Furuno USA 9ZWRTR101 Transceiver for Radar model FAR-1518/1528 User Manual
Furuno USA Inc Transceiver for Radar model FAR-1518/1528
Contents
- 1. Installation Manual Part 3
- 2. Installation Manual Part 1
- 3. Installation Manual Part 2
- 4. Installation Manual Part 4
- 5. Installation Manual Part 5
- 6. Installation Manual Part 6
- 7. User Manual Part 1
- 8. User Manual Part 2
- 9. User Manual Part 3
- 10. User Manual Part 4
- 11. User Manual Part 5
- 12. User Manual Part 6
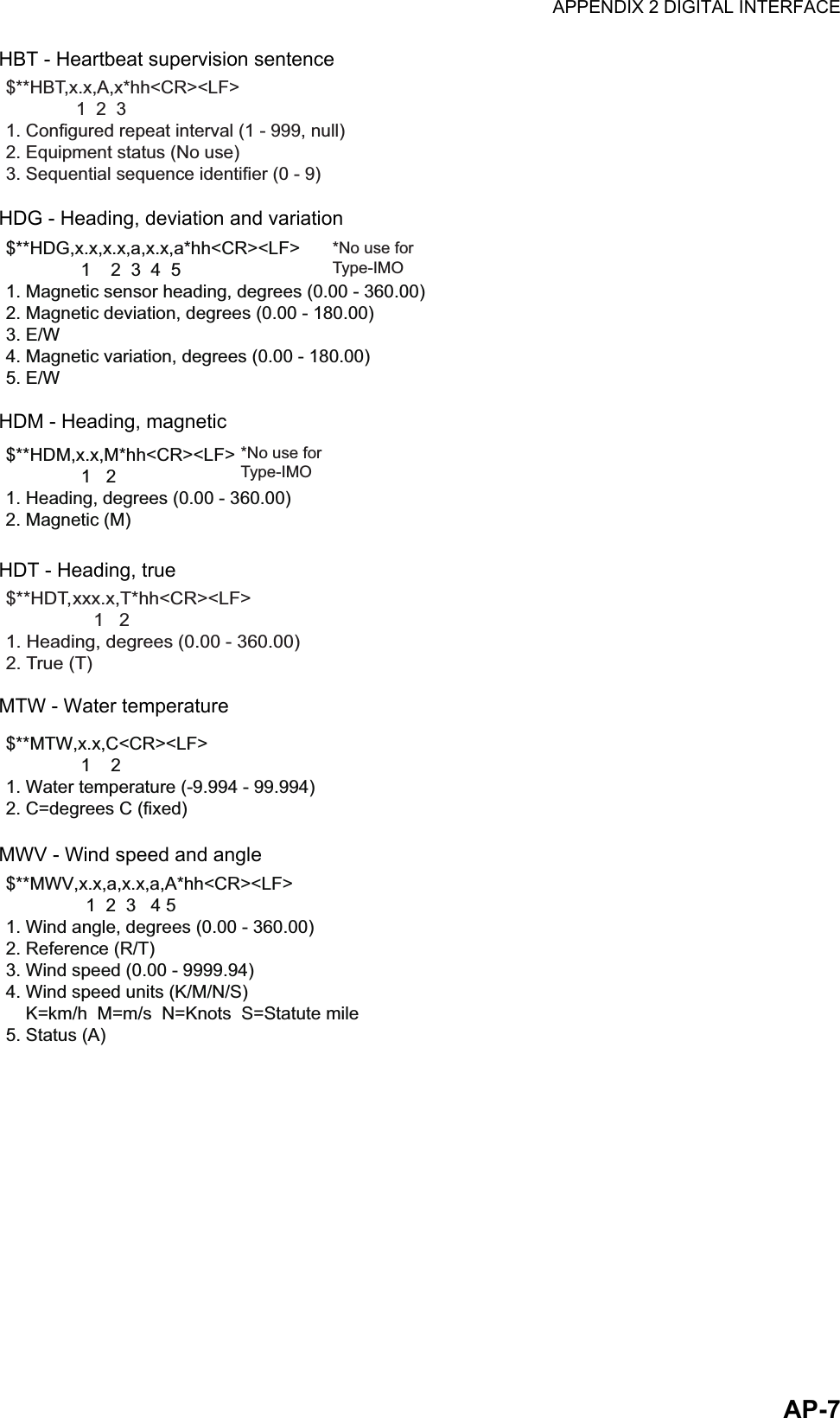
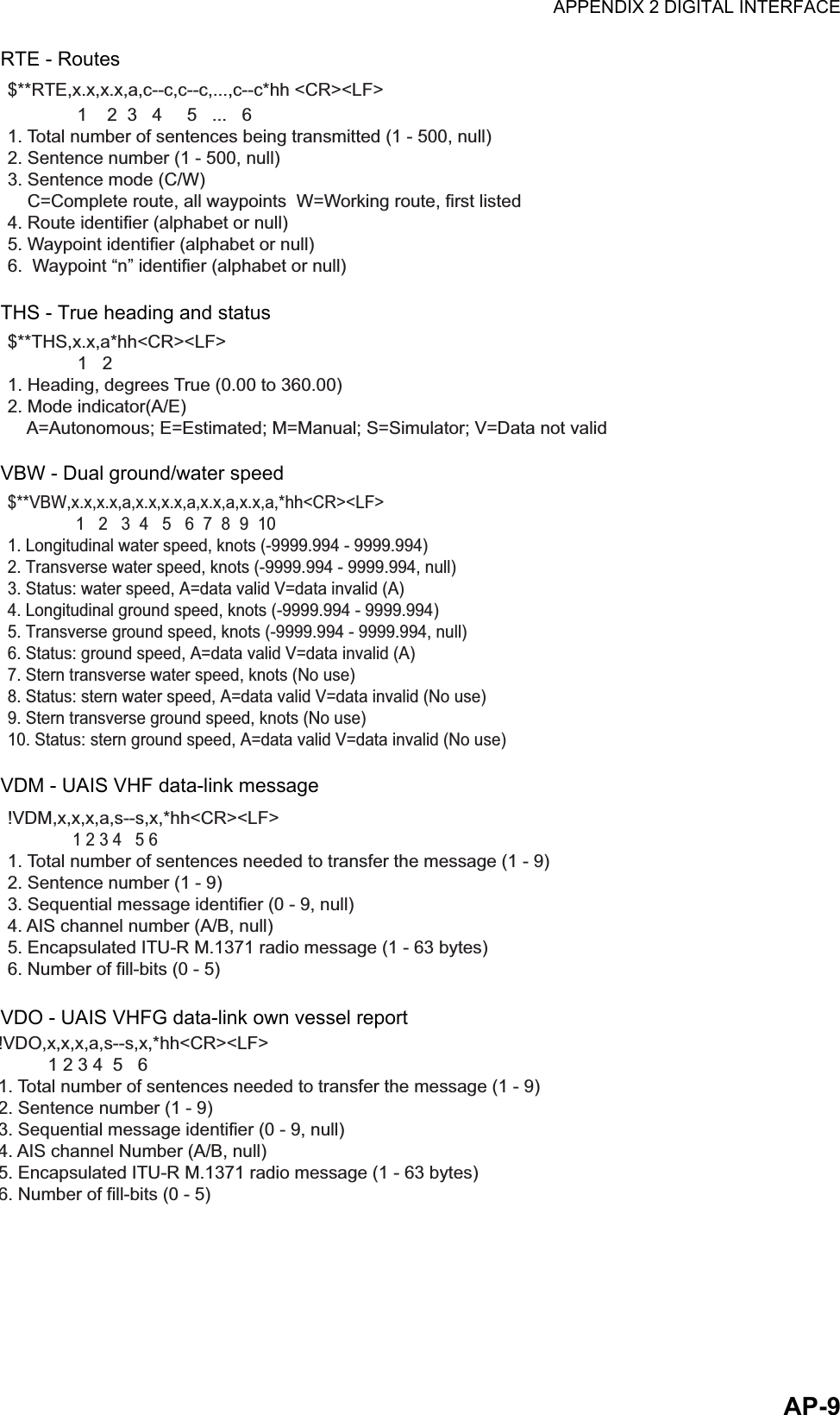
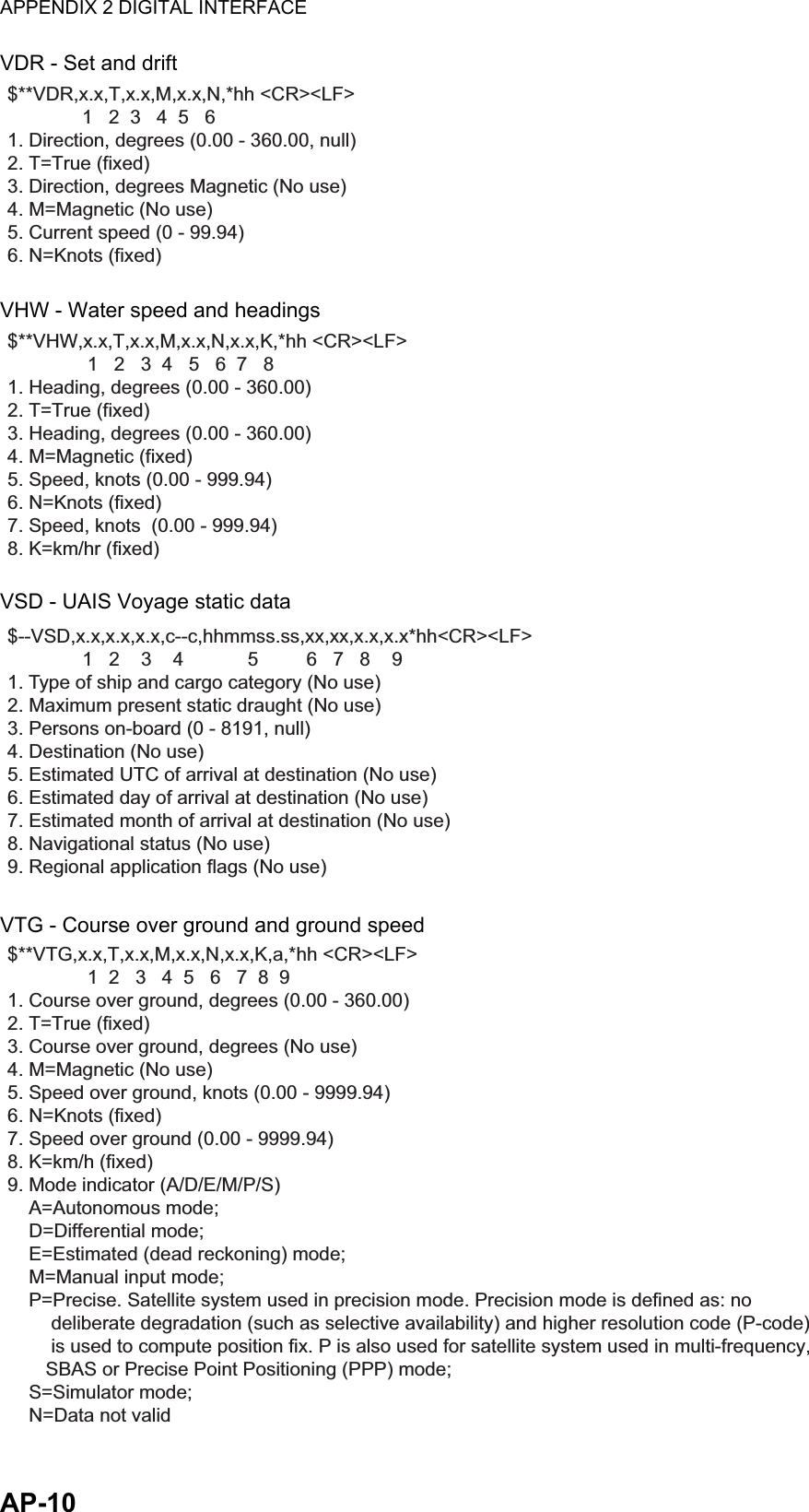
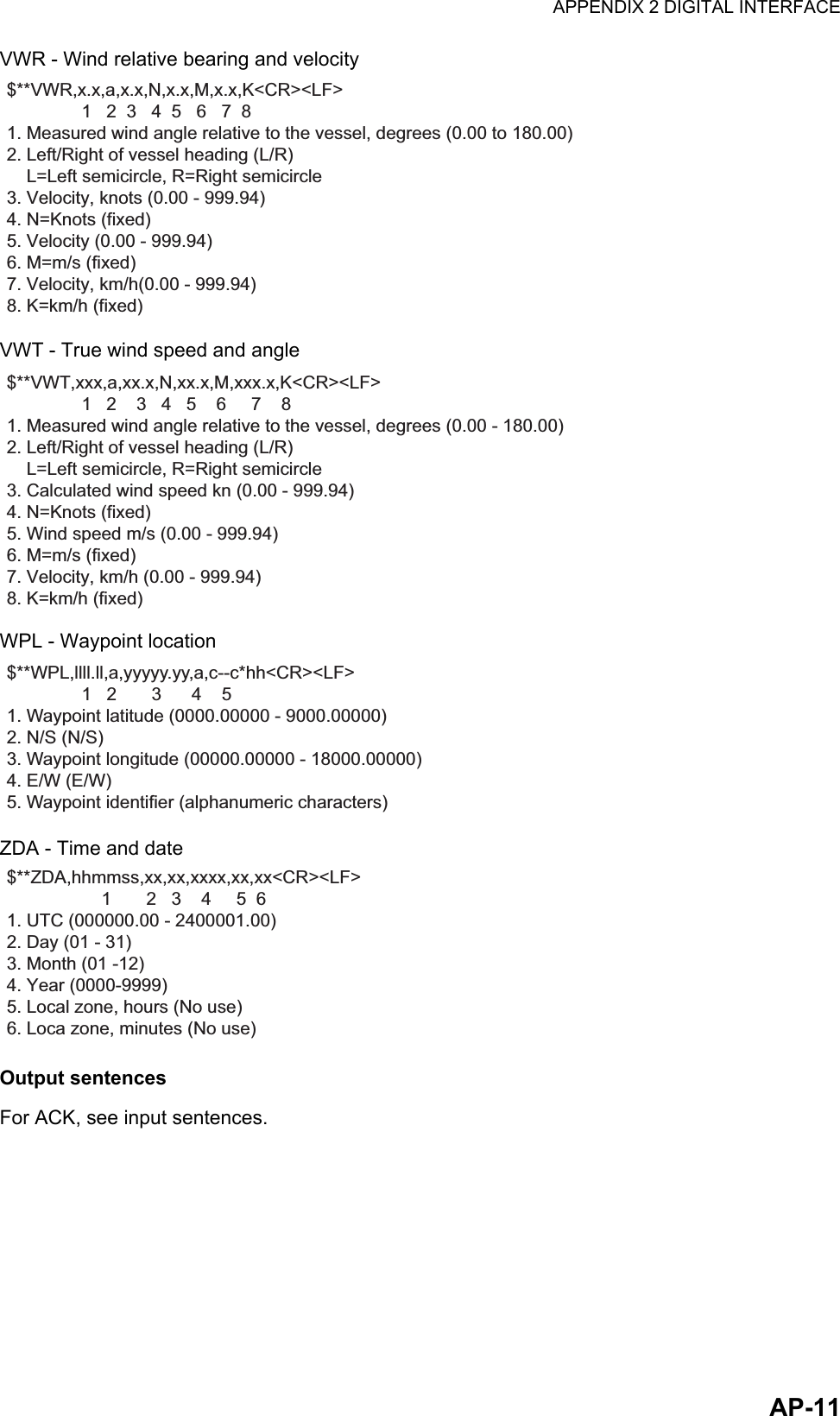
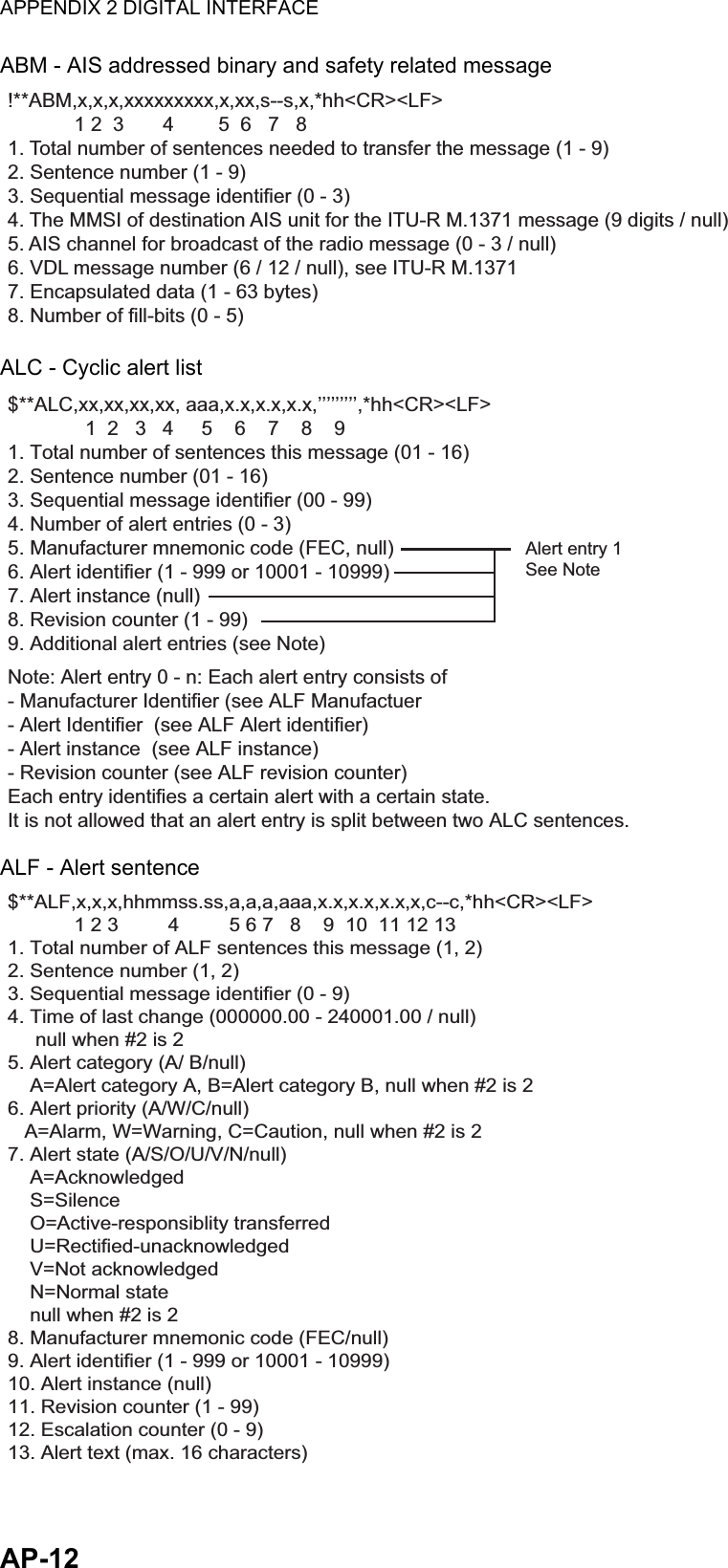
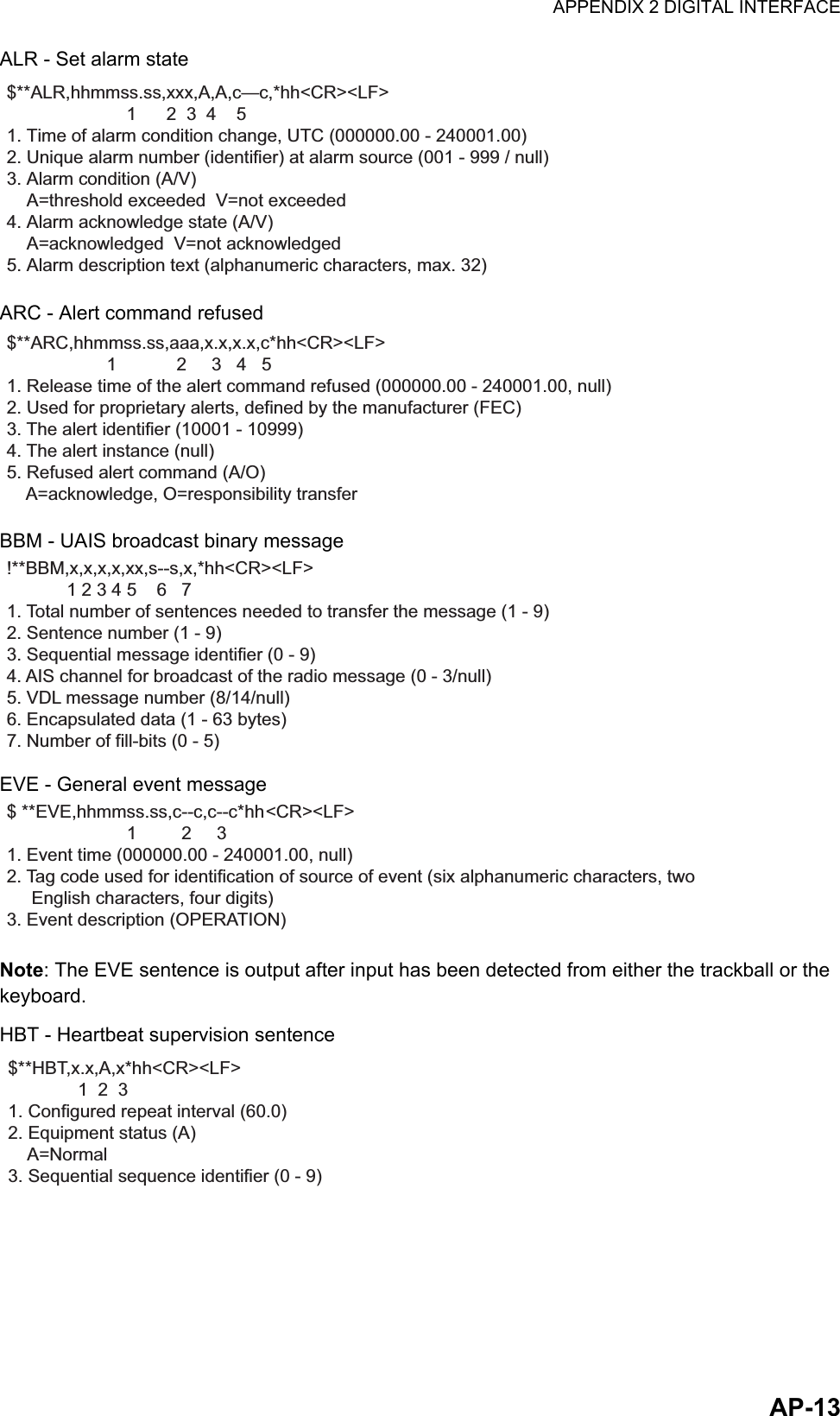
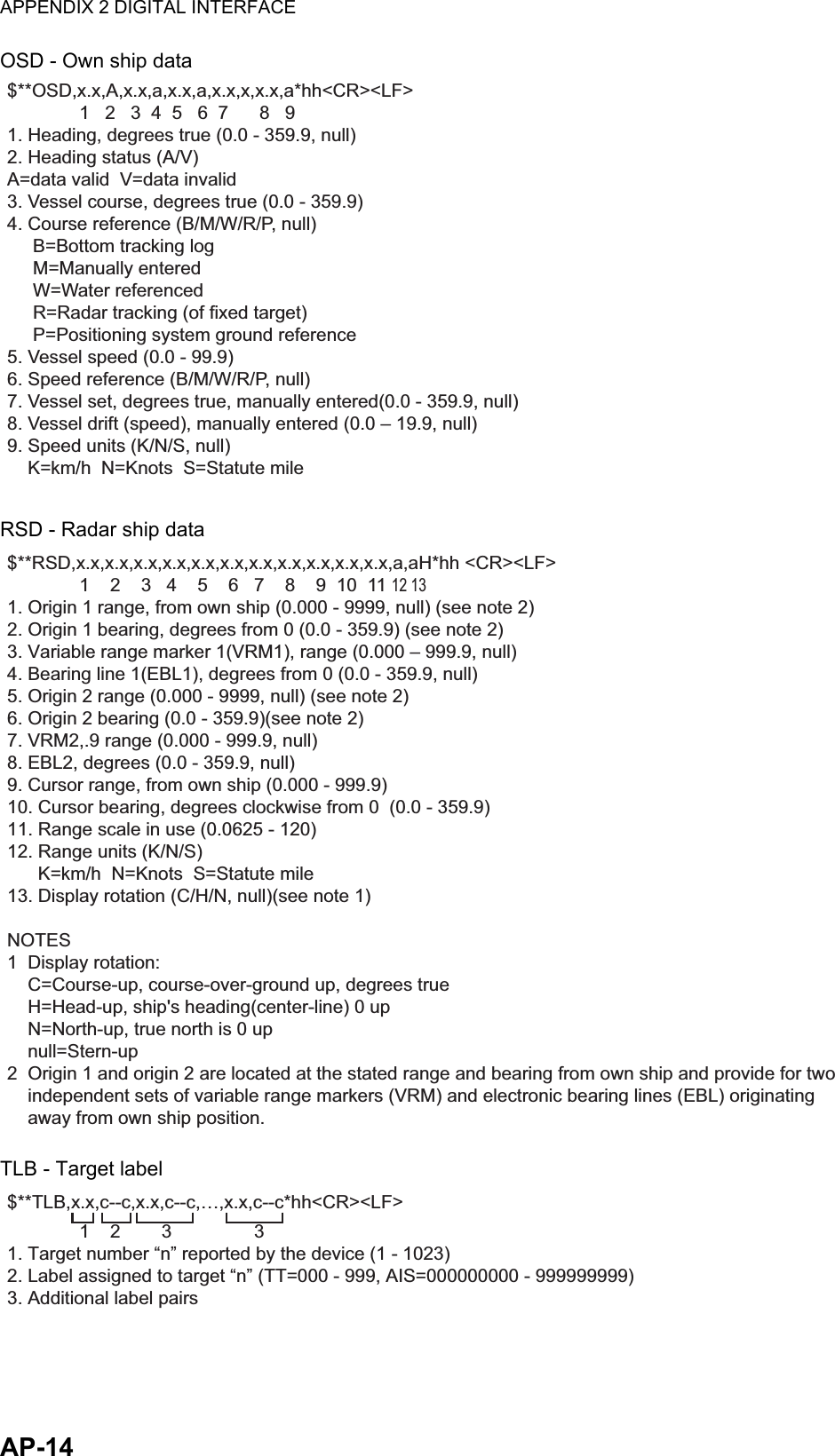
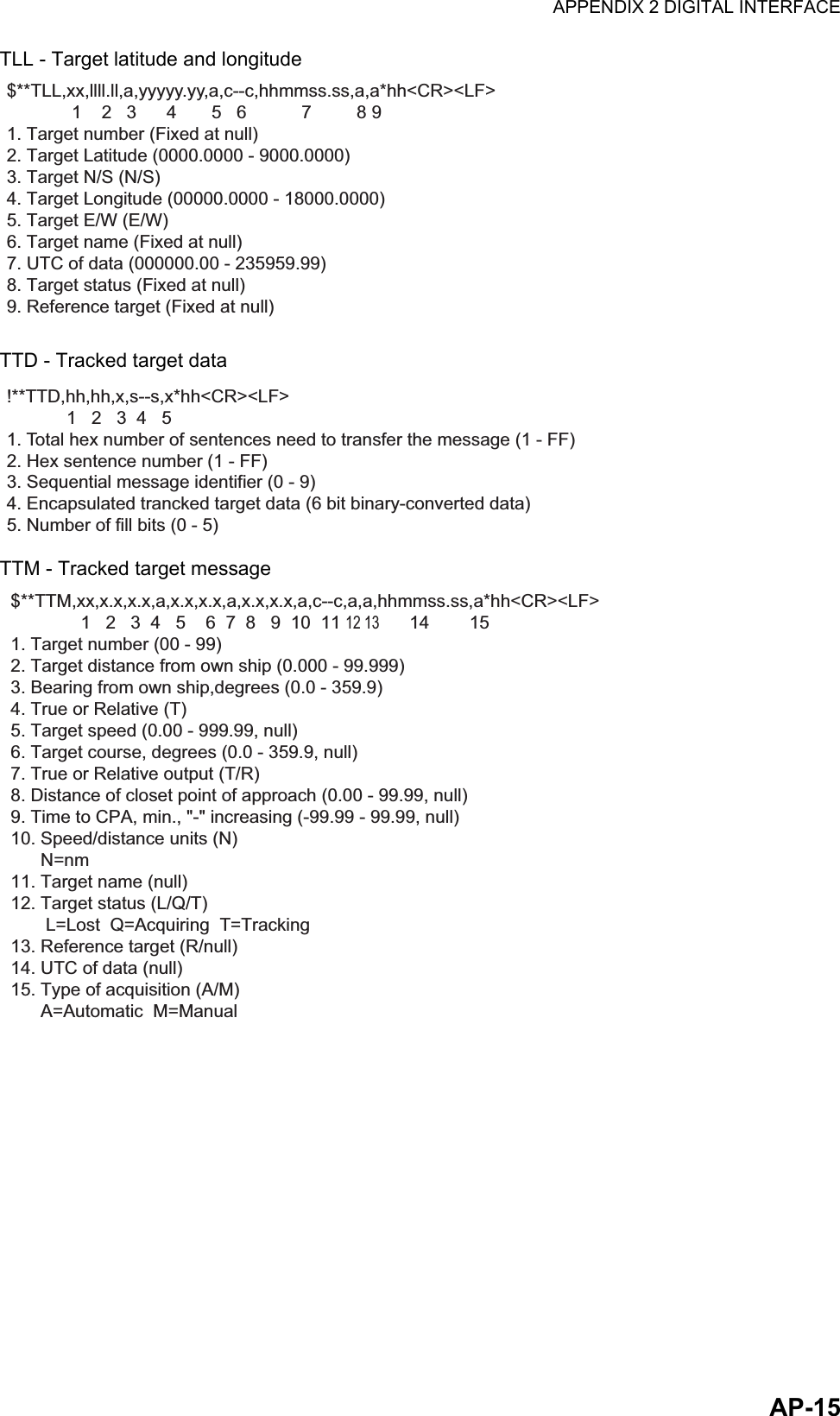
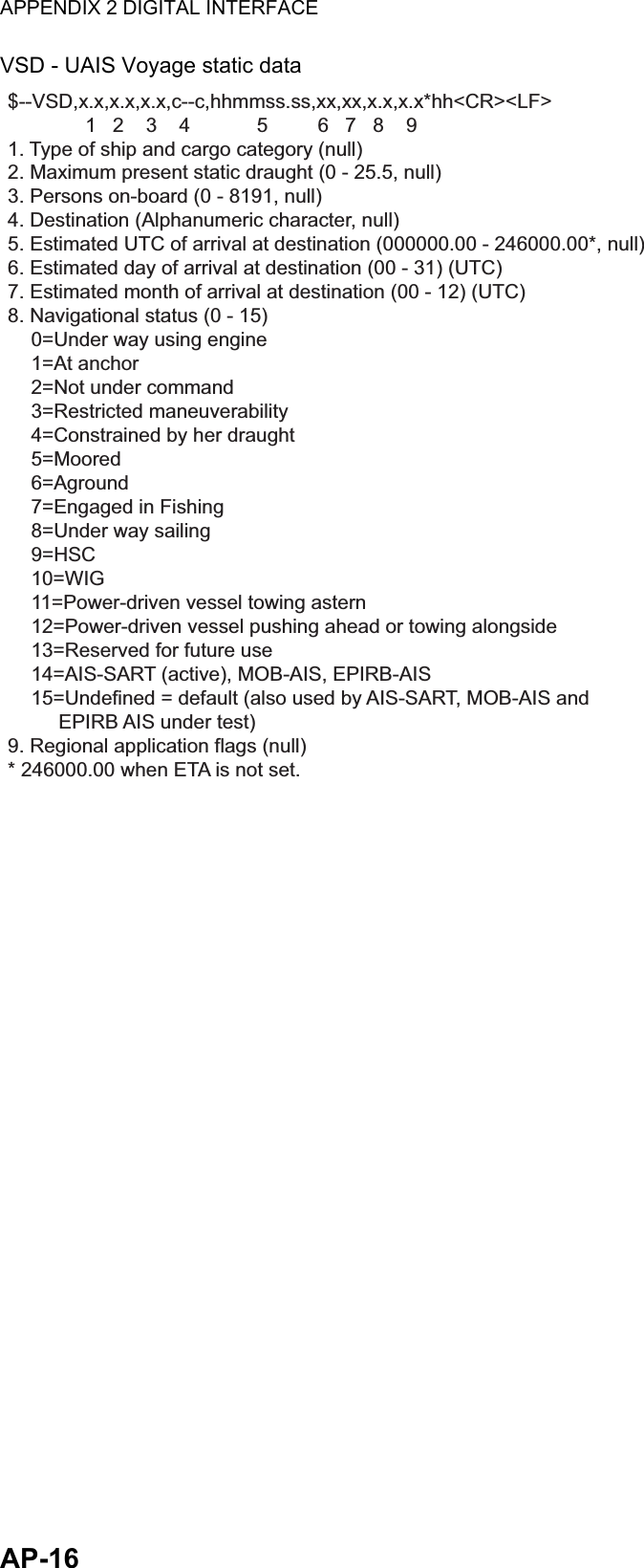
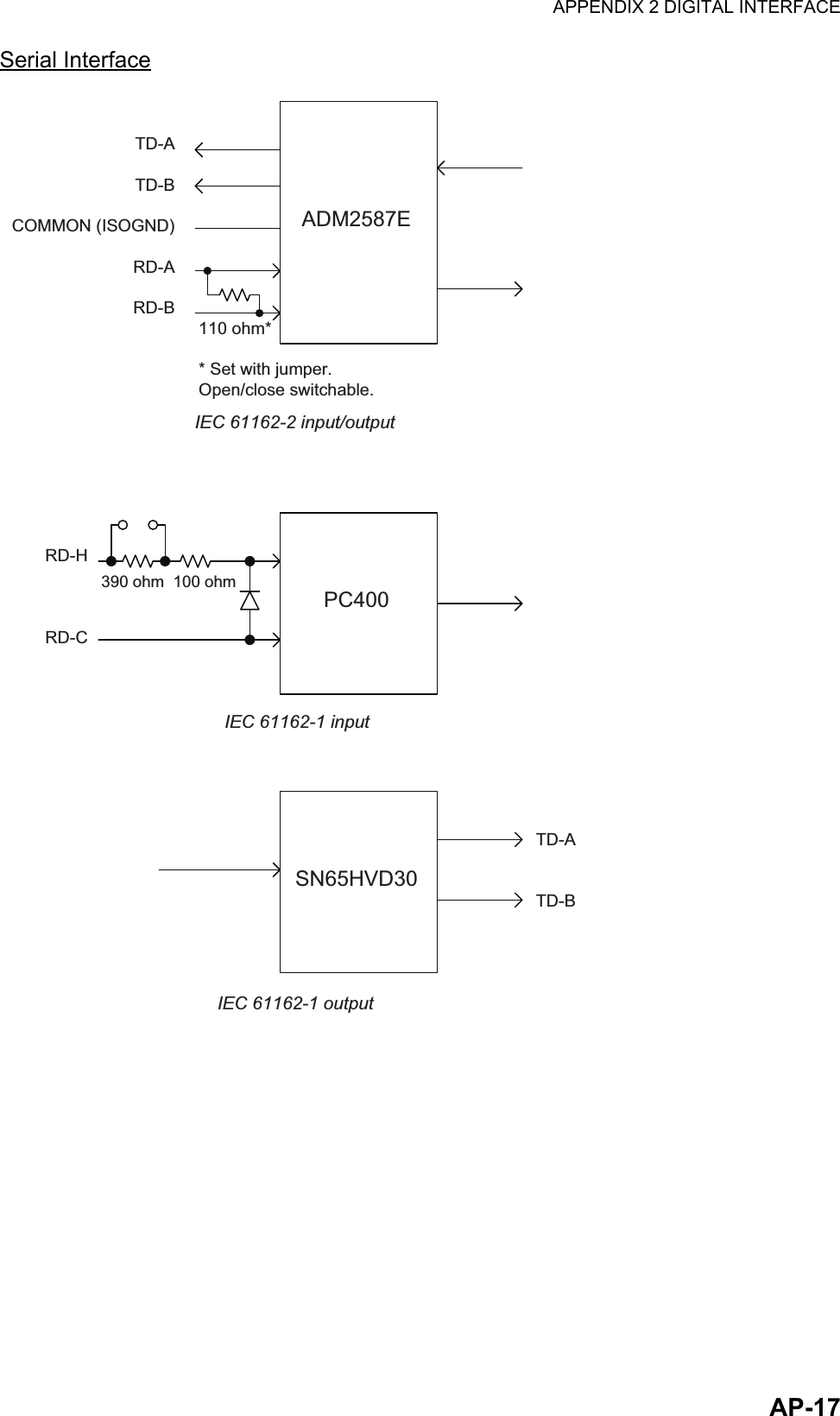
Installation Manual Part 5