Alvarion Technologies MICRO-25 Microbase station transceiver User Manual 4Motion System Manual
Alvarion Technologies Ltd. Microbase station transceiver 4Motion System Manual
Contents
- 1. Manual p1
- 2. Manual p2
- 3. Manual p3
- 4. Manual p4
- 5. Manual p5
Manual p1
4Motion®
System Manual
Release Version: 3.0
June 2010
P/N 215697
Document History
4Motion ii System Manual
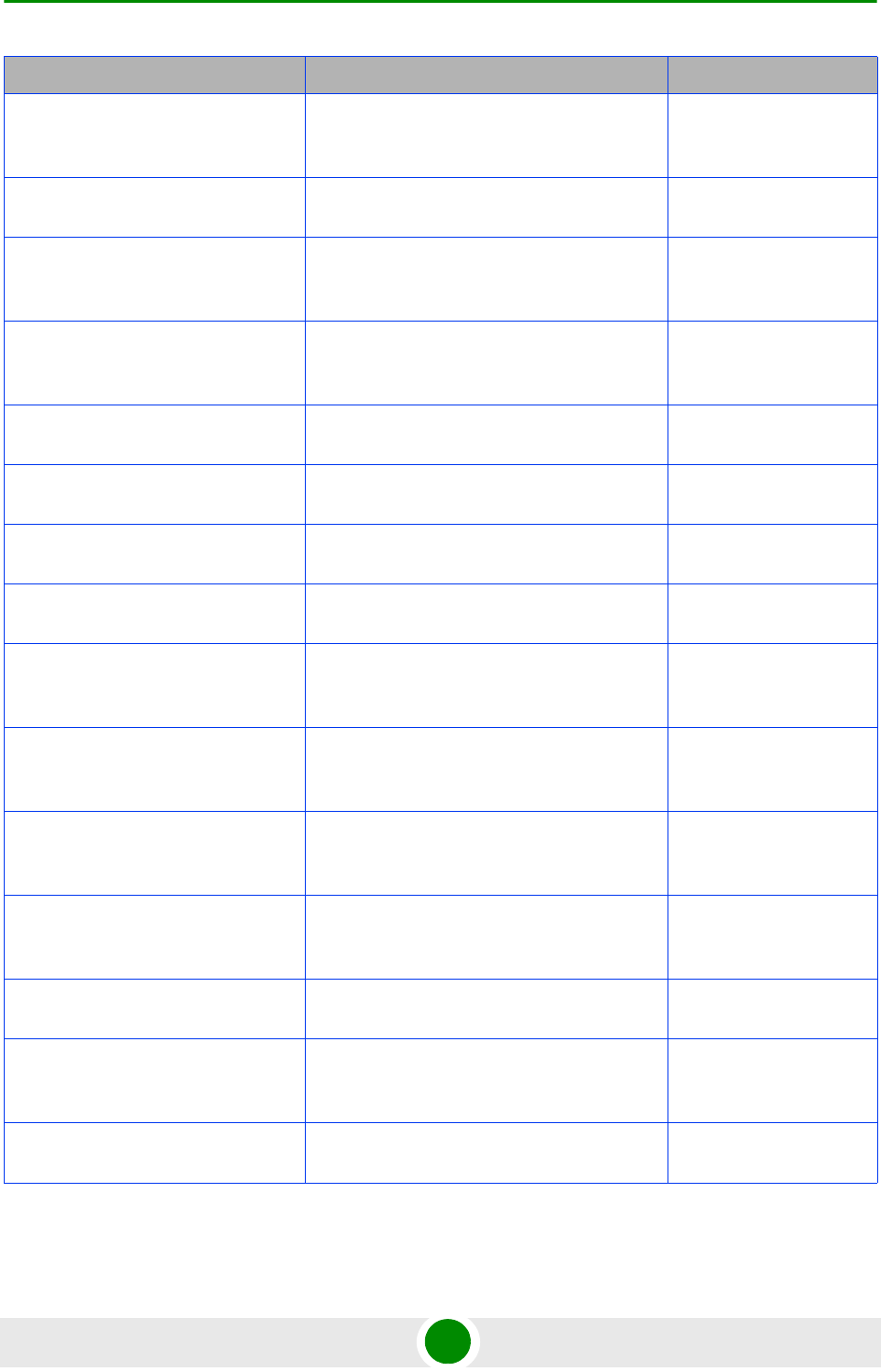
Document History
Topic Description Date Issued
First Release for GA July 2008
Rate Limiting for the NPU
Section 3.4.7.2
Rate limits are configurable only by the
vendor.
May 2009
Configuring ACLs
Section 3.4.10
Updated default ACLs. May 2009
Configuring Performance Data
Collection
Section 3.4.14
Added support for new counters groups,
updated names.
May 2009
Configuring the Power Control
Required C/N Level Parameters
Section 3.9.4.2.2
Updated Defaults for cqi, cdma, qam64-1by2,
qam64-2by3, qam64-3by4, qam64-5by6.
May 2009
Managing the BS Keep-Alive
Functionality
Section 3.9.22
Updated commands’ syntax. May 2009
Managing the BS Idle Mode
Parameters
Section 3.9.23
New feature May 2009
Managing BS Services Added new parameters: paging-cycle,
paging-offset, lm-traffic-idle-period,
dl-def-rate.
Updated range and default value for
max-subburst.
May 2009
Managing Ranging Parameters
Section 3.9.19
The following tables were removed from
operator CLI: Bandwidth Request, Handover
Ranging, Initial Ranging, Periodic Ranging,
Timing Correction.
contbased-rsrvtimeout was removed from
Ranging General table.
May 2009
Airframe General Parameters
Sections 3.9.12.2.1,
3.9.12.3.1, 3.9.12.5.1
Updated parameters:
Removed: enable-ul-scrotation.
Added: auto-diversity, auto-rx-enable.
Corrected name: ul-duration.
May 2009
Airframe Cyclic Delay Parameters
Section 3.9.12.2.4
Updated descriptions. May 2009
Airframe Linear Delay Parameters
Previously Section 4.8.16.2.5
Updated descriptions. May 2009
Document History
4Motion iii System Manual
Airframe Mapping Parameters
Previously Section 4.8.16.2.6
Updated descriptions. May 2009
Airframe Receive Parameters
Previously Section 4.8.16.2.7
Updated descriptions. May 2009
Airframe Downlink Diversity
Parameters
Section 3.9.12.2.3
Changed value range and default for the
MIMO parameter.
May 2009
Airframe MIMO Parameters
Sections 3.9.12.2.7,
3.9.12.3.4, 3.9.12.5.7
New Airframe parameters table. May 2009
Neighbor BS General Parameters
Sections 3.9.9.2.1, 3.9.9.3.1,
3.9.9.7.1
Updated parameters:
Removed: restartcount
ucd-configchangecount and
dcd-configchangecount must be set to 0.
Added: paging-grp-id, nbr-strt-rng-codes.
Updated range and description: preamble-idx
May 2009
Service Mapping Rule R1 Profile
Parameters
Removed: sdu-length, sdu-size.
All possible values of datadeliverytype are
supported (including rTVR and nRTVR).
Updated descriptions of cir, mir, latency.
Updated range for cir, mir.
May 2009
Service Mapping Rule R6 Profile
Parameters,
Updated range for cir, mir. May 2009
Feedback Allocation Parameters
Section 3.9.5
Removed: pr-cdma, ert-poll-enable.
Default value of ir-cdma changed from 20 to
2.
Updated description of max-cqi.
May 2009
Trigger Setup Parameters Removed: hysteresismargin, timetotrigger
Updated description of avgduration-rssi.
May 2009
Neighbor BS Trigger Setup
Parameters
Removed: hysteresismargin, timetotrigger May 2009
Rate Adaptation Parameters
(was previously Section 4.8.20)
All Rate Adaptation parameters were
removed.
May 2009
Scan Negotiation Parameters
Section 3.9.8
Removed: all parameters except
enable-modify.
May 2009
Topic Description Date Issued

Document History
4Motion iv System Manual
Handover Negotiation at SBS
(was previously 4.8.12)
All Handover Negotiation at SBS parameters
were removed.
May 2009
UCD Parameters
(was previously 4.8.15)
All UCD parameters were removed. May 2009
DCD Parameters
(was previously 4.8.16)
All DCD parameters were removed. May 2009
Authentication Relay Parameters
Section 3.9.14
Removed: nonauth-macctrlratethrshld,
nonauth-pduratethrshld
Updated the default value of
maxeaproundsthrshld to 100.
Updated the default value of
suspendedeapprocthrshld to 10000. Updated
the description.
Updated the default value of activemsthrshld
to 1024.
May 2009
Handover Control Parameters
Section 3.9.19
All configurable (read-write) parameters were
removed.
A new read-only parameter added:
CINRReuse.
May 2009
BS Management Alarm Thresholds
(was previously 4.8.26)
All BS Management Alarm Thresholds
parameters were removed.
May 2009
BS Alarm Threshold Parameters
Section 3.9.20
Removed: dl-droppedpackets, unalloc-slots,
dl-retransmissions, ul-retransmissions,
dl-subburstdrop, ul-subburstdrop.
Updated description, range and default for
ul-mednoise, ul-99prcntnoise.
Added: Be-exc-dl-drop-thr, rt-exc-dl-drop-thr,
nrt-exc-dl-drop-thr, ugs-exc-dl-drop-thr,
ert-exc-dl-drop-thr.
May 2009
Managing the Site General
Information
Section 3.4.16.7
Added section on displaying the site general
information.
Address parameter value was changed to up
to 70 characters.
Removed: AsnName, Region.
May 2009
Managing the Unique Identifier
Section 3.4.16.8
Added section on displaying the site ID. May 2009
Displaying the Vendor Identifier
Section 3.4.16.9
New feature. May 2009
Topic Description Date Issued

Document History
4Motion v System Manual
AU Connectivity Parameters
Sections 3.6.2.3, 3.6.3.3,
3.6.6.3
Added new parameters: service-ip,
service-mask, service-next-hop.
Updated possible values of bearervlanid and
the read-only InternalManagementVLANID
parameters.
May 2009
Configuring Physical and IP
Interfaces
Section 3.4.2
AU Fast Ethernet interfaces are not
configurable.
May 2009
AAA Client Configuration
Section 3.4.12.9.1
Updated with new parameters/commands and
additional changes related to support of
multiple AAA clients and AAA Redundancy.
In addition: Removed the auth-port and
acct-port parameters. Added command for
configuring the format of the Calling Station ID
MAC Address.
Added configuration rules for
primary-serveraddr and alternate-serveraddr.
Updated default and presence requirement
for primary-serveraddr.
Updated default and presence requirement
for rad-sharedsecret.
Updated description, default, possible values
and presence requirement for src-intf.
Added comment: If the bearer interface IP
address is being modified after aaa-client
configuration, you must re-configure the
src-intf parameter to "bearer" so that the
aaa-client will attach itself to the new bearer
interface IP address.
May 2009
Global RADIUS Parameters
Configuration
Section 3.4.12.9.2
Added: alrmAaaSwitchoverRetryFailThrshld May 2009
PIU HW Version
Section 3.4.16.1.2
Updated parameter’s possible values. May 2009
Displaying the Current Status of Shelf
Components
Section 3.11.1.2
Added description of displayed details. May 2009
Service Group
Section 3.4.12.10.1
srvc-grp (grp-alias) possible values changed
to 1-30 characters,
May 2009
Topic Description Date Issued
Document History
4Motion vi System Manual
Service Profile
Section 3.4.12.11.3.1
profile-name possible values changed to 1-30
characters,
May 2009
Classification Rules
Section 3.4.12.11.4.1
clsf-rule <rulename> possible values changed
to 1-30 characters,
May 2009
PHS Rules
Section 3.4.12.12.1
phs-rule <rulename> possible values
changed to 1-30 characters,
May 2009
Bearer Plane QoS Marking Rules
Section 3.4.12.7.1
qos-alias possible values changed to 1-30
characters,
media-type possible values changed to 1-30
characters,
May 2009
Log File Name
Section 3.4.13.1.5
file-name possible values changed to 1-50
characters,
May 2009
AU Maintenance VLAN ID
Section 3.4.3
New feature May 2009
AU Connectivity Parameters
Sections 3.6.2.3, 3.6.3.3,
3.6.6.3
Added service interface parameters. May 2009
Neighbor BS Triggers/Specific BS
Triggers
Sections 3.9.9.2.3, 3.9.9.7.4,
3.9.9.4
Added new table: Neighbor BS Specific BS
Triggers.
Updated-added details on deleting Neighbor
BS Triggers.
May 2009
Power Control Target Noise and
Interference Level Parameters
Sections 3.9.4.2.1, 3.9.4.3.1,
3.9.4.5.1
Added: power-control-correction-factor. May 2009
Managing Power Control Levels and
Policies
Section 3.9.4
The following tables were removed:
Open Loop Correction Policy,
Open Loop Correction Range,
Closed Loop - Unstable MS,
Closed Loop - MS in Network Entry,
Closed Loop Correction Range.
May 2009
GPS Position Parameters
Section 3.4.16.2.5
Added possible values details to Latitude and
Longitude.
May 2009
GPS General Configuration
Parameters
Sections 3.4.16.2.2, 3.4.16.2.8
Removed: AdaptorRequired May 2009
GPS Clock Mode
Was previously in sections
4.3.15.2.5, 4.3.15.2.11
Removed May 2009
Topic Description Date Issued
Document History
4Motion vii System Manual
AU Properties
Sections 3.6.2.1, 3.6.3.1,
3.6.6.1
Updated possible values for required-type.
Removed: required-ports, required-bandwidth
(and the corresponding InstalledPorts and
InstalledBandwidth).
Updated options for port-3 power and
port-4-power parameters (removed the NA
option).
May 2009
Sector Parameters
Section 3.10.1
heading is not mandatory when creating a
new sector. The default value is 0.
May 2009
Antennas
Section 3.8
heading is not mandatory when creating a
new antenna. Limitation related to antenna
heading vs. sector heading was removed).
Removed: gain, altitude, beamwidth,
electrical-azymuth-adjustment.
Added: antenna-product-id.
May 2009
BS Bearer Interface Parameters
Section 3.9.13
Added: bearer-vlan.
Updated possible values for
linkusage-hardthrshld.
May 2009
Managing MSs for Specific MS
Advanced Mode Data Collection
New feature. May 2009
Handover Negotiation at TBS
Parameter
The default value of defaultactiontime was
changed to 9.
May 2009
Power Control Maximum EIRP
Section 3.9.4.2.2
The default value for maxeirp was changed to
-99.
May 2009
Neighbor Advertisement Parameters
Section 3.9.6
Removed: mininterval-normalload,
mininterval-highload.
May 2009
IGMP Parameters Configurable only by the vendor. May 2009
MIP Foreign Agent Parameters Configurable only by the vendor. May 2009
Proxy-MIP Client Parameters Configurable only by the vendor. May 2009
ASN Interface Parameters
Section 3.4.12.1
Configurable only by the vendor. Updated
display format.
May 2009
Authenticator Function Parameters
Section 3.4.12.2
Configurable only by the vendor. Updated
display format.
May 2009
Data Path Function Parameters
Section 3.4.12.3
Configurable only by the vendor. Updated
display format.
May 2009
Context Function Parameters
Section 3.4.12.4
Configurable only by the vendor. Updated
display format.
May 2009
Topic Description Date Issued
Document History
4Motion viii System Manual
MS State Change Parameters
Section 3.4.12.5
Configurable only by the vendor. Updated
display format.
May 2009
Connectivity Service Network (CSN)
Parameters
Section 3.4.12.6
Configurable only by the vendor. Updated
display format.
May 2009
Enabling/Disabling VLAN Service
Interface
Section 3.4.12.10.3
Added default (disable). May 2009
Service Flows
Sections 3.4.12.11.3.3,
3.4.12.11.3.5
Removed: ulSfQosSduSize, dlSfQosSduSize.
Updated syntax of commands for better
support of commands auto-completion.
ul-unsol-intrvl not applicable for RTVR data
delivery type.
ulqos-trafficpriority and dlqos-trafficpriority not
applicable for UGS.
Updated range for ulqos-maxsustainedrate,
dlqos-maxsustainedrate, ul-rsrv-rate-min,
dl-rsrv-rate-min.
May 2009
Monitoring Software Components Removed details on counters-full and updated
information is provided in the Performance
Management document.
May 2009
Displaying Statistics for Physical and
IP Interfaces
Removed details on counters-full and updated
information is provided in the Performance
Management document.
May 2009
System Log Files
Sections 3.4.13.1.5, 3.11.2
Corrected directory name to
tftpboot/management/system_logs (added s
at the end)
May 2009
Policy Framework
Section 3.4.12.14
New feature May 2009
Power Feeders Configuration
Section 3.4.16.3
pfAuSlotNoDestination,
pfAuPortNoDestination are optional.
May 2009
DHCP Server/Proxy Parameters
Sections 3.4.12.10.4.2,
3.4.12.10.4.3.
Added: Second DNS support (dnssrvr-addr2) May 2009
Dry Contact Input Alarms
Sections 3.4.16.4, 3.4.16.6
Added alarmPolarity May 2009
Displaying the Active Clear Timer and
Event Rate Limit
Section 3.4.15.2.6
New command May 2009
Topic Description Date Issued
Document History
4Motion ix System Manual
ODUs
Sections 1.3.4, 2.1.3, 3.7.1.1,
3.7.1.2, 3.7.1.6, 3.7.2.
Tables 1-3, 1-6, 1-10, 1-22.
Added new ODUs:
ODU-HP-2.3-WCS,
ODU-2340-2400-000N-36-1X1-N-0,
ODU-2480-2690-000N-38-4X2-N-0.
Removed: 2x1 ODUs.
Updated the list of ODU types in CLI
(including types that are not available yet).
May 2009
ODU General Parameters
Sections 3.7.1.2, 3.7.1.3,
3.7.1.6.
Removed: heater-existence May 2009
Antennas
Table 1-39, Table 1-42
Added antennas:
ANT.2.3-2.7GHz, D/S,65°,16±0.5dBi,
ANT.3.5GHz, D/S,65°,16±0.5dBi
May 2009
Airframe Uplink Feedback Zone
Parameters
Section 3.9.12.2.4
Updated limitation for subchannels. May 2009
Service Mapping Rule R6 Profile
Parameters
Updated range for mediaflowtype. May 2009
Configuring General Service Mapping
Rule Parameters
Updated description of the srvc parameter. May 2009
Performance Data Collection
Section 3.4.14, Table 3-5
Updated syntax of commands for better
support of commands auto-completion.
May 2009
Configuring Common Parameters of
a Service Group
Section 3.4.12.10.2
Updated syntax of commands for better
support of commands auto-completion.
Updated description of dhcp-ownaddr.
May 2009
Enabling/Disabling VLAN Service
Interface
Section 3.4.12.10.3
Updated syntax of commands for better
support of commands auto-completion.
May 2009
Configuring the DHCP
Server/Proxy/Relay
Section 3.4.12.10.4
Updated syntax of commands for better
support of commands auto-completion.
May 2009
IP-IP Service Interface Parameters
Sections 3.4.12.8.2.1,
3.4.12.8.3
Updated syntax of commands for better
support of commands auto-completion.
May 2009
Displaying Configuration Information
for the Service Interface
Section 3.4.12.8.6
Updated May 2009
Topic Description Date Issued
Document History
4Motion x System Manual
VLAN Service Interface Parameters
Sections 3.4.12.8.2.2,
Updated syntax of commands for better
support of commands auto-completion.
Updated possible values and description for
vlan-id.
Added mask for dflt-gw-ip.
May 2009
QinQ Service Interface Parameters
Section 3.4.12.8.2.3
Updated syntax of commands for better
support of commands auto-completion.
Updated possible values and description for
vlan-id.
May 2009
ASN-GW Keep-Alive Parameters
Section 3.4.12.14
Updated syntax of commands for better
support of commands auto-completion.
May 2009
Configuring Power Feeders
Section 3.4.16.3.1
Updated syntax of commands for better
support of commands auto-completion.
May 2009
RF Frequency
Section 3.9.10
Updated possible values. May 2009
General Neighbor BS Parameters
Section 3.9.9.2.1
Updated possible values. May 2009
Bearer Interface IP Address
Section 3.4.2.3.3
Added comment: After changing the bearer IP
address, save configuration and reboot to
apply changed IP address on ASN and CSN
interfaces.
May 2009
IP Connectivity Mode
Section 3.4.1.1
Added comment: You must save the
configuration for a change in connectivity
mode to take effect after next reset.
May 2009
Next Boot Mode
Section 3.4.4.1
Added comment: You must save the
configuration for a change in boot mode to
take effect after next reset.
May 2009
Restoring the Factory Default
Configuration With Connectivity
Section 3.4.5.4.7
New feature. May 2009
displaying Failures in Configuration
Restore Operations
Section 3.4.5.4.8
New feature. May 2009
Privilege Levels
Sections 3.1.5.5, 3.1.6
The highest privilege level available for users
is 10.
May 2009
DGW Profile
Sections 3.4.12.11.3.1,
3.4.12.11.3.3.1
Added a note (parameters related to DGW
profile are not applicable in current release).
May 2009
Topic Description Date Issued
Document History
4Motion xi System Manual
Power Feeders Requirements
Section 2.3.3.3
Required only in configurations with 6 AUs
where each AU is connected to 4 2.x GHz or
3.5 GHz 1x1 ODUs.
May 2009
Configuring the Properties of the
Physical Interface
Section 3.4.2.1.2
Physical interfaces can be configured when
the interface is enabled.
May 2009
Managing AUs
Section 3.6
Up to 6 AUs may be active (removed
limitation on number of AUs that can provide
services).
May 2009
Managing BSs
Section 3.9
Removed the requirement to explicitly
configure at least one parameter in tables with
no mandatory parameters.
May 2009
Apply command
Table 3-28, Sections 3.9.4,
3.9.16, 3.9.19.
Apply command not required for Power
Control Levels and Policies, Control Traffic
QoS Marking Rules and Ranging parameters,
unless none of the BS General parameters
was configured.
May 2009
BS General Parameters
Section 3.9.3
Added ul-def-rate, dl-def-rate. May 2009
Commissioning-NPU Local
Connectivity-External Management
Interface
Section 2.1.3.3
No need to shut-down external interface
before configuring IP parameters.
May 2009
Commissioning-Completing the Site
Configuration Using
AlvariSTAR-Equipment
Configuration-AU
Section 2.2.4.1
Updated (only supported Type is AU 4x4
Modem, Ports and Bandwidth parameters
were removed).
May 2009
Commissioning-Completing the Site
Configuration Using
AlvariSTAR-Equipment-Antenna
Section 2.2.4.3
Updated: Added Antenna Product Type,
Number of Ports applicable only if Antenna
Product Type is set to Empty, Heading is not
mandatory.
May 2009
Commissioning-Completing the Site
Configuration Using AlvariSTAR-BS
Configuration
Section 2.2.6
Removed the requirement for clicking Apply
on Radio Advanced screen and Connectivity
Advanced screen.
May 2009
Commissioning-Completing the Site
Configuration Using
AlvariSTAR-ASNGW Configuration
It is not mandatory to define AAA client (the
default client can be used).
May 2009
Topic Description Date Issued
Document History
4Motion xii System Manual
Creating a Sector Association Entry
Section 3.10.2.1
Updated association rules (relation between
antenna-type, auto-diversity and
auto-rx-enable parameters.
May 2009
Changes in Site Configuration
Section 2.1.3.4
Reset is required only for a change in
Connectivity Mode.
June 2009
Accessing the CLI from a Remote
Terminal
Section 3.1.2.2
No need to disable/enable the interface when
configuring an IP Address.
June 2009
Adding/Modifying Users
Section 3.1.6.1.1
Updated the command’s syntax. June 2009
Displaying the IP connectivity Mode
Section 3.4.1.2
Updated display format. June 2009
Managing VLAN Translation
Section 3.4.2.1.3
Updated ranges.
VLAN Translation entry can be created also
when VLAN Translation is disabled.
June 2009
Configuring IP Interfaces
Section 3.4.2.3
VLAN ID of Local Management Interface is
configurable.
It is not necessary to shut down an IP
interface for configuring its parameters.
June 2009
Configuring a QoS Classification Rule
Section 3.4.8.2.2
IP address of local-management can also be
used as host source IP address.
June 2009
Configuring Static Routes
Section 3.4.9
Added a note regarding automatically
added/deleted kernel routes.
June 2009
Configuring ACLs in the Standard
Mode
Section 3.4.10.1.2
Removed paragraph on Standard ACL 1
which was previously available by default.
June 2009
Configuring Permit/Deny Rules
from/to a Specific Protocol and
Source/Destination IP Addresses
Section 3.4.10.1.3.1
Any IANS value can be configured for the
protocol-type parameter, including IP, OSPF
and PIM.
June 2009
Attaching/De-attaching ACLs to/from
an Interface
Section 3.4.10.3
Removed paragraph on Standard ACL 1
which was previously available by default.
June 2009
Enabling the Interface Configuration
Mode
Section 3.4.10.3.1
By default, all traffic destined towards the AUs
is denied and all traffic towards the NPU is
permitted.
June 2009
Deleting Next-hop IP
Address-Network ID Mappings
nw-id parameter is optional. June 2009
Topic Description Date Issued

Document History
4Motion xiii System Manual
Managing the Authenticator Function
Section 3.4.12.2
Updated descriptions for eapTimerTransfer
and eapCounterTransferMax.
June 2009
Managing the Data Path Function
Section 3.4.12.3
Updated descriptions of
dpTimerInitPathRegReq,
dpCounterInitPathRegReqMax,
dpTimerMsDeregReq,
dpCounterMsDeregReqMax,
dpTimerPathRegReq,
dpCounterPathRegReqMax,
dpTimerPathRegRsp,
dpCounterPathRegRspMax.
June 2009
Managing the Context Function
Section 3.4.12.4
Updated descriptions of all parameters. June 2009
Managing the MS State Change
Functionality
Section 3.4.12.5
Updated descriptions of
msscfnTimerMsscRsp,
msscfnCounterMsscRspMax,
msscfnTimerMsscDrctvReq,
msscfnCounterMsscDrctvReqMax.
June 2009
Configuring Bearer Plane QoS
Marking Rules
Section 3.4.12.7
Corrected value: Up to a maximum of 20
Bearer Plane QoS Marking Rules can be
defined.
June 2009
Deleting Bearer Plane QoS Marking
Rules
Section 3.4.12.7.5
"int_default" and "ext_default" Bearer Plane
QoS Marking Rules cannot be deleted.
June 2009
Enabling the Service Interface
Configuration Mode\Creating a
Service Interface
Section 3.4.12.8.1
Updated the value of the Service Interface
alias parameter (1-30 characters).
June 2009
Configuring Parameters for IP-IP
Service Interface
Section 3.4.12.8.2.1
srcaddr is mandatory. The only allowed value
is the Bearer IP Address.
dstaddr is mandatory.
Updated description of dstaddr.
June 2009
Configuring Parameters for VLAN
Service Interface
Section 3.4.12.8.2.2
vlan-id and dflt-gw-ip are mandatory. June 2009
Configuring Parameters for QinQ
Service Interface
Section 3.4.12.8.2.3
vlan-id is mandatory. June 2009
Topic Description Date Issued
Document History
4Motion xiv System Manual
Configuring the AAA Client
Functionality
Section 3.4.12.9
rad-CallingStationId parameter added to AAA
Client parameters config command (instead
of config aaaserverMACFormat command
added in a previous version of this release).
June 2009
Restoring Operation with the Primary
Server
Section 3.4.12.9.1.2
Updated command syntax and description. June 2009
Deleting the AAA Client
Section 3.4.12.9.1.6
“default” client cannot be deleted. June 2009
Configuring DHCP Server
Parameters
Section 3.4.12.10.4.2.1
No need to delete service group for updating
pool-minaddr & pool-maxaddr values.
Corrected range for lease-interval
(24-4294967295).
Added rules for pool-minaddr &
pool-maxaddr.
Added rules for renew-interval.
June 2009
Deleting a Service Group
Section 3.4.12.10.9
To delete a VLAN type service group, first
execute the "no vlan-enable" command.
June 2009
Configuring Parameters for the Policy
Framework
Previously Section 4.3.11.17.2
aaa-alias must be the alias of an active AAA
client.
June 2009
Managing the ASN-GW Keep-Alive
Functionality
Section 3.4.12.14
Updated description of the feature. June 2009
Configuring ASN-GW Keep-Alive
Parameters
Section 3.4.12.14.1
Added error condition.
Updated range and default for rtx-time.
June 2009
Configuring BS Keep-Alive
Parameters
Section 3.9.22.1
Added error condition. June 2009
Configuring the SNMP Manager
Section 3.4.15.1
Clarified that each SNMP Manager entry is
uniquely identified by the pair of values for the
Read Community and Write Community.
June 2009
Configuring the Trap Manager
Section 3.4.15.2
Added note: A route to forward traps to a
configured Trap Manager IP address must
exist.
June 2009
Displaying the Trap Rate Limit
Section 3.4.15.2.5
Updated description. June 2009
Topic Description Date Issued
Document History
4Motion xv System Manual
Configuring the Date and Time
Section 3.4.16.2.3
Corrected the presence of UTC to Optional. June 2009
Configuring Power Feeders
Section 3.4.16.3.1
Added note on error condition. June 2009
Displaying the Unique Identifier for
the 4Motion Shelf
Section 3.4.16.8.2
Corrected command’s syntax. June 2009
Displaying the Vendor Identifier
Section 3.4.16.9
Updated description. June 2009
Displaying Location Information for
the 4Motion Shelf
This section (previously Section 4.10.1.4) was
removed (described in
Section 3.4.16.7.2).
June 2009
Displaying the Unique Identifier for
the 4Motion Shelf
This section (previously Section 4.10.1.5) was
removed (described in
Section 3.4.16.8.2).
June 2009
Enabling the Port Monitoring Session
Section 3.12.2.1
Updated command’s syntax. June 2009
Disabling a Port Monitoring Session
Section 3.12.2.1
Updated command’s syntax.
Updated description
June 2009
Upgrading the NPU: Step 2:
Triggering Software Download
Added error condition (available memory). June 2009
Upgrading the AU Step 3: Creating
the AU-to-Image Mapping
Removed error condition (regarding mapping
the AU to an image that is not residing in the
AU flash).
June 2009
Displaying the Card Types Installed in
Shelf Slots 1 - 9
Section 3.11.1.1
New June 2009
ODU Names
Table 1-6,
ODU-2340-2400-000N-36-1X1-N changed to
ODU-HP-2.3b
June 2009
Configuring Bearer Plane QoS
Marking Rules
Section 3.4.12.7
Updated description of the feature. June 2009
Deleting Source Addresses
Section 3.4.12.11.4.5.5
Updated command syntax. June 2009
Deleting Destination Addresses
Section 3.4.12.11.4.6.5
Updated command syntax. June 2009
Topic Description Date Issued
Document History
4Motion xvi System Manual
Enabling the Source Address
Configuration Mode\ Creating a New
Source Address
Section 3.4.12.11.4.5.1
Added Privilege Level definition. June 2009
Displaying the Status of the Manual
Backup Procedure
Section 3.4.5.4.2
Updated Privilege Level (10) June 2009
Displaying the Automatic Backup
Time
Section 3.4.5.4.4
Added to manual. June 2009
Displaying Failures in Configuration
Restore Operations
Section 3.4.5.4.8
Updated Privilege Level (10) June 2009
Displaying the Currently Stored
Backup Configuration Files
Section 3.4.5.4.9
Updated Privilege Level (10) June 2009
Displaying Configuration Information
for SNMP Managers
Section 3.4.15.1.3
Updated Privilege Level (10) June 2009
Displaying Configuration Information
for Trap Managers
Section 3.4.15.2.4
Updated Privilege Level (10) June 2009
Displaying Status Information for
HARQ Maximum Retransmissions
Parameter
(was previously section 4.8.30)
Removed. June 2009
Configuring Power Control Target
Noise and Interference Level
Parameters
Section 3.9.4.2.1
Updated default value of pusc to -127. June 2009
Specifying Configuration Parameters
for the L3 Classification Rule
Section 3.4.12.11.4.2
Added consistency and configuration rules for
iptos-low and iptos-high.
June 2009
Enabling the Source Port
Configuration Mode\ Creating a New
Source Port
Section 3.4.12.11.4.7.1
Added consistency rules for start-port and
end-port.
June 2009
Enabling the Destination Port
Configuration Mode\ Creating a New
Destination Port
Section 3.4.12.11.4.8.1
Added consistency rules for start-port and
end-port.
June 2009
Topic Description Date Issued
Document History
4Motion xvii System Manual
Enabling Protocol Lists
Section 3.4.12.11.4.4.2
Added consistency rules-impact of enabling
destination port range
June 2009
Enabling the Destination Port Range
Section 3.4.12.11.4.8.2
Added consistency rules-impact on
parameters of IP protocol lists
June 2009
Enabling the Destination Port Range
Section 3.4.12.11.4.7.2
Added consistency rules-impact on
parameters of IP protocol lists
June 2009
Configuring the Position
Section 3.4.16.2.5
Updated ranges for longitude and latitude. June 2009
Managing Handover Negotiation at
SBS Parameters
The previously removed section was brought
back with one new parameter to support the
Blackout Period feature.
June 2009
Configuring the AAA Client
Functionality
Section 3.4.12.9
Removed all commands and parameters
associated with AAA server redundancy.
Only a single client (default) is supported.
June 2009
Configuring the Output Parameters
for Bearer Plane QoS Marking Rules
Section 3.4.12.7.2
Added a note-for VLAN Service Interface only
VLAN Priority marking is relevant.
June 2009
Managing Secure Shell (SSH)
Parameters
Section 3.1.7
New section June 2009
Using Miscellaneous Commands
Section 3.1.5.4
Update description of exit command. June 2009
Managing the Session
Section 3.1.8
New section June 2009
Managing Service Groups
Section 3.4.12.10
Added explanations on the different service
group types.
Added new type (VPWS-Mapped).
Added acctInterimTmr parameter and
updated range/default for acct parameter in IP
Service Group configuration.
Updated description for ms-loop.
Changed structure/headings and added new
sections for configuring VPWS service
groups.
Updated description of dhcp-ownaddr.
June 2009
Configuring Antenna Parameters
Section 3.8.2
Updated value range for latitude and
longitude, updated default for latitude.
June 2009
Topic Description Date Issued
Document History
4Motion xviii System Manual
Macro Outdoor BTS
Sections 1.2.1, 1.3, 1.3.2 (new),
1.5.6, 1.5.7, 1.5.9,
1.5.10.2.1 (new), 1.5.10.2.2
(new), 1.5.10.2.3 (new), 2.4
(new). 3.1.1 (new)
New product line June 2009
Configuring the Site General
Information for the 4Motion Shelf
Section 3.4.16.7.1
Removed ProductType (not configurable) June 2009
Displaying the Site General
Information Parameters
Section 3.4.16.7.2
Product Type has several options. June 2009
Replacing a PIU
Section 2.3.10.4
Updated procedure June 2009
Output Alarms
Section 3.4.16.5.1
Corrected explanation of N.C. and N.O.
terms.
June 2009
Displaying the Currently Stored
Backup Configuration Files
Section 3.4.5.4.9
Added description of the file’s name format. June 2009
Restoring the Configuration Defined
in the Backup Configuration File
Section 3.4.5.4.5
Added description of the file’s name format. June 2009
Downloading a Configuration
File/Vendor Startup File from an
External Server
Section 3.4.5.2
Updated section, added info related to Vendor
Startup file and file name format.
June 2009
Displaying the Status of the last File
Download Operations
Section 3.4.5.3
New section June 2009
Configuring Service Parameters Updated range for paging-cycle, paging-offset
and lm-traffic-idle-period.
August 2009
4x2 ODU Installation Guidelines
Section 2.1.4.2
Updated August 2009
Configuring R6 Profile Parameters Updated value range for cir and mir
parameters.
August 2009
Configuring R1 Profile Parameters Updated value range for cir and mir
parameters.
August 2009
Topic Description Date Issued
Document History
4Motion xix System Manual
Specifying Service Flow
Configuration Parameters
Section 3.4.12.11.3.3.2
Updated value range for
ulqos-maxsustainedrate,
dlqos-maxsustainedrate, ul-rsrv-rate-min,
dl-rsrv-rate-min.
August 2009
Configuring Airframe MIMO
Parameters
Section 3.9.12.2.7
Updated default value of bcast-msgzone-loc. August 2009
Managing the Policy Framework
(was previously section 4.3.11.17)
Removed August 2009
Managing Handover Negotiation at
SBS
(was previously 4.8.12)
Removed August 2009
Configuring Alarm Threshold
Parameters
Section 3.9.20.1
Updated value range and default for
ul-mednoise and ul-99prcntnoise.
August 2009
Managing Service Interfaces
Section 3.4.12.8
Updated general description.
Removed QinQ Service Interface.
August 2009
Default login ID
Section 3.1
Changed from root to admin, with privilege
level 10.
August 2009
Configuring Service Flows
Section 3.4.12.11.3.3
Only IPv4CS service flows can be configured
in the device.
August 2009
Configuring ACLs
Section 3.4.10
Added details of modified ACL 1. August 2009
Configuring ODU Port Parameters
Section 3.7.2.2
Added warning - do not disable ODU ports August 2009
Configuring Airframe General
Parameters
Section 3.9.12.2.1
auto-diversity and auto-rx-enable are forced
to true (setting to false will be ignored).
August 2009
Configuring Airframe Cyclic Delay
Parameters
Section 3.9.12.2.4
Updated dependencies. The values are set by
internal logic.
August 2009
Configuring Airframe Linear Delay
Parameters
Previously Section 4.8.16.2.5
Updated dependencies. The values are set by
vendor file.
August 2009
Configuring Airframe Mapping
Parameters
Previously Section 4.8.16.2.6
Updated dependencies. The values are set by
internal logic.
August 2009
Topic Description Date Issued
Document History
4Motion xx System Manual
Configuring Airframe Receive
Parameters
Previously Section 4.8.16.2.7
The values are set by internal logic. August 2009
Configuring Antenna Parameters
Section 3.8.2
Updated possible values and default for
antenna-product-id.
August 2009
Configuring Airframe Uplink
Feedback Zone Parameters
Section 3.9.12.2.4
Value of subchannels is set internally
according to bandwidth.
August 2009
Configuring Airframe Downlink Data
Zone Parameters
Section 3.9.12.2.5
Value of subchannels is set internally
according to bandwidth.
August 2009
Configuring Airframe Uplink Data
Zone Parameters
Section 3.9.12.2.6
Value of subchannels-number is set internally
according to bandwidth.
startallocation is hard-coded (value=0).
August 2009
Configuring Airframe MIMO
Parameters
Section 3.9.12.2.7
bcast-msgzone-loc is hard coded (set to
nonSTCzoneOnly).
August 2009
Configuring Ranging Parameters
Section 3.9.19.2
Updated valid values for start-of-rng-codes. August 2009
Managing BS Feedback Allocation
Parameters
Section 3.9.5
Updated valid values for ir-cdma.
The value for max-cqi is set by vendor file.
Updated default value according to
bandwidth.
August 2009
Configuring Power Control Target
Noise and Interference Level
Parameters
Section 3.9.4.2.1
cqi-ack-ranging cannot be modified. August 2009
Configuring the Power Control
Maximum EIRP
Section 3.9.4.2.2
maxeirp cannot be modified. August 2009
Configuring the Power Control
Required C/N Level Parameters
Section 3.9.4.2.2
All parameters cannot be modified. August 2009
Configuring Service Parameters max-subburst is not relevant.
trgt-err-rate cannot be modified.
August 2009
Topic Description Date Issued
Document History
4Motion xxi System Manual
Configuring the Unique Identifier for
the 4Motion Shelf
Section 3.4.16.8.1
A change in site identifier will take effect after
reset.
Special procedure needed when changing the
site identifier of a device managed by
AlvariSTAR.
August 2009
Managing the IP Connectivity Mode
Section 3.4.1
Added AU maintenance IP domain.
Added note on VLAN operation mode of the
ports (tagged/untagged).
August 2009
Configuring Physical and IP
Interfaces
Section 3.4.2
Added AU maintenance IP domain. August 2009
Configuring Parameters for VLAN
Service Interface
Section 3.4.12.8.2.2
A Service Interface VLAN ID shall not conflict
also with AU Maintenance VLAN.
August 2009
Configuring BS Keep-Alive
Parameters
Section 3.9.22.1
Updated default values of tx-cnt and rtx-time. August 2009
Managing Scheduler Parameters
Section 3.9.24
New feature August 2009
Configuring AU Connectivity
Section 3.6.2.3
Updated description of service-ip. August 2009
Chapter 2 - Installation Updated instruction for installing 4x2 ODUs
Updated instructions for installing GPS
Receiver.
Added Macro Outdoor BTS installation
instructions
August 2009
ODUs
Tables 1-3, 1-6 (new), 1-6,
1-10, 1-11 (new), 1-16 (new),
Section 3.7.1.1 (added note,
removed tables of currently available
ODUs)
Updated ODUs August 2009
Radio Standards
Section 1.5.8
Added FCC part 25 August 2009
Managing Service Interfaces
Section 3.4.12.8
QinQ Service Interface is supported (for
special needs)
August 2009
Configuring Service Profiles
Section 3.4.12.11.3
VLAN CS Service Flows can be configured for
the Default Service Profile
August 2009
Topic Description Date Issued
Document History
4Motion xxii System Manual
1x1 ODU LEDs
Table 2-3
ETH connector is functional August 2009
Configuring General Neighbor BS
Parameters
Section 3.9.9.2.1
Updated range for frequency August 2009
Configuring the RF Frequency
Parameter
Section 3.9.10.1
Updated range for frequency August 2009
Configuring Bearer Traffic QoS
Marking Rule Parameters
Section 3.9.16.2
Updated range for srvcflow-datadeliverytype. August 2009
Configuring/Modifying the VLAN ID
for an IP Interface
Section 3.4.2.3.5
Added note that after changing the bearer
interface VLAN ID the bearervlanid of all AUs
must be changed to the same value.
August 2009
Restoring the Factory Default
Configuration
Section 3.4.5.4.6
Added note-reset required. August 2009
Restoring the Factory Default
Configuration With Connectivity
Section 3.4.5.4.7
Added note-reset required. August 2009
Deleting Service Flows
Section 3.4.12.11.3.3.7
Corrected range for flow-id August 2009
Configuring ASN-GW Keep-Alive
Parameters
Section 3.4.12.14.1
Corrected command syntax August 2009
Configuring Logging
Section 3.4.13
Added note: Logging configuration reverts to
default after NPU reset.
August 2009
Managing the BS Idle Mode
Parameters
Section 3.9.23
Updated description of the feature. August 2009
IF Cables
Tables 2-1, 2-2
Limitations/Max Length for 3.5 GHz units are
the same as for other ODUs
August 2009
Commissioning
Section 2.1
No need to configure ACL August 2009
Topic Description Date Issued
Document History
4Motion xxiii System Manual
Configuring Airftame Parameters
Section 3.9.12.2
Removed sections related to Cyclic Delay
Parameters, Linear Delay Parameters,
Mapping Parameters and Receive
Parameters. In General Parameters,
auto-diversity and auto-rx-enable were
removed.
Added notes regarding parameters that are
not relevant (ignored) in Uplink Feedback
Zone Parameters, Downlink Data Zone
Parameters, Uplink Data Zone Parameters,
MIMO Parameters.
August 2009
Restoring Default Values for Airframe
Parameters
Section 3.9.12.3
Removed sections related to Cyclic Delay
Parameters, Linear Delay Parameters,
Mapping Parameters, Receive Parameters
and Uplink Data Zone Parameters. In General
Parameters, auto-diversity and auto-rx-enable
were removed. Added a note that the
command for restoring the default values for
Uplink Data Zone parameters is not
applicable for the current release.
Added notes regarding parameters that are
not relevant (ignored) in MIMO Parameters.
August 2009
Displaying Configuration Information
for Airftame Parameters
Section 3.9.12.5
Removed sections related to Cyclic Delay
Parameters, Linear Delay Parameters,
Mapping Parameters and Receive
Parameters.
August 2009
Managing BS Feedback Allocation
Parameters
Section 3.9.5
Added a note related to max-cqi parameter
that cannot be modified.
August 2009
Configuring Power Control Target
Noise and Interference Level
Parameters
Section 3.9.4.2.1
Added a note related to cqi-ack-ranging
parameter that cannot be modified.
August 2009
Restoring the Default Values of
Power Control Target Noise and
Interference Level Parameters
Section 3.9.4.3.1
Added a note related to cqi-ack-ranging
parameter that cannot be restored to default
value.
August 2009
Topic Description Date Issued
Document History
4Motion xxiv System Manual
Managing Power Control Levels
Section 3.9.4
Removed sections related to configuring or
restoring the default value of Maximum
EIRxP. Added a note that this command is not
applicable for the current release. Updated
the description for displaying configuration
values of the parameter.
Added a note regarding nilevels
cqi-ack-ranging parameter that cannot be
modified.
Required C/N Levels are configurable.
Updated default value for Required C/N
Levels: ack, cqi, cdma.
August 2009
Configuring BS Service Parameters Added a note regarding parameters that are
not relevant or cannot be modified.
August 2009
Restoring Default Values for BS
Service Parameters
Added a note regarding parameters that are
not relevant or cannot be modified.
August 2009
Managing AUs
Section 3.6
Removed sections related to configuring,
restoring default values and displaying
configured values of reserved parameters.
Added a not that these commands are not
applicable for current release.
September 2009
Configuring ODUs
Section 3.7.1
Removed sections related to configuring,
restoring default values and displaying
configured values of reserved parameters.
Added a not that these commands are not
applicable for current release.
September 2009
Managing BS Reserved Parameters
Section 3.9.21
Removed sections related to configuring,
restoring default values and displaying
configured values of reserved parameters.
Added a not that these commands are not
applicable for current release.
September 2009
Managing the IGMP Functionality Removed details, added a note that relevant
show commands are not applicable since the
feature is not supported in the current release.
September 2009
Managing the MIP-Foreign Agent
Functionality
Removed details, added a note that relevant
show command is not applicable since the
feature is not supported in the current release.
September 2009
Managing the Proxy-MIP Client
Functionality
Removed details, added a note that relevant
show command is not applicable since the
feature is not supported in the current release.
September 2009
Topic Description Date Issued
Document History
4Motion xxv System Manual
Configuring the 4Motion Shelf
Section 3.4.16
Updated descriptions of components. September 2009
Configuring Bearer Plane QoS
Marking Rules
Section 3.4.12.7
Updated general description September 2009
Configuring Power Control Target
Noise and Interference Level
Parameters
Section 3.9.4.2.1
Updated range for pusc. September 2009
Manual MS De-registration
Section 3.5.1
Updated-added the options to de-rergister am
MS by its MSID (MAC address) and
de-register all MSs served by a specified BS.
October 2009
Transferring Files from the NPU
Flash to a TFTP Server
Section 3.4.13.1.8
New feature October 2009
Creating a Collected System Logs
File
Section 3.4.13.1.7
New feature October 2009
Displaying System Files
Section 3.11.2
Added the command “show saved system
logs”.
October 2009
Displaying MS Information
Section 3.5.2
New display option (“brief”). October 2009
ODU Tx Power Control Range
Tables 1-6, 1-8,
Section 3.7.2.1,.
Updated to 10 dB for all ODUs October 2009
Commissioning
Sections 2.1.3.2, 2.1.3.3,
2.1.4.
Updated specified sections October 2009
Accessing the CLI from a Remote
Terminal
Section 3.1.2.2
Added details on creating IP level connectivity October 2009
Using the History Feature
Section 3.1.5.3
Updated-up to 14 previously executed
commands can be displayed
October 2009
Privilege Levels
Sections 3.1.5.5, 3.1.6
Correction-the lowest level is 1 October 2009
Configuring Static Routes
Section 3.4.9
Updated description of default “Any
Destination” route.
October 2009
Displaying IP Routes
Section 3.4.9.3
Added a note: IP routes connected to an
interface that is shut down are not displayed.
October 2009
Topic Description Date Issued
Document History
4Motion xxvi System Manual
Adding a Static Route
Section 3.4.9.1
Updated: ip_nexthop must be in the subnet of
one of the NPU IP interfaces.
October 2009
Displaying the Temperature of the
Shelf
Section 3.11.1.3
New command October 2009
Service Flows-Configuring
Uplink/Downlink Classification Rule
Names
Section 3.4.12.11.3.3.4
.Added: If no classifier is associated with the
service flow for one or both directions, it
means any traffic.
October 2009
Managing VLAN Translation
Section 3.4.2.1.3
Updated description October 2009
Configuring ACLs
Section 3.4.10
Updated description-priorities of ACLs October 2009
Managing Global RADIUS
Configuration Parameters
Section 3.4.12.9.2
Removed
alrmAaaSwitchoverRetryFailThrshld.
Added vlan-classf-bit-align
November 2009
Configuring the DHCP Relay Option
82 Parameters
Section 3.4.12.10.4.4.2
Added two new options to Subopt1value and
Subopt2value
November 2009
Configuring the Next-hop IP
Address-Network ID Mapping,
Managing the IGMP Functionality,
Managing the MIP-Foreign Agent
Functionality,
Managing the Proxy-MIP Client
Functionality
Removed. November 2009
Topic Description Date Issued
Document History
4Motion xxvii System Manual
ODU Types
Table 1-3, Section 1.5.3
Added new ODUs:
ODU-2300-2400-000N-38-2X2-N-0
ODU-2485-2690-000N-38-2X2-N-0
ODU-2590-2690-000N-38-2x2-N-0
ODU-3345-3400-000N-33-1x1-N-0
ODU-3400-3600-000N-37-2x2-N-0
ODU-3400-3600-000N-37-4x2-BF-N-0
ODU-3650-3700-000N-22-1x1-N-0
Added Beam Forming Support specifications
to all 4x2 ODUs tables.
Added ETSI compliance requirements for 2.5
GHz ODUs.
February 2010
ODUs Specifications
Section 1.5.3
Updated Power Consumption specifications February 2010
2.3-2.7 GHz DDP Antennas
Table 1-38
Added BS-EDT-DDP-ANT 2.3-2.7 (No RET
support).
February 2010
Macro Outdoor Units
Section 1.3.2
New unit types with 2-channels AUs. February 2010
Micro Outdoor BTS New product line. February 2010
GPS for Macro BTS
Sections 1.3.7.1, 1.5.10.4
Added details on new GPS receiver, updated
specifications (added Interface specs) of
Timing GPS.
February 2010
Managing BS Services,
Managing Service Mapping Rules
Removed February 2010
Managing the BTS Load Balancing
Parameters
Section 3.4.11
New feature February 2010
Managing the BS ASN-GW Load
Balancing Parameters
Section 3.9.25
New feature February 2010
Airframe MIMO Parameters
Sections 3.9.12.2.7,
3.9.12.3.4, 3.9.12.5.7
Removed bcast-msgzone-loc February 2010
Configuring the Airframe Downlink
Diversity Mode Parameter
Section 3.9.12.2.3
Added description of supported modes.
Added beamForming option
February 2010
Topic Description Date Issued
Document History
4Motion xxviii System Manual
Airframe Dynamic Permutations
Parameters
Section 3.9.12
Removed (changed to vendor parameters) February 2010
Configuring Airframe General
Parameters
Section 3.9.12.2.1
Updated value range for ul-duration and
frame-offset. Added nbr-beam-forming.
February 2010
Configuring Airframe Map Zone
Parameters
Section 3.9.12.2.2
Added RCID-Usage February 2010
Configuring Airframe Uplink
Feedback Zone Parameters
Section 3.9.12.2.4
Removed subchannels (changed to vendor
parameter)
February 2010
Configuring Airframe Downlink Data
Zone Parameters
Section 3.9.12.2.5
Removed subchannels (changed to vendor
parameter)
February 2010
Configuring Airframe Uplink Data
Zone Parameters
Section 3.9.12.2.6
Removed subchannels-number (changed to
vendor parameter) and startallocation
(obsolete-hard coded to 0).
permbase is mandatory when creating a new
BS.
February 2010
Restoring the Default Values of
Airframe General Parameters
Section 3.9.12.3.1
Added nbr-beam-forming (new parameter)
and frame-offset
February 2010
Restoring the Default Values of
Airframe Map Zone Parameters
Section 3.9.12.3.2
Added RCID-Usage February 2010
Displaying Configuration Information
for Airframe General Parameters
Section 3.9.12.5.1
Added NeighborBeamForming February 2010
Displaying Configuration Information
for Airframe Map Zone Parameters
Section 3.9.12.5.2
Added RcidUsage February 2010
Displaying Configuration Information
for Airframe Uplink Feedback Zone
Parameters
Section 3.9.12.5.4
Removed subchannels February 2010
Displaying Configuration Information
for Airframe Downlink Data Zone
Parameters
Section 3.9.12.5.5
Removed subchannels February 2010
Topic Description Date Issued
Document History
4Motion xxix System Manual
Displaying Configuration Information
for Airframe Uplink Data Zone
Parameters
Section 3.9.12.5.6
Removed subchannels-number and
startallocation.
February 2010
Managing BS Feedback Allocation
Parameter
Section 3.9.5
Removed max-cqi (changed to vendor
parameter)
February 2010
Managing BS Bearer Interface
Parameters
Section 3.9.13
Removed linkusage-hardthrshld and mtu
(changed to vendor parameters).
Added ASNGWStatus (read-only).
February 2010
Managing BS General Parameters
Section 3.9.3
Added dl-def-rate-for data.
Changed dl-def-rate to
dl-def-for-management and updated default
value.
Added deployment
February 2010
Configuring Alarm Threshold
Parameters
Section 3.9.20.1
Updated descriptions and defaults of
ul-mednoise and ul-99prcntnoise.
February 2010
Configuring Power Control
Parameters
Section 3.9.4.2
Changed pusc to target-ni. Updated step size
to 1. Removed cqi-ack-ranging.
February 2010
Managing Handover Negotiation at
TBS Parameters
Removed. defaultactiontime is obsolete
(calculated automatically), fastrangingalloc
changed to vendor parameter)
February 2010
Configuring AU Parameters
Section 3.6.2
Added support for AU type au2x2 (2-ports
AU).
February 2010
Managing the BS Idle Mode
Parameters
Section 3.9.23
Removed idle-Mode-ms-initiated-for-ugs
(changed to vendor parameter)
February 2010
Managing Software Upgrade
Section 3.2
Moved to Operation Chapter (was previously
an Appendix)
February 2010
Managing AAA Client Configuration
Section 3.4.12.9.1
Added support for AAA server redundancy.
src-intf can be configured to either the bearer
or external-management IP interface.
February 2010
Configuring the DHCP Relay Option
82 Parameters
Section 3.4.12.10.4.4.2
Added new option to Subopt1value and
Subopt2value
February 2010
Topic Description Date Issued
Document History
4Motion xxx System Manual
Mapping of Macro Outdoor BTS AUs
to Slot #
Table 3-1
Corrected mapping February 2010
Managing Neighbor BSs
Appendix 3.9.9
Removed Trigger Setup parameters. February 2010
Managing Trigger Setup Parameters Removed February 2010
Displaying Configuration and Status
Information for ODU Ports
Section 3.7.2.6
Added new read-only parameters
odu-status-mask
RSSI
February 2010
Managing Service Interfaces
Section 3.4.12.8
removed mtu (changed to vendor parameter) February 2010
Configuring IP Interfaces
Section 3.4.2.3
removed mtu (changed to vendor parameter) February 2010
Managing the Hot-Lining Feature
Section 3.4.12.13
New feature. February 2010
Configuring BS Keep-Alive
Parameters
Section 3.9.22.1
Corrected Possible Values range of rtx-cnt,
Updated Default of rtx-time.
February 2010
configuring ASN-GW Keep-Alive
Parameters
Section 3.4.12.14.1
Updated range and default for rtx-cnt,
updated range for rtx-time.
February 2010
Configuring General Configuration
Parameters for the GPS
Section 3.4.16.2.2
Updated default value for HoldoverTimeout February 2010
Managing the Context Function
Section 3.4.12.4
Updated to reflect the ability to configure the
ms-capacity-threshold parameter.
February 2010
Managing the Data Path Function
Section 3.4.12.3
Updated to reflect the ability to configure the
throughput-threshold parameter.
February 2010
Configuring/Displaying the Daylight
Saving Parameters
Sections 3.4.16.2.4,
3.4.16.2.10
New feature February 2010
Creating a Sector Association Entry
Section 3.10.2.1
Updated configuration rules February 2010
Sector Connections Schemes
Appendix A
New section, replacing previous Antenna
Configurations section
February 2010
Topic Description Date Issued
Document History
4Motion xxxi System Manual
Configuring Parameters for IP-IP
Service Interface
Section 3.4.12.8.2.1
Updated Description, Presence and Default
Value for srcaddr and dstaddr.
February 2010
Configuring Parameters for VLAN
Service Interface
Section 3.4.12.8.2.2
Updated Description, Presence and Default
Value for vlan-id and dflt-gw-ip.
February 2010
Configuring DHCP Server
Parameters
Section 3.4.12.10.4.2.1
Updated default value of opt60. February 2010
Specifying DHCP Proxy
Configuration Parameters
Section 3.4.12.10.4.3.1
Updated default value of opt60. February 2010
Configuring the DHCP Relay
Parameters
Section 3.4.12.10.4.4.1
Updated Description, Presence and Default
Value of server-addr.
February 2010
Configuring Classification Rules
Section 3.4.12.11.4
Updated and corrected the sections related to
L2 classifiers.
February 2010
Managing the Baseband Bandwidth
Parameter
Section 3.9.11
A bandwidth of 7 MHz is not applicable for
ODUs in the 2.x GHz band.
February 2010
Configuring Authentication
Parameters
Section 3.9.14.1
Alarms associated with
suspendedeapprocthrshld and
maxeaproundsthrshld are not supported
February 2010
Configuring ODU Ports
Section 3.7.2
Tx power resolution updated to 1 dBm April 2010
Operation and Administration of the
Micro BTS
Chapter 4
New chapter April 2010
Configuring Performance Data
Collection
Section 3.4.14
Updated section content, updated supported
counters groups.
April 2010
Managing MSs for Specific MS
Advanced Mode Data Collection
Removed (feature not supported) April 2010
Monitoring Software Components Removed (display of real-time counters not
supported by CLI)
April 2010
Displaying Statistics for Physical and
IP Interfaces
Removed (display of real-time counters not
supported by CLI)
April 2010
Managing Power Control Parameters
Section 3.9.4
Removed: power-control-correction-factor
Added: allowed-if-level
April 2010
Topic Description Date Issued
Document History
4Motion xxxii System Manual
Displaying the VLAN Translation
Entries
Section 3.4.2.1.7
Updated command syntax April 2010
Managing Beam Forming Parameter
Section 3.9.26
New feature April 2010
Configuring Alarm Threshold
Parameters
Section 3.9.20.1
Updated description and default value of
ul-99prcntnoise.
May 2010
Configuring General Configuration
Parameters for the GPS
Section 3.4.16.2.2
Added Lassen option to the Type parameter May 2010
ODUs
Section 1.5.3
Updated all power consumption specifications May 2010
Operating Humidity
Section 1.5.9
Updated specifications for outdoor units May 2010
Macro Outdoor BTS
Section 1.5.10.2
Updated unit’s dimensions and weights May 2010
ODUs
Section 1.5.3
Updated weights May 2010
Mechanical and Electrical, Macro
Indoor BTS
Section 1.5.10.1
Updated weights of Shelf, AVU, PIU, NPU,
AU
May 2010
Configuring Logging
Section 3.4.13
Updated severity levels for module level
logging (Alert, Error and Info levels are
supported)
June 2010
Displaying the Current Log
Destination
Section 3.4.13.1.4
Updated display format June 2010
Displaying the Current Status of
Trace Destinations
Section 3.12.1.1.3
Updated display format June 2010
Configuring the Unique Identifier
Section 3.4.16.8.1
Updated range for site id June 2010
Testing Connectivity to an IP
Interface
Section 3.4.2.3.8
New command (ping test) June 2010
Resetting the system
Section 3.3.2.1
Updated command syntax and command
mode
June 2010
Topic Description Date Issued
Document History
4Motion xxxiii System Manual
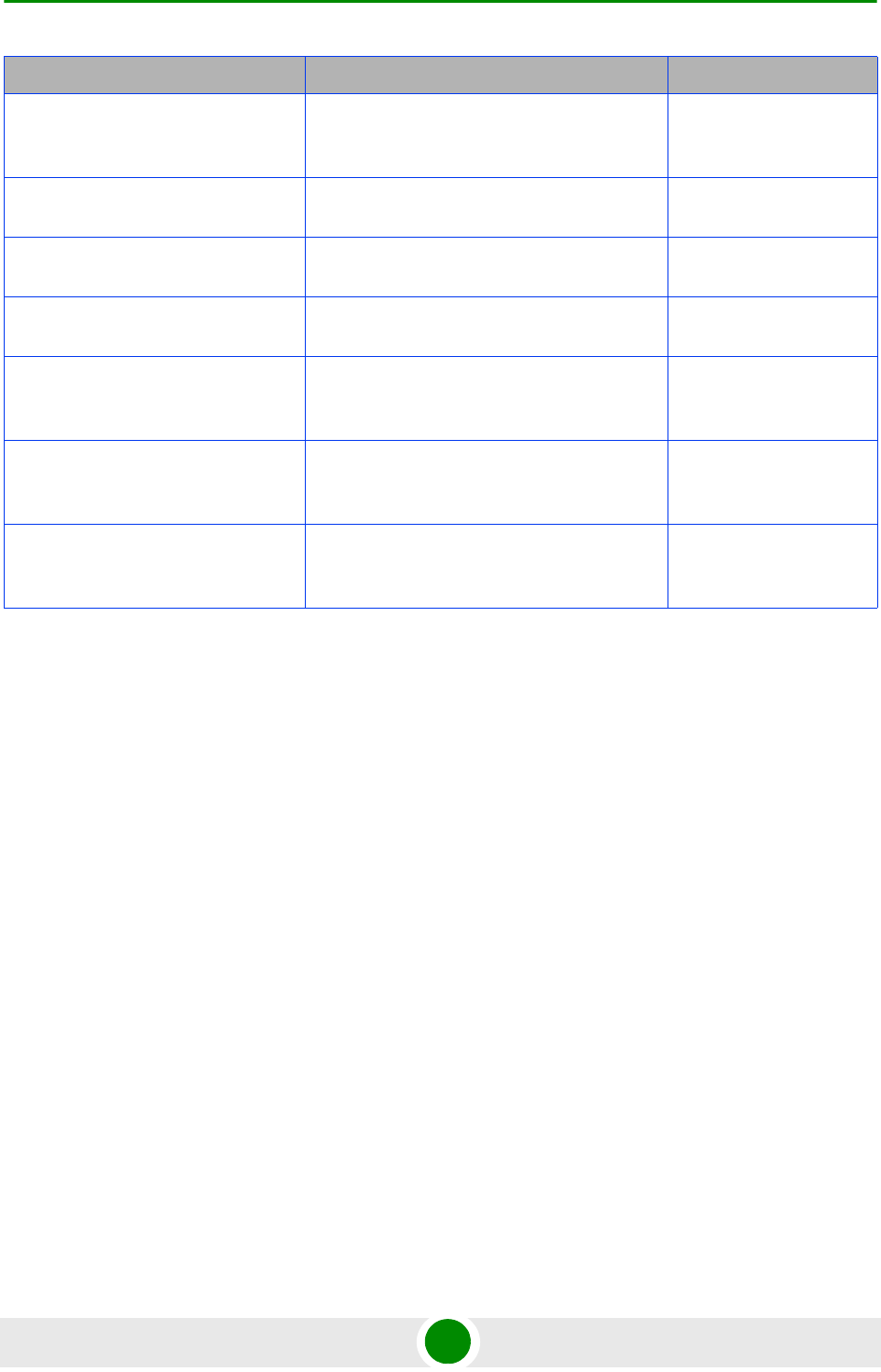
Configuring Parameters for the PHS
Rule
Section 3.4.12.12.2
Corrected definition for verify (in Possible
Values)
Displaying System-level Logs
Section 3.4.13.1.3
Updated command syntax
Configuring the Position
Section 3.4.16.2.5
Updated command syntax
Managing Neighbor BSs,
Section 3.9.9
In General: Removed srvcsupport, added
bsNeighborBsDlDataMIMOMode
Configuring Feedback Allocation
Parameter
Section 3.9.5.1
In current release actual value of ir-cdma is
always 2
Configuring Airframe MIMO
Parameters
Section 3.9.12.2.7
Limitations in functionality of
first-zone-min-size and first-zone-max-size
Configuring Airframe Map Zone
Parameters
Section 3.9.12.2.2
Updated description of majorgrps.
Topic Description Date Issued

Legal Rights
4Motion xxxiv System Manual
Le gal Rights
© Copyright 2010 Alvarion Ltd. All rights reserved.
The material contained herein is proprietary, privileged, and confidential and
owned by Alvarion or its third party licensors. No disclosure thereof shall be made
to third parties without the express written permission of Alvarion Ltd.
Alvarion Ltd. reserves the right to alter the equipment specifications and
descriptions in this publication without prior notice. No part of this publication
shall be deemed to be part of any contract or warranty unless specifically
incorporated by reference into such contract or warranty.
Trade Names
Alvarion®, BreezeCOM®, WALKair®, WALKnet®, BreezeNET®, BreezeACCESS®,
BreezeLINK®, BreezeMAX®, BreezeLITE®, BreezePHONE®, 4Motion®, and/or other
products and/or services referenced here in are either registered trademarks,
trademarks or service marks of Alvarion Ltd.
All other names are or may be the trademarks of their respective owners.
“WiMAX Forum” is a registered trademark of the WiMAX Forum. “WiMAX,” the
WiMAX Forum logo, “WiMAX Forum Certified”, and the WiMAX Forum Certified
logo are trademarks of the WiMAX Forum.
Statem ent of Conditions
The information contained in this manual is subject to change without notice.
Alvarion Ltd. shall not be liable for errors contained herein or for incidental or
consequential damages in connection with the furnishing, performance, or use of
this manual or equipment supplied with it.
Wa rranties a nd Discla ime rs
All Alvarion Ltd. (“Alvarion“) products purchased from Alvarion or through any of
Alvarion's authorized resellers are subject to the following warranty and product
liability terms and conditions.
Exclusive Wa rranty
(a) Alvarion warrants that the Product hardware it supplies and the tangible
media on which any software is installed, under normal use and conditions, will
be free from significant defects in materials and workmanship for a period of
fourteen (14) months from the date of shipment of a given Product to Purchaser
(the "Warranty Period"). Alvarion will, at its sole option and as Purchaser's sole
remedy, repair or replace any defective Product in accordance with Alvarion'
standard R&R procedure.

Legal Rights
4Motion xxxv System Manual
(b) With respect to the Firmware, Alvarion warrants the correct functionality
according to the attached documentation, for a period of fourteen (14) month from
invoice date (the "Warranty Period")". During the Warranty Period, Alvarion may
release to its Customers firmware updates, which include additional performance
improvements and/or bug fixes, upon availability (the "Warranty"). Bug fixes,
temporary patches and/or workarounds may be supplied as Firmware updates.
Additional hardware, if required, to install or use Firmware updates must be
purchased by the Customer. Alvarion will be obligated to support solely the two (2)
most recent Software major releases.
ALVARION SHALL NOT BE LIABLE UNDER THIS WARRANTY IF ITS TESTING
AND EXAMINATION DISCLOSE THAT THE ALLEGED DEFECT IN THE PRODUCT
DOES NOT EXIST OR WAS CAUSED BY PURCHASER'S OR ANY THIRD
PERSON'S MISUSE, NEGLIGENCE, IMPROPER INSTALLATION OR IMPROPER
TESTING, UNAUTHORIZED ATTEMPTS TO REPAIR, OR ANY OTHER CAUSE
BEYOND THE RANGE OF THE INTENDED USE, OR BY ACCIDENT, FIRE,
LIGHTNING OR OTHER HAZARD.
Disclaime r
(a) The Software is sold on an "AS IS" basis. Alvarion, its affiliates or its licensors
MAKE NO WARRANTIES, WHATSOEVER, WHETHER EXPRESS OR IMPLIED,
WITH RESPECT TO THE SOFTWARE AND THE ACCOMPANYING
DOCUMENTATION. ALVARION SPECIFICALLY DISCLAIMS ALL IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
PURPOSE AND NON-INFRINGEMENT WITH RESPECT TO THE SOFTWARE.
UNITS OF PRODUCT (INCLUDING ALL THE SOFTWARE) DELIVERED TO
PURCHASER HEREUNDER ARE NOT FAULT-TOLERANT AND ARE NOT
DESIGNED, MANUFACTURED OR INTENDED FOR USE OR RESALE IN
APPLICATIONS WHERE THE FAILURE, MALFUNCTION OR INACCURACY OF
PRODUCTS CARRIES A RISK OF DEATH OR BODILY INJURY OR SEVERE
PHYSICAL OR ENVIRONMENTAL DAMAGE ("HIGH RISK ACTIVITIES"). HIGH
RISK ACTIVITIES MAY INCLUDE, BUT ARE NOT LIMITED TO, USE AS PART OF
ON-LINE CONTROL SYSTEMS IN HAZARDOUS ENVIRONMENTS REQUIRING
FAIL-SAFE PERFORMANCE, SUCH AS IN THE OPERATION OF NUCLEAR
FACILITIES, AIRCRAFT NAVIGATION OR COMMUNICATION SYSTEMS, AIR
TRAFFIC CONTROL, LIFE SUPPORT MACHINES, WEAPONS SYSTEMS OR
OTHER APPLICATIONS REPRESENTING A SIMILAR DEGREE OF POTENTIAL
HAZARD. ALVARION SPECIFICALLY DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY OF FITNESS FOR HIGH RISK ACTIVITIES.
(b) PURCHASER'S SOLE REMEDY FOR BREACH OF THE EXPRESS
WARRANTIES ABOVE SHALL BE REPLACEMENT OR REFUND OF THE
PURCHASE PRICE AS SPECIFIED ABOVE, AT ALVARION'S OPTION. TO THE

Legal Rights
4Motion xxxvi System Manual
FULLEST EXTENT ALLOWED BY LAW, THE WARRANTIES AND REMEDIES SET
FORTH IN THIS AGREEMENT ARE EXCLUSIVE AND IN LIEU OF ALL OTHER
WARRANTIES OR CONDITIONS, EXPRESS OR IMPLIED, EITHER IN FACT OR BY
OPERATION OF LAW, STATUTORY OR OTHERWISE, INCLUDING BUT NOT
LIMITED TO WARRANTIES, TERMS OR CONDITIONS OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE, SATISFACTORY QUALITY,
CORRESPONDENCE WITH DESCRIPTION, NON-INFRINGEMENT, AND
ACCURACY OF INFORMATION GENERATED. ALL OF WHICH ARE EXPRESSLY
DISCLAIMED. ALVARION' WARRANTIES HEREIN RUN ONLY TO PURCHASER,
AND ARE NOT EXTENDED TO ANY THIRD PARTIES. ALVARION NEITHER
ASSUMES NOR AUTHORIZES ANY OTHER PERSON TO ASSUME FOR IT ANY
OTHER LIABILITY IN CONNECTION WITH THE SALE, INSTALLATION,
MAINTENANCE OR USE OF ITS PRODUCTS.
Limitation of Lia bility
(a) ALVARION SHALL NOT BE LIABLE TO THE PURCHASER OR TO ANY THIRD
PARTY, FOR ANY LOSS OF PROFITS, LOSS OF USE, INTERRUPTION OF
BUSINESS OR FOR ANY INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE OR
CONSEQUENTIAL DAMAGES OF ANY KIND, WHETHER ARISING UNDER
BREACH OF CONTRACT, TORT (INCLUDING NEGLIGENCE), STRICT LIABILITY
OR OTHERWISE AND WHETHER BASED ON THIS AGREEMENT OR
OTHERWISE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
(b) TO THE EXTENT PERMITTED BY APPLICABLE LAW, IN NO EVENT SHALL
THE LIABILITY FOR DAMAGES HEREUNDER OF ALVARION OR ITS EMPLOYEES
OR AGENTS EXCEED THE PURCHASE PRICE PAID FOR THE PRODUCT BY
PURCHASER, NOR SHALL THE AGGREGATE LIABILITY FOR DAMAGES TO ALL
PARTIES REGARDING ANY PRODUCT EXCEED THE PURCHASE PRICE PAID
FOR THAT PRODUCT BY THAT PARTY (EXCEPT IN THE CASE OF A BREACH OF
A PARTY'S CONFIDENTIALITY OBLIGATIONS).
Ra dio Frequency Inte rfere nc e State me nt
The Base Transceiver Station (BTS) equipment has been tested and found to
comply with the limits for a class A digital device, pursuant to ETSI EN 301 489-1
rules and Part 15 of the FCC Rules. These limits are designed to provide
reasonable protection against harmful interference when the equipment is
operated in commercial, business and industrial environments. This equipment
generates, uses, and can radiate radio frequency energy and, if not installed and
used in accordance with the instruction manual, may cause harmful interference
to radio communications. Operation of this equipment in a residential area is
likely to cause harmful interference in which case the user will be required to
correct the interference at the user's own expense.
Legal Rights
4Motion xxxvii System Manual
FCC Ra diat ion Ha zard Wa rning
To comply with FCC RF exposure requirements in Section 1.1307 and 2.1091 of
FCC Rules, the antenna used for this transmitter must be fixed-mounted on
outdoor permanent structures with a separation distance of at least 2 meter from
all persons.
R& T TE Com pliance St atem ent
This equipment complies with the appropriate essential requirements of Article 3
of the R&TTE Directive 1999/5/EC.
Sa fe ty Conside rat ions - Ge ne ral
For the following safety considerations, "Instrument" means the BreezeMAX units'
components and their cables.
Grounding
BTS chassis, Power Feeders and Outdoor Units are required to be bonded to
protective grounding using the bonding stud or screw provided with each unit.
Sa fe ty Conside rat ions - DC Pow e red Equipm ent (BT S & Pow e r Fe eder)
Restricted Access Area: The DC powered equipment should only be installed in a
Restricted Access Area.
Installation Codes: The equipment must be installed according to the latest
edition of the country national electrical codes. For North America, equipment
must be installed in accordance with the US National Electrical Code and the
Canadian Electrical Code.
Overcurrent Protection: A readily accessible Listed branch circuit overcurrent
protective device, rated 60A for the Macro BTS or 20A for the Power Feeder or 10A
for the Micro BTS, must be incorporated in the building wiring.
CAUTION: This equipment is designed to permit connection between the earthed
conductor of the DC supply circuit and the grounding conductor at the
equipment. See installation instructions.
CAUTION ATTENTION
Risk of electric shock and energy
hazard.Disconnecting one Power Interface Unit
(PIU) disconnects only one PIU module. To
isolate the BTS completely, disconnect both
PIUs
Risque de décharge électrique et
d'electrocution. La déconnection d'un seul
module d'alimentation (PIU) n'isole pas
complètement la Station de Base. Pour cela, il
faut impérativement débrancher les deux
modules d'alimentation (PIU).

Legal Rights
4Motion xxxviii System Manual
The equipment must be connected directly to the DC Supply System
grounding electrode conductor.
All equipment in the immediate vicinity must be grounded in the same way,
and not be grounded elsewhere.
The DC supply system is to be local, i.e. within the same premises as the
equipment.
There shall be no disconnect device between the grounded circuit conductor of
the DC source (return) and the point of connection of the grounding electrode
conductor.
Lithium Batt er y
The battery on the NPU card is not intended for replacement.
Ca ut ion
To avoid electrical shock, do not perform any servicing unless you are qualified to
do so.
Line Volta ge
Before connecting this instrument to the power line, make sure that the voltage of
the power source matches the requirements of the instrument.
Ra dio
The instrument transmits radio energy during normal operation. To avoid possible
harmful exposure to this energy, do not stand or work for extended periods of time
in front of its antenna. The long-term characteristics or the possible physiological
effects of radio frequency electromagnetic fields have not been yet fully
investigated.
Outdoor U nits a nd Ant ennas I nsta llat ion a nd Grounding
Ensure that outdoor units, antennas and supporting structures are properly
installed to eliminate any physical hazard to either people or property. Make sure
that the installation of the outdoor unit, antenna and cables is performed in
accordance with all relevant national and local building and safety codes. Even
where grounding is not mandatory according to applicable regulation and national
codes, it is highly recommended to ensure that the outdoor unit and the antenna
mast (when using external antenna) are grounded and suitable lightning
protection devices are used so as to provide protection against voltage surges and
static charges. In any event, Alvarion is not liable for any injury, damage or
Legal Rights
4Motion xxxix System Manual
regulation violations associated with or caused by installation, grounding or
lightning protection.
Disposal of Ele ctronic a nd Elec tric a l Wast e
Disposal of Electronic and Electrical Waste
Pursuant to the WEEE EU Directive electronic and electrical waste must not be disposed of with
unsorted waste. Please contact your local recycling authority for disposal of this product.

Important Notice
4Motion xl System Manual
Important N ot ic e
This user manual is delivered subject to the following conditions and restrictions:
This manual contains proprietary information belonging to Alvarion Ltd. Such
information is supplied solely for the purpose of assisting properly authorized
users of the respective Alvarion products.
No part of its contents may be used for any other purpose, disclosed to any
person or firm or reproduced by any means, electronic and mechanical,
without the express prior written permission of Alvarion Ltd.
The text and graphics are for the purpose of illustration and reference only.
The specifications on which they are based are subject to change without
notice.
The software described in this document is furnished under a license. The
software may be used or copied only in accordance with the terms of that
license.
Information in this document is subject to change without notice. Corporate
and individual names and data used in examples herein are fictitious unless
otherwise noted.
Alvarion Ltd. reserves the right to alter the equipment specifications and
descriptions in this publication without prior notice. No part of this
publication shall be deemed to be part of any contract or warranty unless
specifically incorporated by reference into such contract or warranty.
The information contained herein is merely descriptive in nature, and does not
constitute an offer for the sale of the product described herein.
Any changes or modifications of equipment, including opening of the
equipment not expressly approved by Alvarion Ltd. will void equipment
warranty and any repair thereafter shall be charged for. It could also void the
user's authority to operate the equipment.
Some of the equipment provided by Alvarion and specified in this manual, is
manufactured and warranted by third parties. All such equipment must be
installed and handled in full compliance with the instructions provided by such
manufacturers as attached to this manual or provided thereafter by Alvarion or
the manufacturers. Non-compliance with such instructions may result in serious

Important Notice
4Motion xli System Manual
damage and/or bodily harm and/or void the user's authority to operate the
equipment and/or revoke the warranty provided by such manufacturer.

About This Manual
4Motion xlii System Manual
About T his Manual
This manual describes the 4Motion solution, and details how to install, operate
and manage the BTS system components.
This manual is intended for technicians responsible for installing, setting and
operating the 4Motion BTS equipment, and for system administrators responsible
for managing the system.
This manual contains the following chapters and appendices:
Chapter 1 - System description: Describes the 4Motion BTS and its
components.
Chapter 2 - Installation: Describes how to install the BTS components.
Chapter 3 - Commissioning: Describes how to configure basic parameters
and validate units' operation.
Chapter 4 - Operation and Administration Using the CLI: Describes how to
use the Command Line Interface (CLI) for configuring parameters, checking
system status and monitoring performance.
Appendix A - Antenna Configurations: Describes the proposed antenna
configurations that support the different available diversity scenarios.
Appendix B - Software Upgrade: Describes how to load new software files
using TFTP, and how to switch to a new software version in 4Motion units.
Glossary: A listing of commonly used terms.

Contents
4Motion xliii System Manual
Contents
Chapte r 1 - Syst em De scription .............................................................. 1
1.1 About WiMAX................................................................................................................3
1.2 4Motion Solution ..........................................................................................................4
1.2.1 4Motion Solution Highlights.................................................................................4
1.2.2 WiMAX Network Reference Model......................................................................6
1.3 The Base Transceiver Station ...................................................................................13
1.3.1 The Indoor Macro BTS......................................................................................14
1.3.2 The Macro Outdoor BTS ...................................................................................20
1.3.3 The Outdoor Micro BTS ....................................................................................21
1.3.4 ODUs for Macro (Indoor/Outdoor) BTS.............................................................21
1.3.5 Power Feeder....................................................................................................22
1.3.6 Antenna.............................................................................................................23
1.3.7 GPS...................................................................................................................23
1.4 Element Management Systems.................................................................................25
1.4.1 AlvariSTAR........................................................................................................25
1.5 Specifications .............................................................................................................27
1.5.1 Modem & Radio ................................................................................................27
1.5.2 Sensitivity (per channel)* ..................................................................................27
1.5.3 ODUs ................................................................................................................28
1.5.4 Micro Outdoor BTS ...........................................................................................40
1.5.5 AU - ODU Communication (Macro BTS)...........................................................41
1.5.6 Data Communication (Ethernet Interfaces).......................................................41
1.5.7 Configuration and Management........................................................................42

Contents
4Motion xliv System Manual
1.5.8 Standards Compliance, General .......................................................................43
1.5.9 Environmental ...................................................................................................43
1.5.10 Mechanical and Electrical .................................................................................44
1.5.11 Antennas ...........................................................................................................51
Chapte r 2 - Comm issioning of t he Ma cro BT S ...................................... 5 7
2.1 Initial NPU Configuration...........................................................................................59
2.1.1 Introduction .......................................................................................................59
2.1.2 NPU Local Connectivity ....................................................................................59
2.1.3 Site Connectivity ...............................................................................................59
2.1.4 Static Route Definition.......................................................................................61
2.1.5 SNMP Manager Definition.................................................................................61
2.1.6 Mapping the AU Software Version ....................................................................62
2.1.7 Site ID Definition ...............................................................................................62
2.1.8 Saving the Configuration...................................................................................62
2.2 Completing the Site Configuration Using AlvariSTAR ...........................................63
2.2.1 Introduction .......................................................................................................63
2.2.2 Site Configuration..............................................................................................64
2.2.3 Connectivity Configuration (optional) ................................................................64
2.2.4 Equipment Configuration...................................................................................64
2.2.5 ASNGW Configuration ......................................................................................66
2.2.6 BS Configuration ...............................................................................................68
2.2.7 Site Sector Configuration ..................................................................................69
2.2.8 Apply All Changes.............................................................................................70
Chapte r 3 - Operat ion and Administ ra t ion of t he Ma cro BTS............... 7 1
3.1 Using the Command Line Interface ..........................................................................73
3.1.1 Managing the Macro Outdoor BTS ...................................................................74

Contents
4Motion xlv System Manual
3.1.2 Accessing the CLI .............................................................................................75
3.1.3 Command Modes..............................................................................................78
3.1.4 Interpreting the Command Syntax ....................................................................79
3.1.5 Using the CLI ....................................................................................................80
3.1.6 Managing Users and Privileges ........................................................................83
3.1.7 Managing Secure Shell (SSH) Parameters.......................................................92
3.1.8 Managing the Session.......................................................................................94
3.2 Managing Software Upgrade.....................................................................................99
3.2.1 Before You Start................................................................................................99
3.2.2 Upgrading the NPU ...........................................................................................99
3.2.3 Upgrading the AU............................................................................................106
3.3 Shutting Down/Resetting the System ....................................................................119
3.3.1 Shutting Down the System..............................................................................119
3.3.2 Managing System Reset .................................................................................120
3.4 NPU Configuration ...................................................................................................122
3.4.1 Managing the IP Connectivity Mode ...............................................................123
3.4.2 Configuring Physical and IP Interfaces ...........................................................126
3.4.3 Managing the AU Maintenance VLAN ID........................................................155
3.4.4 Managing the NPU Boot Mode .......................................................................156
3.4.5 Managing the 4Motion Configuration File .......................................................159
3.4.6 Batch-processing of CLI Commands ..............................................................170
3.4.7 Configuring the CPU .......................................................................................171
3.4.8 Configuring QoS Marking Rules......................................................................177
3.4.9 Configuring Static Routes ...............................................................................192
3.4.10 Configuring ACLs ............................................................................................196
3.4.11 Managing the BTS Load Balancing Parameters .............................................227

Contents
4Motion xlvi System Manual
3.4.12 Configuring the ASN-GW Functionality...........................................................230
3.4.13 Configuring Logging ........................................................................................385
3.4.14 Configuring Performance Data Collection.......................................................402
3.4.15 Configuring the SNMP/Trap Manager.............................................................406
3.4.16 Configuring the 4Motion Shelf.........................................................................414
3.5 Managing MS in ASN-GW ........................................................................................450
3.5.1 Manual MS De-registration .............................................................................450
3.5.2 Displaying MS Information ..............................................................................451
3.6 Managing AUs ..........................................................................................................454
3.6.1 Enabling the AU Configuration Mode\Creating an AU Object.........................455
3.6.2 Configuring AU Parameters ............................................................................456
3.6.3 Restoring Default Values for AU Configuration Parameters ...........................460
3.6.4 Terminating the AU Configuration Mode.........................................................462
3.6.5 Deleting an AU Object.....................................................................................462
3.6.6 Displaying Configuration and Status Information for AU Parameters .............463
3.7 Managing ODUs........................................................................................................469
3.7.1 Configuring ODUs ...........................................................................................469
3.7.2 Configuring ODU Ports ...................................................................................476
3.8 Managing Antennas .................................................................................................485
3.8.1 Enabling the Antenna Configuration Mode\Creating an Antenna ...................485
3.8.2 Configuring Antenna Parameters....................................................................486
3.8.3 Restoring Default Values for Antenna Parameters .........................................489
3.8.4 Terminating the Antenna Configuration Mode ................................................490
3.8.5 Deleting an Antenna........................................................................................490
3.8.6 Displaying Configuration Information for Antennas.........................................491
3.9 Managing BSs...........................................................................................................493

Contents
4Motion xlvii System Manual
3.9.1 Enabling the BS Configuration Mode\Creating a BS Object ...........................496
3.9.2 Deleting a BS ..................................................................................................497
3.9.3 Managing BS General Parameters .................................................................498
3.9.4 Managing Power Control Levels .....................................................................506
3.9.5 Managing BS Feedback Allocation Parameter ...............................................519
3.9.6 Managing Neighbor Advertisement Parameters .............................................521
3.9.7 Managing Triggers Parameters.......................................................................524
3.9.8 Managing Scan Negotiation Parameters ........................................................528
3.9.9 Managing Neighbor BSs .................................................................................531
3.9.10 Managing the RF Frequency Parameter.........................................................556
3.9.11 Managing the Baseband Bandwidth Parameter..............................................558
3.9.12 Managing Airframe Structure Parameters.......................................................561
3.9.13 Managing BS Bearer Interface Parameters ....................................................589
3.9.14 Managing Authentication Relay Parameters...................................................592
3.9.15 Displaying Status Information for Handover Control Parameters ...................596
3.9.16 Managing Bearer Traffic QoS Marking Rules .................................................598
3.9.17 Managing Control Traffic QoS Marking Rules.................................................606
3.9.18 Managing ID-IP Mapping Parameters.............................................................615
3.9.19 Managing Ranging Parameters ......................................................................619
3.9.20 Managing Alarm Threshold Parameters .........................................................623
3.9.21 Managing BS Reserved Parameters...............................................................628
3.9.22 Managing the BS Keep-Alive Functionality .....................................................628
3.9.23 Managing the BS Idle Mode Parameters ........................................................632
3.9.24 Managing Scheduler Parameters....................................................................634
3.9.25 Managing the BS ASN-GW Load Balancing Parameters ...............................639

Contents
4Motion xlviii System Manual
3.9.26 Managing Beam Forming Parameter ..............................................................642
3.10Managing Sectors....................................................................................................646
3.10.1 Configuring Sector Parameters.......................................................................646
3.10.2 Configuring Sector Association Entries...........................................................655
3.11Monitoring HW and SW Components ....................................................................660
3.11.1 Monitoring Hardware Components .................................................................660
3.11.2 Displaying System Files ..................................................................................667
3.12Troubleshooting ......................................................................................................670
3.12.1 Configuring Tracing.........................................................................................670
3.12.2 Configuring Port Monitoring ............................................................................678
Chapte r 4 - Operat ion and Administrat ion of t he M icro BTS ............ 68 5
4.1 Micro BTS System Management.............................................................................687
4.2 The Monitor Program ...............................................................................................688
4.2.1 Accessing the Monitor Program ......................................................................688
4.2.2 Using the Monitor Program .............................................................................689
4.3 IP Addresses Configuration ....................................................................................691
4.3.1 IP Address Configuration Restrictions ............................................................691
4.3.2 IP Subnets.......................................................................................................691
4.4 The Main Menu .........................................................................................................692
4.5 BTS Menu..................................................................................................................693
4.5.1 General ...........................................................................................................693
4.5.2 Connectivity.....................................................................................................694
4.5.3 Unit Control .....................................................................................................696
4.5.4 Management ...................................................................................................702
4.6 Sector Menu..............................................................................................................706
4.6.1 Sector Definition..............................................................................................706

Contents
4Motion xlix System Manual
4.6.2 Sector Association ..........................................................................................706
4.7 BS Menu ....................................................................................................................708
4.7.1 Add..................................................................................................................708
4.7.2 Select ..............................................................................................................711
4.8 Equipment Menu ......................................................................................................735
4.8.1 AU ...................................................................................................................735
4.8.2 Radio...............................................................................................................736
4.8.3 Antenna...........................................................................................................738
4.9 GPS Menu .................................................................................................................740
4.9.1 General Configuration .....................................................................................740
4.9.2 Inventory & Statuses .......................................................................................742
Appe ndix A - Se ctor Conne ctions Sc he mes ...................................... 7 44
A.1 Introduction ..............................................................................................................746
A.2 Fourth Order Diversity, Beam Forming and MIMO................................................747
A.3 Fourth Order Diversity, MIMO .................................................................................748
A.3.1 Wide Double Dual slant Array .........................................................................748
A.3.2 Narrow Dual Dual Slant Array .........................................................................749
A.4 Second Order Diversity ...........................................................................................750
A.4.1 Wide Double Single Slant Array (Space and Polarization Diversity)...............750
A.4.2 Narrow Dual Slant Array (Polarization Diversity) ............................................751
A.4.3 Wide Array, Vertical Polarization Antennas (Space Diversity) ........................752
Glossary ............................................................................................... 91 0
1
Chapter
System Description


Chapter 1 - System Description About WiMAX
4Motion 3 System Manual
1.1 About WiMAX
Emanating from the broadband world and using all-IP architecture, mobile
WiMAX is the leading technology for implementing personal broadband services.
With huge market potential and affordable deployment costs, mobile WiMAX is on
the verge of a major breakthrough. No other technology offers a full set of
chargeable and differentiated voice, data, and premium video services in a variety
of wireless fashions - fixed, portable and mobile - that increase revenue and
reduce subscriber churn.
WiMAX technology is the solution for many types of high-bandwidth applications
at the same time across long distances and will enable service carriers to converge
the all-IP-based network for triple-play services data, voice, and video.
WiMAX with its QoS support, longer reach, and high data capacity is positioned
for fixed broadband access applications in rural areas, particularly when distance
is too large for DSL and cable, as well as in urban/suburban areas of developing
countries. Among applications for residential are high speed Internet, Voice Over
IP telephony and streaming video/online gaming with additional applications for
enterprise such as Video conferencing, Video surveillance and secured Virtual
Private Network (with need for high security). WiMAX technology allows covering
applications with media content requesting more bandwidth.
WiMAX allows portable and mobile access applications, with incorporation in
notebook computers and PDAs, allowing for urban areas and cities to become
“metro zones” for portable and mobile outdoor broadband wireless access. As
such WiMAX is the natural complement to 3G networks by offering higher
bandwidth and to Wi-Fi networks by offering broadband connectivity in larger
areas.
The WiMAX Forum is an organization of leading operators and communications
component and equipment companies. The WiMAX Forum’s charter is to promote
and certify the compatibility and interoperability of broadband wireless access
equipment that conforms to the Institute for Electrical and Electronics Engineers
(IEEE) 802.16 and ETSI HiperMAN standards. The ultimate goal of the WiMAX
Forum is to accelerate the introduction of cost-effective broadband wireless access
services into the marketplace. Standards-based, interoperable solutions enable
economies of scale that, in turn, drive price and performance levels unachievable
by proprietary approaches, making WiMAX Forum Certified products.

Chapter 1 - System Description 4Motion Solution
4Motion 4 System Manual
1.2 4Motion Solution
1.2.1 4Motion Solution Highlights
Leveraging its extensive experience in Broadband Wireless Access (BWA) systems,
leading technology and current favorable economics for broadband and mobile
services, Alvarion's 4Motion mobile WiMAX solution represents the next evolution
in communications.
With 4Motion, Alvarion offers a diversified range of products and services for all
operators. Integrating the most advanced and adaptive radio management and
control technologies, 4Motion optimizes usage of the operator's spectrum and
network resources. At the same time, the solution supports the most stringent
quality of service (QoS) requirements for next-generation applications such as
video and gaming.
As a mobile solution, 4Motion network can be efficiently integrated with existing
networks, including 3G, DSL, satellite, and cable, to provide multiple service
applications.
4Motion enables operators and their customers to address the following consumer
and enterprise market segments:
“Best effort" fixed broadband access (DSL equivalent)
Portable broadband access
"Personal broadband" (handheld) access
Mobile broadband (including full handover and roaming support)
4Motion supports the following services:
IP-based and Ethernet-based services (e.g. VoIP, video streaming, gaming)
QoS and application-based prioritization and de-prioritization
4Motion is designed as an end-to-end solution based on the following elements:

Chapter 1 - System Description 4Motion Solution
4Motion 5 System Manual
BTS (Base Transceiver Station) equipment with an optional localized access
service network gateway (ASN-GW):
»Indoor modular Macro BTS.
»All-outdoor modular Macro BTS.
»The all-outdoor single sector Micro BTS
Optional centralized, fully integrated ASN-GW, which may be offered as a part
of an end-to-end solution that includes third-party partners' equipment
AAA servers provided by either Alvarion or its leading WiMAX partners
AlvariSTAR Element management system supporting NMS and OSS systems
Customer premises equipment and handsets
Figure 1-1 illustrates the entire service provider environment and 4Motion
solution elements within the radio access network, core network and subscriber
environment.
Figure 1-1: 4Motion Solution Elements
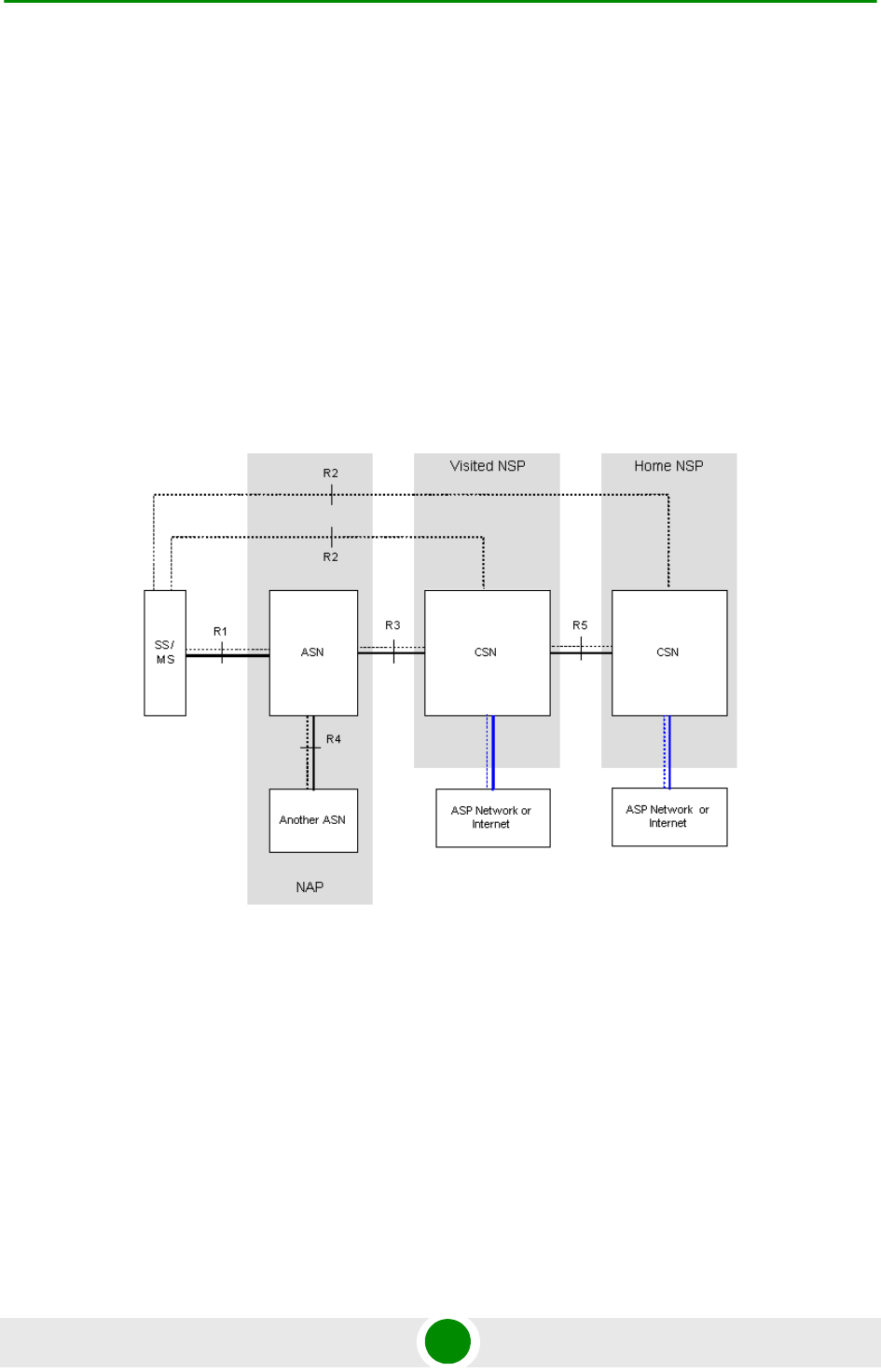
Chapter 1 - System Description 4Motion Solution
4Motion 6 System Manual
Alvarion believes that compliance with standard-driven open architecture protects
the infrastructure investment, and opens the system to a variety of fully
interoperable end-user devices. As such, 4Motion is designed with open
architecture and interfaces according to the WiMAX Forum networking working
group (NWG) profile C, which supports openness and enables flat as well as
hierarchical topologies. In addition, by keeping the radio resource management
functionality in the Base Transceiver Station only, Profile C delivers a faster,
optimized handover mechanism.
1.2.2 WiMAX Net w ork Reference M odel
Figure 1-2 and Figure 1-3 show the basic mobile WiMAX network architecture,
with a single ASN-GW and with multiple ASN-GWs, as defined by the WiMAX
Forum NWG.
Figure 1-2: Mobile WiMAX Network Reference Model
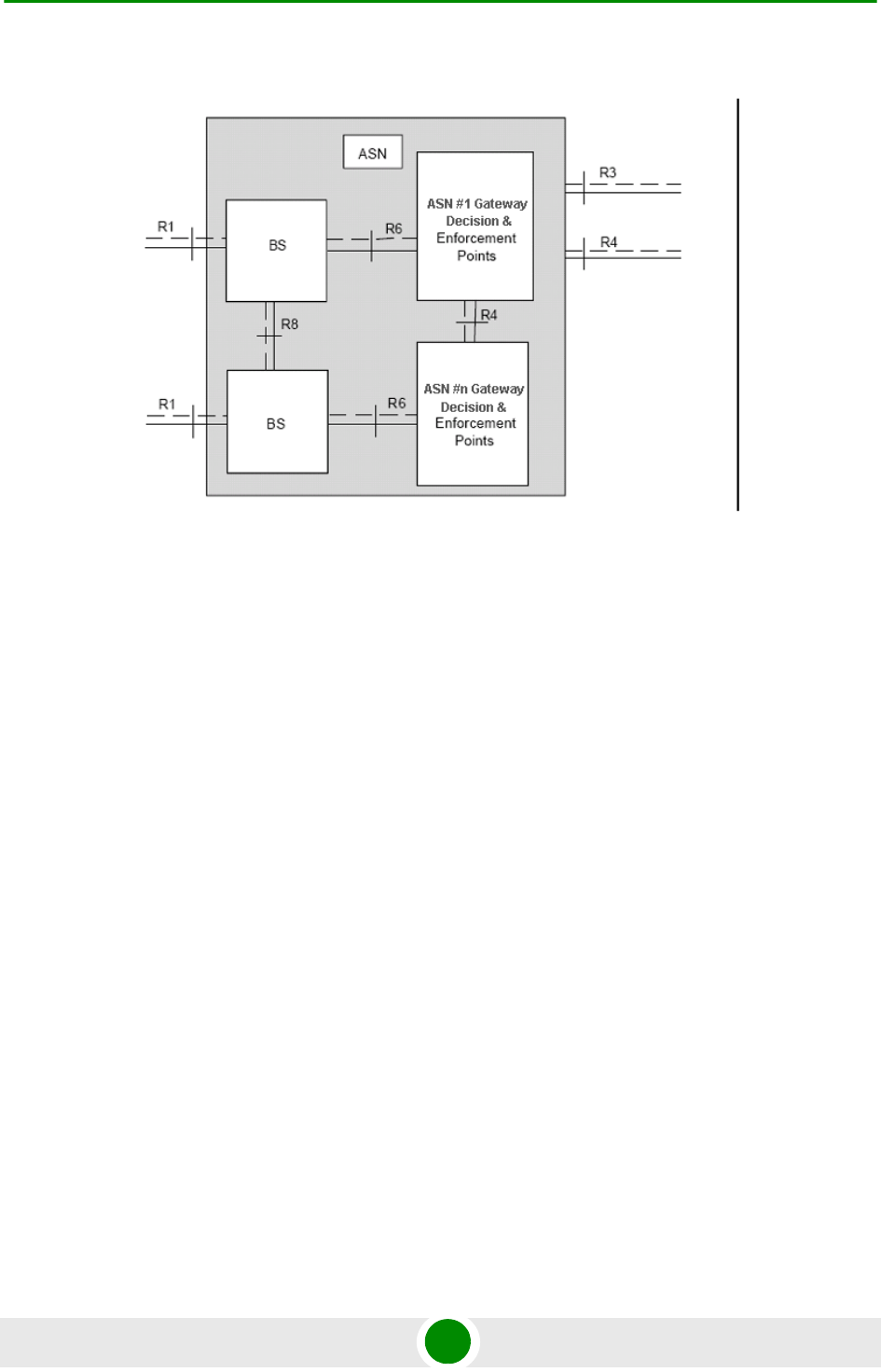
Chapter 1 - System Description 4Motion Solution
4Motion 7 System Manual
The various components and entities involved in the networking architecture are:
1.2.2.1 Access Service Network (ASN)
An ASN is defined as a complete set of network functions needed to provide radio
access to a WiMAX subscriber. The ASN provides the following mandatory
functions:
WiMAX Layer-2 (L2) connectivity with WiMAX mobile station (MS)
Transfer of AAA messages to the WiMAX subscriber's home network service
provider (H-NSP) for authentication, authorization and session accounting for
subscriber sessions
Network discovery and selection of the WiMAX subscriber's preferred NSP
Relay functionality for establishing Layer-3 (L3) connectivity with a WiMAX MS
(i.e. IP address allocation)
Radio resource management
ASN-CSN tunneling
ASN anchored mobility
Figure 1-3: ASN Reference Model containing Multiple ASN-GWs

Chapter 1 - System Description 4Motion Solution
4Motion 8 System Manual
An ASN is comprised of network elements such as one or more base transceiver
stations and one or more ASN gateways. An ASN may be shared by more than one
connectivity service network (CSN).
1.2.2.2 Connectivity Service Network (CSN)
A CSN is defined as a set of network functions that provide IP connectivity
services to WiMAX subscribers. A CSN may offer the following functions:
MS IP address and endpoint parameter allocation for user sessions
Internet access
AAA proxy or server
Policy and admission control based on user subscription profiles
ASN-CSN tunneling support
WiMAX subscriber billing and inter-operator settlement
WiMAX services such as location-based services, connectivity for peer-to-peer
services, provisioning, authorization and/or connectivity to IP multimedia
services, and facilities to support lawful intercept services such as those
compliant with Communications Assistance Law Enforcement Act (CALEA)
procedures
A CSN is comprised of network elements such as routers, proxy/servers, user
databases, and inter-working gateway devices.
1.2.2.3 Network Access Provider (NAP)
An NAP is a business entity that provides WiMAX radio access infrastructure to
one or more WiMAX network service providers (NSPs). A NAP implements this
infrastructure using one or more ASNs.
1.2.2.4 Network Service Provider (NSP)
An NSP is a business entity that provides IP connectivity and WiMAX services to
WiMAX subscribers compliant with the established service level agreement. The
NSP concept is an extension of the Internet service provider (ISP) concept,
providing network services beyond Internet access. To provide these services, an
NSP establishes contractual agreements with one or more NAPs. An NSP may also
establish roaming agreements with other NSPs and contractual agreements with

Chapter 1 - System Description 4Motion Solution
4Motion 9 System Manual
third-party application providers (e.g. ASP, ISP) for the delivery of WiMAX services
to subscribers. From a WiMAX subscriber standpoint, an NSP may be classified as
a home or visited NSP.
1.2.2.5 Base Station (BS)
The WiMAX BS is an entity that implements the WiMAX MAC and PHY in
compliance with the IEEE 802.16e standard. A BS operates on one frequency
assignment, and incorporates scheduler functions for uplink and downlink
resources.
The basic functionality of the BS includes:
IEEE 802.16e OFDMA PHY/MAC entity
R6 and R8 functionality according to NWG definitions
Extensible Authentication Protocol (EAP) relay
Control message authentication
User traffic authentication and encryption
Handover management
QoS service flow management entity
1.2.2.6 ASN Gateway (ASN-GW)
The ASN-GW is a network entity that acts as a gateway between the ASN and
CSN. The ASN functions hosted in an ASN-GW may be viewed as consisting of two
groups - the decision point (DP) and enforcement point (EP). The EP includes
bearer plane functions, and the DP includes non-bearer plane functions.
The basic DP functionality of the ASN-GW includes:
Implementation of EAP Authenticator and AAA client
Termination of RADIUS protocol against the selected CSN AAA server (home or
visited AAA server) for MS authentication and per-MS policy profile retrieval
Storage of the MS policy profile
Generation of authentication key material
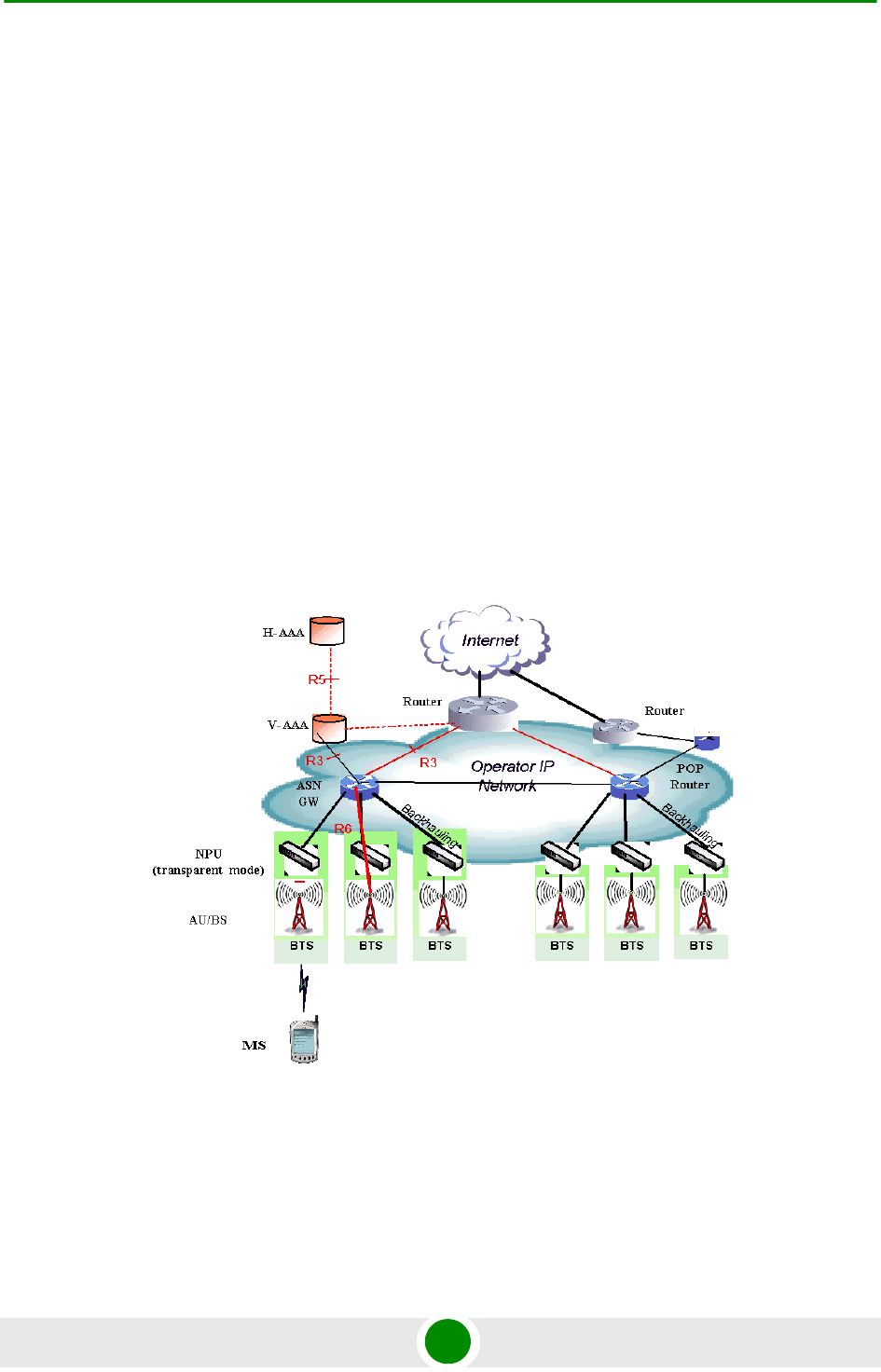
Chapter 1 - System Description 4Motion Solution
4Motion 10 System Manual
QoS service flow authorization entity
AAA accounting client
The basic EP functionality of the ASN-GW includes:
Classification of downlink data into generic routing encapsulation (GRE)
tunnels
Packet header suppression functionality
DHCP functionality
Handover functionality
The WIMAX Forum NWG has adopted two different approaches for ASN
architecture - centralized and distributed: In the centralized approach there is at
least one central ASN-GW, and the NPU operates in transparent mode, as shown
in Figure 1-4.
Figure 1-4: Centralized Network Reference Model
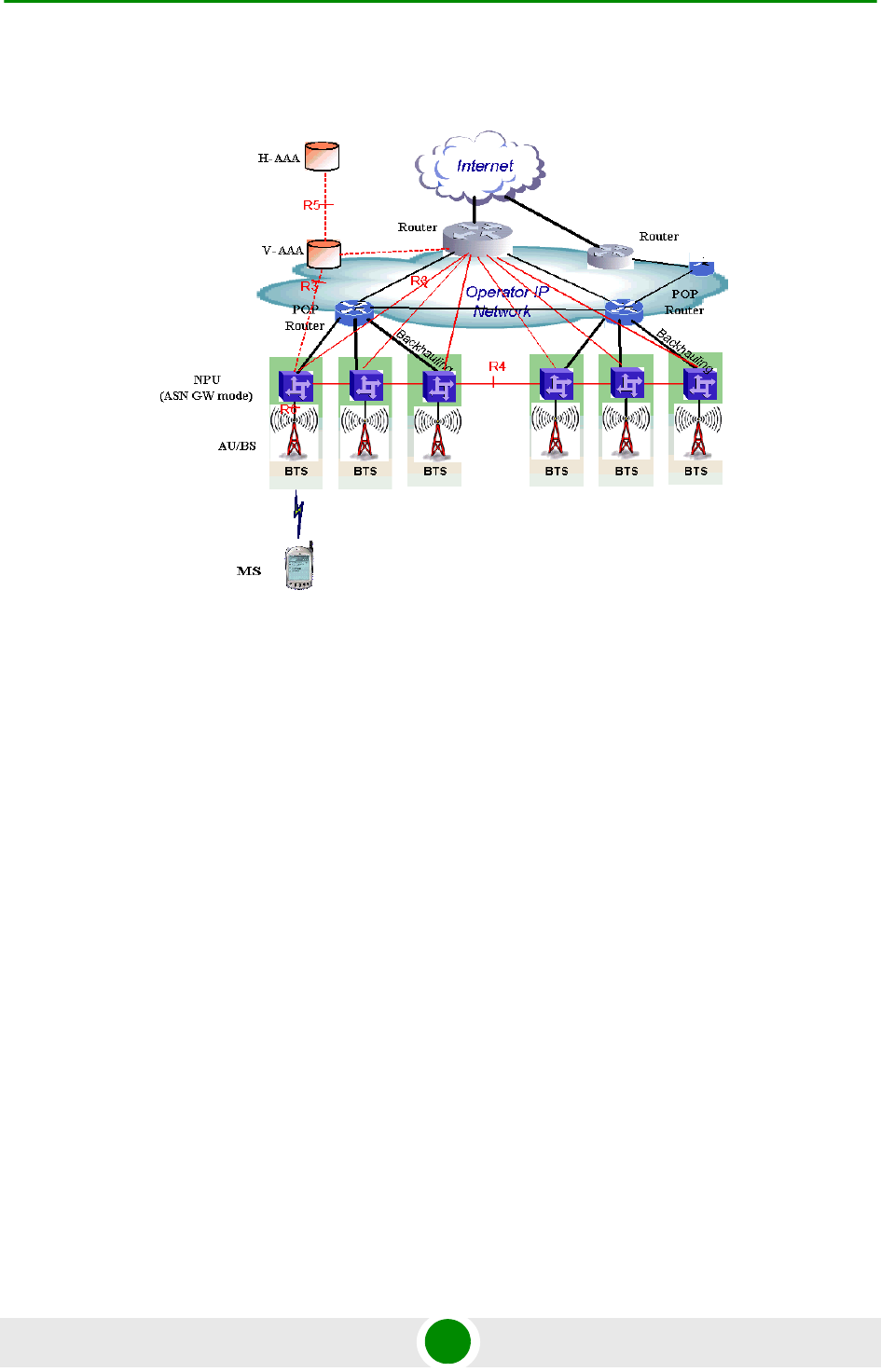
Chapter 1 - System Description 4Motion Solution
4Motion 11 System Manual
In the distributed approach, the NPU operates in ASN-GW mode, as shown in
Figure 1-5.
Alvarion believes in providing operators with the flexibility to select the mobile
WiMAX network topology that best suits their needs and existing network
architecture. Therefore, 4Motion is designed to support both distributed and
centralized topology approaches according to WiMAX Forum NWG profile C.
1.2.2.7 Reference Points
Reference point R1 consists of the protocols and procedures between the MS
and ASN as per the air-interface (PHY and MAC) specifications (IEEE 802.16e).
Reference point R2 consists of protocols and procedures between the MS and
CSN associated with authentication, services authorization and IP host
configuration management. This reference point is logical in that it does not
reflect a direct protocol interface between the MS and CSN. The authentication
part of reference point R2 runs between the MS and CSN operated by the
home NSP, however, the ASN and CSN operated by the visited NSP may
partially process the aforementioned procedures and mechanisms. Reference
point R2 might support IP host configuration management running between
the MS and CSN (operated by either the home NSP or visited NSP).
Figure 1-5: Distributed Network Reference Model

Chapter 1 - System Description 4Motion Solution
4Motion 12 System Manual
Reference point R3 consists of the set of control plane protocols between the
ASN and CSN to support AAA, policy enforcement and mobility management
capabilities. It also encompasses the bearer plane methods (e.g. tunneling) to
transfer user data between the ASN and CSN.
Reference point R4 consists of the set of control and bearer plane protocols
originating/terminating in various functional entities of an ASN that
coordinate MS mobility between ASNs and ASN-GWs. R4 is the only
interoperable reference point between similar or heterogeneous ASNs.
Reference point R5 consists of the set of control plane and bearer plane
protocols for internetworking between the CSN operated by the home NSP and
that operated by a visited NSP.
Reference point R6 consists of the set of control and bearer plane protocols
for communication between the BS and ASN-GW. The bearer plane consists of
an intra-ASN data path between the BS and ASN gateway. The control plane
includes protocols for data path establishment, modification and release
control in accordance with the MS mobility events.
Reference point R8 consists of the set of control plane message flows and
optional bearer plane data flows between the base stations to ensure a fast
and seamless handover. The bearer plane consists of protocols that allow data
transfer between base stations involved in the handover of a certain MS.
It is important to note that all reference points are logical and do not necessarily
imply a physical or even direct connection. For instance, the R4 reference point
between ASN-GWs might be implemented across the NAP internal transport IP
network, in which case R4 traffic might traverse several routers from the source to
the destination ASN-GW.

Chapter 1 - System Description The Base Transceiver Station
4Motion 13 System Manual
1.3 T he Base Transceive r St ation
The 4Motion solution features a multi-carrier, high-power Base Transceiver
Station (BTS). Designed for high availability and redundancy, it utilizes a central
networking and management architecture, and a range of diversity schemes.
The BTS main features include:
R1 support - 802.16e interface handling (e.g. PHY, MAC, CS, Scheduler, ARQ)
and processes such as handover, power control and network entry
R6 support - communication with ASN-GW
EAP proxy in ASN-GW mode
Handover triggering for mobility tunnel establishment - R6 (GRE tunnel)
Local QoS PEP for traffic via air interface (or SFM) and admission control
Hand-Over (HO) control function
Radio resource management agent
Key generation (TEK, KEK) and traffic encryption
The 4Motion Base Transceiver Station equipment includes:
The indoor modular Macro BTS.
The all-outdoor modular Macro BTS.
The all-outdoor single sector Micro BTS.
Outdoor Radio Units.
GPS Receiver
Power-Feeder (optional for the indoor Macro BTS).
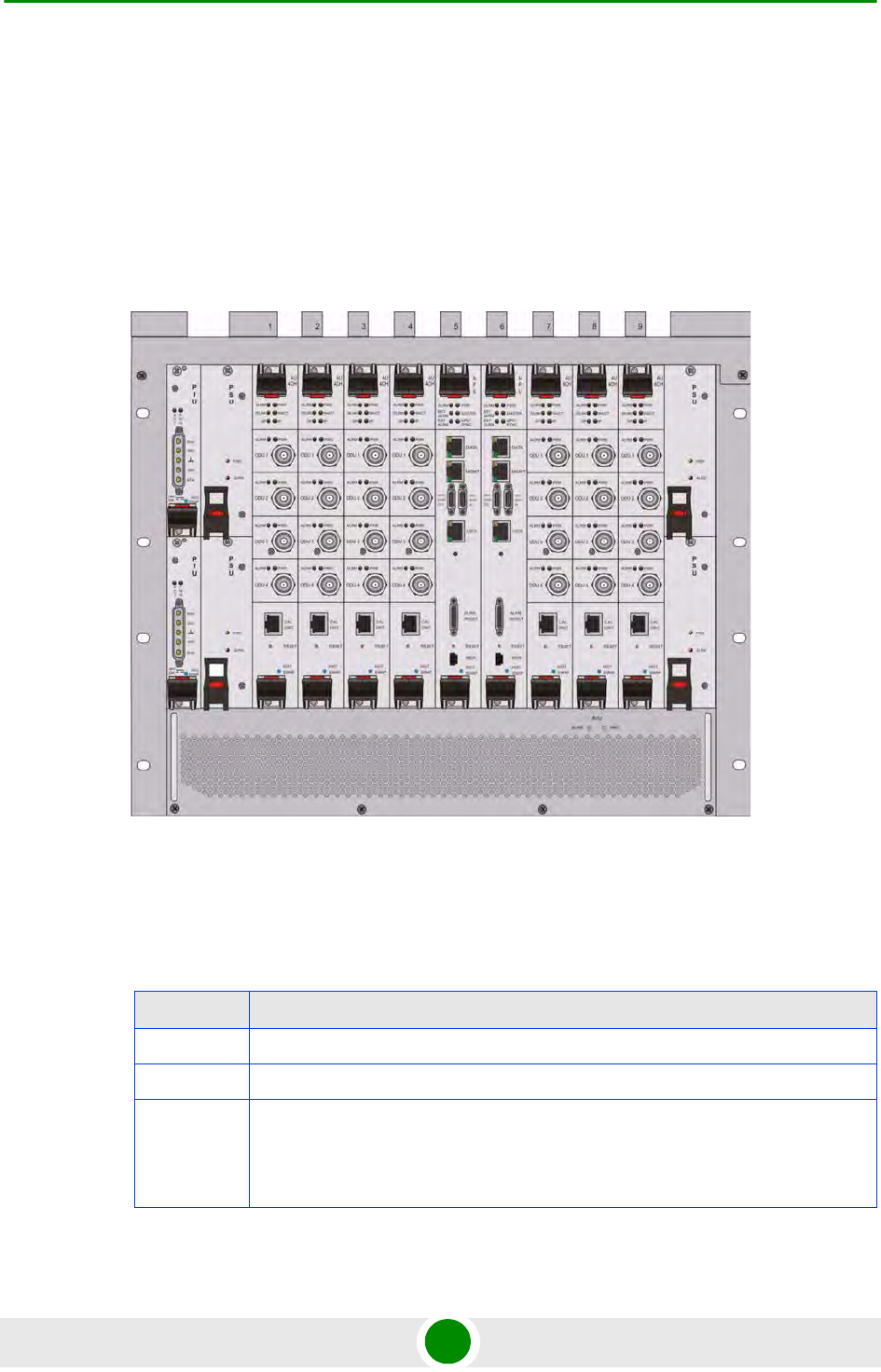
Chapter 1 - System Description The Base Transceiver Station
4Motion 14 System Manual
1.3.1 T he I ndoor Macro BT S
1.3.1.1 The BreezeMAX Shelf
The BreezeMAX shelf is an indoor -48 VDC powered 8U cPCI PICMG 2.x standard
shelf prepared for installation in a 19" or 21" (ETSI) rack. This chassis has a total
of nine double-Euro (6U high) slots and six single-Euro (3U high) slots. All the
modules are hot swappable, and high availability can be provided through
multiple redundancy schemes.
The shelf modules are:
Figure 1-6: BreezeMAX Shelf (with all modules installed)
Table 1-1: BreezeMAX Shelf Modules
Module Description
PIU 3U high power interface unit, 1+1 redundancy, -48VDC, protection, filters
PSU 3U high power supply unit, up to 3+1 redundancy
NPU 6U high network processing unit with optional ASN-GW functionality, hardware
ready for 1+1 redundancy (NPU redundancy is not supported in the current
release), 1000/100 Base-T main network interface, 1000/100 Base-T cascade
interface and 100/10 Base-T out-of-band management interface

Chapter 1 - System Description The Base Transceiver Station
4Motion 15 System Manual
The six single-Euro slots are intended for one or two redundant Power Interface
Units (PIUs) and up to four redundant Power Supply Units (PSUs). One of the
double Euro slots (Slot 5) is dedicated to the NPU module, with interfaces for
network backhaul, in-band and out-of-band (OOB) management connections.
Another double-Euro slot (Slot 6) is reserved for an optional redundant NPU (the
shelf is HW-ready for NPU redundancy). The remaining seven double-Euro slots
(1-4, 7-9) are dedicated for Access Unit (AU) modules, thereby enabling various
network topologies with up to 6 simultaneously operational AUs, and future
redundancy configurations. In addition, the shelf contains an Air Ventilation Unit
(AVU).
1.3.1.2 NPU
The Network Processing Unit is the controller of the Base Transceiver Station.
Serving as the central processing unit that manages the BTS components, the
NPU aggregates traffic to/from the AU modules, and transfers it to/from the IP
backbone through a dedicated Gigabit/Fast Ethernet interface. In addition, the
NPU can be operated in ASN-GW mode, in which case it also implements ASN-GW
functionality.
When operating in ASN-GW mode, the NPU implements the R3 reference point
toward the CSN, R4 reference point toward other ASN-GWs, and R6 reference
point toward AU/BSs. The R8 reference point traffic is transparently relayed
between AU/BSs (intra- or inter-BTS).
When operating in transparent mode, the NPU transparently relays R6 and R8
reference-point traffic between AU/BSs (intra- or inter-BTS).
The BreezeMAX shelf is hardware-ready for 1+1 NPU card redundancy.
The NPU main functions, when operating in transparent mode, are:
Aggregate backbone Ethernet connectivity for user and control traffic
Aggregate backbone Ethernet connectivity for management traffic (in-band or
out-of-band)
Connection to a cascaded shelf (future feature)
AU 6U high access unit, 4-channel, 802.16e MAC-modem-baseband IF card
AVU 2U high air ventilation unit, 9+1 redundancy fans with alarm control
Table 1-1: BreezeMAX Shelf Modules
Module Description

Chapter 1 - System Description The Base Transceiver Station
4Motion 16 System Manual
L2 switch forwarding capabilities
Internal and external traffic VLAN encapsulation
QoS marking
Overall operation, control and shelf management, including AU diagnostics
and control, PSU monitoring, AVU management and redundancy support
Local and remote extensive management support via CLI (Telnet, SSH) and
SNMP, including software download, fault and performance management
Alarm management, including external alarm inputs and activation of external
devices
Synchronization, including GPS receiver interface, clock and IF reference
generation and distribution to the shelf modules, and holdover handling
Security functionalities such as rate limiting and access control lists
When operating in ASN-GW mode, the following additional ASN-GW functions are
supported:
EAP authenticator
RADIUS AAA client
AAA accounting client
MS policy profile storage
QoS service flow authorization
Classification of downlink data into service flows
Packet header suppression functionality
Multiple service provider support (multihost) for improved security and
wholesale model
DHCP functionality - internal server, DHCP proxy, DHCP relay (with Option 82
support)

Chapter 1 - System Description The Base Transceiver Station
4Motion 17 System Manual
Handover functionality
GRE encapsulation/decapsulation
IP-in-IP encapsulation/decapsulation
Transparent VLAN (single tag) and QinQ (dual tag) encapsulation
Fragmentation/reassembly
R4/R6/R3 interfaces implementation
Keep-alive signaling towards the relevant BSs and other ASN-GWs for
enhanced management of service availability
When several shelves are collocated, the NPU cascade interface can be used for
shelf interconnection. In this architecture, the NPU that is directly connected to
the backhaul implements a layer-2 connection toward the NPUs in the cascaded
shelves. Bearer, control and management traffic is sent over the cascade
connection. Synchronization and GPS backup power are sent toward the NPUs in
the cascaded shelves through the GPS/SYNC ports.
GPS synchronization cascading will be implemented in a future release.
1.3.1.3 AU
The Access Unit module performs the WiMAX/IEEE 802.16e BS function
according to the NWG Profile C definitions via digital signal processors (DSPs) and
field-programmable gate array (FPGA) technology. The AU module is designed to
support high-traffic throughput and enable diversity, MIMO and AAS, thereby
extending capacity and range.
The AU implements the following functionality:
802.16e multi-channel OFDMA PHY
Up to four-channel support (Tx/Rx)
Diversity and future AAS
Flexible channel bandwidth - up to 20 MHz
Flexible FFT size - up to 2048 points

Chapter 1 - System Description The Base Transceiver Station
4Motion 18 System Manual
Wide variety of reuse patterns
Advanced channel coding (CTC)
HARQ
Rate adaptation
High-performance CDMA detector
IF interface to RF ODU
MAC-PHY interface
Link management (network entry, basic capabilities negotiation,
authentication and registration, connection management)
Fragmentation/ reassembly
QoS PEP for air interface traffic
QoS DSCP marking
Scheduling - connections quota computation for all data delivery types
Frame/burst building
Power save
Handover management
Power control
R1/R6/R8 functionality
Data path mapping between R6 (GRE) and 802.16e interfaces
Traffic authentication and encryption
Authentication relay
Security key receiver

Chapter 1 - System Description The Base Transceiver Station
4Motion 19 System Manual
Context client/server
ID to IP address resolution for ASN entities
IP and Ethernet convergence sublayers
Keep-alive signaling towards the relevant ASN-GWs for enhanced management
of service availability
The AU design is based on Alvarion's programmable, off-the-shelf, cutting-edge
components, in order to provide a future-proof solution with excellent cost and
performance.
The AU card interfaces with the NPU card for R6/R8 functionality, as well as
control, synchronization and management between the NPU and AU.
The AU implements four receive and transmit channels, each of them is HW-ready
for up to 20 MHz bandwidth.
1.3.1.4 PIU
The single-Euro Power Interface Unit module serves as the interface between the
DC power source and both the PSU modules and external ODU radio transceivers.
The PIU filters and stabilizes the input power, and protects the system from power
problems such as over-voltage, surge pulses, reverse polarity connection, and
short circuits. It filters high-frequency interference (radiated emissions) and
low-frequency interference (conducted emissions) at the external power source.
Each shelf contains two slots for optional 1+1 PIU redundancy. One PIU is
sufficient to support a fully populated shelf, and two modules provide redundant
power feeding (i.e. from two input sources), while avoiding current flow between
the two input sources.
1.3.1.5 PSU
The single-Euro Power Supply Unit module is a -48 VDC power supply unit that
generates low-voltage DC output to comply with PICMG 2.x standard
requirements. Each shelf can contain up to four PSU modules supporting N+1
redundancy configuration scheme.
Table 1-2 displays the number of PSU modules (excluding redundant units)
required for various Base Station configurations without NPU redundancy (one
NPU):

Chapter 1 - System Description The Base Transceiver Station
4Motion 20 System Manual
1.3.1.6 AVU
The 2U-high AVU includes a 1U-high integral chamber for inlet airflow and a
1U-high fan tray with an internal alarm module. To support high availability, the
fan tray includes 10 brushless fans (9 fans are sufficient for cooling a fully-loaded
shelf). Fan failure is indicated by both the front panel LEDs and a trap sent to the
management system. To further support high availability, the chassis may
operate without the hot-swappable fan tray for up to 10 minutes until the AVU is
replaced.
1.3.2 T he M acro Out door BTS
The Macro Outdoor BTS is a modular scalable and reliable all-outdoor platform
enabling extended and flexible installation capabilities while sustaining all the
features and capabilities of the 4Motion solution.
The All-Outdoor Macro BTS portfolio includes the following system elements:
NAU (Network Access Unit): A full-size enclosure containing NPU and AU
cards.
DAU (Dual Access Unit): A full-size enclosure containing two AU cards.
SAU (Single Access Unit): A half-size enclosure containing one AU card.
The full-size enclosure is similar to the enclosure of the 4x2 ODUs (see
Section 1.3.4), supporting flexible mounting options for system components,
including back-to-back and side-by-side mounting. The units are available with
either full (4-channels) AUs or with 2-channels AUs.
The modular architecture and different unit types enable building a variety of
configurations using up to six AUs with either 2 or 4 channels, addressing a
pay-as-you-grow deployment. The functionality is the same as described for the
NPU (see Section 1.3.1.2) and AU (see Section 1.3.1.3) cards of the Indoor Macro
BTS, with a few minor exceptions.
Table 1-2: PSU Requirements, Configurations with one NPU (excluding PSU
redundancy)
Number of AUs Minimum Required Number of PSUs
1 - 4 2
5 - 6 3

Chapter 1 - System Description The Base Transceiver Station
4Motion 21 System Manual
1.3.3 T he Outdoor Mic ro BTS
Micro Outdoor BTS is a full-outdoor small form factor WiMAX Base Transceiver
Station. The Micro Outdoor BTS complements Macro BTS deployments providing
white spots coverage, cell extension and capacity boost. It provides excellent
cost/performance in addressing low dense population areas (rural & suburban). It
also provides an effective solution for installation constrained areas through
light-pole, roof-top or wall mount options.
The Micro BTS comprises a single BS and two integrated radios connected to an
external dual-slant antenna. The functionality of the Micro BTS is very similar to
that of a two-channel NAU unit (an NPU with a single two-channel AU) operating
with an external ASN-GW (Centralized architecture).
Micro BTS systems are currently available in the 2.5 GHz and 3.5 GHz bands.
1.3.4 ODU s for M ac ro (Indoor/Outdoor) BTS
The outdoor unit (ODU) is a high-power, multi-carrier radio unit that connects to
one or more external antennas. It is designed to provide high system gain and
interference robustness utilizing high transmit power and low noise figure. It is
HW-ready for supporting a bandwidth of up to 20 MHz for the 4x2 ODUs and 30
MHz for the 2x2 ODUs, enabling future options such as increased capacity
through the use of a multiplexer or wider frequency channels.
The following ODU port configurations will be available:
1x1(1Rx by 1 Tx): One receive port, one transmit port (one Tx/Rx interface)
2x2 (2Rx by 2Tx): Two receive ports, two transmit ports (two Tx/Rx interfaces)
4x2 (4Rx by 2Tx): Four receive ports, two transmit ports (two Tx/Rx interfaces,
two Rx only interfaces)
The wide range of ODU types will enable efficient utilization of various second and
fourth order transmit and receive diversity schemes. Some of the 4x2 and all 2x2
ODUs support Beam Forming capabilities for enhanced performance.
The following table provides details on the currently available ODUs following the
WiMAX Forum’s definitions:
Chapter 1 - System Description The Base Transceiver Station
4Motion 22 System Manual
1.3.5 Pow er Fee der
The PIU of the indoor Macro BTS can support a maximum current of 58 A (@-40.5
VDC). In certain installations with a relatively high number of ODUs this current
may not be sufficient to power the shelf and all the ODUs. In such installations
the ODU Power Feeder is used as an additional power source providing power (-48
VDC) to ODUs. It transfers transparently all signals between the AU and the ODU,
while injecting DC power received from an external source. Each ODU Power
Table 1-3: ODU Types
Band
(GHz)
ODU Frequency
Range (MHz)
ODU Port
Configuration
ODU Bandwidth
(MHz)
ODU Max Tx
Power (dBm)
BF
Support
2.3 2300-2360 1Rx by 1Tx Up to 10 36 No
2340-2400 1Rx by 1Tx Up to 10 36 No
2305 - 2317, 2348 - 2360
(includes WCS filter)
1Rx by 1Tx Up to 10 36 No
2300-2400 2Rx by 2Tx Up to 30 38 Yes
2.5 2496-2602 (band A) 1Rx by 1Tx Up to 10 36 No
2590-2690 (band B) 1Rx by 1Tx Up to 10 36 No
2485-2690 2Rx by 2TX Up to 30 38 Yes
2496-2602 (band A) 4Rx by 2Tx Up to 20 38 No
2590-2690 (band B) 4Rx by 2Tx Up to 20 38 No
2485-2690 4Rx by 2Tx Up to 20 38 Yes
2560-2570 4Rx by 2Tx Up to 10 37 No
3.3 3300-3355 1Rx by 1 Tx Up to 14 32 No
3345-3400 1Rx by 1Tx Up to 14 33 No
3.5 3400-3455 1Rx by 1Tx Up to 14 34 No
3445-3500 1Rx by 1Tx Up to 14 34 No
3500-3555 1Rx by 1Tx Up to 14 34 No
3545-3600 1Rx by 1Tx Up to 14 34 No
3400-3600 2Rx by 2Tx Up to 30 37 Yes
3400-3600 4Rx by 2Tx Up to 20 37 No
3400-3600 4Rx by 2Tx Up to 20 37 Yes
3.6 3650-3700 1Rx by 1Tx Up to 14 22 No
3600-3800 4Rx by 2Tx Up to 20 36 Yes

Chapter 1 - System Description The Base Transceiver Station
4Motion 23 System Manual
Feeder unit can serve up to four ODUs. Up to three ODU Power Feeder units can
be installed in a 1U high Power Feeder panel.
1.3.6 Ant enna
In the 4Motion architecture, the antenna is approached as an independent
element. This provides the operator with the flexibility to select the antennas
source according to its supplier policy. To ensure the availability of antennas that
complement the 4Motion solution, Alvarion works closely with several antenna
suppliers to ensure availability of antennas that comply with its requirements.
In cases where the operator prefers other antenna vendors, Alvarion can provide a
recommended antenna specification based on the required antennas types.
For more information on recommended antenna configurations and required
antennas refer to “Sector Connections Schemes” on page 744.
1.3.7 GPS
GPS is used to synchronize the air link frames of Intra-site and Inter-site located
Base Transceiver Stations to ensure that in all Base Stations the air frame will
start at the same time, and that all Base Stations will switch from transmit
(downlink) to receive (uplink) at the same time. This synchronization is necessary
to prevent Intra-site and Inter-site interference and Base stations saturation
(assuming that all Base Stations are operating with the same frame size and with
the same DL/UL ratio).
In order for the system to be synchronized, the GPS have to first acquire at least 4
satellites. After that the GPS reception can be reduced to 1 satellite. If no satellite
is received the BTS will go to holdover state where internal clock is provided to
synchronize the BTS.
1.3.7.1 Outdoor GPS Receiver for the Macro BTS
The all-outdoor GPS Receiver is a pole mountable GPS receiver and antenna in a
single environmentally protected enclosure. The receiver is powered from the NPU,
and it can be installed at a distance of up to 100m from the NPU. In the
BMAX-Timing GPS-OGR model, a special adaptor cable is required between the
GPS cable and the NPU. When available, no adaptor cable will be required for the
BMAX-4M-GPS.
1.3.7.2 GPS Antenna Kit for the Micro BTS
The Micro BTS includes an internal GPS receiver with hold over mechanism in
case GPS is lost or satellites synchronization was not reached.
Chapter 1 - System Description The Base Transceiver Station
4Motion 24 System Manual
Alvarion offers the miniature GPS antenna that can be installed at a distance of
up to 3m from the BTS.

Chapter 1 - System Description Element Management Systems
4Motion 25 System Manual
1.4 Element M a na ge ment Systems
The end-to-end IP-based architecture of the system enables full management of
all components, using standard management tools. An SNMP agent in the NPU
implements proprietary MIBs for remote setting of operational modes and
parameters of the Base Transceiver Station equipment. Security features
incorporated in the equipment restrict the access for management purposes.
Alvarion offers the following management tool:
1.4.1 AlvariSTAR
AlvariSTAR is a comprehensive carrier-class Element Management System (EMS)
for Alvarion’s Broadband Wireless Access systems. AlvariSTAR is designed for
today's most advanced Network Operation Centers (NOCs), providing the network
Operation, Administration and Maintenance (OA&M) staff and managers with all
the network surveillance, monitoring and configuration and service provisioning
capabilities required to effectively manage the network while keeping the
resources and expenses at a minimum.
AlvariSTAR offers the network's OA&M staff with a unified, scalable and
distributable management system. Utilizing distributed client-server architecture,
the user is provided with a robust, scalable and fully redundant management
system in which all single points of failure can be avoided.
AlvariSTAR provides the following management functionality:
Device Discovery
Device Inventory
Topology
Fault Management
Configuration Management
Service Management
Data Collection
Performance Monitoring

Chapter 1 - System Description Element Management Systems
4Motion 26 System Manual
Device embedded software upgrade
BTS duplication and template-based configuration modification of multiple
BTS simultaneously.
Security Management
Event Forwarding to other Network Management Systems.
Chapter 1 - System Description Specifications
4Motion 27 System Manual
1.5 Spe cifications
1.5.1 Modem & Ra dio
1.5.2 Sensit ivity (per channel)*
* For second order receive diversity configurations sensitivity is improved by 3 dB.
For fourth order receive diversity configurations sensitivity is improved by 6 dB.
Table 1-4: General Modem & Radio Specifications
Item Description
Operation Mode TDD
Channel Bandwidth 5 MHz
7 MHz (not applicable for the 2.x GHz band)
10 MHz
Central Frequency Resolution 0.125 MHz (actual configurable frequencies depend on the
local radio regulations and allocated spectrum)
Modulation OFDM modulation, 1024/512 FFT points;
QPSK, QAM16, QAM64
Access Method OFDMA
FEC Convolutional Turbo Coding: 1/2, 2/3, 3/4, 5/6
Table 1-5: Per Channel Sensitivity, AWGN @ PER=1%
Modulation
& Coding
Sensitivity (dBm),
5 MHz Bandwidth
Sensitivity (dBm),
7 MHz Bandwidth
Sensitivity (dBm),
10 MHz Bandwidth
QPSK 1/2 -97.3 -95.8 -94.2
QPSK 3/4 -94.9 -93.4 -91.8
16QAM 1/2 -92.2 -90.7 -89.1
16QAM 3/4 -88.3 -86.8 -85.2
64QAM1/2 -86.8 -85.3 -83.7
64QAM2/3 -83.0 -81.5 -79.9
64QAM3/4 -82.2 -80.7 -79.1
64QAM5/6 -81.0 -79.5 -77.9
Chapter 1 - System Description Specifications
4Motion 28 System Manual
1.5.3 ODUs
1.5.3.1 2.3 GHz Band
1.5.3.1.1 2.3 GHz Band 1x1 ODUs
Table 1-6: 2.3 GHz Band 1x1 ODUs Specifications
Item Description
Frequency Band ODU-HP-2.3: 2300-2360 MHz
ODU-HP-2.3-WCS: 2305 - 2317, 2348 - 2360 MHz
(includes WCS filter)
ODU-HP-2.3b: 2340-2400 MHz
Ports Configuration 1x1 (1Rx, 1Tx)
Bandwidth Support Up to 10 MHz, 5 & 10 MHz SAW filters
Maximum Tx Power) 36 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @ antenna port -60 dBm before saturation, -8 dBm before damage
Noise Figure 4.6 dB typical, 6.0 dB maximum
Dimension ODU-HP-2.3-WCS: 329 x 157 x 209 mm
Other ODUs: 329 x 157 x 169 mm
Weight ODU-HP-2.3-WCS: 8.6 Kg
Other ODUs: 6.1 Kg
Connectors ANT: N-Type jack, 50 Ohm, lightning protected
IF: TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 90W maximum
Receive - 20W maximum
Chapter 1 - System Description Specifications
4Motion 29 System Manual
1.5.3.1.2 2.3 GHz Band 2x2 ODU
* With the optional external WCS filter, the frequency range is 2305-2315,
2350-2360 MHz, and Tx power is reduced by 1 dB.
Table 1-7: 2.3 GHz Band 2x2 ODU Specifications
Item Description
Frequency Band ODU-2300-2400-000N-38-2X2-N-0: 2300-2400 MHz*
Ports Configuration 2x2 (2Rx, 2Tx)
Bandwidth Support Up to 30 MHz
Beam Forming Support Yes
Maximum Tx Power) 38 dBm*
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 2 x N-Type jack, 50 Ohm, lightning protected
IF: 2 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 40W maximum

Chapter 1 - System Description Specifications
4Motion 30 System Manual
1.5.3.2 2.5 GHz Band
1.5.3.2.1 2.5 GHz Band 1x1 ODUs
Table 1-8: 2.5 GHz Band 1x1 ODUs Specifications
Item Description
Frequency Band ODU-HP-2.5A: 2496-2602 MHz (Band A)
ODU-HP-2.5B: 2590-2690 MHz (Band B)
Ports Configuration 1x1 (1Rx, 1Tx)
Bandwidth Support Up to 10 MHz
Maximum Tx Power) 36 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.6 dB typical, 6.0 dB maximum
Dimension 329 x 157 x 209 mm
Weight 6.1 Kg
Connectors ANT: N-Type jack, 50 Ohm, lightning protected
IF: TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 90W maximum
Receive - 20W maximum

Chapter 1 - System Description Specifications
4Motion 31 System Manual
1.5.3.2.2 2.5 GHz Band 2x2 ODUs
Table 1-9: 2.5 GHz Band 2x2 ODUs Specifications
Item Description
Frequency Band ODU-2485-2690-000N-38-2X2-N-0: 2485-2690 MHz
Ports Configuration 2x2 (2Rx, 2Tx)
Bandwidth Support Up to 30 MHz
Beam Forming Support Yes
Maximum Tx Power) 38 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 2 x N-Type jack, 50 Ohm, lightning protected
IF: 2 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 40W maximum

Chapter 1 - System Description Specifications
4Motion 32 System Manual
1.5.3.2.3 2.5 GHz Band 4x2 ODUs
1.5.3.2.4 Compliance with ETSI Regulations
For compliance with ETSI regulations for the 2.5 GHz Band A such as limiting the
Tx power to a maximum of 33dBm, one of the following must be done:
1Use a suitable external filter.
2Configure the required ODU type as follows:
aIf you use ODU-2496-2602-000-N-38-4x2-N-0: Configure
oDU24962602000N334by2EtsiNO as the required type. This will create a
“virtual” ODU supporting the frequency range 2496-2602 MHz with a
Table 1-10: 2.5 GHz Band 4x2 ODUs Specifications
Item Description
Frequency Band ODU-2496-2602-000N-38-4x2-N-0: 2496-2602 MHz (Band A)
ODU-2590-2690-000N-38-4x2-N-0: 2590-2690 MHz (Band B)
ODU-2485-2690-000N-38-4X2-N-0: 2485-2690 MHz
ODU-2560-2570-000N-37-4X2-N-0: 2560-2570 MHz
Ports Configuration 4x2 (4Rx, 2Tx)
Bandwidth Support Up to 20 MHz
Beam Forming Support ODU-2485-2690-000N-38-4X2-N-0
Maximum Tx Power) 38 dBm
For ODU-2560-2570-000N-37-4X2-N-0: 37 dBm.
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 4 x N-Type jack, 50 Ohm, lightning protected
IF: 4 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 50W maximum

Chapter 1 - System Description Specifications
4Motion 33 System Manual
maximum Tx power of 33 dBm and without support of beam forming
capability.
bIf you use ODU-2485-2690-000-N-38-4x2-N-0: Configure
oDU24962602000N334by2EtsiBFN0 as the required type. This will create
a “virtual” ODU supporting the frequency range 2496-2602 MHz with a
maximum Tx power of 33 dBm and support of beam forming capability.
cIf you use ODU-2485-2690-000-N-38-2x2-N-0: Configure
oDU24962602000N332by2EtsiBFN0 as the required type. This will create
a “virtual” ODU supporting the frequency range 2496-2602 MHz with a
maximum Tx power of 33 dBm and support of beam forming capability.

Chapter 1 - System Description Specifications
4Motion 34 System Manual
1.5.3.3 3.3 GHz Band
1.5.3.3.1 3.3 GHz Band 1x1 ODUs
Table 1-11: 3.3 GHz Band 1x1 ODUs Specifications
Item Description
Frequency Band ODU-3300-3355-000N-32-1x1-N-0: 3300-3355 MHz
ODU-3345-3400-000N-33-1x1-N-0: 3345-3400 MHz
Ports Configuration 1x1 (1Rx, 1Tx)
Bandwidth Support Up to 14 MHz
Maximum Tx Power 32 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 329 x 157 x 169 mm
Weight 6.1 Kg
Connectors ANT: N-Type jack, 50 Ohm, lightning protected
IF: TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 90W maximum
Receive - 20W maximum
Chapter 1 - System Description Specifications
4Motion 35 System Manual
1.5.3.4 3.5 GHz Band
1.5.3.4.1 3.5 GHz Band 1x1 ODUs
Table 1-12: 3.5 GHz Band 1x1 ODUs Specifications
Item Description
Frequency Band ODU-HP-TDD-3.4a: 3400-3455 MHz
ODU-HP-TDD-3.4b: 3445-3500 MHz
ODU-HP-TDD-3.5a: 3500-3555 MHz
ODU-HP-TDD-3.5b: 3545-3600 MHz
Ports Configuration 1x1 (1Rx, 1Tx)
Bandwidth Support Up to 14 MHz
Maximum Tx Power 34 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 329 x 157 x 169 mm
Weight 6.1 Kg
Connectors ANT: N-Type jack, 50 Ohm, lightning protected
IF: TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 90W maximum
Receive - 20W maximum
Chapter 1 - System Description Specifications
4Motion 36 System Manual
1.5.3.4.2 3.5 GHz Band 2x2 ODUs
Table 1-13: 3.5 GHz Band 2x2 ODUs Specifications
Item Description
Frequency Band ODU-3400-3600-000N-37-2x2-N-0: 3400-3600 MHz
Ports Configuration 2x2 (2Rx, 2Tx)
Bandwidth Support Up to 30 MHz
Beam Forming Support Yes
Maximum Tx Power) 37 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 2 x N-Type jack, 50 Ohm, lightning protected
IF: 2 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 40W maximum
Chapter 1 - System Description Specifications
4Motion 37 System Manual
1.5.3.4.3 3.5 GHz Band 4x2 ODUs
Table 1-14: 3.5 GHz Band 4x2 ODUs Specifications
Item Description
Frequency Band ODU-3400-3600-000N-37-4x2-N-0: 3400-3600 MHz
ODU-3400-3600-000N-37-4x2-BF-N-0: 3400-3600 MHz
Ports Configuration 4x2 (4Rx, 2Tx)
Bandwidth Support Up to 20 MHz
Beam Forming Support ODU-3400-3600-000N-37-4x2-BF-N-0
Maximum Tx Power) ODU-3400-3600-000N-37-4x2-N-0: 37 dBm
ODU-3400-3600-000N-37-4x2-BF-N-0: 37 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 4 x N-Type jack, 50 Ohm, lightning protected
IF: 4 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 50W maximum

Chapter 1 - System Description Specifications
4Motion 38 System Manual
1.5.3.5 3.6 GHz Band
1.5.3.5.1 3.6 GHz Band 1x1 ODU
Table 1-15: 3.6 GHz Band 1x1 ODU Specifications
Item Description
Frequency Band ODU-3650-3700-000N-22-1x1-N-0: 3650-3700 MHz
Ports Configuration 1x1 (1Rx, 1Tx)
Bandwidth Support Up to 14 MHz
Maximum Tx Power 22 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 315 x 157 x 86 mm
Weight 2.9 Kg
Connectors ANT: N-Type jack, 50 Ohm, lightning protected
IF: TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 32W maximum
Receive - 13W maximum
Chapter 1 - System Description Specifications
4Motion 39 System Manual
1.5.3.5.2 3.6 GHz Band 4x2 ODU
Table 1-16: 3.6 GHz Band 4x2 ODU Specifications
Item Description
Frequency Band ODU-3600-3800-000N-36-4x2-N-0: 3600-3800 MHz
Ports Configuration 4x2 (4Rx, 2Tx)
Bandwidth Support Up to 20 MHz
Beam Forming Support Yes
Maximum Tx Power) 36 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Maximum Input Power @
antenna port
-60 dBm before saturation, -8 dBm before damage
Noise Figure 4.5 dB typical, 5.5 dB maximum
Dimension 420 x 340 x 270 mm
Weight 17 Kg
Connectors ANT: 4 x N-Type jack, 50 Ohm, lightning protected
IF: 4 x TNC jack, 50 Ohm, lightning protected
Power Source -40.5 to -60 VDC over the IF cable
Power Consumption Transmit - 180W maximum
Receive - 50W maximum
Chapter 1 - System Description Specifications
4Motion 40 System Manual
1.5.4 Micro Out door BTS
Table 1-17: Micro Outdoor BTS Specifications
Item Description
Frequency 2.5 GHz Band: 2485-2690 MHz
3.5 GHz Band: 3400-3600 MHz
Bandwidth Support Up to 20 MHz
Maximum Tx Power 36 dBm
Tx Power Control Range 10 dB, in 1 dB steps
Tx Power Accuracy +/- 1 dB
Max. Input Power (at
antenna port)
-40 dBm before saturation
-10 dBm before damage
Dimensions (H x W x D) 511 x 280 x 216 mm
Weight (kg) 17.5
Power Source -40.5 to -60 VDC
Connectors PWR: SAMTEC Mini Fit 6 pins.
DATA: RJ-45, lightning protected. Supports Ethernet+PoE Out.
GPS: TNC jack, 50 ohm, lightning protected.
MON: 3-pin low profile jack
ANT: 2 x N-Type jack, 50 Ohm, lightning protected.
Power Consumption Average:180W
Peak: 255W
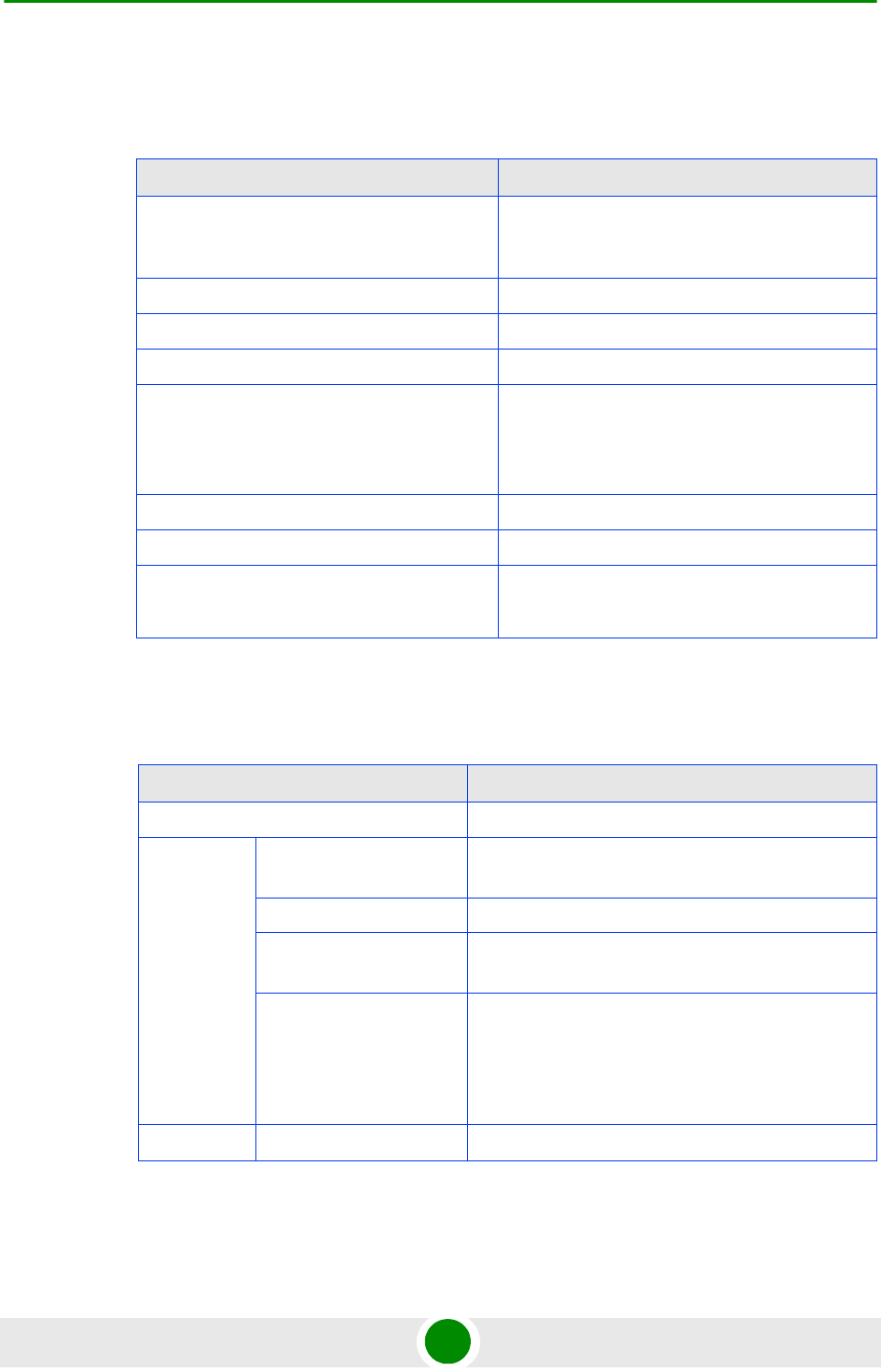
Chapter 1 - System Description Specifications
4Motion 41 System Manual
1.5.5 AU - ODU Com munic ation (Macro BTS)
1.5.6 Data Comm unic ation (Etherne t I nt erfaces)
Table 1-18: AU - ODU Communication
Item Description
IF Frequency Tx: 240 MHz
Rx: 140 MHz
Ref Synchronization Frequency 64 MHz
Bi-Directional Control Frequency 14 MHz
IF cable Impedance 50 Ohm
Maximum IF cable Attenuation 10 dB @ 240 MHz
7.5 dB @ 140 MHz
8 dB @ 64 MHz
Minimum IF cable Shielding Effectiveness 90 dB in the 10-300 MHz band
Maximum IF cable Return Loss 20 dB in the 10-300 MHz band
Maximum IF cable DC Resistance 1x1 ODUs, 2.x GHz 4x2 ODUs: 1.5 Ohm
3.x GHz 4x2 ODUs: 1 Ohm
Table 1-19: Data Communication (Ethernet Interfaces)
Item Description
Standard Compliance IEEE 802.3 CSMA/CD
Macro BTS NPU Data Port 10/100/1000 Mbps, Full Duplex with Auto
Negotiation
NPU Management Port 10/100 Mbps, Half/Full Duplex with Auto Negotiation
NPU Cascade Port
(not applicable for NAU)
100/1000 Mbps, Full Duplex with Auto Negotiation
AU Calibration Port (not
applicable for Macro
Outdoor BTS
components, not used in
current release)
10/100 Mbps, Half/Full Duplex with Auto Negotiation
Micro BTS Data Port 10/100 Mbps, Half/Full Duplex with Auto Negotiation
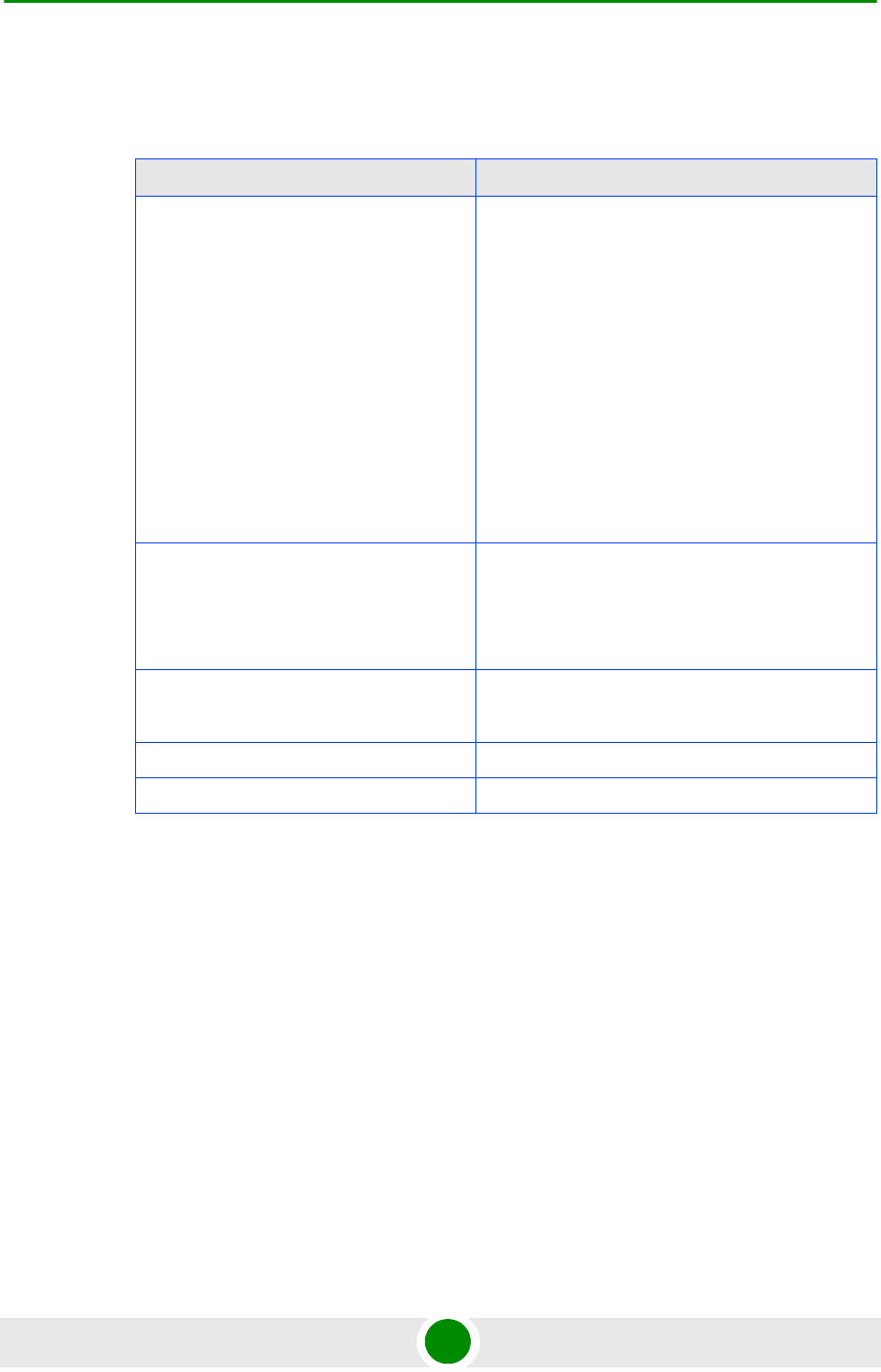
Chapter 1 - System Description Specifications
4Motion 42 System Manual
1.5.7 Configurat ion and Management
Table 1-20: Configuration and Management
Item Description
Out Of Band (OOB) Management
(For Micro only Monitor port is applicable)
Telnet via Management port
SSH via Management port
SNMP via Management port
Telnet via Cascade port (not applicable for
NAU)
SSH via Cascade port (not applicable for NAU)
SNMP via Cascade port (not applicable for
NAU)
Monitor port (serial interface)
In Band (IB) Management via Data Port SNMP
Tel ne t
SSH
SNMP Agents SNMP Ver. 2 client
MIB II (RFC 1213), Private MIBs
Software Upgrade Using TFTP
Configuration Upload/Download Using TFTP
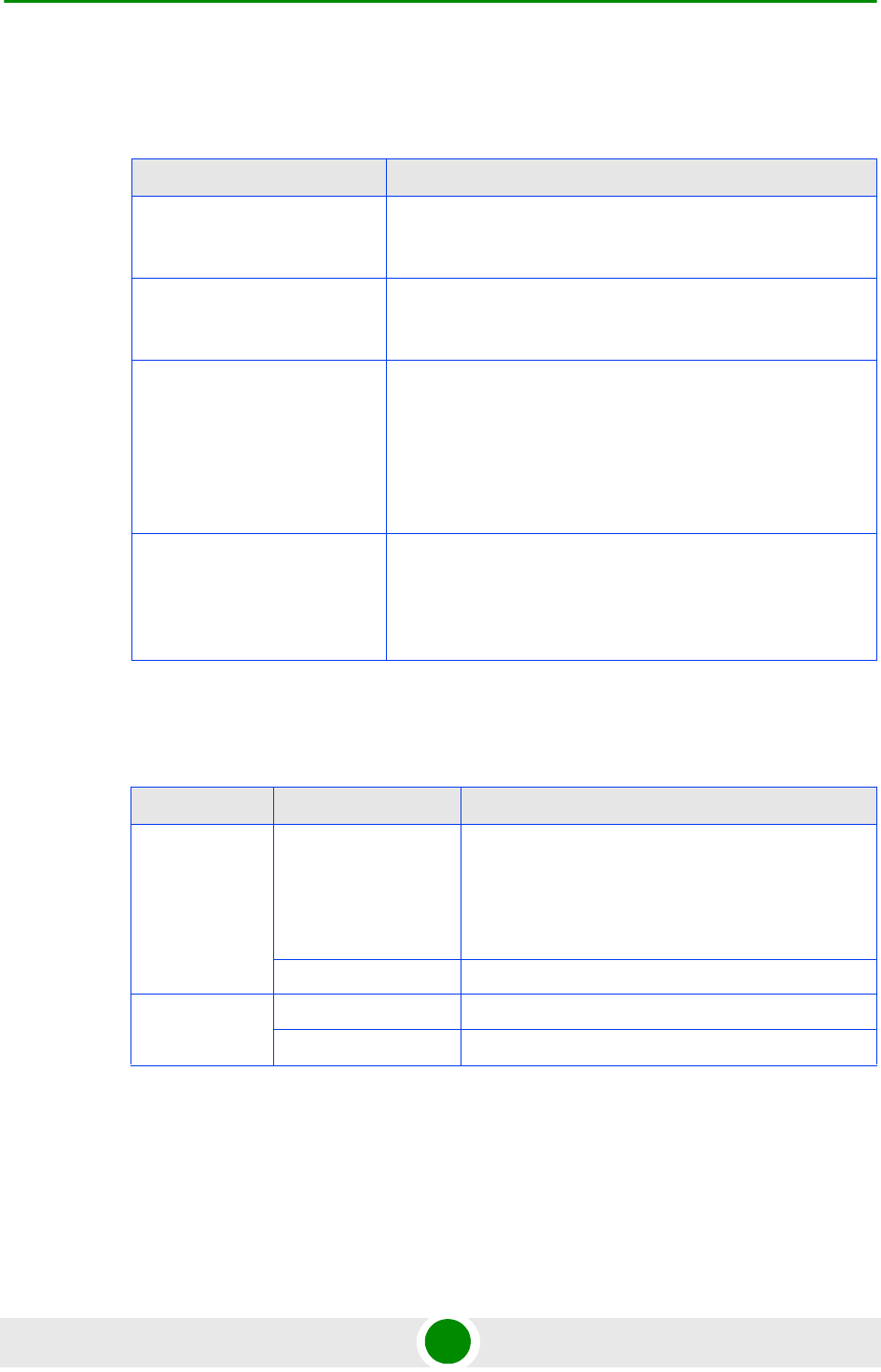
Chapter 1 - System Description Specifications
4Motion 43 System Manual
1.5.8 Standards Complia nc e, Genera l
1.5.9 Environmental
Table 1-21: Standards Compliance, General
Type Standard
EMC ETSI EN 301 489-1/4
FCC Part 15
Safety EN60950-1
UL 60950-1
Environmental ETS 300 019:
Part 2-1 T 1.2 & part 2-2 T 2.3 for indoor & outdoor
Part 2-3 T 3.2 for indoor
Part 2-4 T 4.1E for outdoor
Radio ETSI EN 302 326
ETSI EN 302 544
FCC part 15, part 27, part 25
Table 1-22: Environmental Specifications
Type Unit Details
Operating
Temperature
Outdoor units AU-ODU-HP-2.3-WCS: -52°C to 55°C
All other ODUs, Micro Outdoor BTS and Macro
Outdoor BTS units: -40°C to 55°C
Outdoor GPS Receiver and Antennas: -40°C to 85°C
Indoor equipment 0°C to 40°C
Operating
Humidity
Outdoor units 5%-95%, weather protected
Indoor equipment 5%-95% non condensing

Chapter 1 - System Description Specifications
4Motion 44 System Manual
1.5.1 0 Me chanical a nd Electric al
1U = 44.45 mm (1.75”).
1HP = 5.08 mm (0.2”)
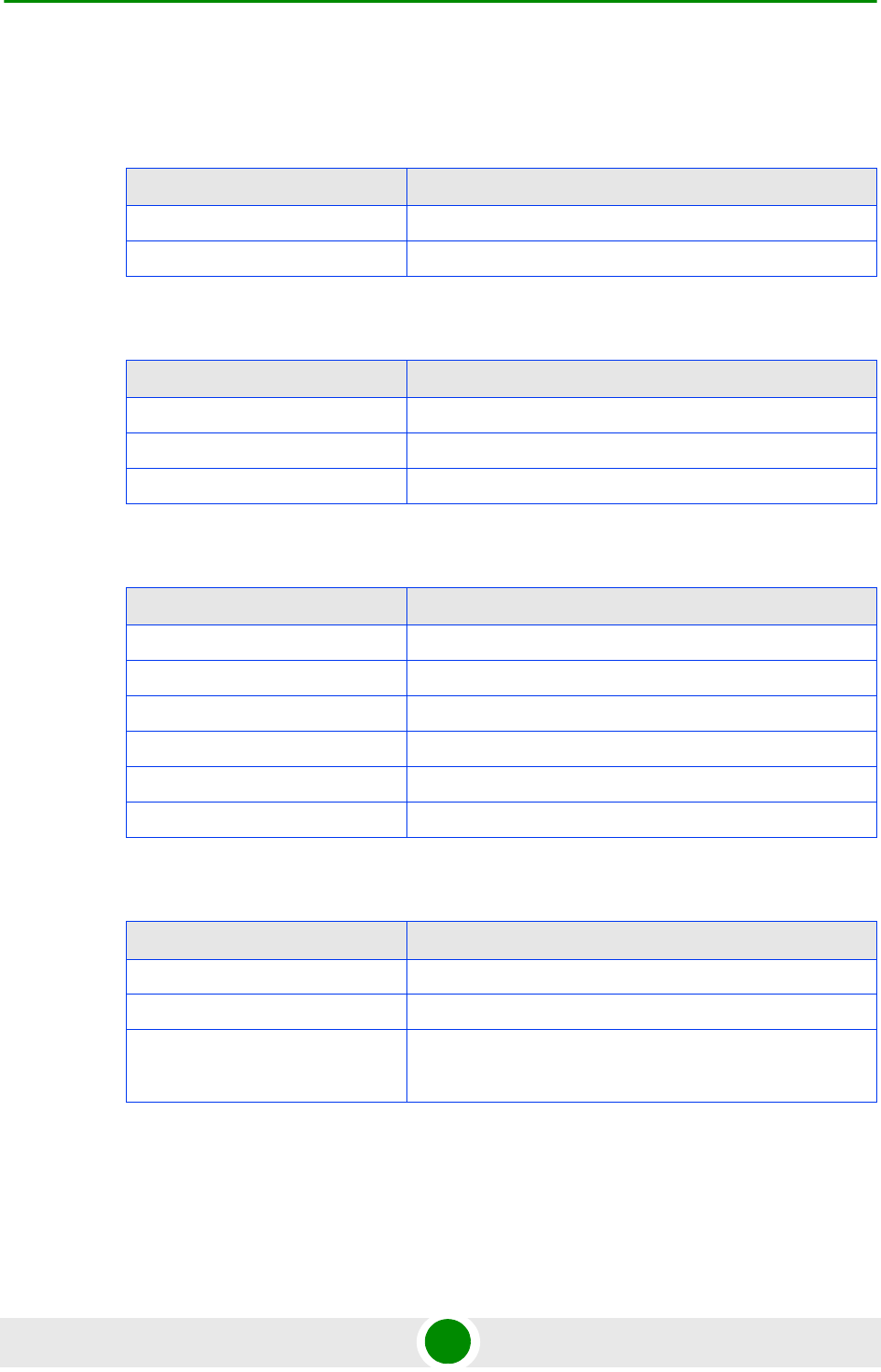
Chapter 1 - System Description Specifications
4Motion 45 System Manual
1.5.10.1 Macro Indoor BTS
1.5.10.1.1 BreezeMAX Shelf
1.5.10.1.2 AVU
1.5.10.1.3 PIU
1.5.10.1.4 PSU
Table 1-23: BreezeMAX Shelf, Mechanical & Electrical Specifications
Item Description
Dimensions 8U ETSI type shelf, 8U x 43.2 x 24 cm
Weight 6.5 Kg (including AVU)
Table 1-24: AVU, Mechanical & Electrical Specifications
Item Description
Dimensions 2U x 84HP x 16 cm
Weight 1.64 Kg
Power Consumption 40W maximum, 23W typical
Table 1-25: PIU, Mechanical & Electrical Specifications
Item Description
Dimensions 3U x 5HP x 16 cm
Weight 0.35 Kg
Power Source -40.5 to -60 VDC
Power Dissipation 35W maximum (active PIU)
Maximum Supplied Current 58A
-48V Connector 5 pin/40A D-Type plug
Table 1-26: PSU, Mechanical & Electrical Specifications
Item Description
Dimensions 3U x 5HP x 16 cm
Weight 0.7 Kg
Power Output 300W maximum output power
Efficiency: 80% minimum
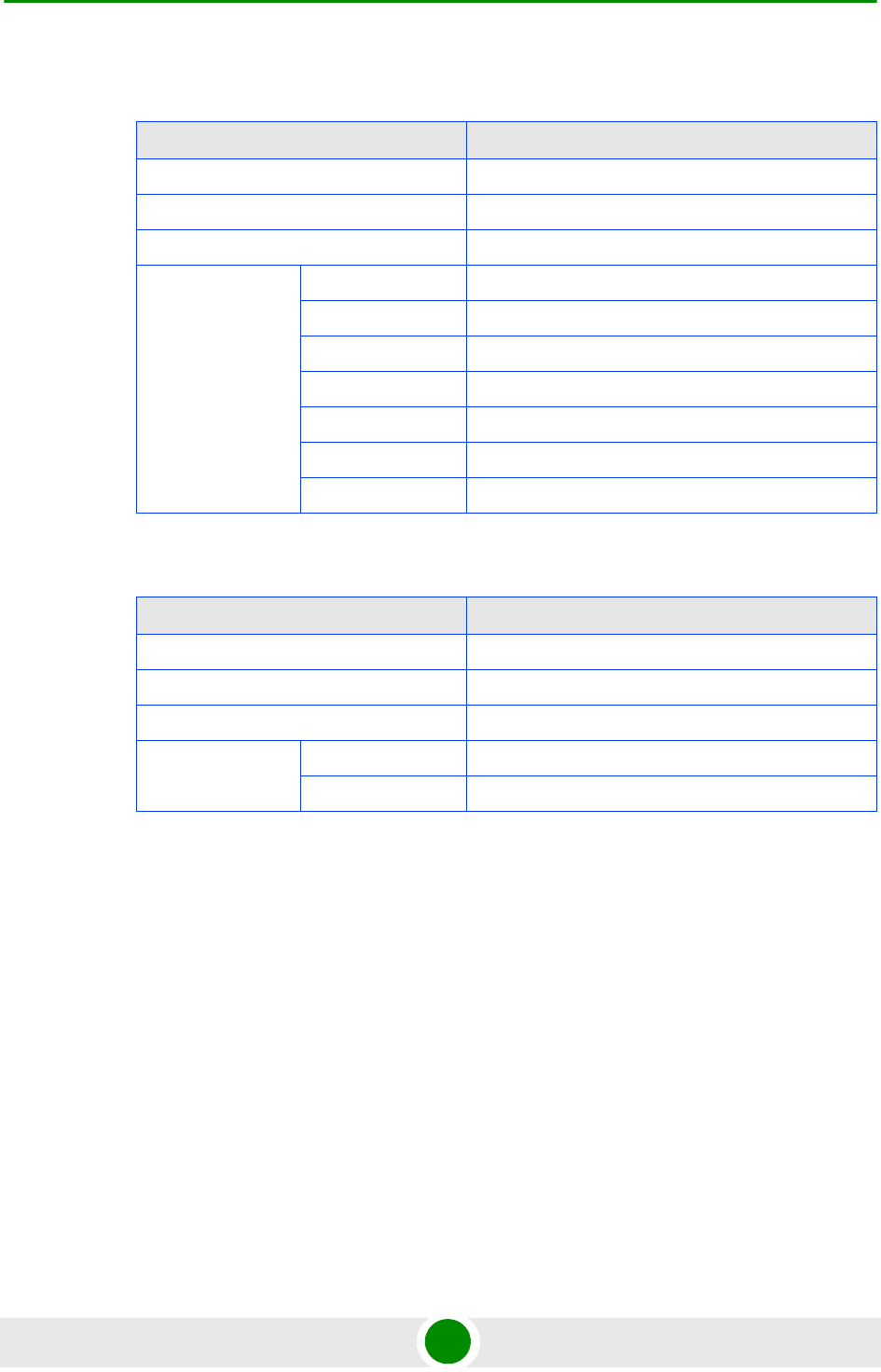
Chapter 1 - System Description Specifications
4Motion 46 System Manual
1.5.10.1.5 NPU
1.5.10.1.6 AU
Table 1-27: NPU, Mechanical & Electrical Specifications
Item Description
Dimensions 6U x 7HP x 16 cm
Weight 0.55 Kg
Power Consumption 68W maximum, 61W typical
Connectors DATA 100/1000Base-T (RJ-45) with 2 embedded LEDs
MGMT 10/100Base-T (RJ-45) with 2 embedded LEDs
GPS/SYNC IN 15-pin micro D-Type jack
GPS/SYNC OUT 15-pin micro D-Type jack
CSCD 100/1000Base-T (RJ-45) with 2 embedded LEDs
ALRM IN/OUT 25-pin micro D-Type jack
MON 3-pin low profile jack
Table 1-28: AU, Mechanical & Electrical Specifications
Item Description
Dimensions 6U x 7HP x 16 cm
Weight 0.95 Kg
Power Consumption 74W maximum, 66W typical
Connectors ODU1 - ODU4 4 x TNC jack, lightning protected
CAL UNIT 10/100Base-T (RJ-45) with 2 embedded LEDs
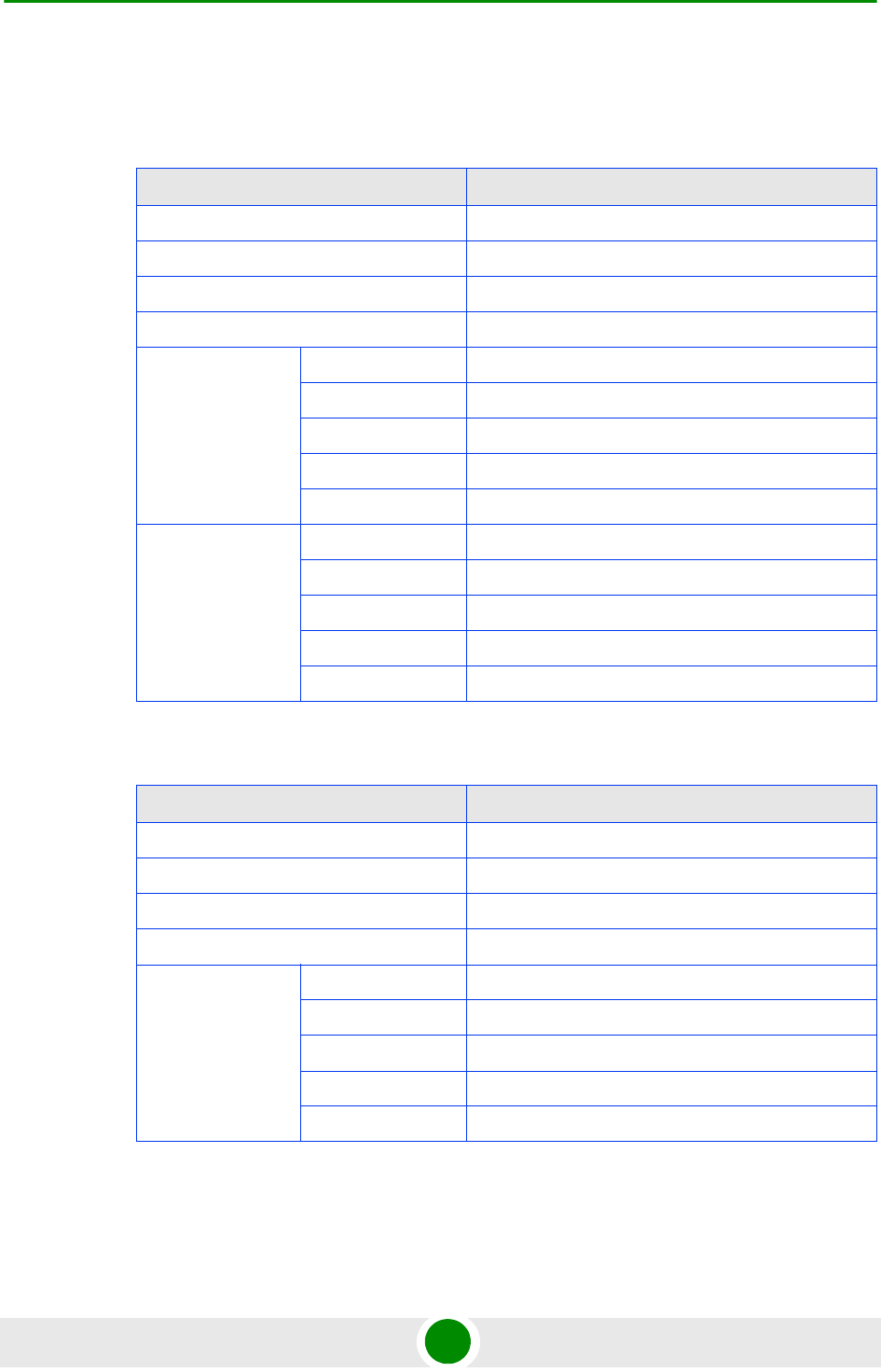
Chapter 1 - System Description Specifications
4Motion 47 System Manual
1.5.10.2 Macro Outdoor BTS
1.5.10.2.1 NAU
1.5.10.2.2 SAU
Table 1-29: NAU, Mechanical & Electrical Specifications
Item Description
Dimensions 420 x 340 x 270 mm
Weight 17 Kg (excluding mounting kit)
Power Source -40.5 to -60 VDC
Power Consumption 140W maximum
NPU Connectors DATA RJ-45, lightning protected
MNG RJ-45, lightning protected
GPS RJ-45, lightning protected
ETH (x5) 5 x RJ-45, lightning protected
SYNC (x3) 3 x RJ-45, lightning protected
AU Connectors POWER SAMTEC Mini Fit 6 pins
IF1-IF4 4 x TNC jack, lightning protected
SYNC -
ETH RJ-45, lightning protected (not used)
MON RJ-45, lightning protected
Table 1-30: SAU, Mechanical & Electrical Specifications
Item Description
Dimensions 420 x 340 x 135 mm
Weight 8.5 Kg (excluding mounting kit)
Power Source -40.5 to -60 VDC
Power Consumption 75W maximum
Connectors POWER SAMTEC Mini Fit 6 pins
IF1-IF4 4 x TNC jack, lightning protected
SYNC RJ-45, lightning protected
ETH RJ-45, lightning protected
MON Not used
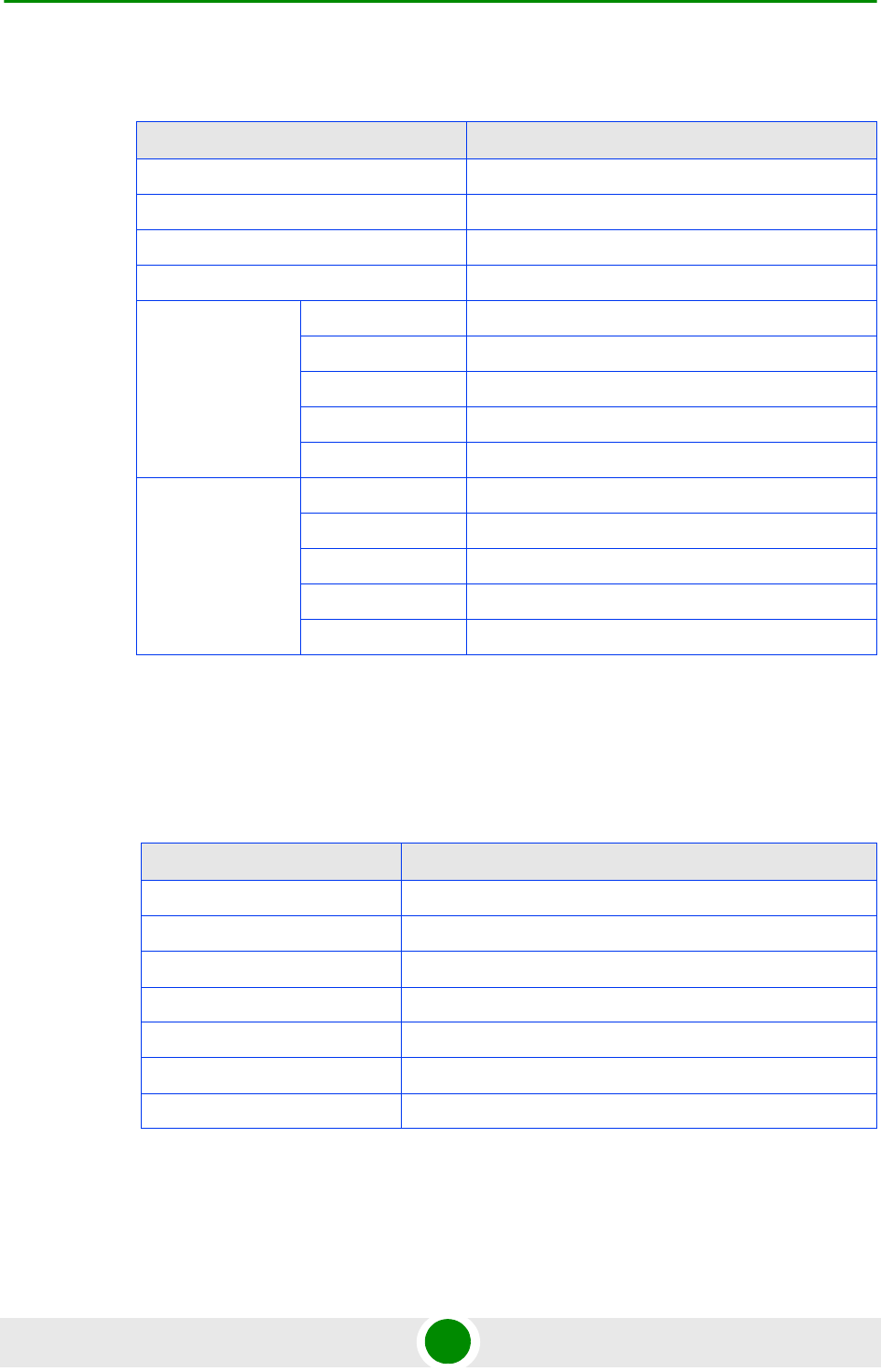
Chapter 1 - System Description Specifications
4Motion 48 System Manual
1.5.10.2.3 DAU
* Master AU is with a SYNC connector (in the Slave AU there is no SYNC
connector)
1.5.10.3 High-Power AC/DC Power Supply for Micro BTS
Table 1-31: DAU, Mechanical & Electrical Specifications
Item Description
Dimensions 420 x 340 x 270 mm
Weight 17 Kg (excluding mounting kit)
Power Source -40.5 to -60 VDC
Power Consumption 150W maximum
Master* AU
Connectors
POWER SAMTEC Mini Fit 6 pins
IF1-IF4 4 x TNC jack, lightning protected
SYNC RJ-45, lightning protected
ETH RJ-45, lightning protected
MON Not used
Slave* AU
Connectors
POWER SAMTEC Mini Fit 6 pins
IF1-IF4 4 x TNC jack, lightning protected
SYNC -
ETH RJ-45, lightning protected
MON Not used
Table 1-32: High-Power AC/DC Power Supply Specifications
Item Description
Input Voltage 90 ~ 132 / 180 ~ 264 VAC (selection by switch), 47 ~ 63 Hz.
Input AC Current (typical) 8A/115 VAC, 3.2A/230VAC
Efficiency 89% typical
Output Voltage 54 VDC
Output Current Up to 10A
Dimensions (H x W x D) 110 x 303 x 240 mm
Weight 4.75 kg
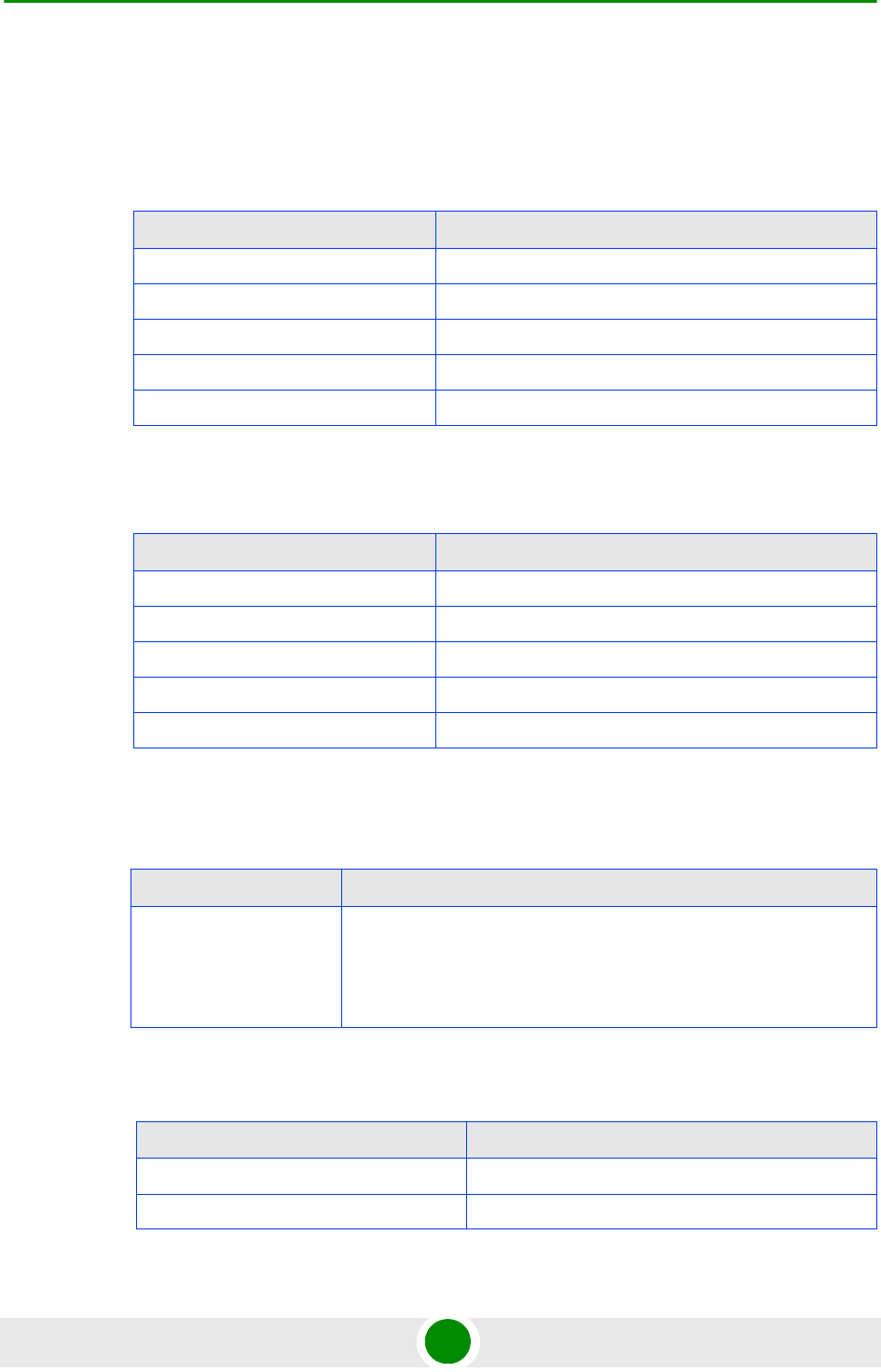
Chapter 1 - System Description Specifications
4Motion 49 System Manual
1.5.10.4 GPS Receiver for Macro BTS
1.5.10.4.1 BMAX-Timing GPS-OGR Specifications
1.5.10.4.2 BMAX-4M-GPS Specifications
1.5.10.5 GPS Antenna Kit for Micro BTS
1.5.10.6 ODU Power Feeder
Table 1-33: BMAX-Timing GPS-OGR GPS Receiver, Mechanical & Electrical
Specifications
Item Description
Dimensions Tubular enclosure, 15.5 D x 12.7 H cm
Weight 0.363 Kg
Power Source 12 VDC from the NPU
Power Consumption 6W maximum
Connector 12-pin round plug
Table 1-34: BMAX-4M-GPS Receiver, Mechanical & Electrical Specifications
Item Description
Dimensions 8.8 x 10.4 x 16 cm
Weight 0.38 Kg
Power Source 12 VDC from the NPU
Power Consumption 2W maximum
Connector RJ-45
Table 1-35: GPS Antenna Kit for Micro BTS Specifications
Item Description
Basic Miniature Antenna 21 mm high, 60 mm diameter, 50 g, ¾” thru-hole or bracket mount,
ROHS compliant, IP 67.
28 dB gain, power consumption 15 mA max. @ 3.3 VDC. Cable
length (RG-6) up to 3m.
Table 1-36: ODU Power Feeder, Mechanical & Electrical Specifications
Item Description
Dimensions 15.7 x 14.6 x 3.17 cm
Weight 0.6 Kg
Chapter 1 - System Description Specifications
4Motion 50 System Manual
Power Source -40.5 to -60 VDC
Power Dissipation 2W per channel
Connectors ODU 1 - ODU 4 4 x TNC jack, lightning protected
IDU 1 - IDU 4 4 x TNC jack, lightning protected
Power 3 pin/20A D-Type plug
Table 1-36: ODU Power Feeder, Mechanical & Electrical Specifications
Item Description

Chapter 1 - System Description Specifications
4Motion 51 System Manual
1.5.1 1 Antennas
1.5.11.1 2.x GHz Antennas
Table 1-37: BS-RET-DP-ANT 2.3-2.7 Specifications
Item Description
Frequency Band (MHz) 2300-2700
Number of Elements 2
Polarization Linear, +/-45°
Gain (dB) 17.3 @ 2.4 GHz
18 @ 2.6 GHz
Azimuth Beamwidth (degrees) 65
Elevation Beamwidth (degrees) 6.5
Elevation Side Lobe Level (dB) <-18
Maximum Power (W) 250
Cross-polarization Discrimination (dB) >15
Front-to-Back Ratio (dB) >30
Electrical Downtilt Range (degrees) 0-10
Remote Electrical Downtilt Support Internal motor, AISG version 2 compliant
Isolation Between Ports (dB) >30
Return Loss (dB) >15
RF Interface Impedance (Ohm) 50
RF Connectors 2 x N-Type jack
RET Connector 8-pin IEC 60130-9
Dimensions (mm) 1060 x 126 x 69
Weight (Kg) 6
Wind Load (Kg) 0.24 @ 160 km/h
Maximum Wind Velocity (km/h) 200
Chapter 1 - System Description Specifications
4Motion 52 System Manual
Table 1-38: BS-RET-DDP-ANT 2.3-2.7 and BS-EDT-DDP-ANT 2.3-2.7 Specifications
Item Description
Frequency Band (MHz) 2300-2700
Number of Elements 4
Polarization Linear, 2 x +/-45°
Gain (dB) 17.3 @ 2.4 GHz
18 @ 2.6 GHz
Azimuth Beamwidth (degrees) 65
Elevation Beamwidth (degrees) 6.5
Elevation Side Lobe Level (dB) <-18
Maximum Power (W) 250
Cross-polarization Discrimination (dB) >15
Front-to-Back Ratio (dB) >30
Electrical Downtilt Range (degrees) 0-10
Remote Electrical Downtilt Support BS-RET-DDP-ANT 2.3-2.7: Internal motor,
AISG version 2 compliant
BS-EDT-DDP-ANT 2.3-2.7: None
Isolation Between Ports (dB) >30
Return Loss (dB) >15
RF Interface Impedance (Ohm) 50
RF Connectors 4 x N-Type jack
RET Connector 8-pin IEC 60130-9
Dimensions (mm) 1070 x 300 x 110
Weight (Kg) 13
Wind Load (Kg) 0.48 @ 160 km/h
Maximum Wind Velocity (km/h) 200

Chapter 1 - System Description Specifications
4Motion 53 System Manual
Table 1-39: ANT.2.3-2.7GHz, D/S,65°,16±0.5dBi Specifications
Item Description
Frequency Band (MHz) 2300-2700
Number of Elements 2
Polarization Linear, +/-45°
Gain (dB) 16 +/- 0.5
Azimuth Beamwidth (degrees) 65 +/-5
Elevation Beamwidth (degrees) 8 +/-2
Elevation Side Lobe Level (dB) <-18
Maximum Power (W) 50
Cross-polarization Discrimination (dB) -15
Front-to-Back Ratio (dB) >28
Isolation Between Ports (dB) >25
RF Interface Impedance (Ohm) 50
RF Connectors 2 x N-Type jacks
Mechanical Downtilt Range (degrees) 0-15
Dimensions (mm) 711 x 171 x 90
Weight (Kg) 2.6
Maximum Wind Velocity (km/h) Survival: 200
Operation: 160
Regulatory Compliance ETSI EN 302 326-3 V1.2.1 class CS
RoHS Compliance
Chapter 1 - System Description Specifications
4Motion 54 System Manual
1.5.11.2 3.5 GHz Antennas
Table 1-40: BS-RET-DP-ANT 3.3-3.8 Specifications
Item Description
Frequency Band (MHz) 3300-3800
Number of Elements 2
Polarization Linear, +/-45°
Gain (dB) 18
Azimuth Beamwidth (degrees) 65
Elevation Beamwidth (degrees) 6.5
Elevation Side Lobe Level (dB) <-18
Maximum Power (W) 200
Cross-polarization Discrimination (dB) >15
Front-to-Back Ratio (dB) >30
Electrical Downtilt Range (degrees) 0-10
Remote Electrical Downtilt Support Internal motor, AISG version 2 compliant
Isolation Between Ports (dB) >30
Return Loss (dB) >15
RF Interface Impedance (Ohm) 50
RF Connectors 2 x N-Type jack
RET Connector 8-pin IEC 60130-9
Dimensions (mm) 760 x 126 x 69
Weight (Kg) 4.5
Wind Load (Kg) 0.17@ 160 km/h
Maximum Wind Velocity (km/h) 200

Chapter 1 - System Description Specifications
4Motion 55 System Manual
Table 1-41: BS-RET-DDP-ANT 3.3-3.8 Specifications
Item Description
Frequency Band (MHz) 3300-3800
Number of Elements 4
Polarization Linear, 2 x +/-45°
Gain (dB) 18
Azimuth Beamwidth (degrees) 65
Elevation Beamwidth (degrees) 6.5
Elevation Side Lobe Level (dB) <-18
Maximum Power (W) 200
Cross-polarization Discrimination (dB) >15
Front-to-Back Ratio (dB) >30
Electrical Downtilt Range (degrees) 0-10
Remote Electrical Downtilt Support Internal motor, AISG version 2 compliant
Isolation Between Ports (dB) >30
Return Loss (dB) >15
RF Interface Impedance (Ohm) 50
RF Connectors 4 x N-Type jack
RET Connector 8-pin IEC 60130-9
Dimensions (mm) 750 x 300 x 110
Weight (Kg) 10.5
Wind Load (Kg) 0.34 @ 160 km/h
Maximum Wind Velocity (km/h) 200

Chapter 1 - System Description Specifications
4Motion 56 System Manual
Table 1-42: ANT.3.5GHz, D/S,65°,16±0.5dBi Specifications
Item Description
Frequency Band (MHz) 3300-3800
Number of Elements 2
Polarization Linear, +/-45°
Gain (dB) 16 +/- 0.5
Azimuth Beamwidth (degrees) 65 +/-5
Elevation Beamwidth (degrees) 6 +/-1
Elevation Side Lobe Level (dB) <-14
Maximum Power (W) 50
Cross-polarization Discrimination (dB) -15
Front-to-Back Ratio (dB) >25
Isolation Between Ports (dB) >25
RF Interface Impedance (Ohm) 50
RF Connectors 2 x N-Type jacks
Mechanical Downtilt Range (degrees) 0-15
Dimensions (mm) 711 x 171 x 90
Weight (Kg) 2.6
Maximum Wind Velocity (km/h) Survival: 200
Operation: 160
Regulatory Compliance RoHS Compliance
2
Chapter
Commissioning of the Macro BTS


Chapter 2 - Commissioning of the Macro BTS Initial NPU Configuration
4Motion 59 System Manual
2.1 Initial NPU Configuration
2.1.1 I ntroduct ion
After completing the installation process, as described in the preceding chapter,
some basic NPU parameters must be configured locally using the CLI via the MON
port of the NPU.
Refer to “Using the Command Line Interface” on page 73 for information on how to
access the CLI either via the MON port or via Telnet and how to use it.
The following sections describe the minimum mandatory configuration actions
required to allow remote configuration of the site and to enable discovery by the
EMS system:
1”NPU Local Connectivity”
2”Site Connectivity”
3”Static Route Definition”
4”SNMP Manager Definition”
5”Mapping the AU Software Version”
6”Site ID Definition”
”Saving the Configuration”
2.1.2 NPU Loca l Connectivit y
Refer to “Accessing the CLI from a Local Terminal” on page 75 for details on
connecting locally to the NPU.
Clear existing site configuration (must be executed for "used” NPUs). Restore to
factory default and reboot using the following command:
npu# restore-factory-default
The system will reset automatically.
2.1.3 Sit e Connect ivity
2.1.3.1 Connectivity Mode
The connectivity mode determines how traffic is to be routed between the NPU and
the BSs, AAA server and external Management System servers.

Chapter 2 - Commissioning of the Macro BTS Initial NPU Configuration
4Motion 60 System Manual
The default connectivity mode is In-Band (IB) via the Data port. Alternatively, the
NPU can be managed Out-Of-Band (OOB) via the dedicated Management port.
To view the current and configured connectivity mode, use the command:
npu# show connectivity mode
To change the connectivity mode to Out-Of-Band, use the command:
npu(config)# connectivity mode outband (for details refer to “Configuring the IP
Connectivity Mode” on page 125).
2.1.3.2 VLANs Translation (Inband Connectivity Mode)
The Data port operates in VLAN-aware bridging mode (tagged-trunk mode). The
values configured for VLAN ID(s) used on this port are the VLAN IDs used
internally. These are the VLAN ID for the bearer IP interface (the default is 11)
and, in In-Band Connectivity mode, the VLAN ID of the external-management IP
interface (the default is 12).
When using In-Band connectivity via the Data port, if the value of the VLAN ID
used for management in the backbone differs from the value configured for the
external-management interface, the external-management VLAN ID should be
translated accordingly. It is recommended to configure also VLAN translation for
the bearer interface.
To enable VLAN translation and configure the required VLANs translation, run the
following commands (the examples are for backhaul Data VLAN ID 30 and
Management VLAN ID 31, assuming the default VLAN IDs for
external-management and bearer interfaces):
1Enable the Data port configuration mode (for details refer to “Enabling the
Interface Configuration Mode” on page 129):
npu(config)# interface gigabitethernet 0/10
2Enable VLAN translation (for details refer to “Enabling/Disabling VLAN
Translation” on page 136): npu(config-if)# vlan mapping enable
3Translate external-management VLAN 12 to the backhaul management VLAN
31: npu(config-if)# vlan mapping 12 31 (for details refer to “Creating a VLAN
Translation Entry” on page 137)
4Translate data VLAN 11 to the backhaul data VLAN 30:
npu(config-if)# vlan mapping 11 30
5Exit the interface configuration mode: npu(config-if)# exit
6To view the VLAN mapping parameters, run the command:
npu# show interface gigabitethernet 0/10 vlan mapping

Chapter 2 - Commissioning of the Macro BTS Initial NPU Configuration
4Motion 61 System Manual
2.1.3.3 External Management Interface
To configure the necessary parameters of the External Management interface used
for connectivity with the EMS system, run the following commands:
1Enable the External Management interface configuration mode (for details
refer to “Enabling the Interface Configuration Mode” on page 129):
npu(config)# interface external-mgmt
(there is no need to shut down the interface for configuring its parameters)
2Configure the IP address (x.x.x.x) and subnet mask (y.y.y.y). For details refer
to “Assigning an IP address to an interface” on page 146:
npu(config-if)# ip address x.x.x.x y.y.y.y
3Exit the interface configuration mode: npu(config-if)# exit
4Exit the configuration mode: npu(config)# exit
2.1.3.4 Save and Apply Changes in Site Connectivity Configuration
1Save the configuration: npu# write (otherwise, after the next time reset you will
lose the configuration changes).
2If you changed the Connectivity Mode, reset the system to apply the changes:
npu# reset
2.1.4 Static Rout e Definition
Static Route must be configured whenever the EMS server and the NPU are on
different subnets. For more details refer to “Adding a Static Route” on page 193.
Run the following command: npu(config)# "ip route x.x.x.x y.y.y.y z.z.z.z"
(x.x.x.x y.y.y.y is the network segment of the EMS server, z.z.z.z is the next-hop IP
address that should be in the segment of the external-management interface.
2.1.5 SNMP Mana ge r Definit ion
To define the communities to be used by the SNMP manager, run the command:
npu(config)# snmp-mgr ReadCommunity public ReadWriteCommunity private.
For more details refer to “Adding an SNMP Manager” on page 406.
For proper operation of the manager you should configure also the Trap Manager
parameters and enable sending traps to the defined Trap Manager (this can also
be done later via the management system):
1npu(config)# trap-mgr ip-source x.x.x.x port 162 TrapCommunity public
(x.x.x.x is the IP address of the EMS server). For more details refer to
“Adding/Modifying a Trap Manager entry” on page 409

Chapter 2 - Commissioning of the Macro BTS Initial NPU Configuration
4Motion 62 System Manual
2npu(config)# trap-mgr enable ip-source x.x.x.x
Note that if the management system is behind a NAT router, the NAT Outside IP
address (the IP of the router’s interface connected in the direction of the managed
device LAN) must be defined in the device as a Trap Manager, with traps sending
enabled. In the NAT router, Port Forwarding (NAT Traversal) must be configured
for UDP and TCP ports 161 and 162 from Outside IP (connected to the managed
device’s LAN) to Inside IP (connected to the management system’s LAN).
2.1.6 Ma pping the AU Softw a re Version
To define the software version to be used by all AUs run the command:
npu(config)# map au default <image name>, where image name is the required AU
software version (to view the AU software versions available in the NPU run the
command npu# show au image repository).
2.1.7 Sit e ID De finition
To define the site ID (Site Number): npu(config)# site identifier x
(x is the unique site identifier, a number in the range from 1 to 999999)
For more details refer to “Configuring the Unique Identifier for the 4Motion Shelf”
on page 447.
2.1.8 Saving the Configuration
To save the configuration run the command: npu# write (otherwise, after the next
time reset you will lose the configuration changes).
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 63 System Manual
2.2 Completing t he Site Configurat ion Using
Alva riSTAR
2.2.1 I ntroduct ion
After completion of the initial configuration you should be able to manage the new
Site using AlvariSTAR and continue configuring (at least) all mandatory
parameters to enable the necessary services.
For details on how to use AlvariSTAR for managing 4Motion sites refer to the
AlvariSTAR and 4Motion Device Manager User Manuals.
Verify that the Site is included in the list of devices that can be managed by
AlvariSTAR. It can be added to the list of managed devices either through the
Equipment Manager (by creating a New managed device) or through the Managed
Network window (by inclusion in a range to be discovered and activation of the
Network Scan Task from the Task Manager).
To complete the minimal configuration, open the Site’s Device Manager from the
Equipment Manager and perform the following configuration steps:
1“Site Configuration” on page 64
2“Connectivity Configuration (optional)” on page 64
3“Equipment Configuration” on page 64
4“ASNGW Configuration” on page 66 (only for Distributed ASNGW topology)
5“BS Configuration” on page 68
6“Site Sector Configuration” on page 69
7“Apply All Changes” on page 70
NOTE
The following sections list the minimum actions that must be performed for completing basic
configuration of the Site. Additional parameters may also be configured in order to complete the
entire configuration of the Site.
After configuring the mandatory parameters in each screen, click on the Apply button. Click Apply
even if you did not change any of the screen’s default parameters.
In some of the screens in the following sections there are no mandatory parameters but still you
must click on the Apply button to activate the default values.
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 64 System Manual
2.2.2 Sit e Configuration
2.2.2.1 General Tab
ASN Topology - the default is Distributed ASNGW.
If you change it to Centralized ASNGW click Apply for the device to accept the
change.
2.2.3 Connec tivit y Configurat ion (optional)
2.2.3.1 IP Interface Screen
Configure the IP address of the Bearer interface:
1Change the IP and/or any other parameter value, except VLAN ID.
2Click on Apply to accept the changes.
2.2.3.2 IP Routing Screen
The IP Routing screen is used to define the static routes for traffic originating from
the NPU.
The static route for management traffic was already configured (see “Static Route
Definition” on page 61).
If necessary (depending on your specific backhaul network) you may configure
additional static route(s) for Bearer Traffic and/or Control Traffic. If additional
static routes were defined (or if you made any changes in the already configured
static route), click on the Apply button.
2.2.4 Equipment Configuration
2.2.4.1 AU
AU entities must be created for all installed AUs (you may create an AU entity also
for AUs that are not installed yet).
1Right click on the AU node in the Navigation Pane and select Create. The New
AU definition window will open. You can also double-click on an empty slot in
the Site Equipment View Page to open the New AU window for the selected
slot.
To create a new AU entity:
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 65 System Manual
2In the New AU definition window, define the following:
»AU number (AU Slot)
»Type (in current release only AU 4x4 Modem is applicable)
3Click Apply.
4Repeat the process for all required AU entities.
2.2.4.2 ODU
ODU entities must be created for all installed ODUs (you may create an ODU
entity also for ODUs that are not installed yet).
1Right click on the ODU node in the Navigation Pane and select Create. The
New ODU definition window will open.
2In the New ODU definition window, define the following:
»ODU number
»ODU Type
3Click Apply.
4In the ODU General screen of the applicable ODU, in the Ports Configuration
section, configure the Tx Power for the relevant Tx/Rx port(s). Click on the
Apply button for the device the accept the configuration.
5Repeat the process for all required ODU entities.
2.2.4.3 Antenna
Antenna entities must be created for all installed and connected antennas (you
may create an Antenna entity also for antennas that are not installed/connected
yet).
1In the Antenna screen, click on the Add New Antenna button.
2In the Antenna Parameters section, define Antenna Product Type
To create a new ODU entity:
To create a new Antenna entity:
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 66 System Manual
3Click Apply.
4Repeat the process for all required Antenna entities.
2.2.4.4 GPS
The default GPS Type is Trimble. If there is no GPS, the value should be changed
to None.
Click Apply for the device to accept the change.
2.2.5 ASN GW Configuration
2.2.5.1 AAA Screen
1Configure the following mandatory parameters:
»Primary Server IP Address
»RADIUS Shared Secret
»ASNGW NAS ID
2Click Apply for the device to accept the configuration.
2.2.5.2 Service Screen
2.2.5.2.1 Service Interface Tab
At least one Service Interface for data must be defined. If a dedicated management
station for CPEs is being used, a suitable Service Interface for management must
also be defined.
1Click on the Add Service Interface button and configure the following
mandatory parameters:
»Service Interface Name
»Type
»Tunnel Destination IP (IP-in-IP Service Interface)
»Service VLAN ID (VLAN Service Interface)
»Default Gateway IP Address (VLAN Service Interface)
NOTE
ASNGW screens are available only for Distributed ASNGW topology (see also “Site
Configuration” on page 64.

Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 67 System Manual
2Click Apply for the device to accept the configuration.
2.2.5.2.2 Service Groups Tab
At least one Service Group associated with a defined Service Interface for data
must be defined. If a dedicated management station for CPEs is being used, a
suitable Service Group associated with the defined Service Interface for
management must also be defined.
1Click on the Add Service Group button and configure at least the following
mandatory parameters:
»Name
»Type
»Service Interface Name
»DHCP Function Mode
»DHCP Own IP Address
»External DHCP Server IP Address (Relay mode)
»IP Address Pool From (Server mode)
»IP Address Pool To (Server mode)
»Subnet Mask (Server mode)
»DNS Server IP Address (Proxy mode)
2Click Apply for the device to accept the configuration.
2.2.5.3 SFA Screen -Classification Rules Tab
Create the necessary Classification Rule(s) according to the relevant type of traffic,
and click Apply.
2.2.5.4 Service Profiles
At least one Service Profile must be defined and associated with an already
defined Service Group.
1Right-click on the Service Profile node and select Create. The New Service
Profile window is displayed.
2Define the Name of the New Service Profile and click Apply.
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 68 System Manual
3The new Service Profile added to the list of available Service Profiles in the
navigation tree. Select it to continue the configuration process.
4Click Add in the Service Flow area.
5Configure the applicable general parameters of the Service Flow.
6Configure the applicable QoS parameters of Service Flow for UL and DL (for
Data delivery type=BE it will be Maximum Sustained Traffic Rate and Traffic
Priority)
7Associate this Service Flow with previously created Classification Rule(s).
8Change the Profile Status to Enable
9Click Apply for the device to accept the configuration.
2.2.6 BS Configuration
2.2.6.1 Creating a New BS Entity
1Right click on the BS level entry in the Navigation Pane. The New BS definition
window will open.
2In the New BS definition window, define the following:
»BS ID LSB
»Operator ID
3Click Apply.
4Complete the BS configuration as described in the following sections.
2.2.6.2 Radio
2.2.6.2.1 Basic Screen
2.2.6.2.1.1 General Tab
1Configure the following mandatory parameters:
»Name
»Bandwidth
»Center Frequency
To create a new BS entity:
Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 69 System Manual
2Click Apply for the device to accept the configuration.
3You will be prompted to properly configure some additional parameters.
4Click Apply for the device to accept the configuration.
5Select the Radio Advanced screen and click Apply to complete the
configuration.
2.2.6.3 R6/R8 Bearer Interface
2.2.6.3.1 Bearer Tab
1Configure the following mandatory parameters:
»IP Address
»IP Subnet Mask
»Default Gateway
2Enable/Disable ASN-GW Pools
2.2.6.3.2 Authentication Tab
1Configure the mandatory Default Authenticator IP Address parameter.
2Click Apply for the device to accept the configuration.
2.2.7 Sit e Se ctor Configuration
1Right click on the Site Sector level entry in the Navigation Pane. The New Site
Sector definition window will open.
2In the New Site Sector definition window, define the Site Sector Number
3Click Apply.
To create a new Site Sector entity:

Chapter 2 - Commissioning of the Macro BTS Completing the Site Configuration Using AlvariSTAR
4Motion 70 System Manual
4At least one Site Sector Association must be defined for each Site Sector. Click
on the Add Sector Association button and configure all the parameters in the
applicable line of the Sector site Association table:
»BS ID LSB
»AU Slot Number
»AU Port Number
»ODU Number
»ODU Port Number
»Antenna Number
»Antenna Port Number
5Click Apply for the device to accept the configuration.
2.2.8 Apply All Changes
If you changed any of the parameters that are applied only after reset of the NPU
such as ASN Topology or Configured GPS Type (indicated by a pop-up message
after applying the change), you must reset the NPU (in the NPU screen select the
Reset option in the Shutdown Operation parameter). This will cause also
automatic reset of all AUs
To fully apply all the Site Sector configuration changes, reset all the relevant AUs
(in the Control tab of each applicable AU screen select the Reset option in the
Shutdown Operation parameter). It is not necessary to reset each of the AUs if you
reset the NPU.
3
Chapter
Operation and Administration of the
Macro BTS

Chapter 3 - Operation and Administration of the Macro BTS
4Motion 72 System Manual
In T his Cha pt e r:
“Using the Command Line Interface” on page 73
“Managing Software Upgrade” on page 99
“Shutting Down/Resetting the System” on page 119
“NPU Configuration” on page 122
“Managing MS in ASN-GW” on page 450
“Managing AUs” on page 454
“Managing ODUs” on page 469
“Managing Antennas” on page 485
“Managing BSs” on page 493
“Managing Sectors” on page 646
“Monitoring HW and SW Components” on page 660
“Troubleshooting” on page 670

Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 73 System Manual
3.1 Using t he Com mand Line Interfa c e
All 4Motion system components are managed via the NPU module. The AU is not
accessed directly: any configuration change or status enquiry is sent to the NPU
that communicates with other system components.
The following system management options are available:
Accessing the Command Line Interface (CLI) locally via the MON port
Using Telnet/Secure Shell (SSH) to access the CLI
The CLI is a configuration and management tool that you can use to configure and
operate the 4Motion system, either locally or remotely, via Telnet/SSH. The
following are some administrative procedures to be executed using the CLI:
Specifying the boot mode to be used at the next system reset
Selecting the connectivity mode
Shutting down/resetting 4Motion
Configuring and operating 4Motion
Monitoring hardware and software components
Executing debug procedures
Executing software upgrade procedures
This section provides information about:
“Accessing the CLI” on page 75
“Command Modes” on page 78
“Interpreting the Command Syntax” on page 79
“Using the CLI” on page 80
“Managing Users and Privileges” on page 83

Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 74 System Manual
“Managing Secure Shell (SSH) Parameters” on page 92
“Managing the Session” on page 94
3.1.1 Ma na ging the M acro Out door BTS
The following section describe the CLI when using it to manage the Indoor Macro
BTS equipment. The same CLI is used also to manage the Macro Outdoor BTS
equipment, with the following changes:
3.1.1.1 CSCD Port and Local Management
There is no CSCD port in the Macro Outdoor BTS. Local Management may be
supported only on the Management port (in in-band or unified connectivity mode).
It should be noted that local management will be blocked if connectivity mode is
set to out-of-band.
3.1.1.2 Management Port
In the Macro Outdoor BTS the management port is marked MNG, while in the
Indoor BTS it is marked MGMT. All references to MGMT port are applicable to the
MNG port of the Macro Outdoor BTS.
3.1.1.3 AVU, PIU and PSU
AVU and its Fans, PIUs and PSUs do not exist in the Macro Outdoor BTS. These
shelf components cannot be manage and the status of all the following is
indicated as existing and healthy:
2 PIUs
4 PSUs
AVU
10 AVU Fans
3.1.1.4 Alarm In/Out Connectors and Dry-Contacts Management
Alarm In-Out connectors do not exist in the Macro Outdoor BTS. All commands
related to dry-contact in/out are not applicable.
3.1.1.5 Power Feeder
Power Feeders are not applicable for the Macro Outdoor BTS
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 75 System Manual
3.1.1.6 AUs
Up to a maximum of six AUs can be supported in the Macro Outdoor BTS. The
following table details the mapping of Macro Outdoor BTS AUs to Slot numbers:
3.1.1.7 ODUs and Antennas
Up to a maximum of 24 ODUs and 24 Antennas can be defined for the Macro
Outdoor BTS.
3.1.2 Accessing t he CLI
You can access the CLI, locally, via an ANSI ASCII terminal or PC that is
connected via the DATA port of the NPU. You can also use Telnet/SSH to remotely
access the CLI.
This section describes the procedures for:
“Accessing the CLI from a Local Terminal” on page 75
“Accessing the CLI From a Remote Terminal” on page 76
3.1.2.1 Accessing the CLI from a Local Terminal
1Use the MON cable to connect the MON connector of the NPU to the COM port
of your ASCII ANSI terminal or PC.
2Run a terminal emulation program, such as HyperTerminal™.
3Set the communication parameters listed in the following table:
Table 3-1: Mapping of Macro Outdoor BTS AUs to Slot #
AU Slot #
AU of NAU 7
SAU 1
Master AU of DAU 1 3 (This is the AU with the Sync connector)
Slave AU of DAU 1 2
Master AU of DAU 2 9 (This is the AU with the Sync connector)
Slave AU of DAU 2 8
To access the CLI via the MON connector:
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 76 System Manual
4The login prompt is displayed. (Press Enter if the login prompt is not
displayed.) Enter your login ID and password to log in to the CLI.
After you provide your login information, the following command prompt is
displayed:
npu#
This is the global command mode. For more information about different command
modes, refer to Section 3.1.3.
3.1.2.2 Accessing the CLI From a Remote Terminal
The procedure for accessing the CLI from a remote terminal differs with respect to
the IP connectivity mode. The Ethernet port and IP interface you are required to
configure for enabling remote connectivity is different for each connectivity mode.
For more information about connectivity modes, and Ethernet ports and IP
interface used for operating the 4Motion system, refer “Managing the IP
Connectivity Mode” on page 123.
Table 3-2: COM Port Configuration
Parameter Value
Baud rate 115200
Data bits 8
Stop bits 1
Parity None
Flow control Xon/Xoff
Port Connected COM port
NOTE
The default login ID and password are:
Login ID: admin
Password: admin123
To access the CLI from a remote terminal, execute the following procedure:
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 77 System Manual
1Assign an IP address to the external-management interface. For this, execute
the following procedure. (Refer Table 3-9 for more information about the IP
interface to be configured for the connectivity mode you have selected).
aRun the following command to enable the interface connectivity mode for
the external-management interface:
npu(config)# interface external-mgmt
bRun the following command to assign an IP address to this interface:
npu(config-if)# ip address <ip-address> <subnet-mask>
2Connect the Ethernet cable to the DATA connector on the front panel of the
NPU. (Refer Table 3-9 for more information about the Ethernet port to be used
for the connectivity mode you have selected).
3To enable exchange of packets, create IP-level connectivity between the remote
machine and the external-management interface. Typically, the DATA port
should be connected to a switch port operating in trunk mode, and the remote
machine is connected to another port of the same switch that is configured to
operate in access mode with the external-management VLAN ID (default is 12).
4From the remote terminal, execute the following command to use Telnet/SSH
to access the IP address of the external-management interface:
telnet <ip address of external-management interface>
ssh <ip address of external-management interface>
Refer to “Managing Secure Shell (SSH) Parameters” on page 92 for details on
managing SSH parameter.
5At the prompt, enter your login ID and password.
IMPORTANT
The in-band connectivity mode is the default connectivity mode; the DATA port and
external-management VLAN are the default Ethernet port and IP interface that are configured for
the in-band connectivity mode. The following procedure can be used for accessing the CLI when
the in-band connectivity mode is selected. This procedure is identical for all other connectivity
modes. However, the Ethernet port, VLAN, and IP interface to be configured will differ for the
out-of-band and unified connectivity modes, as listed in Table 3-9.
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 78 System Manual
After you provide your login information, the following command prompt is
displayed:
npu#
This is the global command mode. For more information about different command
modes, refer to Section 3.1.3.
3.1.3 Com mand M odes
The CLI provides a number of command modes, some of which are listed in the
following table for executing different types of commands:
The following table lists the commands to be executed for entering/exiting a
particular command mode:
NOTE
The default login ID and password are:
Login ID: admin
Password: admin123
Table 3-3: CLI Command Modes
Mode Used for... Command Prompt
Global configuration mode Executing all configuration
commands
npu(config)#
Global command mode Executing all other commands
such as show and delete
commands
npu#
Interface configuration mode Executing all commands for
configuring physical and IP
interfaces.
npu(config-if)#
Standard/extended ACL mode Executing commands for
configuring standard and
extended ACLs
npu(config-std-nacl)#
npu(config-ext-nacl)#
Table 3-4: Commands to Enter/Exit a Command Mode
To... Run the Command... The Command Mode is
Now...
Enter the global configuration
mode
npu# config terminal npu(config)#
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 79 System Manual
3.1.4 Interpreting t he Command Syntax
The following table lists the conventions used in the command syntax for all
4Motion commands:
Enter the interface configuration
mode
npu(config)# interface
{<interface-type>
<interface-id> |internal-mgmt
|external-mgmt | bearer |
local-mgmt | npu-host |
all-au}
npu(config-if)#
Exit the configuration mode and
enter the global command
mode.
npu(config)# end
npu (config-if)# end
npu#
npu#
Exit the current configuration
mode by one level
npu (config-if)# exit npu(config)#
Table 3-5: Conventions Used in the 4Motion Command Syntax
Convention Description Example
{ } Indicates that the parameters
enclosed in these brackets are
mandatory, and only one of these
parameters should be specified.
npu(config)# limit {cpu | memory}
([softlimit <limit>] [hardlimit <limit>])
This command is used for specifying the soft
and hard limits for memory and CPU
utilization. The cpu/memory parameters are
enclosed within {} brackets, indicating that
their presence is mandatory, and that only
one of these parameters is required.
( ) Indicates that one or all
parameters enclosed within these
brackets are optional. However,
the presence of at least one
parameter is required to
successfully execute this
command.
npu(config)# limit {cpu | memory}
([softlimit <limit>] [hardlimit <limit>])
This command is used for specifying the soft
and hard limits for memory and CPU
utilization. The softlimit and hardlimit
parameters are enclosed within () brackets,
indicating that you are required to specify
the value of at least one of these parameters
to successfully execute this command.
Table 3-4: Commands to Enter/Exit a Command Mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 80 System Manual
3.1.5 Using the CLI
To help you use the CLI, this section provides information about:
“Using Control Characters” on page 81
“Using the CLI Help” on page 81
“Using the History Feature” on page 82
[ ] Indicates that the parameter
enclosed within these brackets is
optional.
npu(config)# reboot from shadow
[<shadow image name>]
This command is used to reboot the system
with the shadow image. The shadow image
name parameter is enclosed with the [ ]
brackets, indicating that it is optional. If you
do not specify the value of this parameter,
the system automatically boots up with the
last downloaded shadow image.
< > Indicates that the parameter is
mandatory and requires a
user-defined value (and not a
discrete value).
npu(config)# load to shadow <shadow
image name>
This command is used to load the system
with a particular shadow image. It is
mandatory to specify a value for the shadow
image name parameter; otherwise an error
is raised by the system. The value of this
parameter is not a discrete value; you are
required to specify a value for this
parameter.
| Indicates the OR conditional
operator that is used between two
or more parameters. The
presence of this parameter
indicates that only one of the
parameters separated by the I
conditional parameter should be
specified in the command.
npu(config)# pm-group enable npu
{R6InterfaceTotal | R6InterfaceBs |
ProvisionedQOS | R3Interface |
LoadBalancing | InitialNe | ServiceFlow}
This command is used to specify the group
for which performance data collection and
storage is to be enabled. The | conditional
operator indicates that only one parameter
should be specified.
NOTE
In this document, all discrete values are specified in boldface, and all user-defined values are not
bold.
Table 3-5: Conventions Used in the 4Motion Command Syntax
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 81 System Manual
“Using Miscellaneous Commands” on page 82
“Privilege Levels” on page 82
3.1.5.1 Using Control Characters
Control characters refer to special characters that you can use to recall or modify
previously-executed commands. The following table lists the control characters to
be used for executing commands on the CLI:
3.1.5.2 Using the CLI Help
The CLI provides help that you can access while using the CLI. Execute the
following command to obtain help for a specific command:
help [“<text>”]
Specify the command name as the parameter to view help for this command. For
example, to obtain help for the show resource limits command, run the
following command:
npu# help “show resource limits”
The help for the show resource limits command is displayed.
Table 3-6: Control Characters for Using the CLI
Press To...
Up/Down arrow keys Scroll the previously executed CLI commands.
Press Enter if you want to select and execute a
particular command.
Right/Left arrow keys Navigate to the right/left of the selected
character in a command.
Home key Navigate to the first character of a command.
End key Navigate to the last character of a command.
Backspace key Delete the characters of a command.
TAB key Prompt the CLI to complete the command for
which you have specified a token command.
Remember that the CLI that is the nearest
match to the token command that you have
specified is displayed.
? key View the list of commands available in the
current mode. If you press ? after a command, a
list of parameters available for that command is
displayed.
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 82 System Manual
If you do not provide the command name as the parameter, all commands that
can be executed in the current command mode are displayed.
3.1.5.3 Using the History Feature
The history feature of the CLI maintains a sequential list of all previously executed
commands. The following table lists the commands that you can run to access,
edit or execute a command from the command history list:
3.1.5.4 Using Miscellaneous Commands
The following table lists other miscellaneous commands that you can execute in
any mode while using the CLI:
3.1.5.5 Privilege Levels
All commands that can be executed using the CLI are assigned privilege levels
between 1 and 10, where 1 is the lowest, and 10 is the highest. In addition, each
user is assigned a privilege level; the user can access only those commands for
which the privilege level is the same or lower than the user’s privilege level.
The default user, admin, is assigned privilege level 10. However, if you are logging
in as admin, you can execute certain additional commands for managing users
and enabling passwords for privilege levels. For more information about managing
users and privileges, refer to Section 3.1.6.
Table 3-7: Commands for Using the History Feature
Run the command... To...
show history Obtain a list of previously executed commands (up to 14).
!! Execute the last command displayed in the list of previously executed commands.
!<n> Execute the nth command in the list of previously-executed commands.
!<string> Execute the most recent command in the CLI history that starts with the string
entered as the value for the string parameter.
Table 3-8: Miscellaneous Commands
Enter the command... To...
exit Exit the current configuration mode. In global command mode this command
will cause termination of the session.
clear screen Clear the screen.

Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 83 System Manual
3.1.6 Ma na ging Use rs and Privile ge s
To enable multi-level access to the CLI, you can create and manage multiple
users, and assign privilege levels for each user. The privilege level determines
whether a user is authorized to execute a particular command. The privilege level
is pre-configured for each command, and can be between 1 and 10, where 1 is the
lowest and 10 is the highest. The user can execute all commands for which the
privilege level is equal to or lower than the default privilege level assigned to the
user.
You can also configure passwords for each privilege level. Users with lower
privilege levels can enter this password to enable higher privilege levels.
This section describes the commands for:
“Managing Users” on page 83
“Managing Privileges” on page 86
“Enabling/Disabling Higher Privilege Levels” on page 88
“Displaying Active Users” on page 90
“Displaying All Users” on page 91
“Displaying the Privilege Level” on page 91
3.1.6.1 Managing Users
You can add/modify/delete one or more users for accessing the CLI either
through a local or remote terminal.
This section describes the commands for:
“Adding/Modifying Users” on page 84
IMPORTANT
By default, the privilege level of users logging in with admin privileges is 10. However, the admin
user can execute some additional commands for adding users and enabling passwords for different
privilege levels.
IMPORTANT
Only users who have logged in as admin can add/modify/delete users.
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 84 System Manual
“Deleting a User” on page 85
3.1.6.1.1 Adding/Modifying Users
To add/modify a user, and assign a username, password, and privilege level, run
the following command:
npu(config)# username <user-name> password <passwd> privilege
<1-10>
IMPORTANT
Only users who have logged in as admin can execute this task.
IMPORTANT
An error may occur if:
You are not logged in as the admin.
The username or password that you have specified is more than 20 characters.
The privilege level that you have specified is not within the range, 1-10.
Command
Syntax
npu(config)# username <user-name> password <passwd> privilege <1-10>
Privilege
Level
10
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
username
<user-name>
Indicates the user name of
the user to be added.
Mandatory N/A String (up to 20
characters and
case-sensitive)
password
<passwd>
Indicates the password to be
assigned to the user to be
added.
Optional passwor
d
String (up to 20
characters and
case-sensitive)
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 85 System Manual
3.1.6.1.2 Deleting a User
To delete a user, run the following command:
npu(config)# no user <username>
privilege <1-10> Indicates the privilege level to
be assigned to a user. The
user will be permitted to
execute all commands for
which the privilege level is
equal to or lower than the
value of this parameter.
Mandatory N/A 1-10
Command
Modes
Global configuration mode
IMPORTANT
Only users who have logged in as admin can execute this task.
IMPORTANT
An error may occur if:
You are not logged in as admin user.
The username that you have specified does not exist. Remember that user names are
case-sensitive.
You are trying to delete an active user or the admin user.
Command
Syntax
npu(config)# no user <username>
Privilege
Level
10
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 86 System Manual
3.1.6.2 Managing Privileges
To enable users to execute commands that require a higher privilege level (than
their currently configured default level), you can configure a password for each
privilege level. Other users can then use the password you have specified to
enable a higher privilege level.
This section describes the commands for:
“Assigning a Password for a Privilege Level” on page 86
“Deleting a Password for a Privilege Level” on page 87
3.1.6.2.1 Assigning a Password for a Privilege Level
To assign a password for a privilege level, run the following command:
npu(config)# enable password [Level <1-10>] <password>
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
username
<name>
Indicates the username of the
user to be deleted.
Mandatory N/A String (upto 20
characters and
case-sensitive)
Command
Modes
Global configuration mode
IMPORTANT
Only users who have logged in as admin can assign or delete passwords for any privilege level.
IMPORTANT
Only users who have logged in as admin can execute this command.
IMPORTANT
After you execute this command, any user can use this password to enable the (higher) privilege
level for which you have configured the password. For more information about using passwords for
enabling higher privilege levels, refer Section 3.1.6.3.
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 87 System Manual
3.1.6.2.2 Deleting a Password for a Privilege Level
To delete a password for a privilege level, run the following command:
npu(config)# no enable password [Level <1-10>]
IMPORTANT
An error may occur if:
You are trying to configure a password for a privilege level that is higher than your default
privilege level.
The password that you have specified is more than 20 characters.
The privilege level that you have specified is not within the range, 1-10.
Command
Syntax
npu(config)# enable password [Level <1-10>] <password>
Privilege
Level
10
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
[Level <1-10>] Indicates the privilege level
for which a password is to be
enabled.
Optional 10 1-10
<password> Denotes the password to be
assigned for the current
privilege level.
Mandatory N/A String (up to 20
characters and
case-sensitive)
Command
Modes
Global configuration mode
IMPORTANT
Only users who have logged in as admin can execute this command.
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 88 System Manual
3.1.6.3 Enabling/Disabling Higher Privilege Levels
You can execute commands that require higher privilege levels. If the admin user
has configured a password for that level, you can use that password to enable
higher privilege levels.
For example, if your privilege level is 1, you can provide the password configured
for privilege level 10 to execute all commands that require privilege level 10.
This section describes the commands for:
“Enabling a Higher Privilege Level” on page 89
“Returning to the Default Privilege Level” on page 90
IMPORTANT
An error may occur if:
The privilege level that you have specified is not within the range, 1-10.
You are trying to delete a password for a privilege level that is higher than your default privilege
level.
Command
Syntax
npu(config)# no enable password [Level <1-10>]
Privilege
Level
10
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
[Level <1-10>] Indicates the privilege level
for which a password is to be
disabled.
Optional 10 1-10
Command
Syntax
Global configuration mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 89 System Manual
3.1.6.3.1 Enabling a Higher Privilege Level
1Log in to the CLI.
2Run the following command to specify the privilege level and password:
npu(config)# enable [Level <1-10>]
3At the password prompt, specify the password configured for the privilege level
that you have specified.
If you specify the correct password, you are logged in to the CLI with the privilege
level that you had specified. You can now execute all commands that require the
current privilege level.
You can, at any time, return to your default privilege level. For details, refer
Section 3.1.6.3.2.
To enable a higher privilege level:
NOTE
You can display your current privilege level, using the following command:
npu# show privilege
NOTE
An error may occur if:
You have specified an incorrect password. Remember that all passwords are case-sensitive.
No password is not configured for the privilege level you are trying to access.
Command
Syntax
npu(config)# enable [Level <1-10>]
Privilege
Level
10
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 90 System Manual
3.1.6.3.2 Returning to the Default Privilege Level
Run the following command to disable the current privilege level, and return to
your default privilege level:
npu(config)# disable [Level <1-10>]
After you run this command, you automatically return to your default privilege
level. You can display your current privilege level, using the following command:
npu# show privilege
3.1.6.4 Displaying Active Users
To display all active users, run the following command:
npu# show users
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
[Level <1-10>] Indicates the privilege level
you want to enable.
Mandatory N/A 1-10
Command
Modes
Global configuration mode
Command
Syntax
npu(config)# disable [Level <1-10>]
Privilege
Level
1
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
[Level <1-10>] Indicates the privilege level
you want to disable.
Mandatory N/A 1-10
Command
Modes
Global command mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 91 System Manual
3.1.6.5 Displaying All Users
To display all users, run the following command:
npu# listuser
3.1.6.6 Displaying the Privilege Level
To display your current privilege level, run the following command:
npu# show privilege
Command
Syntax
npu# show users
Privilege
Level
1
Display
Format
Line User Peer Address
0 con <user name> <value>
Command
Syntax
Global command mode
Command
Syntax
npu# listuser
Privilege
Level
1
Display
Format
User Mode
User 1 <value>
User 2 <value>
User 3 <value>
Command
Syntax
Global command mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 92 System Manual
3.1.7 Ma na ging Se cure Shell (SSH) Pa ram et ers
The SSH parameters define the parameters used for establishing remote secure
access to the device using SSH protocol rather than the plaintext-based insecure
Telnet protocol.
This section includes:
“Configuring SSH Parameters” on page 92
“Restoring the Default Values of SSH Parameters” on page 93
“Displaying the SSH Parameters” on page 94
3.1.7.1 Configuring SSH Parameters
To configure SSH parameters, run the following command:
npu(config)# ip ssh {version compatibility | cipher ([des-cbc]
[3des-cbc]) | auth ([hmac-md5] [hmac-sha1]) }
Command
Syntax
npu# show privilege
Privilege
Level
1
Display
Format
Current privilege level is <value>
Command
Syntax
Global command mode
Command
Syntax
npu(config)# ip ssh {version compatibility | cipher ([des-cbc]
[3des-cbc]) | auth ([hmac-md5] [hmac-sha1]) }
Privilege
Level
10
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 93 System Manual
3.1.7.2 Restoring the Default Values of SSH Parameters
To restore the default value of one or more SSH parameters, run the following
command:
npu(config)# no ip ssh {version compatibility | cipher ([des-cbc]
[3des-cbc]) | auth ([hmac-md5] [hmac-sha1]) }.
To restore the default values of all SSH parameters run the following command:
npu(config)# no ip ssh
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
version
compatibility
The SSH version that can be
used: The default is SSH
version 2. The command
npu(config)# ip ssh
version compatibility
enables compatibility with
both SSH version 1 and SSH
version 2.
Optional SSH2 version
compatibility
cipher
([des-cbc]
[3des-cbc])
The encryption algorithm
used by the SSH protocol:
DES-CCBC or 3DES-CBC.
Optional des-cbc des-cbc
3des-cbc
auth ([hmac-md5]
[hmac-sha1])
The authentication
mechanism used by the SSH
protocol: HMAC-MD5 or
HMAC-SHA1.
OPtional hmac-sh
a1
hmac-md5
hmac-sha1
Command
Modes
Global configuration mode
Command
Syntax
npu(config)# no ip ssh {version compatibility | cipher ([des-cbc]
[3des-cbc]) | auth ([hmac-md5] [hmac-sha1]) }
Privilege
Level
10
Command
Modes
Global configuration mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 94 System Manual
3.1.7.3 Displaying the SSH Parameters
To display the current configuration of the SSH parameters, run the following
command:
npu# show ip ssh
3.1.8 Ma na ging the Session
This section includes:
“Locking the Session” on page 94
“Managing the Session Timeout” on page 95
3.1.8.1 Locking the Session
To lock the session, run the following command:
npu# lock
This will prevent unauthorized persons from using the CLI without
terminationg the session. The following message will be displayed:
CLI console locked
Enter Password to unlock the console:
Command
Syntax
npu# show ip ssh
Privilege
Level
1
Display
Format
Version : <value>
Cipher Algorithm : <value>
Authentication : <value>
Command
Modes
Global command mode
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 95 System Manual
To resume the session, you must enter the password used for
initiating it.
3.1.8.2 Managing the Session Timeout
The session timeout parameter defines the maximum allowed inactivity time after
which the session will be terminated automatically. The default timeout is 1800
seconds. You can define a different value for the current Telnet/SSH session. You
can also change the timeout value for the MON port sessions, that will apply also
to future sessions via the MON port.
This section includes:
“Enabling the Line Configuration Mode” on page 95
“Configuring the Session Timeout” on page 96
“Restoring the Default Value of the Session Timeout” on page 97
“Displaying a Session Timeout” on page 97
3.1.8.2.1 Enabling the Line Configuration Mode
To enable the line configuration mode, run the following command:
npu(config)# line {console | vty}
After enabling the line configuration mode you can execute any of the following
tasks:
Command
Syntax
npu# lock
Privilege
Level
10
Command
Modes
Global command mode
IMPORTANT
An error will occur if you select console when using Telnet/SSH or vice versa. In this case the
following error message will be displayed:
Cannot configure for other terminals
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 96 System Manual
“Configuring the Session Timeout” on page 96
“Restoring the Default Value of the Session Timeout” on page 97
3.1.8.2.2 Configuring the Session Timeout
To configure the session timeout, run the following command:
npu(config-line)# exec-timeout <integer (1-18000)>
Command
Syntax
npu(config)# line {console | vty}
Privilege
Level
10
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
console | vty The terminal running the
session to be managed:
Select console if you are
connected via the MON port.
Select vty if you are
connected via Telnet/SSH.
Mandatory N/A console
vty
Command
Modes
Global configuration mode
IMPORTANT
For Telnet/SSH sessions, the modified timeout is applicable only for the current session. Whenever
you start a new session the default timeout (1800 seconds) will apply.
Command
Syntax
npu(config-line)# exec-timeout <integer (1-18000)>
Privilege
Level
10
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 97 System Manual
3.1.8.2.3 Restoring the Default Value of the Session Timeout
To restore the default value of 1800 seconds for the current session timeout, run
the following command:
npu(config-line)# no exec-timeout
3.1.8.2.4 Displaying a Session Timeout
To display the current configuration of a session timeout, run the following
command:
npu# show line {console | vty <line>}
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
<integer
(1-18000)>
The session timeout, in
seconds.
Mandatory N/A 1-18000
(seconds)
Command
Modes
Line configuration mode
Command
Syntax
npu(config-line)# no exec-timeout
Privilege
Level
10
Command
Modes
Line configuration mode
Command
Syntax
npu# show line {console | vty <line>}
Privilege
Level
1
Chapter 3 - Operation and Administration of the Macro BTS Using the Command Line Interface
4Motion 98 System Manual
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
console | vty
<line>
The session for which the
timeout should be displayed:
console: a session via the
MON port (even if there is
currently no active session
via the MON port).
vty #: An active Telnet/SSH
session number #.
To view currently active
sessions refer to
Section 3.1.6.4.
Mandatory N/A console
vty #, where
# is the
number of a
currently
active
Telnet/SSH
session.
Display
Format
Current Session Timeout (in secs) = <value>
Command
Modes
Global command mode
Chapter 3 - Operation and Administration of the Macro BTS Managing Software Upgrade
4Motion 99 System Manual
3.2 Mana ging Softw are Upgrade
This section includes:
“Before You Start” on page 99
“Upgrading the NPU” on page 99
“Upgrading the AU” on page 106
3.2.1 Before You St art
To load new NPU/AU software files to the unit's flash memory, you are required to
execute a simple loading procedure using a TFTP application.
Before performing the upgrade procedure, ensure that you have the most recent
instructions, and that the correct software files are available on your computer.
The NPU flash stores two NPU software files (Operational and Shadow) and three
AU software files. When you download a new NPU software file to the NPU flash,
the shadow file is overwritten with the newly downloaded file. When loading a new
AU software file, the oldest file among the AU software files that are not mapped to
any AU slot is overwritten. If all AU software files in the NPU flash are mapped to
AU slots - a new AU SW file cannot be loaded.
3.2.2 Upgra ding t he NPU
To upgrade the NPU, first configure the TFTP server that you want to use for the
software version download, and then download the image to the NPU flash. You
can then reboot the NPU with the downloaded image. After you have tested and
verified that the NPU is functioning properly with the shadow image, you can
make the shadow image as the operational image.
NOTE
To view the current NPU software files, refer to “Displaying the Operational, Shadow, and
Running Versions” on page 103.
To view the current AU software files, refer to “Displaying Images Residing in the Flash”
on page 118. To view which files are mapped to AU slot(s), refer to “Displaying the
AU-to-Image Mapping” on page 115.
Chapter 3 - Operation and Administration of the Macro BTS Managing Software Upgrade
4Motion 100 System Manual
3.2.2.1 Executing the Upgrade Procedure
“Step 1: Configuring the TFTP Server”
“Step 2: Triggering Software Download”
“Step 3: Resetting and Booting the NPU Using the Shadow Image”
“Step 4: Making the Shadow Version Operational”
3.2.2.1.1 Step 1: Configuring the TFTP Server
To initiate the NPU software upgrade procedure, start with configuring the TFTP
server to be used for the software version download.
To configure the TFTP server, run the following command:
npu(config)# software version server <server ip>
NOTE
The operational image is the default image used for rebooting the NPU after system reset. The
shadow image is the downloaded image that you can use to boot up the NPU. However, the next
time the system is reset, it is the operational image that is used to boot up the NPU.
To execute the upgrade procedure:
IMPORTANT
An error may occur if you execute this command when another software download is already in
progress.
Command
Syntax
npu(config)# software version server <server ip>
Syntax
Description Parameter Description Presence Default
Value
Possible
Values
<server ip> Denotes the IP address of the
TFTP server to be used for
the software version
download.
Mandatory N/A Valid IP
address