Sensors and Software NOGGIN500 NOGGIN 500 User Manual SmartSystemsV11
Sensors & Software Inc. NOGGIN 500 SmartSystemsV11
Contents
- 1. Users Manual Pages 1 to 40
- 2. Users Manual Pages 41 to 80
- 3. Users Manual Pages 801 to end
- 4. Revsied Users Manual
Users Manual Pages 41 to 80

Smart Systems User’s Manual Version 1.1
27
the user will find a data image (CART-n.PCX) file on the external computer in the current
directory.
When the data transfer is complete, on the external computer, exit from the WinPXFER
program. Press any button on the DVL to return to the Noggin screen.
5.3.3 View Menu
The View function allows the user to scroll back through previously recorded data in the
same manner as the Print function (see Section 5.3.2).
5.3.4 Calib. (Calibration) Menu
Noggin systems can be used to scan into many different materials including soil, rock,
concrete, snow, ice and wood. The radio wave emitted by a Noggin system will travel at
different velocities depending on the material being scanned. The depth values on the
Depth menu (see Section 5.3.5) and on Depth Lines (see Section 5.2.2) are only
accurate if the system has been properly calibrated to determine the velocity of the
material being scanned. See Section 5.8.1 for more details about how depth is
calculated.
The Calibration function allows the user to input the velocity of the material being
scanned. Velocity can be determined in one of four different ways depending on the
situation:
1) Hyperbola matching
2) Target of known depth
3) Select a media
4) Input a velocity value
Hyperbola Matching
This is the most accurate way of determining the velocity of the material being scanned
because it extracts the speed using data collected in the area. This method may not
work in all situations because it depends on having a good quality hyperbola (or inverted
U) in the data. A hyperbola is the characteristic Noggin response from a small point
target like a pipe, rock or even a tree root. If the hyperbola has long tails on it, we can
match the shape of the hyperbola and determine the velocity of the material in the area.
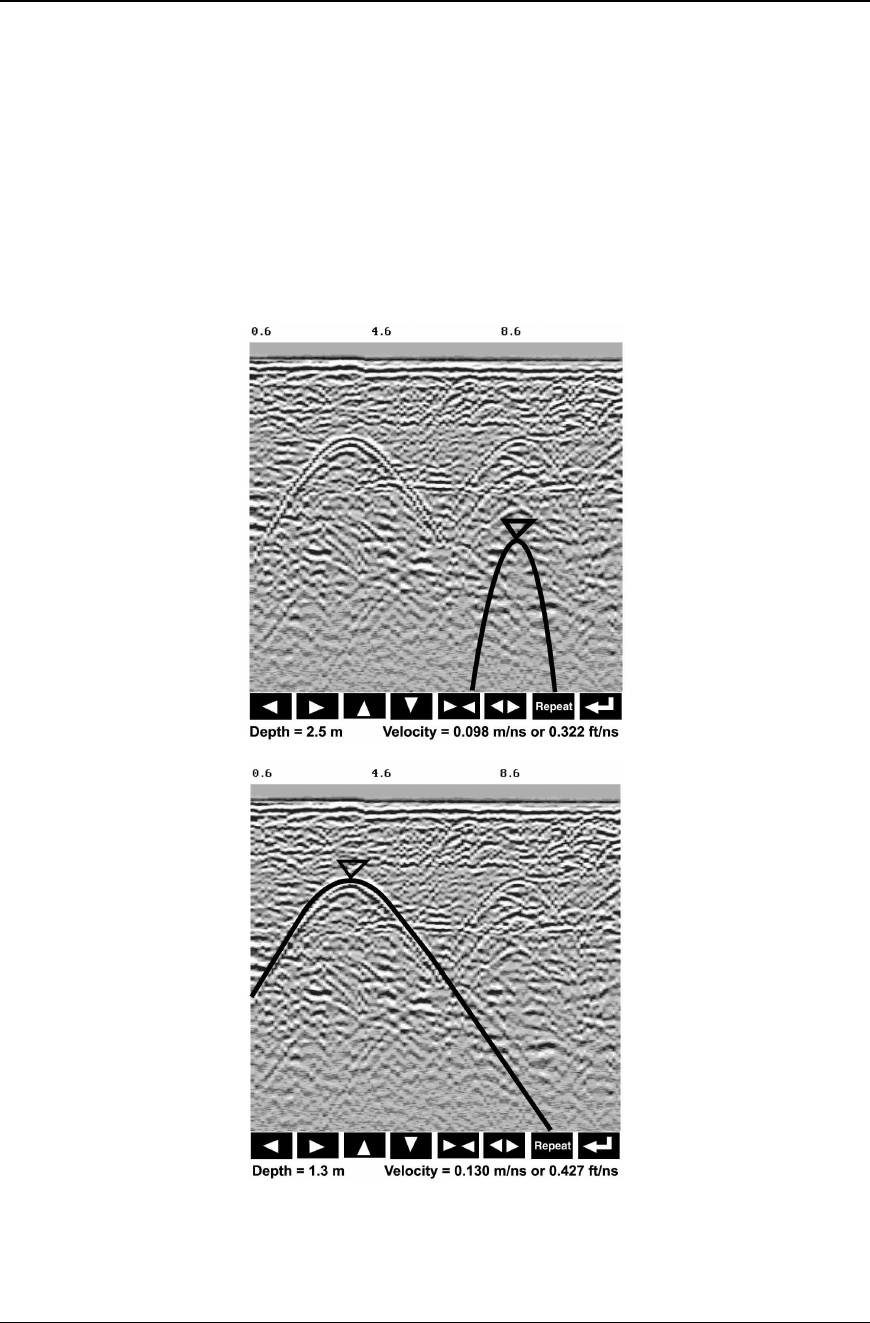
With the hyperbola visible on the DVL screen, select the hyperbola (∩) button. This will
superimpose a hyperbola on the data. This hyperbola can be moved up (5), down (6),
left (3) and right (4) using the appropriate arrow buttons. The goal is move the
hyperbola until it lies on top of the hyperbola in the data (see Figure 5-5). Then, the user
can adjust the width of the hyperbola to make it wider (34) or narrower (43) until the
shape of the hyperbola matches the shape of the hyperbola in the data. After matching
the hyperbola, the velocity value is extracted and used for all subsequent data
acquisition.
Smart Systems User’s Manual Version 1.1
28
Pressing the up, down left, right, wider and narrow buttons once makes a very small
change in the position or width of the hyperbola. These buttons must sometimes be
pressed many times to move the hyperbola to the correct position or width. To speed up
the movement of the hyperbola, use the REPEAT button. For example, to move the
hyperbola up a long distance, press the up button (5) followed by the REPEAT button.
The hyperbola will then start moving upward without having to press any more buttons.
When it gets close to the desired location press any button to stop it and then use the
up, down, left and right buttons to fine-tune the position. The REPEAT button can also
be used after pressing the wider (34) or narrower (43) button.
Figure 5-5: Hyperbola matching to extract velocity. After pressing the CALIB button a hyperbola
appears on the screen (a). This hyperbola should be moved overtop of a hyperbola in the data
using the arrow keys. It can then be widened or narrowed to match the shape of the hyperbola in
the data (b). When the hyperbola shapes match, the velocity is extracted and used to make
depth estimates more accurate in subsequent data.
Smart Systems User’s Manual Version 1.1
29
Hyperbola Matching calibration can only be done during data acquisition. It cannot be
done when viewing previously collected data. Further, the Hyperbola Matching
calibration is only available after at least half a screen of data with the same depth
setting have been collected. If less than half a screen of data are collected and the
CALIB button is selected, only calibrations selecting a material or inputting a
velocity are available (see below).
Depths will appear in metres or feet depending on which units are selected. Velocities
appear in both metres per nanosecond (m/ns) and feet per nanosecond (ft/ns). To
change units see Section 5.5.1 - Units.
Target of Known Depth
If there are no suitable hyperbolas visible in the data to perform the Hyperbola Matching
described above, it may be the situation that there is a target of known depth in the area
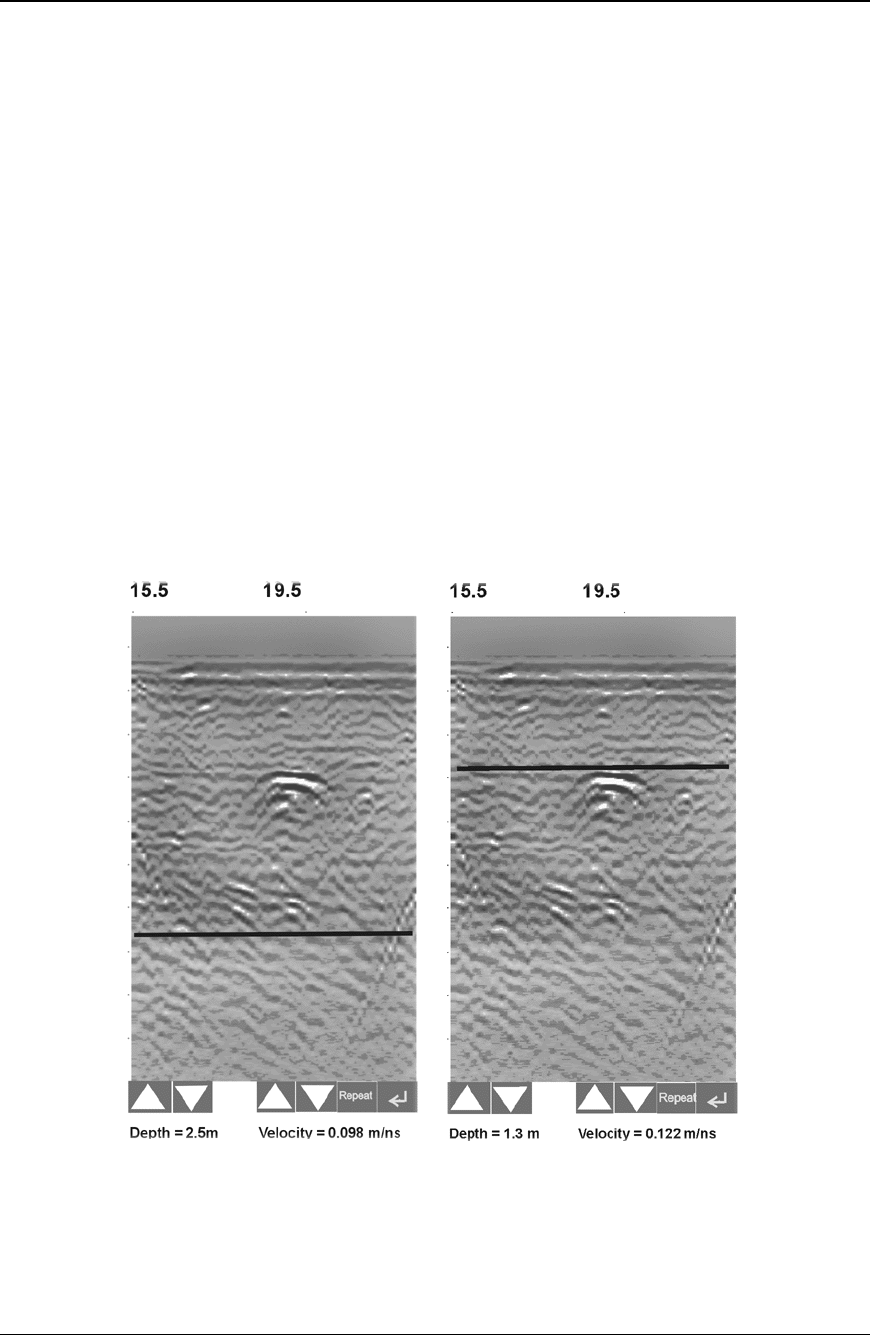
being scanned. If this is the case, selecting the button with the circle with a horizontal
line through it will superimpose a horizontal line on the data. This line can then be
moved up or down until it lies on top of the Noggin response to the known target. Then,
the user can adjust the velocity value up or down until the known target depth is correct.
Once the depth is matched, the current velocity value is the one used for all subsequent
data acquisition.
(a) (b)
Figure 5-6: Using a target of known depth to extract velocity. After selecting CALIB, choosing the
known depth button (a circle with a horizontal line through it) will superimpose a horizontal line on
the data (a). Using the depth buttons, this line can then be moved up or down until it lies on top of
the Noggin response to the known target (b). Then, the user can adjust the velocity value up or
down until the known target depth is correct. Once the depth is matched, the extracted velocity
value is automatically used for all subsequent data acquisition.
Smart Systems User’s Manual Version 1.1
30
If units are metres then depths will appear in metres. If units are feet then depths will
appear in feet. Velocities appear in both metres per nanosecond (m/ns) and feet per
nanosecond (ft/ns). To change units see Section 5.5.1 - Units.
Selecting a Media
If a good hyperbola or a target of known depth is not available, the user will have to
estimate the velocity by selecting the predominant material in the area. This can be
done by selecting the MEDIA button and selecting one of the 8 choices. The velocity
associated with each of these choices is given in the following chart:
Material Velocity (m/ns) (ft/ns)
Very Dry Soil 0.170 0.558
Dry Soil 0.130 0.427
Dry Rock 0.120 0.394
Soil 0.100 0.328
Rock 0.100 0.328
Wet Soil 0.080 0.262
Wet Rock 0.080 0.262
Very Wet Soil 0.065 0.213
Input a Velocity Value
It is also possible to input a velocity value directly. When the Velocity button is selected
the user sees the current velocity and can use the up and down arrows to increase or
decrease that value. A table of typical radar velocities in various materials is given
below. If in doubt, use a value of 0.10 m/ns. This is a good average velocity that will
provide a good estimate of depth in most situations.
Material Velocity (m/ns) (ft/ns)
Air 0.300 1.000
Ice 0.170 0.558
Dry Soil 0.130 0.427
Dry Rock 0.120 0.394
Soil 0.100 0.328
Wet Rock 0.100 0.328
Concrete 0.100 0.328
Pavement 0.100 0.328
Wet Soil 0.065 0.213
Water 0.033 0.108
Velocities appear in both metres per nanosecond (m/ns) and feet per nanosecond
(ft/ns). To change units see Section 5.5.1 - Units.

Smart Systems User’s Manual Version 1.1
31
5.3.5 Depth Menu
This button cycles through 5 different depth ranges. The velocity of the material
determined under Calibration (Section 5.3.4) affects the total apparent depth scanned.
See Section 5.8.1 for more details about how depth is calculated.
The Depth units can be changed to metres, feet or time in nanoseconds. For details,
see Section 5.5.1 – Units. As well, all the Depth values can also be doubled or halved
by changing the Window Zoom option (see Section 5.5.1).
It is important to remember that the properties of the material control the actual
depth being scanned. Just because the Depth setting is set to a certain value, it
does not necessarily mean that the Noggin is able to penetrate to that depth and
collect data. For example, if the Depth setting is 5 meters but the material
penetration is only 3 meters the last 2 meters of the image will not contain
subsurface information. Some materials will absorb the Noggin signal and limit
penetration to less than the selected depth.
If the depth setting is deeper than the Noggin signals penetrate, the data in the lower
part of the section will look blank or speckled rather than signal with continuity.
5.3.6 Gain Menu
The signals that the Noggin system collects from the ground can be very weak,
especially from deeper objects. To see these weak signals it is necessary to amplify or
apply “gain” to them.
The Gain setting controls how much the signal is amplified. It varies from 1 to 9 with 1
the lowest and 9 the highest. In general, if the target is relatively shallow (1-2 meters) a
low gain value can be used. If the target is deeper or if the screen seems to be blank or
speckled in the lower part of the data section, increase the gain setting. Remember,
however, that if the Noggin signal is not penetrating to the maximum depth setting, even
the maximum gain setting will not show any data.
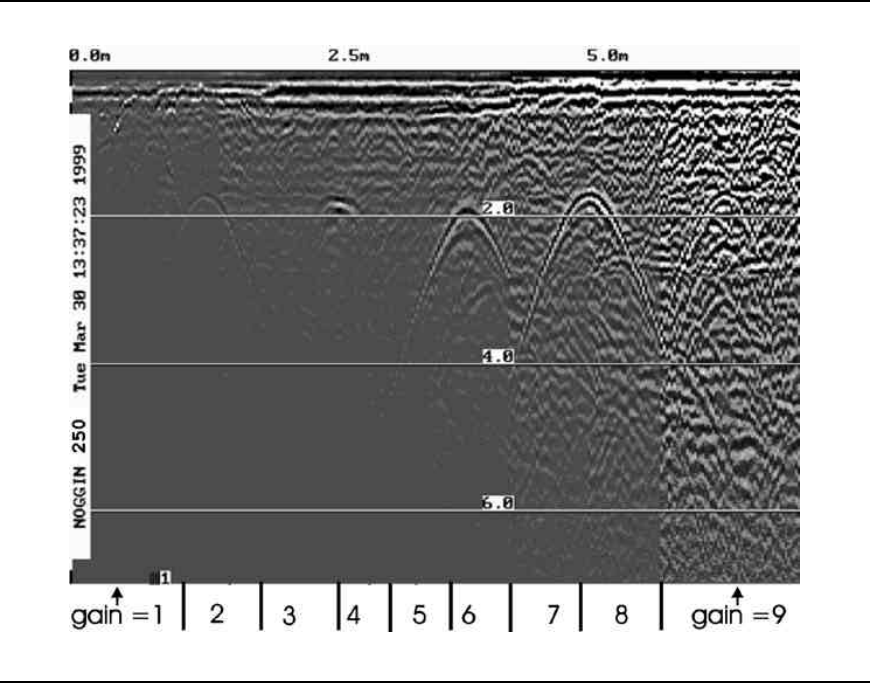
Figure 5-7 shows the effect of the gain setting. The data on the left has a gain of 1
incrementing to the right up to a gain of 9.
Smart Systems User’s Manual Version 1.1
32
Figure 5-7: Effects of the Gain setting
If the user finds that they are always using very high or very low gain settings to see the
data adequately, the user may want to adjust the Linear Gain setting under Setup (see
Section 5.5.1 – Linear Gain).
5.3.7 Start Menu
The Start button will begin the acquisition of data and displaying of data to the screen.
After acquisition has started, the Start button disappears and a Stop button (used to halt
acquisition) appears on the left. As well, when data acquisition begins, the Exit, Print
and View buttons are removed.
Data acquisition begins by pressing the Start button on the DVL.
Smart Handle systems: On Smart Handle systems, data acquisition can also be started
by quickly pressing the Smart Handle button. When the Smart Handle button has been
pressed, the lights on the handle should change from red to green to indicate that the
system is ready to collect data. The Smart Handle button can also be used to stop data
acquisition (see Section 5.3.8).
When the Start button (or Smart Handle button) is pressed for the first time after the
system is turned on, the Noggin will boot up (this can take about 10 seconds depending
on the software version). The operator should not start data collection until the system
has finished booting (see the bottom left corner of the screen) and the STOP button has

Smart Systems User’s Manual Version 1.1
33
appeared on the left. The current battery voltage will then be displayed on the left side
of the screen. This battery voltage appears only briefly before starting data collection.
Anytime the Start button (or Smart Handle button) is pressed, the current date and time
are written vertically on the screen to indicate the start of a new section (see Section
5.5.1 – Time and Date to set time and date). The position indicator is also reset to
zero. The current date and time can be recorded in a field notebook along with the
survey location to help the user organize where each section of data was collected.
5.3.8 Stop Menu
After the Start button is pressed, it disappears from the menu and the Exit button turns
into a Stop button. Data acquisition can be stopped by pressing the Stop button.
Smart Handle systems: On Smart Handle systems, data acquisition can also be
stopped by pressing the Smart Handle button and holding it pressed for about 1 second
before releasing it. When the Smart Handle button has been pressed like this, the lights
on the handle should change from green to red to indicate that the system has stopped
collecting data.
Using the Smart Handle button, it is possible to start a new line, collect the line,
stop the line and start a new line without having to touch the DVL menu buttons.

Smart Systems User’s Manual Version 1.1
34
5.4 Noggin Data Acquisition
Data acquisition is done simply by pushing the Smart Cart or Smart Handle system
along the survey line. This is usually done with the odometer active, however, it is
possible to turn off the odometer and run the Smart System in continuous operation (see
Section 5.5.1 – Odometer Active).
During data acquisition, the settings for Depth (Section 5.3.5) and Gain (Section 5.3.6)
can be changed by pressing the corresponding button until the desired setting appears.
This can be done while the instrument is collecting data; there is no need to stop first.
5.4.1 Collecting Data using the Odometer
As the Smart System moves, the odometer triggers the system to collect a data trace at
fixed distance intervals. This interval is called the “station interval”. For the Noggin 250,
the normal station interval is 5 centimeters (about 2 inches). For the Noggin 500, the
normal station interval is 2.5 centimeters (about 1 inch). For the Noggin 1000, the normal
station interval is 1.0 centimeter (about 0.48 inch). The station interval can be changed
in the Setup (see Section 5.5.1 – Station Interval).
Each data trace is plotted as a vertical strip on the screen (see Figure 5-1).
For the Noggin 250, each trace is 2 pixels wide. Since the screen is 640 pixels wide,
each screen has 320 traces. When the station interval is set to Normal, each screen
displays 16.0 metres (51.2 feet) of data for the Noggin 250.
For the Noggin 500, each trace is 1 pixel wide. Since the screen is 640 pixels wide,
each screen has 640 traces. When the station interval is set to Normal, each screen
displays 16.0 metres (51.2 feet) of data for the Noggin 500.
For the Noggin 1000, each trace is 1 pixel wide. Since the screen is 640 pixels wide,
each screen has 640 traces. When the station interval is set to Normal, each screen
displays 6.4 metres (25.6 feet) of data for the Noggin 1000.
The maximum number of screens (or buffers) that can be saved on the Digital Video
Logger is 250. This gives a total survey distance of 4000 metres (2.4 miles) for both the
Noggin 250 and Noggin 500. For the Noggin 1000, the total survey distance in 250
screens is 1600 metres (1.2 miles). For more details on total distances and Station
Intervals see Section 5.5.1 – Station Interval.
The odometer units that appear across the top of the screen can be set to either metres
or feet (see Section 5.5.1 – Units).
Smart Systems can normally collect data at a very fast walking pace. However, if the
system is moved too quickly, data quality is reduced (see below).
During data acquisition, the current odometer position value (in the current units, either
metres or feet) is written to the lower right corner of the screen.

Smart Systems User’s Manual Version 1.1
35
Note that Smart systems can be configured to collect data either by pushing the system
(forward) or pulling the system (reverse). See Section 5.5.1 – Cart Direction about
changing the system direction.
The odometer should be periodically re-calibrated to ensure accuracy. The procedure for
re-calibrating the odometer is described in Section 5.5.1 – Odometer Calibration.
Reducing Data Quality by Moving too Fast
On the lower right corner of the data acquisition screen, under the current odometer
position value (see Figure 5-1) is a single digit number that usually displays one (1).
This value is the Repeat Trace number.
If the Smart System is being used with the odometer and is moved too quickly for the
Noggin to keep up, traces are skipped and the quality of the survey is reduced. The
skipped traces do not actually create gaps in the data but rather, the last trace that was
collected properly is repeated. The Repeat Trace number displays the number of traces
that are being plotted to the screen. If this number exceeds 1 or if the user notices the
data looking smeared or “blocky”, this is probably due to moving the Smart System too
quickly. To eliminate this, either reduce the cart speed or, if possible, reduce the Depth
setting (see Section 5.3.5).
Note that skipping traces is not usually a problem because in order for the system to do
this it has to be moving at a running pace. It is more likely to happen if the depth setting
is very deep (> 10 metres).
Backing up the System to Pinpoint Target Positions
The odometer also allows the user to stop the Smart System in the middle of a survey
line and back up. When this is done, an arrow and vertical line appear on the data image
and move back along the image as the system moves backwards (see Figure 5-1). This
makes it possible to correlate a target in the data image to an exact location on the
ground. Once the arrow lines up with the target, mark the ground at the centre point of
the Noggin.
When the Smart System is moved forward again to continue with the survey, it does not
start collecting data again until you reach the position where you stopped at. This feature
is useful for producing a continuous data image even if the system is backed up during
the survey line.
Note that it is not possible to back up and have the arrow indicator move more
than one screen.
Sometimes it may be desirable to back up to a point and then continue collecting data
starting at that point. To do this, reset the odometer by pressing Stop and then Start
again. When the Smart System is moved forward, it will collect data immediately.
The physical position corresponding to the Back-up arrow can be changed from the
centre of the Noggin to any other position. See Section 5.5.1 – Arrow Reference on
changing the Arrow Reference value.

Smart Systems User’s Manual Version 1.1
36
5.4.2 Collecting Data using Continuous Operation (No
Odometer)
It is also possible to turn off the odometer input and have the Noggin system run in
continuous mode (see Section 5.5.1 – Odometer Active). This means that the system
collects data even if it is not moving. This option may be the only way of collecting data
when using an odometer wheel is not practical.
When the odometer is turned off, it is up to the user to keep track of positioning by some
other method, for example, a measuring tape, using fiducial markers (see Section 5.2.2)
or GPS (see Section 5.5.1 – GPS Setup Menu).
In this mode, data collection is dependent on two factors, 1) the speed that the Noggin
system is collecting data and 2) the speed the Noggin system is moving.
When the odometer has been turned off, the user can control the speed the Noggin
collects data by increasing or decreasing the number of stacks (for more details on
Stacking, see Section 6.3.1 - Stacks). Increasing the number of Stacks has the effect of
slowing down the data collection speed Noggin system. Decreasing the number of
Stacks has the effect of speeding up the data collection speed Noggin system.
The speed the Noggin moves determines the distance between sample points on the
ground (station interval). This type of data collection requires experimenting with the
number of stacks (see above) and practicing to find a satisfactory speed for the Noggin.
Moving too quickly may result in under-sampling the data making it more difficult to
interpret. Moving too slowly may result in over-sampling the data. This stretches the
data image making it more difficult to interpret. As well, maintaining a uniform walking
speed is important for minimizing image distortion.
Each data trace is plotted as a vertical strip on the screen. Since the station interval is
not fixed, each screen of data can represent any ground distance.
5.4.3 Saving Data
The user has two options for saving data (see Section 5.5.1 – Save Data Mode):
1) Do not save data, or
2) Save up to 250 screens (or buffers) of data and then prompt user to delete data.
When data are saved on the DVL, it acts like a continuous roll chart up to 250 screens
long. If there are data that need to be permanently saved, make sure they are
transferred to an external computer (see Sections 5.3.2 and 5.6.1) before they are
overwritten.
5.4.4 Deleting Data
The easiest way to delete all the data currently on the DVL is to go to the main menu
and press 3 (see Section 5.6.2).

Smart Systems User’s Manual Version 1.1
37
The user is prompted to delete data when the maximum number of screens (250) has
been reached. When this occurs, the user MUST delete 10%, 25%, 50%, 75% or 100%
of the screens. Note that when less than 100% of the screens are being deleted, the
oldest screens are deleted first.
It is also possible to delete all or some of the current screens of data before 250 have
been collected. To do this, stop the system, press the B button and then follow the
directions to delete 10%, 25%, 50%, 75% or 100% of the screens. Note that when less
than 100% of the screens are being deleted, the oldest screens are deleted first.
5.4.5 Special Keys
A Button = Fiducial Marker
Smart Handle button = Fiducial Marker
During data acquisition, the user can press the A button or, on a the Smart Handle
system, the Smart Handle button to put a fiducial marker on the data (see Section 5.2.2
– Fiducial Markers).
B Button = Background Subtraction Filter:
BEWARE THAT THE BACKGROUND SUBTRACTION PROCESS REMOVES DATA. IT
SHOULD ONLY BE TURNED ON WHEN THIS TYPE OF FILTERING IS NECESSARY.
The background subtraction process has the effect of removing flat-lying events in the
data and enhancing dipping events (like the response from pipes and other point
targets). It can also assist in seeing very shallow targets (< 0.5 meters) that may be
masked by the strong signals at the start of the trace.
Pressing the B button during data acquisition turns on (or off) the Background
Subtraction filter. When it is turned on, the text B-SUB ON is displayed in the lower right
corner of the screen. Stopping data acquisition turns the Background Subtraction filter
off.
5.4.6 Error Messages
If an error occurs, an error message will appear in the bottom left section of the Noggin
screen. EXIT the program and turn off the Digital Video Logger.
Make sure the cables are not damaged and that all cable connections are tightly
secured. Sometimes vibrations cause the cable connections to loosen just a bit and
break contact and this can cause errors. Disconnecting cables and reconnecting them
may provide a better contact and solve the problem. Also check and make sure the
battery is adequately charged. Turn the Digital Video Logger back on and try running the
system again.
For more information on Troubleshooting the system, see Section 7.

Smart Systems User’s Manual Version 1.1
38
5.5 Noggin Setup
5.5.1 Editing DVL Settings
Pressing the number 1 on the main menu selects the SETUP item. SETUP lists the
settings that can be edited in the Noggin software. Pressing the 1 button (labelled NEXT)
moves forward through the list and pressing the 2 button (labelled PREV) moves
backward through the list. To select a setting to edit, press the 3 button (labelled SET).
Then use the numbered buttons to select the new setting or press the A button to exit
without changing the setting. When all the desired changes have been made, press the
8 button (labelled SAVE) to save the new settings and return to the main menu. To
discard the edits and return to the previous settings, press the 7 button (labelled QUIT).
Default Settings
It is possible to change all the settings back to the default settings by pressing the 6
button (labelled RESET).
The SETUP options are outlined below.
Time and Date
The date and time are written to the data image every time data are collected. The DVL
date and time setting can be changed by moving to one or more of the appropriate fields
and editing the current setting. The LEFT and RIGHT arrows are used to move between
fields. To change any of the numbers or months, use the UP and DOWN arrows to
increase or decrease the value. When the desired date and time are set, press ENTER
to save the changes.
Save Data Mode
This setting controls how data are saved on the DVL. The available options are:
1) No saving of data buffer: If data are not saved, then only data currently on the screen
can be seen. As data scrolls off the screen it is gone and cannot be recovered or
viewed. In this case the View button will not appear.
2) Prompt at end of buffer (default): If this setting is selected, after the maximum 250
number of buffers has been reached, the program prompts the user to delete 10%,
25%, 50%, 75% or 100% of the data buffers. The oldest buffers are deleted first.
Units Used
This is the setting for the position and depth units. The available options are:
1) metres (default)
2) feet
3) metres and time
4) feet and time
Options 3 and 4 mean that position will be displayed in metres or feet and depth will

Smart Systems User’s Manual Version 1.1
39
displayed in time (nanoseconds). If time is selected the “depth” lines (Section 5.2.2) are
actually time lines.
Odometer Markers
This setting determines whether a vertical dashed line is put on the data image each
time a position label is written to the screen. The available options are:
1) Place a fid at each label
2) No fids at position labels (default)
Odometer Calibration
The odometer should be calibrated periodically to ensure accuracy.
Noggin Smart Systems can take input from several different odometers.
It is very important that the user selects and calibrates the odometer appropriate
for their Smart System.
When Odometer Calibration is selected from the Setup menu, the user is prompted to
select the odometer that is being used with the Smart System.
If a Smart Cart System is being used, select one of the two Smart Cart odometers
(usually #1).
If a Smart Handle system is being used, select one of the two Smart Handle odometers
(usually #1).
If the system is being towed behind a vehicle and using the transmission odometer to
trigger the system, select one of the two Vehicle odometers (usually #1).
The odometers labelled Other are to be used in future configurations.
Once an odometer is selected, the user is prompted to either 1) manually enter the
odometer calibration factor or 2) to actually calibrate the odometer over a known
distance. To achieve the highest accuracy, it is recommended that the user choose
option number 2 - Odometer Calibration.
When Odometer Calibration is selected, the user is prompted to select the length of the
line to calibrate on. There are 8 different choices in metres and 8 choices in feet. To
toggle the units between metres and feet, press the B button. Pressing the A button on
this screen gives the additional option to select a user defined value. The user-defined
value can range from 0.01 to 5000 metres or 0.01 to 26400 feet.
When the calibration distance has been selected follow the directions on the screen:
1) Set cart at zero and press A
2) Move the cart the selected distance and press B
3) Press A to exit.

Smart Systems User’s Manual Version 1.1
40
Odometer calibration values for the Smart Cart odometer should be around 4000.
Odometer calibration values for the Smart Handle odometer should be around 1500.
Odometer calibration values for the Vehicle odometer vary but may be around 50.
Cart Direction
This setting determines whether data are collected as the Smart System is pushed
forward or pulled in reverse. The back up arrow (see Section 5.4.1) will work in the
direction opposite to this setting. The available options are:
1) Forward (push the cart) (default)
2) Reverse (pull the cart)
Odometer Active
This setting determines whether the odometer is used to collect data. If no, then the
system runs continuously (see Section 5.4.2).
1) Yes (use the odometer) (default)
2) No (operate continuously)
If the user selects to turn the odometer off, another menu screen appears and the user is
then prompted to select the number of stacks for the system to run at. Increasing the
number of stacks has the effect of slowing down the data acquisition speed. Decreasing
the number of stacks has the effect of speeding up the data acquisition speed.
The number of stacks should be set to a value that, when combined with speed the
Noggin is moving at, provides an appropriate station interval. This may take a little
experimenting to determine the optimal values for stacks and Noggin speed.
Label Size
This setting determines the size of the position labels across the top of the data image
and the depth labels beside the horizontal depth lines. The sizes available are:
1) Small
2) Medium (default)
3) Large
4) Extra Large
Noggin System
Noggin Smart Carts can be used with the Noggin 250, 500 and 1000 systems. Noggin
Smart Handle systems can be used with the Noggin 500 and 1000 systems. The
Noggin System should be set to the type of Noggin currently in use on the Smart
System. The systems available are:
1) Noggin 250 System
2) Noggin 500 System
3) Noggin 1000 System
Smart Systems User’s Manual Version 1.1
41
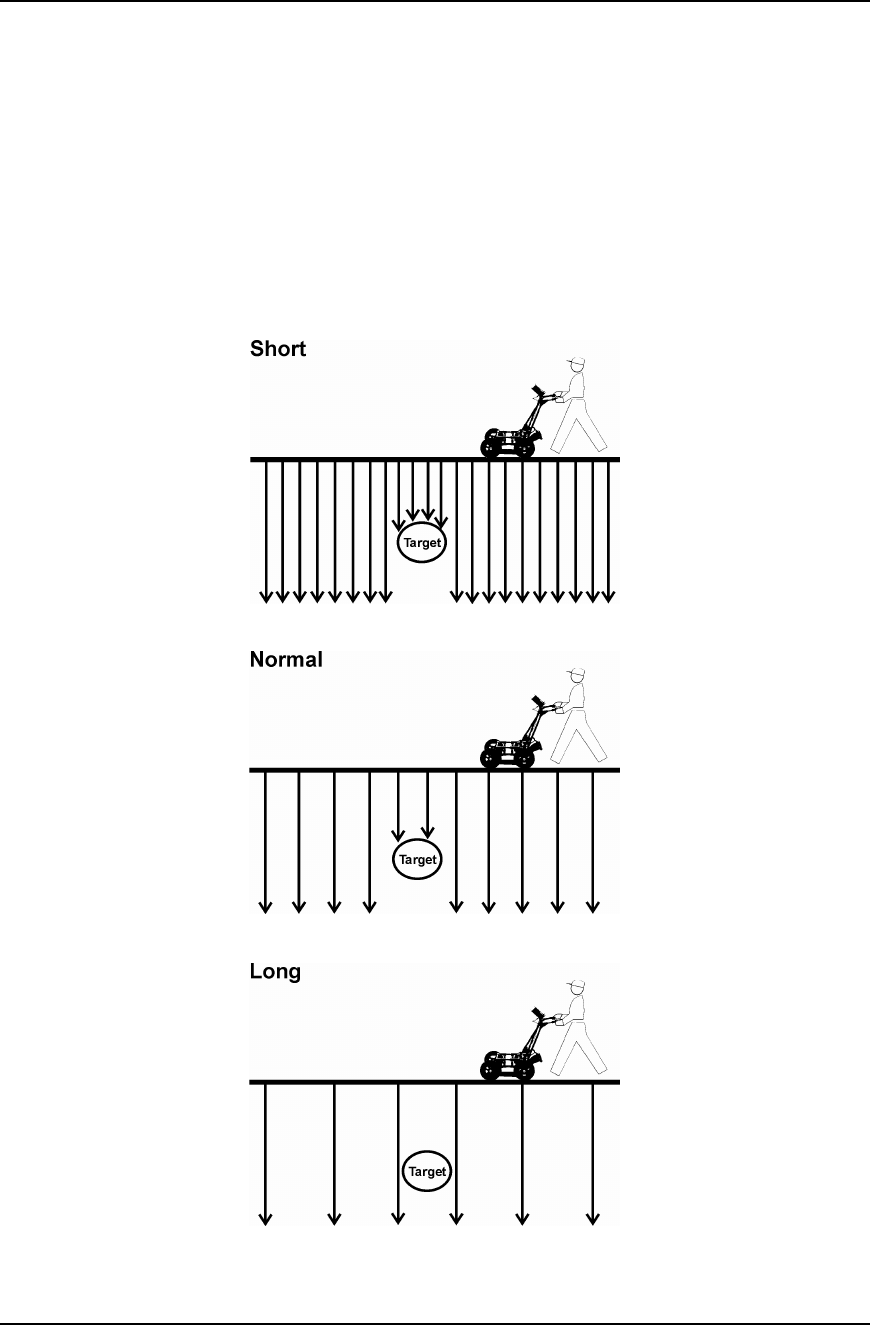
Station Interval
As the Smart Cart moves, the odometer triggers the system to collect a data trace at
fixed distance intervals. This interval is called the “station interval”.
The station interval can be changed to allow a longer or shorter distance between
traces. For a successful survey, it is important that several traces be collected over a
target. If the target is small, the user may want to shorten the station interval to ensure
that data traces are collected over the target. Conversely, if the target is very large or is
a flat-lying feature it is probably not necessary to collect a lot of traces over the target, in
fact, sometimes this can make the target more difficult to see in the data. In this case it
may be beneficial to increase the station interval.
Figure 5-8: The Station Interval is the distance between sample points on the ground. Be careful
not to choose a Station Interval that is larger than the smallest target to be detected.
Smart Systems User’s Manual Version 1.1
42
Note that decreasing the station interval increases the data volume and increasing the
station interval reduces the data volume.
The choices available are:
1) Short
2) Normal
3) Long
4) X-Long
5) Normal x 10
6) Normal x 20
7) Normal x 40
8) Normal x 50
9) Normal x 100
Each choice listed will be followed by an actual value in metres or inches depending on
which units are selected and which Noggin system is being used. Here is a chart
showing the station interval for each system and setting. The choices available are:
Noggin 250 System
Setting
Station Interval Data per Screen Total Data for 250
Screens
Short 2.5 cm or 0.96 in 8 m or 25.6 ft 2 km or 1.2 miles
Normal 5.0 cm or 1.92 in 16 m or 51.2 ft 4 km or 2.4 miles
Long 10.0 cm or 3.84 in 32 m or 102.4 ft 8 km or 4.8 miles
X-Long 25.0 cm or 9.6 in 80 m or 256 ft 20 km or 12.1 miles
Norm x10 50.0 cm or 19.20 in 160 m or 512 ft 40 km or 24.2 miles
Norm x20 100.0 cm or 38.4 in 320 m or 1024 ft 80 km or 48.5 miles
Norm x40 200.0 cm or 76.8 in 640 m or 2048 ft 160 km or 97.0 miles
Norm x50 250.0 cm or 96.0 in 800 m or 2560 ft 200 km or 121.2 miles
Norm x100 500.0 cm or 192.0 in 1600 m or 5120 ft 400 km or 242.4 miles
Noggin 500 System
Setting
Station Interval Data per Screen Total Data for 250
Screens
Short 1.0 cm or 0.48 in 6.4 m or 25.6 ft 1.6 km or 1.2 mile
Normal 2.5 cm or 0.96 in 16 m or 51.2 ft 4 km or 2.4 miles
Long 5.0 cm or 1.92 in 32 m or 102.4 ft 8 km or 4.8 miles
X-Long 12.5 cm or 4.8 in 80 m or 256 ft 20 km or 12.1 miles
Norm x10 25 cm or 9.6 in 160 m or 512 ft 40 km or 24.2 miles
Norm x20 50 cm or 19.2 in 320 m or 1024 ft 80 km or 48.5 miles
Norm x40 100 cm or 38.4 in 640 m or 2048 ft 160 km or 97.0 miles
Norm x50 125 cm or 48.0 in 800 m or 2560 ft 200 km or 121.2 miles
Norm x100 250 cm or 96.0 in 1600 m or 5120 ft 400 km or 242.4 miles
Smart Systems User’s Manual Version 1.1
43
Noggin 1000 System
Setting Station Interval Data per Screen Total Data for 250
Screens
Short 0.5 cm or 0.24 in 3.2 m or 12.8 ft 0.8 km or 0.61 mile
Normal 1.0 cm or 0.48 in 6.4 m or 25.6 ft 1.6 km or 1.2 mile
Long 2.0 cm or 0.96 in 12.8 m or 51.2 ft 3.2 km or 2.4 miles
X-Long 5.0 cm or 2.4 in 32.0 m or 128 ft 8.0 km or 6.1 miles
Norm x10 10 cm or 4.8 in 64.0 m or 256 ft 16.0 km or 12.1 miles
Norm x20 20 cm or 9.6 in 128 m or 512 ft 32.0 km or 24.2 miles
Norm x40 40 cm or 19.2 in 256 m or 1024 ft 64.0 km or 48.5 miles
Norm x50 50 cm or 24.0 in 320 m or 1280 ft 80.0 km or 60.6 miles
Norm x100 100 cm or 48.0 in 640 m or 2560 ft 160 km or 121.2 miles
Note that Noggin 250 traces are plotted on the screen 2 pixels wide while traces from
the Noggin 500 and 1000 are plotted on the screen 1 pixel wide (see Section 5.4.1).
Linear Gain
As described in Section 5.3.6, the weak signals must be amplified or “gained” to see
them on the display. The Gain button described in Section 5.3.6 can be set to a value
from 1 to 9 depending on the amount of gain required (1 is lowest gain, 9 is highest
gain).
There is also a second level of gain available to the user and that is the Linear Gain
setting. The default Linear Gain setting of 2.5 is usually adequate for most ground
conditions, however, if the user finds that they are surveying in areas where high Gain
button settings are always required to see data, it may be advantageous to increase the
Linear Gain setting. Conversely, if the user finds that low Gain button values work to
see the data, it may be useful to decrease the Linear Gain setting.
The choices available for Linear Gain are:
1) 0.0
2) 0.5
3) 1.0
4) 1.5
5) 2.0
6) 2.5 (default)
7) 3.0
8) 5.0

Smart Systems User’s Manual Version 1.1
44
Arrow Reference
Section 5.4.1 describes the Back-up Arrow that appears when a Smart System is
backed up. The Back-up Arrow allows the user to pinpoint the exact ground position
corresponding to a target response on the data image. The Arrow Reference value is
used to change the physical position that corresponds to the Back-up Arrow. If the
Arrow Reference value is set to the default value of zero (0.0) metres, the Back-up arrow
position corresponds with the center point of the Noggin.
However, the Arrow Reference value can be changed so that the Back-up Arrow
corresponds to a position at any offset from the center of the Noggin. For example,
setting the Arrow Reference value to +0.25 meters moves the Back-up Arrow to line up
with a position 25 centimeters in front of the Noggin centre point (on the Noggin 500
Smart Cart this roughly corresponds to the front axle). Setting the Arrow Reference
value to -0.25 meters moves the Back-up Arrow to line up with a position 25 centimeters
in behind the Noggin centre point (on the Noggin 500 Smart Cart this roughly
corresponds to the back axle). In this way, the Arrow Reference value can be changed
to correspond with any position desired by the user.
One reason the user may want to change the Arrow Reference value is so that the
Noggin does not cover the actual target location. This makes it easier to spray paint a
mark or put a flag on the ground where the target occurs.
To change the Arrow Reference value, use the Increase and Decrease buttons. The
Increase button will increment the value by 0.025 meters or 2.5 centimeters. The
Decrease button will decrement the value by 0.025 meters or 2.5 centimeters. Positive
values correspond to positions in front of the Noggin and negative values are positions
behind the Smart Cart. Note that the Arrow Reference value is always expressed in
metres regardless of the settings of the other units. When the Arrow Reference value
has been set, press 4 to save it.
1) Increase
2) Decrease
3) Set to Zero
4) Save and Return
Window Zooming
Window Zooming allows the user to double or half all the default depth settings. For
example, if the Window Zooming is set to the default of 100%, the user may find the five
Depth settings to be 2.5, 5.0, 7.5, 10.0 and 15.0 metres. If the Window Zooming option is
changed to 50% then the Depth settings are reduced to one half, specifically 1.25, 2.5,
3.75, 5.0, and 7.5 metres. Similarly, if The Window Zoom option is set to 200% then the
Depth settings are doubled, specifically 5.0, 10.0, 15.0, 20.0 and 30.0 metres. This
option allows the user to make larger or smaller depth ranges than the default.
The choices available are:
1) 50%
2) 100% (default)
3) 200%

Smart Systems User’s Manual Version 1.1
45
GPS Setup Menu
The Global Positioning System (GPS) uses special satellites around the Earth to
determine the position of a GPS receiver located at any position on the surface of the
Earth. GPS receivers can be purchased from a number of manufacturers.
The DVL has a serial port on the back for attaching a GPS receiver. This port will
accommodate any GPS receiver that has a standard serial port output.
This feature allows GPS information to be logged while collecting Noggin data. The GPS
information may be useful for determining where a specific target of interest is located in
GPS co-ordinates.
The DVL can be set up to read and log GPS information collected during data
acquisition with the Noggin system. GPS information can be logged in two different
ways: 1) to display GPS information on the data image every certain number of data
traces collected by the Noggin system, or 2) to display GPS information on the data
image every time the user presses the A button during data acquisition.
In order for the DVL to read the GPS data string, the GPS settings for the specific GPS
receiver being used must be input into this menu. There are 4 important items that must
be specified correctly for the DVL to display the GPS strings. These items are Baud
Rate, Stop Bits, Data Bits and Parity. These are discussed in more detail below. The
default values listed below are the values that are typically used. Read the GPS
Receiver User’s Guide or experiment with the settings to find the correct ones.
Once these 4 items are set correctly you should be able to run System Test #1 and have
GPS information written to the screen.
When the logging of GPS information is enabled, during data acquisition a message will
appear in the bottom left-hand corner of the DVL screen indicating whether GPS data is
successfully being received (see Section 6.2.4).
Smart Systems User’s Manual Version 1.1
46
Mode
There are three GPS modes available:
1) Off mode means that a GPS receiver is not connected to the DVL so no GPS
information is being logged. This should be the setting if you do not have a GPS
receiver.
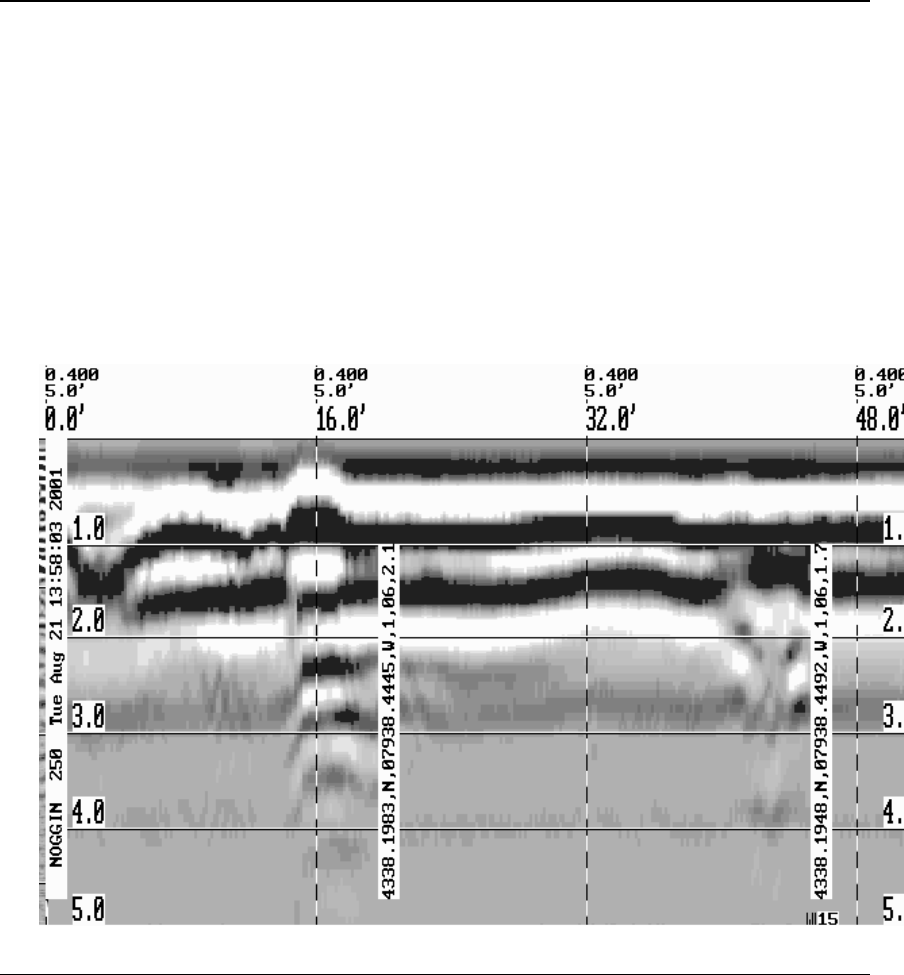
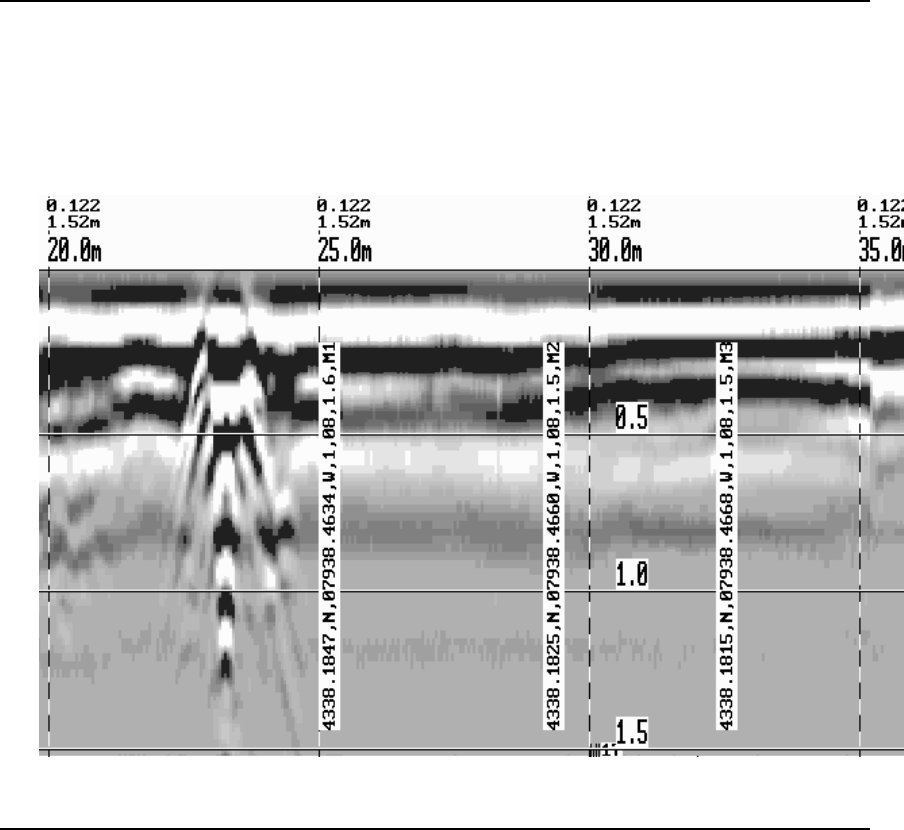
2) Display every X traces mode means that every time the Noggin collects a user-
defined number of traces trace of GPR data, a data string of GPS information will be
written to the data image.
For example, the data may look like this:
Figure 5-9: Noggin Data with GPS information written to the screen every 150 traces
When this option is selected, the user is prompted to enter the number of traces to
collect before the GPS information is written to the data image.
With a Noggin 250 system, there are 320 traces per screen so using a value of 160
traces would ensure that there are 2 GPS positions on each screen.
With a Noggin 500 and Noggin 1000 system, there are 640 traces per screen so
using a value of 320 traces would ensure that there are 2 GPS positions on each
screen.
Smart Systems User’s Manual Version 1.1
47
3) Tagging with the A Button mode means that whenever the A button is pressed
during data acquisition, a data string of GPS information will be written onto the data
image.
For example, the data may look like this:
Figure 5-10: Noggin Data with GPS information written to the screen when the A button is
pressed.
Baud Rate
The baud rate is the speed that data is sent from the GPS receiver to the serial port of
the DVL. The available options are: 2400, 4800, 9600 (default) or 19200.
Stop Bits
The available settings for Stop Bits are: 1 (default) or 2.
Data Bits
The available settings for Data Bits are: 7 or 8 (default).
Parity
The available settings for Parity are: none (default), odd or even.

Smart Systems User’s Manual Version 1.1
48
End String
The GPS receiver can be set up to send one or more types of data strings. These
strings are called NMEA-0183 strings and each contains positional or other information
in specific formats. Each type of string is specified by a 5-character prefix. There are
numerous NMEA strings but examples of three different NMEA strings (GPGGA,
GPVTG and GPGSA) are shown below.
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
$GPGGA,134713.00,4338.221086,N,07938.421365,W,2,06,2.1,152.51,M,-35.09,M,5.0,0118*79
$GPVTG,34.0,T,,,001.4,N,002.5,K,D*70
$GPGSA,A,3,30,26,10,13,24,06,,,,,,,4.2,2.1,3.6*36
Before using the GPS with the Noggin, the DVL software needs to know the prefix of the
LAST string being sent in each group. In the example above, three strings are being
sent each time (GPGGA, GPVTG and GPGSA). Since GPGSA is the last one being
sent in each group, the End String needs to be specified as GPGSA.
To see what the End String is for your particular GPS, run System Test #1 and note the
first 5 characters on the last line after each series of strings is written to the screen.
These are the 5 characters that need to be filled in under End String.
The End String option allows the user to fill in the 5 character GPS prefix. Use the Left
and Right buttons to move left or right to different characters in the string. The currently
selected character will have an “^” under it. To change the letter of the current
character, use the Next button to change it to the next letter in the alphabet and the
Previous button to change it to the previous letter in the alphabet. Using these keys all 5
characters can be filled in with the necessary GPS End String.
See the GPS Receiver User’s Guide for details on how to set up the receiver to output
specific NMEA strings or groups of NMEA strings.
System Test #1
After all the settings above have been input and the GPS receiver is attached to the
serial port on the DVL, the user can test that the DVL is receiving the GPS output by
using the Test option.
If the NMEA strings are successfully being read by the DVL they will appear on the DVL
screen. This is a good time to note the prefix of the last NMEA string in the list and input
it in the End String setting above.
If the NMEA strings do not appear, check that the port settings are correct. It is also
possible that a crossover cable is required between the output cable of the GPS receiver
and the serial port on the DVL.

Smart Systems User’s Manual Version 1.1
49
System Test #2
Once the GPS system is running successfully, System Test #2 can be used to
graphically display the GPS data. This screen displays the GPS Time, Latitude,
Longitude and Altitude as well as other values indicating the accuracy of the GPS
reading. The GPS position is also displayed in a square that can be Zoomed from 2
metres square to 16384 metres square.
Transfer Rate
Transfer Rate is a variable from 1 to 8 that corresponds to the speed of the data transfer
from the Noggin to the DVL. A value of 8 provides the fastest transfer speed while a
value of 1 is the slowest.
For standard Smart Systems like the Smart Cart system and Smart Handle system
the Transfer Rate value must be set to 8.
The Transfer Rate value will only be decreased for systems with data cables longer than
standard lengths. Please contact Sensors & Software before changing the Transfer
Rate on your system.
Reset Counter
The Noggin software records the total distance the cart has travelled. This value is
displayed in Setup but cannot be changed.
The Noggin software also records a distance that can be reset by the user. To reset the
distance counter, move to the Reset Counter option and press the SET button.
Smart Systems User’s Manual Version 1.1
50
5.6 Noggin Buffer File Management
Files collected with the Noggin system can be transferred to an external computer
(Section 5.6.1) or deleted from the DVL (Section 5.6.2).
5.6.1 Transferring all Buffer Files to an External Computer
using the WinPXFER Program
Pressing the number 2 on the main Noggin menu transfers ALL the data buffers (up to
250 screens) from the DVL to an external computer. This type of transfer allows the user
to view the data on the external computer using the SpiView software. SpiView is
available from Sensors & Software Inc.
There are two ways of transferring data to an external PC. This section describes
transferring all data files to an external computer. The other method is to transfer one or
more screens of data as a single PCX graphics file (see Section 5.3.2, Transferring Data
to an External PC). This other type of transfer is appropriate when the user wants to
transfer a small amount of data to an external computer for use with third-party graphics
software packages like Microsoft Paint and Word.
To transfer all the data buffers from the DVL to an external computer, the computer must
be connected to the DVL using the special parallel XFER cable that is supplied with the
system (Section 5.6.1). Note that this is a special cable and standard 25 pin to 25 pin or
Laplink cables will not work. As well, the computer must have the WinPXFER program
running on it (Section 5.6.1).
Connecting the Digital Video Logger to an External Computer
The Smart Cart comes with a separate cable called the parallel XFER cable. This cable
is designed to connect the DVL to an external computer.
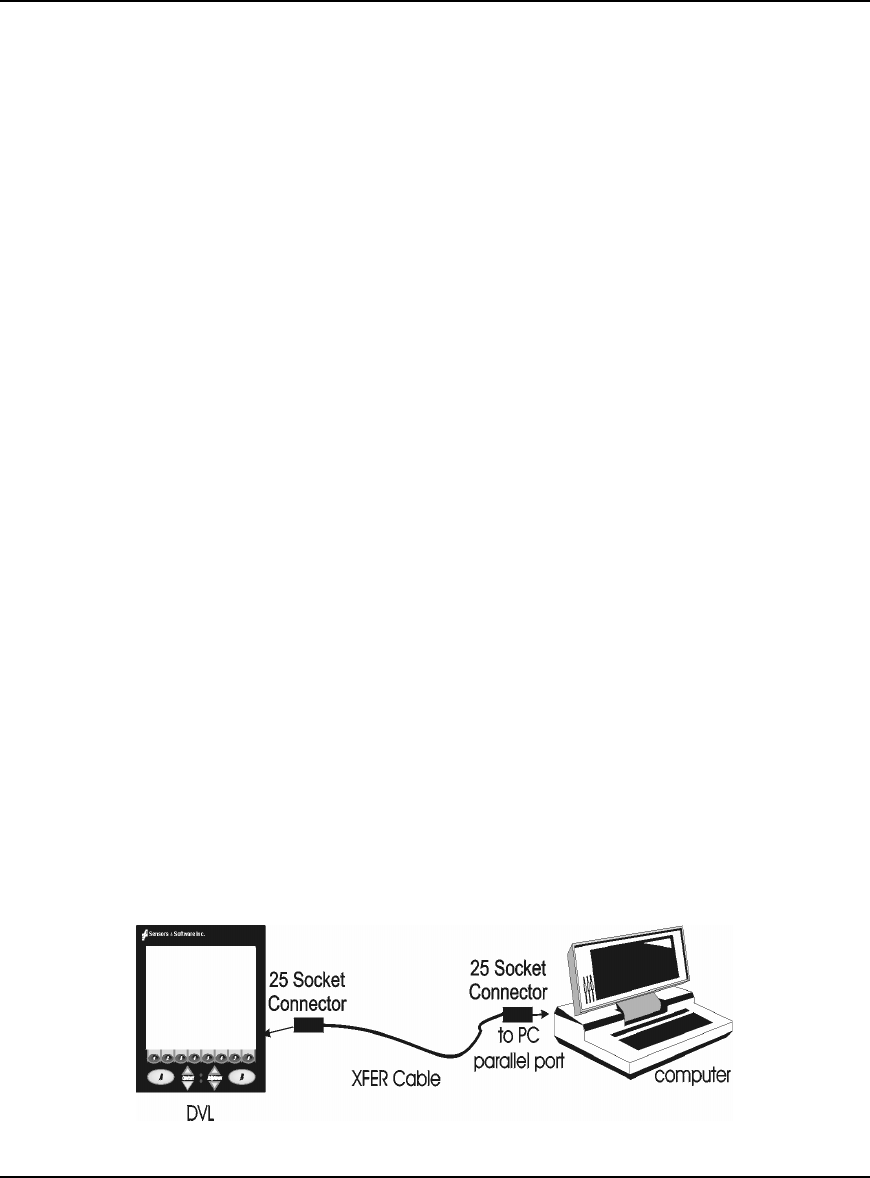
Figure 5-11: Parallel XFER cable connections
The 2 connections that must be made before attempting to transfer data are:
1) Attach the 25 socket parallel connector to the 25 socket parallel port on back of
the Digital Video Logger, and
2) Attach the 25 socket parallel connector the parallel port of the external computer.
Smart Systems User’s Manual Version 1.1
51
WARNING: To avoid damaging any of the components, turn off the DVL
and computer before making any of these connections.
Installing and Running the WinPXFER Program
The Smart system comes with a CD-ROM containing the WinPXFER program.
To install the WinPXFER program, follow the directions in the “Getting Started”
document that accompanies the CD. Basically, running the SETUP.EXE program from
the WinPXFER folder on the CD will install WinPXFER on the computer.
Once the WinPXFER program has been installed on the computer and the user is ready
to transfer data to the computer, the WinPXFER program needs to be run. This can be
done using the WinPXFER shortcut on the Desktop, double-clicking the WinPXFER.EXE
program in Windows Explorer or pressing Start – Programs – Sensors & Software GPR
and finally WinPXFER.
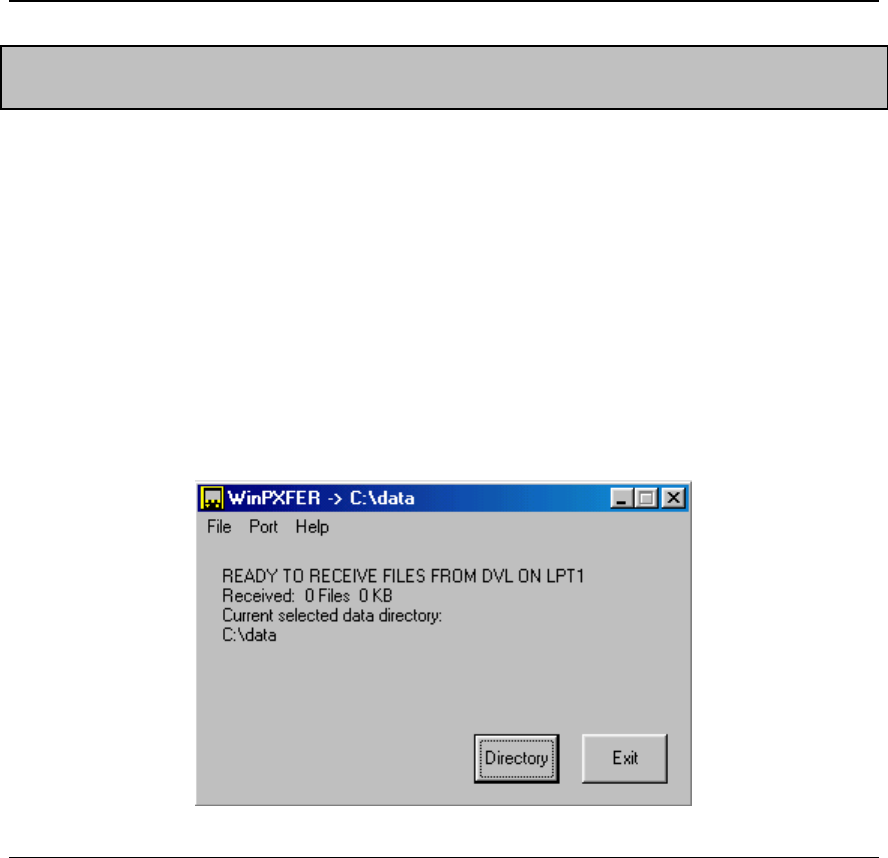
Figure 5-12: WinPXFER main screen
When the WinPXFER program has been run, it will display a screen as shown in Figure
5-12:
This means that it is ready to receive data transferred from the DVL to the LPT port
number 1.
This command assumes that the data buffers are being transferred across Parallel Port
1 (LPT1). If using Parallel Port 2 (LPT2) or higher (LPT3, LPT4 etc.), specify the parallel
port number under the Port menu item from WinPXFER.
The name of the folder (or directory) that the Noggin data will be transferred into is listed
under the “Current selected data directory”. In the example in Figure 5-12, the data will
be transferred to the c:\data directory. The data directory can be changed by pressing
the Directory button and choosing another directory.

Smart Systems User’s Manual Version 1.1
52
Transferring Buffer Files
Once the parallel XFER cable is connected (Section 5.6.1) and the WinPXFER software
is installed and running (Section 5.6.1), it is now possible to transfer all data buffer files
to the external computer.
On the DVL, from the main menu, select number 2 – TRANSFER ALL BUFFERS.
The data will be transferred from the DVL to the computer and saved in the current
working directory. The progress of the data transfer will be displayed on the DVL screen
and the external computer.
When the data transfer is complete, on the external computer, exit from the WinPXFER
program. Press any button on the DVL to return to the main menu.
Parallel Port not bi-directional Error
Sometimes, when attempting to transfer data to the PC, the error message “LPT1 is not
bi-directional” may appear on the DVL screen. When transferring data from the DVL unit
to a PC, the printer port is used. The WinPXFER program utilizes the functions of a bi-
directional printer port for high-speed data transfer. A bi-directional port allows data to
be sent in both directions over the data lines. Most modern ports are bi-directional;
however, they may not be configured as such and may be configured as ‘output only’.
There are a number of ways the port can be reconfigured depending on the type and
manufacturer of your computer. Most computers configure the port using a BIOS setup
program. Again, different manufactures have different ways to start this program. Some
use the Delete key on boot up, some use the F1 or F2 key on boot up, some have a
special key sequence and others use a program run through DOS or Windows. Often
there is a line of text written to the screen during the boot-up sequence that indicates
which key must be pressed to run Setup. This key MUST be pressed BEFORE
Windows starts. If you miss pressing it, go into Windows, shut down, restart the
computer and try again. Consult your owners’ manual for details.
After the BIOS Setup program starts, the Parallel or Printer port configuration that needs
to be changed is normally under the ‘Peripheral’ or “Advanced” setting heading. If you
can’t find it under these headings, look under the various headings for some setting like
“Parallel Mode” or “Parallel Configuration”. Take note of what the current setting is. The
typical settings are Normal, ECP, EPP and bi-directional. It may require some
experimentation to find the correct setting that works with the WinPXFER program.
First, try changing the setting to bi-directional. Save the settings and exit the Setup
program (usually there is a special key like F10 to do this). Then allow the computer to
continue to boot up. Then, try transferring data again, as described above. If the “LPT1
is not bi-directional” error occurs again, reboot the PC, run the BIOS Setup program,
change the Parallel port setting to EPP, save the settings and try again. The settings
don’t appear standard so no one particular setting will solve the error on all computers.
Keep trying the different parallel port settings until one of them eliminates the error and
allows data transfer.

Smart Systems User’s Manual Version 1.1
53
Viewing SPI Files in SpiView on the External PC
If the buffer data transferred to the external computer are to be viewed using the
SpiView software, all of the data buffer files (SPIxx.PCX) must be copied to the
\SPIVIEW\BUFFERS directory. Any buffer data files in this directory should be moved or
deleted before the new buffer data files are copied. Alternatively, the buffer location can
be changed using the SPI_LOAD.INI file (see the SpiView Manual for details). SpiView
is available from Sensors & Software Inc.
5.6.2 Deleting all Buffer Files on the DVL
Pressing the number 3 on the main menu allows the user to delete ALL the data buffers
(up to 250 screens) currently saved on the DVL.
Before the buffers are deleted, the user is asked, “Do you want to delete all the buffers?”
To answer YES to this question press the A button. To answer NO to the question press
the B button and the buffers are not deleted.
5.7 Upgrades
Pressing the number 4 on the main menu puts the DVL into listen mode to allow a
software upgrade to be transferred from an external PC to the DVL. Avoid pressing this
button until the instructions in a software upgrade tell you to. Once pressed, the DVL
must be powered down exit from this menu item.
Smart Systems User’s Manual Version 1.1
54
5.8 Advanced Topics
5.8.1 How Depth is Determined
Ground penetrating radar systems record the time for a radio wave to travel to a target
and back. The depth to that target is calculated based on the velocity at which the wave
travels to the target and back. It is calculated as:
D = V x T/2
Where D is Depth (m)
V is Velocity (m/ns)
T is Two-way travel time (ns)
The wave velocity depends on the properties of the material. The Noggin software
allows the user to input different velocities, which changes the total depth range
displayed on the screen. The velocities of common materials are:
Material Velocity (m/ns) (ft/ns)
Air 0.3 1
Ice 0.17 0.57
Dry Soil 0.15 0.5
Dry Rock 0.12 0.4
Soil 0.1 0.33
Wet Rock 0.1 0.33
Concrete 0.1 0.33
Pavement 0.1 0.33
Wet Soil 0.065 0.22
Water 0.033 0.11

Smart Systems User’s Manual Version 1.1
55
6 Nogginplus
6.1 Overview of Nogginplus Menu Options
The Nogginplus main menu has the following choices:
A – LINE
B – GRID
1 – NOGGIN PLUS SETUP
2 – FILE MANAGEMENT
3 – RUN WITHOUT SAVING DATA
4 – UTILITIES
7 – RETURN
12.1 V Rev 3.00
6.1.1 Line
Survey lines collected with the Nogginplus are saved as digital data files that can be
viewed on the DVL or exported to an external computer for processing and plotting.
Sensors & Software programs like Win_EKKO, EKKO_Mapper, EKKO_3D and
EKKO_Pointer are available to process and display the data.
Pressing the A button from the main Nogginplus menu takes the user to Line data
collection. This menu allows the user to select a project number and line number to
save each data file to.
Data files from the same area can be organized and saved under a project number
selected by the user. As each individual line is collected, it is given a line number.
These line numbers are usually in sequential order but this is up to the user.
6.1.2 Grid
Survey lines collected with the Nogginplus are saved as digital data files that can be
viewed on the DVL or exported to an external computer for processing and plotting.
Pressing the B button from the main Nogginplus menu takes the user to Grid data
collection.
Grid collection involves collecting data in an organized pattern over an area. This type
of data acquisition allows the GPR data to be displayed as 3D volumes with the
EKKO_3D software or presented as plan maps with the EKKO_Mapper or
EKKO_Pointer software.
The Grid menu allows the user to select a grid number and line number to save each
data file to.

Smart Systems User’s Manual Version 1.1
56
Before the data acquisition on a grid begins, the user must define the size of the area to
be surveyed, the direction of the survey lines and line spacing. The details of the grid
survey are specified in the Grid Setup menu option (see Section 6.3.4).
6.1.3 Setup
There are many background setup parameters related to the Noggin Smart Systems
operation for line and grid surveys that can be edited. This menu allows the user to
display and change various settings for different aspects of the Smart system (see
Section 6.3). The user can also reset all the parameters to the factory default settings.
6.1.4 File Management
The file management option allows Line and Grid data to be downloaded from the DVL
to an external computer via the parallel XFER cable (see Section 6.4.1). This option can
also be used to delete data from the DVL.
6.1.5 Run without Saving Data
This option allows the user to go straight into data acquisition. This feature is to allow a
“quick look” at the data in the area. The data collected when in this mode are NOT saved
and cannot be reviewed later or exported. Data that scrolls off the edge of the screen is
gone and cannot be reviewed.
If a GPS receiver is attached to the DVL, GPS information can be logged to a file even
when the Nogginplus data are not being saved (see Section 6.3.5).
6.1.6 Utilities
This menu has utility programs to change the Date and Time on the DVL (see Section
6.5.1) calibrate the odometer (see Section 6.5.2) and use an external PC to transfer
upgraded software to the DVL (see Section 6.5.3).
6.1.7 Return
This button will return the user to main menu. See Section 3.

Smart Systems User’s Manual Version 1.1
57
6.2 Nogginplus Data Acquisition
Selecting the Line, Grid or Run without Saving Data options from the main Nogginplus
menu will start data acquisition. The Run without Saving Option goes straight to data
acquisition while the Line and Grid options require the user to select a project number,
file number and press Run before data acquisition begins.
If the Auto Start option is set to ON (see Section 6.3.2 – Auto Start for details) the
system will automatically boot up and be ready for data acquisition. If Auto Start is set to
OFF the user must press the Start button to boot up the system.
After acquisition has started, the Start button disappears and a Stop button (used to halt
acquisition) appears on the right. A Gain button is also visible as well as the current
depth setting and equivalent Time Window length in nanoseconds (see Figure 6-1).
Data acquisition begins by pressing the Start button on the DVL.
Starting Smart Handle systems: On Smart Handle systems, data acquisition can also
be started by quickly pressing the Smart Handle button. When the Smart Handle button
has been pressed, the lights on the handle should change from red to green to indicate
that the system is ready to collect data. The Smart Handle button can also be used to
stop data acquisition by pressing and holding the button for 1 second before releasing it.
(see Stopping Smart Handle systems below).
When the Start button is pressed for the first time after the unit is turned on, the Noggin
will boot up (this can take up to 30 seconds depending on the software version of the
Noggin). During this time the system is self-calibrating and measuring such factors as
temperature and battery voltage.
Once this boot up has been completed, data acquisition can begin. For subsequent
lines there is only a short delay before data acquisition can begin.
Data acquisition is done by pushing the Smart System along the survey line. During
data acquisition, the Gain button is dynamic and the screen display of the signal
sensitivity can be changed on the go (see Section 6.2.6).
When the survey line is completed press the Stop button to stop data acquisition. At this
point no more data can be collected without starting a new line.
Stopping Smart Handle systems: On Smart Handle systems, data acquisition can also
be stopped by pressing the Smart Handle button and holding it pressed for about 1
second before releasing it. When the Smart Handle button has been pressed like this,
the lights on the handle should change from green to red to indicate that the system has
stopped collecting data.
Smart Systems User’s Manual Version 1.1
58
6.2.1 Replaying or Overwriting Data
Immediately after a data file has been collected and the Stop button (or Smart Handle
button) pressed, the data file can be replayed by pressing the left and right arrow buttons
to the scroll the data to the left and right. As well, during data replay, the data can be
enlarged or “zoomed” by pressing the Zoom button and changing the zoom factor. For
example, zooming 2 times on data with a depth setting of 5.0 metres will show the first
2.5 metres of data on the screen.
Any data file that has been collected can be replayed at any time by selecting the file
number and selecting Run. The user then has the option to View, Overwrite or Delete
the data file.
6.2.2 Screen Overview
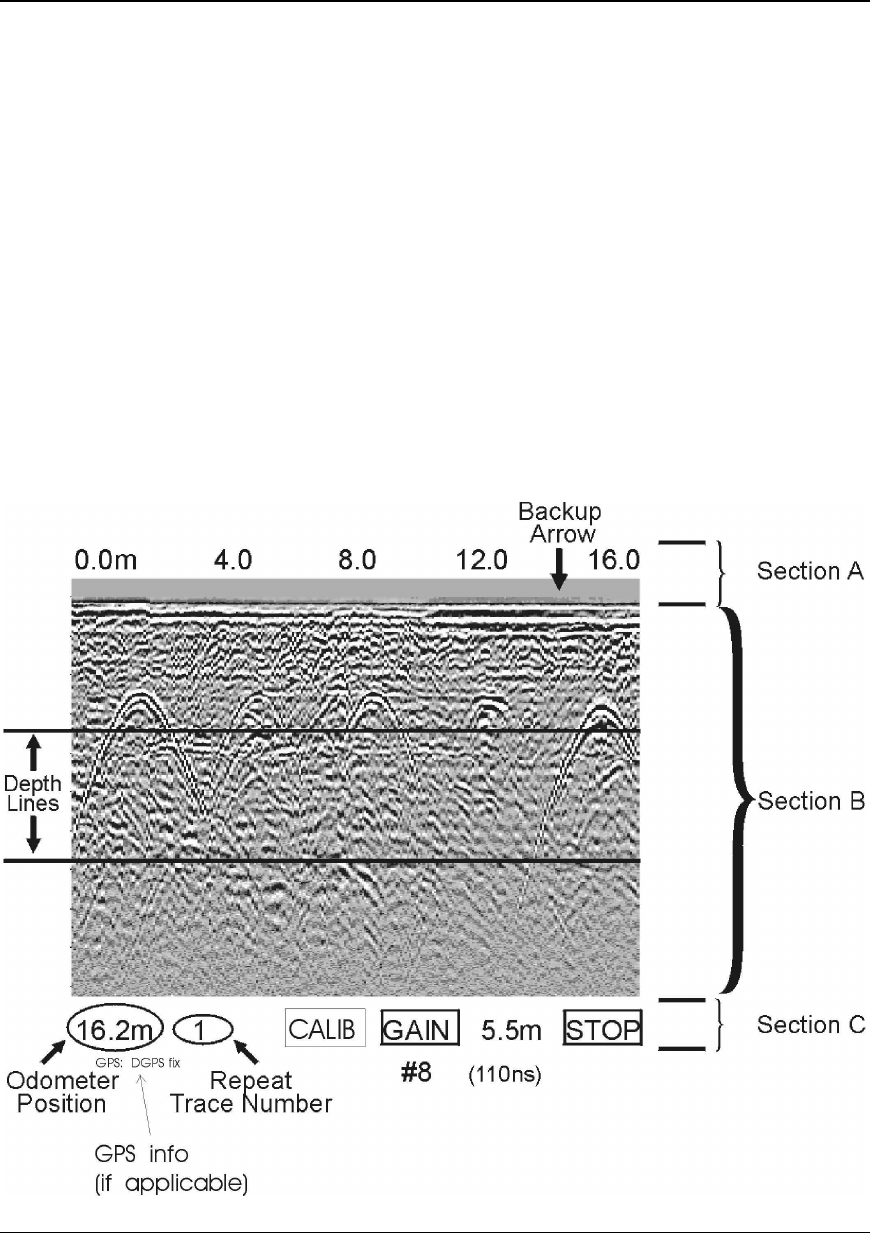
The data acquisition screen is shown in Figure 6-1. It is divided into 3 sections.
Figure 6-1: Nogginplus Data Acquisition Screen
The Noggin screen is shown in Figure 6-1. It is divided into 3 sections. The very top
section (Section A) positioning information. The center section (Section B) contains the
actual data and the bottom section (Section C) contains the menu.

Smart Systems User’s Manual Version 1.1
59
6.2.3 Section A – Position Information
The very top section (Section A) contains horizontal spatial positioning information in
feet or metres depending on the position units setting (see Section 6.3.1).
6.2.4 Section B - Data Display
This section contains the actual data collected or replayed. The section also contains the
depth indicator lines and any fiducial markers the user enters. See the sections below for
more details.
If a GPS receiver is attached to the DVL, a file containing GPS information can be saved
(see Section 6.3.5).
Depth Lines
Depth lines are horizontal lines indicating the estimated depth. They are very useful for
getting depth estimates to features of interest in the data.
The Depth Lines are controlled by the current velocity value as well as the depth
selected. See Section 6.3.1 on changing the depth setting and for more details on how
depths are determined.
To display the correct depth, it is the responsibility of the user to calibrate the
system to the correct velocity of the material (see Section 6.2.8 on how to
calibrate the system). Once a velocity value has been determined see Section
6.3.1 on how to change the velocity setting.
Note that it is possible to change the depth units between metres and feet (see Section
6.3.1).
Fiducial Markers
A fiducial marker is a dotted vertical line placed on the data section at a specific position
during data acquisition. Adding these markers during data acquisition is useful for
recording significant positions or the positions of surface objects encountered during the
survey.
A fiducial marker is activated by pressing the A button on the keypad during data
acquisition. As well, when using the backup arrow (Section 6.2.7) fiducial markers can
be added at the current arrow location by pressing the A button.
Smart Handle systems: On Smart Handle systems, it is also possible to add a fiducial
marker by quickly pressing the button on the Smart Handle during data acquisition.
The position and name of the object encountered at each marker can be recorded in a
field notebook. The fiducial marker is written to the trace header of the next trace to be
collected. Fiducial markers are numbered sequentially (F1, F2 etc.). When the data are
transferred to a PC and reviewed, these markers can assist with data interpretation.

Smart Systems User’s Manual Version 1.1
60
If a GPS receiver is attached to the DVL, a file containing GPS information can be
saved. In Fuducial Tagging mode, whenever a fiducial marker is added to the data, a
line of GPS information will be added to the GPS file (see Section 6.3.5)
6.2.5 Section C - Menu
The bottom section (Section C) contains the user menu selection and current program
settings. This includes:
1) The total depth (and time window) to the bottom of the data image in
Section B (see Section 6.3.1),
2) The Gain button and current Gain setting (see Section 6.2.6),
3) GPS information (if GPS receiver attached, see below and Section 6.3.5),
4) The current odometer position,
5) The Repeat Trace Number which indicates when the system is being
moved too fast (see Section 6.2.7) and
6) The Calib button for calibrating the velocity setting (see Section 6.2.8).
If a GPS receiver is attached to the DVL (see Section 6.3.5) a message will appear in
the bottom left corner of the menu indicating whether the GPS data is successfully being
logged. The possible messages are:
1) GPS: DGPS fix means differential GPS data are currently being logged.
2) GPS: GPS fix means standard GPS data are currently being logged.
3) GPS: fix not valid means GPS data are NOT currently being logged.
This is usually because GPS satellites are not available.
4) GPS: No Input means the GPS receiver is not operating properly. Check
the settings and test the system (see Section 6.3.5).
5) GPS: No GGA means the GPS receiver is not outputting a GGA NMEA
string that the DVL requires (see Section 6.3.5).
6.2.6 Gain
During data acquisition, the Gain setting can be changed by pressing the Gain button
until the desired setting appears. This can be done while the instrument is collecting
data; there is no need to stop first.
The signals that the Noggin system collects from the ground can be very weak,
especially from deeper objects. To see these weak signals it is necessary to amplify or
apply “gain” to them.
The Gain setting controls how much the signal is amplified. It varies from 1 to 9 with 1
the lowest and 9 the highest. In general, if the target is relatively shallow (1-2 metres) a
low gain value can be used. If the target is deeper or if the screen seems to be blank or
speckled in the lower part of the data section, increase the gain setting. Remember,
however, that if the Noggin signal is not penetrating to the maximum depth setting, even
the maximum gain setting will not show any data.
Figure 6-2 shows the effect of the gain setting. The data on the left has a gain of 1
incrementing to the right up to a gain of 9.
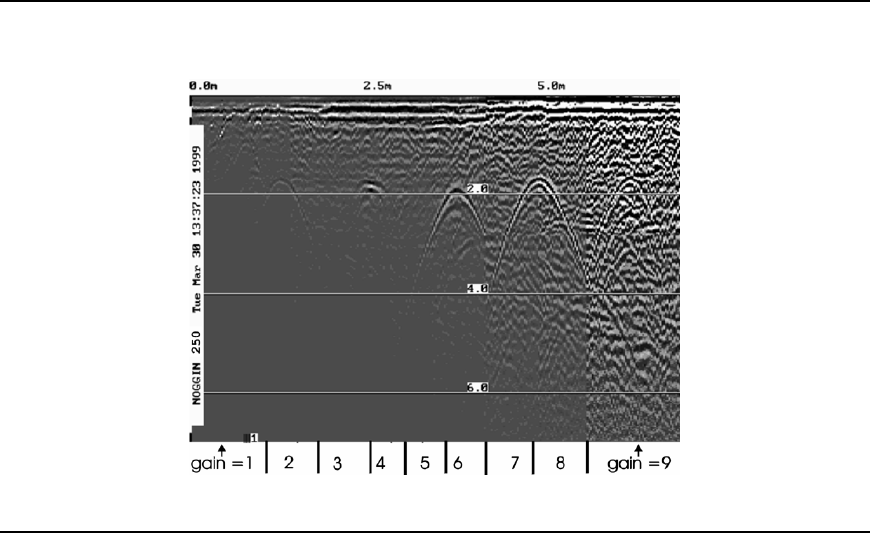
Smart Systems User’s Manual Version 1.1
61
Figure 6-2: Effects of the Gain setting
Note that the gain setting is only for data display. The data are always saved
without any gain applied. It is not possible to collect Nogginplus data with an
“incorrect” gain setting.
If the user finds that they are always using very high or very low gain settings to see the
data adequately, the user may want to adjust the Linear Gain setting under Setup (see
Section 6.3.1).
6.2.7 Collecting Data using the Odometer
As a Smart System moves, the odometer triggers the system to collect a data trace at
fixed distance intervals. This distance is called the “Station Interval”. For the Noggin
250, the normal station interval is 5 centimetres (about 2 inches). For the Noggin 500,
the normal station spacing is 2.5 centimetres (about 1 inch). For the Noggin 1000, the
normal station spacing is 1.0 centimetres (about 0.48 inch). The Station Interval can be
changed to a longer or short distance (see Section 6.3.3).
Each data trace is plotted as a vertical strip on the screen (see Figure 6-1).
For the Noggin 250, each trace is 2 pixels wide. Since the screen is 640 pixels wide,
each screen has 320 traces. When the station interval is set to Normal, each screen
displays 16.0 metres (51.2 feet) of data for the Noggin 250.
For the Noggin 500, each trace is 1 pixel wide. Since the screen is 640 pixels wide,
each screen has 640 traces. When the station interval is set to Normal, each screen
displays 16.0 metres (51.2 feet) of data for the Noggin 500.
For the Noggin 1000, each trace is 1 pixel wide. Since the screen is 640 pixels wide,
each screen has 640 traces. When the station interval is set to Normal, each screen

Smart Systems User’s Manual Version 1.1
62
displays 6.4 metres (25.6 feet) of data for the Noggin 1000.
The odometer units that appear across the top of the screen can be set to either metres
or feet (see Section 6.3.1).
During data acquisition, the current odometer position value (in the current units, either
metres or feet) is written to the lower left corner of the screen (see Figure 6-1).
Note that Smart Systems can be configured to collect data either by pushing or pulling
the Noggin. See Section 6.3.2 about changing the direction of data acquisition.
The odometer should be periodically re-calibrated to ensure accuracy. The procedure for
re-calibrating the odometer is described in Section 6.5.2.
Reducing Data Quality by Moving too Fast
On the lower part of the data acquisition screen, beside the current odometer position
value is a single digit number that usually displays one (1). This value is the Repeat
Trace number.
If the Smart System is being used with the odometer and is moved too quickly for the
Noggin system to keep up, traces are skipped and the quality of the survey is reduced.
The skipped traces do not actually create gaps in the data but rather, the last trace that
was collected properly is repeated. The Repeat Trace number displays the number of
traces that are being plotted to the screen. If this number exceeds 1 or if the user notices
the data looking smeared or “blocky”, this is probably due to moving the cart too quickly.
To eliminate this either slow down the system speed, decrease the number of Stacks or
reduce the Depth setting (see Section 6.3.1).
If the cart is being moved too fast, after the data survey line is complete, the DVL will
indicate the total number of traces that were “skipped”. The user then has the option to
Autofix the data. The Autofix process replaces any repeated traces in the data with
interpolated traces. While this process does not solve the problem of skipping traces, it
will make the data traces look less “blocky”.
If the number of traces skipped is a significant percentage of the total number of traces
collected, i.e. 10% or more, the operator should slow down, decrease the number of
Stacks or reduce the Depth setting (see Section 6.3.1).
Backing up the Cart to Pinpoint Target Positions
The odometer also allows the user to stop the Smart System in the middle of a survey
line and back up. When this is done, an arrow and vertical line appear on the data image
and move back along the image as the system moves backwards (see Figure 6-1). This
makes it possible to correlate a target in the data image to an exact location on the
ground. Once the arrow lines up with the target, mark the ground at the centre point of
the Noggin.
When the system is moved forward again to continue with the survey, the Smart system
does not start collecting data again until you reach the position where you stopped at.

Smart Systems User’s Manual Version 1.1
63
This feature is useful for producing a continuous data image even if the system is
backed up during the survey line.
Note that it is not possible to back up and have the arrow indicator move more than one
screen.
The physical position corresponding to the Back-up arrow is the centre of the Noggin.
This position can be changed from the centre of the Noggin to any other position. See
Section 6.3.2 on changing the Arrow Offset value.
6.2.8 Calib. (Calibration) Menu
Noggin systems can be used to scan into many different materials including soil, rock,
concrete, snow, ice and wood. The radio wave emitted by a Noggin system will travel at
different velocities depending on the material being scanned. The depth value (see
Section 6.3.1) and on Depth Lines (see Section 6.2.4) are only accurate if the system
has been properly calibrated to determine the velocity of the material being scanned.
See Section 6.3.1 - Depth for more details about how depth is calculated.
The Calibration function is a tool for determining the velocity of the material being
scanned. A velocity value can be input directly (see Section 6.3.1 - Velocity) or
determined in one of two different ways depending on the situation:
1) Hyperbola matching
2) Target of known depth
Note that unlike the Calibration with Noggin systems (see Section 5.3.4), the
Nogginplus Calibration does NOT automatically update the velocity value in the
software. In the Nogginplus calibration, once a velocity is determined, the user
must enter it into the System Parameters (see Section 6.3.1 - Velocity).
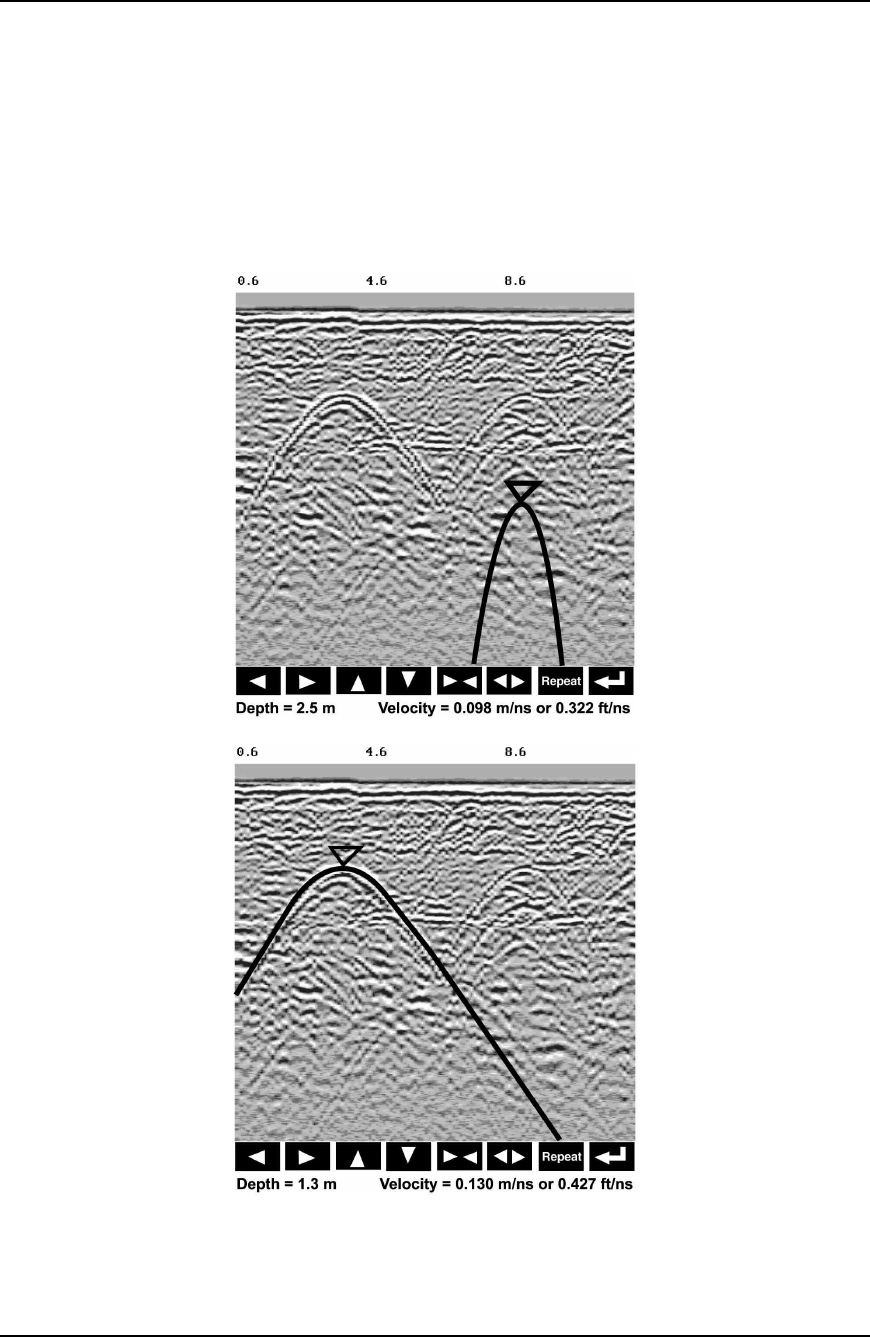
Hyperbola Matching
This is the most accurate way of determining the velocity of the material being scanned
because it extracts the speed using data collected in the area. This method may not
work in all situations because it depends on having a good quality hyperbola (or inverted
U) in the data. A hyperbola is the characteristic Noggin response from a small point
target like a pipe, rock or even a tree root. If the hyperbola has long tails on it, we can
match the shape of the hyperbola and determine the velocity of the material in the area.
With the hyperbola visible on the DVL screen, select the hyperbola (∩) button. This will
superimpose a hyperbola on the data. This hyperbola can be moved up (5), down (6),
left (3) and right (4) using the appropriate arrow buttons. The goal is move the
hyperbola until it lies on top of the hyperbola in the data (see Figure 6-3). Then, the user
can adjust the width of the hyperbola to make it wider (34) or narrower (43) until the
shape of the hyperbola matches the shape of the hyperbola in the data. After matching
the hyperbola, the velocity value is displayed and now can be entered under the System
Parameters (see Section 6.3.1 –Velocity).
Pressing the up, down left, right, wider and narrow buttons once makes a very small
Smart Systems User’s Manual Version 1.1
64
change in the position or width of the hyperbola. These buttons must sometimes be
pressed many times to move the hyperbola to the correct position or width. To speed up
the movement of the hyperbola, use the REPEAT button. For example, to move the
hyperbola up a long distance, press the up button (5) followed by the REPEAT button.
The hyperbola will then start moving upward without having to press any more buttons.
When it gets close to the desired location press any button to stop it and then use the
up, down, left and right buttons to fine-tune the position. The REPEAT button can also
be used after pressing the wider (34) or narrower (43) button.
Figure 6-3: Hyperbola matching to extract velocity. After pressing the CALIB button a hyperbola
appears on the screen (a). This hyperbola should be moved overtop of a hyperbola in the data
using the arrow keys. It can then be widened or narrowed to match the shape of the hyperbola in
the data (b). When the hyperbola shapes match, the velocity is extracted and displayed. The
user can then use this velocity value for surveys done in the area.
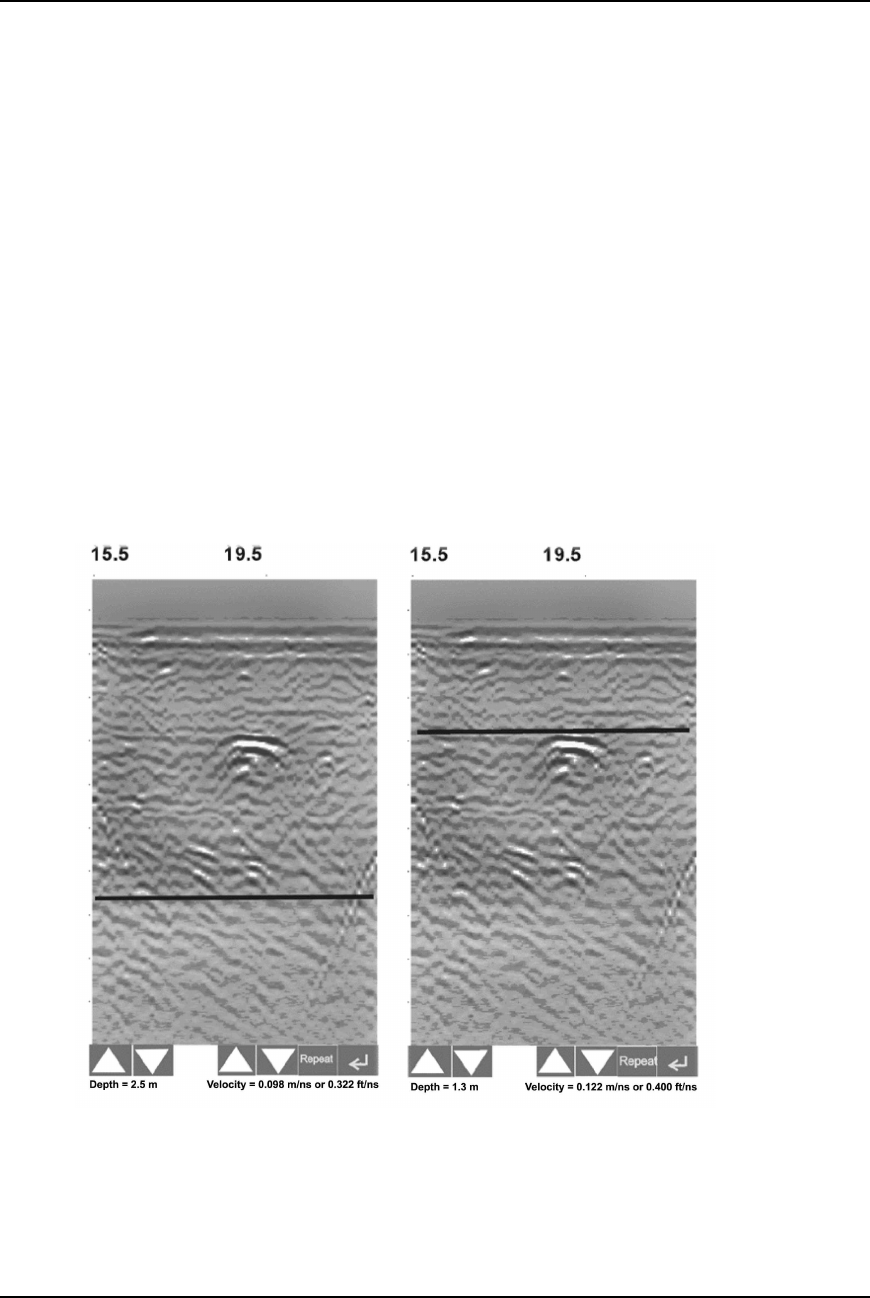
Smart Systems User’s Manual Version 1.1
65
In Nogginplus mode, hyperbola Matching calibration can be done during data acquisition
and also while viewing previously collected data.
If units are metres then depths will appear in metres and velocities in metres per
nanosecond (m/ns). If units are feet then depths will appear in feet and velocities in feet
per nanosecond (ft/ns). To change units see Section 6.3.1 – Depth Units.
Target of Known Depth
If there are no suitable hyperbolas visible in the data to perform the Hyperbola Matching
described above, it may be the situation that there is a target of known depth in the area
being scanned. If this is the case, selecting the button with the circle with a horizontal
line through it will superimpose a horizontal line on the data. This line can then be
moved up or down until it lies on top of the Noggin response to the known target. Then,
the user can adjust the velocity value up or down until the known target depth is correct.
Once the depth is matched, the current velocity value is the one used for all subsequent
data acquisition.
(a) (b)
Figure 6-4: Using a target of known depth to extract velocity. After selecting CALIB, choosing the
known depth button (a circle with a horizontal line through it) will superimpose a horizontal line on
the data (a). Using the depth buttons, this line can then be moved up or down until it lies on top of
the Noggin response to the known target (b). Then, the user can use the velocity buttons to
adjust the velocity value up or down until the known target depth is correct. Once the depth is
matched, the velocity value should be used for all subsequent data acquisition.

Smart Systems User’s Manual Version 1.1
66
If units are metres then depths will appear in metres and velocities in metres per
nanosecond (m/ns). If units are feet then depths will appear in feet and velocities in feet
per nanosecond (ft/ns). To change units see Section 6.3.1 – Depth Units.
6.2.9 Error Messages
If an error occurs during data acquisition, an error message will appear in the bottom left
section of the data acquisition screen. Note the message number, exit the program and
turn off the Digital Video Logger.
Make sure the cables are not damaged and that all cable connections are tightly
secured. Sometimes vibrations cause the cable connections to loosen just a bit and
break contact and this can cause errors. Disconnecting cables and reconnecting them
may provide a better contact and solve the problem. Also check and make sure the
battery is adequately charged. Turn the Digital Video Logger back on and try running the
system again.
For more information on Troubleshooting the system, see Section 7.