Funk Electronic Piciorgros TMO100 TMO-100 SCADA and Telemetry Modem for TETRA Infrastructures User Manual TMO 100 E V2 62
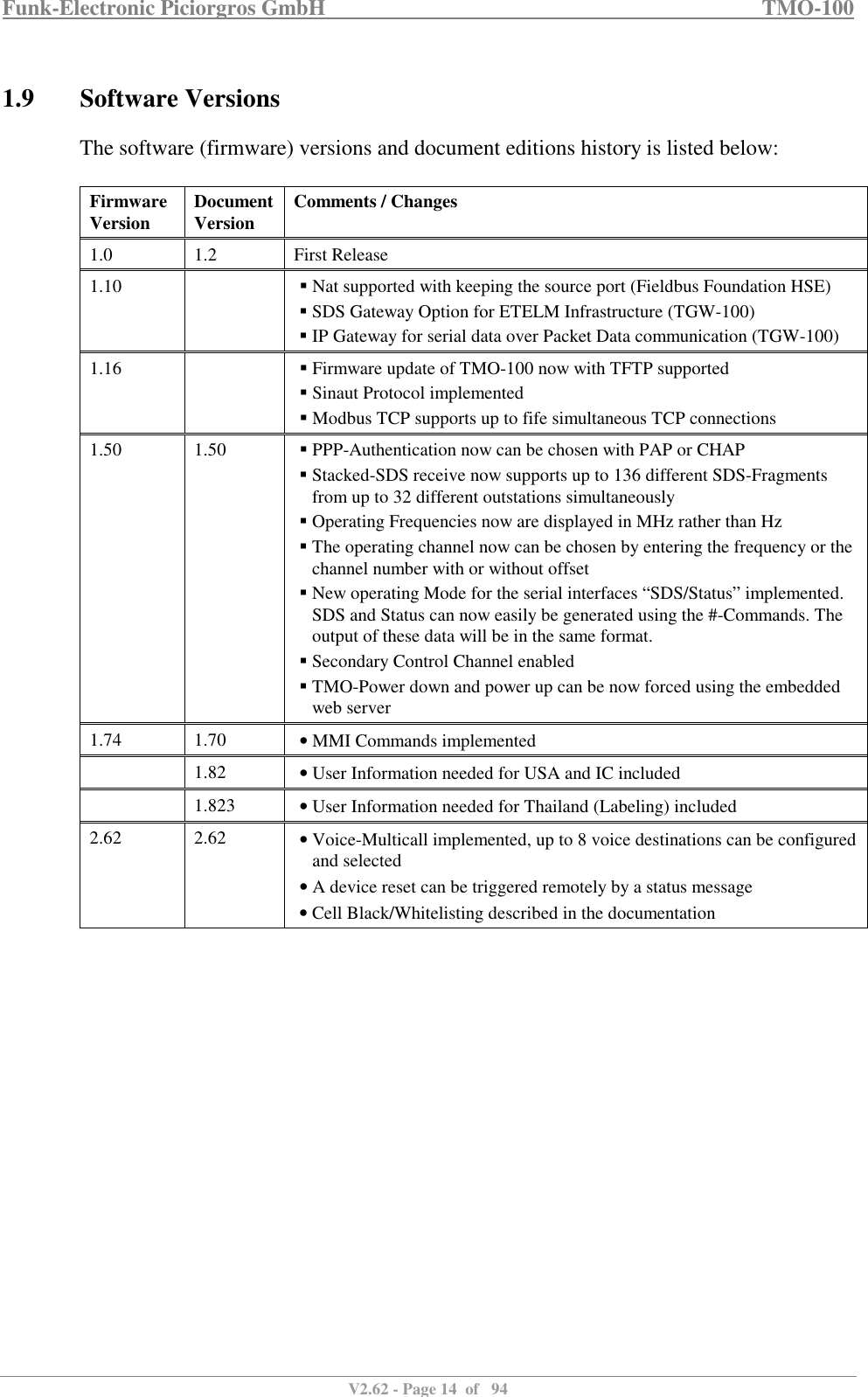
Funk-Electronic Piciorgros GmbH TMO-100 SCADA and Telemetry Modem for TETRA Infrastructures TMO 100 E V2 62
Contents
User manual
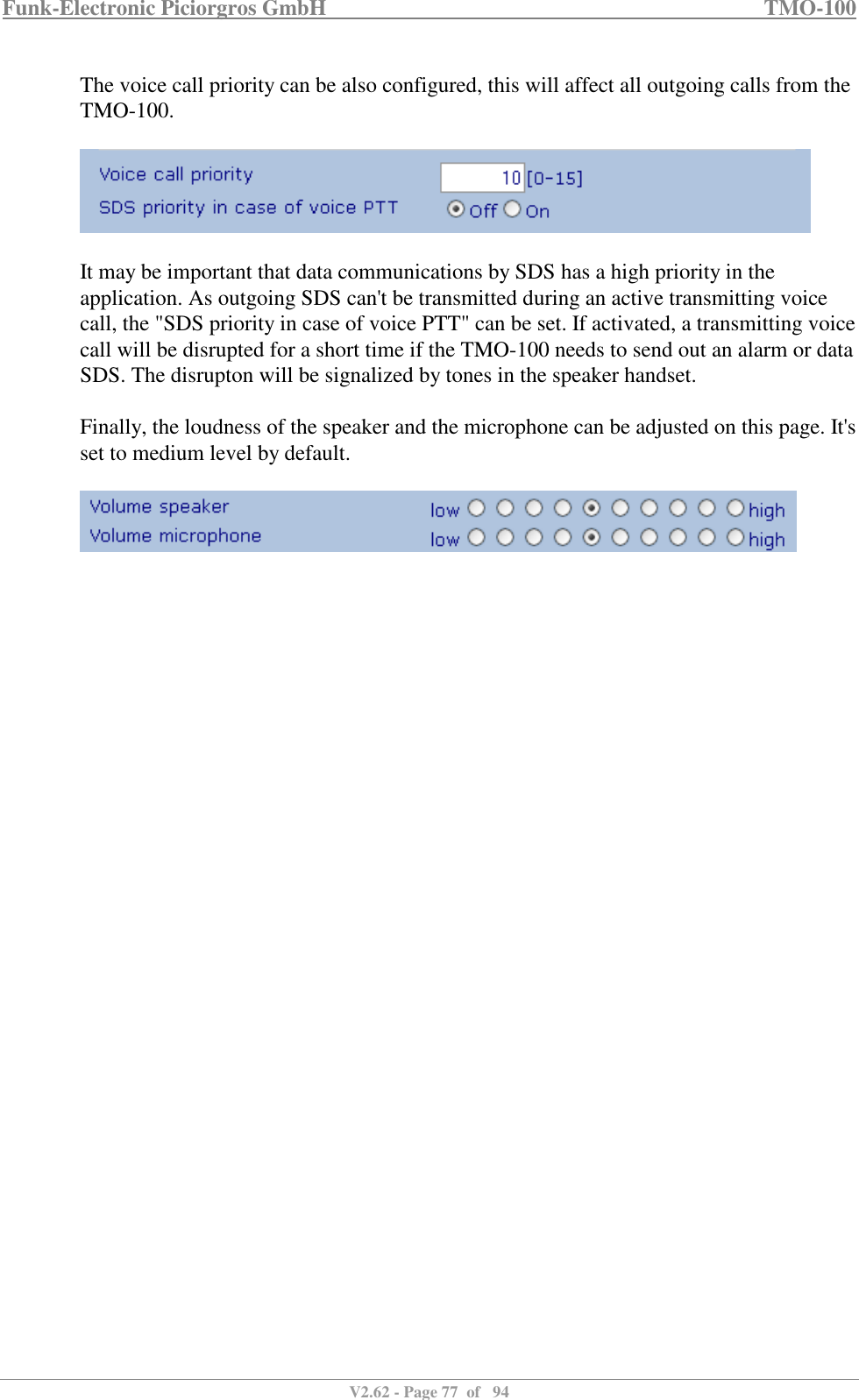
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 8 of 94 1.4.6 Interference with other equipment or services This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures: • Reorient or relocate the receiving antenna. • Increase the separation between the equipment and receiver. • Connect the equipment into an outlet on a circuit different from that to which the receiver is connected. • Consult the dealer or an experienced radio/ TV technician for help. 1.4.7 FCC RF exposure compliance To comply with the FCC RF exposure compliance the antenna used for the TMO-100 must be installed to provide a minimum separation distance to any person as shown below: Radio Tx Power [W] 3 3 3 3 3 Antenna Gain [dBi] 0 3 7 10 20 Output Power [ERP] 3 W 5 W 15 W 30 W 60 W Measurement Distance 0.4 m 0.5 m 0.8 m 1.1 m 3.3 m](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-8.png)
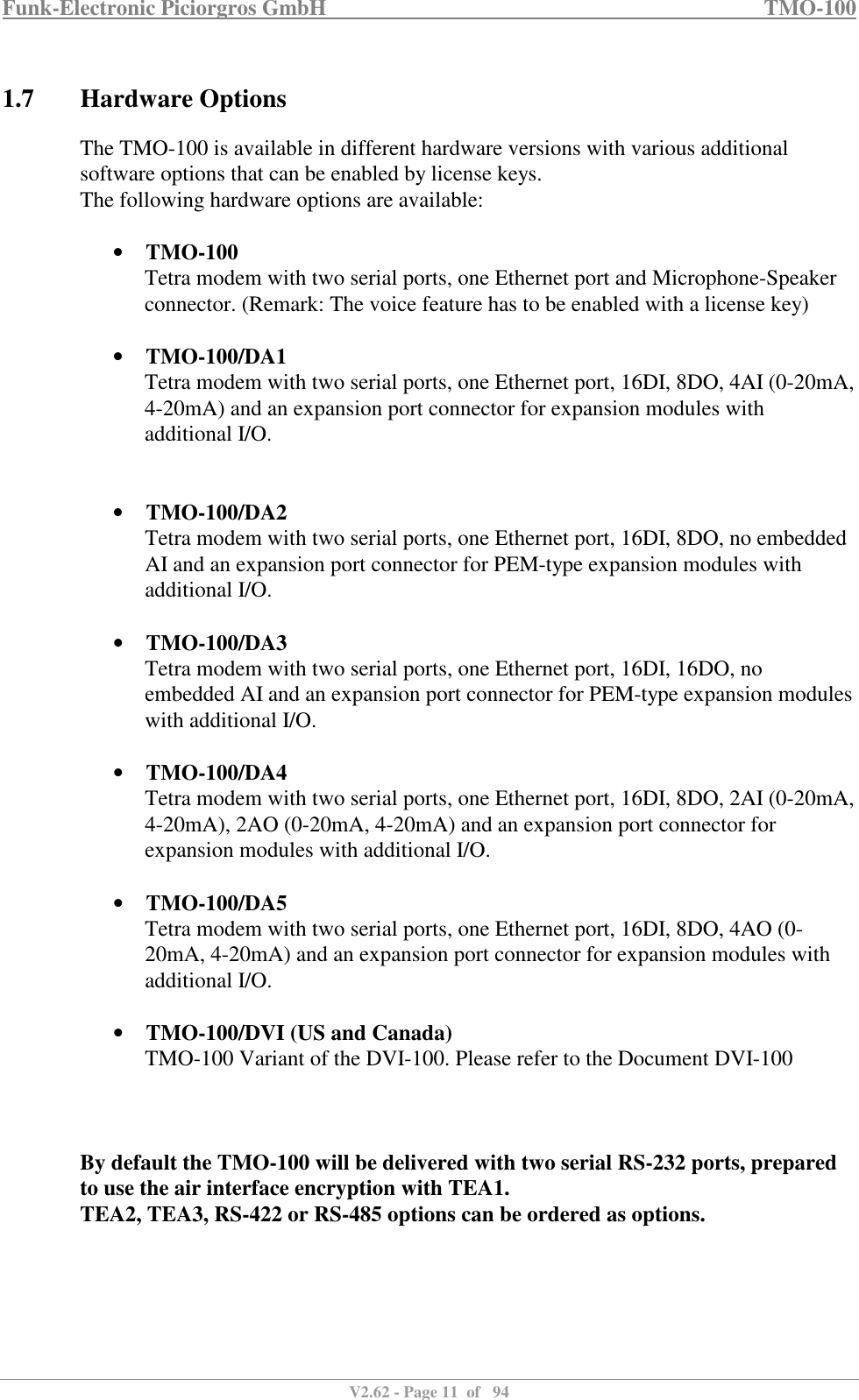
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 10 of 94 1.6 Functions and Features The TMO-100 is a radio data communication modem for TETRA networks. These modems allow transparent data communication between two or more nodes in a TETRA network. The TMO-100 conveniently combines the functions of a controller, router, modem, and radio transceiver in a single compact enclosure. The TMO-100 supports standard serial and IP-based data communication protocols. It has two serial data interfaces (RS-232 or RS-485/422) and an Ethernet (10/100 Mbits/sec) port. For TETRA radio networking, either of two modes can be selected: SDS based communication or packet data transmission. An optional voice communication feature is also available, by which field personnel can talk with a control room. The TMO-100 can also be optionally provided with built-in inputs and outputs that can be read and set remotely using the MODBUS-RTU protocol. It is possible to transmit information about an input change automatically to another station as soon as an alarm condition occurs ["unsolicited message"]. The TMO-100 has a rugged aluminum housing compatible with standard DIN rail mounting. The wide power input voltage range of 12-24 VDC [+/- 20%] makes it easy to integrate the unit into monitoring and control systems.](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-10.png)

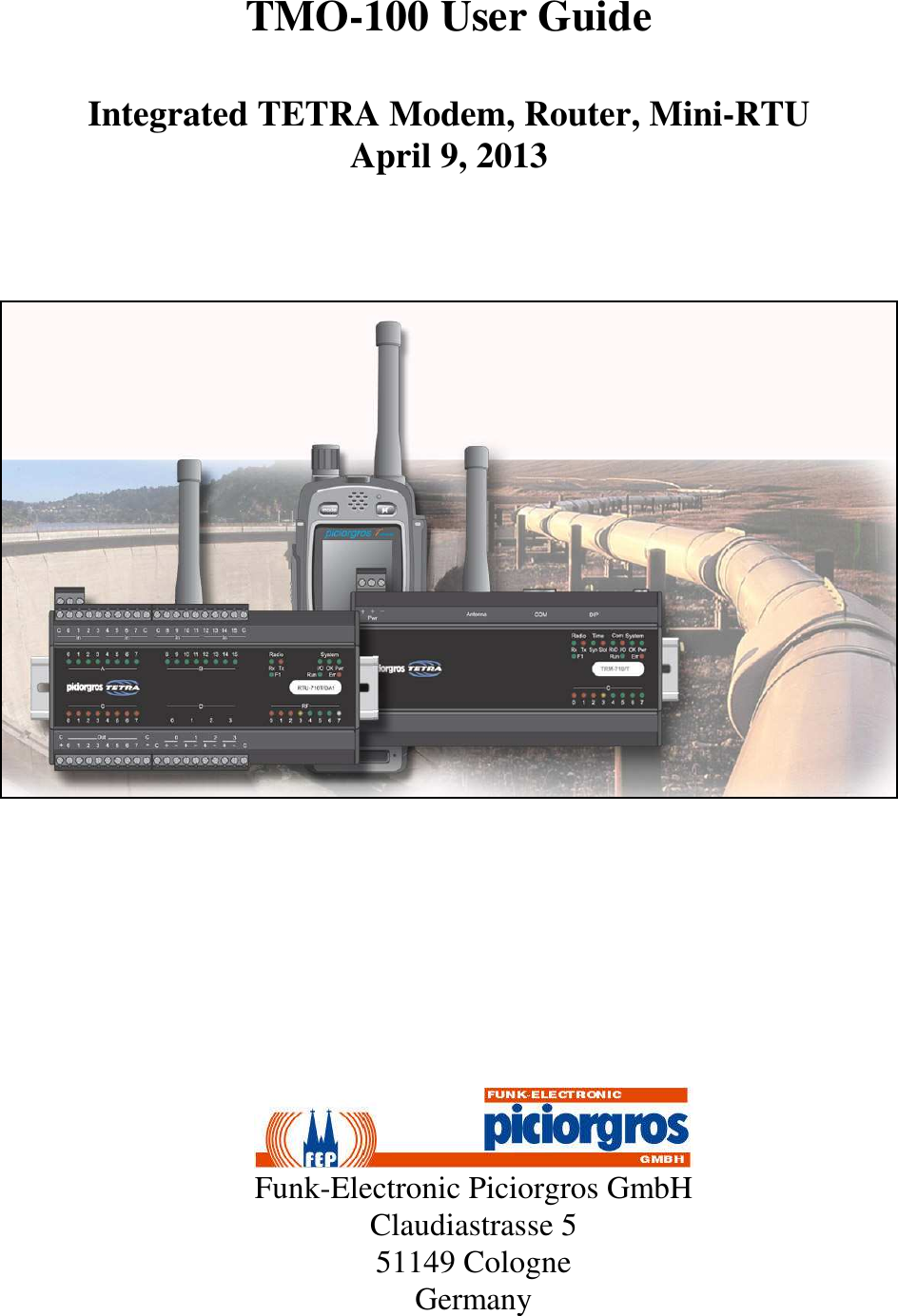
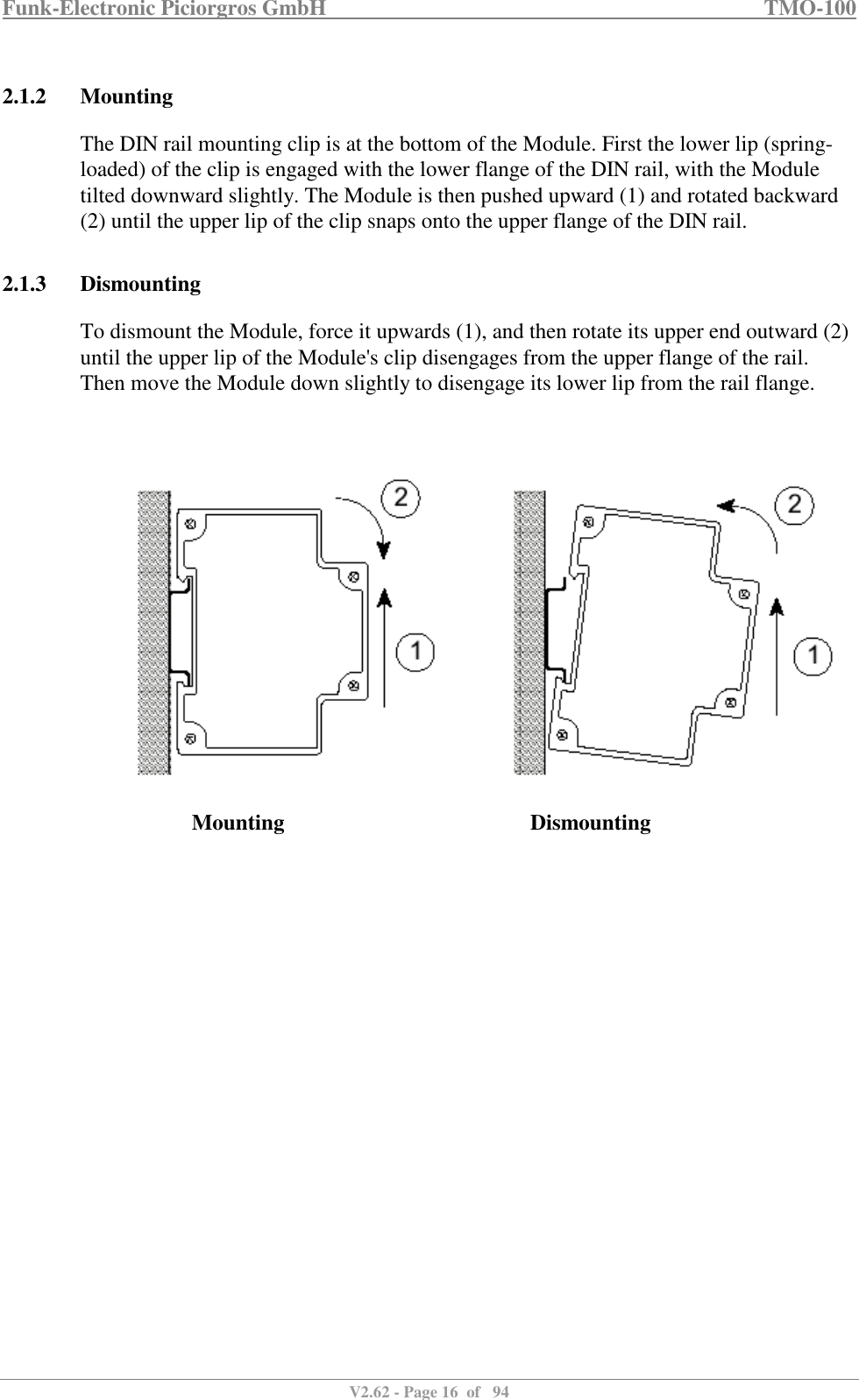
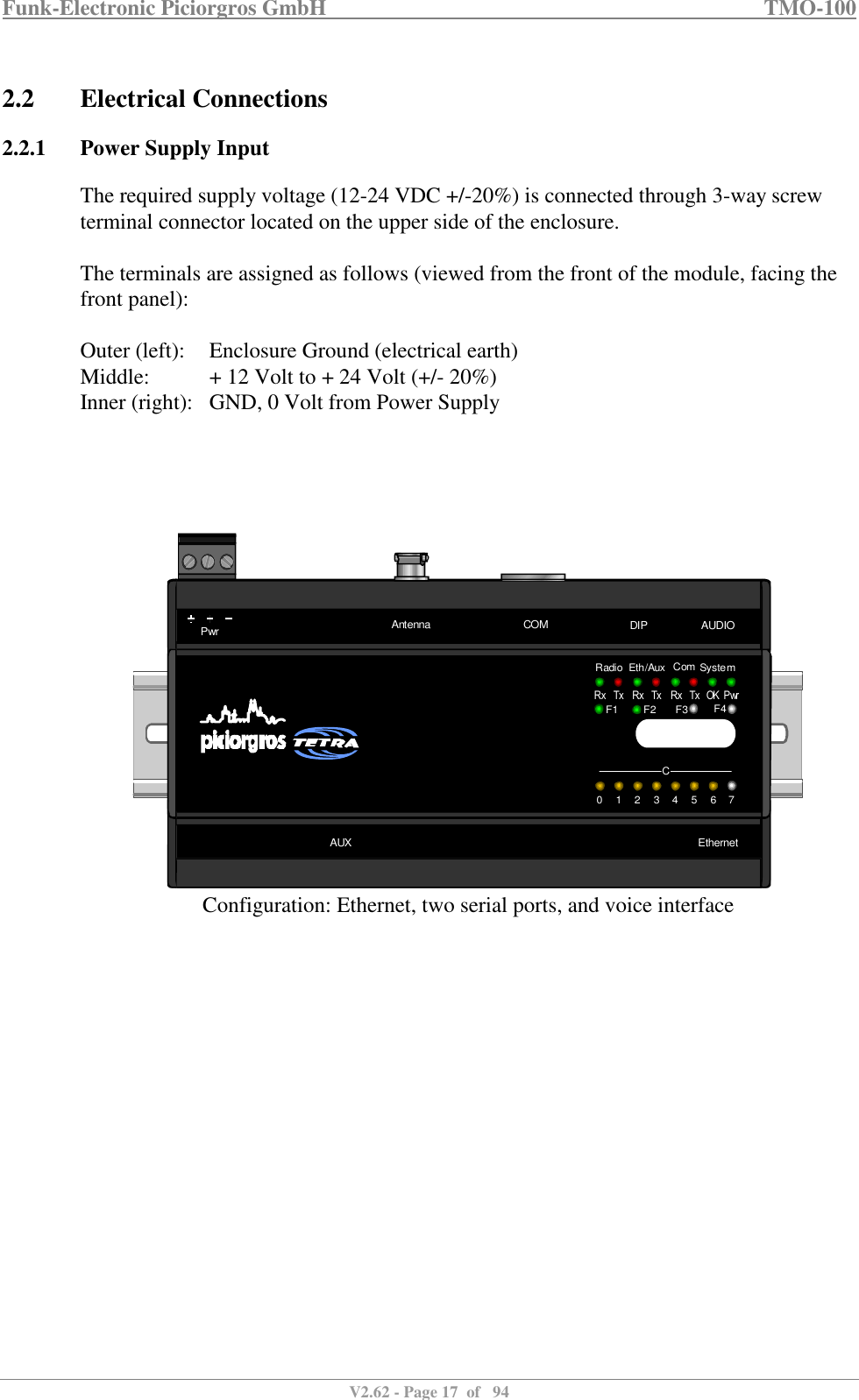
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 15 of 94 2 Connections and Hardware Installation 2.1 Mechanical Details The dimensions of the TMO-100 housing conform to DIN 43880, and therefore it can be mounted on a standard 35mm DIN rail [DIN EN 50022]. Two serial interfaces are provided for connecting the TMO-100 to a PC/PLC or other local terminal equipment. The main serial interface ("COM") uses a standard 9-pin D-sub connector, while the secondary serial interface ("AUX") uses a standard RJ-11 socket. On the lower side of the housing an RJ-45 connector for the Ethernet port allows the TMO-100 to be hard-wire networked with local terminal equipment or PLC’s. On the upper side of unit another RJ-45 connector is provided for connecting a voice handset, for speech communication over the TETRA network. On the upper side of the unit is located the plug-in terminal connector for the power supply (12-24 VDC +/-20%) and a BNC socket for the antenna. A 10-pole DIP-switch allows quick changes to the unit's settings: e.g., changeover to Programming Mode. LED lamps on the front panel provide information about the operating condition of the unit: e.g., received TETRA RF signal strength, error conditions, etc. 2.1.1 Dimensions The dimensions of the TMO-100 are as follows: 162mm (9T) wide x 80mm high x 62mm deep All dimensions exclude connectors and antenna. R FBDAC080 1 2 300 1911 21022 31133 41244 51355 61466 71577CCO u t CC++ + + +-- - - -0 1 2 30 1 2 3 4 5 6 7C C0 81 92 1 03 114 1 251 36 1 4In InIn In7 1 5C C8 0 m m6 0 m m1 6 2 m mR a d i oR x R x R xT x T x T x O K P w rE t h /A u x S y s t e mC o mF 1 F 2 F 4F 3](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-15.png)
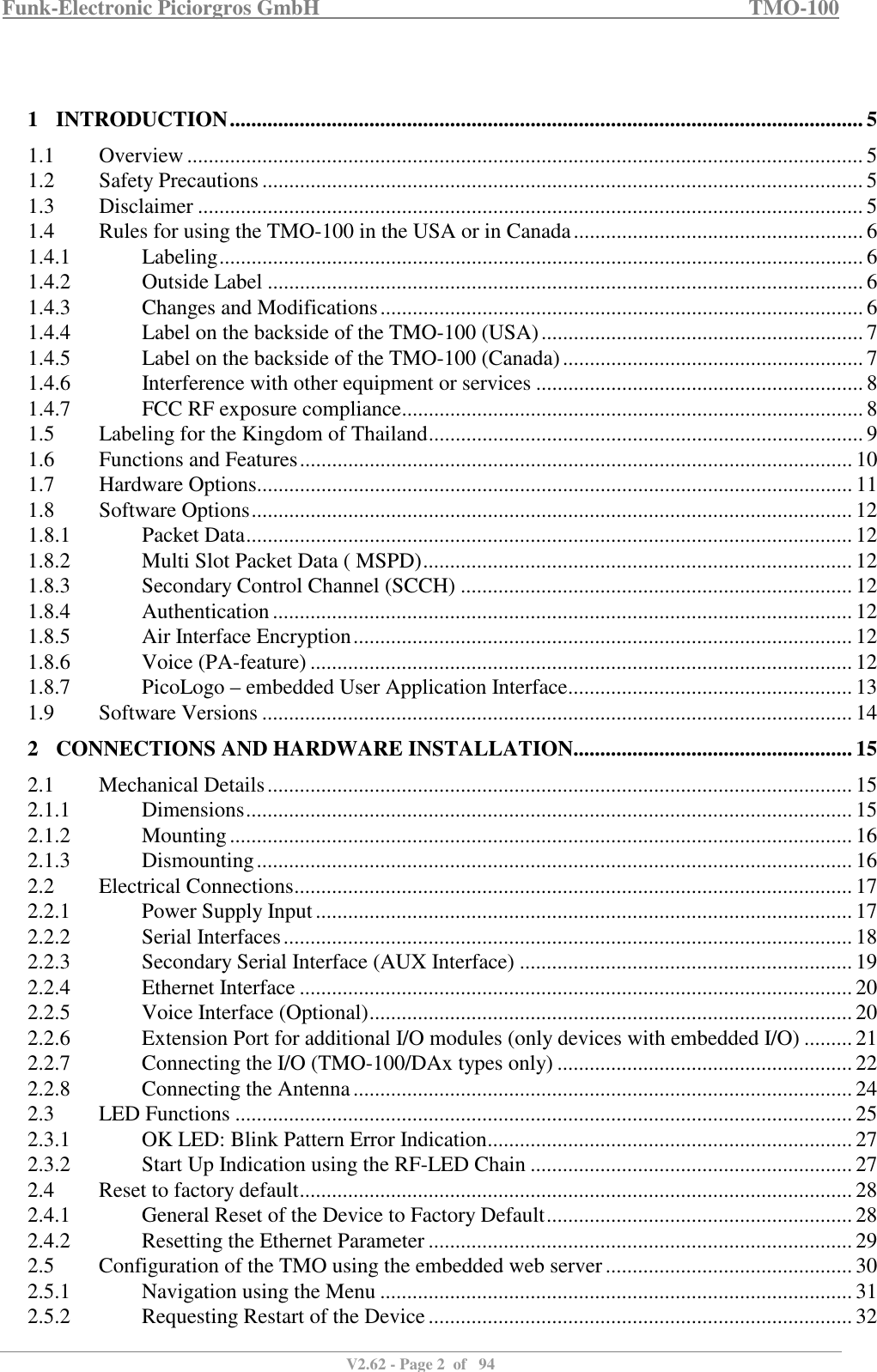
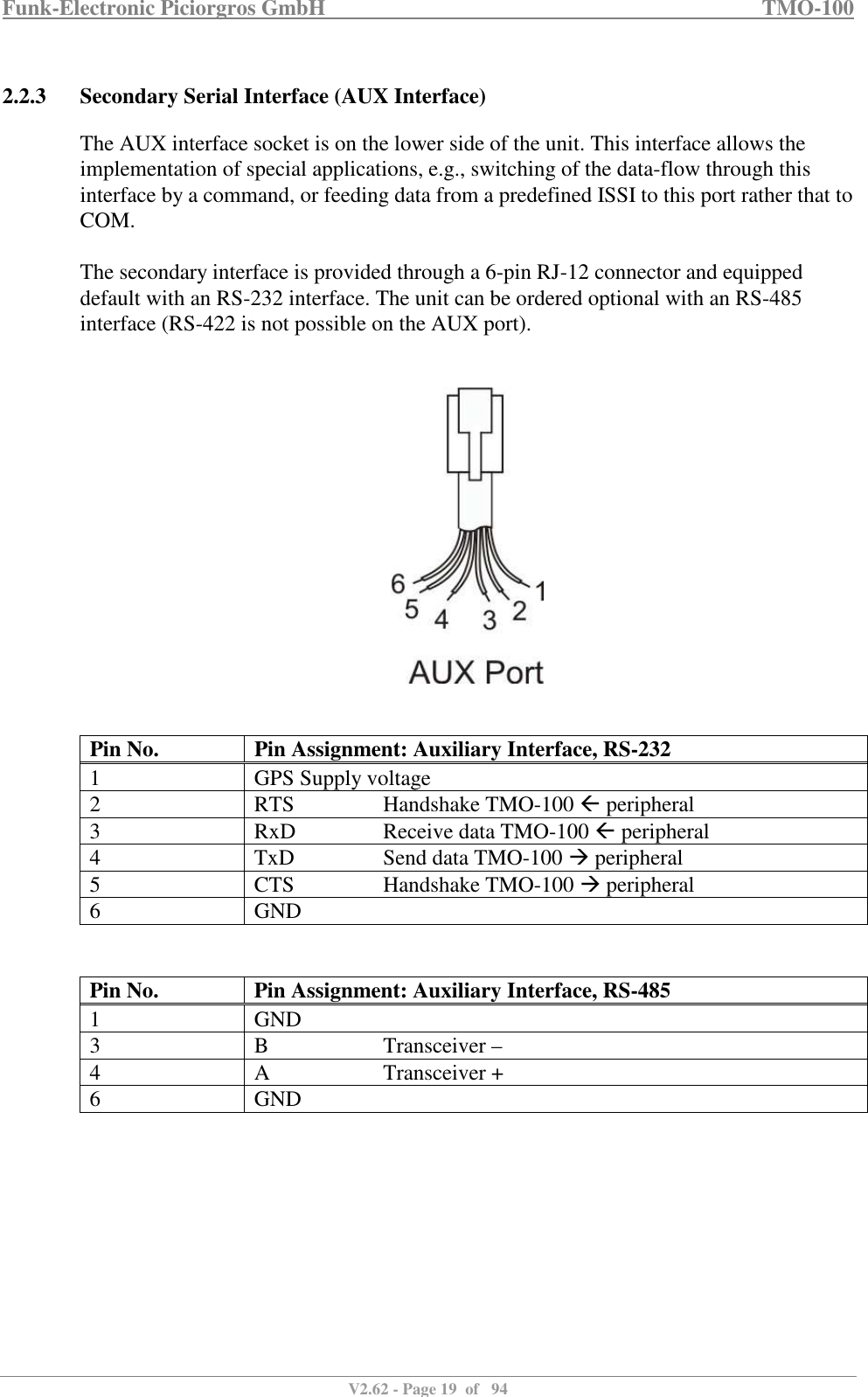
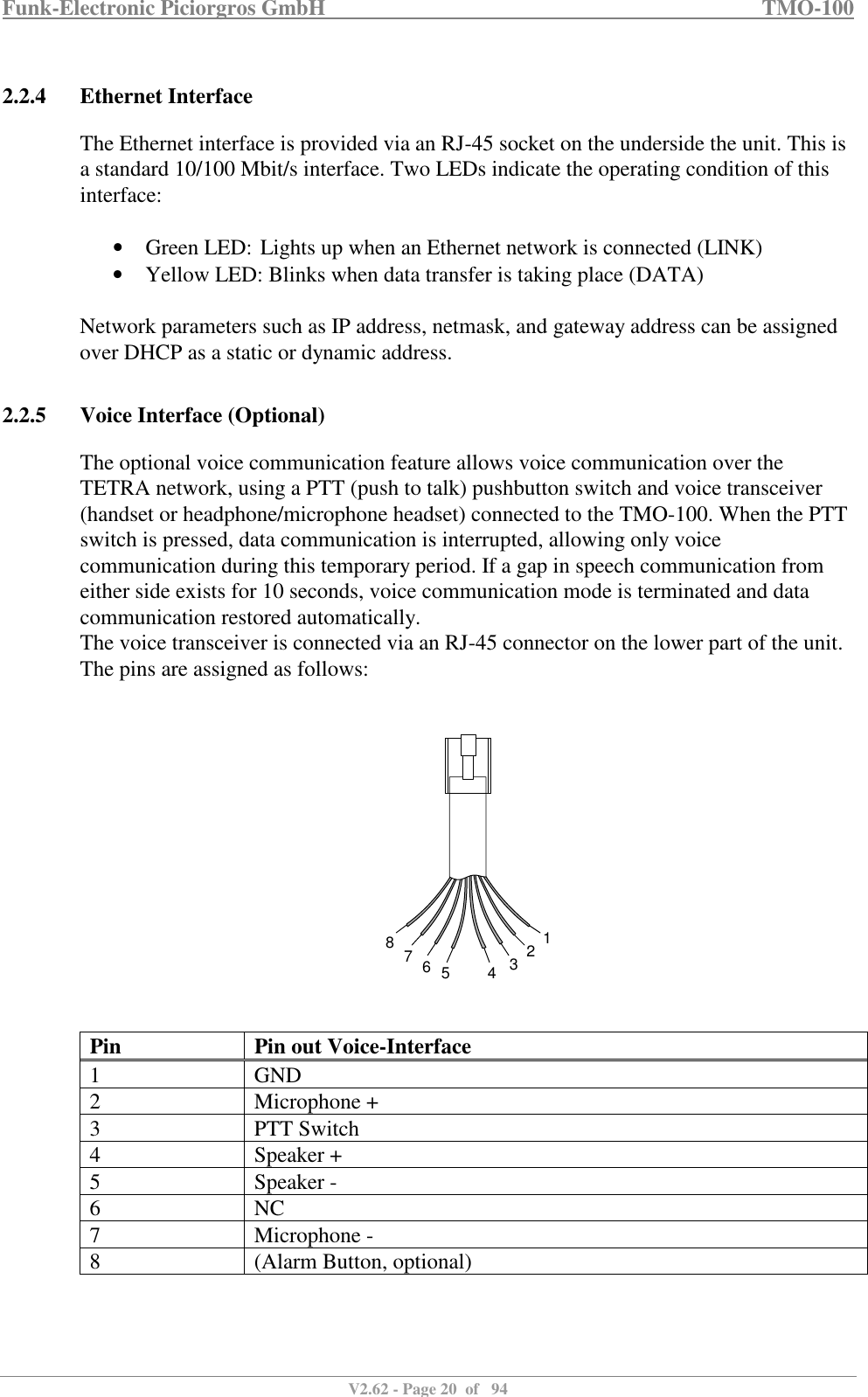
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 18 of 94 2.2.2 Serial Interfaces The TMO-100 has two serial data interfaces. The primary interface (COM) has a 9-pin D-sub connector on the upper side of the unit. The secondary interface [AUX] has an RJ-11 socket on the lower side of the unit. The COM interface can be either RS-232 or user-selectable RS-422/485. The AUX interface can be RS-232 or RS-485 (only). The following parameters are user adjustable: baud rate in the range 1200 - 57600 bps, data word length 7 or 8 bits, odd / even / no parity, and 1 or 2 stop bits. The factory setting is 9600 bps, 8 data bits, no parity, 1 stop bit. If a frame error is detected, or if the parity bit does not conform to the setting, the received data block is rejected. Both serial interfaces are supplied as RS-232, unless ordered otherwise. The primary interface is optionally available as a user-selectable RS-485 / RS-422 port, while the AUX interface is optionally available as an RS-485 port. Note that the RS-485 / RS-422 interface does not have the CTS/RTS lines. Pin No. Pin Assignment: Primary Interface, RS-232 2 TxD Send data TMO-100 peripheral 3 RxD Receive data TMO-110 peripheral 4 DTR Shorted to Pin 6 5 GND 6 DSR Shorted to Pin 4 7 RTS Handshake TMO-100 peripheral 8 CTS Handshake TMO-100 peripheral Pin No. Pin Assignment: Primary Interface, RS-422 2 A Receiver + (input) 3 Z Transmitter – (output) 5 GND 7 B Receiver – (input) 8 Y Transmitter + (output) Pin No. Pin Assignment: Primary Interface, RS-485 3 B Transceiver – 5 GND 8 A Transceiver + For the connection of the COM interface to a PC or PLC, use a standard 1:1 connector-terminated cable (9-pin D-sub male to 9-pin D-sub female).](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-18.png)


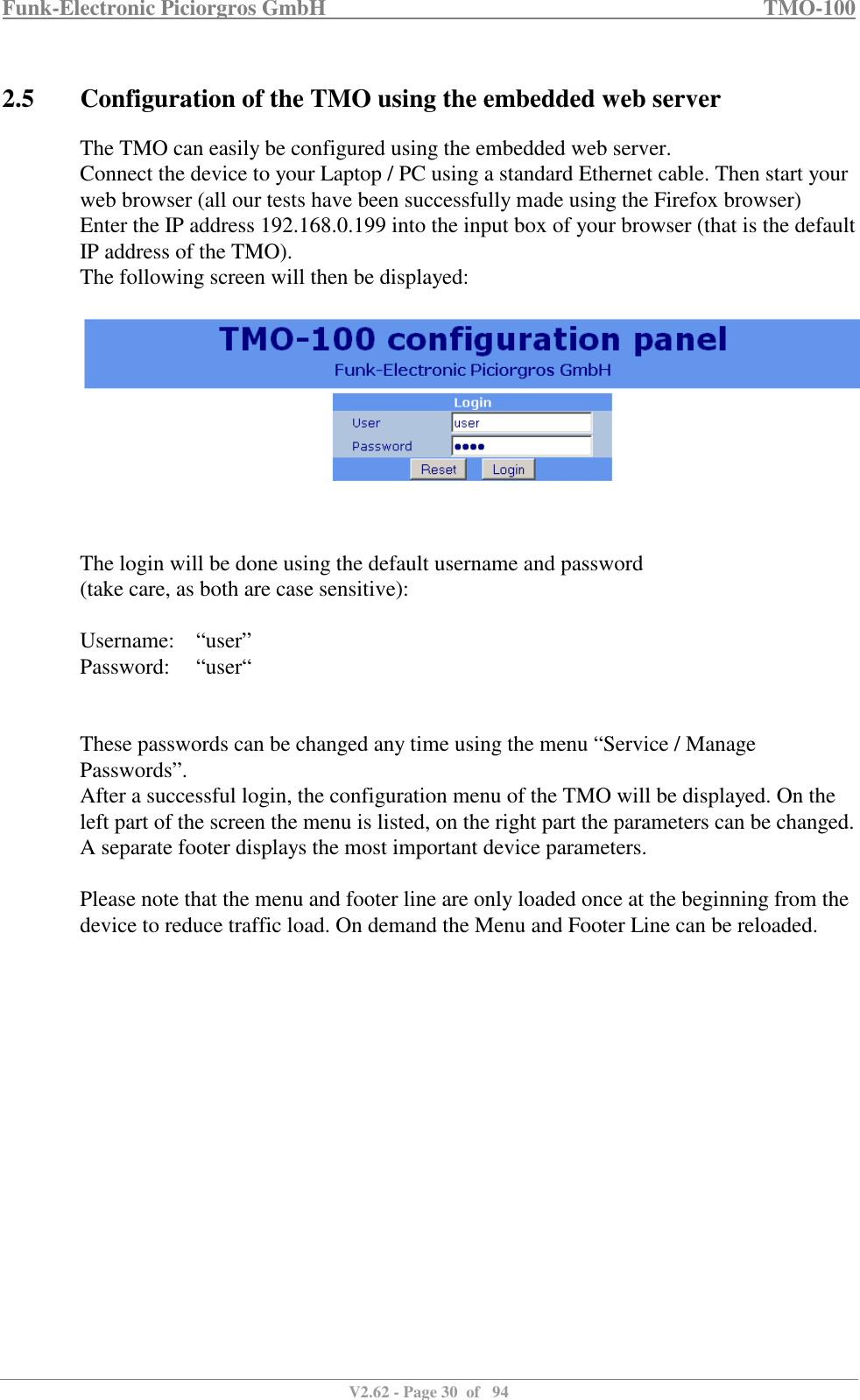
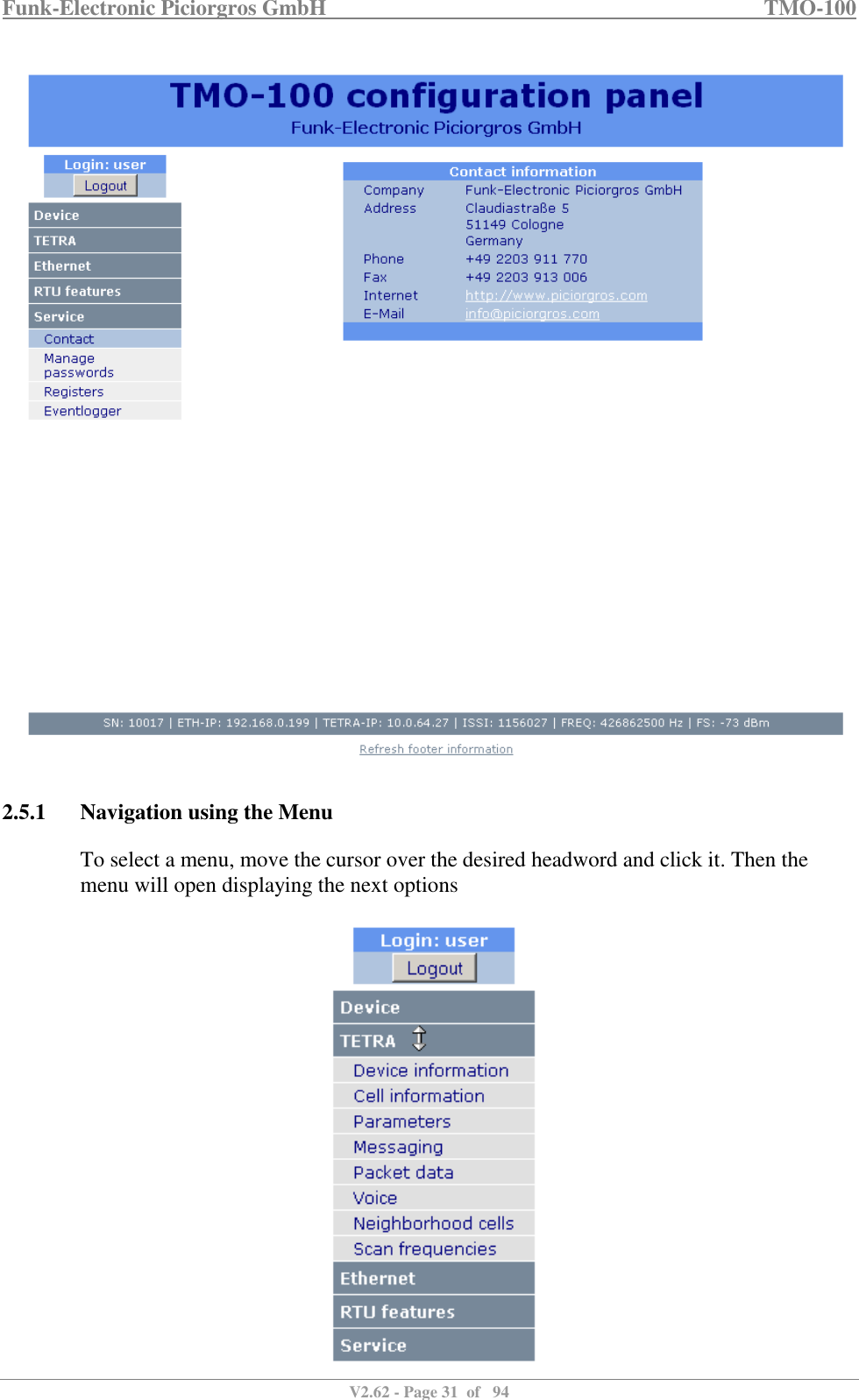
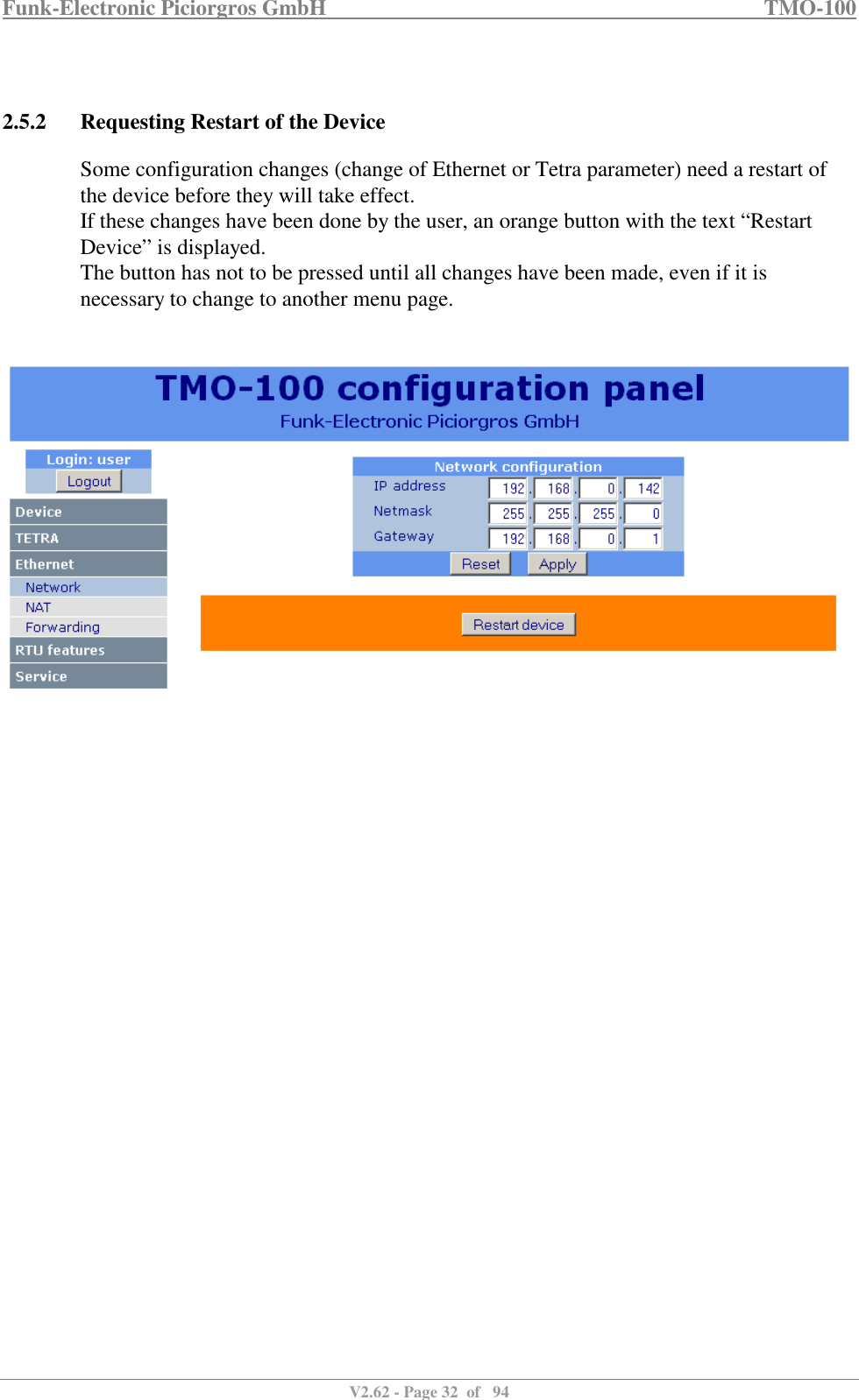
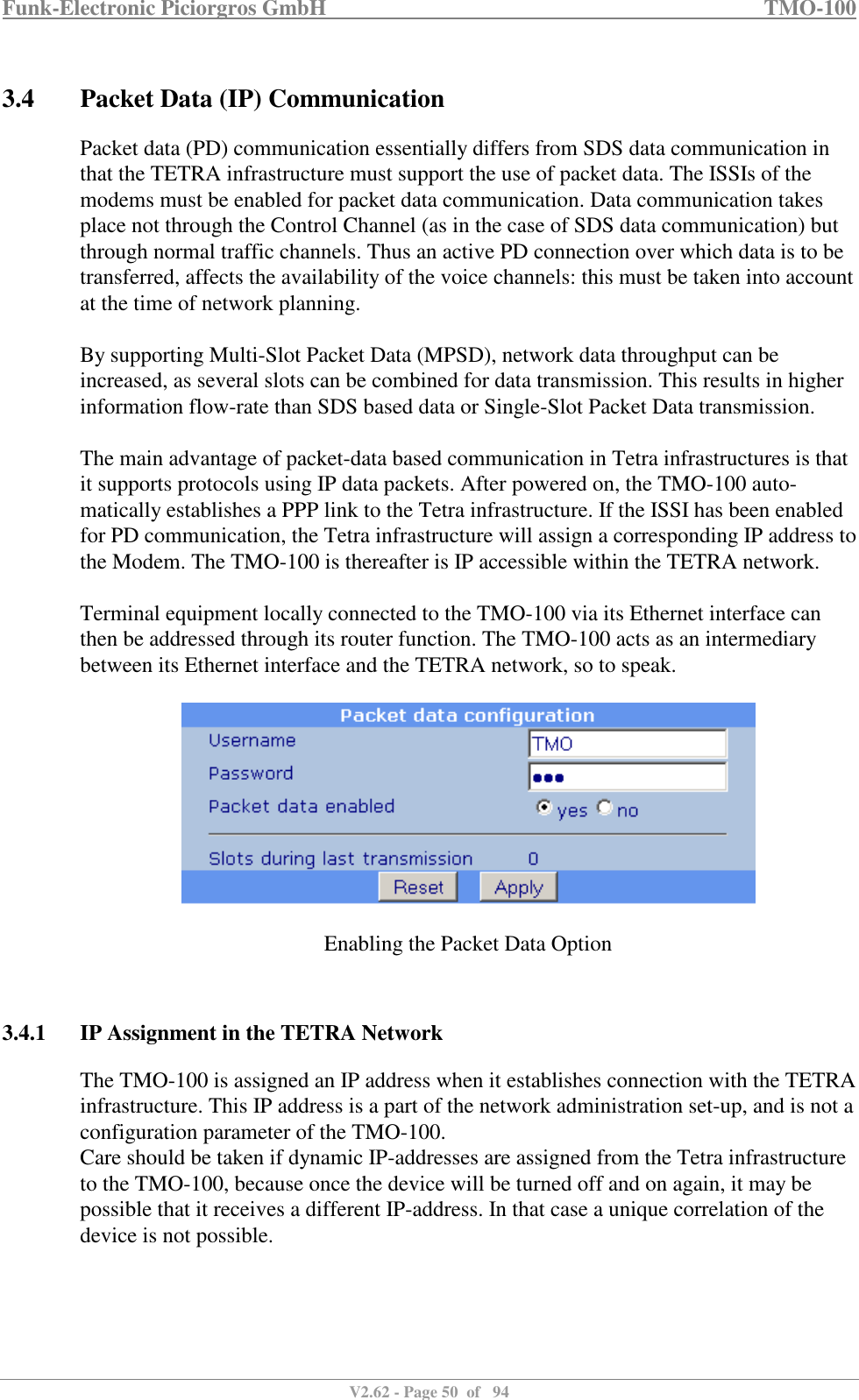

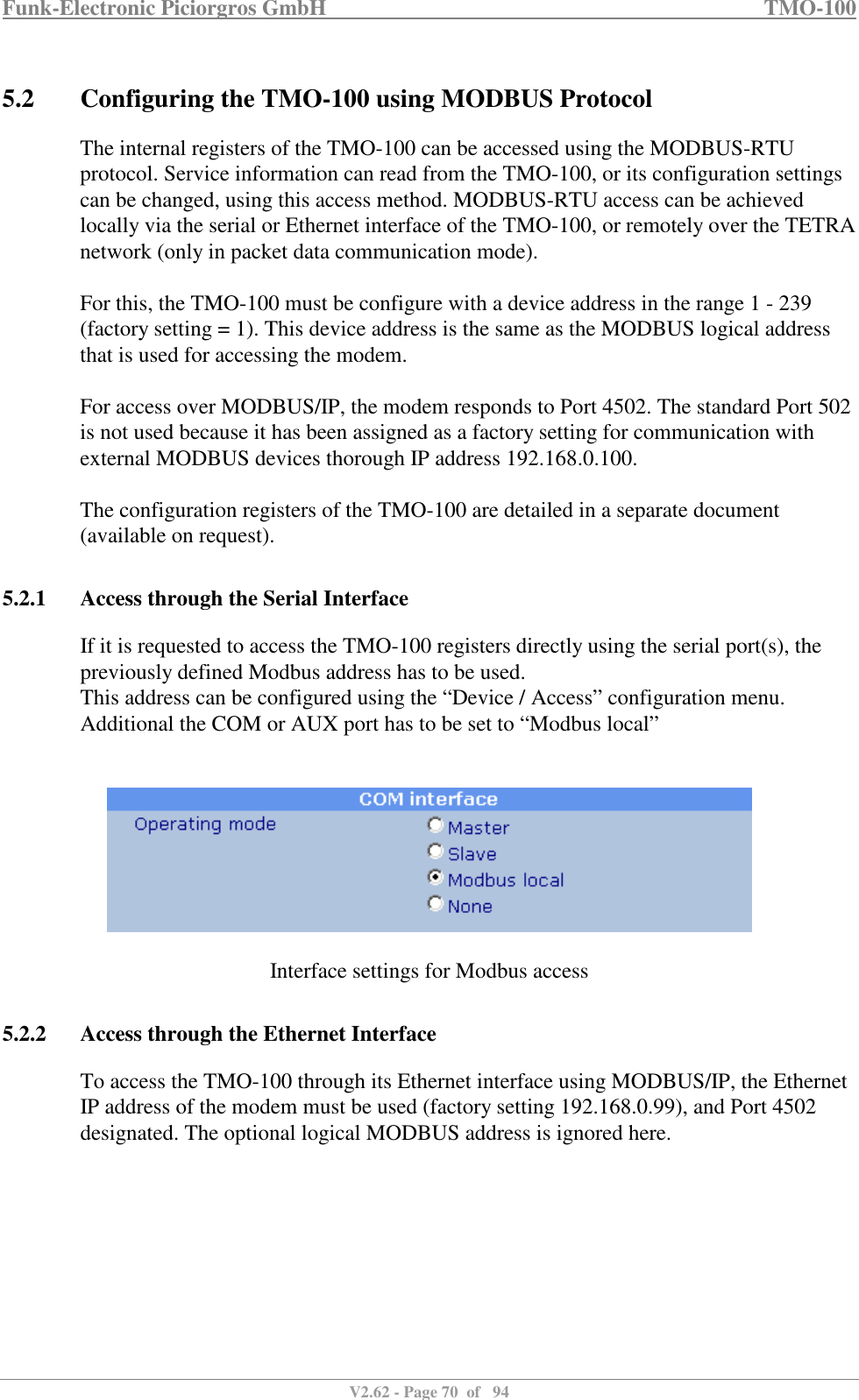
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 69 of 94 5 Configuring the TMO-100 5.1 Configuring the TMO-100 through the Integrated Web Server The adjustable parameters of the TMO-100 can be configured through the integrated Web server from a conventional browser. This can be done either over its Ethernet interface or over the TETRA network, in packet data mode. The Web server responds to queries through Port 80. Example: The TMO-100 is delivered with a factory-installed IP address 192.168.0.199 for the Ethernet interface. A PC connected to this interface has the (for example) the IP address 192.168.0.26. To configure the TMO-100, type http//192.168.0.199 in the address window of the browser and hit "Enter". If necessary, a fixed IP address in the range 192.168.0.xxx may need to be assigned to the connected PC. The TMO-100 can be connected using a 1:1 patch cable if connecting to the PC via a switch or hub. If connecting to a PC directly, use a crossed cable. If the TMO-100 is operated in “Packet-Data Mode” with an assigned IP address, it can be configured locally or remote over the Tetra Network. For example, if the TMO-100 has the IP address 10.0.66.17 on the TETRA network side, a remote PC can access this TMO-100 via another TMO-100 (here “the another” TMO-100 is just used to link the PC to the Tetra network). In that case on the browser input line of the PC http://10.0.66.17 followed by [RETURN] would access the Web server of the remote TMO-100 that has to be configured. Note that a registered port forwarding linkage has higher priority than the internal functions of the TMO-100. Therefore, if Port 80 is assigned in the Port Forwarding Table to an IP address of the local Ethernet, then the Web server of the TMO-100 is no longer accessible remotely over the TETRA network.](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-69.png)

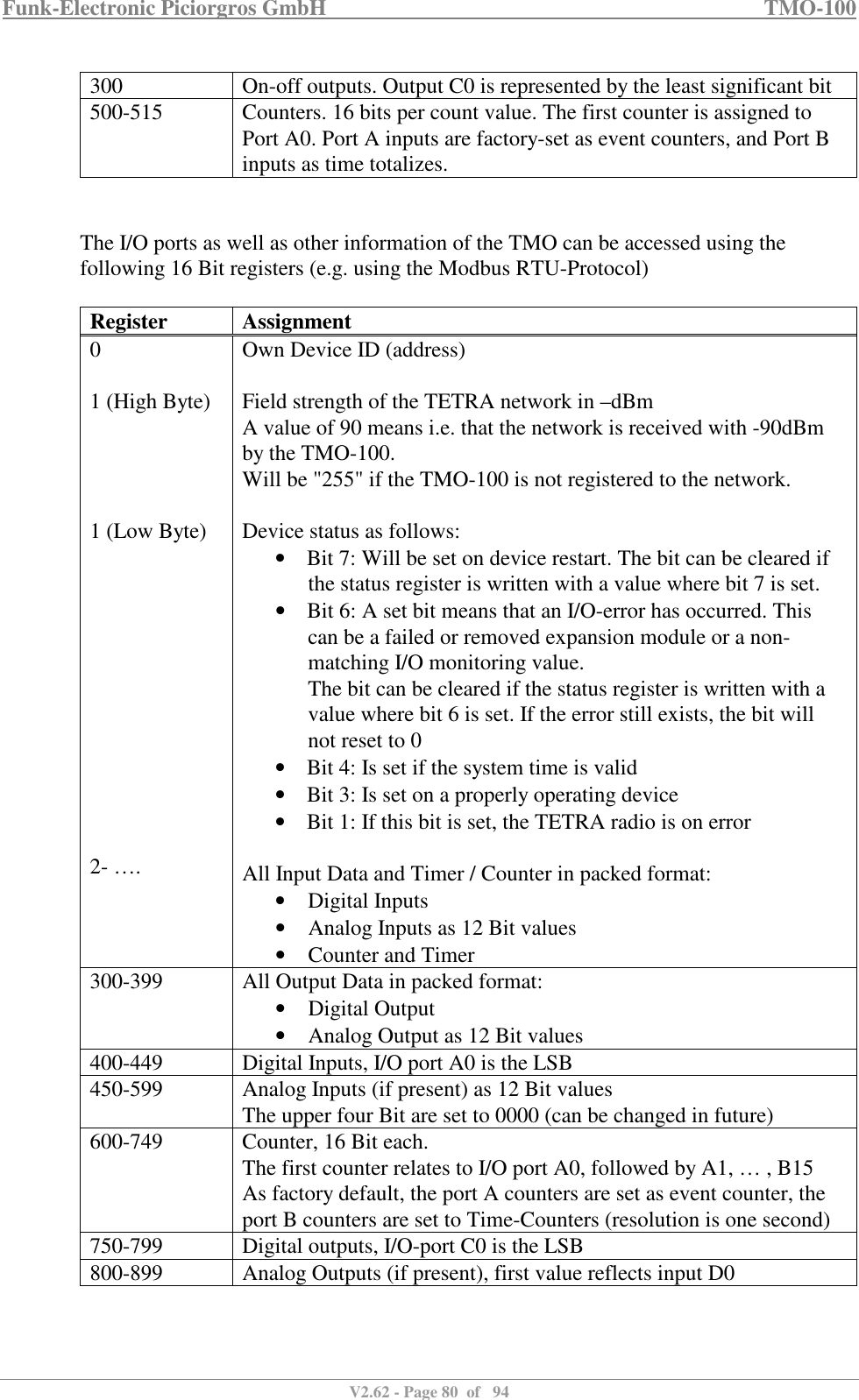
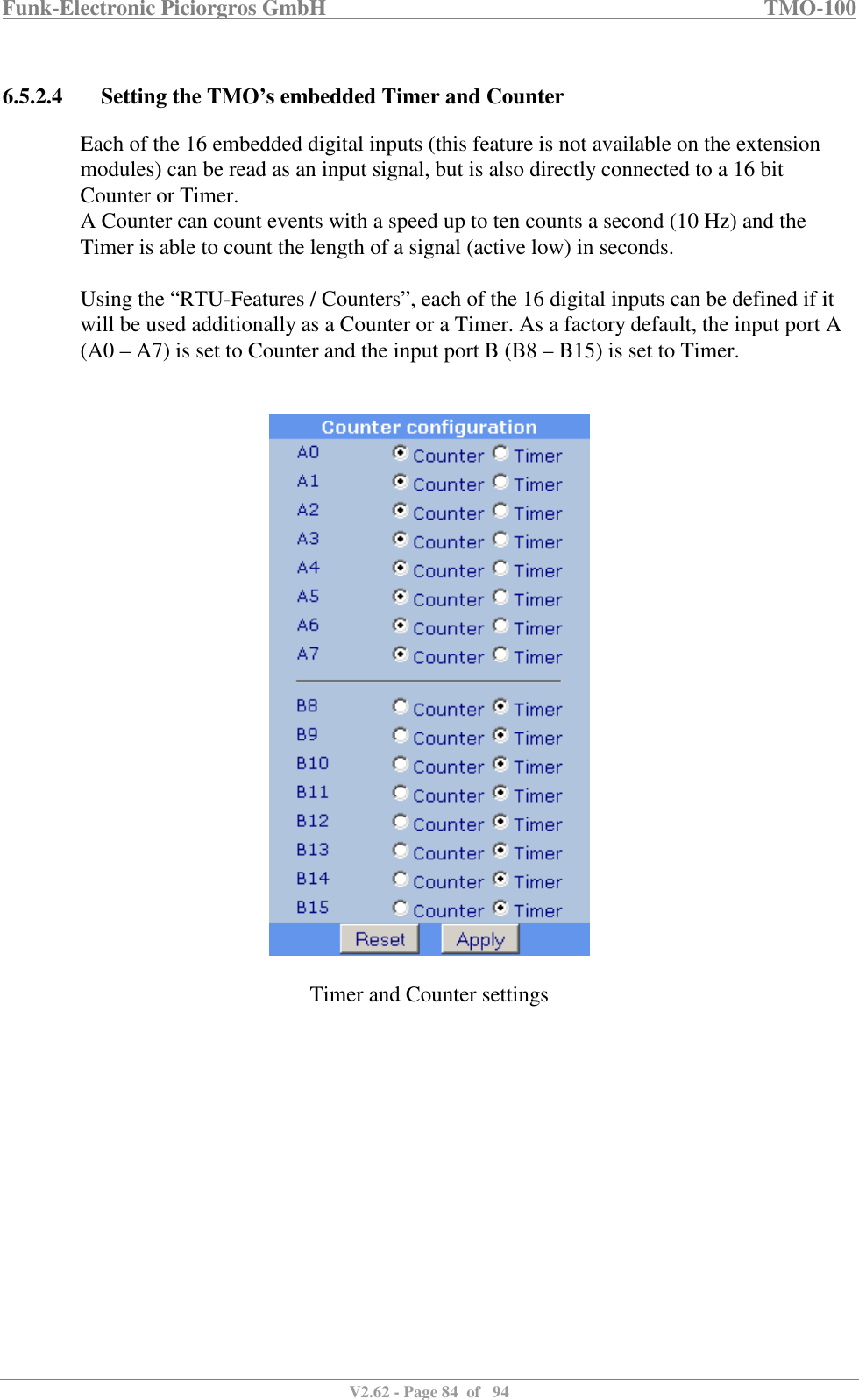
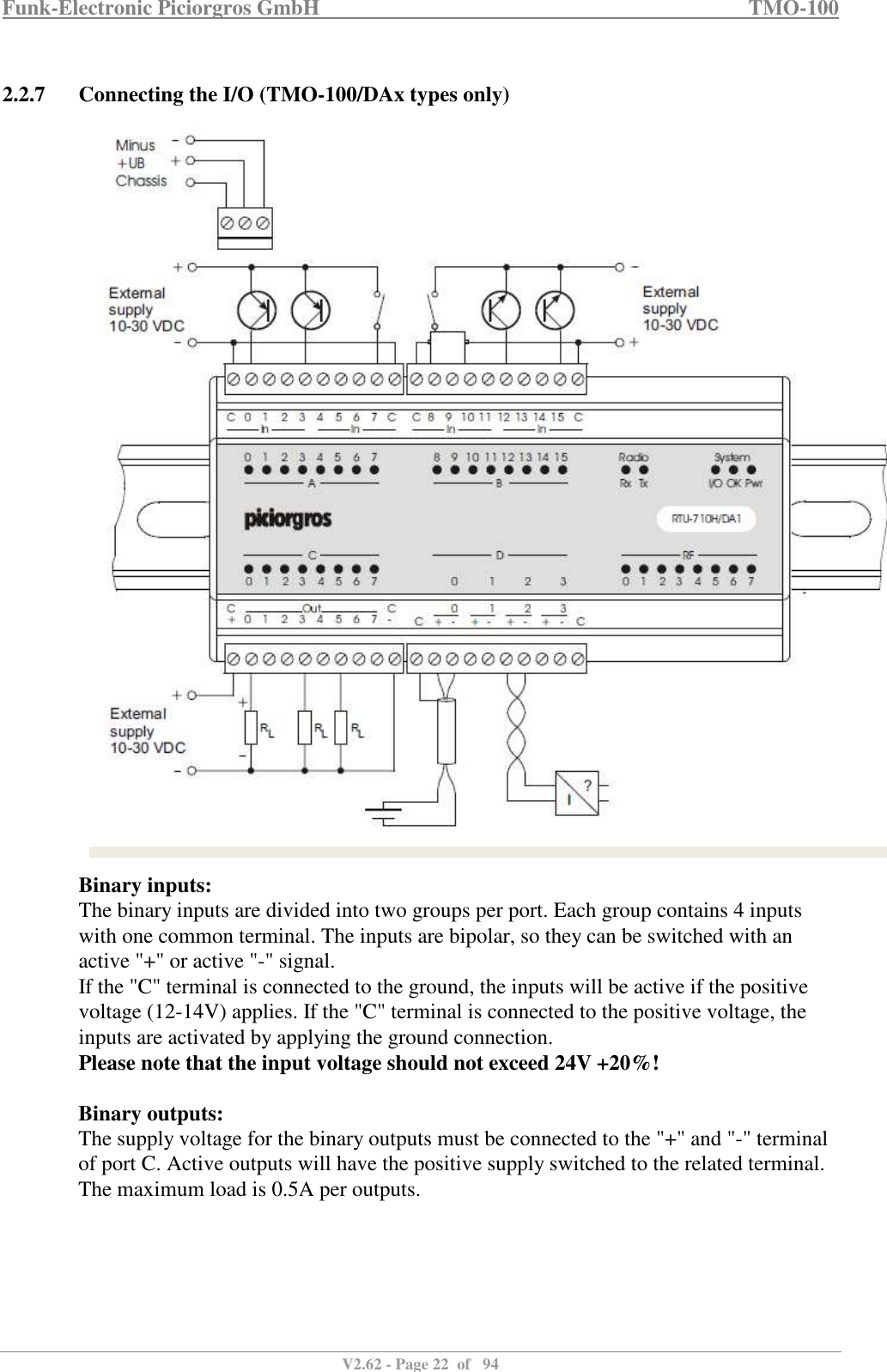
![Funk-Electronic Piciorgros GmbH TMO-100 V2.62 - Page 79 of 94 6.5 Control and Measurement I/O (RTU Functionality) (Note: in the following paragraph Ports A, B, C, & D are not to be confused with IP ports mentioned elsewhere in this document). A version of the TMO-100 is optionally available with control and measurement inputs and outputs integrated with the modem. The basic version has 16 on-off inputs (Ports A and B) and 8 on-off outputs (Port C). A further optional version has Port D, which can be ordered as 8 additional on-off outputs, or as 4 analog inputs. Each of the 16 on-off inputs of Port A have independent event counting functions that can be enabled by the user. Port A inputs counters operate as event counters, while Port B counters operate as time-totalizing counters. The maximum counting rate [input pulse rate] is 10 Hz. The control and measurement I/O can be accessed using any of the following protocols: • MODBUS RTU through the serial interface or Ethernet interface, or over the TETRA network. • DNP3 (future: not presently supported) • IEC-60870-5-101/104 (future: not presently supported) The RTU function of the TMO-100 can be configured so that a status change of an on-off input can cause an appropriate message to be sent (for example) to a TMO-100 Master Modem that has MODBUS access enabled, and stored there in a MODBUS Alarm List. Alarms can then be sent to a control system for appropriate action. 6.5.1 Accessing I/Os using the MODBUS Protocol The TMO-100 can be accessed remotely over the TETRA network or locally through its serial or Ethernet interface. That access is made through Port 4502 (not Port 502 because that has been assigned as a factory setting for another communication function). If the Port number is to be changed from the standard Port 502, the previous entry (factory setting) relating to this Port is removed from the Forwarding Table, as otherwise the TMO-100 will function as a router for MODBUS message frames and pass these through to the local Ethernet, instead of reading and acting on them. The I/Os are accessible as 16 bit values from the following register addresses: Register Assignment 0 - 299 0: Modbus address of the TMO-100 1: High Byte: RF Field Strength in -dBm 1: Low Byte: Device Status 2- …: the input register in packed format as … digital inputs analog inputs counter 150-153 Analog inputs (if available), 12-bit A/D resolution. The upper 4 bits are 0000](https://usermanual.wiki/Funk-Electronic-Piciorgros/TMO100.User-manual/User-Guide-1935043-Page-79.png)