Furuno USA 9ZWFA50 Automatic Identification System User Manual
Furuno USA Inc Automatic Identification System
Contents
- 1. Operators Manual
- 2. operation manual
operation manual

www.furuno.co.jp
The paper used in this manual
is elemental chlorine free.
・FURUNO Authorized Distributor/Dealer
9-52 Ashihara-cho,
Nishinomiya, 662-8580, JAPAN
Telephone : +81-(0)798-65-2111
Fax :
+81-(0)798-65-4200
A
:
MAR
2008
.
Printed in Japan
All rights reserved.
B
:
JUN
.
18, 2008
Pub. No.
OME-44420-B
*
00016841411
*
*
00016841411
*
(
TATA
)
FA-50
*
00016841411
*
*
00016841411
*
* 0 0 0 1 6 8 4 1 4 1 1 *

i
IMPORTANT NOTICES
zThe descriptions in this manual are intended for readers with a solid knowledge of English.
zNo part of this manual may be copied or reproduced without written permission.
zIf this manual is lost or worn, contact your dealer about replacement.
zThe contents of this manual and equipment specifications are subject to change without notice.
zThe example screens (or illustrations) shown in this manual may not match the screens you
see on your display. The screen you see depends on your system configuration and equipment
settings.
zStore this manual in a convenient place for future reference.
zFURUNO will assume no responsibility for the damage caused by improper use or modification
of the equipment (including software) by an unauthorized agent or a third party.
zWhen it is time to discard this product it must be done according to local regulations for disposal
of industrial waste. For disposal in the USA, refer to the Electronics Industries Alliance (http://
www.eiae.org/).
ii
SAFETY INSTRUCTIONS
The operator and installer must read the applicable safety instructions before attempting to install
or operate the equipment.
WARNING
Indicates a potentially hazardous situation which, if not avoided,
could result in death or serious injury.
CAUTION
Indicates a potentially hazardous situation which, if not avoided,
can result in minor or moderate injury.
Warning, Caution Mandatory Action
Prohibitive Action
WARNING
WARNING
Do not open the shield cover.
Only qualified personnel should work
inside the equipment.
Do not disassemble or modify the
equipment.
Fire, electrical shock or serious injury can
result.
Immediately turn off the power at the
power source if
water leaks into the equipment
something is dropped into the
equipment
the equipment is emitting smoke or
is on fire
the equipment is emitting strange
noises
Continued use of the equipment can
cause fire or electrical shock. Contact a
FURUNO dealer or agent for service.
Do not operate the equipment with wet
hands.
Electrical shock can result.
Use the proper fuse.
Use of the wrong fuse can cause fire
or electrical shock.
WARNING
Do not place liquid-filled containers on
the top of the equipment.
Fire or electrical shock can result if a
liquid spills into the equipment.
Make sure no rain or water splash
leaks into the equipment.
Fire or electrical shock can result if water
leaks into the equipment.
WARNING
To avoid electrical shock, do
not remove cover. No user-
serviceable parts inside.
Name: Warning Label (1)
Type: 86-003-1011-1
Code No.: 100-236-232-10
WARNING
To avoid electrical shock,
do not remove cover.
No user-serviceable parts
inside.
Name: Warning Label (2)
Type: 86-129-1001-1
Code No.: 100-236-742-10
Warning labels are attached to the equipment.
Do not remove these labels. If a label is missing
or illegible, contact a FURUNO agent or dealer
replacement.
Safety instructions for the operator
SAFETY INSTRUCTIONS
iii
CAUTION
Observe the following compass safe
distances to prevent interference to a
magnetic compass:
Turn off the power at the switchboard
before beginning the installation.
Fire or electrical shock can result if the
power is left on.
Do not install the equipment where it
may get wet from rain or water splash.
Water in the equipment can result in fire,
electrical shock or damage to the equipment.
Be sure that the power supply is
compatible with the voltage rating of the
equipment.
Connecting an incompatible power supply
can cause fire or damage the equipment.
The voltage rating appears on the inlet
of power.
Standard
compass
Steering
compass
0.30 m 0.30 m
FA-50
WARNING
Safety instructions for the installer
ELECTRICAL SHOCK HAZARD
Do not open the equipment unless
totally familiar with electrical circuits
and service manual.
Only qualified personnel should work
inside the equipment.
0.90 m 0.60 m
PR-240
0.30 m 0.30 m
GVA-100-T
0.30 m 0.30 m
DB-1

iv
TABLE OF CONTENTS
FOREWORD ....................................................................................................................v
SYSTEM CONFIGURATIONS.......................................................................................vii
1. INSTALLATION .....................................................................................................1-1
1.1 Equipment List ........................................................................................................... 1-1
1.2 AIS Transponder FA-50 ............................................................................................. 1-3
1.3 VHF Antenna.............................................................................................................. 1-3
1.4 GPS Antenna ............................................................................................................. 1-5
1.5 GPS/VHF Combined Antenna.................................................................................... 1-7
1.6 AC-DC Power Supply (option) ................................................................................... 1-9
1.7 Wiring .......................................................................................................................1-10
1.8 Setting and Adjustments .......................................................................................... 1-12
1.8.1 COM PORT setup, Network setup ............................................................... 1-12
1.8.2 Ship static..................................................................................................... 1-15
2. OPERATION ..........................................................................................................2-1
2.1 AIS Transponder FA-50 ............................................................................................. 2-1
2.2 Messages................................................................................................................... 2-2
2.2.1 Sending a message ....................................................................................... 2-2
2.2.2 Confirming receiving messages ..................................................................... 2-3
2.3 Own Vessel Data Display........................................................................................... 2-4
2.4 Alarm Status............................................................................................................... 2-7
2.5 Sensor Status............................................................................................................. 2-8
3. MAINTENANCE,
TROUBLESHOOTING3-1
3.1 Maintenance............................................................................................................... 3-1
3.2 Replacing the Fuse .................................................................................................... 3-2
3.3 Troubleshooting ......................................................................................................... 3-2
3.4 Diagnostics.................................................................................................................3-3
APPENDIX 1 MENU TREE .......................................................................................AP-1
APPENDIX 2 VHF CHANNEL LISTS........................................................................AP-2
APPENDIX 3 PARTS LIST, LOCATIONS ................................................................AP-4
APPENDIX 4 DIGITAL INTERFACE.........................................................................AP-6
PACKING LISTS.......................................................................................................... A-1
SPECIFICATIONS .....................................................................................................SP-1
OUTLINE DRAWINGS................................................................................................. D-1
INTERCONNECTION DIAGRAM ................................................................................ S-1
INDEX..........................................................................................................................IN-1

v
FOREWORD
A Word to the Owner of the FA-50
Congratulations on your choice of the FURUNO FA-50 AIS Transponder. We are confident you
will see why the FURUNO name has become synonymous with quality and reliability.
For 60 years FURUNO Electric Company has enjoyed an enviable reputation for quality marine
electronics equipment. This dedication to excellence is furthered by our extensive global network
of agents and dealers.
This equipment is designed and constructed to meet the rigorous demands of the marine environ-
ment. However, no machine can perform its intended function unless operated and maintained
properly. Please carefully read and follow the recommended procedures for operation and main-
tenance.
Thank you for considering and purchasing FURUNO equipment.
Features
The FA-50 is a Class B AIS (Automatic Identification System) capable of exchanging navigation
and ship data between own ship and other ships or coastal stations. It complies with IMO MSC.
140(76) Annex 3, A.694, ITU-R M.1371-2 and DSC ITU-R M.825-3 It also complies with IEC
60945 (EMC and environmental conditions).
FA-50 consists of VHF and GPS antennas, a transponder unit and several associated units. The
transponder contains a VHF transmitter, two TDMA receivers on two parallel VHF channels, inter-
face, communication processor, and internal GPS receiver. The internal GPS is a 12-channel all-
in-view receiver with a differential capability. It also gives position, COG and SOG when the ex-
ternal GPS. FA-50 receives DSC, time-sharing with TDMA receiver.
The main features are:
zSafety of navigation by automatically exchanging navigational data
zStatic data
• MMSI (Maritime Mobile Service Identity)
• Call sign & Ship’s name
• Type of ship
• Location of position-fixing antenna on the ship
zDynamic data
• Ship's position with accuracy indication and integrity status
• Universal Time Coordinated (UTC)
• Course over ground (COG)
• Speed over ground (SOG)
• Heading
zVoyage-related data
• Hazardous cargo (type)
zShort safety-related messages, pre-set messages

FOREWORD
vi
zInterfaces for radar, PC for future networking expansion
zGPS/VHF combined antenna for easy installation available
zBuilt-in GPS receiver for position-fixing device
Program Version
**: Minor change
Item Program No. Version No. Date
FA-50 AIS Transponder
Main Program 0550233 01.** July 2007
vii
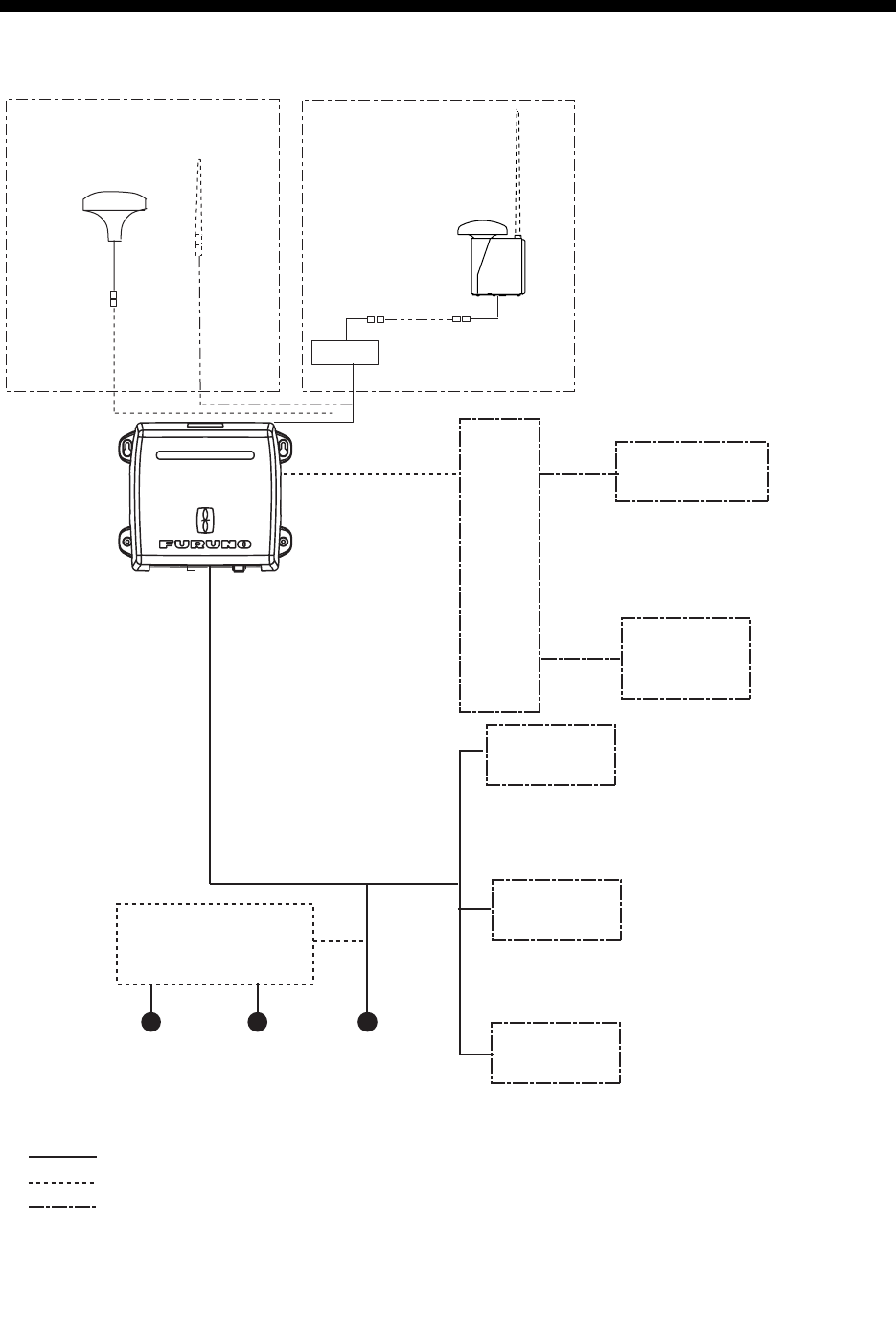
SYSTEM CONFIGURATIONS
AIS TRANSPONDER
FA-50
HUB
SENSOR
OR
12-24 VDC IF-1500AIS
OR
FR-8xx2 SERIES
GPS* (ex. GP-150)
SPEED LOG
GYROCOMPASS
SATELLITE COMPASS
NAVNET
RADAR
CHART PLOTTER
ECDIS
PILOT PLUG
PC
w/FAISPC MX
EXTERNAL
DISPLAY
: Standard supply
: Optional supply
: Local supply
NAVNET
EXTERNAL
DISPLAY
GPS/VHF
combined antenna
GVA-100-T
GPS antenna
GPA-017S or 017
Distributor
DB-1
VHF
antenna
Either
*Usaually FA-50 uses the internal GPS. When connecting the
external GPS, use one which satisfies the following points.
1) Outputs DTM sentence (WGS-84 can be chosen.)
2) Outputs GBS sentence.
3) Outputs sentences with the mode indicator;
GPS navigator GP-150 meets with requirements shown above.
GNS: Ver.3.0 and later
GLL: Ver.2.0 and later
GGA: Ver.2.0 and later
RMC: Ver.1.5 and later
AC-DC POWER
SUPPLY PR-240
24 VDC
100-115/
200-230VAC
1φ, 50/60 Hz
SYSTEM CONFIGURATIONS
viii
This page is intentionally left blank.
1-1
1. INSTALLATION
1.1 Equipment List
Standard supply
Name Type Code No. Qty Remarks
AIS transponder FA-50 - 1
Antenna unit GVA-100 - 1 GPS/VHF combined
GPA-017S - 1 set GPS antenna
GPA-017 - 1 set GPS antenna w/10 m
cable
Distributor DB-1 - 1 For GVA-100
Spare parts SP05-05801 001-031-960 1 set 4A fuses (Type: FGMB
125V 4A, Code No.:
000-157-482-10)
Accessories FP05-06110 000-166-648 1 set FAISPC-MX for PC
Installation
materials CP24-00502 005-955-560 1 set For GPA-017S
CP05-11401 001-031-970 1 set For FA-50, self-tapping
screws (Type: 4x20,
Code No.: 000-158-
850-10)
TNC-PS/PS-
3D-L15M-R 000-133-670-11 1 For GPA-017S, 15 m
cable
CP24-00101 005-950-730 1 set For DB-1, self-tapping
screws (Type: 4x30,
Code No.: 000-162-
659-10)
1. INSTALLATION
1-2
Optional supply
Note: One FA-50 can be installed on a network.
Name Type Code No. Qty Remarks
AC-DC power
supply
PR-240-CE - 1
Whip antenna CP05-11001 001-034-670 1 For outside Japan
Antenna cable
set
CP20-02700 004-381-160 1 For GPA-017S
CP20-02710 004-381-170 1 For GPA-017S
CP24-00300 000-041-938 1 For GVA-100
CP24-00310 000-041-939 1 For GVA-100
Coaxial cable TNC-PS/PS-3D-
L15M-R
000-133-670-11 1 TNC-TNC, 15 m
Right-angle
antenna base
No.13-QA330 000-803-239 1 For GPA-017/S
L-angle anten-
na base
No.13-QA310 000-803-240 1 For GPA-017/S
Antenna base
for rail mount
No.13-RC5160 000-806-114 1 For GPA-017/S
Mast mount
fixture
CP20-01111 004-365-780 1 For GPA-017/S
AIS viewer FAISPC-MX50 000-160-966 1
LAN cable P5E-4PTX-BL
L=2M
000-164-634-10 1 2 m
P5E-4PTX-BL
L=10M
000-164-637-10 1 10 m
Cable assy MJ-A6SPF0017-
010C
000-159-704-11 1 For NavNet VX2, 1 m
MJ-A6SPF0017-
050C
000-159-705-11 1 For NavNet VX2, 5 m
MJ-A6SPF0017-
100C
000-159-706-11 1 For NavNet VX2, 10 m
MJ-A6SPF0017-
200C
000-159-707-11 1 For NavNet VX2, 20 m
MJ-A6SPF0017-
300C
000-159-708-11 1 For NavNet VX2, 30 m

1. INSTALLATION
1-3
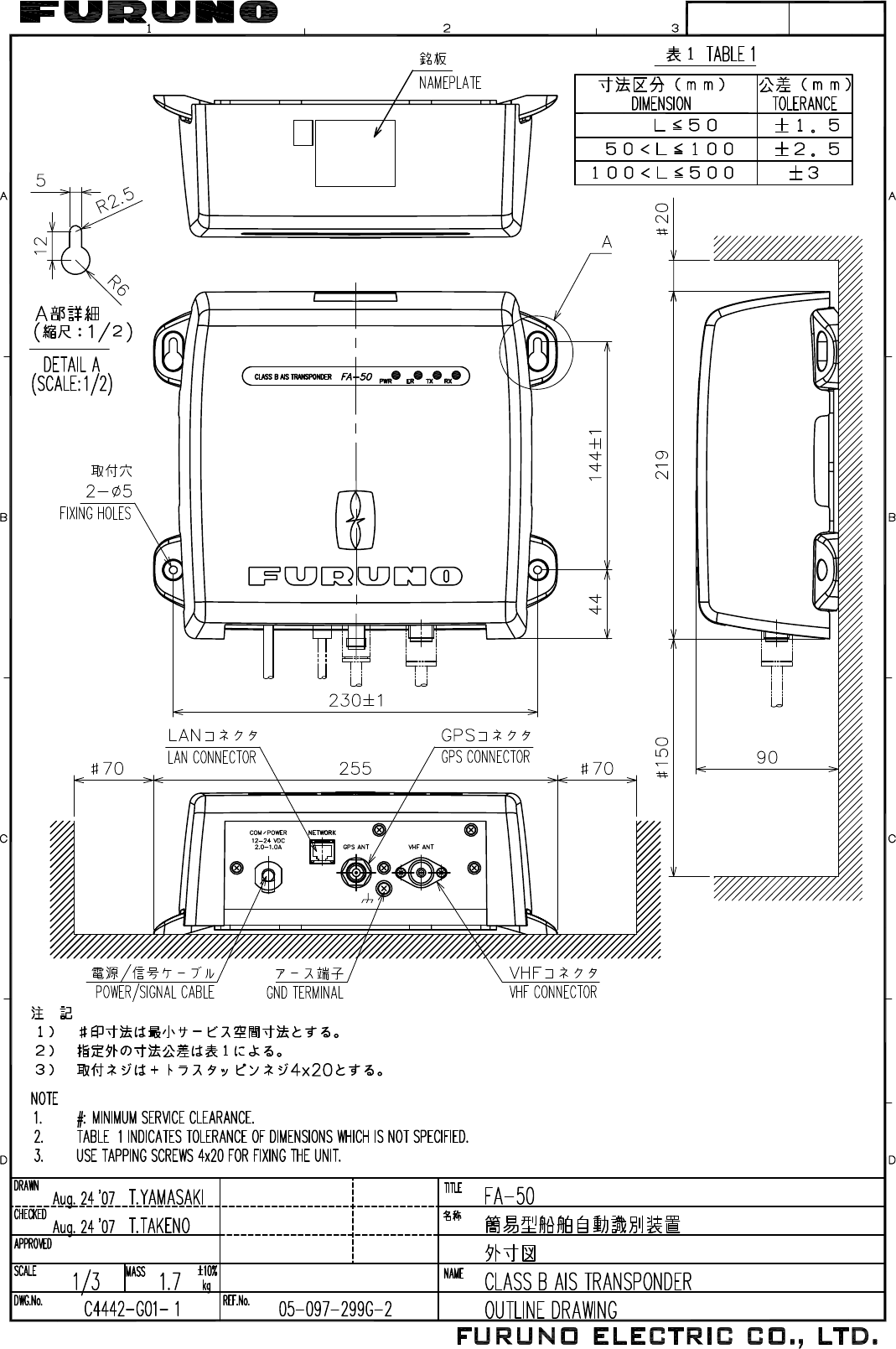
1.2 AIS Transponder FA-50
Mounting considerations, mounting
The FA-50 can be mounted on a desktop, deck or on a bulkhead. When selecting a
mounting location, keep the following points in mind:
• The temperature and humidity should be moderate and stable.
• Locate the unit away from exhaust pipes and vents.
• The mounting location should be well ventilated.
• Mount the unit where shock and vibration are minimal.
• Keep the unit away from electromagnetic field-generating equipment such as mo-
tors and generators.
• A magnetic compass will be affected if the FA-50 is placed too close to it. Observe
the compass safe distances noted in the safety instructions to prevent disturbance
to the magnetic compass.
Fix the unit to the mounting location with 4x20 self-tapping screws (supplied).
1.3 VHF Antenna
Location
The location of the AIS VHF-antenna should be carefully considered. Digital commu-
nication is more sensitive than analog/voice communication to interference created by
reflections in obstructions like masts and booms. It may be necessary to relocate the
VHF radiotelephone antenna to minimize interference effects. To minimize interfer-
ence effects, the following guidelines apply:
• The AIS VHF antenna should be placed in an elevated position that is as free as
possible with a minimum of 0.5 meters in the horizontal direction from constructions
made of conductive materials. The antenna should not be installed close to any
large vertical obstruction. The objective for the AIS VHF antenna is to see the hori-
zon freely through 360 degrees.
• There should not be more than one antenna on the same plane. The AIS VHF an-
tenna should be mounted directly above or below the ship's primary VHF radiotele-
phone antenna, with no horizontal separation and with a minimum of 2.8 meters
vertical separation. If it is located on the same plane as other antennas, the distance
apart should be at least 10 meters.
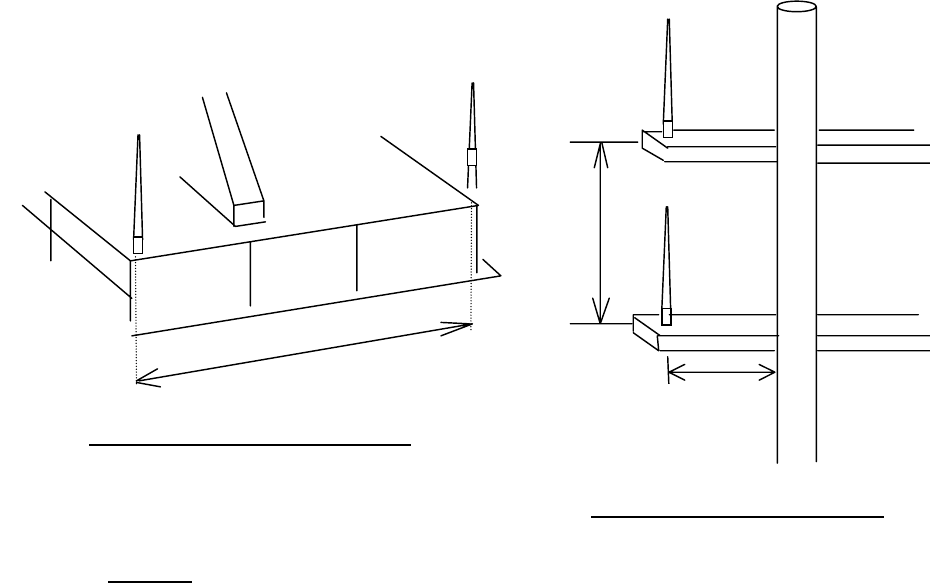
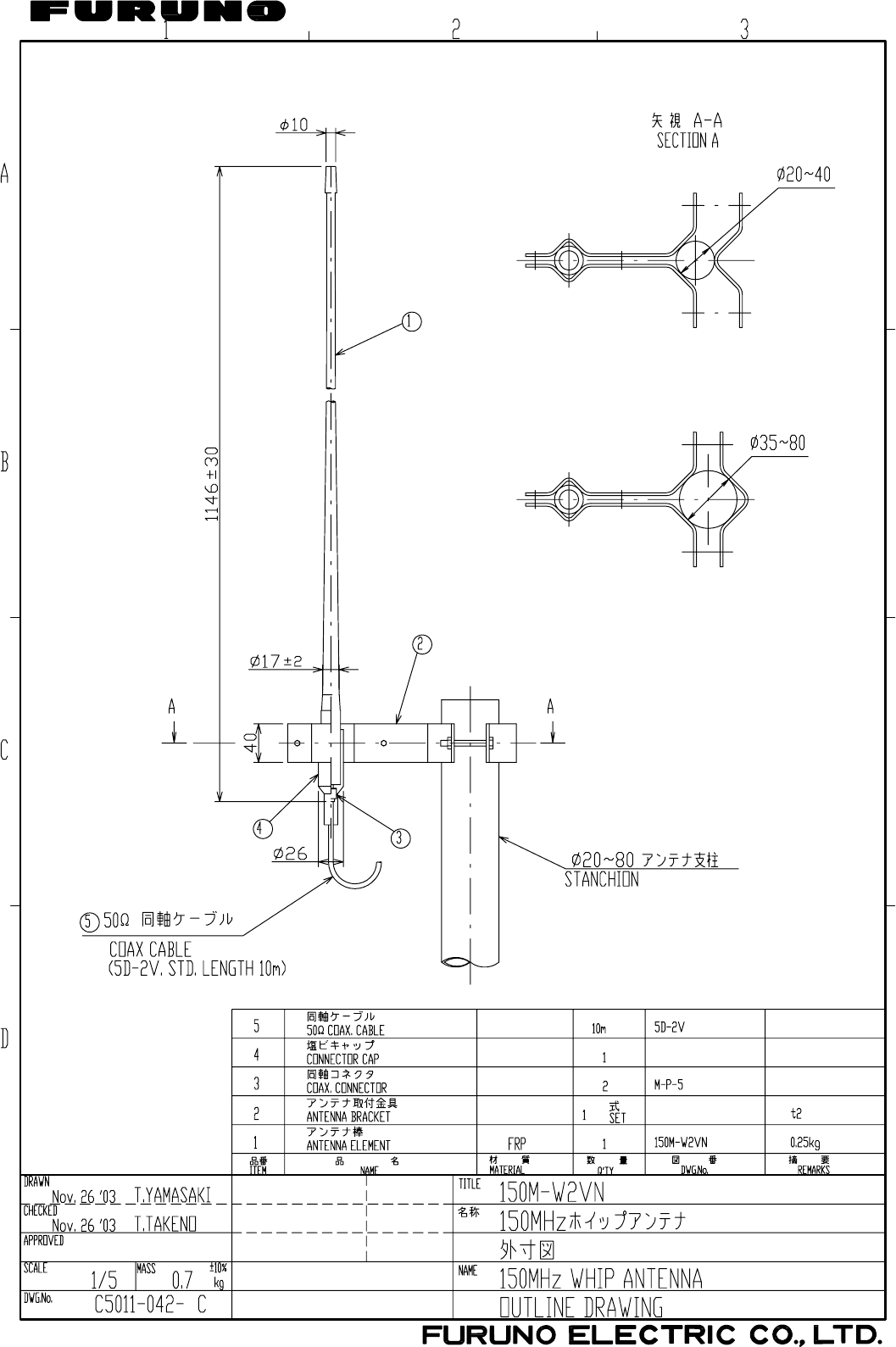
• Install the VHF whip antenna (option) referring to the outline drawing at the back of
this manual. Separate this antenna from other VHF radiotelephone antennas as
shown below to prevent interference to the FA-50.
1. INSTALLATION
1-4
Cabling
• Use coaxial cable type 5D-2V or the equivalent.
• The cable should be kept as short as possible to minimize signal attenuation, and
the maximum length is 50 meters.
• All outdoor-installed connectors on coaxial cables should be fitted with preventive
isolation such as vulcanizing tape to protect against water penetration into the an-
tenna cable.
• Coaxial cables should be installed in separate signal cable channels/tubes and at
least 10 cm away from power supply cables. Crossing of cables should be done at
right angles (90 degrees). The minimum bend radius of the coaxial cable should be
5 times the cable's outer diameter.
Horizontal separation distance
More than 10 m
Vertical separation distance
Other VHF
whip antenna
More than 0.5 m
More than
2.8 m
Whip antenna
for AIS
1. INSTALLATION
1-5
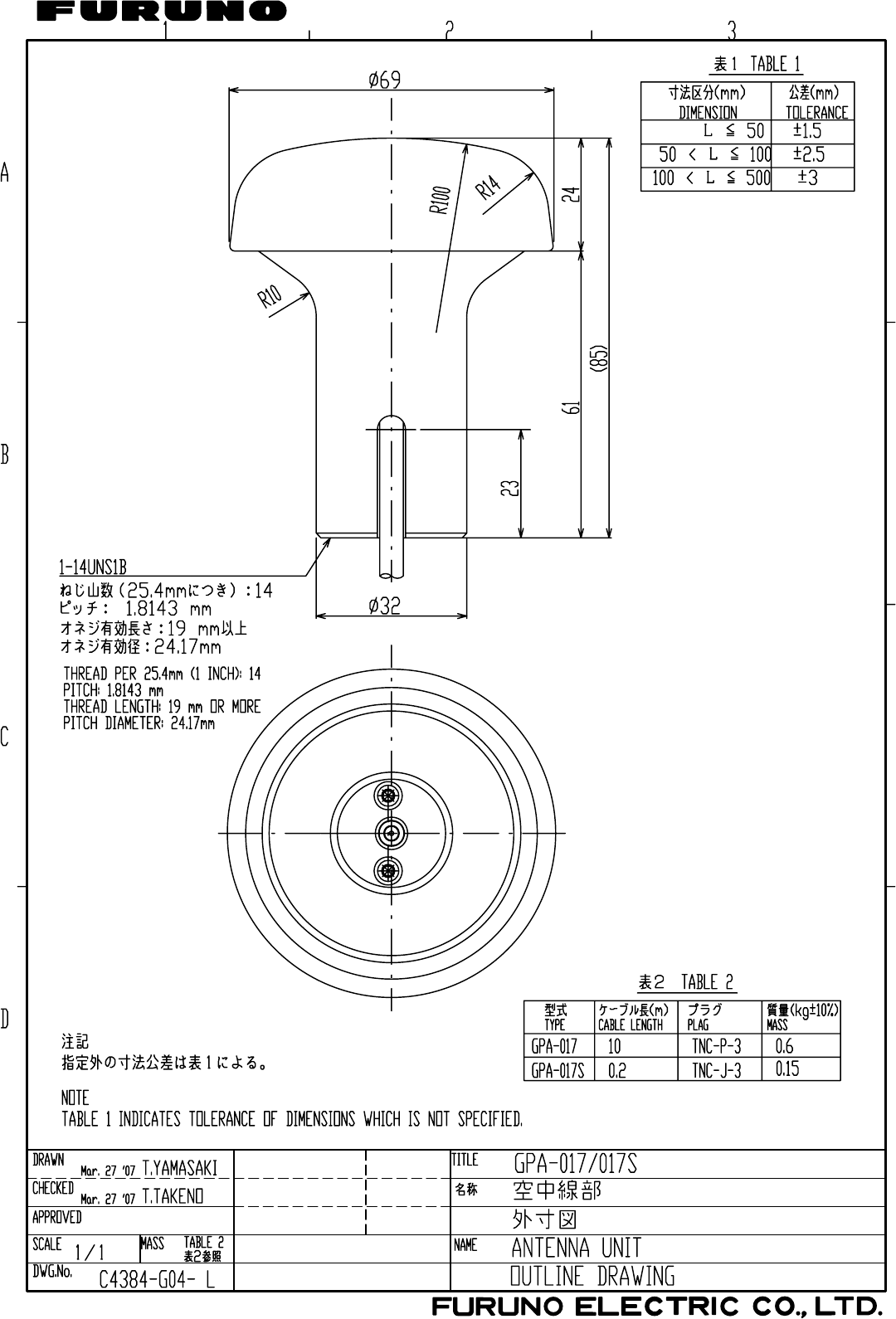
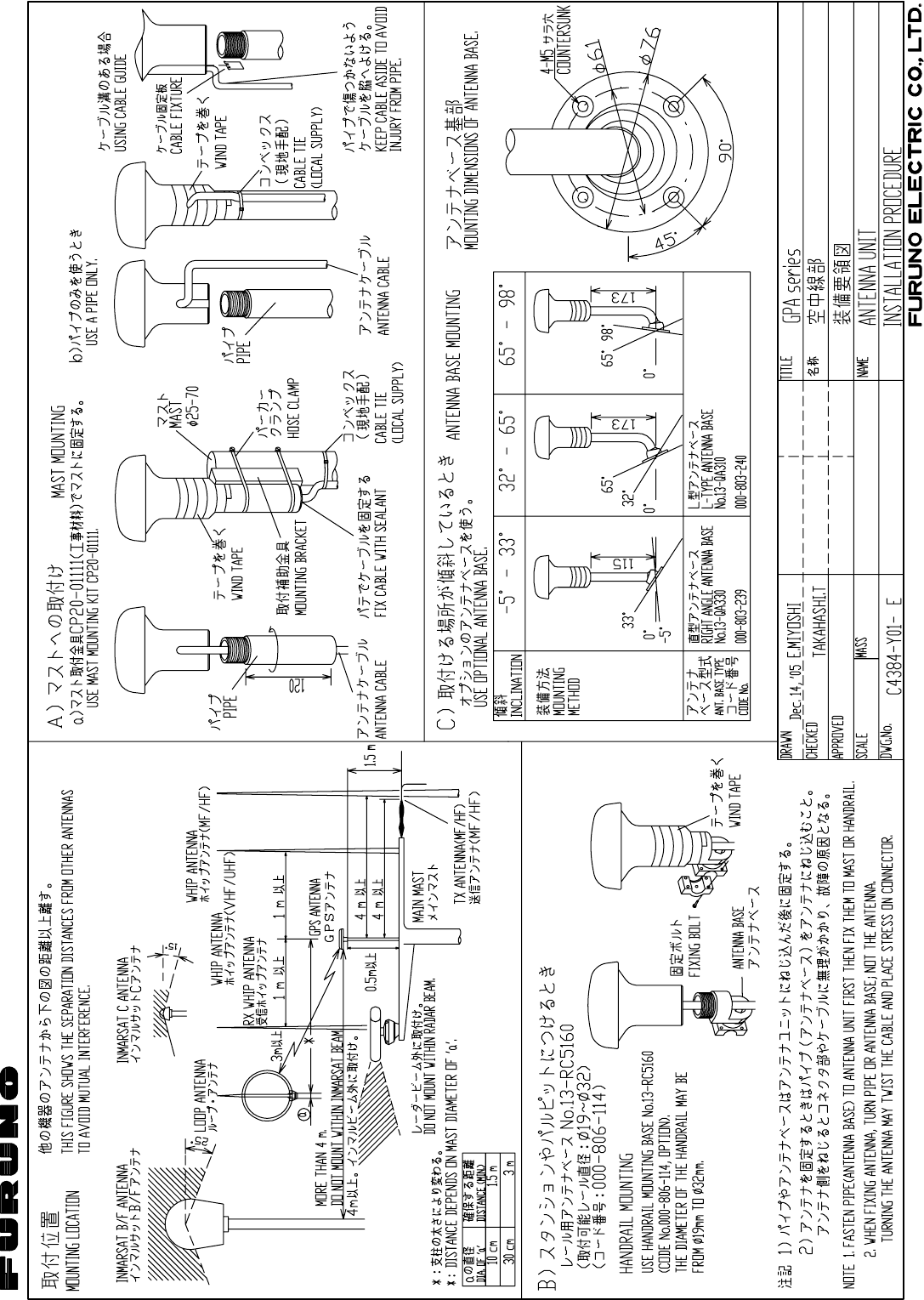
1.4 GPS Antenna
Install the GPS antenna unit referring to the outline drawing at the back of this manual.
When selecting a mounting location for the antenna, keep in mind the following points.
• Select a location out of the radar beam. The radar beam will obstruct or prevent re-
ception of the GPS satellite signal.
• There should be no interfering object within the line-of-sight to the satellites. Objects
within line-of-sight to a satellite, for example, a mast, may block reception or prolong
acquisition time.
• Mount the antenna unit as high as possible to keep it free of interfering objects and
water spray, which can interrupt reception of GPS satellite signal if the water freez-
es.
Extending antenna cable
Three types of antenna cable extensions are optionally available.
• Antenna cable set CP20-02700
Waterproofing connector
Wrap connector with vulcanizing tape and then vinyl tape. Bind the tape end with a
cable-tie.
• Antenna cable set CP20-02710 (8D-FB-CV, 50 m)
• Connect the cable the same as 1) above.
Note: The length of this cable should be less than 20 m to prevent signal loss. The
coax. coupling cable assy.(type: NJ-TP-3DXV-1, code no. 000-123-809), coaxial
connector (N-P-8DFB; supplied), vulcanizing tape and vinyl tape are required. Fab-
ricate both ends of the cable as shown in the figure on the next page.
Antenna Unit
Antenna Cable
30m 1 m
Fabricate locally. (See next page.)
N-P-8DFB
FA-50
: Connector
Conversion
Cable Assy.
NJ-TP-3DXV-1
TNCP-NJ
0.6m
1. INSTALLATION
1-6
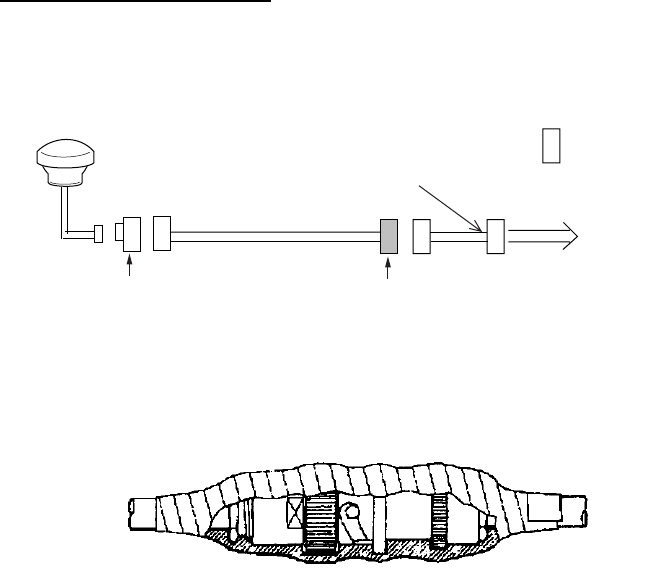
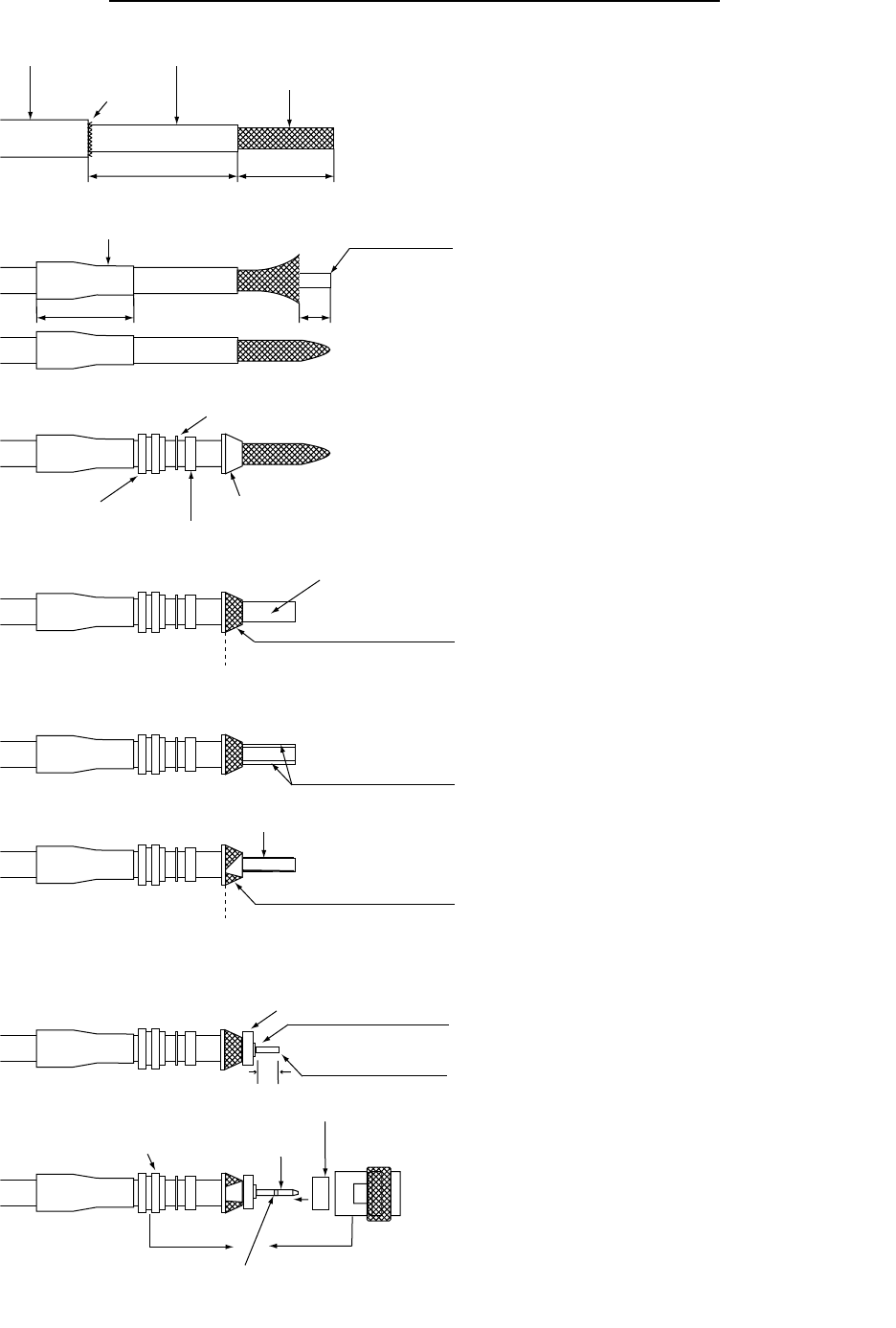
How to attach the connector N-P-8DFB for cable 8D-FB-CV
Remove outer sheath and armor by the dimensions
shown left.
Expose inner sheath and shield by the dimensions
shown left.
Cut off insulator and core by 10mm from its end.
Twist shield end.
Slip on clamp nut, washer 1, gasket and clamp as
shown left. If it is difficult to slip the clamp onto the
cable, use a file to enlarge the inner diameter of the
clamp.
Fold back shield over clamp and trim.
Cut aluminum foil at four places, 90° from one
another.
Fold back aluminum foil onto shield and trim.
Slit the washer 2, and trim insulator at the end of th
e
washer 2.
Expose the core by 5mm.
Slip the pin onto the conductor. Solder them togethe
r
through the hole on the pin.
Insert the pin into the spacer (white) and shell.
Screw the clamp nut into the shell.
(Tighten by turning the clamp nut. Do not tighten by
turning the shell.)
Outer Sheath
Armor
Inner Sheath
Shield
Cover with heat-shrink tubing and heat.
30 10
Clamp
Nut Gasket
(reddish
brown)
Clamp
Aluminum Foil
Trim shield here.
Trim aluminum
tape foil here.
Insulator
Washer 2
5
Clamp Nut Pin Shell
Solder through
the hole.
50 30
Spacer (white)
Washer 1
1. INSTALLATION
1-7
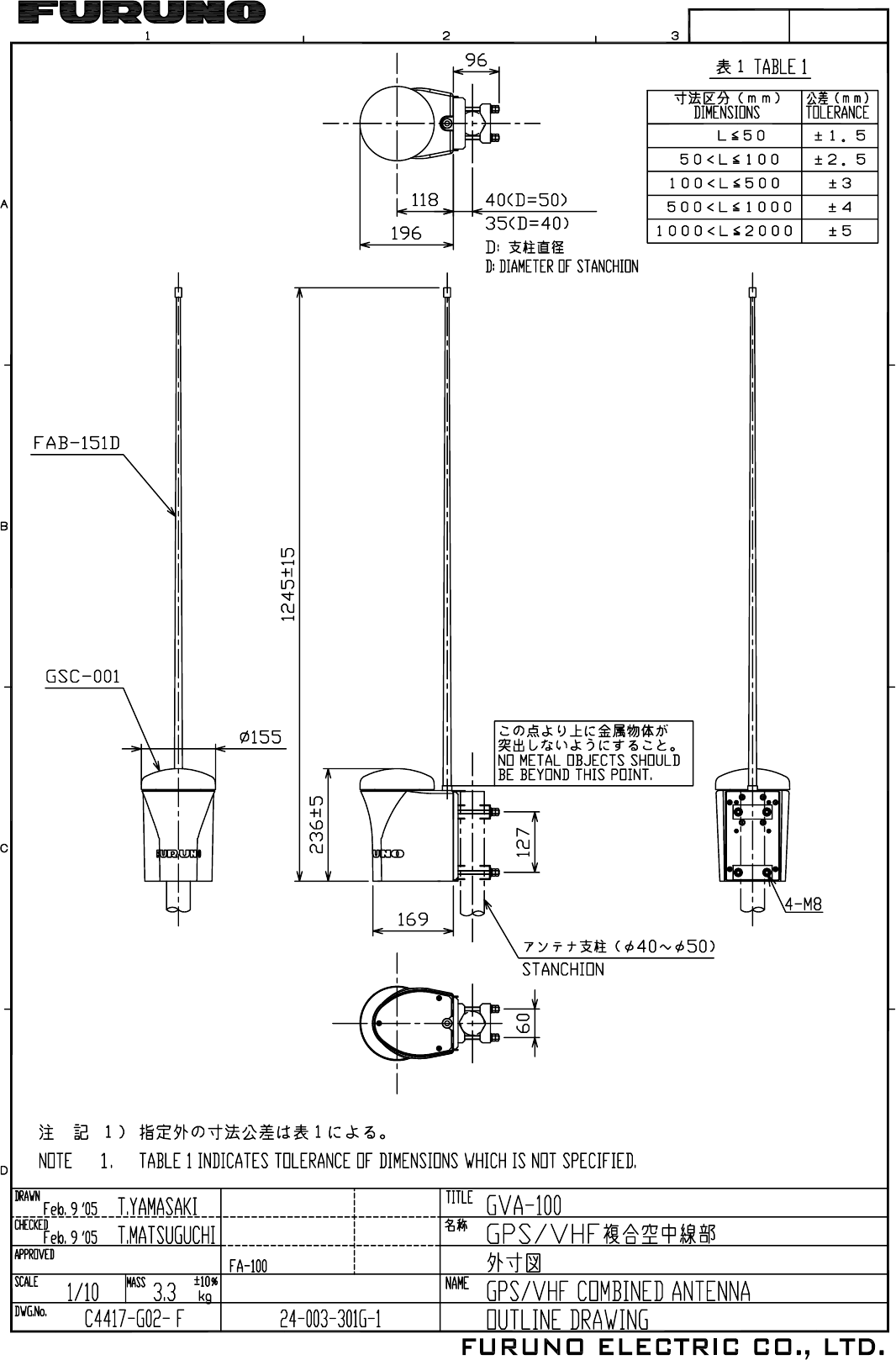
1.5 GPS/VHF Combined Antenna
Install the combined antenna unit referring to the outline drawing. When selecting a
mounting location for the antenna, keep in mind the following points.
• Select a location out of the radar beam. The radar beam will obstruct or prevent re-
ception of the GPS satellite signal.
• There should be no interfering object within the line-of-sight to the satellites. Objects
within line-of-sight to a satellite, for example, a mast, may block reception or prolong
acquisition time.
• Mount the antenna unit as high as possible. Mounting it this way keeps it free of in-
terfering objects and water spray, which can interrupt reception of GPS satellite sig-
nal if the water freezes.
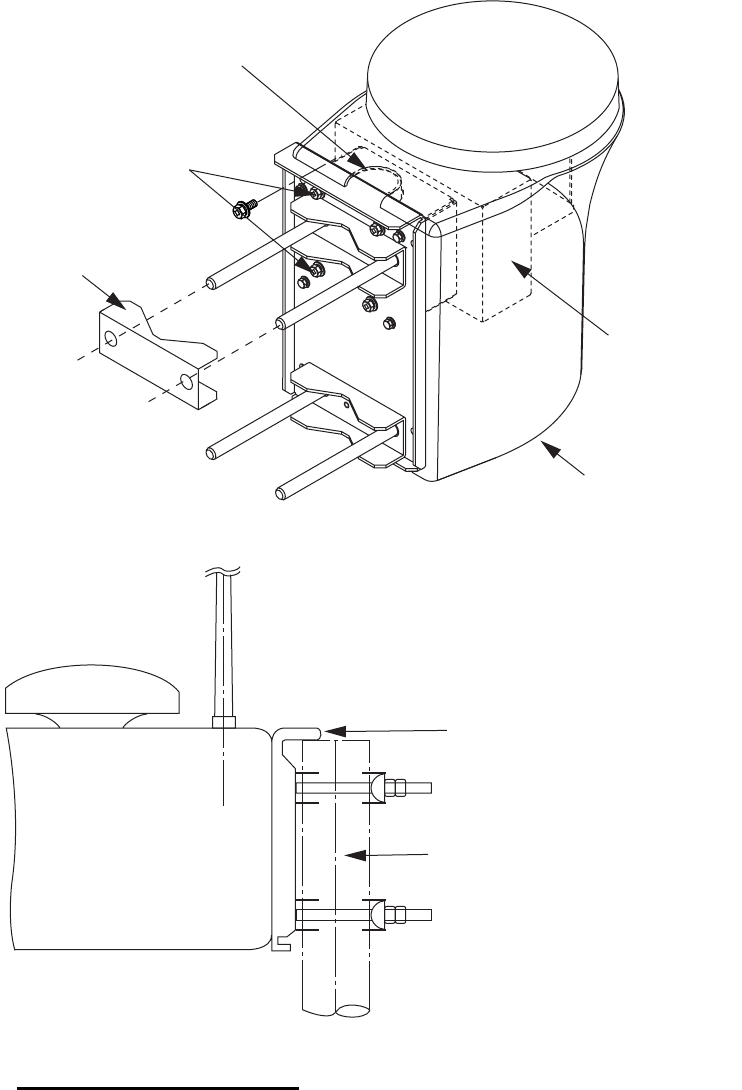
Installation overview of GPS/VHF combined antenna
Mounting procedure
1. Dismount the bottom cover, cut the cable-tie inside the unit and take out the co-
axial connector attached to the combined box.
2. Loosen four screws to loosen whip antenna fixture and pull out the coaxial con-
nector coming from the combined box through the hole in the whip antenna fixture.
3. Connect the coaxial connector to the whip antenna base and wrap the junction
part of the whip antenna with vulcanizing tape and then vinyl tape for waterproof-
ing.
4. Insert the whip antenna from the top of the combined antenna.
5. Secure the whip antenna with whip antenna fixture.
6. Using a new plastic band (supplied), secure the cables and coaxial connector in-
side the antenna case.
7. Mount the bottom cover.
8. Fix the GPS/VHF combined antenna to the ship's stanchion (40 to 50 mm diame-
ter) with antenna fixing brackets, flat washers and hex. nuts. For 60 to 80 mm di-
ameter stanchion, the mast fixing kit (Type: OP24-5, Code No.: 005-954-510) is
necessary.
Note: Coat the exposed parts of bolts and nuts with silicon sealant.
Outdoor Indoor
N-P-8DFB
N-P-8DFB
Distributor DB-1
GPS
AIS Transponder
FA-50
VHF
RG-10U/Y or 8D-FB-CV
1. INSTALLATION
1-8
GPS/VHF combined antenna
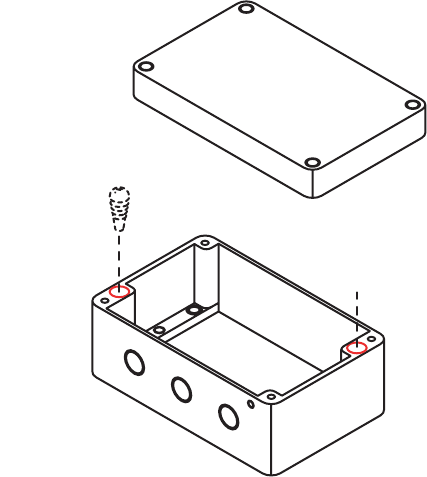
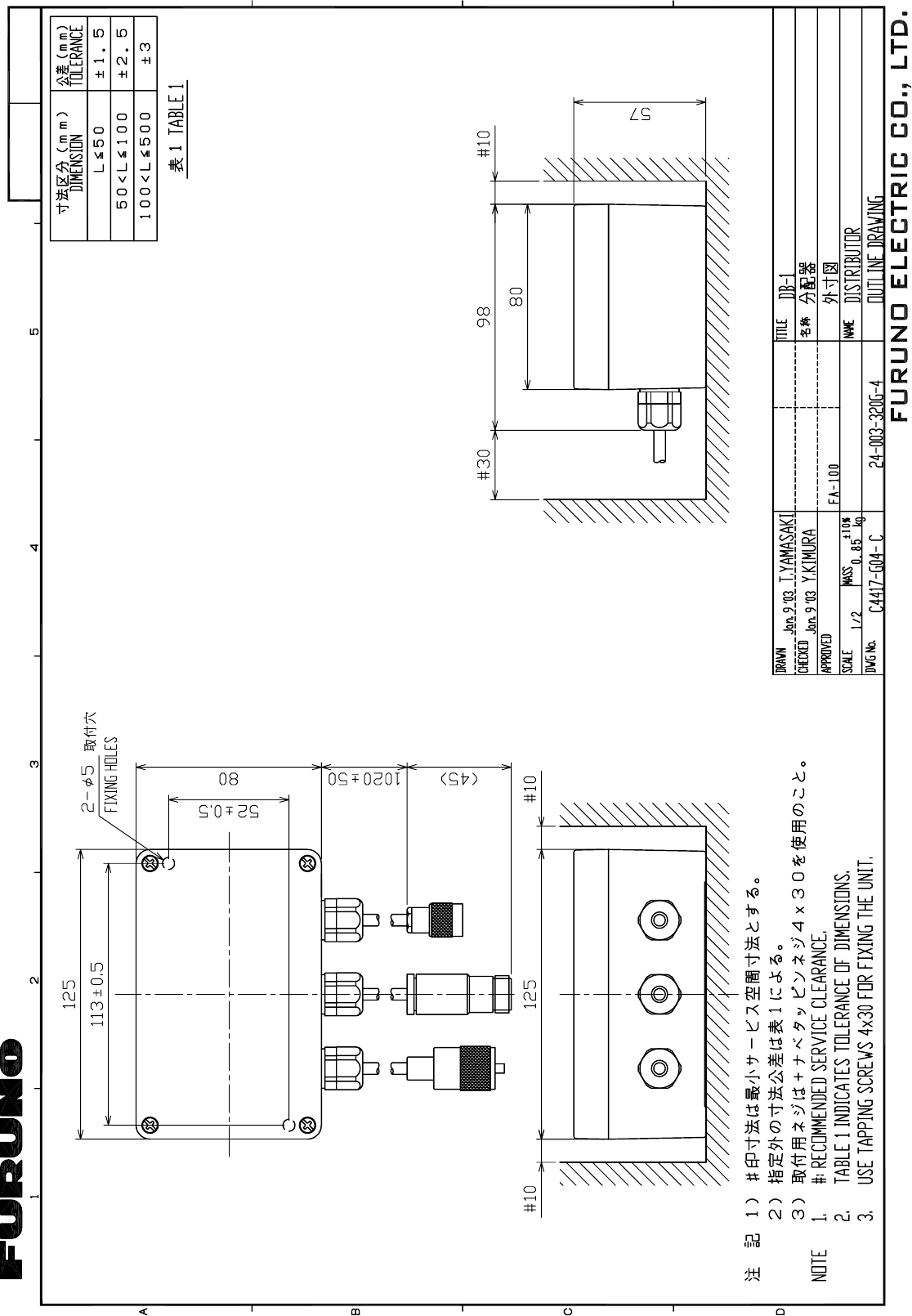
Installing distributor DB-1
The length of the cable between the distributor and transponder is 1 m so locate the
distributor within 1 m from the transponder. Fix the distributor on the bulkhead, facing
the cable entrance downward. Remove the lid of the distributor and secure the distrib-
utor with two self-tapping screws.
Antenna fixing bracket
Loosen four screws.
(M5x16)
Bottom cover
Combined box
Whip antenna fixture
Stanchion
The top of the stanchion comes
into contact with the flange.
1. INSTALLATION
1-9
Note: Be sure no foreign material or water enters the distributor.
1.6 AC-DC Power Supply (option)
When selecting a mounting location for the unit, keep the following in mind:
zKeep the unit out away from areas subject to water splash.
zLocate the unit away from exhaust pipes and vents.
zThe mounting location should be well ventilated.
zMount the unit where shock and vibration are minimal.
zA magnetic compass will be affected if the unit is placed too close to it. Observe the
following compass safe distances to prevent disturbance to the magnetic compass:
• Steering compass: 0.6 m
• Standard compass: 0.9 m
Fix the unit with four self-tapping screws (4x16) to a desktop or the deck. It is not nec-
essary to open the cover.
Self-tapping screw
(4x30)
1. INSTALLATION
1-10
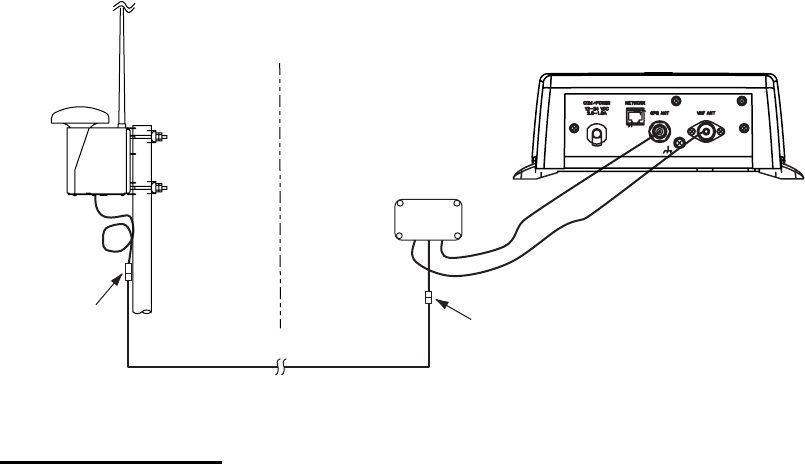
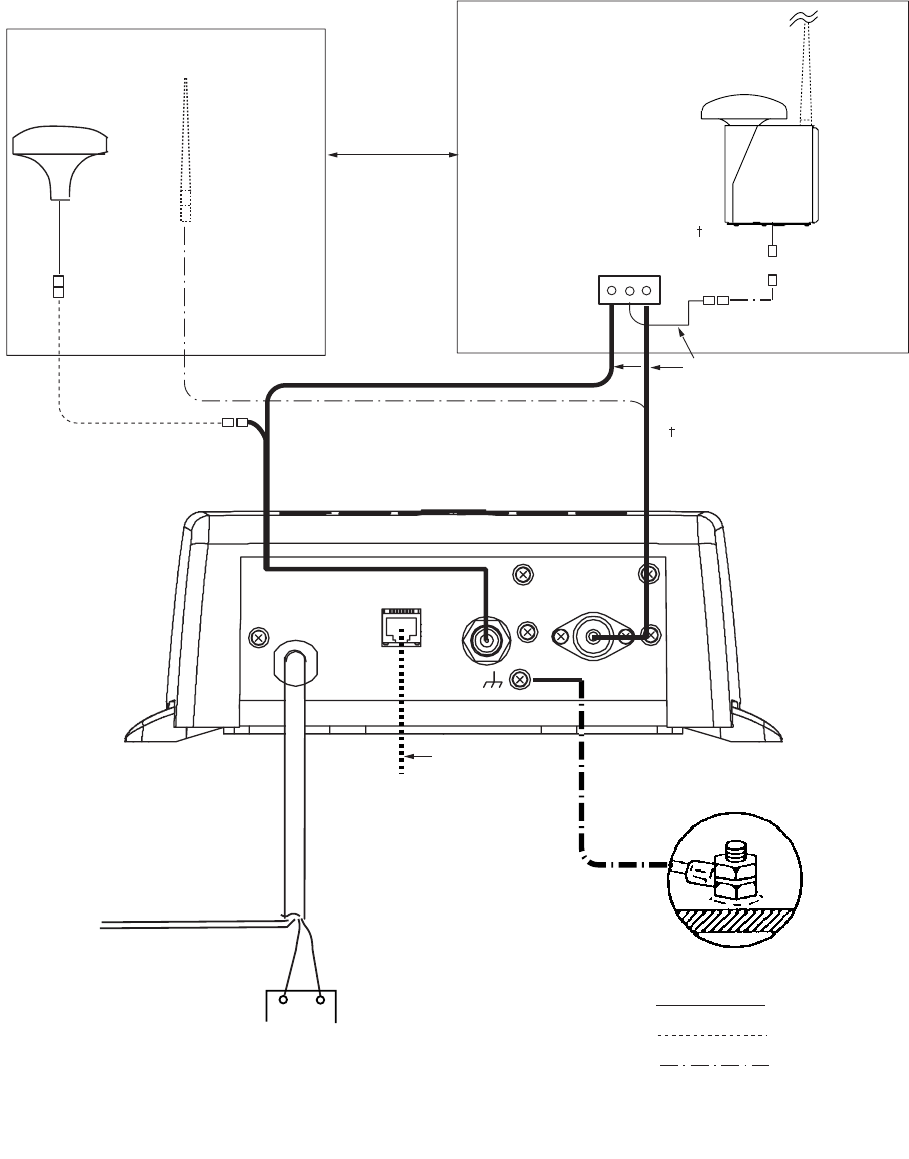
1.7 Wiring
Connect power source, LAN cable, VHF antenna and ground wire as shown below.
RED BLACK
PC, HUB,
NAVNET
GROUND
GROUND WIRE
IV-1.25sq
LAN CABLE
P5E-4PTX-BL
(2 m or 10 m)
AIS TRANSPONDER
POWER CABLE
(supplied)
12-24 VDC*1
RS-422 RATING*2
Switchboard breaker
+-: Standard
: Option
: Local Supply
GPS Antenna
GPA-017/S
150M-W2VN
Either one
RG-10U/Y, 50 m
RG-10U/Y (8D-FB-CV,
option)
Attached to Distributor
(approx. 1m)
Distributor
DB-1
GPS/VHF Combined
Antenna GVA-100-T
8D-FB-CV, 30 m/50 m: Option
RG-10U/Y, 20 m: Local supply
0.6 m 0.8 m
: Ground is not required.
*1: Supply from breaker on switchboard.
*2: If COM lines (connection for NavNet, sensor) are not used,
tape them to prevent short circuit.
NETWORK VHF ANT
COM/POWER
12-24 VDC
2.0-1.0 A GPS ANT
1. INSTALLATION
1-11
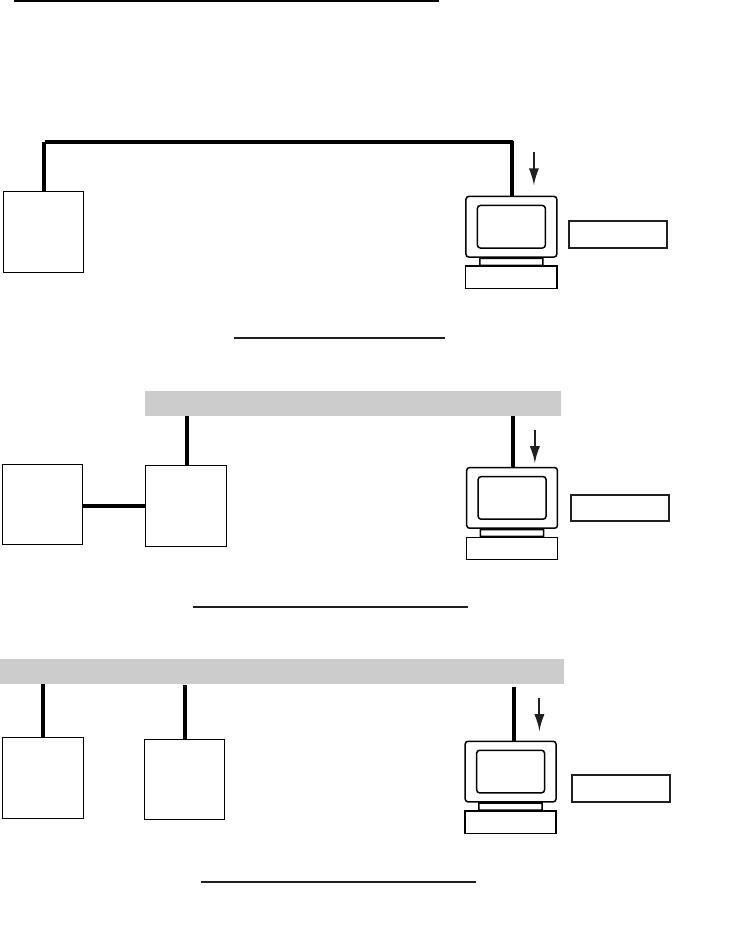
Connection of AIS viewer (FAISPC-MX)
The AIS viewer may be connected to the FA-50 directly, or to both FA-50 and NavNet
VX2/3D. See the figure below for connection examples.
DIRECT CONNECTION
PC FAISPC-MX
FA-50 NavNet
VX2*/3D
LAN
Data sentences
VDM, VDO, L/L,
SOG, COG, HDT
NavNet VX2/3D CONNECTION
PC FAISPC-MX
FA-50 NavNet
VX2*/3D
LAN Data sentences
VDM, VDO,
L/L, SOG, COG, HDT
NavNet VX2/3D CONNECTION
PC FAISPC-MX
FA-50
Data sentences
VDM, VDO
*Required updating software.

1. INSTALLATION
1-12
1.8 Setting and Adjustments
After installing the equipment, set up the COM port, Network and own ship's static in-
formation (MMSI, ship's name, call sign, antenna position and type of ship). The FA-
50 is set up from the PC or external display. The procedure below shows how to set
up from a PC.
Note: Click Tools>Internet Options>Connections>LAN settings, and uncheck the
“Use a proxy server for your LAN” before the setting.
1.8.1 COM PORT setup, Network setup
Note: Only one FA-50 may be connected to the network.
Start up
1. Start up the PC and enter IP address and subnet mask.
(Windows 2000/XP)
1) Right-click My Network and left-click Properties.
2) Right-click Local Area Network and left-click Properties.
3) Select Internet Protocol and Properties.
4) Enter IP address 172.31.24.xxx (xxx=any three digits from 1 to 254, except 3).
5) Enter subnet mask 255.255.0.0.
(Windows Vista)
1) Right-click Network.
2) Left-click Properties.
3) Right-click Manage network connections.
4) Right-click Local Area Connection, and left-click Properties.
5) Choose Internet Protocol Version 4 (TCP/IPv4), and left-click Properties but-
ton.
6) Choose Use the following IP address.
7) Enter “172.31.24.xxx” in IP address. “xxx” should be 0 to 254 other than 3.
8) Enter subnet mask 255.255.0.0.
9) Left-click OK button.
2. Open Internet Explorer and do the following:
1) Click Tools on the menu bar.
2) Click Internet Options.
3) The General tab is selected. Click Settings at Temporary Internet Files.
4) Click the radio button "Every visit to the page" at "Check for newer versions
of stored page".
5) Click the OK button.
6) Click the OK button again.
1. INSTALLATION
1-13
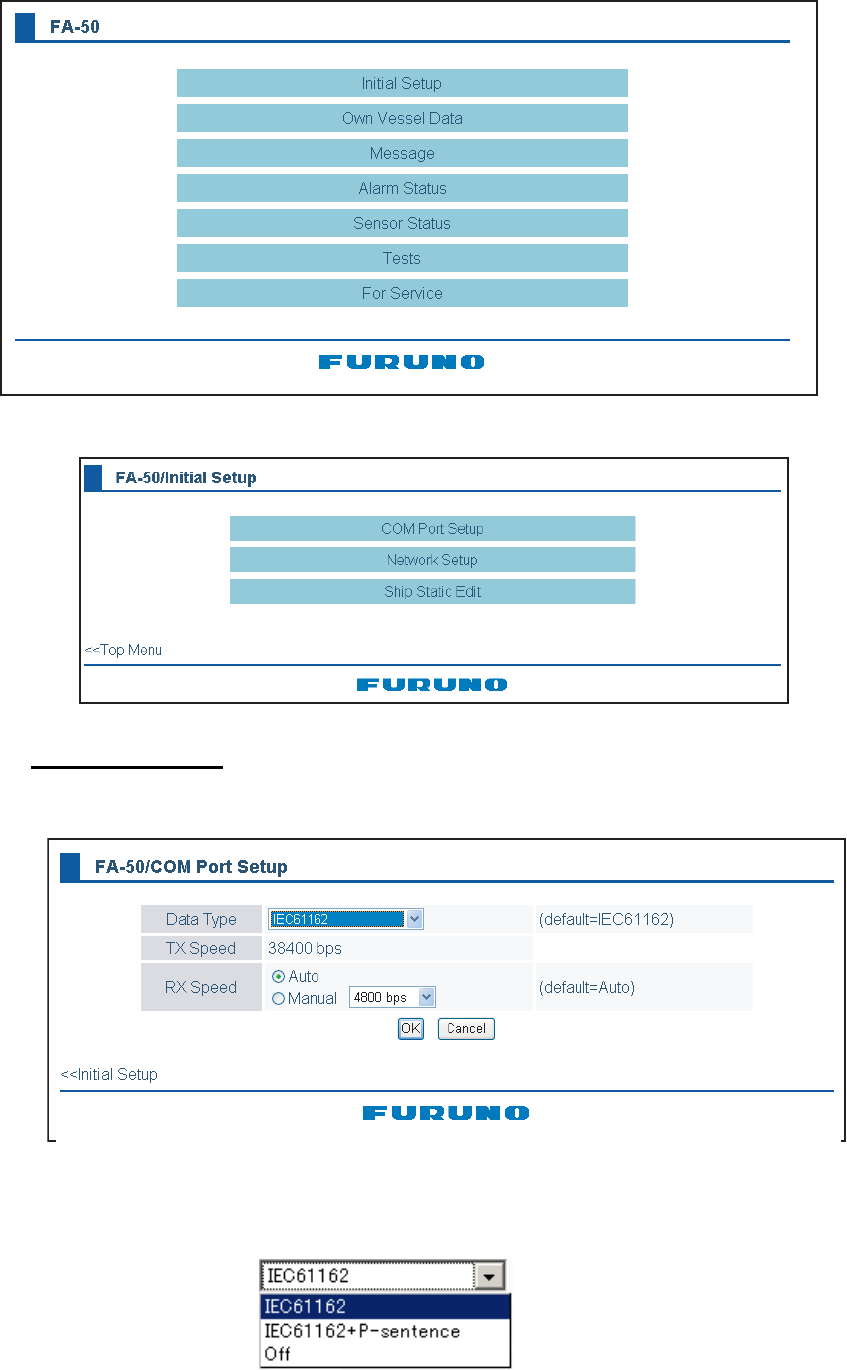
3. Enter URL as http://172.31.24.3 and press the Enter key. This number is the de-
fault value of FA-50.
4. Click Initial Setup to show the Initial Setup screen.
COM PORT setup
1. Click COM Port Setup to show the COM Port Setup screen.
2. The default setting for Data Type is IEC61162, which is suitable for most installa-
tions. If change is necessary, click the Data Type drop-down list and choose data
type as applicable, among the following choices.
(default=IEC61162)
1. INSTALLATION
1-14
IEC61162: Transmit and receive IEC61162 format data via COM port. (P-sen-
tences are received but not transmitted. P-sentence is FURUNO’s original sen-
tence.)
IEC61162+P-sentence: Transmit and receive IEC61162+P sentences format
data via COM port.
Off: FA-50 transmits no data from COM port.
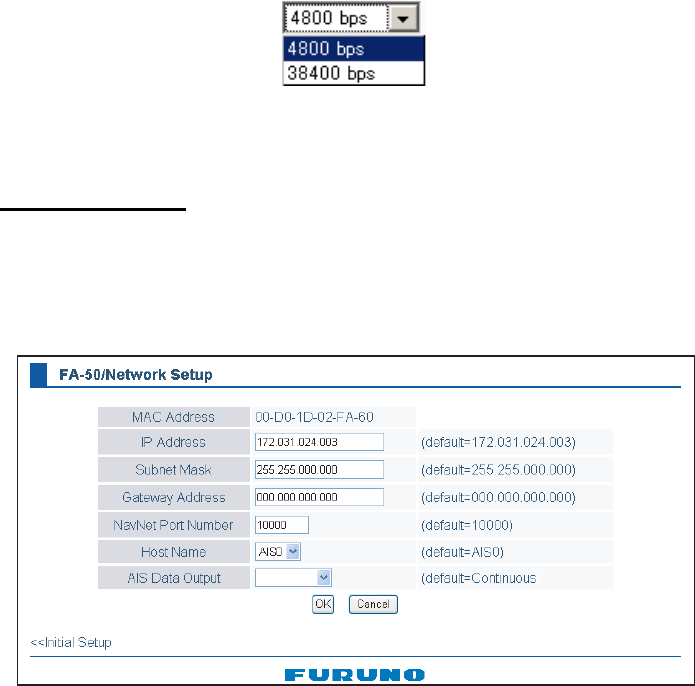
With the radio buttons at RX Speed, choose how RX speed is regulated, Auto or
Manual. For manual, choose speed from the drop-down list.
Note: Tx speed is fixed at 38400 bps.
3. Click OK to confirm setting.
NETWORK setup
If connected to a LAN (via NETWORK port), set the IP address for FA-50 as shown
below.
1. Click Network Setup to show the Network Setup screen.
2. Enter the IP address assigned to the FA-50.
3. Enter subnet mask for the network.
4. Enter gateway address.
5. For NavNet connection, enter NavNet port number at NavNet Port Number. Enter
ten-thousandths and one-thousandths places.
6. At Host Name, select host name to be used in NavNet, AIS0 - AIS9, from the win-
dow.
7. At AIS Data Output, set output condition.
Auto: Auto-detect of where to output AIS data.
Continuous AIS: Output AIS data continuously. Select if interfaced with
FAISPC_MX.
Continuous GPS: Output GPS data (L/L, SOG, COG) continuously. Select if in-
terfaced with FAISPC_MX.
Continuous ZDA: Output time data continuously. Select if interfaced with
FAISPC_MX.
Continuous AIS : AIS)
1. INSTALLATION
1-15
Continuous AIS/GPS: Output AIS/GPS data continuously. Select if interfaced
with FAISPC_MX.
Continuous AIS/ZDA: Output AIS/time data continuously. Select if interfaced
with FAISPC_MX.
Continuous GPS/ZDA: Output GPS/time data continuously. Select if interfaced
with FAISPC_MX.
Continuous AIS/GPS/ZDA: Output AIS/GPS/time data continuously. Select if in-
terfaced with FAISPC_MX.
Note: It is not necessary to change the settings of NavNet Port Number, Host
Name and AIS Data Output. Connection is available without adjusting them.
8. Click the OK button to finish.
If you changed a setting, the message below appears.
9. Click the Yes button to restart. ER LED on the FA-50 lights. After the LED goes
off access is given.
10. The message "Please close the window." appears. Close the browser.
After restart is completed, it is necessary to access the FA-50 using new values.
For example, if you changed the IP address, use the new address to access the
FA-50.
1.8.2 Ship static
Set the static data as below to use the transponder function.
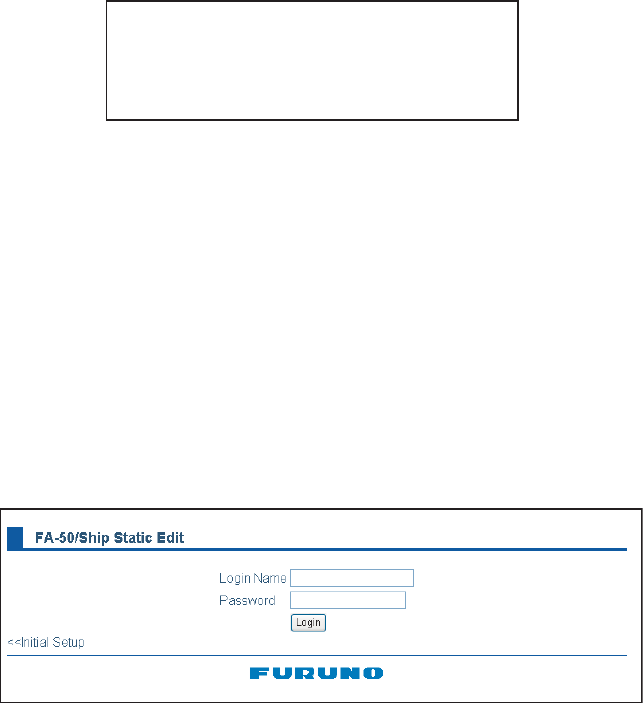
1. On the Initial Setup menu, click Ship Static Edit to show the Ship Static Edit menu.
You must restart your FA-50
before the new settings will take effect.
Do you want to restart your FA-50 now?
(It will take about 1 minute to restart your FA-50)
1. INSTALLATION
1-16
2. Enter the Login Name and Password. The Ship Static Edit screen appears. Note
that the password is known by only the FURUNO dealer.
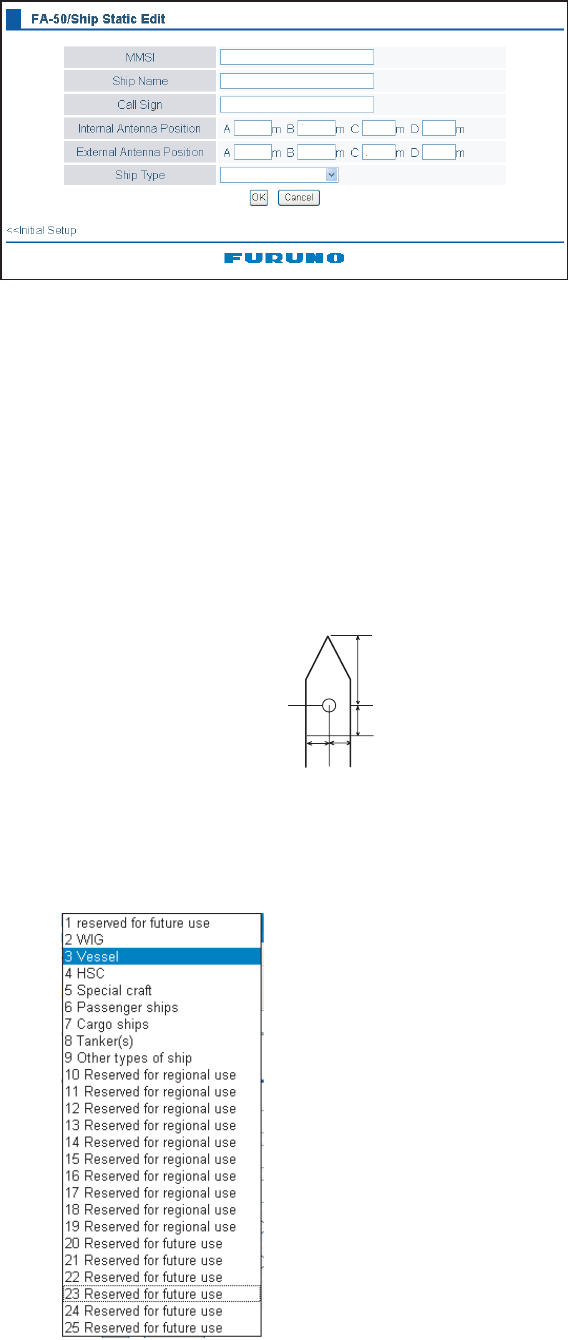
3. Enter ship's MMSI (Maritime Mobile Service Identity) in nine digits.
4. Enter ship's name, using up to 20 alphanumeric characters.
5. Enter call sign, using seven alphanumeric characters.
6. Set Internal/External antenna positions as follows:
1) Enter distance for location “A” of FA-50 GPS antenna.
A: Distance from bow to GPS antenna position, setting range: 0-511 m
2) Enter distance for location B, C and D similar to how you did for “A” above.
B: Distance from stern to GPS antenna position, setting range: 0-511 m
C: Distance from port to GPS antenna position, setting range: 0-63 m
D: Distance from starboard to GPS antenna position, setting range: 0-63 m
3) Enter distance for location of an external GPS antenna (if connected) similar
to how you did for the internal GPS antenna.
7. Click the down-allow button for Ship Type to show the operation window, and then
choose a ship type. (WIG: Wing in ground, HSC: High speed craft)
8. After finishing all settings, click the OK button.
000005044
0000
0000
3 Vessel
A
B
CD
GPS antenna
10 to 19: Reserved for regional use
1, 20 to 25: Reserved for future use
2-1
2. OPERATION
2.1 AIS Transponder FA-50
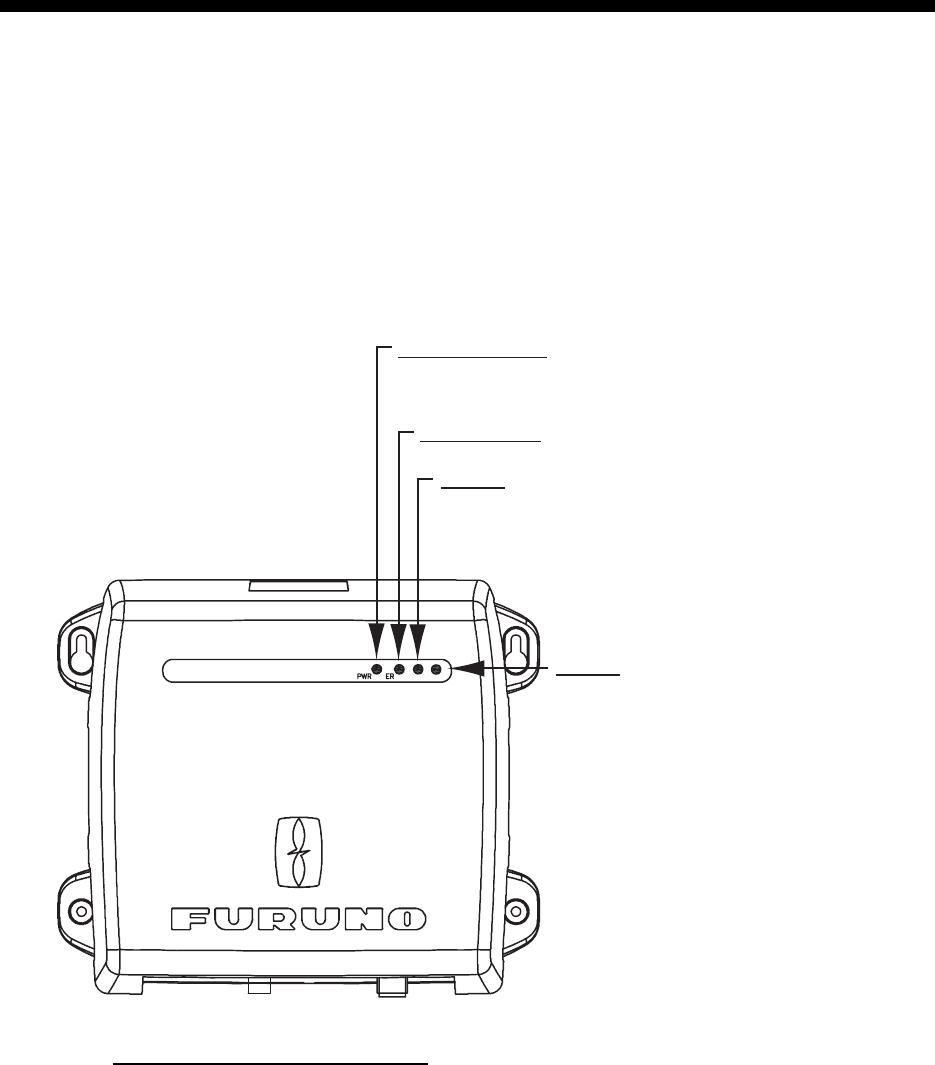
The FA-50 has no power switch. Power is fed from the ship's switchboard, and a pow-
er switch on the switchboard turns the FA-50 on or off. When powered, the PWR LED
(green) on the cover lights. The three other LEDs on the cover blink or light with equip-
ment state. The ER LED (red) lights while the equipment is being initialized, and blinks
when equipment error is found. The RX LED (orange) lights when receiving.The TX
LED lights in blue when transmitting, and blinks in orange when TX time out occurs.
Sending/receiving messages
You may send and receive messages via the VHF link to a specified destination (MM-
SI) or all ships in the area.
The contents of the message may be viewed on the received message log.
RX LED
Lights (in orange) when receiving.
ER (Error) LED
Blinks (in red) for RAM, ROM, TX/RX circuit error.
PWR (Power) LED
Lights (in green) when power is on.
TX
TX LED
-Lights (in blue) during transmitting.
-Blinks (in orange) when continuous transmission is
not possible (Tx time out.)
RX
-Lights (in orange) when not registered MMSI.
2. OPERATION
2-2
2.2 Messages
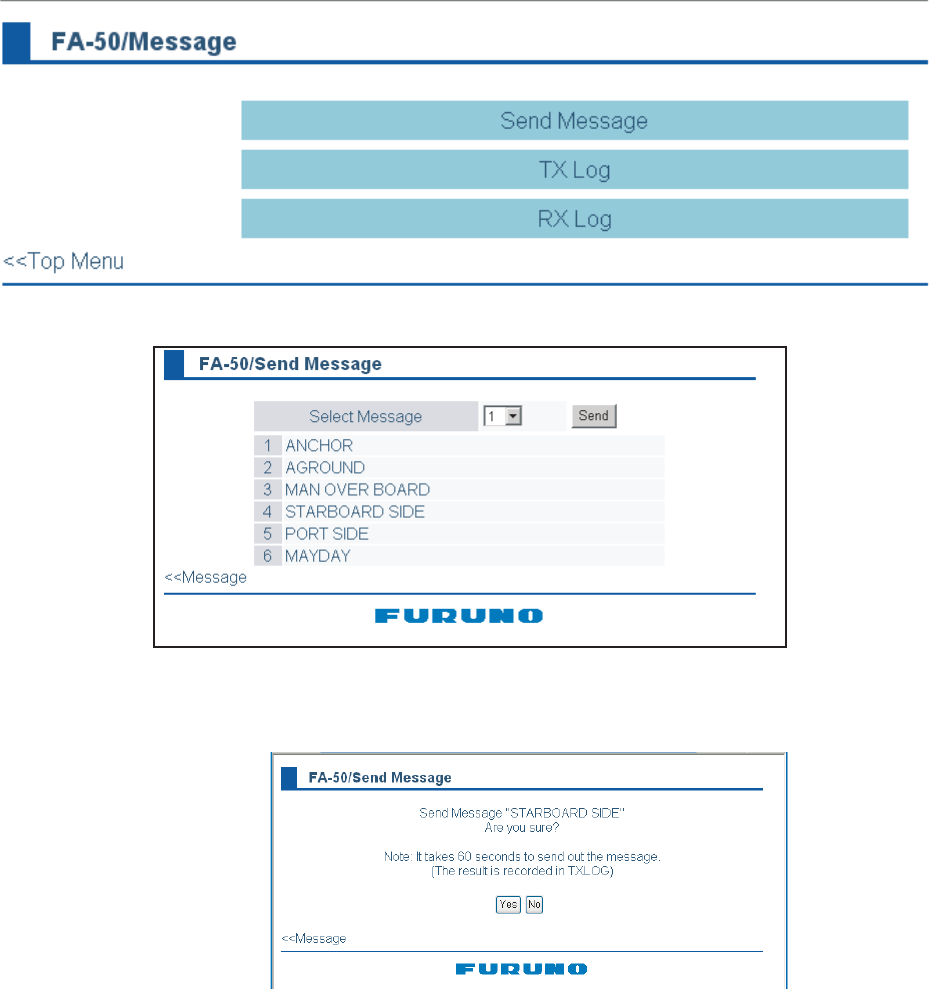
2.2.1 Sending a message
Pre-defined messages (maximum 16 characters for each message) are stored in the
Send Message screen. You can send a message among them once in a minute.
1. Click Message on the main menu.
2. Click Send Message.
3. Choose the message. Message 1 through 6 are fixed and are not able to change.
4. Click the Send button, and the following message appears.
5. Click the Yes button.
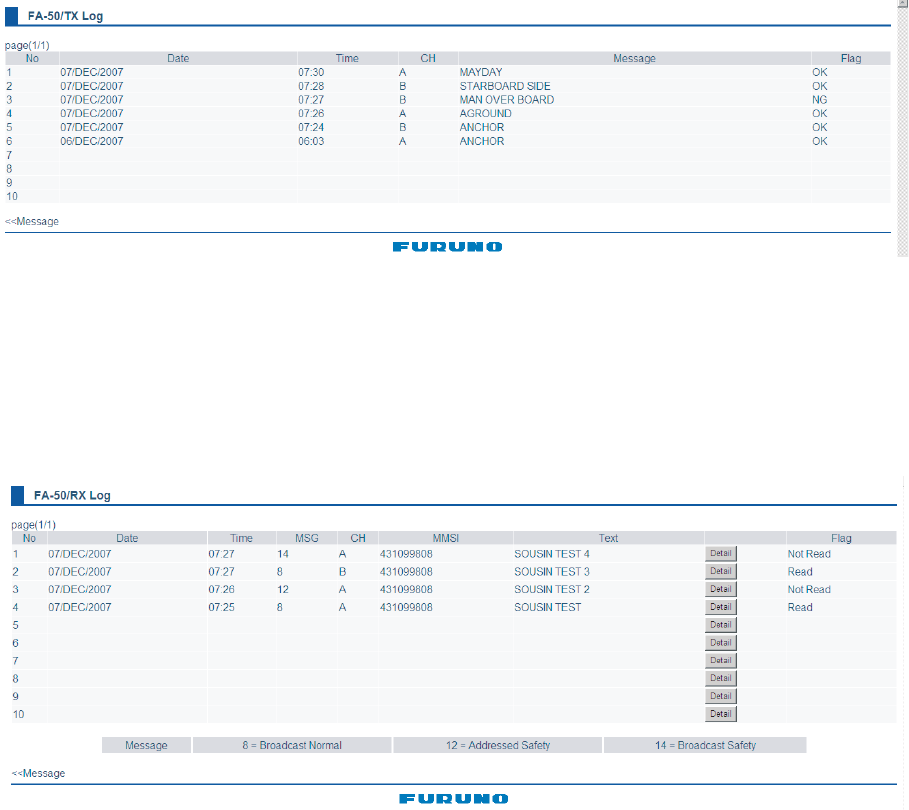
Click the TX Log on the Message menu to show the TX Log to show messages sent.
Each page shows ten messages. When changing the page, click “<Page (x/x)”. Flag
shows OK or NG to in-form you the sending status. “_ _” appears for one minute after
sending a message to check it.
2. OPERATION
2-3
2.2.2 Confirming receiving messages
You can confirm the received messages on the RX Log screen. Click RX Log on the
Message menu.
Click Detail to show the full message.
To change the page, click <<Page (x/x). Flag field shows Read or “Not Read” for each
message received.
Message category:
• Message 8: Received routine messages
• Message 12: Received safety messages from specific party
• Message 14: Received safety messages
2. OPERATION
2-4
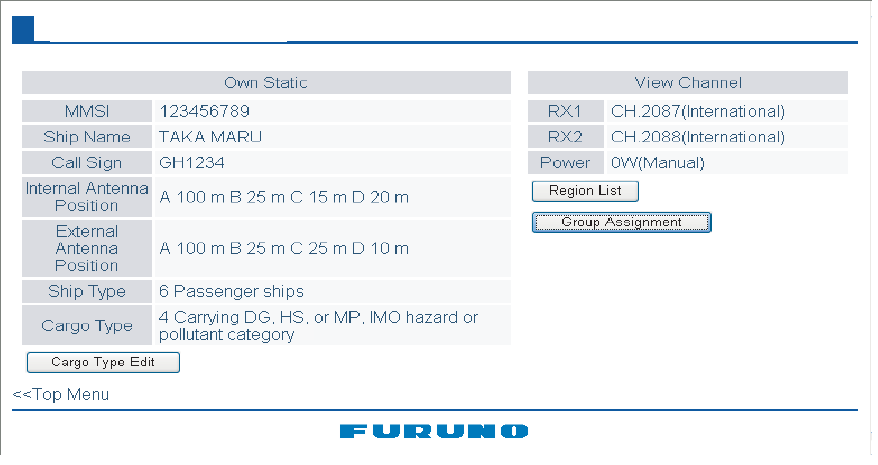
2.3 Own Vessel Data Display
The Own Vessel Data display shows your ship’s various data.
1. Show the main menu.
2. Click Own Vessel Data.
MMSI: Nine-digit number
Ship Name: 20 characters, max
Call sign: 7 characters, max.
Internal/External Antenna Position: Shows GPS and external GPS antenna posi-
tions.
Ship Type
Cargo Type
RX1: Channel (four digits) received over RX1. Channel type (International, Local)
is shown in parentheses.
RX2: Channel (four digits) received over RX2. Channel type (International, Local)
is shown in parentheses.
Power: Shows the power (2W)
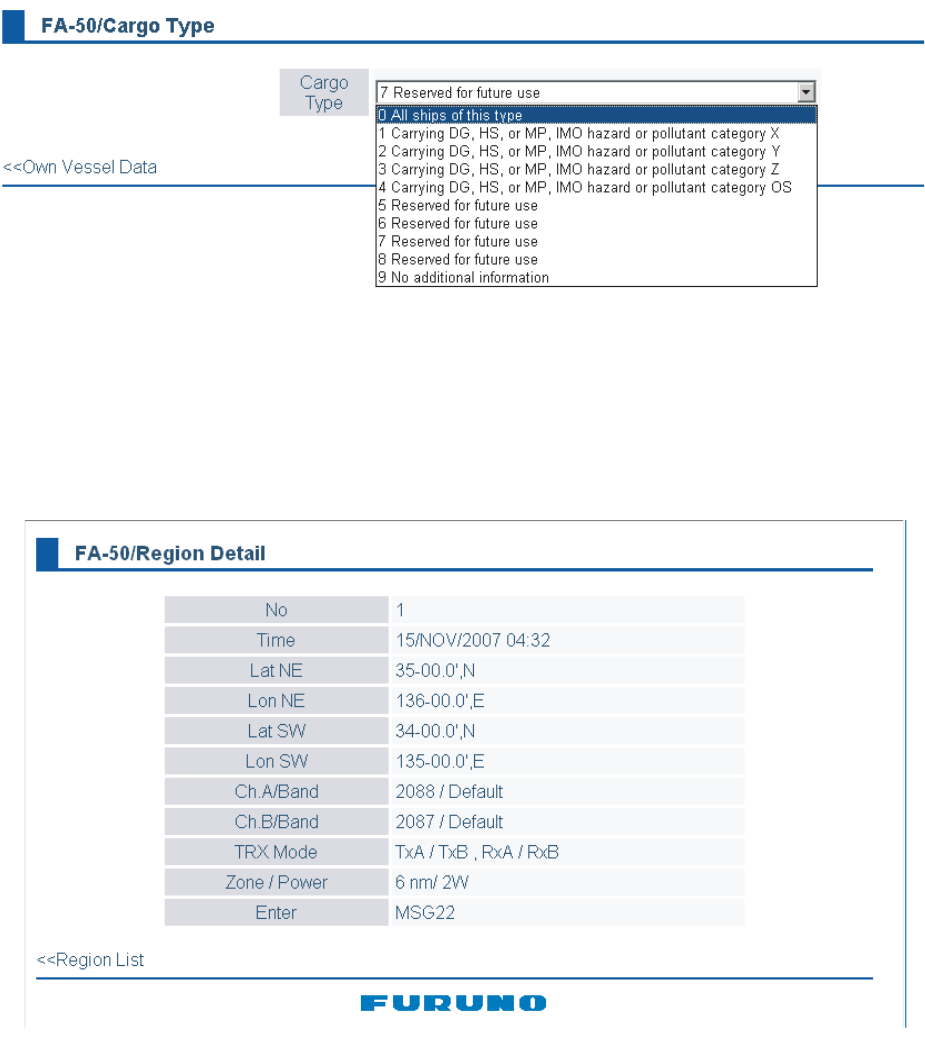
3. Cargo Type can be selected as below.
FA-50/Own Vessel Data
OS
2. OPERATION
2-5
4. Choose a type, and then click the OK button.
5. Click the Cargo Type Edit button to show the Cargo Type screen.
6. Select a Cargo Type from the drop down list and click OK.
7. Click Region List button to show the local sea area.Clicking the Detail button
shows the detailed information of the region.
8. Click <<Region List, <<Own Vessel Data in order to return to Own Vessel Data
window.
2. OPERATION
2-6
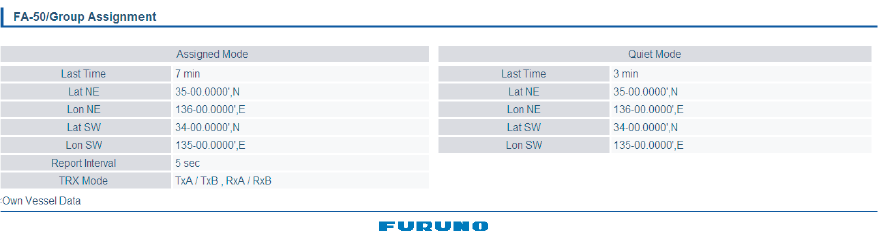
9. Click the Group Assignment button to show the Group Assignment window. This
window shows the following list when receiving a group assignment message via
VHF, own ship is cruising in the area specified on the message.
Assigned mode: Own ship's data is sent automatically with the designated interval
in the specified area.
Quite mode: Transmission is not available in the specified area.
10. Click <<Own Vessel Data, <<Top Menu to go back to the top menu.
2. OPERATION
2-7
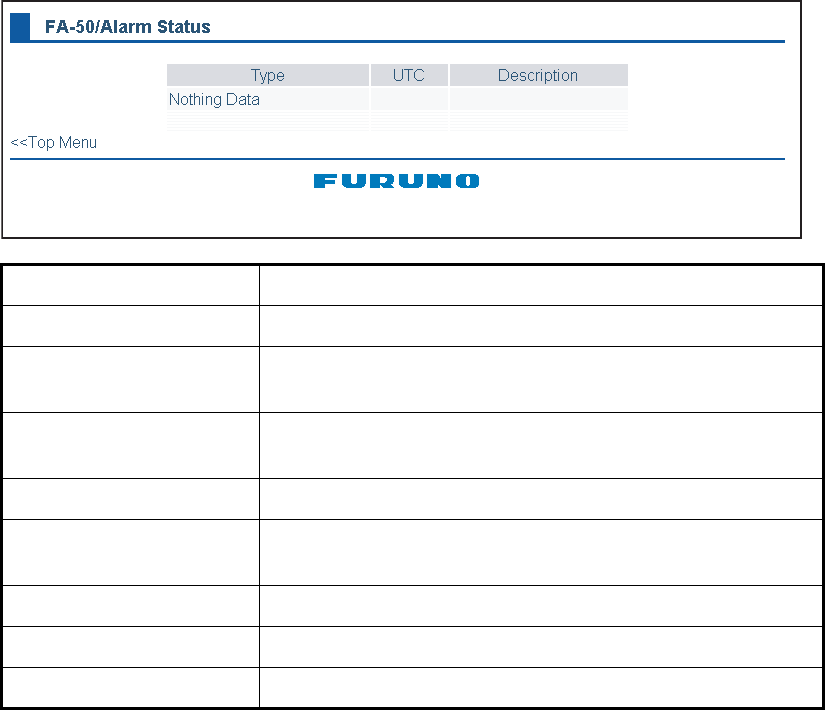
2.4 Alarm Status
The alarm status log shows alarms violated. Click “Alarm Status” on the top menu to
show the alarm status log.
Alarm Status Indication Meaning
TX TX malfunction (and Error LED lights.)
RX1 TDMA RX1 Board trouble. TX stopped on corresponding
TX channel.
RX2 TDMA RX2 Board trouble. TX stopped on corresponding
TX channel.
COG Invalid COG data.
EPFS No data from external navigator. Continued operation pos-
sible.
HDG Invalid/nonexistent HDG data
L/L No L/L data
SOG Invalid SOG data
2. OPERATION
2-8
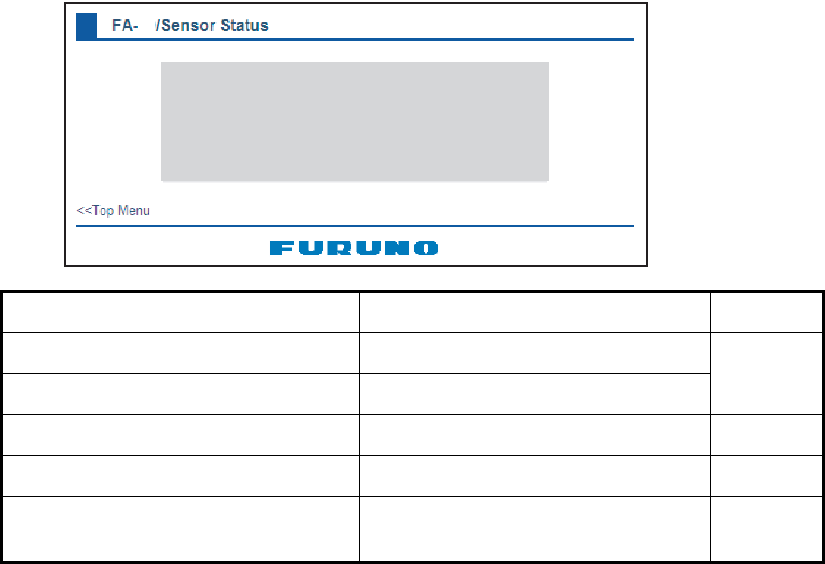
2.5 Sensor Status
The sensor status display provides information about sensors connected to the FA-50.
1. Show Top Menu.
2. Click Sensor Status.
*1: Whichever navigator is in use.
*2: Displayed for 30 seconds after changing channel parameters.
Indication Meaning Remarks
DGPS in use (Internal/External) DGPS currently in use See *1.
.
GPS in use (Internal/External) GPS currently in use
SOG/COG in use (Internal/External) SOG/COG currently in use
Heading valid Valid heading data
Channel Management Parameters
Changed Channel parameters have been
changed. See *2.
Internal GPS in use
Heading valid
Channel Management Parameters Changed
50
3-1
3. MAINTENANCE,
TROUBLESHOOTING
3.1 Maintenance
Regular maintenance helps good performance. Check the items listed below monthly
to keep your equipment in good working order.
Item Check point, remedy
Wiring Check that each cable and wire are securely fastened.
Refasten if necessary.
Ground Check grounding for rust. Clean if necessary.
Antenna Check antenna and its cabling for damage.
Replace if necessary.
Cabinet Dust and dirt should be removed from the cabinet with a soft, dry
cloth. Do not use chemical-based cleaners; they can remove paint
and markings.
WARNING
Do not open the shield
cover unless totally familiar
with electrical circuits and
service manual.
Only qualified personnel
should work inside the
equipment.
NOTICE
Do not apply paint, anti-corrosive sealant
or contact spray to coating or plastic
parts of the equipment.
Those items contain organic solvents that
can damage coating and plastic parts,
especially plastic connectors.
3. MAINTENANCE, TROUBLESHOOTING
3-2
3.2 Replacing the Fuse
The fuse (4A) inside the FA-50 protects it from overcurrent and equipment fault. If the
unit cannot be powered, that is, the PWR (power) LED is off, the fuse may have blown.
If this happens, turn off the power to the FA-50, open the body cover and check the
fuse. If the fuse has blown, find out the reason before replacing it. If it blows again after
replacement, contact a FURUNO agent or dealer for advice.
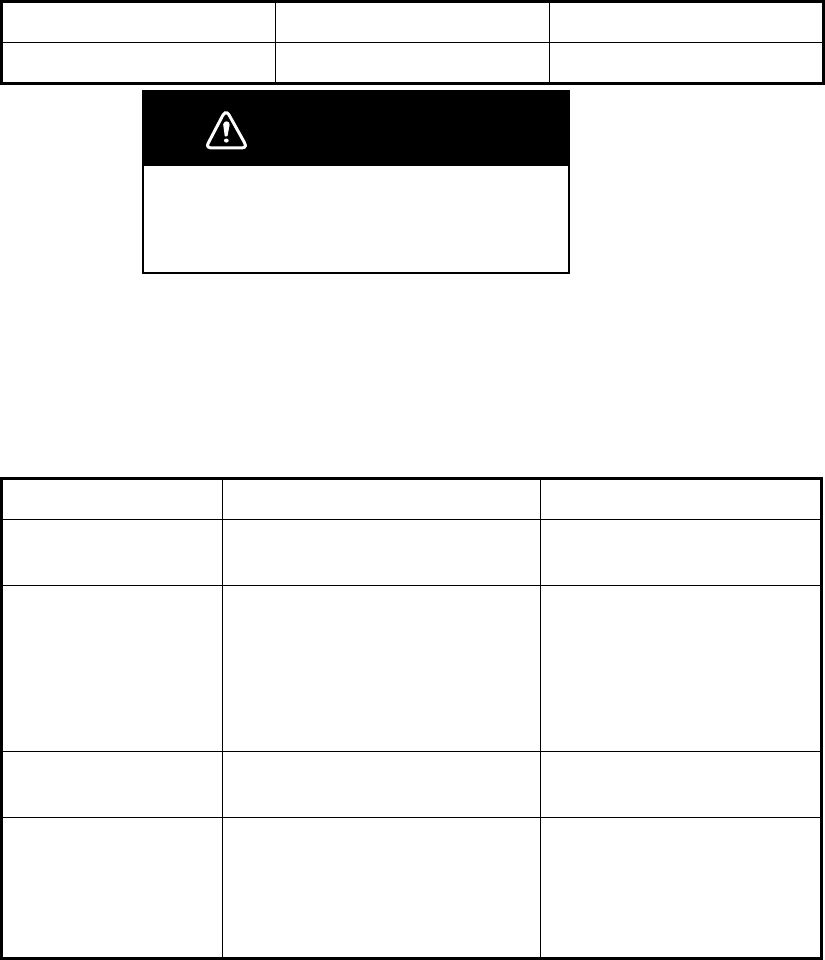
3.3 Troubleshooting
The troubleshooting table below provides typical operating problems and the means
to restore normal operation. If you cannot restore normal operation, do not open the
shield cover; there are no user serviceable parts inside the transponder.
Part Type Code No.
Fuse (4A) FGMB 125V 4A PBF 000-157-482-10
WARNING
Use the proper fuse.
Use of a wrong fuse can result in damage to the
equipment and cause fire.
Symptom Problem Remedy
Transponder cannot
be powered. Fuse inside the transponder
may have blown. Replace the fuse.
Cannot transmit/re-
ceive • VHF antenna cable connec-
tion may haveloosened.
• Antenna or its cabling may be
damaged.
• Rx channel setting is wrong.
• Check if the cable is firmly
connected.
• Check the antenna and its
cabling for damage.
• Confirm the channel set-
ting.
The message is sent
to wrong ship. Setting of transmission is not
correct. Confirm MMSI.
No position data • GPS antenna may be dam-
aged.
• GPS antenna cable may be
damaged.
• Change the GPS anten-
na.
• Check if the cable is firmly
fastened. If the cable has
damage, change it.
3. MAINTENANCE, TROUBLESHOOTING
3-3
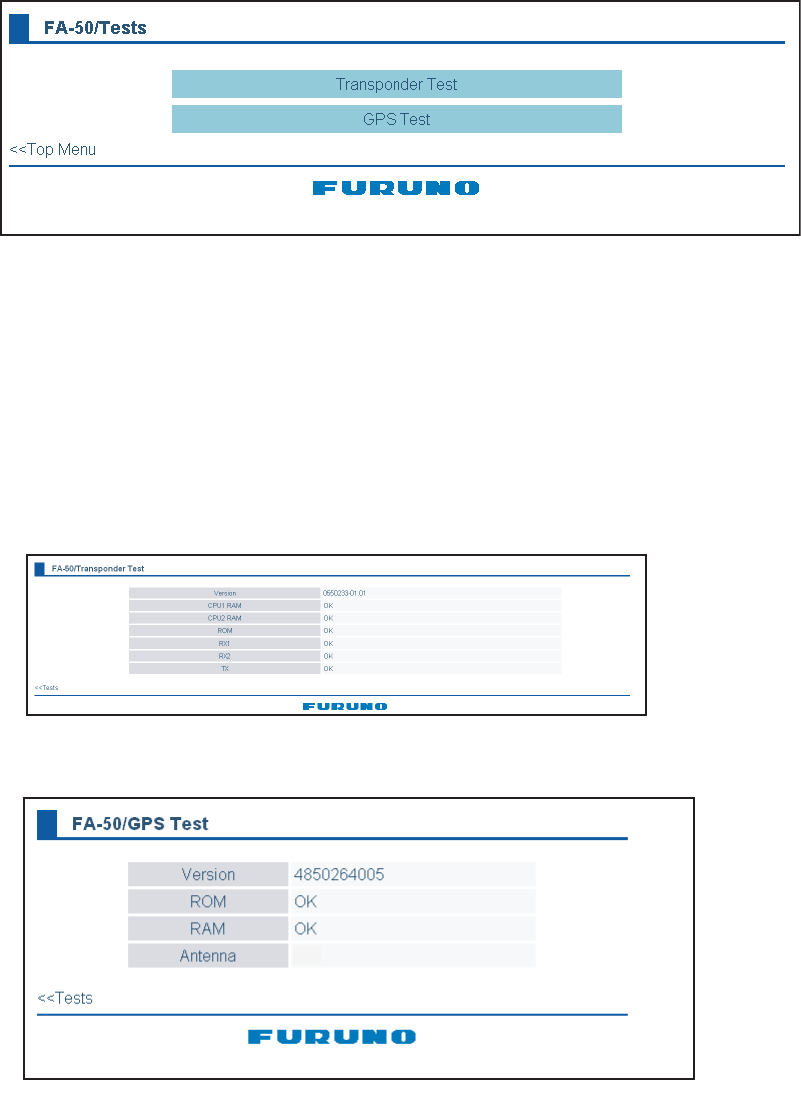
3.4 Diagnostics
The built-in diagnostic facility displays program version no. and TX text, then checks
RAM, ROM, RX channels and GPS antenna for proper operation.
1. Open Internet Explorer and display the main menu.
2. Click Tests to show the Tests display.
3. Click "Transponder Test" or "GPS Test" to show the appropriate test screen.
Transponder Test: The program version number appears on the first line. The
CPU1 RAM and CPU2 RAM, ROM and the two RX channels and TX are checked
for proper operation, and the results are displayed as OK or NG (No Good). For
any NG, try resetting the power and checking connections. If NG persists, contact
your dealer for advice.
GPS Test: The program version number appears on the first line. The ROM, RAM
and connection with antenna (including power line), and the results are displayed
as OK or NG (No Good). For any NG, try resetting the power and checking con-
nections. If NG persists, contact your dealer for advice.
Transponder test
GPS test
OK
3. MAINTENANCE, TROUBLESHOOTING
3-4
This page is intentionally left blank.
AP-1
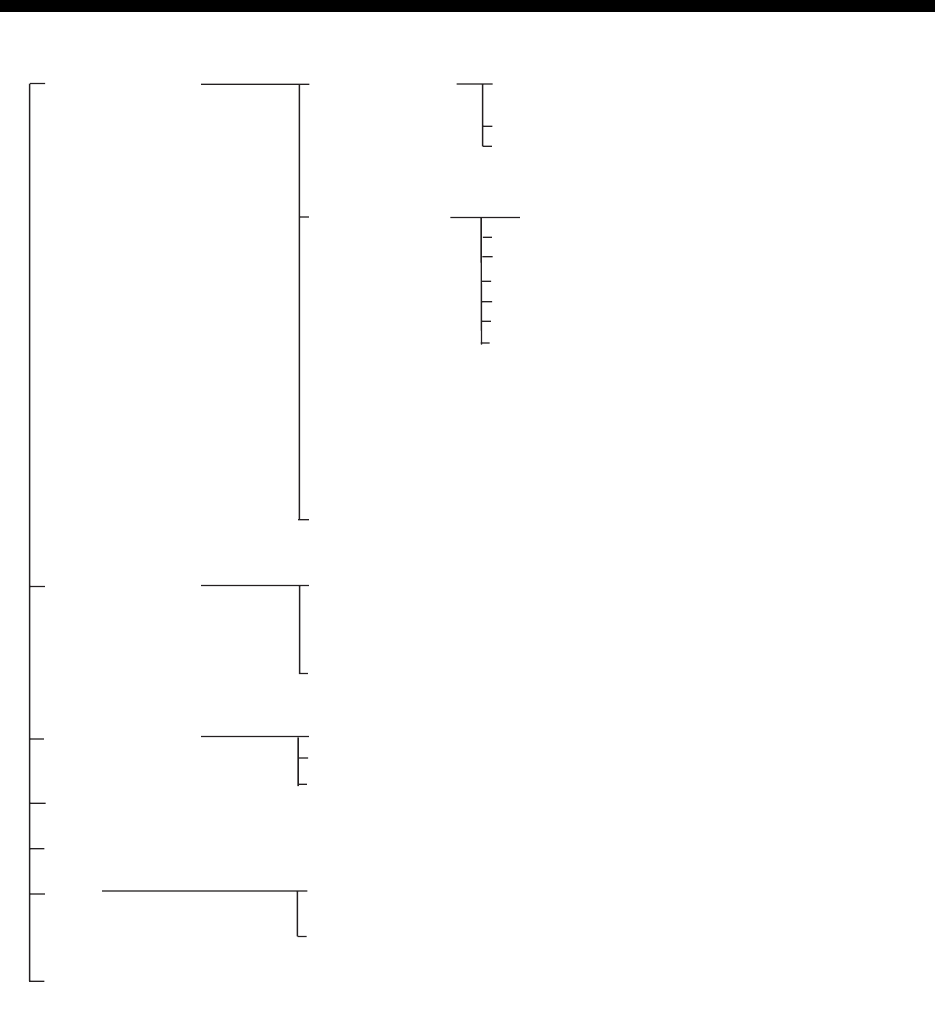
APPENDIX 1 MENU TREE
Initial Setup COM Port Setup Data Type
(
IEC61162
, IEC61162+P-sentence, Off)
TX Speed (
38400 bps
)
RX Speed
(
Auto
, Manual (
4800 bps
, 38400 bps))
Network Setup MAC Address
IP Address (
172.031.024.003
)
Subnet Mask (
255.255.000.000
)
Gateway Address (
000.000.000.000
)
NavNet Port Number (
10000
)
Host Name (AIS0-AIS9,
AIS0
)
AIS Data Output (Continuous: AIS)
(Continuous: GPS)
(Continuous: ZDA)
(Continuous: AIS/GPS)
(Continuous: AIS/ZDA)
(Continuous: GPS/ZDA)
(Continuous: AIS/GPS/ZDA)
(Auto)
Ship Static Edit (Required a password.)
Own Vessel Data Own Static (Cargo Type Edit)
(MMSI, Ship Name, Call Sign, Internal Antenna Position,
External Antenna Position, Ship Type, Cargo Type)
View Channel (Region List, Group Assignment)
(RX1, RX2, Power)
Message Send Message
TX Log
RX Log
Alarm Status
Sensor Status
Tests Transponder Test
(Version, CPU1RAM, CPU2RAM, ROM, RX1, RX2, TX)
GPS Test (Version, ROM, RAM, Antenna)
For Service (Required a password.)
bold: default
AP-2
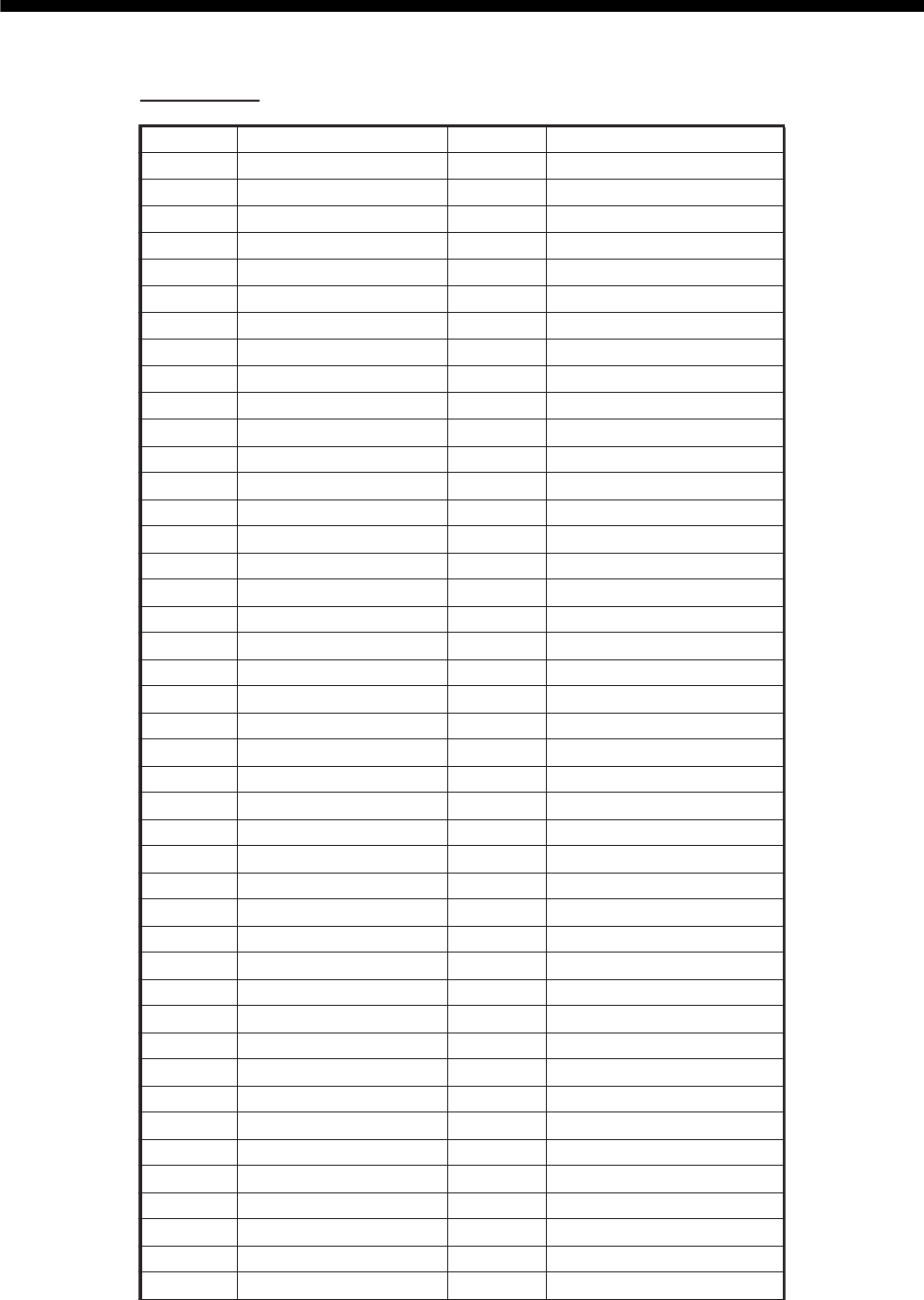
APPENDIX 2 VHF CHANNEL LISTS
USA mode
Ch No. Frequency (MHz) Ch No. Frequency (MHz)
1001 156.05 1088 157.425
- - 2001 160.65
1003 156.15 2002 160.7
- - 2003 160.75
1005 156.25 2004 160.8
6 156.3 2005 160.85
1007 156.35 2007 160.95
1018 156.9 8 156.4
1019 156.95 9 156.45
1020 157 10 156.5
1021 157.05 11 156.6
1022 157.1 12 156.6
1023 157.15 13 156.65
1024 157.2 14 156.7
1025 157.25 15 156.75
1026 157.3 16 156.8
1027 157.35 17 156.85
1028 157.4 2018 161.5
- - 2019 161.55
1061 156.07 2020 161.6
- - 2021 161.65
1063 156.175 2022 161.7
1064 156.225 2023 161.75
1065 156.275 2024 161.8
1066 156.325 2025 161.85
67 156.375 2026 161.9
68 156.425 2027 161.95
69 156.475 2028 162
70 156.525 2060 160.625
71 156.575 2061 160.675
72 156.625 2062 160.725
73 156.675 2063 160.775
74 156.725 2064 160.825
75 156.775 2065 160.875
76 156.825 2066 160.925
77 156.875 2078 161.525
1078 156.925 2079 161.575
1079 156.975 2080 161.625
1080 157.025 2081 161.675
1081 157.075 2082 161.725
1082 157.125 2083 161.775
1083 157.175 2084 161.825
1084 157.225 2085 161.875
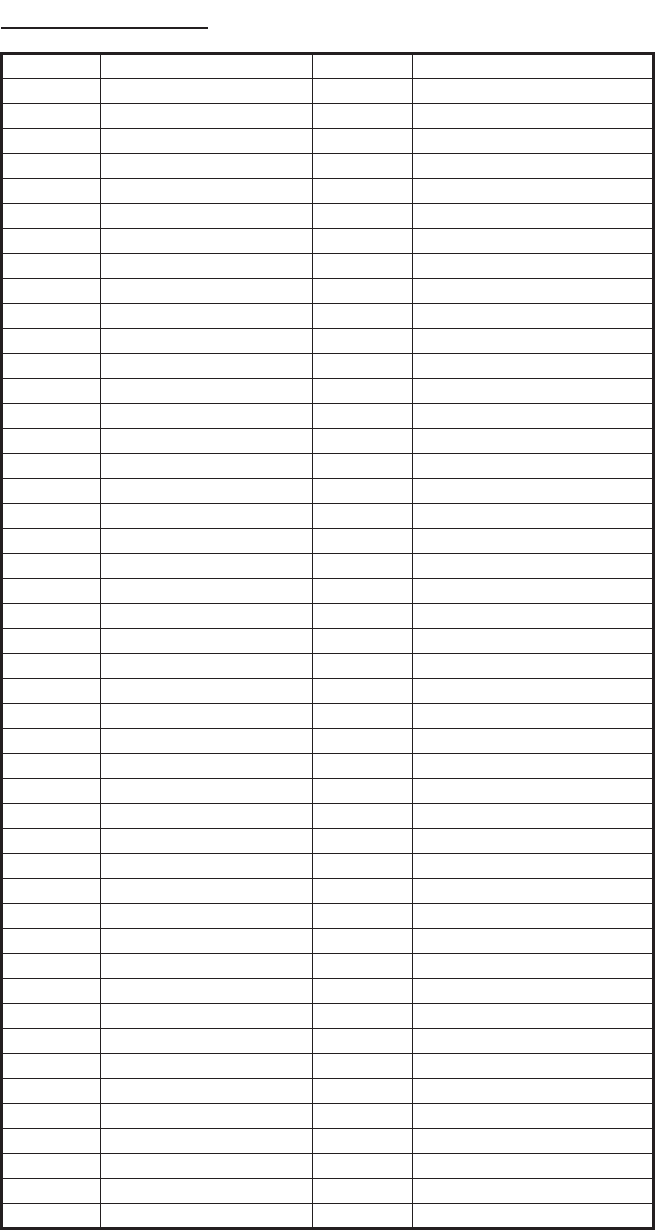
APPENDIX 2 VHF CHANNEL LISTS
AP-3
CH13, 67: operate on 1W.
International mode
Ch No. Frequency (MHz) Ch No. Frequency (MHz)
1001 156.05 1088 157.425
1002 156.1 2001 160.65
1003 156.15 2002 160.7
1004 156.2 2003 160.75
1005 156.25 2004 160.8
6 156.3 2005 160.85
1007 156.35 2007 160.95
1018 156.9 8 156.4
1019 156.95 9 156.45
1020 157 10 156.5
1021 157.05 11 156.55
1022 157.1 12 156.6
1023 157.15 13 156.65
1024 157.2 14 156.7
1025 157.25 15 156.75
1026 157.3 16 156.8
1027 157.35 17 156.85
1028 157.4 2018 161.5
1060 156.025 2019 161.55
1061 156.075 2020 161.6
1062 156.125 2021 161.65
1063 156.175 2022 161.7
1064 156.225 2023 161.75
1065 156.275 2024 161.8
1066 156.325 2025 161.85
67 156.375 2026 161.9
68 156.425 2027 161.95
69 156.475 2028 162
70 156.525 2060 160.625
71 156.575 2061 160.675
72 156.625 2062 160.675
73 156.675 2063 160.775
74 156.725 2064 160.825
75 156.775 2065 160.875
76 156.825 2066 160.925
77 156.875 2078 161.525
1078 156.925 2079 161.575
1079 156.975 2080 161.625
1080 157.025 2081 161.675
1081 157.075 2082 161.725
1082 157.125 2083 161.775
1083 157.175 2084 161.825
1084 157.225 2085 161.875
1085 157.275 2086 161.925
1086 157.325 2087 161.975
1087 157.375 2088 162.025
AP-4
APPENDIX 3 PARTS LIST,
LOCATIONS
Parts lists
F U R U N O Model FA-50
Unit
ELECTRICAL PARTS LIST
Blk.No.
NAME TYPE
PRINTED CIRCUIT BOARD
MAIN&TX 05P0814
POWER 05P0809
RX1 05P0808A
RX2 05P0808B
GPS TB 24P0043
Tranponder
001-034-470
001-034-460
001-015-620
001-015-630
005-955-290
CODE NO.
APPENDIX 3 PARTS LIST, LOCATIONS
AP-5
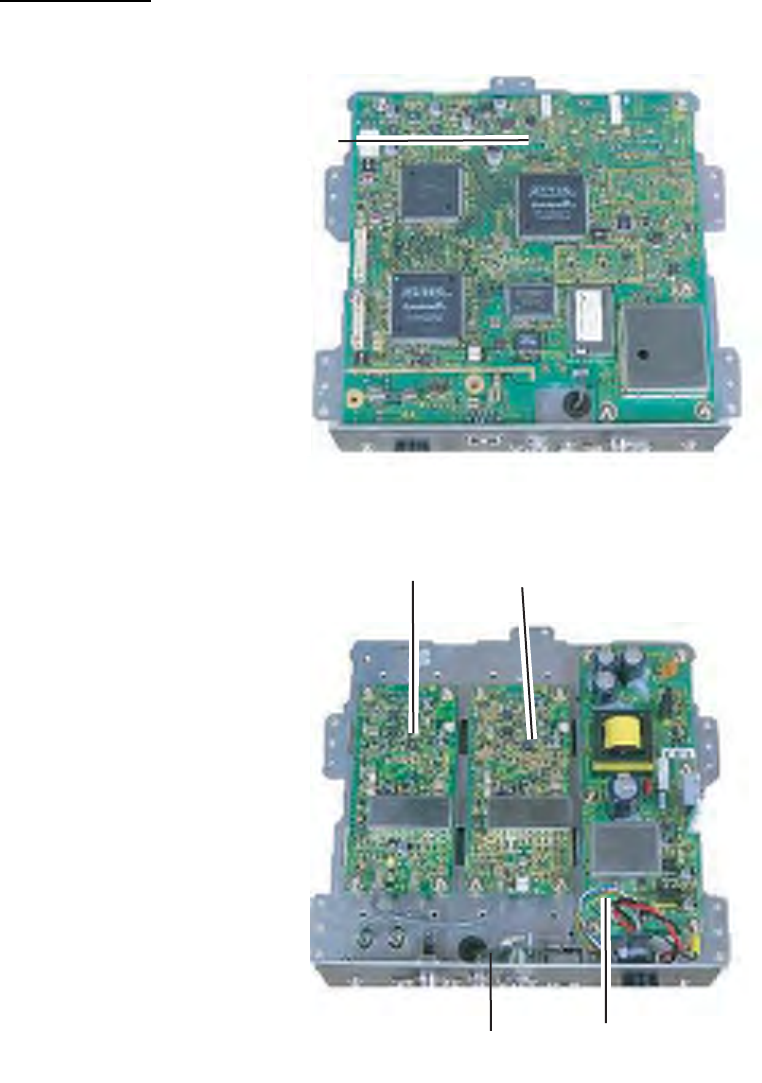
Parts location
Transponder
MAIN&TX Board
05P0814
RX1 Board
05P0808A RX2 Board
05P0808B
POWER Board
05P0809
GPS TB
24P0043
AP-6
APPENDIX 4 DIGITAL INTERFACE
Sentence data
Input sentencesACK, AIQ, BBM, DSC, DSE, DTM, GBS, GGA, GLL, GNS, HDT, OSD, RMC,
SSD, VBW, VSD, VTG
Output sentences
ABK, ACA, ACS, ALR, TXT, VDM, VDO
Transmission intervalABK: With each event
ACA, ACS: At RX/Switch information the region
ALR: 25 s during alarm, 2 min normally no alarm
TXT: Status is changed.VDM: At RX VHFVDO: 1 s
Load requirements as listener
Isolation: opto coupler
Input Impedance: 470 ohms
Max. Voltage: ±15 V
Threshold: 3 mA (In case of FURUNO device talker connection)
Output drive capability
Differential driver outputR=54 ohm, 1.1 V minR=60 ohm, 1.1 V minDriver short-circuit current: 250
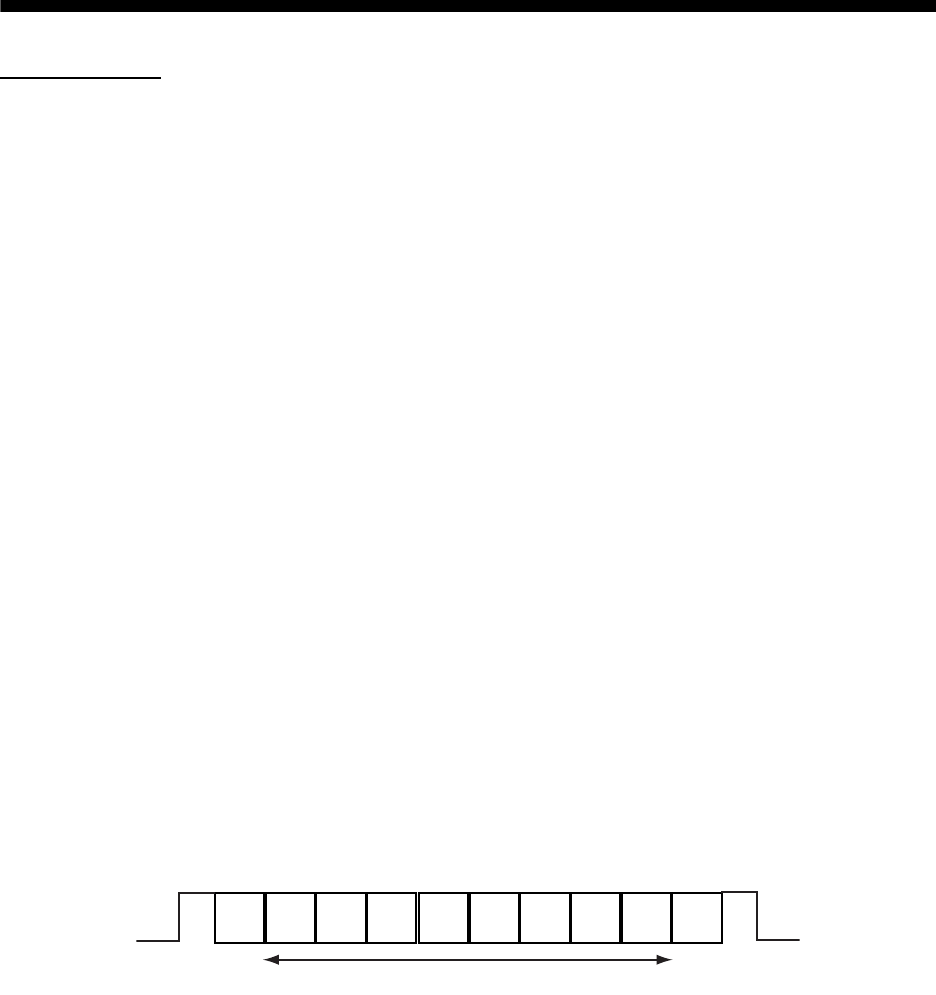
mA max.Data transmissionData format and protocol are transmitted in serial asynchronous form
in accordance with the stan-dard referenced in 2.1 of IEC 61162-1. The first bit is a start bit and
is followed by data bits, least-significant-bit as illustrated below.
The following parameters are used:
Baud rate: 38.4 Kbps
Data bits: 8 (D7=0), parity none
Stop bits: 1
D0 D1 D2 D3 D4 D5 D6 D7
Start
bit
Stop
bit
Data bits
APPENDIX 4 DIGITAL INTERFACE
AP-7
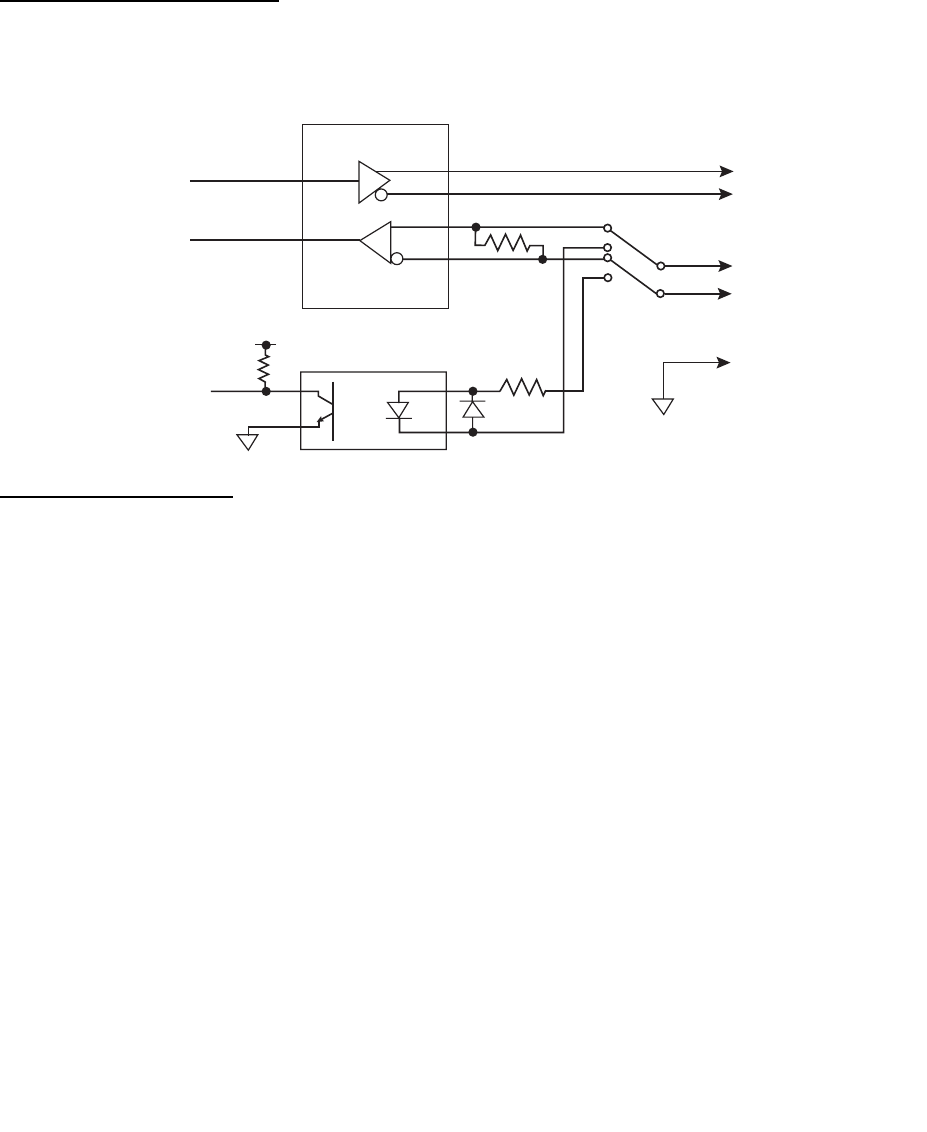
Serial interface I/O circuit
Input/Output Buffer
Sentence description
Input sentences
AIQ-AOIS query
BBM-AIS broadcast binary message
RS422_TD
RS422_RD
NMEA_RD
SN65LBC179DR
COM_TD_B
COM_TD_A
COM_RD_B
COM_RD_
A
GND
470Ω
110Ω
PC400
2.2kΩ
$--AIQ,ccc,*hh<CR><LF>
| |
| |
| +------------------------------ 2
+------------------------------------- 1
1. Query data
2. Checksum
!--BBM,x,x,x,x,x.x,s--s,x*hh<CR><LF>
| | | | | | | |
| | | | | | | +--- 8
| | | | | | +------ 7
| | | | | +--------- 6
| | | | +------------- 5
| | | +---------------- 4
| | +------------------ 3
| +-------------------- 2
+---------------------- 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential Message identifier, 0 to 9
4. AIS channel for broadcast of the radio message
5. VDL message number(8 or 14), see ITU-R M.1371
6. Binary data
7. Number of fill-bits, 0 to 5
8. Checksum

APPENDIX 4 DIGITAL INTERFACE
AP-8
DSC
DSE-Expanded digital selective calling
DTM-Datum referencew
-DSC,xx,xxxxxxxxx,xx,xx,xx,x.x,xxxxxxxxxx,xx,a,a*hh<CR><LF>
| | | | | | | | | | |
| | | | | | | | | | +------- 11
| | | | | | | | | +------- 10
| | | | | | | | +------- 9
| | | | | | | +------- 8
| | | | | | +--------- 7
| | | | | +----------- 6
| | | | +-------------- 5
| | | +----------------- 4
| | +-------------------- 3
| +----------------------- 2
+------------------------------ 1
1. Format Specifier
2. Address
3. Categry
4. Nature of Distress or
First Telecommand
5. Type of Communication
or Second Telecommand
6. Position
7. Time
8. MMSI of ship in distress
9. Nature of distress
10. Acknowledgement
11. Expansion indicator
$--DSE,x,x,a,xxxxxxxxxx,xx,c--c,.......,xx,c--c*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +------- 8
| | | | | | | +--+----------- 7
| | | | | | +--------------------- 6
| | | | +--+--------------------------- 5
| | | +------------------------------------- 4
| | +-------------------------------------------- 3
| +---------------------------------------------- 2
+------------------------------------------------ 1
1. Total number of messages
2. Message number
3. Query/reply flag
4. Vessel MMSI
5. Data set '1'
6. Additional data sets
7. Data set 'n'
8. Checksum
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--- 7
| | | | | | | +------ 6
| | | | | | +---------- 5
| | | | +---+------------- 4
| | +---+------------------- 3
| +------------------------- 2
+---------------------------- 1
1. Local datum W84 - WGS84
W72 - WGS72
S85 - SGS85
P90 - PE90
999 - User defined
IHO datum code
2. Not used
3. Lat offset, min, N/S
4. Lon offset, min, E/W
5. Not used
6. Reference dattum W84 - WGS84
W72 - WGS72
S85 - SGS85
P90 - PE90
7. Checksum

APPENDIX 4 DIGITAL INTERFACE
AP-9
GBS-GNSS satellite fault direction
GGA-Global positioning system (GPS) fix data
GLL-Geographic position-latitude/longitude
$
--GBS,hhmmss.ss,x.x,x.x,x.x,xx,x.x,x.x,x.x*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--------- 9
| | | | | | | +------------ 8
| | | | | | +---------------- 7
| | | | | +-------------------- 6
| | | | +----------------------- 5
| | | +--------------------------- 4
| | +------------------------------- 3
| +----------------------------------- 2
+------------------------------------------- 1
1. Not used
2. Expected error in latitude
3. Expected error in longitud
e
4. Not used
5. Not used
6. Not used
7. Not used
8. Not used
9. Checksum
$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh<CR><LF>
| | | | | | | | | | | | | | |
| | | | | | | | | | | | | | +-- 11
| | | | | | | | | | | | | +---- 10
| | | | | | | | | | | | +--------- 9
| | | | | | | | | | +---+------------ 8
| | | | | | | | +---+------------------ 7
| | | | | | | +------------------------- 6
| | | | | | +---------------------------- 5
| | | | | +------------------------------- 4
| | | +----+--------------------------------- 3
| +---+--------------------------------------------- 2
+------------------------------------------------------------- 1
1. Not used
2. Latitude, N/S
3. Longitude, E/W
4. GPS quality indicat
or
5. Not used
6. Not used
7. Not used
8. Not used
9. Not used
10. Not used
11. Checksum
$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A,a*hh<CR><LF>
| | | | | | | |
| | | | | | | +------- 6
| | | | | | +--------- 5
| | | | | +----------- 4
| | | | +---------------- 3
| | +------+----------------------- 2
+--+----------------------------------- 1
1. Latitude, N/S
2. Longitude, E/W
3. Not used
4. Status: A=data valid, V=data invalid
5. Mode indicator(see note)
6. Checksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
The Mode indicator field supplements the Status field. The Status
field shall be set to V=invalid for all values of Operating Mode except
for A=Autonomous and D=Differential. The positioning system Mode
indicator and Status field shall not be null fields.

APPENDIX 4 DIGITAL INTERFACE
AP-10
GNS-GNSS fix data
HDT-Heading true
OSD-Own ship data
$--GNS,hhmmss.ss,llll.ll,a,yyyyy.yy,a,c--c,xx,x.x,x.x,x.x,x.x,x.x*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 11
| | | | | | | | | | | +------ 10
| | | | | | | | | | +---------- 9
| | | | | | | | | +-------------- 8
| | | | | | | | +------------------ 7
| | | | | | | +---------------------- 6
| | | | | | +------------------------- 5
| | | | | +------------------------------ 4
| | | +-------+--------------------------------- 3
| +--+--------------------------------------------- 2
+------------------------------------------------------------- 1
1. Not used
2. Latitude, N/S
3. Longitude, E/W
4. Mode indicator
5. Not used
6. Not used
7. Not used
8. Not used
9. Not used
10. Not used
11. Checksum
$--HDT,x.x,T*hh<CR><LF>
| | |
| | +--------- 2
+----+----------- 1
1. Heading, degrees true
2. Checksum
$--OSD,x.x,A,x.x,a,x.x,a,x.x,x.x,a*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +--------- 10
| | | | | | | | +----------- 9
| | | | | | | +-------------- 8
| | | | | | +------------------ 7
| | | | | +--------------------- 6
| | | | +------------------------ 5
| | | +--------------------------- 4
| | +------------------------------ 3
| +--------------------------------- 2
+------------------------------------ 1
1. Heading, degrees true
2. Heading status: A=data valid, V=data invalid
3. Vessel course, degrees true
4. Course reference, B/M/W/R/P(see note)
5. Vessel speed
6. Speed reference, B/M/W/R/P(see note)
7. Not used
8. Not used
9. Speed units, K(km/h) / N(Knots) / S(statute miles/h)
10. Checksum
NOTES - Reference systems(speed/course):
B = bottom tracking log
M = manually entered
W = water referenced
R = radar tracking(of fixed target)
P = positioning system ground reference
APPENDIX 4 DIGITAL INTERFACE
AP-11
RMC-Recommended minimum specific GNSS data
SSD-AIS ship static data
VBW-Dual ground/water speed
-
-RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxxxx,x.x,a,a*hh<CR><LF>
| | | | | | | | | | | | |
| | | | | | | | | | | | +--- 10
| | | | | | | | | | | +----- 9
| | | | | | | | | +--+------- 8
| | | | | | | | +--------------- 7
| | | | | | | +--------------------- 6
| | | | | | +------------------------- 5
| | | | +---+---------------------------- 4
| | +---+---------------------------------------- 3
| +--------------------------------------------------- 2
+---------------------------------------------------------- 1
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
1. UTC of position fix
2. Status: A=data valid,
V=navigation receiver warning
3. Latitude, N/S
4. Longitude, E/W
5. Speed over ground, knots
6. Course over ground, degrees tru
7. Date: dd/mm/yy
8. Not used
9. Mode indicator (See NOTE.)
10. Checksum
The Mode indicator field supplements the Status field. The Status field
shall be set to V=invalid for all values of Operating Mode except for
A=Autonomous and D=Differential. The positioning system Mode indicator
and Status field shall not be null fields.
$--SSD,c--c,c--c,xxx,xxx,xx,xx,c, aa*hh<CR><LF>
| | | | | | | | |
| | | | | | | | +--9
| | | | | | | +--- 8
| | | | | | +----- 7
| | | | | +------- 6
| | | | +---------- 5
| | | +-------------- 4
| | +------------------ 3
| +---------------------- 2
+--------------------------- 1
1. Ship's Call Sign, 1 to 7 characters
2. Ship's Name, 1 to 20 characters
3. Pos. ref. point distance, "A," from bow, 0 to 511 Meters
4. Pos. ref. point distance, "B," from stern,
0 to 511 Meters
5. Pos. ref. point distance, "C," from port beam,
0 to 63 Meters
6. Pos. ref. point distance, "D," from starboard beam,
0 to 63 Meters
7. DTE indicator flag
8. Not used
9. Checksum
$--VBW,x.x,x.x,A,x.x,x.x,A,x.x,A,x.x,A*hh<CR><LF>
| | | | | | | | | | |
| | | | | | | | | | +--- 11
| | | | | | | | | +----- 10
| | | | | | | | +-------- 9
| | | | | | | +----------- 8
| | | | | | +-------------- 7
| | | | | +----------------- 6
| | | | +-------------------- 5
| | | +------------------------ 4
| | +--------------------------- 3
| +------------------------------ 2
+---------------------------------- 1
1. Not used
2. Not used
3. Not used
4. Longitudinal ground speed, knots
5. Transverse ground speed, knots
6. Status: ground speed, A=data valid V=data invalid
7. Not used
8. Not used
9. Not used
10. Not used
11. Checksum

APPENDIX 4 DIGITAL INTERFACE
AP-12
VSD-AIS voyage static data
Note: VTG-Course over ground and ground speed
Output sentences
ABK-UAIS addressed and binary broadcast acknowledgement
$--VSD,x.x,x.x,x.x,c--c,hhmmss.ss,xx,xx,x.x,x.x*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +--- 10
| | | | | | | | +------ 9
| | | | | | | +---------- 8
| | | | | | +------------- 7
| | | | | +---------------- 6
| | | | +----------------------- 5
| | | +------------------------------ 4
| | +----------------------------------- 3
| +--------------------------------------- 2
+------------------------------------------- 1
1. Type of ship and cargo category, 0 to 255
2. Maximum present static draught,
0 to 25.5 Meters
3. Persons on-board, 0 to 8191
4. Destination, 1-20 characters
5. Estimated UTC of arrival at destination
6. Estimated day of arrival at destination,
00 to 31(UTC)
7. Estimated month of arrival at destination,
00 to 12(UTC)
8. Navigational status, 0 to 15
9. Regional application flags, 0 to 15
10. Checksum
$--VTG,x.x,T,x.x,M,x.x,N,x.x,K,a*hh<CR><LF>
| | | | | | | | | |
| | | | | | | | | +------- 6
| | | | | | | | +--------- 5
| | | | | | +---+----------- 4
| | | | +--+----------------- 3
| | +--+----------------------- 2
+-+----------------------------- 1
1. Course over ground, degrees true
2. Not used
3. Speed over ground, knots
4. Speed over ground, km/h
5. Mode indicator(see note)
6. Checksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = estimated(dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
The positioning system Mode indicator field
shall not be a null field.
$--ABK,xxxxxxxxx,a,x.x,x,x*hh<CR><LF>
| | | | | |
| | | | | +--- 6
| | | | +----- 5
| | | +------- 4
| | +---------- 3
| +------------- 2
+------------------- 1
1. MMSI of the addressed AIS unit
2. AIS channel of reception
3. Message type
4. Message sequence number
5. Type of acknowledgement
6. Checksum
APPENDIX 4 DIGITAL INTERFACE
AP-13
ACA-AIS channel assignment message
ACS-Channel management information source
ALR-Set alarm state
$--ACA,x,IIII.I, a,yyyyy.y,a,IIII.I,a,yyyyy.y,a,x,xxxx,x,xxxx,x,x,x,a,x,hhmmss.s*hh<CR><LF>
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
1. Sequence number, 0 to 9
2. Region Northeast corner latitude
- N/S
3. Region Northeast corner longitude
- E/W
4. Region Southwest corner latitude
- N/S
5. Region Southwest corner longitude
- E/W
6. Transition Zone Size
7. Channel A
8. Channel A bandwidth
9. Channel B
10. Channel B bandwidth
11. Tx/Rx mode control
12. Power level control
13. Not used
14. In-use flag
15. Time of in-used change
$--ACS,x,xxxxxxxxx,hhmmss.ss,xx,xx,xxxx*hh<CR><LF>
6
5
4
3
2
1
1. Sequence number, 0 to 9
2. MMSI of originator
3. UTC at receipt of regional operating settings
4. UTC day, 01- to 31
5. UTC month, 01 to 12
6. UTC year
$--ALR,hhmmss.ss,xxx,A,A,c--c*hh<CR><LF>
| | | | | |
| | | | | +------------- 6
| | | | +----------------- 5
| | | +-------------------- 4
| | +---------------------- 3
| +------------------------- 2
+--------------------------------- 1
1. Time of alarm condition change, UTC
2. Local alarm number(identifier)
3. Alarm condition(A=threshold exceeded, V=not exceeded)
4. Alarm’s acknowledge state, A=acknowledged V=unacknowledged
5. Alarm’s description text
6. Checksum

APPENDIX 4 DIGITAL INTERFACE
AP-14
TXT-Text transmission
VDM-AIS VHF data-link message
VDO-AIS VHF data-link own vessel report
$--TXT,xx,xx,xx,c--c*hh<CR><LF>
| | | | | |
| | | | | +--- 5
| | | +--+----- 4
| | +---------- 3
| +------------- 2
+---------------- 1
1. Total number of message, 01 to 99
2. Message number, 01 to 99
3. Text identifier
4. Text Message
5. Checksum
!--VDM,x,x,x,a,s--s,x*hh<CR><LF>
| | | | | | |
| | | | | | +--- 7
| | | | | +----- 6
| | | | +-------- 5
| | | +------------ 4
| | +-------------- 3
| +---------------- 2
+------------------ 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential message identifier, 0 to 9
4. AIS channel
5. Encapsulated ITU-R M.1371 radio message
6. Number of fill-bits, 0 to 5
7. Checksum
!--VDO,x,x,x,a,s--s,x*hh<CR><LF>
| | | | | | |
| | | | | | +--- 7
| | | | | +----- 6
| | | | +-------- 5
| | | +------------ 4
| | +-------------- 3
| +---------------- 2
+------------------ 1
1. Total number of sentences needed to transfer the message, 1 to 9
2. Message sentence number, 1 to 9
3. Sequential message identifier, 0 to 9
4. AIS channel
5. Encapsulated ITU-R M.1371 radio message
6. Number of fill-bits, 0 to 5
7. Checksum

SP-1
SPECIFICATIONS OF CLASS B AIS TRANSPONDER
FA-50
E4442S01A
1 GENERAL
1.1 Type Class B AIS Transponder
1.2 RX capacity 2250 report/minute, 1channel
4500 report/minute, 2channel
1.3 RX system CSTDMA dual wave simultaneous reception
1.4 Synchronous framing Indirect synchronize from external oscillator
1.5 Operating mode Autonomous, Assigned, polled/interrogation response
1.6 Frequency switching Automatic
1.7 Prevention of abnormal TX Auto-suspend for detecting TX more than 1 second
1.8 Regulations IMO MSC.140 (76), IEC 62287-1, ITU-R M.1371-2,
DSC ITU R M.825-3, IEC 60945 ed.4 adopted
2 TRANSMITTER
2.1 Frequency range 156.025 MHz to 162.025 MHz (F1D)
2.2 Output power 1W/2W
2.3 Channel interval 25 kHz
2.4 Frequency deviation ±3 ppm or less
2.5 Transmit speed 9600 bps ± 50 ppm
2.6 Spurious Emission 9 kHz to 1 GHz, -36 dBm or less
1 GHz to 4 GHz, -30 dBm or less
3 AIS RECEIVER
3.1 Frequency range 156.025 MHz to 162.025 MHz (DSC: 156.525 MHz)
3.2 Oscillator frequency 1st local oscillator: f + (51.136/51.236 MHz)
2
nd local oscillator: 51.1/51.2 MHz
3.3 Intermediate frequency 1st: 51.136/51.236 MHz, 2nd: 36 kHz
3.4 Receiving system Double-conversion superheterodyne
3.5 Sensitivity -107 dBm (PER 20% or less)
3.6 Error at high input level -7 dBm
3.7 Co-channel rejection 10 dB
3.8 Adjacent channel selectivity 70 dB
3.9 Spurious response 70 dB (50 MHz to 520 MHz)
3.10 Inter-modulation 65 dB
3.11 Sensitivity suppression 86 dB (±5 MHz, ±10 MHz)
4 DSC RECEIVER (TIMESHARING SYSTEM)
4.1 Frequency 156.525 MHz (CH70)
4.2 Sensitivity -107 dBm or less
4.3 Error at high input level -7 dBm

SP-2
E4442S01A
4.4 Co-channel rejection 10 dB
4.5 Adjacent channel selectivity 70 dB
4.6 Spurious response 70 dB
4.7 Inter-modulation 65 dB
4.8 Sensitivity suppression 84 dB
4 GPS RECEIVER
4.1 Receiving frequency 1575.42 MHz
4.2 Tracking code C/A code
4.3 Number of channel 12 channels parallel, 12 satellites
4.4 Position fixing method All in view, 8-state Kalman filter
4.5 Position accuracy 10 m approx., 95% of the time, (HDOP 4)
DGPS: 5m approx., 95% of the time
4.6 Tracking velocity 900 kts
4.7 Position fixing time Warm start: 36 s typical, Cold start: 43 s typical
4.8 Geoids WGS84
4.9 Position update interval 1 s
4.10 DGPS data correcting By AIS information
5 INTERFACE
5.1 COM I/O
Input: RS-422 (38.4kbps) / IEC61162-1 (4800bps)
ACK, BBM, DTM, GBS, GGA, GLL, GNS, HDT, OSD, RMC,
SSD, VBW, VSD, VTG, AIQ, DSC, DSE, PFEC
Output: RS- 422 (38.4kbps)
ABK, ACA, ACS, ALR, VDM, VDO, TXT, PFEC
5.2 NETWORK Ethernet 10BASE-T/100BASE-TX
Input: ACK, BBM, DTM, GBS, GGA, GLL, GNS, HDT, OSD, RMC,
SSD, VBW, VSD, VTG, AIQ, DSC, DSE, PFEC
Output: ABK, ACA, ACS, ALR, VDM, VDO, TXT, PFEC
5.3 Function alarm LED indication, series data output
6 POWER SUPPLY
12-24 VDC: 2.0-1.0 A
7 ENVIRONMENTAL CONDITIONS
7.1 Ambient temperature
Antenna unit -30°C to +70°C
Transponder -15°C to +55°C
7.2 Relative humidity 93% at +40°C
7.3 Degree of protection
Antenna unit IPX6

SP-3
E4442S01A
7.4 Bearing vibration IEC 60945
8 COATING COLOR
8.1 GPS antenna unit N9.5
8.2 Transponder N2.5
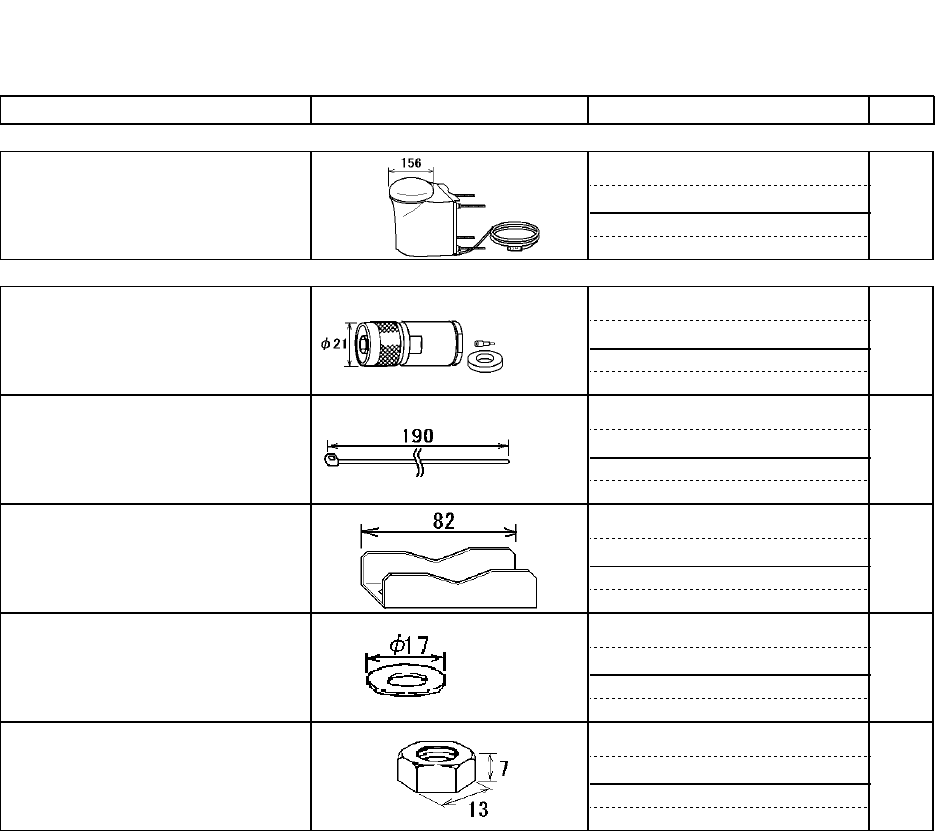
PACKING LIST
24AA-X-9853 -5
GVA-100,GVA-100-T
N A M E O U T L I N E DESCRIPTION/CODE № Q'TY
1/1
ユニット UNIT
複合空中線部
GPS/VHF COMBINED ANTENNA
GVA-100
000-053-810-00
1
**
工事材料 INSTALLATION MATERIALS CP24-00141
コネクタ(N)
CONNECTOR
N-P-8DFB 座金
000-140-463-00
2
コンベックス
PLASTIC BAND
CV-200HT
000-809-226-00
2
CV-200HT
000-162-191-10
アンテナ取付金具
ANTENNA FIXING BRACKET
24-003-3015-0
100-302-670-00
2
ミガキ平座金
FLAT WASHER
M8 SUS304
000-864-130-00
4
六角ナット 1種
HEX.NUT
M8 SUS304
000-863-110-00
8
1.コ-ド番号末尾の[**]は、選択品の代表型式/コードを表します。
CODE NUMBER ENDING WITH "**" INDICATES THE CODE NUMBER OF REPRESENTATIVE MATERIAL.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
24AA-X-9853
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりません。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF THE UPPER
PRODUCT. QUALITY IS THE SAME.
A-1
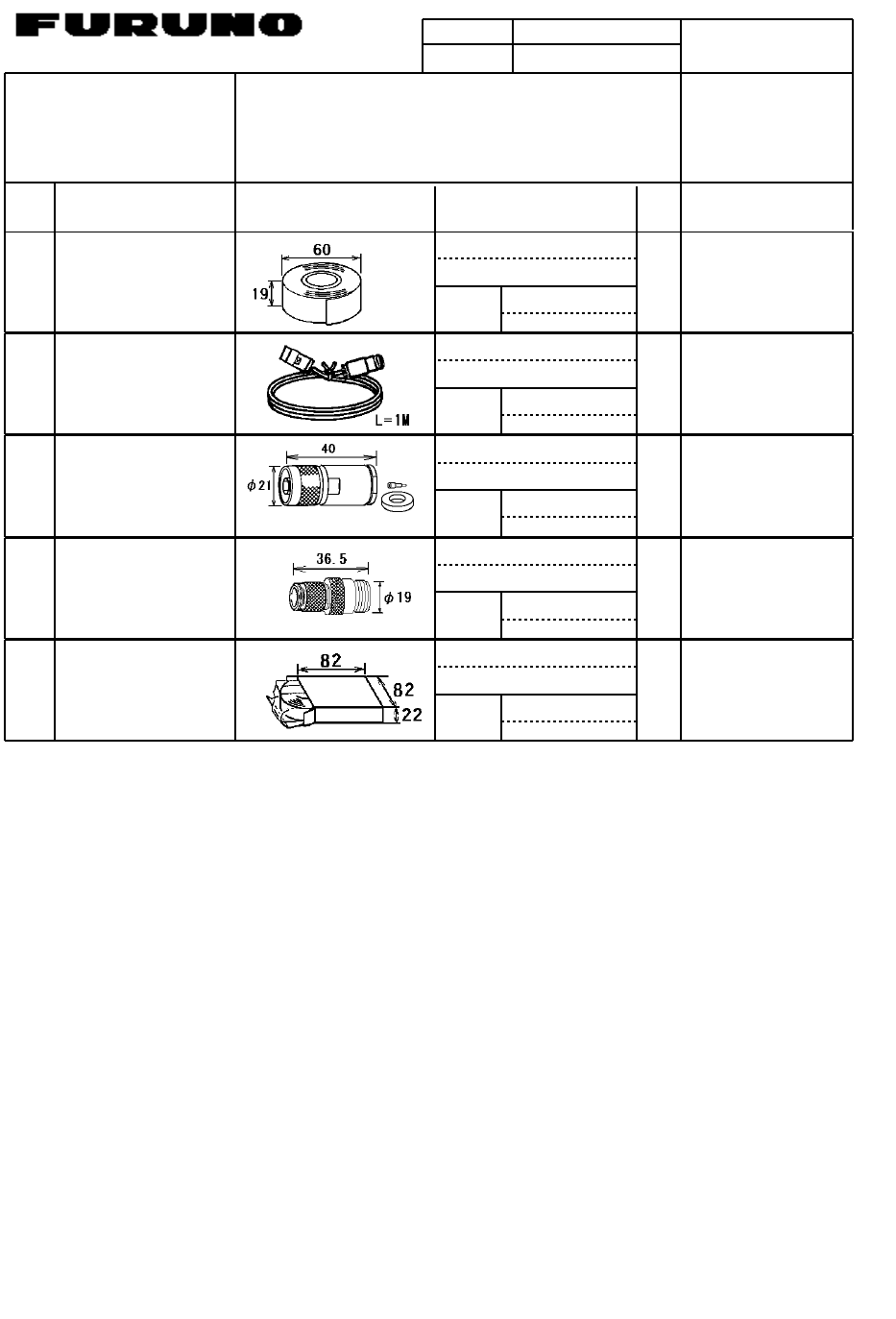
CODE NO. 005-955-560-00
TYPE CP24-00502
略 図
OUTLINE
名 称
NAME
数量
Q'TY
用途/備考
REMARKS
番 号
NO.
型名/規格
DESCRIPTIONS
1/1
-3
INSTALLATION MATERIALS
工事材料表
24AC-X-9403
ビニ-ルテープ NO360
VINYL TAPE 0.2X19X10000 クロ エスロン 1
000-835-215-00
1
CODE
NO.
変換ケーブル組品
CONVERT CABLE ASSY. NJ-TP-3DXV-1 1
000-123-809-00
2
CODE
NO.
コネクタ
CONNECTOR N-P-8DSFA 2
000-167-921-10
3
CODE
NO.
コネクタ(TNC-N)
CONNECTOR TNCP-NJ 1
000-156-599-10
4
CODE
NO.
絶縁テープ
SELF-BONDING TAPE Uテープ 0.5X19X5M 1
000-165-833-10
5
CODE
NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
FURUNO ELECTRIC CO .
,
LTD. 24AC-X-9403
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりませ
ん。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF THE UPPER
PRODUCT. QUALITY IS THE SAME.
A-2
Aug.30'07 R.Esumi
D-1
Mar,27'07 R.Esumi
D-2
Feb.22'05
D-3
Jan. 9, '03
D-4
Nov.28'03
D-5
Y
. Hatai
hatai
2005.12.19
11:57:12
+09'00'
D-6
NAME
TYPE
名称
kg
DRAWN
CHECKED
APPROVED
DWG.No.
SCALE MASS
3421
C
B
A
T.YAMASAKI
NOTE
注記
*2)オプション。
*1)造船所手配。
*4)COMラインを使用しないときは、芯線がショートしないようテープで絶縁する。
T.TAKENO
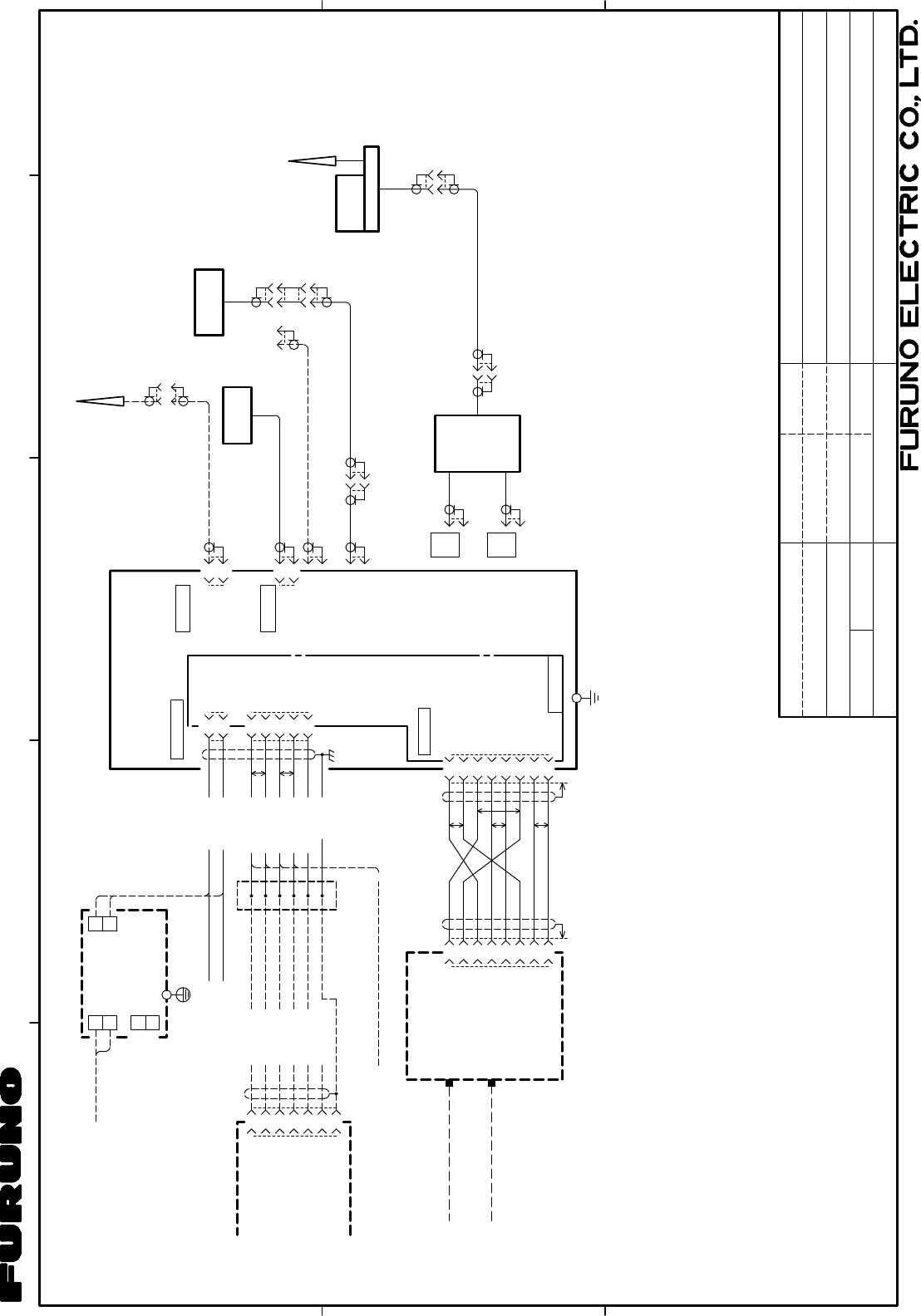
INTERCONNECTION DIAGRAM
相互結線図
*1: SHIPYARD SUPPLY.
*2: OPTION.
*4: IF COM LINES ARE NOT USED, TAPE THEM TO PREVENT SHORT-CIRCUIT.
REF.No.
*3)Auto MDI/MDI-X対応でないHUBのときは、ストレートケーブルを使用する。
*3: USE STRAIGHT LAN CABLE WHEN A HUB W/O AUTO MDI/MDI-X FUNCTION IS USED.
FA-50
簡易型船舶自動識別装置
CLASS B AIS TRANSPONDER
05-097-2002-0
簡易型船舶自動識別装置
CLASS B AIS TRANSPONDER
FA-50
J1
*1
FM-MP-5 *1
GPS ANT
VHF ANT
分配器
DISTRI-
BUTOR
DB-1
1m
1m
M-P-3
TNC-P-3
VHF
ANT
GPS
ANT
1m N-P-8DFB
N-J-3 N-P-8DFB
N-J-3
0.8m
GSC-001 *2
FAB-151D(JAPAN ONLY)
WHIP ANTENNA
ホイップアンテナ
150M-W2VN
RG-10/UY,MAX.20m *1
8D-FB-CV,30/50m *2
GPS/VHF ANTENNA
GVA-100
複合空中線部
TNC-P-3 10m
NJ-TP-3DXV,1m RG-10/UY,MAX.20m
*1
N-P-8DFB *1
8D-FB-CV,30/50m *2
TNC-J-3
*1
N-P-8DFB
GPS ANTENNA
0.2m
TNC-PS-3D-15,15m TNCP-NJ
*2
*2
SELECT ANTENNA CONFIGURATION
アンテナ構成は選択とする
DC_M(-)
DC_P(+)1
2
0V
1
2
3
4
5
ミドリ
BRN
GRN
YEL
BLU
WHT
BLK
RED
P
P
アカ
クロ
シロ
アオ
キ
チャ
J17
J9
TD-A
TD-B
RD-H
RD-C
GND
IV-1.25sq.
*1
8NC
NC
E_RD_N
NC
NC
E_RD_P
E_TD_N
E_TD_P
7
6
1
2
3
4
5
J1RJ45
P
P
P
P
NC
NC
NC
NC
RJ45
2
3
4
5
6
7
8
1
*2 *3
P5E-4PTX-BL,2/10m
TX_P
TX_N
RX_P
RX_N
RJ45
RJ45
LAN CABLE (CAT5)
PC
LAN CABLE (CAT5)
スイッチングハブ
SWITCHING HUB
(AUTO MDI/MDI-X)
EXTERNAL
DISPLAY
外部
表示器
05P0814
MAIN &
TX & GPS
NETWORK
外部表示器/センサー
EXT. DISPLAY/SENSOR
(RS-422/IEC61162-1)
COM/POWER
*4
(+)
(-)
12-24VDC
DRAIN
GPA-017
GPA-017S
AC
IN
IN
DC
DC
OUT
SUPPLY UNIT
PR-240
AC/DC POWER
AC/DC
電源ユニット
+
-
-
+
DPYC-1.5
*1
*2
200-230VAC
100-115/
1φ,50/60Hz
IV-1.25sq.
*1PE
2m
C4442-C01- B
Jan. 9 '08
Jan. 8 '08
5D-2V OR
RG-10/UY,MAX.50m
FAB-151D(JAPAN ONLY)
WHIP ANTENNA
ホイップアンテナ
*2
150M-W2VN
*1
FM-MP-5
1
2
3
4
5
6
7
MJ-A7SPF
ミドリ GRN
YEL
WHTシロ
キ
BLUアオ
クロ BLK
アカ RED
IF-1500AIS
MJ-A7SPF0003-050C,5m,φ6
または OR
GPS航法装置
GPS NAVIGATOR
GP-150
JB *1
*1 *3
*1 *3
Jan.18'08 R.Esumi
S-1

IN-1
INDEX
A
AC-DC power supply .................................1-9
alarm status ...............................................2-7
C
COM PORT..............................................1-13
D
distributor ...................................................1-8
F
Fuse ...........................................................3-2
fuse ............................................................3-2
G
GPS antenna .............................................1-5
GPS/VHF combined antenna.....................1-7
I
index term ...............................................AP-6
IP address................................................1-12
M
maintenance ..............................................3-1
menu tree................................................AP-1
N
NavNet .....................................................1-11
NETWORK...............................................1-14
O
optional supply ...........................................1-2
own vessel data .........................................2-4
P
parts lists.................................................AP-4
parts location...........................................AP-5
R
receiving messasge ...................................2-3
S
sending messasge.....................................2-2
sensor status..............................................2-8
serial interface I/O circuit ........................AP-7
standard supply..........................................1-1
subnet mask.............................................1-12
T
troubleshooting ..........................................3-2
V
VHF antenna..............................................1-3