Zebra Technologies RADEKL Radar Development Kit User Manual Programmers Guide
Zebra Technologies Corporation Radar Development Kit Programmers Guide
UserManual.wiki
>
Zebra Technologies
>
RADEKL User Manual
>
Programmers Guide
Contents
1.
Programmers Guide
2.
Hardware Level ICD
3.
Radar Help User Manual
Programmers Guide
Navigation menu
Upload a User Manual
Namespaces
Wiki Guide
HTML
PDF
Info
Views
User Manual
Discussion / Help
Navigation
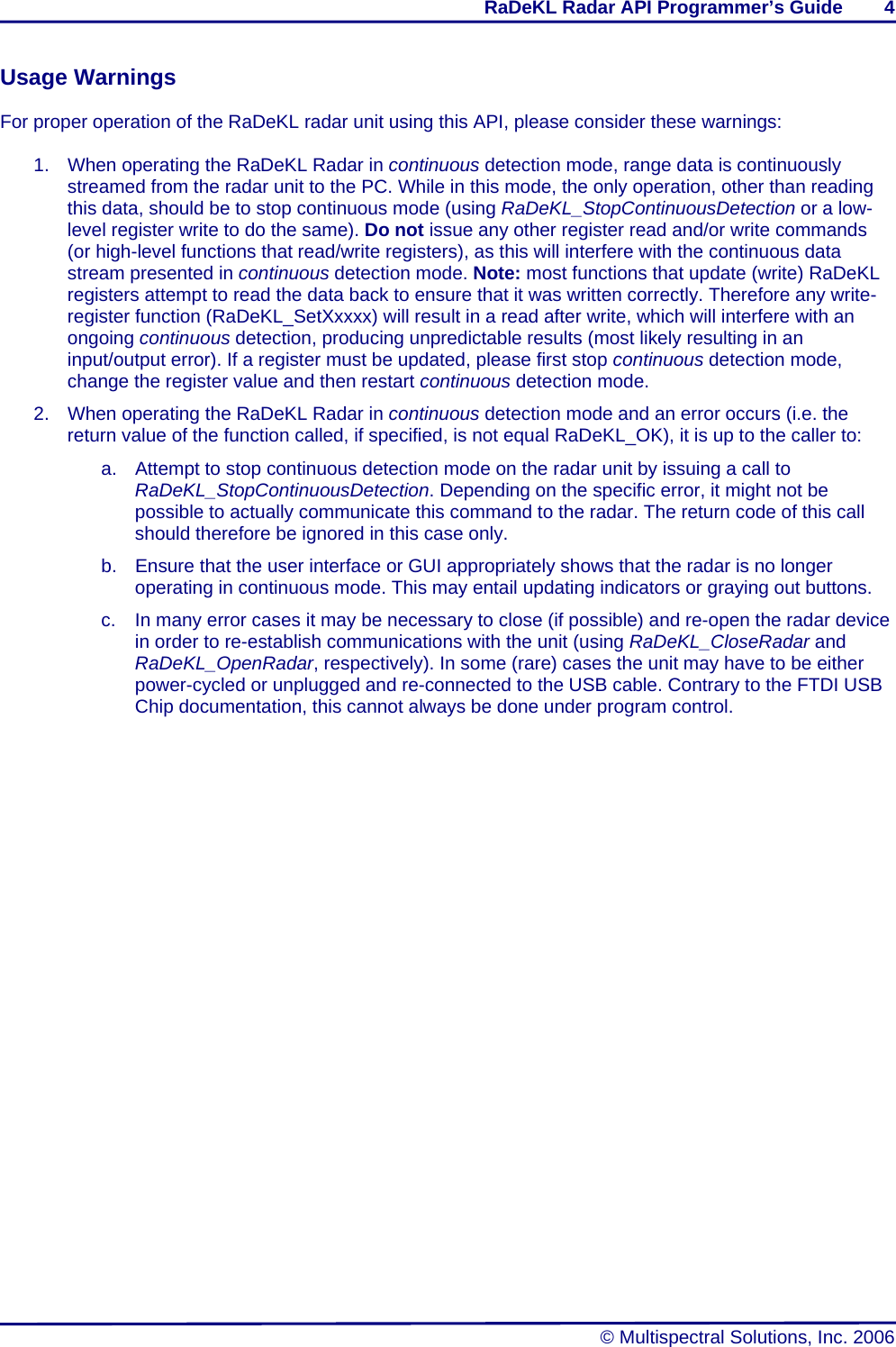
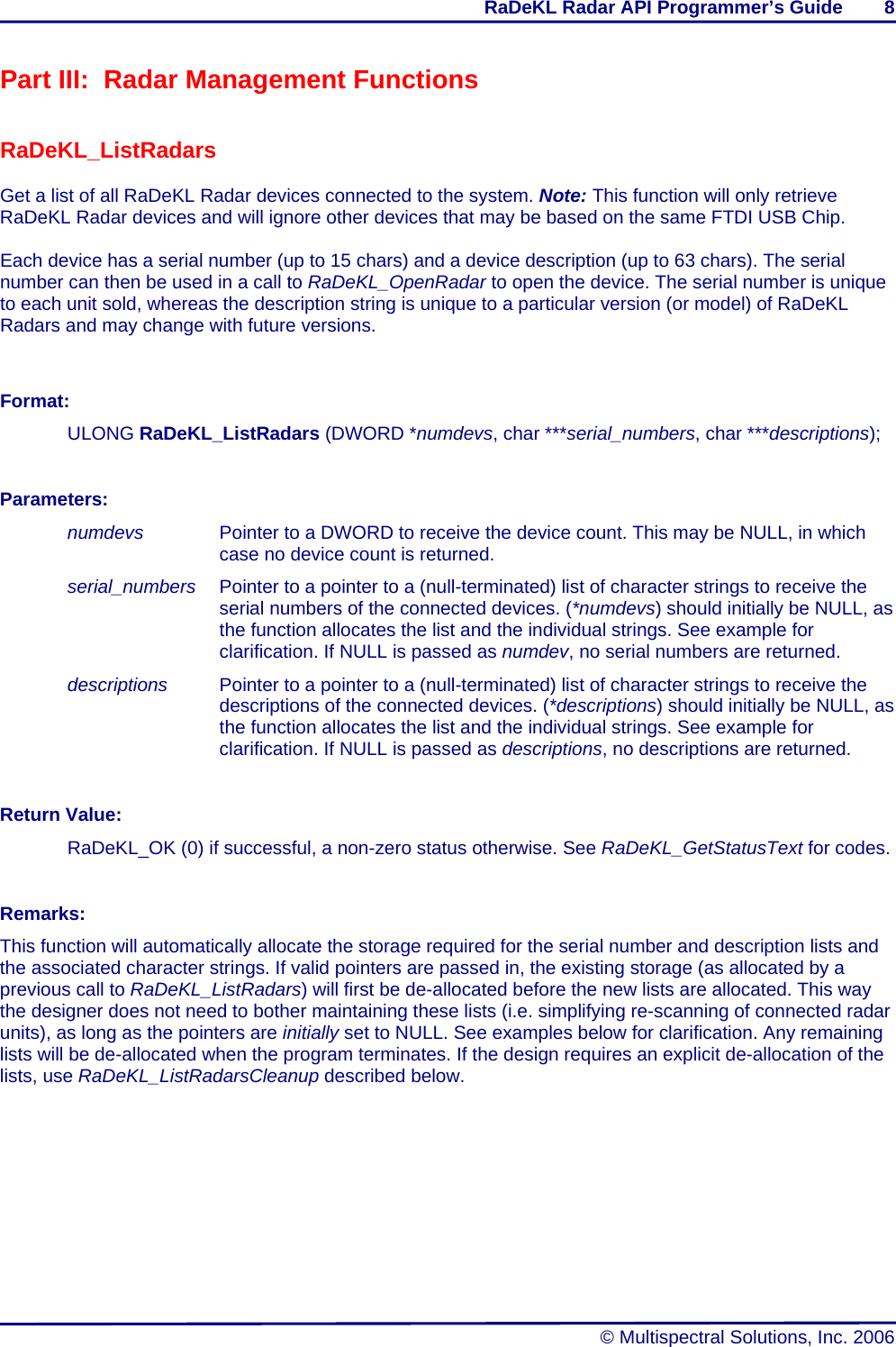
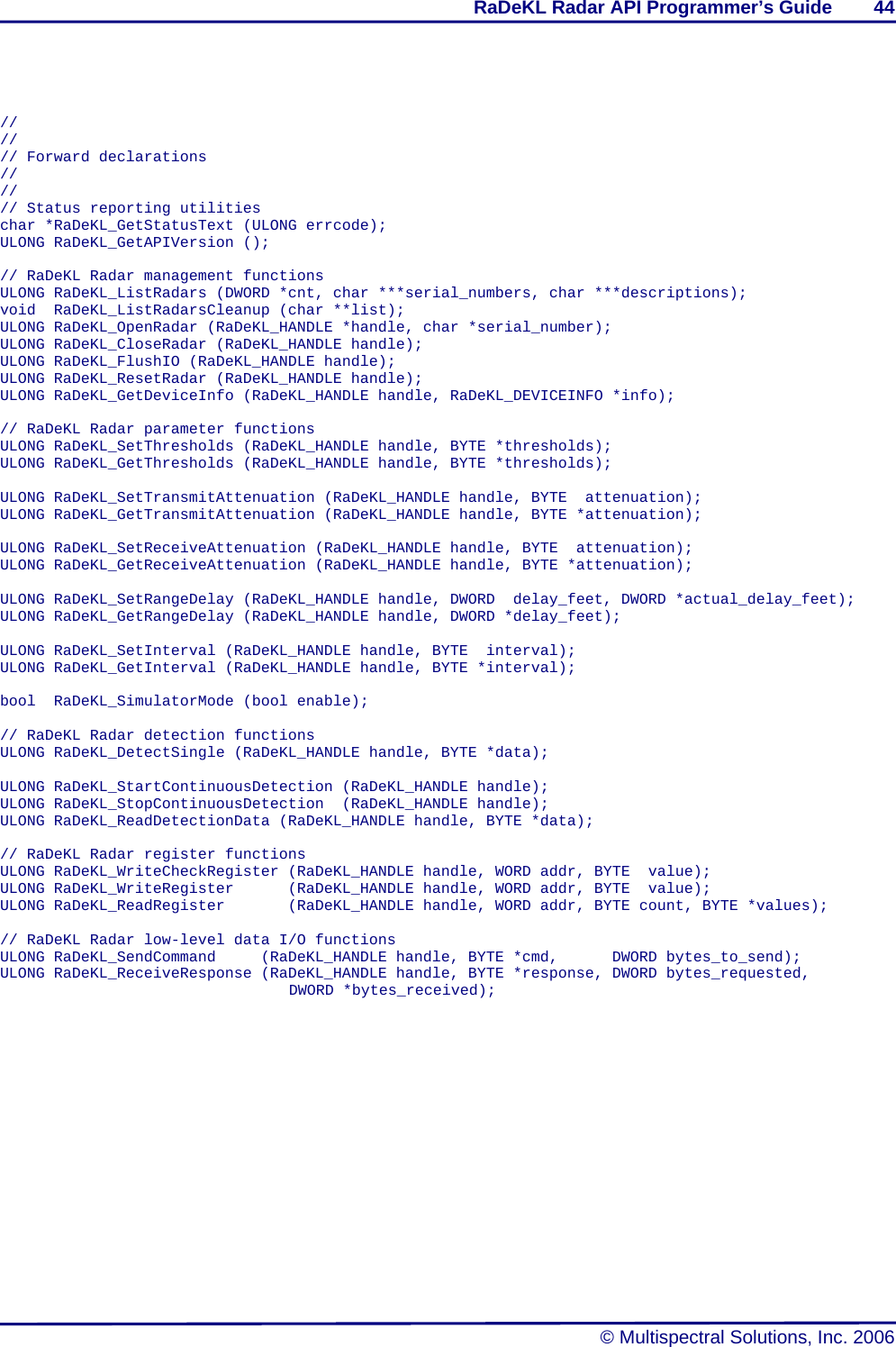
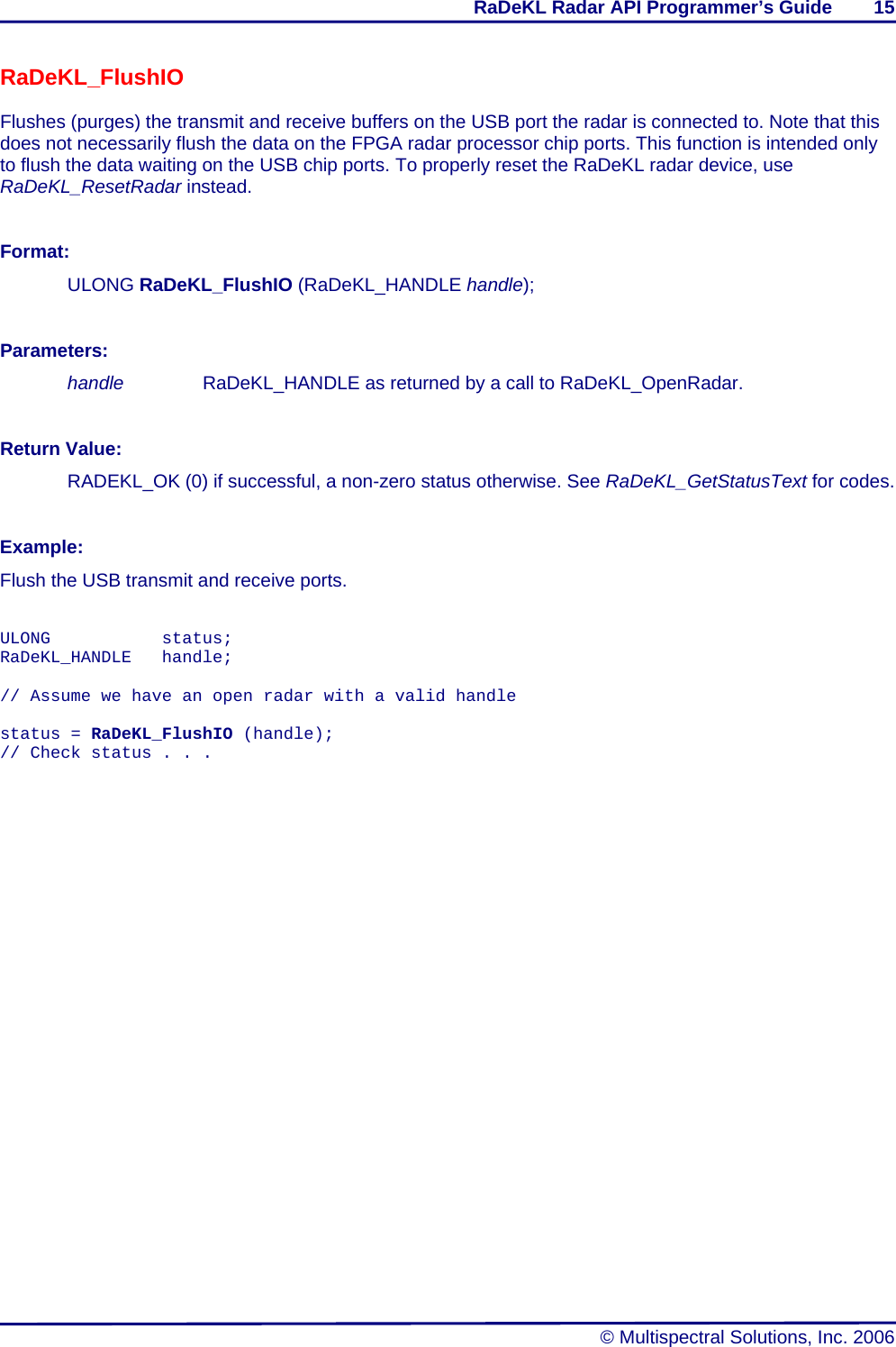
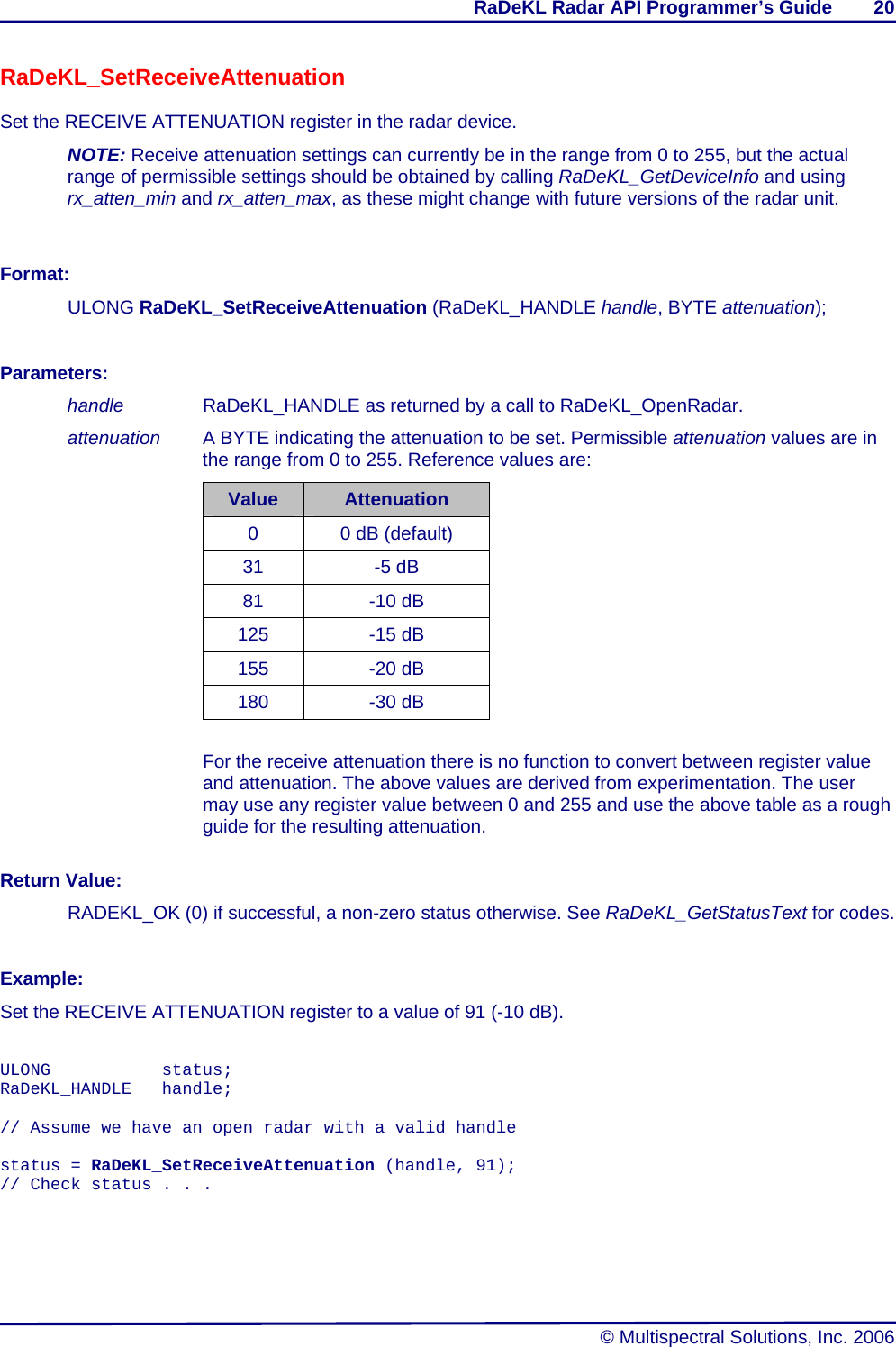
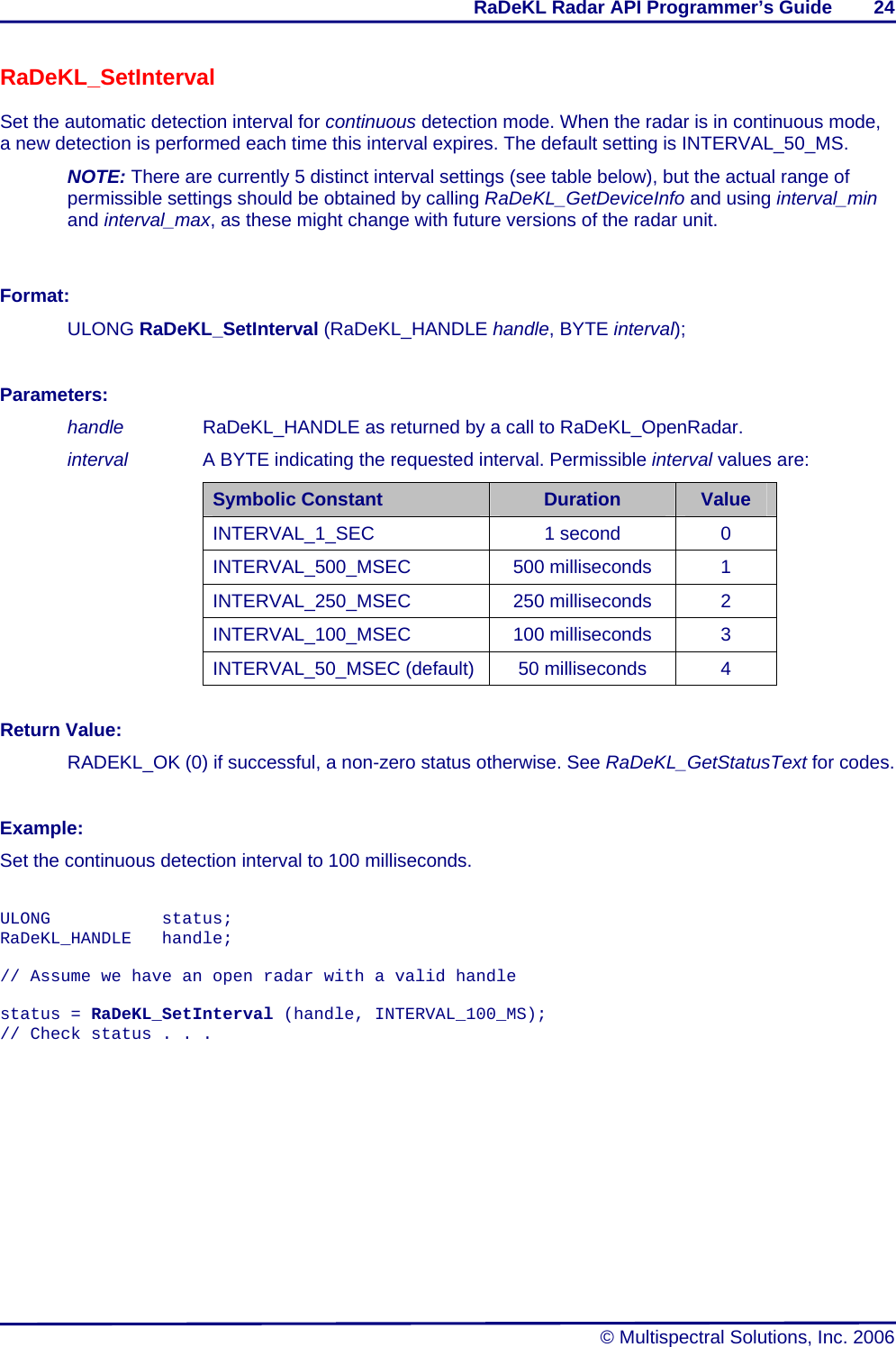
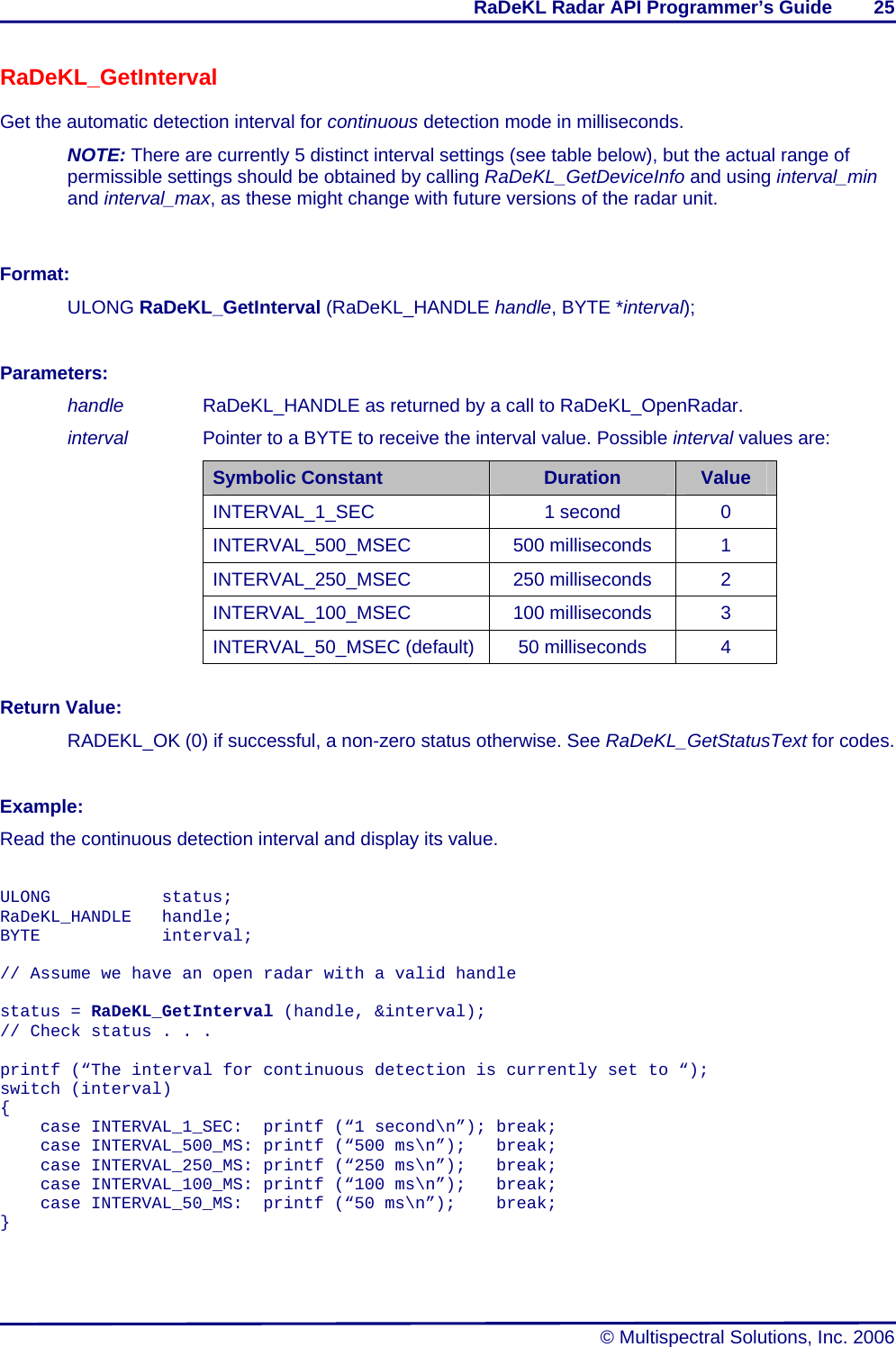
![RaDeKL Radar API Programmer’s Guide 9 © Multispectral Solutions, Inc. 2006 Example 1: List all available radar units and display the information obtained. ULONG status, i; DWORD numdevs; static char **snum = NULL, **desc = NULL; // or make these global status = RaDeKL_ListRadars (&numdevs, &snum, &desc); if (status != RaDeKL_OK) { printf (“Unable to list devices: %s\n”, RaDeKL_GetStatusText (status)); return; } printf (“Number of devices detected: %d\n”, numdevs); for (i = 0; i < numdevs; i++) printf (“Device %d, Serial: %s, Description: %s\n”, i, snum[i], desc[i]); Example 2: Alternately, if we don’t care about the number of devices or their descriptions, the following code segment will return only the (null-terminated) list of serial numbers: ULONG status; static char **snum = NULL; // or make this global char **s; status = RaDeKL_ListRadars (NULL, &snum, NULL); if (status != RaDeKL_OK) { printf (“Unable to list devices: %s\n”, RaDeKL_GetStatusText (status)); return; } for (s = snum; *s; s++) printf (“Serial Number: %s\n”, *s);](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-13.png)
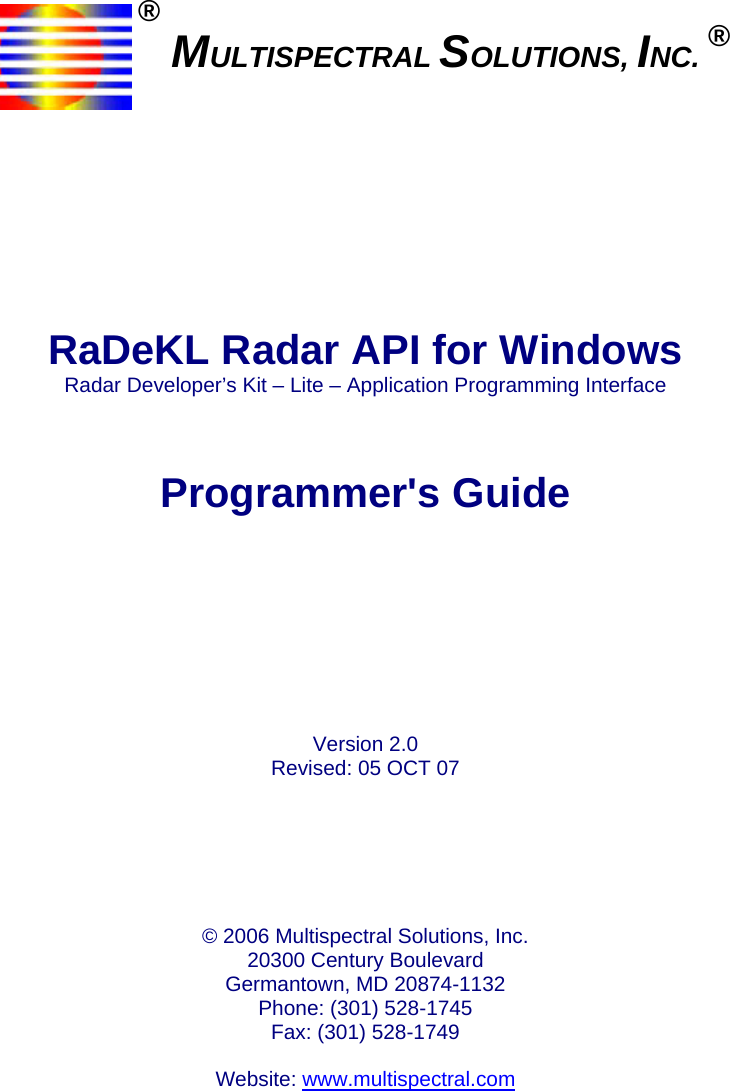
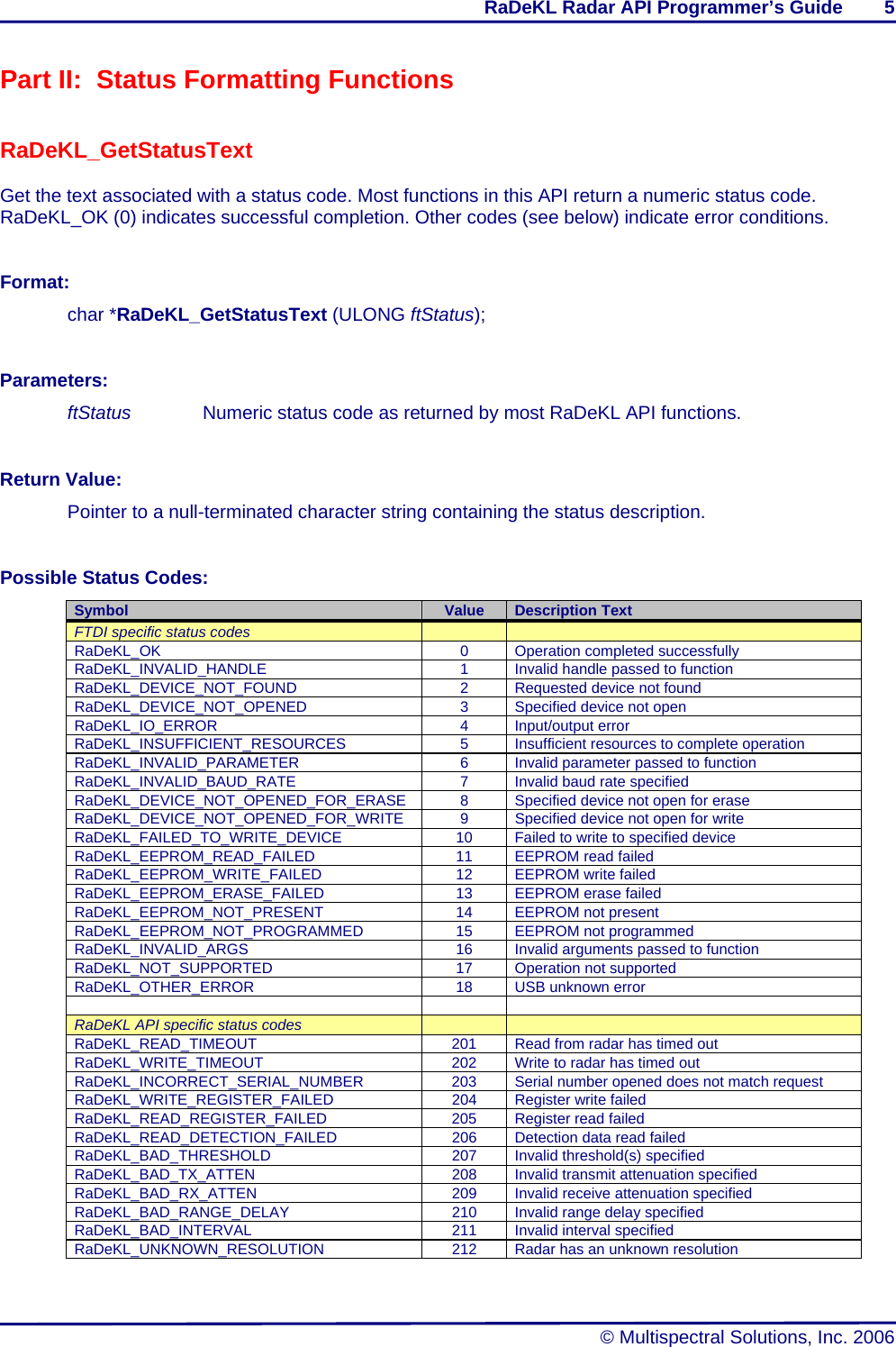
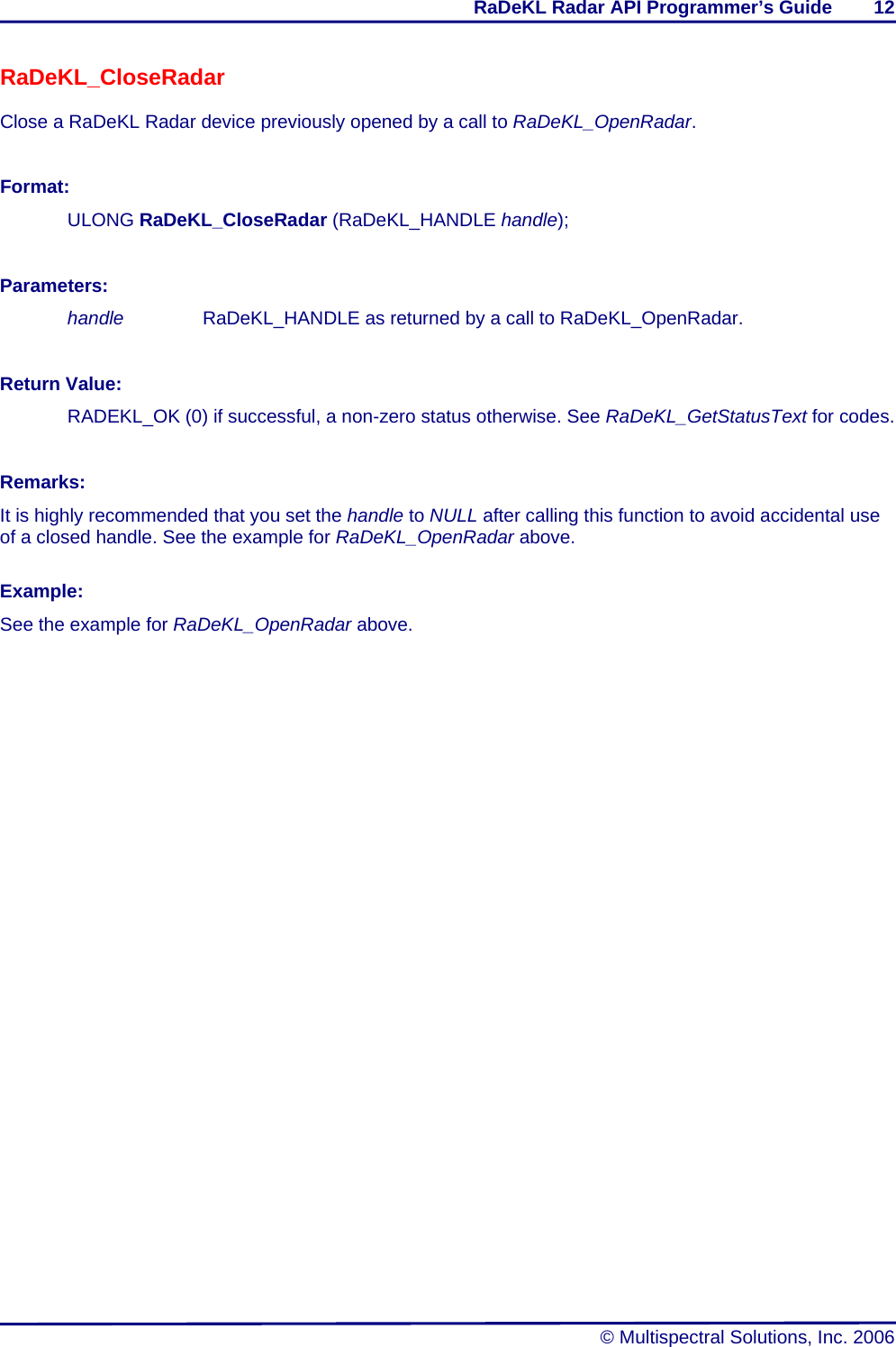
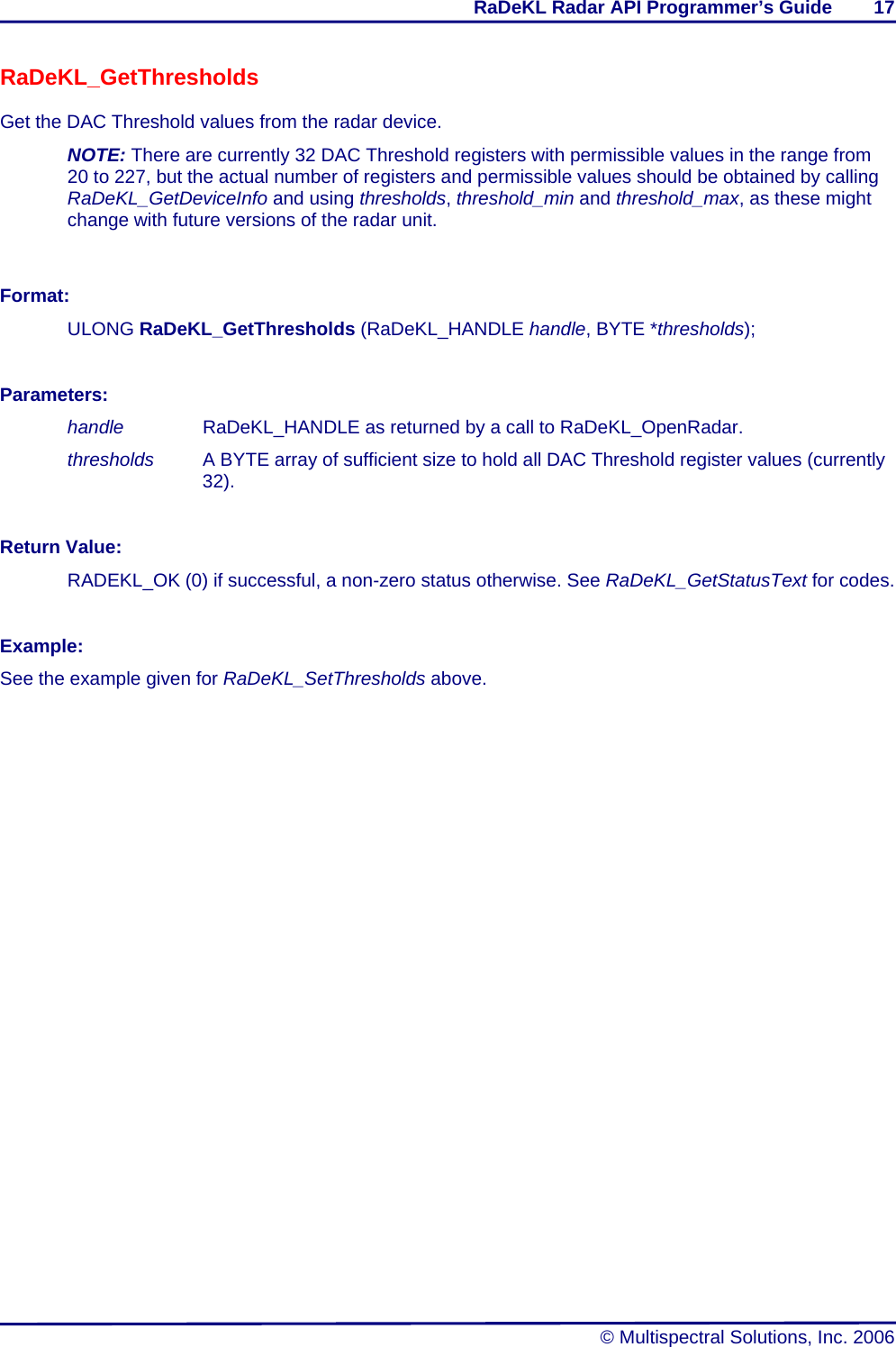
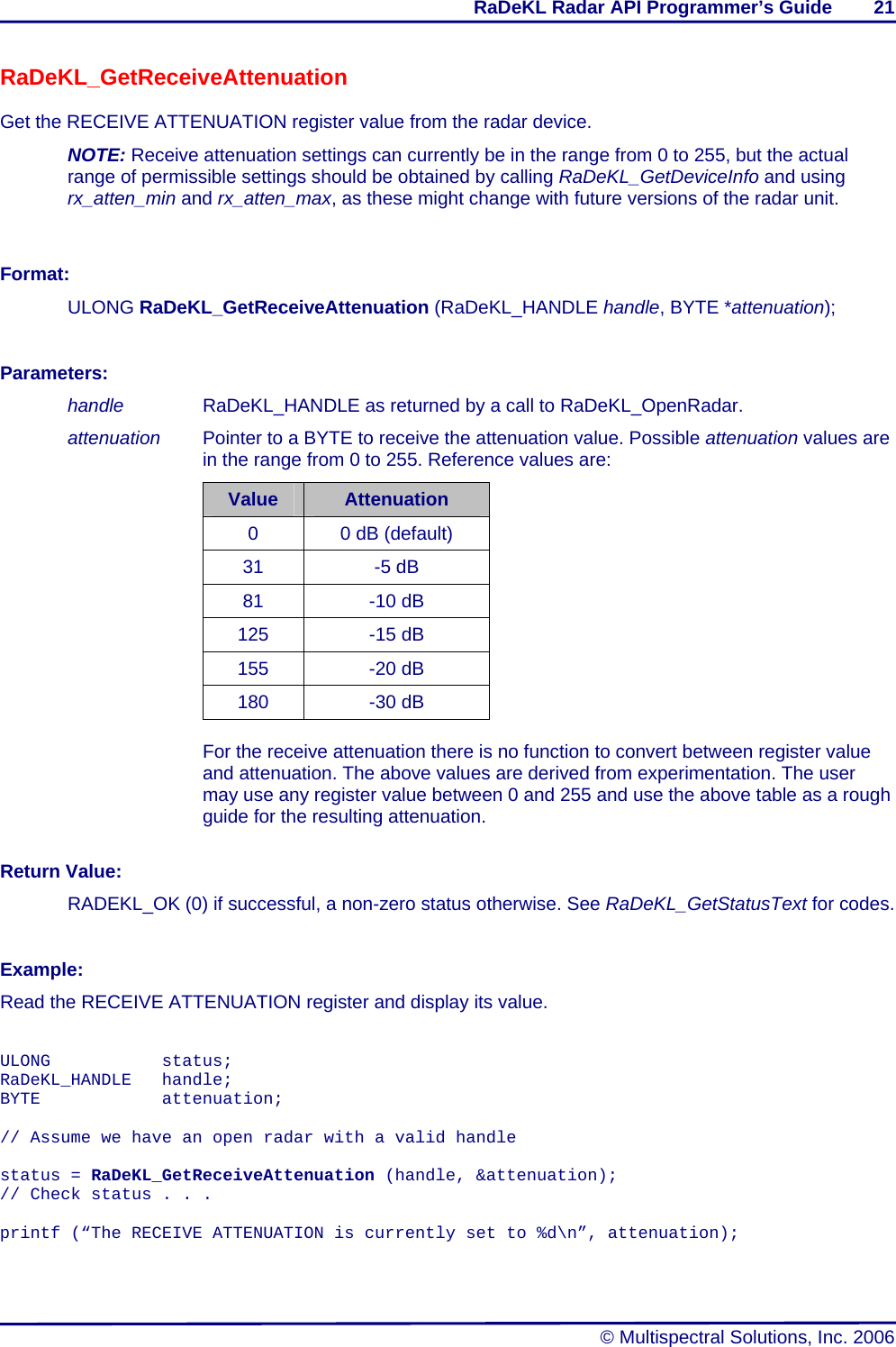
![RaDeKL Radar API Programmer’s Guide 10 © Multispectral Solutions, Inc. 2006 RaDeKL_ListRadarsCleanup De-allocates the memory that was allocated in a previous call to RaDeKL_ListRadars. Normally, this is not required as each successive call to RaDeKL_ListRadars de-allocates these lists and Windows will do the final de-allocation when the program terminates. However, if the design calls for an explicit de-allocation, this function can be used. Format: void RaDeKL_ListRadarsCleanup (char **list); Parameters: list Pointer to a (null-terminated) list of character strings to de-allocate. Return Value: No return value. This function cannot fail. Example: List all available radar units and display the information obtained. ULONG status, i; DWORD numdevs; static char **snum = NULL, **desc = NULL; // or make these global status = RaDeKL_ListRadars (&numdevs, &snum, &desc); if (status != RaDeKL_OK) { printf (“Unable to list devices: %s\n”, RaDeKL_GetStatusText (status)); return; } printf (“Number of devices detected: %d\n”, numdevs); for (i = 0; i < numdevs; i++) printf (“Device %d, Serial: %s, Description: %s\n”, i, snum[i], desc[i]); // De-allocate the lists RaDeKL_ListRadarsCleanup (snum); snum = NULL; RaDeKL_ListRadarsCleanup (desc); snum = NULL;](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-14.png)
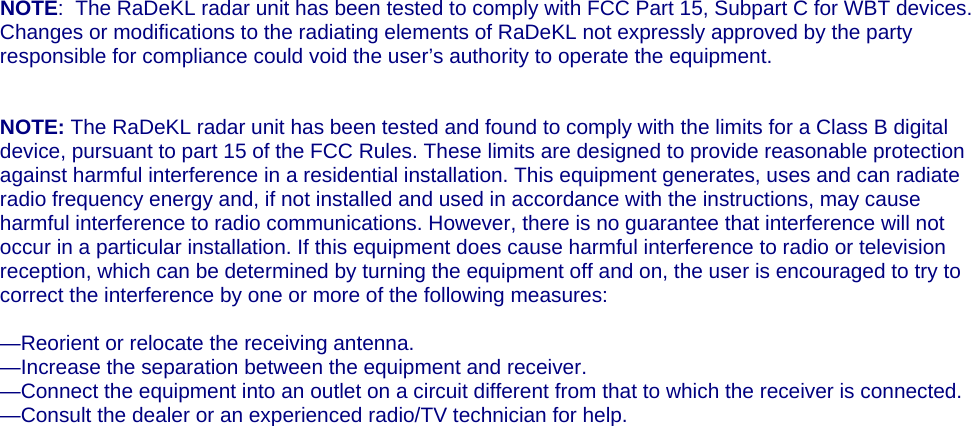
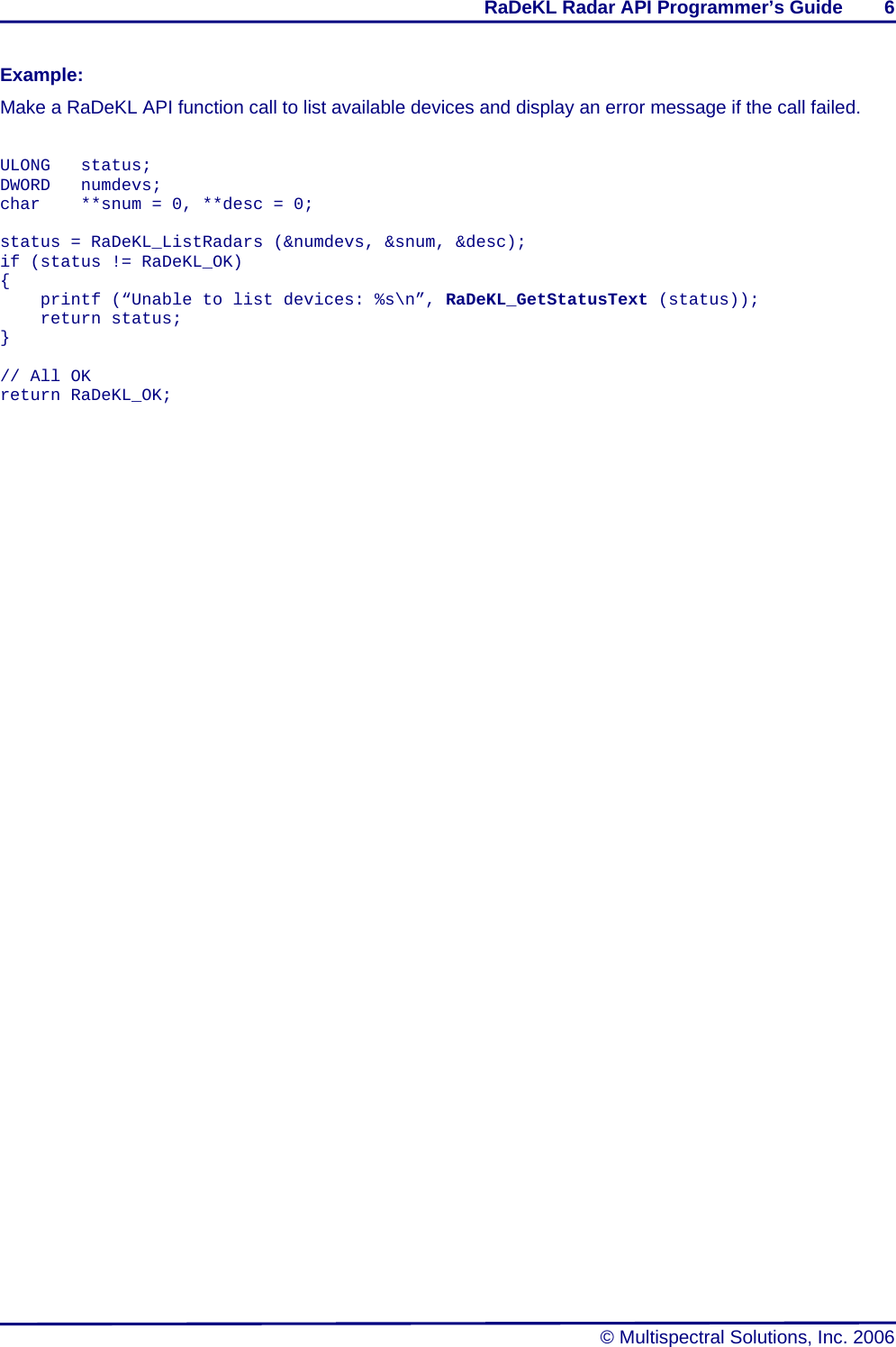
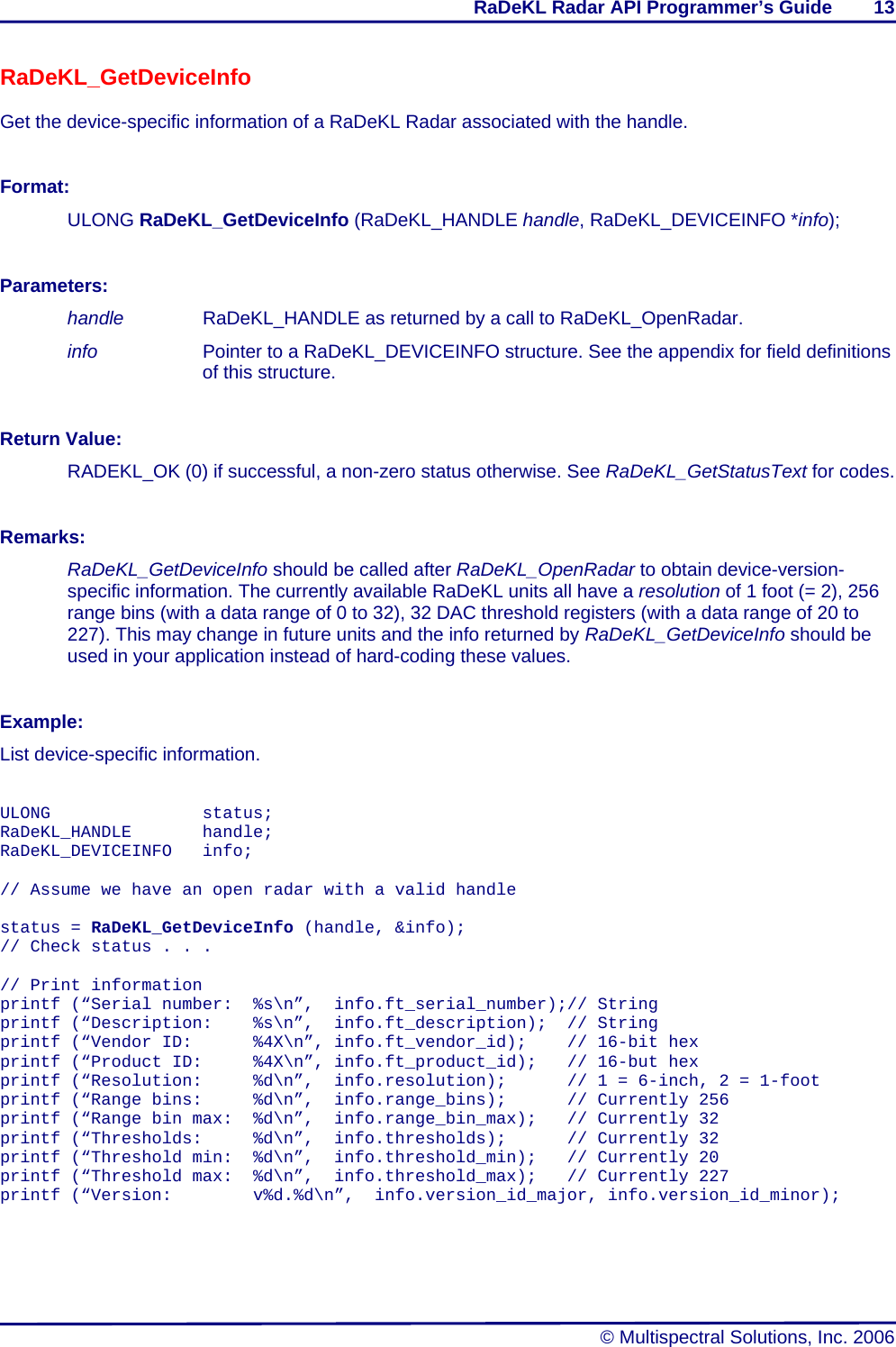
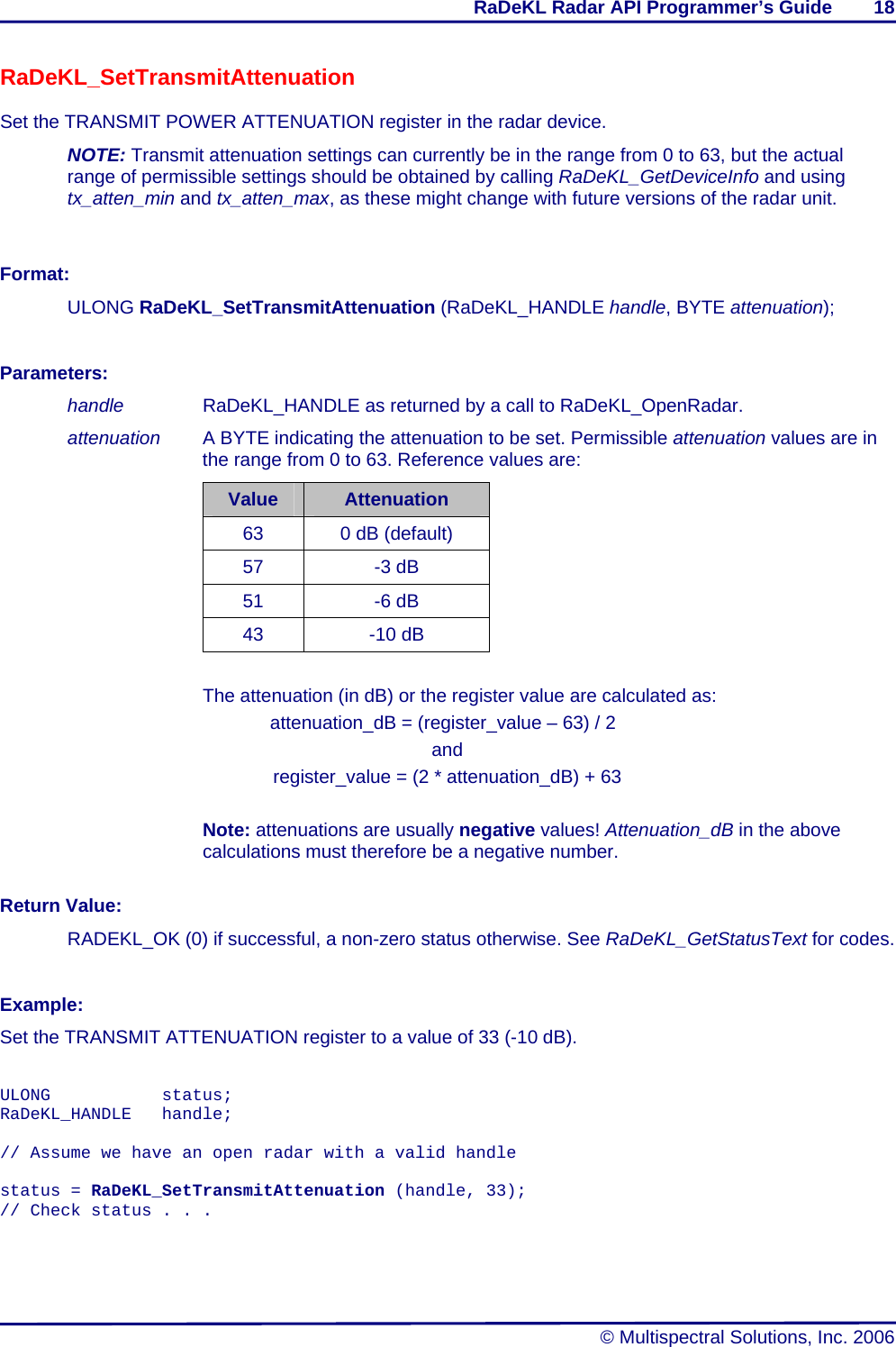
![RaDeKL Radar API Programmer’s Guide 11 © Multispectral Solutions, Inc. 2006 RaDeKL_OpenRadar Open a RaDeKL Radar device as identified by its serial number. Serial numbers are unique for each specific unit. A list of all available RaDeKL Radar devices and their serial numbers is obtained by calling RaDeKL_ListRadars. Format: ULONG RaDeKL_OpenRadar (RaDeKL_HANDLE *handle_ptr, char *serial_number); Parameters: handle_ptr Pointer to a RaDeKL_HANDLE to receive the handle for the opened device. All further operations on that device will use this handle. serial_number Pointer to a (null-terminated) character string containing the serial number of the device to open. A list of all available RaDeKL Radar devices and their serial numbers is obtained by calling RaDeKL_ListRadars. Return Value: RaDeKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example: Open (and close) the first radar unit found. ULONG status; DWORD numdevs; static char **snum = NULL, **desc = NULL; // or make these global static RaDeKL_HANDLE handle = NULL; // or make this global status = RaDeKL_ListRadars (&numdevs, &snum, &desc); if (status != RaDeKL_OK) { printf (“Unable to list devices: %s\n”, RaDeKL_GetStatusText (status)); return; } if (numdevs == 0) { printf (“No devices available\n”); return; } status = RaDeKL_OpenRadar (&handle, snum[0]); if (status != RADEKL_OK) { printf (“Open failed: %s\n”, RaDeKL_GetStatusText (status)); return; } // Do some work and then close the radar and set the handle to NULL RaDeKL_CloseRadar (handle); handle = NULL;](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-15.png)
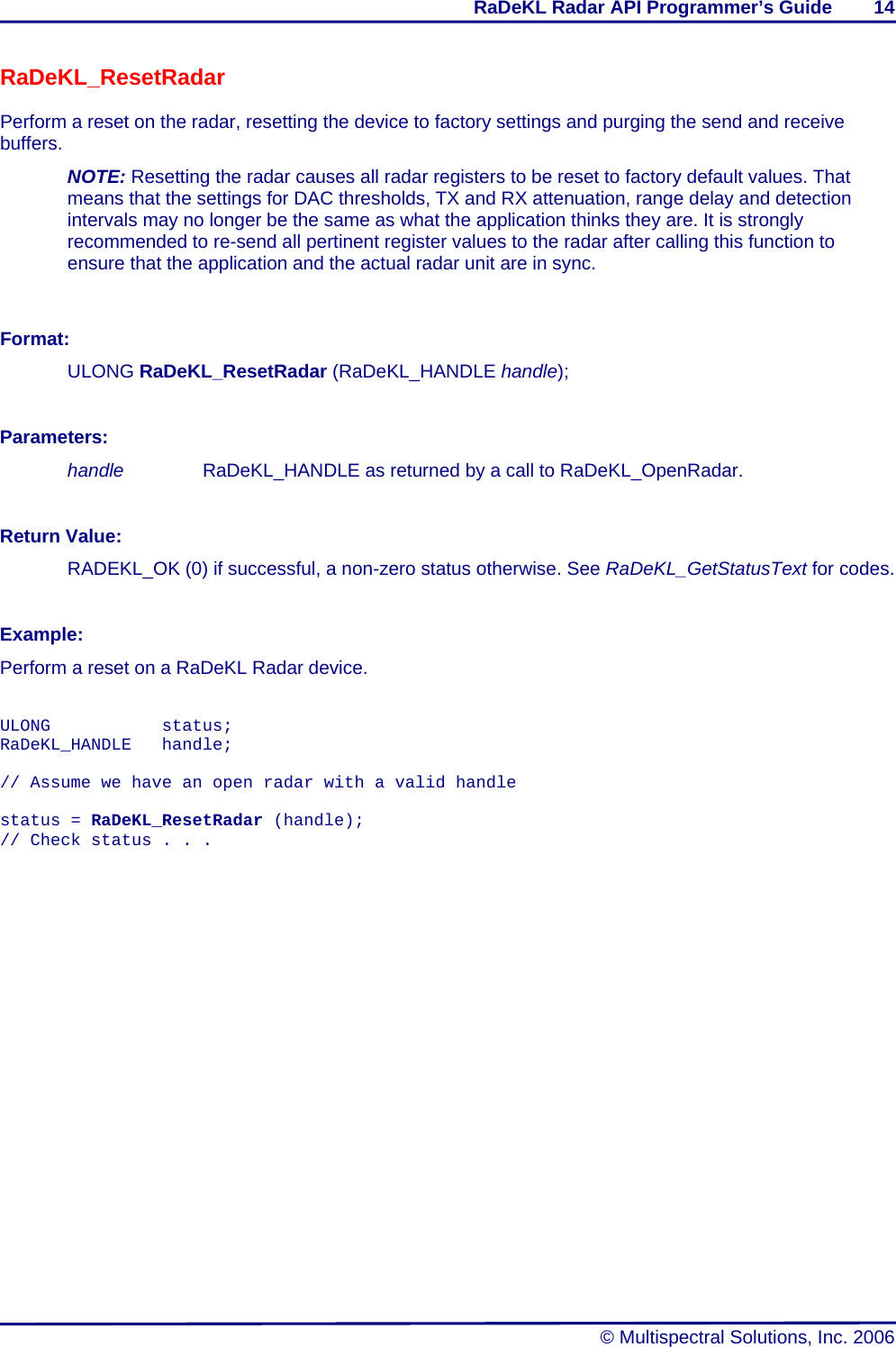
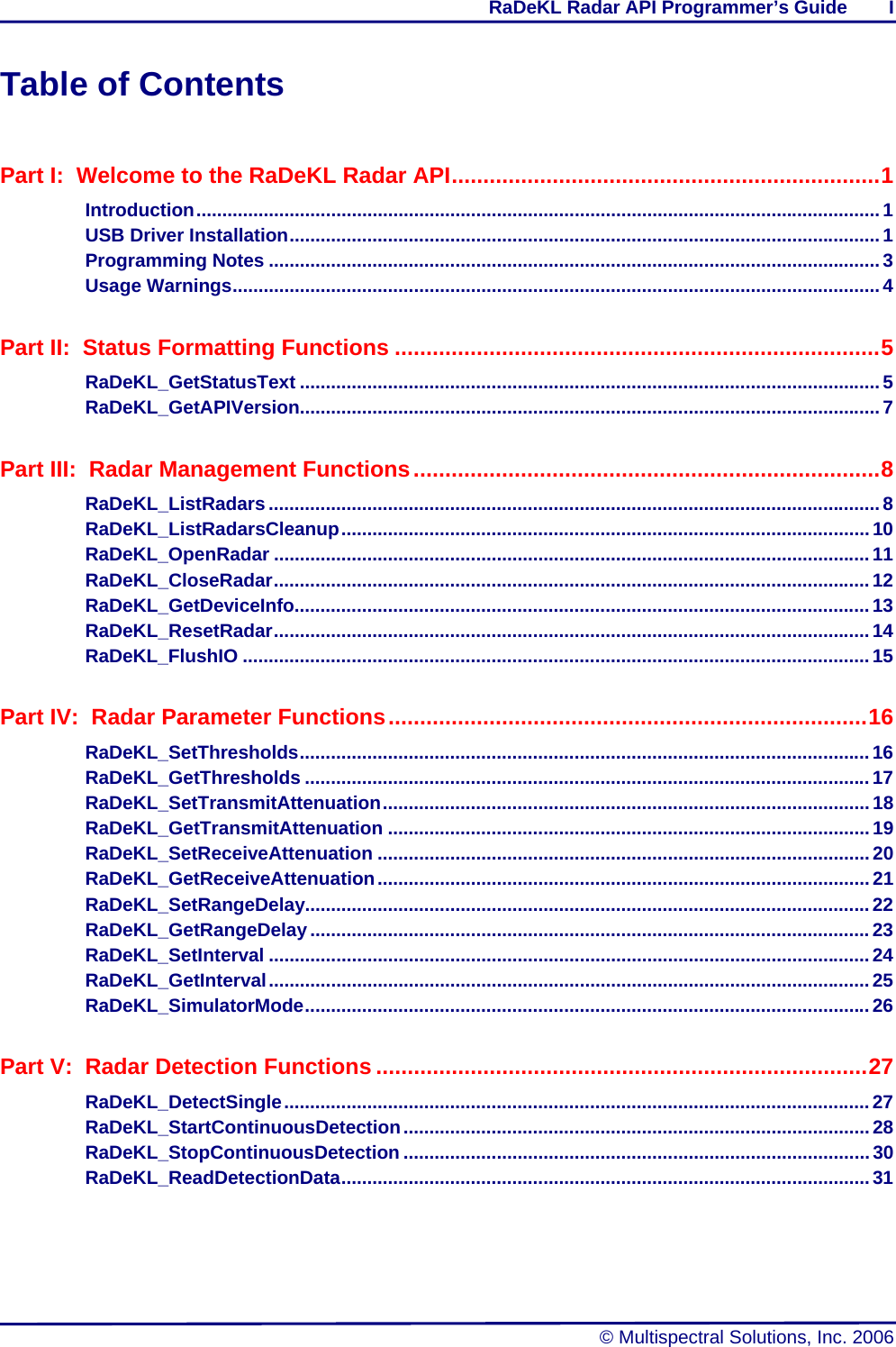
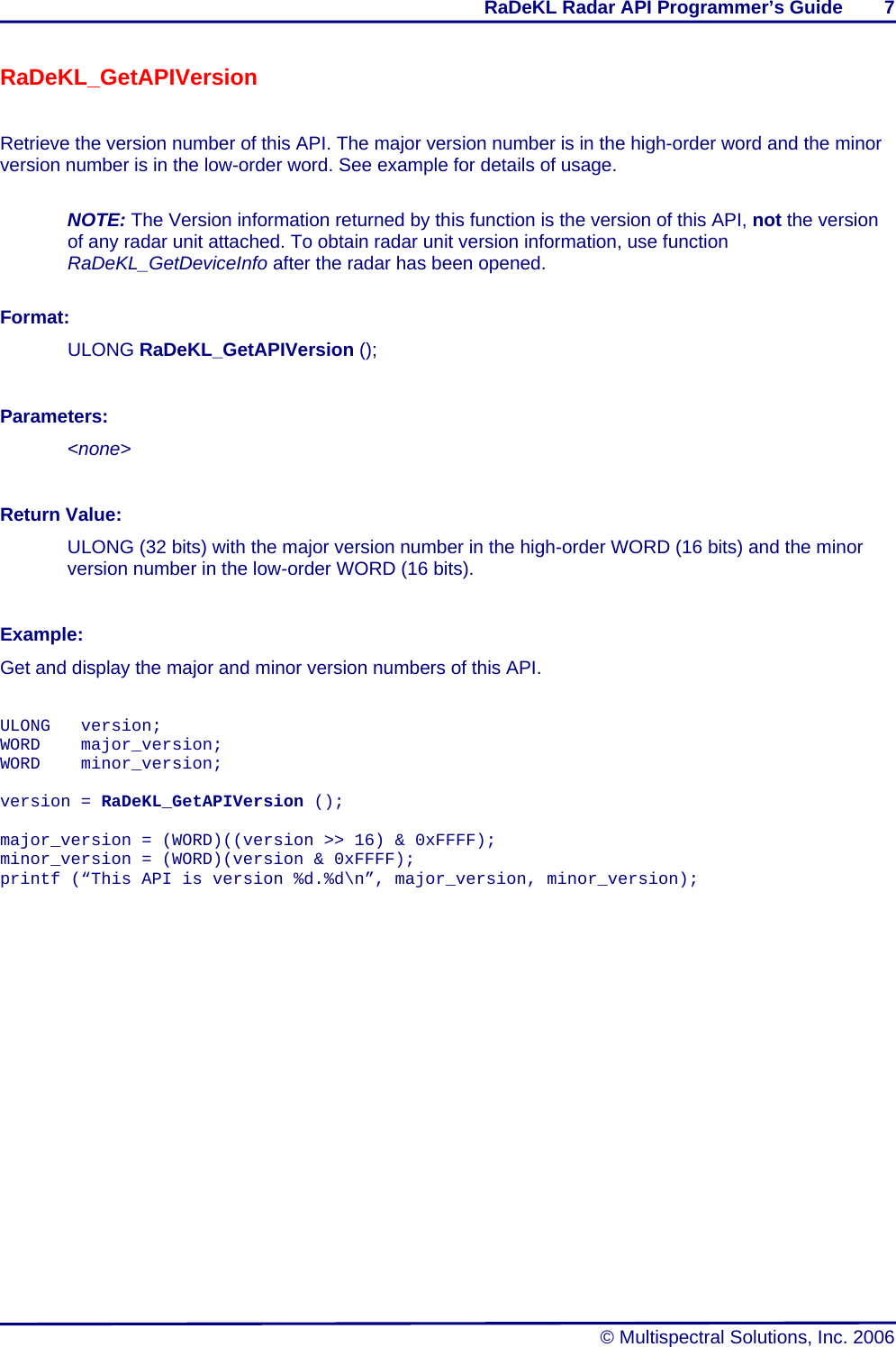
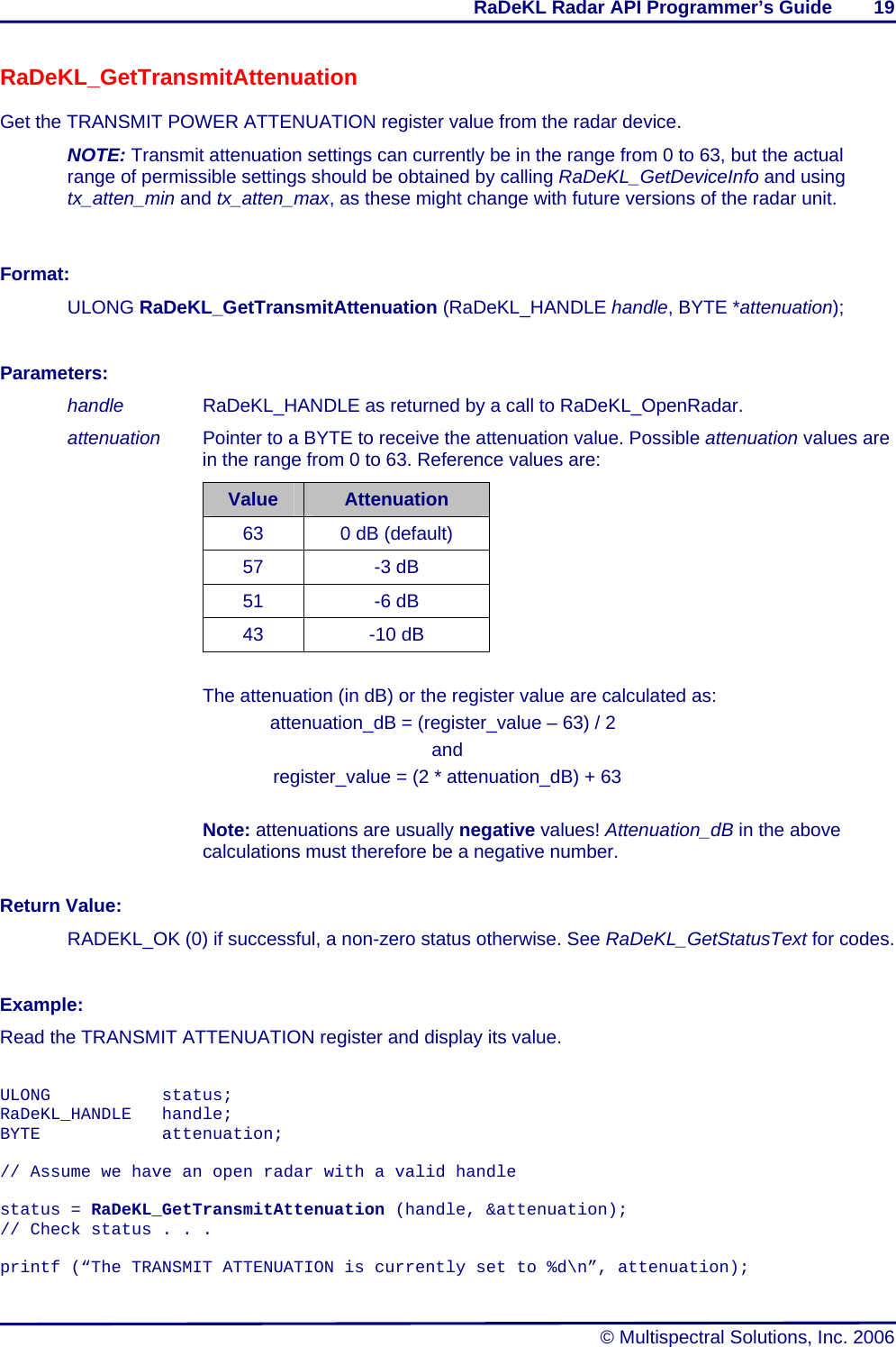
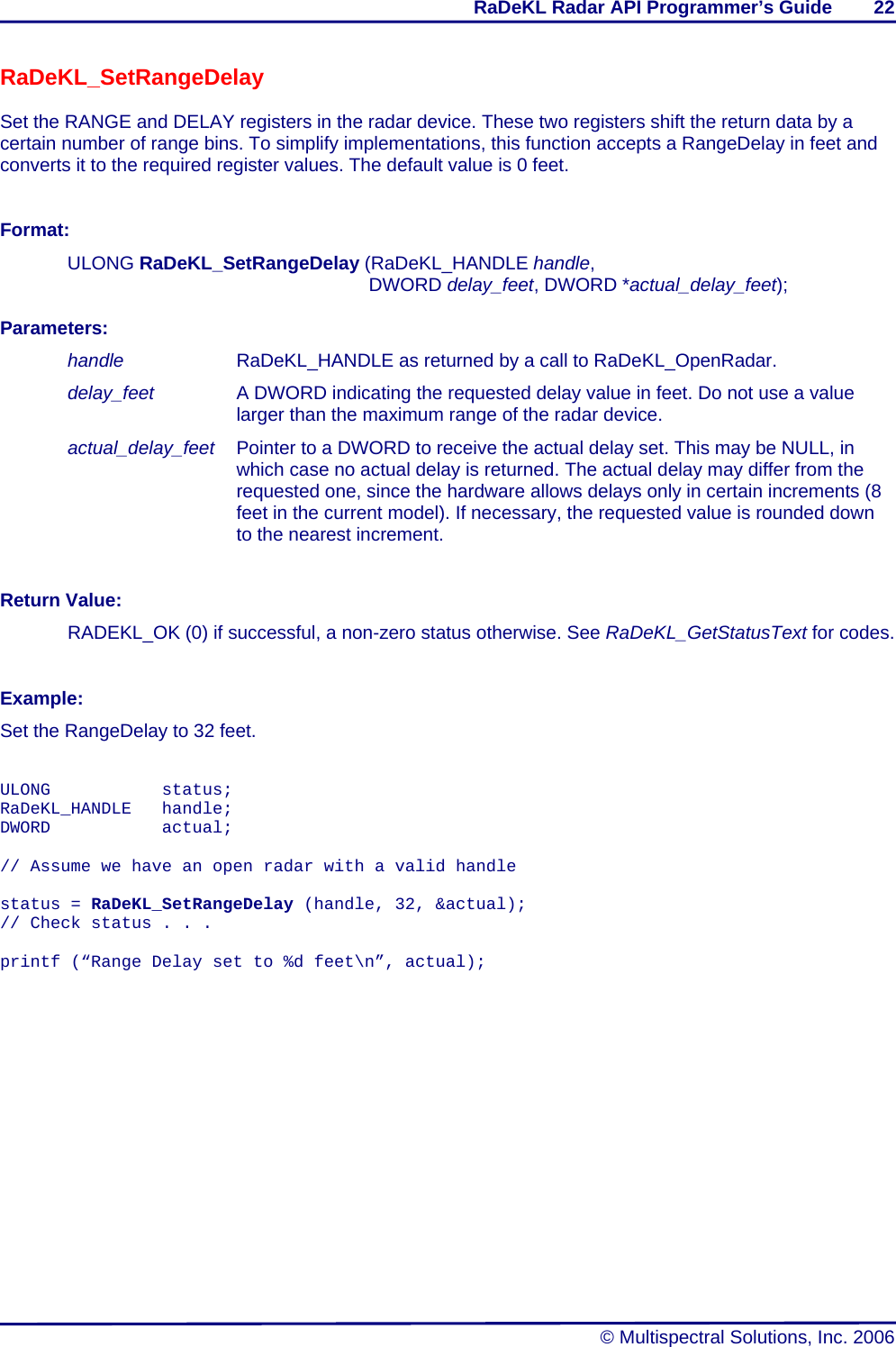
![RaDeKL Radar API Programmer’s Guide 16 © Multispectral Solutions, Inc. 2006 Part IV: Radar Parameter Functions RaDeKL_SetThresholds Set the DAC Threshold values in the radar device. NOTE: There are currently 32 DAC Threshold registers with permissible values in the range from 20 to 227, but the actual number of registers and permissible values should be obtained by calling RaDeKL_GetDeviceInfo and using thresholds, threshold_min and threshold_max, as these might change with future versions of the radar unit. The default values for the 32 DAC Threshold registers start at 20 (DAC 1) and are evenly spread up to 227 (DAC 32). Format: ULONG RaDeKL_SetThresholds (RaDeKL_HANDLE handle, BYTE *thresholds); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. thresholds A BYTE array of sufficient size to hold all DAC Threshold register values (currently 32). Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example: Add 10 to all DAC Threshold values (assuring that the max is not exceeded). ULONG status; RaDeKL_HANDLE handle; RaDeKL_DEVICEINFO info; BYTE thresholds[256]; // Declare a reasonably large number // Assume we have an open radar with a valid handle status = RaDeKL_GetDeviceInfo (handle, &info); // Check status . . . // Get the current DAC Threshold values status = RaDeKL_GetThresholds (handle, thresholds); // Check status . . . // Add 10 to ALL registers (limited by threshold_max) and print the values for (i = 0; i < info.thresholds; i++) { thresholds[i] = min (thresholds[i]+10, info.threshold_max); printf (“DAC Threshold register %2d changed to %d\n”, i, thresholds[i]); } // Set the modified DAC Threshold values status = RaDeKL_SetThresholds (handle, thresholds); // Check status . . .](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-20.png)
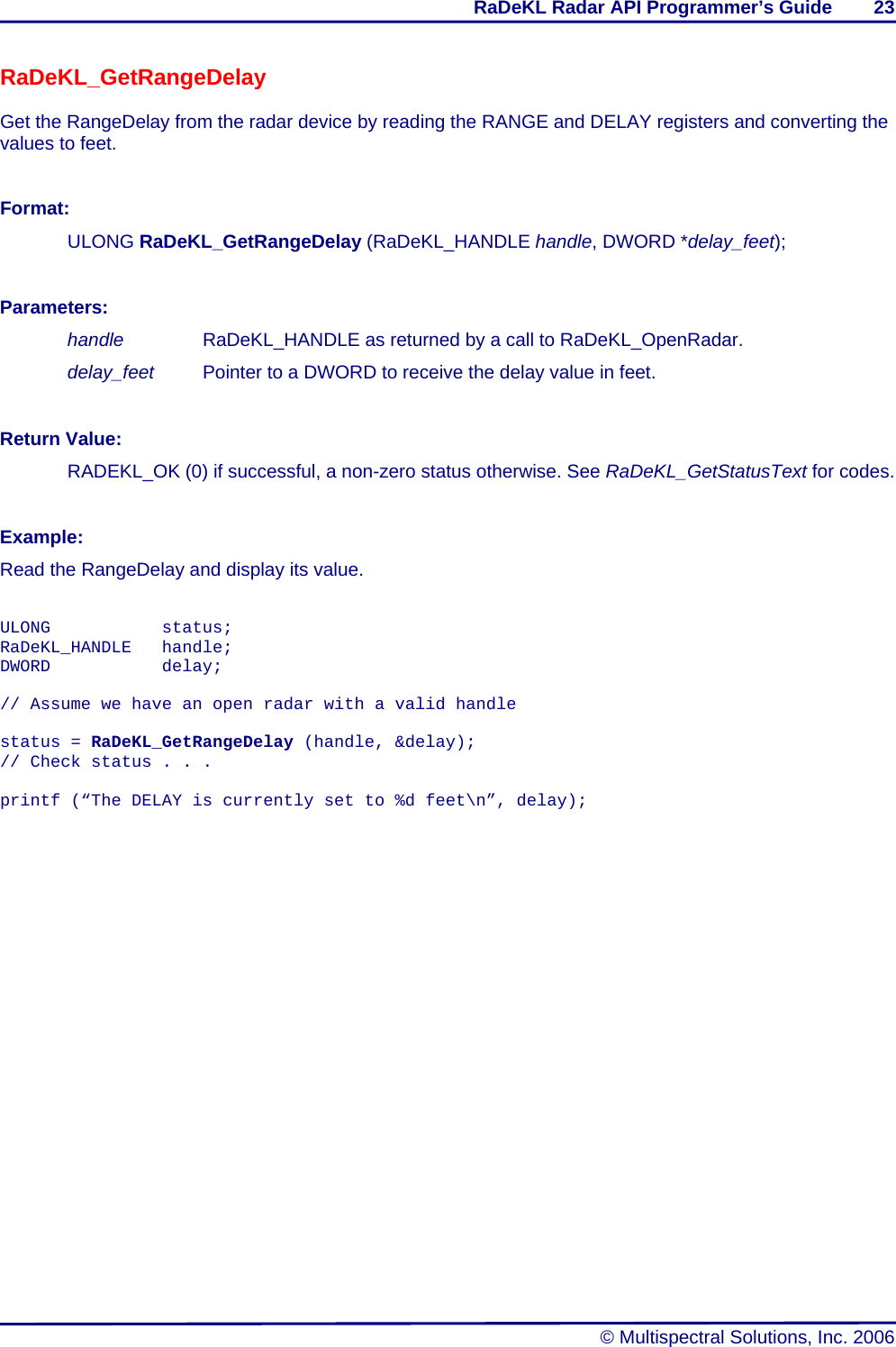
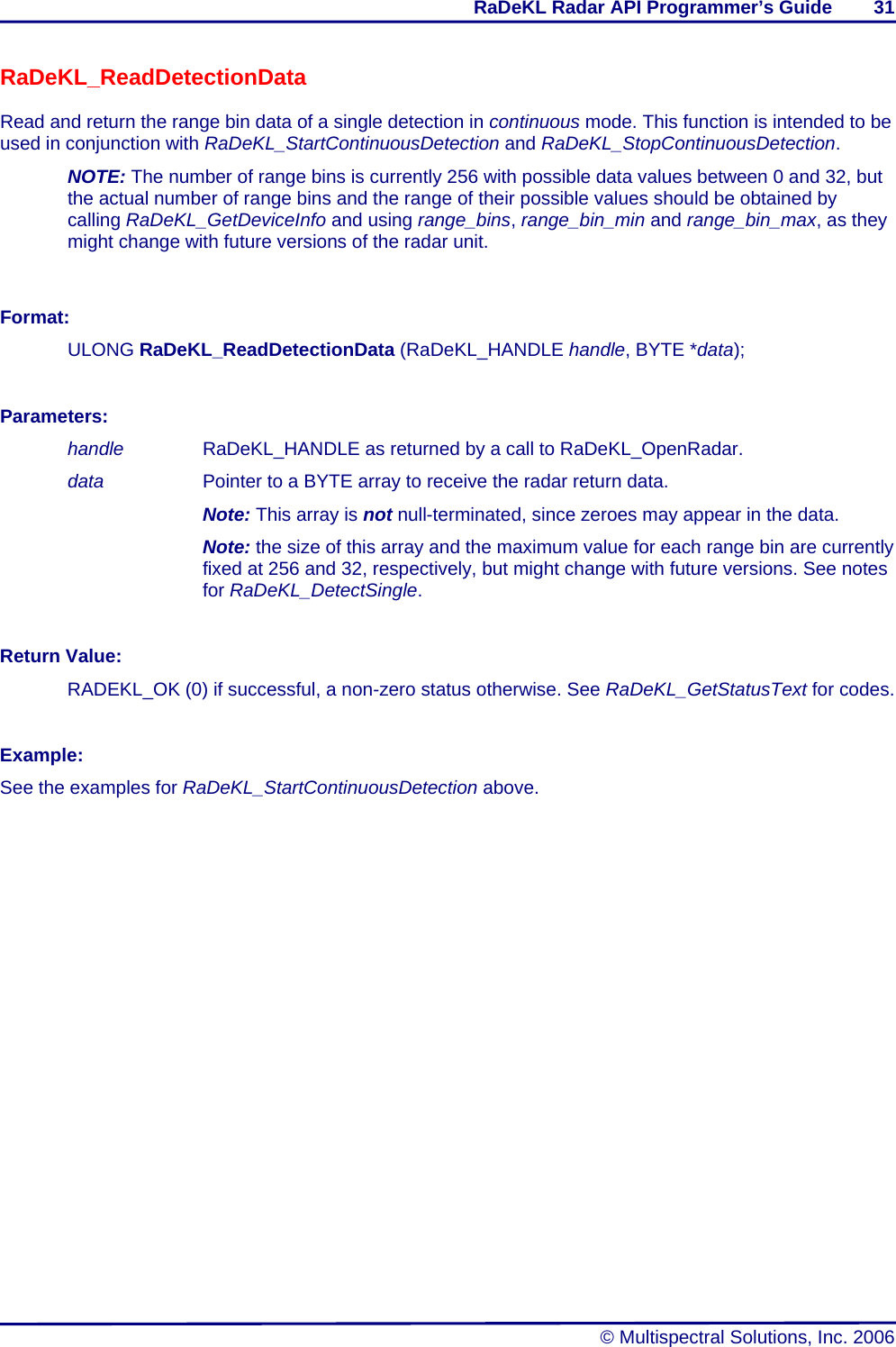
![RaDeKL Radar API Programmer’s Guide 27 © Multispectral Solutions, Inc. 2006 Part V: Radar Detection Functions RaDeKL_DetectSingle Perform a single radar detection and return the range bin data. NOTE: The number of range bins is currently 256 with possible data values between 0 and 32, but the actual number of range bins and the range of their possible values should be obtained by calling RaDeKL_GetDeviceInfo and using range_bins, range_bin_min and range_bin_max, as they might change with future versions of the radar unit. Format: ULONG RaDeKL_DetectSingle (RaDeKL_HANDLE handle, BYTE *data); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. data Pointer to a BYTE array to receive the radar return data. Note: This array is not null-terminated, since zeroes may appear in the data. Note: the size of this array and the maximum value for each range bin are currently fixed at 256 and 32, respectively, but might change with future versions. See notes above. Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example: Initiate a single detection and print the range bin data. ULONG status, i; RaDeKL_HANDLE handle; RaDeKL_DEVICEINFO info; BYTE data[2048]; // Make this sufficiently large // Assume we have an open radar with a valid handle status = RaDeKL_GetDeviceInfo (handle, &info); // Check status . . . status = RaDeKL_DetectSingle (handle, data); // Check status . . . for (i = 0; i < info.range_bins; i++) printf (“Range bin [%3d] contains: %d\n”, i, data[i]);](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-31.png)
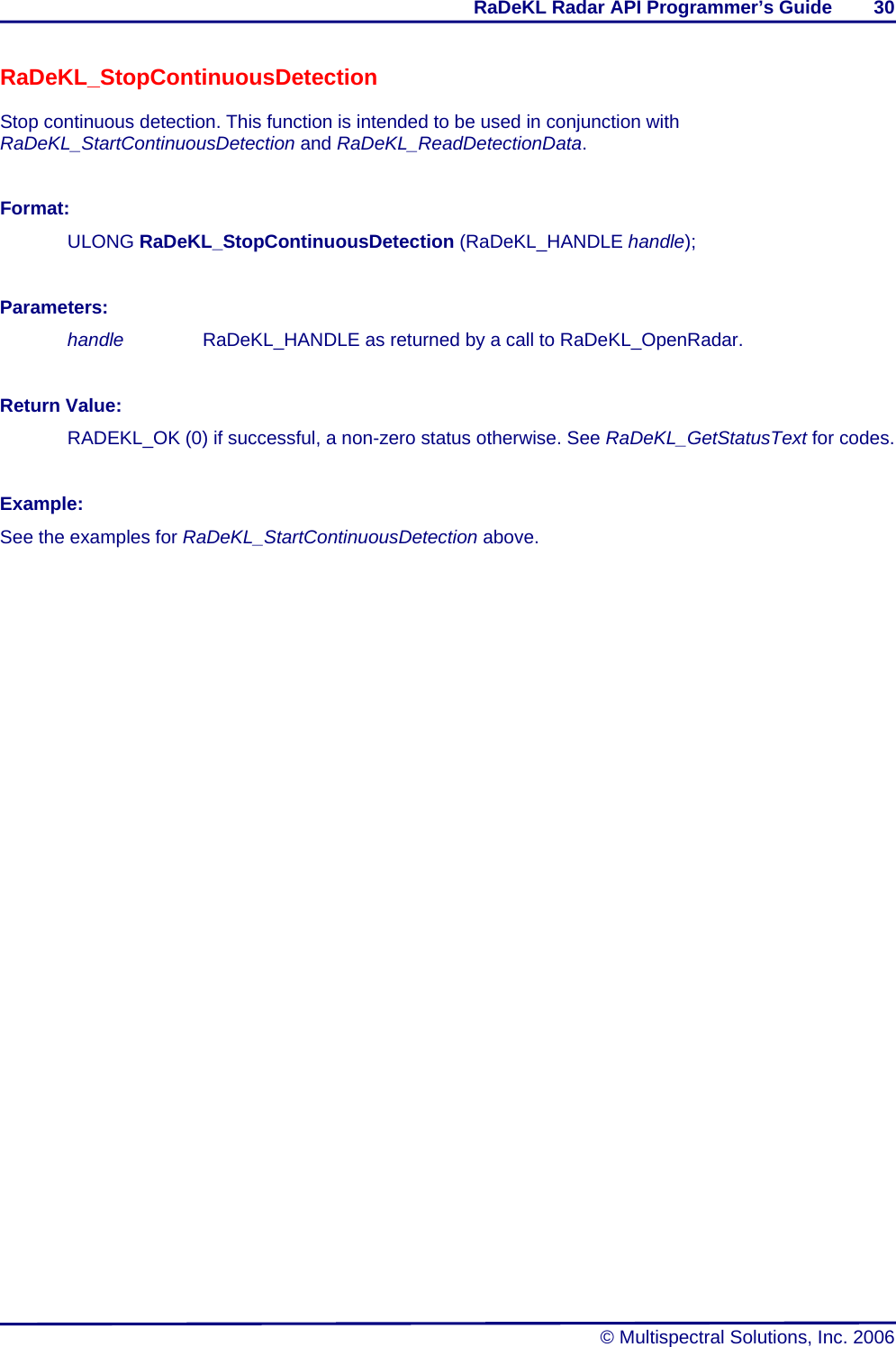
![RaDeKL Radar API Programmer’s Guide 28 © Multispectral Solutions, Inc. 2006 RaDeKL_StartContinuousDetection Start continuous detection, with a new detection occurring each interval set with RaDeKL_SetInterval. This function is intended to be used in conjunction with RaDeKL_ReadDetectionData and RaDeKL_StopContinuousDetection. Note: Unless there is an initially known fixed number of detections to be performed, continuous detection may require a separate thread to execute RaDeKL_ReadDetectionData, or otherwise it may be impossible to issue RaDeKL_StopContinuousDetection since RaDeKL_ReadDetectionData will be in a tight loop waiting for the next detection data to arrive. See examples below for clarification. Note: While in continuous detection mode, do not issue any other register read/write functions (except RaDeKL_StopContinuousDetection) as their processing will interfere with the continuous data stream returned by the RaDeKL Radar device. See Usage Warnings towards the top of this document for clarification. Format: ULONG RaDeKL_StartContinuousDetection (RaDeKL_HANDLE handle); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example 1: Process 100 continuous radar detections. ULONG status, count; RaDeKL_HANDLE handle; BYTE data[2048]; // Make this sufficiently large // Assume we have an open radar with a valid handle status = RaDeKL_StartContinuousDetection (handle); // Check status . . . count = 100; while (count--) { status = RaDeKL_ReadDetectionData (handle, data); // Check status . . . // Do something with the data . . . // } status = RaDeKL_StopContinuousDetection (handle); // Check status . . . // Flush the buffers status = RaDeKL_FlushIO (handle); // Check status . . .](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-32.png)
![RaDeKL Radar API Programmer’s Guide 29 © Multispectral Solutions, Inc. 2006 Example 2: Process continuous radar detections until user stops. This requires 2 threads, one to handle the GUI and the other to read and process the radar range bin data. // Global data RaDeKL_HANDLE handle; HANDLE g_hthread; BOOL running = false; >>> Thread 1 (GUI): // Assume we have an open radar with a valid handle AND a secondary thread // User signals to START continuous detection status = RaDeKL_StartContinuousDetection (handle); // Check status . . . // Wake up secondary thread running = true; ResumeThread (g_hthread); // Return to the GUI message loop . . . // User signals to STOP continuous detection running = false; status = RaDeKL_StopContinuousDetection (handle); // Check status . . . // Flush the buffers status = RaDeKL_FlushIO (handle); // Check status . . . >>> Thread 2 (read and process loop): ULONG status; BYTE data[2048]; // Make this sufficiently large // Assume we have an open radar with a valid handle while (true) // Loop this thread forever until the program terminates { while (running) // Loop until the GUI sets running to false { status = RaDeKL_ReadDetectionData (handle, data); // Check status. Ignore a timeout if running is false if ((status == RADEKL_OK) || ((!running) && (status == RADEKL_READ_TIMEOUT))) { // Do something with the data . . . } else { printf (“Bad read: %s\n”, RaDeKL_GetStatusText (status)); running = false; break; } } // No longer running - go to sleep SuspendThread (GetCurrentThread ()); }](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-33.png)
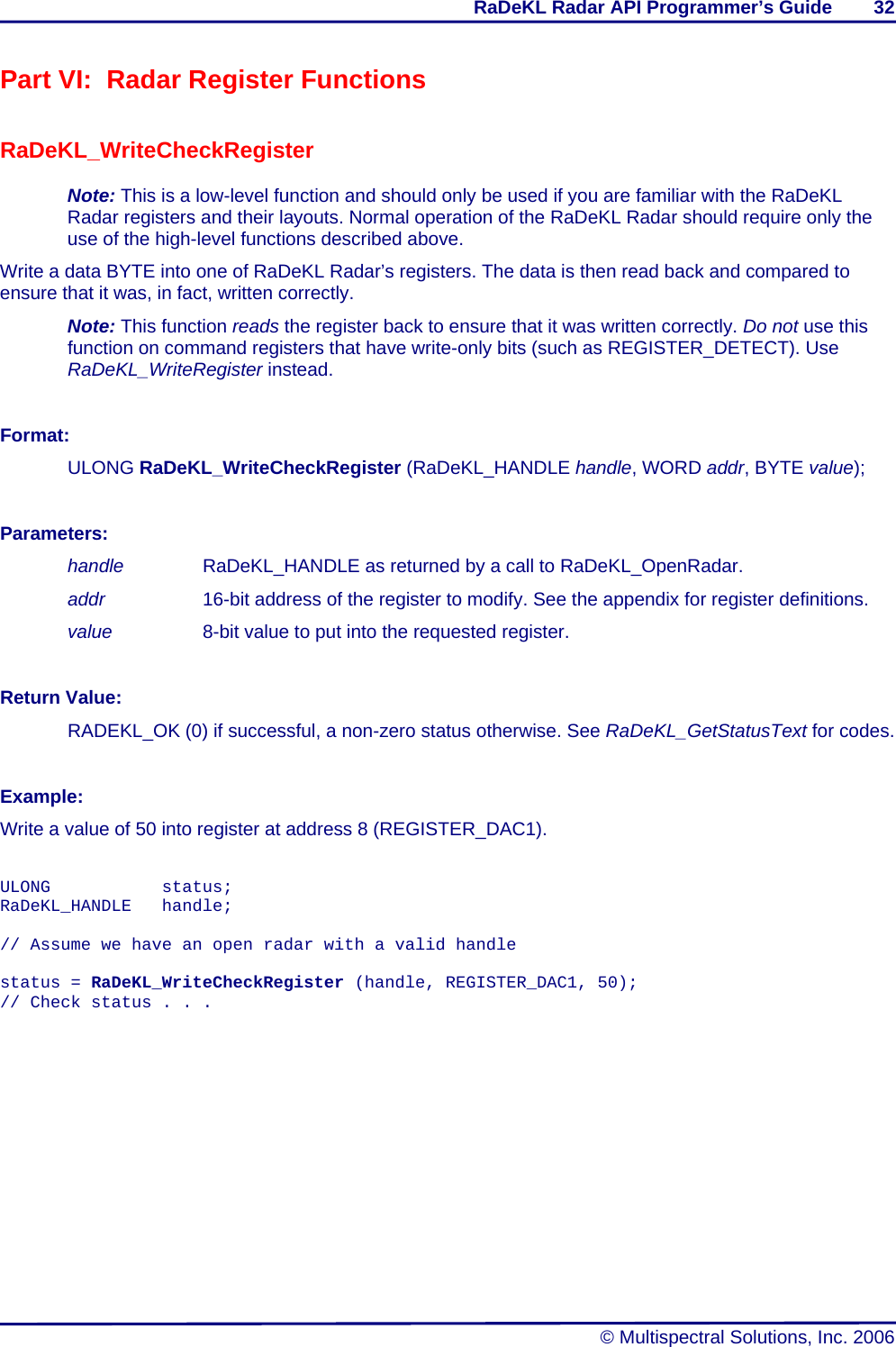
![RaDeKL Radar API Programmer’s Guide 33 © Multispectral Solutions, Inc. 2006 RaDeKL_WriteRegister Note: This is a low-level function and should only be used if you are familiar with the RaDeKL Radar registers and their layouts. Normal operation of the RaDeKL Radar should require only the use of the high-level functions described above. Write a data BYTE into one of RaDeKL Radar’s registers. No checking is performed to see if the data was written correctly, making this function suitable for write-only registers. If verification is required, use RaDeKL_WriteCheckRegister instead. Format: ULONG RaDeKL_WriteRegister (RaDeKL_HANDLE handle, WORD addr, BYTE value); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. addr 16-bit address of the register to modify. See the appendix for register definitions. value 8-bit value to put into the requested register. Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example: Write DETECT_SINGLE (1) into REGISTER_DETECT at address 1. This triggers a single detection and the transmission of the range bin data. ULONG status; RaDeKL_HANDLE handle; BYTE data[2048]; // Make this sufficiently large // Assume we have an open radar with a valid handle status = RaDeKL_WriteRegister (handle, REGISTER_DETECT, DETECT_SINGLE); // Check status . . . // Read the range bin data status = RaDeKL_ReadDetectionData (handle, data); // Check status . . .](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-37.png)
![RaDeKL Radar API Programmer’s Guide 35 © Multispectral Solutions, Inc. 2006 Part VII: Low-Level Data I/O Functions RaDeKL_SendCommand Note: This is a low-level function and should only be used if you are familiar with the RaDeKL Radar I/O features. Normal operation of the RaDeKL Radar should require only the use of the high-level functions described above. Send a command to the RaDeKL Radar. The command must be a read register or a write register command in the following form: Read Register (always 5 bytes): <0x72><addr-hi><addr-lo><qty><0xFF> Write Register (always 5 bytes): <0x77><addr-hi><addr-lo><val><0xFF> Where: <addr-hi> is the high byte of the 16-bit register address. <addr-lo> is the low byte of the 16-bit register address. (See the appendix for register definitions) <qty> is an 8-bit count of registers to read (read command only). <val> is an 8-bit value to write to the register (write command only). Format: ULONG RaDeKL_SendCommand (RaDeKL_HANDLE handle, BYTE *cmd, DWORD bytes_to_send); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. cmd Pointer to the 5-byte command. bytes_to_send Number of bytes to write (should always be 5, unless a future version extends the I/O interface). Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes. Example: Write a value of 50 into register at address 8 (REGISTER_DAC1). ULONG status; RaDeKL_HANDLE handle; BYTE cmd[5] = {CMD_WRITE, 0, REGISTER_DAC1, 50, CMD_TERM}; // Assume we have an open radar with a valid handle status = RaDeKL_SendCommand (handle, cmd, 5); // Check status . . .](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-39.png)
![RaDeKL Radar API Programmer’s Guide 36 © Multispectral Solutions, Inc. 2006 RaDeKL_ReceiveResponse Note: This is a low-level function and should only be used if you are familiar with the RaDeKL Radar I/O features. Normal operation of the RaDeKL Radar should require only the use of the high-level functions described above. Receive a response from the radar by reading a specified number of bytes. There are two types of responses, returned register values and a set of range bins resulting from a detection request. They are in the form: Returned register values (<number of registers requested> + 3 bytes): <addr-hi><addr-lo><data-1>...<data-n><0xFF> Range bins from detection (<number of range bins> + 4 bytes [currently 260 bytes]): <0xEA><0xEA><0xEA><bin-1>…<bin-256><0xFF> Where: <addr-hi> is the high byte of the 16-bit register address. <addr-lo> is the low byte of the 16-bit register address. (See the appendix for register definitions) <data-n> is a series of 8-bit register values (returned register values only). <bin-n> is an 8-bit value from the [n]th range bin (detection only). RaDeKL_ReceiveResponse returns the entire response, including the possible prefix (0xEA) and the terminator (0xFF). Format: ULONG RaDeKL_ReceiveResponse (RaDeKL_HANDLE handle, BYTE *response, DWORD bytes_requested, DWORD *bytes_received); Parameters: handle RaDeKL_HANDLE as returned by a call to RaDeKL_OpenRadar. response Pointer to a BYTE array to receive the data returned. bytes_requested DWORD containing the number of bytes to read. bytes_received Pointer to a DWORD to receive the number of bytes read. Return Value: RADEKL_OK (0) if successful, a non-zero status otherwise. See RaDeKL_GetStatusText for codes.](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-40.png)
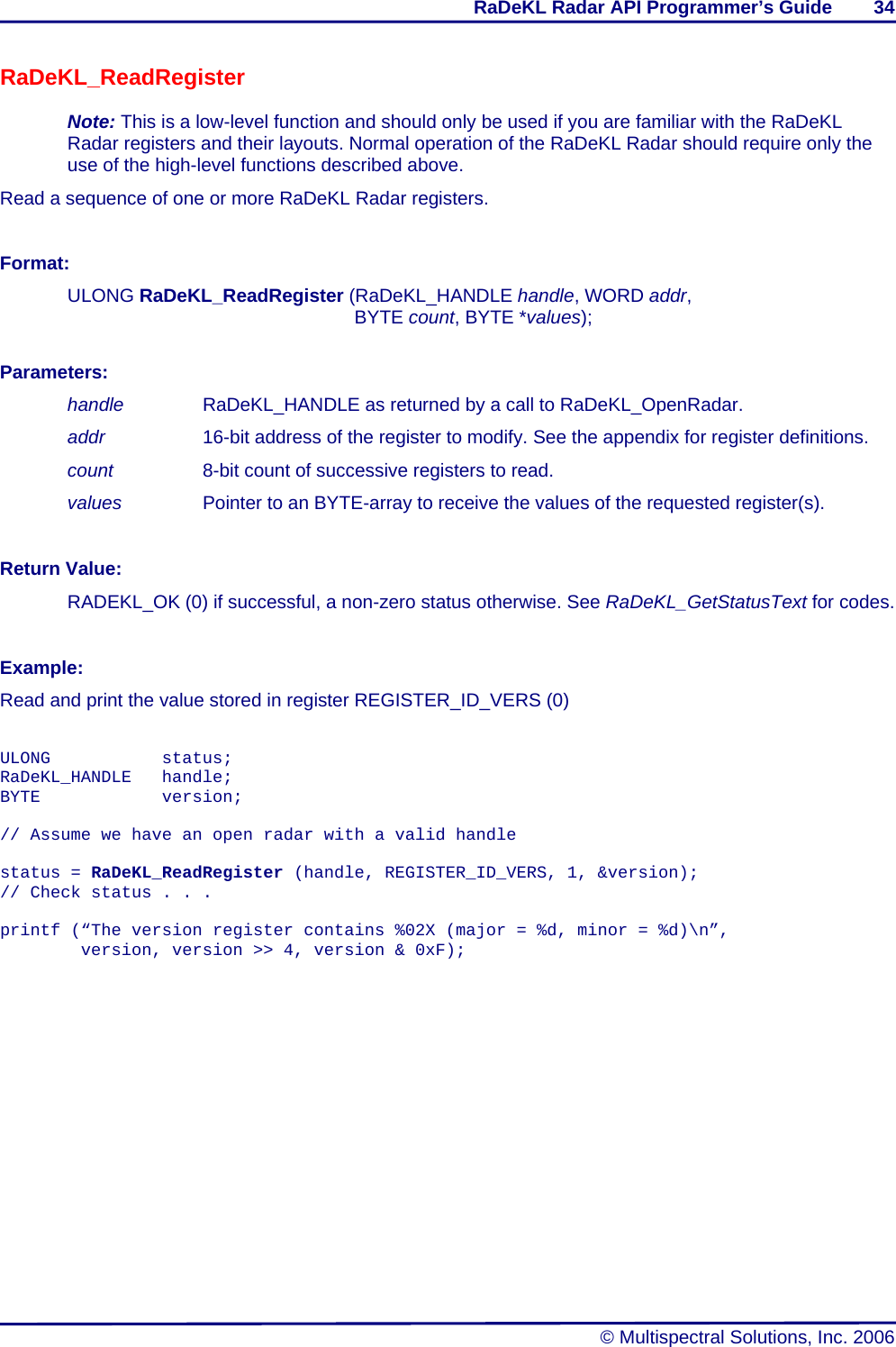
![RaDeKL Radar API Programmer’s Guide 37 © Multispectral Solutions, Inc. 2006 Example 1: Read the value of the register at address 7 (REGISTER_DAC1). ULONG status; DWORD bytes_received; RaDeKL_HANDLE handle; BYTE cmd[5] = {CMD_READ, 0, REGISTER_DAC1, 1, CMD_TERM}; BYTE response [1024]; // Make this sufficiently large // Assume we have an open radar with a valid handle status = RaDeKL_SendCommand (handle, cmd, 5); // Check status . . . status = RaDeKL_ReceiveResponse (handle, response, 4, &bytes_received); // Check status . . . and ensure that bytes_received == 4 printf (“The value at register DAC 1 is %d\n”, response[2]); Example 2: Issue a single detection request and read the range bins returned. ULONG status; DWORD bytes_received; RaDeKL_HANDLE handle; BYTE cmd[5] = {CMD_WRITE, 0, REGISTER_DETECT, DETECT_SINGLE, CMD_TERM}; BYTE response [1024]; // Make this sufficiently large // Assume we have an open radar with a valid handle status = RaDeKL_SendCommand (handle, cmd, 5); // Check status . . . status = RaDeKL_ReceiveResponse (handle, response, 260, &bytes_received); // Check status . . . and ensure that cnt == 260 (number of range bins + 4) // The range bin data is now in response[3] thru response [258]. // response [0], [1] and [2] contain 0xEA and response[259] 0xFF (terminator).](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-41.png)
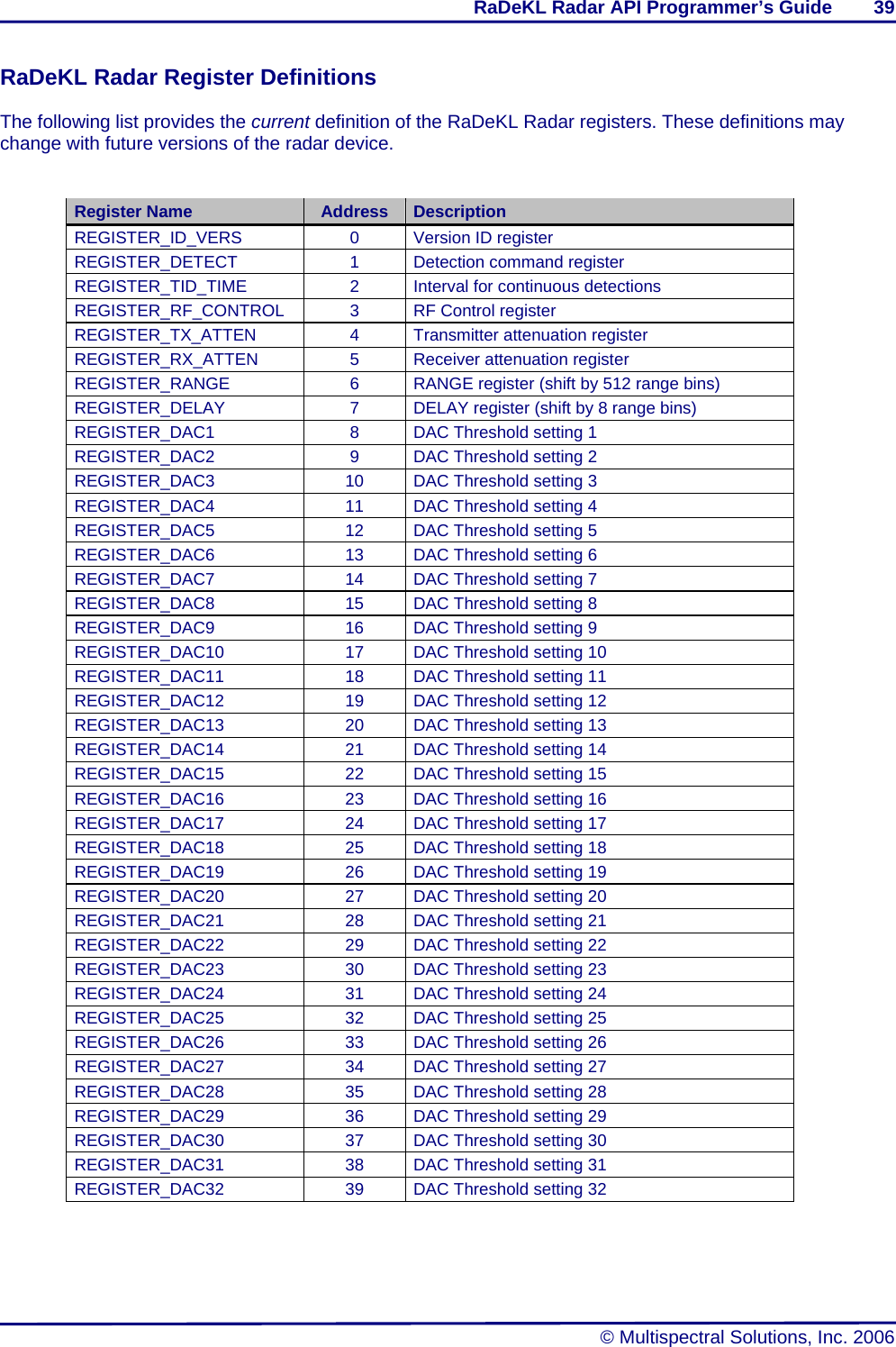
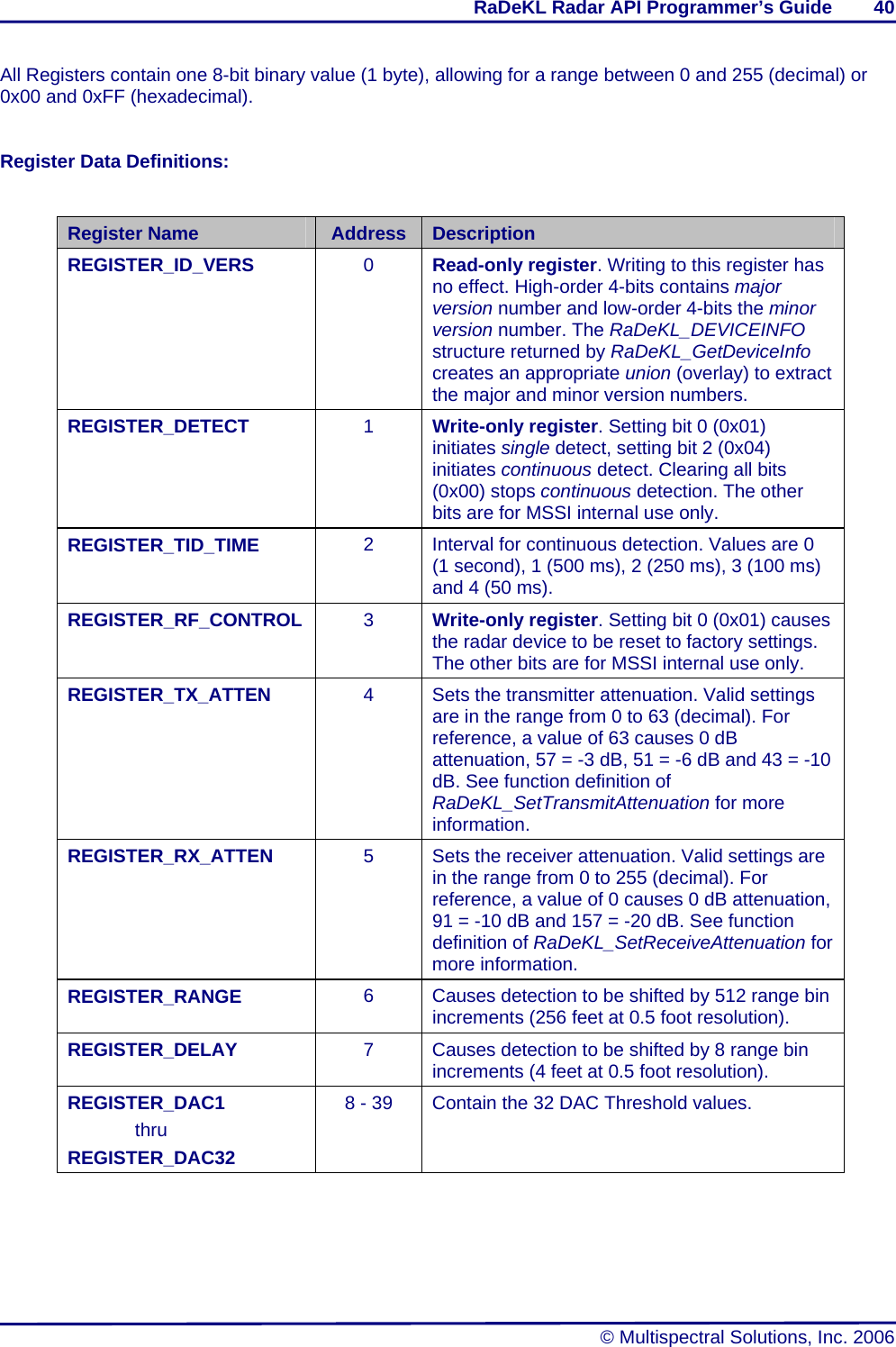
![RaDeKL Radar API Programmer’s Guide 38 © Multispectral Solutions, Inc. 2006 Part VIII: Appendix RaDeKL_DEVICEINFO Field Definitions The following list provides a list of the fields available in the RaDeKL_DEVICEINFO structure, obtained by calling RaDeKL_GetDeviceInfo. For the actual source-code of the structure definition, see the RaDeKLAPI.H Header File Listing at the end of the Appendix. Register Name Type Description FTDI USB Chip specific Please use these (except Serial Number and Device Description) only if you are familiar with the FTDI USB Chip interface. ft_handle void * Handle to the underlying USB device (do not use unless you are familiar with the FTDI USB chip API FTD2XX.h) ft_device_type ULONG USB device type (see FTD2XX.h for details) ft_serial_number char[16] Serial number (null-terminated) ft_description char[64] Device description (null-terminated) ft_device_id DWORD USB Chip device id (see FTD2XX.h for details) ft_product_id WORD USB Chip product id (see FTD2XX.h for details) ft_vendor_id WORD USB Chip vendor id (see FTD2XX.h for details) RaDeKL Radar specific Please use these values in your code instead of hard-coding them as configurations and ranges in future versions of the radar may change. resolution BYTE Resolution (currently RESOLUTION_1FOOT = 2) Use this value to determine the actual distance represented between successive range bin data samples. (See RaDeKLAPI.H for details) range_bins WORD The number of range bins available (currently 256) range_bin_min BYTE Minimum value of a range bin (currently 0) range_bin_max BYTE Maximum value of a range bin (currently 32) thresholds BYTE The number of Threshold registers (currently 32) threshold_min BYTE Minimum value of a Threshold register (currently 20) threshold_max BYTE Maximum value of a Threshold register (currently 227) tx_atten_min BYTE Minimum value for the Transmit Attenuation register (currently 0) tx_atten_max BYTE Maximum value for the Transmit Attenuation register (currently 63) rx_atten_min BYTE Minimum value for the Receive Attenuation register (currently 0) rx_atten_max BYTE Maximum value for the Receive Attenuation register (currently 255) interval_min BYTE Minimum value for the Interval register (currently 0) interval_max BYTE Maximum value for the Interval register (currently 4) Interval BYTE Current interval setting. Do not use this field! It is used for internal purposes and cannot be relied upon within the context of this API. version_id BYTE Full 8-bit version number of the RaDeKL Radar device version_id_minor 4 bits 4-bit Minor version number of the RaDeKL Radar device. This field overlays the low-order 4 bits of version_id. version_id_major 4 bits 4-bit Major version number of the RaDeKL Radar device. This field overlays the high-order 4 bits of version_id.](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-42.png)
![RaDeKL Radar API Programmer’s Guide 43 © Multispectral Solutions, Inc. 2006 #define REGISTER_DAC16 23 // Threshold setting 16 #define REGISTER_DAC17 24 // Threshold setting 17 #define REGISTER_DAC18 25 // Threshold setting 18 #define REGISTER_DAC19 26 // Threshold setting 19 #define REGISTER_DAC20 27 // Threshold setting 20 #define REGISTER_DAC21 28 // Threshold setting 21 #define REGISTER_DAC22 29 // Threshold setting 22 #define REGISTER_DAC23 30 // Threshold setting 23 #define REGISTER_DAC24 31 // Threshold setting 24 #define REGISTER_DAC25 32 // Threshold setting 25 #define REGISTER_DAC26 33 // Threshold setting 26 #define REGISTER_DAC27 34 // Threshold setting 27 #define REGISTER_DAC28 35 // Threshold setting 28 #define REGISTER_DAC29 36 // Threshold setting 29 #define REGISTER_DAC30 37 // Threshold setting 30 #define REGISTER_DAC31 38 // Threshold setting 31 #define REGISTER_DAC32 39 // Threshold setting 32 #define REGISTER_MAX 39 // MUST be same as the last valid register // // // Type definitions // // // Handle to RaDeKL Radar device typedef PVOID RaDeKL_HANDLE; // RaDeKL Radar device-specific info typedef struct RaDeKL_DEVICEINFO { // FTDI USB Chip specific data FT_HANDLE ft_handle; FT_DEVICE ft_device_type; char ft_serial_number[SIZE_SERIAL_NUMBER]; char ft_description[SIZE_DESCRIPTION]; union // This union allows us to overlay the 32-bit device_id { // with the 16-bit product_id and vendor_id DWORD ft_device_id; struct { WORD ft_product_id; // Low word WORD ft_vendor_id; // High word }; }; // RaDeKL Radar specific data BYTE resolution; // Currently always RESOLUTION_1FOOT WORD range_bins; // Currently always 256 BYTE range_bin_min; // Currently always 0 BYTE range_bin_max; // Currently always 32 BYTE thresholds; // Currently always 32 BYTE threshold_min; // Currently always 20 BYTE threshold_max; // Currently always 227 BYTE tx_atten_min; // Currently always 0 BYTE tx_atten_max; // Currently always 63 BYTE rx_atten_min; // Currently always 0 BYTE rx_atten_max; // Currently always 255 BYTE interval_min; // Currently always 0 BYTE interval_max; // Currently always 4 BYTE interval; // Current interval setting union // This union allows us to overlay the 8-bit version_id { // with the 4-bit major and 4-bit minor version_id BYTE version_id; struct { unsigned int version_id_minor:4; // Low nibble unsigned int version_id_major:4; // High nibble }; }; } RaDeKL_DEVICEINFO;](https://usermanual.wiki/Zebra-Technologies/RADEKL.Programmers-Guide/User-Guide-853778-Page-47.png)