Japan Radio NKE2254 Marine Radar User Manual
Japan Radio Co Ltd. Marine Radar Users Manual
Contents
- 1. Users Manual 1
- 2. Users Manual 2
- 3. Users Manual 3
- 4. Users Manual 4
- 5. Users Manual
Users Manual 4
7.4.5 Update of Character String Data (String Data Update)
The system is designed to transfer and display external character strings as the second language display. The
second language is factory-set to "Japanese."
Ask our agent or sales department for the supply of character strings to be updated.
To update character strings, the flash memory card (option) containing the character string file must be inserted
in card slot 2.
Procedures 1. Open the Serviceman Menu.
2. Perform the following menu open procedure to open the String Data
Update menu.
3. Maintenance Menu
→ 6. String Data Update
3. Select Yes in the Confirmation Window.
The character string file on the flash memory card is read into the system, and the second
language area is updated.
To display the read character strings in the second language, select Other in the menu
shown in Section 7.2.6.
7-35
SECTION 8
MAINTEMANCE
8.1 ROUTINE MAINTENANCE ......................................................................8-1
8.2 MAINTENANCE ON EACH UNIT.............................................................8-2
8.3 PERFORMANCE CHECK ........................................................................8-6
8.4 REPLACEMENT OF MAJOR PARTS....................................................8-11
8.1 ROUTINE MAINTENANCE
WARNING
Never carry out internal inspection or repair work
of the equipment by users.
Inspection or repair work by unauthorized
personnel may result in fire hazard or electric
shock.
Ask the nearest branch, business office or a
dealer for inspection and repair.
Turn off the main power before maintenance
work. Otherwise, an electric shock may result.
Turn off the main power before cleaning the
equipment. Especially, make sure to turn off the
indicator if a rectifier is used. Otherwise,
equipment failure, or death or serious injury due
to electric shock may result, because voltage is
outputted from the rectifier even when the radar
is not operating.
For operating the radar equipment in the good conditions, it is necessary to make the maintenance work as
described below. If maintenance is made properly, troubles will reduce. It is recommended to make regular
maintenance work.
Common points of maintenance for each unit are as follow:
Clean the equipment.
Remove the dust, dirt, and sea water rest on the equipment cabinet with a piece of dry cloth.
Especially, clean the air vents with a brush for good ventilation.
8-1
8.2 Maintenance on each Unit yyyy
yyyy
8.2 MAINTENANCE ON EACH UNIT
8.2.1 Scanner Unit NKE-1130/2103/2254
8
WARNING
Turn off the main power source before starting
maintenance.
Otherwise, an electric shock or injury may be
caused.
Turn "OFF" the safety switch to stop the scanner
unit. (Refer to pages 1-6 to 1-10.)
Otherwise, you may be injured if touching the
rotating scanner unit by accident.
Do not touch the radiator. Even if the power is
turned off, the radiator may be rotated by the
wind.
After the work, turn "ON" the scanner unit safety switch.
8-2
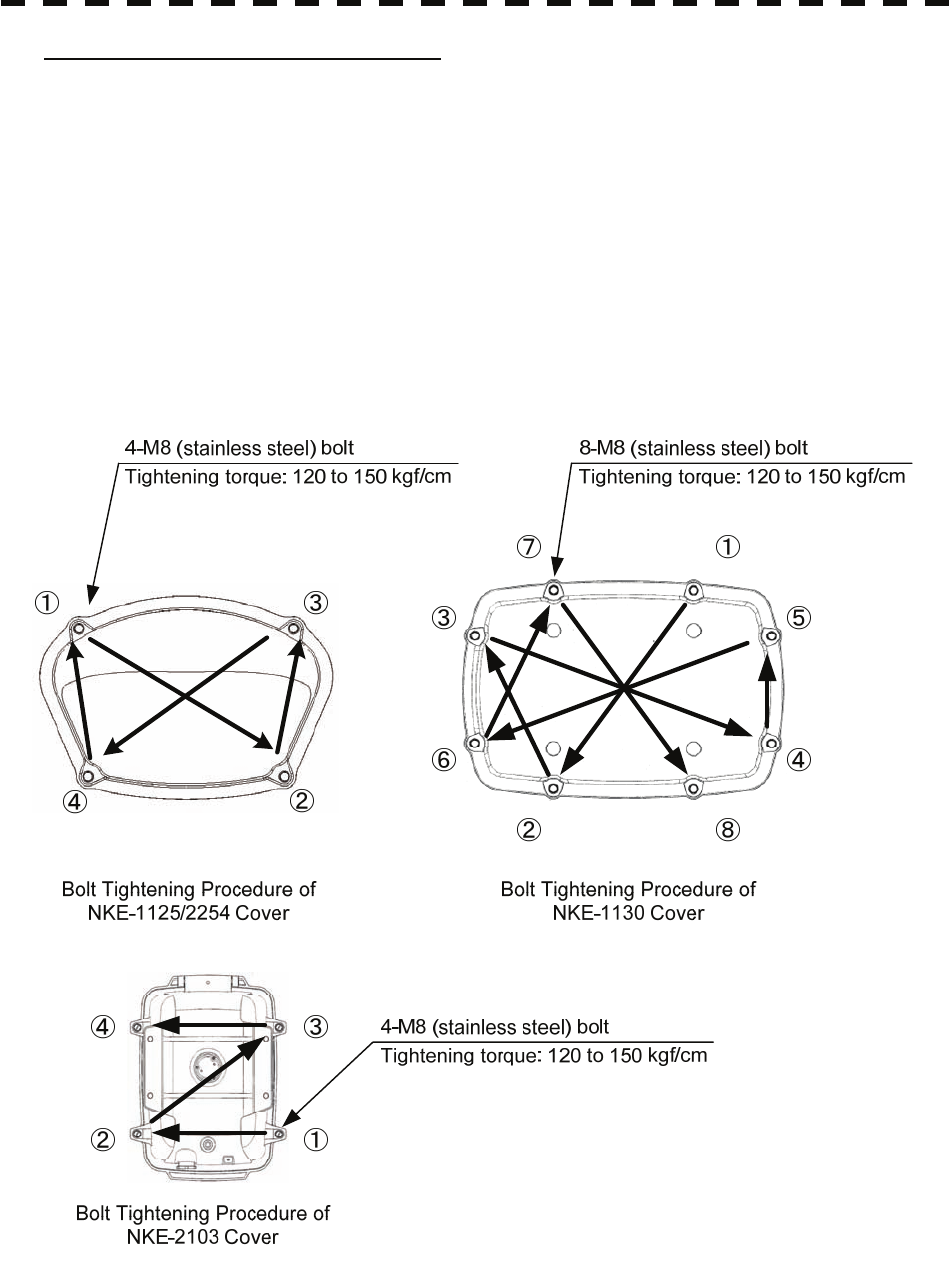
Precautions in Mounting the Cover
When the cover is removed for regular checkup and replacement of parts and refitted after such work, the
procedures of fastening bolts shall be taken with the following precautions:
(a) The proper fastening torque of the fitting bolts (M8) is 1176 to 1470 N•cm (120 to 150kgf•cm) (which
makes the inside water-tight and protects the packings against permanent compressive strain).
The packings start producing from the cover at a torque of approximately 1470N•cm (150kgf•cm).
Do not fasten the bolts with a torque exceeding the specified value. Otherwise, the screws may be broken.
(b) Use an offset wrench of 11 mm × 13 mm or a double-ended wrench of 13 mm × 17 mm (not longer than
200 mm).
(c) Screw all the bolts by hand first to prevent them playing, then fasten them evenly in order not to cause
one-sided fastening. (Fasten the bolts with 25% of the required torque at the first step.)
*: Fasten the bolts in the diagonal order.
8-3
8.2 Maintenance on each Unit yyyy
yyyy
(1) Radiator
z If the radiator front face (radiation plane) is soiled
with smoke, salt, dust, paint or birds’ droppings,
wipe it with a piece of soft cloth wetted with alcohol
or water and try to keep it clean at all times.
Otherwise, radar beam radiation may attenuate or
reflect on it, resulting in deterioration of radar
performance.
z Never use solvents of gasoline, benzine,
trichloroethylene and ketone for cleaning.
Attention
Check up and clean the radiator.
(2) Rotating section
(a) Supply Oil Seal
An scanner unit with a grease nipple needs grease supply. Remove the cap of the grease nipple on
the front of the radiator support, and supply grease with a grease gun.
Make the oiling every six months. The oil quantity shall be approximately 100 g, which is as much
as the grease comes out of the oil seal. Use the grease of Mobilux 2 of Mobil Oil. 8
(b) Oiling gears
Apply grease evenly to the tooth surfaces of the main shaft drive gear and the encoder drive gear
with a spreader or brush. Oiling in short intervals is more effective to prevent the gears from wear
and tear and extend their service life, but oil at least every six months.
Use Mobilux2 of Mobile Oil.
(c) Mounting legs
Check the mounting legs and mounting bolts of the scanner unit case for corrosion at intervals and
maintain them to prevent danger. Apply paint to them once a half year because painting is the best
measure against corrosion.
8-4
8.2.2 Display Unit NCD-4530
WARNING
When cleaning the screen, do not wipe it too
strongly with a dry cloth. Also, do not use
gasoline or thinner to clean the screen. Otherwise
the screen surface may be damaged.
Dust accumulated on the screen will reduce clarity and darken the video. For cleaning it, wipe it with a piece of
soft cloth (flannel or cotton). Do not wipe it strongly with a piece of dry cloth nor use gasoline or thinner.
8-5
8.3 Performance Check yyyy
yyyy
8.3 PERFORMANCE CHECK
Make operational check on the radar equipment regularly and if any problem is found, investigate it
immediately. Pay special attention to the high voltage sections in checking and take full care that no trouble is
caused by any error or carelessness in measurement. Take note of the results of checking, which can be used
effectively in the next check work.
Operational check shall be made in accordance with Table 8-1 Function Check List in the order as specified in
it.
Table 8-1 Check List
Equipment Item to be checked Criteria Remarks
Transmitter-receiver
Unit Tuning LED of Receiver The LED is lighting during
operation 48NM range
Video and echoes on the screen
Sensitivity
LCD brilliance can be controlled
correctly
Various markers
Various numerical indications
Lighting
Can be correctly controlled
Memory See section 8.3.1 [I]-[1].
Communications Lines See section 8.3.1 [I]-[3].
Power Supply, Backup Battery See section 8.3.1 [I]-[4].
Monitor See section 8.3.1 [II].
Operation Unit See section 8.3.1 [III].
System Alarm Log Display See section 8.3.1 [V].
System Information Display See section 8.3.1 [VI].
Magnetron current See section 8.3.1 [VII].
Display Unit
Target Tracking See section 5.2.7.
Signals from the Scanner Unit See section 8.3.1 [I]-[2].
Scanner Unit Performance Monitor See section 8.3.1 [IV].
8
8-6
8.3.1 Check Performance on Test Menu
The radar operating state can be checked by opening the Test Menu.
Procedures 1. Perform the following menu open procedure to open the Test Menu.
Main
→ 9. NEXT
→ 9. Test Menu
2. Select the items to be checked.
The list of check items will appear.
1. Self Test [I] Self-diagnostic function
2. Monitor Test [II] Monitor check
3. Keyboard Test [III] Operation unit check
4. MON Display [IV] Performance monitor
5. System Alarm Log [V] Error log display
6. System Information [VI] System information display
Magnetron Current [VII] Indication of magnetron current
3. Select the items to be checked.
The list of check items will appear.
[I] Self-diagnosis function (Self Test)
Check of memory, scanner unit, and communications Lines
1. Memory Test [1] Memory check
2. TXRX Test [2] Scanner check
3. Line Test [3] Communication line check
4. Supply Voltage [4] Supply voltage check
[1] Memory Test
Checks for the performance of built-in memory.
1. SDRAM [1] SDRAM check
2. SRAM [2] SRAM check
3. FLASH ROM [3] Flash ROM check
4. GRAPHIC [4] Graphic check
When no abnormality is found, OK is displayed.
When an abnormality is found, NG is displayed.
8-7
8.3 Performance Check yyyy
yyyy
[2] TXRX Test
Checks for signals from the scanner.
Safety Switch Scanner’s safety switch check
AZI Pulse Scanner rotation signal check
HL Pulse Heading line signal check
MH Current Check on the load current of high voltage in the modulator
Trigger Radar trigger signal check
Video Radar video check
When no abnormality is found, OK is displayed.
When an abnormality is found, NG is displayed.
In standby, ** will appear.
[3] Check of Communication Lines (Line Test)
Check the status of communications with options.
TXRX Check on connection with the transmitter-receiver
SIG.PROC Check on connection with the signal processing circuit
TT Check on connection with the target tracking unit
GYROO I/F Check on connection with the GYRO I/F unit
GPS Compass Check on connection with the GPS compass
ISW Check on connection with the interswitch
Plotter Key Check on connection with the plotter option
When no abnormality is found, OK is displayed.
When an abnormality is found, NG is displayed.
The status display field of equipment not connected is left blank.
8
[4] Supply Voltage
Check the voltage of internal power supply.
Item Normal value
12V 11.00 to 12.20V
5V 4.75 to 5.25V
3.3V 3.14 to 3.46V
Battery 2.50V or more
8-8
[II] Monitor Test
Checks for the display.
The test pattern will be shown on the display.
Pattern 1 All colors are filled with white.
Pattern 2 A white box is displayed on the black background of 1280 × 1024 dots.
Pattern 3 Displays rectangle × 2, circle × 2, and cross-shape× 13 (white lines on the
black background).
Pattern 4 Displays “H” of 9 dots × 9 dots on the entire screen (white character on the
black background).
Pattern 5 Gray scale display (16 levels)
Pattern 6 Displays a color bar.
Pattern 7 Displays the VDR test pattern.
Pattern 8 Displays the specified color.
To return to the normal display, press any key.
If errors occur in the monitor, no test pattern will appear.
[III] Keyboard Test (Operation Unit Test)
Checks for the controls and switches of the operation panel.
1. Key Test [1] Key check
2. Buzzer Test [2] Buzzer check
3. Light [3] Control panel light check
[1] Key Test
Checks for the controls and switches of the operation panel.
Each key on the operation panel on the display is shown in reverse video at the same time the key is
pressed, and the name of the pressed key is displayed.
[2] Buzzer Test
Checks for the operation panel buzzer.
The buzzer will sound.
The buzzer automatically stops after it sounds for a specified length of time.
[3] Light Test
Checks for the control panel light.
The brightness of the operation panel is gradually intensified at four levels.
[IV] Check of the Performance Monitor (MON Display)
Displays the performance monitor status.
* Transmitter System Transmitter system attenuation value check.
Attenuation Value
* Receiver System Receiver system attenuation value check.
MON Pattern Range
Attenuation Value
Turn the [VRM] dial to make adjustments so that the farthest point of the performance monitor pattern.
The attenuation value of receiver system is displayed.
8-9

8.3 Performance Check yyyy
yyyy
[V] System Alarm Log display
Displays previously occurred system errors with the dates and times when they occurred.
The current error is displayed at the lower right of the radar display. For details, refer to Chapter 9.
The Error log display button (2-29P Alarm) is clicked, in the same way as that one.
To erase the alarm logs, press the All Clear button in the log display window.
[VI] System INFO
Displays the current system information.
Indicator Processor software version information
TXRX Scanner software version information
System No. System number
TX Time Total magnetron transmitting time (Total time during which radar
was transmitted)
X-Band
S-Band
Motor Time Total operating time (Total power-on time)
TXRX Total Time Total operating time of the scanner unit (Total power-on time of the
antenna unit)
Total Time Total operating time of the display unit (Total power-on time of the
display unit)
[VII] Magnetron Current 8
Displays the Magnetron Current bar indicating the magnetron current to check.
When a 48 NM range is set, the magnetron current is normal if the Magnetron Current bar reads the value
below.
10 kW: 4 to 7 scale marks
25/30 kW: 5 to 8 scale marks
8-10
8.4 REPLACEMENT OF MAJOR PARTS
The system includes parts that need periodic replacement. The parts should be replaced as scheduled. Use
of parts over their service life can cause a system failure.
CAUTION
Turn off the main power source before replacing parts.
Otherwise, an electric shock or trouble may be caused.
Before replacing the magnetron, turn off the main power
source and wait for 5 minutes or more until the high
voltage circuits are discharged.
Otherwise, an electric shock may be caused.
Take off your wrist watch when bringing your hands close
to the magnetron.
Otherwise, your watch may be damaged because the
magnetron is a strong magnet.
Two or more persons shall replace the liquid crystal
monitor. If only one person does this work, he may drop
the LCD, resulting in injury.
Even after the main power source is turned off, some high
voltages remain for a while.
Do not contact the inverter circuit in the LCD with bare
hands. Otherwise, an electric shock may be caused.
8-11
8.4 Replacement of Major Parts yyyy
yyyy
8.4.1 Parts Required for Periodic Replacement
Here are parts required for periodic replacement
Part name Interval Radar model Part type Part code
JMA-5312-6/6HS MAF1565N 5VHAA00102
JMA-5322-7/9/6HS M1568BS 5VMAA00106
1. Magnetron 4000 hours
JMA-5332-12 M1555 5VMAA00104
JMA-5312-6/6HS 7BDRD0048 7BDRD0048
JMA-5322-7/9 7BDRD0044A 7BDRD0044A
JMA-5322-6HS 7BDRD0045A 7BDRD0045A
2. Motor 10000 hours
JMA-5332-12 MDBW10823 MDBW10823
3. Fan (Scanner Unit) 20000 hours 7BFRD0002 7BFRD0002
4. LCD PANEL 50000 hours CML-771 CML-771
5. Monitor fan 20000 hours CBP-173A CBP-173A
6. Fan (Radar Process Unit) 20000 hours 7BFRD0005 7BFRD0005
7. Backup battery 5 years 5ZBCJ00012 5ZBCJ00012
8.4.2 Replacement of Magnetron
Caution: Replacement of magnetron must be made by specialized service personnel.
For details, refer to Service Manual.
When mounting a new magnetron, do not touch the magnet with a screwdriver or put it on an iron plate. After
replacement, connect the lead wire correctly.
8
Handling of Magnetron under Long-Time Storage
The magnetron that has been kept in storage for a long time may cause sparks and operate unstably when its
operation is started. Perform the aging in the following procedures:
(1) Warm up the cathode for a longer time than usually. (20 to 30 minutes in the STBY state.)
(2) Start the operation from the short pulse range and shift it gradually to the longer pulse ranges. If the
operation becomes unstable during this process, return it to the standby mode immediately. Keep the state
for 5 to 10 minutes until the operation is restarted.
8-12
Magnetron Replacement Procedure for Scanner Unit NKE-1130
Bow side
Turn off the safety
switch.
(1) Before starting part replacement work, turn off the
safety switch of the scanner unit.
The safety switch is located on the rear (stern) side.
Remove the cover and turn off (to the lower side)
the safety switch.
(2) Loosen the hexagonal bolts and remove the cover
Remove the eight
hexagonal screws.
on the left (port) side
Magnetron
Remove the
yellow cable.
Remove the
green cable.
Remove the
two screws.
(3) Check that there is no remaining electric charge in
the modulation high-voltage circuit board.
Remove the two screws (M4) holding the magnetron
cables (both yellow and green).
8-13
8.4 Replacement of Major Parts yyyy
yyyy
(4) Remove the eight screws (M6) to remove the fixture
holding the magnetron. The screws cannot be
removed from the fixture, so loosen the all eight
screws and remove the magnetron together with the
fixture.
Loosen the
eight screws.
Remove the
magnetron.
The magnetron is held by a hook, but be careful not
to let it fall.
Use a shielded screwdriver. If the magnetron comes
into contact with any metal (tool), its performance
may deteriorate.
(5) Install the new magnetron together with the fixture and tighten the screws to hold the cables.
Follow the removal procedure in the reverse order.
Do not forget to tighten the screws and connect the cables.
8
8-14
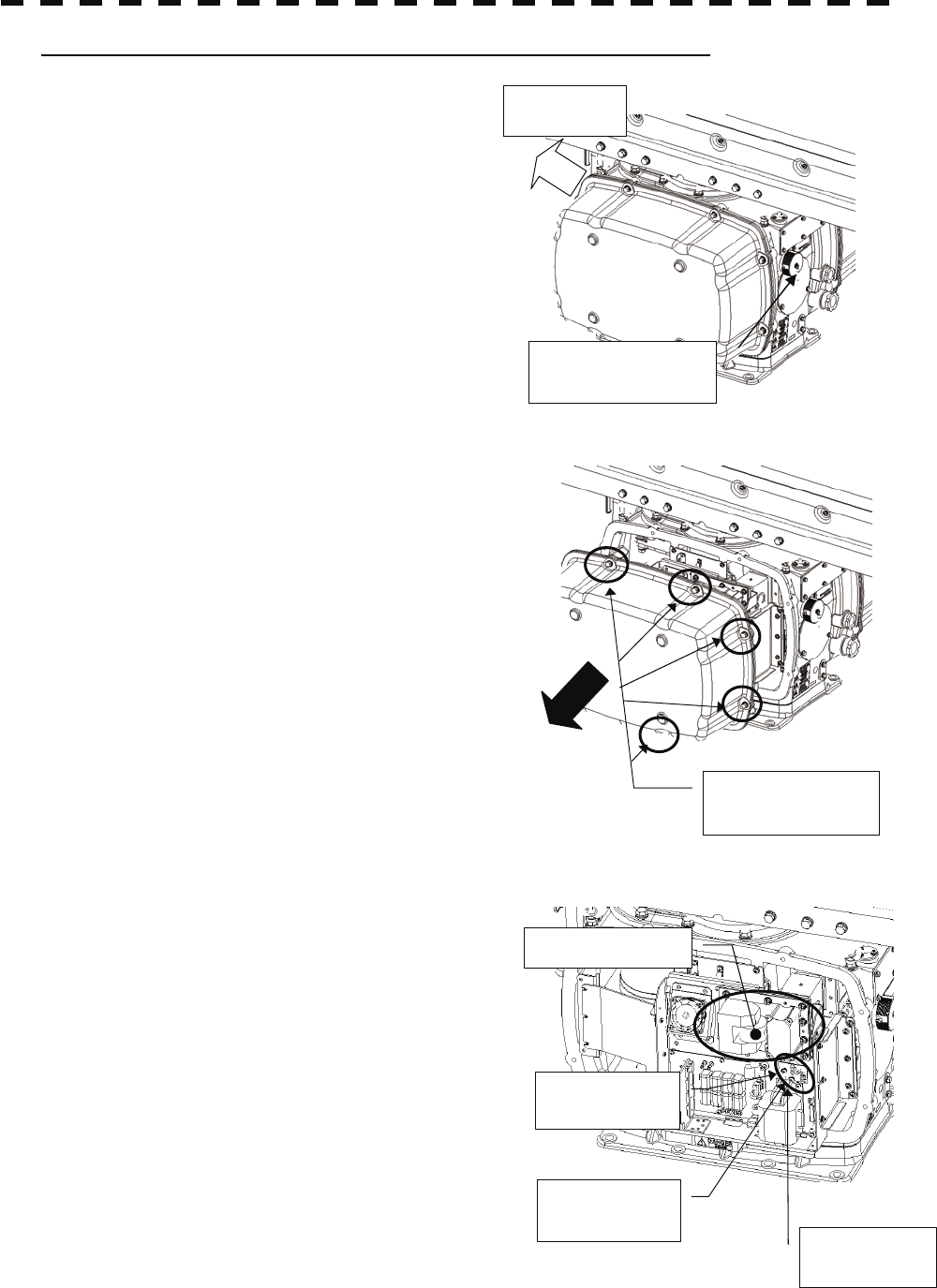
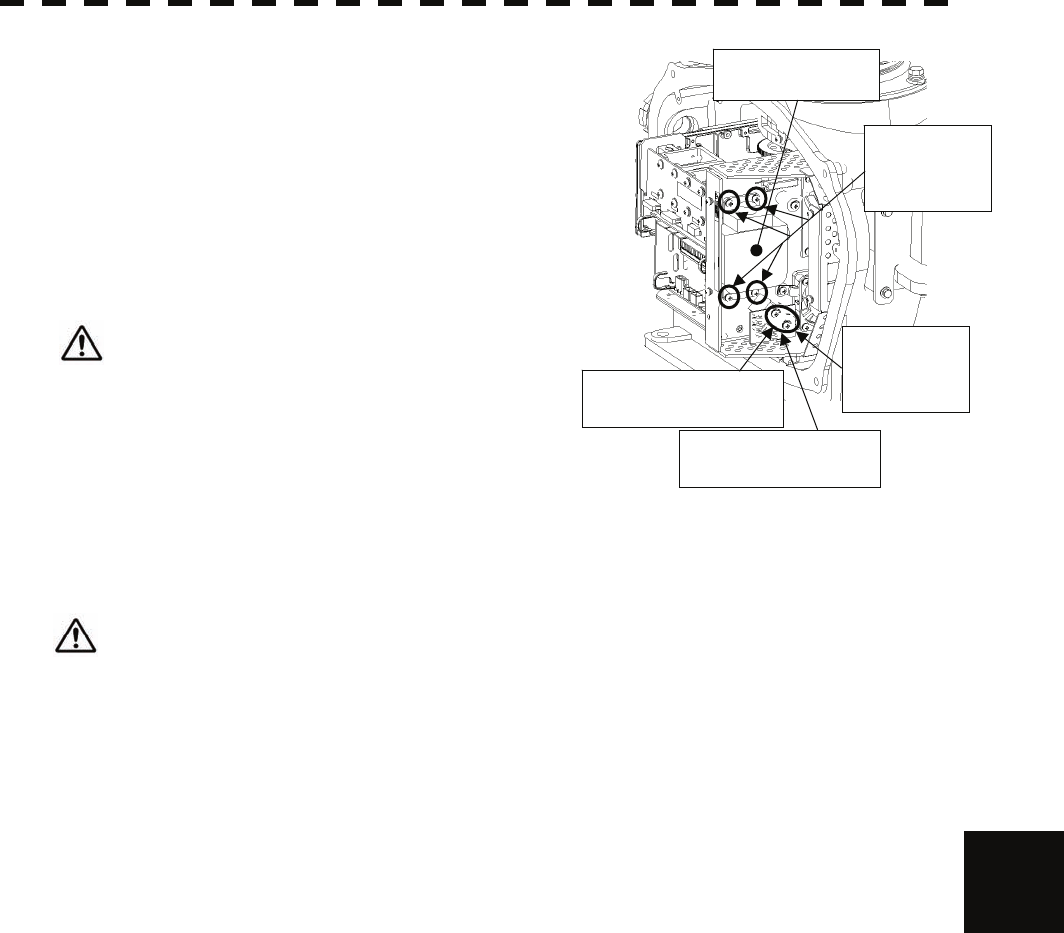
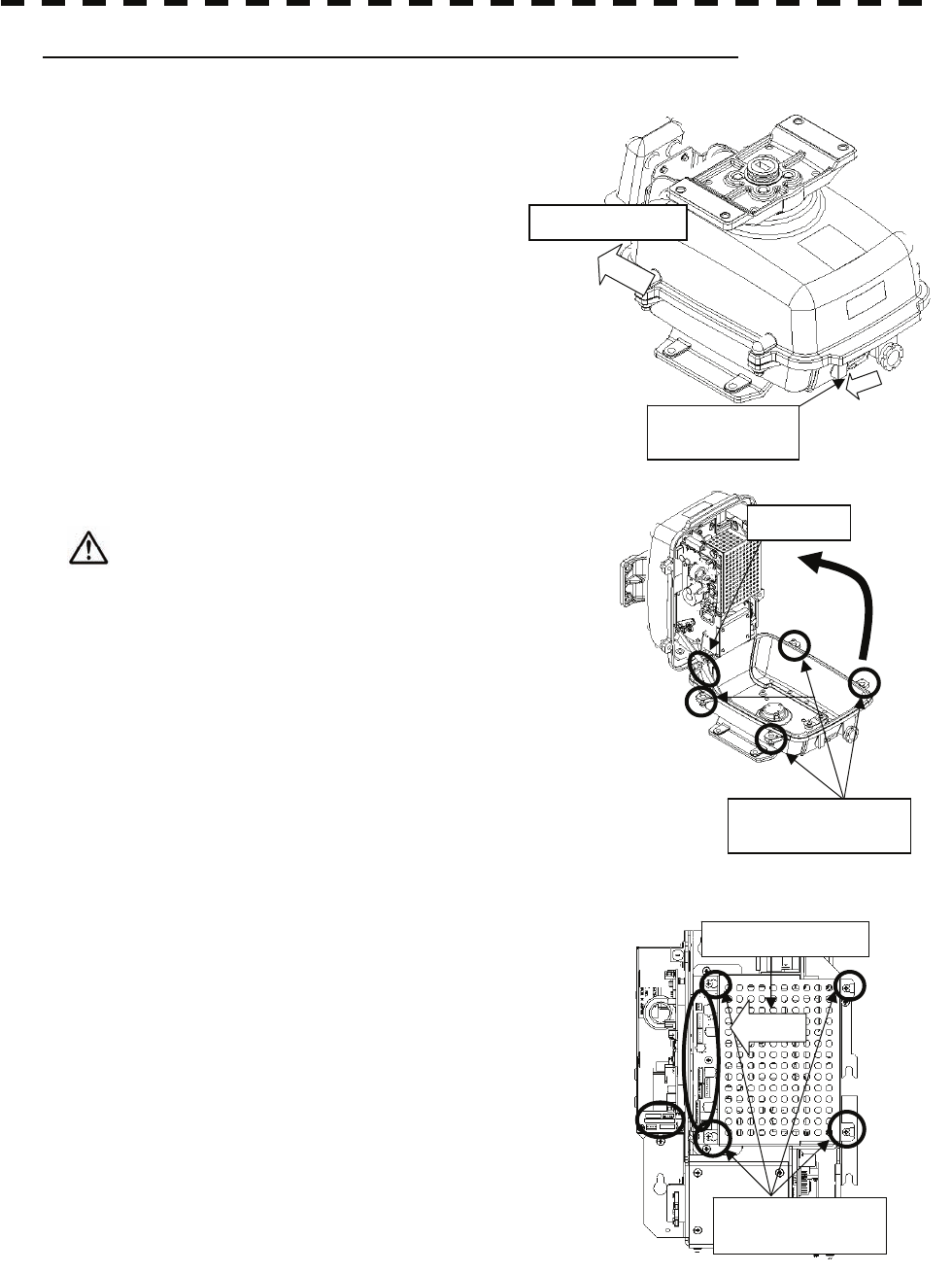
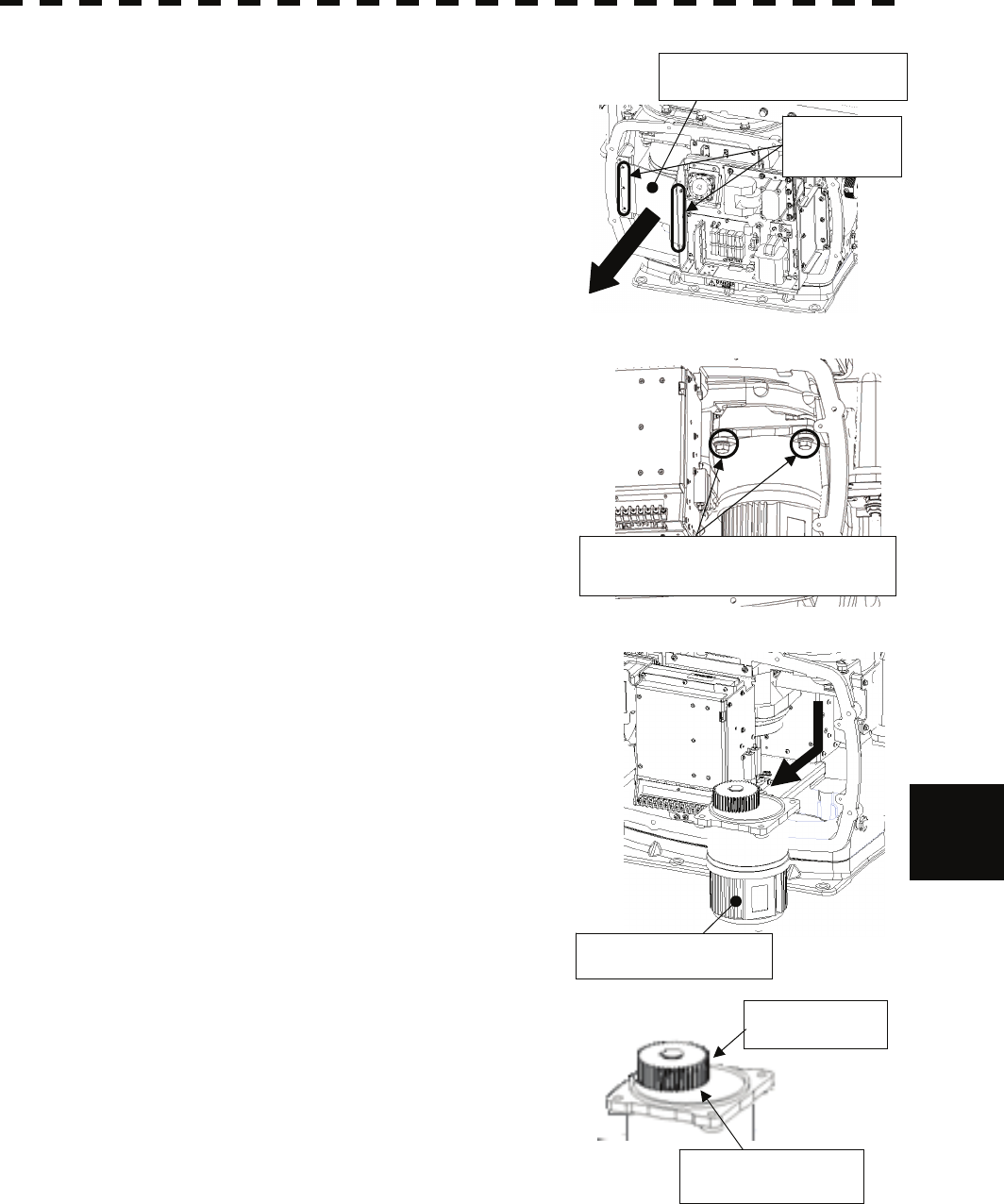
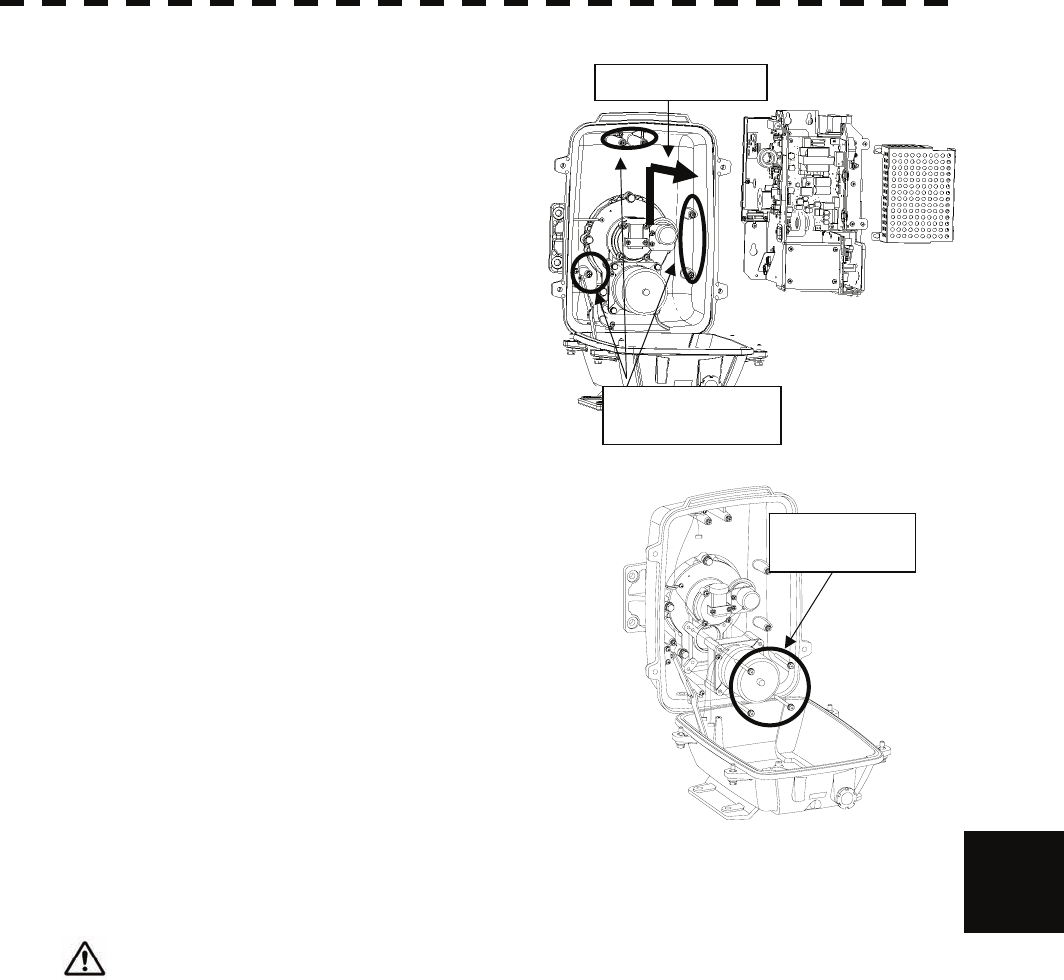
Magnetron Replacement Procedure for Scanner Unit NKE-2254
Bow direction
Turn off the safety
switch.
Bow
direction
(1) Before beginning work, turn off the safety switch
located on the bottom of the stern side of the scanner
unit.
(2) Loosen the hexagonal bolts and remove the cover on the
right (starboard) side.
Loosen the four
hexagonal bolts.
Magnetron cove
r
(3) Loosen the screws (four M4 screws) to remove the magnetron
cover.
Loosen the
four screws.
8-15
8.4 Replacement of Major Parts yyyy
yyyy
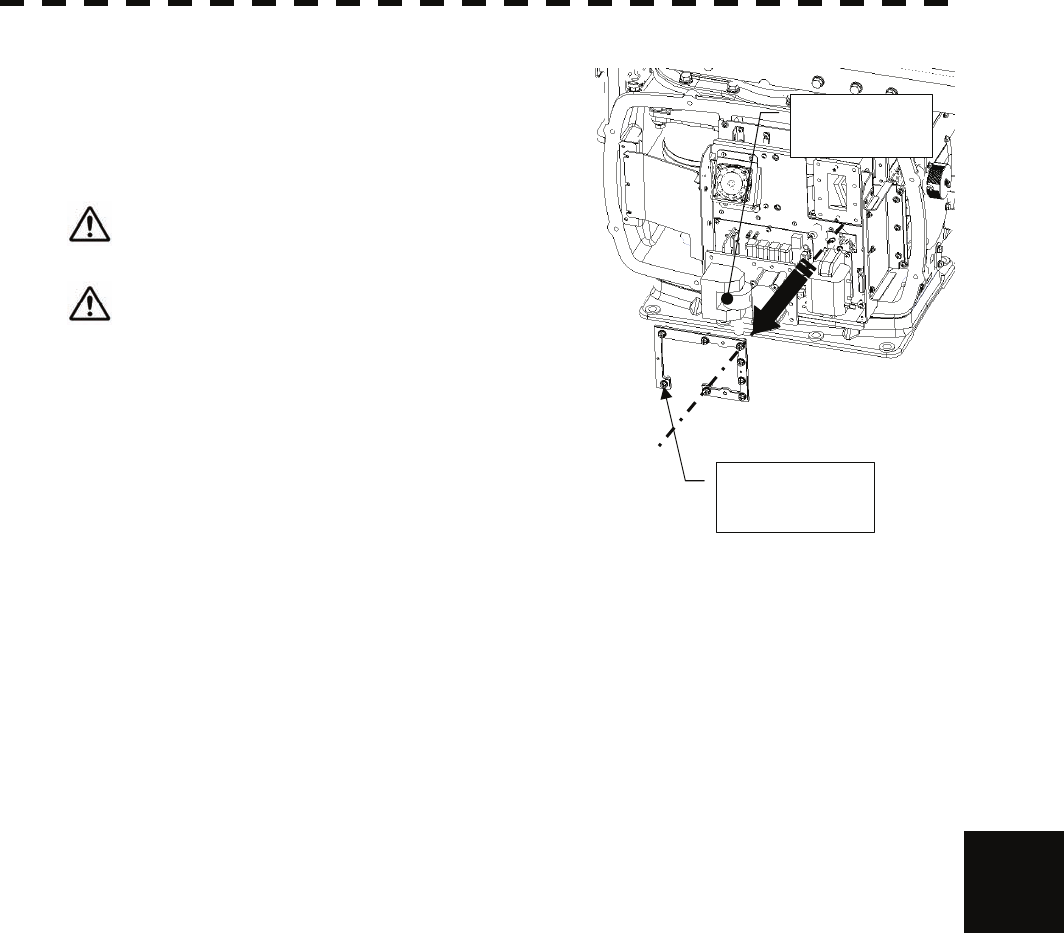
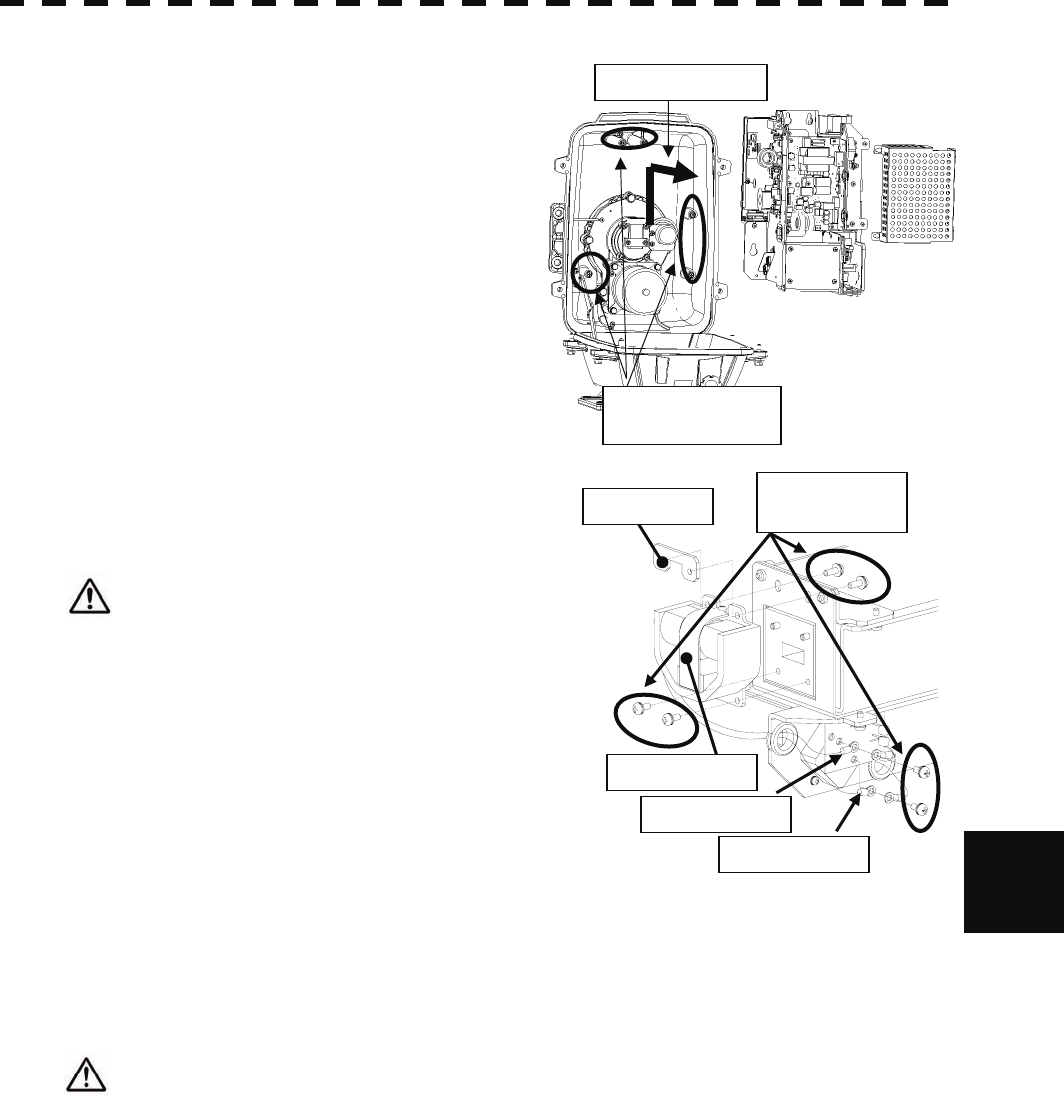
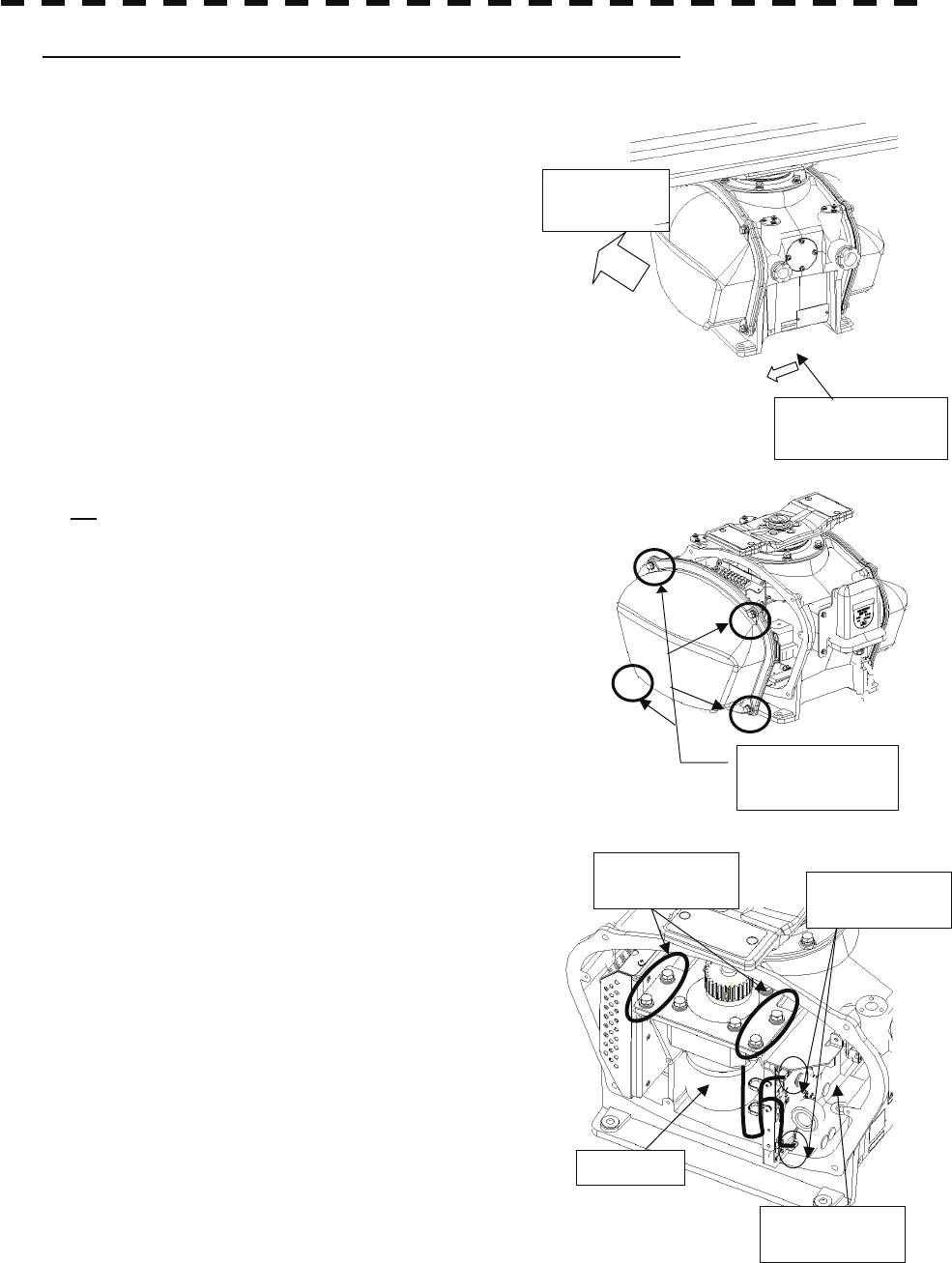
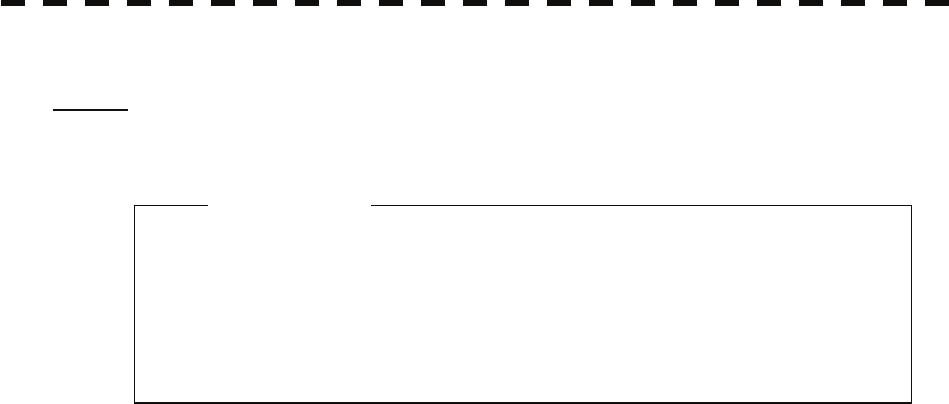
(4) Make sure there is no charge remaining in the
modulation high-voltage circuit board, and then remove
the screws (two M4 screws) holding the magnetron
cables (yellow and green) in place.
Remove the green
cable.
Remove the yellow
cable.
Magnet
r
on
Remove the
four screws.
Remove the
two screws.
(5) Remove the screws (four M4 screws) holding the
magnetron in place, then replace the magnetron after
cutting the leads (yellow and green) for the replacement
magnetron to an appropriate length.
Use a shielded secrewdriver because the contact
of the metal tool with the magnetron causes
deterioration of its performance.
(6) After having replaced the magnetron, reassemble the unit by following the disassembly procedure in the
reverse order.
Do not forget to tighten the bolts and screws, and do not forget to reconnect the cables.
Extreme care should be taken to connect the leads (yellow and green) to the magnetron for prevention
of contact with other parts or the casing. Contact may cause them to discharge.
8
8-16
Magnetron Replacement Procedure for Scanner Unit NKE-2103
Bow direction
Turn off the
safet
y
switch.
(1) Before beginning work, turn off the safety switch on the
bottom of the scanner unit.
(2) Loosen the hexagonal bolts (four bolts) and open the
upper cover until the stopper of the stay operates.
Stay
Loosen the four
hexa
g
onal bolts.
When closing the upper cover, release the stay
stopper and then tighten the cover.
(3) Loosen the screws (four M4 screws), remove the
transmitter-receiver unit cover, and remove the cables
connected to the transmitter-receiver unit (ten cables).
Slide the cover of the transmitter-receiver unit to
remove it.
Slide the cover.
Loosen the four
screws.
8-17
8.4 Replacement of Major Parts yyyy
yyyy
(4) Loosen the bolts (five M5 bolts) and remove the
transmitter-receiver unit. Slide the transmitter-receiver
unit upward to remove it. Slide the unit.
Loosen the five
bolts.
8
(5) Remove the screws (six M4 screws) holding the
magnetron in place and replace the magnetron.
Use a shielded secrewdriver because the contact of the
metal tool with the magnetron causes deterioration of its
performance.
N
ut plate Remove the six
screws.
Magnetron
Green cable
Yellow cable
(6) Cut the leads (yellow and green) for the replacement magnetron to an appropriate length, then tighten the
screws and fix the cables in place.
After having replaced the magnetron, reassemble the unit by following the disassembly procedure in the
reverse order.
Do not forget to tighten the bolts and screws, and do not forget to reconnect the cables.
Extreme care should be taken to connect the leads (yellow and green) to the magnetron for prevention of
contact with other parts or the casing.Contact may cause them to discharge.
8-18
8.4.3 Replacement of Motor
Caution: Replacement of motor must be made by specialized service personnel.
For details, refer to Service Manual.
Motor Replacement Procedure for Scanner Unit NKE-1130
(1) Before starting part replacement work, turn off the
safety switch of the scanner unit. Bow side
Turn off the safety
switch.
The safety switch is located on the rear (stern) side.
Remove the cover and turn off (to the lower side)
the safety switch.
(2) Loosen the hexagonal bolts and remove the cover
Remove the eight
hexagonal screws.
Driver circuit board Disconnect the
cables.
on the both sides
(3) Remove the cover on the right (starboard) side and
loosen the four screws (M4) to remove the driver
unit, which has the motor driver circuit board on its
back side.
Disconnect the cables connecting the motor to the
motor driver circuit board.
8-19
8.4 Replacement of Major Parts yyyy
yyyy
(4) Remove the cover on the left (port) side and remove
Remove the four hexagonal screws
(two screws on each side)
Remove the metal fixture.
Remove the
five screws.
Remove the motor.
the five screws (M5) to remove the fixture.
(5) Remove the four hexagonal screws (M10x40, SW10,
and W10) that hold the motor from both the right and
left sides to remove the motor.
8
Apply grease.
Motor gear wheel
(6) Apply grease to the gear wheel of the new motor.
(7) Install the new motor in the scanner unit and secure it using the hexagonal screws. Tighten the screws with
the specified torque (380 kgf-cm).
(8) After replacing the motor, assemble the unit in the reverse order of the disassembly procedure.
Do not forget to tighten the screws and connect the cables.
8-20
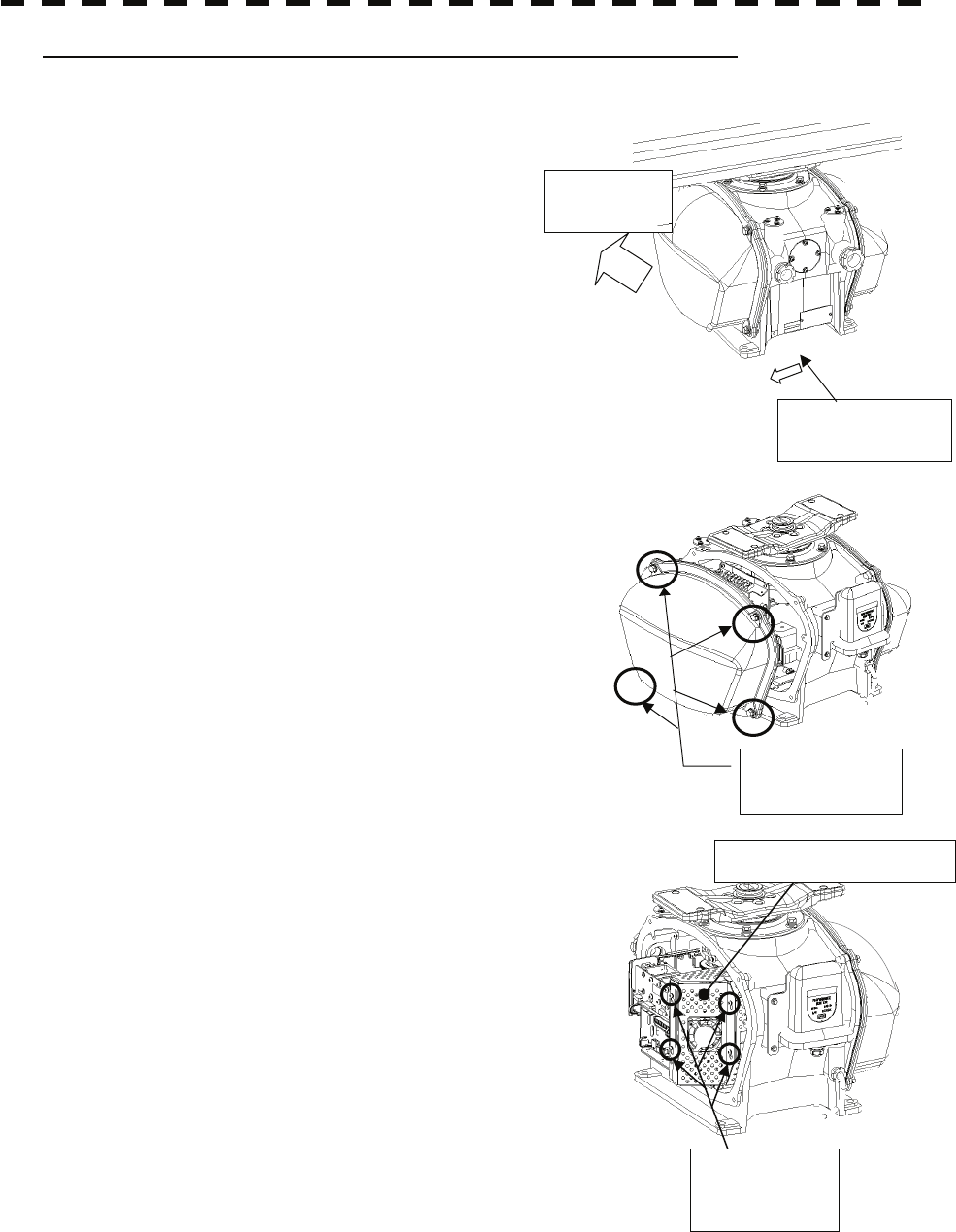
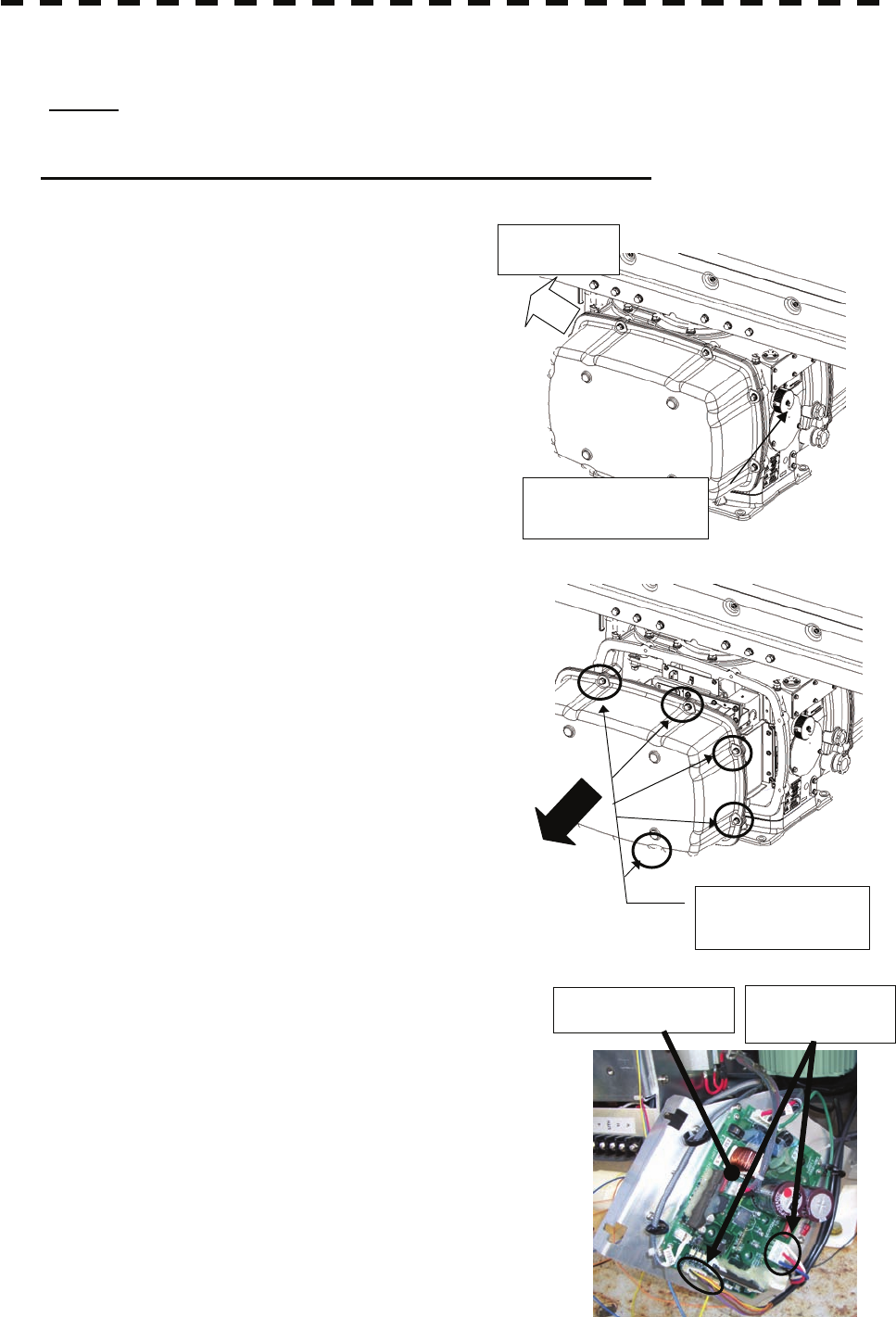
Motor Replacement Procedure for Scanner Unit NKE-2254
Bow direction
Turn off the safety
switch.
Bow
direction
(1) Before beginning work, turn off the safety switch
located on the bottom of the stern side of the scanner
unit.
(2) Loosen the hexagonal bolts and remove the cover on the
left (port) side.
Loosen the four
hexagonal bolts.
(3) Remove the cables connected to the motor driver circuit
board. Remove the four
bolts. Remove the two
cables.
Motor driver
circuit board
Moto
r
(4) Remove the hexagonal bolts (four M8 bolts) and
remove the motor.
8-21
8.4 Replacement of Major Parts yyyy
yyyy
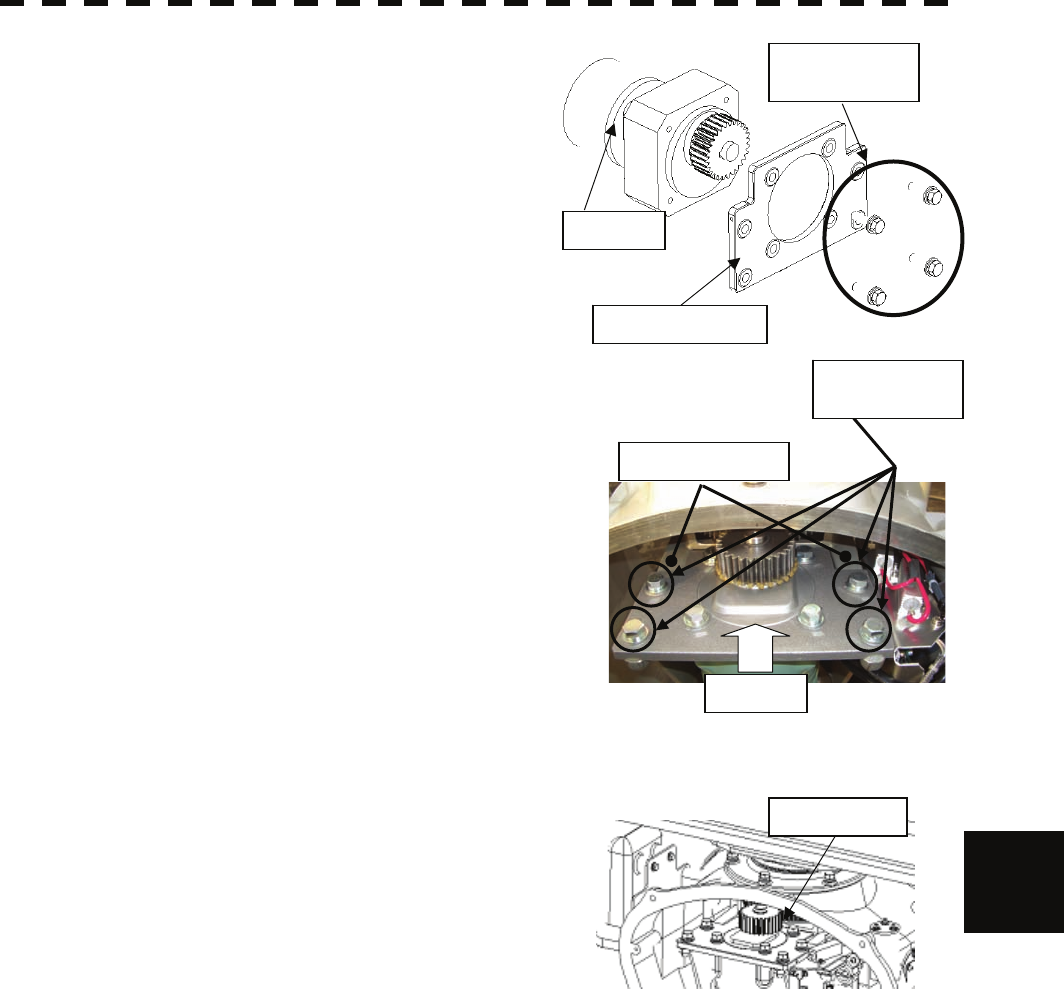
(5) Remove the hexagonal bolts (four M8 bolts) and
remove the installation plate from the motor. Remove the four
bolts.
Moto
r
Installation plate
(6) Attach the installation plate to the replacement motor.
Do not forget to tighten the hexagonal bolts to an
appropriate torque (210 kgf-cm) so they are free of
looseness.
Press
Tighten the four
bolts.
Arm protrusions
(7) Install the motor into the scanner unit. Press the motor
against the protrusions of the arm fixed to the motor on
which the arm extends through the wall of the casing,
adjust it to minimize backlash, and fix it in place.
Do not forget to tighten the hexagonal bolts, to an
appropriate torque (140 kgf-cm) so they are free of
looseness.
(8) After having installed the motor, grease the gear wheel. Grease here.
8
(9) After having replaced the motor, reassemble the unit by
following the disassembly procedure in the reverse
order.
Do not forget to tighten the bolts and screws, and do not
forget to reconnect the cables.
8-22
Motor Replacement Procedure for Scanner Unit NKE-2103
Bow direction
Turn off the
safet
y
switch.
(1) Before beginning work, turn off the safety switch on the
bottom of the scanner unit.
(2) Loosen the hexagonal bolts (four bolts) and open the
upper cover until the stopper of the stay operates.
Stay
Loosen the four
hexa
g
onal bol
t
s.
When closing the upper cover, release the stay
stopper and then tighten the cover.
(3) Loosen the screws (four M4 screws), remove the
transmitter-receiver unit cover, and remove the cables
connected to the transmitter-receiver unit (ten cables).
Slide the cover of the transmitter-receiver unit to
remove it.
Slide the cover.
Loosen the four
screws.
8-23
8.4 Replacement of Major Parts yyyy
yyyy
(4) Loosen the bolts (five M5 bolts) and remove the
transmitter-receiver unit. Slide the transmitter-receiver
unit upward to remove it. Slide the unit.
Loosen the five
bolts.
Remove the
four bolts.
(5) Remove the hexagonal bolts (four M6 bolts) and
remove the motor. Grease the gear wheel of the
replacement motor and place it in the casing. Do not
forget to tighten the hexagonal bolts to an appropriate
torque (72 kgf-cm) so they are free of loose
8
(6) After having replaced the motor, reassemble the unit by
following the disassembly procedure in the reverse
order.
Do not forget to tighten the bolts and screws, and do not forget to reconnect the cables.
Clamp the cables so they do not interfere with the rotation of the motor's rotors.
8-24
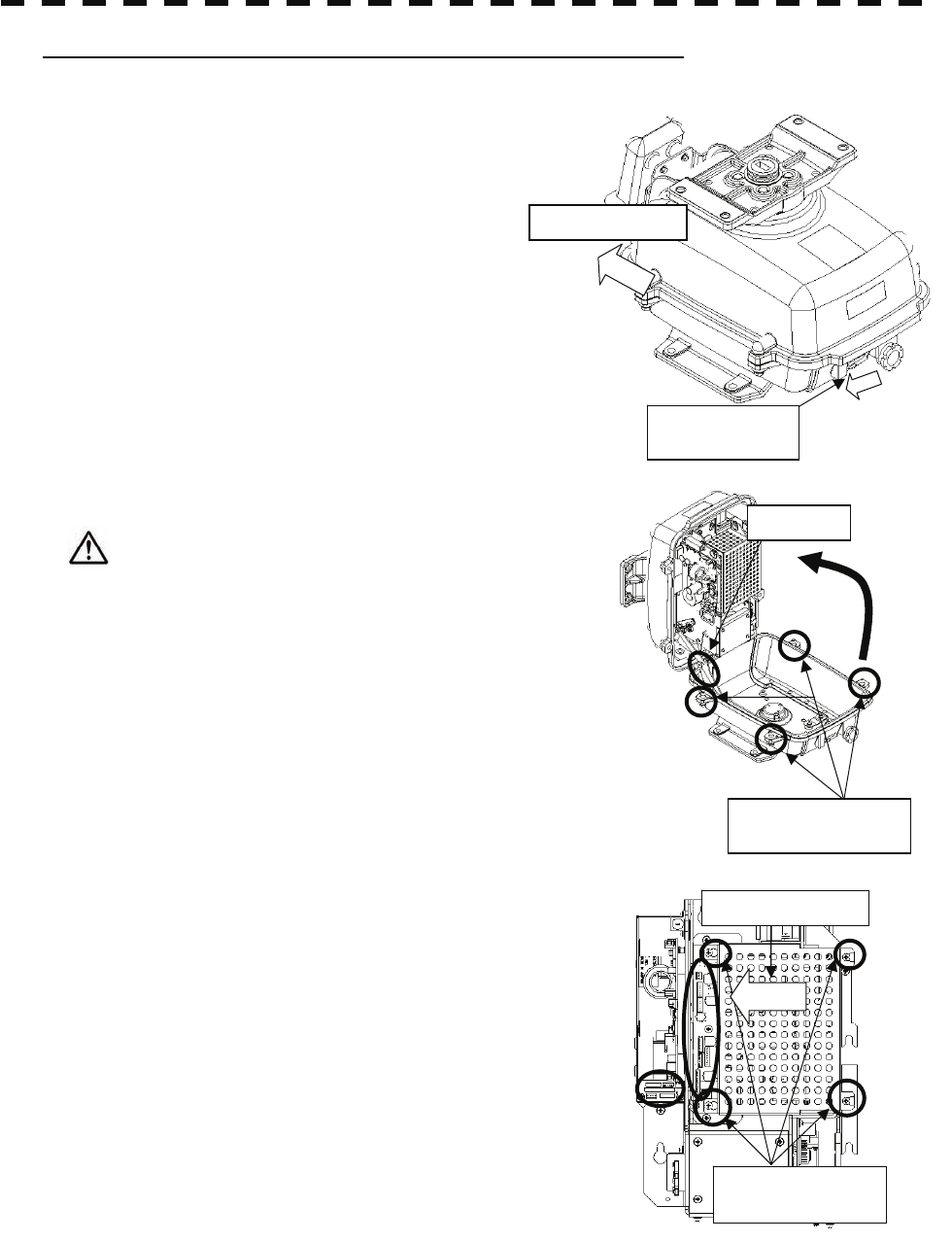
8.4.4 Replacement of LCD Monitor
Caution: Replacement of LCL Monitor must be made by specialized service personnel.
For details, refer to Service Manual.
z When replacing the LCD monitor, which is easily
broken by a little impact, handle it carefully and do
not hit any article against it or put it on a hard article.
Attention
(1) Disconnect the cables from the connectors “VIDEO” and “VIDEO DC OUT” on the rear of the processor.
(2) Softly place the LCD monitor on a desk covered with a soft cloth.
(3) Attach a new LCD monitor in the reverse sequence as described above.
8-25
8.4 Replacement of Major Parts yyyy
yyyy
8.4.5 Replacement of Backup Battery
Caution: Replacement of backup battery must be made by specialized service personnel.
For details, refer to Service Manual.
A coin-cell battery maintains radar system configuration, date, and time information while power off condition.
radar system configuration is saving to non-volatile memory at fixed intervals.
About the Battery Alarm
If Battery Low is appeared at the lower-right of the display when start up the radar system, the battery has
not enough time left to live. We recommend to replace the battery.
If Battery Dead is appeared at the lower-right of the display when start up the radar system,
the battery has no time left to live. There is a necessary to replace the battery. In This condition, this radar
system is restored configuration information from flash memory and normal operation is available. However,
you turned of the radar system before saving to flash memory, the configuration information is maybe lost. In
this case, you must setup the configuration again.
If No Battery is appeared at the lower-right of the display when start up the radar system, the battery has
not inserted. There is a necessary to insert the battery.
Note: About disposal of used battery, refer to Section 10.2.
How to Replacement of Backup Battery
1. Remove the Coin-Cell Battery from the Holder
Be careful, don't break holder.
3. Fix the Coin-Cell Battery in the Holder
Turn up + surface. 8
Battery type : CR2032
8-26
SECTION 9
TROUBLESHOOTING AND
AFTER-SALES SERVICE
9.1 FAULT FINDING.......................................................................................9-1
9.2 TROUBLE SHOOTING.............................................................................9-6
9.3 AFTER-SALES SERVICE ......................................................................9-11
9.1 FAULT FINDING
In case of semiconductor circuits, it is deemed that there are few cases in which the used
semiconductor devices have inferior quality or performance deterioration except due to
insufficient design or inspection or by other external and artificial causes. In general, the relatively
many causes are disconnection in a high-value resistor due to moisture, a defective variable
resistor and poor contact of a switch or relay.
Some troubles are caused by defective parts, imperfect adjustment (such as tuning adjustment) or
insufficient service (such as poor cable contact). It will also be effective to check and readjust
these points.
9.1.1 List of Alarms and other Indications
The system automatically recognizes an internal alarm and displays the alarm message. If an event
which is not trouble but must be reported to the operator occurs, the system notifies the operator
of the event.
This section gives the list of alarms displayed by the system and other display lists.
ALR No : Unique alarm number in ALR sentence and ACK sentence.
Table 9-1 List of System Error Message
Message Description ALR No.
TXRX (SSW Off) Scanner: Safety switch OFF. 308
TXRX (AZI) Scanner: BP error. 311
TXRX (HL) Scanner: HL error. 312
TXRX (MHV) Scanner: Modulator’s high voltage alarm. 315
TXRX (Data) Scanner: No communication, communication mismatched, checksum error,
or collision. 326
TXRX (Heater) Scanner: Magnetron heater voltage error. 314
TXRX (Reverse) Scanner: Reverse rotation. 313
TXRX (Video) Scanner: VIDEO error. 309
TXRX (Trigger) Scanner: TRIGGER error.. 310
TXRX (Fan 1) Scanner: FAN 1 error. 317
TXRX (Fan 2) Scanner: FAN 2 error. 317
Keyboard (Data) Operation unit: Communication error or checksum error. 325
Keyboard2 (Data) Second operation unit: Communication error or checksum error. 325
GYRO I/F (Data) GYRO I/F: No communication or checksum error. 324
GYRO I/F (GYRO) GYRO I/F: GYRO error (error bit detected). 110
GYRO I/F (Log) GYRO I/F: Log error (error bit detected). 111
GPS (Status) GPS status error. 103
Position (Data) Latitude / longitude data: No communication or data error. 102
Date (Data) Date data: No communication or data error. 112
Speed (Log) 1-axis log: No communication or data error. 114
Speed (2AXW) 2-axis log (speed over water): No communication or data error. 114
Speed (2AXG) 2-axis log (speed over ground): No communication or data error. 114
Speed (GPS) GPS speed: No communication or data error. 114
PROC (Interrupt) Process unit: Interrupt error. 962
PROC (AZI) Process unit: AZI error. 305
9-1
9.1 Fault Finding
y
yyyy
yyyy
PROC (HL) Process unit: HL error. 306
ASIC1 to RADAR Error during interrupt from ASIC1 to RADAR DSP. 963
PROC (Video) VIDEO error. 303
PROC (Trigger) Trigger error. 304
Heading (Data) Heading data: No communication or data error. 113
Depth (Data) Water depth: No communication or data error. 115
TEMP (Data) Water temperature: No communication or data error. 117
Wind (Data) Wind direction/velocity: No communication or data error. 118
Current (Data) Tidal current: No communication or data error. 119
ROT (Data) Rate of Turn: No communication or data error. 120
RSA (Data) Rudder Sensor Angle: No communication or data error. 121
Autopilot (Data) APB: No communication or data error. 101
Fan (LCD) LCD monitor: Fan error. 955
Table 9-2 List of Notification
Message Description ALR No.
CCRP Changed CCRP is automatic changed.
Weather INFO Weather information is received.
Copying Display is capturing to file.
Set GYRO Requires setting of true bearing.
TM Reset Use care of resetting TM.
POSN Reset Change the latitude and longitude sentence.
Table 9-3 List of Target Tracking Alarms and AIS Function Critical Alarms
Message Description ALR No.
CPA/TCPA There is a dangerous target. 301
Table 9-4 List of RADAR Alarm, Target Tracking Alarms and AIS Function Alarms 9
Message Description ALR No.
CPA/TCPA There is a dangerous target. 301
RADAR Alarm (In) Targets have entered the radar alarm range.
RADAR Alarm (Out) Targets have left the radar alarm range.
CPA/TCPA There is a dangerous target. 301
Trial There is a dangerous target, when trial maneuver is active.
New Target Acquisition or activation of a target in the automatic acquisition / activation
zone. 335
Lost Failure in tracking the target that has been under tracking.
Failure in receiving AIS target data for a specified time.
REF Target Decrease in the reference target accuracy.
MAX Target The maximum number of targets is under acquisition.
95% Capacity Over 95% of the maximum number of targets to be tracked.
AIS Max Target Maximum number of AIS targets. 333
AIS 95% Capacity Over 95% of the maximum number of AIS targets.
AIS ACT MAX Maximum number of AIS targets to be activated.
9-2
AIS ACT 95% Capacity Over 95% of the maximum number of AIS targets to be activated.
TT (Boot) Target tracking unit start failure. 323
TT (Data) The target tracking unit is malfunctioning.. 323
AIS (Data) AIS: No communication or communication error. 116
AIS PROC (Data) AIS processing circuit: No communication or communication error. 328
AIS ALARM *** AIS alarm (Up to 10 alarm messages can be displayed.).
Table 9-5 List of Route Error Messages and Warnings
Message Description ALR No.
Arrival Arrive at way point.
Break Off (WPT) Out of the way point.
Approach Approach the route.
Cross Track Error Go off the route.
Table 9-6 List of Operational Error Messages and Warnings
Message Description
ALR No.
No Position Data Mark or line input when the latitude and longitude is invalid.
No Heading Data Target tracking operation or TM selection when bearing data is invalid.
Out of Range Out of target acquisition range.
Invalid Range TM selection due to TM-disabled range (96 nm).
Zooming in a ZOOM-disabled range (0.125 nm).
MAX Point Tried to enter navigation information beyond the specified.
Can’t Transmit Tried to transmit within 5 second after standby or when the
transmitter-receiver has any trouble.
Invalid Data Tried to enter any data beyond its range.
Invalid Connection The operator set performance monitor to on without selecting straight.
No Card Card not detected yet.
Card Full Card capacity insufficient.
Format Card Unformatted card.
Invalid Card Invalid card.
Read Failed Read failure.
Write Failed Write failure.
Delete failed Deletion failure.
Format Failed Format failure.
Copy Failed Copy failure.
Not Allowed General operation error.
No Object No object at the cursor-specified position.
Slave Mode Operation of a menu for the scanner unit when the slave mode is active.
9-3
9.1 Fault Finding
y
yyyy
yyyy
Table 9-7 List of Conditions Messages
Message Description ALR No.
GPS (HDOP) The HDOP level is increased (Decrease in the GPS accuracy.).
MON Test Performance monitor is active.
Scanner Rotating The scanner is rotating (When transmitter is standby state.).
Battery Low The battery is weakening.
Battery Dead The battery is dead.
No Battery The battery had removed.
Table 9-8 List of Interswitch Alarms and Messages
Message Description ALR No.
Master Range CHG The range of the own display unit has changed due to change in the range
of the master display unit.
ISW Complete The switchover of the Interswitch ended normally.
ISW Busy Access to the ISW menu was made during interswitching.
TXRX Standby The scanner unit is in the standby mode.
ISW Straight Failed in straight connection when the Interswitch system stops operating.
ISW Standby The Interswitch recovered normally.
ISW Time Out Failed in switching.
ISW Error The interswitch is disabled.
Pattern CHG Failed Connection change failed.
Connection Masked Inhibition of control / connection is set.
Master Standby The master display unit does not transmit any signals.
ISW (Data) ISW: No communication, data mismatched, or checksum error. 327
Update ISW Software Tried to enter new TXRX function, when interswitch software used old
version.
Message set off in a failure of the monitor fan
!
When a failure has occurred in the monitor fan, the LCD monitor displays LCD FAN FAILURE at the center.
This display will disappear by pressing the BRIGHTNESS knob on the LCD monitor. In order to replace the monitor
fan, contact our service department, or the distributor. 9
9-4
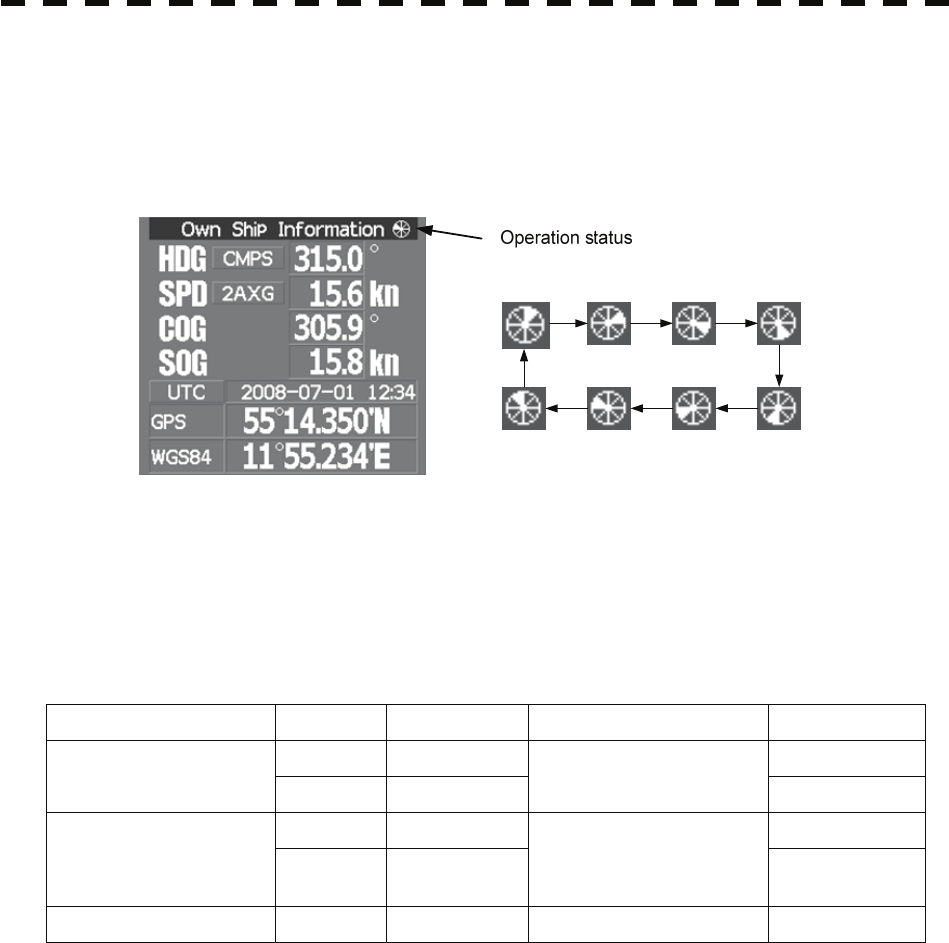
9.1.2 Operation Checking
When the system is operating, the operation status (located at the upper right of the screen) is changing
pictures.
If picture freeze occurred, turn off the system and restart the system.
9.1.3 Fuse Checking
Melted fuses are caused by any clear cause. When a fuse is replaced, it is necessary to check the related
circuits even if there is no trouble. In checking, note that there is some dispersion in the fusing
characteristics. Table 9-8 shows a list of fuses used in the equipment.
Table 9-9 Fuse List
Location Parts No. Current Rating Protection Circuit Type
F2 5A ST4-5AN1 Radar process unit
(JMA-5312-6/6HS) F3 10A
I/F circuit PC410 ST6-10AN1
F2 10A ST6-10AN1 Radar process unit
(JMA-5322-7/9/6HS,
JMA-5332-12) F3 10A
I/F circuit PC410 ST6-10AN1
GYRO I/F circuit F1 to F4 0.5A GYRO I/F circuit PC4201 MF51NR-0.5A
9-5
9.2 Trouble Shooting
y
yyyy
yyyy
9.2 TROUBLE SHOOTING
As this radar equipment includes complicated circuits, it is necessary to request a specialist
engineer for repair or instructions for remedy if any circuit is defective.
There are also troubles by the following causes, which should be referred to in checking or repair
work.
1 Poor Contact in Terminal Board of Inter-Unit Cables
a) Poor contact in terminal board
b) The cable end is not fully connected, that it, contacted with earthed another terminal.
c) Disconnected cable wire
2 Poor Contact of Connector within Unit
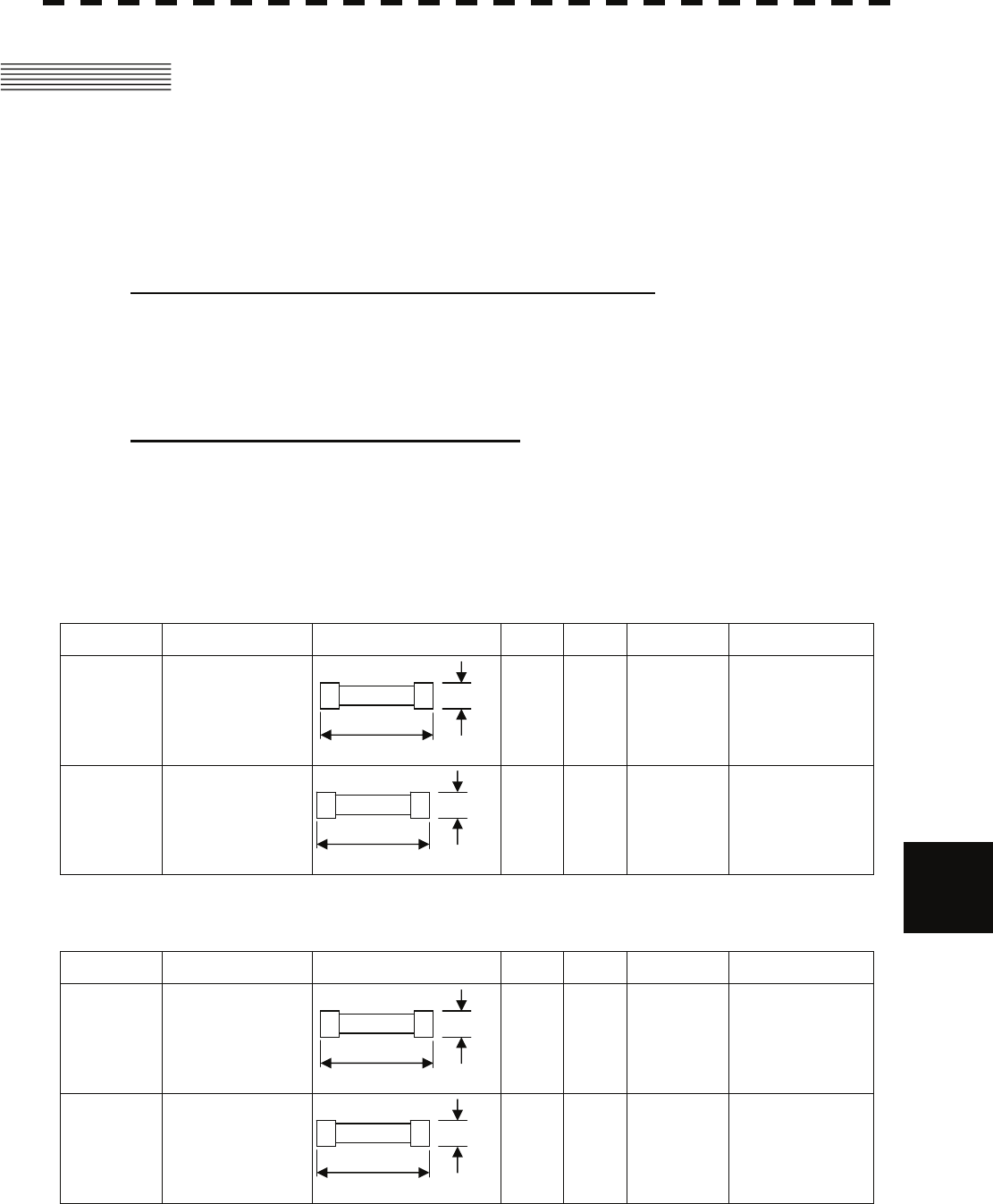
Reference: This radar equipment is provided with 9-9 standard spares.
Table 9-10 Spares (7ZXRD0026, JMA-5312-6/6HS, 7ZXRD0015, JMA-5322-7/9/6HS, JMA-5332-12)
7ZXRD0026
Name Type/Code Shape (mm) In use Spare Parts No. Location
Fuse ST4-5AN1
(5ZFCA00050)
1 3 F2
Inside process
unit
9
Fuse ST6-10AN1
(5ZFCA00053)
1 3 F3
Inside process
unit
7ZXRD0015
Name Type/Code Shape (mm) In use Spare Parts No. Location
Fuse ST6-10AN1
(5ZFCA00053)
1 3 F2
Inside process
unit
Fuse ST6-10AN1
(5ZFCA00053)
1 3 F3
Inside process
unit
Φ6.35
31.8
31.8
Φ6.35
Φ6.35
31.8
Φ6.35
31.8
9-6
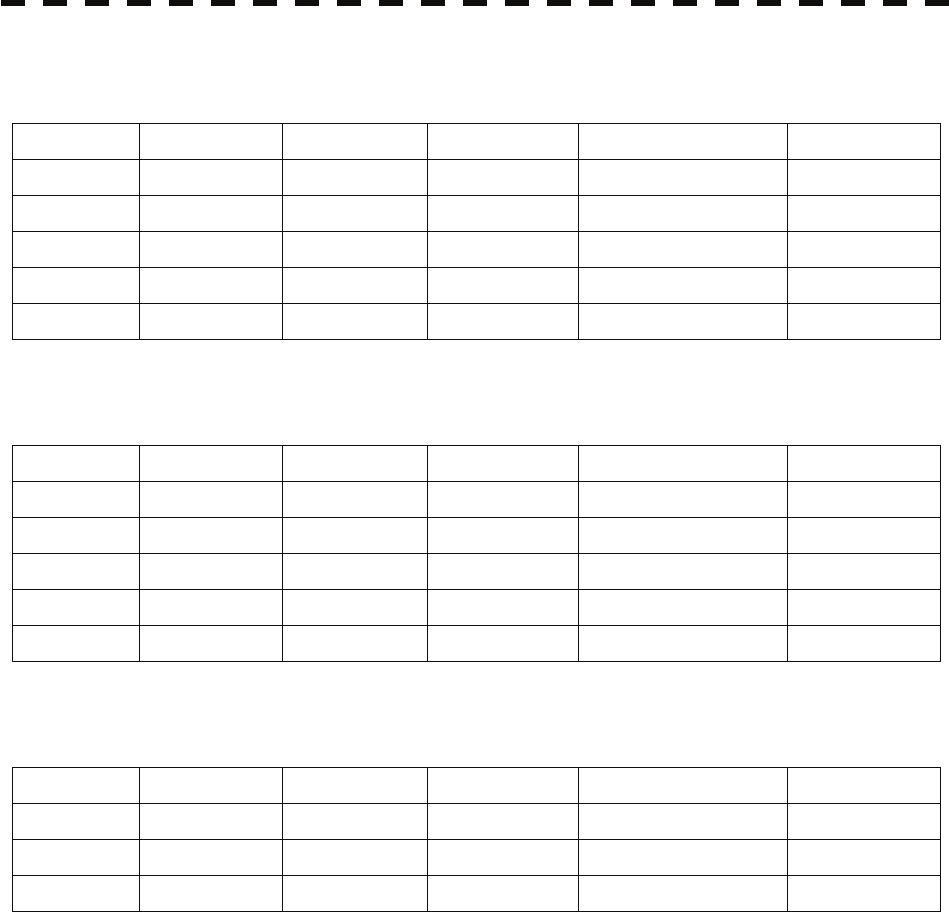
Table 9-11 Special Parts
[I] JMA-5312-6/6HS
Parts No. Name Type Manufacturer Location Code
V101 Magnetron MAF1565N NJRC Scanner unit 5VHAA00102
A101/A102 Circulator FCX68R Toshiba Scanner unit 5AJIX00027
A103 Dummy NJC4002 NJRC Scanner unit 5ANDF00001
A104 Filter NJC9952 NJRC Scanner unit 5AWAX00002
A301 Diode Limiter NJS6930 NJRC Scanner unit 5ATBT00006
[II] JMA-5322-7/9/6HS
Parts No. Name Type Manufacturer Location Code
V101 Magnetron M1568BS NJRC Scanner unit 5VMAA00106
A101/A102 Circulator NJC3901M NJRC Scanner unit 5AJBV00007
A103 Dummy NJC4002 NJRC Scanner unit 5ANDF00001
A104 Filter NJC9952 NJRC Scanner unit 5AWAX00002
A301 Diode Limiter NJS6930 NJRC Scanner unit 5ATBT00006
[III] JMA-5332-12
Parts No. Name Type Manufacturer Location Code
V101 Magnetron M1555 NJRC Scanner unit 5VMAA00104
A101 Circulator NJC3316 NJRC Scanner unit 5AJBV00008
A301 Diode Limiter NJS6318 NJRC Scanner unit 5ATBT00005
9-7
9.2 Trouble Shooting
y
yyyy
yyyy
Table 9-12 Circuit Block to be Repaired (JMA-5312-6/6HS)
Location Circuit Block Type Remarks
Scanner unit Geared motor 7BDRD0048 DC brushless motor
Scanner unit Motor control power circuit CBD-1779
Scanner unit Encoder CHT-71A
Scanner unit Fan 7BFRD0002
Scanner unit Performance Monitor NJU-85
Scanner unit Modulator CME-363 Excluding Magnetron
Scanner unit Receiver NRG-610 Including CAE-529-1
Scanner unit Power supply circuit CBD-1783
Process unit Radar processing circuit CDC-1332
Process unit ARPA process circuit NCA-877WA
Process unit ATA process circuit NCA-877A
Process unit AIS process circuit NQA-2103
Process unit GYRO/LOG I/F circuit CMJ-304D
Process unit Terminal board circuit CQD-1937A
Process unit I/F circuit NQA-2123
Process unit Power circuit NBD-818A
Process unit Fan 7BFRD0005
Operation unit Operation unit CCK-979
Operation unit PS2 connector circuit CQC-1204
Operation unit Trackball CCK-1000
LCD Monitor Monitor fan CBP-173A
LCD Monitor Interface circuit CMH-2227
LCD Monitor Inverter circuit CBF-38
LCD Monitor Brilliance circuit CCK-989
LCD Monitor LCD Panel CML-771 9
9-8
Table 9-13 Circuit Block to be Repaired (JMA-5322-7/9/6HS)
Location Circuit Block Type Remarks
Scanner unit Geared motor 7BDRD0044A DC brushless motor (normal speed)
Scanner unit Geared motor 7BDRD0045A DC brushless motor (high speed)
Scanner unit Motor control power circuit CBD-1779
Scanner unit Encoder CHT-71A
Scanner unit Heater control circuit CHG-216 Option (AC100V)
Scanner unit Fan 7BFRD0002
Scanner unit Performance Monitor NJU-85
Scanner unit Modulator unit NMA-550
Including CPA-264
Including CMB-404
Including CFR-229
Excluding Magnetron
Scanner unit Modulator circuit CPA-264
Scanner unit Receiver unit NRG-162A Including CMA-866A
Scanner unit T/R control circuit CMC-1205R
Scanner unit Power supply circuit CBD-1682A
Process unit Radar processing circuit CDC-1332
Process unit ARPA process circuit NCA-877WA
Process unit ATA process circuit NCA-877A
Process unit AIS process circuit NQA-2103
Process unit GYRO/LOG I/F circuit CMJ-304D
Process unit Terminal board circuit CQD-1937A
Process unit I/F circuit NQA-2123
Process unit Power circuit NBD-818A
Process unit Fan 7BFRD0005
Operation unit Operation unit CCK-979
Operation unit PS2 connector circuit CQC-1204
Operation unit Trackball CCK-1000
LCD Monitor Monitor fan CBP-173A
LCD Monitor Interface circuit CMH-2227
LCD Monitor Inverter circuit CBF-38
LCD Monitor Brilliance circuit CCK-989
LCD Monitor LCD Panel CML-771
9-9
9.2 Trouble Shooting
y
yyyy
yyyy
Table 9-14 Circuit Block to be Repaired (JMA-5332-12)
Location Circuit Block Type Remarks
Scanner unit Geared motor MDBW10823 DC brushless motor
Scanner unit Motor driver circuit 7EPRD0034 220VAC
Scanner unit Motor driver circuit 7EPRD0035 110VAC
Scanner unit Encoder CHT-71A
Scanner unit Heater control circuit CHG-215 Option (AC100V)
Scanner unit Brake control circuit CCB-655
Scanner unit Fan 7BFRD0002
Scanner unit Performance Monitor NJU-84
Scanner unit Modulator unit NMA-551
Including CPA-264
Including CMB-406
Including CFR-229
Excluding Magnetron
Scanner unit Modulator circuit CPA-264
Scanner unit Receiver unit NRG-229 Including CAE-499
Including CAF-595
Scanner unit T/R control circuit CMC-1205R
Scanner unit Power supply circuit CBD-1682A
Scanner unit Relay filter circuit CSC-656
Process unit Radar processing circuit CDC-1332
Process unit ARPA process circuit NCA-877WA
Process unit ATA process circuit NCA-877A
Process unit AIS process circuit NQA-2103
Process unit GYRO/LOG I/F circuit CMJ-304D
Process unit Terminal board circuit CQD-1937A
Process unit I/F circuit NQA-2123
Process unit Power circuit NBD-818A
Process unit Fan 7BFRD0005
Operation unit Operation unit CCK-979
Operation unit PS2 connector circuit CQC-1204
Operation unit Trackball CCK-1000
LCD Monitor Monitor fan CBP-173A
LCD Monitor Interface circuit CMH-2227
LCD Monitor Inverter circuit CBF-38
LCD Monitor Brilliance circuit CCK-989
LCD Monitor LCD Panel CML-771
9
9-10
9.3 AFTER-SALES SERVICE
9.3.1 Keeping period of maintenance parts
Keeping period of maintenance parts is ten years from the production is discontinued.
9.3.2 When you Request for Repair
If you suppose the product may be out of order, read the description in Section 9 carefully and
check the suspected point again.
If it is still out of order, you are recommended to stop operation of the equipment and consult with
the dealer from whom you purchased the product, or our branch office in your country or district,
the sales department in our main office in Tokyo.
z Repair within the Warranty Period
If any failure occurs in the product during its normal operation in accordance with the
instruction manual, the dealer or JRC will repair free of charge. In case that any failure is
caused due to misuse, faulty operation, negligence or force major such as natural disaster and
fire, the product will be repaired with charges.
z Repair after the Warranty Period
If any defective function of the product is recoverable by repair, the repair of it will be made at
your own charge upon your request.
z Necessary Information for Repair
☆ Product name, model, manufacturing date and serial number
☆ Trouble conditions (as detailed as possible. Refer to “Radar Failure Check List” in page
9-10. )
☆ Name of company/organization, address and telephone number
9.3.3 Recommended Maintenance
The performance of the product may deteriorate due to the secular change of the parts used in it,
though such deterioration depends upon the conditions of operation.
So checkup and maintenance is recommendable for the product in addition to your daily care.
For maintenance, consult with the near-by dealer or our sales department.
Such maintenance will be made with charges.
For further details of after-sale service, contact the JRC Offices.
9-11
9.3 After-sales Service
y
yyyy
yyyy
Radar Failure Check List
When placing an order for repair of the product, it is requested that you could confirm the check items and fill the
results and sent the sheet to our contact.
If there is any unclear items, contact the ship on which the product is installed, and give the correct information on
the product.
Ship name: Phone: Fax:
Radar general model name: JMA- Serial No. :
(Write the full model name correctly)
(1)Check the following items in the order of the number, and circle the applicable answer between YES or NO. If the
item cannot be determined as YES or NO, explain in detail in the item (18), others.
(2)If any of the items (1) to (5) is marked as NO, check the fuse of the product (refer to Section 9.1.2 and 9.2).
(3)Check the items (4) to (17) while the transmission (TX) is ON.
*Functions mentioned in the items (14), (15) and (17) may be optional, answer is not necessary.
9
No. Check Item Result
(1) Power can be turned on. (The lamp on the Operation unit is lit) YES NO
(2) A few minutes after powering-on, it will become standby status . YES NO
(3) When powering-on (or TX ON), LCD monitor something is lit. YES NO
(4) The antenna rotates at the transmission (TX) ON.
(Check the following items while transmission is ON) YES NO
(5) Current is supplied to the magnetron. (Refer to the instruction manual) YES NO
(6) Turning is enabled. (Check with the range of 6 NM or more) YES NO
(7) Fixed marker is displayed. YES NO
(8) VRM is displayed. YES NO
(9) While noise is displayed while set at SEA and RAIN minimum, GAIN maximum,
IR-OFF and range 48 NM. YES NO
(10) Target reflection echo is displayed. YES NO
(11) Sensitivity of reflection echo is normal. YES NO
(12) EBL is displayed. YES NO
(13) Cursor mark moves. YES NO
*(14) GYRO course can be set and normally displayed. YES NO
*(15) LOG speed can be normally displayed. YES NO
(16) Target tracking function works normally. YES NO
*(17) If equipped with an interswitch, when switching from the straight mode (II) to (X),
the failures (items marked NO) in the above (1) to (16), are switched over to the other
unit. YES NO
(18)Others (Error message, etc. )
9-12
SECTION 10
DISPOSAL
10.1 DISPOSAL OF THE UNIT ....................................................................10-1
10.2 DISPOSAL OF USED BATTERIES......................................................10-1
10.3 DISPOSAL OF USED MAGNETRON ..................................................10-1
10.4 ABOUT THE CHINA ROHS..................................................................10-2
10.1 DISPOSAL OF THE UNIT
When disposing of this unit, be sure to follow the local laws and regulations for the place of
disposal.
10.2 DISPOSAL OF USED BATTERIES
WARNING
When disposing of used lithium batteries, be
sure to insulate the batteries by taping the ⊕ and
○ terminals.
Otherwise, heat generation, explosion or a fire
may occur.
In this unit, Lithium batteries are used for the following parts:
Radar Processing circuit (CDC-1332): BT1 (Maxell: CR2032)
z Do not store used lithium batteries. Dispose of them in accordance with regulations of local
government.
z When disposing of used lithium batteries be sure to insulate the batteries by taping the ⊕ and
○ terminals. For disposal of batteries, be sure to follow the local laws and regulations.
For detail, consult with the dealer you purchased the product our business office, or local
government.
10.3 DISPOSAL OF USED MAGNETRON
Magnetron is used in the Scanner (NKE-1130/2103/2254)
z When the magnetron is replaced with a new one, return the used magnetron to our dealer or
business office.
For detail, consult with our dealer or business office.
10─1
10.4 About the CHINA RoHS
yy
yyyy
yyyy
10.4 ABOUT THE CHINA ROHS
形式名(Type): JMA-5300MK2 Series 名称(Name): RADAR
铅 汞 镉 六价铬 多溴联苯 多溴二苯醚
(Pb) (Hg) (Cd) (Cr6+) (PBB) (PBDE)
雷达天线单元
(Scanner Unit)
××○×××
收发信单元
(Transmitter-receiver Unit)
××××××
主船内装置 (Inboard Unit)
・显示装置 (Display Unit)
・键盘装置 (OperationUnit)
・信号处理装置
(RADAR Process Unit)
××××××
外部设备 (Peripherals)
・选择 (Options)
・电线类 (Cables)
・手册 (Documennts)
××××××
有毒有害物质或元素的名称及含量
(Names & Content of toxic and hazardous substances or elements)
(Toxic and Hazardous Substances and Elements)
×:表示该有毒有害物质至少在该部件的某一均质材料中的含量超出SJ/T11363-2006 标准规定的限量要求。
(Indicates that this toxic or hazardous substance contained in at least one of the homogeneous materials
used for this part is above the limit requirement in SJ/T 11363-2006.)
○:表示该有毒有害物质在该部件所有均质材料中的含量均在SJ/T11306-2006 标准规定的限量要求以下。
(Indicates that this toxic, or hazardous substance contained in all of the homogeneous materials for this
part is below the requirement in SJ/T11363-2006.)
部件名称
(Part name)
有毒有害物质或元素
10
10-2
SECTION 11
SPECIFICATIONS
11.1 JMA-5312-6/6HS TYPE RADAR ........................................................11-1
11.2 JMA-5322-7/9/6HS TYPE RADAR .....................................................11-2
11.3 JMA-5332-12 TYPE RADAR ..............................................................11-3
11.4 SCANNER (NKE-2103-6) ...................................................................11-4
11.5 SCANNER (NKE-2254-7/9) ................................................................11-5
11.6 SCANNER (NKE-1130).......................................................................11-6
11.7 SCANNER (NKE-2103-6HS) ..............................................................11-7
11.8 SCANNER (NKE-2254-6HS) ..............................................................11-8
11.9 DISPLAY UNIT (NCD-4530)................................................................11-9
11.10 PROCESSOR UNIT (NDC-1417)......................................................11-10
11.11 TARGET TRACKING FUNCTION (OPTION) ...................................11-12
11.12 AIS UNIT (NQA-2103) (OPTION) .....................................................11-13
11.13 PLOTTER..........................................................................................11-14
11.14 OPERATION UNIT (NCE-5171)........................................................11-15
11.15 PERFORMANCE MONITOR (NJU-84) (OPTION) ...........................11-16
11.16 PERFORMANCE MONITOR (NJU-85) (OPTION) ...........................11-16
11.17 AVAILABLE INPUT SIGNAL............................................................11-17
11.18 AVAILABLE OUTPUT SIGNAL........................................................11-18
11.19 STANDARD CONFIGURATION .......................................................11-18
11.20 EQUIPMENT DISTANCE BETWEEN OTHER INSTRUMENTS......11-19
11.21 OTHERS (OPTION) ..........................................................................11-19

11.1 JMA-5312-6/6HS TYPE RADAR
(1) Class of emission P0N
(2) Display Color Raster Scan
(3) Screen 19-inch Color LCD
Effective diameter of radar display, more than 250 mm
(4) Range Scale 0.125, 0.25, 0.5, 0.75, 1.5, 3, 6, 12, 24, 48, 96NM
(5) Range Resolution Less than 30m
(6) Minimum Detective Range Less than 40m
(7) Range Accuracy Less than 1% of the maximum distance of the range scale in use or
less than 15m whichever is larger
(8) Bearing Accuracy Less than 1°
(9) Bearing Indication Relative Motion mode: Head-up/Course-up/North-up
True Motion mode: Course-up/North-up
(10) Ambient Condition According to IEC60945-4
Temperature
Scanner: -25 to +55℃
(Storage Temperature: -25 to +70℃)
Other Unit except Scanner: -15 to +55℃
Relative Humidity 93% at +40℃
Vibration 2 to 13.2Hz, amplitude ±1mm ±10%
13.2 to 100Hz, Gravity acceleration 7m/s2
Velocity of the wind 51.5m/s(100kt)
(11) Power Supply Input +24VDC (Display Unit)
+24VDC (Scanner)
* Display Unit correspond to 100/110/115/220/230/240VAC
when use NBA-5111.
(12) Power Consumption Approx. 620W (In maximum wind resistant velocity)
(13) Power Supply Voltage +24VDC –10/+50% (Display Unit)
Fluctuation +24VDC –10/+50% (Scanner Unit)
(14) Pre-heating Time Approx. Within 1min30sec
11-1
11.2 JMA-5322-7/9/6HS Type Radar
yyy
yyyy
yyyy
11.2 JMA-5322-7/9/6HS TYPE RADAR
(1) Class of emission P0N
(2) Display Color Raster Scan
(3) Screen 19-inch Color LCD
Effective diameter of radar display, more than 250 mm
(4) Range Scale 0.125, 0.25, 0.5, 0.75, 1.5, 3, 6, 12, 24, 48, 96NM
(5) Range Resolution Less than 30m
(6) Minimum Detective Range Less than 40m
(7) Range Accuracy Less than 1% of the maximum distance of the range scale in use or
less than 15m whichever is larger
(8) Bearing Accuracy Less than 1°
(9) Bearing Indication Relative Motion mode: Head-up/Course-up/North-up
True Motion mode: Course-up/North-up
(10) Ambient Condition According to IEC60945-4
Temperature
Scanner: -25 to +55℃
(Storage Temperature: -25 to +70℃)
Other Unit except Scanner: -15 to +55℃
Relative Humidity 93% at +40℃
Vibration 2 to 13.2Hz, amplitude ±1mm ±10%
13.2 to 100Hz, Gravity acceleration 7m/s2
Velocity of the wind 51.5m/s (100kt)
(11) Power Supply Input +24VDC (Display Unit)
+24VDC (Scanner)
* Display Unit correspond to 100/110/115/220/230/240VAC
when use NBA-5111.
(12) Power Consumption Approx. 700W (In maximum wind resistant velocity)
(13) Power Supply Voltage +24VDC –10/+50% (Display Unit)
Fluctuation +24VDC –10/+50% (Scanner Unit)
(14) Pre-heating Time Approx. Within 3min
11
11-2

11.3 JMA-5332-12 TYPE RADAR
(1) Class of emission P0N
(2) Display Color Raster Scan
(3) Screen 19-inch Color LCD
Effective diameter of radar display, more than 250 mm
(4) Range Scale 0.125, 0.25, 0.5, 0.75, 1.5, 3, 6, 12, 24, 48, 96NM
(5) Range Resolution Less than 30m
(6) Minimum Detective Range Less than 40m
(7) Range Accuracy Less than 1% of the maximum distance of the range scale in use or
less than 15m whichever is larger
(8) Bearing Accuracy Less than 1°
(9) Bearing Indication Relative Motion mode: Head-up/Course-up/North-up
True Motion mode: Course-up/North-up
(10) Ambient Condition According to IEC60945-4
Temperature
Scanner: -25 to +55℃
(Storage Temperature: -25 to +70℃)
Other Unit except Scanner: -15 to +55℃
Relative Humidity 93% at +40℃
Vibration 2 to 13.2Hz, amplitude ±1mm ±10%
13.2 to 100Hz, Gravity acceleration 7m/s2
Velocity of the wind 51.5m/s(100kt)
(11) Power Supply Input +24VDC (Display Unit)
100/110/120/220/230/240VAC, 1Φ, 50/60Hz (Scanner)
* Display Unit correspond to 100/110/115/220/230/240VAC
when use NBA-5111.
(12) Power Consumption Approx. 240W +1600VA (In maximum wind resistant velocity)
(13) Power Supply Voltage +24VDC –10/+50% (Display Unit)
Fluctuation 100/110/115/220/230/240VAC ±10% (Scanner Unit)
(14) Pre-heating Time Approx. Within 3min
11-3
11.4 Scanner (NKE-2103-6)
yyy
yyyy
yyyy
11.4 SCANNER (NKE-2103-6)
(1) Dimensions Height 457mm×Swing Circle 1910mm
(2) Mass Approx. 40kg
(3) Polarization Horizontal Polarization
(4) Directional Characteristic Horizontal Beam Width: 1.2° (-3dB width)
Vertical Beam Width: 20° (-3dB width)
Sidelobe Level: Below –26dB (within ±10°)
Below –30dB (outside ±10°)
(5) Revolution Approx. 27rpm (Normal)
(6) Peak Power 10kW±50%
(7) Transmitting Frequency 9410 ±30MHz
(8) Transmitting Tube Magnetron [MAF1565N]
(9) Pulse width/Repetition Frequency
SP1:0.08uS/2250Hz
MP1:0.25uS/1700Hz,MP2:0.5uS/1200Hz
LP1:0.8uS/750Hz,LP2:1.0uS/650Hz
0.125NM SP1
0.25NM SP1
0.5NM SP1
0.75NM SP1 / MP1
1.5NM SP1 / MP1 / MP2
3NM MP1 / MP2 / LP1
6NM MP1 / MP2 / LP1 / LP2
12NM MP1 / MP2 / LP1 / LP2
24NM MP2 / LP1 / LP2
48NM LP2
96NM LP2
(10) Duplexer Circulator + Diode Limiter
(11) Mixer MIC Front End
(12) Intermediate Frequency Amplifier Intermediate Frequency: 60MHz
Band Width: 20MHz(0.08μS)
6MHz(0.25μS,0.5μS)
3MHz(0.8μS, 1μS) 11
Gain: More than 90dB
Amplifying Characteristics: Logarithmic Amplifier
(13) Overall Noise Figure 7.5dB(Average)
11-4

11.5 SCANNER (NKE-2254-7/9)
(1) Dimensions 25kW-7ft: Height 536mm×Swing Circle 2270mm
25kW-9ft: Height 536mm×Swing Circle 2825mm
(2) Mass 25kW-7ft: Approx. 58 kg
25kW-9ft: Approx. 60 kg
(3) Polarization Horizontal Polarization
(4) Directional Characteristics Horizontal Beam Width: 1.0° (7ft, -3dB width)
0.8° (9ft, -3dB width)
Vertical Beam Width 20° (7/9ft, -3dB width)
Sidelobe Level: Below –26dB
(7/9ft, within ±10°)
Below –30dB
(7/9ft, outside ±10°)
(5) Revolution 24rpm (7/9ft, Normal)
(6) Peak Power 25kW ±50%
(7) Transmitting Frequency 9410 ±30MHz
(8) Transmitting Tube Magnetron [M1568BS]
(9) Pulse Width/Repetition Frequency
SP1:0.07uS/2250Hz
MP1:0.2uS/2250Hz,MP2:0.3uS/1900Hz,MP3:0.4uS/1400Hz
LP1:0.8uS/750Hz,LP2:1.0uS/650Hz,LP3:1.2uS/510Hz
0.125NM SP1
0.25NM SP1
0.5NM SP1
0.75NM SP1 / MP1
1.5NM SP1 / MP1 / MP2 / MP3
3NM MP1 / MP2 / MP3 / LP1
6NM MP1 / MP2 / MP3 / LP1 / LP2
12NM MP1 / MP2 / MP3 / LP1 / LP2
24NM MP3 / LP1 / LP2
48NM LP2
96NM LP3
(10) Duplexer Circulator + Diode Limiter
(11) Mixer MIC Front End
(12) Intermediate Frequency Amplifier Intermediate Frequency: 60MHz
Band Width: 25MHz(0.07μS)
8MHz(0.2μS, 0.3μs, 0.4μS)
3MHz(0.8μS, 1μS, 1.2μS)
Gain: More than 90dB
Amplifying Characteristics: Logarithmic Amplifier
(13) Overall Noise Figure 7.5dB(Average)
11-5
11.6 Scanner (NKE-1130)
yyy
yyyy
yyyy
11.6 SCANNER (NKE-1130)
(1) Dimensions Height 791mm×Swing Circle 4000mm
(2) Mass Approx. 180kg
(3) Polarization Horizontal Polarization
(4) Directional Characteristics Horizontal Beam Width 12ft: 1.9°
Vertical Beam Width 12ft: 25°
Sidelobe Level: Below –26dB (within ±10°)
Below –30dB (outside ±10°)
(5) Revolution 24rpm (60/50Hz)
(6) Peak Power 30kW ±50%
(7) Transmitting Frequency 3050 ±20MHz
(8) Transmitting Tube Magnetron M1555
(9) Pulse Width/Repetition Frequency
SP1:0.07uS/2250Hz
MP1:0.2uS/2250Hz,MP2:0.3uS/1900Hz,MP3:0.4uS/1400Hz
LP1:0.8uS/750Hz,LP2:1.0uS/650Hz,LP3:1.2uS/510Hz
0.125NM SP1
0.25NM SP1
0.5NM SP1
0.75NM SP1 / MP1
1.5NM SP1 / MP1 / MP2 / MP3
3NM MP1 / MP2 / MP3 / LP1
6NM MP1 / MP2 / MP3 / LP1 / LP2
12NM MP1 / MP2 / MP3 / LP1 / LP2
24NM MP3 / LP1 / LP2
48NM LP2
96NM LP3
(10) Duplexer Circulator + Diode Limiter
(11) Mixer MIC Front End
(12) Intermediate Frequency Amplifier Intermediate Frequency: 60MHz
Band Width: 25MHz(0.07uS)
8MHz(0.2μS, 0.3μS, 0.4μS)
3MHz(0.8μS, 1.0μS, 1.2μS) 11
Gain: More than 90dB
Amplifying Characteristics: Logarithmic Amplifier
(13) Overall Noise Figure 7.5dB(Average)
11-6

11.7 SCANNER (NKE-2103-6HS)
(1) Dimensions Height 457mm×Swing Circle 1910mm
(2) Mass Approx. 40kg
(3) Polarization Horizontal Polarization
(4) Directional Characteristic Horizontal Beam Width: 1.2° (-3dB width)
Vertical Beam Width: 20° (-3dB width)
Sidelobe Level: Below –26dB (within ±10°)
Below –30dB (outside ±10°)
(5) Revolution Approx. 48rpm
(6) Peak Power 10kW±50%
(7) Transmitting Frequency 9410 ±30MHz
(8) Transmitting Tube Magnetron [MAF1565N]
(9) Pulse width/Repetition Frequency
SP1:0.08uS/2250Hz
MP1:0.25uS/1700Hz,MP2:0.5uS/1200Hz
LP1:0.8uS/750Hz,LP2:1.0uS/650Hz
0.125NM SP1
0.25NM SP1
0.5NM SP1
0.75NM SP1 / MP1
1.5NM SP1 / MP1 / MP2
3NM MP1 / MP2 / LP1
6NM MP1 / MP2 / LP1 / LP2
12NM MP1 / MP2 / LP1 / LP2
24NM MP3 / LP1 / LP2
48NM LP2
96NM LP2
(10) Duplexer Circulator + Diode Limiter
(11) Mixer MIC Front End
(12) Intermediate Frequency Amplifier Intermediate Frequency: 60MHz
Band Width: 20MHz(0.08μS)
6MHz(0.25μS,0.5μS)
3MHz(0.8μS, 1μS)
Gain: More than 90dB
Amplifying Characteristics: Logarithmic Amplifier
(13) Overall Noise Figure 7.5dB(Average)
11-7
11.8 Scanner (NKE-2254-6HS)
yyy
yyyy
yyyy
11.8 SCANNER (NKE-2254-6HS)
(1) Dimensions 25kW-6ft: Height 536mm×Swing Circle 1910mm
(2) Mass Approx. 55 kg
(3) Polarization Horizontal Polarization
(4) Directional Characteristics Horizontal Beam Width: 1.2°
Vertical Beam Width 20° (-3dB width)
Sidelobe Level: Below –26dB
(within ±10°)
Below –30dB
(outside ±10°)
(5) Revolution 48rpm (Normal)
(6) Peak Power 25kW ±50%
(7) Transmitting Frequency 9410 ±30MHz
(8) Transmitting Tube Magnetron [M1568BS]
(9) Pulse Width/Repetition Frequency
SP1:0.07uS/2250Hz
MP1:0.2uS/2250Hz,MP2:0.3uS/1900Hz,MP3:0.4uS/1400Hz
LP1:0.8uS/750Hz,LP2:1.0uS/650Hz,LP3:1.2uS/510Hz
0.125NM SP1
0.25NM SP1
0.5NM SP1
0.75NM SP1 / MP1
1.5NM SP1 / MP1 / MP2 / MP3
3NM MP1 / MP2 / MP3 / LP1
6NM MP1 / MP2 / MP3 / LP1 / LP2
12NM MP1 / MP2 / MP3 / LP1 / LP2
24NM MP3 / LP1 / LP2
48NM LP2
96NM LP3
(10) Duplexer Circulator + Diode Limiter
(11) Mixer MIC Front End
(12) Intermediate Frequency Amplifier Intermediate Frequency: 60MHz
Band Width: 25MHz(0.07μS)
8MHz(0.2μS, 0.3μS, 0.4μS)
3MHz(0.8μS, 1μS, 1.2μS) 11
Gain: More than 90dB
Amplifying Characteristics: Logarithmic Amplifier
(13) Overall Noise Figure 7.5dB(Average)
11-8

11.9 DISPLAY UNIT (NCD-4530)
(1) Structure Desk Top Type
(LCD Monitor/Operation Unit/Processor Unit Separation Structure)
(2) Screen 19-inch Color LCD 1280x1024 dot (SXGA)
Viewing Distance: 1m from the center of Display
(3) Display mode Radar mode
Synthesis mode (Synthesis Radar echo and Coastline)
Plotter mode (Require Plotter Unit (option))
(4) Range Scale 0.125, 0.25, 0.5, 0.75, 1.5, 3, 6, 12, 24, 48, 96NM
(5) Range Marker 0.025, 0.05, 0.1, 0.25, 0.25, 0.5, 1, 2, 4, 8, 16NM
(6) Bearing Indication Rader mode/Synthesis mode
Relative motion: North-up, Course-up, Head-up
True motion: North-up, Course-up
True motion (Plotter mode (Option)): N-up, C-up
(7) Variable Range Maker 2VRM (Digital Display)
VRM unit of Display: NM
VRM Range:0.000 to 100.2NM
(8) Electric Bearing lines 2EBL(Digital Display)
Each EBL can be floating displayed.
EBL unit of Display: 0.1°
EBL Range: 0.000°to 359.9°
Bearing Indication: Relative bearing and True bearing can be switched.
(9) Cursor Target Range, Bearing and Latitude presentation can be possible to move
with trackball.
11-9

11.10 Processor Unit (NDC-1417)
yyy
yyyy
yyyy
11.10 PROCESSOR UNIT (NDC-1417)
(1) Structure Desk Top Type (Horizontal putting and length putting using
combined)
(2) Dimensions Height 170mm×Width 300mm×Depth 320mm
(3) Mass Approx. Below 10kg
(4) Tune Method AUTO/MANUAL(Bar-graph indicate)
(5) STC (SEA) AUTO/MANUAL
(6) FTC (RAIN) AUTO/MANUAL
(7) Radar Interference Rejection Built-in (The effect can be adjusted by three stages.)
(8) Scan Correlation Function1/2/3, 2 Peak Hold Processing1/2
Automatic change of processing method.
(Target range synchronize/Clutter synchronize)
(9) Bearing Marker 360° in 1° digit.
Relative motion: Fixation
True motion: Rewrite at a position correct in every scan.
(10) Heading Line Electronic (Stern Line can be displayed.)
(11) Radar Alarm Invasion, Secession, OFF can be selected.
With buzzer sound.(Possible to output to external buzzer. )
Ring.
Automatically acquisition by target tracking described in
Section “TARGET TRACKING”.
(12) Off Center Within 66% of the radius of any range. (Except 96NM)
Can be operated in all mode in relative motion.
Trail is succeed at Off Center mode.
(13) True motion Unit Built-in (Except 96NM)
(14) True motion reset position 66% of radius of any range.
Possible to manual reset.
(15) Twice zoom The zoom center is 66% radius of any range. (Except 0.125NM)
11
11-10

(16) Radar trails indication True motion mode:(Only true motion trails
Relative motion mode:
True motion trails and relative motion trails can be selected.
Trail time length:
15 sec/30 sec/1 min/3 min/6 min/10 min/15 min/30 min/60
min/Continuous/OFF
Arbitrary trail time length can be displayed at any time.
Possible to display time series trail and continuous trail by color
classification.
Built-in Trail thinning process.
Trail function can be use at true motion reset.
When range is changed, Trail function can be use.
Trail function can be use at Off Center. (Relative motion)
When motion indication and bearing indication changed, Trail
function can be use.(Only true motion trails indication.)
(17) Variety of Pulse width SP1/MP1/MP2/LP1/LP2(NKE-2103)
SP1/SP2/MP1/MP2/MP3/LP1/LP2/LP3(NKE-2254/NKE-1130)
(18) Target enhance 3 stages can be changed.
(19) Correct position When synthesis Radar and Coastline is displayed, position can be
corrected by manually.
(20) Display color Radar echo: 16 stages (Yellow, Green, Amber, Purple, Red)
Radar trails: 16 stages (White, Cyan, Green)
Fixed Maker: 4 colors (White, Cyan, Green, Amber)
VRM1/2,EBL1/2,PI: 4 colors (White, Cyan, Green, Amber)
Character/Bearing Marker: 5 colors (White, Green, Amber, Black,
Red)
Cursor: 4 colors (White, Cyan, Green, Amber)
Heading Line/Vector: 4 colors (Cyan, Green, Amber, Black)
Own Ship’s track/Another Ship’s track: 7 colors
Coastline/Isobaths: 16 colors
Mark/Line: 7 colors
11-11
11.11 Target Tracking Unit (NCA-877WA)
yyy
yyyy
yyyy
11.11 TARGET TRACKING FUNCTION
(OPTION)
Radar mode, synthesis mode
(1) Available range scale All range
(2) Acquisition MANUAL/AUTO(by two automatic acquisition/activation
zone)
(3) Tracking Normal edition type NCA-877A: 30 target
High performance type NCA-877WA: 100 target
Maximum tracking range: 32NM (Available all range scale)
(4) Display Tracking data: 4 at the same time. (Can be scroll.)
Naming function: Possible to name by the alphabet up to 8
characters to each target.
The range, bearing, CPA, TCPA, true course, true speed, BCR, BCT
of target can be displayed. (When naming is displayed, BCR/BCT
can’t be displayed.) Vector display: True/Relative Past position
(5) Alarm Automatic acquisition/activation zone
Danger ship: Depends on CPA/TCPA setting.
(6) Trial Maneuver (NCA-877WA) Input parameter: Course, Speed, Vector time, Time to Maneuver,
Reach, Turn Radius, Acceleration, Deceleration
Synthesis mode
(7) Another ship track 20 targets. 1500 point per one target can be displayed. (Own ship
track and marks are another.)
Display color: 7 colors (The display color of each target can be set.)
(The display color of all targets can be set by the batch. In this case,
the display color is one color.)
Interval of save: 3/5/10/30 sec, 1/3/5/10/130/160 min, 1/3/5/10 NM
Possible to storage in memory card (Option).
Note: ARPA Process Unit (NCA-877WA) or ATA Process Unit (NCA-877A) must be fitted on ships
compliant to IMO.
11
11-12
11.12 AIS UNIT (NQA-2103) (OPTION)
Radar mode, synthesis mode
(1) Activation 100 target
MANUAL/AUTO(by two automatic activation/activation zone)
(2) Display 300 target (sleeping target and activated target)
AIS data: 2 at the same time. (simple display)
The ship's name, call sign, MMSI, course, speed, CPA, TCPA of target can
be displayed. (simple display item)
The ship's name, call sign, MMSI, course, speed, CPA, TCPA, bearing,
range, ship's heading bearing, rate of turn, latitude, longitude, destination,
navigation status of target can be displayed. (detail display item)
Vector display: True/Relative
Past position
The message can be displayed. (broadcast message, addressed message)
(3) Alarm Automatic activation/activation zone
Danger ship: Depends on CPA/TCPA setting.
Synthesis mode
(4) Another ship track 20 targets. 1500 point per one target can be displayed.
(Own ship track and marks are another.)
Display color: 7 colors
(The display color of each target can be set.)
(The display color of all targets can be set by the batch. In this case, the
display color is one color.)
Interval of save: 3/5/10/30 sec, 1/3/5/10/130/160 min, 1/3/5/10 NM
Possible to storage in memory card (Option).
Note: AIS Process Unit must be fitted on ships compliant to IMO.
11-13
11.13 Plotter
yyy
yyyy
yyyy
11.13 PLOTTER
(1) Plotter (Normal) (Synthesis mode)
Projection: Mercator projection (Latitude 85 degree or less.)
Scale: Radar synchronize range scale
Own ship track: 1 color(Cyan)
Interval of save 3/5/10/30 sec, 1/3/5/10/30/60 min or every
0.1/0.2/0.3/0.5/1/3/5/10 NM and Off
Capacity 7,000 point
Cursor mark: 7 colors
Capacity of cursor mark: 2,000 point
Variety of cursor Mark: 29
Line: 7 colors
Capacity of line: Include in cursor mark
Variety of line: Solid line, broken line, alternate long and
short dash line
Coastline data: Coastline ROM Card (Option) (ERC, JRC, C-Map NT+)
One selected depth contour can be displayed.
External memory: Memory card (Option)
Position correction: Latitude / Longitude correction
Radar video synchronize range scale coast line by manual.
(Synthesis mode)
(2) Plotter (Option NDB-34A) (Synthesis mode, Plotter mode)
Projection: Mercator projection (Latitude 70 degree or less.)
Scale: Synchronize range scale
Own ship track: 7 colors.
Interval of save: 3/5/10/30 sec, 1/3/5/10/30/60 min or every
0.1/0.2/0.3/0.5/1/3/5/10 NM and Off
Capacity of own ship track: 7,000 point
Cursor mark: 7 colors
Capacity of cursor mark: 20,000 point
Variety of cursor Mark: 29
Line: 7 colors
Capacity of line: Include in cursor mark
Variety of line: Solid line, broken line, alternate long and
short dash line
Coast line data: Coast line ROM card (Option)(ERC, JRC, C-Map NT+)
Selected one depth contour can be displayed.
External memory: Memory card (Option)
Waypoint and route: Waypoint can be set up to 999 point.
Information of waypoint: Azimuth, distance and the time
to required destination.
Setting of sea route: 10 sea routes. (20 destination for one
route can be set.)
Alarm of route: Waypoint arrival / break off, Route arrival /
break off 11
Position correction: Latitude / Longitude correction
Radar video synchronize range scale coast line by manual.
(Synthesis mode)
11-14

11.14 OPERATION UNIT (NCE-5171)
(1) Structure Structure of operation unit is separate from processor unit.
Desk-Top type
Correspond Flush mount
(2) Switch Gain (Transmit pulse width can be changed by PUSH-SW.)
SEA (AUTO/MANU can be changed by PUSH-SW.)
RAIN (AUTO/MANU can be changed by PUSH-SW.)
MULTI (Adjustment item can be changed by PUSH-SW)
EBL (Floating EBL ON/OFF can be changed by PUSH-SW.)
VRM
Trackball
(3) Operation switch
STBY/OFF (Standby/Power off): Stop transmit, Power off.
TX/OFF (Transmit start/Power off): Start transmit, Power off
PANEL(Brightness of keyboard adjustment): Brightness of keyboard switch adjust.
ALARM ACK(Stop Alarm): Acknowledge and stop alarm.
EBL1(EBL1): Selection display and non-display of EBL1.
EBL2(EBL2): Selection display and non-display of EBL2.
VRM1(VRM1): Selection display and non-display of VRM1.
VRM2(VRM2): Selection display and non-display of VRM2.
RANGE+(Increase display range): Increase display range.
RANGE-(decrease display range): Decrease display range.
ACQ(acquisition): Target acquisition
TGT DATA(Numeric display): Numeric display of tracking target.
TGT CNCL(Release of selection): Release of selection of tracking target.
MOB(Marker): Turning on and release marker.
ENT(Enter): Left side button of trackball.
CLR/INFO(Release/Information): Right side of trackball.
MAP(Display mode): Selection display and non-display of MAP(NAV
LINE, etc…).
Selection of Rader, Synthesis and Plotter mode.
AZI MODE(Display azimuth): Selection of North-up, Course-Up, Head-Up.
TM/RM(True/Relative Motion): Selection true motion, relative motion.
RR/HL(Fixed ring/Heading Line): Selection display and non-display of fixed ring and
heading line.
OFF CENT(Off Center): Off center operation
AZ (Acquisition/Activate zone): Setting and release of acquisition/activation zone.
VECT T/R (True/Relative motion vector): Selection of true motion and relative motion of
vector.
TRAILS (Trails): Selection display and non-display of trails.
DAY/NIGHT: Selection of screen arrangement of color.
FUNC(Function): Selection of signal processing.
USER KEY1(User key1): User assignment key1.
USER KEY2(User key2): User assignment key2.
RADAR MENU(Radar menu): Rader menu.
MARK(MARK): Selection display and non-display of mark.
TT MENU(TT menu): Target tracking menu.
11-15
11.15 Performance Monitor (NJU-84)
yyy
yyyy
yyyy
11.15 PERFORMANCE MONITOR (NJU-84)
(OPTION)
(1) Dimensions Height 130mm×Width 180mm×Depth 70mm
(2) Mass Approx. 1.2kg
(3) Operating Frequency 3050±30MHz
Note: Performance monitor must be fitted on ships compliant to IMO.
11.16 PERFORMANCE MONITOR (NJU-85)
(OPTION)
(1) Dimensions Height 130mm×Width 149mm×Depth 70mm
(2) Mass Approx. 1.2kg
(3) Operating Frequency 9410±30MHz
Note: Performance monitor must be fitted on ships compliant to IMO.
11
11-16

11.17 AVAILABLE INPUT SIGNAL
Receive capability Port: .NAV1, NAV2, GPS port at terminal board TB4303. NMEA Connecter at rear of the
process unit (D-Sub 9 PIN)
(1) Navigation equipment: IEC61162-1/2
Longitude/Latitude: GGA>RMC>RMA>GNS/GLL
Waypoint: RMB>BWC>BWR
COG/SOG: RMC>RMA>VTG
SPEED: VBW
Day/Time information: ZDA
Alarm
acknowledge: ACK
Rate of Turn : ROT
Rudder : RSA
(2) Bearing signal: GYRO-SYNC: 360X, 180X, 90X, 30X. (GYRO I/F Unit)
GYRO-STEP: 360X, 180X, 90X, 30X. (GYRO I/F Unit)
JRC-NSK format (JLR-10,20,30) (COMPASS Connector at rear of
the process unit)
IEC61162-2 38400bps: THS>HDT (over 40Hz) (COMPAS port at
terminal board TB4303).
IEC61162-1 4800bps: HDT>HDG>HDM>VHW (COMPAS port at
terminal board TB4303). ※Can’t be use for target tracking.
(3) Speed signal: LOG-SYNC: 360X, 180X,90X, 30X. (GYRO I/F Unit)
LOG-PULSE: 800, 400, 200, 100. (GYRO I/F Unit)
(4) External event mark: Contact input (EVENT port at terminal board TB4303).
(5) Radar buoy: Negative input (RBVD port at terminal board TB4302).
(6) Depth: DPT>DBS>DBT>DBK, JRC format
(7) Water temperature: MTW, JRC format
(8) Tendency: CUR, JRC format
(9) Direction of wind, velocity of wind: MWV, MWD
(10) AIS: VDM, VDO
Note: The Speed measuring accuracy of speed sensor shall confirm to IMO Resolution MSC.96(72).
The measuring accuracy of GPS shall confirm to IMO Resolution MSC.112(73).
11-17
11.18 Available Output signal
yyy
yyyy
yyyy
11.18 AVAILABLE OUTPUT SIGNAL
(1) Slave video Radar video: TIY, VD, BP(2048p), BZ (Terminal board TB4302)
(2) Navigation information Send capability Port: .NAV1, NAV2, GPS port at terminal board TB4303.
NMEA Connecter at rear of the process unit (D-Sub 9 PIN). IEC61162-1/2
Radar system data: RSD
Own ship data: OSD
Tracking target data: TTM, TLL, TTD, TLB, JRC-ARPA
AIS target data: TTM, TLL, TTD, TLB
Alarm: ALR
Auto pilot: APB
Bearing of destination: BOD
Latitude/Longitude data: GGA, GLL, RMC
Waypoint data: RMB, BWC
COG/SOG data: VTG
Cross track error: XTE
Heading data: HDT, THS
(3) External alarm Default setting: normally closed contact
Maximum current: 200mA
(SYSALM, ARPAALM port at terminal board TB4303).
(4) External monitor Multi scan monitor, Analog RGB, HD15pin Connector
11.19 STANDARD CONFIGURATION
(1) Scanner 1
(2) Display unit 1 (Process unit, LCD unit, Operation unit)
(3) Equipment cable 10/25kW
Standard:20m
30kW
Display unit to junction box Standard:10m
Junction box to scanner Standard:20m
(4) Equipment reserve parts 1
(5) Instruction manual 1 (Japanese or English)
11
11-18
11.20 EQUIPMENT DISTANCE BETWEEN
OTHER INSTRUMENTS
Maximum Standard
(1) LCD monitor to processor unit 5m 5m
(2) Keyboard unit to processor unit 5m 5m
(3) Scanner to display unit (10/25kw) 65m 20m
(4) Scanner to junction box (30kW) 50m*1 20m
(5) Junction box to display unit(30kW) 30m*1 10m
*1 Total distance between scanner and display unit must be 65m or less.
11.21 OTHERS (OPTION)
• Coast line ROM card
• Memory card
• Interswitch unit (NQE-3141)
• Rectifier unit (NBA-5111)
11-19
APPENDIX
INTERSWITCH (OPTION)
NQE-3141
INSTRUCTION MANUAL
I OVERVIEW................................................................................................ A-1
I-I OVERVIEW......................................................................................... A-1
I-II INTERSWITCH SETUP ..................................................................... A-1
II INTERSWITCH OPERATION.................................................................... A-2
II-I OPERATION FLOW........................................................................... A-2
II-II INTER SWITCH MENU..................................................................... A-3
II-III CHANGE OF CONNECTION PATTERN (WITH 2 DISPLAY UNITS)
......................................................................................................... A-6
II-IV CHANGE OF CONNECTION PATTERN
(WITH 3 OR MORE DISPLAY UNITS) ............................................ A-6
II-V OPERATING CONNECTION PATTERN FILES (FILE OPERATIONS)
.......................................................................................................... A-7
II-VI NAMES OF DISPLAY UNITS AND SCANNER UNITS................... A-8
III REFERENCE............................................................................................. A-9
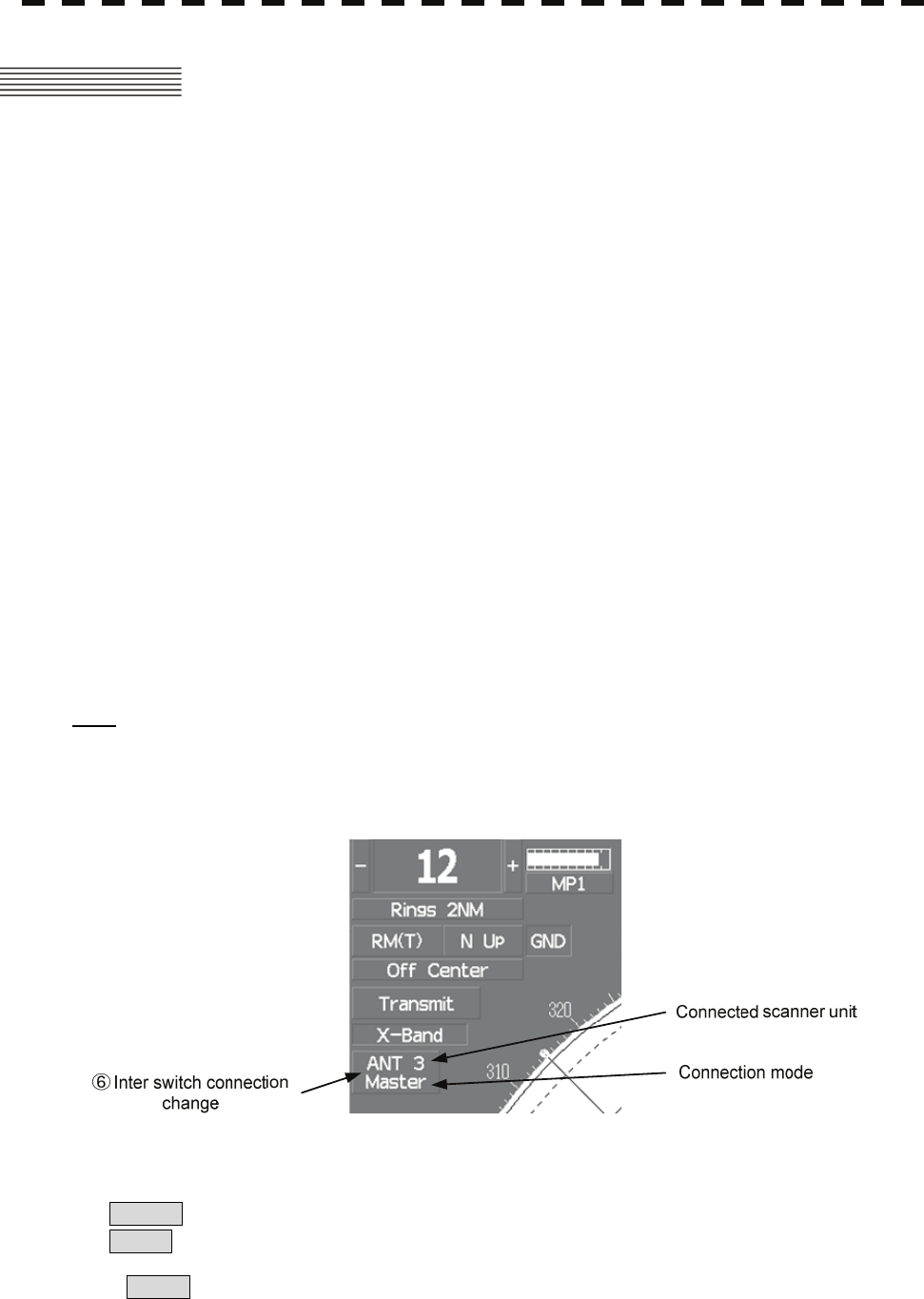
A-1
I OVERVIEW
I-i Overview
Interswitch NQE-3141 is equipment that enables free changeover between radar display units installed on the
bridge and antenna units having different characteristics.
If display unit is turned off or malfunctioned, the scanner unit can be controlled by other display unit.
If interswitch unit had malfunctioned, the radar system is switched to standalone mode.
Up to 8 units can be changed over.
When the connected scanner is changed, following setting values are automatically loaded.
Tune Adjustment (See the section 7.1.3)
Bearing Adjustment (See the section 7.1.4)
Range Adjustment (See the section 7.1.5)
Antenna Height (See the section 7.1.8)
Antenna installation location (See the section 7.1.9)
Sector Blank (See the section 7.2.2)
TNI Blank (See the section 7.2.3)
Performance monitor adjustment (See the section 7.2.4)
PRF Fine Tuning (See the section 3.8.3)
I-ii Interswitch Setup
Connection modes can be changed simply by changing the interswitch connection (upper left of the display ⑥
on page 2-16).
Note: A master display unit is always necessary for establishing a slave connection.
Before a slave display unit can be placed in transmission state, the master display unit must be placed
in transmission state.
upper left of the display
The upper stand indicates the number of the connected scanner unit.
The lower stand indicates the connection mode.
Master :Mode in which the scanner unit can be controlled by the display unit.
Slave :Mode in which the scanner unit cannot be controlled.
When Slave is selected, transmission / standby and pulse length cannot be changed. The available range is
also limited.
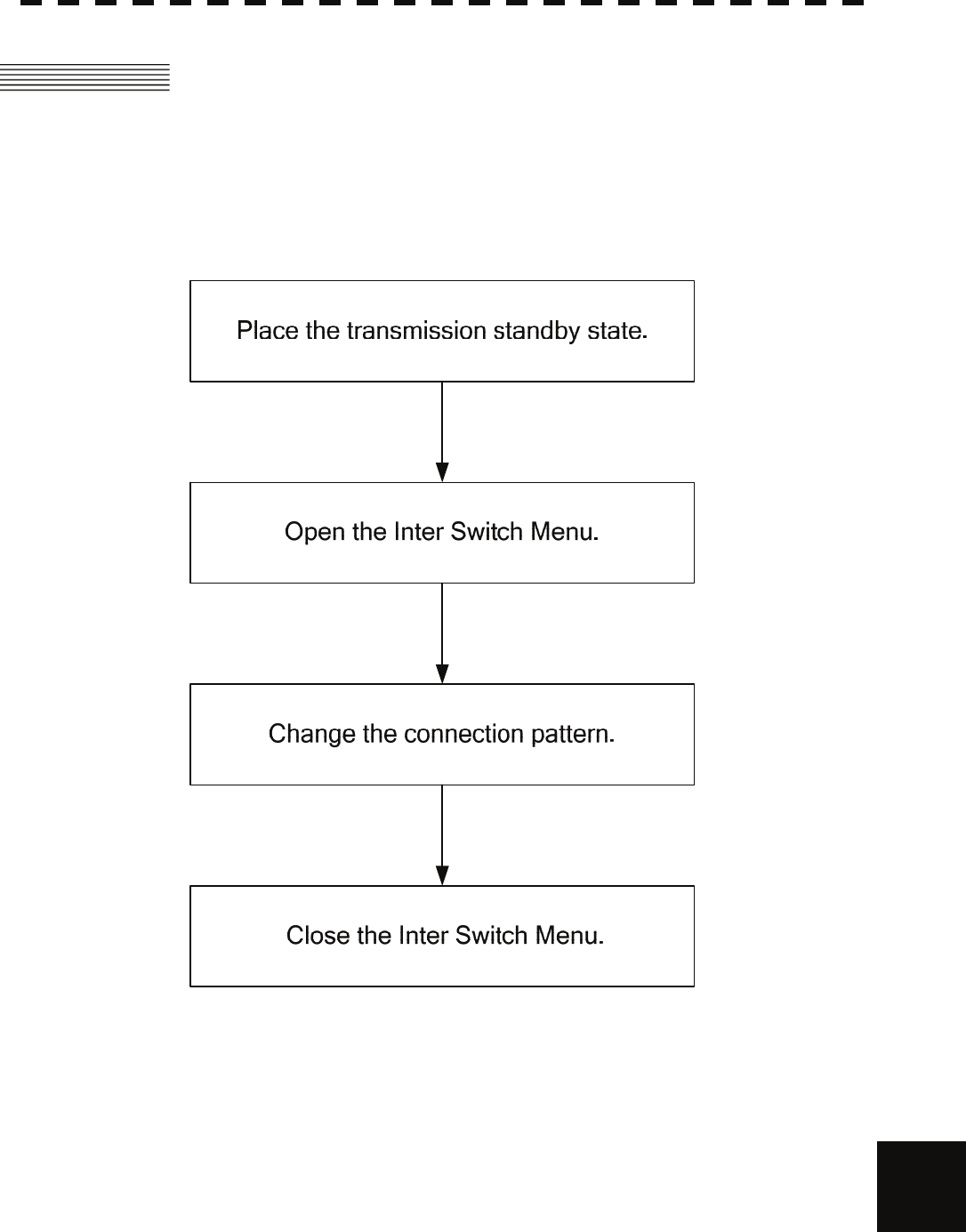
1-2
II INTERSWITCH Operation
APPENDIX
II INTERSWITCH OPERATION
Follow the flowchart below to change the current interswitch connection pattern.
II-i Operation Flow
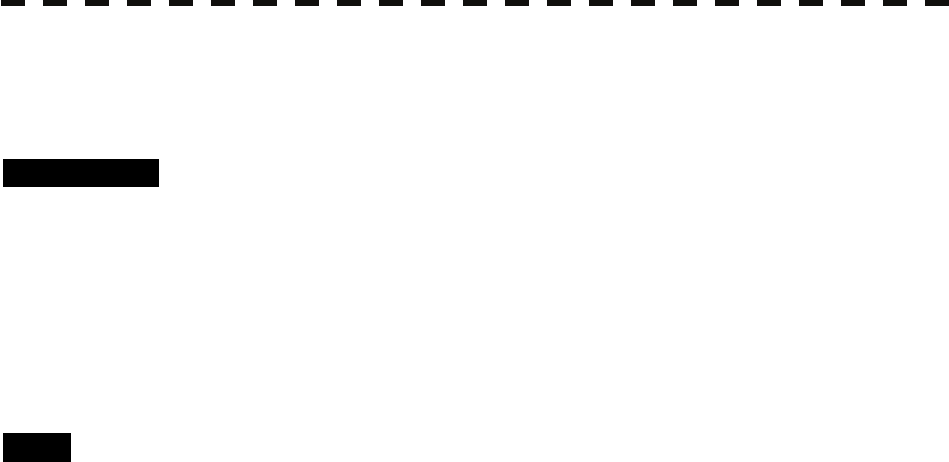
A-3
II-ii Inter Switch Menu
The Inter Switch Menu can be opened only when the transmission standby state.
Procedures 1 Press the [STBY] key.
The transmission standby state will be placed.
2 Move the cursor onto the Interswitch connection change
(upper left of the display ⑥ on page 2-16), and press the [ENT]
key.
The Inter Switch Menu will appear.
Exit 1 Press the [0] key.
The Inter Switch Menu will close.
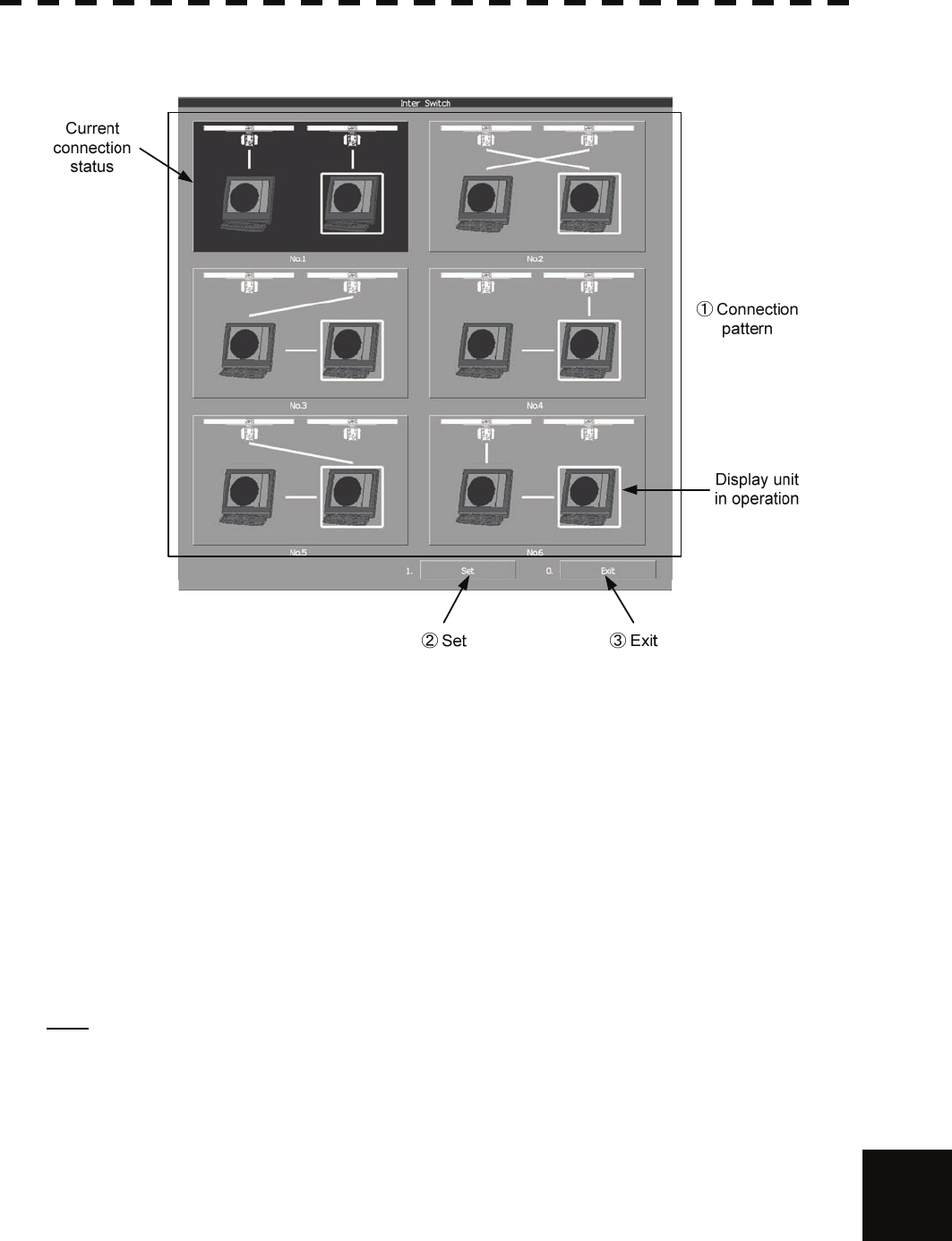
1-4
II INTERSWITCH Operation
APPENDIX
Inter Switch Menu (with 2 Display Units)
①:Connection pattern
If this button is clicked, the connection pattern is selected.
The display unit in operation is enclosed in a square □.
The background of the current connection pattern display is highlighted.
②:Set
If this button is clicked, the change of connection is determined.
③:Exit
If this button is clicked, the Inter Switch Menu is closed .
Note: If only 2 display units are installed but the interswitch is set for 3 or more display units, the Inter
Switch Menu for 3 or more display units will appear.
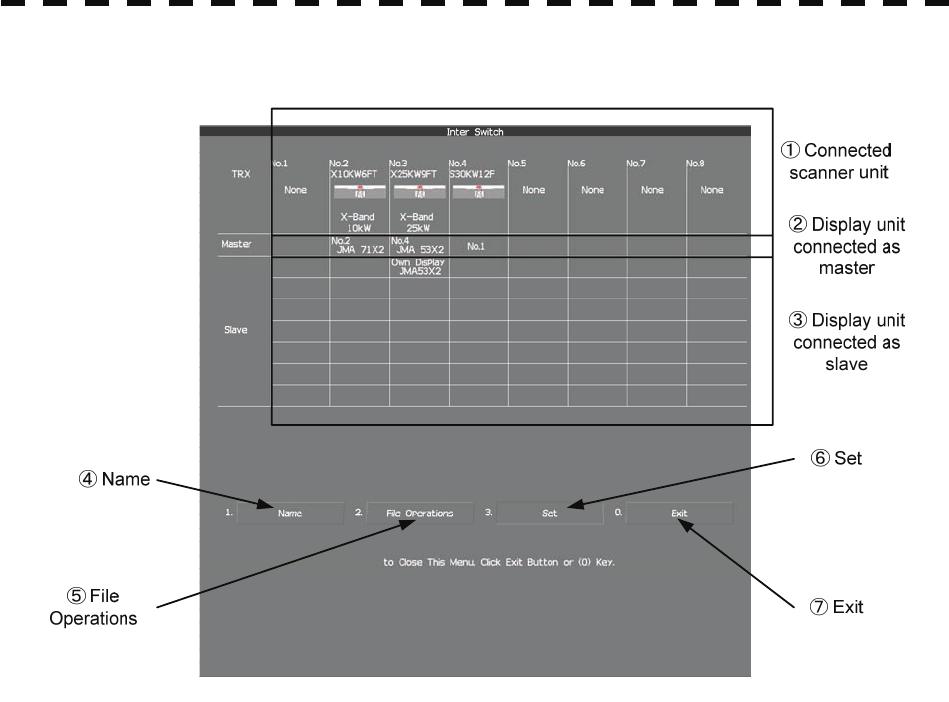
A-5
Inter Switch Menu (with 3 or More Display Units)
①:Connected scanner unit
In mode for naming a display unit or antenna unit, clicking on a unit opens the name input window.
②, ③:Display unit connected as master, and Display unit connected as slave
If this button is clicked, select / cancel the display unit.
If this button is clicked in the naming a display unit or scanner unit mode , the name input window is
opened.
④:Name
If this button is clicked, set to the display or scanner unit rename mode.
⑤:File Operations
If this button is clicked, the File Operations menu is opened.
⑥:Set
If this button is clicked, the change of connection is determined.
⑦:Exit
If this button is clicked, the Inter Switch Menu is closed.
1-6
II INTERSWITCH Operation
APPENDIX
II-iii Change of Connection Pattern (with 2 Display Units)
If two display units are installed, a connection pattern needs to be selected.
Procedures 1 Open the Inter Switch menu (with 2 Display Units).
2 Move the cursor onto the Connection pattern (Inter Switch
Menu ① on page A-4) to be changed , and press the [ENT] key.
The connection pattern will be selected, and Set (in Inter Switch Menu ② on page
A-4) will blink.
3 Press the [3] key.
The connection pattern will be changed.
II-iv Change of Connection Pattern (with 3 or More Display Units)
If three or more display units are installed, the layout of connection patterns needs to be set.
Procedures 1 Open the Inter Switch Menu (with 3 or More Display Units).
2 Move the cursor onto the display unit (Inter Switch Menu ②/③
on page A-5) to be changed , and press the [ENT] key.
The selected display unit will be highlighted.
To deselect the display unit, press the [ENT] key again.
3 Move the cursor to the change-destination display unit, and
press the [ENT] key.
The selected display unit in step 2 will be switched to the change-destination display unit,
and Set (Inter Switch Menu ⑥ on page A-5) will blink.
If the change destination is empty, control will move and Set will blink.
4 Press the [3] key.
The connection pattern will be changed.
Note: A master display unit is always necessary for establishing a slave connection.
A-7
II-v Operating Connection Pattern Files (File Operations)
Frequently used connection patterns can be read easily by saving interswitch connection patterns.
[I] Loading connection patterns (Load)
Procedures 1 Open the Inter Switch Menu (with 3 or More Display Units).
2 Press the [2] key.
The File Operations menu will appear.
3 Press the [1] key.
Currently saved connection patterns in memory will be listed.
4 Press the [numeric] key corresponding to the file to be loaded.
Confirmation Window will appear.
5 Press the [1] key.
The connection pattern will be changed.
[II] Saving connection patterns (Save)
Procedures 1 Open the Inter Switch Menu (with 3 or More Display Units).
2 Press [2] key.
The File Operations window will appear.
3 Press [2] key.
The Save menu will appear.
Currently saved connection patterns in memory will be listed.
4 Press the [numeric] key corresponding to the file to be saved.
The Input File Name window will appear.
5 Enter the file name to be saved.
Up to 8 characters can be entered.
For the input method on the character input screen, see Section 3.3.4.
The connection pattern will be saved when the name is input.
1-8
II INTERSWITCH Operation
APPENDIX
[III] Erasing a connection pattern (Erase)
Procedures 1 Open the Inter Switch Menu (with 3 or More Display Units).
2 Press the [2] key.
The File Operations window will appear.
3 Press the [3] key.
The Erase menu will appear.
The list of connection patterns stored in the memory will be displayed.
4 Press the [numeric] key corresponding to the file to be erased.
Confirmation Window will appear.
5 Press the [1] key.
The selected connection pattern is erased and the file name is deleted from the list.
II-vi Names of Display Units and Scanner Units
The display units and antenna units can be named.
Procedures 1 Open the Inter Switch Menu (with 3 or More Display Units).
2 Press the [1] key.
"Name" will be highlighted, indicating that the rename mode is activated.
3 Move the cursor to the display unit or scanner unit to be
renamed (Inter Switch Menu ① / ② / ③ on page A-5), and
press the [ENT] key.
The Input IND Name or the Input TXRX Name window will appear.
4 Input a new unit name.
Up to 8 characters can be input as a unit name.
For the input method on the character input menu, see Section 3.3.4.
The selected display unit or antenna unit will be renamed when the new name is input.
A-9
III REFERENCE
Preheat Time after Change of Connection Pattern
After the current interswitch connection pattern has been changed, operation needs to wait until the
system is ready. This is because the preheat time varies depending on the previous connection of the
scanner unit and display unit.
The wait time is necessary for protecting the electronic tubes that emit radio waves.
a) When not changed to a new connection pattern : Preheating not required
b) When changed to a new connection pattern and
an scanner unit had been used before the change : Preheating not required
c) When changed to a new connection pattern and
an scanner unit had not been used before the change : Preheating required
Notes on Changing Connection Pattern
An attempt to change to another connection pattern immediately after the completion of connection
pattern change may fail.
This is because internal processing still needs some preparation time upon completion of connection
pattern change. Let several seconds pass between connection pattern change operations.
Notes on Connecting Slave Display Unit
Before a slave display unit can be placed in transmission state, the master display unit must be placed
in transmission state. If the master display unit is moved from the transmission state to the
transmission standby state, the slave display unit is forcibly placed in transmission standby state.
When they are in transmission standby state,
MTR Standby is shown in the alarm indication (Brilliance / alarm on page 2-9), and the alarm
sounds.
A slave display unit cannot control tune. Tune is controlled by the master display unit. Slave is
shown in the transmitter pulse length (upper left of the display on page 2-2).
Range change for a slave display unit is limited by the range and pulse length / repetition frequency of
the master display unit. As a rule, a greater range than the range of the master display unit cannot be
set for a slave display unit. However, if the transmitter pulse length of a slave display unit is identical
to the master display unit's and the repetition frequency is within the master display unit's, a greater
range than the master display unit's can be selected for the slave display unit. When the master display
unit narrows the range or changes the transmitter pulse length, the range of the slave display unit may
be forcibly changed. In this case, Master Range CHG is shown in the alarm indication (Brilliance /
alarm on page 2-9), and the alarm sounds.
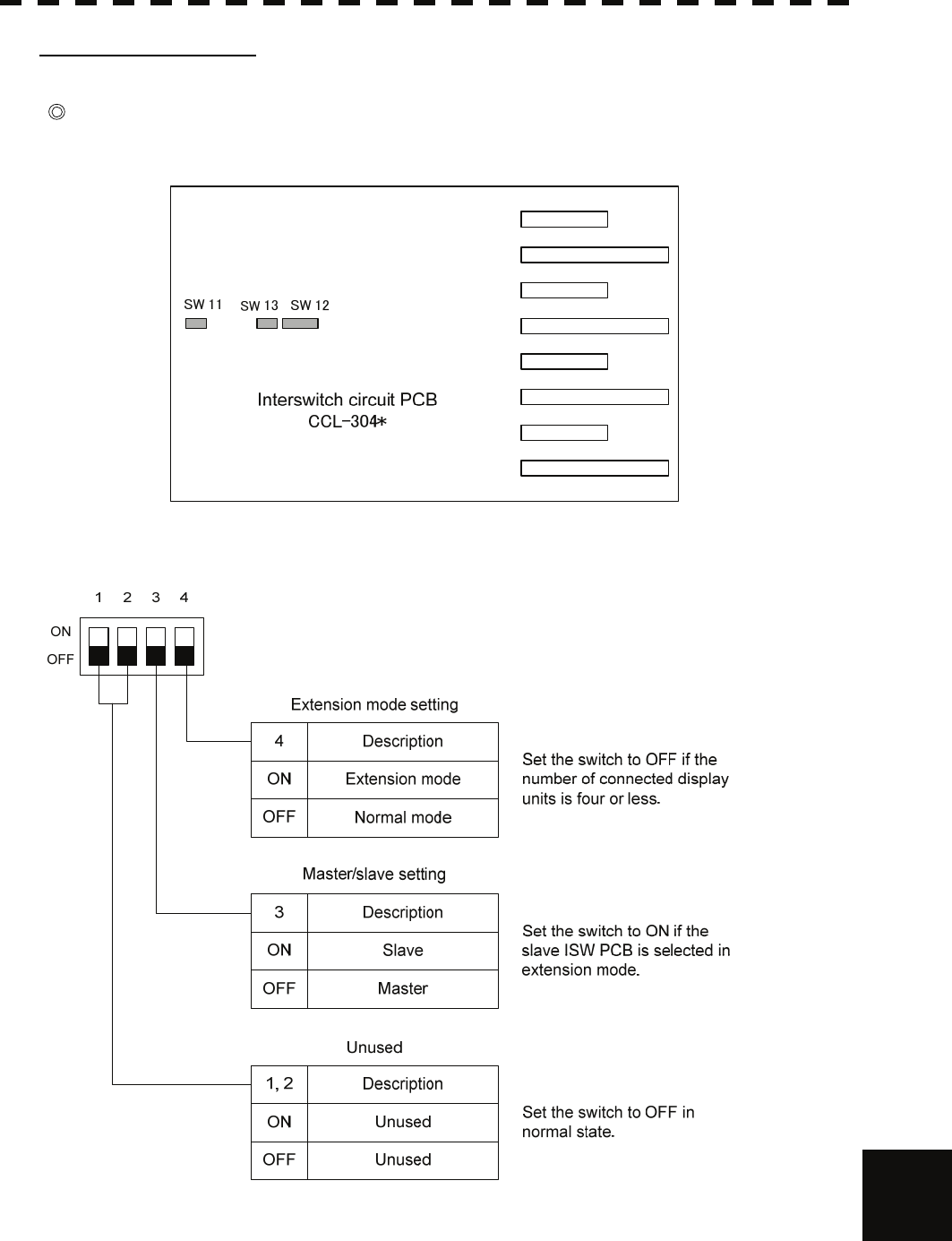
1-10
III Reference
APPENDIX
Setting at Installation
Setting of the interswitch circuit (CCL-304*)
The settings of the DIP switches SW11 to SW13 are shown below.
1) SW11 setting (extension mode and master/slave settings)
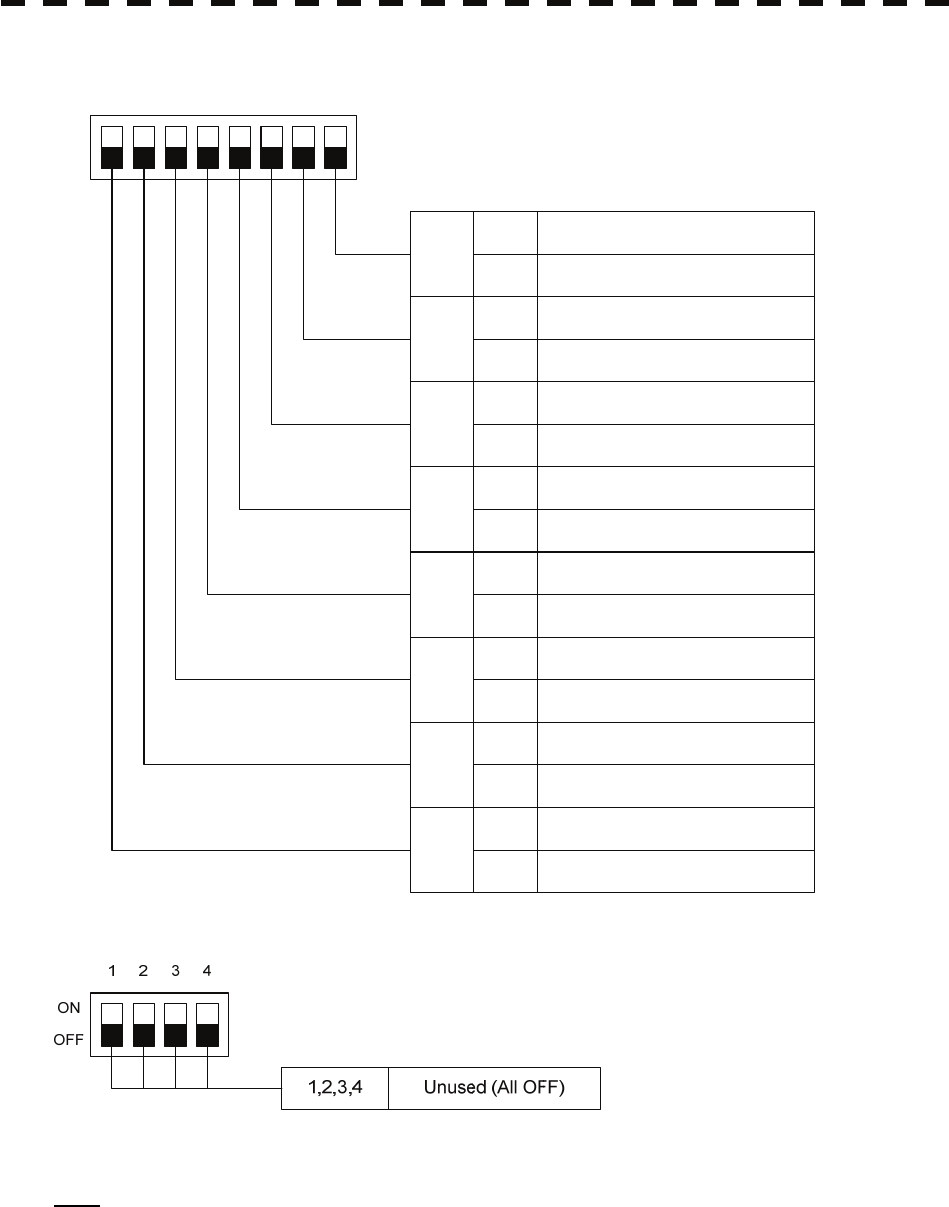
A-11
2) SW12 setting (radar connection settings)
1234
ON
OFF
8
Radar connection settings
ON No.8 display unit connected
OFF No.8 display unit not connected
5678
7ON No.7 display unit connected
OFF No.7 display unit not connected
6ON No.6 display unit connected
OFF No.6 display unit not connected
5ON No.5 display unit connected
OFF No.5 display unit not connected
4ON No.4 display unit connected
OFF No.4 display unit not connected
3ON No.3 display unit connected
OFF No.3 display unit not connected
2ON No.2 display unit connected
OFF No.2 display unit not connected
1ON No.1 display unit connected
OFF No.1 display unit not connected
3) SW13 (unused)
Note: Before the DIP switches of the interswitch circuit can be set, the interswitch breaker must be turned off
in order to ensure safety operation.
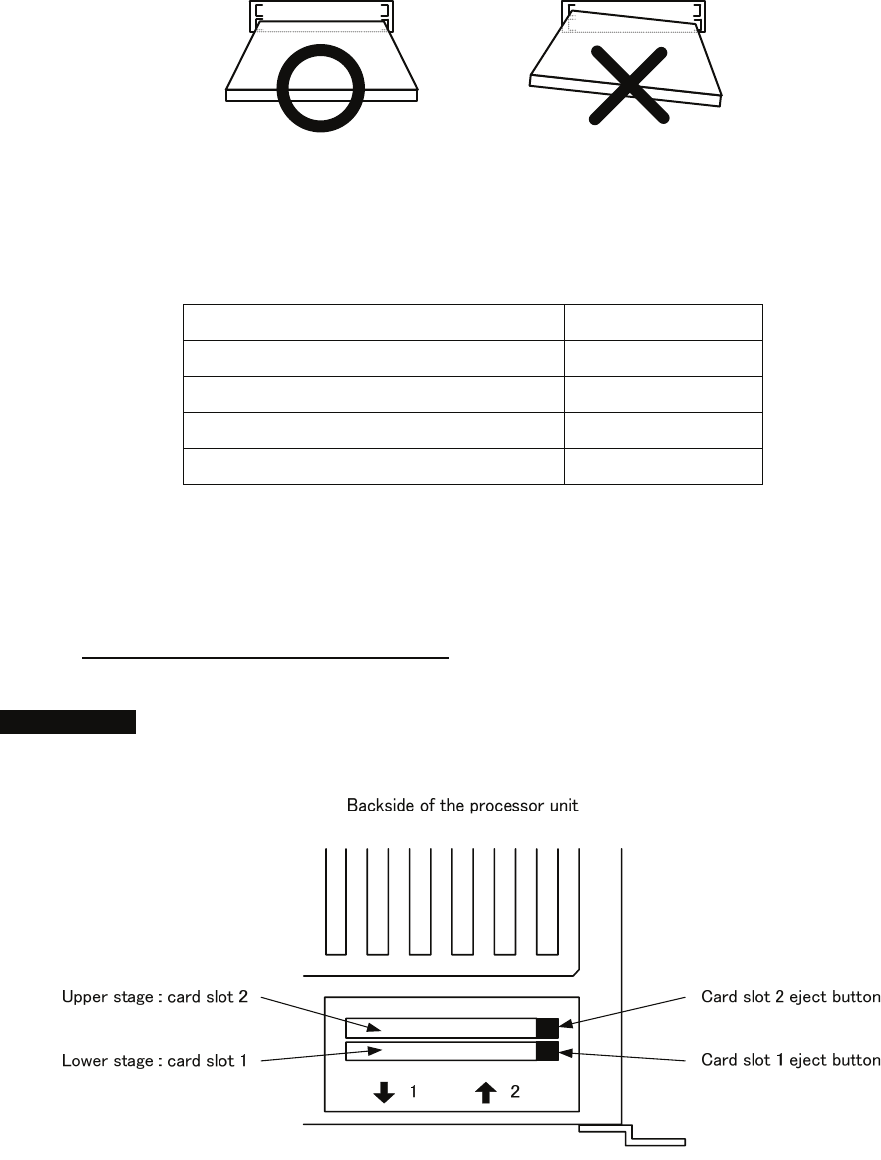
HOW TO INSERT AND REMOVE A CARD
Insert or remove the JRC coastline ROM card, ERC card, C-MAP card and memory card according to the
procedures below.
Note: Keep a card horizontal when inserting it into a card slot. An inclined card causes a failure.
Do not simultaneously insert a JRC coastline ROM card, an ERC card and C-MAP card into the
card slot. A malfunction will occur on the display.
Insert the card into the specified slot according to the following table:
Card type Insertion slot No.
JRC card Either one
ERC card Either one
C-Map NT+ detail card Either one
Memory card Either one
Note: The Background of C-Map has been built in, don’t insert C-Map NT+ background card.
If the background card is inserted, the system will malfunction.
Insert a card into processor unit
Procedures 1 Remove the rubber packing located at the backside of the processing
unit cabinet, and expose the card slot.
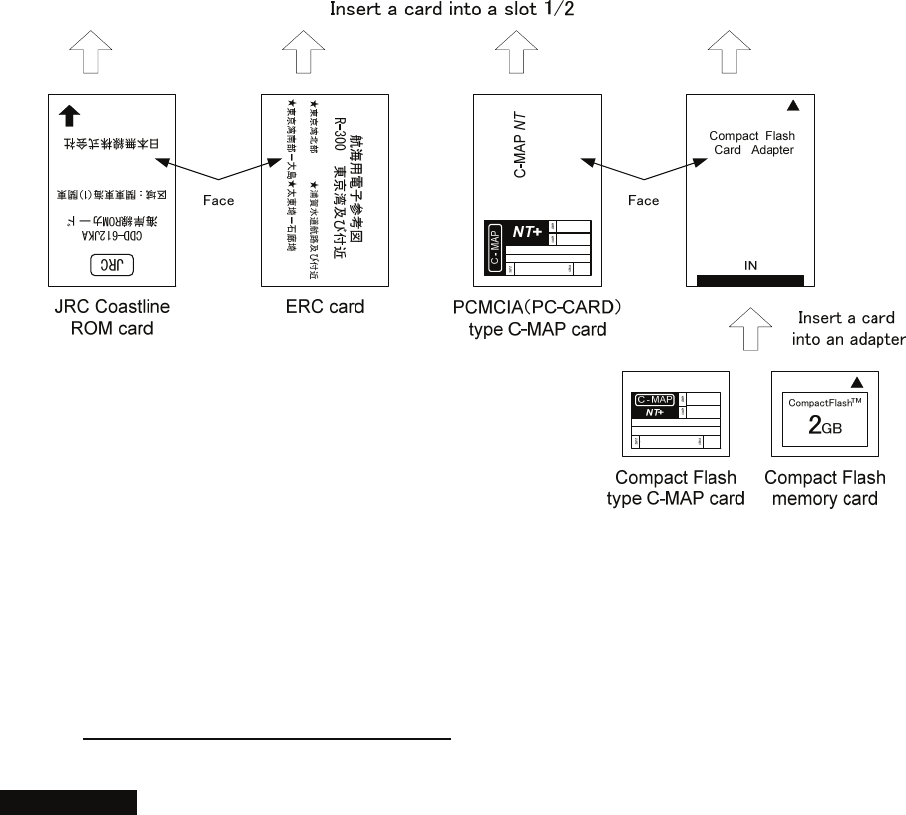
2 Insert the card in the direction indicated by the arrow.
3 Insert the card until the card slot's eject button protrudes and complete
the installation of a card.
Eject a card from processor unit
Procedures 1 Push the eject button corresponding to the desired card slot.
2 remove a card from processor unit
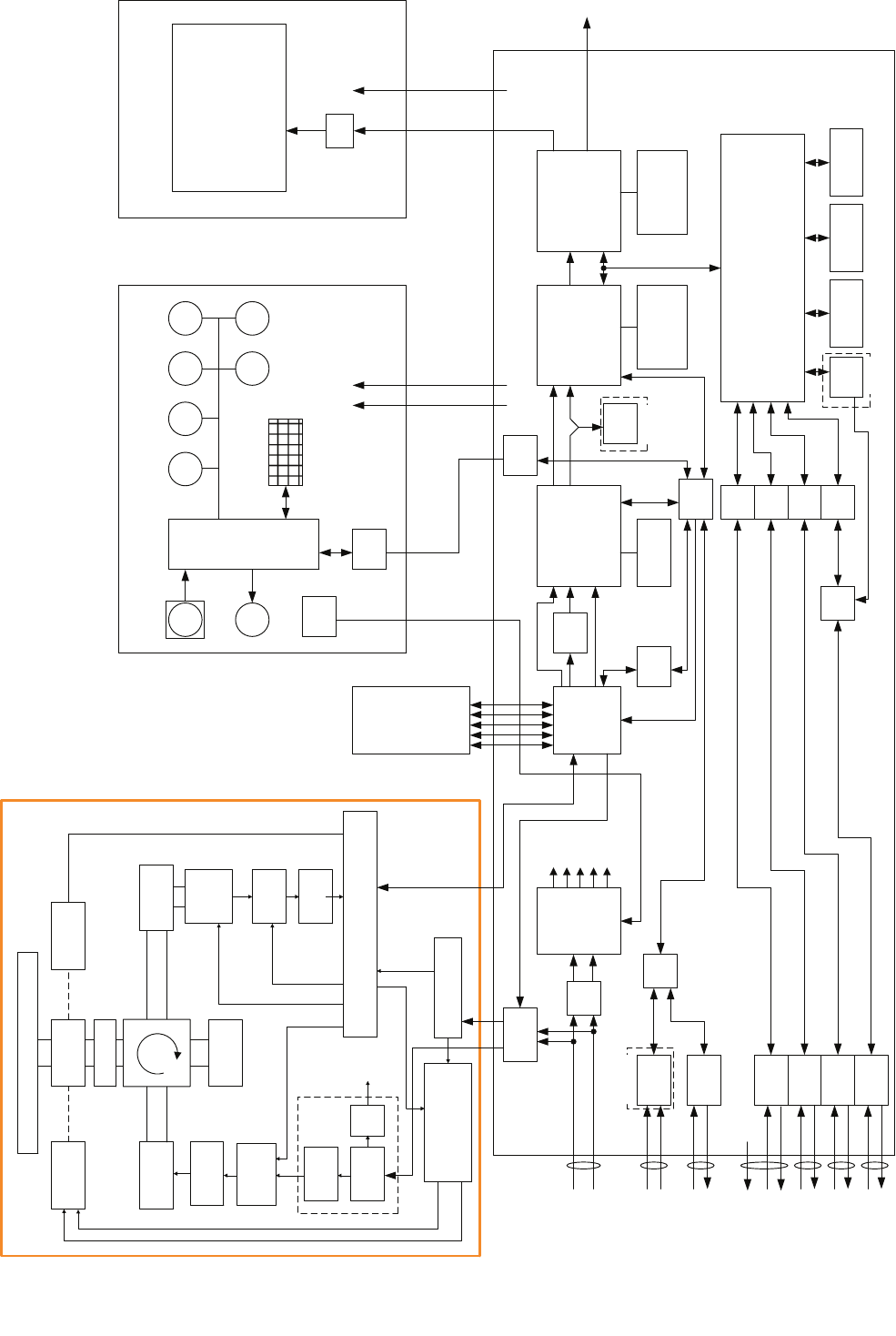
32bit bus
MULTI RAIN SEA
SLOT ANTENNA
MOTOR
B101
SAFETY SWITCH
S101
MAG
V101
PULSE
TRANS
SWITCHING
CIRCUIT
PC201
MH
GENERATOR
AVR
PC1001
ΦA,ΦB,ΦZ
FILTER
DUMMY
LOAD
Scanner Unit
NKE-2103/2254
POWER
SUPPLY
CIRCUIT
MOTOR CONTROL
POWER
PC1501
Rotation Control
Speed control
Status
Tx Trigger/Pulse Width
DC+24V
ENCODER
ROTARY
JOINT
INTERFACE CIRCUIT
IF AMP
VIDEO
AMP
Receiver
Bandwidth
Control
Tune Control
DIODE
LIMITER
GYRO
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
Relay
Filter Power
Supply
GAIN
EBL VRM
CPU
PWR
SW
ISW unit
Signal Proc ASIC
STC/FTC/CFAR
IR/AVE/GZ alarm
Radar Draw ASIC
Scan convert
Scan correlation
Trail process
Graphics ASIC
Map draw
Graphics draw
Main CPU
Communication
User I/F
Main control
TrackBall
Buzzer
Key Matrix
Encoder
BP/BZ
VD
TI
MTR+/-
PWRCNT
RS422
I/F
ISW
SEL
ADC
RS485
I/F
RS422
I/F
Sub
CPU
ARPA
DSP
Sweep
memory Frame memory
Radar Echo
Radar Trails
Frame memory
Map
Graphics
DDR SDRAM
work FROM
program SRAM
Back-up
CPU
AIS
SIO
SIO
SIO
SIOSEL
SEL
P12V
+12V
-12V
+5V
+3.3V
PWRCNT MTR+/-
+12V
OPTION
OPTION
OPTION
Operation Unit NCE-5171/5172 LCD Monitor NWZ-173
19inch LCD
I/F
P12V
+12V
+12V
RGB
Radar Process Unit NDC-1417
DC24V
-10%
+30%
GYRO
LOG
GPS
COMPASS
GPS
PC
NAV2
NAV1
Analog RGB External
Display
PWRCNT
BP/BZ
VD
TI
MTR+/-
付図1Fig.1
JMA-5312-6/6HS,5322-7/9
レーダー装置回路動作説明図
Block Diagram of RADAR
MIC(2103)
or
RF AMP
(2254)
NOTE:Performance monitor, ARPA/ATA Process Unit, AIS Process Unit
and GYRO Interface Unit must be fitted on ships compliant to IMO.
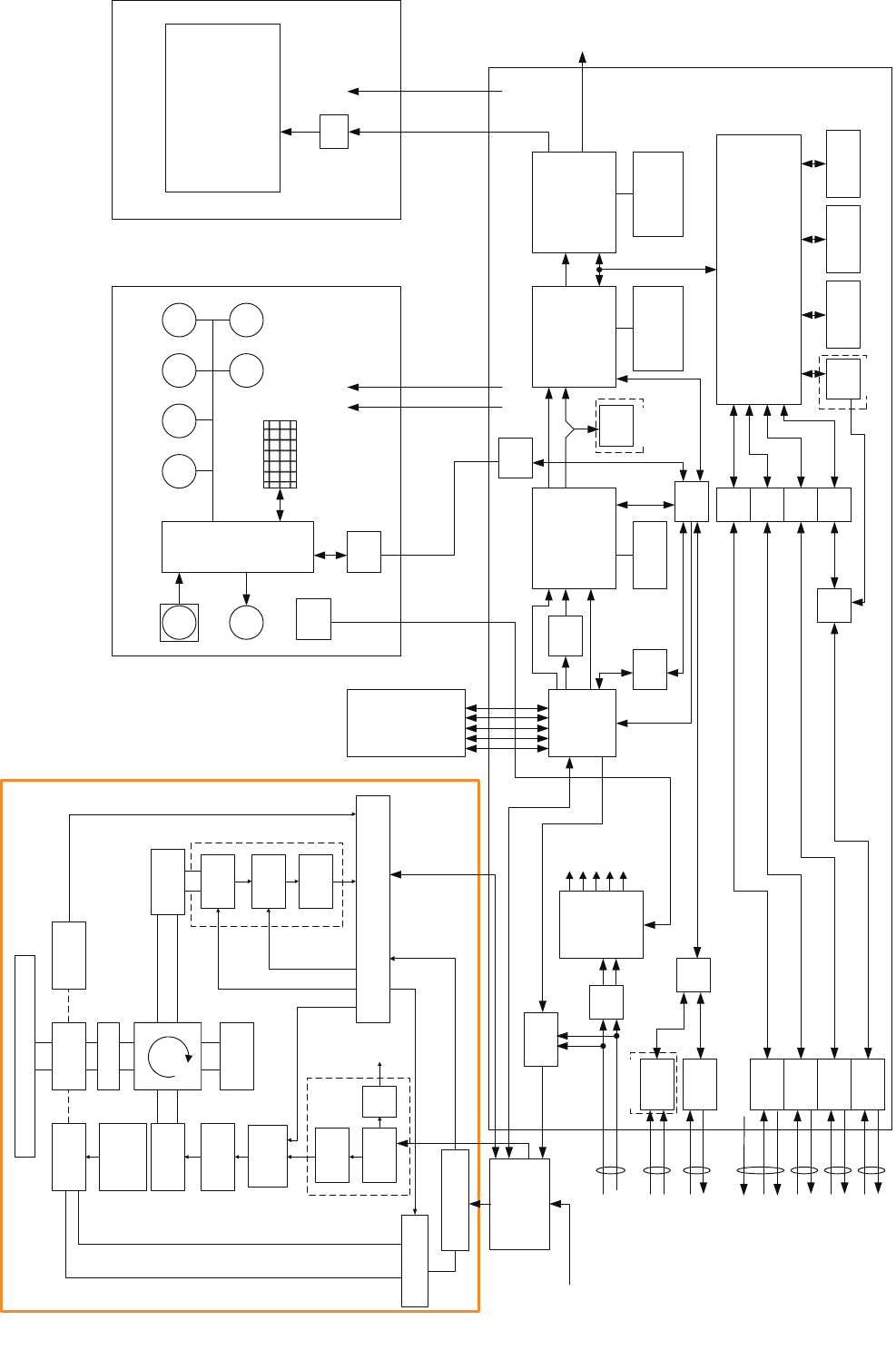
32bit bus
MULTI RAIN SEA
GYRO
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
NMEA
I/F
Relay
Filter Power
Supply
GAIN
EBL VRM
CPU
PWR
SW
ISW unit
Signal Proc ASIC
STC/FTC/CFAR
IR/AVE/GZ alarm
Radar Draw ASIC
Scan convert
Scan correlation
Trail process
Graphics ASIC
Map draw
Graphics draw
Main CPU
Communication
User I/F
Main control
TrackBall
Buzzer
Key Matrix
Encoder
BP/BZ
VD
TI
MTR+/-
PWRCNT
RS422
I/F
ISW
SEL
ADC
RS485
I/F
RS422
I/F
Sub
CPU
ARPA
DSP
Sweep
memory Frame memory
Radar Echo
Radar Trails
Frame memory
Map
Graphics
DDR SDRAM
work FROM
program SRAM
Back-up
CPU
AIS
SIO
SIO
SIO
SIOSEL
SEL
P12V
+12V
-12V
+5V
+3.3V
PWRCNT MTR+/-
+12V
OPTION OPTION
OPTION
Operation Unit NCE-5171/5172 LCD Monitor NWZ-173
19inch LCD
I/F
P12V
+12V
+12V
RGB
Radar Process Unit NDC-1417
DC24V
-10%
+30%
GYRO
LOG
GPS
COMPASS
GPS
PC
NAV2
NAV1
Analog RGB External
Display
PWRCNT
付図2Fig.2
JMA-5332-12
レーダー装置回路動作説明図
Block Diagram of RADAR
SLOT ANTENNA
ROTARY
JOINT ENCODER
MOTOR
B101
SAFETY SWITCH
S101
MAG
V101
PULSE
TRANS
SWITCHING
CIRCUIT
PC201
MH
GENERATOR
AVR INTERFACE CIRCUIT
PC1101
PC1001
DIODE
LIMITER
RF AMP
IF AMP
VIDEO
AMP
RECEIVER
Receiver
Bandwidth
Control
Tune Control
Tx Trigger/Pulse Width
ΦA,ΦB,ΦZ
FILTER
DUMMY
LOAD
MOTOR
DRIVER
PC1501
AC100/110/
220/230V
50/60Hz,1φ
Scanner Unit
NKE-1130
POWER
SUPPLY
CIRCUIT
MOTOR RELAY
PC1201 Relay Control
ERROR
Status
Junction Box
NQE-3151A
NOTE:Performance monitor, ARPA/ATA Process Unit, AIS Process Unit
and GYRO Interface Unit must be fitted on ships compliant to IMO.
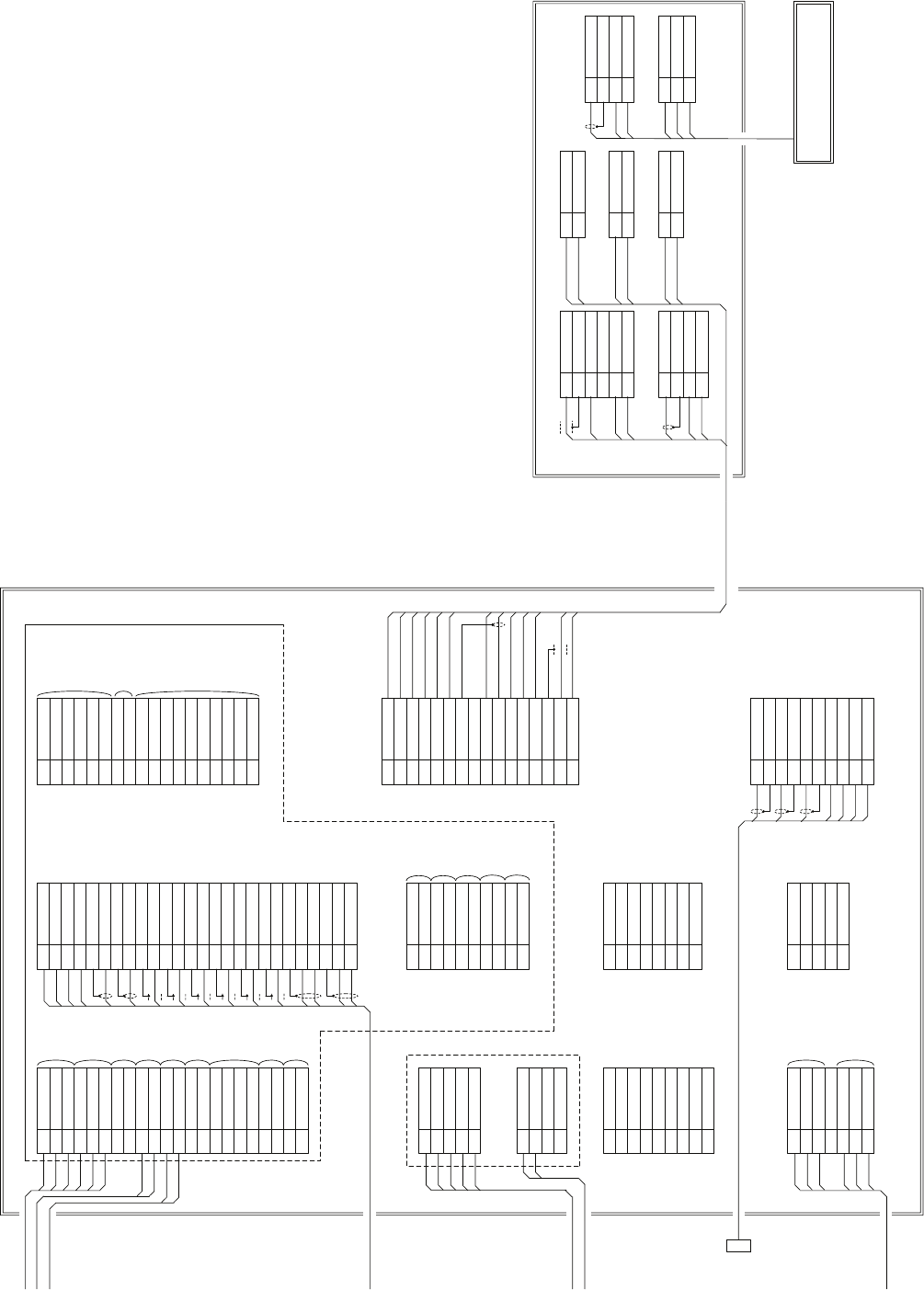
1NAV1TXDE
2NAV1TXD-
3NAV1TXD+
4NAV1RXDE
5NAV1RXD-
6NAV1RXD+
7GPSTXD-
8GPSTXD+
9GPSRXD-
10 GPSRXD+
TB4303
11 NAV2RXD-
12 NAV2RXD+
13 ARPATXD-
14 ARPATXD+
15 ARPAALM-
16 ARPAALM+
17 SYSALM-
18 SYSALM+
19 EVENT-
20 EVENT+
21 COMPAS-
22 COMPAS+
NMEA0183
OUTPUT
NMEA0183
INPUT
GPS
OUTPUT
GPS
INPUT
NMEA0183
INPUT
NMEA0183
OUTPUT
CONTACT
OUT
CONTACT
IN
NMEA0183
INPUT
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
INTER SWITCH
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
CQD-1937A TERMINAL BOARD
NCD-4530 DISPLAY UNIT
11/R1
2 2/S1
3 3/S2
4S3
55/R2
TB10
NCT-59A GYRO I/F UNIT
GYRO SYNC/PULSE
1LOGP+
2LOGP-
3LOGS+
4LOGS-
TB20
LOG SYNC/PULSE
OPTION
1NC
2PCRXD
3PCTXD
4NC
5GND
6NC
7PCRTS
8PCCTS
J8
9NC
RS232C PORT
1 1A
2 1A
3 1A
4NC
5 2A
6 2A
7 2A
J1
BLK
RED
RED
RED
BLK
BLK
POWER INPUT
1RBVDE
2RBVD
3TRGOE
4TRGO
5BPOE
6BPO
7BZOE
8BZO
TB4302
9VDOE
SLAVE OUTPUT
10 VDO
RADR
BUOY IN
TRG
OUT
B PULSE
OUT
Z PLUSE
OUT
VIDEO
OUTPUT
1GPSCTXD-
2GPSCTXD+
3GPSCRXD+
4GPSCRXD-
5GND
6ALM+
7ALM-
8+5V
J5
To JLR-10
1 +12V
2GND
3GPSRXD-
4GPSRXD+
5GPSTXD+
J3
To GPS
1MOTOR-
2MOTOR-
3TRX-
4MOTOR+
5MOTOR+
6TRX+
7GND
8+12V
9COM-
10 COM+
TB4310
11 BZE
12 BZ
13 BPE
14 BP
15 TRGE
16 TRG
17 VDE
18 VD
1M-
2M-
3M+
4M+
52A
6GND
7VDE
8+12V
91A
10 VD
J2
11 MTR+
12 BZ
13 MTR-
14 TRGE
15 TRG
16 BP
1RED
2RED_E
3GRN
4GRN_E
5BLU
6BLU_E
7HS
8HS_E
9VS
10 VS_E
J4406 in CDC-1332
SLAVE RGB OUTPUT
+
-
BLU.T/GRY.T
POWER
OUTPUT
+12V
OUTPUT
SLAVE
INPUT
PUR.T/BRN.T
WHT.T/ORN.T
RED.T/GRN.T
BLK.T/SKY.T
BLK
YEL.T/PNK.T
ORN
YEL
GRN
WHT
3-
2-
2+
3+
1-
1+
1-
1+
1+
1-
19-CORES CABLE
CFQ-6912-20/30
(JRC SUPPLY)
1ETIY
2AGND
3EXBP
4AGND
5EXBZ
6AGND
9VD
10 VDE
J1
11 MTR+
12 MTR-
12A
21A
12A
21A
12A
21A
J3
1PTI
2PTE
3LVR
4PMS
1LVR
2PMS
3E
J81
ORN
BLK.T/SKY.T
RED
BLK
BRN
BLU J82
NKE-2103-6 SCANNER UNIT
250V-TTYCS-4
250V-TTYCS-1
250V-TTYCS-1
2695111153
(JRC SUPPLY)
18-CORES COMPOSITE
CABLE
250V-MPYCYS-7
250V-DPYCYS-1.5
CFQ-5436-5
(5m JRC SUPPLY)
Dsub 15pin
INTER SWITCH
CFQ-8914
(JRC SUPPLY)
VDR or
Remote monitor
SHIP’S MAIN
DC24V
620Wmax
GYRO
LOG(200P)
AIS
DGPS
LOG(NMEA)
NJU-85 PM UNIT (OPTION)
WHT
BLK
WHT
To PM
付図3 Fig.3
JMA-5312-6/6HS
盤間接続図
Terminal Board Connection Diagram
J2
J4
J5
GRN
BLK
YEL.T/PNK.T
BLU.T/GRY.T
WHT.T/ORN.T
PUR.T/BRN.T
RED.T/GRN.T
NOTE: Performance monitor must be
fitted on ships compliant to IMO.
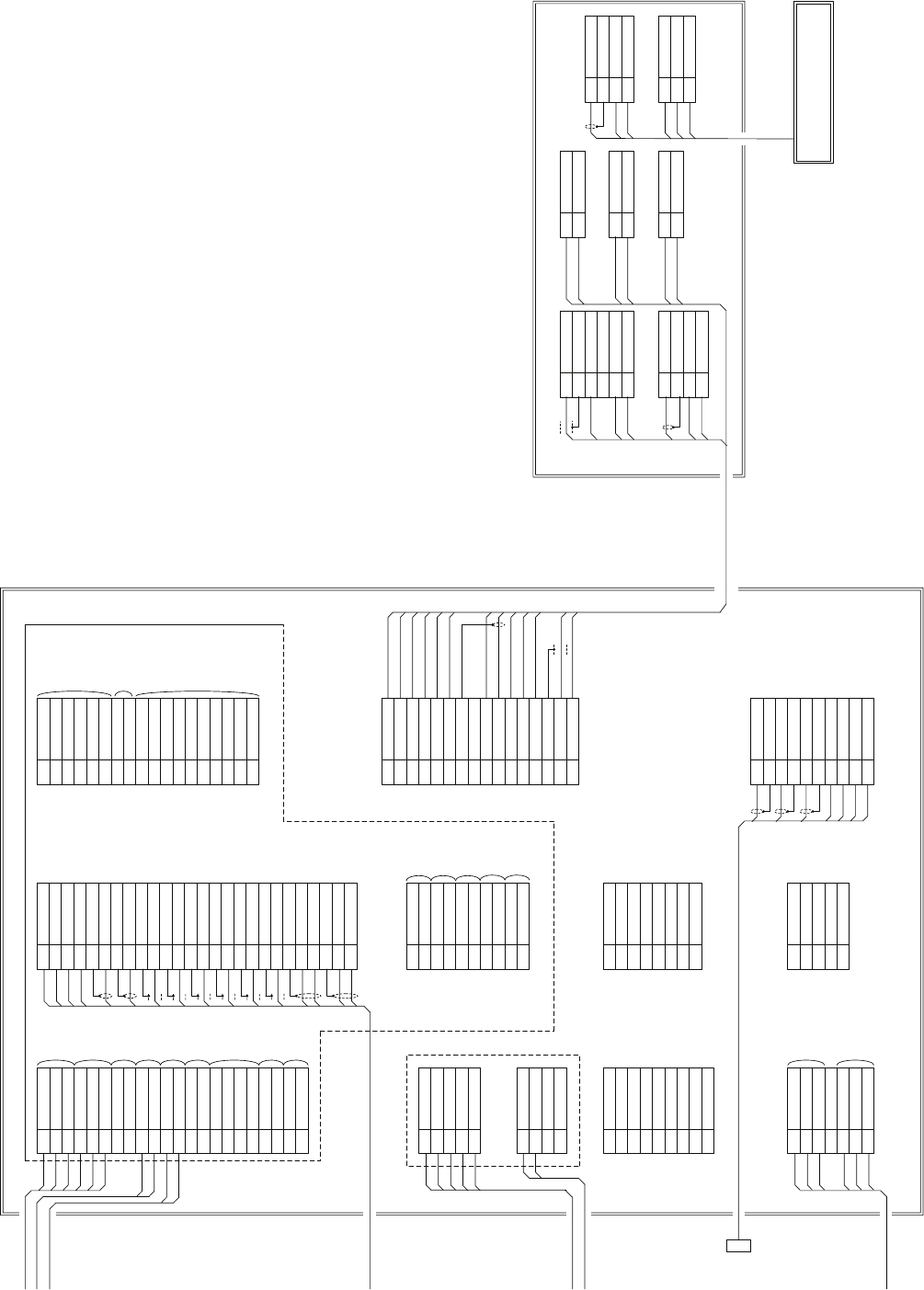
1NAV1TXDE
2NAV1TXD-
3NAV1TXD+
4NAV1RXDE
5NAV1RXD-
6NAV1RXD+
7GPSTXD-
8GPSTXD+
9GPSRXD-
10 GPSRXD+
TB4303
11 NAV2RXD-
12 NAV2RXD+
13 ARPATXD-
14 ARPATXD+
15 ARPAALM-
16 ARPAALM+
17 SYSALM-
18 SYSALM+
19 EVENT-
20 EVENT+
21 COMPAS-
22 COMPAS+
NMEA0183
OUTPUT
NMEA0183
INPUT
GPS
OUTPUT
GPS
INPUT
NMEA0183
INPUT
NMEA0183
OUTPUT
CONTACT
OUT
CONTACT
IN
NMEA0183
INPUT
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
INTER SWITCH
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
CQD-1937A TERMINAL BOARD
NCD-4530 DISPLAY UNIT
11/R1
2 2/S1
3 3/S2
4S3
55/R2
TB10
NCT-59A GYRO I/F UNIT
GYRO SYNC/PULSE
1LOGP+
2LOGP-
3LOGS+
4LOGS-
TB20
LOG SYNC/PULSE
OPTION
1NC
2PCRXD
3PCTXD
4NC
5GND
6NC
7PCRTS
8PCCTS
J8
9NC
RS232C PORT
1 1A
2 1A
3 1A
4NC
5 2A
6 2A
7 2A
J1
BLK
RED
RED
RED
BLK
BLK
POWER INPUT
1RBVDE
2RBVD
3TRGOE
4TRGO
5BPOE
6BPO
7BZOE
8BZO
TB4302
9VDOE
SLAVE OUTPUT
10 VDO
RADR
BUOY IN
TRG
OUT
B PULSE
OUT
Z PLUSE
OUT
VIDEO
OUTPUT
1GPSCTXD-
2GPSCTXD+
3GPSCRXD+
4GPSCRXD-
5GND
6ALM+
7ALM-
8+5V
J5
To JLR-10
1 +12V
2GND
3GPSRXD-
4GPSRXD+
5GPSTXD+
J3
To GPS
1MOTOR-
2MOTOR-
3TRX-
4MOTOR+
5MOTOR+
6TRX+
7GND
8+12V
9COM-
10 COM+
TB4310
11 BZE
12 BZ
13 BPE
14 BP
15 TRGE
16 TRG
17 VDE
18 VD
1M-
2M-
3M+
4M+
52A
6GND
7VDE
8+12V
91A
10 VD
J2
11 MTR+
12 BZ
13 MTR-
14 TRGE
15 TRG
16 BP
1RED
2RED_E
3GRN
4GRN_E
5BLU
6BLU_E
7HS
8HS_E
9VS
10 VS_E
J4406 in CDC-1332
SLAVE RGB OUTPUT
+
-
BLU.T/GRY.T
POWER
OUTPUT
+12V
OUTPUT
SLAVE
INPUT
PUR.T/BRN.T
WHT.T/ORN.T
RED.T/GRN.T
BLK.T/SKY.T
BLK
YEL.T/PNK.T
ORN
YEL
GRN
WHT
3-
2-
2+
3+
1-
1+
1-
1+
1+
1-
19-CORES CABLE
CFQ-6912-20/30
(JRC SUPPLY)
1ETIY
2AGND
3EXBP
4AGND
5EXBZ
6AGND
9VD
10 VDE
J1
11 MTR+
12 MTR-
12A
21A
12A
21A
12A
21A
J3
1PTI
2PTE
3LVR
4PMS
1LVR
2PMS
3E
J81
ORN
BLK.T/SKY.T
RED
BLK
BRN
BLU J82
NKE-2254-7/9 SCANNER UNIT
250V-TTYCS-4
250V-TTYCS-1
250V-TTYCS-1
2695111153
(JRC SUPPLY)
18-CORES COMPOSITE
CABLE
250V-MPYCYS-7
250V-DPYCYS-1.5
CFQ-5436-5
(5m JRC SUPPLY)
Dsub 15pin
INTER SWITCH
CFQ-8914
(JRC SUPPLY)
VDR or
Remote monitor
SHIP’S MAIN
DC24V
700Wmax
GYRO
LOG(200P)
AIS
DGPS
LOG(NMEA)
NJU-85 PM UNIT (OPTION)
WHT
BLK
WHT
To PM
付図4 Fig.4
JMA-5322-7/9/6HS
盤間接続図
Terminal Board Connection Diagram
J2
J4
J5
GRN
BLK
YEL.T/PNK.T
BLU.T/GRY.T
WHT.T/ORN.T
PUR.T/BRN.T
RED.T/GRN.T
NOTE: Performance monitor must be
fitted on ships compliant to IMO.
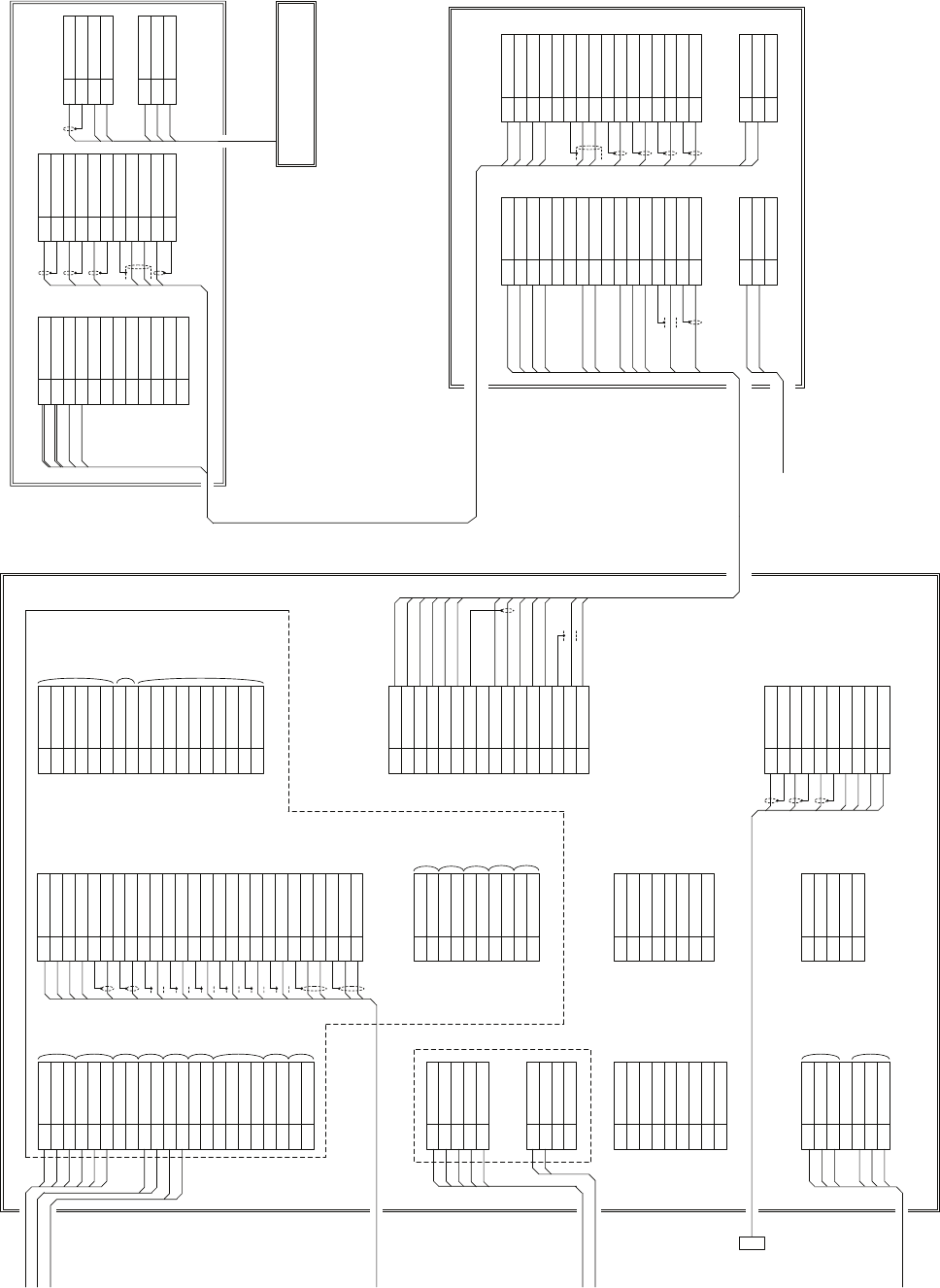
1NAV1TXDE
2NAV1TXD-
3NAV1TXD+
4NAV1RXDE
5NAV1RXD-
6NAV1RXD+
7GPSTXD-
8GPSTXD+
9GPSRXD-
10 GPSRXD+
TB4303
11 NAV2RXD-
12 NAV2RXD+
13 ARPATXD-
14 ARPATXD+
15 ARPAALM-
16 ARPAALM+
17 SYSALM-
18 SYSALM+
19 EVENT-
20 EVENT+
21 COMPAS-
22 COMPAS+
NMEA0183
OUTPUT
NMEA0183
INPUT
GPS
OUTPUT
GPS
INPUT
NMEA0183
INPUT
NMEA0183
OUTPUT
CONTACT
OUT
CONTACT
IN
NMEA0183
INPUT
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
INTER SWITCH
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
CQD-1937A TERMINAL BOARD
NCD-4530 DISPLAY UNIT
11/R1
22/S1
33/S2
4S3
55/R2
TB10
NCT-59A GYRO I/F UNIT
GYRO SYNC/PULSE
1LOGP+
2LOGP-
3LOGS+
4LOGS-
TB20
LOG SYNC/PULSE
OPTION
1NC
2PCRXD
3PCTXD
4NC
5GND
6NC
7PCRTS
8PCCTS
J8
9NC
RS232C PORT
11A
21A
31A
4NC
52A
62A
72A
J1
BLK
RED
RED
RED
BLK
BLK
POWER INPUT
1RBVDE
2RBVD
3TRGOE
4TRGO
5BPOE
6BPO
7BZOE
8BZO
TB4302
9VDOE
SLAVE OUTPUT
10 VDO
RADR
BUOY IN
TRG
OUT
B PULSE
OUT
Z PLUSE
OUT
VIDEO
OUTPUT
1GPSCTXD-
2GPSCTXD+
3GPSCRXD+
4GPSCRXD-
5GND
6ALM+
7ALM-
8+5V
J5
To JLR-10
1+12V
2GND
3GPSRXD-
4GPSRXD+
5GPSTXD+
J3
To GPS
1MOTOR-
2MOTOR-
3TRX-
4MOTOR+
5MOTOR+
6TRX+
7GND
8+12V
9COM-
10 COM+
TB4310
11 BZE
12 BZ
13 BPE
14 BP
15 TRGE
16 TRG
17 VDE
18 VD
1M-
2M-
3M+
4M+
52A
6GND
7VDE
8+12V
91A
10 VD
J2
11 MTR+
12 BZ
13 MTR-
14 TRGE
15 TRG
16 BP
1RED
2RED_E
3GRN
4GRN_E
5BLU
6BLU_E
7HS
8HS_E
9VS
10 VS_E
J4406 in CDC-1332
SLAVE RGB OUTPUT
+
-
BLU.T/GRY.T
POWER
OUTPUT
+12V
OUTPUT
SLAVE
INPUT
PUR.T/BRN.T
WHT.T/ORN.T
RED.T/GRN.T
BLK.T/SKY.T
BLK
YEL.T/PNK.T
ORN
YEL
GRN
WHT
1TRX-
2TRX-
3TRX+
4TRX+
5GND
6COME
7COM-
8COM+
9BZE
10 BZ
TB811
11 BPE
12 BP
13 TRGE
14 TRG
15 VDE
16 VD
BLU.T/GRY.T
PUR.T/BRN.T
WHT.T/ORN.T
RED.T/GRN.T
BLK
ORN
YEL
GRN
WHT
1U0
2V0
3W0
TB801
AC MAIN IN
1TRX-
2TRX-
3TRX+
4TRX+
5GND
6COME
7COM-
8COM+
9BZE
10 BZ
TB812
11 BPE
12 BP
13 TRGE
14 TRG
15 VDE
16 VD
1U2
2V2
3W2
TB803
AC MOTOR POWER
3-
2-
2+
3+
1-
1+
1-
1+
1+
1-
19-CORES CABLE
CFQ-6912-20
(JRC SUPPLY)
BLU.T
BLK
RED.T
PUR
WHT
ORN
4
3
2
1
YEL.TT
GRN.TT
1+48V
2+48VG
3U1
4V1
5W1
61
72
83
94
10 UTH
TB102
11 U
12 V
1BP+
2BP-
3BZ+
4BZ-
5TRG+
6TRG-
7MTRE
8MTR+
9MTR-
10 VD+
TB101
11 VD-
1PTI
2PTE
3LVR
4PMS
1LVR
2PMS
3E
J81
BLU.T/BLK
RED.T/PUR
YEL.TT
GRN.TT
4
3
2
1
ORN
WHT
RED
BLK
BRN
BLU J82
NQE-3151A JUNCTION BOX
NKE-1130 SCANNER UNIT
SHIP’S MAIN
AC100/220V
50/60Hz 1Φ
0.6/1kV-DPYC-6
14-CORES CABLE
2695110056
(JRC SUPPLY)
250V-TTYCS-4
250V-TTYCS-1
250V-TTYCS-1
2695111153
(JRC SUPPLY)
18-CORES COMPOSITE
CABLE
250V-MPYCYS-7
250V-DPYCYS-1.5
CFQ-5436-5
(5m JRC SUPPLY)
Dsub 15pin
INTER SWITCH
CFQ-8914
(JRC SUPPLY)
VDR or
Remote monitor
SHIP’S MAIN
DC24V
100Wmax
GYRO
LOG(200P)
AIS
DGPS
LOG(NMEA)
NJU-84 PM UNIT (OPTION)
WHT
BLK
WHT
To PM
付図5 Fig.5
JMA-5332-12
盤間接続図
Terminal Board Connection Diagram
NOTE: Performance monitor must be
fitted on ships compliant to IMO.
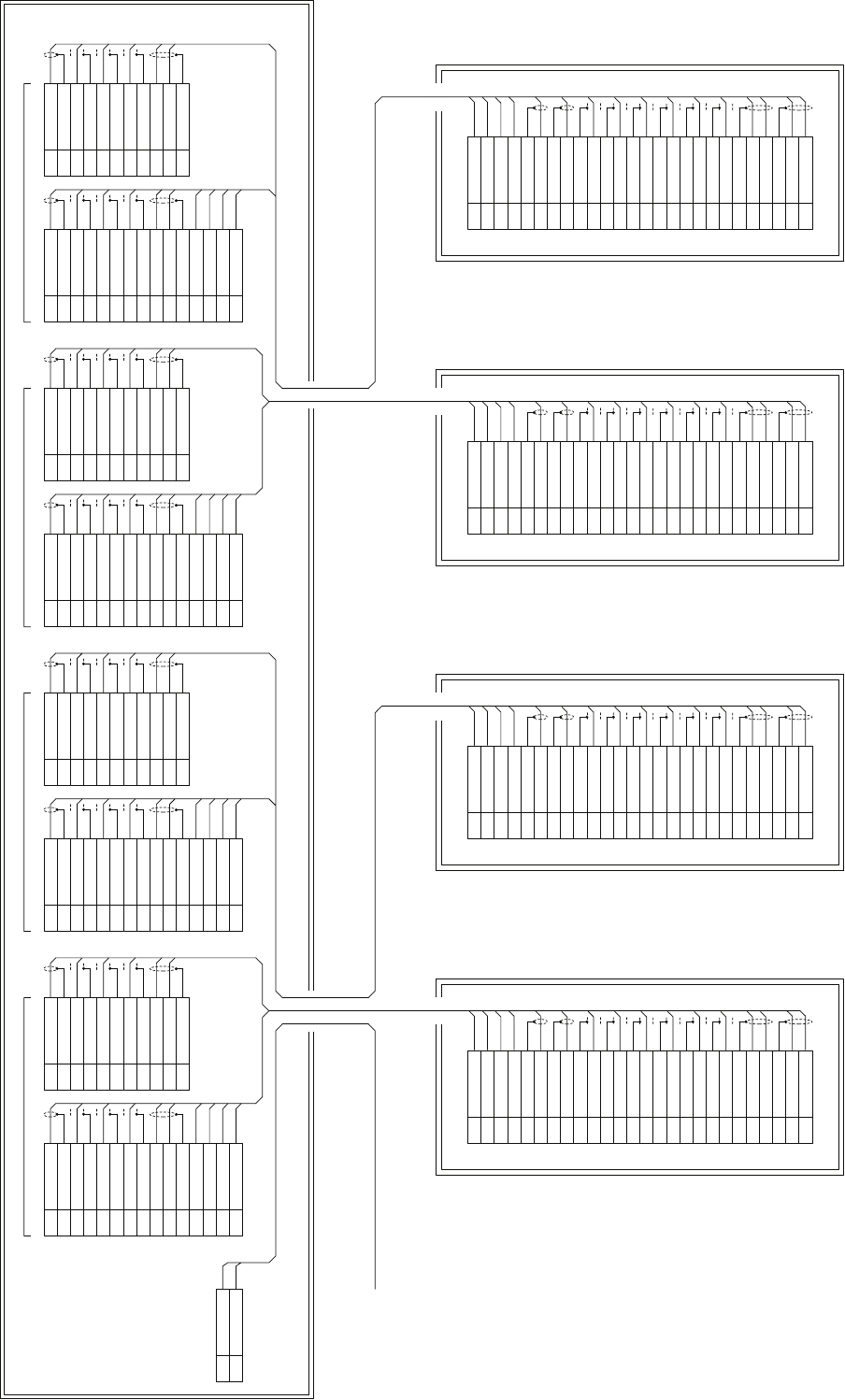
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
in NDC-1417
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
13 PWRINE
12 PWRIN
15 PWROUTE
14 PWROUT
2VDINE
1VDIN
2VDOUTE
1VDOUT
4TRGINE
3TRGIN
TB911
4TRGOUTE
3TRGOUT
6BPINE
5BPIN
6BPOUTE
5BPOUT
8BZINE
7BZIN
8BZOUTE
7BZOUT
11 MTRINE
10 MTRIN-
9MTRIN+
11 MTROUTE
10 MTROUT-
9MTROUT+
BRN
PNK
BLK
ORG
WHT
YEL
TB912
WHT
BLU
GRN
YEL
BLU
1 2
WHT
PUR
RED
CH-1
JMA-5300MK2 Series RADAR
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
in NDC-1417
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
13 PWRINE
12 PWRIN
15 PWROUTE
14 PWROUT
2VDINE
1VDIN
2VDOUTE
1VDOUT
4TRGINE
3TRGIN
TB913
4TRGOUTE
3TRGOUT
6BPINE
5BPIN
6BPOUTE
5BPOUT
8BZINE
7BZIN
8BZOUTE
7BZOUT
11 MTRINE
10 MTRIN-
9MTRIN+
11 MTROUTE
10 MTROUT-
9MTROUT+
BRN
PNK
BLK
ORG
WHT
YEL
TB914
WHT
BLU
GRN
YEL
BLU
1 2
WHT
PUR
RED
CH-2
JMA-5300MK2 Series RADAR
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
in NDC-1417
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
13 PWRINE
12 PWRIN
15 PWROUTE
14 PWROUT
2VDINE
1VDIN
2VDOUTE
1VDOUT
4TRGINE
3TRGIN
TB915
4TRGOUTE
3TRGOUT
6BPINE
5BPIN
6BPOUTE
5BPOUT
8BZINE
7BZIN
8BZOUTE
7BZOUT
11 MTRINE
10 MTRIN-
9MTRIN+
11 MTROUTE
10 MTROUT-
9MTROUT+
BRN
PNK
BLK
ORG
WHT
YEL
TB916
WHT
BLU
GRN
YEL
BLU
1 2
WHT
PUR
RED
CH-3
JMA-5300MK2 Series RADAR
1PWRIN-
2PWRIN+
3PWROUT-
4PWROUT+
5VDINE
6VDIN
7VDOUTE
8VDOUT
9TRGINE
10 TRGIN
TB4301
11 TRGOUTE
12 TRGOUT
13 BPINE
14 BPIN
15 BPOUTE
16 BPOUT
17 BZINE
18 BZIN
19 BZOUTE
20 BZOUT
21 MTRINE
22 MTRIN-
23 MTRIN+
24 MTROUTE
25 MTROUT-
26 MTROUT+
in NDC-1417
BRN
PNK
BLK
ORG
RED
BLU
PUR
YEL
WHT
GRN
WHT
YEL
WHT
BLU
2
1
13 PWRINE
12 PWRIN
15 PWROUTE
14 PWROUT
2VDINE
1VDIN
2VDOUTE
1VDOUT
4TRGINE
3TRGIN
TB917
4TRGOUTE
3TRGOUT
6BPINE
5BPIN
6BPOUTE
5BPOUT
8BZINE
7BZIN
8BZOUTE
7BZOUT
11 MTRINE
10 MTRIN-
9MTRIN+
11 MTROUTE
10 MTROUT-
9MTROUT+
BRN
PNK
BLK
ORG
WHT
YEL
TB918
WHT
BLU
GRN
YEL
BLU
1 2
WHT
PUR
RED
CH-4
JMA-5300MK2 Series RADAR
2695111153 (JRC SUPPLY)
18-CORES COMPOSITE CABLE
0.6/1kV-DPYC-1.5
SHIP’S MAIN
AC100-240V
50/60Hz 1Φ
30VAmax
NQE-3141-4A INTER-SWITCH UNIT
2V
1 U
TB901
2695111153 (JRC SUPPLY)
18-CORES COMPOSITE CABLE
2695111153 (JRC SUPPLY)
18-CORES COMPOSITE CABLE
2695111153 (JRC SUPPLY)
18-CORES COMPOSITE CABLE
付図6 Fig.6
NQE-3141
インタースイッチユニット盤間接続図
Terminal Board Connection Diagram of
Radar and Interswitch Unit
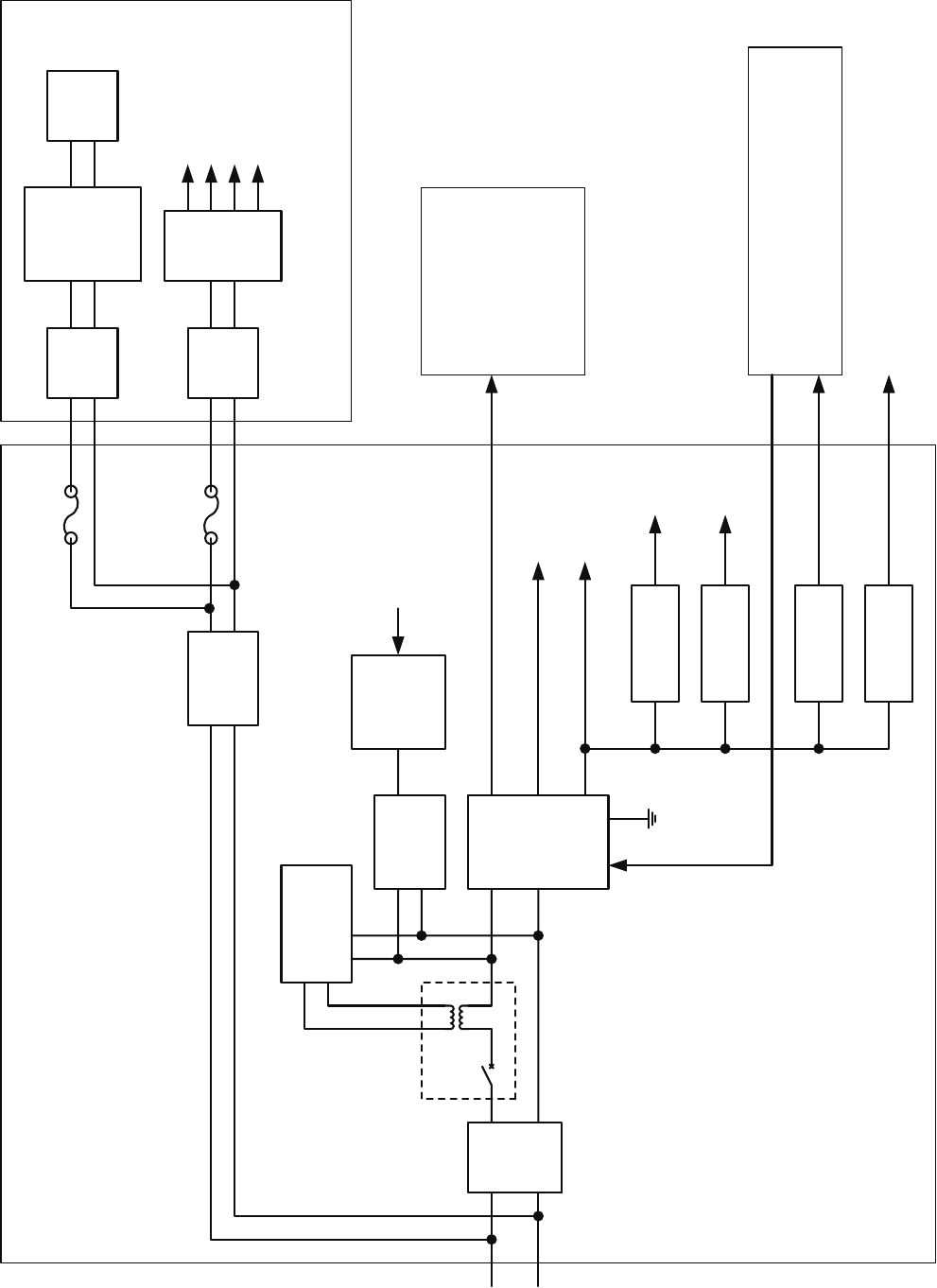
Filter
PWR
SENSE
P12V
±12V
AVR
DC24V
+30%
-10%
PWR
CONT
Relay
+5V AVR
+3.3V AVR
Poly-SW
Poly-SW
Filter
Filter
Motor
Control
AVR
internal circuit
power
-12V 0.2A
+12V 1.0A
Analog
Analog
Logic
Logic
4A
7A
Motor
PWR-ON
0.5A
0.5A
SCANNER UNIT NKE-2103/2254
RADAR PROCESS UNIT NDC-1417
LCD MONITOR
NWZ-173
F3
F2
POWER-SW
OPERATION UNIT NCE-5171
To GPS (SW)
4A
付図7 Fig.7
JMA-5312-6/6HS JMA-5322-7/9/6HS
電源系統図
Power System Diagram
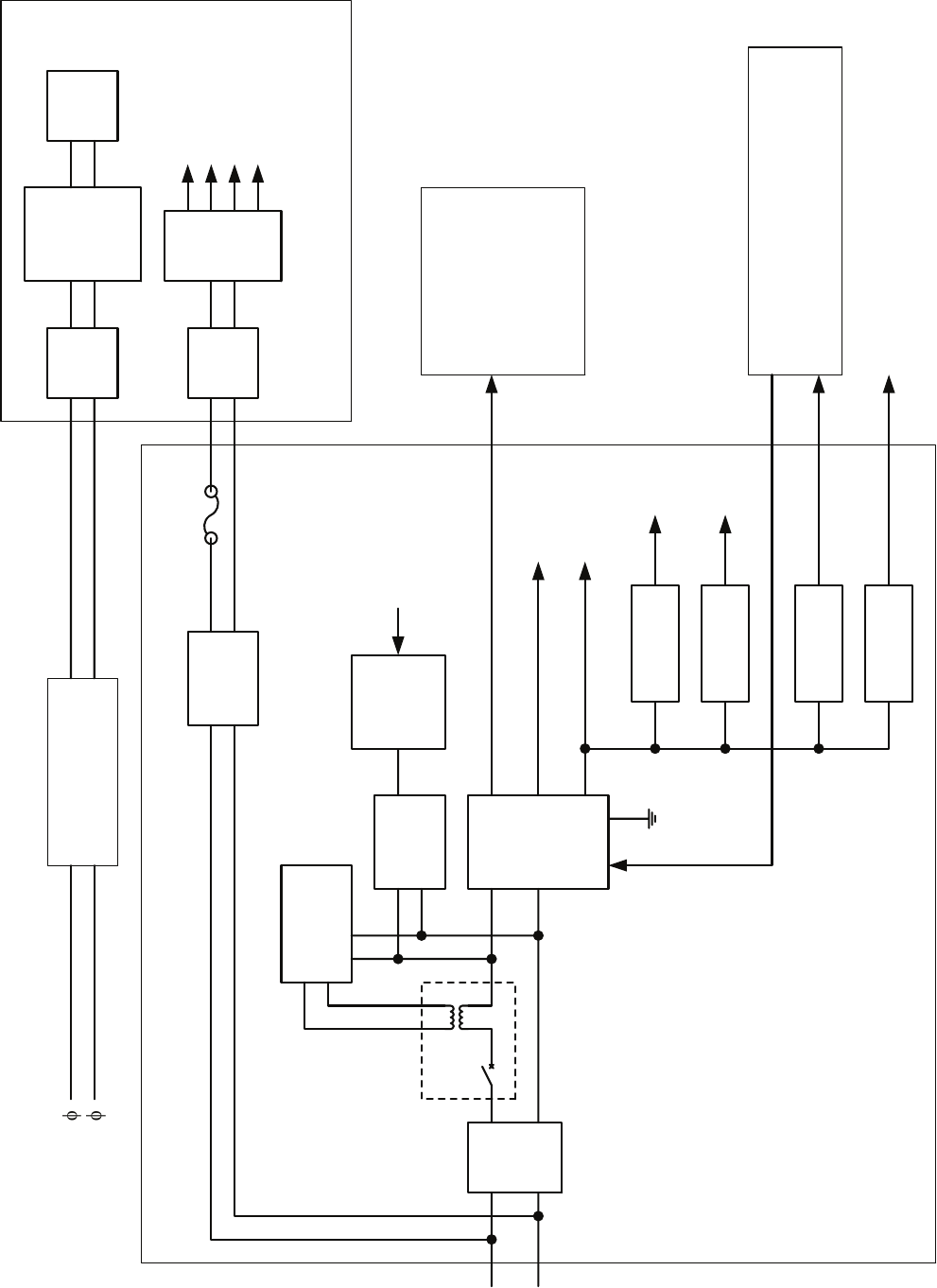
Filter
PWR
SENSE
P12V
±12V
AVR
DC24V
+30%
-10%
PWR
CONT
Relay
+5V AVR
+3.3V AVR
Poly-SW
Poly-SW
Filter
Filter
Motor
Control
AVR
internal circuit
power
-12V 0.2A
+12V 1.0A
Analog
Analog
Logic
Logic
4A
7A
Motor
PWR-ON
0.5A
0.5A
SCANNER UNIT NKE-1130
RADAR PROCESS UNIT NDC-1417
LCD MONITOR
NWZ-173
F3
POWER-SW
OPERATION UNIT NCE-5171
To GPS (SW)
4A
JUNCTION BOX
NQE-3151A
AC100/110/115V 50/60Hz 1
AC220/230/240V 50/60Hz 1
付図8 Fig.8
JMA-5332-12
電源系統図
Power System Diagram
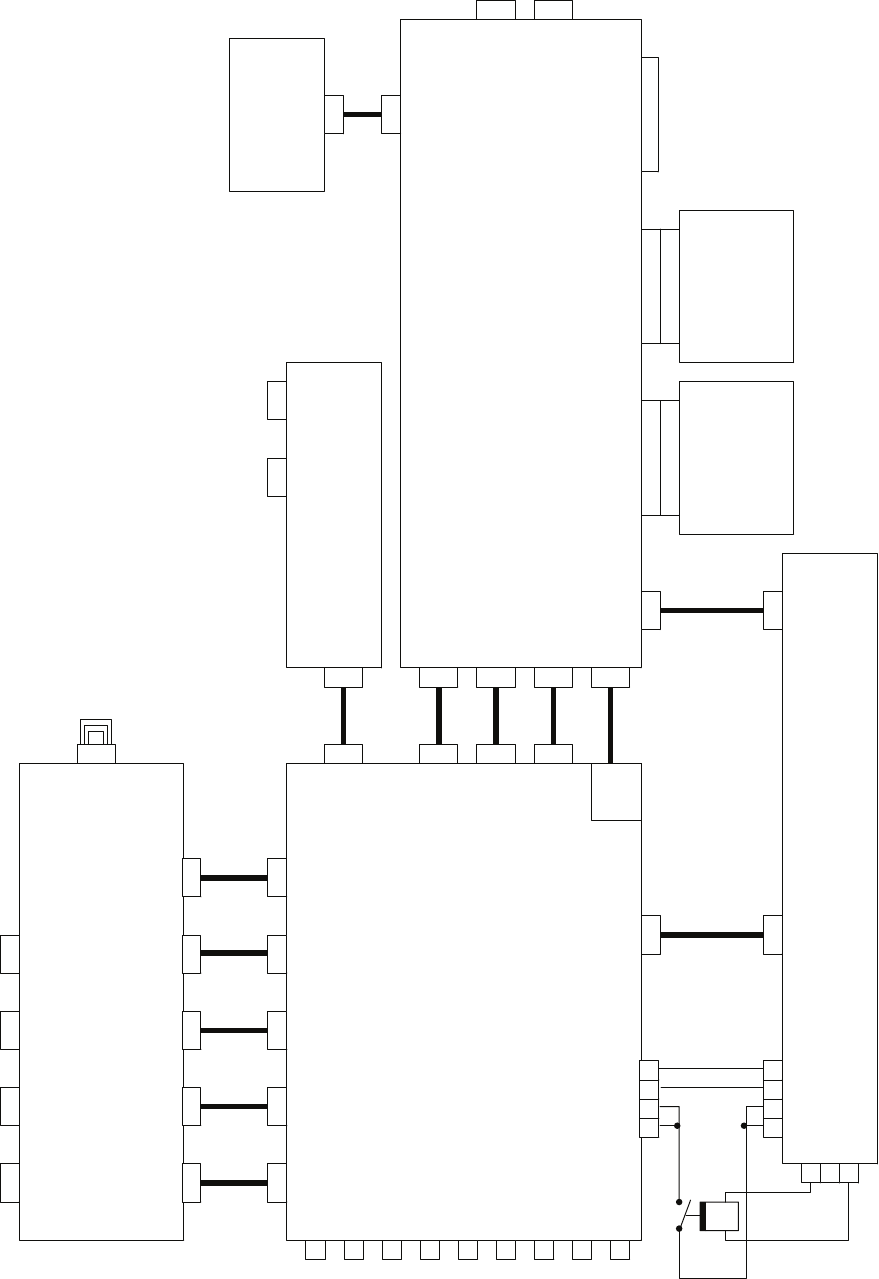
CQD-1937A
Terminal Board Circuit
PC430
NQA-2123
I/F Unit
NBD-818A
Power Unit
NQA-2103
AIS Process Unit
(OPTION)
NBD-34A
Plotter Control Unit
(OPTION)
CDC-1332
Radar Process Circuit
PC440
NCT-59A
GYRO/LOG I/F Unit
(OPTION)
P/J4309 P/J4302 P/J4310 P/J4303 P/J4301
P/J4311
P/J51004
P/J4102
1A 1A 2A 2A
P/J4111
P/J4113
P/J4108
P/J4107
P/J4201
1A 1A 2A 2A
P/J5101
3
2
1
P/J4103
P/J5103
P/J4109 P/J4104 P/J4110 P/J4106 P/J4105
NCA-877WA
ARPA Process Unit
for ARPA
(OPTION)
P/J4404
P/J4403
P/J4402
P/J4401
P/J4406
P/J4405
P/J4407
P/J4901
J303J302J301
J4601 J1
P/J5102
TB10 TB20
GYRO LOG
EXT-RGB
DVI
J1
J2
J7
J5
J3
J4
J6
POWER
SCANNER
GPS
KEYBOARD
GPS
COMPASS
LCD
POWER
RGB
J8
NMEA
TB4301 TB4302 TB4303 TB4310
SCANNERNMEASLAVEISW
W405
6PIN
W410
12PIN
W411
18PIN
W412
24PIN
W413
26PIN
W417
6PIN
W416
10PIN
W415
30PIN
W414
32PIN
W418
14PIN
W403
9PIN
W404
10PIN
W419
6PIN
W402
4PIN
W423
2PIN
CB401
AUX
MONITOR/
KEYBOARD
P/J4408
W427
UTP
RJ45
付図9 Fig.9
NDC-1417
処理部機内接続図
Interconnection Diagram of Radar Process Unit
NOTE:ARPA/ATA Process Unit, AIS Process Unit and GYRO
Interface Unit must be fitted on ships compliant to IMO.
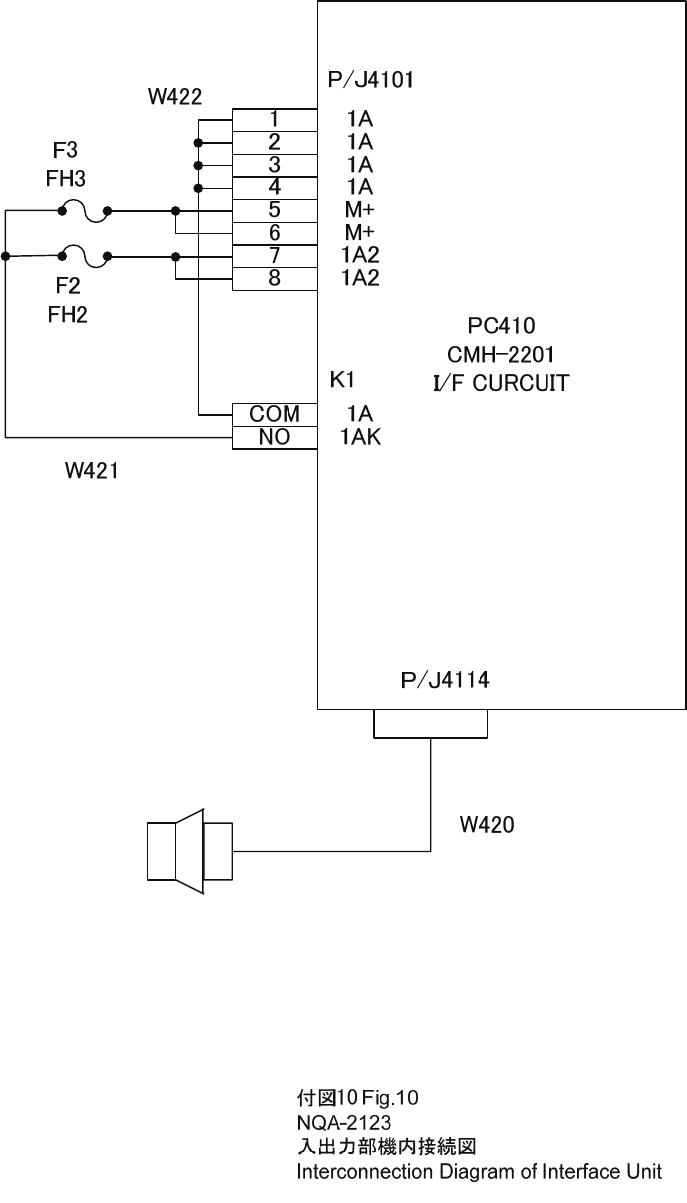
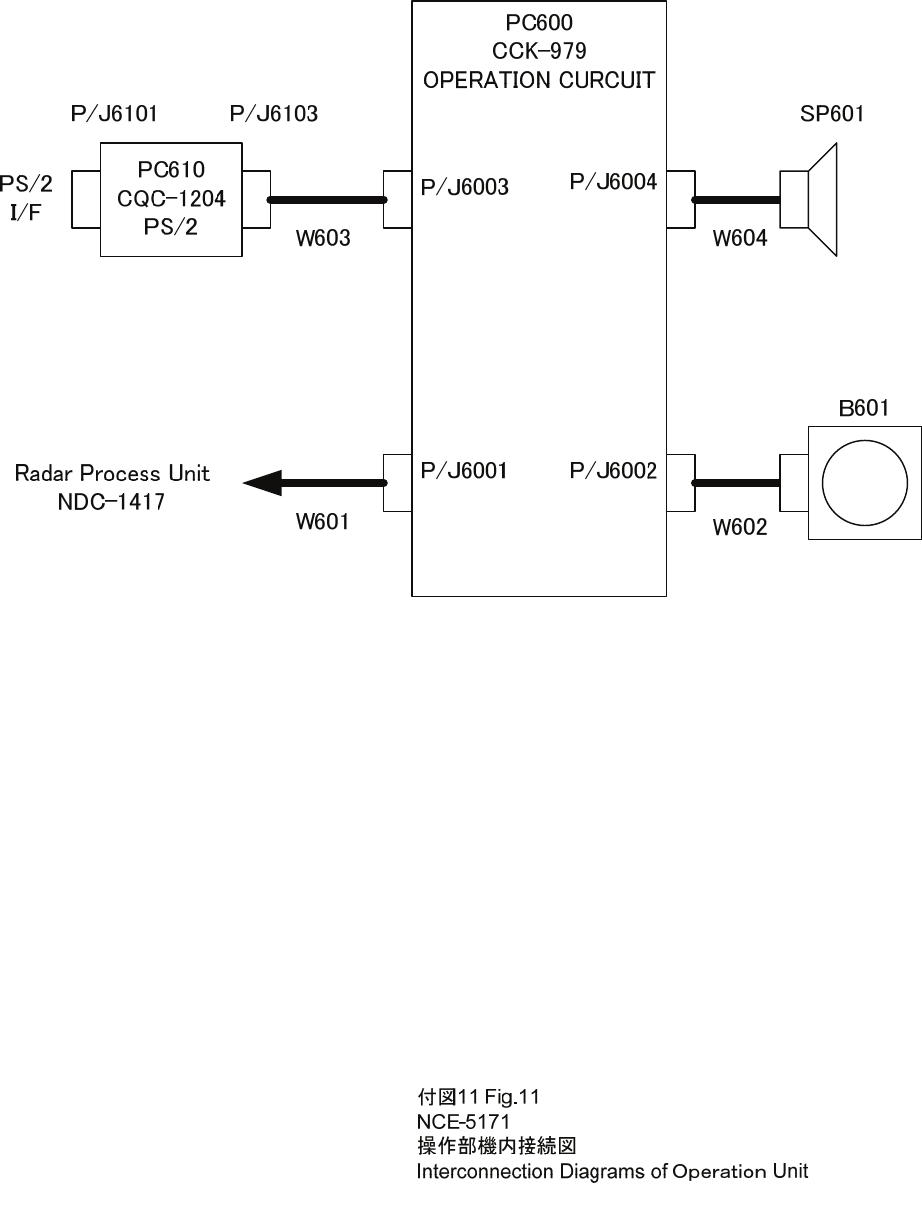
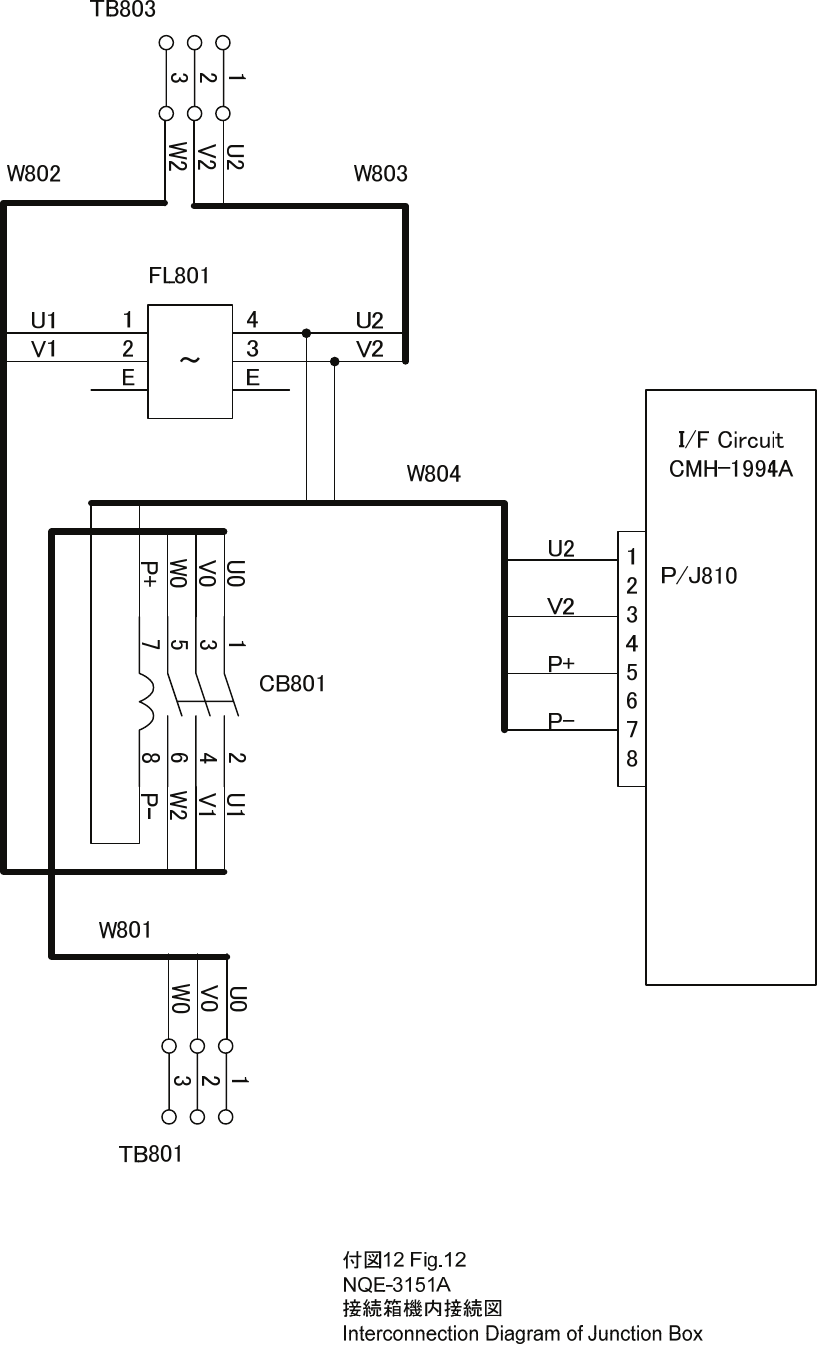
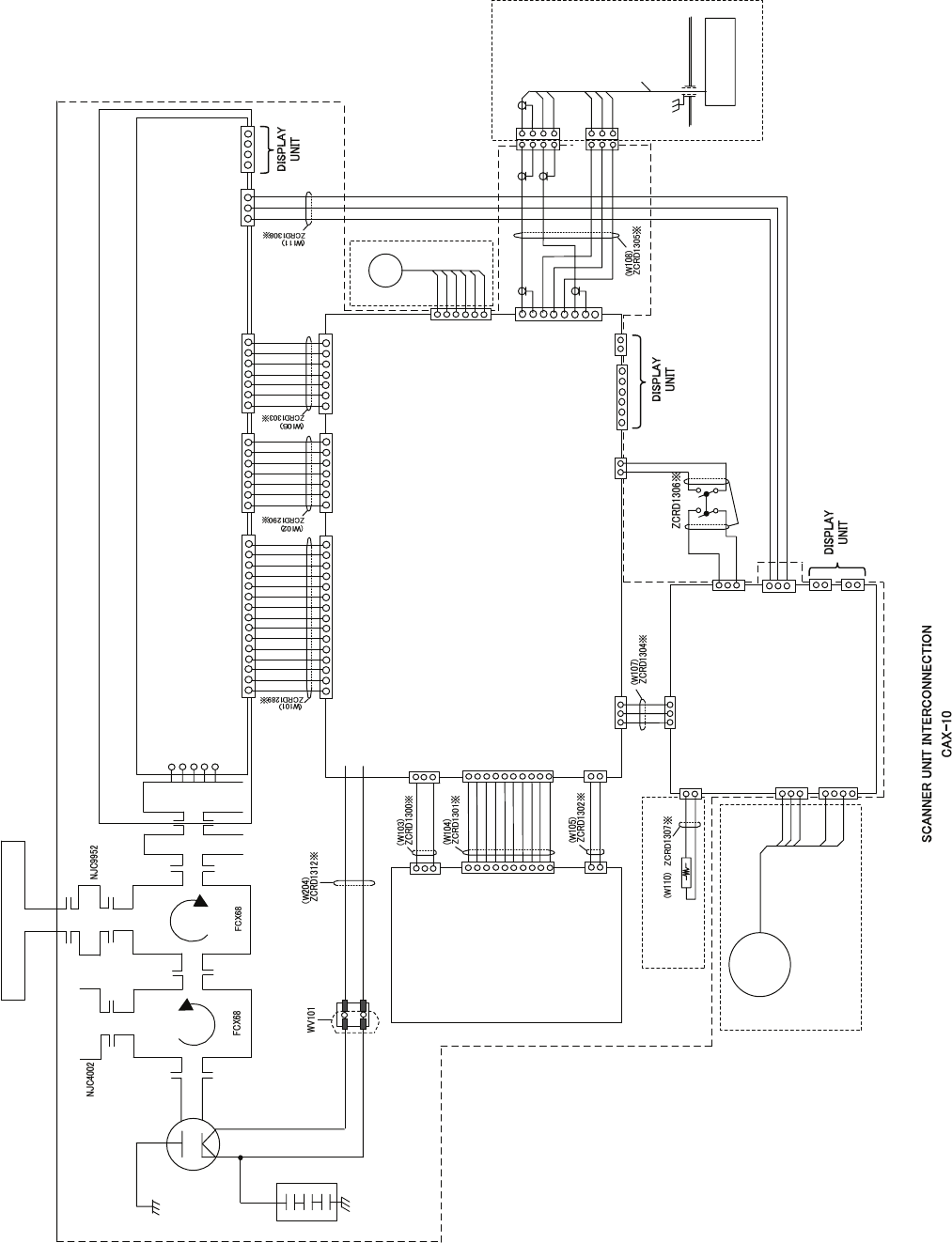
付図13 Fig.13
NKE-2103 / 2103HS
空中線機内接続図
Interconnection Diagram of Scanner Unit
E101
NJT1969
A301
NJS6930
ANTENNA NAX-16B-4/6
FILTER
DUMMY
A101
1.TUNE
2.+5V
3.GND
4.NC
5.IF
IF AMP CIRCUIT (PC301)
CAE-529-1
MAG
MAGNETRON
V101
MAF1565N
POWER SUPPLY
CIRCUIT
(PC1001)
CBD-1783
1.2A
2.1A
J1001
J201
15.NC
4.PW1
5.MCT
6.MBK
7.+15V
8.AGND
9.-7V
10.BP
11.HSP
1.MPS
2.PW3
3.PW2
12.TI
13.+8V
14.MOD ID
T201-16
T201-15
1.MH
3.MN
J1003
J202
4.HTER
1.TIY
2.AGND
3.MAG.I
5.HVER
6.C2
7.BZ
J203
4.PMS
1.PTI
2.PTE
3.LVR
5.GND
6.TXI
7.TXE
1.2A
2.1A
J3
6.AGND
J1
4.AGND
1.ETIY
2.AGND
3.EXBP
5.EXBZ
SAFETY SWITCH
WS101
MODULATOR CIRCUIT
(PC201)
CME-363
J301
15.NC
4.PW1
5.MCT
6.MBK
7.+15V
8.AGND
9.-7V
10.BP
11.HSP
1.MPS
2.PW3
3.PW2
12.TI
13.+8V
14.MOD ID
J302
4.HTER
1.TIY
2.AGND
3.MAG.I
5.HVER
6.C2
7.BZ
J303
4.PMS
1.PTI
2.PTE
3.LVR
5.GND
6.TXI
7.TXE
4.COM-
1.VD
2.VDE
3.COM+
J2
J18
1.HMCNT
2.+15V
3.GND
SE
B102
J8
4.PMS
1.PTI
2.PTE
3.LVR
5.E
6.TXI
7.TXE
4.ΦB
1.ΦZ
2.E
3.ΦA
5.+12V
6.F.G.
YEL
BLK
BLU
WHT
RED
SHIELD
P8 1.PTI
2.PTE
1.LVR
2.PMS
3.E
3.TXI
4.TXE
J81
J82
P81
P82
WHT
BLK
BLU
RED
BLK
WHT
BRN
PM
NJU-85
7ZCRD1280※
1.2A
2.1A
J1503
1.MPS
2.MCT
J1501
3.MBK
1.HMCNT
2.+15V
J1505
3.AGND
1.2A
2.1A
J4
1.2A
2.1A
J5
1.MPS
2.MCT
J209
3.MBK
1.C2G
2.C2
J210
1.2A
2.1A
J204
J206
1.MH
3.MN
MOTOR CONTROL POWER CIRCUIT
(PC1501)
CBD-1779
1.MCNT+
J125
3.NC
1.M+
2.NC
J1502
3.M-
4.NC
2.MCNT-
MOTOR
B101
H-7BDRD0048
MORTOR CBP-202
BREAK CIRCUIT CFA-252
YEL GRN
A103
RECEIVER UNIT NRG-610
MIC
S.G.
S.G.
(OPTION)
5
4
2
1
J208
D.L
1.MS1
2.NC
J1504
3.MS2
TRANSMITTER/RECEIVER UNIT NZT-2103 TRANSMITTER/RECEIVER UNIT
INTERCONNECTION
CMK-599
8.NC
J205
1.+15V
2.+12V
3.+8V
4.AGND
5.-15V
6.X1
7.X2
8.+5V
9.HTER
10.HVER
J1002
1.+15V
2.+12V
3.+8V
4.AGND
5.-15V
6.X1
7.X2
8.+5V
9.HTER
10.HVER
A102
(RECEIVER UNIT INTERCONNECTION CMA-823)
ENCODER CHT-71A
S.G.
CFR-234
MAG FILTER
CIRCUIT
100pF×3
A104
TB1
1-2short : Nomal Speed
2-3short : High Speed
NOTE: Performance monitor must be fitted
on ships compliant to IMO.
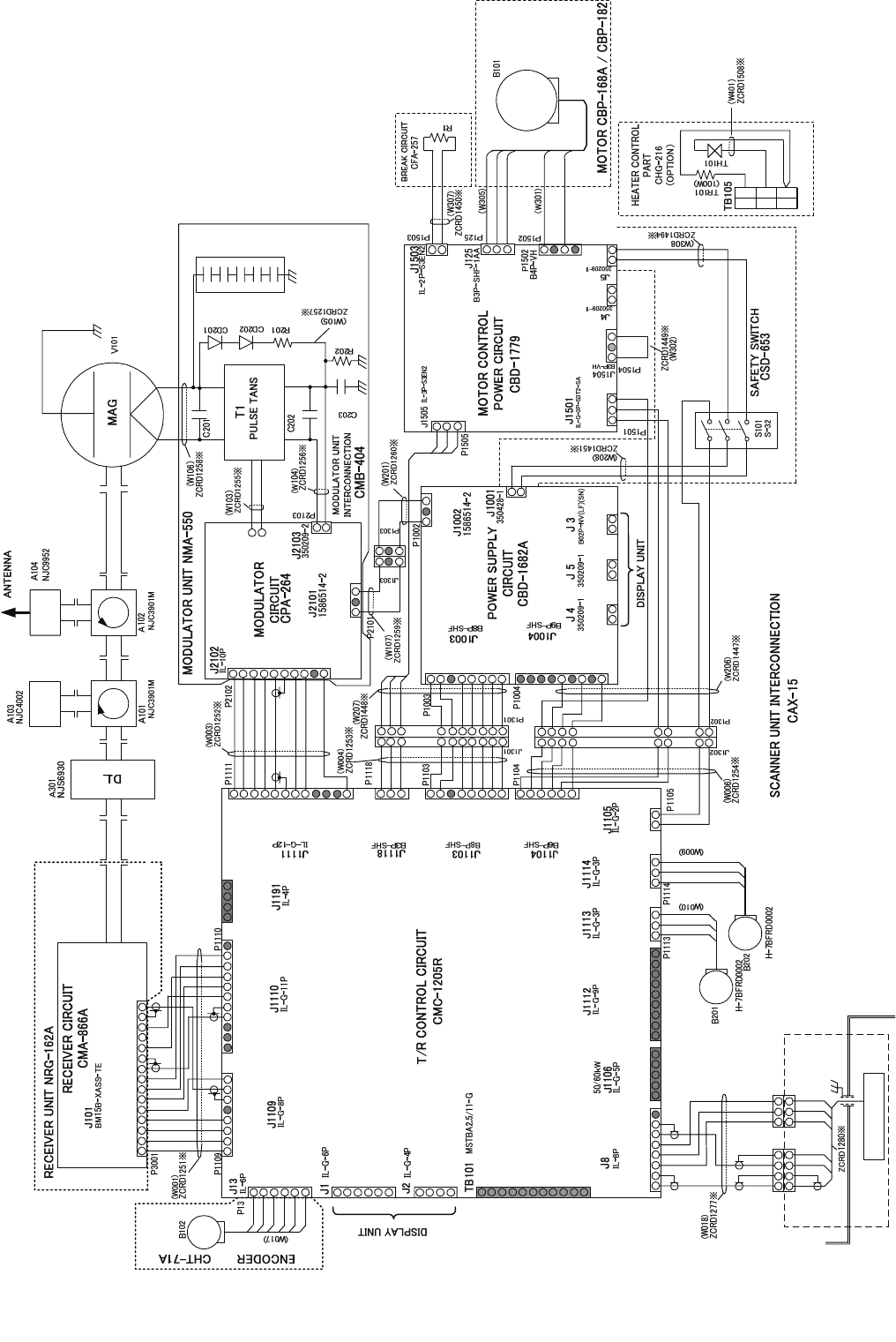
14.VDE
12.VD_DC
15.VD
9.TGT
10.TGTE
13.TNL
11.TNI
1.BS3
2.BS2
3.BS1
4.TNC
5.+5V
6.-15V
7.+15V
1.MONI
2.GS
3.GSE
4.TGT
5.TGTE
6.TNL
7.-15V
8.TNI
9.+15V
10.GND
11.TRG2
1.BS3
2.BS2
3.BS1
4.TNC
5.MicPS
6.VDINE
7.VDIN
8.+5V
1.RXD
2.TXD
3.+5V
4.GND
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
8.GND
9.NC
10.NC
11.NC
12.NC
1.HMCNT
2.+15V
3.GND
1.+15V
2.+12V
3.GND
4.GND
5.-15V
6.10V
7.10VE
8.+5V
1.MCT
2.MBK
3.TISTOP
4.GND
5.MPS
6.MIER
1.TIY
2.TIYE
3.BP
4.BPE
5.BZ
6.BZE
1.+12V
2.GND
3.FAN_ERR1
1.HTER1
2.HVGATE1
3.TISTOP1
4.GND
5.CNT
6.+5V
7.+15V
8.STABY_REQ
9.NC
1.PW1
2.PW2
3.PW3
4.+24V
5.GND
1.BP+
2.BP-
3.BZ+
4.BZ-
5.TRIG+
6.TRIG-
7.MTR+
8.MTR-
9.MTRE
10.VD+
11.VD-
1.VD
2.VDE
3.MTR+
4.MTR-
1.+15V
2.+12V
3.+8V
4.GND
5.-15V
6.X1
7.X2
8.+5V
1.MCT
2.MBK
3.HSP
4.HTER
5.TISTOP
6.C2
7.GND
8.MPS
9.MIER
2.1A
1.2A
2.1A
1.2A
2.1A
1.2A
1.MH
2.NC
3.MN
1.MH
2.NC
3.MN
1.X1
2.X2
No.2
No.1
2
1
4
35
6
FILTER
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
①②
③
①②
③
ミドリ
キ
0.01UF 1KV
0.22UF 200V
2.7KΩ
1/2W
0.22UF
200V
150Ω
8W
H-7LPRD0122
MD-12N1MD-12N1
M1568BS
DUMMY
1.+12V
2.GND
3.FAN_ERR2
1.+12V
2.C2
1.φZ
2.φZE
3.φA
4.φB
5.+12V
6.GND
RED
WHT
8.GND
1.M+
2.M-
9.NC
10.NC
S.G.
S.G.
S.G.
8.GND
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
WHT
BLK
BLU
WHT
BLK
BLU
1
2
3
4
1
2
3
4
5
6
5
6
7
8
7
8
SE
YEL
BLK
BLU
WHT
RED
SHIELD
FAN
RED
BLU
YEL
FAN
RED
BLU
YEL
RED
WHT
シロ
クロ
アオ
12
BLK.T
2
13
3
BLK.T
1.PTI
2.PTE
3.LVR
4.PMS
5.GND
6.TXI
7.TXE
8.NC
1.PTI
2.PTE
1.LVR
2.PMS
3.E
3.TXI
4.TXE
J82
J81
PM
P81
P82
WHT
BLK
BLU
RED
BLK
WHT
BRN
NJU-85
(OPTION)
S.G.
21
7
54
8
1.HMCNT
2.+15V
3.E
1.MS1
2.NC
3.MS2
アカ太
1.MPS
2.MCT
10Ω,10W
GRN
BRN
BLU.T
YEL
1.M+
2.NC
3.M-
4.NC
1.MCNT-
2.MCNT+
3.NC
BLK.T
MOTOR
1.2A
2.1A
1.2A
2.1A
3.MBK
U
VUTH
U
VUTH
WHT.T
シロ太
S.G.
CFR-229
MAG FILTER
CIRCUIT
220pF×5
付図14 Fig.14
NKE-2254
空中線機内接続図
Interconnection Diagram of Scanner Unit
NOTE: Performance monitor must be fitted
on ships compliant to IMO.
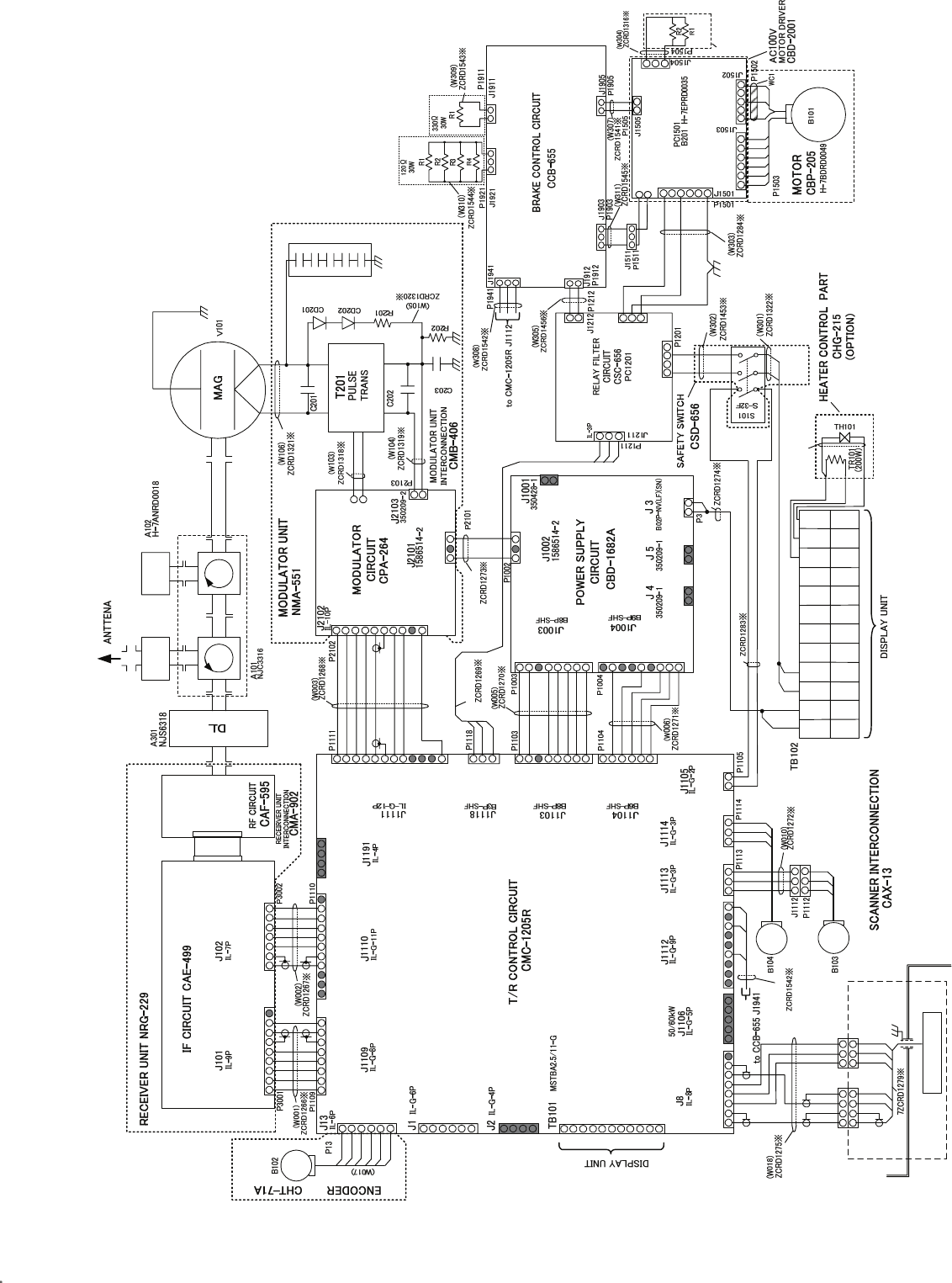
付図15 Fig.15
NKE-1130 (AC100/110/115V)
空中線機内接続図
Interconnection Diagram of Scanner Unit
1.TGT
2.TGTE
3.TNL
4.-15V
5.TNI
6.+15V
7.GND
1.BS3
2.BS2
3.BS1
4.TNC
5.MPS
6.VDE
7.VD
1.MONI
2.GS
3.GSE
4.TGT
5.TGTE
6.TNL
7.-15V
8.TNI
9.+15V
10.GND
11.TRG2
1.BS3
2.BS2
3.BS1
4.TNC
5.MicPS
6.VDINE
7.VDIN
8.+5V
1.RXD
2.TXD
3.+5V
4.GND
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
8.GND
9.NC
10.NC
11.NC
12.NC
1.HMCNT
2.+15V
3.GND
1.+15V
2.+12V
3.GND
4.GND
5.-15V
6.10V
7.10VE
8.+5V
1.MCT
2.MBK
3.TISTOP
4.GND
5.MPS
6.MIER
1.TIY
2.TIYE
3.BP
4.BPE
5.BZ
6.BZE
1.+12V
2.GND
3.FAN_ERR1
1.HTER1
2.HVGATE1
3.TISTOP1
4.GND
5.CNT
6.+5V
7.+15V
8.STABY_REQ
9.NC
1.PW1
2.PW2
3.PW3
4.+24V
5.GND
1.PTI
2.PTE
3.LVR
4.PMS
5.GND
6.TXI
7.TXE
8.NC
1.BP+
2.BP-
3.BZ+
4.BZ-
5.TRIG+
6.TRIG-
7.MTR+
8.MTR-
9.MTRE
10.VD+
11.VD-
1.VD
2.VDE
3.MTR+
4.MTR-
1.+15V
2.+12V
3.+8V
4.GND
5.-15V
6.10V
7.10VE
8.+5V
1.MCT
2.MBK
3.HSP
4.HTER
5.TISTOP
6.C2
7.GND
8.MPS
9.MIER
2.1A
1.2A
2.1A
1.2A
2.1A
1.2A
1.MH
2.NC
3.MN
1.MH
2.NC
3.MN
1.X1
2.X2
No.2
No.1
2
1
4
35
6
FILTER
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
8.GND
9.NC
10.NC
①
②③
①
②
③
GRN
YEL
0.01UF 1KV
0.22UF 200V
2.7KΩ
1/2W
0.22UF
200V
150Ω
8W
H-7LPRD0122
MD-12N1MD-12N1
M1555
(W201)
BLK.T
DUMMY
1.+12V
2.GND
3.FAN_ERR2
1.+12V
2.C2
(W004)
8.+5V
9.NC
1.M+
2.M-
S.G.
S.G. S.G.
1.φZ
2.φZE
3.φA
4.φB
5.+12V
6.GND
SE
YEL
BLK
BLU
WHT
RED
SHIELD
FAN
RED
BLU
YEL
FAN
23
9
56
8
(W203)
RED
WHT
RED
BLU
YEL
1.PTI
2.PTE
1.LVR
2.PMS
3.E
3.TXI
4.TXE
J82
J81
PM
P81
P82
WHT
BLK
BLU
RED
BLK
WHT
BRN
NJU-84
(OPTION)
(W008)
S.G.
RED.T
RED.T
BLK.T
BLK.T
S.G.
CFR-229
MAG FILTER
CIRCUIT
220pF×5
+48V
+48VG
U1
V1
W1
U1
W1
V1
+48V
+48VG
1
2
V
U
1
2
3
4
3
4
V
U
UTH
UTH
WHT.T
WHT.T
W401 7ZCRD1509
(W308)
WHT
BLK
BLU
BRAKE CIRCUIT
CFA-255
1.VERR
2.E
B2P-VH
1.HMCNT
2.+15V
3.GND P1202
1.MU2
1.VERR1
2.E
3.MV2
J1202
J1201
1.U1
3.V1
2.NC
4.NC
2.GND
B4P-VH
B3P-NV
IL-3P
IL-2P
1.VERR1
2.E
1.VERR
2.E
1.P
2.NC
3.N
1. P
2. N
1.BKH1
3.BKH2
1.BKS1
2.BKS2
1.+15V
2.NC
3.+15VE
1.RED
3.BLK
IL-2P
S3B-XH-A
1-350210-0 1-350209-0
1-480700-0
BLAKE CIRCUIT B
CFA-262
BRAKE CIRCUIT A
CFA-261
×4
×1
2.NC
4.NC
1.S1
2.S2
3.S3
4.S4
5.S5
6.S6
3.M2
1.M1
5.M3
MOTOR
2.NC
1.2kΩ
30W
1.R1
3.R2
B3P-VH
2.NC
3.MV2
1.MU2
2.NC
4.NC
5.NC
6.GND
B6P-VH
NOTE: Performance monitor must be fitted
on ships compliant to IMO.
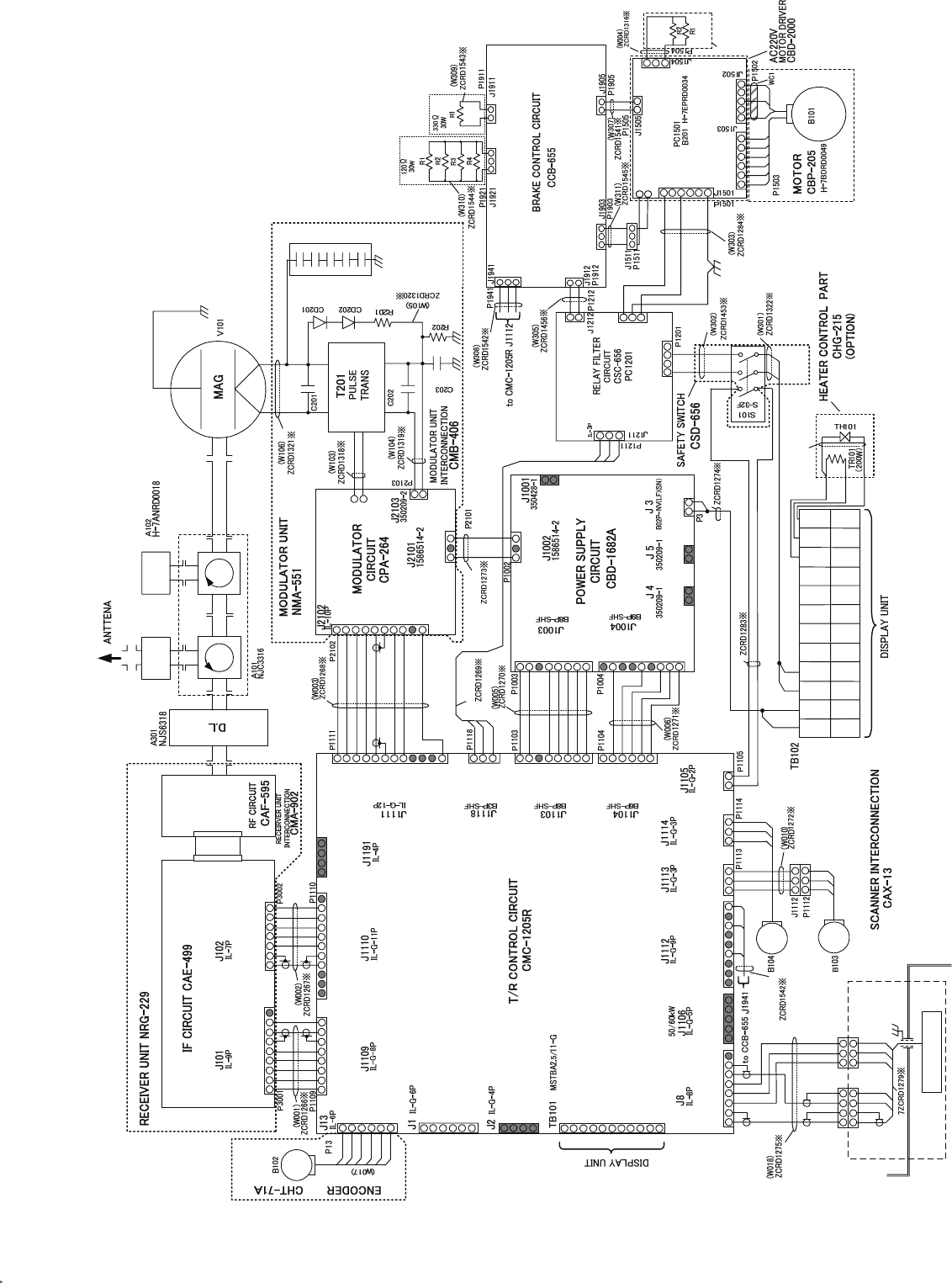
付図16 Fig.16
NKE-1130 (AC220/230/240V)
空中線機内接続図
Interconnection Diagram of Scanner Unit
1.TGT
2.TGTE
3.TNL
4.-15V
5.TNI
6.+15V
7.GND
1.BS3
2.BS2
3.BS1
4.TNC
5.MPS
6.VDE
7.VD
1.MONI
2.GS
3.GSE
4.TGT
5.TGTE
6.TNL
7.-15V
8.TNI
9.+15V
10.GND
11.TRG2
1.BS3
2.BS2
3.BS1
4.TNC
5.MicPS
6.VDINE
7.VDIN
8.+5V
1.RXD
2.TXD
3.+5V
4.GND
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
8.GND
9.NC
10.NC
11.NC
12.NC
1.HMCNT
2.+15V
3.GND
1.+15V
2.+12V
3.GND
4.GND
5.-15V
6.10V
7.10VE
8.+5V
1.MCT
2.MBK
3.TISTOP
4.GND
5.MPS
6.MIER
1.TIY
2.TIYE
3.BP
4.BPE
5.BZ
6.BZE
1.+12V
2.GND
3.FAN_ERR1
1.HTER1
2.HVGATE1
3.TISTOP1
4.GND
5.CNT
6.+5V
7.+15V
8.STABY_REQ
9.NC
1.PW1
2.PW2
3.PW3
4.+24V
5.GND
1.PTI
2.PTE
3.LVR
4.PMS
5.GND
6.TXI
7.TXE
8.NC
1.BP+
2.BP-
3.BZ+
4.BZ-
5.TRIG+
6.TRIG-
7.MTR+
8.MTR-
9.MTRE
10.VD+
11.VD-
1.VD
2.VDE
3.MTR+
4.MTR-
1.+15V
2.+12V
3.+8V
4.GND
5.-15V
6.10V
7.10VE
8.+5V
1.MCT
2.MBK
3.HSP
4.HTER
5.TISTOP
6.C2
7.GND
8.MPS
9.MIER
2.1A
1.2A
2.1A
1.2A
2.1A
1.2A
1.MH
2.NC
3.MN
1.MH
2.NC
3.MN
1.X1
2.X2
No.2
No.1
2
1
4
35
6
FILTER
1.SHORT
2.MAGI
3.X1
4.X2
5.TI
6.TIE
7.+15V
8.GND
9.NC
10.NC
①
②③
①
②
③
GRN
YEL
0.01UF 1KV
0.22UF 200V
2.7KΩ
1/2W
0.22UF
200V
150Ω
8W
H-7LPRD0122
MD-12N1MD-12N1
M1555
(W201)
BLK.T
DUMMY
1.+12V
2.GND
3.FAN_ERR2
1.+12V
2.C2
(W004)
8.+5V
9.NC
1.M+
2.M-
S.G.
S.G. S.G.
1.φZ
2.φZE
3.φA
4.φB
5.+12V
6.GND
SE
YEL
BLK
BLU
WHT
RED
SHIELD
FAN
RED
BLU
YEL
FAN
23
9
56
8
(W203)
RED
WHT
RED
BLU
YEL
1.PTI
2.PTE
1.LVR
2.PMS
3.E
3.TXI
4.TXE
J82
J81
PM
P81
P82
WHT
BLK
BLU
RED
BLK
WHT
BRN
NJU-84
(OPTION)
(W008)
S.G.
RED.T
RED.T
BLK.T
BLK.T
S.G.
CFR-229
MAG FILTER
CIRCUIT
220pF×5
+48V
+48VG
U1
V1
W1
U1
W1
V1
+48V
+48VG
1
2
V
U
1
2
3
4
3
4
V
U
UTH
UTH
WHT.T
WHT.T
W401 7ZCRD1509
WHT
BLK
BLU
BRAKE CIRCUIT
CFA-255
1.VERR
2.E
B2P-VH
1.HMCNT
2.+15V
3.GND P1202
1.MU2
1.VERR1
2.E
3.MV2
J1202
J1201
1.U1
3.V1
2.NC
4.NC
2.GND
B4P-VH
B3P-NV
IL-3P
IL-2P
1.VERR1
2.E
1.VERR
2.E
1.P
2.NC
3.N
1. P
2. N
1.BKH1
3.BKH2
1.BKS1
2.BKS2
1.+15V
2.NC
3.+15VE
1.RED
3.BLK
IL-2P
S3B-XH-A
1-350210-0 1-350209-0
1-480700-0
BLAKE CIRCUIT B
CFA-262
BRAKE CIRCUIT A
CFA-261
×4
×1
2.NC
4.NC
1.S1
2.S2
3.S3
4.S4
5.S5
6.S6
3.M2
1.M1
5.M3
MOTOR
2.NC
1.2kΩ
30W
1.R1
3.R2
B3P-VH
2.NC
3.MV2
1.MU2
2.NC
4.NC
5.NC
6.GND
B6P-VH
(W308)
NOTE: Performance monitor must be fitted
on ships compliant to IMO.
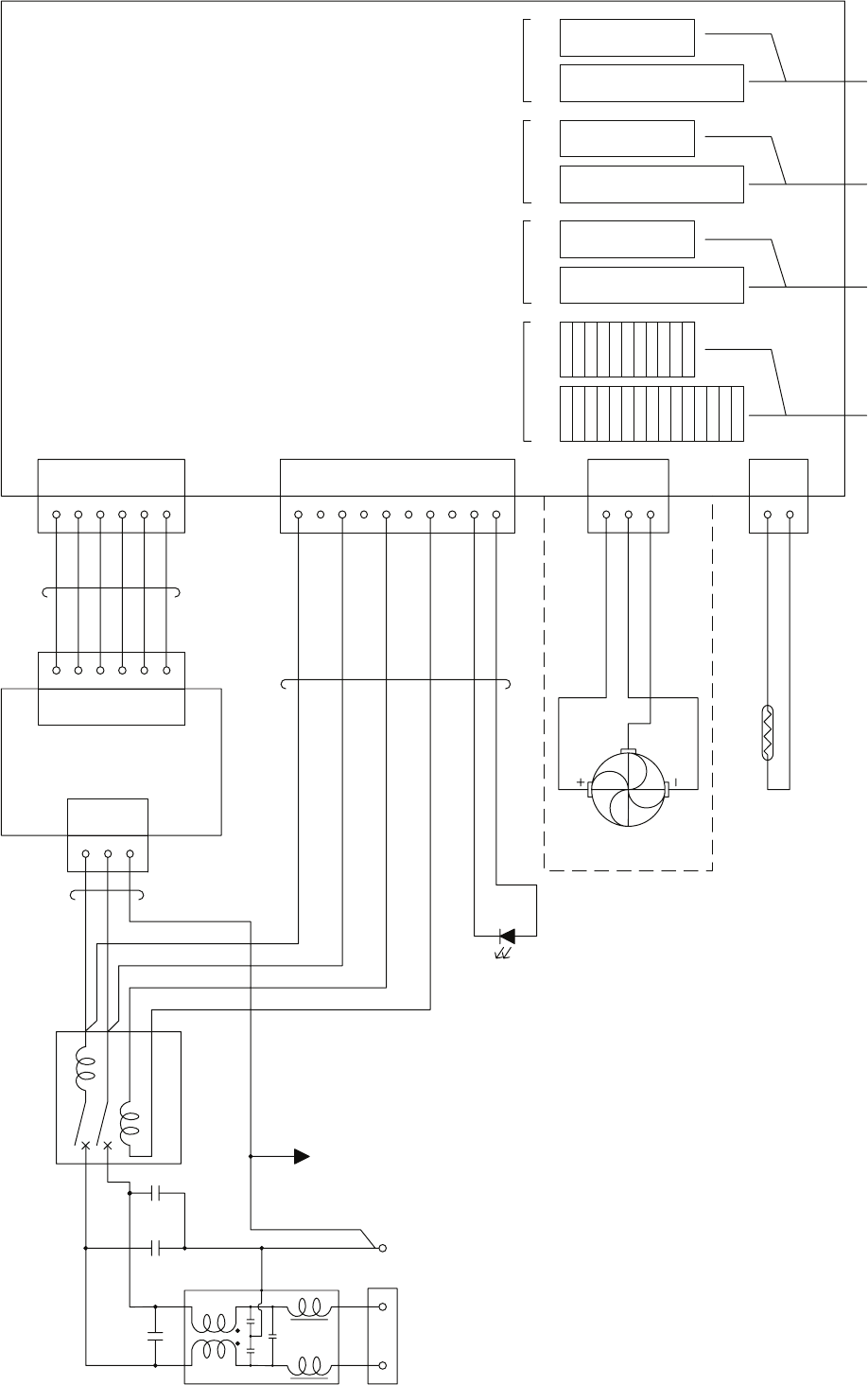
11.MTROUTE
10.MTROUT-
9.MTROUT+
8.BZOUTE
7.BZOUT
5.BPOUT
6.BPOUTE
2.VDOUTE
3.TRGOUT
4.TRGOUTE
1.VDOUT
15.PWROUTE
14.PWROUT
13.RWRINE
12.PWRIN
11.MTRINE
9.MTRIN+
10.MTRIN-
6.BPINE
7.BZIN
8.BZINE
5.BPIN
4.TRGINE
3.TRGIN
2.VDINE
1.VDIN
CH-1
TB 911 TB 912 TB 913 TB 914 TB 915 TB 916 TB 917 TB 918
1
2
CCL-304
TO
DISPLAY1
TO
DISPLAY2
TO
DISPLAY3
CH-2 CH-3 CH-4
3
J903
1
2
3
4
5
6
1
2
3
4
5
6
7
8
9
10
J904
J905
1
2
J909
-15V
GND
GND
GND
5 V
+15V
AC(L)
AC(N
)
TRTP+
E
POWLED
TRTP-
FANV
FANE
FANPLS
1
2
3
4
5
6
-15V
GND
GND
GND
5 V
+15V
P903P902
1
3
5
AC(L)
AC(N
)
FG
S
P904
P905
P909
CN2
CN1P901
LOAD
B
C
D
A
LINE
12
34
UV
E
TB901
AC100V-240V
TE901
FG
CD901
R901
H-7ZCRD0920
H-7ZCRD0921
H-7ZCRD0919
CBA-357
B901
CB901
C901 C902 C903
LF901
TO
DISPLAY4
付図17 Fig.17
NQE-3141
インタースイッチユニット機内接続図
Interconnection Diagram of Interswitch Unit
付図18 レーダーメニュー階層
Fig.18 Over View of RADAR Menu
With PLOTTER Unit (option)
MAIN MENU(RADAR MENU key)
1RADAR Trails Setting - 1 Trails Mode → Section 3.8.2
2 Trails Reference Level → Section 3.8.2
3 Trails Reduction → Section 3.8.2
4 Time/All Combine → Section 3.8.2
5 Trails Process → Section 3.8.2
6 Max Interval → Section 3.8.2
7 Trails Erase -1 Trails Erase Mode → Section 3.4.9
2 Trails Erase Start → Section 3.4.9
3 Eraser Size → Section 3.4.9
8 File Operations -1 Select Card Slot → Section 3.4.10
2 Load → Section 3.4.10
3 Save → Section 3.4.10
4 Erase → Section 3.4.10
2Map Setting - 1 Fill Land Area → Section 3.12.4
2 C-MAP Setting -1 LAT/LON Line Display → Section 3.12.6
2 Depth Display → Section 3.12.6
3 Depth Unit → Section 3.12.6
4 Light Sectors Display → Section 3.12.6
5 Light Sectors Level → Section 3.12.6
6 Chart Boundary → Section 3.12.6
7 Buoy&Beacon → Section 3.12.6
8 Names → Section 3.12.6
9 Next
↓
1 Land Marks → Section 3.12.6
2 River&Lake → Section 3.12.6
3 Cultual → Section 3.12.6
4 Bottom Type → Section 3.12.6
5 Under Water → Section 3.12.6
6 Depth Contour → Section 3.12.6
3 JRC/ERC Setting -1 Day/Night → Section 3.12.5
2 Color of Land → Section 3.12.5
3 Bright of Land → Section 3.12.5
4 Color of Sea → Section 3.12.5
5 Bright of Sea → Section 3.12.5
6 Color of Name → Section 3.12.5
7 Bright of Name → Section 3.12.5
8 Bright of Track/Mark/Line → Section 3.12.5
9 Next
↓
1 LAT/LON Line → Section 3.12.5
2 Color of L/L Line → Section 3.12.5
3 Bright of L/L Line → Section 3.12.5
4 ERC Display Request → Section 3.12.5
5 ERC Mark → Section 3.12.5
6 JRC ROM Card Display -1 Lighthouse → Section 3.12.5
2 Buoy → Section 3.12.5
3 Rough Line → Section 3.12.5
4 Other Line → Section 3.12.5
7Copy JRC ROM Card to CF → Section 3.12.3
8 Fishing Area Display
4 Contour Setting -1 10m → Section 3.12.5
2 20m → Section 3.12.5
3 30m → Section 3.12.5
4 40m → Section 3.12.5
5 50m → Section 3.12.5
6 60m → Section 3.12.5
7 70m → Section 3.12.5
8 80m → Section 3.12.5
9 Other → Section 3.12.5
5 Map Display Setting -1 Shift Coast Line 1 → Section 3.12.7
2 Shift Coast Line 2 → Section 3.12.7
3 LAT/LON Correction → Section 3.12.7
4 Map Center Position → Section 3.12.7
5 LORAN C Correction -1 Chain
2 TD1
3 TD2
4 TD1 Correction
5 TD2 Correction
6 LORAN A Correction -1 LOP1
2 LOP2
3 TD1 Correction
4 TD2 Correction
7 DECCA Correction -1 Chain
2 LOP1
3 LOP2
4 LOP1 Correction
5 LOP2 Correction
6 SEL JRC ROM Card File → Section 3.12.3
7 Map Draw AZI Mode → Section 3.12.8
8 JRC Card Draw Mode → Section 3.12.5
3TOOL Menu -1PI Menu -1 Display for All Lines → Section 4.1.5
2 Operation Mode → Section 4.1.5
3 Control → Section 4.1.5
The setting items are
determined by the setting
of Operation Mode
All:
Individual:
Track:
Equiangular:
4 Floating → Section 4.1.5
5 Heading Link → Section 4.1.5
6 Next
PI Bearing
Interval
8Press EBL Dial
to Control PI#
Displayed only when
"Control" is Individual.
9Press VRM Dial
to Move End Point#
↓
1 Range Scale Link → Section 4.1.5
2 Reference Bearing → Section 4.1.5
The setting items are
determined by the setting
of Operation Mode
All:
Individual:
Track:
Equiangular:
3 Operation Area → Section 4.1.5
4 Display for Individual Line -1 Index Line 1 → Section 4.1.5
2 Index Line 2 → Section 4.1.5
PI Bearing 3 Index Line 3 → Section 4.1.5
Interval 4 Index Line 4 → Section 4.1.5
5 Index Line 5 → Section 4.1.5
6 Index Line 6 → Section 4.1.5
7 Index Line 7 → Section 4.1.5
8 Index Line 8 → Section 4.1.5
8Press EBL Dial
to Control PI#
9Press VRM Dial
to Move End Point#
Displayed only when
"Control" is Individual.
2 Rectangle Cursor -1 Rectangle Cursor Display
2 Make Rectangle Cursor
3 Ent
4 Unit of Distance
3 EBL Maneuver Setting -1 EBL Maneuver → Section 4.1.6
2 Reach → Section 4.1.6
3 Turn Mode → Section 4.1.6
4 Turn Set → Section 4.1.6
4 Trial Maneuver -1 Trial Function → Section 5.7
2 Course(EBL) → Section 5.7
3 Speed(VRM) → Section 5.7
4 Vector Time → Section 5.7
5 Time to Maneuver → Section 5.7
6 Own Ship's Dynamic Trait -1 Reach → Section 5.7
2 Turn Radius → Section 5.7
3 Acceleration → Section 5.7
4 Deceleration → Section 5.7
4 TARGET TRACK Setting - 1 Target Track Function → Section 5.6.2
(T.TRK) 2 Target Track Color -1 All → Section 5.6.2
2 Target Track No.1 → Section 5.6.2
3 Target Track No.2 → Section 5.6.2
4 Target Track No.3 → Section 5.6.2
5 Target Track No.4 → Section 5.6.2
6 Target Track No.5 → Section 5.6.2
7 Target Track No.6 → Section 5.6.2
8 Target Track No.7 → Section 5.6.2
9 Next
↓
1 Target Track No.8 → Section 5.6.2
2 Target Track No.9 → Section 5.6.2
3 Target Track No.10 → Section 5.6.2
4 Other → Section 5.6.2
3 Target Track Display -1 All → Section 5.6.2
2 Target Track No.1 → Section 5.6.2
3 Target Track No.2 → Section 5.6.2
4 Target Track No.3 → Section 5.6.2
5 Target Track No.4 → Section 5.6.2
6 Target Track No.5 → Section 5.6.2
7 Target Track No.6 → Section 5.6.2
8 Target Track No.7 → Section 5.6.2
9 Next
↓
1 Target Track No.8 → Section 5.6.2
2 Target Track No.9 → Section 5.6.2
3 Target Track No.10 → Section 5.6.2
4 Other
4 Track Memory Interval → Section 5.6.2
5 Clear Track Color → Section 5.6.2
6 Clear Track Number → Section 5.6.2
7 File Operations -1 Select Card Slot → Section 5.6.2
2 Load Mode → Section 5.6.2
3 Load → Section 5.6.2
4 Save → Section 5.6.2
5 Erase → Section 5.6.2
6 Card T.TRK Display → Section 5.6.2
5AZ Menu - 1 AZ 1 → Section 5.2.1
2 AZ 2 → Section 5.2.1
3 Make AZ -1 Make AZ 1 → Section 5.2.1
2 Make AZ 2 → Section 5.2.1
3 ENT
4 RADAR Alarm -1 Sector RADAR Alarm -1 Sector Alarm 1 → Section 3.4.24
2 Sector Alarm 2 → Section 3.4.24
3 Make Sector Alarm -1 Sector Alarm 1 → Section 3.4.24
2 Sector Alarm 2 → Section 3.4.24
3 ENT
5 RADAR Alarm Mode → Section 3.4.19
6 Sensitivity Level → Section 3.4.19
5 Set AZ Key -1AZ -1 AZ 1 → Section 5.2.1
2 AZ 2 → Section 5.2.1
2 Sector RADAR Alarm -1 Sector Alarm 1 → Section 3.4.24
2 Sector Alarm 2 → Section 3.4.24
6 Own Track Menu - 1 DISP Own Track → Section 3.5.1
(O.TRK) 1 DISP Own Track Color -1 All
2 White
3 Cyan
4 Blue
5 Green
6 Yellow
7 Pink
8 Red
2 Clear Own Track → Section 3.5.4
2 Clear Own Track Color
3 Track Type
4 Num/Vector Display
5 File Operations -1 Select Card Slot → Section 3.5.5
2 Load Mode → Section 3.5.5
3 Load → Section 3.5.5
4 Save → Section 3.5.5
5 Erase → Section 3.5.5
6 Card Own Track Display → Section 3.5.5
6 Water Depth Setting -1 Depth setting (MIN)
2 Depth setting
3 Depth setting
4 Depth setting
5 Depth setting
6 Depth setting (MAX)
7 Water TEMP. Setting -1 Temperature setting (MIN)
2 Temperature setting
3 Temperature setting
4 Temperature setting
5 Temperature setting
6 Temperature setting (MAX)
8 Current Setting -1 Current Size
2 Layer A
3 Layer B
4 Layer C
7PLOT Menu - 1 Mark Setting -1 Display Mark Type -1 All → Section 3.6.2
2○ → Section 3.6.2
3△ → Section 3.6.2
4▽ → Section 3.6.2
5□ → Section 3.6.2
6◇ → Section 3.6.2
7wreck (mark) → Section 3.6.2
8△△ → Section 3.6.2
9 Next
↓
1▽▽ → Section 3.6.2
2△▽ → Section 3.6.2
3▽△ → Section 3.6.2
4+ → Section 3.6.2
5× → Section 3.6.2
6Y → Section 3.6.2
7hand drum (mark) → Section 3.6.2
8light house (mark) → Section 3.6.2
9 Next
↓
1trapezoid(mark) → Section 3.6.2
2filled trapezoid(mark) → Section 3.6.2
3hat(mark) → Section 3.6.2
4●● → Section 3.6.2
5● → Section 3.6.2
6filled triangle(mark) → Section 3.6.2
7! → Section 3.6.2
8anchor(mark) → Section 3.6.2
9 Next
↓
1slash-anchor(mark) → Section 3.6.2
2circle-dotted line(mark) → Section 3.6.2
3non-dangerous wreck(mark) → Section 3.6.2
4◎ → Section 3.6.2
5mariner's event mark(mark) → Section 3.6.2
6・ → Section 3.6.2
7wavy line (mark) → Section 3.6.2
8solid line (mark) → Section 3.6.2
9 Next
↓
1dashed-dotted line (mark) → Section 3.6.2
2 Display Mark Color -1 All → Section 3.6.2
2 White → Section 3.6.2
3 Cyan → Section 3.6.2
4 Blue → Section 3.6.2
5 Green → Section 3.6.2
6 Yellow → Section 3.6.2
7 Pink → Section 3.6.2
8 Red → Section 3.6.2
3 File Operations -1 Select Card Slot → Section 3.6.6
2 Load Mode → Section 3.6.6
3 Load → Section 3.6.6
4 Unload → Section 3.6.6
5 Save → Section 3.6.6
6 Erase → Section 3.6.6
7 Card Mark Display → Section 3.6.6
4 Select Mark Size → Section 3.6.2
5 Comment Font Size → Section 3.6.2
2 Mark Operations -1 Own Ship Position → Section 3.6.3
2 Edit User Map -1 Make with Cursor -1 Type → Section 3.6.1
2 Color → Section 3.6.1
2 Make with L/L -1 Type → Section 3.6.1
2 Color → Section 3.6.1
3 L/L → Section 3.6.1
4 Comment → Section 3.6.1
5 Enter → Section 3.6.1
9 New Line Input → Section 3.6.1
⇔
New Mark Input → Section 3.6.1
3 Move → Section 3.6.3
4 Delete → Section 3.6.3
5 Insert/Move Vertex → Section 3.6.3
6 Delete Vertex → Section 3.6.3
7 Delete by Type by Color → Section 3.6.3
3 Shift → Section 3.6.5
4 Shift Clear → Section 3.6.5
5 Mark/Line Entry → Section 3.6.4
6 Mark/Line List → Section 3.6.4
7 Geodetic → Section 3.6.7
7PLOT Menu 3 WPT/Route Settig -1 Waypoint Alarm
(Route Type:Plotter)2 Route Alarm
3 Set Route Sequence
4 Select Route
5 Waypoint Entry
6 Waypoint Input
7 Save Temporary Route
8 Cross Track Limit Line
9 Next
↓
1 Select WPT Mark Size
2 Waypoint Vector
3 Status of Origin/DEST
4 WPT Number Display
5 RTE Number Display
4 WPT/Route Operation -1 Route Sequence
2 Waypoint Switch Mode
3 Waypoint Skip
4 Waypoint Back Skip
5 Set/Cancel Waypoint
5 Clear Memory -1 Clear Mark/Line Data → Section 3.6.2
2 Clear WPT/Route Data
6 Plot Setting -1 Scale/Course Up Setup -1 Scale
2 Preset Scale
3 Course Up Data -1 Tolerance
2 Averaging
3 Round Speed
2 Current Position Display
3 Cursor Vector DISP
4 Cursor HL Length
5 Scalebar Display
6 AUTO Backup
7 NMEA Waypoint Display → Section 3.7.1
9 Next
Press RADAR MENU again
1 File Manager → Section 3.11.1
2 RADAR Menu -1 Process Setting -1 Video Latitude → Section 3.8.1
2 Video Noise Rejection → Section 3.8.1
3 AUTO Dynamic Range → Section 3.8.1
4 Process Switch → Section 3.8.1
5 2nd Process Mode → Section 3.8.1
6 Process Switch Range → Section 3.8.1
7 Fast Target Detection → Section 3.8.1
8 User Function Setting -1 Function1 Setting -1 Mode → Section 3.9.3
2IR → Section 3.9.3
3 Process → Section 3.9.3
4 Target Enhance → Section 3.9.3
5 AUTO Sea/Rain → Section 3.9.3
6 Save Present State → Section 3.9.3
9 Next
↓
1 Pulse Length 0.75nm → Section 3.9.3
2 Pulse Length 1.5nm → Section 3.9.3
3 Pulse Length 3/4nm → Section 3.9.3
4 Pulse Length 6/8nm → Section 3.9.3
5 Pulse Length 12nm → Section 3.9.3
6 Pulse Length 16nm → Section 3.9.3
9 Next
↓
1 Video Latitude → Section 3.9.3
2 Video Noise Rejection → Section 3.9.3
3 AUTO Dynamic Range → Section 3.9.3
4 Process Switch → Section 3.9.3
5 2nd Process Mode → Section 3.9.3
6 Process Switch Range → Section 3.9.3
7 Fast Target Detection → Section 3.9.3
9 Next
↓
1 Trails Interval → Section 3.9.3
2 Trails Mode → Section 3.9.3
3 Trails Reference Level → Section 3.9.3
4 Trails Reduction → Section 3.9.3
5 Time/All Combine → Section 3.9.3
6 Trails Process → Section 3.9.3
7 Max Interval → Section 3.9.3
9 Next → Section 3.9.3
↓
1 Gain Offset → Section 3.9.3
2 PRF → Section 3.9.3
3 Small Buoy Detection → Section 3.9.3
4 Fishnet Detection → Section 3.9.3
5 Antenna Height → Section 3.9.3
8 Set Mode Default → Section 3.9.3
9 Initialize → Section 3.9.3
2 Function2 Setting → Section 3.9.3
3 Function3 Setting → Section 3.9.3
4 Function4 Setting → Section 3.9.3
9 SART → Section 6.5
3 TXRX Setting -1 PRF Fine Tuning → Section 3.8.3
2 Stagger Trigger → Section 3.8.3
4 PRF → Section 3.8.3
5 Ice Class Standby Mode → Section 3.8.3
3 Multi Window Setting -1 DIR/DIST EXP Display → Section 3.8.8
2 Numeric NAV INFO → Section 3.8.8
3 Depth Graph Setting -1 Depth Graph Display → Section 3.8.8
2 Depth Range → Section 3.8.8
3 Time Range → Section 3.8.8
4 Depth Unit → Section 3.8.8
4 Wind Graph -1 Wind Graph Display → Section 3.8.8
2 Wind Speed Unit → Section 3.8.8
5 TEMP Graph Setting -1 TEMP Graph Display → Section 3.8.8
2 TEMP Graph Color → Section 3.8.8
3 TEMP Range -1 Temperature setting (MIN) → Section 3.8.8
2 Temperature setting → Section 3.8.8
3 Temperature setting → Section 3.8.8
4 Temperature setting → Section 3.8.8
5 Temperature setting → Section 3.8.8
6Temperature setting (MAX) → Section 3.8.8
4 Time Range → Section 3.8.8
6 Course Bar Setting -1 Course Bar Display → Section 3.8.8
2 Autopilot Course → Section 3.8.8
3 ROT Scale → Section 3.8.8
4 NAV Equipment Setting -1 GYRO Setting → Section 3.4.16 → Section 7.1.7
2 MAG Compass Setting -1 Heading Correction → Section 3.4.18
2 Correct Value → Section 3.4.18
3 Set/Drift Setting -1 Correction → Section 3.4.19
2 Set → Section 3.4.19
3 Drift → Section 3.4.19
4 GPS Setting -1 GPS Process Setting -1 Position → Section 3.4.20
2 Exclusion → Section 3.4.20
3 Geodetic → Section 3.4.20
4 Antenna Height → Section 3.4.20
5 Fix Mode → Section 3.4.20
6 DOP Level → Section 3.4.20
7 Position Average → Section 3.4.20
8 Master Reset → Section 3.4.20
9 Send Data → Section 3.4.20
2 DGPS Setting -1 Mode → Section 3.4.21
2 Frequency → Section 3.4.21
3 Baud Rate(BPS) → Section 3.4.21
4 DGPS Mode → Section 3.4.21
5 Send Data → Section 3.4.21
3 SBAS Setting -1 Mode → Section 3.4.22
2 Ranging → Section 3.4.22
3 NG SBAS → Section 3.4.22
4 SBAS Select Mode → Section 3.4.22
5 SBAS No. → Section 3.4.22
6 Send Data → Section 3.4.22
4 GPS Status → Section 3.4.23
5 Weather INFO Setting -1 Display Weather INFO
2 SEL Observation Place
3 RX Message Display
4 RX Buzzer
5 Sub Menu -1 Display Color Setting -1 Day/Night → Section 3.8.5
2 Outer PPI → Section 3.8.5
3 Inner PPI → Section 3.8.5
4 Character → Section 3.8.5
5 RADAR Video → Section 3.8.5
6 RADAR Trails(Time) → Section 3.8.5
7 RADAR Trails(All) → Section 3.8.5
8 Target Symbol → Section 3.8.5
9 Next → Section 3.8.5
↓
1 Cursor → Section 3.8.5
2 Range Rings → Section 3.8.5
3 EBL/VRM/PI → Section 3.8.5
4 Own Symbol/HL/Vector → Section 3.8.5
2 Brilliance Setting -1 RADAR Video → Section 3.8.5
2 RADAR Trails → Section 3.8.5
3 Target Symbol → Section 3.8.5
4 Range Rings → Section 3.8.5
5 EBL/VRM/PI → Section 3.8.5
6 Character → Section 3.8.5
7 Own Symbol/HL/Vector → Section 3.8.5
8 Keyboard → Section 3.8.5
3 User Setting -1 Load User Setting → Section 3.10.2
2 Save User Setting → Section 3.10.1
3 Delete User Setting → Section 3.10.3
4 User Key Setting -1 User Key 1 → Section 3.8.7
2 User Key 2 → Section 3.8.7
5 Buzzer Volume -1 Key ACK → Section 3.8.6
2 OPE Miss → Section 3.8.6
3 CPA/TCPA Alarm → Section 3.8.6
4 New Target Alarm → Section 3.8.6
5 Lost Alarm → Section 3.8.6
6 Navigation Alarm → Section 3.8.6
7 System Alarm → Section 3.8.6
8 Inter Switch → Section 3.8.6
6 Date/Time Setting -1 UTC/LMT → Section 7.2.7
2 LMT Date → Section 7.2.7
3 LMT Time → Section 7.2.7
4 Time Zone → Section 7.2.7
5 Display Style → Section 7.2.7
6 Synchronize with GPS → Section 7.2.7
7 Screen Capture Setting - 1 Select Item -1 Graphic
2 RADAR Video
3 RADAR Trails
4 Chart
2 Select Card Slot
3 File Erase
4 AUTO Capture Interval
5 AUTO File Erase
9 EBL/Cursor Setting -1 EBL1 Bearing Fix → Section 4.1.3
2 EBL2 Bearing Fix → Section 4.1.3
3 Cursor Setting -1 EBL/VRM Control CURS → Section 3.8.4
2 Cursor Length → Section 3.8.4
4 Cursor Pattern → Section 3.8.4
6 TT Menu -1 Association Setting -1 Association → Section 5.4
2 Priority → Section 5.4
3 Bearing → Section 5.4
4 Range → Section 5.4
5 Course → Section 5.4
6 Speed → Section 5.4
7 Applicable AIS Target → Section 5.4
3 Trial Maneuver -1 Trial Function → Section 5.7
2 Course(EBL) → Section 5.7
3 Speed(VRM) → Section 5.7
4 Vector Time → Section 5.7
5 Time to Maneuver → Section 5.7
6 Own Ship's Dynamic Trait -1 Reach → Section 5.7
2 Turn Radius → Section 5.7
3 Acceleration → Section 5.7
4 Deceleration → Section 5.7
4 Target Number Display → Section 5.2.4
9 TT Test Menu -1 Test Video → Section 5.2.7
2 TT Simulator → Section 5.2.7
3 Status → Section 5.2.7
4 Gate Display → Section 5.2.7
7 AIS Menu -1 Association Setting -1 Association → Section 5.4
2 Priority → Section 5.4
3 Bearing → Section 5.4
4 Range → Section 5.4
5 Course → Section 5.4
6 Speed → Section 5.4
7 Applicable AIS Target → Section 5.4
3 Trial Maneuver -1 Trial Function → Section 5.7
2 Course(EBL) → Section 5.7
3 Speed(VRM) → Section 5.7
4 Vector Time → Section 5.7
5 Time to Maneuver → Section 5.7
6 Own Ship's Dynamic Trait -1 Reach → Section 5.7
2 Turn Radius → Section 5.7
3 Acceleration → Section 5.7
4 Deceleration → Section 5.7
4 AIS Filter Setting -1 Filter Type → Section 5.3.7
2 Make AIS Filter → Section 5.3.7
3 Filter Display → Section 5.3.7
4 ENT
6 Filter Mode → Section 5.3.7
5 Target Number Display → Section 5.3.6
6 AIS Alarm Setting -1 Lost Alarm → Section 5.3.9
2 CPA/TCPA Alarm → Section 5.3.9
7 Message -1 Addressed Message → Section 5.3.5
2 Broadcast Message → Section 5.3.5
8 Display Lost TGT Data → Section 5.3.5
9 Own Ship's AIS Data → Section 5.3.5
8 Multi Dial Setting -1 Vector Time → Section 3.3.6
2 Trails Length → Section 3.3.6
3 TT Display No. → Section 3.3.6
4 C-UP Angle → Section 3.3.6
5 Own Track Color → Section 3.3.6
6 Mark/Line Color → Section 3.3.6
7 Manual Tune → Section 3.3.6
9 Test Menu -1 Self Test -1 Memory Test -1 SDRAM → Section 8.3.1
2 SRAM → Section 8.3.1
3 FLASH ROM → Section 8.3.1
4 GRAPHIC → Section 8.3.1
2 TXRX Test → Section 8.3.1
3 Line Test → Section 8.3.1
4 Supply Voltage → Section 8.3.1
2 Monitor Test -1 Pattern 1 → Section 8.3.1
2 Pattern 2 → Section 8.3.1
3 Pattern 3 → Section 8.3.1
4 Pattern 4 → Section 8.3.1
5 Pattern 5 → Section 8.3.1
6 Pattern 6 → Section 8.3.1
7 Pattern 7 → Section 8.3.1
8 Pattern 8 → Section 8.3.1
3 Keyboard Test -1 Key Test → Section 8.3.1
2 Buzzer Test → Section 8.3.1
3 Light Test → Section 8.3.1
4 MON Display → Section 8.3.1
5 System Alarm Log → Section 8.3.1
6 System Information → Section 8.3.1
0 EXIT
Serviceman Menu → Section 7.1.1
1 Adjust Menu -1 Tune Adjustment → Section 7.1.3
2 Bearing Adjustment → Section 7.1.4
3 Range Adjustment → Section 7.1.5
4 TXRX Adjustment -1 Antenna Height → Section 7.1.8
2 Tune Peak Adjustment → Section 7.1.3
3 Tune Indicator Adjust → Section 7.1.3
4 MON Adjustment → Section 7.3.4
5 MON Indicator Adjustment → Section 7.3.3
6 Output Pulse → Section 7.2.4
2 Installation Menu -1 Installation Information -1 Date → Section 7.2.8
2 Name → Section 7.2.8
3 Company → Section 7.2.8
2 Master/Slave → Section 7.2.5
3 Sector Blank -1 Sector1 → Section 7.2.2
2 Sector2 → Section 7.2.2
3 Sector3 → Section 7.2.2
4 Make Sector1 → Section 7.2.2
5 Make Sector2 → Section 7.2.2
6 Make Sector3 → Section 7.2.2
4 CCRP Setting → Section 7.1.9
5 COM Port Setting -1 Baud Rate -1 COMPASS → Section 7.2.1
2 NAV1 → Section 7.2.1
3 NAV2 → Section 7.2.1
4 GPS → Section 7.2.1
5 NMEA → Section 7.2.1
2 RX Port -1 GPS → Section 7.2.1
2 DLOG → Section 7.2.1
3 Alarm → Section 7.2.1
4 Depth → Section 7.2.1
5 Temperature → Section 7.2.1
6 Wind → Section 7.2.1
7 Current → Section 7.2.1
8 ROT → Section 7.2.1
9 Next
↓
1 RSA → Section 7.2.1
3 RX Sentence -1 GPS(LL/COG/SOG) → Section 7.2.1
2 GPS(WPT/TIME) → Section 7.2.1
3 Depth → Section 7.2.1
4 Wind → Section 7.2.1
5 Current -1 Data Set Number → Section 7.2.1
2 Layer A → Section 7.2.1
3 Layer B → Section 7.2.1
4 Layer C → Section 7.2.1
4 TX Port -1 TTM(TT) → Section 7.2.1
2 TLL(TT) → Section 7.2.1
3 TTD(TT) → Section 7.2.1
4 TLB(TT) → Section 7.2.1
5 OSD → Section 7.2.1
6 RSD → Section 7.2.1
7 ALR → Section 7.2.1
8 ACK → Section 7.2.1
9 Next
↓
1 TTM(AIS) → Section 7.2.1
2 TLL(AIS) → Section 7.2.1
3 TTD(AIS) → Section 7.2.1
4 TLB → Section 7.2.1
5 Remote Maintenance → Section 7.2.1
6 JRC-ARPA → Section 7.2.1
7 NMEA0183 Output Format → Section 7.2.1
8 NMEA0183 Talker → Section 7.2.1
9 Next
↓
1 NMEA0183 TX Interval → Section 7.2.1
2 APB → Section 7.2.1
3 BOD → Section 7.2.1
4 GGA → Section 7.2.1
5 GLL → Section 7.2.1
6 RMC → Section 7.2.1
7 RMB → Section 7.2.1
8 VTG → Section 7.2.1
9 Next
↓
1 XTE → Section 7.2.1
2 BWC → Section 7.2.1
3 HDT → Section 7.2.1
4 THS → Section 7.2.1
5 Select NAV Equipment → Section 7.2.1
7 Line Monitor -1 COMPASS
2 NAV1
3 NAV2/ARPA
4 GPS
5 NMEA
6 TXRX/ISW
7 KEYBOARD1
8 KEYBOARD2
Serviceman Menu → Section 7.1.1
2 Installation Menu 6 Alarm System -2 Relay Output -1 Relay Output Mode → Section 7.2.9
2 TT CPA/TCPA → Section 7.2.9
3 AIS CPA/TCPA → Section 7.2.9
4 New Target → Section 7.2.9
5 Lost → Section 7.2.9
6 RADAR Alarm → Section 7.2.9
3 ALR Output -1 System Alarm → Section 7.2.9
2 TT/AIS Alarm → Section 7.2.9
5 External ACK Setting -1 Critical Alarm -1 Audio → Section 7.2.9
2 Indication → Section 7.2.9
3 Acknowledge State → Section 7.2.9
2 Normal Alarm -1 Audio → Section 7.2.9
2 Indication → Section 7.2.9
3 Acknowledge State → Section 7.2.9
7 Inter Switch -1 ISW Install
2 Mask Setting -1 No.1 Connection
No.1 Master
2 No.2 Connection
No.2 Master
3 No.3 Connection
No.3 Master
4 No.4 Connection
No.4 Master
5 No.5 Connection
No.5 Master
6 No.6 Connection
No.6 Master Only for ISW Extended Mode
7 No.7 Connection
No.7 Master
8 No.8 Connection
No.8 Master
3 S-ISW TXRX Power Supply
8 Language → Section 7.2.6
9 Next
↓
1 Input BP Count → Section 7.2.5
2 TNI Blank -1 TNI Blank → Section 7.2.3
2 Make Sector → Section 7.2.3
3 Device Installation -1 Gyro → Section 7.1.6
2 Compass → Section 7.1.6
3 GPS Compass → Section 7.1.6
4 LOG → Section 7.1.6
5 2AXW → Section 7.1.6
6 2AXG → Section 7.1.6
7 GPS → Section 7.1.6
4 Network -1 Network Function
2 IP Address
3 Maintenance Menu -1 Safety Switch → Section 7.4.1
2 Area Initial - 1 Partial Master Reset -1 Serviceman Menu → Section 7.4.2
2 Except Serviceman Menu → Section 7.4.2
3 User Setting → Section 7.4.2
4 TT Setting → Section 7.4.2
5 AIS Setting → Section 7.4.2
6 Day/Night → Section 7.4.2
7 JRC Card Copy Record → Section 7.4.2
2 All Master Reset → Section 7.4.2
3 Internal To Card 1/2 → Section 7.4.3
4 Card 1/2 To Internal → Section 7.4.3
5 TXRX Time -1 Clear TX Time → Section 7.4.4
2 Clear Motor Time → Section 7.4.4
3 TXRX to Display Unit → Section 7.4.4
4 Display Unit to TXRX → Section 7.4.4
6 String Data Update → Section 7.4.5
9 RADAR/TT Initial Setup -1 Signal Processing -1 Echo Noise Level → Section 7.3.1
2 Setting Mode → Section 7.3.1
2TT -1 Vector Constant → Section 7.3.2
2 Video TD Level → Section 7.3.2
3 Video High Level → Section 7.3.2
4 Video Low Level
5 Gate Size → Section 7.3.2
6 Limit Ring → Section 7.3.2
3 MBS -1 MBS Level → Section 7.3.3
2 MBS Area → Section 7.3.3
MARINE RADARMARINE RADAR
EQUIPMENTEQUIPMENT
INSTRUCTIONINSTRUCTION
MANUALMANUAL
JMA-5312-6/6HSJMA-5312-6/6HS
JMA-5322-7/9/6HSJMA-5322-7/9/6HS
JMA-5332-12JMA-5332-12
01ETM ISO 9001, ISO 14001 Certified
Printed in Japan
Marine Service Department
+81-3-3492-1305
+81-3-3779-1420
tmsc@jrc.co.jp
Telephone :
Facsimile :
e-mail :
AMSTERDAM Branch
Telephone :
Facsimile :
e-mail :
+31-20-658-0750
+31-20-658-0755
service@jrcams.nl
SEATTLE Branch
Telephone :
Facsimile :
e-mail :
+1-206-654-5644
+1-206-654-7030
service@jrcamerica.com
CODE No.7ZPRD0671
CODE No.7ZPRD0671
JUL. 2008 Edition 3 JRCJUL. 2008 Edition 3 JRC
Not use the asbestos
For further information,contact:
URL http://www.jrc.co.jp