4 X Buffer Base Address Register Read/Write Section 42.4.3.8
07E2h USBIEPBCTX_4 Input Endpoint_4 X Byte Count Register Read/Write Section 42.4.3.9
07E5h USBIEPBBAY_4 Input Endpoint_4 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07E6h USBIEPBCTY_4 Input Endpoint_4 Y Byte Count Register Read/Write Section 42.4.3.11
07E7h USBIEPSIZXY_4 Input Endpoint_4 X and Y Buffer Size Register Read/Write Section 42.4.3.12
07E8h USBIEPCNF_5 Input Endpoint_5 Configuration Register Read/Write Section 42.4.3.7
07E9h USBIEPBBAX_5 Input Endpoint_5 X Buffer Base Address Register Read/Write Section 42.4.3.8
07EAh USBIEPBCTX_5 Input Endpoint_5 X Byte Count Register Read/Write Section 42.4.3.9
07EDh USBIEPBBAY_5 Input Endpoint_5 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07EEh USBIEPBCTY_5 Input Endpoint_5 Y Byte Count Register Read/Write Section 42.4.3.11
07EFh USBIEPSIZXY_5 Input Endpoint_5 X and Y Buffer Size Register Read/Write Section 42.4.3.12
07F0h USBIEPCNF_6 Input Endpoint_6 Configuration Register Read/Write Section 42.4.3.7
07F1h USBIEPBBAX_6 Input Endpoint_6 X Buffer Base Address Register Read/Write Section 42.4.3.8
07F2h USBIEPBCTX_6 Input Endpoint_6 X Byte Count Register Read/Write Section 42.4.3.9
07F5h USBIEPBBAY_6 Input Endpoint_6 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07F6h USBIEPBCTY_6 Input Endpoint_6 Y Byte Count Register Read/Write Section 42.4.3.11
07F7h USBIEPSIZXY_6 Input Endpoint_6 X and Y Buffer Size Register Read/Write Section 42.4.3.12
07F8h USBIEPCNF_7 Input Endpoint_7 Configuration Register Read/Write Section 42.4.3.7
07F9h USBIEPBBAX_7 Input Endpoint_7 X Buffer Base Address Register Read/Write Section 42.4.3.8
07FAh USBIEPBCTX_7 Input Endpoint_7 X Byte Count Register Read/Write Section 42.4.3.9
07FDh USBIEPBBAY_7 Input Endpoint_7 Y Buffer Base Address Register Read/Write Section 42.4.3.10
07FEh USBIEPBCTY_7 Input Endpoint_7 Y Byte Count Register Read/Write Section 42.4.3.11
07FFh USBIEPSIZXY_7 Input Endpoint_7 X and Y Buffer Size Register Read/Write Section 42.4.3.12
1167
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

USB Registers
www.ti.com
42.4.3.1 USBOEPCNF_n Register
Output Endpoint-n Configuration Register
This register can be modified only when USBEN = 1.
Figure 42-31. USBOEPCNF_n Register
76543210
UBME Reserved TOGGLE DBUF STALL USBIIE Reserved
rw r0 rw rw rw rw r0 r0
Can be modified only when USBEN = 1
Table 42-32. USBOEPCNF_n Register Description
Bit Field Type Reset Description
7 UBME RW 0h UBM out endpoint-n enable. This bit is to be set or cleared by software.
0b = UBM cannot use this endpoint
1b = UBM can use this endpoint
6 Reserved R 0h Reserved. Always reads as 0.
5 TOGGLE RW 0h Toggle bit. The toggle bit is controlled by the UBM and is toggled at the end of a
successful out data stage transaction, if a valid data packet is received and the
data packet's packet ID matches the expected packet ID.
4 DBUF RW 0h Double buffer enable. This bit can be set to enable the use of both the X and Y
data packet buffers for USB transactions, for a particular out endpoint. Clearing it
results in the use of single buffer mode. In this mode, only the X buffer is used.
0b = Primary buffer only (X-buffer only)
1b = Toggle bit selects buffer
3 STALL RW 0h USB stall condition. This bit can be set to cause endpoint transactions to be
stalled. When set, the hardware automatically returns a stall handshake to the
host for any transaction received on endpoint-0. The stall bit is cleared
automatically by the next setup transaction.
0b = Indicates no stall
1b = Indicates stall
2 USBIIE RW 0h USB transaction interrupt indication enable. Can be set or cleared to define if
interrupts are to be flagged in general. To generate an interrupt, the
corresponding interrupt flag must be set (OEPIE).
0b = Corresponding interrupt flag will not be set
1b = Corresponding interrupt flag will be set
1-0 Reserved R 0h Reserved. Always reads as 0.
1168 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Registers
42.4.3.2 USBOEPBBAX_n Register
Output Endpoint-n X Buffer Base Address Register
This register can be modified only when USBEN = 1.
Figure 42-32. USBOEPBBAX_n Register
76543210
ADR
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-33. USBOEPBBAX_n Register Description
Bit Field Type Reset Description
7-0 ADR RW 0h X-buffer base address. These are the upper eight bits of the X-buffer's base
address. The three LSBs are assumed to be zero, for a total of 11 bits. This
value needs to be set by software. The UBM uses this value as the start address
of a given transaction. It does not change this value at the end of a transaction.
1169
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.3.3 USBOEPBCTX_n Register
Output Endpoint-n X Byte Count Register
This register can be modified only when USBEN = 1.
Figure 42-33. USBOEPBCTX_n Register
76543210
NAK CNT
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-34. USBOEPBCTX_n Register Description
Bit Field Type Reset Description
7 NAK RW 0h No-acknowledge status bit. The NAK status bit is set by the UBM at the end of a
successful USB out transaction to that endpoint, to indicate that the USB
endpoint-"n" buffer contains a valid data packet, and that the buffer data count
value is valid. When this bit is set, all subsequent transactions to that endpoint
result in a NAK handshake response to the USB host. To re-enable this endpoint
to receive another data packet from the host, this bit must be cleared.
0b = No valid data in buffer. The buffer is ready to receive OUT packets from the
host.
1b = The buffer contains a valid packet from the host, and it has not been picked
up (subsequent host-out requests receive a NAK)
6-0 CNT RW 0h X-buffer data count. The Out_EP-n data count value is set by the UBM when a
new data packet is written to the X-buffer for that out endpoint. It is set to the
number of bytes received in the data buffer.
42.4.3.4 USBOEPBBAY_n Register
Output Endpoint-n Y Buffer Base Address Register
This register can be modified only when USBEN = 1.
Figure 42-34. USBOEPBBAY_n Register
76543210
ADR
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-35. USBOEPBBAY_n Register Description
Bit Field Type Reset Description
7-0 ADR RW 0h Y-buffer base address. These are the upper eight bits of the Y-buffer's base
address. The three LSBs are assumed to be zero, for a total of 11 bits. This
value needs to be set by software. The UBM uses this value as the start address
of a given transaction. It does not change this value at the end of a transaction.
1170 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
USB Registers
42.4.3.5 USBOEPBCTY_n Register
Output Endpoint-n X Byte Count Register
This register can be modified only when USBEN = 1.
Figure 42-35. USBOEPBCTY_n Register
76543210
NAK CNT
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-36. USBOEPBCTY_n Register Description
Bit Field Type Reset Description
7 NAK RW 0h No-acknowledge status bit. The NAK status bit is set by the UBM at the end of a
successful USB out transaction to that endpoint, to indicate that the USB
endpoint-"n" buffer contains a valid data packet, and that the buffer data count
value is valid. When this bit is set, all subsequent transactions to that endpoint
result in a NAK handshake response to the USB host. To re-enable this endpoint
to receive another data packet from the host, this bit must be cleared.
0b = No valid data in buffer. The buffer is ready to receive OUT packets from the
host.
1b = The buffer contains a valid packet from the host, and it has not been picked
up (subsequent host-out requests receive a NAK)
6-0 CNT RW 0h Y-buffer data count. The Out_EP-n data count value is set by the UBM when a
new data packet is written to the X-buffer for that out endpoint. It is set to the
number of bytes received in the data buffer.
42.4.3.6 USBOEPSIZXY_n Register
Output Endpoint-n X and Y Buffer Size Register
This register can be modified only when USBEN = 1.
Figure 42-36. USBOEPSIZXY_n Register
76543210
Reserved SIZx
r0 rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-37. USBOEPSIZXY_n Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6-0 SIZx RW 0h Buffer size count. This value needs to be set by software to configure the size of
the X and Y data packet buffers. Both buffers are set to the same size, based on
this value.
000:0000b to 100:0000b are valid numbers for 0 to 64 bytes.
Any value greater than or equal to 100:0001b results in unpredictable results.
1171
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
USB Registers
www.ti.com
42.4.3.7 USBIEPCNF_n Register
Input Endpoint-n Configuration Register
This register can be modified only when USBEN = 1.
Figure 42-37. USBIEPCNF_n Register
76543210
UBME Reserved TOGGLE DBUF STALL USBIIE Reserved
rw r0 rw rw rw rw r0 r0
Can be modified only when USBEN = 1
Table 42-38. USBIEPCNF_n Register Description
Bit Field Type Reset Description
7 UBME RW 0h UBM in endpoint-n enable. This value needs to be set or cleared by software.
0b = UBM cannot use this endpoint
1b = UBM can use this endpoint
6 Reserved R 0h Reserved. Always reads as 0.
5 TOGGLE RW 0h Toggle bit. The toggle bit is controlled by the UBM and is toggled at the end of a
successful in data stage transaction, if a valid data packet is transmitted. If this
bit is cleared, a DATA0 packet ID is transmitted in the data packet to the host. If
this bit is set, a DATA1 packet ID is transmitted in the data packet.
4 DBUF RW 0h Double buffer enable. This bit can be set to enable the use of both the X and Y
data packet buffers for USB transactions, for a particular out endpoint. Clearing it
results in the use of single buffer mode. In this mode, only the X buffer is used.
0b = Primary buffer only (X-buffer only)
1b = Toggle bit selects buffer
3 STALL RW 0h USB stall condition. This bit can be set to cause endpoint transactions to be
stalled. When set, the hardware automatically returns a stall handshake to the
host for any transaction received on endpoint-0. The stall bit is cleared
automatically by the next setup transaction.
0b = Indicates no stall
1b = Indicates stall
2 USBIIE RW 0h USB transaction interrupt indication enable. Can be set or cleared to define if
interrupts are to be flagged in general. To generate an interrupt the
corresponding interrupt flag must be set (OEPIE).
0b = Corresponding interrupt flag will not be set
1b = Corresponding interrupt flag will be set
1-0 Reserved R 0h Reserved. Always reads as 0.
1172 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
USB Registers
42.4.3.8 USBIEPBBAX_n Register
Input Endpoint-n X Buffer Base Address Register
This register can be modified only when USBEN = 1.
Figure 42-38. USBIEPBBAX_n Register
76543210
ADR
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-39. USBIEPBBAX_n Register Description
Bit Field Type Reset Description
7-0 ADR RW 0h X-buffer base address. These are the upper eight bits of the X-buffer's base
address. The three LSBs are assumed to be zero, for a total of 11 bits. This
value needs to be set by software. The UBM uses this value as the start address
of a given transaction. It does not change this value at the end of a transaction.
1173
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
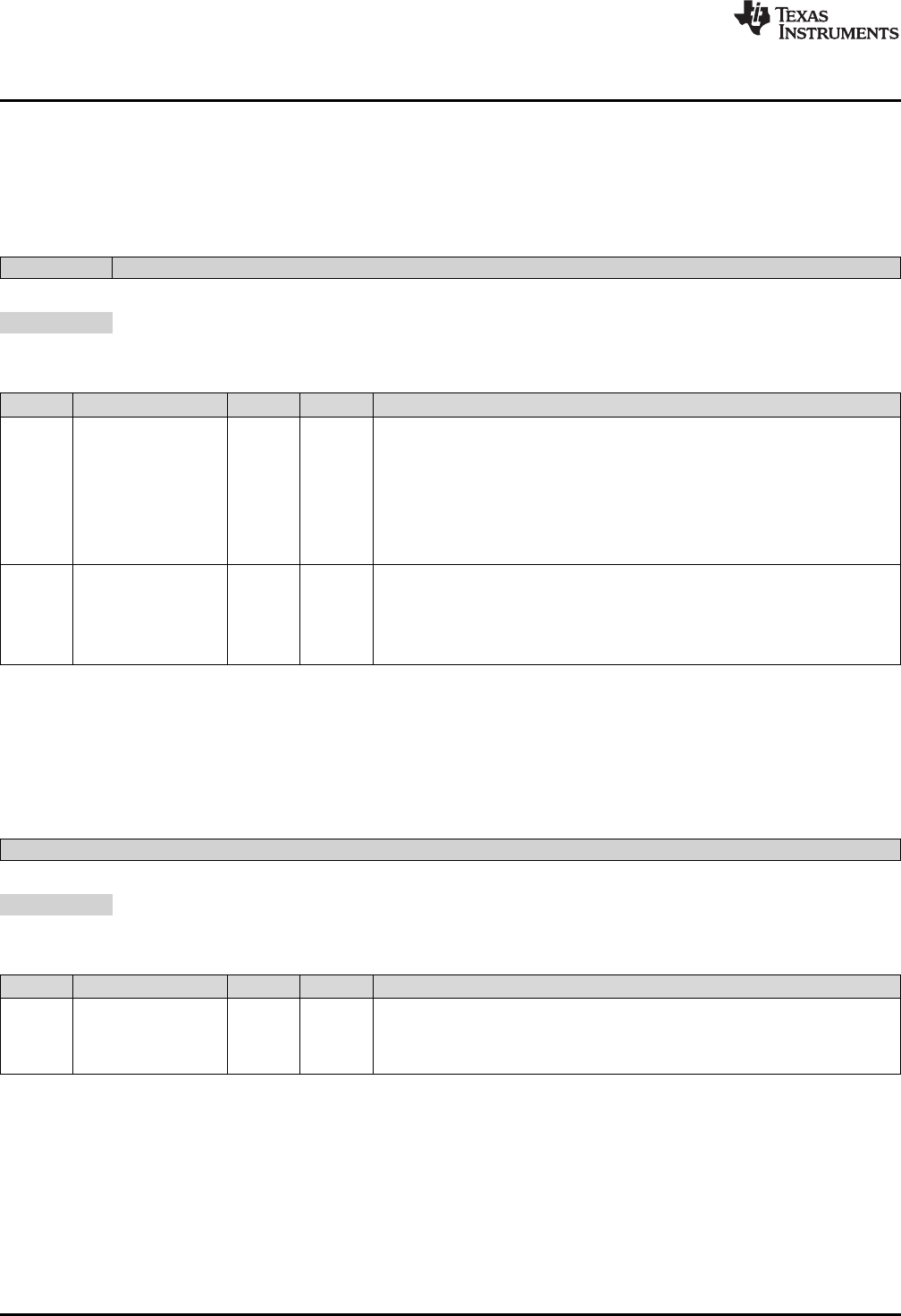
USB Registers
www.ti.com
42.4.3.9 USBIEPBCTX_n Register
Input Endpoint-n X Byte Count Register
This register can be modified only when USBEN = 1.
Figure 42-39. USBIEPBCTX_n Register
76543210
NAK CNT
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-40. USBIEPBCTX_n Register Description
Bit Field Type Reset Description
7 NAK RW 0h No-acknowledge status bit. The NAK status bit is set by the UBM at the end of a
successful USB in transaction from that endpoint, to indicate that the EP-n in
buffer is empty. For interrupt or bulk endpoints, when this bit is set, all
subsequent transactions from that endpoint result in a NAK handshake response
to the USB host. To re-enable this endpoint to transmit another data packet to
the host, this bit must be cleared.
0b = Buffer contains a valid data packet for the host
1b = Buffer is empty (any host-In requests receive a NAK)
6-0 CNT RW 0h X-buffer data count. The In_EP-n X-buffer data count value must be set by
software when a new data packet is written to the buffer. It should be the number
of bytes in the data packet for interrupt, or bulk endpoint transfers.
000:0000b to 100:0000b are valid numbers for 0 to 64 bytes.
Any value greater than or equal to 100:0001b results in unpredictable results.
42.4.3.10 USBIEPBBAY_n Register
Input Endpoint-n Y Buffer Base Address Register
This register can be modified only when USBEN = 1.
Figure 42-40. USBIEPBBAY_n Register
76543210
ADR
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-41. USBIEPBBAY_n Register Description
Bit Field Type Reset Description
7-0 ADR RW 0h Y-buffer base address. These are the upper eight bits of the Y-buffer's base
address. The three LSBs are assumed to be zero, for a total of 11 bits. This
value needs to be set by software. The UBM uses this value as the start address
of a given transaction. It does not change this value at the end of a transaction.
1174 USB Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
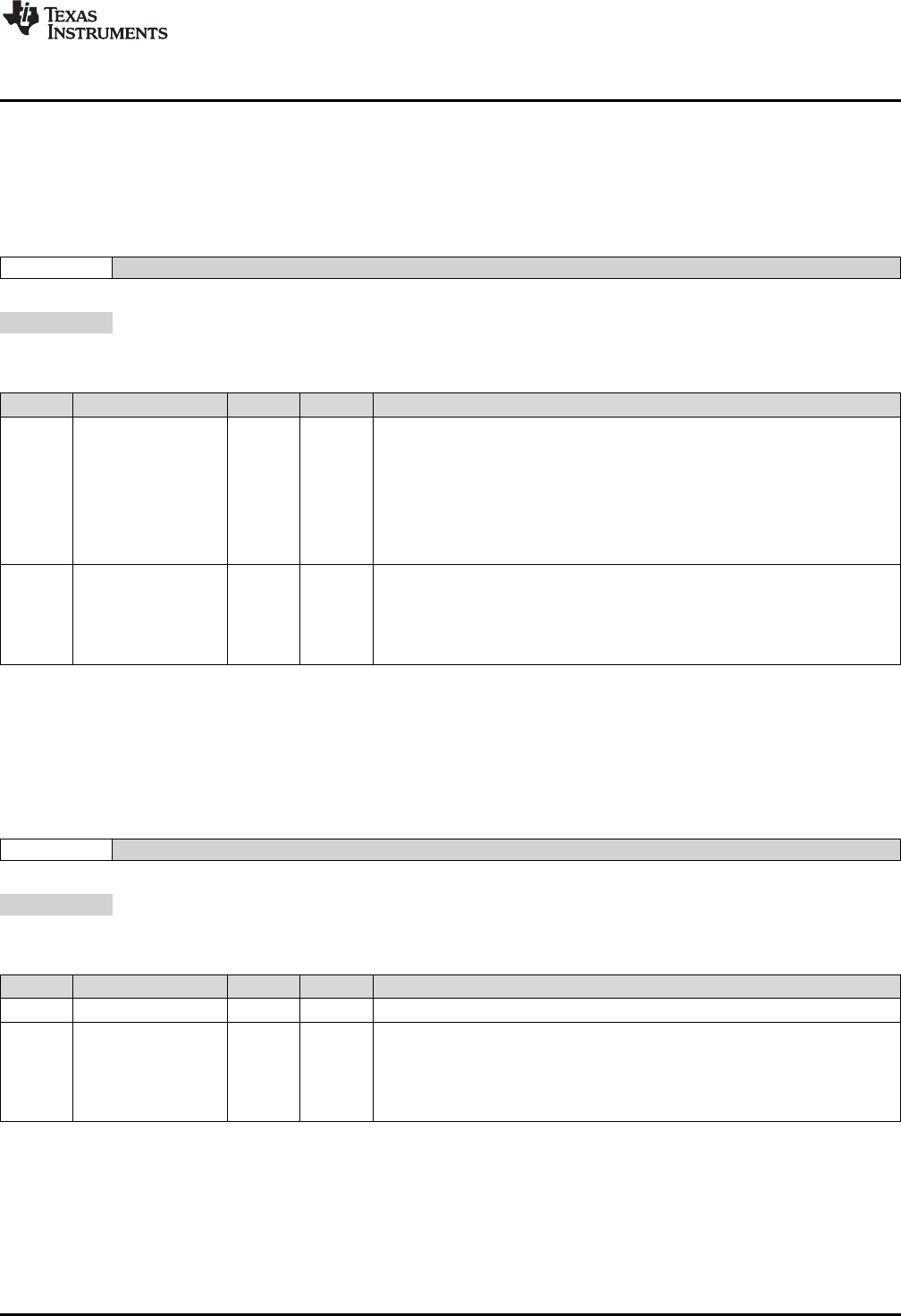
www.ti.com
USB Registers
42.4.3.11 USBIEPBCTY_n Register
Input Endpoint-n Y Byte Count Register
This register can be modified only when USBEN = 1.
Figure 42-41. USBIEPBCTY_n Register
76543210
NAK CNT
rw rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-42. USBIEPBCTY_n Register Description
Bit Field Type Reset Description
7 NAK RW 0h No-acknowledge status bit. The NAK status bit is set by the UBM at the end of a
successful USB in transaction from that endpoint, to indicate that the EP-n in
buffer is empty. For interrupt or bulk endpoints, when this bit is set, all
subsequent transactions from that endpoint result in a NAK handshake response
to the host. To re-enable this endpoint to transmit another data packet to the
host, this bit must be cleared. This bit is set by USB SW-init.
0b = Buffer contains a valid data packet for host device
1b = Buffer is empty (any host-in requests receive a NAK)
6-0 CNT RW 0h Y-Buffer data count. The In EP-n Y-buffer data count value needs to be set by
software when a new data packet is written to the buffer. It should be the number
of bytes in the data packet for interrupt, or bulk endpoint transfers.
000:0000b to 100:0000b are valid numbers for 0 to 64 bytes.
Any value greater than or equal to 100:0001b results in unpredictable results.
42.4.3.12 USBIEPSIZXY_n Register
Input Endpoint-n X and Y Buffer Size Register
This register can be modified only when USBEN = 1.
Figure 42-42. USBIEPSIZXY_n Register
76543210
Reserved SIZ
r0 rw rw rw rw rw rw rw
Can be modified only when USBEN = 1
Table 42-43. USBIEPSIZXY_n Register Description
Bit Field Type Reset Description
7 Reserved R 0h Reserved. Always reads as 0.
6-0 RW 0h Buffer size count. This value needs to be set by software to configure the size of
the X and Y data packet buffers. Both buffers are set to the same size, based on
this value.
000:0000b to 100:0000b are valid numbers for 0 to 64 bytes.
Any value greater than or equal to 100:0001b results in unpredictable results.
1175
SLAU208O–June 2008–Revised May 2015 USB Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Chapter 43
SLAU208O–June 2008–Revised May 2015
LDO-PWR Module
This chapter describes the LDO-PWR module that is available in some devices.
Topic ........................................................................................................................... Page
43.1 LDO-PWR Introduction .................................................................................... 1177
43.2 LDO-PWR Operation........................................................................................ 1178
43.3 LDO-PWR Registers ........................................................................................ 1181
1176 LDO-PWR Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
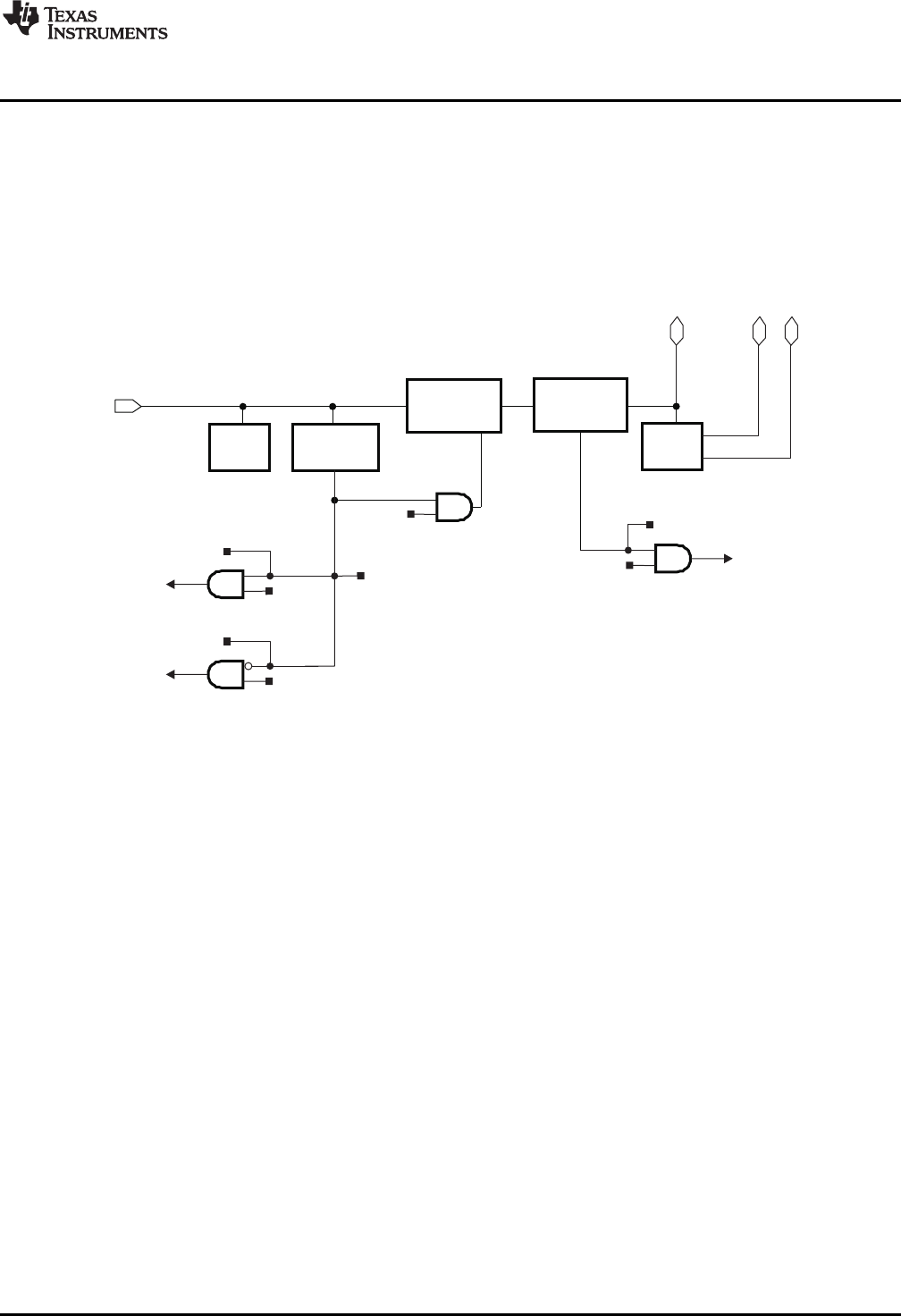
LDOI
BOR
"LDOI present"
interrupt
"LDO overload"
interrupt
LDOO
Overload
Detection
3.3 V LDO
LDOI
Detection
LDOOVLIE
LDOOVLIFG
LDOONIE
LDOONIFG
LDOEN
LDOOFFIE
LDOOFFIFG
"LDOI removed”
interrupt
LDOBGVBV
Port U
PU.0
PU.1
www.ti.com
LDO-PWR Introduction
43.1 LDO-PWR Introduction
The features of the LDO-PWR module include:
• Integrated 3.3-V LDO regulator with sufficient output to power the entire MSP430™ microcontroller and
system circuitry from 5-V external supply
• Current-limiting capability on 3.3-V LDO output with detection flag and interrupt generation
• LDO input voltage detection flag and interrupt generation
Figure 43-1 shows a block diagram of the LDO-PWR module.
Figure 43-1. LDO Block Diagram
1177
SLAU208O–June 2008–Revised May 2015 LDO-PWR Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
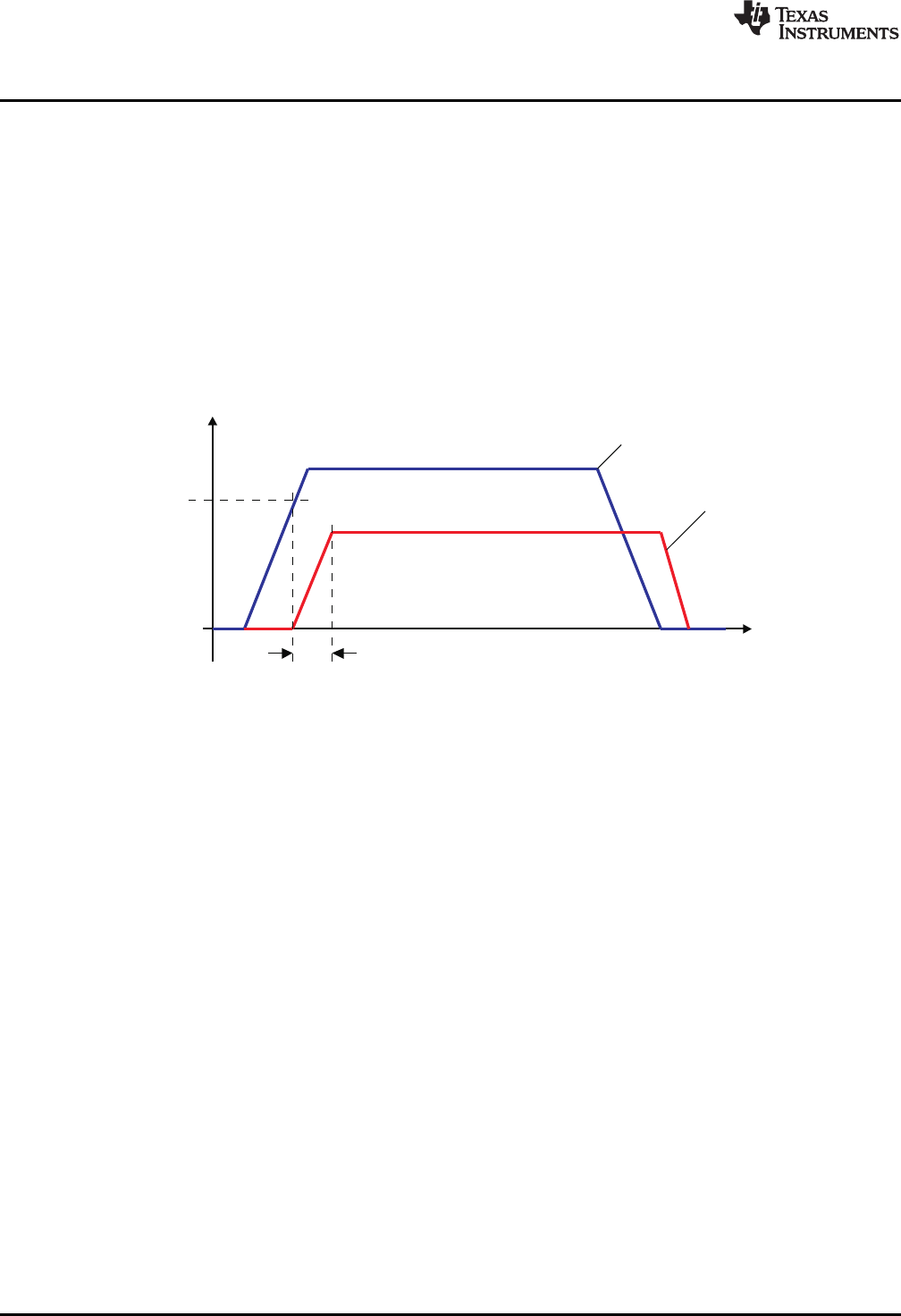
VLDOI
VLAUNCH
Time
VLDOO
VLDOI
tENABLE
LDO-PWR Operation
www.ti.com
43.2 LDO-PWR Operation
The LDO-PWR power system incorporates an integrated 3.3-V LDO regulator that allows the entire
MSP430 microcontroller to be powered from nominal 5-V LDOI when it is made available from the system.
Alternatively, the power system can supply power only to other components within the system, or it can be
unused altogether. The LDO-PWR, when enabled, also supplies power to Port U.
43.2.1 Enabling/Disabling
The 3.3-V LDO is enabled/disabled by setting/clearing LDOEN (LDOEN = 1 by default). If the voltage on
LDOI is detected to be low or nonexistent, the LDO is suspended even if enabled by LDOEN = 1. No
additional current is consumed while the LDO is suspended. When the voltage on LDOI rises above the
LDO power brownout level, the LDO reference and low voltage detection become enabled. When the
voltage on LDOI rises further above the launch voltage VLAUNCH, the 3.3-V LDO becomes enabled (see
Figure 43-2). See device-specific data sheet for value of VLAUNCH.
Figure 43-2. 3.3-V LDO Power Up/Down Profile
43.2.2 Powering the Rest of the MSP430 from the LDO-PWR
The output of the 3.3-V LDO (LDOO) can be used to power the entire MSP430 device, sourcing the
DVCC rail. If this is desired, LDOO and DVCC should be connected externally. Power from the 3.3-V LDO
is sourced into DVCC (see Figure 43-3).
1178 LDO-PWR Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
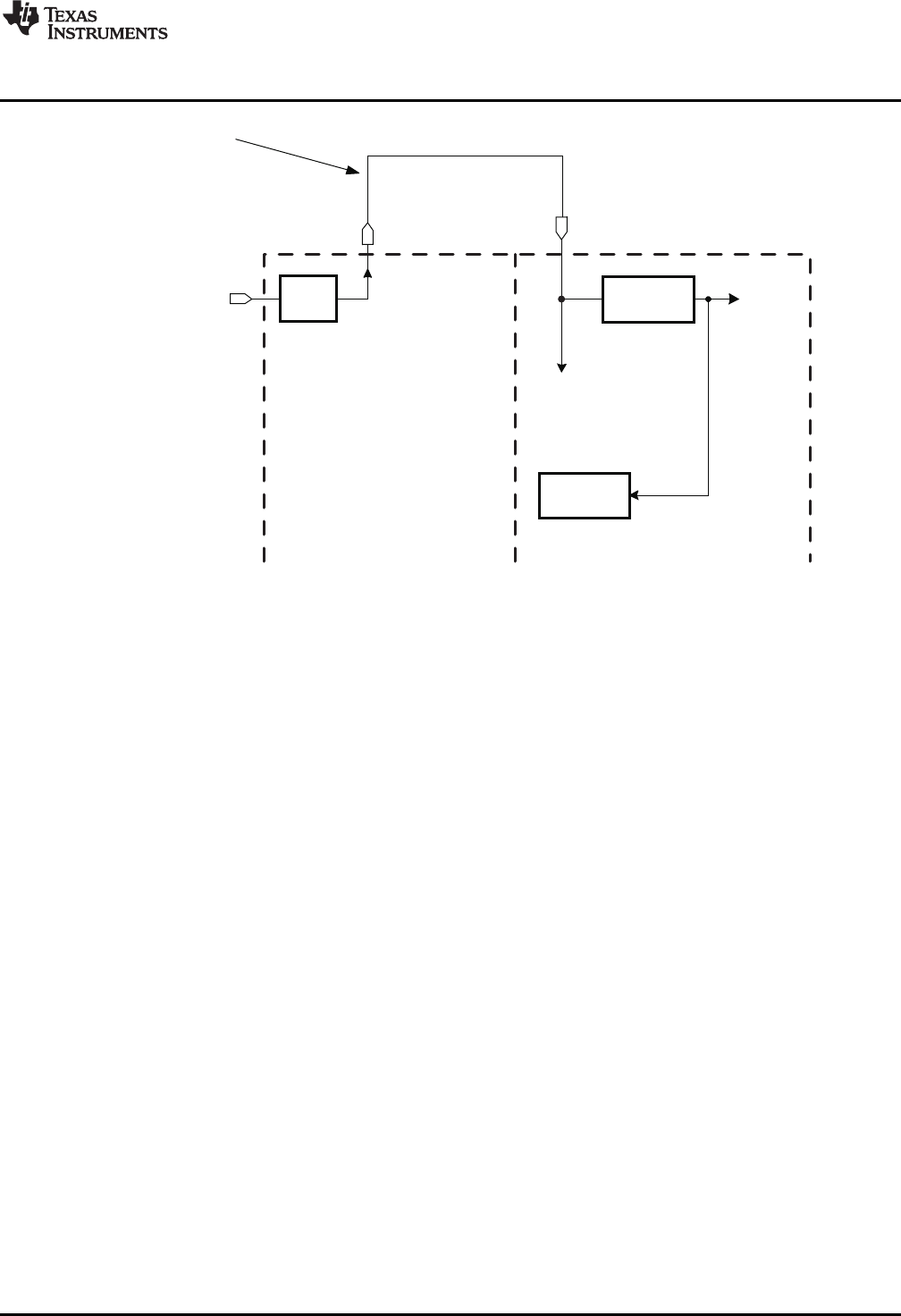
ExternalConnection
LDOI 3.3V
LDO
Digital
Core
LDOPowerDomain MSP430DVCCPowerDomain
PMM VCORE
DVCC
LDOO
I/Os
www.ti.com
LDO-PWR Operation
Figure 43-3. Powering Entire MSP430 From LDOI
With this connection made, the MSP430 allows for autonomous power up of the device when the voltage
on LDOI rises above VLAUNCH. If no voltage is present on VCORE – meaning the device is unpowered (or, in
LPMx.5 mode) – then the 3.3-V LDO automatically turns on when the voltage on LDOI rises above
VLAUNCH.
Note that if DVCC is being driven from the 3.3-V LDO in this manner, and if power is available from LDOI,
attempting to place the device into LPMx.5 results in the device immediately re-powering. This is because
it recreates the conditions of the autonomous feature described above (no VCORE but power available on
LDOI). The resulting drop of VCORE would cause the system to immediately power up again.
When DVCC is being powered from LDOI, it is up to the user to ensure that the total current being drawn
from LDOI stays below the current overload detection, IDET.
43.2.3 Powering Other Components in the System from LDO-PWR
There is sufficient current capacity available from the 3.3-V LDO to power not only the entire MSP430 but
also other components in the system, via the LDOO pin. It is also possible to use the 3.3-V LDO only to
power other components in the system.
43.2.4 Applications That Do Not Require LDO-PWR
There may be applications where the 3.3-V LDO is not required. In these cases, keep LDOI tied low to
prevent the 3.3-V LDO from turning on and drawing any current even if LDOEN = 1. If Port U operation is
desired, since the 3.3-V LDO is not enabled, an external voltage to the LDOO pin is required.
43.2.5 Current Limitation and Overload Protection
The 3.3-V LDO features current limitation to protect itself from an overload condition; that is, when the
output of the LDO becomes current-limited to IDET. This is reported to software via the VUOVLIFG flag.
See device-specific data sheet for value of IDET.
1179
SLAU208O–June 2008–Revised May 2015 LDO-PWR Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

LDO-PWR Operation
www.ti.com
During overload conditions, LDOO drops below its nominal output voltage. In power scenarios where
DVCC is exclusively supplied from LDOO, repetitive system restarts may be triggered as long the
overload condition exists. For this reason, firmware should avoid re-enabling high current draw modules
after detection of an overload on the previous power session, until the cause of failure can be identified
and corrected. Ultimately, it is the user's responsibility to ensure that the current drawn from LDOI does
not exceed IDET.
The LDO-PWR power system brownout circuit is supplied from LDOI or DVCC, whichever carries the
higher voltage.
43.2.6 LDO-PWR Interrupts
The LDO-PWR module shares a single interrupt vector to handle multiple LDO-PWR interrupts.
The LDOONIFG flag can be used to indicate that the voltage on LDOI has risen above the launch voltage.
In addition to the LDOONIFG being set, an interrupt is also generated when LDOONIE = 1. Similarly, the
LDOOFFIFG flag can be used to indicate that the voltage on LDOI has fallen below the launch voltage. In
addition to the LDOOFFIFG being set, an interrupt is also generated when LDOOFFIE = 1.The
LDOBGVBV bit can also be polled to indicate the level of LDOI; that is, above or below the launch voltage.
The LDOOVLIFG flag can be used to indicate an overcurrent condition on the 3.3-V LDO. When an
overcurrent condition is detected, LDOOVLIFG = 1. In addition to the LDOOVLIFG being set, an interrupt
is also generated when LDOOVLIE = 1.
43.2.7 Port U Control
The Port U pins (PU.0/PU.1) function as general-purpose high-current I/O pins. These pins can only be
configured together as either both inputs or both outputs. Port U is supplied by the LDOO rail. If the 3.3-V
LDO is not being used in the system (disabled), the LDOO pin can be supplied externally.
PUOPE controls the enable of both outputs residing on the Port U pins. Setting PUIPE = 1 causes both
input buffers to be enabled. When Port U outputs are enabled (PUOPE = 1), the PUIN0 and PUIN1 pins
mirror what is present on the outputs assuming PUIPE = 1. To use the Port U pins as inputs, the outputs
should be disabled by setting PUOPE = 0, and enabling the input buffers by setting PUIPE = 1. Once
configured as inputs (PUIPE = 1), the PUIN0 and PUIN1 bits can be read to determine the respective
input values.
When PUOPE is set, both Port U pins function as outputs, controlled by PUOUT0/PUOUT1. When driven
high, they use the LDOO rail, and they are capable of a drive current higher than other I/O pins on the
device. See the device-specific datasheet for parameters.
By default, PUOPE and PUIPE are cleared. PU.0/PU.1 are high-impedance (input buffers are disabled
and outputs are disabled).
1180 LDO-PWR Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
LDO-PWR Registers
43.3 LDO-PWR Registers
Write access to the configuration registers is allowed or disallowed using the LDOKEYPID register. Writing
the proper value (9628h) unlocks the configuration registers and enables write access. Writing any other
value disables access while leaving the values of the registers intact. Locking should be done intentionally
after the configuration is finished. Read access is available without the need to write to the LDOKEYPID
register.
The configuration registers are listed in Table 43-1. All addresses are expressed as offsets; the base
address can be found in the device-specific data sheet.
All registers are byte and word accessible.
Table 43-1. LDO-PWR Registers
Offset Acronym Register Name Type Reset Section
00h LDOKEYPID LDO key and ID register Read/Write 0000h Section 43.3.1
04h PUCTL Port U control register Read/Write 0000h Section 43.3.2
08h LDOPWRCTL LDO-PWR control register Read/Write 0810h Section 43.3.3
1181
SLAU208O–June 2008–Revised May 2015 LDO-PWR Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
LDO-PWR Registers
www.ti.com
43.3.1 LDOKEYPID Register
LDO Key Register
Figure 43-4. LDOKEYPID Register
15 14 13 12 11 10 9 8
LDOKEY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
76543210
LDOKEY
rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0 rw-0
Table 43-2. LDOKEYPID Register Description
Bit Field Type Reset Description
15-0 LDOKEY RW 0h Key register. Must be written with a value of 9628h in order to be recognized as
a valid key. This "unlocks" the configuration registers. If written with any other
value, the registers become "locked". Reads back as A528h if the registers are
unlocked.
43.3.2 PUCTL Register
Port U Control Register
Figure 43-5. PUCTL Register
15 14 13 12 11 10 9 8
Reserved Reserved PUIPE
r0 r0 r0 r0 r0 r0 rw-0 rw-0
76543210
Reserved PUOPE Reserved PUIN1 PUIN0 PUOUT1 PUOUT0
r0 r0 rw-0 rw-0 r r rw-0 rw-0
Can be modified only when LDOKEYPID is unlocked
Table 43-3. PUCTL Register Description
Bit Field Type Reset Description
15-10 Reserved R 0h Reserved. Always reads as 0.
9 Reserved RW 0h Reserved. Always write as 0.
8 PUIPE RW 0h PU input enable
0b = PU.0 and PU.1 inputs are disabled
1b = PU.0 and PU.1 inputs are enabled
7-6 Reserved R 0h Reserved. Always reads as 0.
5 PUOPE RW 0h PU output enable
0b = PU.0 and PU.1 outputs are disabled
1b = PU.0 and PU.1 outputs are enabled
4 Reserved R 0h Reserved. Always write as 0.
3 PUIN1 R 0h PU.1 input data, This bit reflects the logic value on the PU.1 terminal when
PUIPE = 1.
2 PUIN0 R 0h PU.0 input data, This bit reflects the logic value on the PU.0 terminal when
PUIPE = 1.
1 PUOUT1 RW 0h PU.1 output data. This bits defines the value of the PU.1 pin when PUOPE = 1.
0 PUOUT0 RW 0h PU.0 output data. This bits defines the value of the PU.0 pin when PUOPE = 1.
1182 LDO-PWR Module SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
LDO-PWR Registers
43.3.3 LDOPWRCTL Register
LDO-Power Control Register
Figure 43-6. LDOPWRCTL Register
15 14 13 12 11 10 9 8
Reserved Reserved LDOEN LDOOFFIE LDOONIE LDOOVLIE
r0 r0 r0 rw-0 rw-1 rw-0 rw-0 rw-0
76543210
Reserved OVLAOFF Reserved LDOBGVBV LDOOFFIFG LDOONIFG LDOOVLIFG
r0 r0 rw-0 rw-1 r rw-0 rw-0 rw-0
Can be modified only when LDOKEYPID is unlocked
Table 43-4. LDOPWRCTL Register Description
Bit Field Type Reset Description
15-13 Reserved R 0h Reserved. Always reads as 0.
12 Reserved RW 0h Reserved. Always reads as 0.
11 LDOEN RW 1h 3.3V LDO enable. When set, the LDO is enabled.
0b = LDO disabled
1b = LDO enabled
10 LDOOFFIE RW 0h LDOI voltage "going OFF" interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
9 LDOONIE RW 0h LDOI voltage "coming ON" interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
8 LDOOVLIE RW 0h LDO overload indication interrupt enable
0b = Interrupt disabled
1b = Interrupt enabled
7-6 Reserved R 0h Reserved. Always reads as 0.
5 OVLAOFF RW 0h LDO overload auto-off enable
0b = During an overload on the 3.3-V LDO, the LDO automatically enters
current-limiting mode and stays there until the condition stops.
1b = An overload indication clears the LDOEN bit.
4 Reserved RW 1h Reserved
3 LDOBGVBV RW 0h LDOI valid
0b = LDOI is not valid yet
1b = LDOI is valid and within bounds
2 LDOOFFIFG RW 0h LDOI "going OFF" interrupt flag. This bit indicates that LDOI fell below the launch
voltage.
0b = LDOI did not fall below the launch voltage.
1b = LDOI fell below the launch voltage.
1 LDOONIFG RW 0h LDOI "coming ON" interrupt flag. This bit indicates that LDOI rose above the
launch voltage.
0b = LDOI did not rise above the launch voltage.
1b = LDOI rose above the launch voltage.
0 LDOOVLIFG RW 0h LDO overload interrupt flag. This bit indicates that the 3.3-V LDO entered an
overload condition.
0b = No overload condition detected.
1b = Overload condition detected.
1183
SLAU208O–June 2008–Revised May 2015 LDO-PWR Module
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated

Chapter 44
SLAU208O–June 2008–Revised May 2015
Embedded Emulation Module (EEM)
This chapter describes the embedded emulation module (EEM) that is implemented in all devices.
Topic ........................................................................................................................... Page
44.1 Embedded Emulation Module (EEM) Introduction ............................................... 1185
44.2 EEM Building Blocks....................................................................................... 1187
44.3 EEM Configurations ........................................................................................ 1188
1184 Embedded Emulation Module (EEM) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
www.ti.com
Embedded Emulation Module (EEM) Introduction
44.1 Embedded Emulation Module (EEM) Introduction
Every MSP430 microcontroller implements an EEM. It is accessed and controlled through either 4-wire
JTAG mode or Spy-Bi-Wire mode. Each implementation is device-dependent and is described in
Section 44.3, the EEM Configurations section, and the device-specific data sheet.
In general, the following features are available:
• Nonintrusive code execution with real-time breakpoint control
• Single-step, step-into, and step-over functionality
• Full support of all low-power modes
• Support for all system frequencies, for all clock sources
• Up to eight (device-dependent) hardware triggers or breakpoints on memory address bus (MAB) or
memory data bus (MDB)
• Up to two (device-dependent) hardware triggers or breakpoints on CPU register write accesses
• MAB, MDB, and CPU register access triggers can be combined to form up to ten (device-dependent)
complex triggers or breakpoints
• Up to two (device-dependent) cycle counters
• Trigger sequencing (device-dependent)
• Storage of internal bus and control signals using an integrated trace buffer (device-dependent)
• Clock control for timers, communication peripherals, and other modules on a global device level or on
a per-module basis during an emulation stop
Figure 44-1 shows a simplified block diagram of the largest currently-available EEM implementation.
For more details on how the features of the EEM can be used together with the IAR Embedded
Workbench™ debugger or with Code Composer Studio (CCS), see Advanced Debugging Using the
Enhanced Emulation Module (SLAA393)atwww.msp430.com. Most other debuggers supporting the
MSP430 devices have the same or a similar feature set. For details, see the user's guide of the applicable
debugger.
1185
SLAU208O–June 2008–Revised May 2015 Embedded Emulation Module (EEM)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
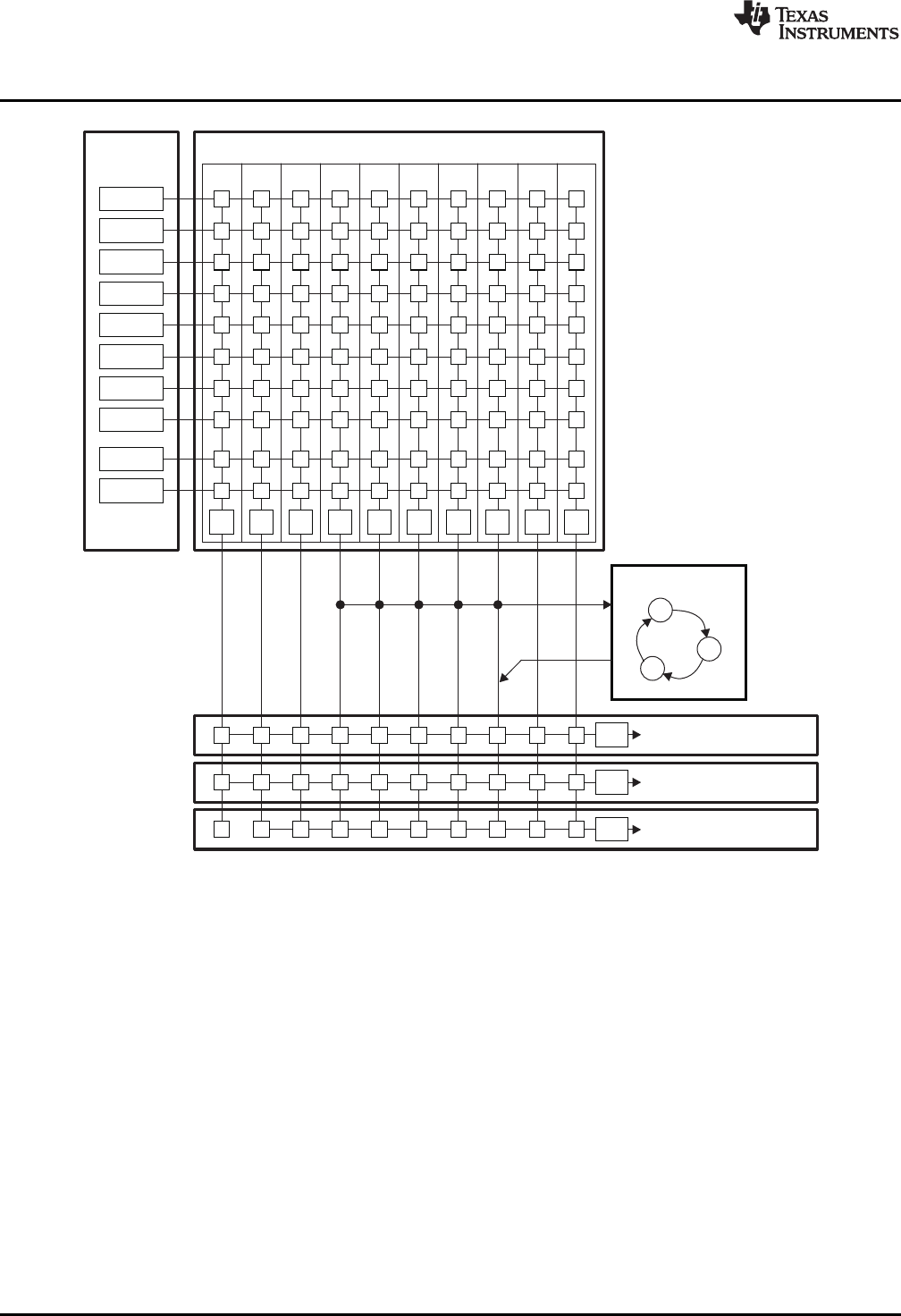
CPU Stop
Trigger
Blocks
MB0
MB1
MB2
MB3
MB4
MB5
MB6
MB7
CPU0
CPU1
&
0
Trigger Sequencer
"AND" Matrix- Combination Triggers
&
1
&
2
&
3
&
4
&
5
&
6
&
7
&
8
&
9
Start/Stop Cycle Counter
Start/Stop State Storage
OR
OR
OR
Embedded Emulation Module (EEM) Introduction
www.ti.com
Figure 44-1. Large Implementation of EEM
1186 Embedded Emulation Module (EEM) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
EEM Building Blocks
44.2 EEM Building Blocks
44.2.1 Triggers
The event control in the EEM of the MSP430 system consists of triggers, which are internal signals
indicating that a certain event has happened. These triggers may be used as simple breakpoints, but it is
also possible to combine two or more triggers to allow detection of complex events and cause various
reactions other than stopping the CPU.
In general, the triggers can be used to control the following functional blocks of the EEM:
• Breakpoints (CPU stop)
• State storage
• Sequencer
• Cycle counter
There are two different types of triggers – the memory trigger and the CPU register write trigger.
Each memory trigger block can be independently selected to compare either the MAB or the MDB with a
given value. Depending on the implemented EEM, the comparison can be =, ≠,≥, or ≤. The comparison
can also be limited to certain bits with the use of a mask. The mask is either bit-wise or byte-wise,
depending upon the device. In addition to selecting the bus and the comparison, the condition under which
the trigger is active can be selected. The conditions include read access, write access, DMA access, and
instruction fetch.
Each CPU register write trigger block can be independently selected to compare what is written into a
selected register with a given value. The observed register can be selected for each trigger independently.
The comparison can be =, ≠,≥, or ≤. The comparison can also be limited to certain bits with the use of a
bit mask.
Both types of triggers can be combined to form more complex triggers. For example, a complex trigger
can signal when a particular value is written into a user-specified address.
44.2.2 Trigger Sequencer
The trigger sequencer allows the definition of a certain sequence of trigger signals before an event is
accepted for a break or state storage event. Within the trigger sequencer, it is possible to use the following
features:
• Four states (State 0 to State 3)
• Two transitions per state to any other state
• Reset trigger that resets the sequencer to State 0.
The trigger sequencer always starts at State 0 and must execute to State 3 to generate an action. If
State 1 or State 2 are not required, they can be bypassed.
44.2.3 State Storage (Internal Trace Buffer)
The state storage function uses a built-in buffer to store MAB, MDB, and CPU control signal information
(that is, read, write, or instruction fetch) in a nonintrusive manner. The built-in buffer can hold up to eight
entries. The flexible configuration allows the user to record the information of interest very efficiently.
44.2.4 Cycle Counter
The cycle counter provides one or two 40-bit counters to measure the cycles used by the CPU to execute
certain tasks. On some devices, the cycle counter operation can be controlled using triggers. This allows,
for example, conditional profiling, such as profiling a specific section of code.
44.2.5 Clock Control
The EEM provides device-dependent flexible clock control. This is useful in applications where a running
clock is needed for peripherals after the CPU is stopped (for example, to allow a UART module to
complete its transfer of a character or to allow a timer to continue generating a PWM signal).
1187
SLAU208O–June 2008–Revised May 2015 Embedded Emulation Module (EEM)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
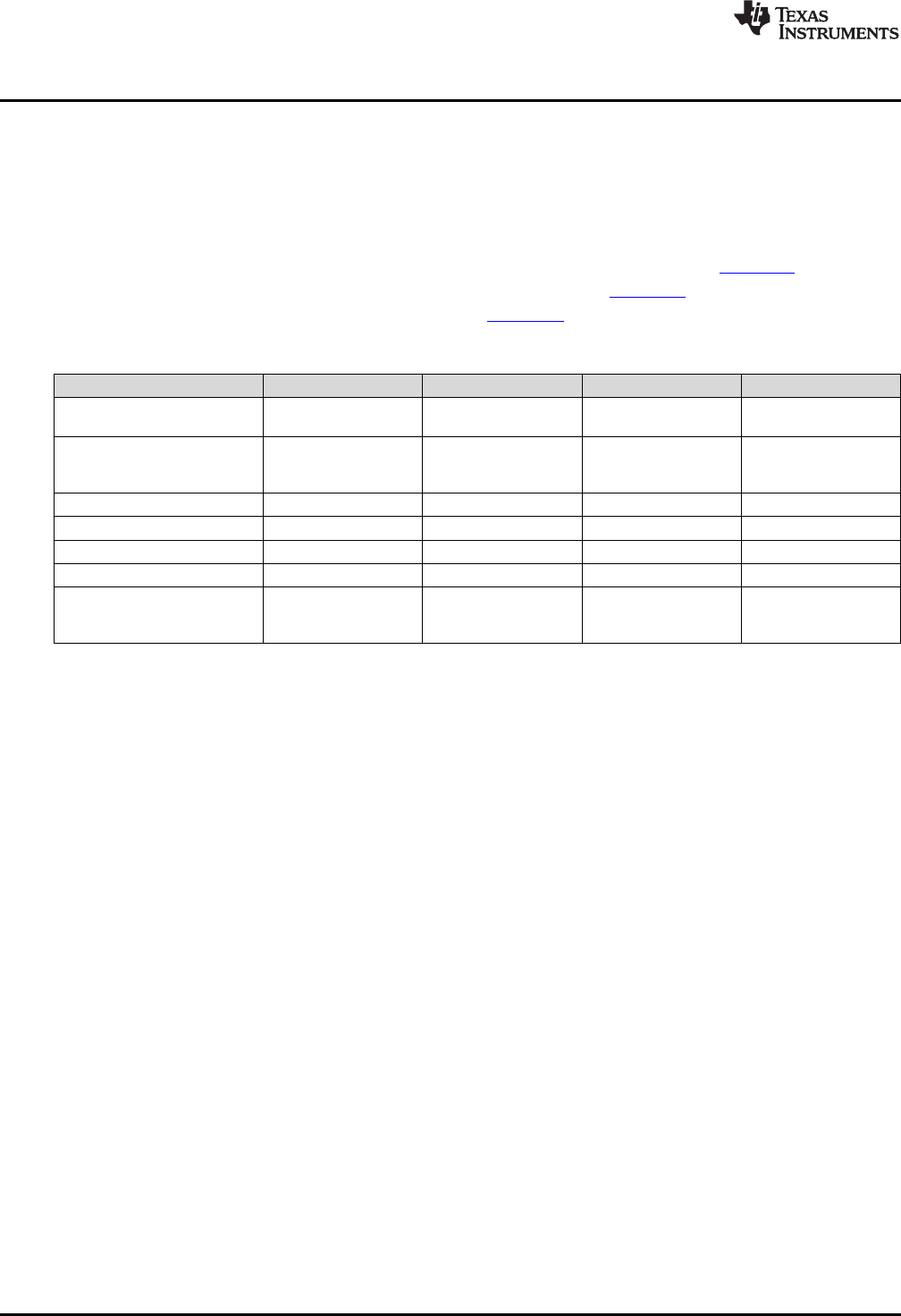
EEM Configurations
www.ti.com
The clock control is flexible and supports both modules that need a running clock and modules that must
be stopped when the CPU is stopped due to a breakpoint.
44.3 EEM Configurations
Table 44-1 gives an overview of the EEM configurations. The implemented configuration is device-
dependent, and details can be found in the device-specific data sheet and these documents:
Advanced Debugging Using the Enhanced Emulation Module (EEM) With CCS (SLAA393)
IAR Embedded Workbench Version 3+ for MSP430 User's Guide (SLAU138)
Code Composer Studio for MSP430 User’s Guide (SLAU157)
Table 44-1. EEM Configurations
Feature XS S M L
2
Memory bus triggers 3 5 8
(=, ≠only)
1) Low byte 1) Low byte 1) Low byte
Memory bus trigger mask for 2) High byte 2) High byte 2) High byte All 16 or 20 bits
3) Four upper addr bits 3) Four upper addr bits 3) Four upper addr bits
CPU register write triggers 0 1 1 2
Combination triggers 2 4 6 10
Sequencer No No Yes Yes
State storage No No No Yes
2
Cycle counter 1 1 1 (including
triggered start or stop)
In general, the following features can be found on any device:
• At least two MAB or MDB triggers supporting:
– Distinction between CPU, DMA, read, and write accesses
– =, ≠,≥, or ≤comparison (in XS, only =, ≠)
• At least two trigger combination registers
• Hardware breakpoints using the CPU stop reaction
• At least one 40-bit cycle counter
• Enhanced clock control with individual control of module clocks
1188 Embedded Emulation Module (EEM) SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated

www.ti.com
Revision History
Revision History
Changes from May 29, 2014 to May 25, 2015 .................................................................................................................. Page
• Changed "Enable and Disable Interrupt" note to clarify operation ................................................................ 60
• Added CPCAP pin to Table 1-3,Connection of Unused Pins ..................................................................... 69
• Added "The minimum reset pulse duration is specified in the device-specific data sheet" in Section 1.7................... 69
• Changed Section 1.8 to clarify operation ............................................................................................. 70
• Added CTSD16 to Section 1.13.5.2,ADC and CTSD16 Offset and Gain Calibration.......................................... 81
• Added Section 1.13.6,Temperature Sensor Calibration for Devices With CTSD16............................................ 82
• Added "SVSMHRRL must always be equal or larger than SVSHRVL" in paragraph that starts "The available voltage
threshold..." ............................................................................................................................. 103
• Updated the steps for how to change the VCORE level ............................................................................. 108
• Added "Note: SVSMLRRL must always be equal or larger than SVSLRVL" to SVSLRVL bit description ................. 118
• Added "Note: SVSMLRRL must always be equal or larger than SVSLRVL" to SVSMLRRL bit description............... 118
• Changed the function of BAKADC = 0 to match device implementation ....................................................... 127
• Changed note "Unused auxiliary supplies" ......................................................................................... 133
• Updated Section 5.2.12,UCS Module Fail-Safe Operation, with information for CTSD16................................... 168
• Added Section 6.4.2.4.MSP430X Address Instructions With Indexed Mode.................................................. 202
• Changed "Disable interrupt" note to clarify operation of pipelined architecture................................................ 251
• Changed "Enable interrupt" note to clarify operation of pipelined architecture ................................................ 252
• Added "No interrupt flags are modified by this command" to the description of RETI ........................................ 269
• Corrected the access type (read only) of the BUSY bit ........................................................................... 363
• Changed note "Writing to PxIES" from ambiguous "may be set" to more clear "will be set" ................................ 413
• Changed the sentence that starts "Setting TACLR also clears the clock divider counter..."................................. 465
• Changed the sentence that starts "Setting TACLR also clears..." ............................................................... 468
• Changed the description of the TACLR bit ......................................................................................... 478
• Changed the sentence that starts "Setting TBCLR also clears the clock divider counter logic..."........................... 487
• Changed the sentence that starts "Setting TBCLR also clears the TBxR value..."............................................ 490
• Changed the description of the TBCLR bit ......................................................................................... 501
• Added valid values to the description of the RTCAMIN (hex) AE bit............................................................ 589
• Added valid values to the description of the RTCAMIN (BCD) AE bit .......................................................... 589
• Added valid values to the description of the RTCAHOUR (hex) AE bit......................................................... 590
• Added valid values to the description of the RTCAHOUR (BCD) AE bit ....................................................... 590
• Added valid values to the description of the RTCADOW AE bit ................................................................. 591
• Added valid values to the description of the RTCADAY (hex) AE bit ........................................................... 591
• Added valid values to the description of the RTCADAY (BCD) AE bit.......................................................... 591
• Corrected the description of the RTCAMIN (hex) AE bit.......................................................................... 615
• Corrected the description of the RTCAMIN (BCD) AE bit ........................................................................ 615
• Corrected the description of the RTCAHOUR (hex) AE bit....................................................................... 616
• Corrected the description of the RTCAHOUR (BCD) AE bit ..................................................................... 616
• Corrected the description of the RTCADOW AE bit ............................................................................... 617
• Corrected the description of the RTCADAY (hex) AE bit ......................................................................... 618
• Corrected the description of the RTCADAY (BCD) AE bit........................................................................ 618
• Changed "flash memory" to "nonvolatile memory"................................................................................. 632
• Added "F673xA, and F672xA" to the sentence that starts "In F677xA, F673xA, and F672xA devices, the RTCLOCK
bit..."...................................................................................................................................... 635
• Added "F673xA, and F672xA" to the note that starts "This bit is implemented in only the F677xA, F673xA, and
F672xA..." ............................................................................................................................... 647
• Added "F673xA, and F672xA" to the note that starts "This bit is implemented in only the F677xA, F673xA, and
F672xA..." ............................................................................................................................... 647
• Added valid values to the description of the RTCAMIN (hex) AE bit............................................................ 656
• Added valid values to the description of the RTCAMIN (BCD) AE bit .......................................................... 656
• Added valid values to the description of the RTCAHOUR (hex) AE bit......................................................... 657
1189
SLAU208O–June 2008–Revised May 2015 Embedded Emulation Module (EEM)
Submit Documentation Feedback Copyright © 2008–2015, Texas Instruments Incorporated
Revision History
www.ti.com
• Added valid values to the description of the RTCAHOUR (BCD) AE bit ....................................................... 657
• Added valid values to the description of the RTCADOW AE bit ................................................................. 658
• Added valid values to the description of the RTCADAY (hex) AE bit ........................................................... 659
• Added valid values to the description of the RTCADAY (BCD) AE bit.......................................................... 659
• Added CTSD16 information throughout Chapter 26,REF including but not limited to adding Figure 26-2,Table 26-1,
Table 26-3,Section 26.2.3.1, and Section 26.2.3.5 ............................................................................... 692
• Changed Figure 26-1,REF Block Diagram: changed logic gate on REFMODEREQ from OR to AND.................... 694
• Corrected name of ADC12REF2_5V bit (changed from ADC12REF2_5)...................................................... 697
• Added LCD_C to Section 26.2.3.7................................................................................................... 701
• Added CTSD16 to REFMSTR bit description ...................................................................................... 703
• Added CTSD16 to REFOUT bit description ........................................................................................ 703
• Updated description in Section 29.2.3,Voltage Reference....................................................................... 769
• Added note "Only the MSP430F676x1(A) devices support the trigger generator" ............................................ 778
• Added Chapter 30,CTSD16.......................................................................................................... 797
• Changed Figure 31-1,DAC12_A Block Diagram for Two-Module Devices .................................................... 826
• Added VREFBG to Table 31-1............................................................................................................ 828
• In Section 31.2.3,DAC12_A Reference, Added information for VREFBG and CTSD16 including adding Table 31-2 ....... 828
• Added information for CTSD16 and VREFBG to DAC12SREFx bit description............................................... 835
• Changed title and text of Section 32.2.7 to show correct register name (CBCTL3)........................................... 849
• Added note that starts "Changing the value of the CBIES bit..."................................................................. 849
• Added Chapter 33,Operational Amplifier (OA) .................................................................................... 860
• Changed Figure 35-4 (removed mux information that does not apply) ......................................................... 911
• Clarified that R03EXT = 1 is required for using V5 as contrast control ......................................................... 912
• Added Section 36.3.16 ................................................................................................................ 957
• Added note "Shared UCxSTE and UCxCLK pins"................................................................................. 974
• Added note "Shared UCxSTE and UCxCLK pins"................................................................................. 975
• Changed the formula for fBitClock and its description................................................................................. 975
• Corrected fBitClock equation in Section 37.4.3 and Section 37.4.4 ................................................................. 981
• Corrected fBitClock equation in Section 37.5.3 and Section 37.5.4 ................................................................. 989
• Corrected software reset (UCSWRST=1) conditions. ............................................................................. 998
• Added note "Handling of TXIFG in a multi-master system". .................................................................... 1006
• Added Section 39.3.16............................................................................................................... 1044
• Corrected description of UCTXCPTIFG bit........................................................................................ 1054
• Added step (4) to note "Initializing or reconfiguring the eUSCI module" ...................................................... 1059
• Changed from "UCSSELx bits are don't care" to "UCSSELx bits must be set to 0" in Section 40.3.6.................... 1062
• Changed the formula for fBitClock and its description ............................................................................... 1062
• Updated UCSSELx bit description.................................................................................................. 1066
• Corrected fBitClock equation in Section 40.4.2 ....................................................................................... 1067
• Corrected fBitClock equation in Section 40.5.2 ....................................................................................... 1076
• Corrected software reset (UCSWRST = 1) conditions........................................................................... 1083
NOTE: Page numbers for previous revisions may differ from page numbers in the current version.
1190 Revision History SLAU208O–June 2008–Revised May 2015
Submit Documentation Feedback
Copyright © 2008–2015, Texas Instruments Incorporated
IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other
changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest
issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and
complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale
supplied at the time of order acknowledgment.
TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms
and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary
to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily
performed.
TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and
applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or
other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information
published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or
endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the
third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration
and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered
documentation. Information of third parties may be subject to additional restrictions.
Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service
voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice.
TI is not responsible or liable for any such statements.
Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements
concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support
that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which
anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause
harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use
of any TI components in safety-critical applications.
In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to
help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and
requirements. Nonetheless, such components are subject to these terms.
No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties
have executed a special agreement specifically governing such use.
Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in
military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components
which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and
regulatory requirements in connection with such use.
TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of
non-designated products, TI will not be responsible for any failure to meet ISO/TS16949.
Products Applications
Audio www.ti.com/audio Automotive and Transportation www.ti.com/automotive
Amplifiers amplifier.ti.com Communications and Telecom www.ti.com/communications
Data Converters dataconverter.ti.com Computers and Peripherals www.ti.com/computers
DLP® Products www.dlp.com Consumer Electronics www.ti.com/consumer-apps
DSP dsp.ti.com Energy and Lighting www.ti.com/energy
Clocks and Timers www.ti.com/clocks Industrial www.ti.com/industrial
Interface interface.ti.com Medical www.ti.com/medical
Logic logic.ti.com Security www.ti.com/security
Power Mgmt power.ti.com Space, Avionics and Defense www.ti.com/space-avionics-defense
Microcontrollers microcontroller.ti.com Video and Imaging www.ti.com/video
RFID www.ti-rfid.com
OMAP Applications Processors www.ti.com/omap TI E2E Community e2e.ti.com
Wireless Connectivity www.ti.com/wirelessconnectivity
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2015, Texas Instruments Incorporated
