Japan Radio Co NKE2632 Solid State S-Band Marine Radar User Manual Installation Manual Part 11
Japan Radio Co Ltd. Solid State S-Band Marine Radar Installation Manual Part 11
Contents
- 1. Installation Manual Part 1
- 2. Installation Manual Part 2
- 3. Installation Manual Part 3
- 4. Installation Manual Part 4
- 5. Installation Manual Part 5
- 6. Installation Manual Part 6
- 7. Installation Manual Part 7
- 8. Installation Manual Part 8
- 9. Installation Manual Part 9
- 10. Installation Manual Part 10
- 11. Installation Manual Part 11
- 12. Instruction Manual Operation Part 1
- 13. Instruction Manual Operation Part 2
- 14. Instruction Manual Operation Part 3
- 15. Instruction Manual Operation Part 4
- 16. Instruction Manual Funtion Part 1
- 17. Instruction Manual Funtion Part 2
- 18. Instruction Manual Funtion Part 3
- 19. Instruction Manual Funtion Part 4
- 20. Instruction Manual Funtion Part 5
- 21. Instruction Manual Funtion Part 6
Installation Manual Part 11
6. Appendix > 6.6 Scanner Unit Interconnection Unit
6-176
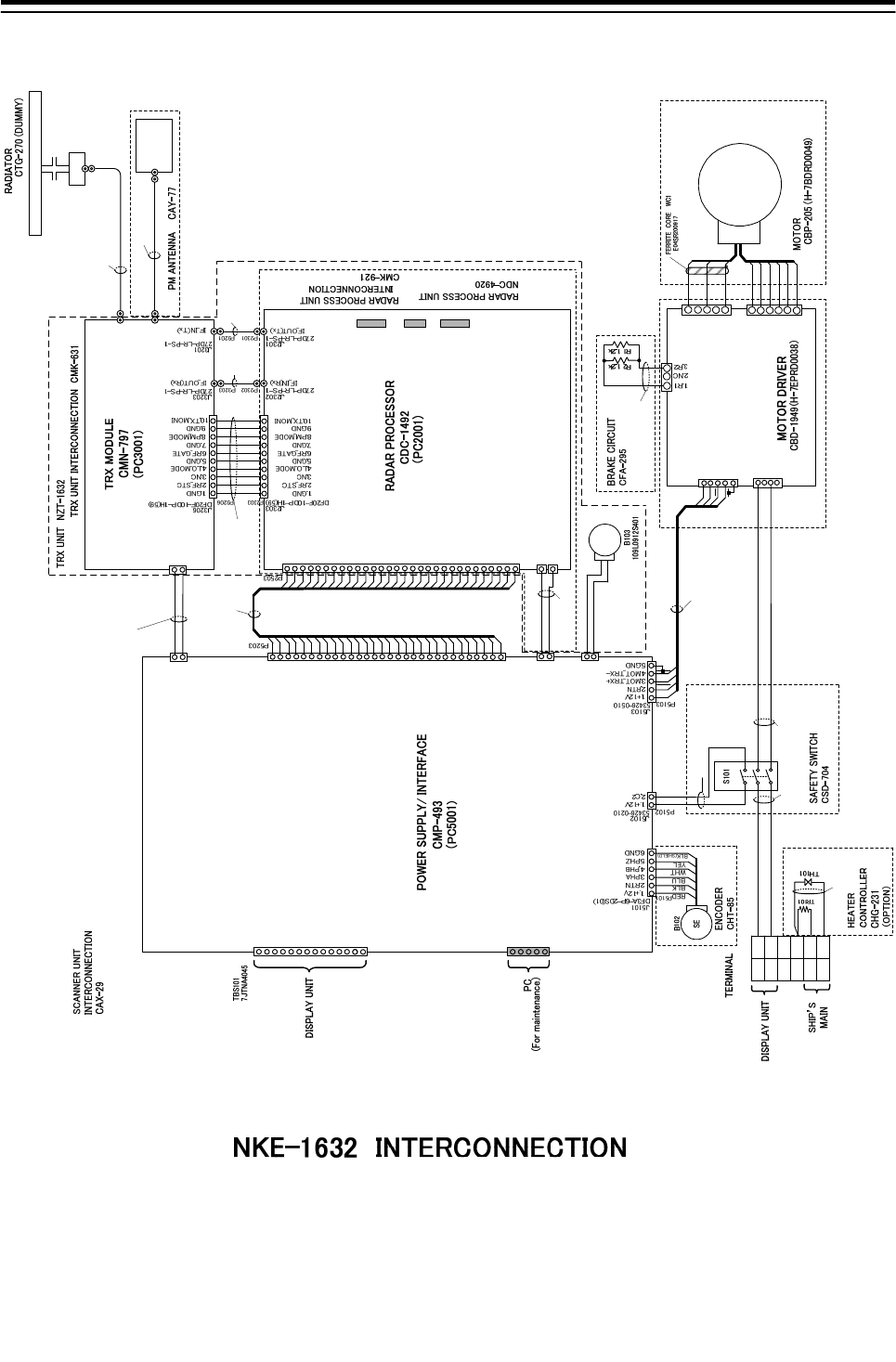
6.6.13 NKE-1632
2
5
8
3
9
6
RF_ANT
PM_OUT
PERFORMANCE
MONITOR ANTENNA
RED.T
BLK.T 3.MV
1.MU
2.NC
4.NC
1.+12V
2.GND
WHT.T
U1
V1
UTH
U
V
U1
V1
UTH
U
V
2.NC
4.NC
1.S1
2.S2
3.S3
4.S4
5.S5
6.S6
3.M2
1.M1
5.M3
MOTOR
B101
1.+12V
1.MNT-RX-P
2.MNT-TX-P
3.MNT-RX-N
4.MNT-TX-N
5.MNTE
FAN
1.+32V
2.GND
1. +32V
2. GND
B2PS-VH
1. +3.3V
2. GND
+3.3V
GND
2.RTN
J5105
J5203
J5201
J5301
J5901
TB102
OGM-300NE-6P-04C
J3505
J2901
J2902
DATA I/F
CPU JTAG
FPGA JTAG
J2903
1.VD+
2.VD-
3.GND
4.BP
5.BZ
6.GND
7.TIY
8.MTR_TRX-
9.TIY_RTN
10.MTR_TRX+
11.GND
12.GND
13.MNT_TX+
14.GND
15.MNT_TX-
16.PHZ
17.GND
18.PHA
19.MNT_RX-
20.PHB
21.MNT_RX+
22.GND
23.GND
24.MOT_TRX-
25.C2
26.MOT_TRX+
27.GND
28.GND
29.FAN_CNT0
30.PS_STATUS
1.VD
2.GND
3.GND
4.BP
5.BZ
6.GND
7.TIY
8.MTR_TRX-
9.TIY_RTN
10.MTR_TRX+
11.GND
12.GND
13.MNT_TX+
14.GND
15.MNT_TX-
16.PHZ
17.GND
18.PHA
19.MNT_RX-
20.PHB
21.MNT_RX+
22.GND
23.GND
24.MOT_TRX-
25.C2
26.MOT_TRX+
27.GND
28.GND
29.FAN_CNT0
30.PS_STATUS
J2501
PV-3-T
J2502
PV-3-T
J2503
DF20F-30DP
-1H(59)
DF20F-30DP-1H(59)
1.VD+
2.VD-
3.TRIG+
4.TRIG-
5.BP+
6.BP-
7.BZ+
8.BZ-
9.MTR+
10.MTR-
11.MTRG
12. NC
13. DC48V+
TB101
231-344/001-000 [WAGO]
DF3A- 5P-2DSA
3.MOT_TRX+
4.MOT_TRX-
5.GND
J1501
B4P-VH(LF,SN)
J1505
53426-0510(L angle)
J1504
B3P-VH(LF,SN) B3P5-VH(LF,SN)
J1503
B06BOXASK-1(LF,SN)
J1301
P1301
J4301
P4301
P3104
P3102
P3505
P5301
P5201 P2501
P2502
P5105
P1505
SC02B-J42SK-GHXPR SC02B-J42SK
-GHXPR
P1501
P1504
S2B-XH-A
14. DC48VG
J3102
P0B-R-35
J3104
P0B-R-35
W204
7ZCRD1669*
W103
7ZCRD1668* W203
7ZCRD1675
W102
7ZCRD1667*
W201
7ZCRD1676*
W202
7ZCRD1677*
W104
7ZCRD1671*
W1
7ZCRD1680*
W302
W301
7ZCRD1692*
W303
7ZCRD1694*
W101
7ZCRD1673*
W501
7ZCRD1674*
W401
7ZCRD1682*
J1502
“*” means revision of the specfication document.
7ZCRD1693*
RED.T
BLK.T
RED.T
RED.T
WHT.T
(TRANSDUCER)
(ROTARY JOINT)
(N type connector)
6. Appendix > 6.6 Scanner Unit Interconnection Unit
6-177
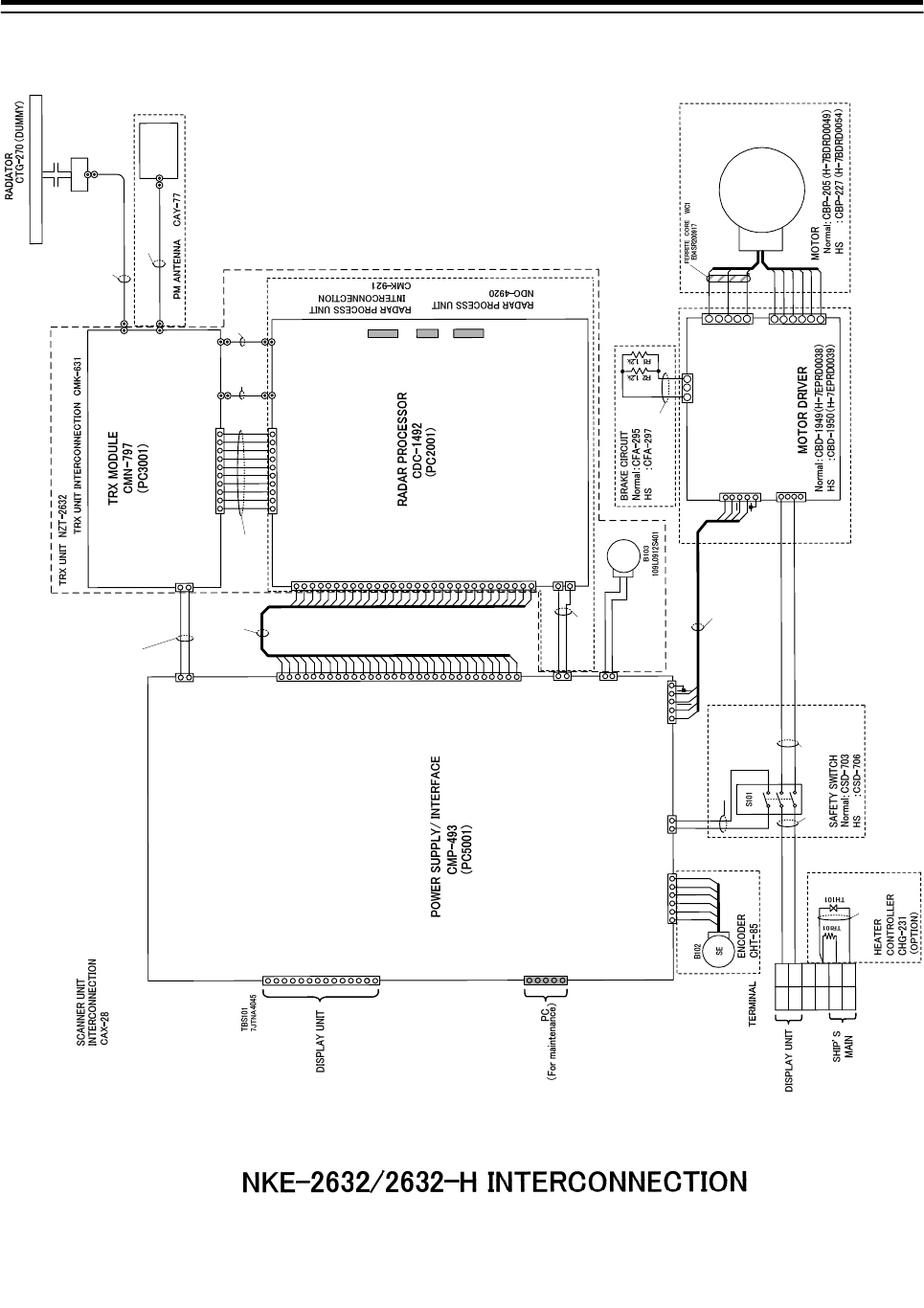
6.6.14 NKE-2632/2632-H
2
5
8
3
9
6
RED
BLK
WHT
BLU
BLK
(SHIELD)
1.+12V
2.C2
1.+12V
2.RTN
1.+12V
2.RTN
3.PHA
4.PHB
5.PHZ
6.GND
IF_OUT(Rx)
RF_ANT
PM_OUT
IF_IN(Tx)
PERFORMANCE
MONITOR ANTENNA
RED.T
BLK.T
1.R1
3.R2
2.NC
3.MV
1.MU
2.NC
4.NC
1.+12V
2.GND
WHT.T
U1
V1
UTH
U
V
U1
V1
UTH
U
V
2.NC
4.NC
1.S1
2.S2
3.S3
4.S4
5.S5
6.S6
3.M2
1.M1
5.M3
MOTOR
B101
1.+12V
1.MNT-RX-P
2.MNT-TX-P
3.MNT-RX-N
4.MNT-TX-N
5.MNTE
FAN
1.+32V
2.GND
1. +32V
2. GND
B2PS-VH
1. +3.3V
2. GND
+3.3V
GND
2.RTN
J5105
J5101
J5102
J5203
J5201
J5103
J5301
J5901
TB102
OGM-300NE-6P-04C
J3201
27DP-LR-PS-1
J3203
27DP-LR-PS-1
J3206
DF20F-10DP-1H(59)
J3505
J2901
J2902
DATA I/F
CPU JTAG
FPGA JTAG
J2903
1.VD+
2.VD-
3.GND
4.BP
5.BZ
6.GND
7.TIY
8.MTR_TRX-
9.TIY_RTN
10.MTR_TRX+
11.GND
12.GND
13.MNT_TX+
14.GND
15.MNT_TX-
16.PHZ
17.GND
18.PHA
19.MNT_RX-
20.PHB
21.MNT_RX+
22.GND
23.GND
24.MOT_TRX-
25.C2
26.MOT_TRX+
27.GND
28.GND
29.FAN_CNT0
30.PS_STATUS
1.VD
2.GND
3.GND
4.BP
5.BZ
6.GND
7.TIY
8.MTR_TRX-
9.TIY_RTN
10.MTR_TRX+
11.GND
12.GND
13.MNT_TX+
14.GND
15.MNT_TX-
16.PHZ
17.GND
18.PHA
19.MNT_RX-
20.PHB
21.MNT_RX+
22.GND
23.GND
24.MOT_TRX-
25.C2
26.MOT_TRX+
27.GND
28.GND
29.FAN_CNT0
30.PS_STATUS
1.GND
2.RF_STC
3.NC
4.LO_MODE
5.GND
6.RF_GATE
7.GND
8.PM_MODE
9.GND
10.TX_MONI
J2303
DF20F-10DP-1H(59)
J2501
PV-3-T
J2502
PV-3-T
J2503
DF20F-30DP
-1H(59)
J2301
27DP-LR-PS-1
J2302
27DP-LR-PS-1
IF_OUT(Tx)
IF_IN(Rx)
1.GND
2.RF_STC
3.NC
4.LO_MODE
5.GND
6.RF_GATE
7.GND
8.PM_MODE
9.GND
10.TX_MONI
3.MOT_TRX+
4.MOT_TRX-
5.GND
DF20F-30DP-1H(59)
1.VD+
2.VD-
3.TRIG+
4.TRIG-
5.BP+
6.BP-
7.BZ+
8.BZ-
9.MTR+
10.MTR-
11.MTRG
12. NC
13. DC48V+
TB101
231-344/001-000 [WAGO]
DF3A-5P-2DSA
DF3A-6P-2DS(01)
3.MOT_TRX+
4.MOT_TRX-
5.GND
53426-0210
53426-0510
J1501
B4P-VH(LF,SN)
J1505
53426-0510(L angle)
J1504
B3P-VH(LF,SN)
B3P5-VH(LF,SN)
J1503
B06BOXASK-1(LF,SN)
J1301
P1301
J4301
P4301
P3206
P2303
P2302
P2301P3201
P3203
P3104
P3102
P3505
P5301
P5203
P2503
P5201P2501
P2502
P5101
P5102
P5103
P5105
P1505
SC02B-J42SK-GHXPRSC02B-J42SK
-GHXPR
P1501
P1504
S2B-XH-A
14. DC48VG
J3102
P0B-R-35
J3104
P0B-R-35
W204
7ZCRD1669*
W103
7ZCRD1668*W203
7ZCRD1675
W102
7ZCRD1667*
W201
7ZCRD1676*
W202
7ZCRD1677*
W104
7ZCRD1671*
W1
7ZCRD1680*
W302
W301
7ZCRD1678*
W303
7ZCRD1670*
W101
7ZCRD1673*
W501
7ZCRD1674*
W401
7ZCRD1682*
J1502
Normal:7ZCRD1679*
HS :7ZCRD1706*
RED.T
BLK.T
RED.T
RED.T
WHT.T
(TRANSDUCER)
(ROTARY JOINT)
(N type connector)
YEL
“*” means revision of the specfication document.

6. Appendix > 6.7 External input/output sentence format
6-178
6.7 External input/output sentence format
Note: Use external input/output sentence data after NMEA version 2.1
6.7.1 Receivable signals
6.7.1.1 Ship Heading
$--THS,x.x,a*hh<CR><LF>
1 2 3 4
1.THS Header
2.x.x Heading, degrees true
3.a Mode indicator: A = Autonomous, E = Estimated (dead reckoning)
M = Manual input, S = Simulator mode ,V = Data not valid (including standby)
4.hh Checksum
$--HDT, x.x, T*hh<CR><LF>
1 2 3 4
1.HDT Header
2.x.x Heading
3.T Degrees true
6.7.1.2 Course
$--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1. GGA Header
2. hhmmss.ss UTC of position
3. llll.ll Latitude
4. a N/S
5. yyyyy.yy Longitude
6. a E/W
7. x GPS Quality indicator
8. xx Number of satellites in use, 00-12, may be different from the number in view
9. x.x Horizontal dilution of precision
10. x.x Antenna altitude from mean-sea-level (geoid) (m)
11. M Antenna altitude unit; M=meters
12. x.x Height difference from WGS-84 earth ellipsoid surface to mean-sea-level
surface (m) = Geoidal separation
13. M Unit for the height difference from WGS-84 earth ellipsoid surface to
mean-sea-level; M=meters
14. x.x Age of Differential GPS data (seconds)
15. xxxx Differential GPS reference station ID (0000 – 1023)

6. Appendix > 6.7 External input/output sentence format
6-179
16. hh Checksum
$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxxxx,x.x,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. RMC Header
2. hhmmss.ss UTC of position fix
3. A Status; A = Data valid, V = Navigation receiver warning
4. llll.ll Latitude
5. a N/S
6. yyyyy.yy Longitude
7. a E/W
8. x.x Speed over ground (knots)
9. x.x Course Over Ground (degrees, true north)
10. xxxxxx Date (UTC): ddmmyy
11. x.x Magnetic variation (degrees)
12. a Magnetic variation direction E/W
13. a Mode Indicator; A = Autonomous mode, D = Differential mode, N = Data not valid,
E = Estimated (dead reckoning) mode, M = Manual input mode, S = Simulator mode
14. hh Checksum
$--RMA, A, llll.ll, a, yyyyy.yy, a, x.x, x.x, x.x, x.x, x.x,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. RMA Heading
2. A Status : A = data valid, V = blink, cycle or SNR warning
3. llll.ll Latitude
4. a Degrees N/S
5. yyyyy.yy Longitude
6. a Degrees E/W
7. x.x Time difference A, μs
8. x.x Time difference B, μs
9. x.x Speed over ground, knots
10. x.x Course over ground, degrees true
11. x.x Magnetic variation, degrees E/W
12. a Degrees E/W
13. a Mode indicator: A = Autonomous mode; D = Differential mode; E = Estimated (dead reckoning)
mode; M = Manual input mode; S = Simulator mode;N = Data not valid.
14. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-180
$-- GNS, hhmmss.ss, llll.ll, a, yyyyy.yy, a, c--c,xx,x.x,x.x,x.x,x.x,x.x,a *hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1. GNS Heading
2. hhmmss.ss UTC of position
3. llll.ll Latitude
4. a N/S
5. yyyyy.yy Longitude
6. a Degrees E/W
7. c—c Mode indicator
8. xx Total number of satellites in use, 00-99
9. x.x HDOP
10. x.x Antenna altitude, m
11. x.x Geoidal separation, m
12. x.x Age of differential data
13. x.x Differential reference station ID
14. a Navigational status indicator
15. hh Checksum
$--GLL,llll.ll,a,yyyyy.yy,a,hhmmss.ss,A,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1.GLL Header
2. llll.ll Latitude
3. a N/S
4. yyyyy.yy Longitude
5. a E/W
6. hhmmss.ss UTC of position
7. A Status; A = Data valid, V = Data not valid
8. a Mode Indicator; A = Autonomous mode, D = Differential mode, N = Data not valid,
E = Estimated (dead reckoning) mode, M = Manual input mode, S = Simulator
mode
9. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-181
6.7.1.3 Geodetic positioning system
$--DTM,ccc,a,x.x,a,x.x,a,x.x,ccc*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10
1. DTM Header (Datum Reference)
2. ccc Local (geodetic reference) datum code; W84 = WGS84, W72 = WGS72,S85
=SGS85, P90 = PE90, 999 = User defined, IHO datum code
3. a Local datum subdivision code
4. x.x Latitude offset (minutes)
5. a N/S
6. x.x Longitude offset (minutes)
7. a E/W
8. x.x Altitude offset (meters)
9. ccc Reference datum code (Geodetic reference system to which being
conformed);W84 = WGS84, W72 = WGS72, S85 = SGS85, P90 = PE90
10. hh Checksum
6.7.1.4 Date information
$--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh<CR><LF>
1 2 3 4 5 6 7 8
1. ZDA Header (Time & Date)
2. hhmmss.ss UTC
3. xx Day (UTC)
4. xx Month (UTC)
5. xxxx Year (UTC)
6. xx Local zone hours, 00 to +13 hrs
7. xx Local zone minutes, 00 to +59
8. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-182
6.7.1.5 COG/SOG
$--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxxxx,x.x,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. RMC Header
2. hhmmss.ss UTC of position fix
3. A Status; A = Data valid, V = Navigation receiver warning
4. llll.ll Latitude
5. a N/S
6. yyyyy.yy Longitude
7. a E/W
8. x.x Speed over ground (knots)
9. x.x Course Over Ground (degrees, true north)
10. xxxxxx Date (UTC): ddmmyy
11. x.x Magnetic variation (degrees)
12. a Magnetic variation direction E/W
13. a Mode Indicator; A = Autonomous mode, D = Differential mode, N = Data not
valid, E = Estimated (dead reckoning) mode, M = Manual input mode, S =
Simulator mode
14. hh Checksum
$--RMA, A, llll.ll, a, yyyyy.yy, a, x.x, x.x, x.x, x.x, x.x,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. RMA Heading
2. A Status : A = data valid, V = blink, cycle or SNR warning
3. llll.ll Latitude
4. a Degrees N/S
5. yyyyy.yy Longitude
6. a Degrees E/W
7. x.x Time difference A, μs
8. x.x Time difference B, μs
9. x.x Speed over ground, knots
10. x.x Course over ground, degrees true
11. x.x Magnetic variation, degrees E/W
12. a Degrees E/W
13. a Mode indicator: D = Differential mode; E = Estimated (dead reckoning) mode;
M = Manual input mode; S = Simulator mode;N = Data not valid.
14. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-183
$--VTG,x.x,T,x.x,M,x.x,N,x.x,K,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11
1. VTG Header
2. x.x Course over ground based on true north (degrees)
3. T Unit of course over ground; T = True
4. x.x Course over ground based on magnetic north (degrees)
5. M Unit of course over ground; M = Magnetic
6. x.x Speed over ground (knots)
7. N Speed over ground unit; N = knots
8. x.x Speed over ground (km/h)
9. K Speed over ground unit; K = km/hr
10. a Mode Indicator; A = Autonomous mode, D = Differential mode, N = Data not valid,
E = Estimated (dead reckoning) mode, M = Manual input mode, S = Simulator
mode
11. hh Checksum
6.7.1.6 Ship speed through water
$--VBW,x.x,x.x,A,x.x,x.x,A,x.x,A,x.x,A*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12
1. VBW Header
2. x.x Longitudinal water speed (knots)
3. x.x Transverse water speed (knots)
4. A Status of water speed; A = Data valid
5. x.x Longitudinal ground speed (knots)
6. x.x Transverse ground speed (knots)
7. A Status of ground speed; A = Data valid
8. x.x Stern transverse water speed (knots)
9. A Status of stern transverse water speed; A = Data valid
10. x.x Stern transverse ground speed (knots)
11. A Status of stern transverse ground speed; A = Data valid, V = Invalid
12. hh Checksum
6.7.1.7 Turning speed
$--ROT, x.x, A*hh<CR><LF>
1 2 3 4
1. ROT Header
2. x.x Rate of turn, °/min, "-" = bow turns to port
3. A Status: A = data valid, V = data invalid
4.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-184
6.7.1.8 Water depth
$--DPT,x.x,x.x,x.x*hh<CR><LF>
1 2 3 4 5
1. DPT Header
2. x.x Water depth relative to the transducer (meters)
3. x.x Offset from transducer (meters)
4. x.x Maximum range scale in use
5. hh Checksum
$--DBS,x.x,f,x.x,M,x.x,F*hh<CR><LF>
1 2 3 4 5 6 7 8
1. SDDBS Header
2. x.x Water depth from ship’s bottom (feet)
3. f Units (feet)
4. x.x Water depth from ship’s bottom (meters)
5. M Units (meters)
6. x.x Water depth from ship’s bottom (fathoms)
7. F Units (fathoms)
8. hh Checksum
$--DBT,x.x,f,x.x,M,x.x,F*hh<CR><LF>
1 2 3 4 5 6 7 8
1. DBT Header
2. x.x Water depth from ship’s bottom (feet)
3. f Units (feet)
4. x.x Water depth from ship’s bottom (meters)
5. M Units (meters)
6. x.x Water depth from ship’s bottom (fathoms)
7. F Units (fathoms)
8. hh Checksum
$--DBK,x.x,f,x.x,M,x.x,F*hh<CR><LF>
1 2 3 4 5 6 7 8
1. DBK Header
2. x.x Water depth from ship’s bottom (feet)
3. f Units (feet)
4. x.x Water depth from ship’s bottom (meters)
5. M Units (meters)
6. x.x Water depth from ship’s bottom (fathoms)
7. F Units (fathoms)
8. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-185
6.7.1.9 Wind direction/wind speed
$--MWV, x.x, a, x.x, a, A *hh<CR><LF>
1 2 3 4 5 6 7
1.MWV Heading
2.x.x Wind angle, 0° to 359°
3.a Reference, R = relative, T=true
4.x.x Wind speed
5.a Wind speed units, K = km/h, M = m/s, N = knots
6.A Status, A = data valid V= data invalid
7.hh Checksum
$--MWD, x.x,T,x.x,M,x.x,N,x.x,M*hh<CR><LF>
1 2 3 4 5 6
1.MWD Heading
2.x.x,T Wind direction, 0° to 359° true
3.x.x,M Wind direction, 0° to 359° magnetic
4.x.x,N Wind speed, knots
5.x.x.M Wind speed, m/s
6.7.1.10 Air temperature
$--XDR, a, x.x, a, c--c,................ a, x.x, a, c--c*hh<CR><LF>
1 2 3 4 5 6 7 8
1.XDR Heading
2.a Transducer type, transducer No. 1
3.x.x Measurement data, transducer No. 1
4.a Units of measure, transducer No. 1
5. c--c Transducer No. 1 ID
6. ................ a Data, variable number of transducers
7. a, x.x, a, c--c Transducer "n"
8.hh Checksum
$--MTA,x.x,C*hh<CR><LF>
1 2 3
1.--MTA Header
2. x.x,C Temperature, degrees C
3.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-186
$--MDA,x.x,I,x.x,B,x.x,C,x.x,C,x.x,x.x,x.x,C,x.x,T,x.x,M,x.x,N,x.x,M*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1.--MDA Header
2. x.x,I Barometric pressure, inches of mercury
3. x.x,B Barometric pressure, bars
4. x.x,C Air temperature, degrees C
5. x.x,C Water temperature, degrees C
6. x.x Relative humidity, percent
7. x.x Absolute humidity, percent
8. x.x.C Dew point, degrees C
9.x.x.T Wind direction, degrees True
10. x.x.M Wind direction, degrees Magnetic
11. x.x.N Wind speed, knots
12. x.x.M Wind speed, meters/second
13. hh Checksum
6.7.1.11 Water temperature
$-- MTW, x.x, C*hh<CR><LF>
1 2 3
1.MTW Heading
2.x.x, C Temperature, degrees C
3.hh Checksum
$--MDA,x.x,I,x.x,B,x.x,C,x.x,C,x.x,x.x,x.x,C,x.x,T,x.x,M,x.x,N,x.x,M*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1.MDA Header
2. x.x,I Barometric pressure, inches of mercury
3. x.x,B Barometric pressure, bars
4. x.x,C Air temperature, degrees C
5. x.x,C Water temperature, degrees C
6. x.x Relative humidity, percent
7. x.x Absolute humidity, percent
8. x.x.C Dew point, degrees C
9.x.x.T Wind direction, degrees True
10. x.x.M Wind direction, degrees Magnetic
11. x.x.N Wind speed, knots
12. x.x.M Wind speed, meters/second
13. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-187
6.7.1.12 Atmospheric pressure
$--XDR, a, x.x, a, c--c,................ a, x.x, a, c--c*hh<CR><LF>
1 2 3 4 5 6 7 8
1.XDR Heading
2.a Transducer type, transducer No. 1
3.x.x Measurement data, transducer No. 1
4.a Units of measure, transducer No. 1
5. c--c Transducer No. 1 ID
6. ................ a Data, variable number of transducers
7. a, x.x, a, c--c Transducer "n"
8.hh Checksum
$--MMB,x.x,I,x.x,B*hh<CR><LF>
1 2 3 4
1.MMB Header
2. x.x,I Barometric pressure, bars
3. x.x,B Barometric pressure, inches of mercury
4.hh Checksum
$--MDA,x.x,I,x.x,B,x.x,C,x.x,C,x.x,x.x,x.x,C,x.x,T,x.x,M,x.x,N,x.x,M*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1.MDA Header
2. x.x,I Barometric pressure, inches of mercury
3. x.x,B Barometric pressure, bars
4. x.x,C Air temperature, degrees C
5. x.x,C Water temperature, degrees C
6. x.x Relative humidity, percent
7. x.x Absolute humidity, percent
8. x.x.C Dew point, degrees C
9.x.x.T Wind direction, degrees True
10. x.x.M Wind direction, degrees Magnetic
11. x.x.N Wind speed, knots
12. x.x.M Wind speed, meters/second
13. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-188
6.7.1.13 Humidity
$--XDR, a, x.x, a, c--c,................ a, x.x, a, c--c*hh<CR><LF>
1 2 3 4 5 6 7 8
1.XDR Heading
2.a Transducer type, transducer No. 1
3.x.x Measurement data, transducer No. 1
4.a Units of measure, transducer No. 1
5. c--c Transducer No. 1 ID
6. ................ a Data, variable number of transducers
7. a, x.x, a, c--c Transducer "n"
8.hh Checksum
$--MHU,x.x,x.x,x.x,C*hh<CR><LF>
1 2 3 4 5
1.MHU Header
2.x.x Relative humidity, percent
3.x.x Absolute humidity, percent
4.x.x,C Dew point, degrees C
5.hh Checksum
$--MDA,x.x,I,x.x,B,x.x,C,x.x,C,x.x,x.x,x.x,C,x.x,T,x.x,M,x.x,N,x.x,M*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1.MDA Header
2. x.x,I Barometric pressure, inches of mercury
3. x.x,B Barometric pressure, bars
4. x.x,C Air temperature, degrees C
5. x.x,C Water temperature, degrees C
6. x.x Relative humidity, percent
7. x.x Absolute humidity, percent
8. x.x.C Dew point, degrees C
9.x.x.T Wind direction, degrees True
10. x.x.M Wind direction, degrees Magnetic
11. x.x.N Wind speed, knots
12. x.x.M Wind speed, meters/second
13. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-189
6.7.1.14 AIS
!--VDM,x,x,x,a,s—s,x*hh<CR><LF>
1 2 3 4 5 6 7 8
1.VDM Header
2.x Total number of sentences needed to transfer the message,1 to 9
3.x Sentence number, 1 to 9
4.x Sequential message identifier, 0 to 9
5.a AIS channel
6.s—s Encapsulated ITU-R M.1371 radio message
7. x Number of fill-bits, 0 to 5
8.hh Checksum
!--VDO,x,x,x,a,s—s,x*hh<CR><LF>
1 2 3 4 5 6 7 8
1.VDO Header
2.x Total number of sentences needed to transfer the message, 1 to 9
3.x Sentence number, 1 to 9
4.x Sequential message identifier, 0 to 9
5.a AIS Channel
6.s—s Encapsulated ITU-R M.1371 radio message
7.x Number of fill-bits, 0 to 5
8.hh Checksum
6.7.1.15 Alert
$--ACK,xxx*hh<CR><LF>
1 2 3
1.ACK Header
2.xxx Unique alarm number (identifier) at alarm source
3.hh Checksum
$--ALR,hhmmss.ss,xxx,A, A,c--c*hh<CR><LF>
1 2 3 4 5 6 7
1.ALR Header
2. hhmmss.ss Time of alarm condition change, UTC
3. xxx Unique alarm number (identifier) at alarm source
4.A Alarm condition (A = threshold exceeded, V = not exceeded)
5.A Alarm’s acknowledge state, A = acknowledged,V = unacknowledged
6. c—c Alarm’s description text
7.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-190
6.7.2 Transmittable signals
6.7.2.1 RADAR system data
$--RSD, x.x, x.x,x.x, x.x,x.x, x.x,x.x, x.x,x.x, x.x, x.x, a, a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1. RSD Header
2. x.x Origin 1 range (see Note 2), from own ship
3. x.x Origin 1 bearing (see Note 2) degrees from 0°
4. x.x Variable range marker 1 (VRM1), range
5. x.x Bearing line 1 (EBL1), degrees from 0°
6. x.x Origin 2 range (see Note 2)
7. x.x Origin 2 bearing (see Note 2)
8. x.x VRM 2, range
9. x.x EBL 2, degrees
10. x.x Cursor range, from own ship
11. x.x Cursor bearing, degrees clockwise from 0°
12. x.x Range scale in use
13. x.x Range units, K = km,N = nautical miles, S = statute miles
14.a,a Display rotation
15.hh Checksum
6.7.2.2 Own ship data
$--OSD, x.x,A,x.x, a,x.x,a,x.x,x.x,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11
1.OSD Header
2.x.x Heading, degrees true
3.A Heading status: A = data valid, V = data invalid
4.x.x Vessel course, degrees true
5.a Course reference,
B = bottom tracking log, M = manually entered, W = water referenced,
R = radar tracking (of fixed target), P = positioning system ground reference.
6.x.x Vessel speed
7.x.x Speed reference,
B = bottom tracking log, M = manually entered, W = water referenced,
R = radar tracking (of fixed target), P = positioning system ground reference.
8.x.x Vessel set, degrees true
9.x.x Vessel drift (speed)
10.x.x Speed units, K = km/h; N = knots; S = statute miles/h
11.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-191
6.7.2.3 Watch timer reset
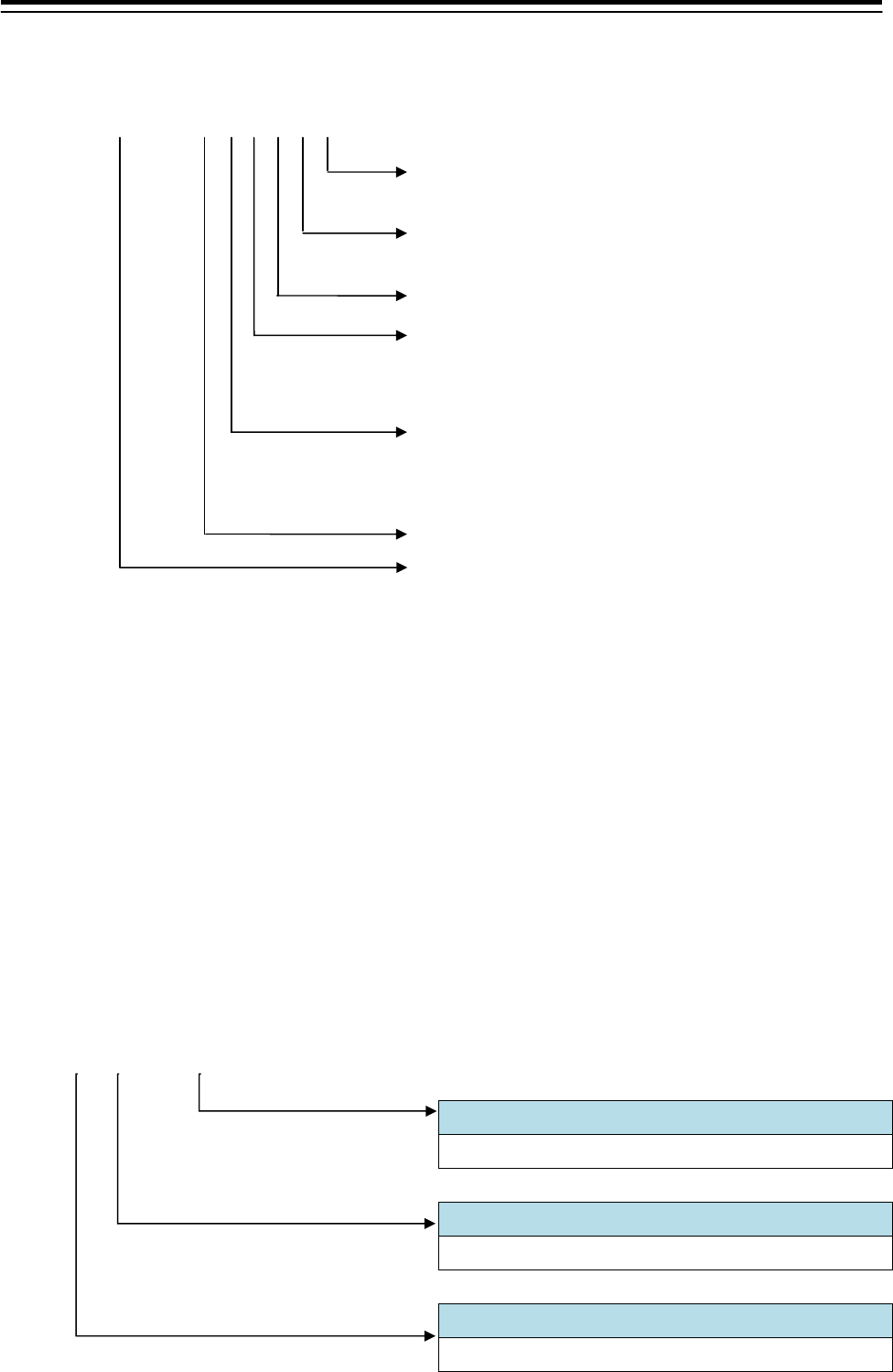
$--EVE,hhmmss.ss,c--c,c--c*hh<CR><LF>
1 2 3 4 5
1.EVE Header
2.hhmmss.ss Event time
3.c—c Tag code used for identification of source of event
4.c—c Event description
5.hh Checksum
6.7.2.4 TT data, AIS target data
$--TTM,xx,x.x,x.x,a,x.x,x.x,a,x.x,x.x,a,c--c,a,a,hhmmss.ss,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1617 18
1. TTM Header (Track Target Message)
2. xx Target number (00-99)
3. x.x Target distance from own ship
4. x.x Target bearing from own ship (degrees)
5. a Reference of target bearing from own ship; T = True, R = Relative
6. x.x Target speed
7. x.x Target course (degrees)
8. a Reference of target course; T = True, R = Relative
9. x.x Distance of closest-point-of-approach
10. x.x Time to CPA (minutes), “-“ = increasing
11. a Speed/distance units (K/N/S)
12. c—c Target name
13. a Target status; L = Lost (tracked target has been lost),
Q = Query (target in the process of acquisition), T = Tracking
14. a Reference target; R = Reference (target is a reference used to determined
own-ship position or velocity), null = other than reference
15. hhmmss.ss UTC of data
16. a Type of acquisition; A = Auto, M = Manual, R = Reported
17. hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-192
$--TLL, xx, llll.ll, a, yyyyy.yy, a, c--c, hhmmss.ss, a, a*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1.TLL Header
2.xx Target number 00 – 99
3. llll.ll, NS Target latitude, N/S
4. yyyyy.yy,a Target longitude, E/W
5. c—c Target name
6. hhmmss.ss UTC of data
7. a Target status
8. a Reference target = R, null otherwise
9.hh Checksum
!--TTD,hh,hh,x,s—s,x*hh<CR><LF>
1 2 3 4 5 6 7
1.TTD Header
2.hh Total hex number of sentences needed to transfer the message, 01 to FF
3.hh Hex sentence number, 01 to FF
4.x Sequential message identifier, 0 to 9
5.s--s Encapsulated tracked target data
6.x Number of fill-bits, 0 to 5
7.hh Checksum
$--TLB,x.x,c--c,x.x,c--c,...x.x,c--c*hh<CR><LF>
1 2 3 4 4 5
1.TLB Header
2.x.x Target number ‘n’ reported by the device.
3.c—c Label assigned to target ‘n’
4.x.x,c—c Additional label pairs
5.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-193
6.7.2.5 AIS remote control data
$--VSD,x.x,x.x,x.x,c—c,hhmmss.ss,xx,xx,x.x,x.x*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11
1.VSD Header
2.x.x Type of ship and cargo category, 0 to 255
3.x.x Maximum present static draught, 0 to 25,5 m
4.x.x Persons on-board, 0 to 8 191
5.c—c Destination, 1-20 characters
6. hhmmss.ss Estimated UTC of arrival at destination
7.xx Estimated day of arrival at destination, 00 to 31 (UTC)
8.xx Estimated month of arrival at destination, 00 to 12 (UTC)
9.x.x Navigational status, 0 to 15
10.x.x Regional application flags
11.hh Checksum
$--AIR,xxxxxxxxx,x.x,x,x.x,x,xxxxxxxxx,x.x,x,a,x.x,x.x,x.x*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1.AIR Header
2. xxxxxxxxx MMSI of interrogated station-1
3.x.x First message number requested from station-1
4.x Message sub-section
5.x.x Second message number requested from station-1
6.x Message sub-section
7. xxxxxxxxx MMSI of interrogated station-2
8.x.x Message Number requested from station-2
9.x Message sub-section
10.a Channel of interrogation
11.x.x Message ID1.1, station-1 reply slot
12.x.x Message ID1.2, station-1 reply slot
13.x.x Message ID2.1, station-2 reply slot
14.hh Checksum
$--AIQ,xxx.*hh<CR><LF>
1 2 3
1—AIQ Header
2.xxx request of static information (VSD, ACA, etc.)
3.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-194
!--ABM,x,x,x,xxxxxxxxx,x,xx,s—s,x*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10
1.AMB Header
2. x Total number of sentences needed to transfer the message,1 to 9
3. x Sentence number, 1 to 9
4. x Sequential message identifier
5. xxxxxxxxx The MMSI of the destination AIS unit for the ITU-R M.1371 Message 6 or 12
6. x AIS channel for broadcast of the radio message
7. xx ITU-R M.1371 Message ID
8. s—s Encapsulated data
9. x Number of fill-bits, 0 to 5
10. hh Checksum
!--BBM,x,x,x,x,xx,s—s,x*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1.--BBM Header
2.x Total number of sentences needed to transfer the message,1 to 9
3.x Sentence number, 1 to 9
4.x Sequential message identifier, 0 to 9
5.x AIS channel for broadcast of the radio message
6.xx ITU-R M.1371 Message ID
7.s—s Encapsulated data
8.x Number of fill-bits, 0 to 5
9.hh Checksum
6.7.2.6 Remote control data
JRC format
$PJRC,s—s*hh<CR><LF>
1 2 3
1.PJRC Header
2.s—s Data field
3.hh Checksum

6. Appendix > 6.7 External input/output sentence format
6-195
6.7.2.7 Alert
$--ACK,xxx*hh<CR><LF>
1 2 3
1.ACK Header
2.xxx Unique alarm number (identifier) at alarm source
3.hh Checksum
$--ALR,hhmmss.ss,xxx,A, A,c--c*hh<CR><LF>
1 2 3 4 5 6 7
1.ALR Header
2. hhmmss.ss Time of alarm condition change, UTC
3. xxx Unique alarm number (identifier) at alarm source
4.A Alarm condition (A = threshold exceeded, V = not exceeded)
5.A Alarm’s acknowledge state, A = acknowledged,
V =unacknowledged
6. c—c Alarm’s description text
7.hh Checksum
6. Appendix > 6.8 Setting for the route transfer by LAN connection with the GPS
6-196
6.8 Setting for the route transfer by LAN connection
with the GPS
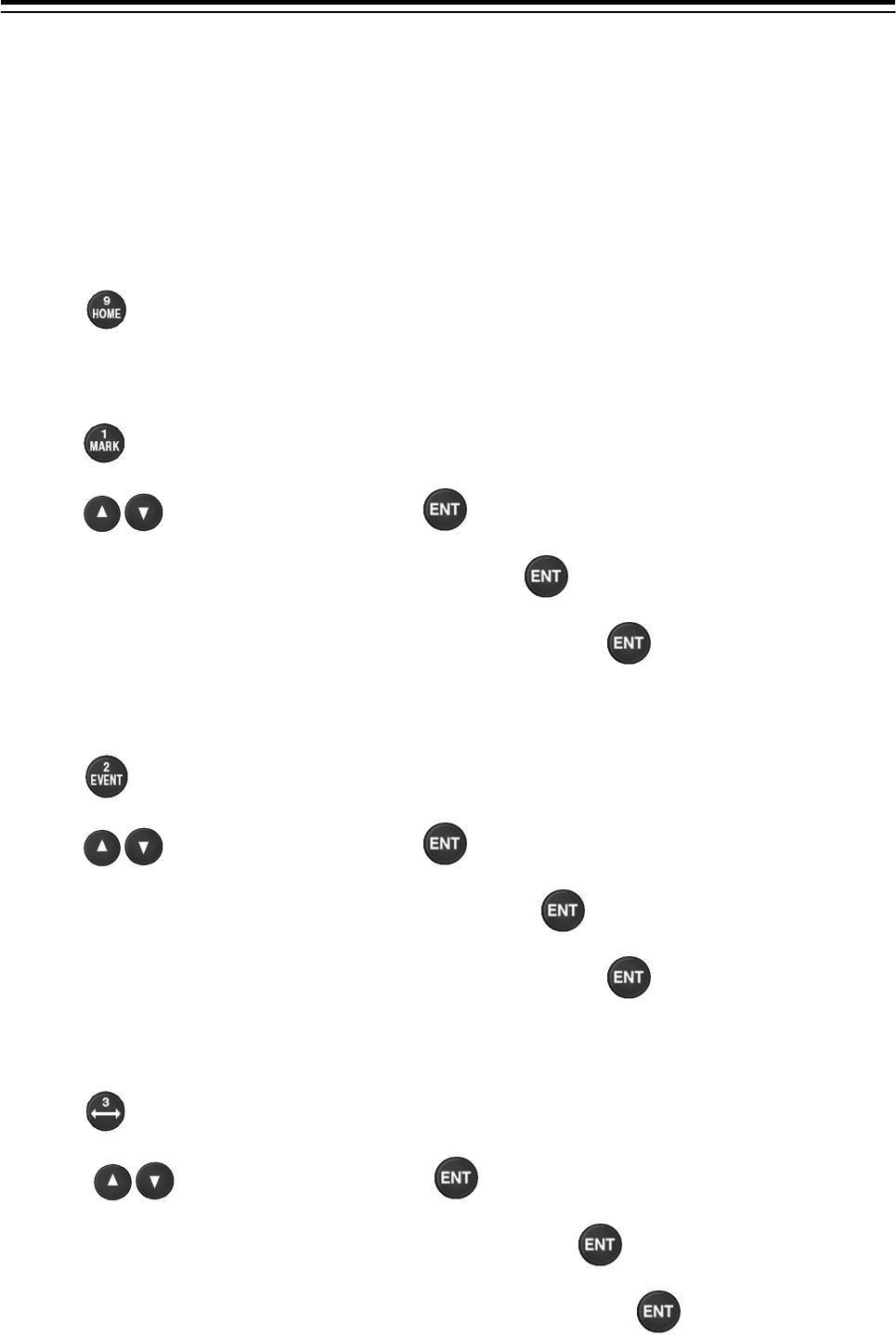
6.8.1 How to set the IP address of GPS
1. Refer to "4.20 Equipment Configuration" and display the equipment configuration menu.
2. Press "IP".
(1) IP ADDRESS Configuration
3. Press "IP ADDR".
4. Press to select "INPUT", and press .
5. Enter the IP address with the numeric keypad, and press .
To return the value to the default value, select "DEFAULT" and press .
(2) SUBNET MASK Configuration
6. Press "SUBNET MASK".
7. Press to select "INPUT", and press .
8. Enter the subnet mask with the numeric keypad, and press .
To return the value to the default value, select "DEFAULT" and press .
(3) DEFAULT GATEWAY Configuration
9. Press "DEFAULT GATEWAY".
10. Press to select "INPUT", and press .
11. Enter the default gateway with the numeric keypad, and press .
To return the value to the default value, select "DEFAULT" and press .

6. Appendix > 6.8 Setting for the route transfer by LAN connection with the GPS
6-197
6.8.2 Setting of the LAN for GPS
· LAN configuration can be performed for active route sharing, data route sharing, data output,
mutual monitoring, and remote maintenance output.
· In data output, the output NMEA sentence can be selected.
· To share active or data routes, sharing route configuration must be performed.
Set the route sharing setting to "SHARE" for data routes.
When set to "SHARE", data route reception will occur automatically.
For active routes, set the route sharing setting to "SHARE 1", "SHARE 2", "SHARE 3",
"SHARE 4" or "SHARE 5".
(1) SHARE1: If the active route is switched on the unit, the route will automatically be sent
out to connected equipment.
When a shared route is received, the route is automatically switched.
(2) SHARE2: If the active route is switched on the unit, a request is made to the user of
the unit before the route is sent. Transmission of the route to the connected
equipment is dependant on the permission of the user.
If the user has not authorized sending, the active route will only be executed
on the local unit.
When a shared route is received, the route is automatically switched.
(3) SHARE3: If the active route is switched on the unit, the route will automatically be sent
out to connected equipment.
When a shared route is received, the user is asked whether or not they want
to switch routes.
If the user does not authorize route switching, the route will not be switched.
(4) SHARE4: If the active route is switched on the unit, a request is made to the user of
the unit before the route is sent. Transmission of the route to the connected
equipment is dependant on the permission of the user.
If the user has not authorized sending, the active route will only be executed
on the local unit.
When a shared route is received, the user is asked whether or not they want
to switch routes.
If the user does not authorize route switching, the route will not be switched.
(5) SHARE5: The active route cannot be sent
When a shared route is received, the route is automatically switched.
The following icon is displayed when active routes are shared.
SHARE1 Icon: SHARE2 Icon: SHARE3 Icon: SHARE4 Icon:
SHARE5 Icon:
6. Appendix > 6.8 Setting for the route transfer by LAN connection with the GPS
6-198
· To perform mutual monitoring, mutual monitoring mode must be configured. With mutual
monitoring mode, when GPS positioning is not being performed, the GPS positioning
information from other units can be displayed.
· Remote maintenance output configuration can be used to regularly output data for use in
remote maintenance
.
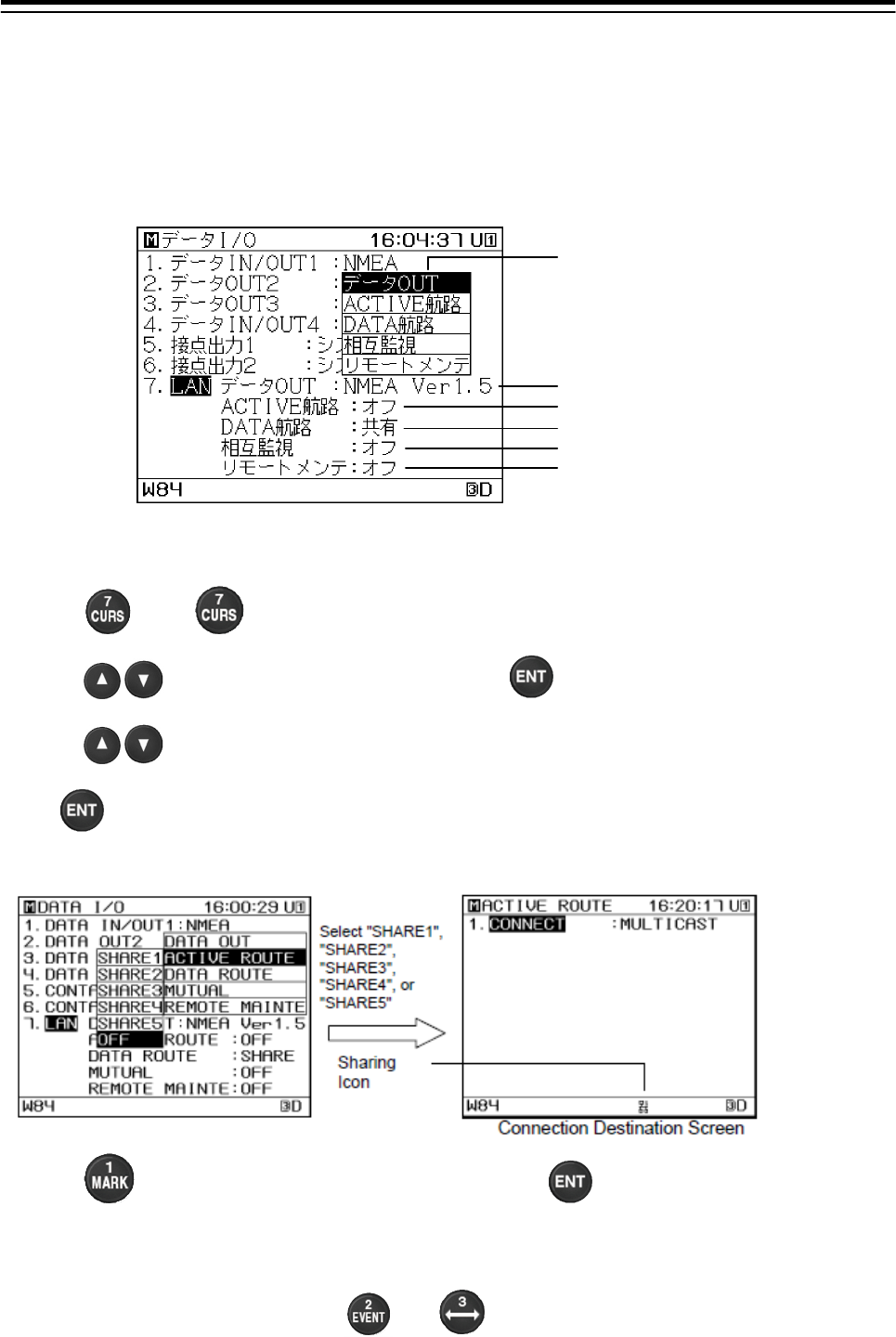
LAN Selection Screen
1. Refer to "4.20 Equipment Configuration" and display the equipment configuration menu.
2. Press , then , and select "LAN".
3. Press to select "ACTIVE ROUTE", and press .
4. Press to select "SHARE1", "SHARE2", "SHARE3", "SHARE4", or "SHARE5", and
press to display the connection destination screen.
Select "OFF" to disable sharing.
5. Press "CONNECT", select the destination, and press .
Normally, "MULTICAST" should be selected for the destination.
To send to a specific unit, select "UNICAST".
6. When "UNICAST" is selected, press and to select the destination IP "2.TO IP"
and "3.PORT No.".
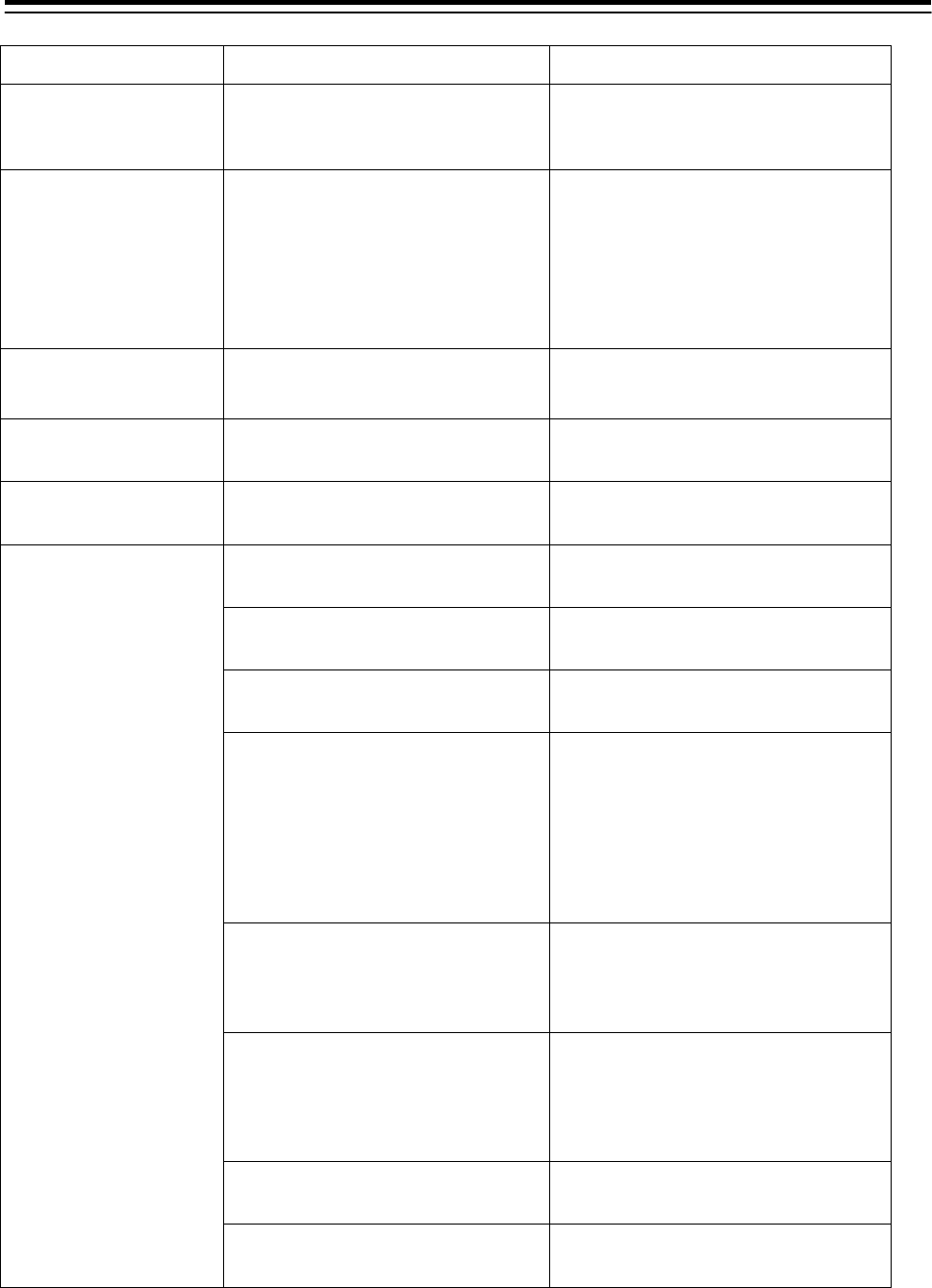
LAN 設定プルダウン
Data output setting
ACTIVE route sharing setting
DATA route sharing setting
Mutual monitoring mode setting
Remote maintenance output setting
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-199
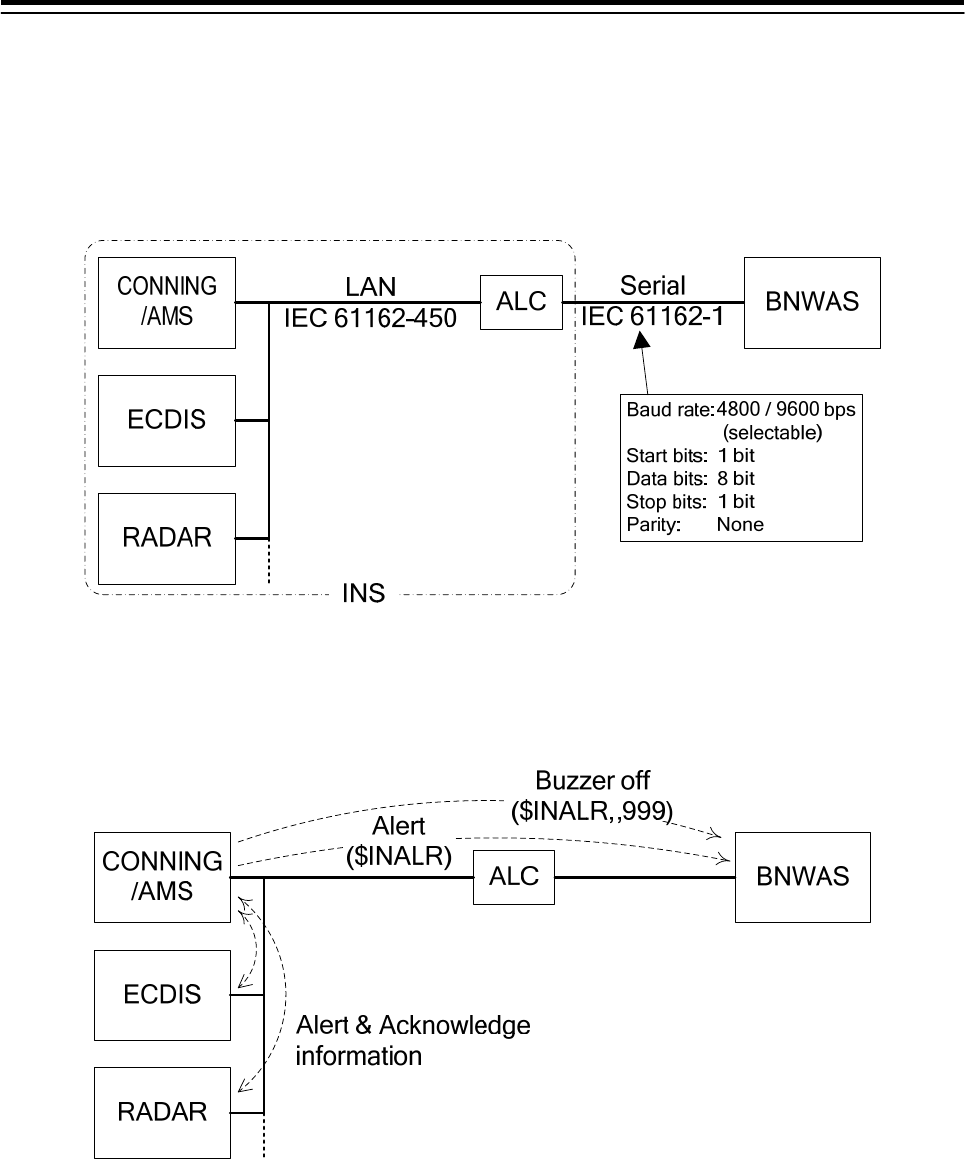
6.9 Specification of alert communication with BNWAS
6.9.1 System Block Diagram
6.9.1.1 Connection Diagram
6.9.1.2 Function Diagram
(1). INS Alert and Back-up navigator call
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-200
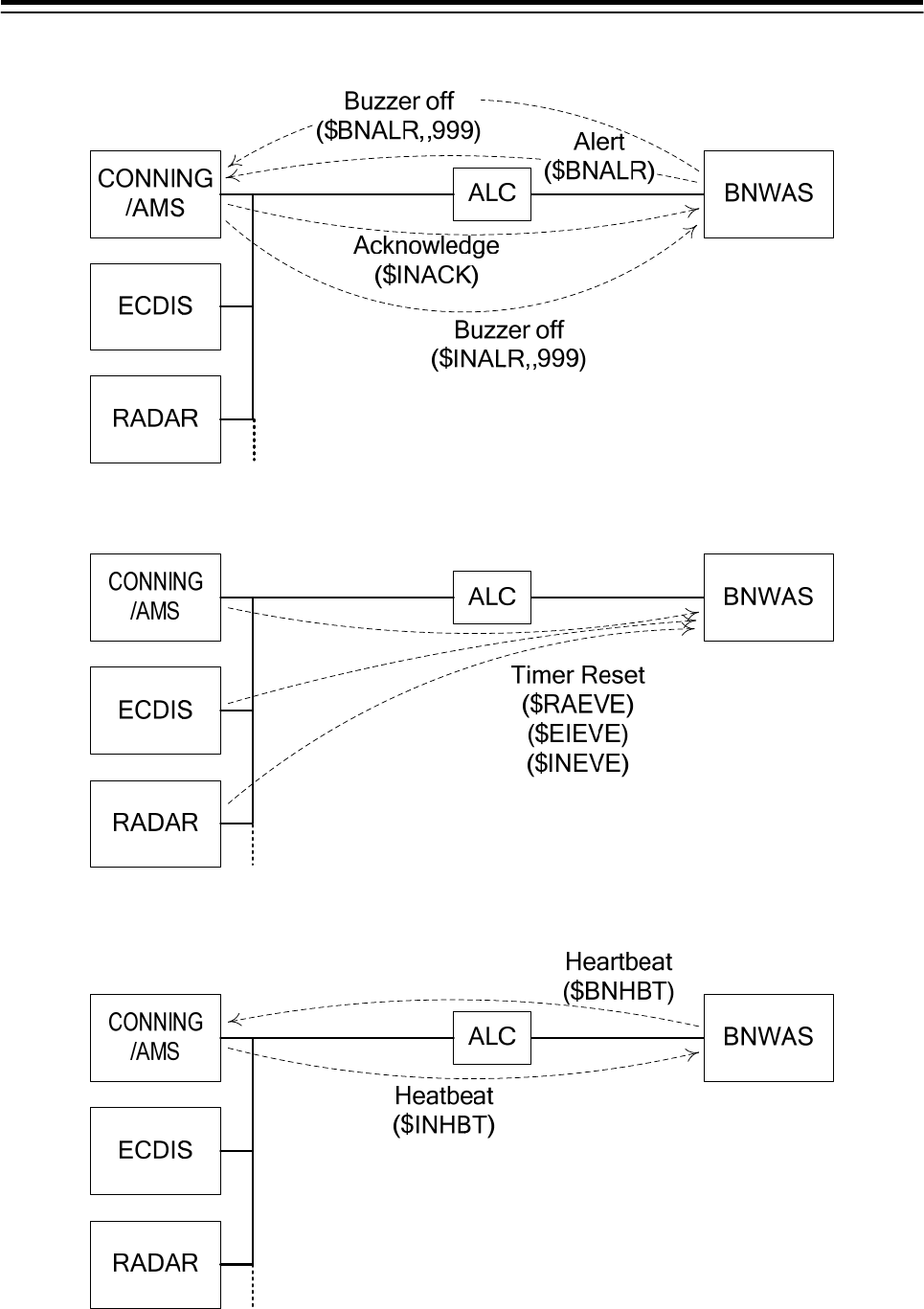
(2). BNWAS alert
(3). Watch Timer Reset
(4). Connection supervision
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-201
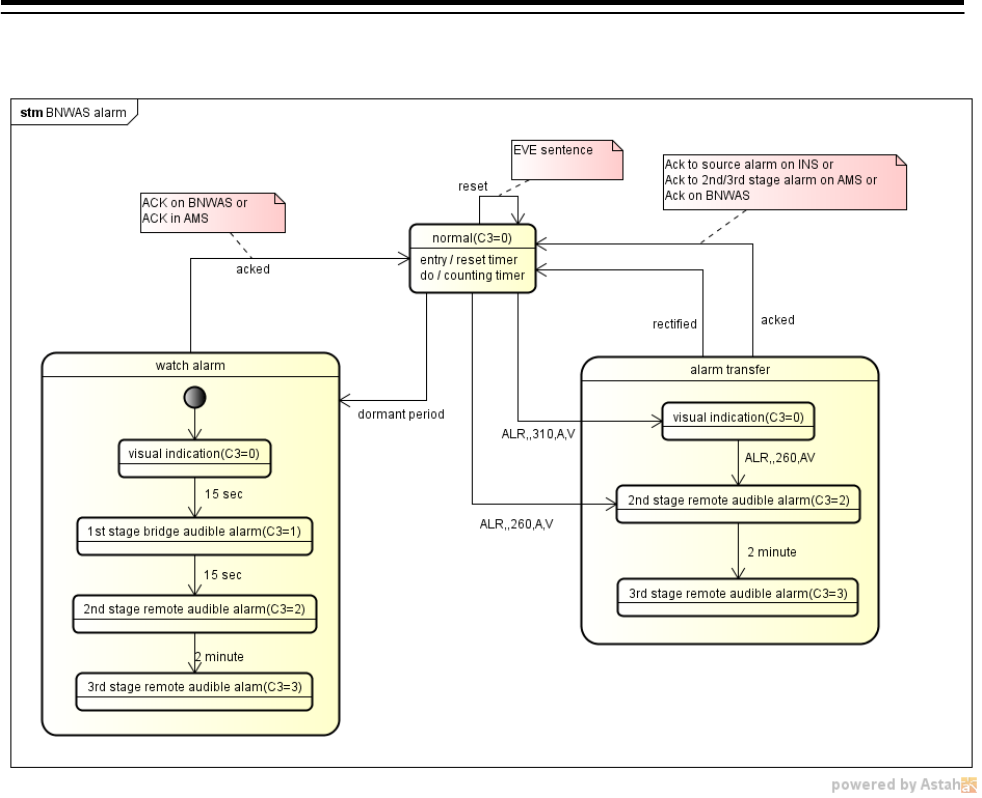
6.9.2 Mechanism
6.9.2.1 BNWAS status
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-202
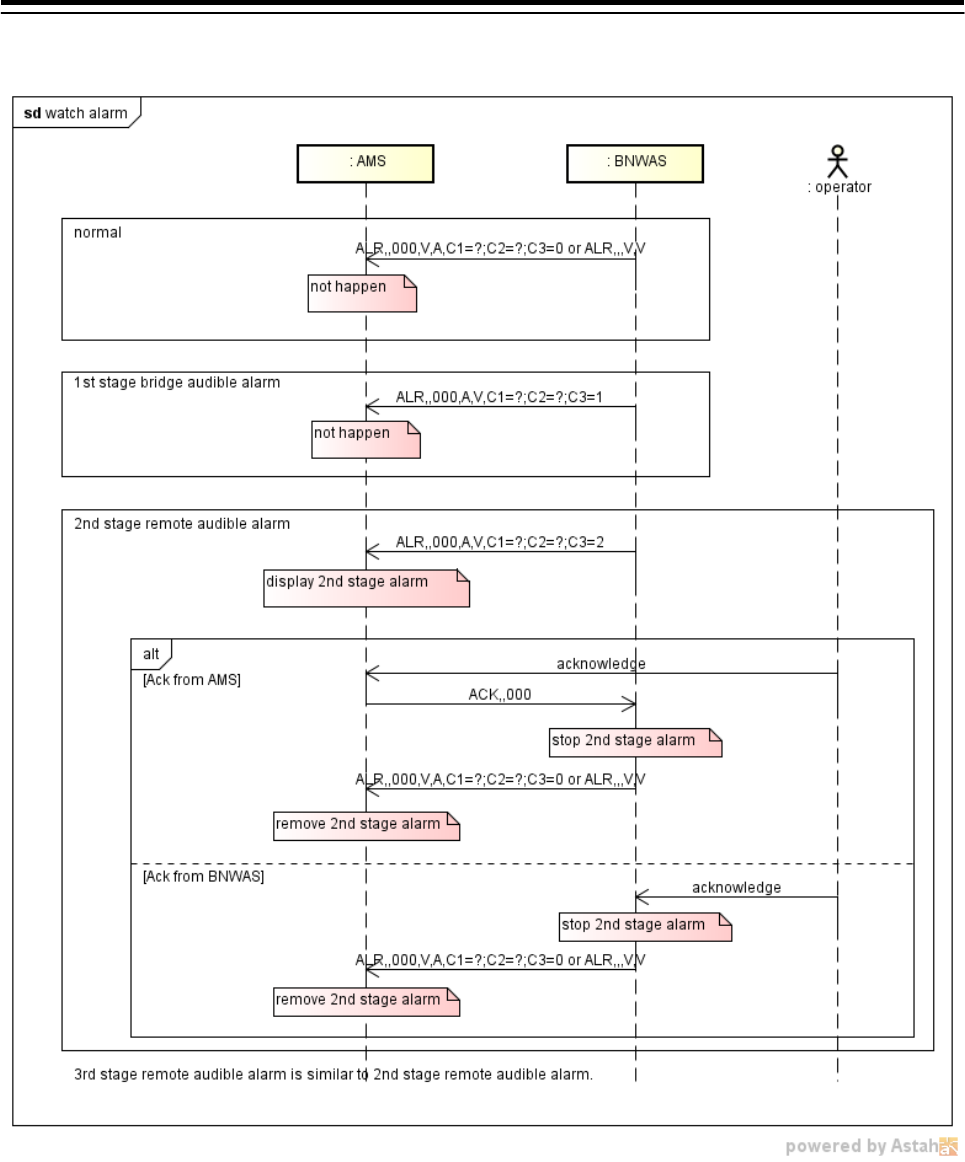
6.9.2.2 Watch alarm
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-203
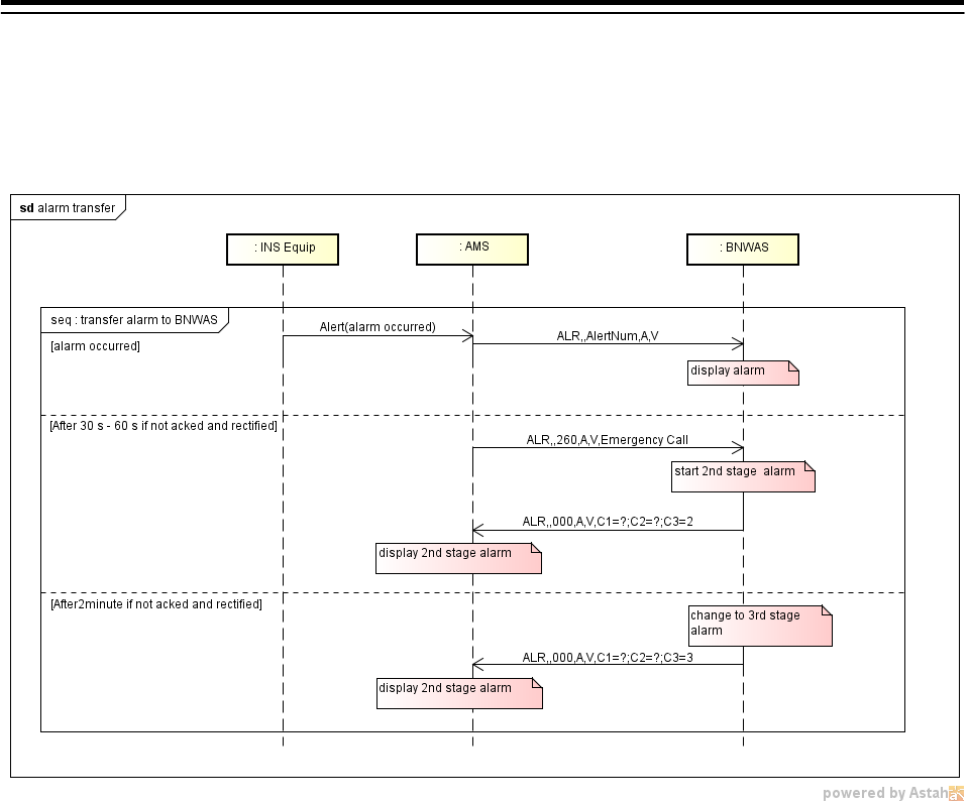
6.9.2.3 Alarm transfer
(1). Alarm transfer
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-204
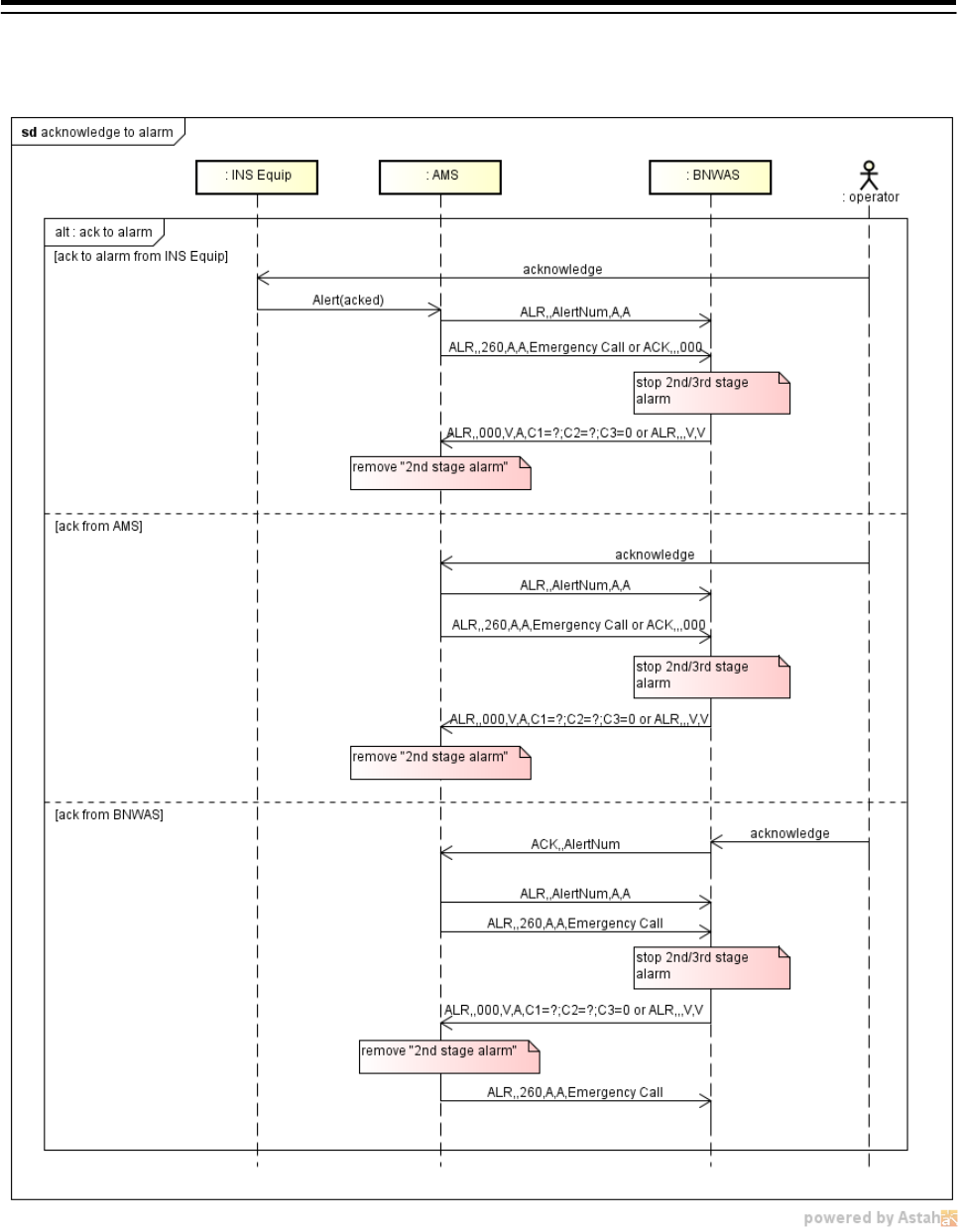
(2). Acknowledge to alert
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-205
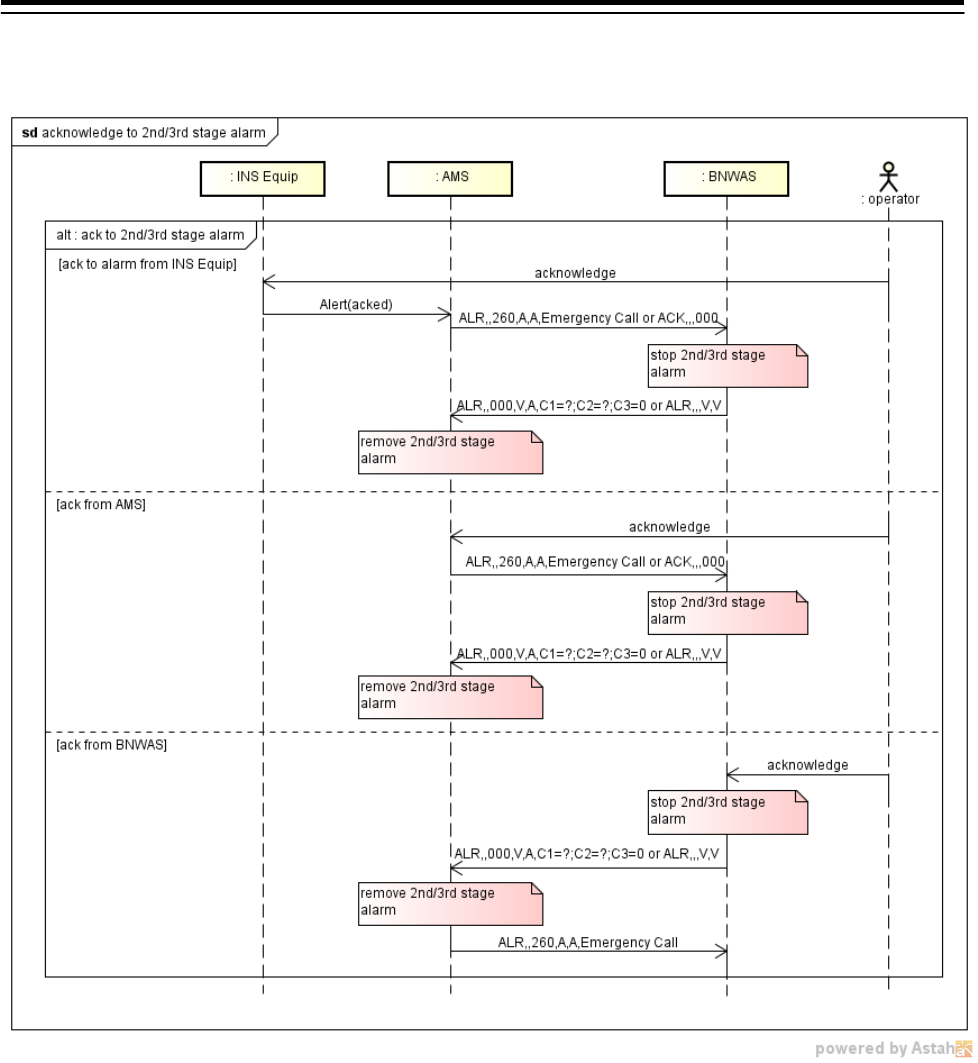
(3). Acknowledge to 2nd/3rd stage remote audible alert
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-206
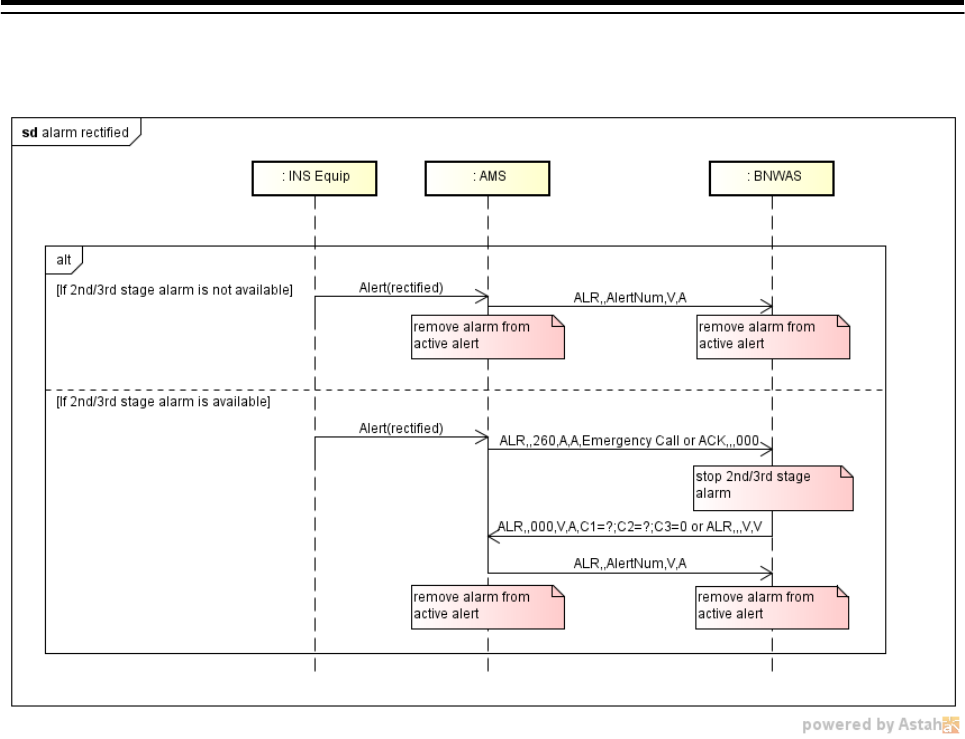
(4). Rectified
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-207
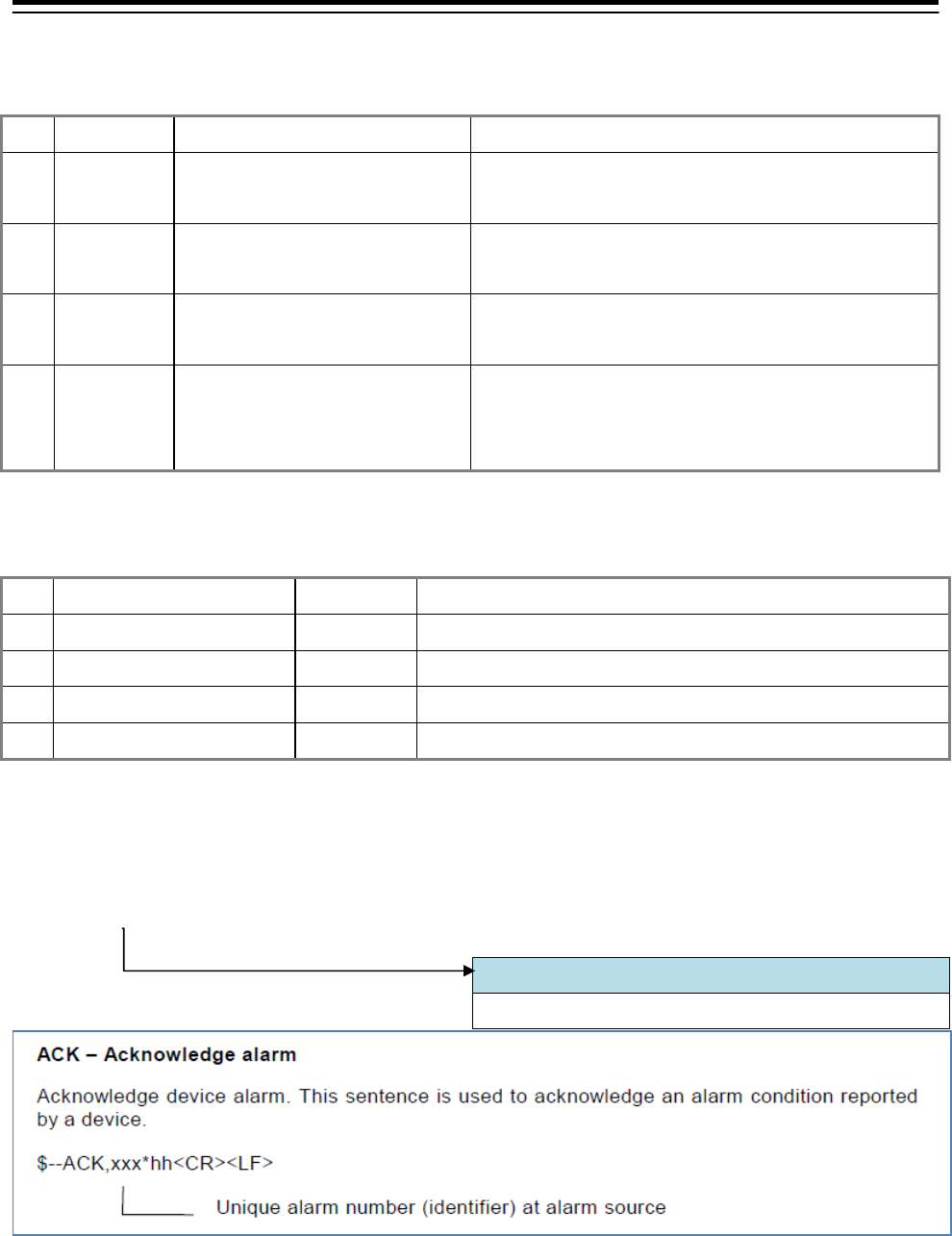
6.9.3 Sentences
No mnemonic Meaning Remarks
1 ACK Acknowledge alert This sentence is used to acknowledge an
Category-B alert condition reported by a device.
2 ALR Set alert state This sentence is used to report an alert condition on
a device and its current state of acknowledgement.
3 EVE Watch Timer reset JRC-INS to BNWAS for timer-reset.
(IEC 62616/7.4.6)
4 HBT Heartbeat supervision sentence This sentence is intended to be used to indicate that
equipment is operating normally, or for supervision of
a connection between JRC-INS and BNWAS.
6.9.3.1 Talker ID
No. Source Talker ID Remark
1 BNWAS BN IEC 61162/Table 4
2 RADAR RA IEC 61162/Table 4
3 ECDIS EI IEC 61162/Table 4
4 INS/ CONNING/ AMS IN IEC 61162/Table 4
6.9.3.2 ACK sentence
$INALR,xxx*hh<CR><LF> (INS -> BMWAS)
$BNALR,xxx*hh<CR><LF> (BNWAS -> INS)
Alert number
See. Alert number table(Described later)
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-208
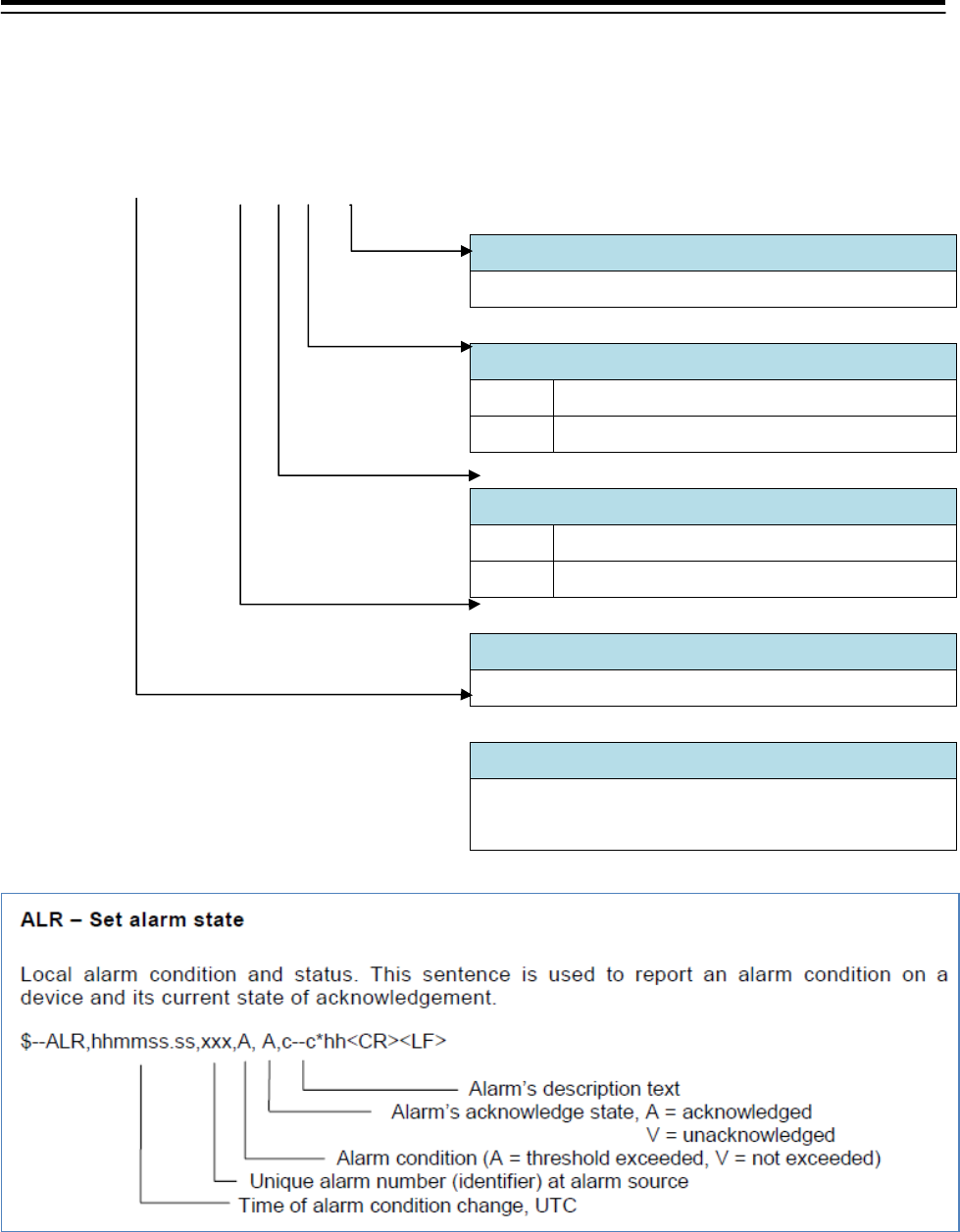
6.9.3.3 ALR sentence
Transmit : interval from 1sec to 15sec for BNWAS, from 1 sec to 3 sec for AMS.
$INALR,hhmmss.ss,xxx,A,A,c--c*hh<CR><LF> (INS -> BMWAS)
$BNALR,hhmmss.ss,xxx,A,A,c--c*hh<CR><LF> (BNWAS -> INS)
Alert’s description text
If unnecessary, null is OK.
Alert’s acknowledge state
A Acknowledged
V Unacknowledged
Alert condition
A Threshold exceeded
V Not exceeded
Alert number
See Alert number table(Described later)
Time of alert condition change. UTC
UTC
or if time cannot be inserted, null is OK.
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-209
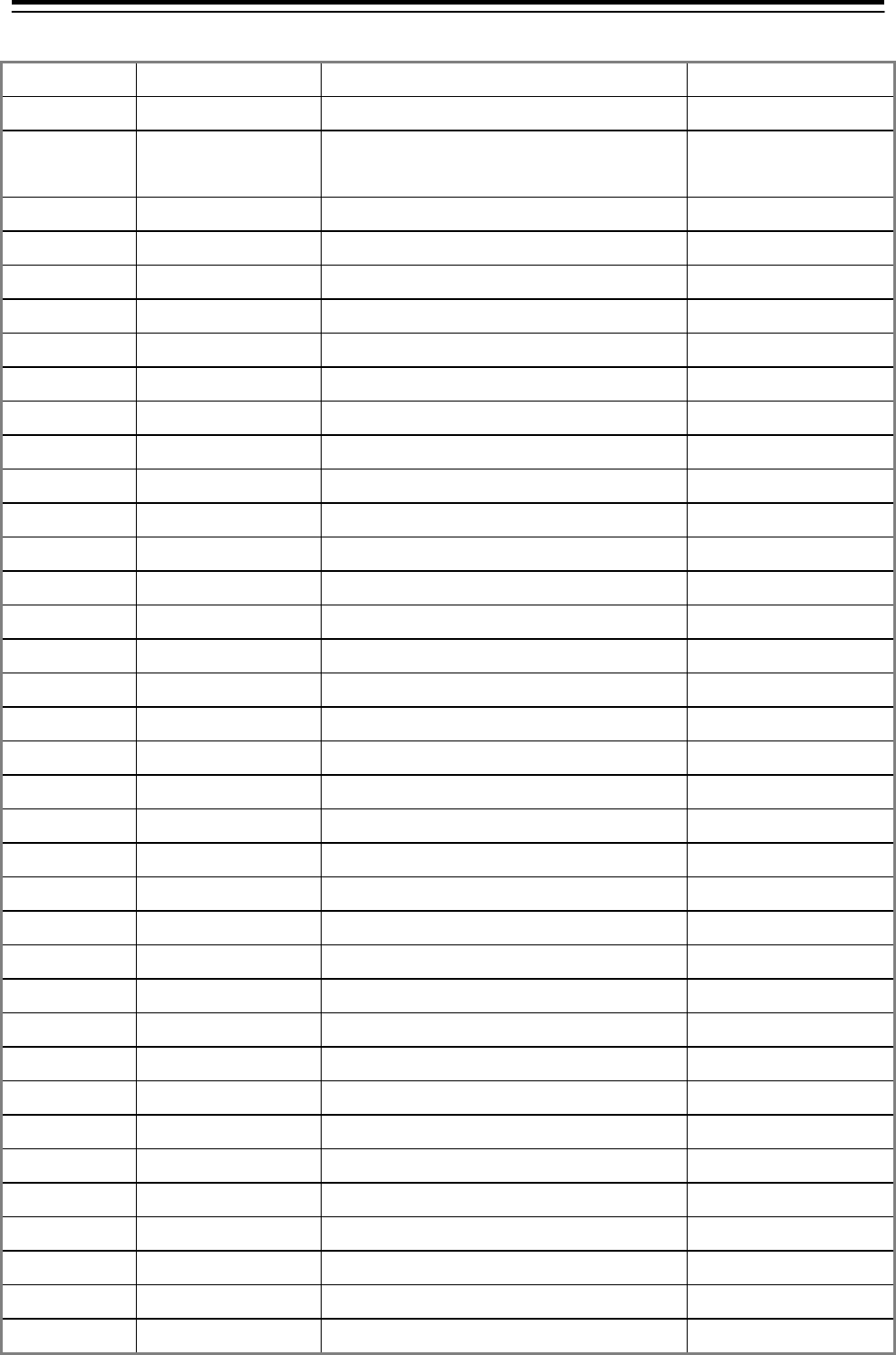
Alert number (sample)
alert number source mean remark
(none) JRC-INS, BNWAS no-alerts message IEC 61924-2/L.1.3
000 BNWAS Dormant period report Category-B
IEC 62616 Ed1.0/6.2
001 BNWAS System fail Category-B
002 BNWAS Power fail Category-B
260 AMS Emergency call (Back-up Navigator Call) IEC 61924-2/J.2
300 No.1 RADAR ARPA(CPA/TCPA) alert Category-A
301 No.1 RADAR Power & System fail Category-B
302 No.2 RADAR ARPA(CPA/TCPA) alert Category-A
303 No.2 RADAR Power & System fail Category-B
304 No.3 RADAR ARPA(CPA/TCPA) alert Category-A
305 No.3 RADAR Power & System fail Category-B
310 ECDIS Cross-Track (Off-Track) Category-A
311 ECDIS Course Difference (Off course) Category-A
312 ECDIS Wheel Over Line (ACCA) Category-A
313 ECDIS End Of Track Category-A
314 ECDIS Depth below keel Category-A
315 ECDIS Power & System fail Category-B
320 Backup-ECDIS Cross-Track (Off-Track) Category-A
321 Backup-ECDIS Course Difference (Off course) Category-A
322 Backup-ECDIS Wheel Over Line (ACCA) Category-A
323 Backup-ECDIS End Of Track Category-A
324 Backup-ECDIS Depth below keel Category-A
325 Backup-ECDIS Power & System fail Category-B
350 CONNING Power & System fail Category-B
360 No.1 DGPS Power & System fail Category-B/Warning
361 No.2 DGPS Power & System fail Category-B/Warning
362 No.1 Gyro Compass Power & System fail Category-B/Warning
363 No.2 Gyro Compass Power & System fail Category-B/Warning
364 No.1 Speed Log Power & System fail Category-B/Warning
365 No.2 Speed Log Power & System fail Category-B/Warning
366 Echo Sounder Power & System fail Category-B/Warning
367 AIS Power & System fail Category-B/Warning
368 Auto Pilot Power & System fail Category-B/Warning
369 NAVTEX Power & System fail Category-B/Warning
370 VDR Power & System fail Category-B/Warning
371 Clock Power & System fail Category-B/Warning
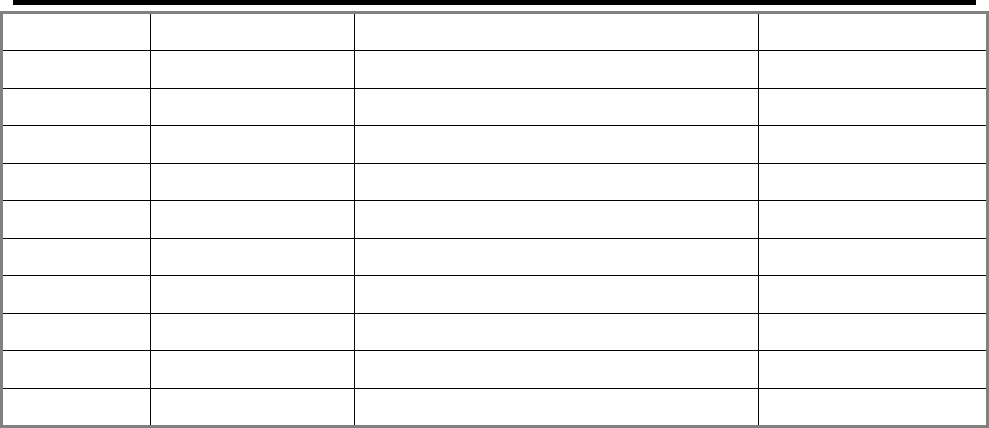
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-210
372 GMDSS Power & System fail Category-B/Warning
373 No.1 Main SLC Power & System fail Category-B/Warning
374 No.2 Main SLC Power & System fail Category-B/Warning
375 No.3 Main SLC Power & System fail Category-B/Warning
376 No.1 Sub SLC Power & System fail Category-B/Warning
377 No.2 Sub SLC Power & System fail Category-B/Warning
378 No.3 Sub SLC Power & System fail Category-B/Warning
379 No.1 ALC Power & System fail Category-B/Warning
380 No.2 ALC Power & System fail Category-B/Warning
381 No.3 ALC Power & System fail Category-B/Warning
999 JRC-INS, BNWAS Buzzer off request original
6.9.3.4 No-alert message
When there is no alarm, this message will be sent from BNWAS or INS to the another.
$INALR,,,V,V,*hh<CR><LF> (INS -> BNWAS)
$BNALR,,,V,V,*hh<CR><LF> (BNWAS -> INS)
Note) see IEC 61924-2/L1.3
6.9.3.5 Back-up navigator call
For Back-up navigator call, emergency message sentence will be sent from AMS to BNWAS:
$INALR,,260,A,V,Emergency Call*hh<CR><LF>
For removing Back up navigator call:
$INALR,,260,A,A,Emergency Call*hh<CR><LF>
Note) see IEC 61924-2/J.2
6.9.3.6 Buzzer off request
For request buzzer off, this message will be used.
Transmit : 1 time
$INALR,,999,A,A,BZ off*hh<CR><LF> (INS -> BNWAS)
$BNALR,,999,A,A,BZ off*hh<CR><LF> (BNWAS -> INS)
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-211
6.9.3.7 Dormant period report
The ALR sentence is used for dormant period report from BNWAS to AMS.
$BNALR, hhmmss.ss, 000, A, A, c1;c2;c3*hh<CR><LF>
Alarm stage
1,2 or 3
Dormant period in min
03 - 12
AUT or MAN or OFF
Alarm’s acknowledge state
A = Acknowledged
V = Unacknowledged
Dormant period condition
A = Threshold exceeded
V = Not exceeded
Alert number = 000
Time of alert condition change.
UTC or if time cannot be inserted, null is OK.
Example:
$BNALR,,000,A,V,C1=AUT;C2=03;C3=1*hh<CR><LF>
The alarm message shall be sent with any change of the BNWAS settings for mode or dormant period, and
with any activated and reset alarm.
2nd and 3rd alarm should be acknowledged by “$INACK,,000*hh<CR>LF>” from AMS.
Note) see IEC 62616 Ed1.0/6.2
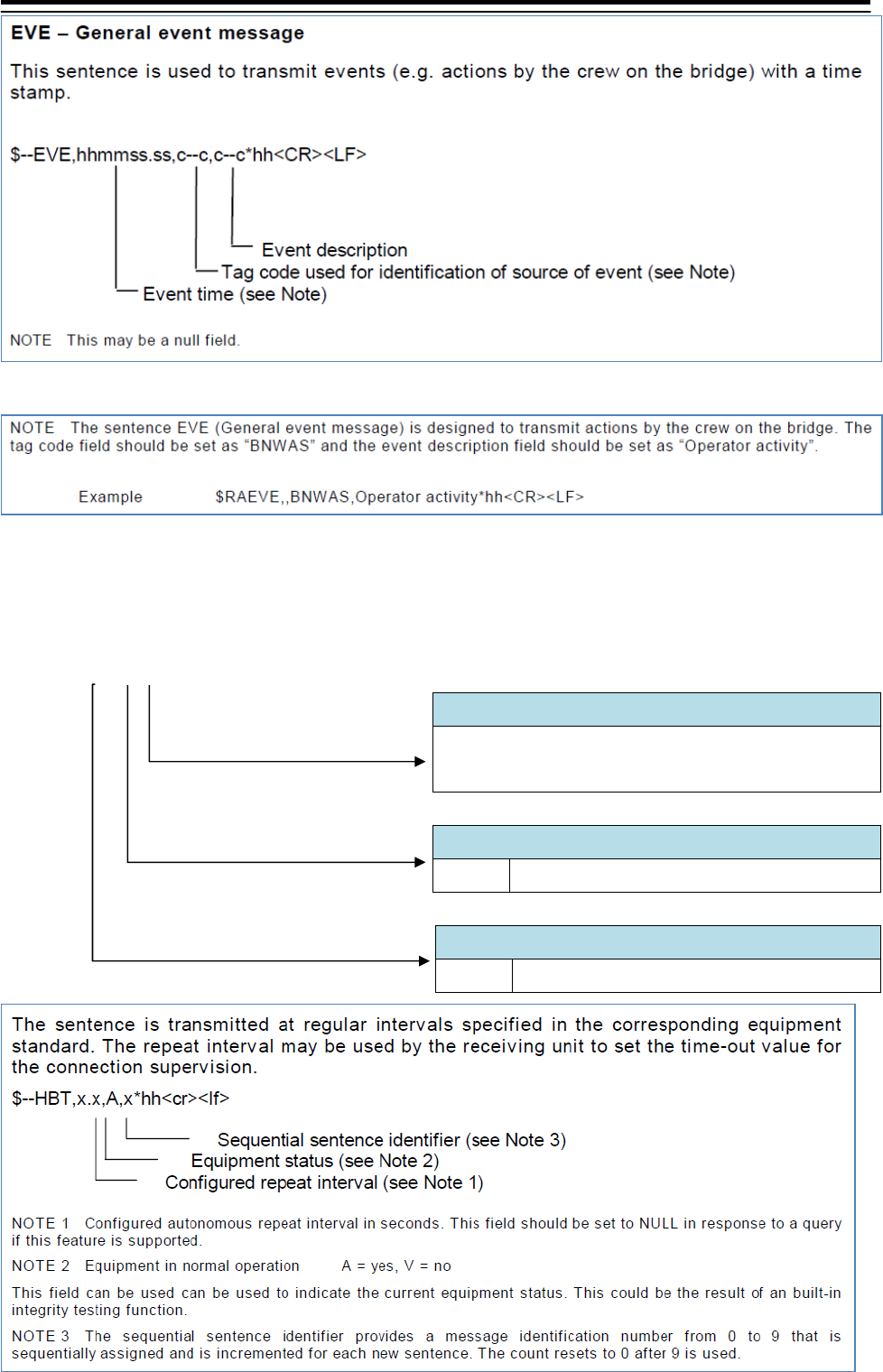
6.9.3.8 EVE sentence
For reset of the Watch Timer, EVE sentence will be sent from individual equipment in INS except ALC to
BNWAS.
Transmit : minimum interval is 1 sec per equipment.
$EIEVE,,BNWAS,Operator activity*hh<CR><LF> (ECDIS -> BNWAS)
$RAEVE,,BNWAS,Operator activity*hh<CR><LF> (RADAR -> BNWAS)
$INEVE,,BNWAS,Operator activity*hh<CR><LF> (CONNING/AMS -> BNWAS)
Event description
Fixed string “Operator activity”
Tag code
Fixed string “BNWAS”
Event time
Null
6. Appendix > 6.9 Specification of alert communication with BNWAS
6-212
see IEC 62616/7.4.6.
6.9.3.9 HBT sentence
This sentence is intended to be used for supervision of a connection between AMS and BNWAS.
Transmit : interval from 1 sec to 3 sec.
$INHBT,x.x,A,x*hh<CR><LF> (INS -> BNWAS)
$BNHBT,x.x,A,x*hh<CR><LF> (BNWAS -> INS)
Sequential sentence identifier
Changing sentence counter. Number from 0
to 9.
Equipment status
A Fix
Configured repeat interval
1.0 Fix
6. Appendix > 6.10 Troubleshooting
6-213
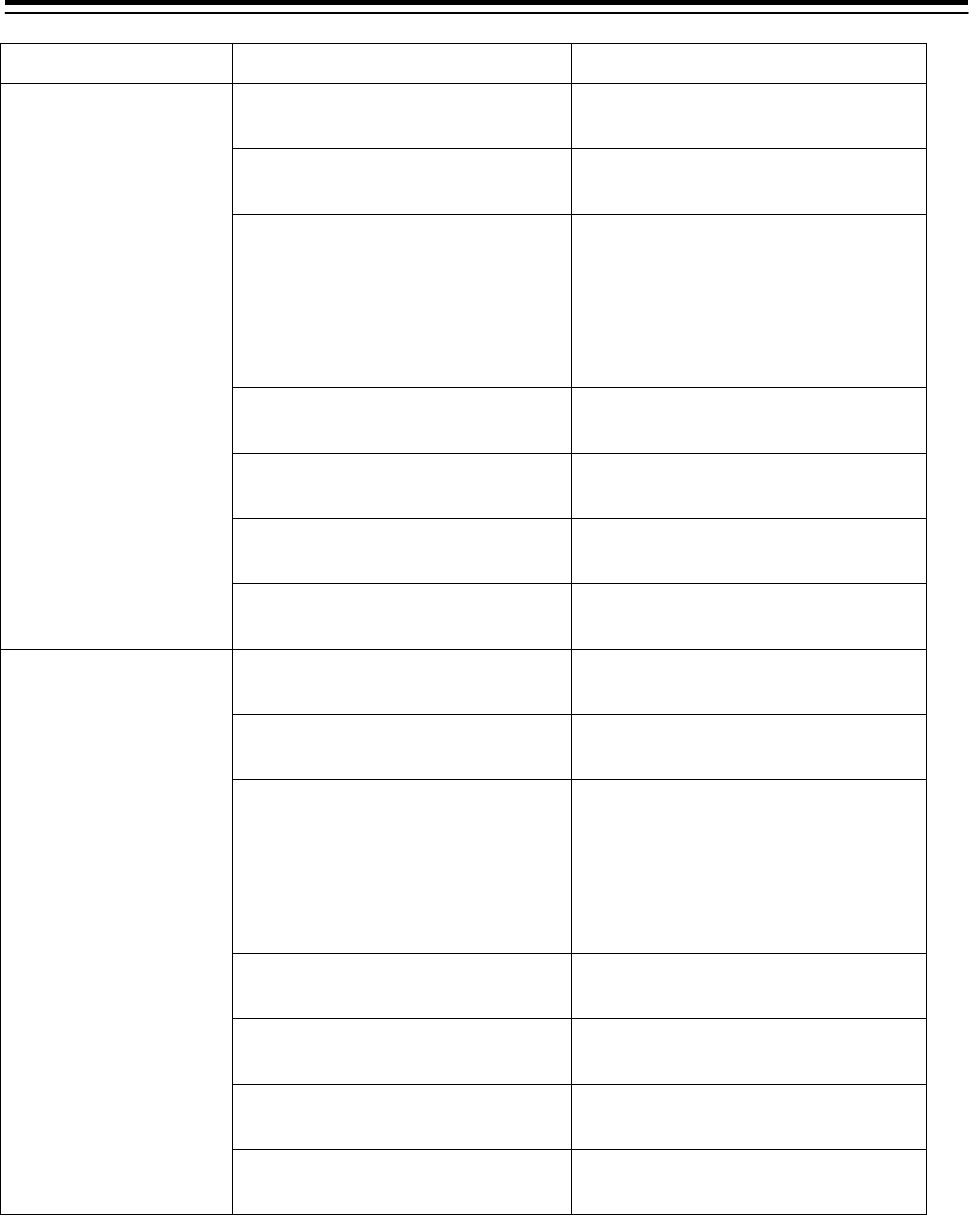
6.10 Troubleshooting
When this equipment does not operate correctly, check the following points before asking for repairs.
Consult with your nearest subsidiary company, branch office, or sales office if the problem does not get solved
even after checking and correcting these points, or if there are any abnormally locations other than the
following items.
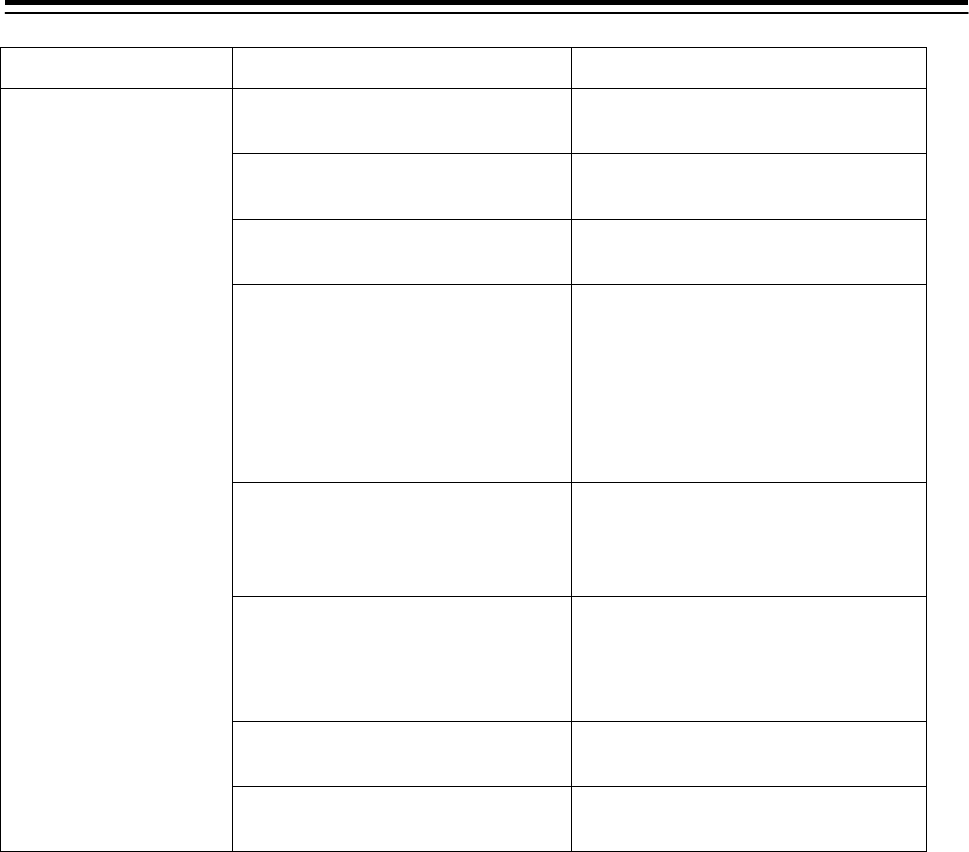
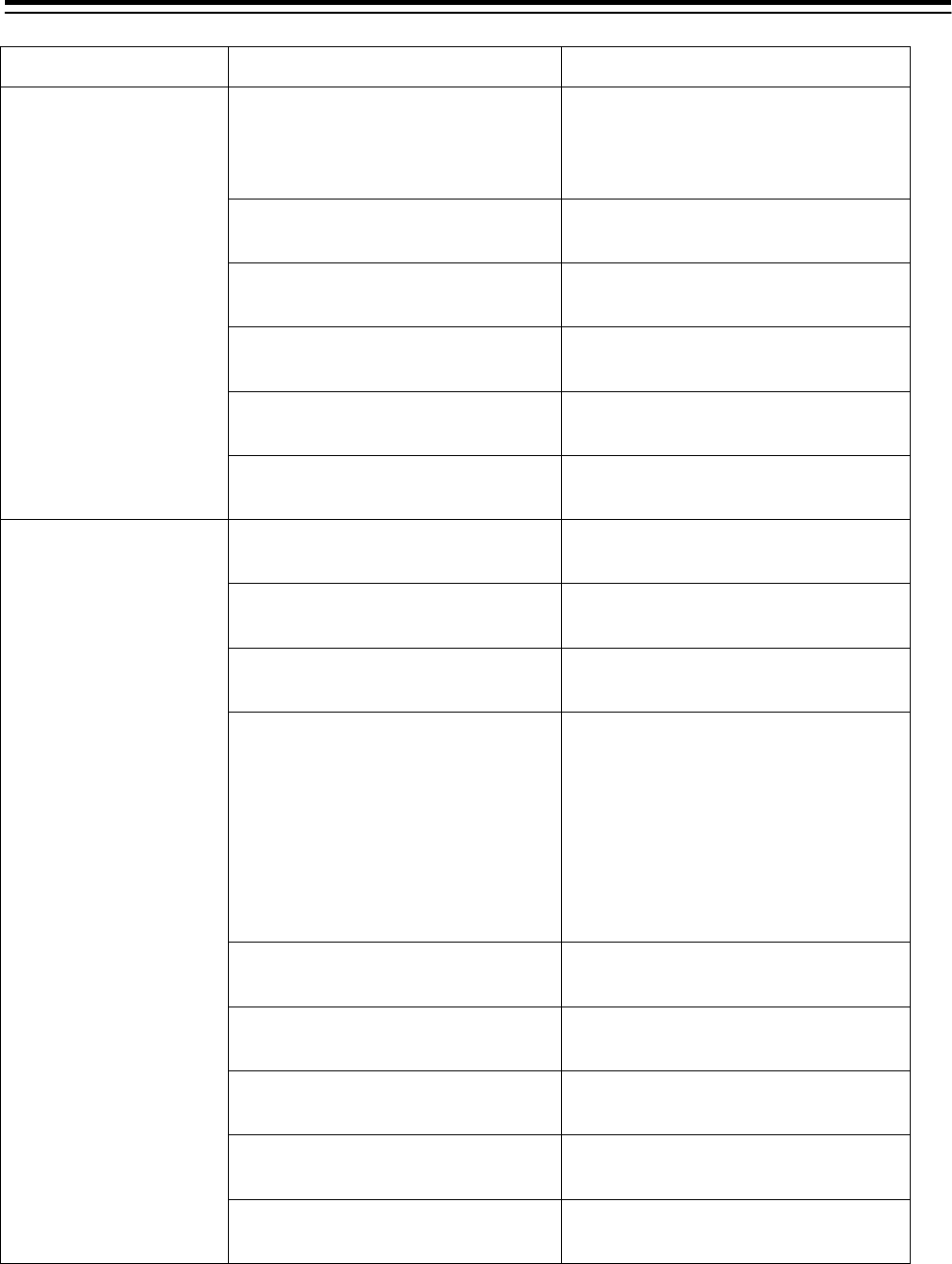
Symptom Cause Action
The power is not
supplied.
Alternatively, the
equipment does not start
even if the Power button
of the operation unit is
pressed.
The AC or DC power supply is not
connected.
Connect the AC or DC power supply.
The circuit breaker at the front of
the PSU (NBD-913) is not set to
ON.
Set the breaker to ON by pushing up
the lever of the breaker.
The AC or DC power supply is not
input within the specified voltage
range.
Connect the AC or DC power supply
within the specified voltage range.
The internal wiring is faulty. Make a request to the distributor for
repair.
The PSU (NBD-913) is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
The CCU (NCE-5605) is faulty. Make a request to the distributor for
repair.
The power is not
supplied to the monitor.
The display unit is not activated. Activate the display unit.
The internal wiring is faulty. Make a request to the distributor for
repair.
The MNU (NWZ-208/NWZ-207) is
faulty.
Make a request to the distributor for
repair.
Although the power is
supplied to the monitor,
the screen is not
displayed.
The brightness of the monitor is set
to the minimum level.
Adjust the brightness of the monitor
to the appropriate level.
The internal wiring is faulty. Make a request to the distributor for
repair.
The MNU (NWZ-208/NWZ-207) is
faulty.
Make a request to the distributor for
repair.
The brightness of the
monitor cannot be
adjusted.
The MNU (NWZ-208/NWZ-207) is
faulty.
Make a request to the distributor for
repair.
The trackball or the
option keyboard cannot
be operated.
The internal wiring is faulty. Make a request to the distributor for
repair.
The display unit
(NCE-5605/NCE5625) is faulty.
Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-214
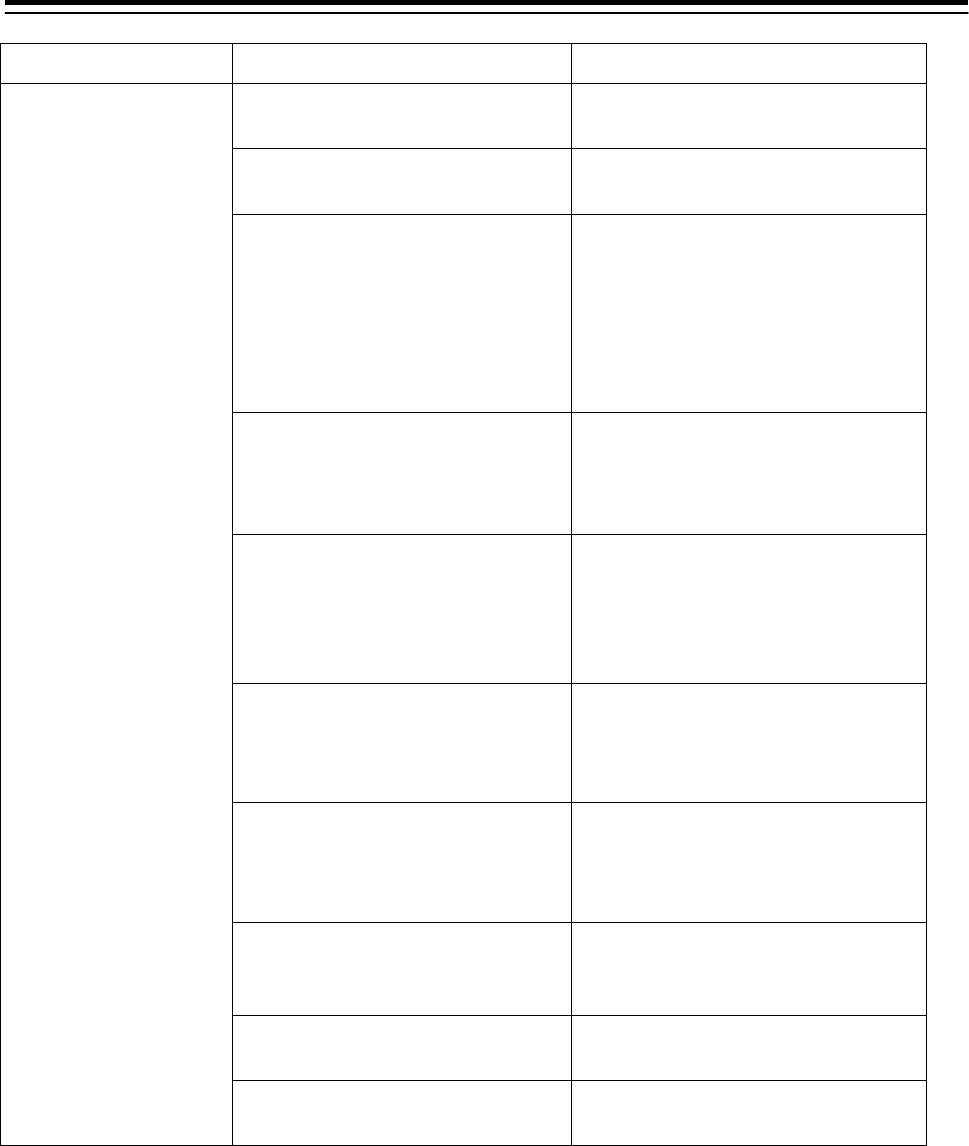
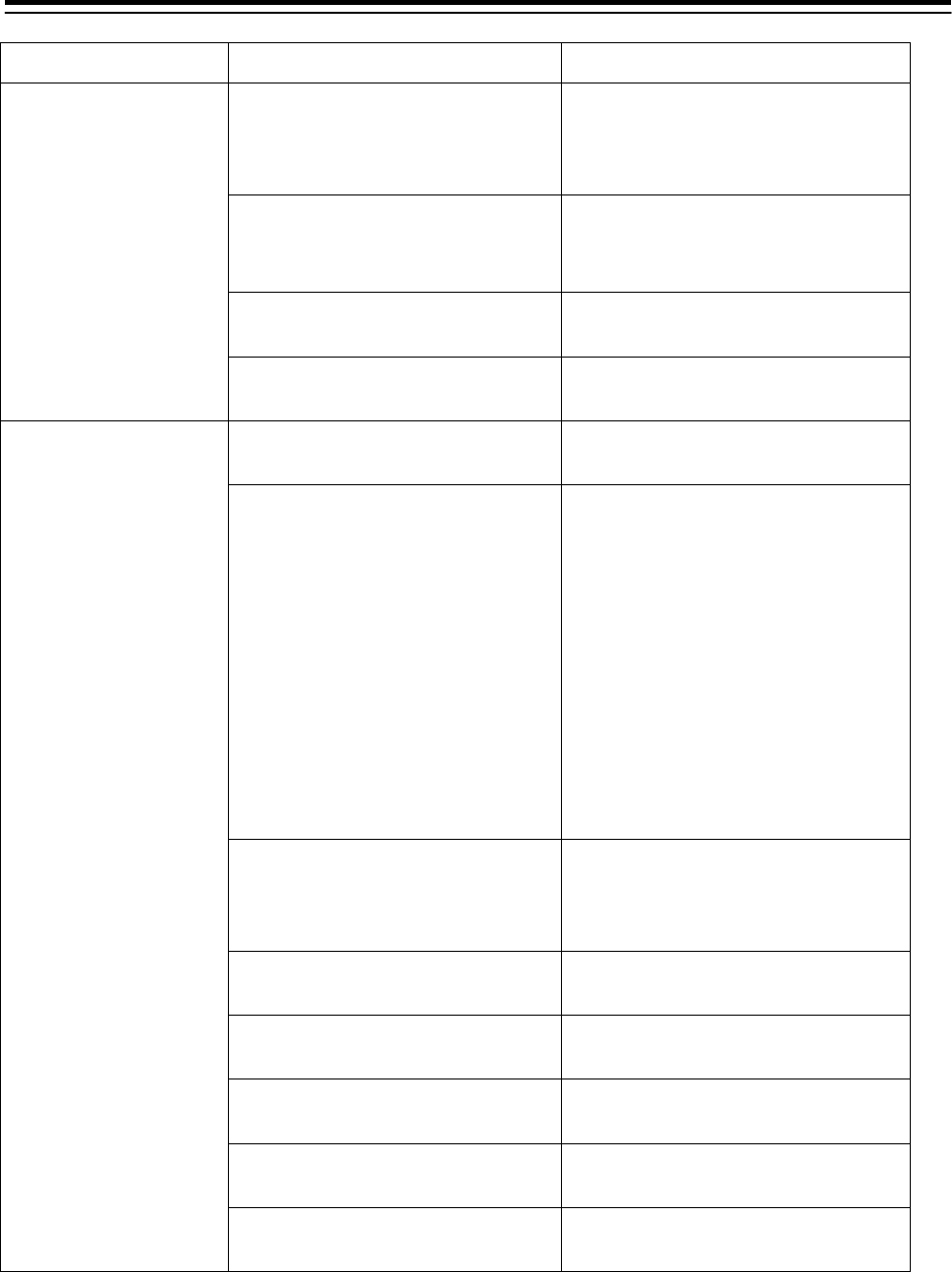
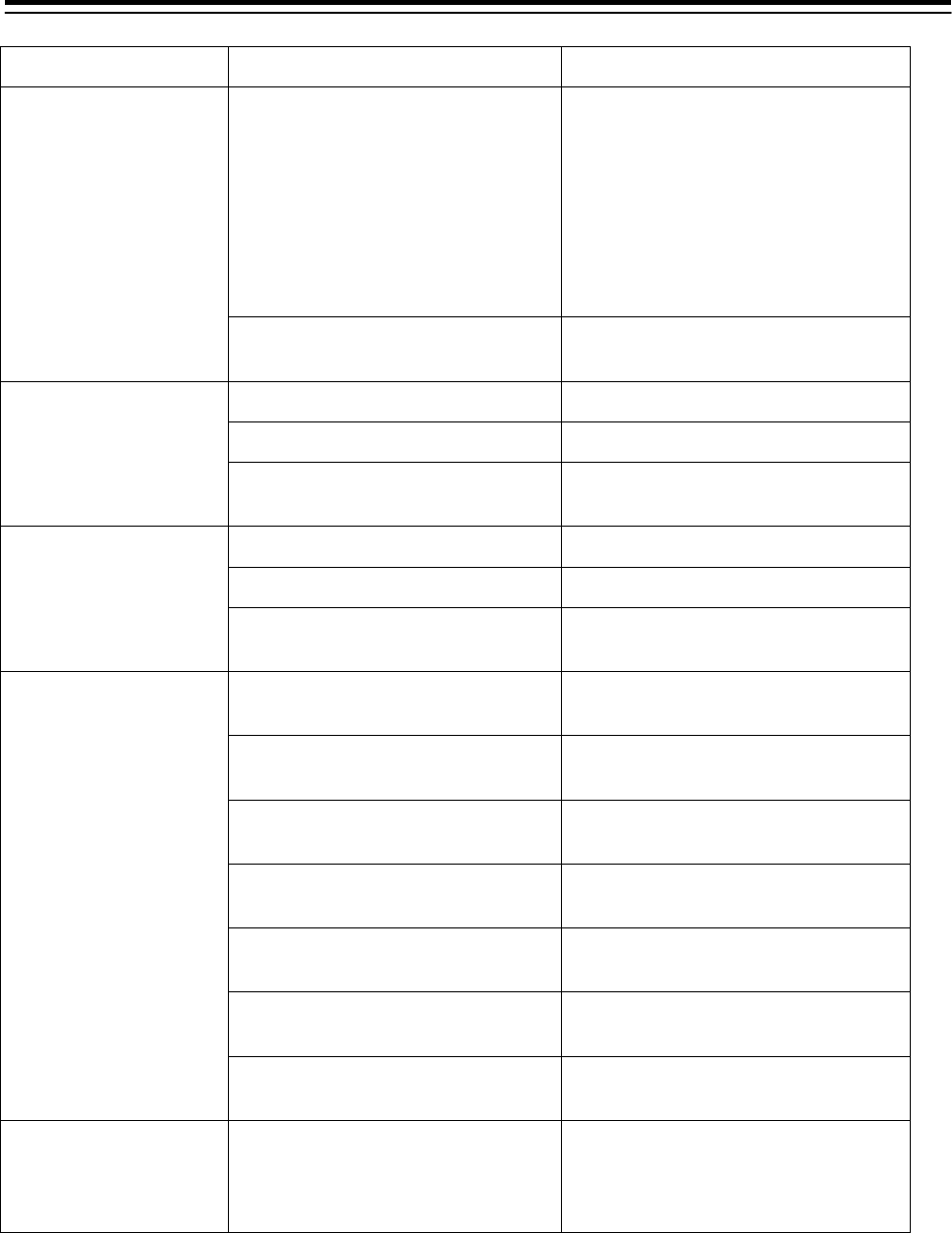
Symptom Cause Action
The trackball does
cannot be moved
smoothly.
The trackball is dirty. Clean the trackball.
Although the power is
supplied and the screen
is displayed, the display
is frozen, disabling
processing to advance
up to display of the task
menu.
The CCU (NDC-1590) is abnormal. Make a request to the distributor for
repair.
Some task menus
cannot be selected.
The device license has not been
installed.
Install the license of the device to be
used.
The cursor is not
displayed correctly.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
Characters/symbols are
not displayed correctly.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
Position information
(GPS) is not displayed.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the GPS unit
is not turned on.
Turn on the power supply for the
GPS unit.
The GPS unit does not perform
positioning.
Check the state of the GPS unit.
The connection with the GPS unit is
abnormal.
Check the connection with the GPS
unit.
If a GPS unit is connected to the
SLC, check that the LED of the
corresponding port is lit during data
reception.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where the GPS unit is
connected to the SLC)
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where the GPS unit is
connected to the SLC)
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-215
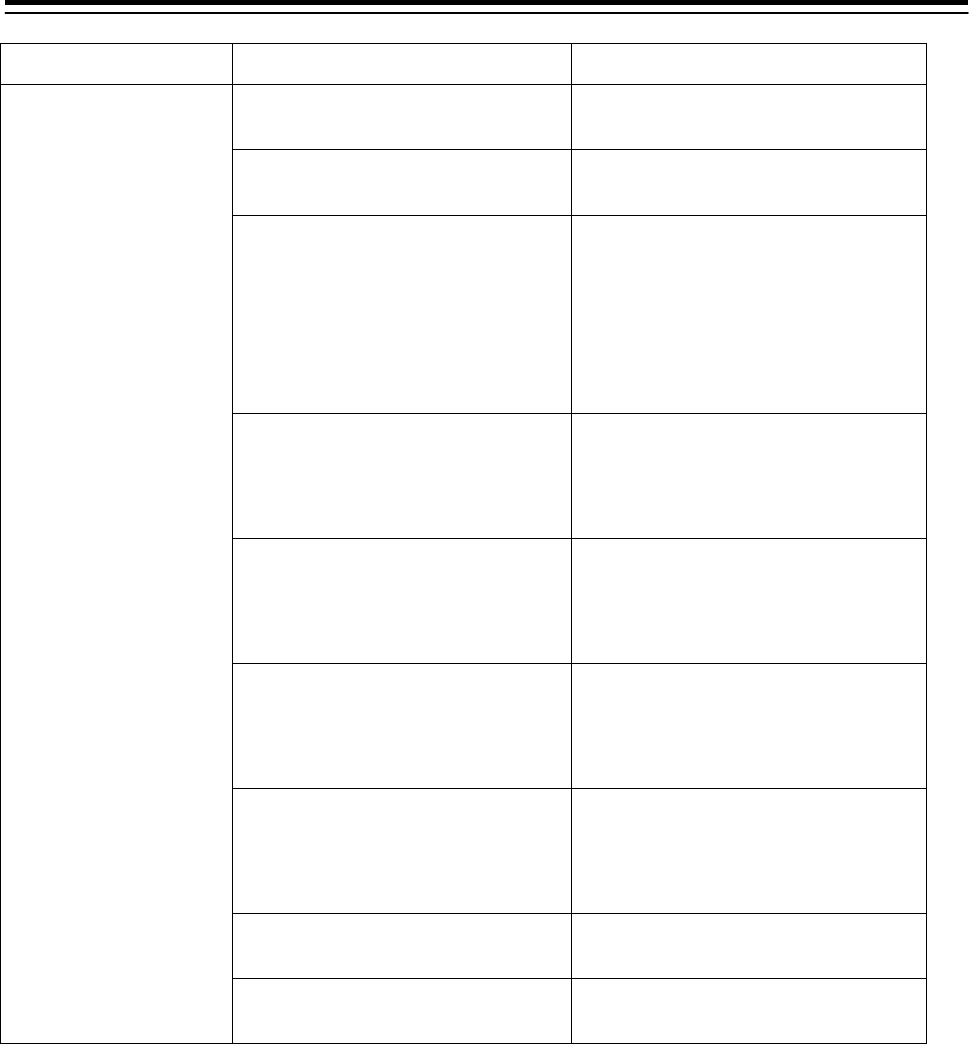
Symptom Cause Action
AIS information is not
displayed.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the AIS unit is
not turned on.
Turn on the power supply for the AIS
unit.
The AIS unit does not perform
receiving.
Check the state of the AIS unit.
The connection with the AIS unit is
abnormal.
Check the connection with the AIS
unit.
If an AIS unit is connected to the
SLC, check that the LED of the
corresponding port is lit during data
reception.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where the AIS unit is
connected to the SLC)
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where the AIS unit is
connected to the SLC)
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-216
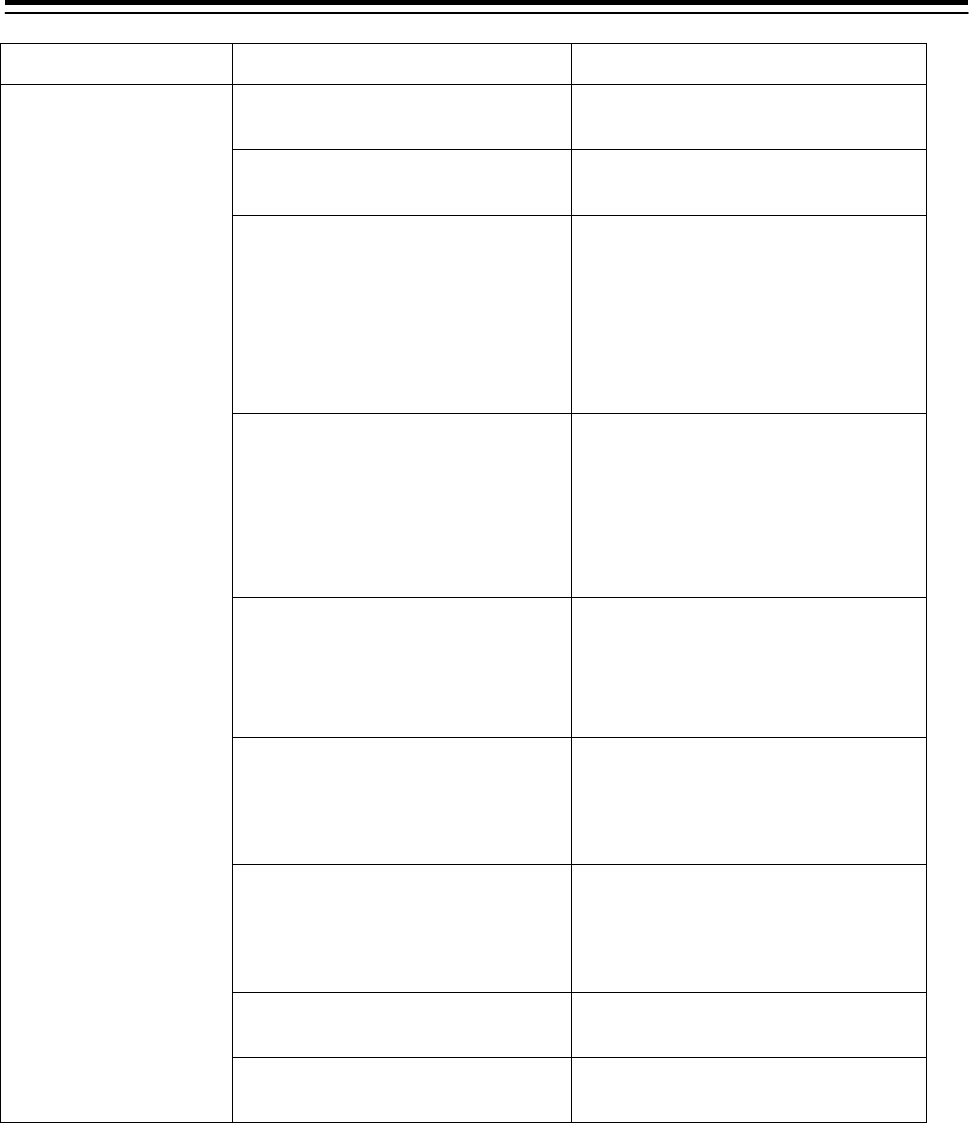
Symptom Cause Action
The azimuth of the Gyro
compass is not
displayed.
Alternatively, the
azimuth rotation
direction is not
displayed correctly.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the gyro
compass is not turned on.
Turn on the power supply for the gyro
compass.
The connection with the gyro
compass is abnormal.
Check the connection with the gyro
compass.
If the gyro compass is connected to
the SLC or GIF, check that the
corresponding LED is lit during signal
reception.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where the gyro compass is
connected to the SLC)
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where the gyro compass is
connected to the SLC)
Make a request to the distributor for
repair.
The GIF (CMJ-554) is not set
correctly
(Case where the gyro compass is
connected to the GIF)
Set the GIF correctly according to the
gyro compass.
The fuse of the GIF (CMJ-554) has
blown.
(Case where the gyro compass is
connected to the GIF)
Replace the fuse of the GIF.
The GIF (CMJ-554)is faulty.
(Case where the gyro compass is
connected to the GIF)
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-217
Symptom Cause Action
Vessel speed is not
displayed or the values
are not displayed
correctly.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the speed log
is not turned on.
Turn on the power supply for the
speed log.
The connection with the speed log
is abnormal.
Check the connection with the speed
log.
If the speed log is connected to the
SLC or GIF, check that the
corresponding LED is lit during signal
reception.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where the speed log is
connected to the SLC).
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where the speed log is
connected to the SLC).
Make a request to the distributor for
repair.
The GIF (CMJ-554) is not set
correctly.
(Case where the speed log is
connected to the GIF).
Set the GIF correctly according to the
speed log.
The GIF (CMJ-554) is faulty.
(Case where the speed log is
connected to the GIF).
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-218
Symptom Cause Action
Rudder angles are not
displayed.
Alternatively, the values
are not displayed
correctly.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the rudder
angle indicator is not turned on.
Turn on the power supply for the
rudder angle indicator.
The connection with the rudder
angle indicator is abnormal.
Check the connection with the rudder
angle indicator.
If the rudder angle indicator is
connected to the SLC, check that the
LED of the corresponding port is lit
during data reception.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where the rudder angle
indicator is connected to the SLC or
the rudder angle indicator is
connected to the AOC)
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where the rudder angle
indicator is connected to the SLC or
the rudder angle indicator is
connected to the AOC)
Make a request to the distributor for
repair.
The AOC (CMJ-560) is not set
correctly.
(Case where the rudder angle
indicator is connected to the AOC)
Set the AOC correctly according to
the rudder angle indicator.
The AOC (CMJ-560) is faulty.
(Case where the rudder angle
indicator is connected to the AOC)
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-219
Symptom Cause Action
The digital anemometer
values (wind direction
and speed) are not
displayed.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the
anemometer is not turned on.
Turn on the power supply for the
anemometer.
The connection with the
anemometer is abnormal
Check the connection with the
anemometer.
Check that the LED of the
corresponding port in the SLC is lit
during data reception.
The power supply for the SLC
(CMH-2370) is not turned on.
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
Water depth values are
not displayed.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the echo
sounder is not turned on.
Turn on the power supply for the
echo sounder.
The connection with the echo
sounder is abnormal.
Check the connection with the echo
sounder.
Check that the LED of the
corresponding port in the SLC is lit
during data reception.
The power supply for the SLC
(CMH-2370) is not turned on.
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.

6. Appendix > 6.10 Troubleshooting
6-220
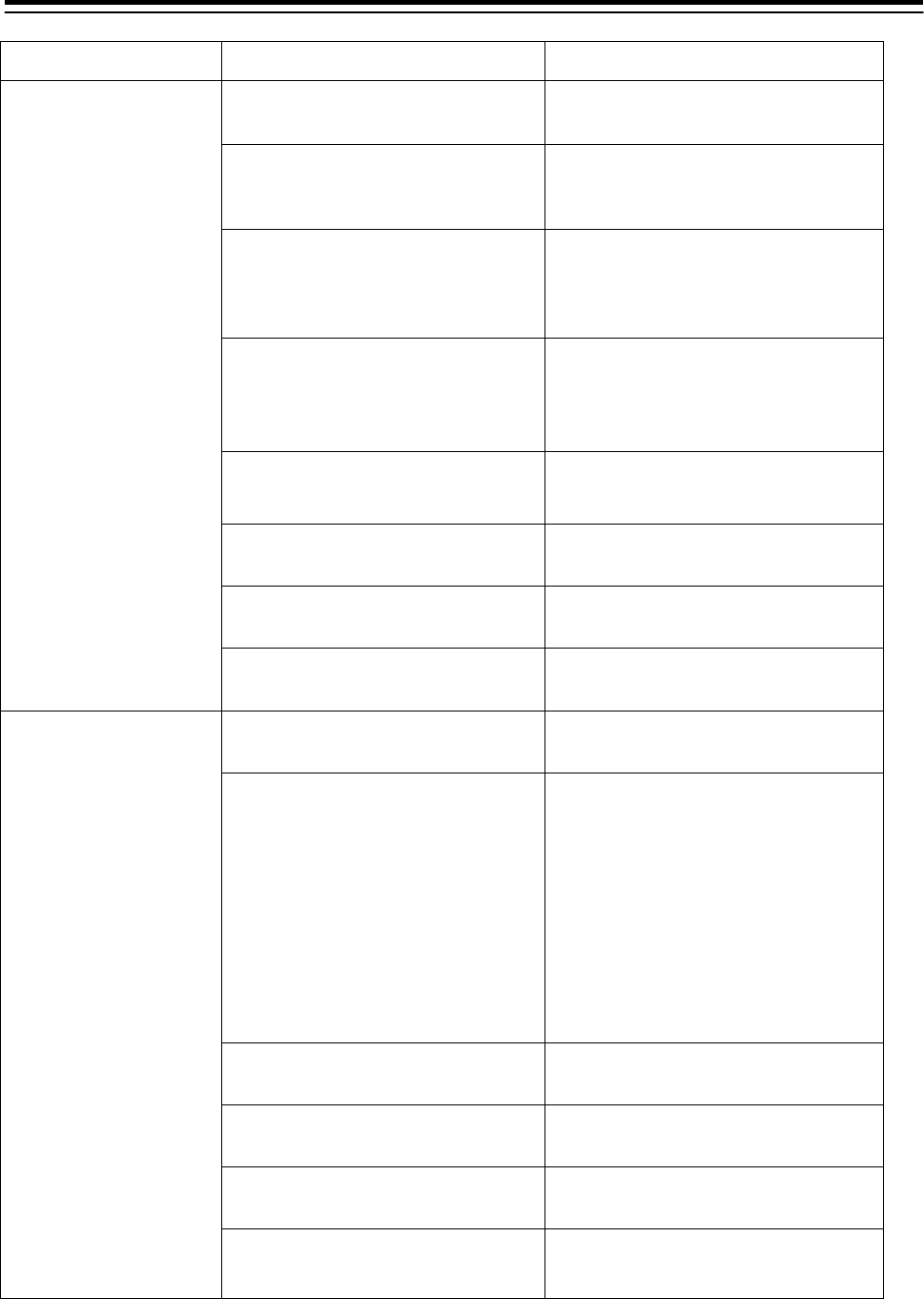
Symptom Cause Action
Sensor signals are not
displayed.
The communication is not set
correctly.
Set the communication correctly.
The power supply for the sensor
equipment is not turned on.
Turn on the power supply for the
sensor equipment.
The connection with the sensor
equipment is abnormal.
Check the connection with the sensor
equipment.
Check that the LED of the
corresponding port in the SLC is lit
during data reception.
The power supply for the SLC
(CMH-2370) is not turned on.
Turn on the power supply for the
SLC.
The internal wiring is faulty. Make a request to the distributor for
repair.
The display unit such as the SLC
(CMH-2370), AOC (CMJ-560), and
CCU (NDC-1590) is faulty.
Make a request to the distributor for
repair.
Auto sailing is disabled. The communication is not set
correctly.
Set the communication correctly.
The Auto sailing function is not
operated correctly.
Operate Auto sailing correctly.
The power supply for the Auto
sailing unit is not turned on.
Turn on the power supply for the Auto
sailing unit.
The connection with the Auto
sailing unit is faulty.
Check the connection with the Auto
sailing unit.
Check that the LED of the
corresponding port in the SLC is lit
during data reception.
The power supply for the SLC
(CMH-2370) is not turned on.
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-221
Symptom Cause Action
Contact signals are not
output.
The power supply for the SLC
(CMH-2370) is not turned on.
(Case where contact signal output
is acquired from the SLC)
Turn on the power supply for the
SLC.
The SLC (CMH-2370) is faulty.
(Case where contact signal output
is acquired from the SLC)
Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
The scanner unit is not
recognized
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
Power is not supplied from the PSU
to the scanner unit.
Check the power supply wiring
between the PSU and the RIF.
Check the power supply connection
inside of the scanner unit.
[Note]
For checking wiring inside of the
scanner unit, always request the
work to the specialized service
person. Before starting the work, turn
off the power supply of the display
unit. Otherwise, an unexpected
accident may occur.
Only AC power is supplied to the
PSU.
(NKE-2254 or NKE-2103 is
connected as the scanner unit)
To connect the NKE-2254 or
NKE-2103 scanner unit, the DC
power supply must be connected to
the PSU.
The RIF (CQD-2273) is not set
correctly.
Set the RIF correctly.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The scanner unit is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-222
Symptom Cause Action
The power is not
supplied to the scanner
unit.
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
The connection with the scanner
unit is abnormal and overcurrent
protection is functioning in the PSU.
Check the connection with the
scanner unit and remove the cause
of short-circuit.
DC power is not supplied to the
PSU.
(NKE-2254 or NKE-2103 is
connected as the scanner unit)
To connect the NKE-2254 or
NKE-2103 scanner unit, DC power
supply must be connected to the
PSU.
The DC24V output fuse is blown
out.
(NKE-2254 or NKE-2103 is
connected as the scanner unit.)
After removing the cause of fuse
blow-out, replace the fuse.
The fuse is the 15A blade fuse at the
front of the PSU (NBD-913).
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The PSU (NBD-913) is abnormal. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
The preheat count
down of the scanner
unit is not displayed.
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
The safety switch of the scanner
unit is set to OFF.
Set the safety switch of the scanner
unit to ON.
[Note]
For operating the safety switch of the
scanner unit, always request the
work to the specialized service
person. Before starting the work, turn
off the power supply of the display
unit. Otherwise, an unexpected
accident may occur.
A solid-state scanner unit is
connected.
Preheat count-down is not displayed
for a solid-state scanner unit.
The scanner unit is faulty. Make a request to the distributor for
repair.
The RIF (CQD-2273) is not set
correctly. Set the RIF correctly.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-223
Symptom Cause Action
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
The scanner unit does
not rotate even if the
[Transmit] button is
pressed.
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
The safety switch of the scanner
unit is set to OFF.
Set the safety switch of the scanner
unit to ON.
[Note]
For operating the safety switch of the
scanner unit, always request the
work to the specialized service
person. Before starting the work, turn
off the power supply of the display
unit. Otherwise, an unexpected
accident may occur.
Power is not supplied from the PSU
to the scanner unit.
Check the power supply wiring
between the PSU and the RIF.
Check the power supply connection
inside of the scanner unit.
[Note]
For checking the wiring inside of the
scanner unit, always request the
work to the specialized service
person. Before starting the work, turn
off the power supply of the display
unit. Otherwise, an unexpected
accident may occur.
The motor driver circuit inside of the
scanner unit is not set correctly.
(NKE-1632, NKE-2632, or
NKE-2632-H is connected as the
scanner unit.)
Set the motor driver circuit correctly.
[Note]
For setting the motor driver circuit,
always request the work to the
specialized service person. Before
starting the work, turn off the power
supply of the display unit.
Otherwise, an unexpected accident
may occur.
The rotating part of the scanner unit
is frozen.
De-freeze the frozen section by using
the neck heater option.
6. Appendix > 6.10 Troubleshooting
6-224
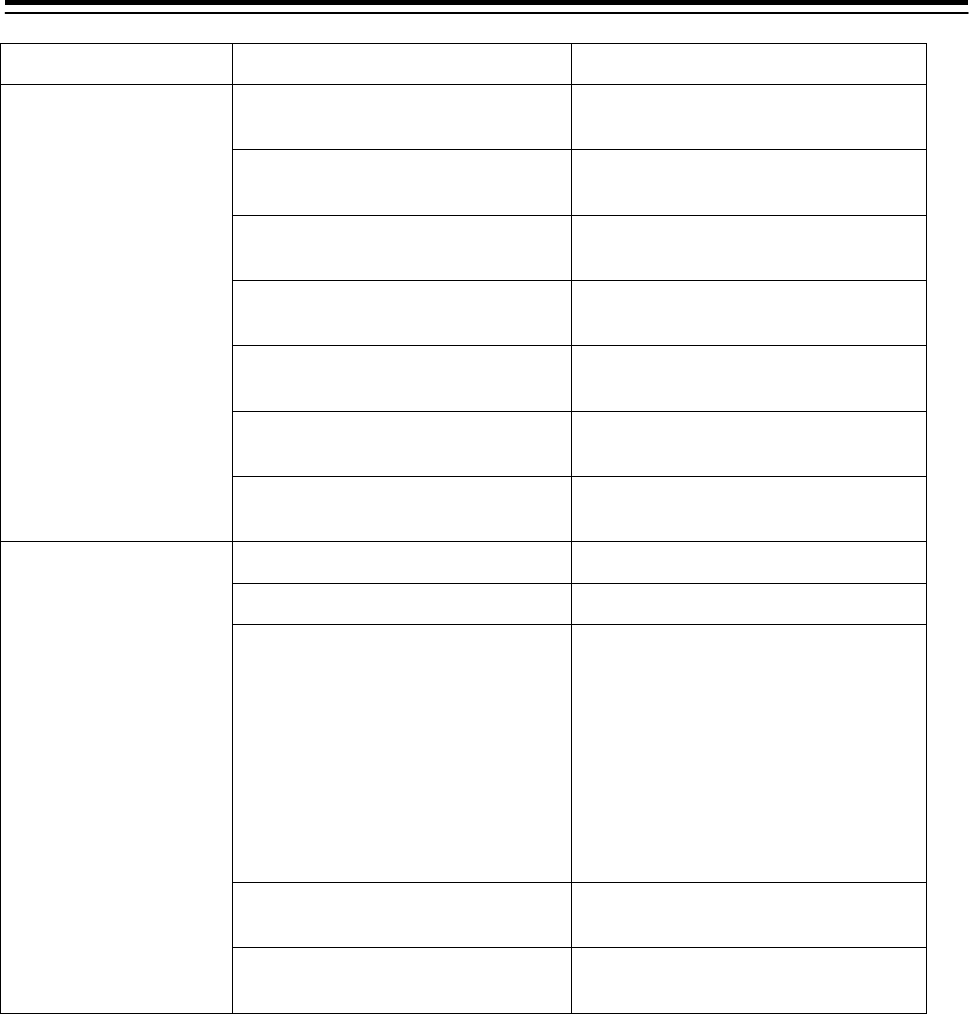
Symptom Cause Action
Strong wind of relative wind velocity
exceeding 100 kt (about 51.5 m/s)
is blowing.
When strong wind of relative wind
velocity exceeding 100 kt is blowing,
the scanner unit does not rotate due
to the protection function.
The scanner unit is faulty. Make a request to the distributor for
repair.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The PSU (NBD-913) is abnormal. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
No radar image is
displayed.
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
The GAIN value is set to the
minimum.
Set a proper value for GAIN.
The SEA/RAIN value is set to the
maximum.
Set a proper value for SEA/RAIN.
The magnetron is deteriorated
significantly.
(Case where an scanner unit that
uses a magnetron is connected)
Replace the magnetron.
[Note]
For magnetron replacement, always
request the work to the specialized
service person. Before starting the
work, turn off the power supply of the
display unit. Otherwise, an
unexpected accident may occur.
The scanner unit is faulty. Make a request to the distributor for
repair.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The PSU (NBD-913) is abnormal. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-225
Symptom Cause Action
Radar images cannot
be tuned
The magnetron is deteriorated
significantly.
(Case where a scanner unit that
uses a magnetron is connected)
Replace the magnetron.
[Note]
For magnetron replacement, always
request the work to the specialized
service person. Before starting the
work, turn off the power supply of the
display unit. Otherwise, an
unexpected accident may occur.
A solid-state scanner unit is
connected.
Tuning bar is not displayed for a
solid-state scanner unit.
The azimuth of the
radar image is not
displayed correctly.
The azimuth is not set correctly. Set the azimuth correctly.
CCRP is not set correctly. Set CCRP correctly.
The GPS antenna position is not
set correctly.
Set the GPS antenna position
correctly.
The range of the radar
image is not displayed
correctly.
The range is not set correctly. Set the range correctly.
CCRP is not set correctly. Set CCRP correctly.
The GPS antenna position is not
set correctly.
Set the GPS antenna position
correctly.
Interswitch Unit does
not function.
Power for the Interswitch Unit is not
turned on.
Turn on the power for the Interswitch
Unit.
The connection with the Interswitch
Unit is abnormal.
Check the connection with the
Interswitch Unit.
The Interswitch Unit is faulty. Make a request to the distributor for
repair.
The RIF (CQD-2273) is not set
correctly.
Set the RIF correctly.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
If the power supply is
turned off, the trail data
is cleared without being
stored.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
6. Appendix > 6.10 Troubleshooting
6-226
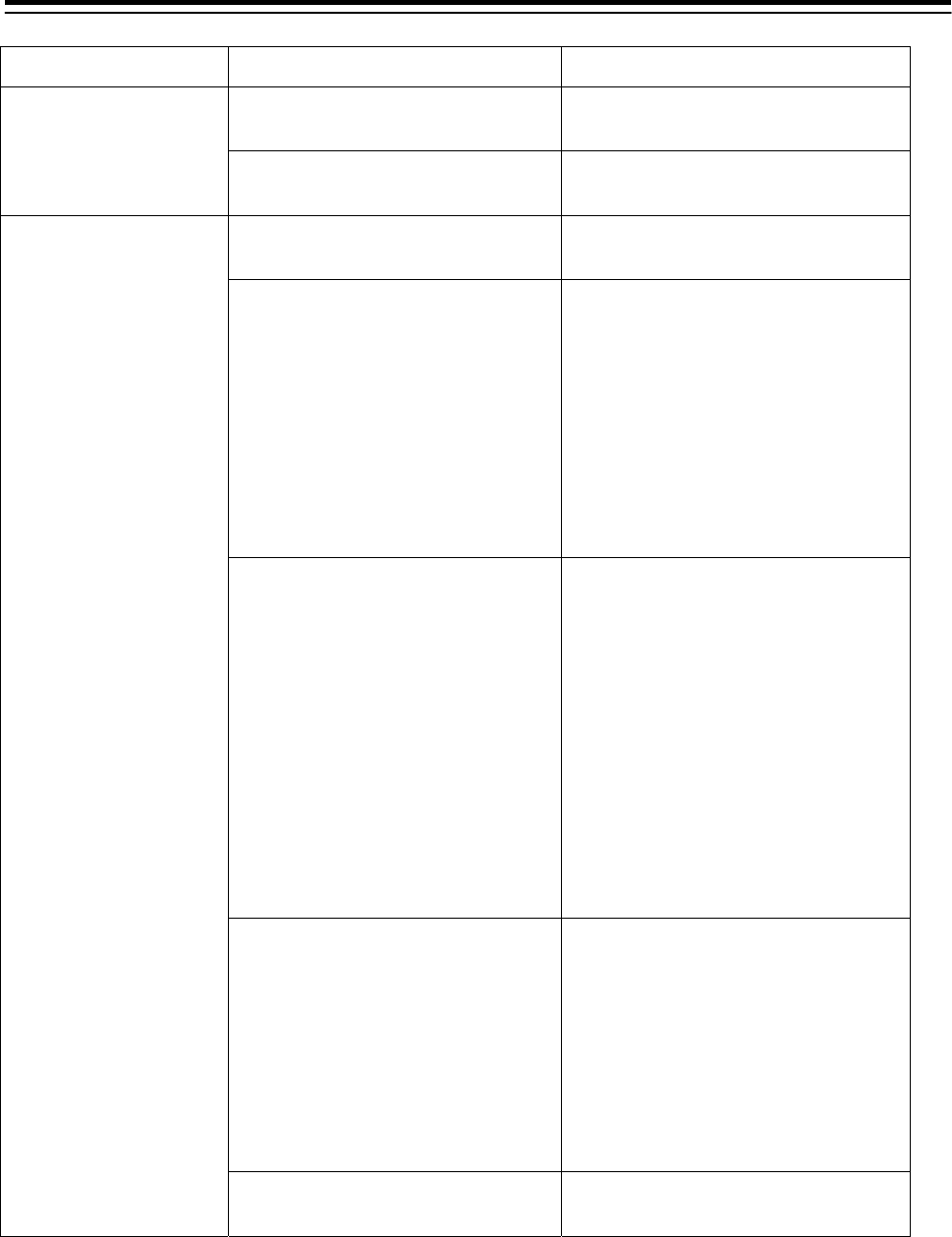
Symptom Cause Action
Radar images cannot
be overlaid.
There is no optional license for
radar overlay.
Implement an optional license for
radar overlay.
The connection with the scanner
unit is abnormal.
Check the connection with the
scanner unit.
The connection with the radar
display unit is abnormal.
Check the connection with the radar
display unit.
The RIF (CQD-2273) is faulty. Make a request to the distributor for
repair.
The internal wiring is faulty. Make a request to the distributor for
repair.
The PSU (NBD-913) is faulty. Make a request to the distributor for
repair.
The CCU (NDC-1590) is faulty. Make a request to the distributor for
repair.
UPS does not function.
The connection with UPS is faulty. Check the connection with UPS.
UPS is not set correctly. Set UPS correctly.
The UPS battery is extremely
depleted.
Replace the battery.
[Note]
At the battery replacement, make a
request for the work to the
specialized service staff. During the
replacement, turn off the
corresponding power supply breaker
in the ship. Otherwise, an
unexpected accident may occur.
The internal wiring is faulty. Make a request to the distributor for
repair.
UPS is faulty. Make a request to the distributor for
repair.
01ETM ISO 9001, ISO 14001 Certified
Printed in Japan
Marine Service Department
+81-3-3492-1305
+81-3-3779-1420
tmsc@jrc.co.jp
Telephone :
Facsimile :
e-mail :
Alphatron Marine Systems Pte Ltd
Telephone :
Facsimile :
e-mail :
+65 6863 0335
+65 6863 3305
service@alphatronmarinesystems.com
Singapore Branch
SEATTLE Branch
Telephone :
Facsimile :
e-mail :
+1-206-654-5644
+1-206-654-7030
marineservice@jrcamerica.com
CODE No.7ZPNA4466A
CODE No.7ZPNA4466A
JUL. 2015 Edition 3 JRCJUL. 2015 Edition 3 JRC
Not use the asbestos
For further information,contact:
URL http://www.jrc.co.jp
Alphatron Marine B.V.
Telephone :
Facsimile :
e-mail :
+31 (0)10- 453 4000
+31 (0)10- 452 9214
service@alphatronmarine.com
Rotterdam (Head office)
URL http://www.alphatronmarine.com
MARINE RADAR EQUIPMENTMARINE RADAR EQUIPMENT
/ECDIS/CONNING/ECDIS/CONNING
INSTALLATION MANUALINSTALLATION MANUAL
JMR-9230-S/S3JMR-9230-S/S3
JMR-9225-7X3/9X3/6X/9X/6XHJMR-9225-7X3/9X3/6X/9X/6XH
JMR-9210-6X/6XHJMR-9210-6X/6XH
JMR-9272-SJMR-9272-S
JMR-9282-S/SHJMR-9282-S/SH
JMR-7230-S/S3JMR-7230-S/S3
JMR-7225-7X3/9X3/6X/9X/6XHJMR-7225-7X3/9X3/6X/9X/6XH
JMR-7210-6X/6XHJMR-7210-6X/6XH
JMR-7272-SJMR-7272-S
JMR-7282-S/SHJMR-7282-S/SH
JAN-9201JAN-9201
JAN-7201JAN-7201
JAN-9202JAN-9202
JAN-7202JAN-7202