Kongsberg Seatex AS AIS200AI80 AIS200 Simrad AI80 User Manual Man inst ai80 r1 not finished
Kongsberg Seatex AS AIS200 Simrad AI80 Man inst ai80 r1 not finished
Contents
- 1. Exhibit 8 User Manual
- 2. Exhibit 8 Installation Guide
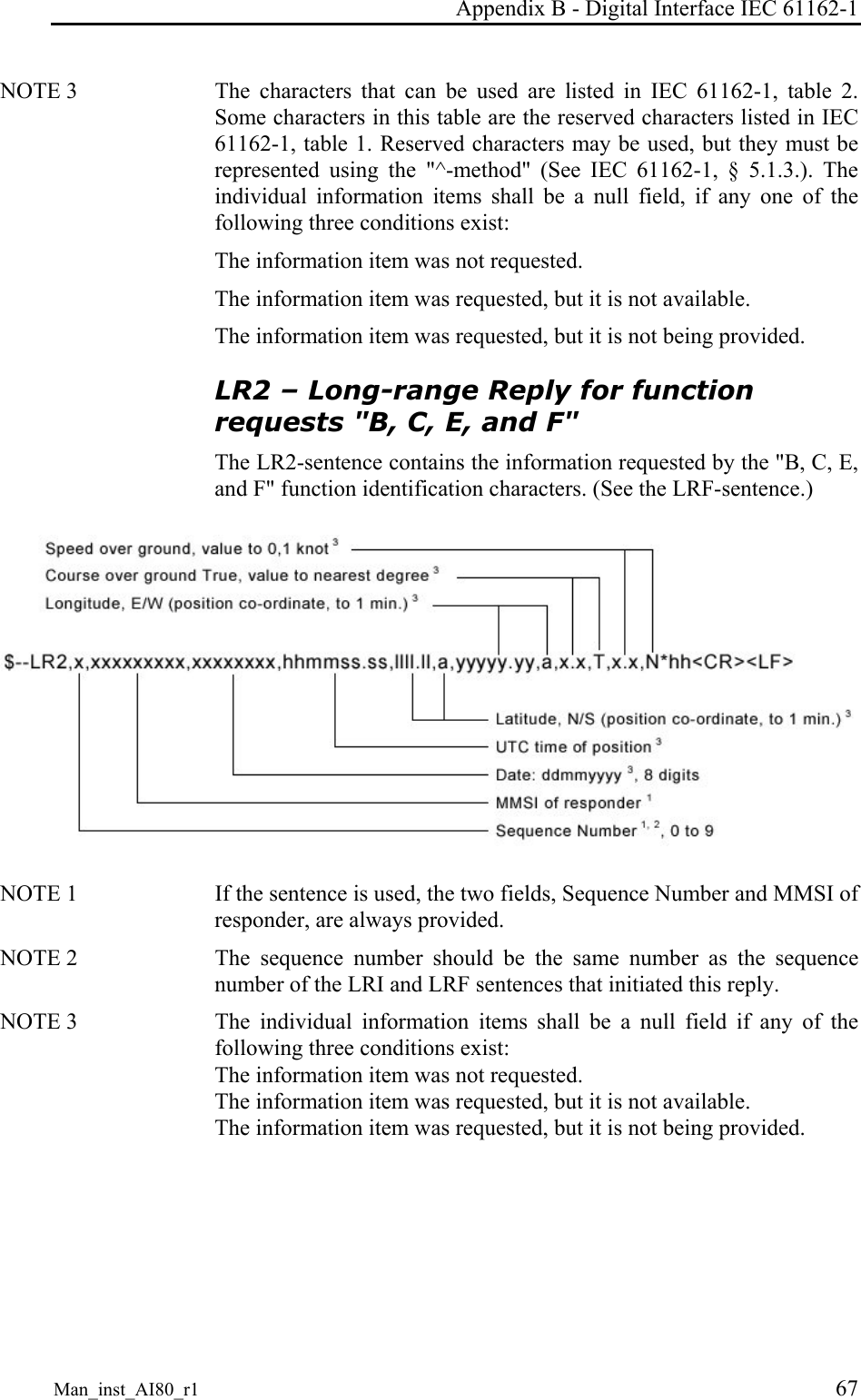
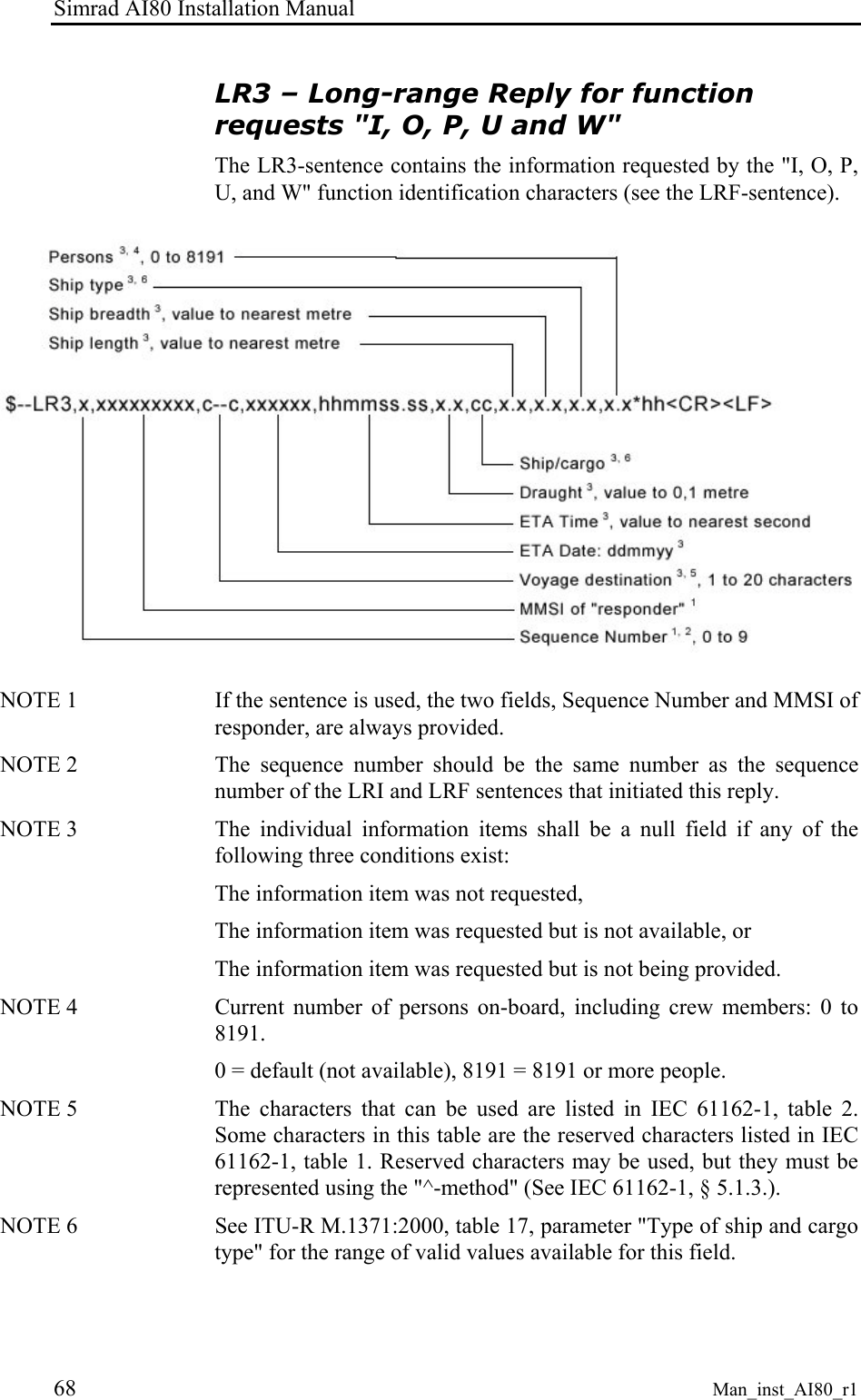
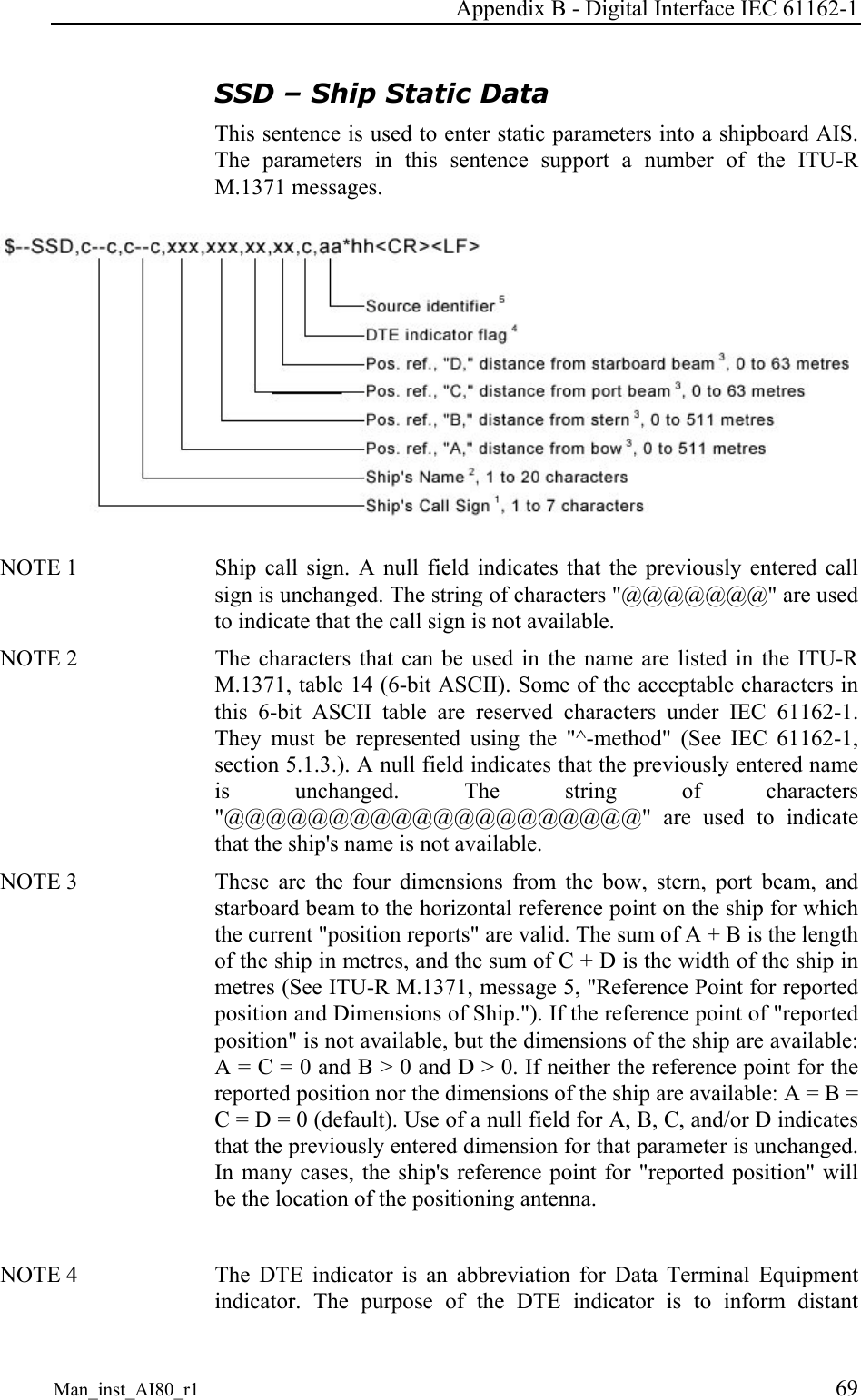
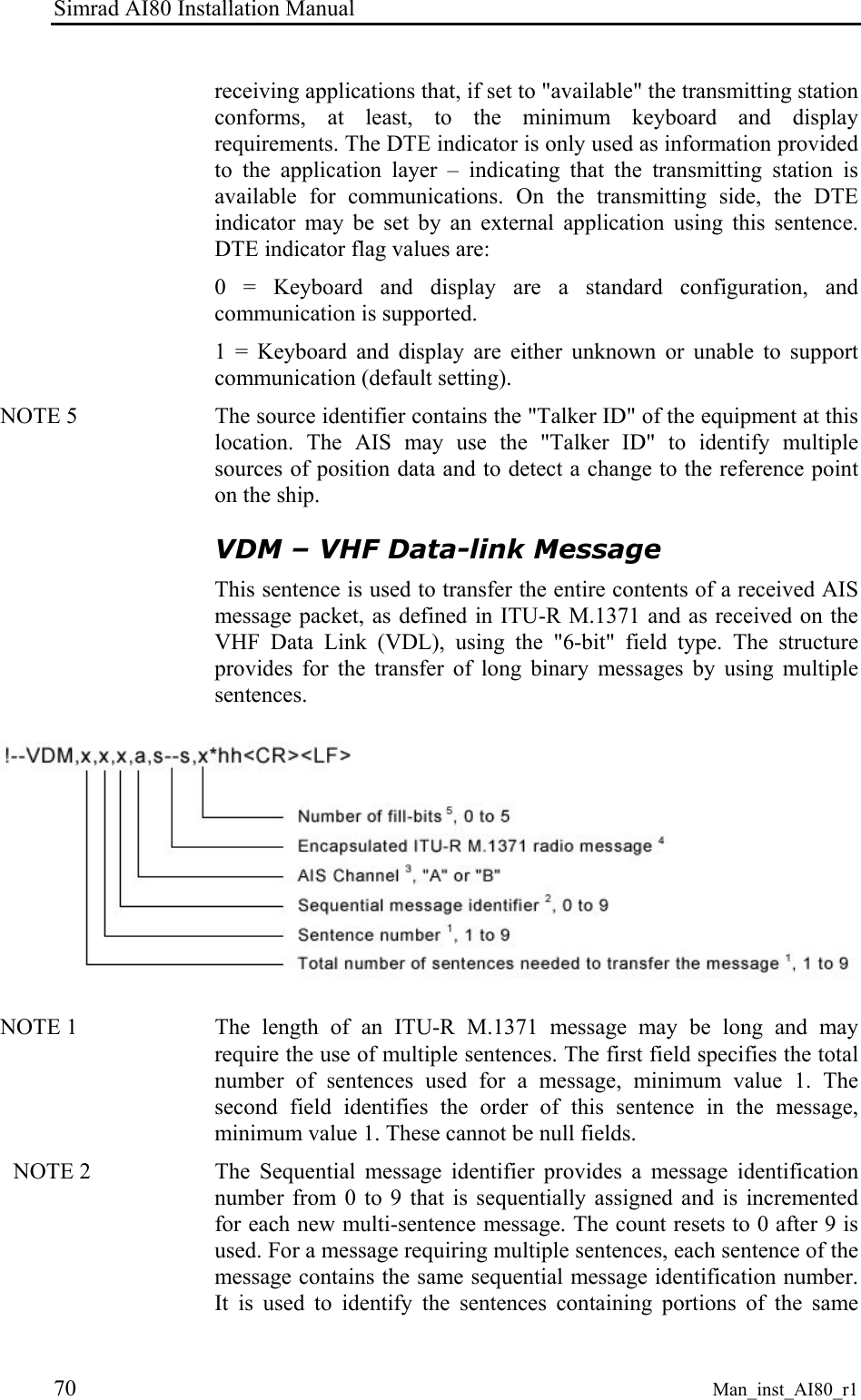
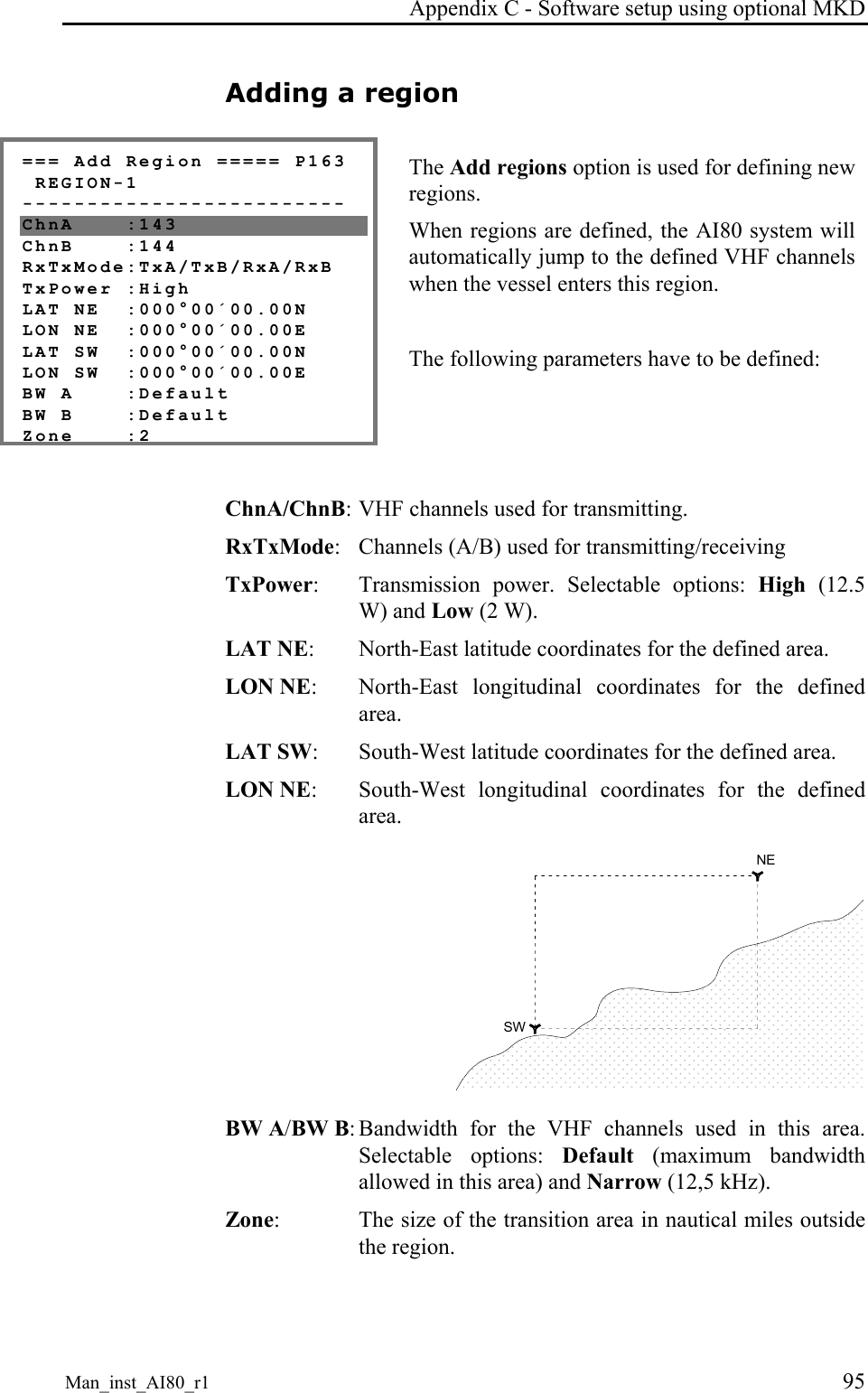
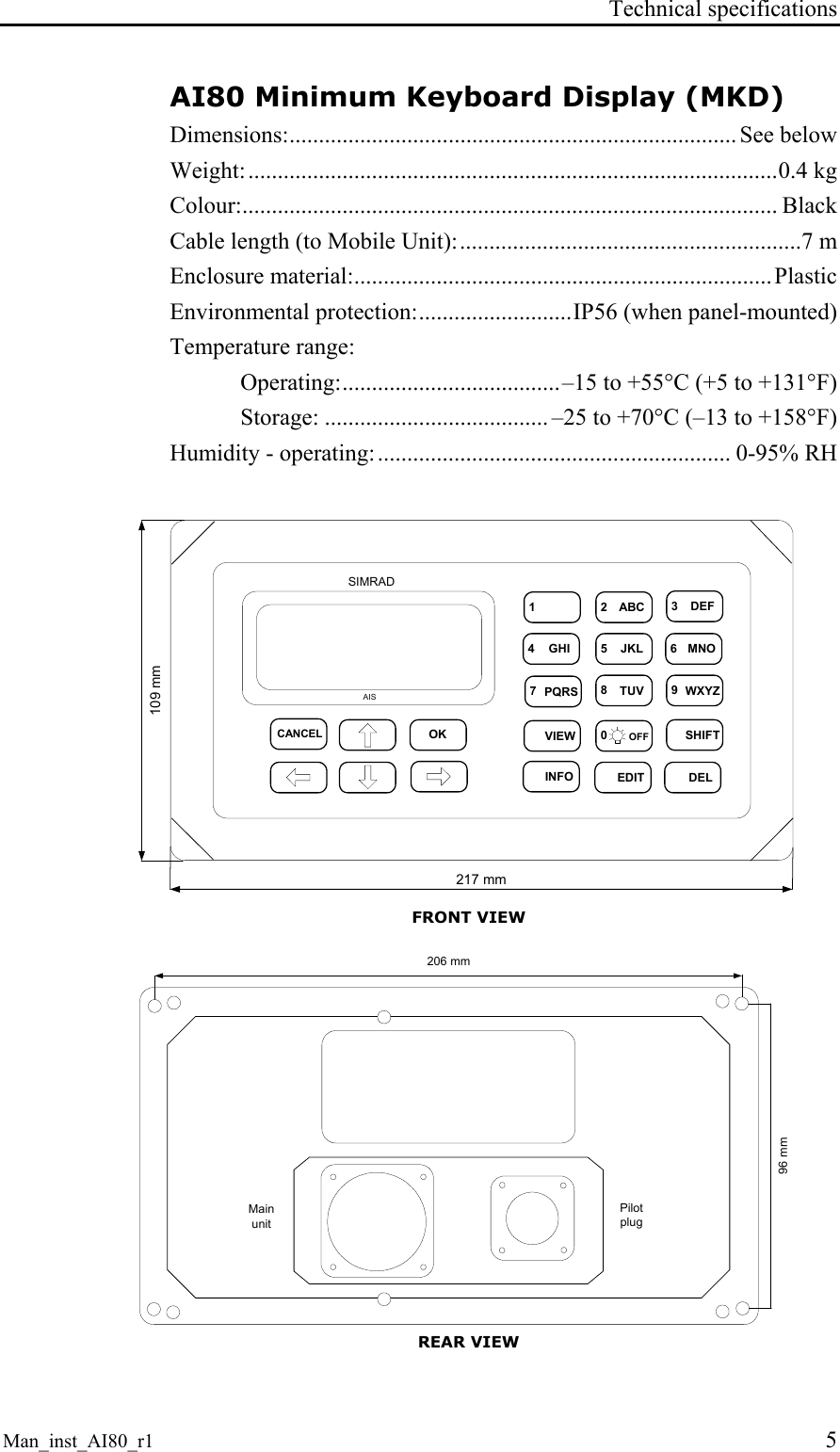
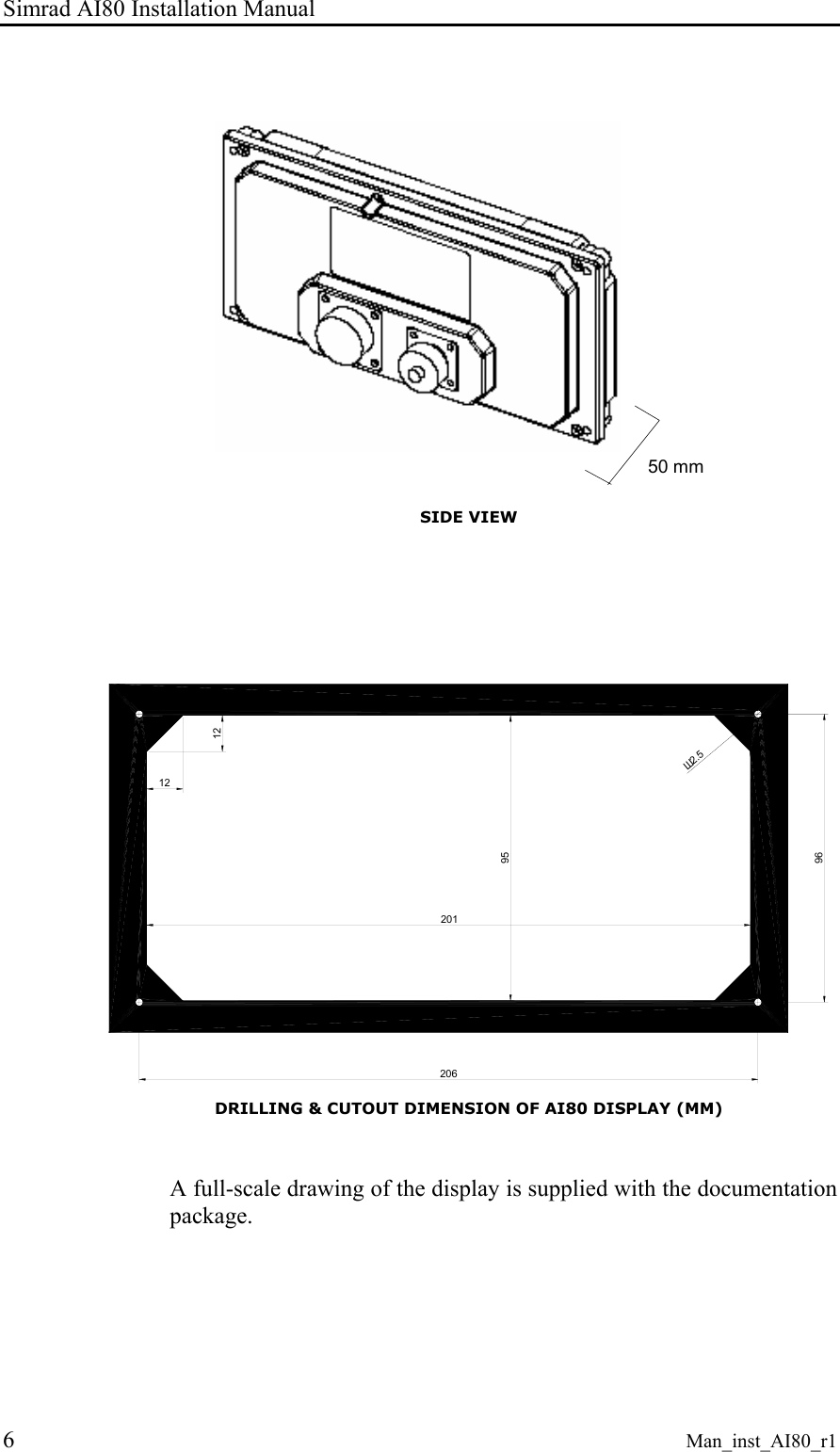
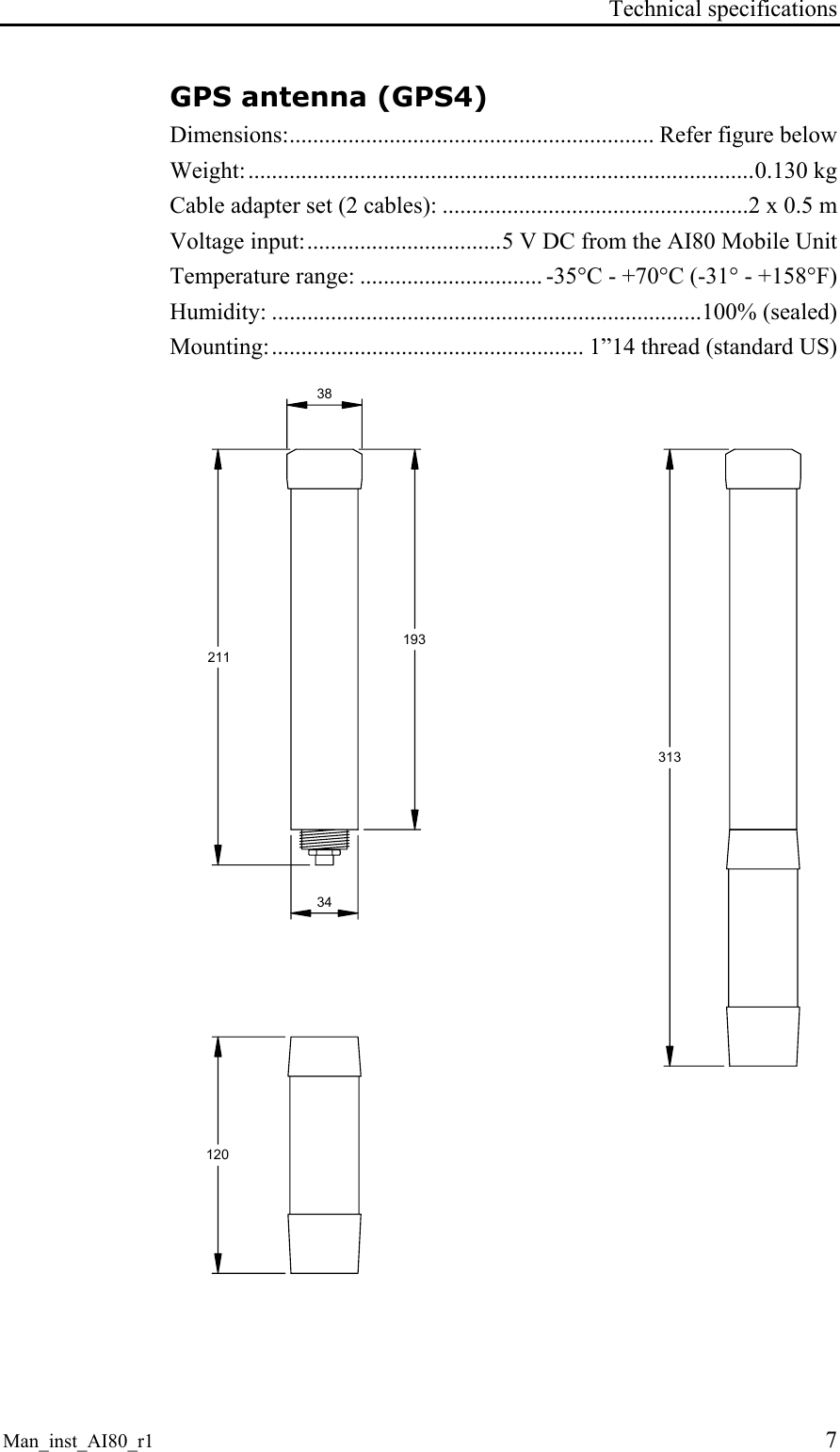
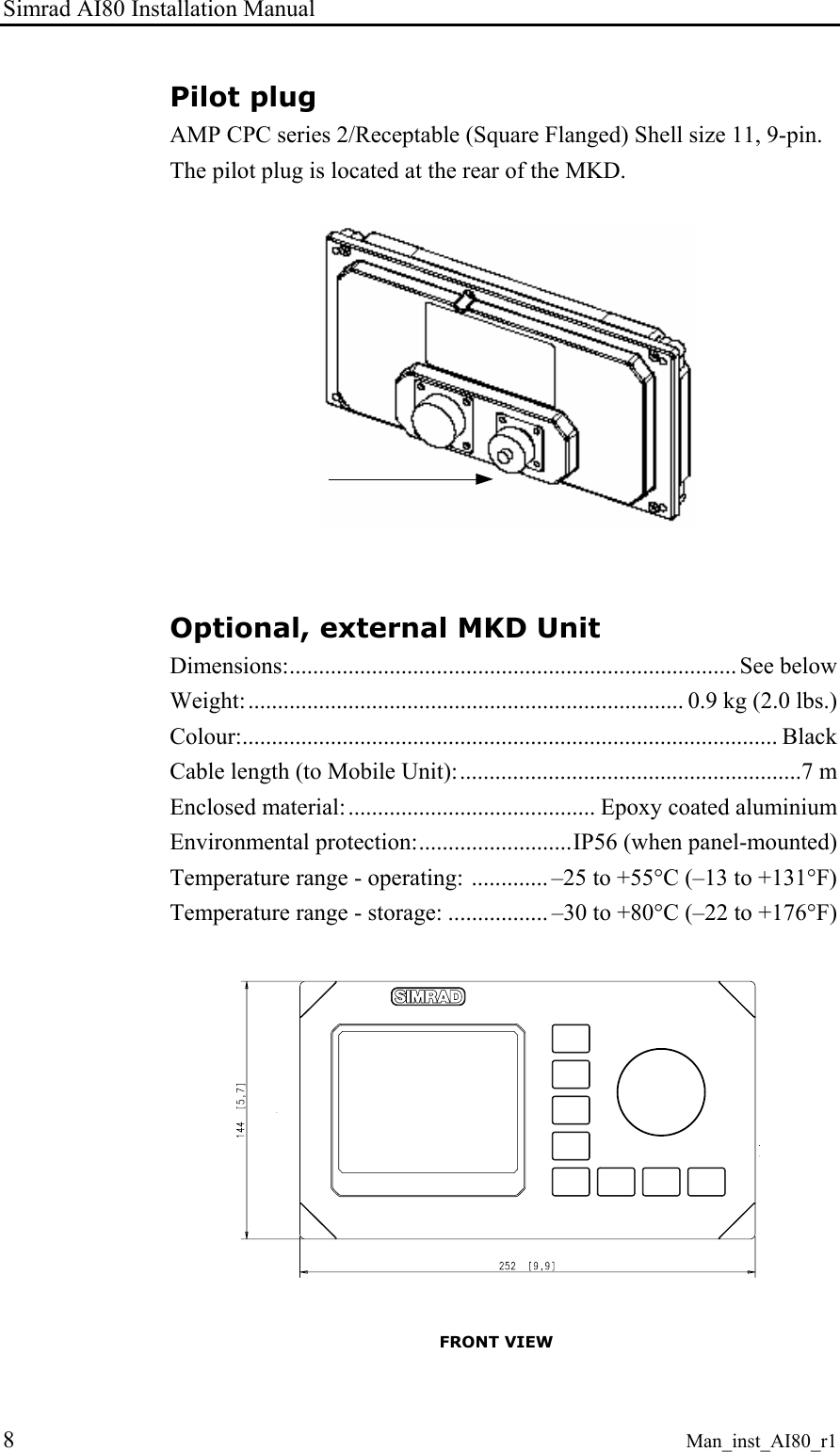
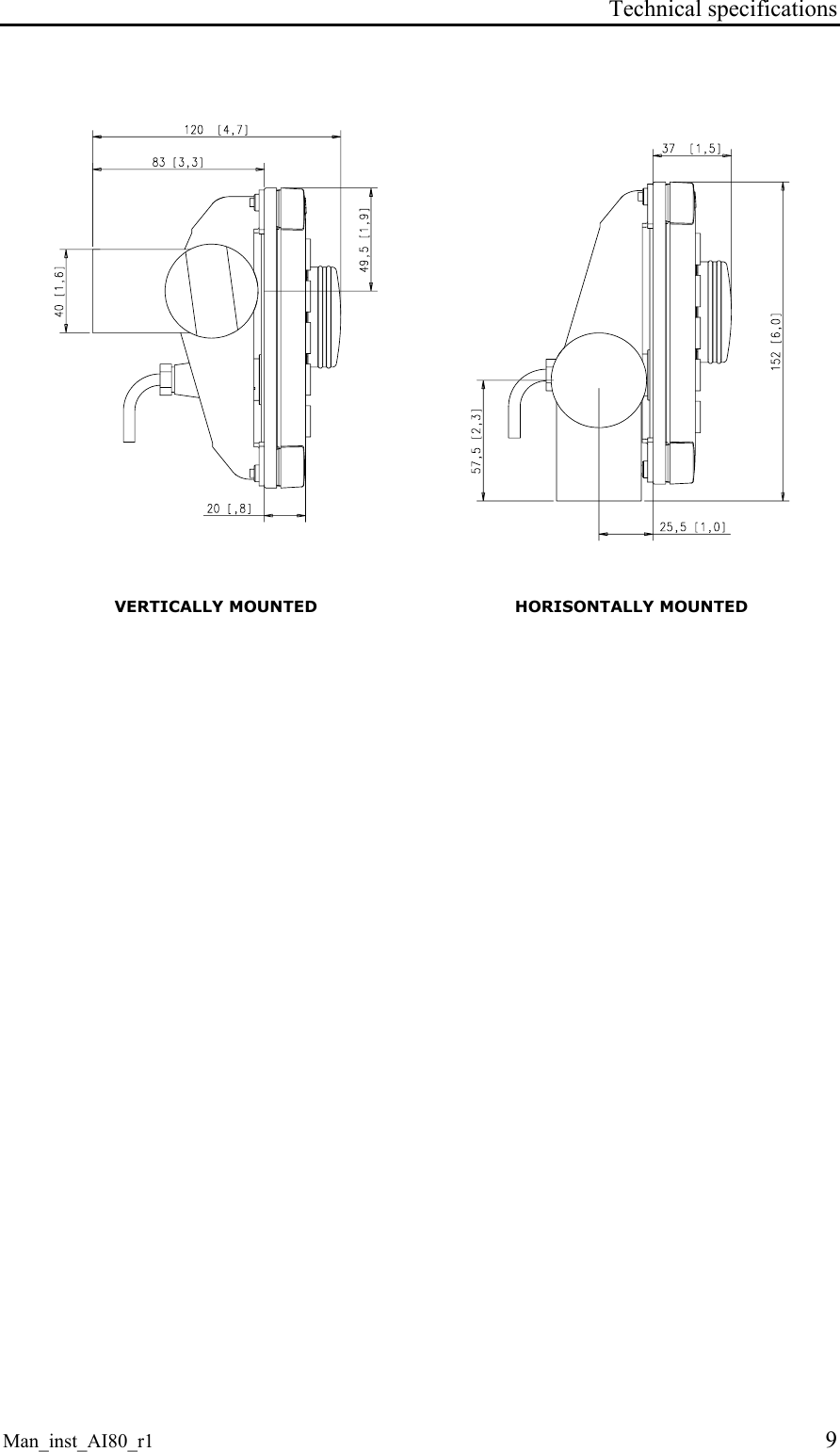
Exhibit 8 Installation Guide
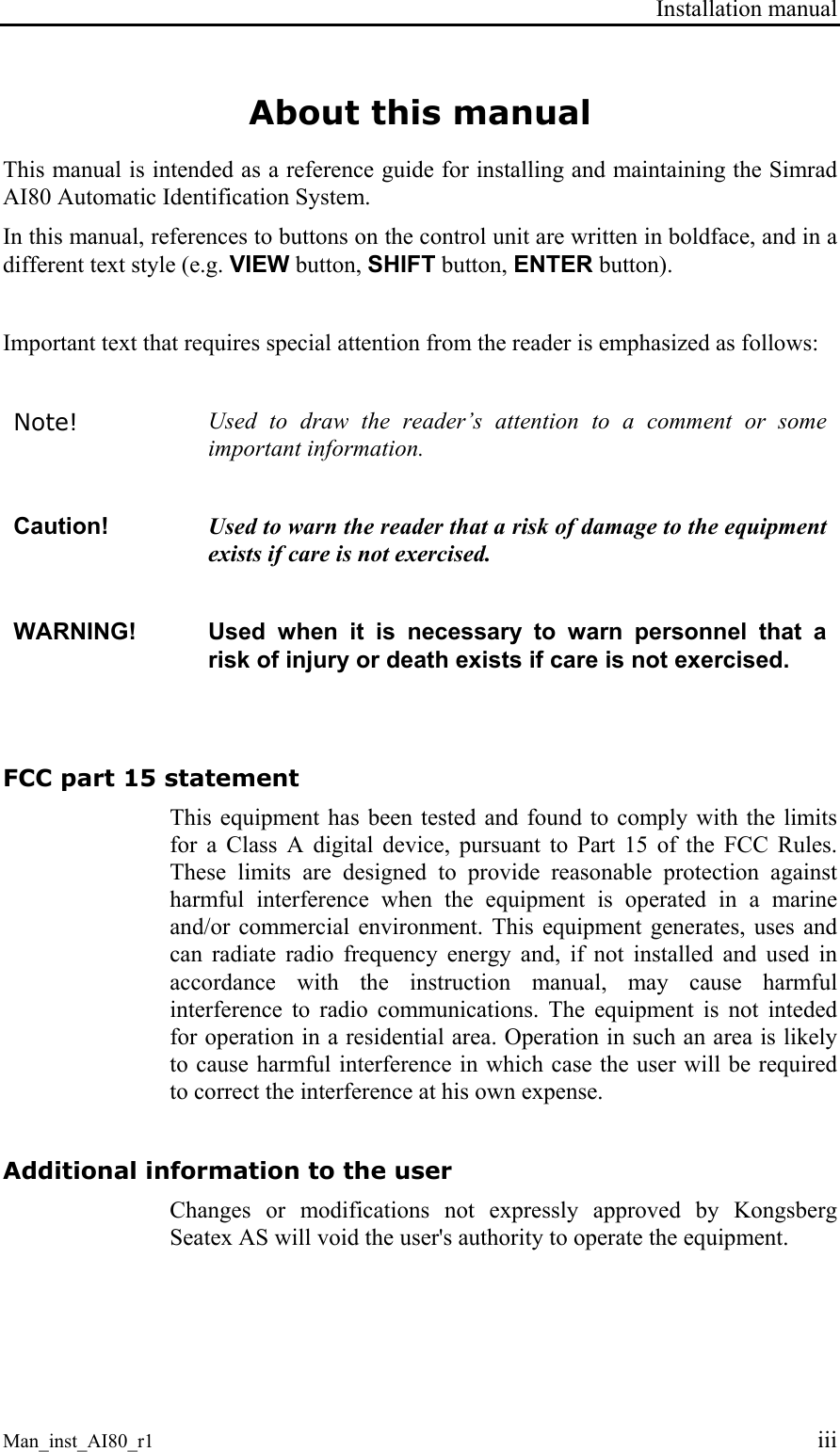
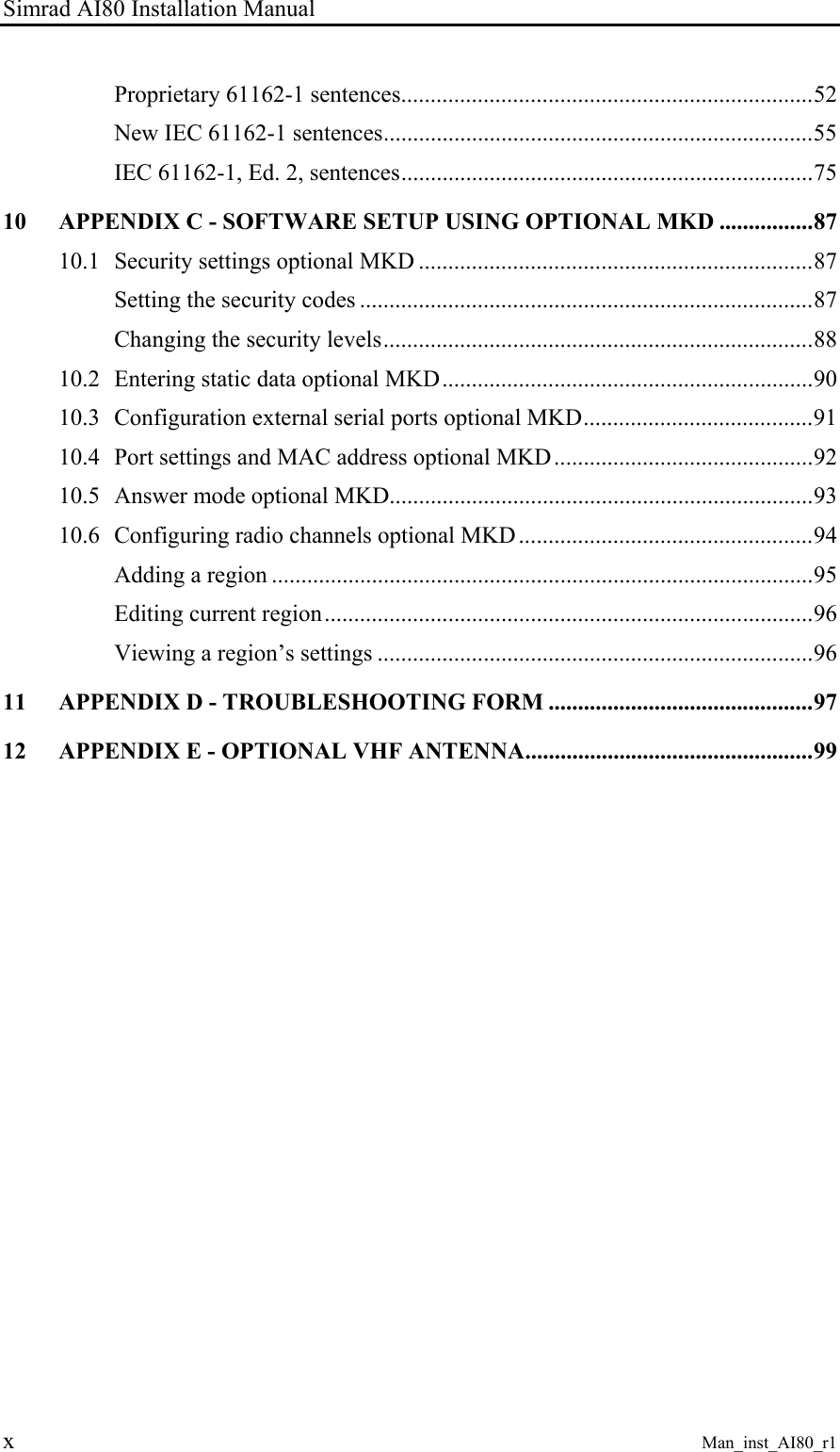
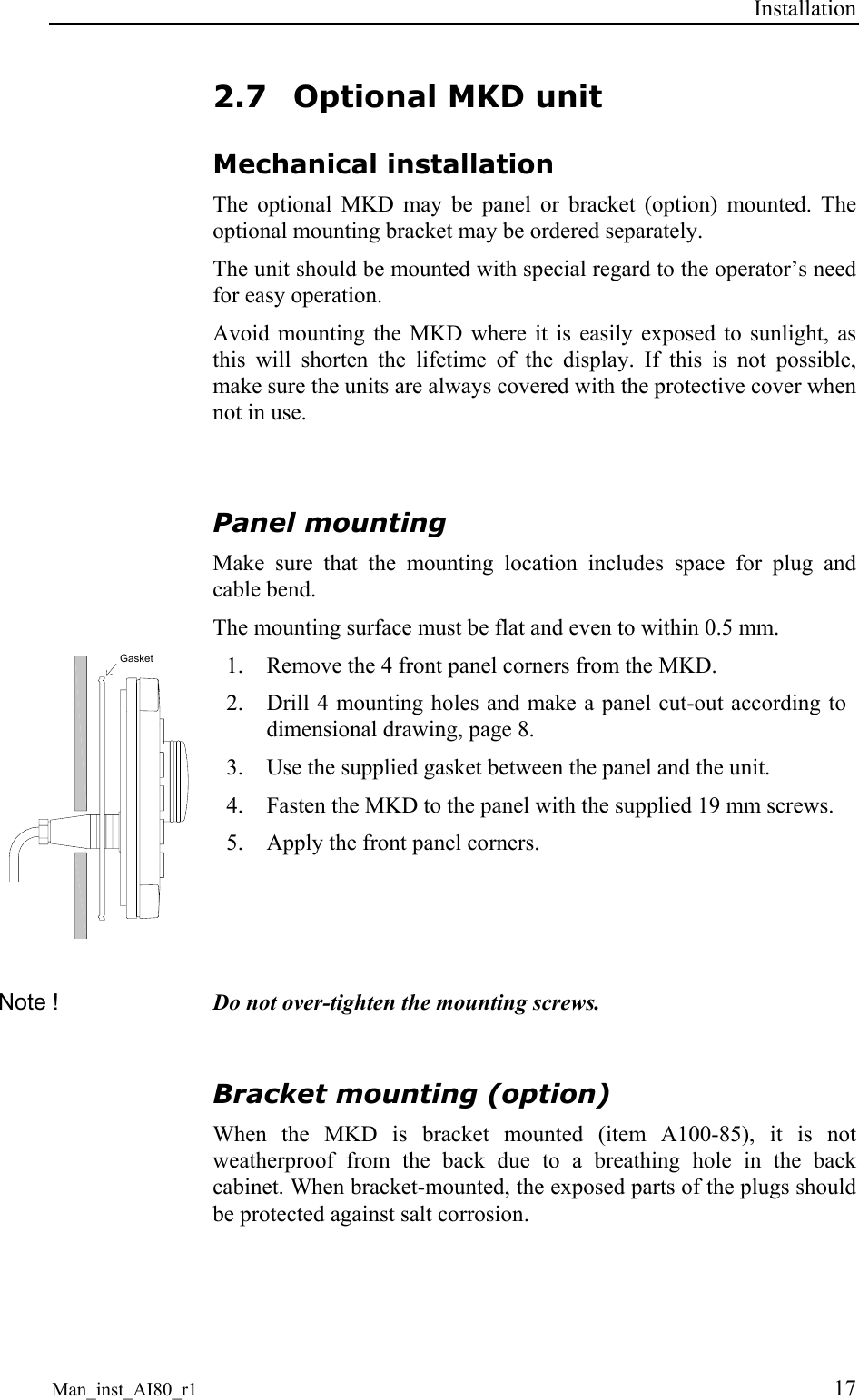
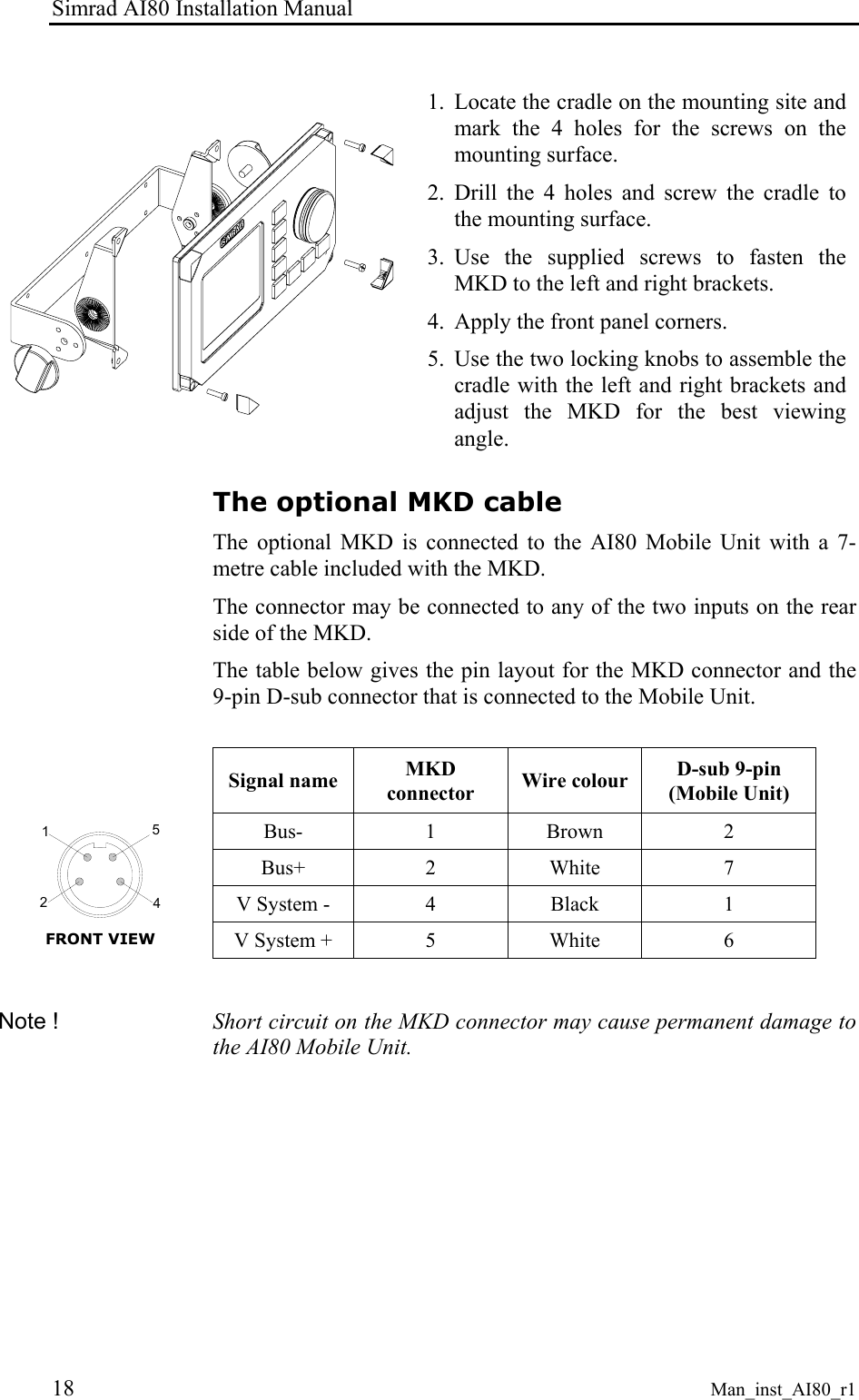
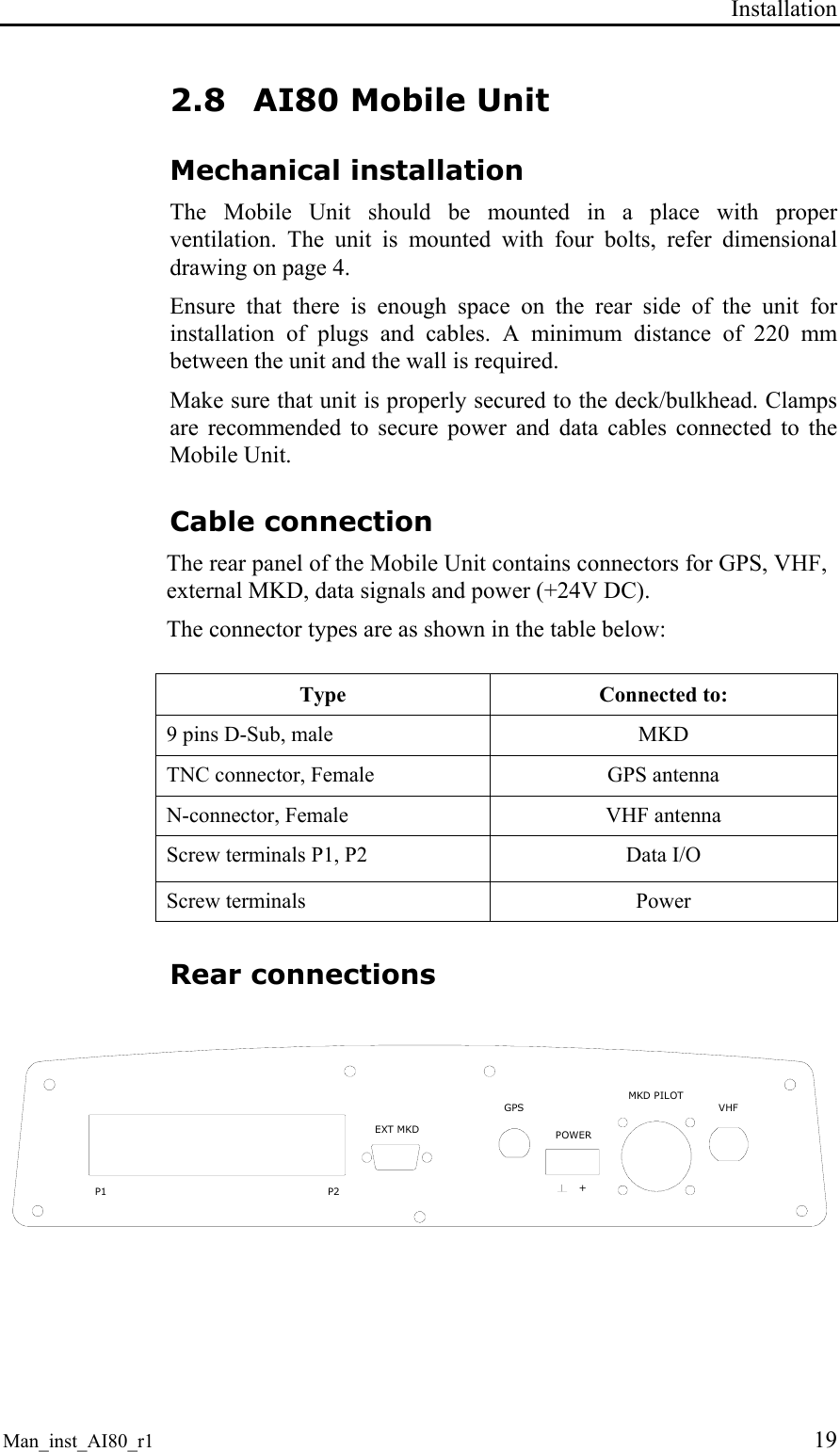
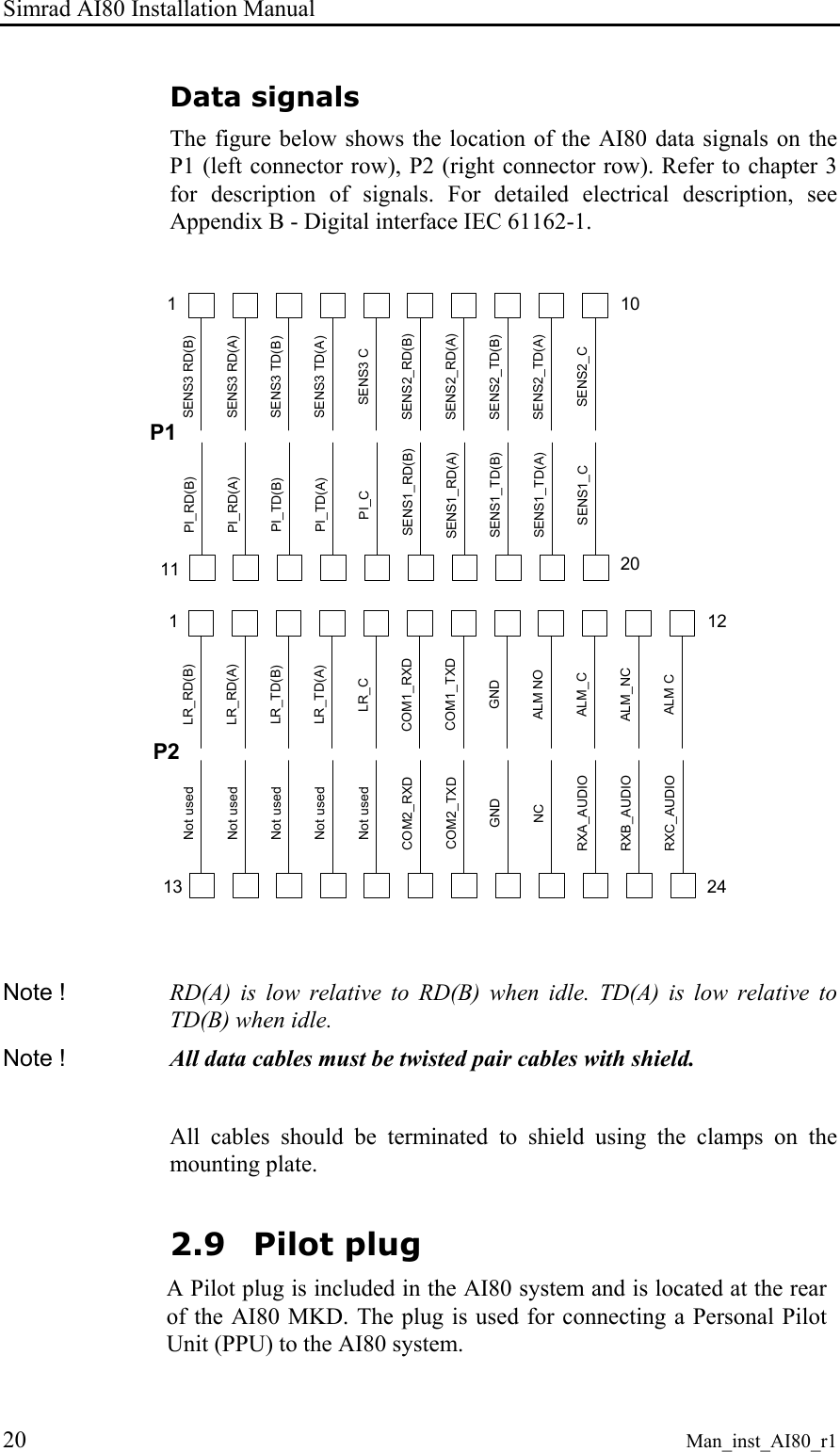
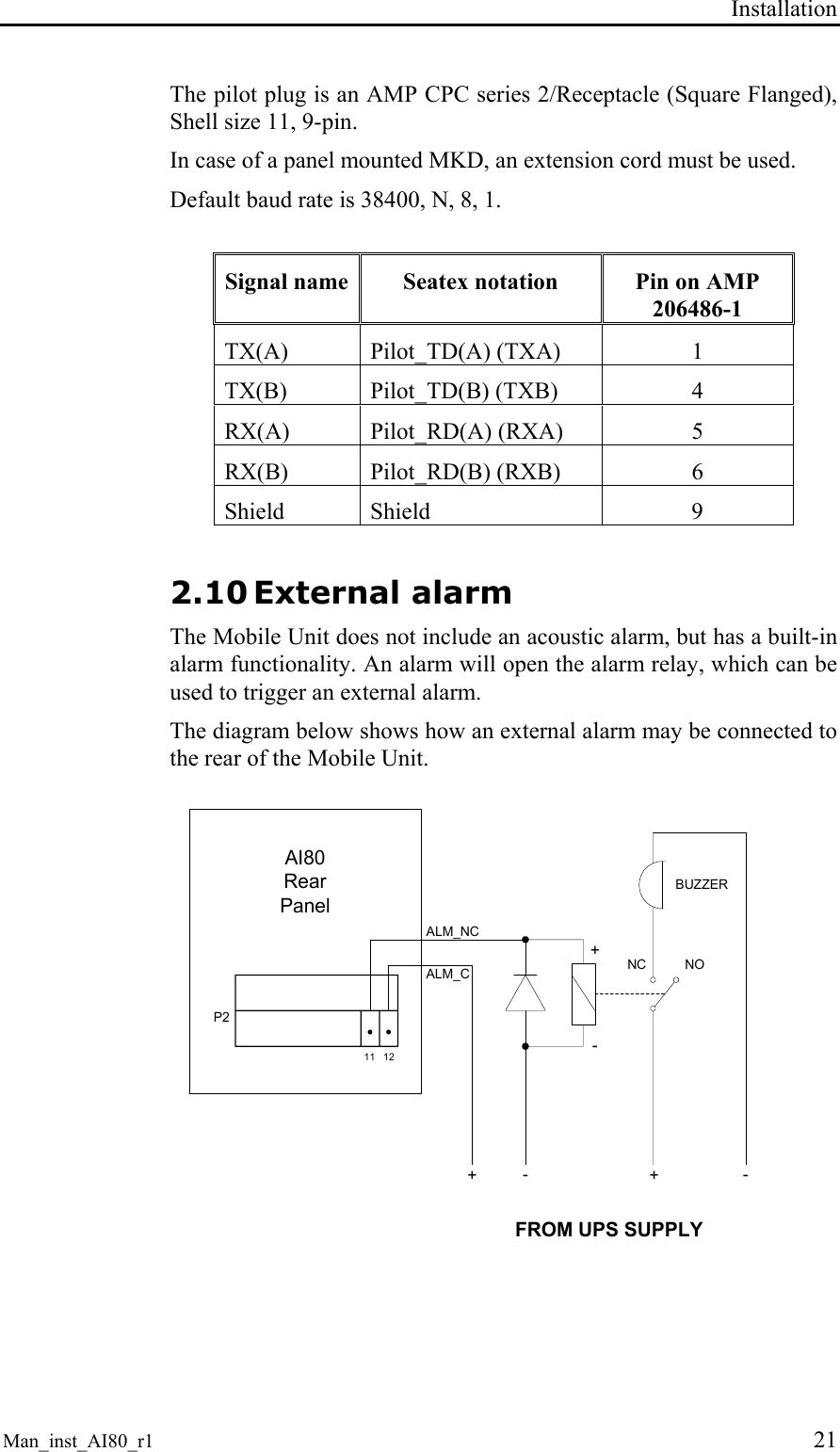
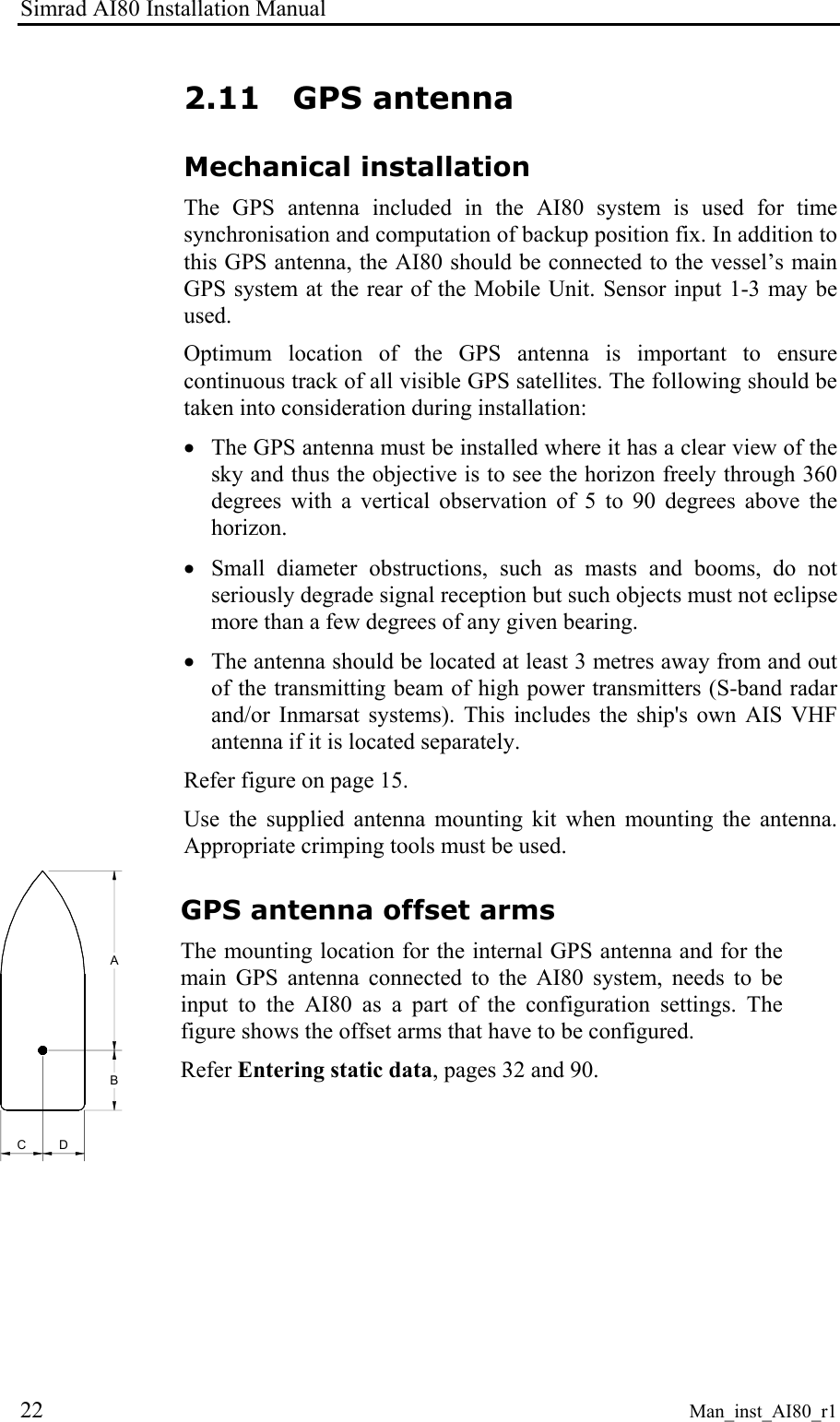
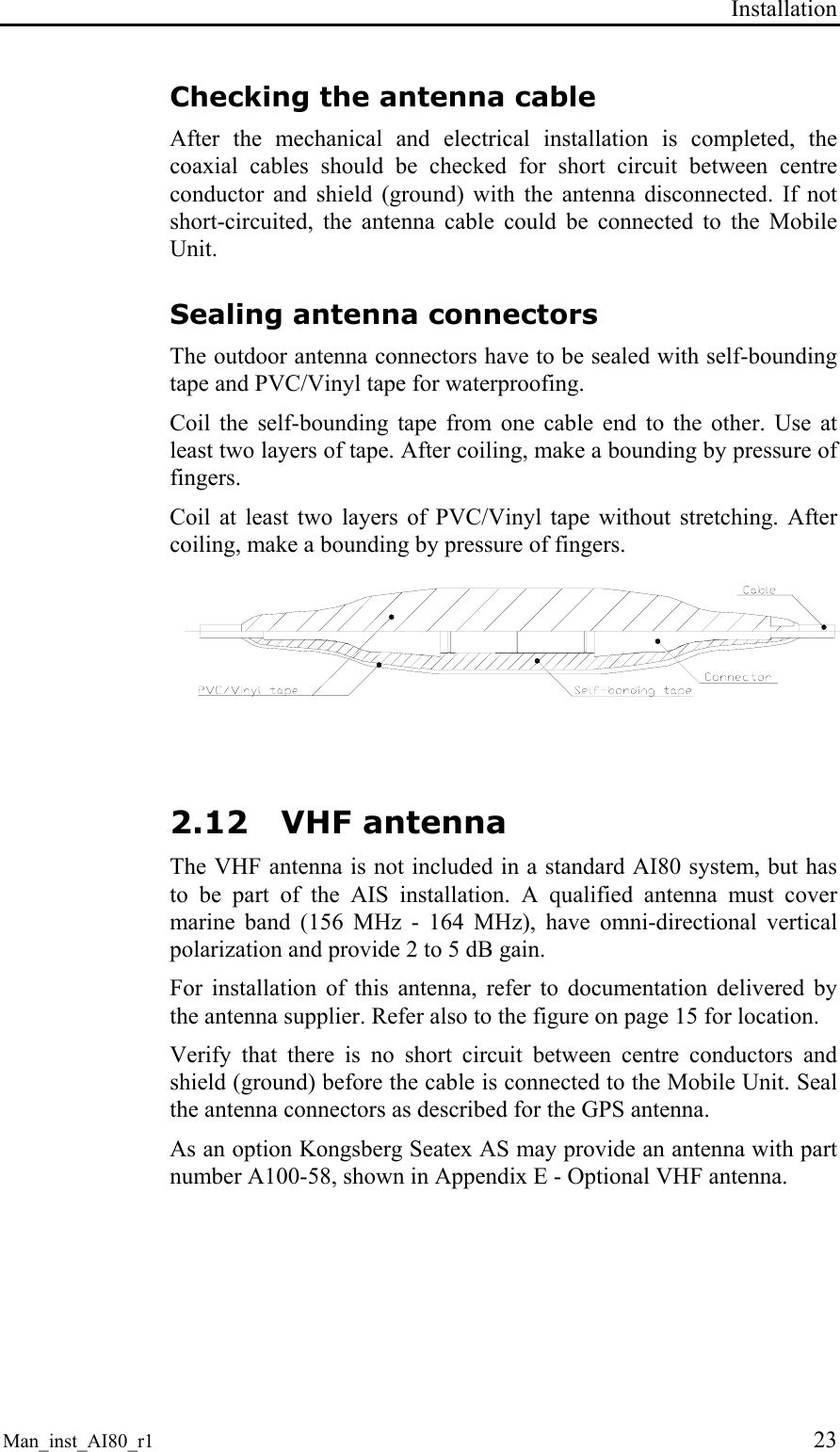
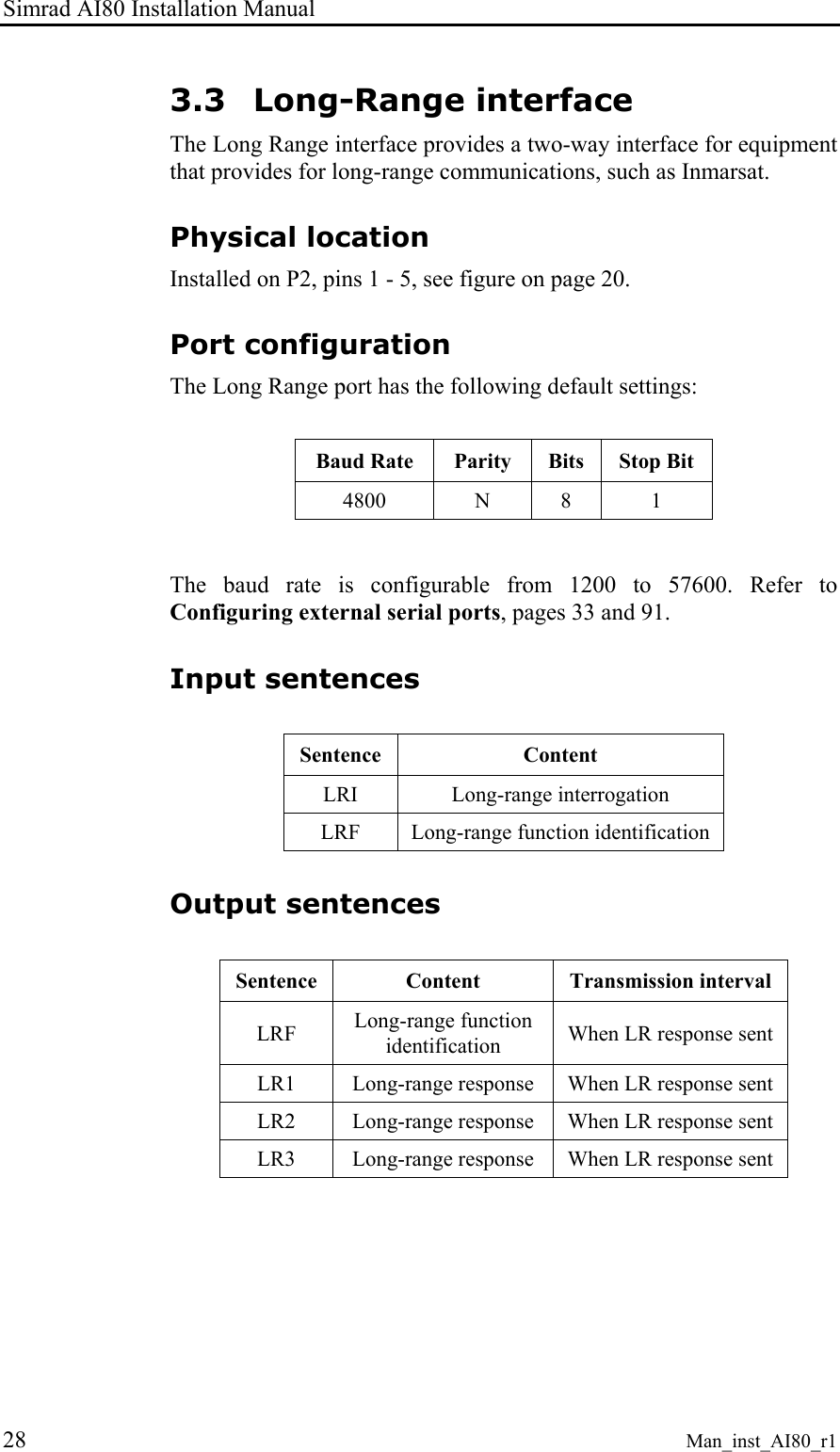
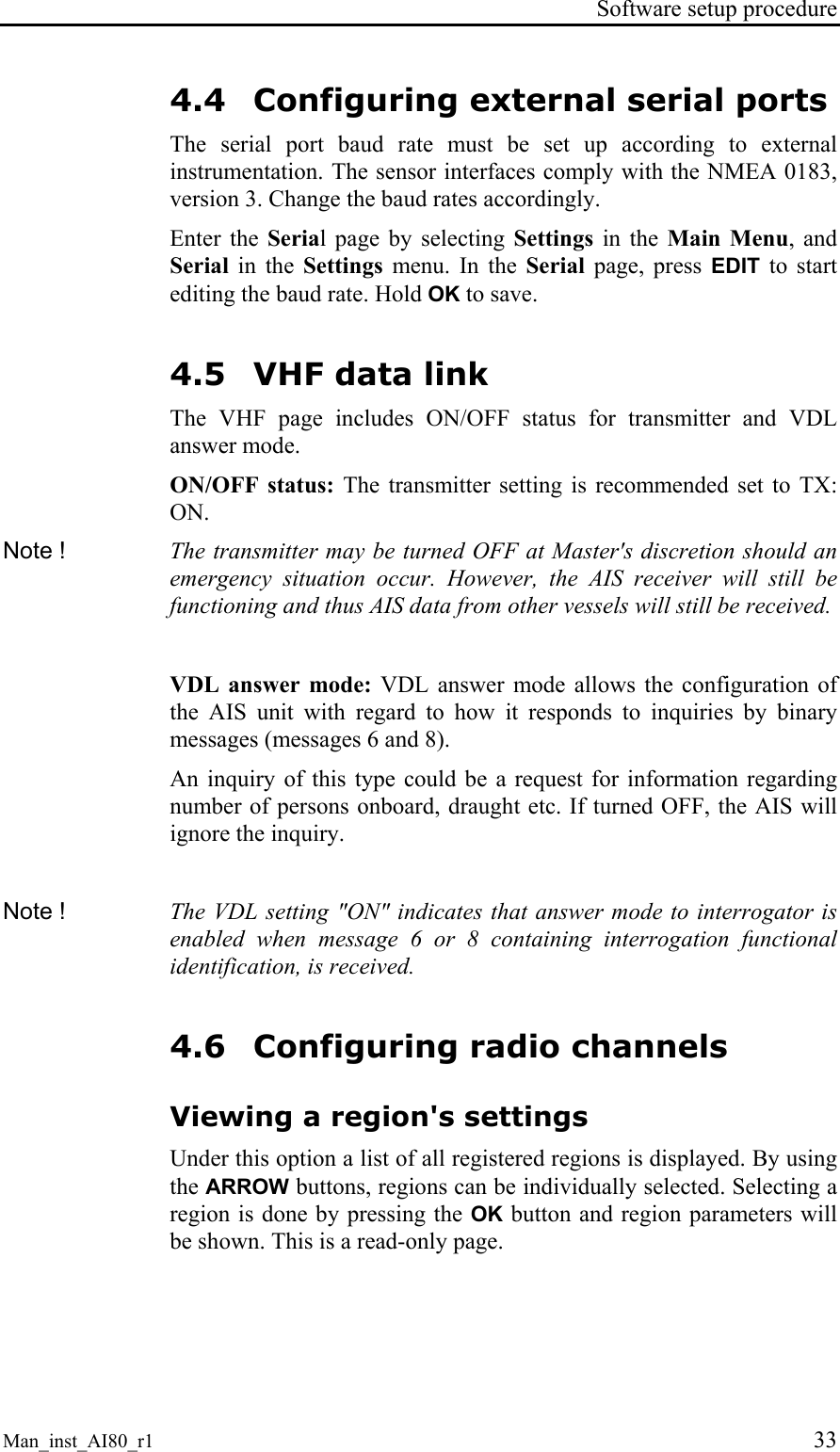
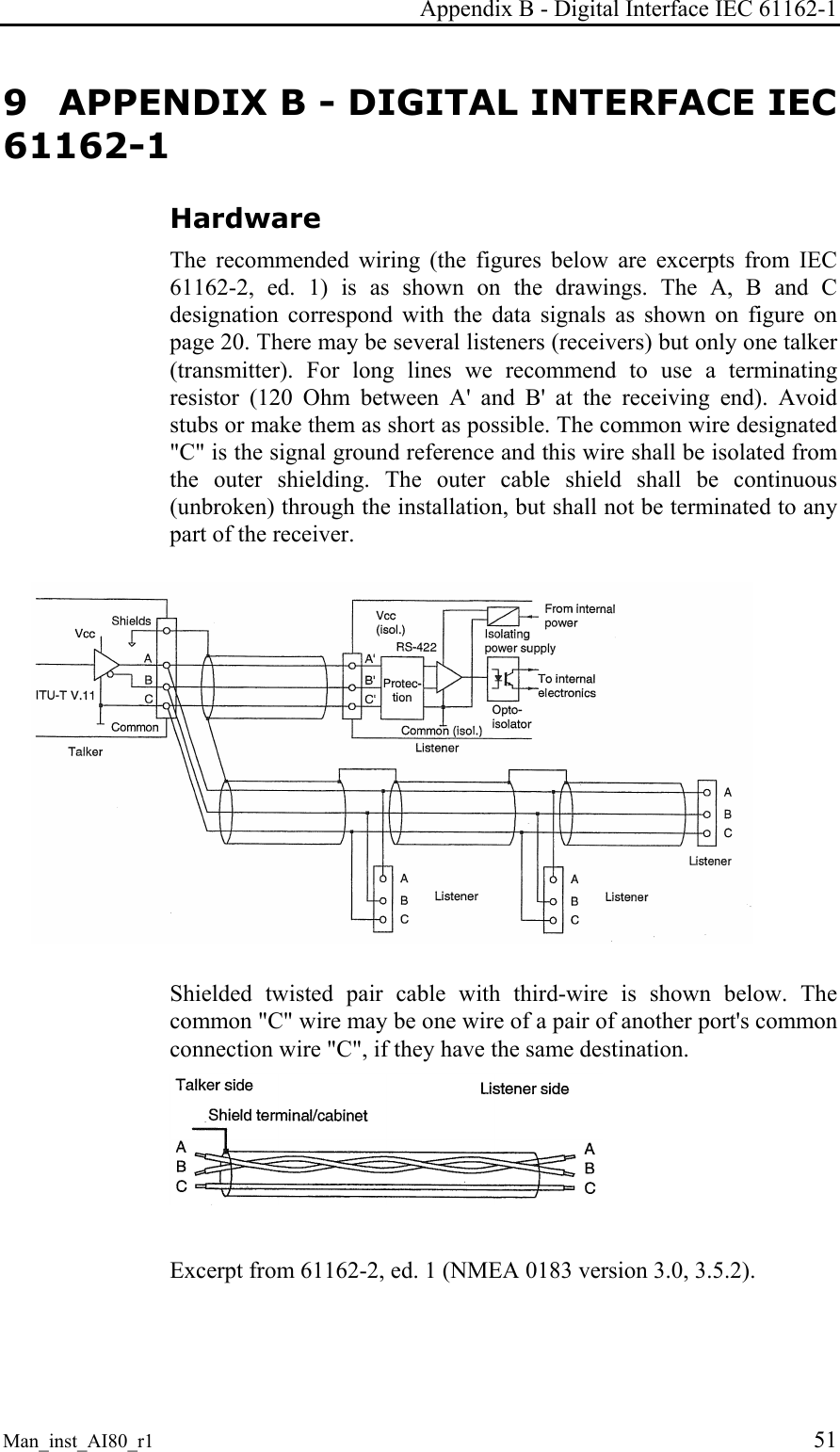
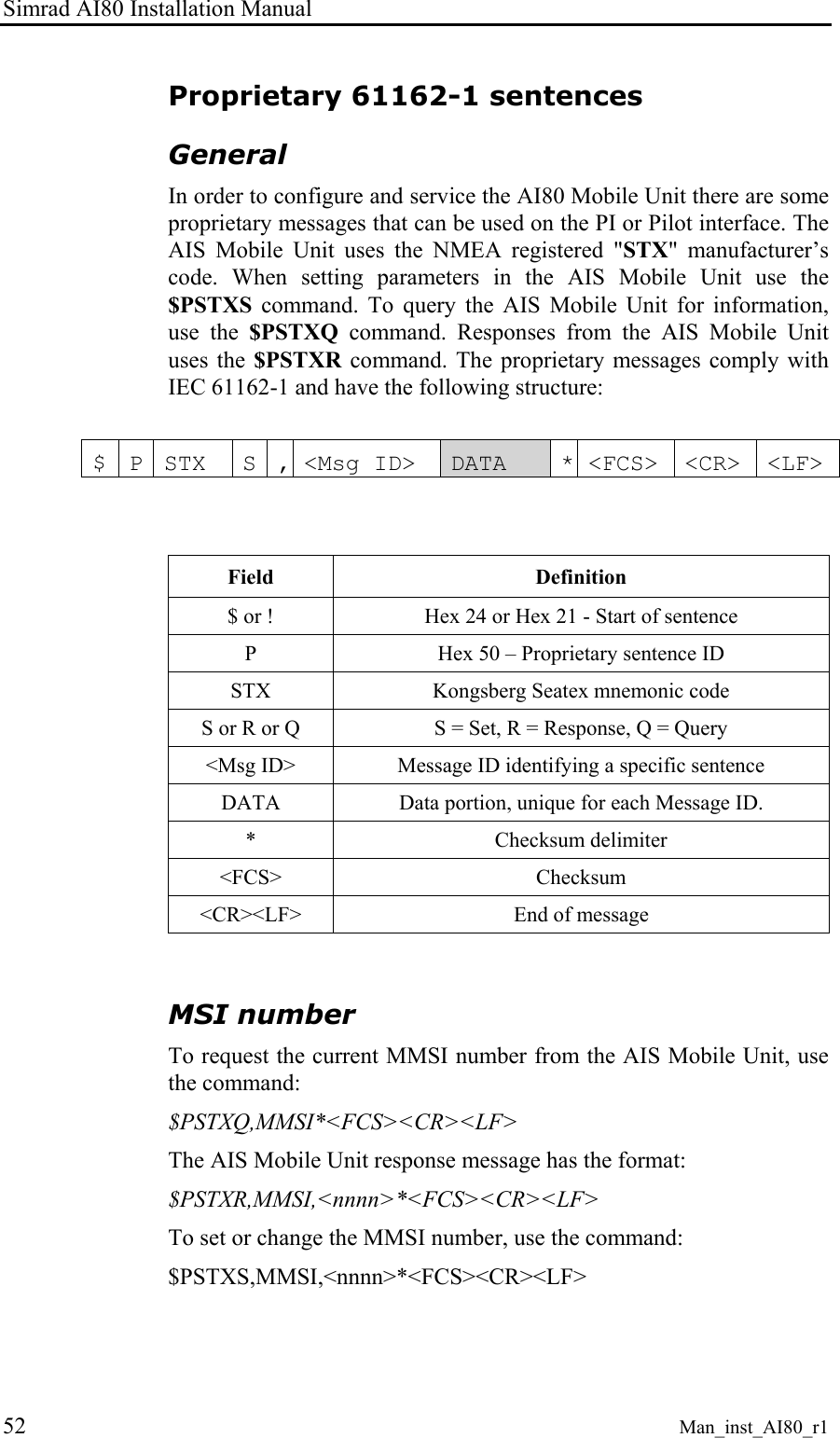
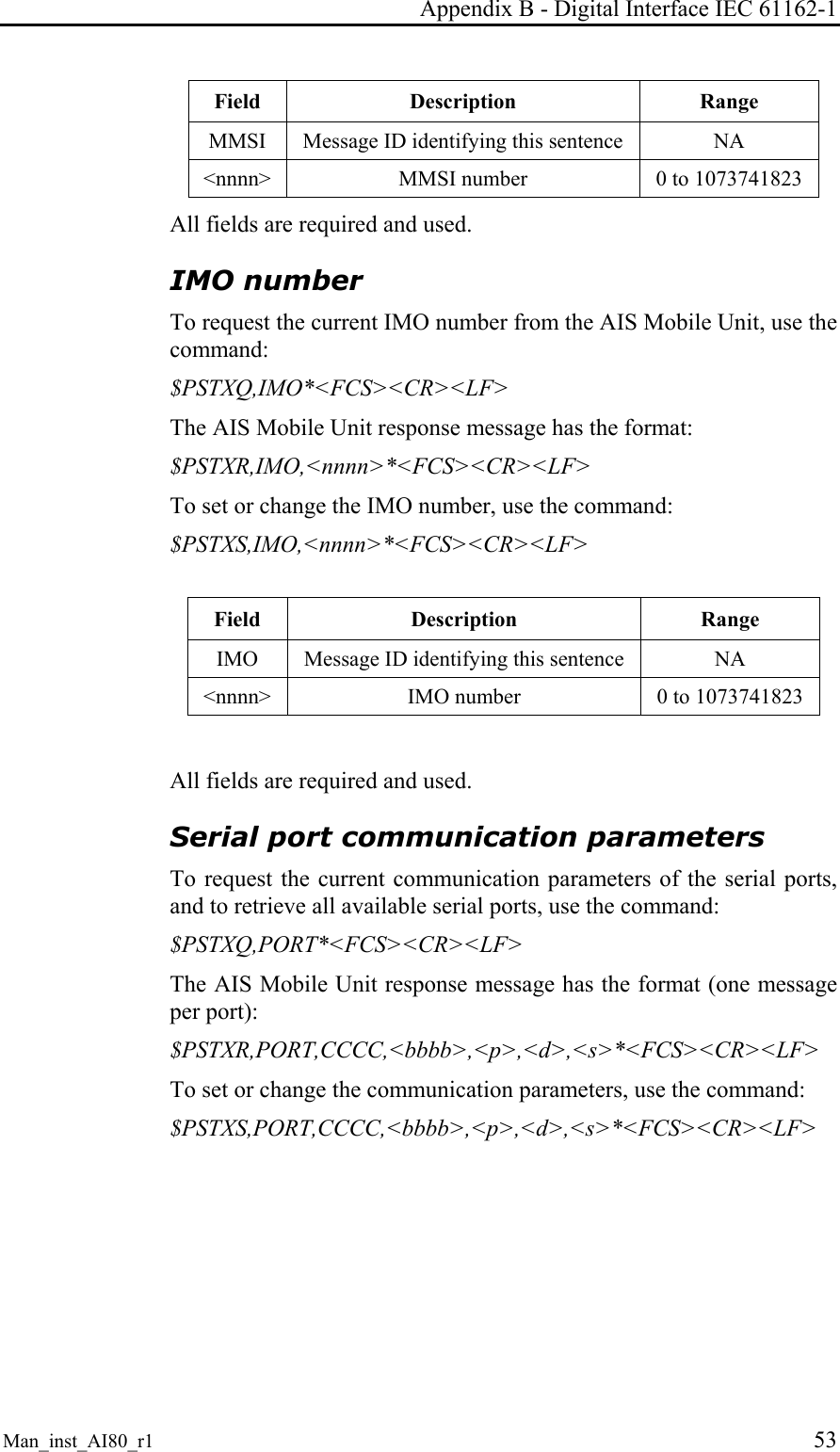
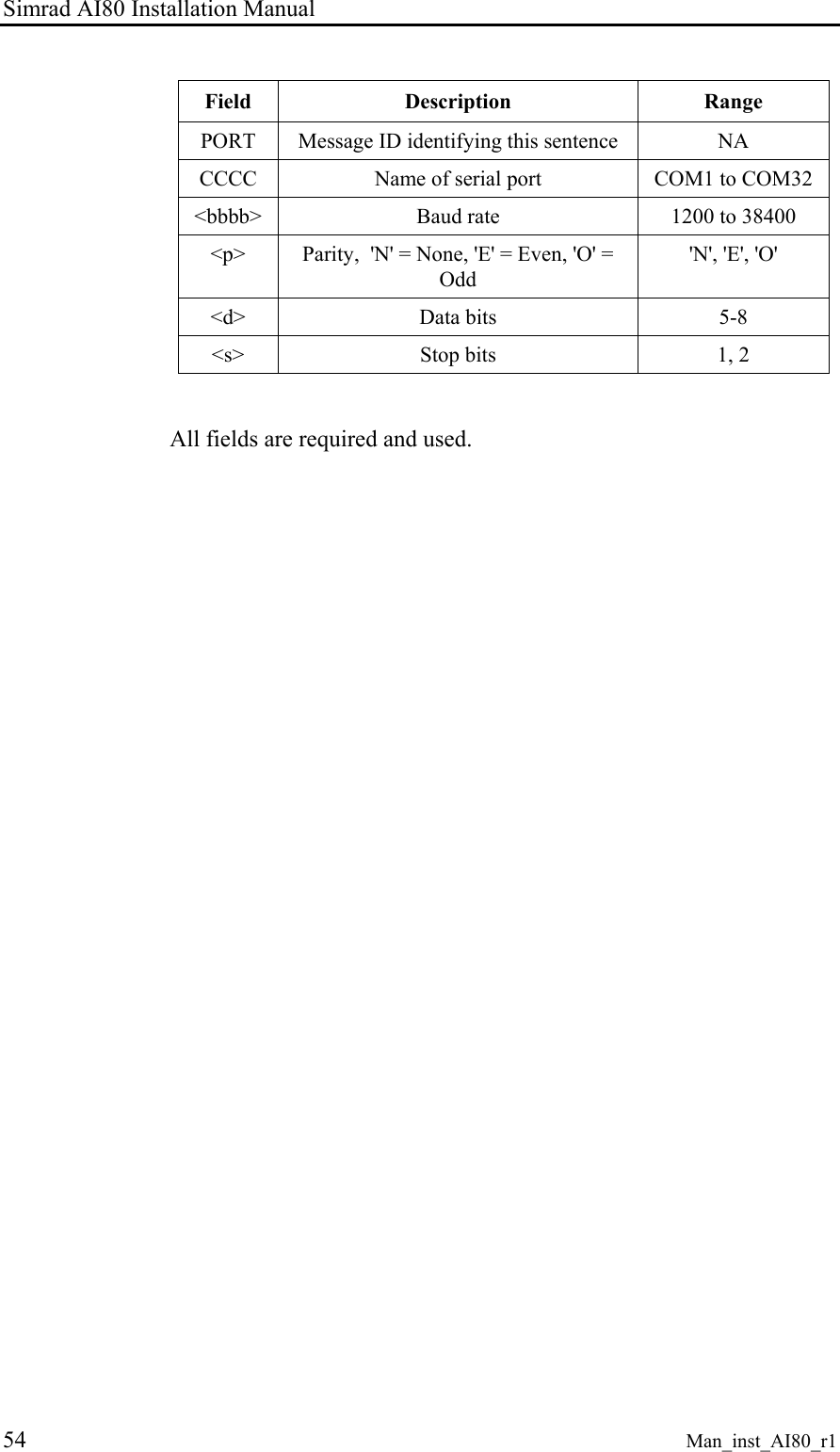
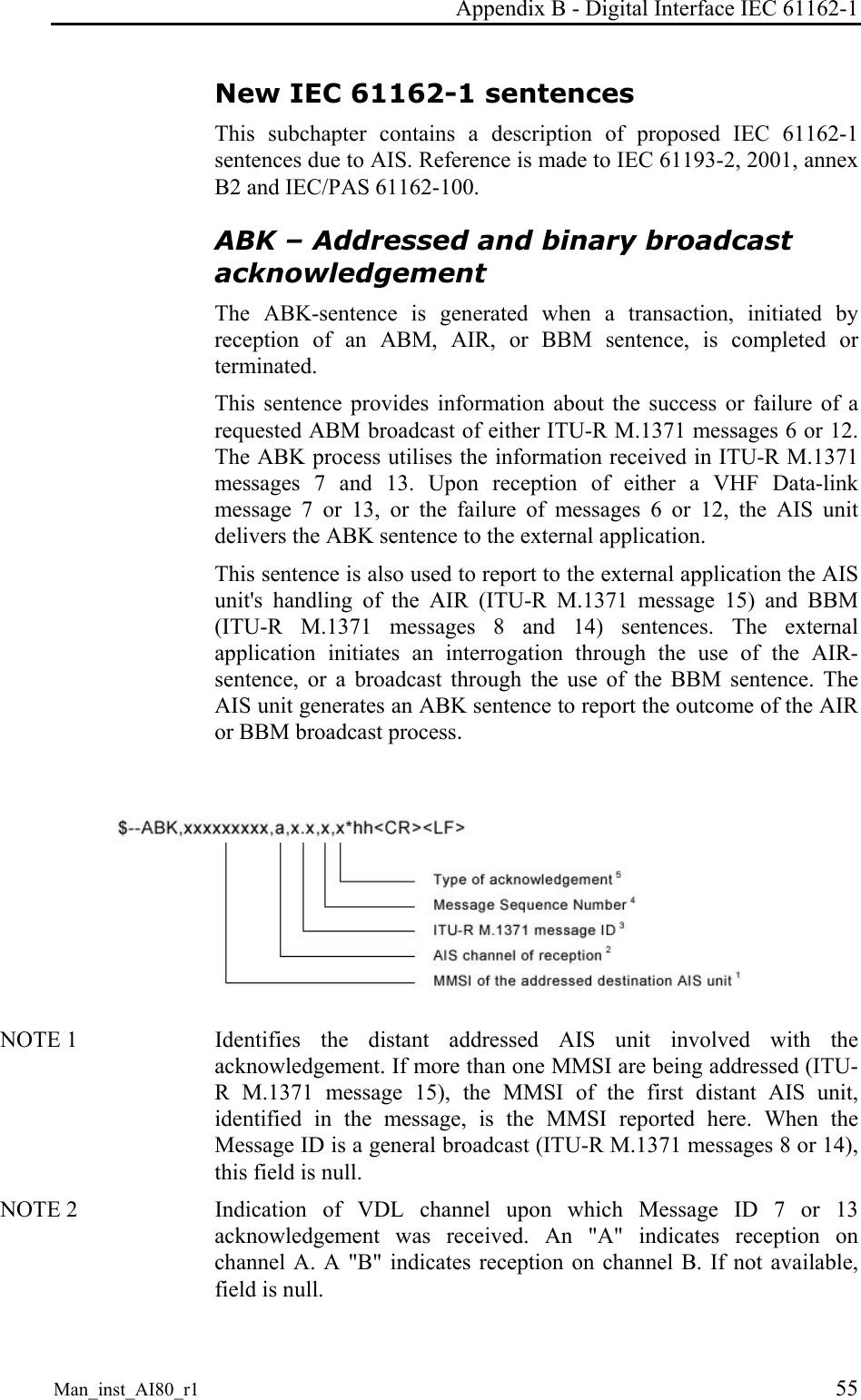
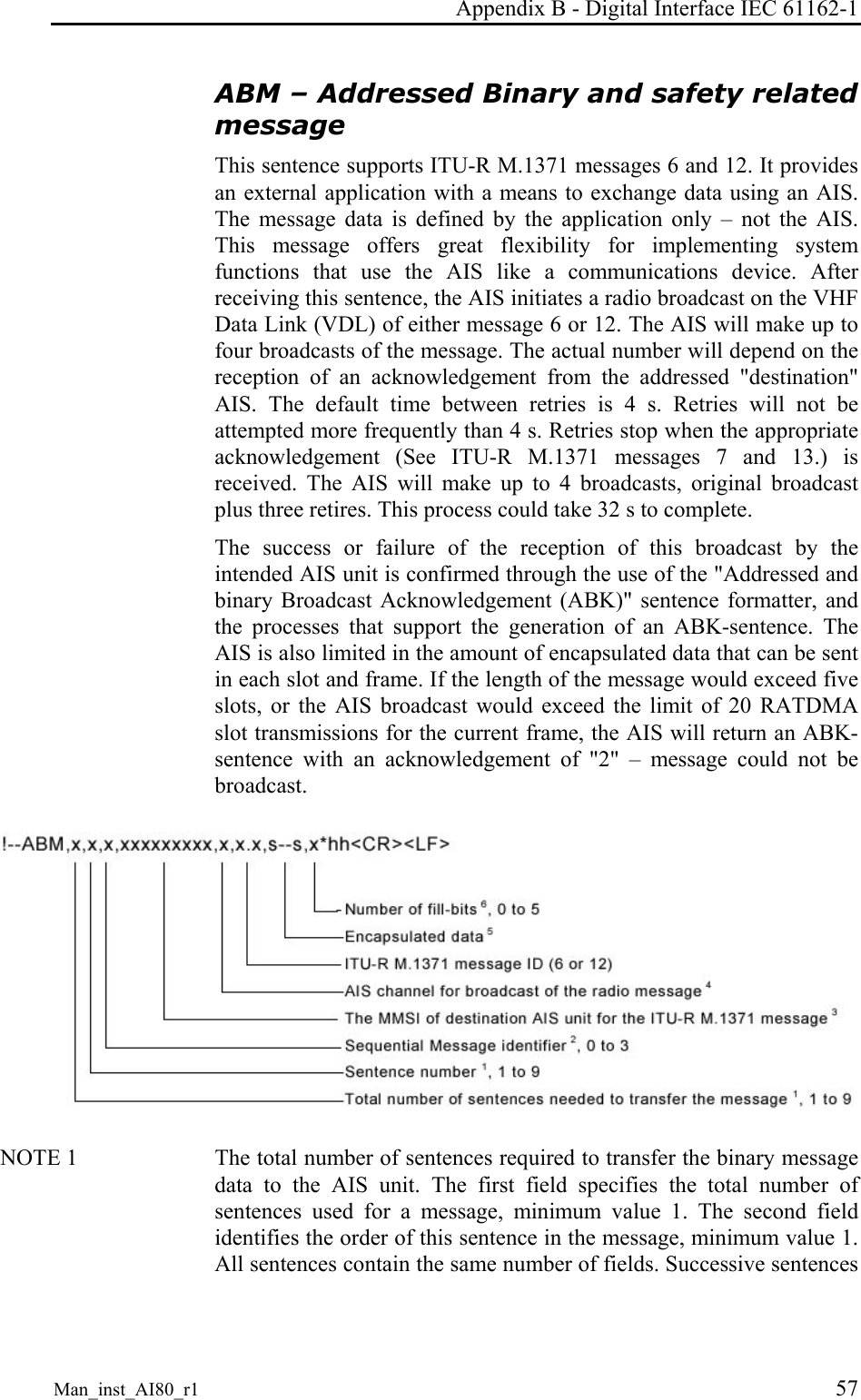
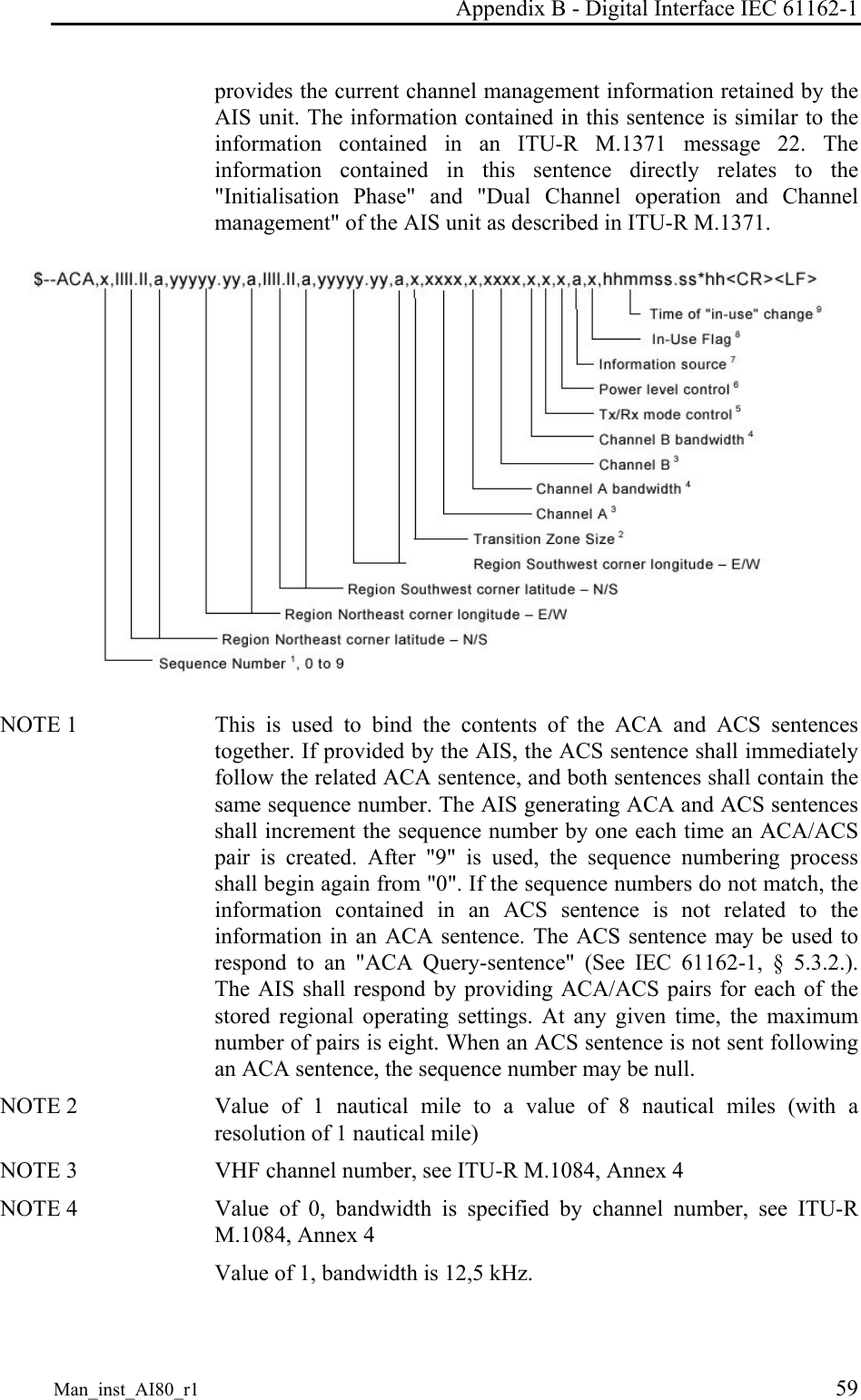
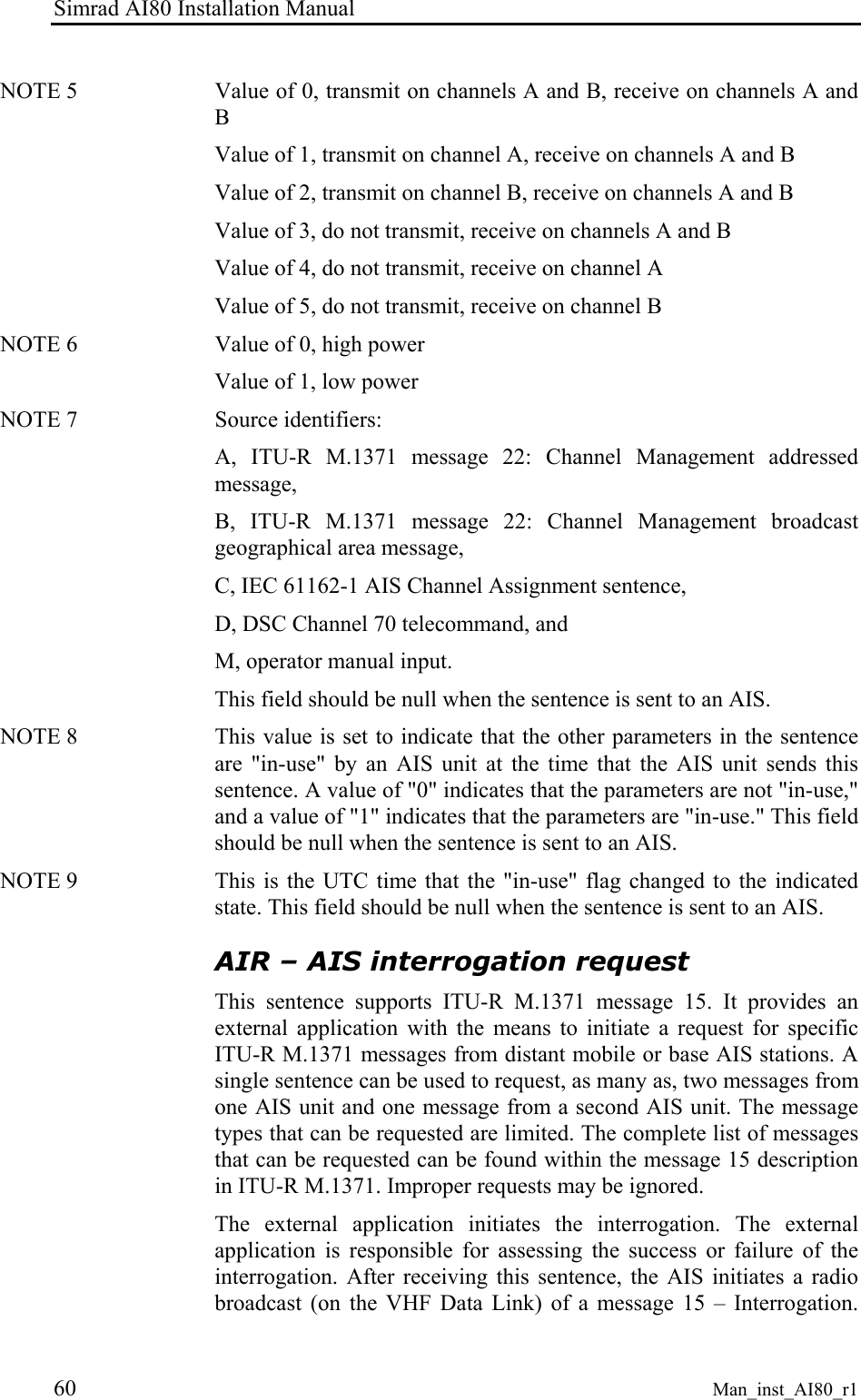
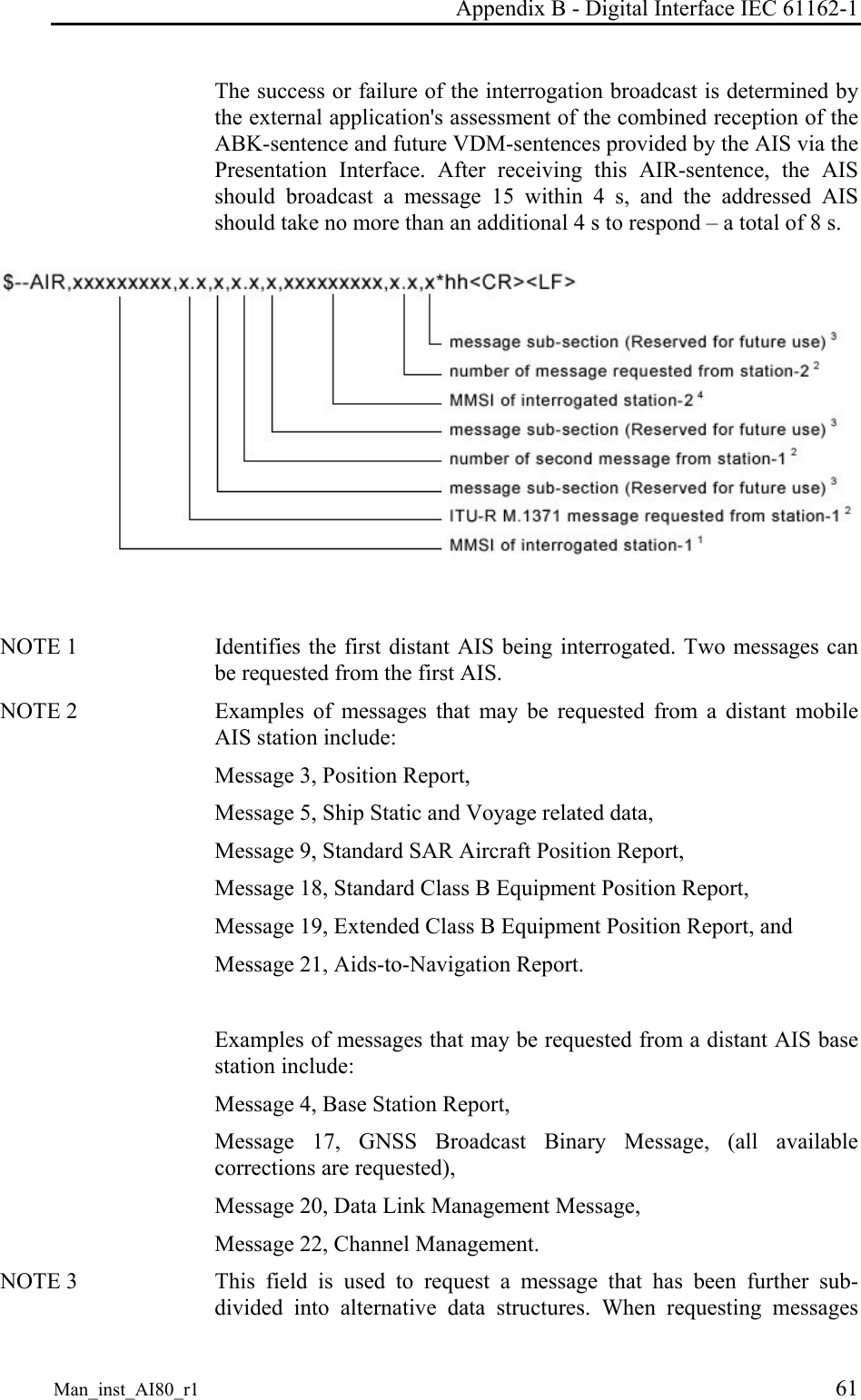
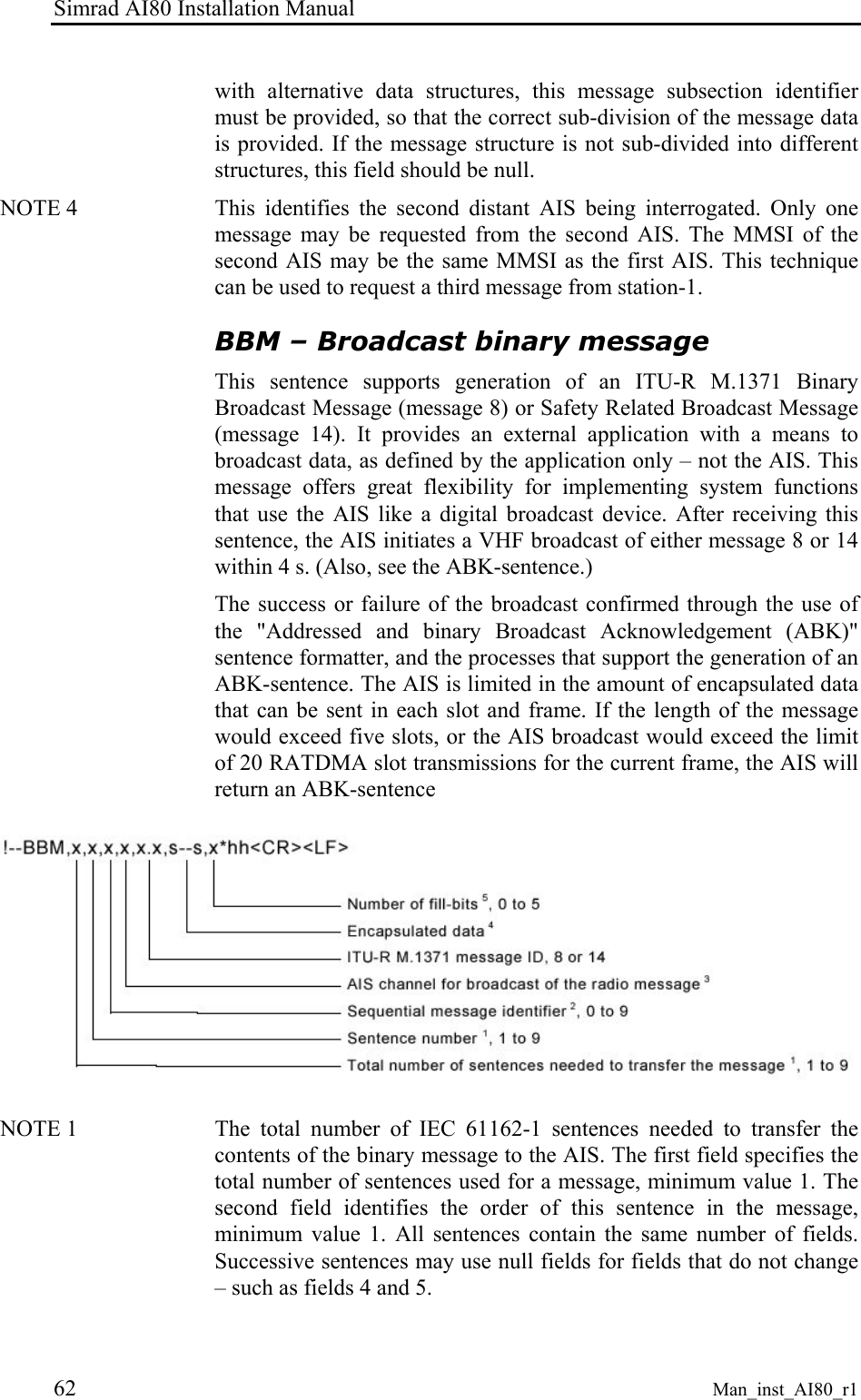
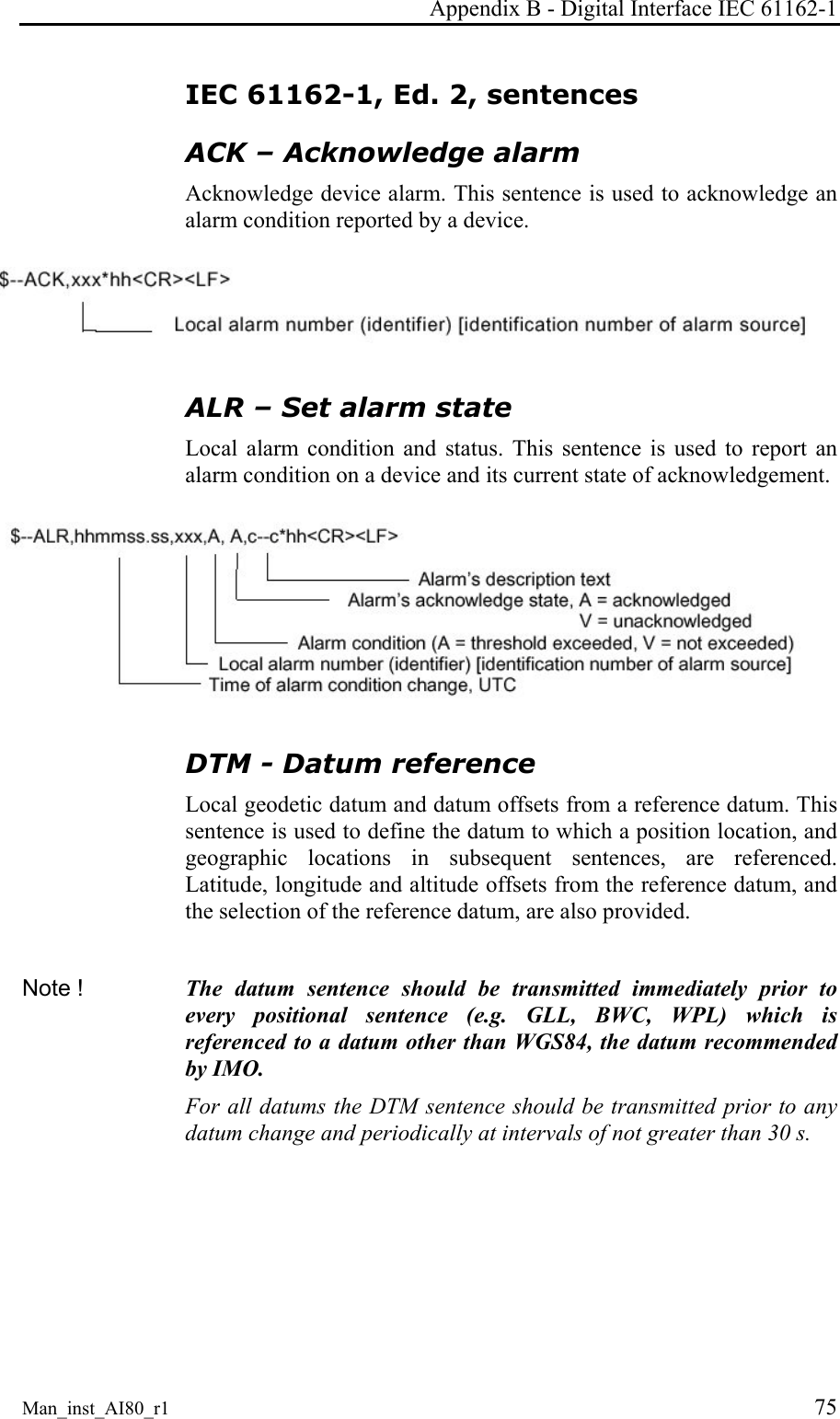
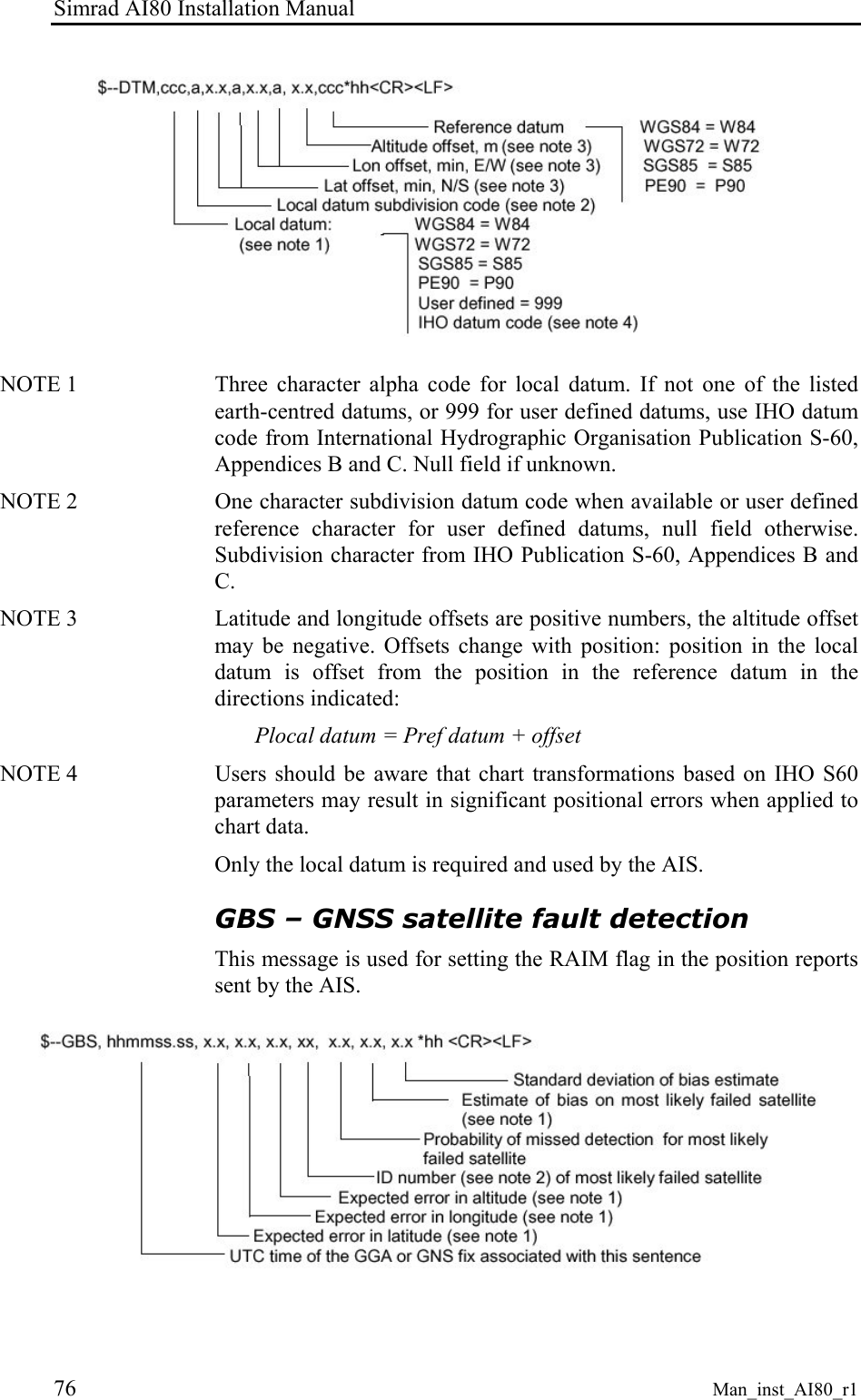
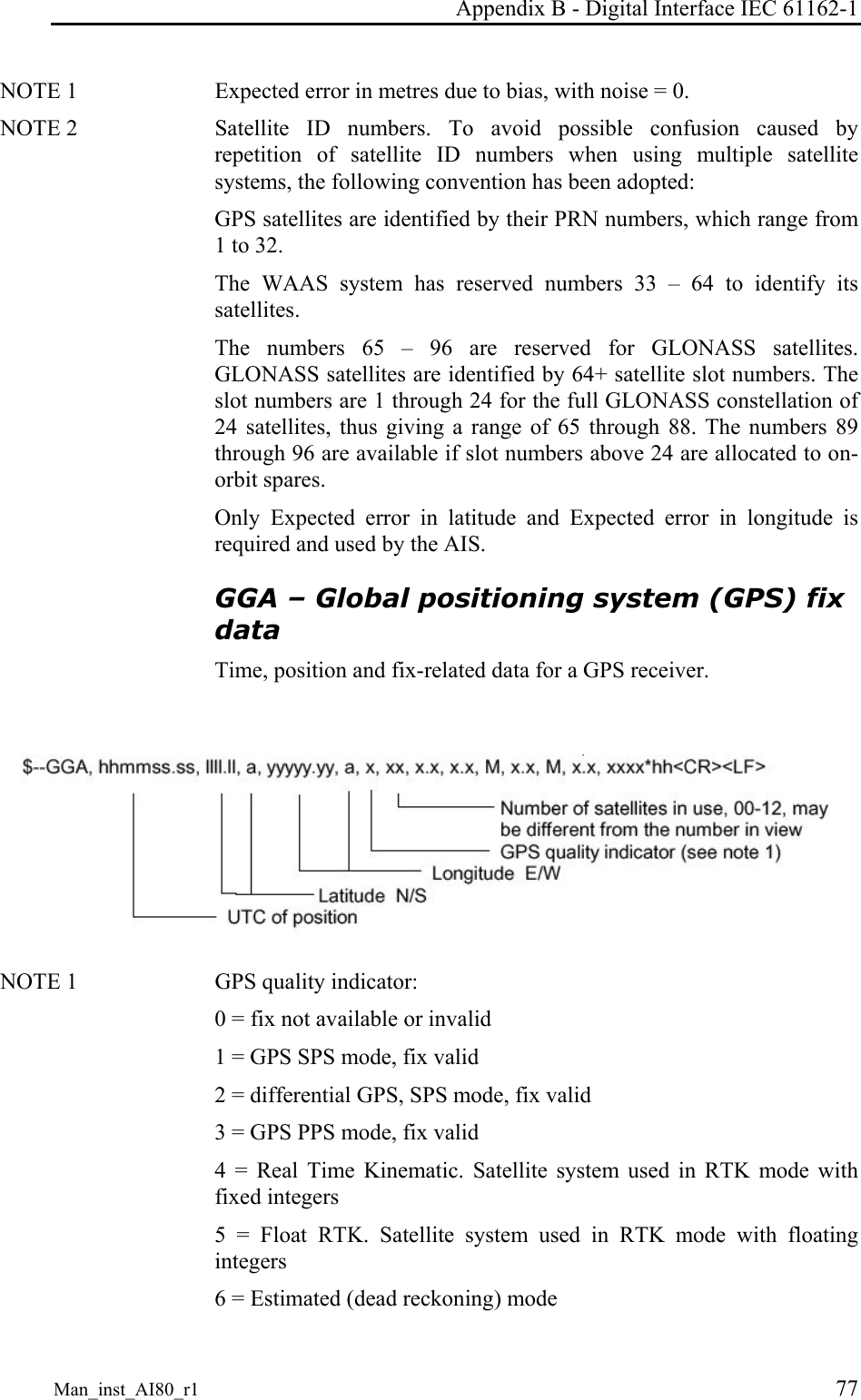
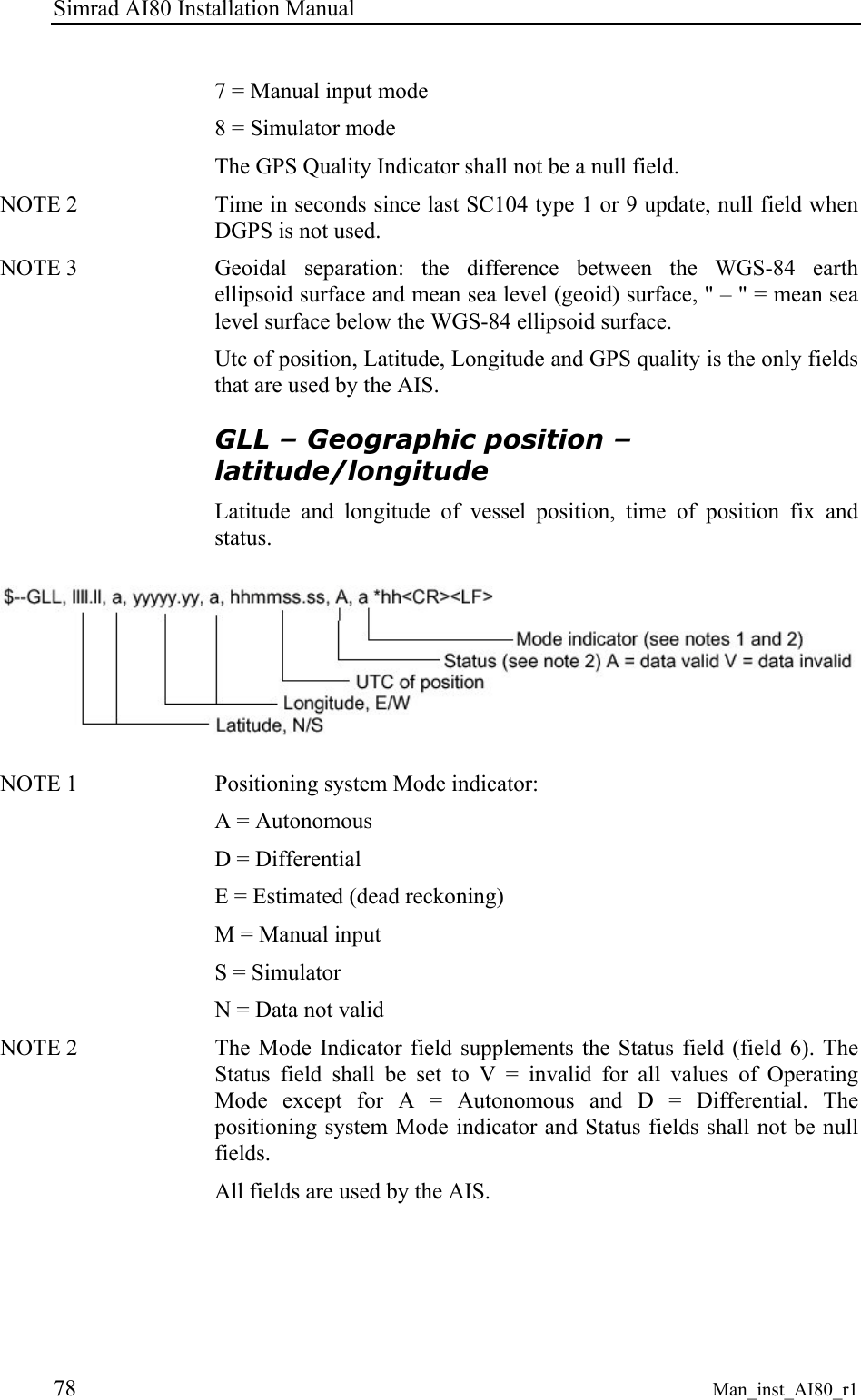
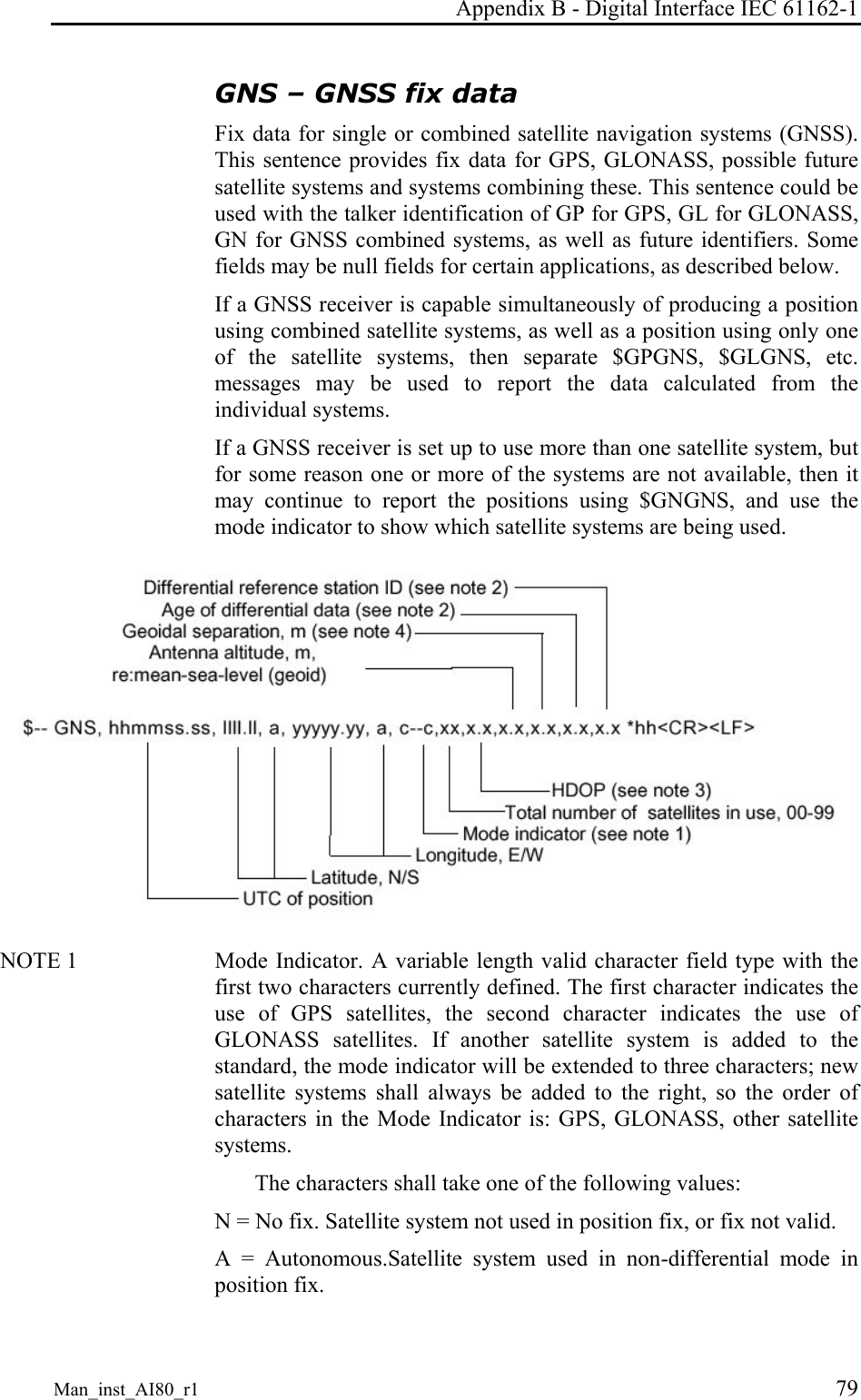
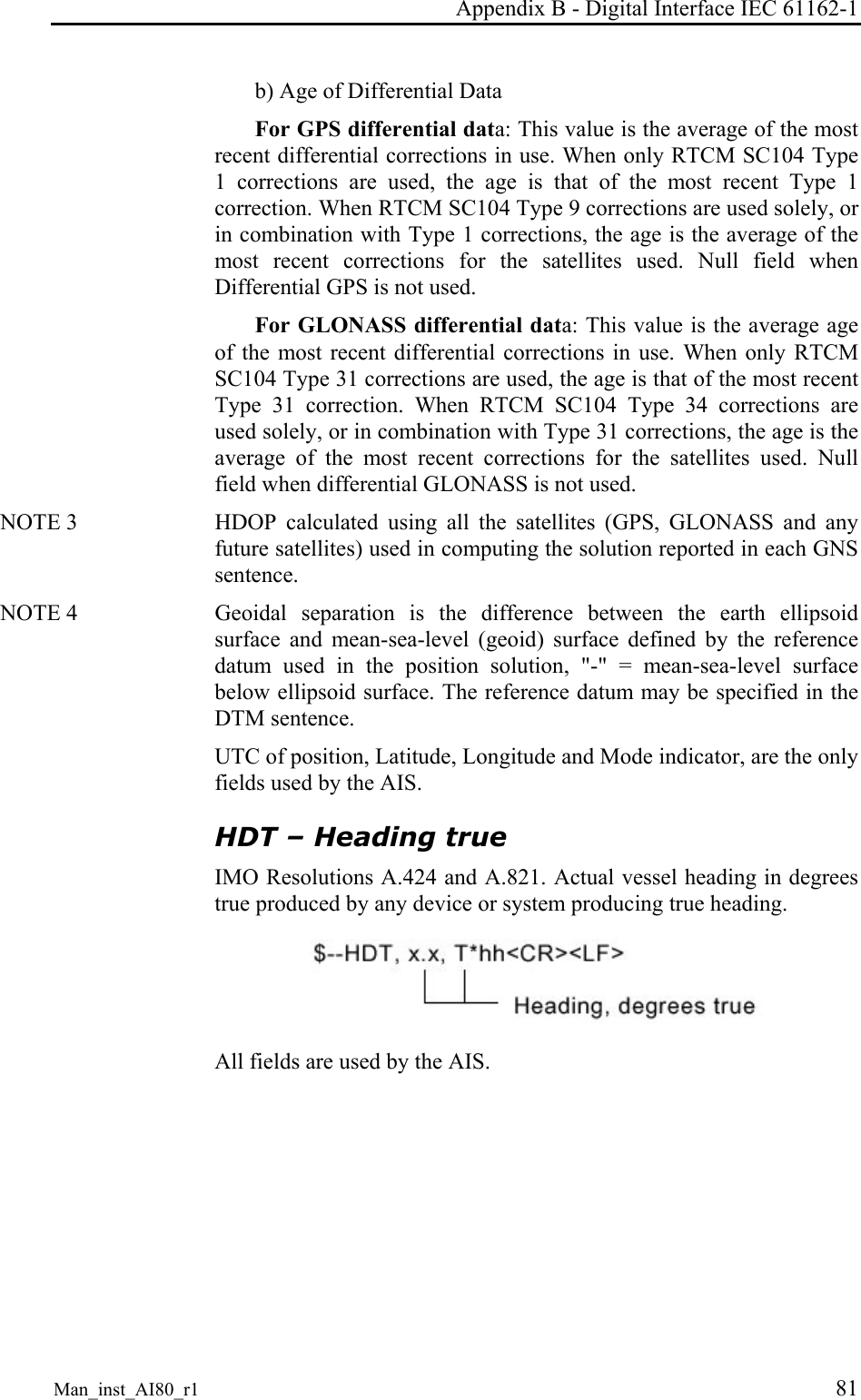
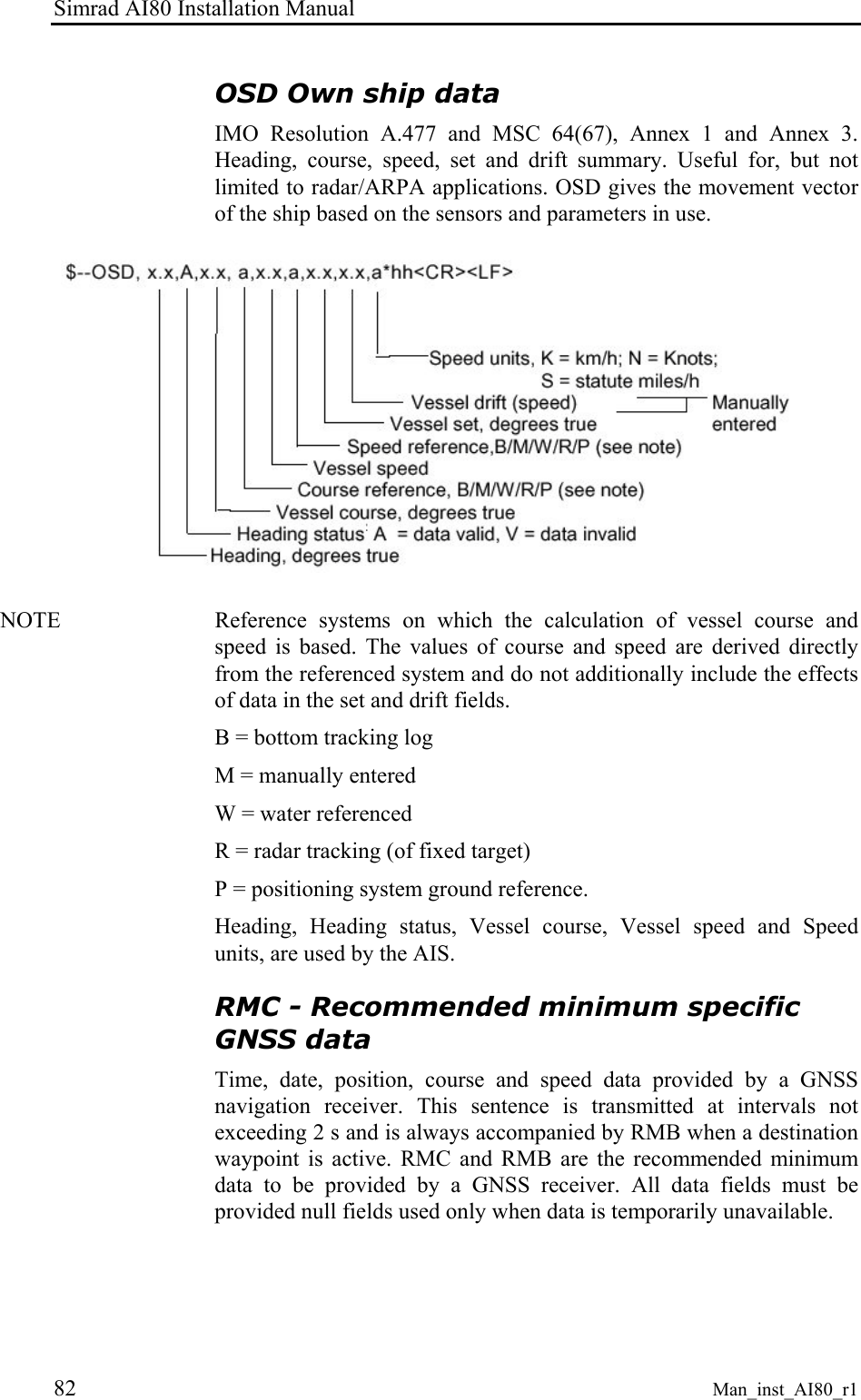
![Simrad AI80 Installation Manual 34 Man_inst_AI80_r1 Adding a region - Add region --------- ChnA: 0 ChnB: 0 RxTx: TxA/TxB, RxA/Rx▼ TxPower: LOW LAT NE: 00°00'00.00N LON NE: 000°00'00.00E LAT SW: 00°00'00.00N LON SW: 000°00'00.00E BW A: Default BW B: Default Zone: 0 Hold [OK] to save To edit these parameters, use the ARROW keys to manoeuvre to the parameter of interest and press EDIT. Use the DEL button if necessary, and enter the new value. If non-digits are required, press the SHIFT button to change to alpha mode. Press the SHIFT button again to return to digit mode. While in alpha mode, letters and special characters can be entered (e.g. the degree symbol °). Note ! If the user tries to enter a region which parameters locates the region more than 500 nautical miles away from the vessel, the region will automatically be discarded. Also when the vessel position is further than 500 nautical miles from the region, this region is automatically discarded by the AIS unit. ChA: The radio channel to be used as channel A. ChB: The radio channel to be used as channel B. RxTx: Transmission/reception mode. This parameter indicates whether or not the AIS should transmit and receive on both channels, or on only a subset of these. TxPower: The transmission power of the radio. Low equals 2W, and High equals 12W. Lat/Lon: The rectangular area to which the radio parameters apply. The area is specified by entering the coordinates for the north-east corner and the south-west corner. BW A: Bandwidth for the selected channel A. BW B: Bandwidth for the selected channel B. Zone: Transition zone for the region. This parameter is given in nautical miles, and provides information about the transition zone of the region in which the AIS should change radio parameters to the ones specified for the region.](https://usermanual.wiki/Kongsberg-Seatex-AS/AIS200AI80.Exhibit-8-Installation-Guide/User-Guide-492487-Page-44.png)