SZ DJI TECHNOLOGY PM4101703 MATRICE SERIES User Manual 3
SZ DJI TECHNOLOGY CO., LTD MATRICE SERIES 3
Contents
User Manual Part 3
22
JP
#
"
#
"
2
1
1
3
2
Matrice 200 の使用方法
1. DJI Assistant 2 および DJI GO 4 アプリのダウンロード
下記のウェブサイトリンクから %+*"44*45"/5TM 2 をお手持ちのコンピューターにダウンロードし、インストー
ルします。
http://www.dji.com/matrice-200-series
"QQ4UPSF または (PPHMF1MBZ で「%+*(0」を検索して、お手持ちのモバイルデバイスにアプリをダウンロー
ドしてください。
初回起動時に、ユーザーの DJI アカウントとインターネット接続が必要です。
Internet
%+*(0 アプリは J04 以降と "OESPJE 以降に対応しています。
%+*1JMPU 内蔵アプリは %+*$SZTUBM4LZTM にのみ装備されています。
DJI Assistant 2 は、8JOEPXT 以降、または 049 以降に対応しています。
%+*(0 アプリ
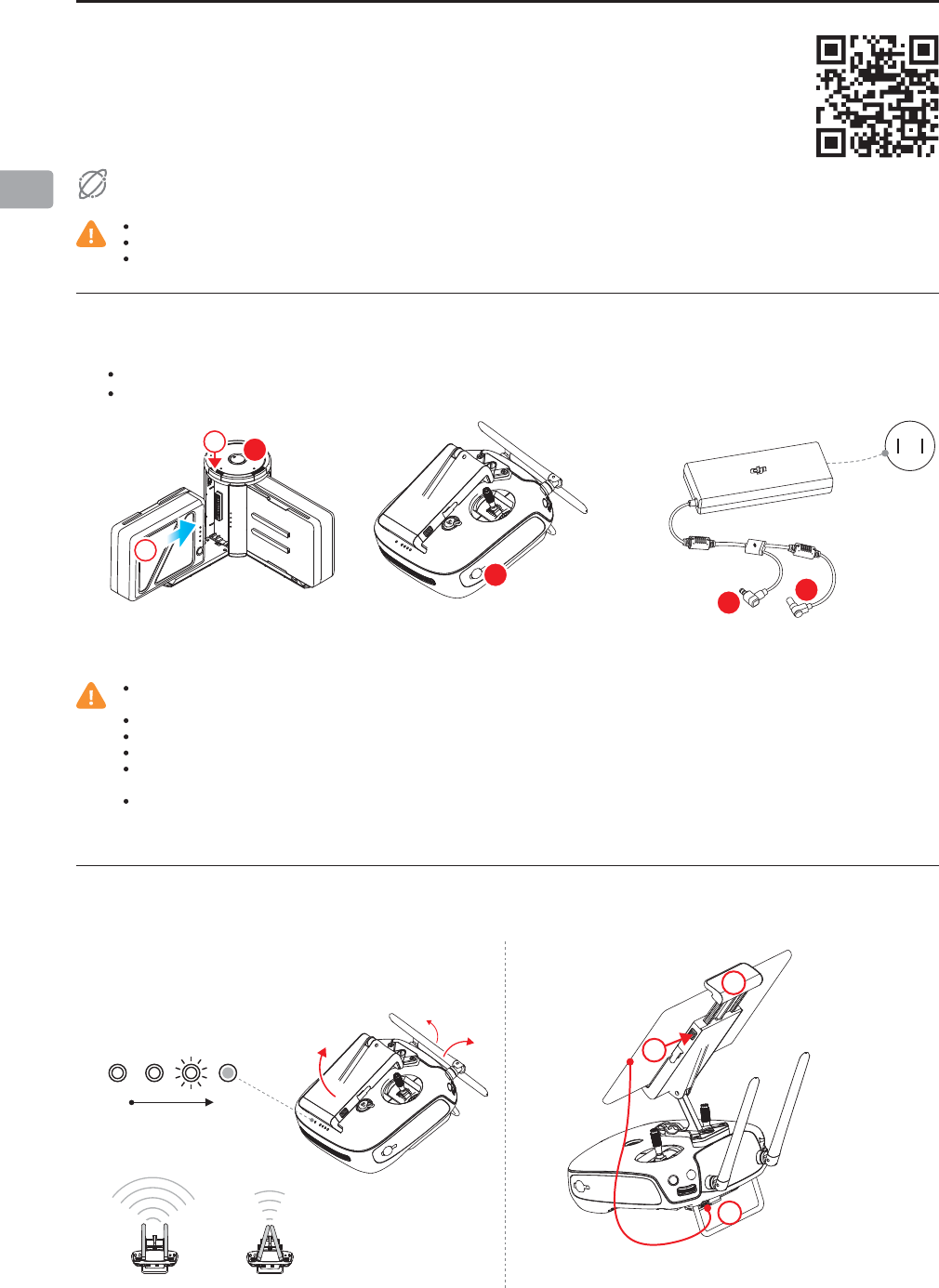
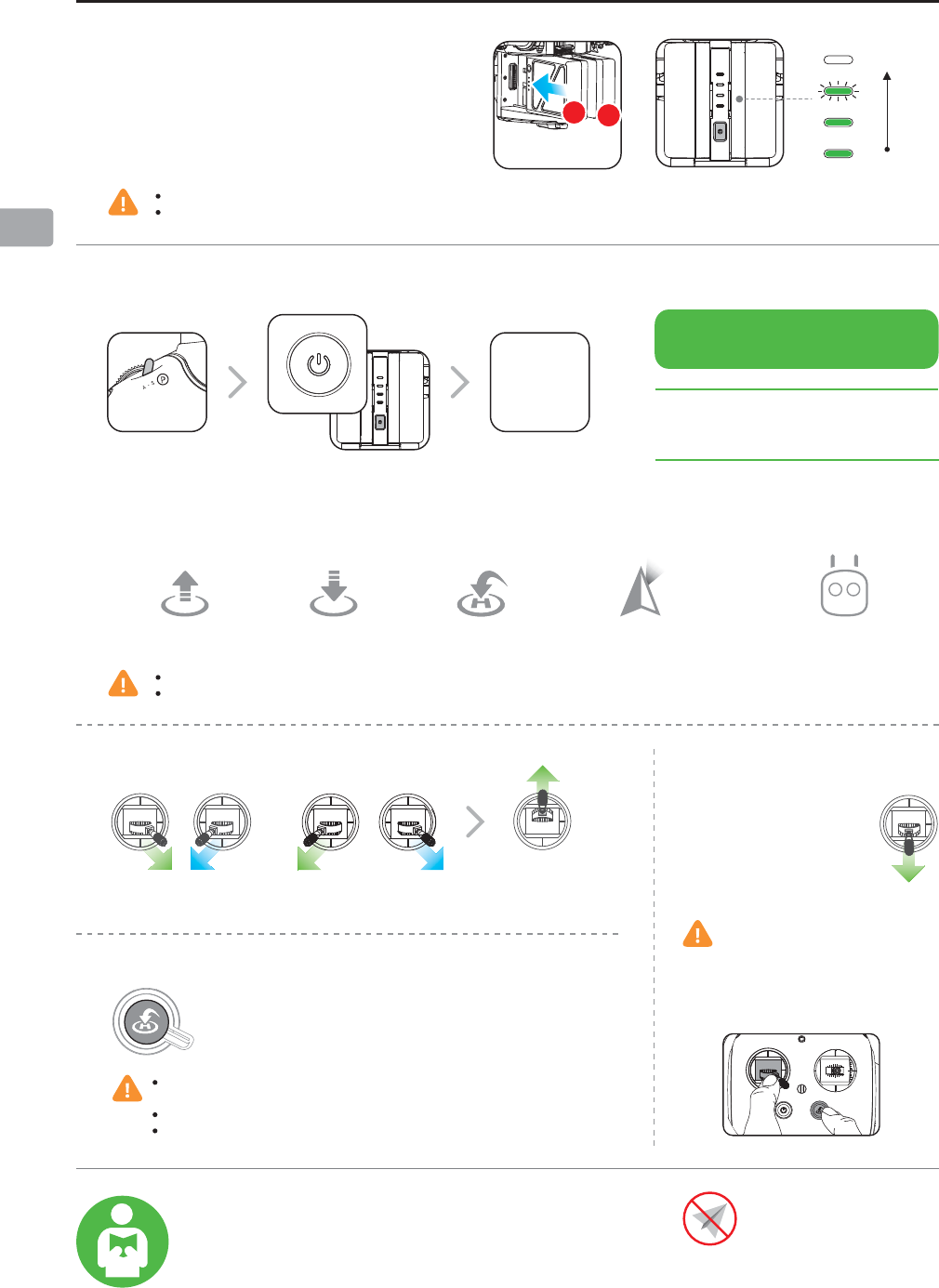
2. バッテリーの充電
インテリジェント・フライト・バッテリーは初回使用前にフル充電する必要があります。フル充電したバッテリーを取り外すときは、充電ハブの上部
にある解除ボタンを押してください。
充電が完了すると、インテリジェント・フライト・バッテリーの -&% ランプが消えて、充電ハブの -&% が緑色になります。
充電前に、送信機の電源をオフにしてください。充電が完了すると、送信機の -&% ランプが消えます。
バッテリーが完全に充電されると、充電ハブから音が鳴ります。充電ハブの底部にあるスイッチを切り替えて、音をオン/オフできます。
機体にバッテリーを取り付けて電源を入れます。バッテリー温度が ℃を下回ると、バッテリーは自動的に熱を発して ∼20℃のバッテリー温度
を維持します。
バッテリーをペアリングすることを推奨します。ペアリングは %+*(0 アプリ内で行うことができます。バッテリーの寿命を長持ちさせ、より適切
なフライトを可能にするために、各バッテリーペアを同時に充電・使用するようにしてください。
解除ボタンを押して、対応する充電ポートカバーを開きます。
インテリジェント・フライト・バッテリーを充電ポートに挿入して充電を開始します。
電源コンセント
7
()[ /)[)
充電時間: 時間 充電時間:時間
付属の充電器
3. 送信機の準備
モバイルデバイス・ホルダーとアンテナを広げます。
電源ボタンを 1回押して、バッテリー残量を確認します。 ボタンを押して、クラン
プを取り外します。
広げる
少
強い
多
弱い
モバイルデバイスを
取り付け、クランプを
調整して固定します。
モバイル機器に 64#
ケーブルを接続します。
23
JP
11 23
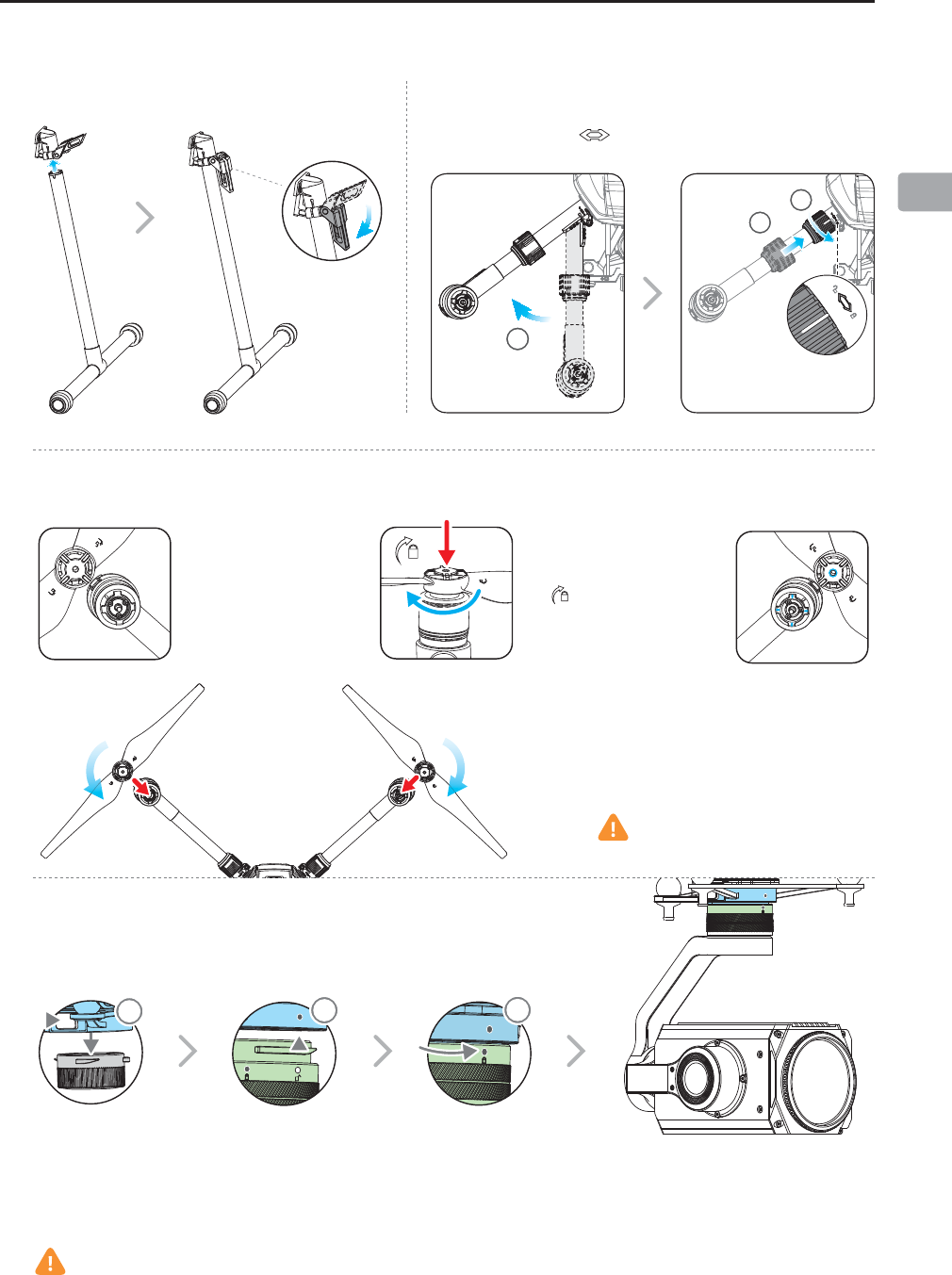
4. 機体の準備
ランディングギアの取り付け
プロペラの取り付け
ジンバルおよびカメラの取り付け
機体の展開
ジンバル取り外しボ
タンを押して、カバ
ーを外します。
白と赤の丸を合わせてジ
ンバルを挿入します。
ジンバルロックをロッ
ク位置まで回します。
各フライト前に、プロペラがしっかり取り
付けられていることを確認してください。
ジンバルロックを回してジンバルとカメラを取り外すときは、ジンバルの取り外しボタンを押してください。
シルバーリングのある
プロペラは、同じ色の
マークのあるモーター
に取り付けます。
シルバーリングのな
いプロペラはマーク
のないモーターに取
り付けます。
プロペラはプレート
に押し付けて、固定
されるまでロック方
向 に回します。
1
2
3
フレームアームを展開して、アームロックをフレームアームの終端まで
スライドし、銀色の線が アイコンの範囲に入るまで約 °回します。
24
JP
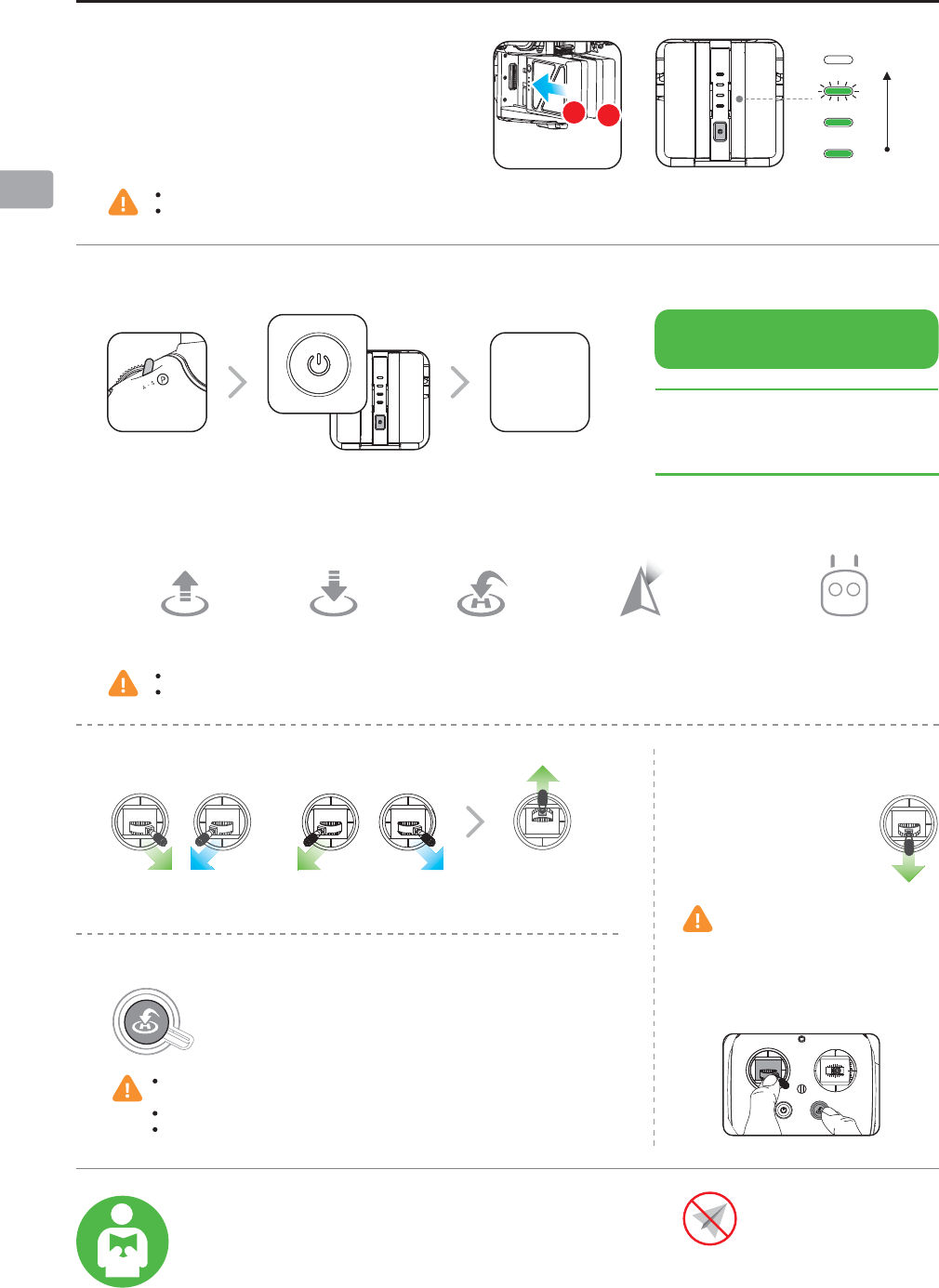
インテリジェント・フライト・バッテリーの
取り付け
バッテリーペアを挿入します。
電源ボタンを 1回押して、バッテリー残量を確認します。
ボタンを 1回押し、次に長押しすると、電源がオンまたは
オフになります。
電力供給にバッテリーを 1つ使用する場合は、必ずバッテリースロット #を使用します。
バッテリーを外すときは、バッテリー取り外しボタンを押してください。
"#
DJI GO 4 アプリ
詳細については、%+*(0 アプリまたは DJI 公式ウェブサイトでチュートリアルをご覧ください。
離陸前に、必ず適切な 3FUVSOUP)PNF(35))高度を設定してください。詳細については、免責事項および安全ガイドラインを参照してく
ださい。
ジンバルの動作モード その他のインテリジェント・フ
ライト・モード
自動離陸 3FUVSOUP)PNF(35))自動着陸
5. 飛行
フライトモードスイッ
チを最も安全な 1モー
ドに切り替えます。
送信機と機体の電源を入れ
ます。
%+*(0 アプリを起動し、
[(0'-:]をタップします。
Ready to GO(GPS)
屋内を飛行させる場合、離陸前に、%+*(0 アプ
リの機体ステータスバーに「3FBEZUP(P((14)」
または「3FBEZUP(P(7JTJPO)」と表示されている
ことを確認してください。
少
多
手動での離陸 手動での着陸
地面に着くまで、左スティックを
(ゆっくりと)引き下げます。
数秒間そのまま保持してから、モ
ーターを停止します。
モーター始動/停止のコンビネーションスティックコマンド 左スティックを上げて
(ゆっくり)離陸
または
Return-to-Home(送信機)
%+*(0 アプリの 35) ボタンと同じです。機体がホームポイントに戻
ります。
長押しすると、3FUVSOUP)PNF が作動します。もう一度 35) ボタンを押
すと、3FUVSOUP)PNF を中止します。
回転中のプロペラは危険です。近くに人がいる場合や狭い場所では、モーターを始
動させないでください。
モーターの回転中は、絶対に送信機から手を離さないようにしてください。
着陸後、送信機の電源を切る前に機体の電源を切ってください。
飛行中のモーター停止:左スティックを
内角下方向に引きながら、35) ボタン
を秒間押し続けます。飛行中のモータ
ー停止は、人体・物体への損傷・負傷の
リスクを低減させる目的で緊急時のみ行
ってください。
詳細については、以下をご覧ください。
IUUQXXXEKJDPNKQnZTBGFOPnZ
ご自身の安全と周りの人々の安全のため、基本的なフライトガイドラインを
理解することが重要です。
詳細については、免責事項および安全ガイドラインを参照してください。
飛行禁止区域
DJI GO 4
アプリ
25
JP
仕様
機体(M200)
寸法 展開時、 × ×NN、折りたたみ時、 ×220 ×NN
重量 約LH(標準バッテリー 2個の場合)、約 LH(オプションバッテリー 2個の場合)
対角寸法 NN
最大離陸重量 LH
最大積載量 LH(標準バッテリー 2個の場合)、約 LH(オプションバッテリー 2個の場合)
ホバリング精度(1モード、(14 付き) 垂直:± N または N(下方ビジョンシステム有効時)
水平:± N または ±N(下方ビジョンシステム有効時)
最大角速度 ピッチ:°秒、ヨー:°秒
最大ピッチ角°(1モードおよび下方ビジョンシステムが両方有効な場合は °)
最大上昇速度 N 秒
最大下降速度 N 秒
最大速度1モード:N 秒、4モード " モード:N 秒
運用限界高度(海抜) N(4 プロペラ付き)
最大風圧抵抗 N 秒
最大飛行時間(標準バッテリーの場合)分(積載物なし)、 分(離陸重量:LH)
最大飛行時間(オプションバッテリーの場合)分(積載物なし)、 分(離陸重量:LH)
対応する DJI ジンバル ;FONVTF949495;
対応するジンバル搭載 単一ジンバル、下向き
保護等級 *1
(/44 (14(-0/"44
作動温度 ∼℃
送信機
動作周波数 ∼()[、 ∼()[
最大伝送距離(障害物や干渉がない場合) ()[:LN('$$)、LN(CE)、LN(433$)
&*31 ()[:E#N('$$)、E#N(CE)、E#N(433$)
内蔵バッテリー N"I4-J1P
出力電力8(スマートデバイスへの電力供給がない場合)
64# 出力供給 J04:1A 7(最大)。Android:" 7(最大)
作動温度 ∼℃
下方ビジョンシステム
対応速度 高度 2m で速度 N 秒未満
対応高度 10m 未満
動作範囲 10m 未満
動作環境 地表の模様が明瞭で、適切な明るさのある状態( ルクス超)
超音波センサー動作範囲 10 ∼DN
超音波センサー動作環境 非吸収性の固い地表(厚い屋内用カーペットは性能が低下します)
前方ビジョンシステム
障害物検知範囲 ∼N
障害物検知角度 水平方向 60°、垂直方向:°
動作環境 地表の模様が明瞭で、適切な明るさのある状態( ルクス超)
上方赤外線検知システム
障害物検知範囲 0∼N
障害物検知角度 ±°
作動環境 大型で拡散反射する物体(反射率 超)
インテリジェント・フライト・バッテリー(標準、モデル:TB50-4280mAh-22.8V)
容量 N"I
電圧 7
バッテリータイプ -J1P4
電力量 8I
正味重量(単体) 約H
作動温度 ∼℃
充電温度範囲∼℃
最大充電電力 8
充電器(モデル:IN2C180)
電圧 7
定格出力 8
充電ハブ(モデル:IN2CH)
入力電圧 7
入力電流 "
最新版は下記よりダウンロードしてください。
http://www.dji.com/matrice-200-series
※このコンテンツは予告なく変更することがあります。
MATRICE とDJI はDJI の商標です。
$PQZSJHIUª%+*"MM3JHIUT3FTFSWFE
%FTJHOFECZ%+*1SJOUFEJO$IJOB
DJI incorporates HDMITM technology.
The terms HDMI and HDMI High-Definition Multimedia
Interface, and the HDMI Logo are trademarks or registered
trademarks of HDMI Licensing LLC in the United States and
other countries.
26
KR
Matrice 200
DJITM MATRICETM 200은 세계적 수준의 민첩성과 속도를 가진 강력한 시스템으로 최대의 안정성을 위해 2개의 기압계 와 IMU 모듈이 탑재되어 있으며 어
려운 샷을 쉽게 촬영할 수 있는 새로운 스마트 비행 기능을 갖추고 있습니다. 기체의 시각 센서는 실내 비행이나 GNSS를 사용할 수 없는 환경에서도 호버
링 정확도를 개선해줍니다. 항공기의 새로운 기체 설계는 IP 등급을 IP43(IEC 60529 표준에 따름)으로 개선하였습니다.
퀵 릴리즈 랜딩 기어와 접이식 암이 장착된 Matrice 200의 기계적 디자인으로 간편하게 운반하고 보관하고 비행을 준비할 수 있습니다. 인텔리전트 플라
이트 배터리에는 업그레이드된 배터리 셀과 고급 전원 관리 시스템이 탑재되어 있습니다. 이 드론은 탑재 중량이 없는 상태에서 표준 배터리 장착 시 최대
27분, 옵션 배터리 장착 시 최대 38분의 비행 시간을 제공합니다*.
Matrice 200은 DJI의 여러 DGC2.0 커넥터 짐벌과 호환됩니다*. 이 매뉴얼에서는 DJI ZENMUSETM Z30을 예로 들어 Matrice 200의 뛰어난 기능에 대해
설명합니다.
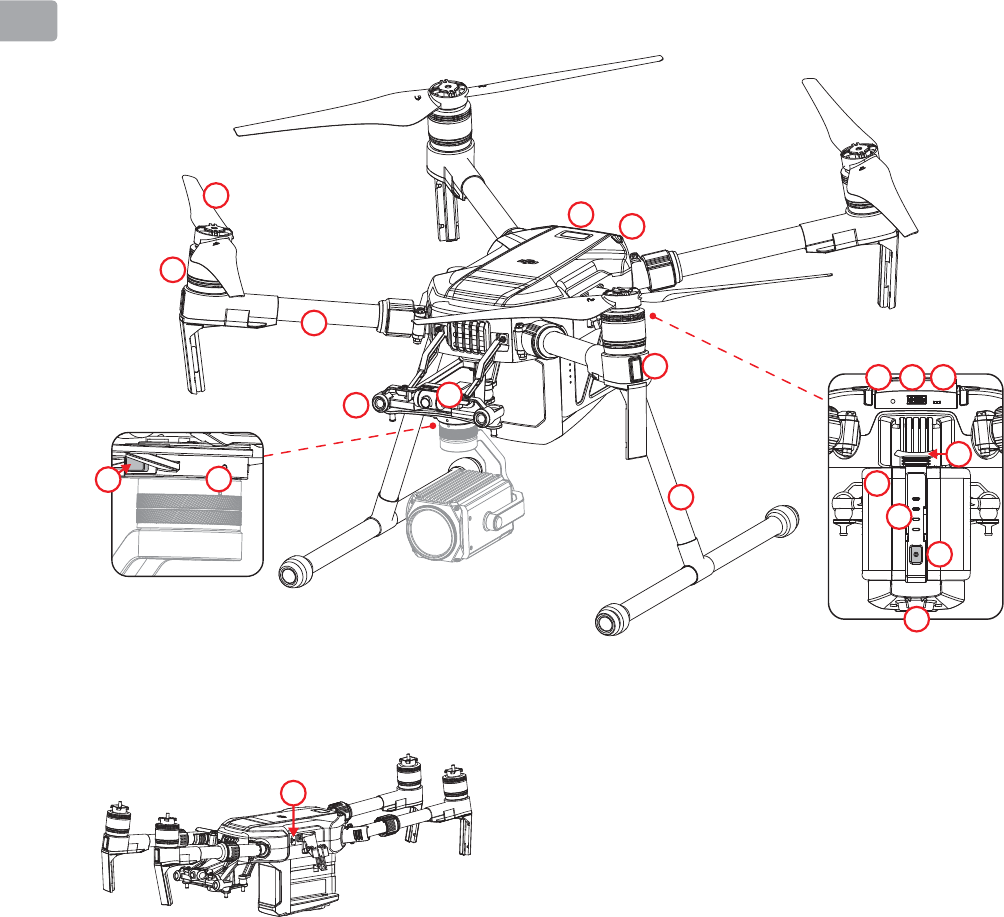
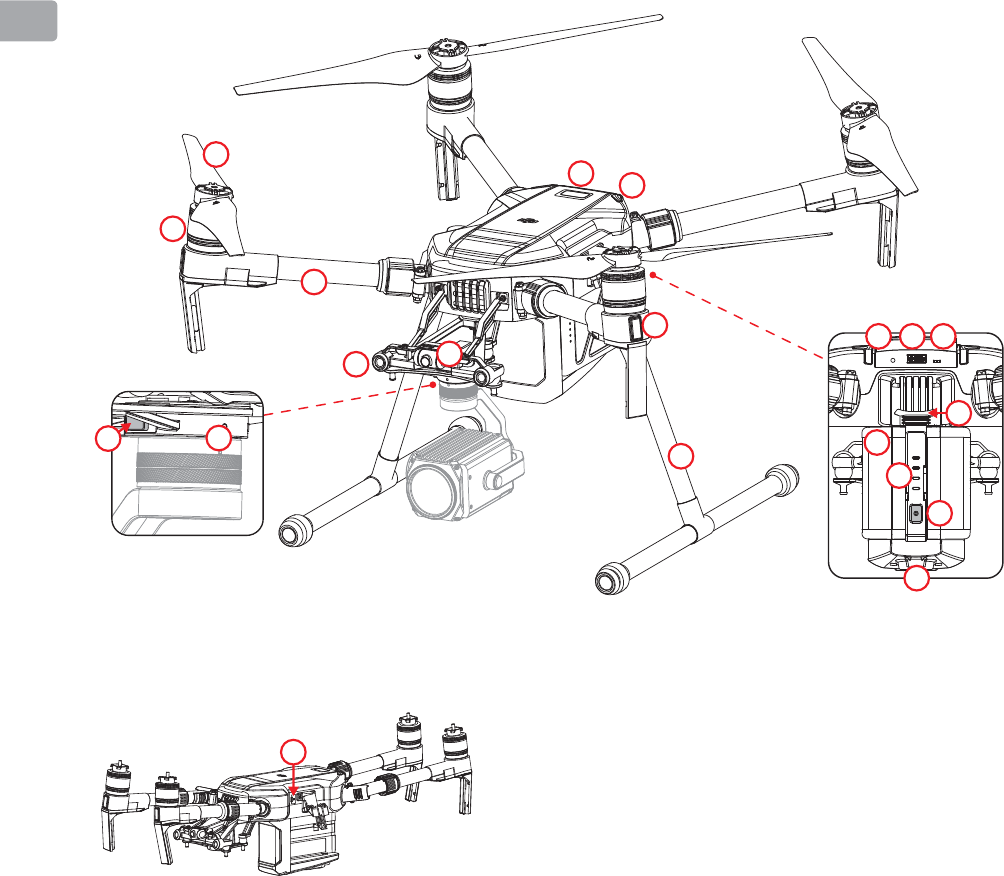
1. FPV 카메라
2. 전방 비전 시스템
3. DJI 짐벌 커넥터 V2.0
(DGC2.0)
4. 짐벌 및 카메라 분리 버튼
5. 프레임 암
6. 모터
7. 프로펠러
8. ESC LED
9. 랜딩 기어
10. 상향 적외선 센서
* 최대 작동 시간은 실험실 환경에서 테스트되었습니다. 성능은 지역 조건에 따라 다를 수 있습니다.
짐벌 및 선택 사항으로 제공되는 배터리는 공식 DJI Online Store에서 별도로 구매할 수 있습니다.
기체 케이스를 분해하지 마십시오. 분해 시 보증이 적용되지 않습니다.
11. 기체 상태 표시기
12. RC/기체 연결 버튼 및 표시기
13. USB 포트
14. USB 모드 스위치
15. 배터리 분리 버튼
16. 인텔리전트 플라이트 배터리
17. 배터리 잔량 표시기
18. 전원 버튼
19. 하향 비전 시스템
20. Micro SD 카드 슬롯
접은 상태
17
19
14
13
12
16
18
2
11
10
9
8
5
6
1
7
3
4
15
20
27
KR
조종기
조종기에는 DJI의 LIGHTBRIDGETM 기술이 적용되어 최대 7km(4.3마일)*의 전송 거리를 보장합니다. 기체가 비행하는 동안에는 페어링된 장치에 설치된
DJI GOTM 4 앱에서 실시간 HD 뷰를 통해 기체를 정밀하고 민첩하게 제어할 수 있습니다. 듀얼 주파수 지원으로 더 안정적인 HD 동영상 다운링크가 가능
합니다. 듀얼 조종기 모드에서는 두 개의 조종기가 각각 기체와 카메라를 별도로 제어합니다. 최대 100m(328피트) 떨어진 곳까지 이 방식으로 조작할 수
있습니다.*
조종기 LiPo 배터리의 최대 작동 시간은 약 4시간*입니다.
* 조종기는 전자기 간섭이 최소화된 장애물이 없는 넓은 야외에서 비행하는 경우 고도 약 120m(400피트)에서 최대 전송 거리(FCC)까지 도달할 수 있습니다.
듀얼 조종기 모드에 대한 자세한 내용은 사용자 매뉴얼을 참조하십시오.
최대 작동 시간은 스마트 장치에 전원을 공급하지 않는 상태에서 테스트되었습니다.
현지 규제를 준수하십시오. 일부 국가에서는 5.8GHz의 작동 주파수를 사용할 수 없습니다.
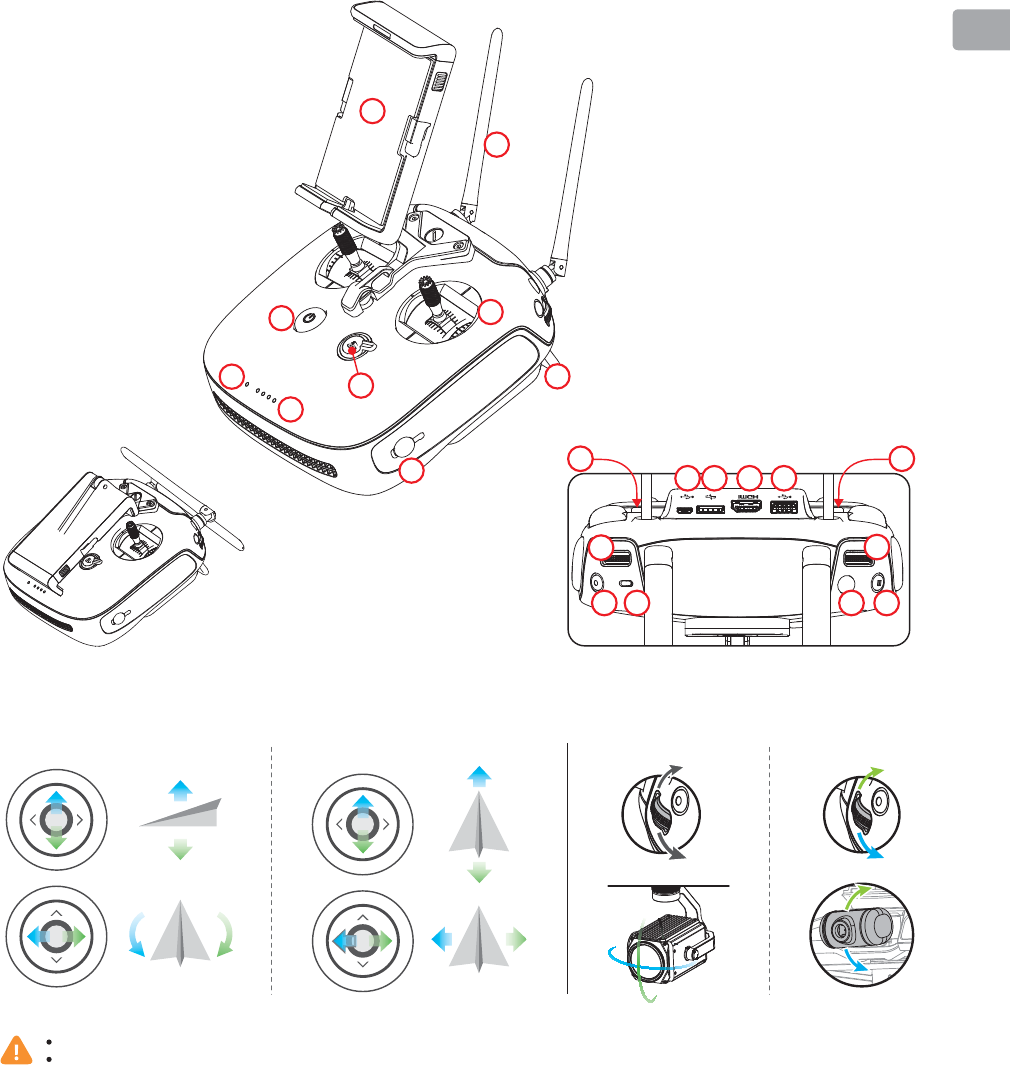
1. 전원 버튼
2. 리턴 투 홈(RTH) 버튼
3. 조종 스틱
4. 상태 LED
5. 배터리 수준 LED
6. 전원 포트
7. 모바일 기기 홀더
8. 안테나
9. 핸들 바
10. 제어 다이얼(짐벌/FPV)
11. 카메라 설정 다이얼
12. 녹화 버튼
13. 비행 모드 스위치
14. 셔터 버튼
15. 일시 정지 버튼
16. Micro USB 포트
17. CAN 버스(확장 포트)
18. HDMI A 포트(동영상 출력용)
19. USB 포트(모바일 기기 연결용)
20. C1 버튼
21. C2 버튼
접은 상태
스틱 모드는 기본적으로 모드 2로 설정되어 있습니다(좌측 스로틀). 왼쪽 스틱은 기체의 고도와 방향을 제어합니다. 오른쪽 스틱은 기체의 전진, 후진 및 횡적
이동을 제어합니다. 짐벌 다이얼은 카메라의 틸트/팬을 제어합니다. FPV 카메라를 조정하려면 C2 버튼을 길게 누르고 제어 다이얼을 돌리십시오.
조종기 연결 및 사용 방법에 대한 자세한 정보는 사용자 매뉴얼을 참조하십시오.
DJI GO 4 앱에서 스틱 모드를 변경할 수 있습니다.
왼쪽 스틱 오른쪽 스틱 카메라 및 짐벌 FPV 카메라
위
로
아
래
로
전
방
후
방
오
른
쪽
으
로
왼
쪽
으
로
오
른
쪽
왼
쪽
3
8
9
7
4
5
1
2
616 17 18 19
10
13
12
11
1514
21
20
28
KR
Matrice 200 사용
1. DJI Assistant 2 및 DJI GO 4 앱 다운로드
아래의 웹사이트 링크를 통해 컴퓨터에 DJI ASSISTANTTM 2를 다운로드하여 설치합니다.
http://www.dji.com/matrice-200-series
App Store 또는 Google Play에서 ‘DJI GO 4’를 검색하여 앱을 모바일 기기에 다운로드합니다.
처음 활성화하는 경우 DJI 계정 및 인터넷 연결이 필요합니다.
Internet
DJI GO 4 앱은 iOS 9 이상 또는 Android 4.4 이상을 지원합니다.
DJI Pilot 내장 앱은 DJI CrystalSkyTM 에서만 사용할 수 있습니다.
DJI Assistant 2는 Windows 7 이상 또는 Mac OS X 10.11 이상을 지원합니다.
DJI GO 4 앱
2. 배터리 충전
인텔리전트 플라이트 배터리를 처음 사용할 때는 완전히 충전되어 있어야 합니다. 완전히 충전된 배터리를 제거할 때는 충전기 허브 상단에 있는 분리 버튼을
눌러야 합니다.
충전이 완료되면 인텔리전트 플라이트 배터리의 LED 등이 꺼지고 충전 허브에 있는 LED가 녹색으로 표시됩니다.
충전하기 전에 조종기의 전원을 끕니다. 충전이 완료되면 조종기의 LED 표시등이 꺼집니다.
배터리가 완전히 충전되면 충전 허브에서 신호음이 납니다. 허브 바닥에 있는 스위치를 전환하여 이 신호음을 켜거나 끌 수 있습니다.
배터리를 기체에 장착하고 전원을 켭니다. 배터리 온도가 15℃보다 낮아지면 배터리가 자동으로 온도를 높여 15~20℃ 사이의 온도를 유지합니다.
배터리를 페어링하는 것이 좋습니다. 이 작업은 DJI GO 4 앱에서 수행할 수 있습니다. 서비스 수명을 늘리고 보다 원활한 비행 환경을 위해 각 배터리 페어를
동시에 충전하고 방전하십시오.
분리 버튼을 누르고 해당하는 충전 포트 덮개를 엽니다.
인텔리전트 플라이트 배터리를 충전 포트에 삽입하면 충전이 시작됩니다.
전기 콘센트
100~240V
(50Hz/60Hz)
충전 시간: 1.5시간* 충전 시간: 3시간*
* 제공된 충전기
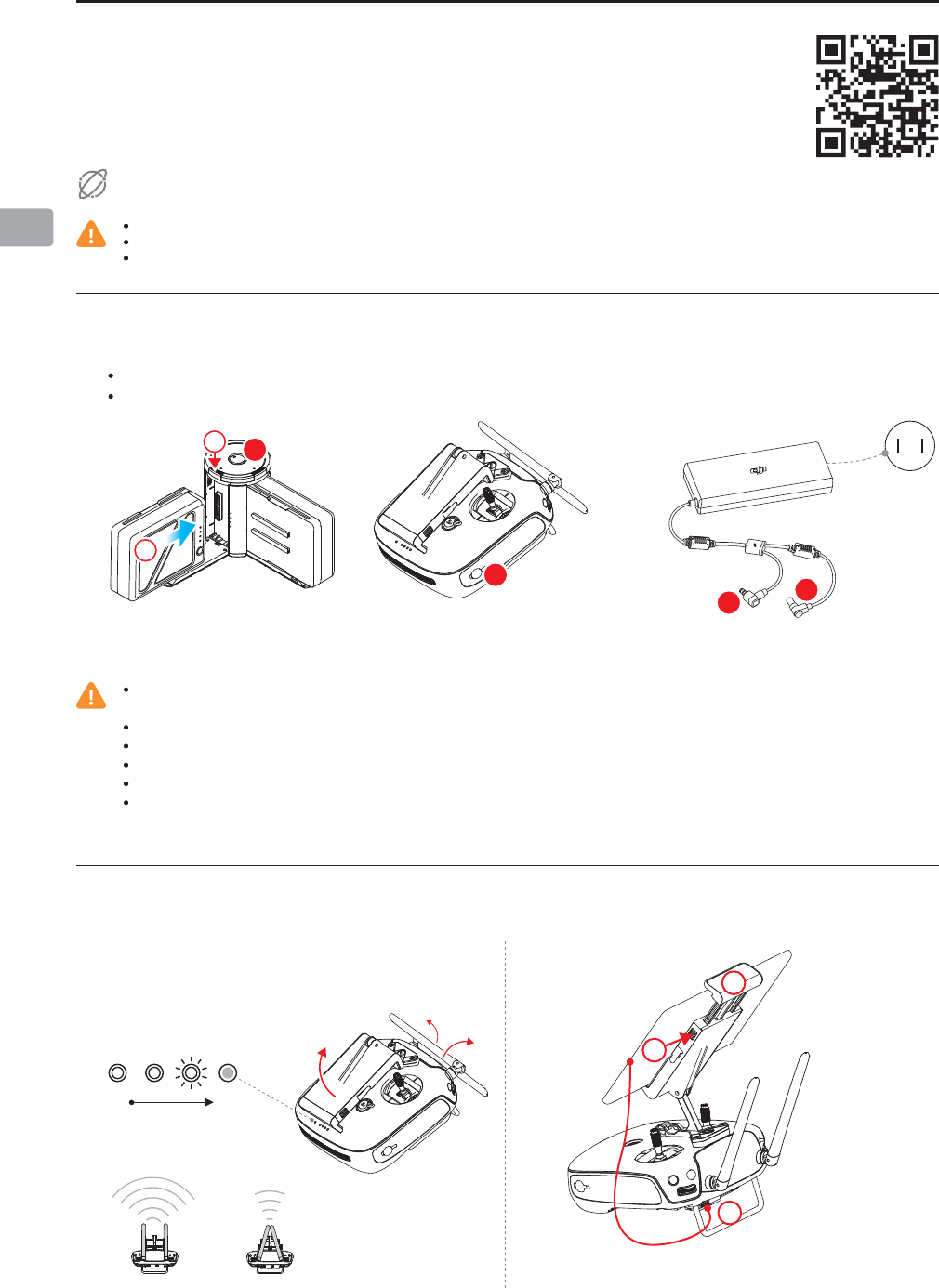
3. 조종기 준비
모바일 기기 홀더와 안테나를 펼칩니다.
전원 버튼을 한 번 눌러 배터리 수준을 확인합니다. 버튼을 눌러 클램프를 분
리합니다.
펼침
낮음
강함
높음
약함
모바일 기기를 장착하
고 클램프를 조정하여
단단히 고정합니다.
USB 케이블을 사용하여 모
바일 기기를 연결합니다.
#
"
#
"
2
1
1
3
2
29
KR
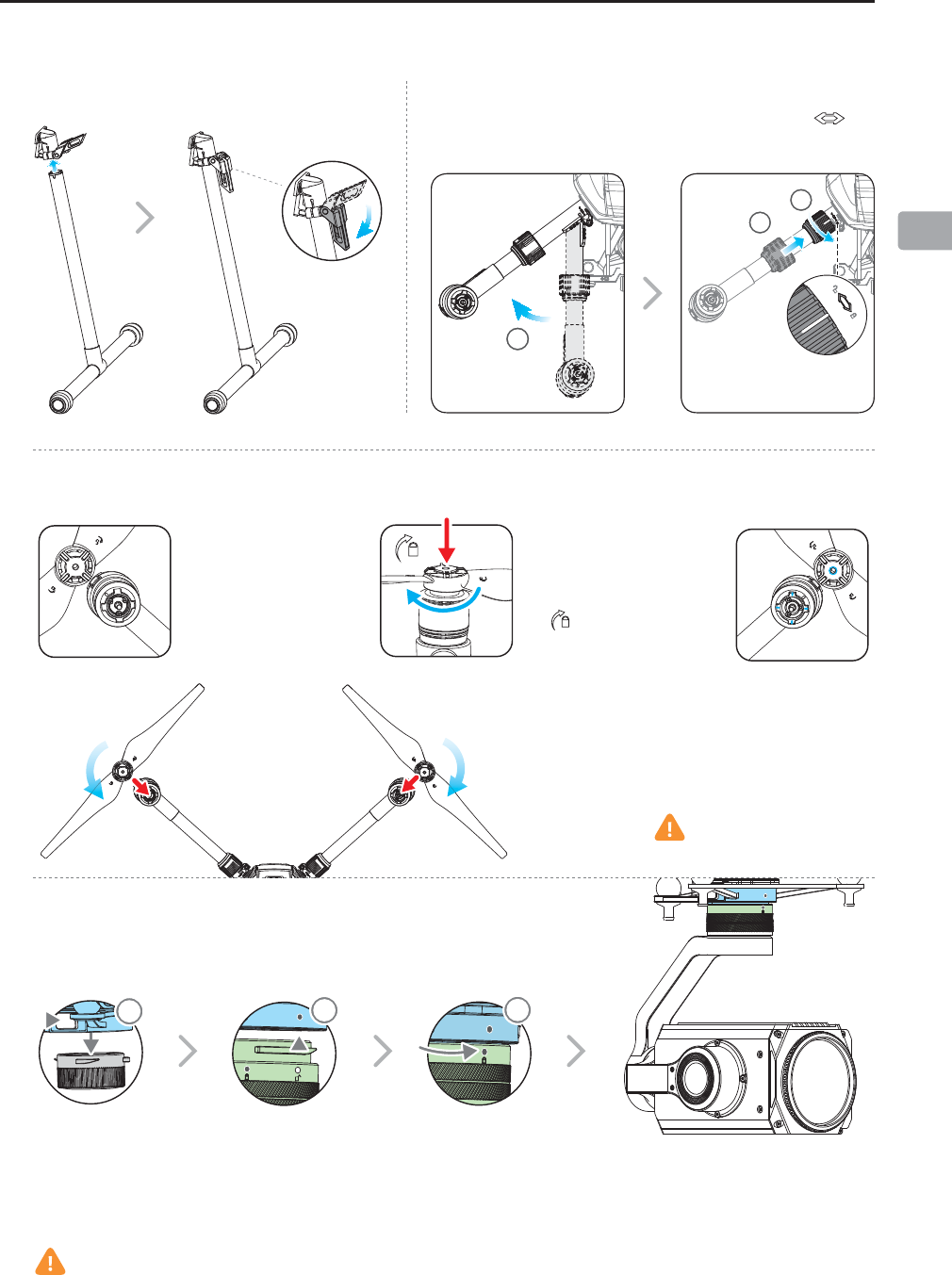
4. 기체 준비
೯ಉ ૺ࿌ ၿᅎ
ይചኵ ၿᅎ
ჴข ෟ ᆽඈೡ ၿᅎ
ૺᅰ ኺૺ
짐벌 분리 버튼을 눌러
덮개를 분리합니다.
흰색 및 빨간색 점을 맞
추고 짐벌을 끼웁니다.
짐벌 잠금 장치를 잠금
위치로 돌립니다.
각 비행 전에 프로펠러가 단단히
고정되어 있는지 확인하십시오.
짐벌 잠금 장치를 돌려 짐벌 및 카메라를 분리할 때는 짐벌 분리 버튼을 눌러야 합니다. 다음 설치를 위해 짐벌을 분리할 때는 짐벌 잠금 장치를 완전히 돌
려야 합니다.
은색 링이 있는 프로펠
러는 같은 색상 표시가
있는 모터에 설치해야
합니다.
은색 링이 없는 프로펠
러는 표시가 없는 모터
에 설치해야 합니다.
프로펠러를 아래쪽으로
눌러 마운팅 플레이트
에 끼우고 단단히 고정
될 때까지 잠금 방향으
로 돌립니다.
11 23
1
2
3
프레임 암을 펴고 암 잠금 장치를 프레임 암으로 민 다음 은색 선이 아이
콘의 범위 내에 위치할 때까지 약 90° 정도 돌립니다.
30
KR
ၨቊ൘႖ቼ ዯೡၦቼ ሽ൘ ၿᅎ
배터리 페어를 삽입합니다.
전원 버튼을 한 번 눌러 배터리 잔량을 확인합니다.
한 번 누른 다음 다시 길게 누르면 켜지거나 꺼집니다.
1개의 배터리를 사용하여 전원을 공급할 때는 배터리 슬롯 B만 사용하십시오.
배터리를 제거할 때는 배터리 제거 버튼을 눌러야 합니다.
"#
DJI GO 4 ྐྵ
자세한 내용은 DJI GO 4 앱 또는 DJI 공식 웹사이트에 있는 튜토리얼을 참조하십시오.
이륙하기 전에 항상 적절한 RTH 고도를 설정하십시오. 자세한 내용은 고지 사항 및 안전 가이드를 참조하십시오.
짐벌 작업 모드 기타 인텔리전트 플라이트 모드자동 이륙 리턴 투 홈(RTH)자동 착륙
5. 비행
비행 모드 스위치를 가
장 안전한 P 모드로 전
환합니다.
조종기와 기체 전원을 켭니다. DJI GO 4 앱을 시작하고
GO FLY를 탭합니다.
Ready to Go (GPS)
이륙하기 전에 DJI GO 4 앱의 기체 상태 표시줄에
‘Ready to Go(GPS)’ 또는 실내 비행의 경우 ‘Ready to
Go(Vision)’가 표시되는지 확인합니다.
낮음
높음
༘ ၦെ ༘ ᅎെ
지면에 닿을 때까지 왼쪽 스틱을
천천히 아래로 내립니다.
몇 초 동안 유지하면 모터가 중지
됩니다.
스틱 조합 명령으로 모터를 시동/중지합니다. 왼쪽 스틱을 천천히
위로 올려 이륙
또는
൘ሿ ብ ጲ(RC)
DJI GO 4 앱의 RTH 버튼과 동일합니다. 기체가 홈 포인트로 돌아옵니다.
길게 누르면 RTH 절차가 시작됩니다. 취소하려면 다시 누릅니다.
회전하는 프로펠러는 위험할 수 있습니다. 좁은 공간에서나 사람이 근처에 있을 때에는
모터를 작동시키지 마십시오.
모터가 계속 돌아가는 동안에는 조종기를 항상 손에 잡고 있으십시오.
착륙 후에는 먼저 기체의 전원을 끈 다음에 조종기를 끄십시오.
비행 중 모터 중지: 왼쪽 스틱을 안쪽 아래
모서리로 당기면서 동시에 RTH 버튼을 3
초 간 누릅니다. 손상 또는 부상의 위험을
줄일 수 있도록 긴급 상황에서만 비행 중에
모터를 중지하십시오.
자세히 알아보기:
http://flysafe.dji.com/no-fly
조종사와 주변의 안전을 위해 기본 비행 지침을 반드시 숙지해야 합니다.
자세한 내용은 고지 사항 및 안전 가이드를 참조하십시오.
비행 금지 구역
DJI GO 4
ྐྵ
31
KR
사양
ૺᅰ(M200)
치수 887×880×378mm(펴진 상태), 716×220×236mm(접힌 상태)
중량 약 3.8kg(2개 표준 배터리 장착 시), 약 4.53kg(2개 옵션 배터리 장착 시)
대각선 휠베이스 643mm
최대 이륙 중량 6.14kg
최대 유효 탑재 중량 2.34kg(2개 표준 배터리 장착 시), 1.61kg(2개 옵션 배터리 장착 시)
호버링 정확도(P 모드, GPS 사용) 수직: 0.5m(±1.64피트) 또는 0.1m(±0.33피트, 하향 비전 시스템 활성화)
수평: 1.5m(±4.92피트) 또는 0.3m(±0.98피트, 하향 비전 시스템 활성화)
최대 각속도 피치: 300°/s, 요잉: 150°/s
최대 피치 각도 35°(P 모드 및 전방 비전 시스템을 모두 활성화한 경우 25°)
최대 상승 속도 5m/초(16.4ft/s)
최대 하강 속도(수직) 3m/초(9.8ft/s)
최대 속도 P 모드: 61km/h(17m/초), S 모드/A 모드: 83km/h(23m/초)
최대 실용 상승 한계 고도 3000m(9842피트, 1760S 프로펠러 장착 시)
최대 바람 저항 10m/초(32.8ft/s)
최대 비행 시간(표준 배터리 장착 시) 27분(탑재 중량 없음), 13분(이륙 중량: 6.14kg)
최대 비행 시간(옵션 배터리 장착 시) 38분(탑재 중량 없음), 24분(이륙 중량: 6.14kg)
지원되는 DJI 짐벌 Zenmuse X4S/X5S/XT/Z30
지원되는 짐벌 장착 짐벌 1개, 하방
IP 등급 IP43
GNSS GPS+GLONASS
작동 온도 -20°~45°C(-4°~113°F)
ႮႶૺ
작동 주파수 2.400~2.483GHz, 5.725~5.825GHz
최대 전송 거리 2.4GHz: 7km(4.3마일, FCC), 3.5km(2.2마일, CE), 4km(2.5마일, SRRC)
(장애물과 간섭이 없는 상태) 5.8GHz: 7km(4.3마일, FCC), 2km(1.2마일, CE), 5km(3.1마일, SRRC)
EIRP 2.4GHz: 26dBm(FCC), 17dBm(CE), 20dBm(SRRC)
5.8GHz: 28dBm(FCC), 14dBm(CE), 20dBm(SRRC)
내장 배터리 6,000mAh 2S LiPo
출력 전원 9W(스마트 장치에 전원을 공급하지 않는 상태)
USB 전원 공급 iOS: 1A 5.2V(최대), Android: 1.5A 5.2V(최대)
작동 온도 -20°~40°C(-4°~104°F)
ዻጎ ๗႖ གྷ༺ቋ
속도 범위 2m(6.56피트) 높이에서 10m/초(32.8ft/s) 미만
고도 범위 10m(32.8피트) 미만
작동 범위 10m(32.8피트) 미만
작동 환경 선명한 패턴이 있는 표면 및 적당한 조명(15럭스 초과)
초음파 센서 작동 범위 10~500cm(0.33~16.4피트)
초음파 센서 작동 환경 비흡수 자재, 단단한 표면(실내에 두꺼운 카펫이 있으면 성능이 감소함)
႖෮ ๗႖ གྷ༺ቋ
장애물 감지 범위 0.7~30m(2.3~98.4피트)
FOV 수평: 60°, 수직: 54°
작동 환경 선명한 패턴이 있는 표면 및 적당한 조명(15럭스 초과)
ືጎ ႕ဘ໓ ხ གྷ༺ቋ
장애물 감지 범위 0~5m(0~16.4피트)
FOV ±5°
작동 환경 크고 확산 반사가 일어나는 장애물(반사율 10% 초과)
ၨቊ൘႖ቼ ዯೡၦቼ ሽ൘(ዑა, කస: TB50-4280mAh-22.8V)
용량 4,280mAh
전압 22.8V
배터리 유형 LiPo 6S
에너지 97.58Wh
순중량(1개) 약 520g
작동 온도 -20°~45°C(-4°~113°F)
충전 온도 5°~40°C(41°~104°F)
최대 충전 전력 180W
ᆚ႖ૺ(කస: IN2C180)
전압 26.1V
정격 출력 180W
ᆚ႖ ጏ๐(කస: IN2CH)
입력 전압 26.1V
입력 전류 6.9A
ᆊཅ ႖ၔ ఋၗ ဿຫၦቼ ఋဪചዻཊགྷ.
http://www.dji.com/matrice-200-series
※ 본 내용은 사전 고지 없이 변경될 수 있습니다.
MATRICE 및 DJI는 DJI의 상표입니다.
Copyright 2017 DJI All Rights Reserved.
Designed by DJI. Printed in China.
DJI incorporates HDMITM technology.
The terms HDMI and HDMI High-Definition Multimedia
Interface, and the HDMI Logo are trademarks or registered
trademarks of HDMI Licensing LLC in the United States and
other countries.
32
DE
Matrice 200
Der DJITM MATRICETMJTUFJOMFJTUVOHTGÊIJHFT(FSÊUNJUFSTULMBTTJHFS"HJMJUÊUVOE(FTDIXJOEJHLFJU[XFJFYUSFN[VWFSMÊTTJHFO#BSPNFUFS
VOE*.6.PEVMFOVOEOFVFOJOUFMMJHFOUFO'MVHGVOLUJPOFONJUEFOFOLPNQMFYF"VGOBINFONJU-FJDIUJHLFJUHFMJOHFO%JFPQUJTDIFO4FOTPSFO
EFT'MVHHFSÊUFTFSNÚHMJDIFOFJOFOQSÊ[JTFSFO4DIXFCFGMVHTPHBSCFJ'MàHFOJO3ÊVNFOPEFSJO6NHFCVOHFOPIOF(/44%BTOFVF
'MVHSBINFOEFTJHOWFSCFTTFSUEJF4DIVU[BSU,MBTTJm[JFSVOHBVG*1HFNÊ/PSN*&$
%VSDIEFONFDIBOJTDIFO"VGCBV.BUSJDFLBOOEBTEBT(FSÊUo[VTBNNFONJUEFN4DIOFMMWFSTDIMVTT-BOEFHFTUFMMVOEEFONPOUJFSUFO
,MBQQBSNFOoMFJDIUUSBOTQPSUJFSUWFSTUBVUVOEGàSEFO'MVHWPSCFSFJUFUXFSEFO%JF*OUFMMJHFOU'MJHIU#BUUFSZWFSGàHUàCFSWFSCFTTFSUF"LLV[FMMFO
VOEFJOIPDIFOUXJDLFMUFT&OFSHJFWFSXBMUVOHTTZTUFN%JFNBYJNBMF'MVH[FJUEFS%SPIOFPIOF/VU[MBTUCFUSÊHUCJT[V.JOVUFONJU4UBOEBSE
"LLVTVOE.JOVUFONJUPQUJPOBMFO"LLVT
%FS.BUSJDFJTULPNQBUJCFMNJU[BIMSFJDIFO%($(JNCBMT%JF#FEJFOVOHTBOMFJUVOHOVU[UBMT#FJTQJFMEFO%+*;&/.64&TM;VNEJF
CFNFSLFOTXFSUFO'VOLUJPOFOEFT.BUSJDF[VEFNPOTUSJFSFO
'17,BNFSB
7PSXÊSUTHFSJDIUFUFT4JDIUTZTUFN
%+*(JNCBM"OTDIMVTT7
%($
(JNCBMVOE,BNFSB
'SFJHBCFUBTUF
3BINFOUSÊHFS
.PUPSFO
1SPQFMMFS
&4$-&%T
-BOEFHFTUFMM
%FSNBYJNBMF#FUSJFCTEBVFSXJSEVOUFS-BCPSCFEJOHVOHFOFSNJUUFMU%JF-FJTUVOHLBOOKFOBDIMPLBMFO#FEJOHVOHFOBCXFJDIFO
&JO(JNCBMVOEPQUJPOBMF"LLVTLÚOOFOTFQBSBUJNPGm[JFMMFO%+*8FCTIPQFSXPSCFOXFSEFO
#BVFO4JFEBT'MVHHFSÊUFHFIÊVTF/*$)5BVTFJOBOEFS"OEFSOGBMMTFSMJTDIUEJF(BSBOUJF
/BDIPCFOHFSJDIUFUFS
Infrarotsensor
4UBUVTBO[FJHFEFT'MVHHFSÊUT
'FSOCFEJFOVOH'MVHHFSÊU
,PQQFMUBTUFNJU"O[FJHF
64#"OTDIMVTT
64#.PEVTTDIBMUFS
"LLVFOUOBINFUBTUF
*OUFMMJHFOU'MJHIU#BUUFSJFT
"LLVMBEF[VTUBOETBO[FJHF
&JO"VT5BTUF
"CXÊSUTHFSJDIUFUFT4JDIUTZTUFN
.JDSP4%,BSUFOFJOHBOH
;VTBNNFOHFLMBQQU
17
19
14
13
12
16
18
2
11
10
9
8
5
6
1
7
3
4
15
20