Kongsberg Seatex AS AIS200AI80 AIS200 Simrad AI80 User Manual Man inst ai80 r1 not finished
Kongsberg Seatex AS AIS200 Simrad AI80 Man inst ai80 r1 not finished
Contents
- 1. Exhibit 8 User Manual
- 2. Exhibit 8 Installation Guide
Exhibit 8 Installation Guide

Installation manual
Man_inst_AI80_r1 i
Installation Manual
AI80 Automatic
Identification System
This manual is intended as a reference guide for installing and
maintaining the Simrad AI80 Automatic Identification System.
Simrad AI80 Installation Manual
ii Man_inst_AI80_r1
Document revisions
Rev Date Written by Checked by Approved by
0 17.09.04 ISt KKr KKr
1 17.11.04 ISt KKr KKr
Document history
Rev. 0 First edition.
Rev. 1 FCC statements included.
To assist us in making improvements to this manual, we would welcome comments and
constructive criticism. Please send all such - in writing to:
Kongsberg Seatex AS
Pirsenteret
N-7462 Trondheim, Norway
or by e-mail to:
firmapost@kongsberg-seatex.no

Installation manual
Man_inst_AI80_r1 iii
About this manual
This manual is intended as a reference guide for installing and maintaining the Simrad
AI80 Automatic Identification System.
In this manual, references to buttons on the control unit are written in boldface, and in a
different text style (e.g. VIEW button, SHIFT button, ENTER button).
Important text that requires special attention from the reader is emphasized as follows:
Note! Used to draw the reader’s attention to a comment or some
important information.
Caution! Used to warn the reader that a risk of damage to the equipment
exists if care is not exercised.
WARNING! Used when it is necessary to warn personnel that a
risk of injury or death exists if care is not exercised.
FCC part 15 statement
This equipment has been tested and found to comply with the limits
for a Class A digital device, pursuant to Part 15 of the FCC Rules.
These limits are designed to provide reasonable protection against
harmful interference when the equipment is operated in a marine
and/or commercial environment. This equipment generates, uses and
can radiate radio frequency energy and, if not installed and used in
accordance with the instruction manual, may cause harmful
interference to radio communications. The equipment is not inteded
for operation in a residential area. Operation in such an area is likely
to cause harmful interference in which case the user will be required
to correct the interference at his own expense.
Additional information to the user
Changes or modifications not expressly approved by Kongsberg
Seatex AS will void the user's authority to operate the equipment.

Simrad AI80 Installation Manual
iv Man_inst_AI80_r1
This manual is divided in the following sections:
1. Technical specifications
Specifications for the system and for all separate units in the AI80 system..
2. Installation
Reference guide for correct installation of the AI80 system.
3. Connecting and configuring external equipment
Describes how external equipment is connected to the AI80 system.
4. Software setup procedure
Reference guide for correct configuration of the AI80 system.
5. Maintenance
Reference guide for correct configuration of the AI80 system.
6. Troubleshooting
Troubleshooting procedures that could be performed for checking hardware and external
interface.
7. Spare parts list
Part numbers for all standard and optional units that may be included in the AI80 system.
8. Appendix A
Vessel identifiers.
9. Appendix B
IEC 61162-1, IEC/PAS 6162-100 sentence description.
10. Appendix C
Software setup procedure using external, optional MKD.
11. Appendix D
AIS troubleshooting form.
12. Appendix E
Optional VHF antenna.

Installation manual
Man_inst_AI80_r1 v
Abbreviations and acronyms
ABK Addressed and Binary Broadcast Acknowledgement
ABM Addressed Binary and Safety Related Message
ACA AIS Regional Channel Assignment
AIS Universal Ship-borne Automatic Identification System
AIS 1 161.975 MHz (87B – 2087)
AIS 2 162.025 MHz (88B – 2088)
ALR Alarm
ARPA Automatic Radar Plotting Aid
ASCII American Standard Code for Information Interchange
ATN Aids to Navigation
BIIT Built In Integrity Tests
COG Course Over Ground
DGPS Differential GPS
DGNSS Differential Global Navigation Satellite System
DSC Digital Selective Calling
ECDIS Electronic Chart Display and Information System
ECS Electronic Chart System
EMC Electromagnetic Compatibility
ETA Estimated Time of Arrival
FATDMA Fixed Allocation TDMA
GNSS Global Navigation Satellite System
GPS Global Positioning System
IALA International Association of Lighthouse Authorities
IEC International Electrotechnical Commission
IMO International Maritime Organisation
LR Long Range
MKD Minimum Keyboard Display
MMSI Maritime Mobile Service Identity
MSG Message
N/A Not Applicable
NMEA National Marine Electronics Association

Simrad AI80 Installation Manual
vi Man_inst_AI80_r1
PI Presentation Interface
PPS Pulse-per-second
PUR Polyurethane
PWR Power
ROT Rate of Turn
RTCM Radio Technical Commission of Maritime Service
RX Receive
SAR Search and Rescue
SMS Short Message Service
SOG Speed Over Ground
SOTDMA Self Organising TDMA
TBD To Be Defined
TDMA Time Division Multiple Access
TX Transmit
TXT Text Message
UTC Universal Co-ordinated Time
VDL VHF Data Link
VDM VHF Data Link Message
VDO VHF Data Link Own Vessel Message
VHF Very High Frequency

Installation manual
Man_inst_AI80_r1 vii
Contents
1 TECHNICAL SPECIFICATIONS.......................................................................1
1.1 Health, environment and safety ......................................................................1
1.2 Restrictions in guarantee ................................................................................1
1.3 Power ..............................................................................................................1
1.4 Data input .......................................................................................................1
1.5 Specifications..................................................................................................2
AI80 Mobile Unit ...........................................................................................2
AI80 Minimum Keyboard Display (MKD)....................................................5
GPS antenna (GPS4) ......................................................................................7
Pilot plug.........................................................................................................8
Optional, external MKD Unit.........................................................................8
2 INSTALLATION .................................................................................................11
2.1 General..........................................................................................................11
2.2 Unpacking and handling...............................................................................11
2.3 Installation procedure ...................................................................................11
2.4 Cabling..........................................................................................................13
2.5 Location of the units .....................................................................................15
Antenna location...........................................................................................15
2.6 MKD unit......................................................................................................16
Mechanical installation.................................................................................16
2.7 Optional MKD unit.......................................................................................17
Mechanical installation.................................................................................17
The optional MKD cable ..............................................................................18
2.8 AI80 Mobile Unit .........................................................................................19
Mechanical installation.................................................................................19
Cable connection ..........................................................................................19
Rear connections...........................................................................................19
Data signals...................................................................................................20
2.9 Pilot plug.......................................................................................................20
2.10 External alarm...............................................................................................21

Simrad AI80 Installation Manual
viii Man_inst_AI80_r1
2.11 GPS antenna .................................................................................................22
Mechanical installation.................................................................................22
GPS antenna offset arms...............................................................................22
Checking the antenna cable ..........................................................................23
Sealing antenna connectors ..........................................................................23
2.12 VHF antenna.................................................................................................23
3 CONNECTING AND CONFIGURING EXTERNAL EQUIPMENT ...........25
3.1 General..........................................................................................................25
3.2 Presentation interface ...................................................................................26
Physical location...........................................................................................26
Port configuration .........................................................................................26
Input sentences .............................................................................................26
Proprietary input sentences...........................................................................27
Output sentences...........................................................................................27
3.3 Long-Range interface ...................................................................................28
Physical location...........................................................................................28
Port configuration .........................................................................................28
Input sentences .............................................................................................28
Output sentences...........................................................................................28
3.4 Sensor input ..................................................................................................29
Physical location...........................................................................................29
Port configuration .........................................................................................29
Input sentences .............................................................................................29
Priority of Position........................................................................................30
Priority of SOG and COG.............................................................................30
Priority of Heading .......................................................................................30
Priority of Rate of Turn ................................................................................30
4 SOFTWARE SETUP PROCEDURE.................................................................31
4.1 General..........................................................................................................31
4.2 Security settings AI80 ..................................................................................31
4.3 Entering static data .......................................................................................32
4.4 Configuring external serial ports ..................................................................33

Installation manual
Man_inst_AI80_r1 ix
4.5 VHF data link ...............................................................................................33
4.6 Configuring radio channels ..........................................................................33
Viewing a region's settings...........................................................................33
Adding a region ............................................................................................34
Edit current region ........................................................................................35
5 MAINTENANCE .................................................................................................37
5.1 General..........................................................................................................37
5.2 Periodic maintenance....................................................................................37
MKD Units ...................................................................................................37
Mobile Unit...................................................................................................37
5.3 Repair and modifications..............................................................................38
Exchanging antenna cables...........................................................................38
Exchanging GPS or VHF antennas ..............................................................38
5.4 Software updates...........................................................................................39
6 TROUBLESHOOTING ......................................................................................41
6.1 General..........................................................................................................41
6.2 Hardware problems.......................................................................................41
Power supply failure.....................................................................................42
GPS and VHF antenna cable connections ....................................................42
GPS and VHF antenna malfunction .............................................................42
GPS receiver failure......................................................................................42
VHF transceiver failure ................................................................................43
6.3 External data interface problems ..................................................................43
Data input from main GPS/GNSS source.....................................................43
Heading from vessel heading sensor ............................................................44
AIS unit restarts ............................................................................................44
7 SPARE PART LIST.............................................................................................45
7.1 Simrad AI80..................................................................................................45
8 APPENDIX A - VESSEL IDENTIFIERS..........................................................47
9 APPENDIX B - DIGITAL INTERFACE IEC 61162-1....................................51
Hardware ......................................................................................................51

Simrad AI80 Installation Manual
x Man_inst_AI80_r1
Proprietary 61162-1 sentences......................................................................52
New IEC 61162-1 sentences.........................................................................55
IEC 61162-1, Ed. 2, sentences......................................................................75
10 APPENDIX C - SOFTWARE SETUP USING OPTIONAL MKD ................87
10.1 Security settings optional MKD ...................................................................87
Setting the security codes .............................................................................87
Changing the security levels.........................................................................88
10.2 Entering static data optional MKD...............................................................90
10.3 Configuration external serial ports optional MKD.......................................91
10.4 Port settings and MAC address optional MKD............................................92
10.5 Answer mode optional MKD........................................................................93
10.6 Configuring radio channels optional MKD ..................................................94
Adding a region ............................................................................................95
Editing current region...................................................................................96
Viewing a region’s settings ..........................................................................96
11 APPENDIX D - TROUBLESHOOTING FORM .............................................97
12 APPENDIX E - OPTIONAL VHF ANTENNA.................................................99

Technical specifications
Man_inst_AI80_r1 1
1 TECHNICAL SPECIFICATIONS
1.1 Health, environment and safety
Operation or troubleshooting of Simrad AI80 equipment will not
imply any risk for high voltages, explosions or exposure to gas. The
AI80 is compliant with IEC 60950/EN60950 standards regarding
product safety (low voltage) and IEC 60945/EN60945 standards on
electromagnetic compatibility (immunity/radiation), vibration and
climatic conditions.
1.2 Restrictions in guarantee
The liability of the manufacturer is limited to repair of the AI80 only,
and excludes consequential damages such as customer's loss of profit
or damage to other systems traceable back to AI80 malfunction. The
warranty does not cover malfunctions of the AI80 resulting from the
following conditions:
a) The customer has opened the Mobile Unit
b) Over-voltage or incorrect power connection
1.3 Power
Voltage input:................................24 V DC (nominal) range 18 – 35 V
Power consumption:....................50 W peak, approx. 30 W continuous
1.4 Data input
Gyro compass:................................................. NMEA 0183 version 3.0
GPS Main source: ........................................... NMEA 0183 version 3.0
DGPS corrections:......................................RTCM – SC104 version 2.1

Simrad AI80 Installation Manual
2 Man_inst_AI80_r1
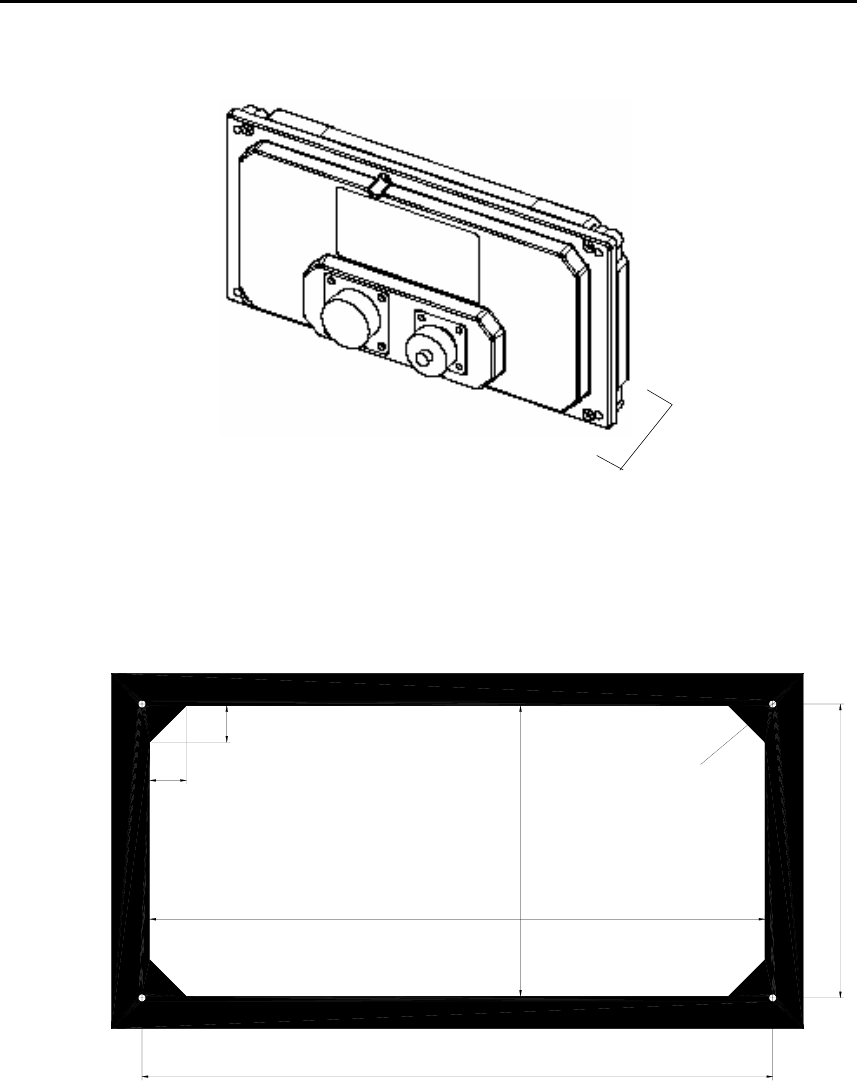
1.5 Specifications
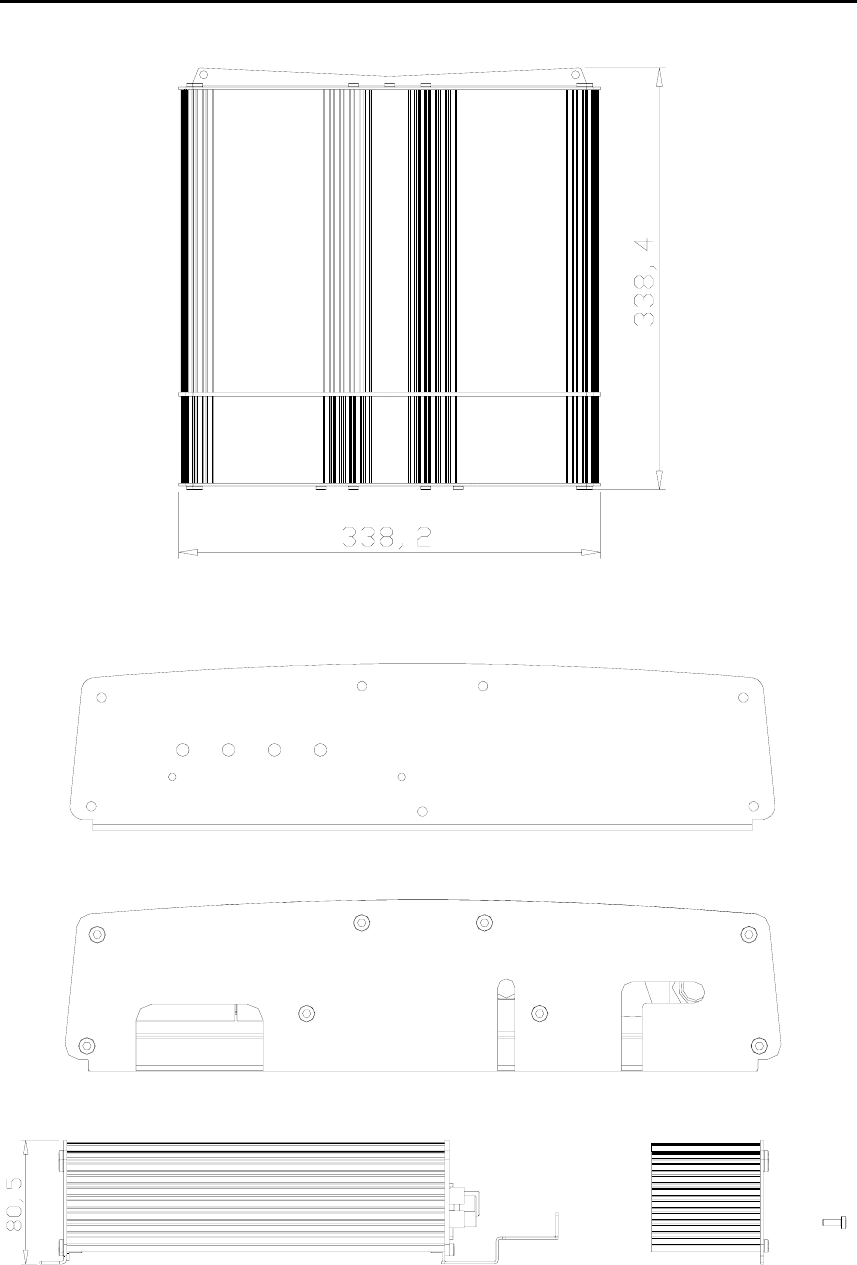
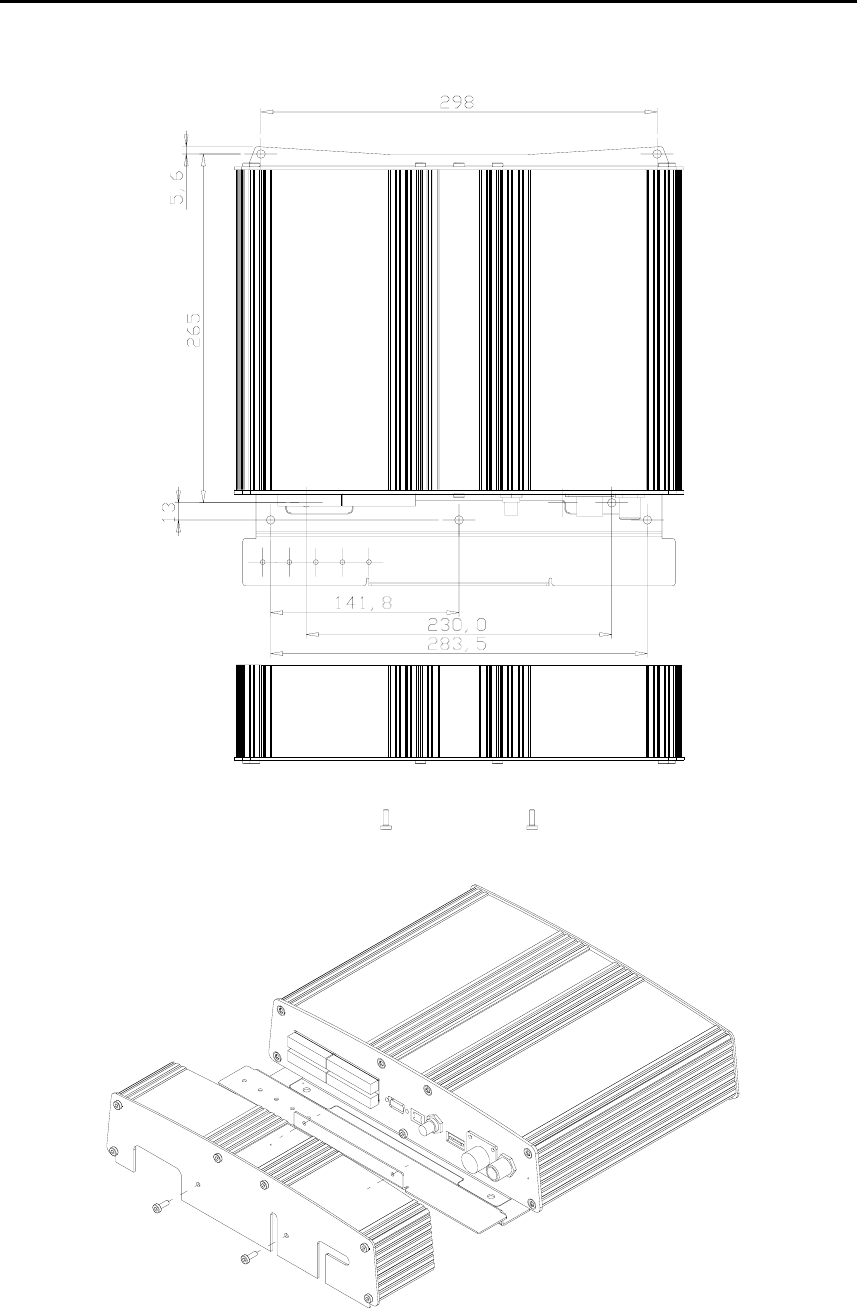
AI80 Mobile Unit
Dimensions:........................................................................ Refer page 3
Weight:..........................................................................................3.4 kg
Colour:........................................................................................... Black
Enclosure material:...............................................Varnished aluminium
Environmental protection:............................................................... IP40
Temperature range:
Operating:................................... –15 to +55°C (+5° to +131°F)
Storage: ..................................... –25 to +60°C (-13° to +140°F)
Humidity - operating:............................................................ 0-95% RH
Vibration test:
Displacement:.................................. 1 mm from 2 Hz to 13 Hz
Acceleration: ............................... 7 m/s2 from 13 Hz to 100 Hz
Compass safe distance..................................................................0.35 m
VHF radio:
Number of transmitters: ............................................................1
Number of receivers:.................................................................3
Channel spacing: .................................................12.5 or 25 kHz
Frequency range:................................................ 156 - 165 MHz
Transmitter power: ............ 2 W or 12.5 W nominal (selectable)
AIS 1 (Channel 87B):........................................... 161.975 MHz
AIS 2 (Channel 88B):........................................... 162.025 MHz
DSC receiver: ....................................................... 156.525 MHz
GPS receiver:
Type: ......................................................................Ashtech A12
Operating frequency
(reception only): .................................. 1575.42 MHz ± 10 MHz
Technical specifications
Man_inst_AI80_r1 3
TOP VIEW
TX MSG GPS ALM
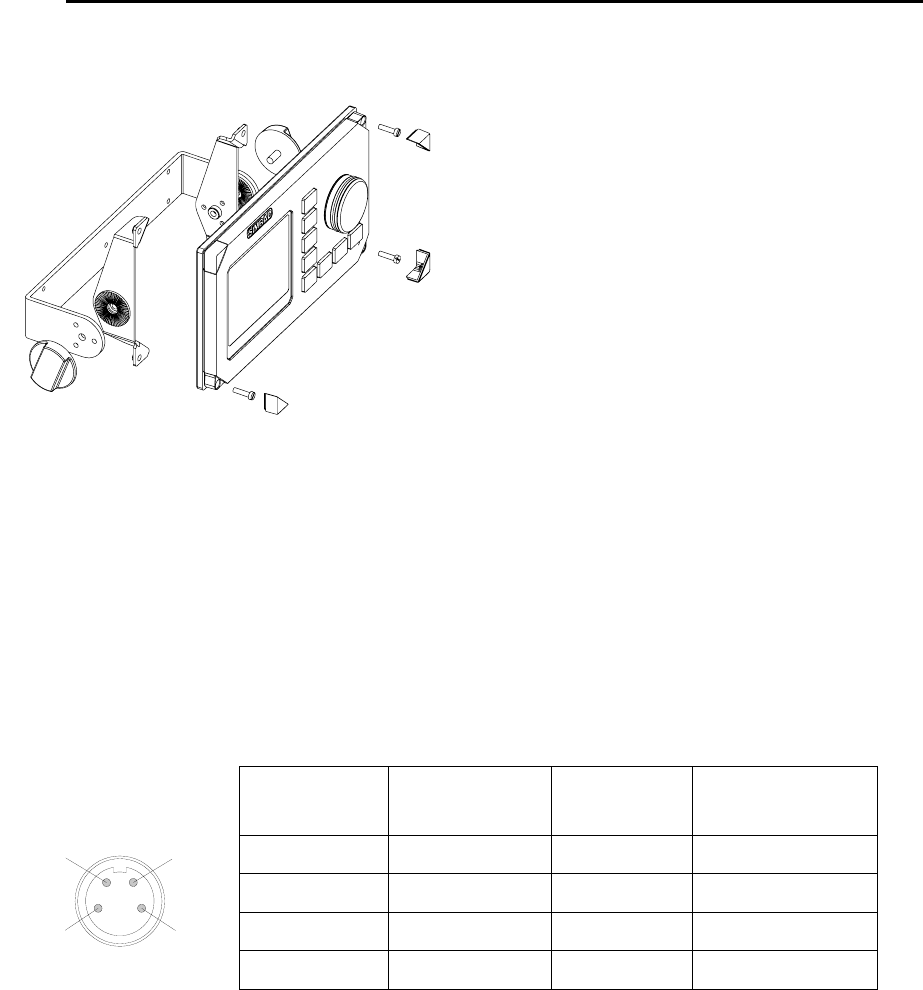
FRONT VIEW
REAR VIEW
SIDE VIEW EXPLODED
Simrad AI80 Installation Manual
4 Man_inst_AI80_r1
BOTTOM VIEW - EXPLODED
ISO VIEW
Technical specifications
Man_inst_AI80_r1 5
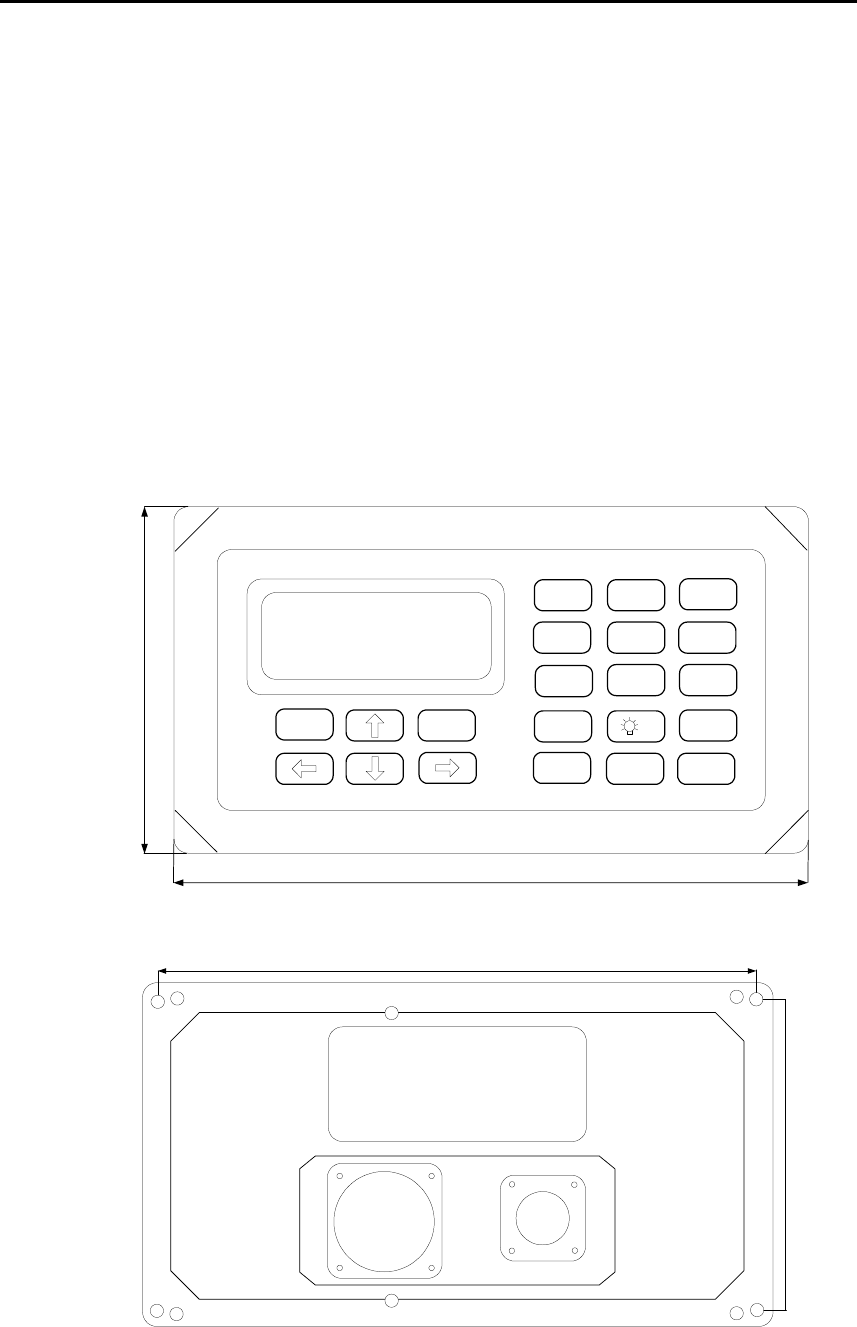
AI80 Minimum Keyboard Display (MKD)
Dimensions:............................................................................ See below
Weight:..........................................................................................0.4 kg
Colour:........................................................................................... Black
Cable length (to Mobile Unit):..........................................................7 m
Enclosure material:.......................................................................Plastic
Environmental protection:..........................IP56 (when panel-mounted)
Temperature range:
Operating:.....................................–15 to +55°C (+5 to +131°F)
Storage: ...................................... –25 to +70°C (–13 to +158°F)
Humidity - operating:............................................................ 0-95% RH
OK
CANCEL
1 2 ABC 3DEF
4GHI 5JKL 6MNO
7PQRS 8TUV 9WXYZ
VIEW 0
OFF
DELEDIT
INFO
SHIFT
AIS
SIMRAD
217 mm
109 mm
FRONT VIEW
Pilot
plug
Main
unit
96 mm
206 mm
REAR VIEW
Simrad AI80 Installation Manual
6 Man_inst_AI80_r1
50 mm
SIDE VIEW
201
206
96
95
12
12
Ш
2.5
DRILLING & CUTOUT DIMENSION OF AI80 DISPLAY (MM)
A full-scale drawing of the display is supplied with the documentation
package.
Technical specifications
Man_inst_AI80_r1 7
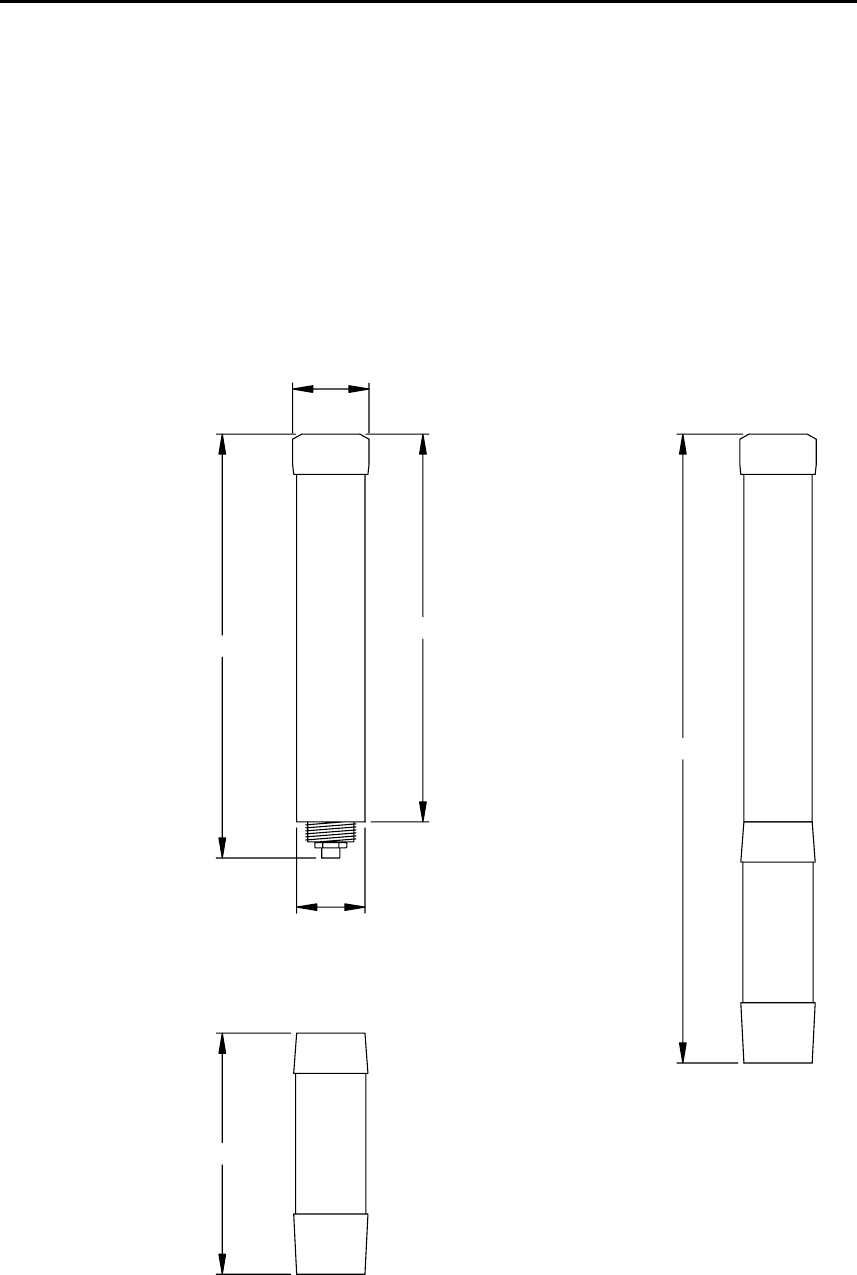
GPS antenna (GPS4)
Dimensions:.............................................................. Refer figure below
Weight:......................................................................................0.130 kg
Cable adapter set (2 cables): ....................................................2 x 0.5 m
Voltage input:.................................5 V DC from the AI80 Mobile Unit
Temperature range: ............................... -35°C - +70°C (-31° - +158°F)
Humidity: .........................................................................100% (sealed)
Mounting:..................................................... 1”14 thread (standard US)
211
313
120
38
34
193
Simrad AI80 Installation Manual
8 Man_inst_AI80_r1
Pilot plug
AMP CPC series 2/Receptable (Square Flanged) Shell size 11, 9-pin.
The pilot plug is located at the rear of the MKD.
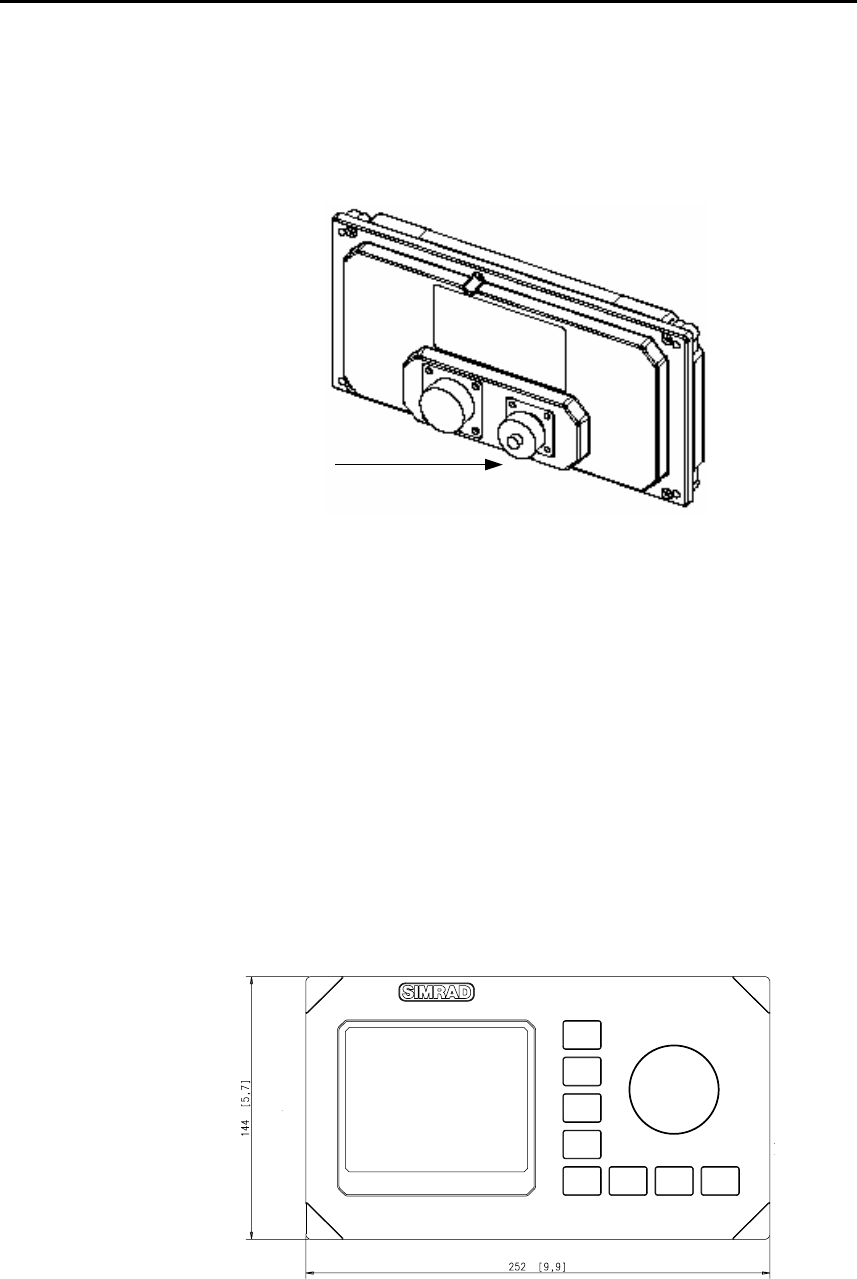
Optional, external MKD Unit
Dimensions:............................................................................ See below
Weight:.......................................................................... 0.9 kg (2.0 lbs.)
Colour:........................................................................................... Black
Cable length (to Mobile Unit):..........................................................7 m
Enclosed material:.......................................... Epoxy coated aluminium
Environmental protection:..........................IP56 (when panel-mounted)
Temperature range - operating: ............. –25 to +55°C (–13 to +131°F)
Temperature range - storage: ................. –30 to +80°C (–22 to +176°F)
FRONT VIEW
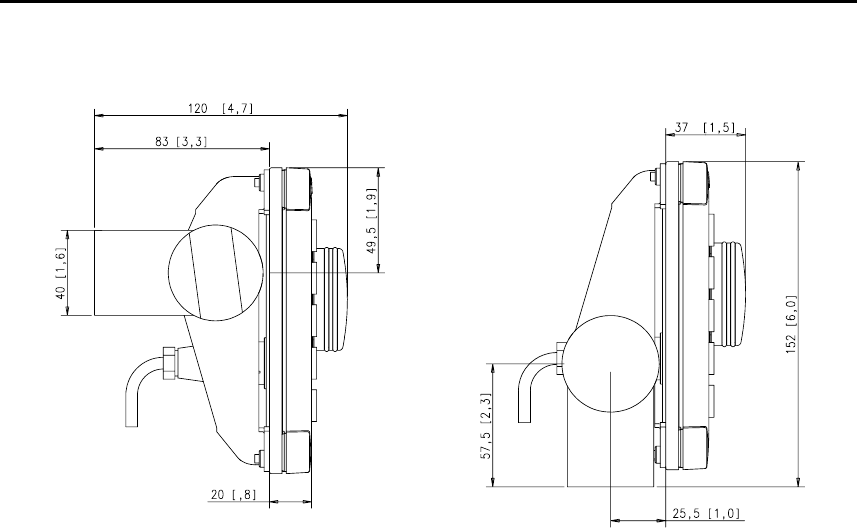
Technical specifications
Man_inst_AI80_r1 9
VERTICALLY MOUNTED
HORISONTALLY MOUNTED
Simrad AI80 Installation Manual
10 Man_inst_AI80_r1
THIS PAGE INTENTIALLY LEFT
BLANK

Installation
Man_inst_AI80_r1 11
2 INSTALLATION
2.1 General
To reduce the installation cost, crew members (Crew) qualified to
perform electrical installations can perform part of the installation.
However, qualified service personnel (SP) should carry out the final
commissioning.
2.2 Unpacking and handling
Care should be taken when unpacking and handling the equipment. A
visual inspection should be made to ensure that the equipment has not
been damaged during shipment, and that all parts are present.
A standard AI80 delivery includes:
• AI80 Mobile Unit
• AI80 MKD
• GPS4 GPS antenna including mounting kit and cable adapter set
• Documentation, including User and Installation manual
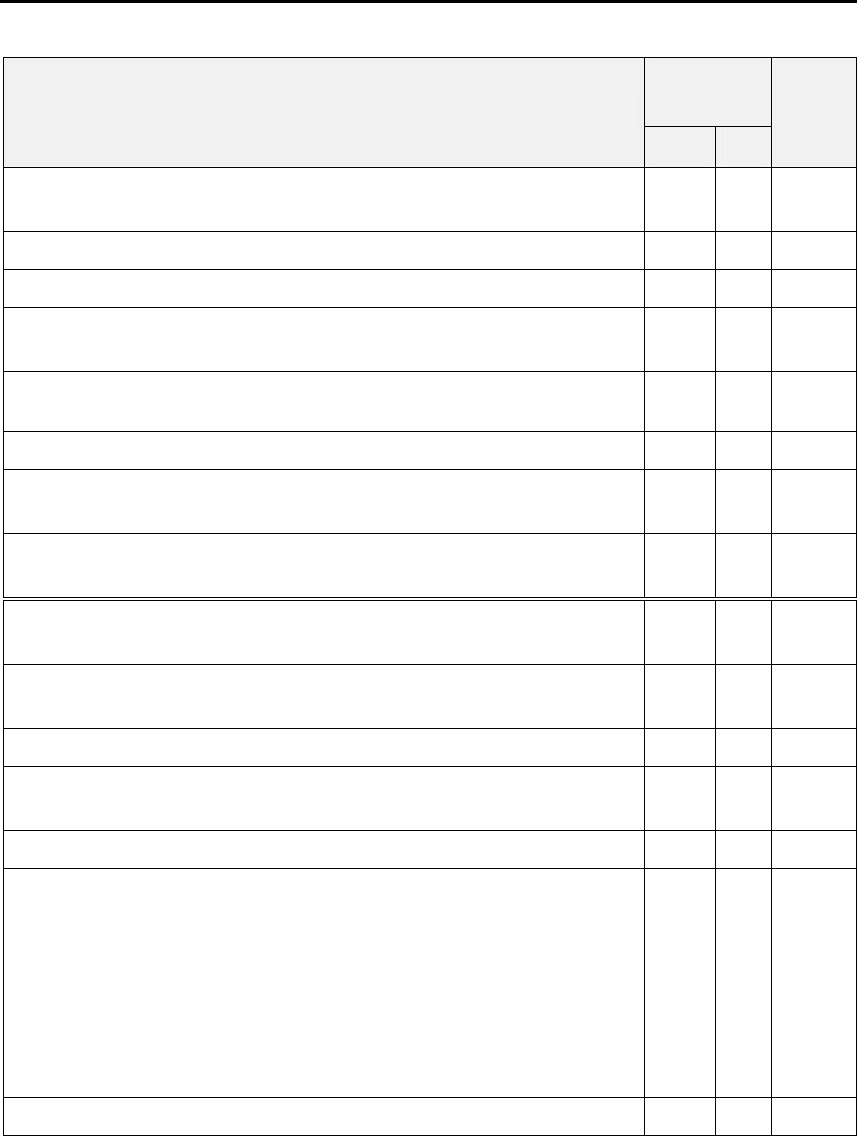
2.3 Installation procedure
The table on the following pages describes a recommended
installation procedure. It also describes items that could be performed
by the vessel crew and items that must be carried out by qualified
personnel. The table also includes page references to the various
items' installation description in this manual.
Simrad AI80 Installation Manual
12 Man_inst_AI80_r1
Performed
by
Description
Crew SP
Ref
page
1. Mount the GPS4 antenna included in the AI80 system and the
third party VHF antenna. x
2. Connect the adapter cable to the GPS4 antenna. x
3. Pull cables from the antennas to the AI80 Mobile Unit. x
4. Check the GPS and VHF cables for short circuit between the
centre conductors and shield (ground). x 23
5. Mount the AI80 Mobile Unit - mount the MKD. x 16
onwards
6. Connect the GPS adapter cable to antenna cable. x
7. Connect the GPS4 antenna and the VHF antenna to the plugs on
the rear of the Mobile Unit (connectors to be mounted by SP). x 19
8. Connect the MKD unit to the Mobile Unit using the supplied
cables. x 19
9. Connect the external main GPS sensor to Sensor port 1, 2 or 3
on the Mobile Unit. x
10. Connect the vessel’s main heading sensor to Sensor port 1, 2 or
3 on the Mobile Unit. x
11. Provide other interface from external sensors to the Mobile Unit. x
12. Connect the Power to the Mobile Unit. Make sure the power
supply is from the vessel's emergency supply. x
13. Apply power to the AI80 system. x
14. Check that the indication on the LED indicators on the Mobile
Unit is as follows:
GPS LED: blinks green once each second
TX LED: blinks green and amber, at the most 10
seconds between each blink
MSG LED: blinks green and amber, at the most 10
seconds between each blink
x
15. Perform the software setup procedure. x
Installation
Man_inst_AI80_r1 13
2.4 Cabling
Double shielded coaxial cables equal or better than RG-214 are
recommended when connecting the GPS and VHF antennas to the
AI80 system.
Coaxial cables should be installed in separate signal cable
channels/tubes and at least 10 cm away from power supply cables.
All outdoor installed connectors on the coaxial cables should be fitted
with preventive isolation such as shrink-stocking with silicone to
protect against water penetration.
Avoid sharp bends of the cables. A bend may change the
characteristic impedance of the cable.
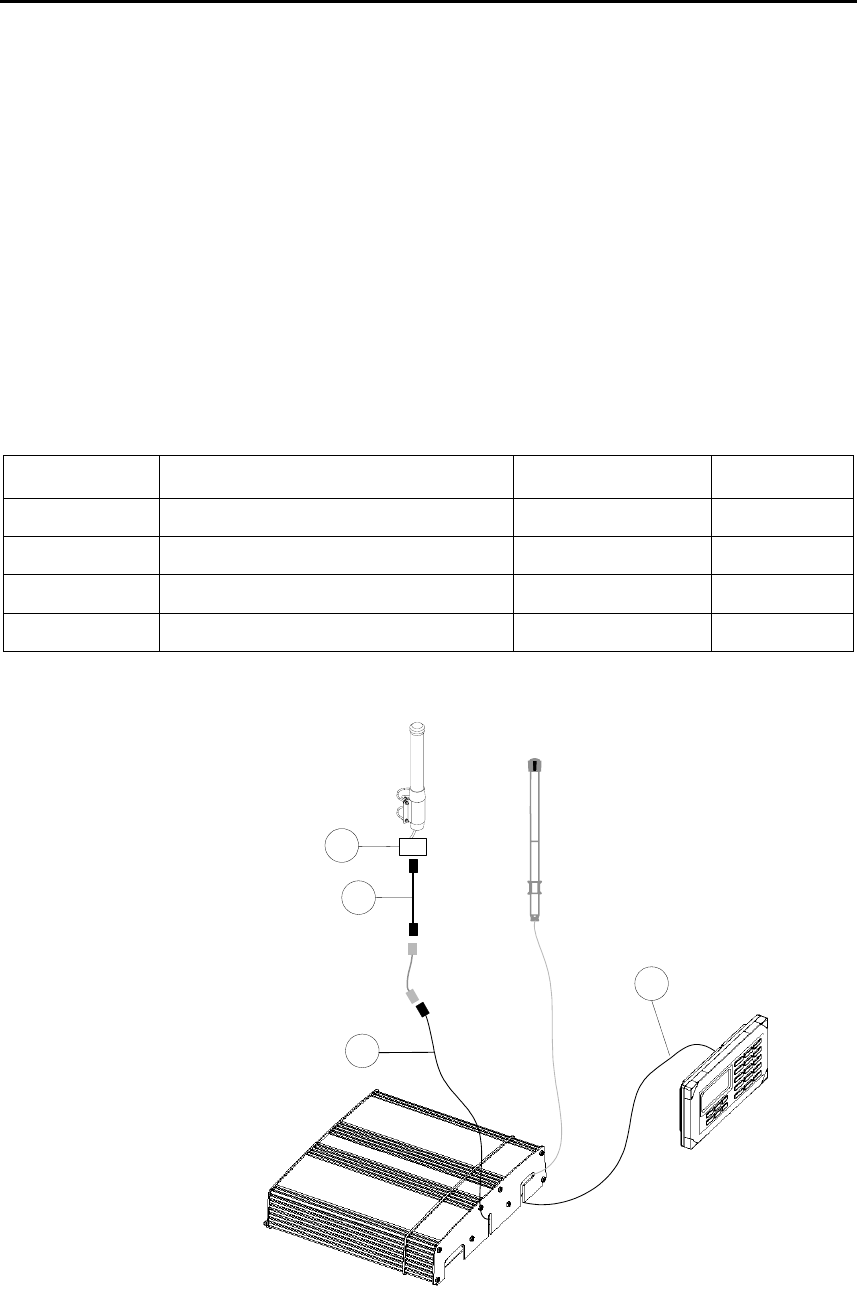
CABLE NO. DESCRIPTION CABLE LENGTH PART NO.
1 Interface cable to MKD/Pilot Plug 7 m A101-13_1
2 Adapter cable GPS 0.5 m A100-93
3 Interconnection cable GPS4 0.5 m A101-03
4 Mounting kit, GPS antenna A101-02
The figure below shows cables and cable length in a standard AI80
system.
1
2
4
3
Note ! Shaded items and cables are not part of a standard AI80 scope of
supply.
Simrad AI80 Installation Manual
14 Man_inst_AI80_r1
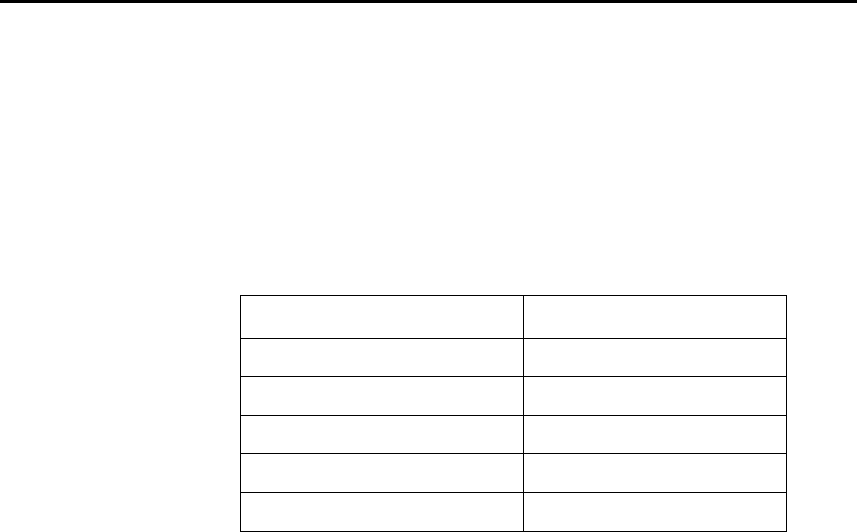
Antenna cables
The antenna cables should be as short as possible to minimise
attenuation of the signal. The cables should be located at least 10 cm
away from power supply cables.
The table below shows the maximum cable length (VHF) for the
different antenna cable types.
Cable type Max. length at 160 MHz
RG58 10 metres
“PUR” 58 * 10 metres
RG213 30 metres
RG214 * 30 metres
LowLoss ½” * 100 metres
* Recommended cable types.
Power cables
Use minimum 2 x 2.5 mm2 cables to avoid voltage drop.
Installation
Man_inst_AI80_r1 15
2.5 Location of the units
The units included in the AI80 system should be mounted with special
regard to the units’ environmental protection, temperature range and
cable length. Refer Technical specifications, page 1 onwards.
Antenna location
The AIS equipment, like any other ship borne transceiver operating in
the VHF maritime band, may cause interference to a ship’s VHF
radiotelephone. This interference may occur as a periodic (e.g. every
20 s) soft clicking sound on a ship’s radiotelephone.
This affect may become more noticeable when the VHF
radiotelephone antenna is located near the AIS VHF antenna, and
when the radiotelephone is operating on channels near the AIS
operating channels (e.g. channels 27, 28 and 86).
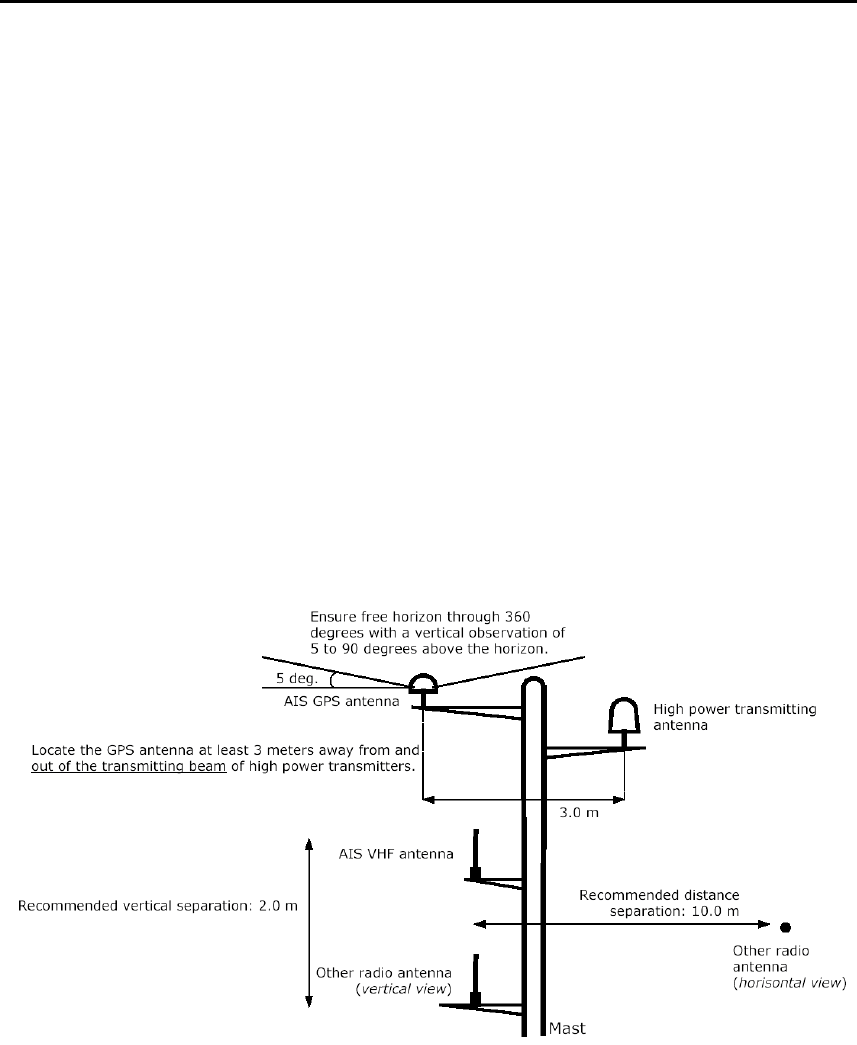
The figure below shows recommended location and distance between
the different antennas.

Simrad AI80 Installation Manual
16 Man_inst_AI80_r1
2.6 MKD unit
Mechanical installation
The MKD may be panel or bracket (option) mounted. The optional
mounting bracket may be ordered separately.
The unit should be mounted with special regard to the operator’s need
for easy operation.
Avoid mounting the MKD where it is easily exposed to sunlight, as
this will shorten the lifetime of the display. If this is not possible,
make sure the units are always covered with a protective cover when
not in use.
Panel mounting
Make sure that the mounting location includes space for plug and
cable bend.
The mounting surface must be flat and even to within 0.5 mm.
1. Remove the 4 front panel corners from the MKD.
2. Drill 4 mounting holes and make a panel cut-out according to
dimensional drawing, pages 5 and 6.
3. Fasten the MKD to the panel with the supplied 19 mm screws.
4. Apply the front panel corners.
Note ! Do not over-tighten the mounting screws.
Bracket mounting (option)
When the MKD is bracket mounted (item A100-85), it is not
weatherproof from the back. When bracket-mounted, the exposed
parts of the plugs should be protected against salt corrosion.
1. Locate the cradle on the mounting site and mark the 4 holes for the
screws on the mounting surface.
2. Drill the 4 holes and screw the cradle to the mounting surface.
3. Use the supplied screws to fasten the MKD to the left and right
brackets.
4. Apply the front panel corners.
Use the two locking knobs to assemble the cradle with the left and
right brackets and adjust the MKD for the best viewing angle.

Installation
Man_inst_AI80_r1 17
2.7 Optional MKD unit
Mechanical installation
The optional MKD may be panel or bracket (option) mounted. The
optional mounting bracket may be ordered separately.
The unit should be mounted with special regard to the operator’s need
for easy operation.
Avoid mounting the MKD where it is easily exposed to sunlight, as
this will shorten the lifetime of the display. If this is not possible,
make sure the units are always covered with the protective cover when
not in use.
Panel mounting
Make sure that the mounting location includes space for plug and
cable bend.
The mounting surface must be flat and even to within 0.5 mm.
Gasket
1. Remove the 4 front panel corners from the MKD.
2. Drill 4 mounting holes and make a panel cut-out according to
dimensional drawing, page 8.
3. Use the supplied gasket between the panel and the unit.
4. Fasten the MKD to the panel with the supplied 19 mm screws.
5. Apply the front panel corners.
Note ! Do not over-tighten the mounting screws.
Bracket mounting (option)
When the MKD is bracket mounted (item A100-85), it is not
weatherproof from the back due to a breathing hole in the back
cabinet. When bracket-mounted, the exposed parts of the plugs should
be protected against salt corrosion.
Simrad AI80 Installation Manual
18 Man_inst_AI80_r1
1. Locate the cradle on the mounting site and
mark the 4 holes for the screws on the
mounting surface.
2. Drill the 4 holes and screw the cradle to
the mounting surface.
3. Use the supplied screws to fasten the
MKD to the left and right brackets.
4. Apply the front panel corners.
5. Use the two locking knobs to assemble the
cradle with the left and right brackets and
adjust the MKD for the best viewing
angle.
The optional MKD cable
The optional MKD is connected to the AI80 Mobile Unit with a 7-
metre cable included with the MKD.
The connector may be connected to any of the two inputs on the rear
side of the MKD.
The table below gives the pin layout for the MKD connector and the
9-pin D-sub connector that is connected to the Mobile Unit.
Signal name MKD
connector Wire colour D-sub 9-pin
(Mobile Unit)
Bus- 1 Brown 2
Bus+ 2 White 7
V System - 4 Black 1
24
15
FRONT VIEW V System + 5 White 6
Note ! Short circuit on the MKD connector may cause permanent damage to
the AI80 Mobile Unit.
Installation
Man_inst_AI80_r1 19
2.8 AI80 Mobile Unit
Mechanical installation
The Mobile Unit should be mounted in a place with proper
ventilation. The unit is mounted with four bolts, refer dimensional
drawing on page 4.
Ensure that there is enough space on the rear side of the unit for
installation of plugs and cables. A minimum distance of 220 mm
between the unit and the wall is required.
Make sure that unit is properly secured to the deck/bulkhead. Clamps
are recommended to secure power and data cables connected to the
Mobile Unit.
Cable connection
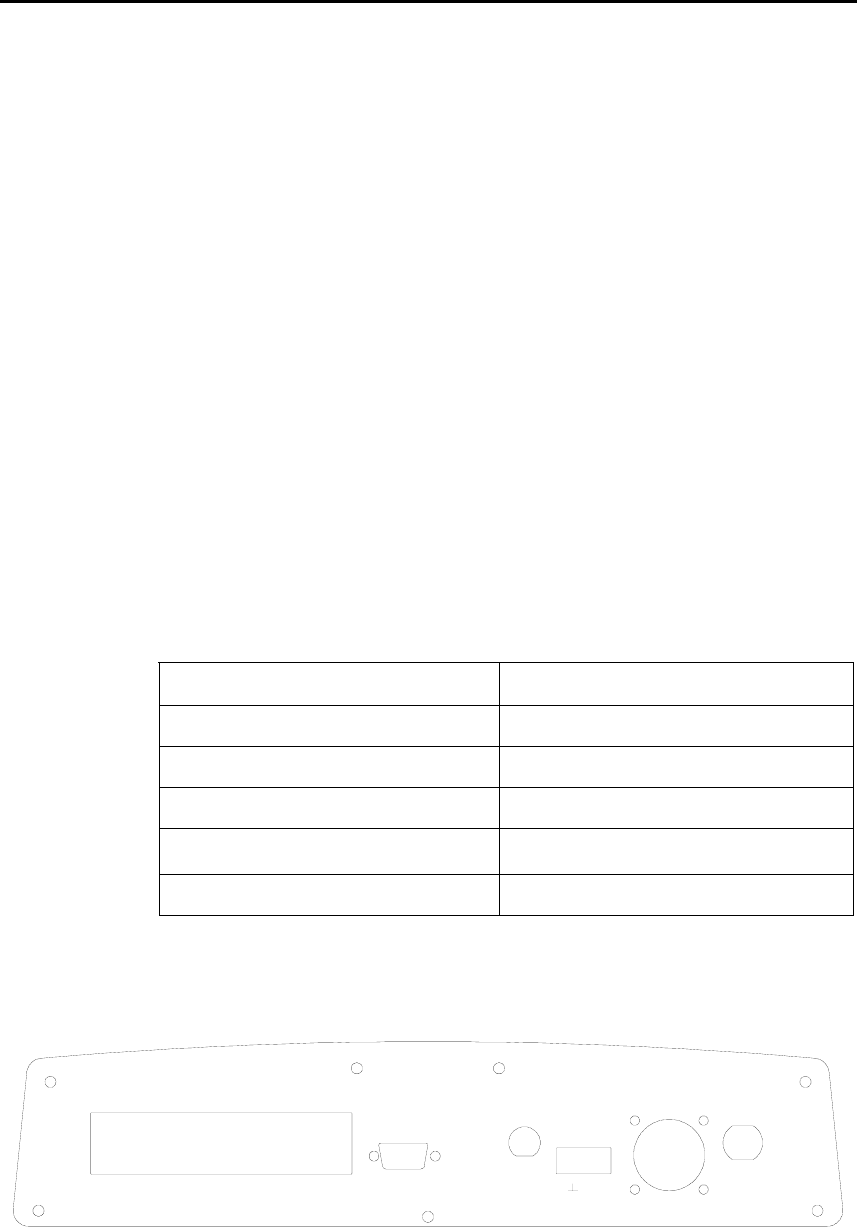
The rear panel of the Mobile Unit contains connectors for GPS, VHF,
external MKD, data signals and power (+24V DC).
The connector types are as shown in the table below:
Type Connected to:
9 pins D-Sub, male MKD
TNC connector, Female GPS antenna
N-connector, Female VHF antenna
Screw terminals P1, P2 Data I/O
Screw terminals Power
Rear connections
GPS VHF
+
POWER
EXT MKD
MKD PILOT
P1 P2
Simrad AI80 Installation Manual
20 Man_inst_AI80_r1
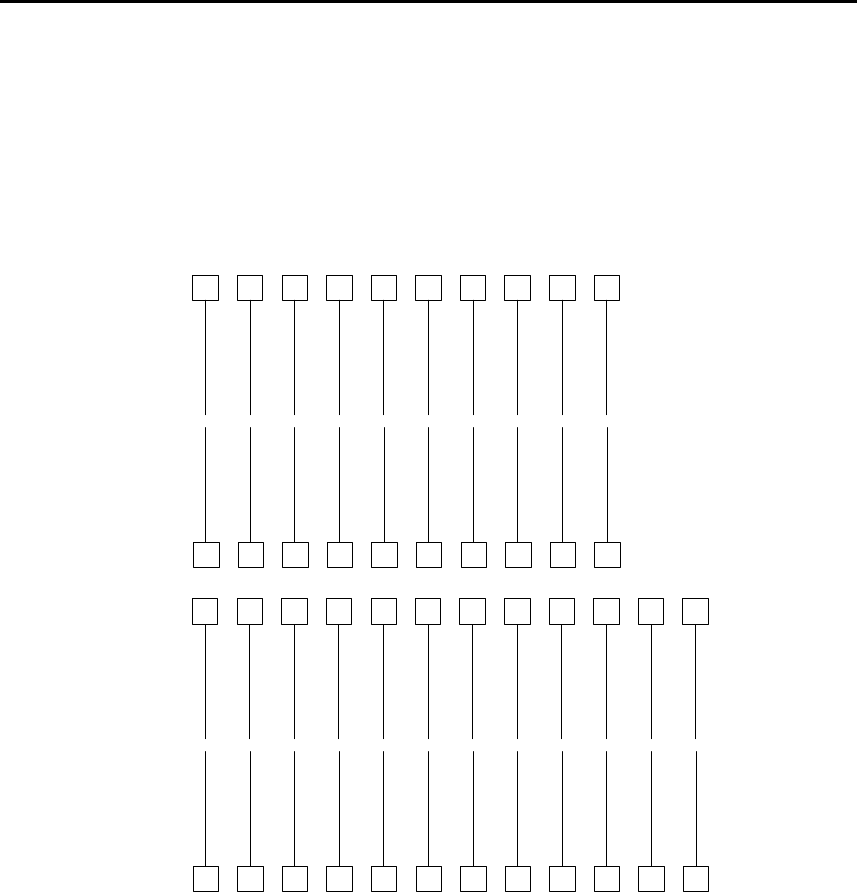
Data signals
The figure below shows the location of the AI80 data signals on the
P1 (left connector row), P2 (right connector row). Refer to chapter 3
for description of signals. For detailed electrical description, see
Appendix B - Digital interface IEC 61162-1.
P2
P1
11
1
PI_RD(B) SENS3 RD(B)
PI_RD(A) SENS3 RD(A)
PI_TD(B) SENS3 TD(B)
PI_TD(A) SENS3 TD(A)
PI_C SENS3 C
SENS1_RD(B) SENS2_RD(B)
SENS1_RD(A) SENS2_RD(A)
SENS1_TD(B) SENS2_TD(B)
SENS1_TD(A) SENS2_TD(A)
SENS1_C SENS2_C
10
20
NC ALM NO
RXA_AUDIO ALM_C
RXB_AUDIO ALM_NC
RXC_AUDIO ALM C
Not used LR_C
COM2_RXD COM1_RXD
COM2_TXD COM1_TXD
GND GND
Not used LR_RD(B)
Not used LR_RD(A)
Not used LR_TD(B)
Not used LR_TD(A)
1
13 24
12
Note ! RD(A) is low relative to RD(B) when idle. TD(A) is low relative to
TD(B) when idle.
Note ! All data cables must be twisted pair cables with shield.
All cables should be terminated to shield using the clamps on the
mounting plate.
2.9 Pilot plug
A Pilot plug is included in the AI80 system and is located at the rear
of the AI80 MKD. The plug is used for connecting a Personal Pilot
Unit (PPU) to the AI80 system.
Installation
Man_inst_AI80_r1 21
The pilot plug is an AMP CPC series 2/Receptacle (Square Flanged),
Shell size 11, 9-pin.
In case of a panel mounted MKD, an extension cord must be used.
Default baud rate is 38400, N, 8, 1.
Signal name Seatex notation Pin on AMP
206486-1
TX(A) Pilot_TD(A) (TXA) 1
TX(B) Pilot_TD(B) (TXB) 4
RX(A) Pilot_RD(A) (RXA) 5
RX(B) Pilot_RD(B) (RXB) 6
Shield Shield 9
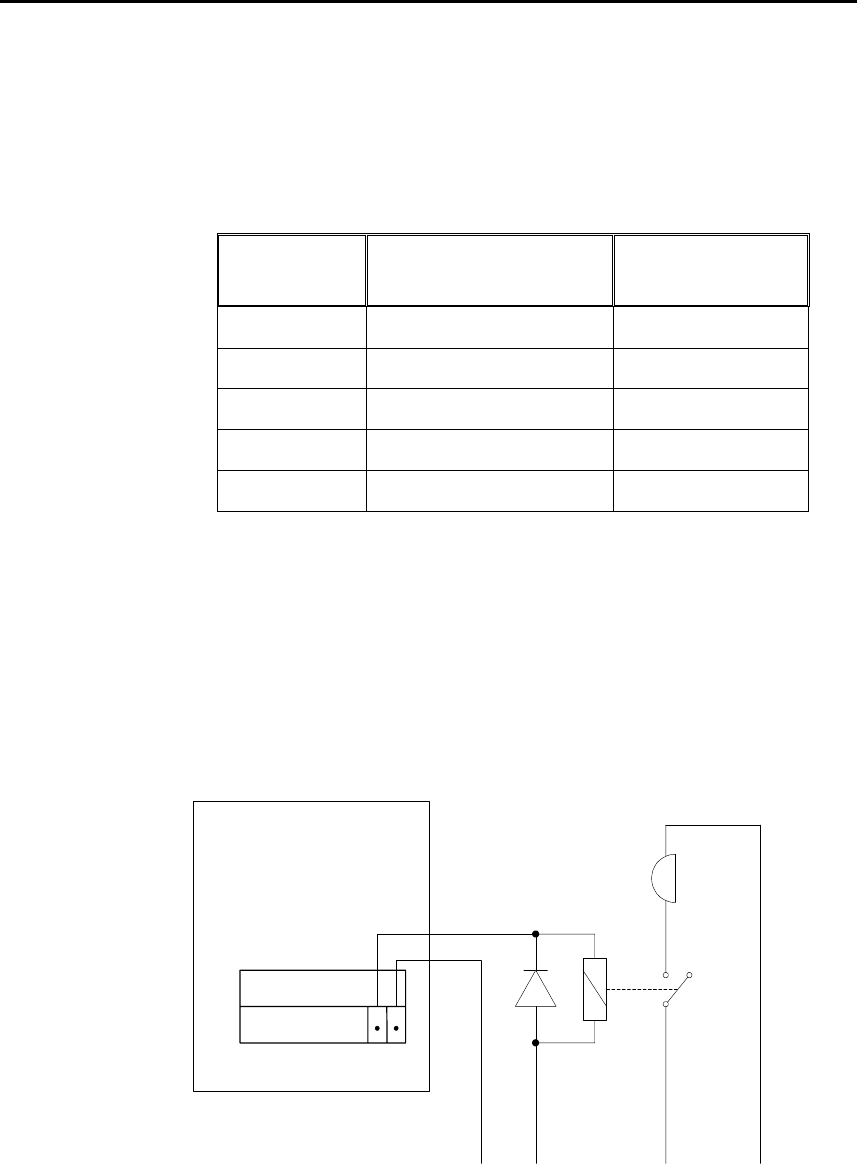
2.10 External alarm
The Mobile Unit does not include an acoustic alarm, but has a built-in
alarm functionality. An alarm will open the alarm relay, which can be
used to trigger an external alarm.
The diagram below shows how an external alarm may be connected to
the rear of the Mobile Unit.
AI80
Rear
Panel
11 12
P2
+
-
+
-
BUZZER
NC NO
+-
ALM_C
ALM_NC
FROM UPS SUPPLY
Simrad AI80 Installation Manual
22 Man_inst_AI80_r1
2.11 GPS antenna
Mechanical installation
The GPS antenna included in the AI80 system is used for time
synchronisation and computation of backup position fix. In addition to
this GPS antenna, the AI80 should be connected to the vessel’s main
GPS system at the rear of the Mobile Unit. Sensor input 1-3 may be
used.
Optimum location of the GPS antenna is important to ensure
continuous track of all visible GPS satellites. The following should be
taken into consideration during installation:
• The GPS antenna must be installed where it has a clear view of the
sky and thus the objective is to see the horizon freely through 360
degrees with a vertical observation of 5 to 90 degrees above the
horizon.
• Small diameter obstructions, such as masts and booms, do not
seriously degrade signal reception but such objects must not eclipse
more than a few degrees of any given bearing.
• The antenna should be located at least 3 metres away from and out
of the transmitting beam of high power transmitters (S-band radar
and/or Inmarsat systems). This includes the ship's own AIS VHF
antenna if it is located separately.
Refer figure on page 15.
Use the supplied antenna mounting kit when mounting the antenna.
Appropriate crimping tools must be used.
CD
B
A
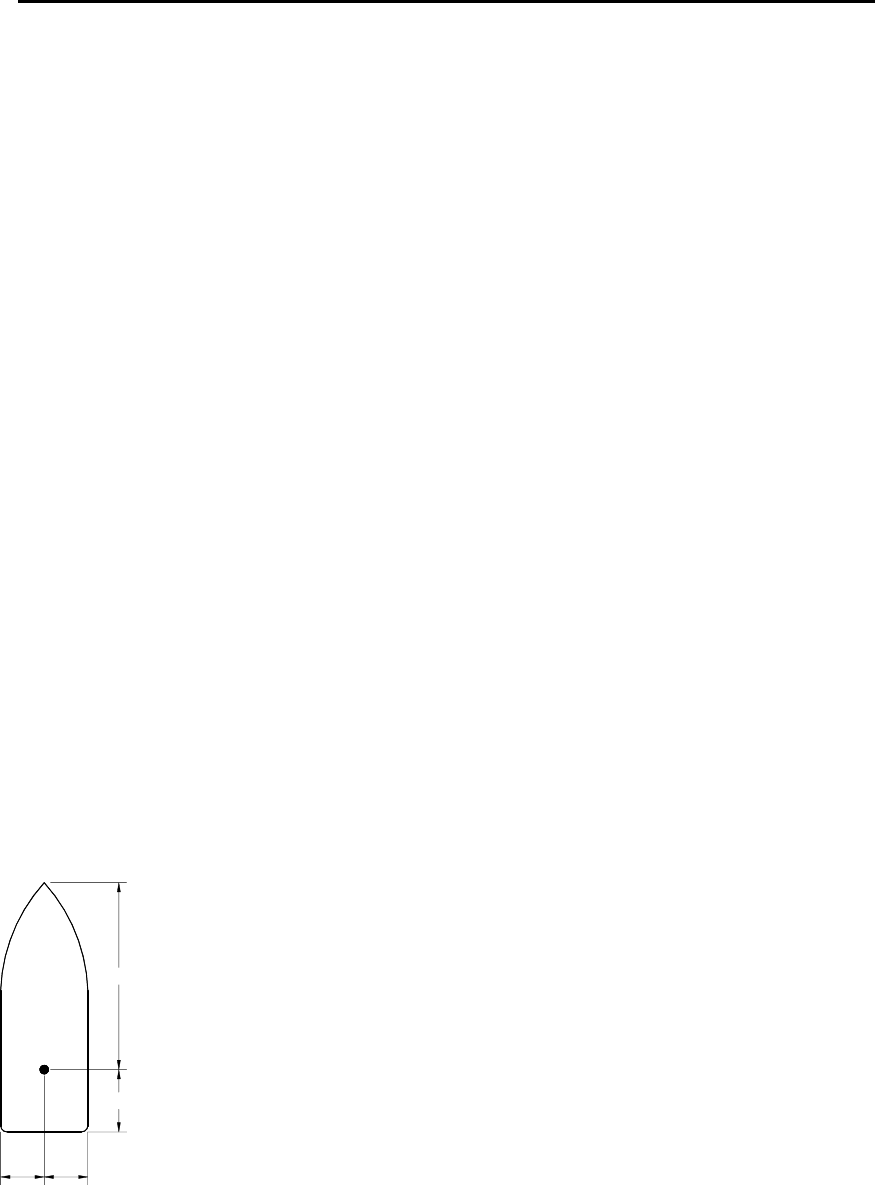
GPS antenna offset arms
The mounting location for the internal GPS antenna and for the
main GPS antenna connected to the AI80 system, needs to be
input to the AI80 as a part of the configuration settings. The
figure shows the offset arms that have to be configured.
Refer Entering static data, pages 32 and 90.
Installation
Man_inst_AI80_r1 23
Checking the antenna cable
After the mechanical and electrical installation is completed, the
coaxial cables should be checked for short circuit between centre
conductor and shield (ground) with the antenna disconnected. If not
short-circuited, the antenna cable could be connected to the Mobile
Unit.
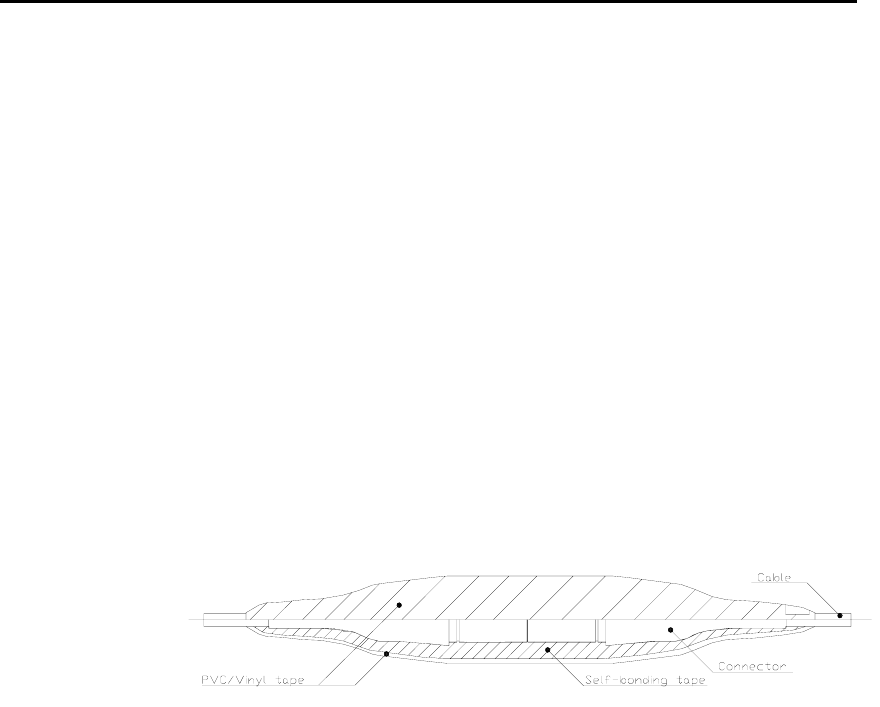
Sealing antenna connectors
The outdoor antenna connectors have to be sealed with self-bounding
tape and PVC/Vinyl tape for waterproofing.
Coil the self-bounding tape from one cable end to the other. Use at
least two layers of tape. After coiling, make a bounding by pressure of
fingers.
Coil at least two layers of PVC/Vinyl tape without stretching. After
coiling, make a bounding by pressure of fingers.
2.12 VHF antenna
The VHF antenna is not included in a standard AI80 system, but has
to be part of the AIS installation. A qualified antenna must cover
marine band (156 MHz - 164 MHz), have omni-directional vertical
polarization and provide 2 to 5 dB gain.
For installation of this antenna, refer to documentation delivered by
the antenna supplier. Refer also to the figure on page 15 for location.
Verify that there is no short circuit between centre conductors and
shield (ground) before the cable is connected to the Mobile Unit. Seal
the antenna connectors as described for the GPS antenna.
As an option Kongsberg Seatex AS may provide an antenna with part
number A100-58, shown in Appendix E - Optional VHF antenna.
Simrad AI80 Installation Manual
24 Man_inst_AI80_r1
THIS PAGE INTENTIALLY LEFT
BLANK
Connecting and configuring external equipment
Man_inst_AI80_r1 25
3 CONNECTING AND CONFIGURING
EXTERNAL EQUIPMENT
3.1 General
In general, all sensors installed in compliance with other carriage
requirements of SOLAS Chapter V should be connected to the AI80
system.
Increased navigational performance can be achieved by interfacing the
AI80 to an ECDIS, ECS and/or radar.
All external equipment is connected to the AI80. For termination,
refer Data signals, page 20.
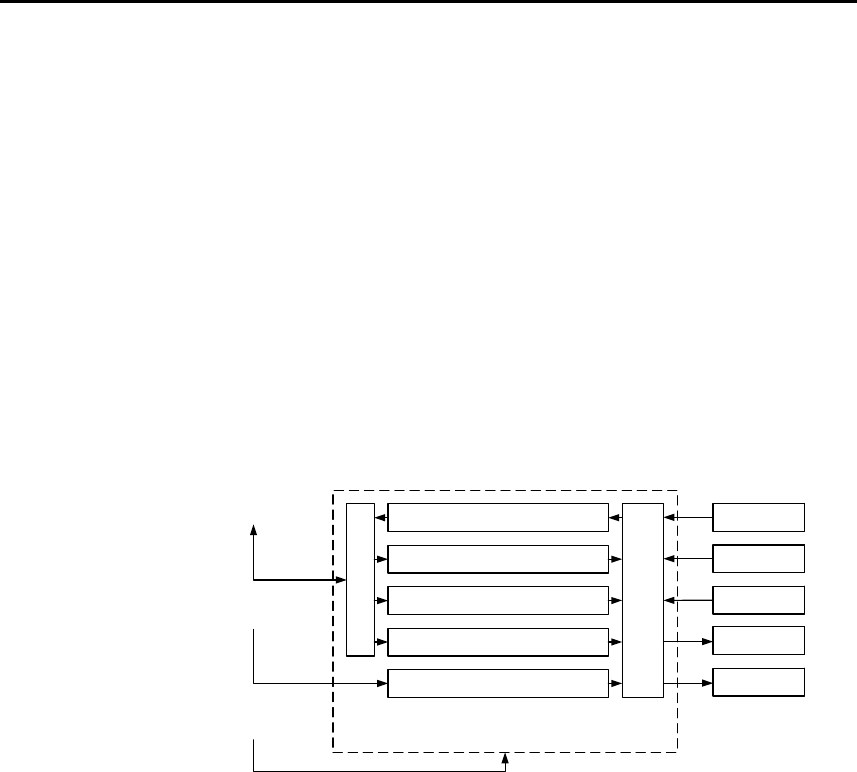
VHF-transmitter
VHF-receive ch. 70
VHF-receive ch. AIS 1
VHF-receive ch. AIS 2
GPS receiver
Interface board
VHF switch
AIS Transponder
GNSS/DGNSS
Antenna
VHF Antenna Heading
GNSS
Rate of Turn
ECDIS
Radar
MKD unit
Note ! Shielded twisted pair cables shall be used for the high-speed serial
data ports.
The following sections present the port configuration and IEC 61162-
1 sentences that may be used when connecting external equipment to
the AI80 system. Detailed description of the IEC 61162-1 sentences
are found in Appendix B - Digital interface IEC 61162-1, page 51.
For terminal location, refer to the figure on page 20.
Simrad AI80 Installation Manual
26 Man_inst_AI80_r1
3.2 Presentation interface
The presentation interface consists of two physical ports: PI and Pilot
port. Both ports are functionally equivalent.
The PI port provides a primary port for connecting onboard
equipment such as ECDIS, radar, Long Range AIS etc.
The Pilot port is used for the Pilot Plug included in the AI80 system.
This plug is intended for the ship's pilot equipment, service
equipment, etc.
Physical location
Installed on P1, pins 11 - 15. See figure on page 20.
Port configuration
The PI and Pilot port have the following default settings:
Baud Rate Parity Bits Stop Bit
38400 N 8 1
The baud rate is configurable to either 38400 or 57600. This due to
the amount of data. Refer to Configuring external serial ports, pages
33 and 91.
Input sentences
Sentence Content
VSD Voyage static data
SSD Ship static data
ABM Addressed binary message
BBM Broadcast binary message
AIR AIS interrogation message
ACA AIS channel assignment command
ACK Acknowledgement message
LRF Long range acknowledge
Connecting and configuring external equipment
Man_inst_AI80_r1 27
Proprietary input sentences
Sentence Content
MMSI MMSI number
IMO IMO number
PORT Serial port configuration parameters
Output sentences
Sentence Content Transmission interval
ABK Acknowledgement message
Upon reception of
messages 7 and 13, and
when sending message 15
VDO VHF Data link own message 1 Hz nominal
ALR Alarm messages 30 seconds/1 min.
TXT Indication messages When change of status
ACA AIS channel assignment
command When change of status
VDM VHF Data link message When receiving on VDL
LRI Long-range interrogation
When LR request received
& when LR response sent
LRF Long-range function
identification
When LR request received
& when LR response sent
LR1 Long-range response When LR response sent
LR2 Long-range response When LR response sent
LR3 Long-range response When LR response sent
Simrad AI80 Installation Manual
28 Man_inst_AI80_r1
3.3 Long-Range interface
The Long Range interface provides a two-way interface for equipment
that provides for long-range communications, such as Inmarsat.
Physical location
Installed on P2, pins 1 - 5, see figure on page 20.
Port configuration
The Long Range port has the following default settings:
Baud Rate Parity Bits Stop Bit
4800 N 8 1
The baud rate is configurable from 1200 to 57600. Refer to
Configuring external serial ports, pages 33 and 91.
Input sentences
Sentence Content
LRI Long-range interrogation
LRF Long-range function identification
Output sentences
Sentence Content Transmission interval
LRF Long-range function
identification When LR response sent
LR1 Long-range response When LR response sent
LR2 Long-range response When LR response sent
LR3 Long-range response When LR response sent

Connecting and configuring external equipment
Man_inst_AI80_r1 29
3.4 Sensor input
Physical location
Sensor1 is installed on P1, pins 16 - 20, Sensor2 is installed on P1,
pins 6 - 10 and Sensor3 is installed on P1, pins 1 - 15, see figure on
page 20.
These ports are mainly intended to serve as inputs from ships' primary
navigation systems such as position sensor data and heading sensor
data (the ports are configurable and transmission of two-way data is
possible).
Port configuration
The sensor inputs Sensor1, Sensor2 and Sensor3 are equivalent and
the default settings are as follows:
Baud Rate Parity Bits Stop Bit
4800 N 8 1
The baud rate is configurable from 1200 to 57600. Refer to
Configuring external serial ports, pages 33 and 91.
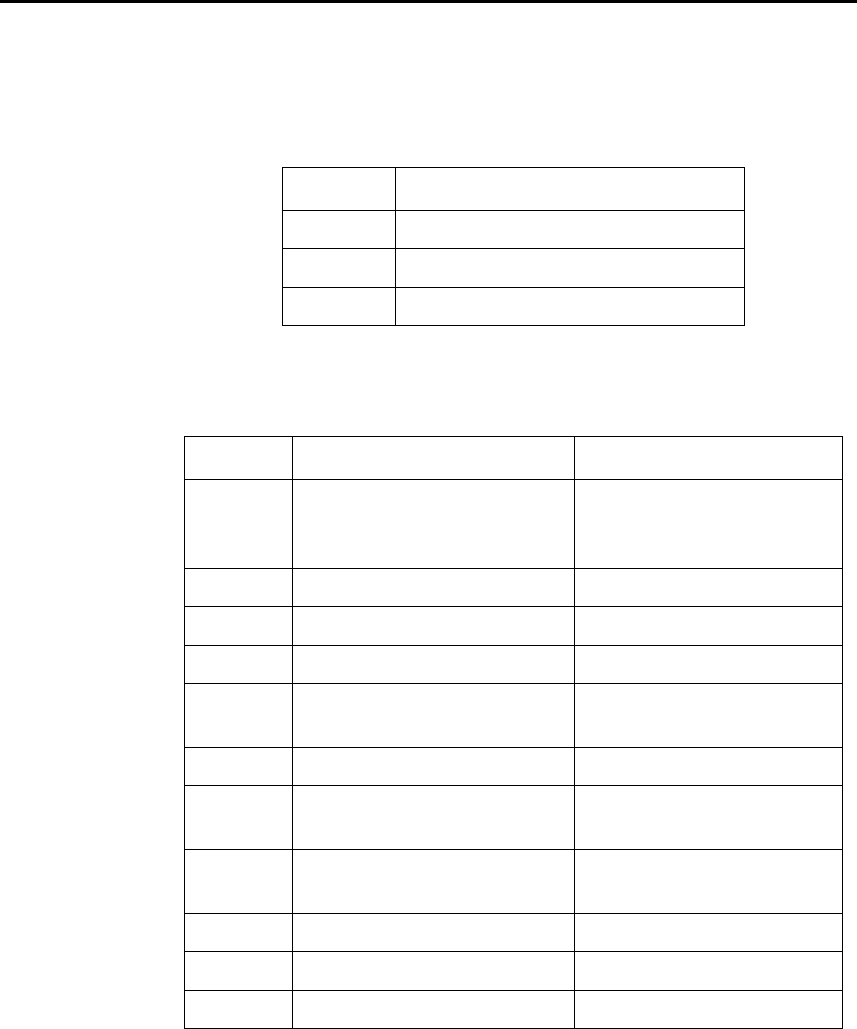
Input sentences
Sentence Content From
version
GGA Position, TOD, position quality (diff/non-diff) 1.5 →
GNS Position, TOD, position quality (diff/non-diff) 3.0 →
GLL Position, TOD, position quality (diff/non-diff) 2.0 →
DTM Datum 3.0 →
VBW SOG, COG (derived from speed components) 3.0 →
VTG SOG, COG 1.5 →
RMC Position, TOD, position quality (diff/non-diff), SOG, COG 1.5 →
HDT Heading 1.5 →
GBS RAIM indicator 3.0 →
ZDA TOD and Date 1.5 →
OSD Position, TOD, SOG, COG, Heading 2.0 →
ROT Rate of turn 2.0 →
Simrad AI80 Installation Manual
30 Man_inst_AI80_r1
If the sensor inputs are configured with redundant data, the tables
below describe the priorities of the redundant data.
Priority of Position
Priority Sentence
1 RMC
2 GNS
3 GGA
4 GLL
Priority of SOG and COG
Priority Sentence
1 RMC
2 OSD
3 VBW
4 VTG
Priority of Heading
Priority Sentence
1 OSD
2 HDT
Priority of Rate of Turn
Priority Sentence
1 ROT
2 OSD (derived from heading)
3 HDT (derived from heading)
Software setup procedure
Man_inst_AI80_r1 31
4 SOFTWARE SETUP PROCEDURE
4.1 General
The AI80 system is set up with factory settings during testing. The
software setup must be performed as a part of the AI80 installation
procedure.
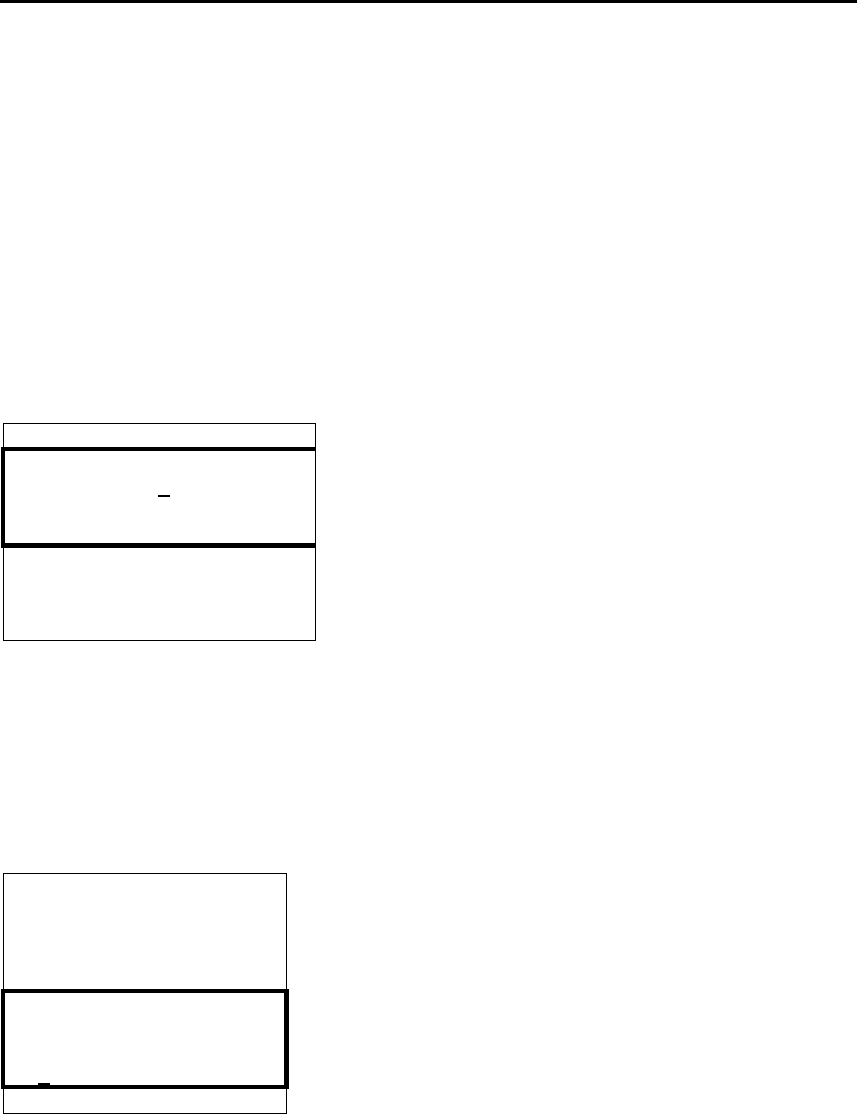
The software setup is performed from sub-menus available from the
Main Menu page, activated by pressing the VIEW button. The
respective Main Menu pages are shown below.
- MAIN MENU ------------
Alarms and LR
Dynamic data
Settings ▼
SMS
Downperiods
Chn.Management
System
This is the Main Menu page for the AI80 with sub-
menus. All settings that need to be changed can be
found in the Settings sub-menu.
For explanation of buttons, manoeuvring in the
menus and for entering data, refer to the Simrad
AI80 User Manual.
Note ! The software settings may be protected by a security code. When
entering parameters defined with a security level other than 0, the
access code has to be entered before these settings can be changed.
Refer Security settings AI80 in the next pages and page 87.
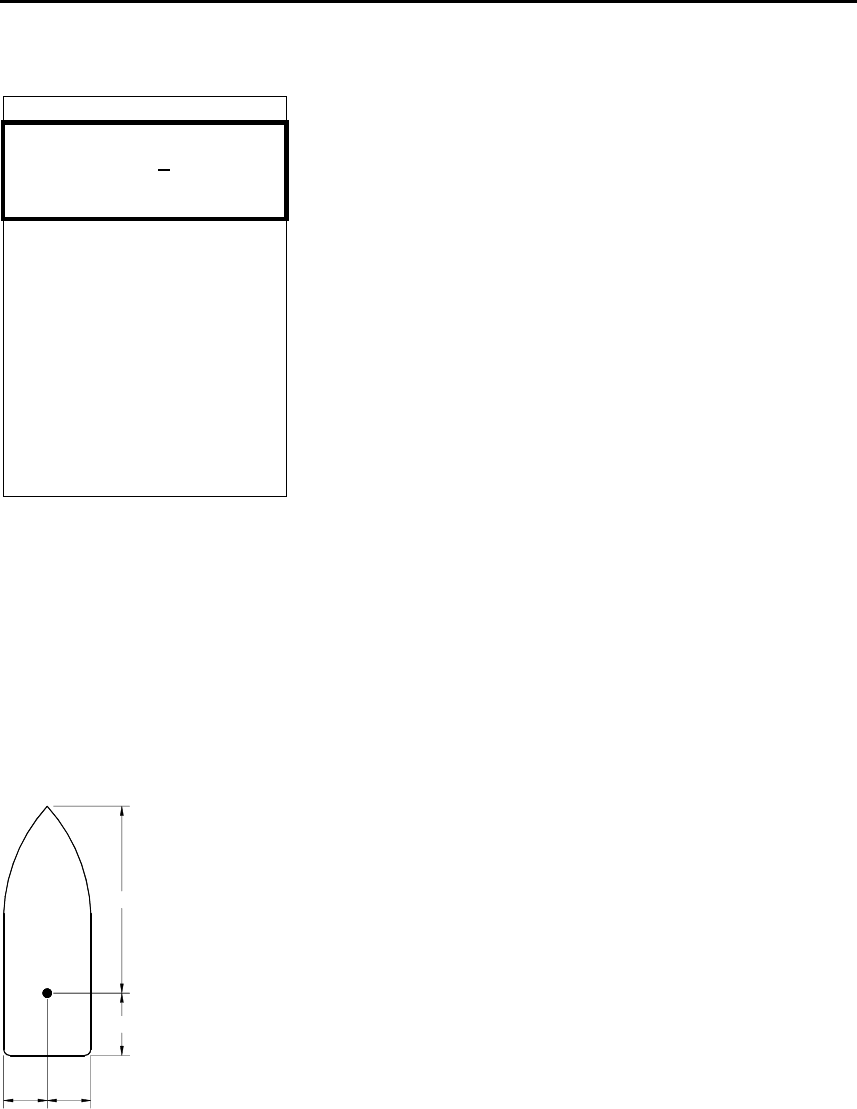
4.2 Security settings AI80
- Settings ----------
Nav.Status
Voyage related
Gyro calibration
Static data
VHF ▲
LR
Serial
PIN
Security PIN code
All entries on this page are protected by a PIN code.
Initially, a default authorisation code is used for
altering data fields in the Settings page. The default
PIN code is: 1234. We recommend to change to a
vessel specific PIN code.
Enter new four digit PIN code by selecting PIN and
PIN: **** on the Settings menu.
Note! Based on the MAC address a master PIN
code can be handed out from Custom Support.
Simrad AI80 Installation Manual
32 Man_inst_AI80_r1
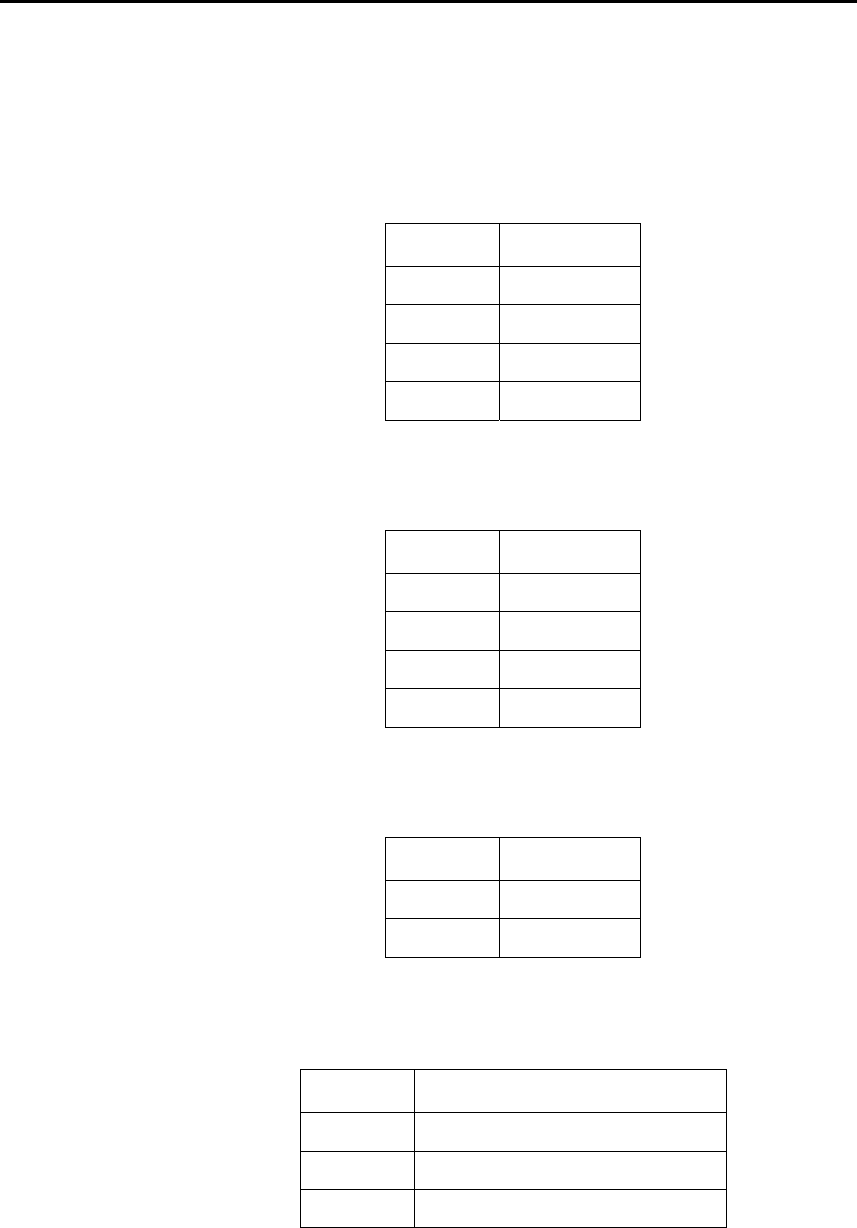
4.3 Entering static data
- Static data -------
Name: VANNINA
Call: CA122
MMSI: 136547932
IMO: 3334445
Type: 123
Keel: 30.5
DimA: 0
DimB: 0
DimC: 0
DimD: 0
LocDimA: 0
LocDimB: 0
LocDimC: 0
LocDimD: 0
Static data are specific ship data that do not change
from one voyage to another. In order to input static
data, select parameters by pressing EDIT and press
SHIFT to access text mode.
If MMSI number is changed, the unit should be
restarted, see the Simrad AI80 User Manual.
Name: The vessel name (text).
Call: The vessel call sign (text).
MMSI: The Maritime Mobile Signal Identifier
number.
IMO: The vessel IMO number.
Type: Type of vessel.
Keel: Height over keel. Total height of vessel in
metres.
DimA: External GPS antenna location
DimB: External GPS antenna location
DimC: External GPS antenna location
DimD: External GPS antenna location
LocDimA: Internal GPS antenna location
LocDimB: Internal GPS antenna location
LocDimC: Internal GPS antenna location
LocDimD: Internal GPS antenna location
CD
B
A
External GPS/GNSS antenna location. Since the vessel's primary
GPS receiver is used as reference for the transmitted AIS position,
the physical location (horizontal plan only) of the vessel GPS
antenna should be input to the AIS in metres.
Setup by entering: DimA, DimB, DimC & DimD.
Internal GPS antenna location. The AIS internal GPS receiver is
backup position sensor for the vessel primary GPS receiver. The
AIS internal GPS antenna's physical location (horizontal plane only)
also needs to be input to the AIS in metres.
Setup by entering: LocDimA, LocDimB, LocDimC & LocDimD.

Software setup procedure
Man_inst_AI80_r1 33
4.4 Configuring external serial ports
The serial port baud rate must be set up according to external
instrumentation. The sensor interfaces comply with the NMEA 0183,
version 3. Change the baud rates accordingly.
Enter the Serial page by selecting Settings in the Main Menu, and
Serial in the Settings menu. In the Serial page, press EDIT to start
editing the baud rate. Hold OK to save.
4.5 VHF data link
The VHF page includes ON/OFF status for transmitter and VDL
answer mode.
ON/OFF status: The transmitter setting is recommended set to TX:
ON.
Note ! The transmitter may be turned OFF at Master's discretion should an
emergency situation occur. However, the AIS receiver will still be
functioning and thus AIS data from other vessels will still be received.
VDL answer mode: VDL answer mode allows the configuration of
the AIS unit with regard to how it responds to inquiries by binary
messages (messages 6 and 8).
An inquiry of this type could be a request for information regarding
number of persons onboard, draught etc. If turned OFF, the AIS will
ignore the inquiry.
Note ! The VDL setting "ON" indicates that answer mode to interrogator is
enabled when message 6 or 8 containing interrogation functional
identification, is received.
4.6 Configuring radio channels
Viewing a region's settings
Under this option a list of all registered regions is displayed. By using
the ARROW buttons, regions can be individually selected. Selecting a
region is done by pressing the OK button and region parameters will
be shown. This is a read-only page.
Simrad AI80 Installation Manual
34 Man_inst_AI80_r1
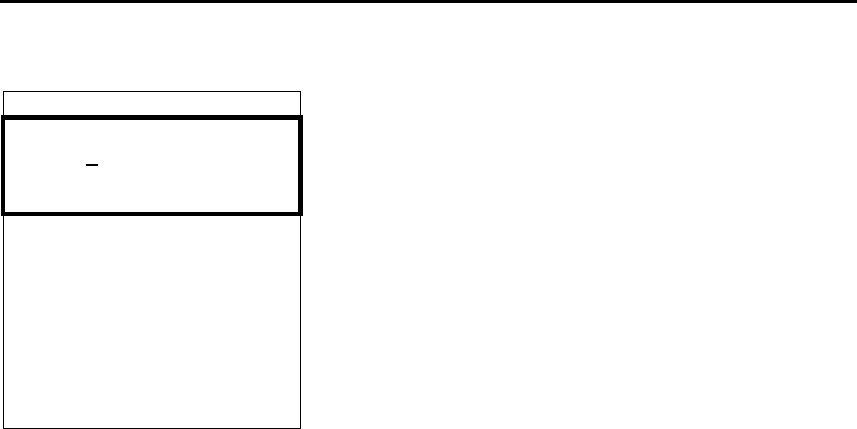
Adding a region
- Add region ---------
ChnA: 0
ChnB: 0
RxTx: TxA/TxB, RxA/Rx▼
TxPower: LOW
LAT NE: 00°00'00.00N
LON NE: 000°00'00.00E
LAT SW: 00°00'00.00N
LON SW: 000°00'00.00E
BW A: Default
BW B: Default
Zone: 0
Hold [OK] to save
To edit these parameters, use the ARROW keys to
manoeuvre to the parameter of interest and press
EDIT. Use the DEL button if necessary, and enter the
new value. If non-digits are required, press the
SHIFT button to change to alpha mode. Press the
SHIFT button again to return to digit mode.
While in alpha mode, letters and special characters
can be entered (e.g. the degree symbol °).
Note ! If the user tries to enter a region which parameters locates the region
more than 500 nautical miles away from the vessel, the region will
automatically be discarded. Also when the vessel position is further
than 500 nautical miles from the region, this region is automatically
discarded by the AIS unit.
ChA: The radio channel to be used as channel A.
ChB: The radio channel to be used as channel B.
RxTx: Transmission/reception mode. This parameter indicates
whether or not the AIS should transmit and receive on both channels,
or on only a subset of these.
TxPower: The transmission power of the radio. Low equals 2W, and
High equals 12W.
Lat/Lon: The rectangular area to which the radio parameters apply.
The area is specified by entering the coordinates for the north-east
corner and the south-west corner.
BW A: Bandwidth for the selected channel A.
BW B: Bandwidth for the selected channel B.
Zone: Transition zone for the region. This parameter is given in
nautical miles, and provides information about the transition zone of
the region in which the AIS should change radio parameters to the
ones specified for the region.

Software setup procedure
Man_inst_AI80_r1 35
Edit current region
This function is used to change the current radio parameters and is
similar to Add Region, the only difference being that by changing
these values the default parameters for the current region are altered
and take effect immediately.
Note ! For software setup procedure using optional MKD see Appendix C -
Software setup using optional MKD on page 87.
Simrad AI80 Installation Manual
36 Man_inst_AI80_r1
THIS PAGE INTENTIALLY LEFT
BLANK

Maintenance
Man_inst_AI80_r1 37
5 MAINTENANCE
5.1 General
All units in the AI80 system are “repair by replacement” units, and the
operator is therefore required to perform only a limited amount of
preventive maintenance on the units.
The service in the field is limited to:
• Replacing damaged GPS or VHF antenna cables
• Replacing failed AI80 system units
A damaged unit that has to be shipped back to the supplier, should be
sent in the original transportation box or another appropriate box. The
return address is provided in the first pages of this manual.
5.2 Periodic maintenance
The AI80 system should regularly be checked for firm and fixed
mounting of the chassis in order to avoid excessive resonances. All
connectors should be checked for good mechanical and electrical
connections. Cables should not be bent more than the minimum
recommended bending radius and there should be no sharp bends on
coaxial cables. All cables should be fixed tight and rigid to their
supporting structure (bulkhead, mast etc.) and special care should be
taken where cables run through holes with sharp edges.
MKD Units
The MKD will under normal use require little maintenance.
If the unit requires any form of cleaning, use fresh water and a mild
soap solution (not a detergent). It is important to avoid using chemical
cleaners and hydrocarbons such as diesel, petrol etc.
Mobile Unit
A properly operating Mobile Unit will indicate transmitting and
receiving messages by short blinks on the TX and MSG LEDs.
Inspecting the LEDs for normal operation gives a good indication of
the operating status. Any red LED indication means that further
investigation and servicing is necessary, see chapter 6.1.

Simrad AI80 Installation Manual
38 Man_inst_AI80_r1
5.3 Repair and modifications
The units in the AI80 system are not designed for customer repair. All
repairs and modifications of the units should be carried out by
qualified personnel. A failed unit should be shipped back to the
supplier for repair.
Exchanging antenna cables
1. Disconnect the power cable.
2. Dismount the damaged antenna cable. The new antenna cable
must be as straight as possible. Do not crush or crimp the
cable, as this will affect the electrical properties of the cable.
3. Connect the antenna cable to the antenna.
4. Seale the connection between the antenna and the antenna
cable against water penetration as described in page 23.
5. Connect the antenna cable to the AI80 Mobile Unit and
reapply power.
Note ! If the GPS antenna cable is attached to the Mobile Unit, do not
attach the antenna cable to the antenna when the AI80 is powered.
If the antenna cable is short-circuited with power on, the GPS
receiver within the unit can be damaged.
Exchanging GPS or VHF antennas
1. Disconnect the power cable.
2. Dismount the failed antenna.
3. Mount the new antenna on the antenna rod.
4. Connect the antenna cable to the antenna.
5. Seale the connection between the antenna and the antenna
cable against water penetration as described in page 23.
6. Connect the antenna cable to the AI80 Mobile Unit and
reapply power.
Note ! If the GPS antenna cable is attached to the Mobile unit, do not
attach the antenna cable to the antenna when the AI80 is powered.
If the antenna cable is short-circuited with power on, the GPS
receiver within the unit can be damaged.

Maintenance
Man_inst_AI80_r1 39
5.4 Software updates
The software in the AI80 system can be upgraded to the latest version
in the field by changing the compact flash inside the Mobile Unit. Do
the following:
1. Enter the System menu, select Software upgrade and Start
upgrade. Follow on-screen instructions. Power off the unit.
2. Open the front panel.
3. Locate the compact flash and gently remove it.
4. Insert new compact flash and close front panel.
5. Power on the unit.
Simrad AI80 Installation Manual
40 Man_inst_AI80_r1
THIS PAGE INTENTIALLY LEFT
BLANK
Troubleshooting
Man_inst_AI80_r1 41
6 TROUBLESHOOTING
6.1 General
The LED indicators on the front of the Mobile Unit can be used to
monitor status as well as data reception and transmission.
LED Colour Description
TX Off
Amber
Green
Red
Transmitter idle
Transmitting on AIS channel B
Transmitting on AIS channel A
Transmitter turned off
MSG Off
Amber
Green
No message/report being received
Message/report received on channel B
Message/report received on channel A
GPS Amber
Green
Indirect synchronisation free run
Internal GPS OK, GPS synch selected
ALM Off
Red
No alarm
Alarm - alarm relay activated
Prior to any troubleshooting, the system should be restarted to see if
this resolves the problem.
• Restart the Mobile Unit as described in the Simrad AI80 User
Manual.
• Remove the + 24 V power supply cable and then reapply
power.
6.2 Hardware problems
Hardware problems can be divided into the following categories:
• Power supply failure
• GPS receiver failure
• VHF transceiver failure
• GPS and VHF antennas and cables
• Interface cables

Simrad AI80 Installation Manual
42 Man_inst_AI80_r1
If the system outputs an alarm, the alarm condition can be read from
the display.
Power supply failure
If the unit periodically restarts approximately every one minute, this
could indicate a power supply failure.
Use the following procedure to check for power failure:
1. Check that external power has been connected to the rear
connectors.
2. Verify that supplied power is in accordance with technical
power specifications, page 1.
3. Verify that power cable dimensions are minimum 2.5 mm2.
GPS and VHF antenna cable connections
Typical problems when no GPS signal is received are that the GPS
antenna cable and/or connectors are damaged, or that the cables are
not properly connected. In order to check for antenna cable problems,
ensure that the GPS antenna is disconnected. The Ohm reading
between the centre and the screen should normally be infinite if there
is no short-circuit in the cable. Make a short-circuit in the opposite
end of the cable and measure the resistance. Now the reading should
be approximately 0 Ohm.
GPS and VHF antenna malfunction
Disconnect the GPS antenna cable at the rear side of the Mobile Unit.
Measure the resistance between the centre pin and shield in the cable
(with the antenna connected). The GPS antenna does not have a
defined resistance that can be measured. Therefore, before
measurements can be carried out, the antenna end of the cable needs
to be short-circuited. Measure between centre conductor and shield.
Resistance should be close to 0 Ohm.
Caution! Switch off the power before disconnecting the antenna!
GPS receiver failure
During normal operation the GPS LED blinks green once each
second. If the GPS LED on the front of the unit blinks amber, the
AI80 system computes no position data, the GPS receiver inside the
Mobile Unit should be checked.

Troubleshooting
Man_inst_AI80_r1 43
Disconnect the antenna cable at the rear side of the Mobile Unit. The
voltage output on the GPS antenna connector should be approximately
4.8 – 5.0 V if the GPS receiver supplies voltage to the antenna. If not,
this indicates problems with the GPS receiver. Disconnect and
reconnect power to see if the Mobile Unit starts up as normal. If not,
consult Customer Support for advice.
VHF transceiver failure
If there is no activity on the TX and/or the MSG LED on the front of
the unit, this indicates a transmitter or receiver problem. Disconnect
and reconnect power to see if the Mobile Unit starts up as expected. If
not, consult Customer Support for advice.
6.3 External data interface problems
External data connections may have incorrect:
• Data input from main GPS source
• Data input from vessel heading sensor
Check NMEA version, see table on page 29.
Data input from main GPS/GNSS source
Position data input to the AI80 system is received from the vessel’s
main GPS/GNSS receiver using an RS-422 serial line communication.
If data are not received in the AI80 Mobile Unit, the following steps
should be taken in order to check for missing position data:
1. Check that corresponding cable connections are correctly
terminated, refer chapter 3.4 and note on page 20.
2. If properly connected, check the serial line communication
(baud rate, parity, number of bytes transmitted, number of stop
bits) between transmitting (vessel GPS/GNSS receiver) and
receiving (parameters to be checked from display) end.
3. If OK, check that the position output format from the
GPS/GNSS receiver is in accordance with the expected input
position format, see page 29 and Appendix B - Digital
interface IEC 61162-1.
If the Mobile Unit still does not receive position data, consult
Customer Support for advice.
For details on electrical interface, see page 51.

Simrad AI80 Installation Manual
44 Man_inst_AI80_r1
Heading from vessel heading sensor
Heading data is received from the vessel’s gyro. If input data is
missing, the following steps should be taken in order to check for
missing heading data:
1. Check that corresponding cable connections are correctly
terminated, refer chapter 3.4 and note on page 20.
2. If correctly connected, check the serial line communication
(baud rate, parity, number of bytes transmitted, number of stop
bits) between transmitting (vessel heading sensor) and
receiving (parameters to be checked from the MKD unit) end.
3. If OK, check that the heading output format from the compass
is in accordance with the expected input heading format, see
page 28 and Appendix B - Digital interface IEC 61162-1.
If the Mobile Unit still does not receive heading data, consult
Customer Support for advice.
AIS unit restarts
If the AIS unit frequently restarts, please note that the AIS is
dependent upon 24 V DC/50 W, see Power supply failure on page 42.
1. Check that external power source has sufficient current rating
(recommended 4 A) and that
2. power cables are within specifications for such a power
consumption.
Spare part list
Man_inst_AI80_r1 45
7 SPARE PART LIST
7.1 Simrad AI80
A120-14 Simrad AI80 including
Part No Description
A101-11_1 Simrad AI80 Class A Mobile Station
A101-12_1 Simrad AI80 MKD, including interface cable to MKD/
pilot plug (A101-13_1) length 7 m
A101-01 GPS antenna, GPS4
A101-02 Mounting kit for GPS4
A101-03 Interconnection cable for GPS4
A100-93 Adapter cable set for GPS antenna cable, one cable, length
0.5 m
A101-17 AI80 terminals for data and power
A101-15 AI80 Installation Manual
A101-16 AI80 User's Manual
Optional supplied equipment
Part No GPS/VHF antenna cables and connectors
A100-59 GPS/VHF antenna cable (RG 214), price per m, max.
length 30 m*
A100-61 Connector kit for GPS antenna cable (RG214), two
connectors
A100-66 Connector kit for VHF antenna cable (RG214), two
connectors
A100-60 GPS/VHF antenna cable (low loss), price per m, max.
length 100 m*
A100-71 Connector kit for GPS antenna cable (low loss), two
connectors
A100-73 Connector kit for VHF antenna cable (low loss), two
connectors
B200-12 Adapter cable set for VHF antenna cable, two cables length
0.5 m
Simrad AI80 Installation Manual
46 Man_inst_AI80_r1
Part No Optional MKD, MKD bracket, VHF antenna and cables
A101-07_3 Simrad AIS MKD, incl. interface cable to MKD, length 7
m
A100-76 Interface cable to MKD, length 7 m
A100-77 Interface cable to MKD, length 15 m
A101-13_1 Interface cable to AI80 MKD, length 7 m
A101-13_2 Interface cable to AI80 MKD, length 15 m
A100-85 MKD bracket for table, bulkhead or overhead mounting
A101-14 AI80 MKD bracket for table, bulkhead or overhead
mounting
A100-58 VHF antenna, AV7N
A100-88 AIS power cable (Belden 8471 NH), price per metre
A100-96 Connection cable (GPS, Gyro, ECDIS), price per metre
Part No Gyro converter and power supply
A900-60 GI51 Gyro Interface Unit including manual
A900-20 Power Supply (110/230 V AC / 24 V DC)
*) For GPS or VHF antenna cable lengths between 30 and 100 meters,
we recommend to select A100-60 with connectors A100-71 and
A100-73.
Appendix A- Vessel identifiers
Man_inst_AI80_r1 47
8 APPENDIX A - VESSEL IDENTIFIERS
The table on the following pages holds an overview of all vessel
identifiers that should be used in an AIS system.
The following abbreviations are used in the table:
WIG: Wing In Ground
HSC: High Speed Craft
DG: Dangerous Goods
HS: Harmful Substances
MP: Marine Pollutants
No. First digit Second digit
10 Reserved for future use All ships of this type
11 Reserved for future use Carrying DG, HS or MP, IMO hazard or
pollutant category A
12 Reserved for future use Carrying DG, HS, or MP, IMO hazard or
pollutant category B
13 Reserved for future use Carrying DG, HS, or MP, IMO hazard or
pollutant category C
14 Reserved for future use Carrying DG, HS, or MP, IMO hazard or
pollutant category D
15 Reserved for future use Reserved for future use
16 Reserved for future use Reserved for future use
17 Reserved for future use Reserved for future use
18 Reserved for future use Reserved for future use
19 Reserved for future use Reserved for future use
20 WIG All ships of this type
21 WIG Carrying DG, HS or MP, IMO hazard or
pollutant category A
22 WIG Carrying DG, HS, or MP, IMO hazard or
pollutant category B
23 WIG Carrying DG, HS, or MP, IMO hazard or
pollutant category C
24 WIG Carrying DG, HS, or MP, IMO hazard or
pollutant category D
25 WIG Reserved for future use
26 WIG Reserved for future use
Simrad AI80 Installation Manual
48 Man_inst_AI80_r1
No. First digit Second digit
27 WIG Reserved for future use
28 WIG Reserved for future use
29 WIG Reserved for future use
30 Vessel Fishing
31 Vessel Towing
32 Vessel Towing and length of the tow exceeds 200
m or breadth exceeds 25 m
33 Vessel Engaged in dredging or underwater
operations
34 Vessel Engaged in diving operations
35 Vessel Engaged in military operations
36 Vessel Sailing
37 Vessel Pleasure craft
38 Vessel
39 Vessel Reserved for future use
40 HSC Reserved for future use
41 HSC Carrying DG, HS or MP, IMO hazard or
pollutant category A
42 HSC Carrying DG, HS, or MP, IMO hazard or
pollutant category B
43 HSC Carrying DG, HS, or MP, IMO hazard or
pollutant category C
44 HSC Carrying DG, HS, or MP, IMO hazard or
pollutant category D
45 HSC Reserved for future use
46 HSC Reserved for future use
47 HSC Reserved for future use
48 HSC Reserved for future use
49 HSC Reserved for future use
50 Pilot vessel
51 Search and rescue vessels
52 Tugs
53 Port tenders
54 Vessels with anti-pollution facilities or equipment
Appendix A- Vessel identifiers
Man_inst_AI80_r1 49
No. First digit Second digit
55 Law enforcement vessels
56 Spare – for assignments to local vessels
57 Spare – for assignments to local vessels
58 Medical transports (as defined in the 1949 Genova Conventions and Additional
Protocols)
59 Shops according to RR Resolution No. 18 (Mob-83)
60 Passenger ships Reserved for future use
61 Passenger ships Carrying DG, HS or MP, IMO hazard or pollutant
category A
62 Passenger ships Carrying DG, HS, or MP, IMO hazard or pollutant
category B
63 Passenger ships Carrying DG, HS, or MP, IMO hazard or pollutant
category C
64 Passenger ships Carrying DG, HS, or MP, IMO hazard or pollutant
category D
65 Passenger ships Reserved for future use
66 Passenger ships Reserved for future use
67 Passenger ships Reserved for future use
68 Passenger ships Reserved for future use
69 Passenger ships Reserved for future use
70 Cargo ships Reserved for future use
71 Cargo ships Carrying DG, HS or MP, IMO hazard or pollutant
category A
72 Cargo ships Carrying DG, HS, or MP, IMO hazard or pollutant
category B
73 Cargo ships Carrying DG, HS, or MP, IMO hazard or pollutant
category C
74 Cargo ships Carrying DG, HS, or MP, IMO hazard or pollutant
category D
75 Cargo ships Reserved for future use
76 Cargo ships Reserved for future use
77 Cargo ships Reserved for future use
78 Cargo ships Reserved for future use
79 Cargo ships Reserved for future use
80 Tankers Reserved for future use
Simrad AI80 Installation Manual
50 Man_inst_AI80_r1
No. First digit Second digit
81 Tankers Carrying DG, HS or MP, IMO hazard or pollutant
category A
82 Tankers Carrying DG, HS, or MP, IMO hazard or pollutant
category B
83 Tankers Carrying DG, HS, or MP, IMO hazard or pollutant
category C
84 Tankers Carrying DG, HS, or MP, IMO hazard or pollutant
category D
85 Tankers Reserved for future use
86 Tankers Reserved for future use
87 Tankers Reserved for future use
88 Tankers Reserved for future use
89 Tankers Reserved for future use
90 Other types of ship Reserved for future use
91 Other types of ship Carrying DG, HS or MP, IMO hazard or pollutant
category A
92 Other types of ship Carrying DG, HS, or MP, IMO hazard or pollutant
category B
93 Other types of ship Carrying DG, HS, or MP, IMO hazard or pollutant
category C
94 Other types of ship Carrying DG, HS, or MP, IMO hazard or pollutant
category D
95 Other types of ship Reserved for future use
96 Other types of ship Reserved for future use
97 Other types of ship Reserved for future use
98 Other types of ship Reserved for future use
99 Other types of ship Reserved for future use
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 51
9 APPENDIX B - DIGITAL INTERFACE IEC
61162-1
Hardware
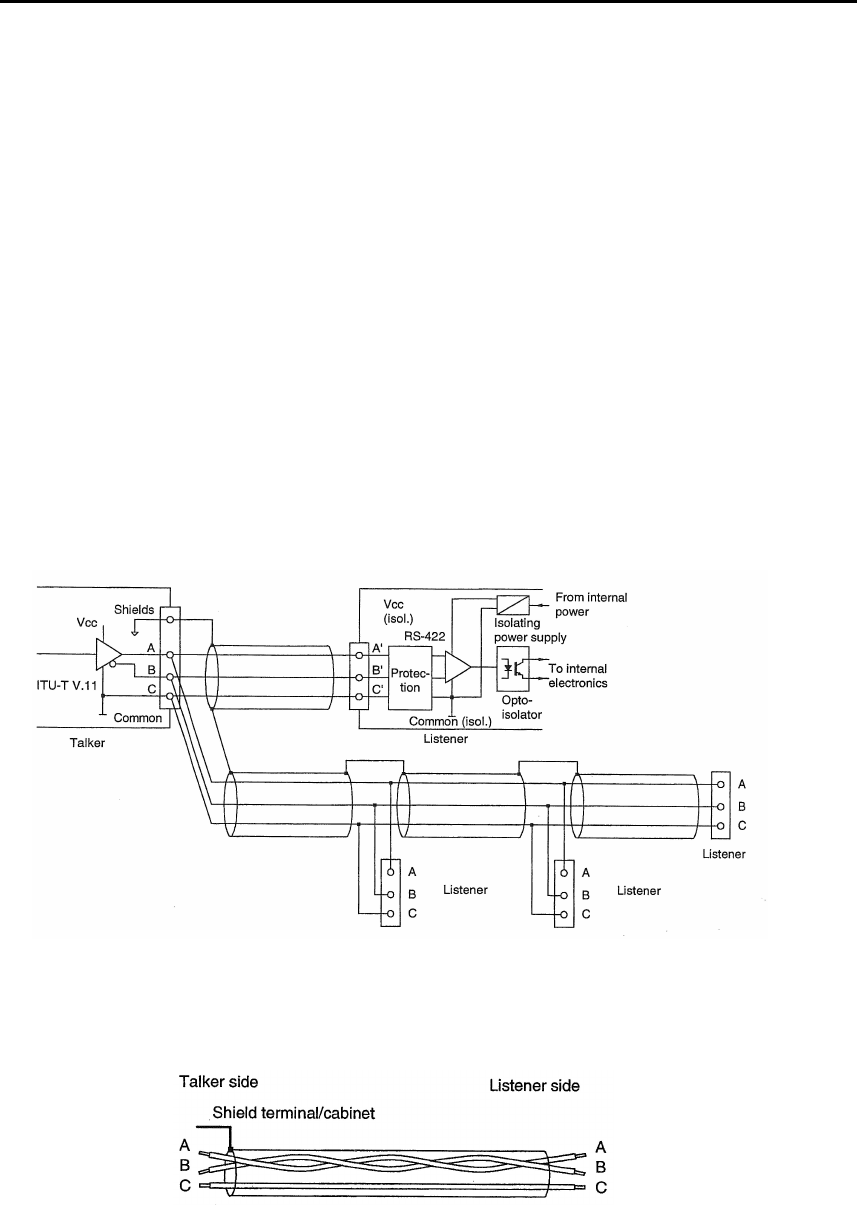
The recommended wiring (the figures below are excerpts from IEC
61162-2, ed. 1) is as shown on the drawings. The A, B and C
designation correspond with the data signals as shown on figure on
page 20. There may be several listeners (receivers) but only one talker
(transmitter). For long lines we recommend to use a terminating
resistor (120 Ohm between A' and B' at the receiving end). Avoid
stubs or make them as short as possible. The common wire designated
"C" is the signal ground reference and this wire shall be isolated from
the outer shielding. The outer cable shield shall be continuous
(unbroken) through the installation, but shall not be terminated to any
part of the receiver.
Shielded twisted pair cable with third-wire is shown below. The
common "C" wire may be one wire of a pair of another port's common
connection wire "C", if they have the same destination.
Excerpt from 61162-2, ed. 1 (NMEA 0183 version 3.0, 3.5.2).
Simrad AI80 Installation Manual
52 Man_inst_AI80_r1
Proprietary 61162-1 sentences
General
In order to configure and service the AI80 Mobile Unit there are some
proprietary messages that can be used on the PI or Pilot interface. The
AIS Mobile Unit uses the NMEA registered "STX" manufacturer’s
code. When setting parameters in the AIS Mobile Unit use the
$PSTXS command. To query the AIS Mobile Unit for information,
use the $PSTXQ command. Responses from the AIS Mobile Unit
uses the $PSTXR command. The proprietary messages comply with
IEC 61162-1 and have the following structure:
$ P STX S , <Msg ID> DATA * <FCS> <CR> <LF>
Field Definition
$ or ! Hex 24 or Hex 21 - Start of sentence
P Hex 50 – Proprietary sentence ID
STX Kongsberg Seatex mnemonic code
S or R or Q S = Set, R = Response, Q = Query
<Msg ID> Message ID identifying a specific sentence
DATA Data portion, unique for each Message ID.
* Checksum delimiter
<FCS> Checksum
<CR><LF> End of message
MSI number
To request the current MMSI number from the AIS Mobile Unit, use
the command:
$PSTXQ,MMSI*<FCS><CR><LF>
The AIS Mobile Unit response message has the format:
$PSTXR,MMSI,<nnnn>*<FCS><CR><LF>
To set or change the MMSI number, use the command:
$PSTXS,MMSI,<nnnn>*<FCS><CR><LF>
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 53
Field Description Range
MMSI Message ID identifying this sentence NA
<nnnn> MMSI number 0 to 1073741823
All fields are required and used.
IMO number
To request the current IMO number from the AIS Mobile Unit, use the
command:
$PSTXQ,IMO*<FCS><CR><LF>
The AIS Mobile Unit response message has the format:
$PSTXR,IMO,<nnnn>*<FCS><CR><LF>
To set or change the IMO number, use the command:
$PSTXS,IMO,<nnnn>*<FCS><CR><LF>
Field Description Range
IMO Message ID identifying this sentence NA
<nnnn> IMO number 0 to 1073741823
All fields are required and used.
Serial port communication parameters
To request the current communication parameters of the serial ports,
and to retrieve all available serial ports, use the command:
$PSTXQ,PORT*<FCS><CR><LF>
The AIS Mobile Unit response message has the format (one message
per port):
$PSTXR,PORT,CCCC,<bbbb>,<p>,<d>,<s>*<FCS><CR><LF>
To set or change the communication parameters, use the command:
$PSTXS,PORT,CCCC,<bbbb>,<p>,<d>,<s>*<FCS><CR><LF>
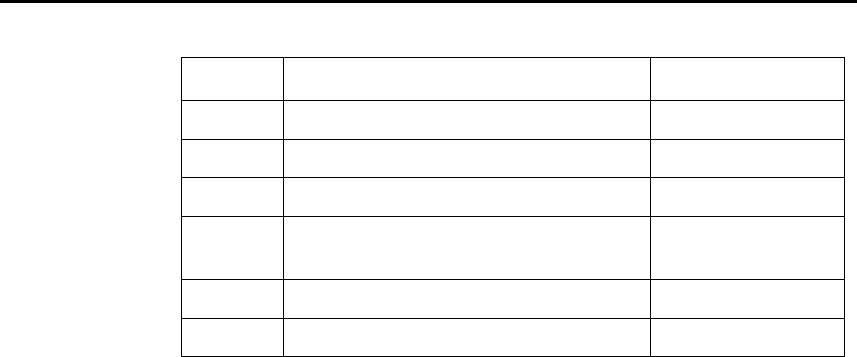
Simrad AI80 Installation Manual
54 Man_inst_AI80_r1
Field Description Range
PORT Message ID identifying this sentence NA
CCCC Name of serial port COM1 to COM32
<bbbb> Baud rate 1200 to 38400
<p> Parity, 'N' = None, 'E' = Even, 'O' =
Odd
'N', 'E', 'O'
<d> Data bits 5-8
<s> Stop bits 1, 2
All fields are required and used.

Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 55
New IEC 61162-1 sentences
This subchapter contains a description of proposed IEC 61162-1
sentences due to AIS. Reference is made to IEC 61193-2, 2001, annex
B2 and IEC/PAS 61162-100.
ABK – Addressed and binary broadcast
acknowledgement
The ABK-sentence is generated when a transaction, initiated by
reception of an ABM, AIR, or BBM sentence, is completed or
terminated.
This sentence provides information about the success or failure of a
requested ABM broadcast of either ITU-R M.1371 messages 6 or 12.
The ABK process utilises the information received in ITU-R M.1371
messages 7 and 13. Upon reception of either a VHF Data-link
message 7 or 13, or the failure of messages 6 or 12, the AIS unit
delivers the ABK sentence to the external application.
This sentence is also used to report to the external application the AIS
unit's handling of the AIR (ITU-R M.1371 message 15) and BBM
(ITU-R M.1371 messages 8 and 14) sentences. The external
application initiates an interrogation through the use of the AIR-
sentence, or a broadcast through the use of the BBM sentence. The
AIS unit generates an ABK sentence to report the outcome of the AIR
or BBM broadcast process.
NOTE 1 Identifies the distant addressed AIS unit involved with the
acknowledgement. If more than one MMSI are being addressed (ITU-
R M.1371 message 15), the MMSI of the first distant AIS unit,
identified in the message, is the MMSI reported here. When the
Message ID is a general broadcast (ITU-R M.1371 messages 8 or 14),
this field is null.
NOTE 2 Indication of VDL channel upon which Message ID 7 or 13
acknowledgement was received. An "A" indicates reception on
channel A. A "B" indicates reception on channel B. If not available,
field is null.
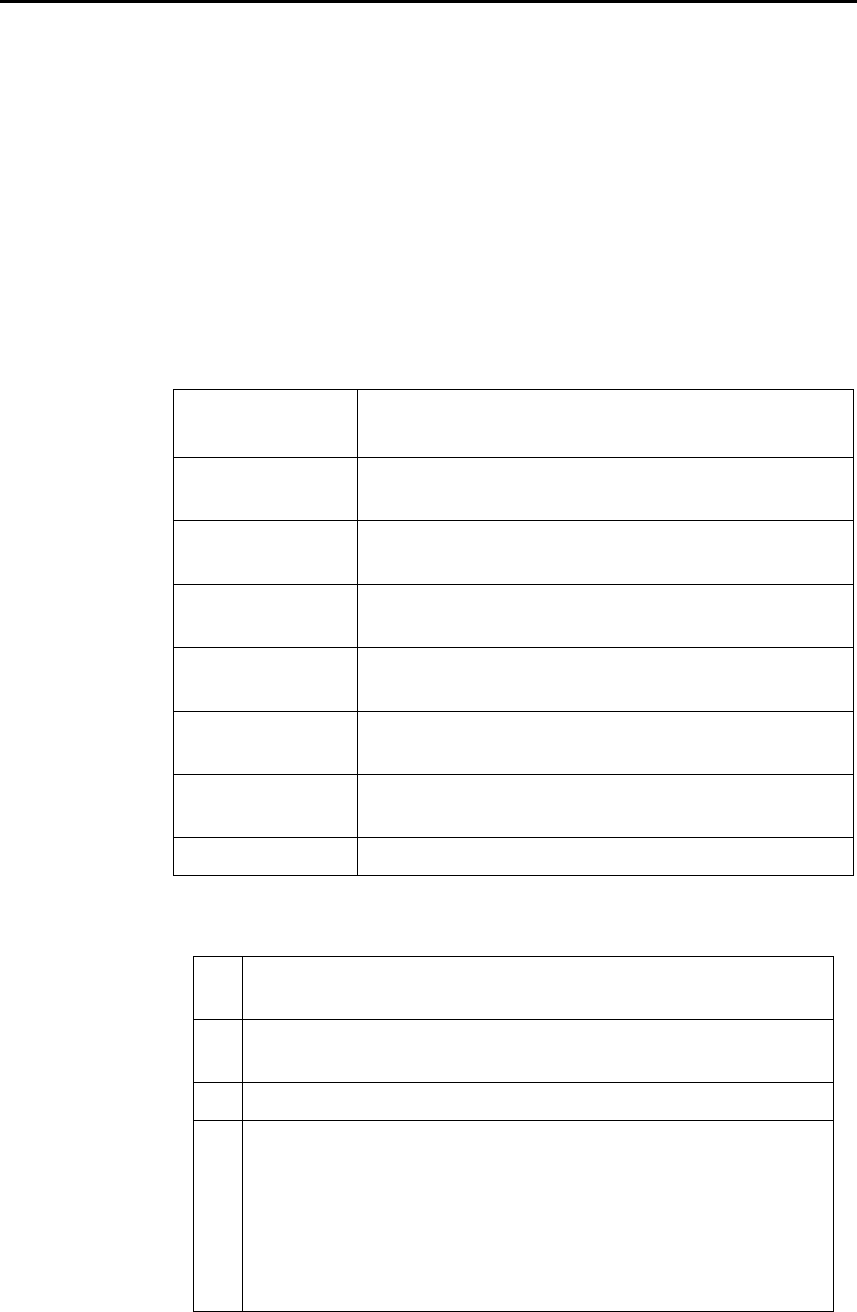
Simrad AI80 Installation Manual
56 Man_inst_AI80_r1
NOTE 3 This indicates to the external application the type of ITU-R M.1371
message that this ABK sentence is addressing. Also see the message
IDs listed in NOTE 4.
NOTE 4 The message sequence number, together with the ITU-R M.1371
message ID and MMSI of the addressed AIS unit, uniquely identifies
a previously received ABM, AIR, or BBM sentence. Generation of an
ABK-sentence makes a sequential message identifier available for
reuse. The ITU-R M.1371 Message ID is used to determine the origin
of the message sequence identifier number. The following table lists
the origins by message ID:
ITU-R M.1371
Message ID Message Sequence Number source
6 sequential message identifier from ABM-sentence,
IEC 61162-1
7 addressed AIS unit's message 7, sequence number,
ITU-R M.1371
8 sequential message identifier from BBM-sentence,
IEC 61162-1
12 sequential message identifier from ABM-sentence,
IEC 61162-1
13 addressed AIS unit's message 13, sequence number,
ITU-R M.1371
14 sequential message identifier from BBM-sentence,
IEC 61162-1
15 no source, field shall be null
NOTE 5 Acknowledgements provided are:
0 = message (6 or 12) successfully received by the addressed AIS
unit,
1 = message (6 or 12) was broadcast, but no acknowledgement by
the distant addressed AIS unit,
3 = message could not be broadcast,
4 = requested broadcast of message (8, 14, or 15) has been
successfully completed, late reception of a message 7 or 13
acknowledgement "addressed to own-ship" MMSI – identified
by; destination MMSI, acknowledgement source MMSI,
message sequence identifier, and message type. Late reception
means that the AIS unit did not have an acknowledgement
process active for the acknowledgement that was received.
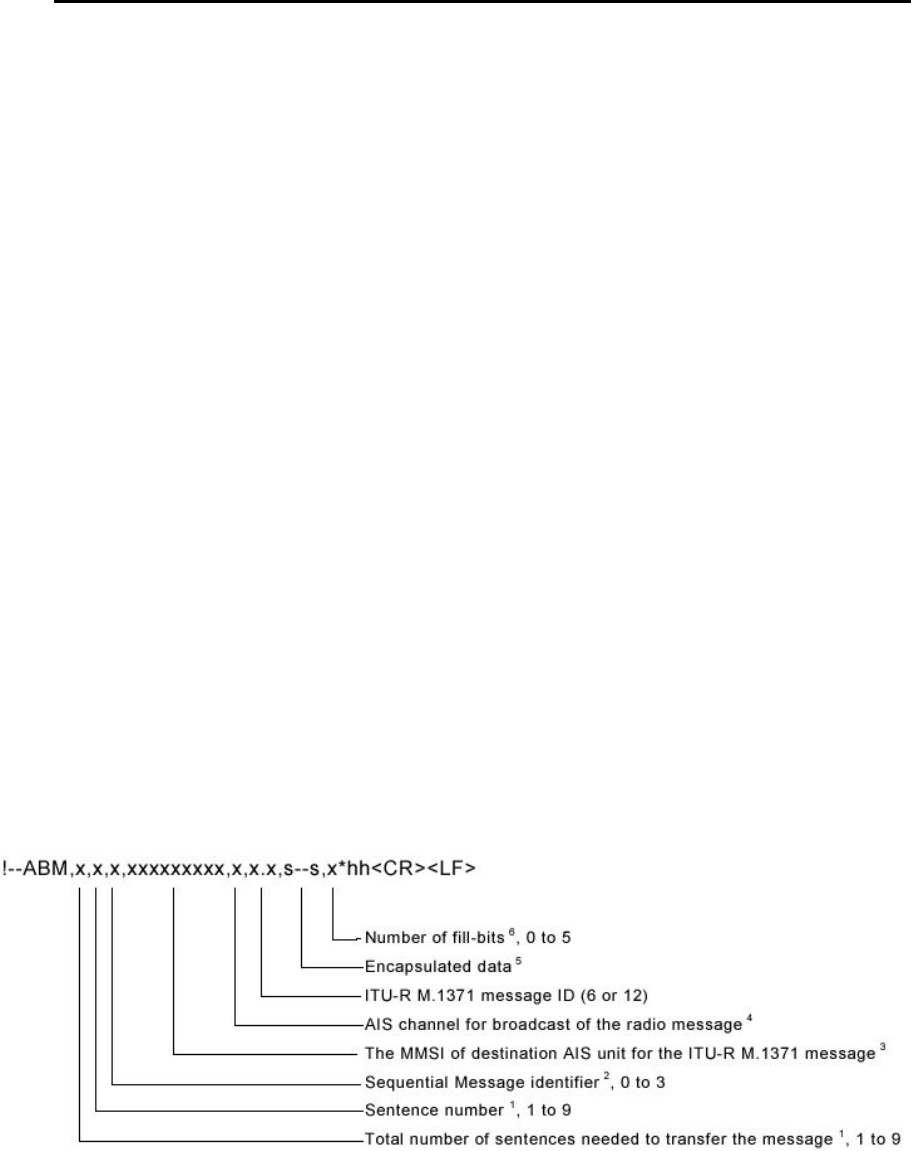
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 57
ABM – Addressed Binary and safety related
message
This sentence supports ITU-R M.1371 messages 6 and 12. It provides
an external application with a means to exchange data using an AIS.
The message data is defined by the application only – not the AIS.
This message offers great flexibility for implementing system
functions that use the AIS like a communications device. After
receiving this sentence, the AIS initiates a radio broadcast on the VHF
Data Link (VDL) of either message 6 or 12. The AIS will make up to
four broadcasts of the message. The actual number will depend on the
reception of an acknowledgement from the addressed "destination"
AIS. The default time between retries is 4 s. Retries will not be
attempted more frequently than 4 s. Retries stop when the appropriate
acknowledgement (See ITU-R M.1371 messages 7 and 13.) is
received. The AIS will make up to 4 broadcasts, original broadcast
plus three retires. This process could take 32 s to complete.
The success or failure of the reception of this broadcast by the
intended AIS unit is confirmed through the use of the "Addressed and
binary Broadcast Acknowledgement (ABK)" sentence formatter, and
the processes that support the generation of an ABK-sentence. The
AIS is also limited in the amount of encapsulated data that can be sent
in each slot and frame. If the length of the message would exceed five
slots, or the AIS broadcast would exceed the limit of 20 RATDMA
slot transmissions for the current frame, the AIS will return an ABK-
sentence with an acknowledgement of "2" – message could not be
broadcast.
NOTE 1 The total number of sentences required to transfer the binary message
data to the AIS unit. The first field specifies the total number of
sentences used for a message, minimum value 1. The second field
identifies the order of this sentence in the message, minimum value 1.
All sentences contain the same number of fields. Successive sentences

Simrad AI80 Installation Manual
58 Man_inst_AI80_r1
may use null fields for fields that have not changed, such as fields 4,
5, and 6.
NOTE 2 This sequential message identifier serves two purposes. It is both an
IEC 61162-1 "sequential message identifier field," and it is the
"sequence number" utilised by the ITU-R M.1371 in message types 6
and 12. The range of this field is restricted by ITU-R M.1371 to the
range of 0 to 3. This sequential message identifier and the destination
MMSI uniquely identifies a message. The sequential message
identifier may be reused after the "ABK" acknowledgement for that
sequence number is provided by the destination AIS unit. (See the
ABK-sentence formatter.)
NOTE 3 The MMSI of the AIS unit which is the destination of the message.
NOTE 4 The AIS channel that shall be used for the broadcast: 0 = no broadcast
channel preference, 1 = Broadcast on AIS channel A, 2 = Broadcast
on AIS channel B, 3 = Broadcast two copies of the message – one
copy sent on channel A and another copy sent on channel B.
NOTE 5 This is the content of the "binary data" parameter for ITU-R M.1371
message 6, or the "Safety related Text" parameter for message 12. The
first sentence may contain up to 48 "6-bit" symbols (288 bits).
Following sentences may contain up to 60 valid "6-bit" symbols (360
bits), if fields 4, 5, and 6 are unchanged from the first sentence and set
to null. The actual number of "6-bit" symbols in a sentence must be
adjusted so that the total number of characters in a sentence does not
exceed the "82-character" limit.
NOTE 6 To encapsulate, the number of binary bits must be a multiple of six. If
it is not, one to five "fill bits" are added. This parameter indicates the
number of bits that were added to the last 6-bit coded character. This
value shall be set to zero when no "fill bits" have been added. This
cannot be a null field.
ACA – AIS regional channel assignment
message
An AIS unit can receive regional channel management information
four ways: ITU-R M.1371 message 22, DSC telecommand received
on channel 70, manual operator input, and an ACA-sentence. The AIS
unit may store channel management information for future use.
Channel management information is applied based upon the actual
location of the AIS unit. An AIS unit is "using" channel management
information when the information is being used to manage the
operation of the VHF receivers and/or transmitter inside the AIS unit.
This sentence is used to both enter and obtain channel management
information. When sent to an AIS unit, the ACA-sentence provides
regional information that the unit stores and uses to manage the
internal VHF radio. When sent from an AIS unit, the ACA-sentence
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 59
provides the current channel management information retained by the
AIS unit. The information contained in this sentence is similar to the
information contained in an ITU-R M.1371 message 22. The
information contained in this sentence directly relates to the
"Initialisation Phase" and "Dual Channel operation and Channel
management" of the AIS unit as described in ITU-R M.1371.
NOTE 1 This is used to bind the contents of the ACA and ACS sentences
together. If provided by the AIS, the ACS sentence shall immediately
follow the related ACA sentence, and both sentences shall contain the
same sequence number. The AIS generating ACA and ACS sentences
shall increment the sequence number by one each time an ACA/ACS
pair is created. After "9" is used, the sequence numbering process
shall begin again from "0". If the sequence numbers do not match, the
information contained in an ACS sentence is not related to the
information in an ACA sentence. The ACS sentence may be used to
respond to an "ACA Query-sentence" (See IEC 61162-1, § 5.3.2.).
The AIS shall respond by providing ACA/ACS pairs for each of the
stored regional operating settings. At any given time, the maximum
number of pairs is eight. When an ACS sentence is not sent following
an ACA sentence, the sequence number may be null.
NOTE 2 Value of 1 nautical mile to a value of 8 nautical miles (with a
resolution of 1 nautical mile)
NOTE 3 VHF channel number, see ITU-R M.1084, Annex 4
NOTE 4 Value of 0, bandwidth is specified by channel number, see ITU-R
M.1084, Annex 4
Value of 1, bandwidth is 12,5 kHz.

Simrad AI80 Installation Manual
60 Man_inst_AI80_r1
NOTE 5 Value of 0, transmit on channels A and B, receive on channels A and
B
Value of 1, transmit on channel A, receive on channels A and B
Value of 2, transmit on channel B, receive on channels A and B
Value of 3, do not transmit, receive on channels A and B
Value of 4, do not transmit, receive on channel A
Value of 5, do not transmit, receive on channel B
NOTE 6 Value of 0, high power
Value of 1, low power
NOTE 7 Source identifiers:
A, ITU-R M.1371 message 22: Channel Management addressed
message,
B, ITU-R M.1371 message 22: Channel Management broadcast
geographical area message,
C, IEC 61162-1 AIS Channel Assignment sentence,
D, DSC Channel 70 telecommand, and
M, operator manual input.
This field should be null when the sentence is sent to an AIS.
NOTE 8 This value is set to indicate that the other parameters in the sentence
are "in-use" by an AIS unit at the time that the AIS unit sends this
sentence. A value of "0" indicates that the parameters are not "in-use,"
and a value of "1" indicates that the parameters are "in-use." This field
should be null when the sentence is sent to an AIS.
NOTE 9 This is the UTC time that the "in-use" flag changed to the indicated
state. This field should be null when the sentence is sent to an AIS.
AIR – AIS interrogation request
This sentence supports ITU-R M.1371 message 15. It provides an
external application with the means to initiate a request for specific
ITU-R M.1371 messages from distant mobile or base AIS stations. A
single sentence can be used to request, as many as, two messages from
one AIS unit and one message from a second AIS unit. The message
types that can be requested are limited. The complete list of messages
that can be requested can be found within the message 15 description
in ITU-R M.1371. Improper requests may be ignored.
The external application initiates the interrogation. The external
application is responsible for assessing the success or failure of the
interrogation. After receiving this sentence, the AIS initiates a radio
broadcast (on the VHF Data Link) of a message 15 – Interrogation.
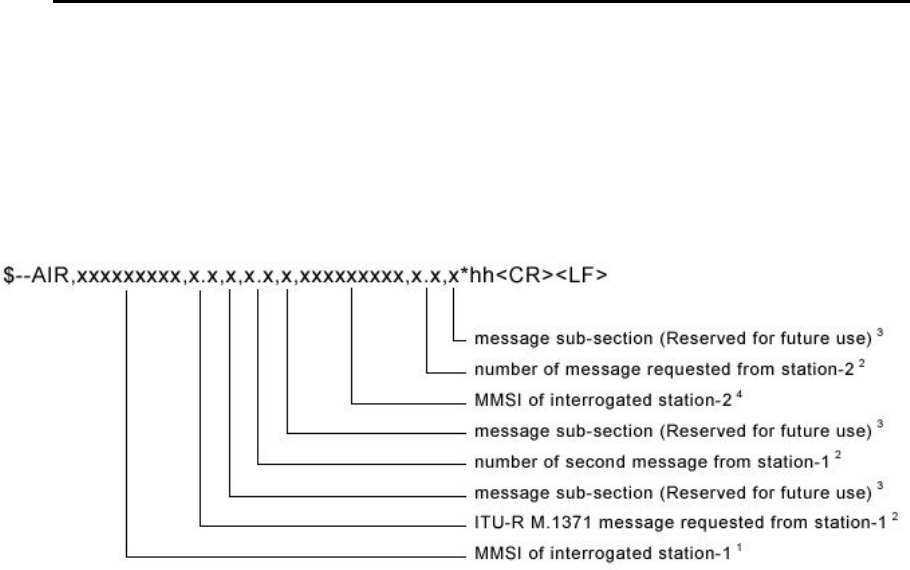
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 61
The success or failure of the interrogation broadcast is determined by
the external application's assessment of the combined reception of the
ABK-sentence and future VDM-sentences provided by the AIS via the
Presentation Interface. After receiving this AIR-sentence, the AIS
should broadcast a message 15 within 4 s, and the addressed AIS
should take no more than an additional 4 s to respond – a total of 8 s.
NOTE 1 Identifies the first distant AIS being interrogated. Two messages can
be requested from the first AIS.
NOTE 2 Examples of messages that may be requested from a distant mobile
AIS station include:
Message 3, Position Report,
Message 5, Ship Static and Voyage related data,
Message 9, Standard SAR Aircraft Position Report,
Message 18, Standard Class B Equipment Position Report,
Message 19, Extended Class B Equipment Position Report, and
Message 21, Aids-to-Navigation Report.
Examples of messages that may be requested from a distant AIS base
station include:
Message 4, Base Station Report,
Message 17, GNSS Broadcast Binary Message, (all available
corrections are requested),
Message 20, Data Link Management Message,
Message 22, Channel Management.
NOTE 3 This field is used to request a message that has been further sub-
divided into alternative data structures. When requesting messages
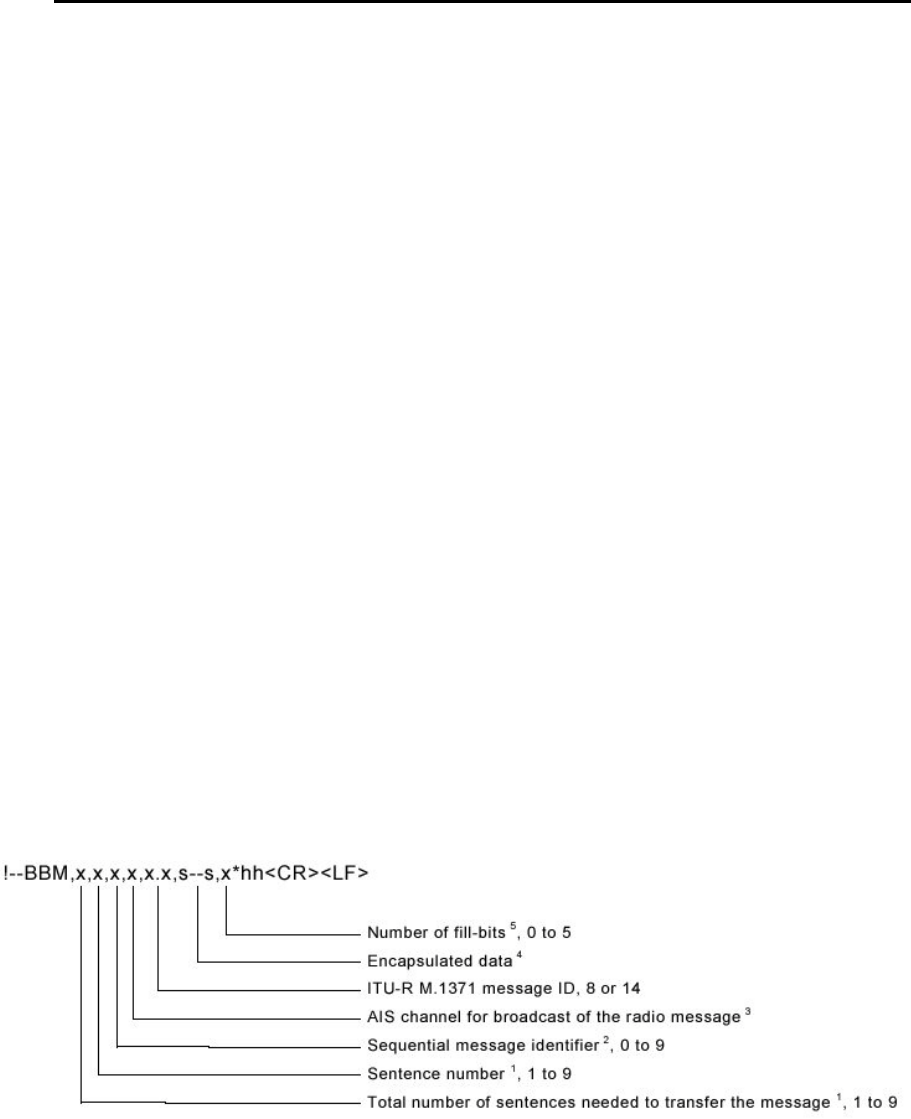
Simrad AI80 Installation Manual
62 Man_inst_AI80_r1
with alternative data structures, this message subsection identifier
must be provided, so that the correct sub-division of the message data
is provided. If the message structure is not sub-divided into different
structures, this field should be null.
NOTE 4 This identifies the second distant AIS being interrogated. Only one
message may be requested from the second AIS. The MMSI of the
second AIS may be the same MMSI as the first AIS. This technique
can be used to request a third message from station-1.
BBM – Broadcast binary message
This sentence supports generation of an ITU-R M.1371 Binary
Broadcast Message (message 8) or Safety Related Broadcast Message
(message 14). It provides an external application with a means to
broadcast data, as defined by the application only – not the AIS. This
message offers great flexibility for implementing system functions
that use the AIS like a digital broadcast device. After receiving this
sentence, the AIS initiates a VHF broadcast of either message 8 or 14
within 4 s. (Also, see the ABK-sentence.)
The success or failure of the broadcast confirmed through the use of
the "Addressed and binary Broadcast Acknowledgement (ABK)"
sentence formatter, and the processes that support the generation of an
ABK-sentence. The AIS is limited in the amount of encapsulated data
that can be sent in each slot and frame. If the length of the message
would exceed five slots, or the AIS broadcast would exceed the limit
of 20 RATDMA slot transmissions for the current frame, the AIS will
return an ABK-sentence
NOTE 1 The total number of IEC 61162-1 sentences needed to transfer the
contents of the binary message to the AIS. The first field specifies the
total number of sentences used for a message, minimum value 1. The
second field identifies the order of this sentence in the message,
minimum value 1. All sentences contain the same number of fields.
Successive sentences may use null fields for fields that do not change
– such as fields 4 and 5.

Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 63
NOTE 2 The Sequential Message Identifier provides a message identification
number from 0 to 9 that is sequentially assigned as needed. Note that
this is only a sequential message identifier. This is used differently
than the "Message sequence identifier" of an ABM sentence. This
identifier is incremented for each new multi-sentence message. The
count resets to 0, after 9 is used. For the contents of a message 8 or 14
requiring multiple sentences, each sentence of the message contains
the same Sequential Message Identification number. This number is
used to link the separate sentences containing portions of the same
encapsulated data. This allows for the possibility that other sentences
might be interleaved with the message sentences that, taken
collectively, contain a single message 8 or 14. This number also links
a future ABK-sentence acknowledgement to the appropriate BBM-
sentence. (See ABK, NOTE 4.)
NOTE 3 The AIS channel that shall be used for the broadcast: 0 = no broadcast
channel preference, 1 = Broadcast on AIS channel A, 2 = Broadcast
on AIS channel B, 3 = Broadcast two copies of the message – one on
channel A and another sent on channel B.
NOTE 4 This is the content of the "binary data" parameter for ITU-R M.1371
message 8 or the "Safety related Text" parameter for message 14. The
first sentence may contain up to 58 "6-bit" symbols (348 bits). The
following sentences may contain up to 60 "6-bit" symbols (360 bits),
if fields 4 and 5 are unchanged from the first sentence and set to null.
The actual number of "6-bit" symbols in a sentence must be adjusted
so that the total number of characters in a sentence does not exceed
the "82-character" limit.
NOTE 5 To encapsulate, the number of binary bits must be a multiple of six. If
it is not, one to five "fill bits" are added. This parameter indicates the
number of bits that were added to the last 6-bit coded character. This
value shall be set to zero when no "fill bits" have been added. This
cannot be a null field.
LRI – Long-Range Interrogation
The long-range interrogation of the AIS is accomplished through the
use of two sentences. The pair of interrogation sentences, a LRI-
sentence followed by a LRF-sentence, provides the information
needed by an AIS to determine if it must construct and provide the
reply sentences (LRF, LR1, LR2, and LR3). The LRI-sentence
contains the information that the AIS needs in order to determine if
the reply sentences need to be constructed. The LRF-sentence
identifies the information that needs to be in the reply sentences.
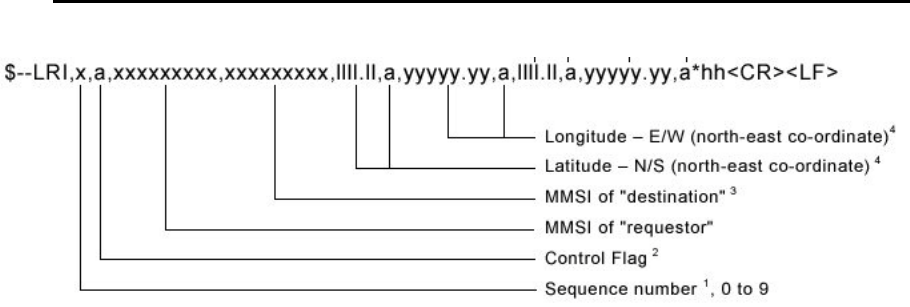
Simrad AI80 Installation Manual
64 Man_inst_AI80_r1
NOTE 1 This is used to bind the contents of the LRI and LRF sentences
together. The LRF sentence shall immediately follow the LRI
sentence and use the same sequence number. The requestor process
shall increment the sequence number each time a LRI/LRF pair is
created. The sequencing process shall continuously increment. After
"9" is used, the process shall begin again at "0". If the LRI and LRF
sequence numbers are different, the Long-range interrogation is not
valid.
NOTE 2 The control flag is a single character that qualifies the request for
information. The control flag affects the AIS unit's reply logic. The
control flag cannot be a null field. When the Control Flag is "0", the
AIS responds if either:
The AIS is within the geographic rectangle provided, and
The AIS has not responded to the requesting MMSI in the last 24
hours, and
The MMSI "destination" field is null.
or
The AIS unit's MMSI appears in the MMSI "destination" field in the
LRI sentence.
When the Control Flag is "1", the AIS responds if:
The AIS is within the geographic rectangle provided.
NOTE 3 This is the nine-digit number that uniquely identifies the specific AIS
that should respond. This field is null when the interrogation is for a
geographic region. When addressing a specific AIS, it is not necessary
to provide the geographic co-ordinates of the region.
NOTE 4 The geographic region being interrogated is a "rectangular" area
defined by the latitude and longitude of the north-east and south-west
corners. These fields should be null when interrogating a specific AIS.
(See note 2.)
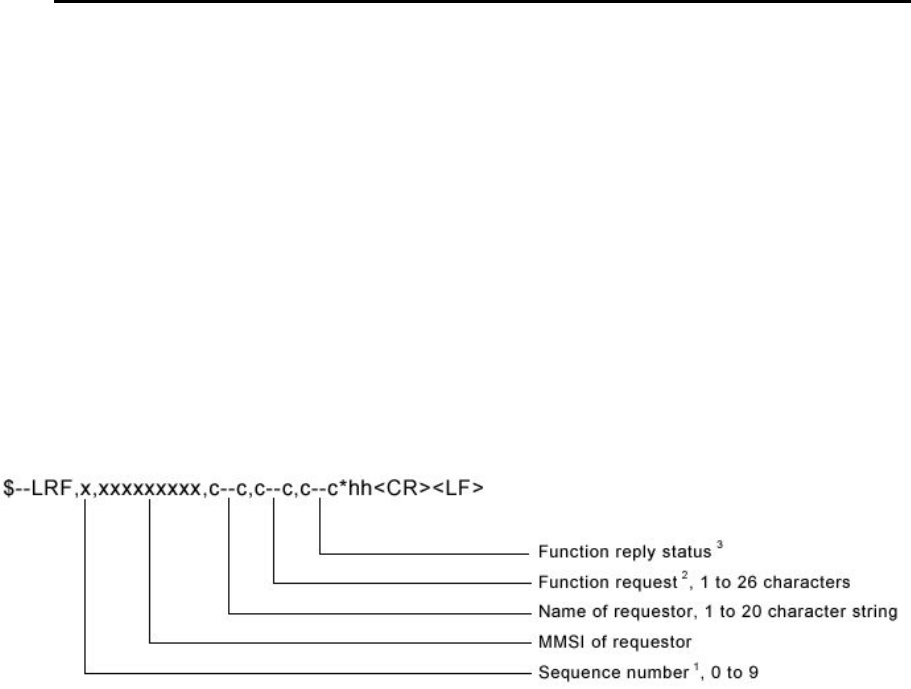
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 65
LRF – Long Range Function
This sentence is used in both long-range interrogation requests and
long-range interrogation replies. The LRF-sentence is the second
sentence of the long-range interrogation request pair, LRI and LRF
(See the LRI-sentence.). The LRF-sentence is also the first sentence of
the long-range interrogation reply. The minimum reply consists of a
LRF-sentence followed by a LR1-sentence. The LR2-sentence and/or
the LR3-sentence follow the LR1-sentence, if information provided in
these sentences is requested in the interrogation. When the AIS creates
the LRF-sentence for the long-range interrogation reply, fields 1, 2, 3,
and 4 should remain as received in the interrogation; and field 5
(Function Reply Status) and a new checksum are added to the LRF
reply sentence.
NOTE 1 This is used to bind the contents of the LRI and LRF sentences
together. The LRF sentence shall immediately follow the LRI
sentence and use the same sequence number. The requestor process
shall increment the sequence number each time a LRI/LRF pair is
created. After 9 is used, the process shall begin again from 0. The
Long-range interrogation is not valid if the LRI and LRF sequence
numbers are different.
NOTE 2 The Function request field uses alphabetic characters based upon IMO
Resolution A.851(20) to request specific information items. Specific
information items are requested by including their function
identification character in this string of characters. The order in which
the characters appear in the string is not important. All characters are
upper case. Information items will not be provided if they are not
specifically requested – even if available to the AIS. The IMO
Resolution defines the use of all characters from A to Z, but not all of
the defined information is available from the AIS. The following is a
list of the function identification characters with the information they
request:
A = Ship's: name, call sign, and IMO number
B = Date and time of message composition
C = Position
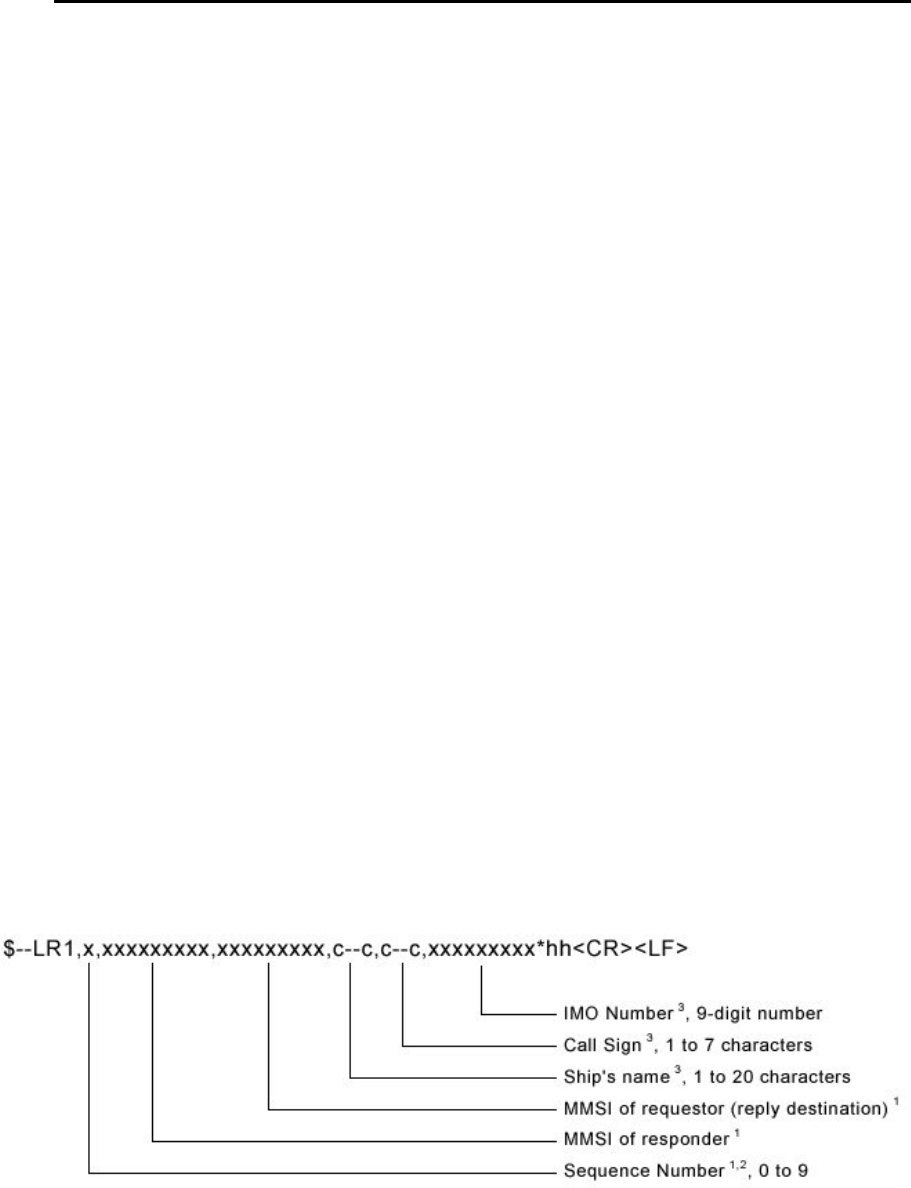
Simrad AI80 Installation Manual
66 Man_inst_AI80_r1
E = Course over ground
F = Speed over ground
I = Destination and Estimated Time of Arrival (ETA)
O = Draught
P = Ship/Cargo
U = Ship's: length, breadth, type
W = Persons on board
NOTE 3 The "Function Reply Status" field provides the status characters for
the "Function Request" information. When a long-range interrogation
request is originated, the "Function Reply Status" field should be null.
The "Function Reply Status" characters are organised in the same
order as the corresponding function identification characters in the
"Function Request" field. The following is a list of the "Function
Reply Status" characters with the status they represent:
2 = Information available and provided in the following LR1, LR2, or
LR3 sentence,
3 = Information not available from AIS unit,
4 = Information is available but not provided (i.e. restricted access
determined by ship's master),
LR1 – Long-range Reply with destination
for function request "A"
The LR1-sentence identifies the destination for the reply and contains
the information requested by the "A" function identification character.
(See the LRF-sentence.)
NOTE 1 The three fields, sequence number, MMSI of responder, and MMSI of
requestor are always provided.
NOTE 2 The sequence number should be the same number as the sequence
number of the LRI and LRF sentences that initiated this reply.
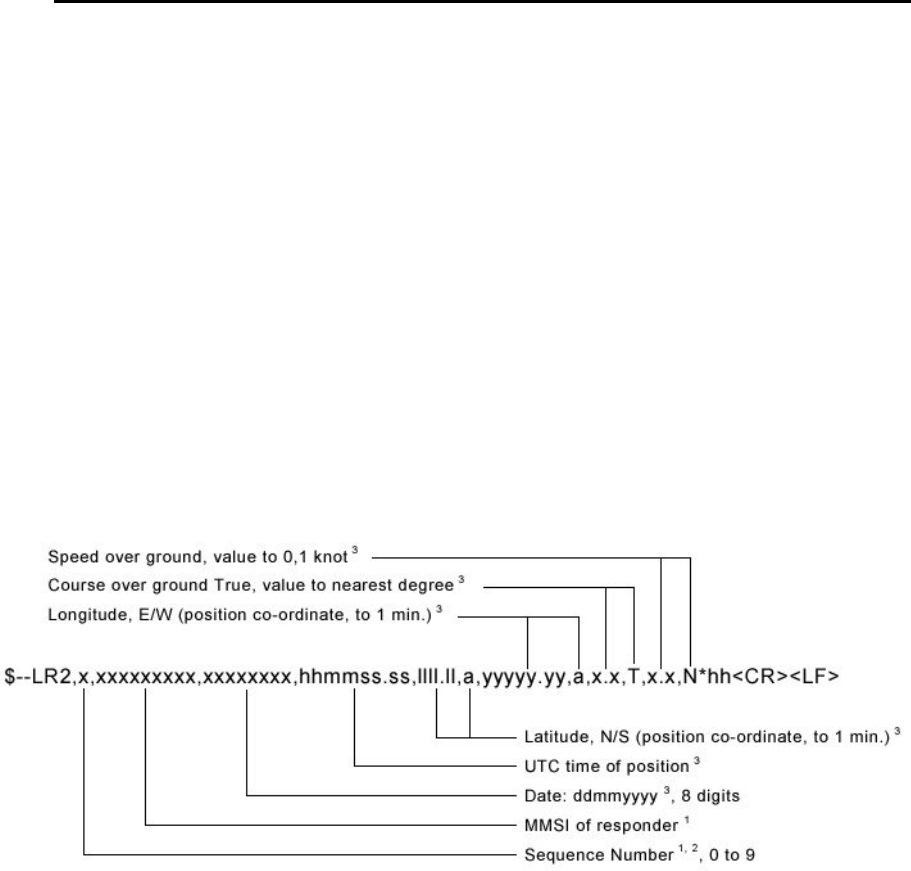
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 67
NOTE 3 The characters that can be used are listed in IEC 61162-1, table 2.
Some characters in this table are the reserved characters listed in IEC
61162-1, table 1. Reserved characters may be used, but they must be
represented using the "^-method" (See IEC 61162-1, § 5.1.3.). The
individual information items shall be a null field, if any one of the
following three conditions exist:
The information item was not requested.
The information item was requested, but it is not available.
The information item was requested, but it is not being provided.
LR2 – Long-range Reply for function
requests "B, C, E, and F"
The LR2-sentence contains the information requested by the "B, C, E,
and F" function identification characters. (See the LRF-sentence.)
NOTE 1 If the sentence is used, the two fields, Sequence Number and MMSI of
responder, are always provided.
NOTE 2 The sequence number should be the same number as the sequence
number of the LRI and LRF sentences that initiated this reply.
NOTE 3 The individual information items shall be a null field if any of the
following three conditions exist:
The information item was not requested.
The information item was requested, but it is not available.
The information item was requested, but it is not being provided.
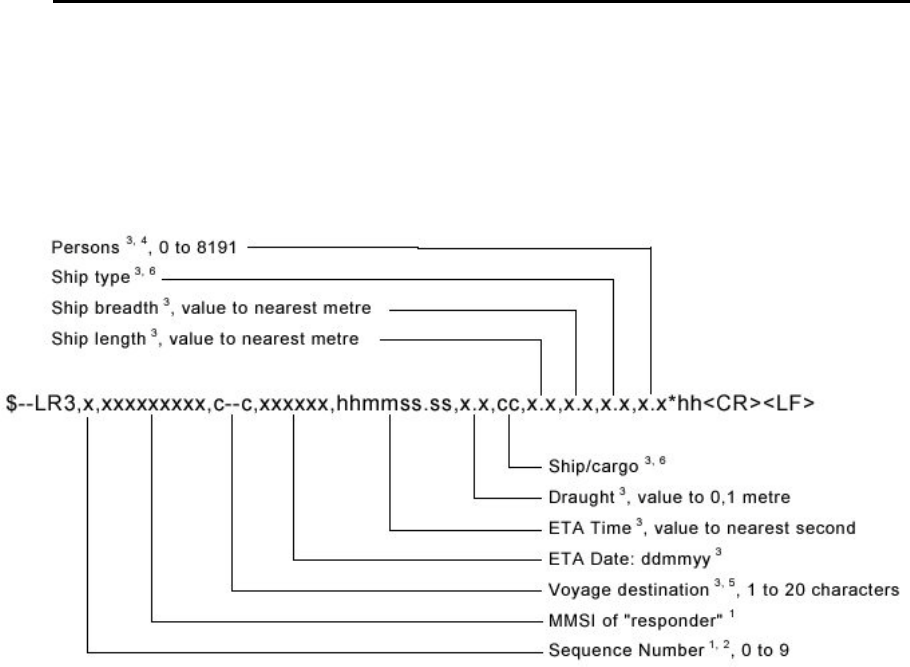
Simrad AI80 Installation Manual
68 Man_inst_AI80_r1
LR3 – Long-range Reply for function
requests "I, O, P, U and W"
The LR3-sentence contains the information requested by the "I, O, P,
U, and W" function identification characters (see the LRF-sentence).
NOTE 1 If the sentence is used, the two fields, Sequence Number and MMSI of
responder, are always provided.
NOTE 2 The sequence number should be the same number as the sequence
number of the LRI and LRF sentences that initiated this reply.
NOTE 3 The individual information items shall be a null field if any of the
following three conditions exist:
The information item was not requested,
The information item was requested but is not available, or
The information item was requested but is not being provided.
NOTE 4 Current number of persons on-board, including crew members: 0 to
8191.
0 = default (not available), 8191 = 8191 or more people.
NOTE 5 The characters that can be used are listed in IEC 61162-1, table 2.
Some characters in this table are the reserved characters listed in IEC
61162-1, table 1. Reserved characters may be used, but they must be
represented using the "^-method" (See IEC 61162-1, § 5.1.3.).
NOTE 6 See ITU-R M.1371:2000, table 17, parameter "Type of ship and cargo
type" for the range of valid values available for this field.
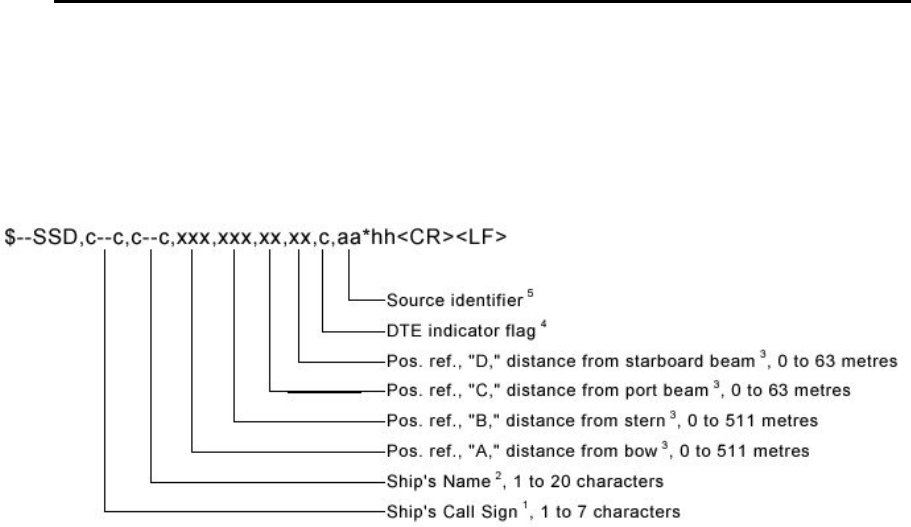
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 69
SSD – Ship Static Data
This sentence is used to enter static parameters into a shipboard AIS.
The parameters in this sentence support a number of the ITU-R
M.1371 messages.
NOTE 1 Ship call sign. A null field indicates that the previously entered call
sign is unchanged. The string of characters "@@@@@@@" are used
to indicate that the call sign is not available.
NOTE 2 The characters that can be used in the name are listed in the ITU-R
M.1371, table 14 (6-bit ASCII). Some of the acceptable characters in
this 6-bit ASCII table are reserved characters under IEC 61162-1.
They must be represented using the "^-method" (See IEC 61162-1,
section 5.1.3.). A null field indicates that the previously entered name
is unchanged. The string of characters
"@@@@@@@@@@@@@@@@@@@@" are used to indicate
that the ship's name is not available.
NOTE 3 These are the four dimensions from the bow, stern, port beam, and
starboard beam to the horizontal reference point on the ship for which
the current "position reports" are valid. The sum of A + B is the length
of the ship in metres, and the sum of C + D is the width of the ship in
metres (See ITU-R M.1371, message 5, "Reference Point for reported
position and Dimensions of Ship."). If the reference point of "reported
position" is not available, but the dimensions of the ship are available:
A = C = 0 and B > 0 and D > 0. If neither the reference point for the
reported position nor the dimensions of the ship are available: A = B =
C = D = 0 (default). Use of a null field for A, B, C, and/or D indicates
that the previously entered dimension for that parameter is unchanged.
In many cases, the ship's reference point for "reported position" will
be the location of the positioning antenna.
NOTE 4 The DTE indicator is an abbreviation for Data Terminal Equipment
indicator. The purpose of the DTE indicator is to inform distant
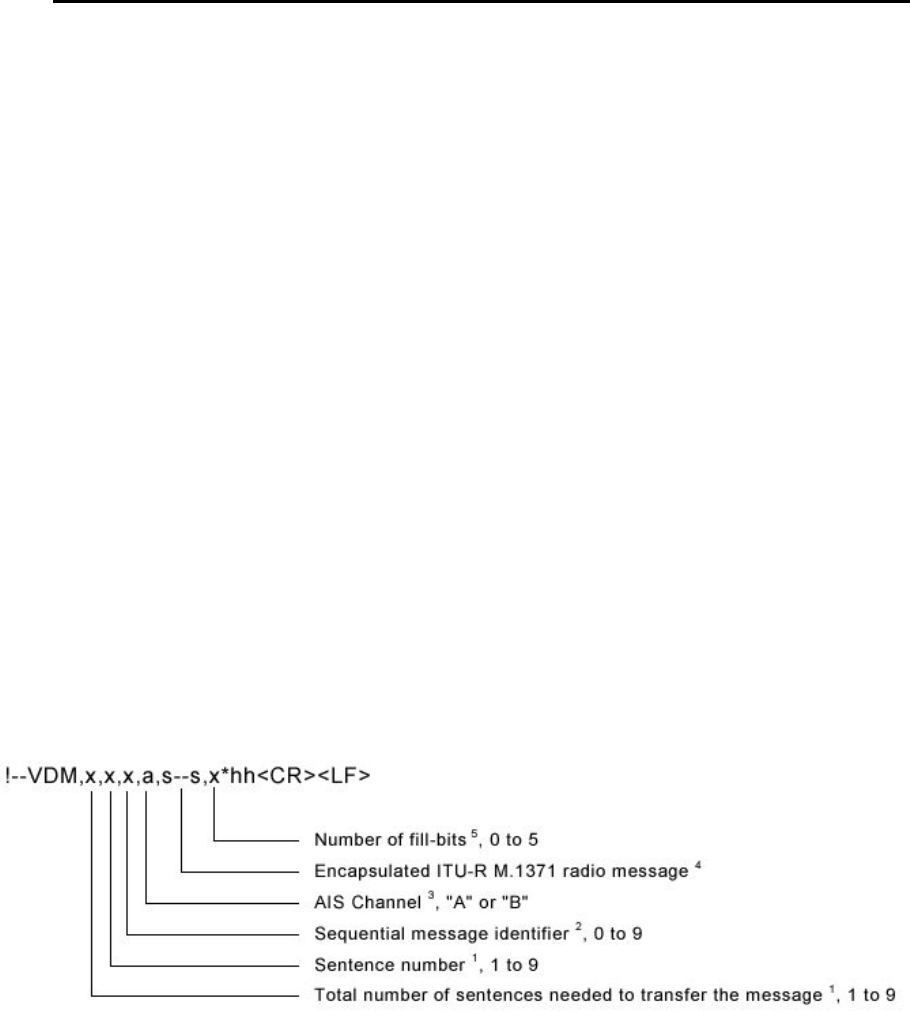
Simrad AI80 Installation Manual
70 Man_inst_AI80_r1
receiving applications that, if set to "available" the transmitting station
conforms, at least, to the minimum keyboard and display
requirements. The DTE indicator is only used as information provided
to the application layer – indicating that the transmitting station is
available for communications. On the transmitting side, the DTE
indicator may be set by an external application using this sentence.
DTE indicator flag values are:
0 = Keyboard and display are a standard configuration, and
communication is supported.
1 = Keyboard and display are either unknown or unable to support
communication (default setting).
NOTE 5 The source identifier contains the "Talker ID" of the equipment at this
location. The AIS may use the "Talker ID" to identify multiple
sources of position data and to detect a change to the reference point
on the ship.
VDM – VHF Data-link Message
This sentence is used to transfer the entire contents of a received AIS
message packet, as defined in ITU-R M.1371 and as received on the
VHF Data Link (VDL), using the "6-bit" field type. The structure
provides for the transfer of long binary messages by using multiple
sentences.
NOTE 1 The length of an ITU-R M.1371 message may be long and may
require the use of multiple sentences. The first field specifies the total
number of sentences used for a message, minimum value 1. The
second field identifies the order of this sentence in the message,
minimum value 1. These cannot be null fields.
NOTE 2 The Sequential message identifier provides a message identification
number from 0 to 9 that is sequentially assigned and is incremented
for each new multi-sentence message. The count resets to 0 after 9 is
used. For a message requiring multiple sentences, each sentence of the
message contains the same sequential message identification number.
It is used to identify the sentences containing portions of the same
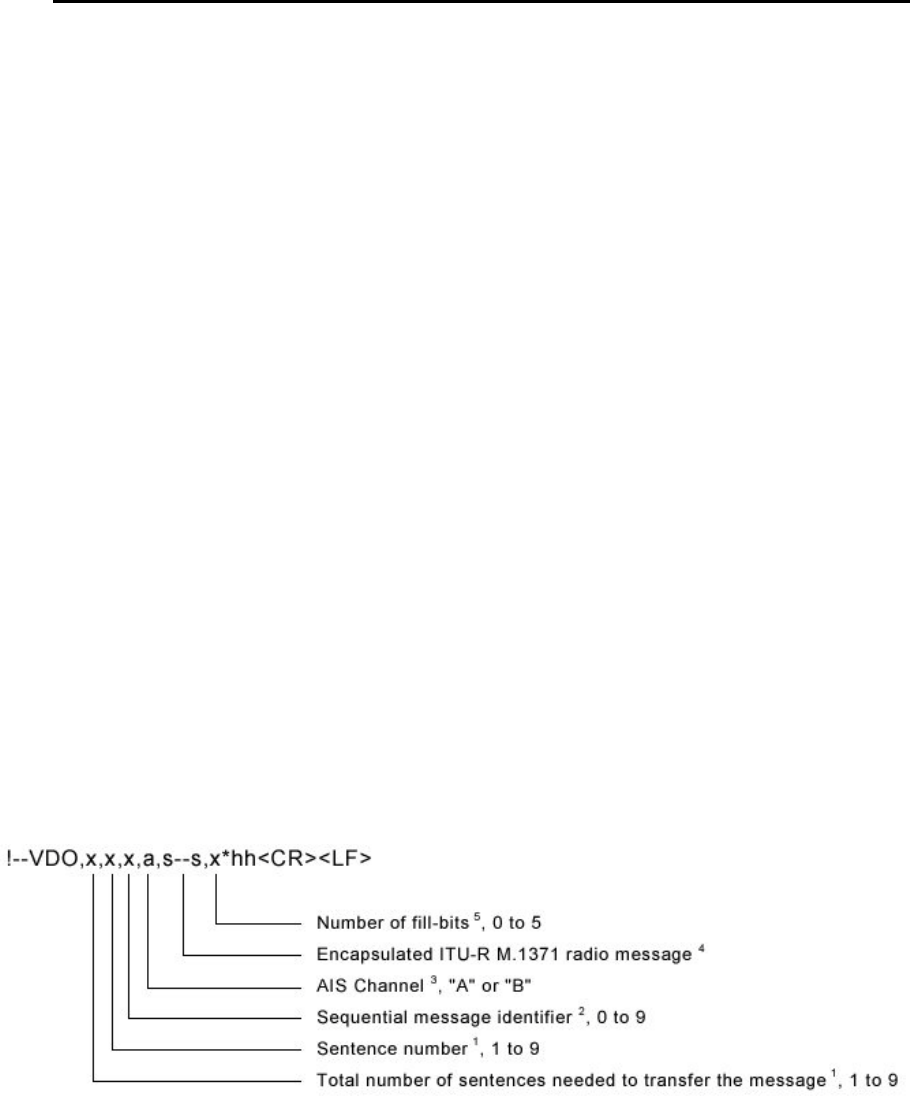
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 71
message. This allows for the possibility that other sentences might be
interleaved with the message sentences that, taken collectively,
contain a single message. This field shall be a null field when
messages fit into one sentence.
NOTE 3 The AIS message reception channel is indicated as either "A" or "B."
This channel indication is relative to the operating conditions of the
AIS when the packet is received. This field shall be null when the
channel identification is not provided. The VHF channel numbers for
channels "A" and "B" are obtained by using an ACA-sentence "query"
of the AIS.
NOTE 4 The maximum string length of encapsulation is limited such that the
total number of sentence characters does not exceed 82. This field
supports a maximum of 62 valid characters for a message transferred
using multiple sentences, and 63 valid characters for a message using
a single sentence.
NOTE 5 To encapsulate, the number of binary bits must be a multiple of six. If
it is not, one to five "fill bits" are added. This parameter indicates the
number of bits that were added to the last 6-bit coded character. This
value shall be set to zero when no "fill bits" have been added. This
cannot be a null field.
VDO – VHF Data-link Own-vessel message
This sentence is used to provide the information assembled for
broadcast by the AIS. It uses the six-bit field type for encapsulation.
The sentence uses the same structure as the VDM sentence formatter.
NOTE 1 The length of an ITU-R M.1371 message may be long and may
require the use of multiple sentences. The first field specifies the total
number of sentences used for a message, minimum value 1. The
second field identifies the order of this sentence in the message,
minimum value 1. These cannot be null fields.
NOTE 2 The Sequential message identifier provides a message identification
number from 0 to 9 that is sequentially assigned and is incremented
for each new multi-sentence message. The count resets to 0 after 9 is

Simrad AI80 Installation Manual
72 Man_inst_AI80_r1
used. For a message requiring multiple sentences, each sentence of the
message contains the same sequential message identification number.
It is used to identify the sentences containing portions of the same
message. This allows for the possibility that other sentences might be
interleaved with the message sentences that, taken collectively,
contain a single message. This field shall be a null field when a
message fits into one sentence.
NOTE 3 This is the channel used to broadcast the AIS message. The AIS
channel field, set to either "A" or "B", indicates that the message was
broadcast. If the message is not broadcast, the "AIS Channel" field
shall be null. The VHF channel numbers for channels "A" and "B" are
obtained by using an ACA-sentence "query" of the AIS.
NOTE 4 The maximum string length of encapsulation is limited such that the
total number of sentence characters does not exceed 82. This field
supports a maximum of 62 valid characters for a message transferred
using multiple sentences, and 63 valid characters for a message using
a single sentence.
NOTE 5 To encapsulate, the number of binary bits must be a multiple of six. If
it is not, one to five "fill bits" are added. This parameter indicates the
number of bits that were added to the last 6-bit coded character. This
value shall be set to zero when no "fill bits" have been added. This
cannot be a null field.
VSD – Voyage Static Data
This sentence is used to enter information about a ship's voyage. This
information remains relatively static during the voyage. However, the
information will frequently change from voyage to voyage. The
parameters in this sentence support a number of the ITU-R M.1371
messages.

Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 73
NOTE 1 Type of ship and cargo category are defined in ITU-R M.1371. The
description of ship and cargo are indicated by a number. The values
are defined in ITU-R M.1371, message 5. A null field indicates that
this is unchanged.
NOTE 2 Draught is reported in the range of 0 to 25,5 metres. The value 0 = not
available (default), and the value 25,5 indicates that the draught is
25,5 metres or more. Only values from 0 to 25,5 shall be accepted by
the AIS. A null field indicates that this is unchanged.
NOTE 3 Number of persons on-board includes the crew. The value 0 = not
available (default). The value 8191 = 8191 or more people. Only
values from 0 to 8191 shall be accepted by the AIS. A null field
indicates that this is unchanged.
NOTE 4 The characters that can be used in the destination are listed in the
ITU-R M.1371, table 14 (6-bit ASCII). Some of the acceptable
characters in this 6-bit ASCII table are reserved characters under IEC
61162-1. They must be represented using the "^-method" (See IEC
61162-1, section 5.1.3.). A null field indicates that the previously
entered destination is unchanged. The string of characters
"@@@@@@@@@@@@@@@@@@@@" are used to indicate
that the ship's destination is not available.
NOTE 5 The UTC time of arrival field follows the "TIME" field type described
in table 6 (IEC 61162-1). The two fixed digits of seconds are not
broadcast by the AIS and should be set to "00". The optional decimal
point and associated decimal fraction shall not be provided. The
resulting time is a number with six fixed digits, "hhmm00". Leading
zeros are always included for the hours and minutes. If the hour of
arrival is not available, "hh" shall be set to 24. If the minute of arrival
is not available, "mm" shall be set to 60. A null field indicates that this
is unchanged.
NOTE 6 The day and month of arrival are in UTC. The day is a two-digit fixed
number requiring leading zeros. The month is a two-digit fixed
number requiring leading zeros. If the day of arrival is not available,
"00" shall be the number for day. If the month of arrival is not
available, "00" shall be the number for the month. A null field
indicates that this is unchanged.
NOTE 7 The Navigational status is indicated using the following values, a null
field indicates the status is unchanged (ref. ITU-R M.1371, Message
1, Navigational status parameter):
0 = under way using engine
1 = at anchor
2 = not under command
3 = restricted manoeuvrability

Simrad AI80 Installation Manual
74 Man_inst_AI80_r1
4 = constrained by draught
5 = moored
6 = aground
7 = engaged in fishing
8 = under way sailing
9 = reserved for High Speed Craft
10 = reserved for Wing In Ground
11 to 14 = reserved for future use
15 = not defined (default)
NOTE 8 Definition of values 1 to 15 provided by a competent regional
authority. Value shall be set to zero (0), if not used for any regional
application. Regional applications shall not use zero. A null field
indicates that this is unchanged (ref. ITU-R M.1371, Message 1,
Reserved for regional applications parameter).
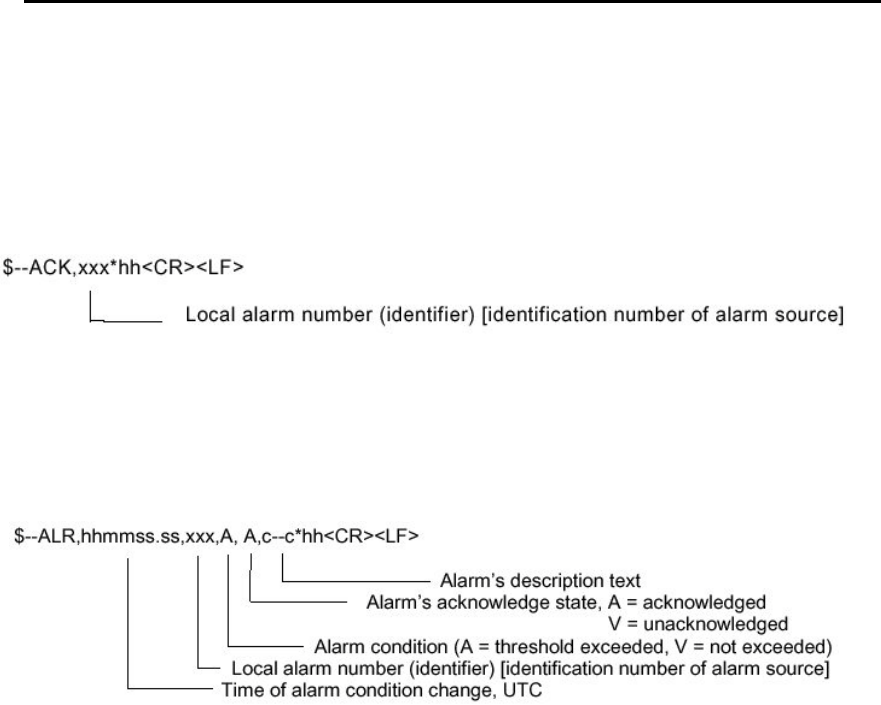
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 75
IEC 61162-1, Ed. 2, sentences
ACK – Acknowledge alarm
Acknowledge device alarm. This sentence is used to acknowledge an
alarm condition reported by a device.
ALR – Set alarm state
Local alarm condition and status. This sentence is used to report an
alarm condition on a device and its current state of acknowledgement.
DTM - Datum reference
Local geodetic datum and datum offsets from a reference datum. This
sentence is used to define the datum to which a position location, and
geographic locations in subsequent sentences, are referenced.
Latitude, longitude and altitude offsets from the reference datum, and
the selection of the reference datum, are also provided.
Note ! The datum sentence should be transmitted immediately prior to
every positional sentence (e.g. GLL, BWC, WPL) which is
referenced to a datum other than WGS84, the datum recommended
by IMO.
For all datums the DTM sentence should be transmitted prior to any
datum change and periodically at intervals of not greater than 30 s.
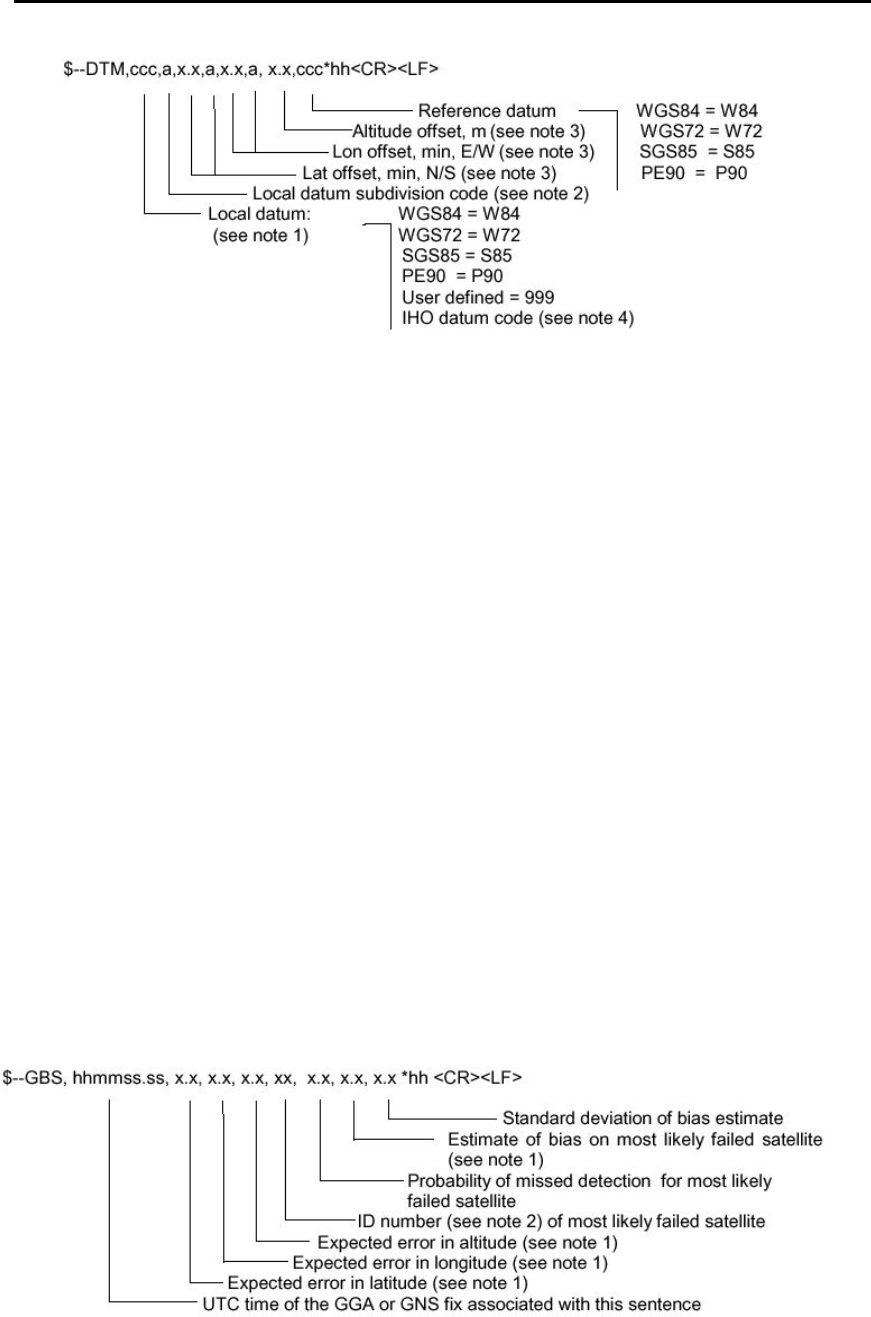
Simrad AI80 Installation Manual
76 Man_inst_AI80_r1
NOTE 1 Three character alpha code for local datum. If not one of the listed
earth-centred datums, or 999 for user defined datums, use IHO datum
code from International Hydrographic Organisation Publication S-60,
Appendices B and C. Null field if unknown.
NOTE 2 One character subdivision datum code when available or user defined
reference character for user defined datums, null field otherwise.
Subdivision character from IHO Publication S-60, Appendices B and
C.
NOTE 3 Latitude and longitude offsets are positive numbers, the altitude offset
may be negative. Offsets change with position: position in the local
datum is offset from the position in the reference datum in the
directions indicated:
Plocal datum = Pref datum + offset
NOTE 4 Users should be aware that chart transformations based on IHO S60
parameters may result in significant positional errors when applied to
chart data.
Only the local datum is required and used by the AIS.
GBS – GNSS satellite fault detection
This message is used for setting the RAIM flag in the position reports
sent by the AIS.
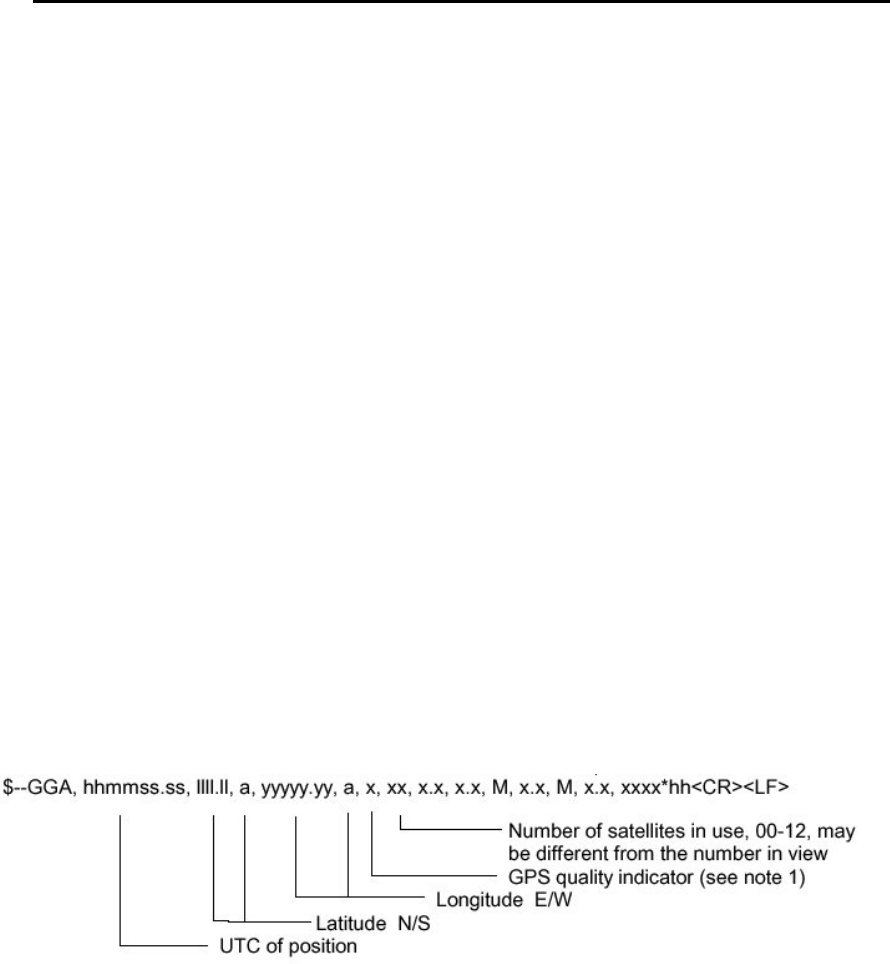
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 77
NOTE 1 Expected error in metres due to bias, with noise = 0.
NOTE 2 Satellite ID numbers. To avoid possible confusion caused by
repetition of satellite ID numbers when using multiple satellite
systems, the following convention has been adopted:
GPS satellites are identified by their PRN numbers, which range from
1 to 32.
The WAAS system has reserved numbers 33 – 64 to identify its
satellites.
The numbers 65 – 96 are reserved for GLONASS satellites.
GLONASS satellites are identified by 64+ satellite slot numbers. The
slot numbers are 1 through 24 for the full GLONASS constellation of
24 satellites, thus giving a range of 65 through 88. The numbers 89
through 96 are available if slot numbers above 24 are allocated to on-
orbit spares.
Only Expected error in latitude and Expected error in longitude is
required and used by the AIS.
GGA – Global positioning system (GPS) fix
data
Time, position and fix-related data for a GPS receiver.
NOTE 1 GPS quality indicator:
0 = fix not available or invalid
1 = GPS SPS mode, fix valid
2 = differential GPS, SPS mode, fix valid
3 = GPS PPS mode, fix valid
4 = Real Time Kinematic. Satellite system used in RTK mode with
fixed integers
5 = Float RTK. Satellite system used in RTK mode with floating
integers
6 = Estimated (dead reckoning) mode
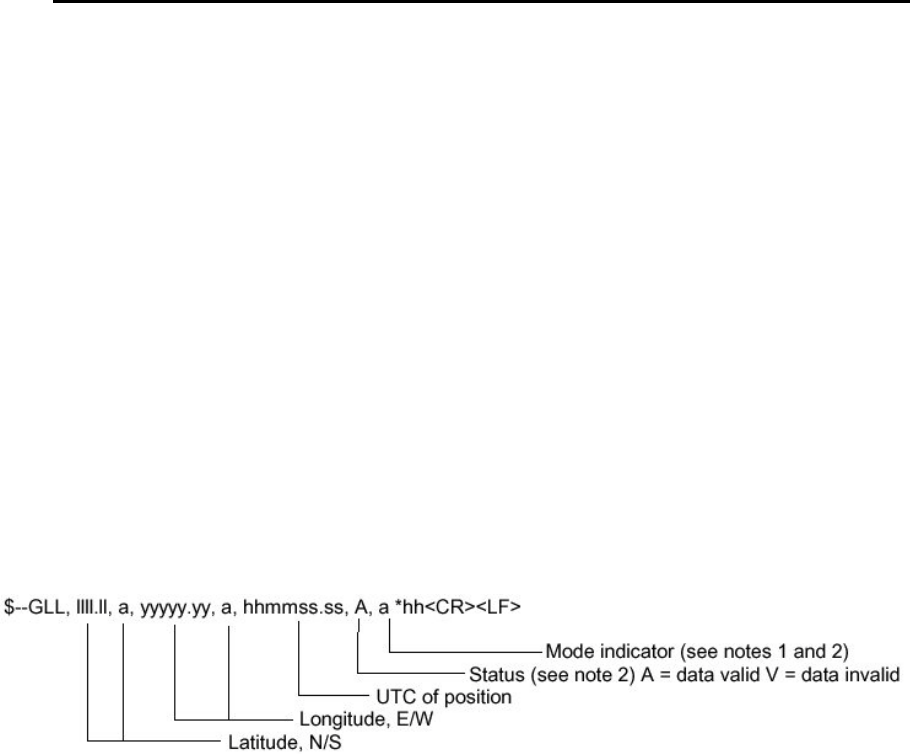
Simrad AI80 Installation Manual
78 Man_inst_AI80_r1
7 = Manual input mode
8 = Simulator mode
The GPS Quality Indicator shall not be a null field.
NOTE 2 Time in seconds since last SC104 type 1 or 9 update, null field when
DGPS is not used.
NOTE 3 Geoidal separation: the difference between the WGS-84 earth
ellipsoid surface and mean sea level (geoid) surface, " – " = mean sea
level surface below the WGS-84 ellipsoid surface.
Utc of position, Latitude, Longitude and GPS quality is the only fields
that are used by the AIS.
GLL – Geographic position –
latitude/longitude
Latitude and longitude of vessel position, time of position fix and
status.
NOTE 1 Positioning system Mode indicator:
A = Autonomous
D = Differential
E = Estimated (dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
NOTE 2 The Mode Indicator field supplements the Status field (field 6). The
Status field shall be set to V = invalid for all values of Operating
Mode except for A = Autonomous and D = Differential. The
positioning system Mode indicator and Status fields shall not be null
fields.
All fields are used by the AIS.
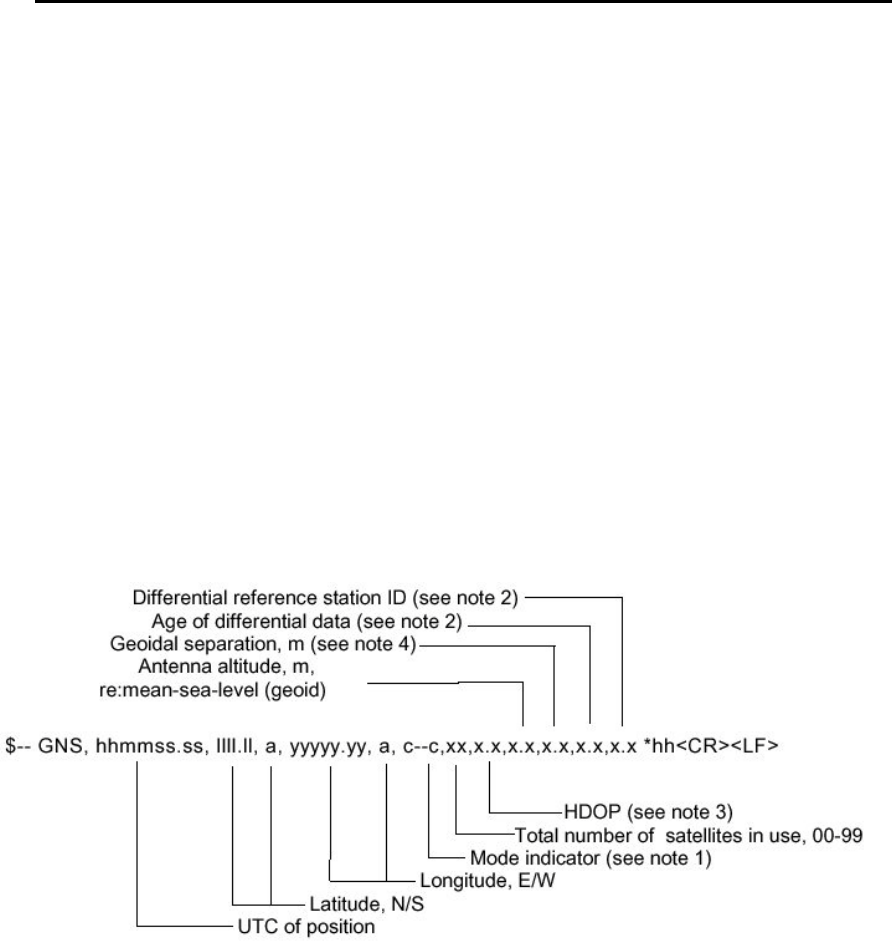
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 79
GNS – GNSS fix data
Fix data for single or combined satellite navigation systems (GNSS).
This sentence provides fix data for GPS, GLONASS, possible future
satellite systems and systems combining these. This sentence could be
used with the talker identification of GP for GPS, GL for GLONASS,
GN for GNSS combined systems, as well as future identifiers. Some
fields may be null fields for certain applications, as described below.
If a GNSS receiver is capable simultaneously of producing a position
using combined satellite systems, as well as a position using only one
of the satellite systems, then separate $GPGNS, $GLGNS, etc.
messages may be used to report the data calculated from the
individual systems.
If a GNSS receiver is set up to use more than one satellite system, but
for some reason one or more of the systems are not available, then it
may continue to report the positions using $GNGNS, and use the
mode indicator to show which satellite systems are being used.
NOTE 1 Mode Indicator. A variable length valid character field type with the
first two characters currently defined. The first character indicates the
use of GPS satellites, the second character indicates the use of
GLONASS satellites. If another satellite system is added to the
standard, the mode indicator will be extended to three characters; new
satellite systems shall always be added to the right, so the order of
characters in the Mode Indicator is: GPS, GLONASS, other satellite
systems.
The characters shall take one of the following values:
N = No fix. Satellite system not used in position fix, or fix not valid.
A = Autonomous.Satellite system used in non-differential mode in
position fix.

Simrad AI80 Installation Manual
80 Man_inst_AI80_r1
D = Differential. Satellite system used in differential mode in position
fix.
P = Precise. Satellite system used in precision mode. Precision mode
is defined as: no deliberate degradation (such as Selective
Availability), and higher resolution code (P-code) is used to compute
position fix.
R = Real Time Kinematic. Satellite system used in RTK mode with
fixed integers.
F = Float RTK. Satellite system used in real time kinematic mode with
floating integers.
E = Estimated (dead reckoning) Mode.
M = Manual Input Mode.
S = Simulator Mode.
The Mode indicator shall not be a null field.
NOTE 2 Age of differential data and Differential reference station ID
When the talker is GN and more than one of the satellite systems are
used in differential mode, then the "Age of differential data" and
"Differential reference station ID" fields shall be null. In this case, the
"Age of differential data" and "Differential reference station ID" fields
shall be provided in following GNS messages with talker IDs of
GP,GL, etc. These following GNS messages shall have the latitude,
N/S, longitude, E/W, altitude, geoidal separation, mode and HDOP
fields null. This indicates to the listener that the field is supporting a
previous $GNGNS message with the same time tag. The "Number of
satellites" field may be used in these following messages to denote the
number of satellites used from that satellite system.
Example: A combined GPS/GLONASS receiver using only GPS
differential corrections has the following GNS sentence sent:
$GNGNS,122310.2,3722.425671,N,12258.856215,W,DA,14,0.9,
1005.543,6.5,5.2,23*59<CR><LF>
Example: A combined GPS/GLONASS receiver using both GPS
differential corrections and GLONASS differential corrections may
have the following three GNS sentences sent in a group:
$GNGNS,122310.2,3722.425671,N,12258.856215,W,DD,14,0.9,1005
.543,6.5,,*74<CR><LF>
$GPGNS,122310.2, , , , , , 7, , , ,5.2,23*4D<CR><LF>
$GLGNS,122310.2, , , , , , 7, , , ,3.0,23*55<CR><LF>
The Differential Reference station ID may be the same or different for
the different satellite systems

Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 81
b) Age of Differential Data
For GPS differential data: This value is the average of the most
recent differential corrections in use. When only RTCM SC104 Type
1 corrections are used, the age is that of the most recent Type 1
correction. When RTCM SC104 Type 9 corrections are used solely, or
in combination with Type 1 corrections, the age is the average of the
most recent corrections for the satellites used. Null field when
Differential GPS is not used.
For GLONASS differential data: This value is the average age
of the most recent differential corrections in use. When only RTCM
SC104 Type 31 corrections are used, the age is that of the most recent
Type 31 correction. When RTCM SC104 Type 34 corrections are
used solely, or in combination with Type 31 corrections, the age is the
average of the most recent corrections for the satellites used. Null
field when differential GLONASS is not used.
NOTE 3 HDOP calculated using all the satellites (GPS, GLONASS and any
future satellites) used in computing the solution reported in each GNS
sentence.
NOTE 4 Geoidal separation is the difference between the earth ellipsoid
surface and mean-sea-level (geoid) surface defined by the reference
datum used in the position solution, "-" = mean-sea-level surface
below ellipsoid surface. The reference datum may be specified in the
DTM sentence.
UTC of position, Latitude, Longitude and Mode indicator, are the only
fields used by the AIS.
HDT – Heading true
IMO Resolutions A.424 and A.821. Actual vessel heading in degrees
true produced by any device or system producing true heading.
All fields are used by the AIS.
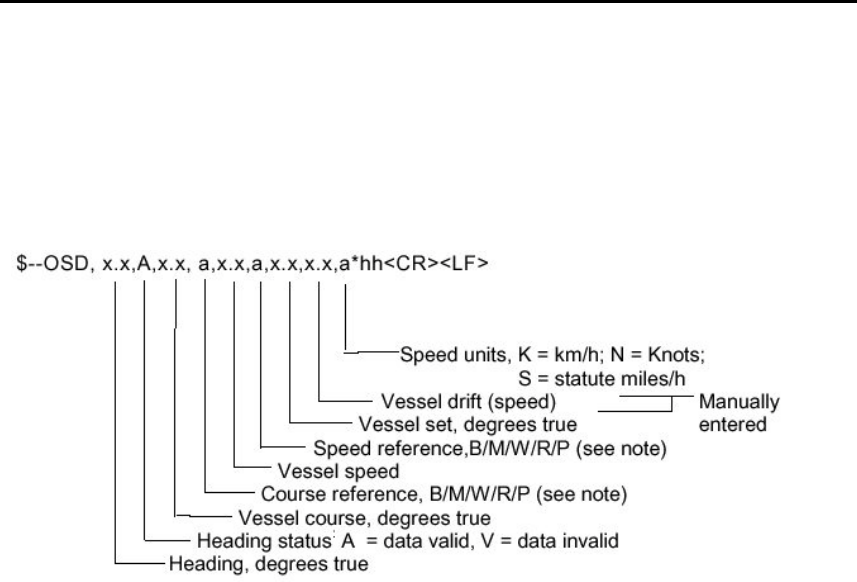
Simrad AI80 Installation Manual
82 Man_inst_AI80_r1
OSD Own ship data
IMO Resolution A.477 and MSC 64(67), Annex 1 and Annex 3.
Heading, course, speed, set and drift summary. Useful for, but not
limited to radar/ARPA applications. OSD gives the movement vector
of the ship based on the sensors and parameters in use.
NOTE Reference systems on which the calculation of vessel course and
speed is based. The values of course and speed are derived directly
from the referenced system and do not additionally include the effects
of data in the set and drift fields.
B = bottom tracking log
M = manually entered
W = water referenced
R = radar tracking (of fixed target)
P = positioning system ground reference.
Heading, Heading status, Vessel course, Vessel speed and Speed
units, are used by the AIS.
RMC - Recommended minimum specific
GNSS data
Time, date, position, course and speed data provided by a GNSS
navigation receiver. This sentence is transmitted at intervals not
exceeding 2 s and is always accompanied by RMB when a destination
waypoint is active. RMC and RMB are the recommended minimum
data to be provided by a GNSS receiver. All data fields must be
provided null fields used only when data is temporarily unavailable.
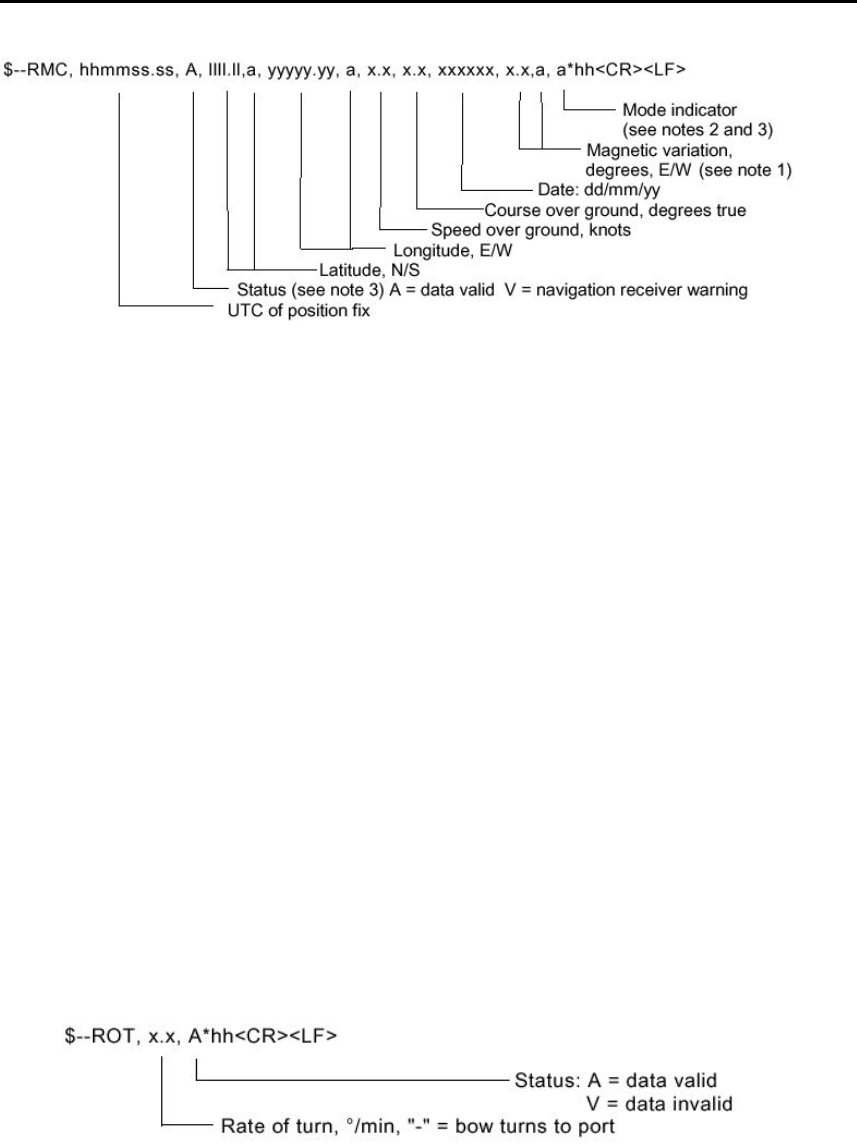
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 83
NOTE 1 Easterly variation (E) subtracts from true course. Westerly variation
(W) adds to true course.
NOTE 2 Positioning system Mode indicator:
A = Autonomous mode
D = Differential mode
E = Estimated (dead reckoning) mode
M = Manual input mode
S = Simulator mode
N = Data not valid
NOTE 3 The positioning system Mode indicator field supplements the
positioning system Status field (field No. 2) which shall be set to V =
invalid for all values of Mode indicator except for A = Autonomous
and D = Differential. The positioning system Mode indicator and
Status fields shall not be null fields.
All fields, except Magnetic variation is used by the AIS.
ROT – Rate of turn
IMO Resolution A.526. Rate of turn and direction of turn.
All fields are used by the AIS.
TXT – Text transmission
For the transmission of short text messages. Longer text messages
may be transmitted by using multiple sentences.
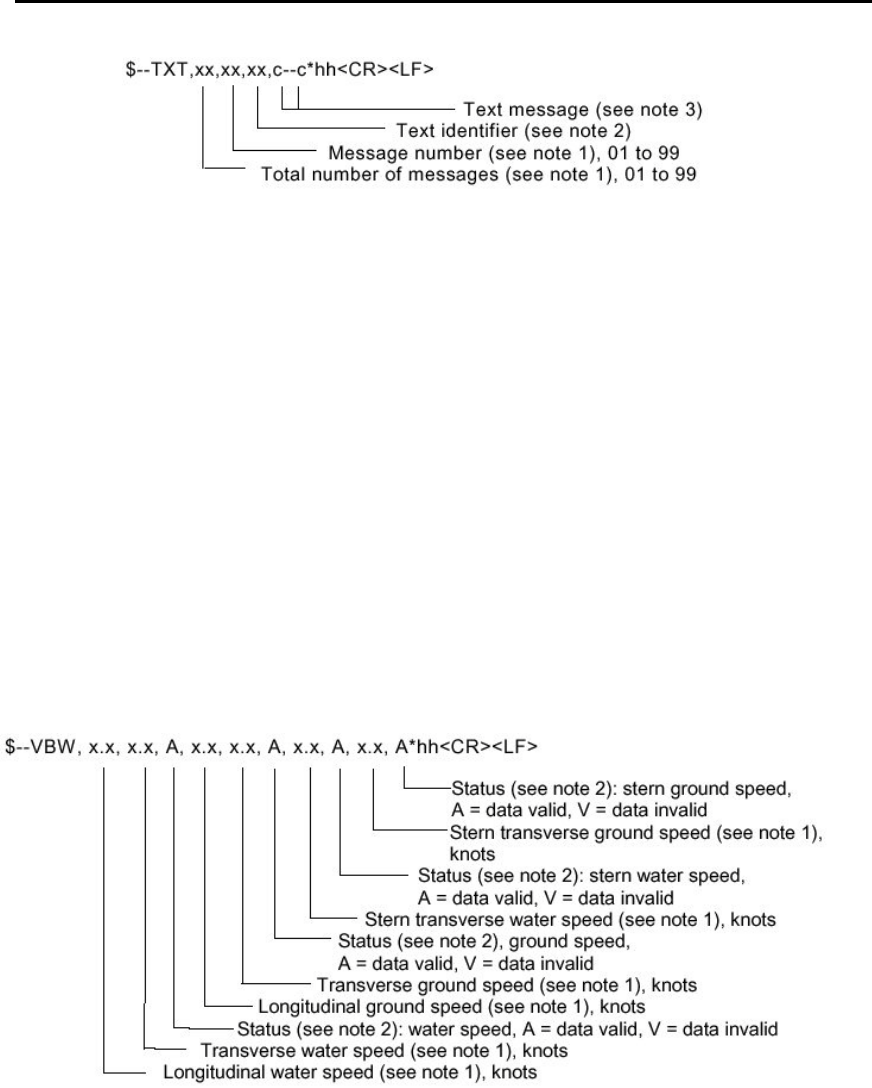
Simrad AI80 Installation Manual
84 Man_inst_AI80_r1
NOTE 1 Text messages may consist of the transmission of multiple messages
all containing identical field formats. The first field specifies the total
number of messages, minimum value = 1. The second field identifies
the order of this message (message number), minimum value = 1. For
efficiency, it is recommended that null fields be used in the additional
sentences, otherwise data is unchanged from the first sentence.
NOTE 2 The text identifier is a number, 01 to 99, used to identify different text
messages.
NOTE 3 ASCII characters, and code delimiters if needed, up to the maximum
permitted sentence length (i.e. up to 61 characters including any code
delimiters).
All fields are used by the AIS.
VBW – Dual ground/water speed
Water-referenced and ground-referenced speed data.
NOTE 1 Transverse speed: "-" = port, Longitudinal speed: "-" = astern.
NOTE 2 The status field shall not be a null field.
All fields are used by the AIS except Stern speed.
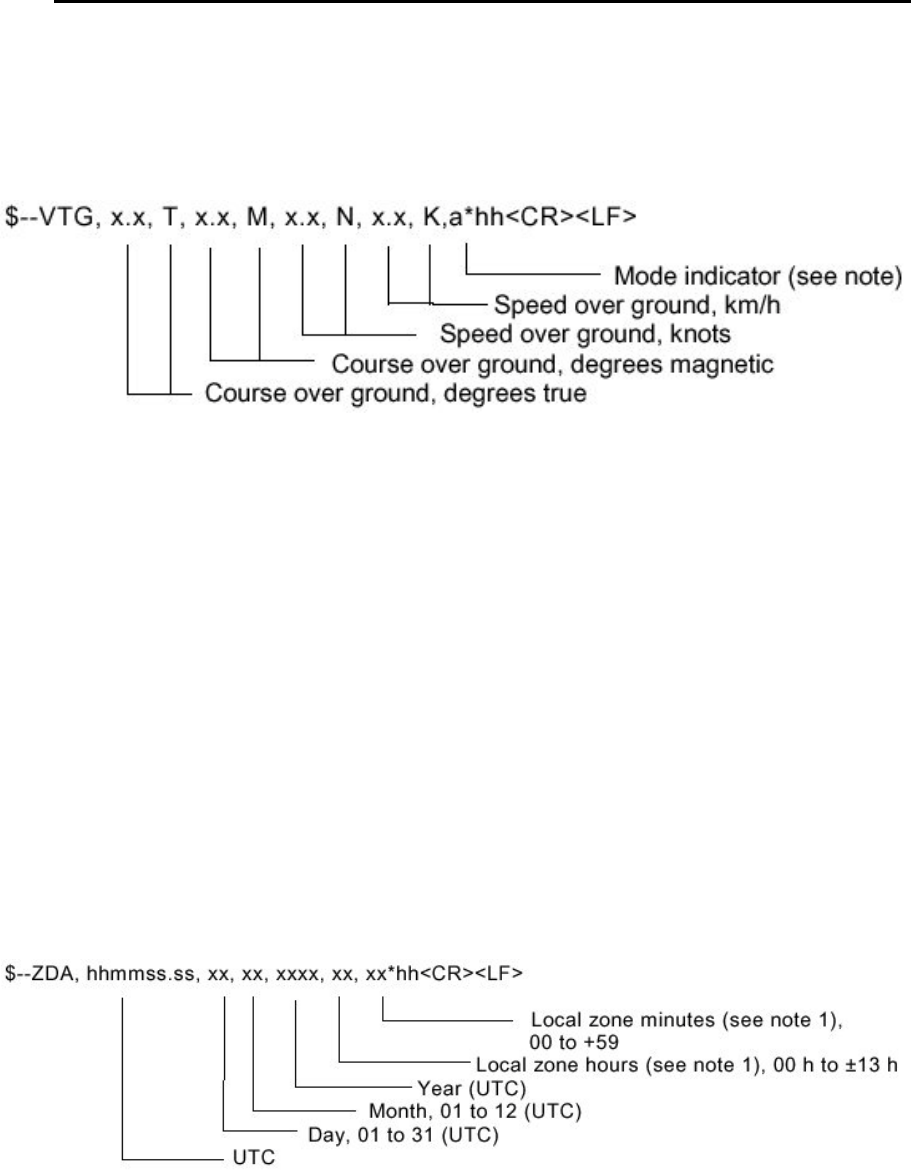
Appendix B - Digital Interface IEC 61162-1
Man_inst_AI80_r1 85
VTG – Course over ground and ground
speed
The actual course and speed relative to the ground.
NOTE Positioning system Mode indicator:
A = Autonomous mode
D = Differential mode
E = Estimated (dead reckoning) mode
M = Manual input mode
S = Simulator mode
N = Data not valid
The positioning system Mode indicator field shall not be a null field.
Course over ground, degrees magnetic and Speed over ground km/h
are not used by the 'AIS
ZDA – Time and date
UTC, day, month, year and local time zone.
NOTE 1 Local time zone is the magnitude of hours plus the magnitude of
minutes added, with the sign of local zone hours, to local time to
obtain UTC. Local zone is generally negative for East longitudes with
local exceptions near the International Date Line.

Simrad AI80 Installation Manual
86 Man_inst_AI80_r1
Example: At Chatham Is. (New Zealand) at 1230 (noon) local time
on June 10, 1995:
$GPZDA,234500,09,06,1995,-12,45*6C<CR><LF>
In the Cook Islands at 1500 local time on June 10, 1995:
$GPZDA,013000,11,06,1995,10,30*4A<CR><LF>
All fields except Local zone, are used by the AIS.
Appendix C - Software setup using optional MKD
Man_inst_AI80_r1 87
10 APPENDIX C - SOFTWARE SETUP
USING OPTIONAL MKD
10.1 Security settings optional MKD
To avoid unauthorised input of data in the menus accessed from the
Main menu, the AI80 system should be set up with security codes and
different access levels.
3 different access levels may be defined:
Level 0: No security code required
Level 1: Access controlled by L1 PIN Code or L2 PIN Code
Level 2: Access controlled by L2 PIN Code
Access levels for the different menus are defined in the Security
submenu, activated from the Menu page.
Setting the security codes
When using the external, optional MKD the default security code
delivered with the Mobile Unit is “AIS” as for both Level 1 and Level
2. These security codes should be changed when the system is
configured for the first time. Use the following procedure to change
the security codes:
=== Main Menu ======== P1
c.Security
1. Press the MENU button to activate the Main
menu, and select Security. The Security menu
will be displayed.
=== Security ======== P1c
Authorisation
-------------------------
L1 PIN Code :********
L2 PIN Code :********
Nav.Status :1
Voyage Data :2
Static Data :0
Chn.Mgmt :0
VHF Link :1
Serial Ports :1
Netw.Settings :2
Answer Mode :0
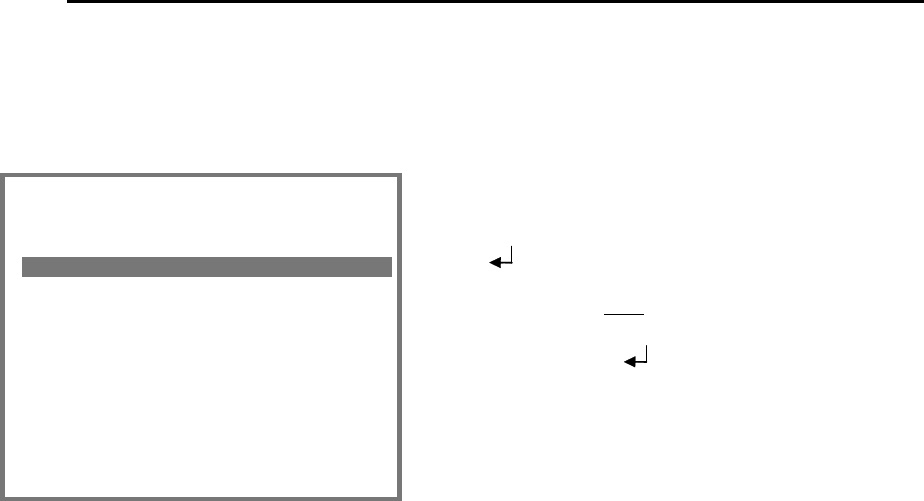
Simrad AI80 Installation Manual
88 Man_inst_AI80_r1
2. Press ENTER when the L1 PIN Code line is highlighted. The
keyboard function will be displayed in the lower part of the
Security menu.
=== Security ======== P1c
Authorisation
-------------------------
L1 PIN Code :********
L2 PIN Code :********
Nav.Status :0
Voyage Data :0
Static Data :1
=========================
Enter authorisation code
PIN:
=========================
ABCDEFGHIJKLMNO
P
Q
RSTUVWXYZ1234
3. Enter AIS (default security code), and
confirme the entry by moving the highlight to
the symbol and pressing the ENTER button.
4. Now enter the new security code for Level 1,
and confirmed the entry by moving the
highlight to the symbol and pressing the
ENTER button.
5. Highlight the L2 PIN Code and repeat the procedure above to
change the security code for Level 2.
6. Record the new codes and keep them in a safe location. If the new
codes are lost, a master code can be obtained from Customer
Support by supplying the MAC address, see pages 91 and 92.
Changing the security levels
To avoid unauthorised input of data in the menus accessed from the
Main menu, the AI80 system should be set up with security codes and
different access levels.
Note ! All entries on the Security page are protected by L2 security code.
This code has to be entered before any parameters can be changed.
Refer item 3 below.
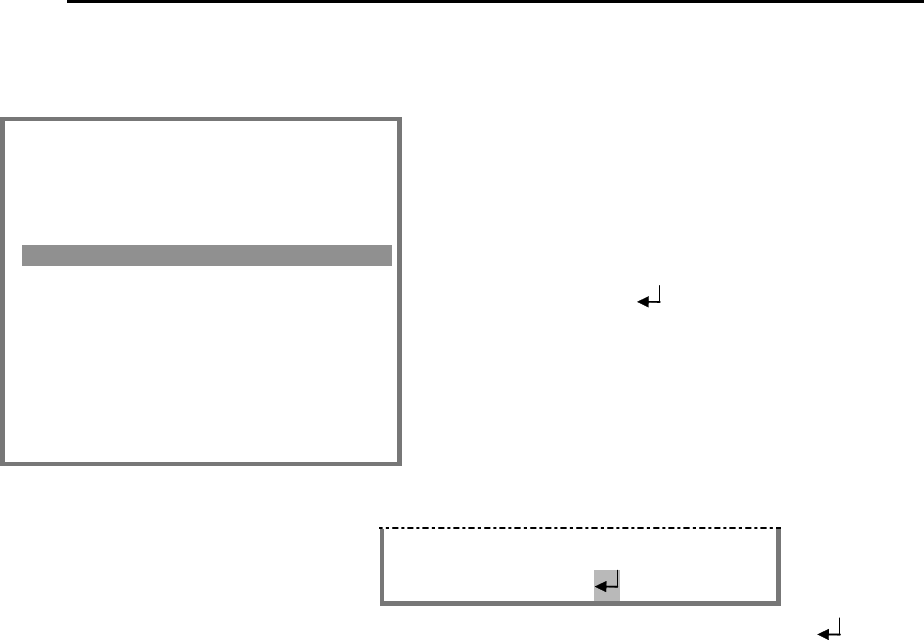
Appendix C - Software setup using optional MKD
Man_inst_AI80_r1 89
1. Activate the Security menu from the Main menu.
=== Security ======== P1c
Authorisation
-------------------------
L1 PIN Code :********
L2 PIN Code :********
Nav.Status :0
Voyage Data :0
Static Data :1
Chn.Mgmt :2
VHF Link :1
Serial Ports :1
Netw.Settings :2
Answer Mode :1
2. Highlight the parameter group for which the
security level is to be changed, and press the
ENTER button. The lower part of the display
will now show the keyboard function.
3. Enter the security code for Level 2, move the
highlight to the symbol and press the
ENTER button. In the lower part of the display
it will now be possible to change security level
for the selected parameter.
=========================
012
4. Select security level, and confirm by highlighting the symbol
and pressing the ENTER button.
5. Continue entering security levels for the remaining parameter
groups.
Note ! To ease the operation of the system, all parameters that have to be
changed during normal operation should be set to Level 0.
Note ! Once authenticated with L1 or L2 PIN code, the authentication is
valid until the View page has been displayed for 5 seconds. To protect
the AI80 security systems, the MKD returns to the View page when not
used for 15 minutes. In high security applications we recommend
manually returning to the View page when a change that required
authentication is completed.
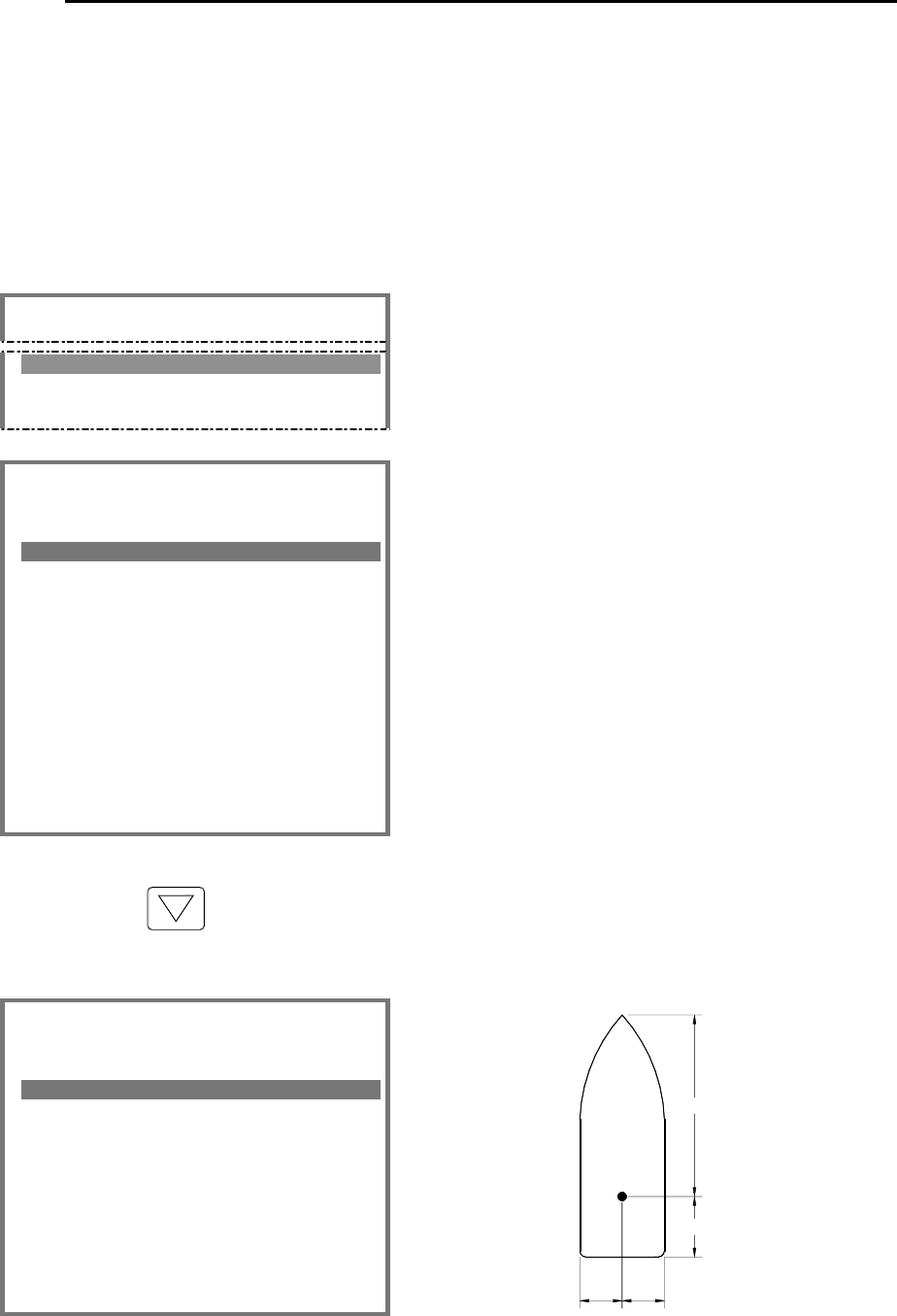
Simrad AI80 Installation Manual
90 Man_inst_AI80_r1
10.2 Entering static data optional
MKD
All vessel data that do not change from one voyage to another should
be entered during installation.
If MMSI number is changed, the unit should be restarted, see the
Simrad AI80 User Manual for details.
=== Main Menu ======== P1
4.Static Data
1. Press the MENU button to activate the Main
menu, and select Static Data. The Static Data
menu will be displayed.
=== Static Data ===== P14
Own Ship 1/3
-------------------------
Name :ANNE BERIT
Call :TA164GH
MMSI :124395856
IMO :1098563
Type :51
Keel :12
▼
The following information should be entered:
Name: Vessel name
Call: Vessel’s call signal
MMSI: The vessel’s Maritime Mobile Signal
Identifier number
IMO: Vessel’s IMO number
Type: Type of vessel. Refer Appendix A - vessel
identifiers, page 47.
Keel: Vessel height over keel in metres. Total
height from keel to mast.
Use the arrow-down button to move to next page where horizontal
location for the GPS antenna included in the AI80 system should be
entered. Refer page 22.
=== Static Data ===== P14
AIS Transceiver 2/3
-------------------------
Length A :30
Length B :10
Length C :7
Length D :7
CD
B
A
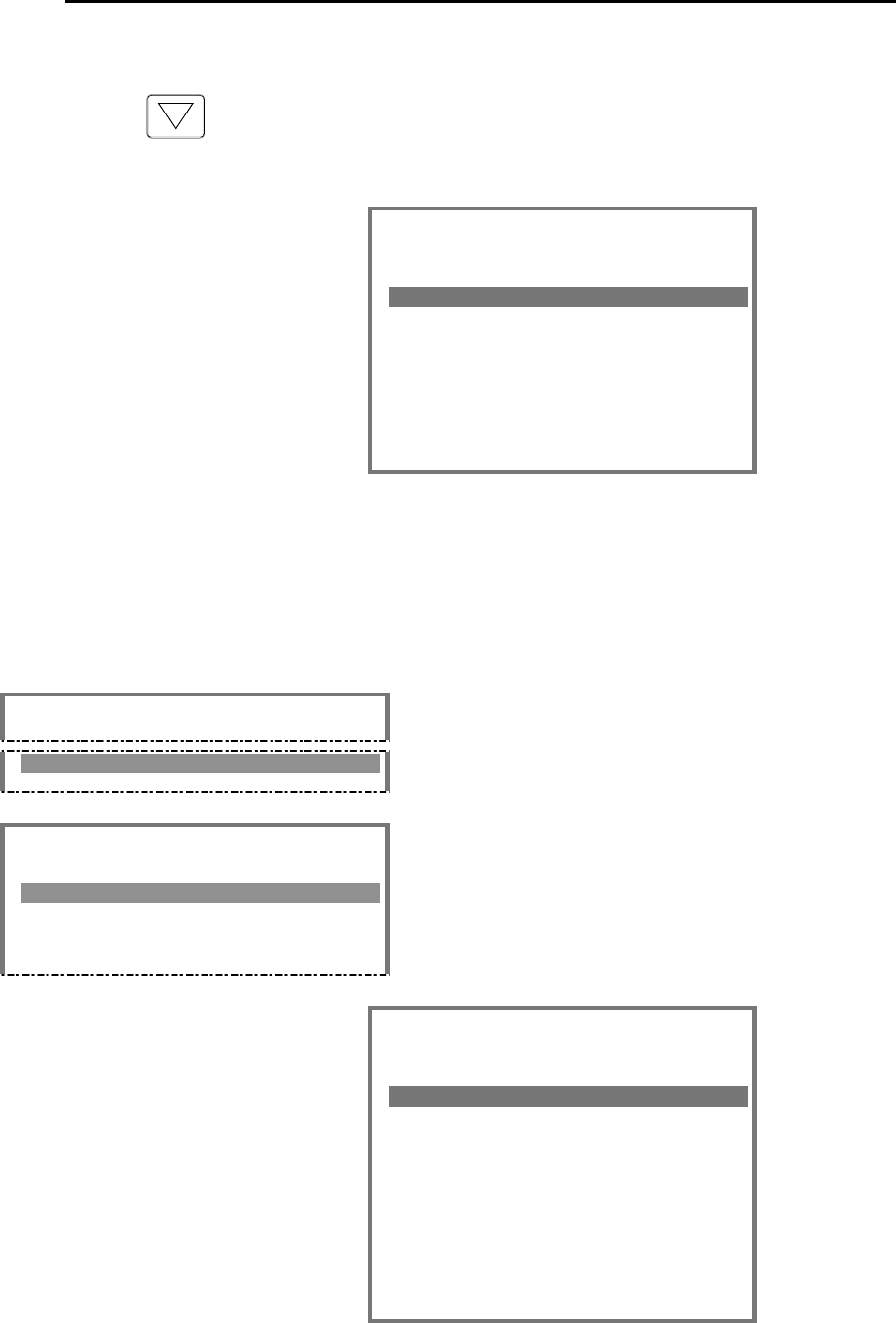
Appendix C - Software setup using optional MKD
Man_inst_AI80_r1 91
Page 3 in the Static Data menu, entered by pressing the Arrow-down
button, is used for entering horizontal location for the vessel’s main
GPS antenna.
=== Static Data ===== P14
GNSS 3/3
-------------------------
Length A :20
Length B :20
Length C :9
Length D :5
▲
10.3 Configuration external serial ports
optional MKD
The baud rate for each serial port used for interfacing external
equipment has to be configured from the Serial ports submenu.
=== Main Menu ======== P1
9.Network & Ports
1. Press the MENU button to activate the Main
menu, and select Ports.
=== Ports =========== P19
1.Serial Ports
2.MAC adr.
2. Select Serial Ports in the Ports menu. The
Serial Ports page will be displayed.
=== Serial Ports === P191
External Ports
-------------------------
PILOT :38400
PI :38400
LongeRange :4800
RTCM :4800
SENSOR-1 :4800
SENSOR-2 :4800
SENSOR-3 :4800
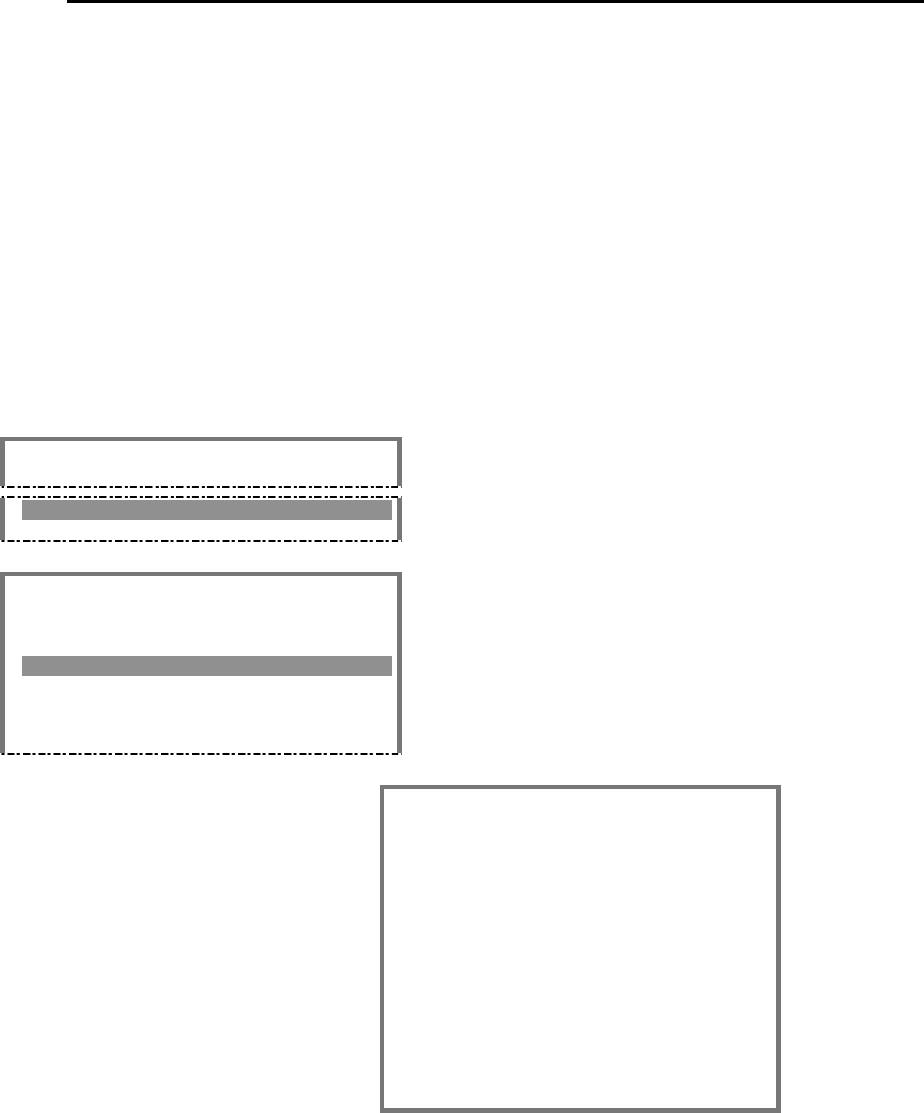
Simrad AI80 Installation Manual
92 Man_inst_AI80_r1
3. Highlight the port that is to be configured, and press the ENTER
button. The lower part of the display will now show baud rates
available for the selected port.
Refer chapter 3.
10.4 Port settings and MAC address optional
MKD
The Ports menu is used by the operator to change serial parameters
and view the MAC address.
=== Main Menu ======== P1
9.Ports
1. Press the MENU button to activate the Main
menu, and select Ports.
=== Ports =========== P19
1.Serial Ports
2.MAC adr.
2. Select MAC adr. in the Ports menu. The
MAC adr. page will be displayed.
=== MAC adr. ======= P192
External Ports
-------------------------
MAC MS :000.005.190
MAC LS :000.000.206
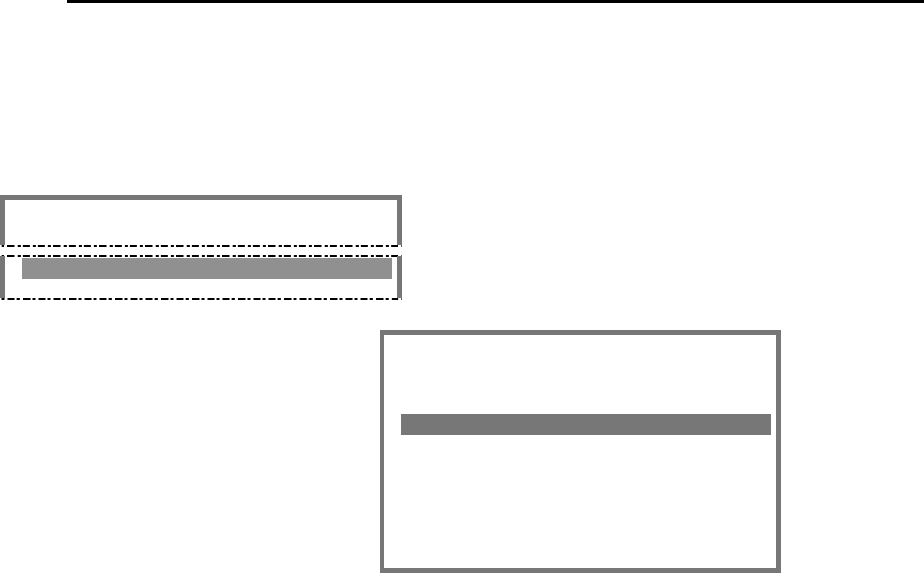
Appendix C - Software setup using optional MKD
Man_inst_AI80_r1 93
10.5 Answer mode optional MKD
The Answer mode page configures the polling operation for the AI80
system.
=== Main Menu ======== P1
a.Answer Mode
1. Press the MENU button to activate the Main
menu, and select Answer Mode.
=== Answer Mode ===== P1a
Current Settings
-------------------------
LongeRange :Automatic
VDL Response :On
The following parameters may be defined:
LongRange Configures the long-range polling. The following
selections are available:
Automatic: The AI80 system will automatically
reply to a long-range request. The
request will however be listed in the
Long Range view.
Manual: The operator will have to manually
reply to a request.
The long-range function is optional and requires
additional external equipment. Refer the Simrad
AI80 User Manual for details.
VDL Response Configures the normal VHF polling. Could be set
to ON (default) or OFF.
Note ! The VDL setting "ON" indicates that answer mode to interrogator is
enabled when message 6 or 8 containing interrogation functional
identification, is received.
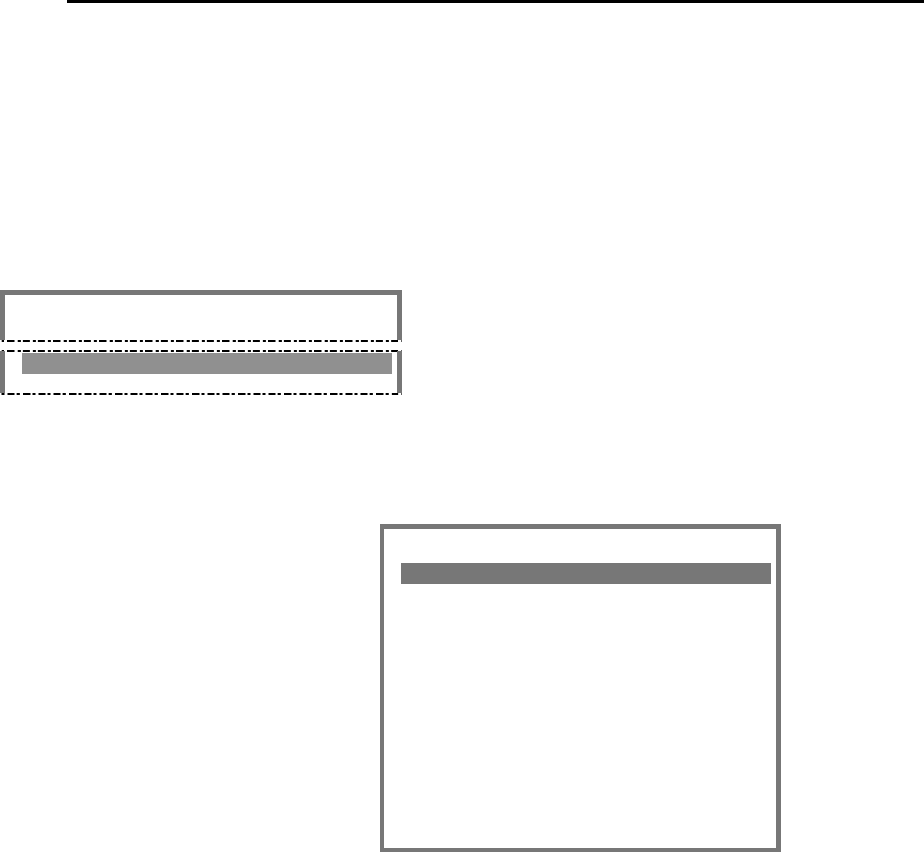
Simrad AI80 Installation Manual
94 Man_inst_AI80_r1
10.6 Configuring radio channels
optional MKD
AIS systems normally operate on two AIS channels: channel 2087 and
channel 2088. Where these channels are not available regionally, other
channels may be configured by using the Chn.Management
submenu. Maximum 8 regions may be configured.
=== Main Menu ======== P1
6.Chn.Management
Press the MENU button to activate the Main
menu, and select Chn.Management.
The Chn.Management submenu has three options for channel
management, described in the next pages.
=== Chn.Management == P16
1.Edit Cur.Reg.
2.View Regions
3.Add Region
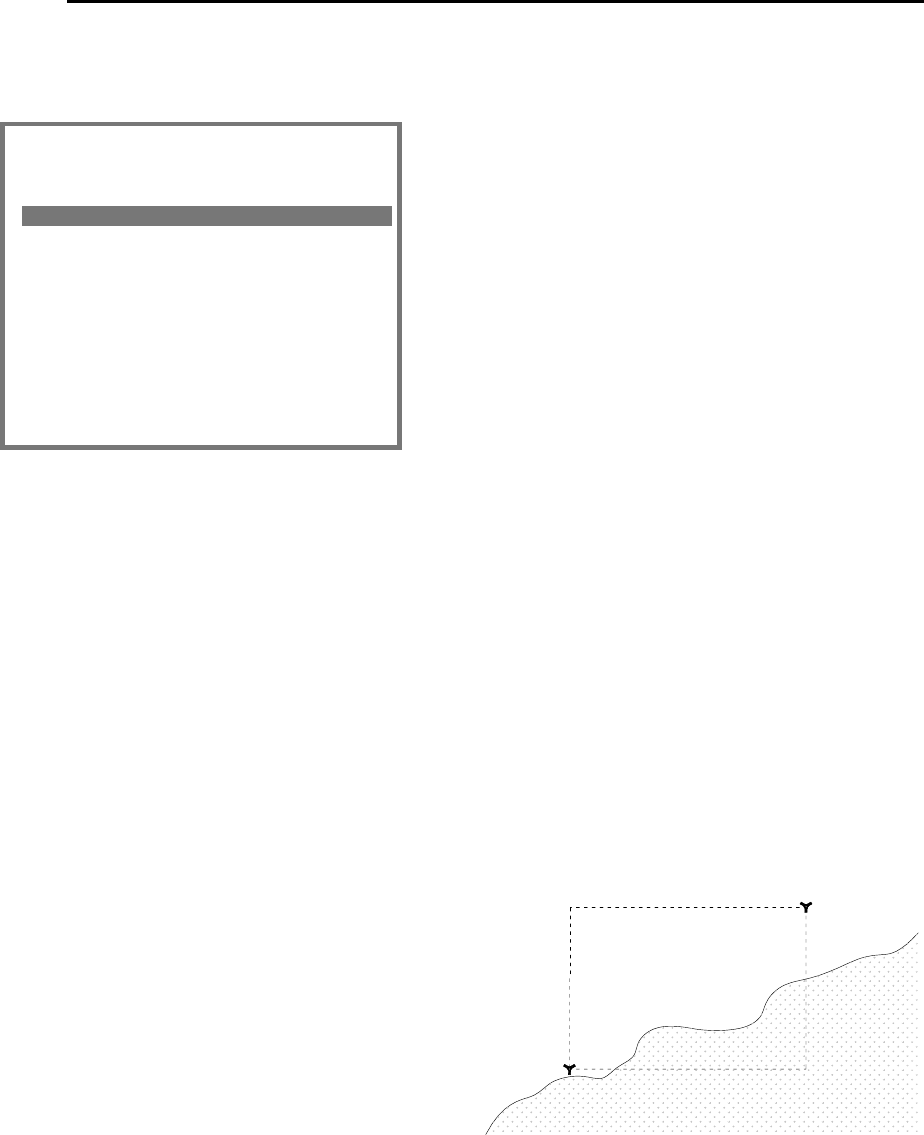
Appendix C - Software setup using optional MKD
Man_inst_AI80_r1 95
Adding a region
=== Add Region ===== P163
REGION-1
-------------------------
ChnA :143
ChnB :144
RxTxMode:TxA/TxB/RxA/RxB
TxPower :High
LAT NE :000°00´00.00N
LON NE :000°00´00.00E
LAT SW :000°00´00.00N
LON SW :000°00´00.00E
BW A :Default
BW B :Default
Z
o
n
e
:
2
The Add regions option is used for defining new
regions.
When regions are defined, the AI80 system will
automatically jump to the defined VHF channels
when the vessel enters this region.
The following parameters have to be defined:
ChnA/ChnB: VHF channels used for transmitting.
RxTxMode: Channels (A/B) used for transmitting/receiving
TxPower: Transmission power. Selectable options: High (12.5
W) and Low (2 W).
LAT NE: North-East latitude coordinates for the defined area.
LON NE: North-East longitudinal coordinates for the defined
area.
LAT SW: South-West latitude coordinates for the defined area.
LON NE: South-West longitudinal coordinates for the defined
area.
NE
SW
BW A/BW B: Bandwidth for the VHF channels used in this area.
Selectable options: Default (maximum bandwidth
allowed in this area) and Narrow (12,5 kHz).
Zone: The size of the transition area in nautical miles outside
the region.
Simrad AI80 Installation Manual
96 Man_inst_AI80_r1
Editing current region
=== Edit Cur.Reg == P161
REGION-1
------------------------
ChnA :143
ChnB :144
RxTxMode:TxA/TxB/RxA/RxB
TxPower :High
LAT NE :012°13´23.56N
LON NE :132°36´14.02E
LAT SW :034°56´21.06N
LON SW :125°56´12.21E
BW A :Default
BW B :Default
Z
o
n
e
:
2
The Edit Cur.Reg. option enables the operator
to change parameters for the current AIS
channels.
Viewing a region’s settings
=== View Cur.Reg === P162
REGION-1 2/6
-------------------------
ChnA :143
ChnB :144
RxTxMode:TxA/TxB/RxA/RxB
TxPower :High
LAT NE :012°13´23.56N
LON NE :132°36´14.02E
LAT SW :034°56´21.06N
LON SW :125°56´12.21E
BW A :Default
BW B :Default
Z
o
n
e
:
2 ▲
▼
The View Regions option displays all defined
regions. This is a read only page and no
configuration changes can be made.
The view regions may consist of up to 8 pages,
indicated in the upper left corner as e.g. 2/6. The
▲ and▼-buttons are used for displaying
available regions.

Appendix D - Troubleshooting form
Man_user_AI80_r1 97
11 APPENDIX D - TROUBLESHOOTING
FORM
When problems, verify that external cables and connectors are OK.
Disconnect 24 volt power, wait 10 seconds and reconnect.
If AIS is still experiencing problems, proceed by filling out the
Troubleshooting form on the next page and sending it to Customer
Support.
Simrad AI80 Installation Manual
98 Man_inst_AI80_r1
Fill in shaded fields when relevant, either by X or plain text.
Vessel name
Customer name
MMSI number
IMO number
Type/model of AIS (see label at the back of main AIS unit, not the keyboard/display unit)
Serial no. of AIS (see label at the back of main AIS unit, not the keyboard/display unit)
Software version in AIS unit (see Simrad AI80 User's Manual for SW version)
Enter X in front of the observation which matches the AIS behaviour.
Light/LED status
4 LEDs on front of AIS main unit (not the keyboard/display unit): TX, MSG, GPS, ALM
01 Normal
operation
TX and MSG will blink (green/orange) occasionally, GPS will blink steady (green) at 1-second
intervals, ALM will stay off.
02 Fault Like Normal operation except ALM light is red.
If alarm, write alarm message(s) here, press ALM button to acknowledge alarm.
03 Fault Like Normal operation except GPS blinks orange.
04 Fault All LEDs constantly orange.
05 Fault All LEDs constantly off, except backlight in MKD is on.
06 Fault All LEDs constantly off, also backlight in MKD - check 24 volt power supply into AIS: wires,
fuses, connections.
07 Fault Other LED observations, write explanation below.
MKD (keyboard/display) status
08 Normal
operation Range, bearing and vessel name in upper part. Buttons work OK.
09 Fault Only Kongsberg logo in display, buttons and scroll wheel not working (optional MKD only).
10 Fault Other MKD observations, write explanation below.
Other comments
If other observations or problems enter description below:
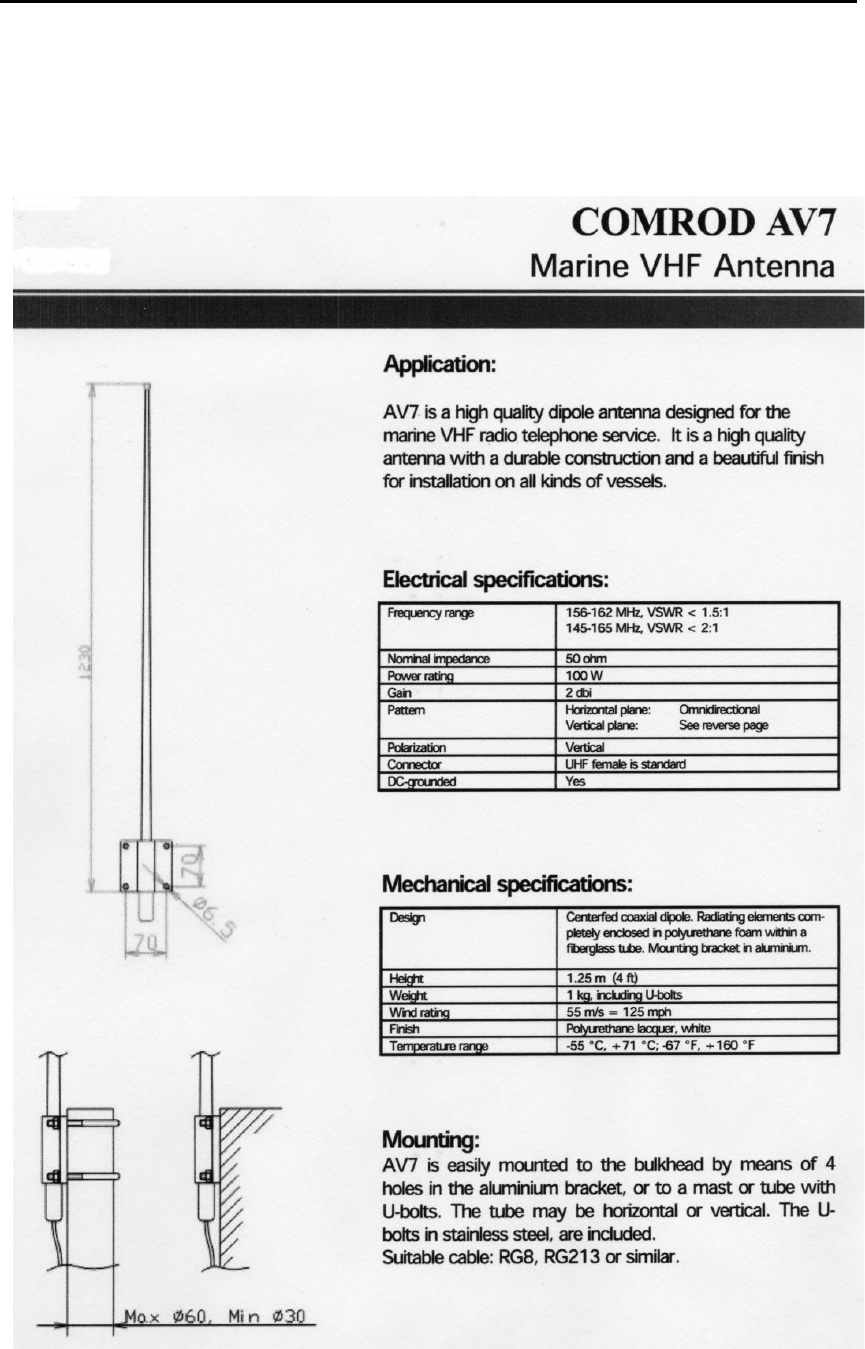
Appendix E - VHF antenna
Man_user_AI80_r1 99
12 APPENDIX E - OPTIONAL VHF
ANTENNA
Simrad AI80 Installation Manual
100 Man_inst_AI80_r1
THIS PAGE INTENTIALLY LEFT
BLANK