JADAK a business unit of Novanta MERCURY6E-M RFID Module User Manual M6e Micro HardwareGuide
Trimble Navigation Limited RFID Module M6e Micro HardwareGuide
Contents
Manual
875-0069-01 RevB
M6e-Micro Hardware Guide
For: M6e-Micro (Firmware Ver. 1.1.0 and later)
Government Limited Rights Notice: All documentation and manuals
were developed at private expense and no part of it was developed using
Government funds.
The U.S. Governmentʼs rights to use, modify, reproduce, release, perform,
display, or disclose the technical data contained herein are restricted by
paragraph (b)(3) of the Rights in Technical Data — Noncommercial Items
clause (DFARS 252.227-7013(b)(3)), as amended from time-to-time. Any
reproduction of technical data or portions thereof marked with this legend
must also reproduce the markings. Any person, other than the U.S.
Government, who has been provided access to such data must promptly
notify ThingMagic.
ThingMagic, Mercury, Reads Any Tag, and the ThingMagic logo are
trademarks or registered trademarks of ThingMagic, A Division of Trimble.
Other product names mentioned herein may be trademarks or registered
trademarks of Trimble or other companies.
©2012 ThingMagic – a division of Trimble Navigation Limited. ThingMagic
and The Engine in RFID are registered trademarks of Trimble Navigation
Limited. Other marks may be protected by their respective owners. All
Rights Reserved.d
ThingMagic, A Division of Trimble
One Cambridge Center, 11th floor
Cambridge, MA 02142
866-833-4069
01 Revision 1
September, 2012
A DIVISION OF TRIMBLE
3
Revision Table
Date Version Description
9/2012 01 Rev1 Revision 1 final release
11/2012 01 RevB Updated Authorized Antennas list

A DIVISION OF TRIMBLE
4

Mercury Embedded Modules Developerʼs Guide 5
Contents
Communication Regulation Information 11
M6e-Micro 12
Federal Communication Commission Interference Statement 12
Industry Canada 14
Industrie Canada 15
Authorized Antennas 16
M6e-Micro Introduction 17
Hardware Overview 19
Hardware Interfaces 20
Antenna Connections 20
Antenna Requirements 20
Digital/Power Interfaces 20
Control Signal Specification 21
General Purpose Input/Output (GPIO) 23
Reset Line 24
Shutdown Line 25
Power Requirements 26
RF Power Output 26
Power Supply Ripple 26
Power Consumption 27
Environmental Specifications 28
Thermal Considerations 28
Electro-Static Discharge (ESD) Specification 30
Authorized Antennas 31
Assembly Information 32
Cables and Connectors 32
Digital Interface 32
Antennas 32
M6e-Micro Mechanical Drawing 33

6Mercury Embedded Modules Developerʼs Guide
M6e-Micro Footprint 34
Firmware Overview 35
Boot Loader 36
Application Firmware 37
Programming the M6e-Micro 37
Upgrading the M6e-Micro 37
Verifying Application Firmware Image 37
Custom On-Reader Applications 38
Communication Protocol 39
Serial Communication Protocol 40
Host-to-Reader Communication 40
Reader-to-Host Communication 41
CCITT CRC-16 Calculation 41
User Programming Interface 42
Functionality of the M6e-Micro 43
Regulatory Support 44
Supported Regions 44
Protocol Support 45
ISO 18000-6C (Gen2) 45
Protocol Configuration Options 45
Protocol Specific Functionality 46
I-PX 46
Protocol Configuration Options 46
ISO 18000-6B 46
Protocol Configuration Options 46
Antenna Ports 48
Using a Multiplexer 48
Port Power and Settling Time 50
Tag Handling 51
Tag Buffer 51
Tag Streaming/Continuous Reading 51
Tag Read Meta Data 53
Power Management 54
Power Modes 54
Transmit Modes 54

Mercury Embedded Modules Developerʼs Guide 7
DRM Compliant Mode 55
Power Save Mode (non-DRM Compliant) 55
Performance Characteristics 56
Event Response Times 56
Save and Restore Configuration 57
Appendix A: Error Messages 59
Common Error Messages 59
FAULT_MSG_WRONG_NUMBER_OF_DATA – (100h) 59
FAULT_INVALID_OPCODE – (101h) 59
FAULT_UNIMPLEMENTED_OPCODE – 102h 60
FAULT_MSG_POWER_TOO_HIGH – 103h 60
FAULT_MSG_INVALID_FREQ_RECEIVED (104h) 61
FAULT_MSG_INVALID_PARAMETER_VALUE - (105h) 61
FAULT_MSG_POWER_TOO_LOW - (106h) 61
FAULT_UNIMPLEMENTED_FEATURE - (109h) 61
FAULT_INVALID_BAUD_RATE - (10Ah) 62
Bootloader Faults 63
FAULT_BL_INVALID_IMAGE_CRC – 200h 63
FAULT_BL_INVALID_APP_END_ADDR – 201h 63
Flash Faults 64
FAULT_FLASH_BAD_ERASE_PASSWORD – 300h 64
FAULT_FLASH_BAD_WRITE_PASSWORD – 301h 64
FAULT_FLASH_UNDEFINED_ERROR – 302h 65
FAULT_FLASH_ILLEGAL_SECTOR – 303h 65
FAULT_FLASH_WRITE_TO_NON_ERASED_AREA – 304h 65
FAULT_FLASH_WRITE_TO_ILLEGAL_SECTOR – 305h 65
FAULT_FLASH_VERIFY_FAILED – 306h 66
Protocol Faults 67
FAULT_NO_TAGS_FOUND – (400h) 68
FAULT_NO_PROTOCOL_DEFINED – 401h 68
FAULT_INVALID_PROTOCOL_SPECIFIED – 402h 68
FAULT_WRITE_PASSED_LOCK_FAILED – 403h 69
FAULT_PROTOCOL_NO_DATA_READ – 404h 69
FAULT_AFE_NOT_ON – 405h 69
FAULT_PROTOCOL_WRITE_FAILED – 406h 70
FAULT_NOT_IMPLEMENTED_FOR_THIS_PROTOCOL – 407h 70
FAULT_PROTOCOL_INVALID_WRITE_DATA – 408h 70
FAULT_PROTOCOL_INVALID_ADDRESS – 409h 70

8Mercury Embedded Modules Developerʼs Guide
FAULT_GENERAL_TAG_ERROR – 40Ah 71
FAULT_DATA_TOO_LARGE – 40Bh 71
FAULT_PROTOCOL_INVALID_KILL_PASSWORD – 40Ch 71
FAULT_PROTOCOL_KILL_FAILED - 40Eh 71
FAULT_PROTOCOL_BIT_DECODING_FAILED - 40Fh 72
FAULT_PROTOCOL_INVALID_EPC – 410h 72
FAULT_PROTOCOL_INVALID_NUM_DATA – 411h 72
FAULT_GEN2 PROTOCOL_OTHER_ERROR - 420h 72
FAULT_GEN2_PROTOCOL_MEMORY_OVERRUN_BAD_PC - 423h 73
FAULT_GEN2 PROTOCOL_MEMORY_LOCKED - 424h 73
FAULT_GEN2 PROTOCOL_INSUFFICIENT_POWER - 42Bh 73
FAULT_GEN2 PROTOCOL_NON_SPECIFIC_ERROR - 42Fh 74
FAULT_GEN2 PROTOCOL_UNKNOWN_ERROR - 430h 74
Analog Hardware Abstraction Layer Faults 75
FAULT_AHAL_INVALID_FREQ – 500h 75
FAULT_AHAL_CHANNEL_OCCUPIED – 501h 75
FAULT_AHAL_TRANSMITTER_ON – 502h 75
FAULT_ANTENNA_NOT_CONNECTED – 503h 75
FAULT_TEMPERATURE_EXCEED_LIMITS – 504h 76
FAULT_POOR_RETURN_LOSS – 505h 76
FAULT_AHAL_INVALID_ANTENA_CONFIG – 507h 76
Tag ID Buffer Faults 78
FAULT_TAG_ID_BUFFER_NOT_ENOUGH_TAGS_AVAILABLE – 600h 78
FAULT_TAG_ID_BUFFER_FULL – 601h 78
FAULT_TAG_ID_BUFFER_REPEATED_TAG_ID – 602h 79
FAULT_TAG_ID_BUFFER_NUM_TAG_TOO_LARGE – 603h 79
System Errors 80
FAULT_SYSTEM_UNKNOWN_ERROR – 7F00h 80
FAULT_TM_ASSERT_FAILED – 7F01h 80
Appendix B: Getting Started - Devkit 81
Devkit Hardware 81
Included Components 81
Setting up the DevKit 81
Connecting the Antenna 82
Powering up and Connecting to a PC 82
Devkit USB Interfaces 83
USB/RS232 83
Native USB 83
Devkit Jumpers 84
Mercury Embedded Modules Developerʼs Guide 9
Devkit Schematics 85
Demo Application 86
Notice on Restricted Use of the DevKit 87
Appendix C: Environmental Considerations 89
ElectroStatic Discharge (ESD) Considerations 89
ESD Damage Overview 89
Identifying ESD as the Cause of Damaged Readers 90
Common Installation Best Practices 91
Raising the ESD Threshold 92
Further ESD Protection for Reduced RF Power Applications 92
Variables Affecting Performance 94
Environmental 94
Tag Considerations 94
Multiple Readers 95

10 Mercury Embedded Modules Developerʼs Guide

Communication Regulation Information
A DIVISION OF TRIMBLE
11
Communication Regulation Information

M6e-Micro
12
M6e-Micro
EMC FCC 47 CFR, Part 15
Industrie Canada RSS-210
M6e-Micro Regulatory Information
Federal Communication Commission Interference Statement
This equipment has been tested and found to comply with the limits for a Class B
digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to
provide reasonable protection against harmful interference in a residential installation.
This equipment generates uses and can radiate radio frequency energy and, if not
installed and used in accordance with the instructions, may cause harmful interference to
radio communications. However, there is no guarantee that interference will not occur in a
particular installation. If this equipment does cause harmful interference to radio or
television reception, which can be determined by turning the equipment off and on, the
user is encouraged to try to correct the interference by one of the following measures:
Reorient or relocate the receiving antenna.
Increase the separation between the equipment and receiver.
Connect the equipment into an outlet on a circuit different from that to which the
receiver is connected.
Consult the dealer or an experienced radio/TV technician for help.
This device complies with Part 15 of the FCC Rules. Operation is subject to the following
two conditions: (1) This device may not cause harmful interference, and (2) this device
must accept any interference received, including interference that may cause undesired
operation.
FCC Caution: Any changes or modifications not expressly approved by the party
responsible for compliance could void the user's authority to operate this equipment.
WARNING!
Operation of the M6e-Micro module requires professional installation to
correctly set the TX power for the RF cable and antenna selected.
This transmitter module is authorized to be used in other devices only by OEM integrators
under the following conditions:
M6e-Micro
A DIVISION OF TRIMBLE
13
1. The antenna(s) must be installed such that a minimum separation distance of 25cm
is maintained between the radiator (antenna) & userʼs/nearby peopleʼs body at all
times.
2. The transmitter module must not be co-located with any other antenna or transmitter.
As long as the two conditions above are met, further transmitter testing will not be
required. However, the OEM integrator is still responsible for testing their end-product for
any additional compliance requirements required with this module installed (for example,
digital device emissions, PC peripheral requirements, etc.).
Note
In the event that these conditions can not be met (for certain configurations
or co-location with another transmitter), then the FCC authorization is no
longer considered valid and the FCC ID can not be used on the final product.
In these circumstances, the OEM integrator will be responsible for re-
evaluating the end product (including the transmitter) and obtaining a
separate FCC authorization.
The OEM integrator has to be aware not to provide information to the end user regarding
how to install or remove this RF module in the user manual of the end product.
User Manual Requirement
The user manual for the end product must include the following information in a prominent
location;
“To comply with FCC’s RF radiation exposure requirements, the antenna(s) used for this
transmitter must be installed such that a minimum separation distance of 25cm is
maintained between the radiator (antenna) & user’s/nearby people’s body at all times and
must not be co-located or operating in conjunction with any other antenna or transmitter.”
AND
“The transmitting portion of this device carries with it the following two warnings:
“This device complies with Part 15....”
AND
“Any changes or modifications to the transmitting module not expressly approved by
ThingMagic Inc. could void the user’s authority to operate this equipment” “
M6e-Micro
14
End Product Labeling
The final end product must be labeled in a visible area with the following:
“Contains Transmitter Module FCC ID: QV5MERCURY6E-M”
or
“Contains FCC ID: QV5MERCURY6E-M.”
Industry Canada
Under Industry Canada regulations, this radio transmitter may only operate using an
antenna of a type and maximum (or lesser) gain approved for the transmitter by Industry
Canada. To reduce potential radio interference to other users, the antenna type and its
gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not
more than that necessary for successful communication.
This radio transmitter (identify the device by certification number, or model number if
Category II) has been approved by Industry Canada to operate with the antenna types
listed below with the maximum permissible gain and required antenna impedance for
each antenna type indicated. Antenna types not included in this list, having a gain greater
than the maximum gain indicated for that type, are strictly prohibited for use with this
device
Operation is subject to the following two conditions: (1) this device may not cause
interference, and (2) this device must accept any interference, including interference that
may cause undesired operation of the device.
To reduce potential radio interference to other users, the antenna type and its gain should
be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than
that permitted for successful communication.
This device has been designed to operate with the antennas listed in Authorized Antennas
table. Antennas not included in these lists are strictly prohibited for use with this device.
To comply with IC RF exposure limits for general population/uncontrolled exposure, the
antenna(s) used for this transmitter must be installed to provide a separation distance of
at least 25 cm from all persons and must not be collocated or operating in conjunction
with any other antenna or transmitter.

M6e-Micro
A DIVISION OF TRIMBLE
15
End Product Labeling
The final end product must be labeled in a visible area with the following:
“Contains ThingMagic Inc. M6e-Micro (or appropriate model number youʼre filing with IC)
transmitting module FCC ID: QV5MERCURY6E-M (IC: 5407A-MERCURY6EM)”
Industrie Canada
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut
fonctionner avec une antenne d'un type et d'un gain maximal (ou inférieur) approuvé pour
l'émetteur par Industrie Canada. Dans le but de réduire les risques de brouillage
radioélectrique à l'intention des autres utilisateurs, il faut choisir le type d'antenne et son
gain de sorte que la puissance isotrope rayonnée équivalente (p.i.r.e.) ne dépasse pas
l'intensité nécessaire à l'établissement d'une communication satisfaisante.
Le présent émetteur radio (identifier le dispositif par son numéro de certification ou son
numéro de modèle s'il fait partie du matériel de catégorie I) a été approuvé par Industrie
Canada pour fonctionner avec les types d'antenne énumérés ci-dessous et ayant un gain
admissible maximal et l'impédance requise pour chaque type d'antenne. Les types
d'antenne non inclus dans cette liste, ou dont le gain est supérieur au gain maximal
indiqué, sont strictement interdits pour l'exploitation de l'émetteur
Le fonctionnement de lʼ appareil est soumis aux deux conditions suivantes:
1. Cet appareil ne doit pas perturber les communications radio, et
2. cet appareil doit supporter toute perturbation, y compris les perturbations qui
pourraient provoquer son dysfonctionnement.
Pour réduire le risque d'interférence aux autres utilisateurs, le type d'antenne et son gain
doivent être choisis de façon que la puissance isotrope rayonnée équivalente (PIRE) ne
dépasse pas celle nécessaire pour une communication réussie.
Lʼ appareil a été conçu pour fonctionner avec les antennes énumérés dans les tables
Antennes Autorisées. Il est strictement interdit de lʼ utiliser lʼ appareil avec des antennes
qui ne sont pas inclus dans ces listes.
Au but de conformer aux limites d'exposition RF pour la population générale (exposition
non-contrôlée), les antennes utilisés doivent être installés à une distance d'au moins 25
cm de toute personne et ne doivent pas être installé en proximité ou utilisé en conjonction
avec un autre antenne ou transmetteur.
Marquage sur l’ étiquette du produit complet dans un endroit visible: "Contient
ThingMagic transmetteur, FCC ID: QV5MERCURY6E-M (IC:5407A-MERCURY6EM)"
A DIVISION OF TRIMBLE
M6e-Micro Introduction 17
M6e-Micro Introduction
The ThingMagic® M6e-Micro® embedded module is an RFID engines that you can
integrate with other systems to create RFID-enabled products.
Applications to control the M6e-Micro modules and derivative products can be written
using the high level MercuryAPI. The MercuryAPI supports Java, .NET and C
programming environments. The MercuryAPI Software Development Kit (SDK) contains
sample applications and source code to help developers get started demoing and
developing functionality. For more information on the MercuryAPI see the MercuryAPI
Programmers Guide and the MercuryAPI SDK, available on the ThingMagic website.
This document is for hardware designers and software developers. It describes the
hardware specifications and firmware functionality and provides guidance on how to
incorporate the M6e-Micro module within a third-party host system. The rest of the
document is broken down into the following sections:
Hardware Overview - This section provides detailed specifications of the M6e-Micro
hardware. This section should be read in its entirety before designing hardware or
attempting to operate the M6e-Micro module in hardware other than the ThingMagic
DevKit.
Firmware Overview - This section describes provides a detailed description of the M6e-
Micro firmware components including the bootloader and application firmware.
Communication Protocol - This section provides an overview of the low level serial
communications protocol used by the M6e-Micro.
Functionality of the M6e-Micro - This section provides detailed descriptions of the M6e-
Micro features and functionality that are supported through the use of the
MercuryAPI.
Appendix A: Error Messages - This appendix lists and provides causes and suggested
solutions for M6e-Micro Error Codes.
Appendix B: Getting Started - Devkit - QuickStart guide to getting connected to the M6e-
Micro Developerʼs Kit and using the Demo Applications included with the MercuryAPI
SDK.

A DIVISION OF TRIMBLE
18 M6e-Micro Introduction
Hardware Interfaces
A DIVISION OF TRIMBLE
20 Hardware Overview
Hardware Interfaces
Antenna Connections
The M6e-Micro supports two monostatic bidirectional RF antennas through two U.FL
connector or edge vias. See Cables and Connectors for more information on antenna
connector parts and M6e-Micro Footprint for antenna edge via locations and layout
guidelines.
The maximum RF power that can be delivered to a 50 ohm load from each port is 1 Watt,
or +30 dBm (regulatory requirements permitting).
Note
The RF ports can only be energized one at a time.
Antenna Requirements
The performance of the M6e-Micro is affected by antenna quality. Antennas that provide
good 50 ohm match at the operating frequency band perform best. Specified sensitivity
performance is achieved with antennas providing 17 dB return loss or better across the
operating band. Damage to the module will not occur for any return loss of 1 dB or
greater. Damage may occur if antennas are disconnected during operation or if the
module sees an open or short circuit at its antenna port.
Digital/Power Interfaces
The digital connector provides power, serial communications signals, shutdown and reset
signals to the M6e-Micro module, and access to the GPIO lines. These signals are
provided through edge vias and the Molex 53748-0208 connector. See Cables and
Connectors for more information on parts.
See M6e-Micro Footprint for pinout details of both connections and layout guidelines
Hardware Interfaces
A DIVISION OF TRIMBLE
Hardware Overview 21
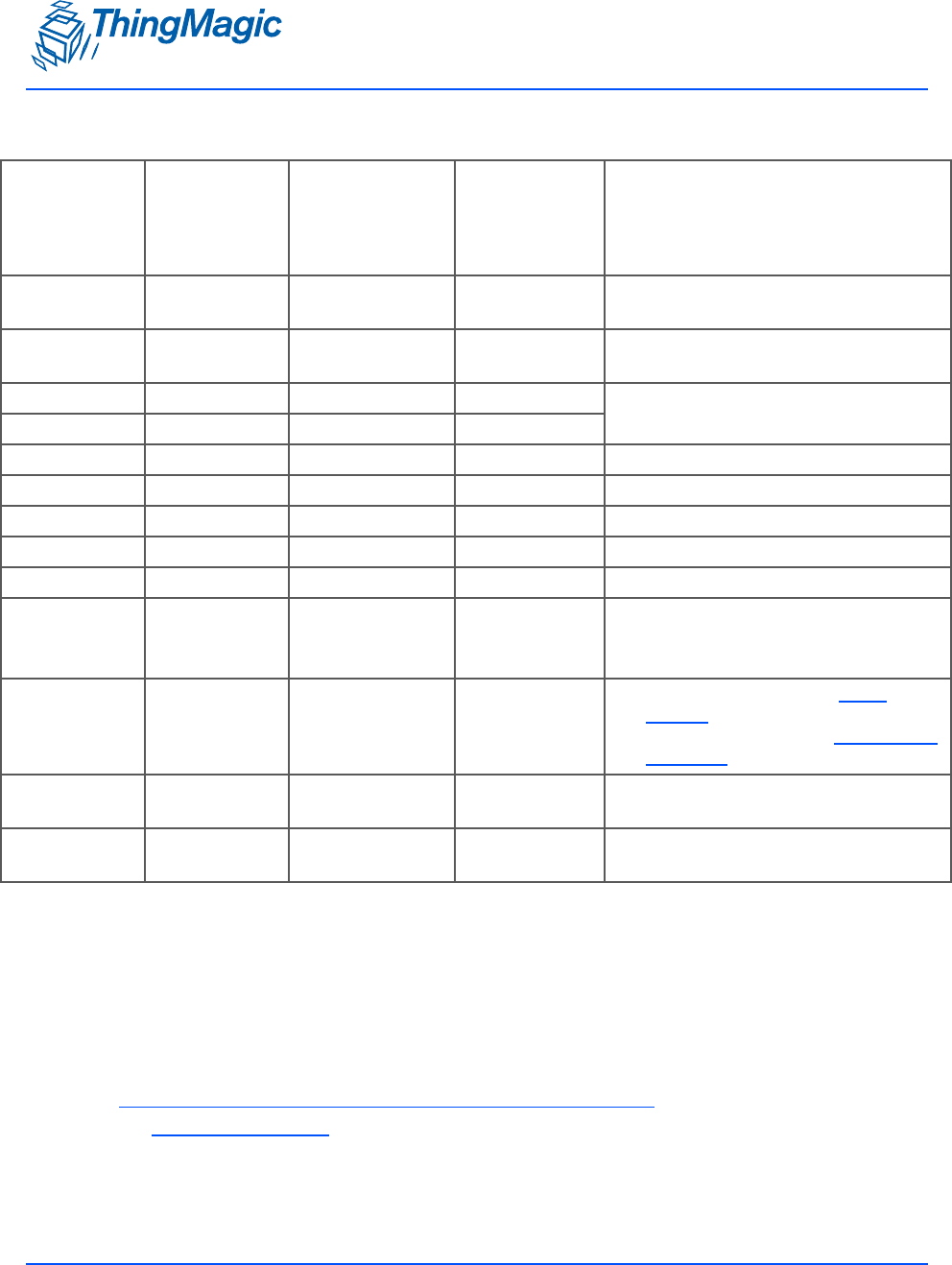
Control Signal Specification
The module communicates to a host processor via a TTL logic level UART serial port or
via a USB port. Both ports are accessed on the Molex connector or edge vias. The TTL
logic level UART supports complete functionality. The USB port supports complete
functionality except the lowest power operational mode.
Note
Power Consumption specifications apply to control via the TTL UART.
M6e-Micro Digital Connector Signal Definition
Edge Via
Pin #
Molex
53748-0208
Pin #
Signal
Signal
Direction
(In/Out of
M6e-Micro)
Notes
1-15, 21, 23,
29, 31
5-8 GND P/S Return Must connect all GND pins to ground
25, 27 1-4 Vin P/S Input 3.5 to 5.25VDC. Must connect all Vin
supplies.
22 11 GPIO1 Bi-directional Input 5VDC tolerant, 16mA Source/
Sink
24 13 GPIO2 Bi-directional
28 15 UART_RX_TTL In
26 17 UART_TX_TTL Out
18 14 USB_DM Bi-directional USB Data (D-) signal
16 12 USB_DP Bi-directional USB Data (D+) signal
20 9 USB_5VSENSE In Input 5V to tell module to talk on USB
19 19 SHUTDOWN In • HIGH or Open Circuit to ENABLE
module
• LOW or Ground to SHUTDOWN
17 20 RESET Bi-directional • HIGH output indicates Boot
Loader is running
LOW output indicates Application
Firmware is running
30 U.FL Antenna 1 Bi-directional U.FL connector closest to the Molex
connector
32 U.FL Antenna 2 Bi-directional U.FL connector closest to the mod-
uleʼs edge
Hardware Interfaces
A DIVISION OF TRIMBLE
22 Hardware Overview
Note
It is not recommended to use the TTL interface when planning to operate the
module in Tag Streaming/Continuous Reading mode. The TTL interface (both the
module side and the host side) cannot detect physical disconnections, as
can the USB Interface, simplifying reconnection.
TTL Level UART Interface
TTL Level TX
V-Low: Max 0.4 VDC
V-High: 2.1 to 3.3 VDC
8 mA max
TTL Level RX
V-Low: -0.3 to 0.6 VDC
V-High: 2.2 to 5 VDC
A level converter could be necessary to interface to other devices that use standard 12V
RS232. Only three pins are required for serial communication (TX, RX, and GND).
Hardware handshaking is not supported. The M6e-Micro serial port has an interrupt-
driven FIFO that empties into a circular buffer.
The connected host processorʼs receiver must have the capability to receive up to 256
bytes of data at a time without overflowing.
Baud rates supported:
– 9600
– 19200
– 38400
– 115200
– 230400
– 460800
– 921600
Note
The baudrate in the Boot Loader mode depends on whether the module
entered the bootloader mode after a power-up or through an assert or “boot
bootloader” user command. Upon power up if the Reset Line is LOW then the
default baud rate of 9600 will be used. If the module returns to the
bootloader from Application Firmware mode, then the current state and
baudrate will be retained.
Hardware Interfaces
A DIVISION OF TRIMBLE
Hardware Overview 23
USB Interface
Supports USB 2.0 full speed device port (12 Megabits per second) using the two USB
pins (USB_DM and USB_DP).
General Purpose Input/Output (GPIO)
The two GPIO connections, provided through the M6e-Micro Digital Connector Signal
Definition, may be configured as inputs or outputs using the MercuryAPI. The GPIO pins
connect through 100 ohm resistors to the high current PA0 and PA1 pins of the
AT91SAM7S processor. The processor data sheet can be consulted for additional details.
Pins configured as inputs must not have input voltages that exceed voltage range of -0.3
volts to +5.5 volts. In addition, during reset the input voltages should not exceed 3.3V.
Outputs may source and sink 16 mA. Voltage drop in the internal series 100 ohm resistor
will reduce the delivered voltage swing for output loads that draw significant current.
Input Mode
– TTL compatible inputs,
– Logic low < 0.8 V,
– Logic high > 2.0V.
– 5V tolerant
Output Mode
– 3.3 Volt CMOS Logic Output with 100 ohms in series.
– Greater than 1.9 Volts when sourcing 8 mA.
– Greater than 2.9 Volts when sourcing 0.3 mA.
– Less than 1.2 Volts when sinking 8 mA.
– Less than 0.2 Volts when sinking 0.3 mA.
Module power consumption can be adversely affected by incorrect GPIO configuration.
Similarly, the power consumption of external equipment connected to the GPIOs can also
be adversely affected. The following instructions will yield specification compliant
operation.
On power up, the M6e-Micro module configures its GPIOs as inputs to avoid contention
from user equipment that may be driving those lines. The input configuration is as a 3.3
volt logic CMOS input and will have a leakage current not in excess of 400 nA. The input
is in an undetermined logic level unless pulled externally to a logic high or low. Module
power consumption for floating inputs is unspecified. With the GPIOs configured as
Hardware Interfaces
A DIVISION OF TRIMBLE
24 Hardware Overview
inputs and individually pulled externally to either high or low logic level, module power
consumption is as listed in the M6e-Micro Power Consumption table.
GPIOs may be reconfigured individually after power up to become outputs. This
configuration takes effect either at API execution or a few tens of milliseconds after power
up if the configuration is stored in nonvolatile memory. The configuration to outputs is
defeated if the module is held in the boot loader by Reset Line being held low. Lines
configured as outputs consume no excess power if the output is left open. Specified
module power consumption is achieved for one or more GPIO lines set as output and left
open. Users who are not able to provide external pull ups or pull downs on any given
input, and who do not need that GPIO line, may configure it as an output and leave it
open to achieve specified module power consumption.
Configuring GPIO Settings
The GPIO lines are configured as inputs or outputs through the MercuryAPI by setting the
reader configuration parameters /reader/gpio/inputList and /reader/gpio/outputList. Once
configured as inputs or outputs the state of the lines can be Get or Set using the gpiGet()
and gpoSet() methods, respectively. See the language specific reference guide for more
details.
Reset Line
Upon power up the RESET line is configured as an input. The input value will determine
whether the Boot Loader (pulled LOW) will wait for user commands or immediately load
the Application Firmware (left open) image and enter application mode. After that action is
completed, this line is configured as an output line. While the unit continues to be in
bootloader the line is driven high.
Once in application mode, the RESET line is driven low. if the module returns to the
bootloader mode, either due to an assert or “boot bootloader”, the RESET line will again
be driven high.
To minimize power consumption in the application, the RESET line should be either left
open or pulled weakly low (10k to ground).
See Note about baud rate applicable when using TTL Level UART Interface.

Hardware Interfaces
A DIVISION OF TRIMBLE
Hardware Overview 25
Shutdown Line
CAUTION!
!!
The polarity of the shutdown line is opposite from the 4-port M6e mod-
ule.
The SHUTDOWN line must be set HIGH or Open Circuit to ENABLE module. In order to
shutdown/reset/power cycle the module the line can be set LOW or pulled to Ground.
Switching from high to low to high is equivalent to performing a power cycle of the
module. All internal components are powered down when set low.

Power Requirements
A DIVISION OF TRIMBLE
26 Hardware Overview
Power Requirements
RF Power Output
The M6e-Micro supports separate read and write power level which are command
adjustable via the MercuryAPI. Power levels must be between:
– Minimum RF Power = 0 dBm
– Maximum RF Power = +30 dBm
Note
Maximum power may have to be reduced to meet regulatory limits, which
specify the combined effect of the module, antenna, cable and enclosure
shielding of the integrated product.
Power Supply Ripple
The following are the minimum requirements to avoid module damage and to insure
performance and regulatory specifications are met. Certain local regulatory specifications
may require tighter specifications.
3.5 to 5.25VDC
Less than 25 mV pk-pk ripple all frequencies,
Less than 11 mV pk-pk ripple for frequencies less than 100 kHz,
No spectral spike greater than 5 mV pk-pk in any 1 kHz band.
Power Requirements
A DIVISION OF TRIMBLE
Hardware Overview 27
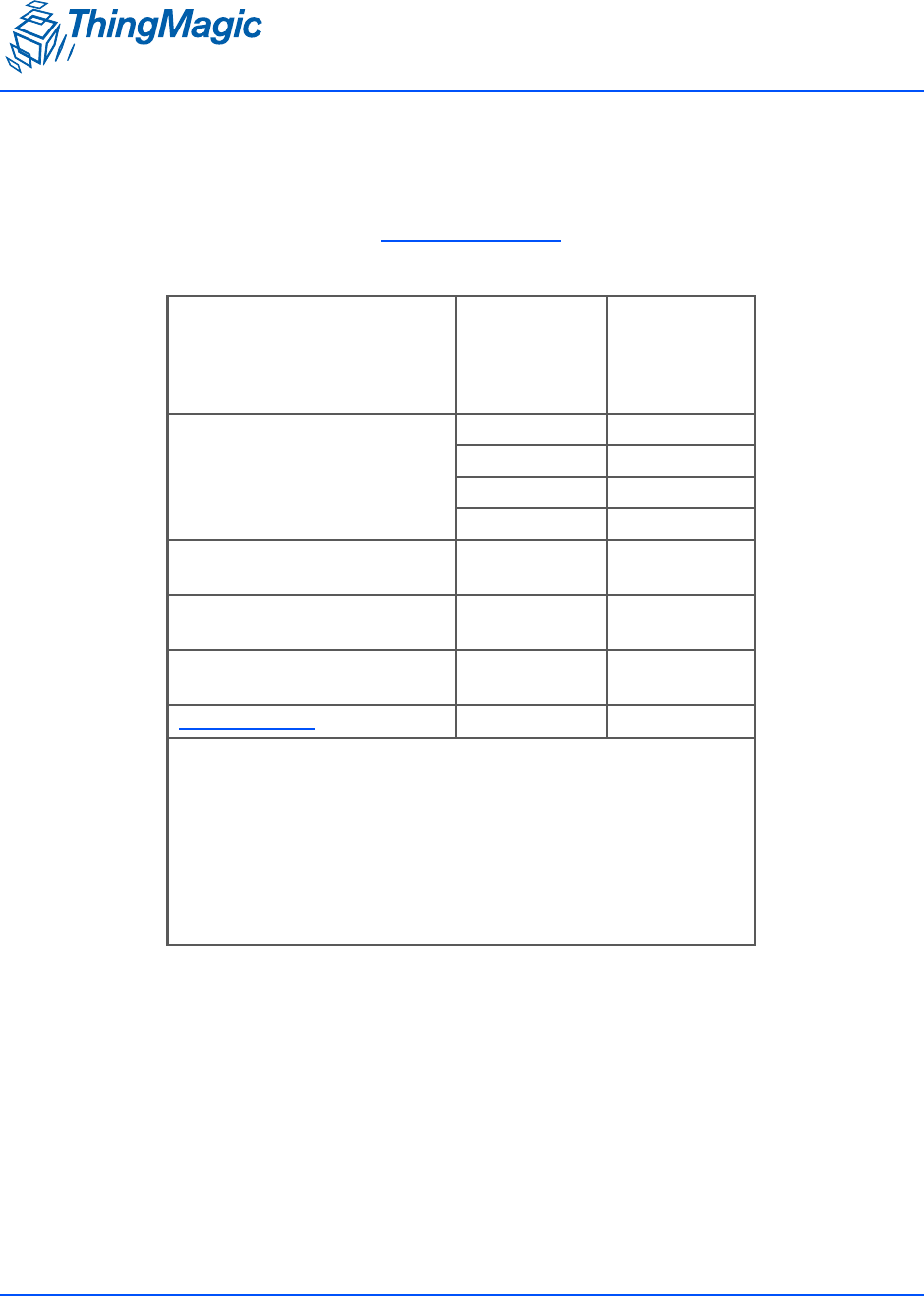
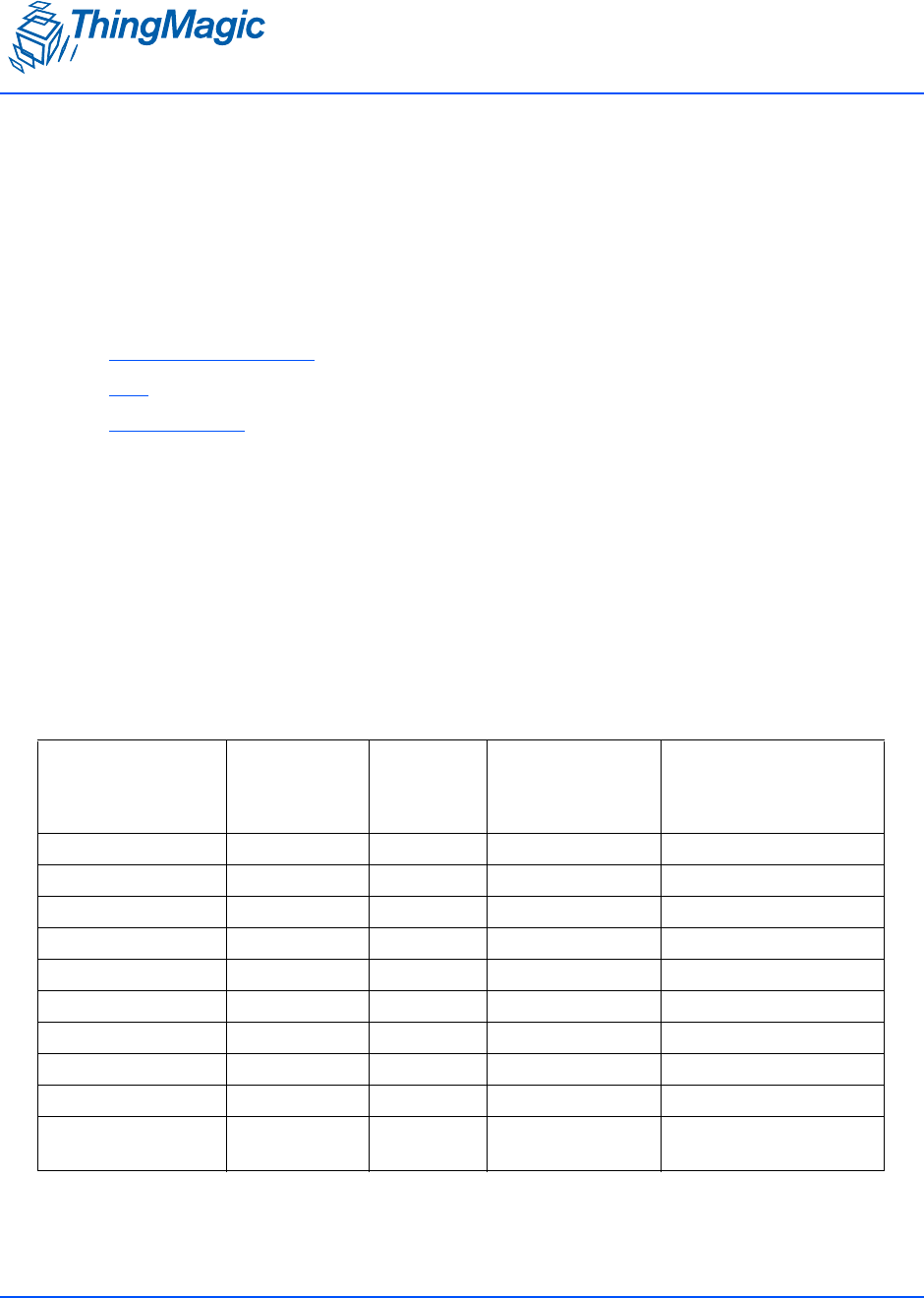
Power Consumption
The following table defines the power consumption specifications for the M6e-Micro in
various states of operation. See Power Management for details.
These nominal values should be used to calculate metrics such as battery life. To
determine the absolute maximum DC power that would be required under any condition,
one must consider temperature, channel of operation, and antenna return loss.
M6e-Micro Power Consumption
Operation
RF Transmit
Power
Setting
(dBm)
Nominal DC
Power1
(Watts)
Active Reader (RF On) +30 5.5
+27 3.5
+23 2.5
+10 2.0
No Tag Reading (M6e idle)
Power Mode = FULL
n/a 0.325
No Tag Reading (M6e idle)
Power Mode = MINSAVE
n/a 0.06
No Tag Reading (M6e idle)
Power Mode = SLEEP
n/a 0.025
Shutdown Line enabled n/a 0.000025
Note: 1 - Power consumption is defined for TTL UART
operation. Power consumption may vary if the USB
interface is connected.
Note: 2 - Power consumption is defined for operation into a
17dB return loss load or better. Power consumption
may increase, up to TBD, during operation into
return losses worse than 17dB and high ambient
temperatures.
Environmental Specifications
A DIVISION OF TRIMBLE
28 Hardware Overview
Environmental Specifications
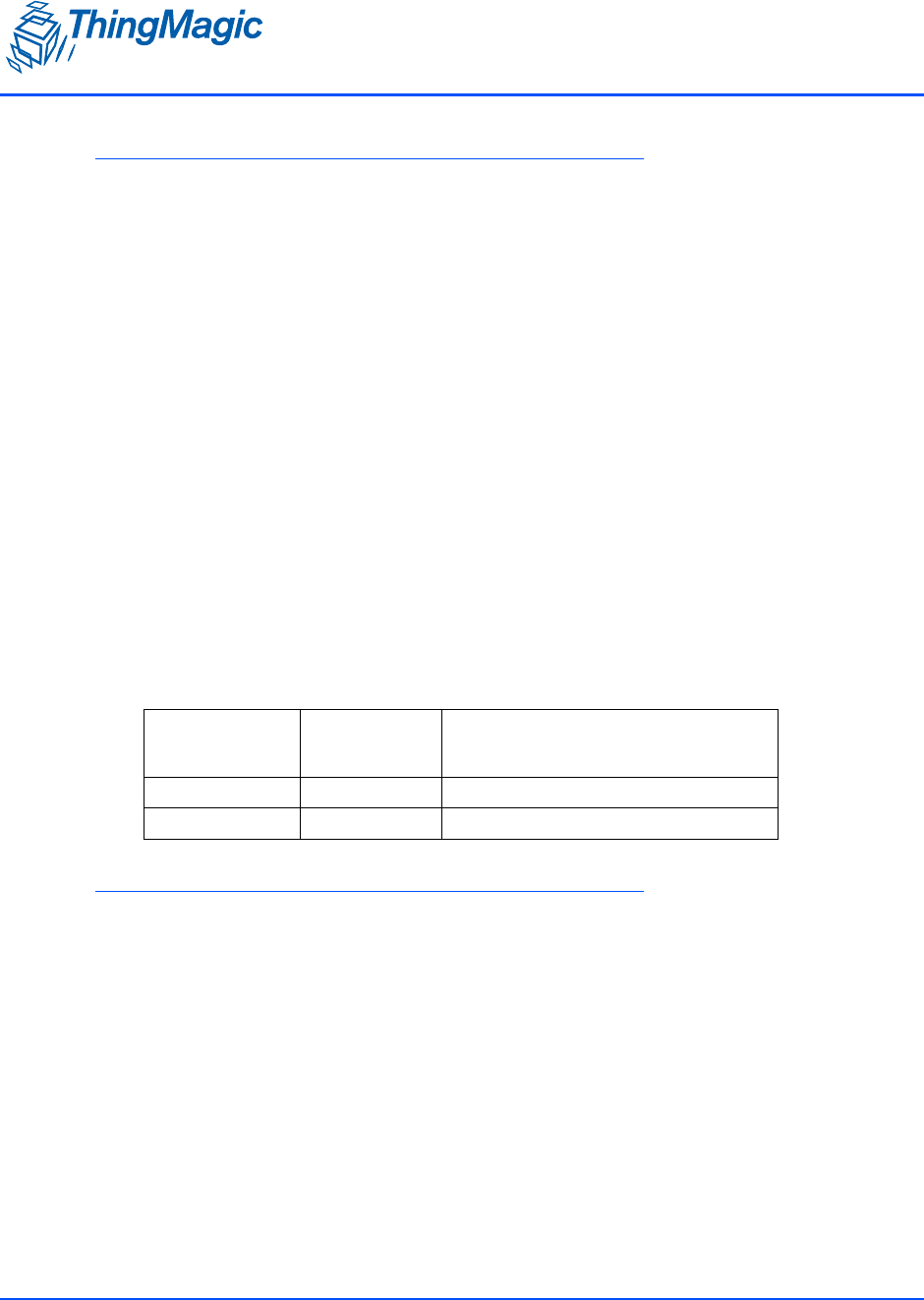
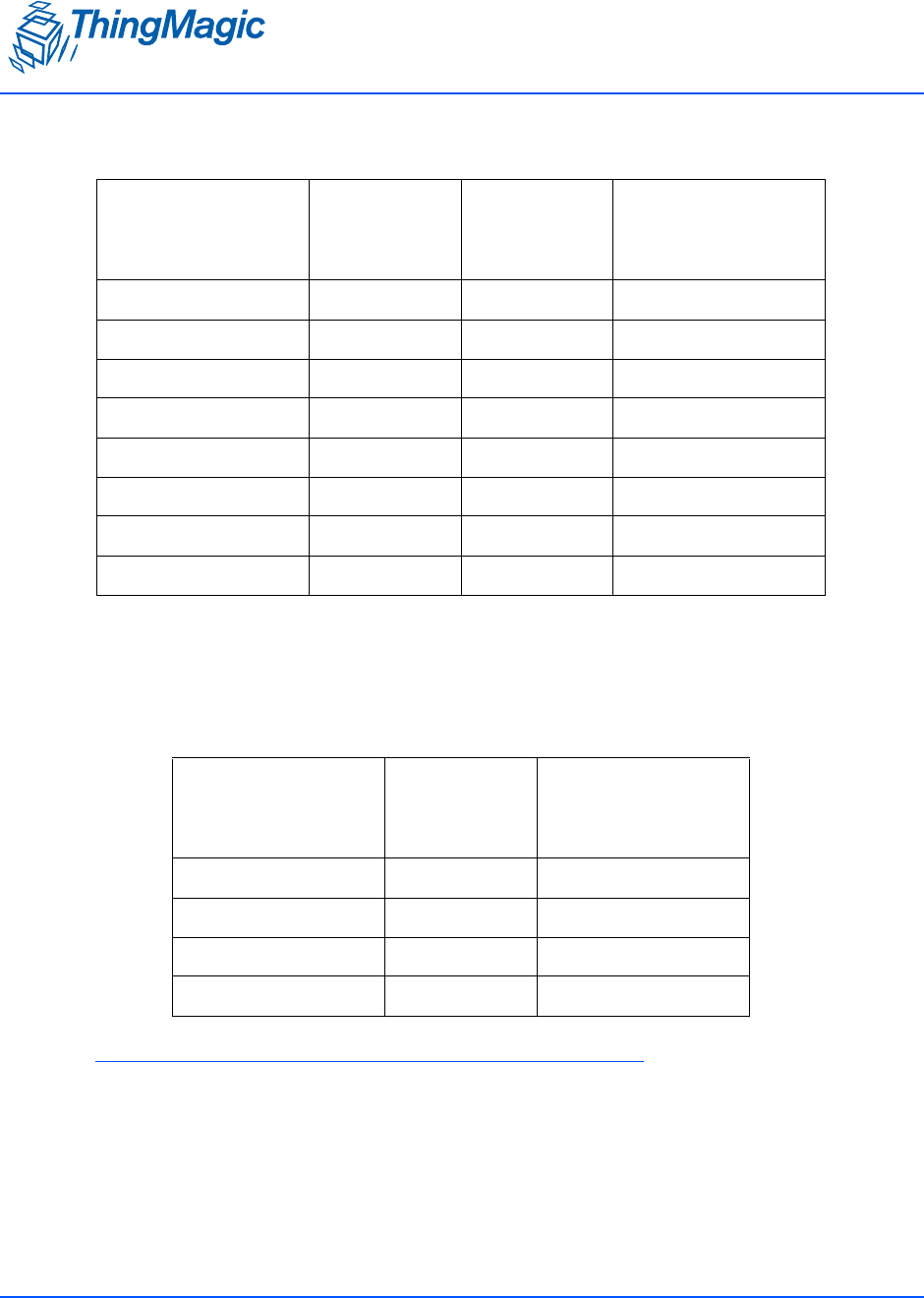
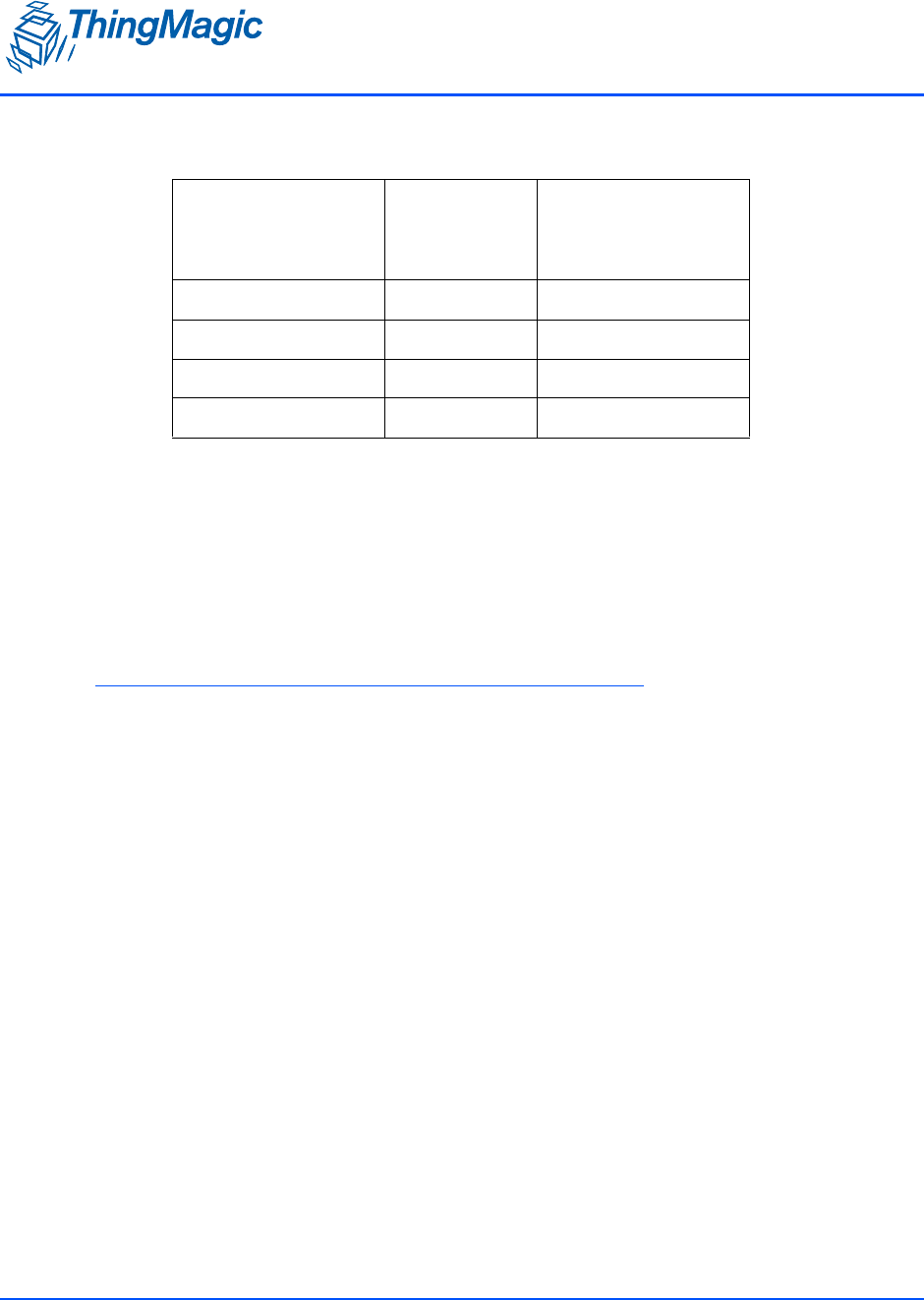
Thermal Considerations
There are two ways of mounting the M6e-Micro, see M6e-Micro Footprint for additional
details. One is to solder the board to the motherboard using its side “vias”, with the RF
shield can facing upward. The other is to use the board-to-board connectors to connect to
the motherboard and solder the 4 tabs on the shield to the motherboard as well. The
orientation with the side “vias” soldered down is best for wicking heat away from the
module.
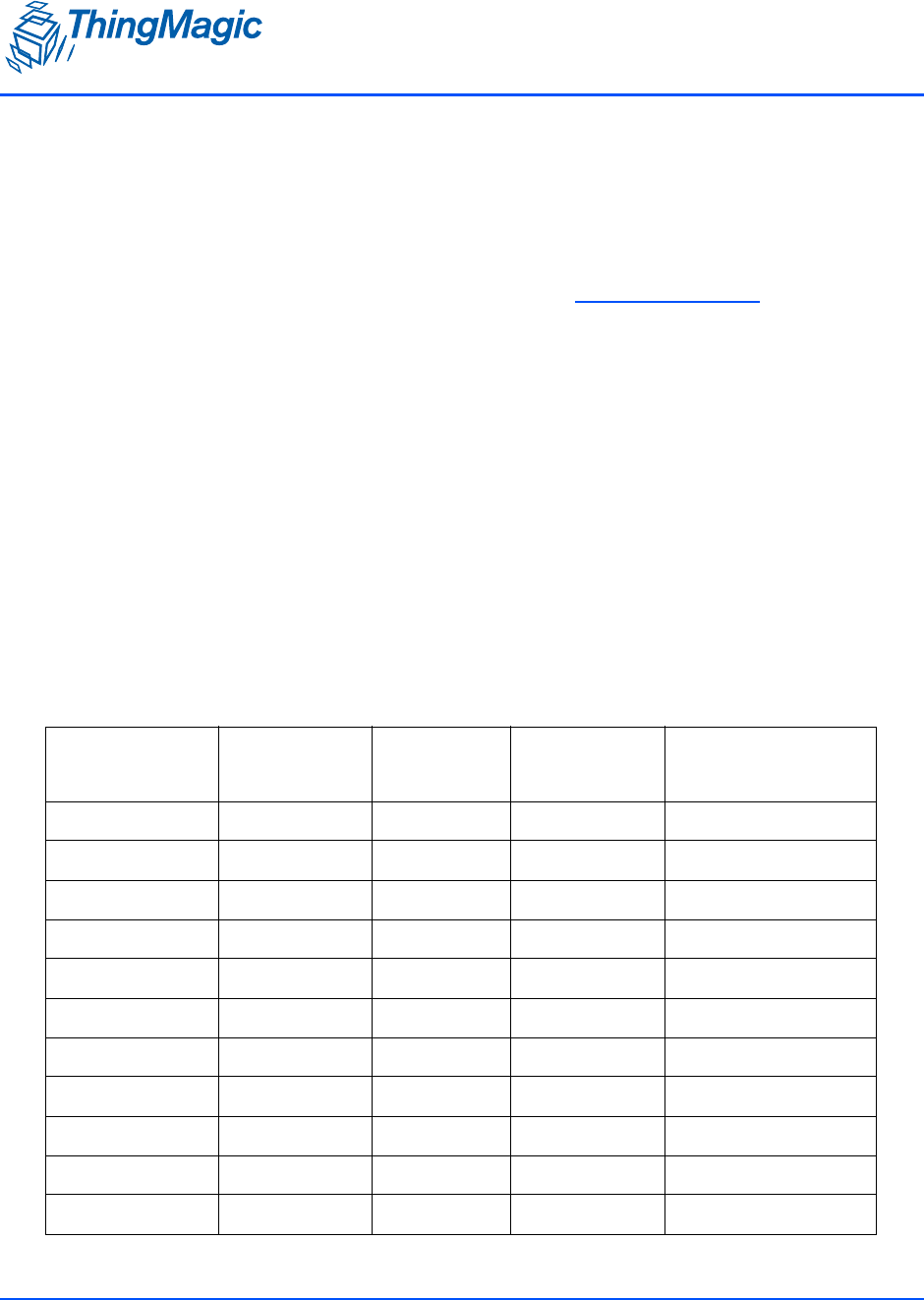
Most applications involve the module transmitting periodically to inventory tags in the
field. The longer the transmitter is on in relation to its off time (the “duty cycle”) the faster
the temperature will rise. The module will not transmit if the temperature is at a dangerous
level, but will transmit again as soon as the temperature drops – often so quickly it is
hardly noticeable. Other factors that affect the time before the module begins to protect
itself is the ambient temperature and the power level at which the module is transmitting.
These factors are represented in the following table, which give the typical minutes of
transmission time before thermal protection is enabled:
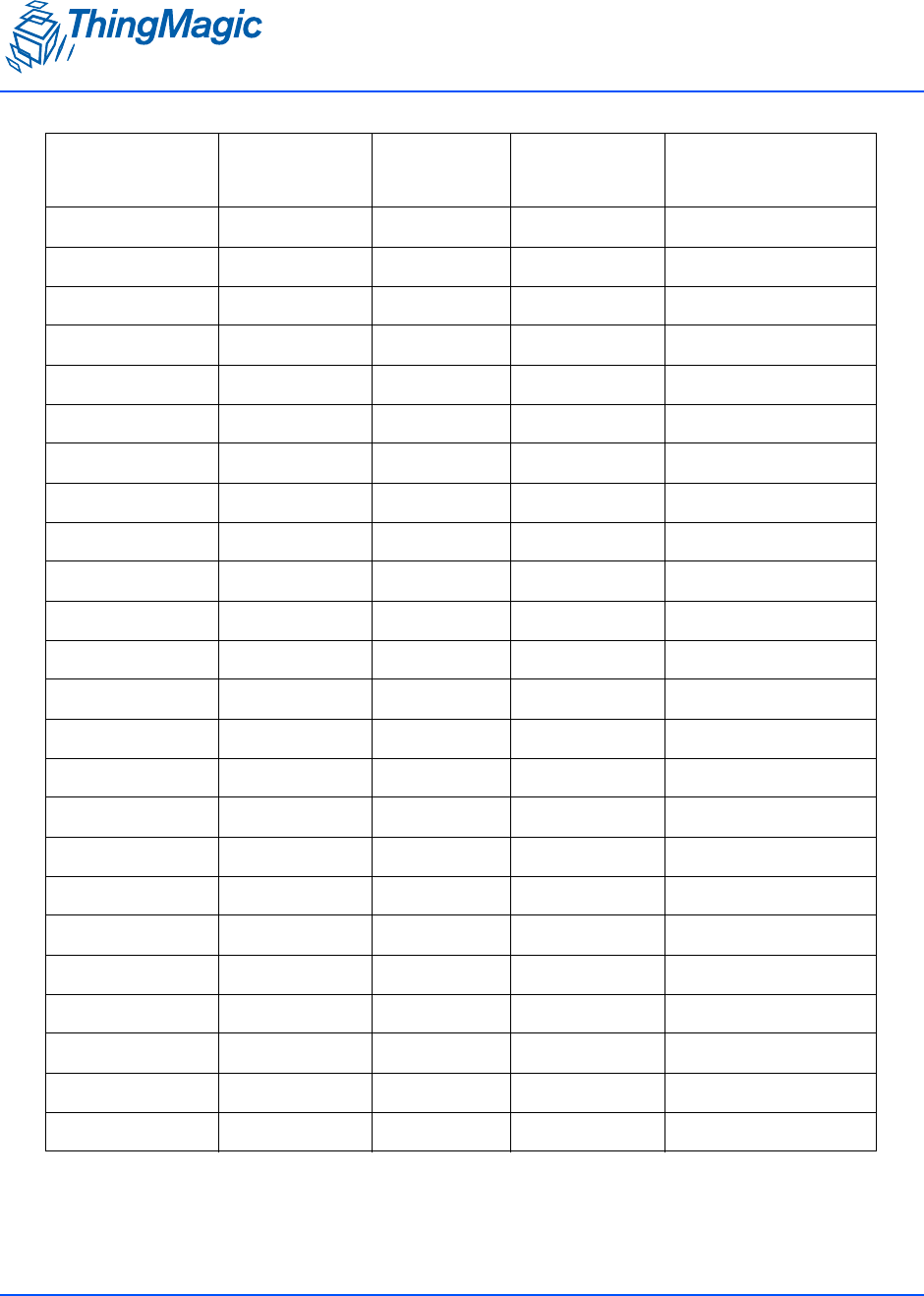
Thermal Calculations
Mounting Ambient
Temp (C)
RF Power
(dBm)
Duty Cycle
%
Time (m) to reach
max temperature
Board to board -40 30 98 >10
Board to board 25 23 98 >10
Board to board 25 30 80 >10
Board to board 25 30 90 7.34
Board to board 25 30 98 5.99
Board to board 60 23 50 >10
board to board 60 23 60 7.59
Board to board 60 23 80 2.24
Board to board 60 23 98 1.46
Board to board 60 30 30 >10
Board to board 60 30 50 4.17
Environmental Specifications
A DIVISION OF TRIMBLE
Hardware Overview 29
Board to board 60 30 60 1.99
Board to board 60 30 80 1.11
Board to board 60 30 98 0.98
Soldered down -40 30 98 >10
Soldered down 25 23 50 >10
Soldered down 25 23 60 2.93
Soldered down 25 23 80 2.22
Soldered down 25 23 98 1.24
Soldered down 25 30 40 >10
Soldered down 25 30 50 6.68
Soldered down 25 30 60 2.49
Soldered down 25 30 80 1.5
Soldered down 25 30 98 1.06
Soldered down 60 23 30 5.64
Soldered down 60 23 50 1.13
Soldered down 60 23 60 0.81
Soldered down 60 23 80 0.54
Soldered down 60 23 98 0.29
Soldered down 60 30 15 >10
Soldered down 60 30 30 1.98
Soldered down 60 30 50 0.73
Soldered down 60 30 60 0.56
Soldered down 60 30 80 0.27
Soldered down 60 30 98 0.27
Mounting Ambient
Temp (C)
RF Power
(dBm)
Duty Cycle
%
Time (m) to reach
max temperature
Environmental Specifications
A DIVISION OF TRIMBLE
30 Hardware Overview
Electro-Static Discharge (ESD) Specification
IEC-61000-4-2 and MIL-883 3015.7 discharges direct to operational antenna port
tolerates max 2KV pulse.
Note
Survival level varies with antenna return loss and antenna characteristics.
See ElectroStatic Discharge (ESD) Considerations for methods to increase ESD
tolerances.
WARNING!
The M6e-Micro antenna ports may be susceptible to damage from
Electrostatic Discharge (ESD). Equipment failure can result if the
antenna or communication ports are subjected to ESD. Standard ESD
precautions should be taken during installation and operation to avoid
static discharge when handling or making connections to the M6e-Micro
reader antenna or communication ports. Environmental analysis should
also be performed to ensure static is not building up on and around the
antennas, possibly causing discharges during operation.

Authorized Antennas
A DIVISION OF TRIMBLE
Hardware Overview 31
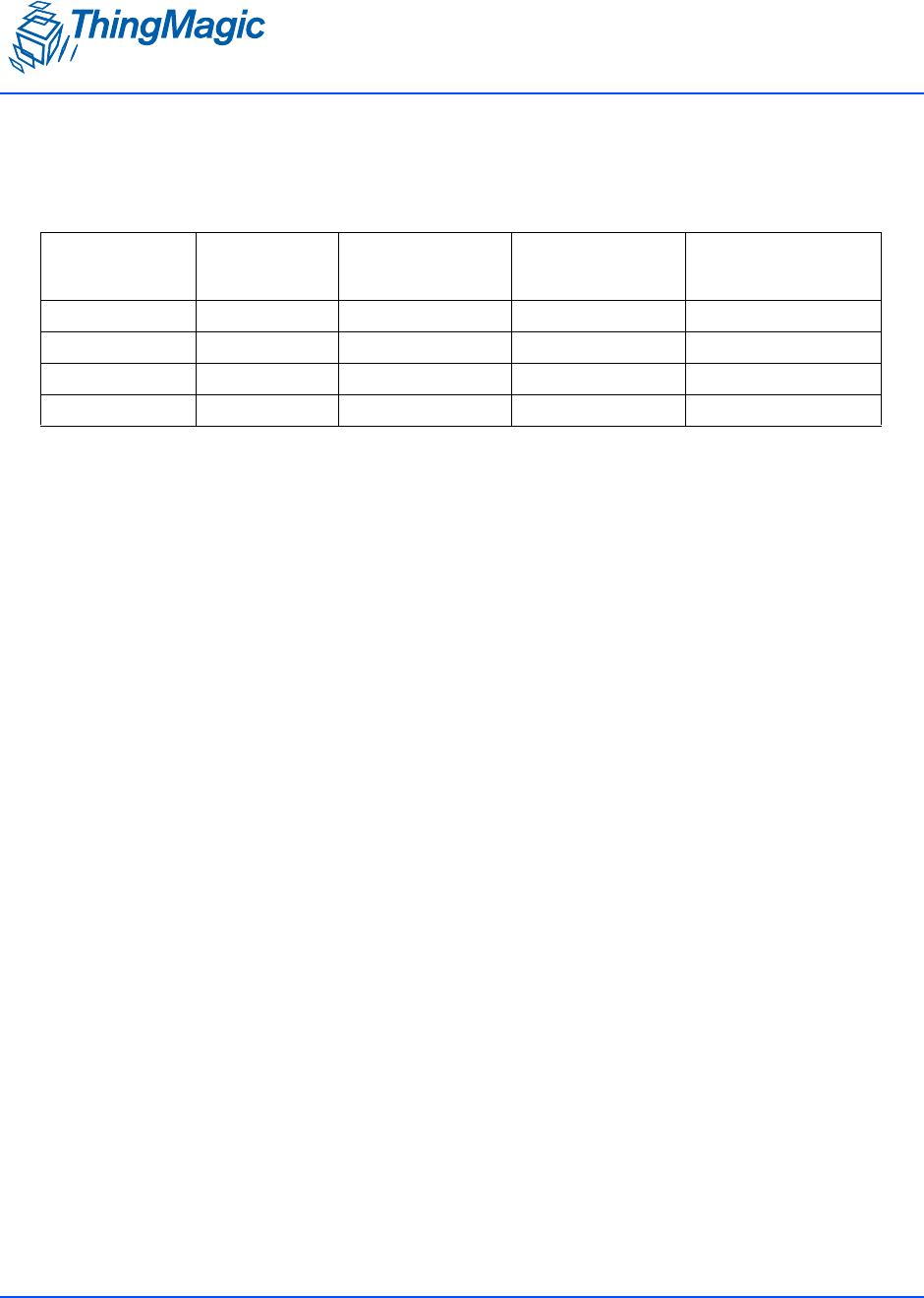
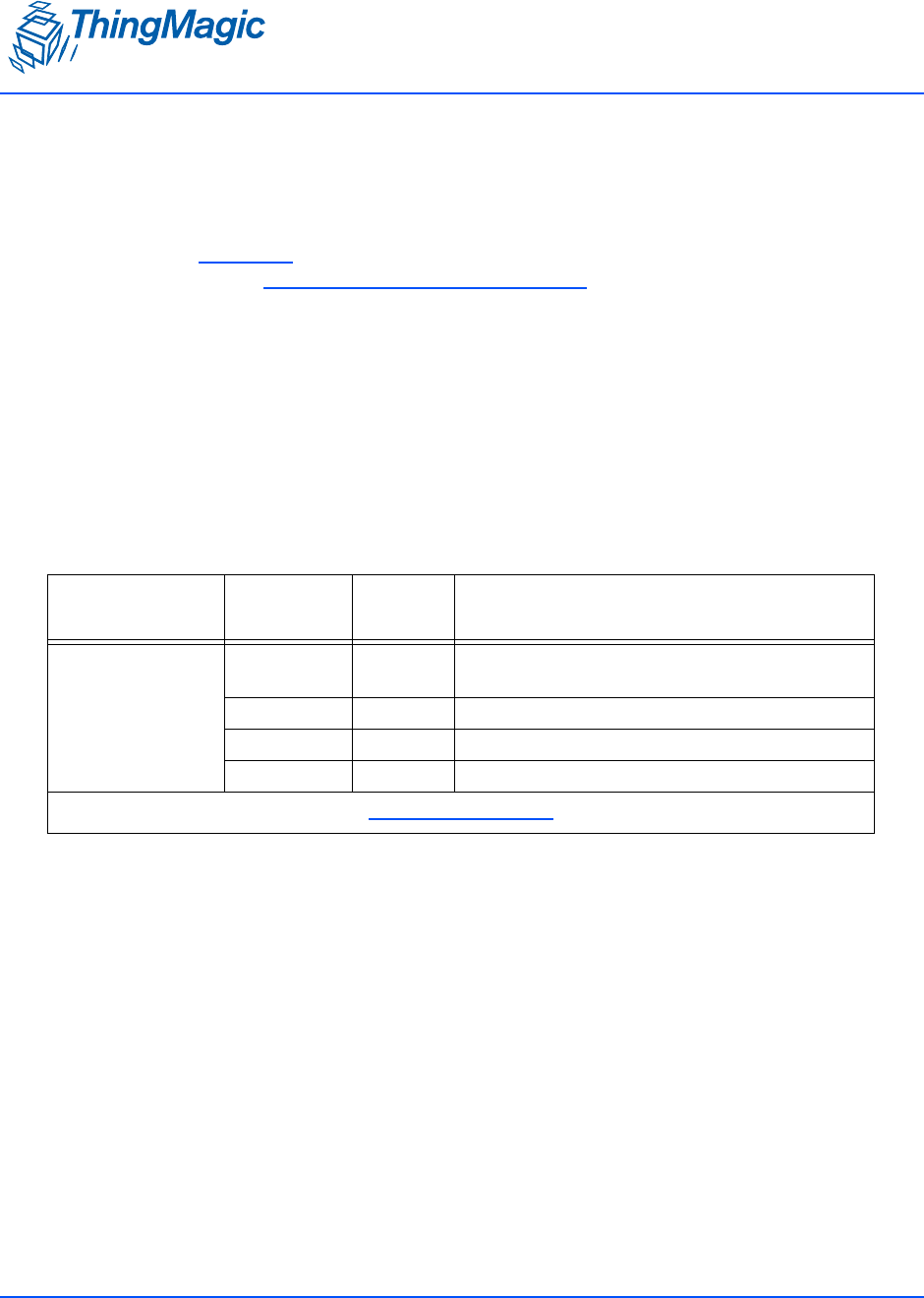
Authorized Antennas
This device has been designed to operate with the antennas listed below, and having a maxi-
mum gain of 6dBiL. Antennas not included in this list or having a gain greater than 6dBiLare
strictly prohibited for use with this device without regulatory approval. The required antenna
impedance is 50 ohms.
M6e-Micro Authorized Antennas
Vendor Model Type Polarization Linear Gain1
(dBi)
Laird S9025P Patch Circular 4.3
MTI Wireless MT-242025 Patch Circular 5.1
Laird FG9026 Dipole Linear 6.0
Note: 1 - These are circularly polarized antennas, but since most tag antennas are linearly
polarized, the equivalent linear gain, as provided, of the antenna should be used for all
calculations.
Assembly Information
A DIVISION OF TRIMBLE
32 Hardware Overview
Assembly Information
Cables and Connectors
The following are the cables and connectors used in the M6e-Micro Developerʼs Kit
interface board:
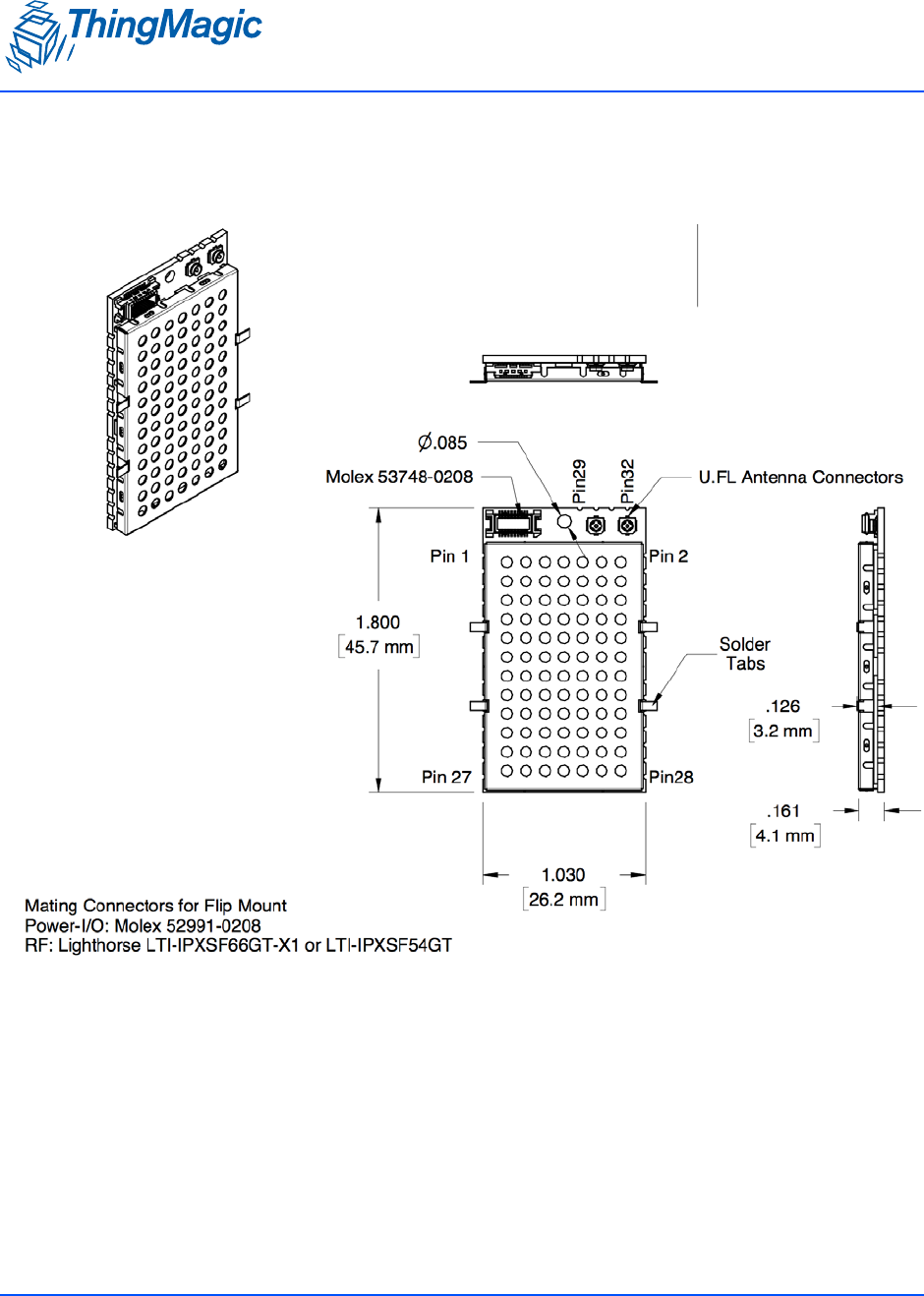
Mating Connectors for Flip Mount
Power-I/O: Molex 52991-0208
RF: Lighthorse LTI-IPXSF66GT-X1 or LTI-IPXSF54GT
Digital Interface
The cable assembly used consists of the following parts:
Note
Pin numbers and assignments are shown in the M6e-Micro Digital Connector
Signal Definition table.
Antennas
The cable assembly used to connect the “external” RP-TNC connectors on the M6e-Micro
Devkit to the M6e-Micro MMCX connectors consists of the following parts:
Assembly Information
A DIVISION OF TRIMBLE
Hardware Overview 33
M6e-Micro Mechanical Drawing
M6e-Micro Dimensional Drawing

M6e-Micro Footprint
A DIVISION OF TRIMBLE
34 Hardware Overview
M6e-Micro Footprint
Boot Loader
A DIVISION OF TRIMBLE
36 Firmware Overview
Boot Loader
The boot loader provides low-level functionality. This program provides the low level
hardware support for configuring communication settings, loading Application Firmware
and storing and retrieving data to/from flash.
When a module is powered up or reset, the boot loader code is automatically loaded and
executed.
Note
Unlike previous ThingMagic modules (M4e and M5e) the M6e-Micro
bootloader should effectively be invisible to the user. The M6e-Micro is by
default configured to auto-boot into application firmware and for any
operations that require the module be in bootloader mode the MercuryAPI
will handle the switching automatically.
Application Firmware
A DIVISION OF TRIMBLE
Firmware Overview 37
Application Firmware
The application firmware contains the tag protocol code along with all the command
interfaces to set and get system parameters and perform tag operations. The application
firmware is, by default, started automatically upon power up.
Programming the M6e-Micro
Applications to control the M6e-Micro module and derivative products are written using
the high level MercuryAPI. The MercuryAPI supports Java, .NET and C programming
environments. The MercuryAPI Software Development Kit (SDK) contains sample
applications and source code to help developers get started demoing and developing
functionality. For more information on the MercuryAPI see the MercuryAPI Programmers
Guide and the MercuryAPI SDK, available on the ThingMagic website.
Upgrading the M6e-Micro
New features developed for the M6e-Micro are made available to existing modules
through an Application Firmware upgrade, along with corresponding updates to the
MercuryAPI to make use of the new features. Firmware upgrades can be applied using
the MercuryAPI to build the functionality into custom applications or using the MercuryAPI
SDK demo utilities.
Verifying Application Firmware Image
The application firmware has an image level Cyclic Redundancy Check (CRC) embedded
in it to protect against corrupted firmware during an upgrade process. (If the upgrade is
unsuccessful, the CRC will not match the contents in flash.) When the boot loader starts
the application FW, it first verifies that the image CRC is correct. If this check fails, then
the boot loader does not start the application firmware and an error is returned.

Custom On-Reader Applications
A DIVISION OF TRIMBLE
38 Firmware Overview
Custom On-Reader Applications
The M6e-Micro does not support installing customer applications on the module. All
reader configuration and control is performed using the documented MercuryAPI
methods in applications running on a host processor.

A DIVISION OF TRIMBLE
Communication Protocol 39
Communication Protocol
The following section provides an overview of the low level serial communications
protocol used by the M6e-Micro.
Serial Communication Protocol
A DIVISION OF TRIMBLE
40 Communication Protocol
Serial Communication Protocol
The serial communication between a computer (host) and the M6e-Micro is based on a
synchronized command-response/master-slave mechanism. Whenever the host sends a
message to the reader, it cannot send another message until after it receives a response.
The reader never initiates a communication session; only the host initiates a
communication session.
This protocol allows for each command to have its own timeout because some
commands require more time to execute than others. The host must manage retries, if
necessary. The host must keep track of the state of the intended reader if it reissues a
command.
Host-to-Reader Communication
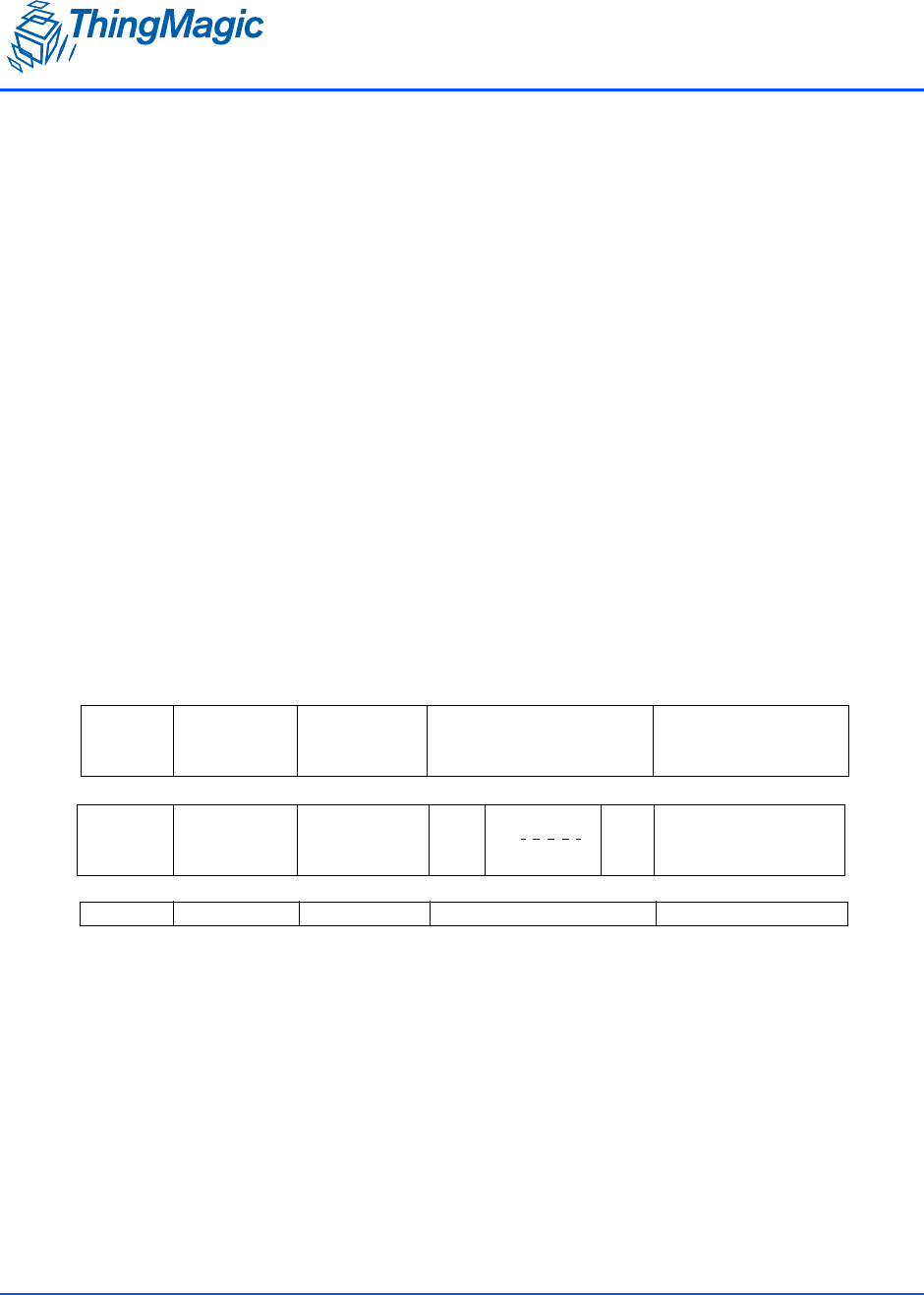
Host-to-reader communication is packetized according to the following diagram. The
reader can only accept one command at a time, and commands are executed serially, so
the host waits for a reader-to-host response before issuing another host-to-reader
command packet.
Header Data Length Command Data CRC-16 Checksum
Hdr Len Cmd CRC Hi CRC LO
I
1 byte 1 byte 1 byte 0 to 250 bytes 2 bytes
Serial Communication Protocol
A DIVISION OF TRIMBLE
Communication Protocol 41
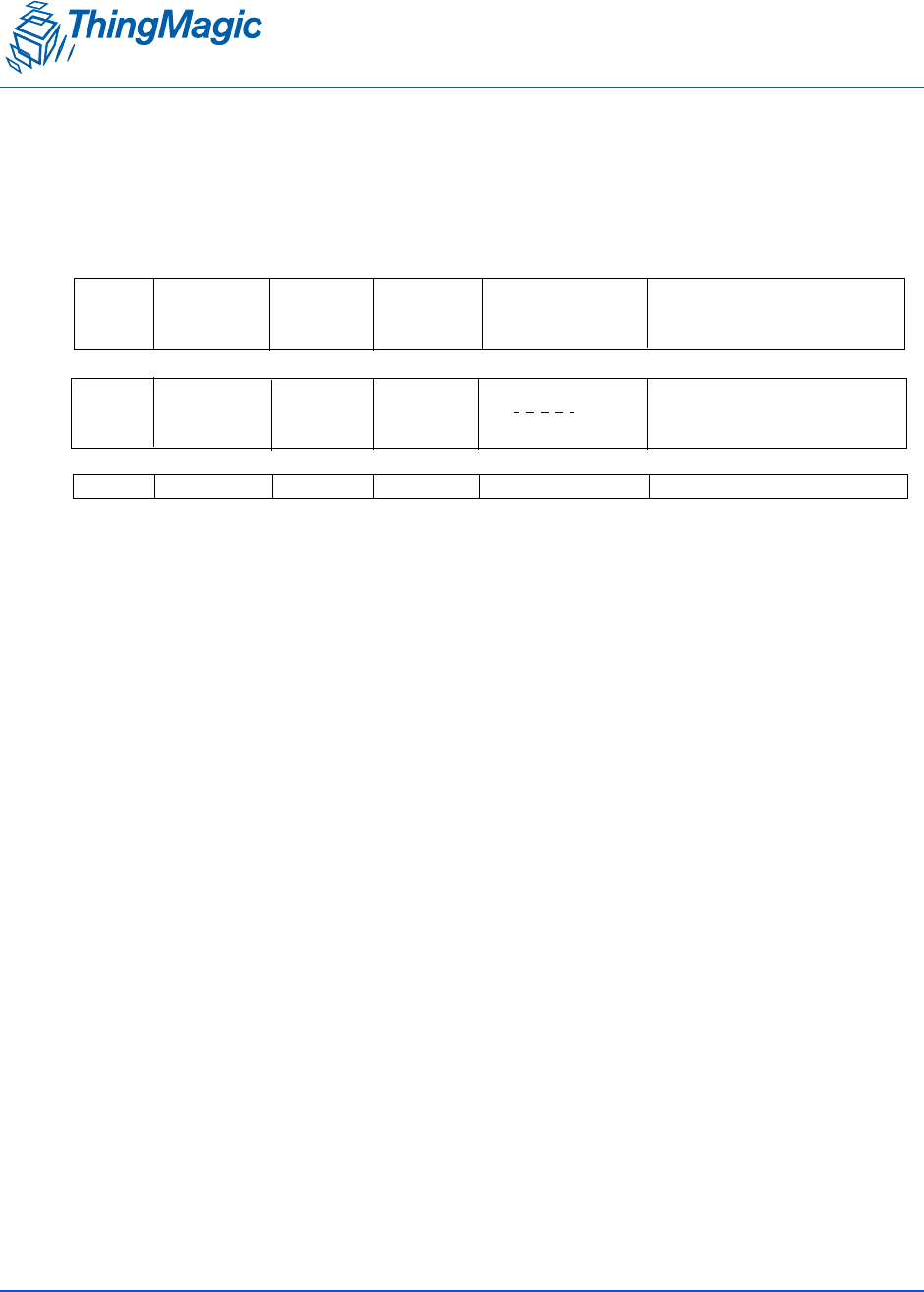
Reader-to-Host Communication
The following diagram defines the format of the generic Response Packet sent from the
reader to the host. The Response Packet is different in format from the Request Packet.
CCITT CRC-16 Calculation
The same CRC calculation is performed on all serial communications between the host
and the reader. The CRC is calculated on the Data Length, Command, Status Word, and
Data bytes. The header is not included in the CRC.
Header Data Length Command Data CRC-16 Checksum
Hdr Len Cmd CRC HI CRC LO
1 byte 1 byte 1 byte 2 bytes
Status Word
Status Word
0 to 248 bytes2 bytes

User Programming Interface
A DIVISION OF TRIMBLE
42 Communication Protocol
User Programming Interface
The M6e-Micro does not support programming to the serial protocol directly. All user
interaction with the M6e-Micro must be performed using the MercuryAPI.
The MercuryAPI supports Java, .NET and C programming environments. The
MercuryAPI Software Development Kit (SDK) contains sample applications and source
code to help developers get started demoing and developing functionality. For more
information on the MercuryAPI see the MercuryAPI Programmers Guide and the
MercuryAPI SDK, available on the ThingMagic website.

A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 43
Functionality of the M6e-Micro
The following section provides detailed descriptions of the M6e-Micro features and
functionality that are supported through the use of the MercuryAPI.
Regulatory Support
A DIVISION OF TRIMBLE
44 Functionality of the M6e-Micro
Regulatory Support
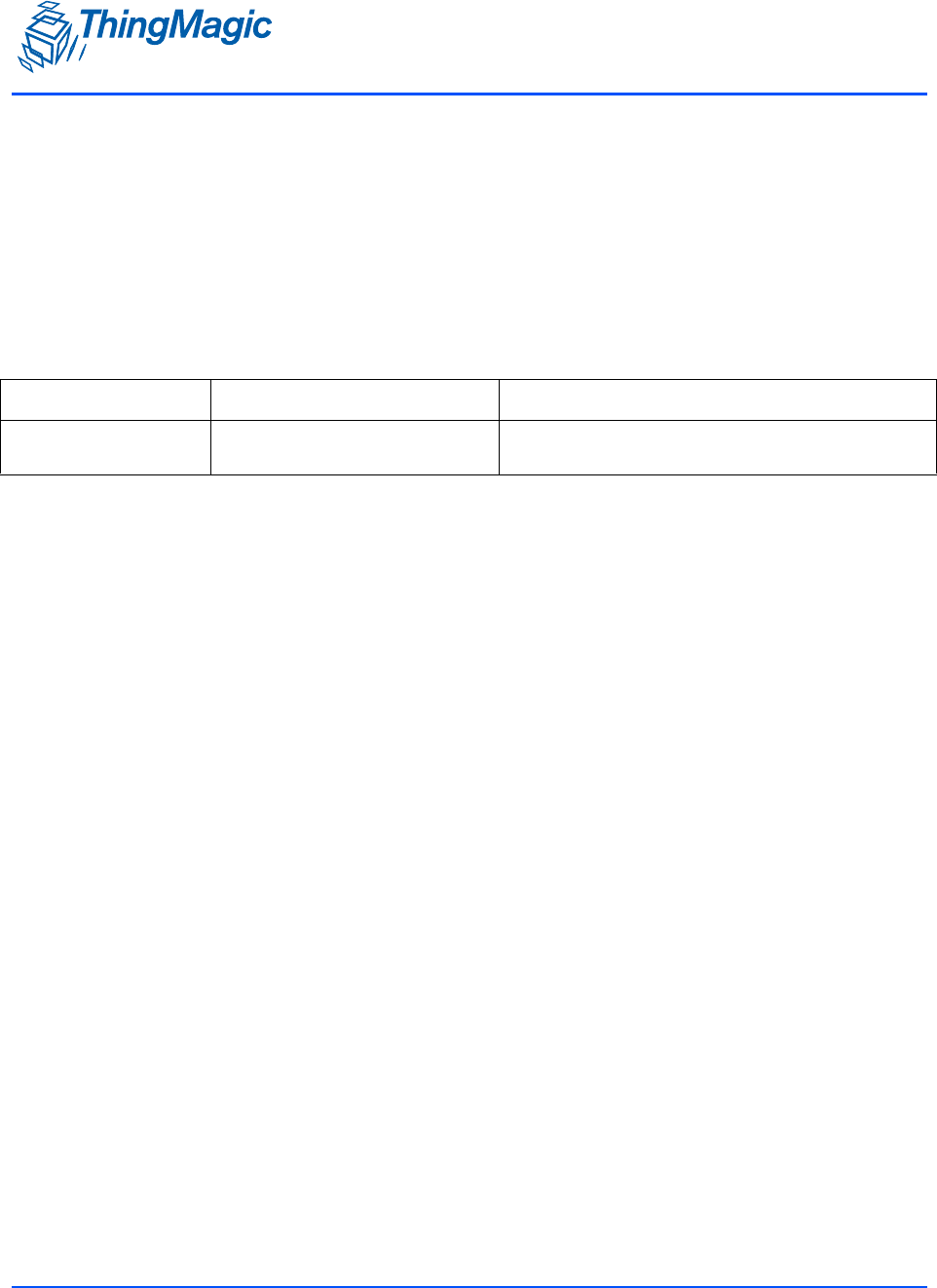
Supported Regions
The M6e-Micro has differing levels of support for operation and use under the laws and
guidelines of several regions. The regional support is shown in the following table.
The regional functionality is set using the MercuryAPI. Setting the region of operation
configures the regional default settings including:
Loads the frequency hop table with the appropriate table for the selected region.
Sets the PLL frequency setting to the first entry in the hop table, even if the RF is off.
Selects the transmit filter, if applicable.
Supported Regions
Region Regulatory Support Notes
North America (NA) FCC 47 CFG Ch. 1 Part 15
Industrie Canada RSS-210
Protocol Support
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 45
Protocol Support
The M6e-Micro has the ability to support many different tag protocols. Using the
MercuryAPI ReadPlan classes the M6e-Micro can be configured to single or multi-
protocol Read operations. The current protocols supported are (some may require a
license to enable):
ISO 18000-6C (Gen2)
I-PX
ISO 18000-6B
ISO 18000-6C (Gen2)
Protocol Configuration Options
The M6e-Micro supports multiple ISO-18000-6C profiles including the ability to specify the
Link Frequency, encoding schemes, Tari value and modulation scheme. The protocol
options are set in the MercuryAPI Reader Configuration Parameters (/reader/gen2/*). The
following table shows the supported combinations:
ISO-18000-6C Protocol Options
Backscatter
Link Frequency
(kHz)
Encoding Tari
(usec)
Modulation
Scheme Notes
250 Miller (M=8) 12.5 PR-ASK
250 Miller (M=4) 12.5 PR-ASK
250 Miller (M=2) 12.5 PR-ASK
250 FM0 12.5 PR-ASK
250 Miller (M=8) 25 PR-ASK
250 Miller (M=4) 25 PR-ASK Default
250 Miller (M=2) 25 PR-ASK
250 FM0 25 PR-ASK
250 Miller (M=8) 25 PR-ASK
640 FM0 6.25 PR-ASK Not supported in PRC
Region
Protocol Support
A DIVISION OF TRIMBLE
46 Functionality of the M6e-Micro
Note
It is important that the /reader/baudRate is greater than /reader/
gen2/BLF, in equivalent frequency units. If its not then the reader could be
reading data faster than the transport can handle and send, and the readerʼs
buffer might fill up.
Protocol Specific Functionality
See the MercuryAPI Programmers Guide and language specific reference guides for
details on supported Gen2 command functionality.
I-PX
Protocol Configuration Options
The M6e-Micro supports multiple I-PX profiles including the ability to specify the Return
Link Frequency, encoding and modulation scheme. The two profiles are treated as
distinct protocols, the individual parameters are not configurable as with the other
protocols. The following table shows the supported combinations:
Note
The two link rates are effectively two different protocols and treated as such.
I-PX tags are fixed to one of the two frequencies and cannot communicate
on the other, unlike ISO 18000-6B/C tags which can operate under multiple
profiles.
ISO 18000-6B
Protocol Configuration Options
The M6e-Micro supports multiple ISO-18000-6B profiles including the ability to specify the
Return Link Frequency, encoding, Forward Link Rate and modulation scheme. The
ISO-18000-6B Protocol Options
Return Link
Freq (kHz)
Modulation
Scheme Notes
64 PWM Protocol ID = TagProtocol.IPX64
256 PWM Protocol ID = TagProtocol.IPX256
Protocol Support
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 47
protocol options are set in the MercuryAPI Reader Configuration Parameters (/reader/
iso18000-6b/*). The following table shows the supported combinations:
Delimiter
ISO18000-6B tags support two delimiter settings on the transmitter. Not all tags support
both delimiters, some tags require the delimiter be set to 1, the default is 4.
The delimiter setting is set using the MercuryAPI Reader Configuration Parameter:
/reader/iso180006b/delimiter
In addition to setting the delimiter to 1, a TagFilter of the class
ISO180006b.Select must be used in order to read certain ISO18000-6b tags,
specifically one of the following options must be used:
– GROUP_SELECT_EQ
– GROUP_SELECT_NE
– GROUP_SELECT_GT
– GROUP_SELECT_LT
– GROUP_UNSELECT_EQ
– GROUP_UNSELECT_NE
– GROUP_UNSELECT_GT
– GROUP_UNSELECT_LT
ISO-18000-6B Protocol Options
Return Link
Freq (kHz)
Return
Encoding
Forward Link
Freq (kHz)
Forward
Encoding
Modulation
Depth
40 FM0 10 Manchester 11%
40 FM0 10 Manchester 99%
160 FM0 40 Manchester 11%
160 FM0 40 Manchester 99% (default)
Antenna Ports
A DIVISION OF TRIMBLE
48 Functionality of the M6e-Micro
Antenna Ports
The M6e-Micro has two monostatic antenna ports. Each port is capable of both
transmitting and receiving. The modules also support Using a Multiplexer, allowing up to 8
total logical antenna ports, controlled using two GPIO lines and the internal physical port
Antenna1/Antenna2 (A1/A2) switching.
Note
The M6e-Micro does not support bistatic operation.
Using a Multiplexer
Multiplexer switching is controlled through the use of the internal module physical port A1/
A2 switch along with the use of one or more of the General Purpose Input/Output (GPIO)
lines. In order to enable automatic multiplexer port switching the module must be
configured to use Use GPIO as Antenna Switch in /reader/antenna/
portSwitchGpos.
Once the GPIO line(s) usage has been enabled the following control line states are
applied when the different Logical Antenna settings are used. The tables below show the
mapping that results using GPIO 1 and 2 for multiplexer control (as is used by the
ThingMagic 1 to 4 multiplexer) allowing for 8 logical antenna ports.
Note
The Logical Antenna values are static labels indicating the available control
line states. The specific physical antenna port they map to depends on the
control line to antenna port map of the multiplexer in use. The translation
from Logical Antenna label to physical port must be maintained by the
control software.
Antenna Ports
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 49
GPIO 1 & 2 Used for Antenna Switching
If only one GPIO Output line is used for antenna control, the combinations of the available
output control line states (the GPIO line in use and the module port) result in a subset of
logical antenna settings which can be used.
ONLY GPIO 1 Used for Antenna Switching
Note
The “missing” logical antenna settings are still usable when only one GPIO
line is used for antenna control and simply results in redundant logical
antenna settings. For example, using only GPIO 1, logical setting 1 and 3
both result in GPIO1=Low and M6e-Micro port A1 active.
Logical Antenna
Setting
GPIO
Output 1
State
GPIO
Output 2
State
Active M6e-Micro
Physical Port
1Low Low A1
2Low Low A2
3Low High A1
4Low High A2
5High Low A1
6High Low A2
7High High A1
8High High A2
Logical Antenna
Setting
GPIO
Output 1
State
Active M6e-Micro
Physical Port
1Low A1
2Low A2
5High A1
6High A2
Antenna Ports
A DIVISION OF TRIMBLE
50 Functionality of the M6e-Micro
ONLY GPIO 2 Used for Antenna Switching
Port Power and Settling Time
The M6e-Micro allows the power and settling time for each logical antenna to be set using
the reader configuration parameters /reader/radio/portReadPowerList and /
reader/antenna/settlingTimeList, respectively. The order the antennas settings
are defined does not affect search order.
Note
Settling time is the time between the control lines switching to the next
antenna setting and RF turning on for operations on that port. This allows
time for external multiplexerʼs to fully switch to the new port before a signal is
sent, if necessary. Default value is 0.
Logical Antenna
Setting
GPIO
Output 2
State
Active M6e-Micro
Physical Port
1Low A1
2Low A2
3High A1
4High A2
Tag Handling
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 51
Tag Handling
When the M6e-Micro performs inventory operations (MercuryAPI Read commands) data
is stored in a Tag Buffer until retrieved by the client application, or streamed directly to the
client if operating in Tag Streaming/Continuous Reading mode.
Tag Buffer
The M6e-Micro uses a dynamic buffer that depends on EPC length and quantity of data
read. As a rule of thumb it can store a maximum of 1024 96-bit EPC tags in the TagBuffer
at a time. Since the M6e-Micro supports streaming of read results the buffer limit is,
typically, not an issue. Each tag entry consists of a variable number of bytes and consists
of the following fields:
The Tag buffer acts as a First In First Out (FIFO) — the first Tag found by the reader is
the first one to be read out.
Tag Streaming/Continuous Reading
When reading tags during asynchronous inventory operations (MercuryAPI
Reader.StartReading()) using an /reader/read/asyncOffTime=0 the M6e-Micro
“streams” the tag results back to the host processor. This means that tags are pushed out
of the buffer as soon as they are processed by the M6e-Micro and put into the buffer. The
buffer is put into a circular mode that keeps the buffer from filling. This allows for the M6e-
Micro to perform continuous search operations without the need to periodically stop
reading and fetch the contents of the buffer. Aside from not seeing “down time” when
performing a read operation this behavior is essentially invisible to the user as all tag
handling is done by the MercuryAPI.
Tag Buffer Entry
Total Entry
Size Field Size Description
68 bytes
(Max EPC
Length = 496bits)
EPC
Length
2 bytes Indicates the actual EPC length of the tag
read.
PC Word 2 bytes Contains the Protocol Control bits for the tag.
EPC 62 bytes Contains the tagʼs EPC value.
Tag CRC 2 bytes The tagʼs CRC.
Tag Read Meta Data
Tag Handling
A DIVISION OF TRIMBLE
52 Functionality of the M6e-Micro
Note
It is recommended the USB Interface be used when operating the M6e-Micro
in continuous reading mode. When the TTL Level UART Interface is used it is
not possible for the module to detect a broken communications interface
connection and stop streaming the tag results.
Tag Read Meta Data
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 53
Tag Read Meta Data
In addition to the tag EPC ID resulting from M6e-Micro inventory operation each
TagReadData (see MercuryAPI for code details) contains meta data about how, where
and when the tag was read. The specific meta data available for each tag read is as
follows:
Tag Read Meta Data
Meta Data Field Description
Antenna ID The antenna on with the tag was read. If the same tag is read
on more than one antenna there will be a tag buffer entry for
each antenna on which the tag was read. When Using a Multi-
plexer, if appropriately configured, the Antenna ID entry will
contain the logical antenna port of the tag read.
Read Count The number of times the tag was read on [Antenna ID].
Timestamp The time the tag was read, relative to the time the command to
read was issued, in milliseconds. If the Tag Read Meta Data is
not retrieved from the Tag Buffer between read commands
there will be no way to distinguish order of tags read with dif-
ferent read command invocations.
Tag Data When reading an embedded TagOp is specified for a Read-
Plan the TagReadData will contain the first 32 words of data
returned for each tag.
Note: Tags with the same TagID but different Tag Data
can be considered unique and each get a Tag
Buffer entry if set in the reader configuration
parameter /reader/tagReadData/
uniqueByData. By default it is not.
Frequency The frequency on which the tag was read
Tag Phase Average phase of tag response in degrees (0°-180°)
LQI/RSSI The receive signal strength of the tag response in dBm.
GPIO Status The signal status (High or Low) of all GPIO pins when tag was
read.

Power Management
A DIVISION OF TRIMBLE
54 Functionality of the M6e-Micro
Power Management
The M6e-Micro is designed for power efficiency and offers several different power
management modes. The following power management modes affect the power
consumption during different periods of M6e-Micro usage and impact performance in
different ways. The available power management modes are:
Power Modes - set in /reader/powerMode - Controls the power savings when the
M6e-Micro is idle.
Transmit Modes - set in /reader/radio/enablePowerSave - controls power
savings while transmitting.
Power Modes
The Power Mode setting (set in /reader/powerMode) allows the user to trade off
increased RF operation startup time for additional power savings. The details of the
amount of power consumed in each mode is shown in the table under Power
Consumption. The behavior of each mode and impact on RF command latency is as
follows:
PowerMode.FULL – In this mode, the unit operates at full power to attain the best
performance possible. This mode is only intended for use in cases where power
consumption is not an issue. This is the default Power Mode at startup.
PowerMode.MINSAVE – This mode may add up to 50 ms of delay from idle to RF on
when initiating an RF operation. It performs more aggressive power savings, such as
automatically shutting down the analog section between commands, and then
restarting it whenever a tag command is issued.
PowerMode.SLEEP – This mode essentially shuts down the digital and analog
boards, except to power the bare minimum logic required to wake the processor.This
mode may add up to 100 ms of delay from idle to RF on when initiating an RF
operation. PowerMode.SLEEP is not supported when using the USB interface.
Using the setting PowerMode.MEDSAVE is the same as SLEEP.
Note
See additional latency specifications under Event Response Times.
Transmit Modes
The Transmit Mode setting (set in /reader/radio/enablePowerSave) allows the
user to trade off RF spectral compliance with the Gen2 DRM Mask for increased power

Power Management
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 55
savings while transmitting. The details of the amount of power consumed in each mode is
shown in the table under Power Consumption. The behavior of each mode is as follows:
DRM Compliant Mode
This mode maximizes performance in dense reader environments, minimizing
interference when used with other M6e-Micro or similar DRM-compliant readers, and is
fully compliant with the Gen2 DRM spectral mask.
Power Save Mode (non-DRM Compliant)
This mode reduces the power consumption during RF operations but is not 100%
compliant with the DRM spectral mask. This can result increased interference with other
readers and reduce overall systems performance.
Performance Characteristics
A DIVISION OF TRIMBLE
56 Functionality of the M6e-Micro
Performance Characteristics
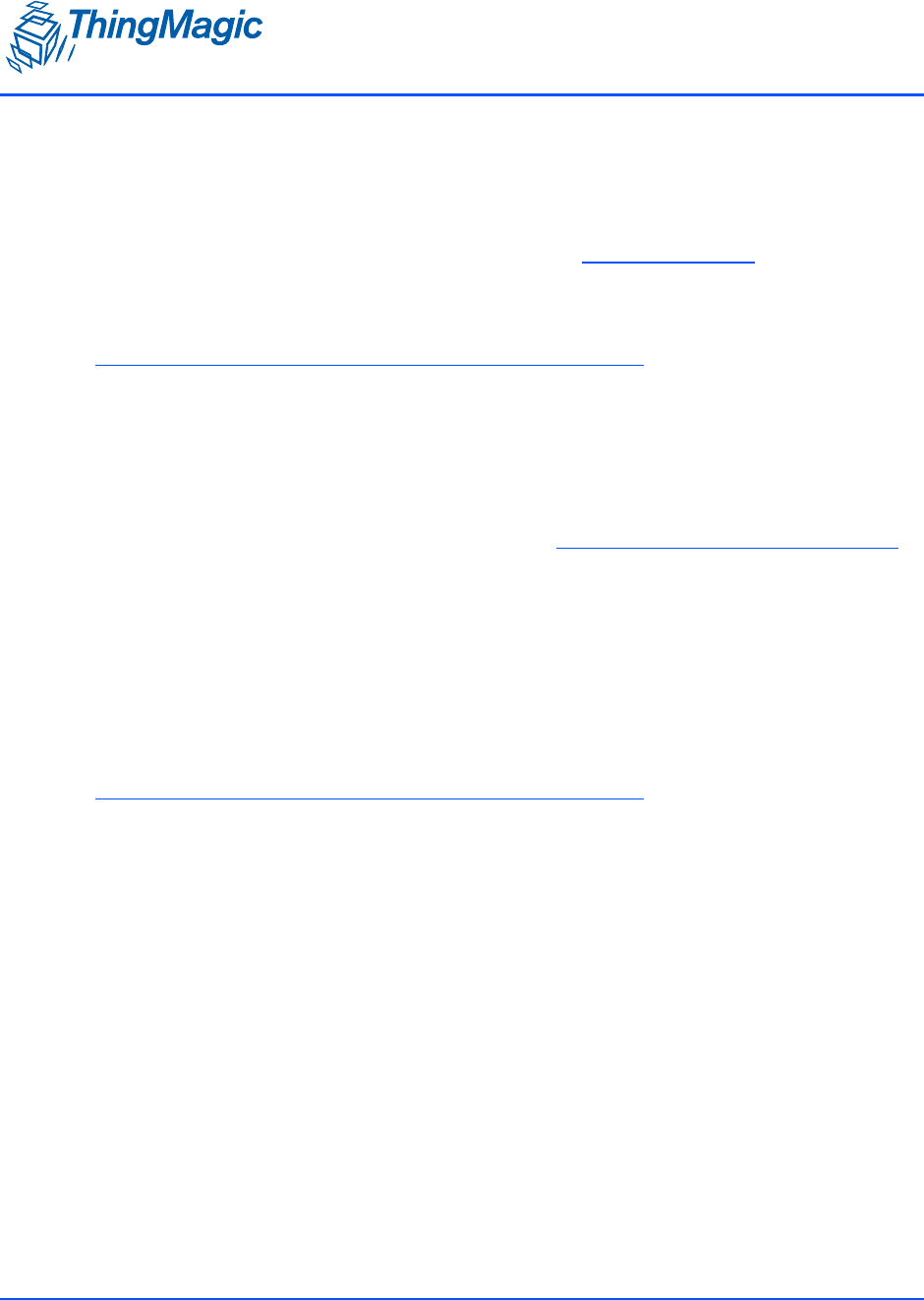
Event Response Times
The following table provides some metrics on how long common M6e-Micro operations
take. An event response time is defined as the maximum time from the end of a command
(end of the last bit in the serial stream) or event (e.g. power up) to the response event the
command or event causes.
Event Response Times
Start Command/
Event End Event Time
(msecs) Notes
Power Up Application Active (with
CRC check)
1500 This longer power up period should only
occur for the first boot with new firm-
ware.
Power Up Application Active 120 Once the firmware CRC has been veri-
fied subsequent power ups do not
require the CRC check be performed,
saving time.
Tag Read RF On 20 When in Power Mode = FULL
Tag Read RF On 50 When in Power Mode = MINSAVE
Tag Read RF On 120 When in Power Mode = SLEEP
Change to MINSAVE PowerMode.MINSAVE 5 From Power Mode = FULL
Change to SLEEP PowerMode.SLEEP 5 From Power Mode = FULL

Save and Restore Configuration
A DIVISION OF TRIMBLE
Functionality of the M6e-Micro 57
Save and Restore Configuration
The M6e-Micro supports saving module and protocol configuration parameters to the
module flash to provide configuration persistence across boots. Currently the region,
baud-rate, and default protocol can be saved across reboots. Future firmware upgrades
will support saving other configuration values.
See the MercuryAPI Programmers Guide and sample applications for details on saving
and restoring reader configuration.

Save and Restore Configuration
A DIVISION OF TRIMBLE
58 Functionality of the M6e-Micro
Common Error Messages
Appendix A: Error Messages 59
Appendix A: Error Messages
Common Error Messages
The following table lists the common faults discussed in this section.
FAULT_MSG_WRONG_NUMBER_OF_DATA – (100h)
Cause
If the data length in any of the Host-to-M5e/M5e-Compact messages is less than or more
than the number of arguments in the message, the reader returns this message.
Solution
Make sure the number of arguments matches the data length.
FAULT_INVALID_OPCODE – (101h)
Cause
The opCode received is invalid or not supported in the currently running program
(bootloader or main application) or is not supported in the current version of code.
Fault Message Code
FAULT_MSG_WRONG_NUMBER_OF_DATA – (100h) 100h
FAULT_INVALID_OPCODE – (101h) 101h
FAULT_UNIMPLEMENTED_OPCODE – 102h 102h
FAULT_MSG_POWER_TOO_HIGH – 103h 103h
FAULT_MSG_INVALID_FREQ_RECEIVED (104h) 104h
FAULT_MSG_INVALID_PARAMETER_VALUE - (105h) 105h
FAULT_MSG_POWER_TOO_LOW - (106h) 106h
FAULT_UNIMPLEMENTED_FEATURE - (109h) 109h
FAULT_INVALID_BAUD_RATE - (10Ah) 10Ah

Common Error Messages
60 Appendix A: Error Messages
Solution
Check the following:
Make sure the command is supported in the currently running program.
Check the documentation for the opCode the host sent and make sure it is correct and
supported.
Check the previous module responses for an assert (0x7F0X) which will reset the
module into the bootloader.
FAULT_UNIMPLEMENTED_OPCODE – 102h
Cause
Some of the reserved commands might return this error code.
This does not mean that they always will do this since ThingMagic reserves the right to
modify those commands at anytime.
Solution
Check the documentation for the opCode the host sent to the reader and make sure it is
supported.
FAULT_MSG_POWER_TOO_HIGH – 103h
Cause
A message was sent to set the read or write power to a level that is higher than the
current HW supports.
Solution
Check the HW specifications for the supported powers and insure that the level is not
exceeded.
The M5e 1 Watt units support power from 5 dBm to 30 dBm.
The M5e-Compact units support power from 10 dBm to 23 dBm.

Common Error Messages
Appendix A: Error Messages 61
FAULT_MSG_INVALID_FREQ_RECEIVED (104h)
Cause
A message was received by the reader to set the frequency outside the supported range
Solution
Make sure the host does not set the frequency outside this range or any other locally
supported ranges.
FAULT_MSG_INVALID_PARAMETER_VALUE - (105h)
Cause
The reader received a valid command with an unsupported or invalid value within this
command.
For example, currently the module supports four antennas. If the module receives a
message with an antenna value other than 1 to 4, it returns this error.
Solution
Make sure the host sets all the values in a command according to the values published in
this document.
FAULT_MSG_POWER_TOO_LOW - (106h)
Cause
A message was received to set the read or write power to a level that is lower than the
current HW supports.
Solution
Check the HW specifications for the supported powers and insure that level is not
exceeded. The M6e-Micro supports powers between 5 and 30 dBm.
FAULT_UNIMPLEMENTED_FEATURE - (109h)
Cause
Attempting to invoke a command not supported on this firmware or hardware.

Common Error Messages
62 Appendix A: Error Messages
Solution
Check the command being invoked against the documentation.
FAULT_INVALID_BAUD_RATE - (10Ah)
Cause
When the baud rate is set to a rate that is not specified in the Baud Rate table, this error
message is returned.
Solution
Check the table of specific baud rates and select a baud rate.
Bootloader Faults
Appendix A: Error Messages 63
Bootloader Faults
The following table lists the common faults discussed in this section.
FAULT_BL_INVALID_IMAGE_CRC – 200h
Cause
When the application firmware is loaded the reader checks the image stored in flash and
returns this error if the calculated CRC is different than the one stored in flash.
Solution
The exact reason for the corruption could be that the image loaded in flash was corrupted
during the transfer or corrupted for some other reason.
To fix this problem, reload the application code in flash.
FAULT_BL_INVALID_APP_END_ADDR – 201h
Cause
When the application firmware is loaded the reader checks the image stored in flash and
returns this error if the last word stored in flash does not have the correct address value.
Solution
The exact reason for the corruption could be that the image loaded in flash got corrupted
during the transfer or, corrupted for some other reason.
To fix this problem, reload the application code in flash.
Fault Message Code
FAULT_BL_INVALID_IMAGE_CRC 200h
FAULT_BL_INVALID_APP_END_ADDR 201h
Flash Faults
64 Appendix A: Error Messages
Flash Faults
The following table lists the common faults discussed in this section.
FAULT_FLASH_BAD_ERASE_PASSWORD – 300h
Cause
A command was received to erase some part of the flash but the password supplied with
the command was incorrect.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_FLASH_BAD_WRITE_PASSWORD – 301h
Cause
A command was received to write some part of the flash but the password supplied with
the command was not correct.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
Fault Message Code
FAULT_FLASH_BAD_ERASE_PASSWORD – 300h 300h
FAULT_FLASH_BAD_WRITE_PASSWORD – 301h 301h
FAULT_FLASH_UNDEFINED_ERROR – 302h 302h
FAULT_FLASH_ILLEGAL_SECTOR – 303h 303h
FAULT_FLASH_WRITE_TO_NON_ERASED_AREA – 304h 304h
FAULT_FLASH_WRITE_TO_ILLEGAL_SECTOR – 305h 305h
FAULT_FLASH_VERIFY_FAILED – 306h 306h

Flash Faults
Appendix A: Error Messages 65
FAULT_FLASH_UNDEFINED_ERROR – 302h
Cause
This is an internal error and it is caused by a software problem in module.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_FLASH_ILLEGAL_SECTOR – 303h
Cause
An erase or write flash command was received with the sector value and password not
matching.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_FLASH_WRITE_TO_NON_ERASED_AREA – 304h
Cause
The module received a write flash command to an area of flash that was not previously
erased.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_FLASH_WRITE_TO_ILLEGAL_SECTOR – 305h
Cause
The module received a write flash command to write across a sector boundary that is
prohibited.

Flash Faults
66 Appendix A: Error Messages
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_FLASH_VERIFY_FAILED – 306h
Cause
The module received a write flash command that was unsuccessful because data being
written to flash contained an uneven number of bytes.
Solution
When this occurs make note of the operations you were executing, save FULL error
response and send a testcase reproducing the behavior to support@thingmagic.com.
Protocol Faults
Appendix A: Error Messages 67
Protocol Faults
The following table lists the common faults discussed in this section.
Fault Message Code
FAULT_NO_TAGS_FOUND – (400h) 400h
FAULT_NO_PROTOCOL_DEFINED – 401h 401h
FAULT_INVALID_PROTOCOL_SPECIFIED – 402h 402h
FAULT_WRITE_PASSED_LOCK_FAILED – 403h 403h
FAULT_PROTOCOL_NO_DATA_READ – 404h 404h
FAULT_AFE_NOT_ON – 405h 405h
FAULT_PROTOCOL_WRITE_FAILED – 406h 406h
FAULT_NOT_IMPLEMENTED_FOR_THIS_PROTOCOL – 407h 407h
FAULT_PROTOCOL_INVALID_WRITE_DATA – 408h 408h
FAULT_PROTOCOL_INVALID_ADDRESS – 409h 409h
FAULT_GENERAL_TAG_ERROR – 40Ah 40Ah
FAULT_DATA_TOO_LARGE – 40Bh 40Bh
FAULT_PROTOCOL_INVALID_KILL_PASSWORD – 40Ch 40Ch
FAULT_PROTOCOL_KILL_FAILED - 40Eh 40Eh
FAULT_PROTOCOL_BIT_DECODING_FAILED - 40Fh 40Fh
FAULT_PROTOCOL_INVALID_EPC – 410h 410h
FAULT_PROTOCOL_INVALID_NUM_DATA – 411h 411h
FAULT_GEN2 PROTOCOL_OTHER_ERROR - 420h 420h
FAULT_GEN2_PROTOCOL_MEMORY_OVERRUN_BAD_PC -
423h
423h
FAULT_GEN2 PROTOCOL_MEMORY_LOCKED - 424h 424h
FAULT_GEN2 PROTOCOL_INSUFFICIENT_POWER - 42Bh 42Bh
FAULT_GEN2 PROTOCOL_NON_SPECIFIC_ERROR - 42Fh 42Fh
FAULT_GEN2 PROTOCOL_UNKNOWN_ERROR - 430h 430h

Protocol Faults
68 Appendix A: Error Messages
FAULT_NO_TAGS_FOUND – (400h)
Cause
A command was received (such as like read, write, or lock) but the operation failed. There
are many reasons that can cause this error to occur.
Here is a list of possible reasons that could be causing this error:
No tag in the RF field
Read/write power too low
Antenna not connected
Tag is weak or dead
Solution
Make sure there is a good tag in the field and all parameters are set up correctly. The best
way to check this is to try few tags of the same type to rule out a weak tag. If none
passed, then it could be SW configuration such as protocol value, antenna, and so forth,
or a placement configuration like a tag location.
FAULT_NO_PROTOCOL_DEFINED – 401h
Cause
A command was received to perform a protocol command but no protocol was initially set.
The reader powers up with no protocols set.
Solution
A protocol must be set before the reader can begin RF operations.
FAULT_INVALID_PROTOCOL_SPECIFIED – 402h
Cause
The protocol value was set to a protocol that is not supported with the current version of
SW.

Protocol Faults
Appendix A: Error Messages 69
Solution
This value is invalid or this version of SW does not support the protocol value. Check the
documentation for the correct values for the protocols in use and that you are licensed for
it.
FAULT_WRITE_PASSED_LOCK_FAILED – 403h
Cause
During a Write Tag Data for ISO18000-6B or UCODE, if the lock fails, this error is
returned. The write command passed but the lock did not. This could be a bad tag.
Solution
Try to write a few other tags and make sure that they are placed in the RF field.
FAULT_PROTOCOL_NO_DATA_READ – 404h
Cause
A command was sent but did not succeed.
Solution
The tag used has failed or does not have the correct CRC. Try to read a few other tags to
check the HW/SW configuration.
FAULT_AFE_NOT_ON – 405h
Cause
A command was received for an operation, like read or write, but the AFE was in the off
state.
Solution
Make sure the region and tag protocol have been set to supported values.

Protocol Faults
70 Appendix A: Error Messages
FAULT_PROTOCOL_WRITE_FAILED – 406h
Cause
An attempt to modify the contents of a tag failed. There are many reasons for failure.
Solution
Check that the tag is good and try another operation on a few more tags.
FAULT_NOT_IMPLEMENTED_FOR_THIS_PROTOCOL – 407h
Cause
A command was received which is not supported by a protocol.
Solution
Check the documentation for the supported commands and protocols.
FAULT_PROTOCOL_INVALID_WRITE_DATA – 408h
Cause
An ID write was attempted with an unsupported/incorrect ID length.
Solution
Verify the Tag ID length being written.
FAULT_PROTOCOL_INVALID_ADDRESS – 409h
Cause
A command was received attempting to access an invalid address in the tag data address
space.
Solution
Make sure that the address specified is within the scope of the tag data address space
and available for the specific operation. The protocol specifications contain information
about the supported addresses.
Protocol Faults
Appendix A: Error Messages 71
FAULT_GENERAL_TAG_ERROR – 40Ah
Cause
This error is used by the GEN2 module. This fault can occur if the read, write, lock, or kill
command fails. This error can be internal or functional.
Solution
Make a note of the operations you were performing and contact ThingMagic at http://
support.thingmagic.com
FAULT_DATA_TOO_LARGE – 40Bh
Cause
A command was received to Read Tag Data with a data value larger than expected or it is
not the correct size.
Solution
Check the size of the data value in the message sent to the reader.
FAULT_PROTOCOL_INVALID_KILL_PASSWORD – 40Ch
Cause
An incorrect kill password was received as part of the Kill command.
Solution
Check the password.
FAULT_PROTOCOL_KILL_FAILED - 40Eh
Cause
Attempt to kill a tag failed for an unknown reason
Solution
Check tag is in RF field and the kill password.

Protocol Faults
72 Appendix A: Error Messages
FAULT_PROTOCOL_BIT_DECODING_FAILED - 40Fh
Cause
Attempt to operate on a tag with an EPC length greater than the Maximum EPC length
setting.
Solution
Check the EPC length being written.
FAULT_PROTOCOL_INVALID_EPC – 410h
Cause
This error is used by the GEN2 module indicating an invalid EPC value has been
specified for an operation. This fault can occur if the read, write, lock, or kill command
fails.
Solution
Check the EPC value that is being passed in the command resulting in this error.
FAULT_PROTOCOL_INVALID_NUM_DATA – 411h
Cause
This error is used by the GEN2 module indicating invalid data has been specified for an
operation. This fault can occur if the read, write, lock, or kill command fails.
Solution
Check the data that is being passed in the command resulting in this error.
FAULT_GEN2 PROTOCOL_OTHER_ERROR - 420h
Cause
This is an error returned by Gen2 tags. Its a catch-all for error not covered by other codes.

Protocol Faults
Appendix A: Error Messages 73
Solution
Check the data that is being passed in the command resulting in this error. Try with a
different tag.
FAULT_GEN2_PROTOCOL_MEMORY_OVERRUN_BAD_PC -
423h
Cause
This is an error returned by Gen2 tags. The specified memory location does not exist or
the PC value is not supported by the Tag.
Solution
Check the data that is being written and where its being written to in the command
resulting in this error.
FAULT_GEN2 PROTOCOL_MEMORY_LOCKED - 424h
Cause
This is an error returned by Gen2 tags.The specified memory location is locked and/or
permalocked and is either not writable or not readable.
Solution
Check the data that is being written and where its being written to in the command
resulting in this error. Check the access password being sent.
FAULT_GEN2 PROTOCOL_INSUFFICIENT_POWER - 42Bh
Cause
This is an error returned by Gen2 tags. The tag has insufficient power to perform the
memory-write operation.
Solution
Try moving the tag closer to the antenna. Try with a different tag.

Protocol Faults
74 Appendix A: Error Messages
FAULT_GEN2 PROTOCOL_NON_SPECIFIC_ERROR - 42Fh
Cause
This is an error returned by Gen2 tags. The tag does not support error specific codes.
Solution
Check the data that is being written and where its being written to in the command
resulting in this error. Try with a different tag.
FAULT_GEN2 PROTOCOL_UNKNOWN_ERROR - 430h
Cause
This is an error returned by M6e-Micro when no more error information is available about
why the operation failed.
Solution
Check the data that is being written and where its being written to in the command
resulting in this error. Try with a different tag.

Analog Hardware Abstraction Layer Faults
Appendix A: Error Messages 75
Analog Hardware Abstraction Layer Faults
FAULT_AHAL_INVALID_FREQ – 500h
Cause
A command was received to set a frequency outside the specified range.
Solution
Check the values you are trying to set and be sure that they fall within the range of the set
region of operation.
FAULT_AHAL_CHANNEL_OCCUPIED – 501h
Cause
With LBT enabled an attempt was made to set the frequency to an occupied channel.
Solution
Try a different channel. If supported by the region of operation turn LBT off.
FAULT_AHAL_TRANSMITTER_ON – 502h
Cause
Checking antenna status while CW is on is not allowed.
Solution
Do not perform antenna checking when CW is turned on.
FAULT_ANTENNA_NOT_CONNECTED – 503h
Cause
An attempt was made to transmit on an antenna which did not pass the antenna detection
when antenna detection was turned on.
Analog Hardware Abstraction Layer Faults
76 Appendix A: Error Messages
Solution
Connect a detectable antenna (antenna must have some DC resistance).
FAULT_TEMPERATURE_EXCEED_LIMITS – 504h
Cause
The module has exceeded the maximum or minimum operating temperature and will not
allow an RF operation until it is back in range.
Solution
Take steps to resolve thermal issues with module:
Reduce duty cycle
Add heat sink
Use Power Save Mode (non-DRM Compliant)
FAULT_POOR_RETURN_LOSS – 505h
Cause
The module has detected a poor return loss and has ended RF operation to avoid module
damage.
Solution
Take steps to resolve high return loss on receiver:
Make sure antenna VSWR is within module specifications
Make sure antennas are correctly attached before transmitting
Check environment to ensure no occurrences of high signal reflection back at
antennas.
FAULT_AHAL_INVALID_ANTENA_CONFIG – 507h
Cause
An attempt to set an antenna configuration that is not valid.
Analog Hardware Abstraction Layer Faults
Appendix A: Error Messages 77
Solution
Use the correct antenna setting or change the reader configuration.
Tag ID Buffer Faults
78 Appendix A: Error Messages
Tag ID Buffer Faults
The following table lists the common faults discussed in this section.
FAULT_TAG_ID_BUFFER_NOT_ENOUGH_TAGS_AVAILABLE
– 600h
Cause
A command was received to get a certain number of tag ids from the tag id buffer. The
reader contains less tag ids stored in its tag id buffer than the number the host is sending.
Solution
Send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_TAG_ID_BUFFER_FULL – 601h
Cause
The tag id buffer is full.
Solution
Make sure the baud rate is set to a higher frequency that the /reader/gen2/BLF frequency.
Send a testcase reproducing the behavior to support@thingmagic.com.
Fault Message Code
FAULT_TAG_ID_BUFFER_NOT_ENOUGH_TAGS_AVAILABLE – 600h 600h
FAULT_TAG_ID_BUFFER_FULL – 601h 601h
FAULT_TAG_ID_BUFFER_REPEATED_TAG_ID – 602h 602h
FAULT_TAG_ID_BUFFER_NUM_TAG_TOO_LARGE – 603h 603h

Tag ID Buffer Faults
Appendix A: Error Messages 79
FAULT_TAG_ID_BUFFER_REPEATED_TAG_ID – 602h
Cause
The module has an internal error. One of the protocols is trying to add an existing TagID
to the buffer.
Solution
Send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_TAG_ID_BUFFER_NUM_TAG_TOO_LARGE – 603h
Cause
The module received a request to retrieve more tags than is supported by the current
version of the software.
Solution
Send a testcase reproducing the behavior to support@thingmagic.com.

System Errors
80 Appendix A: Error Messages
System Errors
FAULT_SYSTEM_UNKNOWN_ERROR – 7F00h
Cause
The error is internal.
Solution
Send a testcase reproducing the behavior to support@thingmagic.com.
FAULT_TM_ASSERT_FAILED – 7F01h
Cause
An unexpected Internal Error has occurred.
Solution
The error will cause the module to switch back to Bootloader mode. When this occurs
make note of the operations you were executing, save FULL error response and send a
testcase reproducing the behavior to support@thingmagic.com.
Appendix B: Getting Started - Devkit 81
Appendix B: Getting Started - Devkit
Devkit Hardware
Included Components
With the devkit, you will receive the following components:
The M6e-Micro module and power/interface developers board
One USB cable
One antenna
One coax cable
One 9V power supply
International power adapter kit
Sample tags
One paper insert:
– QuickStart Guide - Details on which documents and software to download to get
up and running quickly, along with details on how to register for and contact
support.
Setting up the DevKit
When setting up the DevKit, use the following procedures:
Connecting the Antenna
Powering up and Connecting to a PC
Devkit Hardware
82 Appendix B: Getting Started - Devkit
Connecting the Antenna
ThingMagic supplies one antenna that can read tags from 20ʼ away with most of the
provided tags. The antenna is monstatic. Use the following procedure to connect the
antenna to the DevKit.
1. Connect one end of the coax cable to the antenna.
2. Connect the other end of the cable to the antenna port 1 connector on the DevKit.
Powering up and Connecting to a PC
After connecting the antenna you can power up the DevKit and establish a host
connection.
1. Connect the USB cable (use only the black connector) from a PC to the developerʼs
kit. There are two Devkit USB Interfaces options.
2. Plug the power supply into the DevKitʼs DC power input connector.
3. The LED next to the DC input jack, labeled DS1, should light up. If it doesnʼt light up
check jumper J17 to make sure the jumper is connecting pins 2 and 3
4. Follow the steps based on the Devkit USB Interfaces used and make note of the COM
port or /dev device file, as appropriate for your operating system the USB interface is
assigned.
5. To start reading tags start the Demo Application (Universal Reader Assistant).
WARNING!
While the module is powered up, do not touch components. Doing so
may be damaged the devkit and M6e-Micro module.
Devkit Hardware
Appendix B: Getting Started - Devkit 83
Devkit USB Interfaces
USB/RS232
The USB interface (connector labeled USB/RS232) closest to the power plug is to the
RS232 interface of the M6e-Micro through an FTDI USB to serial converter. The drivers
for it are available at
http://www.ftdichip.com/Drivers/VCP.htm
Please follow the instructions in the installation guide appropriate for your operating
system.
Native USB
To use the M6e-Micro native USB interface (connector labeled USB), if on Windows, a few
installation steps are required for Windows to recognize the M6e-Micro and properly
configure the communications protocol. In order to use the USB interface with Windows
you must have the M6e-Micro.inf file (available for download from rfid.thingmagic.com/
devkit). The installation steps are:
1. Plug in the USB cable to the M6e-Micro (devkit) and PC.
2. Windows should report is has “Found New Hardware - Mercury6eUltra” and open the
Hardware Installation Wizard.
3. Select the Install from a list or specific location (Advanced) option, click Next.
4. Select Donʼt search..., click Next, then Next again.
5. Click Have Disk and navigate to where the m6ultra.inf file is stored and select it, click
Open, then OK.
6. “Mercury6eUltra” should now be shown under the Model list. Select it and click Next
then Finished.
Note
The M6e-Micro driver file has not been Microsoft certified so compatibility
warnings will be displayed. These can be ignored and clicked through.
7. A COM port should now be assigned to the M6e-Micro. If you arenʼt sure what COM
port is assigned you can find it using the Windows Device Manager:
a. Open the Device Manager (located in Control Panel | System).
b. Select the Hardware tab and click Device Manager.
Devkit Hardware
84 Appendix B: Getting Started - Devkit
c. Select View | Devices by Type | Ports (COM & LPT) The device appears as
Mercury6eUltra (COM#).
Devkit Jumpers
J8
Jumpers to connect M6e-Micro I/O lines to devkit.
J9
Header for alternate power supply. Make sure DC plug (J1) is not connected if using J9.
J10, J11, J13, J15
Jump pins OUT to GPIO# to connect M6e-Micro GPIO lines to output LEDs. Jumpe pins
IN to GPIO# to connect M6e-Micro GPIO to corresponding input switches SW[3-
6]GPIO#. Make sure GPIO lines are correspondingly configured as input or outputs (see
Configuring GPIO Settings).
J14
Can be used to connect GPIO lines to external circuits. If used jumpers should be
removed from J10, J11, J13, J15.
J16
Jump pins 1 and 2 or 2 and 3 to reset devkit power supply. Same as using switch SW1
except allows for control by external circuit.
J17
Jump pins 1 and 2 to use the 5V INPUT and GND inputs to provide power. Jump pins 2
and 3 to use the DevKitʼs DC power jack and power brick power.
J19
Jump SHUTDOWN to GND to enable module. While grounded SHUTDOWN pushbutton
(SW2) will break circuit and shutdown the M6e-Micro (see M6e-Micro Digital Connector
Signal Definition). AUTO_BOOT controls Reset Line.

Devkit Hardware
Appendix B: Getting Started - Devkit 85
Devkit Schematics
Available upon request from support@thingmagic.com.

Demo Application
86 Appendix B: Getting Started - Devkit
Demo Application
A demo application which supports multi-protocol reading and writing is provided in the
MercuryAPI SDK package. The executable for this example is included in the MercuryAPI
SDK package under /cs/samples/exe/Universal-Reader-Assistant.exe and is also
available for direct download from rfid.thingmagic.com/devkit.
See the Readme.txt in /cs/samples/Universal-Reader-Assistant/Universal-Reader-
Assistant for usage details.
See the MercuryAPI Programming Guide for details on using the MercuryAPI.

Notice on Restricted Use of the DevKit
Appendix B: Getting Started - Devkit 87
Notice on Restricted Use of the DevKit
The Mercury6e Developers Kit (DevKit) is intended for use solely by professional
engineers for the purpose of evaluating the feasibility of applications.
The userʼs evaluation must be limited to use within a laboratory setting. This DevKit has
not been certified for use by the FCC in accordance with Part 15 of the FCC regulations,
ETSI, KCC or any other regulatory bodies and may not be sold or given for public use.
Distribution and sale of the DevKit is intended solely for use in future development of
devices which may be subject to regional regulatory authorities governing radio emission.
This DevKit may not be resold by users for any purpose. Accordingly, operation of the
DevKit in the development of future devices is deemed within the discretion of the user
and the user shall have all responsibility for any compliance with any regional regulatory
authority governing radio emission of such development or use, including without
limitation reducing electrical interference to legally acceptable levels. All products
developed by user must be approved by the appropriate regional regulatory authority
governing radio emission prior to marketing or sale of such products and user bears all
responsibility for obtaining the prior appropriate regulatory approval, or approval as
needed from any other authority governing radio emission.

Notice on Restricted Use of the DevKit
88 Appendix B: Getting Started - Devkit
Appendix C: Environmental Considerations 89
Appendix C: Environmental
Considerations
This Appendix details environmental factors that should be considered relating to reader
performance and survivability.
ElectroStatic Discharge (ESD) Considerations
WARNING!
The M6e-Micro antenna ports may be susceptible to damage from Electrostatic
Discharge (ESD). Equipment failure can result if the antenna or communication
ports are subjected to ESD. Standard ESD precautions should be taken during
installation to avoid static discharge when handling or making connections to
the M6 reader antenna or communication ports. Environmental analysis should
also be performed to ensure static is not building up on and around the antennas,
possibly causing discharges during operation.
ESD Damage Overview
In M6e-Micro-based reader installations where readers have failed without known cause,
based on anecdotal information ESD has been found to be the most common cause.
Failures due to ESD tend to be in the M6e-Micro power amplifier section (PA). PA failures
typically manifest themselves at the software interface in the following ways:
RF operations (read, write, etc.) respond with Assert - 7F01 - indicating a a fatal error.
This is typically due the the module not being able to reach the target power level due
to PA damage.
RF operations (read, write, etc.) respond with No Antenna Connected/Detected
even when a known good antenna is attached.
Unexpected Invalid Command errors, indicating command not supported, when that
command had worked just fine shortly before. The reason a command becomes
suddenly not supported is that the reader, in the course of its self protection routines,

ElectroStatic Discharge (ESD) Considerations
90 Appendix C: Environmental Considerations
has returned to the bootloader to prevent any further damage. This jump to boot
loader caused by power amp damage occurs at the start of any read tag commands.
Ultimately determining that ESD is the root cause of failures is difficult because it relies on
negative result experiments, i.e. it is the lack of failure after a configuration change, rather
than a positive flag wave that says “Iʼm ESD”. Such flag waves are sometimes, but only
sometimes, available at the unpackaged transistor level under high power microscopy.
The remoteness of microscopic examination from the installed field failures is indicative of
the high cost of using such analysis methods for chasing down ESD issues. Therefore
most ESD issue resolutions will be using the negative result experiments to determine
success.
ESD discharges come with a range of values, and like many things in life there is the
“matter of degree”. For many installations, the M6e-Micro has been successfully deployed
and operates happily. For these, there is no failure issue, ESD or otherwise. For a
different installation that with bare M6e-Micro, has a failure problem from ESD, there will
be some distribution of ESD intensities occurring. Without knowledge of a limit in the
statistics of those intensities, there may always be the bigger zap waiting in the wings. For
the bare M6e-Micro equipped with the mitigation methods described below, there will
always be the rouge ESD discharge that exceeds any given mitigation, and results in
failure. Fortunately, many installations will have some upper bound on the value of ESD
events given the geometry of that installation.
Several sequential steps are recommended for a) determining the ESD is the likely cause
of a given group of failures, and b) enhancing the M6e-Microʼs environment to eliminate
ESD failures. The steps vary depending on the required M6e-Micro output power in any
given application.
Identifying ESD as the Cause of Damaged Readers
The following are some suggested methods to determine if ESD is a cause of reader
failures, i.e. ESD diagnostics. Please remember- some of these suggestions have the
negative result experiment problem.
Return failed units for analysis. Analysis should be able to say if it is the power
amplifier that has in fact failed, but wonʼt be able to definitively identify that the cause
is ESD. However, ESD is one of the more common causes of PA failure.
Measure ambient static levels with static meter. AlphaLabs SVM2 is such a meter, but
there are others. You may be surprised at the static potentials floating detected.
However, high static doesnʼt necessarily mean discharges, but should be considered
cause for further investigation. High levels that keep changing are highly indicative of
discharges.
Touch some things around the antenna, and operating area. If you feel static
discharges, that qualitatively says quite a bit about what is in front of the antenna.

ElectroStatic Discharge (ESD) Considerations
Appendix C: Environmental Considerations 91
What actually gets to the M6e-Micro is also strongly influenced by the antenna
installation, cabling, and grounding discussed above.
Use the mean operating time statistic before and after one or more of the changes
listed below to quantitatively determine if the change has resulted in an improvement.
Be sure to restart your statistics after the change.
Common Installation Best Practices
The following are common installation best practices which will ensure the readers isnʼt
being unnecessarily exposed to ESD in even low risk environments. These should be
applied to all installations, full power or partial power, ESD or not:
Insure that M6e-Micro, M6e-Micro enclosing housing (e.g. Vega reader housing), and
antenna ground connection are all grounded to a common low impedance ground.
Verify R-TNC knurled threaded nuts are tight and stay tight. Donʼt use a thread locking
compound that would compromise the grounding connection of the thread to thread
mate. If there is any indication that field vibration might cause the R-TNC to loosen,
apply RTV or other adhesive externally.
Use antenna cables with double shield outer conductors, or even full metallic shield
semirigid cables. ThingMagic specified cables are double shielded and adequate for
most applications. ESD discharge currents flowing ostensibly on the outer surface of
a single shield coaxial cable have been seen to couple to the inside of coaxial cables,
causing ESD failure. Avoid RG-58. Prefer RG-223.
Minimize ground loops in coaxial cable runs to antennas. Having the M6e-Micro and
antenna both tied to ground (per item 1) leads to the possibility of ground currents
flowing along antenna cables. The tendency of these currents to flow is related to the
area of the conceptual surface marked out by the antenna cable and the nearest
continuous ground surface. When this conceptual surface has minimum area, these
ground loop current are minimized. Routing antenna cables against grounded
metallic chassis parts helps minimize ground loop currents.
Keep the antenna radome in place. It provides significant ESD protection for the
metallic parts of the antenna, and protects the antenna from performance changes
due to environmental accumulation.
Keep careful track of serial numbers, operating life times, numbers of units operating.
You need this information to know that your mean operating life time is. Only with this
number will you be able to know if you have a failure problem in the first place, ESD
or otherwise. And then after any given change, whether things have improvement or
not. Or if the failures are confined to one instantiation, or distributed across your
population.
ElectroStatic Discharge (ESD) Considerations
92 Appendix C: Environmental Considerations
Raising the ESD Threshold
For applications where full M6e-Micro power is needed for maximum tag read range and
ESD is suspected the following components are recommended additions to the
installation to raise the level of ESD the reader can tolerate:
Select or change to an antenna with all radiating elements grounded for DC. The MTI
MT-262031-T(L,R)H-A is such an antenna. The Laird IF900-SF00 and CAF95956
are not such antennas. The grounding of the antenna elements dissipates static
charge leakage, and provides a high pass characteristic that attenuates discharge
events. (This also makes the antenna compatible with the M6e-Micro antenna detect
methods.)
Install a Minicircuits SHP600+ high pass filter in the cable run at the M6e-Micro (or
Vega or other finished reader) end. This additional component will reduce transmit
power by 0.4 dB which may affect read range in some critical applications. However
the filter will significantly attenuate discharges and improve the M6e-Micro ESD
survival level.
Note
The SHP600+ is not rated for the full +31.5 dBm output of the M6e-Micro
reader at +85 degree C. Operation at reduced temperature has been
anecdotally observed to be OK, but has not been fully qualified by
ThingMagic.
Install a Diode Clamp* circuit immediately outboard from the SHP600 filter. This will
reduce transmit power by an additional 0.4 dB, but in combination with the SHP600
will further improve the M6e-Micro ESD survival level. * Not yet productized. Needs
DC power, contact support@thingmagic.com for details.
Further ESD Protection for Reduced RF Power Applications
In addition to the protective measures recommended above, for applications where
reduced M6e-Micro RF power is acceptable and ESD is suspected the following
protective measures can also be applied:
Install a one watt attenuator with a decibel value of +30 dBm minus the dBm value
needed for tag power up. Then run the reader at +30 dBm instead of reduced
transmit power. This will attenuate inbound ESD pulses by the installed decibel
value, while keeping the tag operation generally unchanged. Attenuators of 6 dB
have been shown to not adversely effect read sensitivity. Position the attenuator as
close to the M6e-Micro as feasible.
As described above add the SHP600 filter immediately adjacent to the attenuator, on
the antenna side.

ElectroStatic Discharge (ESD) Considerations
Appendix C: Environmental Considerations 93
Add Diode Clamp, if required, adjacent to the SHP600, on the antenna side.
Variables Affecting Performance
94 Appendix C: Environmental Considerations
Variables Affecting Performance
Reader performance may be affected by the following variables, depending on the site
where your Reader is being deployed:
Environmental
Tag Considerations
Multiple Readers
Environmental
Reader performance may be affected by the following environmental conditions:
Metal surfaces such as desks, filing cabinets, bookshelves, and wastebaskets
may enhance or degrade Reader performance.
Antennas should be mounted far away from metal surfaces that may adversely
affect the system performance.
Devices that operate at 900 MHz, such as cordless phones and wireless LANs,
can degrade Reader performance. The Reader may also adversely affect the
performance of these 900 MHz devices.
Moving machinery can interfere the Reader performance. Test Reader
performance with moving machinery turned off.
Fluorescent lighting fixtures are a source of strong electromagnetic interference
and if possible should be replaced. If fluorescent lights cannot be replaced, then
keep the Reader cables and antennas away from them.
Coaxial cables leading from the Reader to antennas can be a strong source of
electromagnetic radiation. These cables should be laid flat and not coiled up.
Tag Considerations
There are several variables associated with tags that can affect Reader performance:
Application Surface: Some materials, including metal and moisture, interfere with
tag performance. Tags applied to items made from or containing these materials
may not perform as expected.
Variables Affecting Performance
Appendix C: Environmental Considerations 95
Tag Orientation: Reader performance is affected by the orientation of the tag in
the antenna field. The ThingMagic antenna is circularly polarized, so it reads
face-to but not edge-to.
Tag Model: Many tag models are available. Each model has its own
performance characteristics.
Multiple Readers
The Reader adversely affect performance of 900 MHz devices. These devices also may
degrade performance of the Reader.
Antennas on other Readers operating in close proximity may interfere with one
another, thus degrading performance of the Readers.
Interference from other antennas may be eliminated or reduced by using either
one or both of the following strategies:
w Affected antennas may be synchronized by a separate user application using
a time-multiplexing strategy.
w Antenna power can be reduced by reconfiguring the RF Transmit Power
setting for the Reader.
Note
Performance tests conducted under typical operating conditions at your site are
recommended to help you optimize system performance.